/








































































































































































Текст
в.с.пышнов
АЭРОДИНАМИКА
САМОЛЕТА
ОНТИ • НКТП • СССР
ВОЕННАЯ ВОЗДУШНАЯ АКАДЕМИЯ РККА ИМ. Н. Е. ЖУКОВСКОГО
в. с. пышнов
АЭРОДИНАМИКА САМОЛЕТА
ЧАСТЬ ВТОРАЯ
РАВНОВЕСИЕ В ПРЯМОЛИНЕЙНОМ ПОЛЕТЕ
И СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
Допущено в качестве учебника Глав-
ным управлением учебных заведений
НКТП СССР на 1935—1936 уч. г.
Отзыв проф. А. Н. Журавченко.
ОНТИ НКТП СССР
ГЛАВНАЯ РЕДАКЦИЯ АВИАЦИОННОЙ ЛИТЕРАТУРЫ
МОСКВА 1935 ЛЕНИНГРАД
A >30-5-2
TKK № 66
Книга является учебником для авиационных
втузов и представляет, собой вторую часть
курса „Аэродинамика самолета", рассматривающую
вопросы равновесия в прямолинейном полете и
статической устойчивости. Весь курс, подготовляе-
мый автором к печати, рассчитан на четыре части.
Учебник построен в соответствии с програм-
мой курса аэродинамики самолета Военной воздуш-
ной академии РККА и Московского Авиацион-
ного института предполагает у слушателей знание
следующих дисциплин: аэродинамики теоретиче-
ской, аэродинамики экспериментальной и , курса
гребных винтов.
Редактор С. Г. Боженятпов.
Техн, редактор А. Н. Саварил
Изд. № 38. Индекс 30-5-2. Тираж 6000. Сдано в набор 17/IV-35 г. Подп. в печать
26/VII-35 г. Формат бумаги 62X94. Уч.-авт. лист. 12,5. Бум. лист. Печ. зн.
в бумажн. листе 101.000. Заказ № 639. Уполн. Главлита В-22293. Выход в свет
август 1935 г. __
3-я тип. ОНТИ им. Бухарина. Ленинград, ул. Моисеенко, 10.
ОГЛАВЛЕНИЕ
Предисловие . . . . ............................. . . . ....... 5
Литература по продольному равновесию и статической устойчивости
Введение*............................................................. 7
Общие сведения о равновесии самолета ....*....*................... 7
Краткая история способов управления самолетом..................... 9
Равновесие моментов вокруг оси Z в прямолинейном полете
Момент крыла..................................................... 17
Коэфициенты Сп и Ct............................................ 23
Коэфициент момента и фокус крыла................................ 29
Момент крыла вокруг оси Z и вокруг центра тяжести................ 32
Зависимость Смг от положения оси Z. . ........................... 33
Аналитическое выражение момента крыла............................ 35
Момент крыла непрямоугольной формы биплана, полутораплана и дру-
гих форм......................................................... 36
Расчет См2, основанный на теории индуктивного сопротивления ... 36
Расчет моментов по средней аэродинамической хорде................ 37
Примеры расчета средней аэродинамической хорды моноплана .... 40
Средняя аэродинамическая хорда биплана........................... 45
Центр тяжести самолета
Способы определения центра тяжести............................... 49
Практическое определение центра тяжести самолета................. 51
Практические замечания . ....................................... 52
Ошибка в определении центра тяжести от передвижения грузов и пере-
ливания жидкостей при взвешивании . . . . • • *.................. 57
Приближенное определение положения центра тяжести................ 58
Центровка самолета............................................... 60
Изменение центровки.............................................. 61
Моменты вокруг центра тяжести
Момент крыла вокруг центра тяжести............................... 68
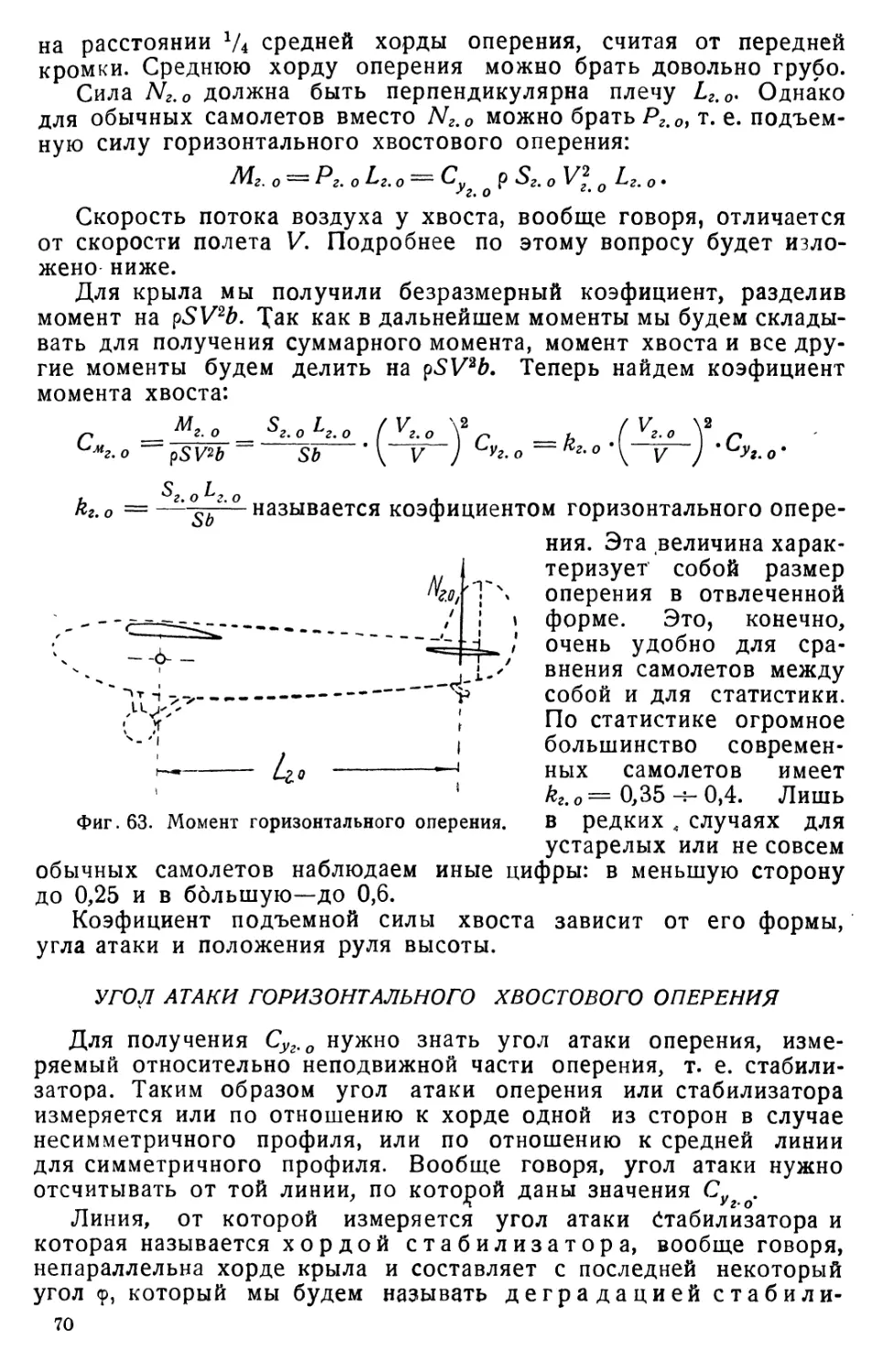
Момент горизонтального хвостового оперения....................... 69
Угол атаки горизонтального хвостового оперения................... 70
Скорость потока у хвоста при планировании........................ 75
Су горизонтального оперения...................................... 77
Действие руля высоты............................................. 79
Момент горизонтального оперения при планировании ........ 80
Момент горизонтального оперения в моторном полете.........• 82
Момент от тяги винта........................................ 86
Момент фюзеляжа................................................. 88
Момент от лыж, поплавков и других деталей, имеющих большие раз-
меры и плавно обтекаемых.................................... 89
Момент ненесущих деталей.................................... 89
Момент всего самолета вокруг его центра тяжести......... 90
Равновесие моментов вокруг оси Z в прямолинейном полете
Расчет равновесия путем продувки модели самолета................. 96
Расчет равновесия путем сравнения моментов самолета без хвоста с
моментами хвоста............................................. 98
1*
3
Расчет равновесия по аналитическому выражению моментов • • • . . 101
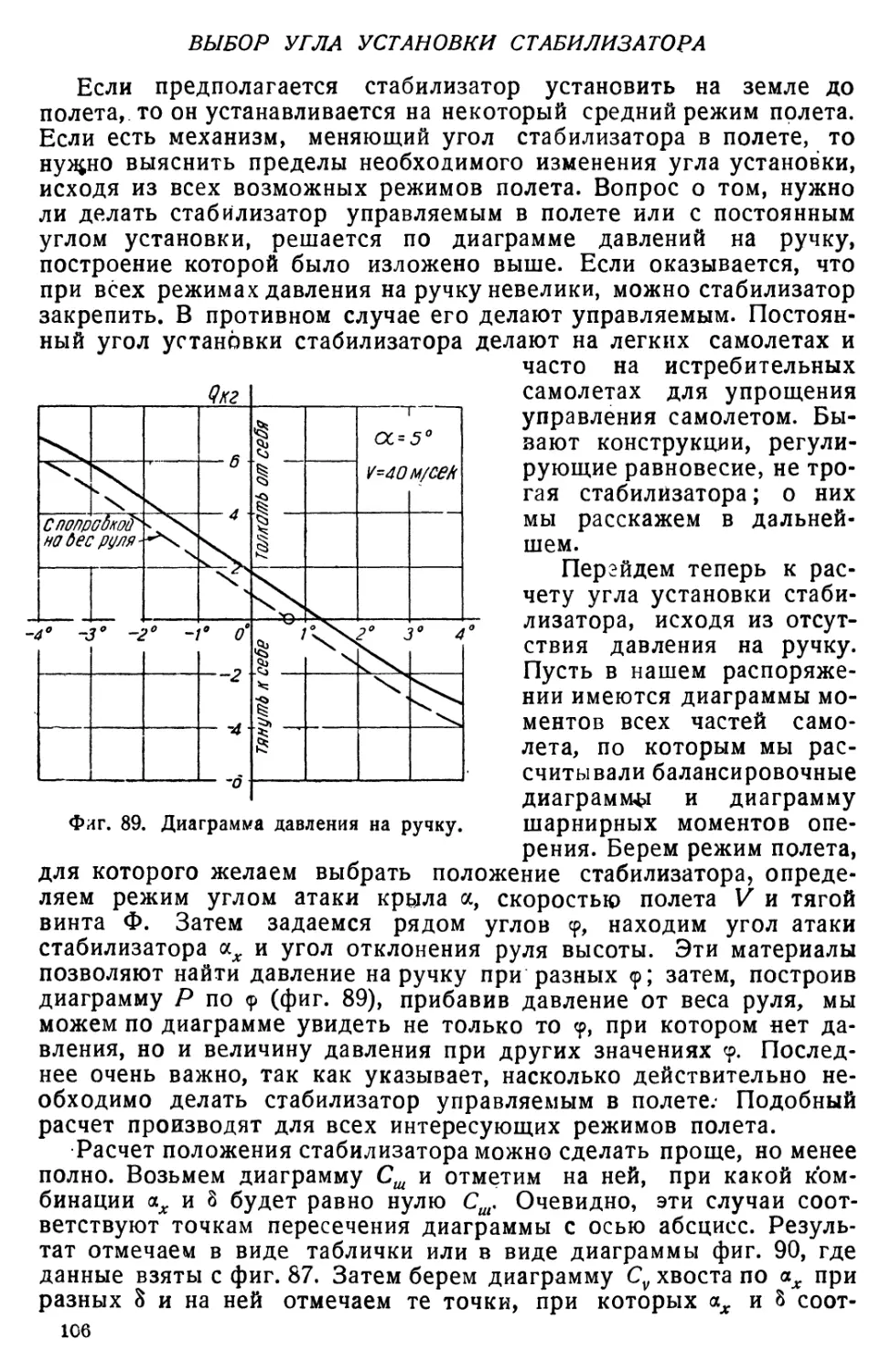
Расчет давленая на ручку управления рулем высоты
Выбор угла установки стабилизатора............................... 106
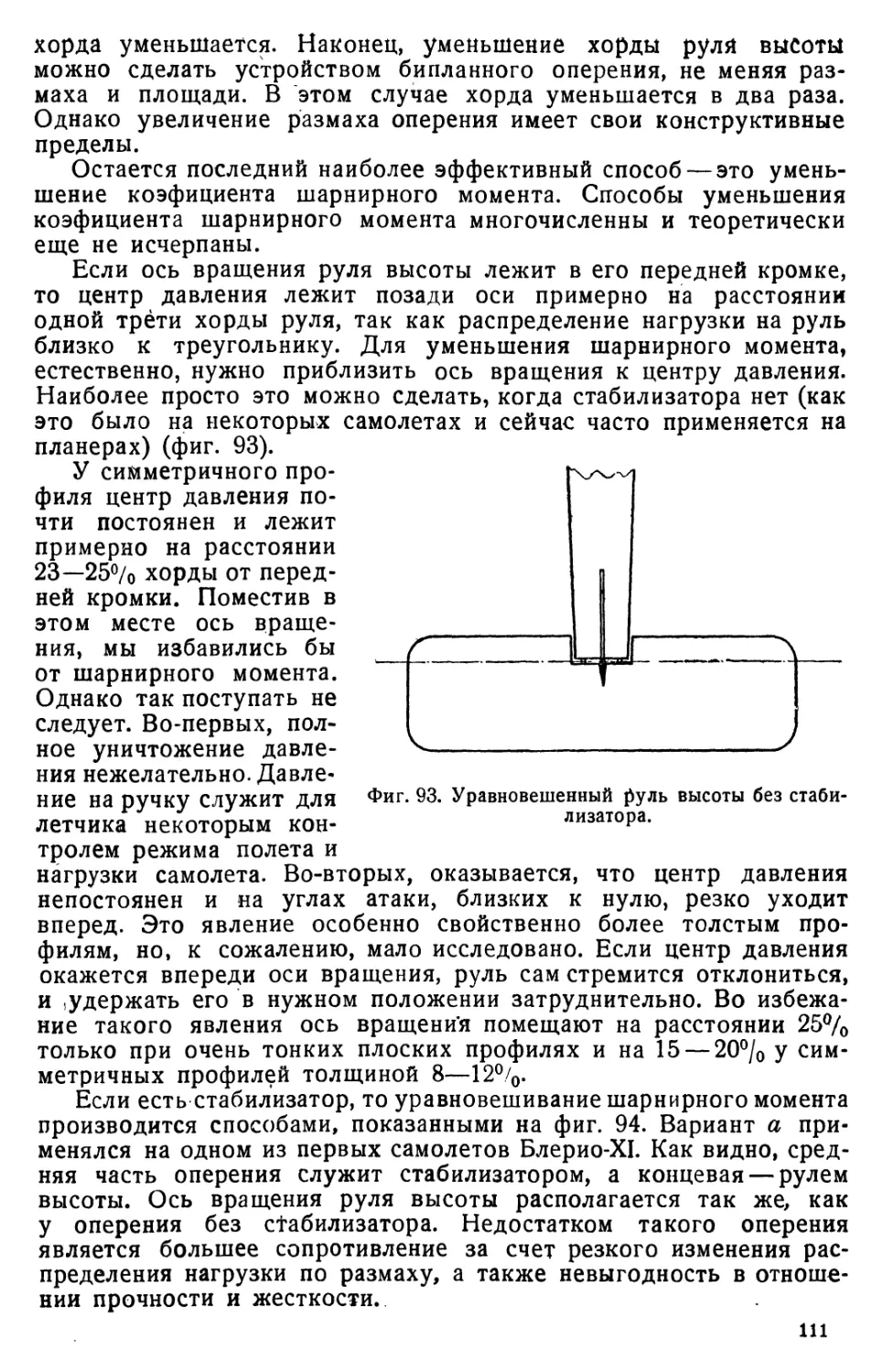
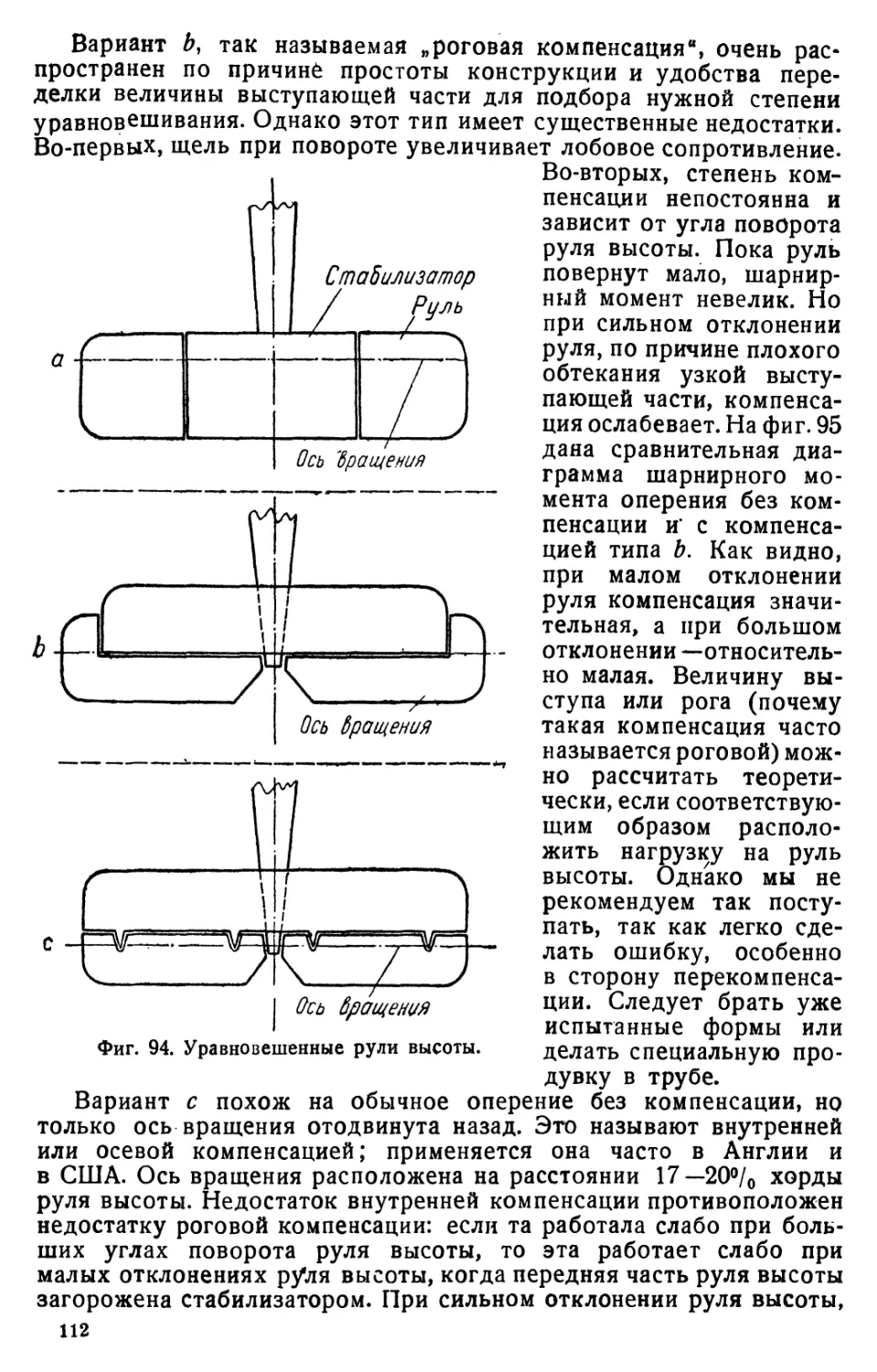
Меры уменьшения давления на ручку ............................... 109
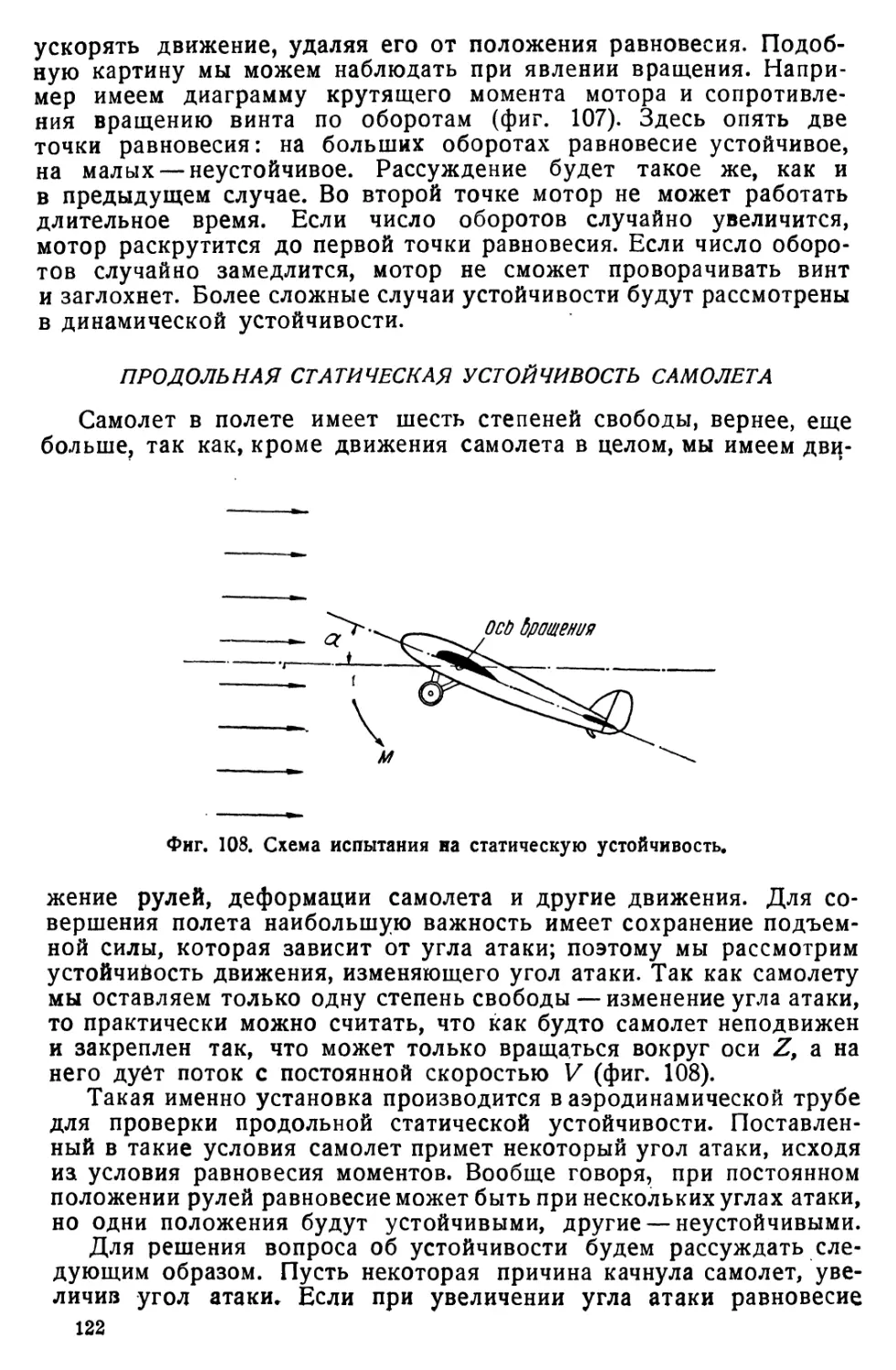
Продольная статическая устойчивость
Понятие устойчивости. Виды устойчивости.......................... 118
Продольная статическая устойчивость самолета.................... 122'
Аналитическое выражение устойчивости............................. 127
Анализ факторов, влияющих на устойчивость
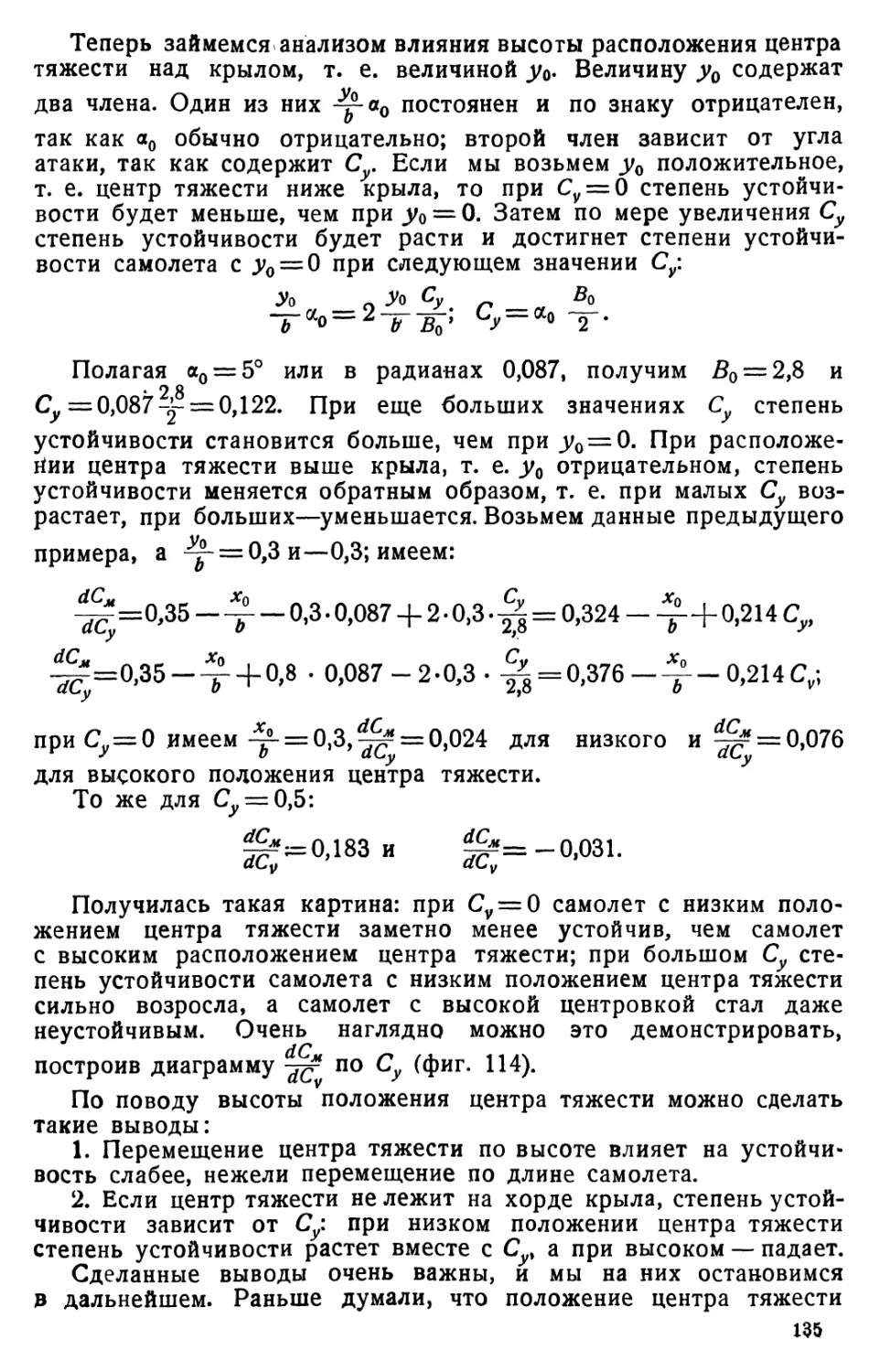
Влияние центровки на устойчивость................................ 134
Элементарное объяснение устойчивости.........• . • .............. 136
Суждение об устойчивости по диаграммам балансировочным и давлений 138
Проявление статической устойчивости в полете и испытание устойчи-
вости ......................................................... 143
Степень устойчивости и управляемости самолета . • .............. 145
Темы и содержание работ по пр9дольному равновесию и статической
устойчивости
Проектирование нового самолета................................... 149
Поверочный расчет равновесия и устойчивости................• . . 154
Простейшие расчеты равновесия и устойчивости...............• . 154
Приближенный расчет изменения угла установки стабилизатора и угла
отклонения руля высоты при перемене центровки.................... 156
Меры к устранению перемены режима полета при включении и выклю-
чении мотора..................................................... 156
Приложения
Продольное равновесие и статическая устойчивость самолетов необыч-
ной схемы.........................*. .......................... 161
Полет на спине................................................... 166
Влияние поворота закрылка на равновесие.......................... 169
Расчет равновесия и статической устойчивости по методу В. П. Вет-
чинкина..........................................*................ 17
ПРЕДИСЛОВИЕ
Аэродинамика самолета часть вторая является продолжением
первой части и рассматривает вопросы равновесия моментов и
статической устойчивости.
Вопросы равновесия изложены применительно к прямолиней-
ному движению. Равновесие моментов в криволинейном движении
будет рассмотрено в третьей части.
К сожалению, мы не успели подготовить материала по равно-
весию поперечному и пути. Не желая задерживать издания книги
мы решили этот вопрос перенести в третью часть.
Одновременно можно считать недостаточно освещенными во-
просы о моноплане произвольной формы и биплане с деградацией.
Соответствующие дополнения будут помещены в третьей части.
В. Пышное
ЛИТЕРАТУРА ПО ПРОДОЛЬНОМУ РАВНОВЕСИЮ
И СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ
Б. Н. Юрьев, Индуктивное сопротивление крыльев аэроплана, .Труды ЦАГИ",
вып. 20, 1926. Книга содержит основные сведения о продольном равновесии и
устойчивости.
Р. Фукс и Л. X о п ф, Аэродинамика, ч. 2, перевод с немецкого В. В. Калинина,
под ред. Б. Н. Юрьева, изд. ВВА, 1925. Книга представляет собой курс про-
дольного равновесия и устойчивости, легший в основу современного курса.
Я. М. Курицкес, Продольная устойчивость самолета, ч. I, ОНТИ, 1932.
Книга представляет собой курс равновесия и продольной устойчивости.
Фр. Ш. Гос, Устойчивость и управляемость самолетов, ОНТИ, 1934. Книга
представляет собой наиболее полный курс устойчивости статической, динами-
ческой, штопора и автоматического управления.
Б. Т. Г о р о щ е н к о, Продольная устойчивость самолета, .Техника воздуш-
ного флота" № 7 — 8, 1929. Статья излагает аналитический расчет равновесия
и устойчивости по методу Бреге.
Самолетостроение, Сборник, изд. ГНТИ, 1931; В. С. Be дров, Балансировка
самолета и расчет статической устойчивости; Б. Т. Г о р о щ е н к о, Расчет
продольной статической устойчивости и балансировки самолета аналити-
ческим методом.
В. С. Ведро в, Скос потока у стабилизатора; Ю. А. Победоносцев,
Балансировка самолетов и расчет продольной статической устойчивости
по методу Б. П. Ветчинкина, .Труды ЦАГИ", вып. 42.
Аэродинамические исследования по оперению самолета, .Труды ЦАГИ", вып. 49.
М. П. Могилевский и И. В. Острславский, Исследование скоса по-
тока у оперения, „Техника воздушного флота" №10, 1930.
С. М. Т а р г, О влиянии крыла на продольную статическую устойчивость
самолета, „Техника воздушного флота" № 9, 1933.
„Технический бюллетень ЦАГИ" № 1, В. Г о р с к и й, Влияние обдувки на фюзе-
ляж и хвостовое оперение самолета У-2; Е. Румянцева, Аэродинамиче-
ские исследования изолированных горизонтальных оперений.
В. П. Горский, Исследование влияния частей самолета на горизонтальное
оперение в условиях моторного полета и планирования, .Труды ЦАГИ",
вып. 131.
А. Н. Журавченко и А. И. Никитюк, О мере статической продольной
устойчивости самолета, .Труды ЦАГИ", вып. 94.
М. М. Девкин, Влияние поплавков на продольную статическую устойчи-
вость гидросамолета, „Техника воздушного флота" № 2, 1932.
В. С. В ед ров, В. П. Горский и М. А. Т а й ц, Сравнение результатов
испытания пяти самолетов в трубе и в полете, .Техника воздушного флота*
№ 5, 1934.
Б. Раушенбах, Продольная устойчивость бесхвостых самолетов, „Само-
лет" Ко 10, 1934.
А. К. Аузан, Летные испытания самолетов, Госмашметиздат, 1933.~
М. П. Могилевский, О предварительном расчете продольной статиче-
ской устойчивости самолета, Научно-техническое управление Аэрофлота,
„Сборник трудов" № 1.
ВВЕДЕНИЕ
В первой части мы рассмотрели установившийся полет само-
лета, разбирая вопросы скоростей полета под разными углами на-
клона траектории. Все это мы сделали, налагая условие равновесия
сил, действующих на самолет. Из механики известно, что для
установившегося движения необходимо еще равновесие моментов.
Это условие нами, конечно, подразумевалось. Мы считали, что
самолет имеет тот угол атаки, который нам желательно, — полет
происходит без (скольжения и без крена. Теперь мы все эти во-
просы должны рассмотреть подробно путем анализа моментов,
действующих на самолет.
Вопрос о равновесии в полете чрезвычайно важен. Всем кон-
структорам первых самолетов этому вопросу пришлось уделить
очень много внимания. Необеспеченное равновесие приводило
к опрокидыванию аэроплана, как только он поднимался в воздух.
Примеров такой технической неграмотности можно найти много
в истории авиации. Однако и современный авиационный инже-
нер,— как конструктор, так и эксплоатационник,—должен уве-
ренно разбираться в вопросах равновесия. Дело в том, что на
равновесие самолета влияет очень много факторов—и особенно
нагрузка Самолета. Неправильная нагрузка, громоздкие предметы
оборудования, установленные снаружи, могут так изменить усло-
вия равновесия, что полет станет опасным, а полетные качества
будут снижены.
ОБЩИЕ СВЕДЕНИЯ О РАВНОВЕСИИ САМОЛЕТА
Всякое тело будет находиться в равновесии тогда, когда у
него нет стремления повернуться ни в каком направлении. Отсут-
ствие стремления повернуться требует или отсутствия момента
в данном направлении, или равновесия моментов, когда несколько
моментов, действуя в разные стороны, уничтожают друг друга.
Если мы будем иметь равновесие моментов около трех взаимно
перпендикулярных осей, то этим мы обеспечим равновесие в лю:
бом направлении. Для рассмотрения равновесия самолета мы
к нему прикрепляем систему из трех осей. Направление осей вы-
бирается’ наиболее естественное для формы самолета, а именно:
самолет имеет плоскость симметрии, которая разбивает все части
на правые и левые; две оси располагаются в этой плоскости сим-
метрии, а третья; естественно, будет перпендикулярна к плоскости
симметрии и пойдет вдоль размаха крыльев. Одну из осей в пло-
1‘
скости симметрии ставят параллельно или строевой линии фюзе-
ляжа, или оси мотора, или хорде крыла, или одной из ближайших
главных осей инерции.
Из механики мы знаем, что если есть равновесие моментов
относительно некоторой оси, то равновесие будет и относительно
других параллельных осей. Однако техника подсчета моментов
заставляет нас поставить оси в определенное место. Таким наи-
более удобным местом является центр тяжести самолета. В самом
деле, расположив оси в центре тяжести, мы избавляемся от мо-
ментов силы тяжести и сил инерции поступательного движения.
Последнее позволяет нам часто рассматривать равновесие момен-
тов, отвлекаясь от рассмотрения равновесия сил.
В разных странах приняты различные обозначения и направле-
ния осей. На фиг. 1 дана система осей, которой мы будем поль-
зоваться в дальнейшем.
Кроме буквенного обозначения осей, примем еще такую тер-
минологию: ось X назовем продольной осью самолета, ось Z—
поперечной осью и ось Y—осью поворотов или осью направления,
иногда ее называют осью рысканья.
Моменты, действующие вокруг этих осей, будем называть так:
моменты вокруг оси X, т. е. продольной, поперечными моментами
или накреняющими моментами; моменты вокруг поперечной оси Z
будем называть продольными, причем момент, поднимающий нос
самолета, будем называть кабрирующим, а момент, опускающий
нос самолета, пикирующим; моменты вокруг оси Y будем называть
заворачивающими моментами или моментами рысканья.
8
При рассмотрении сложных вопросов динамики приходится
брать три системы осей: 1) неподвижные оси, 2) оси, связанные
с воздушным потоком, и 3) оси, связанные с самолетом. Для раз-
решения вопросов, помещенных в данной части „Аэродинамики
самолета", достаточно осей, связанных с самолетом; встречный же
поток характеризуется вектором скорости V и его углами с осями
самолета.
КРАТКАЯ ИСТОРИЯ СПОСОБОВ УПРАВЛЕНИЯ САМОЛЕТОМ
Моменты, уравновешивающие самолет, могут служить одновре-
менно Для управления самолетом, т. е. для изменения режима равно-
весия. Поэтому вопрос о равновесии тесно связан с управляе-
мостью. Разделение этих вопросов производится только с мето-
дической целью, история же их неразделима.
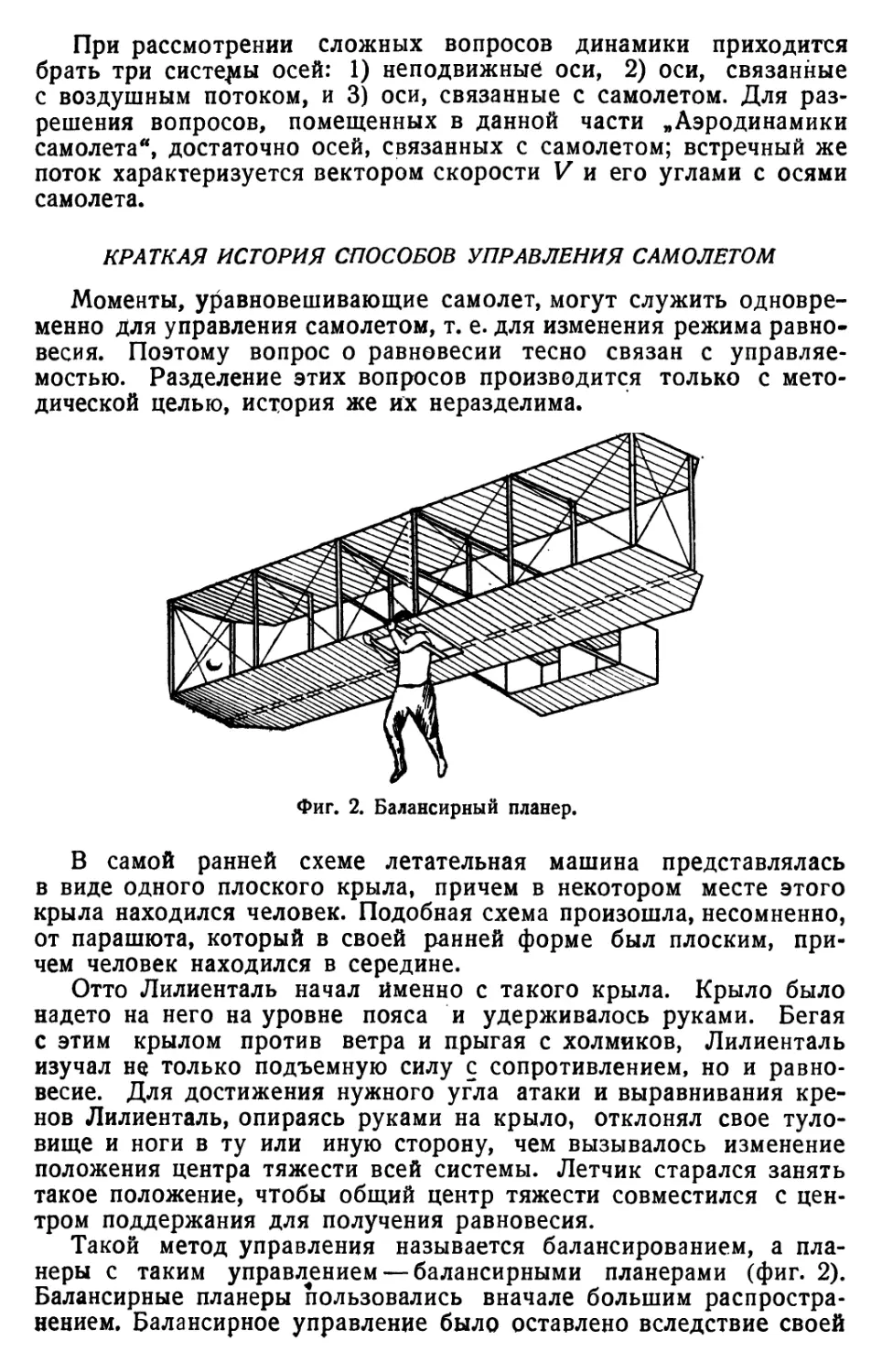
Фиг. 2. Балансирный планер.
В самой ранней схеме летательная машина представлялась
в виде одного плоского крыла, причем в некотором месте этого
крыла находился человек. Подобная схема произошла, несомненно,
от парашюта, который в своей ранней форме был плоским, при-
чем человек находился в середине.
Отто Лилиенталь начал йменно с такого крыла. Крыло было
надето на него на уровне пояса и удерживалось руками. Бегая
с этим крылом против ветра и прыгая с холмиков, Лилиенталь
изучал не только подъемную силу с сопротивлением, но и равно-
весие. Для достижения нужного угла атаки и выравнивания кре-
нов Лилиенталь, опираясь руками на крыло, отклонял свое туло-
вище и ноги в ту или иную сторону, чем вызывалось изменение
положения центра тяжести всей системы. Летчик старался занять
такое положение, чтобы общий центр тяжести совместился с цен-
тром поддержания для получения равновесия.
Такой метод управления называется балансированием, а пла-
неры с таким управлением — балансирными планерами (фиг. 2).
Балансирные планеры пользовались вначале большим распростра-
нением. Балансирное управление было оставлено вследствие своей
грубости, неудобства работы для летчика й 'затраты больших
усилий. Нужно, однако, указать, что птицы тоже используют
принцип балансирования, перемещая крылья назад-вперед. Упра-
вление перемещением центра тяжести может быть очень мощным,
и если сейчас его в самолетах не применяют, то- нельзя утвер-
ждать, что и в будущем оно будет оставлено.
Вернемся опять к Лилиенталю. При плоском крыле можно
было достичь равновесия балансированием. Когда же Лилиенталь
сделал крыло вогнутым, равновесия достичь балансированием не
удавалось, и тогда был сделан стабилизатор по образцу птичьего
хвоста. Стабилизатор представлял собой небольшую плоскую по;
верхность, помещенную позади крыла (фиг. 3). Стабилизатор дол-
жен быть установлен под определенным углом по отношению
к крылу, и летчик должен располагаться в определенном месте
Фиг. 3. Балансирный планер Лилиенталя.
по отношению к крылу. Только в этом случае полет был устой-
чив, и можно было управлять балансированием. Кроме того, при
вогнутом крыле появилась необходимость в небольшом киле для
устранения рысканья вправо й влево. Киль был устроен анало-
гично стабилизатору, но расположен перпендикулярно последнему.
Такой планер обладал в известной степени автоматической устой-
чивостью, т. е. сохранял режим полета без непрерывного участия
летчика.
Как видно, планер Лилиенталя отличался от птицы наличием
киля, т. е. вертикальной хвостовой'поверхности. Киль сохранился
затем на самолетах, причем размеры его постепенно увеличива-
лись. Вопрос о том, почему птицы обходятся без киля, а само-
леты имеют киль, очейь интересен, й мы к нему еще вернемся,
когда будем рассматривать самолеты необычной схемы и попе-
речную устойчивость.
После Лилиенталя, у которого было много последователей,
обратим свое внимание на планер и аэроплан бр. Райт. Летчик
располагался сначала лежа, а потом сидя; в руках летчика были
ю
рычаги, которые управляли рулями. Таким образом балансирное
управление было заменено рулевым (фиг. 4).
На аэроплане бр. Райт система рулей была такова. Стабилиза-
тор сзади крыла отсутствовал, но зато был поставлен передний
руль высоты, представлявший собой небольшое крыло, угол атаки
которого можно было менять по усмотрению летчика. Такое по-
ложение руля потребовало перенесения центра тяжести вперед.
Схема самолета или планера, у которого есть руль или стабили-
затор перед крылом и нет их позади крыла, называется „уткой"
(такой самолет в полете очень напоминает ле-
тящую утку.с длинной вытянутой вперед шеей).
Затем аэроплан бр. Райт получил руль по-
воротов, т. е. подвижной киль, расположенный
сзади, и перекашивание крыльев для выравни-
вания и создания крена. Смысл перекашивания
Фиг. 5. Летчик выра-
внивает крен искри-
влением крыльев.
Аэроплан Моран-G.
Фиг. 4. Управление аэропланом бр. Райт.
крыльев был очень прост. Крылья деформиро-
вались таким образом, что с одной стороны
угол атаки увеличивался, а с другой умень-
шался. Изменение углов прогрессивно увели-
чивалось от середины к концам, и крылья при-
обретали винтовую форму (фиг. 5). Разница в подъемных силах
давала мощный момент вокруг оси X, который поворачивал весь
самолет туда, куда хотел летчик.
Перекашивание крыльев, искривление крыльев или гоширо-
вание,—это все одно и то же,—имело большое распространение
в авиации с 1909 до 1920 г. Конструктивно оно выполнялось так:
передний лонжерон или передняя ферма у биплана были жесткие,
а задний лонжерон или ферму при помощи тросов, соединенных
с рычагом управления, можно было поднимать или опускать; на
фиг. 6 дан примерный вид устройства искривления крыльев.
Применение перекашивания крыльев и других способов попе-
речного управления вызвало к жизни одно новое свойство, с ко-
торым пришлось вести борьбу, а именно: когда самолет заставляли
накреняться или выравнивать крен, то самолет одновременно за-
Н
ворачивал в нежелательную сторону. Причина этого явления объ-
яснялась очень просто: разная подъемная сила крыльев давала и
разное сопротивление, что вызывало заворот в сторону крыла
с большим углом атаки. На аэроплане бр. Райт это явление было
довольно сильно, и применение перекашивания крыльев требовало
одновременно действия рулем поворотов для противодействия за-
вороту. Для обеспечения последней операции управление перека-
шиванием крыльев и рулем поворотов было соединено в одной
рукоятке.
Наибольший недостаток перекашивания крыльев заключался
в больших усилиях на ручке управления. Даже на маленьком са-
молете в неспокойную погоду летчик быстро уставал. На больших
самолетах и при толстом профиле крыльев перекашивание стало
невозможным. В бипланах перекашивание применялось очень
редко; в монопланах до 1917 г. применялось почти исключительно
перекашивание, но затем оно быстро исчезло.
Моноплан Блерио 1909 г. имел стабилизатор, руль высоты и
руль поворотов позади крыла. Поперечное управление было осу-
ществлено перекашиванием крыльев. Рычаги управления летчика
были такие же, как и у современных самолетов. Руль поворотов
управлялся ножными педалями, причем передача была такова, что
самолет поворачивал в сторону вытянутой ноги. Эта система про-
тивоположна применяемой на велосипеде или мотоцикле, где по-
ворот происходит в сторону сокращаемой руки.
Управление рулем высоты и перекашиванием крыльев было
сосредоточено в одной рукоятке. Передача была выбрана так,
чтобы движения были инстинктивны и самолет как бы ходил за
ручкой: куда двинул летчик конец ручки, в ту сторону поворачи-
вался и самолет. При даче ручки „от себя“, т. е. вытягивании
руки, самолет опускает нос, при сокращении руки — поднимает
нос. Отклонение ручки вправо вызывает накренение вправо, — и
наоборот.
Затем нужно остановиться на аэропланах Вуазен 1908 г. и
Фарман 1909 г.
Аэроплан Вуазен имел большой бипланный хвостовой стабили-
затор и руль поворотов. Руль высоты находился впереди само-
18
лета, а поперечного управления не было совсем (фиг. 7). Летчик
управлял самолетом при помощи штурвального колеса, которое
могло еще передвигаться назад-вперед. Поворот штурвала был
связан с рулем поворотов подобно автомобилю, а передвижение
штурвала назад-вперед действовало на руль высоты. Повороты
Фиг. 7. Аэроплан Вуазен 1908 г.
происходили без крена, а для сокращения радиуса поворота между
крыльями были поставлены перегородки. Выравнивание неболь-
ших кренов происходило, вероятно, путем отрывистых поворотов,
когда изменение скоростей концов крыльев давало изменение
Фиг. 8. Аэроплан Фарман 1909 г.
подъемных сил и, следовательно, поперечный момент. Этот эф-
фект летчики используют и на современных самолетах. На аэро-
плане Вуазен летали лишь в тихую погоду на малой высоте.
Аэроплан Фарман-3 по внешнему виду походил на Вуазен
(фиг. 8): тот же хвостовой стабилизатор с рулями поворотов и
руль высоты впереди. Но система управления была иная, Руль
13
поворотов управлялся ногами, как на Блерио; руль высоты и по-
перечное управление — ручкой, причем различие от Блерио было
в замене' перекашивания крыльев элеронами или крылышками.
Устройство элеронов и управление ими было очень примитивно.
Сами элероны представляли собой небольшие поверхности в зад-
них концевых частях крыла, подвешенные на петлях. Тросы упра-
вления были только снизу и потому при' стоянке элероны сво-
бодно висели вниз. В полете под давлением воздуха элероны
поднимались и становились в продолжение крыла. Отклонение
ручки вправо вызывало опускание левого элерона, и самолет накре-
нялся вправо. Отклонение только одного элерона вниз давало одно-
стороннее торможение и отсюда — стремление самолета завернуть.
В дальнейшем Фарман и другие конструкторы, применявшие
элероны, видоизменили передачу к элеронам так, чтобы при опу-
скании одного элерона другой поднимался. Действие элеронов
этим было усилено, а заворачивающий момент ослаблен.
Можно было бы привести еще много примеров самолетов с не-
обычным управлением, но мы это сделаем в особой главе.
Изучая дальнейшую историю авиации, мы видим, как передние
рули высоты переходят назад к стабилизатору. Были такие само-
леты, у которых хвостовое оперение состояло только из рулей
высоты и поворотов без неподвижных поверхностей; были само-
леты, у которых вместе с рулем высоты был неподвижный ста-
билизатор, а с рулем поворотов—и киль. Поперечное управле-
ние достигалось элеронами или перекашиванием (с постепенным
отмиранием последнего по указанным уже причинам). На фиг. 9
дана схема управления самолетом.
Укрупнение размеров и утяжеление самолетов оказали и сейчас
оказывают большое влияние на управление самолетом. Прежде
всего постарались избавить летчика от утомительного постоянного
нажима на ручку. Это было достигнуто устройством регулируемого
14
в полете стабилизатора (фиг. 10). Если равновесие самолета тре-
бовало наличия подъемной силы на хвосте, то ее можно было по-
лучить, регулируя стабилизатор. На долю руля высоты осталась
борьба с порывами ветра, выполнение взлета, посадки, виражей и
фигур.
Однако даже временное отклонение рулей стало для летчика
утомительным, и потому было обращено большое внимание на
Фиг. 10, Схема регулируемого в полете стабилизатора.
уменьшение усилий для поворота рулей. Это достигалось особой
формой рулей. В отношении элеронов возможно было изменить
передачу путем замены бокового отклонения ручки вращением
штурвала. Все тяжелые самолеты были снабжены штурвальным
Фиг. 11. Схема штурвального управления самолетом.
управлением (фиг. 11). Мы можем видеть самолеты, рули которых
могли бы по размерам служить крыльями маленькому самолету.
Наконец, все способы уменьшения давлений стали недостаточны,
и тогда поднялся вопрос о вспомогательных рулевых машинах.
В отношении безопасности полета очень важным является во-
прос о потере скорости. Потеря скорости на малой высоте давала
большой процент аварий и катастроф, причины которых обычно
относились к „ошибкам летчика**.
15
Потеря скорости означает главным образом ослабление попе-
речной управляемости с тенденцией к переходу в штопор. Для
борьбы с потерей поперечной управляемости применяются различ-
ные конструкции, как, например, разрезные крылья и 'свободные
или „плавающие" элероны.
Наиболее новый и интересный вопрос, стоящий в порядке дня
и частично уже разрешенный, это — автоматическое управление
самолетом. Автоматическое управление предназначено для того,
чтобы, с одной стороны, облегчить управление тяжелых самолетов,
а с другой,—сделать вполне надежным, полет ночью, в тумане,
облаках или, как говорят, .слепой полет".
Здесь мы дали краткие элементарные сведения, необходимые
перед детальным изучением равновесия и устойчивости.
1в
РАВНОВЕСИЕ МОМЕНТОВ ВОКРУГ ОСИ Z В ПРЯМО-
ЛИНЕЙНОМ ПОЛЕТЕ
Равновесие моментов вокруг оси Z или продольное равновесие
считают наиболее важным. Это не значит, конечно, что равновесие
вокруг других осей не существенно. Равновесие вокруг других осей
получается часто в силу симметрии, и временные нарушения равно-
весия не так сильно сказываются на полете, как нарушение равно-
весия продольных моментов. Даже при небольшом изменении на-
клона самолета подъемная сила значительно меняется и вслед за
этим траектория полета искривляется.
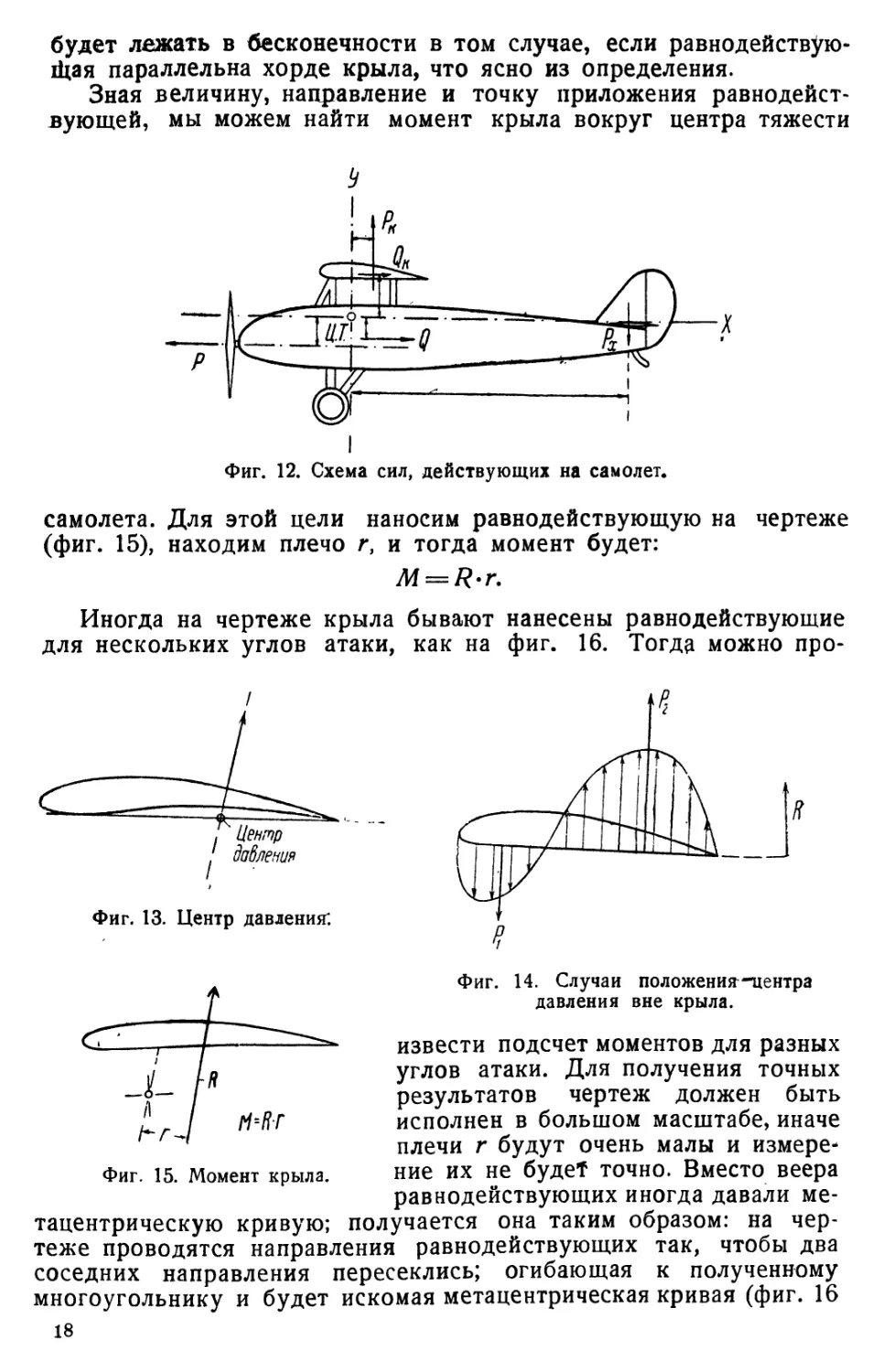
Вокруг оси Z действуют следующие моменты (фиг. 12): кры-
льев, оперения, от тяги винта, от фюзеляжа и от лобовых сопро-
тивлений. Первые три момента наиболее значительны. Работаю-
щий мотор, кроме момента непосредственно от тяги винта, вы-
зывает косвенный момент от действия струи винта на хвостовое
оперение. Наща ближайшая задача будет состоять в том, чтобы
научиться подсчитывать все эти моменты.
МОМЕНТ КРЫЛА
Понятие о центре давления крыла было введено в авиации
очень давно. Под центром давления крыла понимается точка
приложения равнодействующей всех аэродинамических сил, дей-
ствующих на крыло. Этот центр аналогичен центру действия вся-
кой поверхностной нагрузки, обычно применяемому в технике.
Так как всякую силу можно переносить вдоль направления ее
действия, за центр давления условились принимать точку пересе-
чения направления равнодействунэщей с хордой крыла или ее
продолжением (фиг. 13).
Нечего и говорить, что на самом крыле этот центр ничем не
отмечен и представляет собой лишь абстракцию, удобную для ре-
шения задач. Центр давления вполне аналогичен точке приложе-
ния равнодействующей многих сил. Не нужно удивляться, если
центр давления окажется вне крыла. Пусть на переднюю часть
крыла действует небольшая срла вниз, а на заднюю — большая
сила вверх (фиг. 14). Применяя правило сложения параллельных
сил, мы получим, что равнодействующая будет лежать вне этих
сил и тем дальше, чем ближе эти силы по величине. В частном
случае, если силы равны, получим пару сил, равнодействующая
которых, как известно, лежит в бесконечности. Центр давления
2 В. С. Пышно в 639 17
будет лежать в бесконечности в том случае, если равнодействую-
щая параллельна хорде крыла, что ясно из определения.
Зная величину, направление и точку приложения равнодейст-
вующей, мы можем найти момент крыла вокруг центра тяжести
Фиг. 12. Схема сил, действующих на самолет.
самолета. Для этой цели наносим равнодействующую на чертеже
(фиг. 15), находим плечо г, и тогда момент будет:
M = R>r.
Иногда на чертеже крыла бывают нанесены равнодействующие
для нескольких углов атаки, как на фиг. 16. Тогда можно про-
I Центр
; дабленин
Фиг. 13. Центр давления:
Фиг. 14. Случаи положение-центра
давления вне крыла.
извести подсчет моментов для разных
углов атаки. Для получения точных
результатов чертеж должен быть
исполнен в большом масштабе, иначе
плечи г будут очень малы и измере-
ние их не будет точно. Вместо веера
равнодействующих иногда давали ме-
тацентрическую кривую: получается она таким образом: на чер-
теже проводятся направления равнодействующих так, чтобы два
соседних направления пересеклись; огибающая к полученному
многоугольнику и будет искомая метацентрическая кривая (фиг. 16
и 17). На ней дёлаются отметки об углах атаки в том месте, где
соответствующая равнодействующая касается кривой. Если нам
дана метацентрическая кривая, то мы можем получить положение
равнодействующей путем проведения касательнрй к кривой около
Отметки нужного угла атаки. В настоящее время пучки сил и ме-
тацентрические кривые не применяются; причина этого заклю-
чается в том, что по ним трудно
анализировать свойства крыла,
мала точность расчетов, а также
в том, что материал трудно пред-
ставить в виде цифровых таблиц.
Другой способ характеристи-
ки центра давления состоит в
построении диаграммы зависи-
мости центра давления от угла
атаки (фиг. 18). Подобные диа-
граммы применялись в старых
работах Эйфеля; встречаются они
еще и сейчас, например в репор-
тах NACA.
Нафиг. 18 и 19 показаны два
вида таких диаграмм. Коническая
диаграмма применяется только
при исследовании центра давле-
ния в большом диапазоне углов
атаки. По оси ординат в мас-
штабе отложена хорда крыла,
причем за начало принимается
передняя кромка, и таким обра-
зом положение центра давления
отсчитывается от передней кром-
ки. Длина хорды принимается за
100%, и положение центра да-
вления выражается в процентах
хорды.
Законом зависимости поло-
жения центра давления от угла
атаки всегда очень интересова-
лись. Различные профили крыла
давали разные характеристики
Фиг. 16. Метацентрическая кривая.
перемещения центра давления, в
результате чего все профили были подразделены^на устойчи-
вые и неустойчивые. Для изучающего аэродинамику само-
лета совершенно необходимо^разобраться в этом вопросе.
Из параметров, характеризующих форму профиля крыла, на
перемещение центра давления оказывает влияние только форма
средней линии. У большинства крыловых профилей средняя линия
вогнута снизу и близка к дуге круга или параболы (фиг. 20). Ха-
рактер перемещения центра давления у них таков. Наиболее пе-
редний центр давления соответствует углу атаки, близкому
к Сутах, и в зависимости от кривизны средней линии лежит на
2*
19
28—32%.'При уменьшении угла атаки центр давления уходит на-
зад к задней кромке, а при Су — 0 лежит бесконечно далеко сзади,
указывая на то, что подъемные силы дают пару сил. Таким обра-
зом в области рабочих углов атаки при увеличении угла атаки
Фиг. 17. Метацентрическая
кривая.
Фиг. 18. Диаграмма перемещения центра давле-
ния.
центр давления идет вперед, при уменьшении — идет назад. По-
добное крыло было названо неустойчивым, так как если при одном
угле атаки нам удалось совместить центр тяжести с центром давле-
чго/i ом/
Фиг. 19. Полярная диаграмма перемещения центра
давления.
ния, то стоит углу атаки
измениться, как центр
давления уйдет, и полу-
чится момент, стремя-
щийся еще дальше изме-
нить угол атаки. Предо-
ставленное самому себе
крыло переворачивается
вогнутой стороной вверх,
и потому без хвостового
оперения нормальный, по-
лет такого крыла невоз-
можен.
Другая категория про-
филей — это симмет-
ричные, у которых
средняя линия прямая.
У них в пределах пла-
вного обтекания центр да-
вления занимает посто-
янное положение. Сим-
метричные профили почти не применяются для крыльев по при-
чине низкого качества на больших углах атаки.
20
Третья категория профилей — это профили, у которых средняя
линия имеет перегиб, или, как их называют, S-образные про-
фили. По внешнему виду у них весьма примечательна загнутая
вверх задняя кромка. Такие профили были известны давно, хотя
они не имели широкого распространения.
В 1926 г. в Report NACA было опубликовано испытание целой
серии S-образных профилей Мунка. Потом эти профили стали все
чаще и чаще при-
меняться на само-
летах, особенно на
скоростных. Харак-
тер перемещения
центра давления S-
образных профилей
зависит от степени^
перегиба средней §
линии в задней ча-
сти; если перегиб^
мал, то характери- gj.
стика близка к обыч- .Ц
ным неустойчивым
профилям; если пе-
региб больше, то
получается профиль
с постоянным цен-
тром давления; на-
конец, если перегиб силь-
ный, получается профиль,
у которого характер переме-
щения центра давления обра-
тен простому крылу. При уве-
личении угла атаки центр да-
вления переходит назад, при
уменьшении — вперед. Если
при одном угле атаки центр
тяжести был совмещен с цен-
Фиг. 20. Диаграмма перемещения цешра
давления различных крыльев.
тром давления, то в случае
перемены угла атаки центр
давления смещается так, что
возникший момент стремится
вернуть прежний угол атаки. Такое крыло называют устойчивым
и оно может летать без хвоста.
Нужно обратить внимание еще на следующее обстоятельство.
При увеличении угла атаки центры давления разных профилей
сближаются, стремясь подойти к 25% хорды. У S-образного крыла
при увеличении угла атаки центр давления хотя и отходит назад,
но в общем остается в передней части крыла.
Обычное крыло, перевернутое выпуклой стороной вниз, имеет
характеристику устойчивого крыла.
Если имеется диаграмма перемещения центра давления, то мы
можем подсчитать момент крыла вокруг нужной оси. Для этой
21
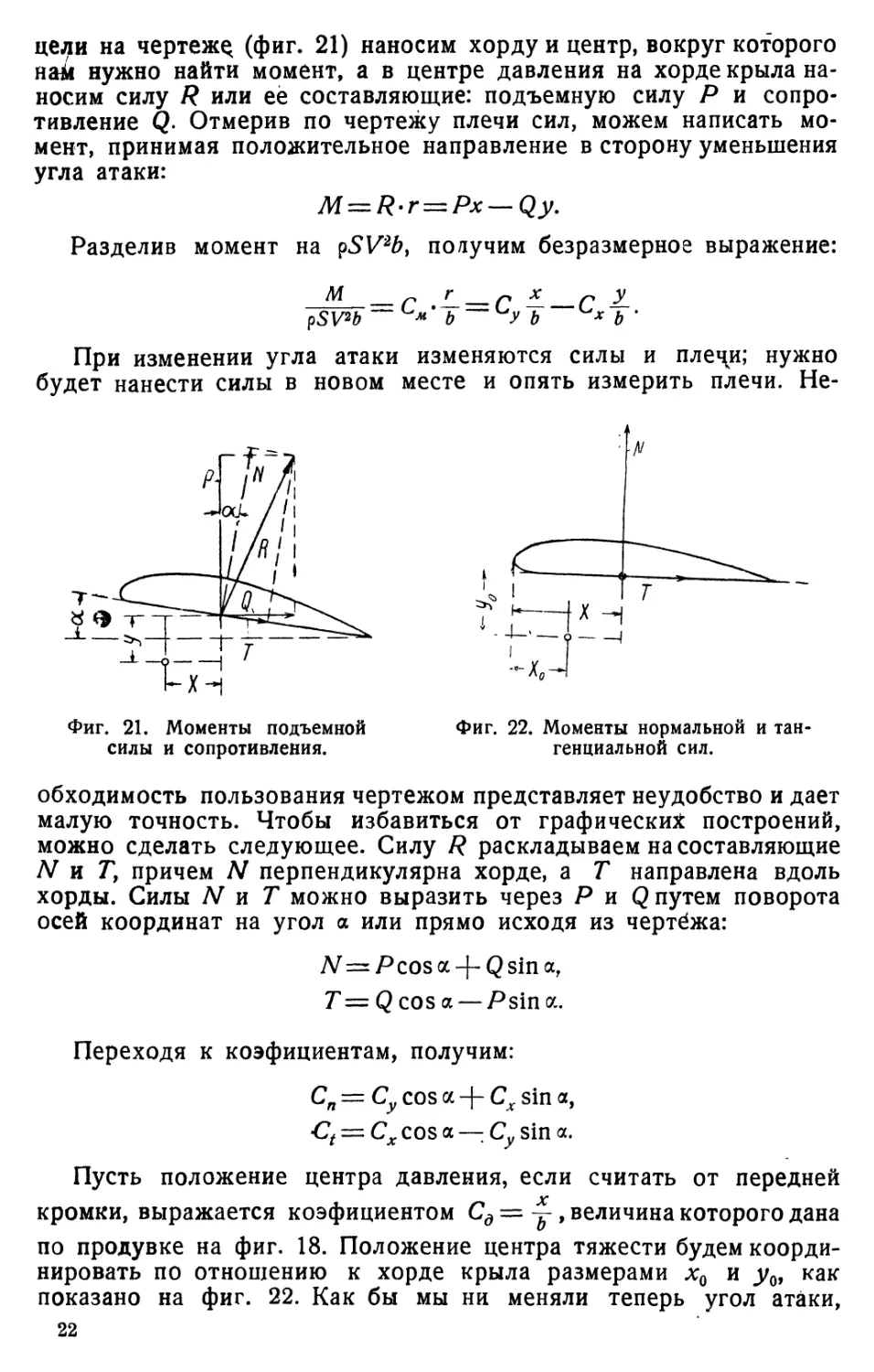
цели на чертежу (фиг. 21) наносим хорду и центр, вокруг которого
нам нужно найти момент, а в центре давления на хорде крыла на-
носим силу R или ее составляющие: подъемную силу Р и сопро-
тивление Q. Отмерив по чертежу плечи сил, можем написать мо-
мент, принимая положительное направление в сторону уменьшения
угла атаки:
M = R-r=Px — Qy.
Разделив момент на ?SV2b, получим безразмерное выражение:
м _r L. — C ——г У_
?SV*b ь ~у ь * ь ’
При изменении угла атаки изменяются силы и плечи; нужно
будет нанести силы в новом месте и опять измерить плечи. Не-
Фиг. 21. Моменты подъемной
силы и сопротивления.
Фиг. 22. Моменты нормальной и тан-
генциальной сил.
обходимость пользования чертежом представляет неудобство и дает
малую точность. Чтобы избавиться от графических построений,
можно сделать следующее. Силу R раскладываем на составляющие
N vi Т, причем N перпендикулярна хорде, а Т направлена вдоль
хорды. Силы N и Т можно выразить через Р и Q путем поворота
осей координат на угол а или прямо исходя из чертёжа:
7V=Pcosa-|-Qsin a,
T=Q cos a — Psin a.
Переходя к коэфициентам, получим:
С„ — Су cos a -f- Сх sin a,
Ct — Cx cos a —: Cy sin a.
Пусть положение центра давления, если считать от передней
кромки, выражается коэфициентом Сд = —, величина которого дана
по продувке на фиг. 18. Положение центра тяжести будем коорди-
нировать по отношению к хорде крыла размерами х0 и у0, как
показано на фиг. 22. Как бы мы ни меняли теперь угол атаки,
22
плечо силы Т будет постоянно равноyw а плечо силыМ будет' равно
х — х0 — Ср-Ь — х0. Тогда
момент будет:
М = N (Сд • Ь—х0)—Т у0>
с.=с,(св-^)-с,4".
Теперь чертеж нужен
только для определения
величин х0 и у0, которые
характеризуют располо-
жение центра тяжести по
отношению к крылу.
Остановимся несколь-
ко подробнее на коэфи-
циентах Сп и Ct, так как
в аэродинамике их ана-
лизируют обычно недо-
статочно.
КОЭФИЦИЕНТЫ Сп u Ct
Если мы Просумми-
руем давления,.действую-
щие на отдельные части
крыла, то получим равно-
действующую R. Величи-
ну равнодействующей R
мы можем измерить при
опытах в аэродинамиче-
ской тр!убе. Если мы возь-
мем крыло, находящееся
в потоке, и будем менять
’Поток
угол атаки, поворачивая Фиг, 23. Кривая Лилиенталя первого рода,
крыло, и откладывать ве-
личину равнодействующей /? в некотором масштабе, то -конец век-
тора R опишет кривую Лилиенталя (фиг. 23). Оси координат на-
правлены по потоку и нормально к нему. В .этом случае R разла-
гается на подъемную силу Р и сопротивление Q. Пользование
этими силами наиболее удобно для расчета полетных качеств.
Можно было бы испытание крыла произвести иначе. Крыло за-
крепить неподвижно, провести оси вдоль хорды и перпендикулярно
хорде, а направление потока воздуха поворачивать, меняя угол
атаки. Нанося равнодействующую R, получим, что конец вектора R
опишет кривую Лилиенталя второго рода, т. е. в координатах, свя-
занных с крылом (фиг. 24). Целый ряд задач устойчивости очень
удобно решается при пользовании силами N и Т или коэфициен-
тами С„ и Ct. Кроме устойчивости, Сп и Ct используются в теориях
штопора, автожира и слепого полета.
Анализ коэфициентов Сп и Ct представляет'большой интерес.
Переход от Су, Сх к C„, Ct представляет собой операцию, называе-
' 23
мую поворотом координатных осей. Пересчет можно сделать двоя-
ким образом: расчет по формулам и графическое перестроение, по-
ляры первого рода в поляру второго рода. Формулы для пересчета
уже были даны выше:
Сп = Су cos a -f- Сх sin а,
Ct = Сх cos а — Cj, sin а.
Если угол атаки не превышает 15°, т. е. в пределах нормаль-
ного полета, можно сделать упрощение, считая cosa= 1, a sin a = a;
Сх sin а, как произведением малых величин, пренебрегаем; имеем:
Ct—Cx Су а.
Для расчета равновесия и устойчивости в нормальном полете
можно пользоваться такими упрощенными выражениями. Если мы
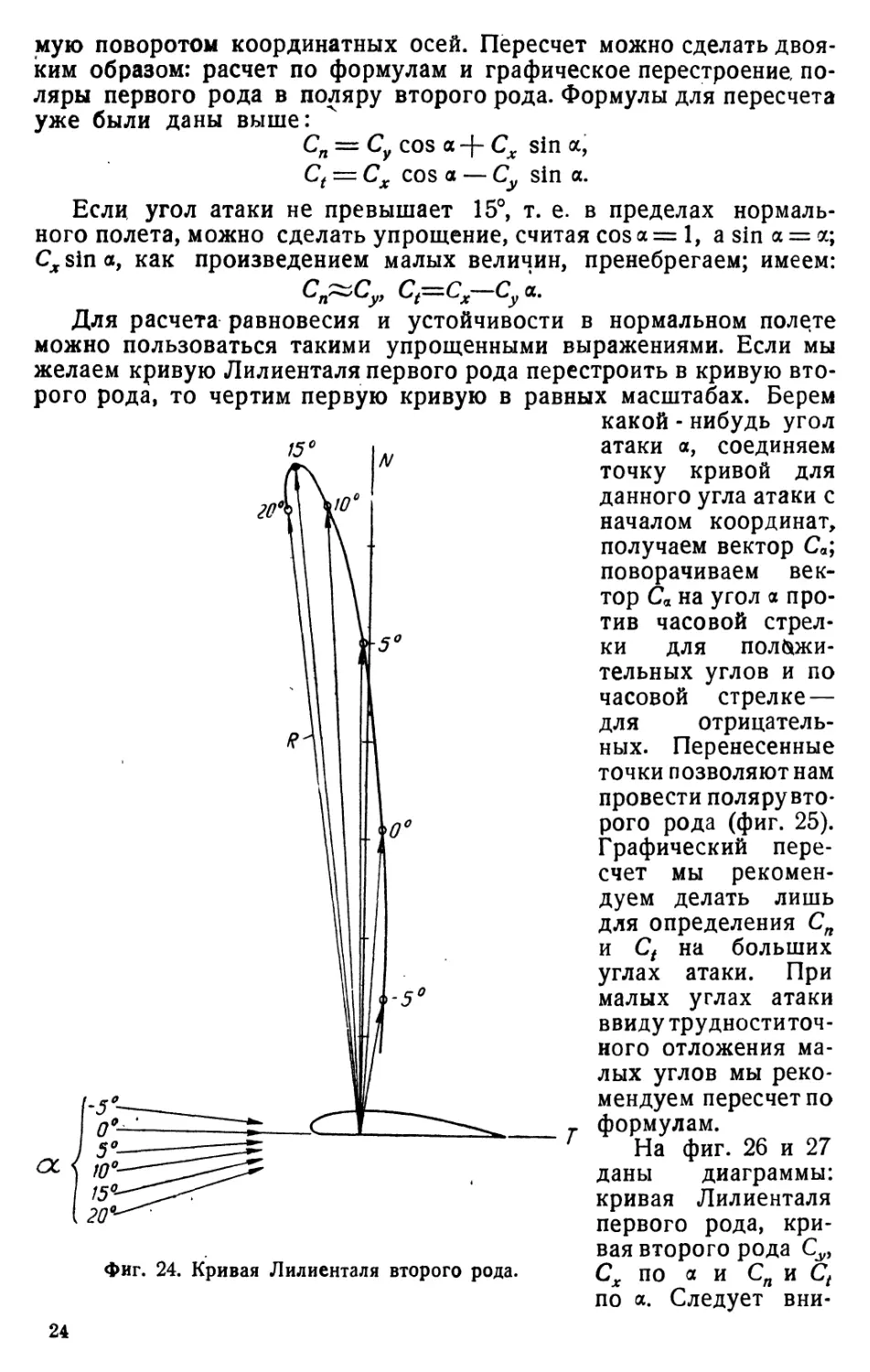
желаем кривую Лилиенталя первого рода перестроить в кривую вто-
рого рода, то чертим первую кривую в равных масштабах. Берем
какой - нибудь угол
Фиг. 24. Кривая Лилиенталя второго рода.
атаки а, соединяем
точку кривой для
данного угла атаки с
началом координат,
получаем вектор Са;
поворачиваем век-
тор Ся на угол а про-
тив часовой стрел-
ки для положи-
тельных углов и по
часовой стрелке—
для отрицатель-
ных. Перенесенные
точки позволяют нам
провести полярувто-
рого рода (фиг. 25).
Графический пере-
счет мы рекомен-
дуем делать лишь
для определения Сп
и Ct на больших
углах атаки. При
малых углах атаки
ввиду трудноститоч-
ного отложения ма-
лых углов мы реко-
мендуем пересчет по
формулам.
На фиг. 26 и 27
даны диаграммы:
кривая Лилиенталя
первого рода, кри-
вая второго рода С,,,
Сх по а и Сп и Ct
по а. Следует вни-
24
Фиг. 25. Перестроение кривой первого рода
в кривую второго рода.
Фиг. 26. Кривые Лилиенталя первого и второго рода для углов
атаки от —5 до 90°.
мательно вглядеться в эти кривые и изучить их различие. Возьмем Сп
На малых углах Сп почти не отличается от Су, однако на боль-
ших углах атаки, в то время как Су падает до нуля при а=90°,
Сп возрастает и при а = 90° С„ = СХ. Более интересно ведет себя Сг
Как видно, кривая Ct совсем не похожа на Сх. Вообще говоря, Ct
невелико. При угле атаки 0° и меньше Ct положительно и дей-
ствует назад, т. е. от передней кромки крыла к задней. Однако
уже на небольших положительных углах Ct меняет знак и довольно
«быстро нарастает в отрицательном направлении. Максимальная от-
рицательная величина Ct соответствует примерно углу при
л затем опять резко переходит на малые положительные значения и
потом постепенно приближается ,к нулю при а = 90°. На углах
атаки за срывом обтекания Ct очень мало, а если угол атаки от-
считывался от внутренней хорды крыла, Ct почти равно нулю при
а от 20 до 90°.
Особенно замечательно то, что отрицательные значения Ct зна-
чительно превышают положительные. Это вызывает удивление, а
иногда даже приводит к неверным выводам. Кажется абсурдным,
что на крыло действует сила, тянущая его вперед. Однако нужно
помнить, что если мы спроектируем Сп и Ct на направление полета,
26
то всегда получим положительный Сх, т. е. действующий назад.
Отрицательное значение Ct происходит от сильного разрежения в
передней части крыла. Наибольшее значение мы имеем у толстых
или сильно изогнутых крыльев, меньшее — у двояковыпуклых и сим-
метричных и, наконец, у плоской пластинки Ct имеет лишь малое
положительное значение. Особенно велико отрицательное Ct у раз-
резных крыльев с предкрылком.
Полное различие диаграмм Ct для крыла и плоской пластинки
приводит к тому, что4 модель самолета с плоскими крыльями будет
иметь совершенно другие характеристики устойчивости. Вообще
говоря, Ct сильно сказывается на характеристике полета и прочности
самолета.
Посмотрим, как будет влиять удлинение крыла на Сп и Ct.
Режим работы крыла мы характеризуем величиной Су. Так как
С„ приблизительно равно Су, то при переходе на другое удлинение
С„ остается без изменения. Однако можно было бы доказать, что
это верно не приблизительно, а точно. Доказательство этого мы
приведем далее для Ct. Посмотрим, как изменится Cz:
Ct=Cx Суа.
При переводе на другое удлинение угол атаки изменится на Да
и Сх на ACx = CvAa:
Л Л J
С/ = Сх + ЛС - Су (а Да) = Сх + СуЬа - Ср. - С Да =
'=c,+c/«=<
т. е. оказалось, что Ct не зависит от удлинения.
Такое заключение не должно быть неожиданно, его можно сде-
лать просто и рассуждением. Силы Сп и С( зависят от распреде-
ления давления по крылу. Сущность индуктивного сопротивления
сводится к разности между кажущимся и действительным углами
атаки, а потому удлинение крыла не влияет на распределение да-
вления при условии сохранения истинного угла атаки.
Кривые Лилиенталя второго рода не зависят от удлинения. Ме^
няется только разметка углов атаки. На самом деле нужно ожи-
дать некоторых изменений кривой при малом удлинении, так как
в этом случае имеет место еще изменение распределения нагрузки
по размаху по причине концевых потерь.
Наконец, остановимся на аналитическом выражении Сп и Ct.
Величины Су и Сх в пределах плавного обтекания крыла имеют
такое приближенное аналитическое выражение.
Изменение Су по углу атаки а принимается по прямой:
Су = В(а —а0),
где а0 — угол атаки, при котором Cy-Q-, обычно а0 отрицательно;
В — тангенс угла наклона диаграммы Су по а.
Теоретически для бесконечно большого удлинения В — Во —
= п = 3,14. Практически при пересчете результатов продуйки на
бесконечно большие удлинения получаются значения меньшие, а
27
именно: Во = 2,5—2,8. Если взять конечное удлинение крыла* и
в выражение угла атаки ввести скос потока, то получим:
Су = В0(а — Да — а0) = В(« — а0),
Да =
^. — а — а0,
Су I л
-д-+Да = а—а0;
разделив второе на первое, получим:
D _______|____ _ ^0
/„.L. _i_ 1 2Д°
\ В^ Су/ ТТЛ
Для угла атаки в пределах обтекания без срыва можно считать
С„ = Су = В (а а0).
Аналитическое выражение для Сх принимается в виде параболы,
так как Сх складывается из двух частей — профильного сопроти-
вления Ср и индуктивного Cz-:
В пределах плавного обтекания Ср можно принимать постоян-
ным. Для профилей с толщиной в пределах от 8 до 20% вели-
чину Ср можно принимать:
где 8 — наибольшая толщина профиля,
b — хорда профиля.
Величину Ct получим из выражения:
Cz = Сх Суа = Ср -| Сул.
Угол а можем выразить через Су:
Су = В(а — а0) = В0(а — а0 — ^а),
Cv 9
9Г а С 2 о Г 2
г _г \ у „ г 2 г 2 — г „г у
Во “° ' а° Ьу Во '
Если выразить Ct через угол атаки, то получим:
Су — В(а — а0);
28
Ct — Ср а0В (а а0) (а — а0)2 —
= Ср — 4-Ва02 — а2+ 2аа0 —- а02 ^-==
Dq Ljq ZJq
= С.~+ Г, ~ £)•
Полученные выражения для Ct являются тоже уравнениями
парабол.
Аналитическое выражение для Сп и Ct будет использовано
в дальнейшем.
КОЭФИЦИЕНТ МОМЕНТА И ФОКУС КРЫЛА
О том, что такое центр давления и как он перемещается, уже
было сказано. Однако пользование центром давления представляет
ряд неудобств. Во - первых,
характер перемещения центра
давления у разных крыльев
сильно различен. Затем на ма-
лых углах атаки центр давле-
ния уходит далеко от крыла,
а при Cv = 0 центр давления
лежит в бесконечности.
Вместо центра давления лаборатория Прандтля
стала применять коэфициент момента См-.
с _ М
~~ pSV?b’
где М—момент крыла вокруг передней кромки
точнее, вокруг точки, являющейся проекцией передней кромки
на хорду крыла, как это показано на фиг. 28.
Момент крыла вокруг
передней кромки можно
выразить как произведение
силы ЛА на. расстояние х
от передней кромки до
центра давления (х = Сд • &):
M = N-Cd-b,
отсюда
/-» _ к • Сд • Ь_р р
pSV2-b ьл‘ьй>
_ См
—7^-
коэфициентом момента См и
в Гёттингене
крыла, или,
Фиг. 29. Схема испытания момента крыла.
Здесь мы получили связь между
центром давления, что нужно твердо запомнить.
При испытании крыла в аэродинамической трубе обычно непо-
средственно определяют См. При подвеске Прандтля подъемная
сила определяется как сумма двух параллельных сил, из которых
одна Pi берется на передней кромке крыла, а другая Р2—сзади
на расстоянии с (фиг. 29). Тогда
М = Р2-с.
29
Если бы взять с=Ь,т. е. вторую силу измерять по задней кромке,
то р
М=^Р2-Ь и См = [Ts- ’
т. е. получаем, что если С„ разложено на две составляющих в пе-
редней и задней кромке, то составляющая на задней кромке будет
См, а на передней Сп — См-
Если по продувке дано положение центра давления Сд, то
обычного диапазона
углов С =СЙ-Су.
Значения См даются
в виде диаграммы,
например См по уг-
лу атаки а. Однако
чаще применяют
диаграмму См по Су,
совмещая ее с кри-
вой Лилиенталя, как
это делают, напри-
мер, в Гёттингенской
лаборатории (фиг.
30). В этом случае
результаты испыта-
ния получаются ком-
пактные и довольно
наглядные. По оси
ординат имеем С„,
а по оси абсцисс две
шкалы — Сх и См.
На диаграмме имем
две кривых: кривую
Лилиенталя с раз-
меткой углов атаки
и кривую Су по См.
По этой диаграмме
можно легко най-
ти центр давления.
Пусть нам нужно
найти центр давле-
ния при Су = 0,5; отмечаем точку Су = 0,5 на кривой См и через
нее и начало координат проводим прямую до пересечения с орди-
натой Су=1 (или Су = 100 по немецким обозначениям). Спускаясь
на шкалу См, прочтем расстояние до центра давления; по фиг. 30
для примера получаем Са = 0,335.
При испытании крыла на очень большом диапазоне углов атаки,
например до 90°, лучше давать диаграмму Су) Сх и См по углу
атаки а.
Посмотрим, как выглядят диаграммы Су по См для разных
профилей. Нужно напомнить, что форма диаграммы не зависит от
удлинения, так как, оставляя Су постоянным, мы сохраняем рас-
пределение давления, и только разметка углов атаки меняется.
зо
На диаграмме фиг. 31 даны Су по См для разных профилей
крыльев. Рассматривая их, можно сделать следующие выводы.
В пределах плавного обтека-
ния крыла диаграмма См по
Су идет по прямой линии.
В том месте, где начинается
срыв обтекания и возрастает
профильное сопротивление,
диаграмма См отходит от пря-
мой. Для ,всех профилей пря-
молинейные участки парал-
лельны, т. е. составляют оди-
наковый угол с осью ординат.
Все различие между разными
профилями в пределах плав-
ного обтекания заключается
в различной величине См°,
т. е. См при 6^ = 0. В случае
срыва обтекания на малых
углах атаки для получения См^
диаграмму продолжаем по
прямой.
Полученные результаты
весьма интересны. Они по-
казывают, что все разнообра-
зие в характере перемещения
центра давления сводится к
различию в величине См<. За-
тем См может быть очень
легко выражено аналитически.
Если тангенс угла наклона
прямой См к оси Су обозна-
чим через т, то
С = См + тСу.
ль 1 У
Величина т по разным
испытаниям колеблется в пре-
делах 0,23 — 0,25.
Профили крыльев с боль-
шой кривизной на отрица-
тельных углах атаки дают
срыв обтекания и перелом фиг> 31* ДиагРамма Су °о См для крыльев
г /ж qi\ различного прЬфиля.
диаграммы (фиг. ol). г
Если будем брать момент вокруг некоторой точки, лежащей
на хорде на расстоянии х от передней кромки, то коэфициент
момента будет:
С« — См„ + тСу Ь Су-См„Л-Су [т----у)-
31
Если возьмем -у —т, то См — См, — и это будет справедливо
для всех углов атаки в пределах плавного обтекания.
Точка, лежащая на хорде на расстоянии х = т-Ь от передней
кромки, называется фок ус ом крыла. Следовательно, фокус
есть гакая точка, вокруг которой коэфициент момента крыла имеет
постоянную величину.
Су Самое существование фокуса
крыла весьма интересно. Это по
называет, что схему сил, действую-
----щйх на крыло, можно свести к си-
Q х-- ле, приложенной в фокусе, вели-
чина которой зависит от скорости
•*' 7} —и Угла атаки, и к моменту, величи-
на которого зависит только от ско-
Фиг. 32. Фокус крыла. рости (фиг. 32). Такая схема пред-
ставляет большие удобства для ре-
шения задач устойчивости и прочности самолета. В дальнейшем
мы еще остановимся на пользовании фокусом.
МОМЕНТ КРЫЛА ВОКРУГ ОСИ Z И ВОКРУГ ЦЕНТРА ТЯЖЕСТИ
Осью Z MofyT служить различные оси, перпендикулярные пло
скости симметрии крыла. В большинстве задач ось Z берут прохо
дящей через центр тяжести, и в этом случае для краткости гово
рят, что берется момент вокруг
центра тяжести. Однако нередко
берут ось и в другом месте, на-
пример, ось колес и др.
Выражение для момента кры-
ла, пользуясь центром давления,
мы уже дали выше. Для практи-
ческих расчетов удобнее поль-
зоваться значениями Сп, Ct и См.
Проводя через нужный центр
ось X, параллельную хорде, и Y,
перпендикулярную ей, получим
координаты передней кромки х0
и у0 (фиг. 33). Принимая поло-
жительное направление момента
т. е. пикирования,, получим:
Фиг. 33. Схема расчета момента крыла.
в сторону уменьшения угла атаки,
MZ = M — Nxo—Tyo.
Для получения безразмерной величины делим Мг на р£Уа£:
__ Мг _____р f~< Ха г' У о.
pSV2ft л 6 f Ь ’
это и есть основное выражение момента крыла.
Для расчета См нужно знать координаты х0, _у0, хорйу крыла
Ь, площадь 5 и затем данные профиля Cv, Сх и См для разных
углов атаки; коэфициенты Cv и Сх пересчитываем на Сп и Ct, и
32
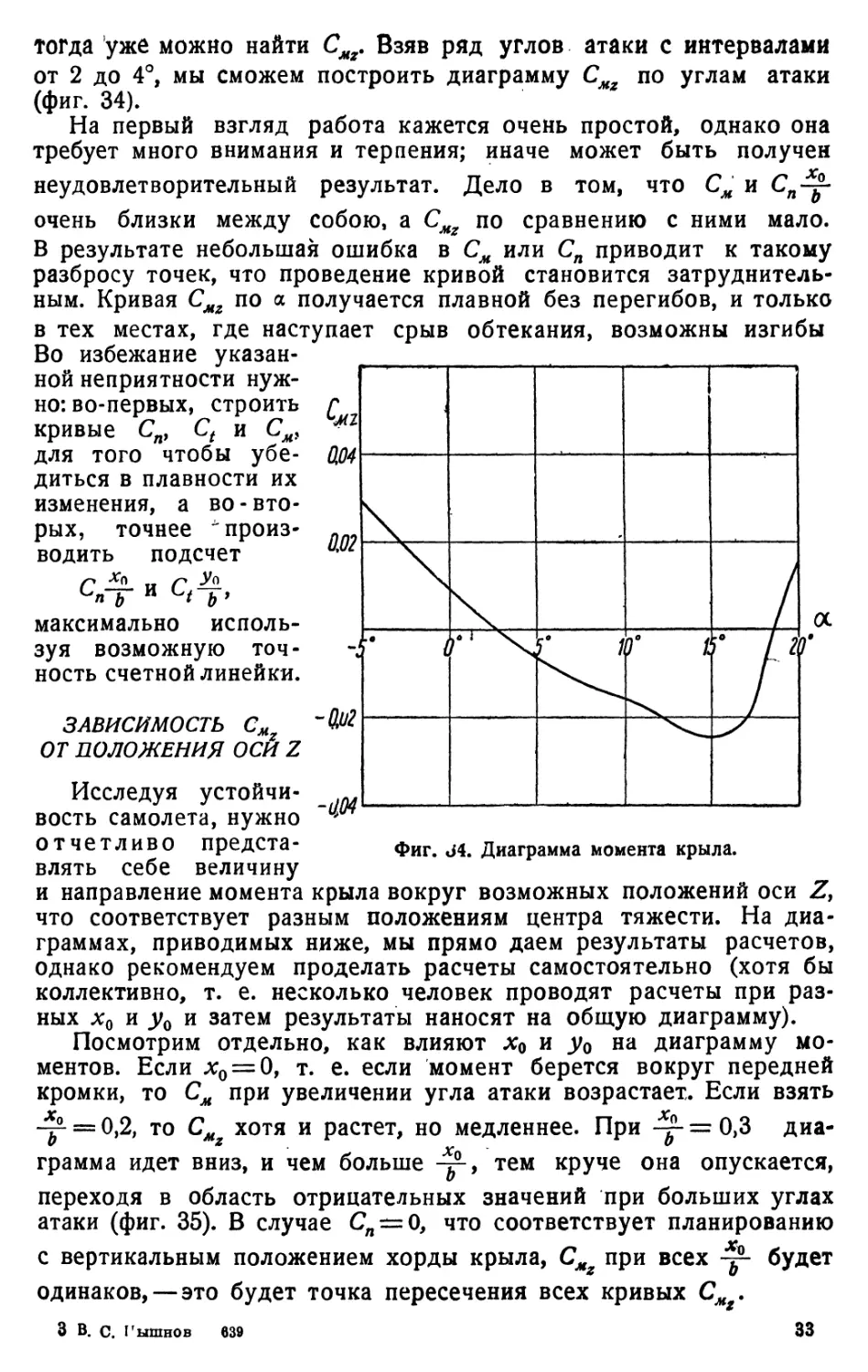
тогда уже можно найти Смг. Взяв ряд углов атаки с интервалами
от 2 до 4°, мы сможем построить диаграмму С по углам атаки
(фиг. 34).
На первый взгляд работа кажется очень простой, однако она
требует много внимания и терпения; иначе может быть получен
неудовлетворительный результат. Дело в том, что См и Ся-у
очень близки между собою, а Смг по сравнению с ними мало.
В результате небольшая ошибка в См или Сп приводит к такому
разбросу точек, что проведение кривой становится затруднитель-
ным. Кривая Смг по а получается плавной без перегибов, и только
в тех местах, где наступает срыв обтекания, возможны изгибы
отчетливо предста- Фиг. Л. Диаграмма момента крыла,
влять себе величину
и направление момента крыла вокруг возможных положений оси Z,
что соответствует разным положениям центра тяжести. На диа-
граммах, приводимых ниже, мы прямо даем результаты расчетов,
однако рекомендуем проделать расчеты самостоятельно (хотя бы
коллективно, т. е. несколько человек проводят расчеты при раз-
ных х0 и у0 и затем результаты наносят на общую диаграмму).
Посмотрим отдельно, как влияют ха и у0 на диаграмму мо-
ментов. Если хо = 0, т. е. если момент берется вокруг передней
кромки, то См при увеличении угла атаки возрастает. Если взять
-у = 0,2, то СМг хотя и растет, но медленнее. При -у- = 0,3 диа-
грамма идет вниз, и чем больше тем круче она опускается,
переходя в область отрицательных значений при больших углах
атаки (фиг. 35). В случае Ся = 0, что соответствует планированию
с вертикальным положением хорды крыла, СМг при всех у- будет
одинаков,—это будет точка пересечения всех кривых CMf.
3 В. С. Пышно в 639 33
Фиг. 36. Диаграммы моментов крыла при поднятии и опу-
скании моментной точки»
Теперь возьмем -у- — 0,3, а -у- будем менять. Результат показан
на фиг. 36. Как видно, при изменении -у- меняется кривизна диа-
грамм. При опускании оси вниз кривая загибается вверх, при под-
нятии оси вверх кривая загибается вниз. При некотором угле атаки
Ct = Q, и тогда в этом случае CMz не зависит от y-и кривые пере-
секутся.
Характер изменения кривой CMg при перемене х0 и у0 очень
важен для анализа равновесия и устойчивости самолета.
АНАЛИТИЧЕСКОЕ ВЫРАЖЕНИЕ МОМЕНТА КРЫЛА
Предыдущий расчет моментов крыла был основан на диаграм-
мах продувки крыла. Однако, как нами уже было показано, в пре
делах плавного обтекания Сп, Ct и См можно выразить аналитиче
ски в функции Cv или а. Имеем:
Ся — Су — В (л а0),
CJ В»
Ct— Cp — ^Cy — Ср — а2 +
+«а,в(2А-1) + %»в(1-А),
См — СМа “И тСу = См„ ~|“ тВ (а
Подставляя эти значения в вы-
ражение для Cmz, получим:
С,=с..+ («--£)в(а—
Первое выражение дает Смг в функции Су, второе — в функ-
ции угла атаки а.
Аналитическое выражение CMg довольно точно, и потому им
часто пользуются на практике.
Выразим CMg через фокус. Если координаты фокуса крыла
относительно осей X, Y обозначим х и у, то из фиг. 37 имеем:
Мг = М0—Nx0 — TyQ,
с.=с.-с4-с,^.
Аналитическое выражение:
г —С ___С ~__~(с —а С _—
ВВ
МОМЕНТ КРЫЛА НЕПРЯМОУГОЛЬНОЙ ФОРМЫ БИПЛАНА, ПОЛУТОРА-
ПЛАНА И ДРУГИХ ФОРМ
Расчет момента крыла непрямоугольной формы биплана и дру-
гих форм может быть проделан совершенно таким же способом,
как прямоугольного крыла, если только есть продувка данного
крыла или данной формы крыльев на Су, Сх и См. При этом обя-
зательно должна быть известна точка, относительно'которой опре-
деляется См, и какая хорда b принята в расчете См; х0 и _у0 будут
координатами моментной точки относительно осей X и У. В осталь-
ном расчете мы поступаем так же, как при расчете обыч-
ного крыла. Если сравнивать численные значения См, то они будут
отличны от значений См прямоугольного моноплана.
Если полной продувки нет, а есть только продувка прямоугольных
крыльев с нужными профилями, то расчет моментов можно сделать
более или менее приближенно. Далее мы приводим несколько
способов расчета моментов моноплана и биплана.
РАСЧЕТ См ОСНОВАННЫЙ НА ТЕОРИИ ИНДУКТИВНОГО СОПРО-
" ТИВЛЕНИЯ
Расчет, основанный на теории индуктивного сопротивления,
наиболее точен, но, к сожалению, сложен и трудоемок. Пусть мы
имеем монопланное крыло переменной ширины, переменного про-
филя и с различными установочными углами профилей. Для рас-
чета моментов такого крыла нужно прежде всего найти распреде-
ление Су по размаху, учитывая углы атаки, профиль и скос потока.
Эта работа производится обычно по методу Трефтца. Найдя
распределение Су по размаху в зависимости от формы профиля
в данном сечении крыла и Сх, будем иметь Ct и См. Затем по
чертежу находим изменение координат х0 и j/0 по размаху и
в результате строим кривые CMb\ CnxQb и Ctyab по размаху.
Элементарный момент от некоторого сечения крыла будет:
= CMb dS—СЛ dS— ClVo dS,
но элемент площади dS = b-dz‘, тогда
= CMb*dz — Cnbx0 dz — Ctby* dz,
111
M 2 2 2
CM№dz 2 dz 23 Ctby^ dz.
о о о
Удвоенные суммы в правой части последней формулы предста-
вляют собой не что иное, как площади построенных диаграмм.
Для получения безразмерного выражения делим еще на пло-
щадь S и на какую-нибудь хорду Z>0. Обычно берут хорду у осно-
вания крыла. Подсчет площадки диаграммы можно производить
различными способами. Практически расчет площади, если разби-
вать диаграмму на трапеции, достаточно точен и быстр.
36
Если распределение подъемной силы по размаху близко
к эллиптическому, что обычно стараются получить, работа значи-
тельно упрощается; расчета по Трефтцу делать не нужно, а прямо
берут Су соответственно углу атаки и форме профиля.
Для оиплана, имеющего, вообще говоря, разные площади верх-
него и нижнего крыльев, разные профили и разные установочные
углы, расчет производится так.
Имея характеристики профилей
крыльев, как монопланов, и поль-
зуясь теорией Бетца, производим
расчет Су, Сх и См каждого кры-
ла в отдельности, учитывая удли-
нения крыльев, их расположе-
ние и взаимное влияние. Затем
находим С„, Ct, х0, уа для каж-
дого крыла и подсчитываем раз-
дельно их моменты. Если верх-
нему крылу дадим индекс 1 и
нижнему крылу индекс 2, полу-
чим (фиг. 38):
М _ Mi , Af3
pl/2 руз+руз-
Для получения безразмерного
м л
выражения делим на общую
площадь S = Sj -|-$2 и на какую-нибудь хорду. Чаще берется хорда
верхнего крыла а иногда средняя Ьср = 61 $ получим:
р _______________ Мг ____ St I с 34 ) I
•из — — "У \~ Ч x ' *Г)-t-
Так как обычно центр тяжести самолета лежит между крыльями,
то для нижнего крыла у2 получается отрицательное.
РАСЧЕТ МОМЕНТОВ ПО СРЕДНЕЙ АЭРОДИНАМИЧЕСКОЙ ХОРДЕ
Пусть мы имеем моноплан с переменной хордой или биплан.
Попробуем, нельзя ли заменить их монопланом с постоянной
хордой так, чтобы значения N, Т и М сохранились. Условие со-
хранения сил МиГ требует, чтобы площадь осталась без измене-
ний; в частности, если мы биплан заменяем монопланом, то пло-
щадь крыльев моноплана должна быть равна площади обоих
крыльев биплана.
37
Нужно обратить особенное внимание на то, что, производя
такую замену, мы имеем целью сохранить лишь силы N, Т нМ.
В других отношениях, как например в индуктивном сопротивле-
нии, мы равноценности не получим.
Посмотрим, какое требование на величину хорды и ее располо-
жение налагает условие сохранения момента Мг.
Пусть мы имеем крыло фасонной формы (фиг. 39, вид сверху
и спереди) и ось Z, положение которой может быть выбрано
произвольно, но обязательно перпендикулярно плоскости симмет-
рии крыла. Разделим крыло на полоски с бесконечно малой шири-
ной dz. Площадь такой полоски будет dS — bdz, а координаты
.1
Фиг. 39. Схема расчета средней аэродинамической хорды.
передней кромки х и у. Составим выражение элементарного мо-
мента вокруг оси Z от одной полоски:
= Сж&2 dz-\- СпЬх dz— Ctby dz.
р ’
Интегрируя вдоль размаха, получим:
1 1 £
2 2 2
-^- = 2 /* CMb2dz-\-2 f C„bxdz—2f Cpydz.
ooo
Теперь возьмем крыло с постоянной хордой Ьср, но с прежней
площадью S. Координаты передней кромки обозначим хср и угр.
Составим выражение момента для этого прямоугольного крыла:
ур! = С* Sbcp CnSxcp С£уср.
Приравняем моменты обоих крыльев. Но мы потребуем равен-
ства не только моментов в целом, но и почленного равенства, т. е.
чтобы моменты от См, С„ и С(, в отдельности взятые, были равны:
38
CMSbcp=2 f CMb*dz,
0
2
CnSxcp = 2 J C„bxdz,
и
2
2
С^Уср = 2 J Cjby dz.
о
Отсюда получаем хорду прямоугольного крыла и координаты
передней кромки:
2
2
2fCMb*dz
t, _ о
Ь‘Р— CMS *
J_
2
2 J' Cnbxdz
X —_2_________
СР Cns ’
2
2 У* Cflydz
v =_2________
УсР CfS
Вообще говоря, значения См, Сп и Ct непостоянны по размаху.
Даже при постоянном профиле и установочном угле атаки См, СпиС(
переменны по размаху по причине переменного скоса потока и
концевых обтеканий. Однако, если профиль крыла постоянен и рас-
пределение подъемной силы не сильно отличается от распределе-
ния по эллиптическому закону, значения См, Сп и Ct можно считать
постоянными, вынести их в вышеприведенных формулах за знак
интеграла и затем сократить. То же самое можно делать и в случае
переменного профиля, если распределение подъемной силы близко
к эллиптическому. В остальных случаях при разных углах атаки
величина и расположение Ьср могут оказаться переменными, и рас-
чет моментов лучше будет вести, исходя из продувки, или по
методу Трефгца, или по методу фокусов.
Найденная хорда прямоугольного крыла Ьср называется сред-
ней аэродинамической хордой. Таким образом средняя
аэродинамическая хорда какого-либо крыла есть хорда прямоуголь-
ного крыла, которое при соответствующем расположении на всех
углах атаки в пределах плавного обтекания дает момент вокруг
поперечной оси Z такой же, как исходное крыло.
После преобразования вышеприведенных формул путем сокра-
з»
щения на См, Сп и Ct получим следующие выражения для средней
хорды и координат ее передней кромки:
£
2
2 f b2 dz
-к °
^ср S ’
2
2 f bxdz
х — _2_____
ср— s ’
2
2
2 f bydz
____ о
у<ф s
Интегралы удобнее всего подсчитать, разбивая полукрыло на
трапеции, причем пять-шесть частей будет вполне достаточно.
ПРИМЕРЫ РАСЧЕТА СРЕДНЕЙ АЭРОДИНАМИЧЕСКОЙ ХОРДЫ МОНО-
ПЛАНА
Трапецевидное крыло. Возьмем трапецевидное крыло (фиг. 40).
z
Заметим, что 2 j 2b" dz есть не что иное, как удвоенный статический
о
Фиг. 40. Средняя хорда трапецевидного крыла.
момент площади диаграммы, у которой по оси абсцисс отложены z,
а по оси ординат — хорды Ь. Затем мы знаем, что статический
момент площади равен произведению площади на координату
центра тяжести площади. Следовательно, средняя аэродинамиче-
ская хорда будет равна удвоенной координате центра тяжести пло-
щади диаграммы b по %.
♦о
У трапеции центр тяжести лежит на средней линии, следова-
тельно, средняя аэродинамическая хорда трапеции есть хорда тра-
пеций, проходящая через центр тяжести площади. Способ определе-
ния центра тяжести трапеции показан на фиг. 40.
Иногда за среднюю хорду берут полусумму параллельных сто-
рон, но это неправильно. В частном случае, когда трапеция обра-
2
щается в треугольник, Ьср — у Ьо, где Ьо — основание; полусумма
у bQ
сторон дает в этом случае Ьср = т. е. разница получается до-
вольно значительная.
Остается доказать, что если мы для трапецевидного крыла берем
среднюю хорду проходящей через центр тяжести трапеции, то
координаты передней кромки тоже будут правильны. Для этого
рассмотрим интегралы
У ~2
J bxdz и ! bydz.
о 6
Так как передняя кромка представляет собой прямую линию, то
можно написать x — a-[-kz и y = c-\-kiZ, где k и — тангенсы
углов наклона. Тогда интегралы примут вид:
L L L
2 2 2
2 у* (а + kz) b dz 2а f b dz 2k f bz dz
x — —2_____________— 0_____l 0_______— n I h 2Q-*
cp~ S ~ S ’ 5 —
£
2
2 f (c + kit) b dz
ycp= —- s = c 4- ki .
Интегралы
£
2
J9 bzdz
и
есть не что иное, как статические моменты Qx площади крыла
вокруг оси X. Деля 2QX па 5, получаем расстояние до центра
тяжести площади, и теперь нетрудно видеть, что
являются координатами передней кромки хорды, проходящей через
центр тяжести трапеции.
Все эти выводы можно было бы сделать и иначе, подставляя
аналитические выражения Ь, хср и уср и производя интегрирование;
однако, по нашему мнению, приведенный выше расчет более прост
и нагляден.
Трапеция с прямоугольником. Очень часто крыльям самолетов
дают форму в виде центральной прямоугольной части и концевых
41
S,
г
трапеций (фиг. 41). В этом случае для расчета берем одну половину
крыла; затем находим положение средних аэродинамических хорд b
отдельно для прямоугольной и трапецевидной частей. Концы най-
денных хорд соединяем прямыми линиями, а расстояние между
ними делим обратно пропорционально площадям прямоугольной и
трапецевидной частей; проведя в найденном месте хорду между
соединяющими прямыми, по-
лучим среднюю аэродинами-
ческую хорду всего крыла.
Эллиптическое крыло. Пусть
мы имеем эллиптическое
крыло, составленное из
двух полуэллипсов (фиг. 42).
Одна полуось общая-у, две
другие bi и й2; bv-}-b2 = b0,
т. е. имеем хорду крыла у осно-
вания. Для удобства расчета
ось Z проведем через точку
пересечения полуосей; весь вы-
вод можно произвести только
для одного полуэллипса, для
второго расчет
будет вполне
j 5»
Q-0——
Фиг. 41. Расчет средней хорды.
/1 1\_ 1.,.
~ 2 /2-3-8 —01 Ц 2 6 / ~~ 3 °1
д ___2й,2/-4__д 8 _ Л oct.
b<v~ з-rtbii —bi-r^ — 0,85bi.
Для второго полуэллипса получим аналогично 0,85 Ь* таким
образом средняя аэродинамическая хорда всего эллипса будет:
йср = О,85до.
42
Теперь найдем положение средней аэродинамической хорды.
Согласно выбранному расположению оси Z величины х для обоих
полуэллипсов равны нулю; следовательно, средняя аэродинами-
ческая хорда расположится так, что от поперечной полуоси в одну
сторону будет часть Ь'ср = 0,85 Ьи а по другую сторону Ь"ср = 0,85 Ь2,
или, иначе говоря, поперечная полуось поделит среднюю аэро-
динамическую хорду пропорционально полуосям Ьг и
Остается найти еще расположение средней аэродинамической
хорды по высоте. Пусть крыло имеет поперечный угол р (фиг. 43).
Тогда
У ср— s ~ s ’
но 4 = »о]/1-4
I
и 2 _____
23Ло Г l/l-4-J«te j
о 8 3 Г,/----.
У ср ~ ir it t J V 1~~4~p~Z dZ-
Tbol s
У
Фиг. 43. Расчет положения средней хорды по высоте.
z2
Для интегрирования делаем подстановку и2 = 1
получаем:
d(u*) = 2udu =-----^zdz,
z dz =-----v- и du,
£ 2 0 4 о P f 2Л l> C-^u3\ Hv ' j-J и du— 4]d^3) 4 J з о i !£ 2
43
Подставив пределы, получим:
i
2 _______
о
_ 8^2 _2/ч
Лр— я/12 Зк
Превышение конца крыла над серединой
Л = -2"Р;
отсюда 4
Л, = ^3 = 0,424*.
Прямоугольное крыло с вырезом в середине и закруглением на
конце. Если концевые закругления невелики, их вообще можно
не принимать во внимание, так как концы крыльев обтекаются
Фиг. 44. Расчет средней хорды.
иначе и учитывать это мы не умеем. Форма закруглений бывает
различна, но без особого ущерба для точности закругления можно
считать эллиптическими. Вырезы в центре для упрощения следует
приводить к прямоугольникам или трапециям. Таким образом все
крыло можно разбить на три части: прямоугольную, у централь-
ного выреза и закругления. Соответственно площади этих частей
будут Sj, S2 и Ss. Для каждой части согласно приведенным уже приме-
рам находим среднюю хорду Ьсо и координаты передней кромки х, у.
Соответственно будем иметь bi, хи уй Ь2, х2, у2', Ь3, х3 и у3.
Окончательные значения средней хорды и координат передней
кромки для целого крыла получим из условия:
L ___ S, ^1 ~4~ S2 62 ^3 ^3
Sj + S2 + S3
___ S, , -|~ S> х2 S3 х3
СР S, -f- S2 4- S3 ’
.. $iУ1 Ч- S2у2 + S2Уз
•Уср Sj + Sj + s,
44
На фиг. 44 приведем примерный расчет для типичного крыла.
Подобный расчет можно применить для различных форм крыла,
разбивая их на прямоугольники, трапеции и эллипсы.
СРЕДНЯЯ АЭРОДИНАМИЧЕСКАЯ ХОРДА БИПЛАНА
Попробуем найти среднюю аэродинамическую хорду биплана,
для чего заменим биплан равноценным по моменту прямоугольным
монопланом.
Пусть имеем биплан с площадями верхнего крыла Sj и нижнего
крыла S2. Пусть для каждого крыла в отдельности найдена средняя
Фиг. 45. Расчет средней хорды биплана.
аэродинамическая хорда: для верхнего Ьх, для нижнего Ь2. Затем эти
хорды спроектируем на плоскость симметрии, т. е. на боковой вид
самолета (фиг. 45); расстояние между крыльями обозначим Н и вы-
нос по передней кромке—В. Теперь возьмем момент вокруг оси Z.
Так как местоположение оси Z безразлично, то для простоты
возьмем ее в передней кромке средней хорды верхнего крыла:
= cMt St b, + См S2 b2 + С„/2 В + ctt S2 Н.
Затем возьмем момент от монопланного прямоугольного крыла,
лежащего ниже верхнего на расстоянии Но с выносом Во:
^ = CMSb0 + CnSB0+CtSH0.
Приравниваем моменты почленно, так как только в этом слу-
чае равенство может иметь место на всех углах атаки:
См S Ьо == См Sj -|- См* S2 b2,
CnSB0 = CntS2B, CtSH0 = C(iS2H.
Кроме того, есть еще условие равенства сил N яТ:
С„ S = с,2 S, + С„, S„ См = С, А + с* 4 ,
c/s=c/s14-c/js2.
Из этих выражений находим:
, __ См< Si bt + См> S, b2 _ CMi St bj -f- CM* S2 b2
c? Cm $ Si -f- CM> S2 ’
D — D C^Si D S2
Dq--D ~~ „ ~~ — D г ,
1 7* Г *^2
°ла
rr _ LT *^2 __ rr $2
— ct Si + ct sa ct
1 ’ Si^ + s2
Рассмотрим сначала BQ и HQ. Как видно, они зависят от площа-
деи и отношений ~ и Эти отношения, вообще говоря, зависят
ля
от угла атаки, и потому при разных углах атаки положение сред-
ней аэродинамической хорды будет различно. Такое усложнение
задачи практически неприменимо. Только в том случае, если про-
фили крыльев и установочные углы одинаковы, отношения -~9
Ctt CMt Су
~^-9 почти постоянны и равны приблизительно отношению
Дальнейшие рассуждения мы будем вести только для этого случа’я.
Получим:
В0 = В—--------, НО = Н—С^------;
St^-4-S, Si-A + S»
кроме того:
А-А
Но ~ Н ‘
46
ней
ние
Последнее отношение говорит о том, что передний кромка срёд-
аэродинамической хорды лежит на линии, соединяющей перед-
кромки крыльев. Величину средней хорды преобразуем так:
к _CJ,Sib1 + CMS2b2 и с,/1 ,
°СР~ См Si + См S3 01 ~Су f
Mi Mi t^Sj + S,
±Л______1 I I
s3
2 СУ
р-1 + s2
___^2______i
2 СУ
р1 $1 + s3
<-л
bi
\ -^-‘S1 + S3
Gv,
_____$Д> I _L^
Cy
p-1 sx -f- s3
4, J
^2
су
уг2 4" 52
Gv
но
s2
Я0
Н ’
следовательно:
Si + sa
^ + b,^=bi-(bi-b^
1
Полученное выражение имеет очень простой геометрический
смысл: если мы передние и задние кромки верхней и нижней сред-
них хорд соединим и, отложив Но, проведем линию параллельно
хордам, то получим среднюю аэродинамическую хорду биплана по
величине и положению. Этим правилом обычно и пользуются для
расчета средней аэродинамической хорды биплана.
Повторим последовательно порядок построения средней
аэродинамической хорды биплана. Прежде всего оговариваемся,
что построение средней аэродинамической хорды имеет смысл лишь
для случая одинаковых профилей и установочных углов крыльев.
В остальных случаях нужно вести более точный расчет, приведен-
ный уже выше, или применить метод фокусов, о чем будет ска-
зано ниже.
Прежде всего ищем средние хорды крыльев в отдельности,
пользуясь видом их сверху (фиг. 45, а), затем найденные хорды
переносим на боковой вид (фиг. 45, б и в) и соединяем передние
и задние кромки.
Вычисляем:
значение
^S. + S.
Су
берем по каким-либо данным в зависимости от вы-
носа крыльев. На основании некоторых опытов можно считать
1,07 Ц-0,009?°
47
для средних полетных углов атаки в зависимости От угла выноса <р6;
последний определяется как угол между нормалью к хордам и
линией, соединяющей точки, лежащие на V8 хорды от передней
кромки.
Отложив Но, проводим линию параллельно хорде крыльев, и
тогда линии, соединяющие передние и задние кромки, отсекут сред-
нюю аэродинамическую хорду.
Средняя аэродинамическая хорда биплана имеет очень услов-
ный характер. В самом деле, по своему размеру она лежит между
хордами верхнего и нижнего крыльев, но среднему крылу мы при-
писываем полную площадь, хотя удлинение должно остаться без
изменения. Затем в отношении моментов надо заметить, что заме-
нить биплан монопланом с сохранением моментов на всех углах
атаки невозможно, и только при одинаковых профилях и устано-
вочных умах допущение это практически приемлемо. Нередко
высказываются против применения средней аэродинамической хорды
биплана, но мы считаем, что она дает известные удобства в рас-
чете и наглядность.
ЦЕНТР ТЯЖЕСТИ САМОЛЕТА
Центром тяжести называется точка приложения равнодейству-
ющей сил тяжести тела; одновременно с этим центр тяжести яв-
ляется точкой приложения равнодействующей сил инерции от
поступательного движения.
Вращательное движение дает момент вокруг центра тяжести от
сил инерции угловых ускорений.
Нет такой отрасли техники, где бы положение центра тяжести
не играло важнейшей роли. Особую важность приобретает центр
тяжести для быстродвижущихся механизмов. Для самолета, имею-
щего все шесть степеней свободы, определение положения центра
тяжести необычайно важно. Положение центра тяжести должно
быть известно с точностью не менее 0,5% длины самолета, а ошибка
в 2% длины самолета может иметь катастрофические последствия.
Поэтому при проектировании, постройке, испытании и эксплоата-
ции самолета положение центра тяжести его должно быть хорошо
известно.
СПОСОБЫ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ
В различных случаях применяют различные методы определе-
ния положения центра тяжести. При проектировании нового само-
лета конструктор обычно задает положение центра тяжести, исходя
из условий устойчивости. Когда конструкция самолета разработана
в виде рабочих чертежей, следует проверить положение центра
тяжести самолета. Для этой цели по чертежам, зная объем и мате-
риал деталей, находят вес и центр тяжести деталей. Центры тяжести
отдельных частей отмечают на чертеже бокового вида самолета,
нумеруя точки соответственно журналу весов частей (фиг. 46).
Центры тяжести отдельных частей находят примерно, как для
простейших геометрических тел. Для готовых частей, оборудования
и мотора центр тяжести следует найти практически, путем подве-
шивания. Когда веса и центры тяжести отдельных частей найдены
и отмечены на боковом виде, центр тяжести всего самолета можно
найди двумя способами: построением веревочного многоугольника
и подсчетом моментов.
Построением веревочного многоугольника назы-
вается графический метод определения равнодействующей многих
параллельных сил. Изложение этого метода можно найти в курсах
механики и графостатики. Сложение сил тяжести производится
дважды — при направлении векторов вдоль оси Y и вдоль оси X.
4 В. С. ПышнОв 639 49
Пересечение равнодействующих дает центр тяжести. Однако мы нё
рекомендуем пользоваться веревочным многоугольником, так как
неточное построение его может привести к большим ошибкам;
кроме того, при этом способе расчета неудобно вводить какие бы то
ни было изменения, всегда неизбежные при проектировании.
Второй способ — путем подсчета моментов — состоит в сле-
дующем. На боковом виде самолета наносят оси X и Y. Место
начала координат большого значения не имеет. Обычно берут какую-
нибудь характерную точку, например ось колеса или носок винта
(фиг. 46). Затем измеряют координаты х и у всех отдельных цен-
Фиг. 46. Схема к расчету центра тяжести самолета.
тров, записывая результаты в таблицу. Затем подсчитывают моменты
На практике таблица принимает вид журнала, так как деталей
много.
Момент равнодействующей равен сумме моментов слагаемых
сил; отсюда получаем координаты центра тяжести:
__2Gx _____SGy
Х° SG“ ’ Уй ~ ~2G‘
В этот расчет очень удобно вносить разные изменения. Напри-
мер один из грузов G мы передвинули на расстояние Дх; тогда
передвижение центра тяжести будет:
Дх0 = Дх .
50
Если центр тяжести не находится в нужном месте, приходится
прибегать к перестановке грузов и даже к конструктивным пере-
делкам.
Если самолет летает с разными нагрузками, следует проверить
все возможные варианты.
ПРАКТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА
Центр тяжести построенного самолета может быть найден пра-
ктическим путем. Таких способов три: подвешивание, опора и
взвешивание на нескольких весах.
Определение центра тяжести подвешиванием очень просто и
точно. Однако для целого самолета этот способ обычно неприме-
Фиг. 47. Определение центра тяжести подвешиванием.
ним, так как стропила ангаров не рассчитаны на подвеску само-
лета. Производятся два-три подвешивания в разных положениях и
отмечаются точка подвеса и наклон при равновесии. Затем на чер-
теже, проводя вертикальные линии из точек подвеса, на пересече-
нии их получают центр тяжести (фиг. 47).
Иногда бывает возможно прочертить вертикаль через точку
подвеса на самом предмете, центр тяжести которого определяется.
Для определения центра тяжести тяжелых или громоздких пред-
метов под них подкладывают круглый или треугольный брусок.
Меняя положение бруска и наклон тела, можно найти положение
равновесия, когда центр тяжести будет над опорой. Проводя отвес
через точку опоры, получим линию, на которой лежит центр тя-
жести. Передвинув опору в другое место и найдя положение при
равновесии, проведем вторую линию. Пересечение линий дает поло-
жение центра тяжести.
4“ -51 •
Этот метод пригоден для определения центра тяжести плане-
ров и гидросамолетов, у которых под фюзеляжем или поплавками
имеется прочный стержень, под который можно подвести опору.
На фиг. 48 показано определение центра тяжести планера. Линии
проводят прямо на стенке фюзеляжа или на прикрепленном к нему
куске фанеры. Часто интересуются только положением центра тя-
жести по длине; тогда точку опоры подбирают так, чтобы равно-
весие было при горизонтальном положении хорды крыла.
Определение положения центра тяжести самолета или планера
нельзя производить на открытом воздухе при ветре.
Центр тяжести сухопутных самолетов определяется путем взве-
шивания на весах. Для этой цели само пет ставится натрое весов:
под колеса и под костыль (фиг. 49). Произведя взвешивание, полу-
чаем опорные реакции. Сложив их, получим положение равнодей-
ствующей, которая пройдет через центр тяжести. Подставив под
костыль козелок, производим второе взвешивание и находим опять
опорные реакции, причем из показания хвостовых весов вычитаем
вес козелка. Пересечение направлений равнодействующих даст
центр тяжести. Веса, показанные весами под колесами, нужно скла-
дывать.
Если нагрузка на правое и левое колеса различна, это указы-
вает, что самолет стоял криво по причине неодинакового давления
в шинах. Это обстоятельство не имеет, однако, важного значения.
Кроме двух взвешиваний, иногда самолет испытывают в третьем
положении, когда хвост поднимают так высоко, что он становится
невесомым, и в этом положении центр тяжести находится над
осью колес.
ПРАКТИЧЕСКИЕ ЗАМЕЧАНИЯ
Положение центра тяжести самолета можно отметить либо на
чертеже, либо на самом самолете. Чаще центр тяжести отмечают
на чертеже, но нужно заметить, что здесь возможны ошибки из-
за несоответствия чертежа с самолетом. Поэтому, если желательно
нанести центр тяжести на чертеже, основные размеры, положение
52
Фиг. 49. Схема определения центра тяжести взвешиванием.
оси колес, оси мотора, крыльев, оперения л костыля следует снять
с натуры. Для этой цели самолет ставят в положение для регули-
ровки и снимают размеры, указанные на фиг. 50. Прямой горизон-
тальный пол ангара сильно облегчает работу. На основании сня-
тых размеров делается схематический чертеж в масштабе (фиг. 51).
При каждом взвешивании снимаются такие данные:
1) показания трех весов;
2) записываются веса козелков, подкладок и других лишних
претметов, находившихся на весах;
3) расстояния осей к лес, правого и левого, и некоторой точки
фюзеляжа у хвоста от горизонтального пола по вертикали; эти
размеры нужны для фиксирования наклона самолета; поэтому на
неровном полу вместо указанных размеров можно замерить наклон
оси фюзеляжа или хорды крыла по точному угломеру; если амор-
тизация шасси не стопорится и при изменении положения само-
лета шасси сдвигается, нужно для определения наклона самолета
измерять не расстояние оси колес до полу, а расстояние до полу
какой-либо точки, жестко связанной с самолетом, как, например,
носка винта;
4) расстояние между точками опоры колес и хвоста по горизон-
тали, для чего нужно у точек опоры иметь отвесы ; эти размеры
показаны на фиг. 49 и приведены в следующей таблице:
Данные
Первое Второе
взвешивание взвешивание
Правое колесо .
Левое колесо . .
8 1 Хзост . . . . .
Оба колеса ис-
й ' правленные . .
; Хвост исправлен-
ный ............
Полный вес . .
Примечания
। Вес подкладок
1 Вес подкладок
Вес козелка
Gi + G2
G. + G2 -f - G
Для получения положения центра тяжести на чертеже произво-
дим следующее графическое построение. От оси колес и отме-
ненной точки фюзеляжа у хвоста проводим дуги соответствующими
радиусами г и h. Линия, касательная к обеим дугам, будет линией
пола. От оси колес параллельно полу откладываем расстояние / и
на этом расстоянии от пола восставляем перпендикуляр. Такое
построение повторяем для второго взвешивания, и тогда пересе-
54
фиг. 50. Схемы снятия размеров самолета для расчета центровки.
Фиг. 51. Построение центра тяжести по результатам взвешивания.
чение перпендикуляров даст центр тяжести. Если самолет ставили
в положение невесомого хвоста, под найденным углом проводим
линию через ось колес. Все три линии должны были бы пересечься
в одной точке, но на практике этого не бывает, а получается не-
большой треугольник. Тогда обычно положение центра тяжести
берут в центре полученного треугольника.
Мы уже указывали на необходимость большой точности опре-
деления положения центра тяжести. Точность по длине самолета
должна быть не менее 1% хорды крыла, что сводится примерно
к 0,2 — О,3°/о длины L.
Отсюда, обозначая возможную ошибку диференциалом, полу-
чим: ошибка в положении центра тяжести dl = kL, где k — от 0,002
до 0,003 или в среднем 0,0025.
Диференцируя I, получим:
dl = ^-dL + L(-^^^\ = ^-dL + L^ — L^^ = kL,
G 1 \ О3 / О ' G G G ’
, _ G3 dL dG3 _G3 dG__G3 IdL_dG\ . dG3
G~ ~G' 'G~^G\T~G')+~G ’
b_G3 (dL dG , dG3\
G\L'G' G, J'
В последней формуле знак минус заменен на плюс ио тем сооб-
ражениям, что в худшем случае ошибки сложатся.
Величины
dL dG dG3
L > G И G3
представляют собой точности измерений L, G и G3.
При взвешивании в положении на трех точках будет около
.0,1; точность определения (73 примерно равна точности определе-
ния G; имеем:
^ + 2^2=106 = 0,025.
L ' G ’
Длина L может быть измерена с точностью около 0,5°/о или
^•- = 0,005. Отсюда точность взвешивания должна быть не менее
^2 = 0,01 или 1°/0. На практике точность взвешивания может быть
около 0,001 и даже выше. Таким образом точность в -|-0/0 от L
может быть достигнута без особых затруднений.
Однако ошибки все же происходят главным образом по при-
чине неправильного отмеривания длин и вследствие наклонов, когда
трудно подойти к нужной точке. Также процент ошибок повышает-
ся от чертежных неточностей при построении. При малом масштабе
точность отложения малых отрезков может быть малой. Во избе-
жание значительной чертежной ошибки сама допустимая ошибка
(// = 0,0025 L не должна быть очень малой. Как минимум dl нужно
принять 1 — 2 мм, и тогда на чертеже длина L должна быть по-
рядка 500—1000 мм.
F6
Во избежание чертежной ошибки можно рекомендовать строить
положение центра тяжести на самом самолете, например на боко-
винке фюзеляжа или на специально прикрепленном к фюзеляжу
щите. Если центр тяжести лежит на уровне крыла, нанести его
на самолете невозможно, и следует нанести стрелки, пересечение
которых должно быть в центре тяжести.
Работа производится следующим образом. Взвешиваем само-
лет в некотором положении. Тут же подсчитываем l = L~ и про-
черчиваем линию по отвесу, находящемуся на расстоянии I от от-
веса, проходящего через центр тяжести. Если расстояние I сразу
отметить нельзя, применяют промежуточный отвес, как это пока-
зано на фиг. 52. Проделывая то же в другом положении самолета,
на пересечении прочерченных отвесов получим центр тяжести.
Фиг. 52. Нанесение центра тяжести на самолете.
Часто интересуются положением центра тяжести только по длине
самолета, и тогда достаточно одного взвешивания в положении
горизонтального полета.
Так как разница в положении самолета в обоих взвешиваниях
невелика и угол пересечения линии очень острый, небольшая ошиб-
ка в положении центра тяжести в длину дает ошибку по высоте
примерно в четыре раза больше, чем по длине. Однако ошибка
в высоте центра тяжести может быть и по другой причине, о чем
мы скажем далее.
ОШИБКА В ОПРЕДЕЛЕНИИ ЦЕНТРА ТЯЖЕСТИ ОТ ПЕРЕДВИЖЕНИЯ
ГРУЗОВ И ПЕРЕЛИВАНИЯ ЖИДКОСТЕЙ ПРИ ВЗВЕШИВАНИИ
Пусть самолет взвешивался в двух положениях при наклоне
оси винта at и а2. Некоторый груз веса G передвинулся на рас-
стояние х при перемене положения из первого во второе. Прове-
дем вертикали через центр тяжести груза в обоих положениях
(фиг. 53). Они пересекутся под углом (я2° — а^) = Да°. Результат
взвешивания самолета будет таков, как будто центр тяжести груза
G находился в точке пересечения вертикалей, т. е. выше действи-
тельного положения. Превышение точки пересечения вертикалей
над центром тяжести груза можно найти геометрически; если угол
Да невелик, то , 57 з°
57
Практически Да° около 15°; отсюда h^Ax.
Аналогичный расчет можно применить в случае переливания
горючего или иной жидкости в баке или из одного бака в другой.
В случае переливания жидкости расстояние h называется высо-
той метацентра. При малом изменении угла <х можно считать,
что h не меняется, и т(7гда можно написать аналитическое выражение:
h = ~,
V ’
где J—момент инерции площади поверхности уровня, v— объем
жидкости.
Особенно большое h можно получить при переливании горю-
чего из одного бака в другой.
Кажущееся полотенце
центра тяжести груза
Фиг. 53. Кажущееся поднятие центра тяжести от перемещения груза при
взвешивании.
Во избежание ошибок в положении центра тяжести самолет
следует взвешивать без перемещающихся грузов и жидкостей.
Можно баки и водяную систему заполнять полностью, тогда пере-
ливания не будет. Во всяком случае, при наличии нескольких баков,
разнесенных по длине самолета, их следует разобщать.
ПРИБЛИЖЕННОЕ ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ
На практике бывают случаи, когда проделать полное взвеши-
вание самолета бывает невозможно. Может не быть именно трех
весов, или весы неспособны выдержать вес самолета.
Наибольшую важность имеет положение центра тяжести по
длине самолета. По высоте разнесение грузов очень невелико,
и высота центра тяжести может быть намечена прямо на-глаз.
58
Если весов нет совсем, прибегают к такому методу. Намечают
линию, на которой лежит центр тяжести по высоте. Затем подни-
мают хвост до тех пор, пока он станет невесомым, и проводят
отвес через ось колеса. Пересечение линий дает положение центра
тяжести. Обсуждая возможную при этом методе ошибку, можно
отметить следующее. Хвост становится невесомым тогда, когда
ось мотора наклонена вниз примерно на 12-15°. Пусть мы ошиб-
лись в высоте центра тяжести на величину Ду. Тогда ошибка
в положении центра тяжести по длине будет:
Ax = Aysin 15°^
т. е. ошибка будет в четыре раза меньше.
Если есть одни весы, но слабые, можно произвести взвешива-
ние одного хвоста С3 и расстояние до центра тяжести подсчитать
по формуле:
l = L^.
G
Вес самолета G берется на основании подсчета путем сложения
веса пустого самолета с нагрузкой. Пусть мы желаем найти центр
тяжести так, чтобы ошибка не превышала &x?^k-b, где b—хорда
крыла. Ма худой конец k можно взять равным 0,02. Величина I
довольно близка к тогда Дх = 0,04 /, т. е. величину / нужно
найти с точностью не менее 4%. Если точность определения L
и О3 около 0,5%, то вес самолета нужно знать с точностью не
менее 3%.
Если вес самолета совсем неизвестен, его можно найти при
помощи одних весов, хотя это довольно сложная работа. Для этой
цели весы подставляются последовательно под колеса и костыль,
причем нужно обязательно при всех взвешиваниях строго сохра-
нять одно положение самолета как в продольном, так и в попе-
речном положениях.
Если есть динамометр, вес самолета можно найти следующим
способом. Закатываем самолет на естественную или искусственную
наклонную плоскость. Хвост ставим на тележку. Через динамометр
тянем самолет сначала в гору, а потом с горы. В первом случае
сила тяги ло динамометру будет равна трению F плюс проекция
веса; при скатывании вниз — трение минус проекция веса, т. е.
Q1 = F-4-GsinP,
Q2 = F— Gsinp;
отсюда
Q, — Q2 = 2GsinP
и
С}__ Qi Qz
2smp
Если наклон велик и G sin p > F, самолет будет сам скатываться
вниз и Q2 нужно будет считать отрицательным. Чем больше р
,и меньше трение, тем точнее будет измерение. Тянуть самолет
59
нужно равномерно и наблюдать Q не при трогании с места, а когда
движение станет равномерным. Нужно сделать несколько отсчетов
Q, и Q2 и затем взять среднее значение.
ЦЕНТРОВКА САМОЛЕТА
В полете вес самолета несут крылья, и поэтому необходимо
знать положение центра тяжести самолета по отношению к крыльям.
Центровку самолета определяют координаты центра тяжести всего
Фиг. 54. Координаты центра тяжести моноплана.
самолета по отношению к крыльям. Одна координата х0 берется
вдоль хорды крыла, вторая у0— перпендикулярно к ней (фиг. 54).
Для удобства сравнения самолетов между собой и для обобщаю-
щих выводов координаты х0 и у0 выражают в процентах хорды
крыла, 1. е.
xo°/o = ^1000/0
И V
Л°/о=^ЮО°/о.
Обычно на практике центровку самолета дают в процентах.
Так как для равновесия и устойчивости более важна координатах,
то часто говорят, например, что центровка 32%. Это
^- = 0,32.
во
Если крыло имеет непрямоугольную форму (или биплан), цен-
тровку дают или по отношению к хорде около фюзеляжа в моно-
плане (по отношению к верхнему крылу в биплане), или по отно-
шению к средней аэродинамической хорде (фиг. 55). В первом
случае указывают просто х0 и_у0; во втором случае центровку дают
в процентах.
У обычных самолетов х0% колеблется от 25 до 40%. Величина
х0% очень важна и в дальнейшем изложении будет подробно
освещена. Величина уа % бывает положительна до 50%, т. е. ниже
крыла, и до — 20%, т. е. выше крыла. Как все это сказывается
на свойствах самолета, будет подробно разобрано в дальнейшем.
Для определения центровки самолета на чертеж бокового вида
самолета наносим среднюю аэродинамическую хорду и центр
тяжести всего самолета. Затем из центра тяжести опускаем пер-
пендикуляр на среднюю аэродинамическую хорду и получаем
координаты х0 и у0; разделив их на длину средней аэродинамиче-
ской хорды и умножив на 100, получим центровку в процентах.
ИЗМЕНЕНИЕ ЦЕНТРОВКИ
При изменении нагрузки самолета центр тяжести смещается
и центровка изменяется. На практике наблюдаются изменения
центровки не только в разных полетах, но и в течение одного
Фиг. 56. Смещение центра тяжести от дополнительного груза.
полета по причине выгорания горючего и сбрасывания грузов.
Конструктор самолета должен предусмотреть возможные колебания
центровки и назначать допустимые пределы ее изменения, исходя
из равновесия и устойчивости. При испытаниях и эксплоатации
центровка не должна выходить из назначенных пределов, причем
эти пределы зависят также от назначения полета. Во избежание
ошибок в центровке дают варианты нагружения самолета. При
эксплоатации следует самим инженерам-эксплоатационникам и тех-
никам производить расчет центровки.
Для расчета центровки самолета нужно знать вес пустого само-
лета О0 и положение центра тяжести тоже для пустого самолета.
Пусть на расстоянии, определяемом xt и yv положен в самолет
груз Gx; найдем изменение центровки (фиг. 56). От груза Gt центр
61
тяжести сместится на расстояние Дх и Дд/. Берем момент вокруг
начального центра тяжести:
. G1x1-(G0 + G1)Ax^O,
откуда
a Gi
Ах = Xi ;
Go+Gi Gq ,
g;
°1У1 — (Go + GJ Ду = О,
откуда
л— V ___>!_ •
Oi +
далее
Дл°/о = ^<ОГ—У°°°/о’
° I 21 + 1 )
\ Gt + V
>юо»/о.
Если у нас положено в самолет несколько грузов Gb G2, ...>ОР
на расстояниях хр х2, • • •, хп^УъУ^ > • • поступаем таким же образом.
л у._ ^ixi + G2x2 + ... + Gnxn _ Gj ! G2 ( Gn
Gq 4- Gr + G2 4- • •. + Gn Xi G ±X2 G "I" • • • cP
av _ G,yt + G2y2 4- • • • + Gnyn Gi G2 J । Gn
- Go + G1 + G2 + ... + G„ -У' -G +^2 -G + • • • 2-Уп q-
На практике диапазон перемещения центра тяжести не превы-
шает + 5-^ + 7% средней аэродинамической хорды от среднего
значения. Если мы назначим точность расчета центровки в 1/2°/о
средней хорды, то значит величины Дх и Ду должны быть рас-
считаны с точностью 0,10—0,06, т. е. от 6 до Ю%- Это обстоятель-
ство позволяет нам сделать некоторые упрощения. Предположим,
что мы подсчитываем изменение центровки для нескольких вари-
антов нагрузки. Тогда некоторый груз GK на расстоянии х,. в раз-
ных вариантах будет вызывать различные изменения центровки Дх,г,
так как полный вес G будет различен. Здесь можно сделать такое
допущение: вместо истинного веса G брать некоторый средний
вес Gcp, но при условии, что Gcp отличается от G нс чем
на 6—10%- Тогда получим:
Дхо/о = у + у о2о1о + ... + у
где G^/o, G2% и т. д. — веса грузов в процентах среднего полет-
ного веса.
Можно поступить несколько иначе.
Величины Xi Gp х2 G2 и т. д. являются моментами груза отно-
сительно центра тяжести самолета со средней центровкой, a -т^0--
величина постоянная для данного самолета и ее можно рассматри-
вать как масштаб. Тоже самое можно положить в отношении Ау.
Для упрощения работы в аэродромных условиях можно изготовить
таблицы или диаграммы; к грузовому самолету Юнкере прилага
лась такая диаграмма (фиг. 57).
Берем боковой вид самолета, на котором нанесены оси коорди-
нат, проходящие через центр тяжести самолета без груза. На оси
ординат нанесена шкала веса груза и на диаграмме имеется ряд
кривых, каждая из которых относится к определенной центровке.
Например, мы хотим положить груз и иметь центровку 35%.
От шкалы G1 идем до кривой нужной центровки, затем спускаемся
вниз и получаем место, в котором нужно груз положить. Можно,
обратно, зная груз и его местоположение, найти центровку.
Фиг. 57. Диаграмма Юнкерса для расчета ценглвки.
Такую диаграмму можно без труда построить для любого само-
лета. Центр тяжести и вес самолета без грузя Go нам известны.
Задаемся центровкой, и это дает нам Дх:
Дх=х-„-—, х = Дх(^-+ 1V
Go , , \ Gi 1 /
А +
Задаваясь произвольными Gp получаем х и строим нужную
кривую. Однако этот метод мало пригоден, так как на самолете
редко бывает один груз.
Мы предлагаем видоизменить диаграмму следующим образом.
Берем боковой вид самолета с указанием центра тяжести с той
нагрузкой, которая всегда бывает в полете (фиг. 58). Начальную
центровку х0% указываем. Через центр тяжести проводим оси
координат; по оси ординат разбиваем шкалу возможных грузов.
На диаграмме наносим кривые с отметками Дх%, т. е. передви-
жения центровки. Если в самолет было положено нисколько
63
Грузов G(, 62, <5з И т. д., Тб йб одной шкале берем вес, по дру-
гой — местоположение и, интерполируя между диаграммами, читаем
изменение центровки, вызванное данным грузом, Дх^/о. То же
самое повторяем для других грузов и полученные Дх°/0 складываем
алгебраически.
Кривые строим таким образом. Задаемся Дх°/0; тогда:
д% = ~ьо>ср (xiХ24-• • • 4-x„Gn) = Дх1°/о 4~ д*2°/о 4"• • • 4- Дх„°/о >
^Х„°/о= -Jq— X„G„’,
Xn = ^Xnl0lQQQn-
Задаваясь грузом G„, получаем расстояние хп и строим кривую.
То же самое можно проделать для расчета изменения центровки
по высоте, но только оси координат должны быть повернуты на 90°.
Фиг. 58. Диаграмма для приближенного расчета изменения центровки.
Можно диаграмму для пересчета центровки построить иным
образом (фиг. 59). По оси ординат откладываем изменение цен-
тровки в желаемом масштабе, а на диаграмме надписываем вели-
чину груза. Тогда, как нетрудно понять, диаграммы получаются
в виде прямых линий. Для построения линий достаточно найти
одну точку, например, задаваясь Gx — 0,05 Gc0 и x = brj>", тогда
Дл°/о = 5%- Наносим эту точку на диаграмму и проводим прямую
через начало координат. Линии для других значений груза Gx строим
изменением ординат пропорционально Gi.
В диаграммах фиг. 58 и 59 делались допущения, что х отме-
рялось от средней центровки и вес брался средний. Можно разра-
ботать приспособления для расчета центровки, в которых нет
таких допущений. Одно из приспособлений в виде планшета изоб-
ражено на фиг. 60. Нижняя часть с боковым видом самолета может
64
Фиг. 59. Диаграмма для приближенного расчета изменения центравки.
Фиг. 60. Диаграмма для расчета изменения центровки.
'подбижн ~ тд&жн.
5 В. С. Пышнов 639
65
передвигаться так, что осьу/ может быть поставлена против исходной
центровки. Для этого средняя аэродинамическая хорда поднята к ли-
нии сдвига. На средней неподвижной линейке планшета есть
шкала веса G в произвольном масштабе. Затем есть верхняя по-
движная часть, на которой нанесены шкалы для груза и изме-
нения центровки Дх%- Наконец, есть поворотная линейка, ось
вращения которой лежит на оси Y и линии Дх%=0 и Gx = 0.
Расчет производится так:
1) ставим ось Y на исходную центровку;
2) зная начальный вес Go и положенный груз Gt, получаем
G = Go-}- G}; ставим шкалу Gi против нужного значения G;
3) поворачиваем линейку так, чтобы она прошла через нужное
значение на шкале Gj;
Фиг. 61. Определение центровки по наклону при плавании у гидросамолетов.
4) зная место груза G в фюзеляже, проводим от него вертикаль
до наклонной линейки и по отметкам Дх читаем изменение цен-
тровки; справедливость этого видим из выражения:
Дх —X____Q1
Go+Gt ’ х “ G0+Gt •
Отношения ~ и q^q представляют^собой отношения сторон
подобных треугольников. Масштабы для Дх, х, Gi и О^можно
выбрать разные, однако для сохранения пропорции необходимо,
чтобы масштаб Дх был во столько раз больше масштаба х, во
сколько масштаб Gt больше масштаба G. На фиг. 60 отношение
масштабов взято равным десяти.
Можно придумать и другие способы расчета центровки, более
автоматизированные.
У гидросамолетов центровку можно определять по наклону
при плавании на тихой воде. Можно теоретически рассчитать вели-
чину центровки в зависимости от показания продольного уклоно-
мера. Для суждения о степени точности этих измерений определим,
насколько изменится продольный наклон Ду при смещении центра
66
-тяжести на величину Дх. Считая, что при малом изменении наклона
самолета положение метацентра не меняется, получим из фиг. 61:
Л
ДхО/0 = ДТ4^=1,75ДТ4,
где Д?— изменение продольного наклона в градусах,
h — высота метацентра над центром тяжести,
b — средняя аэродинамическая хорда.
Метацентрический радиус цм, т. е. расстояние от метацентра
до центра тяжести объема вытесненной воды, можно найти по
формуле:
где J — момент инерции площади ватерлинии,
v — объем вытесненной воды.
Практически для гидросамолетов -у-= 3 —s—6 (ориентировочно);
меньшие значения — для поплавковых машин. Если точность измере-
ния угла у взять 0,2°, то точность центровки будет от 1 до 2°/0.
Точность достаточна, но она требует внимательного отсчета угла;
можно рекомендовать установку специального, более чувствитель-
ного уклономера.
*5
МОМЕНТЫ ВОКРУГ ЦЕНТРА ТЯЖЕСТИ
В механике движение твердого тела рассматривается двумя
способами: или путем качения полодий, или расчленяя движение
на движение центра тяжести, как материальной точки, и вращение
вокруг центра тяжести. Последний способ имеет большие удобства и
поэтому применяется в анализе движения самолета. В дальнейшем
мы будем брать моменты почти исключительно вокруг центра
тяжести самолета. Этим мы избавляемся от моментов силы тяже-
сти и сил инерции поступательного движения.
МОМЕНТ КРЫЛА ВОКРУГ ЦЕНТРА ТЯЖЕСТИ
Метод расчета момента крыла вокруг некоторой точки уже
был изложен. Для получения момента крыла или коробки крыльев
нужно взять в расчет координаты центра тяжести. В некоторых
случаях расчет можно вести, пользуясь средней аэродинамической
хордой.
Как уже ранее было выведено, момент крыла имеет такое
выражение:
л» _____________________г' Уо
ft Ч & >
где xQ и _у0— координаты центра тяжести относительно хорды
крыла; примерней вид Ст, Сп и Ct был дан на фиг. 27.
Необходимо рассмотреть, какой вид имеют диаграммы по углам
атаки при разных положениях центра тяжести самолета. Сначала
возьмем случай, когда -^ = О, т. е. центр тяжести лежит на хорде
крыла, а ~—различные. Результат расчета показан на фиг. 35.
Как видно, в пределах плавного обтекания диаграмма идет по
прямой линии. Все линии пересекаются в одной точке, и нетрудно
заключить, что это будет при угле атаки, когда Сл = 0 или очень
близко к Су = 0. Центровка самолета сказалась на наклоне пря-
мых. При малых -у наклон вверх и СМг все время положителен,
т. е. момент пикирующий. При Гл > о,25 наклон становится вниз,
затем диаграммы начинают пересекать ось абсцисс и на больших
углах атаки момент становится отрицательным, т. е. кабрирующим
или стремящимся увеличить угол атаки. Затем необходимо обра-
68
тить внимание на то, как сильно изменяется диаграмма при изме-
нений -у- на 0,05, т. е. при изменении центровки на 5°/0.
На фиг. 62 построена диаграмма моментов М в кгм, причем
скорость полета взята соответственно планированию при данном
угле атаки. Следует обратить внимание на различие кривых См и М.
Затем возьмем такой случай, когда ^°=0,3,а-~ имеет разные
значения. Диаграммы даны на фиг. 36. Как видно, диаграммы
потеряли свой прямолинейный характер и походят на параболы.
Фиг. 62. Диаграмма момента и коэфициента момента крыла.
В случае у0 > 0, т. е. когда центр тяжести ниже крыла, на малых
и отрицательных углах атаки СМ2 уменьшается, а на больших углах
увеличивается. При уй < 0 картина получается обратная.
МОМЕНТ ГОРИЗОНТАЛЬНОГО ХВОСТОВОГО ОПЕРЕНИЯ
Горизонтальное хвостовое оперение, т. е. стабилизатор с рулем
высоты, представляет собой небольшое крыло некоторого профиля,
и потому расчет момента мог бы быть вполне аналогичен расчету
моментй крыла. Однако здесь можно сделать ряд упрощений.
См вокруг передней кромки или мал, или центр давления постоянен,
как, например, для симметричного профиля; ордината у очень
мала по сравнению с х, и потому момент можно брать только от
нормальной силы (фиг. 63):
Мг. о == Nг. о' 1^г. о,
здесь Ьг о взято вместо х и означает расстояние от центра тяжести
самолета до центра давления оперения. Последний принимается
69
на расстоянии V4 средней хорды оперения, считая от передней
кромки. Среднюю хорду оперения можно брать довольно грубо.
Сила М. о должна быть перпендикулярна плечу Ьг.о. Однако
для обычных самолетов вместо М. 0 можно брать Рг. 0, т. е. подъем-
ную силу горизонтального хвостового оперения:
Мг. о — Рг. о Ьг. о = С р St. о V2 Ьг. о •
Л2. О с. и
Скорость потока воздуха у хвоста, вообще говоря, отличается
от скорости полета V. Подробнее по этому вопросу будет изло-
жено ниже.
Для крыла мы получили безразмерный коэфициент, разделив
момент на p5V2Z>. Так как в дальнейшем моменты мы будем склады-
вать для получения суммарного момента, момент хвоста и все дру-
гие моменты будем делить на Теперь найдем коэфициент
момента хвоста:
_^.o_S,o£,o _ (Уг.о\2г
^мг.о pSV^b Sb \ V / Ьуг- ° Кг-°'\ V J 'иУг.о‘
. ° L?.o ,
кг. о — —— называется коэфициентом горизонтального опере-
ния. Эта величина харак-
теризует собой размер
оперения в отвлеченной
форме. Это, конечно,
очень удобно для сра-
внения самолетов между
собой и для статистики.
По статистике огромное
большинство современ-
ных самолетов имеет
kt. о = 0,35 н- 0,4. Лишь
в редких 4 случаях для
устарелых или не совсем
обычных самолетов наблюдаем иные цифры: в меньшую сторону
до 0,25 и в ббльшую—до 0,6.
Коэфициент подъемной силы хвоста зависит от его формы,
угла атаки и положения руля высоты.
Фиг. 63. Момент горизонтального оперения.
УГОЛ АТАКИ ГОРИЗОНТАЛЬНОГО ХВОСТОВОГО ОПЕРЕНИЯ
Для получения СУг.о нужно знать угол атаки оперения, изме-
ряемый относительно неподвижной части оперения, т. е. стабили-
затора. Таким образом угол атаки оперения или стабилизатора
измеряется или по отношению к хорде одной из сторон в случае
несимметричного профиля, или по отношению к средней линии
для симметричного профиля. Вообще говоря, угол атаки нужно
отсчитывать от той линии, по которой даны значения СУг
Линия, от которой измеряется угол атаки Стабилизатора и
которая называется хордой стабилизатора, вообще говоря,
непараллельна хорде крыла и составляет с последней некоторый
угол <р, который мы будем называть деградацией стабили-
70
затора. Положительное значение <р будем считать, когда стаби-
лизатор имеет больший угол, нежели крыло (фиг. 64).
Углом атаки стабилизатора называется угол между хордой ста-
билизатора и направлением движения потока воздуха перед стаби-
лизатором. Угол стабилизатора по отношению к направлению
полета будет (а-}-?); однако было бы весьма грубой ошибкой
считать его за угол атаки. Дело в том, что хвост находится
позади крыла, а крыло значительно изменяет направление движе-
ние воздуха, давая так называемый скос потока е (фиг. 65). Нали-
чие скоса потока за крылом имеет громадное значение для расчета
Фиг. 64. Схема углов у оперения.
равновесия и устойчивости самолета. Расчет равновесия без учета
скоса потока может привести к катастрофе.
Наиболее ранние сведения в скосе потока у хвоста можно
найти в журнале »ZFM“ il г., № 14. Там приведены результаты
опытов, а также теоретическая формула Прандтля. Более полные
сведения были получены после империалистической войны, когда
были опубликованы работы по теории индуктивного сопротивле-
ния и, в частности, курс аэродинамики Фукса и Хопфа, в котором
изложена теория расчета устойчивости. Излагаемый ниже расчет
устойчивости мало отличается от приведенного у Фукса и Хопфа.
Величина скоса потока подробно рассматривается в теории
индуктивного сопротивления крыла. В элементарном виде происхо-
ждение скоса потока можно объяснить так. В результате взаимо-
действия крыла с окружающей воздушной средой образуется
подъемная, сила, поддерживающая вес самолета. В свою очередь
71
крыло давит на воздух, отбрасывая его вниз с некоторой верти-
кальной скоростью w, причем . на основании законов механики
секундное количество движения отброшенного вниз воздуха должно
равняться подъемной силе или, в горизонтальном полете — весу
самолета. Чем медленнее летит самолет, тем меньше секундная
масса воздуха, тем большей должна быть скорость отбрасывания
воздуха вниз и тем сильнее должен быть скос потока. Чем больше
размах крыльев, тем больше секундная масса и, следовательно,
меньше скос потока при создании подъемной силы. Если подъем-
ная сила отсутствует, то нет и скоса потока. В теории для расчета
величины, скоса потока рассматривают систему вихрей, действие
которых эквивалентно крылу.
Существует довольно большое число формул для расчета скоса
потока за крылом. Большинство формул имеет вид:
где Су берется для крыла, X—удлинение крыла, величина А или
предлагается в виде некоторого постоянного числа, или включает
в себе координаты той точки, в которой ищется скос потока;
последнее, конечно, лучше.
Здесь мы приводим данные для расчета скоса потока, заимство-
ванные из* статьи инж. М. П. Могилевского и И. В. Остославского
„Исследование скоса потока у оперения самолета" („Техника воз-
душного флота" № 10, 1930). Формула имеет вид:
е° = 57,з4'С;-х-
Множитель х учитывает место расположения оперения за кры-
лом. Если координаты хвостового опёрения по отношению к осям,
начало координат которых лежит на одной трети хорды крыла
от передней кромки, а ось X направлена вдоль потока, х и у, то
относительную величину координат получаем, деля их на полу-
размах
Значения х в функции х и у даны в таблице:
\ х 0,4 0,6 0,8 1,0 1,2 1,4 1,6
0 1,30 1,06 0,96 0.91 0,89 0,86 0,85
0,1 1,23 1,04 0,95 0,90 0,88 0,85 0,84
0,2 1,08 0,97 0,90 0,86 0,83 0,81 0,80
Для наглядности дана фиг. 66, на которой за крылом построены
линии равных х. Эта фигура наглядно показывает влияние
расположения оперения; понятно, что пренебрегать им не следует.
72
Как видно, влияние крыла ослабевает как при удалении назад,
так и вверх-вниз.
В случае биплана или полутораплана вместо X предлагается
брать эквивалентный размах 1Э и удлинение X,, т. е. размах и
удлинение такого монопланного крыла, которое по своему дейст-
вию на воздух равноценно данному биплану или полутораплану.
Для расчета 1Э и Хэ можно воспользоваться приближенной форму-
лой Прандтля:
^+4^
4 12Н
« А”
Хэ — s , »
большего крыла,
меньшего крыла,
где Л — размах
/2 — размах
Н — расстояние между крыльями,
S—полная площадь обоих крыльев.
Кроме того, приводим номограмму для расчета Хэ, заимствован-
ную из упомянутой статьи Могилевского и Остославского. Спо-
соб пользования номограммой виден из самой номограммы (фиг. 67).
Для получения поправки х координаты х и у следует брать от
точки, полученной следующим построением: на каждом крыле
отмечаем точки, лежащие на одной трети хорды от передней
кромки; соединив их между собой, делим полученное расстояние
обратно пропорционально подъемным силам и получаем искомую
точку (фиг: 68). Нетрудно видеть, что если была найдена средняя
аэродинамическая хорда биплана, то искомая точка будет лежать
на одной трети ее ширины от передней кромки.
В практическом расчете самолета приходится искать скос потока
для разных углов атаки, и потому формулу для скоса по Остослав-
скому следует привести к виду ,е° = с. Су, [где с—некоторое
постоянное число, свойственное данному самолету.
Итак, в результате угол атаки стабилизатора
ах = а -|- ср — е.
Угол атаки руля высоты отдельно не рассматривается, а откло-
нение руля вводится в величину Су*, о чем будет сказано далее.
73
Фиг. 67. Номограмма для расчета эквивалентного удлинения биплана
СКОРОСТЬ ПОТОКА У ХВОСТА ПРИ ПЛАНИРОВАНИИ
Мы уже указали, что скорость потока у хвоста отличается от
скорости полета. На первый взгляд это вызывает недоумение, как
будто скорость движения хвоста отличается от скорости полета.
Однако здесь, конечно, дело не в скорости движения, а в ско-
рости воздушного потока, омывающего оперение.
В некоторых самолетах руль высоты находился впереди
крыльев, и тогда скорость потока у руля равнялась скорости
полета. У большинства современных самолетов стабилизатор и
руль высоты находятся позади крыла, позади фюзеляжа или гон-
долы, но, правда, обычно в струе винта. О струе винта мы будем
говорить еще особо. Сопротивление крыльев, фюзеляжа и других
частей самолета, лежащих перед оперением, вызывает торможение
Фиг. 68. Условное положение присоединенного вихря у биплана.
потока, и потому скорость у хвоста оказывается пониженной. Это,
конечно, верно в случае, если струя винта не попадает на опере-
ние, или для планирования.
Рассмотрим, какое изменение скорости вызывает лобовое
сопротивление. Возможны два случая: 1) завихрения от обтекания
тела попадают на оперение и 2) завихрения проходят вблизи.
В первом случае происходит почти полное падение скорости
и, следовательно, эффективности рулей. Поэтому необходимо
всемерно избегать попадания завихрений на оперение.
Если горизонтальное оперение расположено немного ниже
крыла, на некотором угле атаки возможно заметное ухудшение
эффективности рулей и появление вибраций. При тонком крыле
на малом угле атаки это явление неважно, так как достаточно
немного изменить режим полета и явление прекратится. На углах
атаки, близких к Су max , попадание завихрений от крыла на опере-
ние становится весьма нежелательным и его нужно избегать,
располагая оперение выше или ниже. После срыва обтекания за
Cvmax , за крылом образуется широкая область, в которой движе-
ние воздуха возможно даже обратное. Если оперение расположено
75
очень высоко, на больших углах атаки возможно полное заслоне-
ние оперения; этот вопрос будет подробнее рассмотрен в главе
о потере скорости и штопоре.
Другим источником завихрений служит фюзеляж и надстройка
над ним. На фиг. 69 показано распределение скоростей за фюзе-
ляжем у оперения, заимствованное из работы В. П. Горского
(„Труды ЦАГИ“, вып. 49). Как видно, за фюзеляжем есть зона с зна-
чительно пониженной скоростью или, как говорят, аэродинами-
Фиг. 69. Диаграмма скоростей у конца фюзеляжа.
ческая тень. Пулеметные гнезда, угловатый срез кабины и дру-
гие надстройки перед оперением нежелательны или, вернее,
вредны.
Если завихрения не попадают непосредственно на оперение, а
проходят вблизи от него, то все же они сказываются на работе
оперения. Учесть точно степень ослабления эффективности опере-
ния довольно трудно. Обычно эту задачу сводят к понижению
скорости у хвоста по сравнению со скоростью полета. Для обыч-
ных самолетов упрощенно принимают скорость у хвоста Vx = 0,9 V
или = 0,8, т. е. эффективность оперения снижают на 2О°/о.
Можно к этому вопросу подойти несколько точнее.
Исследования работы оперения производились разными авто-
76
рами; можно рекомендовать упомянутую выше работу В. П. Гор-
ского, в которой предлагается такое значение
(•£)’=
где а — наибольшая'ширина фюзеляжа;
ci—коэфициент, учитывающий ширину зоны пониженной ско-
рости, величину которого предлагается брать для оваль-
ного фюзеляжа Ci=0,70, для трехгранного = 1,65;
1Х—размах горизонтального оперения;
Сх — коэфициент сопротивления фюзеляжа с прилегающими
к нему деталями.
Если мотор не работает, винт оказывает значительное сопроти-
вление. Если винт остановлен, то с лопастей сбегают завихрения,
которые дают сильное уменьшение скорости, но в довольно узкой
зоне. Если винт вращается от воздушного потока, торможение
распределяется по всей ометаемой площади. В этом случае степень
торможения струи можно найти, пользуясь теорией идеального
ветряка.
Если СХв — коэфициент сопротивления винта, отнесенный к оме-
таемой площади, то, вводя некоторые упрощения, имеем:
Для обычных самолетных винтов Сх «0,08, и тогда
(£)г = 0,845.
Су ГОРИЗОНТАЛЬНОГО ОПЕРЕНИЯ
Горизонтальное хвостовое оперение представляет собой крыло
некоторого профиля, и для него можно иметь те же характери-
стики, что и для основного крыла, т. е. кривую Лилиенталя и
кривую коэфициента момента См.
Однако ввиду того, что изменение лобового сопротивления
хвоста момента почти не дает и перемещение центра давления
играет малую роль, мы в дальнейшем будем интересоваться
только величиной коэфициента нормальной силы С„ или, проще, Су.
Для каждого крыла мы имеем диаграмму Су по а. В этой диа-
грамме мы интересуемся следующими факторами. Во-первых,
нужно отметить угол атаки а0 при Су = 0. В большинстве случаев
на самолетах оперение делают симметричного профиля, и тогда
ао = О. На практике часто можно видеть продувку симметрич-
ного оперения, у которого а0 не равно нулю; это есть резуль-
тат неточности опыта или неточности изготовления модели;
поэтому шкалу }глов атаки нужно сдвинуть так, чтобы а0 было
равно нулю.
Однако применяется оперение и несимметричного профиля;
иногда его ставят подобно крылу, и тогда а0 отрицательно;
77
в других случаях его располагают выпуклой стороной вниз, й
тогда «о положительно. Для чего оперение ставят таким образом,
будет указано далее.
Второй весьма важный фактор—это наклон диаграммы. Тангенс
7dCv\
угла наклона I ) обозначим В. Углы выражаются либо в граду-
сах, либо в радианах. Применяются оба способа обозначения; на
это нужно обратить внимание и не перепутать,—ошибка будет
Е (сг
очень велика. Если угол дан в радианах, то ( 1 больше единицы.
Мы уже говорили об аналитическом расчете величины В для
крыла. Ее можно аналогичным способом рассчитать для хвоста
соответственно удлинению хвоста Однако здесь нужно учесть,
что хвост имеет иную форму в плане и подвержен вредному
влиянию фюзеляжа. Коэфициент индуктивного сопротивления опе-
рения нужно считать
Д . С 2
Р ЛЬУ
xi
Да
АСу
^-х
Величина А будет уже не 2, как для эллиптического крыла, а
около 3 и даже доходит до 4. Переходя к аналитическому выра-
жению для Вх, получим:
1 = 1 _____А_
Вх Bq
Для оперения с
А = 3, и тогда
неразрезанным рулем высоты можно брать
В
2,7
Для оперения с разрезанным рулем высоты можно брать
Д = 3;5, и тогда
Удлинение хвоста \х подсчитываем по формуле: ^х — у~, где
1Х—полный размах хвоста.
В случае бипланного оперения следует найти сначала для него
эквивалентное удлинение, о чем мы уже говорили.
Третий фактор, характеризующий диаграмму Су по а—это наи-
большая величина Су или С>тах. Обычно для нормального само-
лета Су тах хвоста не представляет особого интереса, так как в
диапазоне нормального полета Су не доходит до Су шах- Однако в
некоторых случаях это может иметь интерес. Симметричные про-
фили имеют сравнительно невысокий Сутях, порядка 0,4, но зато
при положительных и отрицательных углах атаки он одинаков.
У несимметричных профилей при положительных углах Су тах зна-
78
чительно больше — до 0,6, но зато при отрицательных углах атаки
он мал,—порядка 0,3 и даже еще меньше. На величину Сутп сильно
влияет поворот руля высоты, о чем будет сказано далее.
ДЕЙСТВИЕ РУЛЯ ВЫСОТЫ
Су хвоста, а следовательно, и подъемная сила хвоста, может
изменяться не только путем изменения угла атаки стабилизатора,
но и путем поворота руля высоты. Если мы отклоняем руль высоты,
СПХ д=>30°
Фиг. 70. Диаграмма Сп горизонтального оперения.
то это вызывает, во-первых, увеличение угла атаки, во-вторых
изменение профиля. В результате подъемная сила оперения сильно
изменяется. Соотношение размеров руля высоты и всей площади
бывает различное, и об этом подробнее мы скажем далее.
Для изучения действия руля высоты производится продувка
оперения при разных углах атаки а.х стабилизатора и при разных
положениях руля высоты 8. На фиг. 70 дан примерный вид такого
испытания. Как видно, получился ряд параллельных линий, и
только при очень больших ах линии искривляются. Расстояние
между линиями пропорционально отклонению руля и только при
очень больших 8 линии идут теснее. Если углы атаки хвоста не
превосходят +12°, а угол поворота руля высоты не превосходит
+ 20°, можно считать, что Су хвоста прямо пропорционален углу
79
атаки и углу поворота руля. Тогда диаграмму легко и удобно
выразить аналитически:
= В^х 4- В28.
Величины Bt и В2 можно получить из диаграммы, задаваясь
последовательно «х= 10° и 8 = 10°. Деля изменение Су на 10°, полу-
чим искомые В{ и В2. Величину Bi обычно выносят за скобки, и
тогда получим:
CF = B1(ax+g8) = B1(ax+n8),
где =
Это выражение показывает, что поворот руля высоты действует
в п раз слабее, нежели поворот всего оперения. Однако, если
площадь руля высоты в два раза меньше площади всего горизон-
тального оперения, величина п равна не 0,5, а будет значительно
больше. Обработка продувок оперения дает примерное значение
п = 0,95 К® >
где
т. е. отношение площади руля высоты к площади всего горизон-
тального оперения. В практике наблюдаются значительные откло-
нения от этой цифры, и потому в расчете ее следует уточнить,
учитывая форму руля высоты и компенсацию.
Поворот руля высоты сильно влияет на С/Шах и соответствую-
щий угол атаки. Здесь аналитическое выражение дать затрудни-
тельно, и потому, если нужно иметь Су хвоста на очень больших
углах атаки или при больших отклонениях рулей, продувка
необходима.
Если оперение должно давать большую подъемную силу, про-
филь оперения лучше сделать несимметричным. Если оперение
должно давать большую обратную (т. е. отрицательную) силу,
профиль лучше сделать несимметричным, но расположить его
выпуклой стороной вниз.
МОМЕНТ ГОРИЗОНТАЛЬНОГО ОПЕРЕНИЯ ПРИ ПЛАНИРОВАНИИ
Выражение для момента горизонтального оперения уже было
дано в таком виде:
г _____ $г.о ^г. о (YA2 р
^мг. о~ Sb \V ' 'ЬУх‘
Величину Су берем соответственно углу атаки хвоста:
и.х = а <р — е,
где а — угол атаки крыла,
<р — установочный угол,
е — скос потока.
80
Скос потока в больших пределах углов атаки пропорционален
углу атаки, а СУх пропорционален ах. В результате диаграмма Смго
по а имеет вид прямой линии и только на больших углах атаки,
вблизи Суmax, диаграмма начинает более круто изгибаться вверх,
так как изменение скоса потока ослабевает.
Для построения диаграммы Смг о задаются рядом углов атаки
крыла с интервалами в 2—4°, затем берут Су крыла, подсчитывают
угол скоса потока е, угол атаки хвоста, по которому можно
найти СУх, пользуясь диаграммой продувки оперения, и наконец,
находят Смго. Весь этот подсчет удобно производить в виде таб-
Фиг. 71. Исправление диаграммы моментов хвоста на скос потока от крыла.
лицы. Если нужно построить диаграмму СМго для разных поло-
жений руля высоты, берут соответствующие Су
Иногда диаграмму СМго строят без учета скоса потока, а по-
правку на скос потока делают на самой диаграмме. Пусть мы
имеем диаграмму Смг Опо а и диаграмму скоса потока (фиг. 71).
Скос потока уменьшает угол атаки оперения, и следовательно,
если мы хотим получить Смг о при угле атаки крыла а, то нужно
взять СМг 0 для угла атаки а — е и эгу ординату передвинуть на
угол атаки а. Такая передвижка произведена на фиг. 71 и, как
видно, от действия скоса потока уменьшился наклон диаграммы.
Аналитическое выражение момента оперения можно дать в та-
ком виде:
л $г. о ^г. о (. р
Смг.о =---Sb--^г'0'
6 В. С. Пытнов «39
81
но
^Уг.о = ^х(а + ? —e + wS)>
откуда
Такое аналитическое выражение часто применяется на практике,
но нужно помнить, что оно справедливо для (а-}-? —е) в пРеДе*
лах+12° и 8 в пределах+15°.
МОМЕНТ ГОРИЗОНТАЛЬНОГО ОПЕРЕНИЯ В МОТОРНОМ
ПОЛЕТЕ
Если горизонтальное оперение полностью или частично нахо-
дится в струе винта, при полете с работающим мотором проис-
ходит значительное изменение момента оперения. Изменение мо-
мента происходит от двух причин: 1) изменения скорости потока
в струе и 2) изменения скоса потока за счет винта.
Для того чтобы разобраться в этом вопросе, напомним основ-
ные сведения из теории винтов. Образование тяги винта происхо-
дит за счет отбрасывания воздуха назад, причем сила тяги равна
секундному количеству движения, сообщенного воздуху, прошед-
шему плоскость вращения винта. Вдали от винта скорость воздуха
Уо, в плоскости вращения Vt= V0-i~v и за винтом = Vo2и.
Секундное количество движения будет за счет сообщения массе
pF(Vo 4-г») добавочной скорости 2v; отсюда тяга винта
Ф = р F(V0-f-p)2v,
где F—площадь, через которую проходит струя в плоскости
вращения, или, как ее называют, сметаемая винтом площадь;
F=^~ (D2— d2), где D — диаметр винта и d— диаметр нерабочей
части. Обозначают В — рДл2 > тогда
ВЧ‘+тУ2 +
отсюда
2f== УО(/Г=Р2В-1),
Vo + = Vo VT+2B, = (1 + 25).
Таким образом квадрат отношения скорости в струе к скорости
вне струи равен (1+25). В моторном полете в струе винта мы
имеем увеличение скорости на величину 2v = V0(|/l +25 — 1);
следовательно, этот добавок скорости зависит от скорости полета Vo,
от тяги винта Ф и сметаемой площади.
Можно рассматривать несколько случаев полета: горизонталь-
ный полет и полет на полной мощности, когда траектория может
82
быть наклонной. Если полет горизонтален, тяга винта равна сопро-
тивлению:
® = Q — CxpSV3, В = Ся-у,
(14-2В) = (1 + 2Сж4).
Здесь мы видим, что изменение скорости зависит от Сх. У со-
временных самолетов в среднем Сх= 0,025-^0,035 и -^- = 5-Мк
Отсюда получаем, что в горизонтальном полете (14-2В) =
= 1,25-н 1,5.
При полете на полной мощности тягу винта можно выразить
через мощность мотора N и к. п. д. винта ц:
ф= 757^
Vo ’
отсюда
В = 14-2В)= 14-150-^-3.
р F Vo3 1 ' 1 р F Уо3
Максимум величины В в полете мы имеем при крутом
подъеме, когда скорость близка к минимальной. Если положить
М=500 л. с., v] = 0,65, Г=6 л2,У =30 м/сек, то
D 75-500 0,65-8 . о
И
(14-2В) = 3,4.
Таким образом наибольшее влияние струи винта будет при
крутом подъеме. Кроме отбрасывания струи назад, винт сообщает
струе винта вращение. Однако вследствие симметрии влияние вра-
щения струи мы пока рассматривать не будем.
Перейдем к скорости потока у хвоста. Тормозящее действие
фюзеляжа и других частей Скажется и на струе винта, и потому,
если торможение потока на планировании мы оцениваем множите-
лем /?, в струе винта получим /? (1 4~2В).
Если площадь хвоста в струе обозначим Slx, то в среднем для
всего хвоста I ) будет иметь значение:
(v)'=4tr2B+1]-
Расчет части площади оперения в струе винта производится
довольно примитивно, причем струя считается цилиндрической.
Для этой цели на общем виде самолета спереди измеряют часть
оперения по размаху, которая попадает в струю, а затем по виду
сверху подсчитывают обдуваемую площадь.
Перейдем к рассмотрению скоса потока в струе винта.
6 83
Скорость, сообщаемая винтом воздуху, направлена в сред-
нем вдоль тяги Ф; направление силы тяги можно считать вдоль
оси винта. Ось винта составляете хордой крыла некоторый угол у,
и тогда угол между осью винта и направлением полета будет
(« + f) (Фиг. 72).
Скорость потока в струе сложится геометрически из скорости
подходящего потока Уо и скорости, сообщенной винтом, 2т», при-
чем скорость 2т» наклонена под углом (а-}-у) к скорости Vo.
В результате сложения получим горизонтальную составляющую
Уо4*2т» cos (a-j-y) и вертикальную составляющую 2v sin (а-|-у); далее
t _ 2vsin(« + r)
° 1 Vo 4- 2v cos (a + т) ’
Так как угол (а+у) в нормальном полете не превышает 10°,
косинус можно принять равным единице, а синус и тангенс заме-
нить углом, выраженным в радианах:
или, подставляя значение 2v‘.
е _ Уо (УТ+2В - 1) (а + Т) . (/Г+2В - 1) (а + т)
1 У0/1 + 2В /1+2В ’
е° = 0^* + 2Д — 1) (« + т). 57 3.
1 /1+2В ’ ’
здесь ех— угол скоса, вызванный только струей винта.
К найденному углу ех нужно еще прибавить угол скоса, вызван-
ный крылом, е2.
При расчете скоса потока от крыла и винта иногда исходят
из независимости действия винта и крыла на поток. Скорость
встречного потока Vo сначала поворачивают на угол скоса потока
крыла е, а затем к повернутому вектору Уо добавляют вектор 2т»,
параллельный оси винта (фиг. 73).
Считая косинусы равными единице, а синусы и тангенсы рав-
ными углам, получим выражение для угла скоса потока:
g Упе 4-2t> (а + т) е + (а + т)(1/~1+2Д-П
2 Vo4-2v У14-2В ’
е2 = . 6 -4- е..
У1 4- 2В 1 1
84
Пожалуй, более правильным было бы считать, что струя винта
тоже скошена крылом на угол е, и тогда
^2 = е —|—
Здесь предполагается, что при набегании струи винта на крыло
угол атаки не меняется. На самом деле может измениться угол
атаки, а с этим — характер распределения циркуляции по крылу.
В результате изменится скос потока у хвоста. Однако точный рас-
чет этого явления еще не разработан.
Переходя к оперению в целом, нужно учесть, что в струе на-
ходится только часть оперения, и тогда приведенный средний
скос для всего оперения е8 будет:
Фиг. 73. Скос потока от крыла и струи винта.
при независимом действии скоса получим:
ез
1
V'l + 2В
__ I ‘S'lx
SS = £ + /'8l.
Расчет момента хвоста в моторном полете вполне аналогичен
расчету момента при планировании, но только нужно брать соот-
ветствующие значения (-^)аие8. Если рассматривается случай, когда
скорость не меняется, величина В постоянна. Если рассматривается
случай установившегося полета, то каждому углу атаки соответ-
ствует своя скорость и, следовательно, своя величина В. Для
расчета следует задаваться углами атаки, затем по ним найти Су
крыла и определить скорость полета V — ; зная скорость,
из аэродинамического расчета берем тягу винта и подсчитываем В
и j/14-2В; затем находим (v/’ как это уже было указано, е8,
ax = a.-]-q — е3, по ах имеем СУх и, наконец, СМх. Все эти расчеты
располагаем в таблице. Если расчет сделан на установившийся
85
режим, то диаграмма получается не прямой, как при планирова-
нии, а кривой с крутизной, возрастающей с увеличением углов
атаки за счет увеличения величины В.
МОМЕНТ ОТ ТЯГИ ВИНТА
Момент от тяги винта получим, умножая силу тяги на плечо,
считая последним расстояние от центра тяжести до оси винта
(фиг. 74):
Л4в=3ф.^.
Необходимо, конечно, обращать внимание на знак момента.
Для получения безразмерного коэфициента надо разделить
момент на pSV2b-.
г — ф У
•«e“ pSV2 b •
При построении диаграммы момента или коэфициента момента
возможны следующие случаи (которые необходимо различать):
Фиг. 74. Момент от тяги винта.
1. При изменении угла атаки скорость не меняется, что возможно
при быстром изменении угла атаки в неустановившемся движении.
Так как при постоянном положении дросселя мотора сила тяги
зависит от скорости, то при постоянной скорости тяга постоянна,
момент постоянен и диаграмма будет иметь вид прямой, парал-
лельной оси абсцисс.
2. Установившийся горизонтальный полет. В этом случае сила
тяги должна быть равна сопротивлению Ф = Q^‘CJfpSVi и тогда
Смв примет вид:
/-» _ CxpSV^y_р у
pSV^b *b'
При увеличении угла атаки Сх растет, и поэтому абсолютная
величина CMg с увеличением угла атаки растет приблизительно по
параболическому закону.
3. Установившийся полет на полной или, вообще говоря, посто-
янной мощности, когда движение установившееся, но траектория
необязательно горизонтальна. В этом случае силу тяги нужно брать
по особому расчету, например из аэродинамического расчета. При
расчете момента оперения в моторном полете нам тоже нужна
была тяга винта, которую мы преобразовали в коэфициент на-
86-
грузки на ометаемую площадь В. Эту же найденную величину В
можно использовать для расчета момента оперения:
R— Ф Г — ф у
’ ^мв ~ pSV2 b ’
См = В~^~.
Me Sb
При увеличении угла атаки и соответственном падении скорости
величина В растет и См„ по абсолютной величине также растет.
Наибольшая величина Ме и СМв будет при крутом подъеме на ма-
лой скорости.
До сих пор мы считали, что сила тяги направлена по оси
винта. Однако это не так. При больших углах атаки сила тяги
отклоняется от оси винта, и образуется некоторая проекция силы
Фиг. 75. Момент от подъемной силы винта.
тяги Фу на ось Y (фиг. 75). Если винт сильно удален от центра
тяжести, сила Ф^, может дать значительный момент, и пренебре-
гать им нельзя. К сожалению, в теории и в опытных материалах
можно найти лишь весьма скудные сведения о силе Ф^,-
В журнале „Flight" от 26/IV 1926 г. инж. Барнвелл дает такое
выражение для Фу:
Фу = 0,00105 • D’p V2 (а0 + у°),
где 7 — установочный угол винта по отношению к крылу, (« + у)—
наклон оси винта к линии полета. В формуле участвует только
диаметр винта; это, конечно, очень грубо, и несомненно Фу зави-
сит от шага винта и числа оборотов. Формула Барнвелла дает Фу
примерно такой величины, как подъемная сила крыла, площадь
которого равна площади проекции лопастей на плоскость X—Z.,
проходящую через ось вращения.
Причина образования силы Фу заключается в том, что при
отсутствии угла наклона оси винта силы, действующие на лопасти
винта, дают проекции на ось К, равные и противоположные, соз-
дающие момент сопротивления вращению (фиг. 76). При наличии
угла (аЦ-у) эти проекции не равны, так как у одной лопасти угол
атаки несколько возрастает, у другой—уменьшается. Сила Фу имеет
месте Даже в том случае, если винт вращается, но не дает тяги.
87
МОМЕНТ ФЮЗЕЛЯЖА
Момент фюзеляжа можно рассчитывать так же, как момент
крыла, если для него есть значения СМф, Су$ и Сх$, полученные
путем продувки. Коэфициент момента СМф берется около некото-
рой точки, как, например, носика фюзеляжа. Зная координаты этой
точки относительно центра тяжести самолета хф и уф, можно на-
Фиг. 76. Объяснение образования подъемной силы винта.
писать момент фюзеляжа относительно центра тяжести. Величину
Ct можно считать равной Сх ввиду малой подъемной силы. Имеем
Мф = р V2 {См$8фЬф Су^8фхф -f- Cx*S^y
с — ^фьф ( q ' — q _1~ с
%- Sb l S ^УфЬф-г'-'хф Ьфг
Размеры Ьф, хф и уф указаны на фиг. 77; 8ф — площадь проек-
ции на плоскость XZ.
Для фюзеляжа примерно симметричной формы С*ф очень мало
и член СХф1ф тоже мал; в этом случае См$ можно выразить ана-
литически:
С = - Г0,22 - f*] (X 0,002 (0,22 — Х)«°-
МФ sb l ^ф-1 уФ Sb \ ’ кф)
at
Сюда можно еще добавить учет удлинения фюзеляжа =
где а — наибольшая ширина фюзеляжа; имеем:
Су =0,02^а°,
УФ Ьф
Смх = 0.02 (0,22 — ЗД а.°.
Md) Sb \ ’
88
Диаграмма См^ по а, подсчитанная по этой формуле, получается
в виде прямой линии, наклон которой зависит от разности
(о,22 — В случае кольцевых капотов можно ожидать значи-
тельного изменения момента фюзеляжа; однако материалов испы-
таний капотов еще не имеется.
МОМЕНТ ОТ ЛЫЖ, ПОПЛАВКОВ И ДРУГИХ ДЕТАЛЕЙ, ИМЕЮЩИХ
БОЛЬШИЕ РАЗМЕРЫ И ПЛАВНО ОБТЕКАЕМЫХ
Моменты от указанных деталей можно подсчитывать совер-
шенно таким же образом, как для фюзеляжа, но только значи-
тельное удаление их от центра тяжести по высоте не позволяет
пренебрегать моментом от лобовых сопротивлений. Имеем:
р ___/ р ' р хп | р Уп\
---Sb~ \ Г„ + Г„) ’
где Ln — длина детали,
хп и у„ — координаты носика детали относительно центра тяжести,
Sn — площадь проекции на плоскость XZ.
Если величину СМп принять равной 0,22 С№, а Суп выразить
аналитически через
а 2
С„я = 0,02^(а + т),
то получим аналитическое выражение для момента:
С‘. = ТГ [°’02 (°’22 - й) (’°+Y.") + Й ] ’
где ап — наибольшая ширина, т. е. размер вдоль оси Z,
Тп — установочный угол относительно хорды крыла,
Сх —постоянно.
Этой формулой следует пользоваться, если нет специальных
испытаний.
МОМЕНТ НЕНЕСУЩИХ ДЕТАЛЕЙ
Ненесущими деталями называются те детали, которые совсем
не имеют подъемной силы, как, например, колеса, или детали, у ко-
торых подъемная сила по сравнению с лобовым сопротивлением
очень мала, например, тело небольшого размера, малой длины и,
кроме того, плохо обтекаемое. Для ненесущих деталей опреде-
ляется только один момен от лобового сопротивления:
р ___ р $пУп
Sb ’
Если известна приведенная вредная площадь детали <зп, то можно
написать так:
С — л сд ^пУп
— О,ОТ Sb .
89
На больших углах атаки сила сопротивления направлена не
вдоль оси X, а дает составляющую по оси У; однако ввиду ма-
лости силы и угла для обычных самолетов этого можно не учи-
тывать. Возможно наличие еще других моментов, как, например,
при буксировке, от действия реактивных ракет и пр.
МОМЕНТ ВСЕГО САМОЛЕТА ВОКРУГ ЕГО ЦЕНТРА ТЯЖЕСТИ
Момент всего самолета слагается из моментов отдельных его
частей, причем при сложении нужно учесть взаимное влияние
частей. Получить момент всего самолета можно тремя способами:
1) путем испытания модели в аэродинамической трубе,
2) путем сложения моментов отдельных частей, рассчитанных
на основании испытания этих частей в отдельности,
3) путем применения аналитического выражения моментов от-
дельных частей, полученного на основании обобщений теорети-
ческих и экспериментальных данных.
Когда и какой способ применить, зависит от поставленной за-
дачи и имеющихся возможностей. Например, испытание модели
в трубе всегда желательно в тех случаях, когда нет уверенности
в правильном учете взаимного влияния частей, особенно при за-
слонении оперения. Аналитическое выражение обычно применяется
для теоретического исследования вопросов равновесия и устой-
чивости. Остановимся подробнее на каждом способе.
Для испытания в трубе изготовляется модель с размахом около
40—50% диаметра трубы. Мелкие детали, которые не влияют на
момент, можно не выполнять, например расчалки.
Модель устанавливается или на трехкомпонентных весах, на-
пример типа Прандтля, или на специальных моментных весах.
В первом случае момент измеряется вокруг некоторой оси, не
проходящей через центр тяжести и лишь параллельной оси Z;
кроме того, определяются подъемная сила и сопротивление, т. е.
снимается кривая Лилиенталя. Затем расчетным путем находится
момент вокруг оси Z. Способ пересчета будет точно такой же,
как переход от момента вокруг передней кромки крыла к моменту
вокруг центра тяжести. Для этой целй Су и Сх пересчитываем на
Сп и Ct; имеем:
См = СМ -Сп^-+ СЛ-.
MZ MZ. nb 1 U
За хорду b нужно взять ту длину, которая была принята при
расчете коэфициента СМг.
Если испытание производится на моментном приборе, то модель
должна быть установлена так, чтобы ось вращения проходила, как
раз через центр тяжести самолета (фиг. 78). Модель ставится под
разными углами атаки и измеряется момент, который затем пере-
считывается на коэфициент момента CMz, причем вместо хорды
крыла обычно берут расстояние от центра тяжести до шарнира
руля высоты; при сравнении продувки модели с теоретическим
90
расчетом переход к Смг> отнесенному к хорде крыла Ъ, можно
сделать, умножив СМг, отнесенный к L, на -у-.
Испытание на моментном приборе даст ответ быстрее, чем на
трехкомпонентном, но зато имеет тот недостаток, что переход на
другую центровку не может быть сделан за отсутствием Су и Сх.
На практике всегда приходится искать моменты при разных
центровках; поэтому испытание модели следует производить или
на трехкомпонентных весах, или на моментном приборе с после-
дующим снятием поляры на весах. Испытывать модель на момент-
ном приборе при разных центровках не следует, хотя, если испы-
тание проведено вокруг трех не лежащих в одной плоскости осей Z,
можно расчетным путем найти момент вокруг любой другой па-
раллельной оси. Способа пересчета мы здесь не приводим, так как
он легко может быть получен из простых правил статики.
Результат испытания модели дается обычно в виде диаграммы
СМг по а (фиг. 79) или реже—по Су. На одном графике распола-
гают несколько диаграмм, отличающихся положением руля высоты
стабилизатора или другими факторами. О том, какие именно фак-
торы нужно выявить, будет указано далее.
Проводимое испытание соответствует планированию самолета,
так как струи винта нет. Важное влияние струи винта на равно-
весие моментов и трудность теоретического учета влияния струи
привели к попыткам испытания модели с работающим винтом. Та-
кие опыты были весьма успешны. Для этой цели в фюзеляже мо-
дели устанавлизается маленький электромотор с винтом. Режим
работы винта 1=^- подбирается соответственно нужному режиму
полета. Второй способ получения момента всего самолета заключается
в сложении моментов отдельных частей самолета: крыла, оперения,
фюзеляжа, винта и других частей. Расчет моментов и учет взаим-
ного влияния уже был изложен. Для сложения коэфициентов мо-
мента все они должны быть отнесены к одной величине, т. е. по-
делены на pSV2^, как это мы делали выше. Для сложения реко-
91
мендуется построить диаграммы Стг отдельных частей по а и затем
ординаты алгебраически сложить. Построение кривых моментов
отдельных частей поучительно в педагогическом отношении, так
как наглядно показывает роль каждого момента и облегчает кон-
троль правильности расчета.
Для обычной самолетной схемы результат теоретического сло-
жения моментов очень близко подходит к результатам опыта в трубе,
только некоторая сдвинутость кривых вдоль шкалы углов атаки
всегда возможна по причине неточности установки углов на модели.
Перейдем теперь к аналитическому выражению моментов всего
самолета. Выше мы уже дали выражения моментов крыла и опе-
рения в аналитической форме. Для крыла мы имели:
СМг = СМо -{-(/и — ~ь)Су — у (Ср — «о С,—
= См„ + (7/1 у) (а ао)В Во “Ь ааоВ (^Bq — 1) +
+а°2В(1~И-
Аналитическое выражение момента оперения
С'..=тг (v)! -Вх («+?—+"8);
для планирования
/ VA2 А Q 4С\, Су
\~v) — °>8> е—а- — ~в ’о>
отсюда
<4 =0,8 ^.вХй+«.+т .
92
Если момент нужно выразить в функции угла атаки, то получим:
<4 = °>8 тг-М* + Т (а - «о) В + «5 ] •
В случае моторного полета изменятся (yyf и е; имеем:
(v)! =0.8[^-2В,+ 1].
Подставляя, получим:
С^а = ’°’8 • 25« +1) ~ “о + ? - + «8 ) ,
или через угол атаки:
с-„,=тг в-' °.8 (I;2В-+1) («+? - •»+"г)
Коэфициент нагрузки на ометаемую площадь тоже можно выра-
зить аналитически. Сила тяги винта меняется почти по прямой, и
поэтому ее можно выразить через
ф=ф.(1-^).
где Фо — сила тяги при У=0, а Уо —скорость, при которой сила
тяги обращается в нуль.
Значения Фо и Уо получаются путем экстраполяции куска диа-
граммы тяги по скорости из аэродинамического расчета, или берут
приближенно Ф0 = от 1,5 N до 2IV, где IV—мощность мотора,
а У0 = 2Итах, где Утах — максимальная скорость горизонтального
полета.
Теперь величину Вв получим в виде:
Вв = -^(1 — -К).
e pFV* \ VqJ
Это выражение применяется для рассмотрения быстрых изме-
нений угла атаки, когда скорость не успевает меняться. Для
установившегося движения V = ]/ и
д Ф°5С>
fg
Если Су выразить через а, т. е.: Су = В(а.—а0), то
Ф(5В (а — а0)
Be = FG
л/_____2____
1 _ V pSB (а — а0)
Ио
Момент от тяги винта
р ____ D ЛУз
g^8 —
93
Момент от фюзеляжа
=0,02 "*-(о,22-Л).
или
^.=0да^(0,22-2)(^-«0).
Наконец, момент от лобовых сопротивлений
п _ 0,64 Х7
c-*s> sb °5 ‘У5’
Момент всего самолета будет:
— ^мг ^Mz Ч~ C*z ~Ь Смг Ч- C*z •
Теперь можно подставить отдельные выражения, но тогда
получим чрезвычайно громоздкую формулу. Если в формулу
подставить численные выражения для постоянных величин, фор-
мула сразу упрощается. В дальнейшем мы так и будем поступать.
РАВНОВЕСИЕ МОМЕНТОВ ВОКРУГ ОСИ Z
В ПРЯМОЛИНЕЙНОМ ПОЛЕТЕ
До сих пор мы обрабатывали материал, который необходим
для рассмотрения равновесия и устойчивости, а теперь займемся
равновесием моментов вокруг оси Z.
В аэродинамическом расчете мы исходили из условия, что
силы и моменты находятся в равновесии. Условие равновесия
сил было рассмотрено, а про моменты было указано, что при
выбранном угле атаки сумма моментов равна нулю. Условие рав-
новесия моментов можно написать в виде:
£х=о.
Напоминаем, что если сумма моментов не равна нулю, то будет
иметь место угловое ускорение
</<!> _5
где Jz — момент инерции вокруг оси Z.
Если Мг = 0, то
Сейчас мы будем рассматривать прямолинейное установившееся
движение. В качестве показателя режима полета берем угол атаки
или Су. В зависимости от угла атаки должна быть найдена ско-
рость полета. Если наклон траектории полета не более + 15°, то У=
= pSC ' Обратно, — каждой скорости полета соответствует свой
угол атаки крыльев. Следовательно, при каждом практически не-
обходимом угле атаки должно быть равновесие моментов.
Если при одном угле атаки было равновесие моментов, то
при другом угле атаки оно само собой не получится. На летчике
лежит обязанность приводить моменты к равновесию при всех
нужных углах атаки, при всех режимах работы мотора и при всех
изменениях центровки самолета в результате выгорания горючего,
сбрасывания грузов и других причин. В современных самолетах
летчик воздействует на моменты при помощи руля высоты и под-
вижного стабилизатора. Возможны, конечно, и другие способы.
Расчет равновесия самолета вокруг оси Z заключается в том,
95
что проверяется, достаточно ли руля высоты для получения рав-
новесия моментов при необходимых в полете и при посадке углах
атаки. Эти вопросы разрешаются для центровок углов атаки и
углов установки стабилизатора, оговоренных техническими усло-
виями для данного самолета. Совершенно ясно, что нельзя тре-
бовать равновесия моментов при любых центровках самолета.
Но если перемещения центра тяжести в разных полетах или в те-
чение одного полета неизбежны, конструктор должен позабо-
титься о том, чтобы руля высоты хватило для гарантии безопас-
ности полета. Что касается вопроса установки стабилизатора в
полете (если это имеет место), то, вообще говоря, стабилизатор
содействует рулю высоты. Однако возможны такие случаи, когда
стабилизатор стоит в неблагоприятном положении и его нельзя
переставить по причине отказа механизма или, что нередко бы-
вает, за отсутствием времени. Само собой разумеется, что про-
верены должны быть как моторный полет, так и планирование.
Если в результате расчета оказывается, что действие руля вы-
соты недостаточно для равновесия моментов при необходимом
диапазоне углов атаки, то нужно найти средства улучшения,
о чем подробнее будет сказано в дальнейшем.
Для нормальных (неспециальных) самолетов военных и граж-
данских требуется, чтобы движением руля высоты могли быть по-
лучены углы атаки в пределах от угла атаки при Суmax ДЛЯ СОВер-
шения посадки и до угла атаки при Су = 0 для пикирования.
При этом руль должен иметь еще некоторый запас эффективно-
сти. К сожалению, этот запас до сих пор еще никак не устано-
влен. Обычно в крайнем случае берут отклонение руля высоты
+ 15°, и тем самым создается некоторый запас, так как при
отклонении более указанного действие руля еще усиливается.
Затем проверяются основные режимы полета, как, например, пла-
нирование, крутой подъем и максимальная скорость горизонталь-
ного полета.
Одна поверка эффективности руля еще недостаточна,— нужно
обеспечить летчику определенную границу усилий на ручке упра-
вления и нужно, чтобы при всех режимах полета равновесие было
устойчивым. Вопросам устойчивости и давления на ручку мы по-
святим специальные главы. Однако, говоря о равновесии, нельзя
упускать эти важнейшие факторы; в частности, вопрос устойчи-
вости налагает строгие ограничения на пределы перемещения центра
тяжести.
Установочный угол стабилизатора играет большую роль в рас-
смотрении равновесия, но основной смысл регулировки стабили-
затора заключается в уменьшении давлений на ручку.
Подобно тому как мы давали три способа расчета момента,
действующего на весь самолет, имеются и три аналогичных ме-
тода расчета равновесия.
РАСЧЕТ РАВНОВЕСИЯ ПУТЕМ ПРОДУВКИ МОДЕЛИ САМОЛЕТА
Для выяснения эффективности рулей путем продувки модель
испытывается на моментном приборе при трех положениях рулей:
96
О, 4-15° и —15°. Получаем три кривых (фиг. 79). Равновесие имеем
в точке пересечения кривых с осью X, где См = 0. Если весь по-
г
летный интервал углов атаки расположился между точками пере-
сечения для 5=15° и 8 =—15°, рули достаточны. Если какой-либо
угол атаки, например при посадке, оказался вне точки пересече-
ния 8 = —15°, то такое положение должно быть исправлено, так
как иначе посадка на три точки будет невозможна.
Вообще говоря, недостаточность руля высоты, проявляется
именно при посадке, но только тут нужно обратить внимание на
одно важное обстоятельство, о котором иногда забывают. При
посадке самолет летит параллельно земле, причем стабилизатор
и руль высоты подходят очень близко к земле. Близость земли
почти полностью устраняет скос потока от крыла. Это сущест-
венно сказывается на равновесии моментов. Поэтому, если жела-
тельно проверить достаточность руля высоты при посадке на три
точки, продувку модели следует произвести в присутствии экрана,
заменяющего землю. На фиг. 80 показаны кривые моментов, полу-
ченные без экрана и с экраном.
Изыскание положения стабилизатора тоже может б .ять сделано
путем продувки модели, 'хотя при матой модели легко сделать
ошибку в углах, не говоря уже, конечно, о птохом аэродинами-
ческом подобии вследствие малых чисел Рейнольдса.
Очевидно, что нулевое давление на ручку управления соответ-
ствует такому положению руля высоты, которое он занял бы при
брошенной ручке. Поэтому для изыскания положения стабилиза-
тора производят продувку модели со свободным рулем высоты.
Это испытание не совсем правильно, так как давление на ручку
получается не только от воздушных сил, но и от веса руля. По-
7 В. С. Пышвов 639 97
этому при продувке к рулю следовало бы приложить некоторую
силу, заменяющую вес, учитывая при этом масштаб и скорость
потока.
Положение стабилизатора можно считать подобранным пра-
вильно, если кривая См со свободным рулем высоты пересекает
ось абсцисс при нужном угле атаки (фиг. 81). От руля высоты
мы требовали, чтобы при отклонениях его могли быть получены
углы атаки от нуля подъемной силы до Cvmn. От стабилизатора
не требуют такой эффективности. Стабилизатор подбирают по
углу атаки при средней скорости полета и устанавливают его
в этом положении наглухо или подбирают стабилизатор по режи-
мам планирования, крутого подъема, максимальной скорости
сиг
ибз
Фиг. 81. Влияние установочного угла стабилизатора на диаграмму
моментов.
и устраивают механизм изменения угла установки в полете в най-
денных пределах.
Поверку эффективности руля высоты и определение угла
установки стабилизатора можно было бы вести и без определения
моментов, а установив модель на центрах соответственно оси Z
и наблюдая углы атаки при разных положениях рулей и стаби-
лизатора. Если центр тяжести модели не лежит на оси Z, необ-
ходимо расположить ось Z вертикально. Такой эксперимент нужно
рекомендовать как наглядное пособие при изучении равновесия.
РАСЧЕТ РАВНОВЕСИЯ ПУТЕМ СРАВНЕНИЯ МОМЕНТОВ
САМОЛЕТА БЕЗ ХВОСТА С МОМЕНТАМИ ХВОСТА
Мы уже изложили, как можно найти моменты отдельных ча-
стей и суммарный момент для всего самолета. Теперь возьмем
98
все моменты, кроме хвоста, т. е. моменты крыла, тяги винта,
сопротивлений и отдельно моменты хвоста при разном положении
рулей высоты (фиг. 82). Как именно построить эти диаграммы,
уже было указано ранее.
Равновесие будет в тех точках, где SCU=O или 2 С —С„ =
z мг гх
= — См , т. е. там, где моменты самолета без хвоста равны и про-
тивоположны моментам хвоста. Найти такую точку можно, прикиды-
вая ординаты циркулем, однако это очень неудобно. Для облегчения
работы наносим на той же диаграмме кривую моментов без хвоста,
но с обратным знаком, или, как говорят, зеркальное отражение
(фиг. 82). Тогда равновесие моментов будет в точках пересечения
обращенной кривой с диаграммами момента хвоста при разных Зр.в.
Фиг. 82. Расчет равновесия моментов.
По такой диаграмме мы можем легко найти положение руля
высоты при всех углах атаки. Результат работы дается в виде
так называемой балансировочной диаграммы, в которой по оси
абсцисс отложены углы атаки или скорость установившегося
полета соответственно углу атаки, а по оси ординат — отклоне-
ния руля высоты (фиг. 83). По балансировочной диаграмме легко
судить о достаточности руля высоты.
Аналогичный расчет для моторного полета на постоянном
дросселе и скорости соответственно углам атаки дан на фиг. 84
и 85. Приведенный метод расчета равновесия одно время считался
нормальным, но в последнее время стал применяться реже по
следующим причинам. Пусть нам нужно произвести расчет при
разных.положениях стабилизатора; тогда диаграммы момента хвоста
нужно перестраивать. Наносить новые моменты хвоста на преж-
ний чертеж не следует, так как это слишком загромоздит чертеж.
Посмотрим, что случится с моментами хвоста при перемене угла
7* ор
установки стабилизатора. Если сначала <р было равно нулю, а за-
тем получило некоторое значение, то значит, угол атаки хвоста
возрос на величину <р. При планировании, когда постоянно,
перестроение можно сделать сравнительно просто, исходя из
углов атаки хвоста. В моторном полете перестроение почти рав-
ноценно расчету новых кривых. На практике приходится очень
часто менять или изыскивать установочный угол стабилизатора.
Способ расчета равновесия должен позволить легко менять угол <р.
Таким преимуществом обладает следующий метод расчета. Для
равновесия момент хвоста должен быть равен и противоположен
сумме всех других моментов; найдем отсюда Су хвоста:
с.х = - (С,, + с.ф + С.,) - (-£) ‘ с,*,
с =S (Си» 4~ Ct# + Си,)
~ SXLX (V^ •
Sb \V )
Имея уже значения всех моментов и для разных углов
атаки, по этой форму те находим тот Су, который должно иметь
хвостовое оперение. Угол атаки хвоста при <р = 0 будет ах = а— е.
Теперь берем диаграмму СУх по лх для нашего оперения при раз-
ных 8Р. в и на эту диаграмму наносим подсчитанную кривую (фиг. 85).
На последней следует оставить разметку углов атаки крыла.
Опять нетрудно понять, что равновесие будет в точке пересечения
кривых, и для каждого угла атаки можно прочесть путем интер-
поляции 8Р „ и построить балансировочную диаграмму. Если дано <р,
100
то ах изменится на величину <? и вся построенная кривая сдвинется
на величину <?. Когда нужно часто менять <? или изыскивать наи-
лучшее <р, подсчитанную кривую Су по ях наносят не на самую
менять <р. Такой способ расчета равновесия можно рекомендовать.
Способ изыскания угла <р по этим же кривым будет указан далее.
РАСЧЕТ РАВНОВЕСИЯ ПО АНАЛИТИЧЕСКОМУ ВЫРАЖЕНИЮ МОМЕНТОВ
Аналитическое выражение моментов отдельных частей самолета
уже' было дано. Условие равновесия будет:
СЛг 4‘ С* + cMlt 4- См^ 4- ся^ = 0;
здесь индексы означают: 1—крыло, 2 — хвост, 3—винт, 4 — фюзе-
ляж, 5—сопротивления.
1<Н
Отсюда находим:
C»z, = ~~ (С*г, + Cmz, + Cm2i + Ск2).
Подставим значение момента хвоста:
с-, = ~sr 'в* («+?— + “Ч “
Фиг. 85. Расчет равновесия моментов по потребным Су у хвоста.
определяя отсюда 8, получим:
1 <^z, "I” Cmz, ^Mz, + Cm*. I ,
S = “V ------sxix Ш’----------Н + т-‘
L -ST (v)'s' J
Аналитические выражения для
CMz, Смг, CMZ, CMz , (-£)’, Вх и Да
^**5 1 у I
были приведены, и потому, имея основные данные о самолете,
можно подсчитать отклонение руля высоты для желаемых углов
атаки и затем построить балансировочную диаграмму.
РАСЧЕТ ДАВЛЕНИЯ НА РУЧКУ УПРАВЛЕНИЯ
РУЛЕМ ВЫСОТЫ
Первые аэропланы были так легки и тихоходны, что вопрос о
давлении на ручку не интересовал конструкторов. Однако затем,
особенно к концу империалистической войны, вопрос о давлении
на ручку стал играть большую роль, а в современных тяжелых
самолетах вопрос о давлении на ручку является наиболее важным
вопросом, который нужно разрешить при расчете равновесия и
устойчивости. Возьмём сначала изолированное оперение, находя-
щееся в воздушном потоке. Стабилизатор имеет некоторый угол
атаки а.х и руль повернут на угол 8 (фиг. 86). Под действием воз-
душного потока создается момент вокруг оси вращения руля, кото-
рый стремится повернуть руль в иное положение. Для удержания
руля в данном положении к нему нужно приложить момент равный,
но противоположный моменту воздушных сил.
Момент, стремящийся повернуть руль, называется шарнирным.
Из элементарного рассмотрения воздушных сил можно заключить,
что шарнирный момент зависит от : 1) формы оперения, 2) площади
руля высоты, 3) хорды руля высоты, 4) углов аж и 8, 5) плотности
воздуха р, 6) квадрата скорости у хвоста.
В виде формулы это можно изобразить так:
Мш = С„рЗр. вЬр. „V/.
Коэфициент шарнирного момента Сш в свою очередь зависит
от формы руля, угла атаки стабилизатора ах и отклонения руля 8.
Эта зависимость дается путем продувки оперения данной формы
на Сш при разных лх и 8, а результат продувки дается в виде
диаграммы фиг. 87.
Имея Мш, можем получить давление на ручку. Пусть руль свя-
зан с ручкой, как показано на фиг. 88. По Мш находим усилие
в тяге, а затем и усилие в ручке. Рассматривая равновесие руля,
пишем:
Мш^Ргъ Р =
из условия равновесия ручки имеем:
pr^4rz, <} = Р± = МШ^.
На практике применяют и более сложные механизмы передачи.
Однако вместо рассмотрения равновесия отдельных звеньев меха-
но?
низма гораздо удобнее воспользоваться началом возможных пере-
мещений. Если механизм находится в равновесии и ему дано беско-
нечно малое перемещение, то сумма работ всех сил будет равна
нулю. В данном случае мы даем ручке бесконечно малое переме-
щение dx, тогда руль высоты повернется на угол Можем напи-
сать:
Фиг. 87. Диаграмма коэфициента шарнирного момента.
ИЛИ
Р = МШ~.
ш dx
Величину можно назвать передачей. Обычно 8 прямо про-
порционально х, нулевые значения 8 и х совпадают, и тогда
Ю4
вместо можно взять . Величину 8 нужно брать в радианах,
х — в метрах. Например, при движении ручки „от себя* на 0,2 м
руль высоты опускается на 15° или
8=-й=0'262;
отсюда
_ 0,262 _ .
dx ~~ 0,2 —
В современных самолетах обычно постоянно по всем значе-
ниям 8. Однако может быть будет иметь смысл конструировать и
. d8 -
такой механизм передачи, при котором менялось бы.
Порядок расчета давления на ручку будет такой. Из предыду-
щих расчетов мы имеем диаграмму 8 по а и ах по а. Затем для
нужной формы оперения имеем диаграмму коэфициентов шарнир-
ных моментов. Задаваясь разными углами атаки а, беремч соответ-
ствующие 8 и а.х, по ним находим Сш и, наконец, вычисляем Мш и Q.
Величину Q строим по углам атаки или по скорости соответ-
ственно углам атаки.
К давлению на ручку от воздушных сил нужно прибавить да-
вление от веса руля и трения в механизме. Для расчета давления
от веса руля нам нужно знать вес руля и положение центра тяже-
сти ; тогда находим шарнирный момент от веса и затем давление.
Относительно трения в механизме еще нет никаких материалов
справочного характера, несмотря на то, что иногда трение бывает
очень велико, особенно при наличии большого количества роликов.
105
ВЫБОР УГЛА УСТАНОВКИ СТАБИЛИЗАТОРА
Фиг. 89. Диаграмма давления на ручку.
Если предполагается стабилизатор установить на земле до
полета, то он устанавливается на некоторый средний режим полета.
Если есть механизм, меняющий угол стабилизатора в полете, то
нуя^но выяснить пределы необходимого изменения угла установки,
исходя из всех возможных режимов полета. Вопрос о том, нужно
ли делать стабилизатор управляемым в полете или с постоянным
углом установки, решается по диаграмме давлений на ручку,
построение которой было изложено выше. Если оказывается, что
при всех режимах давления на ручку невелики, можно стабилизатор
закрепить. В противном случае его делают управляемым. Постоян-
ный угол установки стабилизатора делают на легких самолетах и
часто на истребительных
самолетах для упрощения
управления самолетом. Бы-
вают конструкции, регули-
рующие равновесие, не тро-
гая стабилизатора; о них
мы расскажем в дальней-
шем.
Пергйдем теперь к рас-
чету угла установки стаби-
лизатора, исходя из отсут-
ствия давления на ручку.
Пусть в нашем распоряже-
нии имеются диаграммы мо-
ментов всех частей само-
лета, по которым мы рас-
считывали балансировочные
диаграмму и диаграмму
шарнирных моментов опе-
рения. Берем режим полета,
для которого желаем выбрать положение стабилизатора, опреде-
ляем режим углом атаки крыла а, скоростью полета V и тягой
винта Ф. Затем задаемся рядом углов <р, находим угол атаки
стабилизатора ах и угол отклонения руля высоты. Эти материалы
позволяют найти давление на ручку при разных <р; затем, построив
диаграмму Р по <р (фиг. 89), прибавив давление от веса руля, мы
можем по диаграмме увидеть не только то <?, при котором нет да-
вления, но и величину давления при других значениях <р. Послед-
нее очень важно, так как указывает, насколько действительно не-
обходимо делать стабилизатор управляемым в полете.' Подобный
расчет производят для всех интересующих режимов полета.
Расчет положения стабилизатора можно сделать проще, но менее
полно. Возьмем диаграмму Сш и отметим на ней, при какой ком-
бинации ах и о будет равно нулю Сш. Очевидно, эти случаи соот-
ветствуют точкам пересечения диаграммы с осью абсцисс. Резуль-
тат отмечаем в виде таблички или в виде диаграммы фиг. 90, где
данные взяты с фиг. 87. Затем берем диаграмму Cv хвоста по ах при
разных 8 и на ней отмечаем те точки, при которых лх и 8 соот-
106
ветствуют Сш~0. Для этой цели нужно интерполировать между
линиями 8. Через отмеченные точки проводим диаграмму, на которой
отмечаем Сш = 0 (фиг. 91).
На эту диаграмму накладываем кальку с кривой СУх по ах,
полученной, исходя из условий равновесия моментов. На кривой
замечаем тот угол атаки крыла, при котором' давление должно
быть равно нулю, и передвигаем кальку вдоль оси абсцисс до
тех пор, пока отмеченная точка не попадет на линию Сш=0. То
значение ах, на котором будет начало координат кальки, “и будет
искомым <р.
В этом расчете можно было бы учесть давление от веса руля;
однако это очень неудобно, так как для каждого режима полета
(Хх
Фиг. 90. Диаграмма зависимости 8 от ах при Сш — 0.
будет своя скорость й коэфициент шарнирного момента от веса
руля
р t _ ____________
“ — pSp.e bp.g VJ
будет различный.
Для расчета находим Сш', взяв Ух для исследуемого режима
полета. На диаграмме Сш откладываем Сш' с обратным знаком и
через это значение проводим прямую, параллельную оси абсцисс.
Теперь Сш будет равно нулю в тех точках, где линии диаграммы
пересекаются с проведенной линией. Дальше расчет идет указан-
ным уже способом.
Остановимся еще на расчете установки стабилизатора, пользуясь
аналитическим выражением моментов.
Возьмем руль высоты со стабилизатором под некоторым лх
(фиг. 92). Если 5 = 0, то руль высоты составляет продолжение
107
стабилизатора. Легко понять, что давление воздуха на руль будет
стремиться поднять руль, сделав ?> отрицательным. Если бы мы
подняли руль высоты так, чтобы он был параллелен потоку, или
8 =— вд., то на руль появится давление сверху за счет обтекания
стабилизатора. Следовательно, Mw = 0 будет соответствовать слу-
чаю, промежуточному между 8=ОиХ = — а.х. В общем виде
можно написать: Сш = 0 при8= — k-ax, где k меньше единицы.
Естественно, что k будет зависеть от соотношения площадей ста-
билизатора и руля высоты и от формы оперения. Если руль вы-
Фиг. 91. Расчет установочного угла стабилизатора из условий отсутствия
давления на ручку.
соты составляет продолжение стабилизатора, величина k близка
к отношению площади руля высоты к площади всего горизонталь-
ного оперения; если часть руля высоты выступает в сторону от
стабилизатора, то величина k будет больше. Обычно можно считать
§ = — .
о
Подставим значение 8 в выражение для момента оперения:
— ~ (С*г, + CMZi + 4- смг^,
108
т(тУв-[» + ’-'-я %(«+»— )]=
=-- (См 4 ^MZ + ^MZ “Ь Cmz ) •
Находим отсюда <р:
(pMzt + Сиг» + Сиг, + Сиг»)
a-f-s.
(Сиг, + Сиг, + Сиг, + Сиг,)
/у а
Подставляя коэфициенты моментов (~^\ и е соответственно ре-
жиму полета, найдем положение стабилизатора <f> и можем найти
необходимый диапазон его отклонений.
Фиг. 92. Схема условия Мш = 0.
МЕРЫ УМЕНЬШЕНИЯ ДАВЛЕНИЯ НА РУЧКУ
При конструировании новых самолетов проблема уменьшения
давления на ручку занимает очень значительное место. Даже у
небольших, но быстроходных самолетов мы встречаем недостатки
по причине больших давлений на ручку. Нечего и говорить, что
для тяжелого самолета вопрос о давлении на ручку может быть
решающим при определении пригодности самолета к эксплоатации.
Займемся рассмотрением возможных способов уменьшения давле-
ния на ручку.
Самый важный способ—это правильный выбор центровки и поло-
жения оси винта. Все это должно быть сделано в самом начале
проектирования самолета. Конструктора иногда не подумают об
этом серьезно, а исправлять потом готовую машину бывает почти
невозможн'о.
Какую же именно центровку нужно давать и как располагать
ось винта? Ответ на этот вопрос можно получить из расчета по-
ложения стабилизатора. Мы меняли положение стабилизатора для
уничтожения давления на ручку. Если бы оказалось, что при всех
полетных углах атаки нужно только одно положение стабилизатора,
тогда, естественно, при всех углах атаки давление будет отсутство-
вать. Значит, лучшая центровка и лучшее положение оси винта
будут тогда, когда при перемене углов атаки, включении и выклю-
109
чении мотора положение стабилизатора для уничтожения давления
на ручку будет одно и то же.
На фиг. 91 нанесена линия Сш = 0. С точки зрения давления на
ручку лучший случай будет тогда, когда диаграмма Сух, потребных
для равновесия моментов, которую мы наносили на кальку,, на всем
своем протяжении совпадет с линией Сш=0. Затем, включение мотора
не должно вызывать изменения диаграммы потребных Сух.
Так как вопрос о центровке и размерах оперения тесно связан
с устойчивостью, то более подробное исследование зависимости
давления на ручку от центровки и расположения оси винта мы
сделаем ниже после рассмотрения устойчивости.
Второй способ уменьшения давления на ручку—это изменение
передачи от руля к ручке. На первый взгляд этот способ кажется
соблазнительным, однако на деле применение его весьма ограни-
чено. Во-первых, степень передачи связана с минимальным откло-
нением рулей. Уменьшая передачу, мы уменьшаем крайнее отклоне-
ние рулей. Пойти на это мы можем в том случае, если отклонение
было чрезмерно велико или если для равновесия в крайних режи-
мах, например при посадке, не требуется больших отклонений и
к тому же самолет по роду своей службы маломаневренный.
Последняя оговорка относится к тому, что если в горизонтальном
полете большие отклонения рулей не нужны, то в криволинейном
полете они могут потребоваться.
Второй недостаток изменения передачи заключается в следующем.
Вопрос о давлении на ручку связан не столько с опасением недо-
статка силы у летчика, сколько с утомляемостью летчика при полете
в неспокойную погоду. Вопрос об утомляемости связан не с силой,
а с работой, затрачиваемой на отклонение руля. Из элементарной
механики мы знаем, что никакое изменение передачи не меняет
затраченной работы. При малой передаче мы будем иметь большие
силы, но зато малые перемещения ручки. При большой передаче—
малые силы и большие перемещения. Работа в обоих случаях будет
одинаковая.
Прочие способы уменьшения давления на ручку будут заклю-
чаться в уменьшении шарнирного момента:
CwpSp.ebp.gV2.
Выражение для шарнирного момента указывает нам меры для
его уменьшения. Прежде всего уменьшение руля высоты Sp.e или,
вернее, площади горизонтального оперения. Момент хвостового
оперения зависит от произведения площади на плечо. Следова-
тельно, если мы уменьшаем площадь хвоста, то зато должны уве-
личить плечо Lx. Однако делать длинный фюзеляж нежелательно.
Это портит маневренность, а условия стоянки на земле под углом,
близким к посадочному, при длинном фюзеляже заставят делать
высокое шасси; 1Х почти никогда не делают более 50% размаха
крыльев.
Вторая мера уменьшения давления на ручку — это уменьшение
хорды руля высоты. Уменьшение хорды происходит при уменьше-
нии площади оперения за счет удлинения фюзеляжа, затем — путем
увеличения размаха оперения, когда при сокращении площади
но
хорда уменьшается. Наконец, уменьшение хорды руля высоты
можно сделать устройством бипланного оперения, не меняя раз-
маха и площади. В этом случае хорда уменьшается в два раза.
Однако увеличение размаха оперения имеет свои конструктивные
пределы.
Остается последний наиболее эффективный способ — это умень-
шение коэфициента шарнирного момента. Способы уменьшения
коэфициента шарнирного момента многочисленны и теоретически
еще не исчерпаны.
Если ось вращения руля высоты лежит в его передней кромке,
то центр давления лежит позади оси примерно на расстоянии
одной трети хорды руля, так как распределение нагрузки на руль
близко к треугольнику. Для уменьшения шарнирного момента,
естественно, нужно приблизить ось вращения к центру давления.
Наиболее просто это можно сделать, когда стабилизатора нет (как
это было на некоторых самолетах и сейчас часто применяется на
планерах) (фиг. 93).
У симметричного про-
филя центр давления по-
чти постоянен и лежит
примерно на расстоянии
23—25% хорды от перед-
ней кромки. Поместив в
этом месте ось враще-
ния, мы избавились бы
от шарнирного момента.
Однако так поступать не
следует. Во-первых, пол-
ное уничтожение давле-
ния нежелательно. Давле-
ние на ручку служит ДЛЯ Фиг- 93. Уравновешенный руль высоты без стаби-
летчика некоторым кон- лизатора.
тролем режима полета и
нагрузки самолета. Во-вторых, оказывается, что центр давления
непостоянен и на углах атаки, близких к нулю, резко уходит
вперед. Это явление особенно свойственно более толстым про-
филям, но, к сожалению, мало исследовано. Если центр давления
окажется впереди оси вращения, руль сам стремится отклониться,
и одержать его в нужном положении затруднительно. Во избежа-
ние такого явления ось вращения помещают на расстоянии 25%
только при очень тонких плоских профилях и на 15 — 20% у сим-
метричных профилей толщиной 8—12%.
Если есть стабилизатор, то уравновешивание шарнирного момента
производится способами, показанными на фиг. 94. Вариант а при-
менялся на одном из первых самолетов Блерио-XI. Как видно, сред-
няя часть оперения служит стабилизатором, а концевая — рулем
высоты. Ось вращения руля высоты располагается так же, как
у оперения без сФабилизатора. Недостатком такого оперения
является большее сопротивление за счет резкого изменения рас-
пределения нагрузки по размаху, а также невыгодность в отноше-
нии прочности и жесткости.
ш
Вариант Ь, так называемая „роговая компенсация", очень рас-
пространен по причине простоты конструкции и удобства пере-
делки величины выступающей части для подбора нужной степени
уравновешивания. Однако этот тип имеет существенные недостатки.
Во-первых, щель при повороте увеличивает лобовое сопротивление.
| Ось вращения
Фиг. 94. Уравновешенные рули высоты.
Ось вращения
Во-вторых, степень ком-
пенсации непостоянна и
зависит от угла поворота
руля высоты. Пока руль
повернут мало, шарнир-
ный момент невелик. Но
при сильном отклонении
руля, по причине плохого
обтекания узкой высту-
пающей части, компенса-
ция ослабевает. На фиг. 95
дана сравнительная диа-
грамма шарнирного мо-
мента оперения без ком-
пенсации и’ с компенса-
цией типа Ъ. Как видно,
при малом отклонении
руля компенсация значи-
тельная, а при большом
отклонении —относитель-
но малая. Величину вы-
ступа или рога (почему
такая компенсация часто
называется роговой) мож-
но рассчитать теорети-
чески, если соответствую-
щим образом располо-
жить нагрузку на руль
высоты. Однако мы не
рекомендуем так посту-
пать, так как легко сде-
лать ошибку, особенно
в сторону перекомпенса-
ции. Следует брать уже
испытанные формы или
делать специальную про-
дувку в трубе.
Вариант с похож на обычное оперение без компенсации, но
только ось вращения отодвинута назад. Это называют внутренней
или осевой компенсацией; применяется она часто в Англии и
в США. Ось вращения расположена на расстоянии 17—2О°/о хорды
руля высоты. Недостаток внутренней компенсации противоположен
недостатку роговой компенсации: если та работала слабо при боль-
ших углах поворота руля высоты, то эта работает слабо при
малых отклонениях р/ля высоты, когда передняя часть руля высоты
загорожена стабилизатором. При сильном отклонении руля высоты,
112
когда между Стабилизатором и рулем высоты образуется щель,
через которую проходит воздух, нагрузка на переднюю часть руля
высоты резко возрастает, шарнирный момент сильно уменьшается-
и может стать даже обратным (перекомпенсация). Для избежания
этого толщину стабилизатора и положение оси вращения выбирают
такими, чтобы даже при крайнем отклонении руля высоты щель
не образовывалась.
Для получения возможно более равномерной компенсации сме-
шивают оба типа компенсации.
Вариант d фиг. 96 представляет собою совмещение обеих ком-
пенсаций, но каждая из них соответственно ослаблена.
Фиг. 95. Диаграмма Сш для различных рулей.
Вариант е имеет тот же смысл, но выполнен иначе. На первый
взгляд это просто роговая компенсация. Однако здесь внесены
такие изменения: во-первых, сама выступающая часть имеет луч-
шее удлинение, во-вторых, перед ней находится кусок стабилиза-
тора. Размер выступа таков, что если бы впереди не было стаби-
лизатора, при малых отклонениях руль был бы перекомпенсирован.
Кусок стабилизатора перед выступом руля высоты снижает на-
грузку на последний, почему перекомпенсации нет. При сильном
отклонении руля высоты выступ выходит из-за стабилизатора, но
при большом угле поворота руля высоты это уже не дает пере-
компенсации.
Другой способ уравновешивания шарнирного момента заклю-
чается в установке дополнительных крылышек, подъемная сила
которых помогает повороту руля (фиг. 97).
8 В. С. Пышаов 639 113
Фиг. 97. Компенсация рулей дополнительными крылышками.
Вариант / (фиг. 97) наиболее прост и называется компенсацией
Авро. Принцип работы ее нетрудно понять из рисунка.
Вариант g представляет собой компенсацию типа Дорнье. Пре-
имущество ее по сравнению с компенсацией Авро заключается
в большей равномерности работы путем подбора плеч рычагов.
Судя по легкости управления на самолетах Дорнье, можно считать
компенсацию весьма совершенной.
Вариант h называется компенсацией Флеттнера и представляет
собой очень распространенный за последнее время тип. Принцип
Фиг. 98. Серворуль Флеттнера.
Фиг. 99. Регулирование руля вы-
соты на самолете.
работы нетрудно понять из чертежа. Когда руль повернут в одну
сторону, дополнительное крылышко повернуто в обратную сторону.
Тогда сила, действующая на крылышко, помогает поворачивать
руль. Переставляя точку крепления тяги, можно менять степень
компенсации. На фиг. 98 показан серворуль Флеттнера. Он похож
на компенсатор Флеттнера, но проводка выполнена совершенно
иначе. Основной руль высоты висит свободно на шарнире, а от
летчика управляется лишь дополнительный рулек. При стоянке на
земле управление не работает. В полете сила, действующая на
дополнительный рулек, заставляет поворачиваться основной руль.
Для расчета дополнительного рулька нужно произвести специаль-
я 115
иое испытание в трубе Большого внимания требует весовое урав-
новешивание руля с серворулем Флеттнера; следует отметить, что
весовое уравновешивание рулей вообще весьма желательно при
всех типах рулей для борьбы с вибрацией.
Остановимся еще на некоторых устройствах для регулирования
равновесия и устранения давления на ручку. Основной мерой устра-
нения давления на ручку является регулировка стабилизатора.
Однако конструктивное выполнение регулируемого стабилизатора
встречает затруднения на тяжелых самолетах и при бипланном
оперении. Ниже мы опишем устройства, заменяющие регулировку
стабилизатора. Одним из таких устройств может служить пружина,
присоединенная к тяге руля высоты. Если добавить устройство,
меняющее натяжение пружины в полете, то им можно регулиро-
вать равновесие самолета в полете, не создавая давления на ручке
Другое устройство напоминает компенсатор Флеттнера, но
только переставляемый на земле или в полете. На фиг. 99 пока-
зано это устройство, применявшееся на истребителе Спад 61.
Стабилизатор самолета присоединен к фюзеляжу наглухо. Если на
самолете замечалось систематическое давление на ручку в какую-
либо сторону, то регулируемую часть руля высоты можно было
отклонить при помощи специальных винтов. На рулях, сделанных
по типу Юнкерса, подобный же эффект достигался изгибом самого
руля, причем . фирма Юнкере сделала для этого специальную
машинку.
Устройство компенсатора Флеттнера, регулируемого в полете,
показано на фиг. 100. Поворачивая специальную ручку или штур-
вал, летчик поворачивает дополнительное крылышко, а крылышко
тянет за собой руль высоты. Работа крылышка как компенсатора
при этом остается. Совершенно аналогичную роль может выпол-
нять. компенсатор Дорнье (фиг. 100). Регулируя высоту колонки
не
на. стабилизаторе, мы поворачиваем дополнительное крылышко,
а с ним и руль. Такое устройство было на гигантском само-
лете Do X.
Несмотря на все усовершенствования компенсации, для очень
больших самолетов она оказывается уже недостаточной, и встает
проблема об устройстве рулевых машин. В настоящее время руле-
вые машины можно встретить лишь как составную часть при-
боров для автоматического управления самолетом.
ПРОДОЛЬНАЯ СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
Для состояния покоя и установившегося движения необходимо
равновесие сил и моментов. Однако для длительного покоя или
длительного установившегося движения равновесия сил и момен-
тов уже недостаточно, а требуется еще устойчивость. Ввиду того
что в обычных курсах механики устойчивость почти не рассмат-
ривают, мы здесь временно отойдем от собственно самолета и
займемся изучением устойчивости.
В данной части курса „Аэродйнамика самолета* мы рассмотрим
устойчивость в простейшем виде, во-первых, только для одной
степени свободы — вращение вокруг оси Z, а во-вторых, статически,
т. е. не рассматривая движения самолета с учетом сил инерции.
Более детальное рассмотрение устойчивости самолета будет сделано
в отделе „Динамическая устойчивость*. Мы предполагаем поме-
стить основы динамической устойчивости в четвертой части курса.
ПОНЯТИЕ УСТОЙЧИВОСТИ. ВИДЫ УСТОЙЧИВОСТИ
Понятие устойчивости неразрывно связано с наличием возму-
щения, т. е. причины, выводящей тело из равновесия. Само воз-
мущение обычно принимается весьма малым, но иногда в динами-
ческой устойчивости рассматривают устойчивость, приняв некото-
рое определенное возмущение.
При рассмотрении задач динамики мы применяем начало Далам-
бера, сводя задачу к равновесию сил. Поэтому устойчивость мы
можем рассматривать как для покоя, так и для движения. В слу-
чае покоя устойчивое равновесие будет соответствовать стремле-
нию сохранить неподвижность, свое место в пространстве и поло-
жение в отношении наклона. В случае движения устойчивое равно-
весие сил будет соответствовать стремлению сохранить постоян-
ными скорости линейные или угловые.
Устойчивым равновесием сил или моментов мы называем спо-
собность сил или моментов, в случае нарушения равновесия под
действием возмущения, приходить в прежнее положение равно-
весия.
Если под действием возмущения сами силы или моменты стре-
мятся увеличить последствия возмущения, такое равновесие назы-
вается неустойчивым.
Под действием малого возмущения неустойчивое равновесие
стремится перейти к другому устойчивому равновесию, соответ-
ствующему другому случаю покоя или другому виду движения.
П8
Если под действием возмущения равновесие сил или моментов
не нарушается, хотя положение равновесия или характер движе-
ния изменяется, равновесие называется безразличным или ней-
тральным.
Для суждения об устойчивости всегда нужно нарушить равно-
весие и затем определить,
как изменились силы или
моменты. Если они стре-
мятся восстановить прежнее
положение равновесия, зна-
чит, мы имеем устойчивость.
Для пояснения приведем
примеры устойчивости.
В качестве примера
устойчивости приводят ма-
ятник и шарик в чашке
(фиг. 101). Задаваясь откло-
нением из положения равно-
весия, нетрудно убедиться,
что силы стремятся вернуть
маятник или шарик в поло-
жение равновесия.
Примером неустойчиво-
сти можно привести тело,
стоящее на острие, или ша-
рик, лежащий на выпуклой
поверхности (фиг. 102). До-
статочно очень малого воз-
мущения, чтобы данное
равновесие нарушилось,
причем действующие силы
будут стремиться перевести
тело к новому положению*
равновесия.
Примером безразличного
равновесия может служить
колесо на оси или шарик,
лежащий на горизонтальной
плоскости (фиг. 103).
Нужно заметить, что ви-
дов устойчивости два, а не
три. Безразличное равнове-
сие является лишь разде-
лом между устойчивостью
и неустойчивостью. На прак-
тике безразличным равновесием мы называем такое, когда после
возмущения мы долго не можем заметить признаков устойчивости
или неустойчивости, 'хотя малая устойчивость или неустойчивость
может существовать.
В природе мы можем иметь самые разнообразные силы: .постоян-
ные силы, как например сила тяжести; силы, зависящие от поло-
119
Фиг. 102. Схема неустойчивого равновесия.
жения в пространстве, как например силы упругости; постоянные
силы, направление которых зависит от направления движения, как
например силы трения; силы, изменяющиеся по времени; силы,
зависящие от скорости линейной или угловой в первой или другой
Фиг. 103. Схема безразличного равновесия.
степени. Последние силы особенно важны при рассмотрении устой-
чивости самолета. Наконец, есть силы, зависящие от ускорения,
как^например силы инерции; могут быть и другие силы.
Фиг. 104. Неустойчивое
равновесие с трением.
Фиг. 105. Устойчи-
вое равновесие с
сопротивлением.
Когда много различных сил и несколько степеней свободы, по-
нятие об устойчивости сильно усложняется. Постоянные силы ни-
как не влияют на устойчивость. Сила, меняющаяся со временем,
делает устойчивость вообще невозможной. Силы трения расширяют
область безразличного равновесия; например пусть мы имеем
iao
маятник, в шарнире которого сильное трение, в положении, когда
центр тяжести находится над точкой опоры (фиг. 104); тогда при
малых возмущениях вместо неустойчивости мы будем наблюдать
безразличное равновесие.
Наиболее четко можно наблюдать виды устойчивости для сил
или моментов, зависящих
от положения в простран-
стве. Силы, зависящие от
скорости и ускорения,
наиболее важны для рас-
смотрения равновесия в
движении.
Для пояснения всего
этого приведем несколько
примеров. На фиг. 105
изображен маятник, снаб-
женный пластинкой, ко-
торая при движении ока-
зывает сопротивление,
причем сила сопроти-
вления пропорциональна
квадрату скорости. Такая
пластинка вообще не мо-
Фиг. 106. Устойчивое и неустойчивое равновесие
сил в полете самолета.
жет изменить характера устойчивости, например вместо не-
устойчивости дать устойчивость, однако при возмущениях характер
движения станет иной. Если тормозящее действие пластинки очень
Фиг. 107. Устойчивое и неустой-
чивое равновесие моментов.
велико, то при неустойчивости изме-
нение положения будет происходить
очень медленно и неустойчивость
будет выглядеть совсем иначе. В само-
лете мы иногда наблюдаем такой вид
неустойчивости, причем, когда тор-
можение очень велико, летчик даже
не замечает неустойчивости.
Устойчивость и неустойчивость в
движении можно наблюдать по кри-
вым потребной и располагаемой тяги
для горизонтального полета самолета
(фиг. 106). На фиг. 106 имеем равно-
весие в двух точках пересечения
кривых. Одно равновесие на боль-
шой скорости—устойчивое, другое
на малой скорости — неустойчивое.
Пусть например по некоторой при-
чине скорость увеличилась; тогда
в первой точке сопротивление ока-
жется больше тяги и движение замедлится до положения равно-
весия. Если скорость замедлится, появится избыток тяги и он
ускорит движение до положения равновесия.
Для второй точки мы получим совсем другое: при случайном
увеличении скорости станет преобладать тяга винта, и она будет
121
ускорять движение, удаляя его от положения равновесия. Подоб-
ную картину мы можем наблюдать при явлении вращения. Напри-
мер имеем диаграмму крутящего момента мотора и сопротивле-
ния вращению винта по оборотам (фиг. 107). Здесь опять две
точки равновесия: на больших оборотах равновесие устойчивое,
на малых — неустойчивое. Рассуждение будет такое же, как и
в предыдущем случае. Во второй точке мотор не может работать
длительное время. Если число оборотов случайно увеличится,
мотор раскрутится до первой точки равновесия. Если число оборо-
тов случайно замедлится, мотор не сможет проворачивать винт
и заглохнет. Более сложные случаи устойчивости будут рассмотрены
в динамической устойчивости.
ПРОДОЛЬНАЯ СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ САМОЛЕТА
Самолет в полете имеет шесть степеней свободы, вернее, еще
больше, так как, кроме движения самолета в целом, мы имеем двц-
Фиг. 108. Схема испытания на статическую устойчивость.
жение рулей, деформации самолета и другие движения. Для со-
вершения полета наибольшую важность имеет сохранение подъем-
ной силы, которая зависит от угла атаки; поэтому мы рассмотрим
устойчийость движения, изменяющего угол атаки. Так как самолету
мы оставляем только одну степень свободы — изменение угла атаки,
то практически можно считать, что как будто самолет неподвижен
и закреплен так, что может только вращаться вокруг оси Z, а на
него дует поток с постоянной скоростью V (фиг. 108).
Такая именно установка производится в аэродинамической трубе
для проверки продольной статической устойчивости. Поставлен-
ный в такие условия самолет примет некоторый угол атаки, исходя
из условия равновесия моментов. Вообще говоря, при постоянном
положении рулей равновесие может быть при нескольких углах атаки,
но одни положения будут устойчивыми, другие — неустойчивыми.
Для решения вопроса об устойчивости будем рассуждать сле-
дующим образом. Пусть некоторая причина качнула самолет, уве-
личив угол атаки. Если при увеличении угла атаки равновесие
122
нарушилось так, что появился момент, уменьшающий угол атаки
то самолет вернется к положению равновесия, которое мы назовей
устойчивым. Если бы угол атаки уменьшился, то для устойчивости
должен появиться момент, увеличивающий угол атаки. Это про-
стое рассуждение необходимо усвоить.
Пусть мы имеем диаграмму моментов вокруг оси Z по углам
атаки и на ней три положения равновесия соответственно трем
точкам пересечения кривой с осью абсцисс (фиг. 109). Правило
знаков нам уже известно, а именно: положительный поворот са-
молета считается в сторону увеличения угла атаки, а положитель-
ный момент — в сторону уменьшения угла атаки. Берем первую
точку равновесия. При небольшом увеличении угла атаки появляется
положительный, т. е. уменьшающий угол атаки, момент; при умень-
шении угла атаки появляется отрицательный, т. е. увеличивающий
угол атаки, момент. Как видно, это соответствует условию устой-
чивого равновесия. То же самое мы будем иметь для третьей точки.
Фиг. 109. Суждение об устойчивости по диаграмме моментов.
Во второй точке мы будем иметь характерные признаки не-
устойчивого равновесия. При увеличении угла атаки появляется
отрицательный момент, т. е. увеличивающий угол атаки, и само-
лет, увеличив немного угол атаки под действием посторонней при-
чины, далее будет продолжать увеличение угла атаки, пока не дой-
дет до третьей точки. При уменьшении угла атаки появляется по-
ложительный момент, и самолет будет уменьшать угол атаки, пока
не дойдет до первой точки.
Теперь условие устойчивости можно сформулировать несколько
иначе. Самолет устойчив, если в точке равновесия касательная
к кривой моментов имеет положительный наклон или если при
положительном увеличении угла атаки появляется положительный
момент, а при отрицательном изменении угла — отрицательный мо-
мент. Иными словами, знаки изменения угла атаки и момента оди-
наковы. Если изменение угла атаки взять бесконечно малое, то усло-
вие устойчивости будет:
->0.
da
123
Нетрудно видеть, что условием неустойчивости будет отрица-
тельный наклон касательной к кривой в точке равновесия:
^<0
dx и.’
а для безразличного равновесия касательная совпадает с осью
абсцисс:
Если не говорить о величине производной, а только о ее
знаке, то вместо момента М можно взять коэфициент момента и
рассмотреть диаграмму Сж по а.
Таким образом расчет устойчивости самолета после расчета
равновесия не представляет труда. Для этого нужно только по-
смотреть на наклон касательной к диаграмме Сж в точке Ск=>=0.
Действуя рулем высоты или стабилизатором, мы можем полу-
чить равновесие в известном диапазоне углов атаки,, например от
пикирования до угла при Сута1. Проверим устойчивость на всех
этих углах атаки. Оказывается, для этой цели совсем нет нужды
строить диаграммы Сж для разных случаев равновесия. Как это мы
могли уже видеть ранее, поворот руля высоты или изменение уста-
новочного угла стабилизатора меняет момент на всех углах атаки
на равную величину, и потому диаграмма Сж опускается или под-
нимается без изменения углов наклона касательных. Таким обра-
зом для проверки устойчивости в данном диапазоне углов атаки
нужно, чтобы в этом диапазоне было больше нуля или тангенс
угла наклона касательных был положителен. На фиг. 110—112 по-
казаны диаграммы Сж для устойчивого и неустойчивого самолета.
124
Мы еще раз напоминаем, что судить об устойчивости по прЛ*
изводной в точке, где См не равно нулю, можно только по тому*
что рулем высоты и стабилизатором возможно получить равнове-
См Л по _
ций ппс ~
U,ио ПГ}А - 1 неуст —
и,ич —1 ’ И
U,uc^ Ун /
10° и Ппу _ 1° ' 0°' Z -•
... U,Uc ППЛ-
' 1 ' 1 ГТ he _
1*— /1 quo ieyan-A (1М _
и,ио
Фиг. 111. Диаграмма Сж для неустойчивых самолетов.
сие, не Меняя наклона касательной. Во всех остальных, случаях
сначала нужно добиться равновесия, а потом уже брать- производ-
ную. Нужно заметить, что независимость наклона касательной от
См -!
и,ио
.... цуд .. п м
U,U£ — без/. 7Z7JT7 — 1 .т.
ю° 5е 0 Л 1 Л
-0.02 _ _ Л Пл .
—» QJj4 ——. -ПИК
- и,ио
Фиг. 112. Диаграмма Сж для самолета с безразличной устойчивостью.
положения руля высоты не совсем точна, что иногда видно по
диаграммам См, полученным по продувке. Если у нас есть диаграммы
С„ для отдельных частей самолета, то для всего самолета мо-
123
жет быть получено сложением отдельных частей. Например,
часто мы имеем диаграммы отдельно для крыла, отдельно для опе-
рения (фиг. 113). Если наклон обеих кривых положителен, то во-
прос ясен. Если наклон касательной к кривой крыла отрицателен,
то для устойчивости нужно, чтобы положительный наклон диа-
граммы моментов оперения был больше отрицательного наклона
диаграммы моментов крыла.
Так как в диапазоне нормальных полетных углов атаки Су
прямо пропорционален углу атаки а, то вместо производной
можно брать
Пользование Су вместо а имеет некоторые удобства, почему
иногда применяется, например, в расчете равновесия и устойчи-
вости, предложенном В. П. Ветчинкиным Ч Нужно заметить, что
мера устойчивости для углов атаки более Сут1а уже непри-
менима, так как там начинает доминировать вопрос об устойчи-
вости в отношении других степеней свободы.
Изучая аэродинамику самолета, мы уже привыкли к анализу
кривых и убедились в их преимуществе над формулами в отно-
шении наглядности течения функции в интересующем нас диапа-
зоне. Однако формулы имеют свои преимущества, позволяя легко
вносить всякие изменения и анализировать влияние отдельных
факторов. Для анализа устойчивости вернемся к аналитическому
выражению моментов.
1 См. приложение.
120
АНАЛИТИЧЕСКОЕ ВЫРАЖЕНИЕ УСТОЙЧИВОСТИ
Для того чтобы получить суждение об устойчивости самолета,
нужно составить аналитическое выражение для коэфициента момен-
тов всех частей самолета в функции угла атаки и затем взять
производную. Тогда знак производной даст нам ответ.
При рассмотрении равновесия самолета мы уже составляли
выражение коэфициента моментов в функции Су. Затем мы уже
указали, что вместо можно брать Возьмем эти выраже-
ния и продиференцируем их. Так как выражения для моментов
довольно сложны, диференцирование произведем раздельно для
моментов отдельных частей.
Для крыла имеем:
dCMl
dCv
хй
т------v
су .
ва'
если у = 0, то
dCMl
~dCy
Для хвостового оперения в случае планирования получаем:
SXLX (Cv 4CV
= 0,8. В Д + а0 - ? X + Л8),
dCM „ „ SXLX „ / 1 4» \ 1 1 2
=0,8 4^-Вж -д—у- ,-g- = -y + -r,
аС.у ои л \ d ик / о dq ик
В случае моторного полета, если считать, что струя винта не
скашивается крылом, получим:
(/1 + 2Вв —1) (-J’-
dCMt SXL
dCv Sb
/Ц-2В,
fe25.+i)[4
4x c
У Sue__f Sxx \ 4x
$x \ SXJ J
Six
SxVl+2Be
4х
лк/1 +2Вв
Здесь мы считали, что Be — величина постоянная; последнее
возможно при постоянном дросселе мотора и постоянной скорости.
127
Такой случай имеем при сбвершёнйи самолетом быстрых колеба-
ний, когда скорость не успевает изменяться.
Если колебания самолета медленны, скорость меняется, сила
тяги меняется, а с ней меняется и Вв. В этом случае Вв можно
выразить через Су.
( 1Л ° \
д __ ^0 5 Су I г р S Су
°e~ FG у1 V9 у-
Подставляя Вв и диференцируя, получим очень сложное выра-
жение,—этот случай рассматривается в теории динамической устой-
чивости. Если струя винта скашивается крылом на угол е, получим
такой результат:
_ SxLr ГSlje 1Г Cv , 4х
с- = -srВ‘-°-8№-+11|т-’- Л с’-
Коэфициент моментов от лобовых сопротивлений и от тяги
винта не зависит от угла атаки. В отношении лобовых сопроти-
влений это понятно; в отношении же тяги винта можно сказать,
что она не зависит от угла атаки, а при постоянном положении
дросселя мотора зависит лишь от скорости полета. Выше мы при-
няли, что угол атаки менялся быстро, когда скорость измениться
не успевала. Если коэфициент момента не зависит от угла
атаки, то его производная равна нулю и на устойчивость не
влияет.
Как мы уже указывали, тяга винта имеет составляющую по
реи К, как бы подъемную силу лопастей винта. Это дает момент
С«, = —О,00105
dCM
мз ___
dCy
D*xe 1
Этот момент имеет место не только в моторном полете, но и
при планировании, когда винт вращается.
Наконец, остается момент от фюзеляжа, который мы принимали
в виде:
С.. = 0,02^ °’22
Диференцируя, получим:
^ = 0,02^( 0,22-^).
dC BSb \ Ьф!
12»
Теперь, сложив ,все производные, получим производную для
целого самолета. Если взять полет без мотора и моментом фюзе-
ляжа пренебречь, получим сравнительно простое выражение:
, Уо
dCy ~
4%\
тек / *
и если -у- = 0, т. е. центр тяжести самолета лежит на хорде крыла,
получим:
-^ = /и----т-4-0,8-^т-Вл.(-д—-т-1.
аСу b оЬ х \ В тек /
Этими выражениями
вости самолета.
мы воспользуемся для анализа устойчи-
9 В. С. Иышпов 639
АНАЛИЗ ФАКТОРОВ, ВЛИЯЮЩИХ НА
УСТОЙЧИВОСТЬ
Выясним, какие факторы влияют на устойчивость. Они уже на-
dC„
писаны в виде символов в выражениях , и нужно лишь дать
некоторые пояснения. Вопрос о факторах? влияющих на устойчи-
вость, имеет огромную практическую важность, и потому его нужно
хорошо проработать. Нужно заметить, что часто наблюдаются
ошибки в решении вопроса о влиянии данного фактора на устой-
чивость, и эти ошибки происходят от отсутствия четкого разгра-
ничения в понятиях равновесия и устойчивости.
Начнем с крыла. Крыло является наиболее интересным и важ-
ным фактором устойчивости. Вопросом зависимости устойчивости
от крыла интересовались уже очень давно, однако правильные вы-
воды были сделаны сравнительно недавно,, когда стали применять
выражение для моментов в той форме, как это было приведено
в предыдущей главе.
В прежнее время рассматривали перемещение центра давления
и метацентрические кривые. При этом крылья сразу были подраз-
делены на устойчивые и неустойчивые. Считали, что у устойчивых
крыльев при увеличении угла атаки центр давления отходит назад,
у неустойчивых — вперед. Однако такой анализ был правилен лишь
при рассмотрении устойчивости бесхвостого самолета, когда во-
прос о величине подъемной силы не играл роли. При рассмотрении
устойчивости самолета с хвостом имеет значение не только поло-
жение центра давления крыла, но и сравнительная величина подъем-
ных сил крыла и оперения. В некоторых случаях рассматривали
перемещение общего центра давления крыла и оперения.
Возьмем выражение крыла:
dCM Xq уо । у0 Су
dCy~m “~г + “Гво + 2Т В7"
От формы профиля крыла зависят: т, Въ и а0; т — для крыла
dCv
вокруг передней кромки; Во = для бесконечно большого удлине-
ния; а0 — угол атаки при Cv = 0.
Какие именно параметры профиля влияют на т и Во, было ра-
зобрано в теории крыльев.
Однако для профилей, применяемых в современных самолетах
и оперении, величины т и Во так близки, что точность экспери-
130
мента не позволяет уловить различия; т имеет значение 0,23 — 0,25,
Во соответственно 2,7 — 2,9. Величина а0 варьируется в довольно ши-
роких пределах в зависимости от формы средней линии профиля,
примерно от 0 до — 9°. Но нетрудно заключить, что если бы мы
угол атаки и координаты х0 и у0 стали отсчитывать от плоскости
нулевой подъемной силы, то для всех профилей а0 было бы равно
нулю.
Теперь мы пришли к выводу, что, в пределах применяемых
в настоящее время профилей при всем их разнообразии, устойчи-
вость самолета не зависит от формы профиля или, во всяком слу-
чае, влияние ее на статическую продольную устойчивость в преде-
лах плавного обтекания не улавливается. Оговорку о пределах
плавного обтекания необходимо сделать, так как срыв обтекания
происходит не только на Супах, но и на других углах атаки, напри-
мер для сильно изогнутых крыльев срыв обтекания происходит на
малых углах атаки и тогда величины т и Вй резко меняются.
Вывод о независимости продольной устойчивости от формы про-
филя может показаться довольно неожиданным, и в нем необхо-
димо разобраться. В дальнейшем будут сделаны некоторые поя-
снения по данному вопросу. Форма крыла в плане нами учиты-
вается как удлинение X. Более подробно вопрос о влиянии формы
будет рассмотрен для бесхвостых самолетов. Удлинение крыльев
самолета содержится в моменте хвостового оперения,—• в выра-
жении скоса потока мы видим множитель (4- — -^-). Величина
о ЛСУ
В — для данного крыла зависит от удлинения, о чем мы уже го-
ворили. При уменьшении удлинения уменьшаются В и X, но в раз-
ной степени, и в результате множитель уменьшается и вместе
с тем уменьшает полезное действие хвоста, снижая общую устой-
чивость самолета. Теоретически мыслимо обращение
\ В -кХ /
в нуль. Например, если
х = 1,0; В —
Bq _______ 2,8
, 1,78 ’
г лХ 1 * X
найдем, при каком X величина обратится в нуль:
М_____________________________2__П. 1-178
кХ “ 2,8 хХ ~ 1,1 °"
Получается таким образом, что скос потока равен углу атаки
и, следовательно, при изменении угла атаки крыла угол атаки
хвоста не меняется, -^-'для хвоста обращается в нуль и хвост пе-
рестает давать устойчивость самолету, каких бы размеров он ни
был. Конечно, сделанный вывод неточен и цифра Х = 1,78 неверна,
так как при таком удлинении выражения для В и скоса потока
должны быть уточнены. Однако все же это указывает, что при
9* 131
малом удлинении крыла хвост работает очень плохо и схема само-
лета с хвостом ст новится мало рациональной.
dCM
-rz* для хвостового оперения имеет вид:
dCM_fр ____________\
dCv\V) Sb Х\В zX/
Собственно от хвостового оперения зависят величины xsx-
S L
иВг Величинауказывает на относительный размер и плечо
dCy
оперения, а Вх — -^- зависит от удлинения оперения. Таким обра-
зом мы видим, что площадь Sx и плечо Lxоперения равноценны в от-
ношении устойчивости. При увеличении удлинения оперения
растет и это способствует повышению устойчивости.
В отношении удлинения оперения можно сказать, что хотя тео-
ретически желательно делать его возможно большим, вопросы
прочности, вибраций и кручения фюзеляжа не позволяют делать
очень большим.
Работа мотора сказывается на устойчивости следующим обра-
зом. Как мы уже указали, сама тяга винта не влияет на статическую
устойчивость. Работа винта в косом потоке дает некоторую сла-
гающую в плоскости вращения, и тогда имеем:
dCM
мз____
асу
D»x.
0,06^
1
В’
Для винтов тянущих это фактор неустойчивости, для толкаю-
щих—фактор устойчивости. Чем дальше вперед или назад удален
винт, тем сильнее его действие.
Работа мотора в наибольшей степени влияет на устойчивость
через струю винта, причем здесь мы различаем действие увеличе-
dC„
ния скорости и действие на скос потока. Величина-^- хвоста для
моторного полета имеет вид: У
1 4х
dC SxLXd no\Six Jf 1 51х(/Г+Гбв-1)в- + ^-
~dc; •°’8L S7 25‘+1J Lb- - s;
Роль струи винта здесь входит через множитель B,f который
представляет собой, как уже было указано, коэфициент нагрузки
на ометаемую винтом площадь, характеризующую приращение
скорости в струе.
Для решения вопроса о влиянии струи винта на степень устой-
dC dC
чивости разделим 4^ моторного полета на планирования. Для
(Lv^y *
132
с
упрощения возьмем х = 1и^=1, т. е. положим весь хвост
в струе; получим:
I i (/i+2Be-d4-+4
(1 +2Вв) 4----- -------—
I * В /1+23,
1 4
В ъК
4 1
лк .1
VT+W 1.
N =
1
(1+2Вв)[-д
/1+2В,
J____4_
В
Оказывается, что устойчивое действие хвоста возрастает на
множитель К1 + 2Вв • Однако нужно заметить, что мы не учли иска-
жение крылом скорости, вызванной винтом, 2ч>.
Если мы возьмем производную момента хвоста, учитывая скос
струи винта, то при тех же условиях полупим:
В В \ ]Л + 2Be /] _
_1__4%
В лк
= (1+2В.)
1 - - -
1 _ У1 + 2ВД
1-В-^-
irX
подставляем
4-=-+4-
В Во ~ irk ’
имеем:
М==(1Н-25в) 1 —
+2Вв
В следующей таблице даем значения N и !\\ для разных
Вв, к = 5, к = 10 и х=Г.
к 5 10
В„ 0,25 0,5 1,0 0,25 0,5 1,0
N 1,225 1,41 1,73 1,225 1,41 1,73
0,95 0,8 0,465 1,11 1Л7 1,19
183
Как видно, устойчивое действие хвоста ухудшилось, а при ма-
лом удлинении оно даже хуже, нежели на планировании. Все это
указывает на важность изучения влияния струи винта на крыло.
Производные моментов лобовых сопротивлений очень малы, и
ими обычно пренебрегают. Однако иногда лобовое сопротивление
может быть причиной неустойчивости самолета. Это происходит
в том случае, когда завихрения, вызываемые данным телом, иска-
жают поток и в худшем случае просто заслоняют оперение. Если
есть подозрение на это явление, вопрос можно исследовать только
путем продувки в аэродинамической лаборатории.
ВЛИЯНИЕ ЦЕНТРОВКИ НА УСТОЙЧИВОСТЬ
Рассмотрев ряд факторов, влияющих на устойчивость самолета,
перейдем к наиболее для нас важному фактору — центровке само-
лета. Этот фактор особенно важен потому, что изменение центровки
часто имеет место не только в разных полетах, но в течение од-
того полета, например по причине сбрасывания грузов и выгора-
ния горючего.
При изменении центровки меняются величины х0, у0 и Lx; изме-
нением плеча хвостового оперения можно пренебречь; х0 и у0
входят в выражение момента крыла, и разобраться во влиянии их
на устойчивость очень легко; имеем:
Величина -у имеет отрицательный знак. Значит, при увеличении
х0 степень устойчивости уменьшается, а при некотором значении
х0 каждый самолет можно сделать неустойчивым. Увеличение х0
соответствует отодвиганию центра тяжести назад. Отсюда мы делаем
весьма важный вывод: при перемещении центра тяжести назад сте-
пень устойчивости уменьшается, при перемещении вперед—возра-
стает. Этот вывод заставляет нас очень строго относиться к поло-
жению центра тяжести самолета.
Приведем некоторую иллюстрацию сказанного. Пусть у нас есть
самолет со следующими данными: от = 0,24; -у = 0;^|у=0,4; к=5;
В — 2,0; Вх — 1,4. Имеем:
^ = 0,24 — ^ + 0,4-0,8-1,4 Ц-----У = 0,35 —
аСу о \ 2 тс«5/ О
Если взять -у = 0,3, т. е. центровка 30%, ^* = 0,05. Отодви-
гая центр тяжести на 2% средней аэродинамической хорды, мы
сделаем — 0,03; при центровке 35% = 0, т. е. самолет уже
нейтрален, а при еще более задней центровке самолет станет
неустойчивым. Здесь можно видеть, как очень малое смещение
центровки делает самолет неустойчивым, причем приведенные
цифры соответствуют среднему самойету.
1.34
Теперь займемся анализом влияния высоты расположения центра
тяжести над крылом, т. е. величиной уй. Величину у0 содержат
два члена. Один из них -у-% постоянен и по знаку отрицателен,
так как а0 обычно отрицательно; второй член зависит от угла
атаки, так как содержит С. Если мы возьмем у0 положительное,
т. е. центр тяжести ниже крыла, то при Су = 0 степень устойчи-
вости будет меньше, чем при _уо = О. Затем по мере увеличения Су
степень устойчивости будет расти и достигнет степени устойчи-
вости самолета с jo=0 при следующем значении Су:
Уо Г, —9 —г — а —
Т а°—2 Во’ S-а° 2 •
Полагая а0 = 5° или в радианах 0,087, получим Во = 2,8 и
Су =0,087-’- = 0,122. При еще больших значениях Су степень
устойчивости становится больше, чем при у0=0. При расположе-
йии центра тяжести выше крыла, т. е. у0 отрицательном, степень
устойчивости меняется обратным образом, т. е. при малых Су воз-
растает, при больших—уменьшается. Возьмем данные предыдущего
примера, а ^- = 0,3 и—0,3; имеем:
^*=0,35 - ~ - 0,3 • 0,087 4- 2 • 0,3 • ^ = 0,324 - ^+0,214 Су,
(♦Оу V U J
4Й=О,35 — 4г + 0,8 • 0,087 — 2*0,3 • = 0,376—4г—0,214Сг,
cZO^y и О у
при Су=0 имеем-=- = 0,3, §? = 0,024 для низкого и §* = 0,076
г У Ь ’ аСу ’ аСу
для высокого положения центра тяжести.
То же для Су = 0,5:
—*=0,183 и §*=-0,031.
Получилась такая картина: при Су = 0 самолет с низким поло-
жением центра тяжести заметно менее устойчив, чем самолет
с высоким расположением центра тяжести; при большом Су сте-
пень устойчивости самолета с низким положением центра тяжести
сильно возросла, а самолет с высокой центровкой стал даже
неустойчивым. Очень наглядно можно это демонстрировать,
построив диаграмму по Су (фиг. 114).
По поводу высоты положения центра тяжести можно сделать
такие выводы:
1. Перемещение центра тяжести по высоте влияет на устойчи-
вость слабее, нежели перемещение по длине самолета.
2. Если центр тяжести не лежит на хорде крыла, степень устой-
чивости зависит от Су. при низком положении центра тяжести
степень устойчивости растет вместе с Су, а при высоком — падает.
Сделанные выводы очень важны, и мы на них остановимся
в дальнейшем. Раньше думали, что положение центра тяжести
135
должно быть низкое. Здесь мы видим, что и при высокой центровке
самолет может быть устойчив. Большее влияние х0, чем_у0, объяс-
няется тем, что ха служит плечом большой силы Сп, а у0— плечом
сравнительно малой силы Ct.
Фиг. 114. Изменение степени устойчивости при поднятии
и опускании центра тяжести.
ЭЛЕМЕНТАРНОЕ ОБЪЯСНЕНИЕ УСТОЙЧИВОСТИ
Мы даем здесь элементарное объяснение устойчивости для того,
чтобы изучивший теорию в полном объеме умел объяснить ее проще,
и кроме того, по нашему мнению, элементарное объяснение спо-
собствует лучшему усвоению вопроса.
Фиг. 115. Устойчивое положение крыла.
Возьмем такую модель: крыло закреплено на стержне, который
в свою очередь может поворачиваться на шарнире (фиг. 115/ Все
это поставлено в аэродинамическую трубу, причем шарнир нахо-
дится впереди крыла, а угол атаки крыла подобран так, что подъ-
емная сила уравновешивает вес. Таким образом в потоке эта
система находится в равновесии. Обсудим устойчивость этого рав-
новесия. Предположим, что крыло немного опустилось; тогда угол
133
атаки возрастет, подъемная сила возрастает и крыло поднимается.
Если крыло поднимется, угол атаки уменьшится и вес крыла
заставит систему вернуться в положение равновесия. Значит, модель
устойчива и крыло, находящееся позади точки вращения, дает
устойчивость, как и обычный флюгер.
Теперь возьмем вторую модель, отличающуюся от первой только
тем, что шарнир находится позади крыла (фиг. 116). Применяя
рассуждения, как и для первой модели, нетрудно доказать, что эта
модель будет неустойчива. Например достаточно немного крылу
Фиг. 116. Неустойчивое положение крыла.
подняться, как подъемная сила возрастет, станет больше веса крыла,
и вращение будет продолжаться до тех пор, пока крыло не ока-
жется позади шарнира. Это нам говорит о том, что крыло, распо-
ложенное впереди оси вращения, дает неустойчивость.
Точкой раздела устойчивого и неустойчивого равновесия является
безразличное равновесие. Приближая крыло к шарниру, мы при-
ближаемся к безразличному равновесию. Оно будет иметь место
Фиг. 117. Схема самолета для демонстрации устойчивости.
тогда, когда шарнир находится в точке, называемой фокусом крыла.
Как мы уже указывали ранее, фокус крыла находится на рассто-
янии примерно */4 хорды крыла от передней кромки. Когда ось
вращения находится в фокусе, то на крыло действует момент, не-
зависящий от угла атаки, величина которого зависит от ^формы
профиля. Этот момент мы можем уравновесить грузом и тогда
будем наблюдать безразличное равновесие.
Теперь возьмем третью модель, состоящую из двух крыльев
на одном стержне, а шарнир расположен между крыльями (фиг. 117).
Так как можно регулировать равновесие, меняя установочные углы
крыльев, то общий центр тяжести нужно поместить на оси враще-
ния. Теперь мы получили схему, близкую к самолету.
137
Переднее крыло, находясь впереди оси вращения, дает неустой-
чивость, заднее крыло дает устойчивость. Вопрос об устойчивости
модели в целом зависит от того, действие которого крыла пре-
обладает, причем необходимо заметить, что действие заднего крыла
понижено за счет скоса потока, вызываемого передним крылом.
Предположим, что система оказалась неустойчивой. Тогда, пере-
двигая шарнир и центр тяжести вперед, одновременно регулируя
установочный угол для сохранения подъемной силы, мы будем уве-
личивать устойчивое действие заднего крыла и ослаблять неустой-
чивое действие переднего крыла. При достижении некоторой точки
модель станет безразлично устойчивой, а при дальнейшем выдви-
жении шарнира и центра тяжести вперед появится устойчивость. Если
бы центр тяжести был поставлен впереди фокуса переднего крыла,
оба крыла давали бы устойчивость й получилась бы очень устой-
чивая система.
У обычного самолета заднее крыло, т. е. оперение, составляет
около 10—15% переднего, удлинение заднего крыла меньше и кроме
того оно подвержено вредному действию скоса потока. Поэтому
устойчивость мы наблюдаем только в том случае, если центр тя-
жести лежит не далее 10—12% хорды крыла позади фокуса перед-
него крыла. Если переднее и заднее крылья близки по размерам
или, как это называют, мы имеем схему тандем, устойчивость бу-
дет при расположении центра тяжести между крыльями, но все же
ближе к переднему.
Для демонстрации зависимости устойчивости от центровки мы
рекомендуем делать такую простую модель из двух крыльев, при-
чем заднее надо делать лишь немного меньше переднего. Рассто-
яние до крыльев и углы делать переменные и кроме того давать
подвижной груз для совмещения центра тяжести с шарниром. Эта
модель ставится в поток небольшой открытой трубы и затем рукой
ей сообщается возмущение.
Элементарное объяснение зависимости устойчивости от положе-
ния центра тяжести по высоте значительно труднее, так как для
этого необходимо разобраться в действии силы Ct. В этом случае
можно рекомендовать демонстрацию на описанной модели, добавив
к ней перемещение шарнира по высоте и регулировку центра тя-
жести. В этом случае нужно взять схему, более близкую к само-
лету, т. е. с небольшим хвостом, а крыло взять с большей толщиной
и аккуратнее выполнить профиль.
СУЖДЕНИЕ ОБ УСТОЙЧИВОСТИ ПО ДИАГРАММАМ БАЛАНСИРОВОЧНЫМ
И ДАВЛЕНИЙ
Для суждения об устойчивости мы брали производные к зави-
симости момента от угла атаки. Характер изменения моментов,
действующих на самолет, влияет на отклонения руля высоты и
давления на ручку. Следовательно, имея зависимость отклонения
руля высоты от режима полета, определяемого углом атаки, можно
сделать заключение о статической устойчивости. Характер измене-
ния давления на ручку также дает указания на свойства самолета.
Разберем вопрос сначала в более простой форме в виде рассуж-
138
дения. Пусть мы имеем устойчивый самолет. Нарушим его равно-
весие, увеличив угол атаки; тогда получим стремление самолета
уменьшить угол атаки, а для удержания самолета на большем угле
атаки нужно было бы уничтожить пикирующий момент, взяв ручку
на себя. Для уменьшения угла атаки нужно было бы дать ручку
от себя для преодоления стремления самолета вернуться в перво-
начальное положение равновесия.
Для неустойчивого самолета картина получилась бы обратная.
При отклонении от равновесия в сторону увеличения угла атаки
при неподвижном руле
самолет обнаружит
стремление к даль-
нейшему увеличению
угла атаки, и для удер-
жания его от увеличе-
ния угла атаки нужно
было бы дать ручку от
себя. При уменьшении
угла атаки для удер-
жания самолета в рав-
новесии нужно было
бы ручку взять на себя.
На фиг. 118 показано
положение рулей на
устойчивом и неустой-
чивом самолетах.
Из приведенного
рассуждения совсем не
следует, что у неустой-
чивого самолета рули
имеют обратное дей-
ствие. На устойчивом
самолете рулями ну-
жно действовать так:
для уменьшения угла
Фиг. 118. Действие рулем высоты у устойчивого
й неустойчивого самолетов.
атаки ручку давать от
себя на нужную для равновесия величину, или для ускорения
можно сначала- дать более сильное отклонение от себя, а затем
немного вернуть ручку обратно, оставив ее все же от себя по
отношению к первоначальному положению (фиг. 119). Для увели-
чения угла атаки ручку нужно взять на себя, причем, если она
была взята слишком сильно, ее затем немного возвращают обратно.
На неустойчивом самолете рулями нужно действовать так: для
уменьшения угла атаки сначала нужно дать ручку от себя, — само-
лет начнет уменьшать угол атаки с увеличивающейся угловой ско-
ростью, имея стремление перейти в пикирование. Поэтому, когда
самолет уменьшил угол атаки до нужной величины, ручку прихо-
дится не только вернуть в начальное положение, но даже взять
на себя. Для увеличения угла атаки ручку сначала берут на себя,
а затем для удержания в равновесии отдают от себя. Таким об-
разом на неустойчивом самолете движение ручкой более сложно.
139
Правило суждения об устойчивости по отклонению руля высоты
получается такое. Если при больших углах атаки отклонение руля
нужно уменьшать (ручка на себя), а при меньших углах атаки от-
клонение увеличивать (ручка от себя), самолет статически устойчив.
Если на больших углах атаки отклонение руля от себя, а на мень-
ших на себя, самолет статически неустойчив. У нейтрального само-
лета на всех углах атаки положение руля высоты одинаково. Если
взять бесконечно малое изменение угла атаки da, то это потребует
отклонения руля высоты на угол dl. Тогда условие устойчивости
будет < 0, т. е. знаки da и dZ различны. Для неустойчивого
самолета -^->0, т. е. знаки da и db одинаковы.
Возьйем диаграммы См по а для целого самолета при разном
отклонении руля высоты и балансировочные диаграммы, полученные
Фиг. 119. Движение ручкой для изменения угла атаки
у устойчивого и неустойчивого самолетов.
по пересечению с осью абсцисс диаграммы См. На фиг. 120 даны
диаграммы См по а и балансировочные диаграммы для устойчи-
вого и неустойчивого самолетов. Теперь балансировочные диаг-
раммы наглядно показывают нам зависимость их от устойчивости.
То же самое можно сделать в аналитической форме. Для этой
цели момент хвостового оперения мы разделяем на две части;
момент при закрепленном руле высоты и момент от поворота руля
высоты; имеем:
с- = ~st~ ((“ + т - +«8) = («+т-.) +
+-й4-г)д.'"8-
Первый член суммы есть момент хвоста при закрепленном
руле, второй член—момент от поворота руля высоты. Момент
io°
Фиг 120. Балансировочные кривые у устойчивого и неустойчивого
самолетов.
хвоста при закрепленном руле складываем С мбмейтом крыла
и других частей самолета и получим См всего самолета с закреп-
ленными рулями. При равновесии момент от поворота руля вы-
соты должен уравновесить См всего самолета:
Диференцируем по а:
da Sb \ V J х da
Это выражение показывает нам, что условие устойчивости со-
стоит в том, что < 0, т. е. отрицательно, а также дает связь
между величинами 4^ и
аа аа
Теперь перейдем к давлению на ручку. Давление на ручку
можно разделить на две части: постоянную от веса руля и пере-
менную от воздушной нагрузки. По устойчивости нас интересует
переменная часть.
Если есть давление на ручку от воздушной нагрузки, значит
руль высоты нагружен и участвует в создании момента хвоста.
Предположим, что на некотором режиме самолет уравновешен
так, что давление на ручку отсутствует. Увеличим угол атаки
рулем высоты.’ Если теперь нам приходится ручку подтягивать
на себя, значит руль нагружен сверху. Если мы ручку бро-
сим, то самолет вернется в прежнее положение равновесия,
т. е. окажется устойчивым с брошенной ручкой. Если для умень-
шения угла атаки нам нужно ручку жать от себя, то при брошен-
ной ручке самолет вернется в положение равновесия, т. е. будет
устойчив с брошенной ручкой.
Если при увеличении угла атаки ручку нужно удерживать,
нажимая ее от себя, или при уменьшении угла атаки подтягивать,
не давая ей уйти вперед, значит самолет с брошенной ручкой
неустойчив, так так, если ручку отпустить, самолет не вернется
в положение равновесия, а будет от него удаляться. Если на раз-
ных режимах давление на ручку отсутствует, значит самолет
с брошенной ручкой статически нейтрален. Мы не будем вда-
ваться подробнее в анализ устойчивости с брошенной ручкой, так
как в этом случае мы получаем уже две степени свободы и кроме
того в отношении уравновешивания веса руля большое значение
имеет скорость полета. Будем здесь считать, что руль статически
уравновешен, т. е. его вес на ручке не чувствуется. Если ручка
брошена, то это‘соответствует как бы уменьшению площади опе-
рения, и поэтому устойчивость самолета уменьшается. Однако
для обычного оперения, когда руль высоты составляет про-
должение стабилизатора, при устранении руля высоты удлинение
оперения возрастает и величина Вх увеличивается. ’ В резуль-
тате устойчивость хотя и уменьшается, но не значительно. Если
самолет с брошенной ручкой нейтрален, то с закрепленной он
устойчив. Если самолет с закрепленной ручкой нейтрален, то ха-
142
рактер давления йа, ручку йблуййётёя, как у неустойчивого ёймО-
лета.
В заключение нужно добавить, что если руль высоты переком-
пенсирован, то все явления будут обратными и даже очень устой-
чивый самолет с брошенной ручкой станет неустойчивым.
Более подробно вопрос о полете с брошенной ручкой или
ручкой, упруго связанной с самолетом, например пружиной, будет
рассмотрен в разделе динамической устойчивости.
ПРОЯВЛЕНИЕ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ В ПОЛЕТЕ И
ИСПЫТАНИЕ УСТОЙЧИВОСТИ
Мы уже указывали, что самолет в полете имеет много степеней
свободы, а теория статической продольной устойчивости рассмат-
ривает только одно движение изменения угла атаки. Однако для
полета статическая продольная устойчивость имеет такую важ-
ность, что ее нетрудно выделить из всех движений самолета
в полете. Так как измерение моментов в полете затруднительно,
то об устойчивости приходится судить по косвенным факторам:
отклонению руля высоты и давлению на ручку.
Можно ли вообще летать на неустойчивом самолете? Можно.
Летать нельзя на неуправляемом самолете. Больше того, до конца
империалистической войны большинство самолетов было неустой-
чиво, и объяснялось это не дефектами самолетов, а неправильной
центровкой. Первые самолеты советской конструкции также были
частью неустойчивы, и это объяснялось отсутствием должного
внимания к центровке. В проекте центр тяжести был на месте,
а в производстве уходил назад. И тогда приходилось делать
перегруппировку нагрузки, а в некоторых случаях даже перед-
вигать мотор.
То же самое имело место в практике постройки планеров, и
там для восстановления центровки приходилось класть груз в но-
совую часть. В некоторых случаях ошибки в центровке были
так грубы, что не было не только устойчивости, но и управляемо-
сти, и при пробном полете планер задирался до потери скорости,
несмотря на стоящий до отказа от себя руль высоты.
Все эти явления исчезли, как только стали не только каждый
новый самолет, но и серийный, после ремонта или переделки,
подвергать взвешиванию или производили точный расчет цент-
ровки по известным весам отдельных частей. Знать центровку
с точностью до 1—2%—элементарное правило безопасности по-
летов.
При испытании самолета нельзя полагаться только на показа-
ния летчика, а надо стараться получить объективные показатели,
как например запись отклонения рулей и давления на ручку.
Бывали случаи, когда летчик летал на неустойчивом самолете
и давал заключение, что самолет хорош, относя вертлявость само-
лета за счет атмосферных условий. Бывали и обратные случаи,
когда летчик жаловался на неустойчивость самолета, когда по всем
данным самолет должен быть устойчив. Объяснялось это или пе-
рекомпенсированным рулём, или чрезмерно большой передачей
143
от ручки к рулю высоты, когда при очень малом движении руч-
кой руль сильно отклонялся, или в некоторых случаях дефектами
проводки, люфтами или деформациями.
Исследование устойяивости самолета вообще следует произ-
водить в спокойную погоду. Однако в этом случае самолету
трудно бывает сообщить возмущение. Проще всего обнаружить
устойчивость в полете с брошенной ручкой. Для этой цели лет-
чик регулирует стабилизатор на некоторый режим полета. Затем
бросает ручку, сообщая самолету возмущение, толкнув ручку от
себя или на себя.
Предположим, летчик толкнул ручку от себя и бросил ее;
тогда устойчивый самолет пойдет вниз, но, набрав скорость,
Фиг. 121. Полет устойчивого и неустойчивого самолетов
с закрепленным рулем высоты под действием возмущения.
выровняется, пойдет вверх, затем, теряя скорость, наклонится
опять вниз и так повторит несколько раз, переходя постепенно
в режим нормального полета.
Неустойчивый самолет (с брошенной ручкой) после того, как его
толкнули, пойдет в ту сторону, куда, толкнули. Например, если
ручку дали от себя, Самолет будет опускать нос, пока не уйдет
в отрицательное пикирование. Если ручку толкнули на себя, само-
лет будет задираться, пока не потеряет скорость (фиг. 121). Нуж-
но заметить, что это испытание касается, собственно говоря, дина-
мической устойчивости.
Статическую устойчивость удобнее всего проверить по крайним
режимам: пикированию и посадке. Регулируем стабилизатор на
среднюю скорость полета и замечаем положение ручки. Затем
переводим самолет в крутое планирование и, когда угол устано-
вится, отмечаем положение ручки. Наконец, задираем самолет
на режим полета на минимальной скорости и вновь отмечаем по
144
ложение ручки. Взнести заключение об устойчивости мы теперь
можем без труда. В самом деле, когда для пикирования ручку
давали от себя, а для минимальной скорости брали на себя, то
было отрицательно и самолет был устойчив. Когда же на пикиро-
вании ручку приходилось брать на себя и, как говорят летчики,
самолет затягивало в пикирование, а на минимальной скорости
и посадке летчику приходилось удерживать самолет от чрезмер-
ного задирания, то это означало, что самолет неустойчив.
Наиболее полные сведения о статической устойчивости самолета
можно получить, если снять диаграмму отклонения руля высоты
по углу атаки и диаграмму давлений на ручку. Для этой цели
самолет нужно оборудовать указателем отклонения руля высоты
и измерителем давления на ручку. Испытание состоит из серии
полетов по прямой горизонтальной или наклонной в зависимости
от режима работы мотора и скорости. При испытании записыва-
ются скорость по прибору, отклонение руля и давление на ручку.
При каждой серии испытаний следует газ мотора держать не-
изменным и стабилизатор не трогать. На тяжелых машинах испы-
тание можно проводить, регулируя положение стабилизатора, но
тогда мы получим характеристику устойчивости со свободным ру-
лем высоты. Как перейти от диаграммы отклонения руля вы-
соты к диаграмме устойчивости, уже было разобрано выше.
СТЕПЕНЬ УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ САМОЛЕТА
Степень устойчивости самолета трудно характеризовать только
статической устойчивостью. Однако, ввиду сложности и недоста-
точной доработанности теории динамической устойчивости, при-
бегают к статической устойчивости, снабжая ее некоторыми эле-
ментами динамической устойчивости.
Для суждения об устойчивости мы брали величину или ;
' dC У
эти величины связаны между собой множителем -^4. Отсюда есте-
ственно было выбрать их за меры устойчивости. Так часто и де-
лают, тем более, что эти величины безразмерны, и таким образом
обобщают все самолеты, большие и малые. Для понимания устой-
чивости наиболее простой будет величина — она нам пока-
зывает, насколько далеко лежит центр тяжести от точки безраз-
личного равновесия. Например, если ^* = 0,05, значит центр тя-
жести лежит на 0,05 хорды крыла впереди точки нейтрального
равновесия, и смещение центра тяжести назад более, чем на 0,05,
даст уже неустойчивость. У некоторых самолетов <~ варьируется,
в зависимости от нагрузки, в пределах до =±0,05 от^среднего зна-
чения, а у некоторых (с большим у) самолетов варьируется
в зависимости от режима полета.
Ю В. О. Пышнов 689
146
Центровку, при которой -jf3<=0> называют критической цент-
ровкой. Ее находят из аналитического выражения устойчивости
для основных режимов полета. Зная критическую центровку, можно
легко найти степень устойчивости как разность критической и фак-
тцческой центровок.
т» dCM dC„ dCy
Имея легко получить для чего умножаем на-^-=В.
Эта величина зависит от удлинения крыльев; но для обычного са-
молета близка к 2,, если угол атаки в радианах, и к 0,035, если
угол атаки в градусах.
Теперь рассмотрим вопрос о степени устойчивости, введя не-
которые динамические элементы. Мы называли устойчивостью
самолета способность восстанавливать угол атаки в случае возму-
щения. Отсюда за меру устойчивости можно было бы принять
угловое ускорение, которое будет иметь самолет, восстанавливая
равновесие при некотором определенном возмущении. В качестве
такого возмущения Да можно принять, например, Г; тогда момент
будет:
Угловое ускорение будет 0 = ^, где Jz—момент инерции во-
Jz
круг поперечной оси Z для всего самолета. Подставляя значения,
получим:
ДЛ1 = ^« .^L.pSV^b,
dCy da
dCy pSV^b
dCy dz Jz '
За меру управляемости самолета берут т. е. отношение ве-
личины изменения у, ла атаки к величине угла отклонения руля
высоты. У устойчивого самолета эта величина отрицательна. Чем
устойчивее самолет, тем меньше тем хуже управляемость само-
лета и тем больших давлений на ручку нужно ожидать. При
безразличной устойчивости равно бесконечности, а для неустой-
чивого самолета — положительно.
Степень управляемости является лишь косвенным фактором,
указывающим на легкость изменения угла атаки самолета. Она
показывает, что чем устойчивее самолет, тем больше должны быть
отклонения руля высоты. Наименьших отклонений руля высоты
требует самолет с безразличным равновесием. Неустойчивый само-
лет тоже требует отклонений руля, но в сторону обратную,
нежели устойчивый. Более подробно мы рассмотрим действие
рулей самолета в отделе фигурных полетов. Мы указали, что -&
дает указание на давление на ручку. Можно поставить себе за-
ме
дачу—найти, при каком не будет давления на ручку. Эту задачу
нетрудно разрешить.
Пусть на некотором режиме давление на ручку равно нулю;
посмотрим, каково должно быть чтобы и на соседних режимах
давление было равно нулю. Ранее мы указали, что для отсутствия
давления на ручку должно иметь место равенство:
8 = — kax,
Sp. в
где величина k близка к .
•Jjr
Отсюда вытекает:
_____.chx
da da
Подставляя = — е, получим:
—___ь (1__— — $Р'в( 1___
da~ da) ~ Sx\ da)9
= ^Су.57,3;^=^.57,3^,
•пХ У 9 9 da it к 9 da’
Sp'e'll _ f* 57
da~ Sx V itX 0/’d da J’
da__ _______Sx_______
/ 4x dC»\
Jl-^-57,3—Л
P e\ rcX da J
Например: для^-в = 0,5;x = 0,9; X = 5;-^ = 0,035
получим:
g = —3,7, Да = — 3,7 Д8.
Оказывается для этого, при повороте руля на 1°, угол атаки
должен измениться на 3,7°. Этот вывод очень важен при выборе
центровки.
Проделаем то же самое для моторного полета. Скос потока
в моторном полете:
, (У1+2В,-1) (a + Т) + 7 SuA , (1 ,
1 -------I sj + V ~ SJ ’
4х л
Преобразуем это выражение:
е 1 = fl----- 1 V Д- (1-----1 А а— 1 — 4
1 У1+2Л, у $Д /1+2ВвУ Г5Л /1+2Вв
10*
147
Диференцируем Sj по а:
Л_______1____\ , / $1х___। 1__£ixA 4у-' ед
da~Sx\ /1 + 2Be / \SX ]/1 + 2Вв I- Sx/itk ’da'
Теперь получим:
*=-k ____-_____-(—^= +1-^)--57,3^' .
da L $х \ /1 + 2Be / \S(/14-2Be Sx/n\ dxj
dCv Six
Например: для k — 0,5; x = 0,9; X = 5; -^=0,035; Be — 0,4; у — 1
получим:
^ = — 0,2, Да = — 518.
det ’ '
Производя то же самое, но полагая, что струя винта скаши-
вается винтом, получим:
rfet_4х dCy $1л.Л __ 1 \
da ~ г. к da Sx у 1 +23в ) '
___d____________________________1 \
rfa \ it), da SXJ у i _|_ 2Be J *
Подставляя k = 0,5; x = 0,9; X = 5; -^- = 2; Be=0,4; у = 1, по-
лучим:
-5- = —0,142, Да= —7Д§.
Получив можно найти затем необходимую центровку, поль-
dCM dZ
зуясь связью между и
ТЕМЫ И СОДЕРЖАНИЕ РАБОТ ПО ПРОДОЛЬНОМУ
РАВНОВЕСИЮ И СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ
Исследование продольного равновесия и статической устой-
чивости представляет собой одну из ответственных сторон рас-
чета самолета наравне с прочностью. Нужно всегда помнить, что
пренебрежение или ошибки в этом вопросе могут привести к ката-
строфе.
В зависимости от содержания работы, производимой над само-
летом, в той или иной мере приходится касаться равновесия
и устойчивости. Мы приведем здесь наиболее характерные работы.
ПРОЕКТИРОВАНИЕ НОВОГО САМОЛЕТА
При проектировании нового самолета вопросам равновесия
и устойчивости должно быть уделено очень большое внимание,
начиная с выбора схемы самолета. В противном случае в процессе
проектирования и постройки придется вносить изменения, ча-
сто неприятные; иногда некоторые недостатки так и остаются за
невозможностью их исправить без радикальной переделки само-
лета.
Поэтому, приступая к проектированию самолета, нужно от-
четливо представить себе все требования равновесия и устойчиво-
сти. Требования эти сводятся в основном к следующему:
1. Достаточная мощность рулей высоты для получения всех
необходимых режимов полета и иногда при всех возможных поло-
жениях стабилизатора.
2. Самолет должен быть статически устойчив на всех летных
режимах, на всем диапазоне возможных центровок.
3. Давления на ручное управление не должны превышать
определенной величины, причем следует оговорить давления
очень длительные, давления кратковременные при переходных
режимах и давления в случае отказа того или иного средства
регулировки самолета в полете.
4. Нужно оговорить поведение самолета при включении и вы-
ключении мотора, указав допустимое отклонение рулей и давле-
ние на ручку.
Средства обеспечения этих требований могут быть различны,
поэтому мы их даем в общей .форме.
Для обеспечения этих требований мы имеем средства: размеры
стабилизатора, руля высоты, плеча оперения, центровку самолета,
форму оперения и другие средства уменьшения шарнирного мо-
мента и, наконец, расположение винтомоторной группы. Перемен-
ных, как видно, много, прямой связи между нцми не имеется,
и поэтому возможны различные решения задачи. Мы здесь при-
водим те решения задачи, которые в данный момент предста-
вляются более целесообразными.
Прежде всего нужно обратить внимание на высоту центра тя-
ести и расположения винта. Если центр тяжести самолета бу-
дет лежать далее 0,2—0,3 средней хорды, над или под средней
хордой, то получить удовлетворительную характеристику устой-
чивости и управляемости довольно затруднительно. Таким образом,
нужно постараться приблизить центр тяжести к средней хорде.
В отношении винтомоторной группы нужно сказать следующее.
Включение мотора дает момент тяги винта и изменение момента
хвоста за счет струи винта. Нужно постараться сделать эти мо-
менты равными и противоположными, чтобы включение или выклю-
чение мотора не требовало изменения регулировки.
Основной вопрос при выборе центровки и размеров опере-
ния — это степень устойчивости ^*. Та или иная цифра зависит
от назначения самолета. Приведем некоторые соображения. В насто-
ящее время едва ли кто станет делать заведомо неустойчивый
самолет, особенно имея в виду требование полета в тумэне. Как
минимум, можно требовать безразличного равновесия при полете
с брошенной ручкой, и то для специально фигурных самолетов.
Для всех остальных самолетов даже с брошенной ручкой
должна быть обеспечена устойчивость.
Однако большая степень устойчивости нежелательна. Во-пер-
вых, при этом будет малое значение т. е. самолет будет бо-
лее вяло отвечать руля:#. Во-вторых, малое дает - увеличение
давления на ручку, хотя с этим можно бороться средствами ком-
пенсации рулей. Третье соображение такое: большая степень
устойчивости—значит сильное стремление самолета сохранясь угол
атаки. В полете изменение углов атаки происходит за счет воз-
мущающего действия восходящих и нисходящих потоков. Значит,
устойчивый статически самолет будет сильнее качаться под дей-
ствием воздушных течений, а лучше всего будет вести себя самолет
безразлично устойчивый. Детальное решение вопроса о колебаних
самолета приводится в разделе динамической устойчивости.
Исходя из высказанных положений, порядок расчета примем такой.
Выбрав отношение площади руля высоты к площади всего опе-
о в
рения по статистике или задавшись несколькими значениями
аа
для исследования, находим соответст ующее отсутствию да-
вления на ручку, по условию:
da
dT
4х dC«\
— 57,3-^
яХ at j
150
где k =-----— при Сш = 0, т. е. отношение угла отклонения руля
ах
высоты к углу атаки хвоста при отсутствии давления на ручку.
Эту величину можно выбрать, задаваясь некоторой формой
оперения по его продувке на Сш. Более грубо для обычных хво-
стов можно считать
То же самое делаем для моторного полета:
1
di
I I
1 \ _ ( S'x 4. 1 _ ^.57 о
У1 + 2B„ J + 2Be Sxj тгХ ’ ch.
Полученные значения & нужно рассматривать, как максимально
допустимые для полета.
Минимальные значения можно найти из условия управляемо-
сти. Диапазон полетных режимов самолета занимает около 20°,
например от пикирования на угле атаки в—5° до посадки на-|-150.
Диапазон работы руля высоты занимает около 20—25° и в край-
нем. случае до 30°. Отсюда = ^=1н-0,7.
\аб/п11п 2jO
Таким образом мы наметили пределы допустимых максималь-
ный по условию безразличного равновесия с брошенной руч-
кой и минимальный по условию достаточности руля высоты для
получения необходимых углов атаки. Выбор той или иной величины
делаем по следующим соображениям. 'Если хотим получить очень
fa
маневренный самолет, величину берем почти максимальную. Если
желаем получить устойчивый самолет, но с малым давлением на
fa
ручку, берем меньше, например 60—80% от максимального зна-
чения. Для самолетов особо устойчивых, например первоначального
обучения или предназначенных для мало квалифицированных лет-
чиков, $ можно доводить до единицы, а иногда, может быть, и еще
ЛО
меньше.
Выбрав величину можем найти соответствующую степень
устойчивости по выражению:
йСм___ $xLx I Vr\2 д „ do
da — Sb \ VI x da *
Возьмем более простой случай, когда у0 — 0 и самолет пла-
нирует, т. е. (у У = 0,8; имеем:
dCM_ т_-^о I SXL_
dCy~m Г Sb
1 4х'
8—я —
Sb U>° В n<h'
151
отсюда:
45 = /п + ^.0,8Вл +
b ' Sb ’ л \В itl ' B(faJ
Полученное выражение дает нам связь между центровкой -у-
и размерами оперения при условии одинаковой степени устойчи-
вости. На каких значениях-у- и остановиться, теория статиче-
ской устойчивости ответа не дает. С точки зрения динамической
устойчивости дело обстоит иначе, и поэтому, если не производится
С т
расчета динамической устойчивости, величину-^ следует взять
по статистике.
Вот таким способом выбирается центровка самолета с желаемой
устойчивостью и управляемостью. Проделаем то же самое для
более сложных случаев.
Для полета с мотором приуо = О берем для расчета только
самое большое Вв, соответствующее полету на полной мощности.
Для меньших значений Вв характеристика самолета будет средней
между планированием и Ветах. Имеем:
от —^ + ^.0,8 ВхГ-1х2Вв4-11 Г±-^-
ь sb х L sx r J L в
dCM_
dCy ~
— = от0,8В, Г—2Вв+11 [ —— — —-^(1-----------ZJ_____1 + — rL
b Sb Lsx J LB ** SXB\ 1/1 + 2В/ В
Если y0 не равно нулю, то степень устойчивости переменна,
а значит тоже будет переменно. Центровку самолета нужно
выбрать так, чтобы от Cy = Q до Су шах величина не выходила из
указанных выше пределов. Для этой цели можно поступить
так: задаться наибольшим для наименее устойчивого режима,
найти центровку и затем проверить расчет на наиболее устойчивом
режиме. Если полученное мало удовлетворяет, можно внести из-
Уо
менения, но только нужно помнить, что если -у- очень велико,
удовлетворительную характеристику получить трудно. Если мы
задались для режима, определяемого величиной Су, центровку
найдем из условия:
для планирования:
„ । Уа „
b —m~v ь ао
Уо СУ
ь в.
0,8В+ ,
Sb х \ В BfaJ ’
152
для моторного полета:
С/ U \ £3q J off л L I I D
Stx Л______1 \ _ । 2?_^1
\ УТ+2^/ л /. В daj
Если центровка самолета меняется, то, задаваясь предельными
da • _
значениями можно найти предельные центровки, а конструктор
должен обеспечить эти пределы центровок.
После того как центровка выбрана, следует произвести расчет
угла установки стабилизатора для разных режимов полета и выб-
ранного диапазона центровок.
Регулировка стабилизатора в полете производйтся для устра-
нения давления на ручку, и это нужно делать только для режимов
длительного полета. Следует избегать излишне большого диапазона
регулировки стабилизатора. В качестве режимов, которые должны
быть обеспечены регулировкой стабилизатора или другим приспо-
соблением, нужно принять: режим максимальной горизонтальной
скорости, крейсерской скорости, наиболее быстрого подъема и наи-
более пологого планир'ования.
За крайний положительный угол установки стабилизатора нужно
принять такой, при котором самолет при Су = 0 имеет еще неболь-
шой отрицательный момент, т. е. стремится увеличить угол атаки.
Это делается во избежание такого опасного явления, когда на от-
рицательном пикировании летчик, боясь вывалиться из самолета,
бросает ручку, а самолет переворачивается на спину или продол-
жает пикировать, развивая опасную скорость.
Наконец, последняя работа состоит в проверке давления на
ручку для условий; предусмотренных требованиями. Для этого
лучше построить диаграммы давления на ручку на разных скоро-
стях полета при крайних и среднем угле установки стабилизатора
для планирования и моторного полета. Если давления оказались
da
велики, то можно в пределах допустимого увеличить изменив
соответственно центровку, а затем остается действовать теми ме-
рами, которые мы указали в главе об уменьшении давления на
ручку.
Расчет установки стабилизатора и давлений на ручку можно
производить по диаграммам, если же самолет новой схемы или
трудно что-нибудь учесть расчетом, следует произвести испытание
продувкой. Заказывая продувку, следует испытание поставить шире,
чтобы получить ответ на определенный вопрос, а не производить
одиночных контрольных продувок.
Работы по равновесию и устойчивости при проектировании но-
вого самолета очень разнообразны, и их трудно исчерпывающе
предусмотреть в учебнике. Затем, проектированием занимаются
люди, хорошо изучившие вопрос, и порядок расчета может быть
иным.
153
ПОВЕРОЧНЫЙ РАСЧЕТ РАВНОВЕСИЯ И УСТОЙЧИВОСТИ
Поверочный расчет равновесия и устойчивости приходится про-
изводить довольно часто в случаях, если характеристика самолета
неизвестна, если внесены изменения в конструкцию самолета или
если желают применить новую центровку.
Поверочный расчет может быть полным и сокращенным. Сокра-
щенный расчет имеет целью выяснить, допустим ли полет на дан-
ном самолете, а полный расчет служит для получения полной ха-
рактеристики равновесия и устойчивости.
Сокращенный расчет состоит в следующем. Во-первых,
определяется положение центра тяжести путем расчета или взве-
шивания. Затем находится центровка по средней аэродинамической
хорде. По центровке и размерам оперения находится степень устой-
dC и af
чивости и, наконец, определяется угол установки стабилизатора
на трех основных режимах: максимальной скорости, подъеме и пла-
нировании, а также угол отклонения руля высоты при посадке на
три точки.
Весь расчет проводится в аналитической форме.
Полный расчет состоит из: 1) расчета и построения диаграмм
моментов всех частей самолета для нескольких центровок, 2) рас-
чета угла установки стабилизатора на основных режимах полета,
3) построения балансировочных диаграмм для разных положений
стабилизатора в моторном полете и планировании, 4) расчета да-
вления на ручку и построения диаграмм давления при разной уста-
новке стабилизатора в моторном полете и планировании. Кроме
этих расчетов приходится решать отдельные задачи по расчету
степени устойчивости, установки стабилизатора, отклонения рулей
и давлению на ручку.
Затем бывают задачи исследовательского порядка, когда по
известным мОййнтам, степени устойчивости , величине да*
у tZO
влению на ручку ищутся начальные элементы, например:
скос потока и др.
ПРОСТЕЙШИЕ РАСЧЕТЫ РАВНОВЕСИЯ И УСТОЙЧИВОСТИ
Под простейшими расчетами мы подразумеваем установление
простейших соотношений для равновесия и устойчивости и вне-
сение поправок в имеющиеся данные за счет изменения цен-
тровки.
Центровка современных самолетов колеблется в пределах
25—37%; —^х' — в пределах 0,33—0,4; удлинение хвоста — в пре-
делах 3—4; плечо оперения Lx составляет от 35 до 50% размаха
крыльев; площадь горизонтального оперения — около 10—15% пло-
щади крыльев; руль высоты — от 35 до 50% площади горизонталь-
ного оперения.
Центровку, при которой самолет имеет безразличную устойчи-
154
вость с закрепленными рулями, для средних режимов можно вы*
разить приблизительно так:
-^- = 0,244-0,33-^.
То же для безразличной устойчивости, считая снижение момента
оперения от брошенного руля высоты около 35%:
-у-= 0,24-|-0,21
Влияние у не учитываем, так как на средних режимах Ct очень
мало.
Установочный угол стабилизатора для среднего режима полета
без мотора будет:
( Сжо + 0,06 — 0,25
<Р° = — а0— 4,5 - 72 -----;
"ST
здесь а0—угол атаки при Су = 0, обычно отрицательный, так что
в результате будет знак плюс; Смо—коэфициент момента при Су=0;
для обычных крыльев средней толщины и плоских снизу С„о = 0,05,
для двояковыпуклых около 0,02 и даже иногда 0,00. Если взять
^ф = 0,375, то
= -ао-15,5-190 С„04-47,5у.
Проделаем то же самое для моторного полёта. Величину В,
возьмем 0,5, что является довольно большим; обдуваемую площадь
оперения будем считать в 75% полной; («4 у) Для среднего режима
близко к нулю; имеем:
См0 + 0,06 - 0,25 + о,5
9° = -“о-5 - 42------~
Sb
здесь -я—отношение ометаемой винтом площади к площади
О
крыльев, что обычно бывает от 0,2 до 0,3; у — отношение плеча
тяги винта к средней аэродинамической хорде.
Что касается давления на ручку, то ввиду большого разнообра-
зия в оперении упростить выражение затруднительно.
Теперь дадим еще угол отклонения руля высоты при посадке
на три точки, считая, что при этом скоса потока нет; имеем:
8 = 1,4 48
С -I- 0,15 — 0,65 + 0,08
л»о 1 D и
Ч"18 + ? +
<*о .
Sb
155
S L
Если взять в среднем --^— = 0,38, получим:
8=115^-14^--175СЖо-50-1,4(? + «о).
ПРИБЛИЖЕННЫЙ РАСЧЕТ ИЗМЕНЕНИЯ УГЛА УСТАНОВКИ СТАБИЛИ-
ЗАТОРА И УГЛА ОТКЛОНЕНИЯ РУЛЯ ВЫСОТЫ ПРИ ПЕРЕМЕНЕ ЦЕН-
ТРОВКИ
Пользуясь приближенными выражениями угла установки стаби-
лизатора и угла отклонения руля высоты, нетрудно получить изме-
нения, вызываемые переменой центровки.
При изменении центровки х0 на один процент средней аэроди-
намической хорды, для равновесия моментов руль высоты нужно
отклонить: на режиме планирования на 0,7°, на подъеме на 0,4°,
на посадке на три точки на 1,1°.
Для устранения давления на ручку угол установки стабилизатора
нужно изменить: на режиме планирования на 0,5°, на режиме
подъема на 0,3°. При передвижении центровки вперед знак изме-
нения углов отрицательный.
При изменении центровки _у0 на один процент средней аэроди-
намической хорды (по высоте) на средних режимах полета и пла-
нирования отклонение руля высоты и угол установки стабилизатора
не меняются. При посадке на три точки отклонение руля высоты
меняется на 1,7°, причем при опускании центра тяжести знак изме-
нения будет отрицательным.
МЕРЫ К УСТРАНЕНИЮ ПЕРЕМЕНЫ РЕЖИМА ПОЛЕТА ПРИ
ВКЛЮЧЕНИИ И ВЫКЛЮЧЕНИИ МОТОРА
У многих самолетов есть одно очень неприятное свойство: ме-
нять режим полета при включении и выключении мотора. Измене-
ние режима может быть настолько велико, что с неопытным или
невнимательным пилотом может произойти авария.
Включение мотора производит троякое действие: изменяется
момент от тяги винта, затем происходит изменение скорости у хвоста
и изменение скоса потока у хвоста. Можно дать самолету такую
схему и такую центровку, чтобы эти три фактора давали взаимно
уничтожающий результат. В худших случаях результаты действия
тяги винта, скорости и скоса потока у хвоста могут сложиться,
и тогда получится очень скверный в смысле управления самолет.
В этих случаях прибегают к регулировке угла установки стабили-
затора, однако это не годится при быстрых переходах на моторный
полет и обратно.
Приведем несколько примеров. На фиг. 122, а показан самолет,
у которого ось винта проходит ниже центра тяжести, центровка
самолета передняя и на средних режимах полета оперение нагру-
жено сверху вниз. При включении мотора момент от тяги винта
стремится увеличить угол атаки, струя винта немного уменьшает скос
потока, но увеличивает скорость. В результате обратная нагрузка
на хвосте увеличивается, и это тоже дает увеличение угла атаки,
156
Самолет, построенный по такой схеме, будет иметь очень сильную
тенденцию увеличивать угол атаки при включении мотора. Если
тому же самолету дать заднюю центровку, когда в полете стабили-
затор (фиг. 122,6) несет, то
под действием' струи винта
хвост дает момент, умень-
шающий угол атаки, про-
тивоположный моменту от
тяги винта. Такая схема
была бы выгодна в отно-
шении поведения самолета
при включении мотора, од-
нако задняя центровка для
устойчивости потребует опе-
рения значительных разме-
ров.
Схема фиг. 122,а может
быть улучшена путем на-
клонения ОСИ винта вниз. фиг. 122, а и б. Влияние работы мотора на
Тогда при включении МО- равновесие при низком положении оси винта,
тора произойдет увеличение
угла атаки стабилизатора, что поведет к уменьшению обратной на-
грузки и моменту, уменьшающему угол атаки.
На фиг. 123 дана другая схема, у которой тяга винта проходит
выше центра тяжести. При передней центровке (фиг. 123,а), когда
фиг. 123, а и б. Влияние работы мотора на равно-
весие при высоком положении оси винта.
на средних режимах ста-
билизатор нагружен свер-
ху, включение мотора
дает следующее: момент
от тяги винта стремится
уменьшить угол атаки;
возросшая обратная на-
грузка на стабилизатор
дает момент, увеличиваю-
щий угол атаки. Моменты
получились обратных зна-
ков, и это хорошо. Если
приращение пикирующе-
го момента преобладает,
кабрирующий момент мо-
жно усилить, наклонив
ось винта вверх. Тогда
скос потока от струи бу-
дет усиливать обратную
нагрузку на оперение.
Теперь возьмем ту же схему с-задней центровкой (фиг. 123,6),
когда в полете стабилизатор несет. Тогда от тяги винта и от опе-
рения самолет будет стремиться уменьшить угол атаки. Для борьбы
с этим нужно будет стабилизатор поставить в сильно отрицатель-
ное положение, но тогда при выключении мотора самолет резко
увеличит угол атаки. Подобная схема еще хуже, чем данная на
167
фиг. 122,а, где изменение углов атаки совпадало с изменением
наклона самолета при переходе с подъема на планирование и об-
ратно.
Можно сделать и другие приспособления для автоматического
регулирования равновесия при включении мотора, но пока таковых
еще нет.
Тому, что мы проанализировали выше качественно, постараемся
дать количественное объяснение, пользуясь аналитическими выра-
жениями моментов.
Пусть на планировании самолет имеет угол атаки а1г а при
включении мотора мы желаем иметь угол атаки а2. Тогда если на
планировании оперение дает момент СМх1, то при включении мотора
хвостовое оперение должно дать момент СЛх2, равный CMxi минус
момент от тяги винта и минус приращение момента крыла за счет
желаемого изменения угла атаки. Поставим задачу сохранить угол
атаки.
Момент хвостового оперения выразим в форме:
СМх
мх
__SXLX (
~~Sb' \VJ
Теперь напишем, что момент хвоста при планировании равен
моменту хвоста в моторном полете плюс момент от тяги винта.
Так как изменения момента происходят только в обдуваемой части
хвоста, то в расчет будем вводить только Six:
^•О,8СЛ = %^.о,8(1 + 2В,)(С,ж+ЛСЛ) + а,§,
C,,-<C„ + AC,.J (1 +2S,)+B,^-.1,25.
Изменение СУх выражаем через изменение скоса потока:
= Вх (е< в);
ДС/Х —
если не учитывать влияния крыла на струю:
_в Г(/Г+2в;-1)М-т) + е_ 1 =
Ч /1+2Вв J
— Вх (1— (а + Y — е).
\ )<1 + 2Вв/ ‘
Если считать, что струя винта скашивается крылом на угол е,
получим:
1—...1.
/1 + 2Вв
Су хвоста при планировании находим из равновесия моментов
на планировании:
SXLX _______ [> 1 ✓-» / л од_г*
Чх — — ь)— Ч~ь\>
Смо + Су ^0,24 —
с"=
О0
158
Подставляя СУх и ЬСУх, получим:
в. 1,25+ДС,, (1+2В,)+ С,„.2В, = О,
<«+т) а+гв.)-
'в
= 0.
1,25 - Вх(\----? . 1 .--'j
Six^x \ У 1 + 2Be /
См0+ Су(о,24-
0 4 SxLx
’ Sb
Если величина Вв невелика, можно заменить УЛ + 2В, = 1 -f- Вв
тогда в среднем члене получим:
А-----—1.....
к ]Л+2В,
'в
Pv CM0 + Cy(0,<24-^\-Ct^
Ь25 - Вх (а + Т-е)---------------------*- = О-
о 4 SxLx
и’ Sb
Если считать, что струя винта скошена крылом, то
с, C„ + C,(0,24-S!)-C,»
1,25 Л- - В,(.+т)-------------------------- = 0.
^ix^x
SXL;
Sb
Для устранения изменения режима полета у конструктора
имеются такие средства: уе—плечо тяги винта, у— угол заклинения
оси винта, центровка у и ~ и профиль крыла в виде СМа.
Конечно, задача сохранения угла атаки не так уж необходима;
тогда расчет можно основать на определении величины изменения
угла атаки при включении мотора и затем уже решать, насколько
такое изменение допустимо. Наконец, можно поставить задачу
о давлении на ручку при включении мотора для сохранения угла
атаки. Однако, эти задачи в аналитическом виде выглядят очень
сложно, и пожалуй быстрее и точнее их можно решить числовым
подбором.
Проделаем пример: В=7; 5^=10; Slx = 8; Lx=7\ S='6O; 6 = 3;
Вх = 0,025; а = 8; « = 4; Су = 0,4; См, = 0,^2; х0 = 0,9; Ct = — 0,015;
у0 = — 0,45. Величины уй и у будем подбирать. Возьмем уа — 0>
тогда получим:
—0,025 (8 + у - 4) - 0.02 + 0.4(0,24 - 0,3)-0,015-0,15
= 0;
0,4
’60-3
— 0,025 (4 + у) + 0,04 = 0; у = - 2,4°.
159
Если считать, что струя винта скошена крылом, то у = — 6,4°.
Если зададимся у = 0, можем найти ув:
1,25^ — 0,1+0,04 = 0; 0,156 j/4 = 0,06; jze = 0,385.
И если считать, что струя винта скошена крылом, тод/Л = 1,02.
Положительный знак у, указывает, что ось винта должна быть
выше центра тяжести. Здесь мы видим, насколько важно уточнение
величины скоса потока за крылом в моторном полете.
ПРИЛОЖЕНИЯ
ПРОДОЛЬНОЕ РАВНОВЕСИЕ И СТАТИЧЕСКАЯ УСТОЙЧИ-
ВОСТЬ САМОЛЕТОВ НЕОБЫЧНОЙ СХЕМЫ
Из самолетов необычной схемы мы рассмотрим:
1) самолет типа „тандем", т. е. самолет, состоящий из двух
почти равных крыльев, расположенных одно за другим;
2) самолет типа „утка", у которого стабилизатор и руль высоты
расположены спереди;
3) бесхвостые самолеты со стреловидными крыльями и типа
„летающее крыло".
Рассмотрение устойчивости и равновесия этих типов не пред-
ставляет труда и для удобства анализа мы его произведем в анали-
тической форме.
Тип тандем (фиг. 124). Расчет может быть проведен по обыч-
ной самолетной формуле. Пусть нам известны фокусы обоих кры-
льев, величины
величины aoi и а02, т. е. углы атаки, при которых Су = 0, и дегра-
дация <р. Скос потока будем считать по обычной формуле, хотя
это и менее точно. Рулем высоты будем считать среднюю подвиж-
ную часть заднего крыла. Величинами у пренебрежем, а цен-
тровку х0 будем отсчитывать от переднего фокуса. Индекс 1 отно-
сится к переднему крылу, а 2 — к заднему.
Напишем момент вокруг центра тяжести:
jTpj = Cm^S^i CyiSlxQ -j- CMa,S2 bt -f~ CyaS2 (L xQ) — 0,
Су, = в2 (a2 — a02) = B2 (a + <P — e — a02 -|- nS),
Cyt — Bi(n a01).
Поделим выражение на S —Si-j-S2 и L, где L — расстояние
между фокусами; получим:
С** + S+B.(« + 9 — -«» +
+й8)г(1-г)=0-
11 В. С. Пышное 6»9 161
Равновесие можно регулировать углами <? и S. Для получения
Степени устойчивости продиференцируем выражение по а:
= (1 —тг)—г-
da о \ L J \ kAj/ L S L
х S S
Найдем, при каком самолет нейтрален, если ^ = ^ = 0,5; Xt=6;
В1=В2 = 2,0; получим = 0,365. В результате центр тяжести ока-
зался даже позади переднею крыла.
Тип „утка*. Размеры схемы „утка" даны на фиг. 125. Пусть
центр тяжести лежит между крыльями. Влиянием скоса потока от
Фиг. 125. Самолет типа „утка*.
переднего малого крыла можно пренебречь (для грубого рассмо-
трения вопроса). Составим выражение для коэфициента момента,
причем моментом переднего крыла вокруг фокуса пренебрегаем
и у0 положим равным нулю:
здесь а0' — угол атаки нулевой подъемной силы для переднего крыла.
Для получения устойчивости диференцируем См по а, заменив
Су = В (а — <х0):
____ О *0 D $XLX
da~D b * Sb '
Для устойчивости должно быть:
£о Вх SXLX
b В Sb •
162
Для того чтобы не нагружать слишком сильно переднее крыло,
Вх нужно делать меньше В, а это указывает, что удлинение перед-
него крыла должно быть хуже, чем заднего.
У самолета типа »утка“ переднее крыло всегда несет, поэтому
может возникнуть опасение, что при посадке переднее крыло дой-
дет до Сушах раньше, чем заднее, и тогда будет потеряна упра-
вляемость. Во избежание этого назначим, чтобы, при достижении
СуШах у заднего крыла, у переднего крыла был некоторый Су/, заве-
домо меньший, чем CVx ши. Тогда условие равновесия можно
написать:
С £
Величину менять не следует, так как она вытекает из
условий динамической устойчивости и управляемости. Найдем у:
х9____________________$х^х ^Л<0
£ymax G'max
Условие устойчивости дает:
________ $Х^Х §х
dCy - b Sb В 9
Подставляем имеем:
f Сух Вх \ CMq
dCy Sb \Су max В ) С max
С 1
Отсюда видим, что ^Ух должно быть обязательно больше,
^У max
чем
в
Возьмем для примера = 0,3; С^о = 0,05; Су max = 0,65; В = 2;
= 0,05; получим:
v (С* ' Вх\ 0,05
0,05 = 0,3 —дез»
Cv' Вх
-^--^ = 0 423,
и,ОО Л
Су ’ = 0,275+0,325 Вх.
Пусть удлинение переднего крыла равно 2, тогда Вх будет
около 1,2 и CVx тах — 0,665. По условию Су/ должен быть меньше
СуЛ1пП переднего крыла, следовательно сам Сушах переднего крыла
должен быть около 0,8—0,9.
Центровку теперь можем получить:
т=%+°>05=0>3*т+°’05=°’23*
11*
168
Так как х0 мы отсчитывали от фокуса вперед, то по отношению
к передней кромке получим центровку 0,24 — 0,23 = 0,01, т. е. 1%.
У самолетов типа „утка" центровка может получиться и отри-
цательной. Таким образом, мы видим, что достичь устойчивости
и управляемости у „утки" труднее, нежели у обычного самолета.
Центровка получается очень передняя, порядка 0 —10%, удлинение
переднего крыла малое, а Сутах высокий. Применение крыла с вы-
соким Сушах, вероятно, встретит затруднения. Для увеличения С/д.тах
Фиг. 126. Схемы бесхвостых самолетов.
переднее крыло выгодно
делать разрезным.
Бесхвостые самолеты.
Бесхвостыми самолетами
называются такие, которые
не имеют ясно выраженного
хвоста, т. е. небольшого
крыла, отделенного от глав-
ного значительным проме-
жутком. Применялись раз-
личные формы бесхвостых
самолетов. На фиг. 126 мы
даем некоторые из них:
1—одно прямоугольное кры-
ло, 2—стреловидное крыло,
3—крыло с обратной стре-
лой, 4—трапецевидное кры-
ло, о— параболическое кры-
ло, 6-обратное параболи-
ческое крыло.
Крылья снабжены эле-
ронами и рулями высоты,
причем иногда функцию
элеронов и руля высоты
выполняют одни и те же
поверхности.
На причинах различия формы мы остановимся специально в чет-
вертой части, а здесь отметим лишь основные мом.енты продоль-
ного равновесия и статической устойчивости. Так как мы имеем
только одно крыло, не сильно отличающееся от обычного, выра-
жение для коэфициента момента составить очень легко:
c„=c^+c/w-^)=o.
Тогда См вокруг центра тяжести:
г —г _______г *1— п = С
ь — и, ь — ^Мо.
Производную будем иметь:
dCM___
~dCy~
dCu xQ
—77- или = т----
b dCy b
164
Получали очень простые выражения. Для устойчивости нужно,
чтобы ~ было меньше т или центр тяжести лежал впереди фо-
куса; тогда из условия равновесия СМа должно быть отрицательным.
Значит, для равновесия и устойчивости бесхвостого самолета
нужны: центровка менее 23—25°/0 средней аэродинамической хорды
и отрицательное См°. Для достижения отрицательного СМо, т. е.
чтобы при Су = 0, соответствующем пикированию, был момент,
стремящийся увеличить угол атаки, применяются такие средства.
Фиг. 127. Профиль бесхвостого само- Фиг. 128. Поофиль бесхвостого само-
лета. лета Б. И. Черановского.
Для крыльев прямоугольной, трапецевидной и параболической
формы применяются профили, имеющие СМо отрицательное. Такие
профили известны очень давно. В последнее время они сильно
развились по причине интереса к бесхвостым самолетам и ради
выгод в прочности крыльев.
Все эти профили характерны формой средней линии, имеющей
перегиб в задней части. Задняя часть профиля подвижная и по-
Фиг. 129. Стреловидное крыло с геометрической
закруткой.
зволяет менять СКо (фиг. 127 и 128). Наиболее значительное отри-
цательное СМо нужно при посадке: С«отах = ^-СутЯУ., на что и
нужно проверять мощность руля высоты. Нужно только заметить,
что у подобных крыльев при посадке задняя часть очень близка
к земле и потому продувку нужно обязательно произвести вблизи
экрана, заменяющего землю.
Крылья с прямой или обратной стрелой имеют „закрутку", т. е.
угол атаки, считаемый от направления Су = 0, возрастает для стре-
ловидного крыла от концов к середине, и от середины к концам —
165
для обратной стрелы. „Закрутка* может быть выполнена или прямо
закрученной формой крыла с сохранением его. профиля, или
изменением формы профиля (фиг. 129 и 130).
Сравнивая устойчивость различных схем самолетов, нужно от-
метить следующее обстоятельство, известное уже давно; это—на-
фиг. 130. Стреловидное крыло с аэродинамиче-
ской закруткой.
личие продольного угла самолета, вершиной обращенного вниз.
Такой угол мы имеем у обычного самолета между плоскостями
нулевой подъемной силы крыла и оперения (фиг. 131), у „тандем*
Фиг. 131. Продольный угол самолета.
и „утки". Нечто подобное мы усматриваем в форме профиля крыла
бесхвостых самолетов и вполне отчетливо видим у бесхвостых
самолетов со стреловидными крыльями.
ПОЛЕТ НА СПИНЕ
Среди фигур, совершаемых самолетом, мы имеем полет на спине,
когда летчик сидит вниз головой. В последнее время эта фигура
все больше и больше входит в практику тренировки в высшем
1вб
пилотаже, и мы имеем полеты на спине продолжительностью бо-
лее получаса.
При расчете равновесия и устойчивости самолета обычно не
проверяют полет на спине, и бывают случаи, когда летчик не мо-
жет удержаться на спине и сваливается в пикирование. Переход
со спины в пикирование иногда представляет опасность вследствие
развития больших скоростей. Поэтому для истребительных и спе-
циально фигурных самолетов расчет полета на спине производить
необходимо.
Сам расчет, конечно, в принципе ничем не отличается от обыч-
ного расчета, но тол(ко данные для крыла нужно брать при отри-
цательном С„, на отрицательных углах атаки.
Все формулы, приведенные ранее, пригодны для расчета пере-
вернутого полета; правило знаков сохраняется, т. е. момент, умень-
шающий угол атаки, считается положительным. Только теперь его
нельзя называть пикирующим, так как уменьшение угла атаки
означает увеличение его отрицательной величины, т. е. кабриро-
вание; Су нужно, конечно, ставить отрицательный; условие устойчи-
вости остается без изменений.
Можно поставить задачу и иначе, считая, что мы имеем нор-
мальный полет, Су положителен, угол атаки положителен, но по-
ставлено крыло с характеристикой соответственно работе в пере-
вернутом положении. При аналитическом расчете это сводится
к изменению знака а0 и Смо.
Расчет перевернутого полета часто будет затрудняться отсут-
ствием надлежащих данных. Поэтому при заказе продувок для фи-
гурных машин нужно требовать испытания до отрицательного
Сути- В пределах работы крыла с плавным обтеканием можно
пользоваться аналитическими выражениями, подставляя в них
отрицательный Су. Однако при работе обратной стороной срыв
обтекания иногда наступает при сравнительно малых по абсолют-
ной величине Су.
Проделаем в аналитической форме расчет поворота руля вы-
соты для перехода от Су —0,3 на Су = — 0,3. Предположим: _уо=О;
а0 = —5°; С.Ио=0,04; В = 2; Вж=1,6; Х = 6; =0,4; получим:
СЛо + с/о,24-^) + ^.0,8вД^+«о+<Р-е + ^) = 0;
найдем 8:
<\+^(0,24-*!) ^ + ао + ?-е
Для перевернутого полета знаки Су и е меняем:
Х'= _ С-»~СХ°’24~т) _~? + ао + У + £
SXLX _ п п
— - - 0,8^-^
Теперь найдем 8' — 8, замечая, что члены, знак которых не из-
менился, сократятся при вычитании, а остальные удвоятся:
8' —3 = 2
сЛ?'И~т)
Cv е
2 -2- 2 —
z Bn z П
Производим подстановку, причем В и Вх берем соответственно
углам в градусах:
!'-S=±(26-67^).
Взяв п = 0,65, подсчитаем (8' — 8) для разных значений ±.Су
и центровок:
х0 b 0,25 0,30 0,35 СУ
О'—0 14° 9° 4° ±0,3
8' — 3 18,8° 12° 5,35° ±0,4
3' — 3 23,3° 15° 6,7° ±0,5
Как видно, при центровке 0,25 переход на спину рулем высоты
невозможен, а при центровке 0,3 довольно затруднителен и дает
большие давления на ручку. Если пользоваться стабилизатором,
то регулировка стабилизатора потребуется в очень широких пре-
делах. Таким образом для полета на спине самолету нужно давать
очень незначительный запас устойчивости-
168
В заключение приведем кривые моментов для прямого и пере-
вернутого полета самолета, профиль которого дает срыв обтекания
при Су — — 0,2 (фиг. 132). Как видно, после срыва у крыла кривые
резко изогнулись. У некоторых профилей с большой кривизной
средней линии срыв происходит еще при положительных Cv.
ВЛИЯНИЕ ПОВОРОТА ЗАКРЫЛКА НА РАВНОВЕСИЕ
b
~1~
Существует способ регулирования равновесия самолета путем
передвижения задней части крыла (фиг. 133). Если мы поворачи-
ваем заднюю часть крыла, то изменение моментов происходит от
следующих причин: во-
первых, меняется вели-
чина подъемной силы;
во-вторых, меняется мо-
мент пары сил, действую-
щих на крыло, и, в-треть-
их, меняется скос потока
от крыла, что в свою
очередь влияет на момент
хвоста. Для анализа дан-
ного вопроса будем ис-
ходить из условия сохра-
нения Су, что для прак-
тики как раз интересно.
Сохраняя Су, мы тем
самым ставим условие
сохранения скорости по-
лета. При таком условии
задача стоит иначе, а
именно: повернув заднюю
часть крыла, например,
вниз, мы должны уменьшить угол атаки основной части крыла для
сохранения Су. Раз Су не изменился, скос потока тоже не
нится, но угол атаки стабилизатора уменьшится на ту же
чину, на которую уменьшился угол атаки центральной
крыла.
Вопрос удобнее рассматривать в аналитической форме,
значим поворот задней части крыла через ф, как это показано
на фиг. 133.
Пусть для сохранения Су, при повороте закрылка на угол ф,
угол атаки нужно изменить на угол Да. Угол атаки, при кото-
ром Cv = 0, т. е. а0 изменится на величину Да, получим из выра-
жения':
133. а — простой закрылок, # —щелевой
закрылок, с — щиток-закрылок.
Фиг.
изме-
вели-
части
Обо-
«о'= а0-
Так как а0 отрицательно, то при опускании закрылка абсолютная
величина а0 увеличится.
Напишем условия равновесия моментов в аналитической форме,
169
найдем отклонение руля высоты 8 и, наконец, найдем связь между
углом ф и изменением (8'—8):
С,. + С, (0,24 - й - Су) +
+ 0,8Вж(« 4- <р — е + Я8) = о,
С
См +Су(о,24-^-)-^(ср--^--Суу:0} . , .
Л,“ Л\ о ) о\ р Во у ) (а Ц- <р — е)
S,LX .п
После поворота закрылка на угол ф получим:
( хо\ Уо Г CJ 1
+ Су (^>24 ~ yj |J^p' — Су (а0 — Да) j (а —Да | <р — е)
Производя вычитание 8' — 8, замечаем, что неизменившиеся
члены сократятся:
8 = —
(Сл.0'-^0)-у (С/-Ср)+ <?/«]
^•0,8Sx.n
Да
На основании обработки продувок получены такие зависимости.
Для закрылков простых и щелевых (фиг. 133, а и Ь) при ф не
более 30°:
Aa° = -f/4’
ДСЛо = 0,008 ф° jZ-y;
изменение Ср незначительно; — хорда закрылка.
В случае применения щитков закрылков (фиг. 133, с) при откло-
нении их на 60° имеем: ДСЛо = 0,12; Да0 =—14°; ДСр=0,08; делая
подстановку для закрылков, получим:
0,008 —у Су
^0,8Sx
Если Jo = 0;-^ = 0,4; Вх = 0,028; « = 0,65; ]/-£- = 0,5, то
8'—8 = 0,075’1',
170
Например, если мы дали ф = 10, то для сохранения Су ручку
нужно дать от себя на 0,75°. Если мы ручку от себя не дадим, то
самолет увеличит Су. Полученный результат показывает, что
при опускании закрылка и неизменном 8 почти не меняется Су.
Производя подобный расчет для щитка-закрылка, получим:
0,12—£ (о,08 +С™)
8'- 8 = 14°------.
Если v0 = 0;-*b = 0,4; Вх = 0,028, то
8'— 8 = 4- о,6°.
Опять получили, что Су самолета почти не изменился. Применяя
закрылки для снижения посадочной скорости, мы заинтересованы
в обеспечении достижения больших Су, т. е. в увеличении 8'—S, что
уменьшает необходимое взятие ручки на себя. С этой целью можно
S L
рекомендовать увеличение ~|~и увеличение Вх путем увеличения
удлинения хвоста. Опускание центра тяжести также выгодно.
РАСЧЕТ РАВНОВЕСИЯ И СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ
ПО МЕТОДУ В. П. ВЕТЧИНКИНА
Расчет равновесия й устойчивости по материалам продувки мы
производим путем построения диаграмм См по а для крыла, опе-
рения и пр.
В. П. Ветчинкин предложил производить расчет в координатах
Су по См, т. е. в тех, в которых дается и продувка крыла. Это
дало целый ряд упрощений расчета, в том числе особенно легко
изменять центровку самолета.
Сумма моментов, действующих на самолет при планировании:
С, = С -c^-c*+s-^o,sc,,.
Cv хвоста можно разбить на две части: СУх при = 0 и 8 = 0
и ДС\Х, т. е. изменение Су за счет <р и 8:
СМх = СМх -j- ДСЛх,
^0,8 С,/, ДСЛх = ^0,8ДСУж.
Значения С'Ух и ЬСУх можно брать по продувке; однако гораздо
удобнее принять аналитическое
часто делали:
Сж/ = ^0,8Вж(а-.),
В практике расчета самолета
по хорде у, переставлять стабилизатор <р и поворачивать руль 8.
Изменения центра тяжести по высоте если и бывают, то незначи-
171
выражение, как мы это выше уже
ЛСЛх = ^.0,8Вх(<р + /г8).
нам приходится менять центровку
Су
тельные. Для удобства расчета мы группируем моменты постоянные
и переменные. Постоянные моменты будут:
G,-C,f + ^0,8Bx(a-e),
переменные моменты:
Напоминаем, что с достаточной степенью точности можно счи-
тать Сп — Cv. Предварительную балансировку самолета будем про*
изводить одним стабилизатором, т. е. полагая
?о = ? + «8-
Расчет ведем следующим образом. Берем диаграмму Су по См
по продувке крыла (фиг. 134) и вносим в нее поправку на — •
Получаем диаграмму См для точки, лежащей на расстоянии у0 над
или под передней кромкой, в зависимости от знака. Затем под-
173
Фиг. 137. Расчет равновесия по методу В. П. Ветчинкина.
Фиг. 138.
считываем СМх\ для чего предварительно Строим диаграмму Су
крыла по а, вносим поправку^ на^е и получаем («— е) (фиг. 135).
Складывая момент См— Ct~ с СМх, получим постоянную часть
моментов.
Так как мы будем интересоваться равновесием моментов, то
для графического решения задачи переменные моменты будем
строить с обратным знаком и лучше на прозрачной кальке.
Момент на диаграмме изобразится в виде прямой линии,
идущей из начала координат. Для построения диаграмм при раз-
Фиг. 139.
личных центровках удобно поступить так: при Су=1 откладываем
величины х£ в масштабе См (фиг. 136). Соединяя нужную центровку
с началом координат, получим искомую диаграмму. Для добавле-
ния ДСЛх диаграмму Су~ сдвигаем на нужную величину; величину
сдвижения даем в виде шкалы в зависимости от <р0. Если диаграмма
дана на кальке, то, пользуясь шкалой <р0, сдвигаем кальку.
Построить шкалу <р0 очень легко: задаваясь <р0 = 1, получаем
ЬСМх = и берем эту величину по шкале См.
Теперь для решения задач накладываем кальку на диаграмму
См — Ct у- + СМх (фиг. 137). Равновесие получаем в точке пересечения
кривой с прямой для желаемой центровки. Двигая кальку, можем
найти <р0 для разных Су и затем построить диаграмму <р0 по Су
175
(фиг. 138)* Балансировочную диаграмму можно Получить Из диа*
граммы <р0 по Су из условия:
?о = ? + «8. 8
выбрав желаемую величину <р.
Выбор угла установки стабилизатора для устранения давления
на ручку можно произвести следующим образом. Из испытания
оперения на шарнирные моменты можем построить диаграмму 8
по ах при Сш — 0. Для решения задачи на оси абсцисс отклады-
ваем ах1==а— е + ?о (фиг. 139). Если мы будем менять положение
руля высоты и стабилизатора так, чтобы момент оперения оста-
вался без изменений, нужно соблюсти условие п8 = <р0 • Поло-
жив <р = 0, получим 8 = -^ при аХа =а — е; по этим данным строим
на диаграмме вторую точку. Через обе точки проводим прямую
до пересечения с диаграммой. Точка пересечения решает задачу,
8 читается прямо, а = ажз—(а — е). В случае моторного полета диа-
грамму моментов хвоста нужно перестроить и добавить момент
от тяги винта. Это, конечно, усложняет работу, но анализ мотор-
ного полета усложняется при всех методах.
Суждение об устойчивости производится по величине тангенса
угла наклона касательной к кривой. Для устойчивости ~й кри-
вой См — Ct?~-[-CMx должен быть больше наклона прямой Су~ .
Передвигая кальку, можно очень легко найти центровку для до-
стижения желаемой степени устойчивости.
Замеченные опечатка
Стр. Строка Напечатано Нужно По чьей вине
37 11 снизу {Сп (Cms Тип*
G3 dL dG9 G3 dL G3
56 16 сверху G L ~ G + — G L G 1-й корр.
68 14 с Сж, CM Вычитчик
78 3 , r ^max Суть* Тип.
89 17 . r Уп Цу, > r Уп Ред.
n L bn Л дЛ
130 3 » yQ y0 Тип.
в
132 4 сверху (== = (
136 3 снизу момент вес Авт.
140 4 . ea с •
Ч С. П ышнов, Аэродинамика самолета ч. 2.