/





















































































































Текст
А. Г. МАЦИЕВСКИЙ, Л. Б. ЭРЛИХ
РАЦИОНАЛИЗАЦИЯ РАСЧЕТОВ
ПРИ КОНСТРУИРОВАНИИ
СТАНКОВ
Под редакцией
С. X. СВИРИДЕНКО
МАШ ГИЗ
ГОСУДАРСТВЕННОЕ
НАУЧНО-ТЕХНИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МАШИНОСТРОИТЕЛЬНОЙ ЛИТЕРАТУРЫ
М осква 1962 Киев
В книге освещены вопросы организации и тех-
ники выполнения расчётов станков, дана методи-
ка составления расчетных формуляров.
Книга предназначена для инженерно-техниче-
ских работников конструкторских бюро.
Рецензент доц. М. Л. Орликов
ЮЖНОЕ ОТДЕЛЕНИЕ МАШГИЗА
Главный редактор инж. В. К. Сердюк
ПРЕДИСЛОВИЕ
Для современного машиностроения характерен все возрастаю-
щий объем конструкторских работ в общей трудоемкости, себесто-
имости и продолжительности создания новых машин.
Чтобы справиться с огромным объемом конструкторских работ,
предусмотренных семилетним планом,—обеспечить машинами раз-
витие всех отраслей народного хозяйства — необходимо, чтобы рост
числа конструкторов опережал рост общего числа работников машино-
строения.
Однако, кроме увеличения числа конструкторов, для решения
указанной задачи нужно рационализировать все элементы конструк-
торской работы.
В настоящей книге изложен опыт СКБ-3 в области технических
расчетов по станкостроению.
Ознакомление с расчетным делом в других конструкторских
бюро родственного профиля показывает, что организация расчетных
работ в СКБ-3 имеет некоторые положительные особенности.
В составлении приведенных в книге расчетных формуляров
и других материалов наряду с авторами принимали участие канд.
техн, наук доцент И. Н. Слезингер и инженеры Л. С. Менакер и
И. Ш. Рабинович, работавшие ранее в группе технических расчетов.
I. ОРГАНИЗАЦИЯ И ТЕХНИКА ВЫПОЛНЕНИЯ РАСЧЕТОВ В СКБ-3
1. Организация расчетных работ
Размерные, прочностные и другие расчеты деталей, узлов станков
и машин прочно вошли в обиход конструкторских бюро машино-
строительных заводов и отраслевых конструкторских бюро.
Используя в проектируемых машинах новые оригинальные ме-
ханизмы и узлы, значительно повышая скорости, мощности и другие
характеристики машин, конструкторы должны глубоко и всесто-
ронне проверять выбранные решения путем расчетов.
Однако расчетам еще не уделяется должного внимания. В некоторых
бюро они выполняются каждым конструктором самостоятельно, без
единой методики и общего направления, не сохраняются, не систе-
матизируются, не изучаются.
Расчеты, выполняемые для определения нагрузок, проверки проч-
ности и долговечности деталей машин, как правило, приближенные.
Они справедливы лишь в некоторых границах, определяемых вхо-
дящими в них опытными коэффициентами. Опыт, приобретенный в
результате наблюдения за рассчитанными и затем построенными
узлами или целыми машинами при испытании и особенно в эксплуа-
тации, позволяет уточнять эти опытные коэффициенты и тем са-
мым приближать расчетные данные к действительным. Естественно,
что расчеты, выполняемые различными, подчас случайными, ме-
тодами и притом не сохраняемые и не систематизируемые, не могут
способствовать накоплению опыта.
В практике наших конструкторских бюро чаще всего встреча-
ются два вида организации расчетных работ:
1) расчеты выполняются конструкторской бригадой;
2) расчеты выполняются специальной группой технических рас-
четов.
Второй вид организации работ по сравнению с первым обес-
печивает более высокое качество расчетов при меньшей затрате
времени. Однако отрыв собственно конструирования машин от их
расчета при втором виде организации работ вреден. Он вносит
элементы безответственности за качество конструкции и за сроки
проектирования. Поэтому в СКБ-3 принят первый вид организации
расчетных работ.
5
Все расчеты, как правило, выполняются каждой конструктор-
ской бригадой. Единство методики расчетов и минимальное время,
затрачиваемое на их выполнение, обеспечиваются системой норма-
лизованных расчетов, которые составляются группой технических
расчетов. Эта группа выполняет также сложные расчеты, встреча-
ющиеся впервые.
В СКБ-3, которое обеспечивает всей необходимой технической
документацией выпуск более чем 100 моделей станков среднего раз-
мера в год, группа технических расчетов состоит в настоящее время
из трех сотрудников.
Группа технических расчетов СКБ-3 выполняет в основном сле-
дующие функции:
1. Определяет необходимый объем расчета, консультирует кон-
структоров по его выполнению и проверяет расчеты после их оформ-
ления.
2. Выполняет расчеты во всех случаях, представляющих затруд-
нения для рядовых конструкторов, а также поверочные аварийные
и другие расчеты.
3. Составляет расчетные формуляры и другие материалы по рас-
чету; систематически пересматривает их, обновляет и совершенствует.
4. Участвует во всех экспериментально-исследовательских рабо-
тах, проводимых в лаборатории (исследование принципиально новых
узлов и конструктивных решений).
В распоряжении расчетной группы находятся следующие про-
стейшие механизмы и машины: арифмометры типа «Феликс» и ВК-1;
вычислительная машина с электроприводом («Рейнметалл»); элек-
тронная моделирующая установка МН-7. В работе используются так-
же различные передвижные линейки, таблицы и номограммы, состав-
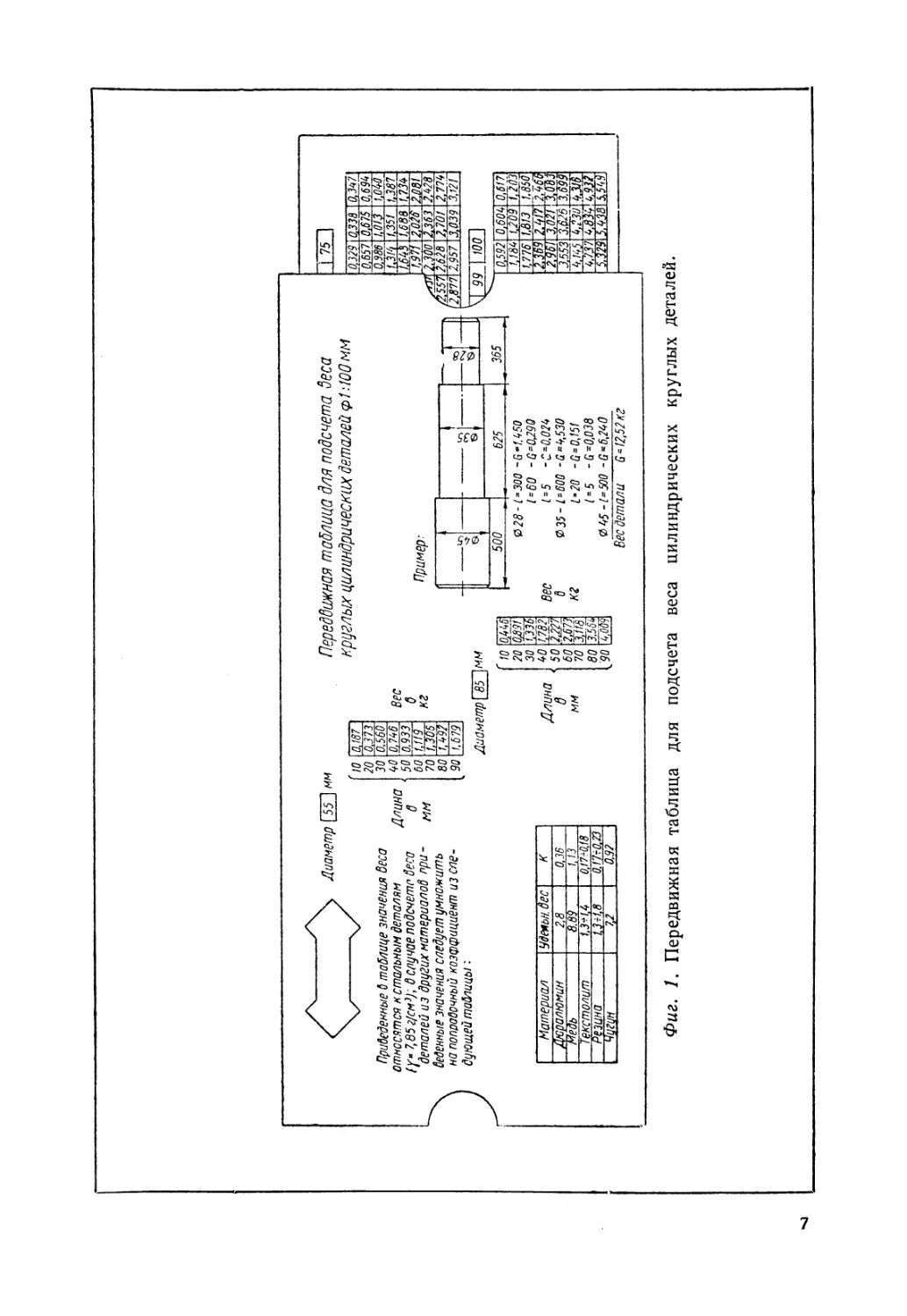
ленные сотрудниками группы. Примером может служить передвиж-
ная таблица для подсчета веса круглых цилиндрических деталей
(фиг. 1).
2. Нормали расчетов
Центральное место в описанной выше организации расчетных ра-
бот занимает нормализация расчетов и оформление соответствую-
щих нормалей.
В практике СКБ-3 все нормали расчетов разделены на три вида:
1. Расчетные формуляры (индекс РФ) — наиболее важная часть
расчетных нормалей, охватывающая массовые расчеты, встречающи-
еся особенно часто при конструировании станков и машин.
2. Типовые расчеты (индекс ТР) — охватывают разные специаль-
ные расчеты, встречающиеся сравнительно редко.
3. Руководящие материалы по расчетам (индекс РМР) — охва-
тывают расчеты, встречающиеся при конструировании каждого стан-
ка примерно один раз. В отличие от типовых расчетов РМР отли-
чаются широким диапазоном изменения различных коэффициентов
и поэтому требуют подробных рекомендаций по их применению.
6
Диаметр (55 ] мм
Приведенные 0 таблице значения Веса
относятся кетальным деталям
(р=7,85 z!cmj) ’, в случае подсчете веса
деталей из других материалов при-
веденные значения следует умножить
на поправочный коэффициент из сле-
дующей таблицы :
Длина
д
мм
ю
20
зо
но
50
60
70
80
90
0,187
0,373
0566
0,796
0,933
~1,119
ЫЙ92
1,679
Вес
О
кг
Передвижная таблица для подсчета беса
круглых цилиндрических деталей ф / 100 мм
Диометр\85 \мм
Пример^
Материал
Дюралюмйн
уедь
Текстолит
Резина
чугун
Удельн. Вес
2.8
8.89. ~
1,3^1,9
7,2
К
0,36
1,13____
0,!7т0,!8
~0.17+0.23
0,92
Длина
В
мм
0Д96
0391
&
1Д82-
2Л27_
2jTi
70 3318
пп 3,569
ю
20
30
90
50
60
вес
8
кг
500
625
0,329
0,657
0,386
1,319
да*
1,97Т
и
2,957
0.338
1,351
L688
ZJlZL
2,363
2,701
3,039
0,347
0,699
1Д7Р0
Ш1.
1.739
2,928
2,779
3,12 Г
80^.
'90 \9бб9
028-ЫЗОО -G-1.950
‘ -0=0,290
-6=0.029
-О =9,530
-0 = 0,151
-G =0,038
0 95-1=500 -G=6,290
Вес детали G=12,52 кг
1=60
1 = 5
035-1=600
1-20
0,592
1,189
1,776
0,609
1,813
2,yip
0517
1,203
_1,850
3,553
JtJpL
9р_37
АИ
2Л61
ЯШ
ЗД2б\^..,
9.3JT
ж*-
Км
5,54.91
Фиг. 1. Передвижная таблица для подсчета веса цилиндрических круглых деталей.
Наибольший эффект в сокращении времени на выполнение рас*
четов достигается использованием формуляров, поскольку они ох-
ватывают основную массу расчетов.
Формуляры отпечатаны в виде светокопий или типографских от-
тисков тиражом, равным примерно годовой потребности. По мере
необходимости они выдаются конструкторам, работа которых по
расчету детали сводится к заполнению формуляра и выполнению
связанных с этим элементарных подсчетов.
Замечания и пожелания всех пользующихся формулярами си-
стематизируются и служат материалом для изменений, периодически
вносимых в последующие издания.
Введение системы расчетных формуляров в практику работы
конструкторского бюро позволило:
1. Значительно упростить, облегчить и ускорить выполнение
расчетов, сократить время, обычно расходуемое на поиски необхо-
димой литературы, выбор подходящего к данному случаю метода
расчета и т. д.
2. Расширить круг работников, которым может быть поручено
выполнение расчетов, снизив требования к их квалификации.
3. Неизмеримо повысить точность и качество расчетов благо-
даря использованию наиболее совершенных, постоянно исправляе-
мых методов расчета, а также простоте проверки всех выкладок.
Отечественное машиностроение располагает испытанными мето-
дами расчета большинства типовых деталей, что значительно облег-
чает составление формуляров.
В частности, при составлении формуляров в СКБ-3 широко ис-
пользуются материалы по расчетам, разработанные ЭНИМС. Подоб-
ные материалы издаются также и другими отраслевыми институтами.
При наличии нескольких методов расчета и различных ре-
комендаций по выбору расчетных величин возникает задача выбрать
наиболее совершенный метод. Трудность решения этой задачи иног-
да является основным препятствием к нормализации расчетов. Так,
например, до сих пор отсутствует всесоюзная нормаль по расчету
зубчатых передач. Поэтому лучше иметь один метод расчета, пусть
даже и не совсем совершенный, чем пользоваться многими методами.
Используя один метод и накопляя опыт, в дальнейше^м этот ме-
тод можно будет усовершенствовать.
При оформлении расчетных формуляров окажутся полезными
некоторые общие методические указания, заимствованные из опыта
СКБ-3:
1. Расчет должен быть сжат так, чтобы он мог разместиться на
одном листе формата 4, в крайнем случае 3.
2. Все обозначения и исходные величины следует располагать
так, чтобы выполнение расчета не потребовало никаких дополни-
тельных пояснений.
3. В некоторых случаях можно вводить в формуляр несложные
номограммы, упрощающие вычисления.
8
4. Расчет должен быть изложен так, чтобы его выполнение не
требовало использования дополнительных источников: в формуля-
ре должны быть все необходимые таблицы и графики для выбора
встречающихся в расчете величин.
5. Расположение всех выкладок должно быть последовательным
и наглядным, обеспечивающим простую проверку всего расчета.
6. Из встречающихся в практике конструирования двух видов
расчета — предварительного и поверочного — формулярами следует
обеспечивать прежде всего последний.
Специфика формуляров — их сжатость и лаконичность сужает
и ограничивает область их применения. Формуляры должны быть
различными не только для разных областей машиностроения, но и
внутри одной области.
Расчетные формуляры, приведенные в настоящей книге, состав-
лены в СКБ-3 для профиля машин этого бюро (в основном, метал-
лорежущие станки среднего размера). Необходимо предостеречь от
применения этих формуляров для расчета деталей, хотя бы и того
же наименования, но работающих в других условиях, отличных от
принятых при их составлении.
При составлении некоторых формуляров иногда отсутствуют до-
статочные теоретические и экспериментальные разработки. Поэтому
в основу составления формуляра следует заложить рациональные
принципы с тем, чтобы в последующих изданиях изменялись вели-
чины коэффициентов, но предпосылки и, по возможности, структура
формул оставались неизменными на длительный промежуток времени.
По мнению авторов, такими основными общими принципами
являются следующие:
1. Расчетные формулы и коэффициенты должны отвечать физиче-
скому смыслу явлений.
2. Коэффициенты и прочие нормативы по своей структуре должны
быть выбраны так, чтобы каждый из них в дальнейшем мог быть
подвергнут непосредственной экспериментальной проверке.
3. Расчетные величины должны отвечать требованию однознач-
ности: при определении этих величин людьми различной квалифи-
кации должны получаться неизменно одинаковые результаты.
4. Методика расчета должна быть построена как бы по «агре-
гатному» принципу: она должна состоять из самостоятельных в
физическом отношении формул, чтобы изменение какого-либо одно-
го коэффициента или формулы не затронуло остальных формул
и методику в целом.
II. РАСЧЕТНЫЕ ФОРМУЛЯРЫ
1. Классификация расчетных формуляров
Все расчетные формуляры разбиты на группы. Каждой группе
присвоен порядковый номер, начиная с 01 с соответствующим на-
именованием, определяющим содержание формуляров данной груп-
пы. Внутри каждой группы формуляры также пронумерованы, при-
чем номера присвоены им в порядке родства и последовательности
расчета. «Свободные номера» означают запланированные, но еще не
разработанные формуляры.
В настоящее время применяемые в СКБ-3 расчетные формуляры
разделены на 10 групп (см. приложение):
1) группа 01 — разные вспомогательные материалы;
2) группа 02 — зубчатые и червячные передачи;
3) группа 03 — передачи гибкой связью;
4) группа 04 —валы;
5) группа 05 — подшипники;
6) группа 06 — пружины, зажимы;
7) группа 07 — соединения;
8) группа 08 —муфты;
9) группа 09 — кулаки;
10) группа 11—расчет механизмов.
Техника заполнения формуляров каждой группы не требует
дополнительных пояснений. Из формуляров видно, что в качестве
исходных данных выбрана всегда одна определенная величина,
например в расчетах зубчатых колес не мощность или окружнре
усилие, а только крутящий момент.
Исходные данные записываются в формуляр в размерностях,
которые дальше без пересчета подставляются в формулы.
III. ТИПОВЫЕ РАСЧЕТЫ
1. Расчет вертикально-сверлильного станка СС-49 на жесткость (ТР-2)
Расчетом определяются относительное смещение и угол накло-
на инструмента и изделия.
Допустимая величина смещения кронштейна относительно стола
определяется необходимой точностью обработки изделий. Согласно
ГОСТ 370-60, допустимая величина отклонения оси шпинделя В
оавна 2,5 мм на длине 1000 мм для станков с наибольшим диамет-
жения вертикально-
сверлильного Фиг. 3. Расчетное сечение стойки:
Станка. 1, 2, 3 — элементы сечения.
За расчетные схемы принимаются балки с ломаной осью. Рас
четным усилием является вертикальное усилие подачи (фиг. 2).
Жесткости отдельных деталей принимаются постоянными по всей
длине и равными жесткости средних сечений.
Основным видом напряженного состояния, по которому произ-г
водится расчет, является изгиб.
Исходные данные: вертикальное усилие Р = 900 кг; вылет шпин-
деля Zx = 250 мм; длина направляющих кронштейна hi = 380 мм;
длина направляющих стола h2 = 420 мм; расстояние между середи-
нами опор кронштейна и стола Н = 935 мм.
Расчет. 1. Определение координат: центра тяжести и момента
инерции среднего сечения стойки (фиг. 3 и табл. 1); центра тяжести
и/
2У0
Фиг. 4. Расчетное сечение
кронштейна:
1, 2, 3 — элементы сечения.
УЦо
.2
Фиг. 5. Расчетное
сечение стола:
1, 2, 3 — элементы
сечения.
и момента инерции среднего сечения кронштейна (фиг. 4 и табл. 2)
центра тяжести и момента инерции среднего сечения стола (фиг. 5
И табл. 3). Таблица 1
Элементы сечения Поз. по фиг. 3 П, xi Ft Fi xi xi xc Fi(xi - хс]г s
1 9,0 1,2 — 13,0 10,8 —140,5 —15,1 2460 1,3
2 2,4 27,2 0 65,3 0 —2,1 288 4020
3 23,0 1,2 + 13,0 27,6 +358,4 10,9 3280 3,3
Сумма | 103,7 | 217,9 | 6028 | 4024,6
Положение центра тяжести _2 7='/Х| 217,9 хс 7 = 2,1 см. Момент инерции* Jc ~ 10053 см4
2. Вылет шпинделя от нейтральной оси сечения стойки
Z = 42 см.
3. Расчетная высота стойки
Нг = Н — 0,125 + Л2) - 93,5 — 0,125 (38 + 42) - 83,5 см.
4. Относительный угол наклона оси шпинделя к поверхности
стола в результате деформаций стойки стола и кронштейна
„ Llu.l , '? ,41
900 /83,5-42 . 252 . 252 \ „ аллю л
— 2,1 • 10е 10053 -г 2 - 8487 + 2 • 12549 / ~ 0,00018 Ра°-
12
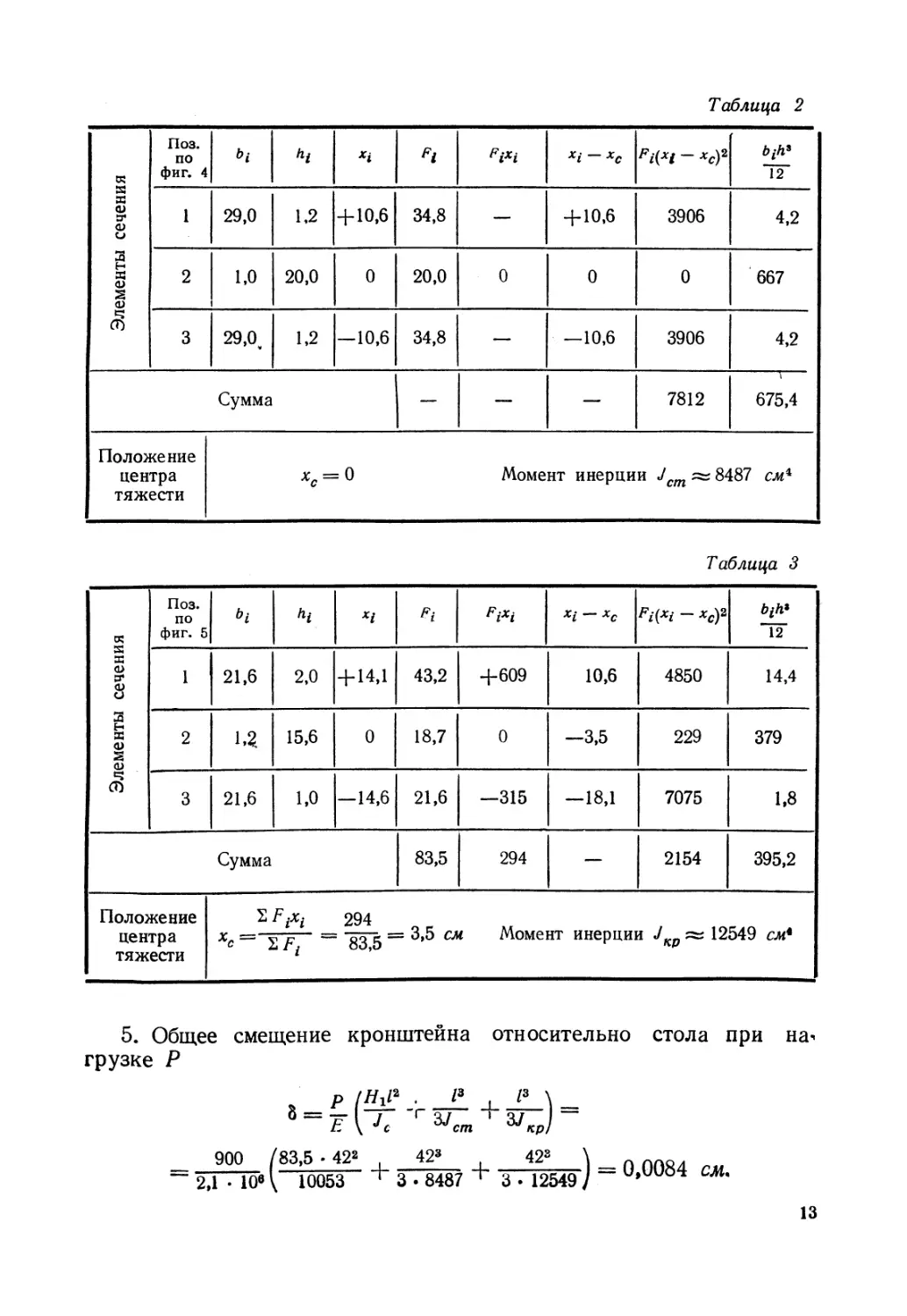
Таблица 2
Элементы сечения Поз. по фиг. 4 bi hi xi pixi xi — хс pi(*i - *с)* d/Л8 ТГ
1 29,0 1,2 + 10,6 34,8 — + 10,6 3906 4,2
2 1,0 20,0 0 20,0 0 0 0 667
3 29,0* 1,2 —10,6 34,8 — —10,6 3906 4,2
Сумма — — — 7812 675,4
Положение центра тяжести хс = 0 Момент инерции Jcm 8487 см*
Таблица 3
Элементы сечения Поз. по фиг. 5 bl >ч xi ^ixi xi xc ^i{xi xc)2 bih» “12"
1 21,6 2,0 + 14,1 43,2 +609 10,6 4850 14,4
2 1.2 15,6 0 18,7 0 —3,5 229 379
3 21,6 1,0 —14,6 21,6 —315 —18,1 7075 1,8
Сумма 83,5 294 — 2154 395,2
Положение центра тяжести 2 294 хс ==‘~^р— — = 3,5 см Момент инерции JKp « 12549 см*
5. Общее смещение кронштейна относительно стола при на-
грузке Р
8==+Л +
900 /83,5 • 422
~ 2,1 • 10е \ 10053
493 доз \
+ 3 • 8487 + 3 • 12549 ) = °’0084 см'
13
Заключение
1. Как сказано выше, ГОСТ 370-60 обусловливает величину В'
допустимого отклонения оси шпинделя на длине Г при усилии
подачи Р'.
При сравнительно малых смещениях, какие практически имеют
место, можно принять
Ь , Ь' Р ПО2’5 900 Л ЛЛЛ£
I ~^1' ’ Р'~ °,21000 • 750 °’0006’
где ф = 0,2— коэффициент, учитывающий, что только небольшая
часть фактически наблюдаемого на станке смещения идет за счет
деформации основных деталей станка.
Остальная — большая часть получается вследствие отжатия в сты-
ках. Тогда
Ьдоп = 0,0006.1 = 0,0006 • 407 = 0,244 мм,
2. Влияние жесткости стыков учтено коэффициентом ф, взятым
из данных исследований жесткости станков аналогичной конструк-
ции. В других случаях жесткость стыка может быть рассчитана
по формуляру РФ-07-06.
2. Расчет усилия зажима задней бабки токарного станка
с помощью эксцентрика (ТР-3)
В некоторых зажимных устройствах получаемое усилие зажима
определяется податливостью деталей зажимного механизма. К таким
устройствам относятся, в частности, все механизмы с эксцентриком.
Расчет этих механизмов без учета деформации их элементов
является неправильным.
В качестве примера определения зажимного усилия с учетом
деформации приведен расчет усилия зажима задней бабки то-
карного станка.
Расчетная схема зажимного устройства задней бабки токар-
ного станка с эксцентриком изображена на фиг. 6. Механизм со-
стоит из двух тяг О±А и О2В и поперечного рычага АВ с прикреп-
ленной к нему в точке С подушкой DE.
Шарнир 01 жестко прикреплен к станине станка, шарнир О2
при повороте рукоятки эксцентрика может перемещаться вверх.
В незажатом состоянии между подушкой DE механизма и
опорной поверхностью FG станка имеется некоторый зазор, благо-
даря которому бабка может свободно передвигаться по своим на-
правляющим в нужное положение.
При повороте эксцентрика шарнир О2 тяги О2В поднимается
и прижимает подушку к опорной поверхнссти.
Величина усилия зажима между подушкой и опорной поверхно;
стью зависит от деформации всех элементов системы.
Примем следующие обозначения (фиг. 6):
14
ei — осевая податливость тяги О\А (т. е. деформация ее
под действием единичного осевого усилия) с учетом кон-
тактных деформаций в шарнирах 01 и А;
е2 — осевая податливость тяги 02В с учетом контактных де-
формаций в шарнирах 02 и В;
а2Ь2
т = зц- — изгибная податливость точки С поперечного рычага АВ
(т. е. прогиб точки С рычага под действием единично-
го поперечного усилия, приложенного в этой точке);
Фиг. 6. Расчетная схема зажимного устройства.
z — жесткость поперечного сечения рычага на изгиб;
L — длина рычага АВ\
а и b — расстояние точки С от шарниров А и В\
s и t — размеры опорных частей подушки (в плане);
k — удельная податливость опорной поверхности FG\
В —вертикальное перемещение шарнира О2 механизма при
повороте эксцентрика;
г — первоначальный зазор между подушкой механизма и
опорной поверхностью;
Р— искомое усилие зажима.
При зажиме механизма усилие Р на рычаге АВ загружает
шарниры А и В силами Р^ — ^-Р и Р2 = Р. Эти силы растя-
гивают тяги 0\А и О2В соответственно на величины
М =£1^1 = £1 7-Г И Х2 = е2/?2 = е2 %- Р.
L, Lj
Значит, шарниры А и В перемещаются по вертикали (фиг. 7):
шарнир А — на величину АА' = ki = Ь-^е\Р вниз, а шарнир В —на
величину В В' = 8— Х2 = 8 — -jre2? вверх.
Поперечный рычаг АВ устанавливается при этом в наклонном
положении так, что точка С занимает положение С'.
15
Из подобия треугольников находим перемещение точки С:
СС' + АА' __ АС СС' + Xi _ а
ВВ' + АА' ~~ АВ ИЛИ b — Х2 + Xi — L ’
откуда после простых преобразований
СС' = £ 8-пР,
где
а2е2 +
п — —£—4—
Фиг, 7, Схема перемещений шарниров А и В.
Перемещение точки С из-за изгиба рычага поперечной силой Р
С'С" = тР,
Тогда вертикальное перемещение точки С при зажиме:
СС^СС — С’С = — (т + п) Р.
Считая подушку DE и ее крепление к рычагу С абсолютно
жесткими (недеформирующимися), записываем уравнение совмест-
ных деформаций механизма зажима и опорной поверхности FG в
виде
CCK-z = k^
st
ИЛИ
£• s — П)Р — 2 = рР,
где
k
Тогда получаем искомое значение усилия зажима
т + п + Р«
В качестве примера рассчитываем наибольшее осевое усилие, до-
пустимое зажимом задней бабки токарного станка (мод. 1 Б 61)
16
Пример расчета
Исходные данные: Li = 12 см; d\ = 2 см; L2 = 15 см; d2 =
= 2 см; L = 25 см; а = 6 см; Ь = 19 см; BL = 7-4 см; st = 4 х
Хб см; k = 1/8000 см3/кг; г = 0,05 см; 8 = 0,3 см; G = 112,5 кг,
р.= 0,1.
Расчет: 1. Площадь поперечного сечения тяг
F, = = 0,785 • 2* 2 = 3,14 см2.
2. Податливость тяг*
в1 = = 2 • 10е • 3,14 = 1’91 ' Ю 6 см/кГ;
2 . З.н "2'39'10-’ ™"<г-
3. Момент инерции поперечного сечения рычага
/ = ^ = Ц±’ = 37,3 см*.
4. Жесткость сечения
i = EJ = 2 • 106 • 37,3 = 74,6 • 10е кГсм2.
5. Податливость рычага
™ = £ = 3 . 764,6;-10*-—5 = 2’32 • 1°-6
6. Коэффициенты
а2е2 + 62ех 62 • 2,39 + 192 • 1,91 ln fi < п. 1п . . „
п = ——L =-----------:—йг-------- 10-6 = 1.24 • IO"6 см/кГ.
L2 252
Р = st = 8000 . 4 • 6 = ^’2 * Ю~б см/кГ'
Усилие зажима эксцентриком задней бабки
6
nr о,3 — 0,05
р________20_________________9^10 к Г
Г ~ (2,32 + 1,24 + 5,2) 10-6 ~ .
Наибольшее осевое усилие, допустимое зажимом задней бабки,
Т = 2|х (Р + G) = 2 • 0,1 (2510 + 112,5) 520 кГ.
3. Расчет вибрационного бункера (ТР-4)
Вибрационный бункер предназначен для транспортировки заго-
товок к рабочим оргайам машины и накопления деталей в коли-
* Без учета контактных деформаций в шарнирах тяг.
2 1275 17
честве, обеспечивающем ее непрерывную работу. По сравнению
с другими транспортирующими механизмами имеет следующие
преимущества.
Отсутствуют захватные органы; процесс транспортировки про-
исходит без ударов; механизм не требует предохранительных
устройств, так как при заклинивании детали проскальзывают
относительно спирального лотка; конструкция позволяет сравни-
тельно просто решать вопросы ориентации подаваемых деталей;
возможно бесступенчатое регулирование скорости движения детали,
Фиг. 8. Геометрические" размеры транспортируемых
заготовок.
т. е. легко обеспечивается синхронизация работы бункера и станка;
конструкция чаши позволяет одновременно разместить несколько
спиральных лотков; в механизме отсутствуют трущиеся части,
подверженные механическому износу.
Методика расчета. Исходные данные: производительность — Q
тт/мин\ размеры заготовок — /3, h (фиг. 8).
1. Скорость движения заготовок, обеспечивающая заданную
производительность,
<2*3
v3 = с-a-.- мм/сек,
oU kK
где ^ = 0,8-ь0,9 — коэффициент заполнения лотка.
Эта скорость может плавно регулироваться изменением напря-
жения, питающего катушку электромагнита.
2 Угол движения лотка ф выбирается по графику (фиг. 9) в за-
висимости от скорости v3 для заданной частоты питающего тока.
Для мелких деталей обычно принимают частоту v = 100 гц, для по-
дачи крупных и средних деталей v = 50 гц. В последнем случае
уменьшается инерционность тяжелой чаши и шум бункера.
Для хрупких деталей целесообразно увеличивать частоту до
v == 100 гц, так как при этом уменьшается отрыв деталей от лотка.
3. Наружный диаметр чаши, обеспечивающий высокий коэффи-
циент заполнения лотка, выбирается
DH > (7 -ь 9) 13.
4. Шаг спирали
t = 1,6Й + 5,
18
где s — толщина лотка (принимается из конструктивных сообра-
жений).
5. Высота чаши определяется шагом спирали лотка:
Н = (1-4-2)/.
В случае применения предбункера (фиг. 10,6) его емкость оп-
ределяет время работы устройства без дополнительной загрузки за-
готовок.
Без предбункера рабочий объем
чаши должен быть либо равен, либо
больше объема V одной засыпки за-
готовок:
4V103
Н > --7- ММ.
ср
6. Угол подъема спирали лотка
₽ = arctg^ <2°,
ср
где Dcp = DH — b; b — ширина про-
филя лотка (принимается из конструк-
тивных соображений).
7. Угол наклона пружин
tga = ~
Фиг. 9. График для определения
оптимального угла движения:
1— для частоты 100 гц\ 2—для
частоты 50 гц.
где /? —средний радиус спирального лотка;
г\ — радиус крепления пружин к днищу бункера в см.
8. Длина опорных пружин I принимается из конструктивных
соображений и при выборе размеров магнита уточняется.
9. Масса чаши, приведенная к точкам крепления пружин,
тпг) 1 = р/~(mi sin а)2 + cos а
где ш\ — масса чаши в кГ • сек2/см;
J\ — момент инерции чаши в кГ см • сек2.
10. Масса основания, приведенная к точкам крепления пру-
жин *,
тпр 2 = ‘рЛ (m2sin а)2 + cos а
где т2 — масса основания в кГ • сек2/см\
J2 — момент инерции основания в кГ см * сек2;
г2 — радиус крепления опорных пружин к основанию в см.
г2 = + /2 sin2 а.
* Определяется только для бункеров, установленных на амортизаторах
(фиг. 10, б).
2* 19
11. Суммарная приведенная масса
Мпр = —-— кГ • сек?/см.
тпр2
Из энергетических соображений необходимо стремиться к умень-
шению Мпр.
Фиг. 10. Конструктивные схемы вибрационных бункеров,
установленных:
а — на неподвижном основании; б — на амортизаторах с предбункером;
/ — чаша; 2 — опорные пружины; 3 — неподвижное основание; 4 — по-
движное основание; 5 — вибратор; 6 — пред бункер.
12. Диаметр опорных пружин
d = 2
4яЛ1прчр/3
3£я
см9
где ур = (1,05-ь 1,1) v— расчетная частота вынужденных колебаний
системы;
п — число опорных пружин;
Е — модуль упругости материала опорных пру-
жин в кПсм?.
13. Усилие электромагнита
кГ,
^ykckK
где у = 2,5 -ь 3 — модуль резонанса;
kc = 0,6 -ь 0,7 — коэффициент скорости.
Пример расчета. Исходные данные:
производительность Q = 86,0 шт/мин\
размеры заготовки lah = 45 . 10 мм.
2©
Расчет. 1. Скорость движения заготовок, обеспечивающая задан-
ную производительность,
86• 45 . . л о /
v3 = —т = s-nn = ™ Мм/сек 4,3 м/мши
а 60 • kK 60 • 0,9
2. Угол движения лотка, соответствующий скорости v3 по графи-
ку (фиг. 9), ф = 25°.
3. Наружный диаметр чаши
£>«>(7ч-9)/3 = 8 • 45 = 360 мм.
Принимаем £>м = 390 мм.
4. Шаг спирали
t = 1,6й + s = 1,6 • 10 + 1,5 = 17,5 мм.
5. Угол подъема спирали лотка
р = arc tg = arc tg 3^^ « 1°,
где
Dcp = DH — b = 390 — 20 = 370 мм.
6. Угол наклона пружин
tga = £tg<l> = |||tg25e; a~25°.
7. Длину опорных пружин принимаем I = 180 мм.
8. Масса чаши, приведенная к точкам крепления пружин,
тпр 1=1/ (тх sin a)2 +
./'Ч -
(0,034 • 0,423)2 + • 0,90б)2 = 30,9 • 10~3 кГсекг/см;
момент инерции чаши равен
Ji = JK + Jan + Лот = 3,78 + 5,75 + 0,33 = 9,86 кГ-см-сек2;
момент инерции корпуса чаши
Л _ = = 3.78 «/-.«.rf;
момент инерции днища
mdflR3 22 • 22,75а
Jдн — ~~~ 981 • 2 — 5,75 кГ * см • сск ,
момент инерции лотка
21
9. Масса основания, приведенная к точкам крепления пружин,
тпр 2 = р/"(т2 sin а)2 + cos а)2 =
= (0,1 • 0,423)2 + • 0,906)2 = 112- Ю"3 кГ-сек2/см,
где
г2 = рАг2 + /2 sin2 а = у 182 + 182 . 0>4232 = 19>5 см.
. т2К2 0,1 • 29,52 . о к г 2
J2 = -75— =----5---= 43,5 кГ-см-сек.
£ £
10. Суммарная приведенная масса
м = W"P L_ = . 10-3 = 24,2 • 10-3кГ-сек2/см.
1+^пр1 1 + ^|
тчр2
11. Диаметр опорных пружин
где
4 / 4^пр^2/3
<* = 2/ -3£Г- =
п4 Г4л24,2 10-3 . 552 . 183
= 2^/ 3 • 2 • 10е -~3 =1,48 см,
Vp = l.lv = 1,1 • 50 = 55 гц.
IV. РУКОВОДЯЩИЕ МАТЕРИАЛЫ ПО РАСЧЕТАМ
1. Расчет к.п.д. станка (РМР-1)
(На примере модернизированного токарно-винторезного станка мод. 1613Д)
При полном использовании установленной мощности двигателя
общий к.п.д. станка, учитывающий все механические потери в
приводе станка, определяется по формуле
ъ = (1~7г}
где N — установленная мощность двигателя (Д/=1 кет),
Nx — мощность холостого хода;
т] —к.п.д., учитывающий дополнительные потери под на-
грузкой.
При определении общего к.п.д. станка по заданной эффективной
мощности кЭф следует пользоваться формулой
Мощность холостого хода этого станка можно подобрать по табл. 4*.
V = ч\р.п Г1зьп пЛ'Пп.с = о,962 • 0,99 • 0,9952 • 0,98® = 0,816,
* Денисов С. И., Новое в конструкциях советских токарных станков и
вопросы экономики», «Вестник технической информации МСС СССР» 1951, № 1.
* * «Руководство по паспортизации металлорежущих станков», ЦБТИ, 1948.
23
где ур. п = 0,96 — к. п. д. клиноременной передачи;
Чз. п = 0,99 — к. п. д. цилиндрической зубчатой передачи (с шли-
фованными зубьями);
т|п к = 0,995 — к. п. д. подшипника качения;
с = 0,98 — к. п. д. подшипника скольжения;
a, b9 d9 е — числа соответствующих элементов в кинемати-
ческой цепи (в данном случае а = 2, b = 1, d = 2,
е = 5).
Таблица 5
п в об/мин 200 368 567 1000 1415 2000
Чо 0,604 0,523 0,425 0,262 0,098 0
Для различных чисел оборотов по табл. 5 можно подобрать
соответствующие значения
Необходимо отметить, что найденное значение общего к. п. д. стан-
ка т)0 предполагает полное использование установленной мощности
двигателя на всем диапазоне чисел оборотов. В действительности уста-
новленная мощность двигателя обычно используется полностью толь-
ко на высоких числах оборотов, а на низких она используется не
полностью; соответственно этому фактические значения будут при
этих оборотах ниже.
Таким образом, для определения общего к. п. д. станка необхо-
димо знать следующее:
1) установленную, полностью используемую мощность двигателя N
или эффективную мощность (резания) Ы9ф\
2) мощность холостого хода Nx\
3) к. п. д., учитывающий дополнительные потери под нагрузкой.
Эффективная мощность станка определяется на основании соответ-
ствующего технологического расчета.
Мощность холостого хода принимается по имеющимся данным
замеров мощности для родственных станков. Наиболее точные дан-
ные имеются в актах испытаний опытных образцов станка.
2. Определение мощности холостого хода привода шпинделей
алмазно-расточных станков (РМР-2)
Мощность приводного электродвигателя в алмазно-расточных
станках расходуется главным образом на преодоление потерь хо-
лостого хода в клиноременных передачах привода шпинделей и в
самих расточных головках.
Мощность холостого хода для группы головок с приводом
Nx = ZNsx+ZNpx,
24
Фиг. 11. График для определения мощности холостого хода
алмазно-расточных головок (для головок АР-13, АР-23, АР-33,
АР-43 — по данным ОЗРС).
25
ZNx — сумма потерь мощности в головках;
LNx — сумма потерь мощности в ремнях
Потери мощности в стандартных головках типов АР-13, АР-23,
АР-33, АР-43 по нормалям ОЗРС* определяются по графику (фиг. 11)
в зависимости от числа оборотов шпинделя.
При использовании головок типов АР-5 и АР-45, для которых
экспериментальные данные отсутствуют, ориентировочно потери
холостого хода можно принимать как для головок АР-23 и АР-43.
Для подрезных головок ОЗРС типов У15-1 и У15-2 ориентиро-
вочно можно пользоваться данными по головкам АР-43 и АР-33
соответственно, увеличивая их на 30—40%.
Потери мощности в клиноременной передаче зависят от профиля
ремня, скорости ремня, числа ремней и диаметров шкивов и натяжных
роликов (фиг. 12):
где с — коэффициент потерь холостого хода, определяемый
по графику (фиг. 13) в зависимости от профиля ремня,
и его скорости vp;
г — число ремней в передаче;
di, d2,.. ., dn — диаметры рабочих шкивов в см;
d„i, dH2 — диаметры натяжных и направляющих роликов в см.
С целью облегчения расчетов в табл. 6 приведены значения
величин ^2 Для шкивов и роликов по нормалям ОЗРС.
Рекомендуемые данные относятся к случаю нормального натя-
жения ремней (оо= 12-7-15 кГ/см2), которое следует контролировать
при сборке передач.
Пример. Определим мощность холостого хода привода с тремя
расточными головками, показанного на фиг. 14. Для головок типа
АР-23 и АР-33 скорость ремней принимаем vp = 15,2 м/сек.
По графику (фиг. 11) находим потери мощности в головках:
Nxi = 0,23 кет; Nex2 = 0,23 кет; = 0,28 кет.
По графику (фиг. 13) при скорости vp = 15,2 м/сек с = 8.
* Одесский завод радиальных станков.
26
Фиг. 12. Схемы клиноременных
передач привода головок.
Фиг. 13. График; для определения коэффициента
потерь мощности холостого хода клиноременной
передачи:
А, Б и О — профили ремней. Кривые для профилей А
и Б построены по материалам ЭНИМС, а для профиля О
путем экстраполяции данных величин А и Б.
Определим потери мощности в клиноременной передаче по фор-
мулам:
= 8 - 2 (0,01 + 0,007 + 0,01 + 0,018) = 0,72 кет;
NU = сг21 + 4-) = 8-2(0,007 + 0,003 + 0,01) = 0,32 кет;
\d2 d3 dH3'
Фиг. 14. Расчетная схема привода с тремя рас-
точными головками:
/ — головка типа АР-23; 2 и 3 — головки типа АР-ЗЯ;
4 — ремни профиля А.
Мз = С23 (4 + 4 + 4-) = 8 • 1 (9.003 -ь 0,004 + 0,01) = 0,14 кет;
\d3 d4 dH4'
Nx = E M + KNP = 0,23 + 0,23 + 0,28 + 0,72 + 0,32 +
+ 0,14 = 1,92 квгп.
Ввиду ограниченности экспериментальных данных, положенных
в основу руководящего материала, необходимо при отладке станков
производить замеры мощности холостого хода и результаты сооб-
щать в расчетную группу для накопления данных и корректи-
ровки РМР.
28
Таблица 7
Схема подачи Усилие прижима ролика N и момент подачи (на один ролик) М*
к, R N> fl-f М > (fr+ k+ ki)N + frG + rR
М > 2(^+ ki) N + (k + kO G + rR
+ 2(k+k1)G + rR)]
R
M > -j-[(4A+ 3^+ £S)W +
+ 2 (k + kJ G + rR]
N>2 (2Л + h)
M > ^[2(3k+2kl-ki)N +
+ 3(k + ki)G + rR)l
29
Схема подачи
Продолжение табл. 7
Усилие прижима ролика Л/ и момент
подачи (на один ролик) М*
N >------R
М > 2 (/г + k)N + trG + г/?
М > 2ifrN + ifrG + rR
* Крутящие моменты в формулах для каждого ролика получены путем де-
ления суммарного момента сопротивления на число ведущих роликов.
30
3. Основные расчетные схемы механизма подачи дерево-
обрабатывающих станков (РМР-3)
Для расчетных формул, приведенных в табл. 7, приняты следу
ющие обозначения:
k — коэффициент трения качения в опорах роликов*;
ki — коэффициент трения качения между гладким роликом и деталью =0,25-4-0,3);
k2 — коэффициент трения качения между рифленым роликом и
деталью (&2 = 0,7-=-0,95);
f — коэффициент трения скольжения между столом станка и
деталью;
— коэффициент трения скольжения между гладким роликом
и деталью*;
f2 — коэффициент трения скольжения между рифленым роликом
и деталью*;
— коэффициент трения скольжения между гусеницей и де-
талью*;
Af —усилие прижима ролика;
R—активное сопротивление перемещению детали;
G — вес детали;
М — момент подачи на одном ролике;
г—радиус роликов.
Эти формулы (табл. 7) полностью соответствуют условиям расчета
мощности. Для расчетов на прочность нужно учесть возможные
специальные случаи — заклинивание, буксование некоторых роли-
ков и связанное с этим перераспределение нагрузок.
* ЭСМ, т. 2, стр. 135—141.
V. ПРИМЕРЫ НЕПРАВИЛЬНЫХ КОНСТРУКТИВНЫХ РЕШЕНИЙ
В практике работы конструкторов бывают иногда и неудачи —
результат неправильных конструктивных решений, которые выяв-.
ляются, к сожалению, только при испытании машины. Такие слу-
чаи ^должны быть предметом детального разбора и возможно более
широкого обсуждения. В практике С.КБ-3 это производится на за-
нятиях по технической учебе по мере того, как заслуживающие раз-
бора случаи выявляются в практике бюро или становятся извест-
ными при посещении родственных конструкторских бюро и заводов.
Фиг, 15. Схема устройства для выключения стола фрезерного
станка.
Ниже приведены примеры неправильных конструктивных реше-
ний, выявленных при испытании машин.
1. Стол фрезерного станка 8 (фиг. 15) приводится в движение
от коробки подач через цилиндрическую зубчатую шестерню 3 и
колесо 4, затем коническую зубчатую передачу 2 и ходовой винт /.
Подача выключается с помощью вывода из зацепления колеса 4
с помощью ручного рычага (на схеме не показан), входящего в паз
коромысла 5, или автоматически от упора 7, закрепленного на
столе и воздействующего на толкатель 6.
При испытании станка обнаружилось, что ручное выключение
подачи производилось сравнительно легко. При попытке автома-
тического выключения упором 7 даже на холостом ходу срабаты-
вала предохранительная муфта в механизме подачи. После ее
поджатия при дальнейших испытаниях сломалась ось коромысла 5,
консольно закрепленная в корпусе.
32
Причина этой поломки выяснилась в результате анализа.
Обозначим тяговое усилие, необходимое для перемещения стола
8 станка через Q.
Соответствующее ему на зубчатом колесе 4 окружное усилие
T = Q-\
‘Hi
где и и т]1 — соответственно передаточное число и к. п. д. меха-
низма от стола 8 до колеса 4. Для выключения подачи рукой или
посторонним источником энергии к зубчатому колесу 4 вдоль его
оси необходимо приложить усилие
Р = Tfприв>
где fnpue — коэффициент, учитывающий трение между зубьями, а
также по шпонке и валику при перемещении колеса 4 относи-
тельно шестерни 5.
Силе Р при автоматическом выключении с помощью упора 7
соответствует усилие Pi, направленное вдоль движения стола:
где т]2 и г2— соответственно к. п. д. и передаточное число цепи
от упора 7 стола через толкатель 6, коромысло 5 к зубчатому
колесу 4.
Выражая Pi через Q, получим
где для краткости обозначено:
Выражение для Pi, применимое для случая выключения подачи
посторонним источником энергии, не применимо к случаю автома-
тического самовыключения.
Действительно, сила Pi, необходимая для выключения стола,
передается от коробки подач через ту же цепь, что и тяговое уси-
лие Q. При этом соответственно увеличивается окружное усилие
Т и сила, необходимая для выключения Pi. Из уравнения пре-
дельного равновесия
Рп — (Q + Рп) k
находим предельную силу выключения
Pn = Q^-{- (2)
В случае механизма (фиг. 15), в котором зубчатое колесо 4 диа-
метром 46 мм перемещалось при выключении по валу диаметром
20 мм с одной шпонкой, fnpue учитывает трение между зубьями
3 1275 33
шестерни 3 и колеса 4 на валике и на шпонке. Приняв исходный
коэффициент трения f= 0,15, получим
fnpue = f l+i + isoU
Остальные величины имели в этом механизме следующие зна-
чения:
/1 = 0,024; /2 =1,1; = 0,3; т]2 = 0,1.
Подставив их в формулы (I) и (2), соответственно получим:
Фиг. 16. Схема установки для испытания труб на прочность и плотность.
т. е. усилие, необходимое для выключения механизма, более чем
в семь раз превышает нормальное тяговое усилие стола. Это не-
учтенное при конструировании обстоятельство и послужило при-
чиной поломки.
Отсюда ясно, что при данном Q сила Рп, необходимая для вы-
ключения, определяется величиной k. Вообще, при конструировании
механизмов, подобных изображенному на фиг. 15, не следует допу-
скать значений k, близких к единице, так как Рп становится очень
большим. Имея в виду надежный запас, следует ограничиваться
значениями k < 0,5. При этом для определения k нужно выбирать
наиболее неблагоприятное сочетание определяющих его величин.
2. Трубы для ответственных энергетических установок в про-
цессе изготовления должны испытываться на прочность и плотность.
Для такого испытания внутренним давлением длинных тонкостен-
ных труб была спроектирована установка по схеме, изображенной
на фиг. 16. Подлежащая испытанию труба укладывается на опоры;
в трубу с необходимым уплотнением вставляются пробки — с одной
стороны глухая, а с другой с отверстием для подвода жидкости
требуемого давления.
При первом испытании обнаружилось, что для заданной цели
она совершенно непригодна — когда давление жидкости достигает
определенной величины, труба изгибается в дугу.
34
Расчет показал, что труба теряет устойчивость при давлении
жидкости Ркр, определяемом уравнением *
__ 4гс2 EJ
Икр ~ IF ’
где F — площадь сечения трубы;
J — момент инерции сечения;
I — длина трубы.
В процессе проектирования установки возможность потери устой-
чивости не учитывалась (поскольку труба не работает на сжатие).
Это и было причиной ошибочного конструктивного решения всей
установки.
Фиг. 17. Кинематическая
схема привода поперечной
подачи прецизионного плос-
кошлифовального станка.
Фиг. 18. Конструкция ходовой гайки
с выборкой зазоров:
/ — гайка; 2 — тарельчатые пружины.
3. В прецизионном плоскошлифовальном станке поперечная по-
дача стола осуществлялась по схеме (фиг. 17) кратковременным
включением электродвигателя в конце каждого продольного хода
стола. Величина подачи регулировалась установкой реле времени,
т. е. длительностью включения электродвигателя. Ходовая гайка
для выборки зазоров была выполнена из двух частей, сжатых та-
рельчатыми пружинами усилием Р = 31 кг (фиг. 18).
При испытании станка обнаружилось, что при одной и той же
установке реле времени подача в направлении стрелки А (фиг. 17)
всегда была на 30—50% больше подачи в направлении стрелки Б.
Это обстоятельство, не предусмотренное проектом, потребовало
выяснения его причин. Оказалось, что причина различной величины
подачи заключается в соотношении между усилием Р пружины,
сжимающей гайку, и силой Q, направленной вдоль винта. При
Q > Р в данном механизме величина подачи при движении в раз-
ные стороны должна получиться различной (фиг. 19).
* Феодосьев В. И., Избранные задачи и вопросы по сопротивлению матери-
алов, Гостехиздат, 1953.
3* 35
Действительно, мощность электродвигателя импульсной подачи
N = 40 вт, число оборотов п = 1400 об/мин, кратность пускового
момента kn = 1,8. Так как за время одного импульса подачи ротор
поворачивается лишь на долю оборота, крутящий момент на валу
электродвигателя в течение всего периода подачи можно принять
равным пусковому моменту
k„M 1,8 • 0,04
Мп = 975 = 975 —= 0,05 кГм = 5 кГсм.
п 1400
Фиг. 19. Расчетная схема гайки при Q > Р.
Ввиду малости маховых масс привода и потерь в передаче кру-
тящий момент на ходовом винте (при zi = 18; z2 = 54)
М~Мл-2 = 5^ = 15 кГсм.
Z} 1о
Определим усилие на винте Qa и Qb при движении стола
соответственно в направлении стрелок А и Б (фиг. 17).
В общем случае усилие подачи, создаваемое крутящим моментом
на винте М, равно
м — мп
и
где Мтр — момент сил трения между винтом и гайкой;
Rep — средний радиус резьбы ходового винта (Rcp = 10,5 лш);
а — угол подъема нарезки (а = 5°1Г);
p=arctg|i — коэффициент трения в нарезке (рь = 0,1).
При условии, что Q > Р, момент сил трения при движении по
стрелке А будет
М/прА — I^QaRcp*
Подставив значение МтрА в уравнение (3) и решив его отно-»
сительно Qa, получим:
О м
ЧА ^pltg (а+ р) + •
Аналогично при движении по стрелке Б получим:
М-тр Б = Iх (Qb Р) Rep
36
и Qe = М-Рр*ср = Q _______________^Р
Rcp [tg (а + р) + Iх] ЧЛ tg (а + р) 4-р. •
Отсюда
Qa > Qe-
Подставив численные значения величин в указанные выше,,
формулы, получим
Qa = 49 кГ, QB = 38,4 кГ и = 1,28.
ЧБ
Так как сопротивление перемещению стола по направляющим
качения пренебрежимо мало по сравнению с усилиями Сд и
то движение стола будет равноускоренным с ускорениями
где tn — масса стола.
За время, соответствующее установке реле времени /, переме-
щение стола (подача на один продольный ход) равно
aAt2 aEt2
Sa = — и = — •
Тогда отношения подач равны отношению усилий, что совпадает
с значениями, полученными при испытании станка:
^ = аЛ = ^ = 1128,
SB аБ Qb
т. е. величина подачи пропорциональна действующему тяговому
усилию.
ПРИЛОЖЕНИЕ
РАСЧЕТНЫЕ ФОРМУЛЯРЫ (РФ)
РФ-01-01 Модель
Структурная сетка
Примечание. Здесь и далее в формулярах, составленных в виде таблиц, дана только форма. Количество граф при-
нимается в зависимости от объема расчета.
Модель
РФ-01-02 Зависимость между мощно- стью, крутящим моментом, окружными силой и скоростью
Со § Со Со Со Со СО Со О со Си 5 щ ОО <*> No См "* Со "м Cb СП Д 1 1 1 > ! Г ||.1 1 1 1 1 I 1 1 III 1 ll Н И-I Г 1 1 1 II и .1 1 1! .1 L.I1.1 1 1-1 1- 1 Ыш rl 1 f • ‘ < .' !. ! 1 in 1 г 1 I f i ! ! ;l I 1 1 1 1 1 I 1 5 § 8 § 5§S- Л * <<> <> s $££££§;§ * —Ll 1 1 1 1 1 1 1 1 1 1 1 1 1 t I I ! ! 1 1 1 , , I 1 1 f 1 1 ! 1 >4 1 1 1 t 1 1 1 1 f 1 1 1 ! 1 1 1 fl f 1 1 1 f 1 1 1 1 1 1 1 1 1 LI 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 L1 i 1 Py N=~^K6(n pnv M=975j~^m М-7!6,2%ЛС V~6000Q dn M~ К ГМ n - об/мин d- мм v- м/сек Р0-кГ со со § со о S’ Со S’ Sj 9? >? с^ >> \> Г* ~ ' о о § со Q; OC3Q 5 с5 S S 9? со S’ со S' & -ь No-ч -* _ Со о со co Cj Q <о со S> q С> Q Со с5 со со со о со со со со о Ll: 1! 11 • г: 111 f 11:111 1111111.11 lI ' Ini i!: i > i i 11111 и и 11111 l I: h 1 i L i > 111 n 11111111111 I Ll! 111 \l i 1 l 11:11111 i i 1111111 11 i 111111111 i _1 tStS^n §§§§§§ §§§§§1 iiilH V- S. COCO CO Co" CO CO CO CO Co \A t*) t4- 9 c\ S N 9 C-) tx S C\ C’d Lid N 9 (\ c^) < iJI 14 2 * Ll 1,1. ,1 , 1 , lil l,l,,l ,Ul,l l,l,,l .lili! 1 .i ! 1 ,1,1 l.lnl ,1,1,1 1; L,l 1 , l.hl.LJ о а э a s4gg§ s;§ §§«§§§§§ Bi §§§ ^3 < S Coccjt^- \ °C> co i=i is O-) <r Lr-) «о be °O Co CO • i£} xf * 1 M I 1 1 1 1 1 1 1 III iJ/f 1 I 1 l\l 1 1 1 1 1 I M 1 Ш 1 L I 1 1 1 1 1 1 1 1 11!Ill 1 1 1 1 1 J.l 1 1 1 1 1 1 l l И lJ 1 1 1 1 1 1 1 1 l! Ulll 5 § §§§§ § § CO § § & Co CO co Co co CO (-X t gg !£! «Ъ es, S - lihhl ll i 11 Innin llIiihJ/ii i lili li 11111 j In nil и 1 Inn I; 111 hhlil 11111 Innin n Innin 11 lililil 11111 Innin 11 Inulin d . . _ wx o> 4> C4- Co fc? Co CO bx QO Q-J xj- CV> «X v-A »x co“ con CS CO** CO* co*4 Co Lilli 1 i 1 i 1 i 1 i 1 i 111 idi i i i 1 li i i 1 i i i l L i i l i lililil i 1 i 11 i.i ,i .Inj_j..d
42
РФ-01-04 Модель
Передаточные отношения для планетарных передач
Случай передачи движения Валы механизма Передаточные отношения для механизмов по схемам
ведущий ... ведомый неподвижный А' г-1 - Т - _"-7* г*-~ I Ш -1; - Т ”.Л — HL- Л. и гт-'z Ш-*- L d. . 7 ^7, — * - - * ~=^ - ±3 Uz, U п ] гп ' Т zV-n Zj‘ ~ Z3 Z! 1 п П- F \ И z„ to ш to у и
Ж? UL ^“Т-- L ГЙКл? и 1—] ш. и Т - П
I z, п ’ ПЛ Z, Lki
1 1 II III _ £4 £2 Z3Z1 24 21 1 + г? 2з 21
2 I III 11 1 _£1 ?3 г2 z4 21 1 + 7 24 'А 1 + ?1£? 1 22г4
3 II I III 1 1 _£i£2 ?3Z1 1 'А 1 1+£?£? 23г3
4 II III 1 £1 £3 ?2 ?4 £1 24 £1 24 £1 £з 22 г4
5 III I II 1 1 __ £1 £з г2 г4 1 21 1 'А 1 22 24
6 III II I £4£2 •?3 21 гЛ 21 £4 21 24 22 23 2i
43
Модель
РФ-01-06
Расчет координат центра
ф — искомый центр
Дано а, /?, с, k
Найти х, у
Ход расчета
/= )Ла2 + 62
/2 _|_ С2 _ £2
1 = 2/
А = ]/"с2 —
и = lid
т = hb
и — т
Х=—Г
v = lib
п — ha
v + п
у = —Г
Проверка: ]Лх2 4- у2 = с
Место для эскиза
Рациональная схема ведения и записи расчета
и =
т =
х =
х2 =
У'2 =
Проверка:
v =
п =
У =
У =
Примечания. 1. Во всех расчетах оставлять три знака после запятой. 2. Ма-
ксимально допустимая ошибка при проверке ± 0,003 мм
44
РФ-01-07 Модель
Определение момента инерции сложного сечения
Поз. (эле- менты сече- ния) Ь1 в см hi в СМ У1 в см F/B СМ2 Р1У1 в СМ3 у, — Ус в см (У1-УсУ в см2 Fi (Vi - -Ус)2 в см* 12 В см*
4,5 | 1,8 17,1 | 8,1 | 138,5 б,3 1 39,7 322 1 2
2 1 1 2,8 1 7,5 14,25 | 18,7 | 266,5 | 3,45 | 11,9 222 | 88
3 1 4J | 1,5 | 18,751 7,1 | 133,0 7,95 | 63,2 | 450 1
4 1 Ь5 | 18,5 10,251 27,8 | । 284,5 | 0,55 0,3 1 8 | 790
5 i 1 3’° 1 1,5 | 1 »’75| 4,5 | 8,0 | 9,05 82,0 | 370 1 1
6 1 2'5 1 5,5 | 2,751 13,7 | 37,5 1 8,05 | 64,8 | 888 | 35
Сумма | 79,9 |868,0 Сумма | 2260 | 917
Координата центра тяже- сти _ 868,0 Ус lFi “ 79,9 |10,8|сл* Суммар- ный мо- мент инерции сечения JXc-Xc = ^^-yc)2 + Ь$ + S-L2 = 2260+ 917 « ’12 ~ |3200Т см*
Эскиз сечения
6 5
Порядок расчета
Сложное сечение разбивается на элементар-
ные геометрические фигуры.
В таблицу вписываются значения ширины
(bj) и высоты (^) элементарных фигур, рас-
стояния центра тяжести до произвольно
проведенной оси Ось хг — xY
обычно совмещают с наиболее удаленной ча-
стью сечения. Затем в порядке расположения
колонок в таблице производят вычисления.
Таблица составлена применительно к эле-
ментарным прямоугольным сечениям, наиболее
часто встречающимся. В случае, если встретят-
ся сечения другого вида, то вычисления пло-
щади, центра тяжести и момента инерции про-
изводятся по РФ-01-08
45
РФ-01-08 Модель
Координаты центра тяжести, моменты сопротивления и моменты инерции
Профиль сечения Координаты центра тяжести Момент сопротивления Момент инерции
с X sb X II II М ьо| ^х = ^(Я3-ЛЗ) W/ Н —h Wy- 6 62 г ъ 4=Г2(//3-а») г Н —h Jy~ 12 Ь3
h COS а + b sin а W cos2 а sin2 а) , Ыг К — |2 (^2 cos2 а + 62 sin2 а
2/1 = 2 х 6 (h cos а + b sin а)
У| 5 —< |сО 04 ICO II II rl СЧ =5> г, х' 12 Г х2 24 / __^3 х 36
-е SJ-Ч ч 1 У< Уг
|. У]Ь [
"К u jO 6 + 2// А У1 - 3(6 + 6') Л 26 + 6' Уг~ 3 (6 + Ь'} п w = A2 (b + Ь'У + 2ЬЬ' х* 12 6 + 26' F = — (6 + b'^ + 2ЬЬ’ Хг 12 26 + 6' j _ h3 (62 + 466' + 62) х 36 (6 + 6')
|\_ b 1У _.|
Продолжение РФ-01-08
Профиль сечения Координаты центра тяжести Момент сопротивления Момент инерции
У У d Ух 2 ’.-tui- oz r itd^ — 0,05d‘ 64
У дх D Ух 2 ]w __ кВ3 , л X— 32- (! — a ) d a = D , nD* yx= 64 (1 —
г
- /к </1 = 0,2122d г/2 = 0,2878d WXi = 0,0323d3 Wr = 0,0239d3 x2 Jx = 0,00686d* J Яб/4 128^ 0,024511*
у|
2 D'2 + Dd + d2 yi ~ Зя D + d D У2 = 2 — У* У1 w2=J-i Уг = 0,00686 (D4—d<)~ 0,0177D2J2 (D — d) D + d
У d J
1 ,Х,|У X = — sin a 2 . и sin a th = a ” 3a d { 2sin a\ */2== 2 "" ~ЗГ~J w = y d sin a uz - 3g/^ j d* / 16 sin2 a\ x ~ 64 (a + S,n “ cos a 9a ) r & J y — 64 — sin a cos a)
ly Xi dsin a *2 d (3a — 2 sin a)
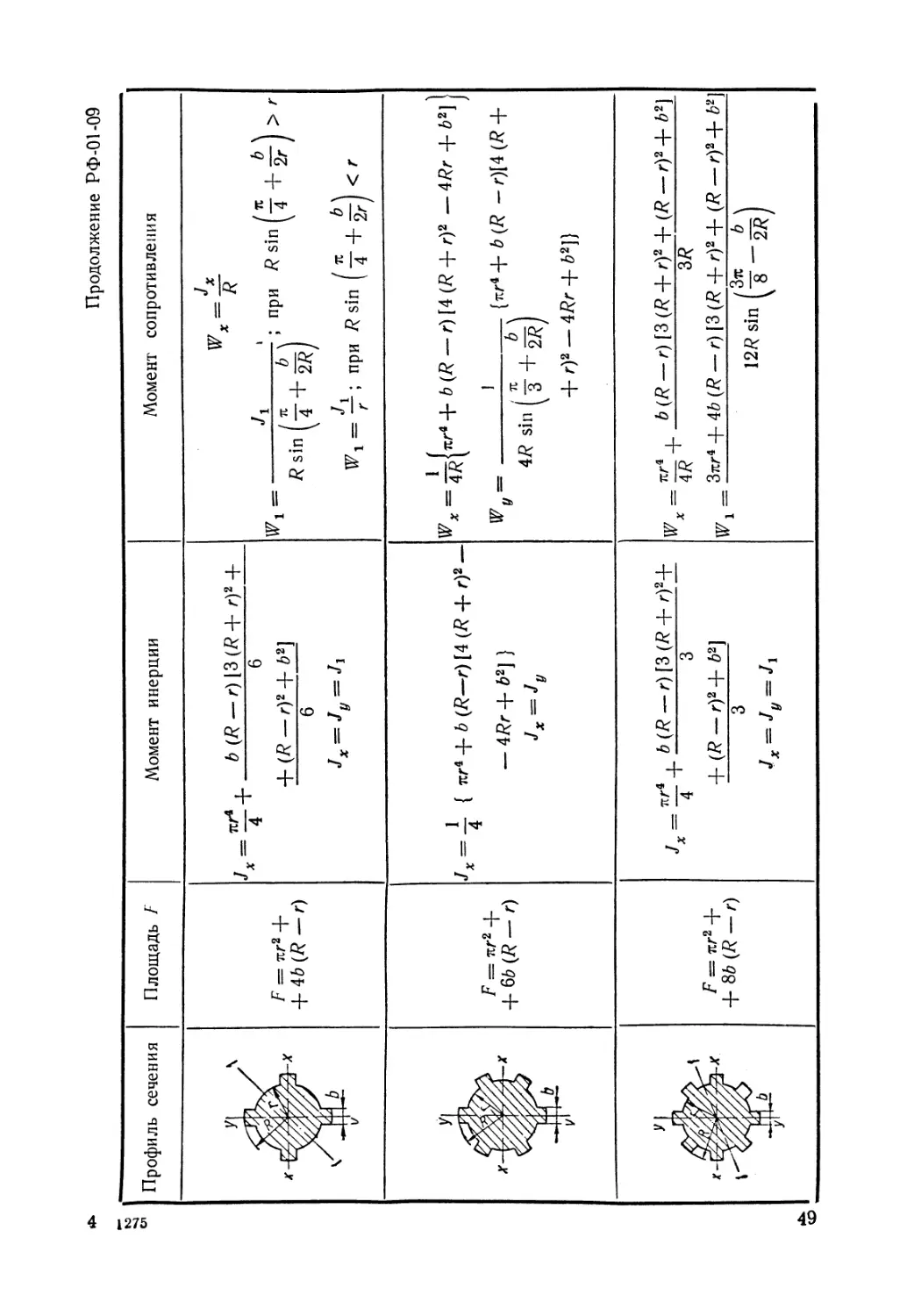
РФ-01-09 Модель
Площади, моменты инерции и моменты сопротивления поперечных сечений валов
Профиль сечения
Момент инерции
Площадь F
Момент сопротивления
х
" V
— 2bt
nd2
~ V
— bt
itd2
— ad
rcd4
"64
, __ ltd4
*~“64
___bt(d^ t)2
4
j _ bt (d — t)2
x~~64 2
nd3 / a'
Г = -32
w =
x “32 2d
__ 7td3_____bt (d — t)2
x" “32 d
1275
Продолжение РФ-01-09
Профиль сечения Площадь F Момент инерции Момент сопротивления
У к J V \ \Ь F = 7Cf2 -|- 4-46(7?-г) 1 _*'4д. b (R — г) [3 (R-\- Г)2 + * 4 + 6 + (R-r)2+fe2] 6 4=4 = 4 W'r = — x R Ji । / ТС Ь \ - / Я ’ b \ : ПРИ R Sln 4 + 2r ) > r R&'m\j+2R) Ji / Tt b\ ^1=7-; при R sin [ у + 27I < r
У х\уУ V %/Л~* F = яг2 -|- + &b (R - г) 4 = 4 < ^4 + M^-r)[4(R + r)2- - 4Rr + 62] } Jx — Jy = 4^{^4 + b (R - r) [4 (R + r)2 - 4Rr + Z>2] j «7 = ! {r^+b(R -r)[4(R + v . i 71 b \ 4R зпЦз +2^ 4-r)2 — 47?r 4-62]}
У ~У /7^'Х F = лг2 + + 8b (R - г) J = *r*b(R-r}\3(R + rY+ *4 3 + (R-r)2+62] 3 Jy~ A w = , fr(R-r) [3 (R + r)2 + (R -r)2 + i2] x 4R~r 3R _ 3nr* + 4fe (R - r) [3 (R + r)2 + (R -r)2+ fr2J
1 /3л b \ 12R sin ("8 —
Модель
РФ-01-10
л. 1
Номограмма для возведения
в дробные степени чисел от
(0,01 до 1)
50
РФ-ОЫО л. 2 Модель
Номограмма для возведения в дробные степени чисел от 1 до 100
/ ---------Хц _ показатель степени.
\ // Примеры Примечай
/ 1. Дано: а~9;х= 0,125. Найти у (у=ах) ч Если берем значение показа- /
£ Соединяем прямой 1 трчку 9 шкалы а ' теля степени на шкалах Xj, /
V ; с точкой 0,125 шкалыхТ ид пересечении \ то читаем отдет на шкале уч
со шкалой уг читаем отдет у»1,32 \ Если же берем значение пока-/
V 2. Дано: а *35; х*18. Найти у \зателя степени на шкалах/
Соединяем прямой 2 точку 35шкалы а 'х^то читаем отдет /
с точкой 1, 8 шкалы х^и б пересечении \ на шкале у л /
<y ч со шкалой уд читаем отдет у=80о \
\ /
4^
51
РФ-01-11 Модель
Расчет координат шестерен в многошпиндельных головках
Дано: М, Н, L, К, = г2 = г3
Найти: х, у, А
Расчетные формулы:
М (И2 + К2) — Н (L2 + М2)
2 (КМ — HL)
tJ_^K(L2 + M2)-L (Н2 + К2)
2 (КМ — HL)
а = Н2 + К2 b = L2 + М2
1 = КМ — HL
и = аМ
т — ЬН
х = ц ~~—
v = bK
п = aL
v — D
2Г~ у== 21~
= 1/ v2 _1- /J2
Рациональная схема ведения и записи расчета
Величины Квадраты Дей- ствие
Н = +
К=
а =
L = +
М=
. Ь =
КМ =
HL =
1 =
21 = |
У= V =
т = п =
х =
У =
*=[
X2 =
У2—
Проверка:
(х-£)а+(Л4-1/)2
| л/л/
г4 =
принимаем
= А
= А
У(К-х)* + (Н-уУ =]/
Определение числа зубьев
При / = £1 =________= I---------1 и модуле передачи т = |
Zi 1-------1
2Ai
m(l + Z)
= z4/=----
Примечания: 1. В расчетах координат оставлять три знака после запятой.
2. Максимально допустимая ошибка при проверке ± 0,003 мм. 3. Геометричес-
кий расчет зубчатой передачи производить по РФ-02-05. 4. Этот формуляр приме-
нять, когда L и К расположены по одну сторону принятого начала координат.
52
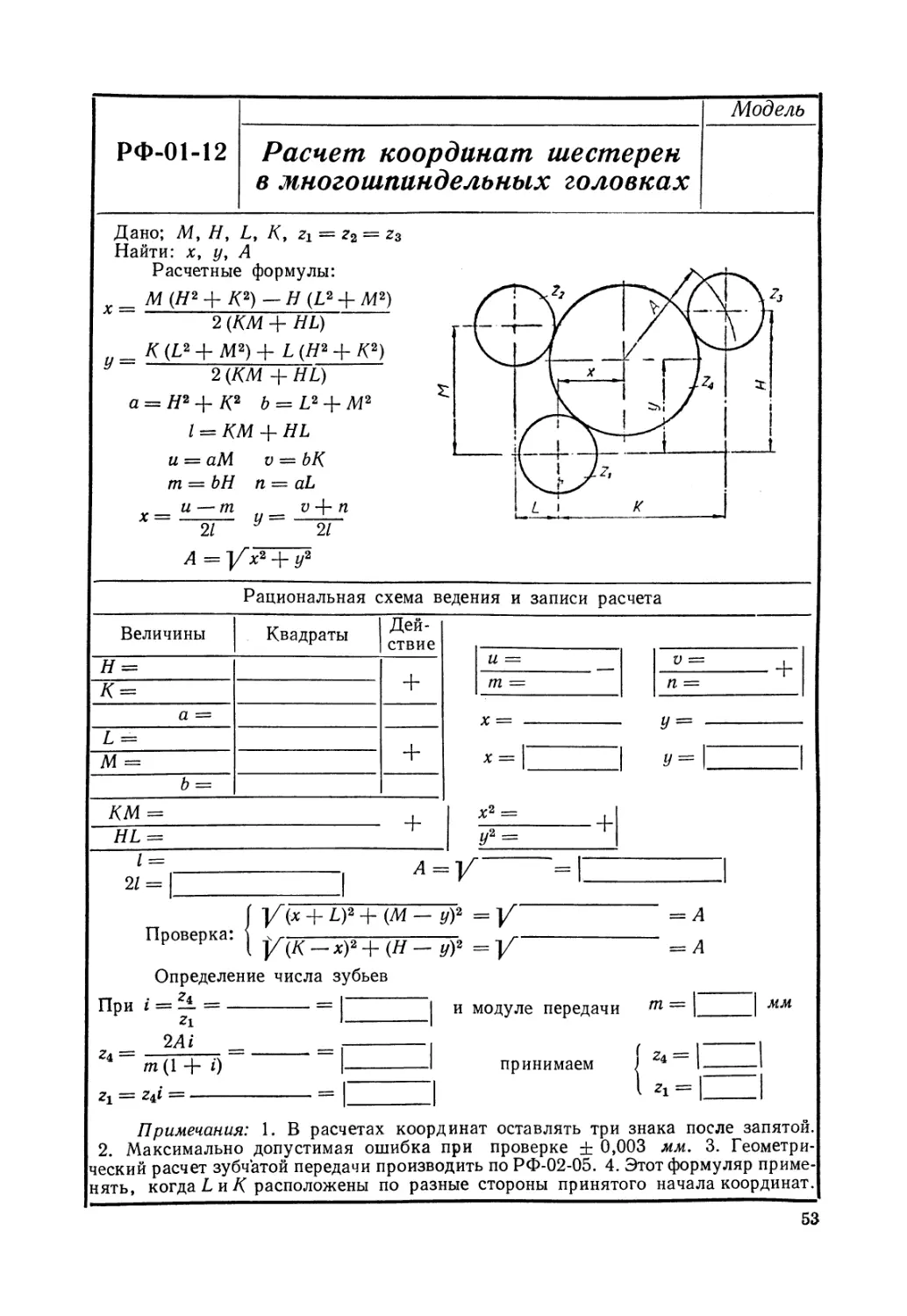
РФ-01-12 Модель
Расчет координат шестерен в многошпиндельных головках
Дано; М, Н, L, К, = z2 = ?з
Найти: х, у, А
Расчетные формулы:
х_ М(Н2 +К2)—Н (L2 + М2)
2 (КМ + HL)
Я (L2 + М2) + А (Н2 + К2)
2 (КМ 4- HL)
а = Н2+К2 b = L2 + M2
I = КМ + HL
и = аМ
т — ЬН
х= и — т
21
v — ЬК
n — aL
У 21
Y2 -4- /72
Рациональная схема ведения и записи расчета
Величины Квадраты Дей- ствие
+
а =
L = +
М =
Ь =
КМ =
HL =
1 =
У — -
У~ I'
/ У(х + LY + (М - у)* = У
Проверка: [ _ х). + |Д _ _ у-------------
Определение числа зубьев
При i = — =-----------= I I и модуле передачи
Zi ---------1
2Ai
т (1 + О
г, = г4« =---
Примечания: 1. В расчетах координат оставлять три
| мм
г4 =
принимаем
v =
п =
= А
= А
Примечания: 1. В расчетах координат оставлять три знака после запятой.
2. Максимально допустимая ошибка при проверке ± 0,003 мм. 3. Геометри-
ческий расчет зубчатой передачи производить по РФ-02-05. 4. Этот формуляр приме-
нять, когда Lи^ расположены по разные стороны принятого начала координат.
53
Модель
РФ-ОЫЗ
Распет координат шестерен
в многошпиндельных головках
Дано: M, H, L, К, rlt r2, r3 \zr =# z2 ¥= г3|
Найти: R, x,y.
a = H2 + № +
। 2 „2
Расчетные формулы
b = L2+M2 +
+r\- r\
I = KM— HL
r aM — bH
G==-2T-
117_bK — aL
21
Величи- ны Квадраты Дей- ствие
H =
K = +
—
Gi =
a =
L =
M = +
ri =
Г2 = — —
b =
KM =
HL =
1 =
21 = 1
aM =
bH= ~
G =
G = Г '
ьк=
aL= —
W =
«7= | - |
I
Fi =
kr =
ri=
Г2 =
=
ki = ri — г3
&2 = И — г2
р__ k2K k±L
I
2== krM-k2H
I
A = 1,000 —
— F2 — г2
В = Г1- W X
X F — Gz
С = Г2 + G2—
4
y^W+FR
k2K =
k'L =
F =
f=l 1
k±M =
k2H =
z =
г = | 1
1,000
—
г2 =
A =
П =
WF= ~~
—
Gz =
B =
1
G2 = "Г
—
^2 _
ri “
c =
.
AC= +
V
в =
R =
R= Г
zR =
X =
W =
FR =
У =
Проверка:
2. К(х - L)2+(M-</)2- R =
— I ..—-1 - '2
3. V(К-хУ+(Н-у)2- R =
] = /•#
П римечания:
1. Во всех расчетах
оставлять три знака
после запятой. 2. Макси-
мально допустимая ошиб-
ка при проверке ±
± 0,003 мм. 3. Геоме-
трический расчет зубча-
той передачи производить
по РФ-02-05. 4. Этот
формуляр применять, ког-
да L и К расположены
по одну сторону приня-
того начала координат .
54
Модель
РФ-01-14
Расчет координат шестерен
в многошпиндельных головках
Дано: M, H, L, K, r12 r2l r3
Найти: R, x, у
формулы
kl = Г1 — rs
k2 = rl — r2
_ k2K-k, L
r = -- —
Расчетные
a = H2 + K2 +
b = L2 + M2 +
I = КМ + HL
аМ — ЬН
G = 21
т ЬК + aL
I
krM+k2H
Z~ I
A = 1,000 —
— F2 — z2
Вели- чины Квадра- ты Дейст- вие
Я =
/< = +
И =
—
а =
£ =
М = +
И =
Г2 =
Ь =
км =
HL = -г
1 =
2/= |_ —1
аМ —
ЬН =
G = -
G = | 1
ЬК = - + I
aL =
W = _
F = |
= __
гз =
ki = 1
£2=
k2K =
krL =
WF =
Gz =
.2 __
AC =
В =
R =
C =
B2 =
1,000
F2 =
В =
W2 =
G2 =
kjM =
k2H =
Z = —
z2 =
A =
l^i =/= ?2 z3 I
С=№2 + 62~г?
R =
5 = ^ — W x
FR~
2. V(x + D?+(M-yy--R =
x = G + zR
У = W + FR
у —
Проверка:
G =
7r =
x =
W =
3. v(K-xY+iH-yf— R =1
'I = гз
Примечания:
1. Во всех расчетах остав-
лять три знака после запятой.
2. Максимально допусти-
мая ошибка при проверке
± 0,003 мм.
3. Геометрический расчет
зубчатой передачи произво-
дить по РФ02-05.
4. Этот формуляр приме-
нять, когда L и К располо-
жены по разные стороны от
принятого начала координат.
55
Модель
РФ-01-20
Зависимость между диа-
метром трубы, скоростью
и объемом масла
Q йда-|"~ 50 о
см3/сек е. _ л/мин
а
мм
Рекомендуемые диапазоны
скоростей даны для масла вяз-
костью не более 8,66° Е при
температуре 38 ° С
V
м/сек
Q- объем масла,про спекаемо го
через трубу, в см3/сек
б~ внутренний диаметр 6 мм
I/- скорость масла в
трубе б м/сек
-—0,1
-—0,09
1Г0’08
3-----0,07
—0,06
56
РФ-01-21 Модель
Зависимость между производительностью насоса, мощностью и давлением
Л/MUH 50 -□ 4/7— 30 — 20—_ (5 — to— 9-t 8 — 7 — 6 — 8— Q — 3-^ 45-- 1 — 5 $0 О) СО СЧ. Со Со О- О) С\4 *•- Со" СО*1 <х 1111 1 1 1 1 1 1 1 1 । 1 I L I 1 I 1 I I 1 1 1 а 1 । 1 1 1 1 1 1 11II11 1 I t I 1 I ! 1 1 1 1 1 1 I 1 1 1 1 1 1 । 1 1 1 1. 1 1 1 1 1 \ Со <§ § \ сз|£ ^1^ * f *§ \ 11 11 11 с5 Ч* \ 9- § ' • 1 \ Q. О «3 ООГчСО ч~) -ф О) сч, S 5 Со Сз § § О» § § § «< CQ IT) о-) сх» * сзГезсз е>\ О' с; сз Сз CS сз OS cs cS с5> С5 <~5'C5'CS' cj“ CS co" Cj c$ >v'i'^v,ivl'1''11 к-’Л!T'iT7-'i L p''‘l'Hili' i 'i 1 1' * ” 3 ~ «« s\s « Bi в § в § § § в § \ Co Co Co' co' \ si CO co CO Co co CO CO Co \ O _ 00 RK:^\§ e§?§SgS5 § c," i. i , I , i , 1 L i 1 i,, Xk. , I. I, i , i i . i i I i 1 1 l
57
РФ-02-01
Модель
Расчет цилиндрических зубча- тых колес с прямым зубом при постоянной нагрузке
материал /
Вала
Исходные данные: /
Крутящий момент м i--------------| г
на 1-ом колесе ~~ |____________I К1 см
Число оборотов = .-------------1 б/
1-го колеса 1 I---------------1
Передаточное число
г2 I-
1 ~ г, ~ ~ I-
Модуль зацепления т = |
| мм
Окружная скорость
1-го колеса
1 mib1z1y1
6,35
атериол?
Timzxnr
V = 60000 = 60000
Напряжение изгиба
2гго колеса
о = о
и'у^~
| м/сек
kt k =
1
|кГ/мм2 [а] = |
\кГ/мм2
| кГ/мм2 < [a]*= | \кГ/мм2
Коэффициент формы зуба
Z 14 15 16 17 18 19 20 21 23 25 27
У 0,088 0,092 0,094 0,096 0,098 0,100 0,102 0,104 0,106 0,108 0,111
Z 30 34 38 43 50 60 75 100 150 300 Рейка 0,154
У 0,114 0,118 0,122 0,126 0,130 0,134 0,138 0,142 0,146 0,150
Скоростной коэффициент для колес 7-ой степени точности изготовления
v м/сек 1 2 3 4 5 6
1 0,75 0,67 0,60 0,55 0,50 1
Удельное давление на рабочих поверхностях зубьев
о
/А 44 t, А
I0tnin Rv
| кГ/мм2
| кГ/мм2
Коэффициент давления С
С
| кГ/мм2
Материалы | С | Материалы | С | Материалы
Сталь
Сталь
Материалы
1
2
* См. табл. РФ-02-02
* * При наружном зацеплении знак (+), при внутреннем зацеплении знак (—)
Г7 „ 1• i 1 1
При зацеплении с рейкой вместо - подставить у
670
Сталь
Чугун
560
Чугун
Чугун
470
Текстолит
Сталь
170
1
2
2
2
С
58
Модель
РФ-02-02 Допускаемые напряжения для зубьев колес
Материал Расчетные значения меха- нических характеристик Допускаемые напря- жения
Марка Термообра- ботка Предел прочно- сти ав в кГ/мм* Предел устало- сти, определенный на малых образ- цах, а_| ькГ/mmz Т вердость Напряжения изги- ба [а]м в кГ / мм? Контактные на- пряжения [а] в кГ/мм?
Модули т в мм
о ч: 7—10 12,13 14-16 18,20
Сталь 45 Нормали- зация Улучшение Закалка, по сечению Закалка по профилю с выкружкой 60—75 75—90 >100 25-34 32-40 40-50 НБ 170-4-217 НБ 220ч-250 HR С384-48 Поверхность HR С48-Т-55 14 18 26 13,5 17 25 13 16,5 24 12 16 23 11,5 15,5 22 45 60 100 145
Сталь 50Г | Закалка 95—110142-50 HR С28-4-33 |24 23 1 22 1 21 | 20 80
Сталь 40Х Улучшение Закалка по сечению Закалка по профилю с выкружкой 80—100 150—165 36-45 НБ 230—260 HR С45н-50 Поверхность HR С48--55 22 38 32 21 36 30 20 35 20 33 19 32 65 135 145
Сталь 20Х Цементация и закалка >90 Поверхность HR С56-4-62 32 30 28 24 21 165
Сталь 18ХГТ Цементация и закалка 110—130 Поверхность HR С56-4-62 сердц. HR СЗО 40 38 35 32 28 175
Сталь 12ХНЗ Цементация и закалка >90 | Поверхность j HR С56-4-62 1 35 33 30 27 24 170
Чугун СЧ 15-32 15 1 \НБ 160-?-229| 5 | 4,6 | 4,4 |4,1| 3,9 | | 50
Чугун СЧ 21-40 21 | \НБ 170-4-241 | 6 | 5,5 | 5,2 | 4,9| 4,7| 60
Чугун МСЧ 32-52 32 | \НБ 170-4-24118,01 7,5 1 7,0 6,5| 6,0 75
Текстолит 8,5 / НБ 30-н34 4-5 4-5 4-5 4-5 4-5 8-10
Примечания: 1. Приведенные значения напряжений изгиба для шестерен с поверх-
ностной закалкой ТВЧ соответствуют хорошо отработанному процессу термообработ-
ки. В противном случае напряжения нужно снижать на 15%. 2. В случае сквозной
прокалки (ТВЧ) зубьев малых модулей можно пользоваться значениями допустимых
напряжений при закалке профиля с выкружкой. 3. В случае поверхностной термооб-
работки, не охватывающей выкружку, допустимые напряжения изгиба берутся по
механическим характеристикам сердцевины.
59
Модель
РФ-02-04 Расчет прямозубой передачи равносмещенного зацепления
I MM\ — |
Исходные _ ।
данные: т== I.
\мм—т—2~
Режущий
инструмент нормальный: fQ = 1,0;
Выбираем
коэффициенты сдвига (см. таблицу)
Диаметры
= = |
Диаметры окружностей выступов
делительных окружностей
2
Dp = 2т
2
2 “
мм;
а0 = 20°
Толщины зубьев по дугам делительных окружностей
(’л \
2" + 2 tg ао 5, I = (1,5708 + 0,72794) = |
ММ
(1,5708 — 0,72794) = |
Половина угловой толщины зубьев на делительных окружностях
в _ S! 180 _ 57,324 _ ------ . _ s2 180 _57,324 _ ,____
ddK I-----1 2 к I----
1 <^2
Толщины зубьев по хордам делительных окружностей
syi ~ sin = = || мм; Sy* = ddi sin = |
Высота головок зубьев от хорды на делительной окружности
h0, = -$-(De, -da1cos5i) = ^- < - ) = |
^у2 = 2" C0S М = Т/ ( — ) = |
s2 = т
мм
мм
мм
| мм
* Подставляется в формулу со своим знаком
60
Продолжение РФ-02-04
Рекомендуемые значения коэффициентов сдвига £, =—£2 (из условий выравнивания удельных скольжений
17 18 19 20 21 22 24 27 32 40 50 60 72 90 НО 140 170 210
10 — — — — — 0,458 0,475 0,499 0,529 0,554 0,570 0,582 — — — — —
11 — — — — — — 0,408 0,430 0,460 0,495 0,520 0,540 0,554 0,563 0,566 — — —
12 — — — — — 0,328 0,357 0,389 0,422 0,460 0,487 0,510 0,527 0,537 0,541 — — —
13 — — — — 0,264 0,283 0,313 0,347 0,385 0,427 0,457 0,479 0,499 0,511 0,515 — — —
14 — — — 0,199 0,220 0,239 0,211 0,308 0,360 0,395 0,427 0,450 0,472 0,485 0,493 0,499 — —
15 — — 0,134 0,159 0,181 0,201 0,235 0,271 0,315 0,363 0,398 0,423 0,445 0,462 0,472 0,479 — —
16 — 0,062 0,094 0,120 0,144 0,165 0,199 0,232 0,282 0,333 0,373 0,397 0,421 0,440 0,452 0,462 0,460 —
17 0,000 0,032 0,060 0,066 0,110 0,131 0,165 0,205 0,251 0,306 0,348 0,374 0,398 0,418 0,433 0,445 0,431 0,458
18 — 0,000 0,030 0,056 0,080 0,101 0,136 0,178 0,224 0,282 0,326 0,353 0,378 0,400 0,414 0,427 0,434 0,440
19 — — 0,000 0,027 0,052 0,073 0,109 0,132 0,200 0,260 0,305 0,334 0,361 0,382 0,396 0,410 0,418 0,424
20 — — — 0,000 0,025 0,047 0,085 0,128 0,178 0,240 0,285 0,316 0,344 0,365 0,379 0,393 0,402 0,408
21 — — — — 0,000 0,023 0,052 0,107 0,159 0,222 0,268 0,299 0,328 0,350 0,364 0,379 0,389 0,395
22 — — — — — 0,000 0,041 0,087 0,141 0,205 0,251 0,283 0,313 0,335 0,350 0,666 0,379 0,382
24 — — — — — — 0,000 0,051 0,110 0,173 0,219 0,252 0,281 0,305 0,324 0,341 0,351 0,358
27 — — — — — — 0,000 0,065 0,129 0,176 0,212 0,243 0,267 0,289 0,308 0,318 0,328
30 — — — — — — — — 0,025 0,089 0,138 0,178 0,208 0,235 0,259 0,278 0,292 0,302
33 0,057 0,108 0,149 0,180 0,206 0,232 0,252 0,267 0,280
36 — 0,029 0,082 0,122 0,154 0,181 0,208 0,230 0,247 0,262
40 — 0,000 0,052 0,090 0,124 0,151 0,178 0,203 0,222 0,2 39
Модель
РФ-02-05 Расчет прямозубой передачи неравносмещенного зацеплен ия
Исходные
данные:
| мм; г! = ||; z2 = |
. |-----------1 , г1 + г2
А — I I т ' 2
Режущий инструмент нормальный: fQ = 1; а0 = 20°; inv20° = 0,014904
Фактический угол зацепления
mcosa0/ 0,469846 ,----------,
COS а = 2Д— (Zi + Z2) = -----( + ) = I I a =
Суммарный коэффициент сдвига профилей зубьев inv a* —
f. . c inv a—inv a0 , , к —0,014904
61+ $2 = -^1^0—(г1+г2) =-072794-
Выбираем коэффициенты сдвига**: Si = |
Диаметры делительных окружностей
= mz1 = = I I мм; dd* = mz2 =
Рабочая высота зуба
/?з = Д — m 2 ~Ь £1 + ^2 — 2 = — f”2"
Диаметры наружных окружностей
и £2 =
мм
мм
'3
мм
D. = 2m
^2
Z2 I
“2 + £2 -1 + 2/1з = 2
Толщины зубьев по дугам делительных окружностей
у + 2 tg а0 ?! = [ 1,5708 + 0,72794] = [
sr = т
s2 = т
= [1,5708 + 0,72794] = |
~2 + 2 tg % Ъ
Половина угловой толщины зубьев
Si 180 57,324
~ =1----------=
Толщины зубьев по хордам делительных окружностей
sVi = sin = I | мм; s = da sin S2 = ~ |
Высота головок зубьев от хорды на делительной окружности
= 4 lD^ ~ ddr cos 81] = °-5 [ ] =
Ай=11Ре,-^созМ = 0>5[ ] = |-
i на делительных окружностях
. s2 180 57,324
.1: =-----------------------
мм
мм
мм
| мм
| мм
I мм
* Пользоваться таблицами эвольвентных функций.
** При разбивке величин коэффициентов сдвига двух
колес по сумме их сдвигов прежде всего нужно избегать
подрезания и заострения (см. табл. 1 и 2)
62
Продолжение РФ-02-05
Значение минимальных коэффициентов сдвига, при которых нет подрезания
Таблица 1
8 9 10 11 12 13 14
*min 4-0,532 4-0,474 +0,416 4-0,358 4-о,зоо 4-0,241 4-0,182
22 23 24 25 26 27 28
*min —0,286 —0,344 —0,403 —0,461 —0,520 —0,578 —0,636
15 16 17 18 19 20 21
^min 4-0,124 4-0,065 4-0,006 —0.052 —0,111 —0,170 —0,228
29 30 31 32 33 34 35
^min —0,692 —0,752 —0,810 —0,829 —0,928 —0,986 —
Значение £тах из условия заострения
Таблица 2
г h 1 8 9 10 И 12 13 14 15
2т 0,187 0,255 0,317 | 0,378 | 0,434 | 0,490 | 0,542 | 0,589 | 0,636
1,95/т? 0,276 0,349 0,413 | 0,475 | 0,535 | 0,588 | 0,630 | 0,697 | 0,741
1,9 т | 0,369 | 0,441 0,509 | 0,571 | 0,632 | 0,688 | 0,734 | 0,797 | 0,846
1,85 т | 0,465 | 0,534 | 0,604 | 0,667 | 0,731 | 0,789 | 0,833 | 0,899 | 0,950
1,8 т | 0,555 | 0,628 | 0,697 0,764 | 0,828 | 0,890 | 0,944 | 0,988 | 1,052
1,75 т | 0,644 | 0,720 | 0,791 | 0,859 | 0,922 | 0,985 | 1,035 1,097 | 1,155
1,7 т | 0,736 | 0,811 | 0,886 | 0,954 | 1,019 | 1,079 | 1,133 | 1,196 | 1,255
1,65 т | 0,825 | 0,9051 0,978 | 1,042 | 1,114 | 1,178 | 1,230 | 1,299 | 1,354
1,6 т | 0,915 | 0,977 | 1,071 | 1,143 | 1,209 | 1,272 | 1,330 | 1,397 | 1,454
1,55 т | 1,006 | 1,087 | 1,163 | 1,236 | 1,303 | 1,370 | 1,420 | 1,492 | 1,554
1,5 т | 1,094 | 1,177 | 1,255 | 1,328 | 1,398 | 1,464 | 1,526 | 1,590 | 1,652
63
РФ-02-06
Модель
Расчет цилиндрических зубчатых колес с косым зубом при постоянной нагрузке
Bg/i\
Материал t
Всл1
и
ь.
LJ/w атериал?
__ ч __
“ COS3 £
Окружная скорость v = боосюХ^ =
Исходные данные:
Крутящий момент
на 1-м колесе
Число оборотов
1-го колеса
Передаточное отношение
г2_____________I-
1" *1 ~ “ I-
Модуль зацепления _ г
(нормальный) “ I.
Угол наклона зуба = |
Приведенное число зубьев
---1 __ г2___________
I* ~~ COS3 £
| кГсм
| об/мин
| мм
60000
| м/сек
М1= [
Напряжения изгиба
1-го колеса:
6,35 cos 3 1
= m2biz1y1 kv =
6,35 1
I кГ/мм2 < [а] *=|
и
2-го колеса:
°и* “* УъЬ%
| кГ/мм2
Коэффициент формы зуба
zi 14 15 16 17 18 19 20 21 23 26 27
У 0,088 0,092 0,094 0,096 0,098 0,100 0,102 0,104 0,106 0,108 0,111
34
38
60
75
30
43
50
100
150 .300 Рейка
0,114 0,118 0,122 0,126 0,130 0,134 0,138 0,142 0.146 0,150 0,154
У
Скоростной коэффициент для колес 7-ой степени точности изготовления
и м/сек < 1 2 3 4 5 6
1 0,75 0,67 0,60 0,55 0,50
* См. табл. РФ-02-02
64
Продолжение РФ-02-06
РФ-02-06 Модель
Расчет цилиндрических зубчатых колес с косым зу бом при постоянной нагрузке
Удельное давление на рабочих поверхностях зубьев
С cos 8 Г i ± 1 *
zlm ]/ 'Anin
I I кГ/мм2 <
,| кГ/мм2
I кГ/мм2
Коэффициент давления С
Материалы С Материалы С Материалы С Материалы С
1 | Сталь 670 1 | Сталь 560 1 | Чугун 470 1 | Текстолит 170
2 | Сталь 2 | Чугун 2 | Чугун 2 | Сталь
При наружном зацеплении знак (+), при внутреннем зацеплении знак (—),
i + 1 1
при зацеплении с рейкой вместо —подставить у
5 1275
65
Модель
РФ-02-07
Расчет геометрических пара-
метров червячной передачи
(% = 20°)
Размеры зуба червяка в нормальном сечении
Модуль передачи
т — ( мм
Число модулей в делительном
диаметре червяка
_ I--------1
<7 = 7? = |--------1
Угол подъема витка червяка
7 = arc tg 5- = ||
<7 '
Шаг по оси червяка
Ход винтовой линии витка
Длина ной нарезан- |ПрИг1=1 и части <
t — топ = 3,1416
i червяка s = tz± = — |
I 2L>(11+0,06z2)m= (11+0,06) =|2
червяка’*** |ПРИ z,=3 и 4 £>(12,5+0,097г2)т=(12,5+0,09)=
Осевая толщина витка soc = 1,498 tn = 1,498 по делитель- = |”
ному цилиндру
Хордальная толщина витка червяка в нормальном сечении
Г sin2 7 cos2 7 \ х
s = soecos7 1--------—-------- = Л -----------------) =1
\ 6d£ / 6 / 1—
Хордальная высота головки витка червяка в нормальном сечении
SgC sin2 7 cos2 7
A = т +
4
Диаметр начальной окружности колеса = тг2 =
Диаметр
Наружный диаметр колеса (значения д см. в табл. 1)
DH = De2 4- Ь =
окружности выступов Dgz = + 2m = + 2 = |
*Размеры червяка выбирать по нормали
денным формулам:
Н24-5 или
Dex = ddt + 2т =
Di, = dd. — 2’4т =
** А выбирать по нормали Н21-5; допуски по ГОСТ
*** Для шлифованных червяков L увеличивать на 2m
— 2,4
| мм
| мм
I мм
| мм
\мм
| мм
I мм
| мм
| мм
| мм
рассчитывать по приве-
3675-56
| мм
| мм
66
РФ-02-07
РФ-02-07
Модель 1
Расчет геометрических пара- метров червячной передачи (а = 20°)
Таблица 1
т в мм
ВХ 1 |1’5|2|2,5|3|(3,5)| 4|5|6|(7)|8|1О
Z1
Ширина червячного колеса
пои
Значения (&) в мм
1 | 2 | 3 | 4 | 4 | 51 6 16 | 8 10| 12|15|18
при
= 1,2 и 3 В<0,75 =0,75
= [ | мм
г1== 4 В < 0,67 Dei = 0,67
= | \мм
4
Таблица 2
т | 1 |1,5| 2 2,5| 3 |(3,5)| 4 5 | 6 |(7)| 8 |10
Радиус|0,8|1,2|1,5 2 |2,5| 3 |3,2 4 | 5 | 6 |б,5| 8
Радиус закругления по наруж-
ной поверхности колеса
R = -у1 — т | | мм
Значения радиусов закругления
зубьев г см. в табл. 2
* Значения В округлять до целого числа
67
5*
Модель
РФ-02-08
Расчет червячной передачи
Исходные данные:
Модуль передачи
т — | |мм
Число модулей в диаметре делит, окруж-
ности червяка
<7 = 1 I
Крутящий момент на колесе
— |__________| к Г см
Число оборотов червяка
п = | | об/мин
Угол подъема витков червяка .
Скорость скольжения на начальной окружности червяка
л d п i----
v =________-____ =------------- = м/сек
ск 60000-cos X 60000 1-----
К. п. д. передачи _ V' I I 11 tg (X + <р) Напряжение изгиба а = —L— = = I \кГ/мм2 < [а] = । | кГ/мм2 а zkm3qyt° 1 1 lu 1 !
zk I У у 1 zk 1 у zk 1 у zk 1 у Ч 1 У
16 0,095 20 0,100 26 0,107 35 0,120 50 0,136 150 0,156
17 0,096 21 0,101 28 0,110 37 0,123 60 0,141' 300 0,160
18 0.098 22 0,103 30 0,113 40 0,128 80 0, 148 Рейка [0,164
19 0,099 24 0,105 32 0,116 45 0,133 100 0,152
Удельное давление на рабочих поверхностях зубьев 5000 Г м 5000 / г/ 2^1.» а = 1 / к = 1 / = кГ/мм2 < а] = тг* V У — кГ/мм2
vCK& м/сек | Угол трения ср Нижние значения угла трения ср в таблице следует брать при червяках высокой твердости, шлифованных и полированных при точном из- готовлении, сборке и обильной смазке. Для чугунных колес угол трения ср прини- мать от 7° при малых скоростях до 3°30' при больших скоростях.
0.01 6°20' — 6°50'
0,1 4°30' — 5° 10'
1.0 2°30' —3°10'
4.0 Г20' — 1°40'
10 1°00' — 1°20'
15 0°50' — 1°10'
* См. табл. РФ-02-09
68
РФ-02-09 Модель
Допускаемые напряжения для зубьев червячных колес
Материал Способ отливки Допускаемые напряжения
Изгиба [<з]и в кГ/мм2 Контактные [оЦв кГ/мм2
Червяк #7?С<45 Червяк Я/?С>45
Бр. ОФЮ-1 В землю 6,0 17 20
В кокиль 8,0 25 30
Бр. ОЦС6-6-3 В землю 5,5 15 19
В кокиль 6,0 17 20
Центробежная 7,0 21 28
Бр. ОЦС5-7-12 В землю 5,5 15 19
Бр. СУРН В землю 6,0 17 20
Бр. АЖ9-4 В землю 10 В зависимости от ско- рости скольжения и материала червяка
В кокиль 11
Бр. АЖ11 >3-3,7 В землю 11
СЧ 12-28 4,0
СЧ15-32 4,5
СЧ 18-36 5,0
СЧ21-40 6,0
Материал [а] лри скорости скольжения vCK в м/сек
червяка 1^олеса 0 0,25 0,5 1 2 3
СЧ 15-32 СЧ 18-36 СЧ 21-40 СЧ 12-28 СЧ 15-32 22 20 19 17 14 10
Сталь 20 цементуемая СЧ 12-28 СЧ 15-32 Бр. АЖ9-4 Бр. АЖИ,3-3,7 19 16 13 11 9
Ст. 6 Сталь 45 СЧ 12-28 СЧ 15-32 17 14 12 10 7
69
РФ-02-10 Модель
Расчет винтовой зубчатой передачи
Исходные данные:
Колесо? __
/ведомо^ zj,
Угол между осями
Передаточное число
Колесо!
(Ьедущее)^Л^
Колесо?
Колесо!
Ь = 1
Модуль зацепления (нормальный) тп = || мм
Расстояние между осями*
Крутящий момент на ведущем
колесе
Д = |
Число оборотов ведущего колеса пг = j"
По заданным значениям / и b
Mk = | \кГ см
| об/мин
находим:
Из графика 1
Угол наклона
зуба ведущего колеса
Угол наклона
зуба ведомого колеса
Проверка: & = Pi + ₽2 =
Из графика 2
?1 = I
Число зубьев ведущего колеса
2Д 2 _____
Zi __ ------=-------= । । принимаем
r minmn ——
Число зубьев ведомого колеса
г2 = zri = = |_____| принимаем
Диаметры делительных окружностей
_ z1mn __
д* cos Pi
Скорость скольжения
] мм dd2 =
z2mn
cos p2
z2= I
| мм
v - ^d^ni
c 60000 cos p.
Фактор передаточного числа
I 2dd V /
Q _ ( ----21-- I — -
Условное напряжение
2000
—5-------------»»~z---
coshi
2000
* Уточненное значение А= 0,5 (d# + dd)
** Значения^ приведены в табл. 1
*** Значения [К] приведены в табл. 2
60000
| м/сек.
2
2
| < [К]***
| кг/см2
мм
70
Продолжение РФ-02-10
Скоростной коэффициент kv
Таблица 1
ис м/сек\ 0,05| 0,1 | 0,25| 0,4 | 0,5 | 0,75| 1,0 | 1,5 | 2,0 | 2,5 | 3,0 | 4,0 | 5,0 | 6,0
k~v | 0,98| 0,95| 0,9 | 0,86| 0,83| 0,78| 0,75| 0,7 | 0,67| 0,64| 0,62| 0,60| 0,58| 0,57
График 1. Определение углов наклона и р2
при заданном угле перекрещивания и передаточном
отношении i
Материал винтовых колес Значения [К1
после непродол- жительной при- тирки в паре после тщательной п ритирки в паре|
Сталь (HRC > 50) по бронзе 0,35 0,85
Сталь (HRC > 50) по стали (HRC> 50) 0,40 1,05
Чугун по чугуну 0,55 1,40
Чугун по бронзе 0,55 1,40
Пластмасса по чугуну 0,7 1,75
Пластмасса по стали (HRC > 50) 0,7 1,75
График 2. Определение вспомогательной величины pmin для углов пере-
крещивания осей & — 10-4-175° при передаточном отношении /=5:1-н1:2.
71
РФ-02-11 Модель
Расчет храпового колеса
Исходные данные:
Число зубьев храпового колеса
Необходимый угол поворота
храпового колеса
Передаваемый крутящий
момент
Материал храпового
колеса
Допускаемая нагрузка на
единицу длины зуба*
| к Г см
Р = |\кГ/мм
Л1Ж=|'
(предварительное)
360 _ 360
Принятое число зубьев храпового колеса
2 “ ।_________________________________। zmin = 8
Фактический угол поворота храпового колеса (на один зуб)
36СГ 360°
z ~
Расчетный модуль храпового колеса**
а =
20
т
| мм
Принятый модуль храпового колеса т = [
I m | 1 | 1.5| 2 I 2,51 3 |3,5| 4 I 5 I 6 I 8 | 101
Наружный диаметр храпового колеса
D = mz =
Глубина зуба храпового колеса
h = 0,75m = 0,75
Ширина зуба храпового колеса
b = ф т —
I мм
мм
мм
мм
* Для материала сталь 35—45, термически обработанной (Р< 20 кГ/мм)
Для материала сталь 20X—40Х, термически обработанной (Р^40 кГ/мм)
** ф= — = 1-т-4
т
72
РФ-02-12 л. 1 Модель
Геометрический расчет цилиндрических зубчатых колес внутреннего зацепления
1. Выбор коэффициентов коррекции
Для внутреннего зубчатого зацепления обычно применяют равнесмещенное
зацепление
бх-^О; ^ = е2
При этсм следует пользоваться следующими системами корригирования:
Первая система
Для всех чисел зубьев
= е2 = о,4
при /0 = 1,0; а0 = 20°
^2 ” z \ 8; ^2 —2ц 0
Если требуются меньшие значения этих разностей, то переходят к
/о = 0,8 или, в крайнем случае, к а0 > 20°. В этом случае следует соблюдать
условие следующих неравенств:
/о fo+co
«2 —Z1 > и sin2a<): г2 —г« > I,l sini'a.
Вторая система
Для всех чисел зубьев
=0,25
при г1 > 16 zu > 16
/о = 1А == 0>25; ^2 — > 12.
f0 = 0,8; с0 = 0,25: z2 - zu > 7.
Hepавнесмещенное зацепление
Применяется при необходимости вписаться в заданное межцентровое рас-
стояние или при малой разности
г2 —<8
г2-г„ < 9
В этом случае применяют только увеличенные углы зацепления
Во всех случаях необходимо производить проверки на все виды интерфе-
ренций при нарезании, в работе и сборке (см. РФ-02-12, листы 2—7)
--------------------------------------------------------------------------------------------------------------------------------------------------------1
7Х
Модель
РФ-02-12 л. 2 Геометрический расчет цилин- дрических зубчатых колес внутреннего зацепления
11. Выбор долбяка
Модуль зацепления т = \ I
Число зубьев шестерни г1 ~ 1 1
Число зубьев колеса г2 = 1 1
Долбяк выбирается по ГОСТ 9323-60 Выбирая долбяк, следует придерживаться следующего неравенства: 22-г,г>9
Характеристика долбяка 1 1
Модуль т=\ |
Число зубьев г«= । 1
Диаметр делительной окружности 1 MM
Диаметр окружности выступов ^еи ~ । | MM
Диаметр основной окружности и = I 1 MM
Коэффициент высоты головки зуба ь=1 1
Коэффициент радиального зазора с и ~ 1 1
Угол профиля исходного контура ао = 1 1
Коэффициент коррекции (полученный измерением) = | |
Коэффициент Z) коррекции долбяка*
Диаметр окружности выступов / z,, \ / ) = | 1
DeU = ^(-f + fu + cu + tU) = 2 (g- При нарезании углы зацепления между: долбяком и шестерней 2tg а0 . = 1 1 MM
lnva«>-z, 4-z (5i + U + lnvc’o = =1 i
• и
а«=1 I sin’« =1 I COS aUi = | |
долбяком и колесом 2tg ап
inv а — иг ^2 ~ (£2 — ём) + 1HV а0 = = 1 1
аиг-= \ I sin аи =| 1 cos аиг = 1 I
Угол давления у кромки зуба долбяка d^.
и и cosaeu= D~ = = 1 1
ей
аеи = ! ] iiw aeu = I I
* Определяется, если его величина не задана
74
РФ-02-12 л. 3 Модель
Геометрический расчет цилин- дрических зубчатых колес внутреннего зацепления
III. Геометрические размеры передачи
.1 Модуль передачи т = |_
Угол профиля “о = 1_
< исходного контура inv а0 = 1
Коэффициенты J^ = L
коррекции Х = |_
[ мм
Межосевые расстояния при нарезании между:
долбяком и шестерней
/п(г„ + 71) ___________
Л«. “ 2cos <zUj cos «о - 2 - I
долбяком и колесом
т(г2~гц) ____________________
| мм
л ______________
«2 2COS а
U2
cos О'о = 2
I мм
COS а = |
Угол зацепления передачи
(£2 — £1) + inv с0 =
а = |
2tg а0
inv а =-----
22“ 2Х
Межосевое расстояние
т (г2 — г,)
А ~ 2cos а со° а° ~ 2 = 1 । мм
Диаметры делительных окружностей
dd^ = mz1 = =| | мм-, dd2 = mz2= — | ] мм
Диаметры основных окружностей
d0. = ddtcos °о = = I 1 мм; dOi = ddi cos а0 = - I 1 мм
Диаметры окружностей впадин
= ~ — | । мм
Dit = 2 (Аиг + Я ей) = = ! 1 ММ
Диаметры окружностей выступов
De, = Di2 -2тс — М= = | । мм
Dei = + 2тс + ЧА = = | мм
Углы давления у кромки зуба:
шестерни cos ае^ = — = —— = | |
cos а„
е2
inv ае
колеса
De2
а
inv а.
е2
75
РФ-02-12
л. 4
Модель
Геометрическиа расчет цилин- дрических зубчатых колес внутреннего зацепления
IV. Проверка на отсутствие эвольвентной интерференции
Основная .
окружности
Эвольвента \ />
'Окружность
Idb/cmynod
Условия
Эвольвентная интерференция возникает, если
у колеса с внутренними зубьями окружность
выступов меньше основной окружности
(De2 < do2)
В этом случае участки зуба
положенные внутри основной
(выполненные не по эвольвенте),
с участками зуба шестерни, выполненными
по эвольвенте
колеса, рас-
окружности
пересекаются
отсутствия интерференции:
при зацеплении
,2
О,
при нарезании колеса
= I
2 —
76
Модель
РФ-02-12 л. 5 Геометрический расчет цилин- дрических зубчатых колес внутреннего зацепления
I/. Проверка на отсутствие интерференции с переходными кривыми
А. Интерференция переходной кри-
вой колеса с головкой зуба шестерни,
выполненной по эвольвенте
' Б
Б. Интерференция переходной кри-
вой шестерни с головкой зуба колеса,
выполненной по эвольвенте
Условия отсутствия интерференции:
при нарезании колеса
ей rou “Ь Ацг s*n аиг
e,~ro, +Asina0
N
при нарезании шестерни
1 - ГО2 — A sin %
= AUi sin aUj
>2 _ 2 =
ей 'ои
77
РФ-02-12
л. 6
Модель
Геометрический расчет цилин- дрических зубчатых колес внутреннего зацепления
VI. Проверка на отсутствие трохоидальной интерференции
Интерференция
набыходе..
Интерференция головок между кромкой
зуба шестерни или долбяка и профилем
зуба колеса при входе в зону захода
зубьев и выхода из нее
Условия отсутствия интерференции:
при зацеплении
/ р2 __Д2 __
Nr = 4(sin а0 — а0 cos а0) + rOx arc cos 62 -----е±- + inv at
(р2 । у|2 _ р2
ЭГС C°S ,2 2AR-- + ‘П¥
е2
ЛЛ
при нарезании колеса
N3 — A (sin а — a COS а1
° U2 \ Wg U2 '
/ __д2 _____j^2
а«,) + rou arc “S “ "р----------------- + inv аеи
2Л„Л«
( R2 + А2 - Р2„
Д^4 = r0 [ arc cos -2 ол 2п---- 4- inv а(
™u,Re,
Л/3 =
78
РФ-02-12 л. 7 Модель
Геометрический расчет цилин- дрических зубчатых колес внутреннего зацепления
VII. Проверка на отсутствие интерференции при радиальной сборке
и при радиальной подаче долбяка
Чтобы не было срезания головок внутренних зубьев при радиальной подаче
долбяка или чтобы была возможна радиальная сборка передачи, достаточно
(но не необходимо) соблюдать условия:
при радиальной сборке
при радиальной подаче
Rl+Al и ।-------------1
— ‘.. .______________________________________________
2AU ~ 2 “ ।-----------1
w2
N*= I I >4 = I... I
Если это условие не соблюдается, то следует произвести проверку по
Ястребову (см. «Станки и инструмент», 1959, № 6)
Расчетные величины
е2 = inv а. — inv а„ —
et. — inv а — inv а =
U &U U2
Средний угол поворота колеса
Условие отсутствия интерференции
N3 = Rej sin (<fcp- ea) - Reu sin (Чср1с - e„) =
= I l>0
79-
Модель
РФ-02-13
Геометрический расчет кониче-
ских прямозубых колес для пере-
дач с углом между осями 90° *
Исходные данные:
Модуль
Число зубьев
Высота головки зуба
h' = tn
Высота ножки зуба
h" = 1,2 т
Размеры со стороны большего диаметра
шестерни | колеса
Диаметр начальной окружности
Dtt = =
| мм | Dtn = tnz2
| мм
Угол начального конуса
о '
tga! = g- = —= Проверка: а1 + а2 = Наружный tga2 = |L = _= | |. > о а2=| | | ММ + = 90° диаметр
Da = т (zA + 2 cos ах) = = 1 ih Da2 = т (г2 + 2 с s а2) = | | мм
Угол головки зуба tg (3 = ? CT1 =----
Угол ножки зуба tg == —5*п ai __-----
Угол наружного конуса
£1 = а1+3 = + =(| I || = + + = | | |
Угол внутреннего конуса
, о ' о
Ф1 = «1 — <Р = — = | I | I ф2 = я2 — ? — = | | |
* Табличный расчет см. в работе Н. В. Решетихина «Расчет конических
колес», Машгиз, 1947
** Длина зуба b обычно принимается равной L
80
Продолжение РФ-02-13
РФ-02-13 Модель
Геометрический расчет кониче- ских прямозубых колес для пе- редач углом между осями 90° *
C1 2 tg’jj — 2 “I---------------1*'
Угол между образующей наружного
конуса и торцовой линией зуба
Длина образующей начального конуса
Толщина зуба по хорде
п • 90°
s. = sin — =
1
Высота головки зуба от хорды
Высота наружного конуса
Da,
°2~ 2 tg S2 — 2
___I I мм
о '
90°
cos —
= 90° — р == 90° — = |
Т = -Д-==___________=1
2 81Паг 1---
делительной окружности
> . 90“ _ ---
sln ~ “ |_
на делительной окружности
1 90° \
1—COS =
г2/
| мм
на
j мм | s2 = £>г
| мм
= т
2
| мм
2
| мм
6 1275
81
РФ-02-14
Модель
Расчет конических зубчатых колес с прямым зубом при постоянной нагрузке
Материал t
Материал 2
\мм>
Исходные данные:
Крутящий момент на 1-м
колесе = | | кГсм
Число оборотов 1-го колеса
П1 = | | об/мин
Передаточное число
«=£1 =-------=1 I >)
Приведенное число зубьев
2 _ ~_______ I-----
г»1 COS (Xi ---
Окружная скорость
тс т (1 — 0,5 ф)
Наибольший модуль зацепления
т = | | мм
Конусное расстояние L=| | мм
Степень полноты
+ = Г---------а
?2
2ii cos а2
60000
60000
\м/сек
Напряжение изгиба
1-го колеса
6,35
% т2 (\ — 0,5ф)2?!ЬгУ1
6,35 1
2-го колеса
, =О У^-
«8 «1 7Г7Г
У2&2
\кПмм2
\кГ/мм2
= I____I к,Г!мм* < [с]’2 = [
\кПмм2
Коэффициент формы зуба
г1 1 14 1 15 1 16 1 1 17 1 18 | 19 | 20 | 21 | 23 | 25 27
У | 0,086 | 0,092 | 0,094 | 0,096 | 0,098 | 0,100 | 0,102 | 0,104 | 0,106 | 0,108| 0,111
zt 1 30 1 1 34 1 38 1 43 1 50 | 60 | 75 | 100 150 300 Рейка
У | 0,114 | 0.118 | 0,122 | 0,126 I 0,130 | 0,134 | 0,138 | 0,142 0,146 0,150 0,154
* См. табл. РФ-02-02
82
Продолжение РФ-02-14
РФ-02-14 Модель
Расчет конических зубчатых колес с прямым зубом при постоянной нагрузке
Скоростной коэффициент для колес 7-й степени точности изготовления
v м/сек | 1 2 1 3 4 1 5 1 6
kv 1 1 | 0,75 | 0,67 0,60 | 0,55 | 0,50
Удельное давление на рабочих поверхностях зубьев
°- Z1m (1-0,51) |/ i bm.n У =1|кГ/л<л2=
г [а]* = |__| кГ/мм2
I [а]* = || кГ/мм2
Коэффициент давления С
Материалы ( с 1 Материалы | cl Материалы cl Материалы С
1 | Сталь 670 1 | Сталь 560 1 | Чугун 470 1 | Текстолит 170
2 | Сталь 2 | Чугун 2 | Чугун 2 | Сталь
* При межосевом угле Ь ф 90° вместо lA2 + 1 следует подставить sln
sin
6’
83
РФ-03-01
л. 1
Модель
Расчет кланоременной передачи
Исходные
Передаваемая мощность
Число оборотов малого
шкива
Число оборотов большег
шкива
Расчетный диаметр мень-
шего шкива
выбранное
/0 = | | мм ние ремня
данные:
N= | | кет
«1 = 1 | об/мин
О
«2 = 1 | об/мин
D, =1 I мм
сече-
Предварительно выбранное
межцентровое расстояние
Расчетный диаметр большего шкива
пл
D2 = 0,985 - Dx = 0,985----
Угол обхвата на малом шкиве
60 (
= loU —-----
мм
а = 180° —
)
^0
Скорость ремня
к Dxnx к
v = 60 • 1000 = 60 • 1000
м/сек
N
Принимаем г = |
Число ремней
Значения- Мо (табл. 3, л. 2), коэф. kx и k2 (табл. 1 и 2)
Расчетная длина ремня при
Lq = 21. + 1,57 (D2 + + A- (D2 - Dx)2 = Г
Межцентровое расстояние /0 (номограмма л. 3)
Принятая расчетная длина ремня** L — |
Уточненное межцентровое расстояние (номограмма л. 3)|
I = — — 0,393
4
т - 0,393 (D2 + DO
2
-0,126 (D2-D^= i
мм
мм
ММ
Число пробегов ремня в секунду***
v 1000 1000
U=Z~~L~ = =
Необходимое начальное натяжение ремня (табл. 4, л. 2). So =
15
| кГ
* Минимальный диаметр шкива для данного сечения ремня (табл. 3, л. 2)
** Стандартные значения расчетной длины ремня—ГОСТ 1284-57
*** Детали машин под ред. Ачеркана Н. С., Машгиз, 1953, стр. 560
84
Продолжение РФ-03-01
РФ-03-01 л. 1 Модель
Расчет клиноременной передачи
Таблица 1
Угол обхвата на малом шкиве 180° в град 170° 160° 150° 140° 130° 120° 110° 100° 90° 80° 70°
Коэффициент kr | 1,00 0,98 | 0,95 | 0,92 0,89 I 0,86 | 0,83 | 0,79 | 0,74 0,68 | 0,62 0,65
Таблица 2
Наименование станков и машин Коэф. k2 при смен- ности работы ремней
1 1 2 | 3
Токарные, сверлильные, шлифовальные станки | 1 1,0 | 0,87 I 0,72
Фрезерные, револьверные, дисковые пилы по дереву | | 0,92 I 0,80 | 0,66
Строгальные, долбежные, прессы винтовые и эксцентрико- вые с маховиком 0,84 0,73 0,60
85
РФ-03-01 л. 2 Модель
Расчет клиноременной передачи
Мощйость, передаваемая одним ремнем в кет Таблица 3
Сечения ремней О А Б В
Скорость ремня v в м/сек При величине расчетного диаметра шкива в мм
63 71 80 90 и । более 90 100 112 125 и более 125 140 160 180 и более 200 224 250 280 и| 1 более
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 0,07 0,13 0,19 0,25 0,31 0,36 0,42 0,48 0,53 0,59 0,65 0,71 0,77 0,83 0,88 0,93 0,97 1,01 1,04 1,07 1,09 1,07 1,05 1,03 1,01 0,08 0,15 0,21 0,27 0,33 0,40 0,47 0,54 0,60 0,66 0,73 0,79 0,85 0,91 0,96 1,02 1,07 1,10 1,14 1,18 1,21 1,18 1,15 1,12 1,09 0,09 0,17 0,24 0,31 0,38 0,46 0,52 0,60 0,67 0,74 0,78 0,85 0,92 0,98 1,04 1,09 1,15 1,20 1,25 1,29 1,32 > 1,32 . 1,32 : 1,29 ' 1,27 0,10 0,19 0,26 0,34 0,42 0,50 0,58 0,66 0,74 0,82 0,88 0,95 1,02 1,08 1,14 1,20 1,26 1,31 1,36 1,40 1,43 1,46 1,43 1,40 1,38 0,13 0,24 0,36 0,47 0,59 0,69 0,77 0,86 0,95 1,04 1,12 1,19 1,25 1,29 1,32 1,33 1,34 1,34 1,34 1,33 1,31 1,28 1,25 1,23 1,20 0,15 0,28 0,41 0,54 0,66 0,78 0,89 0,99 1,10 1,18 1,26 1,33 1,40 1,45 1,51 1,55 1,57 1,59 1,62 1,64 1,65 1,65 1,62 1,59 1,56 0,17 0,32 0,46 0,60 0,74 0,87 0,99 1,10 1,21 1,32 1,41 1,49 1,56 1,63 1,69 1,76 1,82 1,87 1,92 1,96 1,99 1,99 1,96 1,92 1,88 0,20 0,36 0,52 0,67 0,81 0,95 1,11 1,24 1,36 1,47 1,56 1,65 1,73 1,80 1,87 1,95 2,03 2,10 2,16 2,21 2,25 2,28 2,25 2,23 2,21 0,43 0,63 0,83 1,02 1,21 1,35 1,52 1,68 1,84 2,00 2,14 2,25 2,36 2,43 2,50 2,56 2,58 2,58 2,58 .2,54 ;2,50 .2,43 12,36 2,29 0,48 0,70 0,91 1,12 1,31 1,50 1,69 1,88 2,06 2,24 2,43 2,57 2,69 2,80 2,90 2,98 3,05 3,10 3,10 3,10 3,05 2,95 2,85 2,75 0,53 0,77 1,01 1,25 1,45 1,65 1,85 2,05 2,23 2,41 2,59 2,77 2,94 3,08 3,19 3,29 3,38 3,47 3,54 3,60 3,64 3,60 3,56 3,52 0,58 0,83 1,08 1,32 1,54 1,75 1,97 2,19 2,41 2,59 2,77 2,94 3,11 3,28 3,44 3,58 3,72 3,83 3,94 4,03 4,08 4,04 4,01 1 3,98 0,88 1,25 1,62 1,98 2,30 2,62 2,94 3,27 3,60 3,88 4,16 4,40 4,61 4,80 4,98 5,15 5,30 5,40 5,52 5,52 5,50 5,45 5,35 5,15 © 1,03 1,40 . • 1,77 2,14 2,50 2,87 3,24 3,60 3,98 4,30 .4,60 4,90 5,19 '5,41 ; 5,63 .5,81 15,98 >6,10 ! 6,25 •6,30 16,25 > 6,15 >6,05 J5,95 1,18 1,59 2,00 2,41 2,82 3,24 3,64 4,05 4,45 4,86 5,26 5,63 5,89 6,14 6,36 6,56 6,74 6,88 7,00 7,10 7,10 7,05 7,00 6,95 1,29 • 1,75 2,22 2,67 3,12 3,58 4,04 4,50 4,95 5,40 5,80 6,16 6,48 6,77 7,04 7,22 7,41 7,56 7,72 7,88 8,00 7,95 7,92 7,88
Примечание. В передачах со скоростью ремня v < 4 м/сек (отмечены знаком • ) натяжение ремней должно быть повышенным. Необходимое натяжение на ремень (обеспечивающее передачу мощности, указанной в табл. 3) дано в табл. 4. Таблица 4
Сечения ремней | О | А Б | В
Расчетные диаметры шкивов в мм 63-80 90 и более 90-112 125 и более 125-16С । 180 и более 2 100-224 250 и более
Натяжение на одну ветвь ремня в покое в кГ при скорости ремня v < 4 м/сек 6,5 8,5 12 14,5 20 26 33 42
v > 4 м/сек 5,5 7 10 12 16,5 21 27,5 35
86
Модель
РФ-03-01 л. 3 Расчет клиноременной передачи
's
s
wa/ д додпят godmamg DHufy
§ I'-
Л
нн g-uuwddпнтлт
hfilililihlilifii
В
wat д апииошзопа додоашна'пждм
§
y/z да g gogrixm godujdNim(> вшзонжз
87
Модель
РФ -04-01
Расчет радиальной нагрузки
на опоры
Значения коэффициента k
k Передача
1,1 Зубчатая а =20°; [3 = 0
1,25 Цепью
1,5 Клиновым ремнем
3 Плоским ремнем
2 То же, с натяжным роликом
0,3 Упругой муфтой
Схем А а! Схема2 D_Da нв~н h Схема 3 A r
R JL „ A В ' 1 1 1— i'i
*а b " b Ra* 41 ь
-О 'Л а- D >b -n a a+b Ra Ina+b -R~r 4^
Вал № Зубчатка или шкив в кГсм D в cm P окр в кГ R в кГ Схема № а в мм 3 и k. sc M RB в кГ SZ?y|B кГ ^Rbb кГ
— — — — — — — — — — — —
1
88
РФ-04-03
Модель
Расчет нагрузок на опоры червячной передачи
Крутящий момент на червяке
| кГсм
Осевая нагрузка на червячном колесе
М.
р.
Тангенс угла подъема витка червяка
z,m --------
tgX= = 5--------= ||
ч
Распорное усилие
| кГ
tg А. ------
Осевая нагрузка на червяке
А
tgA.
| кГ
Угол зацепления а = [
К
Нарезка червяка правая
\см
Суммарная
Нарезка червяка левая
\см
]см
Гк =
|кГ
радиальная нагрузка
*i = ^/(W + (№1±V4)2 = —V
Дн=77 m6i)2+(^i±^)2 = -L v
кГ
кГ
кГ
я1У=7Г У(ЛА)2 + (рл ± W
кГ
Л1Ч = Г
1
* Без учета потерь в передаче
S9
to температурный коэффициент km (табл. 4) 1 J 1 i 1 1 ►— № пп РФ-05-01
1 to Место установки подшипника
w коэффициент вра- щения кольца kK (табл. 3)
7 приведенную ради- альную нагрузку Q = k рР + кдА I Вычисляем 1
w Расчет- ное Пр число боротов подшипника в минуту 1 Исходные данные 1 Проектировочный расчет подшипников качения
сл условную нагрузку на подшипник Q == крежкткк Q * - - S'® 2 м CD СГ 1
сл со ь . сг м Чзязч BJ д я • нагрузка на подшипник в кГ
сг> необходимый коэф- фициент работоспо- собности с = <?1(пй)°-3
о> о СО со
ПОДШИП- НИК d х D х b Выбираем Необходимая рабо- чая долговечность подшипника h в ч
00 g»232»s о ? я
00 предельное число оборотов ппред
J'odn СО «г коэффициев приведен! к радиальн нагрузке (табл. 1; I Выбираем 1
СО допустимую статиче- скую нагрузку Qcm
(олжен! о
Ю О коэффициент работо- способности С
° а 3 да £ I Модель (
яе табл. коэффи- циент режима креж (табл. 2)
to ® Я к Л TJ л> Р д
Продолжение РФ-05-01
Таблица 1
Тип подшипника Соотношение нагрузок kP kA
Однорядный радиальный шариковый А < 0,25Р 1 0
А > 0,25Р 0,75 1
Р~0 0 1,5
Радиально-упорный шариковый V /Л о о СП о Чз 1 0,55 0 0,6
Роликовый конический серии 7200 и 7500 V /Л о о to to от От "хз Чз 1 0,6 0 1,5
Роликовый конический серии 7300 и 7600 А < 0,25Р 1 0
А > 0,25Р 0,6 1,8
Роликовый с углом конуса р > 25° А 0,55Р 1 0
А > 0,55Р 0,55 0,6
Таблица 2
Характер нагрузки на подшипник креж
Наличие толчков Кратковре- менная перегрузка в % от нор- мальной (расчетной)
Спокойная без толчков | Нет 1
Легкие толчки | До 125 1 — 1,2
Умеренные толчки, вибрация на- грузки До 150 1,3—1,8
Значительные толчки и вибрации До 200 1,8—2,5
Сильные удары, повышенная тем- пература узла, ненадежность уп- лотнений До 300 2,5—3,0
Таблица 3
Вращающееся кольцо Для подшипни- ков kK
Внутреннее Всех типов 1 1
Сферических 1,1
Наружное Всех прочих 1,35
Таблица 4
Рабочая температура подшипника в °C 125 150 175 200 225 250
Значение km 1,05 1,1 1,15 | 1,25 1,35 1,4
* Значение hp см. РФ-05-03
91
Модель
РФ-05-02 Поверочный расчет подшипников качения
№ п. п Место установки подшипника Исходные данные Характеристика установленного
Число оборотов подшипника в минуту Нагрузка на подшипник в кГ тип и № Предельное число оборо- тов ппред
расчетное пР наиболь- шее "max радиаль- ная Р осевая А
1 2 3 4 5 6 7 8
Продолжение
подшип- ника Выбираем Вычисляем Необходимая рабочая долговечность подшип- ника h Примечание
допустимая стати- ческая нагрузка Qcm коэффициент работоспособности С коэффициент приведения к радиальной нагрузке (табл. 1) коэффициент режи- ма креж (табл. 2) । температурный коэф- фициент km (табл. 4) коэффициент вра- щения кольца kK (табл. 3) 1 приведенную ради- альную нагрузку Q = крР+кдА условную нагрузку на подшипник Qi = ЬрежЬткцР расчетное значение (»ЛР)°’3= расчетную долговеч- ность hp *
kA
9 10 11 12 13 14 15 16 17 18 19 20 21
—
* Значение /^приведено в РФ-05-03.
92
Продолжение РФ-05-02
Таблица 1
Тип подшипника Соотноше- ние нагрузок
Однорядный радиальный шариковый А < 0,25Р 1 0
А > 0,257* 0,75 1
Р^0 0 1,5
Радиально-упорный шариковый А < 0,6Р 1 0
А > 0,6Р 0,55 0,6
Роликовый конический серии 7200 и 7500 А < 0,257* 1 0
А > 0,257* 0,6 1,5
Роликовый конический серии 7300 и 7600 А < 0,25Р 1 0
А > 0,257* 0,6 1,8
Роликовый с углом конуса р > 25° А < 0,55Р 1 0
А > 0,55Р 0,55 0,6
Таблица 2
Характер нагрузки на подшипник &реж
наличие толчков кратковре- менная пере- грузка в % от нормальной (расчетной)
Спокойная, без толчков — 1
Легкие толчки До 125 1—1,2
Умеренные толчки, вибрация на- грузки До 150 1,3—1,8
Значительные толчки и вибрации До 200 1,8—2,5
Сильные удары, повышенная темпе- ратура узла, ненадежность уп- лотнений До 300 2,5—3,0
Таблица 3
Вращающееся кольцо Для подшипников kK
Внутреннее | Всех типов 1
Наружное Сферических 1,1
Всех прочих 1,35
Таблица 4
Рабочая температура подшипника в °C 125 150 175 200 225 250
Значение km 1,05 1,1 1,15 1,25 1,35 1,4
93
Числовые значения величины (п/гр)°»3
уП в об/мин hp В 10 16 20 25 32 40 50 63 80 100 125 160 200 250 320 400 500 630 800 1000 1250 1600 2000 2500 3200
100 8,0 9,2 9,8 10,5 11,2 12,0 13,0 13,8 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7
125 8,5 9,8 10,5 11,2 12,0 13,0 13,8 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0
160 9,2 10,5 11,2 12,0 13,0 13,8 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3
200 9,8 11,2 12,0 13,0 13,8 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0
250 10,5 12,0 13,0 13,8 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 39,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0
320 11,2 13,0 13,8 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0
400 12,0 13,8 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0( 51,3 55,0 59,0 63,0 67,6
500 13,0 14,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 -32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5
630 13,8 16,0 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7
800 14,8 17,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7 83,2
1000 16,0 18,2 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7 83,2 89,0
1250 17,0 19,5 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7 83,2 89,0 95,5
1600 18,2 21,0 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7 83,2 89,0 95,5 102,0
2000 19,5 22,4 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7 83,2 89,0 95,5 102,0 110,0
2500 21,0 24,0 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55, । 59,0 63,0 67,6 72,5 77,7 83,2 89,0 95,5 102,0 110,0 117,0
3200 22,4 25,7 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7 83,2 89,0 95,5 102,0 110,0 117,0 126,0
4000 24,0 27,5 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,6 67,6 72,5 77,7 83,2 89,0 95,5 102,0 110,0 117,0 126,0 135,0
5000 25,7 29,5 32,0 34,0 36,3 39,0 41,7 44,7 48,0 51,3 55,0 59,0 63,0 67,6 72,5 77,7 83,2 89,0 95,5 102,0 110,0 117,0 126,0 135,0 145,0
Пример. Даны: Коэффициент работоспособности подшипника
№ 208—С =э 36 000 (из каталога)
Условная нагрузка Q = 460 кГ (из расчета)
Расчетное число оборотов п = 400 об/мин. (из расчета)
_ . . .• з С 36UUU
Вычисляем величину (n/io) » = — = - - = 78
р Q 460
По таблице для п = 400 об/мин и {nhp^ ’ «= 78
находим долговечность подшипника hp =» 5000 ч
Примечание^ Значение hp для п > 3200 об/мин см. в каталоге «Шариковые и роликовые подшипники»,
Союзподшипниксбыт, стр. 65
Таблица для определения - моаель
РФ-05-03 долговечности подшипников
из формулы hp = ^f'3aL
Модель
РФ-05-06
Выбор класса точности шпин-
дельных подшипников
Оправка
ГОСТ
Биение
Ъ =
оправки регламен-
тированное
| мм
Методика расчета:
Выбирают класс точности переднего (или заднего) подшипника и затем
рассчитывают необходимую точность заднего (переднего) подшипника
Радиальное биение подшипников в мм по ГОСТ 520-55
Номинальный диаметр
вала d в мм
Классы точности
свыше ДО Н 77 1 В и ВП | А и АВ | С и С А
30 0,013 0,010 0,010 0,005 0,003
30 50 0,015 0,012 0,010 0,005 0,003
50 80 0,020 0,016 0,012 0,006 0,004
80 120 0,025 0,020 0,014 0,007 0,005
120 180 0,030 0,024 0,016 0,008 0,006
180 250 0,040 0,032 0,020 0,010 —
250 315 0,050 0,040 0,024 0,012 —
315 400 0,060 0,048 0,030 0,015 —
3; щаемся рг идеальным биением:
подшипника
переднего
заднего подшипника
«2= |___________
Допускаемое радиальное биение:
переднего подшипника
0,67mb — k2c2
C1 = kx(m+ 1) =
0,67 ______
заднего подшипника
0,67/иЬ — kY (т 4- 1) С]
с2=-----------------------
0,67
k2
т =
класса
«2 ।------------[
где т = =----------= ||
£х, — коэффициенты, учитывающие количество подшипников, установленных
соответственно в передней и задней опорах: при двух подшипниках £1,2 = 0,71.
Таким образом, окончательно принимаем:
в передней опоре — | | подшипник
в задней опоре — | | подшипник
Примечание. Точность подшипников задней опоры следует выбирать на
1—2 класса ниже точности подшипников передней опоры
класса
95
РФ-05-07 Расчет радиально-упорных и радиальных подшипников повышенной точности с предва- рительным натягом Модель
Исходные данные:
Рассчитываемый подшипник |
Коэффициент работоспособности подшипника
Угол линии давления
Диаметр шариков в подшипнике*
Количество шариков в подшипнике*
Начальный радиальный зазор в поде
( радиальная
Нагрузка на подшипник <
( осевая
Рабочее число оборотов подшипника
Желаемая долговечность подшипника
Величина минимально необходимого предварительного
II II О ОХ
d=l 1 мм
г= 1 1
пнике (см. м таблицу) I мм
Я = 1 \кГ
4 = 1 | кГ
п = ___ об/мин
Л=1 4
натяга**
| кГ
:н
Ао min = 1,58 /?tg₽± 0,5 =1,58
tg ± 0,5
Выбранная величина предварительного натяга* ***
Условная нагрузка на подшипники узла****
Ъусл = [R + m(A„± 0,5А)]
|кГ
________R
Примечание. Большая величина QycA относится к подшипнику непосред-
ственно воспринимающему рабочую осевую нагрузку, меньшая — к подшип-
нику, который разгружается от рабочей осевой нагрузки.
Необходимый коэффициент работоспособности рассчитываемого подшипника
c«=Q^(«A)°’3= =1 1<
качения (справоч-
* Бейзельман Р. Д. и Цыпкин Б. В. Подшипники
ник), стр. 426—445 и 492—501, Машгиз, 1960.
** Для однорядных шариковых подшипников z4omin
тельно можно определить по формулам Ао min = 0,04 zd2\
и AZ приблизи-
Д/ = 0,0156 d.
*** Усилие предварительного натяга Ао выбирается по наибольшему из
двух полученных значений Лот£п.
**** Значения т, k6, kK, km см. в работе P. Д. Бейзельман и Б. В. Цыпкин,
Подшипники качения, стр. 193—195.
96
Продолжение РФ-05-07
Нормальное давление на шарик от действия предварительного натяга
Р = -^5 =--------:----= кГ
о zsinp sin 1-----------------------1
Вспомогательный коэффициент
3 3
tf=]/p2dJ = j/' ~ | |
Разность длин распорных втулок (или съем металла с торцов подшлифовы-
ваемых колец) для создания необходимого предварительного натяга*
AZ = 2 ~|/ 4’1° 6/^+1,2.10~4К —0,25Z24- 0,03d/ =
= 2 ]/" 4-10~6---+ 1,2-10-4 — °>25 + 0,03 = | | мм
Примечание. Рассчитанная таким образом величина Д/ может служить лишь
для предварительной ориентировки, в ответственных случаях (шпиндельные
подшипники) эта величина должна быть определена экспериментально (см.
Р. Д. Бейзельман и Б. В. Цыпкин, Подшипники качения, стр. 230—238).
Начальные радиальные зазоры в радиальных однорядных
шарикоподшипниках
Диаметр отверстия под- шипника d в мм Радиальный зазор в мк Измерение под нагруз- кой в кГ
свыше ДО наименьший наибольший
2,5 ю 5 16 ±2
10 18 8 22
18 24 10 24 ± 5
24 30 10 24
30 40 12 26
40 50 12 29
50 65 13 33 ±10
65 80 14 34
80 100 16 40
100 120 20 46
120 140 23 53
140 160 23 58 ±15
160 180 24 65
180 200 29 75
* Вычислять с точностью до десятых долей мм
% 1275
97
РФ-05-09 Модель
Расчет проволочно- шарикового подшипника*
ВМ5®
Р.4 \см
Исходные данные:
Досевая Р = |_
& .------] Нагрузки I радиальная Q=j_
пр ----- S опрокидывающий __
| момент М = |
] кГ
1 кГ
| кГсм
Ширина беговой дорожки** 6=|___| см Диаметр шарика d = [
| см
Твердость проволоки НБ = | | кГ/мм? Число шариков z = [
Удельная нагрузка
на шарик при действии:
Осевой нагрузки
1,4 1,4
| кГ
Радиальной нагрузки
Q
К = 3,5 у = 3,5
| кГ
„ ™ 7
Опрокидывающего ^момента д = = -
| кГ
Допускаемая удельная нагрузка на подшипник
/Я5\2 / \2
| кГ
к = \
Т кГ <[/(] = [
I кГ
* Рекомендуемая ширина беговой дорожки b 0,3 dnp — при непосредствен-
ном накатывании проволоки шариком, b 0,6d„p — при накатывании шари-
ком по предварительно прошлифованной проволоке.
** В предварительных расчетах допускаемая нагрузка на подшипник мо-
жет определяться по следующим эмпирическим формулам:
Осевая нагрузка (г] = 15(Ю= 150 = | | кГ
Радиальная нагрузка [ Q] = 60D = 60 = | \_кГ
Опрокидывающий момент [М] = 30Z)2 = 30 = । | кГсм
98
Модель
РФ-06-01 Расчет цилиндрической пружины сжатия из круглой проволоки
Исходные данные:
Наименьшее рабочее усилие
р* = !| кГ
Наибольшее рабочее усилие
р’ = |_______L кГ
Наружный диаметр пружины
D =| | мм
Диаметр проволоки
d =>j [ мм
Рабочий ход пружины
Н = | | мм
тл „ D-d
Индекс пружины С = — =--------
Коэффициент К = 1 + 1^ — i 115
О
Наибольшее усилие, развиваемое пружиной
</з *
Р= °'392 = °-393------
Усадка одного витка при нагрузке Р
j e 0,001---~rf--3p = 0,001---------------------
d*
Шаг пружины в свободном состоянии
f = d + f4-A =
e 1 [
-1 1
= ! | кГ
= I 1 мм
о | | мм
(Д а 0,2 4- 2 мм — зазор между витками при нагрузке Р;
t — округляется до целого числа)
тт „ HP
Число рабочих витков п — —------5— = ----------
__ ДР»—Р1)
Усилие пружины при сжатии до соприкосновения витков
Длины пружины
В свободном СОСТОЯНИИ Lce nt -f- d =3
•= I I
- I I КГ
Под нагрузкой Р,
Под нагрузкой Р2
— Lce nf р —
L2 =3 LCe nf — =>
P
D3 = LCq -- nf~b
Под нагрузкой Р,
Длина проволоки I == rc(D—d} (п -f- 1»5)
= 1 | мм
= 1 I мм
= 1 I мм
= 1 | мм
_ 1 1
1 мм
Допускаемые напряжения на кручение выбираются по следующей таблице
d в мм Проволока марки П(ГОСТ 6047-49) Сталь 60С2 (ГОСТ 2052-53)
О,2|о,з|о,4 |о,5|о,б|о,8 1,о| 1,2)1,б|2,о|2,5| 3 | 4 | 5 6 | 7 | 8 | 10| 12| 14| 16
txUi | 66 | 63| 60 58| 57| 55| 52| 49| 4б| 43| 39| 39
[т]£П | 97 | 92| 88| 8б| 841 81| 771 731 68| 64| 57| 59
Индекс I относится к пружинам, работающим с числом циклов свыше 100 в минуту,
II — менее 100 циклов в минуту
7*
99
Модель
РФ-06-02 Расчёт цилиндрической пружины растяжения из круглой проволоки Исходные данн! ле:
Индекс пружины С = — =--------- = | |
1,5 15 ________
Коэффициент К = 1 + = 1 +---------- = ' |
Наибольшее усилие, развиваемое пружиной
________________________________________________________________
р = 01393 ПЦЬ-d) MZ = °’393----------- = I______________I кГ
Деформация одного витка под нагпузкой Р
(D _ ^)з * ________
f = 0,001 -- Р = 0,001----------- = || мм
тт HP ________
Число рабочих витков п — -777--57 =----------- = | |
/ V 2 ^1) --------
Предельное усилие, развиваемое пружиной
f + Д ________
Рз = Р “у— =------------ = I| «Г
где Д = 0,2 ~ 2 мм — дополнительная деформация витка; (/ + Д) — предель-
ная деформация.
Длины пружин:
В свободном состоянии Lcq = d (п + 1) = = 1 | мм
В местах крепления Lk = Lce + 2(£> — 2d) = = 1 1 мм
р При нагрузке Pr = L -pfn —
= 1 1 мм
р2
При нагрузке Р2 L2 = Lk = = 1 1 мм
Рз
При нагрузке Р3 £3 = Lk + ~pfn = = 1 1 мм
Длина проволоки 1 = к (D — d) (п + 2) = = 1 1 мм
* Допускаемые напряжения на кручение выбираются по следующей таблице
d в мм Проволока марки П (ГОСТ 6047-49) Сталь 60С2 (ГОСТ 2052-53)
В кГ 0,210,310,410,510,610,811,011,211,612,012,51 3 | 4 | 5 6
Mai | 66 |63 160 |58 |57 |55 |52 |49 |46|43|39| 39
Wai | 97 |92188 |86 |84 |81 |77 |73 |68|б4|57| 59
Индекс I — относится к пружинам, работающим с числом в минуту, II —менее 103 циклов в минуту циклов свыше 100
100
РФ-06-05 Модель
Расчет цилиндрической пружи- ны кручения из проволоки круглого сечения
Исходные данные:
Наибольший (рабочий)
крутящий момент
Мнб = 1 I кГсм
Наименьший (рабочий)
крутящий момент*
Мнм =1 I кГСМ
Рабочий угол поворота
торца пружины
®° = I I
Условия работы пру-
жины
Материал пружины**
Допускаемое напряже-
ние на изгиб***
Расчетный диаметр проволоки dp — 0,5
Принятый диаметр проволоки*****
|к/7лш2
= | ] см
d = | \ см
Индекс пружины
D — d
с-~з~
I >4-5
Коэффициент формы k0 — 4 =-----= | |
5450° d3
Расчетное число витков Пр = (мнб-Л4нл()С =----------= I I
Принятое число рабочих витков п =[ |
Предельно допускаемый угол поворота торца пружины
1,8Сп[а]м _________о
^пред = 100ko = = I I
Предельно допускаемый крутящий момент пружины
„ 9,8d3[o]„ ________
М пред ----------= ---------= | | кГсм
101
Продолжение РФ-06-05
РФ-06-05 Модель
Расчет цилиндрической пружи- ны кручения из проволоки круглого сечения
Наибольший рабочий угол закручивания пружины
ф __ ^пред^нб _ ।?
^кон ~М 7“ _________
*vlnped
* Мнм обычно принимают в пределах (0,1 ч- 0,5) Мнб
* * Для пружин из проволоки 0 d < 6 мм применять сталь марки П;
для пружин из проволоки 0 d > 6 мм применять сталь марки 60С2
* ** Допускаемые напряжения на изгиб [п]и выбираются по таблице:
Материал проволоки Сталь марки П Сталь мар- ки 60С2
d в мм | 0,2 — 0,5 | 0,6| 0,8| 1,0| 1,2| 1,б| 2,о| 2,5| 3 | 4 | 5 | 6—16
аь в кГ/мм2 | 220 |210|200| 195| 190| 185| 1751165| 155| 145| 130| 130
[т] в кГ/мм2 | 121 1115|110| 107| 104| 102| 96 | 91 | 85 | 80 | 71 | 78
[<>]„= 1,25 [г] | 151 |144|138|134| 130| 128|120|114|10б| 100| 89 | 97
**♦* Значения коэффициента klf учитывающего условия работы пружины,
п риведены ниже_______________________________________________
Условия нагрузки Характер нагрузки Безударная | Ударная
Число циклов изменения нагрузки <100 > 100
Коэффициент режима kr
0,75 | 0,55
***** Проверить соответствие принятой величины [a]w полученному d.
****** Шаг пружины в свободном состоянии
f=d+(0,1-4-0,5) =
| мм
102
Модель
РФ-06-07
Расчет сжатой пружины
при разворачивании
Исходные данные:
Угол наклона оси пружины
-Г 1°
Предварительное сжатие пружины
/о = I I СМ
Сила предварительного сжатия пружины
ро = I I кГ
Коэффициент трения скольжения
н = |
Величина груза Q =|
j кГ
Путь, пройденный грузом в процессе разворачивания пружины к момен-
ту, t* = | | сек
| сек,
Наибольшая скорость груза I в момент
к
, _~2 _ 1,57
(О
т. е. при х = А
| см
v = Аы =
max
| см/сек
* При t = 0; v = 0 и х = 0
* * В случае массивной цилиндрической пружины в формулу следует
взамен Q внести Q 4- т/3 Qo, где Qo — вес пружины
103
РФ-06-09 Модель
Расчет кругового эксцентри- кового зажима*
Исходные данные:
Ход эксцентрика
s= [
| мм
Наибольший угол поворота рукоятки
апов
Начальный угол установки эксцентрика
Ширина эксцентрика
*=1
Необходимое усилие зажима Р = |
Длина рукоятки
^=[
Необходимая величина эксцентриситета
s
1°
I мм
\кГ
I мм
е cos а — cos (а + апов) I---------1 ММ
Наименьший радиус цапфы эксцентрика (из условий самоторможения)
Г = 5е [1 — sin (а + 6°)] = 5 [1 — = [ | мм
Наименьший радиус цапфы эксцентрика (из условий удельного давления)
Принимаем г
Наименьший радиус диска эксцентрика
/?min = 10(e-0,lr) = 10( -0,1
Наибольший радиус диска эксцентрика
^шах = 10е sin (а + 6°) + г = 10 +
| мм
\ мм
_[ мм
Принимаем R
Усилие, приложенное к рукоятке эксцентрика,
Q*** = Z.5[e + 0,l (г 4-/?)] =----51 + 0,1 (
| мм
| мм
I кГ
* В расчете принят угол трения р = 6°
** При материалах сталь по стали [а]СЛ< = 100 кГ/см2
*** Не должно превышать 15 кГ
104
РФ-06-10 Модель
Расчет зажима магнито- стриктора
Необходимое суммарное
Исходные данные:
Наибольшее осевое усилие на подающем
стержне Р = |' | кГ
Диаметр стержня в зажиме d = |
Длина оболочки зажима
Толщина стенки зажима
усилие зажима стержня
| мм
| мм
| мм
м
Q — ? —
где р = 2ч- 2,5 — коэффициент запаса усилия зажима
f == 0,08 — коэффициент трения между зажимом и
попадания смазки)
стержнем (при учете
Давление
усилия Q,
масла в полости зажима, необходимое для
создания зажимного
100Q
8,4 10%А 100 , 8,4-10е
ud(Z —4M5d) г d2 =V +
| кГ/см2
где (Z — 0,15d) — рабочая длина оболочки зажима
Д — расчетная величина радиального зазора в зажиме, выбираемая из таблицы:
d в мм 30—79 80—120
& в мм 0,03 0,04
Напряжение растяжения в стенке зажима
ар = 4’2:?0—= 4^J0_4 = | | кПмм* < [о]р = 40 кГ/мм?
Напряжение изгиба в концевых сечениях оболочки
0,009 Pd 0,009
% = --------- =------=
| кГ/мм2 [а]м = 56 кГ/мм2
h
Материал оболочки зажима сталь ЗОХГС (HRC40 — 45)
105
Модель
РФ-06-12 Расчет мембранного патрона
(без центрального окна)
Исходные данные:
Передаваемый крутящий момент
Зажимаемый диаметр детали
dd=\
Принятые размеры патрона:
Радиус защемления мембраны
а = I____________________________
Радиус расположения кулачков
b = I
| кГсм
мм
мм
мм
Зажим детали осуществляется Высота кулачков
силами упругости предварительно
изогнутой мембраны Толщина мембраны
Радиус стержня толкателя или центрового винта
Суммарная нормальная сила зажима детали
20Л4 20
= =--------------------=
где f ж 0,15 — коэффициент трения между деталью и кулачками
р = 1,5-4-2 — коэффициент запаса
Цилиндрическая жесткость (стальной) мембраны
D = 1930Л3 = 1930
Радиальное перемещение кулачков, необходимое для создания
зажимного усилия
Д =
h=\
4Г— I1-----------) =L
Усилие, необходимое для разжима патрона,
_ 4я D (А + е + 0,56) 4- _
Q 2,36/1g — 2,3
ё Ь
где s — радиальный зазор, облегчающий установку детали
е = 0,0004с^ + 0,02 = 0,0004 + 0,02 = | | мм
Ъ — допуск зажимаемого диаметра детали; В = | | мм
Прогиб мембраны, соответствующий усилию Q,
Qa2 -
тах 16 тс/) - 16тс Ч
Наибольшее напряжение в материале мембраны
(2\ / \
а го\ 2 / \ —
2,3 1g — 4- — 2,3 + -Л---- - I
6 г0 ‘ 4а2 / тс \ 4 I '—
кГ
а [а] = 40 —- для стали 65Г термически обработанной М43
Диаметр отверстия патрона в свободном состоянии
^ = damin-2(A + 0 = -2( + )= Г
где dd min — нижний предельный размер зажимаемого диаметра
а =
2,3
мм
ММ
мм
кГ
кГмм
I мм
'I кГ
1 мм
| кГ/мм2
| мм
106
Модель
РФ-06-13
л. 1
Расчет мембранного патрона
(с центральным окном)
Исходные данные:
Передаваемый крутящий момент
Чс=Г
Зажимаемый диаметр детали __________
dd = | | мм
Принятые размеры патрона:
Радиус защемления мембраны
а = 1
Радиус расположения кулачков
| кГсм
мм
мм
Зажим детали осуществляется
силами упругости предвари-
тельно изогнутой мембраны
Радиус центрального окна с = |
Высота кулачков
Толщина мембраны
Суммарная нормальная сила зажима
20А1к 20.
—
где f 0,15 — коэффициент трения между деталью и кулачками
Р = 1,5 -т- 2 — коэффициент запаса
Цилиндрическая жесткость (стальной) мембраны
D = 19307г3 = 1930 • = Т
Радиальное перемещение кулачков, необходимое для создания
зажимного усилия
2М2Д b2\
Д~ *1 — а2/ ~4к
Усилие, необходимое для разжима патрона
q _ -1 D (А + е + 0,58) _ 1_
~ ki 2,ЗЯ 1g
ё Ь
где е — радиальный зазор, облегчающий установку детали;
е = 0,0004da + 0,02 = 0,0004 +0,02 = | | мм
Ь — допуск зажимаемого диаметра детали
Прогиб мембраны, соответствующий усилию Q,
, О.а2
“’тах-А:з"16^О~1б7
Наибольшее напряжение в материале мембраны
ЧО ч /1,3—1,3—6 —
о <2 I а2 с I 3 /
2л/г2 у 1 + 1,8б|! /~2я \ 1+1,86-
Л = |
детали
| мм
| мм
| мм
| кГ
I кГмм
мм
4п
кГ
*4
а [ст] = 40 кГ/мм2 для стали 65Г термически обработанной М43
Диаметр отверстия патрона в свободном состоянии
dnc = dd min ~ 2 + £) = — 2 ( + ) = I____
гДе dp min — нижний предельный размер зажимаемого диаметра
мм
мм
\кГ/мм2
| мм
107
РФ-06-13 л. 2 Модель
Расчет мембранного патрона (с центральным окном)
Значения коэффициента k2
Й | й / / ° 1 °* 0,30 0,35 0,40 0,45 0,50 0,55 0,60 0,65 0,70 0,75 0,80
0,10 1,19 1,14 1,10 1,08 1,06 1,04 1,03 1,02 1,02 1,02 1,01
0,15 1,41 1,31 1,21 1,16 1,12 1,10 1,08 1,06 1,04 1,04 1,03
0,20 1,73 1,55 1,37 1,29 1,21 1,17 1,13 1,10 1,07 1,05 1,04
0,25 1,79 1,55 1,43 1,31 1,24 1,18 1,14 1,11 1,08 1,06
0,30 1,81 1,62 1,43 1,34 1,25 1,20 1,15 1,11 1,08
0,35 1,81 1,59 1,46 1,33 1,26 1,19 1,15 1,11
0,40 1,55 1,42 1,33 1,24 1,18 1,13
0,45 1 1 1,52 1,40 1,29 1,22 1,16
Значения коэффициента k2
«О | Q / / Ъ | Q 0,30 0,35 0,40 0,45 0,50 0,55 0,60 0,65 0,70 0,75 0,80
0,10 1,31 1,24 1,16 1,14 1,12 1,11 1,10 1,09 1,08 1,08 1,07
0,15 1,50 1,38 1,26 1,23 1,20 1,18 1,16 1,15 1,13 1,12 1,11
0,20 1,64 1,49 1,33 1,29 1,25 1,23 1,20 1,19 1,17 1,16 1,15
0,25 1,51 1,35 1,30 1,26 1,24 1,21 1,20 1,17 1,16 1,15
0,30 1,36 1,31 1,27 1,24 1,22 1,20 1,18 1,17 1,16
0,35 1,24 1,21 1,19 1,17 1,16 1,14 1,13 1,12
0,40 | 1,13 1,12 1,11 1,10 1,09 1,08
0,45 1,02 1,02 1,02 1,01 1,01
Значения коэффициента ks
с а j 0,10 0,15 0,20 0,25 0,30 0,35 0,40 0,45
^3 1 ыо 1 1,13 | 1,09 I 1,00 | 0,88 | 0,75 1 0,61 | 0,50
108
Модель
РФ-07-01 Расчет соединения вала со ступицей
кГсм
Мк — |\кГсм2
Шпонка b h I =
= |_| I I I I СМ
d = | | см
Напряжение смятия
а = 1___= | j кГ/см2
см _dhl !---!
асм = [_\кГ/ем2^]см=\___| кГ1см2
Напряжение среза
2М 9 -----
т „ =___* = -___= I I кГ/см2
ср _dbl !---1 '
тср = I IкГ>см2, WCp=l IкГ''см2
d = | | см
d-t = |I см
М* = | | кГсм
Напряжение среза
1,27МЛ 1,27 ___-
т =------7)-=--------=| кГ/см2
ср d^d 1--1
трр = j \кГ/см2 < [т]ср=|__| кГ/см2
мк=т
4=1
см
см
Число шлицев
г=||
I = I| см
Напряжение смятия
12,5МК
12,5
= | | кГ/см2
асм = о кГ [см2 < [o]gJM| I кГ/см2
Л1К=Г
6 = 1
к Г см
см
см
Напряжение смятия
см ьч 1
° см = LJ /сл<2 = 1°1Сл<=!___! кГ>см2
| кГ/см2
Допускаемые напряжения
Вид соеди- нения Условия работы соединения Смятия [а]СЛ£ в кГ/см2 Среза [Tjcp в кГ/см2
Материал ступицы Материал шпонки, штифта
Чугун Сталь Сталь термообр. Сталь 45
Штифт, шпонка, квадрат Неподвижное 800 1500 1200
Подвижное без нагрузки 400 700
Шлицы Неподвижное 500 1000 1500
Подвижное без нагрузки 300 600 900
Подвижное под нагрузкой 100 150
Примечание. При ударной нагрузке допускаемые напряжения уменьшаются
на 50%.
109
РФ-07-06
Модель
Расчет болтового стыка базовых деталей на жесткость
'll =[
П2 = I
кГ
кГсм
Исходные данные:
Нагрузка на стык N — |
М =1
Размеры болтов:
в крайних рядах (а—а) |___
в средних рядах (б—б) |
Число болтов
в крайних рядах
в средних рядах
Коэффициент жесткости
стыка* К = Т
Площадь поперечного сечения болта:
крайнего f =—, 2 среднего f = —, 2
ряда 11 •------1 ряда 12 !--1
Длина деформирующейся части болта:
крайнего , =— среднего, —
ряда 1 1-------1 ряда 2 1--!
кГ/смг
Площадь опорной поверхности
F1=BH — bh =
Момент инерции площади стыка относительно средней оси I — I
Л = (B//3-W) - )=]
Приведенная площадь стыка
F =^14-2,1.10» = 4-2,1 • 10»(—4- —) =1
Приведенный момент инерции стыка
J = KJX 4- 2,1 . 10» 4- П-^\ =
\ ‘i 12 /
стыка
I см2
| см4
| кГ/см
= + 24 • 106
J кГсм
Минимальное напряжение предварительной затяжки стыка (из условия рабо-
ты всех болтов)
(0) _ 2,ЬЮ6/М
cmin Vi \ «/
Фактическое напряжение предварительной затяжки стыка
а(0) = — [
2,1 • 10е
| к Г/см2
| кГ/см2
* Для малых и средних станков рекомендуется принимать К=№МкГ/смг
(«Станки и инструмент», 1951, № 1).
ПО
Продолжение РФ-07-06
Модель
РФ-07-06 Расчет болтового стыка базовых деталей на жесткость
Фактическое усилие предварительной затяжки:
в болтах средних рядов =
в болтах крайних рядов = — а^°^2 =
Рабочие усилия (после приложения нагрузки):
в болтах крайних рядов
Р1=Р(0)+?^/"
2,1 • 106
.1 кГ
1 кГ
в болтах средних рядов
2,1 • 106 /#
р2 = р^>4 '
2,1 • 10е
1 кГ
| кГ
12 I/ Х
Максимальное напряжение
= а<°>
на опорной поверхности стыка
W МН\ /
стах — + Д ~ J 2 j == + ~
Угол поворота торцовой поверхности стыка
М _________
? = ~j=z------= I________L Рад
j кГ
]кГ
| кГ/см2
2
* Для сопрягаемых деталей из чугунного и стального литья можно при-
нимать [о] 600-7-900 кГ/см2
111
Модель
РФ-08-01
Расчет многодисковой
фрикционной муфты
Передаваемый муфтой крутящий момент
М = | | кГсм
Коэффициент запаса сцепления
Р = | | (обычно р = 1,25 -т- 1,5)
Число пар поверхностей трения
i = \ I
Окружная скорость на среднем диаметре
трущихся поверхностей
= к (£> + d) n = 2=
60 • 100 • 2 12000
= |[ м/сек
п = | | об/мин
Коэффициенты трения f и наибольшие допускаемые удельные давления
[р] кР/см2 для фрикционных муфт
Муфты | Материалы | f [р] в кГ/см2
Ф а СЙ ч се £ Закаленная сталь по закаленной стали 0,06 6—8
Текстолит по стали 0,15 5—6
Чугун по чугуну или по закаленной стали 0,08 6—8
ф я X О Прессованный асбест или феррадо по стали или чугуну 0,3 2—2,5
Чугун по чугуну или по закаленной стали 0,15 2,5—3
При малых числах дисков — верхние значения [р], при больших — нижние
При окружных скоростях на среднем диаметре v ^2,5 м/сек удельные дав-
ления умножаются на коэффициент kv
Окружная скорость на среднем диаметре поверхности трения v в м/сек 2 2,5 3 4 6 8 10
Коэффициент скорости kv 1,08 1 1 0,94 0,86 0,75 0,68 0,63
При постоянной работе с числом включений и реверсов больше 50—100 в час
(в зависимости от размера) удельное давление [р] снижается на 1% на каж-
дые дополнительные 5—10 включений и на 2% на каждые дополнительные
5—10 реверсов. Для многодисковых муфт с тонкими дисками значения допус-
каемого удельного давления снижается на 30—40%.
Необходимое осевое усилие
п 4______________________
® ~ (D + d) if ~ — 1_______! кГ
Удельное давление на трущихся поверхностях
Л 4 Q 4 __________ _______________
Р ~ (D2 — (Р ) — 7U I I [Pl = I!
112
Модель
РФ-08-06
Расчет шариковой предохрани-
тельной муфты
Твердость HRC = | |
Число одновременно работающих Число рабочих витков
шариков z = || пружины п = | "|
Номинальный крутящий момент, передаваемый муфтой,
Мн = || кГсм
Расчетный крутящий момент выключения муфты
= (1,25 -н1,5) Мн= = | | кГсм
Давление пружины в начале включения должно быть
20Л4„ Г 4 1 20 I 4 1 ________,
p«« = E2^Ltg(a_'f)_ ”d=T72l g(~ |кГ
Дополнительное сжатие пружины при выключении
d I j
X = (1 — sin a) = —(1 — ) = | мм
£ £
Жесткость пружины
Gd* ** 8000 ________
a = 80^ п ~ 8 =1_________\ кГ/мм
ср
Нагрузка пружины при выключении
рв = рнв + «*= + = I I кГ
Напряжения в материале пружины
т = ---------------- = I I < I I кГlMMi
nd3 тс 1--------- ---------------1
Условные контактные напряжения в лунке
* Коэффициент, учитывающий трение на поверхности А.
** См. РФ-06-01.
8 1275
113
РФ-08-07
Модель
Расчет срезной предохрани- тельной муфты
Исходные данные:
Номинальный крутящий момент, передава-
емый муфтой, Мн = | | кГсм
Коэффициент запаса 3* = | [
Радиус
Радиус
вала
установки
Число
штифтов
штифтов
s=i:
i=I'
| мм
| мм
Расчетный крутящий момент срабатывания муфты
мр = мнз =
Сила, действующая на срезной штифт:
при установке одного штифта
| кГсм
при установке i > 2 штифтов
1 iR
10
+ 0,15
| кГ
| кГ
10 •
| мм
По величине Р выбираем диаметр штифта d = |
Р в кГ 70 130 290 530
d в мм 1,5 2 3 4
Р в кГ 825 1200 2100 3300
d в мм 5 6 8 10
Р в кГ 5600 8500 13200
d в мм 13 16 20
Примечание. Размеры деталей муфты см. в нормали Р95-1
* Коэффициент запаса принимается 3 = 1,25-?-1,5
114
Модель
РФ-09-01
Профилирование кулака
по параболическому закону
График ускорений
t
График скоростей
Таблица
№ участ. j р II + В II + R, = =рг - vmax -si
0 0
1 1
2 4
3 9
4 16
5 25
6 36
7 49
8 64
Исходные данные:
Угол поворота по циклограмме
Наибольший и наименьший радиусы
траекторий центра ролика
^тах = I | мм< Rmln~ 1 I
Число оборотов кулачкового вала
п = || об/мин
Путь центра ролика
S1 = ^max ^min ~ || ММ
Число участков, на которые разбит
угол поворота кулака,
Профиль кулака рассчитывается по
таблице, где
мм
Время, соответствующее повороту
кулака на угол а,
t = — =
12п 12
| сек
Ускорение (замедление)
01 = ToW = ^ооо- =1=1 м/сек*
Наибольшая скорость
"max = аР = = | |
Наибольший угол давления
8*
115
РФ-09-06 Модель
Расчет контактных напряже- ний в кулачковой передаче
Материал
f
\кГ/смг
Радиус ролика
Радиус кривизны
Исходные данные:
Сила, действующая на кулачок,
Q =| | кГ
г ~ I I см
кулачка в точке каса-
р= I Iсм
ния с роликом
Рабочая ширина кулачка
Материал Г I
..\кГ/™г
Погонная нагрузка, действующая на
Q
<? = -&=---------=
Приведенный модуль упругости
ЧЕхЕг 2
Е - Ег + Е2 ~
Наибольшее удельное давление на
середине площадки касания)
b = || см
Расчетная характеристика материала
| '| кПсм* НБ= |~
или HRC = |
кулачок,
ат
| кПсм
= || кПсм?
соприкасающихся поверхностях (на
= 0,418
Ро = 0,418 I/ qEr^ -
г гр
Условие прочности
р0 = | [ кПсм1 < [р] =
Выбор допускаемых удельных давлений [р]
| кПсм2
| кПсм2
Статическая прочность
Динамическая прочность
При постоянной максимальной нагруз-
ке Q [р] = 2ат
При редкодействующей максимальной
нагрузке Q, когда имеет место хотя бы
незначительное перекатывание контакти-
руюидих поверхностей, [р] = За^
При переменной нагрузке
[р] ~ (25 -н 30) НБ ~
(250 -н 300) HRC*
* Меньшие значения коэффициентов относятся к меньшим значениям
твердости (незакаленные стали); большие — к большим значениям твердости
(закаленные стали)
116
Модель
РФ-11-01
л. 1
Расчет механизма тонкой
периодической подачи шлифо-
вальной головки
Исходные данные:
Размер винта механизма подачи dxs =
Длина сжатой (растянутой) части винта =
Длина скручиваемой части винта
Вес головки
Усилие противовеса
Усилия трения в ( покоя
направляющих 1 движения
осевой
1" =
в
Р =
R =
Тп =
Тд =
Рп “
Ра =
е
мм
1 мм
мм
кГ
кГ
кГ
кГ
о
о
крутильной X =I
Углы трения f покоя
в резьбе винта { движения
Коэффициенты приве- /
дения податливостей
системы к соответ-
ствующим податли-
востям винта*
Общее передаточное отношение привода / = I--1
Цена наименьшей подачи ~...1
^ = |_____I
Необходимое наименьшее перемещение головки
Хо = | | мм
Внутренний диаметр винта dt = | | мм
Средний радиус винта гср = 0,25 (d + dt) = 0,25 ( + ) = | | мм
Угол подъема резьбы винта ф = arctg^/ = arctg = arctg =\________. 1°
Площадь сечения винта
Податливость винта на сжатие
Полярный момент инерции винта
мм2
ев
| мм/кГ
| мм*
F1 = Л df = 0,785 =|-
_£=_______________=|-
EF1 2 • 104 '•
Л> = ^ = 0,1 = [
1" _________________
—___L —_______= I I МкГмм
GJp 8 • 103 1-----1
Минимально необходимый угол закручивания, определяющий возможность
сдвига головки с места
Податливость винта на скручивание
3 = --------—r---------[5,2 х tg (ф + p„) + e ctg ф] = = I
в ср
Перемещение головки при закручивании системы на угол Ь == |
P — R±T. ।------/
х = ь гср —----------------- [5’2 х tg (ф 4- Ра) tg ф + г] = I I
* Расчет коэффициентов s и х см. в РФ-11-01, л. 2.
* * В случае схемы 1/^=0.
117
Модель
РФ-11-01 л. 2 Сводная таблица расчета податливостей
Крутильная податливость
№ п.п Рассчиты- ваемый элемент схемы Пере- даточ- ное отно- шение к винту Размеры вала Полярный мо- мент инерции /р = 0,1^ в мм^ Приведенная податливость K = gTJ 1 В г- кГмм При- меча- ние
Диаметр d в мм Длина 1 в мм
1 1 1 1 1 i 1
1 1 1 1 1 1
1 1 1 1 1 \
Суммарная податливость валов механизма подачи Ж =
Коэффициент приведения податливости элементов, испытывающих действие
скручивающего момента на винте, к крутильной податливости винта
Zk*
X = 1 + -г- = 1 + ------- = 1 + =
кв
Осевая податливость
№ п.п Рассчитываемый элемент схемы Расчетная фор- мула или ссыл- ка на экспери- мент Основные размеры Податли- вость е в мм/кГ Приме- чание
1. Резьбовая часть
винта, сопряжен-
ная с гайкой
2. Крепление гай-
ки к корпусу
3. Упорный под-
шипник винта
4. Упорный крон-
штейн винта
Суммарная податливость элементов =
Коэффициент приведения податливости элементов, испытывающих действие
осевой силы на винте, к осевой податливости винта
Se*
е = 1 + = 1 ------ = 1 + =
* Расчет податливостей ke и ев винта см. в РФ-11-01, л. 1.
118
Модель
РФ-11-02
л.1
Расчет ходового винта
Длина гайки I = | | см
Предел текучести материала винта
ат - | | кГ/см2
Исходные данные:
Тяговое усилие Q = J_______| кГ
Диаметр винта наружный
d = | | см
Диаметр винта внутренний
dr = |______________________| см
Шаг винтовой линии резьбы
S = ]_______| см
Число заходов резьбы
г=\ I
Расчет на прочность
Средний диаметр резьбы
^ = 0,5(6/ + ^) =0,5 ( + ) = l~ I ем
Угол подъема винтовой линии резьбы
S ________
? = arc tg = arc tg------------= arc tg = j_____|°
ср *
К. д. винтовой передачи
. _ tg?_________tg _i-----------.
11 “tg(? + p) ~tg( + )~!----------1
Расчетная площадь сечения винта
F = 0,785 - d\= 0,785 =| | см2
Приведенное напряжение в материале винта
%> = £]/1 + 1>6(-)2=LZZU^/^
Допускаемое напряжение в материале винта
м =
а/п
5 4-3,5
{ | кГ/см2
Расчет на износостойкость
Рабочая высота витка резьбы
h = = 0,5 ( ---- ) = | | см
* При малых скоростях скольжения 0,01 м/сек) угол трения р = 6-г-8°
(ЭСМ, т. II, стр. 347, табл. 66).
119
Продолжение РФ-11-02
РФ-11-02 л. 1 Модель
Расчет ходового винта
Среднее удельное давление на рабочих поверхностях резьбы 1 QS ^cpt2 -0’32 =! 1кГ^2 Допускаемое среднее удельное давление [р] = | | кГ/см2 Допускаемые значения среднего удельного давления [р] в кГ/см2
Наименование Материал [р] Наименование Материал [р]
винта гайки винта гайки
Винтовые передачи, осуществляющие точные расчетные перемещения Сталь Бронза 30 Другие ответствен- ные винтовые пе- редачи (в механиз- мах подачи фде- зерных и др. стан- ков) Сталь Бронза 120
Винты рабочих по- дач винторезных, резьбонарезных и др. станков Сталь Чугун 20 Сталь Чугун 80
1 Примечания. При — < 2,5-н 4,0 приведенные в таблице значения [р] иоп можно повысить примерно на 20% Для разрезных маточных гаек, у которых часть резьбы срезана, приве- денные в таблице значения [р] следует уменьшать на 15—20%.
120
Модель
РФ-11-02
л. 2
Расчет ходового винта
В качестве расчетной длины винта L
принимается наибольшее возможное рас-
стояние между опорами винта
Исходные данные:
Тяговое усилие Q = | | кГ
Диаметр винта наружный
d =| | см
Диаметр винта внутренний
di =j| см
Расчет на
Диаметр винта средний*
dcp = I I см
Площадь поперечного сечения
винта* F=]_________________I см2
Диаметр опоры винта левой
d'on = 1 I см
Диаметр опоры винта правой
d"„ = | I см
Длина опоры винта левой
Длина опоры винта правой
С =। I
Модуль упругости материала
винта Е = |[кГ/см2
устойчивость
Расчетный момент инерции поперечного сечения
JpaC4 = 0-01 (2 + 3 d* = 0,01 (2 + 3 -----)
Характеристика опоры винта **
I' ______ /"
Л ' on __ _ I 1 ЛЛ оп
слева \оп = ---------I-----I; справа Хо„ = -у-
аоп аоп
Коэффициент заделки винта (табл. 1)
Расчетный запас устойчивости
= I! СМ*
— =| I
Ж = | /
* См. РФ-11-02, л. 1.
** Для опорной гайки за don принимать dcp резьбы.
121
Продолжение РФ-11-02, л. 2
Модель
РФ-11-02
л. 2
Расчет ходового винта
Необходимый запас устойчивости (табл. 2) п —\
Значения коэффициентов заделки tn
Примечание. Характер опор винта устанавливается в зависимости от \оп
при < 1,5 опора шарнирная, при \оп > 3 винт заделан в опоре; при
Хо/г=1,5-~3 винт закреплен в опоре упруго. То же относится к неразрез-
ным гайкам: разрезную гайку следует рассматривать как шарнирную опору.
Необходимые значения запаса устойчивости пу.
Таблица 2
Для вертикальных ходовых винтов | 2,5—4,0
Для горизонтальных ходовых винтов | 3,0—5,0
122
РФ-11-04 Ударная нагрузка в механизме остановки по жесткому упору Модель
Исходные данные:
Мощность установленного электро-
двигателя N = ]___________| кет
Число оборотов установленного элек-
тродвигателя
пэл = I_______| об[ мин
Передаточное число от электродвига-
теля к валу стопора
! I
Маховой момент механизма, приведен-
ный к валу стопора*
GD2 = I| кГм2
К. п. д. кинематической цепи от элек-
тродвигателя к валу стопора
ч = 1 I
Приведенная податливость механизма
Эле- мент схемы № вала по схеме Передаточное отношение от рассчитываемого вала до вала стопора i Размеры вала Полярный мо- мент инерции Jp =0,1 • в см^ Приведенная податливость 1 Н2 K-GJp в рад/кГсм При- меча- ние
Диа- метр d в см Длина 1 в см
Валы
Стер- жень сто- пора длина 1 =| | см 1 1 Л! Г Т = Рад/кГсм k EFr2
Рычаг сто- пора Момент инерции поперечного сечения J = | | см^ Ра- диус г = =| \см 1 г — = —— pad/кГ см R, oEJ
Суммарная податливость Sr-I- II м *1-
* Определяется по РФ-11-07
123
Продолжение РФ-11-04
РФ-11-04 Модель
Ударная нагрузка в механизме остановки по жесткому упору
Крутящий момент на валу стопора по мощности электродвигателя
N _________
= 97500 —— Л] = 97500 = | | кГсм
пэл
Инерционный момент механизма, приведенный к валу стопора
/ п \ 2 __________
М% = 0,112GD2 МЛ 6 = 0,112 = I I кГсм2
Суммарный крутящий момент на валу стопора
= Ум21 +A1i)=4 = I I кГсм
Величина момента используется дальше для проверки напряжений
в деталях стопорного механизма.
124
Модель
РФ-11-06 Расчет времена разгона и торможения механизма
Асинхронный электродвигатель Исходные данные:
Номинальная Лг _ Номинальное „ :---
мощность N- = !______I квт число оборотов "« = I_I ^мин
Кратность пускового и максимального моментов
, М ___ . Мм
kn==M _I k*=M- = '__________I
Тип |
М
п
Мощность холостого хода механизма
Nx = J________________________________| кет
Маховой момент механизма, приведенный к ва-
лу электродвигателя**
GD2 = |_______| кГм2
Маховой момент механизма, приведенный к
тормозному валу** GD% = ।___________| кГм2
Число оборотов тормозного вала
I
\об/мин
Номинальный крутящий момент электродвигателя
N
= 975-2? = 975
пн
кГм
Движущий момент
Ма = 0,45Мя (*„+*„) = 0,45
Разгон
кГм
Момент сопротивления
Nx _____
Л1 = 975 — = 975 - = | I кГм
c nn ----------------------
Время разгона
_ GD\nH
tp ~ 375 (Мд — Мс) = 375 ( — )
| сек
Момент
Момент
кГм
Т орможение
торможения***
Чп = Г
сопротивления
Nx —
Мс = 975-^ = 975—= |
т ---
Время торможения
___ ^^2пт _
т 375 (Мт + Мс) = 375 ( + ) ~
= || сек
кГм
* См. Каталоги асинхронных электродвигателей.
Определение GD2 см. в РФ-11-07.
Г * '^т определяется из расчета тормоз-
** Определение GD2 см. в РФ-11-07.
*** Величина момента торможения
ного устройства. При электрическом торможении противовключением прини-
мать Мт = Мд.
125
РФ-11-07
Модель
Расчет GD2 механизма
Скорость поступательно перемещаю-
щихся частей v — || м/сек
Исходные данные:
Номинальное число оборотов элек-
тродвигателя пн = | | об/мин
Маховой момент ротора электро-
двигателя GD2 = || кГм2
Число оборотов вала, к которому
приводится маховой момент
п = || об/мин
Вес поступательно перемещающих-
ся частей Gc = ||
Определение приведенного
махового момента системы
№ эле- мента по схеме /С* в кГ/м3 b в м г в м Г1 в м г4 в м^ '1 в м± GD? В кГ м2 ni в об/мин 1 п (GDtynpue — в кГм2
b — —
Г: /// — —
1 777 3
— —
GD^Kbr*
г]ь — — —
/
с-т
— — —
2Z
GD1-К b(r*-rt4
* Значения приведены в таблице (К = 2^).
126
Продолжение РФ-11-07
РФ-11 -07 Модель
Расчет GD2 механизма
Приведенный маховой момент по- ступательно перемещающихся частей (^)n^= 365-Ge(-^)2 = = 365 У =
Приведенный маховой момент ротора электродвигателя (G42X«e=GDt(^)2 =
1
Приведенный маховой момент системы GD2 = 2 (GD*)npue =
Таблица
Материал | К || Материал | К || Материал |
Сталь | 50 • 103 || Алюминий | 17 • 103 || Пластмасса | 10 • 103
Чугун | 45 • 103 || Бронза | 55 • 103 || Дерево | 4,4 • 103
127
СОДЕРЖАНИЕ
Стр.
Предисловие ......................................................... 3
I. Организация и техника выполнения расчетов в СКБ-3................. 5
1. Организация расчетных работ................................... 5
2. Нормали расчетов.............................................. 6
II. Расчетные формуляры............................................. 10
1. Классификация расчетных формуляров........................... 10
III. Типовые расчеты................................................ 11
1. Расчет вертикально-сверлильного станка СС-49 на жесткость (ТР-2) 11
2. Расчет усилия зажима задней бабки токарного станка с помощью
эксцентрика (ТР-3).............................................. 14
3. Расчет вибрационного бункера (ТР-4).......................... 17
IV. Руководящие материалы по расчетам.............................. 23
1. Расчет к. п. д. станка (РМР-1)............................... 23
2. Определение мощности холостого хода привода шпинделей алмаз-
но-расточных станков (РМР-2).................................... 24
3. Основные расчетные схемы механизма подачи деревообрабатываю-
щих станков (РМР-3).........................‘................... 29
V. Примеры неправильных конструктивных решений .................... 32
Приложение ......................................................... 38
Анатолий Гаврилович Мациевский, Лазарь Борисович Эрлах
Рационализация расчетов при конструировании станков
Редактор инж. А. И. Быковский. Техн, редактор М. С. Горностайпольская.
Корректор Н. 3. Лаптева
Подписано к печати 22. III 1962. Формат 60 X 90 Vie- Физ. печ. л. 8. Усл. печ. л. 8.
Уч.-изд. л. 6,85. БФ 00042. Тираж 7500. Зак. 1275. Цена 34 коп.
Южное отделение Машгиза. Киев, ул. Парижской коммуны, 1'1.
Харьковская типография Госгортехиздата. Харьков, ул^ Энгельса, 1-1.