



























































































































































































































































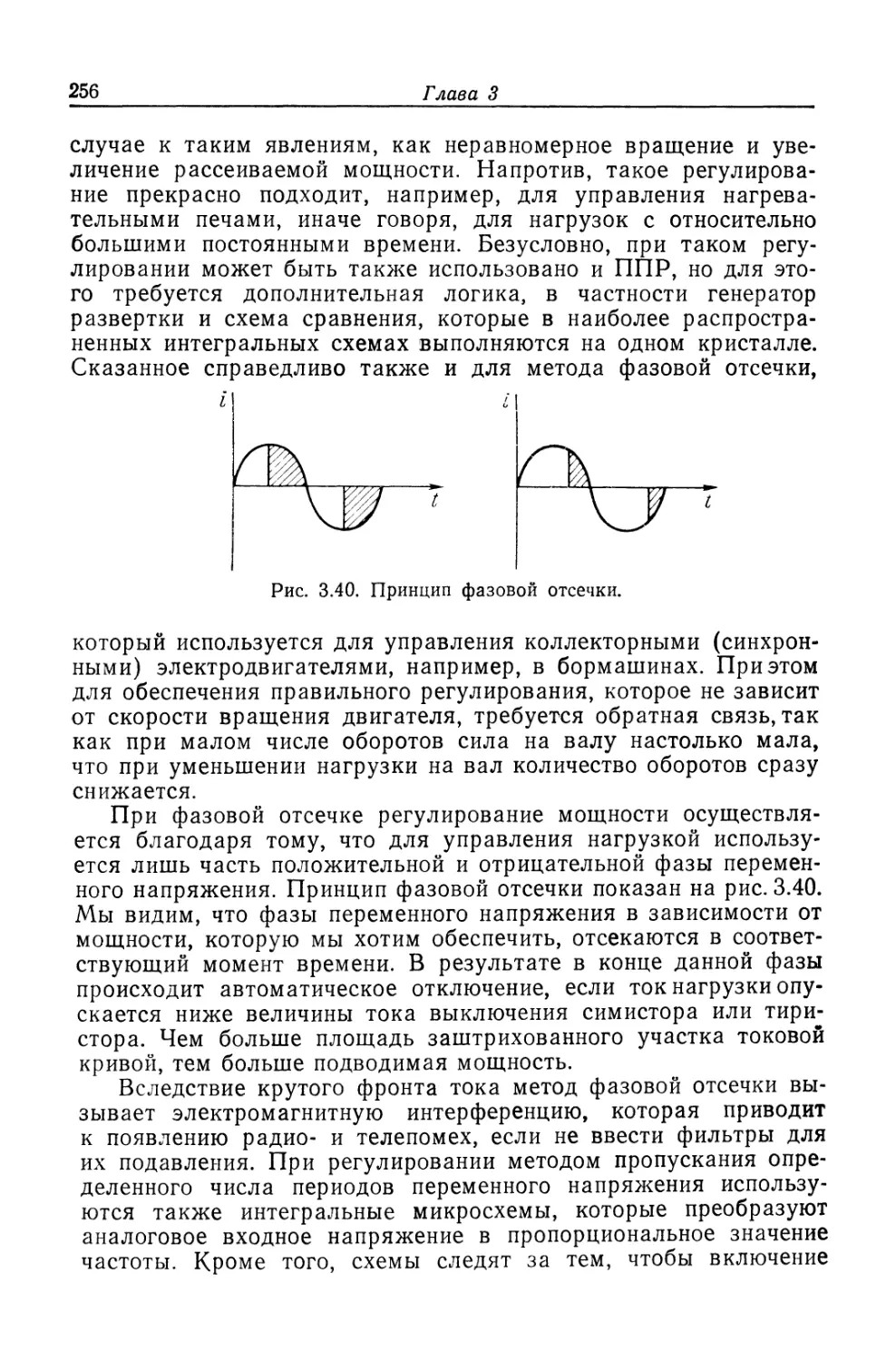












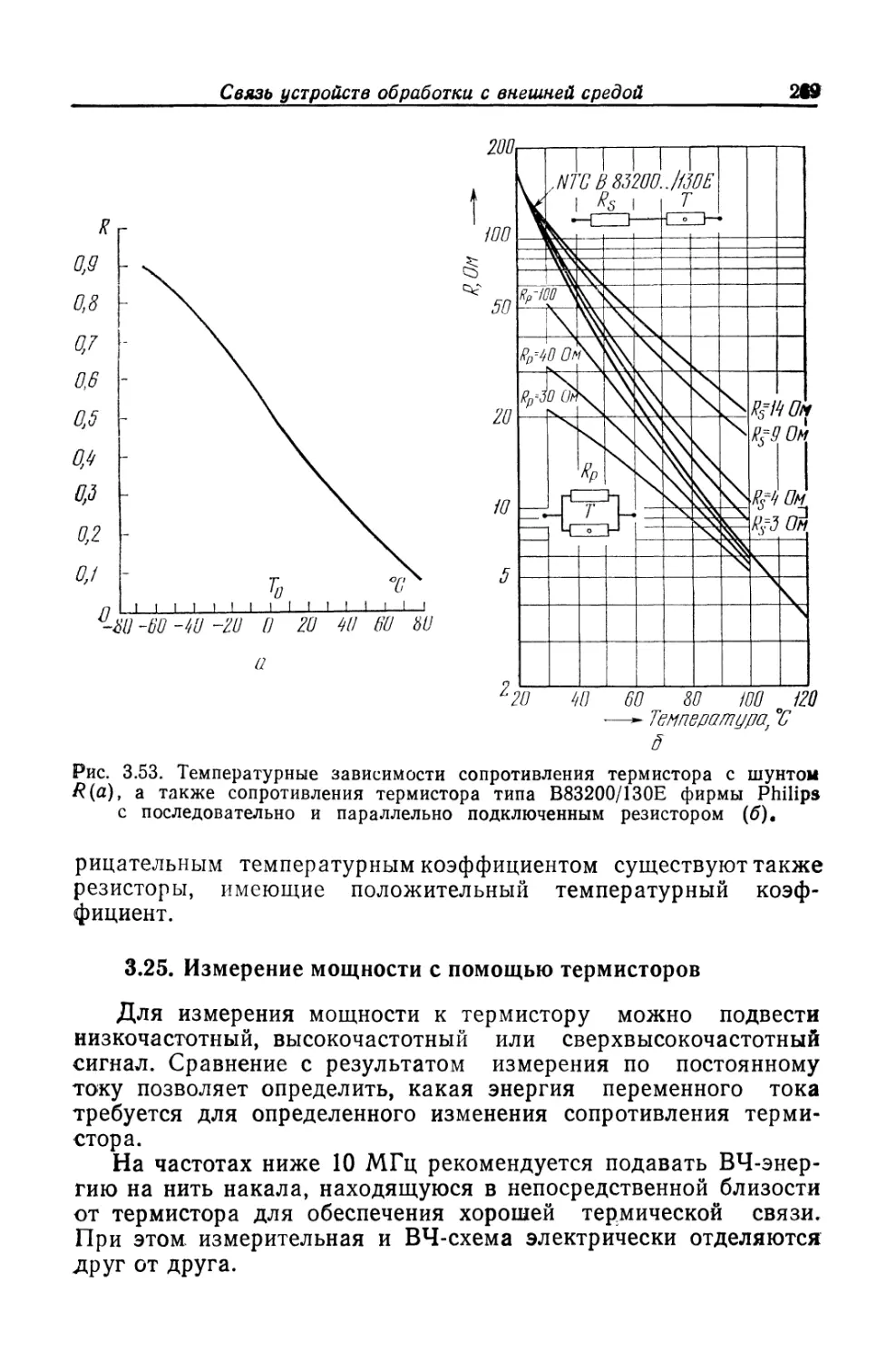



















































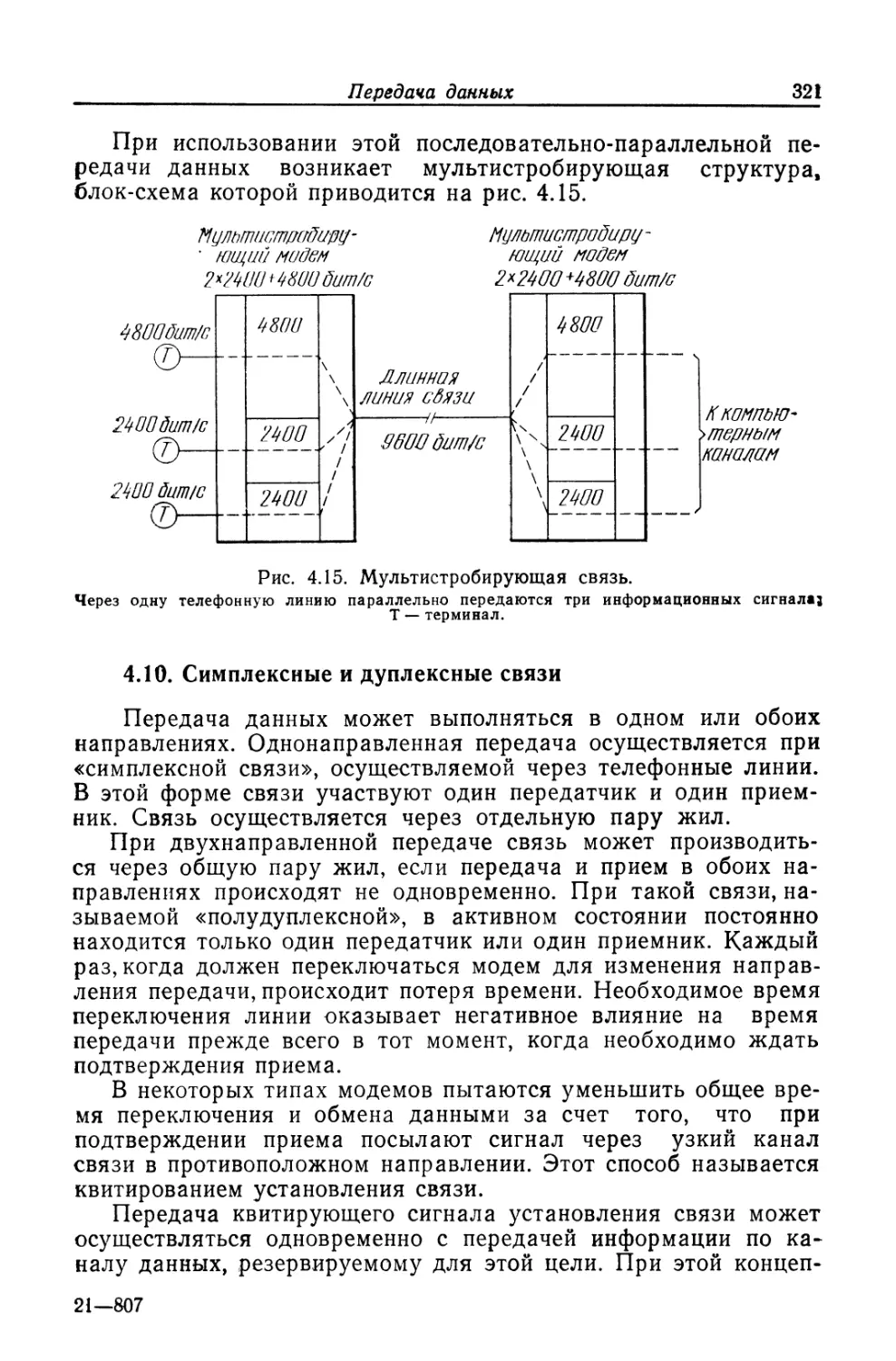




























































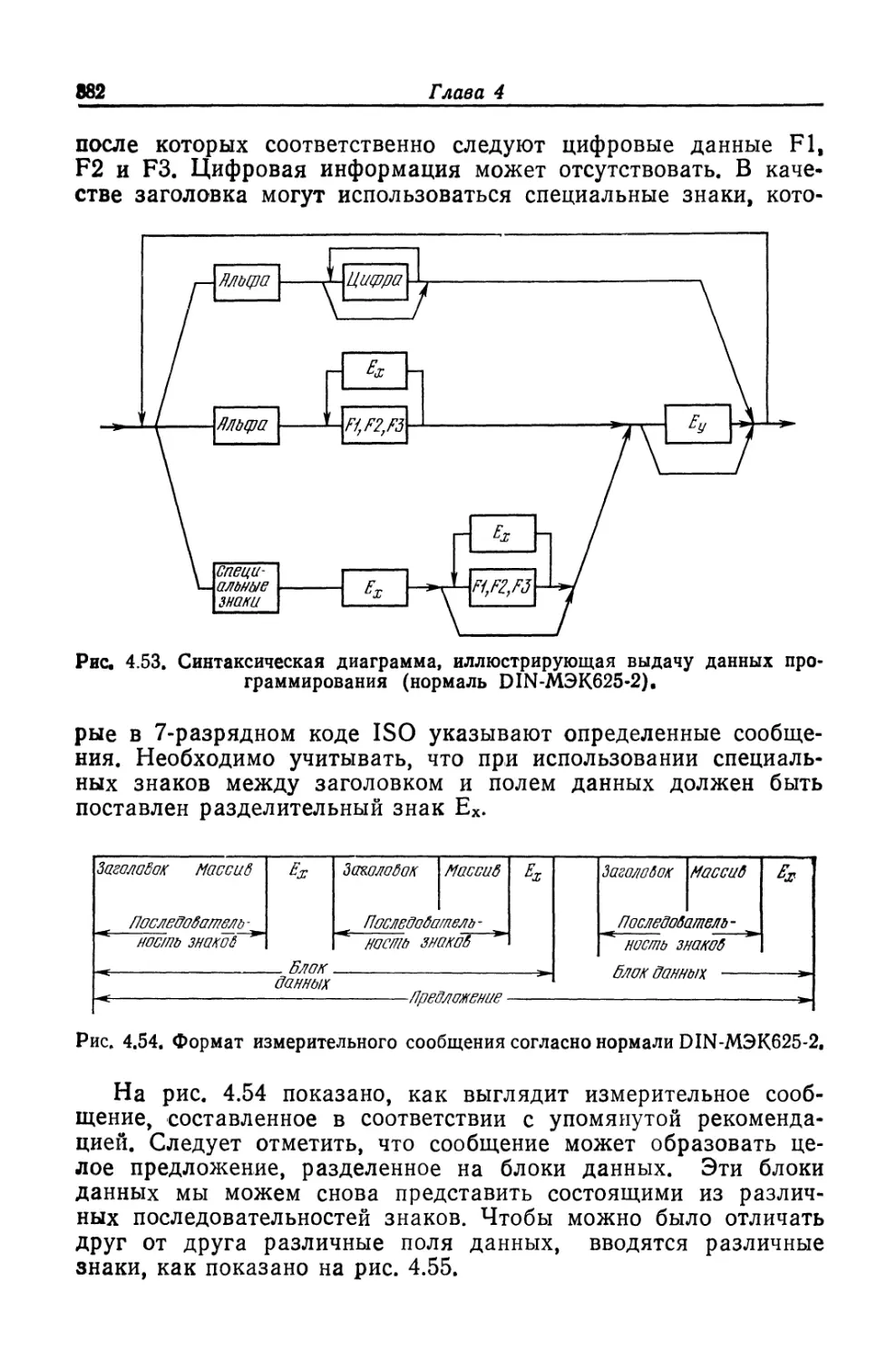

































Текст
Курс цифровой электроники
Handboek digitale elektronica deel 3
Complexe bouwstenen
en datacommunicatie
J. H. Jansen
Kluwer Technische Boeken, 1983
И. Янсен
Курс цифровой
электроники
В 4-х томах
Том 3
Сложные ИС для устройств
передачи данных
Перевод с голландского
М. Б. БЛЕЕР,
канд. физ.-мат. наук В. И. ИЛЮЩЕНКО,
канд. техн, наук В. И. КОРОБКОВА
под редакцией
д-ра техн, наук И. И. ШАГУРИНА
Москва «Мир» 1987
ББК 32.85
Я 65
УДК 621.38
AlVaKo 24/02/2012
Янсен И.
Я 65 Курс цифровой электроники: В 4-х т. Т. 3. Сложные
ИС для устройств передачи данных. Пер. с голл. — М.: Мир,
1987, —412 с., ил.
Курс создан крупным голландским специалистом в области микросхемотех-
ники. В томе 3 рассматриваются микросхемы средней степени интеграции для
цифровых устройств, запоминающие устройства на БИС, разнообразные датчики
и преобразователи информации. Обсуждаются вопросы передачи данных по ли-
ниям связи.
Для инженеров и студентов электронных специальностей, а также разработ-
чиков ЭВМ.
2401000000—271
Я ””041(01)—87 подп- изд*
ББК 32.85
Редакция литературы по информатике и робототехнике
© 1983 Kluwer Technische Boeken В. V. — Deventer
© перевод на русский язык, «Мир», 1987
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
Предлагаемая читателю книга является третьим томом
курса по цифровой электронике. Потребность в издании подоб-
ного курса вызвана широким внедрением в народное хозяй-
ство современной цифровой техники, реализуемой на основе
интегральных схем различной степени сложности, а также мик-
ропроцессоров. При этом специалистам, работающим в раз-
личных отраслях, необходимо знание цифровой схемотехники,
умение эффективно применять микросхемы, выпускаемые про-
мышленностью, для решения разнообразных задач обработки
и передачи информации, автоматизации управления технологи-
ческими процессами и оборудованием. Издаваемый курс рас-
считан на читателей, которые только начинают освоение и при-
менение современной цифровой микроэлектронной техники.
В книге описываются микросхемы цифровых устройств,
широко используемые для реализации различных функций
в цифровой аппаратуре, а также структура и принцип работы
цифровой системы на основе микропроцессорных секций с на-
ращиваемой разрядностью. Читатель подробно знакомится
с различными видами микросхем памяти для оперативных
и постоянных запоминающих устройств (ОЗУ и ПЗУ), которые
используются практически во всех цифровых системах. Опи-
сываются различные варианты программируемых ПЗУ, приво-
дятся примеры использования ПЗУ для реализации в цифровой
аппаратуре функций преобразователей кодов, управляющих
устройств (контроллеров) и др. Отдельный раздел посвящен
знакомству с программируемыми логическими матрицами
(ПЛМ). Рассматриваются разнообразные датчики (темпера-
турные, оптические, давления), твердотельные реле, аналого-
цифровые и цифро-аналоговые преобразователи, фильтры
и стабилизаторы напряжения. Описываются основные методы
и средства передачи информации по линиям связи. Таким об-
разом, в книге рассматривается комплекс вопросов, связанных
с разработкой отдельных цифровых устройств, обеспечением
связи между ними и подключением к ним внешнего оборудо-
6 Предисловие редактора перевода
вания — источников информации, объектов управления и т. д.
Ориентировка на массового читателя определила характер
изложения материала. В книге отсутствуют сложные формулы,
описание большинства схем ведется на очень доступном уровне,
понятном даже неспециалисту; приводится очень много приме-
ров, которые могут быть непосредственно использованы на
практике. Поэтому книга может оказаться полезной широкому
кругу читателей, включая начинающих радиолюбителей и уча-
щихся техникумов.
Перевод выполнен М. Б. Блеер (гл. 3), В. И. Илющенко
(гл. 1, 2), В. И. Коробковым (гл. 4).
И. И. Шагурин
ПРЕДИСЛОВИЕ
В предисловии к тому 1 было показано, что сложные ло-
гические функции реализуются путем выполнения ряда эле-
ментарных операций.
Наиболее сложные логические функции реализует мик-
роЭВМ, которая представляет собой комплекс элементарных
логических схем, соответствующим образом связанных между
собой. Такая микроЭВМ содержит несколько тысяч транзисто-
ров, размещенных на одном кристалле. Для осуществления
связей между различными элементами применяется метод мно-
гослойного монтажа, который выполняется с помощью ряда
тонких технологических операций.
Рассматриваемые в этом томе сложные функции использу-
ются почти в каждой специализированной схеме или логиче-
ской системе. Схемы, реализующие эти функции, пользуются
большим спросом, поэтому их обычно выпускают в виде от-
дельных микросхем.
Очевидно, что выпуск микросхемы, выполняющей одну ло-
гическую функцию, может быть оправдан только при большом
объеме их применения. С другой стороны, существуют такие
логические функции, которые имеют специализированную об-
ласть применения и ограниченный спрос. Однако может ока-
заться, что какой-то пользователь применяет в определенном
устройстве ежегодно десятки тысяч таких специальных схем.
Такой пользователь заинтересован в интегральном варианте
своей схемы, так как соответствующая микросхема большой
степени интеграции (БИС) будет более дешевой и надежной
и займет меньше места на плате, чем аналогичная схема, со-
бранная из отдельных дискретных элементов или микросхем
малой степени интеграции.
Эта область применения обеспечивает широкие возможно-
сти для интегральной технологии. В данном случае речь идет
о выпуске так называемых «заказных схем», т. е. специальных
схем, изготовленных по заказу пользователя. Как уже отме-
чалось выше, подобные схемы выгодно изготавливать только
тогда, когда их количество достигает нескольких десятков ты-
8
Предисловие
сяч штук. Производство «заказных» ИС для специализирован-
ных применений налажено многими фирмами.
Большинство фирм используют для этой цели так называе-
мые логические матрицы, которые содержат на кристалле не-
сколько тысяч элементарных схем. Эти матрицы изготавлива-
ются в больших количествах и хранятся на складах. Чтобы
подготовить такую матрицу для использования в специальной
схеме, требуется в зависимости от расположения логических
элементов на кристалле разработать схему их соединения
(монтажа) и изготовить соответствующие маски, которые обес-
печат массовое производство указанных специальных схем.
Очевидно, что логическая схема, появляющаяся в резуль-
тате подобного метода изготовления, должна быть основатель-
но испытана до начала ее массового производства, так как
стоимость и время разработки такой ИС оказываются обычно
достаточно большими. С другой стороны, вероятность того, что
на стадии разработки будут допущены какие-то ошибки, оста-
ется всегда довольно высокой. Это обстоятельство может при-
вести к серьезным затруднениям, поскольку после коррекции
этих ошибок требуется изготовление новой партии микросхем,
что существенно увеличивает стоимость.
Фирмы — изготовители ИС находят выход из такого поло-
жения в том, что создают и предлагают логические матрицы,
режим работы которых программируется самим пользовате-
лем. С этой целью фирма снабжает эти схемы «стандартным»
монтажом определенного типа. Пользователь с помощью мощ-
ных импульсов тока пережигает включенные в монтажные со-
единения плавкие перемычки и получает схему с требуемой
конфигурацией. Не так давно подобные программируемые мат-
рицы, состоящие из логических схем, начали выпускаться под
наименованиями „программируемая логическая матрица”
(ПЛМ), „программируемая матричная логика” (ПМЛ) и т. д.
Об этих новых разработках в области базовых элементов так-
же говорится в настоящем томе.
Кроме того, в настоящем томе рассматриваются различные
виды ЗУ, которые широко применяются в современной цифро-
вой технике. Речь идет о биполярных ЗУ и МОП-ЗУ, а также
ЗУ на цилиндрических магнитных доменах (ЦМД). Также
уделяется внимание приборам с зарядовой связью (ПЗС), ко-
торые не нашли широкого применения в цифровой обработке
данных.
У многих разработчиков цифровых схем возникает пробле-
ма: как связать цифровые электронные схемы с внешней аппа-
ратурой? Проблема связи (интерфейса) не относится к числу
основных проблем цифровой электроники, однако и здесь необ-
ходимо решить ряд принципиальных вопросов. В настоящем
Предисловие
9
томе проблеме, связанной с интерфейсами, специально посвя-
щена гл. 3.
В данном томе рассмотрены также вопросы передачи дан-
ных между системами, находящимися на большом расстоянии
друг от друга и связанными между собой, например, телефон-
ной линией. Затронута также тема протоколов, обеспечиваю-
щих обмен данными между такими системами.
Развитие систем передачи данных только начинается, одна-
ко я убежден, что это развитие должно приобрести широкие
масштабы и привести к появлению терминалов массового
пользования для обработки данных с подключением к сущест-
вующей телефонной абонентской сети. В этом случае появится
возможность «банковского обслуживания на дому», т. е. воз-
можность выполнять через домашний терминал все банковские
операции. При этом терминал будет одновременно использо-
ваться и для ведения бухгалтерии. В конце очередного финан-
сового года вам будет достаточно одного удара по клавише —
и все необходимые данные для заполнения декларации по по-
доходному налогу появятся на экране дисплея или же будут
отпечатаны на бумаге с помощью простого печатающего уст-
ройства.
Я снова сердечно благодарю всех тех, кто содействовал вы-
ходу в свет настоящего справочника.
Хазерсвуде, осень 1982 г. Автор
Глава 1
ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ И ИХ ПРИМЕНЕНИЕ
В СЛОЖНЫХ СХЕМАХ
1.1. Введение
В этом справочнике мы неоднократно говорили о том, что
с помощью базовых логических схем, таких, как И, ИЛИ, НЕ,
можно реализовать самые сложные логические функции. Наи-
более сложной современной схемой является микроЭВМ, ко-
торая построена из вышеуказанных логических элементов.
В настоящее время вместо того, чтобы собирать такие слож-
ные схемы из тысяч отдельных элементов, применяют метод ин-
тегрирования этих элементов на одном кристалле кремния.
Между базовыми элементами и микроЭВМ располагается
область более сложных цифровых микросхем, отличающихся
степенью интеграции — малой, средней и большой (МИС, СИС
и БИС соответственно). МикроЭВМ в интегральном варианте
попадает в категорию схем со сверхбольшой степенью интег-
рации, т. е. СБИС. К этой же категории относятся и интег-
ральные ЗУ с объемом памяти в 64 Кбит/кристалл.
Семейство сложных цифровых микросхем развивалось в те-
чение многих лет, при этом число элементов, размещенных на
одном кристалле, т. е. степень интеграции, постоянно увеличи-
валось. Процесс увеличения степени интеграции основан на по-
стоянном усовершенствовании технологии ИС.
Известно, что многие сложные схемы, такие, как селекто-
ры, кодеры, декодеры и т. д., входят в состав почти каждого
цифрового устройства. Очевидно, что изготовители ИС стали
заниматься интеграцией этих цифровых схем, потому что на
них имеется значительный спрос. С течением времени нача-
лась интеграция схем с очень сложной структурой, что было
вызвано постоянно возрастающим интересом к решению про-
блем автоматизации при помощи средств цифровой электрони-
ки. Если, например, раньше для осуществления связи между
цифровой и телексной системами применялись в основном дис-
кретные компоненты и отдельные сложные элементы, то в на-
стоящее время для этой цели разработаны специальные ИС,
которые содержат все необходимые электронные устройства
в одном корпусе.
Очевидно, что если эти ИС применяются редко, то их раз-
работка и массовое производство будут невыгодны с экономя-
Логические элементы и их применение в сложных схемах 11
ческой точки зрения. В этой главе мы сделаем небольшой об-
зор сложных логических схем, выпускаемых в ТТЛ-исполнении,
а также рассмотрим ряд практических примеров их примене-
ния. Большинство сложных схем фигурировали в предыдущих
томах настоящего справочника для иллюстрации применений
базовых логических функций. Хотя при анализе сложных
схем нелегко избежать повторений, мы попытаемся не делать
постоянных ссылок на предыдущие тома настоящего справоч-
ника.
К сложным схемам, с которыми мы уже встречались в циф-
ровых разработках, относятся селектор или мультиплексор,
распределительная схема, а также декодер и демультиплексор,
преобразователь кода и схема сравнения (компаратор).
Необходимо отметить, что некоторые из этих схем имеют
одинаковую структуру, однако в зависимости от области при-
менения называются по-разному. Пример: преобразователь ко-
да, который преобразует BCD-kqr в десятичный код «1 из 10»,
является одновременно декодером. Преобразователь из двоич-
ного кода в десятичный можно реализовать с помощью рас-
пределительной схемы или демультиплексора.
Группируя эти функции, можно упростить анализ указан-
ных выше схем, что, несомненно, является положительным фак-
тором. Кроме того, читатель получает лучшее представление
о «родственных связях», которые существуют между различны-
ми сложными элементами.
Как известно, цифровые элементы обеспечивают требуемые
связи между входными и выходными логическими переменны-
ми. При этом число переменных может сильно отличаться от
схемы к схеме.
С другой стороны, каждая сложная логическая схема мо-
жет обработать только определенное число входных перемен-
ных. Поэтому при реализации таких схем обычно предусмотре-
на возможность подключения дополнительных микросхем,
обеспечивающих обработку большего числа (входных) пере-
менных.
1.2. Селекторы-мультиплексоры
Селекторы (схемы выбора) данных, или мультиплексоры,
используются для осуществления связи приемного устройства
с различными источниками данных. Определенный канал (ис-
точник данных) выбирается путем подачи на адресные входы
схемы двоичного числа (адреса), которое указывает, какой
именно канал должен быть выбран. В большинстве случаев та-
кая схема снабжается дополнительным стробирующим входом,
который разрешает передачу данных в тот момент времени,
когда происходит выборка.
12
Глава 1
Механическим аналогом мультиплексора (селектора) явля-
ется многопозиционный переключатель, который представлен
на рис. 1.1. Ось переключателя устанавливается в требуемую
позицию с помощью ручки. Такие переключатели применялись
ранее в радиоприемниках для перехода с одного волнового
диапазона на другой. В настоящее время такой переход осу-
ществлялся в видео- и радиоаппаратуре посредством нажатия
клавиш, управляющих работой соответствующих исполнитель-
ных электронных схем.
Рассмотрим работу схемы мультиплексора более подробно
(рис. 1.2, я). Мультиплексор состоит из четырех схем И, выхо-
Входные
каналы
Выход
Рис. 1.1. Многопозиционный переключатель.
ды которых связаны со схемой ИЛИ. На один из входов схем
И поступают данные (вход данных). Два других входа ис-
пользуются для выборки. Определенный канал будет выбран
после того, как на оба селектирующих входа поступят сигналы
с высоким уровнем потенциала И. При этом с выхода схемы
будут сниматься данные, поступающие на соответствующий
вход.
Если на d-вход поступает напряжение высокого уровня
(/7-уровня), то в процессе выборки на трех входах будет на-
пряжение //-уровня и на выходе также появится /7-сигнал. Ес-
ли, на d-вход поступает напряжение низкого уровня (/.-уров-
ня), то на выходе он также будет воспроизведен в виде напря-
жения /.-уровня. Как следует из функциональной таблицы, уже
одного /.-сигнала на входах достаточно, чтобы на выходе так-
же появился /.-сигнал (рис. 1.2, в).
Как видно из этой таблицы, с помощью двух селектирую-
щих (адресных) входов Si, So можно выбрать один из четырех
входов данных. Чтобы при поступлении на адресные входы
каждой из четырех возможных комбинаций двоичных чисел (00,
01, 10, И) можно было выбрать требуемый d-вход, необходимы
дополнительные инверторы. Какой именно d-вход будет
выбран при данной двоичной комбинации, зависит от конкрет-
ной схемы монтажа (рис. 1.2,а).
Требуемый вход данных выбирается путем подачи /7-уров-
ня на два других входа соответствующей схемы И. На ее вы-
ходе появится сигнал L- или /7-уровня в зависимости от логи*
Sf!H) S0(H)'
S/ $о No No Выход
ВходЗ Вход 2 Вход /
L L L L 1 н . . Н 1 L Выборка
L L Н L Н L L —.
L Н L L Н L —
L И Н L L L L —
Н L L Н 1 N _ Н | И Выборка
// L // 7/ // L L .—
н Н 7 Н L Н L
н /7 И н L L L —
Выход
Рис, 1.2. a — мультиплексор (схема выборки); б — таблица истинности; в —
функциональная таблица для d0 (в случаях, обведенных чертой, выбрана
схема No); г — МЭК-символ,
14
Глава 1
ческого уровня сигналов на входе данных. При этом на выходе
других схем И будет сохраняться напряжение L-уровня. В ре-
зультате схема ИЛИ будет повторять выходной сигнал выбран-
ной схемы И. Если этот сигнал имеет /7-уровень, то на выходе
схемы ИЛИ появится также сигнал //-уровня. Если на выходе
выбранной схемы И появится L-сигнал, то на выходе схемы
ИЛИ также появится L-сигнал. Оба этих случая соответству-
ют функциональной таблице схемы ИЛИ.
Символическое обозначение мультиплексора показано на
рис. 1.2, г. Входы данных имеют И-зависимость от G\ и G2.
Вход d0 будет выбран в том случае, если мы имеем S0(L)
и Si(L), т. е. (1,2); вход di — если S0H и Si(L), т. е. (1,2);
вход d2 — если S0(L) и Si (Я), т. е. (1,2); и, наконец, вход
d3 — если So (Я) и S^H, т. е. (1,2). .
Можно увеличить число выбираемых каналов в этой схеме,
используя схемы И с большим числом входов. При этом обыч-
но получают вариант мультиплексора не выше, чем «1 из 8»,
т. е. используют то число входов, которое в большинстве при-
менений оказывается вполне достаточным. Для увеличения
числа выбираемых каналов рекомендуется использовать на
выходе мультиплексоров схемы ИЛИ с тристабильными буфе-
рами. В этом варианте мы можем включать каскадно несколь-
ко мультиплексоров и выбирать требуемый мультиплексор
с помощью декодера. На вход декодера поступают старшие
разряды адреса. Операция выбора мультиплексора осуществ-
ляется с помощью стробирующего входа, который управляет-
ся от декодера, как показано на рис. 1.3. Здесь в качестве
мультиплексоров включены ТТЛ-микросхемы 74LS151 и
74LS153, которые осуществляют выборку в варианте «1 из 8».
Микросхема 74LS151 имеет дополнительный стробирующий
вход (L-уровня), а сигнал на выходе декодера может иметь
как L- так и //-уровень. Подача //-уровня на этот вход запре-
щает выборку данных. Если мультиплексоры со стробирующим
входом каскадируются для увеличения числа выбираемых ка-
налов, то требуется включить еще одну дополнительную схему
ИЛИ, связывающую выходы четырех отдельных мультиплексо-
ров с одним общим выходом схемы. При использовании муль-
типлексоров с тристабильным буфером на выходе эта дополни-
тельная схема ИЛИ не потребуется. Такой мультиплексор на-
ходит практическое применение при работе с генератором ко-
да Морзе, в котором он используется для проверки диодной
матрицы.
В ЭВМ большое число мультиплексоров применяется для
того, чтобы связать различные регистры между собой и со
счетно-решающим устройством для последующего обмена дан-
Рис. 1.3. Каскадное включение мультиплексоров.
d-Ьыход
16
Глава 1
тактового
В
Рис. 1.4. а — преобразование параллельного кода в последовательный с по-
мощью мультиплексора, делителя на 16 и триггера; б — набор импульсов.
ними. Здесь разрядность выбираемых чисел обычно составля-
ет 1—2 байт, т. е. мультиплексор должен одновременно пропу-
скать 8 или 16 бит.
Мультиплексор (селектор данных) применяется не только
для решения перечисленных выше задач, но и для других це-
лей. В качестве примера можно назвать применение мульти-
плексора для преобразования параллельного набора битов
в последовательный. Подавая параллельный набор битов на
входы данных и управляя адресными входами с помощью дво-
Логические элементы и их применение в сложных схемах 17
ичного счетчика, мы можем сформировать на выходе требуемый
последовательный набор битов. Такой параллельно-последова-
тельный преобразователь показан на рис. 1.4, а. После подачи
стартового импульса начинается считывание состояния управ-
ляющего триггера под контролем тактовых импульсов и про-
исходит запуск счетчика. Выходные сигналы счетчика управля-
ют адресными входами мультиплексора данных. Как только
счетчик доходит до состояния «8», на его выходе D устанавли-
вается //-уровень, который возвращает управляющий триггер
в исходное состояние. Цикл счета прекращается. В результате
на выходе мультиплексора появляется последовательный на-
бор битов, который подавался на вход схемы выборки в па-
раллельной форме (рис. 1.4,6).
1.3. Преобразователи кода
Семейство преобразователей кода состоит из ряда схем,
выполняющих сложные логические функции, которые имеют
различные области применения и разные названия.
Преобразователи кода решают задачу преобразования од-
ного кода в другой. В частности, нам известны преобразовате-
ли из BCD-кода в десятичный код, из кода с избытком 3 в де-
сятичный код, из кода Грея в десятичный код и обратно. Пре-
образователь из двоичного кода в десятичный известен в циф-
ровой технике под наименованием декодирующей схемы или,
сокращенно, декодера. Преобразователь из десятичного кода
в двоичный обычно называется кодирующей схемой или ко-
дером. Отсюда следует, что кодеры и декодеры имеют тесную
связь с преобразованием. Например, в случае 7-сегментного
декодера двоичное число, поступающее на вход, преобразует-
ся в последовательность сигналов для управления /-сегмент-
ными индикаторами на основе светодиодов или жидкокристал-
лических индикаторов.
Более сложным элементом, который имеет близкое сходство
с двоично-десятичным декодером, является распределительная
схема, или демультиплексор, т. е. элемент, который распреде-
ляет по различным каналам данные, поступающие из какого-
то одного источника. Эта схема решает задачу, противополож-
ную той, которую выполняет мультиплексор (селектор).
Демультиплексор представляет собой декодирующую схему
с дополнительным входом, который называется разрешающим
и позволяет использовать несколько декодирующих схем
в каскадном включении.
1.4. Преобразователь из BCD-кода в десятичный (декодер)
На рис. 1.5, а показана декодирующая схема SN74LS42.
Она состоит из 10 схем И-НЕ, которые управляются по вхо-
2—807
18
Глава 1
Логические элементы и их применение в сложных схемах 19
Входы Выходы
6
Рис. 1.5. а — декодирующая схема типа 7442 (74LS42) для преобразования
из BCD-кода в десятичный; б — размещение в корпусе; в — символическое
обозначение.
дам как неинвертированными, так и инвертированными сигна-
лами А, В, С и D. На выходе схемы И-НЕ устанавливается
низкий L-уровень только при наличии на входах схемы опре-
деленной комбинации двоичных сигналов.
Возьмем в качестве примера схему И-НЕ с выходным сиг-
налом, обозначенным 0. На этом выходе установится L-ypo-
вень, когда на все входы поступят //-сигналы, т. е. при подаче
двоичного кода DCBA-0000, так как на входы схемы подаются
переменные DCBA. При этом на выходах других схем И-НЕ
сохраняется высокий потенциал (//-уровень). Если мы подадим
на вход преобразователя двоичную комбинацию DCBA-0110,
то на всех входах схемы И-НЕ с выходом «6» появятся //-сиг-
налы, так как на эти входы подаются сигналы DCBA. Оба ну-
ля в исходной комбинации DCBA преобразуются в единицы на
входах схемы И-НЕ, так что все четыре входных сигнала дей-
ствительно будут иметь //-уровень. Декодер (преобразователь)
из кода с избытком 3 в десятичный код также состоит из
10 схем И-НЕ, однако между входами кодера и входами ин-
верторов, которые преобразуют закодированные сигналы, мон-
таж выполнен так, чтобы обеспечить соответствующую декоди-
рующую структуру. Как будет показано в следующей главе,
для этой же цели можно использовать диодную матрицу или
ПЗУ.
Декодеры и селекторы широко применяются для управле-
ния различными вариантами устройств памяти как ОЗУ, так
и ПЗУ.
2*
20
Глава 1
tg h h 4 15 4 h h Iff
s
Рис. 1.6. a — получение последовательности импульсов с помощью двоично-
го счетчика и декодера; б — временная диаграмма.
Ячейки этих ЗУ образуют матричную структуру. Выбирая
с помощью селектора х- и у-линии, мы идентифицируем опре-
деленную ячейку ЗУ. С этой целью применяются декодеры
строк и колонок матрицы, которые обрабатывают информацию,
поступающую с адресных шин и содержащую требуемые адре-
са в двоичной форме. В результате мы реализуем режим про-
извольного доступа к ячейкам ЗУ.
В цифровой технике последовательность импульсов часто
применяется для последовательного опроса определенных шин
данных. Последовательный набор сигналов можно также при-
менить и для инициирования необходимых операций, происхо-
дящих в определенные моменты времени. Такую импульсную
последовательность можно получить с помощью двоичного
счетчика, который контролирует работу декодера «1 из 8» или
«1 из 10». На рис. 1.6, а приведена блок-схема подобного уст-
ройства. Здесь ширина последовательных импульсов определи-
Логические элементы и их применение в сложных схемах
21
ется длительностью тактового импульса. Это устройство фор-
мирует ступенчатый импульс, вид которого показан на времен-
ной диаграмме (рис. 1.6,6).
Декодер или демультиплексор со стробируемым входом
(74LS138) представлен на рис. 1.7. Эта схема имеет в своем
составе комбинированный вход «данные/строб». Вход Gi за-
пускается //-сигналом, входы G2A и G2B — Л-сигналами. Если
мы присоединяем Gi к источнику данных и обеспечиваем со-
стояния G2A(L) и G2B(jL), то схема работает как распредели-
тельное устройство (демультиплексор); это следует из табли-
цы, представленной на рис. 1.7, б. Для состояния Gi(//), т. е.
(1), на выбранном выходе появляется L-сигнал, а для состоя-
ния GiA, т. е. (0), на соответствующем выходе появляется
//-сигнал. В последнем случае значение выбираемых сигналов
не влияет на состояния выхода и обозначается через (X).
В данном примере распределения данных предполагается, что
мы имеем постоянные состояния G2A (L) и G2B(L).. В каскад-
ном включении схем этого типа указанные входы можно стро-
бировать для обеспечения выборки той или иной микросхемы.
На рис. 1.8 показано, как можно перейти к каскадному ва-
рианту. Селектирующие входные сигналы А, В и С обеспечи-
вают реализацию демультиплексора «1 из 8». С помощью се-
лектирующих сигналов D и Е (1 из 4) выбирается одна из че-
тырех декодирующих схем. Для генерации управляющих сиг-
налов, подаваемых на стробируемые входы, требуется допол-
нительный декодер, который формирует из сигналов выборки D
и Е четыре отдельных сигнала. Два бита D й Е обеспечивают
здесь выборку «1 из 4». При параллельном включении демуль-
типлексоров их входы данных определенным образом связыва-
ются между собой (рис. 1.8).
Символическое обозначение рассмотренной схемы показано
на рис. 1.7, в и г. На рис. 1.7, в эта схема представлена в виде
декодера, а на рис. 1.7, г — в виде демультиплексора. Декоди-
рующий вариант (АЛ/У) показывает, что рассматриваемое пре-
образование имеет И-зависимость от входов 4, 5 и 6, а представ-
ление в виде демультиплексора (DX) показывает, что выходы
имеют ИЛИ-зависимость от селекторных (адресных) входов 1,
2 и 3. Вход данных 6 имеет И-зависимость от входов 4 и 5.
Демультиплексор часто применяется для последовательной
передачи информации через одни и те же выводы микросхемы
к различным ее узлам, что позволяет ограничить используемое
число выводов. Такая ситуация показана на рис. 1.9. Здесь се-
лектор производит последовательную выборку из двух источни-
ков данных, А и В. В момент времени t0 источник данных А
соединяется с микросхемой и данные с помощью демульти-
плексора пересылаются в регистр А. В момент времени G на-
22
Глава 1
чинается выборка из источника В с использованием тех же
выводов микросхемы. Однако с помощью демультиплексора
данные передаются теперь в регистр В. Такая распределитель-
ная схема часто применяется в микросхемах ЗУ, размещенных
в корпусе с 16 или 18 выводами. При этом на передачу данных
затрачивается больше времени, чем и вызывается увеличение
времени обращения к ЗУ.
1.5. Преобразователи из ВС/)-кода в двоичный
и из двоичного кода в ВСД-код
Среди ТТЛ-схем имеются также преобразователи из BCD-
в двоичный код и наоборот, к ним относятся схемы
SN74185 и SN74184, соответственно. Преобразование кода осу-
ществляет ПЗУ, размещенное на кристалле и запрограммиро-
ванное соответствующим образом. О применении ПЗУ в каче-
стве преобразователя кода более подробно будет рассказано
в следующей главе.
Выходы
данных
а
1
Логические элементы и их применение в сложных схемах
23
Входы RhivnrikT
Разреш. Выборка
Gi G2* С В А Yo Y, y2 Y3 y4 Y5 Уб Y7
X н X X X Н Н Н Н Н н н н
L X X X X Н Н н Н Н н н н
Н L L L L L Н н н н н н н
Н L L L Н Н L н н н н н н
н L L Н L Н Н L н н н н н
н L L Н Н Н Н Н L н н н н
н L Н L L Н Н Н Н L н н н
н L Н L Н Н Н Н Н н L н н
н L Н Н L Н Н Н Н н н L н
н L Н Н Н Н Н Н Н н н н L
*62 = G2A + G2B
б
г
Рис. 1.7. а — декодер (демультиплексор) типа 74LS138; б — функциональная
таблица; в и г — символическое обозначение схемы, используемой в качестве
декодера или демультиплексора соответственно.
Такие преобразователи можно применять в каскадном
включении для работы с более длинными BCD-словами. При
длине слова 2X4 бит BCD-кол реализуется с помощью двух
отдельных преобразователей указанного типа. Однако если
длина слова будет больше, то число требуемых схем становит-
ся слишком большим. Например, для трех BCD-декад требу-
ется 6 схем, а для шести BCD-декад — уже 28. Работа этих
преобразователей в каскадном включении здесь рассматри-
ваться не будет, так как на практике в подобных случаях
обычно используют ПЗУ большого объема, которые могут ра-
ботать с более длинными словами. В этой ситуации примене-
ние каскадного варианта неоправданно с экономической точки
зрения, так как требует большого числа микросхем.
24
Глава 1
Рис, 1.8, Каскадное включение декодирующих схем для получения много-
канальной распределительной схемы.
1.6. Декодер 7-сегментного кода
Декодер 7-сегментного кода находит широкое применение
в цифровой технике. Эта схема преобразует ВС/9-код в после-
довательность сигналов, которые управляют работой 7-сегмент-
ных индикаторов на светодиодах (СД) или жидких кристаллах
(ЖК). ТТЛ-микросхемы этого типа имеют обозначения
74LS46, 74LS47 и 74LS48 и отличаются между собой по вели-
чине допустимого выходного напряжения или выходного тока
и отсутствию фиксирующего резистора.
Логические элементы и их применение в сложных схемах
25
Распределительная схема
Выбрать В
Рис. 1.9. Распределительная схема, позволяющая ограничить число выводов
корпуса микросхемы.
Преобразование BCD-кода в 7-сегментный происходит так,
как показано в функциональной таблице на рис. 1.10. Внутрен-
ний монтаж и здесь определяет вид преобразования кода. Схе-
ма снабжена рядом дополнительных выводов, таких, как вывод
для проверки индикаторов, вход гасящего импульса и вход им-
пульса для гашения пульсаций. Активным состоянием выходов
декодера является L-уровень, так как СД и ЖК-сегменты
включаются при подаче низкого потенциала. Используя конт-
рольный вывод, можно проверять работу семи сегментов инди-
катора, а с помощью гасящего сигнала можно убрать засвет-
ку сегментов. Как следует из функциональной таблицы, это
произойдет, если на входе BI/RBO появится Л-сигнал. При
этом состояние других входов значения не имеет. Этот же вы-
вод можно использовать для гашения пульсаций. Нуль появит-
ся на этом выводе в том случае, если на вход RBI будет подан
L-сигнал и BCD-входы будут находиться в состоянии «0».
В этой ситуации индикаторные сегменты не включаются (не
26
Глава 1
Десятичная Функция входы BI/RBO выходы
LT RBI D с в А a ь с d е f 9
0 1 1 0 0 0 0 1 1 1 1 1 1 1 0
1 1 X 0 0 0 1 1 0 1 1 0 0 0 0
2 1 X 0 0 1 0 1 1 1 0 1 1 0 1
3 1 X 0 0 1 1 1 1 1 1 1 0 0 1
4 1 X 0 1 0 0 1 0 1 1 0 0 1 1
5 1 X 0 1 0 1 1 1 0 1 1 0 1 1
6 1 X 0 1 1 0 1 0 0 1 0 0 0 0
7 1 X 0 1 1 1 1 1 1 1 0 0 0 0
8 1 X 1 0 0 0 1 1 1 1 1 1 1 1
9 1 X 1 О 0 1- 1 1 1 1 0 0 1 1
10 1 X 1 0 1 0 1 0 0 0 1 1 0 1
11 1 X 1 0 1 1 1 0 0 1 1 0 0 1
12 1 X 1 1 0 0 1 0 1 0 0 0 1 1
13 1 X 1 1 0 1 1 1 0 0 1 0 1 1
14 1 X 1 1 1 0 1 0 0 0 1 1 1 1
15 1 X 1 1 1 1 1 0 0 0 0 0 0 0
BI X X X X X X 0 0 0 0 0 0 0 0
RBI 1 0 0 0 0 0 0 0 0 0 0 0 0 0
LT 0 X X X X X 1 1 1 1 1 1 1 1
а
Рис. 1,10. Функциональная таблица 7-сегментного декодера (a) (SN7447A)
и МЭК-символика для этой схемы (б).
Логические элементы и их применение в сложных схемах
27
Схема управляется сигналами декадного счетчика.
светятся), в результате чего на экране дисплея не будет виден
даже 0.
Интенсивность светового излучения СД регулируется с по-
мощью импульса, который подается на вход BI и имеет регу-
лируемую ширину.
На рис. 1.11 представлена схема индикации, в которой
7-сегментный декодер управляется от декадного счетчика типа
SN7490A. Выходы декодера связаны с сегментами, составлен-
ными из СД через ограничивающий резистор Т?2 с сопротивле-
нием 330 Ом.
В настоящее время все шире используются индикаторные
устройства с улучшенным качеством изображения. С этой
целью изображение формируется из точек, образующих матри-
28
Глава 1
цу 5X7. Управление подобным индикатором является более
сложным процессом и для своей реализации требует большего
числа каналов.
В этом случае дискретный декодер заменяется на ПЗУ, ко-
торое называется «генератором символов». К этим генераторам
мы вернемся при рассмотрении ПЗУ в следующей главе. В ка-
честве иллюстрации на рис. 1.12 представлены шестнадцате-
ричные цифры, которые получены с помощью точечной 5X7*
матрицы. Такая многоточечная матрица позволяет существен-
Рис. 1.12. Шестнадцатеричные цифры в матричном изображении из 5X7 эле-
ментов.
но улучшить качество изображения букв и других знаков.
В настоящее время индикаторные элементы на СД размеща-
ются обычно вместе с генератором символов. Фирма Texas
Instruments выпускает такие схемы под названием TIL311.
Каждая схема TIL311 состтоит из 4-разрядного регистра, деко-
дера на основе ПЗУ, источника постоянного тока и индикатор-
ной матрицы из точечных СД. Внешних ограничивающих ре-
зисторов для питания СД не требуется.
Преобразователи кода, которые применяются для генера-
ции буквенно-цифровых символов, в основном базируются на
ПЗУ. В этих преобразователях символы представляются в ко-
де ASCII и затем преобразуются с помощью ПЗУ в требуемый
код для последующего контроля буквенно-цифровых индикато-
ров. При большом числе индикаторов символы воспроизводят-
ся по методу сканирования, т. е. реализации одной линии за
другой, что позволяет работать с одним ПЗУ.
1.7. Кодеры
Одной из популярных цифровых схем является преобразо-
ватель из десятичного кода в двоичный код. Ранее мы познако-
мились с подобной схемой в форме диодной матрицы, которая
преобразовывала нажатия клавиш в двоичный код.
Среди ТТЛ-микросхем, которые реализуют эту функцию,
известна, например, ИС типа SN74LS148, блок-схема которой
приведена на рис. 1.13, а. Функциональная таблица этой ИС
показана на рис. 1.14.
Из анализа блок-схемы следует, что после активизации од-
ного входа (Л-сигналом) благодаря соответствующему монта-
Логические элементы и их применение в сложных схемах
29>
жу включается набор схем И, которые обеспечивают на выходе
двоичный эквивалент входной десятичной величины. Если, на-
пример, мы активизируем вход «5», то это приведет к активи-
зации третьей схемы И на выходе АО и второй схемы И на выхо-
де Д2. К схеме добавлена одна дополнительная схема И с вы-
ходом £0, который показывает, в каком состоянии находится
вход данных или £1. Эта схема требуется для реализации кас-
кадного варианта, который позволяет расширить число вход-
ных десятичных шин.
Данная кодирующая схема относится к разряду приоритетных,
кодеров, т. е. в ней первым всегда декодируется вход с макси-
мальной десятичной величиной. Свойство приоритетности обес-
печивается с помощью дополнительных соединений входов
схем И. Возникающие при этом дополнительные переменные на
входах схем И исключают кодирование меньших десятичных
величин, если случайным образом будет активизировано не-
сколько входов.
Кроме этого, декодер имеет еще один разрешающий вход
£/, с помощью которого можно запереть все схемы И. Вход EI
активизируется //-сигналом. Этот же вход используется так-
же в том случае, когда мы переходим к каскадному варианту
включения нескольких кодеров с целью обслуживания больше-
го числа десятичных каналов. Символическое обеспечение
приоритетного кодера показано на рис. 1.13,6.
Входы и выходы активизируются £-уровнем, что соответст-
вует приведенной выше функциональной таблице. Дополни-
тельные символы в верхней части функционального блока по-
казывают, что речь идет о преобразовании из десятичного кода
в двоичный. Тот факт, что вход с максимальной десятичной
величиной имеет приоритет, отмечен сокращенным обозначени-
ем HPR — Highest Priority (максимальный приоритет) в ука-
зателе функции.
Применяемые обозначения зависимостей основаны на функ-
циональной таблице истинности, которая выполняется для дан-
ной схемы. Входы связаны И-зависимостью с £/, что следует
из указателя G8 около £/-входа и идентификатора 8 около
выходов. На выходе £0 появляется //-сигнал, если на один из
входов поступает £-сигнал и одновременно выполняется
£/(G8). Также £0 = //, если Е1 = Н, что следует из идентифи-
катора 9 около £О-выхода. CS-выход связан инверсной зави-
симостью (Z) с £О-выходом (10). Мы имеем G5 = £, если на
один из входов или несколько одновременно поступает £-сиг-
нал и если EI = L. Кроме этого, G5 = L = H, если £O = Z10 = £,
или EI = L или одновременно Z10 = £/ = £.
На рис. 1.15 показано, как приоритетные кодеры включают-
ся в каскадном варианте. Мы видим, что выход £0 старшего
30
Глава 1
а
Логические элементы и их применение в сложных схемах
31
Рис. 1.13. а — кодер типа 74LS148; б — символическое обозначение; в — раз-
мещение в корпусе.
кодера связан со входом EI младшего кодера. Активизация
старшего кодера приводит к блокировке младшего кодера. На-
жатие клавиши, связанной со старшим кодером, означает, что
устанавливается ЕО = Н, в результате чего происходит блоки-
ровка младшего кодера. Рассмотрим функциональную табли-
цу, приведенную на рис. 1.14. В нашем примере выход ЕО
обеспечивает четвертый бит для двоичной декодировки, необ-
ходимый при наличии двух 8-входных шин.
Входы Выходы
EI 0 1 2 3 4 5 6 7 А2 А1 АО GS ЕО
Н X X X X X X X X 1 1 1 1 1
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 X X X X X X X 0 0 0 0 0 1
0 X X X X X X 0 1 0 О 1 0 1
0 X X X X X 0 1 1 0 1 0 0 1
0 X X X X 0 1 1 1 0 1 1 0 1
0 X X X 0 1 1 1 1 1 0 0 0 1
0 X X 0 1 1 1 1 1 1 0 1 0 1
0 X 0 1 1 1 1 1 1 1 1 0 0 1
0 0 1 1 1 1 1 1 1 1 1 1 0 1
существенно; 1=Н, 0-L
Рис. 1.14. Функциональная таблица для кодера типа 74LS148.
Давайте исследуем, что произойдет в этой схеме, если будет
задействован вход младшего кодера. Активный входной сигнал
приведет к появлению двоичного сигнала на выходе, так как
старший кодер не активизирован (£'О = Л), и поэтому младший
кодер получил разрешение на преобразование кода. Одновре-
менно EO = L означает, что старший двоичный выходной бит
равен 0. Выходы обеих схем Ао, А2 объединяются схемами
32
Глава 1
15 входных линии
Рис. 1.15. Каскадное включение нескольких приоритетных кодеров.
ИЛИ, чтобы получился общий выход. Мы имеем GS=^H, если
Е\ = Н или если на все шестнадцать входов поступают //-сиг-
налы, т. е. ни один из входов каскадного кодера не является
активным. Во всех остальных случаях как при одной, так и
при большом числе нажатых клавиш выход GS активизируется
(устанавливается на Л-уровне). Поэтому с помощью GS мы
можем следить за тем, чтобы в двоичные выходные каналы
поступала только содержательная информация.
Выше в качестве примера применения кодера мы взяли
преобразование нажатия «десятичной» клавиши в двоичный
код. Другой пример применения этой схемы связан с реализа-
цией режима прерывания в ЭВМ. Если нам требуется осущест-
вить связь внешних устройств с ЭВМ, то для этой цели акти-
визируется соответствующая десятичная входная шина деко-
дера. С помощью сигнала GS, который посылается в систему
управления ЭВМ, осуществляется попытка прерывания. Одно-
временно по выходным шинам декодера этой системе сообща-
ется, какое именно периферийное устройство посылает запрос
на прерывание. ЭВМ реагирует на это ответным сообщением
о получении запроса. Она также посылает по внешним шинам
Логические элементы it их применение в сложных схемах 33
сигналы, обеспечивающие дальнейшую обработку запроса на
прерывание. В результате система инициирует переход к под-
программе, обеспечивающей совместную работу ЭВМ с соот-
ветствующим периферийным устройством.
В большинстве запросов на прерывание преимущество по-
лучает периферийное устройство с более высоким приорите-
том (максимальная десятичная цифра на входе кодера). GS
активизируется на L-уровне, и это сделано для того, чтобы из-
бежать нежелательных последствий после удаления из крейта
печатной платы, на которой смонтирован кодер. При этом на
вход запроса на прерывание ЭВМ поступит //-сигнал.
1.8. Схема ИСКЛЮЧАЮЩЕЕ ИЛИ
Эта схема является основой многих других логических
схем, таких, как генератор битов четности, компаратор (схема
сравнения) и другие. На рис. 1.16 показан один из вариантов
реализации схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, которая иногда
Рис. 1.16. Схема ИСКЛЮЧАЮЩЕЕ ИЛИ (а) и ее функциональная таб-
лица (б) условное обозначение.
(Если не инвертируем F, то возникает функция ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ
(Х-ИЛИ-НЕ), и тогда мы проверяем равенство. Схема Х-ИЛИ-НЕ часто
обозначается как схема совпадений.
называется полусумматором. Схема, реализующая инверсную
функцию, называется ВКЛЮЧАЮЩЕЕ ИЛИ либо схемой рав-
нозначности.
Как следует из функциональной таблицы, на выходе схемы
ИСКЛЮЧАЮЩЕЕ ИЛИ появляется 1, если А=#В. При этом
в схеме равнозначности выходной сигнал будет равен 0.
3-807
34
Глава 1
$ Зеш
Рис. 1.17. Схема контроля четности типа 74LS28O.
а —логическая схема; б —размещение в корпусе.
Логические элементы и их применение в сложных схемах 35
Тот факт, что эту схему можно назвать полусумматором,
также следует из таблицы. Действительно, на выходе схемы
образуется арифметическая сумма переменных А и В, однако
перенос в старший разряд не формируется. Если бы этот пе-
ренос образовался, то схему можно было бы назвать полным
сумматором.
Работа схемы ИСКЛЮЧАЮЩЕЕ ИЛИ объясняется доста-
точно просто. Для схем И-НЕ на обоих входах мы имеем
//-сигналы, как в случае А = 0, В=1, так и в случае А=1, В =
= 0. На соответствующем выходе появляется 0, что приводит
к В=1, так как схема ИЛИ активизируется при сигналах
£-уровня на входах.
1.9. Схема контроля четности
Схемы контроля четности
редачи данных и добавляют
ный бит (бит четности), с
помощью которого проверя-
ется качество передачи дан-
ных по соответствующему
каналу связи. Проверка
четности заключается в
подсчете числа единичных
битов в передаваемой груп-
пе. Четное или нечетное
число единичных битов ко-
дируется в виде 0 и 1 или
наоборот в зависимости от
способа кодирования дан-
ных. Бит четности обычно
обычно передается в линию
связи последним.
Имеется целый ряд ТТЛ-
и КМОП-микросхем, кото-
рые производят проверку на
четность. Одной из них яв-
ляется микросхема типа
74LS280, структурная схема
которой представлена на
рис. 1.17. Из этого рисунка
видно, что она состоит из
пяти идентичных схем, каж-
дая из которых проверяет на
четность три бита двоичного
числа. Для трех битов воз-
можны следующие четыре
применяются в устройствах пе-
к группе битов данных контроль-
Рис. 1.18. Последовательное включение
схем контроля четности.
3*
36
Глава 1
нечетные комбинации: 001, 010, 100 и 111. Эти комбинации
кодируются с помощью схем И-ИЛИ. Три такие схемы могут
обработать 9 битов, т. е. образовать 3 бита четности. Эти 3 бита
снова поступают в такую же схему, так что в результате на
выходе появляется только 1 бит четности.
Рис, 1.19. Параллельное включение схем контроля четности.
С помощью схем И-ИЛИ-НЕ, показанных справа внизу на
рис. 1.17, на выходе формируется сигнал нечетности, который
равен 1 только в том случае, когда число единичных битов
в слове нечетно.
При каскадном включении генераторов битов четности вы-
ход каждой предыдущей схемы соединяется со входом после-
дующей. В каскадном варианте, показанном на рис. 1.18, вы-
ходы верхнего и нижнего генераторов соединены с двумя вхо-
дами среднего генератора, на выходе которого и появляется
конечный результат проверки на четность.
Другая возможность каскадного включения проиллюстриро-
вана на рис. 1.19. Здесь применен тот же метод соединения,
что и на соответствующем кристалле. Выходы отдельных
8-разрядных генераторов (проверочных устройств) соединяют-
ся со входами специальной схемы, которая заново определяет
Рис, 1,20, а — схема сравнения типа 74LS85 с возможностью увеличения
длины слова; б — символическое обозначение.
38
Глава 1
четность для поступающих нулей и единиц и обеспечивает ко-
нечный результат проверки. При генерации бита четности один
из 9 входных сигналов делается нулевым. В процессе проверки
мы обрабатываем все 9 бит и выделяем девятый бит в каче-
стве бита четности. В результате выходной сигнал сразу же
показывает, не возникла ли при передаче какая-нибудь ошиб-
ка. Если на выходах схемы контроля появляются В-сигналы,
это означает, что при передаче была допущена ошибка.
1.10. Компаратор, или схема сравнения
С помощью этой схемы сравнивается содержимое двух
чисел (А и В) и вырабатываются выходные сигналы, соответ-
ствующие случаям А<В или А>В. Имеется целый ряд при-
менений, где необходимо сравнение двух чисел. В качестве
примера можно указать применение компараторов в схемах
фазового детектирования, которые используются в синтезато-
рах частот.
В принципе схема сравнения представляет собой каскад-
ную схему, состоящую из схем ИСКЛЮЧАЮЩЕЕ ИЛИ
с инверсией (схем равнозначности). Одна такая схема срав-
нивает содержимое двух разрядов чисел. Проверив какие-ли-
бо два разряда, один из числа А, а другой — из В, мы пере-
ходим к следующей паре разрядов и продолжаем сравнение
до тех пор, пока не получим конечный результат сравнения
этих чисел. В составе ТТЛ-семейства имеется 4-разрядный ком-
паратор типа 74LS85, при каскадном включении которого воз-
можно увеличение длины сравниваемых слов (рис. 1.20).
Анализируя состав этой схемы, можно заметить, что для
сравнения двух 4-разрядных слов требуются четыре схемы рав-
нозначности, расположенные на рисунке слева. На их выходах
появится 1 в том случае, когда на все входы поступают пары
-одинаковых сигналов. Если все биты в двух словах одинаковы,
то на А = В-выходе (в нижней части рисунка) появляется 1. Это
возможно только тогда, когда все сигналы на входе схемы И рав-
ны 1. При анализе случаев A<ZB и А>В обычно указывают,ка-
кие именно биты отличаются друг от друга. Допустим, что би-
ты А0=^В0, а значения остальных пар битов совпадают. Тогда
в схеме активизируется одна из схем И, обозначенных через Р
и Q, Если А0>В0 (т. е. А0 = 1), то это означает, что на оба
входа порта Р, которые связаны со входами АО, ВО, поступают
единицы. Сигнал 1 с выхода схемы Р через схему ИЛИ посту-
пает на выход А>В компаратора. Если же В0>А0 (т. е.
В0=1), то активизируется схема Q и единица через другую
схему ИЛИ поступит на выход А<В. Если старшие биты не
равны, то сигнал 0 на выходе их схем заблокирует схемы И
для младших битов. Лучше всего это видно в том случае, ког-
Логические элементы и их применение в сложных схемах
39
Д>В /ЬВ
а
Рже. 1.21. Каскадное включение
4-разрядных компараторов (74LS85) (а)
и символическое обозначение (б),
40
Глава 1
да неравными оказываются самые старшие биты. При этом на
выходе АЗВЗ схемы равнозначности, проверяющей биты АЗ, ВЗ,
появляется нуль, который блокирует все нижележащие схе-
мы И. На рис. 1.21 показано, как такие компараторы использу-
ются при анализе слов с большей длиной.
В каскадном варианте входы А = В, А>В и A<ZB и выхо-
ды компараторов соединяются между собой, как показано на
рис. 1.21. Для наименее значимого (младшего) компаратора
входы А>В и A<zB заземляются, а вход А = В переводится
в состояние «1».
Компараторы широко применяются в цифровой технике.
В качестве иллюстрации укажем на один из примеров. При
тестировании программ вычислений нам часто требуется оста-
навливать ЭВМ на каком-либо адресе ЗУ для проведения конт-
роля. Этот режим обеспечивается с помощью компаратора, ко-
торый в процессе вычислений сравнивает биты обрабатывае-
мых адресов с битами стоп-адреса, которые вводятся с по-
мощью переключателей с пульта управления ЭВМ. Другими
словами, мы постоянно сравниваем двоичные величины состоя-
ний, в которых находятся переключатели на пульте, с изме-
няющимися битами адресов программы вычислений. При сов-
падении (равенстве) всех битов из двух сравниваемых адресов
на пульте ЭВМ появляется сигнал, который переводит ЭВМ
в режим ожидания. Таким же образом можно войти в режим
останова, сравнивая биты данных с содержанием адреса, на-
бранного с помощью переключателей на панели управления.
1.11. Схемы сложения — полные сумматоры
В предыдущих разделах мы уже познакомились с полу-
сумматором, т. е. схемой ИСКЛЮЧАЮЩЕЕ ИЛИ, которая оп-
ределяет логическую сумму двух входных переменных, но не
образует на выходе сигнал переноса. В полном сумматоре сум-
ма передается на выход для последующей арифметической обра-
ботки. В ТТЛ-семействе имеется схема полного сумматора
74LS183, представленная на рис. 1.22. Формирование сигнала
переноса происходит в верхней части этой схемы. Из таблицы
истинности следует, что Cn+i = l, если Сп и В, Сп и А или В
и С попарно находятся в состоянии «1», т. е. по крайней мере
два входных сигнала должны быть равны 1. Можно показать,
что если по крайней мере два входа находятся в состоянии «О»,
то Сл+1 = 0. Сумма S равна 1 для комбинаций входных пере-
менных 001, 010, 100 и 111. Сумма S равна 0, если два входа
находятся в состоянии <1» или все три входа находятся в со-
стоянии «0». Как видно из схемы, для выделения этих ком-
бинаций требуются четыре схемы И.
Логические элементы и их применение в сложных схемах
41
м;— s —2/®
В!Н) —
С„Ш) ---1/7 СО------CrfHH)
МЭК=симбол
Рис. 1.22. Полный сумматор из микросхемы 74LS183.
а —схема; б — размещение в корпусе; в — функциональная таблица4
42
Глава 1
Для сложения, например, двух байтов следует перейти
к каскадному варианту включения нескольких сумматоров.
Проще всего это можно сделать, соединяя выход Cn+i преды-
дущего сумматора с входом Сп последующего.
Йз-за последовательного выполнения операции переноса
суммирование по этому методу приводит к значительной за-
держке во времени. Вместо последовательного переноса с по-
мощью дополнительной логической схемы можно одновременно
реализовать перенос для группы из четырех разрядов, что по-
зволяет уменьшить время задержки в 4 раза.
Следует отметить, что разработаны программируемые ариф-
метико-логические устройства (АЛУ) и функциональные гене-
раторы, которые путем подачи управляющих сигналов можно
запрограммировать на реализацию той операции, которую тре-
буется выполнить в данный момент. Такой схемой является
микросхема АЛУ типа 74S181 с двумя 4-разрядными входами
данных, с которой можно соединить микросхему формировате-
ля ускоренного переноса типа 74S182, уменьшающую задерж-
ку при переносе до минимума. Микросхему 74S181 можно ис-
пользовать не только для арифметической обработки данных, но
и для реализации логических функций, таких, как И, ИЛИ,
ИСКЛЮЧАЮЩЕЕ ИЛИ, а также для пересылки данных без
их изменения. Из схем такого типа в сочетании со схемой управ-
ления (контроллером) или ПЗУ можно построить счетно-реша-
ющее устройство ЭВМ.
1.12. Практическая схема сумматора
Рассмотрим работу сумматора, который вычисляет сумму
двух четырехразрядных чисел, формируемых двумя группами
переключателей А и В. Для упрощения используем метод по-
следовательного сложения, при котором разряды обоих слагае-
мых вводятся в полный сумматор последовательно (один за
другим). При этом нам потребуется всего лишь один полный
сумматор в отличие от метода параллельного суммирования,
когда число сумматоров равно числу разрядов слагаемых. По-
следовательный сумматор работает следующим образом.
Допустим, что мы суммируем два 4-разрядных числа А и В,
например А=10 и В=14. При этом выполняются следующие
операции:
Момент
бремени т3 т2 т, т0
с„ =: 1 1 0 -— 0
А г= 1 0 1 0 = 10
В = 1 1 1 0 = 14
Сумма == 1*1 1 0 0 0 = 24
Перенос -1 —‘ 1 — 1 0
Логические элементы и их применение в сложных схемах 43
Начиная последовательное сложение, мы вводим в сумма-
тор крайние правые разряды чисел А и В в момент То. Оба
этих младших бита равны 0. В результате на выходе суммато-
ра появится сумма, равная 0, которую мы помещаем в ячейку
регистра сдвига, соответствующую его старшему разряду D3:
А =о
в о
------------
Сумма = о c„ + i = о
D3 D2 DI DO OV
0 О
Величина Сл+i будет помещена в регистр переноса, который
состоит из одного триггера. Сп+\ необходимо запомнить, так
как перенос потребуется нам при сложении последующих би-
тов. В момент времени 1\ мы вводим в сумматор следующую
(вторую справа) пару разрядов вместе с Сп.
Сп =0
А = 1
В = 1
Сумма = о Сл+1 = 1
I
D3 D2 DI DO OV
О 0 1
Полученная сумма, равная 0, будет помещена в крайнюю
левую ячейку регистра сдвига £>3. Одновременно нуль, введен-
ный в момент То, будет сдвинут на одну позицию вправо
в ячейку D2. В момент Т2 мы вводим в полный сумматор тре-
тий набор разрядов совместно с результатом предыдущего пе-
реноса и получаем следующую сумму.
с„ = 1
А =0
В = 1
Сумма =о = i
РЗ D2 DI DO OV
0 0 0 1
44
Глава 1
Наконец, в момент Т3 мы вводим в сумматор четвертую
группу разрядов совместно с Сп и определяем сумму вместе
с переносом:
Сп = 1
А = 1
В = 1
--------
Сумма = 1 Ся+1 = 1
J.
D3 D2 DI DO OV
1 0 0 0 1
Теперь после третьего сдвига суммы в регистре сдвига мы за-
канчиваем суммирование и получаем число 24, т. е. сумму чи-
сел А и В. Результат переноса, полученного на последнем ша-
ге сложения, находится в триггере переноса OV. Этот триггер
необходимо рассматривать как продолжение регистра суммы.
1.13. Схема для генерации временных сигналов
При обсуждении работы последовательного сумматора мы
ввели четыре различных момента времени То, Т% и Т3.
В эти моменты времени были реализованы последовательные
операции суммирования, необходимые для получения полной
суммы двух чисел. Эти четыре временных сигнала выдает
счетчик, имеющий четыре состояния, который связан с декоде-
ром, как показано на рис. 1.23. Счетчик состоит из двух
/Х-триггеров, J- и К-входы которых подключены к напряжению
-|-5В, т. е. на оба входа подается напряжение Я-уровня. Так
как Q-выход FF\ связан с Т-входом FF2, то счетчик работает
в двоичном режиме.
Декодер связан со счетчиком таким образом, что сигнал
ТОЦ) наблюдается при состоянии счетчика «00», если при
этом одновременно Sq = H, т. е. переключатель So находится
в состоянии «0». Сигнал 7Т возникает при состоянии счетчика
«01», Т2— при состоянии «10» и ТЗ — при состоянии «11», если
при этом, как и выше, мы имеем S0 = H.
Связь между тактовым импульсом и сигналами То, Ti,
и Т3 видна из временнбй диаграммы, приведенной на рис. 1.24.
Каждый раз, когда тактовый импульс имеет L-уровень, проис-
ходит генерация различных временных сигналов.
Можно задаваться вопросом: а почему эти сигналы нельзя
получать при помощи фиксированных тактовых импульсов?
Почему, например, нельзя получить эти сигналы в момент вре-
мени, когда тактовый импульс 5о = Я? Причины заключаются
в следующем.
Рис. 1.23. Генератор тактовых импульсов для схемы сложения.
Рис. 1.24. Временная диаграмма схемы сложения.
46
Глава 1
Цикл суммирования в действительности состоит из двух
фаз, а именно из операции суммирования и операции переме-
щения результата в регистр сдвига. Четыре операции суммиро-
вания выполняются в те моменты времени, когда появляются
сигналы То, Т1, Т2 и Т3, а перемещение суммы в регистр сдвига
происходит сразу же после того, как тактовый импульс пере-
шел с L- на //-уровень, т. е. в течение времени нарастания так-
тового импульса.
1.14. Регистры А, В и OV (перенос) в сумматоре
Как видно из рис. 1.25, регистры А и В для простоты вы-
полнены в виде наборов переключателей. Переключатель, как
и триггер, является запоминающим элементом, однако в отли-
чие от триггера он имеет ручную установку. Два слагаемых
(двоичных числа) сохраняются с помощью переключателей,
причем наименее значимые разряды чисел представляются
с помощью ключей Ао и Во. Если какой-либо переключатель
Логические элементы и их применение в сложных схемах
47
замкнут, то в момент поступления тактового сигнала Тп на со-
ответствующем входе схемы HE-ИЛИ, включенной после груп-
пы переключателей, появляется напряжение L-уровня и на
вход сумматора поступает 1.
Рис, 1.26. Полный сумматор типа SN7480N.
Если переключатель находится в состоянии «О», то на со-
ответствующем входе схемы HE-ИЛИ появляется напряжение
Я-уровня. Поскольку одновременно это же напряжение появ-
ляется на трех других входах, то на вход сумматора поступа-
ет 0. Во время суммирования производится последовательное
считывание сигналов с выходов обоих регистров (переключате-
лей) А и В, а затем определяется сумма. Эта сумма заносится
в регистр сдвига в момент появления синхроимпульса. Перенос
попадает в регистр переноса, выполненный в виде D-триггера,
Схема такого сумматора представлена на рис. 1.26.
48
Глава 1
1.15. Регистр суммы
Регистр суммы, в котором хранится сумма чисел А и В,
состоит из четырех D-триггеров (рис. 1.27). Если So переклю-
чается из состояния «О» в состояние «1», то на выходе тригге-
ра появляется та информация, которая поступила на D-вход.
Эта информация вводится в регистр со стороны старшего раз-
ряда FF3. После четырех So-импульсов мы получаем полную
сумму, и младшая цифра суммы попадает в крайнюю правую
ячейку регистра суммы. Перенос, который возникает при сум-
мировании последних битов, попадает не в регистр суммы,
а в OV-регистр (регистр переноса) (рис. 1.25).
Для считывания суммы используются схемы, связанные как
с триггерами регистра суммы, так и с триггером регистра пе-
реноса.
Получая с помощью переключателя тактовые сигналы, мож-
но проследить за различными фазами процесса последователь-
ного сложения.
1.16. Последовательностная логика — процессор
с разрядной организацией
Управляемое арифметико-логическое устройство (АЛУ)
вводит нас в мир последовательностной логики. Для реализа-
ции сложных функций в рамках комбинационной логики для
реализации различных специальных функций использовались
логические схемы, связанные между собой при помощи монта-
жа. Параметры этих сложных устройств определяются как ви-
дом используемых логических схем, так и типом монтажа.
Логические элементы и их применение в сложных схемах 49^
Если в подобной системе различные функции выполняются
многократно, то можно задаться вопросом, а не будет ли более
экономично заменить параллельную организацию схемных эле-
ментов на последовательную?
В рамках последовательностной логики функция определен-
ного типа реализуется многократно с различными входными
переменными. Например, необходимые нам источники данных,,
которые обеспечивают входные переменные, можно связать с
соответствующими схемами с помощью всего лишь одного се-
лектора. Передачу данных к различным приемным устройствам,
можно контролировать с помощью демультиплексора. Приме-
нение какой-либо схемы для реализации различных операций,,
например селектора на входе и выходе с учетом требуемого*
времени, можно контролировать с помощью управляющего бло-
ка, т. е. контроллера.
Различие между комбинационной и последовательностной*
логикой лучше всего можно проиллюстрировать с помощью при-
мера из жизни. Известно, что изделия массового производства*
изготавливаются в основном на конвейере. На конвейере рабо-
тают люди, каждый из которых выполняет небольшую часты
полного монтажа данного изделия. Каждый рабочий на кон-
вейере выполняет лишь строго определенную функцию. Отдель-
ная операция обычно достаточно упрощена, она заключается*
лишь в перемещении отдельной детали. Таким образом, ответ-
ственность этого рабочего ограничивается на уровне отдельной*
операции.
Производительность труда на конвейере высока. Фактиче-
ски она определяется скоростью движения конвейерной ленты.
Набор (ассортимент) деталей, который имеется в распоряже-
нии каждого рабочего, очень ограничен. Монтаж можно выпол-
нить с помощью простых селекторов. Человеку вряд ли потре-
буется мобилизация всего своего ума для выполнения какой-
либо определенной монотонной операции.
С другой стороны, сборку изделия может обеспечить один'
рабочий. Однако теперь в его распоряжении должен находить-
ся весь набор необходимых деталей, которые он использует
в определенном последовательном порядке (шаг за шагом) при
монтаже изделия. На каждом этапе он выбирает новую де-
таль, новый монтажный материал и новый инструмент, короче
говоря, он прибегает к более сложным средствам селекции
(выборки). Кроме того, такое последовательное выполнение-
операций означает, что данный монтажник должен одновремен-
но осуществлять и внутреннее управление, которое регулирует
скорость производства.
Принцип конвейерного производства очень напоминает
принцип комбинационной логики. В частности, на конвейере:
4-807
60
Глава 1
все операции выполняются одновременно (за исключением пре-
небрежимо малой задержки, связанной с движением ленты).
В комбинационной логике учитывается задержка по времени
прохождения сигналов через электронные схемы. Далее каж-
дый монтажник на конвейере выполняет одну, строго опреде-
ленную операцию. То же самое делает ИС в комбинаторной
системе. Последовательность операций определяется располо-
жением монтажников вдоль конвейерной ленты. В комбинаци-
онной логике эта последовательность связана с расположением
ИС в монтажной схеме. С другой стороны, рассмотренный вы-
ше пример с монтажником, который один собирает целиком все
изделия, соответствует переходу к последовательностной логи-
ке. Здесь речь идет о рабочем, который может выполнять раз-
личные монтажные операции (реализовать различные функ-
ции) на различных фазах (этапах) процесса обработки, ис-
пользуя различные детали (входные переменные). Для каж-
дой новой операции требуется новая деталь. Порядок следова-
ния операций известен, и они выполняются одна за другой.
В последовательностной логике отдельные специальные опе-
рации контролируются при помощи управляющего устройства
(контроллера) и также выполняются одна за другой. При мон-
таже мы предполагаем, что рабочий может выполнить разно-
образные операции, используя различные инструменты. В по-
следовательностной логике для этой цели применяется много-
функциональное устройство, которое может реализовать ряд
специальных функций под управлением сигналов выборки
функций, связанных с контроллером. Таким многофункциональ-
ным устройством является упомянутое выше арифметико-логи-
ческое устройство (АЛУ).
Основные различия между комбинационной и последова-
тельностной логиками заключаются в продолжительности опе-
раций, размерах схем и стоимости устройства.
Комбинационная логика оказывается быстрее последова-
тельностной. (То же самое наблюдается и при монтаже на
конвейере в сравнении с комплектной сборкой изделия одним
монтажником. На конвейере готовые изделия сходят с ленты
через короткие промежутки времени, в то время как при ин-
дивидуальной сборке монтаж может потребовать многих ча-
сов.) С другой стороны, затраты в случае комбинационной ло-
гики оказываются выше, чем в случае последовательностной
логики. Этот аспект возникает также и при сравнении конвей-
ерного метода с методом индивидуальной сборки. На конвейе-
ре гораздо выше зарплата, к тому же выше предварительные
затраты на установку самого конвейера.
Естественно, приведенный выше сравнительный анализ
имеет смысл только для случая сложной функции. В нашем
Логические элементы и их применение в сложных схемах 5В
примере конвейерного производства какого-либо изделия не
очень существенно, состоит ли оно только лишь из двух или
трех деталей, например бельевая прищепка.
Примером цифровой схемы, которая работает в последова-
тельном режиме, является ЭВМ.
Эта функциональная единица может последовательно вы-
полнить большое число операций под управлением программы,
которая находится в командном ЗУ. Следующие одна за дру-
гой команды указывают операции, которые затем выполняет
решающий автомат. Командное ЗУ доступно для пользователя,
который определяет, какие операции и в каком порядке необ-
ходимо выполнять на ЭВМ.
Этими операциями могут быть функции управления, ис-
пользуемые в автоматически регулируемых химических процес-
сах, при распределении газа и электроэнергии или при управ-
лении станками. К ним можно также отнести бухгалтерский
учет, управление магазинами, дебитными и кредитными отде-
лами и отделом зарплаты.
В случае ЭВМ диапазон ее действия как функциональной
единицы определяет программа, т. е. набор следующих друг
за другом команд. В комбинационной логике функционирова-
ние устройства определяется монтажом. Программу можно из-
менить достаточно просто, монтаж в этом отношении более
консервативен.
Сложность применяемого автомата также играет здесь оп-
ределенную роль. Исполнительный автомат, который состоит
всего лишь из дюжины компонентов, изменить гораздо легче,
чем, например, ППЗУ ЭВМ, в котором хранятся команды. Од-
нако в общем случае мы можем также утверждать, что при пе-
реходе к более сложной обработке данных изменить структу-
ру программы будет гораздо легче, чем изменить структуру ав-
томата, изготовленного из элементов комбинационной логики.
Как уже было сказано выше, управляемые логические уст-
ройства предназначены для последовательного выполнения циф-
ровых операций. В частности, для хранения данных использу-
ются регистры, которые служат в АЛУ в качестве источников
и приемников данных. Тот факт, что такая функциональная
единица управляется в последовательном режиме, означает,
что нам требуется управляющее устройство (контроллер) со
счетчиком и генератором тактовых сигналов (таймером) для
того, чтобы в результате получилась законченная управляе-
мая система.
В последние годы начат широкий выпуск микросхем, содер-
жащих регистры, селекторы и АЛУ на одном кристалле. Мик-
росхемы этого типа называются процессорными блоками с раз-
рядно-модульной организацией. Длина обрабатываемого слова
4е
152
Глава 1
в них составляет 4 бит, однако ее можно увеличить путем па-
раллельного соединения нескольких процессорных элементов.
Обычно команда, с которой имеет дело программист, в об-
щем случае является комбинацией отдельных элементарных
функций, которые последовательно выполняются в процессор-
ном блоке. Назовем в качестве примера команду «сложить со-
держимое регистра А с информацией, которая находится в п-й
ячейке внешнего ЗУ, и передать полученный результат в ре-
гистр С». Эта команда требует выполнения ряда подготови-
тельных операций еще до того, как процессор перейдет к обра-
ботке данных. Главное, необходимо сформировать адрес
•ячейки ЗУ, из которой с учетом времени доступа передать дан-
ные, например, в регистр В. Такая передача обычно происходит
через общую шину данных, а это означает, что мы не можем
передать всю информацию одновременно за один прием.
По окончании передачи регистры А и В необходимо соеди-
нить с АЛУ через селекторы, если АЛУ допускает режим свя-
зи с несколькими регистрами одновременно. Затем начинается
собственно обработка (суммирование), после которой получен-
ный результат будет передан в регистр С через распредели-
тельную схему (демультиплексор). Для обеспечения необходи-
мой последовательности выполнения операций применяется
контроллер, о котором мы уже говорили выше. В ЭВМ, коман-
ды которой обеспечивают такие сложные операции, как умно-
жение, деление или извлечение корня, применяются контрол-
леры со сложной структурой и обширным набором команд,
хранящихся в ПЗУ. Для реализации сложных команд, доступ-
ных пользователю или программисту, используются внутриси-
стемные подпрограммы, не доступные для пользователя или
программиста. Эти подпрограммы должны обеспечить управле-
ние работой процессора, т. е. обеспечить выполнение сложных
логических операций путем последовательного выполнения эле-
ментарных действий. Такие подпрограммы обычно называются
микропрограммами, а также программно-аппаратными средст-
вами.
Переходя к терминологии, следует напомнить, что основная
системная программа обычно называется программным средст-
вом (Software), микропрограмма — программно-аппаратным
средством (firmware), а ИС, такие, как процессорные блоки,
контроллеры, ПЗУ и т. д., называются обычно аппаратными
средствами (hardware).
Работу процессорного блока полезно проиллюстрировать на
практическом примере.
Процессорный блок можно сравнить с плотником, каменщи-
ком или сборщиком велосипедов. Как известно, человек также
программируется для выполнения работы по этим узким спе-
Логические элементы и их применение в сложных схемах 53
циальностям! Это программирование осуществляется в процес-
се обучения данной специальности. Программируя ПЗУ, мы
•обучаем процессорный блок тому, как он должен выполнять
определенную команду. Модифицируя ПЗУ, можно перенастро-
ить блок для выполнения других операций. То же самое про-
исходит и с человеком, но при этом мы говорим о переквали-
фикации. Естественно, благодаря программированию мы суще-
ственно расширяем сферу применения процессорного блока. То
же самое происходит со специалистом в сравнении с неквали-
фицированным работником. В результате программирования
(обучения) и процессор, и рабочий становятся более квали-
фицированными.
В области программного обеспечения у нас также имеются
возможности для увеличения интеллектуальных способностей
системы за счет обучения ЭВМ языкам программирования вы-
сокого уровня, которые значительно упрощают сам процесс
программирования. При этом ЭВМ исключает из процесса про-
граммирования ряд специфических проблем.
На базе процессорных блоков можно разрабатывать мини-
ЭВМ с собственным специфическим набором команд. Этот на-
бор можно изменить, заменяя ПЗУ в контроллере; процессор-
ные блоки обычно изготавливаются с помощью биполярной
технологии и имеют относительно высокое быстродействие.
С помощью встроенной микропрограммы мы можем реализо-
вать на базе процессорных блоков ЭВМ, которая будет иметь
такой же набор команд, как другая ЭВМ, например, та, с ко-
торой знаком пользователь и на которой он ранее уже работал
{чтобы избежать переквалификации!). Эту операцию приспо-
собления набора команд ЭВМ одного типа к ЭВМ другого ти-
па называют эмуляцией (имитацией). При этом эмулируемая
ЭВМ называется базовой. Совершенно очевидно, что возмож-
ность эмуляции увеличивает конкурентоспособность соответст-
вующей ЭВМ, так как клиент получает более широкие возмож-
ности по выбору наиболее удобного для него набора команд.
Встречается также и другая ситуация, когда клиенту для его
целей требуется использовать какую-то специальную команду.
Эту команду можно ввести в ПЗУ, если, конечно, в ПЗУ преду-
смотрены свободные ячейки для размещения такой команды.
Кроме ЭВМ с разрядно-модульной организацией (РМО)
имеются также микроЭВМ, в которых контроллер и другие
внешние схемы, размещенные автономно в ЭВМ, объединя-
ются на одном кристалле вместе с другими схемами. Мик-
роЭВМ имеет фиксированный набор команд, состав которого
определяется изготовителем. Однокристальные микроЭВМ
обычно изготавливаются по n-МОП-технологии, поэтому они
работают медленнее, чем ЭВМ на базе биполярных процессор-
54
Глава 1
ных блоков. Например, в конторских мини-ЭВМ обычно при-
меняются процессорные блоки. Такие же блоки обычно ис-
пользуются в таких устройствах, как контроллеры для управ-
ления ЗУ на гибких дисках, и других быстрых периферийных
устройствах, так как в применениях такого типа МП, реализо-
ванные по МОП-технологии, проигрывают по быстродействию.
Набор команд контроллера на базе процессорных блоков мож-
но «настроить» на какое-либо специфическое применение, что
невозможно для МП с фиксированным набором команд. При
управлении ЗУ на гибких дисках контроллер на процессорных
блоках организует обмен данными между ЭВМ и несколькими
дисковыми ЗУ. Обычно в составе этого контроллера имеется
другой контроллер (схема управления) более низкого уровня,
который управляет работой процессорных блоков.
Слово «контроллер» используется для того, чтобы показать,
что данное функциональное устройство выполняет различные
функции контроля и управления, которые могут иметь разные
уровни сложности и важности (приоритетности). Например,
есть уровень управления системой в целом, более низкий уро-
вень управления периферийным оборудованием и еще более
низкий уровень управления процессорными блоками. Контрол-
леры находятся в управляющих автоматах станков и стираль-
ных машин. МП, запрограммированный в качестве контролле-
ра, также выполняет функцию управления и применяется как
устройство управления для игральных автоматов, радио- и те-
левизионных устройств, электропроигрывателей и т. д.
Процессорный блок является функциональным устройством,
которое, как мы видели выше, может выполнять различные
арифметические и логические операции. Около этого обрабаты-
вающего органа располагаются запоминающие элементы, на-
пример регистры, предназначенные для хранения промежуточ-
ных результатов вычислений. Кроме того, на кристалле обыч-
но размещаются такие селектирующие схемы, как мультиплек-
соры и демультиплексоры. Это функциональное устройство ге-
нерирует также переменные, которые обеспечивают каскадное
включение процессорных блоков, что позволяет переходить
к обработке слов большей длины. Наконец, процессорный блок
выдает сигналы, которые несут информацию о результатах вы-
полнения предыдущих операций. В их числе можно назвать
сигналы переполнения (превышения объема памяти регистра)
и нулевого значения результата.
Процессорный блок является сравнительно простым элемен-
том, который можно использовать в самых различных случаях.
Как мы сообщали ранее, разработчик с помощью соответству-
ющей микропрограммы может легко приспособить такой блок
для своих специальных целей.
Логические элементы и их применение в сложных схемах
55
Рис. 1.28. МикроЭВМ с разрядно-модульной организацией.
Как следует из рис. 1.28, микропрограмму можно хранить
в отдельном ПЗУ. Чтобы различные операции выполнялись
в надлежащем порядке, требуется организовать соответствую-
щие обращения к адресам ЗУ, где находятся необходимые для
этой цели биты информации. Эти упорядоченные обращения
к адресам ПЗУ контролируются так называемым устройством
управления последовательности микрокоманд (УУП), которое
реализует функции двоичного счетчика с дополнительными воз-
можностями для осуществления операций пропуска микро-
команды или перехода к микропрограмме. Эти возможности
УУП позволяют изменять ход операций процессорного блока,
исходя из результата обработки данных. В качестве примера
вновь рассмотрим деление: тот факт, что при повторяющемся
вычитании и сдвиге результат будет равен 0 или приведет к
изменению знака, служит указанием на выход из программы
деления для последующего перехода к другой арифметической
или логической операции. В результате формируемый адрес
66
Глава 1
ПЗУ, т. е. состояние счетчика в УУП, автоматически приводит
к переходу из подпрограммы деления в основную программу
или в другую подпрограмму.
На рис. 1.29 показан пример разбиения слова микропро-
граммы, которое хранится в ПЗУ. Мы видим, что это слово
разбито на ряд битовых полей. Первые 9 младших (наименее
\3130 292827282529 | 23 222120!918 17 /б \i5 19 13 12\/110 9 \8 7 8 59 3 2 1 о\
Поде команд ЯЛУ
Команда УЗП
(следующийадрес)
Управляющий мультиплексор
(быВор / из 16 тес то бык переменных)
Поле для адреса перехода
Поле управления внешней логикой,
различными регистрами, бходом-быходом и ЗУ__________________
Рис. 1.29. Поля двоичных разрядов микрокоманды на выходе ПЗУ в конт-
роллере с разрядно-модульной организацией.
значимых) разрядов слова (справа) являются битами управле-
ния АЛУ. Они определяют в двоичном коде операцию, которую
необходимо выполнить АЛУ. Выходы ПЗУ связаны с помощью
декодера с управляющими входами процессорного блока для
того, чтобы активизировать устройства, необходимые для вы-
полнения данной операции, такие, как АЛУ, внутренние ре-
гистры и селекторы.
Следующее поле из 3 бит используется для управления
УУП, например, для того, чтобы увеличить содержимое счетчи-
ка на 1 или 2 (2 в случае пропуска микрокоманды), или для
того, чтобы выполнить переход по адресу, указанному в чет-
вертом битовом поле.
Счетчик может также извлечь адрес из адресного стека.
Этот стек служит для хранения адреса команды, от которой
был совершен переход, для того, чтобы можно было вернуться
к этому месту программы после завершения операций. Такие
отклонения от основной программы делятся на переходы в про-
граммный цикл и переходы в подпрограмму, различие между
которыми иллюстрируется на рис. 1.30.
Поле, включающее биты 12—15, зарезервировано для се-
лекции одного из 16 имеющихся тестовых сигналов (признаков»
Логические элементы и их применение в сложных схемах 57
флаговых битов), которые может генерировать процессорный
блок. Эти тестовые сигналы дают информацию о результате
операции и могут воздействовать на последовательность чисел
(адресов), появляющихся на выходе УУП. С помощью 4 уп-
равляющих битов через внешний мультиплексор можно вы-
брать требуемый тестовый сигнал и послать его в УУП.
Рис. 1.30. Подпрограмма и программный цикл.
Биты 16—23 указывают адрес перехода, если на основании
полученного тестового результата возникает переход — откло-
нение от последовательного выполнения команд программы.
В этом поле указывается адрес команды, к которой должна
перейти программа в результате операции разветвления. Пе-
реход можно выполнить простым способом, вводя адрес в ад-
ресный регистр УУП, если тестовая переменная имеет соответ-
ствующее значение. Безусловные переходы, т. е. переходы без
участия тестовых переменных, всегда происходят по адресу,
указанному в микрокоманде.
Последнее поле в микрокоманде предназначено для управ-
ления внешними регистрами, такими, как регистр команд. Кро-
ме этого указанная группа битов контролирует адресацию ЗУ
и управление портами входа-выхода.
По окончании выполнения очередной команды необходимо
считывать следующую команду. При этом счетчик адресов ЗУ
Зыюдные данные
Рис. 1.31. Процессорный блок с разрядно-модульной организацией типа 2901
(набор команд дан на рис. 1.33).
Логические элементы и их применение в сложных схемах
59
получает приращение на 1, после чего соответствующую коман-
ду можно ввести в регистр команд.
Мы видим, что для управления выполнением различных
операций в микрокоманде требуется большое число разрядов.
Разряды микрокоманды могут непосредственно не использо-
Выхоанои адрес
Рис. 1.32. Устройство управления последовательностью микрокоманд ти-
па 8X02.
ваться для управления и контроля, а образовывать необходи-
мый двоичный код после их декодирования, например с по-
мощью демультиплексоров, превращаясь в управляющие сиг-
налы для различных узлов и блоков системы. Некоторые опе-
рации могут выполняться под управлением нескольких микро-
команд, что влияет на разрядность микрокоманд и скорость
обработки данных, а также требует использования дополни-
тельного регистра для хранения некоторых управляющих пере-
менных.
На рис. 1.31 приведена блок-схема процессорного блока ти-
па 2901. Блок-схема УУП представлена на рис. 1.32. Если мы
рассмотрим процессорный блок, то увидим, что здесь на кри-
a
Восьмеричная выборка Iw> 1st* Группа Функция
4 0 И AAQ
4 1 АДВ
4 5 DAA
4 6 DAQ
3 0 ИЛИ AVQ
3 1 AVB
3 5 DX/A
3 6 DVQ
6 0 ИСКЛЮЧАЮЩЕЕ AVQ
6 1 ИЛИ AVB
6 5 DVA
6 6 DVQ
7 0 ВКЛЮЧАЮЩЕЕ AVQ
7 1 ИЛИ АуВ
7 5 DVA
7 6 DVQ
7 2 Инвертировать Q
7 3 в
7 4 А
7 7 D
6 2 Пропускать Q
6 3 В
6 4 А
6 7 D
3 2 Пропускать Q
3 3 В
3 4 А
3 7 D
a
Продолжений
Восьмеричная выборка 1*43» hio Группа Функция
4 2 Устанавливать 0
4 3 на нуль 0
4 4 0
4 7 0
5 0 Маскировать AAQ
5 1 АДВ
5 5 _рЛА
5 6 DAQ
Восьмеоичная выбоока ,-0 5
1б43> Ью Группа Функция Группа Функция
0 0 Сум миро- A+Q Добавить 1 A+Q+1
0 1 вать А+В А+В+1
0 5 D+A D+A+1
0 6 D+Q D+Q+1
0 2 Пропускать Q Инкремен- Q+1
0 3 в тировать В+1
0 4 А А+1
0 7 D D+1
1 2 Декремен-^ Q-1 Пропускать Q
1 3 тировать В^-1 в
1 4 А—1 А
2 7 D—1 D
2 2 Дополнение —Q—1 Дополнение —Q
2 3 до единицы —В—1 до двух —в
2 4 —А—1 (отрицание) —А
1 7 —D—1 —D
1 0 Вычесть Q—А—1 Вычесть Q-A
1 1 дополнение В—А—1 дополнение В—А
1 5 до единицы A—D—1 до двух A—D
1 6 Q—D—1 Q—D
2 0 A-Q-1 A—Q
2 1 А—Вг-1 А—В
2 5 D—А—1 D—А
2 6 D—Q—1 D-Q
€2
Глава 1
Продолжение
Микрокод Операнды источника данных АЛУ
12 11 1о Восьмеричный код R 1 1 S
0 0 0 0 А Q
0 0 1 1 А в
0 1 0 1 0 Q
0 1 1 3 0 в
1 0 0 4 0 А
1 0 1 5 D А
1 1 0 6 D Q
1 1 1 7 D 0
в
1 = Н; 0 = L
Рис. 1.33. Набор команд микросхемы процессорного блока типа 2901.
а — логические команды; б — арифметические команды; с помощью шин выборки (зако-
дированных в таблице в восьмеричной системе) производится выборка требуемых логи-
ческих и арифметических функций. Результат операций, названных в функциональных
таблицах, появляется на выходе F АЛУ; в — выборка регистров АЛУ в ИС 2901.
сталле находится ОЗУ объемом в 16 слов по 4 бит, которое
имеет двухпортовый выход. С помощью адресных В-шин дан-
ные из ЗУ выбираются в В-регистр. С помощью адресных
Л-шин происходит выборка данных в Л-регистр. Передача дан-
ных происходит при подаче синхросигнала. Оба регистра свя-
заны с АЛУ через мультиплексор. Через такие же мультиплек-
соры можно также передать внешние данные на /?-входы АЛУ.
В зависимости от вида команды, обеспечиваемой микропро-
граммой, данные из А-, В- и Q-регистров могут быть переданы
на S-входы АЛУ.
9-разрядные управляющие коды имеют 3 группы по 3 бит
для задания вида операции и выбора регистров данных и ре-
зультата. С помощью 3 бит можно реализовать 8 двоичных
комбинаций, т. е. мы можем выбрать 8 вариантов подключения
регистров исходных данных и результата. В таблице, приве-
денной на рис. 1.33, в, показано, какие регистры можно соеди-
нить с R и S-входами АЛУ, когда на входы декодера управля-
ющего кода поступают определенные восьмеричные коды.
С помощью битовой группы, которая связана с регистром
результата, можно также выполнить дополнительные операции,
такие, как операции сдвига на входах Q-регистра и ОЗУ.
Мультиплексор позволяет осуществлять сдвиги как налево, так
и направо.
Кроме ^-выходов в АЛУ имеется еще ряд выходов, которые
обеспечивают каскадное включение нескольких ИС 2901,
Логические элементы и их применение в сложных схемах 63
а также выходы тестовых переменных (признаки) для реали-
зации переходов (ветвлений) в программе.
Схема УУП, представленная на рис. 1.32, выполняет все
функции, необходимые для адресации микропрограммного ЗУ,
и хранит адреса переходов для того, чтобы обеспечить нор-
мальное продолжение вычислений после возвращения из под-
программы или программного цикла.
Для этой последней функции имеется стековый регистр,
в который можно поместить 4 адреса по принципу LIFO —
Last-In — First-Out (последний в очереди обслуживается —
выбирается из стека первым). Другими словами, тот адрес, ко-
торый был введен в стек последним, считывается из него пер-
вым. Указатель стека запоминает, какой именно адрес был
введен последним.
Далее, через адресный мультиплексор регистр адреса полу-
чает приращение либо на одну, либо на две позиции. Послед-
ний вариант соответствует команде пропуска, после выполне-
ния которой будет пропущен один адрес.
Адресный мультиплексор сигналами, поступающими от де-
кодера, на который поступают разряды А СО— АС2 микро-
команды, образует битовое поле для управления УУП. При
этом устанавливается состояние регистра адреса, которое оп-
ределено соответствующей микрокомандой.
Набор команд, контролирующий выполнение вышеуказан-
ных операций с помощью УУП, показан в функциональной
таблице, приведенной на рис. 1.34. В третьей колонке таблицы
указано, как следует программировать соответствующее поле
команды, реализующей требуемую функцию. Команды TSK
и BRT позволяют осуществить в программе один пропуск или
один переход соответственно, исходя из значения тестовой пе-
ременной. Две другие команды PLP и BLT используются для
инициализации программного цикла с условным возвратом в
исходную программу в соответствии со значением тестовой пе-
ременной.
При исполнении команды RST регистр адреса будет пере-
веден в нулевую позицию (сброшен на нуль), а команда INC
обеспечит нормальное приращение содержимого регистра адре-
са на 1.
Набор команд микросхемы 2901 приведен на рис. 1.33.
Символические обозначения не могут достаточно полно оп-
ределить все особенности функционирования процессорного
блока. Наиболее существенная информация по работе такого*
процессора содержится в программе. Выше было показано, что
нормальный режим работы процессорного блока возможен
только в сочетании с УУП («интеллектуальным» счетчиком),
которое последовательно вызывает команды и ЗУ для обра-
Мнемоника Описание Функция АС 2 1 0 Про- верка Следу- ющий адрес Стек Указатель стека
TSK Проверить и про- пустить ООО 0 +1 Без из- менений Без из- менений
1 +2
INC Инкрементировать 0 0 1 X +1 Без из- менений Без из- менений
BLT Переход в цикл, если используемая переменная=1 0 1 0 0 +1 X
1 Из стека POP (чтение) —1
POP POP-стек (возвра- щение стека) 0 1 1 X Из стека POP (чтение) —1
BSR Переход к подпро- грамме (перемен- ная^) 1 0 0 0 +1 Без из- менений Без из- менений
1 Адрес пере- хода PUSH (+1) +1
PLP PUSH для перехо- да в программный цикл 1 0 1 X +1 PUSH- адрес +1
BRT Переход, если про- веряемый вход= 1 1 1 0 0 +1 Без из- менений Без из- менений
1 Адрес пере- хода
RST Сбросить адрес- ный регистр в нуль 1 1 1 X Все биты =0 Без из- менений Без из- менений
X = несущественно
Рис. 1.34. Набор функций устройства управления последовательностью (УУП)
микрокоманд типа. 8X02.
Логические элементы и их применение в сложных схемах
65
ботки информации. Процессорный блок УУП и ЗУ образуют ос-
нову микроЭВМ. Такие же микроЭВМ изготавливаются и на
отдельном кристалле, и в таком виде они называются «одно-
кристальными микроЭВМ».
С помощью семантических обозначений на входах и выхо-
дах этих ЭВМ мы можем описать функции и сигналы гораздо
более эффективно, чем при использовании для этой же цели
системы обозначения зависимостей.
Зависимости некоторых входов и выходов друг от друга ча-
сто бывают неочевидны, так как здесь имеются в виду зави-
симости на программном уровне, т. е. выраженные в тексте
соответствующих программ. Для иллюстрации можно назвать
сигналы IOW и IOR, т. е. выходные сигналы, которые управля-
ют операциями записи и чтения информации соответственно,
осуществляя связь ЭВМ с внешними схемами. Эти сигналы
представляют собой некие комбинации разрядов в регистре
программы, которые активизируются только тогда, когда цент-
ральное управляющее устройство (ЦП), контролирующее по-
следовательность выполнения операций, переходит в опреде-
ленное состояние. Отдельная временная диаграмма требуется
здесь только для того, чтобы указать момент появления данно-
го сигнала. Индикация зависимости входа и выхода от такто-
вых сигналов, как это делается, например, в триггерах, здесь
также малоэффективна.
Система обозначения зависимостей позволяет описывать до-
статочно простые функции, а при описании сложных приводит
к конструкциям, которые недоступны семантически для сред-
него специалиста.
Те схемотехники, которые знают описываемую функцию бо-
лее основательно, будут использовать все элементы системы
условных обозначений для исчерпывающего описания указан-
ной функции. Однако как показывает практика, это приводит
к настолько сложным описаниям функций, что их дешифровка
превращается в неразрешимую проблему для всех, кроме са-
мих авторов этих описаний. Систему условных обозначений
можно рассматривать как относительно удобный язык для вы-
ражения простых соотношений между входами и выходами ло-
гических схем. Если эти соотношения становятся слишком
сложными, то этот простой язык оказывается неадекватным по-
ставленной задаче. В результате авторы вынуждены придумы-
вать сложные комбинированные выражения и обозначения,
которые оказываются непонятными читателю.
В предыдущих разделах мы встречались с рядом понятий,
которые, возможно, непонятны читателю. Мы имеем в виду та-
кие выражения, как программный цикл, подпрограмма, про-
талкивание в стек (push-on), выталкивание из стека (pop-off).
5-807
06
Глава 1
Эти понятия также можно проиллюстрировать с помощью ана-
логов из жизненной практики.
Возьмем в качестве примера каменщика, который выклады-
вает стену. Основная программа работы каменщика включает
в себя такие специальные операции, как подготовка кирпича
и цементного раствора, натягивание мерного шпагата, вдоль
которого затем укладываются кирпичи, и т. д. Программный
цикл состоит из следующих шагов: берется кирпич из штабеля
(стека), на него мастерком накладывается слой цементного
раствора, после чего кирпич кладется в стену и прижимается.
Эти действия повторяются до тех пор, пока не опустеет поддон
с раствором, о чем нам сообщит тестовая переменная, например
такая, как «раствор кончился». В результате прерывается про-
граммный цикл «кладка кирпичей», после чего каменщик
пододвинет к себе новый поддон с раствором и продолжит
прерванный цикл «кладка кирпичей».
После прерывания цикла каменщик должен будет зафикси-
ровать в своем штабельном «ЗУ» (стеке) следующие факты
(данные): а) где был уложен последний кирпич; б) где был
оставлен мастерок? Перед тем как продолжить кладку, он об-
думает свои действия, снова возьмет мастерок, затем возьмет
новый кирпич и т. д., после чего подойдет к тому месту, где
был уложен последний до перерыва кирпич. Запоминание по-
следних данных перед перерывом относится к разряду занесе-
ния операций в стек, а то, что происходит после замены поддо-
на с раствором, — к восстановлению соответствующей инфор-
мации путем выборки из стека.
Необходимо отметить, что последний элемент данных, кото-
рый был помещен в ЗУ, а именно «мастерок оставлен на л-м
месте (адресе)»; после перерыва вызывается первым. Таким
образом, стековое ЗУ, которым пользуется каменщик, относится
к разряду «последний в очереди обслуживается первым»
(LIFO).
Кладку стены как часть полной программы строительства
дома можно считать эквивалентом подпрограммы. В програм-
ме «кладка стены» имеется несколько программных циклов,
один из которых мы рассмотрели выше.
Как мы видели, при совершении переходов перед прерыва-
нием главной программы требуется запомнить ряд данных, на-
пример, данные из рабочих регистров поместить в централь-
ное ЗУ. Это же действие совершает каменщик перед перерывом,
когда оставляет на определенном месте свой мастерок.
Подпрограмма обычно выполняет специальную операцию,
которая является вполне законченной, как, например, вычисле-
ние корня, степени числа е или тригонометрической функции.
В нашем примере постройки дома эквивалентами подпрограммы
Логические элементы и их применение в сложных схемах
67
являются возведение стен, крыши, установка оконных рам. При
выполнении главной программы «постройка дома» существенно
необходимые данные также сохраняются после прерывания,
такие, как «куда идти после того, как возведение стен будет
закончено». Промежуточные результаты из подпрограммы в ос-
новном будут несущественными для главной программы. В дан-
ном случае главная программа ждет, когда закончится действие
«кладка стен», после чего она начнет следующую фазу (этап).
Отсюда видно, что постройка дома является запрограмми-
рованной деятельностью даже в том случае, когда планирова-
ние этой деятельности специально не предусматривалось. В об-
щем случае последовательность выполнения отдельных строи-
тельных операций изменить просто невозможно: например, кры-
шу можно возводить только после того, как возведены стены.
1.17. Программируемые логические схемы
В предыдущих разделах мы многократно говорили о том,
что характер функции, которую реализует сложное логическое
устройство, определяется схемой соединения (монтажом) со-
ставляющих ее элементов. Характеристики этих элементов опре-
деляют допустимые величины межэлементных расстояний
(длину линий связи) и те логические уровни напряжения, ниже
которых амплитуда сигнала опускаться не может.
Тот факт, что монтаж определяет характер выполняемой
функции, привел к разработке так называемых логических мат-
риц, состоящих из большого числа схем И, ИЛИ и НЕ, входы
которых связаны между собой в матричном порядке. В узло-
вых точках этих схем размещаются соединения, пережигая кото-
рые, можно реализовать определенный рисунок соединений
(монтажа). Пережигание этих соединений производится с по-
мощью программатора, который прилагается к соответствующей
логической матрице. В действительности логическая матрица
имеет форму миниатюрной монтажной платы со схемами И,
ИЛИ и НЕ, все входы и выходы которых соединены меж-
ду собой проводниками. Такая плата подготавливается к реали-
зации определенной логической функции посредством уда-
ления «ненужных» соединений. Эта операция удаления про-
граммируется определенным образом для данной схемы.
С помощью программируемых логических матриц можно
также реализовать сложные стандартные функции, которые
обсуждались в данной главе, хотя эта реализация может ока-
заться и невыгодной с экономической точки зрения.
При программировании ПЛМ используется такой же подход,
как и при разработке логического устройства. Сначала разра-
батывается логическая схема, а затем решается проблема ее
реализации на базе ПЛМ определенного типа.
5*
68
Глава 1
Предшественником ПЛМ являются ППЗУ, т. е. программи-
руемые постоянные ЗУ, допускающие только считывание инфор-
мации. ППЗУ программируются для реальных применений
с помощью набора команд, используемых для управления ЭВМ.
В таких ЗУ можно хранить обширные программы со сложной
структурой. ППЗУ является в действительности преобразовате-
лем кода, так как поступление на его входы двоичного адреса
приводит к генерации выходного набора битов. Благодаря про-
граммированию обеспечивается требуемый набор битов на
выходе, т. е. определяется тип выполняемого преобразования
кода. Состояние входа ППЗУ определяется двоичным адресом,
который не может быть выбран произвольно. В качестве адреса
используется непрерывная последовательность двоичных чисел,
начинающаяся с нуля. Если реальный код, используемый
в устройстве, сильно отличается от последовательного двоичного
кода, то многие двоичные комбинации оказываются неисполь-
зованными. Это обстоятельство приводит к неэкономичному
использованию адресов, в результате чего для реализации дан-
ного преобразования кодов потребуется слишком много адре-
сов, т. е. чрезмерно большой объем ППЗУ, что экономически
нецелесообразно. Приведем пример экстремальной ситуации:
преобразователь входного кода, содержащего только две ком-
бинации 10000 и 00001, требует для своей реализации ППЗУ,
имеющее 64 ячейки (адреса), из которых мы будем использо-
вать всего лишь 2.
Чтобы сделать программирование более экономичным, были
разработаны ПЛМ на базе ППЗУ с программируемыми входа-
ми и выходами.
Выше подчеркивалось, что конкретная схема монтажа опре-
деляет функцию соответствующего электронного устройства.
В этом можно легко убедиться на примере электронных прибо-
ров «Сделай сам», которые состоят из резисторов, конденсато-
ров и транзисторов. В зависимости от вида конкретного монта-
жа из этих компонентов можно собрать радиоприемник, теле-
визор или звуковой усилитель. Резисторы, конденсаторы и
катушки индуктивности можно назвать специальными компонен-
тами, которые вроде бы не имеют с монтажом ничего общего.
Однако это не совсем так, поскольку резистор в принципе пред-
ставляет собой длинный проводник, конденсатор — два располо-
женных рядом и влияющих друг на друга проводника, а катуш-
ка индуктивности — длинный проводник, спирально намотан-
ный на сердечник. Транзистор является при монтаже элементом
связи, который обеспечивает одностороннюю проводимость и
усиление, необходимое для того, чтобы скомпенсировать ослаб-
ление сигналов в процессе реализации соответствующей логи-
ческой функции.
Логические элементы и их применение в сложных схемах 69
Пример: при записи оркестра на грампластинку происходит
ослабление громкости, которое компенсируется с помощью уси-
лителя на транзисторах.
Описанный здесь подход к логическим функциям как осно-
ванным на монтаже может показаться читателю несколько
странным. Однако эту проблему можно прояснить на примере
из повседневной жизни. Ящик, стол или стул обычно изготав-
ливаются из дерева. Способ соединения деревянных деталей
определяет функцию готового изделия. Чтобы реализовать соот-
ветствующие соединения, в узловых точках мы используем
гвозди или клей.
Допустим, что у нас имеется трехмерная матрица из дере-
вянных планок в форме стеллажа, ксторый имеет конечные глу-
бину, длину и ширину. Наше утверждение заключается в том,
что с помощью пилы из этого «универсального» стеллажа мож-
но изготовить стул со спинкой, ящик или стол определенных
размеров, которые будут определяться структурой матрицы,
например расстоянием между соседними планками. Если мы
выпилим из этой матрицы несколько стульев, ящиков и столов,
то может оказаться, что у нас останется большое количество
неиспользованного материала.
В ПЛМ мы также имеем дело с монтажной матрицей, и
с помощью электрического «вырезания» (пережигания током)
мы формируем вариант монтажа, необходимый для реализации
специальной логической функции, хотя при этом также воз-
можны потери ряда элементов матрицы.
При преобразовании кода реализуется определенная логи-
ческая функция, эта функция постоянно стоит у нас «перед гла-
зами». В принципе мы можем создать устройство, выполняю-
щее произвольную функцию, с целью преобразования извест-
ной величины в какой-либо специальный код. Декодируя новое
сообщение, т. е. переводя новый код в обратном направлении,
мы снова получим исходную величину.
1.18. Криптография
При передаче информации через линии связи данные коди-
руются на передающей стороне, а после передачи они декоди-
руются на приемной стороне линии.
В настоящее время развитие данной техники криптографии
(секретной записи) существенно расширилось, причем не в по-
следнюю очередь под влиянием ЭВМ. Преобразование сообще-
ния как на стороне передатчика, так и на стороне приемника
происходит в ЭВМ в процессе выполнения сложной математи-
ческой операции, при этом способ преобразования задается
битами, записанными в качестве криптокода. Пользователь или
70
Глова 1
передающая ЭВМ может изменить преобразование кода, и то же
самое может произойти в приемнике или в приемной ЭВМ, —
в результате станет невозможным расшифровка потока постоян-
но изменяющейся информации за короткое время обработки.
Попытки дешифровки будут в целом бессмысленны, если крип-
токод изменяется бесконечное число раз в совершенно произ-
вольные моменты времени.
Криптография была известна еще в древности: спартанские
воины писали тайные сообщения на поясе, намотанном на ци-
линдрическую боевую палицу. В нормальных условиях такое
сообщение дешифровке не поддавалось — для дешифровки
сообщения пояс необходимо было снова намотать на цилиндр
соответствующих размеров. В данном случае ключом к дешиф-
ровке был цилиндр в виде боевой палицы, которая использова-
лась многократно для одной и той же цели. Не только греки,
но и римляне использовали криптографию для того, чтобы
скрыть содержание секретных сообщений от своих врагов.
Звуковые сигналы, например устную речь, также можно
преобразовать в цифровой криптокод. Для этой цели на пере-
дающей стороне аналоговый сигнал сначала преобразуется
с помощью АЦП в последовательность битовых групп. Затем
к информационным битовым группам длиной, например,
в 1 байт добавляется специальная битовая группа (кодовый
ключ) и все сообщение после усиления пересылается по линии
связи. На приемной станции из полученного сообщения извле-
кается кодовый ключ, и с его помощью это сообщение через
ЦАП снова преобразуется в аналоговую форму. Полученный
при этом аналоговый сигнал является точной копией того зву-
кового сигнала, который был послан в микрофон передатчика.
Если при прохождении между передатчиком и приемником сиг-
нал с данными и кодовым ключом искажается, то расшифро-
вать его можно, только зная заранее кодовый ключ.
Переход на другой кодовый ключ можно осуществить
с помощью идентификационных байтов, генерируемых в произ-
вольные моменты времени между закодированными текстовыми
байтами. Идентификационные байты, которые вырабатывает
передающая ЭВМ, в приемной ЭВМ распознаются в составе
сообщения в целом. Распознавание нового ключа приводит
к изменению метода обработки передаваемой информации.
После смены ключа передающая ЭВМ изменяет кодирование
соответствующей информации, поэтому в приемнике сразу
же после приема нового ключа изменяется метод декодиро-
вания.
Здесь кодирование и декодирование осуществляются уже
не с помощью неизменного кодового ключа, добавляемого или
отнимаемого от байта данных, а наоборот, с помощью иденти-
Логические элементы и их применение в сложных схемах 71
фикационных байтов, из которых затем извлекаются парамет-
ры, необходимые для получения правильного разбиения битовых
групп при декодировании байтов данных.
1.19. Генератор кода Морзе
Интересным примером цифровой системы, в которой при-
меняется целый ряд сложных логических ИС, является генера-
тор кода Морзе. В этой системе мы встречаем селекторы и де-
кодеры, управляемые двоичными счетчиками, при этом в систе-
ме предусмотрена возможность сканирования диодной матрицы
или ПЗУ для того, чтобы затем передать определенное сообще-
ние в коде Морзе. Эта система повторяет сообщение четыре
раза и после этого добавляет сигнал roger-piep1), длительность
которого определяется специальным ждущим мультивибра-
тором.
Генерация точек и тире осуществляется с помощью симмет-
ричного импульсного сигнала, имеющего скважность, равную
двум, длительность (ширина) которого соответствует длитель-
ности одной точки в коде Морзе. Это означает, что для переда-
чи сообщения в коде Морзе автоматически генерируется опреде-
ленное число точек. Тире в этом коде получают, заполняя про-
межутки между двумя точками, а ненужные точки (импульсы),
которые не участвуют в формировании знаков кода Морзе, за-
тем удаляются. На рис. 1.35 приведена блок-схема генератора
кода Морзе. В этой схеме генератор тактовых импульсов выра-
батывает сигнал, из которого путем деления частоты на два по-
лучается симметричный импульс. Этот импульс управляет
работой двоичного счетчика, состоящего из делителя на 8 и де-
лителя на 10. Выходной сигнал делителя на 8, пройдя через
селектор, сканирует горизонтальные линии диодной матрицы,
а выходные сигналы делителя на 10, пройдя через декодер, обес-
печивают выборку вертикальных линий. В зависимости от со-
стояния счетчика производится выбор узловой точки в матрице,
чтобы установить, есть ли в ней диод. При этом в матрице сна-
чала сканируются верхние горизонтальные линии, а затем ниж-
ние. Номер группы определяется делителем на 2, который сле-
дует после делителя на 80 (IC4).
По окончании полного сканирования матрицы управляющий
счетчик получает приращение на 4 состояния, и это означает,
что сообщение повторялось 4 раза. Затем запускается ждущий
мультивибратор, который считывает сигнал триггера конца
передачи. Этот тригер блокирует делитель на 10, поэтому гене-
0 Roger-piep — сигнал в конце переданного радиосообщения. Этот сигнал
заменяет сигнал «конец» или «кап(па)>, используемый в радиотелефонии.
*5B *5B
Рис. 1.35. Генератор кода Морзе.
RPE — разрешение для сигнала «конец передачи».
Логические элементы и их применение в сложных схемах
73
рация сигнала в коде Морзе прекращается, а это означает, что
передача сообщения закончена. Триггер сигнала конца переда-
чи (RPE) разрешает смесителю выработать на кодовом выходе
сигнал «конец передачи», частота которого определяется гене-
ратором OSC2. Длительность сигнала «конец передачи», как
уже сообщалось выше, определяется шириной импульса на
выходе ждущего мультивибратора.
Схема ИСКЛЮЧАЮЩЕЕ ИЛИ генерирует сигнал SEIN.
Мы уже отмечали, что тактовый сигнал //2 в передаваемом
Генерация /поок и
с помощью диода
Г‘операция тиски с помощью
синхроимпульса
Подавление синхро-
импульса с помощью диода
Рис. 1.36. а — функциональная таблица функции ИСКЛЮЧАЮЩЕЕ ИЛИ
в генераторе кода Морзе; б — блок-схема, которая дает ответ на вопрос,
требуется или нет использовать диод в узловой точке матрицы.
сообщении автоматически вырабатывает последовательность
точек. Если необходимо убрать точку в какой-либо позиции,
то это реализуется с помощью диода, включенного в том узле
матрицы, который сканируется в данный момент времени.
То, что импульс точки будет действительно подавлен, очевидно
из функциональной таблицы схемы ИСКЛЮЧАЮЩЕЕ ИЛИ,
используемой для генерации кода. Эта таблица приведена на
рис. 1.36, а. Из этой таблицы следует, что если поступает соот-
ветствующий опрашивающий импульс (Т=1) и диодная матри-
ца одновременно генерирует 1, то на выходе схемы ИСКЛЮ-
ЧАЮЩЕЕ ИЛИ появляется 0 (точки нет). Если мы хотим
заполнить промежуток между двумя точками, чтобы получить
тире, то это опять можно осуществить с помощью диода, рас-
положенного в узловой точке матрицы. В отсутствие тактового
импульса (7’=0) единица на диодном входе схемы ИСКЛЮ-
ЧАЮЩЕЕ ИЛИ дает на выходе этой схемы также 1. Для ана-
лиза того, как будет работать соответствующий диод, следует
рассмотреть блок-схему, представленную на рис. 1.36,6.
Импульс, полученный на выходе схемы ИСКЛЮЧАЮЩЕЕ
ИЛИ, подвергается в кодовом смесителе модуляции звуковым
сигналом с выхода НЧ-генератора OSC1. Сигнал «конец пере-
дачи» будет генерировать этот же смеситель, однако с частотой
74
Глава 1
модуляции 2000 Гц и только в тот момент, когда появится сиг-
нал RPE (разрешение для сигнала «конец передачи»).
На рис. 1.37 приведена временная диаграмма для управляю-
щего счетчика. Этот счетчик, состоящий из микросхем IC8 и
IC9, получает приращение 1 после полного сканирования диод-
ной матрицы. Управляющий счетчик представляет собой дели-
тель на 4, поэтому сигнал «конец передачи» появится после
IC8U5)
JCSU1)
Ков Zx КоВ 5х Ков вх
Код /л
Конец
передачи
Конец
передачи
Коней
передачи
1С10(5)
Код
строка В
Код
строка В
Конец
передачи
Рис, 1.37. Временная диаграмма генерации кода Морзе.
того, как сообщение будет повторено 4 раза. В течение этого
сигнала делитель на 8 продолжает работать. Как уже отмеча-
лось, длительность сигнала «конец передачи» определяется дли-
тельностью выходного сигнала ждущего мультивибратора. Этот
импульс производит считывание /?Р£-триггера. Если мульти-
вибратор прекращает свою работу, то /?Р£-триггер переходит
в исходное состояние в момент времени, когда делитель на
8 переходит из состояния «8» в состояние «0». Затем он будет
снова запущен после появления сообщения в коде Морзе.
Временная диаграмма (рис. 1.37) показывает, что во время
передачи сообщения колонки А и В сканируются в последова-
тельном порядке, а это означает, что сообщение должно быть
записано так, как показано на рис. 1.38. Для сообщения
PA0QHB (PA0QH) диодная матрица должна выглядеть так,
как показано на рис. 1.39. В кодовой таблице одновременно
записывается регулярный набор импульсов, а также знаки кода
Рис. 1.38. Порядок сканирования диодной матрицы в генераторе кода Морзе.
Рис. 1.39. Заполнение диодной матрицы сообщения PA0QHB и PA0QH.
Набор тактовых импульсов (слеп) и код Морзе (справа) представлены вертикальными
линиями. Если в какой-либо клетке присутствуют или отсутствуют обе линии, то в со-
ответствующей узловой точке диоды отсутствуют (ситуации 00 и 01). Если одна из линий
в клетке присутствует (ситуация 01 и 10), то в соответствующей узловой точке будет
помещен диод.
76
Глава 1
Морзе, которые необходимо получить на выходе генератора.
Из более детального анализа схемы, представленной на
рис. 1.35, следует, что нам требуются схемы И-НЕ с входным
триггером Шмита для того, чтобы получить тактовый импульс
с частотой 6 Гц и звуковые сигналы с частотами 2000 и 3000 Гц
для модуляции сигналов в коде Морзе и генерации сигнала
«конец передачи». С помощью схемы И-НЕ с входным тригге-
ром Шмита можно реализовать соответствующий генератор.
Для получения очень низких частот требуется дополнитель-
ный транзистор, который позволяет реализовать НЧ-генератор
на 6 Гц с использованием относительно небольших конденса-
торов. Так как при этом получается асимметричный тактовый
сигнал, то после генератора включается делитель на 2, который
убирает асимметрию.
Генератор тактовых импульсов с выходным делителем на
2 управляет работой делителя на 8, в то время как делитель
на 10 с /7-выходом управляется сигналами делителя на 8.
Таким образом, оба счетчика включены в каскадном варианте.
Так как счетчик на 8 связан с селектирующими шинами мульти-
плексора, делитель на 10 — с входами демультиплексора, то
сначала будет производиться сканирование колонки из 8 точек
матрицы, после чего будет выбрана следующая колонка и обра-
ботка повторится.
По окончании сканирования 10 колонок происходит прира-
щение содержимого делителя на 2 (IC4) и начинается скани-
рование колонок второй группы точек матрицы. Оба цикла ска-
нирования повторяются 4 раза один за другим и контролиру-
ются с помощью управляющих счетчиков IC8 и IC9 (делителей
на 4).
Если Q-выход микросхемы IC9 совершает переход 1—>0
во время перехода счетчика из состояния 4—>0, то происходит
запуск ИС NE555, которая считывает состояние /?ЛЕ-триггера.
До тех пор пока NE555 находится в активном состоянии, RPE
остается в состоянии «1» и звуковой сигнал «конец передачи»,
промодулированный A-сигналом 8-канального делителя, будет
поступать на кодовый выход. /?Р£-триггер возвратится в исход-
ное состояние после прекращения сигнала «конец передачи»
с помощью /7-сигнала делителя на 8 в тот момент времени,
когда этот делитель совершает переход из состояния 8—>0,
т. е. в начале нового сообщения в коде Морзе.
Как уже отмечалось выше, сигнал в коде Морзе формирует-
ся из тактового импульса и сигнала с выхода диодной матрицы.
Благодаря соответствующему программированию матрицы пос-
ле обработки обоих сигналов с помощью схемы ИСКЛЮЧАЮ-
ЩЕЕ ИЛИ на ее выходе появится требуемый сигнал в коде
Морзе, который нам необходимо еще промодулировать. С этой
Логические элементы и их применение в сложных схемах
77
целью сигнал SEIN вместе с сигналом RPE подается на вход
схемы И-НЕ выходной сигнал которого промодулирован прямо-
угольным импульсом частотой 1000 Гц (OSC1), поступающим
на выход инвертора через схему И-НЕ. Модуляторная часть
генератора кода Морзе находится на схеме слева внизу
(рис. 1.35).
Рис. 1.40. Фотография генератора кода Морзе.
Матричные шины соединяются с шиной питания +5 В через
фиксирующие резисторы. Декодер DEMUX замыкает соответ-
ствующие матричные шины через диоды на землю, так что на
выбранном входе появляется напряжение L-уровня. Так как
L-вход селектора через схему HE-ИЛИ связан со схемой
ИСКЛЮЧАЮЩЕЕ ИЛИ, то вышеупомянутый L-уровень инвер-
тируется в //-уровень, т. е. на входе схемы ИСКЛЮЧАЮЩЕЕ
ИЛИ мы получаем сигнал правильной полярности.
Фотография реального генератора кода Морзе представлена
на рис. 1.40.
78
Глава t
1.20. Схема ввода данных с помощью клавиатуры
Другой пример функциональной единицы, содержащей
сложные ИС, представлен на рис. 1.41. На нем показана схема,
которая преобразует нажатие клавиш в двоичный код, который
затем запоминается в ЗУ. Благодаря этой схеме данные или
адрес (соответственно две или четыре шестнадцатеричные циф-
ры) попадают в регистры в зависимости от положения клавиш-
ных переключателей. Запоминание групп из четырех битов
(шестнадцатеричных цифр) происходит последовательно, начи-
ная с младшей тетрады (четырех битов). Требуемый порядок
следования контролируется двоичным счетчиком. В случае оши-
бочного нажатия клавиши счетчик возвращается в исходное
состояние, и после ввода данных или адреса он снова начинает
с младшей тетрады.
Вслед за нажатием клавиши происходит автоматическая ге-
нерация опорного сигнала, который может произвести считыва-
ние содержимого регистров после того, как произойдет установ-
ка данных на входах этих регистров. В дальнейшем счетчики
данных или адреса получают автоматическое приращение, рав-
ное 1.
Чтобы исключить возможность сбоя из-за дребезга входного
сигнала в начале и конце нажатия клавиши, используется
схема временной развертки, состоящая из трех ждущих мульти-
вибраторов (рис. 1.42). Относительное расположение различных
временных сигналов, которые обеспечивает эта схема, и опера-
ции, которые они инициируют, видны из рис. 1.43, на котором
представлена соответствующая временная диаграмма. На самом
верхнем графике показан сигнал, который ожидается после
нажатия клавиши. Хорошо видно, что в начале и конце этого
сигнала возникает дребезг.
Если дребезг отсутствует, то в начале нажатия клавиши
будет запущен ждущий мультивибратор Л40, который выдает
импульс для получения определенного времени задержки.
На заднем фронте этого импульса произойдет считывание
D-триггера и одновременно будет запущен второй ждущий
мультивибратор. На переднем фронте М2 произойдет прираще-
ние содержимого счетчиков данных и адреса на 1, в то время
как на заднем фронте Л12 результат нажатия клавиши будет
записан в регистр, выбранный соответствующим строб-импуль-
сом.
При освобождении клавиши будет запущен ждущий мульти-
вибратор All, импульс которого своим задним фронтом возвра-
тит D-триггер в исходное состояние. Мы видим, что в данной
схеме содержимое счетчиков данных и адреса увеличивается
яа 1 только один раз после нажатия клавиши. Теперь если мы
О.МнкР
Рис. 1.41. Схема ввода данных с помощью клавиатуры типа Cenralab
М-1650-0.
На рисунке изображены кодер, регистры и часть контроллера.
5В 5В
>BRR0(H)
^SRRj(H)
>MR2(H)
>SDR0(H)
Рис. 1.42. Схема управления вводом данных.
Логические элементы и их применение в сложных схемах 81
рассмотрим схему ввода данных более подробно, то на рис. 1.41
найдем кодер, регистры и схему временной развертки, пред-
ставленные тремя ИС NE555 и одним 72-триггером.
Кодер состоит из двух каскадно включенных микросхем
приоритетных кодеров, используемых для преобразования из
восьмеричной системы счисления в двоичную. Здесь каскадное
включение необходимо потому, что в случае шестнадцатерич-
ного кода мы будем иметь дело с 16-разрядными числами.
Рис. 1.43. Временная диаграмма схемы ввода данных.
Как мы видели при анализе работы кодера, микросхема,
кодирующая младшие разряды, будет заперта за счет появле-
ния на ее £7-входе напряжения /7-уровня, поступающего
с ЕО-выхода кодера старших разрядов. Нажатие клавиш, соот-
ветствующих диапазону чисел 8—15, приведет в нашем случае
к состоянию ЕО2 = Н, а последующие нажатия клавиш в диапа-
зоне 0—7 не приведут ни к каким последствиям. Однако если
клавиша в диапазоне 0—7 была нажата автономно, то мы
имеем EO2 = L и, следовательно, EI1 = L. Очевидно, что здесь
кодер младших разрядов получает разрешение на кодовое пре-
образование. Четвертый разряд в двоичном коде, который ука-
зывает, какая клавиша была нажата — в диапазоне чисел 0—7
или 8—15, — формируется на выходе ЕО2, так как после удара
по клавише в диапазоне чисел 8—15 на этом выходе всегда
устанавливается /7-уровень. Чтобы разрешить работу кодера
старших разрядов, необходимо выполнение условия EI = L, т. е.
6—807
62
Глава 1
в данной логической системе разрешающий вход £12 необходи-
мо соединить с землей.
Схема временной развертки генерирует сигнал INCR (прира-
щение счетчика), с помощью которого содержимое счетчиков
(рис. 1.43) увеличивается на 1. В зависимости от состояния
триггера «данные/адрес» (левая часть схемы) для приращения
‘будет выбран либо счетчик на 4 (для адреса), либо счетчик
на 2 (для данных).
Счетчик на 4 состоит из двух //(-триггеров, обозначенных
через /?0 и /?1 в верхней части рис. 1.42. Счетчик на 2, т. е.
отдельный //(-триггер, обозначенный через /?2, изображен ниже.
Декодер, находящийся в правой части рисунка, преобразует
состояния счетчика на 4 в четыре сигнала выборки, обозначен-
ные через SARn, а состояния счетчика на 2 — в два сигнала
выборки (SDRn), которые через схему И осуществляют считы-
вание соответствующего регистра, когда в схему поступает так-
же сигнал INCR. Передача данных происходит на заднем фрон-
те сигнала выборки, т. е. на спадающем фронте соответствующе-
го импульса. Мы видим, что в рассматриваемой системе кодеры
я регистры выполнены в виде СИС, в то время как счетчики
и демультиплексор для получения сигнала считывания изготов-
лены из дискретных схем И. Распределительная схема, которая
обеспечивает сигнал INCR на входе счетчика данных или счет-
чика адреса, также выполнена на дискретных схемах И. Эта
распределительная схема находится слева на рис. 1.42.
Выходы регистров данных и адреса обозначены через
DAS0 — DAS7 и Л£30 — ADS15 соответственно. Входы кодеров
типа 74LS148 активизируются на Л-уровне, потому что во время
шажатия клавиш мы замыкаем их входы на землю через кла-
вишные переключатели.
1.21. Автомат для управления водяным насосом
® системе центрального отопления (комбинационная логика)
До сих пор мы рассматривали ряд специальных схем ком-
бинационной логики и отдельные системы, содержащие логиче-
ские элементы. Теперь мы перейдем к анализу более сложной
схемы, которая обеспечит нам более глубокое представление
о проблеме автоматизации. В качестве примера мы рассмотрим
автомат для управления водяным циркуляционным насосом
системы центрального отопления (СЦО).
В настоящее время для повышения эффективности СЦО
одновременно с гашением газовой форсунки производится и
остановка циркуляции воды в системе. Эта остановка требуется
для того, чтобы не было обратного теплообмена, направленного
от радиаторов к пароводяному котлу. Этот теплообмен сопро-
Логические элементы и их применение в сложных схемах
83
Рис. 1.44. Увеличенная фотография кристалла микропроцессора типа 2650
фирмы Philips-Signetics.
вождается теплопередачей из СЦО в окружающую атмосферу,,
так как после выключения газовой форсунки котел СЦО охлаж-
дается за счет тяги в дымовой трубе.
В момент гашения газовой форсунки котел обладает некото-
рым количеством тепловой энергии, запасенной металлическими
стенками котла и водой, заполняющей котел, которую необхо-
димо передать в радиаторы центрального отопления. Этой энер-
гии нам будет вполне достаточно на время переходного периода,.
84
Глава 1
если мы будем выключать циркуляционный насос с некоторой
задержкой во времени относительно выключения газовой фор-
сунки. Кроме того, при одновременном выключении форсунки
и насоса может возникнуть избыточный перепад тепла, т. е. при
низком давлении в системе вода в котле может закипеть, что
небезопасно. По этой причине также необходимо выключать
циркуляционный насос с некоторой задержкой во времени.
Для реализации такого режима выключения с задержкой
имеются соответствующие приборы, которые можно подключить
к СЦО и которые остановят циркуляционный насос по истече-
нии определенного времени задержки. Это время является фик-
сированным и составляет 3—10 мин в зависимости от конкрет-
ного типа прибора. Увеличение эффективности работы СЦО
за счет применения такого метода остановки насоса достигает
-5%.
Очевидно, что точный момент остановки насоса можно опре-
делить, измеряя температуру воды на входе и выходе котла
СЦО. Если температура воды в обеих точках одинакова, то
дальнейшая циркуляция воды становится бессмысленной и на-
сос необходимо выключить. Для измерения соответствующих
температур можно использовать два резистора с отрицательным
температурным коэффициентом, которые имеют тепловой кон-
такт с напорной (входной) и сливной (выходной) трубами на
расстоянии около 1 м от стенки котла. Измеренные величины
температур сравниваются, и насос будет работать до тех пор,
пока температура на сливной трубе будет выше, чем на на-
порной.
Для такой системы контроля была разработана схема, кото-
рая обеспечивала работу насоса ежедневно по 30 мин, когда
в течение длительного времени (летних месяцев) СЦО не ис-
пользуется. Эти получасовые периоды работы насоса важны,
так как из практики известно, что не работающий в течение
длительного времени насос из-за коррозии выйдет из строя.
Помимо этого, СЦО необходимо снабдить устройством конт-
роля пламени форсунки. Это устройство следит за тем, чтобы
при непредвиденном заклинивании газового клапана насос про-
должал работать и отводил тепло. Такой режим позволяет за-
щитить котел от перегрева.
СЦО имеет клеймо службы техники безопасности, а это
означает, что электрический контроль этих систем имеет офи-
циальный статус. Основная схема контроля СЦО вместе с за-
щитными элементами должна оставаться неизменной, а необхо-
димые связи с дополнительной электроникой можно выполнить
негальваническим способом, например с помощью оптических
элементов связи.
Логические элементы и их применение в сложных схемах
85
Рис, 1.45, Типичные схемы управления работой газового клапана и водяного
насоса в СЦО.
KETS — котельный термостат; KATS — комнатный термостат; PR — реле управления;
GK — газовый клапан.
Разработка дополнительной схемы контроля означает при-
менение не только аналоговой, но и цифровой электроники.
Рассматриваемая ниже схема является хорошим примером ком-
бинированного применения обоих типов электроники.
Прежде чем перейти к обсуждению схемы контроля, необхо-
димо более детально рассмотреть условия применения систем
контроля в СЦО в целом. Принципиальная схема такой системы
представлена на рис. 1.45, а. Газовый клапан GK, который регу-
лирует поток газа, поступающего в форсунку, управляется с по-
мощью комнатного термостата KATS. Как только температура
86
Глава 1
в жилой комнате уменьшится ниже некоторого установленного
предела, в термостате сработает релейный переключатель. Это
приведет к открытию газового клапана и дополнительному на-
греву воды в котле. Подогретая вода с помощью циркуляци-
онного насоса направляется в комнатные радиаторы, что приве-
дет к увеличению температуры воздуха. Когда температура воз-
духа в комнате достигнет установленного предела, сработает
релейный переключатель комнатного термостата и газовый кла-
пан будет снова закрыт. В результате погаснет пламя в газо-
вой форсунке под котлом.
Последовательно с переключающими контактами комнатного
термостата в схеме включены контакты котельного термостата,
обозначенного через KETS. Этот термостат является пороговым
термостатом с определенным верхним пределом, так как его
контакты размыкаются только тогда, когда температура воды
в котле превысит определенную максимальную величину. Такой
термостат с верхним пределом применяется в основном в диапа-
зоне температур 70—НО °C.
Слишком высокая температура воды в котле приведет
к тому, что пламя в форсунке погаснет, так как при этом замк-
нутся контакты комнатного термостата.
В старых СЦО, применявшихся в те времена, когда газ был
дешевым, циркуляционный насос работал в непрерывном режи-
ме (рис. 1.45,а). В современных СЦО насос выключается после
того, как прекращается подача газа в форсунку. Таким обра-
зом, как мы уже отмечали, исключается обратный теплообмен
из комнаты через котел в окружающую атмосферу. Схема,
которая переключает насос, представлена на рис. 1.45,6. Раз-
мыкание контактов котельного термостата означает гашение
пламени, однако насос останется во включенном состоянии
(через контакт KETS и диод D1). В результате этого при пере-
греве насос также остается во включенном состоянии. При
срабатывании комнатного термостата насос выключается одно-
временно с газовой форсункой.
Индикатором нагрева котла является детектор пламени, ко-
торым может быть фотодиод, размещенный в кожухе форсунки.
Как только загорается пламя, фотодиод выдает сигнал, который
после усиления можно использовать для контроля работы
насоса.
В данной схеме котельный термостат и детектор пламени
используются для включения циркуляционного насоса. В ре-
зультате получается система с дублированной защитой от не-
желательных режимов, которые могут привести к аварийному
перегреву котла.
Логические элементы и их применение в сложных схемах
87
1.22. Блок-схема автомата для управления
работой водяного насоса
При разработке схемы нам следует сначала задать себе
вопрос о том, что мы, собственно говоря, хотим достичь с по-
мощью автомата для управления работой водяного насоса и
какие функции будет выполнять этот автомат. В результате
мы сможем разработать электронную систему, блок-схема кото-
рой представлена на рис. 1.46.
Какова основная функция автомата? Автомат должен вклю-
чить циркуляционный насос, если активизируется комнатный
термостат, если необходимо нагреть воду в котле, о чем сигна-
лизирует котельный термостат, и если появляется сигнал фото-
диода, размещенного в кожухе форсунки. Кроме того, с помо-
щью переключателя насос необходимо ввести в постоянный
Рис, 1.46. Блок-схема алгоритма функционирования автомата для управле-
ния работой насоса СЦО.
88
Глава 1
режим работы в случае сильного мороза, когда постоянная цир-
куляция необходима для предотвращения замораживания воды
в подводящих трубах СЦО. В ряде применений СЦО выклю-
чаются ночью согласно специальному круглосуточному графику,
составленному с учетом рассматриваемого автомата.
Далее, нам требуется, чтобы насос был включен до тех пор,
пока разность температур воды на входе и выходе из котла
не стала равной нулю. Может понадобиться вариант с запаз-
дывающим отключением насоса через постоянные интервалы
времени в 3,3; 6,6 и 9,9 мин.
Возможен также режим, когда через каждые 7 дней необхо-
димо автоматически включить насос на 15 мин, как это имеет
место, например, летом.
Сначала мы набросаем блок-схему автомата и посмотрим,
как будут выглядеть требуемые функции, после чего проследим
за ходом обработки данных. Мы будем исходить из того, что
насос работает вне помещения. В таком случае необходимо
постоянно следить за тем, горит ли форсунка, замкнуты или
разомкнуты контакты переключателя котельного термостата,
включены или выключены контакты комнатного термостата.
Ромб, обозначенный через «KETS вкл.», запрашивает, в каком
состоянии находятся контакты переключателя котельного термо-
стата. Если они разомкнуты, это означает, что котел «горячий»
и необходимо перейти к табличке «насос вкл.». Аналогичное
должно произойти, если замкнуты контакты переключателей
обоих (котельного и комнатного) термостатов. При этом фор-
сунка должна быть включена, что мы указываем в ромбе с обо-
значением «пламя».
Указанные сигналы должны активизировать реле водяного
насоса, причем как непосредственно, так и обходным путем,
через триггер насоса Q1.
Если эти сигналы исчезают, то Q1 остается в состоянии «1»
и насос продолжает работу. Переход триггера в исходное
состояние, т. е. отключение насоса, произойдет через ДТ=0 или
же если на факультативный режим работы будет затрачено
время, равное пХЗ,3 мин.
Таймер, который используется для отсчета цикла
в пХЗ,3 мин, а также интервалов времени в 15 мин и 7 дней,
будет запущен после включения котельного термостата и вы-
ключения комнатного. В дальнейшем переключатель ручного
управления должен быть выключен.
Таймер отсчитывает интервал в 3,3 мин и в факультативном
режиме работы возвращает в исходное состояние триггер Q1,
что приводит к отключению насоса. После этого таймер про-
должает отсчет времени вплоть до достижения границы интер-
вала в 7 дней, после чего включается интервальный триггер Q2.
Логические элементы и их применение в сложных схемах
89
Включение Q2 одновременно означает появление импульса
сброса в нуль, который возвращает таймер в исходное состоя-
ние. Счетчик запускается снова и отсчитывает 15 мин, после
чего триггер Q2 возвращается в исходное состояние. Как следу-
ет из блок-схемы, до тех пор, пока Q2 активизирован, насос
будет включен и это состояние сохранится в течение 15 мин.
1.23. Реализация схемы
Как мы уже отметили выше, изменять существующую стан-
дартную схему контроля СЦО не разрешается. Если к этой схе-
ме добавляется какая-то электроника, то она должна подклю-
чаться с использованием негальванической связи. В автомате
для управления работой циркуляционного насоса негальваниче-
ская связь реализована с помощью элемента оптической связи
типа CNY21.
Если мы рассмотрим этот автомат более тщательно, то уви-
дим, что его схему можно разбить на аналоговую часть, цифро-
вую схему и источник питания, представленные на рис. 1.47—
1.49.
Аналоговая схема состоит из двух аналоговых компараторов
типа LM339A. Компаратор Ci связан с мостом, в котором нахо-
дятся два резистора с отрицательным температурным коэффи-
циентом. Оба резистора смонтированы на напорной и сливной
трубах котла СЦО с целью определения разности температур
Д71 между входом и выходом котла. Если ДТ#=0, то на выходе
компаратора появляется напряжение //-уровня.
Второй компаратор управляется по входу разностью напря-
жений, которую обеспечивает мост с двумя плечами-фотодиода-
ми. Оба фотодиода смонтированы в кожухе форсунки СЦО, ко-
торый имеет форму трубки с окном, выполненной из алюминия.
В этой трубке размещены также развязывающие катушки
индуктивности и конденсатор емкостью 10 нФ. Один из фото-
диодов «смотрит» на пламя, другой — заэкранирован. Два фото-
диода используются здесь для сведения к минимуму темпера-
турных эффектов, возникающих при регистрации пламени. Если
один из фотодиодов зарегистрирует свет, то равновесие моста
нарушится, появится сигнал ПЛАМЯ (А-сигнал).
Оба моста настроены на требуемые пороговые значения,
устанавливаемые с помощью потенциометра 1 кОм. ВЧ-фильт-
ры, включенные в мостовую схему с фотодиодами, и развязы-
вающие конденсаторы на входах компараторов введены для
подавления реакции этих схем на излучательные помехи (сиг-
налы MARC и другие ВЧ-помехи).
Циркуляционный насос управляется цифровой схемой, пока-
занной справа на рис. 1.47 и выполненной на КМОП-элементах.
Если мы рассмотрим эти элементы более подробно, то увидим,
Рис. 1.47. Управляющая часть автомата для управления работой насоса СЦО,
Рис. 1.48. Таймерная часть автомата для управления работой насоса СЦО,
92
Глава 1
что логический сигнал, возникающий на контактах переключа-
теля комнатного термостата, будет передаваться через элемент
оптической связи СМУ21. Когда эти контакты разомкнуты, на
них появляется переменное напряжение амплитудой 24 В
(каждый раз, когда будут замкнуты контакты переключателя
котельного термостата).
Это переменное напряжение управляет током ~6 мАПик
через СД, находящийся в CWY21, за счет чего транзистор
в этом элементе оптической связи становится проводящим и на
выходе схемы появляется напряжение Л-уровня.
Разомкнутые контакты переключателя комнатного термоста-
та означают отсутствие пламени, поэтому насос включать
не следует. Таким образом, тот факт, что на выходе CNY21
появляется напряжение L-уровня, ни к каким действиям не при-
водит. Однако если мы замкнем контакты переключателя ком-
натного термостата или разомкнем контакты переключателя
котельного термостата, то на выходе CNY21 появится напряже-
ние //-уровня. После инверсии с помощью схемы Л оба режима
обеспечивают запуск 5/?-триггера Qi и появление напряжений
L-уровня на входах (3) и (5) схемы ИЛИ О\.
Рис. 1.49. Источник питания для системы управления работой насоса СЦО.
Для каждой группы из 4 DK DIP-корпусов напряжение питания (+12B) развязывания
на землю с помощью конденсатора емкостью 0,1 мкФ.
Логические элементы и их применение в сложных схемах
93
Подача напряжения L-уровня на один или несколько вхо-
дов Qi приводит (после инверсии через /2) к появлению на-
пряжения L-уровня на входе Ш, в результате чего размыкается
реле и циркуляционный насос включается через размыкаю-
щие контакты этого реле. Через схему ИЛИ Oi насос остается
во включенном состоянии до тех пор, пока замкнуты контакты
KATS или разомкнуты контакты KETS. Это и есть как раз то,
что нам потребуется. Насос должен работать при наличии раз-
решения со стороны газового клапана GK, а также при слишком
высокой температуре котла, когда разомкнуты контакты пере-
ключателя котельного термостата. Если ситуация изменяется
в том смысле, что на выходе CNY21 снова появляется напряже-
ние L-уровня, то насос тем не менее будет продолжать свою
работу до тех пор, пока 5/?-триггер не вернется в исходное
состояние.
Это произойдет при наличии сигнала ДТ или сигнала ТЗМ,
т. е. сигнала, посланного из таймера, к чему мы еще вернемся.
Относительно сигнала ДГ можно сказать, что он переходит на
L-уровень, если разность температур циркулирующей воды на
входе и выходе из котла становится равной нулю.
Рис. 1.50. Выводы схем, используемых в автомате для управления работой
насоса СЦО.
-94
Глава 1
Отсюда видно, что насос действительно будет включен по
истечении некоторого времени задержки, а именно в момент,
когда будет выполнено условие ДТ = 0.
57?-триггер Qi будет запущен также в том случае, когда
фотодиоды зарегистрируют появление пламени в форсунке. Это
является мерой предосторожности на случай заклинивания газо-
вого клапана.
Рис. 1.51. Практическая схема автомата для управления работой насоса СЦО.
Детектор пламени и его алюминиевый корпус (светлая трубка) видны справа.
Как мы уже отмечали, реле включает циркуляционный насос
через размыкающие контакты. Это сделано на случай внезап-
ного отключения питания электронной схемы. Рассматривае-
мое реле включено параллельно реле переменного напряжения,
которое находится в исходной электронной схеме управления
СЦО.
В схеме имеется также переключатель SO, который в замкну-
том состоянии переводит циркуляционный насос в непрерывный
режим работы. Как было показано выше, подобная предосто-
рожность может стать необходимой в случае морозной погоды и
позволяет избежать замерзания воды в подводящих трубах
СЦО.
Цифровой таймер, который включает циркуляционный насос
один раз в неделю летом, представлен на рис. 1.48.
Логические элементы и их применение в сложных схемах
Импульсы цифрового таймера передаются через волоконно-
оптическую линию связи. С выхода CNY21 на питающий транс-
форматор подается напряжение в виде импульсов частотой’
50 Гц. После CNY21 включена схема НЕ, которая улучшает
крутизну фронтов сигнала частотой 50 Гц для повышения на-
дежности управления цифрового счетчика.
Как следует из этой схемы, таймер состоит из 8 декадных
счетчиков, размещенных в четырех 2?/Р-корпусах.
После регистрации 3-107 импульсов (~7 дней) запускается
5/?-триггер Qz и одновременно таймер возвращается в исходное
состояние благодаря ЛЧ и 04.
После отсчета 105 импульсов (~15 мин) происходит воз-
врат в исходное состояние триггера Q2. В течение этих 15 мин
работает циркуляционный насос, и это состояние обеспечивает
сигнал Т15М.
Запаздывающее отключение циркуляционного насоса по ис-
течении постоянного временного интервала (факультативный*
режим работы) также осуществляется с помощью данной
схемы.
Как уже отмечалось выше, каждый раз после включения
насоса таймер возвращается в нуль и начинает повторный цикл
отсчета после того, как дезактивируется таймерный вход,
«сброс». Если мы теперь потребуем, чтобы насос отключился»
через 3,3 мин, то S1 необходимо будет перевести в состояние
«1», a S2 — в состояние «0».
Насос будет включен до тех пор, пока таймер не отсчитает*
еще 104 дополнительных импульсов. В конце цикла на двенад-
цатом выводе N3 появится напряжение Я-уровня и сигнал сбро-
са ТЗМ, который сбросит в нуль триггер Qi. В двоичном состоя-
нии переключателей S2/S1, соответствующем «10», задержка,
равна 6,6 мин, а в состоянии «11» — 9,9 мин. Имеющиеся в схе-
ме светодиоды обеспечивают необходимые сигналы, что особен-
но удобно при испытаниях этой схемы.
Конструктивно автомат размещен в двух пластмассовых
корпусах, в одном из которых находятся сильноточная схема
и питание, в другом — аналоговая и цифровая электроника.
Схема источника питания представлена на рис. 1.49. После
понижения сетевого переменного напряжения происходит вы-
прямление и сглаживание. Сглаженное напряжение подается*
на вход стабилизатора, который обеспечивает на выходе по-
стоянное напряжение для питания аналоговой и цифровой
электроники. Третья вторичная обмотка вырабатывает управ-
ляющий сигнал для цифрового таймера. Общий вид автомата
для управления работой циркуляционного насоса СЦО пред-
ставлен на рис. 1.51, а выводы используемых в нем схем —
на рис. 1.50.
Глава 2
ЗАПОМИНАЮЩИЕ УСТРОЙСТВА (ЗУ)
2.1. Введение
Как известно, ЗУ применяются для хранения информации
в течение определенного отрезка времени.
В предыдущей главе были рассмотрены элементы ЗУ, широ-
ко применяемые в цифровой электронике: триггер (элемент
памяти), который используется для хранения одного бита, и ре-
гистр — группа триггеров, служащая для хранения нескольких
битов.
Запоминающее устройство обычно содержит большое число
элементов памяти. Современное полупроводниковое ЗУ обычно
состоит из нескольких десятков тысяч элементов памяти, разме-
щенных на одном кристалле (чипе).
ЗУ применяются в ЭВМ для того, чтобы хранить программу
обработки данных, а также промежуточные и конечные резуль-
таты обработки. ЭВМ оперируют командами — группами битов,
которые являются закодированными элементами программы об-
работки данных, и сами обрабатываемые данные выражаются
также в виде групп битов. Организация ЗУ на битовом уровне
соответствует организации программ и данных. Термином «сло-
во» мы будем определять группу битов, которые хранятся в ЗУ
и обрабатываются в ЭВМ как единое число. Для хранения одно-
го слова в ЗУ используется группа элементов памяти, которые
образуют ячейку памяти. Каждая ячейка имеет свой адрес.
После обращения к соответствующему адресу ячейки ЗУ (вызо-
ва) может быть записано или прочитано одно слово. Ячейку
ЗУ можно уподобить регистру, учитывая, однако, что эти цифро-
вые элементы выполняют в системе существенно разные функ-
ции. В частности, регистры обычно располагаются непосредст-
венно на кристалле микропроцессора (МП), в то время как
ячейки памяти находятся в отдельном запоминающем уст-
ройстве.
Между ЗУ и регистрами микропроцессора в большинстве
случаев возможен прямой обмен информацией. Передача дан-
ных между ними осуществляется с помощью команды MOVE.
Как будет показано при анализе работы МП в т. 4 настояще-
го справочника, длины слов в ЗУ и в регистре могут не совпа-
дать.
Запоминающие устройства (ЗУ)
97
Рис. 2.L ЗУ, состоящее из п слов по tn бит (объем ЗУ равен пХт бит).
Как следует из вышесказанного, структура ЗУ состоит из п
ячеек памяти, каждая из которых хранит слово из m битов
в каждом. С помощью двоичной адресации можно вызвать п
ячеек памяти ЗУ и по командам ЗАПИСЬ/ЧТЕНИЕ записать
или прочитать в них п слов (рис. 2.1). При указании объема ЗУ
следует пользоваться системой обозначений, которая указывает
в явной форме, сколько и какой длины слов может содержать
данное ЗУ. Так, например, мы говорим о ЗУ объемом в 256Х
Х4 бит, которое содержит 256 ячеек памяти по 4 бит каждое.
Современные ЗУ, содержащие десятки тысяч ячеек памяти,
обозначаются с помощью буквенных символов, похожих на те,
которые применяются для маркировки резисторов. В частности,
мы говорим о ЗУ объемом 1К4, 2К8 или 64К1, что соответству-
ет структурам, имеющим 1024X4, 2048x8 и 65536X1 бит соот-
ветственно.
ЗУ, в которых с помощью прямой двоичной адресации мож-
но вызывать ячейки памяти для записи или считывания двоич-
ных слов, называются обычно ЗУПВ, что является сокращением
от слов ЗУ с произвольной выборкой1). В ЭВМ эти ЗУ служат
для хранения промежуточных результатов вычислений, т. е.
° Английский термин RAM (Random Access Memory) переводится так
же, как ОЗУ, т. е. оперативное ЗУ. — Прим, перев.
7—807
98
Глава 2
данных, изменяющихся в процессе вычислений. С другой сто-
роны, программы обработки данных часто записываются
в ЗУ, из которых допускается только считывание данных. Эта
особенность связана с тем, что такая программа содержит
большое количество постоянных системных команд, организую-
щих весь процесс обработки информации. Программа должна
сохраняться в таком ЗУ даже после выключения источника
питания.
По этим причинам для хранения системных команд не реко-
мендуется применять ОЗУ, так как если, например, произойдет
какой-либо сбой в адресации ячеек ЗУ, то ЭВМ уже не сможет
самостоятельно восстановить исходный («правильный») текст
программы. Поэтому для хранения программ обработки обычно
применяются ЗУ типа ПЗУ1).
Другая категория ЗУ включает запоминающие элементы
с последовательным доступом, к которым также принадлежит
и регистр сдвига с последовательными вводом и выводом ин-
формации. С регистром сдвига мы уже познакомились в т. 2
настоящего справочника. Несколько длинных регистров сдвига
можно сгруппировать параллельно в соответствии с требуемой
длиной слова. Затем с помощью последовательных сдвигов мы
можем перемещать слова, введенные в эту параллельную струк-
туру. Для считывания требуемого слова необходимо продолжать
операции сдвига до тех пор, пока это слово не появится на
выходе (рис. 2.2).
Другими разновидностями ЗУ с последовательным доступом
являются ЗУ на ПЗС* 2) и ЗУ на ЦМД3). Дисковые ЗУ можно
также отнести к ЗУ с последовательным доступом.
Полупроводниковые ОЗУ являются в общем случае энерго-
зависимыми, т. е. они теряют хранящуюся в них информацию
при выключении источника питания. К энергонезависимым
типам ЗУ относятся ЦМД-ЗУ и ПЗУ.
Полупроводниковые ОЗУ подразделяются на статические и
динамические. Ячейка статического ОЗУ (СОЗУ) состоит из
триггера на биполярных или МОП-транзисторах.
В динамических ОЗУ (ДОЗУ) в качестве запоминающей
ячейки обычно используется МОП-конденсатор. ДОЗУ необ-
ходимо подзаряжать через определенные промежутки времени
(~2 мс), так как МОП-конденсаторы теряют заряд под дейст-
вием неизбежных утечек. Уровень рассеиваемой мощности (дис-
сипации) в ДОЗУ оказывается намного меньше, чем в СОЗУ.
Когда доступ к ячейкам ДОЗУ не производится, их можно
п Постоянное ЗУ, т. е. ЗУ, допускающее только считывание. — Прим, пе-
ред.
2) ПЗС — прибор с зарядовой связью. — Прим, перев.
5) ЦМД — цилиндрический магнитный домен. — Прим, перев.
Запоминающие устройства (ЗУ)
99
синхросигнала выхода
Рис. 2.2. ЗУ с последовательным доступом объемом 256X4 бит.
переключить в режим с пониженной мощностью. Кроме этого,
за счет более простой структуры динамических МОП-ячеек
ДОЗУ обеспечивает более высокую плотность размещения эле-
ментов на одном кристалле, чем СОЗУ. Поэтому ДОЗУ занима-
ют в системе обработки данных гораздо меньше места, чем
СОЗУ сравнимого объема.
При использовании в системе обработки данных ЗУ с после-
довательным доступом совместно с МП необходимо обеспечить
преобразование данных в процессе их передачи между ЭВМ и
ЗУ. Такое преобразование данных из параллельного кода в по-
следовательный и наоборот выполняется с помощью специаль-
ной схемы управления (контроллера), которая обычно реализу-
ется в виде интегральной микросхемы. В случае ДОЗУ контрол-
леры управляют также процессом подзарядки (регенерации).
В ПЗУ обычно хранятся неизменяющиеся данные, такие, как
системная программа МП и просмотровые таблицы. Необходи-
7е
100
Глава 2
мый набор битов вводится однократно при изготовлении ПЗУ
и в дальнейшем не изменяется. Структура монтажа, который
определяет содержимое ПЗУ, задается с помощью специальных
масок. Если система находится в стадии разработки, то ПЗУ
на этой стадии обычно не применяются, так как их производ-
ство экономически целесообразно только при выпуске большими
партиями. Кроме этого, изготовление ПЗУ занимает достаточно
много времени. Это может привести к серьезным проблемам
в процессе разработки системы, когда выполняются отладка и
коррекция программы и для записи каждого ее варианта при-
ходится изготавливать новое ПЗУ. Для применения в разраба-
тываемых системах и в мелкосерийном производстве более
удобны программируемые ПЗУ (ППЗУ), информацию в кото-
рые заносит сам пользователь с помощью так называемого про-
грамматора. При разработке какой-либо системы можно быстро
изменить программу работы, если в ней были обнаружены
ошибки, и занести ее в новое ППЗУ. К сожалению, исходное
ППЗУ при этом оказывается непригодным для дальнейшего ис-
пользования, так как записанную в него неправильную про-
грамму исправить невозможно.
С другой стороны, и новый вариант программы для ППЗУ
может оказаться неокончательным, поэтому специально для
испытаний разрабатываемых моделей были сконструированы
имитаторы ПЗУ/ОЗУ. Эти устройства работают в испытывае-
мых системах в качестве ПЗУ, однако ими можно управлять
в режиме ОЗУ. Ошибки, обнаруженные в исходной программе,
можно быстро исправить с помощью клавиатуры. Такие имита-
торы после реализации требуемого варианта программы пере-
водят ее в ППЗУ или записывают на магнитную ленту, которая
затем играет роль входного задающего устройства при созда-
нии окончательного варианта ПЗУ или при управлении про-
грамматором ППЗУ.
ПЗУ и ППЗУ подразделяются на биполярные и МОП-ва-
рианты. Биполярные ПЗУ имеют меньшее время доступа и мень-
шую плотность интеграции по сравнению с МОП-ПЗУ.
Чтобы не выбрасывать ППЗУ после каждого нового изме-
нения в программе, было разработано стираемое ППЗУ, т. е.
СППЗУ, в котором для стирания записанной информации ис-
пользуется ультрафиолетовое (УФ)-излучение. Кроме того,
было разработано электрически программируемое ПЗУ, т. е.
ЭППЗУ, с записью информации при помощи электрических
сигналов.
ПЗУ и ППЗУ являются упорядоченными наборами (матри-
цами) логических схем, которые связаны между собой в соот-
ветствии с директивами пользователя. Как мы увидим позже,
ПЗУ и ППЗУ можно программировать таким образом, что
Запоминающие устройства (ЗУ)ПН
в результате будут реализованы логические схемы типа гене-
раторов кода, декодеров и т. п.
Эти возможности реализации логических функций с помощью
ПЗУ позволяют разрабатывать новые формы логических мат-
риц, которые при надлежащем программировании могут заме-
нить большинство сложных логических схем. Такие устройства
известны под наименованиями «программируемые логические
матрицы» (ПЛМ), «программируемые матрицы логических эле-
ментов» (ПМЛЭ) и т. д.
Полупроводники'
бое ЗУ
биполярные
ПЗУ с плав-
кими соеди-
нениями
Злектрииес-
ки програм-
мируемые
МОП ПЗУ
Рис. 2.3. Полупроводниковые ЗУ разных типов, доступные разработчика»
систем.
Нам известно также ЗУ с большим объемом памяти, а имен-
но дисковое ЗУ, которое широко применяется в системах обра-
ботки данных. Дисковые ЗУ часто используются в качестве
устройств памяти, предназначенных для хранения больших
объемов информации (баз данных). Эти ЗУ не обеспечивают
произвольного доступа, так как информация записывается на
магнитном диске в последовательной форме в виде концентри-
ческих треков. В настоящей главе мы рассмотрим этот тип ЗУ,
а также разновидность дисковых ЗУ, известных под наименова-
нием «гибкие диски» (дискеты).
На рис. 2.3 представлены различные типы полупроводнико-
вых ЗУ, которые в основном служат для хранения цифровой ин-
формации и анализируются в настоящей главе. Далее приво-
дятся два графика, один из которых характеризует изменение
стоимости бита ячейки полупроводникового ЗУ за последние
0,5
пт\---1-------1--------1-----1--------1-
и,и 1973 1975 1977 1979 1981 1983
Годы
Рис. 2.4. Изменение стоимости бита информации для полупроводниковых ЗУ
за последние 10 лет.
Стоимость Сити информации, цент
Рис. 2.5. Стоимость бита информации и время доступа для ЗУ различных
типов.
Запоминающие устройства (ЗУ)
103
годы (рис. 2.4), а другой — различные виды ЗУ с указанием
ожидаемых средних времен доступа (рис. 2.5).
На рис. 2.6 представлены кремниевая пластина и готовые
схемы.
Рис. 2.6. Кремниевая пластина с несколькими сотнями кристаллов и гото*
вые микросхемы в корпусах, содержащие микропроцессоры и схемы с более
низкой степенью интеграции.
2.2. Статические полупроводниковые ЗУ (СОЗУ)
Как мы уже отмечали во введении, статическое полупро-
водниковое ЗУ состоит из элементов памяти (триггеров) на би-
полярных или МОП-транзисторах. На рис. 2.7 приведены два
примера элементов ЗУ, один из которых построен на биполяр-
Ю4 Глава 2
иых транзисторах, а другой — на n-МОП-транзисторах. Бипо-
лярный элемент памяти состоит из связанных между собой
многоэмиттерных транзисторов. Выборка элемента производит-
ся с помощью двух шин выборки х и у, которые связаны с эмит*
х~ адреса
+ ив
К трем дру-
гим ячейкам
'Ко беем
другом
ячейкам
Шина о К трем, другим
логической „Г1 ячейкам
Шина
логического „Оп
а
Данные
-Выборка пол
-Данные
Выдорканоу
Рис. 2.7. Ячейка ЗУ в биполярном (а) и МОП-исполнении (б),
терными выводами обоих транзисторов. Третий эмиттерный вы-
вод служит для считывания и записи информации в элемент,
в котором один из транзисторов может находиться в проводя-
щем состоянии, а другой — закрыт. Если ячейка не выбрана,
то на обе адресные шины х и у, а следовательно, на оба эмит-
терных вывода, связанных с этими шинами, поступает напряже-
ние низкого (L) уровня. Выборка элемента происходит путем
Запоминающие устройства (ЗУ)105
подачи напряжения высокого (Н) уровня на обе адресные
шины х и у. При этом считывающий эмиттер, который связан
с проводящим транзистором, перехватит часть эмиттерного тока
адресных эмиттеров и через шину логического 0 или логиче-
ской 1 направит этот ток в один из двух считывающих усили-
телей. Считывание не приводит к потере информации, так как
состояние элемента не изменяется под действием напряжения
//-уровня, которое появляется на адресных шинах х и у.
При записи считывающие эмиттеры служат для перевода
элемента в новое состояние. На эмиттер транзистора, который
в новом состоянии должен быть проводящим, подается низкое
напряжение (L-уровень), на эмиттер транзистора, который дол-
жен запереться, — высокое напряжение (//-уровень). Этот тран-
зистор запирается, когда на оба других эмиттера подается на-
пряжение //-уровня, как это и происходит при выборке ячейки.
Другой транзистор будет открываться, так как на его базу
через коллекторный резистор с сопротивлением 7 кОм подается
высокое напряжение (//-уровень).
На рис. 2.8 показано, как происходит выборка одного бита.
ЗУ ведет себя в целом как ху-матрица. Подавая на одну из
шин х и одну из шин у напряжение //-уровня, мы выбираем
одну из ячеек для записи или считывания информации. В дан-
ном примере 16-разрядного ОЗУ мы видим, что выход усилите-
ля сигнала записи и вход усилителя сигнала чтения соединены
с активными шинами логического 0 или логической 1 соответ-
ствующей запоминающей ячейки.
Элемент статического МОП-ЗУ состоит из соединенных меж-
ду собой МОП-транзисторов, которые образуют триггер
(рис. 2.7). При считывании информации из ячейки, которая
является элементом матричной структуры, транзисторы Tl, Т7
и Т2, Т8 начинают проводить и содержимое запоминающей
ячейки попадает на активные шины логического 0 и логиче-
ской 1. Информация считывается соответствующим усилителем
и преобразуется в ТТЛ-уровни для дальнейшей обработки.
На рис. 2.9 представлена структура ОЗУ типа 2114. В дан-
ном случае рассматривается ОЗУ с объемом памяти 1К4
(1024 4-разрядных слова) и временем доступа 200 нс. Для вы-
борки 1024 ячеек памяти требуется 10 адресных входов (210 =
= 1024), которые обозначены на схеме как биты адреса АО—А9.
Буферные каскады для ввода и вывода данных связываются
с внешними схемами через общие выводы I/O корпуса микро-
схемы.
Входные буферы получают разрешение на передачу инфор-
мации при поступлении сигналов CS(L) (выбор кристалла) и
WE(L) (разрешение на запись), т. е. при записи информации
сигнал CS(L) инициирует выборку ОЗУ.
Рис. 2.8. 16-разрядные биполярные ОЗУ типа SN7484A.
Рис. 2.9. Блок-схема ОЗУ типа 2114 емкостью 1К4 бит.
Запоминающие устройства (ЗУ)
107
Рис. 2.10. Параллельное включение ОЗУ типа 2114 для увеличения объема
памяти ЗУ (4К4).
Выходной буфер получает разрешение на передачу при нали-
чии сигнала CS(L), если не поступил сигнал WE(L), т. е. в слу-
чае считывания информации из ОЗУ, когда WE(L)=H.
Для увеличения объемов памяти можно подключить парал-
лельно несколько микросхем ОЗУ; при этом можно увеличить
как число слов, так и их длину. На рис. 2.10 и 2.11 представле-
ны оба варианта расширения объема памяти.
108
Глава 2
В примере, рассмотренном на рис. 2.10, при увеличении
объема памяти ЗУ число адресных битов увеличивается на
два. Выборка одного из четырех ОЗУ производится с помощью
отдельного декодера, выходы которого связаны с CS(L) -входа-
ми используемых ОЗУ. С помощью двух младших адресных
битов А10 и АП можно селектировать «1 из 4», т. е. выбирать
требуемое ОЗУ. Одноименные выводы I/O, т. е. все I/OI-выво-
ды, все //02-выводы и т. д. различных ОЗУ соединяются между
собой. Возможность такого объединения обеспечивается бла-
годаря использованию I/O-буферных каскадов с тристабильны-
ми выходами. При этом всегда селектируется только один
I/O-буфер, а именно тот, для которого активизирован сигнал
CS(L), т. е. CS(L)=L.
ЗУ с увеличенной длиной слова представлено на рис. 2.11.
Адресные шины, а также входы, на которые поступают сигналы
WE(L) и CS(L), соединены параллельно. Для ввода и вывода
Зхиды-дь/ходы
данных
Рис. 2.11. Параллельное включение ОЗУ типа 2114 для увеличения длины
слова (1К8)<
Запоминающие устройства (ЗУ)
109
данных имеется 8 шин I/O, что соответствует длине слова
и 8 бит.
В течение последних лет для структуры выводов корпуса
ОЗУ разработан определенный промышленный стандарт, кото-
рый позволил решить проблему совместимости по выводам.
ОЗУ, изготовленные разными фирмами, могут отличаться по
электрическим параметрам, однако структура выводов у всех
моделей одинакова. Так обстоит дело по крайней мере с дина*
мическими ОЗУ.
Относительно выходов данных ОЗУ уже отмечалось, что
кроме буферов с тристабильными выходами имеются также
схемы с открытым коллекторным выходом. Эти схемы также
можно соединять между собой, однако при этом необходимо
использовать фиксирующие резисторы, которые присоединяются
к высокому потенциалу +^в, чтобы обеспечить на выходе
напряжение //-уровня, когда выходные транзисторы не прово-
дят ток.
В спецификациях фирм-изготовителей тристабильные выхо-
ды обозначаются через TS, а выходы с открытым коллекто-
ром — через ОС.
В настоящее время выпускаются также и ОЗУ в КМОП-
исполнении. Как известно, ячейки КМОП-ОЗУ отличаются пре-
небрежимо малой потребляемой мощностью. С другой стороны,
большие размеры КМОП-ячеек по сравнению с биполярным
вариантом не позволяют разместить на одном кристалле ОЗУ
с большим объемом памяти.
В настоящее время для уменьшения энергопотребления стан-
дартные п-МОП-ОЗУ переводят в режим с пониженной мощ-
ностью после каждого прерывания связи с внешними схемами.
В таком режиме потребляемая мощность уменьшается до 15%
от мощности питания в режиме с непрерывным доступом. Это
понижение потребляемой мощности играет существенную роль
в больших ЗУ, содержащих десятки микросхем памяти, так как
при вызове одного слова в этом режиме производится выборка
только из одной микросхемы. Те микросхемы, которые не выби-
раются, автоматически переходят в режим с пониженной мощ-
ностью. Этот режим обеспечивается специальной схемой, раз-
мещенной рядом с ЗУ и состоящей из декодеров и буферов,
которые отключают напряжение питания периферийных схем,
расположенных на кристалле микросхемы памяти, если ее вход
CS не активизируется.
Недостатком режима с пониженной мощностью является
увеличение времени доступа по мере того, как уменьшается
время деселекции ОЗУ. Этот эффект является следствием того,
что нам требуется каждый раз заново подавать напряжение
на периферийные схемы, а это требует времени и приводит
no
Глава 2
к увеличению общего времени доступа. Схема автоматического
понижения мощности находится на кристалле ОЗУ, как, напри-
мер, в случае ОЗУ типа 2147 фирмы Intel. Данное ОЗУ, выпол-
ненное в виде МОП-микросхемы, размещено в корпусе DIP
с 18 выводами, разводка которых соответствует промышленному
стандарту.
На рис. 2.12 показана зависимость среднего тока, потреб-
ляемого ОЗУ, от коэффициента заполнения рабочего цикла
10п выборки. По мере увеличения
времени деселекции растет и
средний ток. При отношении
времени доступа ко времени
деселекции, равном 1%, по-
требляемый ток составляет
всего лишь 10% от величины
тока, потребляемого при непре-
рывной работе ОЗУ.
Для ОЗУ с режимом авто-
матического понижения мощно-
сти необходимо обеспечить эф-
фективную развязку по выво-
дам напряжения питания.
В процессе выборки битов
из ОЗУ следует точно выпол-
нять требования спецификаций
фирм-изготовителей. Эти дан-
ные представляются обычно в
таблице, полученной на основе
временной диаграммы.
На рис. 2.13 приведены вре-
менные диаграммы циклов счи-
Скважность коэффициент заполнения)
импульсов Выборки кристалла, °/°
Рис. 2.12. Зависимость среднего тока
от коэффициента заполнения им-
пульса выборки кристалла ОЗУ
типа 2147 фирмы Intel.
тывания и записи для микро-
схемы ОЗУ типа 2114. Цикл считывания начинается с выборки
адреса, после чего сигнал CS (выбор кристалла) инициирует
чтение и тристабильные выходные буферы получают разреше-
ние на передачу информации из ОЗУ.
Время задержки, возникающей между началом выборки
адреса и появлением информации на выходе, называется време-
нем доступа ОЗУ. Для ОЗУ типа 2114 фирма-изготовитель дает
максимальное время доступа 200 нс. Очевидно, что сигнал CS
должен иметь длительность, достаточную для того, чтобы дан-
ные могли появиться на выходе ОЗУ. Во время считывания сиг-
нал WE(L) не активизируется, т. е. WE(L)=H.
Цикл записи также начинается с выборки адреса. При появ-
лении команды записи WE(L) входные буферы получают раз-
решение на передачу соответствующей информации в ячейки
Запоминающие устройства (ЗУ)
111
В fa/х
Символ времен- ной диаграммы Значение
Последствие для входи Должно быть стабильно (Нили L) Последствие для выхода Стабильно (Н или L)
Изменения H+L разрешены Изменения H+L в течение данного интервала
Изменения L +Н разрешены Изменения L—H в течении
////// данного интервала
Несущественно
(Не применяется)
Неизвестное или изменяемое
состояние
Средняя линия означает
v подвешенное”состояние выхода.
-Рис. 2.14. Символические обозначения, используемые на временных диа-
граммах.
112
Глава 2
ЗУ. Выборка адреса продолжается до тех пор, пока данные не
запишутся в ячейках ЗУ. Передача информации происходит при
поступлении заднего фронта сигнала WE(L). В течение некото-
рого времени после этого данные еще продолжают записывать-
ся из-за конечного времени перехода схемы из одного состоя-
ния в другое. Поэтому входные данные должны сохраняться
в течение определенного времени после заднего фронта сигна-
ла WE(L), чтобы обеспечить их надежную запись. Запись воз-
можна только тогда, когда сигналы CS(L) и WE(L) перекры-
ваются во времени между собой. Если CS(L)=H, то ОЗУ от-
соединяется от шины данных. Значения используемых символов
объясняются на рис. 2.14.
2.3. Динамические полупроводниковые ОЗУ (ДОЗУ)
На рис. 2.15 представлена схема запоминающей ячейки
ДОЗУ с МОП-емкостями. В фиктивную ячейку CD вводится
заряд, при этом на ячейке устанавливается напряжение, величи-
на которого оказывается меньше минимального Н-уровня и
Рис. 2.15. Фрагмент схемы динамического ОЗУ (выбор строки с помощью
считывающего триггера).
больше максимального L-уровня напряжения, которое может
возникнуть на ячейке ЗУ, обозначенной через Cg. По существу
эта фиктивная ячейка функционирует как источник опорного
напряжения при считывании информации с МОП-емкостей.
В схеме имеются также транзисторы Т1 и Т2, которые обра-
зуют триггер (бистабильную ячейку).
Запоминающие устройства (ЗУ)ПЭ
В течение времени, когда сигнал RA (адрес колонки) Из
тактовый сигнал фк не активизированы, т. е. не достигли L-уров-
ня, сигнал 0Р переводит транзисторы Т5 и Тб в проводящее
состояние. При этом в узловых точках А, В устанавливается
потенциал Ub—где £7th — пороговое напряжение МОП-тран-
зисторов Т5 и Тб.
Во время действия сигнала фр транзистор Т7 также находит-
ся в проводящем состоянии, связывая между собой точки А и В.
В результате эти точки имеют одинаковый уровень напряжения..
Сигнал обеспечивает проводящее состояние транзистора T9,,
и на фиктивной ячейке CD устанавливается опорное напряже-
ние (7ref.
При 0А(Н)=Н действие фр прекращается, т. е. прерывается
связь между точками А и В, а также связи между А и Ub, В и
иь соответственно. Кроме того, фиктивная ячейка CD снова
отсоединяется от источника опорного напряжения UTef-
После того как произошло декодирование бита адреса ко-
лонки ЗУ и возник соответствующий сигнал выборки колонки,,
тактовый сигнал фА переводит транзисторы Т8 и Т10 в прово-
дящее состояние, в результате чего фиктивная ячейка CD и за-
поминающая емкость связываются с узловыми точками А и В:
соответственно. При этом Cg и Cd оказываются соединенными
с шинами битов BSll и Bslr (BSll — Bit-Sense-Line-Left — ле-
вая шина считывания битов, Bslr — Bit-Sense-Line-Right — пра-
вая шина считывания битов).
Когда напряжение на CG оказывается выше напряжения на
CD, то напряжение в узловой точке А становится выше напря-
жения в узловой точке В. Эта разность напряжений переклю-
чает триггер, состоящий из Т1 и Т2, если МОП-транзисто-
ры ТЗ и Т4 находятся в проводящем состоянии во время дейст-
вия импульса фв. Транзистор Т2 триггера открывается, присо-
единяя узловую точку В к земле. Транзистор Т1 запирается,,
и узловая точка А оказывается подключенной к потенциалу [7В.
Сигнал фв задержан относительно сигнала фА для того, что-
бы в узловых точках А и В успели установиться напряжения,,
под которыми находятся МОП-емкости CD и Cg, в результате*
чего в схеме реализуется триггерная функция.
Когда напряжение на CG оказывается ниже напряже-
ния на CD, то триггер переходит в другое состояние,,
характеризуемое уровнем Н для точки А и L для точки В. Так
как Т10 не проводит ток, то высокий потенциал с точки А посту-
пает на запоминающую ячейку — затвор транзистора Т2. В ре-
зультате происходит регенерация (восстановление содержимого)
ячейки. Цикл регенерации может состоять из набора сигналов
RAS (строб адреса строки) с адресацией, которая поочередно
включает все строки ячеек ЗУ. Схема считывания данных с рас-
8—807
114
Глава 2
положенными в одном ряду запоминающими ячейками образу-
ют одну строку. Разные строки соединяются через МОП-тран-
зисторы с общей схемой ввода-вывода, которая связывает ЗУ
с внешними устройствами.
На рис. 2.16 приведена такая схема, которая обслуживает
две строки. Переключатели для выборки строк образуются
транзисторами ТЗ и Т4. После считывания данные на ши-
нах Bsll и Bslr имеют дополняющую форму, т. е. единица, со-
Bsx-----'
Выборка коронки
Триггер
Входа
данных
31 ячейка ЗУ+
ариктибная
леей к а .._
ЗыдоркагЬргу
строки ' _L
I Gq
Сиитыба-
ннрийуси-
литель
v—\\~Bbi5opKa
строки с
J 11 S ио
31 ячейка ЗУ+
(риктибная ячейка
чч&или 11
Выборка Ik—j
строки 61
строки 32_______
Триггер
Выхода
данных
выборка коронки
Тб
I/O J 1 J
31ячейка ЗУ+
фикгпибная
ячейки
дчитыба-
нлрийиси
литель
31 ячейка ЗУ+
Фиктивная
ячейка
Выборка
_11й строки
| Gg 32
Рис. 2.16. Фрагмент схемы динамического ОЗУ (две колонки).
ответствующая слева Я-уровню, будет представлена справа
L-уровнем. Однако на выходе £)ВЫх ничего не произойдет.
Структуру ЗУ, собранного на кристалле из фрагментов, по-
казанных на рис. 2.16, поясняет схема, приведенная на рис. 2.17.
Из нее следует, что кристалл ЗУ состоит из двух полей, по
8192 бит каждое, к которым имеют доступ общая группа деко-
деров колонок и общая внутренняя шина входа-выхода.
Каждое поле имеет структуру матрицы, состоящей из
64X128 ячеек, и на каждое поле приходится 128 считывающих
усилителей. Бит адреса строки А6, который является младшим
адресным битом, селектирует поле ЗУ, которое будет активизи-
ровано во время данного рабочего цикла ЗУ. Другими словами,
в течение этого цикла будет активизирована только одна груп-
па, состоящая из 128 считывающих усилителей, поэтому рассея-
ние мощности в кристалле будет существенно ограничено.
Простым способом регенерации ЗУ является последователь-
ная выборка всех 128 строк ЗУ с помощью сигнала RAS в те-
чение рабочего цикла ЗУ. Этот способ регенерации назван
RASOR (регенерация только стробом адреса строки).
Как следует из блок-схемы, генераторы тактовых сигналов
и декодеры, предназначенные для выборки строк и колонок
матрицы, объединены с остальными схемами на кристалле ЗУ.
М5Ц)
Рис, 2.17. Блок-схема и символическое обозначение динамического ОЗУ
емкостью 16К1-
116
Глава 2
"Рис. 2.18. Динамическое ОЗУ с объемом памяти 64К8 бит, связанное через
контроллер с микропроцессором типа 8085А.
ХАСК — подтверждение регенерации; STB — строб; PCS — выборка защищенного кри-
сталла.
Для ограничения числа выводов Д7Р-корпуса 14 адресных
битов, необходимых для выборки одной из 16384 ячеек, вводят-
ся в ЗУ в виде двух последовательных групп через 7 выводов
корпуса DIP. Такое мультиплексирование производится под
контролем сигналов RAS и CAS (строб адреса колонки).
Динамические ОЗУ имеют время доступа в диапазоне 200—
400 нс.
По сравнению со статическими ОЗУ динамические ЗУ ис-
пользуют несколько более сложные способы связи с шинами
данных и адреса. В частности, требуется дополнительный конт-
роллер, который служит для формирования строб-сигналов
RAS и CAS в циклах регенерации, а также для мультиплекси-
рования адреса.
На рис. 2.18 показано ОЗУ со структурой памяти 64К8 бит,
которое состоит из 4 групп по 16К8 бит, связанных с микропро-
Запоминающие устройства (ЗУ)117
цессором через контроллер. Каждая группа состоит из восьми
ОЗУ со структурой I6K1 бит, входы и выходы которых связаны
с шиной данных для ввода и вывода информации, причем выхо-
ды оформлены через 8-разрядные буферы типа 8212. Адресные
биты после демультиплексора передаются во все ОЗУ. Выборка
групп, к которым нам требуется обратиться, т. е. выборка кри-
сталла, производится с помощью сигналов RASO(L), RAS1(L),
RAS2(L) и RAS3(L).
Записьбл
Чгпениеир
PC3(L)
flLM
/Li5
Разреше-
ние для
регене '
рации
Ш PL 6
PHO РН6
WE(L)
CP3LL}
шоа)
ЕРЗЗЩ
ХЯСКИЗ
Адресные
биты
Рис. 2.19, Структура контроллера динамического ОЗУ.
На все ОЗУ поступают также сигналы CAS и WE. Строб-
сигналы RAS0 — RAS3 формируются и с помощью дешифрации
двух старших битов адреса ЗУ.
Из анализа структурной схемы контроллера (рис. 2.19) сле-
дует, что адресные биты появляются на выходе в виде двух
групп (биты строк и биты колонок, АО—А6). В контроллере
использован мультиплексор «3—>1» для обработки 7 битов
с источниками информации в виде 7-разрядного реверсивного
счетчика со 128 состояниями и одного 14-разрядного адресного
регистра, который производит выборку 7-разрядных номеров
строк и колонок соответственно. Управление логическими схе-
мами чтения-записи обеспечивают сигналы WE(L), CAS(L) и
RAS0(L)-RAS3(L). Если же на вход ОЗУ подается только сиг-
нал CAS(L), то выходы этого ОЗУ «повисают».
В данном примере процесс регенерации полностью опреде-
ляется контроллером. Операция регенерации возобновляется
118
Глава 2
через каждые 2 мс. В течение цикла регенерации обмен данны-
ми между МП и ЗУ невозможен. При вызове ЗУ во время этого
цикла, когда активизируется сигнал ХАСК, МП переходит в ре-
жим WAIT (ожидание) и ждет до конца цикла. Для исключе-
ния указанного периода ожидания в некоторых МП, таких, как
Z80, во время операций, не требующих связи с ЗУ, выполняется
несколько циклов регенерации.
Контроллер следит за числом циклов регенерации и своевре-
менно обеспечивает их для всех строк ЗУ. В англоязычной спе-
циальной литературе этот метод регенерации называется «скры-
той регенерацией» (hidden refresh).
В настоящее время в продаже имеются контроллеры для
ДОЗУ в интегральном исполнении, например Intel 8202. Эта
схема совместима по выводам со стандартными ОЗУ на
16К1 бит в О/Р-корпусе на 16 выводов и может управлять рабо-
той ЗУ с объемом памяти вплоть до 64 кбайт, выполненных
на ОЗУ типа 2117/2118.
Стабилизированный кварцем генератор вырабатывает такто-
вый сигнал с частотой следования 25 МГц, который в свою
очередь синхронизирует формирование необходимых сигналов
выборки. С помощью кольцевого регистра сдвига, в котором
производится сдвиг единиц, генерируются требуемые времен-
ные сигналы RAS, CAS и WE. Внутренний счетчик обеспечивает
последовательную выдачу адресов строк во время регенерации.
Схема-арбитр проверяет, можно ли разрешить доступ к шине
связи с ЗУ. Например, если происходит регенерация, то ее мож-
но прервать, чтобы осуществить связь между ЗУ и МП, не вы-
ходя за пределы временного интервала 2 мс.
По окончании связи с ЗУ регенерация будет продолжена до
конца. В общем случае, независимо от совершенной в ЗУ
операции в первую очередь будет закончен сеанс связи с ЗУ или
цикл регенерации (т. е. регенерация какой-либо определенной
строки).
Регенерацию можно проводить также в режимах, задавае-
мых пользователем, например скрытой регенерации или распре-
деленной регенерации, когда используется указанный выше спо-
соб с последовательностью по 64 или 128 циклов, допускающих
только RAS (128 циклов для ОЗУ с объемом памяти более
16 Кбит, например типа Intel 2117). С помощью контроллера,
который размещен в DZP-корпусе, имеющем 40 выводов, можно
осуществить непосредственную связь с МП типа 8080А, 8085А
и 8086. Такой контроллер называется УУП (устройство управ-
ления памятью).
Фирмы-изготовители обычно предоставляют потребителям
необходимые временные диаграммы, из которых можно полу-
чить сведения о рабочих циклах ЗУ (время доступа, требуемое
Запоминающие устройства (ЗУ)
119
W£(L)
RAS(L)
ШЗЩ
Цикл при поступлении
Циклзаписи
цикл при поступлении
только сигнала W8
'„Подбешен-1Подвешенное
। ноеаоотояние । состояние
„Подвешенное" • !
состояние |
да~\ / Данные из предыдущего цикла
щего/ \ чтения
цикли
Цикл ввода б Циклите- цикл записи/
Цикл чтение-изменение- страничном ноя ветра- окончания б стра-
Рис, 2.20. Различные рабочие циклы динамического ОЗУ.
время установления уровней и хранения сигналов). Для интер-
претации временных диаграмм необходимо также указать, ка-
кие именно операции инициируют различные сигналы адресации
и управления. Например, цикл, при котором поступает только
RAS, «подвешивает» выходы, если в предыдущем цикле не про-
исходило обращение к ОЗУ. Цикл, допускающий только CAS,
переключает схему в режим пониженной мощности и также
«подвешивает» выходы.
При выборке определенной микросхемы или группы из не-
скольких микросхем в ЗУ с определенной структурой, когда на
отдельные ОЗУ подается сигнал CAS, остальные ОЗУ автома-
тически переходят в режим пониженной мощности. Группы мик-
120
Глава 2
росхем памяти внутри ЗУ большого объема селектируются
с помощью сигналов RASO-RASn.
При этом сигнал CS является лишним, что позволяет сэко-
номить один или два вывода £>/Р-корпуса. В современных ОЗУ
с объемом памяти 16 и 64К бит отсутствует также и СЕ- или
CS-вывод. При этом ОЗУ, находящееся внутри ЗУ большого
объема, будет селектировано для передачи информации при
помощи сигналов RAS и CAS, поданных одновременно на вход
соответствующей ИС.
На рис. 2.20 приведены временные диаграммы, которые не-
посредственно иллюстрируют процесс доступа к ДОЗУ. Эти
диаграммы показывают, какие сигналы активизируются в раз-
личных рабочих циклах ЗУ и что мы можем ожидать на выходе-
ЗУ после обработки соответствующих данных.
С помощью цикла чтение — изменение — запись адресация
ЗУ устанавливается только один раз, поэтому этот цикл длит-
ся меньше, чем индивидуальные циклы чтения и записи, взятые
вместе. При подаче данных в последовательность колонок оп-
ределенной строки также требуется более короткое время
доступа, поскольку в этом случае выбор строки производится
также только один раз. В связи с этим мы говорим о странич-
ном режиме работы, так как здесь одновременно передается
целая «страница» данных. Цикл ввода в страничном режиме
длится несколько дольше, потому что в этом цикле устанав-
ливается адрес строки. Мы видим, что в цикле, допускающем
только сигнал RAS, выходные данные поступают из предыду-
щего цикла считывания. Если цикл считывания не предшест-
вует этому циклу RAS, то выходы «повисают». В цикле, допус-
кающем только сигнал CAS, выходы ОЗУ также «повисают» и,
как мы уже отмечали выше, соответствующие элементы ОЗУ
переходят в режим с пониженной мощностью.
В пределах цикла чтение — изменение — запись прочитан-
ная информация во время записи не теряется. Передача данных
в страничном режиме используется при «дампе», т. е. при сбро-
се больших объемов данных с последовательной организацией
в другое ЗУ, например дисковое ЗУ, ПЗС-ЗУ или ЦМД-ЗУ»
в режиме «прямого» доступа к памяти, т. е. без участия цент-
рального процессора (микропроцессора).
Как статические, так и динамические современные ОЗУ сов-
местимы по выходным сигналам с ТТЛ-схемами и используют
источники питания напряжением +5 В. Если для уменьшения
времени доступа к ЗУ требуются какие-либо другие напряжения»
то они обеспечиваются непосредственно на кристалле ОЗУ.
Пользователь обычно не имеет информации об этих дополни-
тельных источниках напряжения.
Запоминающие устройства (ЗУ)
121
2.4. Сравнение статических и динамических ОЗУ
Как следует из сказанного выше, СОЗУ в общем случае
рассеивает большую мощность, чем ДОЗУ, что приводит к на-
личию разной плотности размещения информации на одном
кристалле. Кроме того, для статической ячейки требуется боль-
ше транзисторов, чем для динамической (отношение составляет
примерно 2—6). Статические ОЗУ имеют преимущество, связан-
ное с отсутствием регенерации, что приводит к экономии по
числу внешних схем и контроллеров. В результате небольшие
Рис. 2.21. Фотография ОЗУ типа 2102А с объемом памяти 1024X1 бит
С разрешения фирмы Intel.
122
Глава 2
ЗУ оказывается выгоднее использовать в статическом варианте,
а ОЗУ большого объема — в динамическом.
В течение последних нескольких лет для СОЗУ были разра-
ботаны ячейки нового типа, с более простой геометрией и мень-
шей площадью. Как уже отмечалось выше, широкое применение
находит режим работы с пониженной мощностью. Статические
ОЗУ особенно широко используются в небольших промышлен-
ных ЭВМ.
Ниже приведена таблица, в которой собраны параметры не-
которых СОЗУ и ДОЗУ, иллюстрирующие уровень разработок
в области этих ЗУ по состоянию на 1982 г. Приведенные в таб-
лице типы микросхем ЗУ производятся в основном фирмой
Intel.
СОЗУ
2114, объем памяти 1К4 (время доступа 100—250 нс) —
D/P-корпус на 18 выводов.
21812, объем памяти 2К4 (совместимо по выводам с 2716) —
DTP-корпус на 24 вывода.
21822, объем памяти 4К4 (совместимо по выводам с 2764) —
Р/Р-корпус на 28 выводов.
21834, объем памяти 8К8 (совместимо по выводам с 2764) —
DPP-корпус на 28 выводов (псевдостатическое ОЗУ с ди-
намической структурой и регенерационной схемой на
одном кристалле)
ДОЗУ.
2164, 4164, объем памяти 64К1 (время доступа 150—250 нс,
напряжение питания +5 В).
На рис. 2.21 представлена фотография микросхемы ОЗУ
емкостью 1024X1 бит фирмы Intel. Эта фотография является
сильно увеличенным изображением кристалла ОЗУ.
2.5. Биполярные ПЗУ
По методу адресации ПЗУ представляет собой ЗУ с произ-
вольным доступом, которое допускает лишь считывание инфор-
мации в системе обработки данных. ПЗУ используется для хра-
нения неизменяющихся (перманентных) данных, например,
программ ЭВМ (системной подпрограммы и управляющей про-
граммы). В комбинационной логике ПЗУ используются в каче-
стве преобразователей кода, декодеров, контроллеров и дру-
гих устройств. В предыдущей главе мы уже познакомились
с простым вариантом ПЗУ в форме диодной матрицы (ПЛМ).
В такой матрице набор диодов преобразует данные, вводимые
с помощью клавиатуры в BCD-код.
На рис. 2.22 представлены ПЗУ различных типов, имеющиеся
в распоряжении разработчиков схем. Их применяют как в бипо-
Запоминающие устройства (ЗУ)
123
лярном, так и в МОП-исполнении. Биполярные ПЗУ имеют бо-
лее высокое быстродействие, но меньшую плотность размещения
информации по сравнению с МОП-ПЗУ. Кроме того, ПЗУ под-
разделяются на масочно-программируемые ПЗУ (МППЗУ) и
программируемые ПЗУ (ППЗУ). В случае МППЗУ программи-
рование обеспечивается фирмой-изготовителем. При этом с по-
мощью специально спроектированной маски в конце процесса
изготовления ПЗУ на кристалле формируется требуемый ва-
Рис. 2.22. Типы ПЗУ,
используемых разработчиками схем.
риант соединения компонентов (монтажа). Пользователь задает
изготовителю исходную информацию для программирования
ПЗУ в виде данных, пробитых на перфокартах, или записанных
на магнитную ленту или магнитный диск (гибкий диск или дис-
кету) .
В случае ППЗУ программирование осуществляется с по-
мощью специального прибора — так называемого программато-
ра. ППЗУ поставляется с памятью, заполненной либо нулями,
либо единицами, в зависимости от технологии изготовления
ячеек ЗУ. С помощью коротких импульсов тока пользователь
сам разрушает проводящие дорожки в тех местах, где требуется
убрать межсоединения, чтобы получить ПЗУ с необходимой си-
стемой соединений. Соединения, которые удаляются путем
пережигания импульсами тока, изготавливаются из хромонике-
левого сплава и ведут себя как плавкие предохранители. При
этом импульсы тока программатора не воздействуют на другие
124
Глава 2
(обычно алюминиевые) соединения и полупроводниковые эле-
менты. В биполярных ППЗУ иногда используются также и пе-
режигаемые поликристаллические кремниевые соединения.
В результате улучшается воспроизводимость программирования
и исключается коррозия, которая наблюдается в случае хромо-
никелевых соединений.
Третий метод основан на пережигании соединений, реализо-
ванных в виде р—л-переходов. При этом за счет миграции мате-
Рис. 2.23. Ячейка ПЗУ с пережигае-
мым (плавким) соединением.
риала электрода в месте расположения перехода возникает
короткое замыкание.
На рис. 2.23 представлена схема базовой ячейки биполярно-
го ППЗУ. Когда на строку х поступает //-уровень потенциала,
такой же уровень установится на колонке у, если пережигаемое
соединение находится в нормальном (замкнутом) состоянии.
Если это соединение пережгли импульсом тока, потенциал ко-
лонки у остается низким, т. е. на Л-уровне.
Для программирования биполярных ППЗУ используется еще
один метод, который основан на эффекте пробоя между базой и
эмиттером при слишком высоком обратном напряжении. В ре-
зультате пробоя за счет миграции алюминия из эмиттерного
электрода возникает локальное короткое замыкание между ба-
зой и эмиттером.
На рис. 2.24 показаны блок-схема и принципиальная схема
биполярного ППЗУ со структурой в виде матрицы 32X32.
Из принципиальной схемы следует, что путем задания адреса
строки производится выборка горизонтальных шин, а с помощью
разрешающих входов считывающих усилителей выбирается тре-
буемая колонка. Хотя для всех ячеек, находящихся на одной
горизонтальной шине, имеется только один выход, данные на
него поступают только от одной ячейки, выборка колонки кото-
рой обеспечена одним из считывающих усилителей. Сигнал
/Ю
Д1
Л2
Д в кодер Декодер Декодер Декодер
;г1из8" ч1из8" „1из8” Jusd'1
Считывай Считыбпн Кчитыбан Считывай.
Y-CS2(L)
,^Cd1(L)
№
Л5 -
Л6
/77
Рис. 2.24.
126
Глава 2
Рис. 2.24. ППЗУ с пережигае-
мыми соединениями.
а — блок-схема; б — принципиаль-
ная схема; в — символическое обо-
значение.
Выход
'данных
разрешения передачи данных поступает на этот усилитель от
дешифратора адреса колонки. В исходном состоянии пережигае-
мые соединения находятся в нормальном (замкнутом) состоя-
нии, так что при выборке любого элемента памяти (бита) ПЗУ
на выходе будет обеспечиваться единица. Пережигание поли-
кристаллических кремниевых соединений обеспечивает запись
в ПЗУ требуемого набора битов. Сигнал CS разрешает выход-
ному буферу передачу информации на шину данных. Расширяя
эту схему, мы получим структуру типа 256X4 путем параллель-
ного включения еще трех идентичных схем.
2.6. Программирование биполярного ППЗУ
Микросхема ППЗУ содержит матрицу элементов памяти,
декодеры, считывающие усилители, буферы и ряд логических
схем, необходимых для программирования ППЗУ.
Программатор, представленный на рис. 2.25, обеспечивает
на выходе значения «1» в виде импульсов тока с коэффициен-
том заполнения 50%, которые подаются в ячейку памяти, где
происходит пережигание соответствующих соединений. В начале
программирования эти импульсы имеют частоту 500 кГц, кото-
рая за 100 мс линейно уменьшается примерно до 60 кГц.
Импульсы с такой частотой подаются в ППЗУ в течение интер-
вала программирования продолжительностью 1 мс.
В процессе программирования адресация ячейки произво-
дится путем подачи управляющих сигналов, имеющих стандарт-
ные ТТЛ-уровни. По окончании адресации импульсный генера-
тор обеспечивает на различных выводах ППЗУ необходимые
значения напряжений и токов. Так, в режиме программирова-
ния на выводе + £7В необходимо повысить напряжение с 4,5 до
10 В, a CS (L) -вывод необходимо переключить с 0 до 15 В.
К выходу программируемой ячейки подводится ток 5 мА от ис-
точника тока.
Запоминающие устройства (ЗУ)
127
Программатор в наиболее простой форме выглядит так, как:
показано на рис. 2.25. Если ППЗУ имеет длину считываемых,
слов п бит, то запись единицы в заданный разряд (бит) осу-
ществляется при разомк-
нутом переключателе,
подключаемом к выходу
программируемой ячейки
памяти. При этом другие
переключатели должны
оставаться замкнутыми.
Следует учесть, что один
цикл записи программато-
ра позволяет запрограм-
мировать лишь один раз-
ряд. Это означает, что для
ввода п единиц потребу-
ется п циклов записи.
Временные диаграммы
для процесса считывания
ПЗУ и ППЗУ почти не от-
личаются от аналогичных
диаграмм для ОЗУ. Обра-
щение к ПЗУ начинается
с подачи адреса, и по ис-
течении времени доступа
на выходе считывающего
усилителя появится тре-
буемый бит. С помощью
сигнала CS осуществля-
быборка
слова
ется выборка кристалла, Рис 225 подключение программатора*
то есть активизируется ППЗУ.
тристабильный буфер.
Время доступа для биполярных ПЗУ составляет 50—100 нс, а
время, необходимое для выборки кристалла, — около 30 нс. Для
формирования ПЗУ с большим объемом памяти несколько мик-
росхем включаются параллельно, обеспечивая выдачу слова с
большей разрядностью. При этом адресные входы АО—Ап
вход разрешающего сигнала CE(L) микросхем соединяются па-
раллельно по аналогии с ОЗУ, за исключением того, что управ-
ляющий вход для сигнала WE в ПЗУ отсутствует.
Как и в случае ОЗУ, большее число слов можно получить,
за счет увеличения числа микросхем ПЗУ по вертикали. Для.
выборки требуемой микросхемы, которая выполняется с по-
мощью старших битов адреса, используется дополнительный*
декодер, выходы которого связываются с CS-входами микро-
схем.
128
Глава 2
Некоторые микросхемы ПЗУ, например ППЗУ с объемом
памяти 16Кбит типа 82S 190/191 фирмы Signetics, снабжаются
тремя СЕ-входами. Для реализации ПЗУ со структурой 8К8 из
микросхем ПЗУ емкостью 2К8 в данном случае требуется толь-
ко один инвертор, осуществляющий выборку одной из четырех
микросхем (рис. 2.26). В данном случае дополнительного деко-
дера не требуется. Некоторые ОЗУ имеют большее число
СЕ-входов, позволяющих избежать использования адресных
декодеров.
Входы СЕ соединяются внутри каждой микросхемы ПЗУ
логической схемой И, так что выбор микросхемы осуществляет-
ся при поступлении 0 (L-уровня) на один из входов CE(L) и
1 (Н-уровня) на два остальных входа СЕ(Н). При подаче
адресных сигналов А12=А11=0 производится выбор ППЗУ-1,
на инвертирующий вход которого поступает сигнал CE(L) =
—Al 1 = 0, на один из неинвертирующих входов — СЕ(Н) =
«=А12=1, а на другой подан потенциал 4-5 В, что эквивалентно
ГРис. 2.26. Каскадное включение ППЗУ для увеличения объема памяти до 8К8.
Нумерация ППЗУ сверху вниз.
Запоминающие устройства (ЗУ)12$
СЕ(Н) = 1. Для трех остальных микросхем ППЗУ условия вы-
борки при этом не выполняются. При подаче сигналов А12 = 0,
Al 1 = 1 выбирается ППЗУ-2, на входах которого устанавливают-
ся CE(L) =А12 = 0, СЕ(//)=А11 = 1 и СЕ(//)=+5 В = 1. Выбор
ППЗУ-З осуществляется при А12= 1, Al 1 =0, а выбор ППЗУ-4 —
при А12 = А11 = 1. Выходы микросхем ППЗУ можно включать
параллельно, так как невыбранные микросхемы имеют либо
«отключенный» выход (в микросхеме типа 82S190), либо выход
с открытым коллектором (в микросхеме 82S191). В схемах с от-
крытым коллектором выходной фиксирующий резистор следует
подключать к источнику напряжения 4-5 В.
Благодаря своей энергонезависимой структуре ПЗУ и ППЗУ
более пригодны для работы в режиме с пониженной мощностью
по сравнению с энергозависимыми ОЗУ. Когда запросы на дос-
туп к ЗУ не поступают, источник питания ПЗУ автоматически
выключается. Единственное условие, которое при этом требует-
ся выполнить, — это отсутствие дополнительной нагрузки на
адресные шины, шины данных и шины управления при переходе
к режиму с пониженной мощностью питания.
Переход на этот режим выполняется с помощью электронно-
го переключателя, который включается в цепь питания С7в =
= +5В ППЗУ и управляется сигналом СЕ (рис. 2.27). На пере-
ключателе не должно быть падения напряжения более 0,5 В,
чтобы его включение не влияло на работу микросхем ППЗУ,
так как минимальное напряжение питания, при котором эти
микросхемы обеспечивают номинальные значения всех парамет-
ров, составляет +4,5 В.
Практическая схема электронного переключателя представ-
лена на рис. 2.28. Если СЕ(Л) =Л(0В), то р — п — р-транзистор
переключается в проводящее состояние и соединяет шину +5 В
с выводом (7В на корпусе микросхемы ППЗУ. Для обеспечения
быстрого режима отключения используется схема драйвера
шины типа 75451, который через резистор с сопротивлением
47 Ом быстро разряжает внутренние монтажные емкости ПЗУ,
чтобы защитить от перегрузок шину данных.
Переход в режим с пониженной мощностью питания влияет
на время доступа. После появления сигнала CE(L) требуется
интервал времени tps для включения напряжения питания и
подготовки к началу адресации. Затем происходит доступ в те-
чение интервала времени Taccess. По окончании сигнала CE(L)
требуется определенное время отключения /Cd для перевода
ПЗУ в режим с пониженной мощностью. Время fPS составляет
примерно 30 мс.
На рис. 2.29 представлено ППЗУ с объемом памяти
8К16 бит, снабженное схемой переключения в режим с пони-
женной мощностью. Выбор кристалла осуществляется с разря-
9—807
130
Глава 2
Рис. 2.27. Переключатель перевода ППЗУ в режим с пониженной мощностью
питания.
+J3
СЕО.)
Рис. 2.28. Схема, обеспечивающая переключение в режим пониженного по-
требления мощности ППЗУ типа 82S181 фирмы Philips-Signetiocs.
Запоминающие устройства (ЗУ)
131
дами А10—А12 адреса, которые декодируются с помощью схе-
мы 74LS138. Через буферы выходы декодера управляют работой
восьми стробируемых выключателей питания. Во включенном
состоянии находится только один из них, который обеспечивает
нормальный рабочий режим выбранной группы из двух микро-
1кОм
/110-Л12
И2Л
025
+53
+53 I
I | -31-1
+53
/Ы6Ы2 EN(L)
08(0
W1
89
89
89
89
89
80
80
89
^в
Д 1,
Д. +иь
80
8дресация
89
80
80
80-89
80
8К
080)
д
89
8К
-J
Схемы управления
режимом потреб-
ления мощности
89
; 828181
80
80 р—
6К
ПТ
Д
7К
ХГГ'
яД
ШГ'
д
98
Z17
Д
38
хгг u
д
27
JJj
I
"1К '
гпт
-D8
89
89
89
89
89
89
78
80
80
80
. 80
80
Д— 2К
89
; 828181
*80
~1Х—
-D7
т
5К
08
58
Выход
данных
&
с
в
я
+ 0^
98
Рис. 2.29. ППЗУ с объемом памяти 8К16 бит, со схемами, снижающими
потребление мощности.
схем ППЗУ, обеспечивающих выдачу 16-разрядного слова.
Остальные ППЗУ работают в режиме с пониженной мощно-
стью. Младшие разряды адреса АО—А9 подаются на все микро-
схемы ППЗУ одновременно.
2.7. Символические обозначения элементов ЗУ
При обозначении элементов ЗУ в логических схемах исполь-
зуются символические изображения, утвержденные Междуна-
родной электротехнической комиссией (МЭК), в которых выде-
ляются функциональные блоки и связанные с ними блоки управ-
ления. Внутри блоков управления указываются сигналы СЕ или
132
Глава 2
CS, а также сигнал ME, разрешающий запись или считывание
данных. В функциональном блоке выделяются группы ячеек па-
мяти, в каждой из которых хранится один разряд выходного
Рис, 2.30, Символическое
обозначение статического
ОЗУ типа 2114 с объемом
памяти 1024X4 бит.
слова. Связь с управляющими сигна-
лами обозначается соответствующими
символами. Для описания адресации
слов в ЗУ применяется система обоз-
начения адресной зависимости.
Проиллюстрируем применение этой
системы на примере символа, который
обозначает статическое ЗУ типа 2114
(рис. 2.30). В данном случае адресные
входы в блоке управления выделены с
помощью фигурной скобки, рядом со
скобкой помещена буква А вместе с
диапазоном адресов ЗУ типа 2114:
0—1023. То, что выбор ячеек памяти,
находящихся в функциональном блоке,
зависит от адреса, указывается с по-
мощью буквы А, расположенной рядом
с 5/?-обозначением входов /^-тригге-
ров. Связь сигнала WE (разрешение
на запись) с сигналом СЕ (разреше-
ние на доступ к кристаллу) осуществ-
ляется через логическую операцию
<И>, что отражается символом G1 у СЕ-входа и идентификато-
ром 1 у И^Е-входа.
Режим работы ячейки памяти зависит от сигнала на вхо-
де М2. Если сигнал М2 «истинен» (WE = L), то выполняется
Рис. 2.31, Символическое обозначение динамического ОЗУ типа 4096 с объ-
емом памяти 4096X1 бит.
запись; отсюда наличие идентификатора 2 у входа ячейки. Если
истинен сигнал М2, то произойдет считывание и тристабильный
выход ячейки получит разрешение для связи с шиной данных;
Запоминающие устройства (ЗУ)
133
отсюда наличие идентификатора 2 у выхода ячейки.
Символ динамического ОЗУ представлен на рис. 2.31.
В блоке управления имеется демультиплексор (DMUX), кото-
Рис. 2.32. Символическое обо-
значение ПЗУ (ППЗУ).
Тристадильныв
выходы
рый по командам RAS и CAS передает через шесть выводов
информацию, следующую после полного 12-разрядного адреса,
для последующего хранения на вход внутренних регистров-за-
щелок. G1 и G2 с индивидуальными идентификаторами указы-
вают в демультиплексоре, как происходит распределение адре-
СЕЩ
10
11
12
13
/4
4
ЕЮ
ПЗУМ'Ъ
£
£
£
£
£
£
-Н—
Н31
/
Т
3
I
5_
о_
7
8
Выходы t
-{открытый
коллектор)
Рис. 2.33. Условное обозначение
ПЗУ выделенного блока управ-
ления.
О
са. Через вход для выбора рабочего режима ячейка ЗУ прини-
мает сигналы на считывание или запись информации (М5 и
идентификаторы 5 и 5 в ЗУ). Тот факт, что в функциональном
блоке используется емкостной элемент ЗУ, указывается с по-
мощью букв SR, за которыми следует символ емкости.
ПЗУ или ППЗУ изображаются обычно так, как показано
на рис. 2.32. Блок управления имеет тот же вид, что и в слу-
чае статического ОЗУ. Вход EN дает разрешение на считывание
с кристалла (сигнал СЕ). Адресация ПЗУ обеспечивает выдачу
содержимого соответствующей ячейки, поэтому рядом с выходом
помещена буква А. Если ПЗУ имеет тристабильный выход, то
это обстоятельство указывается символом V — «набла», если
открытый коллектор, то у выхода помещается ромб.
Как видно из рис. 2.32, использование для ПЗУ отдельных
блока управления (сверху) и функционального блока (внизу)
134
Глава 2
не очень оправданно, так как все входы здесь являются управ-
ляемыми входами и находятся слева, а все выходы данных
находятся справа. В результате, если мы переместим все входы
и выходы внутрь одной рамки, как показано на рис. 2.33, то
никакой путаницы не возникает.
2.8. Программатор
Чтобы получить представление о работе программатора
ППЗУ в режиме ручного управления, рассмотрим программатор
ППЗУ, выпускаемого фирмой Signetics. Это ППЗУ программи-
руется по методу пережигания хромоникелевых соединений
с помощью импульсов тока.
На незапрограммированные выходы поступает напряжение
L-уровня (логический «О»). Если мы программируем ячейку,
пережигая соответствующее соединение, то на выходе устано-
вится высокое напряжение (Н-уровень), т. е. появится логиче-
ская «1». Для пережигания соединения необходимо выполнить
следующие операции:
1) Соединить все выходы через резистор сопротивлением 10 кОм
с точкой +5 В.
2) Выбрать адрес программируемой ячейки.
3) Довести напряжение Ub до величины 8,75 В.
4) По истечении 10 мкс соединить выход программируемого
разряда с точкой +17 В. За один прием (импульс) можно за-
программировать только один бит.
5) По истечении 10 мкс активизировать сигнал CE(L) в тече-
ние 1—2 мс.
6) По истечении 10 мкс отсоединить точку +17 В от выхода.
7) По истечении 10 мкс понизить напряжение (7В с +8,75 В
до +5 В.
8) Продолжить программирование других разрядов, повторяя
пп. 4—7.
9) По истечении 10 мкс, повторяя пп. 2—8, продолжить про-
граммирование других адресов.
Программатор, первоначально разработанный фирмой Sig-
netics, а затем усовершенствованный И. Кербером, проверяет,
запрограммировано ли данное ППЗУ или нет. Эта проверка
происходит в процессе автоматического опроса всех адресов.
При обнаружении какого-либо аномального отклонения в содер-
жимом адресов ППЗУ программатор останавливается и сооб-
щает с помощью светодиодного дисплея, в какой ячейке (адре-
се) обнаружен дефект.
После этой проверки можно перейти к программированию,
в процессе которого после каждого импульса тока адрес увели-
Рис, 2.34. Принципиальная схема программатора для ППЗУ типа 82S129
и 82S131 фирмы Philips-Signetics (а),
136
Глава 2
Рис. 2.34. Внешний вид серийного ППЗУ-программатора модели IX (б).
чивается на 1. С помощью связанного с выходом переключате-
ля, который можёт ввести в ячейку единицу, мы запускаем авто-
матический цикл программирования. После того как ячейка
будет запрограммирована, т. е. в нее будет введена единица, мы
увидим результат с помощью светодиодного индикатора, кото-
рый располагается над переключателем.
Из схемы, приведенной на рис. 2.34, видно, что ход адреса-
ции -контролируется 8-разрядным счетчиком, который образо-
ван микросхемами IC6A и IC6B в верхней части схемы. Этот
счетчик после сброса может стартовать с адреса 0. Если потре-
буется начать работу с какого-то другого адреса, то требуемый
двоичный адрес можно установить с помощью 5А-переключате-
лей. Подавая команду LOAD, мы можем произвести считыва-
ние информации, задаваемой переключателями, и затем увели-
чить или уменьшить содержимое с помощью импульса, выраба-
тываемого шаговым переключателем S/S. После этого
переключателя включен триггер для защиты схемы от ложных
импульсов, которые могут возникнуть из-за дребезга контактов
переключателя. Счетчик производит прямую адресацию ППЗУ
в схеме IC5 и одновременно осуществляет считывание через
преобразователи из двоичного кода в BCD-kqj\ (микросхемы
1С10, IC11, IC12) и декодеры (микросхемы IC13, IC14 и IC15)
с выходом на 7-сегментный дисплей. Программирование выхо-
дов происходит с помощью четырех переключателей 501—504,
размещенных в правой нижней части схемы.
Запоминающие устройства (ЗУ)
137
1Ь( 5 В)
5К1
Схема Временной разВертки
1Сд
RE/CE
77123
IC2
RE/CF
77123
IC2
RE/CE
77121
31 СЕ
32 Q
В Q
23 СЕ
а?2
мк?
'МСЕ.^
23
2 С 02 —|
— 13
- О Of
JC2 ______
RE/CE ор2
77123 =р
13 СЕ —
- 1В
*- 1С 01-----
М(]цщии НУЛЬ
mu&ubpamop,
дне
Ждущий нуль
inudi/dpumopj
1 мс
Ждущие
нут, mu б ид
Змс
1СЗ _____
33/031
77Г23 =т
23 СЕ —
23
2 С 02 —
2К2
Ждущие нуль- Ждущий нуль-
/пиЕидратор, спивидратор,
1нс 1,3 мс
1)о I----J
2К2
Т2
2N2222
О/ЯмкТ
г—#
&
ммпцльс программатора
Запуск
— В1 В2
75751
Г-Х/ 32
*L
Рис. 2.34. Его можно также использовать для программирования ПЛМ (в^
ВW —заем; СА —общий анод; CD — обратный счет; CU — прямой счет; CY — перенос;
DP — десятичная точка; NG — нормально замкнутые контакты; NO—нормально разомк-
нутые контакты; в качестве преобразователя из двоичного кода в BCD-код использует-
ся микросхема 74185.
Не следует забывать, что при работе с программатором
в определенный момент времени можно нажимать только на
один определенный переключатель.
Цикл программирования начинается после нажатия на кноп-
ку одного из переключателей. Этот переключатель генерируем
138
Глава 2
L-импульс, который запускает ждущий мультивибратор. В ре-
зультате начинается цикл программирования, при этом различ-
ные управляющие сигналы с требуемыми задержками обеспе-
чиваются схемой временной развертки, состоящей из нескольких
ждущих мультивибраторов. С помощью микросхемы IC4,
в требуемый момент времени обеспечивается напряжение пи-
тания £/Вр = 8,75 В и выход источника питания STAB3 переклю-
чается на уровень +17 В. STAB3 работает как источник тока,
величина которого определяется сопротивлением, включенным
между точками 2 и 3 этой ИС. В данном случае ток зафикси-
рован на уровне 5/25 А = 200 мА.
Если пережигание приведет к разрушению соответствующего
соединения, то на выходе появится напряжение Н-уровня, при
этом светодиод должен включиться после возвращения переклю-
чателя SOn в исходное положение. Эти операции необходимы
для проверки того, запрограммирована ли в действительности
соответствующая ячейка памяти. СЕ (L)-импульс получается с
помощью транзисторов Т1 и Т2, управляемых схемой временной
развертки.
Как уже отмечалось выше, можно начать либо с нулевого
адреса после сброса в нуль, либо с ненулевого адреса, который
набирается с помощью переключателей. Одношаговый переклю-
чатель S/S производит увеличение или уменьшение содержимого
счетчика.
Для контроля ППЗУ этот переключатель активизирует им-
пульсный генератор, работающий на двух частотах и позволяю-
щий автоматически увеличивать адрес. Этот генератор построен
на микросхеме IC18 (NE555), которая получает разрешение от
триггера IC17. В свою очередь триггер запускается через IC16
в автоматическом или ручном режимах управления. Проверка
того, являются ли все биты в слове действительно нулями, про-
изводится схемой ИЛИ-HE микросхемы IC19, связанной с выхо-
дами ППЗУ. Если при проверке обнуления будет обнаружена
единица, то триггер IC17 возвратится в исходное состояние и
остановит автоматическую адресацию ППЗУ.
На дисплее при этом можно будет увидеть, в каком адресе
обнаружена ошибка заполнения (единица). Счетчик также оста-
навливается после того, как будут опрошены все 256 адресов.
Декодер IC8 регистрирует это состояние и возвращает триггер
IC17 в исходное состояние.
Программирование 512 слов производится в два этапа: сна-
чала от 0 до 256, а затем от 256 до 512. На первом этапе SA8
замкнут, на втором этапе — разомкнут. При программировании
второй группы на экранах СД-дисплеев загораются десятичные
точки. Рассмотренная схема опубликована в журнале Electro-
nic Design, № 22 (25 окт. 1977).
Запоминающие устройства (ЗУ)
139
2.9. МОП-ППЗУ и СППЗУ
Фирма Intel разработала МОП-ППЗУ, в котором про-
граммируемым элементом является так называемая
FAMOS-ячейка (лавинно-инжекционный МОП-транзистор с пла-
вающим затвором). Эта ячейка состоит из обычного п-МОП-
транзистора с двумя расположенными друг над другом затвора-
ми, которые называются верхним и нижним затворами. Верх-
ний затвор связан с декодером строк СППЗУ, который задает
режим работы этого затвора. Нижний затвор является пла-
вающим. Ячейка ЗУ программируется с помощью электро-
нов, находящихся на верхнем энергетическом уровне и про-
ходящих через слой SiO2 по проводящему каналу к пла-
вающему затвору. Этот затвор захватывает электроны и
удерживает их. Как видно из рис. 2.35, б, появление заряда на
плавающем затворе приводит к смещению порогового напряже-
3amбор выборки
(к X-декод еру)
Управляемый затвор
((хранение заряда)
810?
8 В
Подложка
Управляемый
затвор
Сток
| Символическое
обозначение
I
Исток
д
Порог считывания
^запрограммирован
Uih1 Незипрограмми- UfhO Запрограммирован
робан
Рис. 2.35. МОП-ячейка ППЗУ с плавающим затвором и лавинной инжекцией,
а —структура; б — условное обозначение; в — зависимость тока стока от напряжения на
зз1 воре.
но
Глава 2
ния транзистора. Если нижний затвор не заряжен, то транзистор
имеет низкое пороговое напряжение, и при подаче управляющего
импульса на верхний затвор, как это происходит при выборке,
МОП-транзистор переходит в проводящее состояние. При про-
граммировании ячейки пороговое напряжение смещается на бо-
лее высокий уровень, в результате чего при нормальном управ-
ляющем сигнале на верхнем затворе транзистор уже не перехо-
дит в проводящее состояние.
Состояние ячейки определяется (считывается) достаточно
надежно, так как сигнал выборки, подаваемый на верхний за-
твор, идентифицирует состояние транзистора — проводящее или
непроводящее. Порог считывания указан на рис. 2.35, в верти-
кальной штриховой линией.
Так как плавающий затвор не имеет никакой связи с осталь-
ной частью транзистора, то его «очистка» от накопленного заря-
да с помощью какого-то электрического напряжения оказывает-
ся невозможной. Очистка производится за счет облучения ячеек
ЗУ ультрафиолетовым (УФ) светом с определенной длиной вол-
ны (2537 А) в течение требуемого промежутка времени. В про-
цессе УФ-облучения захваченные электроны получают достаточ-
но энергии для того, чтобы возвратиться назад, пройдя через
слой БЮг.
МОП-ППЗУ выполнены из ячеек типа FAMOS. Фирма-изго-
товитель поставляет ЗУ с ячейками, находящимися в состоянии
«1». Пользователь может получить требуемый набор битов,
программируя ППЗУ по стандартной методике. В ППЗУ этого
типа можно заменять единицы на нули, но не наоборот. Оши-
бочное программирование приводит к тому, что ППЗУ становит-
ся непригодным для использования.
Чтобы избавиться от этого недостатка, корпус ППЗУ снаб-
жается кварцевым окном, через которое пользователь может
очищать ППЗУ с помощью УФ-облучения — при этом все ячей-
ки заполняются единицами. Такие ППЗУ известны под наиме-
нованием репрограммируемых (стираемых) ППЗУ, т. е.
РППЗУ. Они поставляются, например, в виде ИС типа 2708 и
2716 со структурой 1К8 и 2К8 соответственно и временем досту-
па 280 нс (максимальное время доступа 450 нс).
Давайте рассмотрим более детально организацию РППЗУ
типа 2708 (рис. 2.36). Из этого рисунка видно, что ячейки ЗУ
организованы в виде матрицы 64X128. Верхние затворы управ-
ляются через декодер для выборки строк, а состояние, в кото-
ром находятся ячейки ЗУ (проводящее или непроводящее),
считывается через декодеры колонок с помощью считывающих
усилителей. Полученные сигналы поступают через буферы и по-
лучают разрешение на выход из схемы посредством сигналов
CS(L)/WE(H).
142
Глава 2
Для программирования имеются специальные буферы дан-
ных, которые применяются только при записи требуемого набо-
ра битов в СППЗУ.
Программирование РППЗУ по аналогии с биполярными
ППЗУ также происходит согласно определенной процедуре. За
время одного импульса тока накопление требуемого заряда на
плавающем затворе может не произойти. Тогда эта операция
выполняется за несколько импульсов, чтобы не превысить допу-
стимую величину мощности, рассеиваемой в схеме ЗУ. При
этом программирование протекает следующим образом.
Каждый адрес, начиная с 0 и кончая 1023, вызывается в
последовательном порядке, после чего подается импульс тока,
который обеспечивает парциальное смещение заряда в плаваю-
щий затвор.
Таким образом обрабатываются один за другим все 1024
адреса. Затем цикл повторяется, например 1000 раз (1000 по-
вторений), до тех пор, пока плавающие затворы не получают
заряды, требуемые для обеспечения необходимого порогового
напряжения.
Фирма-изготовитель обеспечивает обычно подробные дан-
ные по процедуре программирования, такие, как длительность
импульса тока и число шагов (импульсов), которое необходимо
для обеспечения оптимальных условий программирования
РППЗУ без заметного увеличения потребляемой мощности.
Программирование РППЗУ 2708 начинается с повышения на-
Запоминающие устройства (ЗУ)
143
пряжения до +12 В на шине CS(L)/WE(H) (рис. 2.37). Затем
происходит выборка слова аналогично режиму считывания.
Информация, которую необходимо записать в виде 8-разряд-
ного слова, появляется на выходах данных О0—О7. Логические
уровни напряжения для выходов адресации и данных и напря-
жение питания будут такими же, как и для режима считывания
информации.
После окончания подготовки адреса и данных на 18-й вы-
вод, т. е. клемму «программирование», подается импульс тока
Управление млением-
записью б ОЗУ к шине вход выход
Рис. 2.38. Блок-схема программатора РППЗУ,
из программатора. Эта операция повторяется и для следующих
адресов вплоть до последнего 1024-го адреса. Один полный про-
ход программатора для всех адресов называется циклом. Чис-
ло требуемых циклов п является функцией длительности им-
пульса тока программатора Zpw, а именно: nX/pw^100 мс. Ши-
на импульса программатора лежит в пределах 0,1—1 мс. Число
циклов, согласно приведенной выше формуле, изменяется от
100 (fpw=l мс) до 1000 (Zpw = 0,l мс) в зависимости от величи-
ны Zpw.
Как отмечалось выше, за один прием не удается обеспечить
полное программирование требуемого слова. Поэтому реализу-
ется работа в циклическом режиме, позволяющая обеспечить
минимальное рассеяние мощности в СППЗУ.
Процесс программирования РППЗУ 2708 протекает так, как
показано в структурной схеме на рис. 2.38. Очевидно, что перед
началом программирования мы должны иметь в своем распоря-
жении всю информацию, необходимую для заполнения матри-
цы РППЗУ. Требуемые данные хранятся в СОЗУ на 1К8 бит,
которое через буфер связано с шиной данных соответствующей
микроЭВМ. В начале процесса программирования ОЗУ запол-
няется через микроЭВМ и сигнал PCI, инициированный мик-
144
Глава 2
роЭВМ, начинает осуществлять первый шаг программирования.
Сигнал PCI считывает триггер цикла программы, в результате
чего запускается таймер программатора. Одновременно в мик-
роЭВМ поступает сообщение о том, что программирование
РППЗУ началось (сигнал «занято»).
Таймер программатора вырабатывает импульс, ширина ко-
торого равна требуемой длительности цикла записи. Одновре-
менно таймер запускает счетчик, который производит выборку
слов ЗУ как в ОЗУ, так и в РППЗУ. Кроме этого, каждый раз,
когда встречается адрес 1024, счетчик вырабатывает импульс
приращения содержимого счетчика цикла. Таймер программа-
тора запускает также схему временной развертки, которая
обеспечивает основной токовый импульс программатора. Эта
схема состоит из двух ждущих мультивибраторов, первый из
которых обеспечивает задержку на 10 мкс, а второй формирует
токовый импульс. Второй ждущий мультивибратор запускается
задним фронтом импульса первого ждущего мультивибратора.
Амплитуда токового импульса повышается до необходимого
уровня по напряжению и через вывод № 18 подается на РППЗУ
2708. Выходы ОЗУ связаны с выходами РППЗУ, так что вели-
чины данных, хранящиеся в ОЗУ, в процессе адресации авто-
матически передаются в РППЗУ. После регистрации требуемо-
го числа циклов счетчик циклов вырабатывает импульс, кото-
рый сбрасывает триггер цикла в нуль.
Для управления входами программатора и CS/UZE-выходами
РППЗУ требуются импульсы, амплитуды которых отличаются
от стандартных ТТЛ-уровней напряжения. Схемы, пригодные
для реализации такого интерфейса, показаны на рис. 2.39—2.41.
В частности, схема, показанная на рис. 2.39, обеспечивает авто-
матическую выборку СППЗУ с помощью сигналов CS(L)/
/WE(H), а схема, показанная на рис. 2.40, обеспечивает запись
и считывание.
Обе эти схемы позволяют проверить, правильно ли запро-
граммировано РППЗУ после окончания работы программатора.
Схема с тремя выходными уровнями предназначена для осуще-
ствления постоянной связи с РППЗУ в системе, а схема с двумя
уровнями переключения предназначена для работы с автоном-
ным программатором.
Программирование РППЗУ можно упростить с помощью
микроЭВМ, снабженной программой, которая обеспечивает ад-
ресацию, ввод данных и формирование импульса тока. Адресуе-
мый регистр с большим числом байтов, связанный с шиной дан-
ных микроЭВМ, запоминает и своевременно изменяет все дан-
ные, необходимые для программирования в течение цикла. Ад-
ресный регистр, который подходит для решения этой задачи,—
это, например, микросхема Intel 8255А.
7406
Рис. 2.39. Схема управления сигналов CS(L)/WE(H) (два уровня).
Рис. 2.40. Схема управления сигналов CS(L)/WE(H) (три уровня)*
Рис. 2.4L Схема генерации программирующего импульса амплитудой 26 В,
146
Глава 2
При программировании РППЗУ с помощью микроЭВМ так-
же требуются указанные выше интерфейсные схемы (рис. 2.39—
2.41). Программисты применяют этот же метод, записывая ис-
ходную программу, которая содержит ошибки, в ОЗУ, после чего
осуществляется поиск ошибок и в программе производятся необ-
ходимые исправления. При использовании только ППЗУ и
РППЗУ (без микроЭВМ) проделать такую операцию в один
прием не удается.
По этой причине при оценке качества программ рекомендует-
ся применять ППЗУ/ОЗУ-имитатор, т. е. автономное СОЗУ, ко-
торое через плоский кабель с O/L-разъемом на 24 вывода связы-
вается с ППЗУ-гнездом на плате микроЭВМ. ОЗУ имеет собст-
венный источник питания, выполненный в виде так называемой
батарейной приставки, т. е. устройства, которое кроме обычного
сетевого выпрямителя содержит также батарею или аккумуля-
тор, автоматически включающиеся после выключения сетевого
напряжения.
Имитатор также снабжен кнопочным переключателем, кото-
рый осуществляет запись в ПЗУ/ОЗУ-имитатор. В нормальном
режиме записи микроЭВМ доступа к имитатору не имеет. Од-
нако с помощью команды на запись, которая поступает с пане-
ли управления, соответствующее слово можно изменить, если
одновременно будет нажата и кнопка переключателя. В указан-
ном выше ОЗУ имеется ^Е(Л)-шина, по которой с помощью
переключателя производится отсоединение микроЭВМ. Если
кнопка переключателя не нажата, то на WE(L)-выход будет
постоянно подаваться напряжение //-уровня. На рис. 2.42 по-
казано сильно увеличенное изображение кристалла РППЗУ
2708.
2.10. ЭППЗУ и энергонезависимое ОЗУ
Как мы видели выше, в РППЗУ МОП-транзистор имеет
два затвора, один из которых «подвешен». При подаче высокого
положительного напряжения на верхний затвор проводящего
транзистора электроны инжектируются в пространство, распо-
ложенное между верхним затвором и каналом проводимости,
и затем захватываются нижним «подвешенным» затвором.
В электрически программируемом ПЗУ (ЭППЗУ) происходит
примерно то же самое, за исключением того, что «подвешен-
ный» (плавающий) затвор заменен здесь слоем нитрида крем-
ния (AfTWS-структура1). В структуре с таким слоем нитрида
электроны можно вернуть в канал проводимости, подавая на
верхний затвор обратное напряжение.
О Metal — Thick Nitride — Silicon—кремниевая МОП-структура с изо-
ляцией нитридом кремния. — Прим, перев.
Рис. 2.42. Фотография РППЗУ типа 2708 фирмы Intel.
148
Глава 2
’Рис, 2.44. Структура энергонезависимого ОЗУ фирмы SGS-ATES (FG — пла*
вающий затвор).
Современные ячейки ЭППЗУ имеют структуру затвора, ко-
торая показана на рис. 2.43. Слой SiC>2 имеет в середине выем-
ку, где его толщина уменьшена до 20 А для того, чтобы обес-
печить заполнение и стирание ячеек, сохраняя при этом все по-
лезные свойства МАЮЗ-структуры1).
В энергонезависимом ПЗУ, принцип действия которого ана-
логичен СППЗУ, ячейка имеет тройной затвор, один из элемен-
тов которого «подвешен» (см. рис. 2.44). Подавая положитель-
ное напряжение на оба крайних затвора, можно записать дан-
ные, при этом «подвешенный» затвор становится отрицатель-
ным и пороговое напряжение МОП-транзистора увеличивается.
Для того чтобы записать вместо единицы нуль (т. е. стереть
единицу), применяется схема, показанная на рис. 2.45. Здесь
Metal — Nitride — Oxide — Semiconductor — структура металл — нит-
рид — оксид — полупроводник (МНОП). — Прим, перев.
Сток
Вход \\CjP FC
^2F
'9?
Рис. 2.45. Стирание информации в энергоне-
зависимом ОЗУ (Cif и Сгг — емкости, кото-
рые образуют затворы gl и g2 по отноше-
нию к плавающему затвору FG; Cfg — ем-
кость, образованная плавающим затвором
относительно подложки).
Запоминающие устройства (ЗУ)149
затвор g2 заземлен. Если теперь на gl будет подано высокое
напряжение, то возникнет деление напряжения в отношении
9:1. Это приводит к появлению между gl и «подвешенным» за-
твором напряжения, достаточного для того, чтобы электроны
.приобрели энергию, кото-
рая позволяет им пройти
сквозь оксидный слой на
затвор gl.
Как запись, так и сти-
рание данных произво-
дятся с помощью серии
импульсов программато-
ра, что по аналогии с
•СППЗУ позволяет огра-
ничить рассеиваемую мо-
щность.
В энергонезависимом
ОЗУ фирмы SGS-ATES
используется режим удер-
жания данных, т. е. обес-
печивается возможность
длительного хранения данных. Для ЭППЗУ такой режим менее
выгоден. Стирание данных в обоих типах ЗУ осуществляется
без всяких побочных эффектов.
2.11. РППЗУ и ЭППЗУ по состоянию на 1982 г.
РППЗУ типа 2708 со временем приобрело «последователей»
в виде РППЗУ типа 2716 (2К8-16К), 2732 (4К8-32К) и 2764
(8К8-64К). Эти РППЗУ питаются от источника напряжения
4-5 В. Кроме этого, в новых моделях применяется существенно
упрощенная процедура программирования. Для новых РППЗУ
можно программировать целый байт без применения цикличе-
ской операции, как это требовалось для РППЗУ типа 2708.
Время программирования одного адреса занимает 50 мс, что
приводит к полному времени программирования РППЗУ на
2К8 бит, равному 100 с.
В случае РППЗУ типа 2716 и 2732 адресные биты кодиру-
ются как АО, А1...А7, а выходные биты — как ОО, 01...07. Вы-
борка кристалла производится сигналом CS(L).
Вывод, на который поступает сигнал «программирование»,
комбинируется с сигналом «понижение мощности». В режиме с
пониженной мощностью энергопотребление снижается в 4 раза
по сравнению с активным режимом считывания, поэтому соот-
ветствующий вывод обозначен через PD/PGM1). В процессе
о Power Down/Program. Понижение мощности/программирование. —
Прим, перев.
150
Глава 2
Выбор режима РППЗУ типа 2716
Режим/сигнал PD/PGM (18) CS(L) (20) UB (24) Выходы (9—11, 13-17)
Чтение Ui(L) U;(L) + 5 В + 5 В Овых
Отсутствие вы- борки X Ui(H) « « «Подве- шенные»
Понижение мощности Программи- U,(H) 1 |U,(H) X « « »
рование Ui(L)-1 50МС1- Ui(H) + 25 В « Dbx
Проверка про- граммы U,(L) Ui(L) « « Овых
Блокировка программы Ui(L) U;(H) « « «Подве- шенные»
X = не существенно
Рис. 2.46. Функциональная таблица применений ЭППЗУ типа 2716.
программирования новых СППЗУ напряжение t/pp повышается
с +5 до +25 В. Для РППЗУ типа 2716 применяется функцио-
нальная таблица, которая показана на рис. 2.46. Время досту-
па для РППЗУ типа 2716 и 2732 равно 450 нс, однако для
2732А и 2764 оно составляет 250 нс.
РППЗУ типа 2732А и 2764 изготавливаются по технологии
СППЗУ четвертого поколения, т. е. HMOS-E^, разработанной
фирмой Intel. РППЗУ типа 2716 совместимо с ЭППЗУ типа
2816 (энергонезависимым ЗУ), которое программируется в ЭВМ
и входит в ее состав.
2.12. ППЗУ в качестве ПЛМ
Из более подробного анализа ППЗУ следует, что этот эле-
мент состоит по существу из строки функций И, закодирован-
ных в двоичном коде, и строки функций ИЛИ, которые пользо-
ватель может запрограммировать по своему усмотрению. Отсю-
да очевидно, что эту схему можно применять непосредственно
для преобразования из двоичного кода в другие коды. По этой
причине область применения ППЗУ оказывается гораздо шире
области применения простого ЗУ. В последующих разделах мы
рассмотрим некоторые применения ППЗУ более подробно.
ППЗУ могут заменять большую часть обычных логических
схем и поэтому имеют высокую экономическую эффективность.
Большим преимуществом является то, что ППЗУ определенного
High-Performance M.OS-E— высококачественные МОП-Е-схемы.—
Прим, перев.
Запоминающие устройства (ЗУ)151
типа можно стандартизовать, чтобы ограничить число типов ис-
пользуемых схем. Применяя адекватные методы программиро-
вания, можно приспособить ППЗУ для самых разных целей.
Такой подход является альтернативой технологии заказных ИС,
когда по заказу клиента фирма-изготовитель интегрирует на
одном кристалле цифровые схемы с определенными характери-
стиками. Применение ППЗУ оказывается более выгодным за
счет снижения цены и уменьшения времени изготовления требуе-
мой логической микросхемы, потому что при изготовлении за-
казных ИС требуется определенный подготовительный период,
в течение которого пробные экземпляры ИС доводятся до уров-
ня массового производства. Среднее время выполнения заявки
на заказную ИС составляет около 3 месяцев, в то время как
ППЗУ можно запрограммировать за один-два дня.
2.13. Преобразователи кода
Как мы уже отмечали, ППЗУ хорошо приспособлены для
применения в качестве преобразователей кода. В ходе такого
преобразования логический элемент представляет одно м-раз-
Вход
двоично- <
ео кода
Выход
кода
Грея
функциональная таблица
Входы Выходы
Моичнкод Код Грея
А3 А2 А1 Ао В3 в2 в, во
0 0 0 0 0 0 0 1 0 0 10 0 0 11 0 10 0 0 10 1 0 110 0 111 10 0 0 10 0 1 10 10 10 11 110 0 110 1 1110 1111 0 0 0 0 0 0 0 1 0 0 11 0 0 10 0 110 0 1 ' 1 1 0 10 1 0 10 0 110 0 110 1 1111 1110 10 10 10 11 10 0 1 10 0 0
Рис. 2.47. Использование ППЗУ в качестве преобразователя двоичного кода
в код Грея.
рядное слово в виде другого m-разрядного слова с измененной
кодовой структурой. Пример преобразователя кода, который
трансформирует 4-разрядный двоичный код в 4-разрядный код
Грея, приведен на рис. 2.47. В ППЗУ двоичный код определяет-
152
Глава 2
ся методом адресации. Программируя строки матрицы в эквива-
лентном коде Грея, мы фактически решаем задачу преобразо-
вания.
Эквивалент двоичного кода в коде Грея генерируется при
обращении к соответствующему адресу. Таким же образом осу-
ществляется преобразование из кода Грея в двоичный код или
в BCD-код. Подавая эквиваленты кода Грея в качестве двоич-
ного адреса, мы программируем по строкам соответствующий
двоичный код или BCD-код.
Для преобразования кода с помощью ППЗУ требуется /иХ
Х2П бит, где тип определены выше. Указанный выше преоб-
разователь можно, например, реализовать в ППЗУ на 4Х42 =
= 64 бит. Преобразователи кода с большим числом битов мож-
но реализовать с помощью одного ППЗУ большего объема или
с помощью нескольких ППЗУ меньшего объема, но связанных
параллельно так, как это делается при увеличении емкости ЗУ
в системах обработки данных. Например, преобразователь 8-раз-
рядного ASCII в 8-разрядный EBCDIC можно изготовить в виде
одного ППЗУ на 258X8 бит или в виде четырех ППЗУ на 64Х
Х8 бит, дополнительные (старшие) входы которых декодируют-
ся и связываются с СЕ(L)-входами для выборки одного из че-
тырех ППЗУ.
В другом варианте применяются восемь ППЗУ на 256X1 бит
в параллельном включении.
Здесь все выходные разряды всех ППЗУ могут быть запро-
граммированы так, что параллельное включение обеспечивает на
выходе требуемое кодовое преобразование без всяких дополни-
тельных схем. Достоинством этого метода является возможность
исключения из преобразователя дополнительного декодера. Кро-
ме того, многие фирмы-изготовители выпускают ППЗУ со струк-
турой 256X4 бит, поэтому требуемый преобразователь проще
изготовить из двух таких ППЗУ.
Часто в ПЗУ требуется выполнить несколько различных
преобразований. В качестве примера назовем принтер с иголь-
чатыми исполнительными элементами, который может печатать
символы в матричной форме, включая арабские, ивритские и
греческие буквы.
В ППЗУ этот режим осуществляется по методу управления
индивидуальными ячейками. На рис. 2.48 показано ППЗУ,
которое запрограммировано для выполнения преобразования
4-разрядных двоичных чисел в четыре различных кода. Два би-
та в адресных входах ППЗУ, т. е. старшие цифры, определяют
тип конкретного кодового преобразования. Например, при
А5А4 = 00 входной двоичный код будет преобразован в BCD-эк-
вивалент, а при А5А4 = 01 получится преобразователь в код с
избытком Зит. д.
Запоминающие устройства (ЗУ)
153
Управление
Вход двоич-
ного мда
Выход преодразо-
Вонного кода
Функциональная таблица
। Вход Выход
У правлен. । а4 А4 Дбоичн код А3 Аз А, Alt Преобразование В7 В6 В5 В4 Вз в2 в, в0
0 0 0 0 0 0 00000000
0 0 1111 0 0 0 1 0 1 0 1
0 1 0 0 0 0 X X X X 0 0 1 1
\ I 0 1 I 10 0 1 X X X X 1 10 0
1 0 0 0 0 0 X X X 0 0 0 1 1
1 0 10 0 1 X X X 1 10 0 0
1 1 0 0 0 0 X 0 0 0 0 0 0 0
1 1 1111 X 1 1 1 1 1 1 1
Х= несущественно
BCD код
Код о избыт-
ком 3
Код„2 из 5"
Код
Хеннинга
Рис. 2.48. Различные кодовые преобразования, управляемые разрядами А5
и А4 адреса.
Многие преобразователи кода поставляются в продажу в ви-
де стандартных ИС со специфическим обозначением функции.
Они входят в состав таких логических семейств, как ТТЛ и
КМОП.
2.14. Детектирование ошибок
Для детектирования ошибок, возникающих при передаче
данных, используются преобразователи кода особого типа.
В частности, при детектировании ошибок широко применяется
система проверки на четность, с которой мы уже познакомились
154
Глава 2
в предыдущей главе. В процессе передачи данных бит четности
добавляется к битам передаваемых данных и передается вместе
с ними. На приемном конце линии бит четности определяется
заново и сравнивается с битом четности, который был получен
на передающем конце линии. Если при этом обнаруживаются
вход
7-разр.
кода
Передатчик
Приемник
Передатчик | . Приемник
Входные данные Четность Входные данные Вх бит четности Вых. оишб.
0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 1 0 111110 1 1111110 1111111 0 (0 0 0 0 0 0 0 * 0 0 0 0 0 0 0 1 (0 0 0 0 0 0 1 ^0 0 0 0 0 0 1 (0 0 0 0 0 1-0 [0 0 0 0 0 1 0 0 (1 11110 1 4 11110 1 О р 111110 [1 1 1 1 1 1 1 (1 111111 4 111111 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 0 1 ° 0 1 0 1 1 0
Генератор Витов четности Детектор ошибки
Рис. 2.49. Проверка четности с помощью ППЗУ (МОДЕМ — МОдулирую-
щее-ДЕМодулирующее устройство).
ошибки, то попытка передачи повторяется. На рис. 2.49 показа-
но, как выглядит проверка на четность. Мы видим, что к 7 бит
с помощью ППЗУ был добавлен бит четности. Возникшее в
результате слово из 8 бит было превращено в последователь-
ную структуру с помощью МОДЕМа, т. е. модулирующего-де-
модулирующего блока, и эта структура была затем передана
через телексную или телефонную линию связи на вход прием-
ного МОДЕМа. После детектирования набора битов и его пре-
образования из последовательного кода в параллельный дан-
ные были введены в ППЗУ для нового определения бита четно-
Запоминающие устройства (ЗУ)
155
сти и сравнения этого бита с тем битом четности, который был
передан с данными.
Из таблицы, представленной на рис. 2.49, следует, что на
выходе генератора битов четности появляется 1, если число
единичных битов в передаваемом слове нечетно. Если число
единичных битов четно, то бит четности равен 0.
Детектором ошибок является ППЗУ с 8-разрядным входом,
которое запрограммировано таким образом, что его выход сра-
зу же показывает, обнаружена ошибка или нет. Переданный
бит четности при новом определении четности также учитыва-
ется, и, как следует из таблицы, мы можем сразу установить,
как прошла передача данных — с ошибками или без них. Если
число единичных битов в слове нечетно, то бит четности ра-
вен 1, и эта 1 вместе с битами данных дает при новом опреде-
лении четности бит четности, равный 0. Если число единичных
битов в слове четно, то бит четности будет равен 0, и при но-
вом определении, если этот 0 будет взят вместе с битами дан-
ных, мы снова получим 0. Таким образом, если на выходе воз-
никает 0, то можно сделать заключение, что проверка на чет-
ность прошла нормально.
2.15. Коррекция ошибок
Было бы гораздо эффективнее использовать при передаче
данных код, который хотя бы в какой-то степени мог корректи-
ровать сам себя. Для этой цели подходит код Хемминга. В этом
коде k контрольных битов добавляются к пг битам данных,
156
Глава 2
причем для того, чтобы скорректировать один бит данных,
k должно удовлетворять следующему условию: 2h^m-l~k-}-l.
Если при передаче было введено 4 бит данных, то к ним
требуется добавить 3 контрольных бита. К слову из 8 бит дан-
ных необходимо добавлять 4 контрольных бита и т. д. Пример
кода Хемминга приведен в таблице, показанной на рис. 2.50.
Таблица демонстрирует, как биты данных и контрольные биты
распределены по определенным позициям. Три контрольных би-
та извлекаются следующим образом: первый контрольный бит
(&о) определяется четностью битов данных т3, mi и т0. Если
3-3 5 5
Рис. 2.51. Пример программирования ППЗУ для кода Хемминга с 4 разря-
дами данных и 3 контрольными разрядами (битами).
^3 (т3) ^2 (т2) А, (mJ ^0 (т0) В2 (к2) в, (kJ Во (к0)
0 0 0 0 0 0 0
0 0 0 1 1 1 1 :
0 0 1 0 1 1 0
0 0 1 1 0 0 1
0 1 0 0 1 0 1
0 1 0 1 0 1 0 ,
0 1 1 0 0 1 1
0 1 1 1 1 0 0
1 0 0 0 0 1 1
1 0 0 1 1 0 о :
1 0 1 0 1 0 1
1 0 1 1 0 1 0
1 1 0 0 1 1 0
1 1 0 1 0 0 1
1 1 1 0 0 0 о :
1 1 1 1 1 1 1 ;
в этих трех битах число единиц четно, то Ло = 1. Второй конт-
рольный бит ki определяется таким же образом, однако теперь
уже для битов данных т3, т2 и т0. Наконец, третий контроль-
ный бит k2 получается из четности битов данных m2, mt и та
(рис. 2.51). На приемном конце линии контрольные биты k оп-
ределяются таким же образом и сравниваются с переданными
контрольными битами. Если все контрольные биты совпадают,
то на выходе всех трех схем сравнения появляются нули.
В случае неравенства каких-либо битов на выходе схемы
сравнения появится единица. Если мы возьмем в качестве пе-
ременных выходные сигналы схем сравнения, то для них мож-
но будет получить таблицу истинности, причем десятичный эк-
вивалент двоичного кода в этой таблице даст нам позицию
ошибочного бита в коде. Следует отметить, что контрольный
бит ko находится на менее значимой стороне таблицы. Инверти-
Запоминающие устройства (ЗУ)
15?
руя соответствующий ошибочный бит, мы корректируем допу*
щенную ошибку. Таким образом можно исправлять ошибки от-
дельных битов.
ППЗУ можно так запрограммировать, что при поступлении’
данных на выходе ППЗУ будет получено k битов. Эти биты
можно добавить к битам данных на передающем конце линии,
после чего по линии будет передан полный набор битов.
Проверка на приемном конце линии состоит в повторном на-
хождении k битов и их сравнении, чтобы определить, имеется лв
ошибка и какому биту она соответствует. Другое решение дает
Нормальный код
Ошибочные коды
(б одном разряде)
Во В, В2 А3 А2 А, Ао
110 0 110
Рис. 2.52. Биты в коде Хемминга, которые могут быть ошибочными. (Дан-
ные восемь кодов представляют двоичную цифру 6. Программируя в матрице
ППЗУ цифру 6 в виде кода 1100110, мы получим правильный результат на
выходе, даже если один разряд кода окажется ошибочным.)
Ошибочные-
разряды
ППЗУ с 7-разрядной адресацией и 4-разрядными словами. На
7 входов ППЗУ подаются 4 бит данных и 3 контрольных бита из
принятого кода.
Теперь ППЗУ необходимо запрограммировать так, чтобы
4 выхода обеспечивали требуемые биты данных даже при на-
личии ошибок. Эта операция, к сожалению, невыполнима. Если
мы имеем в своем распоряжении 7-разрядный код, как в данном
примере, то возможны 7 конфигураций с одним ошибочным би-
том. В таблице, представленной на рис. 2.52, такие ошибочные
биты находятся между двумя диагональными линиями. Все ко-
ды представляют здесь число 6, причем один бит в каждом из
них является ошибочным, однако это не играет роли. Для каж-
дой конфигурации данных должна быть образована группа из
8 входных комбинаций (8 комбинаций, поскольку код с пра-
вильной битовой конфигурацией будет в свою очередь также
правилен). Отсюда видно, что для такого детектора ошибок
требуется ППЗУ на 16X8X3 бит. На практике мы выбираем
ППЗУ со структурой 128X4 бит.
2.16. Таблицы реализации
В процессе цифровой обработки данных часто используются
таблицы реализации функций, в которых для каждого двоич-
158
Глава 2
Рис. 2.53. Таблица реализации функции у=х2.
ного или BCD-числа указаны значения логарифмов тригономет-
рических функций функции ех и т. д., которые можно считывать
с соответствующего выхода. С помощью ППЗУ, запрограммиро-
ванных соответствующим образом, эти таблицы реализуются
достаточно просто.
ППЗУ такого типа часто находят применение в генераторах
сигналов специальной формы. На рис. 2.53 приведен пример
таблицы, в которой представлена связь между х и у в виде
функции у = х2. Программируемые биты достаточно просто оп-
ределяются из элементарных вычислений.
Пользующиеся большой популярностью генераторы функций
совместно с ППЗУ изготавливаются различными фирмами в ви-
де стандартных схем.
Запоминающие устройства (ЗУ)
159
2.17. Линеаризация передаточной характеристики
с помощью ППЗУ
Другим интересным примером использования преобразова-
теля кода на основе ППЗУ является коррекция нелинейной пе-
редаточной характеристики какого-либо измерительного элемен-
та, например датчика давления. Для этого элемента наблюдает-
ся нелинейная связь между давлением и выходным напряжени-
ем. Линеаризацию можно осуществить, преобразуя с помощью
Рис. 2.54. Линеаризация передаточной характеристики с помощью ППЗУ*
АЦП аналоговый сигнал с выхода измерительного элемента в
цифровую форму и затем подавая этот цифровой сигнал на вход
ППЗУ.
Это ППЗУ запрограммировано таким образом, чтобы скор-
ректировать нелинейную характеристику измерительного эле-
мента. На рис. 2.54 приведена нелинейная характеристика, а в
таблице истинности показано, как эта характеристика линеари-
зуется в ППЗУ. Величины напряжения для нелинейной харак-
теристики подаются в цифровой форме на адресные входы
ППЗУ, в то время как на выходах ППЗУ появляются линеари-
зованные величины напряжения, причем также в цифровой фор-
ме. Применение ППЗУ для решения задачи калибровки такого
типа имеет большое значение, тем более что техническая реали-
зация оказывается в этом случае довольно недорогой.
2.18. Генераторы символов
Генераторы символов преобразуют буквенно-цифровые зна-
ки в двоичный код, например код ASCII, и осуществляют после-
дующее представление этих знаков в виде последовательности
160
Глава 2
Фис. 2.55. Генерация символов на экране электронно-лучевой трубки (ЭЛТ).
импульсов, управляющих работой исполнительных устройств,
например монитора ЭЛТ, печатающих устройств и т. д., кото-
рые обеспечивают точечные изображения букв, цифр и знаков
другой формы, разложенных на линейные элементы.
Рассмотрим в качестве примера монитор ЭЛТ, представлен-
ный на рис. 2.55. Требование, которое мы предъявляем здесь к
генератору символов, заключается в том, чтобы эта схема могла
преобразовать 6-разрядный ASCII-код в буквенно-цифровые
знаки, представленные с помощью матрицы из 5X7 точек. Это
преобразование можно осуществить с помощью ПЗУ емкостью
2560 бит. Такие генераторы символов поставляются в продажу
^различными фирмами-изготовителями в виде запрограммирован-
ных ПЗУ.
Если стандартные ПЗУ использовать по каким-либо причи-
нам нельзя (например, когда буквенно-цифровые знаки пред-
ставлены не в коде ASCII, а в другой двоичной форме для обес-
печения более широкого разнообразия в представлении знаков),
Запоминающие устройства (ЗУ)
161
то часто разрабатывают собственный генератор символов или
(что также вполне возможно) используют дополнительные ПЗУ,
которые преобразуют собственный код в код ASCII. Этот метод
является наиболее привлекательным, потому что требует мини-
мума времени для реализации.
Мы покажем, как формируются символы на экране ЭЛТ.
Как известно, изображение на экране образуется с помощью
светового пятна, которое вычерчивает совокупность горизонталь-
ных линий, смещенных относительно друг друга на небольшое
расстояние по вертикали. В результате на экране появляется ли-
нейный растр из 625 горизонтальных линий. Модулируя интен-
сивность свечения (яркость) светового пятна, мы получаем на
экране требуемое изображение.
Этот же метод используется при формировании изображения
символа, при этом (рис. 2.55) фрагменты (точки) символов по-
мещаются на горизонтальные линии растра.
Проецируя на экран эти точки «линия за линией», мы полу-
чим строку, заполненную соответствующими символами. При
этом видно, что точечные фрагменты символов располагаются
на экране в матричной форме. Такие символы можно хранить в
матрице ЗУ, в данном примере — в матрице размером 5X7 то-
чек, где информация о символе будет закодирована в цифровой
форме (1 — точка, 0 — пробел).
Желаемый буквенно-цифровой символ можно вызвать из
матрицы с помощью адресных шин, сканирование экрана по
горизонтали и вертикали осуществляется с помощью каскадной
схемы из двоичных счетчиков, которая формирует серию им-
пульсов для управления положением светового пятна. Выход-
ной сигнал ПЗУ после выборки усиливается и затем подается
на управляющий электрод ЭЛТ, катод или цилиндр Венельта,
с помощью которого производится модуляция яркости светово-
го пятна.
Таймер, управляющий работой счетчика, синхронизирован
со схемой временной развертки. Такая система позволяет гене-
рировать на экране кинескопа несколько горизонтальных полос,
заполненных символами.
После краткого знакомства с принципами формирования
изображения на экране перейдем к их практической реализа-
ции. С этой целью рассмотрим блок-схему устройства для полу-
чения видеоизображения (VDU), которая представлена на
рис. 2.56. В данном случае генератор тактовых сигналов за-
пускает счетчик, который производит выборку выходов генера-
тора символов (вертикальных линий в матрице) через мульти-
плексор. Каждый раз после окончания сканирования 8 верти-
кальных линий (колонок) матрицы из ОЗУ вызывается новый
символ, который селектирует соответствующую матрицу в
11—807
162
Глава 2
ПЗУ-генераторе символов. Для этого требуется увеличить на 1
содержимое счетчика, имеющего 64 состояния, с которым свя-
заны адресные входы ОЗУ (ЛО—Л5). Цикл повторяется до тех
пор, пока не будут записаны все точки первой линии для всех
формируемых символьных изображений строки (64 символа).
После этого воспроизводится следующая линия. За счет при-
ращения счетчика линий в матрице выбирается следующая
строка, которая сканируется с помощью счетчика колонок.
Счетчик полос Счетчик Адресация Счетчик
(/111-/16) пиний ОЗУ(Я5-/10) колонок
Рис. 2.56. Использование генератора символов в составе системы индикации
на ЭЛТ.
Изображение строится линия за линией до тех пор, пока не
будут обработаны все элементы 64 возможных символов пер-
вой строки. В результате этой обработки на экране ЭЛТ будет
записана первая строка символов. Затем появится вторая стро-
ка, третья и т. д. вплоть до последней, 64-й строки.
Генерация символов происходит в режиме последовательно-
го повторения: новая генерация начинается с верхнего края эк-
рана, и этот процесс заполнения экрана изображениями симво-
лов повторяется с частотой 50 Гц. Такая частота повторения
изображений символов обеспечивает режим без мерцания. Ин-
формация записывается «точка за точкой», однако из-за инер-
ции восприятия информации человеческим глазом мы этого
мерцания не замечаем, поскольку сканирование всего экрана
происходит очень быстро (50 раз/с). Такая система с повтор-
ным воспроизведением информации применяется не только на
выходе ЭВМ, но и, например, при передаче сообщений по те-
лексу или с помощью кода Морзе. В этих случаях сообщения
Запоминающие устройства (ЗУ)
163
передаются «буква за буквой», а затем проецируются на экран
по методу, изложенному выше.
Как следует из предыдущего изложения, дисплейная система
на ЭЛТ должна содержать ЗУ. В качестве такового использу-
ется ОЗУ, которое наряду с обеспечением связи с генератором
символов должно также поддерживать связь с системой генера-
ции новых данных. Такой системой может быть контроллер,
Рис. 2.57. Генератор символов типа 2516 фирмы Philips-Signetics.
который подготавливает сообщения, принятые по радио или по
телексу, для последующего проецирования на экране. По этой
причине вход данных ОЗУ связан с внешним контроллером.
Адресация ОЗУ при воспроизведении изображения на экране
связана с генераторами блока временной развертки, например
с упоминавшимися выше счетчиками.
При поступлении новых данных адресная шина связывается
с устройством, которое выдает эти данные. Переключение ад-
ресной шины производит мультиплексор, управляемый от внут-
реннего коллектора в блоке воспроизведения изображения.
Приведенный пример используется лишь для иллюстратив-
ных целей. На практике соответствующая схема более сложна
из-за ряда специфических проблем, встречающихся в телевиде-
нии. Для формирования видеосигналов, при котором обеспечи-
11*
164
Глава 2
Haffop H8CII, растр 7^д с преоОразобанаем кода
{лЬрес строк\
£|Дэ|Аг{А1]
Вь/хоЬы
ЕЗЕЗБ1ЕЗЕЗЕЯБЗ(ЗЮ1
Рис, 2.58. Набор символов ПЗУ типа 2526 фирмы Philips-Signetics (матри-
ца 7X9).
вается синхронизация строк и растра в целом, требуются до-
полнительные логические схемы.
На рис. 2.57 приведена блок-схема генератора символов ти-
па 2516 фирмы Philips-Signetics. Здесь требуемый символ се-
лектируется с помощью адресных входов А4—А9, а выборку ко-
лонок обеспечивают разряды Ai—А3. В данном случае мы име-
ем 8 выходов данных. Эта организация отличается от рассмот-
ренной в предыдущем примере, при которой для сканирования
Запоминающие устройства (ЗУ)
163
колонок использовался мультиплексор, связанный с выходами
генератора символов, а сканирование строк производилось че-
рез строчные адресные входы этого генератора. Очевидно, что
такое изменение в организации не сказывается на возможно*'
стях применения схемы. Рассматриваемую схему можно при-
способить к предыдущей организации. При этом счетчик строк
будет контролировать схему выборки (MUX), а выходы счет-
чика колонок будут связаны с адресными входами колонок
□□□□□□□
□
□□□□□в
□□□□□и
□□□□□
□
□□□□□□
□□□□□□
□□□□□□
□□□□□□
□□□□□□□
□□□□□□□
□□□□□□□
□□□□□□□
□□□□□□□
□□□□□□□
D6 DO
R1S
R14
R13 •
R12
R11
R10
R9
R8
R7
R6
R5
R4
R3
R2
R1
R0
Номерстрош
□□□□□□□
□□□□□□и
□□□□□□п
□□□и
□□□□ИJ
□□□□□□
□□□□□□□
□□□□□□□
□□□□□□□
D6 DO
Номерстроки
□ R0
□□□□□В R1
□□□□□ R2
□□□□□В R3
ВВВВВВО R4
□□□□□□ R5
В □□□□□□ R6
В □□□□□□ R7
В Г ПЬООП R8
Рис. 2.59. Генератор символов фирмы Motorola в виде матрицы 7x9*
При использовании генератора типа МСМ 66710 матричное поле имеет высоту в 16 то-
чек, что дает возможность перемещать символы в пределах полосы на экране ЭЛТ.
Генератор символов позволяет получить полный набор как прописных, так и строчных
символов.
ОЗУ Д1—А3. В ИС 2516 выбор символов осуществляется с по-
мощью адресных разрядов А4—Л9, а в предыдущей схеме эту
функцию выполняли адресные разряды Ао—Л5.
На рис. 2.58 представлен набор символов 5184-разрядного
генератора символов типа 2526 фирмы Philips-Signetics. В дан-
ном случае каждый символ имеет форму матрицы, состоящей
из 7X9 точек, которая обеспечивает более высокое качество
воспроизведения символов. Две колонки могут понадобиться
для преобразования кодов EBCDIC и Бодо в код ASCII.
В матричном поле обе колонки показаны слева. Таким обра-
зом, мы имеем здесь матрицу из 9X9 точек. Данный генератор
также имеет выходы колонок, о которых мы уже говорили при
обсуждении схемы, представленной на рис. 2.56,
166
Глава 2
Из рис. 2.59 очевидно, как можно формировать заглавные
(прописные) и строчные буквы, используя матричное поле из
16X9 точек. В генераторах символов обычно используется пол-
ный набор как прописных, так и строчных букв.
2.19. Генераторы последовательности импульсов
Использование ППЗУ в качестве преобразователя кода поз-
воляет реализовать на его основе также генератор последова-
тельности импульсов с управлением от двоичного счетчика.
> Выходы
Управление Код счета Выходы
A3 а2 А, Ао Во в. В2 В3 В4 В5 В6 В7
0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 1 0 1 0 0 0 0 0 0
0 0 1 0 0 с 1 0 0 0 0 0
0 0 1 1 0 0 0 1 0 0 0 0
0 1 0 0 0 0 0 0 1 0 0 0
0 1 0 1 0 0 0 0 0 1 0 0
0 1 1 0 0 0 0 0 0 0 1 0
0 1 1 1 0 0 О 0 0 0 0 1
1 0 0 0 0 0 0 0 0 0 0 1
1 0 0 1 0 0 0 0 0 0 1 0
1 0 1 0 0 0 0 0 0 1 0 0
1 0 1 1 0 0 0 0 1 0 0 0
1 1 0 0 0 0 0 1 0 0 0 0
1 1 0 1 0 0 1 0 0 0 0 0
1 1 1 с 0 1 0 0 0 0 0 0
1 1 1 1 1 0 0 0 0 0 0 0
Рис. 2.60. Генератор последовательности импульсов на базе ППЗУ.
В этом варианте на адресные входы ППЗУ подаются выходные
сигналы двоичного счетчика. Запрограммировав соответствую-
щим образом ППЗУ, можно формировать разнообразные после-
довательности двоичных сигналов, которые затем могут ис-
пользоваться в качестве команд, управляющих работой других
устройств системы.
Запоминающие устройства (ЗУ)
167
Содержимое ПЗУ при этом можно рассматривать как рабо-
чую программу.
Используя устройства, меняющие состояния счетчика в за-
висимости от результатов операций, выполненных в соответст-
вии с программой, записанной в ППЗУ, можно обеспечить ав-
томатический процесс управления с учетом промежуточных ре-
зультатов.
Пример простого генератора последовательности импульсов,
в котором используется ППЗУ, приведен на рис. 2.60. На ад-
ресные входы А0/ Л1 и Л2 поступают выходные сигналы двоич-
ного счетчика, Дз служит входом для подачи управляющего
импульса. Если на этом входе появляется нуль, то происходит
последовательная генерация кодов на выходах Во—В7, При со-
ответствующем программировании ППЗУ можно формировать
самые разнообразные и сложные наборы кодов.
В данном примере с помощью адресного входа А3 в ПЗУ
можно выбрать две последовательности временных сигналов.
Очевидно, что число этих последовательностей на самом деле
не ограничивается двумя. Используя большее число управляю-
щих сигналов совместно с ППЗУ большей емкости, можно по-
лучить большее число разнообразных кодов, обращаясь к раз-
личным частям матрицы с помощью управляющих адресных
переменных. Число последовательных шагов (команд) в про-
грамме также не ограничено восемью, поскольку длина выход-
ной последовательности не ограничивается восемью словами.
2.20. Мультиплексор/демультиплексор
На рис. 2.61 показан пример использования ППЗУ в каче-
стве мультиплексора, который связывает 61 линию связи с об-
щей шиной данных через схему И с четырьмя входами, один из
которых является входом данных, а три других — управляющи-
ми входами. Три последних входа управляются через ППЗУ, за-
программированное согласно приведенной функциональной таб-
лице. Мы видим, что при выборке адреса в двоичном коде один
бит все время сдвигается вправо, причем сначала самый стар-
ший, затем следующий за ним и т. д. до тех пор, пока все биты
не сдвинутся на одну позицию, после чего самый старший бит
сдвигается влево на одну позицию и т. д. Так как выборка яв-
ляется однократной, то среди 61 возможной комбинации оди-
наковые не встречаются. С помощью различных комбинаций
на управляющих входах производится выбор входа данных,
подключаемого к схеме И.
Как видно из рис. 2.62, демультиплексор данных, т. е. схему
распределения данных, можно также реализовать и с помощью
ППЗУ. Один из адресных входов ППЗУ служит в качестве
Выборка каналов
Функциональная таблица
Рис. 2.61. Мультиплексор данных с ППЗУ.
В 8-разрядном слове возможна 61 различная комбинация, каждая из которых содержит
по 3 единицы в различных разрядах. Стрелка указывает на перемещаемую единицу.
Так, например, верхняя полоса таблицы содержит 4 комбинации, которые получаются
при перемещении едцницы из разряда S3 в разряды S2, Si, So и заполнении остальных
разрядов нулями. Аналогичным образом различные комбинации образуются и в других
полосах таблицы, при этом изменяется лишь число возможных шагов комбинаций.
Запоминающие устройства (ЗУ)
169
Выйорка
канала <
ППЗУ 1
Выдирка ГД ан -
_канала НЬ1е
0 0 0 0 о
\ О О О О 1
\ О О О 1 о
0 0 0 1 1
0 111 о
0 111 J
Выходы
1 2 3 4 5 6 7 8
00000000
1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
00000000
0 0 0 0 0 0 0 1
ППЗУ 2
00000000
1 0 0 0 о
Рис. 2.62. Мультиплексор данных на базе ППЗУ.
Функциональная таблица приведена для ППЗУ. 1. ППЗУ 2 запроектировано для кана-
лов с номерами от 9 до 16.
входа данных. Остальные разряды адреса задают режим вы-
борки канала. Таблица истинности показывает, как необходи-
мо программировать ППЗУ для данного случая. Допустим, что
мы селектируем канал 1. Если на вход данных £>0 подан 0, то
на выходе 1 появится 0 и на других выходах также появится 0.
Однако если на вход данных Z)o подается I, то и на выходе
1 появляется 1, а на остальных выходах сохранятся нули. Как
170
Глава 2
следует из таблицы, при программировании матрицы ППЗУ по
адресу 00001 заносятся единица для выхода 2 и нули для
остальных выходов. При программировании по адресу 00011
выход 3 должен быть равен единице, а на остальных выходах
также сохранятся нули; по адресу 00101 на выходе 4 — еди-
ница и нули на остальных выходах и т. д. Такой демультиплек-
сор, который распределяет данные из одной входной линии по
16 выходным каналам, можно собрать из двух ППЗУ.
2.21. Контроллеры с ППЗУ
Контроллеры (управляющие устройства) применяются в си-
стемах обработки данных и автоматизированных системах
управления для обеспечения последовательного выполнения
различных операций в определенные моменты времени. Конт-
роллеры уже упоминались в т. 2, в котором мы рассматривали
систему управления работой автоматической стиральной маши-
ны. Такой контроллер можно реализовать на основе двоичного
счетчика, построенного из дискретных элементов, или на осно-
ве ППЗУ.
Большим преимуществом использования ППЗУ является
возможность быстрой перестройки процесса управления, кото-
рая достигается путем программирования ППЗУ, в то время как
в дискретной логике для этой цели требуется изменить схему
монтажа, что является достаточно сложной задачей, если эле-
менты контроллера смонтированы на специальной печатной
плате. Кроме этого, контроллер с ППЗУ занимает гораздо
меньше места.
Мы видели, что при последовательной адресации ППЗУ че-
рез посредство двоичного счетчика порядок выполнения каждой
операции задается отдельным разрядом управляющего слова
(микрокоманды), получаемого на выходе ППЗУ. Каждый раз-
ряд слова обеспечивает выполнение одной операции, что пред-
ставляется единицей, записанной в соответствующем элементе
матрицы ППЗУ. Эти разряды осуществляют управление насо-
сами, моторами, клапанами, кранами и другими устройствами.
Обеспечивая выдачу соответствующих значений (0 или 1) каж-
дого из разрядов управляющего слова, контроллер осуществля-
ет автоматическое управление различными сложными процес-
сами.
При реализации сложных процессов промежуточные резуль-
таты обычно влияют на последовательность выполнения отдель-
ных операций и моменты времени, когда эти операции начина-
ются. Пример: операция нагревания стирального барабана в
стиральной машине должна произойти не раньше того момен-
та, когда закончится наполнение барабана водой, так как нель-
Запоминающие устройства (ЗУ)
171
зя нагревать барабан, в котором нет требуемого количества во-
ды. Таким образом, необходимо, чтобы нагревание не начина-
лось, если не активизирована управляющая переменная NDH
(детектор верхнего уровня воды), которая указывает, что тре-
буемое количество воды находится в барабане. Контроллер сле-
дит за тем, чтобы своевременно перевести счетчик в исходное
состояние, если в течение некоторого времени из-за прекраще-
ния подачи воды в барабане не будет достигнут требуемый уро-
вень воды.
Контроллер без отрицательной обратной связи, т. е. без ис-
пользования входных управляющих переменных, которые сами
Разряды адреса Разряды управления
A3 а2 А, Ао В7 в6 В5 в4 В3 В2 В, Во
0 0 0 0 0 1 0 1 1 1 0 0
0 0 0 1 1 0 1 0 1 0 0 1
0 0 1 0 1 1 1 0 0 1 1 1
1 1 0 1 1 1 0 1 1 1 0 1
1 1 1 0 1 1 1 1 1 1 0 1
1 1 1 1 1 0 0 1 1 1 1
Рис. 2.63. Функциональная таблица ППЗУ, запрограммированного в качест-
ве контроллера.
являются результатом соответствующего управляемого процес-
са, обычно состоит из счетчика с ППЗУ. Ячейки ППЗУ запро-
граммированы таким образом, что в результате воздействия
записанных в них управляющих слов (микрокоманд) отдельные
операции происходят в требуемом порядке, а время обработки
на отдельных этапах определяется таймером.
Как мы видели выше, при использовании контроллера с от-
рицательной обратной связью результаты отдельных операций
определяют как порядок, так и продолжительность отдельных
этапов обработки информации. На рис. 2.63 приведена функцио-
нальная таблица контроллера, позволяющего в зависимости от
запрограммированного набора битов при каждом отсчете счет-
чика реализовать несколько операций обработки.
Вместо программирования отдельных разрядов управляюще-
го слова, каждый из которых определяет выполнение одной
элементарной операции, можно записать в ПЗУ двоичные ко-
ды, инициирующие выполнение в каждом рабочем такте (пе-
риоде счетчика) группы необходимых' операций. Эти коды
преобразуются в управляющие сигналы для исполнительных
172
Глава 2
устройств с помощью декодера. Кодировка операций позволяет
уменьшить длину (число разрядов) управляющего слова, выда-
ваемого ППЗУ.
В примере, показанном на рис. 2.64, управляющие перемен-
ные, которые называются флаговыми битами или признаками,
определяют как последовательность, так и продолжительность
отдельных операций. Как мы уже видели, управляющая пере-
Управляющие
Модификация адреса
Рис* 2.64* ППЗУ-контроллер для автоматической стиральной машины*
менная является сигналом, который сообщает информацию о
результате выполнения отдельных предыдущих операций;
управляющей переменной может быть, например, внешний сиг-
нал— старт или стоп, — а также сигналы, поступающие с пуль-
та управления при ручном режиме обработки данных. Из
рис. 2.64 следует, что в схеме отсутствует счетчик, а последова-
тельность операций определяет ППЗУ.
Допустим, что мы выбираем управляющее слово из ППЗУ.
Программируя соответствующим образом это слово, мы можем
получить такой код, который после декодирования обеспечит
выполнение требуемой операции. Этот код определяет также
адрес, по которому указаны параметры следующего этапа об-
работки. При этом выходы ППЗУ через шины изменения адре-
сов связываются со старшими разрядами адреса. В результате
на выходе ППЗУ формируется управляющее слово, определя-
ющее следующий этап обработки. После выполнения этого
Запоминающие • устройства (ЗУ)
173
этапа активизируется од-
на из управляющих пере-
менных, которая обеспе-
чивает обращение к сле-
дующему адресу ППЗУ.
При этом происходит вы-
бор ячейки памяти, в ко-
торой хранится двоичный
код следующей операции
обработки. Порядок сле-
дования этапов обработ-
ки данных определяется
управляющими перемен-
ными, которые появляют-
ся одна за другой, т. е.
последовательно. ППЗУ
запрограммировано так,
что когда управляющие
переменные возникают в
ожидаемом порядке, то и
отдельные этапы обра-
ботки сохраняют требуе-
мую последовательность
выполнения операций.
Если эти этапы про-
текают не так, как ожи-
далось, то возникающее
отклонение может приве-
сти к другому порядку в
развитии процесса обра-
ботки. В этом случае с
помощью специальной
управляющей переменной
можно вызвать тот адрес
ЗУ, где берет начало но-
вый порядок следования
операций. Выполнение
обработки, согласно но-
вой последовательности
операций, не обязательно
соответствует какому-то
нарушению нормального
функционирования уст-
ройства. Такое изменение
(Старт)
Пуск
боды
Нагре-
бание
Рис. 2.65. Алгоритм управления автома-
тической стиральной машиной.
хода выполнения процесса («ветвление») может происходить и
при нормальной работе цифрового устройства. Возможно, луч-
174
Глава 2
ше всего это положение иллюстрируется на примере процесса
деления чисел. Мы знаем, что деление состоит из операций вы-
читания и сдвига, которые повторяются до тех пор, пока оста-
ток не превратится в нуль или не изменит знак. В этой ситуа-
ции ППЗУ необходимо программировать так, чтобы сдвиги и
вычитания повторялись до того момента, пока контрольная пе-
ременная не выдаст нулевой или отрицательный результат, на
который контроллер реагирует прерыванием подпрограммы
вычислений и началом следующего этапа обработки. Контроль-
ная переменная произведет обращение к адресу ЗУ за преде-
лами данной подпрограммы, так что в действительности мы
имеем дело с переходом в другую часть программы.
По-видимому, нам следует пояснить сам принцип управле-
ния с применением ППЗУ-контроллера и несколько углубить
его с помощью примера системы управления автоматической
стиральной машиной. Если мы предполагаем, что процесс стир-
ки протекает так, как показано на структурной схеме, приве-
денной на рис. 2.65, и что отдельные операции закодированы в
двоичной форме, как показано в таблице на рис. 2.66, то для
ППЗУ получится кодовая таблица, которую мы привели на
рис. 2.67. В этой таблице указываются адреса с соответствую-
щим содержимым разрядов слова, хранящегося в ППЗУ. Кро-
ме этого, в таблице приведены управляющие переменные, кото-
рые инициируют последовательные операции. Обзор сокращен-
ного обозначения управляющих переменных содержится в
таблице на рис. 2.68.
Порядок следования отдельных операций в нормальных
условиях соответствует графе «состояние» (см. рис. 2.67). Этот
порядок мы обнаруживаем и в структурной схеме (см. рис.
2.65). Работа стиральной машины начинается после команды
SWP (запуск программы стирки). Этот сигнал вырабатываетеся
внешней запускающей схемой. Через адресный вход Аб сигнал
SWP выбирает слово, хранящееся в ячейке ППЗУ с адресом
00001. При этом появляется сообщение о первой операции
(001 — подача воды).
Эта команда декодируется, и полученный в результате де-
кодирования сигнал осуществляет требуемую операцию — от-
крывается водопроводный кран. После считывания этого слова
из ЗУ адресация ЗУ изменится на 00101, в результате чего вы-
ходы DQi Di и £>2 связываются с адресными входами А8, Л9 и
Аю соответственно. Поэтому адресу в ПЗУ также записан код
001, поэтому подача воды будет продолжаться. Аналогичная
ситуация наблюдается и для адреса 00100, так как если сигнал
SWP прекращается, то мы имеем Аб = 0. И в этом случае водо-
проводный кран будет оставаться открытым. Как только будет
установлено, что уровень воды достиг требуемой отметки, по-
Запоминающие устройства (ЗУ)
175
Функциональная таблица
Код Функция
d2 D, Do
0 0 0 Иско Он состояние
0 0 1 Пуск боды
0 1 0 Нагребание
0 1 1 Полоскание
1 0 0 Слиб боды
1 0 1 Отжим
1 1 0 Конец программы
Рис. 2.66. Кодовая таблица для отдельных операций в стиральной машине.
Состояние У правиле ременные ЯОрес ППЗУ Содержание ППЗУ
A to A, At A( A5 a4 A3 Ai A, Ao D3 d2 D, Do
Иск со с тонн 1 STOP 0 0 0 1 $0 0 0 0
Пцскбоды 2 SWP 0 0 0 0 1 S, 0 0 1
3 0 0 0 0 1 1 0 0 1 0 Sj 0 0 0 0 1 1 xpa пение
Нагребание 4 NDH TEMP 80 0 0 1 0 0 1 S2 0 1 0
5 6 0 О 0 1 1 0 0 0 0 0 0 1 0 S2 0 0 1 1 1 0 хра- нение
Полосноние 1 0 0 1 S3 0 1 1
7 SMT 100 0 0 1 1 1 1 0 0 1 0 S3 S3 0 0 1 1 1 1 Хра- нение
Слив боды 8 9 ° 1 1 0 1 S4 1 0 0
NDL 1 1 0 0 0 0 0 0 0 1 1 0 0 0 0 хра- нение
Пуск боды 10 1 0 0 0 1 5, 0 0 1
11 0 0 0 0 1 1 0 0 1 0 S3 0 0 0 0 1 1 Хра- нение
Полоскание 12 NDH 0 0 1 0 1 0 1 1
13 0 0 1 1 1 1 0 0 1 0 0 0 1 1 1 1 хра- нение
Слиб боды 14 SMT 100 0 1 1 0 1 S7 1 0 0
15 1 1 0 0 0 0 0 0 1 0 s7 s7 1 1 0 0 0 0 Хра- нение
Отжим 16 NDL 1 0 0 0 1 S, 1 0 1
17 1 1 0 0 1 1 0 0 1 0 S, S, 1 1 0 0 1 1 Хра- нение
Конец 18 T5M 1 0 1 0 1 S, 1 1 0
19 1 1 1 1 0 0 0 0 1 0 S, s, 1 1 1 1 0 0 хра- нение
Иск состоял 20 STOP 1 So 0 0 0
21 0 0 0 1 0 0 0
пуск боды 22 о 0 1 0 S, 0 0 1
Пропуск 23 NDH, SKIP 0 0 1 0 1 1 S, 0 1 1
Полоскание 24 0 0 1 1 1 1 0 0 1 0 I Sj 0 0 1 1 1 1 Хра- нение
Рис. 2.67. Программирование ППЗУ,
явится сигнал NDH (сработал детектор уровня), в результате
чего мы перейдем к адресации следующего слова ЗУ, как ука-
зано в четвертой строке функциональной таблицы.
176
Глава 2
Сокращенные обозначения управляющих переменных
SWP — старт программы стирки
NDH — детектор верхнего уровня (воды)
ТЕМР80 — температура 80 °C
SMT100 — счетчик перемешивания 100
NDL — детектор нижнего уровня (воды)
Т5М — счетчик 5 мин
STOP — стоп
SKIP — пропуск, переход по указанному адресу
Рис. 2.68. Сокращенные обозначения управляющих переменных.
Это слово генерирует код 010, который после декодирования
даст команду на включение нагревательных элементов в сти-
ральной машине. При этом адресация изменяется с помощью
шин модификации адреса, как это следует из пятой строки
функциональной таблицы. По новому адресу слова появляется
код 010, который также сохраняется и для адреса следующей
строки, потому что, несмотря на прекращение сигнала NDH
(А0 = 0), нагревание воды должно продолжаться. При нагрева-
нии воды до 80 °C появляется сигнал ТЕМР80.
Аналогичным образом ППЗУ контролирует все остальные
операции. При этом коды, которые инициируют различные опе-
рации, вместе с управляющими переменными определяют поря-
док следования и продолжительность отдельных этапов стирки.
В рамках данного метода управления предусмотрена возмож-
ность отклонения от стандартного порядка следования опера-
ций за счет изменения адресации ППЗУ при помощи определен-
ной управляющей переменной, что приводит к переходу к дру-
гой подпрограмме обработки.
В приведенном примере это может произойти, если активи-
зируются внешние управляющие переменные SKIP или STOP.
При появлении сигнала SKIP адресация изменится таким обра-
зом, что операция «нагревание» будет пропущена, а при подаче
сигнала STOP программа стирки будет переведена в начальное
состояние. В нижних строках функциональной таблицы пока-
зано, как происходит адресация при активизации сигнала
SKIP. Если сигналы SKIP и NDH появились одновременно, то
произойдет обращение к адресу, указанному в 23-й строке
этой таблицы. Соответствующее слово содержит код 011, со-
впадающий с командой «полоскание», поэтому в данном слу-
чае нагревание не производится, а сразу же после заполнения
водой барабана мы перейдем к полосканию. В остальном про-
грамма будет выполняться по-старому, однако адресация ЗУ
при этом будет другой: так как сигнал SKIP остается актив-
Запоминающие устройства (ЗУ)
177
ним, то в разряде А5 адреса ЗУ будет стоять 1. Разряды адре-
са, которые остались незаполненными в таблице на рис. 2.67,
не оказывают влияния на выполнение соответствующих опера-
ций. Поэтому при программировании ППЗУ их значение может
быть выбрано произвольным — равным 0 или 1. Выбранное зна-
чение этих адресных разрядов заносится в соответствующее
управляющее слово, записываемое в ППЗУ.
В микроЭВМ контроллеры (устройства управления) при по-
ступлении определенной команды управляют выполнением раз-
личных специальных операций, которые реализуются в задан-
ной последовательности и с учетом промежуточных результа-
тов. Как отмечалось выше, последовательность, в которой
необходимо выполнять отдельные операции, определяется набо-
ром управляющих слов, записанных в ППЗУ. Этот набор, ко-
торый обеспечивает выполнение очередной поступившей коман-
ды, называется микропрограммой. Для пользователя микропро-
грамма обычно недоступна. С помощью микропрограммы уни-
версальной микроЭВМ придаются специальные функции. В ре-
зультате микроЭВМ можно использовать для выполнения
различных наборов команд посредством замены ППЗУ, где хра-
нятся микропрограммы.
2.22. Реализация произвольных логических функций
с помощью ППЗУ
С учетом того, что было сказано о возможностях ППЗУ в
качестве преобразователя кода, мультиплексора и демульти-
плексора, можно спросить, а применимы ли ППЗУ для реали-
зации других логических функций? Ответ будет утвердитель-
ным.
Данный вариант применения ППЗУ иллюстрируем на следу-
ющем примере. Допустим, что нам требуется реализовать сле-
дующие две функции:
F1 =АВС + АВС;
F2 = АВС + АВС + АВС.
Таблица истинности для этих функций показана на рис. 2.69.
Их реализация обеспечивается с помощью логической схемы,
показанной на рис. 2.70. То же самое может сделать и ППЗУ
емкостью 8X2 бит, необходимо только запрограммировать его
согласно рис. 2.69. Как следует из рис. 2.71, можно выполнить
эти функции с помощью включения двух ППЗУ меньшего объ-
ема. При этом ППЗУ 1 программируется для выполнения функ-
ции F2, а ППЗУ 2 реализует Fb
12-807
178
Глава 2
Эти примеры приведены здесь для того, чтобы показать,
как можно применить ППЗУ в автономном и комбинаторном
вариантах для решения определенных логических проблем.
Другим интересным примером является программирование не-
^2 (А) А, (В) Ао (С) Во (F,) в, (F2
с АО ППЗУ (АВС) 0 0 0 0 1
в А1 (АВС) 0 0 1 0 0
4 А2 (АВС) 0 1 0 0 0
□ с F 1 АВС) 0 1 1 1 1
S 0 (АВС) 1 0 0 0 0
В 1 F 2 (АВС) 1 о 1 1 1
(АВС) 1 1 0 0 0
(АВС) 1 1 1 0 0
Рис. 2.69. Использование
ППЗУ для реализации логических функций.
скольких ППЗУ для реализации последовательности логиче-
ских функций И, ИЛИ, И-ИЛИ, которые можно соединить
между собой для получения сложной системы, которая успеш-
но заменяет набор дискретных логических схем. Соответствую-
щие функции реализуются при подаче сигналов на адресные
Рис. 2.70. Логическая схема,
реализующая функции: Fl =
« АВС+ABC, F2=ABC +
+АВС+АВС.
входы ППЗУ, а это значит, что нам потребуется контроллер,
например двоичный счетчик, который обеспечит требуемый по-
рядок выполнения логических операций.
На рис. 2.72 показана схема генератора логических функ-
ций. Мы видим, что два адресных входа ППЗУ используются
для ввода переменных X и У, а другие входы определяют тре-
буемую функцию. Программируя каждый элемент памяти, рас-
Запоминающие устройства (ЗУ)
17$>
положенный на горизонтальной линии матрицы ППЗУ, в соот-
ветствии с таблицей истинности, мы получим на выходе требуе-
мую функцию. Функция запрещения, реализуемая при Со =
= Ci = C2 = 0, устанавливает на выходе нуль при любых значе-
ниях X и У.
ППЗУ 1 ППЗУ 2
А2 А, Ао Во
(А) (В) (С) (F2)
А„ (F2) Ajo (С) В jo !Fj)
0 0 0
0 1 0
1 1 0 1 0 1
10 0 0
10 11
Рис, 2.71. Комбинация ППЗУ, выполняющих функции Fi, F2.
Функциональная таблица
Функция Входы Выход
Управление Переменные
Со с, с2 X У F (X, У)
Запре- щение ООО X X 0 I
А* В 0 0 1 0 0 0 ,
0 0 1 0 1 0 '
0 0 1 1 0 о I
0 0 1 1 1 1 >
А+ В 0 1 0 0 0 О (
0 1 0 0 1 7 ;
А®В 0 1 1 0 0 0 I
0 1 1 1 0 ' I J
Рис. 2.72. ППЗУ в качестве генератора логических функций.
2.23. Программируемые логические матрицы (ПЛМ)
Мы видим, что ППЗУ можно с успехом применять для реа-
лизации различных логических схем, хотя первоначально эти
элементы были разработаны только для хранения информации.
Можно задать вопрос: а насколько оптимально структура
ППЗУ используется в таких схемах? Практика показывает, что
для данных применений можно предложить более подходящие
структуры, которые известны под названием «программируе-
мые логические матрицы» (ПЛМ). Их важным преимуществом
является то, что их можно запрограммировать в оптимальном
варианте с помощью существующих ППЗУ-программаторов.
Программирование определенных семейств ПЛМ возможно
с помощью ППЗУ-программаторов, однако требует применения
специальных приемов. Это относится, в частности, к функцио-
12*
a
6
Рис. 2.73. Обобщенная архитектура ФПЛМ (FPLA).
Запоминающие устройства (ЗУ)
181
Выходы
нально-программируемой логической матрице (ФПЛМ). На
рис. 2.73, а приведена ее обобщенная схема. На этом рисунке
крестики показывают связи между горизонтальными и верти-
кальными шинами. На рис. 2.73, б еще раз показано, к чему
приводит упрощение этой схемы. Мы видим, что здесь четыре
входа после схемы И заменяются одним входом, в результате
чего обеспечивается упрощение схемы. Если мы теперь рас-
смотрим ПЛМ (рис. 2.74), то увидим, что эта матрица имеет
набор программируемых схем И на входе, а на ее выходе рас-
полагается набор схем ИЛИ, которые также программируются.
Такая схема обладает большей гибкостью, чем ППЗУ, обеспе-
чивая выполнение логических функций с использованием мень-
шего числа элементов.
Другим вариантом ПМ является программируемая вентиль-
ная матрица (ПВМ) (FPGA), которая представляет собой на-
182
Глава 2
Рис. 2.76. Организация ПМП (про-
граммируемого мультиплексора).
Адресные Моды
Рис. 2.77. Архитектура ПМЛ (про-
граммируемой матричной логики).
бор схем И с программируемым соединением входов. Выходы
матрицы подключаются к внешним схемам (рис. 2.75). Эта
матрица может заменять функции И в логических схемах. Ее
можно использовать в качестве декодеров, детекторов или се-
лекторов кодов.
Несколько другую структуру имеет программируемый муль-
типлексор (ПМП) (PMUX), показанный на рис. 2.76. В этой
схеме часть входов схем И имеет фиксированное включение
(соединение), а подключение двух входных переменных (72, /з)
программируется. Подключение входов схем ИЛИ зафиксиро-
вано и не программируется. Такая схема находит применение
там, где широко используются мультиплексорные функции.
Наконец, известна еще одна разновидность ПВМ— програм-
мируемая матричная логика (ПМЛ), которая имеет программи-
руемое подключение входов схем И и фиксированное соедине-
ние входов схем ИЛИ. Такая структура является более гибкой
Запоминающие устройства (ЗУ)
183
и приспособленной для применения в контроллерах. На рис.
2.77 показана архитектура ПМЛ.
Эти матрицы удобно программировать с помощью ППЗУ-
программатора. В настоящее время все виды логических мат-
риц бурно развиваются. Схемотехники знакомы с достоинства-
ми этих ПЛМ и широко применяют их в логических системах и
разработках. Эти матрицы можно интегрировать на одном кри-
сталле вместе с такими распространенными элементами ЗУ,
как триггеры.
2.24. ЗУ на приборах с зарядовой связью (ПЗС)
Наряду со статическими и динамическими ОЗУ с помощью
МОП-технологии реализуются ЗУ с последовательным досту-
пом, основанные на принципе перемещения электрического за-
ряда. Элементы таких ЗУ называются приборами с переносом
заряда или, сокращенно, ППЗ. ППЗ разделяются на два типа,
один из которых существенно связан со структурой МОП-тран-
зистора, а в другом в качестве элемента ЗУ используется
Рис. 2.78. Многозатворный МОП-транзистор в качестве ПЗС.
МОП-емкость. Первый тип ППЗ называется ПЗС, т. е. прибор
с зарядовой связью, а второй — ППЦ, т. е. прибор типа «по-
жарная цепочка».
Принцип действия ПЗС можно лучше всего объяснить пу-
тем анализа рабочего режима МОП-транзистора обогащенного
типа с несколькими затворами (рис. 2.78). Канал такого тран-
зистора в нормальном состоянии не проводит. Если мы пода-
дим на затвор положительное напряжение, то за счет индукции
на поверхности канала под затвором возникнет зона, обога-
щенная носителями заряда. Этими носителями могут быть как
дырки, так и электроны в зависимости от типа канала проводи-
мости (р- или гг-типа соответственно).
Обогащение канала означает, что в месте расположения ис-
тока потенциальный барьер исчезает и в канал МОП-транзис-
тора, показанного на рис. 2.78, инжектируются дырки. Эти дыр-
184
Глава 2
ки заполняют область подложки, обедненную носителями за-
ряда, при этом существующая разность потенциалов (потенци-
альная яма) уменьшается. В этой ситуации при положительном
управляющем напряжении на затворе возникает состояние рав-
новесия, которое остается стабильным до тех пор, пока сохра-
няется это напряжение. Если напряжение на затворе исчезает»
то равновесие нарушается и заряд начинает стекать в другие
места. Для управления этим процессом в структуре подается
положительное напряжение на следующий затвор. В результате
действия этого напряжения зарядовый пакет, который первона-
чально находился под затвором gi, теперь смещается под за-
твор g2. Таким образом, подавая положительное напряжение
на последовательно расположенные затворы, мы можем пере-
мещать зарядовый пакет от одного затвора к другому.
В ПЗС-регистрах последовательное смещение заряда произ-
водится с помощью трех тактовых импульсов, сдвинутых меж-
ду собой во времени. Применяя затворы со специально разра-
ботанной геометрией, можно осуществить смещение зарядов в
одном направлении с помощью двух тактовых сигналов, при
этом, однако, часть заряда теряется и требуется регенерация
зарядового пакета после нескольких операций смещения. По
этой причине простой метод смещения заряда широкого рас-
пространения не получил. Зато широко распространен метод,
в котором применяются четыре сдвинутых между собой внут-
ренних тактовых импульса, которые обеспечиваются двумя ге-
нераторами тактовых сигналов. Как будет показано ниже,
в этой базовой схеме требуются три сигнала, сдвинутых между
собой во времени.
Для более подробного анализа ПЗС-регистра рассмотрим
еще раз рис. 2.78. Из этого рисунка видно, что рядом с истоком
находится входной затвор, через который мы можем ввести в
регистр один разряд (бит) данных. Пусть на электрод epi будет
подан положительный потенциал, тогда в gi будут переданы
данные из gi и в g4— из g3l так как затвор g4 управляется
синхронно с затвором gi. При подаче положительного потен-
циала на электрод ф2 в g2 переходит бит из gi и в g5— из g4.
Наконец, при подаче положительного потенциала на электрод
Фз в g3 передается бит из g2 и в gQ— из g$. Для данной струк-
туры такое перистальтическое движение с помощью одного»
двухфазного таймера обеспечить невозможно. Очевидно, что
если нам, например, требуется переместить заряд от g3 к g4>
в то время как на g2 также поступит тактовый импульс, то за-
ряд, находящийся под g3, распределится между g2 и g4. Для
обеспечения оптимального переноса заряда между последова-
тельно расположенными затворами тактовые импульсы необхо-
димо сделать частично перекрывающимися, чтобы заряд не де-
Запоминающие устройства (ЗУ)
185
лился на части в процессе переноса. На рис. 2.79 изображено,
как происходит процесс переноса заряда под затворами. На-
пряжение на затворе создает разность потенциалов, т. е. по-
тенциальную яму, которая стремится вытянуть заряд из сосед-
него затвора. Если под очередным затвором находится заряд,
то он перетечет под следующий затвор. Если заряда нет (0),
то никакого переноса заряда не происходит.
Ъ *3 *1 *2 Ъ
ьд^-инжектируемый заряд
6 г
Рис. 2.79. Перенос заряда в ПЗС.
а —структура; б — статическое состояние с «потенциальной ямой»; в — перемещение'
инжектированного заряда AQS; г — сигналы фь <р2 и <р3, которые обеспечивают смеще-
ние заряда*
Таким образом, мы можем хранить под соответствующими
затворами разряды (биты) данных и перемещать их с помощью
подачи тактовых сигналов. В конце такого последовательного
регистра мы получим цифровую информацию на выходе стока.
Выходной затвор должен при этом управляться в фазе с ф3,
либо его можно подключить к постоянному потенциалу UB.
Во время передачи пакетов заряда вдоль ячеек (затворов)
наблюдается его постепенная потеря, т. е. ухудшение качества
(уровня) передаваемой информации, поэтому после прохожде-
ния определенного числа ячеек (затворов) необходимо вклю-
чить регенеративную схему.
2.25. Архитектура ЗУ на ПЗС
ЗУ на основе ПЗС является типичным примером устройств
памяти с последовательным доступом, которое предназначено
для хранения данных в виде блоков или страниц. Очевидно,
что при хранении данных в последовательно-параллельных
186
Глава 2
Выход донных
Рис. 2.80. Блок-схема ПЗС-ЗУ на 64К бит.
структурах время доступа к блокам или страницам можно су-
щественно сократить. В этой связи в специальной литературе
делается различие между ПЗС-ЗУ с длинным циклом и
ПЗС-ЗУ с коротким циклом, где последний вариант имеет по-
следовательно-параллельную организацию.
Хотя по времени доступа ПЗС-ЗУ с коротким циклом имеют
преимущество по сравнению с ПЗС-ЗУ с длинным циклом, од-
нако они требуют использования большего числа логических
схем для регенерации, селекции и генерации тактовых сигна-
лов. На каждый цикл требуется один усилитель считывания и
один регенератор.
На рис. 2.80 приведена блок-схема ПЗС-ЗУ со структурой
64К1. Внутри схема разделена на 16 адресуемых 4К-разрядных
регистра сдвига. Это ПЗС-ЗУ имеет один вход и один выход
данных, которые с помощью селекторов можно связать с од-
ним из 16 регистров. Мультиплексор и демультиплексор управ-
ляются четырьмя адресными шинами. Каждый регистр произ-
водит постоянную рециркуляцию данных, за исключением пе-
риода записи данных. Во время операции сдвига данные с вход-
ной шины записываются в выбранный регистр, в то время
как остальные 15 регистров производят только рециркуляцию
данных. Все 16 регистров получают команду сдвига одновре-
Запоминающие устройства (ЗУ)
187
Рис. 2.81. Реализация одного регистра сдвига (1x4096), показанного на
рис. 2.80.
менно. Современные ПЗС-ЗУ работают на тактовой частоте
5 МГц. Максимальное «мертвое» время, т. е. время, которое
проходит между подачей команды на считывание информации
и появлением соответствующего бита на выходе, составляет
около 800 мкс. Среднее время доступа равно 400 мкс.
Хотя каждый из внутренних регистров представляется поль-
зователю как 1Х4К-регистр сдвига, реальная архитектура это-
го ЗУ представляет собой последовательно-параллельное со-
единение регистров (рис. 2.81). Каждый из 32 регистров хране-
ния получает данные из 32-разрядного входного регистра,
управляемого генератором тактовых сигналов с частотой
5 МГц. После поступления 32 тактовых импульсов этот регистр
будет заполнен, и далее эти 32 бита вводятся параллельно в
вертикально расположенные регистры хранения — сдвига, каж-
дый длиной по 128 бит. Для этого после каждых 32 тактовых
импульсов на эти вертикальные регистры подается команда
сдвига. На нижнем конце вертикальных регистров включен го-
ризонтальный расположенный выходной регистр, который так-
же считывает биты данных с частотой 5 МГц.
Эта последовательно-параллельная структура имеет опреде-
ленные преимущества. Во-первых, потребление мощности в этой
188
Глава 2
структуре существенно меньше, чем в последовательном IX
Х4К-регистре, так как биты смещаются в вертикальных регист-
рах с меньшей частотой переноса. Чем выше частота этого пе-
реноса, тем больше рассеяние мощности в ячейке. Во-вторых,
каждый бит смещается здесь только 160 раз (128 вертикальных
и 32 горизонтальных смещения), что приводит к меньшей по-
тере заряда. Таким образом, эта архитектура обеспечивает
меньшее снижение уровня передаваемого заряда, чем обычный
последовательный ПЗС-регистр емкостью 1Х4К.
Стоимость одного бита ПЗС-ЗУ оказывается меньше, чем
одного бита ОЗУ. С другой стороны, ПЗС-ЗУ имеют более
сложную систему доступа -к информации и обеспечивают боль-
шее время доступа, особенно если данные записываются или
считываются не в виде последовательных блоков или страниц.
В некоторых применениях ПЗС-ЗУ оказываются выгоднее0.
Следует отметить, что ПЗС-ЗУ, так же как полупроводниковые
ОЗУ, являются энергозависимыми.
Выше мы рассматривали применение ПЗС-ЗУ для хранения
цифровой информации. Однако в ПЗС-ЗУ можно хранить не
только два определенных логических уровня (0 или 1), но и
мгновенные значения аналоговых напряжений. В частности, на-
бор ячеек ПЗС-ЗУ можно использовать в качестве линии за-
держки. Аналоговый сигнал, поданный на вход ПЗС-ЗУ, по-
явится на его выходе с определенной задержкой во времени.
Величина времени задержки регулируется с помощью частоты
сигналов таймера.
Величиной заряда ПЗС-ячейки можно управлять с помощью
облучения светом. При этом можно, например, ввести изобра-
жение с разрешением 1000X1000 точек в структуру, содержа-
щую тысячу ПЗС-регистров на 1000 ячеек каждый. Затем эту
информацию можно передать в выходной ПЗС-регистр, считы-
вание с которого производится в последовательном режиме.
Таким образом, мы получаем видеосигналы, которые вместе с
соответствующими синхронизирующими сигналами можно по-
дать на вход кинескопа. ПЗС-ЗУ можно использовать также в
телевизионных камерах, которые способны заменить камеры
обычного типа (видиконы). Очевидно, что к входным и вы-
ходным схемам ПЗС при таком применении предъявляются
более высокие требования, чем при использовании ПЗС в ка-
честве битовой ячейки. При воспроизведении изображения пе-
ренос элементов должен быть строго линейным, равно как и
усиление в указанных входных и выходных усилителях, что в
случае цифровых применений ПЗС не требуется.
о В последнее время в связи с разработкой высококачественных полупро-
водниковых ОЗУ с произвольным доступом ПЗС-ЗУ применяются крайне ред-
ко. — Прим, редактора.
Запоминающие устройства (ЗУ)
2.26. ЗУ на основе ЦМД
Новой разработкой в области энергонезависимых ЗУ явля-
ется ЗУ, реализованное на цилиндрических магнитных доменах
(ЦМД). Если мы нанесем тонкий слой аморфного магнитного
материала, например гадолиний-кобальта или гадолиний-желе-
за, на немагнитную подложку, то в этой пленке появятся обла-
сти, имеющие одинаковое направление намагничивания, кото-
рые похожи по форме на коромысло. Под действием внешнего-
магнитного поля эти области преобразуются в домены цилинд-
без магнитного /юля
Приложено сильное
магнитное поле
Рис. 2.82. Возникновение доменов в тонкой пленке из магнитного материалам
Приложено слабое
магнитное поле
рической формы. На рис. 2.82 показано, как это происходит..
Эти домены («пузырьки») имеют диаметр от 1 до 5 мкм. По-
ле, которое требуется для получения доменов такого размера,,
обеспечивает постоянный магнит, который располагается над
подложкой с магнитной пленкой (кристаллом ЦМД-ЗУ).
В очень сильном магнитном поле домены исчезают. Для
хранения информации внешнее электрическое напряжение пи-
тания для таких ЗУ не требуется, поэтому они называются
энергонезависимыми.
Домены смещаются под действием магнитного поля, кото-
рое направлено по вертикали к основному полю. Для переме-
щения пузырьков в требуемом направлении и по определенной
траектории на поверхность ЦМД-кристалла напыляются тон-
кие магнитные слои из пермаллоя, которые имеют форму шев-
ронов (рис. 2.83). Вращая вспомогательное магнитное поле,
можно перемещать домены вдоль шеврона, как показано на
рис. 2.83. При этом их можно также перебрасывать от одного
шеврона к другому. Вращающееся вспомогательное магнитное
поле получается с помощью двух обмоток, которые питаются
треугольными импульсами тока, сдвинутыми по фазе на 90°.
190
Глава 2
Поправление
поля Г"
магнитный домен Тонкая магнитная пленка
Рис. 2.83. Движение доменов вдоль шевронов.
Домены в тонкой магнитной пленке можно сформировать с
помощью тонкой алюминиевой петли, через которую пропуска-
ется ток. Магнитное поле петли накладывается на основное
поле постоянного магнита.
Возникающие в пленке домены смещаются вдоль шевронов
точно так же, как и их предшественники, занимая при каждом
обороте поля одно определенное положение. Пропуская домены
под магниточувствительным датчиком, можно осуществить счи-
тывание данных в двоичной форме: наличие пузырька соответ-
ствует 1, отсутствие — 0. Такой метод считывания является де-
структивным процессом, при котором домен пропадает. Одна-
ко, разделив каждый пузырек на две части, можно осущест-
вить и недеструктивный метод считывания. Переместив магнит-
ный домен под слой пермаллоя и разделив на две части, мы
получим его копию. Затем один из двух доменов — оригинал
Запоминающие устройства (ЗУ) 191
или копия — продолжает свой нормальный путь, а другой будет
направлен к двоичному детектору. При деструктивном считы-
вании домен направляется к детектору без предварительного
копирования. Домен, который мы считываем, проходит под
другим рядом симметричных шевронов и там регенерируется.
Диаметр регенерированного пузырька намного превышает диа-
метр исходного пузырька. Увеличенный пузырек пройдет вбли-
зи магниточувствительного датчика, который и произведет его»
регистрацию. Полученный в результате импульс после усиления
Рис. 2.84. Архитектура ЦМД-ЗУ с большими и малыми петлями.
и буферизации обеспечит на выходе двоичную информацию*
причем формируемые уровни выходного напряжения достаточ-
ны для переключения ТТЛ-схем.
Описанное здесь ЦМД-ЗУ представляет собой регистр сдви-
га, недостатком которого является большое время доступа.
Кроме того, любая ошибка в размещении шевронов на поверх-
ности приводит ЦМД-кристалл в негодность.
На практике применяются ЦМД-ЗУ, в которых расположе-
ние шевронов напоминает структуру ПЗС-ЗУ. Этот вариант
структуры ЦМД-ЗУ состоит из так называемых больших и ма-
лых петель шевронов, которые обеспечивают организацию типа
«регистр связи — накопительные регистры» (рис. 2.84). Мы ви-
дим на рисунке, что данные вводятся в основную петлю (ре-
гистр связи) и сдвигаются по кольцу. Из основной петли дан-
ные через специальный порт передаются в малые петли (нако-
192
Глава 2
пительные регистры). Когда домен достигает требуемой малой
петли, мы можем, управляя режимом работы передаточного
вентиля, получить локальное магнитное поле, под действием
которого домен перескочит из одной петли в другую. Длитель-
ность импульса передачи определяет направление перехода пу-
зырька— из основной петли в малую или наоборот.
ЦМД-ЗУ с большими и малыми петлями представляет со-
бой не что иное, как ЗУ с последовательно-параллельным до-
Вращающееся
поле
Лпмрн НаЗор элементов
из пермаллоя
Рис. 2.85. TI-структура ЦМД-ЗУ.
ступом. При этом последовательно введенные в основную пет-
лю биты после ряда сдвигов переходят в малые петли. Затем
за счет одновременно подаваемых на все петли сигналов пере-
носа они перемещаются в этих петлях. При обращении к пол-
ному слову путем ряда сдвигов, выполняемых в малых петлях,
его разряды (биты) переводятся в верхнее положение, из кото-
рого передаются в основную петлю. Затем путем последова-
тельного сдвига в этой петле разряды данных считываются из
ЦМД-ЗУ.
Архитектура с большими и малыми петлями позволяет ис-
ключить дефектные малые петли. Исключение достигается пу-
тем заполнения этих петель нулями при переносе двоичной ин-
формации из больших петель. В процессе контроля ЦМД-кри-
Запоминающие устройства (ЗУ)
193
Рис. 2.86. Платы с ЦМД-ЗУ типа TIB0203S, плата содержит 92 Кбайт. На
фотографии показаны модули TIB100 (1 Мбит), TIB0500 (512 Кбит) и
TIB0250 (256 Кбит), выпускаемые фирмой Texas Instruments.
сталла дефектные петли идентифицируются и вносятся в пас-
порт. Эти данные затем программируются в ППЗУ, входящее в
состав контроллера, который управляет ЦМД-ЗУ с учетом вы-
явленных дефектных малых петель. Этот контроллер автомати-
чески учитывает, что при считывании дефектных петель между
двумя битами появляется лишний нуль.
В настоящее время вместо шевронов как средства передви-
жения пузырьков применяются также и другие структуры, та-
кие, например, как TI-структура, изображение которой мы ви-
дим на рис. 2.85. Пузырек перемещается при вращении магнит-
ного поля в соответствии с указанным порядком номеров. Были
разработаны структуры, основанные на принципе больших и
малых петель, в которых используются две большие петли, ко-
194
Глава 2
торые работают параллельно, причем одна из них осуществля-
ет только запись, а другая — только считывание.
Управление работой ЦМД-ЗУ является довольно сложным
процессом из-за необходимости синхронизировать перенос пу-
зырьков (т. е. вращающееся поле) и ввод-вывод данных. Для
этой цели требуется специальный контроллер, который решает
задачи преобразования информации из последовательной фор-
мы представления в параллельную и наоборот, осуществляя
одновременно детектирование дефектных малых петель. В на-
стоящее время такие контроллеры реализуются на отдельном
кристалле и обеспечивают все необходимые операции управле-
ния, возникающие при обмене данными с ЦМД-ЗУ (рис. 2.86).
2.27. ЗУ на гибких дисках
Дисковые ЗУ применяются в системах обработки данных в
качестве массовых ЗУ для хранения больших массивов инфор-
мации. Информация регистрируется в тонком магнитном слое,
который нанесен на поверхность вращающегося диска, изготов-
ленного из алюминия или пластика. Метод регистрации прин-
ципиально не отличается от того метода, которым пользуются
при записи на магнитную ленту.
ЗУ на гибком диске относится к семейству дисковых ЗУ с
емкостью памяти 3 Мбит (ЗХЮ6 бит). Такой диск, который
часто называется дискетой (дисковой кассетой), показан на
рис. 2.87. Дискета имеет форму граммпластинки, помещенной в
пластиковый конверт. Диаметр диска равен 19,8 см, а отверстие
под ведущий шпиндель имеет диаметр 3,81 см. Индикаторное
отверстие в диске (диаметр 0,025 см) предназначено для син-
хронизации данных во время его вращения.
Как магнитные ленты и граммпластинки, дискеты очень
чувствительны к грязи, пыли и отпечаткам пальцев, поэтому их
помещают в защитных конвертах, изготовленных из материа-
ла, который обеспечивает минимальное трение, так как при чте-
нии и записи эти защитные конверты не снимаются с дискета.
Стандартная дискета имеет три отверстия — для шпинделя,
для головки записи-чтения и для индикаторного фотодатчика.
Внутренняя поверхность конверта имеет волнообразную струк-
туру, которая обеспечивает минимальное трение между диске-
той и конвертом. Кроме того, на поверхность нанесен электро-
проводящий слой графита, который защищает диск от накопле-
ния электростатического заряда, а систему записи-чтения — от
внешних помех.
Для дополнительной экранировки дискеты при транспорти-
ровке применяется тонкий пакет из картона, похожий на те,
в которых хранятся граммпластинки.
Запоминающие устройства (ЗУ)
195
Гибкий диск был разработан в середине 60-х гг. фирмой
IBM. Затем дискета IBM была принята в качестве промышлен-
ного стандарта. Позже появились и другие варианты дискет,
два из которых показаны на рис. 2.88. При использовании дис-
кеты, показанной на рис. 2.88, а, для блокировки записи сле-
дует нажать на отверстие в кассете, точно так же как это де-
лается в магнитофонных (звуковых) кассетах, где имеется пла-
стиковый лепесток на обратной стороне кассеты, после удале-
ния (обрывания) которого запись музыки оказывается невоз-
можной. На дискетах запись блокируется в тех случаях, когда
на них записана какая-то программа, которая постоянно при-
меняется и которую нельзя стирать.
Дискета, показанная на рис. 2.88, б, имеет вместо одного
несколько индикаторных отверстий, расположенных на опре-
деленных расстояниях между собой. Преимуществом этой так
называемой секторной индикации является более высокая
плотность битовой упаковки, приходящаяся на одну дорожку.
13*
196
Глава 2
Первоначально дискеты имели магнитный слой только на
одной стороне. В настоящее время этот слой наносится на обе
стороны, так что после переворачивания мы можем использо-
вать информацию, записанную на обратной стороне дискета.
Конверт дискеты имеет на обороте отверстие для головки за-
писи-чтения. В некоторых вариантах ЗУ на гибких дисках для
записи-чтения данных доступны обе стороны одновременно.
Рис. 2.88. Варианты дискет, отличающиеся
от промышленного стандарта.
В дисковых ЗУ информация записывается на поверхности
в виде концентрических окружностей, а не спиралей, как в слу-
чае граммпластинок. Эти окружности называются дорожками.
Внешние дорожки длиннее внутренних, поэтому плотность упа-
ковки информации на внутренних дорожках выше, чем на внеш-
них.
При записи данных магнитный слой работает в режиме на-
сыщения. Ввиду цифрового кодирования информации искаже-
ния сигналов не играют здесь такой роли, как при записи зву-
ка. Поэтому ток подмагничивания, который используется при
магнитофонной записи, здесь не требуется. Не применяется
здесь и предварительное стирание информации.
В качестве привода дискет в основном применяется син-
хронный двигатель со скоростью вращения шпинделя 360 об/мин.
Скорость вращения должна быть фиксированной, что необхо-
димо для обмена гибкими дисками, записанными на различ-
ных устройствах. Очевидно, что если скорость вращения не со-
ответствует стандарту, то ни о какой передаче данных речи
Запоминающие устройства (ЗУ)
197
быть не может. По этой причине некоторые дисковые ЗУ снаб-
жены двигателями постоянного тока с сервоприводом.
Головка записи-воспроизведения существенно отличается от
магнитных головок, применяемых в больших ЗУ с алюминиевы-
ми (жесткими) дисками. В последнем случае головки исполь-
зуются в подвешенном состоянии, и необходимый зазор между
поверхностью диска и головкой обеспечивается потоком возду-
ха, который возникает при быстром вращении диска. Сопри-
Рис. 2.89. Механизм привода дискеты.
косновение такой магнитной головки с поверхностью диска при-
водит к аварии, в результате которой соответствующая дорож-
ка портится. Если же диск покоится, то эту головку необходи-
мо приподымать.
Такая система не применяется при работе с дискетой, так
как она пригодна только для диска с жесткой поверхностью.
При работе ЗУ на гибких дисках головки находятся в постоян-
ном контакте с поверхностью дискеты, хотя это и приводит к
дополнительному износу трущихся элементов, однако позволя-
ет упростить конструкцию головок. Износ сильно ограничивает
сроки службы как головок, так и дискет. Обычно устройства с
гибкими дисками устроены так, что в паузах между операция-
ми записи-воспроизведения магнитная головка приподнимается
над поверхностью дискеты, чтобы уменьшить износ.
С другой стороны, магнитные головки легко заменяются.
На рис. 2.89 приведен вид сбоку для механизма привода гиб-
кого диска. Здесь устройство для управления положением го-
ловки состоит из шагового двигателя, вращающего винт, кото-
рый передвигает держатель головки вдоль поверхности диске-
та снаружи внутрь и наоборот.
Мы видим, что дискета прижимается к магнитной головке с
помощью фетрового выступа. Давление этого выступа таково,
198
Глава 2
что в этом месте дискета даже изгибается в одну сторону, как
это происходит и в случае магнитной ленты. При перемещении
головки к другой дорожке устройство для управления положе-
нием головки сначала обращается к самой внешней дорожке
00, а затем с помощью шагового двигателя перемещает голов-
ку к требуемой дорожке.
Положение «дорожка 00» для магнитной головки определя-
ется с помощью микропереключателя. Смещение головки в си-
стемах с жесткими дисками осуществляется с помощью катуш-
ки, действующей аналогично звуковой обмотке электродинами-
ческого громкоговорителя. В громкоговорителе звуковой конус
смещается под действием тока, протекающего через обмотку.
В устройстве управления положением головки происходит то
же самое, только конус заменен здесь держателем головки.
Для обеспечения обмена данными между дискетой и систе-
мой обработки данных требуется контроллер, который управ-
ляет переносом данных с дискеты и на нее. Контроллер ини-
циирует этот перенос в требуемые моменты времени, обеспечи-
вает разделение на блоки (форматизацию) и вырабатывает
сигналы прерывания как для диска, так и для системы обра-
ботки данных.
В связи с относительно большим временем доступа к дис-
ковому ЗУ оказалось невыгодно записывать данные, размещая
их в произвольных местах на дисковом ЗУ. Значительно мень-
шее среднее время доступа обеспечивает метод хранения дан-
ных в виде блоков, так как для конкретного этапа обработки
данных целиком вся информация, хранящаяся на дискете, ни-
когда не требуется. Тот, кто читает книгу, видит перед собой
только одну страницу, необходимую ему для ознакомления с
текстом. То же самое обычно происходит и при обработке дан-
ных, где весь массив данных также делится на страницы. В дис-
ковых ЗУ блок данных, которые в данный момент требуются
программе, обрабатывается однократно — слово за словом —
и записывается в рабочее ЗУ системы, например в ОЗУ. При
записи данных на диск эта процедура протекает точно так же,
но только в обратном направлении. При форматизации, т. е.
разделении данных на блоки, дорожка разбивается на секто-
ры. Каждый сектор имеет фиксированную длину и собственный
адрес, который определяется местом расположения этого сек-
тора на поверхности диска. В начале каждого сектора записы-
вается его адрес на диске. Контроллер не разрешает записы-
вать в места, где хранится адрес сектора, какую-либо другую
информацию, поступающую из системы. Адреса секторов мож-
но только считывать.
При попытке ЭВМ получить доступ к данным контроллер
сообщает адреса дорожки и сектора, где находятся требуемые
Запоминающие устройства (ЗУ)
199
данные. Контроллер через устройство для управления поло-
жением головки устанавливает ее над требуемой дорожкой.
После этого производится поиск сектора и запись-считывание
соответствующего блока данных. На рис. 2.90 показан стан-
дартный формат для записи данных на дискете. Этот формат
известен как стандартный IBM-формат, который выполняется
Индексный импульс
Рис. 2.90. Стандартный формат
записи данных на дискете (формат IBM
3740).
для всех 77 дорожек на дискете. Из рисунка видно, что после
детектирования индикаторного отверстия с помощью оптиче-
ского датчика мы получим последовательность из 46 байтов,
заполненных нулями. Эти 46 байт являются тактовыми импуль-
сами, с помощью которых производится сихронизация генера-
тора тактовых сигналов (таймер чтения) с системой фазовой
автоматической подстройки частоты (ФАПЧ) в требуемом ра-
бочем режиме. На дискете отсутствует отдельная таймерная
дорожка с датчиком и дополнительной электроникой для осу-
ществления синхронизации. Проблема распознавания битов
разрешена с помощью таймера в виде генератора, который
синхронизируется битовой информацией, содержащейся в по-
лях адреса, данных и пустого промежутка соответствующей до-
рожки. Применение ФАПЧ-генератора тактовых импульсов
означает, что биты могут находиться в любых точках дорожки
и даже там, где. не содержится никаких полезных данных.
Сразу же после установки головки над требуемой дорожкой
включается генератор тактовых сигналов, который обеспечи-
200
Глава 2
Бит1/
Битв
Бит7
бит/
Бит 2
Бит б
БитБ
БитО
if мкс-А
Биты байт данных
данных
Биты
таймера
Тип метки
И п п
и
о
7
U
U
О
/
О
Нв запилнвно
Данные
Индекс
Нарве
Биты ~
таймера п[]оме^у/пна
Биты
Биты
таймера байт метки
'биты
1
2мкс
б
Бит 0 бит /
Бит 2
бит 3 Бит1/ бит 5
бит 6
бит 7
11O1U 0 10
П2-Б\__я________н я ы
Шестнадр итерииный
б
Рис. 2.91. Различие между байтом данных, байтом промежутка и меткой ад-
реса, расположенными на дискете. На рис. 2.91, в приведена импульсная
диаграмма, применяемая в МЧМ-режиме.
вает синхронизацию тактовых битов и битов данных. При этом
используются нули и единицы, размещенные по длине дорож-
ки, причем частота импульсов, соответствующих единицам, пре-
вышает в два раза частоту импульсов, соответствующих нулям.
Используя ФАПЧ-схему, которая реагирует как на основную
частоту, так и на ее гармонические составляющие, можно осу-
ществить непрерывное разделение тактовых импульсов и им-
пульсов данных. Преимущество применения ФАПЧ-генератора
заключается в том, что он реагирует на случайные изменения
в скорости вращения диска. Соответствующую информацию
Запоминающие устройства (ЗУ)
201
этот генератор получает из данных, записанных вдоль трека.
Если мы теперь снова вернемся к рис. 2.90, то увидим, что
после первых 48 байтов, отсчитанных от переднего фронта ин-
дикаторного импульса в заголовке, записана метка индикатор-
ного адреса. Эта метка появляется как первый значащий байт,
который осуществляет реальную байтовую синхронизацию.
Распознавание происходит так, как показано на рис. 2.91, а.
Один из специальных байтов, записанных на дорожке, содер-
жит набор битов, в котором отсутствуют три тактовых бита.
Пропущенные биты обнаруживаются в процессе считывания,
при этом соответствующий байт распознается как байт метки.
Как следует из рис. 2.91, б, три младших идентификационных
бита дают нам тип метки. В случае распознавания индикатор-
ной метки система через контроллер оповещается о том, что
после 32 байт, заполненных нулями, появится адресная метка
первого информационного сектора.
Считывание информации из сектора начинается с проверки
адреса дорожки и сектора, после чего распознается адресная
пометка. Затем следует пустой промежуток в 17 байт, который
позволяет электронике при записи блоков данных переклю-
чаться с чтения на запись. После этого мы можем переходить
к чтению или записи блока данных длиной в 128 байт. Метка
адреса данных сообщает, имеется ли в поле данных полезная
информация или нет. Для синхронизации генератора тактовых
импульсов в этом поле все время записываются биты, из ко-
торых контроллер узнает, что полезные данные из системы не
поступают. Так, факт, что контроллер заполнил это поле беспо-
лезными данными, необходимо указать в начале поля данных.
Эта операция осуществляется с помощью метки адреса данных.
При записи данных таймер чтения отсутствует и тактовый сиг-
нал обеспечивается кварцевым генератором.
Блок данных заканчивается пустым промежутком данных.
Этот промежуток необходим для того, чтобы по окончании пе-
реноса данных иметь определенный интервал для распознава-
ния следующего адреса.
Данные записываются на дорожке так, как показано на
рис. 2.91. Из рисунка видно, что единицы имеют двойную час-
тоту по сравнению с частотой, используемой для записи нулей.
Как мы уже говорили выше, здесь также идет речь о частот-
ной модуляции (ЧМ).
Как известно, при переходе от внешних дорожек к внутрен-
ним плотность записи информации на дорожках возрастает,
а частота тактовых импульсов остается равной 250 кГц. Мак-
симальную плотность записи имеет дорожка 77. Увеличение
плотности записи, естественно, влияет на надежность считыва-
ния информации. В частности, при этом возникает сдвиг вер-
202
Глава 2
шины сигнала, в результате чего приходится уменьшать ток
записи для дорожек от 44 до 77 включительно.
Одним из вариантов ЧМ-метода является модифицирован-
ный ЧМ-метод (МЧМ), который обеспечивает в два раза бо-
лее высокую плотность записи. В МЧМ-режиме тактовые им-
пульсы декодируются в виде последовательности битов данных,
показанной на рис. 2.91, в. Здесь байт разделен на битовые
ячейки, при этом данные записаны в середине битовых ячеек.
Если значение бита равно 1, то появляется импульс. Тактовые
биты записаны между последовательно расположенными нуля-
ми. На рис. 2.91, в такая ситуация возникает между битовыми
ячейками 4 и 5. При таком варианте кодирования расстояние
между соседними импульсами составляет 2, 3 и 4 мкс. Здесь
получена плотность записи, в два раза более высокая, чем в
ЧМ-режиме.
Для управления ЗУ с гибкими дисками выпускаются конт-
роллеры типа piPD372 фирмы NEC, которые обеспечивают ге-
нерацию управляющих сигналов и подготавливают деление
данных на блоки или страницы. Кроме этого, контроллер обес-
печивает последовательный и параллельный режимы доступа,
декодирование блоков данных, а также выполняет необходи-
мые проверки контрольных сумм.
Тем не менее остается еще большой объем работы для си-
стемы и ее специальных подпрограмм (сервисных подпро-
грамм), необходимых для обеспечения обмена данными с дис-
кетой. В системах, работающих с большим числом дисковых
накопителей, часто используется специальная вспомогательная
ЭВМ, которая в автономном режиме обеспечивает обмен дан-
ными с дисками. В общем случае для этой цели подходят мик-
ропроцессоры, которые программируются так, чтобы обеспе-
чить автономный обмен данными. Для проверки контрольных
сумм здесь используется так называемый символ циклического
контроля (CRC). В ходе последовательного контроля все биты,
находящиеся в байтах, обрабатываются математически мето-
дом полиномов (для этой цели применяются полиномы разных
типов), а затем из полученного результата формируются два
байта, которые записываются после блока данных. При считы-
вании блок данных обрабатывается таким же образом, и новые
контрольные байты сравниваются с записанными. Если зафик-
сировано совпадение контрольных байтов, значит, блок дан-
ных считан правильно. В гл. 4 мы еще вернемся к различным
современным методам контроля блоков данных.
Недостатком дискеты является то, что, несмотря на экрани-
рующее покрытие (пластиковый конверт), пыль через микро-
щели все-таки попадает на поверхность дискета, что приводит
к снижению надежности хранения данных. Нередко получается
Запоминающие устройства (ЗУ)
203
так, что аккуратно записанные данные через некоторое время
прочитать уже невозможно. Причиной этого эффекта может
быть накопление пыли на поверхности дискеты.
По этой причине понятна тенденция к использованию дис-
ковых ЗУ с так называемыми жесткими дисками в конвертах,
непроницаемых для пыли. Надежная защита от пыли позво-
ляет использовать в таких ЗУ тонкопленочные магнитные го-
ловки, которые обеспечивают плотность записи, превышающую
Рис. 2.92. Жесткий диск со считыванием данных с обеих сторон диска.
в 20—30 раз ту, которая принята для дискет (218,8 Кбайт).
Такие головки подвешиваются на высоте 5 мкм от поверхности
диска. Применяемые диски имеют диаметры 14, 8 и 5,25 дюйма
(13,56; 20,32 и 13,33 см). Мини-диск диаметром 13,33 см
(2 диска) предназначен для использования в основном ЗУ
(6,38 Мбайт). Для расширения памяти в систему с помощью
контроллера включаются дополнительные ЗУ на дискетах или
кассетах. Этот контроллер обеспечивает обмен данными как
между центральной ЭВМ и основным ЗУ, так и между основ-
ным ЗУ и периферийными дискетами и кассетами. В последнем
случае вмешательство центральной ЭВМ не требуется, т. е.
контроллер управляет обменом данных автономно.
Область применения ЗУ с жесткими дисками включает
в себя микроЭВМ для небольших банковских и администра-
тивных учреждений, процессоры с пословной обработкой, а так-
же приборные и процессорные ЭВМ с языками программирова-
ния BASIC и PASCAL.
204
Г лава 2
Рис. 2.93. Устройство с жестким диском под герметизированной крышкой.
Рис. 2.94. Устройство с дискетой типа 9895А фирмы Hewlett-Packard (двой-
ная плотность 2,36x10е байт).
Жесткий диск допускает запись на обеих сторонах. Несом-
ненно, мини-диск будет изделием массового производства, и
поэтому его продажная цена будет довольно низкой. На рис. 2.92
представлен поперечный разрез мини-дискового ЗУ с жестким
диском, который имеет двустороннее покрытие. На рис. 2.93
приведена фотография устройства с жестким диском, причем
шпиндель, на котором крепится диск, имеет привод от дви-
Запоминающие устройства (ЗУ)205
гателя с пластиковым приводным ремнем. На рис. 2.94
показано ЗУ с дискетой, которое поставляется в продажу фир-
мой Hewlett-Packard.
2.28. ЗУ на оптических дисках
Этот тип ЗУ, которое разрабатывалось в течение последних
нескольких лет, включает в себя видеопластинки с оптической
головкой записи-воспроизведения, (вместо магнитной головки),
а также полупроводниковый лазер и р—i—n-диод. Основное
назначение этого ЗУ — использование в качестве устройства
массовой памяти, т. е. библиотеки, в которой будут храниться
огромные массивы информации.
Так как видеопластинка не имеет механического контакта с
головкой, то информационную дорожку можно защитить экра-
нирующим слоем так, что при этом качество считывания уже
не будет зависеть от отпечатков пальцев, пыли и грязи на по-
верхности видеопластинки. Механический износ пластинки в
процессе эксплуатации совершенно незначителен.
Глава 3
СВЯЗЬ УСТРОЙСТВ ОБРАБОТКИ
С ВНЕШНЕЙ СРЕДОЙ1)
3.1. Введение
Устройство обработки данных, которое не имеет удовлетво-
рительной связи с окружающей средой, не пригодно для приме-
нения. Если вычислительная машина используется, например,
для регулирования дорожного движения с помощью светофо-
ров, то она должна одновременно приводить в действие свето-
форы и принимать данные, которые поступают от приборов, ре-
гистрирующих процесс движения.
Осуществление связи с внешней средой является достаточно
сложным процессом, так как среда характеризуется собствен-
ным ритмом передачи информации и как следствие этого тре-
бует кодирования этой информации способами, отличными от
обычных.
Окружающая среда и устройство обработки данных пред-
ставляют собой единое целое, составные части которого исполь-
зуют различные способы представления информации. Как для
ввода, так и для вывода данных необходимы преобразователи,
обеспечивающие неискаженную передачу данных. В приведен-
ном примере с применением вычислительной машины для регу-
лирования дорожного движения необходимо преобразовать
логические ТТЛ-сигналы ЭВМ (0,4 или 3,5 В) в сигналы замы-
кания или размыкания цепи, в которой находится светофор.
В некоторых случаях последовательный двоичный код в те-
лефонном канале передачи данных необходимо преобразовы-
вать в параллельный двоичный код, обрабатываемый в ЭВМ.
Системы обработки данных используются для регулирова-
ния химических процессов, в частности при распределении тока
и газа, а также для управления станками и в качестве контор-
ской вычислительной техники. Эти устройства должны обеспе-
чивать прием или передачу данных, представленных в соответ-
ствующей форме для управления процессом.
В этой главе будут рассмотрены различные аспекты пробле-
Внешней средой в данной главе называются внешние приборы, от кото-
рых поступают данные на обработку (например, датчики), либо устройства,
принимающие обработанные данные (например, индикаторы, печатающие
устройства и т. д.). — Прим. ред.
___________Связь устройств обработки с внешней средой___207
мы обмена данными, но необходимо заметить, что мы не имеем
возможности дать здесь исчерпывающее изложение этих вопро-
сов. Мы будем исходить из того, что измерительные приборы в
общем случае вырабатывают аналоговый сигнал, амплитуда ко-
торого имеет определенную взаимосвязь с измеряемой величи-
ной. Причем такая зависимость между сигналом и измеряемой
величиной не всегда бывает линейной.
Если для управления исполнительными механизмами необ-
ходим аналоговый сигнал, то также устанавливается зависи-
мость между управляющим воздействием, выработанным в циф-
ровой форме, и аналоговым сигналом.
Система обработки данных может принимать и вырабаты-
вать только двоичные данные, а следовательно, для осуществле-
ния связи между системой и окружающей средой необходимо
использовать аналого-цифровой или цифро-аналоговый преоб-
разователь.
Один из методов, часто используемый как для приема, так
и для передачи данных, заключается в кодировании их значе-
ниями 0/1. При этом лишь определяется, является ли данная
величина активной или нет. Сказанное относится, например,
к сигналам управления газовыми или жидкостными вентилями
(«открыто-закрыто») и сообщениям о наличии газа или жид-
кости в трубе («да-нет»). Такой метод кодирования сообщений
легко реализуется с помощью цифровой системы, так как уров-
ни напряжений, соответствующие логическому 0 или 1, воспри-
нимаются ее входными цепями и формируются на ее выходах.
К устройствам, вырабатывающим необходимые логические
уровни напряжений, относятся микровыключатели, генераторы
Холла и оптические детекторы при условии обеспечения их до-
статочным количеством света. Если измерительные и считыва-
ющие устройства вырабатывают сигнал в другой форме, то его
предварительно нужно преобразовать в логический уровень на-
пряжения. Для этого сигнал подается на аналоговую схему
сравнения, имеющую гистерезис, и сравнивается с эталонным
напряжением. В зависимости от того, является ли аналоговое
напряжение выше или ниже эталонного напряжения, на выхо-
де схемы сравнения появится сигнал логического 0 или 1, кото-
рый подается непосредственно на вход цифровой системы. Схе-
ма сравнения должна иметь гистерезис, чтобы исключить неоп-
ределенность при уровне входного напряжения, равного эталон-
ному.
Электрическую цепь, подключенную к выходу цифровой си-
стемы, можно замыкать и размыкать сигналом 0 или 1 с ис-
пользованием различных симисторов или реле, которые приводят
в действие различные механизмы, например центробежный насос
или магнитные жидкостные вентили.
208
Глава 3
При соединениях входных и выходных приборов с системой
обработки данных предъявляются высокие требования к галь-
ванической развязке. Для иллюстрации этого воспользуемся
только что приведенным примером с центробежным насосом.
Этот насос питается от сети, и было бы катастрофой, если бы
напряжение питания попадало в систему, минуя развязывающую
цепь. В данном случае наилучшую развязку обеспечивают опто-
электронная связь, состоящая из светодиода и фототранзистора,
и кварцевые реле, благодаря которым тоже можно разделить
сильноточные и слаботочные цепи.
Кроме перечисленных проблем преобразования данных для
получения связи между цифровой системой и внешней средой
в этой книге уделяется также внимание связи через телефонные
в телеграфные каналы. Однако мы не будем рассматривать
проблемы связи вычислительной машины с такими периферий-
ными устройствами, как дисковая память, печатающие устрой-
ства, а также пульты управления. Мы будем, насколько возмож-
но, касаться этой проблемы в тех главах, где упоминаются пе-
риферийные устройства. Выражение «насколько возможно» при-
менено в связи с тем, что связь между некоторыми периферий-
ными устройствами и системой обработки данных часто бывает
настолько сложной, что требуется применение отдельной мик-
роЭВМ или схемы управления.
3.2. Чувствительные элементы и устройства управления —
схемы «1/0»
Как сказано во введении, чувствительные элементы, выра-
батывающие аналоговый сигнал, в комбинации со схемой срав-
нения могут давать на выходе логический 0 или 1 в зависимо-
сти от того, какое значение имеет измерительный сигнал —
больше или меньше эталонного напряжения. Такие чувствитель-
ные элементы можно использовать в сочетании с аналого-цифро-
вым преобразованием, если измеряемую величину нужно преоб-
разовать в двоичный код.
В настоящее время в промышленности вычислительные ма-
шины все чаще используются для управления производствен-
ными процессами. Вычислительная машина управляет процес-
сом в определенной последовательности, принимает решения,
контролирует систему автоматического регулирования и коррек-
тирует ее в случае необходимости.
Система регулирования должна обеспечивать управление
процессом в точном соответствии с поступающей информацией.
При этом регулирующее устройство контролирует отклонения
поступающей информации от допустимых пределов. Под «посту-
пающей информацией» мы подразумеваем данные, вводимые
Связь устройств обработки с внешней средой 20ffi
в систему регулирования извне. При появлении отклонения про-
изводится корректировка процесса с учетом допустимых пре-
делов.
Система регулирования состоит из регулирующего устройст-
ва и обратной связи. Вокруг нас имеются тысячи таких систем
регулирования, реализованных не только в виде регулирующей
аппаратуры, но и в самой природе.
По-видимому, понятие «система регулирования» целесооб-
разно более подробно объяснить с помощью практических при-
меров. Хорошим примером является регулирование температу-
ры в комнате при центральном отоплении. Требуемая темпера-
тура устанавливается по комнатным термометрам. Если комнат-
ная температура ниже установленной, то быстродействующий
выключатель на термостате замыкает электрическую цепь,
с помощью которой открывается газовый клапан и нагревается?
отопительный котел. Нагретая вода перекачивается в батареи,
и температура в комнате поднимается. Это продолжается до тех
пор, пока комнатный термометр не покажет, что достигнута тре-
буемая температура. В тот же момент быстродействующий
выключатель, управляемый биметаллическим температурным
датчиком, прекращает подачу газа, и огонь под котлом гаснет.
Комнатная температура постепенно снова понижается, пока не
упадет ниже установленного значения, после чего быстродейст-
вующий выключатель замыкается и газовое пламя загорается
вновь. Подобное регулирование температуры, как видим, реали-
зует все принципы действия системы регулирования. Процесс
регулирования представляет собой замкнутый цикл. Система
регулирования обеспечивает сохранение постоянства установлен-
ной температуры (в допустимых пределах).
Однако система регулирования может иметь второй регули-
рующий контур с обратной связью, которым может быть чело-
век, устанавливающий требуемое значение на термостате. Чело-
век подстраивает термостат, когда установленная комнатная
температура воспринимается как некомфортная. Какую темпе-
ратуру следует рассматривать как комфортную, в большой сте-
пени зависит от характера деятельности человека, оказываю-
щего существенное влияние на второй регулирующий контур,
в котором температурным датчиком является кожа человека,
а регулирующим органом — его рука, подстраивающая термо-
стат. Здесь следует обратить внимание на то, что род деятель-
ности человека (в которой предельными случаями являются
безделие и тяжелая физическая работа) смещает точку отсчета,
поэтому требуется подстройка.
Третий регулирующий контур, который следует назвать в свя-
зи с изложенным, включает контроль нагрева с помощью перво-
го и второго регулирующих контуров. Если первый регулирую-
14—807
210
Глава 3
щий контур (обогрев комнаты), а за ним и второй функциони-
руют неправильно, то требуется обратная связь непосредственно
с нагревательным котлом, т. е. очистка или ремонт котла.
При регулировании процесса отдельные регулирующие кон-
туры влияют друг на друга, в результате чего при их рассогла-
совании приходится принимать настолько сложные решения, что
становится необходимой вычислительная машина. Она осу-
ществляет контроль регулирующего контура и в случае необхо-
димости изменяет эталонные значения в контурах, если это воз-
можно в пределах диапазона регулирования; в противном слу-
чае возникает неисправность. Вычислительная машина может
также выполнить диагностику и, если потребуется, подключать
параллельный регулирующий контур, а неисправный — исклю-
чить из схемы. Последнее оказывается необходимым в том слу-
чае, когда неисправность приборов контроля оказывает ката-
строфическое влияние на управляемый процесс, например при
управлении процессом в ядерном реакторе.
Описанный регулирующий контур центрального отопления
относится к классу выключателей. Огонь нагревает котел в те-
чение определенного оптимального времени, затем он гасится,
а спустя некоторое время, когда температура в комнате опуска-
ется ниже установленного значения, огонь снова загорается.
Регулирование тепла можно проводить и по-другому, т. е.
вместо гашения и зажигания огня использовать подвод газа.
В данном случае процесс регулирования состоит в следующем:
при снижении температуры подводится большее количество
газа, при повышении температуры — меньшее. Но такой способ
регулирования является для центрального отопления слишком
сложным, а следовательно, и слишком дорогим. Кроме того, ре-
гулирование температуры методом «включено-выключено» по-
зволяет достаточно просто оставаться в допустимых пределах,
тем более, что система регулирования имеет большие постоян-
ные времени, сглаживающие колебания температуры. Это мож-
но сравнить со сглаживанием постоянного напряжения с по-
мощью сетевого выпрямителя и сглаживающего конденсатора.
Из сказанного выше следует, что при управлении процессом
с помощью отрицательной обратной связи используются эта-
лонные элементы, входящие в регулирующие контуры. Далее
мы установили, что применение регулирования по методу
«включено-выключено» во многих случаях позволяет получить
приемлемое управление процессом, особенно в тех случаях,
когда регулирующие контуры имеют большие постоянные
времени.
Относительно применения вычислительной машины в ходе
управления процессами необходимо сказать следующее. Обычно
машина, используемая как регулирующее устройство, обслужи-
Связь устройств обработки с внешней средой
211
вает несколько контуров одновременно и при переходе от одно-
го из них к другому обеспечивает подстройку контура с учетом
поступающих данных. Скорость обработки данных, обеспечи-
ваемая вычислительной машиной, весьма велика по сравнению
с постоянными времени, действующими внутри регулирующего
контура. Поэтому во взаимодействующих контурах не возникает
отрицательных последствий из-за подключения регулирующего
устройства.
Относительно постоянных времени в регулирующем контуре
следует также сказать, что они должны быть выбраны такими,
чтобы устранить нежелательные колебания, отрицательный и
положительный выбросы, предшествующие фронту сигнала. Для
регулирующих контуров подходят критерии стабильности Най-
квиста и Боде, а для оценки этих критериев требуется вычисли-
тельная машина, которая в данном регулирующем контуре иг-
рает активную роль. Интересно сравнить сказанное о регули-
рующем контуре с тем, что происходит в схеме стабилизатора
напряжения.
В данной схеме также имеется цепь отрицательной обратной
связи, которая поддерживает питающее напряжение постоян-
ным в очень узком диапазоне. Эталонным элементом является
диод Зенера (полупроводниковый стабилитрон). Здесь также
выходное напряжение изменяется при изменении эталонного.
При этом в случае несоблюдения соответствующих требований
источники питания могут стать нестабильными. Тогда регулиро-
вание становится инерционным и может компенсировать только
медленные изменения выходного напряжения. Для устранения
быстрых изменений к выходным клеммам источника питания
подключают сглаживающий конденсатор.
Для источников тока существуют два способа регулирования
(аналогично управлению процессом): аналоговый и цифровой.
В управлении процессом участвуют обычно многие входные
переменные, которые поступают с различных чувствительных
элементов. Благодаря инерционности процесса отпадает необхо-
димость постоянного определения того, какие именно измеряе-
мые величины имеются в этот момент. Используя систему сбо-
ра и обработки данных, можно по мере необходимости выбирать
тот или иной чувствительный элемент и по команде вычисли-
тельной машины с помощью аналого-цифрового преобразовате-
ля определить численное значение измеряемой величины на вы-
ходе датчика. Благодаря системе сбора и обработки данных
упрощается устройство сопряжения между вычислительной ма-
шиной или другими автоматическими устройствами управления
и различными чувствительными элементами измерительных
устройств. Если же требуется провести аналого-цифровое пре-
образование, то с помощью переключения каналов можно при
14*
212
Глава 3
необходимости выбрать определенный датчик и подключить его
к аналого-цифровому преобразователю. Тогда устройство со-
пряжения будет менее дорогостоящим.
3.3. Схемы устройств сопряжения для управления процессом
При разработке управляющих автоматов обычно много вре-
мени и средств требует разработка устройств сопряжения меж-
ду автоматами и чувствительными элементами или схемами уп-
равления регулируемым процессом. До недавних пор стоимость
этих схем часто в несколько раз превосходила затраты на вы-
числительную машину и программное обеспечение. Причина за-
ключается в том, что вычислительная машина стала предметом
широкого потребления, а схемы сопряжения выпускаются в ин-
дивидуальном исполнении, так как они предназначены для ре-
шения специфических проблем управления определенным про-
цессом. Таким образом, можно говорить о выпуске схем сопря-
жения в виде «заказных ИС» очень малыми партиями.
В связи с быстро возрастающими потребностями в выпуске
систем автоматического регулирования процессами в последние
годы существенно возрос спрос на устройства сопряжения, что
привело к появлению интегральных схем или модулей, пред-
назначенных специально для этих целей. В связи с этим следует
назвать аналого-цифровой и цифро-аналоговый преобразовате-
ли, твердотельные реле и элементы оптоэлектронной связи, ко-
торые служат для получения надежной развязки между цепями
со слабым и сильным током как по соображениям безопасно-
сти, так и для предотвращения поступления помех от регули-
рующих устройств к управляющим автоматам или вычислитель-
ной машине.
Устройства сопряжения отличаются схемами управления по
переменному и постоянному току, входными цепями, которые
с помощью оптоэлектронной связи переносят напряжение с из-
мерительных сопротивлений и измерительного трансформатора
сильноточных схем к слаботочным схемам (к вычислительной
машине), а также чувствительными элементами, регистрирую-
щими давление газа, температуру, степень влажности и т. д. и
имеющими такое низкое выходное напряжение, что его необхо-
димо усиливать перед передачей этих измеряемых величин.
На рис. 3.1—3.4 представлены перечисленные устройства. Что
касается твердотельных реле, то эти полупроводниковые сило-
вые выключатели обеспечивают возможность включения при пе-
реходе сетевого напряжения через нулевой уровень, что необ-
ходимо для предотвращения помех. Для подавления помех, вы-
званных переключением, к симистору подключен фильтр с эле-
ментами R и С для подавления или ослабления возможных пи-
Связь устройств обработки с внешней средой
213
Рис. 3.1, Управление цепью переменного тока с помощью логического сигнала.
Рис. 3.2, Управление цепью постоянного тока с помощью логического сигнала.
Рис, 3.3. Преобразование постоянного или переменного напряжения в логи-
ческий сигнал.
ков, возникающих при переключении и наличии индуктивной
нагрузки.
В случае когда измеренный сигнал должен быть преобразо-
ван в цифровой двоичный код, необходимо применение аналого-
цифрового преобразователя. Как уже упоминалось, аналого-
цифровое преобразование бывает длительным и может привести
к ошибкам в случае, если измеряемая величина кратковремен-
на. В этом случае требуется усилитель считывания с хранением
214
Глава 3
(Sample-and-hold-amplifier), который фиксирует аналоговое зна-
чение измеряемой величины в процессе считывания, что обеспе-
чивает возможность работы аналого-цифрового преобразовате-
ля. На рис. 3.5 показана схема устройства сопряжения с анало-
го-цифровым преобразователем. В этой схеме применяется си-
стема сбора и обработки данных; в ее составе имеется мульти-
плексор, входы которого в свою очередь выбираются при помо-
щи адресации мультиплексных адресных регистров. Адресация
выполняется с помощью автоматических устройств или вычис-
лительных машин, управляющих процессом.
Рис. 3.4. Преобразование аналоговой величины в напряжение, ток или
частоту.
После мультиплексора включен измерительный усилитель,
предназначенный для усиления сигнала, поступающего с выхода
мультиплексора, до такого уровня, который воспринимается уси-
лителем считывания с хранением. Этот усилитель отпирается
импульсом считывания и принимает сигнал, поступающий с вы-
хода измерительного усилителя.
В период между двумя импульсами считывания аналого-
цифровой преобразователь преобразует аналоговое значение
напряжения в двоичный код. Мы видим, что во время выбора
каналов осуществляется также и считывание. Усилитель счи-
тывания с хранением, фиксирующий аналоговое напряжение,
может принимать измеряемую аналоговую величину от выбран-
ного канала. Между чувствительными элементами и входами
аналоговых мультиплексоров находятся элементы оптоэлект-
ронной связи для обеспечения необходимой развязки между
схемами с сильным и слабым током.
Импульс считывания должен быть достаточно длительным,
чтобы усилитель считывания с хранением мог принимать ана-
логовую величину напряжения. Следует отметить, что схема
имеет общее время установки. Как показано на рис. 3.6, внут-
ренние сопротивления и монтажные емкости, обведенные на схе-
ме штриховой линией, образуют интегрирующую цепочку, пре-
Связь устройств обработки с внешней средой
215
пятствующую мгновенному подъему выходного напряжения до
требуемой величины. Период считывания должен немного пре-
вышать время установки, чтобы можно было фиксировать пра-
вильное значение напряжения. Период считывания должен быть
в 10 раз больше постоянной времени интегрирующей цепочки.
В аналоговом мультиплексоре в качестве аналоговых пере-
ключателей использованы полевые транзисторы. Величина внут-
усшноЬки
Рис. 3.5. Схема устройства сопряжения с аналого-цифровым преобразова-
телем.
реннего сопротивления /?вн этих переключателей (полевых тран-
зисторов) составляет порядка нескольких сотен ом. Показанный
на рис. 3.6 последовательный резистор при управлении от
операционного усилителя (ОУ) может иметь более низкое зна-
чение сопротивления, так как в этом случае требуется меньшее
усиление. При непосредственном управлении от фототранзисто-
ра как элемента оптоэлектронной связи величина Rs может до-
стигать нескольких десятков килоом.
На рис. 3.7 показан фрагмент схемы сбора и обработки дан-
ных. Переключатели на комплементарных полевых транзисто-
рах включаются логическим устройством, которое состоит из
декодирующей и управляющей схем. Каждый из 16 переключа-
телей может быть активизирован путем адресации цепей выбо-
ра каналов, так что передается только сигнал, появляющийся
на адресованном входе. Декодирующая схема имеет также вход
для возможного ступенчатого переключения нескольких анало-
216
Глава 3
Рис. 3.6. Внутренние сопротивления и монтажные емкости, образующие ин-
тегрирующую цепочку, которая препятствует мгновенному подъему напря*
жения на входе измерительного усилителя.
Рис. 3.7. Фрагмент схемы сбора данных.
говых переключателей каналов. Входы переключателя защище-
ны от статических напряжений диодами.
В настоящее время схемы сбора и обработки данных, вклю-
чая аналого-цифровой преобразователь и усилитель считывания
с хранением, располагаются на одном кристалле, в результате
чего существенно сокращается требуемое время установки схем.
3.4. Аналоговые схемы сравнения (компараторы)
Как было сказано в предыдущих главах, аналоговая схема
сравнения (компаратор) применяется для преобразования на-
пряжения измерительного сопротивления или чувствительного
Связь устройств обработки с внешней средой
217
элемента в сигнал с определенными логическими уровнями на-
пряжения (0/1) для управления ТТЛ-схемами. Примером та-
кой схемы является, например, устройство LM339A, показанное
на рис. 3.8, а, в виде схемы сравнения с гистерезисом. Гистере-
зис необходим, чтобы исключить влияние отклонений эталонно-
го уровня. Эти отклонения возникают при наличии около схемы
сравнения источников помех.
Рис. 3.8. Комбинация схемы сравнения (а) с элементом оптоэлектронной
связи и измерительным мостом (б).
Схема сравнения имеет дифференциальный вход, благодаря
которому ее особенно удобно использовать в качестве считы-
вающего элемента в мостовой схеме. На рис. 3.8, б показано со-
четание измерительного моста с компаратором. На потенциомет-
ре устаналивается пороговое или эталонное напряжение. В при-
веденном примере предполагается, что светодиод управляется
непосредственно напряжением на резисторе в цепи передачи
сигнала от светодиода к фототранзистору. Как только транзи-
стор мостовой схемы открывается, мост выходит из состояния
равновесия, а на выходе схемы сравнения, где поначалу был
высокий уровень (//), появляется низкий уровень (L).
В устройстве LM339A содержатся четыре такие схемы срав-
нения.
218
Глава 3
Аналоговый компаратор является основной схемой при пре-
образовании информации из аналоговой формы в цифровую,
поэтому он был рассмотрен здесь более подробно.
3.5. Аналого-цифровое преобразование
Принцип преобразования информации из аналоговой фор-
мы в цифровую (аналого-цифровое преобразование) очень про-
сто можно сравнить со взвешиванием на весах. Представьте
себе старые коромысловые весы, на одну чашу которых кладут
определенный груз неизвестного веса, а на другую ставятся
гири. Для определения веса необходимо выполнить следующее.
Берется определенное число гирь по 1 г каждая и поочередно
выставляется на весы. Гири ставятся до тех пор, пока весы не
придут в состояние равновесия. Число гирь соответствует весу
содержимого чаши в граммах.
Можно применить другой способ, в котором на чаше весов
устанавливают 20 или 50 гирь по 1 г и наблюдают, как реаги-
руют весы. Если перевешивает груз, то добавляют еще 10 таких
гирь. Если перевешивают гири, то их снимают с чаши до тех
пор, пока не установится равновесие. Безусловно, в данном слу-
чае удобнее вместо нескольких гирь по 1 г использовать гири
по 50 или 100 г.
Этот принцип часто используется на рынке. Если, например,
вы покупаете 1 кг яблок, то продавец прежде всего ставит на
тарелку гирю в 1 кг, а затем добавляет яблоки в чашу до тех
пор, пока не будет получен вес около 1кг. Затем он точно дози-
рует требуемый вес, добавляя или снимая одно-два яблока.
При анализе такого способа определения веса можно сделать
вывод, что продавец допускает ошибку в ущерб себе. Обычно
весы не бывают точно уравновешены, а это значит, что они
сильно отклоняются в другую сторону, когда в чаше лежит
лишнее яблоко.
В описанном примере с неизвестным весом товара, при кото-
ром весы должны приводиться в равновесие добавлением 1-грам-
мовых гирь, тоже возможна подобная ошибка. При взвешива-
нии в граммах трудно обеспечить точность до 1 г. При цифро-
вом определении аналоговой величины мы имеем дело с ошибкой
подобного рода. Эта ошибка называется ошибкой квантования.
Если бы в описанном примере мы производили взвешивание че-
рез каждые 10 г, то число добавлений гирь при взвешивании
уменьшилось бы в 10 раз, но при этом точность ухудшилась бы
также в 10 раз. Максимальная ошибка, которую мы можем до-
пустить, соответствует половине числа с наименьшим значени-
ем: при 1г — 0,5 г, а при 10 г — 5 г. При этом предполагается,
что весы уже с самого начала имеют погрешность 0,5 или 5 г
Связь устройств обработки с внешней средой
219
в положительную сторону, как видно из рис. 3.9. Штриховая ли-
ния соответствует идеальному определению веса при бесконеч-
ном числе долей грамма. Эта линия начинается в нулевой точке,
и для достижения минимальной погрешности при единице изме-
рения в 1 г весы перед взвешиванием устанавливаются на 0,5 г.
Преобразование аналоговой величины в цифровую построе-
но на принципе взвешивания. Механизм сравнения (определение
равновесия) в аналого-цифровых преобразователях (АЦП) по-
строен на аналоговой схеме сравнения, которая контролирует
Рис. 3.9. График, иллюстрирующий процесс взвешивания.
равенство двух величин напряжений. На один вход подается из-
меряемая величина, а на другой — ступенчато нарастающее на-
пряжение, подаваемое под контролем цифрового датчика. Сле-
довательно, этот процесс полностью соответствует принципу
взвешивания, согласно которому при подсчете, если необходимо,
на чаше весов устанавливается дополнительная гиря, а полу-
ченная информация регистрируется после уравновешивания
весов.
На рис. 3.10 представлена элементарная схема, в которой
используется описанный принцип взвешивания при аналого-
цифровом преобразовании.
В приведенном примере измеряемое напряжение имеет по-
стоянную величину, а эталонное напряжение — переменную,
вводимую в ступенчатой форме.
Специальный сигнал запускает стартстопную триггерную
схему, и формируется прямоугольный импульс для управления
генератором ступенчато нарастающего напряжения и двоич-
ным счетчиком. Этот генератор вырабатывает ступенчатое на-
пряжение, а счетчик начинает отсчет от нуля.
220
Глава 3
Рис. 3.10. Аналого-цифровое преобразование по методу взвешивания.
Когда ступенчатое напряжение сравняется с входным, что
зафиксирует компаратор, стартстопный триггер возвратится в
исходное состояние и поступление прямоугольных импульсов
заблокируется с помощью элемента И (N1). Понятно, что опре-
деление измеряемой величины длится достаточно долго, так
как ступенчатое напряжение вводится последовательно.
Для сокращения времени обработки схема модифицируется:
генератор ступенчатого напряжения заменяется цифро-аналого-
вым преобразователем (ЦАП), который управляется регистром
последовательных приближений, а цифровой счетчик может быть
исключен. Такой метод уже обсуждался. Для определения веса
груза сначала устанавливают самую тяжелую гирю, например
весом в 500 г, и следят за тем, как реагируют весы. Если пере-
вешивает гиря, то ее заменяют более легкой, например весом
в 250 г. Если перевешивает груз, то к гире 500 г добавляется
более легкая гиря — 250 г. Затем поступают следующим обра-
зом: если перевешивают гири, то гирю 250 г заменяют гирей
в 125 г. Если перевешивает груз, то на другую чашу добавляют
еще одну гирю весом в 125 г. и т. д. Таким образом, методом
последовательных приближений мы определяем правильный вес.
Связь устройств обработки с внешней средой
221
Схема, представленная на рис. 3.11, является электрическим
эквивалентом такого метода последовательных приближений.
Регистр последовательных приближений передает 1 из са-
мого старшего разряда (ССР) в ЦАП, и входной ток течет к
схеме сравнения, а от нее — через последовательный резистор
к источнику напряжения на аналоговом входе. Ток, текущий че-
рез резистор, и входное напряжение на аналоговом источнике
напряжения определяют знак напряжения на входе схемы срав*
Рис. 3.11. Аналого-цифровое преобразование по методу последовательны®
приближений.
нения. Если напряжение отрицательно, то преобладает ток ЦАП
и 1 в данном разряде не будет участвовать в формировании вы-
ходного кода. Схема сравнения передает полученный результат
в регистр последовательных приближений, который на основа-
нии этой информации передает 1 в ЦАП из разряда, следующе-
го за старшим. Если от схемы сравнения не поступает никакой
информации, то регистр передает в ЦАП содержимое старше-
го и следующего за ним разряда. Этот процесс продолжается?
до тех пор, пока не будут обработаны все разряды, а в регистре1
не появится цифровое значение аналоговой величины.
Метод аналого-цифрового преобразования, который наилуч-
шим образом реализуется при размещении АЦП на отдельном*
кристалле, показан на рис. 3.12.
Схема состоит из интегратора, за которым расположена схе-
ма сравнения. Эта схема сравнения с помощью логического вен-
тиля И управляет счетчиком, причем, как только счетчик;
222
Глава 3
Рис. 3.12. Расходометрический аналого-цифровой преобразователь.
а — схема; б — временная диаграмма.
устанавливает равенство входного напряжения нулю, поступле-
ние импульсов к нему прекращается. Кроме того, в схеме при-
сутствует управляющая логика, переключающая вход и отпи-
рающая счетчик в момент, когда можно проводить вычисление.
Для объяснения принципа действия рассмотрим временную диа-
грамму (рис. 3.12,6). Управляющая логика отпирает вход на
определенное время для прохождения аналогового входного сиг-
нала. При этом интегрирующий конденсатор С заряжается по
линейному закону. В зависимости от величины входного напря-
жения существуют три возможных варианта, что показано на
рис. 3.12, б для трех значений входного напряжения. Входное
напряжение определяет величину выходного напряжения инте-
гратора, достигаемую через период времени t\.
Затем управляющая логика переключает вход на эталонное
напряжение £7ЭТ, в результате чего конденсатор интегратора на-
Связь устройств обработки с внешней средой 223
чинает разряжаться также по линейному закону. Разряд продол-
жается до тех пор, пока не будет достигнут нулевой потенциал,
о чем сигнализирует схема сравнения. Из графиков отчетливо
видно, что трем значениям входных напряжений соответствуют
различные значения времени разряда конденсатора, которые
фиксируются двоичными счетчиками.
Поскольку постоянные времени заряда и разряда конденса-
тора в интеграторе равны между собой, то при равенстве вели-
чин входного и эталонного напряжений значения ti и t2 также
будут равны. Так как в данном случае речь идет о соотношении,
определяющем измеряемую величину, а именно о соотношении
параметров ti и /2, то данный тип АЦП точнее было бы назы-
вать расходометрическими АЦП. Такой тип АЦП применяется
в настоящее время в цифровых приборах измерения напря-
жения.
3.6. Цифро-аналоговое преобразование.
Связь преобразователей с микроЭВМ
Преобразование цифровой величины в аналоговую (циф-
ро-аналоговое преобразование) осуществляется достаточно про-
сто, если включить параллельно резисторы, сопротивления ко-
'^~дггг,пк Л-ТТ
Цисрродь/е Входы
Рис. 3.13. Принцип цифро-аналогового преобразования.
торых увеличиваются по закону 2"/? (п = 0,..., 3) и соответст-
вуют цифровым величинам, как показано на рис. 3.13. В зави-
симости от двоичной комбинации, поданной на входы, открыва-
ется один или несколько транзисторов, в результате чего за-
земляются соответствующие резисторы.
224
Глава 3
ССР CMP
s
Рис. 3.14. а — цифро-аналоговый преобразователь типа NE 5008 фирмы
Philips-Signetics; б — источники тока и монтажная схема со значениями на*
пряжений и токов.
Ток, протекающий через заземленные резисторы, создает на
общем выходном резисторе напряжение, величина которого со-
ответствует поступившей двоичной информации. Это напряже-
ние усиливается операционным усилителем (ОУ).
На практике отдельные резисторы заменяются источниками
тока, чтобы можно было поддерживать выходной ток в требуе-
мом диапазоне управления, как показано на рис. 3.14. На нем
Связь устройств обработки с внешней средой 225
представлен 8-разрядный быстродействующий умножающий
ЦАП типа NE5008 фирмы Signetics («умножающий» — так как
выходной ток является произведением поступающего двоичного
числа на эталонный входной ток.) Эталонное значение входного
тока лежит в пределах 0,1—0,4 мА. Выходной ток при отклоне-
нии на полную шкалу /п.ш = 255/256 X 1ЭТ.
Рассмотрим схему из 9 источников тока, 8 из которых под-
ключаются к выходу, где с помощью переключателей форми-
руется Лых. Кроме /Ьых имеется также выходной ток /вых, кото-
рый дает дополнение цифрового слова. Переключатели тока
управляются разрядами поступающего двоичного числа.
Токи транзисторных источников зависят от эталонных напря-
жений и значений сопротивлений, находящихся в эмиттерных
цепях источников тока.
На рис. 3.14,6 отдельно показана схема источника тока. Из
этой схемы следует, что каждый источник постоянно вырабаты-
вает ток, поступающий на выход, /Вых или 1ВЫХ. Для цифро-ана-
логового преобразования источники тока должны вырабатывать
такие токи, которые увеличиваются вдвое по отношению друг
к другу, т. е. если транзистор Т4 имеет ток //2, то транзисто-
ры ТЗ, Т2 и Т1 должны соответственно вырабатывать токи 1/,
2/ и 4/.
Если транзистор включить по схеме эмиттерного повторите-
ля, а на его базу подавать эталонное напряжение, то получится
источник тока. Протекающий при этом постоянный ток прибли-
зительно равен величине С/эт, деленной на величину эмиттерного
сопротивления.
Эталонное напряжение и эмиттерный повторитель имеют об-
щую опорную точку, обычно потенциал земли или —UB.
Если мы хотим, чтобы через эмиттерные сопротивления 2R
тек ток, величина которого возрастает в два раза, то необхо-
димо изменить напряжение в опорных точках отдельных источни-
ков тока в названном соотношении по отношению к £7ЭТ. В при-
веденном примере это означает, что напряжение должно иметь
величину: на эмиттерном сопротивлении 2R транзистора Т4 =
= 1В; на сопротивлении 2R транзистора ТЗ = 2В; на сопротив-
лении 2R транзистора Т2 = 4В и на сопротивлении 2R транзи-
стора Т1 = 8В. Для обеспечения этого в узловых точках D, С,
В и А должны быть напряжения £/эт = 1 В, [/Эт = 2В, [/ЭТ = 4В
и //ЭТ = 8В. Требуемые величины напряжений могут быть полу-
чены только при горизонтальном последовательном включении
сопротивлений величиной R. Через сопротивления текут токи /,
21 и 4/, величина которых задается соответствующим образом,
а произведение IXR показывает, что на сопротивлениях дейст-
вительно создана требуемая разность потенциалов. Однако при
этом необходимо подключить к схеме дополнительный источник
15—807
226
Глава 3
тока Т5, вырабатывающий ток 1/2. С помощью транзисторных
источников тока, в эмиттерные цепи которых включены сопро-
тивления R—2R, относительно просто получить требуемые токи.
Необходимые величины сопротивлений ограничиваются двумя
значениями, а именно R и 2R. Это особенно удобно при изготов-
лении ЦАП на одном кристалле.
Напряжение 17lc позволяет совместить вход данных с таки-
ми логическими схемами, как ТТЛ, ДТЛ, ВПЛ, КМОП, р-ка-
Рис. 3.15. Полная схема цифро-аналогового преобразователя типа NE 5008.
нальные МОП, ЭСЛ и логические схемы высокой помехоустой-
чивости. Более подробно эти вопросы будут рассмотрены в со-
ответствующих разделах. На рис. 3.15 приведена полная схема
описанного ЦАП с внешними компонентами для пояснения про-
цесса получения /Эт.
При управлении процессом, в котором участвует вычисли-
тельная машина, по команде вычислительной машины входные
аналоговые данные преобразуются в цифровые данные.
АЦП является в системе входным каскадом, а запрос осу-
ществляется с помощью соответствующей команды в программе
вычислительной машины, которая указывает адрес входной схе-
мы, в данном случае аналого-цифрового преобразователя.
После принятия команды АЦП определяет цифровое значе-
ние аналоговых величин напряжения в момент регистрации.
Когда получено цифровое значение напряжения, АЦП выдает
сигнал прерывания (INT), на который реагирует вычислитель-
ная машина. По этому сигналу полученная цифра вводится
в машину по шине данных в соответствии с подпрограммой
прерывания. Под шиной данных мы понимаем группу линий,
отведенных под информационные сигналы.
При выводе данных в аналоговой форме преобразователь,
в данном случае ЦАП, играет в системе роль выходного каска-
Связь устройств обработки с внешней средой
227
да. По команде вывода вычислительная машина выдает данные
в шину данных, а регистр должен принимать эти данные по
команде WRITE(WR(L)). Регистр управляет ЦАП, который
преобразует цифровую информацию в аналоговую величину на-
пряжения. Обычно во втором байте команды вывода указыва-
ется адрес выходного каскада, в данном случае регистр с ЦАП.
Для такого преобразования также необходима дополнительная
логика, чтобы можно было соединить соответствующий ЦАП
с системой.
В связи с возрастающим спросом на АЦП и ЦАП для си-
стем автоматизированного управления процессами с использо-
ванием вычислительных машин возникла потребность в инте-
гральных схемах, которые можно непосредственно соединять
с вычислительной машиной, не используя вспомогательную ло-
гику. Ряд фирм поставляет такие микросхемы. Если вначале
такие схемы стоили несколько сотен гульденов, то сегодня эти
преобразователи в интегральном исполнении стоят уже менее
10 гульденов.
На рис. 3.16 представлена схема включения аналого-цифро-
вого устройства ввода для микроЭВМ на базе микропроцессо-
ра 8080А. Устройство выбирается с помощью схемы сравнения
типа 8131. Как только адреса ADO...AD7 совпадут с набранной
двоичной комбинацией на выходах Т0...Т5, то по команде
CS(L) выбирается АЦП, а по команде IO/WR(L) начинается
преобразование. Команда IO/WR(L) появляется в тот момент,
когда во втором байте команды появится адрес устройства.
В процессе преобразования АЦП определяет цифровое зна-
чение аналогового сигнала на входных клеммах. Когда преобра-
зование заканчивается, выдается сигнал INT(H). Благодаря это-
му сигналу микроЭВМ сигнализирует о наличии и возможности
приема информации. В АЦП цифровая информация накаплива-
ется в регистре с тремя состояниями.
МикроЭВМ отвечает на прерывание переходом к подпро-
грамме, обеспечивающей прием информации по команде ввода
и ее обработку. По команде ввода активным становится сигнал
IO/RD(L) (считывание), причем во время приема второго бай-
та команды этот сигнал отпирает регистр с тремя состояниями
в АЦП, а информация поступает в шину данных и может быть
принята в регистр-аккумулятор А микропроцессора 8080.
АЦП типа ADCO801... ADCO804 фирмы National Semicon-
ductor работают по методу последовательных приближений.
Как показано выше, в соответствии с этим методом сначала оп-
ределяется значение самого старшего разряда (ССР), а затем
определяются остальные разряды. Каждому биту соответствует
8 импульсов, так что общая двоичная комбинация состоит из
8 бит и 64 импульсов. Тактовая частота определяется внешни-
15*
228
Глава 3
Рис. 3.16. Устройство сопряжения аналого-цифрового преобразователя (типа
ADC 0801 ... ADC 0804) с микропроцессором 8080А.
ми элементами и Ci и может быть определена по формуле
f= 1/1,1/?С.
Что касается ЦАП на выходе системы, то в номенклатуру
микросхем фирмы NS включен ряд типов ЦАП для непосредст-
венной связи с микроЭВМ, имеющих обозначения DAC1000...
...DAC1008. На рис. 3.17 показано, как этот преобразователь
соединяется с устройством сопряжения вычислительной ма-
шины. В данном случае речь идет об устройстве сопряжения
с преобразователем типа DAC1000.
В этом случае ЦАП рассматривается как выходной каскад
и снабжается данными по команде вывода. Во втором байте
команды определяется адрес ЦАП.
При поступлении второго байта команды адрес переносится
на адресную шину, и по команде IO/WR(L) информация запи-
сывается с шины данных во входной регистр ЦАП. В 10-битном
преобразователе дополнительная запись должна проводиться
в два этапа. Преобразователь рассматривается тогда как два
отдельных выходных устройства, выбор которых можно прове-
Связь устройств обработки с внешней средой
229
сти, например, с помощью младшего разряда адреса, как пока-
зано на рис. 3.17. Конечно, для заполнения двойного регистра
потребуется вторая команда вывода.
ЦАП имеет 8-разрядный входной регистр и 10-разрядный
ЦАП-регистр. ЦАП-регистр разделен на 8-разрядный входной
регистр и отдельный 2-разрядный регистр. Если управляющий
сигнал B1(H)/B2(L) (= байт1/байт2) является логической 1, то
8-разрядный ЦАП-регистр принимает 8 бит от входного регист-
Рис. 3.17. Устройство сопряжения цифро-аналогового преобразователя типа
ДАС 1600 с микропроцессором 8080А.
ра, а 2-разрядный ЦАП-регистр — два старших бита от входно-
го регистра. Это выполняется, когда адресный бит AD0 равен 1.
Когда сигнал B1(H)B2(L) имеет уровень, соответствующий
логическому 0, оба бита второго информационного слова, вы-
данного машиной, записываются в 2-разрядный ЦАП-регистр.
Когда поступает сигнал RJ(L) (выравнивать вправо),то 10-би-
товое информационное слово выравнивается вправо, а это в дан-
ном случае означает, что 8 самых младших разрядов (СМР)
в регистре заполняются битами первого информационного слова,
а в два самых старших разряда в ЦАП-регистре заносятся два
самых младших бита второго информационного слова. При вы-
полнении команды LJ(L) (выравнивать влево) два старших раз-
ряда второго информационного слова поступают в 2-разрядный
ЦАП-регистр и формируют в нем два самых младших разряда.
Прием данных от входного регистра в ЦАП-регистр осуществ-
ляется по команде XFER(L) (передача).
К выходу ЦАП подключен операционный усилитель (ОУ),
который преобразует изменение потока данных на выходе ЦАП
230
Глава 3
Рис. 3.18. Связь аналоговых схем сравнения, вырабатывающих измеритель-
ную информацию, с шиной данных микропроцессора.
в изменение напряжения. Требуемая обратная связь в операци-
онном усилителе возникает благодаря соединению его выхода
с внутренним сопротивлением связи (RFB) ЦАП. Это сопротив-
ление обеспечивает схеме оптимальную температурную ста-
бильность.
Если в процессе аналого-цифрового преобразования анало-
говый входной сигнал быстро изменяется, то обычно произво-
дится выборка входного сигнала в определенные моменты вре-
мени. Выбранная величина напряжения этого сигнала фиксиру-
ется в схеме хранения. В процессе аналого-цифрового преобра-
зования, который является достаточно продолжительным, на-
пряжение на входе АЦП остается постоянным. Считывание
сигнала может быть осуществлено в тот момент, когда преобра-
зователь запрашивается вычислительной машиной, т. е. по
команде WRITE. К усилителю считывания с хранением мы еще
вернемся в дальнейшем описании.
В тех устройствах передачи входных данных, у которых схе-
Связь устройств обработки с внешней средой
231
мы сравнения преобразуют аналоговую информацию в цифро-
вую, для соединения схемы с вычислительной машиной также
необходимо ввести дополнительную логику.
Для пояснения того, что требуется для осуществления связи,
на рис. 3.18 показано устройство ввода данных с подключен-
ными схемами сравнения, которые указывают равный, макси-
Улрабляющпя шина
1U/WML)
Рис. 3.19. Управление внешними приборами от выходного устройства вычис-
лительной машины.
мальный или минимальный уровень температуры, давления и
тока. Выходы схем сравнения соединены с регистром типа
73LS374, содержащим восемь D-триггеров, данные в кото-
рые вводятся при поступлении переднего фронта синхроимпуль-
сов Т. Выходы триггеров (Qn) соединяются с шиной данных че-
рез буферное устройство с тремя состояниями, которое также
находится в регистре типа 74LS374.
Если вычислительная машина принимает данные от датчи-
ков измеряемой величины, то должны быть поданы сигналы
WR(L) и CE(L), после чего D-триггеры принимают данные
с выходов схем сравнения. Теперь эти данные можно считывать
по команде ввода, которая содержится в программе, выполняе-
232 Глава 3
мой вычислительной машиной. При поступлении второго байта
команды ввода значения сигналов СЕ и RD становятся равны-
ми 0 и буферное устройство с тремя состояниями открывается
для передачи данных. При этом информация от D-триггеров
попадает на шину данных и считывается микроЭВМ.
При выводе двоичной информации для управления нагрева-
тельными элементами, насосами, магнитными вентилями и т. д.
данные выбираются из ЭВМ с помощью команды вывода. Дан-
ные, выдаваемые вычислительной машиной, находятся на шине
данных очень недолго, а именно лишь во время действия сиг-
нала IO/WR(L). Поэтому требуется записать их в регистр, что-
бы можно было достаточно продолжительное время распола-
гать данными для управления выходными устройствами.
На рис. 3.19 показана схема с выходными элементами, которые
управляются сигналами с выходов D-триггеров регистра. Здесь
используется регистр того же типа, что и в схеме на рис. 3.18.
При выполнении команды вывода активными во время по-
ступления второго байта являются сигналы CE(L) и IO/WR(L),
что ведет к считыванию сигналов с шины данных в D-триггеры.
Выходы D-триггеров через буферное устройство с тремя состоя-
ниями, соответствующий усилитель или полупроводниковое
реле подключаются к различным внешним приборам, которые
используются в зависимости от информации, содержащейся
в регистре. Полупроводниковые реле (ППР) и другие схемные
элементы мы более подробно рассмотрим в дальнейшем.
3.7. Ошибки аналого-цифрового и цифро-аналогового
преобразования
При преобразовании аналоговой измеряемой величины
в двоичное число возникает целый ряд вопросов, связанных
с разрешающей способностью, точностью, организацией считы-
вания и т. д. Если требуется применить указанный преобразо-
ватель, то необходимым условием является знание хотя бы не-
которых из перечисленных вопросов.
Точность АЦП обычно оценивается по величине разности
между действительным значением входного напряжения и его
двоичным эквивалентом на выходе преобразователя, которая
возникает из-за наличия различных видов ошибок. Обычно эта
величина задается, но более подробные сведения о том, из чего
состоят ошибки и насколько они велики, в формуляре данных
АЦП отсутствуют. Для тех случаев, которые связаны исключи-
тельно с применением этого вида схем, причины ошибок не так
важны до тех пор, пока схема удовлетворяет предъявляемым
к ней требованиям. Тем не менее в этом разделе мы рассмотрим
ряд причин, вызывающих ошибки, чтобы получить представле-
ние о проблемах этого преобразования.
Связь устройств обработки с внешней средой
233
На примере весов мы уже рассмотрели так называемую
ошибку квантования. Эта ошибка проявляется при цифровом
представлении аналоговой величины, так как точность опреде-
ления аналоговой величины ограничивается младшим разрядом
АЦП. Чем больше разрядность АЦП, тем меньше будет ошибка
квантования в его показаниях.
Рис. 3.20. Погрешность преобразования, возникающая в схеме при очень
большом или очень малом усилении.
Другой ошибкой, которая может встретиться при аналого-
цифровом преобразовании в интегральной схеме, является
ошибка усиления, которая возникает при неправильно выбран-
ном коэффициенте усиления, в результате чего, например, изме-
нение интегрального входного напряжения происходит слишком
резко или слишком плавно.
При слишком резком изменении напряжения цифровой счет-
чик работает слишком быстро, а при слишком плавном измене-
нии напряжения — слишком медленно. Это иллюстрируется на
рис. 3.20.
При применении операционных усилителей (ОУ) в схемах
преобразования также возникают специфические ошибки, свя-
занные с их использованием. Среди них следует назвать ошиб-
ку, возникающую из-за начального напряжения смещения ОУ,
234
Глава 3
которое вызывает сдвиг всей цифровой шкалы (рис. 3.21).
В аналоговых измерительных приборах также возникает сме-
щение такого типа, если измерительный прибор смонтирован
в неправильном положении. Тогда говорят, что стрелка измери-
тельного прибора не установлена на нуль. Кроме того, ошибка
может возникнуть, если схема сравнения в АЦП имеет гистере-
Рис. 3.21. Погрешность аналого-цифрового преобразования, возникающая
из-за начального смещения.
зис и точка переключения при повышении напряжения не соот-
ветствует точке переключения при понижении напряжения.
Ошибка в схеме сравнения рассматривается как внутренняя
и не зависит от внешних воздействий.
Кроме того, могут возникать нелинейности шкалы, что ведет
к появлению погрешности на выходе.
Например, малые по абсолютной величине относительные по-
грешности в ЦАП могут явиться причиной большой ошибки.
При определении постоянного тока ошибка в 1 % в самом млад-
шем двоичном разряде (LSB) не оказывает влияния, в то вре-
мя как эта погрешность в десятом бите (1024) вызывает по-
грешность, соответствующую 10 младшим битам. В результате
этого появляется опасность того, что, например, при переходе
от числа 1023 на входе к числу 1024 может произойти умень-
шение тока, на выходе, что совершенно недопустимо. По этой
причине изготовители следят за тем, чтобы при переходах та-
кого рода ток оставался постоянным, т. е. была бы обеспечена
монотонность его изменения. Под монотонностью в данном слу-
Связь устройств обработки с внешней средой
235
чае мы понимаем отсутствие на передаточной характеристике пре-
образователя участков с отрицательным наклоном. На рис. 3.22
представлена передаточная функция ЦАП, а также показана
нелинейность аналого-цифрового преобразования (штриховая
линия). Отклонения передаточной характеристики от линейно-
сти определяются относительно идеальной прямой. При этом
важно, чтобы было известно отношение возможного отклонения
к величине шага преобразования в соответствующей точке ха-
Рис. 3.22. Нелинейность аналого-цифрового преобразования.
рактеристики. Такой параметр называют дифференциальной не-
линейностью преобразователя.
Дифференциальная нелинейность не должна иметь отрица-
тельных значений, так как следствием этого является немоно-
тонность передаточной характеристики. Отрицательная диффе-
ренциальная нелинейность при цифро-аналоговом преобразова-
нии приводит к тому, что увеличение цифрового значения на
входе вызывает снижение аналоговой величины напряжения на
выходе. Это недопустимо в системе управления, так как вклю-
чение в цепь управления устройства с отрицательным накло-
ном передаточной характеристики превратило бы отрицатель-
ную обратную связь в положительную, что привело бы к не-
стабильности системы.
3.8. Измерительные усилители
Основой измерительного усилителя служит, как показано
на рис. 3.23, операционный усилитель (ОУ), при проектирова-
нии которого уделено повышенное внимание проблемам нели-
нейности, смещения и ослабления синфазного сигнала (CMR).
236
Глава 3
Этот усилитель применяется для того, чтобы преобразовать от-
носительно низкие значения измеряемых напряжений (1 мВ),
поступающих от приемных устройств в более высокие значения
для управления усилителем считывания с хранением.
Операционные усилители реагируют на разность напряже-
ния, имеющуюся между дифференциальными входами. Усили-
тель не реагирует, если на оба входа поступают сигналы с оди-
наковой полярностью и фазой (синфазные сигналы). Это осо-
бенно важно, поскольку между приемным устройством и усили-
Г рк Источник диттеренци-
I ^)D/JbHK0 Годного сигнала s'
1 Сигнал Измерительный
Q помехи усилитель
Выход (усиленное)
° дифференциальное
напряжение)
Рис. 3.23. Измерительный усилитель и входные напряжения.
телем обязательно имеются соединительные провода, на кото-
рых возникают помехи.
Индуцированная помеха имеет на обоих входных проводах
одинаковую величину и фазу, поэтому в усилителе с хорошим
подавлением синфазного сигнала она не приводит к появлению
ложного сигнала на выходе. Коэффициент ослабления синфазно-
го сигнала является важным параметром измерительных усили-
телей, который определяется по формуле
CMR = 201g(Ks/Kc),
где Кд — коэффициент усиления дифференциального напряже-
ния, Кс — коэффициент передачи синфазного напряжения. Ве-
личина CMR для измерительных усилителей лежит в пределах
70—120 дБ.
3.9. Усилители считывания с хранением
Преобразование аналоговой величины напряжения в двоич-
ное число занимает достаточно много времени, в течение кото-
рого поступивший аналоговый сигнал должен оставаться посто-
янным. Поэтому между измерительным усилителем и АЦП
включается усилитель считывания с хранением информации, ко-
торый сохраняет поступившее аналоговое значение напряжения
в течение того периода, когда идет его аналого-цифровое преоб-
разование.
В процессе считывания и хранения различаются два времен-
ных интервала: период считывания и период хранения. В пе-
риод считывания принимается поданный на вход уровень напря-
Связь устройств обработки с внешней средой
237
жения, который в период хранения остается постоянным. Схема
переходит в режим хранения напряжения при поступлении зад-
него фронта импульса считывания.
Время установления схемы определяется зарядом паразит-
ных емкостей и емкости хранения.
Усилитель считывания с хранением (рис. 3.24) состоит из
двух операционных усилителей, которые включены как повтори-
тели напряжения. Кроме того, схема содержит аналоговый
переключатель и емкость, используемую в качестве элемента
Рис. 3.24. Принципиальная схема усилителя считывания с хранением*
хранения. Повторители напряжения имеют высокий входной и
низкий выходной импеданс. Применение повторителей обеспечи-
вает:
а) быстрый заряд емкости хранения в период считывания
благодаря низкому выходному импедансу;
б) постоянное значение напряжения, считываемого с емкости
в период хранения, вследствие высокого входного импеданса по-
вторителя.
Высокий входной импеданс считывающего усилителя-повто-
рителя необходим, чтобы исключить разряд емкости в период
хранения, который приведет к непостоянству напряжения на
выходе усилителя.
На рис. 3.24 приведена принципиальная схема усилителя
считывания с хранением. На входе схемы находится операцион-
ный усилитель — повторитель напряжения, который ускоряет за-
ряд емкости хранения благодаря низкому выходному импедан-
су. Между выходом первого операционного усилителя и ем-
костью хранения включен аналоговый переключатель состояний
из двух комплементарных полевых транзисторов, режим работы
которых меняется в период считывания и хранения. Полевые
транзисторы открыты в период считывания, и емкость хранения
при этом заряжается напряжением с выхода первого операци-
онного усилителя.
238
Глава 3
Рис. 3.25. Временные диаграммы, иллюстрирующие работу усилителя считы-
вания с хранением.
После емкости хранения включен второй повторитель, кото-
рый, как уже указывалось, обеспечивает передачу напряжения
с емкости хранения на выход с незначительными изменениями.
На временной диаграмме (рис. 3.25) показано, что происходит
с входным сигналом в период считывания и хранения. Мы ви-
дим, что в период считывания выходное напряжение усилителя
повторяет входное напряжение, но имеются небольшие отклоне-
ния, вызванные неточностью передачи повторителей.
При подаче заднего фронта импульса выборки емкость хра-
нения отключается от входного повторителя с некоторым запаз-
дыванием. Поэтому изменения входного напряжения повторяют-
ся на емкости в течение некоторого периода времени. В резуль-
тате емкость имеет несколько более высокое значение напря-
жения.
В период хранения уровень напряжения на емкости несколь-
ко уменьшается. На графике это показано в преувеличенном
Связь устройств обработки с внешней средой 239
виде для большей ясности изложения. Уменьшение напряжения
объясняется тем, что происходит некоторый разряд емкости хра-
нения. В период хранения появляются также некоторые пере-
крестные помехи, так как закрытые переключатели на полевых
транзисторах имеют собственную проходную емкость, через ко-
торую передаются быстрые изменения входного напряжения
в этот период. После этого начинается новый период считыва-
ния. Таким образом, в действительности выходное напряжение
не точно повторяет входное напряжение, что связано с влияни-
ем емкости хранения и паразитных емкостей.
3.10. Преобразователь аналогового напряжения в частоту
В настоящее время используется метод аналого-частотного
преобразования, поскольку он характеризуется сравнительно не-
высокой чувствительностью к возникающим помехам. Измеряе-
мая аналоговая величина, поступающая от датчиков, мгновенно
Рис. 3.26. Преобразование аналогового напряжения в частоту (ПНЧ).
преобразуется в сигнал, частота которого связана с этой вели-
чиной определенным соотношением.
Через оптический элемент связи сигнал передается в слабо-
точную схему, где он с помощью двоичного счетчика преобразу-
ется в цифровое значение.
На рис. 3.26 представлена блок-схема, используемая при
частотном преобразовании.
240
Г лава 3
Установленные на входе измерительные усилители повышают
низкий уровень входных напряжений (мВ), поступающих от
чувствительных элементов до такого значения, которое необ-
ходимо для управления преобразователем напряжения в часто-
ту. После аналого-частотного преобразования с помощью муль-
типлексора выбирается нужный сигнал, поступающий на двоич-
ный счетчик, который преобразует частоту в цифровое значение.
Рис. 3.27. Реализация ПНЧ.
Одна часть периода выходного сигнала является постоянной, а другая изменяется в
зависимости от величины аналогового напряжения.
Преобразование частоты в цифровое значение осуществля-
ется следующим образом. После установки адреса соответст-
вующего канала подается сигнал начала преобразования, кото-
рый переключает триггер. В свою очередь триггер разрешает
подачу сигнала, проходящего через мультиплексор, на двоичный
счетчик для определения его частоты. Счетчик работает опре-
деленное время, в течение которого производится измерение
частоты. Чем выше частота сигнала, тем больше значение числа,
полученного на выходе счетчика.
Так как частота определяется величиной аналогового напря-
жения на входе, то полученное при измерении частоты цифро-
вое значение соответствует уровню входного напряжения.
На рис. 3.27 показано, как осуществляется преобразование
аналогового напряжения в частоту.
Связь устройств обработки с внешней средой
241
Интегратор с операционным усилителем на входе питается
от источника постоянного тока в течение определенного проме-
жутка времени. Этот промежуток времени регулируется одно-
вибратором. Затем происходит отключение источника тока и ин-
тегрирующий конденсатор разряжается до нуля. Время разряда
конденсатора зависит от величины аналогового напряжения на
входе. Чем выше это напряжение, тем быстрее разряжается кон-
денсатор. При этом одна часть периода сигнала определяется
одновибратором и является постоянной, а другая изменяется
Рис. 3.28. Другой тип преобразования, при котором для связи между ПНЧ
и цифровым счетчиком используется оптоэлектронный элемент.
в зависимости от величины напряжения на аналоговом входе.
Таким путем можно изменять частоту сигнала, на что реагиру-
ет двоичный счетчик, включенный как измеритель частоты. Ну-
левое показание при разряде интегрирующего конденсатора ре-
гистрируется схемой сравнения, которая запускает одновибра-
тор для получения следующего периода сигнала. Интегратор,
схема сравнения, одновибратор, источник тока и аналоговый
переключатель в совокупности образуют импульсный генератор,
частота которого регулируется с помощью аналогового входно-
го сигнала.
С выхода одновибратора снимается модулированный по час-
тоте сигнал. На рис. 3.28 показано, как выглядит простейшая
схема без мультиплексора, но с электрической развязкой меж-
ду первичной и вторичной цепями, которая осуществляется оп-
тоэлектронными элементами.
3.11. Линейная передача аналоговых данных
через нелинейный элемент оптоэлектронной связи
Передача сигнала через элемент оптоэлектронной связи,
содержащий светодиод, фотодиод или фототранзистор, является
нелинейной операцией из-за нелинейности передаточных харак-
теристик как светодиодов, так и фотодиодов и фототранзисто-
ров. Тем не менее передаточную характеристику можно линеа-
ризировать с помощью обратной связи, как показано на
рис. 3.29.
16—807
242
Глава 3
В данной схеме в качестве элемента связи используется
светодиод с двумя фотодиодами, расположенными на одном
кристалле. Фотодиоды освещаются светодиодом. Поскольку эти
фотодиоды изготовлены на одном кристалле, то они имеют оди-
наковую передаточную характеристику.
Один из фотодиодов включен во входную цепь управляемо-
го операционного усилителя и так изменяет передаточную функ-
цию операционного усилителя, что на выходе второго фотодио-
Оптрон
Рис. 3.29. Линейная передача аналоговых данных через нелинейный элемент
оптоэлектронной связи.
да появляется сигнал, который линейно зависит от напряжения
чувствительных элементов. Благодаря такому хитроумному ис-
пользованию обратной связи осуществляется линеаризация
передаточной функции элементов оптоэлектронной связи. Сиг-
нал от фотодиода усиливается операционным усилителем вто-
ричной цепи и после аналого-цифрового преобразователя посту-
пает на последующую обработку в систему сбора данных, со-
стоящую из мультиплексора и вспомогательных схем.
Требуемое напряжение питания для операционного усилите-
ля в первичной цепи поступает от генератора через трансфор-
матор. Данная схема осуществляет выпрямление, сглаживание
и стабилизацию, после чего напряжение питания подается на со-
ответствующие клеммы операционного усилителя.
3.12. Подавление синфазного сигнала
Уже неоднократно упоминалось, что требуемое подавление
синфазного сигнала между первичной и вторичной цепями мож-
но обеспечить благодаря применению оптоэлектронной связи.
Связь устройств обработки с внешней средой
243
Но до сих пор не рассматривалась возможность применения
на входах операционного усилителя емкостей связи. В опера-
ционном усилителе коэффициент усиления Ку определяется со-
противлением обратной связи RQQ (=Rt) между выходом и не-
инвертируемым входом, и сопротивлением 7?вх, включенным меж-
Rt
fyx 20к0м
Дифференци- 1---'
альиыи вход ।1 -у
2ОкОн
Рис. 3.30. Развязка входов операционного усилителя для подавления син-
фазных помех.
Рис. 3.31. Устройство гальванической развязки между первичной и вторичной
цепями.
ду этим входом и источником сигнала, т. е. Ky = ROc/RBx- Если
внутренним сопротивлением источника нельзя пренебречь, то при
определении усиления его следует прибавить к RBX.
В общем случае сопротивление, включенное между источни-
ком сигнала и входами операционного усилителя, совместно с
конденсатором образует фильтр низких частот для подавления
синфазных сигналов.
На рис. 3.30 представлена схема, в которой между диффе-
ренциальными входами установлен конденсатор емкостью
0,5 мкФ. Такой фильтр особенно эффективен против помех, воз-
никающих при переключении релейных контактов в сильноточ-
ных цепях системы управления процессом.
В системе сбора данных при переключении каналов должны
включаться оба входа, поэтому для выбора чувствительных эле-
ментов необходимо использовать сдвоенные переключатели ка-
налов. В настоящее время для развязки при переключении ка-
налов с помощью реле используется так называемый мульти-
16*
244
Глава 3
плексор с накопительными емкостями, принцип которого пока-
зан на рис. 3.31.
Переключающие контакты реле поочередно замыкаются и
размыкаются, поэтому система сбора данных никогда не быва-
ет непосредственно соединена с источником сигнала. Конденса-
тор работает как аналоговый накопитель.
Когда левые контакты замкнуты, конденсатор принимает из-
меряемую величину, а после замыкания правых контактов пере-
дает это значение в измерительный усилитель.
3.13. Мощные схемы
При контроле и управлении процессом с помощью автома-
тического устройства или вычислительной машины действуют
те же правила относительно электрической развязки при ослаб-
лении синфазных сигналов, что и для чувствительных элемен-
тов. Здесь также рекомендуется применение соответствующих
методов, которые обеспечивают необходимую развязку. Для этой
цели используются оптоэлектронные элементы связи и развязы-
вающие /?С-фильтры.
При преобразовании двоичной информации в аналоговую ве-
личину можно применить цифро-аналоговое преобразование, ко-
торое было рассмотрено выше. Затем полученный сигнал усили-
вается для управления светодиодом в элементе оптоэлектрон-
ной связи. Благодаря использованию элемента связи с двумя
идентичными фотодиодами, расположенными на одном кристал-
ле, и применению обратной связи здесь также обеспечивается
линеаризация передаточной характеристики, как в схеме на
рис. 3.29.
Сигнал, полученный вторичной цепью элемента оптоэлект-
ронной связи, можно затем усилить с помощью транзисторов
или интегральных схем для обеспечения возможности линейно-
го регулирования управляющего элемента.
При контроле и управлении процессом часто применяется
метод «включено-выключено», который рассмотрен в начале
этой главы на примере обогрева помещения.
Возможность применения метода «включено-выключено»
обусловлена большими постоянными времени большинства мощ-
ных схем. Большие постоянные времени прежде всего имеют
электродвигатели и гальванические нагревательные элементы.
Чтобы избежать перерегулирования в методике «включено-вы-
ключено», можно принять соответствующие меры. Например,
можно отключить несколько элементов, как только при регули-
ровании температуры достигается требуемое значение. Кроме
того, ток нагревательного элемента можно уменьшить с помощью
фазовой отсечки при управлении отсимисторов. Отключение ряда
Связь устройств обработки с внешней средой 245
нагревательных элементов является реализацией метода «вклю-
чено-выключено», а фазовую отсечку можно рассматривать как
аналоговое регулирование.
Элементы схем при регулировании методом «включено-вы-
ключено» обычно потребляют меньшую мощность по сравнению
с аналоговыми усилителями, используемыми при аналоговом
регулировании. При аналоговом регулировании с фазовой от-
сечкой в принципе также потребляется меньшая мощность, так
как управление симистором или тиристором осуществляется не
непрерывно, а с частотой 100 Гц. Следовательно, речь идет об
импульсном, или прерывистом, регулировании.
3.14. Электромагнитные и полупроводниковые реле в качестве
регулирующих элементов по методу «включено-выключено»
Ранее регулирование методом «включено-выключено» осу-
ществлялось лишь с использованием электромагнитных реле
(ЭМР), поскольку в то время еще не были известны полупро-
водниковые реле (ППР).
Рис. 3.32. Электромагнитное реле (ЭМР).
а — общий вид; б — компоновка с указанием максимальных размеров (в мм).
ЭМР состоит из набора контактов, замыкание которых обес-
печивает протекание тока через обмотку. Ток в обмотке созда-
ет магнитное поле, которое притягивает якорь, а этот якорь при-
водит в действие контактные язычки, на которых находятся пе-
реключающие контакты реле.
Переключающим контактам уделяется особое внимание, так
как они обеспечивают качество соединения. Покрытие контак-
тов зависит от их применения. Если они используются при ма-
лых токах, например, в логических схемах, то необходимо золо-
тое покрытие. При работе в слаботочных схемах обычно исполь-
246
Глава 3
зуются посеребренные контакты, в то время как при работе
с сильным током предпочтение отдается платиновым контактам.
Конструкция реле представлена на рис. 3.32.
Существуют сотни типов ЭМР для коммутации токов разной
величины. ЭМР имеют одну или несколько пар контактов для
включения в цепи с различной развязкой. Чем проще осуществ-
ляется переключение от одного контакта к другому, тем легче
Рис. 3.33. Полупроводниковые
реле (ППР).
Снаружи к выходам 1 и 2 подклю-
чена RC-цепь, используемая для
согласования нагрузки.
изготовить реле. В данном случае речь идет о двухполюсном
реле.
Полупроводниковые реле (ППР) состоят из двух встречно-
параллельно включенных тиристоров с управляющей схемой
(рис. 3.33).
Для получения электрической развязки между первичной и
вторичной цепями на входе полупроводникового реле предусмот-
рен элемент оптоэлектронной связи, а для работы переключаю-
щего элемента при переходе через нулевой уровень подводимо-
го переменного напряжения используются другие особенности
схемы. ППР является типичным переключателем переменного
тока и неприменимо для переключения постоянного тока. Эле-
мент отключается тогда, когда отключается вентильное управ-
ление, а ток опускается ниже уровня, требуемого для удержа-
ния реле. Поскольку отключение происходит при уменьшении
тока ниже уровня удержания, это может иногда вызывать слож-
ности при отключении нагрузки с большой индуктивной состав-
ляющей.
Особенностью таких нагрузок является то, что они задержи-
вают ток в индуктивности, что замедляет отключение симистора
или тиристора. В следующей фазе при задержке перехода тока
через ноль в индуктивной нагрузке на переменное напряжение
накладывается напряжение, обусловленное влиянием dfZ/d/,
Связь устройств обработки с внешней средой 247
и реле вновь замыкается через внутренние паразитные емкости.
Следовательно, ППР не отключаются. На профессиональном
языке это называется «залипанием».
3.15. Преимущества и недостатки ЭМР и ППР
Как ЭМР, так и ППР имеют характерные преимущества и
недостатки. Часто ЭМР оказываются непригодными для приме-
нения, но в некоторых случаях они считаются идеальными. То
же самое можно сказать и о ППР.
В механизмах, подвергаемых сильным ударам и вибрациям,
ЭМР может неожиданно замкнуть цепь тока. К замыканию
и размыканию контактов реле может приводить также и сильное
магнитное поле. В этих случаях более пригодными являются
ППР.
Преимуществом ЭМР является очень низкое переходное со-
противление между контактами, поэтому контакты легко пере-
носят кратковременные перегрузки. Такие перегрузки могут
возникать, например, при включении двигателей или ламп нака-
ливания. В электродвигателе противоэлектродвижущая сила,
вырабатываемая вращающимся ротором, в момент включения
еще не действует, поэтому ток может в 10 или 20 раз превышать
номинальное значение. Этот пусковой ток будет существовать
всего несколько секунд, и его должен выдерживать элемент
схемы, не допуская превышения рассеяния энергии в месте кон-
такта.
В лампе накаливания сопротивление нити накала в холодном
состоянии во много раз ниже, чем в нагретом состоянии. Здесь
также имеет место ток включения, в несколько раз превышаю-
щий номинальное значение, что также может иметь значение
для переключающего элемента.
Допустимый ток включения играет в ППР главную роль.
Однако большое значение для определения допустимого рассея-
ния имеет не только величина этого тока, но и продолжитель-
ность его действия. Поэтому для ППР часто задают значение
I2t, превышение которого приводит к выходу реле из строя.
ППР в противоположность ЭМР неустойчивы также к кратко-
временным перегрузкам. В ЭМР перегрузка в худшем случае
может вызвать сваривание контактов друг с другом, но это по-
правимо, хотя, конечно, контакты от этого не становятся лучше.
В большинстве сильноточных реле в принципе можно заме-
нять контакты и обмотку, поэтому замена всего реле необяза-
тельна. При этом мы имеем в виду так называемые магнитные
переключатели. А в ППР ошибка функционирования ведет
к полной его непригодности.
ЭМР применимы при экстремальных значениях температу-
ры, от низких отрицательных до высоких положительных значе-
248
Глава 3
ний (возникающих, например, вблизи нагревательной печи). Па-
раметры ППР при экстремальных температурах могут оказать-
ся такими, что становятся неприменимыми. Ток утечки и чувст-
вительность симисторов и тиристоров зависят прежде всего от
температуры полупроводникового слоя, а следовательно, и от
температуры окружающей среды.
Следует также отметить, что ЭМР имеют более низкое пере-
ходное сопротивление между контактами, а следовательно, мень-
шее рассеяние на контактных переходах. Для ППР падение на-
пряжения на включенном элементе имеет величину порядка 1 В,
а это означает, что при значительных номинальных токах нельзя
пренебречь рассеиваемой на них мощностью. Поэтому часто та-
кие ППР монтируются с теплоотводом, что увеличивает их га-
бариты. В противоположность ППР охлаждение для ЭМР обыч-
но не требуется.
Однако ППР являются бесконтактными, а следовательно,
безыскровыми переключателями, что нельзя сказать об ЭМР.
Кроме того, в ППР отсутствуют шумы от якоря и контактов.
В них переключение обычно осуществляется бесшумно. Лишь
иногда при быстром переключении улавливается интерференци-
онный свист, что приводит к магнитострикции в полупроводни-
ковых соединениях. ППР, как и биполярные транзисторы, име-
ют плохую стойкость к излучениям. Поэтому в радиоактивной
среде предпочтительнее использовать ЭМР. Этому можно про-
тивопоставить такой недостаток ЭМР, как значительно меньший
срок службы по сравнению с ППР. Однако именно срок служ-
бы играет существенную роль в тех средах, где затруднена за-
мена элементов, например, из-за опасности излучения. Из всего
сказанного следует, что ЭМР, как и ППР, имеют специальные
области применения.
ППР открыли путь к таким областям применения, которым
раньше даже не имелось альтернатив. Хотя в некоторых обла-
стях ЭМР больше не применяются, однако при разработке но-
вой контрольно-измерительной аппаратуры, например, для регу-
лирования процессов в ядерных реакторах, опять появляются
области, в которых используется исключительно этот переклю-
чающий элемент. Что касается вопросов стоимости, то можно
сказать, что в настоящее время ЭМР и ППР стоят одинаково
дорого, особенно в тех случаях, когда переключаются токи ве-
личиной до 10 А.
Стоимость ЭМР, вероятно, больше снижаться не будет,
а ППР будут становиться дешевле, так как производство этих
полупроводниковых элементов в отличие от ЭМР не является
трудоемким.
ЭМР управляется благодаря подаче в обмотку достаточно^
сильного тока. При управлении реле с тяжелыми контактами
Связь устройств обработки с внешней средой 249
требуется большая энергия для получения контактного давле-
ния, необходимого для хорошего соединения. Поэтому для пере-
ключения ЭМР требуется гораздо большая энергия, чем для
ППР. Часто ППР непосредственно управляются логическими
схемами типа ТТЛ и КМОП, в то время как для ЭМР в боль-
шинстве случаев необходим дополнительный усилитель.
В начале этого раздела в качестве недостатка ЭМР указы-
валась невозможность применения их в приборах, подвергаемых
сильным ударам или воздействиям магнитных полей.
В ППР возникает пиковая помеха в цепи переменного напря-
жения или в монтажных проводах, которая ведет к нежелатель-
ным коммутационным процессам. Другими свойствами ППР,
которые также следует отнести к их недостаткам, являются эф-
фекты теплового пробоя, прямого смещения и эффект dU/dt^,
вызывающие непредвиденное включение в произвольный момент
времени.
В процессе теплового пробоя при увеличении тока утечки
и повышении температуры полупроводникового слоя происходит
замыкание ППР. Ток утечки уменьшает пороговое значение на-
пряжения на входе переключающего элемента, в результате
чего увеличивается чувствительность к помехам. При дальней-
шем увеличении токов утечки отпираются некоторые элементы,
входящие в состав ППР, которое оказывается постоянно замк-
нутым.
Эффект прямого смещения возникает, когда ППР работает
при пиковом напряжении, которое может поступать от другого
реле и наложиться на переменное сетевое напряжение. Если эти
пики поступают регулярно, например, в течение одной фазы пе-
ременного напряжения, то ППР остается замкнутым. Во многих
случаях этот недостаток можно устранить, если применить со-
ответствующую фильтрацию. Как мы уже упоминали, влияние
эффекта dU/dt приводит к внезапному изменению на-
пряжения на нагрузке, которое может вызвать сгорание эле-
ментов ППР. Это явление возникает при нагрузках с относи-
тельно большими индуктивными составляющими в тот момент,
когда не происходит требуемого отключения нагрузки.
3.16. Устранение самопроизвольного включения ППР
Самопроизвольное включение, которое происходит под дей-
ствием помех, вызывает внезапное изменение напряжения или
тока. Такое включение ППР часто происходит в произвольный
момент времени без видимых причин.
в Эффектом d(7/d/ называется самопроизвольное включение тиристора
при быстром изменении напряжения. — Прим. ред.
250
Глава 3
При подключении омической нагрузки к помехозащищенной
сети переменного напряжения обычно не возникает проблем.
Однако, к сожалению, помехозащищенных сетей практически не
существует, так же как и полностью омических сопротивлений.
Поэтому в схемы, содержащие ППР, включаются развязываю-
щие фильтры. Кроме того, в схемах ППР используются встреч-
Вариетир ющий фильтр Демпфер
Зенера
Симистор
С t
Развязывающий фильтр
I--------1
----1---1 J
[
R1
Рис. 3.34. Помехи, возникающие в схеме с ППР (а), и некоторые методы их
подавления (б).
но-параллельно включенные диоды Зенера, варисторы (сопро-
тивления которых зависят от напряжения), селеновые диоды
и демпфирующие цепи.
Все эти элементы служат для подавления помех, появляю-
щихся при самопроизвольном включении, т. е. для ограничения
возникающих пиков напряжения. На рис. 3.34 показан процесс
подавления помех при самопроизвольном включении, возни-
кающем в схеме с ППР в качестве переключающего элемента.
В сети переменного напряжения самопроизвольному включению
соответствует полное сопротивление, состоящее из индуктивно-
го и емкостного сопротивления проводов (рис. 3.34). Последова-
тельно с полным сопротивлением включена нагрузка ППР.
Понятно, что эффективное предотвращение самопроизвольно-
го включения может быть получено только в том случае, когда
Связь устройств обработки с внешней средой 251
в ППР включен 7?С-фильтр, позволяющий путем сглаживания
напряжения избежать этого явления. В качестве устройств, пре-
пятствующих самовключению, применяют либо линейную схему,
либо такие нелинейные элементы, как диоды Зенера, металло-
окисные варисторы (МОВ) или демпферы.
При превышении переменным напряжением максимального
значения У2Х£Лфф нелинейные элементы обычно сразу отклю-
чаются. Демпфером, как правило, служит /?С-фильтр со сме-
щением. Требуемая величина смещения получается выпрямле-
нием напряжения с использованием диодного моста, при этом
переменное напряжение на конденсаторе достигает максималь-
ного значения. Конденсатор не повторяет изменения переменно-
го напряжения, так как мост не работает при обратном на-
пряжении. В каждый период конденсатор разряжается через
мост, поскольку к нему подключен резистор 7?2.
Если произошло самовключение выключенного ППР и на-
ложение переменного напряжения, то при величине переменного
напряжения, приблизительно равной максимальному значению,
это явление устраняется отключением от конденсатора через
мостовой выпрямитель. Емкость конденсатора должна быть до-
статочно большой, чтобы локализовать этот процесс без сущест-
венного увеличения напряжения на конденсаторе.
3.17. Явления, возникающие при замыкании
и размыкании электрической цепи
Интересно подробнее рассмотреть явления, которые могут
возникать при замыкании и размыкании электрической цепи,
например, с помощью электромагнитного реле при омической,
емкостной или индуктивной нагрузке.
При чисто омической нагрузке не возникает никаких про-
блем. При включении ток достигает своего номинального зна-
чения, а при выключении ток без побочных явлений вновь сни-
жается до нуля. Если нагрузкой является нелинейное сопротив-
ление, например лампа накаливания, то иногда ток включения
в 15 раз превосходит номинальное значение, как показано на
рис. 3.35. При отключении лампы ток снижается до нуля.
При емкостных нагрузках в момент включения временно
возникает короткое замыкание и ток ограничивается только
оставшимся омическим сопротивлением электрической сети.
При больших значениях емкости ток короткого замыкания
может сварить друг с другом контакты ЭМР, а ППР полностью
выходит из строя, как только происходит превышение величи-
ны l2t. Следствием тока короткого замыкания является само-
произвольное включение в сеть переменного напряжения, что
252
Глава 3
может привести к спонтанному включению других переключаю-
щих элементов схемы.
При отключении емкостных нагрузок как для ЭМР, так и
для ППР не возникает никаких проблем. Емкостные нагрузки
используются в случае длинных питающих проводов, в фильт-
рах выпрямителей сетевого напряжения (сетевых фильтрах)
для подавления помех от внешней сети переменного напряже-
Рис. 3.35. Явления, возникающие при замыкании и размыкании электриче-
ской цепи с различной нагрузкой.
а — лампа накаливания; б — емкостная нагрузка; в — электродвигатель.
ния, в низковольтных источниках питания со сглаживающими
конденсаторами и в большинстве типов электродвигателей.
При включении индуктивных нагрузок ток ограничивается
полным сопротивлением катушки индуктивности. Следователь-
но, включение не вызывает сложностей. При выключении осво-
бождается накопленная в катушке индуктивности энергия, ко-
торая создает на нагрузочном элементе напряжение такой по-
лярности, что сохраняется начальный ток схемы. Освободив-
шаяся энергия вызывает при размыкании контактов реле искре-
ние, которое приводит к обгоранию этих контактов.
Обгорание контактов гораздо сильнее при постоянном на-
пряжении, чем переменном, так как постоянное напряжение дей-
ствует непрерывно. Часто возникает электрическая дуга, кото-
рая переносит материал одного контакта на другой. На одном
контакте появляется отверстие, металл из которого осаждается
на другом контакте. Направление переноса материала зависит
от полярности приложенного к контактам напряжения.
Связь устройств обработки с внешней средой
253
Для предотвращения обгорания к контактам следует под-
ключить буферную схему, чтобы энергия отводилась конденса-
тором. Однако это может вызвать сложности при включении,
поэтому последовательно с конденсатором включается резистор.
Конденсатор, резистор и катушка индуктивности выбирают-
ся таким образом, чтобы получился апериодический колебатель-
ный контур. Тогда можно использовать постоянный ток. При
переменных токах буферная схема может вызвать нежелатель-
ное появление тока в нагрузке. При переменных напряжениях
действуют иные критерии, хотя в данном случае не так важны
емкость конденсатора и сопротивление резистора. Многие изго-
товители включают буферную цепь в схему ППР, ссылаясь на
то, что это реле необходимо применять в разнообразных целях.
Любопытной нагрузкой является электродвигатель. Если он
имеет хотя бы небольшую индуктивную составляющую, то при
включении возникает сильный пусковой ток, поскольку враще-
ние еще не началось и ротор не вырабатывает противоЭДС,
ограничивающую ток. У тяжелых двигателей пусковой ток мо-
жет также привести к сильному обгоранию контактов. При уве-
личении числа оборотов увеличивается и противоЭДС, которая
обеспечивает постепенное снижение пускового тока до номи-
нального значения. Для ППР длительное воздействие большого
пускового тока электродвигателя обычно означает выход из
строя.
3.18. Включение ППР в нулевой точке
переменного напряжения
Мы уже говорили о том, что внутренняя схема ППР слу-
жит для того, чтобы обеспечивать включение симистора в нуле-
вой точке переменного напряжения при управлении по входу.
Это способствует уменьшению тока включения при емкостных
Наихцдшии случаи’ при
Включении б
нулевой точке
t
Рис. 3.36. Включение ППР.
а —в произвольный момент времени; б — в нулевой точке синусоидального напряжения.
нагрузках, лампах накаливания и т. д., что позволяет избежать
помех, вызванных внезапным включением. Однако включение
в нулевой точке не решает проблем, связанных с отключением
нагрузок, особенно индуктивных.
254
Глава 3
На рис. 3.36 показано, что происходит, если включить ППР
в произвольный момент времени. Ток с крутым фронтом, опре-
деляемым отношением С7М0М/^ь, вызывает появление помехи
в цепи переменного напряжения. Появляется провал напряже-
ния, а поскольку монтаж не является безындукционным, то вы-
брос тока создает пик напряжения, который может вызвать от-
пирание других элементов, как было показано ранее.
Напряжение на ППР схемы
Сетевое напряжение
Тик нагрузки j
Отключение
внутренние паразитные
емкости
при отключении величи-
на dU/dt ниидольшия
Симистор
Управляющий электрод
Рис. 3.37. Явления, возникающие при отключении симистора с индуктивной
нагрузкой.
Рис. 3.38. Полупроводниковые реле различных фирм-изготовителей.
Более благоприятным является тот случай, когда включение
действительно осуществляется в нулевой точке, как показано на
рис. 3.36 ,б. С учетом допусков точка включения находится в
пределах =F20 В, т. е. при сетевом напряжении 220 В напряже-
ние в точке включения не превышает 6,5% амплитудного значе-
ния и не вызывает особенных неприятностей.
Связь устройств обработки с внешней средой
255
На рис. 3.37 показано изменение тока и напряжения при
включении индуктивной нагрузки. Ток отстает по фазе от на-
пряжения, поэтому при выключении ток позже достигает нуле-
вой точки. Во время отрицательного периода переменного на-
пряжения ток в катушке индуктивности прерывается, что при-
водит к появлению наведенной ЭДС, которая накладывается на
отрицательный период переменного напряжения. Если сразу не
принять соответствующих мер, то эта ЭДС может опять вызвать
включение симистора через внутренние паразитные емкости.
На рис. 3.38 представлены ППР различных фирм-изготови-
телей.
3.19. Времяимпульсное регулирование
переменного тока
Как следует из сказанного выше, регулирование методом
«включено-выключено» с использованием ППР используется
только при управлении процессом. Пропорциональное регули-
рование с помощью симисторов и тиристоров возможно как ме-
тодом фазовой отсечки, так и методом «включено-выключено»;
при этом для управления мощностью нагрузки используется оп-
ределенное количество периодов переменного напряжения. Та-
кое управление называется времяимпульсным.
В этом случае (рис. 3.39) включение происходит в нулевой
точке и в зависимости от аналогового значения входного напря-
Рис. 3.39. Пропускание определенного количества периодов переменного на-
пряжения при пропорциональном управлении.
жения пропускается определенное число периодов. В результа-
те включения нагрузки в нулевой точке исключаются такие
проблемы, как возникновение пускового тока и связанные с ним
причины появления помех. Но при выключении, особенно при
индуктивных нагрузках, остается риск появления пиков напря-
жения, если не будут приняты соответствующие меры, о кото-
рых уже было сказано. Пропускание определенного количества
периодов для управления мощностью нагрузки непригодно
в случае использования электродвигателя и приводит в данном
256
Глава 3
случае к таким явлениям, как неравномерное вращение и уве-
личение рассеиваемой мощности. Напротив, такое регулирова-
ние прекрасно подходит, например, для управления нагрева-
тельными печами, иначе говоря, для нагрузок с относительно
большими постоянными времени. Безусловно, при таком регу-
лировании может быть также использовано и ППР, но для это-
го требуется дополнительная логика, в частности генератор
развертки и схема сравнения, которые в наиболее распростра-
ненных интегральных схемах выполняются на одном кристалле.
Сказанное справедливо также и для метода фазовой отсечки,
Рис. 3.40. Принцип фазовой отсечки.
который используется для управления коллекторными (синхрон-
ными) электродвигателями, например, в бормашинах. При этом
для обеспечения правильного регулирования, которое не зависит
от скорости вращения двигателя, требуется обратная связь, так
как при малом числе оборотов сила на валу настолько мала,
что при уменьшении нагрузки на вал количество оборотов сразу
снижается.
При фазовой отсечке регулирование мощности осуществля-
ется благодаря тому, что для управления нагрузкой использу-
ется лишь часть положительной и отрицательной фазы перемен-
ного напряжения. Принцип фазовой отсечки показан на рис. 3.40.
Мы видим, что фазы переменного напряжения в зависимости от
мощности, которую мы хотим обеспечить, отсекаются в соответ-
ствующий момент времени. В результате в конце данной фазы
происходит автоматическое отключение, если ток нагрузки опу-
скается ниже величины тока выключения симистора или тири-
стора. Чем больше площадь заштрихованного участка токовой
кривой, тем больше подводимая мощность.
Вследствие крутого фронта тока метод фазовой отсечки вы-
зывает электромагнитную интерференцию, которая приводит
к появлению радио- и телепомех, если не ввести фильтры для
их подавления. При регулировании методом пропускания опре-
деленного числа периодов переменного напряжения использу-
ются также интегральные микросхемы, которые преобразуют
аналоговое входное напряжение в пропорциональное значение
частоты. Кроме того, схемы следят за тем, чтобы включение
Связь устройств обработки с внешней средой
257
происходило именно в нулевой точке. Такие интегральные мик-
росхемы поставляет фирма Philips под типовым обозначением
TDA 1023. Ее блок-схема представлена на рис. 3.41.
В описываемом примере речь идет о регулировании темпе-
ратуры, так как мы видим, что на входе микросхемы включен
резистор с отрицательным температурным коэффициентом, ко-
торый соединен с нагревательным элементом, так что образует-
Рис. 3.41. Блок-схема интегральной микросхемы типа TDA 1023 фирмы
Philips.
ся контур регулирования. Этот контур обеспечивает сохранение
постоянства температуры, установленной внешним органом ре-
гулирования. В интегральной микросхеме имеется внутренний
источник напряжения для различных частей схемы, обозна-
ченный на схеме как источник питания. Входное напряжение
подается непосредственно от сети через последовательный ре-
зистор Rd-
Кроме того, в схеме имеются нуль-детектор и блок защиты,
препятствующий отпиранию симистора в случае размыкания
или короткого замыкания на входе. В этих случаях управление
прекращается и мощность к нагрузке не поступает. При этом
регулирование нагревательного элемента также прекращается.
Генератор развертки вырабатывает пилообразный сигнал, кото-
рый поступает в схему сравнения. Путем сдвига опорного уров-
ня мы можем с помощью схемы сравнения выделить определен-
17—807
258
Глава 3
ную часть этого напряжения и задать, таким образом, число
периодов, используемых для управления симистором (рис. 3.42).
Управляющим напряжением, сдвигающим опорный уровень,
является входное напряжение времяимпульсного регулирую-
щего устройства, которое складывается из напряжения на ре-
зисторе с отрицательным температурным коэффициентом и на-
пряжения на потенциометре 7?р. Резистор с отрицательным тем-
Рис. 3.42. Временная диаграмма пропорционального управления.
Эталонное напряжение сравнивается с небольшим возрастающим участком пилообраз-
ного напряжения, поэтому для управления нагрузкой остается меньшее количество пе-
риодов переменного тока.
пературным коэффициентом, находящийся в цепи обратной свя-
зи, служит для поддержания постоянства температуры в преде-
лах ±1%. Требуемую температуру можно установить с по-
мощью управляющего напряжения на выводе 9. В приведенном
примере управляющее напряжение снимается с потенциомет-
ра J?p. В процессе управления это напряжение может задавать-
ся автоматом или вычислительной машиной, т. е. приборами,
следящими за общим ходом процесса и управляющими им.
На рис. 3.43, а представлена практическая схема регулирова-
ния нагрева, в которой используются микросхема типа TDA 1023
и симистор ВТ138 или ВТ139, рассчитанный на мощность 1200
или 2000 Вт соответственно. К симистору подключен варистор
для предотвращения появления пиков напряжения при отключе-
нии нагревательного элемента. Чтобы нагрузка имела индуктив-
ный характер, используется нагревательная спираль.
Спецификация схемы представлена на рис. 3.43, б.
3.20. Управление электромагнитным реле
с помощью логического сигнала
ППР разработаны в последние годы, и при их проектирова-
нии учитывалось, что управление ими должно осуществляться
логическими уровнями напряжений, которые обеспечивают мик-
росхемы ТТЛ и КМОП. Иначе обстоит дело с ЭМР, особенно
с реле для сильноточных схем. Обычно здесь требуется раздели-
тельный каскад между логической схемой и реле, так как эти
реле требуют достаточно большой управляющей мощности. Уп-
Связь устройств обработки с внешней средой
259
а
Напряжение переменного тока: 220 В, 50 Гц
Вариант А: 400—1200 Вт, вариант В: 1200—2000 Вт
Перечень компонентов A в Примечания
Симистор BT138 ВТ 139
Варистор 350B, 1 mA 350 В, 1 мА Кат. № 2322 594 13512
Dj BYX10 BYX10
Ri 18,7 кОм 18,7 кОм Допуск 1%
Rntc { R25=22 кОм Rs5=22 кОм Кат. № 2322 642 12223
В = 4200 К В = 4200 К
Rp 22 кОм 22 кОм Потенциометр
Rd 4,3 кОм/6,8 Вт 6,2 кОм/4,8 Вт
Rg ПО Ом ПО Ом
Rs 430 кОм 180 кОм
Ct 47 нФ 47 нФ
cs 220 мкФ, 16 В 220 мкФ, 16 В
CT 15 мкФ (пост, ток) 68 мкФ (пост, ток)
Cd1) 680 нФ 470 нФ
Rsd1) 390 Ом/1,2 Вт 390 Ом/О,6 Вт
’) CD и RSd можно использовать вместо Di и RD.
б
Рис. 3.43. Схема управления нагревательными элементами с использованием
микросхемы типа ТО А 1023 (а) и ее спецификация (б).
равляющая мощность определяется произведением напряжения
на ток и достигается либо при большом напряжении и малом
токе, либо при низком напряжении и большом токе.
Поясним это на примере: реле фирмы Siemens для схемы
200 В—16 А должно управляться подачей на катушку электро-
17*
260
Глава 3
магнита напряжения 24 В и тока 80 мА. В данном случае между
логикой и этим реле требуется включить дополнительный уп-
равляющий усилитель. Часто даже для такого небольшого сла-
боточного реле, как гребенчатое реле фирмы Siemens, требует-
ся разделительный каскад, поскольку большие интегральные
ООин из усилителей
в схеме ULN2003
Рис. 3.44. Схема типа ULN 2001N-ULN 2004N.
« — электрическая схема; б — расположение выводов корпуса DIL.
микросхемы ТТЛ и особенно КМОП имеют очень малую выход-
ную мощность.
Наиболее приемлемыми для управления реле являются
транзисторные схемы типа ULN2001-ULN 2004 в корпусах
с двухрядным расположением выводов (DIL), которые исполь-
зуются при напряжении питания 20 В и вырабатывают ток
500 мА (максимальный пусковой ток реле составляет 600 мА).
Схемы отличаются друг от друга управлением. Например,
тип ULN 2003 управляется от микросхем КМОП и БИС ТТЛ.
В корпусе DIL находится семь усилителей по схеме Дарлинг-
тона; один из них представлен на рис. 3.44. Кроме того, для
каждого усилителя предусмотрен диод для подавления пиков
напряжений при индуктивной нагрузке, например, реле. В об-
мотке реле накапливается энергия магнитного поля, как в слу-
Связь устройств обработки с внешней средой
261
чае намагничивания катушки индуктивности, которая при от-
ключении тока освобождается в форме наведенной ЭДС с та-
кой же полярностью, как и напряжение питания. Сумма пико-
вого напряжения и напряжения питания может превзойти мак-
симально допустимое напряжение коллектор — эмиттер t/кэмакс
переключающего транзистора и вывести его из строя. Если к об-
мотке подключить диод, а его анод соединить с коллектором
транзистора, то пиковое напряжение отделяется от напряже-
ния питания. Тогда предотвращается опасность превышения
величины f/кэ. Поскольку ток в обмотке протекает через диод,
БИС ТТЛ
ВхиО И
'/гШШОМ g
---wn
Реле
2^/ШмЯ
Рис, 3.45. Практический пример управления реле с помощью схемы типа
ULN 2003.
то не происходит спонтанного выключения реле, а это можно
рассматривать как недостаток. Напряжение насыщения усили-
теля Дарлингтона в среднем составляет 1 В при усилении по
току 400 и величине тока /к=Ю0 мА. На рис. 3.45 показана
практическая схема разделительного каскада со схемой типа
(/LN2003. Каскад управляется от БИС ТТЛ и в свою очередь
управляет реле при напряжении 24 В и токе 100 мА. Логиче-
ская 1 (Н) на входе схемы Дарлингтона в данном случае соот-
ветствует намагниченному состоянию катушки реле.
3.21. Усилители мощности на биполярных транзисторах
Схема типа ULN 2003 может также использоваться для уп-
равления усилителями мощности на биполярных транзисторах.
На рис. 3.46 показана схема управления с мощным транзисто-
ром npn-типа. В этой схеме 1 на входе означает отсутствие тока
в нагрузке. В схеме с транзистором pnp-типа, наоборот, 1 на вхо-
де означает наличие тока в нагрузке. Эта особенность учиты-
вается при выборе того или иного типа транзистора. Усилитель
мощности с транзистором pnp-типа представлен на рис. 3.47.
Рассмотрим наиболее общий пример применения таких уси-
лителей. В данном случае речь идет о регулировании тягового
тока для локомотива модели железной дороги. Часто при ре-
гулировании скорости поезда используется принцип регулиро-
вания мощности, в основе которого лежит изменение длительно-
262
Глава 3
сти импульса. К двигателю локомотива подводится импульс
тока переменной длительности, причем при узком импульсе на
двигатель подается меньший ток,
при широком импульсе —
большой. Таким образом,
при сохранении тягового
усилия регулируется ско-
рость.
При управлении доро-
гой с помощью автоматов
или вычислительной
шины постепенное
нение
пульса программируется
таким образом,
воспроизводились прибы-
тие и остановка поезда.
Связь между автоматом
и дорогой обеспечивается
благодаря усилителю
мощности. Импульсный сигнал автомата, который может быть
представлен в виде уровней 1/0 ТТЛ-схем (входы и выходы от
вычислительной машины или автомата), с помощью сочетания
схемы ULN 2003 с усилителем мощности преобразуется в тре-
1/? *ULN 20U3N
б ИС ТТЛ Вход 1^
— Ов+2дВ
ЗЛ J
Мощный
транзистор
прп-типа
Ж
уОм
16
BY 126
ма-
изме-
длительности им-
чтобы
8
Рис. 3.46. Усилитель мощности со схемой
типа ULN 2003 в качестве управляющего
каскада.
Рис. 3.47. Усилитель мощности со схемой
типа ULN 2003 в качестве управляющего
каскада (в качестве мощного транзистора
использован транзистор рпр-типа).
буемый импульсный ток,
подаваемый на двигатель
локомотива.
Другим примером, в
котором целесообразно
промежуточное включе-
ние схемы ULN 2003, яв-
ляется управление свето-
диодом от КМОП-микро-
схемы. Микросхемы этого
типа должны иметь очень
небольшую нагрузку, что-
бы уровни напряжения на
их выходах сохранялись
в допустимых пределах.
Для уменьшения нагруз-
ки на выходе КМОП-микросхемы включается ULN 2003. В том
случае, когда одновременно используется большое количество
светодиодов, вместе со схемой ULN 2003 включается усилитель
мощности.
В качестве нагрузки в коллекторной цепи транзистора
используется светодиод с последовательно включенным резис-
тором, который ограничивает ток величиной приблизительно
Связь устройств обработки с внешней средой 263
20 мА. Если светодиод загорается, то падение напряжения на
нем составляет — 1 В; требуемая величина сопротивления 7?s
рассчитывается по формуле Rs = (t/в—1)/0,02 (Ом).
3.22. Управление мощными линейными
интегральными схемами
Существует большое количество линейных интегральных
схем, рассчитанных на различные мощности. Это усилителщ
состоящие из нескольких каскадов, которые связаны друг
с другом по постоянному току. В интегральной схеме нет раз-
делительных конденсаторов. Вход является дифференциаль-
ным. Требуемый коэффициент усиления устанавливается вклю-
чением резистора 7?t между выходом и инвертируемым входом,
а также резистора 7?s последовательно с источником сигнала.
Как и для операционного усилителя коэффициент усиления
определяется отношением Rt/Rs- Мы исходили из предположе-
ния, что источник сигнала не имеет внутреннего сопротивления
(^i==0), хотя оно должно учитываться при расчете уси-
ления. В этом случае вместо Rs в формулу подставляется
Рис. 3.48. Усилитель мощности типа SH3015 фирмы Fairchild для аналого-
вого управления двигателями.
264
Глава 3
Обычно к усилителю подключается также определенное ко-
личество резисторов, а иногда и конденсаторов для получения
требуемой стабильности и заданного усиления.
Часто усилители мощности реализуются в гибридном испол-
нении в связи с их высокой мощностью рассеяния. В этом слу-
чае усилитель состоит из некоторого количества отдельных
кристаллов, соединенных между собой с помощью толстопле-
ночной технологии. Кристаллы, на которых сформированы мощ-
ные транзисторы, часто термически соединяются с внешними
Рис. 3.49. Схемы установки смещения для усилителя типа SH3015.
Показаны две схемы для случая, когда напряжение питания усилителя превышает
й:18 В. Их использование вызвано тем, что максимально допустимое напряжение пита-
ния операционного усилителя типа 741 не должно превышать ±18 В.
дополнительными металлизированными проводниками, которые
в свою очередь связаны с теплоотводом.
На рис. 3.48 представлена схема усилителя мощности типа
SH 3015 фирмы Fairchild, который применяется также для
управления двигателями. Операционный усилитель типа 741 об-
разует входной каскад, за которым следуют задающий и выход-
ной каскады. Номинальная величина теплового сопротивления
между выходными транзисторами и корпусом составляет
1,7° C/Вт. Транзисторы изолированы от корпуса. При мощнос-
ти рассеяния 70 Вт и температуре корпуса 25 °C вероятная тем-
пература полупроводникового кристалла транзистора составля-
ет 150 °C. Такая мощность рассеивается в нагрузке сопротивле-
нием 2 Ом при токе /L = 6A и напряжении 17в=±23,5В.
В усилителе не предусмотрены отключение при перегреве
или защита от короткого замыкания. Однако ток ограничива-
ется включением резисторов между выводами 2, 3 и 10, 11 уси-
лителя. При слишком большом токе в оконечном каскаде на
указанных резисторах создается значительное падение напря-
жения, и передача управляющих сигналов к выходным транзи-
сторам прекращается вследствие включения двух блокирующих
транзисторов. Оконечный каскад должен быть спроектирован
таким образом, чтобы выходные транзисторы не отпирались
одновременно, так как иначе могут возникнуть проблемы в пе-
Связь устройств обработки с внешней средой
265
реходной области. В результате этого возникают искажения пе-
редаточной характеристики, особенно при омической нагрузке.
Это означает, что такой усилитель мы не можем применять в
высоконадежных установках. При индуктивных нагрузках эти
искажения не проявляются. Одновременное запирание выход-
ных транзисторов в данном случае даже благоприятно с точки
зрения защиты усилителя при индуктированных выбросах тока,
возникающих, например, в асинхронных двигателях.
Рис. 3,50. Практическая схема неинвертирующего усилителя на базе усили-
теля типа SH3015 с индуктивной нагрузкой.
Усилитель имеет стробирующий вход (вывод 9), благодаря
которому выход может отключаться независимо от напряжений
на входах. Как только на вывод 9 подается напряжение 0,4 В,
выход отключается. Управляемая схема потребляет ток 25 мА
при поступлении стробирующего напряжения 0,4 В. Изменение
напряжения должно составлять 20 В, а импеданс в указанной
точке в разомкнутом состоянии должен быть не ниже 10 кОм.
Входы 5 и 8 служат для подачи напряжения смещения на
операционный усилитель типа 741. Напряжение на этих входах
не должно превышать ± 18 В. Если усилитель питается от бо-
лее высокого напряжения, то это напряжение нельзя использо-
вать для установки смещения. На рис. 3.49 показана схема
установки смещения для усилителя типа SH3015. На рис. 3.50
представлена схема неинвертирующего усилителя с индуктив-
ной нагрузкой.
При аналоговом регулировании усиление напряжения необя-
зательно. Часто бывает достаточно того, что схема работает
как повторитель. При этом входное напряжение, которое уже
имеет требуемый уровень, передается на выход с усилением
266
Глава 3
мощности. В данном случае источник входного напряжения
с относительно высоким внутренним сопротивлением Ri заменя-
ется источником напряжения — повторителем, вырабатываю-
щим такое же напряжение, но имеющим много меньшее значе-
ние
3.23. Чувствительные элементы-датчики
Чувствительные элементы, часто называемые датчиками,
можно подразделить на три группы. По этой классификации
выделяются группы датчиков, у которых:
а) при изменении измеряемой величины меняется величина
сопротивления или импеданса. К этой группе относятся термо-
резисторы, флюксисторы, фоторезисторы (LDR) и т. д.;
б) при изменении измеряемой величины меняется напряже-
ние. К этой группе относятся генераторы Холла, пьезоэлектри-
ческие датчики и тахогенераторы;
в) при изменении измеряемой величины меняется сила тока.
К этой группе относятся фотоэлементы и термоэлементы.
Практически все чувствительные элементы, у которых про-
исходит изменение сопротивления или импеданса, используются
в мосте Уитстона для получения дифференциального напряже-
ния, которое управляет дифференциальным усилителем.
Преимуществом измерений с помощью дифференциального
напряжения, как уже упоминалось, является то, что синфазные
сигналы, возникающие в соединениях между датчиком и уси-
лителем, не оказывают влияния на выход усилителя. Следова-
тельно, усилитель не реагирует на эти синфазные сигналы. Ска-
занное относится к операционным усилителям. В этих усилите-
лях подавление синфазных сигналов лежит в пределах 60—
120 дБ.
По этим причинам датчики, вырабатывающие напряжение,
также реализуются как дифференциальные усилители. В прин-
ципе возможно включение датчика между инвертирующим
и неинвертирующим входом усилителя, но для правильного вы-
бора рабочей точки и получения требуемого коэффициента уси-
ления необходима дополнительная схема, как показано на
рис. 3.51.
В чувствительных элементах, у которых происходит измене-
ние тока, это изменение должно быть преобразовано в измене-
ние напряжения, а затем усилено операционным усилителем.
Чувствительные элементы с изменяющейся силой тока имеют
достоянную ЭДС, но их внутреннее сопротивление 7?вн изменя-
ется вместе с измеряемой величиной. Благодаря включению
резистора последовательно с внутренним сопротивлением и учи-
тывая, что ЭДС постоянна, мы можем преобразовать измене-
Связь устройств обработки с внешней средой
267
ние )7?вн в изменение напряжения и подать это напряжение на
операционный усилитель. В принципе такое же преобразование
происходит в чувствительных элементах с переменным сопро-
тивлением, но здесь отсутствует внутренняя ЭД С. Для того
чтобы определить, изменилось ли сопротивление элемента, на
него необходимо подать внешнее напряжение питания. Измене-
ния напряжения или сопротивления чувствительного элемента
могут быть самыми различными. В одних случаях изменения
Рис. 3.51. Схема с операционным усилителем.
напряжения составляют милливольты, в других случаях —
вольты.
Усилитель, подключенный к чувствительному элементу, дол-
жен иметь достаточный коэффициент усиления для того, чтобы
повысить входное напряжение до требуемого уровня на вы-
ходе.
В операционных усилителях требуемая величина коэффици-
ента усиления достигается с помощью резистора обратной
связи /?ос (=/?т, рис. 3.51). Коэффициент усиления определя-
ется соотношением 7?ос//?вх, причем /?вх является суммой сопро-
тивления Rs и внутреннего сопротивления источника напряже-
ния.
3.24. Термистор в качестве датчика температуры
Термисторы изготовляются из полупроводящих окислов,
смесей медномарганцевой и никелевой закиси. Их называют
также резисторами с отрицательным температурным коэффици-
ентом. У термисторов зависимость между сопротивлением и
температурой выражается следующим образом:
R=AeB'T (Ом),
где R — сопротивление при абсолютной температуре Т\ А и В—
постоянные для определенного сопротивления; е—основание
натуральных логарифмов (е = 2,718).
Представленная здесь экспоненциальная характеристика
изменения сопротивления термистора может оказаться неудоб-
268
Глава 3
ной для некоторых случаев применения. Часто бывает необхо-
димо, чтобы характеристика имела более линейный характер.
На практике это осуществляется благодаря параллельному или
последовательному включению линейного резистора. Получен-
ная схема имеет более низкий температурный коэффициент, чем
отдельный термистор. На рис. 3.52 в логарифмическом масшта-
бе показана зависимость сопротивления термистора от темпе-
ратуры. На рис. 3.53, а в линейном масштабе представлена за-
висимость сопротивления термистора, шунтированного постоян-
ным резистором /?, от температуры.
Эталонной температурой То (рис. 3.53, а) является темпера-
тура, при которой термистор и постоянный резистор имеют
равные величины; при этом принимается, что при температуре
То термистор имеет температурный коэффициент, равный
—3,5%/°C. Температурный коэффициент а термистора получа-
ется при дифференцировании предыдущей формулы:
_ 1 d₽ __ В
а ~ R ‘ dT “ Т» ’
Благодаря малым размерам и высоким температурным ко-
эффициентам термисторы особенно пригодны для использова-
ния в качестве термодатчиков. Эти элементы устойчивы против
влектрических и магнитных помех. Наряду с резисторами с от-
Связь устройств обработки с внешней средой
219
Рис. 3.53. Температурные зависимости сопротивления термистора с шунтом
/?(а), а также сопротивления термистора типа В83200/130Е фирмы Philips
с последовательно и параллельно подключенным резистором (б).
рицательным температурным коэффициентом существуют также
резисторы, имеющие положительный температурный коэф-
фициент.
3.25. Измерение мощности с помощью термисторов
Для измерения мощности к термистору можно подвести
низкочастотный, высокочастотный или сверхвысокочастотный
сигнал. Сравнение с результатом измерения по постоянному
току позволяет определить, какая энергия переменного тока
требуется для определенного изменения сопротивления терми-
стора.
На частотах ниже 10 МГц рекомендуется подавать ВЧ-энер-
гию на нить накала, находящуюся в непосредственной близости
от термистора для обеспечения хорошей термической связи.
При этом измерительная и ВЧ-схема электрически отделяются
друг от друга.
270
Глава 3
Практическая схема датчиков мощности, защищенная от из-
менений температуры окружающей среды, представляет собой
мост из двух одинаковых термисторов с косвенным подогревом.
К нити накала одной цепи подается неизвестная мощность, а
к нити накала другой цепи — мощность постоянного тока. Бла-
годаря тому что при наличии постоянного тока происходит раз-
баланс моста, можно определить неизвестную мощность. При
ГЛ бмММб [W6*У,5;
M847/0^x/Z7Z7)
Рис. 3.54. Конструктивное исполнение термисторов фирмы Siemens.
управлении процессом можно вводить мощность постоянного
тока в цифровой форме и с помощью схемы сравнения опреде-
лять, достигнуто ли согласование.
На рис. 3.54 представлены некоторые типы термисторов.
3.26. Использование полупроводниковых диодов
в качестве датчиков температуры
Падение напряжения на диоде, включенном в прямом на-
правлении, зависит от температуры и изменяется примерно на
величину 2 мВ/^С. Поэтому в измерительной схеме, где диод
используется в качестве температурного датчика, мы можем
использовать обычный измерительный мост или операционный
усилитель, как показано на рис. 3.55. В данной схеме измеря-
ется разница между температурой окружающей среды и тем-
пературой в помещении, т. е. определяется температура отно-
сительно температуры окружающей среды, которая служит
эталоном. В некоторых случаях в ту ветвь моста, где находит-
ся диод, подается более сильный ток, при этом измерительный
диод рассеивает большую мощность и происходит разбаланс
моста. Мост может быть также выведен из равновесия в об-
ратном направлении охлаждением диода воздушным потоком.
В этом случае можно:
Связь устройств обработки с внешней средой
271
а) измерить величину воздушного потока (движение возду-
ха);
б) определить наличие воздушного потока для охлаждения.
В последнем случае мост необходимо сочетать со схемой
сравнения, значение логического сигнала на выходе которой
определяет наличие воздушного потока. При контроле
охлаждения устройствами обработки данных часто применяет-
+18 В
/7
Рис. 3.55. Схема измерения температуры с кремниевым диодом в качестве
чувствительного элемента.
а — мостовая схема; б — мост в сочетании с операционным усилителем.
ся метод, при котором температура определяется введением
датчика в воздушный поток охлаждающего вентилятора. Если
вентилятор вышел из строя, то реагирует схема сравнения
и включается запасной вентилятор при одновременной индика-
ции на панели обслуживания выхода из строя одного из венти-
ляторов. Кроме того, можно дать команду к отключению всего
устройства, после чего проводятся ремонтные работы и работо-
способность приборов восстанавливается.
3.27. CdS-фотоэлементы или фоторезисторы
Сернистокадмиевые элементы, часто обозначаемые CdS-
элементы, имеют разные обозначения, например Л/)7?-резисторы
(фирма Philips), но обычно их называют фоторезисторами.
Уже давно известно, что кристалл сернистого кадмия имеет
фоточувствительные свойства, однако эти свойства были впер-
вые практически использованы лишь в 1955 г. Р. X. Буде и
другими физиками.
Сернистый кадмий является достаточно дешевым и чрезвы-
чайно светочувствительным, через него можно пропускать отно-
сительно большие токи. На рис. 3.56 показана конструкция
272
Глава 3
C^S-элемента. Его чувствительность тесно связана с конструк-
цией электродов. Чем сложнее и точнее система электродов,
тем чувствительнее элемент.
Большое значение имеет также длина волны света, падаю-
щего на элемент, как видно из характеристики, показанной на
Рис. 3.56. Конструкция CdS-эле-
мента.
Рис. 3.57. Спектральная чувствительность
CdS-элемента (1 А=0,1 нм).
рис. 3.57. Мы видим, что чувствительность достигает максиму-
ма в диапазоне длин волн 5200—5500 А (1А = 0,1 нм). CdS-эле-
мент не успевает следить за быстрыми изменениями света. При
силе света в 1000 лк вре-
мя нарастания и убыва-
ния характеристики ле-
жит в пределах 10 мс.
По сравнению с дру-
гими светочувствитель-
ными элементами это,
безусловно, является не-
достатком. Поэтому CdS-
элементы применяются
только в том случае, ког-
да не требуется высокая
скорость переключения.
При отклонениях тем-
пературы изменение чув-
ствительности обычно не-
велико. При изменении
температуры изменяется
ток утечки, но это ощущается только при работе с очень малы-
ми значениями силы света.
Фотопроводящий материал очень чувствителен к влажности.
Поэтому элементы должны быть герметичными, о чем должен
заботиться изготовитель. В процессе старения свойства элемента
существенно не изменяются. Высокая чувствительность и достато-
чно низкая стоимость по сравнению с другими элементами обусло-
вили повышенный интерес к CdS-элементам. Недавно эти эле-
менты нашли новую важную область применения: для авто-
Связь устройств обработки с внешней средой
273-
матического включения и выключения уличного освещения,
в автоматических замках и автоматических выключателях авто-
мобильных подфарников.
3.28. Оптическое измерение длины провода
При измерении длины очень тонкой проволоки с помощью
механических счетчиков возникает опасность обрыва или растя-
гивания проволоки вследствие трения между катушкой и счет-
Рис. 3.58. Принцип электронного измерения длины проводи
Рис. 3.59. Счетная схема с Cd S-элементом.
чиками. Поэтому гораздо удобнее проводить измерения с по»
мощью оптических счетчиков на CdS-элементах. На рис. 3.58
объясняется принцип действия фотоэлектрических счетчиков.
В сочетании с транзистором CdS-элемент переключает ток
электромагнитного счетчика. Оптическая счетная схема показа-
на на рис. 3.59.
3.29. Контроль производственного процесса
с помощью CdS-элементов
В настоящее время многие производственные процессы пол-
ностью автоматизированы. Для предотвращения остановки про-
изводственного процесса, ведущей к простою машинного парка,
необходимо контролировать планомерность прохождения полу-
готового изделия по различным участкам.
18—807
274
Глава 3
Для этого можно встроить простые считывающие устройст-
ва на светодиодах и CrfS-элементах, а возможное попадание
дневного света исключить благодаря применению мостовой схе-
мы, в каждой ветви которой находится CdS-элемент, причем
один элемент измеряет падающий свет, а другой — падающий
свет плюс инфракрасное излучение от светодиода. Если соче-
Рис. 3.60. Схема индикации с CdS-эле-
ментом и операционным усилителем.
тать мост с операционным усилителем, то получится схема ин-
дикации, которая реагирует только на инфракрасное излуче-
ние светодиода (рис. 3.60).
3.30. Пьезоэлектрические датчики давления
Изменение сопротивления монокристаллического слоя в про-
цессе диффузии примеси бора может быть достигнуто давле-
нием на кристалл в том месте, где находится указанный слой.
В основе принципа лежит измерение абсолютного или относи-
тельного давления. При изготовлении кристаллов интегральных
схем на них наносятся четыре линии в виде моста, а затем оп-
ределяется, какая из линий чувствительна к давлению.
Измерительный элемент отделяется от внешней среды с по-
мощью мембраны. Измеряемое давление с мембраны на изме-
рительный элемент передается через силиконовое масло. Явле-
ние проскальзывания, возникающее в удлинительных линиях,
в этом элементе отсутствует. Кроме того, датчик практически
нечувствителен к ударам и вибрациям. Его преимуществом по
сравнению с другими чувствительными элементами является
также отсутствие гистерезиса. На рис. 3.61 представлена схема
усиления, в которой использованы датчик давления, разности
давления или уровня. Мост, расположенный на кристалле, при
определенной разнице давлений вырабатывает дифференциаль-
Рис. 3.61. Пьезоэлектрический датчик давления с усилительной схемой.
Рис. 3.62. Дифлонометры-датчики перепада давлений с капиллярной трубкой
и разделительной мембраной (фирма Honeywell).
Рис. 3.63. Датчики давления и перепада давлений (фирмы Honeywell).
276
Глава 3
ное напряжение, которое подается на операционный усилитель.
Мост питается от источника тока, чтобы исключить влияние
напряжения питания на результат измерения. Требуемая вели-
чина коэффициента усиления устанавливается с помощью ре-
зистора Roc- Соответствующие датчики давления находят при-
менение в измерителях уровня жидкости и в дифлонометрах-
датчиках перепада давлений с капиллярной трубкой и разде-
лительной мембраной фирмы Honeywell (рис. 3.62 и 3.63).
3.31. Емкостные датчики влажности
Эти датчики разработаны фирмой Philips для автоматиче-
ских устройств регулирования влажности, но применимы также
и для компактных гигрометров. Само название этих датчиков
свидетельствует о том, что емкость этих элементов зависит от
относительной влажности окружающей среды.
Датчик рассчитан на диапазон относительной влажности
Яотн Ю—90% и не чувствителен к конденсации воды. Элемент
Рис, 3.64. Схема гигрометра с емкостным датчиком влажности Н фирмы
Philips.
Связь устройств обработки с внешней средой
277
не стоек против действия жидкостей, растворяющих пластмас-
су, например ацетона. На рис. 3.64 представлена практическая
схема, в которой использован датчик влажности. В обведенной
части схемы находятся два мультивибратора. В верхнем муль-
тивибраторе емкость Н, чувствительная к влажности, определя-
ет коэффициент заполнения генерируемого импульсного сигна-
ла, который синхронизируется с сигналом, вырабатываемым
t
Рис. 3.65. Временная диаграмма для схемы на рис. 3.64.
Среднее значение напряжения (U) меняется в зависимости от степени изменения влг
ности (АН).
нижним мультивибратором. Затем оба сигнала смешиваются,
в результате чего образуется выходной сигнал, пропорциональ-
ный разности длительностей импульсов обоих сигналов, как
показано на рис. 3.65. Поскольку эта разность связана с опре-
деляемой степенью влажности, то измеренное на выходе напря-
жение является мерой искомой относительной влажности.
Правая часть схемы представляет собой стабилизатор на-
пряжения. Кроме того, в схеме между смесителем типа
HEF4001 В и выходом находится линеаризирующая цепь (диод
ВА221 и дополнительный резистор).
3.32. Полупроводниковый фотоэлемент
Если облучить светом рп-переход, то в материале п-типа
фотоны вызовут образование избыточного числа свободных ды-
рок, а в материале р-типа — свободных электронов. Свободные
носители зарядов будут рекомбинировать, т. е. освободивший-
ся электрон в р-материале замещает дырку, а свободная дырка
278
Глава 3
в n-материале принимает электрон. В результате нарушенное
вследствие инжекции фотонов электрическое равновесие вос-
станавливается.
Но в прилегающем к рп-переходу слое, где в результате
обеднения не имеется свободных электронов и дырок, освобож-
фогпоны
Q Электроны
(?) Дырки
@ Отр. ионы
(?) Пол. ионы
Рис. 3.66. Фотогальванический эффект.
/7^/77
Прозрачный верхний Направление излучения ,
слой (ср-пои- || Прозрачный р-слси
Кольцевой
контакт
ьыбой
Кремний
тнпипа
Кремний
п-типи
Тонкий слой никеля
Соединение пайкой
Рис. 3.67. Конструкция фотоэлемента.
денные фотонами электроны и дырки дрейфуют, при этом раз-
ность потенциалов сохраняется благодаря диффузии в погра-
ничном слое. Электроны переходят в n-область, а дырки — в
p-область в направлении, противоположном направлению диф-
фузии (рис. 3.66).
При диффузии электронов через граничный слой рп-перехо-
да отрицательным становится р-материал, а при диффузии ды-
рок положительным становится «-материал. Здесь происходит
обратное, т. е. результирующая разность потенциалов уменьша-
ется. Подобную ситуацию можно получить, если подключить
диод в прямом направлении к внешнему источнику напряже-
ния. Если мы соединим выводы диода друг с другом, то в цепи
Связь устройств обработки с внешней средой
279
появится ток, величина которого определяется силой источника
света.
Напряжение на зажимах полученного таким образом фото-
элемента приблизительно равно ширине запрещенной зоны
(для кремния ~0,6В). Так как сила тока определяется исклю-
чительно количеством инжектированных фотонов, то полупро-
водниковый элемент ведет себя как источник тока.
Переходы в полупроводниковом фотоэлементе выполнены
таким образом, чтобы излучение падало на значительную часть
пограничного слоя. На рис. 3.67 показана конструкция полу-
проводникового фотоэлемента. При /=1000 °C проводится диф-
фузия бора в кремний n-типа, в результате которой образуется
p-слой толщиной в несколько микрон. На верхней и нижней
поверхности элемента расположены контакты, причем верхняя
поверхность предварительно покрывается тонким слоем никеля,
а затем к контактам припаиваются провода.
К контактам может быть подключена нагрузка, и когда
верхняя поверхность элемента освещается светом, через на-
грузку течет ток. До настоящего времени фотогальванические
элементы имели небольшой коэффициент полезного действия.
Полагают, что в ближайшем будущем к. п.д. этих элементов
увеличится на 20%. В разд. 3.35 описывается схема усиления
для фотоэлемента.
3.33. Фотодиод и фототранзистор
Как и в фотоэлементе, в пограничном слое рп-перехода фо-
тоны освобождают носители зарядов, которые легко переходят
через этот слой, так как этому способствует возникающий
Рис. 3.68. Преобразование с по-
мощью фотодиода изменения ин-
тенсивности света в изменение на-
пряжения.
перепад диффузионного напряжения. Если диод подключить к
источнику питания в обратном направлении (рис. 3.68) и облу-
чить светом пограничный слой рп-перехода, то возрастет ток
неосновных носителей заряда. Если источник света имеет моду-
лированное излучение, то эту модуляцию мы можем рассматри-
вать как переменный обратный ток диода, который создает пе-
ременное напряжение на сопротивлении нагрузки. Если мы еде-
280
Глава 3
лаем фотоэлемент составной частью транзистора, то получим
структуру, показанную на рис. 3.69, б.
Мы видим, что между базой и эмиттером транзистора на-
ходится источник тока, который вызывает появление потока
электронов, обозначенного стрелками на рис. 3.69, а. Инжекти-
рованные эмиттером электроны переходят в базу под воздейст-
вием электрического поля между коллектором и базой, и боль-
шая часть их попадает в коллектор. Ток источника питания
вызывает освобождение такого количества электронов в облас-
ти между эмиттером и коллектором, что переход можно рас-
сматривать как низкоомный. Если источник света исчезнет, то
-------||—1|---
а------И
Рис, 3.69, Фототранзистор (стрелки указывают направление потока элек«»
тронов).
Рис. 3.70. Кривая чувствительности фототранзистора.
и Связь устройств обработки с внешней средой 281
переход эмиттер—коллектор станет высокоомным. Фототран-
зистор мы можем представить как сочетание фотоэлемента и
транзистора. Фототранзистор обладает большей светочувстви-
тельностью по сравнению с фотодиодом, поэтому в настоящее
время для преобразования изменений света в электрические
напряжения используются почти исключительно фототранзи-
сторы.
Фототранзистор наиболее чувствителен к инфракрасному
свету. Это видно из рис. 3.70, на котором приведен график
чувствительности фототранзистора. Диапазон длин волн 0,4—
0,8 мкм соответствует видимому свету. В этом диапазоне тран-
зистор имеет меньшую чувствительность.
Каждому диоду и транзистору свойствен тот или иной
фотоэлектрический эффект, поэтому раньше для предотвраще-
ния попадания света их стеклянные оболочки покрывались
слоем темного лака. Практическая схема усиления с фототран-
зистором показана на рис. 3.8, б, разд. 3.4.
3.34. Элемент оптоэлектронной связи (оптрон)
В настоящее время для получения информативной связи
фототранзистор применяется в сочетании со светоизлучающим
диодом при полном отсутствии электрической связи. На
рис. 3.71 показана схема элемента оптоэлектронной связи (оп-
Рис. 3.71. Элемент оптоэлектронной связи (оптрон)*
трона). Светодиод входит в состав одной цепи и действует как
передатчик, а фототранзистор находится в другой цепи, где он
играет роль приемника. Таким образом осуществляется переда-
ча как аналоговой, так и цифровой информации. Элемент оп-
тоэлектронной связи используется вместо реле прежде всего
в том случае, когда в области низких частот логические схемы
управляют тиристорами и симисторами, которые выполняют
функцию переключателей в сильноточной части (напряжение
сети) устройства, поскольку благодаря этому элементу стано-
282
Глава 3
вится возможным электрическое разделение цепей при напря-
жениях до нескольких тысяч вольт.
Кроме того, с помощью оптической связи можно соединить
между собой системы, которые имеют относительно высокий
уровень помех по сравнению друг с другом. Мы имеем в виду
связь между станками и вычислительными машинами. Исполь-
зование элементов оптоэлектронной связи позволяет избежать
передачи помех. Полным ходом идет исследование процесса пе-
редачи сигнала по световоду1) (световолоконному кабелю), при
котором светодиод и фототранзистор соответственно выполняют
функции передатчика и приемника. Этот вопрос рассматрива-
ется также применительно к системам обработки данных с уче-
том широкого частотного диапазона этих двух полупроводнико-
вых элементов, т. е. необходимо получить информативную связь
между этими элементами и вместе с тем отделить их друг от
друга. На рис. 3.8 приведена практическая усилительная схема
с элементом оптоэлектронной связи.
3.35. Полупроводниковый термоэлектрический генератор
и элемент термоэлектрической связи
Если нагреть две точки проводника до различной темпера-
туры, то между этими точками возникнет электрическое напря-
жение или термоЭДС. Это явление, называемое эффектом Зе-
Рис. 3.72. Термоэлектрический генератор.
а — конструкция; б — символическое обозначение; в — зависимость UT от межэлектрод-
ного расстояния.
ебека, проявляется еще сильнее, материал имеет полупро-
водниковую структуру, как показано на рис. 3.72.
Если нагреть электрод А, то подведенная энергия Е вызовет
диффузию дырок из полупроводника p-типа и электронов из
В настоящее время волоконно-оптические линии связи (ВОЛС) уже вы-
пускаются промышленностью и находят широкое практическое применение. —
Прим. ред.
Связь устройств обработки с внешней средой
283
полупроводника n-типа к электродам В или А соответственно.
В результате такого перемещения носителей заряда между
электродами В и С возникнет термонапряжение £7Т.
Получаемые таким путем термонапряжения очень малы. Ве-
личина напряжения составляет около 100 мкВ на градус раз-
ницы температуры между теплым и холодным электродами.
Рис. 3.73. Термоэлектрический генератор в сочетании с операционным уси-
лителем.
Внутреннее сопротивление термогенераторов также мало, так
что, несмотря на малую ЭДС, может возникать довольно боль-
шой ток, конечно, при небольших сопротивлениях нагрузки.
Принцип действия элемента термоэлектрической связи за-
ложен в работе полупроводникового термогенератора. Он также
имеет очень низкое термонапряжение. На рис. 3.73 показана
принципиальная схема, в которой термогенератор соединен
с операционным усилителем. Входной ток генератора течет че-
рез сопротивление обратной связи /?ос, а напряжение на выхо-
де соответствует произведению It* Roc-
3.36. Стабилизированные низковольтные источники
питания
Причиной нестабильности напряжений питания является тот
факт, что каждый источник питания имеет внутреннее сопро-
тивление. Если в подключенной к источнику питания нагрузке
произошли изменения, то это неизбежно приводит к изменению
напряжения на зажимах источника питания, что иллюстриру-
ется на рис. 3.74.
Если напряжение питания поступает от сети, то его измене-
ния могут также привести к нестабильности напряжения на
зажимах источника питания (это связано также с внутренним
сопротивлением, но в данном случае с сопротивлением сети).
В промышленности напряжение сети часто колеблется вследст-
вие включения и выключения различных механизмов и прочих
потребителей!
Еще одна причина нестабильности выходного напряжения
связана с изменениями температуры окружающей среды. К из-
менениям напряжения на выходе приводит также нагрев ком-
284
Глава 3
понентов после включения источника питания. Например, если
применяемые в настоящее время в выпрямителях кремниевые
стабилитроны имеют отрицательный температурный коэффици-
ент напряжения стабилизации, то прямое напряжение на них
уменьшается при повышении температуры. Это означает, что
повышается выходное напряжение выпрямителя сетевого на-
пряжения. Другим примером является изменение емкости сгла-
живающего конденсатора при отклонениях температуры, а так-
Рис. 3.74. Источник тока с ре-
зистором Rit к которому под-
ключается переменная на-
грузка.
же изменение индуктивности и омического сопротивления об-
мотки сетевого трансформатора.
Использование хорошего стабилизатора напряжения после
выпрямителя позволяет свести эти колебания к минимуму.
Раньше для этих целей требовалась очень громоздкая схема,
но теперь благодаря использованию интегральных схем эти ста-
билизаторы можно изготовить с минимальным количеством
элементов при невысокой стоимости.
В настоящее время имеются стабилизаторы в корпусах
ТО-3, на вход которых подается нестабильное выходное напря-
жение от сетевых выпрямителей, а на выходе получается чрез-
вычайно стабильное напряжение питания при максимальном то-
ке нагрузки 1 А. Для этих интегральных стабилизаторов не тре-
буется дополнительных компонентов, а также исключается
возможность выхода из строя при коротком замыкании или
перегрузке благодаря встроенной защите от тока перегрузки.
3.37. Выпрямители сетевого напряжения
В выпрямителях, используемых для низковольтных источни-
ков питания, переменное сетевое напряжение вначале преобра-
зуется в требуемое напряжение, а затем происходит его вы-
прямление и сглаживание. На рис. 3.75 представлена блок-
схема стабилизированного низковольтного источника питания.
Для выпрямления переменного напряжения сети использу-
ются три основных вида схем: однофазные, двухфазные с вы-
водом средней точки от вторичной обмотки трансформатора
и мостовые. Эти схемы показаны на рис. 3.76. Мы не рассмат-
Связь устройств обработки с внешней средой 28S
риваем здесь трехфазные схемы выпрямителей; они использу-
ются только для питания больших промышленных установок.
Наиболее приемлемой является мостовая схема выпрямле-
ния, так как в противоположность однофазным схемам она ра-
ботает в течение целого периода, что обеспечивает более эф-
фективное выпрямление. Кроме того, мостовая схема не требу-
Однофазная
1&х (сроднее)
(среднее)
Ддухфазния
Рис. 3.75. Блок-схема стабилиизированного низковольтного источника питания.
ет вывода от средней точки вторичной обмотки трансформато-
ра в противоположность двухфазным схемам, в результате чего
может быть уменьшено число витков трансформатора (число
UA). Большее количество диодов, необходимое для этой схемы
выпрямления, в настоящее время не вызывает проблем, по-
скольку уже давно мостовые выпрямители являются предметом
массового производства, а их стоимость определяется лишь спо-
собом герметизации диодной схемы. Если в одном корпусе име-
ется на два диода больше или меньше, то это никак не влия-
ет на стоимость изделия. Используемые в выпрямителях крем-
ниевые стабилитроны разрабатываются таким образом, что их
работоспособность сохраняется в определенных условиях, на-
пример при максимальных токах, возникающих при включении
питания. Естественно, для получения требуемого тока нагрузки
нужно подобрать соответствующий трансформатор.
286
Глава 3
При подключении напряжения сети вторичная обмотка
трансформатора в выпрямителе и сглаживающий конденсатор
на какой-то момент могут оказаться короткозамкнутыми. Ток
короткого замыкания ограничивается омическим сопротивлени-
ем вторичной обмотки, умноженным на трансформированное
сопротивление первичной обмотки, динамическое сопротивление
диода и эффективное последовательное сопротивление сглажи-
Рис. 3.76. Три схемы выпрямления переменного напряжения сети.
а — однофазная; б — двухфазная; в — мостовая.
вающего конденсатора. Общее сопротивление мы обозначили ве-
личиной /?s.
При разработке выпрямителя необходимо обеспечить задан-
ный ток нагрузки, а также пропускание определенного импуль-
са тока, возникающего при его включении. Допустимый им-
пульс тока при включении /доп приводится в таблице парамет-
ров для выпрямительных диодов.
Если выпрямитель не нагружен, то напряжение на сглажи-
вающем конденсаторе достигает величины, равной максималь-
ному значению переменного напряжения (С/макс), к которому
добавлено падение напряжения на диодах. В однофазных и двух-
фазных выпрямителях с выводом средней точки это падение
напряжения приблизительно составляет 0,6 В, а в мостовых
выпрямителях эта величина больше, т. е. 1,2 В. При подклю-
Связь устройств обработки с внешней средой
237
чении нагрузки напряжение сразу опускается до некоторой
средней величины. Эта величина убывает по мере увеличения
тока нагрузки. Средняя величина напряжения на выходных за-
жимах выпрямителей со сглаживанием зависит от отношения
Rl/Rs и емкости сглаживающего конденсатора.
Многие изготовители поставляют стабилизаторы, рассчитан-
ные на стабильное напряжение, при котором не требуется при-
менять дополнительные компоненты. Эти стабилизаторы вы-
полняются в различных корпусах в зависимости от токов на-
грузки. Наилучшими являются исполнения ТО-3 и Т0-220 с то-
ками нагрузки 1 А. Эти стабилизаторы можно сразу монтиро-
вать на печатную плату, но при этом необходимо подвести
к плате нестабилизированное напряжение питания от выпрями-
теля.
Преимущество этого метода состоит в том, что схемы, рас-
положенные на других платах, не оказывают влияния на дан-
ную плату через шину питания, и наоборот. Стоимость стаби-
лизаторов в корпусах Т0-220 сравнительно невысока. Рекомен-
дуется также использовать стабилизаторы на интегральных
схемах из экономических соображений, поскольку стоимость
источника питания на дискретных элементах является достаточ-
но большой.
Из всего многообразия изделий мы выбрали стабилизаторы
серии 78ХХ для краткого обзора возможностей их применения.
Эта серия стабилизаторов поставляется фирмами National
Semiconductors (NS) и Fairchild для различных стабильных на-
пряжений, например 5 и 12 В.
3.38. Стабилизаторы напряжения серии 78ХХ
Представленная на рис. 3.77 схема очень проста в эксплу-
атации. В случае длинных соединительных линий к входным и
выходным зажимам стабилизатор рекомендуется подключать
конденсатор. На вход подключается конденсатор емкостью
0,22 мкФ, а на выход — керамический дисковый конденсатор
емкостью 0,1 мкФ.
Схемы серии 78ХХ позволяют добавлением минимального
количества компонентов легко перейти к стабилизатору, рас-
считанному на более сильные токи, как следует из рис. 3.78.
Мы видим, что параллельно стабилизатору включен транзистор
pnp-типа, который пропускает большую часть тока нагрузки.
Входной ток стабилизатора частично проходит через переход
эмиттер — база транзистора pnp-типа и вызывает появление
коллекторного тока, который в раз больше, чем был бы ток
к стабилизатору, если бы между базой и эмиттером не было
шунтирующего сопротивления /?1.
288
Глава 3
Рис. 3.77. Стабилизатор напряжения серии 78ХХ.
Fhc* 3.78. Стабилизатор с параллельно включенным транзистором для мак-*
симального тока нагрузки 10 А.
Рис. 3.79. Стабилизатор на 12 В — 8 А.
Чтобы предохранить источник питания от перегрузок, па-
раллельно входу транзистора можно включить два последова-
тельных диода, которые отпираются, если ток нагрузки превы-
шает 7 А (рис. 3.79). Благодаря этому стабилизатор продолжа-
ет работать при дальнейшем увеличении тока нагрузки, а как
только общий ток стабилизатора достигает 8 А, срабатывает
внутренняя защита от тока перегрузки.
В том случае, когда ток перегрузки сменяется малым то-
ком нагрузки, вместо двух диодов можно использовать один
Связь устройств обработки с внешней средой
289
диод с последовательным резистором, сопротивление которого
должно соответствовать максимальному току. Сопротивление
для каждой отдельной схемы эмпирически определяется пря-
мым напряжением диодов и рассеянием на переходе база —
эмиттер транзистора pnp-типа. Из-за необходимости защиты от
тока перегрузки схема не предназначена для общего использо-
вания, поскольку не каждый источник питания можно наст-
(/
ТТ
1мкФ Т" Ю мкФ
(Тантал)
(Тантал)
о +
15В-5Я
-6 Шиш
шина
Рис. 3.80. Стабилизатор 15 В — 5 А с защитой от короткого замыкания.
роить на требуемый ток перегрузки. Это относится также и
к схеме с двумя последовательными диодами.
Более эффективной становится такая защита от перегру-
зок, когда сопротивление включается в эммитерную цепь
транзистора pnp-типа, в результате чего уменьшается влияние
рассеяния на переходе база — эмиттер. Влияние диода также
уменьшается, поскольку последовательный резистор имеет
большое сопротивление, которое определяет тот момент, в ко-
торый ток нагрузки начинает изменяться.
На рис. 3.80 представлена модификация этой схемы. Если
исходить из того, что переход база — эмиттер и параллельный
диод имеют приблизительно равное прямое напряжение, то
распределение тока между стабилизатором и транзистором за-
висит от величины отношения Введение дополнительного
резистора 7?1 в эмиттерную цепь транзистора требует более вы-
сокого входного напряжения. Как уже упоминалось, 'чем боль-
ше будет выбранная величина сопротивления, тем выше будет
воспроизводимость для тока перегрузки. Но это также означа-
ет, что на эмиттерном сопротивлении рассеивается большая
мощность, в результате чего снижается к. п.д. схемы. Кроме
того, это влияет на тепловой режим стабилизатора. Таким об-
разом, преимущества введения дополнительного резистора яв-
ляются спорными.
19—807
290
Глава 3
Как было сказано выше, недостатком простейшей схемы
является то, что невозможно с достаточной точностью устано-
вить границу появления тока перегрузки, поэтому при длитель-
ном коротком замыкании питание током прекращается из-за
избыточного рассеяния. Однако на практике длительные корот-
кие замыкания встречаются крайне редко, зато при измерениях
и эксплуатации схем часто возникают кратковременные корот-
кие замыкания. Эти кратковременные короткие замыкания вы-
зывают значительные колебания тока, поэтому во многих слу-
чаях по технико-экономическим соображениям применение
простейшей схемы бывает спорным. Защита, вводимая в вы-
прямители, препятствует долговременным коротким замыка-
ниям, но в случае с транзистором рир^типа короткое замыкание
может быть вызвано перегрузкой.
3.39. Стабилизаторы отрицательного напряжения
серии 79ХХ
Эти стабилизаторы имеют такие же параметры, как и ана-
логичные им стабилизаторы положительного напряжения. Если
два этих вида стабилизаторов использовать вместе, то на вы-
ходе следует включить диоды, что и показано на рис. 3.81. Эти
Udx
н- о—
Земля
о—
о--
±CZ
0,1 мк^
Земля'
I 1 0
ф С1/т Пентал)
1мк<Р
-tbBnpuIR
—---------о
Н&ЫХ
-Г'6*
+15Впри1Л
Рис. 3.81. Источник питания с положительным и отрицательным выходными
напряжениями.
Германиевый транзистор D1 включен как диод. Оба входных напряжения составляют
20 В (относительно земли).
диоды служат для того, чтобы один стабилизатор не изменял
полярность на выходе другого через сопротивление нагрузки.
Это может случиться, если одно из питающих напряжений по-
является раньше другого вследствие различного сглаживания.
Кроме того, изменение полярности на выходе может возник-
нуть, если один из стабилизаторов вышел из строя, и на опре-
деленные схемы через нагрузку подается питающее напряжение
противоположной полярности.
'Связь устройств обработки с внешней средой
291
3.40. Стабилизаторы серии 78ХХ с переменным
выходным напряжением
Стабилизатор этой серии можно преобразовать в стабили-
затор с регулируемым выходным напряжением, что достигается
включением резистора и потенциометра, как показано на
рис. 3.82. Нижняя граница регулировки выходного напряжения
соответствует стабильному выходному напряжению данного
типа схем и возникает в том случае, когда движок потенцио-
метра R2 соединен с выводом 3. Наивысшее напряжение появля-
Рис. 3.82. Стабилизатор, выходное напряжение которого регулируется потен-
циометром 2?2.
ется в том случае, когда движок потенциометра соединен об-
щей точкой. В приведенном примере это напряжение составляет
X напряжение стабилизации и равно 5 В для стабилиза-
торов типа 7805.
3.41. Маломощные стабилизаторы для положительных
и отрицательных питающих напряжений
{серии 78L, 79L, 78MG, 79MG)
В настоящее время монолитные стабилизаторы серии 78ХХ
с тремя выводами в корпусе Т0-220 поставляются в корпусах
ТО-39 (металлические) и ТО-92 (пластмассовые) для исполь-
зования в маломощных схемах (100 мА). Эти стабилизаторы
применяются в схемах, где предъявляются высокие требования
к стабильности напряжения питания. Серия 79 содержит ряд
типов стабилизаторов отрицательного напряжения, часто ис-
пользуемых для питания операционных усилителей, которые
требуют симметричных относительно потенциала земли значе-
ний напряжения питания.
Низковольтные стабилизаторы напряжения выгодно исполь-
зовать даже в тех случаях, когда обычно применяется диод Зе-
лера. Разница в стоимости между диодом Зенера и стабилиза-
тором настолько малд, что напрашивается вопрос, не лучше
19*
292
Глава 3
Смонтирован на радиатора /Мем
Смеете с 7812 CU
Д 7805
-г---------0+5В-1Я
Стадилитрон-
устройстдо защи-
ты от перенапряжения
(фирма Philips)
Смонтирован на радиа-
торе (см. 5 В cmadj
--------о+12В-0,М
BZW12
-о
* + 58-0,1 fl
* th 5 мкФ {Тантал)
Рис. 3.83. Практическая схема источника питания для двух положительных
и одного отрицательного напряжений.
ли использовать монолитный стабилизатор. Напомним, что
стабилизаторы серий 78 и 79 поставляются фирмами National
Semiconductors, Fairchild и Motorola. На рис. 3.83 представле-
на практическая схема с двумя положительными и одним отри-
цательным напряжением.
3.42. Импульсные стабилизаторы
В схемах импульсных стабилизаторов используются тран-
зисторные ключи, которые в зависимости от изменений в на-
грузке в течение большего или меньшего времени обеспечивают
поступление энергии в параллельный колебательный контур,
состоящий из диода, катушки индуктивности и конденсатора.
Можно сказать, что этот контур возбуждается импульсами с
частотой 50—100 кГц. Если происходят изменения в нагрузке,
то интенсивность возбуждения (ширина импульса сигнала)
соответственно увеличивается или уменьшается. В результате
вырабатывается постоянное напряжение, причем благодаря вы-
сокой частоте переключения можно использовать малогабарит-
Связь устройств обработки с внешней средой
293
ный транзистор с тороидальным ферритовым сердечником
для получения больших мощностей при низких значениях ста-
билизированного выходного напряжения. К-п.д. при таком пи-
тании значительно выше, чем при использовании аналогового
стабилизатора, и составляет 60—70%.
Благодаря высокой скорости переключения и большим то-
кам такой источник питания практически является генератором
высоких частот, который нельзя применять в системах обработ-
ки данных без экранирования и соответствующей фильтрации
входных и выходных цепей. Применение такого источника пи-
тания обоснованно только тогда, когда устройство является до-
статочно большим (как в мини-ЭВМ) и для питания всех его
логических схем требуется напряжение +5 В и сила тока в де-
сятки ампер. Процент импульсных источников питания, выпус-
каемых для таких нагрузочных токов, невысок по сравнению
с аналоговыми источниками питания, имеющими более громозд-
кие питающие трансформаторы.
Для защиты от перенапряжения, т. е. превышения макси-
мально допустимого напряжения питания интегральной схемы,
этот источник питания снабжен аварийной защитой. Для этого
к входным клеммам источника питания после предохранителя
подключают тиристор, который сгорает, как только выходное
напряжение переходит установленный предел. В результате пе-
регорает предохранитель, и источник питания обесточивается.
Минимальная нагрузка импульсного источника питания
должна составлять как минимум 10% от максимально допус-
тимой величины тока, так как иначе происходят неприятности
в пусковой области. Транзисторный ключ в каждый период
обеспечивает подачу определенного количества энергии в ко-
лебательный контур, и эту энергию необходимо отводить. Если
этого не делать, то наступит перенапряжение, которое выведет
из строя сетевой предохранитель или отключит автоматический
предохранитель.
3.43. Защита от перегрузок и помех
Что касается защиты устройств обработки данных, то в раз-
ных странах существуют требования, которым должны удовле-
творять используемые устройства. Полный комплекс требова-
ний содержится в сборнике МЭК-380/77 и 435, где разделу
«Защита устройств обработки данных» уделено особое внима-
ние.
Кроме того, для Северной Америки действуют документы:
UL94 (2-е издание), UL114 и UL478 (3-е издание) —для США,
а также CSA — стандарты С22.2 № 154/75 и С22.2 № 141 («За-
щита конторских машин») — для Канады.
294
Глава 3
Устройства обработки данных должны иметь сетевую защи-
ту и заземление: в Европе — с помощью штекерного соедине-
ния с двумя предохранителями, а в Северной Америке (в част-
ности, в Канаде) — с одним предохранителем.
Предписанное использование двух предохранителей объяс-
няется тем, что в цепях переменного тока, включенных звездой,
по одному проводу течет ток, а другой провод является нуле-
вым. Нулевая точка в определенном месте заземлена. Общая
шина также соединена с землей. Может получиться так, что
один предохранитель при коротком замыкании между фазой и
общей шиной окажется не на фазовом проводе, а на нулевом.
Такая ситуация может возникнуть при питании от штепсельной
розетки, и прибор в этом случае окажется незащищенным. По-
этому необходимо защищать как фазовый провод, так и нуле-
вой.
Кроме того, устанавливаются требования к изоляции между
первичной и вторичной цепями. Испытательное напряжение
величиной 3750 В не должно вызывать пробой между первич-
ной и вторичной цепями, а также общей шины. На практике
это означает, что сетевой трансформатор должен иметь высокое
качество, а для развязки сети при указанном испытательном на-
пряжении необходим элемент оптоэлектронной связи (VDE).
Помимо этого прибор должен быть оснащен двумя сетевы-
ми выключателями, один из которых находится в фазовом про-
воде, а другой — в нулевом. Предписывается наличие допол-
нительного механического переключателя, даже если при вклю-
чении используется симистор. Это требование рассматривается
как мера защиты в тех случаях, когда эксплуатация и ремонт
проводятся внутри схемы. Что касается первичных цепей, то в
инструкциях должны содержаться требования относительно
цвета изоляции проводов, особенно для общей шины. Цвет изо-
ляции в приборах должен быть желто-зеленым (для Европы)
или зеленым (для Северной Америки). Для европейских уста-
новок в Северной Америке также допускается желто-зеленый
цвет кабеля.
Все отдельные блоки, питаемые от переменного напряжения
220 В и имеющие общую шину, должны быть заземлены желто-
зелеными проводами, а не непосредственно «на корпус». Зазем-
ляющий провод должен быть соединен «к корпусу» посредст-
вом винта диаметром 3,5 мм, а затем подведен к земляным
выводам блоков. Ток утечки, который может появиться между
фазовым или нулевым проводом и землей, не должен превы-
шать 3,5 мА. Источники питания в момент включения имитиру-
ют короткое замыкание. При включении возникает пусковой
ток, который часто во много раз превышает номинальный ток.
Этот пусковой ток ограничивается удвоенным значением допус-
Связь устройств обработки с внешней средой 295
тимого тока предохранителя, т. е. если установлен предохра-
нитель в 16 А, то он выдерживает ток до 32 А.
В инструкциях по эксплуатации UL и CSA, которые исполь-
зуются при экспорте в США и Канаду, перечисляются те бло-
ки, которые работают под напряжением свыше 42,5 В. Это от-
носится также и к используемым кабелям. Контроль за соблю-
дением инструкций UL и CSA заключается в проверке элемен-
тов оптоэлектронной связи на предприятии-изготовителе на
наличие маркировки компонентов и условий их эксплуатации.
Проверенные блоки, например выключатели, должны иметь
клеймо проверки или содержаться в указателях, ежегодно вы-
пускаемых соответствующими органами. Приборы, допускаемые
к эксплуатации инструкциями UL и CSA, имеют на товарном
знаке клеймо с эмблемой UL или CSA.
3.44. Электромагнитные помехи
Во многих странах имеются жесткие требования относи-
тельно уровня допустимых помех, вызываемых электрическими
приборами как по сети переменного тока, так и по окружающей
среде. Специальный международный комитет радиоэлектриче-
ских помех (CISPP) выпустил документ, объединяющий эти
требования в единые рекомендации (11 и 14) для изготовителей
электронных приборов, имеющих дело с инструкциями разных
стран. В ФРГ при изготовлении устройств обработки данных
руководствуются постановлениями № 529/1970 и 523/1969,
Контроль соответствия устройств предъявляемым требованиям
осуществляется с помощью измерительных приемников обще-
признанных фирм-изготовителей (Siemens Schwarzbeck). При
кондуктивном измерении помех измерительный приемник
соединяется со входом устройств с помощью искусственно соз-
данного импеданса. При излучении в окружающей среде изме-
ряется и регистрируется спектр помех от 10 кГц до 1 ГГц
с помощью измерительного приемника с антенной, имеющей
определенную дальность действия (например, 30 м).
Для предотвращения возникновения помех в сети перемен-
ного напряжения в устройствах обработки данных необходимо
использовать сетевой фильтр, который должен быть установлен
в месте подведения напряжения к корпусу. Тогда помеха от
сети не пройдет ни по одному из проводов. На рис. 3.84 пред-
ставлен вариант включения сетевого фильтра в первичную цепь
устройства обработки данных. Фильтры, используемые для по-
давления помех, поставляются многими изготовителями. Среди
них можно назвать фирмы Siemens, Eichhoff и Corcom.
Сложнее обстоит дело в том случае, когда помеха возникает
в окружающей среде. В устройстве обработки данных сущест-
296
Глава 3
вует множество потенциальных источников помех,, но обычно
излучаемая ими энергия не превосходит установленных преде-
лов. В некоторых случаях в том или ином месте требуется под-
ключить экранированный провод. Лучший способ защиты от
Рис. 3.84. Фильтр для подавления помех от переменного напряжения сети.
помех — уменьшение длины провода, поскольку он действует
как антенна. Чем длиннее провод, тем больше излучаемая энер-
гия. Самые короткие соединительные провода используются
внутри интегральных схем, поэтому в них не наблюдается ка-
ких-либо излучений. Что касается помехоустойчивости, то тут
Рис. 3.85. Сетевые фильтры подавления помех фирмы Siemens.
следует иметь в виду статический разряд. Статические заряды,
возникающие при трении синтетических материалов (например,
между одеждой и чехлом сидения), которые могут накапли-
ваться также на синтетическом покрытии пола, вызывают появ-
ление искр при соприкосновении с заземленной установкой. Та-
кое искрение является не только неприятным для человека, но
может также стать причиной появления помех, что отрицатель-
но сказывается на работе прибора. Статический разряд являет-
ся колебательным процессом, создающим электромагнитное по-
ле, которое может оказывать влияние на провода. Хороший
результат дает такая защита от помех, при которой различные
детали корпуса из листового металла, в котором заключена
Связь устройств обработки с внешней средой 297
установка, электрически соединяются друг с другом, а весь
корпус, естественно, заземляется. Металлический кожух (бо-
ковая стенка), изолированный от шасси лаком, в принципе
является изолированным проводником, и через него возможно
влияние помех на схемы внутри прибора.
Для контроля чувствительности установки к статическому
разряду используется контрольный прибор, который с помощью
индикатора определяет наличие статических зарядов в различ-
ных местах корпуса для того, чтобы определить, какое влияние
они оказывают на установку. Таким путем определяются места,
где накапливаются статические заряды. Что касается соедине-
ния с общей шиной и заземления, то следует заметить, что их
следует предусматривать только в одном месте устройства, на-
пример в центральном устройстве или автомате, чтобы избе-
жать циркуляции наведенных токов и связанных с ней помех.
Часто в центральном устройстве предусмотрен специальный
блок питания, выполняющий такие функции, как поочередное
включение питания периферийных приборов. Последователь-
ное включение питания приборов часто необходимо для того,
чтобы уменьшить импульс тока при включении. Нередко бывает
так, что в сети переменного напряжения возникают скачки
напряжения величиной 2—3 кВ. Через блок питания они могут
попасть в логические схемы и вызвать их выход из строя. По-
этому часто к первичной обмотке трансформатора питания под-
ключают металлооксидный варистор, который устраняет эти пики
напряжения. Можно также подключить к вторичной обмотке ус-
тройство, препятствующее внезапному включению. Обычно это
диоды Зенера, которые сглаживают кратковременные пики пи-
тающих напряжений до требуемой величины.
На рис. 3.85 представлены некоторые фильтры подавления
сетевых помех фирмы Siemens.
В гл. 5 тома 4 будут более подробно рассмотрены устройст-
ва ввода и вывода для административной системы обработки
данных.
Глава 4
ПЕРЕДАЧА ДАННЫХ
4.1. Передача данных через длинные линии связи
Если передача данных должна осуществляться на боль-
шие расстояния, то тогда возрастает опасность, что при пере-
сылке данных может произойти ошибка. Речь идет о длинных
линиях передачи между двумя раздельными блоками обработ-
ки данных, каждый из которых имеет собственный логический
потенциал земли и устройство защиты от замыкания на землю.
Между точками заземления в обоих блоках существует разни-
ца напряжений, воспринимаемая как помеха. Поблизости от
устройств обработки данных имеется много источников помех,
оказывающих влияние на линии связи. При большой длине ка-
беля возрастает опасность наводки помех.
Другой проблемой является согласование в линиях пере-
дачи данных. Если эти линии не совсем точно согласуются
с характеристическим волновым сопротивлением, то тогда по-
являются отражения сигналов: после передачи импульса в ли-
нии связи некоторое время наблюдаются остаточные колеба-
ния, что может привести ik ошибке в передаче данных. Для
устранения этой проблемы надо некоторое время выждать, по-
ка линия связи снова придет в состояние покоя, однако для
этого потребуется время. Поэтому за последние годы были
разработаны различные методы передачи данных через длин-
ные линии, чтобы добиться хорошей взаимосвязи между двумя
подсистемами. Эти методы реализуются в виде однопроводных
и дифференциальных систем связи, причем последние могут
быть выполнены в виде уравновешенных и неуравновешенных
систем.
В однопроводной системе, которая используется лишь при
связи на короткие расстояния, передача сигналов происходит
только по одной линии. Обратной линией связи является соеди-
нение через землю.
Связь представляет собой в принципе большой контур, в
котором легко может наводиться помеха. Контуры многих
сигнальных линий, имеющих общие соединения через землю,
связаны друг с другом. Передача сигнала по одному контуру
обусловливает появление нежелательных помех в других кон-
Передача данных
299
турах, а это означает в данном случае взаимное влияние меж-
ду каналами связи. Резко уменьшая величину полного волно-
вого сопротивления общего отрезка контуров, в данном случае
общего заземления, можно ограничить связь, а тем самым и пе-
редачу помех.
Однопроводная система представляет собой простой и тем
самым дешевый метод передачи данных. Рис. 4.1 иллюстрирует
однопроводный метод передачи сигнала. При этом передающее
и принимающее устройства состоят из схемы И-НЕ. За счет
Ввод данных
Разрешение
передаги
данных
&
-L-------------& Выбор
Разрешение при-
| zK епа Винных Lj-J данных
Рис. 4.1. Однопроводная передача данных.
разрешающих входов вентильных схем И-НЕ передача и прием
данных могут быть блокированы. Линия связи не достаточно
точно согласуется с принимающей вентильной схемой И-НЕ,
поэтому появляются отражения. При коротких линиях связи
эти отражения не оказывают возмущающего воздействия, так
как рассогласование является не очень большим: отражения
в коротких отрезках линии связи происходят быстро в обе
стороны, и итоговое значение напряжения и тока быстро до-
стигает своей установившейся величины. Отражения можно
наблюдать с помощью осциллоскопа, при этом они лежат внут-
ри интервала времени нарастания и (или) спада фронта им-
пульса.
При более длинных линиях связи однопроводная система
уже не пригодна. Во всяком случае, надо отметить, что для
быстродействующих систем передачи данных она не подходит.
В системах медленного действия со значительными временами
нарастания и спада фронта импульсов непосредственно на
фронте импульса могут иметь место отражения, следующие
друг за другом не так быстро, как это наблюдается при длин-
ных линиях связи. Однако, поскольку во время прохождения
фронта импульса данные еще не являются установившимися,
эти отражения не являются помехой.
При больших длинах линий связи в общем случае можно
утверждать, что однопроводные системы передачи неприемле-
мы; здесь приходится рассчитывать только на сбалансирован-
ные или несбалансированные дифференциальные системы
(рис. 4.2 и 4.3).
В сбалансированной системе противофазный сигнал посту-
пит на две линии передачи. Со стороны приемного устройства
300
Г лава 4
информация воспринимается дифференциально и переводится
в логический сигнал.
За счет парафазного сигнала в линиях и применения усилите-
ля с дифференциальным входом эта система передачи данных
нечувствительна к синфазным помехам. Это означает, что на-
водимая помеха, в обеих линиях одинаковая по фазе и ампли-
туде, не вызывает существенной реакции на выходе дифферен-
циального усилителя. При увеличении коэффициента подавле-
Вбии данных
Разрешение пе-
ревихи данных
~х~\ Выбив йинных
Рис. 4.2. Дифференциальная передача данных с балансированным управ-
лением.
Разре- —
шение при-
"еми винных
Вбодданных
Разрешение не-
ревах и данных
Рис. 4.3. Дифференциальная передача данных с несбалансированным управ-
лением.
ния синфазного сигнала (GMR) эта реакция уменьшается,
обеспечивая снижение влияния указанной наводимой помехи.
Через общую линию связи (земля) поток сигналов больше не
проходит, так что связь между различными линиями передачи
данных через эту проводящую линию маловероятна. Конеч-
но, предполагается, что обе линии передачи сигнала
расположены близко друг от друга; таким образом, обратный
ток вынужден протекать через вторую линию, а не через пара-
зитную емкость и общую линию связи через землю. Помеха,
возникающая за счет отражений, продолжает существовать.
Она отсутствует только тогда, когда принимающая сторона
согласована с характеристическим сопротивлением линии. Воз-
можно также подсоединение с передающей стороны сопротив-
ления последовательно с линиями передачи сигналов, как это
будет показано ниже.
В многопроводной линии связи величина характеристическо-
го (волнового) сопротивления ZK составляет около 130 Ом, и на
конце линии на входе приемника должен включаться резистор
с таким же значением сопротивления.
С передающей стороны требуется, чтобы амплитуда импуль-
са сигнала данных в линии связи была достаточно большой,
чтобы можно было надежно воспринимать его дифференциаль-
ным усилителем. Напряжение сигнала может быть меньше, чем
логический перепад напряжений в транзисторно-транзисторных
Передача данных
301
логических схемах (ТТЛ-схемах). Таким образом, можно огра-
ничить рассеивание мощности в системе передачи данных.
В общем случае (в данном примере тоже) как передающее,
так и принимающее устройства снабжены разрешающими вхо-
дами для блокирования (и деблокирования) линии передачи
данных.
В несбалансированной системе в линию связи посылаются
не парафазные, а однофазные сигналы. Так как для передачи
сигналов имеются два провода: прямая и обратная линия, то
по сравнению с однопроводной данная система менее чувстви-
тельна к помехе, наводимой между линиями сигналов. Однако
сама помеха, возникающая вследствие взаимного влияния меж-
ду каналами связи, появляется значительно реже.
В отношении соединения через общую шину заземления на
стороне передающего устройства должны быть приняты специ-
альные меры: необходимо использовать «жесткое заземление».
При асимметричном управлении величины полных сопротивле-
ний, с которыми сигнальные линии заканчиваются на стороне
передающего устройства, не равны между собой. При наводи-
мой помехе и при помехе, проходящей через логическое зазем-
ление, это ведет к различию в синфазных сигналах, на что мо-
жет реагировать принимающее устройство. В этой связи наибо-
лее целесообразно использовать симметричную систему.
4.2. Согласование с линией передачи данных
Как мы уже объяснили, линии передачи сигналов должны
согласовываться во избежание появления отражений. Правда,
при передаче данных отражение не обязательно приводит к по-
явлению помех. Возможно, например, подсоединение к линии
связи с передающей стороны последовательного согласующего
сопротивления, за счет чего отражения появляются только на
стороне приемника, где они не вызывают никаких неприятных
последствий. Передатчик не подвержен воздействию отражений,
так как энергия, подаваемая в линию связи, возвращается на-
зад и при этом помогает достичь на выходе конечного значения
выходного напряжения.
На рис. 4.4 приведены некоторые возможные методы, кото-
рые мы можем использовать для борьбы с помехами, возни-
кающими из-за влияния отражений.
На рис. 4.4, а для иллюстрации показано, что произойдет
в случае, если линия не будет согласована ни со стороны пере-
датчика, ни со стороны приемника. Фронт импульса, который
мы подали в линию связи, передается по ней в виде волнового
фронта. Волновое сопротивление линии равно ZK, и за счет
деления напряжения в отношении ZK: (^к+^вых) амплитуда
и
z6x
д
Вь/бий
Рис. 4.4. Различные методы согласования
ранения отражений на стороне приемника.
а
ВбоО
Вбод
ВыбпО
линии передачи данных для уст-
Передача данных
303
импульса имеет меньшее значение по сравнению с величиной
выходного напряжения ивых (/?ВЫх — выходное сопротивление
передатчика). Волновой фронт движется по линии связи к при-
емнику со скоростью около 6 см/нс. На (конце линии связи вол-
на достигает приемника, имеющего достаточно высокое входное
сопротивление (много больше ZK), что эквивалентно разомкну-
тому состоянию линии передачи данных, при котором энергия
волны не рассеивается. Это ведет к появлению напряжения, ве-
личина которого в 2 раза больше выходного напряжения пере-
датчика.
Из рисунка видно, что волновой фронт, изображенный в виде
фронта импульса, действительно приходит к приемнику не-
сколько позже. Затем волна возвращается назад к передатчику
и вызывает здесь также появление ступеньки напряжения, так
как на конце линии энергия не рассеивается (разомкнутый ко-
нец). В принципе волна отдает энергию, которая определяется
величиной ступеньки напряжения. Отдача продолжается, если
волновой фронт вслед за этим снова проходит по линии в сто-
рону приемника, где отдача энергии ведет затем к отрицатель-
ному изменению встречного напряжения. При возвращении
к передающей стороне волна может снова поглощать энергию
благодаря преобладающему высокому напряжению. Это вновь
ведет к увеличению напряжения на конце линии по истечении
времени прохождения волнового фронта. Все это продолжа-
ется соответственно уменьшающимися ступеньками до тех пор,
пока линия не придет в состояние покоя. Потери внутри линии
связи являются причиной того, что ступеньки напряжения по-
степенно становятся все меньше и меньше, и вслед за этим от-
ражения полностью гасятся.
При прохождении отрицательного фронта импульса все про-
исходит подобным же образом, только в обратном порядке.
Тотчас после фронта импульса включения конечное волновое
сопротивление делает невозможным получение полной ампли-
туды импульса в том виде, в каком он был послан передатчи-
ком. Разомкнутый конец линии на стороне приемника явля-
ется причиной появления ступеньки, которая по величине
больше, чем существовавшее до этого момента времени зна-
чение напряжения импульса. Так как индуцируемое напряже-
ние имеет отрицательную полярность, то мгновенное значение
опускается ниже нулевого уровня (это видно из рисунка). За-
тем энергия отражается в прямом и обратном направлениях,
причем мгновенное значение один раз поднимается над нуле-
вым уровнем, а затем снова опускается ниже него.
Если мы замкнем конец линии, то волна проходит через со-
противление, воспринимающее энергию, и поэтому не возникает
никакого отражения.
304
Глава 4
Передний фронт импульса как в начале, так и в конце сра-
зу же достигает конечного значения, как это видно из
рис. 4.4, б, в. При замыкании линии не играет никакой роли,
к чему подсоединено нагрузочное сопротивление: к земле или
к напряжению питания. Амплитуда импульса остается такой же,
хотя при подсоединении нагрузочного сопротивления к напря-
жению питания импульс несколько затягивается за счет уровня
постоянного напряжения (рис. 4.4, в).
Если у передатчика последовательно с передающей линией
мы поместим сопротивление, величина которого равна ZK
(рис. 4.4, г), то фронт импульса, посланного по линии, будет
иметь половинное значение выходного напряжения t/вых. Вол-
на проходит по линии передачи, отражается и теряет энергию.
За счет этого на выходе немедленно достигается конечное зна-
чение напряжения, и отражения не возникают. Этот последний
метод имеет то преимущество, что при наличии большого вход-
ного сопротивления приемника рассеивание энергии происходит
вслед за фронтом импульса и после него больше не наблюда-
ется.
На рис. 4.5 представлена линия передачи данных, которая
на стороне передатчика управляется сбалансированой диффе-
ренциальной системой, в то время как на выходе в качестве
приемника используется дифференциальный усилитель. Здесь
согласование линии происходит при помощи последовательных
сопротивлений, подключенных на стороне передатчика к линиям
передачи сигналов. Этот метод предотвращения отражений
называется фоновым согласованием.
В предыдущей системе использованы микросхемы типа
АМ9621 и АМ9620. Линия передачи, состоящая из многожиль-
ного провода, имеет сопротивление ZK=130 Ом, поэтому каж-
дое из последовательных сопротивлений должно иметь значение
65 Ом. Полное выходное сопротивление передатчика составляет
менее 5 Ом, и поэтому его можно не принимать во внимание.
Передача данных
305>
4.3. Плоский кабель и передача данных
В гл. 1 (том 2), посвященной технике электрического мон-
тажа, мы познакомились с плоскими кабелями, которые имеют
проводники, расположенные на расстоянии 1,27 мм друг от
друга. Эти кабели могут быть запрессованы на штекерный
разъем за одну рабочую операцию.
Стандартные плоские кабели применяются для передачи
данных в микропроцессорных системах на микросхемах с п-ка-
нальными МОП-приборами при расстояниях до 2—3 м без
специальных мер. При использовании биполярных микросхем^
которые обеспечивают более крутые фронты импульсов, веро-
ятность взаимного влияния между линиями связи значительно
больше. Поэтому рекомендуется рядом с каждой линией сигна-
лов оставлять свободным один провод, чтобы соединить его на
штекерном разъеме с логическим потенциалом земли. Между
всеми линиями сигналов проложен таким образом экран в фор-
ме провода, соединенного с потенциалом земли. Более дорогим
решением является плоский кабель, имеющий на одном из сво-
их краев на небольшом расстоянии от сигнальных проводов-
медную ленту в тканевой оболочке. По этой ленте должны
протекать обратные токи, что приводит к значительному ослаб-
лению взаимного влияния между сигналами. В то же время
снижается вероятность наводки, так как ткань плотно прилега-
ет к линиям передачи сигналов.
Далее имеются плоские кабели с многожильным проводом
и плоскими концами, которые могут применяться также в ком-
бинации с пронизывающими штекерными разъемами. Изготови-
телем и поставщиком таких плоских кабелей является фирма
Spectra Strip.
Как стандартные кабели, так и кабели с односторонним
экраном имеют также специальную толстую оплетку из черного
синтетического материала для внешних соединений между дву-
мя отдельными блоками.
4.4. Сети передачи данных
Прежде чем детально рассматривать применение этих се-
тей, имеет смысл рассмотреть, как функционируют некоторые
виды транспорта в нашей повседневной жизни, чтобы сделать
более понятным принцип передачи данных.
Внутригородская перевозка грузов, выполняемая современ-
ными транспортными средствами, является комплексным про-
цессом, который призван сделать более экономичной транспор-
тировку товаров. Мы можем, например, организовать транспор-
тировку товара одного вида ежедневно в одно и то же время
20-807
•306 Г лава 4
либо обеспечить перевозки грузов, которые должны отправлять-
ся в различные моменты времени разными транспортными сред-
ствами. В качестве примера здесь следует назвать ежедневное
.пополнение запаса товаров в торговой сети. С центрального
^склада ежедневно отправляется грузовик в филиалы. Товары
находятся на складе в контейнерах. Поскольку эта транспорти-
ровка осуществляется каждый день к одним и тем же филиа-
лам и всегда с одним и тем же видом товара в контейнерах,
то для безошибочного протекания этого процесса необходимы
лишь несколько адресных данных. Таким же примером явля-
ется электрический аналог в форме телеграфной связи, где в
определенное время передаются сообщения в одинаковом
коде и к одним и тем же адресатам.
Однако если грузы должны рассылаться в различные места
.назначения, в разные моменты времени и различными транс-
шортными средствами, то тогда потребуется больше данных для
обеспечения безошибочного распределения грузов.
Например, если требуется отправить посылки из пункта А
гв пункт Б, то мы можем осуществить перевозку по железной
дороге. Рассмотрим, как протекает этот процесс.
Из адреса отправителя А посылка доставляется на велоси-
педе на товарную станцию железной дороги после предвари-
тельного заполнения багажной квитанции. В этом документе
записаны все возможные данные, а именно: адреса отправите-
ля и получателя, вид товара, упаковка (место), вес и т. д.,т.е.
текущие данные, которые используются в процессе транспорти-
ровки. Багажная квитанция сопровождает посылку на протя-
жении всего отрезка пересылки по железной дороге. Для пе-
ревозки на велосипеде такая багажная квитанция не требуется.
Багажную квитанцию можно сравнить с так называемой на-
чальной этикеткой, которая заполняется перед передачей дан-
ных и содержит необходимую информацию, чтобы осуществить
эту передачу по точному адресу. На товарной станции (терми-
нале) с различных сторон собираются грузы, которые должны
помещаться в один контейнер. При передаче данных эту функ-
цию берут на себя мультиплексор и концентратор. Мультиплек-
сор собирает данные от различных источников информации, а
концентратор объединяет их.
В конце дня контейнер нагружается и ночью может быть
отправлен товарным поездом к месту назначения.
Если грузопоток определенного типа превышает вместимость
одного вагона, то можно по этому маршруту пустить поезд не-
сколько раз или увеличить число вагонов. При передаче дан-
ных мы также используем эти два способа, которые обознача-
ются как TDM (передача с разделением по времени) и FDM
((передача с разделением по частоте).
Передача данных
307
Мы можем также позвонить из места отправления получате-
лю и сказать ему, что посылка находится в пути и что он мо-
жет приехать на велосипеде на товарную станцию назначение
и получить посылку.
Что-то подобное происходит и при передаче данных. Это^
называется «квитировать» установление связи. За счет этого ус-
коряется транспортировка, так как в случае с перевозкой гру-
зов получатель может уже стоять на вокзале и ждать, чтобы
получить свою посылку тотчас же после прибытия поезда. Ана-
логичный случай наблюдается при передаче данных.
Для железнодорожного транспорта существуют инструкции
по перевозке (кодекс правил), из которых следует, как должна’
осуществляться транспортировка. При передаче данных мы так-
же используем такие инструкции. Они по отдельности обозна-
чают формат, упаковку данных, а внутри этой макроупаковки
возможны меньшие упаковки, такие, как группа данных, длина
слова с допустимой проверкой по контрольным суммам. Эта:
проверка по контрольным суммам в примере с железнодорож-
ным транспортом может быть сопоставлена с указанием веса
при транспортировке. Получатель путем повторного взвешива-
ния может проверить, прибыли отправленные товары в комп-
лекте или нет.
При передаче данных мы различаем синхронную и асин-
хронную передачу. Если мы перевозим на велосипеде по мере-
надобности только одну посылку в произвольное время, то это-
можно рассматривать как асинхронную транспортировку. При
транспортировке посылок в строго определенные моменты вре-
мени, как это принято в торговле, мы могли бы говорить о.
синхронной транспортировке.
Если мы рассмотрим весь транспортный участок более под-
робно, то окажется, что транспортировка товаров от места от-
правления до вокзала может производиться самим пользовате-
лем. Он может доставить посылку на терминал (товарную
станцию) пешком, на велосипеде, или на автомашине, однако
в любом случае он будет использовать обычное транспортное
средство и не поставит задачу создать для этой цели специ-
альное средство передвижения. Для передачи данных также
имеются нормированные средства передачи, которые обознача-
ются как стандартные устройства сопряжения или стандартные
интерфейсы, такие, как EIA-RS232C или CCITT V24 и V28.
Внутри участка транспортировки (по железной дороге) от-
правитель не может оказать влияния на перевозку. Это пре-
рогатива самой железной дороги. Если отправитель своевре-
менно отправит на вокзале товары в соответствующей упаковке
с указанием в багажной квитанции необходимых данных, та
средства общественного транспорта позаботятся о том, чтобы
20*
308
Глава 4
перебозки об-
щественным
Перевозки гастными средствимитринспортом \ Перевозки г о ст нь/ми средсшбими
। I
Рис. 4.6. Грузовые перевозки по железной дороге.
ввод данных
нетерминал
оборудобан.
RS252C-
интерфейс
Медленно
(Общественная с йоте-1
\ми ебязщтелефон, i
фидеоконолы инфор-1
\миционной сети) !
R8252G
Системотер-
минального
оборудован
RS422/425
быстро
R8252G-
интерфейс
Медленно
R8422/425
быстро
tu/ !
но дем
оборудо-
вания Оля
передали
данных
модем
одору до -
бания для
передали
донных
интерфейс
Медленно
R8422/425
быстро
R8252G
интерфейс
Медленно
R8422/423
быстро
Ввод данных
нетерминал
оборудован
Система тер-
минального
оборудобан
Ввод данных
нетерминал
оборудован
Система тер
минального
оборудован
I
I
।
Рис. 4.7. Передача данных через
общественную систему связи (почту).
перевозка была осуществлена в соответствии с предписанием.
При передаче данных по общественной телефонной сети спра-
ведливы те же самые принципы. Если мы правильным образом
упакуем данные и снабдим их требуемой информацией, то тогда
телефонная сеть позаботится о том, чтобы эти данные попали
в нужное место.
При перевозке грузов общественным транспортом можно
арендовать необходимое средство, которое осуществляет связь
между двумя определенными пунктами непрерывно или в оп-
Передача данных
309
Рис. 4.8. Структура общественной сети телефонной связи.
Абоненты или системы соединены с местной станцией. Местные телефонные станции (А)
связаны друг с другом через центральную телефонную станцию (В). Связь между раз-
личными странами и континентами осуществляется с помощью спутниковой связи.
ределенное время. В общественной телефонной сети это также
возможно при условии, что в аренду берутся отдельные специ-
альные линии связи для передачи данных.
В последнее время товарные станции по перевозке грузов
часто называют терминалами. На этих терминалах грузы не
только отправляются, но и принимаются. Таким образом, речь
в принципе идет о двусторонней связи, которая позволяет осу-
ществлять транспортировку в обоих направлениях. Также и
в терминалах данных (станциях передачи данных) мы имеем
дело с такой двусторонней транспортировкой. Рис. 4.6 и 4.7
310
Глава 4
поясняют сходство между перевозкой грузов и передачей дан-
ных на большие расстояния. Если уяснить себе это сходство,
то намного легче можно понять вид и способ, которыми осуще-
ствляется передача сообщений между системами обработки
данных. На рис. 4.8 приводится общественная сеть по передаче
данных между тремя городами. В каждом городе имеется цент-
ральная телефонная станции (В), которая может выполнять
коммутацию через телефонные линии связи, имеющие звездооб-
разную структуру. Эта центральная станция заботится о том,
чтобы подключенные абоненты могли обмениваться друг с дру-
гом данными. Центральная станция управляется с помощью
наборных телефонных дисков таким образом, чтобы выполня-
лось желаемое соединение.
При внутреннем сообщении связь осуществляется с помо-
щью передатчиков, работающих в микроволновом диапазоне.
Через одну микроволновую линию могут одновременно переда-
ваться 1860 разговоров или информационых сообщений. На ри-
сунке мы видим, что можно соединить телефонный аппарат
с телефонной сетью, а также через модем (модулятор/демоду-
лятор) подключить систему обработки данных (компьютер).
Между городами микроволновую связь можно осуществить
с использованием, например, коаксиального кабеля, через
который одновременно могут передаваться 600 сообщений.
Наконец, данную сеть можно расширить путем подключе-
ния ее к международной и межконтинентальной сети для осу-
ществления связи с различными странами и континентами
с помощью спутников, т. е. космических кораблей, оснащенных
микроволновыми передатчиками и приемниками. Эти спутники
перемещаются синхронно со скоростью вращения Земли, так
что при наблюдении за ними из определенных мест на Земле
они кажутся неподвижными. Микроволновые передатчики де-
лают возможным получение узкого пучка электромагнитного
излучения при использовании в качестве антенн параболиче-
ских зеркал. Таким образом, на Земле эти данные могут при-
нять только те станции, на которые направлены эти зеркала.
Это справедливо также и в отношении приемников, располо-
женных на космических аппаратах, так что связь не может
быть нарушена передатчиком, работающим вне этого пучка
волн.
При рассмотрении сетей передачи даных мы можем сделать
различие между общественными и частными сетями, как это
показано на рис. 4.9.
Общественные сети доступны подключенным к ним абонен-
там. Телефон и телеграф являются составными частями этих
сетей, также как в последнее время и сеть данных, находящая-
ся в распоряжении государственной почтовой службы.
Передача данных
311
По структуре и способу передачи данных различают сети
со схемной коммутацией и сети, передающие сообщения или
блоки данных. Передаваемые сообщения (посылки данных)
могут иметь различную длину, тогда как блоки данных имеют
постоянную длину. В сетях со схемной коммутацией подключе-
ние абонентов осуществляется центральной станцией (схемой).
В сетях, передающих сообщения или блоки данных, избира-
тельность соединения абонентов (управление каналом передачи
Рис. 4.9. Обзор существующих сетей передачи данных.
данных) обеспечивается специальными программно-управляе-
мыми схемами.
В частном секторе имеются линии связи, сдаваемые в арен-
ду (арендуемые линии), и частные линии связи. Телефонные
и телеграфные линии связи позволяют осуществлять обмен дан-
ными со скоростью 300—4800 бит/с. В специальных сетях дан-
ных возможны скорости передачи данных до 10 Кбит/с. Линии,
сдаваемые в аренду в частном секторе, обычно работают со
скоростью передачи, не превышающей 9600 бит/с. В общем слу-
чае частные линии связи оперируют с потоком данных до
19,2 Кбит/с.
4.5. Передача данных через телефонные линии связи
Использование плоских (кабелей, в которых передача дан-
ных осуществляется по параллельным линиям, ограничивается
относительно небольшими расстояниями. Обычно они применя-
ются, чтобы соединить периферийные устройства, расположен-
ные в непосредственой близости от компьютера или автомата,
друг с другом и с центральной системой. При этом соединении
обычно реализуются звездообразные конфигурации, в которых
312
Глава 4
периферийные устройства разъединены друг с другом и имеют
только одно соединение с центральной системой. При таком
соединении используются также «гирляндные» цепи.
При больших расстояниях параллельная передача данных
становится чрезмерно дорогой. Поэтому пытаются передавать
данные последовательно по одной линии связи. При этом па-
раллельная двоичная информация (двоичное слово) преобра-
зуется на стороне передатчика в последовательность двоичных
сигналов, которая передается по одной сигнальной линии. На
стороне приемника происходит обратное: здесь последователь-
ность двоичных сигналов снова преобразуется в параллельную
двоичную информацию.
Для последовательной передачи в нашем распоряжении
имеется линия связи с телефонной сетью.
При передаче данных на большие расстояния часто исполь-
зуются терминалы с клавиатурой и телевизионным монитором,
которые имеют скорость ввода данных не столь высокую по
сравнению с обычной скоростью перечисленных выше линий
последовательной передачи данных. Наконец, печать данных
представляет собой относительно медленный процесс, поэтому
вполне возможна коммутация нескольких терминалов с систе-
мой обработки данных через одну линию связи. При таком
способе телефонная линия используется более экономично.
Если говорят о терминале, то при этом в общем случае име-
ют в виду соответствующие электронные устройства с клавиа-
турой и телевизионным экраном. Эти терминалы могут содер-
жать также устройство ввода данных, под которым мы пони-
маем отдельную компьютерную систему с памятью на магнит-
ных дисках; к ней подключаются, например, 32 индивидуальных
блока с клавиатурой и телеэкраном. Через эти блоки одновре-
менно вводятся данные от 32 печатающих устройств. Эти дан-
ные после подготовки их компьютером записываются в ЗУ на
магнитных дисках. Из памяти на магнитных дисках данные
снова передаются последовательным способом через телефон-
ную сеть в центральную систему. Само собой разумеется, что
передача данных при таких способах использования происхо-
дит столь быстро, что действительно достигается предельная
скорость, при которой может осуществляться передача данных
через телефонную линию связи.
Поэтому это ограничение привело к разработке разумных
систем передачи данных, которые допускают внутри частотной
полосы пропускания (полосы частот) линии связи передачу
информации одновременно на нескольких несущих частотах.
За счет этого получается последовательно-параллельная систе-
ма передачи данных с большой информационной плотностью.
При передаче данных от различных станций ввода-вывода
Передача данных
313
через телефонную линию связи к компьютеру и обратно необ-
ходимо адресовать и обозначать данные, направляемые в ту
и другую сторону, чтобы не возникало недоразумений при их
интерпретации. Способ, в соответствии с которым эти услов-
ные обозначения передаются и интерпретируются, установлен
в протоколе (инструкции).
Понятие «протокол» должно быть пояснено в следующем
примере типичного для сегодняшних дней формуляра, который
должен быть заполнен определенным образом, чтобы электрон-
ное считывающее устройство могло его понять. При заполне-
нии формуляра должны быть записаны сумма денег и номер
текущего счета владельца в специально предусмотренные для
этого графы. Определенные графы не должны заполняться, так
как система считывания помещает здесь дополнительную ин-
формацию для обеспечения дальнейшей обработки формуляра
в компьютере соответствующей службы. Пожелания этой служ-
бы относительно внесения информации приведены в инструк-
ции по применению.
В основном речь здесь идет об узаконенном предписании,
так как если не придерживаться инструкции по применению,
то тогда невозможна автоматическая обработка формуляра и
должна изготавливаться специальная перфокарта, что, естест-
венно, ведет к замедлению исполнения.
В качестве аналогии можно указать почтовый индекс. Здесь
также следует руководствоваться инструкцией по его заполне-
нию, так как иначе отправка почтовой корреспонденции значи-
тельно замедлится.
Как в нашем примере с формуляром, так и в случае с поч-
товым индексом мы имеем дело с протоколом, которым следу-
ет руководствоваться. Для участия в общественной сети пере-
дачи данных необходимо также следовать инструкции. Если не
придерживаться правил, то данные будут поняты неправильно,
а это может привести к ошибочной обработке информации.
При передаче данных имеются различные протоколы для
их обработки. Существуют также инструкции в отношении
электрических параметров схем сопряжения, например интер-
фейса EIA-RS232C, о котором будет сказано ниже.
4.6. Электрическое соединение системы обработки
данных с существующими сетями передачи данных
Как уже было указано, для передачи данных на большие
расстояния используют телефонные сети. В будущем большую
роль, несомненно, будут играть связи, осуществляемые с по-
мощью спутников. Если мы ограничимся телефонными линия-
ми связи, то следует иметь в виду, что они в основном разра-
314
Глава 4
батываются для передачи звуковой информации в частотном
диапазоне 300—3300 Гц. При оснащении этих сетей не думали
о том, что они будут использоваться для передачи цифровой
информации. Поэтому передача дискретных сигналов с опре-
деленным логическим уровнем напряжения возможна через
телефонные линии связи после спецпреобразований (отметим,
что гальваническая связь с телефонной сетью не разрешается по
причинам безопасности). Существуют очень строгие предписа-
6
4
7 Э Стоп Спит
Метка
Старт 12 3
Пробел Метка Пробел Метка Пробел Метка Метка Пробел Метко Метка Метка
элемент
-йзлементоб-
— Знак
--2—
элемента
Рис. 4.10. Метка и пробел — элементы, с помощью которых передается знак
телеграфного сигнала.
В этом случае знак кодируется путем двоичной комбинации, состоящей из восьми двоич-
ных разрядов. Речь идет об асинхронной передаче данных со стартовым двоичным раз-
рядом (стар-битом) и двумя двоичными разрядами окончания передачи данных (стоп-
битами).
ния в отношении электрической развязки цепей, чтобы пол-
ностью исключить гальваническую связь между осветительной
и телефонной сетями, которая могла бы привести к несчастно-
му случаю. Поэтому устройства, соединяющие систему с теле-
фонной сетью, должны иметь официальное разрешение на
применение.
При передаче цифровой информации от системы в телефон-
ную сеть информационные данные должны быть обработаны
таким образом, чтобы телефонная сеть смогла осуществлять
их передачу с оптимальной степенью надежности. На стороне
приемника должно производиться обратное преобразование дан-
ных, чтобы они были снова понятны для системы, соединенной
с приемником.
При передаче данных используют известные методы радио-
передачи путем модуляции, например амплитудной, частотной и
фазовой. Особенно привлекательна применяемая в телеграф-
ной связи система с частотной модуляцией, обозначаемая как
FSK-система (система с периодическим переключением
частот). В FSK-системе знаки телефонной техники (метка и
пробел) различаются при помощи двух звуковых частот. Обо-
значения метки и пробела видны из рис. 4.10. Такая система
подходит, естественно, и для передачи информации в форме
двоичных сигналов.
Внутри канала с граничной частотой 3000 Гц возможна
даже передача нескольких сигналов с периодическим переклю-
чением частот (FSK-сигналов), например как это показано на
Передача данных
315
Рис. 4.11. Передача двух сигналов с периодическим переключением частот
(FSK-сигналов) по отдельной телефонной линии.
Кривая в диапазоне 300—3300 Гц охватывает полосу пропускания телефонной сети; fc —
несущая частота.
Рис. 4.12. Передача двух сигналов с периодическим переключением частот
(FSK-сигналов) по одной телефонной линии.
Один FSK-сигнал передает информацию о модулированных данных, второй — управляю-
щую информацию для квитирования процесса установления связи. В данном случае воз-
можно использование узкой полосы для передачи управляющих сигналов, поскольку ча-
стота этих сигналов очень низка.
рис. 4.11. При малых скоростях телеграфной передачи в бо-
дах1) можно допускать наличие гораздо большего числа кана-
лов внутри заданной полосы частот. Иногда внутри полосы
частот проектируются каналы с очень ограниченной полосой
пропускания для передачи управляющих сигналов (рис. 4.12).
4.7. Соединение систем друг с другом
и с телефонной сетью
Длина линии связи, используемой для сообщения между
системами обработки данных, может быть различной. При пе-
редаче данных между системами и периферийными устройства-
п Бод — единица скорости телеграфной передачи. Число бодов равно ко-
личеству передаваемых единиц информации в секунду. — Прим, перев.
316
Глава 4
ми, находящимися в машинном зале ЭВМ, такими, как ЗУ на
магнитных дисках, скоростные печатающие устройства и подоб-
ные им приборы, речь идет о коротком соединении. Поэтому
в общем случае здесь происходит параллельная передача дан-
ных.
Для этих оконечных устройств необходима параллельная
передача данных, чтобы обеспечить высокую скорость обработ-
ки данных этими устройствами. По этой же причине они обыч-
но располагаются непосредственно в машинном зале ЭВМ.
При длинных линиях связи между вычислительными систе-
мами и устройствами ввода-вывода параллельная передача
данных становится настолько дорогостоящей, что в таких слу-
чаях переходят к использованию последовательной передачи
данных. Чаще всего такой способ передачи используется для
связи устройств с низкой скоростью обработки данных или для
автономно работающей системы, которая относительно редко
должна сообщаться с другой системой. Такая автономная сис-
тема имеет в своем распоряжении ЗУ, в котором она может
хранить информацию, необходимую для передачи данных.
Во введении мы уже описывали систему ввода данных с па-
мятью на магнитных дисках. При ее использовании передача
данных может происходить в момент времени, который подхо-
дит как для передающей, так и для принимающей системы.
При передаче информации на большие расстояния может
подключаться общественная телефонная сеть при условии ис-
пользования (аренды) одной или нескольких линий связи.
Опыт показывает, что при соединении нескольких устройств
для обмена данными пользователь держит под своим контро-
лем некоторые отрезки цепи передачи информации. В других
случаях он должен использовать уже имеющуюся сеть связи,
например упомянутую телефонную сеть, которая может нахо-
диться внутри или вне линии связи. Под термином «внутри» мы
понимаем здесь собственную центральную телефонную стан-
цию, которая в общем случае является также частью общест-
венной телефонной сети. При передаче данных через общест-
венную телефонную сеть, которая, как мы уже заметили, была
разработана для передачи звуковых сигналов, информацию
необходимо кодировать таким образом, чтобы она имела «под-
ходящую» форму для передающей сети данного вида. На прак-
тике это приводит к тому, что информационные сигналы долж-
ны преобразовываться в звуковые, после чего телефонная сеть
может передавать их обычным способом.
При использовании телефонной линии связи мы должны
придерживаться действующих для нее инструкций. Это означа-
ет, что не может быть превышена определенная скорость пере-
дачи данных из-за возникновения взаимного влияния между
Передача данных
317
каналами связи. Однако если используются линии связи, спе-
циально предназначенные для передачи данных, то допускается
более высокая скорость передачи, чем это предусмотрено для
телефонной сети.
4.8. Модем
Преобразование исходных данных в форме двоичных сиг-
налов в модулированный звуковой сигнал и наоборот происхо-
дит в модеме — блоке модуляции-демодуляции, включаемом
как на стороне передатчика, так и на стороне приемника. Отре-
зок линии связи объекта с другими устройствами, затраты на
реализацию которой несет пользователь, представляет собой
соединение между системой и модемом. Сюда же относятся не-
посредственные параллельные или последовательные соедине-
ния между центральной системой и периферийными устройст-
вами.
В случае периферийных устройств речь идет об устройствах
ввода-вывода информации, выпускаемых фирмами, специально*
занимающимися их производством. К системам обработки дан-
ных могут быть подсоединены периферийные устройства раз-
личных марок. При их соединении должны соблюдаться опре-
деленные правила, так как в противном случае компьютер и
периферийные устройства не смогут совместно работать друг
с другом.
Стандартным устройством сопряжения среди прочих явля-
ется уже названный интерфейс RS232C. Этот интерфейс выпус-
кается многими фирмами — изготовителями систем обработки
данных и периферийных устройств, поскольку он соответствует
скорости работы периферийных устройств. Этот же интерфейс
RS232C применяется и при соединении систем с модемами.
При данном стандартном интерфейсе RS232C речь идет об
электрической спецификации и определении значений сигналов,
которые должны гарантировать необходимую связь между
устройствами.
В линии передачи данных между системами обработки
информации, которые расположены на большом удалении друг
от друга, мы имеем участки линии связи между системой об-
работки данных и модемом, для которых действителен стан-
дартный интерфейс RS232C, и участок линии передачи данных
между модемами через общественную телефонную сеть, где
действительны спецификации для передачи звуковых сигналов
в том виде, в каком они определены телефонной службой.
В наипростейшей форме модем может состоять из передат-
чика с ключевым переключением частот и приемника с блоком
соединения для выполнения необходимой гальванической раз-
318
Глава 4
вязки с сетью. Чтобы можно было оптимально использовать
линию связи при параллельном или последовательном подклю-
чении к ней нескольких станций данных, к данному модему
добавлены дополнительные схемы. Это позволяет добиться па-
раллельного или последовательного режима работы линии.
В числе этих схем следует назвать мультиплексор для пере-
ключения источников или станций приема данных, а также
устройства уплотнения, которые задерживают данные, чтобы
затем передать их за один сеанс работы приемной станции.
Рис. 4.13. Блок-схема модема (модулятора-демодулятора).
Эти уплотнители не только временно хранят информацию, но
и подготавливают данные, чтобы гарантировать их правильную
передачу при более сложных системах модуляции, позволяю-
щих достигать более высокой плотности информации.
На рис. 4.13 представлена блок-схема модема. Мы видим,
что в модуляторе последовательный поток данных преобразу-
ется в переменное напряжение, (которое после усиления и филь-
трации поступает на передающую линию в виде электрического
сигнала звуковой частоты. Управление осуществляется управ-
ляющим блоком с базовым генератором меток времени (син-
хронизации) .
При приеме информации сигнал звуковой частоты снимает-
ся с линии связи, снова фильтруется и усиливается, после чего
демодулируется и преобразуется в дискретный сигнал с опре-
деленным логическим уровнем напряжения. Этот сигнал затем
подается в систему через двухпроводную линию связи.
При использовании телефонной сети можно осуществить
желаемую связь таким образом, что будет выбираться абонент,
и вслед за этим телефонный аппарат будет соединяться с сис-
темой. В данном случае не требуется разрешения телефонной
^службы на применение модема. Однако если используется
^арендуется) фиксированная линия передачи и, таким образом,
Передача' данных
31Э
речь идет о прямой и непрерывной связи, тогда необходимо’
промежуточное включение модема.
Если телефонная линия сильно загружена, тогда жесткая*
связь более предпочтительна, поскольку такая линия связи до-
пускает большую скорость прохождения двоичной информации.
4.9. Системы модуляции
Как известно, систему с периодическим переключением частот
можно использовать в качестве системы модуляции для пере-
дачи цифровой информации. Наряду с этой системой приме-
няются также системы амплитудной (AM) и фазовой (ФМ)^
модуляции.
Рис. 4.14. Модуляция с периодическим переключением частот (FSK), ампли-
тудная (AM) и фазовая (ФМ) модуляции, используемые для передачи
данных.
При модуляции с периодическим переключением частот, как.
это показано на рис. 4.14, а, частота звукового сигнала изменяет-
ся относительно средней частоты. При появлении сигнала 1 час-
тота снижается на 500 Гц (Л), при появлении сигнала 0 часто-
та повышается на 500 Гц (F2). При наличии в середине поло-
сы пропускания центральной частоты 1700 Гц сигнал 1 означа-
ет сдвиг частоты до значения 1200 Гц, а сигнал 0 — сдвиг до
частоты 2200 Гц. При таком сдвиге частоты система с ключе-
вым переключением частот допускает передачу данных со ско-
ростью 1800 бит/с.
320
Глава 4
При амплитудной модуляции различие между 0 и 1 выра-
жается в разнице амплитуд сигнала, как это наглядно следует
из рис. 4.14,6. Внутри амплитудной модуляции возможны не-
сколько уровней, таким образом может быть реализовано не-
сколько каналов для передачи данных. Хотя ширина полосы
пропускания при амплитудной модуляции используется более
экономично, чем при модуляции с ключевым переключением
частот, тем не менее модуляция с ключевым переключением
частот имеет то преимущество, что она менее чувствительна
к влиянию помех.
Внутри амплитудной модуляции возможны еще и другие
варианты, такие, как EZB-модуляция и квадратурная модуля-
ция.
При фазовой модуляции передача данных также возможна
на различных уровнях, при этом различия уровней выражаются
в сдвиге фаз. При данном методе модуляции фаза несущей вол-
ны передатчика сдвигается при изменении поступающего дво-
ичного сигнала. Так, при двухфазной модуляции сдвиг фазы
на 180° означает изменение содержания двоичного разряда
с 0 до 1 или с 1 до 0. Отсутствие сдвига фазы означает про-
хождение серии единиц или нулей. На рис. 4.14, в эта модуля-
ционная система проиллюстрирована при сдвиге фазы на 180°.
Далее существует еще один метод модуляции, обозначаемый
как квитированная модуляция, при которой в амплитудной или
фазовой модуляции имеются два или четыре различных уровня.
Названные методы модуляции применимы не только для
передачи данных. В своей основе они происходят из радиотех-
ники, где эти формы модуляции применяются уже многие годы.
В радиотехнике все звуковые частоты внутри полосы про-
пускания диапазона модуляции передаются с помощью несущей
волны высокой частоты через эфир и на стороне приемника
воспроизводятся соответствующим детектором или модулято-
ром. При этом все звуковые частоты снова появляются с пра-
вильной амплитудой и фазой.
При передаче данных можно также использовать для от-
дельных каналов данных различные звуковые частоты, чтобы
таким способом добиться параллельной передачи данных через
одну линию связи. Однако при низких частотах модуляции
поток данных будет происходить медленнее, так как продолжи-
тельность периода устанавливает границы для скорости пере-
дачи, с которой могут передаваться изменения.
Между каналами модуляции должны также оставаться сво-
бодными полосы частот, чтобы исключить взаимное влияние
между этими каналами. Эти необходимые разделения и общая
ширина диапазона системы передачи ограничивают число ка-
налов, которые могут использоваться параллельно.
Передача данных
321
При использовании этой последовательно-параллельной пе-
редачи данных возникает мультистробирующая структура,
блок-схема которой приводится на рис. 4.15.
Мультистройару-
нлций модем
2^ии^Шдит/с
Мультистродиру -
клций морем
2*М00Ч800 дит/е
Ккомпью-
ущерньгм
каналам
Рис. 4.15. Мультистробирующая связь.
Через одну телефонную линию параллельно передаются три информационных сигнала!
Т — терминал.
4.10. Симплексные и дуплексные связи
Передача данных может выполняться в одном или обоих
направлениях. Однонаправленная передача осуществляется при
«симплексной связи», осуществляемой через телефонные линии.
В этой форме связи участвуют один передатчик и один прием-
ник. Связь осуществляется через отдельную пару жил.
При двухнаправленной передаче связь может производить-
ся через общую пару жил, если передача и прием в обоих на-
правлениях происходят не одновременно. При такой связи, на-
зываемой «полудуплексной», в активном состоянии постоянно
находится только один передатчик или один приемник. Каждый
раз, когда должен переключаться модем для изменения направ-
ления передачи, происходит потеря времени. Необходимое время
переключения линии оказывает негативное влияние на время
передачи прежде всего в тот момент, когда необходимо ждать
подтверждения приема.
В некоторых типах модемов пытаются уменьшить общее вре-
мя переключения и обмена данными за счет того, что при
подтверждении приема посылают сигнал через узкий канал
связи в противоположном направлении. Этот способ называется
квитированием установления связи.
Передача квитирующего сигнала установления связи может
осуществляться одновременно с передачей информации по ка-
налу данных, резервируемому для этой цели. При этой концеп-
21—807
322
Глава 4
ции канал данных использует диапазон частот, простирающий-
ся на 500 Гц в обе стороны от средней частоты 1700 Гц, в то
время как канал квитирования установления связи имеет час-
тоту около 387 Гц.
При дуплексном методе используются две раздельные пары
жил, через которые одновременно может производиться пере-
дача данных в обоих направлениях. При малых скоростях
передачи данных можно также выбрать внутри диапазона
пропускания сети два канала с одинаковыми по величине по-
лосами пропускания: один для передачи данных в одном на-
правлении, второй для обмена данными в противоположном
направлении.
Обычно при скоростях передачи данных более 2400 бит/с
используют дуплексный метод и четырехпроводную линию
связи.
Относительно скорости передачи данных необходимо отме-
тить следующее. Скорость передачи в бодах зачастую отож-
дествляется с числом битов в секунду. Это правильно только
в том случае, когда элемент сигнала имеет два состояния: мет-
ку и пробел (единицу или нуль). Однако если имеется несколь-
ко состояний, как в случае многоступенчатой модуляции (не-
сущая волна модулирована несколькими сигналами данных),
то число битов в секунду больше скорости передачи в бодах.
Полоса пропускания в своей основе определяет наивысшую
скорость передачи данных, и в той же пропорции, в какой она
возрастает, может расти и число передаваемых битов.
В отношении скорости передачи пользователь в общем слу-
чае должен лишь знать, сколько знаков в секунду может обес-
печить передающая сеть. Телеграфная служба, наоборот, имеет
в наличных инструкциях скорость передачи в бодах, в то время
как технические специалисты по передаче данных часто интере-
суются лишь числом битов в секунду. Телеграфная служба ог-
раничивает только максимальную скорость передачи в бодах,
чтобы предотвратить появление перекрестных помех в линиях
телефонной связи. С помощью рациональных систем модуляции
технически возможно реализовать большую скорость передачи
битов по сравнению с максимально допустимой скоростью пере'
дачи в бодах.
4.11. Синхронизация передачи данных
При последовательной передаче двоичные разряды данных
передаются к приемнику по одной линии со сдвигом во време-
ни. Рис. 4.16 еще раз показывает, как осуществляется перевод
из параллельного представления в последовательное.
Ясно, что приемник «не знает», как он должен интерпрети-
ровать этот поток двоичной информации, если этому потоку
Передача данных
323
данных не придавать никаких определенных признаков. При
последовательной передаче данных особенно важно знать, ка-
кой двоичный разряд информационного слова является первым
и с какой скоростью передаются двоичные разряды. Коротко
это можно выразить так: должен быть установлен определен-
ный критерий синхронизации, с тем чтобы передача данных
осуществлялась правильно. Другим важнейшим фактором яв-
ляется ответ на вопрос: какова длина информационного слова,
выраженная количеством двоичных разрядов?
------*• 1
Параллельное
Пбоигное
лреостобление
ПослеОабатель-
ное Обоалное
прсистабление
0
1
1
1
О
о
о
о
1
о
1
о
1
о
о
о
о
11UU10110G1011Ui 0 0 0 0 1
/
О
1
Рис. 4.16. Преобразование параллельной двоичной комбинации в последова-
тельное сообщение,
В телеграфной технике сообщение передается кодированным
способом. Знаки в этом коде изображаются с помощью 5 дво-
ичных разрядов в коде Бодо, при помощи 7 или 8 двоичных
разрядов в коде ASCII и 8 двоичных разрядов в коде EBCDIC.
Таким образом, код определяет величину информационного сло-
ва. Это информационное слово плюс дополнительные двоичные
разряды в качестве сигналов старта и прекращения передачи
данных, указывающих начало и конец передаваемого слова,
обозначается как «кадр». При передаче данных через одну
сигнальную линию различают асинхронную и синхронную пе-
редачу.
На рис. 4.17 изображен кадр, используемый для асинхрон-
ной передачи данных. Если линия не используется, то тогда она
имеет состояние Н (1). Мы обозначаем это состояние как «со-
стояние простоя», которое может наступить также между двумя
информационными словами, если они при передаче следуют не
сразу, а одно за другим.
Передача слова начинается с двоичного разряда старта
(стартового бита), который обозначается снижением потенциа-
21
324
Глава 4
ла линии от состояния Н(1) к L(0), т. е. поступлением отри-
цательного (спадающего) фронта импульса.
Приемник детектирует этот стартовый двоичный разряд,
точнее говоря, фронт спада импульса, и готовится к тому, что-
бы можно было воспринимать двоичные разряды данных. Как
это происходит далее, мы сейчас увидим.
В конце передаваемого кода или знака даются один, пол-
тора или два двоичных разряда, служащих сигналом прекра-
Стартобьи!
бит
ъетн.
—//---•
Стоп-
диты
101000110111
Рис. 4.17. Асинхронная передача данных.
щения передачи данных (стоп-бита). При этом линия передачи
данных снова приходит в состояние простоя Н (1). Двоичным
разрядом старта является двоичный нуль L (0), двоичным раз-
рядом сигнала прекращения передачи данных — двоичная еди-
ница Н(1).
Часто вместе со знаком по линии передается еще и двоич-
ный разряд четности, чтобы таким способом обеспечить на сто-
роне приемника возможность контроля правильности приема.
Этот процесс повторяется для каждого посылаемого числа
(знака) до тех пор, пока не передано все сообщение.
Передача слов может происходить взаимосвязанно, однако
между ними должны находиться промежуточные зоны (пробе-
лы). Посредством этих пробелов производится синхронизация
приема и передачи информации.
На стороне приемника информационное слово считывается
следующим образом. В приемнике находится генератор синхро-
низирующих импульсов с делением на 16. Делитель при спа-
дающем фронте импульса стартового двоичного разряда уста-
навливается на нуль, и начиная с этого момента отсчитывают-
ся синхронизирующие импульсы. Генератор синхронизирую-
Передача данных
325
щих импульсов имеет частоту пульсации, в 16 или 64 раза пре-
вышающую частоту следования двоичных разрядов.
При нашем рассмотрении мы принимаем, что частота син-
хроимпульсов в 16 раз выше, чем частота передачи двоичных
разрядов. Тогда после прохождения восьми син-
хроимпульсов, т. е. в середине интервала передачи двоичного
разряда, мы можем проверить значение информационного сиг-
нала на линии (// или L). Это наиболее удобная позиция для
Синхроимпульсы (с частотой• б
16риз превышающей гостоту
передали банных)
0 1 2 3 4 5 6 7 8 9 1011 12 15 14 15 О 1 2 5 4 5 6 7 8 9 16
_____Синхронизатор V _________________________
приемника |___________________
I [
Детектируемый лойтберждение Лербый бит
стартовый Лит стартового йота Оанных
Рис. 4.18. Индикация двоичной комбинации при асинхронной передаче
данных.
Стробирующий сигнал устанавливается в положение 8 двоичного счета для считывания
данных.
считывания значения передаваемых двоичных разрядов, что яс-
но следует из рис. 4.18.
Если приемник через восемь синхроимпульсов после про-
шедшего перед этим спадающего фронта импульса констатиру-
ет на линии нуль, то этот первый двоичный разряд восприни-
мается в качестве стартового сигнала. Начиная с этого момен-
та линия передачи будет опрашиваться через каждые
шестнадцать импульсов с целью определения следующих друг
за другом двоичных разрядов передаваемого числа (символа).
Двоичные сигналы прекращения передачи данных (стоп-биты)
не оказывают влияния на значение считываемого информаци-
онного слова. Они важны для приема следующего слова, так
как линия должна снова принять состояние Н(1), прежде чем
может быть принят новый сигнал старта (старт-бит). При пе-
редаче символов (чисел), следующих один за другим, двоич-
ные сигналы прекращения передачи данных дают промежуток
времени, равный продолжительности прохождения одного или
двух двоичных разрядов, достаточных для того, чтобы линия
могла принять состояние Н.
Как мы установили, наилучший момент для считывания
информационного слова наступает тогда, когда счетчик нахо-
дится в состоянии 8. Если частота синхронизирующих импуль-
326
Глава 4
сов отклоняется от значения 16-кратной частоты следования
двоичных разрядов, то опрос происходит не точно в середине
интервала. При следующем двоичном разряде точка опроса
сдвигается дальше, и наконец один двоичный разряд считыва-
ется уже неправильно. Если частота синхронизирующих им-
пульсов передатчика отклоняется на 5% 16-кратной частоты сле-
дования потока двоичных разрядов,то после передачи 9 дво-
ичных разрядов (двоичный разряд стартового сигнала + 8 дво-
ичных разрядов данных) отклонение возрастает до 45%, что
соответствует временному интервалу, равному половине вре-
мени прохождения двоичного разряда. Это, конечно, неприем-
лемо, так как вызывает неправильный прием данных.
Процедура, которая здесь описана, определяется стандартом
RS404 EIA (Electronic Industry Association).
При синхронной передаче пересылка данных синхронизиро-
вана: с помощью передаваемого особого тактового сигнала или
с помощью тактового сигнала, который генерируется при по-
ступлении определенной комбинации двоичных разрядов. В слу-
чае использования последнего способа можно снова использо-
вать шестнадцатеричный счетчик, который запускается генера-
тором синхроимпульсов с частотой, в 16 раз превышающей
частоту передачи потока данных (бит/с). В положении 8 счет-
чика опрашивается поступающий сигнал и считываются дан-
ные.
В исходное состояние счетчик устанавливается фронтами
(переходами) сигнала данных в случае, если эти переходы воз-
никают. В противном случае счетчик считает дальше до 16 и
затем при переходе с 16 на 0 устанавливает новый цикл счета.
Таким способом осуществляется синхронизация.
Сигнал синхронизации приема двоичных разрядов форми-
руется при поступлении сигнала передачи данных с помощью
осциллятора (тип PLL). О таком осцилляторе шла речь при
рассмотрении накопителя на магнитных дисках. При помощи
генератора также вырабатывается тактовый (запускающий)
сигнал при поступлении заданной комбинации двоичных раз-
рядов. Часто при передаче данных сигнал для синхронизации
приема двоичных разрядов выдает модем.
Если в качестве синхронизирующего генератора использу-
ется осциллятор, то тогда целесообразно после переключения
с передатчика на приемник послать впереди сообщения серию
из 16 импульсов (10101010...), чтобы таким образом на стороне
приемника перевести осциллятор на равномерный шаг. Эта
серия предварительных импульсов (преамбула) обозначается
как «шестнадцатеричное 55».
Часто наряду с сигналом «шестнадцатеричное 55» (PAD 1)
необходимо дать в конце блока данных или в случае прерыва-
Передача данных
327
ния передачи данных (ABORT) также сигнал PAD 2. Этот вто-
рой сигнал PAD имеет шестнадцатеричный код FF (11111111).
Поскольку при стартовом сигнале передачи данных пода-
ются один или два синхрознака, то сразу после этого следует
полное сообщение без сигналов старта или прекращения пере-
дачи, помещаемых между знаками. Синхронизирующие знаки
используются здесь не только для синхронизации задающего
Синхро- Синхро
3HUK 1 3HUK2
'Информацией- 1
\нью слаба ,
1 0 0 0 0 0 111 11
I Синхрознак / IСинхрознак 2 IОнформационХИнформацион I Информацией
I I \ное слабо / \ноеслобо2 \ное слабой I
Рис. 4.19. Синхронная передача данных.
генератора, но и для формирования кадров. Наряду с синхро-
низацией задающего генератора для опрашивания двоичных
разрядов надо также синхронизировать поступление разряда
(знака), т. е. приемник должен считывать в качестве первого
двоичного разряда именно первый, а не второй или третий
двоичный разряд.
При использовании двух синхрознаков получаем точное рас-
познавание сообщения. В этом случае сначала происходит поиск
первого знака, и как только он найден, происходит проверка,
совпадает ли с ранее заданным также и второй знак. Этот
факт констатируется в протоколе. Если нет соответствия, то
синхронизация не обеспечивается и прием не производится.
В случае соответствия второго синхрознака принимающая си-
стема тотчас же переходит к приему данных.
Прием и распознавание синхрознаков на стороне приемника
осуществляются в режиме поиска. В этом режиме система по-
следовательно принимает и проверяет поступающие данные.
Как только синхрознаки детектируются, режим поиска прекра-
щается. Сразу после этого, как уже было сказано, дается раз-
328
Глава 4
решение на прием информации в регистр. Двоичный разряд,
следующий за последним синхрознаком, представляет собой
первичный двоичный разряд информационного слова.
Если передающая система не в состоянии своевременно вы-
рабатывать передаваемое число, то свободный промежуток, воз-
никающий в подобном случае, заполняется синхрознаками.
При этом принимающая система просто ждет, пока на стороне
передатчика будет подготовлено для передачи соответствующее
число.
На рис. 4.19 представлена комбинация двоичных разрядов
в синхронном последовательном формате данных. Мы видим,
что перед сообщением подаются два синхрознака и сразу пос-
ле этого происходит переход к передаче информационных слов
или знаков.
4.12. Управление модемом
Модем, выполняющий преобразование комбинации двоич-
ных разрядов в модулированный сигнал (и наоборот), должен,
естественно, управляться системой, чтобы осуществлялась же-
лаемая функция (передача или прием). При этом система так-
Интврщейс
Рис. 4.20. Интерфейс между системой и модемом.
Последовательный интерфейс выполнен в виде интегральной схемы (например, интер-
фейсы Philips-Signetics 2651 и Intel 8251А).
же должна быть информирована посредством некоторого
устройства, например, о готовности модема к передаче сообще-
ния, а при приеме — о том, должен ли модем в зависимости от
обстоятельств выдавать сообщение системе. Обозначение этих
сигналов производится в соответствии с нормами EIA-RS232C
и CCITT-V24, чтобы обеспечить таким образом некоторый стан-
дарт. Соответствующие кабели с необходимыми штеккерными
разъемами на обоих концах поставляются фирмами — изгото-
вителями соединений.
Передача данных
329
Как следует из рис. 4.20, в названном интерфейсе разли-
чаются следующие информационные и управляющие сигналы:
TxD (transmit data): вход последовательных сигналов данных
в модем;
RTS (request to send): требование к модему перейти в режим
передачи;
DTR (data terminal ready): сообщение в модем о том, что сис-
тема готова к передаче данных;
RxD (receive data): выход последовательных сигналов данных
от модема;
CTS (ctear to send): сигнал, показывающий, что модем готов
к приему последовательных данных для пересылки;
DSR (data set ready): сообщение от модема к системе, что
установлена связь с телефонной линией;
DCD (data carrier detect): сообщение системе, что модем при-
нимает сигнал, несущий информацию.
Полный перечень сигналов для интерфейса RS232C приво-
дится в таблице рис. 4.21. Ранее мы говорили о связи между
модемом и системой. Теперь между компьютером и модемом
находится так называемый программируемый интерфейс. Он
представляет собой управляемый блок, регулирующий связь
с модемом. Такой программируемый интерфейс (PCI) выпол-
няет не только преобразование последовательных сигналов
в параллельные и наоборот, но и одновременно интерпретирует
также управляющие сигналы, поступающие от модема. Схема
вырабатывает также сигналы, необходимые для управления
модемом. Эти программируемые интерфейсы (PCI) в общем
случае являются самостоятельно функционирующими блоками,
которые через адресные линии связи взаимодействуют с систе-
мой при помощи сигналов прерывания и команд. Интегральны-
ми схемами, которые служат в качестве программируемого ин-
терфейса, являются наряду с другими и схемы Philips-Signetics
2651 и Intel 8251.
С применением программируемого интерфейса типа 8251,
имеющего также универсальный синхронно-асинхронный прием-
ник-передатчик (USART), мы подробнее познакомимся в гл. 5
(том 4).
В отношении электрического интерфейса между модемами
и системами в интерфейсе типа EIA-RS232C даются рекоменда-
ции, которые несколько изменили свой вид в промышленных
нормах (рис. 4.22). В этом интерфейсе используется несбалан-
сированная линия передачи, поэтому передатчик и приемник
имеют общую обратную линию связи (общую землю АВ).
Передатчик должен выдать «маркерный импульс» с уров-
нем, который по отношению к потенциалу земли находится в
интервале между —5 и —15 В, в то время как «пробел» имеет
330
Глава 4
Номера D-выводов Кодирование в интерфей- се EIA RS232C Эквивалент CCITTV.24 Описание
1 АА 101 Земля (защита)
7 АВ 102 «Подвешенная земля»/общий обрат- ный провод
2 ВА 103 Переданные данные
3 вв 104 Принятые данные
14 SBA 118 Вторично переданные данные
16 SBB 119 Вторично принятые данные
4 СА 105 Запрос на посылку сообщения
5 СВ 106 Очистить для посылки сообщения
6 СС 107 Готовность набора данных
20 CD 108.2 Готовность оконечного устройства преобразования данных
22 СЕ 125 Кольцевой индикатор
8 CF 109 Сигнальный детектор приемной линии
21 CG ПО Детектор качества сигнала
19 SCA 120 Вторичный запрос на посылку сооб- щения
13 SCB 121 Вторичная очистка для посылки со- общения
12 SCF 122 Вторичный детектор приемной ли- нии/сигнала
23 CI 112 Селектор скорости передачи дан- ных/сигнала (DCE)
24 DA 113 Синхронизация сигнального элемента передатчика (DTE)
15 DB 114 Синхронизация сигнального элемента передатчика (DCE)
17 DD 115 Синхронизация сигнального элемента приемника (DCE)
DCE (Data Communications Equipment) — оборудование для передачи данных
Рис. 4.21. Интерфейс RS232C (CCITT —V.24)
Передача данных
331
уровень напряжения между 4-5 и 4-15 В. Приемник распознает
уровни ниже —3 В по отношению к потенциалу земли в каче-
стве «маркерного импульса (метки)», а уровни свыше +3 В —
в качестве «пробела».
Интерфейс RS232C ограничивает также максимальное вы-
ходное напряжение, выходной ток при коротком замыкании
и крутизну фронта импульсов, выдаваемых передающей систе-
мой (скорость прогона). Далее ограничиваются значения пол-
ного входного сопротивления приемника, полного выходного
сопротивления передатчика, которое является важной характе-
ристикой при параллельно включенных передатчиках в неактив-
Данные Управление Синхронизация
от DCE к DCE от DCE к DCE от! DCE I к DCE
X X X X
X X X X X X X
X X X X X X
(модем); DTE (Data Terminal Equipment)—система, связанная с модемом.
с данными кодирования и подключения.
Стандарт Передатчики (2) Приемники!О)
СОбокннь/е Сче/пберенные Сббоенные Сьетберенные
Z ь RS232 п л 0 -1 5N 75150 8М 75188 МС1588 8М 75152 8М 75156 8N 75189 ' 80751895 МС1989 МС1689Р
В
7 ь R8232 п, 5 и ± /илдозсн 5N 75186 8М75187 /1506375 5M26L8325 МС3686 8М75173 3N 75175
, В'
7 R8252 Г 2Л... 2Ж Многожильный гибки и кабель 295WG 0 SO 75178 8N 75175 /159638 8N75151 SN75153 HM26L851 МС3487 ЗМ 75172 8N 75176 /150637 5M26L8325 МС3586 8N75173 8N 75175
Рис. 4.22. Электрические спецификации интерфейсов RS232, RS422 и RS423.
Сдвоенный — 2 схемы в одном DIL-корпусе; счетверенный — 4 схемы в одном
DIL-корпусе.
Параметр RS232 (V24) однопроводный (несбалансированный)
Рекомендованная макс, длина кабе- ля, м Макс, скорость передачи данных, Кбит/с Напряжение Uo на линии передачи при отключенной нагрузке, В Напряжение Ul на линии передачи при подключенной нагрузке, В Ток короткого замыкания |IS| на уп- 15 20 ± (3—25) Мин. ±5; макс. ±15 (вели- чина нагрузки 3—7 кОм)
равляемом выходе, мА Скорость нарастания сигнала dU/dt на управляемом выходе, В/мкс ^±500 Макс. 30
Метка (выключено = 1) ЗВ
Пробел (включено = 0) ^+зв
Пороговое напряжение (чувствитель- ность) приемника, В Полное входное сопротивление при- емника, кОм Диапазон входного напряжения при- емника, В Выходное сопротивление при обесто- ченном приемнике ±3 3—7 (2500 пФ) ±25 300 Ом
RS423 (Х26, V10) однопровод- ный (несбалансированный) RS422 (Х27, VII) с дифферен- циальным выходом (сбалан- сированный)
1200 1200
100 (при длине 12 м) ±(4-6) Мин. ±3,6; макс. ±6 (вели- чина нагрузки 450 Ом) С ±150 Зависит от длины кабеля и скорости передачи данных в битах А' отрицательно относитель- но В' А' положительно относи- тельно В' 104 (при длине 12 м) =Сб между дифференциаль- ными выходами Мин. ±2 между дифферен- циальными выходами (на- грузка 100 Ом) С ± 150 А'<В' А'>В'
±0,2 ±0,2
>4 >4
±6 от —25 до +6
±100 мкА при ±6 В ±100 мкА (0,25 B^Ucm^ ^6 В)
334
Глава 4
ном состоянии, а также и емкости, на которую может работать
выход передатчика.
Данная спецификация действительна для кабеля между тер-
минальным оборудованием DTE и схемным оборудованием
DCE, т. е. между системой и модемом с длиною от 15 м и выше
и скоростью передачи данных более 20 Кбит/с.
Эти электрические спецификации не совместимы с характе-
ристиками ТТЛ-схем. Интерфейс RS232C работает с напряже-
ние. 4.23. Сигнал переключения, удовлетворяющий спецификации интерфей-
са RS232C.
Область перехода от метки к пробелу лежит в пределах между —3 и +3 В.
ниями 4-15 и —15 В вместо 4-5 В, используемых в СИС и БИС
ТТЛ-логики.
Одностороннее соединение с учетом взаимного влияния меж-
ду каналами связи через общий потенциал земли вызывает
в отличие от идеального случая возникновение существенных
помех. Поэтому соединение ТТЛ-схем с интерфейсом RS232C
на стороне передатчика и приемника должно выполняться с по-
мощью специально разработанных интегральных схем или
электронных устройств. Что касается интегральных схем, то
для таких устройств сопряжения различные фирмы-изготови-
тели поставляют как передатчики, так и приемники.
Для интерфейса RS232C действительна характеристика пе-
реключения, изображенная на рис. 4.23. Магистральный (шин-
ный) передатчик должен быть в состоянии устанавливать вы-
ходное напряжение высокого уровня в интервале между +3 и
4-25 В, в то время как напряжение низкого уровня должно на-
ходиться в интервале между —3 и —25 В.
Переходная зона между 4-3 и —3 В должна проходить за
время, меньшее 0,04/в и с максимальным значением в 1 мс.
В данном случае величина /в является длительностью элемен-
та сигнала (метки или пробела). Если скорость передачи дан-
ных задана, то /в соответствует величине 1/скорость передачи
Передача данных
335
(в бодах). При времени спада, равном 0,04/в, мы теряем 4%
времени прохождения фронта двоичного разряда на спадающем
фронте импульса. Если мы еще присовокупим к этому в худ-
шем случае 1% для нарастающего фронта импульса, то полу-
чим общие потери на время переключения при передаче одного
двоичного разряда в 5%, что во многих случаях приемлемо.
При этой оценке мы исходим из того, что переход от состояния
Н к L выполняется с помощью низкоомного ключевого элемен-
та транзистора рпр- или /гр/г-типа (включенное состояние), а
переход от L к Н — с помощью пассивного элемента в виде
выходного резистора. Скорость, с которой проходится переход-
ная зона, определяется в основном характеристиками выходно-
го каскада передатчика и собственной емкости кабеля, под-
ключенного к его выходу. Согласно спецификации RS232C при
длине кабеля 15 м его собственная емкость составляет 2500 пФ,
что является допустимым.
Рис. 4.24. Управляемый передатчик для устройств сопряжения, удовлетво-
ряющих спецификации интерфейса RS232C:
а — простой управляемый передатчик; б — механизм переключения; в — разряд емкости
кабеля на линию напряжением—12 В через выходное сопротивление; г — управляемый
передатчик е двухтактным выходным каскадом.
336
Глава 4
На рис. 4.24 показан выходной каскад, реализованный на
одном транзисторе, который при подаче управляющего сигна-
ла переходит в режим насыщения и обеспечивает низкоомную
связь между выходом и шиной питания 4-12 В. Данная схема
позволяет получить хороший нарастающий фронт импульсного
сигнала даже в том случае, когда на выходе подключен кабель
интерфейса с паразитной емкостью 2500 пФ.
При отрицательном фронте импульсного сигнала транзистор
находится в запертом состоянии. В этом случае паразитная ем-
кость линии связи разряжается через выходное сопротивление
Рис. 4.25. Приемное устройство для интерфейса RS232C.
Четыре такие схемы объединены в одной микросхеме MC1489L фирмы Motorola.
каскада, равное 3,3 кОм. Разряд емкости с потенциала +12
до —12 В происходит в течение примерно 25 мкс (3\RC). Это
слишком долго, если мы хотим передать по линии данные со
скоростью 20 Кбод. Поскольку время переключения ограничено
величиной 0,04/-в, то данная схема применима только для ско-
рости передачи не более 6600 бод. Для таких скоростей пере-
дачи применим описанный выше простой выходной каскад.
Повышение скорости может быть достигнуто за счет уменьше-
ния выходного сопротивления схемы. Однако наиболее эффек-
тивным решением для получения максимальной скорости пере-
дачи является использование двухтактного (пуш-пульного)вы-
ходного каскада. Такой каскад потребляет гораздо меньшую
мощность, чем схема на рис. 4.24, а, характеризуемая малым
выходным сопротивлением.
о Весьма распространенное в последнее время название каскадов этого
типа происходит от слов «push-pull» (англ.), переводимых как «тяни-толкай».
Это название отражает принцип действия каскада. — Прим. ред.
Передача данных
337
Приемник, удовлетворяющий спецификации интерфейса
RS232C, может в своей простейшей форме состоять из схемы
с тремя транзисторами, как это показано на рис. 4.25. Четыре
таких схемы интегрированы на одном кристалле («чипе») и
размещены в корпусе с двухрядным расположением 14 выводов
(микросхема MC1489L фирмы «Motorola»).
В усилителе между коллектором второго транзистора и ба-
зой первого включено сопротивление положительной обратной
связи Rf величиной 10 кОм, вызывающее появление гистерезиса
Рис. 4.26. Две схемы из микросхемы MC1489L, включенные в качестве
приемника для интерфейса RS232C.
Кабель подключен через сопротивление 8 кОм к штырькам подачи управляющего воз-
действия (установки усиления).
22—807
338
Глава 4
«на передаточной характеристике. Наличие гистерезиса застав-
ляет усилитель самопроизвольно включаться в переходной зо-
не, за счет чего устраняется неопределенность порогового
уровня.
Пороговый уровень зависит от сопротивления резистора,
который должен быть включен между входом для подачи уп-
равляющего воздействия и потенциалами или —t/в. При
напряжении питания +5 В и величине сопротивления 5 кОм по-
рог составляет —2 В, а при сопротивлении 13 кОм составляет
О В. Если сопротивление отсутствует, то порог имеет значение
Доннь/е1х
Данные?
иссМ5В)
16 ^29627
Запрет
Даная
обратной о бязи
Интерфейс ,
Е1ЯИ8232С^ 5 кОм
----------И-Г-1 Г
।—
&
мОкОм
UEE{-15B)
ВыШ
\ЙОННЬ/Х /
I Строб- или?
импульс
&
-56
Фис. 4.27. Интерфейс RS232C с управляемым передатчиком типа 9616 и
приемником типа 9627.
Длина кабеля не должна превышать 15 м.
4-1 В, а при £7В = —5 В и сопротивлении 11 кОм — значение
+ ЗВ.
Усилитель, рассматриваемый как приемник для интерфейса
5?S232C, управляется сигналом, поступающим на вход через
внешнее сопротивление 8 кОм, как это показано на рис. 4.26.
Приемник включается при уровне напряжения около 1 В
си имеет величину гистерезиса 250 мВ. Приемник типа
MC1489AL имеет величину гистерезиса 1,15 В.
На рис. 4.24, г приведен выходной каскад управляемого пе-
редатчика типа 9616 фирмы Fairchild, который также может
использоваться для реализации интерфейса RS232C. Передатчик
выполнен в виде интегральной микросхемы (три передатчика
в одном корпусе с двухрядным расположением 14 выводов).
Двухтактный выходной каскад обеспечивает скорость нараста-
ния сигналов 15 В/мкс в кабеле, соединенном с резистором
Rl = 3 кОм и имеющем собственную емкость 2500 пф.
При напряжении питания 12 В выходное напряжение лежит
в интервале между +6 и —6 В, причем как при положитель-
ной, так и при отрицательной полярности может протекать
выходной ток 17 мА. Данный передатчик применяется для ин-
терфейса RS232C в комбинации с приемником типа 9617 или
*9627.
Микросхема типа 9627 представляет собой приемник с диф-
ференциальным входом. Однако при его подключении к интер-
Передача данных
339'
фейсу RS232C один из входов соединяется с потенциалом зем-
ли. Вход, подсоединяемый к кабелю, определяет, будет ли сиг-
нал на выходе приемника L- или //-активным.
Из рис. 4.27 видно, как реализуется интерфейс RS232C при
использовании микросхем 9616 и 9627. На входах приемника!
Оконезная
нагрузка
Рис. 4.28. Сбалансированный интерфейс RS422 (а) и несбалансированный
RS423 (б).
9627 разрешается появление общего напряжения питания
±25 В. Значения входных сигналов (точки включения), на ко-
торые реагирует приемник, задаются с помощью вывода 1.
Если мы соединим этот вывод с напряжением — С7Ее, то точки
включения имеют значения +2,6 и —2,6 В согласно интерфейсу
RS232C. Если вывод 1 свободен, то точки включения имеют
значения +0,45 и —0,45 В. Входное сопротивление приемника
лежит в диапазоне 3—7 кОм, если вывод /?Вх соединен с инвер-
тирующим входом. Сигналы на выходе приемника совместимы
с сигналами микросхем ТТЛ и ОТЛ.
Нормы для несбалансированного интерфейса RS423 и сба-
лансированного RS422 допускают более высокую скорость пе-
22
340
Глава 4
редачи двоичных разрядов по сравнению с интерфейсом RS232C.
Для последнего нормы были разработаны в 1969 г. и за это
время уже устарели. Тем не менее эта нормаль еще исполь-
зуется в тех устройствах, для которых не обязательно обеспе-
чение наибольшей скорости передачи двоичной информации.
В качестве примера можно назвать построчно печатающее
устройство, устройство ввода-вывода данных на перфоленту,
программатор для программируемого постоянного ЗУ устрой-
ства (ППЗУ) и кассетное ЗУ (кассетный магнитофон).
I.
компьютер}
\Дист ултГ\
терминал I
\дисплея I
s|5/V -г
Х75176____2
S ХЛ
5N75278
420 ОМ
6N
75176
I РвБерсибный усилителе. Ц—1
L----------------------1 [пееатуст.
1~И ____ .
\1/43N75173 1143075172^
[Терминал дисплея J
Рис. 4.29. Устройство сопряжения системы через общую шину, реализован-
ную согласно стандарту № 1360.
К системе также подключен модем; R — приемник; D — передатчик.
Интерфейс RS422 допускает скорость передачи двоичной
информации 10 Мбит/с, а интерфейс RS423 — порядка
100 Кбит/с. На рис. 4.28 приведены структурные схемы интер-
фейсов RS422 и RS433. Мы видим, что линия связи при исполь-
зовании интерфейса RS422 управляется сбалансированно,
и приемник на конце линии воспринимает дифференциальный
сигнал. При применении интерфейса RS423 линия управляется
несбалансированно, однако на конце также находится приемник
с дифференциальным входом.
Относительно преимуществ и недостатков использования
сбалансированных и несбалансированных линий передачи сиг-
налов следует указать на материал, изложенный в разд. ч. 1
данной главы. Эта тема обсуждается также в гл. 5 (том 1).
Микросхемы, реализующие интерфейсы RS422 и RS423 со-
гласно нормалям, поставляются различными изготовителями
интегральных схем. Обзор схем приведен в таблице на рис. 4.30.
На рис. 4.29 приведена схема интерфейса некоторой систе-
мы с центральным процессором и различными периферийными
устройствами. К шине интерфейса подключены: модем, терми-
нал дисплея, реверсивный усилитель, построчное печатающее
Передатчики
Схема Стандарт Число схем в DIL-кор- пусе ^ЫХ’ мА Макс, мощ- ность, мВт Макс, за- паздывание, нс
SN75172 Предло- женный стандарт № 1360 и RS422 4 ±60 315 50
SN75174 ±60 315 50
SN75151 RS422 4 ±40 420 30
SN75153 ±40 420 30
AM26LS31 МС3487 ±20 420 20
±50 550 20
SN75158 SN75159 2 ±40 263 25
±40 341 25
МА9636А RS423 2 ±9 432 Устанавли- вать
ив, в Напряжение источника питания, В Примечания
+ 5 4-12/—7 ф Для подключения шины • Разрешение Н- и L-активными сигналами
+5 4-12/—7 ф Для подключения шины ф Разрешение двумя Н-активными сигналами
+5 +6/—0,25 • Небольшой сдвиг по фазе • Отдельный сигнал разрешения+ +строб-импульс
+5 +6/—0,25 • Небольшой сдвиг по фазе • Общий сигнал разрешения
45 +6/-0,25 • Небольшой сдвиг по фазе • Разрешение Н- и L-активными сиг- налами
+5 +6/—0,25 • Небольшой сдвиг по фазе ф Разрешение Н-активными сигна- лами
+5 +5 +6/—0,25 +6/—0,25
±12 +6 ф Крутизна фронта, настраиваемая с помощью внешнего сопротивления
SN75150 RS232 2 ±2 488 Устанавли- вать ±12 ±25 • Устойчив к короткому замыканию при напряжениях от —25 до +25 В
5N75188 2 ±2 576 Устанавли- вать ±12 ±15
Схема Стандарт Число схем в DIL-кор- пусе Макс, мощность, мВт Макс, за- паздыва- ние, нс ив. в Напряже- ние источ- ника пита- ния, В Чувствитель- ность, мВ Примечания
1 Приемники SN75173 SN75175 Предложен- ный стан- дарт № 1360 и RS422 RS423 4 368 35 +5 ±12 ±200 ф Для подключения шины ф Разрешение Н- и L-актив- ными сигналами
368 35 +5 ±12 ±200 ф Для подключения шины ф Разрешение двумя Н-актив- ными сигналами
AM26LS32A RS422 RS423 RS232 4 368 35 +5 ±7 ±200 ф Разрешение Н- и L-актив- ными сигналами
МС3486 420 35 +5 ±7 ±200 ф Разрешение двумя Н-актив- ными сигналами
МА9637А 2 262 25 +5 ±7 ±200
SN75152 2 383 80 | ±12 ±25 ±3000 ф Настраиваемый гистерезис
SN75154 175 30 +5 ±25 ±3000 ф Настраиваемый гистерезис ф Оптимальное значение Ub= = + 12 В
SN75189 SN75189A 4 130 130 85 85 +5 +5 ±25 ±25 См. лист данных См. лист данных ф Настраиваемый гистерезис ф Настраиваемый гистерезис
I Приемопередатчики Схема Стандарт Число схем в DIL-кор- пусе Передатчик Напряжение источника питания, В Приемник ив. в Макс, мощ- ность , мВт Примечания
^ВЫХ* мА макс, запаз- дыва- ние, нс чувст- витель- ность, мВ быстро- дейст- вие, нс
SN75176 Предложен- ный стан- дарт № 1360 ±60 40 ±12 —7 ±200 35 +5 185 О Двунаправленный прие- мопередатчик шины ф Разрешение приема Н-ак- тивным сигналом • Разрешение передачи L-активным сигналом
SN75177 1 ±60 40 + 12 —7 ±200 35 +5 185 • Используется в качестве повторителя • Разрешение Н-активным сигналом
SJN75178 ±60 40 + 12 —7 ±200 35 +5 185 О Используется в качестве повторителя • Разрешение L-активным сигналом
Рис. 4.30. Спецификации передатчиков, приемников и приемопередатчиков, соответствующих требованиям интерфейсов
RS232C, RS422, RS423 и американского стандарта № 1360,
344
Глава 4
устройство и дистанционно управляемый терминал дисплея
(клавиатура + устройство визуального отображения). Усили-
тель является промежуточным звеном, служащим для того»
чтобы можно было увеличить длину кабеля сверх допустимой
величины. Усилитель используется для восстановления уровней
напряжения для метки и пробела.
На схеме приведены типы кабельного передатчика и прием-
ника, которые могут использоваться при соединении перечис-
ленных периферийных устройств с шиной. Речь идет здесь о
схемах фирмы Texas Instruments. Длина ответвлений от шины
до схем интерфейса должна быть возможно короче, чтобы ис-
ключить возникновение помех из-за влияния отражений.
Относительно сопряжения системы через общую шину сле-
дует заметить, что для такой шины был предложен стандарт
№ 1360. Этот американский стандарт допускает скорость пере-
дачи информационных данных 10 Мбит/с, в то время как мак-
симальная длина кабеля может достигать 120 м. К шине мо-
жет быть подключено 32 управляемых передатчика и 32 при-
емника. Интерфейс управляется сбалансированно.
Приведенная на рис. 4.29 конфигурация системы соответ-
ствует стандарту № 1360, поскольку в нем указаны те же типы
схем, которые используются в данной системе. Микросхемы
типа SN75176 и SN75177, включенные в системе на рис. 4.29F
являются так называемыми приемопередатчиками.
4.13. Транспарантные операции и протоколы
До сих пор мы говорили о передаче данных, причем инфор-
мационные слова были закодированы знаками кодов Бодо,
ASCII (стандартный американский код для обмена информа-
цией) или EBCDIC (расширенный двоично-десятичный код об-
мена информацией). Эти коды содержат также управляющие
знаки, приведенные на рис. 4.31. При передаче данных в одном
из этих кодов наличие управляющих знаков не вызывает каких-
либо осложнений. Однако если в случае связи между двумя
системами не требуется передача знаков и двоичные данные
поступают непосредственно в линию передачи, то тогда не мо-
гут применяться определенные комбинации двоичных разрядов,
которые изображают тот или иной управляющий знак
(рис. 4.31). Это затрудняет процедуру связи. Для устранения
таких затруднений были разработаны процедуры, при исполь-
зовании которых не накладывается никаких ограничений на
содержание слова. Благодаря этому передача стала лучше
«просматриваться», и поэтому здесь говорят о «прозрачности»
(транспарантности) передачи данных (инвариантности по от-
ношению к схеме кодирования).
Вместо того чтобы выражать управляющий знак в некото-
Передача данных
345
ром коде, в сообщении можно поместить эту управляющую
информацию между двоичными разрядами данных, т. е. как бы
заключить эту управляющую информацию в скобки. Таким
способом управляющая информация при передаче четко отли-
чается от двоичных разрядов данных. Реально для выделения
управляющей информации не применяют никаких скобок, а ис-
пользуют группу знаков, как мы это увидим ниже.
При транспарантном методе передача данных начинается
опять с двух синхрознаков, чтобы синхронизировать приемник
и передатчик в системе отсчета. Наконец приемник может за-
полнить заголовок после того, как он дал сигнал начала заго-
ловка SOH. В заголовке мы можем записать адресную инфор-
мацию, а также указать, какова величина информационного
блока (число слов), который передается за один сеанс. Инфор-
мация заголовка завершается знаком начала передачи текста
STX, после чего незамедлительно можно начинать передачу
информационных слов в том виде, в каком они выдаются пере-
дающей системой. Данная часть текста может содержать инфор-
мационные данные, причем это поле может иметь переменную
длину.
Чтобы указать, что группа слов имеет транспарантное со-
держание, эту группу надо начать кодом DLE-STX (начало
0 0 0 0 1 1 1 1
0 0 1 1 0 0 1 1
j
0 1 0 1 0 1 0 1
Z?Z/Z7Z6/| Ь7! Ь6 [ Ь5 Ь4 ьз Ь2 ы ^^СТПЛОВЦ Строк~''~^ 0 1 2 3 4 5 6 7
а 0 0 0 0 0 NUL DC0 Раздел слов 0 (а) Р \ P
0 0 0 1 1 SOM X-on i 1 А а a q
0 0 1 0 2 EDA Tape on 2 В R b r
0 0 1 1 3 EDM X-off + 3 С S с s
0 1 0 0 4 EOT Tape off $ 4 D т d t
0 1 0 1 5 WRU ERROR •/о 5 Е и е u
0 1 1 0 6 RU SYNC & 6 F V f V
0 1 1 1 7 BELL LEM 7 G W 9 w
1 0 0 0 8 S0 ( 8 Н X h X
1 0 0 1 9 HTAB s. ) 9 I Y i У
1 0 1 (У 10 LINE FEED s2 J Z J z
1 0 1 1 11 VTAB S3 ♦ К [ k
1 1 0 0 12 FORM $4 с L \ I ACK
1 1 0 1 13 RETURN S5 - = М ] m ALT MODE
1 1 1 0 14 SO S6 > N t n ESC
1 1 1 1 15 SI s7 / 7 0 — 0 RUB OUT
Рис. 4.31. Код ASCII (а) с расшифровкой управляющих знаков (б) (разряд О
является контрольным разрядом четности).
346
Глава 4
Легенда
NUL Нуль, ожидание
SOM Начало сообщения
ЕОА Конец адреса
ЕОМ Конец сообщения
EOT Конец передачи
WRU «Кто Вы?»
RU «Вы...?»
BELL Звуковой сигнал
FEo Исполнительный элемент формата
НТ Горизонтальная табуляция
LF Подача на одну строку
UTAB Вертикальная табуляция
FORM Подача формы
RETURN Обратный ход каретки (CR)
SO Выключить сдвиг (строчные буквы)
SI Включить сдвиг (заглавные буквы)
DC0 Управление аппаратами
X-on Включение построчно печатающего устройства
tape on Включение ленточного перфоратора
X-off Выключение построчно печатающего устройства
tape off Выключение ленточного перфоратора
ERROR Ошибка
SYNC Синхронное ожидание
LEM Логический конец носителя перфолент, перфокарт
или других средств информации
S0-S7 Информация разделителя
Spatie Разделитель слов
Меньше чем
> Больше чем
t Стрелка вверх (возведение в степень)
+— Стрелка влево (соответствует.../заменяется на ..)
/ Косая черта дроби, заключительный знак
ACK Подтверждение приема
ALTMODE Альтернативный режим
ESC Переход на другой канал данных
RUBOUT Стереть (DEL — вычеркивать/ожидать), отрицание
передачи данных) и закончить кодом DLE-ETX (конец текста).
При помощи выражения DLE управляющая информация STX
и ЕТХ как бы «заключается в скобки» внутри текста и тем са-
мым четко маркируется.
Если команда DLE (переход канала данных) появляется
Передача данных
347
DLE STX Запуск транспарантного текста
DLE ЕТВ Конец транспарантного текстового блока
DLE ЕТХ Конец транспарантного текста
DLE SYN Синхрознак в сообщении
DLE ENQ Запросить информацию
DLE DLE Знак DLE данных
DLE SOH Запуск транспарантного заголовка
Рис. 4.32. Управляющие коды в транспарантном режиме.
внутри транспарантного поля в качестве обычного информа-
ционного слова, то это слово может интерпретироваться оши-
бочно. При обнаружении этого управляющего знака передаю-
щая система генерирует знак второй раз. Приемник распознает
этот второй знак и знает, что речь идет здесь о двоичной ин-
формации, а не об управляющем знаке.
При заполнении пустот в поле данных синхрознаками этим
знакам также должна предшествовать команда DLE, посколь-
ку синхрознаки имеют управляющую функцию. Если убрать
команду DLE, то тогда синхрознак воспринимается как обычное
число в потоке данных. За счет этого синхронизация могла бы
нарушиться. Чтобы избежать этого, при подаче синхрознака
передающая система сразу же автоматически генерирует коман-
ду DLE.
Таким образом, все управляющие коды оказываются в поле
данных в виде управляющей информации, поскольку им пред-
шествует команда DLE, кроме комбинации DLE-DLE, при ко-
торой DLE воспринимается как слово, относящееся к полю
данных. На рис. 4.32 дан обзор управляющих кодов.
4.14. Двоичная синхронная связь (BYSINC)
Разработанный фирмой IBM протокол, часто применяемый
в настоящее время, является протоколом двоичной синхронной
связи и обозначается BYSINC. Формат, используемый здесь для
передачи, приводится на рис. 4.33. Прием данных начинается
после поиска и распознавания синхрознаков.
Сразу же после последнего двоичного разряда синхрознака
подается управляющий знак SOH (начало заголовка) для того,
чтобы указать, что последующие информационные слова содер-
жат сообщение об адресации и количестве подлежащих пере-
даче слов, т. е. указать размер последующего блока данных.
Заголовок заканчивается символом STX (начало передачи тек-
ста), после чего сразу может считываться текст, который выра-
жается при помощи знаков. В конце сообщения текст закан-
348
Глава 4
чивается символом ЕТХ (конец текста) или ЕТВ (конец пере-
даваемого блока данных).
В заключение передачи блока выдается контрольная сумма,
которая выделяется с помощью знака контроля блока (ВСС).
Принимающая система может на основе сравнения переданного
и вновь вычисленного значения контрольной суммы блока ВСС
определить, правильно ли прошла передача.
Продел
Стартовый йот
/ | / | Z | J | 4
биты
^данных
Стон-бит
биты
четности
Продел
^—Знак или синхрознок----------------Знак или синхрознак---»
/ 2 б 4 | <5 | 7 | Р 7 | Р
8
У
/У
8
О
N
3OZOPObOK
Текст
Признак
Ядрес
8 бит
Поле ВСС
-SDLC-кодр
ипроЗление(ко
лизестбослоб)
бдит
Данные
FC8
приз-
нак
16бит\8бит
8
Т
X
б
Рис, 4.33. Асинхронная (а) и синхронная (б) передача данных; двоичная син-
хронная связь (в) и синхронное управление передачей данных (г) (SDLC).
FCS — последовательность контроля кадра; признак — шестнадцатеричное число 7Е.
Двоичная синхронная связь ориентирована на передачу зна-
ков. Если мы хотим передать одну из частей текста транспа-
рантным способом, то это можно осуществить, снабжая эту
часть индикацией DLE-STX (переход канала данных — начало
передачи данных) и DLE-EBT (переход канала данных — конец
текста) в начале и в конце текста.
Двоичная синхронная связь применяется как при асинхрон-
ной, так и при синхронной передаче. Синхрознак SYN (синхро-
низация) в коде ISO изображается при помощи шестнадцате-
ричного числа 16, в коде EBCDIC — при помощи шестнадцате-
ричного числа 32.
Передача данных
34^
Что касается установления возможных ошибок в сообще-
нии, то для этого могут применяться различные методы опреде-
ления ошибок, такие, как VRC (вертикальный контроль по из-
быточности), LRC (продольный контроль по избыточности),
CRC (циклический контроль по избыточности) и FCS (последо-
вательность проверки кадров).
При вертикальном контроле по избыточности (VRC) опре-
деляется четность 7 двоичных разрядов, начиная с Do и кончая
VPC
Четность б бер-
тикальном
направлении ,
р
Рис. 4.34. Графическое изображение методов вертикального контроля по из-
быточности (VRC) и продольного контроля по избыточности (LRC).
В методе VRC речь идет о генераций знака четности или о проверке каждого знака*
(на рисунке вертикально). При методе LRC четность определяется за счет двоичных»
разрядов, имеющих внутри блока одинаковую значимость. На рисунке эти двоичные
разряды обозначены с помощью горизонтальных стрелок. Контрольные разряды четно-
сти, полученные при методе LRC, вместе образуют знак контроля блока (BCC)).
Do. Контрольный разряд проверки на четность выдается в ка-
честве восьмого разряда знака и передается приемнику, где
еще раз определяется четность поступившего двоичного числа.
Затем результат сравнивается с переданным контрольным раз-
рядом проверки на четность. Если оба значения не совпадают,
то, очевидно, при передаче числа была ошибка и к приемнику
оно пришло в неправильном виде. Техническая реализация
генератора проверки на четность описана в гл. 1 настоящей
книги.
Если контрольный разряд проверки четности генерируется^
в продольном (горизонтальном) направлении, как это изобра-
350
Глава 4
жено на рис. 4.34, то тогда говорят о продольном контроле по
избыточности (LRC). Если контролируются двоичные разряды
с одинаковой значимостью (степенью 2), то в конце сообщения
формируется контрольный знак, который обозначается как знак
контроля блока (ВСС). Четность проверяется путем логическо-
го суммирования всех двоичных разрядов, в результате чего
и генерируется сигнал контроля четности. Восьмой двоичный
разряд в знаке контроля блока является разрядом контроля
Рис. 4.35. Генератор циклического контроля по избыточности (CRC) и про-
верочный блок для определения последовательности контроля блока (BCS)
и последовательности контроля кадра (FCS).
при проверке четности этого знака. Метод продольного контро-
ля по четности позволяет обнаруживать более 90% ошибок,
возникающих при передаче данных.
При циклическом контроле по избыточности проводится де-
ление передаваемых двоичных разрядов данных на определен-
ный полином. Делимое в регистре перед началом сообщения
устанавливается на нуль. Единицы и нули в информационном
сообщении образуют коэффициенты делимого полинома. Де-
ление производится путем сдвига и вычитания без заема раз-
рядов, а остаток, образующийся в конце действия, передается
в поле проверки ошибок (2 двоичных разряда). Принимающая
станция сравнивает переданный остаток с остатком, вычислен-
ным по результатам приема. Если установлено соответствие,
то это означает правильную передачу сообщения.
Вид прикладного полинома следует из протокола и кода,
используемого при обмене сообщениями. Генератор цикличе-
ского контроля по избыточности построен на принципе исполь-
зования циклического 16-разрядного регистра сдвига элемента-
ми «ИСКЛЮЧАЮЩЕЕ ИЛИ», включенными в определенных
точках цепи сдвига (рис. 4.35).
Передача данных
351
Из рис. 4.36 можно видеть, как включается в канал данных
генератор кодов, используемый как проверочный блок при цик-
лическом контроле по избыточности. Комбинация логических
схем И-ИЛИ на выходе данных (справа) выполняет следующую*
операцию: под управлением линии разрешения деформирова-
ния контрольного слова (CWE) сначала выдается полный блок,
данных, после чего сразу же следует контрольный набор двоич-
ных разрядов циклического контроля по избыточности (CRC).
Полином, применяемый в этом примере, имеет вид Х16+Х15 +
+Х2 + 1, так как схемы ИСКЛЮЧАЮЩЕЕ ИЛИ включены в
Рис. 4.36. CRC — генератор в цепи передачи данных.
На линии передачи контрольного слова (CWE) присутствуют сигнал Н при тактирова-
нии данных и сигнал L при выдаче контрольного двоичного разряда. Генератор типа 9401»
должен устанавливаться на 0 или 1 в зависимости от вида контроля. Эта установка
триггера на 0 или 1 происходит посредством подачи сигналов на входы предварительной''
установки или общего сброса. Комбинация вентилей И-ИЛИ на входе способствует то-
му, что под управлением линии сначала выдается блок данных, после чего сразу сле-
дует генерированный контрольный разряд.
циклическом регистре сдвига на месте разрядов 16, 15 и 2.
В начальном положении двоичные разряды в регистре сдвига;
устанавливаются на нуль.
При циклическом контроле по избыточности (CRC) вероят-
ность того, что ошибка останется необнаруженной, составляет
меньше 1%, что значительно лучше, чем при продольном конт-
роле по избыточности (LRC).
На рис. 4.37 показано, как приводится в действие механизм
генерации циклического контроля по избыточности (CRC) на»
уровне двоичных разрядов. Последовательный поток двоичных
разрядов, который направляется к генератору, изображен на5
рисунке слева. Стрелка указывает направление передачи. Раз-
ряд Dn вычитается из разряда 15 в регистре сдвига и дает CL
Этот результат указан дальше в других схемах на позициях
двоичных разрядов 14 и 1 и ведет там к вычету 0 в качестве
вычитаемого числа. Результат подается на D-триггер младшего^
разряда регистра (двоичный разряд 0).
При последующем сдвиге, который производится при по-
ступлении синхронизирующего импульса, результат обработки,
принимается следующим триггером, расположенным справа..
Я52
Глава 4
Затем обработка повторяется, однако теперь с информацион-
ным двоичным разрядом Dn+i.
Деление полинома продолжается до тех пор, пока не будет
обработан последний двоичный разряд блока данных. Получен-
ное в результате двоичное число последовательно выдается из
регистра при помощи 16 сдвигов [CRW(H)=L]. Во время этой
передачи на один из входов элементов „ИСКЛЮЧАЮЩЕЕ
SbOO
данных
JnimO— ООО-регистр -------бит 15
X I х If I х-------X I /<- I 15 I
И И I------------------------------
10 11---1 1
— О’
С О
1
'о
Искл
иди
----Логические вычитай
ние (Лез заема)
0101 ~~0 1 1
---1 .. / ч /7
О О О 1 ^--(1)0 0^1
о о о -- 1 о о
10 0 —-(О) /.
Синхро-
импульсу
^"ИСКЛ
иди
Синхроне
ПУЛЬС
^искл
или
Сдвиг вправо
Синхро-
импульс
о
f
f
1
1--(О)1
о
о
Рис. 4.37. Механизм проведения циклического контроля по избыточности.
Подлежащий делению полином задан выражением Xie+XI5+X2+1. Согласно этому ме-
ханизму, работает CRC-генератор, как это показано на рис. 4.35.
ИЛИ” подается нуль, вследствие чего содержимое регистра
сдвига не изменяется.
При проведении на стороне приемника циклического конт-
роля по избыточности (CRC) можно брать в расчет определен-
ные биты информации из поля контроля ошибок, поступившего
со стороны передатчика. В этом случае после завершения про-
верки в регистре сдвига появляется ранее поступившее двоич-
ное число, если передача данных прошла без ошибок.
Переданное поле контроля ошибок часто называется после-
довательностью контроля блока (BCS).
При реализации метода FCS последовательности контроля
кадра также проводится циклический контроль по избыточ-
ности (CRC), однако двоичные разряды в регистре цикличе-
ского контроля вначале устанавливаются в 1. Остаток, обра-
зующийся после обработки блока данных, теперь передается в
инвертированном виде. Полином, которым оперируют при по-
Передача данных
353
следовательности контроля кадра (FCS), имеет вид
G(x) = X16 + X12 + X6+1.
При определении знака результата циклического контроля
по избыточности на стороне приемника снова используются
16 двоичных разрядов последовательности контроля кадра
(FCS), определенные на стороне передатчика. За счет аккуму-
ляции результата циклического контроля по избыточности
(CRC) в регистре формируется ранее определенное шестна-
дцатеричное число FOB8 при условии, что блок данных был
передан без ошибок.
Генераторы полиномов и проверочные устройства для цик-
лического контроля по избыточности (CRC) поставляются раз-
личными фирмами в виде интегральных микросхем, как, напри-
мер, типа 9401/11 фирмы Fairchild (скорость передачи данных
10 МГц) и типа 2653 фирмы Philips-Signetics (скорость пере-
дачи данных 500 килознак/с). Оба генератора и проверочных
устройства программируемы для различных полиномов.
В отношении формирования знака контроля блока ВСС
можно еще сказать, что символы синхронизации (SYN) и на-
чала заголовка (SOH) не участвуют в определении значения
этого знака в отличие от данных, содержащихся в заголовке,
символа STX (начало текста), данных, находящихся в инфор-
мационном поле, и символа ЕТХ (конец текста). В упомянутых
выше генераторах полиномов и проверочных устройствах при
проведении циклического контроля по избыточности (CRC)
выполняется логическая операция отрицания символов: DLE
SYN (знак синхронизации транспарантной передачи данных),
DLE SOH (начало заголовка транспарантной передачи данных)
и DLE STX (начало текста при транспарантной передаче). Та-
кие символы, как DLE (переход канала данных) или DLE DLE
(слово, относящееся к полю данных), ЕТХ (конец текста) или
DLE ЕТХ (конец транспарантного текста), ЕТВ (конец пере-
даваемого блока данных) или DLE ЕТВ (конец передаваемого
блока транспарантных данных) и STX (начало текста) или
DLE STX (начало транспарантного текста), непосредственно
участвуют в вычислении знака контроля.
4.15. Синхронный контроль канала передачи
данных (SDLC) и высокоуровневый контроль канала
передачи данных (HLDC)
Протоколы SDLC и HLDC ориентированы на передачу
двоичных разрядов (битов), в то время как метод синхронной
связи (BYSINC) ориентирован на передачу символов (знаков).
В протоколе, ориентированном на использование двоичных раз-
354
Глава 4
рядов, как адресная, так и текстовая информация обычно пред*
ставляется в двоичной форме и группы двоичных разрядов не
образуют специфических знаков. Управляющий знак, слу-
жащий в протоколе SDLC в качестве индикации начала и
конца, обозначается как двоичный разряд флага или знак син-
хронизации. В начале потока данных этот двоичный разряд
флага выполняет роль идентификатора при «поиске», в то же
время этот знак заодно обеспечивает и синхронизацию слов.
Двоичный образ флага представляет собой шестнадцатеричное
число 7Е.
Заголовок, включая флаг, имеет жесткую длину в 24 двоич-
ных разряда, как это следует из рис. 4.33.
Текстовое поле имеет переменную длину, и сообщение за-
канчивается 16 двоичными разрядами контроля кадра, после
чего следует байт флага в качестве знака окончания.
Все поля данных, за исключением знаков флага в начале
и конце, являются транспарантными. Величина сообщения
указывается в заголовке количеством слов, которое может
достигать максимального значения 256.
После управляющей информации, записанной в 24 двоич-
ных разрядах, сразу же, без какого бы то ни было обозначе-
ния, происходит переход к передаче данных. Чтобы исключить
неправильную интерпретацию тех информационных слов в тек-
сте, которые совпадают с символом флага, в данном случае
приняты специальные меры. В знаке флага последовательно
поступают одна за одной шесть единиц. Если передатчик пере-
дает пять единиц в информационном поле, то после них он
автоматически включает дополнительный нуль, из чего прием-
ник делает заключение, что полученный флаг является разре-
шенным информационным словом. При последующем обраще-
нии с данными этот нуль автоматически изымается.
Если группа двоичных разрядов представляет флаг, напри-
мер, при окончании текста, то приемник воспринимает одну
за другой шесть единиц и затем интерпретирует их в качестве
управляющего знака.
Протокол высокоуровневого контроля канала передачи дан-
ных (HLDC), являющийся международным стандартом, утверж-
денным ISO (международная организация стандартизации),
в принципе одинаков с контролем синхронного канала переда-
чи данных (SDLC). Только адрес и поле, указывающее количе-
ство слов, содержат более 8 двоичных разрядов. Это означает,
что длина текста при этом протоколе передачи данных (HLDC)
может быть больше 256 байт. Протокол HLDC имеет в флаге
семь единиц, расположенных последовательно одна за другой,
в то время как протокол SDLC имеет в флаге шесть единиц.
В методе двоичной синхронной связи (BYSINC) для устра-
Передача данных
355
нения неправильной передачи знака в тексте производится за-
полнение символами, в методах HLDC и SDLC, где произво-
дится передача двоичных слов, — заполнение битами.
При использовании протоколов SDLC и HLDC говорят так-
же о передаче информации в «упакованной форме», так как
при этом данные передаются в закрытых блоках. Ориентиро-
ванные на знаки протоколы в общем случае обозначаются сим-
волом ВСР (протокол контроля байтов), а протоколы, ориен-
тированные на биты, — символом ВОР (протокол, ориентиро-
ванный на биты).
4.16. Протоколы различного уровня
В предыдущих разделах были введены такие понятия, как
заголовок и поле контроля, которые требуют некоторого пояс-
нения.
Если информационные данные передаются по каналу связи,
к которому подключены несколько станций, то тогда имеет
смысл адресовать информационный поток. Тем самым имеется
гарантия, что информация попадает в правильное место, и про-
тивоположную станцию можно запросить об ответе путем одно-
временной посылки в заголовке управляющего знака. Тогда
передающая станция может проверить, установлена правиль-
ная связь или нет.
При телеграфной связи работают подобным же образом.
Оператор передающей станции может установить здесь связь
после того, как он наберет телеграфный номер противополож-
ной станции с непосредственным знаком вопроса. Противопо-
ложная сторона реагирует теперь путем обратной связи теле-
графного номера с непосредственным телеграфным адресом —
группой букв, являющейся сокращением названия адресата.
Если выясняется, что установлено правильное соединение, то
можно передавать сообщение. Здесь можно также говорить
о квитировании установления связи, об обоюдном подтверж-
дении.
Передача информации между устройствами для обработки
данных производится аналогичным образом, лишь несколько в
большем объеме. Переданное сообщение может содержать
в управляющей информации даже целое текстовое поле. То, что
при этом речь идет об управляющем сообщении, указывается
в заголовке.
В общем случае управляющая информация производит
инициацию (выбор) желаемой станции приема, в результате
чего она переводится в состояние приема. После передачи по-
лученного сообщения эта станция вновь вызывается для пере-
хода в состояние ожидания, чтобы обеспечить возможность
связи с другими станциями.
23*
356
Глава 4
Управляющая информация может содержать также вопрос,
почему ответ или сообщение не последовали в течение опреде-
ленного срока. Ответ принимающей стороны может содержать
и сообщение о правильно или ошибочно полученных сведениях,
подтверждать проведение на стороне приемника одного из спо-
собов контроля, например циклический контроль по избыточ-
ности (CRC), продольный контроль по избыточности (LRC),
Кадр адреса
DLE 5ТХ 50 DLE ЕТХ контрол. сумма ССР Контрол суммаСМР
DLE 5ТХ J/ j | DLE ЕТХ Контрол сумма ССР Контрол, сумма СМР
байты данных
Сообщение
правильное
DLE STX 5Z DLE ЕТХ контрол. суммоССР Контрол. суммаСМР
Сообщение
ошидоеное
DLE STX 33 DLE ЕТХ контрол сумма ССР контрол. суммаСМР
Рис. 4.38. Кадры адресации, данных и управляющих сообщений.
вертикальный контроль по избыточности (VRC) или последо-
вательность контроля кадра (FCS).
Для иллюстрации на рис. 4.38 приведены четыре кадра:
для адресации, для данных и для управляющих сообщений
(правильного и ошибочного). В показанном примере речь идет
об установлении связи между двумя станциями, так что более
подробная адресация станций может отсутствовать. Правда,
в заголовке задается адресация, т. е. указывается, где должен
быть размещен массив данных в памяти принимающей систе-
мы. То, что в данном случае речь идет об адресной информа-
ции для средств памяти, следует из кода включения 30i6, ко-
торый выдается непосредственно после знаков DLE STX. После
этой управляющей информации следует адресная спецификация
(2 байта), заканчивающаяся знаками DLE ЕТХ и указанием
контрольной суммы.
Приемник будет распознавать эти данные, передаваемые
в виде адресованного сообщения, и после повторной проверки
контрольной суммы и ее сравнения с суммой, полученной от
передающей станции, сообщение будет воспринято как пра-
вильное или ошибочное. Сообщение о правильной или ошибоч-
Передача данных
357
ной передаче данных следует из управляющей информации,
заданной кодами включения 32i6 и 33i6-
И наконец, можно передавать данные с условным обозна-
чением 3116л после чего будет следовать обратное сообщение
приемника о получении правильной или ошибочной контроль-
ной суммы.
5ТХ еоодщенае ЕТХ ВСС
Этап к
Этап 5
Передача закончена
Рис. 4. 39. Передача данных от системы к терминалу с программным обеспе-
чением квитирования установления связи.
Использованный здесь метод называют «автоматический за-
прос на подтверждение приема (ARQ)». Соответственно после
передачи сообщения проводится контроль ошибок, на основа-
нии результатов которого формируется обратный ответ со зна-
ком АСК (знак подтверждения приема) или со знаком NAK
(знак неподтверждения приема).
Для передачи этой управляющей информации в прямом и
обратном направлениях требуется время. При этом рентабель-
ность (коэффициент полезной загрузки линии) может состав-*
лять 25—50%, что часто является неприемлемым. Данный ме-
тод часто обозначают также как «останов и ожидание автома-
тического запроса на повторение», или «останов и ожидание
сообщения типа ARQ».
358
Глава 4
Можно также использовать метод, при котором обратный
ответ следует только тогда, когда в информационном блоке
установлена ошибка. Эта процедура называется «непрерывным
автоматическим запросом на повторение» или непрерывным
ARQ. При идеальных условиях рентабельность линии может
быть повышена таким способом до 90%.
Метод, используемый при «останове и ожидании ARQ», еще
раз иллюстрируется в
связи
понятной
Узловые
пункты
Путь передачи
Рис. 4,40. Сложная сеть для переда-
чи данных.
и наглядной форме на рис. 4.39.
Система запрашивает терми-
нал: «Слышишь меня?», тер-
минал отвечает утвердительно
с помощью знака АСК. Затем
система передает сообщение, в
завершение следует знак АСК
подтверждения приема терми-
нала, свидетельствующий о
том, что сообщение поступило
без ошибок. После этого сис-
тема сообщает знак EOT (ко-
нец передачи), после чего об-
мен сообщениями можно счи-
тать законченным. Вслед за
этим обе станции снова переходят в состояние слежения. Та-
ким образом, обмен данными осуществляется в пять этапов.
Реализация соответствующих протоколов при передаче данных
обеспечивается с помощью специального программного обес-
печения, т. е. посылка запроса и интерпретация полученного
ответа выполняются управляющим компьютером, который за-
программирован для этой протокольной функции. При наличии
сложной сети станций этот компьютер определяет тот путь,
по которому должно быть передано сообщение (рис. 4.40).
В общем случае в сложных системах связи каждый узловой
пункт содержит компьютер в качестве регулятора передачи
данных. Этот компьютер может временно хранить данные в
том случае, если линия передачи занята. Тогда соответствую-
щий узловой пункт сообщает об этом передающей станции,
и станция может по возможности напоминать и добиваться
особой срочности передачи.
При более сложных системах передачи данных часто имеет-
ся несколько протоков на различном уровне значимости. Про-
токол контроля линии передачи данных (DLC), в котором за-
писано, какой формат имеет информационное сообщение и ка-
кие виды контроля должны быть проведены в отношении этих
данных, находится, очевидно, на более низком уровне, чем
протокол, определяющий такие процессы, как накопление со-
Передача данных
359
общений, преобразование кода, распознавание ошибок и сооб-
щение о них, описание функции управления. Протокол более
высокого уровня может, например, обеспечить регулирование
передаваемого потока данных с учетом степени срочности в
сетях с последовательно-параллельной структурой.
Протокол контроля линии передачи данных (DLC), при
котором выполняется распознавание двоичных разрядов и оши-
бок, использует в общем случае средства аппаратного обеспе-
чения, как это видно из предыдущих разделов. Протоколы вы-
сокого уровня реализуются с помощью системы программного»
обеспечения. Это означает, что процедуры, содержащиеся в
этих протоколах и подлежащие выполнению, проводятся и конт-
ролируются компьютером, который снабжен для этого соответ-
ствующей программой. Протоколы связаны друг с другом че-
рез указанные для этих целей каналы. В качестве примера
мы назовем циклический контроль по избыточности (CRC),
реализуемый с помощью системы аппаратного обеспечения,
которая при правильной или ошибочной передаче выдает еди-
ницу или нуль соответственно, т. е. информацию, которая в
дальнейшем обрабатывается компьютером с помощью про-
граммного обеспечения. В результате формируется сообщение
о том, правильно или ошибочно происходит передача данных.
Значение 0 или 1, поступающее от системы (схемы) аппарат-
ного обеспечения, преобразуется в полное сообщение с синхро-
знаками, заголовком и более подробной управляющей инфор-
мацией, например: «ошибочно, возвратиться назад к N».
Протокол, с которым работает управляющий компьютер,
имеет более высокий уровень, однако с его помощью прини-
мается информация из протокола более низкого уровня.
Протоколы различного уровня мы находим также при об-
мене информацией внутри нашего общества, например, этот
обмен происходит при переписке. Человек, который пишет
письмо, должен знать протокол, согласно которому письмо по-
мещается в конверт, на лицевой стороне которого пишется
фамилия и адрес получателя, а справа сверху наклеивается
почтовая марка. Внизу слева или на обратной стороне конвер-
та отправитель может указать свой адрес1*. Затем письмо по-
падает в общий почтовый ящик, чтобы в дальнейшем его об-
работка была продолжена почтовой службой.
Протоколом более высокого уровня является тот, в котором
определено, что должно произойти с письмом в дальнейшем,
с тем чтобы оно достигло своего адресата. Если речь идет о
почтовом отправлении за границу, то может действовать про-
!> Приведенный порядок заполнения почтового конверта существует в стра-
нах Западной Европы. — Прим, перев.
360
Глава 4
токол более высокого порядка, а именно такой, в котором,
например, установлено, как необходимо обращаться с объектом
при отправке его авиапочтой.
При передаче данных мы используем протоколы низкого
уровня, определяющие физические и электрические связи, на-
пример RS232C и CCITTV.35, байты контроля и протоколы,
ориентированные на двоичную структуру: двоичная синхронная
передача (Bisync) или синхронный контроль канала передачи
данных (SDLC). На более высоком уровне известны протоко-
лы, регулирующие накопление сообщений, преобразование ко-
да, распознавание и сообщение ошибочных условий. Эти про-
токолы имеются в нашем распоряжении в виде «пакетов ма-
тематического обеспечения», как, например, протокол сети
фирмы IBM (SNA), CCITTX.25 и протокол сети фирмы DEC,
обозначаемый как DECNET.
В отношении протокола контроля байтов (ВСР) и протоко-
ла, ориентированного на двоичную структуру (ВОР), которые
были рассмотрены в предыдущих разделах, можно в заключе-
ние сказать, что сообщения могут содержать здесь как управ-
ляющую информацию, так и текст. В протоколе контроля бай-
тов (ВСР) управляющая информация может состоять из спе-
циальных знаков или их последовательностей, т. е. из группы
как отдельной единицы. В протоколе ВОР, ориентированном
на двоичную структуру, имеется отдельное поле управления,
в котором может быть указан вид сообщения (управление или
текст). Далее в этом поле указано число последовательностей
кадров и количество слов (байт), из которых состоит сообще-
ние. В протоколе ВОР при выполнении поиска адрес ищется
после знака флага. Если в многоточечной сети одна из стан-
ций получает сигнал вызова, то принимающая схема после
этого немедленно переходит в режим приема, с тем чтобы
можно было ввести сообщение, следующее за знаком флага
и адресом. В обоих протоколах ВСР и ВОР информация может
состоять из двоичных данных, десятичных чисел с плавающей
запятой, специальных кодов, информационных данных с тек-
стом, а также из программ компьютера. В протоколе ВОР
стандартный формат кадра одинаков для всех сообщений,
и контроль ошибок проводится во всем кадре.
Часто для синхронизации кадра байтов каждые 1—2 с ав-
томатически выдается синхрознак. В протоколе ВСР имеются
управляющие знаки для опроса состояния с целью возврата
станции в исходное состояние, подтверждения приема команды
возврата в исходное состояние (для старта), подтверждения
приема команды старта и отключения связи с линией (разъ-
единения).
Запротоколированное событие, связанное с асинхронным
Передача данных
361
и синхронным обменом данными на базе протоколов ВСР и
ВОР, в действительности является сложнее, чем это описано
здесь. Более детальная информация об этом содержится в ряде
документов, из которых можно рекомендовать «Метод переда-
чи данных согласно стандарту DIN 66019» (ФРГ), в котором
обработаны рекомендации ISO 1745, 2111, 2628 и 2629 Между-
народной организации по стандартам. Следует также назвать
стандарты ANSI ХЗ-281 (заголовки независимого кода)
и CCITTX.25 (пакетное переключение).
4.17. Конфигурации сетей
В последние годы для передачи данных широко исполь-
зуются различные конфигурации сетей связи. При выборе кон-
фигурации существенную роль играют такие факторы, как
стоимость, скорость передачи, расстояние, на которое пере-
Рис. 4.41. Прямая связь между двумя пунктами.
даются данные, и т. д. Прямая связь, которая реализуется
между абонентами, расположенными в различных пунктах,
представлена на рис. 4.41. Здесь речь идет о четырех терми-
налах, которые соединены через телефонные линии с цент-
ральным компьютером. В качестве таких терминалов могут
использоваться, например, терминалы, установленные в раз-
личных филиалах банка. Главный компьютер одновременно
ведет обработку банковских счетов всех четырех филиалов.
Если четыре терминала должны быть соединены с централь-
ным компьютером, расположенным в том же самом здании,
можно использовать одну телефонную линию, как это показа-
но на рис. 4.42. Речь идет здесь о так называемой сети упоря-
доченного опроса, в которой каждый терминал может пода-
вать свой «голос» в определенные моменты времени.
362
Глава 4
При упорядоченном опросе имеются управляющая станция
и одна или несколько подчиненных станций в многопунктовой
сети. Управляющая станция регулирует передачу данных. Че-
рез определенные промежутки времени подчиненные станции
опрашиваются управляющей станцией о том, имеют ли они
сообщение для передачи. Эта процедура называется последо-
вательностью опроса. Другие станции при опросе не реагируют
или отвечают на запрос отрицательно. Опрос станций управ-
ляющей станцией происходит последовательно, одна за другой.
Компьютер
Рис, 4.42. Сеть упорядоченного опроса.
Обмен сообщениями происходит с использованием квитиро-
вания процесса установления связи. Если определено появле-
ние сообщения от одной подчиненной станции, то можно осу-
ществить обмен сообщением через управляющую станцию.
Однако может случиться, что управляющая станция устанавли-
вает связь только между обеими подчиненными станциями и
предоставляет им самим выполнить обмен сообщениями. В по-
следнем случае управляющая станция выступает в роли регу-
лятора передачи информации. В том случае, когда пересылка
данных в сети полностью проходит через управляющую стан-
цию, сообщение идет сначала к этой первичной станции. После
этого может в случае необходимости производиться обработка
данных и затем сообщение передается вторичной станции на-
значения. Получение сообщения происходит в последователь-
ности опроса, выдача — в последовательности выборки.
В рассматриваемом примере опроса речь идет о связи, ко-
торая называется многосписковой или многоточечной, т. е.
о групповой связи с несколькими станциями. В этом случае мы
имеем общую линию передачи, к которой подключены все
станции. Одна из этих станций является первичной, осталь-
ные — вторичными.
Передача данных
363
При нормальном обмене сообщениями между двумя стан-
циями на основе диалогового режима может возникнуть поло-
жение, когда обе станции одновременно хотят передать друг
другу некоторое сообщение. При этом, конечно, необходимо
препятствовать тому, чтобы они начали «говорить, перебивая
друг друга».
В диалоговом режиме, при котором вначале отсутствует
первичная станция, до начала обмена данными необходимо
установить роли управляющего и управляемого устройства,
т. е. первичного и вторичного. То устройство, которое первым
заявит о необходимости обмена информацией, становится
управляющим, а другие устройства должны подтвердить свою
готовность стать управляемыми. Путем выдачи предназначен-
ных для этой цели управляющих знаков, которые предшествуют
сообщениям во встречном направлении, вторичная станция
подтверждает свое согласие.
В диалоговом режиме может произойти так, что и управ-
ляющее, и управляемое устройства при выдаче сообщений те-
ряют нить передачи. В результате информационные блоки
бывают утеряны или многократно передаются один за другим.
Само собой разумеется, что для обмена сообщениями не-
обходима также и хорошо функционирующая система учета.
Для этого в заголовке наряду с другой информацией указы-
вается номер блока. Оконечные устройства снабжены двумя
счетчиками: один для счета переданных, а другой для счета
принятых блоков данных. Счетчик является составной частью
математического обеспечения (программы).
Наряду с сетью опроса используются также сети распре-
деления, в которых задействован мультиплексорный принцип.
В данном случае коммутацию устройств регулирует компью-
тер, который перед передачей данных предоставляет мультип-
лексорам управляющую информацию для выборки каналов
(рис. 4.43).
Известно также так называемое временное мультиплексиро-
вание, реализация которого обычно обеспечивается с помощью
соответствующего программного обеспечения. Здесь компьютер
также предварительно генерирует управляющую информацию,
выполняющую селектирование нужного терминала. Эта про-
цедура осуществляется таким образом, что терминалы по оче-
реди подключаются к компьютеру. Терминал, указанный в
заданном адресе, реагирует на поступившую информацию,
т. е. его передатчик или приемник получает разрешение на
связь. Адресный код пользователь может набрать сам с по-
мощью выключателей, которые находятся в терминале. Так же
как и в сети опроса, в терминале целесообразно иметь некото-
рое ЗУ, выполняющее промежуточное хранение данных.
364
Глава 4
В предыдущих разделах мы уже указали на возможность
концентрации данных, за счет которой линия связи может ис-
пользоваться более экономично.
Современная система для ввода данных состоит из микро-
или миникомпьютера, к которому подключено большое число
терминалов данных (до 32) и ЗУ для размещения набираемых
данных. В качестве памяти в общем случае используется ЗУ
на магнитных дисках. На этом магнитном диске хранится ин-
формация, помещаемая операторами, обслуживающими терми-
налы в течение из рабочего времени. Все эти данные передают-
Рис. 4.43, Селектирование
с помощью мультиплексоров.
ся центральному компьютеру за один прогон по телефонной
линии в то время, когда она не используется для телефонных
разговоров, например ночью.
За счет этого терминал в системах ввода данных может
брать на себя такую активную функцию центрального компью-
тера, как сортировка информации, поэтому центральный
компьютер не загружается несущественной побочной работой.
Этот вид концентрации данных используется не только при
операциях ввода данных. Такую концентрацию можно также
применять в точках сопряжения линий передачи данных, на-
пример в тех точках сопряжения, в которых линия медленной
передачи данных через телефонные линии (скорость передачи
9600 бод) связывается с быстродействующими линиями с ис-
пользованием световодов, микроволновых передатчиков и спут-
ников связи (скорость передачи 50 Мбод).
При концентрации информации можно реализовать ее про-
межуточное хранение на магнитном диске у определенных
точек сопряжения, если нужный абонент в данный момент за-
нят. Передатчик может разместить свои данные непосредствен-
но у точки сопряжения, и эти данные будут ждать, пока або-
нент не освободится для приема данных. После этого ему пе-
редается сообщение от точки сопряжения.
Система связи может иметь также форму петли, как это
показано на рис. 4.44. Тогда говорят о гирляндной цепи («дей-
Передача данных
365
зи»-цепочка, дословный перевод — «венок из маргариток»).
Каждая соседняя станция в «дейзи»-цепи выполнена в виде
повторителя, т. е. принятое информационное сообщение на
месте назначения вновь обрабатывается, прежде чем оно пере-
дается дальше. В своей простейшей форме схема может со-
стоять из приемника и передатчика. Допустимо также хране-
ние информации на магнитных дисках в тех случаях, когда
соседняя станция в это время сама передает сообщение. Вто-
Рис. 4.44. Петлевая система передачи данных (гирляндная цепь).
ричная станция может также прибавлять к сообщению допол-
нительную информацию.
В простейшем виде такая «петлевая система передачи дан-
ных» нормально функционирует в качестве воспроизводителя,
т. е. принятое сообщение после усиления передается дальше.
Когда информация дойдет до станции, адрес которой содержит-
ся в адресном поле сообщения, она принимает и обрабатывает
данные. В конфигурациях сетей этого вида в общем случае
используют синхронный контроль канала передачи данных
(SDLC).
4.18. Интерфейсная шина МЭК/1ЕЕЕ
В предыдущих разделах мы рассмотрели передачу данных
на большие расстояния с применением телефонных линий, мик-
роволновых передатчиков и спутниковых каналов связи.
Чтобы уменьшить количество требуемых линий, были ис-
пользованы протоколы, в которых управляющая информация
366
Глава 4
и информационные сообщения передавались последовательно.
Управляющая информация, к которой могут быть отнесены
также адрес отправителя и его наименование, помещена в за-
головок, который предшествует информационному сообщению.
При передаче данных на короткое расстояние, например
на расстояние 20 м внутри одного и того же здания, создание
отдельных линий передачи для данных и управляющей инфор-
мации не представляет значительных затруднений. В то же
время реализация системы передачи в двоичном коде при ис-
пользовании раздельных линий будет проще. Кроме того, при
этом обеспечивается более быстрый обмен данными.
Потребность в такой системе передачи почувствовали в на-
чале 70-х гг., особенно при реализации измерительных систем.
В таких системах часто реализуются централизованная реги-
страция и обработка данных измерений, которые поступают
от приемников измеряемых величин (датчиков), расположен-
ных в установках для длительных испытаний, термических ис-
пытаний, и при автоматической регистрации большого числа
электрических параметров, например при входном и выходном
контроле интегральных схем. Для управления промышленными
процессами также требуются универсальные системы передачи
информации, чтобы можно было отслеживать и контролировать
процесс с помощью измерения и регулирования.
Необходимо обеспечить возможность подключения к уни-
версальной шине интерфейса самых различных устройств, вы-
пускаемых разными фирмами-изготовителями, которые разли-
чаются как по электромеханическим параметрам, так и по про-
граммному обеспечению. Короче говоря, возникла необходи-
мость в создании стандартной интерфейсной шины.
Система передачи вначале была введена в употребление
фирмой Hewlett Packard и стала известной под обозначением
HPIB (интерфейсная шина фирмы Hewlett Packard). Эта шина
в течение последних лет стала своего рода стандартом. Этот
стандарт известен как интерфейсная шина МЭК/IEEE и GPIB
(универсальная интерфейсная шина или шина общего назна-
чения).
В этой стандартной интерфейсной шине применяют общую
(комбинированную) информационную и адресную шину, а так-
же шину управления, как это показано на рис. 4.45. Шины дан-
ных управления насчитывают по 8 линий. Если мы хотим осу-
ществить передачу данных, то вначале необходимо обменяться
сообщениями относительно адресации в прямом и обратном
направлениях. На этой фазе передачи комбинированная инфор-
мационно-адресная шина используется в качестве адресной.
В терминологии МЭК/IEEE передатчик обозначают как источ-
ник сообщений, а приемник — как приемник информации.
Передача данных
367
Рис, 4.45, Интерфейсная шина МЭК625/1ЕЕЕ488.
368
Глава 4
Связь осуществляется на основе квитирования установления
связи, как это будет пояснено ниже.
Регулирование передачи данных во время связи находится
в руках контроллера (блока управления). Такой контроллер
имеет структуру такого же вида, как схема управления сти-
ральной машины, которая рассматривалась в гл. 2. Этот конт-
роллер, выполненный на основе ПЗУ, описывался в разд. 2.21.
Необходимые управляющие сигналы можно реализовать
путем кодирования состояний (блока управления) контролле-
ра. В контроллере, выполненном на основе ПЗУ, можно про-
граммировать дополнительные биты информации в слове, за-
писанном в постоянной памяти. С их помощью можно активи-
зировать линии управления.
При использовании контроллера реализуются последова-
тельный опрос измерительных приборов и регистрация изме-
ренных данных. Однако если данные должны быть также под-
вергнуты численной обработке, то тогда одного контроллера
недостаточно. В этом случае управление и обработку данных
необходимо возложить на микрокомпьютер, который для вы-
полнения этих функций можно запрограммировать на языке
Бэйсик. По сравнению с контроллером компьютер имеет то
преимущество, что изменения в последовательности команд
можно вносить путем изменения программы (программного
обеспечения).
4.19. Квитирование установления связи
Как уже было сказано, слово, имеющее 8 двоичных разря-
дов, может передаваться по шине параллельно. Если мы хо-
тим передать сообщение величиною пХ8 бит, то это можно
выполнить за п последовательных фаз. В этом случае можно
говорить о разрядно-параллельной (словарно-последователь-
ной) передаче.
Если мы хотим осуществить связь через шину, управляемую
контроллером, то необходимо определить, какие управляющие
сигналы необходимы, чтобы реализовать правильную передачу
данных.
Чтобы обеспечить различие между управляющей информа-
цией и информационным сообщением, требуется специальная
сигнальная линия, сигнал на которой указывает вид переда-
ваемой информации. В интерфейсной шине МЭК/IEEE эта
линия обозначается как ATN(L) (attention — внимание).
Если контроллер переводит эту линию в состояние L, то это
указывает всем соединенным с шиной станциям, что начинается
передача данных. Все станции переходят в режим приема
и с помощью сигнала RFD(H) (считывание данных) сообщают
Передача данных
36©
DIO
DAV
NRFD
NDAC
ATN
SRQ
EOI
REN
IFC
Шина данных
Шина передачи дан-
ных (квитирования)
Управляющая шина
Шина данных
Шина передачи данных
и управления
Общая шина интерфейса
и управления
Рис. 4.46. Квитирование установления связи при обмене данными с помощью
шины МЭК625/1ЕЕЕ488. Ниже приводится обзор использованных сигнальных
линий. Линии NRAD и NDAC находятся в активном состоянии, остальные —
в неактивном.
контроллеру о своей готовности к приему. Эта процедура кви-
тирования установления связи изображена на рис. 4.46.
То обстоятельство, что станции сообщили сигнал RFD(H),
означает также, что они одновременно сделали бездействую-
щим (неактивным) сигнал принятия данных DAC(H), о кото-
ром подробнее будет сказано ниже. Станции стали принимаю-
щими, и теперь контроллер может подать на шину адрес при-
емника. Адрес приема имеет код, отличающийся от адреса
сообщения. С помощью сигнала DAV(L) (достоверность дан-
ных) контроллер разрешает выборку. При поступлении этого
сигнала станции принимают адрес. Станция, адрес которой
совпадает с адресом, выданным контроллером, сообщает о себе
контроллеру тем, что она переводит линию RFD (считывание
24—807
870
Глава 4
данных) в неактивное состояние (L). Принимающая станция
передает сигнал DAC(H), чтобы указать контроллеру, что ин-
формация принята к сведению. То обстоятельство, что вызван-
ная станция указана в качестве приемника, регистрируется
посредством установки соответствующего состояния внутрен-
него триггера. Невоспринятый адрес вызывает обратную уста-
новку (сброс) триггера, как это будет показано далее.
Контроллер реагирует на активизацию сигнала DAC (при-
нятие данных) тем, что снимает сигнал DAV (достоверность
данных). Исчезновение сигнала DAV ведет к тому, что сигнал
DAC становится бездействующим (пассив,ным). Речь идет здесь
о квитировании, в котором участвуют сигналы RFD(H),
DAV(L) и DAC(H), т. е. о квитировании с помощью трех ли-
ний.
Затем наступает период ожидания, который продолжается
до тех пор, пока линия RFD (считывание данных) не станет
опять активной (примет состояние Н). Сигнал блокировки ли-
нии RFD выполняется принимающей станцией, которая была
вызвана в предыдущем цикле.
Таким же способом могут быть вызваны несколько прием-
ников информации, а в заключение контроллер производит ад-
ресацию источника информации. Идет ли речь о приемнике
или источнике информации — это следует из адресного кода,
как об этом было уже сказано ранее.
После адресации можно переходить к непосредственной пе-
редаче данных. Это происходит тогда, когда линия ATN
становится активной (переходит в состояние Н).
Начиная с этого момента в качестве источника информации
функционирует не контроллер, а указанная станция-передатчик.
Сигнал достоверности данных (DAV) исходит теперь от этого
передатчика информации, в то время как сигналы RFD (считы-
вание данных) и DAC (принятие данных) выдаются станция-
ми, указанными в качестве приемников информации.
4.20. Кодирование измеренных данных и команд
(инструкций)
Для кодирования адресов используется 7-разрядный код
ISO, который очень близок к коду ASCII. В отношении данных
можно пользоваться одним кодом, а также применять двоич-
ное изображение величины (транспарантная передача). В таб-
лице, представленной на рис. 4.47, приведена стандартная ко-
дировка адресов. Мы видим, что 128 комбинаций, реализуемые
с помощью семи двоичных разрядов, разделены на четыре
группы по 32 кодированных значения. Первые 32 кода являют-
ся кодами команд, из которых первые шестнадцать представ-
Передача данных
871
7-разряОнй/й код 765 4321 Обозначение
0 15 ООООООО ООО 1111 пи! S1 ] НОрессобаннуя группа J инструкции
16 31 ОО1 0000 001 1111 DLE US ] Универсальные инструкции
32 010 0000 SP ~\лдреса приемкикеб
62 011 1110
63 011 1111 Небосприниматщии а аре с
64 1ОООООО Уббреса исто и ни кеб
94 101 1110 п J информации
95 101 1111 Непервбающии абрес
Ь7 0 0 0 0 1 1 1 1
Ь6 0 0 1 1 0 0
Ь5 0 1 0 1 0 1 0 1
NUL IC7 (DLFI SP 0 a P P
ТС| (SOH) 0(1 1 1 A 0 a q
ТС? (SIX) oc? II 2 8 R b r
кз (ЕТХ) DC3 3 C S c s
К4 (ЕОП OC4 $ 4 0 I d t
'(5 (ENQ) 1(8 (NAK) % 5 E U e и
Кб (АСК) leg (STN) & 6 F V f V
BEL 1(10 (E IB) / 7 G W g w
FEO IBS) CAN ( 8 H X h X
(El (HI) EM ) 9 I Y i У
FEZ (IF) SUB * • ] z j z
FE3 (VI) ESC + К c k {
FE4 (FF) IS4 (FS) I < L \ I 1
((5 (CR) IS] (GS) - = M ] m
SO is? (PS) > N n -
SI IS1 IUSJ / ? 0 - 0 OEL
Сообщения IEEE
1) GTL (go to local), 7-разрядный код
ISO : 01
Перевести адресованный прибор в
режим ручного управления
2) SDC (selective device clear), 7-раз*
рядный код ISO : 04
Включить адресованный прибор
3) РРС (parallel poll configure), 7-раз-
рядный код ISO : 05
Выдача информационного бита, ко-
торый должен активизировать адре-
сованный прибор при параллельном
опросе
4) GET (group executive trigger),
7-разрядный код ISO : 08
Запуск измерительной программы в
адресованном устройстве.
5) ТСТ (take control), 7-разрядный код
ISO : 09
Контроллер передает функцию уп-
равления адресованному прибору
6) LLO (local lock out), 7-разрядный
код ISO : 11
Выключить ручное управление, а
также возможный переключатель
возврата в исходное состояние на
всех приборах
7) DCL (device clear), 7-разрядный код
ISO : 14
Возврат в исходное состояние всей
приборов
8) PPU (parallel poll units), 7-разряд-
ный код ISO : 15
Возврат в исходное состояние на
положения РРС
9) SPE (serial poll enable), 7-разряд-
ный код ISO : 18
Установить все приборы в состояние
опроса или готовности
10) SPD (serial poll desable), 7-разряд-
ный код ISO : 19
Окончить поисковую процедуру по-
следовательного опроса
Рис, 4.47, 7-разрядный код ISO с перечнем заданных адресов источника и
приемника сообщений, а также адресованных и универсальных групп инст-
рукций.
Обзор специфических сообщений IEEE и их значение. Сообщения являются составной
частью адресованных и универсальных групп инструкций.
24*
S72
Глава 4
ляют собой адресованные инструкции, а остальные шестна-
дцать— универсальные инструкции. Адресованные инструкции
поступают только в запрашиваемые станции, адресация кото-
рых была проведена накануне. Универсальные инструкции вы-
полняет каждое устройство, даже если оно не было адресо-
вано.
Примером адресованной инструкции является, например,
команда «переход в режим ручного управления» (GTL), по ко-
торой адресованное устройство переходит в этот режим. При-
мером универсальной инструкции могла бы служить команда
«отключить ручное управление» (LLO), после чего ручное
управление теряет силу. Другие используемые команды приве-
дены на рис. 4.47.
Вторая группа из 32 кодовых значений содержит адреса
приемников, включая в качестве последнего адреса так назы-
ваемый «невосприимчивый адрес». Путем выдачи этого послед-
него адреса приемники могут быть отключены.
Группа кодов с десятичными номерами от 64 до 95 пред-
ставляет собой адреса источников информации, в качестве
последнего кода указан так называемый «непередающий ад-
рес», с помощью которого возможно отключение (деадресация)
передатчика.
Здесь следует указать, что эта информация действительно
считывается только тогда, когда линия ATN (L) активна. Ин-
струкция может также осуществлять перевод измерительного
прибора на правильный диапазон измерения.
На рис. 4.46 была приведена временная диаграмма, из ко-
торой наглядно следует, как происходит квитирование при
использовании шины МЭК/IEEE. Характерным для такой диа-
граммы является то, что нанесенные стрелки указывают после-
довательность выполняемых действий. Переход сигнала в
активное или неактивное состояние начинается после завер-
шения предшествующего действия. Для временной диаграммы
-квитирования не существует никаких определенных временных
соотношений, так как имеющиеся запаздывания сигналов за-
висят от времени задержки в сигнальных линиях, которые мо-
яут быть как малыми, так и большими.
4.21. Управляющие сигналы REN, IFC, EOI и SRQ
В нормали IEEE 488/78 используются также некоторые
другие управляющие сигналы, которые могут иметь важное
значение при передаче данных между устройствами.
С помощью сигнала дистанционного снятия блокировки
REN(L) все блоки управления устройства, передатчика или
приемника могут быть установлены в нерабочее состояние.
В начале процесса измерения контроллер немедленно выдает
Передача данных
373
этот сигнал с тем, чтобы отключить ручное управление
устройств, подсоединенных к шине. При помощи универсальной
инструкции LLO эта команда может быть также передана по
шине данных, как мы только что это видели.
Затем имеется линия, обозначенная IFC (установка интер-
фейса в исходное состояние), посредством которой все имею-
щиеся элементы фиксирования состояний, такие, как триггеры
и регистры, переводятся в исходное или нулевое состояние.
Этот сигнал контроллер также передает перед началом про-
цесса измерения, чтобы можно было установить в исходное
состояние те элементы фиксирования состояний, которые уча-
ствуют в процессе. После появления сигнала IFC адресации
каких-либо устройств не производится.
Сигнал «окончание или идентификация» (EOI) имеет, как
говорит его название, две функции. Он выдается передатчиком
в тот момент, когда передается последнее слово блока данных.
Этот сигнал предназначен для оповещения контроллера о за-
вершении того или иного процесса.
Часто встречается режим работы, при котором передатчик
инициируется для выдачи измерительной информации, которая
появляется лишь через некоторое время. В это промежуточное
время по шине могут передаваться другие сообщения, чтобы
она использовалась эффективнее.
Если передатчик получил измерительную информацию для
посылки ее приемнику, то посредством сигнала SRQ(L) (за-
прос на обслуживание) он просит контроллер разрешить пере-
дачу информации. Контроллер будет реагировать на этот сиг-
нал после того, как завершится текущий процесс. Реакция
контроллера выражается в том, что линия EOI становится
активной.
В приведенной ниже таблице показано, как сигнал EOI
в комбинации с сигналом ATN может служить для идентифи-
кации конца блока или запроса на обслуживание.
ATN EOI DIO
0 0 Нормальный байт данных
0 1 Последний информационный байт блока (END)
1 0 Адрес, универсальная инструкция, адресованная инструкция
1 1 Просьба об идентификации после запроса на об- служивание (IDENTIFY)
О означает: шина в неактивном состоянии; Н.
1 означает: шина в активном состоянии; L.
374
Глава 4
Мы уже указали, что приемник или передатчик информа-
ции при вызове соответствующего устройства устанавливает
внутреннее состояние триггера. Эта установка выполняется
тогда, когда адрес на шине (DIO1—DIO8) совпадает с группой
двоичных разрядов, которые поступают от переключателей
(диспетчера). Совпадение адресов устанавливается с помощью
компаратора. Адрес, установленный при помощи переключате-
лей, указывается устройству абонентом.
4.22. Кабель и штекерный разъем для интерфейсной шины
То обстоятельство, что интерфейсная шина МЭК/1ЕЕЕ,
согласно международной рекомендации IEC 625, нормали США
IEEE 488/78 и нормали ФРГ DKE 66.22, совместима как с си-
стемой математического обеспечения, так и с аппаратной
частью, еще не означает, что все устройства имеют эту желае-
мую совместимость.
В течение последних лет вошли в употребление две раз-
личные системы кабельной связи: 24-контактный штекерный
разъем Amphenol и 25-контактный штекерный разъем Cannon.
В первоначальной американской нормали исходили из 24-кон-
тактного штекерного разъема, в то время как в Европе позд-
нее предпочтение отдали 25-контактному штекерному разъему
типа D.
При приобретении прибора и устройств необходимо прини-
мать во внимание это различие в интерфейсах, чтобы в даль-
нейшем не возникло проблем при соединении устройств между
собой.
Специально для интерфейсной шины МЭК/IEEE многие
фирмы-изготовители поставляют полные кабельные комплекты,
т. е. кабели с 24-контактными штекерными разъемами и с 25-
контактными штекерными разъемами типа D. Существует также
кабель с 24-контактным штекерным разъемом на одном конце
и с 25-контактным штекерным разъемом на другом, поэтому
проблемы связи могут быть решены достаточно простым спо-
собом.
Совместимость аппаратной части одновременно означает,
что электрические сигналы имеют уровень значений L и Н,
соответствующий нормалям. Для совместимости программного
обеспечения необходимо соответствие форматов данных как
для управления, так и для передачи информации. На рис. 4.48
воспроизведены 24-контактный штекерный разъем и 25-контакт-
ный штекерный разъем типа D, используемые в шинах IEC и
IEEE соответственно.
В предыдущих разделах мы указали информационные дан-
Передача данных
375
ные и управляющие сигналы согласно символике МЭК со зна-
чением (Н) для Н-активных и значением (L) для L-активных
линий. В соответствии с нормалями МЭК 625 и IEEE 488 сиг-
налы обычно являются L-активными. Если речь идет о некото-
ром Н-активном сигнале, то тогда он помечается знаком N перед
названием сигнала. Имеются два Н-активных сигнала, а имен-
но: RFD(H) (считывание данных) и DAC(H) (принятие дан-
Рис. 4.48, Подключение информационных и управляющих сигналов к штекер-
ным разъемам.
а — 25-контактный штекерный разъем типа D MIL-C-24308, предназначенный для интер-
фейсной шины МЭК; б — 24-контактный штекерный разъем Micro — Ribbon, предназна-
ченный для интерфейсной шины IEEE.
ных), которые в соответствии с нормалями должны обозна-
чаться как NRFD и NDAC.
То, что сигналы RFD и DAC должны быть Н-активными,
становится ясным, если вспомнить, что эти сигналы могут ис-
ходить от многих абонентов, которые подключены к шине па-
раллельно. Как для сигнала RFD, так и для сигнала DAC не-
обходимо реализовать функцию И, поскольку все абонентные
станции должны выдать сигналы «считывание данных» или
«принятие данных», прежде чем может начаться следующее
действие. При реализации функции на выходе управляющего
передатчика с открытым коллектором возможно выполнение
логической операции «монтажное И» только для Н-активных
сигналов. Для L-активных сигналов будет выполняться функ-
ция «монтажное ИЛИ». На это уже было указано в предыду-
щих главах.
Сигналы EOI (окончание или идентификация), REN (ди-
станционное разрешение), SRQ (запрос на обслуживание),
ATN (внимание) и DAV (достоверность данных) могут быть
L-активными, поскольку они выдаются источником информации,
а на шине во время передачи сообщения может действовать
лишь один передатчик.
Как было указано, при сигналах, передаваемых через
штекерный разъем, предпочтение отдается L-активным сигна-
лам. За счет применения L-активных сигналов можно пред-
отвратить начало непредвиденных процессов при разрыве ли-
нии связи, которая при этом принимает значение Н, а состоя-
ние Н является неактивным.
376
Глава 4
4.23. Программирование
Чтобы уяснить, как должен программироваться контроллер,,
например, при измерении частоты, на рис. 4.49 приведен в фор-
ме таблицы соответствующий алгоритм (последовательность-
выполняющихся операций) с тем, чтобы можно было прово-
дить это измерение. Измеренные данные выдаются устройством*
построчной печати.
Контроллер включается в фазе 1 с адресованием датчика^
частоты, после чего следует ряд указаний относительно уста-
новки диапазона частот и начала процесса измерения.
Если передача этой управляющей информации полностью
закончена, то после предварительного разъединения (отклю-
чения датчика частоты в качестве абонента) могут выдаваться,
адреса передатчика и приемника. Теперь с шиной данных со-
единяются датчик частоты в качестве передатчика (источника
информации) и устройство построчной печати в качестве при-
емника (абонента).
Затем производится измерение частоты, а как только оно
произошло, датчик частоты будет направлять на шину DIO
байт результата измерения с наименьшим значением разрядов-
(самый младший байт) и выдавать сигнал DAV (достоверность
данных) с тем, чтобы устройство построчной печати могло при-
нимать младшие байты. Тем самым введен метод квитирования
установления связи, при котором байт информации по мере
необходимости передается по шине. В данном случае речь идет,
очевидно, о двух байтах, так как из алгоритма следует, что
сигнал EOI (окончание или идентификация) после выдачи
второго байта делается активным, и контроллер будет интер-
претировать это как окончание передачи данных.
Контроллер будет реагировать на этот сигнал отключением,
выдавая один за другим невоспринимаемый и непередающий
адреса или код знака «?» и «—» (подчеркнуть).
Теперь может запускаться новый алгоритм, например, для
измерения температуры с выводом данных на перфоленту.
В приведенном примере была использована линия EOI
(окончание или идентификация), чтобы сообщить контроллеру
о том, что передано последнее измеренное значение. Можно
также к последнему данному измерения добавить код «карет-
ка назад» (CR-обратный ход каретки) или «новая строка»
(LF-подача на одну строку). Тогда контроллер знает, что пе-
редача измеренных данных закончена. В то же время назван-
ные коды могут в дальнейшем служить для того, чтобы устрой-
ству построчной печати практически реализовать команду «ка-
ретка назад, новая строка».
В отношении передачи данных измерений можно сказать,
Передача данных
377
Алгоритм измерения частоты
Фаза ATN Сообщение Операция Код на шине данных DIO
1 1 Адрес линии Адресовать датчик ча- стоты 8 (сообщение IEEE)
2 0 Инструкция Настроить датчик ча- стоты Т (7-разрядный код ISO)
3 0 Инструкция Секунда S (7-разрядный код ISO)
4 0 Инструкция Начало измерения F (7-разрядный код ISO)
5 1 Отклонение (ад- рес отключения) Отмена выборки дат- чика частоты ? (сообщение IEEE)
6 1 Адрес линии Адресовать устройст- во построчной пе- чати & (сообщение IEEE)
7 1 Т-адрес Адресовать датчик ча- стоты F (сообщение IEEE)
Ожидать в конце измерений
8 0 Данные измерений LS-байты 0 (7-разрядный
9 0 Данные измерений MS-байты код ISO) 5 (7-разрядный
10 0 Электрооптиче- Конец данных (EOI- код ISO) CR/LF (7-разряд-
11 1 ская система (конец измере- ния) Отклонение (адрес. активная) Отмена выборки при- ный код ISO) ? (сообщение
12 1 отключения) Отключение (адрес емника (устройства построчной печати) Отмена выборки ис- IEEE) (сообщение IEEE)
отключения) точника сообщений (датчика частоты)
Рис. 4.49. Пример алгоритма измерения частоты.
что они могут быть выражены в коде ASCII, в упакованном
коде BCD (2 двоично-кодированные десятичные цифры в одном
байте) или в двоичном коде с фиксированной или плавающей
точкой. Перечисленные формы кодирования представлены на
рис. 4.50.
378
Глава 4
С формой выражения данных это мало связано, однако в
отношении инструкций и адресации необходимо придерживать-
ся указанных полей знаков в 7-разрядном коде ISO, как это
показано на рис. 4.47.
В устройство построчной печати данные поступают в общем
случае в коде ASCII. Однако в этом коде должны поступать
Рис. 4.50. Представление чисел в 7-разрядном коде ISO (а), в упакованной
двоично-кодированной десятичной форме (BCD) (б), в двоичном коде (в),
а также выражение измеренного значения в соответствии с представлением
чисел с плавающей точкой при использовании 7-разрядного кода ISO (г).
и данные от измерителя частоты. Может также произойти, что
вырабатываемые измерителем частоты данные должны пре-
образовываться в контроллере в код ASCII, прежде чем эти
данные могут быть направлены устройству построчной печати.
Для этого необходимо использовать интеллектуальный конт-
роллер, т. е. микрокомпьютер, который может осуществлять
необходимое преобразование, а также другие необходимые ви-
ды обработки данных с помощью соответствующей программы.
4.24. Опрос
В предыдущих разделах было сказано, что если измерение
или другая операция занимают длительное время, то контрол-
лер может занять шину для передачи других данных.
Передача данных
379
Как только измерение или другой процесс закончен, то
прибор сообщает об этом контроллеру, активизируя линию
SRQ (запрос на обслуживание). После того как текущие про-
цедуры завершены и сигнальные линии ATN (внимание) и EOI
(окончание или идентификация) активизированы, контроллер
проверяет на шине данных, какой прибор послал сообщение.
Этот процесс называют опросом.
Различают последовательный и параллельный методы опро-
са. При последовательном опросе опрашивают байт состояния
всех приборов, одного за другим. Определенный бит или не-
сколько битов в байте информируют о состоянии, и при его
опросе соответствующий прибор сообщит о том, что измерение
проведено, и данные измерений могут быть приняты. При па-
раллельном опросе байт состояния опрашивается при помощи
отдельной инструкции, а байт информации выдается станцией,
которая просила о служебном запросе. Эта станция переводит
в состояние 1 намеченный бит в байте состояния, из чего конт-
роллер может сделать заключение, какой прибор послал сооб-
щение. Так как в распоряжении имеются 8 бит, то таким спо-
собом можно опрашивать состояние максимум восьми прибо-
ров.
Специально для интерфейсной шины IEEE 488 различные
фирмы — изготовители интегральных схем поставляют микро-
схемы, например, Fairchild типа 96LS488, Motorola типа
МС68488 и Philips типа HEF4738V. Последняя схема выполне-
на в виде МОП-структуры с использованием локального окис-
ления. Схема фирмы Motorola обозначается изготовителем как
GPIA (интерфейсный адаптер общего назначения), и эта схема
помещена в корпус с двухрядным расположением 40 выводов.
В отношении максимального числа приборов, которые могут
быть подключены к интерфейсу, в рекомендации IEC называет-
ся пятнадцать единиц. В общей сложности шина может иметь
длину не более 20 м. Если шина используется в последователь-
ной конфигурации сети, как это показано на рис. 4.51, то тогда
длина кабеля между двумя приборами может составлять самое
большее два метра.
Если мы более подробно рассмотрим адреса источников и
приемников информации, изображенных на рис. 4.47, то уви-
дим, что обе группы различаются кодированием двоичных раз-
рядов de и di.
В адресах приемников значение d7/de=01, а в адресах ис-
точников информации это значение равно 10. Таким образом,
пять младших двоичных разрядов адреса могут быть одинако-
выми как у приемника, так и у источника информации. Пре-
имуществом такого кодирования является то, ито для задания
этой группы битов информации обходятся одним набором пере-
380
Глава 4
ключателей. Двоичные разряды de и d7, определяющие, прием-
ник это или передатчик, при распознавании их контроллером,
могут быть жестко закоммутированы изготовителем измери-
тельного инструмента, что уменьшает затраты.
Рис. 4.51. Оптимальное (вверху) и неоптимальное (внизу) соединения прибо-
ров через шину МЭК.
4.25. Синтаксис данных измерений и программирования
Из изложенного ранее следовало, что при сборе данных
измерений и их последующей выдаче необходимо соблюдать
определенный протокол. В приведенном алгоритме это было
показано на примере выполнения процесса измерения частоты
(рис. 4.49).
Прежде чем начать измерение, необходимо указать адреса
приемника и источника информации, а также сообщить инфор-
мацию, касающуюся проводимых измерений. При этом ясно,
что речь идет о передаче управляющей информации. Эту ин-
формацию можно обозначить как «заголовок».
Передача управляющей информации должна происходить с
помощью указанных кодовых полей 7-разрядного кода ISO.
Определения управляющих и информационных сообщений,
а также сведения о запуске этих сообщений (синтаксис) при-
водятся как в нормали IEEE 488, так и в нормали МЭК 625.
Эти сообщения можно, очевидно, подразделять по собственно-
му усмотрению.
В том случае, когда сеть приборов сложна и с шиной со-
единяются многие приборы различных фирм-изготовителей,
возрастает потребность в протоколе, который можно назвать
протоколом программного обеспечения высокого уровня. В дан-
Передача данных
381
ном протоколе более подробно определен формат управляю-
щих и информационных сообщений.
Как для изготовителя, так и для пользователя измери-
тельных приборов важно, что такой протокол существует, по-
этому известно, как требуется поступать в том случае, когда
необходимо удовлетворить определенным спецификациям.
Появившаяся в октябре 1979 г. нормаль DIN-M3K625-2
является той нормалью, которая должна направить в правиль-
Рис. 4.52. Синтаксическая диаграмма, иллюстрирующая выдачу данных изме-
рения (нормаль DIN-МЭК 625-2).
ное русло решение проблемы синтаксиса при использовании,
шины МЭК.
Выдачу измерительных данных иллюстрирует синтаксиче-
ская диаграмма, приведенная на рис. 4.52. Прямоугольные бло-
ки диаграммы изображают поля данных. Блоки с надписью-
«альфа» относятся к буквенным комбинациям, а помеченный
еще и знаком А предназначен для составления сообщений
правильной длины. Заголовок в данных измерения может'
отсутствовать.
За заголовком следует информационное поле с цифровой
информацией соответственно в форме целых чисел (FJ, деся-
тичных чисел (F2) или в виде числа с плавающей запятой
(F3).
Последовательности данных, информационных блоков и
информационных предложений отделены друг от друга посред-
ством указанных для этого разделительных знаков Ех, Еу и Ez.
Стрелки, ведущие обратно в диаграмму, означают, что приве-
денный синтаксис может проходить с повторением, после того
как необходимые разделительные знаки помещены между по-
следовательностями или блоками.
Синтаксическая диаграмма, иллюстрирующая выдачу дан-
ных программирования, приведена на рис. 4.53. Заголовок?
здесь необходим, и он состоит из одной или нескольких букв,,
882
Глава 4
после которых соответственно следуют цифровые данные F1,
F2 и F3. Цифровая информация может отсутствовать. В каче-
стве заголовка могут использоваться специальные знаки, кото-
Рис. 4.53, Синтаксическая диаграмма, иллюстрирующая выдачу данных про-
граммирования (нормаль DIN-M3K625-2).
рые в 7-разрядном коде ISO указывают определенные сообще-
ния. Необходимо учитывать, что при использовании специаль-
ных знаков между заголовком и полем данных должен быть
поставлен разделительный знак Ех.
Заголовок Массив Ех
Последователь -
ноешь знаков^
Заголовок Массив
Последователь-
ноешь знаков
Заголовок Массив
Последователь -
н ость знаков
- Блок____________________
данных
---------------Предложение
блок данных
Рис. 4.54. Формат измерительного сообщения согласно нормали DIN-M3K625-2.
На рис. 4.54 показано, как выглядит измерительное сооб-
щение, составленное в соответствии с упомянутой рекоменда-
цией. Следует отметить, что сообщение может образовать це-
лое предложение, разделенное на блоки данных. Эти блоки
данных мы можем снова представить состоящими из различ-
ных последовательностей знаков. Чтобы можно было отличать
друг от друга различные поля данных, вводятся различные
знаки, как показано на рис. 4.55.
Передача данных
383
Поле Вид знака окончания Кодирование
предпочтительное разрешенное
Ех Последовательность знаков 7-разрядный код ISO, (запятая) 7-разрядный код! (точка с запятой)
Еу Блок данных (запись) 7-разрядный код ISO NL 7-разрядный код ISO ЕТВ CRLF NLAEND
Предложение (запись) (указатель конца) 7-разрядный код ISO и END DABAEND 7-разрядный код ISO ЕТХ NLAEND
Рис, 4.55. Кодирование границ раздела между последовательностями знаков,
блоков данных и предложений.
В нормали даются некоторые примеры, иллюстрирующие
применение изображенного синтаксиса. В первом примере речь
идет о приборе для измерения напряжения постоянного тока
до 10 В, с помощью которого измеряется напряжение 12,002 В,
т. е. имеется перегрузка.
Значение напряжения дается в форме числа с плавающей
точкой. Сообщение, выдаваемое вольтметром после измерения
с учетом предписанного для этого синтаксиса, будет выглядеть
следующим образом:
OLDC+12002. E-03NL,
или OLDC+ 12.002CRLF,
или 12002Е-03ЕТВ.
Заголовок может отсутствовать, поскольку речь идет только
об одной измеряемой величине. В противоположность этому
во втором примере рассматривается датчик частоты с двумя
каналами измерений, вследствие чего необходимо передавать
измеренные величины.
В первом измерительном канале измеряется частота
4,23 МГц, а в другом — частота 2,6 кГц. В заголовках мы раз-
личаем оба канала с помощью знаков AF и BF. За этими бук-
вами следует указание частотного диапазона AF = MHZ (МГц)
и для BF = KHZ (кГц). Далее в информационном поле указы-
ваются данные измерений, соответственно 4,23 и 2,6. Оба ряда
384
Глава 4
знаков разделены запятой. Блок завершается знаком NL (но-
вая строчка). Сообщение гласит:
AFMAHZ 4.23, BFKHZ 2,60NL,
или AFMAHZ 4.23, BFKHZ 2.6 (6 END),
или А4.23, В2.60ЕТХ.
Здесь знак (О END) означает, что одновременно с послед-
ним байтом данных активизируется линия ЕО1( окончание
•или идентификация). В третьем примере сообщение самое
короткое, и оно заканчивается знаком ЕТХ (конец текста).
Следует также привести пример синтаксической диаграммы
при выдаче данных программирования. При этом речь идет о
вольтметре, который должен программироваться для измерения
напряжения постоянного тока (FO = функция О) в диапазоне
10 В (R4 = диапазон 4). Измерение должно начинаться вслед за
внутренним сигналом триггера (Т1) с выдачей данных в со-
стоянии (М3). После приема и интерпретации инструкции про-
граммирования Р прибор будет воспринимать измеряемую
информацию и передавать ее по шине после того, как контрол-
лером указаны адреса источника и приемника информации.
Сообщение тогда может иметь вид
FOR4T1M3 (PEND).
Перед этим сообщением сначала указывается передатчик,
а затем — приемник (в нашем случае — контроллер и вольт-
метр).
В данном сообщении заголовку предписывается роль ин-
струкции программирования, и он начинается знаком FO.
Для указания диапазона, момента запуска и состояния выдачи
используются буквы в комбинации с цифрами. Знак (PEND)
указывает, что линия EOI (окончание или идентификация) ак-
тивизируется одновременно с Р (инструкцией программирова-
ния), тем самым указывается конец сообщения.
На рис. 4.56 указано, как эта последняя инструкция про-
граммирования последовательно подается контроллером на
•шину. Первые буквы и цифра 1 уходят по активной линии ATN
(внимание) на шину, за счет чего приемник и передатчик зна-
комятся с этими данными. Как уже было сказано, здесь источ-
ником информации является контроллер (С), а приемником —
вольтметр VI.
После адресации может выполняться выдача данных, при-
чем сигнал ATN (внимание) теперь должен быть неактивным.
Как было отмечено, во время выдачи инструкции програм-
мирования Р сигнал EOI (окончание или идентификация) ста-
Передача данных
385
новится активным. Тем самым указывается, что этот знак со-
держит маркер конца сообщения. В последующем цикле конт-
роллер снова активизирует сигнал ATN, чтобы адресовать вольт-
метр знаком UNL (снятие блокировки).
то /
2
3
4
5
6
7
8
™[-Т-~Н I I I I I I I I
ж LL I I I I I I I I I I •И
жI • I • i • I • I • I • I I • Ы • I • I • I •! tSSKr
\С I/ 1 О R U Т 1 М 5 Р \
Рис. 4.56. Программированное сообщение согласно нормали DIN-MSK625-2
с рекомендованным синтаксисом.
Речь идет о выдаче данных для программирования цифрового прибора измерения на-
пряжения. Точки показывают, что в данном состоянии линии сигналов L-активны.
4.26. Выдача информации о состоянии
Если измерительный прибор «хочет» сообщить контроллеру
данные о своем состоянии, то он может сделать это в то время,
когда по линии SRQ (запрос на обслуживание) подается соот-
ветствующий запрос. В идентификационном цикле прибор рас-
познается затем контроллером, в это же время активизируется
линия D107. При помощи остальных информационных битов
прибор может передать то, что пожелает. Битам 5, 6, 7 припи-
сываются специальные значения. Битами 1—4 можно свободно
распоряжаться для обозначения определенного состояния.
Состояниями, указываемыми с помощью этих битов, яв-
ляются: занято (бит 5), искажено (бит 6) и вызвано обслужи-
25—807
386
Глава 4
вание (бит 7). Необходимо заметить, что эти сообщения рас-
познаются контроллером в том случае, когда линия EOI сде-
лалась активной при поступлении сигнала ATN(L)-L.
Выдача информации о состоянии таким способом возможна
только при последовательном опросе, когда состояние подклю-
ченных к шине приборов опрашивается последовательно.
4.27. Код и упорядочивание кода
В предыдущих разделах мы всегда исходили из того, что
переданные источником данные интерпретируются приемником
надлежащим образом, чтобы затем поступить для соответ-
ствующей регистрации.
Однако на практике оказывается, что часто необходим
перевод выданных данных, прежде чем их можно было пред-
ложить приемнику. Подобная ситуация создается в том случае,
когда вольтметр выдает упакованные данные в BCD-коде
(двоично-кодированном десятичном), а печатающее устройство,
обязанное производить регистрацию информации измерений,
должно получать ее в коде ASCII. В таком случае управляю-
щее устройство может просить о помощи для выполнения тако-
го перевода (преобразования). В этом случае источник инфор-
мации переводит измеренные данные контроллеру, который
должен быть в состоянии выполнять этот перевод. После пере-
вода контроллер направляет данные измерений печатающему
устройству.
Если создается возможность пронормировать структуру
кода сообщения об измерении, то можно исключить работу по
переводу или свести ее к минимуму.
Необходимо добиться некоторого «двоичного эсперанто»,
т. е. языка, который может понимать каждый прибор и на
котором он может «говорить».
В нормали DIN-МЭК 625-2 до этого еще не дошли, воз-
можно, потому, что введение такого языка чревато многочис-
ленными последствиями. Каждый прибор должен был бы со-
держать устройство перевода, что приведет к увеличению рас-
ходов, так как это делает необходимым наличие в приборе
дополнительных схем. Изготовители измерительных приборов
выражают мнение, что функцию перевода внутри некоторой
системы шин можно лучше реализовать с помощью контролле-
ра или микрокомпьютера, который и без того выполняет обя-
занности управляющего устройства системы.
В рекомендации МЭК в этом отношении не пошли дальше
предписания о том, что для приборных сообщений можно ис-
пользовать буквы и числа, а также знаки «Н---» и «.,», изоб-
раженные в 7-разрядном коде ISO. Сообщения состоят только
Передача данных
387
из чисел или из комбинаций букв и чисел. В сообщениях на-
ряду с данными измерений можно, как уже было сказано, ис-
пользовать различные формы кода, например целые и дробные
числа в 7-разрядном коде ISO (в десятичных дробях вместо
запятой ставится точка), упакованный BCD-код, двоичный и
шестнадцатеричный коды, причем последний опять в форме
ISO-7.
Таким образом, открыты все направления; одновременно
это означает, что требуется наличие управляющего устройства,
знающего множество языков, при реализации системы шин,
к которой подключаются приборы различных фирм-изготови-
телей.
Подобное системное управляющее устройство (контроллер)
часто выполняется в виде микрокомпьютера, который запро-
граммирован таким образом, что действительно может справ-
ляться с названными функциями управления.
Благодаря использованию доступных по цене микропроцес-
соров системное управляющее устройство может быть выпол-
нено при относительно небольших затратах. Поэтому данное
решение предпочтительнее, чем то, при котором каждый под-
ключенный прибор имел бы встроенное устройство перевода.
Это, вероятно, является причиной того, что в нормали
МЭК 625-2 ничего не говорится об этой проблеме, так как при
стандартизации экономический аспект играет большую роль.
4.28. Устройство связи между приборами и МЭК-шиной
Многие из используемых в настоящее время приборов не
имеют возможности для непосредственной связи с интерфейс-
ной шиной. Поэтому требуется устройство связи, которое поль-
зователь может сам изготовить или купить.
Такое устройство связи должно обладать функциями, по-
зволяющими выполнять оптимальную связь с интерфейсной
шиной. Обзор и описание функций приводятся на рис. 4.57.
Мы видим, что цифровой вольтметр выдает последователь-
ность результатов измерения, которые после преобразования
должны образовать сообщение. Затем это сообщение можно
направлять на шину интерфейса. Некоторые функции, напри-
мер квитирование установления связи и инструкции источнику
и приемнику информации, не имеют ничего общего с измери-
тельным прибором, однако они весьма важны для обеспечения
передачи данных.
В данном случае вольтметр многократно выдает измерен-
ное значение, и именно в тот момент, когда поступает сигнал
«конец измерения» и данные появляются на экране дисплея.
Ясно, что сигнал «конец измерения» должен приводить к за-
25*
388
Глава 4
просу на обслуживание и что приемник или контроллер дол-
жен принимать данные за время изображения их на дисплее.
Выработка сигналов квитирования легче всего может осу-
ществляться с помощью управляющего устройства (контролле-
ра), как это было описано ранее в стиральном автомате. Мож-
но также подумать о применении микрокомпьютера на одном
кристалле, который берет на себя выполнение этой функции
управления. В таких микрокомпьютерах на одном кристалле
рядом с микропроцессором помещаются также программируе-
мое постоянное ЗУ (ППЗУ) и ЗУ с произвольной выборкой
Рис. 4.57. Блок связи между измерительным прибором и интерфейсной шиной.
Функции интерфейса: АН — квитирование установления связи с получателем информации;
L — приемник; SH — квитирование установления связи с источником информации; Т —
источник информации; SR — запрос на обслуживание; РР — параллельный опрос; DT—
триггер устройства; DC—установка устройства в исходное состояние.
(ЗУПВ), кроме того, в распоряжении имеется некоторое коли-
чество схем ввода-вывода. Чтобы сохранить для шины требуе-
мые управляющие способности, необходим отдельный линей-
ный усилитель. Передатчики должны иметь по возможности
выход с тремя состояниями и быть способными выдавать ток
48 мА. Скорость передачи данных при использовании МЭК-ши-
ны с длиной кабеля 2 м и системой управления линиями, имею-
щей открытый коллекторный выход, составляет 250 кбайт/с.
При длинах кабелей каждого прибора 0,5 м и системе управ-
ления линией с тремя состояниями достижима скорость пере-
дачи данных 1 Мбайт/с при полной нагрузке шин данных, кви-
тирования и управления.
4.29. Реализация периодического переключения
частот (FSK)
Как уже было замечено в начале этой главы, телефонные
линии не подходят для передачи цифровой информации в том
виде, в каком она поступает от устройства обработки данных.
Линии телефонной связи были разработаны для передачи зву-
ковых сигналов, т. е. переменного напряжения. Это напряже-
ние позволяет реализовать необходимые соединения с помощью
трансформаторов. При необходимости усиления сигналов в це-
Передача данных
389
пи исходят также из того, что поступающая информация до-
стигает сети в виде переменного напряжения.
В этом случае можно применять относительно простые
схемы усилителей. Кроме того, между различными сетями и
участками сетей возможна гальваническая развязка.
Если мы хотим передать по телефонным линиям дискретные
уровни напряжения, то мы должны использовать принцип несу-
щей частоты, при котором информация каким-либо способом
модулирует эту несущую. На стороне приемника эта инфор-
мация за счет детектирования может снова отделяться от несу-
щей частоты и преобразовываться в стандартные логические
уровни напряжения.
Одной из известных в телеграфной технике систем модуля-
ции, которая может быть реализована с помощью ограничен-
ных средств, является система периодического переключения
частот FSK (манипуляция сдвига частоты). Речь идет при этом
об одном из видов частотной модуляции. Метод периодического
переключения частот (FSK), в общем случае обозначаемый
как частотная модуляция (FM), имеет по сравнению, напри-
мер, с амплитудной модуляцией преимущество в нечувстви-
тельности к отклонениям амплитуды, а также к помехам.
При использовании метода периодического переключения частот
не требуется автоматического регулирования громкости. Пре-
имущество частотной модуляции, заключающееся в нечувстви-
тельности к помехам при передаче информации, справедливо
и для этого метода. Эти достоинства делают FSK-метод на-
столько притягательным, что данный принцип модуляции
широко используют при связи систем обработки данных через
общественную телефонную сеть. В FSK-методе знаки «метка»
и «пробел», используемые в телеграфной технике, передаются
при помощи несущей волны, которая может принимать два
значения частоты.
Эти частоты в большинстве случаев лежат симметрично
относительно средней частоты канала, резервированного для
передачи.
В принципе возможно расположить обе частоты в узкой
полосе пропускания. Однако узкая полоса пропускания отрица-
тельно влияет на скорость передачи данных, т. е. числа битов,
которые могут передаваться за 1 с. Чем уже полоса пропуска-
ния, тем ниже скорость передачи. Все это становится яснее,
если мы рассмотрим передачу двоичного образа, показанного
в верхней части рис. 4.58. Импульсный сигнал состоит из основ-
ной волны с более высокими гармониками. Гармоники высших
порядков способствуют тому, что передаваемый сигнал дей-
ствительно имеет форму импульса. Если полоса пропускания
канала слишком узкая, то высшие гармоники не пропускаются
390
Глава 4
Двоичная О 1 0 0 0 0 1 0 0
информация ---- ---------------------
Форма импульса
(перса переОочей)
Скорость пере Рачи
2000 бит/с _________________
Форма импульса
(при приеме)
Полоса пропус-
кания 500 Гу
Полоса пропус-
кания ООО Га,
Полоса пропус-
кания (500 Гу
Рис. 4.58. Иллюстрация влияния полосы пропускания информационного кана-
ла на импульсную форму данных.
и через эту очень узкую полосу пропускания проходит лишь
основная волна импульсного сигнала. Если увеличить число
изменений в двоичной комбинации, так чтобы частота удвои-
лась или утроилась, что наблюдается в случае возрастания
потока битов, то тогда основная волна такой частоты, переда-
ваемая через эту узкую полосу пропускания, ослабнет на-
столько, что, если принять во внимание уровень помех, ее
считывание становится невозможным. Таким образом, узкая
полоса пропускания не допускает быстрого изменения двоич-
ных разрядов в модулируемой двоичной комбинации.
На рис. 4.59 представлена осциллограмма, на которой
изображен сигнал периодического переключения частот FSK,
вырабатываемый системой обработки данных при помощи им-
пульсного сигнала (двоичный сигнал 0/1). Мы видим, что вы-
сокий и низкий уровень импульсного сигнала изображаются
посредством двух частот сигналов.
Выработку FSK-сигнала и его демодуляцию достаточно
просто можно осуществлять с помощью второй интегральной
схемы.
На рис. 4.60 изображена блок-схема, в которой для пере-
дачи и приема информации совместно работают схема кодиро-
Передача данных
391
вания периодического переключения частот FSK (модулятор)'
и схема декодирования переключения частот (демодулятор).
Мы видим, что схема кодирования переводит двоичную ин-
формацию в FSK-сигнал, который передается затем в телефон-
ную сеть через общий трансформатор линии.
При приеме сигналов информация через общий трансфор-
матор снимается с линии и направляется в схему декодирова-
ние. 4.59. Осциллограмма сигнала периодического переключения частот.
При изменении содержания двоичного разряда ясно видно, как изменяется несущая ча-
стота.
ния, которая преобразует FSK-сигнал в последовательную
двоичную комбинацию.
Передатчик сигналов с периодическим переключением ча-
стот в принципе может состоять из генератора, управляемого
напряжением (VCO), о котором говорилось ранее в данном
справочнике. Однако при периодическом переключении частот
предпочтение отдается применению генератора, управляемого
током (ССО), из-за большей стабильности частоты при коле-
баниях температуры. Другим требованием, которое предъяв-
ляется к FSK-сигналам, является постоянная величина сигнала
при переходе частоты от метки к пробелу и наоборот. Это не^
обходимо, чтобы избежать возникновения переходных процес-
сов в телефонной сети, а также чтобы схему считывания можно
было выполнить более просто. Хорошо также, если частота
может быстро изменяться, например в течение полупериода
несущей волны. Искажения сигнала должны быть менее 1%.
Таким образом, сигнал, направляемый в линию, должен иметь
синусоидальную форму.
На рис. 4.61 представлена блок-схема модулятора сигналов
периодического переключения частот FSK с генератором, управ-
392
Глава 4
Рис. 4.60. Блок-схема модема.
Рис. 4.61. Блок-схема передатчика сигналов с периодическим переключением
частот (FSK-передатчика).
ляемым током (ССО). Переключатели тока переводят уровни
двоичных сигналов в токовые сигналы для управления гене-
ратором (ССО).
Импульсный выходной сигнал этого управляемого генерато-
ра тока направляется в вентильный фильтр, подавляющий вы-
сокие гармоники сигнала. В результате возникает синусои-
дальный сигнал, искажения которого меньше 1%.
Демодуляция FSK-сигнала осуществляется при помощи
детектора с регулируемой полосой пропускания (PLL), как
это в настоящее время типично для воспроизведения при ча-
Передача данных
393
стотной модуляции. Принцип воспроизведения сигналов перио-
дического переключения частот ясен из рис. 4.62.
Детектор состоит из схемы сравнения фаз, вентильного
фильтра и генератора, управляемого напряжением (VCO).
В этом детекторе поступающий частотно-модулированный сиг-
нал, или FSK-сигнал, сравнивается с сигналом, вырабатывае-
мым генератором, управляемым напряжением (VCO). Различие
Часть хтт/ебого аетектора
Рис. 4.62. Блок-схема приемника сигналов с периодическим переключением
частот (FSK-приемника).
частот между обоими сигналами ведет к появлению регулируе-
мого напряжения на выходе фазового детектора, которое через
вентильный фильтр направляется на регулировочный вход
управляемого генератора (VCO). С помощью этого напряже-
ния обеспечивается дополнительное регулирование генератора,
так что разница фаз между входным сигналом и сигналом,
вырабатываемым управляемым генератором напряжения, ста-
новится почти равной нулю.
В представленной схеме генератор, управляемый напряже-
нием, должен следовать входному сигналу по частоте, во вся-
ком случае в пределах половины диапазона детектора. Как мы
видим, изменение частоты входного сигнала приводит к изме-
нению сигнала регулировки, который является точной копией
сигнала, посредством которого несущая волна была промоду-
лирована согласно FM- или FSK-методу. Этот сигнал регули-
ровки усиливается, и на выходе детектора с регулируемой по-
лосой пропускания (PLL) при частоте метки выдается 1,
а при частоте пробела — 0.
394
Глава 4
Мы уже упомянули о половине диапазона детектора с ре
гулируемой полосой пропускания (PLL). Вполне понятно, что
управляемый генератор не в состоянии следовать частоте сиг-
налов, далеко удаленных от центральной частоты, на которую
он настроен. Тот диапазон, в котором обеспечивается управле-
ние частотой генератора, обозначают как диапазон детектора
с регулируемой полосой пропускания (PLL). Вне этого диапа-
зона детектора регулировочное напряжение падает до нуля и не
Вращение
гастатЩ
Рис. 4.63. Фазовый детектор с генератором, управляемым напряжением.
PLL-детектор имеет обычный диапазон пропускания, внутри которого управляемый гене-
ратор отслеживает входной сигнал. Вне этого диапазона сигнал регулировки падает
до нуля.
зависит больше от частоты поступающего сигнала, как показа-
но на рис. 4.63.
Наличие фильтра объясняется тем обстоятельством, что в
принципе при демодуляции возникают сумма и разность обоих
входных напряжений. Суммарная частота равна двухкратной
входной частоте, а разница частот равна нулю. Разность пред-
ставляет собой незначительный сдвиг фаз, который дает по-
стоянный компонент напряжения и который мы используем
для дополнительного регулирования генератора, управляемого
напряжением (VCO).
Суммарная частота должна подавляться, для чего служит
фильтр высоких частот.
На рис. 4.64 представлен полный демодулятор сигналов
периодического переключения частот с ключевым детектором.
Этот детектор проверяет наличие сигнала на линии.
Передача данных
395
При поступлении сигнала определяется, находится ли этот
сигнал внутри частотного диапазона «метки» и «пробела».
Если это так, с помощью схемы сравнения снимается блокиров-
ка выхода модулятора сигналов периодического переключения
частот для передачи данных. Во всех других случаях, таких,
как «отсутствие сигнала» или «сигнал для другого приемника
на другом канале», ключевой детектор будет блокировать вы-
Выход вход Настроен Вход
фазового го нор от, емкость Р5К-
4 Земля
компаратора
7 Выходы
—детектора
Выход опор-
много нап-
- ряжения
— Q
Выходы
ключевого
детектора
Рис. 4.64. Блок-схема FSK-приемника с ключевым детектором.
ход детектора. За счет этого чувствительность схемы к поме-
хам значительно снижается.
Можно также реализовать модулятор и демодулятор сиг-
налов периодического переключения частот с помощью двух
интегральных схем, как это следует из полной схемы, изобра-
женной на рис. 4.65, а.
При рассмотрении этой схемы видно, что дуплексные сиг-
налы периодического переключения частот подаются в линию
или поступают из нее через общий трансформатор.
С помощью резисторов 7?а и можно установить симмет-
ричный выходной сигнал с возможно малым искажением (менее
0,5%), а с помощью резистора можно регулировать величи-
ну амплитуды этого сигнала.
Существующие в настоящее время интегральные схемы поз-
воляют исключить связующий трансформатор. Тоже самое спра-
ведливо для пассивного фильтра, который заменяется активным.
Благодаря применению этих интегральных схем можно раз-
местить модемы в компактном объеме. Схема может быть зна-
чительно упрощена за счет интегрирования модулей.
396
Глава 4
вывод данных
FSK-полоса
XR-2206
XR-2211
Скорость
передачи
данных, ,
бод/с *L
R6AR6B R7B R?B Сз R4A R4B R5
C2 CF CD
300 1070 1270
300 2025 2225
1200 1200 2200
10 18 10 20 0,039
10 16 10 18 0,022
10 16 20 30 0,022
10 18 100 0,039
10 18 200 0,022
10 18 30 0,027
0,01 0,005 0,05
0,0047 0,005 0,05
0,01 0,0022 0,01
б
Примечания: Частоты выражены в герцах, сопротивления — в килоомах,
емкости — в микрофарадах. С помощью сопротивления R3 осуществляется
установка амплитуды, с помощью RA— установка синусоидальной формы,
с помощью Rb — установка симметрии.
Рис. 4.65. а — модем с двумя интеральными схемами типа XR-2206 и
XR-2211 фирмы Ехаг; б — значения параметров.
Передача данных
397
Рис. 4.66. Передача данных через телефонную линию.
Терминал оснащен устройством построчной печати с клавиатурой фирмы Philips.
На рис. 4.66 представлен терминал данных с клавиатурой
и печатающим устройством.
4.30. Реализация других форм модуляции данных
В предыдущих разделах мы видели, что распознавание
битов данных, ориентированных на знаки, возможно за счет
использования синхронизированного импульсного генератора,
который вырабатывает сигнал с частотой, кратной частоте по-
вторения битов. Из этого сигнала формируется соответствую-
щий стробирующий импульс.
398
Глава 4
Пока нули и единицы с промежуточными паузами последо-
вательно поступают друг за другом, этот метод синхронизации
надежен, — это наблюдается (как уже было сказано) в случае
передачи данных, ориентированных на знаки.
При транспарантной передаче данных, когда информация
может в принципе состоять из длинных последовательностей
нулей и единиц, синхронизация в том виде, в каком она типич-
на при распознавании знаков, трудноосуществима. Поэтому
разработаны системы модуляции, в которых из потоков дан-
ных выделяется синхронизирующий или стробирующий сигнал
для распознавания двоичных разрядов. В этих системах для
последователь - n . . Л .
нал двоичная 0 0 0 10 11 10 10 0 1 1 0 1
комбинация ।---1 ।--------1 I--1 I-----1 ।—
NRZ ------------1 I--« 1--1 1-----1 1--1
Рис. 4.67. Двоичная комбинация и полученный для нее сигнал «без возвра-
щения к нулю» (NRZ-сигнал).
модуляции используется несущая волна с потоком данных. Мо-
дуляция имеет жесткую временную связь с несущей волной,
поэтому моменты времени, пригодные для считывания, могут
определяться по несущей волне. Как было указано ранее, для
этого может использоваться амплитудная, частотная или фазо-
вая модуляция. При периодическом переключении частот речь
идет в принципе также о модуляции несущей волны, так что
подходящие для считывания моменты времени здесь тоже мо-
гут определяться из сигнала. Если мы преобразуем параллель-
ную двоичную комбинацию в последовательную с помощью
параллельно-последовательного преобразователя, то получим
импульсный сигнал, обозначаемый как сигнал «без возвраще-
ния к нулю» — NRZ-сигнал. При этом сигнал не изменяется в
течение времени, когда в последовательном двоичном ряду
выдаются один за другим нули и единицы. На рис. 4.67 при-
водится такой NRZ-сигнал (без возвращения к нулю). Мы ви-
дим, что в потоке данных как последовательности единиц, так
и последовательности нулей соответственно передаются в виде
единого блока. Информация из этого блока не может быть
выделена без соответствующего стробирующего сигнала.
Сигнал «без возвращения к нулю» представляет собой им-
пульсный сигнал, наинизшая частота которого равна О (DC),
а наивысшая — максимальной частоте следования битов. Наи-
низшая частота появляется при отсутствии изменения значений
передаваемых двоичных разрядов, а наивысшая — при после-
довательном появлении нулей и единиц.
Передача данных
399
То обстоятельство, что наинизшая частота может равняться
нулю, означает, что сигнал «без возвращения к нулю» (NRZ)
не может передаваться через сети передачи данных перемен-
ного тока, например через телефонные и телеграфные сети.
При этом виде передачи данных требуется использование мо-
дулированной несущей волны. Кроме того, из несущей волны
необходимо выделить стробирующий сигнал для распознавания
данных.
В течение последних лет были разработаны различные
методы модуляции для передачи данных, большей частью ба-
зирующиеся на частотной и фазовой модуляции. Амплитудная
модуляция не так популярна, поскольку модуляция данных
при перегрузке усилителей может теряться в цепи передачи за
счет искажения амплитуды, что не наблюдается при частотной
и фазовой модуляции, а также в производных от них системах
модуляции. Кроме того, амплитудная модуляция чувствительна
к помехам. Метод периодического переключения частот (FSK)
может рассматриваться как производный от частотной модуля-
ции. Хотя существует много различных методов модуляции,
производных от частотной и фазовой модуляции, в последую-
щих разделах мы будем обсуждать только два из них, обра-
ботка которых может производиться в цифровом виде.
4.31. Метод сдвига фаз (фазовой коммутации)
(PSK-метод)
Метод сдвига фаз представляет собой модуляцию, бази-
рующуюся на фазовой модуляции. Этот метод известен также
как фазовый, или манчестерский, код.
На рис. 4.68 представлена временная диаграмма, из которой
видно, как вырабатывается сигнал сдвига фаз при наличии
синхроимпульсов А и В, а также сигнал данных «без возвра-
щения к нулю» (NRZ), который синхронизирован с названными
синхроимпульсами.
При данной концепции установка триггера происходит в
момент времени, когда сигнал генератора синхронизирующих
импульсов А становится активным (имеет состояние 1), если
при этом сигнал «без возвращения к нулю» (NRZ) имеет зна-
чение 1. Это происходит также и в случае, когда сигнал NRZ =
= L(O), как только сигнал генератора синхронизирующих им-
пульсов В становится активным. Обратная установка происхо-
дит в том случае, когда в генераторе синхроимпульсов А сиг-
нал NRZ = L(O), а также если NRZ = H(L) при вступлении в
действие генератора синхроимпульсов В.
Как видно из временной диаграммы, полученный выходной
сигнал оказывается кодом, базирующимся на фазовой модуля-
400
Глава 4
ции, так как при каждой смене двоичного разряда фаза им-
пульсного сигнала изменяется на 180°.
При считывании из принятого сигнала путем дифферен-
цирования можно получить синхронизирующий сигнал, с по-
мощью которого можно синхронизировать внутренний генера-
тор тактовых импульсов.
ms) __п_пп_п_п_л_
FF(R) Гк_П_П_ЛП_Л-П-ЛЛ_пл_л_гьлл_г
GOO1O1 11O1OO! 101
о
Рис. 4.68. PSK-передатчик (а) с временной диаграммой (б).
Этот генератор вырабатывает двойную тактовую частоту,
из которой путем ее деления пополам выводится синхронизи-
рующий сигнал А (рис. 4.69). За счет этого сигнала мы уста-
навливаем 5/?-триггер.
Если на входе триггера синхронизирующий сигнал является
активным и сигнал сдвига фаз одновременно имеет состояние
Н (1), то происходит установка триггера. Если сигнал сдвига
фаз имеет состояние L(O), как и синхроимпульс А, то вход
сброса триггера становится активным и происходит его обрат-
ная установка.
Детектор фронта импульсов вырабатывает импульс как при
нарастающем, так и при спадающем фронтах принятого сиг-
Передача данных
401
нала сдвига фаз. Этот импульс синхронизирует генератор син-
хроимпульсов. Синхроимпульсы А, как уже было сказано, фор-
мируются путем деления пополам частоты сигнала генератора.
Нарастающий фронт импульса преобразуется путем дифферен-
цирования и усиления в узкий импульс для записи и обратной
установки триггера.
4.32. Метод кодирования сдвига частоты (FSC-метод)
В методе кодирования сдвига частоты (FSC) речь идет о
частотной модуляции, что следует также из рис. 4.70, на кото-
ром приведен выходной сигнал передатчика кодированного
пцльсыЯ ._П_Л_П_11_П_П_П_П_П_Гl_f1JL_П_n_fЪ_JL
Рис. 4.69. PSK-приемник (а) с временной диаграммой (б).
сдвига частоты. На временной диаграмме мы имеем две после-
довательности синхроимпульсов А и В, а также сигнал «без
возвращения к нулю» (NRZ) и последовательную двоичную
комбинацию, направляемую передатчику.
Временная диаграмма показывает, что выходной сигнал
при нарастающем фронте синхроимпульса А изменяется неза-
висимо от содержания двоичного разряда сигнала «без возвра-
щения к нулю» (NRZ). Если содержание двоичного разряда
сигнала NRZ равно 1, то во время синхроимпульса В генери-
26—807
402
Глава 4
руется дополнительный импульс. За счет этого возникает же-
лаемый сигнал частотной модуляции, при котором единицы
сигнала «без возвращения к нулю» (NRZ) возбуждают двойную
частоту.
Из рис. 4.70, а видно, как выглядит передатчик кодирован-
ного сдвига частоты в своей классической форме. Из синхроим-
ВбоО RNZ-сигнала
пульсы Д
пульсы В
HRZ ---------------1 I—I ~~ I------i I-------I l Г~~
Данные В-------------П-----------П—П_П----П____________П_П______TL
нас J I I 1 П П П П I ~1 П I | П П П
Данные О' О О / и / / / о j о д / / д /
о
Рис. 4.70. FSC-передатчик (а) с временной диаграммой (б).
пульса за счет деления частоты пополам и дифференцирования
нарастающих фронтов импульсов формируются два отдельных
синхроимпульса А и В.
С помощью синхроимпульсов управляется JK-триггер по
синхронизирующему входу С. Синхроимпульс А всегда вызы-
вает изменение содержания, а синхроимпульс В приводит к
изменению содержания только тогда, когда сигнал «без воз-
вращения к нулю» (NRZ) во время синхроимпульса равен 1.
Оба синхроимпульса «упорядочиваются» и после этого направ-
ляются на синхронизирующий вход //(-триггера.
При декодировании сигнала в декодирующей схеме
(рис. 4.71) мы регистрируем фронты импульсного сигнала за
счет дифференцирования и выпрямления входного сигнала. За-
регистрированные фронты сигналов после усиления импульсов
используются генератором синхроимпульсов В в качестве сиг-
налов данных и синхронизирующих сигналов. Сигналы установ-
ки и возврата в исходное состояние могут теперь легко выде-
Передача данных
403
Рис. 4.71. FSC-приемник (а) с временной диаграммой (б).
Вход NRZ-сигналод
Рис. 4.72. FSK-передатчик, собранный из логических схем.
ляться с помощью двух логических элементов И, как это сле-
дует из импульсной диаграммы. К этим элементам подключены
линии, по которым поступают данные, инвертированные данные
и синхроимпульсы В. Из временной диаграммы следует, что
мы действительно можем вырабатывать желаемые сигналы
установки и возврата в исходное состояние для управления
триггером.
В отношении схемы декодирования рис. 4.71 можно также
сказать, что в принципе она подходит и для считывания сиг-
нала периодического переключения частот (FSK), хотя обычно
отдают предпочтение схеме декодирования с программируемой
логической матрицей, как это описано в предыдущих разделах.
Схема передатчика сигналов периодического переключения ча-
стот (FSK) может быть составлена из логических элементов,
как это изображено на рис. 4.72.
26*
404
Глава 4
Из синхронизирующего сигнала с помощью деления его
частоты пополам формируются два сигнала с частотами f и
/72, которые направляются к логическим схемам И-НЕ. К этим
схемам одновременно подключаются сигнал данных «без воз-
вращения к нулю» (NRZ) и инверсный сигнал «без возвраще-
ния к нулю» (NRZ). Выходы схем И-НЕ затем подключаются
к общей выходной схеме.
Понятно, что при сигнале NRZ = H(1) верхняя схема И-НЕ
активизируется и сигнал с частотой f/2 направляется к выходу.
Если сигнал NRZ = L(O), то тогда через инвертор активизи-
руется нижняя схема И-НЕ, и на выходе появляется сигнал с
частотой f. Данный пример показывает, что передатчик сигна-
лов периодического переключения частот (FSK) можно легко
реализовать с помощью логических схем. Оба делителя частоты
могут быть реализованы на базе триггеров D- или Ж-типа.
Названные виды фазовой и частотной модуляции подходят
также для передачи сигналов по стекловолоконным световодам,
для регистрации данных на магнитном или оптическом диске,
а также на магнитной ленте.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Адаптер интерфейсный общего назна-
чения (GPIA) 379
Байт данных 200, 201
— промежутка 200, 201
Блок процессорный типа 2901 58
Бод 315
Время переключения линии 321
Выдача данных измерения 381
----- программирования 382
— информации о состоянии 385
Выпрямитель мостовой 284
— однофазный 284
— сетевого напряжения 284
-----двухфазный с выводом средней
точки 284
Генератор кода Морзе 71
— полупроводниковый термоэлектри-
ческий 282
— последовательности импульсов 166
— символов 159
— управляемый напряжением (VCO)
391
-----током (ССО) 391
— тактовых импульсов 45
— циклического контроля избыточно-
сти (CRC) 350
Датчик влажности 276
— давления 274—276
----- пьезоэлектрический 274
— мощности 270
— перепада давлений 275
— разности давления 274
— температуры 270
Декодер 7-сегментного кода 24, 26
Демультиплексор 167
— «1 из 8» 21
Детектирование ошибок 153
Домены магнитные цилиндрические
(ЦМД) 189
Запрос на подтверждение приема
автоматический (ARQ) 357
Заряд статический 296
Защита от перегрузок и помех 293
Изменения света 272
Интерфейс несбалансированный
RS423 339
— сбалансированный RS422 339
— типа RS232C 317, 330, 336—338
Кабель плоский 305
Кадр адреса 356
— данных 356
Каскад выходной 338
Квитирование установления связи
307, 321, 322, 368
Код Бодо 323
— преобразователь 151
— управляющий 347
— фазовый или манчестерский 399
— Хемминга 155—157
— АСП 323, 345
Кодер 28
Компоненты 2708 140, 141, 143
~ 74LS42 19
— 74LS46 24
— 74LS47 24
— 74LS48 24
— 74LS138 21
— 74LS151 14
— 74LS153 14
— 74S181 42
— 74S182 42
— 7815 289, 290
— 7915 289
— 8202 118
— 9616 339
— 9627 339
— 96LS488 379
— ADC0801 296
— ADC0802 206
— ADC0803 206
— ADC0804 206
406
Предметный указатель
— ВТ138 258
— ВТ139 258
— DAC1000 229
— HEF4738V 379
— MCI489 336
— MC1489L 336, 337
— МС68488 379
— NE5008 224, 226
— SH3015 263
— SN74184 22
— SN74185 22
— SN74LS148 28, 31
— TDA1023 257—259
— TIL311 28
— ULN2001 260
— ULN2002 260
— ULN2003 260
— ULN2004 260
— XR-2206 396
— XR-2211 396
Контроль канала передачи данных
353, 354
----------высокоуровневый
(HLDC) 354
----------синхронный (SDLC) 353
— по избыточности вертикальный
(VRC) 349, 356
-------продольный (LRC) 349
-------циклический (CRC) 349—
353
Контроллер (управляющее устройст-
во) 170
Концентратор 306
Коррекция ошибок 155
Коэффициент ослабления синфазного
сигнала 236
Криптография 69
Линия связи телефонная, 311, 312,
315
Логика последовательностная 48
— матричная программируемая
(ПМЛ) 182
Матрица программируемая велтиль-
ная (ПВМ) 181
----логическая (ПЛМ) 67, 68, 150,
393
Метка (маркерный импульс) 314, 329,
331
— адреса 200
Метод кодирования сдвига частоты
(FCS-метод) 401
— сдвига частоты (PSK-метод) 399
Мини-диск 203
Модем 317, 396
— управление 328
Модуляция амплитудная 314, 319,
320
----квадратурная (EZB) 320
— квитированная 320
— с ключевым переключением частот
319, 320
— фазовая 314, 319, 320
— частотная 314
МОП-конденсатор 98
Мультиплексор 167, 306
— аналоговый 215
— программируемый 182
— с накопительными емкостями 343,
344
Нелинейность 235
— аналого-цифрового преобразова-
ния 235
— дифференциальная 235
Нормаль DIN-M3K625-2 381, 382, 385
Операция транспарантная 344
Организация разрядно-модульная ти-
па 2901 58
Останов и ожидание типа ARQ 357
Отклонение от линейности 235
Отражение 301
Отсечка фазовая 256
Ошибка, возникающая из-за началь-
ного напряжения смещения ОУ
233
— квантования 218, 233
— усиления 233
Передатчик сигналов с периодиче-
ским переключением частот
(FSK-передатчик) 391—393
— FCS (FCS-передатчик) 402
Передача данных 298, 307
— — асинхронная 307, 323—325
•---дифференциальная 300
------- с управлением балансиро-
ванным 300
------------- несбалансирован-
ным 300
---- сеть 311
---- синхронная 307, 326
— однопроводная 299
— с разделением по времени (TDM)
306
----------частоте (FDM) 306
Переключение частот периодическое
(FSK) 388, 389
Пересылка данных 326
Пики кратковременных питающих на-
пряжений 297
Плотность записи 202
Предметный указатель
407
Подавление синфазного сигнала 242
Помехи электромагнитные 295
Последовательность контроля блока
(BCS) 352
----кадра (FCS) 352
Преобразование аналого-цифровое
218, 220, 232, 235
— цифро-аналоговое 223, 232
Преобразователь аналогового напря-
жения в частоту 239
— аналого-цифровой (АЦП) 216
«---расходометрический 222, 223
— из BCD-кода в двоичный 22
----------десятичный 17, 19
----двоичного кода в BCD-код 22
— кода 17
Прибор с зарядовой связью (ПЗС)
183
----переносом заряда (ППЗ) 183
— типа «пожарная цепочка» (ППЦ)
183
Пробел 329, 331
Программатор 123, 134
Протокол (инструкция) 313, 344
— контроля байтов (ВСР) 355
— ориентированный на биты (ВОР)
355
— сети DECNET 360
----SNA 360
Процессор с разрядной организацией
48
Разряд статический 296
Регенерация распределенная 118
«Регенерация скрытая» 118
— только стробом адреса строки
(RASOR) 114
Регистр сдвига 98
— суммы 48
Регулирование времяимпульсное 255
Режим пониженной мощности 119
— транспарантный 347
Резистор с отрицательным темпера-
турным коэффициентом 267
Реле полупроводниковое (ППР)
245—249, 257
----самопроизвольное включение
249
— электромагнитное (ЭМР) 245—
249, 258
---- управление 258
Связь двоичная синхронная 347
— дуплексная 321, 322
— оптоэлектронная 241
— полудуплексная 321
— прямая между двумя пунктами
361
— симплексная 321
Селекторы-мультиплексоры 11
Сети конфигурация 361
Сеть распределенная 363
— передающая блоки данных 311
----сообщения 311
— со схемной коммутацией 311
— упорядоченного опроса 361, 362
Сигнал без возвращения к нулю
(NRZ-сигнал) 398, 399, 402
Сигналов периодического переключе-
ния частот демодулятор 395
---------- модулятор 395
Сигналы синфазные 266
— управляющие 372
— FSK (FSK-сигналы) 314, 315, 393
Символ циклического контроля (CRC)
202
Синхрознак 327
Синхронизация 322, 323
Система кабельной связи 374
— модуляции 319
— передачи данных петлевая 365
— регулирования 209
— с периодическим переключением
частот (FSK-система) 314
— центрального отопления (СЦО)
85, 86, 89, 91, 92
Скорость передачи в бодах 315
Слой аморфного магнитного материа-
ла 189
Согласование 301
Сообщения IEEE 371
Стабилизатор импульсный 292
— интегральный 284
— маломощный серий 78L, 79L,
78MG, 79MG 291, 292
— на интегральных схемах 287
— напряжения 284
— серии 78ХХ 291
Стандарт CCITT Х.25 (пакетное пере-
ключение) 361
Станция подчиненная 362
— управляющая 362
Сумматор полный 74LS183 40, 41
----SN 7480N 47
Схема ввода данных с помощью кла-
виатуры 78
— интегральная мощная 263
— ИСКЛЮЧАЮЩЕЕ ИЛИ 33, 40,
42
— контроля четности 74, 280, 34, 35
Схемы мощные 244
— сложения (полные сумматоры) 40
408
Предметный указатель
— сравнения аналоговые (компара-
торы) 36, 216, 234
----74LS85 37
— сумматора 42
— установки смещения 264
— устройств сопряжения 212
Счетчик декадный типа SN7490A 27
— фотоэлектрический 273
Терминал 309, 312
Термистор 267
Управление пропорциональное 255
Усилители измерительные 235
Усилитель мощности
— считывания с хранением 236, 237
Устройство гальванической развязки
343
— запоминающее (ЗУ) на дисках
гибких 194, 195
---------- оптических 205
--------ПЗС (приборах с зарядовой
связью) 98, 183
---------- архитектура 185
----------с циклом длинным 185,
186
---------------- коротким 186
--------ЦДМ (цилиндрических маг-
нитных доменах) 98, 189
----оперативное (ОЗУ) 97, 98
--------биполярное типа SN7784A
106
--------динамическое (ДОЗУ) 98
-------- полупроводниковое 112
--------статическое (СОЗУ) 98
-------- типа 2114 106
--------2117/2118 118
--------2147 ПО
--------энергонезависимое 146, 148
---- полупроводниковое 101
-------- статическое 103
----постоянное (ПЗУ) 98, 100, 122,
123
— ------биполярное 122, 123
--------масочно-программируемое
(МППЗУ) 123
--------МОП (МОП-ПЗУ) 123
--------программируемое (ППЗУ)
100, 123, 167—170
----------биполярное 124, 125
----------МОП (МОП-ППЗУ) 139
—---------репрограммируемое
(РППЗУ) 144, 149
-------------блок программатора
143
-----------стираемое (СППЗУ) 100,
139
-------электрически программируе-
мое (ЭППЗУ) 100, 146, 149
-----с последовательным доступом
99
-------произвольной выборкой
(ЗУПВ) 97
-----символическое обозначение эле-
ментов 131
— получения видеоизображения 161
— приемное 336
— управления последовательностью
микрокоманд (УУП) 56, 57
----------типа 8X02 59, 64
Фотодиод 279
Фотоэлемент полупроводниковый 277,
278
Фотоэлементы CdS (фоторезисторы)
271
Фототранзистор 279
Формализация 198
Формат IBM 3740 199
Цикл регенерации 113, 116
ЧМ-метод 202
— модифицированный (МЧМ) 202
Шина интерфейсная МЭК/1ЕЕЕ 365,
374
-----фирмы Hewlett Packard (HPIB)
366
-----универсальная (GPIB) 366
Элемент оптической связи CNY 21, 92
— оптоэлектронной связи (оптрон)
281
— термоэлектрической связи 282
— CdS 272
-----спектральная чувствительность
272
Элементы чувствительные (датчики)
208, 266
Этикетка начальная 306
Эффект Зеебека 282
Ячейка памяти 96
— FAMOS (FAMOS-ячейка) 139
СОДЕРЖАНИЕ
Предисловие редактора перевода...................................... 5
Предисловие.......................................................... 7
Глава 1. Логические элементы и их применение в сложных схемах 10
1.1. Введение.............................................10
1.2. Селекторы-мультиплексоры.............................10
1.3. Преобразователи кода.................................17
1.4. Преобразователь из BCD-кода в десятичный (декодер) . . 17
1.5. Преобразователи из BCD-кода в двоичный и из двоичного
кода в BCD-код............................................22
1.6. Декодер 7-сегментного кода...........................24
1.7. Кодеры...............................................29
1.8. Схема ИСКЛЮЧАЮЩЕЕ ИЛИ................................33
1.9. Схема контроля четности .................................. 35
1.10. Компаратор, или схема сравнения......................36
1.11. Схемы сложения — полные сумматоры....................40
1.12. Практическая схема сумматора.........................42
1.13. Схема для генерации временных сигналов...............44
1.14. Регистры А, В и OV (перенос) в сумматоре.............46
1.15. Регистр суммы........................................48
1.16. Последовательностная логика — процессор с разрядной орга-
низацией ......................................................48
1.17. Программируемые логические схемы.....................67
1.18. Криптография . 69
1.19. Генератор кода Морзе.................................71
1.20. Схема ввода данных с помощью клавиатуры .... 78
1.21. Автомат для управления водяным насосом в системе цент-
рального отопления (комбинационная логика) .... 82
1.22. Блок-схема автомата для управления работой водяного насоса 87
1.23. Реализация схемы.....................................89
Глава 2. Запоминающие устройства (ЗУ)..........................96
2.1. Введение.............................................96
2.2. Статические полупроводниковые ЗУ (СОЗУ) . , . . . 103
2.3. Динамические полупроводниковые ОЗУ (ДОЗУ) . . . . 112
2.4. Сравнение статических и динамических ОЗУ............121
2.5. Биполярные ПЗУ......................................122
2.6. Программирование биполярного ППЗУ . ..... 125
2.7. Символические обозначения элементов ЗУ..............131
2.8. Программатор........................................134
410
Содержание
2.9. МОП-ППЗУ и СППЗУ.........................................139
2.10. ЭППЗУ и энергонезависимое ОЗУ............................146
2.11. РППЗУ и ЭППЗУ по состоянию на 1982 г.................149
2.12. ППЗУ в качестве ПЛМ......................................150
2.13. Преобразователи кода.....................................151
2.14. Детектирование ошибок.................................. 153
2.15. Коррекция ошибок....................................... .155
2.16. Таблицы реализации.................. ..................157
2.17. Линеаризация передаточной характеристики с помощью ППЗУ 159
2.18. Генераторы символов.......................... . . 159
2.19. Генераторы последовательности импульсов..................166
2.20. Мультиплексор/демультиплексор .....................167
2.21. Контроллеры с ППЗУ.......................................170
2.22. Реализация произвольных логических функций с помощью
ППЗУ . . ............................. . . 177
2.23. Программируемые логические матрицы (ПЛМ) . . 179
2.24. ЗУ на приборах с зарядовой связью (ПЗС).................183
2.25. Архитектура ЗУ на ПЗС . 185
2.26. ЗУ на основе ЦМД............................. . . 189
2.27 ЗУ на гибких дисках.....................................194
2.28. ЗУ на оптических дисках.................................205
Глава 3. Связь устройств обработки данных с внешней средой 206
3.1. Введение . -..............................................206
3.2. Чувствительные элементы и устройства управления — схемы
«1/0»................................................. .208
3.3. Схемы устройств сопряжения для управления процессом 212
3.4. Аналоговые схемы сравнения (компараторы) .... 216
3.5. Аналого-цифровое преобразование..............218
3.6. Цифро-аналоговое преобразование. Связь преобразователей с
микроЭВМ...................... .............................223
3.7. Ошибки аналого-цифрового и цифро-аналогового преобразо-
вания ................................................. .... 232
3.8. Измерительные усилители.....................................235
3.9. Усилители считывания с хранением............................236
3.10. Преобразователь аналогового напряжения в частоту . 239
3.11. Линейная передача аналоговых данных через нелинейный эле-
мент оптоэлектронной связи....................................241
3.12. Подавление синфазного сигнала..............................242
3.13. Мощные схемы...............................................244
3.14. Электромагнитные и полупроводниковые реле в качестве регу-
лирующих элементов по методу «включено-выключено» . . 245
3.15. Преимущества и недостатки ЭМР и ППР.........................247
3.16. Устранение самопроизвольного включения ППР .... 249
3.17. Явления, возникающие при замыкании и размыкании электри-
ческой цепи...................................................251
3.18. Включение ППР в нулевой точке переменного напряжения 253
3.19. Времяимпульсное регулирование переменного тока . . . 255
3.20. Управление электромагнитным реле с помощью логического
сигнала.......................................................258
3.21. Усилители мощности на биполярных транзисторах ... 261
3.22. Управление мощными линейными интегральными схемами 263
3.23. Чувствительные элементы-датчики.............................266
3.24. Термистор в качестве датчика температуры....................267
3.25. Измерение мощности с помощью термисторов....................269
Содержание 411
3.26. Использование полупроводниковых диодов в качестве датчи-
ков температуры................................................270
3.27. CdS-фотоэлементы или фоторезисторы.......................271
3.28. Оптическое измерение длины провода.......................273
3.29. Контроль производственного процесса с помощью CdS-эле-
ментов ........................................................273
3.30. Пьезоэлектрические датчики давления......................274
3.31. Емкостные датчики влажности..............................276
3.32. Полупроводниковый фотоэлемент............................277
3.33. Фотодиод и фототранзистор................................279
3.34. Элемент оптоэлектронной связи (оптрон)...................281
3.35. Полупроводниковый термоэлектрический генератор и элемент
термоэлектрической связи.......................................282
3.36. Стабилизированные низковольтные источники питания . . 283
3.37. Выпрямители сетевого напряжения..........................284
3.38. Стабилизаторы напряжения серии 78ХХ......................287
3.39. Стабилизаторы отрицательного напряжения серии 79ХХ . . 290
3.40. Стабилизаторы серии 78ХХ с переменным выходным напряже-
нием ..........................................................291
3.41. Маломощные стабилизаторы для положительных и отрицатель-
ных питающих напряжений (серии 78L, 79L, 78MG, 79MG) 291
3.42. Импульсные стабилизаторы.................................292
3.43. Защита от перегрузок и помех.............................293
3.44. Электромагнитные помехи................................ 295
Глава 4. Передача данных...........................................298
4.1. Передача данных через длинные линии связи................298
4.2. Согласование с линией передачи данных....................301
4.3. Плоский кабель и передача данных.........................305
4.4. Сети передачи данных.....................................305
4.5. Передача данных через телефонные линии связи . . . . 311
4.6. Электрическое соединение системы обработки данных с су-
ществующими сетями передачи данных............................313
4.7. Соединение систем друг с другом и с телефонной сетью . 315
4.8. Модем................................................317
4.9. Системы модуляции....................................319
4.10. Симплексные и дуплексные связи..................... 321
4.11. Синхронизация передачи данных........................322
4.12. Управление модемом...................................328
4.13. Транспарантные операции и протоколы..................344
4.14. Двоичная синхронная связь (BYSINC)...................347
4.15. Синхронный контроль канала передачи данных (SDLC) и вы-
сокоуровневый контроль канала передачи данных (HLDC) 353
4.16. Протоколы различного уровня..........................355
4.17. Конфигурации сетей...................................361
4 18 Интерфейсная шина МЭК/1ЕЕЕ..........................365
4.19. Квитирование установления связи......................368
4.20. Кодирование измеренных данных и команд (инструкций) 370
4.21. Управляющие сигналы REN, IFC, EOI и SRQ .... 372
4 22. Кабель и штекерный разъем для интерфейсной шины . . 374
4.23. Программирование.....................................376
4.24. Опрос................................................378
4.25. Синтаксис данных измерений и программирования . . . 380
4.26. Выдача информации о состоянии........................385
4.27. Код и упорядочивание кода............................386
4.28. Устройство связи между приборами и МЭК-шиной . . . 387
412 Содержание
4.29. Реализация периодического переключения частот (FSK) . . 383
4.30. Реализация других форм модуляции данных.................397
4.31. Метод сдвига фаз (фазовой коммутации) (PSK-метод) . . 399
4.32. Метод кодирования сдвига частоты (FSC-метод) .... 401
Предметный указатель......................................405
УВАЖАЕМЫЙ ЧИТАТЕЛЬ!
Ваши замечания о содержании книги, ее оформ-
лении, качестве перевода и другие просим присылать
по адресу: 129820, Москва, И-110, ГСП, 1-й Рижский
пер., д. 2, изд-во «Мир».
УЧЕБНОЕ ИЗДАНИЕ
И. Янсен
КУРС ЦИФРОВОЙ ЭЛЕКТРОНИКИ
В 4-х томах
Том 3
СЛОЖНЫЕ ИС ДЛЯ УСТРОЙСТВ ПЕРЕДАЧИ ДАННЫХ
Старший научный редактор В. С. Соболев
Младший научный редактор М. Н. Стасюк
Художник А. И. Чазов
Художественный редактор Н. М. Иванов
Технический редактор Н. И. Манохина
Корректор В. И. Киселева
И Б № 5987
Сдано в набор 15.01.87 г. Подписано к печати 22.6.87 г. Формат
60X90V16. Бумага типографская № I имп. Печать высокая.
Гарнитура литературная. Объем 13.00 бум. л. Усл. печ. л.
26.00. Усл. кр.-отт. 26.00. Уч.-изд. л. 25.88. Изд. № 6/4900.
Тираж 40 000 экз. Зак. 807. Цена 2 р. 20 к.
ИЗДАТЕЛЬСТВО «МИР». 129820, ГСП, Москва, И-110,
1-й Рижский пер., 2.
Московская типография № 11 Союзполиграфпрома при Го-
сударственном комитете СССР по делам издательств, поли-
графии и книжной торговли. 113105, Москва, Нагатинская
ул., д. 1.