










































































































































































































































































































Автор: Коварский Е.М. Янко Ю.И.
Теги: электротехника электрические машины и аппараты электронно-и аппаратостроение оборудование электрические машины метрология измерительная аппаратура физические процессы
ISBN: 5-283-00528-3
Год: 1990



ЕМ. Коварский Ю. И. Янко
ИСПЫТАНИЕ электрических машин
ЭНЕРГОАТОМИЗДАГ
ББК 31.26 К56
УДК 621.313.001.4:621.317
Рецензент доктор технических наук В. И. РАДИН
Е. М. Коварский, Ю. И. Янко
К 56 Испытание электрических машин. — М.: Энергоатомиздат,
1990. - 320 с.: ил.
ISBN 5-283-00528-3
Излагаются методы испытания электрических машин. Даются сведения о применяемой измерительной аппаратуре и оборудовании. Кратко излагаются некоторые общие положения метрологии и сведения о физических процессах в электрических машинах, на которых строятся методы испытания.
Предназначена как практическое пособие для инженеров и техников, занятых испытанием электрических машин.
„ 2202070100-007
К----------------138-89
051 (01) -90
ББК 31.26
ISBN 5-283-00528-3
© Энергоатомиздат, 1990
ПРЕДИСЛОВИЕ
Технический прогресс в электромашиностроении в значительной степени зависит от результатов работы большого отряда специалистов, занятых испытанием электрических машин (ЭМ). Этой цели должно послужить и настоящее издание, направленное на повышение квалификации и творческой активности инженерно-технических работников, занятых испытанием ЭМ.
В отличие от книг по испытанию ЭМ, выпускавшихся ранее у нас и за рубежом, в данной книге дается углубленное рассмотрение физических процессов в ЭМ (в том числе потери энергии, вибро- и шумо-образования, коммутации и др.), определяющих в настоящее время технический уровень ЭМ, без понимания которых невозможна успешная работа персонала при испытаниях.
Существенное внимание уделено в книге решению метрологических задач с учетом применения современных измерительных приборов.
Представленный в книге материал знакомит с проведением всего комплекса стандартных промышленных испытаний, дает возможность исследовать причины отклонения параметров ЭМ от заданных и разработать мероприятия по исключению брака, повышению качества и технического уровня выпускаемых ЭМ. Книга должна оказать существенную помощь в выполнении задач, поставленных перед электротехнической промышленностью по повышению качества продукции электромашиностроительных предприятий.
Генеральным направлением развития технологии испытания является ее автоматизация с переходом от автоматизации измерений к комплексной автоматизации всего процесса испытания.
Детальное рассмотрение этой проблемы выходит за рамки настоящего издания, однако при описании методов контроля отдельных параметров ЭМ, как правило, даются рекомендации, облегчающие автоматизацию этого вида испытаний и его включение в комплексную систему.
В книге дается также описание ряда отработанных практикой технологических приемов испытания, что позволит читателю быстрее получить необходимые навыки.
Существенное внимание уделено в книге энергосберегающей технологии испытания и вопросам техники безопасности.
Поскольку в одной книге невозможно отразить специфику испытания широкой современной номенклатуры ЭМ, то для получения дополнительных сведений (в частности по вопросам испытания на надежность) следует обратиться к приведенной библиографии.
Книга состоит из девяти глав: гл. 1 (кроме § 1.7) — 6, 8 написаны Е. М. Коварским, § 1.7, гл. 7 и 9 — Ю. И. Янко.
В книге в значительной мере использован опыт завода ’’Динамо” им. С. М. Кирова и ВНИИЭМ; товарищам по работе в этих коллективах авторы выражают свою благодарность.
Авторы также благодарят кафедру электрических машин Омского института инженеров железнодорожного транспорта за любезно предоставленную информацию о приборах для количественной оценки коммутации.
Авторы считают своим долгом выразить признательность рецензенту доктору техн, наук В. И, Радину за ценные замечания по содержанию книги и инж. Ю. М. Косому за редактирование книги.
Авторы отдают себе отчет в том, что первое издание книги, освещающей широкий круг вопросов по испытанию ЭМ, может оказаться не свободным от недостатков. Замечания, направленные на улучшение содержания книги, просим направлять по адресу: 113114, Москва, М-114, Шлюзовая наб., 10, Энергоатомиздат.
Авторы
СПИСОК ПРИНЯТЫХ СОКРАЩЕНИЙ
ЭМ - электрическая машина
АЭМ — асинхронная ЭМ
АД — асинхронный двигатель
СМ — синхронная ЭМ
эмпт — ЭМ постоянного тока
им — испытуемая ЭМ
нм — нагрузочная ЭМ
тд — тарированный двигатель
ТУ — технические условия
XX — холостой ход
КЗ — короткое замыкание
д — двигатель
г — генератор
гп — главный полюс
дп — добавочный полюс
ип — измерительный прибор
Сокращения, используемые в отдельных разделах, оговариваются в этих разделах.
Глава первая
ОСНОВНЫЕ ВОПРОСЫ МЕТОДИКИ ИСПЫТАНИЙ
1.1. КЛАССИФИКАЦИЯ ИСПЫТАНИЙ
Установлены следующие виды испытаний:
Приемо-сдаточные (контрольные) испытания, проводящиеся отделами технического контроля (ОТК) заводов на каждой выпускаемой ЭМ для проверки ее соответствия требованиям ТУ (ОСТ, ГОСТ) по основным показателям.
Периодические испытания, проводящиеся ОТК или лабораториями на определенной части партий ЭМ для проверки соответствия их требованиям ТУ (ОСТ, ГОСТ).
Типовые испытания, которые проводят при изменениях конструкции, материалов или технологии, могущих повлиять на характеристики ЭМ.
Приемочные испытания, которые проводят на опытном образце (образцах) для установления соответствия их ТУ (эти испытания иногда называются типовыми).
Перечисленные выше испытания предусмотрены ГОСТ 183-74 и относятся к промышленным.
Конструкторские испытания опытных образцов (или головных образцов) новых типов электромашин, проводящиеся лабораториями с целью выяснения соответствия образцов расчетным и конструктивным данным и выявления резервов конструкции.
Специальные испытания (исследования), целью которых является выяснение физической природы и закономерностей различных процессов и параметров в ЭМ (потерь, нагревания, коммутации, вибро- и шумо-образования и др.).
Следует подчеркнуть взаимосвязь этих работ: исследование ряда конструктивных и технологических факторов можно провести, например, только путем соответствующей статистической обработки материалов промышленных испытаний большого числа изделий.
Общие положения, на которых строятся программы и методики испытаний, приведены в ГОСТ 183-74, 11828-86, 16504-81, СТ СЭВ 1346-78 ГОСТ 16264-85.
1.2. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ МЕТОДИКИ
1.2.1. Задачи методики. Методика должна обеспечивать необходимую и достаточную точность определения искомой величины (в дальнейшем — точность).
Точность методики промышленных испытаний должна обеспечивать возможность уверенного определения отклонения значений контролируемых величин, не превышающего 1/5—1/10 допуска на них, установленного ТУ. Так, например, если допуск на сопротивление обмотки составляет ± 5%, то точность его измерения должна быть не ниже ±1%.
Для исследовательских испытаний, указанных в § 1.1, требуемая точность зависит от конкретных задач. Она определяется минимальным изменением исследуемого параметра, которое должно быть измерено. Так, например, для выбора наиболее эффективной конструкции вентилятора нужно провести сравнительные определения перегрева обмоток по сопротивлению с точностью не ниже 2—3 °C, что соответствует изменению сопротивления на ± (0,8—1,2)%. Измерение сопротивления должно проводиться с точностью не ниже ± (0,2—0,5)%.
Если искомая величина является функцией нескольких параметров Y =F(Xi, Х2, Хз), то в методике должно быть предусмотрено раздельное определение их влияния на Y. Все параметры должны быть контролируемыми и регулируемыми. Проводится серия опытов при изменении поочередно в заданных пределах одного из параметров и постоянстве остальных. Полученное в результате семейство кривых определяет Y для всех возможных X.
В числе факторов, влияющих на У, могут оказаться также побочные (помехи), связанные с условиями испытания и вызывающие погрешности при его определении.
Методика должна предусматривать сведение этой погрешности к минимальной по одному из двух способов.
Один из них заключается в поддержании, если это возможно, влияния побочных факторов на неизменном уровне, или, если указанное условие невыполнимо, то в изучении, например, путем моделирования влияния этих факторов на исследуемую величину, контроле их уровня и внесении соответствующих коррективов в измеренную величину.
Так, например, при изучении влияния материала щетки на коммутацию опыт проводится на одной и той же машине или установке при одних и тех же условиях: скорости вращения, температуре коллектора, силе тока, напряжении и т. д. Изменяется только материал (марка) щетки.
При проведении различных исследований, где необходимо и возможно особо точное определение результатов и сравнение их, рекомендуется всю серию опытов проделать не меняя измерительную ап
паратуру и, по возможности, на одних и тех участках шкал измерения. Таким способом (и применением при необходимости поправочных кривых) уменьшают влияние ошибки измерительных приборов.
Примером второго способа уменьшения погрешности является контроль температуры при измерении сопротивлений обмоток в практически холодном состоянии (в дальнейшем — сопротивления обмоток в холодном состоянии) и приведение их значений к единой стандартной температуре.
При исследовании сложных процессов, на которые могут влиять побочные факторы, проведению испытаний должен предшествовать анализ этих факторов, разработка на его основе плана испытания и подготовка оборудования. При этом следует учитывать технико-экономические соображения.
Наиболее сложным является планирование массовых испытаний в тех случаях, когда исследуемые параметры являются случайными величинами, например результатом не поддающихся прямому контролю технологических факторов и воздействующих в процессе испытания побочных факторов, которые также носят случайный характер.
В этом случае для планирования испытаний может быть использована теория планирования эксперимента [1.1], являющаяся разделом теории математической статистики.
Планирование эксперимента — это процедура выбора числа и условий проведения опытов, необходимых и достаточных для решения поставленной задачи с требуемой точностью. Слово ’’эксперимент” здесь применено в широком смысле, как математическое исследование связи изменения выходных параметров при заданном изменении воздействующих факторов. Применение этой теории облегчает поиск оптимальных планов испытания.
Сочетание методов математической статистики при обработке результатов массовых испытаний (см. § 1.6) и их планировании позволяет поднять эффективность этих методов — возможность четкого выделения интересующих нас связей (в общем случае вероятностных) из общего объема данных, полученных при испытании.
Примеры использования теории планирования эксперимента в электромеханике приведены в [0.10; 1.1]. Во всех случаях выбора методики должен быть проведен тщательный анализ предельных погрешностей, входящих в общую погрешность определения — погрешность метода (ПМ). Материал для такого анализа приводится ниже.
1.2.2. Точность методики. Она характеризуется наибольшей относительной погрешностью. Чем меньше погрешность, тем выше точность. В дальнейшем изложении, если не сделано оговорки, погрешностью будут называться предельные относительные погрешности (ОП).
Под погрешностью метода (ПМ) мы будем понимать суммарную погрешность в определении искомой величины (ИВ) (рис. 1.1), которая состоит из погрешности, связанной со способом ее выявления (ПВ), и погрешности, которую дает примененная измерительная система — погрешности измерения (ПИ).
Измерительная система состоит в общем случае из датчика Д (по-
Рис. 1.1. Погрешности
грешность рд), измерительного тракта ИТ (погрешность рт) и измерительного прибора П (погрешность рп).
Измерительный прибор в свою очередь может состоять из различных
элементов: преобразователей, мостов, усилителей, фильтров и показывающей или записывающей систем, позволяющих произвести отсчет. Поскольку измерительный прибор характеризуется суммарной погрешностью всех его звеньев рп, мы будем рассматривать его как один элемент измерительной системы.
Погрешность способа выявления, ПВ, определяется степенью влияния на датчик измерительной системы посторонних воздействий, что связано с выбором режимов испытания, способом измерения и вычисления ИВ (прямое или косвенное). В эту погрешность входят так
же составляющие, связанные с искажающим влиянием датчика на ИВ, и контактная погрешность рк в месте контакта датчика с исследуемой поверхностью.
Важно подчеркнуть, что простое суммирование предельных погрешностей дает необоснованно завышенный результат. Наиболее вероятное значение ПМ определяется из выражения
ПМ = \/пВ2 + ПИ2. (1.1)
То же относится и к вычислению погрешностей ПВ и ПИ через их составляющие.
Необходимая точность должна достигаться решением всего комплекса вопросов, определяющих погрешность метода.
1.2.3. Характеристики точности. Всякое измерение (определение) дает приближенное значение А измеряемой величины (ИВ), отличающееся от действительного значения X на значение абсолютной погрешности а , т. е. А = X ± а . Отношение а/Х или, поскольку а < X, то отношение а = а/А называется относительной погрешностью. Точность определения характеризуется обычно предельной относительной погрешностью (ОП), поскольку практическое значение имеет не сама погрешность, а ее отношение к номинальному значению ИВ.
При технических измерениях, о которых вдет речь, за действительное значение ИВ принимается среднеарифметическое Лср некоторого количества повторных измерений А без указания погрешности.
Задача заключается в установлении и удержании предельной погрешности в допустимых (достаточно малых) пределах. Очевидно, что условием соответствия того или иного параметра требованиям является неравенство
^ном + А > + а\ Пщум. — Д ‘С Л —
где /Гном “ номинальное значение параметра; Д — допуск (+, —).
В ряде случаев для критичных параметров, значения которых лежат на границе поля допуска А — Ппом + Д, оценка погрешности может оказаться необходимой при решении вопроса о соответствии ЭМ требованиям или необходимости каких-либо конструктивных или технологических мероприятий, уменьшающих вероятность брака.
Погрешности могут быть разделены на две группы: систематические и случайные. [Иногда указывают еще на один вид погрешности — грубые ошибки (промахи).]
К числу систематических относятся погрешности, имеющие определенную и достаточно стабильную зависимость от уровня измеряемой величины и внешних условий.
Основной способ оценки и уменьшения систематической погрешности — сравнение результатов определения ПВ с результатами ее определения более точным методом (тарирование).
Для измерительных систем такой метод оценки систематической погрешности является основным. По результатам тарирования строятся поправочные кривые, применение которых позволяет уменьшить систематические погрешности.
К числу случайных ошибок относятся ошибки, возникающие под влиянием различных неконтролируемых факторов, закономерности возникновения которых сложны и носят вероятностный характер.
Часть случайных ошибок составляют ошибки отсчета (ошибки наблюдения) .
В то время как систематические ошибки при измерении неизменной величины в неизменных внешних условиях сохраняют свое значение и знак, случайные ошибки имеют различные знаки. Это обстоятельство позволяет уменьшить их путем проведения с одинаковой тщательностью повторных измерений и определения среднеарифметического.
Проведенные таким образом повторные измерения не должны значительно отличаться друг от друга (разница может быть в последнем знаке), но и не должны полностью совпадать, так как в этом случае становится сомнительной чувствительность метода.
Нужно следить за тем, чтобы при следующих друг за другом измерениях не имело место систематическое изменение (увеличение или
уменьшение) результата измерения. Подобные изменения указывают на наличие систематической ошибки, например подогрева измерительным током сопротивления, значение которого определяется.
При контрольных и большей части типовых испытаний основной задачей является удержание погрешности измерения в определенных допустимых пределах без внесения каких-либо поправок.
Для некоторых видов наиболее точных измерений, таких как измерение сопротивлений обмоток в холодном состоянии, выполняемых для последующего измерения превышения температур, тарирование нагрузочных устройств, определение добавочных потерь, где имеется возможность выполнения повторных измерений, для повышения точности целесообразно применение поправочных кривых (для уменьшения систематической ошибки) и вычисление среднеарифметического (для уменьшения случайной ошибки). Поправочные кривые могут применяться для учета собственного потребления приборов при испытании ЭМ малой мощности.
Многократные измерения и применение поправочных кривых обязательны там, где используется сложная измерительная аппаратура и где возможно влияние большого числа неконтролируемых условий эксперимента на результат.
1.2.4. Погрешность при косвенном определении. Если искомая величина не может быть измерена непосредственно, а определяется косвенно в результате нескольких измерений и математической обработки результатов, то возможная погрешность в определении этой величины зависит уже не только от погрешностей отдельных измерений, но и от характера математических операций.
Поскольку ошибка отдельных измерений может иметь любой знак, нужно считаться с возможностью случайных неблагоприятных сочетаний, при которых независимо от характера математических операций над самими результатами измерения их относительные погрешности складываются.
Общая погрешность для случая двух величин Alt Л2, измеренных с погрешностью al9 соответственно, приведена в табл. 1.1.
Таблица 1.1
Операция
«S
Сложение
Вычитание
Умножение Деление
Возведение в степень
+ [(0!1 +О2с)/(1 + е)] ±[(Я1 +О2с)/(1 - с)] ±(«1 +аг) ап
Следует особо обратить внимание на резкое увеличение относительной ошибки, если исследуемая малая величина определяется как разность двух близких больших значений.
Из табл. 1.1 видно, что если с = | Ai/A2I близко к 1, то может быть очень большой, несмотря на то, что значения «1, а2 малы. Чем больше разность Ai — А2, тем точнее определение. Это обстоятельство должно учитываться при выборе методики. Во всех случаях, где это возможно, следует стремиться к непосредственному измерению разности.
Так, например, при измерении с помощью измерительных обмоток (шлейфов) магнитного потока рассеяния через боковые поверхности полюса магнитопровода его можно получить как разность между потоками, измеряемыми в различных сечениях полюса.
Однако значительно точнее можно измерить эту разницу непосредственно, путем подключения флюксметра к двум соединенным навстречу шлейфам, охватывающим различные поперечные сечения полюса.
В качестве другого примера можно привести определение числа витков обмотки по напряжению или ЭДС на ее выводах. Если нужно определить число витков с точностью 1 виток на 100 витков, то должен быть применен вольтметр с точностью измерения, существенно большей, чем ±0,5%.
Безусловно, более правильно будет принять другой метод определения, основанный на непосредственном измерении разницы ЭДС проверяемой обмотки и эталонной (через обе должен проходить строго одинаковый переменный магнитный поток). В этом случае вольтметр измеряет разность напряжений и требования к нему по точности будут во много раз ниже.
Можно применить и компенсационный метод, при котором эталонная обмотка имеет отпайки через виток и с помощью переключателя отпаек и индикатора нуля устанавливается точное число витков проверяемой обмотки.
Этот пример подчеркивает определяющее влияние метода на требования, предъявляемые к точности измерительных приборов.
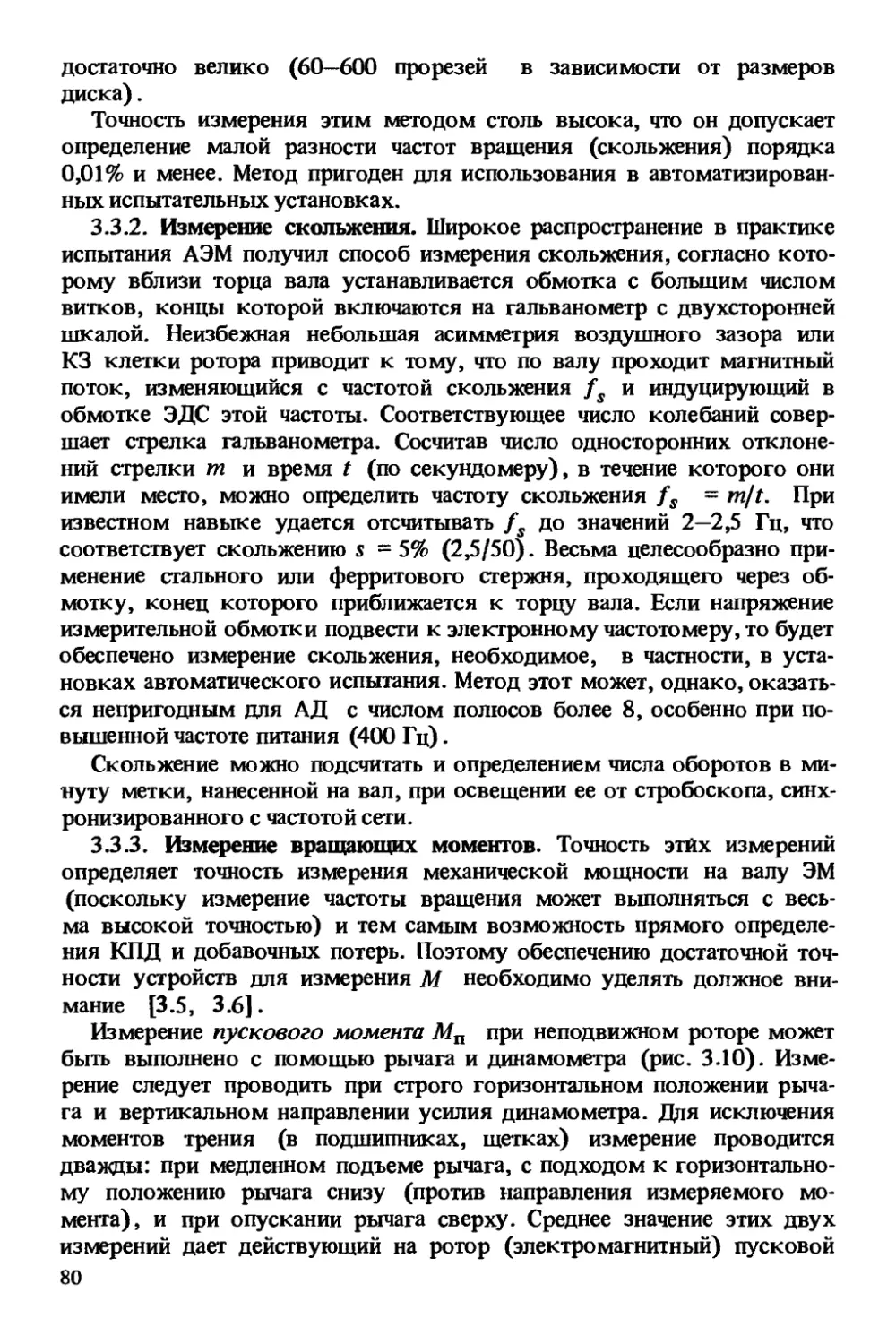
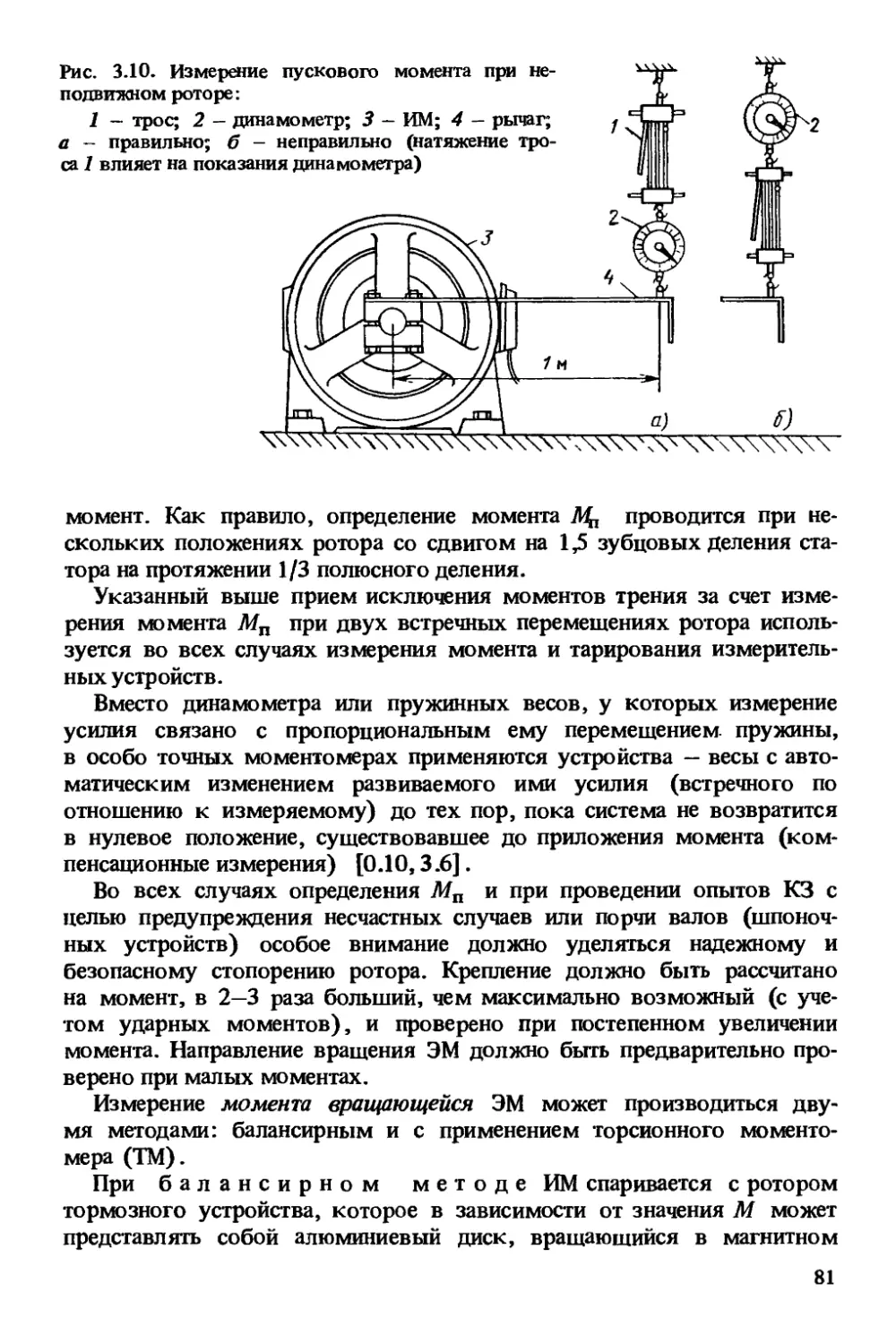
Следует также остановиться на вопросе измерения скольжения АД.
Если частота вращения ротора определяется тахометром по шкале 3000 об/мин с точностью ± 2%, то абсолютная погрешность составляет ± 60 об/мин. Частота вращения поля определяется по частотомеру с точностью ± 0,2%, погрешность равна ± 6 об/мин для частоты 3000 об/мин.
Скольжение является разностью между частотой вращения поля и ротора, и скольжение 1% составляет 30 об/мин. В этом случае
= 100(60+ 6)/30 = 220%,
что разумеется неприемлемо.
Для измерения малых скольжений (до 5%) должен быть следовательно, либо применен метод непосредственного измерения скольжения (гл. 3), либо использованы электронные приборы для измерения скорости вращения и частоты с высокой точностью (см. § 1.7).
1.2.5. Погрешность способа выявления. Вопросы, связанные с влиянием режимов испытания на ПВ, рассматриваются в разделах, посвященных соответствующим испытаниям.
На конкретных примерах рассмотрим составляющие этой погрешности, обусловленные контактными перепадами рк, зависимостью ее от размеров датчика и мощности, потребляемой измерительной системой, неправильным выбором точек измерения.
Контактный перепад при тепловых измерениях - это разность температур головки термометра (или вообще датчика) и поверхности, температура которой измеряется. При неплотном контакте и значительном рассеивании тепла он может достигать больших значений — порядка 10 °C и более. Для его уменьшения применяются фольга с хорошей теплопроводностью, увеличивающей плотность контакта, и теплоизоляция места контакта от окружающей среды.
Очевидно, что при определенном сопротивлении контакта перепад тем больше, чем больше мощность, потребляемая датчиком.
Другим примером погрешности, существенно влияющей на результаты измерения, может служить перепад температур между датчиком вибрации (ускорения) и поверхностью, к которой он крепится (или прижимается). Механические характеристики крепления (например, собственная частота) играют здесь большую роль.
При измерениях напряжения на обмотках, обтекаемых током, можно исключить контактный перепад напряжения, если применить отдельную цепь вольтметра (рис. 1.2, б). Разумеется, это нужно делать для обмоток, имеющих низкое сопротивление (< 1 Ом), соизмеримое с сопротивлением контакта RK.
При измерении напряжения на вращающемся коллекторе или контактных кольцах с помощью вольтметра, подключенного к щеткам, будет измеряться не только напряжение на коллекторе, но и падение напряжения под двумя щетками. Чтобы получить непосредственно напряжение на коллекторе (или кольцах), необходимо вольтметр с внутренним сопротивлением RB > 7?к включить на щетки, через которые не проходит рабочий ток машины. При этом щетки изолируются от щеткодержателей или последние изолируются от общих шин (см. п. 4.3.1).
Этот способ исключения переходного падения напряжения под щетками широко используется при определении потерь, нагрева, тарировании и в ряде других случаев.
Здесь следует подчеркнуть относительный характер ошибки. Так, для машин низкого напряжения (6; 12; 24 В) измерение напряжения на коллекторе через рабочие щетки влечет за собой недопустимую 12
Рис. 1.2. Измерение сопротивлений: рИс. 1.3. Отвод проводников от места а - R-U/A - Яд; б -R = U/A - измерения:
- iy а - правильно; б - неправильно
ошибку, поскольку падение напряжения под щетками (1—2 В) велико по отношению к рабочему напряжению. В то же время, для машин с напряжением 200 В и более ошибка при этом измерении будет невелика.
В некоторых случаях контактный перепад неизбежен. Так, например, при измерении температуры меди обмотки термопара прижимается к поверхности изоляции, иначе она оказывается под напряжением. Для уменьшения погрешности метода в этом случае перепад температуры в изоляции должен быть определен экспериментальным или расчетным путем и учтен. Что касается второго контактного перепада между поверхностью изоляции и термопарой, то здесь должны применяться те же методы для его уменьшения: развитие контактной поверхности, например путем пайки термопары к тонкому медному диску, тщательная общая изоляция места, где приложена термопара. Кроме того, следует продумать вопросы уменьшения отвода тепла через проводники термопары за счет их изоляции и монтажа (рис. 1.3).
Чем больше отношение размеров датчика к размерам детали или участка, на котором производится измерение, тем более вероятна погрешность за счет усреднения, т. е. измерения не значения самой интересующей нас величины, а среднего значения этих величин для всей площади, охваченной датчиком. Так, например, при измерении с помощью крыльчатого анемометра скоростей воздуха в выходном вентиляционном патрубке ЭМ, где имеет место большая разница скоростей в соседних точках (большой градиент изменения скорости), удовлетворительный результат может быть получен лишь в том случае, если .размер крыльчатки анемометра намного меньше размеров выходного патрубка. Следовательно, этот способ применим лишь для крупных ЭМ.
При измерении скорости воздуха в вентиляционных каналах ЭМ диаметр датчика (трубки), введенного в канал, не должен создавать заметного уменьшения его сечения.
При измерении виброскорости микромашин пьезодатчиком масса его не должна существенно влиять на эту величину и т. д.
Собственное поле датчика (магнитное, тепловое и т. п.) также не должно влиять на ИВ.
Так, например, при измерениях значения магнитного потока с помощью измерительной обмотки МДС этой обмотки, создаваемая измерительным током, может влиять на значение магнитного потока, если измерение проводится в магнитных полях с малой напряженностью.
Особое внимание следует уделять выбору места, где располагается датчик, чтобы исключить или уменьшить влияние посторонних факторов.
Так, например, при определении магнитного потока, проходящего через зубец статора, с помощью измерительной обмотки (шлейфа), намотанной на головку зубца, в нее может проникать поток рассеяния через шлиц паза.
В небольших ЭМ, где размеры зубца невелики, правильная установка шлейфа представляет часто настолько большие трудности, что становится целесообразным применить метод исследования на модели с увеличенным размером зубцов.
Нетрудно видеть, что размеры и масса датчика должны быть тем меньше, чем меньшую мощность потребляет измерительная система. Проблема уменьшения относительного размера датчиков при испытании малых ЭМ является весьма острой.
1.2.6. Погрешность измерительной системы. Собственные погрешности датчиков рд, в том числе такие, как нарушение пропорциональности между измеряемым значением и сигналом или отклонение сигнала от номинального значения, угловые, амплитудно- и фазочастотные, а также дополнительные погрешности, вызванные воздействием различных полей, указываются в паспортах.
Погрешности измерительного тракта рт могут быть связаны с изменениями значений его комплексного сопротивления, с различного рода помехами, утечками.
Если сопротивление измерительного тракта (ИТ) изменилось в сравнении с тем, при котором проводилась тарировка системы (например, калиброванные провода между шунтом и милливольтметром заменены некалиброванными), то возможна погрешность, тем большая, чем меньше ЭДС датчика и входное сопротивление прибора 7?п, вхэт- е-чем больше ток прибора.
Особенно опасны в этом смысле различные контактные сопротивления — переключатели, которых в цепях милливольтметров стремятся избегать, а также скользящий контакт (гл. 5).
Влияние электрического сопротивления ИТ практически исключается в случае применения компенсационных измерительных схем и электронных приборов, обладающих весьма малым собственным потреблением и высоким Rn, вх.
Если измерения проводятся на высокой несущей частоте (измеряемой в килогерцах), то при большой длине ИТ причиной погрешности может быть его электрическая емкость, для уменьшения которой в этом случае применяются дроссели.
Однако, по мере увеличения 7?п, вх» увеличивается влияние помех в виде ЭДС, индуцируемых в ИТ магнитными и электрическими полями, через которые проходит ИТ. Поэтому, особенно в тех случаях, когда применяется электронная измерительная аппаратура, проводники ИТ должны быть бифилярны, хорошо изолированы и экранированы.
Электронные измерительные приборы, в соответствии с инструкцией по эксплуатации, экран проводов ИТ и испытуемые ЭМ должны быть заземлены.
Электрическая изоляция ИТ должна регулярно проверяться. Следует по возможности избегать прокладки ИТ внутри ЭМ в местах с высокими магнитной индукцией и напряженностью электростатического поля.
Если ИТ представляет собой резиновую трубку (например, в схемах измерения давления), то с целью исключения погрешностей из-за утечек она должна иметь достаточную толщину и натяг в местах соединения.
Как указывалось выше, суммарная погрешность измерительной системы ft, может быть определена путем тарирования. При тарировании учитываются погрешности всех звеньев: датчика, тракта, измерительного прибора.
Если система состоит из стандартных звеньев, проверяемых отдельно, то суммарная погрешность измерения может быть подсчитана как корень квадратный из суммы квадратов отдельных погрешностей. При этом стремятся к применению стандартных датчиков, таких, как внешние шунты, добавочные сопротивления, трансформаторы тока и напряжения с более высоким классом точности, чем измерительный прибор. В этом случае, эа малым исключением (например, измерения мощности при низких cos<p), погрешностями этих звеньев можно пренебречь).
1.2.7. Правила работы с измерительной аппаратурой. Для удержания погрешности измерений в определенных пределах не меньшее значение, чем чисто технические мероприятия, о которых говорилось выше, имеет четкое выполнение правил работы с измерительной аппаратурой.
К числу основных правил, которые должны соблюдаться в первую очередь, можно отнести следующие:
1. Перед началом работы должны быть проверены условия, в которых находится измерительная аппаратура: положение прибора (если есть ватерпас — точность установки), отсутствие влияния соседних приборов друг на друга (для этого проверяются показания при повороте приборов поочередно на 180°), температура в приборном помещении.
2. Ежедневно перед началом работы должны проверяться правильность установки приборов на нуль, выбор пределов, с тем чтобы измерения производились на второй половине шкалы (протирку стекол приборов, во избежание заметных электростатических влияний на стрелку, рекомендуется делать влажной тряпкой).
3. При медленном изменении значений в процессе измерения регистрация показаний всех приборов должна проводиться одновременно по команде.
4. Правила техники безопасности при работе с приборами (см. § 1.8) должны четко соблюдаться.
5. Приборы должны иметь свидетельства о своевременной поверке.
6. Должны выполняться следующие правила записи результатов измерений в журнал:
а) записываются непосредственные показания приборов (число делений по шкале) без перевода их в действительные значения;
б) записываются пределы измерения приборов, номинальные значения токов шунтов, трансформаторов тока и т. д. После каждого изменения этих данных новая запись производится немедленно;
в) при обработке материалов испытаний устанавливаются цена деления и действительные значения измеренных величин, которые записываются в предусмотренную в журнале графу. Кроме того, в журнал вносятся все данные, характеризующие испытания: тип, номер и результаты внешнего осмотра ЭМ, режим испытания, отличие данного испытания от предыдущего, дата испытания, фамилии лиц, проводивших испытание и подписавших протокол.
1.3. ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
1.3.1. Схемы измерения электрических величин постоянного тока (рис. 1.4, а, б). При испытании малых ЭМ с большим отношением U/I при токах Z, соизмеримых с током вольтметра ZF, применяется схема рис. 1.4, а, при которой напряжение на ИМ С/им отличается от измеренного Uна падение напряжения в амперметре ДС7Л.
При малых отношениях U/I применяется схема на рис. 1.4, б, в которой ток /им отличается от измеренного I на iv.
Для схемы на рис. 1.4, а
икм=и± &uai/iuv,
где ДС/д — падение напряжения в амперметре при предельном токе 7Пр (см- § I -7)-
16
Для схемы на рис. 1.4,6
4м = I ± IvUlUav,
где Iv — ток вольтметра при предельном напряжении [7пр (знак ’’плюс для генераторного, ’’минус” — для двигательного режима ИМ).
1.3.2. Схема для измерения в цепях однофазного тока (рис. 1.5).
Для измерения используются вольтметры и амперметры, измеряющие среднеквадратические значения (СКЗ) I и U, и ваттметры, измеряющие активную мощность Р:
Р = UI cos ф. (1.2)
Коэффициент мощности
cos у =P/UI. (1.3)
Изменение фазы измеряемой величины при переключении подводящих концов не изменяет знаки показаний U и 7, но такая перемена меняет знак показаний ваттметров (направление передачи мощности) , и для возможности отсчета при односторонней шкале предусматривается переключатель знака (+, —), поэтому входные зажимы I и U ваттметра имеют обозначение (* ).
Рис. 1.5. Измерения при однофазном токе:
БИМ - блок измерения мощности; ♦ — входные зажимы ваттметра Wи БИМ; - добавочные сопротивления вольтметра и ваттметра
Для расширения диапазона измерения и соблюдения техники безопасности при токах более 5—10 А и напряжениях более 220—380 В применяются трансформаторы тока (ТТ) и напряжения (TH) (рис. 1.6).
Включение трансформаторов не должно менять знака показаний ваттметров, что особенно важно в схеме двух ваттметров, в связи с этим при подключении приборов к вторичным обмоткам трансформаторов должны сохраняться знаки на выводах первичной и вторичной обмоток.
Измерительные цепи ТТ не должны размыкаться под нагрузкой, так как при этом из-за многократного увеличения потока будет повреждаться ТТ.
В тех случаях, когда потребляемая ИМ мощность мала, включение вольтметра и обмотки напряжения ваттметра производится так, как указано на рис. 1.5, чтобы потребляемая ими мощность не входила в показания ваттметра. Это важно, в частности, при измерении потерь холостого хода при низком cos <р.
Так, например, при (7=150 В, 7 = 5 А мощность, измеренная ваттметром при cos<p= 0,1, равна 75 Вт.
При токах вольтметра и обмотки напряжения ваттметра 7,5 мА потребляемая ими мощность составит 150(7,5 + 7,5)/1000 = 2,25 Вт, или 3% измеряемой мощности, что в большинстве случаев недопустимо.
В схеме на рис. 1.5 напряжение на зажимах ИМ будет меньше (двигательный режим) или больше (генераторный режим) измеренного на падение напряжения в амперметре и в токовой обмотке ваттметра.
При расчете потерь холостого хода Рх в случае низких номинальных напряжений падение напряжения в обмотках амперметра и ваттметра желательно учесть, а при построении кривой Рх = f(U2) можно внести поправки на указанное падение напряжения; при единичном
Рис. 1.7. Измерение мощности одной фазы трехфазной обмотки: а - звезда; б - треугольник
Рис. 1.6. Блок измерения мощности с трансформаторами тока и напряжения: * - входные зажимы
(контрольном) измерении следует устанавливать U выше номинального на это падение напряжения.
Выпускаемые в настоящее время электронные ваттметры, амперметры и вольтметры полностью исключают необходимость поправок на собственное потребление. Если, однако, такой подбор приборов невозможен, то поправки на собственное потребление могут быть сделаны по методу, изложенному в [1.2].
1.3.3. Схемы для измерения в цепях трехфазного или гя-фазного тока. Для этих измерений могут применяться три или т схем, приведенных на рис. 1.5, каждая из которых измеряет мощность одной фазы по схеме рис. 1.7. Схема пригодна для любого нагружения фаз, в том числе и при наличии тока через нулевую точку. Общая мощность системы равна сумме мощностей фаз.
При симметричной нагрузке трехфазной системы Р - ЗРф = = 3£7ф/фСОБф можно ограничиться одним ваттметром, тремя амперметрами для контроля симметрии нагрузки, одним вольтметром с переключателем, позволяющим измерить все фазные и линейные напряжения.
При симметричной нагрузке и недоступной нулевой точке также можно применить схему с одним ваттметром, обмотка напряжения которого подключается одним концом к искусственной нулевой точке (рис. 1.8). Для измерения фазных напряжений вольтметр также подключается к отдельной искусственной нулевой точке.
Наибольшее распространение для измерения в трехфазных системах получила схема двух ваттметров (рис. 1.9), пригодная для всех случаев нагружения фаз и их соединений ( Д , Д), но при отсутствии тока через нулевую точку.
Общая мощность трехфазной системы равна в этом случае Pw ~ = Pjyj + Pw2> где Pwi> ?W2 “ мощности, измеренные ваттметрами
БИМ
Рис. 1.8. Измерение мощности симметричной трехфазной системы с искусственными нулевыми точками: сопротивления вольтметра — ваттметра — flow
Рис. 1.9. Измерение мощности трехфазной системы двумя ваттметрами
~Рыг при cos Ф “ О • При cos =0,5 показания одного из ваттметров Рт обращаются в нуль и при дальнейшем уменьшении cos меняют знак (для выполнения отсчета необходимо повернуть переключатель знака). Мощность системы становится равной разности показаний ваттметров.
Указанное выше положение имеет место при симметричном включении входных зажимов ваттметров (рис. 1.9). Правильность сборки схемы можно проверить, проведя измерение с примерно известным cos<p, например при нагрузке на активное сопротивление (cosip = 1) или на АД (мощностью < 1 кВт) при холостом ходе (cos <р < 0,5).
Коэффициент мощности симметричной трехфазной системы может быть определен по формуле
cos ф = 1/ Vl + 3[(Pm Pjf2)]2‘ (1.4)
Он может быть определен и по общему уравнению
cos Ф = P/yfTui, (1.5)
где U, I — линейные значения напряжения и тока.
Проверка совпадения значений cosip, рассчитанных по (1.4) и (1.5) , используется для контроля правильности схемы.
Относительная погрешность измерения мощности двумя ваттметрами
a2W = Асл.т [1Л5ипр/пр/(И) + sin Ф] cos <PHOM/cos <р,
где ркл,т — основная погрешность, соответствующая классу точности примененных ваттметров; cos <РНОМ — номинальный коэффициент мощности ваттметра; £/пр, 7пр — предельные значения U, 7, cosip, измеренные в опыте.
Весьма удобными являются трехфазные ваттметры, в которых две измерительные системы воздействуют на один указатель (стрелку).
Особое внимание должно уделяться измерению мощности при низких costp, например при определении потерь холостого хода (XX) в АД. В этом случае, если применить ваттметр, градуированный при cos<p = 1, то при cos ф = 0,1, имеющем место в опыте XX, и при предельных значениях U и I отсчет составит лишь 1/10 шкалы. Относительная погрешность увеличится при этом в 10 раз. Поэтому для таких измере-20
Рис. 1.10. Измерение реактивной мощности симметрии- До-ной трехфазной системы
Го
ний необходимо применять малокосинусные ваттметры, градуированные при собф = ОД и дающие в приведенном выше примере полное отклонение указателя.
Если при таких измерениях приходится применять ТТ, то необходимо учитывать влияние их угловой погрешности.
Поправка на угловую погрешность ТТ определяется [0. 9] из уравнения
Р =РИ[1 + 8/(90°-фи)],
где Р, Ри — действительная и измеренная мощность; фи — измеренный агссоБф (’’минус” — для отстающего тока, ’’плюс” — для опережающего тока).
Угловая погрешность 6 в градусах приводится в паспортах ТТ. После корректировки значения Р должен быть по (1.5) откорректирован cos ф.
Учитывая, что в схеме двух ваттметров один работает с весьма низким cos<p (с углом <р+ 30°), рекомендуется измерение потерь XX АД выполнять по схеме трех ваттметров. Предельная мощность, которая может быть при этом измерена без ТТ при U = 300 В и Z = 10 А, при соБф = 0,1 составляет 900 Вт.
Следует также иметь в виду, что при измерении мощности на повышенных частотах (до 500 Гц) ваттметрами с номинальной частотой 50 Гц дополнительная погрешность из-за углового сдвига в цепях напряжения ваттметра, вызванного индуктивностью обмотки, может быть значительной.
Несимметрия трехфазного напряжения, питающего ИМ, из-за появления обратно вращающегося поля в сильной мере влияет на потери, нагрев и шум.
Схема двух ваттметров является несимметричной и в некоторых случаях при низких напряжениях падение напряжения в обмотках ваттметров и амперметров может вызывать несимметрию напряжений на зажимах ИМ. В этом случае согласно [0.9] можно включить третий ваттметр по схеме рис. 1.10, что дает возможность измерения реактивной мощности, вар, симметричной трехфазной системы и sin^:
Q — VTtZsin<p.
При низких cosip это дает возможность дополнительного контроля точности измерения.
1.3.4. Измерения в цепях несинусоидального тока. При работе ЭМ в стационарном режиме в цепях переменного тока с сильно искаженной (несинусоидальной) формой кривой напряжения и тока могут определяться гармонический состав тока и напряжения, их средние, среднеквадратические (СКЗ) и амплитудные значения.
Измерения напряжения и тока. При несинусоидальной форме кривой приборы различных систем будут давать различные результаты измерения при одном и том же значении измеряемой величины.
Приборы электродинамической системы реагируют на СКЗ измеряемой величины. Приборы выпрямительной системы (магнитоэлектрические измерительные механизмы с выпрямителями на германиевых или кремниевых диодах) измеряют среднее значение измеряемой величины.
Обычно приборы электродинамической и выпрямительной систем используются для измерения СКЗ тока и напряжения, и поэтому их шкалы градуируются в этих же значениях. Так как СКЗ тока связано со средним значением равенством /ср = /Скз/^ф, ясно, что выпрямительный прибор может быть градуирован в СКЗ тока (напряжения) только для заданной формы кривой. Если форма кривой отличается от заданной, в показаниях прибора появляется погрешность. Поэтому приборы выпрямительной системы могут практически применяться только для измерения синусоидальных напряжений и токов.
Термоэлектрические приборы представляют собой соединение одного или нескольких термопреобразователей с магнитоэлектрическим измерительным механизмом. Ток в цепи измерительного механизма пропорционален квадрату СКЗ измеряемого тока и не зависит от формы его кривой.
Электростатические вольтметры реагируют на СКЗ измеряемого напряжения. Форма кривой напряжения на показания не влияет.
Электронные вольтметры (ЭВ) переменного тока представляют собой сочетание выпрямителя на полупроводниковых диодах, усилителя и магнитоэлектрического измерительного механизма.
В зависимости от того, какое значение переменного напряжения измеряет ЭВ, различают вольтметры среднего, СКЗ и амплитудного значения.
ЭВ среднего значения строятся с использованием схем одно- или двухполупериодного выпрямителя на полупроводниковых диодах, работающих на линейном участке характеристики. Поэтому постоянная составляющая тока выпрямителя определяется выражением /ср - KUcp. При градуировке шкалы вольтметра в СКЗ напряжения в показаниях прибора появится дополнительная погрешность за счет несинусоидальности измеряемого напряжения.
В ЭВ СКЗ используются выпрямители с квадратичной вольт-амперной характеристикой вида i ~ аи2 (и > 0). При периодическом вход-22
ном напряжении u(t) постоянная составляющая выпрямленного тока двухполупериодного выпрямителя /ср = aU^K3. Шкала прибора при этом получается квадратичной с градуировкой в СКЗ напряжения. Такая зависимость справедлива для симметричных периодических сигналов и (Г) практически любой формы кривой. Однако следует иметь в виду, что при сильно искаженной форме кривой (Кф > 5) может иметь место значительная дополнительная погрешность.
ЭВ амплитудного значения являются такие приборы, у которых показания соответствуют амплитуде измеряемого синусоидального напряжения или максимальному его значению при искаженной форме кривой. Шкала прибора может быть градуирована как в максимальных значениях напряжения Umax, так и в СКЗ. Для синусоиды
Измерение мощности. Для измерения мощности могут использоваться обычные ваттметры электродинамической системы. Дополнительная погрешность здесь невелика, тем более, что потери мощности от высших гармонических токов и напряжений резко уменьшаются с повышением порядка гармоник. Ваттметры электродинамической системы обладают свойством избирательности: подвижная часть прибора отклоняется в результате взаимодействия токов одинаковой частоты. При синусоидальном напряжении и несинусоидальном токе в цепи ваттметр будет показывать только мощность первой гармоники.
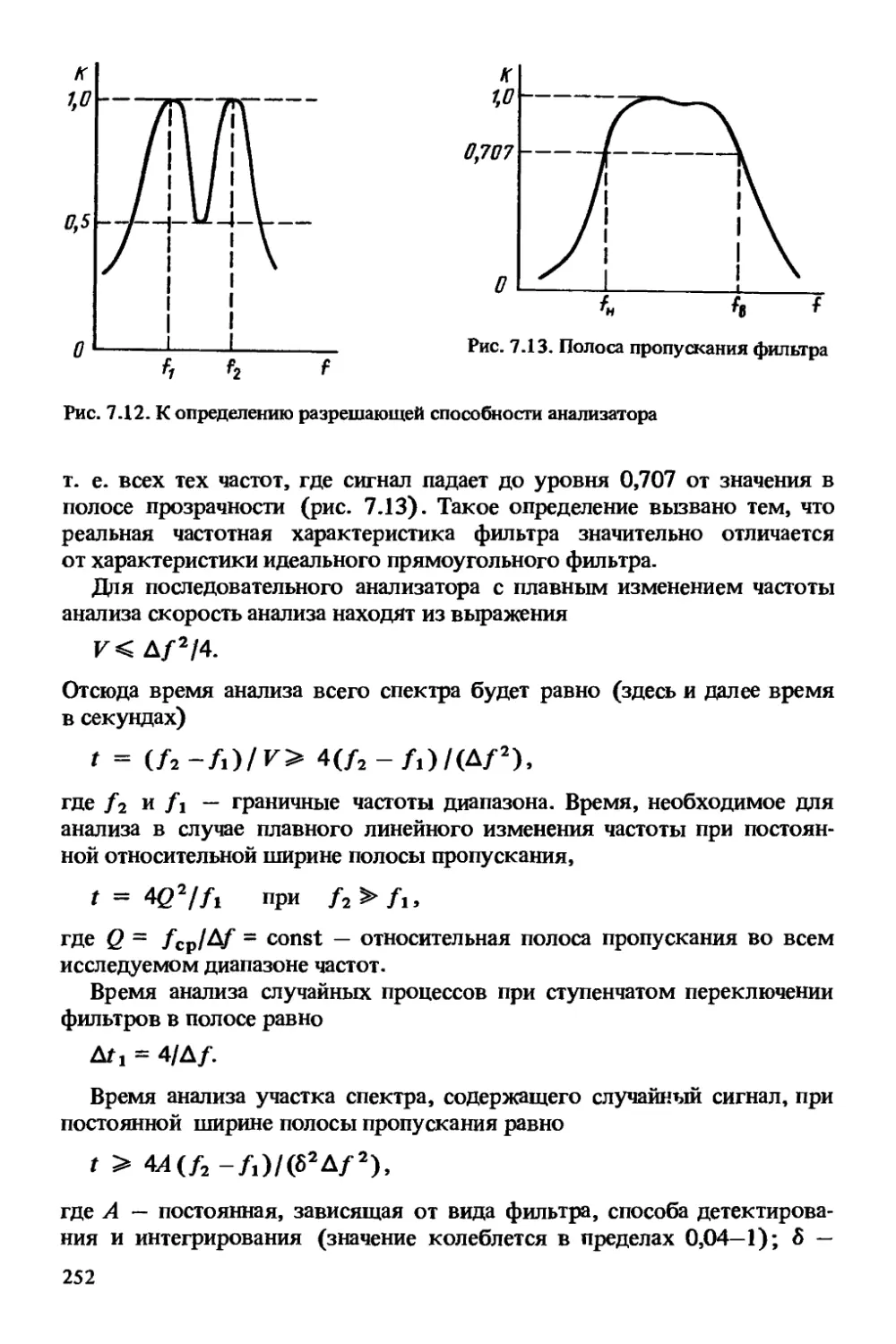
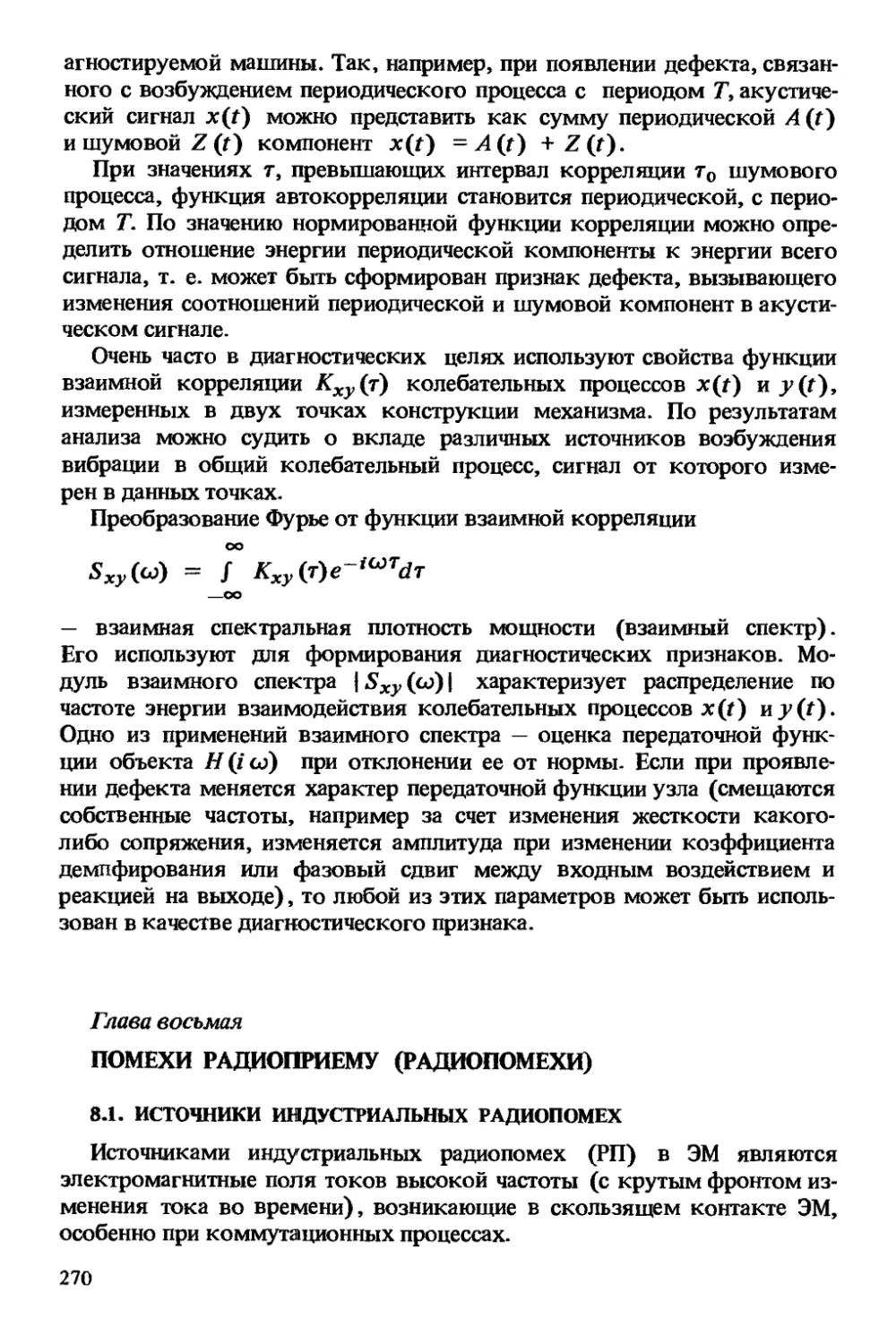
Для определения спектрального состава кривых напряжения и тока исследуются их энергетические спектры (спектральный состав тока определяется по падению напряжения, мВ, на безындуктивных шунтах) путем частотного анализа формы кривой. Методика частотного анализа и технические характеристики анализаторов частот приведены в § 7.4.
Для измерения частоты несинусоидального периодического сигнала следует применять электронные частотомеры (со встроенным магнитоэлектрическим механизмом) и электронно-счетные (цифровые) частотомеры в режиме импульсных измерений, при условии, что измеряемый сигнал имеет не более двух экстремумов за период. Сведения о частотомерах приведены в п. 1.7.4.
1.3.5. Измерения в цепях пульсирующего тока. Пульсирующий ток (напряжение) содержит постоянную составляющую — среднее значение этих величин — и периодическую переменную составляющую, которая может быть представлена в виде ряда гармоник.
Такое напряжение и ток имеют место в коллекторных двигателях постоянного тока, работающих в схемах с выпрямителями или широтно-импульсными регуляторами.
Измерение постоянной составляющей проводится приборами постоянного тока (магнитоэлектрической системы).
Измерение напряжения и тока переменной составляющей проводится электронными вольтметрами с конденсаторным входом (напряжение) и электронными милливольтметрами на безындуктивных шунтах (ток).
Переменная составляющая тока может быть измерена амперметром через трансформатор тока с разомкнутым сердечником или воздушным, в которых постоянная составляющая не вызывает насыщения магнитной цепи.
Для определения гармонического состава измерения проводятся с помощью электронных анализаторов гармоник. Для измерения мощности переменной составляющей применяют электронные вольтметры и ваттметры, в том числе малокосинусные.
В установках большой мощности для измерения могут использоваться малокосинусные ваттметры, токовые обмотки которых включаются в цепь пульсирующего тока, а в цепь обмотки напряжения включается блокирующий конденсатор. Во избежание появления дополнительной погрешности напряжение на нем должно быть существенно меньше напряжения на обмотке.
1.4. ИЗМЕРЕНИЕ ПАРАМЕТРОВ ПЕРЕХОДНЫХ ПРОЦЕССОВ
1.4.1. Измерение и запись изменяющихся во времени величин*. В процессе таких исследований возникает динамическая погрешность** измерения РдИН, приводящая к тому, что зафиксированные прибором мгновенные значения исследуемой величины Ак отличаются от действительных А [1.4]:
Рдин = (А — А1Л)/АК. (1-6)
Возникновение рдин связано с наличием инерционного элемента — механической массы — в приборах, содержащих механические узлы и индуктивности в электрических цепях, приводящих к запаздыванию показаний, а также с возможностью появления колебательного процесса, поскольку наряду с инерционными, прибор содержит упругие элементы. Колебательный процесс также приводит к запаздыванию измерений, так как для его затухания требуется определенное время — время успокоения ty9 в течение которого динамическая ошибка больше допустимой.
* Периодическое изменение какой-либо величины во времени с постоянной частотой, амплитудой, фазой и формой кривой следует рассматривать как стационарный процесс. Для определения параметров такого процесса (гармонического состава, частот и амплитуд отдельных гармонических составляющих) не требуется записывающей аппаратуры.
** Другими видами погрешностей измерения мы в данном случае пренебрегаем.
Для получения оптимального времени затухания в приборах предусматриваются демпфирующие элементы, поглощающие энергию колебаний в механических системах; в электрических системах энергия колебаний рассеивается в активных сопротивлениях.
Для оценки динамической ошибки используются два метода:
по методу единичного импульса исследуется изменение показаний прибора при мгновенном приложении к нему измеряемой величины с постоянным значением, принимаемым за 1;
по другому методу исследуются показания прибора при воздействии на него синусоидально изменяющейся во времени измеряемой величины в диапазоне частот, в котором может работать прибор.
Результаты исследования изображаются в виде амплитудно-частотных (АЧХ) и фазочастотных (ФЧХ) характеристик.
Этот метод экспериментального исследования, ’ базирующийся на принципах гармонического анализа, широко применяется для исследования динамики в различных отраслях техники (для измерения, регулирования), а также для определения параметров ЭМ при неуста-новившихся режимах (см., например, ГОСТ 10169-77).
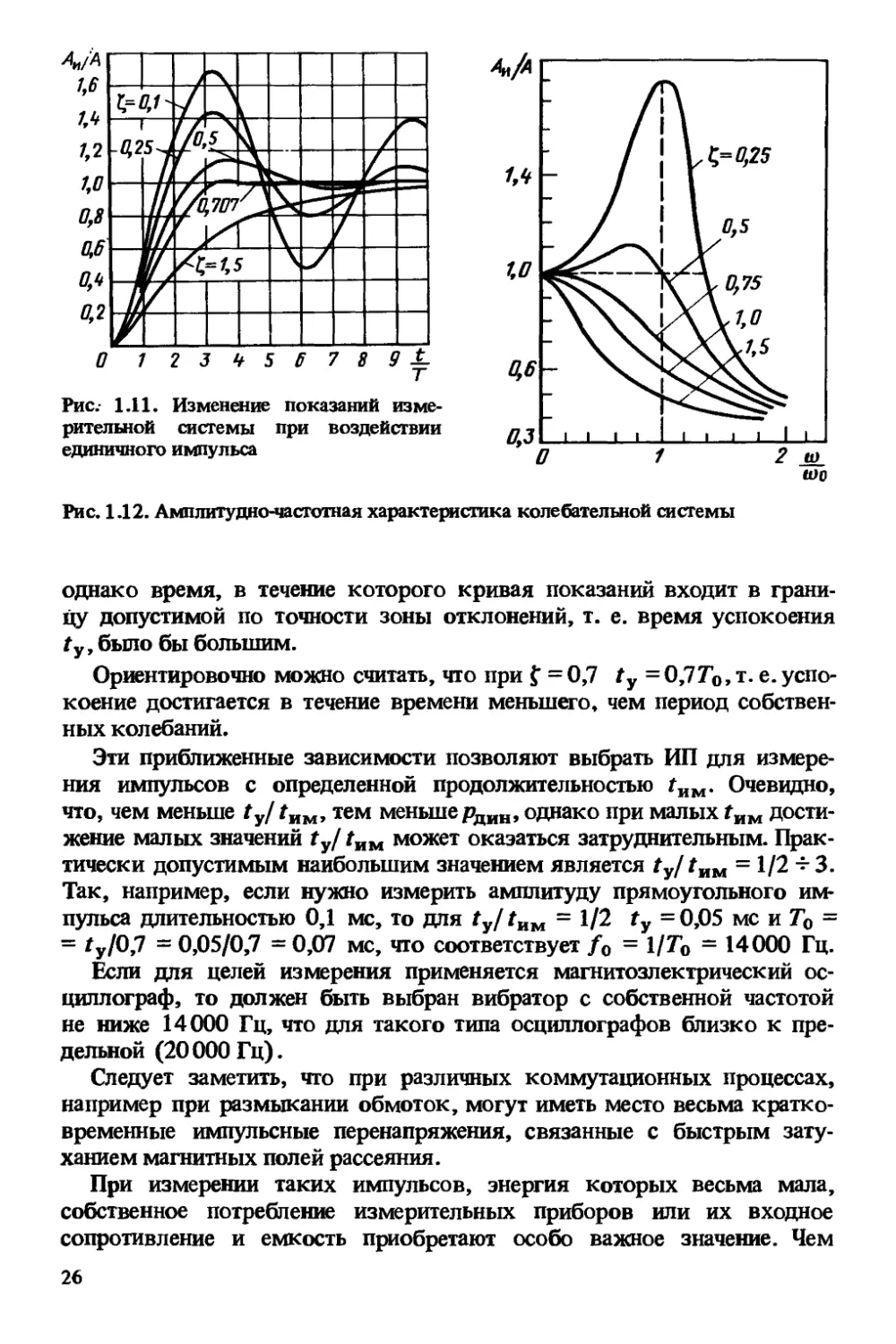
1.4.2. Метод единичного импульса. При воздействии на прибор единичного импульса измеряемой величины его показания будут изменяться во времени по кривым рис. 1.11.
На рис. 1.11 величина Т = Г0/2тг, где Го — период собственных колебаний прибора при отсутствии затухания; собственная частота /0 = = 1/Г0; f — относительный коэффициент затухания, предельные значения которого 0 — незатухающие колебания и 1 — критическое затухание, при этом отклонения подвижной системы прибора достигают установившегося значения апериодически по экспоненциальному закону.
Величина £*, определяющая скорость затухания колебательных процессов, может быть подсчитана через определяемый опытным путем логарифмический декремент колебаний X из уравнения (для f < < 1)
X = Ь(4,Л4лм) = я2Гл/1-Г2^ (1.7)
где Ли+1 — амплитуды двух следующих друг за другом колебаний.
За время успокоения ty принимается обычно время, в течение которого динамическая погрешность уменьшается до значения + 5%. Как видно из рис. 1.11, наименьшее tу достигается при f - 0,7.
Если бы прибор имел критическое успокоение f = 1, то его показания апериодически приближались бы к установившемуся значению,
* Величина 2f, входящая во многие формулы, называется иногда показателем затухания. Вместо f часто используется обозначение Z).
Рис.- 1.11. Изменение показаний измерительной системы при воздействии единичного импульса
Рис. 1.12. Амплитудно-частотная характеристика колебательной системы
однако время, в течение которого кривая показаний входит в границу допустимой по точности зоны отклонений, т. е. время успокоения ?у, было бы большим.
Ориентировочно можно считать, что при f = 0,7 ty = 0,7То, т. е. успокоение достигается в течение времени меньшего, чем период собственных колебаний.
Эти приближенные зависимости позволяют выбрать ИП для измерения импульсов с определенной продолжительностью Гим. Очевидно, что, чем меньше ty/ fHM, тем меньше рдин, однако при малых Гим достижение малых значений Гу/ может оказаться затруднительным. Практически допустимым наибольшим значением является fy/fHM = 1/2^3. Так, например, если нужно измерить амплитуду прямоугольного импульса длительностью 0,1 мс, то для ty/ ГИм = 1/2 ty = 0,05 мс и То = = /у/0,7 = 0,05/0,7 = 0,07 мс, что соответствует /0 = 1/?о ~ 14000 Гц.
Если для целей измерения применяется магнитоэлектрический осциллограф, то должен быть выбран вибратор с собственной частотой не ниже 14000 Гц, что для такого типа осциллографов близко к предельной (20000 Гц).
Следует заметить, что при различных коммутационных процессах, например при размыкании обмоток, могут иметь место весьма кратковременные импульсные перенапряжения, связанные с быстрым затуханием магнитных полей рассеяния.
При измерении таких импульсов, энергия которых весьма мала, собственное потребление измерительных приборов или их входное сопротивление и емкость приобретают особо важное значение. Чем 26
ниже это сопротивление, тем меньше будет измеренная величина импульса.
В качестве ориентировочной рекомендации можно считать, что входное сопротивление прибора должно быть не менее чем в 100 раз больше сопротивления обмотки, на которой измеряется перенапряжение. В этих случаях целесообразно применение электронных осциллографов.
1.4.3. Метод синусоидального воздействия. Если измеряемая величина изменяется во времени по синусоидальному закону, то подвижная система измерительного прибора также будет совершать синусоидальные колебания с этой частотой.
При этом, однако, в зависимости от отношения этой частоты к частоте собственных колебаний ///0 и от коэффициента затухания f будут иметь место различные отношения между амплитудным значением величины, измеренной прибором Ли, и действительным амплитудным значением измеряемой величины А.
Кривая AJ А = Ф(//fq) называется амплитудно-частотной характеристикой АЧХ. Семейство АЧХ для различных f приведено на рис. 1.12, где вместо ///0 дано равное ему отношение 60 =2ir/.
Когда измеряемая величина постоянна или изменяется очень медленно, flfG < 1, можно считать, что AJ А =1; рдин =0.
Однако при приближении к резонансу при///0 = 1 отношение AJ А существенно изменяется. При резонансе AJ A = l/2f, откуда следует другая интерпретация коэффициента затухания как величины, определяющей степень увеличения показаний при резонансе.
Очевидно, что для диапазона частот измеряемой величины, лежащего вблизи резонанса, может иметь место недопустимо высокое значение Рдин-
При f = 0,7 рдин = ± 5% может быть выдержана в диапазоне частот до f - 0,5/о, а при f = 0,6 даже до 0,75/о. Практически при оптимальных значениях f = 0,6 * 0,7 можно использовать частотный диапазон, не превышающий 0,5/о.
При этом следует иметь в виду, что отношение /0 2/ должно со-
блюдаться для гармонической составляющей с наибольшей частотой /и. Это обстоятельство весьма важно при исследовании процессов с широким частотным спектром, например при исследовании вибрации и шума ЭМ. На его основе рекомендуются значения 10со.
При изменении отношения ///0 меняется не только отношение AJ А, но и угол сдвига фазы ip между синусоидально изменяющейся величиной, воздействующей на прибор и измеренной (записанной) прибором. Зависимость ip = Ф* (///0) называется фазочастотной характеристикой ФЧХ. Угол ip зависит также от f.
Для неискаженного воспроизведения исследуемого процесса нужно, чтобы фазовый сдвиг отдельных гармонических составляющих был пропорционален частоте.
Наименьшая фазовая погрешность может быть получена в том случае, когда зависимость Ф* (///0) по возможности приближается к прямой, что соответствует значению f = 0,6 -г 0,7.
Разумеется, и при оптимальных значениях f имеет место сдвиг фаз между результатом измерения и исследуемой периодической величиной. Поэтому при определении сдвига фаз между двумя исследуемыми величинами их регистрация должна быть сделана с помощью приборов, имеющих одинаковые значения f.
Следует иметь в виду, что хотя для синусоидально изменяющихся величин можно говорить раздельно об амплитудной и фазовой погрешностях, в общем случае при переходных процессах разность мгновенных значений результатов измерения и действительной кривой определяется обеими погрешностями.
Чем меньше отношение ///0, тем меньше амплитудная и фазовая погрешности. Однако это не означает, что всегда следует выбирать приборы с предельно высокой собственной частотой, так как такие приборы менее чувствительны и в некоторых случаях неудобны в том отношении, что хорошо воспроизводят не только исследуемую величину, но и помехи, имеющие значительно более высокую частоту, чем исследуемая величина.
Как видно из АЧХ, измерительный прибор является своего рода фильтром, поскольку частоты, лежащие выше /0, регистрируются с уменьшением амплитуды. Это обстоятельство используется, например, при записи относительно медленных процессов изменения скорости вращения, где в качестве датчика применен коллекторный тахогенератор. Выбор для такой записи приборов с низкой собственной частотой или с большим коэффициентом затухания позволяет избежать ухудшения записи из-за ’’размыва” линий, вызванного зубцовыми и коллекторными пульсациями напряжения тахогенератора, частота которых относительно велика.
Уменьшение влияния высокочастотных помех может достигаться также за счет применения внешних (для приборов) фильтров.
В наиболее точных приборах, и в особенности в приборах, которые должны работать в большом диапазоне частот, например при исследовании вибрации, имеются обычно устройства, позволяющие регулировать коэффициент затухания таким образом, чтобы получить наименьшую амплитудную погрешность для определенного интервала частот или при наибольшей допустимой погрешности поднять чувствительность. Регулировка затухания позволяет отстроиться от помех высокой частоты, ухудшающих запись.
Оценка рдин с помощью АЧХ и ФЧХ может производиться как для всей измерительной системы, так и для отдельных ее элементов: трансформаторов тока и напряжения, шунтов, различных измерительных преобразователей, в частности пьезопреобраэователей для измерения вибрационных параметров.
При осциллографировании токов, в особенности токов КЗ большой величины с помощью шунтов, источником погрешности может быть индуктивность шунта. В этом случае для больших токов применяются либо бифилярные шунты [0.9], либо шунты с пониженной индуктивностью, состоящие из параллельных проводников, симметрично расположенных на значительном расстоянии от оси шунта.
1.5. ГРАФИЧЕСКАЯ ОБРАБОТКА
РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ
Для получения представления о характере исследуемого процесса, результаты измерения подвергают графической обработке — построению кривой, изображающей взаимозависимость двух исследуемых величин X, Y или (если число этих величин больше двух) семейства таких кривых.
К числу зависимостей, построение которых проводится систематически, относятся, например, кривые намагничивания, нагрева и охлаждения, потерь, выбега и т. п. Построение таких кривых может быть полностью автоматизировано с помощью координатных самописцев (см. § 1.7).
Если проводится вычерчивание этих кривых, то в случаях, когда добиться достаточно полного совпадения экспериментально определенных точек с вычерченной кривой нельзя, лучшим считается тот вариант кривой, который имеет минимальную сумму квадратов отклонений для равного числа абсцисс указанных точек.
Следует отметить, что при графической обработке результатов измерений происходит естественная корректировка, при которой промахи и экстремальные случайные погрешности выявляются в виде точек, выпадающих из кривой.
Кроме текущей графической обработки результатов испытаний периодически возникает задача обобщения результатов экспериментальных работ. С этой целью производится подбор аналитических функций, изображение которых наиболее близко совпадает с определяемым экспериментально.
Установление таких аппроксимирующих функций (АФ) обеспечивает возможность повышения точности существующих и создание новых методов расчета ЭМ, а также более четкого представления физической природы исследуемого процесса.
При известном навыке АФ может быть подобрана путем проб. Существуют, однако, приемы, облегчающие ее нахождение. В их основе лежит ’’спрямление” АФ за счет преобразования величин X, Y или функции в целом, приводящего ее график к прямой линии.
Если подстановка в преобразованную АФ экспериментально найденных значений X и Y приводит ее графическое изображение к пря
мой линии, то тем самым подтверждает достоверность предложенной АФ.
В качестве примера можно привести АФ вида
Y = А/Х + В, (1.8)
подстановкой вместо X его преобразованного значения = 1/Х графическое изображение приводится к прямой Y = АХ* + В.
Другим примером может служить АФ, используемая для определения зависимости потерь в стали рс от частоты перемагничивания f (см. гл. 4):
Pc=Cif+C2f2. (1.9)
Разделив обе части (1.9) на /, получим преобразованную линейную функцию
Pdf = G + С2/. (1.10)
Если построенное по опытным данным графическое изображение функции (1.10) является прямой линией, то АФ по (1.9) является достоверной.
Спрямление графиков позволяет существенно уточнить экстраполяцию и применять ее для определения коэффициентов уравнения.
Так, в предыдущем примере при экстраполяции прямой (1.10) до оси ординат (f = 0) она отсекает на этой оси величину С19 что позволяет затем определить из (1.10) величину С2.
Для широкого круга задач может использоваться степенная АФ вида
Y = АХп + В. (1.11)
Графическое изображение этой функции для частного случая при А = 1, В = 0 приведено на рис. 1.13. При п > 1 имеет место параболическая кривая 7; при 0 < п < 1 кривые 2, 3, при п < 0 гиперболическая кривая 4.
Спрямление функции достигается логарифмированием:
lg Y = nlgX. (1.12)
Показатель степени п определяется как tg угла наклона прямой, наиболее близко совпадающей с построенной по опытным данным. Если для построения (1.12) применить логарифмическую бумагу, то вычисление логарифма не потребуется.
Другой, часто используемой для описания переходных процессов АФ, является экспонента
Y = Ae~t/T, (1.13)
ИЛИ
Y = А(1
(1.14)
Рис. 1.13. Графическое изображение степенной функции
Рис. 1.14. Экспоненциальные кривые
где t — время от начала процесса, а Г- постоянная времени, определяющая скорость изменения исследуемого процесса. Изображение этой функции для случая А = 1 приведено на рис. 1.14. Отношение У/А для кривой 1 рис. 1.14 при ti — Т составляет 36,8%; t2 — 'IT — 13,5%, t3 = = ЗТ — 5% и U,б = 4,6Т — 1%. Отношения У/ А для кривой 2 получаются вычитанием приведенных выше значений из 100%..
Это обстоятельство позволяет определить Т для АФ из формулы
T = [(G+^/2 + ^/3)]/3, (1.15)
где G, t2, t3 — значения t опытной кривой рис. 1.14, соответствующие приведенным выше отношениям У/А.
Из рис. 1.14 видно, что значение Т равно отрезку, отсекаемому касательной к кривым 1 и 2 в точке t = 0 на прямой, проведенной через точку У = А параллельно оси абсцисс или на этой оси. Такой метод определения Т имеет, однако, низкую точность из-за возможного отклонения угла наклона кривой в начале координат.
Спрямление функции (1.13) проводится логарифмированием
1g У = lg>4 - 0,43 Г/У,
откуда
1g Л =lgy + 0,43 Г/ Г. (1.16)
Экстраполяция функции (1.16) на момент времени t =0 позволяет уточнить начальное значение А величины У. Она широко используется при определении параметров переходных процессов, определении температуры обмоток по кривым остывания (гл. 5) и в ряде других случаев.
Lg A A
Рис. 1.15. Экстраполяция кривой 1 рис. 1.14 на начальный момент времени t = О
iy ^2 ^3 t
График функции (1.16) приведен на рис. 1.15. Построение этого графика на полулогарифмической бумаге (масштаб оси t линейный, оси Y — логарифмический) позволяет избежать вычисления логарифмического значения.
1-6. СТАТИСТИЧЕСКИЕ ИССЛЕДОВАНИЯ
РЕЗУЛЬТАТОВ ИСПЫТАНИЯ
Влияние ряда неконтролируемых или неполностью контролируемых факторов, например ступенчатый контроль размеров по предельным калибрам при производстве ЭМ, приводит к разбросу значений одних и тех же параметров ЭМ одной партии или, иначе говоря, разбросу отклонений от их среднего значения. Те ЭМ, для которых эти отклонения превышают допуск Д, являются браком. Разброс характеризует стабильность производственного процесса и качество технологии.
При выпуске большого числа однотипных ЭМ при неизменной конструкции и технологии производства обработка результатов контрольных испытаний методами математической статистики [1.5; 1.6] позволяет установить число изделий, отнесенное к общему числу изделий партии, для которых могут иметь место определенные отклонения, параметра, и установить требования к качеству технологии, обеспечивающие минимально возможный уровень брака. Кроме того, эти методы позволяют установить минимально необходимый объем контроля, в том числе возможность перехода от сплошного к выборочному, и снизить, тем самым, трудоемкость изделий.
При большом числе изделий (п > 30) отклонение какого-либо контролируемого параметра от среднего значения а = А - Лср может рассматриваться как случайная величина.
Случайные величины характеризуются следующими признаками: средним значением
Лср = (Ai+ А2+ ... + Ап)/п;
(1-17)
среднеквадратическим отклонением
О = V[(A -Лср)2 + (Л2-Лср)2 + ...
~ • ••+ (А„- Лср)2]/(и - 1)’, (1.18)
оценивающим вариацию значений параметра Л;
законом распределения вероятностей (мы будем в дальнейшем иметь в виду дифференциальную форму этого распределения — закон распределения плотности вероятности), связывающим значение отклонения и вероятность его появления.
Для того чтобы установить, каким законом описывается в конкретном случае совокупность случайных величин, на основе результатов испытаний строится так называемая гистограмма (рис. 1.16), на которой по оси X откладываются значения параметра (на рисунке 7Х), а по оси Y — количество изделий, у которых эти значения имели место, отнесенное к общему числу испытанных изделий (вероятность). Отклонения группируются в определенные интервалы, и гистограмма проводится через точки среднего отклонения интервала.
Выбор интервалов требует определенных навыков: при слишком узких интервалах может появиться зубчатость (рис. 1.16,6), при слишком широких — искажение характера кривой.
В большом числе практических задач кривые распределения удовлетворяют закону нормального распределения [1.5], которое имеет место при воздействии на исследуемую величину ряда взаимно независимых факторов.
Для подобного распределения в табл. 1.2 приведены значения нормированных относительных отклонений t =а/о для различного числа испытанных изделий п и различной вероятности 1 — а того факта, что
Рис. 1.16. Полигон частостей (гистограмма) токов холостого хода АД:
w — количество двигателей, отнесенное к общему числу испытанных (143 шт.); а — правильный; б - неправильный выбор интервала значений тока холостого хода
Таблица 1.2
1 -а
п 0,5 0,8 0,9 0,95 0,98 0,99 0,999
2 1 3,08 6,31 12,71 31,8 63,7 636
5 0,718 1,44 1,94 2,45 3,14 3,7 5,96
10 0,697 136 1,80 2,2 2,75 3,11 4,49
20 0,686 1,32 1,72 2,08 2,52 2,83 3,82
60 0,679 1,296 1,67 2 2,39 2,66 3,36
(HP) 0,674 1,282 1.65 1,96 2,33 2,58 3,29
ря, что отклонения, равные или большие, могут иметь место в числе изделий, не превышающем ап.
При числе испытаний п -+ 00 (практически при п > 30) имеет место нормальный закон распределения (нормальное распределение HP), для которого значения t = 1, 2, 3 соответствуют вероятностям 0,638; 0,955; 0,997.
В последнем случае, если рассматривать отклонение t = 3, а =3о как допустимое, т. е. Д = Зо, то брак (число изделий с отклонением а > > Зо) составит а = 1 — 0,997 = 3/1000 или три изделия на 1000. Это так называемое правило "трех сигм" широко используется в технике. Очевидно, что условием для технологического обеспечения такого уровня брака будет следующее:
о < Д/3. (1.19)
В табл. 1.2 приведены данные и для п < 20 (распределение Стьюден-та [1.5]). Для таких малых партий (выборок) в качестве случайной величины, оцениваемой методами теории вероятности, выбираются не отдельные отклонения параметра какого-либо изделия, а среднее значение этого параметра Лсрд малой партии, которое может иметь различные значения от партии к партии.
Для такой оценки малых партий необходимо знать величину ЛСР1Г для достаточно большого числа этих партий (т. е. среднее генеральной совокупности) или для выпускавшихся ранее по той же технологии партий достаточного объема.
Закономерности, указанные выше, справедливы для малых партий с заменой в них величины А на Лср z , Лср на ЛСР1Г и среднеквадратического отклоненйа о на оср = o/\fn.
Как видно из табл. 1.2, при п < 5 доверительные интервалы 2г, в особенности для высоких 1 — о, резко возрастают. Применение методов теории вероятности, основанной на законе больших чисел, теряет в этом случае смысл.
Пример применения методов математической статистики при испытании АД приведен в гл. 3.
1.7. КРАТКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
В практике испытаний электрических машин наряду с аналоговыми электроизмерительными (ЭИ) приборами все шире используются электронные аналоговые и цифровые приборы, как радиотехнические, так и входящие в состав агрегатного комплекса средств электроизмерительной техники (АСЭТ), информационно-измерительные системы (ИИС) и измерительно-вычислительные комплексы (ИВК). Применение ИИС и ИВК рассматривается в гл. 9.
1.7.1. Общие сведения об электроизмерительных приборах. Основным стандартом, нормирующим метрологические характеристики ЭИ приборов, является ГОСТ 22261-82 (СТ СЭВ 3206-81) ’’Средства измерений электрических величин. Общие технические условия”, который устанавливает общие для всех средств измерений общепромышленного назначения нормальные и рабочие условия применения; метрологические характеристики, методы их контроля и определения; требования к конструкции, надежности и безопасности; правила приемки, маркировки, упаковки, транспортировки и хранения; гарантии изготовителя.
Основными метрологическими характеристиками любого ЭИ прибора и устройства являются класс точности, или предел допускаемой основной погрешности, или предел допускаемой систематической составляющей и допускаемого отклонения случайной составляющей погрешности. Для большинства типов приборов в качестве основной характеристики (ГОСТ 8.401-80) устанавливается класс точности. Класс точности является обобщенной характеристикой ЭИ прибора, определяющей пределы допускаемых основных и дополнительных погрешностей.
Для измерений при испытаниях ЭМ применяются лабораторные и переносные ЭИ приборы с классами точности 0,1; 0,2; 0,5; 1; 1,5 и 2.
Основная погрешность — это погрешность средства измерения, используемого в нормальных условиях эксплуатации: температуре окружающего воздуха (20 ± 0,5), (20 + 1), (20 ± 2), (20 ± 5) °C; относительной влажности воздуха (65 ± 15)%; атмосферном давлении (100 ± 4) кПа, или (750 ± 30) мм рт. ст.; напряжении питающей сети (220 ± 4,4) В для сети с частотой 50 Гц, (220 ± 4,4) или (115 ± ± 2,5) В для сети с частотой 400 Гц; частоте питающей сети (50 ± ± 0,2) или (400 ±12) Гц.
К метрологическим характеристикам также относятся: предел допускаемой погрешности в интервале значений влияющей величины; предел дополнительной погрешности, обусловленный изменением влияющей величины или функции воздействия влияющих величин в пределах рабочей области. При линейной зависимости дополнительных погрешностей от изменения влияющей величины устанавливается
отношение приращения погрешности к изменению влияющей величины.
Пределы допускаемых основных и дополнительных погрешностей устанавливаются в виде абсолютных погрешностей Д, выражаемых в тех же единицах, что и измеряемая величина; относительных погрешностей 8 и приведенных погрешностей у в процентах.
Следует отметить, что измерительные приборы характеризуются постоянством абсолютной погрешности. Поэтому относительная погрешность тем больше, чем меньше измеряемая величина по сравнению с предельной.
Абсолютные, относительные и приведенные погрешности определяются соответственно по формулам:
Д = ±а . Д = ± (а + ЬХ);
8 = + 100Д/Х, 8 = +[с + d(X*JX - 1)];
7 = ± ЮОД/А^, 7 = -1- (а + />А)100,
XN
где а, Ь, с, d — постоянные размерные или безразмерные величины; X — мщуяь измеряемой или влияющей величины; Хк — конечное значение диапазона измерения; Х^ — нормирующее значение измеряемой величины.
Предел относительной допускаемой погрешности может быть выражен следующей формулой:
8 = ±А lg(l + Д/Х),
где А = 10 при измерении мощности и других энергетических величин; А = 20 при измерении напряжения, тока и других силовых величин.
Нормирующее значение XN принимается равным:
конечному значению диапазона измерения, если нулевая отметка находится на краю шкалы или вне шкалы, и арифметической сумме конечных значений диапазона измерений, если нулевая отметка находится внутри шкалы - для приборов с равномерной или степенной шкалой;
номинальному значению — для приборов, предназначенных измерять такие величины, у которых установлено это номинальное значение;
диапазону показаний — для приборов с логарифмической, гиперболической или другой существенно неравномерной шкалой.
Важной характеристикой приборов являются вариации отсчетов и значения невозвращения указателя к нулевой отметке. Эти характеристики нормируются в зависимости от класса точности прибора. Для электромагнитных и ферродинамических приборов классов 0,05 и 0,1, самопишущих приборов с чернильной записью, приборов, устойчивых к механическим воздействиям, миниатюрных и малогабаритных при-36
боров допускается полуторакратное значение основной погрешности. Для всех остальных приборов вариация не должна превышать абсолютного значения основной погрешности.
Невозвращение указателя к нулевой отметке от наиболее удаленной точки шкалы для приборов класса 0,05 и приборов, указанных выше, не должно превышать, мм,
Д = 0,01К£,
где К — численное значение класса точности прибора; L — длина диапазона показаний, мм.
Для остальных приборов допускается половина указанного значения.
К дополнительным погрешностям относятся: температурная погрешность, отклонение положения прибора от его рабочего положения, влияние внешнего магнитного или электрического полей. Изменения показаний отдельных видов приборов могут происходить под влиянием других факторов.
ГОСТ 8.009-84 ’’Государственная система единства измерений. Нормируемые метрологические характеристики средств измерений” устанавливает номенклатуру нормируемых метрологических характеристик средств измерений для оценки погрешностей измерений в известных рабочих условиях их эксплуатации. Стандарт определяет метрологические характеристики, способы их нормирования и формы представления, метрологические характеристики, подлежащие нормированию для средств измерений.
Маркировка приборов и вспомогательных частей выполняется по ГОСТ 23217-78 и СТ СЭВ 1052-78. Каждый прибор имеет на лицевой стороне, на корпусе или у зажимов следующие данные:
обозначения единицы измеряемой величины или наименование прибора (например, А — ампер, V — вольт, W — ватт, Hz — герц и др.);
класс прибора;
знак государственного реестра;
обозначения рода тока и числа фаз (например,----- — постоянный
ток, ~ — переменный однофазный ток, — постоянный и переменный ток; S — трехфазный ток и т.п.);
обозначения системы прибора и вспомогательной части, с которой градуирован прибор (например, [ — магнитоэлектрический при-
бор с подвижной рамкой,
— магнитоэлектрический логометр
с подвижной рамкой,
— электромагнитный прибор,
ф -
электродинамический прибор и др.);
обозначения символов по МЭК-51;
обозначения степени защищенности от внешних электрических и магнитных полей ( ' — электростатический экран, ~
магнитный экран);
обозначение рабочего положения, если это положение имеет значение (например, | — вертикальное положение шкалы, | | —
горизонтальное положение шкалы и др.);
обозначение испытательного напряжения изоляции измерительной цепи по отношению к корпусу (например, “ измеРительная
часть изолирована от корпуса и испытана напряжением 2 кВ, ~
прибор или вспомогательная часть под высоким напряжением и т. д.);
товарный знак завода-поставщика;
обозначение типа прибора;
год выпуска и заводской номер.
Кроме перечисленных обозначений приборы и вспомогательные части могут иметь следующие обозначения: номинальную частоту, если она отличается от 50 Гц, или номинальную область частот; номинальный ток, напряжение или коэффициент мощности; ток или напряжение, соответствующие конечному значению шкалы; номинальные значения тока и падения напряжения на шунтах; сопротивления и номинальные токи добавочных сопротивлений; коэффициенты трансформации измерительных трансформаторов; схема подключения прибора или вспомогательной части.
1.7.2. Лабораторные и переносные приборы. Диапазоны измерений электрических величин лабораторными и переносными приборами составляют: напряжения постоянного тока 0,5 • 1СГ6 — 105 В; напряжения переменного тока 1 • 10~3— 103 В; постоянного тока 0,5 • 10-3 — 102 А; переменного тока 1 • 10-3 — 50 А; мощности однофазного переменного тока: напряжение 0,1—600 В, ток 0,01—10 А, при коэффициенте мощности cos^ = 0,1—1; мощности трехфазного переменного тока: напряжение 25—300 В, ток 0,075—10 А при cos^ = 1; сопротивления от 100 мкОм до 200 МОм; емкости 0,03—10 мкФ; частотные диапазоны отдельных приборов достигают десятков мегагерц.
В лабораторных и переносных приборах используются в основном измерительные механизмы следующих систем: магнитоэлектрической, 38
электродинамической, ферродинамической, электромагнитной, электростатической, выпрямительной и термоэлектрической- Приборы выпрямительной и термоэлектрической систем строятся на основе измерительных механизмов магнитоэлектрической системы.
1.7.3. Приборы для измерения постоянного и переменного токов, напряжения и мощности. Для измерения постоянного тока и напряжения используются приборы магнитоэлектрической системы, приборы электродинамической системы используются для измерении в цепях постоянного и переменного токов. В электродинамических системах различают две разновидности приборов: со сталью и без стали в измерительном механизме. Приборы без стали носят название электродинамических, а приборы со сталью — ферродинамических. Принцип действия этих систем одинаков, но применение стали позволило увеличить вращающий момент подвижной системы, то есть увеличить ее чувствительность. В дальнейшем термин ’’электродинамический” будет относиться к обеим разновидностям систем.
Измерительные механизмы амперметров и вольтметров принципиально не различаются. В зависимости от назначения прибора меняется его измерительная цепь. Амперметр включается в цепь непосредственно или при помощи шунта. В вольтметре последовательно с измерительным механизмом включается добавочный резистор. Собственное потребление мощности магнитоэлектрических приборов относительно невелико. Для вольтметров потребляемая мощность определяется по формуле
~ ^НОМ ^НОМ’
где 1НОм — ТОК’ соответствующий номинальному показанию вольтметра; Цюм “ номинальное напряжение вольтметра.
Таким образом, например, для вольтметра на 150 В при токе 0,01 А потребление мощности составляет 1,5 бт. Для амперметров потребляемая мощность определяется по формуле
~ Люменом?
гДе 1НОМ — номинальный ток; Цтом ~ падение напряжения на зажимах прибора при номинальном токе.
Обычно <7НОМ находится в пределах 45—75 мВ, следовательно потребляемая мощность в приборе с шунтом на 100 А составляет 4,5—7,5 Вт. Мощность, потребляемая электродинамическими приборами, относительно велика вследствие значительной МДС неподвижной катушки, необходимой для создания достаточного вращающего момента. Потребляемая мощность в амперметрах достигает примерно 5—10 Вт, а в вольтметрах с пределами измерения до 300 В примерно 7—15 Вт. Потребление мощности в приборе вместе с добавочным резистором или шунтом пропорционально при но мин ал ь-
ном значении измеряемой величины номинальному напряжению вольтметра и номинальному току амперметра.
Амперметры непосредственного включения имеют встроенный внутри прибора шунт и позволяют измерять ток от долей микроампера до 100 А. Применение наружных шунтов значительно расширяет пределы измерения тока до 6 кА и более.
Вольтметры, включаемые в цепь непосредственно, имеют встроенные в прибор добавочные резисторы и позволяют измерять напряжение от 45 мВ до 600 В. С отдельными добавочными резисторами можно измерять напряжение 15 кВ и более.
Для измерения мощности в цепях постоянного и переменного токов применяют ваттметры, в которых используют электродинамические и ферродинамические измерительные механизмы. В приборах высокого класса точности 0,1—0,5 применяется электродинамическая система. Эти ваттметры используются для точных измерений мощности постоянного и переменного токов на промышленной и повышенной частотах до 5000 Гц.
Электронные аналоговые и цифровые ЭИ приборы потребляют очень малую мощность от измеряемой цепи и имеют еще ряд преимуществ. Рассмотрим некоторые типы приборов.
Вольтметр типа Ф5263 с приставкой типа Ф5051 — электронный вольтметр, предназначенный для измерений среднеквадратических значений напряжения (совместно с приставкой Ф5О51) и токов в цепях переменного тока при синусоидальной и искаженной формах кривой. Вольтметры этого типа относятся к классу точности 0,5, за исключением тех, которые имеют пределы измерений 1 и 3 мВ; 0,1; 0,3 и 1 А. Эти вольтметры относятся к классу точности 1,0. Минимальное значение измеряемого напряжения 0,2 мВ, максимальное — 300 В; минимальное значение измеряемого тока 0,002 -мА, максимальное 1 А. Нормальная область частот от 50 Гц до 100 кГц, рабочая область от 10 Гц до 10 МГц. Изменение показаний прибора, вызванное изменением коэффициента амплитуды К от 1 до 6, приведено в табл. 1.3, а значение полного входного сопротивления вольтметра на частоте 20 Гц приведено в табл. 1.4. Падение напряжения на
Таблица 1.3
Диапазоны измерений Коэффициент амплитуды Допускаемая погрешность измерений, %
1-300 мВ; 3-100 В 4 ±1,0
1-300 мВ; 3-100 В 6 ±2,0
1 В; 300 В 2 ±1,0
Таблица 1.4
Диапазоны измерений Входное сопротивление, МОм Входная емкость, пФ
0,2—1; 0,6-2; 2-10; 6-30; 20-100; 60-300 мВ; 0,1-1 В 10 50
Остальные диапазоны 100 50
входных зажимах при номинальном токе не превышает 20 мВ для предела 0,1 А и не более 100 мВ для пределов 0,3 и 1 А.
Микроваттметр типа Ф585. Однофазный электронный ваттметр Ф585 предназначен для измерения очень малых мощностей, от 1 нВт до 90 Вт, в цепях переменного тока с синусоидальной и искаженной формой кривой.
Прибор может быть использован для измерения мощности микромашин, определения качества магнитных материалов, определения добротности катушек индуктивности. Нормальная область частот ваттметра от 40 Гц до 20 кГц, рабочая область частот от 20 Гц до 40 кГц. Диапазон входных напряжений от 10 мВ до 300 В, входных токов от 0,1 мА до 3 А.
Входное сопротивление цепи измерения напряжения 10 МОм для диапазонов от 10 мВ до 3 В и более чем 100 МОм для остальных диапазонов. Входная емкость не более 50 пФ. Падение напряжения на зажимах токовой цепи не превышает 30 мВ на всех диапазонах. При искаженной форме кривой входного сигнала гармонические составляющие не должны выходить за пределы рабочего частотного диапазона.
Электронный ваттметр типа Ф4860. Прибор предназначен для измерения активной мощности в однофазных цепях переменного тока. Диапазон измерений мощности от 40 мВ • А до 5000 В • А. Номинальный диапазон частот 45—60 Гц, рабочий диапазон частот 40— 450 Гц. Диапазон входных напряжений от 200 мВ до 1000 В при номинальных конечных значениях поддиапазонов 1; 10; 100 и 1000 В. Диапазон входных токов от 200 мА до 5 А при номинальных конечных значениях поддиапазонов 1 и 5 А. Диапазон коэффициента мощности от 0,6 до 1 при номинальном значении коэффициента мощности 1. Входное сопротивление цепи напряжения ваттметра не менее 100 кОм на поддиапазоне 10 В, не менее 1 МОм на поддиапазонах 1 и 100 В и не менее 10 МОм на поддиапазоне 1000 В. Входная емкость не более 200 пФ. Модуль полного сопротивления токовой цепи ваттметра на частоте (50 ±1) Гц не более 1,5 Ом на поддиапазоне 1 А и не более 0,3 Ом на поддиапазоне 5 А. Предел допус-
касмой погрешности ваттметра при номинальных значениях коэффициента мощности, частоты и входного напряжения не более ± 0,5%, Прибор имеет цифровую индикацию с выводом числового значения измеренной мощности и информацию о коде поддиапазона.
1.7.4. Приборы для измерения частоты. В практике испытаний ЭМ приходится измерять частоты в довольно широком диапазоне примерно от 1 Гц до 60 кГц. Для этих целей применяются как аналоговые электромеханические частотомеры, так и цифровые электронно-счетные частотомеры. Возможности применения частотомеров могут быть расширены за счет различных измерительных преобразователей — для измерения температуры, давления, деформации, числа оборотов, скольжения и других величин.
Для измерения частоты в сетях переменного тока с частотой 50 Гц применяется частотомер типа Д126, а в сетях с частотой 400 или 500 Гц — частотомер Д126/1 ферродинамической системы, класса точности 1,5.
Более совершенными являются частотомеры электронные типа Ф5048 с прибором магнитоэлектрической системы в качестве отсчетного устройства. Частотный диапазон прибора разбит на 21 узкий диапазон измерений со средними частотами от 35 до 5000 Гц. Кроме того, он имеет следующие широкие диапазоны измерений: 0—200; 0— 400; 0-1000; 0-2000; 0-4000; 0-10000; 0-20 000 Гц. Допускаемая погрешность не превышает ± 0,5% разности конечного и начального значений диапазона измерений для узких диапазонов измерений и конечного значения диапазона измерений для широких диапазонов измерений. Диапазон входных напряжений 1—500 В. Входное сопротивление прибора не менее 20 МОм.
Применение при испытаниях ЭМ электронно-счетных частотомеров (ЭСЧ) с цифровой индикацией позволяет с возможно высокой степенью точности проводить измерение частоты и периода электрических колебаний, длительность импульсов, интервал времени, отношение частот двух сигналов, количество электрических импульсов, отклонение частоты от номинального значения. ЭСЧ работают в диапазоне частот от 0,1 Гц до 50 МГц.
Принцип работы ЭСЧ заключается в подсчете числа периодов измеряемых колебаний за определенный промежуток времени. Основными элементами ЭСЧ являются электронный счетчик импульсов (ЭСИ) с запоминающим устройством и системой цифровой индикации; временной селектор; формирующие устройства (ФУ), вырабатывающие нормированные по значению и временным параметрам сигналы; устройство формирования времени счета (УФВС), в состав которого входит блок декадных делителей частоты (ДДЧ), устройство управления, обеспечивающее необходимую синхронизацию работы всех элементов ЭСЧ в различных режимах работы.
Рис. 1.17. Электронно-счетный частотомер, работающий в режиме измерения частоты
В режиме измерения частоты (рис. 1.17) импульсы, вырабатываемые из измеряемого сигнала, поступают через селектор, открытый на время, формируемое сигналом образцовой частоты, на ЭСИ, на цифровом табло которого индицируется среднее значение измеряемой частоты в единицах частоты. Время счета (усреднения) тсч = 1, 10, 100 мс, 1 или 10 с определяется числом ДДЧ.
В режиме измерения периода (рис. 1.18) УФВС вырабатывает импульс длительностью 1 или 10” (п — целое положительное число) периодов входного сигнала, открывающий селектор. Через открытый селектор на ЭСИ от устройства формирования сигнала (УФС) поступают импульсы, сформированные из сигнала образцовой частоты. На цифровом табло ЭСЧ индицируется значение одиночного или усредненного периода в единицах времени (микросекундах, миллисекундах). Коэффициент усреднения 10” определяется числом п делителей, включенных в тракт формирования времени счета.
Погрешность частотомера не превышает значения нестабильности образцовой частоты внутреннего генератора, суммированного с одной единицей младшего разряда отсчетного устройства.
Все ЭСЧ имеют цифровой выход и могут успешно применяться в автоматизированных измерительных системах. Технические данные ЭСЧ приведены в [1.7,1.8].
1.7.5. Приборы для измерения сопротивления. Для измерения активного сопротивления ЭМ широко применяются мосты постоянного тока.
Одинарные мосты постоянного тока. Одинарными мостами постоянного тока принято называть четырехплечие мосты с питанием от источника постоянного тока. Известен ряд конструкций этих приборов с различными характеристиками. Погрешность моста зависит
Рис. 1.18. Электронно-счетный частотомер, работающий в режиме измерения периодов
от пределов измерения. При измерении малых сопротивлений на результат измерения значительное влияние оказывают сопротивления контактов и соединительных проводов, суммируемые с измеряемым сопротивлением. Для уменьшения этого влияния используют специальное четырехзажимное присоединение. В настоящее время выпускается одинарный мост типа Р369 (МО-4), обеспечивающий измерение сопротивления от 1СГ4 до 1,11111 • 10*0 Ом на постоянном токе при четырехзажимном подключении, с классами точности'от 1,0 до 0,005 в зависимости от выбранного диапазона измерений и диапазоном рабочих температур 10—35 °C. Мост имеет автономную поверку.
Двойные мосты для измерения малых сопротивлений. С целью расширения пределов измерения в промышленных приборах двойные мосты совмещаются с одинарными, обеспечивая широкие пределы измерений. Выпускаемый промышленностью одинарно-двойной мост типа Р3009 предназначен для измерения электрического сопротивления в пределах от 10"8 до 1,11111 • 10*0 Ом на постоянном токе, с классом точности для одинарного моста 0,02, а для двойного моста от 0,01 до 2,0 в зависимости от схемы измерения и диапазоном рабочих температур 10—35 °C.
Для измерения индуктивности обмоток ЭМ применяются мосты переменного тока, В большинстве случаев мосты переменного тока делаются универсальными, т. е. позволяют кроме индуктивности измерять емкость, добротность катушек индуктивности, тангенс угла
Таблица 1.5
Диапазон измерений
индуктивности, мГн добротности (при / = = 1 кГц) в схеме замещения Погрешность измерений индуктивности, % Диапазон рабочих частот. Гц
последовательной параллельной
io-3 - io-2 0,2-5,5 9 • 10-3 \ 800-20 000
10 2 - 10 1 2-5 — 2+ L 500-5000
Ю"1 - 1 2-50 - \ 1 500-5000
1-10 2-50 20-200 Jl+ б10~3\ 500-5000
10-ю2 2-50 20-200 500—2500
102 - 103 2-50 20-200 \ L / 500-1000
ю3 - ю4 - - 200-800
104 -1,1 10s - - + 2 40-200
диэлектрических потерь и сопротивление. К таким приборам, например, относится мост переменного тока типа Р571, имеющий класс точности 0,1. Основные технические характеристики моста при измерении индуктивности приведены в табл. 1.5. Остальные характеристики при измерениях по другим параметрам, а также технические данные аналогичных приборов приводятся в справочной литературе.
Для измерения сопротивления изоляции выпускаются мегаомметры типов M4100I1—M4100I5. Приборы предназначены для измерения изоляции электрических цепей, не находящихся под напряжением. Класс точности приборов 1. Диапазоны измерения от 0 до 1000 МОм. Выходное напряжение в соответствии с индексами типов приборов 1, 2, . . ., 5 составляет 100, 250, 500, 1000 и 2500 В. Питание приборов типа М4100 осуществляется от встроенного генератора с ручным приводом.
1.7.6. Регистрирующие приборы. Самопишущие приборы. Самопишущие приборы представляют собой приборы с нормированной погрешностью и предназначены для измерений и записи контактным способом электрических сигналов с функциональной зависимостью х = f(у)- Наибольшее распространение получили самопишущие приборы для регистрации электрических параметров как функций времени.
Самопишущие приборы подразделяются на приборы прямого и следящего преобразования. В приборах первого вида регистрируемый сигнал после усиления непосредственно воздействует на измери
тельный механизм. В приборах второго вида регистрируемый сигнал уравновешивается сигналом обратной связи, снимаемым с устройства, преобразующего угловую координату измерительного механизма в напряжение. Таким образом, положение подвижной системы и связанного с ней органа записи является линейной функцией входного сигнала. Частотный диапазон приборов не нормируется. Практически частота регистрируемого процесса не должна превышать 1 Гц.
В последние годы получили распространение быстродействующие самопишущие приборы (БСП), предназначенные для измерения и записи по одному или нескольким каналам мгновенных значений изменяющегося электрического тока или напряжения. Отличительными особенностями БСП являются: отсутствие шкал для визуального отсчета показаний, сравнительно узкое по ширине поле записи (не более 50 мм), наличие специальных измерительных механизмов с большим вращающим моментом. БСП позволяют регистрировать сигналы, изменяющиеся с частотой до 100—150 Гц, т. е. могут применяться при исследовании различных динамических процессов, для регистрации аварийных режимов и тому подобное.
Отечественной промышленностью выпускаются самопишущие приборы, производящие запись с помощью чернил на диаграммной бумаге в прямоугольных или криволинейных координатах. Технические характеристики самопишущих приборов приведены в [1.7, 1.11].
Двухкоординатные самопишущие приборы (ДСП), называемые также графопостроителями, предназначены для вычерчивания кривых функциональных зависимостей физических величин типа у = /(х), у -= / (/), преобразованных в сигналы постоянного или переменного синусоидального напряжения, в прямоугольной системе координат или в двоичном коде. ДСП выпускаются двух видов: с вводом аналогового сигнала — в планшетном исполнении; с вводом кодовых сигналов в планшетном и барабанном исполнениях. Запись осуществляется на бумаге с помощью чернильного пера капиллярного или волоконного типа. Технические характеристики ДСП приведены в [1.7, 7.22].
Самописцы уровня (СУ) предназначены для непрерывной записи уровня переменного (среднеквадратического, среднего или пикового значений) или медленно изменяющегося постоянного напряжения. Запись осуществляется в прямоугольных координатах на поступательно движущейся бумажной ленте в линейном или логарифмическом масштабе. В некоторых СУ предусмотрена возможность записи полярных диаграмм, а для записи используются чернильный и резцовый способы. Резцовый способ заключается в процарапывании тонкого мягкого слоя на специальной бумаге корундовой иглой до черной, цветной или прозрачной основы. Технические характеристики СУ приведены в [1.11, 7.13, 7.21, 7.22].
Все самопишущие приборы оснащаются различными вспомогательными устройствами для связи с внешней аппаратурой.
Светолучевые осциллографы (СО) предназначены для наблюдения и записи по одному или нескольким каналам мгновенных значений электрических величин, соответствующих быстроизменяющимся процессам в диапазоне частот от 0 до 30 кГц. Запись измеряемых параметров на носитель информации (ультрафиолетовую или фотографическую бумагу, фотопленку) осуществляется световым лучом, отклоняемым с помощью подвижной части осциллографического гальванометра. В современных СО применяют гальванометры-вставки, которые имеют небольшие размеры (в корпусе расположена только подвижная часть), легко заменяются и предназначены для установки в общей магнитной системе СО. Технические характеристики СО и гальванометров-вставок приведены в [1.7, 1.11]. СО обычно снабжаются набором гальванометров различных типов, отличающихся друг от друга частотой собственных колебаний, чувствительностью по току, рабочей полосой частот, наибольшим допустимым током и т. д. Эти данные позволяют выбрать наиболее подходящий к условиям эксперимента тип гальванометра.
Электронно-лучевые осциллографы (ЭО) широко применяются в различных областях. Главными достоинствами ЭО по сравнению с СО являются возможность исследования высокочастотных периодических и кратковременных процессов, протекающих однократно, и ничтожно малое потребление мощности от источника сигнала. В ЭО электрические сигналы, пропорциональные изменению исследуемых величин, поступают на взаимно перпендикулярные отклоняющие пластины осциллографической электронно-лучевой трубки, и на экране трубки наблюдают, измеряют или фотографируют графическое изображение.
Большинство ЭО универсального назначения построено по схеме, приведенной на рис. 1.19, в которую входят следующие части: электронно-лучевая трубка (ЭЛТ), содержащая системы отклонения луча по вертикали, горизонтали, фокусировки и управления током луча;
канал вертикального отклонения луча (канал У), включающий входные цепи, предварительный усилитель, линию задержки и оконечный усилитель;
канал горизонтального отклонения луча (канал X), включающий генератор Г временной развертки, устройство синхронизации и запуска развертки и оконечный усилитель;
канал управления лучом по яркости (канал Z);
встроенные калибраторы для калибровки коэффициентов усиления каналов Y и X;
блок питания БП осциллографа.
К основным характеристикам ЭО, определяющим его эксплуатационные возможности относятся:
коэффициент отклонения (В/см или В/дел) — отношение напряжения входного сигнала к отклонению луча, вызванного этим напряжением;
Канал Y
Рис. 1.19. Универсальный электронно-лучевой осциллограф
полоса пропускания, т. е. диапазон частот входного сигнала, при котором коэффициент отклонения уменьшается не более чем на 3 дБ относительно коэффициента отклонения на опорной частоте;
коэффициент развертки (с/см или с/дел), т. е. отношение времени нарастания к отклонению луча, вызванного напряжением развертки за это время;
скорость записи, т. е. скорость перемещения луча по экрану, при которой обеспечивается фотографирование или запоминание однократного сигнала.
Кроме универсальных ЭО промышленностью выпускаются запоминающие, стробоскопические, скоростные и некоторые другие виды специализированных осциллографов. Для исследования одновременно двух или более процессов используются многолучевые ЭО, а также многоканальные электронные коммутаторы, встраиваемые в тракте вертикального отклонения. Наибольшими функциональными возможностями обладают ЭО со сменными блоками в трактах вертикального и горизонтального отклонения.
Типы некоторых ЭО и их характеристики приведены в [1.8].
1.7.7. Приборы для исследования формы колебаний. Для анализа формы сигналов широко используют осциллографы, на экране которых воспроизводится зависимость сигнала тока или напряжения от времени. Однако этот способ не всегда удовлетворяет требованиям, 48
предъявляемым к анализу формы сигналов. Более удобным является анализ формы сигналов с помощью приборов, называемых частотными анализаторами или анализаторами гармоник. Методы частотного анализа, принципы построения приборов для частотного анализа и их технические характеристики подробно рассматриваются в гл. 7.
В отдельных случаях, при изучении формы сигнала, нет необходимости учитывать распределение амплитуд высших гармонических составляющих, а необходимо только оценить степень ’’чистоты” периодического сигнала, т. е. степень приближения его к синусоиде. Степень ’’чистоты” периодического сигнала, близкого к синусоидальному, характеризуется коэффициентом нелинейных искажений (коэффициентом формы волны)
^н,и
(1.20)
где Ux, U2, - . Un — значения амплитуд основной и высших гармоник сигнала.
Измерители нелинейных искажений (ИНИ) осуществляют измерение среднеквадратических значений напряжения высших гармоник, отнесенных к среднеквадратическому значению напряжения основного сигнала.
Основными параметрами ИНИ являются: диапазон частот по первой гармонике; пределы измерения А^ни; погрешность измерения Авиапромышленностью выпускаются два вида ИНИ: со стрелочным индикатором и с ручным нормированием входного сигнала, с цифровой индикацией и автоматическим измерением Ани.
Технические характеристики ИНИ отечественного производства приведены в [1.8].
1.7.8. Приборы для измерения характеристик магнитного поля. В зависимости от определяемой величины различают приборы для измерения магнитного потока (веберметры, называемые также флюксметрами), магнитной индукции (тесламетры), магнитного потенциала (магнитные потенциалометры) и других характеристик магнитного поля (напряженности, направления, градиента, магнитной проницаемости). Наиболее широко при испытаниях ЭМ применяются микровебер-метры и тесламетры.
Веберметр. Принцип действия веберметра основан на явлении электромагнитной индукции — возникновения ЭДС в измерительной катушке при изменении проходящего сквозь ее. контур магнитного потока. Простейший веберметр представляет собой баллистический гальванометр, действующий в сильно переуспокоенном режиме (С*~
*С — постоянная баллистического гальванометра по магнитному потоку.
* КГ4 Вб/дсл). Наиболее распространены веберметры магнитоэлектрической сисчсмы (С * 1(Г6 Вб/дел) и фотоэлектрической системы (С ~ * НГВ Вб/дсл). Потокосцепление изменяется при включении (выключении) измеряемого магнитного поля или при изменении положения измерительной катушки в магнитном поле. В отличие от баллистического гальванометра, показания веберметров других систем в определенных пределах не зависят от времени изменения магнитного потока (до нескольких секунд) и от сопротивления внешней цепи. Отличие фотоэлектрических веберметров от магнитоэлектрических заключается в применении компенсационного усилителя, что позволяет расширить частотный диапазон и увеличить чувствительность. Так, например, микровеберметр Ф190 имеет выход на самописец и может вести запись и регистрацию низкочастотных переменных потоков.
Тесламетр. В большинстве промышленных тесламетров используется эффект Холла, заключающийся в возникновении между гранями полупроводниковой пластины разности потенциалов — ЭДС Холла, пропорциональной протекающему по пластине току и измеряемой магнитной индукции. После усиления ЭДС Холла измеряется милливольтметром, шкала которого проградуирована в единицах магнитной индукции. Для повышения точности измерения магнитной индукции, измерение ЭДС Холла часто осуществляется компенсационным методом. Тесламетр достаточно прост, имеет удовлетворительную точность — погрешность не превышает + (1,0 — 2,5)%, позволяет измерять магнитную индукцию или напряженность в постоянных, переменных (в широком диапазоне частот) и импульсных полях. Измерительные преобразователи прибора имеют малые размеры, что позволяет проводить измерение индукции в узких зазорах.
Технические характеристики некоторых измерителей магнитного потока и магнитной индукции приведены в [1.7,1.11].
1.7.9. Приборы для измерения сдвига фаз. Для измерения угла сдвига фаз в сетях переменного тока, при испытаниях ЭМ, применяют переносные фазометры, имеющие электродинамическую или электромагнитную систему.
Четырехквадратный фазометр электродинамической системы типа Д578/1 (50 Гц) и Д578/2 (60 Гц) предназначен для определения в однофазных сетях переменного тока частоты 50 и 60 Гц, угла сдвига фаз между основными* гармоническими составляющими тока и напряжения, коэффициента мощности. При коэффициенте гармоник менее 1% фазометр сохраняет класс точности 0,5.
Диапазон измерения электрического угла сдвига фаз фазометра в градусах 0—90—180—270—360°. Диапазон измерений cosip составляет +1 -г — 1. Мощность, потребляемая последовательной цепью прибора при номинальном токе 5 и 10 А и нормальной частоте, не превышает 5 В х х А, а параллельной цепью — не превышает 8 В • А. Отсчетное устройство — стрелочный указатель.
50
Для измерения коэффициента мощности в сетях трехфазного тока частотой 50 Гц при равномерной нагрузке фаз с симметричным напряжением и током применяются фазометры Э120 и Э120/1 электромагнитной системы, характеристики которых приведены в табл. 1.6. Отсчетное устройство приборов — стрелочный указатель.
Таблица 1.6
Тип прибора Класс точности Нормальная Конечное значе- Номиналь- Номи- (ГОСТ) частота, Гц ние диапазона ное напря- наль- измерений жение, В ный ток, А
Э120 50 ОеМкЧ”С 127> 220 5 1,5
Э120/1 (ГОСТ№’-”> 4)Х1;ЗГЮ 380
* Для емкостной нагрузки.
** Для индуктивной нагрузки.
Таблица 1.7
Диапазон рабочих частот Пределы измерения электрического угла, град. Погрешность измерения фазового уша, град- Напряжение выходного сигнала, В Входные емкость и сопротивление
20 Гц- 0±18 ±(0,15 ^+0,5) 0,1-10 15 пФ;
1 МГц 0±36 при 200 кГц 10 МОм
0±90 ±(0,02<рх+ 1)
0±180 при 1 МГц
* — показание измерительного прибора в данной точке х диапазона измере-
ний. х
Для измерения разности фаз двух синусоидальных сигналов в широком диапазоне частот, при очень малом потреблении мощности от измеряемой цепи, применяется электронный фазометр типа Ф213. Работа прибора основана на преобразовании разности фаз сигналов во временной интервал. Формирование импульсов в момент перехода сигнала через нуль выполняется с использованием туннельных диодов. Ступенчатый фазовращатель позволяет измерять нулевой фазовый сдвиг при значении временного интервала вблизи половины периода, что
исключает влияние мертвой зоны при временном интервале, близком к нулю. В составе прибора имеются высокоомные входные пробники. Предусмотрена возможность записи измеряемой величины на самописец. Основные технические характеристики прибора приведены в табл. 1.7.
1.8. ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
Вопросы охраны труда в электроустановках рассматриваются в [0.15]. Общие требования при электрических испытаниях и измерениях сформулированы в ГОСТ 12.3.019-80. При испытании ЭМ наряду с ТБ, указанными в ГОСТ 11828-86 и 10169-77 должны соблюдаться ’’Правила технической эксплуатации электроустановок потребителей”* и ’’Правила техники безопасности при эксплуатации электроустановок потребителей” ♦. Ниже приводятся некоторые выработанные практикой рекомендации по монтажу измерительных схем и проведению измерений:
1. Для испытательных установок постоянного тока желательно заземление одного полюса (обычно отрицательной полярности). Для установок переменного тока должен заземляться один провод однофазной схемы или нулевая точка в схеме А •
2. Амперметры и токовые обмотки ваттметров должны, как правило, включаться в заземленные провода. Если это невозможно, то для переменного тока 220 В и более применяются ТТ с заземлением корпусов и одного зажима вторичной (измерительной) цепи.
3. К заземленной точке должны присоединяться один зажим вольтметра и один зажим обмотки напряжения ваттметра, а не зажим их добавочных сопротивлений.
4. Обмотки ваттметров должны включаться таким образом, чтобы между ними была минимальная разность потенциалов (т. е. один из зажимов тока и один зажим напряжения должны подключаться к одному проводу сети), а если это невозможно, то минимальная разность потенциалов не должна превышать предельное напряжение, указанное на зажимах ваттметра.
5. Для напряжений более 220 В вольтметры и обмотки напряжения ваттметров включаются через TH, корпуса которых и один полюс вторичной (измерительной) цепи заземляются.
6. Провода, присоединяемые к приборам, должны иметь наконечники с изолированной частью достаточной длины, предупреждающие прикосновение к токоведущей части. Целесообразно применение используемых рядом испытательных станций изоляционных цилиндров, на
* М.; Энергоатомиздат, 1986.
двигаемых с помощью пружины на наконечник после отключения провода.
7. Приборный отсек должен закрываться застекленной крышкой, при открывании которой подается световой или звуковой предупредительный сигнал ’’осторожно—напряжение”, а при необходимости снимается напряжение с измерительных цепей. Меаду амперметрами и вольтметрами (ваттметрами) целесообразно иметь изоляционные перегородки.
Амперметры, в случае их включения в заземленных проводах, могут размещаться в соседнем отсеке без блокировки застекленной крышки.
8. Корпуса приборов (например, электронных с питанием от сети и др.) должны быть заземлены в соответствии с инструкцией по их эксплуатации.
9. Во всех случаях, когда измерительные приборы могут оказаться под напряжением, опасным для персонала, возможность прикосновения к ним должна быть исключена.
Обязательным условием для допуска к работе на испытательной установке является, кроме знания общих правил техники безопасности, детальное знакомство со всеми электрическими схемами данной установки, что подтверждается соответствующими удостоверениями, выданными на основе периодической проверки знаний техники безопасности с присвоением квалификационной группы по электробезопасности.
Персонал испытательных станций, там где это необходимо, должен быть также знаком с техникой безопасности при перемещении грузов и сочленении испытуемых ЭМ.
Глава вторая
ИСПЫТАНИЯ В ПРОЦЕССЕ ПРОИЗВОДСТВА
Целью этих испытаний является проверка соответствия параметров ряда узлов ЭМ требованиям технической документации и подготовка ЭМ к испытаниям под нагрузкой. При испытаниях устанавливаются значения отклонений параметров от номинальных значений и степень электрической, магнитной и механической симметрии ЭМ (различие этих параметров по фазам и полюсам), что, совместно с результатами испытаний под нагрузкой, дает необходимые сведения для оценки технологии производства ЭМ и выбора мероприятии для ее совершенствования.
В программу испытаний входят:
1) испытание электрической изоляции;
2) измерение ’’холодных” сопротивлений обмоток (см. гл. 5);
3) контроль числа витков и схемы соединения обмоток;
4) контроль качества пайки и схемы соединения обмоток с коллектором (см. гл. 6);
5) контроль магнитной симметрии;
6) контроль узлов токосъема (см. гл. 6);
7) контроль состояния подшипников.
Ряд работ, указанных в этой программе (п. 4 и др.), выполняется персоналом ОТК сборочного или обмоточного цеха. Во всех случаях, однако, необходима тесная координация работ персонала испытательной станции и ОТК цеха.
2.1. ИСПЫТАНИЕ ЭЛЕКТРИЧЕСКОЙ ИЗОЛЯЦИИ
В изоляционных конструкциях ЭМ различают следующие виды изоляции: между витками обмотки, обмотки от корпуса и соприкасающихся с ней других обмоток, комплекта коллекторных пластин от корпуса и между собой (межламельная изоляция), контактных колец, щеткодержателей и стяжных болтов активной стали (если они имеются) от корпуса, бандажей якоря от обмотки, подшипниковых опор от фундамента или корпуса ЭМ.
Различают также изоляцию пазовой и лобовой частей обмоток. В наиболее тяжелых условиях находится витковая и корпусная изоляция в месте выхода обмотки из пазов, где она подвержена действию повышенных электрических и механических нагрузок.
Электрическая изоляция характеризуется в основном сопротивлением Rn и максимальным напряжением которое она способна выдержать без повреждения (пробоя). К числу основных параметров мы отнесем также коэффициент абсорбции.
Прежде чем перейти к методам испытания, коснемся вкратце физических процессов в изоляции ЭМ [2.1].
Слои изоляции, расположенные между находящимися под напряжением элементами ЭМ или между этими элементами и корпусом (введем общее название — ’’электроды”), имеют определенное сопротивление и емкость, что обусловливает наличие тока утечки и емкостного (зарядного) тока.
Ток утечки может проходить как через толщу изоляции (сквозной ток), так и по поверхности изоляции, граничащей с воздухом или какой-либо другой изоляционной средой, например маслом.
Токи утечки тем больше, чем больше градиент напряжения, т. е. напряжение, приходящееся на 1 см пути утечки. В силу неизбежной неравномерности структуры изоляционных слоев, наличия в них воздушных или иных включений напряжение распределяется по толщине изоляции неравномерно. Значительные напряжения приходятся на воздушные включения, поскольку диэлектрическая проницаемость воздуха в несколько раз меньше, чем у изоляционного материала. 54
Если градиент напряжения на воздушных включениях превышает электрическую прочность воздуха (25—50 кВ/мм), происходит пробой, появляются частичные разряды, сопровождающиеся увеличением тока утечки. Частичные разряды вызывают ионизацию воздуха и появление, весьма опасного с точки зрения химического разрушения изоляции, озона. Воздушные включения ухудшают также теплопроводность изоляции.
Поэтому изоляция ЭМ должна быть монолитной, без воздушных включений, что достигается специальной технологией производства электроизоляционных материалов и конструкций, предусматривающей сушку и пропитку обмоток изоляционными лаками или компаундами.
Для изоляции особо ответственных ЭМ предусматривается вакуумная сушка, при которой воздух удаляется в наиболее полной мере, а затем осуществляется пропитка или заполнение пор изоляционными составами под давлением.
В высоковольтных ЭМ (при фазном напряжении > 1 кВ), для того чтобы снять напряжение, способное пробить воздушные включения между обмоткой и стенкой паза, поверхность обмотки покрывается электропроводящим лаком.
По достижении током утечки в наиболее слабых точках изоляции достаточно высоких плотностей начинает сказываться тепловое действие этого тока, прожигающего в изоляции, вследствие обугливания, проводящие шнуры, что, в свою очередь, усиливает ток утечки. Весь процесс приобретает лавинообразный характер, приводит к замыканию на землю и при достаточном напряжении — к дугообразованию и разрушению узла.
Поэтому зависимость тока утечки от напряжения имеет характерный перегиб, после которого начинается быстрый рост тока. Очевидно, что напряжение, соответствующее этой точке, должно быть существенно (в 10—100 раз) выше рабочего.
Поверхностный ток утечки зависит от расстояния между электродами, качества поверхности и связанной с условиями эксплуатации степенью ее загрязнения. Усиление поверхностного тока утечки может также приводить к перекрытию изоляционного расстояния, появлению дуги и разрушению поверхностных слоев изоляции. Для ее восстановления поврежденные слои должны быть удалены.
Для высоковольтных ЭМ причиной пробоя могут быть как описанные выше ионизационные, так и тепловые процессы. Для ЭМ с напряжением менее 1 кВ пробой обычно возникает от теплового фактора.
С ростом температуры и степени увлажненности изоляции ее сопротивление падает, а ток утечки растет. Примерная зависимость сопротивления изоляции от температуры приведена на рис. 2.1. Ориентировочно можно считать, что изменение температуры изоляции на
Рис. 2.1. Примерная зависимость сопротивления изоляции от температуры
15 °C в пределах температур 20— 100 °C изменяет сопротивление изоляции в два раза.
В процессе работы под влиянием нагрева, механических и химических (оксидирования) воздействий изоляция подвергается старению, становится хрупкой. Улетучиваются некоторые составляющие пропиточных составов, что способствует появлению пор. Механические нагрузки приводят к появлению трещин.
Эти характерные для старения изоляции последствия, как правило, не обнаруживаются при измерении сопротивления изоляции. Сопротивление такой изоляции часто даже повышается, а пробивное напряжение снижается. Однако для установления этого факта необходимо подвергнуть изоляцию или ее часть испытанию на пробивание, т. е. разрушению. Такие испытания иногда проводят для ЭМ, поставленных на ремонт, выборочно — для нескольких стержней обмотки, с целью определения состояния ее изоляции и объема потребного
ремонта.
Для определения степени старения изоляции используется тот факт, что она становится менее влагостойкой, т. е. легче впитывает влагу (пары воды), что приводит к понижению ее сопротивления. Для небольших ЭМ такая проверка может производиться помещением их в камеру влажности. Для крупных ЭМ, однако, степень увлажнения может быть функцией изменяющихся климатических условий, и сопоставление данных по сопротивлению изоляции за определенный период эксплуатации не дает возможности оценить ее состояние. Зависимость сопротивления изоляции от температуры усугубляет трудности такой оценки.
Для оценки степени увлажнения изоляции широкое распространение получил метод контроля абсорбции, основанный на определении зависимости тока, проходящего через изоляцию, при приложении к ней постоянного напряжения, от времени.
Для понимания сути этого метода нужно напомнить, что электроды, разделенные изоляцией, представляют собой определенную электрическую емкость, способную накапливать заряды. Структура изоляции может рассматриваться как состоящая из большого числа элементарных ЯС-цепей, включенных последовательно и параллельно. Как известно, скорость заряда конденсаторов в ЯС-цепи определяется посто-
янной времени Т = RC. Чем больше Г, тем медленней происходит процесс заряда. Наряду с цепями, в которых преобладают емкости, изоляция включает в себя цепи, в которых преобладают сопротивления, имеющие весьма высокие значения.
При подаче постоянного напряжения на электроды через изоляцию начинает проходить ток утечки /у, быстро затухающий ток заряда чисто емкостных цепей и медленно затухающий ток заряда элементарных 7?С-цепей — ток абсорбции za. Значение этого тока связано не только с большими постоянными времени ЯС-цепей, но и с временем перетекания — выравнивания этих зарядов через параллельные связи цепей, так называемым временем релаксации, измеряемым десятками секунд — минутами. Чем больше увлажнена изоляция, тем больше fy и меньше (ближе к 1) отношение
~ О'у za)Ay 1 (2-1)
называемое коэффициентом абсорбции [2.1, 2.2]. Определение сводится к определению показаний мегаомметра RK через 15 и 60 с (или 1 и 10 мин для крупных ЭМ) после приложения к обмотке (изоляции) напряжения
=^ибо/^и15- (2-2)
Для неувлажненной изоляции К % достигает значений 3—4 и более. Перед измерением обмотки замыкаются на землю для снятия возможных остаточных зарядов. Для повышения точности метода рекомендуется снимать также точки Rn через 30 и 45 с с построением кривой Ка = f (f) [2.2]. Поскольку метод абсорбции использует отношение сопротивлений изоляции, влияние температуры на результаты измерений существенно уменьшается, что составляет основное преимущество метода. Этот метод и его модификации, например метод саморазряда, находят широкое применение при контроле изоляции ЭМ в процессе сушки и в эксплуатации.
2.1.1. Измерение сопротивления изоляции. Для этого применяются мегаомметры, генерирующие определенное напряжение постоянного тока и измеряющие отношение напряжения к току [см. § 1.7; 2.4]. Источником постоянного напряжения могут быть генераторы с ручным (частотой вращения рукоятки 120 об/мин) или электродви-гательным приводом, а также статические выпрямительные устройства. Напряжение мегаомметра UMO указывается обычно в технической документации. Ориентировочные данные для его выбора в зависимости от номинального напряжения Ц,Ом приводятся ниже:
Цюм» В.... не более 100 220 660 3000 6000 не менее 10 000
UMOi В.... 125*250 500 1000 2500 5000
* Напряжение 125 В может быть получено вращением ручки мегаомметра на 250 В со скоростью 60 об/мин.
Минимальное сопротивление изоляции обмотки относительно корпуса и других обмоток, при котором допускается включение ЭМ под напряжение, устанавливается в стандартах или ТУ.
Оно может быть определено в мегаомах ориентировочно из выражения
Rvimin = ^4гом/ (1000 + Рном/Ю0), (2.3)
а при Рном < № МВ - А
- С/ном/Ю00, (2.4)
где ^ном — номинальное напряжение, В, Рном — номинальная мощность, КВ- А (для многофазных ЭМ R^min ~ сопротивление изоляции одной фазы).
Если сопротивление изоляции меньше то в допустимых
местах производится разъединение цепей ЭМ и проверка 7?и отдельных участков. В первую очередь должно быть проверено отсутствие загрязнения изоляционных поверхностей, по которым может пройти ток утечки.
2.1.2. Испытание электрической прочности изоляции. Испытание производится приложением к ней повышенного по сравнению с номинальным испытательного напряжения переменного тока 50 Гц с практически синусоидальной формой кривой С/ис. Значение С/ис и время ее приложения (1 мин) устанавливаются ГОСТ 183-74.
Испытательное напряжение прикладывается между выводами обмотки, изоляция которой испытывается, и соединенными вместе выводами других соприкасающихся с ней обмоток и корпусом ЭМ. Напряжение плавно поднимается до значения С/ис и после выдержки плавно снижается до нуля и отключается. Для ЭМ массовых серий время выдержки может быть снижено до 1 с с увеличением С/ис на 20% (ГОСТ 183-74), С/ис прикладывается при этом сразу.
Испытание электрической прочности изоляции рекомендуется делать как завершающее после испытания ЭМ на нагрев и других видов испытаний, в которых на изоляцию воздействуют повышенные механические, тепловые и электрические нагрузки.
В процессе изготовления ЭМ испытание изоляции производится многократно. Изоляция обмоток испытывается, например, после изготовления секций, укладки их в пазы, соединения обмотки, ее пропитки и т. д. Во избежание повреждения изоляции каждое последующее испытание проводится с понижением С/ис, с тем чтобы С/ис полностью собранной ЭМ соответствовало требованиям технической документации. Для крупных ЭМ, которые после испытания на заводе-изготовителе транспортируются в разобранном виде, при испытании изоляции после сборки на месте установки прикладывается сниженное на 20%.
Если в процессе испытания электрической прочности изоляции произошел пробой, сопровождающийся внезапным увеличением тока утечки и падением сопротивления изоляции, то необходимо установить места пробоя. Для этого проводится возможное разъединение цепей и измерение сопротивления изоляции отдельных участков цепей между собой и корпусом. Если измерение сопротивления изоляции не дает четкой информации о месте повреждения (изоляция может частично восстанавливаться), то производится повторное испытание изоляции отдельных цепей напряжением 0,5UKC, после чего снова проверяется сопротивление изоляции.
Для установления места пробоя можно поступить двояко. В первом случае, если пробой не привел к металлическому замыканию, приложением небольшого напряжения ’’прожечь” место пробоя, которое обнаруживается по выделению дыма, характерному треску, видимому искрению.
Во втором случае, если место пробоя является металлическим замыканием, что характеризуется весьма низким переходным сопротивлением, применить метод магнитной стрелки. Согласно этому методу к одному из двух концов обмотки, изоляция которой относительно корпуса пробита, и к корпусу подводится напряжение постоянного тока и пропускается небольшой ток. Приближая поочередно к пазам, в которых расположена обмотка, магнитную стрелку, можно установить паз, после отхода от которого притяжение стрелки при включении тока прекращается. Место замыкания на корпус находится вблизи этого паза. Для контроля этот опыт повторяется при подводе постоянного тока к другому концу обмотки.
Особенно этот метод удобен для якорных обмоток, соединенных с коллектором, где, передвигая по коллектору точку подвода постоянного тока (второй конец соединяется с валом), можно найти пластину, питание которой дает минимальное число пазов, притягивающих стрелку. Распаяв и подняв верхнюю секцию, входящую в петушок
Рис. 2.2. Определение места пробоя изоляции на корпус:
а - для обмоток, соединенных с коллектором; б - для полюсных обмоток
этой пластины, можно с помощью магнитной стрелки установить паз, в котором произошел пробой (рис. 2.2, а).
Для обмоток, соединенных с коллектором, при определении места замыкания на землю может быть также применен метод милливольтметра по рис. 2.2, а. Передвигая по коллектору щуп милливольтметра, можно получить минимальный отсчет на пластине, соединенной с местом заземления.
Установление места заземления в тех случаях, когда сопротивление обмотки больше переходного сопротивления заземления и отдельные точки обмотки доступны, можно выполнить способом потенциометра. На рис. 2.2, б приведена схема этого способа для обмотки возбуждения. Передвигая движок потенциометра, можно при нулевом отсчете милливольтметра установить расстояние (число витков) от входных концов до точки заземления.
2.1.3. Установки для испытания электрической прочности изоляции повышенным напряжением. Установки должны обеспечивать возможность плавного регулирования напряжения (ступенями не более 1— 1,5% £/ис), измерения, а также автоматического отключения и сигнализации при пробое и резком увеличении тока утечки [2.3]. Источником повышенного напряжения при испытаниях обычно служат силовые однофазные трансформаторы. Для ЭМ небольшой мощности (до 10 кВт) при рабочих напряжениях до 500 В в качестве источников UKC могут использоваться измерительные трансформаторы напряжения.
При выборе мощности испытательного трансформатора следует иметь в ввду, что она должна быть пропорциональна U^c. Ток испытательного трансформатора
+ 1*,
4«с
ушах
(2.5)
где максимальный ток утечки Iyrnax = Unc/ Rnmin°, емкостный ток
Zc “
С —емкость обмотки относительно корпуса, gj = 2тг/.
Для крупных высоковольтных ЭМ превалирующее значение имеет составляющая /с.
Если при Рном < 200 кВт Unc < 500 В мощность испытательного трансформатора имеет порядок 100 В • А, то для турбогенераторов мощностью 500—800 МВт и напряжением 24 кВ она доходит до 150 кВ • А.
Минимальная мощность испытательного трансформатора должна быть достаточной для того, чтобы ’’прожечь” место пробоя. Напряжение на первичной стороне трансформатора регулируется регуляторами напряжения.
Важнейшим вопросом при выборе оборудования испытательной установки является обеспечение практически синусоидальной формы кри
вой напряжения, так как наличие гармонических составляющих, например 3-й гармоники, приводит к существенному увеличению емкостного тока и неправильной оценке свойств изоляции.
С этой целью рекомендуется выбирать номинальное напряжение испытательных трансформаторов и регуляторов более высокое, чем это требуется для обеспечения заданного С/ис.
Реостатное регулирование напряжения не рекомендуется, так как оно может искажать форму кривой испытательного напряжения.
Измерение напряжения, как правило, производится на стороне высокого напряжения трансформатора. Для этой цели используются вольтметры, включенные через трансформаторы напряжения или делители напряжения, электростатические киловольтметры. Допускается включение вольтметра на ответвление стороны высокого напряжения со стороны заземленного вывода.
В установках с С/ис > 10 кВ для контроля С/ис могут применяться шаровые разрядники.
Особое значение при испытании повышенным напряжением приобретает техника безопасности (см. ГОСТ 12.3.019-80).
2.1.4. Испытание электрической прочности изоляции повышенным напряжением постоянного тока. Испытание переменным током 50 Гц имеет ряд недостатков: невозможность контроля тока утечки, пониженное напряжение на изоляции лобовых частей обмоток ЭМ из-за емкостного тока пазовой изоляции [0.9]. Поэтому для крупных ЭМ с Unc > 3 кВ испытанию переменным током предшествует испытание постоянным (выпрямленным) током со снятием зависимости fy = = /(tkc,n)- Испытательное напряжение постоянного тока С/ис>п = = 1,6Ц,с- При испытаниях не должно иметь место самопроизвольное увеличение iy или резкое увеличение его при росте £/ис>п. После проведения испытания выводы обмоток должны быть заземлены на 5—15 мин для снятия заряда. Схемы установок для испытания выпрямленным напряжением см. в [2.2—2.4].
2.1.5. Испытание электрической прочности изоляции между смежными витками обмоток. В соответствии с ГОСТ 183-74 оно проводится путем повышения напряжения при холостом ходе до значений (1,3 1,5) С/ном на 3—5 мин. Для ЭМ постоянного тока и синхронных
это испытание связано с необходимостью увеличения тока возбуждения, а для АД — с увеличением тока холостого хода. Если при этом указанные выше токи могут вызвать чрезмерный нагрев, то время испытания может быть сокращено до 1 мин. С целью уменьшения этих токов разрешается повышение на 15% частоты питающей сети, а также частоты вращения ЭМ. Испытание межвитковой изоляции можно совмещать с испытанием при повышенной частоте вращения.
Для ЭМ постоянного тока с числом полюсов 2р > 4 повышение напряжения якорной обмотки ограничивается величиной ик,таХ9 при
которой среднее напряжение между коллекторными пластинами < 24 В,
U^max = 24*/2р, (2.6)
где К — число пластин.
Указанные выше стандартные испытания в связи с небольшим значением напряжения между витками являются проверкой исправности обмотки, но не дают информации об электрической прочности межвит-ковой изоляции. Для самой тонкой изоляции (эмалытровода) пробивное напряжение равно примерно 100 В, в то время как напряжение между витками не превышает десятков вольт.
В практике нашли распространение два метода, дающие возможность подвергнуть межвитковую изоляцию воздействию достаточно высоких напряжений, причем такое воздействие может обеспечиваться на всех стадиях технологического процесса изготовления обмоток и сборки ЭМ [2.5].
Первый метод заключается в индуцировании в витках обмотки напряжения повышенной частоты. Для этой цели секции обмотки надеваются на сердечник из листовой стали (со съемным ярмом), в котором с помощью обмотки возбуждения, питающейся от источника тока с частотой примерно 10 кГц, возбуждается магнитный поток. Такое испытание дает возможность повышения ЭДС, приходящейся на один виток, в 200 раз по сравнению с испытаниями частотой 50 Гц. Указанный метод применим и для испытания полюсных многовитковых катушек.
Для обнаружения замыкания между витками применяется ряд методов, простейший из которых — приближение к виткам испытуемой секции П-образного контрольного сердечника из тонкой электротехнической стали с намотанной на нем многовитковой измерительной катушкой, соединенной с электронным вольтметром. Появление тока в короткозамкнутых витках индуцирует в этой катушке ЭДС, регистрируемую чувствительным вольтметром.
После укладки секций в пазы (до соединения параллельных ветвей) ЭДС повышенной частоты индуцируется с помощью П-образного сердечника с обмоткой возбуждения, который прикладывается к головкам двух зубцов, между которыми в пазу лежит сторона испытуемой секции.
Для обнаружения повреждения межвитковой изоляции используется описанный выше контрольный сердечник, прикладываемый к тем же зубцам на некотором расстоянии (чтобы избежать возникновения взаимной индукции) от индукторного. Оба сердечника крепятся на общей рукоятке.
Если расположить по окружности ротора или расточки статора на одинаковом расстоянии р индукторных сердечников, где р — число пар полюсов, то испытание можно вести на полностью соединенной по 62
схеме обмотке [2.6]. Контрольный сердечник перемещается при этом по окружности ротора или статора.
Метод обнаруживает не только замыкания между витками, но и ошибки в числе витков и шаге секций, схеме соединения, а также наличие двойного замыкания на землю.
Другим методом испытания межвитковой изоляции (и обнаружения различных дефектов обмоток) является метод ’’бегущей волны” [2.5]. При этом методе на вывод обмотки с помощью тиратронных преобразователей и переключателей подаются импульсы высокого напряжения с крутым фронтом. Частота повторения импульсов 50—60 раз в секунду.
При прохождении такой волны напряжения по обмотке (с числом витков в секции до 2—3) имеется возможность создать напряжение между витками до 1 —2 кВ.
Для обнаружения пробоя существует ряд методов. В основе одного из них лежит сравнение формы импульсов, прошедших через две какие-либо части одной обмотки (фазы, секции). Для этой цели с помощью переключателя импульс подается поочередно на входные концы этих частей обмотки. Выходные концы их присоединяются к делителю напряжения, соединенному с экраном электронного осциллографа (ЭО). При появлении дефекта в одной из частей, например замыкании между витками, форма импульса меняется и изображение на ЭО раздваивается.
Существуют способы установления места повреждения изоляции [2.5]. При этом вместо сравнения двух частей обмотки можно использовать сравнение испытуемой обмотки и эталонной. Этот метод предоставляет существенные удобства при контроле изоляции в процессе производства.
2.2. КОНТРОЛЬ ОБМОТОК
2.2.1. Измерение ’’холодных” сопротивлений. Измерение ’’холодных” сопротивлений обмотки (см. гл. 5) и сравнение их с расчетным значением позволяет выявить ошибки в числе витков и схеме соединения, качество пайки соединений, несимметрию сопротивления аналогичных обмоток. В случае многовитковых катушек из тонкого провода несоответствие сопротивления расчету может быть следствием технологических причин (вытяжки провода при намотке и др.).
2.2.2. Проверка симметрии напряжения холостого хода обмоток фаз генераторов. Проверка проводится по схеме рис. 2.3 с отсчетом по двум вольтметрам, что позволяет исключить влияние нестабильности режима проверки (изменения скорости вращения или тока возбуждения) .
Рис. 2.3, Проверка симметрии напряжения фаз
Рис. 2.4. Направление тока и магнитного потока
5
Рекомендуется проверять симметрию как фазных, так и линейных напряжений.
2.23. Измерение коэффициента трансформации. Измерение коэффициента трансформации (гл. 3) проводится для АД с фазным ротором.
2.2.4. Проверка симметрии обмоток фаз для АД с фазным ротором. Проверка может быть проведена при питании одной из фаз обмотки статора (при этом проверяется обмотка ротора) или ротора (при этом проверяется обмотка статора) и сравнении максимальных значений ЭДС разомкнутых обмоток фаз, имеющих место при повороте ротора.
2.2.5. Проверка симметрии обмоток фаз для АД с короткозамкнутым ротором. Для АД с КЗ ротором симметрия обмоток фаз проверяется по равенству токов XX. Для исключения влияния возможной не-сйммётрии питающих напряжений опыт проводится трижды (для трехфазных ЭМ) с последовательным переключением питающих проводов.
2.2.6. Проверка симметрии короткозамкнутой обмотки ротора. Для этой цели проводится опыт КЗ (при токах примерно 0,5/ном) с контролем токов фаз статора. При медленном повороте ротора не должно наблюдаться значительных изменений значений фазных токов.
Способ проверки целости стержней короткозамкнутых роторов описан в [2.7,2.8].
2.2.7. Проверка полярности обмоток ЭМ постоянного тока. Напомним, что связь между направлением тока и магнитного потока, который он создает, определяется по рис. 2.4, а связь между направлением магнитного поля, направлением движения проводника в поле, направлением тока, ЭДС и силы, действующей на проводник в поле, по рис. 2.5, а, б. Указанные правила позволяют проверить правильность схемы соединений обмоток возбуждения, добавочных полюсов и компенсационной.
Проверка полярности главных полюсов (ГП) или добавочных полюсов (ДП) может производиться с помощью магнитной стрелки, при-64
Двигатель Направление вращения
Рис. 2.5. Связь электромагнитных и механических величин: а — поле—движение—ЭДС; б - поле—ток—сила
Рис. 2.6. Чередование полярности главных и добавочных полюсов
ближенной к головкам болтов, крепящих полюсы к магнитопроводу. При этом питание подается поочередно к каждой из проверяемых систем обмоток. Включая и выключая небольшой ток (дающий намагничивание, намного большее, чем остаточное), можно определить правильность чередования полюсов.
Учитывая, что поле вблизи болтов неравномерно, для небольших ЭМ можно устанавливать между головкой болтов и компасом (стрелкой) стальной (не намагниченный!) стержень.
Правильное чередование ГП и ДП видно из рис. 2.6: у генератора ДП расположен впереди ’’своего” (имеющего ту же полярность) ГП, у двигателя — сзади ’’своего” ГП.
Полярность отдельно якорной или компенсационной обмотки можно определить по полярности головок болтов ДП, включая эти обмотки поочередно. Полярность компенсационной обмотки должна совпадать с полярностью обмотки ДП и быть противоположна полярности якоря.
Полярность обмоток полюсов крупных ЭМ можно также определить, приближая к головкам болтов небольшую пробную многовитковую катушку, включенную на гальванометр с двухсторонней шкалой, и наблюдая направление отклонения стрелки [2.9]. Предварительно такой индикатор проверяется на катушке (соленоиде) с известной полярностью.
Связь полярности якоря, ГП и направления вращения ЭМ постоянного тока см. [0.8; 2.9].
Проверить эти связи проще всего, наблюдая направление малых углов поворота якоря при кратковременном подключении его к источнику низкого напряжения при полном токе возбуждения ЭМ.
2.3. КОНТРОЛЬ МАГНИТНОЙ СИММЕТРИИ
Магнитную симметрию можно определить как равенство магнитных индукций в соответствующих точках под всеми полюсами ЭМ. Она обеспечивается равенством МДС намагничивающих обмоток и равенством магнитных сопротивлений путей, по которым проходят магнитные потоки.
Под магнитным сопротивлением понимается отношение Ам = F/В, где F — намагничивающая сила, а В — индукция на определенном участке магнитопровода. Значения Ям в сильной степени определяются значением воздушного зазора между статором и ротором, а при составных роторах (синхронные ЭМ с явно выраженными полюсами и др.) ив сегментированных статорах — также и воздушных зазоров в стыках элементов магнитопроводов.
Напомним, что при индукции 1 Тл падение НС на единицу длины потока по воздуху в 50—300 раз больше, чем на ферромагнитных участках магнитопровода. При индукции в зубцах 2 Тл зто отношение уменьшается до 6—8.
Контроль магнитной симметрии должен включать контроль равенства чисел витков аналогичных обмоток по полюсам, контроль значения и симметрии воздушного зазора статор—ротор, а для ЭМ с составными статорами и роторами (поскольку прямой контроль зазоров в стыках невозможен) — контроль значений магнитных потоков полюсов.
Магнитная несимметрия при максимальных и минимальных значениях этих потоков
~' ($тах — ^min)l (Фтах + (2-7)
2.3.1. Контроль значения и равномерности воздушного зазора. Несимметрия воздушного зазора характеризуется относительной неравномерностью (ГОСТ 10169-77):
6g — (Ьтах — max + (2-8)
где Ьупах и bmin — максимальное и минимальное значения зазора.
Обеспечение малых значений 6g (не более 15%) является обязательным для достижения хороших показателей ЭМ.
Неравномерность воздушного зазора может быть следствием отклонения внутренней поверхности статора и поверхности ротора от цилиндрической или следствием смещения оси вращения ротора относительно оси статора (статический эксцентриситет) и относительно оси поверхности ротора (динамический эксцентриситет).
Для ЭМ со штампованными листами стали ротора и статора неравномерность воздушного зазора определяется в основном эксцентриситетом, причем зазоры Ьтах и bmin располагаются по одному диа-66
метру:
е6 = е6с + е6д’ (2-9)
где egс — статический эксцентриситет; — динамический эксцентриситет.
В ЭМ постоянного тока egc вызывает постоянные по направлению и значению приложенные к якорю силы одностороннего магнитного тяжения, токи в уравнительных соединениях обмоток якорей, ухудшение коммутации.
В ЭМ с вращающимся полем egc вызывает появление сил одностороннего магнитного тяжения постоянного направления, значение которых изменяется с частотой 2/ (f — частота тока в сети). Эти силы вызывают шум и вибрацию ЭМ, особенно сильную при несимметрии питающего напряжения [3.11].
В зависимости от значения egc эти силы могут достигать весьма больших значений, что приводит к снижению срока службы подшипников качения и ухудшению динамических свойств роторных систем (снижению критических скоростей).
Динамический эксцентриситет в ЭМ постоянного тока и синхронных вызывает появление сил одностороннего магнитного тяжения, вращающихся (так же как силы небаланса) вместе с ротором с частотой /г= л/60, вибрацию ЭМ, модуляцию напряжения. В асинхронных ЭМ ega вызывает изменения уровней вибрации и шума с частотой скольжения (так же как дефекты клетки КЗ ротора). Значение ega обычно невелико, особенно в тех случаях, когда предусматривается механическая обработка (например, шлифовка) ротора; 6gn может иметь существенное значение в составных роторах.
Контроль значения и равномерности воздушного зазора проводится с помощью набора щупов. В конструкции ЭМ должны предусматриваться соответствующие отверстия в щитах. Проведение замеров требует определенных навыков, чтобы избежать погрешностей, связанных с наличием пазовых клиньев (особенно при скошенных пазах), натеков лака и т. п.
Для ЭМ массовых серий небольшой мощности контроль воздушного зазора проводится по значению тока холостого хода. Контроль эксцентриситета проводится выборочно путем оценки размеров деталей, определяющих значение зазора. Для крупных ЭМ (6 > 10 мм) для контроля 6 и eg применяются специальные раздвижные щупы. Существуют электромагнитные щупы [0.11] (рис. 2.7), в которых имеются намагничивающая обмотка, через которую пропускается переменный ток постоянного значения, и измерительная обмотка, ЭДС которой обратно пропорциональна значению воздушного зазора.
Для многополюсных синхронных ЭМ с явно выраженными полюсами измерение 6 проводится под центром трех-четырех полюсов, сдви-
Рис. 2.7. Электромагнитный щуп:
1 — обмотка возбуждения; 2 - измерительная обмотка
нутых соответственно на угол 120 и 90° друг от друга при последовательных поворотах ротора на указанный выше угол (до полного оборота).
Полученные при этом замеры дают возможность определить раздельно статический эксцентриситет как разность зазоров под одним полюсом ротора при его повороте и динамический эксцентриситет как разность зазоров в одной точке стато-
ра при повороте ротора.
Для определения эксцентриситета используются максимальные значения, полученные указанным выше способом, и вычисляется средний
зазор.
2.3.2. Определение симметрии магнитных потоков. Симметрия обмоток и воздушного зазора не гарантирует, как указывалось выше, равенства потоков полюсов в ЭМ постоянного тока и синхронных с составными роторами, возбуждаемыми обмотками постоянного тока (при 2р > 4). Для проверки равенства потоков могут быть использованы различные метода измерения индукции и потока. Следует, однако, иметь в виду, что определению подлежит небольшая разность потоков полюсов.
Измерить эту разность можно при неподвижном состоянии ЭМ с помощью, например, двух последовательно включенных измерительных обмоток, намотанных на края полюсных наконечников и присоединенных к флюксметру. Включая и выключая ток возбуждения, можно непосредственно измерить разность потоков (см. гл. 3). Измерить разность потоков полюсов можно и путем осциллографирования ЭДС проводника, размещенного на поверхности статора при вращении возбужденного ротора. Неравенство потоков полюсов вызывает в этом случае изменение амплитуды ЭДС с частотой и/60 Гц, так называемую модуляцию напряжения. Здесь также, учитывая малые величины модуляции, следует обеспечить непосредственное ее измерение (гл. 3).
2.3.3. Магнитное уравновешивание. В связи с весьма большим значением суммарных магнитных сил, действующих на полюсы роторов синхронных ЭМ, даже небольшая асимметрия потоков вызывает появление приложенной к ротору и вращающейся вместе с ним силы, во много раз превышающей допустимую силу от небаланса ротора. При наличии определенной (неодинаковой по осям X и У) податливо
сти конструкции статора и системы ротор—опоры эти силы вызывают, так же как и небаланс ротора, вибрацию с частотой вращения.
Если балансировка ротора ЭМ производится на собранной ЭМ в режиме двигателя при напряжении, близком к номинальному, то в конечном счете, хотя зто и вызывает некоторые затруднения при определении значения и места установки балансировочных грузов, сила магнитной неуравновешенности, как и сила от механического небаланса, компенсируется центробежной силой уравновешивающих грузов.
Однако такое равновесие имеет место лишь при одном значении магнитного потока и тока возбуждения. При регулировании (изменении тока возбуждения в эксплуатации) возникает сильная вибрация с частотой вращения, являющаяся признаком магнитной неуравновешенности [2.10]. Для ее исключения необходимо производить раздельное механическое и магнитное уравновешивание. Механическое уравновешивание роторов в собранной ЭМ должно производиться при минимально возможных напряжении и токе возбуждения; магнитное — при наибольших допустимой ЭДС и токе возбуждения. Технология магнитного уравновешивания та же, что и механического [2.11].
При механическом уравновешивании после измерения значения и определения фазы вибрации опор в определенную точку ротора вносится пробный груз с известной массой и определяются изменение значения и фаза вибрации, что дает возможность определить место установки и массу необходимого балансировочного груза. При магнитном уравновешивании вместо внесения пробного груза производится выключение (замыкание) одного витка в катушке определенного полюса ротора. По изменению фазы и значению вибрации находится катушка, в которой следует выключить виток (витки) для обеспечения магнитного уравновешивания (выключение витков всегда возможно, поскольку имеется возможность это сделать в одной из двух точек по диаметру ротора). По этим данным изготавливается специальная катушка.
Разумеется, магнитное уравновешивание должно производиться после контроля и выравнивания зазоров под отдельными полюсами. Качество магнитного уравновешивания, кроме контроля зависимости уровня вибрации от тока возбуждения, можно проверить на неподвижной ЭМ, измеряя индикатором с ценой деления 1—10 мкм смещение вала ротора при включении тока возбуждения.
2.3.4. Контроль ЭДС вала. Неравенство магнитных сопротивлений 7?м ярма статора и ротора под отдельными парами полюсов и эксцентриситет воздушного зазора приводят к несимметрии магнитных потоков Ф. в ярме, которую можно рассматривать как появление охватывающего вал кольцевого магнитного потока, накладывающегося на симметричную систему этих потоков.
Рис. 2.8. Несимметрия магнитных потоков в ярме:
а - из-за различного магнитного сопротивления стыков; б - из-за повышенного значения магнитного сопротивления стыков; в - из-за эксцентриситета ротора
В то время как симметричная система потоков Ф. (сумма Ф. при обходе ярма равна нулю) не создает ЭДС в контуре, образованном валом (опорами) корпусом ЭМ, изменяющийся при вращении ротора по значению и направлению кольцевой поток (при несиммегрии Ф.) создает ЭДС ЕЪЛ) которая может быть измерена на концах вала. При значениях Евл > 2 В масляная пленка в подшипниках может быть пробита и через них пройдет ток, вызывающий разрушение рабочих поверхностей.
Для ЭМ, у которых активная сталь статора или ротора собрана из сегментов, причиной появления таких потоков может быть неправильный выбор числа сегментов, высокое RM стыков сегментов. При высоких индукциях причиной их могут быть также уменьшения сечения ярма: наличие вентиляционных и других каналов, вырубок под шпонки и т. д. Возникновение несиммегрии потоков в ярме статора явнополюсной ЭМ поясняет рис. 2.8, а—в.
В крупных ЭМ, где Еъл может достичь указанного выше значения, для исключения подшипниковых токов опоры ротора изолируются от фундаментной плиты, корпуса и от других элементов конструкции (например, трубопроводов). Измерение сопротивления этой изоляции и ЭДС вала производится в соответствии с рис. 2.9. Вал через меднографитную щетку соединяется с корпусом (при этом шунтируется сопротивление масляной пленки неизолированной опоры), измеряется напряжение на изоляции опоры Ux и с помощью медно-графитных щеток измеряется ЭДС вала U2 (^Вл)- При исправной изоляции они должны быть равны. Если это не имеет место, приводится в порядок изоляция опоры и снова измеряются Ux и U2. Для измерения Еъл не следует применять вольтметры с высоким входным сопротивлением, например электронные, так как они могут давать увеличенные показания из-за различных наводок, не влияющих на значения подшипниковых токов. 70
Рис. 2.9. Измерение ЭДС вала и проверка изоляции подшипников
Заметим, что если для ЭМ с частотой 50 Гц Евл может достигать опасных значений для относительно крупных ЭМ (Рн >500 кВт), то для ЭМ с повышенными частотами (400 Гц) такая опасность возникает уже для ЭМ мощностью > 50 кВт. Для измерения Еъл в таких ЭМ следует изолировать наружное кольцо подшипника качения от щита. Наличие текущих через вал подшипниковых токов можно обнаружить, измеряя ЭДС неподвижной обмотки, намотанной вокруг вала. Контроль ЭДС вала должен проводиться систематически.
Для установления причин возникновения повышенных Евл нужно определить ее гармонический состав — значения 1,3 и 5-й гармонических составляющих в зависимости от тока возбуждения. Если зависимость Евл от тока возбуждения имеет максимум, после которого она начинает снижаться, то причиной является эксцентриситет ротора. Снижение 6ВЛ с ростом тока возбуждения объясняется насыщением зубцов, приводящим к увеличению эффективного среднего воздушного зазора и уменьшению тем самым относительного эксцентриситета. Если с ростом тока возбуждения резко возрастают 3-я и 5-я гармонические составляющие Евл, то имеет место насыщение листов активной стали, перекрывающих стыки магнитопровода, из-за увеличения торцевых зазоров стыка.
Кроме проходящих в плоскости, перпендикулярной оси вала, кольцевых потоков, в крупных ЭМ из-за наличия НС соединений между катушками может возникать осевой поток через вал. В местах, где этот поток выходит из вала, например в шейках, возникает ЭДС униполярной индукции, создающая ЭДС, действующие вдоль шейки. Значения их обычно малы и не вызывают опасных воздействий. Величина осевого потока легко может быть проверена с помощью флюксметра.
24. ПРОВЕРКА СОСТОЯНИЯ ПОДШИПНИКОВ
Проверка состояния подшипников до пуска ЭМ сводится к контролю наличия достаточного количества смазки нужной марки, проверке системы маслоподачи и охлаждения, аппаратуры теплового и вибрационного контроля. Проверяется возможность свободного вращения ротора путем его проворота. Проворот ротора крупных ЭМ может проводиться вручную, с помощью рычага и домкрата, а также с помощью крана, натягивающего свободнонамотанный (незакрепленный на валу) трос [0.9].
При провороте должны выполняться требования техники безопасности, исключающие возможность включения ЭМ.
После кратковременного включения ЭМ на пониженное напряжение (толчка) и разгона ротора до небольшой частоты вращения следует на выбеге проверить с помощью стетоскопа отсутствие ненормальных шумов, вызванных ударами, цеплянием, сухим трением в деталях опоры и т. п. В процессе последующего выхода на номинальную скорость нужно непрерывно контролировать нагрев вкладышей или наружных обойм подшипников качения, крышек-фланцев уплотнений, смазки, а также уровень вибрации.
Для отработки конструкции подшипников, проведения указанных выше пусконаладочных работ и контроля в эксплуатации следует рекомендовать метод контроля режима трения — проверка достаточности толщины масляной пленки по измерению ее электрического сопротивления [2.13]. Для этой цели к валу через щетку и к корпусу ЭМ подводится напряжение порядка 100 мВ постоянного тока, не способное привести к пробою пленки. Измерение небольшого (в миллиамперах) тока через подшипник позволяет установить режим трения, в котором он работает.
При непосредственном металлическом контактировании тел качения и беговой дорожки имеет место сухое трение, при полном разделении вершин микронеровностей масляной пленкой имеет место нормальный для работы подшипника гидродинамический режим. В первом случае измерительный ток проходит через подшипник, во втором — практически отсутствует. Если толщина масляной пленки недостаточна, то на определенной части оборота вала может иметь место металлический контакт. Метод позволяет определять часть полного оборота вала, в течение которого этот контакт отсутствует (’’фактор ОМК”).
Очевидно, что длительная работа подшипника невозможна, если ОМК < 100%. Измерение ОМК позволяет подбирать нужный смазочный материал, отрабатывать конструкцию и технологию изготовления ЭМ. В процессе пуска наблюдается постепенное увеличение ОМК. Частота вращения, при которой тела качения ’’всплывают” на смазку, может служить дополнительной оценкой выбранного смазочного материала.
Для ЭМ с неизолированными подшипниками методом контроля сопротивления смазочной пленки проверяются оба подшипника одновременно.
Другим прибором, который следует рекомендовать для контроля состояния подшипников качения при установившейся частоте вращения, является индикатор состояния подшипников ИСП-1 (см. гл. 7), измеряющий уровень вибрации, возбуждаемой ударными процессами в подшипниках [2.12].
Глава третья
ХАРАКТЕРИСТИКИ. ПАРАМЕТРЫ
3.1. ВИДЫ ХАРАКТЕРИСТИК
Под характеристикой ЭМ понимается функциональная зависимость мевду величинами, определяющими ее свойства, приводящаяся обычно в наглядной графической форме. Существует большое число различных характеристик ЭМ. Рассмотрим характеристики, определяющие эксплуатационные свойства ЭМ. Эксплуатационные характеристики могут быть непосредственно определены из опыта или рассчитаны с помощью схем замещения. Основные их виды приведены в табл. 3.1.
Таблица 3,1
Режим Характеристика Зависимость Постоянные величины
Генераторный Внешняя U—F(J) n, iB, cos^>
Регулировочная Ь» F(D n, U, cos <p
Нагрузочная U=F(fB) n, I, COSip
Двигательный Механическая* n - u, f
Электромеханическая* I, cos ip = F (M) u, f
U-образная (для СМ)* I = ^b) u, P2. f
Генераторный Энергетическая* Pl= F(P2} u. f
и двигательный кпд* V = F(P2) u, f
* Входит в состав рабочих характеристик по ГОСТ 17154-71.
Они относятся к установившимся режимам. Полезной мощностью Р2 для двигательного режима является механическая мощность (iB — ток возбуждения, I — ток якоря).
Неустановившиеся режимы работы генераторов характеризуются изменением напряжения во времени U = F (г) при внезапном нагружении или отключении нагрузки и зависимостью тока от времени при внезапном КЗ.
К числу основных характеристик неустановившегося режима двигателей относятся пусковые характеристики М = F (г), п = F (t), / = =F(f).
Важным эксплуатационным показателем генераторов является качество энергии, характеризуемое, в первую очередь, стабильностью напряжения по значению, форме и амплитуде кривой напряжения для генераторов переменного тока и также значению пульсационных составляющих напряжения постоянного тока.
3.2. МЕТОДЫ НАГРУЖЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
С целью уменьшения расхода электроэнергии во всех случаях, где зто целесообразно,-а для крупных ЭМ всегда, при испытании должна применяться система возврата энергии, прошедшей через испытуемую электрическую машину (ИМ) в сеть.
Различают системы возврата энергии и взаимной нагрузки. В первом случае нагрузка ИМ (или ее привод) может реализоваться с помощью ЭМ другого типа или даже другого рода тока. Места потребления и возврата энергии отделены при этом друг от друга относительно длинной энергетической цепочкой, в которой имеют место потери.
В случае взаимной нагрузки для испытания используются две близкие по мощности, а еще лучше — одинаковые ЭМ, из которых одна работает двигателем, а другая — генератором. Точки отбора и возврата энергии при этом совпадают, и из сети потребляется лишь мощность, равная потерям двух ЭМ. Очевидно, что такие схемы наиболее экономичны.
Ниже приводятся основные принципы построения схем взаимной нагрузки для ЭМ различного типа и рода тока.
Следует иметь в виду, что для ЭМ с одним концом вала направления вращения в схеме взаимной нагрузки получаются различными, что требует пересоединения обмоток, наладки коммутации ЭМ постоянного тока.
3.2.1. Методы нагружения машин постоянного тока. Для этих целей могут применяться четыре различные схемы.
Схема на рис. 3.1 применима для ЭМ с регулируемым возбуждением. Усилением тока возбуждения одна из ЭМ переводится в генераторный режим. Магнитные потоки в ЭМ получаются разными. Покрытие потерь производится за счет сети.
Рис. 3.1. Схема взаимной нагрузки с регулируемым возбуждением
Рис. 3.2. Схема взаимной нагрузки с вспомогательным двигателем
Рис. 3.3. Схема взаимной нагрузки с питанием от сети и вольтодобавочным генератором
Рис. 3.4. Схема взаимной нагрузки с вспомогательным двигателем и вольтодобавочным генератором (схема возбуждения, см. рис. 3.3)
На рис. 3.2 показана схема с вспомогательным двигателем. Потери, за исключением потерь на возбуждение, покрываются за счет энергии, подведенной к валу вспомогательного двигателя (ВД). Обмотки возбуждения должны питаться (в целях устойчивости режима) от сети. Схема весьма удобна для низковольтных и высоковольтных ЭМ. Магнитные потоки ИМ различны.
Схема с питанием от сети и вольтодобавочным генератором (ВГ) показана на рис. 33. В этой схеме в цепь якоря ЭМ, работающей генератором, включается ВГ, рассчитанный на полный ток, и напряжение, равное суммарному падению напряжения в якорных цепях двух ЭМ. Магнитные потоки в ЭМ одинаковы, что важно при исследовании добавочных потерь (см. гл. 4).
Схема с ВГ и вспомогательным двигателем приведена на рис. 3.4. Эта схема создает полностью идентичные по токам в обмотках условия
Рис. 3.5. Схемы взаимной нагрузки синхронных ЭМ за счет углового смещения роторов с помощью муфты:
а — с питанием от сети; б — с приводом от вспомогательного двигателя
работы ИМ. Применение ВГ обязательно при испытании ЭМ с нерегулируемым возбуждением, например тяговых двигателей последовательного возбуждения. Показателем правильности сборки схемы в этом случае является отсутствие вращения ИМ при наличии тока через якорные цепи при возбуждении ВГ. ИМ должны иметь одинаковую частоту вращения в обе стороны в двигательном режиме.
Для обеспечения возможности работы ЭМ в схемах взаимной нагрузки они должны обладать устойчивыми характеристиками — частота вращения ИМ, работающей в двигательном режиме, и напряжение ИМ, работающей в генераторном, должны уменьшаться с ростом нагрузки (тока якоря), что достигается введением МДС, пропорциональной току (включением последовательной обмотки, сдвигом щеток с нейтрали), направленной против МДС возбуждения.
3.2.2. Методы нагружения синхронных машин. Значение и характер (генераторный, двигательный) нагрузки синхронных ЭМ (СМ) определяются углом 8 между осью полюсов ротора Е и поля статора LT поэтому нагружение СМ методом взаимной нагрузки может быть осуществлено за счет создания относительного углового сдвига между роторами или полями статоров двух спаренных СМ, в результате чего одна из СМ работает в генераторном режиме, а другая — в двигательном.
Как и в случае ЭМ постоянного тока, покрытие потерь при испытании может производиться как из сети (рис. 3.5, а), так и механически (рис. 3.5, б) — вращением двух спаренных СМ приводным двигателем.
Простейшим вариантом нагружения является создание углового сдвига между роторами. Этот вариант не нуждается в дополнительных устройствах и является единственным возможным вариантом для испытания ЭМ большой мощности (турбогенераторов).
К числу недостатков варианта относится сложность регулирования нагрузки (угла 8), требующая поворота роторов на малые углы; спаривающие муфты (М) должны быть жесткими (для этих целей могут, например, использоваться зубчатые полумуфты и обоймы с внутренним зацеплением).
Поэтому при испытании крупных турбогенераторов приходится проводить точные расчеты угла [3.1]. Для СМ малой и средней мощности 76
Рис. 3.6. Возврат энергии при испытании асин- f хронных машин в сеть с пониженной частотой -------
Сеть
Сеть 2
'"-'ИМ
могут использоваться устройства для поворота статора одной из ИМ вокруг оси вращения на заданный угол.
Описанные выше варианты основаны на механическом регулировании угла 6. Существует также вариант электрического регулирования этого угла. Относительный поворот поля статора одной из СМ может быть получен включением в его цепь фазорегулятора (ФР) (эта СМ используется как нагрузочная, поскольку напряжение на ее зажимах отличается в этом случае от номинального).
Другим вариантом электрического регулирования угла 6 является применение в качестве привода или нагрузки специальной СМ (с тем же числом пар полюсов, что и ИМ), имеющей неявнополюсный ротор с двумя обмотками возбуждения, сдвинутыми на электрический угол 90°. Меняя отношение токов возбуждения в этих обмотках, можно плавно поворачивать ось поля ротора. Такая машина двойного возбуждения (МДВ) представляет значительные удобства для испытательных станций.
Нагружение СМ током, близким к номинальному, может быть получено без спаривания при работе в режиме синхронного компенсатора (costf = 0).
3.2.3. Методы нагружения асинхронных машин. Величина и характер нагрузки (двигательный, генераторный) АЭМ определяется значением и направлением (знаком) скольжения s.
Возвратная работа АЭМ возможна при наличии двух сетей (рис. 3.6) с частотами = /(1 + s) и/2 “/О - $), где/ — номинальная частота. Для АЭМ с малыми значениями s можно иметь только одну сеть с регулируемой частотой и работать с частотами f и /(1 — 2s). Взаимная нагрузка АЭМ от одной сети возможна, если между валами ИМ включается редуктор с передаточным отношением 1 + 2s.
Для АЭМ с фазным ротором для осуществления режима возвратной работы могут использоваться каскадные схемы. Пример такой схемы [3.2] для испытания четырехполюсных АД приведен на рис. 3.7 (О’ — контактные кольца). ИМ спаривается в этой схеме с шестиполюсной АЭМ (АГ1), с колец ротора которой питается асинхронный двигатель-генератор (четырех- и десятиполюсный). Регулирование нагрузки производится сопротивлением в цепи ротора АГ2. Потери в сопротивлении составляют примерно 7% от мощности ИМ. Номинальная мощность АД2 и АГ2 составляет 1/3 мощности ИМ. Общие потери в схеме равны примерно 30—35% мощности ИМ.
им
АГ1 КК
АД2 АГ2
Рис. 3.7. Каскадная схема возврата энергии при испытании четырехполюсных АД (цифры 4; 6; 10 означают число полюсов)
Другой пример схемы возвратной работы (рис. 3.8) при испытании крупных АД (8—10 МВт) с КЗ ротором приведен в [3.3]. В качестве нагрузки используется АЭМ с фазным ротором (которая может быть получена перемоткой обмотки ротора АЭМ того же типа, что и испы-
туемая (с форсировкой охлаждения). В цепь контактных колец этой АЭМ включаются три ЭМ постоянного тока с шихтованной станиной. Обмотки возбуждения ЭМ постоянного тока питаются от источника низкой частоты (регулируемой в пределах от 0 до Д). Заданием этой частоты устанавливается требуемый
Рис. 3.9. Схема двухчастотного нагружения асинхронного двигателя:
1 - генератор (индукционный регулятор) частотой 50 Гц; 2 — генератор частотой 40 Гц;
3 - испытуемый АД; 4 - схема измерения напряжения, тока, мощности
режим нагружения ИМ. Требуемая мощность ЭМ постоянного тока равна РНом«-
Для АЭМ имеется возможность нагружения номинальным током без спаривания за счет питания от двух источников с разной частотой (50 и 40 Гц) (рис. 3.9). Регулируя напряжение генератора (частотой 40 Гц), можно получить номинальный ток ИМ. Такой искусственный метод нагружения позволяет проводить контрольные испытания (за исключением проверки уровня вибрации и шума), определять превышение температуры и добавочные потери.
Существует также ряд других схем искусственного нагружения АЭМ без спаривания, например по методу Костенко—Кузнецова с использованием постоянного тока [0.13,4.7 ].
3.3. МЕТОДЫ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ВЕЛИЧИН
3.3.1. Измерение частоты вращения. Для измерения ni9 об/мин, применяются контактные методы, когда измерительный прибор — тахометр прижимается или присоединяется к концу вала, и бесконтактные методы.
Из контактных приборов может быть рекомендован часовой тахометр (ТЧ10Р) и тахометр-датчик, вырабатывающий т электрических импульсов за один оборот, которые передаются на цифровой электронный частотомер (см. § 1.7). Точность первого из указанных приборов ± 0,5%, время отсчета 6 с. Точность второго, если нет проскальзывания, весьма высока. Центробежные тахометры могут применяться лишь для грубого контроля.
Из числа бесконтактных широкое применение получил стробоскопический метод, в котором частота вспышек специальной лампы может регулироваться с точностью ± 0,5% (при частотах 2—250, 500 Гц). В строботахометрах имеется система синхронизации вспышек с частотой какого-либо внешнего напряжения (например, сети питания, генератора с высокостабильной частотой и т. п.), что позволяет измерять скольжение.
Наиболее перспективным является измерение п с помощью фотодатчиков, например ПДФ-3, создающих ига/60 электрических импульсов в секунду, которые учитываются электронным цифровым частотомером (например, 43-57 — см. § 1.7) или электронным тахометром (например, ТЦ-ЗМ). Электрические импульсы возникают при воздействии на фотодатчик световых импульсов, которые могут быть получены с помощью сидящего на валу ИМ диска с прорезями, отражением светового луча от светлой метки, нанесенной на вал, вентилятор или шкив [0.10,3.4,3.5].
Если сигнал фотодатчика подвергается обработке для определения ускорения, скольжения и других целей, то число т должно быть
достаточно велико (60—600 прорезей в зависимости от размеров диска).
Точность измерения этим методом столь высока, что он допускает определение малой разности частот вращения (скольжения) порядка 0,01% и менее. Метод пригоден для использования в автоматизированных испытательных установках.
3.3.2. Измерение скольжения. Широкое распространение в практике испытания АЭМ получил способ измерения скольжения, согласно которому вблизи торца вала устанавливается обмотка с большим числом витков, концы которой включаются на гальванометр с двухсторонней шкалой. Неизбежная небольшая асимметрия воздушного зазора или КЗ клетки ротора приводит к тому, что по валу проходит магнитный поток, изменяющийся с частотой скольжения fs и индуцирующий в обмотке ЭДС этой частоты. Соответствующее число колебаний совершает стрелка гальванометра. Сосчитав число односторонних отклонений стрелки т и время t (по секундомеру), в течение которого они имели место, можно определить частоту скольжения fs = m/t. При известном навыке удается отсчитывать fs до значений 2—2,5 Гц, что соответствует скольжению s = 5% (2,5/50). Весьма целесообразно применение стального или ферритового стержня, проходящего через обмотку, конец которого приближается к торцу вала. Если напряжение измерительной обмотки подвести к электронному частотомеру, то будет обеспечено измерение скольжения, необходимое, в частности, в установках автоматического испытания. Метод этот может, однако, оказаться непригодным для АД с числом полюсов более 8, особенно при повышенной частоте питания (400 Гц).
Скольжение можно подсчитать и определением числа оборотов в минуту метки, нанесенной на вал, при освещении ее от стробоскопа, синхронизированного с частотой сети.
3.3.3. Измерение вращающих моментов. Точность этих измерений определяет точность измерения механической мощности на валу ЭМ (поскольку измерение частоты вращения может выполняться с весьма высокой точностью) и тем самым возможность прямого определения КПД и добавочных потерь. Поэтому обеспечению достаточной точности устройств для измерения М необходимо уделять должное внимание [3.5, 3.6].
Измерение пускового момента Мп при неподвижном роторе может быть выполнено с помощью рычага и динамометра (рис. 3.10). Измерение следует проводить при строго горизонтальном положении рычага и вертикальном направлении усилия динамометра. Для исключения моментов трения (в подшипниках, щетках) измерение проводится дважды: при медленном подъеме рычага, с подходом к горизонтальному положению рычага снизу (против направления измеряемого момента), и при опускании рычага сверху. Среднее значение этих двух измерений дает действующий на ротор (электромагнитный) пусковой 80
Рис. 3.10. Измерение пускового момента при неподвижном роторе:
1 - трос; 2 - динамометр; 3 - ИМ; 4 - рычаг; а - правильно; б - неправильно (натяжение троса 1 влияет на показания динамометра)
момент. Как правило, определение момента 7Ц, проводится при нескольких положениях ротора со сдвигом на 1,5 зубцовых деления статора на протяжении 1/3 полюсного деления.
Указанный выше прием исключения моментов трения за счет измерения момента Мп при двух встречных перемещениях ротора используется во всех случаях измерения момента и тарирования измерительных устройств.
Вместо динамометра или пружинных весов, у которых измерение усилия связано с пропорциональным ему перемещением пружины, в особо точных моментомерах применяются устройства — весы с автоматическим изменением развиваемого ими усилия (встречного по отношению к измеряемому) до тех пор, пока система не возвратится в нулевое положение, существовавшее до приложения момента (компенсационные измерения) [0.10,3.6].
Во всех случаях определения 7ИП и при проведении опытов КЗ с целью предупреждения несчастных случаев или порчи валов (шпоночных устройств) особое внимание должно уделяться надежному и безопасному стопорению ротора. Крепление должно быть рассчитано на момент, в 2—3 раза больший, чем максимально возможный (с учетом ударных моментов), и проверено при постепенном увеличении момента. Направление вращения ЭМ должно быгь предварительно проверено при малых моментах.
Измерение момента вращающейся ЭМ может производиться двумя методами: балансирным и с применением торсионного моментомера (ТМ).
При балансирном методе ИМ спаривается с ротором тормозного устройства, которое в зависимости от значения М может представляй» собой алюминиевый диск, вращающийся в магнитном
поле, создаваемом системой полюсов, или электрический генератор, работающий на внешнюю нагрузку [3.5, 3.6]. Полюсная система тормозного устройства или корпус генератора подвешивается таким образом, что под влиянием действующего на них момента, равного моменту на вал, они могут поворачиваться, воздействуя при этом на измерительную систему, аналогичную описанным выше.
В балансирных моментомерах (БМ) возникают погрешности двоякого рода. Трение в опорах балансирной части и изгибные силы в токо-подводах и воздухоподводах (в больших генераторах) создают зону нечувствительности, а часть увлекаемого при вращении диска (ротора) воздуха, взаимодействуя с окружающим, создает реактивный, действующий на ротор момент, не учитываемый балансиром (часть этого момента, действующая на балансир, учитывается). С целью уменьшения трения применяются специальные конструкции опор. Для подшипников качения применяются жидкая смазка с небольшим количеством постоянного обновляемого масла заданной вязкости и специальные электромагнитные устройства, создающие быстрые угловые колебательные перемещения гнезда, в котором смонтировано наружное кольцо подшипника [3.6].
Для уменьшения реактивных моментов вход и выход вентилирующего воздуха в балансирных генераторах должен иметь строго аксиальное направление.
Для контроля значений погрешностей проводится тарирование БМ. Для БМ класса точности 0,5 и более низкого для этой цели может использоваться тарированный двигатель (см. гл. 4), а в случае балансирного генератора с точностью более 0,5 — такой же БМ более высокой точности, работающий в режиме двигателя.
При тарировании снимается график показаний (измерений) динамометра 7Ии в зависимости от приложенного тарирующего момента Л/тар, при многократном изменении Л/тар от наименьшего до наибольшего значения и наоборот. По этим данным определяется вариация показаний 7Ии для определенного значения 7Итар, порог чувствительности, дрейф нуля и среднеквадратическая погрешность. При обработке результатов измерения используется средняя линия указанных выше тарировочных графиков. Для наиболее точных БМ измерительное устройство проходит отдельное тарирование (без вращения БМ) навеской эталонных грузов на поворотный корпус [3.6].
В методе торсионного моментомера угол скручивания торсионного участка между двумя фланцами пропорционален приложенному моменту.
Для измерения угла скручивания, который очень мал (примерно 0,5°), применяются три варианта: индукционный, вариант встречного включения обмоток двух индукторных генераторов, тензометрический.
В случае индукционного варианта при скручивании вала уменьшается воздушный зазор специального магнитопровода с одной стороны вала и увеличивается с другой. Соответственно изменяется индуктивность каждой из двух неподвижных, включенных по мостовой схеме, катушек, охватывающих магнитопровод.
При встречном включении обмоток двух индукторных генераторов-датчиков с большим числом зубцов, роторы которых расположены по краям торсионного участка вала — при скручивании вала меняется угол сдвига фаз между ЭДС датчиков, что приводит к появлению сигнала, характеризующего угол скручивания. Катушки датчиков неподвижны.
ТМ с тензометрическим мостом выпускаются серийно в двух модификациях: с передачей измерительного сигнала через скользящий контакт и с бесконтактной передачей сигнала. В последнем случае используются схемы преобразования тока разбаланса тензометрического моста в частоту (10—15 кГц). Передача сигнала с вращающейся части и питание измерительной схемы происходят через индуктивные или (реже) емкостные связи. Контактные ТМ имеют несколько большую длину, но меньший диаметр и момент инерции.
ТМ выпускаются классов точности 0,2; 0,5; 1. Имеется, однако, значительное число факторов, например дрейф нуля, гистерезис тензодатчиков и особенно механических факторов, определяемых качеством соединения валов (радиальных, осевых и изгибных усилий в соединениях), приводящих к значительным дополнительным погрешностям. Для ТМ с классами точности 0,2; 0,5 реальные погрешности могут быть в 2—3 раза больше основной.
Весьма жесткие требования предъявляются к условиям спаривания при применении ТМ. Если для измерения моментов в установившихся режимах могут применяться муфты с компенсацией углового нарушения соосности (например зубчатые по ГОСТ 5006-83Е), то для измерения нестационарных моментов необходимо жесткое соединение валов при весьма точной центровке ИМ.
Следует иметь в виду, что ТМ являются упругим звеном системы валопровода, что может приводить к крутильным колебаниям. Если это явление наблюдается, следует применить ТМ с большим номинальным моментом, т. е. более жесткий.
Размеры и основные характеристики ТМ приведены в табл. 3.2 и на рис. 3.11.
Измерение моментов при неустановившихся режимах дает возможность определения важнейшей характеристики двигателя — зависимости М =F (п) или для АД — М = F ($).
Характерными точками кривой М ==/(s) (рис. 3.12) являются: пусковой момент Мп при п = 0, s = 1 (а), минимальный момент в процессе разбега Mmin при smin (б), максимальный моментМтах при
Таблица 3.2. Основные характеристики торсионных моментом еров
Вид по передаче сигнала • Ж G, кг J. ю3, кг - м2 £, мм £), мм ^вл’ мм Т>ф, мм
Контакт- 10-100 5 0,6 320 120 20 —
ный 200-500 6,5 1 345 120 36 —
2000 8,5 3,7 440 140 52 —
5000 27,5 18 535 190 75 —
10 000 37,5 38 575 190 92 —
Бесконтакт- 50-200 5 1,4 160 135 — 90
ный 500-2000 9 10,5 175 160 — 160
5000 15 30,6 190 175 — 190
10 000 33 ПО 210 205 — 235
Примечание. AfHOM _ номинальный момент; J — момент инерции; L — общая длина; Dr— диаметр корпуса; £)ф — диаметр фланца; — диаметр конца вала; G — вес.
Рис. 3.11. Габаритные размеры торсионных моментомеров: а — контактного; б — бесконтактного
Рис. 3.12. Механическая характеристика асинхронного двигателя
$тах (в) и номинальный момент 7ИНОМ (в номинальном режиме) при «ном (*)-
Моменты Мп, Mmtn , Мтах связаны с большими токами (пусковой ток может в 5-7 раз превышать номинальный), и определение этих моментов требует применения специальных методов. Моменты Мп и Мтах могут быть определены при нескольких пониженных напряжениях с последующей экстраполяцией на номинальное напряжение.
Для определения зависимости М =F(n) (или М =F(cj)) используются три метода:
1. Метод определения ускорения ротора при разбеге двигателя на
холстом ходу. В этом случае действующий на ротор в воздушном зазоре электромагнитный момент
Мэы = Му + 7ИМХ, (3.1)
где Му — момент, сообщающий ротору угловое ускорение со; 7ИМХ — момент механических потерь.
My=ajJ9 (3.2)
где J — момент инерции ротора;
означает
dco/dt. (3.3)
AfMX — 9,55 рмх/и, (3.4)
где рмх — механические потери.
Следовательно, если определить со, то при известных значениях J и рмх можно определить Мэм.
Существует несколько методов определения <Ь.
Простейшим методом определения со является графическое дифференцирование кривой со =F(f), т. е. разбиение времени пуска t на малые отрезки Д/, определение приращения скорости Дсо для каждого из этих отрезков и вычисление сЬ~ Дсо/Д/.
Такой метод, однако, не дает возможности выявления кратковременных изменений — ’’провалов” момента (особенно так называемых ’’игольчатых”), которые существенно ухудшают качество механической энергии, способствуя возникновению ударов в механической трансмиссии, имеющей зазоры (например, в зубчатых передачах), с которой сцеплен двигатель (рис. 3.13).
Поэтому для определения & предложен ряд методов непосредственного измерения, описанных ниже.
Поскольку исходные данные для определения & содержатся в кривой со = F(f), получаемой с помощью тахогенераторов, то особое значение приобретает отсутствие различного рода пульсаций в их напряжении, искажающих пропорциональность Етт = со. Наиболее опасными
Рис. 3.13. Механическая характеристика асинхронного двигателя серии 4А:
а — опытный образец; б — серийный образец
являются при этом зубцовые пульсации, их период близок к времени ’’провалов” момента, которые желательно выявить. Применение фильтров для этих пульсаций снижает чувствительность (повышает инерционность) метода. Коллекторные пульсации в тахогенераторах постоянного тока, частота которых существенно выше зубцовых, могут быть отфильтрованы без ущерба для чувствительности метода.
Поэтому в практике для измерения нашли применение униполярные тахогенераторы, ЭДС которых не содержит заметных пульсаций. Поскольку эта ЭДС мала (милливольты), применяются усилители и электронная схема дифференцирования.
Применяются также тахогенераторы постоянного тока с обмоткой на полом стакане, вращающемся в зазоре магнитной системы. В таких тахогенераторах зубцовые пульсации отсутствуют, коллекторные отфильтровываются и для получения производной используются электронные схемы.
К числу методов непосредственного преобразования относится также метод электромагнитного преобразователя. В этом случае ЭДС тахогенератора воздействует на обмотку, намотанную на подвижной рамке, расположенной в сильном поле постоянного магнита (так же как это делается в магнитоэлектрических измерительных приборах). На одной оси с этой системой расположена такая же вторая подвижная система, обмотка которой присоединена к осциллографу. Угол поворота первой рамки пропорционален са, что обеспечивается пружинами с возвратным усилием. ЭДС второй рамки пропорциональна <Ь.
Зубцовые и коллекторные пульсации тахогенератора в этом случае не вносят существенных помех, поскольку преобразователь является для них механическим фильтром. Однако повышенная инерционность ухудшает возможность выявления кратковременных провалов момента в процессе разгона.
Применяется также метод асинхронного тахогенератора с двухфазной обмоткой на статоре и полым ротором. Возбуждая одну из обмоток постоянным током, можно получить в другой ЭДС, пропорциональную со, а возбуждая одну из обмоток переменным током стабильной частоты и амплитуды, можно получить в другой ЭДС, пропорциональную [0.10; 3.7]. Сдвоенный тахогенератор указанного типа способен, таким образом, измерять величины со и со. Подводя эти ЭДС к отклоняющим пластинам электрического осциллографа (ЭО), можно получить на экране кривую со = со или М ~ F(cS). Следует отметить, что точность этого метода ниже, чем у описанных выше. Он может применяться для выборочного сравнения пусковых характеристик при контроле партии двигателей.
Наиболее совершенным и перспективным, а для микромашин единственно возможным, является метод обработки сигнала фотодатчика частоты вращения с помощью электронных схем [3.4, 3.5]. При этом 86
могут применяться как схемы с дифференцированием аналогового сигнала тахометра с фотодатчиком, так и специальные схемы измерения ускорения за счет сравнения временных интервалов между фотоимпульсами.
Следует иметь в виду, что при определении момента при п = 0 необходимо перед включением двигателя разогнать его ротор до скорости примерно 15—20% «нОм в обратном направлении, с тем чтобы точка п = 0 проходилась с ходу. Если время пуска двигателя вхолостую мало и соизмеримо со временем протекания электромагнитных переходных процессов, то кривая М =F(n) может существенно отличаться от реальной, где двигатель соединен с маховой массой механизма. Для увеличения времени разбега на вал двигателя помещается и тщательно балансируется дополнительная масса. Механические потери Рмх должны определяться с этой массой. Дополнительная масса сглаживает проявление в кривых разбега кратковременных тормозящих и ускоряющих моментов.
Следует также иметь в виду, что если определяется ударный пусковой момент при включении двигателя, то на его значение влияет выбор фазы питающего напряжения при включении и работа включающего механизма, контакты которого (в трехфаэной системе) должны быть отрегулированы на одновременное замыкание.
2. Метод измерения момента, действующего на корпус. Очевидно, что этот момент равен действующему на ротор моменту ЛГЭМ (обратного направления).
Для определения пускового момента при XX небольшие ИМ с двумя концами вала могут быть подвешены на неподвижно закрепленном вале. Измерение момента на корпусе может выполняться с помощью тензодатчика или пьеэодатчика [3.8]. Для более крупных двигателей может использоваться измерение усилий под лапами корпуса с помощью пьезодатчиков, с последующей автоматической обработкой их показаний. Для определения момента на валу применяется установка корпуса на балансирную раму, угол поворота которой измеряется.
Для того чтобы уменьшить погрешность, связанную с тем, что часть момента, идущая на ускорение корпуса, не измеряется, вся система измерения усилий (моментов) выполняется весьма жесткой (перемещение корпуса измеряется в микрометрах). Иначе говоря, собственная частота колебаний корпуса в измерительной установке должна быть по возможности высокой. Период собственного колебания должен быть в 3—5 раз меньше, чем время наиболее кратковременного ’’игольчатого” провала момента в кривой Af=F(n), который желательно выявить.
3. Квазистатический метод определена зависимости M=F (л) реализуется путем спаривания ИМ (двигателя) через ТМ с нагрузочным
Рис. 3.14. Условия устойчивости работы системы двигатель—нагрузочное устройство
Рис. 3.15. Механическая характеристика синхронной машины при работе от сети с регулируемой частотой (л) и условия устойчивости вращения АД и СМ (б)
генератором, характеристика которого Мп =F(ri) позволяет двигателю устойчиво работать в любой точке кривой ЛГД = F(n) двигателя.
Условием устойчивости работы системы двигатель—нагрузочное устройство является выполнение неравенства dMn/dt > dM^/dt или > tgaA (рис. 3.14). Очевидно, что если при увеличении л тормозной момент становится больше двигательного, то возрастание п невозможно. Чем больше тем устойчивее работа системы, и при ^90° ее можно обеспечить в любой точке кривой ЛГД =F(n). Такую характеристику имеет, например, синхронный генератор, работающий на сеть с постоянной частотой, которая может регулироваться в заданных пределах (рис. 3.15,а).
Поэтому, если спарить испытуемый АД с СГ (мощность СГ должна быть в 2—4 раза больше мощности АД), работающим на сеть с регулируемой частотой, то, изменяя частоту в пределах (0,1 -г 1) /ном, можно снять по точкам всю кривую ЛГД = /(л) (рис. 3.15, б). Сделать это нужно быстро, чтобы не получить чрезмерных превышений температур (температура обмоток в начале и конце опыта должна контролироваться), и в то же время (желательно) так, чтобы не требовалось внесения поправок на момент J со, затрачиваемый на ускорение ротора, поскольку измеренный на валу момент
^В Л ^эм — ^МХ ~ (3 .5)
Рис. 3.16. Установка для снятия кривой М = F(s) с нагрузочным генератором постоянного тока и реверсивным тиристорным преобразователем:
1 — испытуемый АД; 2 - нагрузочный генератор; 3 — тахогенератор; 4 — задающий потенциометр; 5 — реверсивный тиристорный преобразователь
Иначе говоря, желательно, чтобы в точках измерения режим был близок к установившемуся. Если это невозможно, то по построенной кривой со = F (t) вносятся необходимые поправки в определение Мэы на величину Jeb.
Получить характеристики, близкие к изображенным на рис. 3.15, можно и с помощью генератора постоянного тока, работающего на сеть переменного тока через реверсивный тиристорный преобразователь (инвертор), с помощью которого поддерживается постоянная заданная частота вращения [3.9, 3.10] (рис. 3.16). В схеме предусмотрены автоматическое изменение частоты вращения нагрузочного генератора (НГ) и испытуемого двигателя в течение заданного времени и автоматическая запись момента и частоты вращения на регистрирующий прибор.
Напоминаем, что для записи кривыхM=F(n), n=F(t) на регистрирующих приборах, в том числе прямой записи на координатный самописец с относительно медленной записью, можно использовать прием растягивания времени, согласно которому результаты опыта пуска записываются на магнитную ленту, а затем производится перезапись на регистрирующий прибор с уменьшенной скоростью движения ленты.
Минимальный момент Mmin определяется по ГОСТ 7217-87 ’’Электродвигатели трехфаэные асинхронные. Методы испытания”. Рекомендуется схема, в которой в качестве нагрузочной используется асинхронная машина (НАМ), работающая в режиме тормоза (с встречным вращением поля и ротора). Напряжение на зажимах НАМ поднимается до тех пор, пока не начнется ’’застревание” при разбеге. Момент при этом может измеряться описанными выше методами (включая тарирование НАМ).
ЗД. ЭЛЕКТРОМАГНИТНЫЕ ПРОЦЕССЫ
3.4.1. Магнитные потоки. Индуктивные сопротивления. Различают следующие магнитные потоки ЭМ (рис. 3.17, а, б)', главный поток (называемый рабочим потоком, потоком возбуждения, потоком взаимоиндукции) Ф1>2» проходящий через воздушный зазор и сцепленный с обмотками статора и ротора, и потоки рассеяния обмоток Ф51, Ф52, каждый сцеплен только с одной обмоткой.
Рис. 3.17. Магнитные потоки
Главный поток (для ЭМ переменного тока, работающих в энергосистемах, только его 1-я гармоническая — см. ниже) во взаимодействии с токами в статоре и роторе обеспечивает создание вращающего момента и преобразование энергии в ЭМ.
Различают потоки рассеяния, охватывающие лобовые и пазовые части рабочих (якорных) обмоток, и потоки рассеяния обмоток возбуждения (постоянного тока). Потоки рассеяния в значительной части проходят по воздуху, в связи с чем значение их принимается пропорциональным МДС соответствующей обмотки. С ростом использования активной стали и повышения индукций в зубцах при определении пазового потока рассеяния приходится учитывать магнитное насыщение.
В ЭМ имеется также дифференциальное (разностное) двоякосцеп-ленное рассеяние, возникающее от того, что при несинусоидальной форме магнитного поля, создаваемого, например, статорной обмоткой АД, ЭДС в ней индуцируется всеми гармоническими составляющими поля, в то время как с роторной обмоткой (например, клеткой КЗ ротора) сцепляется и создает вращающий момент только 1-я основная составляющая. Другие высшие составляющие поля вращаются относительно ротора со скоростями существенно большими, чем 1-я, и демпфируются токами в КЗ обмотке. Поэтому высшие гармонические потока, проходящего через воздушный зазор, могут рассматриваться как потоки дифференциального рассеяния.
Дифференциальное рассеяние может возникать вследствие различного распределения обмоток статора и ротора по полюсному делению.
Главный поток Фх 2 образует с обмоткой I, МДС которой его создает, число потокосцеплений поток рассеяния Ф51 —
число потокосцеплений Ф51 = Ф51и>т. Здесь и>1д — эффективное число витков обмотки I; где — обмоточный коэффициент
1-й гармонической обмотки I (см.ниже).
ЭДС, индуцируемая этими потоками в обмотке I,
Esi = d^sl/dt.
Рис. 3.18. Зависимость магнитного* потока (кривая 7) и коэффициента самоиндукции (кривая 2) от МДС для магнитопровода со сталью (насыщение)
Для удобства расчета вводят коэффициенты самоиндукции = + = + 1, характеризующие число потокосцеплений, вызываемых током 1 А в обмотке.
Учитывая, что Фя 2 = iiWi/XM и Ф51 = iiWi/Xs, где 1/Хм — проводимость магнитопровода, по которому замыкается поток Ф1е2> и 1 /\ — магнитная проводимость пути потока рассеяния, получим:
Ll.l =wJ/XM; Lsi = W*/XS;
Ei.i + ES1 ~ idi 1/dt‘ Esi = L^dii/dt.
Поскольку магнитопровод главного потока обычно сильно насыщен, зависимость Ф1-2 = ^Oi^i) определяется экспериментально в виде кривой намагничивания (кривая 1 на рис. 3.18). Проводимость 1/Хм и коэффициент самоиндукции £1Л определяются как tga этой кривой (кривая 2). Значение £1Л на участке А-Б кривой 1 существенно зависит от МДС и значения L г л при насыщении меньше значения на ненасыщенном участке кривой 7.
Для оценки коэффициента самоиндукции в этом случае кроме показанного на рис. 3.18 дифференциального его значения (кривая 2) можно использовать среднее значение £ср, пропорциональное tgacp спрямленной характеристики Ф -F (/, w) (3 на рис. 3.18).
При расчете переходных процессов в цепях постоянного тока используется эквивалентное значение коэффициента самоиндукции L3. Для этой цели осциллографируется зависимость тока в обмотке от времени при приложении к ней постоянного напряжения. Для полученной экспоненциальной кривой (см. § 1.5) определяется постоянная времени Т. Поскольку в этом случае Т -L/R, где R — сопротивление обмотки при постоянном токе, то £э = TR.
ЭДС Esi можно рассматривать как падение напряжения на индуктивном сопротивлении рассеяния х5. При синусоидальном переменном
токе
Esl = xsi = 2^fLsli. (3.6)
Для определения xs может быть проведен опыт питания обмотки переменным током при вынутом роторе (см. ГОСТ 10169-77).
Если на роторе расположена обмотка II с тем же числом полюсов (см. рис. 3.17, а), то поток Ф1>2 образует с этой разомкнутой обмоткой число потокосцеплений Ф2.1 где — эффективное число
витков обмотки II. Он индуцирует в этой обмотке ЭДС Е2Л -=бГФ21/dr, причем отношение Е1Л/Е2Л = Wi/w2.
Если приложить к обмотке I синусоидальное напряжение Uv и измерить ЭДС обмотки II Е29 то отношение Ux/E2 дает приближенное отношение wi/w2, поскольку кроме ЭДС Е1Л в обмотке/ существуют еще две ЭДС — падение напряжения на индуктивном сопротивлении рассеяния xs и в ЭМ малой мощности — на активном сопротивлении Я i.
Если пренебречь Ri, то коэффициент трансформации
< = wi/w2 = U.I[E2 (1 + г,)] ~ UJE29 (3.7а)
гдет! =£51/£1Л — коэффициент рассеяния обмотки I.
Если приложить напряжение U2 к обмотке II и измерить ЭДС Ех в обмотке I, то
О + t2)/V2 ~ Ei/U29 (3.76)
где т2 = Ls2/L2,2 —коэффициент рассеяния обмотки II.
Если нужно учесть влияние сопротивлений обмоток R19 (Я2), то вместо Ul9 (U2) подставляется у/Ц2(2) — (G (2)^1 (2))2- Для уменьшения погрешностей, вызванных неучетом индуктивного и активного сопротивлений, лучше определять кт при пониженных напряжениях.
Согласно [0.9] уточненное значение равно
*ti = (<! + )/2~w
Если индуцированная потоком Ф1.2 в обмотке II ЭДС Е2 создает ток i2 (рис. 3.17, б), то МДС, вызывающая поток Ф1Л, равна разности
1*1 Wi — I2W2.
3.4.2. Форма кривой ЭДС. В ЭМ переменного тока кривые периодического изменения ЭДС рабочих обмоток во времени Е - F (г) (в дальнейшем — кривые ЭДС) должны быть по возможности близки к синусоиде (косинусоиде). Производные этих кривых по времени сохраняют форму исходной кривой, что позволяет применять трансформаторы в энергетических системах.
В реальных ЭМ форма генерируемой ЭДС по ряду рассмотренных ниже причин отличается от синусоидальной. С помощью метода гармонического анализа такую периодическую кривую можно представить как сумму основной, 1-й чисто синусоидальной гармонической составляющей, изменяющейся с частотой Д =ри/60 и периодом Tr = 1//1# и синусоидальных гармонических составляющих с частотой, в тх —шк раз большей основной составляющей и соответственно меньшим периодом так называемых высших гармоник, от т^го до шк-го порядка (временные гармоники).
При несимметрии пар полюсов (при различных воздушных зазорах, обмотке с дробным числом пазов на полюс и фазу и т. п.) в кривой ЭДС могут содержаться также низшие гармонические (субгармонические) с частотой, в к раз меньшей основной, и соответственно большим периодом изменения.
При наличии высших гармоник нечетного порядка положительная и отрицательная полуволны ЭДС являются зеркальным отражением друг друга; при наличии четных гармоник кривые двух полуволн имеют различную форму (рис. 3.19, а—в).
Гармонический состав несинусоидальной периодической кривой характеризуется ее спектром, т. е. зависимостью амплитуды гармоники от ее порядка.
Для экспериментального определения спектра кривых ЭДС (или тока) применяются электронные гармонические анализаторы (см. § 1-7).
Отклонение формы кривых от синусоиды характеризуется коэффициентом нелинейного искажения Л?ис, см. (1.28) в 1.7.7.
Для ЭМ с /ном < ЮО Гц проверяется гармонический состав ЭДС до частоты 5 кГц. При Кнс < 10% вместо С4 в (1.28) можно подставить действующее значение напряжения U.
Допустимое значение Кис трехфазных генераторов 50 Гц при XX и 1/ном равно 10% для мощности до 100 кВ - А и 5% для больших мощностей (ГОСТ 183-74). Кнс может непосредственно измеряться с помощью измерителей нелинейных искажений (ИНИ) (см. § 1.7).
Наличие в кривой гармонических составляющих 3—15-го порядка с амплитудой порядка 5% (и более) амплитудного значения кривой можно обнаружить визуально, наблюдая кривую на экране осциллографа.
Уровень помех, в процентах, наводимых ЭМ в линиях связи, оценивается коэффициентом телефонных гармоник
Ут
S иУк./и-, (3.9)
i - 1 где т — число гармонических составляющих в диапазоне частот 93
Рис. 3.19. Форма кривой ЭДС при наличии нечетных гармоник (Лз на рис. 3.19, а»6) и четной гармоники (Лз на рис. 3.19, в)
до 5 кГц; U. — действующее значение напряжения i-й гармонической составляющей; Xf — весовой коэффициент i-й гармонической, определяемой по таблице значений X. в ГОСТ 10169-77 (для диапазона частот 800 Гц — 4 кГц X > 1). ’
Индуцированная в проводнике обмотки ЭДС связана с относительным перемещением магнитного потока относительно проводника. Форма кривой изменения ЭДС во времени при постоянной скорости перемещения (частоты вращения) повторяет кривую распределения магнитной индукции в воздушном зазоре вдоль полюсного деления -кривую поля В = F(x); х = 0 + 2т. Гармоническим составляющим кривой Е = F(t) (временным гармоникам) соответствуют гармонические составляющие кривой поля В = F(x) (пространственные гармоники). Гармоническая составляющая кривой поля m-го порядка имеет в
т раз большее число пар полюсов, чем основная, и соответственно в т раз меньшее полюсное деление.
Если намотать на статоре ЭМ обмотку по рис. 3.20, а, то при вращении индуктора формы кривых Е = F(t) и В ~ F(x) совпадают. Период основной гармоники при этом равен 7\ = 2т/ v , где т — полюсное деление ЭМ; v — относительная окружная скорость вращения индуктора.
Таким способом может быть записана на осциллографе форма кривой поля в зазоре при любом режиме, например при КЗ синхронного генератора.
В установившемся режиме гармонический состав кривой поля в воздушном зазоре может быть получен в результате гармонического анализа кривой ЭДС измерительной обмотки с помощью электронного анализатора гармоник (АГ). Если измерительную обмотку выполнить из 2w последовательно включенных проводников (w — число витков) с шагом т между проводниками (диаметральный виток), то в ЭДС такой обмотки будут отсутствовать ЭДС, индуцированные четными гармониками кривой распределения индукции в зазоре, поскольку эти ЭДС в двух проводниках (сторонах) витка взаимно компенсируются (рис. 3.20, б).
Такая обмотка дает сумму ЭДС от основной и нечетных гармоник поля и в тех случаях, когда возможны существенные четные гармоники поля (например, при несимметричных полюсах, в индукторных генераторах) и ЭДС обмотки не отражает действительной картины
Рис. 3.20. Варианты намотки измерительных обмоток:
Н — начало; К - конец
Рис. 3.21. Исключение ЭДС 5-й гармонической составляющей для витка с укороченным шагом
поля. Если укоротить шаг витка обмотки у, сделав его меньше г на величину, равную полюсному делению какой-либо гармоники m-го порядка
У = т(1 - Цт),
то в спектре ЭДС витка будет отсутствовать ЭДС этой гармоники, поскольку суммарный ее поток через виток обмотки будет равен нулю. Так, для исключения ЭДС от пятой гармоники поля выбирают у = 0,8т (рйс. 3.21).
Индуцируемая в обмотке ЭДС £Об из-за укорочения шага витка и углового сдвига между витками, распределенными по паэам, меньше ЭДС Е = 4,440/w, где Ф — поток m-й гармоники, f - ее частота.
Отношение Fo6/Е = kwm = куткрт, где kwm — обмоточный коэффициент для т-й гармоники; кут — коэффициент укорочения шага; крт ~ коэффициент распределения обмотки.
Можно считать, что в обмотке действует число витков [0.1, 0.2] wn =
В трехфазных обмотках, у которых электрический угол сдвига между осями обмоток составляет 120° в линейных ЭДС, не содержатся ЭДС, индуцированные 3-й и кратными ей гармониками — 9-й, 15-й, 21-й и т. д., хотя в ЭДС фазы они могут иметь место. Сдвиг фаэ 120° для основной гармоники означает сдвиг на 120 х 3 = 360° для 3-й и кратных ей гармоник, в связи с чем ЭДС этих гармоник при соединении обмоток в звезду взаимно компенсируются. При соединении обмоток в треугольник эти ЭДС вызывают токи, циркулирующие внутри схемы (внутренние токи).
ЭДС третьей гармонической и кратных ей 9-й, 15-й и т. д. гармоник можно измерить с помощью АГ, разомкнув треугольник по схеме рис.3.22,а. Действующее значение внутренних токов /вт можно определить, измерив токи по схеме рис. 3.22, б,
4т = 7/ф2 - 42/з.' (3.10)
Гармонический состав 7ВТ можно определить, анализируя с помощью АГ падение напряжения на беэындуктивном шунте, включенном в цепь этого тока.
При установлении связи между кривой ЭДС обмотки и кривой поля необходимо различать два случая.
В первом случае при вращении индуктора синхронного генератора (СГ), поле которого содержит кроме основной гармоники также порядка 3, 5, 7 и т. д., эти гармоники перемещаются с той же угловой скоростью, что и основная. Поскольку число пар полюсов этих гармоник в т раз больше числа пар полюсов основной р, они индуцируют ЭДС с частотой, в т раз большей основной. При автономной работе СГ кривая его ЭДС может отличаться от синусоидальной.
Of
Рис. 3.22. Измерение ЭДС (с) и тока (б) 3-й гармонической составляющей трехфазной обмотки, соединенной в треугольник
Если во втором случае к зажимам якорной обмотки ЭМ приложить синусоидальное напряжение трехфазной (многофазной) сети с частотой Л, то появляется намагничивающий ток и вращающееся поле, создающие в обмотке противо-ЭДС той же частоты. В этом случае, поскольку число пар полюсов поля гармоник в т раз больше числа пар полюсов основной, частота вращения полей гармоник будет в т раз меньше, чем основной (при этом они индуцируют в обмотке ЭДС частотой Д).
Направление вращения гармоник при этом разное. Для трехфазных обмоток гармоники 7, 13, 19, 25-я (вообще гармоники порядка 2АтИф + + 1, где Шф — число фаз, к — целое число) вращаются в ту же сторону, что и основная, а 5, 11, 17, 23-я (вообще гармоники порядка 2ЬЙф — — 1) — в противоположную.
Если приложенное к зажимам якорной обмотки напряжение содержит гармонику fc-ro порядка, то появляется намагничивающий ток с частотой f\k и поле в зазоре, частота вращения которого больше основного поля в к раз. Это поле также может содержать гармоники m-го порядка. Для отношения к/т- \ частота вращения гармоники порядка т будет равна частоте вращения основной.
Высшие гармоники поля якорной обмотки в синхронных ЭМ вращаются относительно индуктора, что вызывает поверхностные и пульсационные потери в стали и в успокоительных обмотках.
В АД высшие гармоники поля якорной обмотки кроме потерь в роторе создают тормозные моменты — провалы в кривойМ =F(и),ухудшающие пусковые свойства АД.
Причинами отклонения формы ЭДС и кривой поля от синусоидальной могут быть многие факторы, в том числе несинусоидальное распре-
деление МДС обмоток вдоль полюсного деления, неравномерный воздушный зазор, насыщение стали, зубцов (пазов) на статоре и роторе. Рассмотрим эти случаи:
1. Виток обмотки создает прямоугольную МДС, состоящую из основной гармонической с полюсным делением, равным шагу витка, и высших нечетных гармоник с амплитудой, равной 1/т основной [0.1, 0.2].
Если обмотка состоит из нескольких витков (или катушек — секций с числом витков w в каждой), то они могут быть распределены по q пазам, входящим в фазную зону обмотки (</ — число пазов на полюс и фазу). В этом случае создается ступенчатая кривая МДС с шириной ступени, равной зубцовому делению, и высотой, равной МДС проводников, лежащих в пазу. МДС обмотки содержит, таким образом, кроме других также и зубцовую гармонику. В зависимости от q кривая МДС может в той или иной степени приближаться к синусоиде.
Наибольшее приближение может быть достигнуто, если число проводников расположено по пазам неравномерно, с тем чтобы получить синусоидальную кривую распределения МДС. Такие обмотки называются синусными. Они применяются, например, в индукторах СМ с неявновыраженными полюсами. Для этой цели устанавливается оптимальное соотношение обмотанной и необмотанной частей полюсного деления индуктора (большого зуба). Для рабочих обмоток неравномерная раскладка проводников затруднительна. В этом случае для улучшения кривой МДС применяются двухслойные обмотки с укорочением шага (относительным сдвигом слоев).
Известно, что индуцированная в обмотках ЭДС содержит только те гармонические составляющие, которые содержатся в МДС этой обмотки. Поэтому измерительные обмотки с синусной раскладкой витков могут использоваться как анализаторы, ЭДС которых соответствует гармонике поля, полюсное деление которой равно шагу витка измерительной обмотки. С помощью такой обмотки, например с шагом, равным Gp/2, где tzp — зубцовое деление ротора, расположенной в воздушном зазоре, можно определить значение зубцовой гармоники ротора (например на увеличенной модели активной зоны).
2. Насыщение активной стали вызывает уплощение кривой поля (уменьшение Втах) и заострение кривой намагничивающего тока (увеличение амплитуды), что эквивалентно появлению в кривой поля и тока ряда нечетных гармоник, в том числе 3-й и 5-й (в противофазе для поля и тока).
Если бы реактивное сопротивление рассеяния обмотки xs было равно нулю, то противо-ЭДС EnPf индуцированная в обмотке при синусоидальном питающем напряжении (/, была бы также синусоидальной, поскольку Епр = U — Ixs. Намагничивающий ток Zg имел бы в этом случае несинусоидальную форму кривой и амплитуду, достаточную для обеспечения синусоидальной кривой поля. Однако при наличии xs паде-98
ние напряжения (при насыщенном магнитопроводе) от намагничивающего тока имеет несинусоидальный характер, в связи с чем в кривых поля и Епр появляются гармоники насыщения.
Следует иметь в виду, что в кривых = F (f) в магнитопроводах с подмагничиванием постоянным током могут иметь место четные гармоники, главным образом 2-я, за счет изменения взаимного направления переменного и постоянного потоков для двух полупериодов изменения переменного потока.
3. Поскольку индукция в какой-либо точке воздушного зазора определяется отношением МДС к значению зазора, форма кривой поля зависит от формы воздушного зазора.
В ЭМ с явно выраженными полюсами для улучшения формы кривой поля, в том числе при нагрузке, когда кроме МДС возбуждения действует поперечная МДС рабочей обмотки, поток которой замыкается через полюсный наконечник, применяется обычно увеличение воздушного зазора от центра к краю полюсного наконечника. В ЭМ постоянного тока при увеличении зазора под краем полюса улучшаются также коммутационные условия (уменьшается напряжение между коллекторными пластинами вблизи коммутационной эоны).
Эксцентриситет воздушного зазора вызывает несимметрию потоков отдельных пар полюсов, возникновение значительных сил одностороннего магнитного тяжения ротора и появление гармонических поля порядка р ± к, где к — целое число (наиболее сильные гармоники при к = 1). Гармоники порядка р — к при р > 1 являются гармониками низшего порядка, способными, в частности в многополюсных синхронных генераторах, создавать модуляцию ЭДС, т. е. периодическое изменение ее амплитуды с низкой частотой (измерение модуляции см. ниже).
4. Наличие зубцов вызывает появление ступенчатых (зубцовых) гармоник МДС порядка Z/p ± 1 и гармоник кривой проводимости воздушного зазора с полюсным делением тЦ^/р). Возникающие в результате зубцовые поля содержат кроме 1-й зубцовой гармонической с указанным выше порядком также 2-ю зубцовую гармонику порядка 2Z/(p + 1). Составляющие более высоких порядков обычно практического значения не имеют.
Следует отметить, что для борьбы с зубцовыми гармоническими в кривой ЭДС такой метод, как укорочение шага неприменим, поскольку нельзя укоротить шаг на половину зубцового деления. Для их уменьшения применяется скос пазов, скос краев полюсных наконечников, сдвиг этих наконечников через один на половину зубцового деления якоря в ЭМ постоянного тока. При этом может ухудшиться коммутация (см. гл. 6) и не компенсируются зубцовые гармоники 2Z/p. Применение дробного q уменьшает амплитуду, но увеличивает порядок и количество зубцовых гармоник; кроме того, цри этом появляются низшие гармонические [0.1,0.4].
В явнополюсных ЭМ, в том числе ЭМ постоянного тока, при целом числе зубцовых делений в полюсной дуге суммарная проводимость воздушного зазора при вращении якоря не изменяется. Значение потока возбуждения остается постоянным; отсутствуют продольные колебания потока и пульсационные ЭДС, вызываемые этой причиной; не возникают также и пульсационные ЭДС в секциях, замкнутых щеткой (в ЭМ постоянного тока), и в обмотках возбуадения. Заметим, что последние могут достигать больших значений в многовитковых обмотках управления электромашинных усилителей. Поэтому для ЭМ постоянного тока рекомендуется выбор целых (четных) чисел зубцовых делений на полюсную дугу. Однако при этом имеет место поперечное перемещение (колебание) оси потока полюса на 1/4 зубцового деления в обе стороны от середины полюса с зубцовой частотой, которое индуцирует ЭДС в проводниках обмотки якоря. Дня их исключения применяется нечетное число зубцов на пару полюсов; при этом направление ЭДС зубцовых пульсаций в проводниках секций якоря под соседними полюсами оказывается встречным.
3. 4.3. Модуляция. У многополюсных СГ (в том числе и у генераторов повышенной частоты) может наблюдаться периодическое изменение амплитуды ЭДС и напряжения на зажимах с частотой, равной или кратной ’’оборотной” (и/60) — амплитудная модуляция (рис. 3.23), которая может рассматриваться как наложение на ЭДС генератора модулирующей ЭДС с амплитудой
^4«од ” Щпах ~~ Umin) /2>
где Umax, Umin — максимальное и минимальное амплитудные зна-
чения напряжения на зажимах.
Амплитудная модуляция (AM) выражается следующим образом:
^мод/Ua ,ср “ (Pmax~^mv^l(Pmax + Umin)- (3-11)
Основной причиной появления AM является изменение проводимости воздушного зазора вследствие эксцентриситета роторной поверхности. В однокорпусных электромашинных преобразователях причиной может быть также несимметрия воздушного зазора двигателя, вызывающая магнитный поток через общий вал.
Характерной особенностью при этом (как и в других процессах, вызванных несимметрией воздушного зазора) является наличие максимума в зависимости AM от вследствие насыщения зубцов, увеличения эффективного зазора и уменьшения относительного эксцентриситета при увеличении рабочего потока в ЭМ (рис. 3.24).
В низковольтных генераторах постоянного тока причиной появления AM могут быть дефекты уэла токосъема. Кривая на рис. 3.23 может отличаться от синусоиды.
Рис. 3.24. Зависимость амплитудной модуляции от тока возбуждения
Для измерения AM применяются два метода: метод ВФК (выпрямитель, фильтр, конденсатор) и осциллографический метод.
По методу ВФК после выпрямления и отфильтрования несущей (основной) частоты исследуемого напряжения через конденсатор проходит низкочастотное модулирующее напряжение, измеряемое вольтметром. Точность измерения зависит от формы кривой напряжения модуляции. Применяемые приборы могут применяться для контрольных (сравнительных) измерений AM при достаточно высоких ее значениях (1%) и низких частотах.
Сущность осциллографического метода [3.14] поясняет рис. 3.25. Исследуемое напряжение проходит через разделительный трансформатор 1 (для исключения помех) и блок отсечки 2, который с помощью блока 5 пропускает на осциллограф 3 изображение только верхушек полуволн. Из-за наличия AM это изображение оказывается размытым
по вертикали на величину 2£/мод.
Изменяя напряжение блока малых перемещений 4 на величину Д/72, можно переместить верхушку полуволны на величину 2£/мод, тогда AM равно LUqJ'IUx, где Д(/2 измеряется точным вольтметром постоянного тока; a L4 — детекторным вольтметром переменного тока (измеряется ^ср).Если прибор для Ui проградуирован в действующих значениях, то для определения AM используется величина Ui Метод позволяет измерять AM в пределах 0,01—10% с частотами до 2,5 кГц.
3. 4.4. Несимметрия напряжения. Существенное влияние на работу
Рис. 3.25. Схема модуле метра
ЭМ трехфазного (многофазного) переменного тока оказывает несим-метрия напряжения сети, в которую включена ЭМ. Однако для оценки этого влияния недостаточно определить разность напряжений фаз, необходимо найти симметричные составляющие этой многофазной системы.
Несимметричная система напряжений или токов может быть представлена суммой трех симметричных составляющих: прямой последовательности, т. е. симметричной системой с таким же чередованием фаз, как у питающей или индуцированной в ЭМ несимметричной системы, с напряжением Ц; обратной последовательности (инверсная) с чередованием фаз, обратным первой системе, с напряжением С7П; нулевой последовательности; напряжения UQ этой системы имеют одинаковую фазу во всех обмотках многофазной системы.
Очевидно, что токи в обмотках, соединенных по схеме ’’звезда”, вызванные напряжением Uo, могут протекать только через нулевой провод и отсутствуют в трехпроводных системах. Между нулевыми точками электрических машин, работающих в таких системах, возникает разность потенциалов.
Определение составляющих U? Uo производится методом геометрического суммирования [3.20].
Несимметрия (в процентах) характеризуется величиной
е = ип/иг. (3.12)
В простейшем случае, когда трехфазная звезда векторов напряжений L^4, Ub, Uc имеет равные электрические углы между векторами 120°, но разные значения напряжения с небольшим отклонением (< 10%) от среднего значения, составляющие Ц и могут быть определены по упрощенным формулам:
Ц = (UA + UB + 67с)/3; (3.13)
Vn = (UA + UBI2 - t/c/2)3. (3.14)
За вектор UA принимается наибольшее значение U Если положить:
UA = 1 + ci; UB = 1 + с2; Uc = 1 + сз,
то
Ц = 1 + (ct + с2 + с3)/3,
Un = (С1+ с2/2~ с3/2)/3.
Полагая в конкретном случае =0,05; с2 =0; с3 = —0,05, получим Ц = 1; Un= 0,025; е = 2,5%.
Согласно ГОСТ 183-74 многофазные (трехфаэные) ЭМ должны допускать работу при е < 2%. Как следует из приведенного выше примера, 102
это соответствует разнице напряжений фаз примерно 4—5% от среднего значения.
Практически симметричной считается трехфазная система, у которой е<1% для напряжений и € < 5% для токов.
3.5. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК.
СХЕМЫ ЗАМЕЩЕНИЯ
3.5.1. Определение характеристик ЭМ постоянного тока. Характеристики ЭМ постоянного тока можно определить, если известны МДС, действующие по оси главных полюсов (ГП). Предполагается, что щетки стоят на нейтрали или имеет место незначительный сдвиг с нейтрали.
По оси главных полюсов (продольной оси d) действуют намагничивающие силы: обмотки возбуждения — FB, последовательной обмотки возбуждения — Fn. При сдвиге щеток с нейтрали на угол а по продольной оси действует МДС, равная Fa =sina, пропорциональная току якоря. Мы будем считать эту МДС входящей в Fn (с соответствующим знаком).
В ЭМ без компенсационной обмотки Fa и вызванный ею поперечный поток реакции якоря Фя, накладываясь в активной зоне под полюсной дугой на поток возбуждения Фв, искажает кривую индукции под полюсом, усиливая ее под одной половиной полюса и уменьшая под другой. Поскольку при насыщенных зубцах ослабление потока не компенсируется его усилением, поток возбуждения уменьшается. Действие поперечной реакции эквивалентно действию по оси d некоторой размагничивающей МДС, равной FH^. Кроме указанных выше МДС, по продольной оси действует также МДС коммутационных токов (см. гл. 6) -FK>T.
Следует напомнить, что сдвиг щеток с нейтрали в направлении вращения или ’’слабые” ДП (замедленная коммутация) вызывают ослабление главного потока у генератора и усиление у двигателя. Сдвиг щеток с нейтрали против вращения или ’’сильные” ДП (ускоренная коммутация) вызывают обратный эффект.
По поперечной оси (оси <?) действует разность МДС якоря и компенсационной обмотки Fn - FKO =Fqs, кроме того, в коммутационной зоне действует МДС дополнительного полюса — Ftt>n. Эти МДС на характеристики ЭМПТ непосредственно не влияют. Для расчета характеристик используют уравнения, приведенные ниже.
Напряжение на зажимах генератора, В,
ит = Е - 2ДЦц - /Кц,я, (3.15)
где 7?ц>я —сопротивление обмоток, входящих в цепь якоря.
эдс’ В,
Е = сиФ, (3.16)
где
с = Np/a6Q; (3.17)
Ф — магнитный поток одного полюса, Вб; п — частота вращения, об/мин; р — число пар полюсов; а — число пар па’раллельных ветвей обмотки; N — число активных проводников якоря.
Отношение, Вб,
Е/ п = сФ. (3.18)
Частота вращения двигателя, об/мин,
п = Е1(Е1п) = ( - 2Д£/Щ-//?„,„)/(еФ). (3.19)
Электромагнитный момент, Н • м,
Мэ = 9,551Е/п. (3.20)
Момент на валу, Н - м,
Мвп = 9,55 (£7 ± рх)/п9 (3.21)
где рх — потери холостого хода (знак ’’минус” — для двигателя, ’’плюс” — для генератора), Вт.
Таким образом, для расчета характеристик нужно определить значение потока Ф (или Е/ п). Для этого используется полученная из эксперимента кривая намагничивания Е/п - f(FaS)> где Ed^ — суммарная МДС по оси главных полюсов. Входящие в нее FB> Fn определяются расчетом. Что касается FK>T и ГЯФ для ЭМ без компенсационной обмотки, то для их определения могут применяться рассмотренные ниже методы с использованием флюксметра. В связи с относительной малостью этих МДС опыты для их определения (FK T) требуют тщательной подготовки и весьма трудоемки.
3.5.2. Определение характеристик АЭМ. Схема замещения АЭМ приведена на рис. 3.26. В схему входят активные R, индуктивные X и полные сопротивления Z = \Tr2 + X2'. Индекс 1 означает принадлежность этих параметров к рабочей обмотке 1 (обычно статорной). Индексом 2 отмечены приведенные к числу витков обмотки 1 (умноженные на fc^) параметры обмотки 2 (роторной). Ток роторной цепи 72 также приведен к обмотке 1 (умножением на 1/Агт1). Сопротивление Хц определяет значение намагничивающего тока а сопротивление 7?п,с — потери в стали.
Сопротивление роторной цепи Я2/х ($ — скольжение) делим на две части: R2/s - Ri + [Т?2 (1 — s)]/s + 7?рэ, где7?р>э характеризует
электромагнитную мощность ротора, сопротивление R2 определяет потери в обмотке ротора I 2 R2. Потери 7^7?рэ равны электромагнитной мощности ротора при угловой частоте вращения сир = gjc (1 — $) (сос — синхронная частота вращения). Вращающий момент АЭМ равен 104
Рис. 3.26. Схема замещения асинхронной электрической о машины
о
этой мощности, разделенной на сор, или мощности /^Я2/ s (в ’’синхронных” ваттах), разделенной на со-
вращающий момент, Н • м,
M=miU2R2/[s^c[{Rl + 7?2e,/s)2 + (X, + X2<?i)2]] , (3.22)
где /т?! — число фаз рабочей обмотки.
Пусковой момент Мп получается подстановкой в (3.22) значения s =1.
Максимальный момент, Н • м,
мтах = тхи21 {2wcC1 [±Rx + Vk2 + (Xj + Х2е1)2']| . (3.23)
При этом скольжение
Wx ± R2 + (Х.+Х^)2.
В случае Ri < (Л^ + %2)
Мтах = ™1^/[2исС!(%! +X2d)], (3.24)
$тах ” ^2/(^1 + ^2^1)»
Знак ’’плюс” для двигательного, знак ’’минус” — для генераторного режимов.
В выражения (3.22)—(3.24) входит учитывающий влияние намагничивающей ветви коэффициент
С! - I 1 + I . (3.25)
Для экспериментального определения параметров схемы замещения проводят опыты: опыт КЗ (s = 1, =0); опыт XX (sx ->0; RPf3 -*
-> 00, I2x ->0), а для асинхронных микромашин, у которых sx > 0 — опыт идеального XX (см. гл. 4) при s = 0 за счет принудительного вращения ротора. >-------,
Иэ опыта КЗ определяются величины: ZK = V + %*; Як + + /?2/с2; %K =%i + Х2/с2, где с2 определяется так же, как е19 но с заменой на Х2.
Для АЭМ мощностью более 1 кВт, у которых Х^/Хц и Х2/Хц < 1, можно полагать =с2 = 1.
Рис. 3.27. Наложение на кривую моментов первой гармонической (7), асинхронных моментов пятой (5) и седьмой (2) гармонических и результирующий момент (4)
Для АЭМ малой мощности, многополюсных и других, у которых с19 с2 могут быть равны 1,1 и более, принятые выше допущения могут приводить к некоторому преувеличению расчетных значений М.
В качестве уточняющего приближения можно считать
Ci = с2 = ХК/2ХД. (3.26)
Экспериментальные способы определения с19 С2 см. в п. 3.6.3. Схемы замещения однофазных АЭМ см. в [0.10].
Зависимость момента АЭМ от скольжения имеет характерный вид, приведенный на рис. 3.12. При отрицательном скольжении ($ < 0, ротор обгоняет поле) имеет место генераторный режим; при s > 1 (ротор вращается навстречу полю) - режим электромагнитного тормоза. В обоих случаях на вал АЭМ действуют тормозные моменты.
Наличие гармоник поля (в том числе зубцовых), вращающихся в т раз медленнее основной или навстречу ей, приводит к появлению паразитных тормозных моментов, вызывающих провалы в кривой М = F(s) (рис. 3.27). Наряду с этими провалами момента асинхронного происхождения могут также иметь место провалы синхронного происхождения с крутым фронтом снижения момента, так называемые игольчатые, возникающие в том случае, когда при определенной частоте вращения ротора имеет место совпадение частот вращения зубцовых полей статора и ротора с одинаковым числом полюсов.
Возможность проявления этих паразитных моментов существенно усиливается при несинусоидальном напряжении питания АЭМ, вызывающем появление новых серий высших гармонических поля.
Несимметрия трехфазного (многофазного) напряжения, связанная с появлением системы напряжений обратной последовательности, вызывает появление в АЭМ поля с встречным по отношению к основному направлением вращения.
Для такого поля скольжение равно 2 — s (режим электромагнитного тормоза) и сопротивление Яр>э R2f2, т. е. намного меньше, чем при нормальной нагрузке, при s < 1. В результате через обмотки АЭМ проходят значительные токи обратной последовательности, вызывающие нагрев и ухудшение механических характеристик.
Из сказанного выше следует, в частности, что напряжение испытательных установок должно удовлетворять самым жестким требованиям по форме кривой и симметрии питающего напряжения.
В АД, имеющих малые воздушные зазоры и двустороннюю зубчатость, в особенности в АД с КЗ ротором, в обмотке которого могут индуцироваться токи от многих высших гармоник поля, выбор отношения чисел зубцов статора и ротора является одним из центральных вопросов проектирования, поскольку этим определяется уровень паразитных сил и моментов, возбуждающих вибрацию и шум АД и провалы момента при пуске [0.4; 7.16].
Необходимо иметь в виду, что оптимальные с точки зрения вибрации и шума отношения Zr/ Z2 определяются не только электромагнитными процессами взаимодействия зубцовых гармоник в воздушном зазоре, но и вибрационными характеристиками (собственной частотой, коэффициентом затухания) конструктивных узлов ЭМ, которые зависят от абсолютных значений и соотношения размеров этих узлов (например, отношения общей длины к диаметру ротора и т. п.). Выбор чисел зубцов для конкретных типов АД (в особенности несимметричных — однофазных [3.12, 3.13]), несмотря на наличие некоторых общих теоретических положений [0.4], базируется на эксперименте.
Характеристики АЭМ могут рассчитываться графически по круговым диаграммам согласно ГОСТ 7217-87 ’’Электродвигатели трехфазные асинхронные. Методы испытаний”.
3.5.3. Статистические методы контроля параметров АД. Учет определенных связей между параметрами XX, КЗ и эксплуатационными характеристиками АД с применением статистических методов, позволяет радикально упростить и автоматизировать контроль при массовом выпуске.
Для контроля уровня нормируемых параметров КПД, cos# Мп, Мтах, непосредственное определение которых весьма трудоемко, достаточно, согласно [0.14, 3.15, 3.16], провести несложные измерения величин/х,рх и /к, рк (опыт КЗ проводится при ^ном/3,8).
Для определения соответствия каждого АД требованиям ТУ строятся графики трех зон в координатах: /к - /х, рх - рк, рк - 7К (рис. 3.28). В зоне /к - 7Х максимальное значение 7Х ограничивает-
Рис. 3.28. Зоны допустимых значений/х, 7К, рх, й<: направление смещения контрольных точек при увеличении воздушного зазора (7), сопротивления RK (2), числа витков (5), потерь XX (4); I — эллипс допустимых значений параметров для отдельных измерений; Я - эллипс допустимых средних значений контрольных параметров партии
ся допустимым, с учетом также допуска Д по п. 1.20 ГОСТ 183-74, значением cos<£, минимальное — значением воздушного зазора. Соответственно, величина 7К ограничивается допустимым пусковым током 7П и пусковым моментом Мп. В зоне рх - рк максимальное значение этих величин ограничивается допустимым значением КПД (с учетом также допуска по п. 1.20 ГОСТ 183-74). В зоне рк - 7К ток 1К ограничивается по 7П, а рк (минимум) по пусковому моменту Мп. Ограничивающие линии строятся на основе зависимостей, например Мп = = F(pK), устанавливаемых при приемочных или типовых испытаниях.
Попадание значении 7Х, рх, 7К, рк внутрь указанных зон означает соответствие их ТУ. Однако вести массовое производство при использовании предельных значений нормируемых параметров нельзя, так как в этом случае при неизбежных незначительных отклонениях в технологии или качестве материалов появится брак. Поэтому внутри указанных выше зон методами статистического контроля (см. § 1.6) строятся контрольные зоны (эллипсы), в которые должны укладываться 99,7% выпускаемых при нормальной технологии изделий.
Для построения контрольных эллипсов используются результаты испытаний 50—100 и более экземпляров АД, проведенных в строго одинаковых условиях. Результаты испытаний изображаются на гистограммах (обычно имеет место нормальный закон распределения частостей). Средние значения параметров 7Х, рх, 7К, рк, соответствующие наибольшим частостям, используются как координаты средних точек контрольных эллипсов соответствующих зон. Размеры осей эллипсов см. в [3.16]. Если контролируются средние значения параметров для 108
Рис. 3.29. Взаимодействие потока возбуждения 4^ (FB) и потока якорной обмот-ки Фя(^я):
а - активная нагрузка; б - индуктивная нагрузка; в — емкостная нагрузка
партии из п штук, то оси контрольных эллипсов должны быть уменьшены в \fn раз. Направления смешения (стрелки 1—4 на рис. 3.28) точек внутри контрольных эллипсов позволяют получить информацию о характере нарушения технологического процесса.
3.5.4. Определение характеристик синхронных машин. В СМ электромагнитные процессы определяются главным потоком Ф, созданным МДС обмотки возбуждения FB и синхронно вращающимся с ним потоком реакции якоря Фя, созданным МДС обмотки якоря Fa.
Поток Ф и МДС FB направлены по оси полюсов индуктора — продольной оси d. Угловой сдвиг между FB и FH определяется углом сдвига фаз 6 + между током и ЭДС Ed (см. рис. 3.31), созданной в обмотке якоря потоком Ф. Напомним, что ЭДС отстает от потока и вызвавшей его МДС на 90°. Угол 6 — угол между ЭДС Ed и напряжением на зажимах U - определяется внутренней индуктивностью СМ, угол у определяется полным сопротивлением нагрузки, если речь идет о генераторе. При чисто активной нагрузке 6 + = 0 (в цепи тока якоря нет индуктивных сопротивлений) ток якоря 1яд совпадает по фазе с ЭДС, и FH сдвинута относительно FB на 90°, Ёя направлена в этом случае по поперечной оси q (рис. 3.29, а). При реактивной нагрузке (в цепи якоря нет активных сопротивлений) 6 + <£ = 90°, FH направлена по оси d (рис. 3.29,6, в). При нагрузке на индуктивность ток якоря отстающий от Ed, создает FRd, направленную против FB (размагничивает СМ), а в случае нагрузки на емкость ток якоря Idi опережающий Ed, действует совместно с FB (намагничивает СМ).
Как нетрудно убедиться из рис. 3.29, только ток /я<7, взаимодействуя с потоком по продольной оси Ф, создает вращающий (или тормозной у генератора) момент и вырабатывает активную мощность.
Рис. 3.30. Потоки Фя6/ (а) и Фя<? (б) в синхронных машинах
Это положение можно объяснить и как взаимодействие поперечного потока якоря Фя<? с током (МДС) обмотки возбуждения.
Если СМ работает на сеть с напряжением С/, то в случае перевозбуждения (Е > U) она направляет в сеть ток, отстающий от ЭДС на 90°, Fd которого уменьшает Е. Относительно напряжения сети, которое находится в противофазе с ЭДС, этот ток является опережающим, что позволяет питать реактивной мощностью другие потребители, работающие от сети, и разгружать за этот счет основной генератор сети и линию. Такой синхронный компенсатор не требует привода, он может вращаться за счет небольшого активного тока, потребляемого из сети (режим двигателя).
При реальной нагрузке ток якоря содержит обе составляющие Iq и Id. Индуктивные сопротивления обмотки якоря определяются потоками Фя</ и Фя<? и потоком рассеяния Ф5 .(рис. 3.30):
Ха = хяа + Xs. (3.27)
Xq = Хя(1 + Xs. (3.28)
В явнополюсных СМ проводимость пути, по которому замыкается Фя<?, меньше, чем пути для Фя<ь в связи с чем Хяд < Хяа. В неявнополюсных СМ Xd = Xq = Хя и синхронное сопротивление
Хс = Хя + Xs. (3.29)
На значение и даже Xq влияет насыщение стали магнитопровода, в связи с чем эти величины зависят от главного потока (ЭДС) и тока якоря.
Определение параметров для случаев ненасыщенного и насыщенного магнитопроводов является одной из актуальных задач испытания ЭМ.
Векторная диаграмма СМ приведена на рис. 3.31, а. Для ненасыщенной СМ поток по продольной оси Ф^ можно рассматривать как сум-
0 /d а)
воздушного зазора Ес (по Д. А. Городскому,
Рис. 3.31. Векторная диаграмма (а) и диаграмма МДС (б) синхронной машины:
АВ = 7ЕЯ, ВС = IXS9 BD = 1ХС (неявнополюсные СМ); FG = DG ~ (Xad ~~ % яд) (явнополюсные CM); OG-синхронная ЭДСЕ^ OD—ЭДСЕ^ (за поперечным реактивным сопротивлением); ОС - ЭДС OF - ЭДС воздушного зазора по продольной оси Е^
му потоков возбуждения Ф и продольной реакции якоря Фя</. Для насыщенных СМ поток Ф^ и ЭДС Е^а должны определяться из кривой намагничивания по суммарной МДС =Fb + FH (рис. 3.31, б) с учетом межполюсного рассеяния индуктора, пропорционального FB, Реально существующим является поток Ф^ и ЭДС воздушного зазора Eg или близкая к ней продольная ЭДС воздушного зазора Egtf. По этому потоку определяется насыщение активной стали статора и по этому же потоку, в сумме с потоком рассеяния полюсов Фяи — насыщение в индукторе.
Электромагнитный момент СМ равен
Мэ>с = m[EaUsinb/Xd + (72sin 26 (1/Xd - 1/^)]/сос. (3.30)
Второй член (3.30) определяет реактивный момент явно полюсных СМ.
При Ха ~ Xq максимальное значение M3tCfnax = тпЕаи/ХаыС9 или
^з,стах — (3.31)
Оно достигается при 6 = 90°. При Хя Ф Ха Мзстах достигается при 6 несколько меньшим 90°.
Рис. 3.32. Продольное поле статора при переходном (а) и сверхпереходном (б) режимах
Рис. 3.33. Схемы замещения для индуктивных сопротивлений по продольной оси
Величина М3^тах определяет предел статической устойчивости СМ. Отношение ЛГэ>с/6 = Э7Иэс/Э5, т. е..изменение момента на 1° изменения угла 6, называется синхронизирующим моментом или синхронизирующей мощностью. Для 6 в пределах 0—90° она положительна, т. е. препятствует изменению 6. Наибольшее значение она имеет при 5=0.
Рассмотренные выше индуктивные сопротивления Ха и Xq соответствуют установившемуся режиму, при котором 1-я гармоническая поля статора неизменна и неподвижна относительно ротора, и не индуцирует в его обмотках (возбуждения и успокоительной) каких-либо токов. При неустановившихся переходных, в том числе сверхпереходных, режимах поле статора индуцирует в обмотках ротора токи, препятствующие возникновению соответствующих потоков рассеяния и уменьшающие индуктивные сопротивления обмотки статора (рис. 3.32,а, б). Это отражено в схеме на рис. 3.33 для оси d.
В момент возникновения переходного процесса, например включении нагрузки, внезапном КЗ, на первой его ’’сверхпереходной” стадии, замкнуты выключатели Si и S2 и за счет токов, индуцированных в обмотке возбуждения (индуктивное сопротивление рассеяния Хв) и в успокоительной обмотке по оси d(Xyd), сверхпереходное индук
тивное сопротивление по продольной оси
х” = xs + 1 (ЦХяа + цхв + цхуа).
После затухания тока в успокоительной обмотке, постоянная времени которого мала (относительно высокое активное сопротивление), переходное индуктивное сопротивление
X^=xs+ + 1/XB),
что соответствует разомкнутому положению S2, и после окончания переходного процесса (разомкнутывыключатели Si и S2)
= Xs + Хяа .
Поскольку по оси q на роторе расположена только успокоительная обмотка, то
X” =XS + 1(1/ЛГя<? + 1/ХУЧ);
X” = Xq = Xs + Хя,.
Время затухания токов переходного и сверхпереходного процессов в обмотках определяется соответствующими постоянными времени этих обмоток.
Для расчета несимметричных режимов нагружения, при которых возникают поля обратной и нулевой последовательности, необходимо определять индуктивные и активные сопротивления обратной
и нулевой Хо, Rq последовательностей.
3.6. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ
3.6.1. Магнитные измерения. Измерение магнитных потоков в различных частях ЭМ выполняется с помощью флюксметров (веберметров, микровеберметров) (см. § 1.7). К числу достоинств прибора следует отнести независимость его показаний от сопротивления измерительной обмотки RMtO и времени.
Сопротивление внешней цепи флюксметра — измерительной обмотки — все же не должно более чем в 30—50 раз превышать внутреннее сопротивление флюксметра Яф, равное сопротивлению обмотки рамки и добавочного сопротивления, так как с увеличением внешнего сопротивления ухудшается успокоение, т. е. увеличивается время подхода стрелки к установившемуся положению.
Если необходимо увеличить предел измерения, то к измерительной обмотке параллельно включается сопротивление (шунт) Яш>ф ~ = Яи,о/(& — О, где k — кратность увеличения предела (цены деления). Измерение может проводиться либо путем перемещения изме-
ригельной обмотки (магнитные потоки в воздухе), либо путем включения или выключения МДС, создающей измеряемый поток. Все измерения (за исключением таких, когда возникновение потоков или МДС связано с вращением ротора (якоря), например измерение МДС токов коммутации) можно производить на неподвижной ЭМ при пропускании через обмотки соответствующих постоянных токов. Следует иметь в виду, что при измерениях по методу включения (выключения) МДС, создающей поток, флюксметр измеряет не полный поток, а разность между этим потоком и потоком остаточного намагничивания. Поэтому, чтобы измерить полный поток, производится изменение МДС (тока) возбуждения (реверсирование) от +?в до — ?в и показание флюксметра делится пополам. Если изготовить измерительную обмотку в виде небольшой плоской рамки, то, помещая ее в нужную точку, можно измерить среднюю индукцию внутри рамки.
Для измерения МДС применяется магнитный потенциалометр (пояс Роговского). Магнитный потенциалометр (МП) представляет собой обмотку, равномерно намотанную на гибкую немагнитную и неэлектропроводную подложку, например твердую резину небольшой толщины, способную, однако, сохранять форму поперечного сечения.
Во избежание погрешностей от потоков, сцепляющихся с выводными концами обмотки пояса, эти концы скручиваются и сама обмотка наматывается таким образом, чтобы выводы находились посередине пояса (рис. 3.34). Крайние витки должны совпадать с торцами подложки. Они удерживаются за счет лент, уложенных под первый ряд обмотки.
Если между какими-либо участками магнитопровода действует МДС (разность магнитных потенциалов), то при однородной по магнитным свойствам среде и при отсутствии других МДС между ними потенциалометр, концы которого прижаты к точкам А и В, измерит (независимо от того, по какой линии изогнется его подложка), МДС AF, действующую между этими точками (рис. 3.35). Для проведения измерений концы потенциалометра подключаются к флюксметру и производится включение (выключение) МДС. В случае заметного остаточного намагничивания измерение можно проводить без изменения МДС, отводя концы потенциалометра от точек измерения и замыкая потенциалометр на себя (т. е. прижимая торцы его друг к другу).
Тарирование потенциалометра проводится включением и выключением тока известного значения, охватываемого замкнутым на себя потенциалометром.
С помощью потенциалометра могут, в частности, решаться задачи облегчения (оптимизации использования магнитопроводов ЭМ постоянного тока и синхронных, устранения чрезмерных насыщений отдельных участков его вследствие конструктивных или технологических причин (неплотных стыков и т. п.).
Направление j \/укладки витков
Рис. 3.34. Магнитный потенциалометр
Рис. 3.35. Принцип действия потенциале»метра:
ЭП - эквипотенциальные поверхности; СЛ - силовые линии
Рис. 3.36. Измерение МДС, расходуемой в ярме (п), и между главным полюсом и ярмом (б):
1 - потенциалометр; 2 - медная прокладка; 3 - медная втулка
На рис. 3.36, а показано измерение МДС на полюсном делении ярма магнитопровода, а на рис. 3.36, б — измерение МДС, теряемой в стыке между затылком полюса и ярмом в ЭМ постоянного тока (см. также [3.17]).
Для определения магнитной индукции пользуются тесламетрами с датчиками Холла (см. § 1.7). С помощью датчиков Холла, подключенных через усилители к осциллографу, можно снимать кривые распределения поля в зазоре вращающихся ЭМ. Подробное исследование поля в зазоре на модели ЭМ можно провести методом, позволяющим
вращать статор и ротор ЭМ. Датчик Холла устанавливается при этом на неподвижной тонкой пластине, вдвигаемой в заэор [3.18]. Определение проводимости путей рассеяния, в частности межполюсного рассеяния явнополюсных ЭМ, может выполняться моделированием на электропроводящей бумаге или тонкой фольге.
3.6.2. Определение характеристик намагничивания. Эти характеристики определяются двумя путями:
1. Снятие характеристики намагничивания ЭМ постоянного тока и синхронных может выполняться как в режиме ненагруженного генератора (НГ), так и в режиме ненагруженного двигателя (НД). Оно может выполняться (для ЭМ с возбуждением постоянным током) при неподвижном роторе с помощью флюксметра. Метод НГ не требует поправок на падение напряжения в цепи якоря, однако требует спаривания испытуемой ЭМ с приводным двигателем. При снятии характеристик намагничивания СМ в режиме НД ток возбуждения регулируется так, чтобы при каждом значении напряжения питающей сети получить минимальный, т. е. чисто активный ток XX —
В режиме НД ЭДС Ех определяется из выражений: Ех = Ц— 1хХк/2— для АД; EX=U- IxrninRR ~ для СМ; Ех = UK - 1ХКЯ - для ЭМ постоянного тока, (UK — напряжение на изолированных щетках у ЭМ постоянного тока).
2. Характеристика намагничивания АД строится в функции тока намагничивания 1ц = 7xsin<Px-
Для трехфазных ЭМ за Ех принимается среднее значение (Ех1 + + Ех2 + Ех3)/3. Минимально допустимое значение Ех в режиме НД определяется резким возрастанием 7Х.
При возбуждении постоянным током отдельные точки кривых намагничивания снимаются при изменении тока 7В в одном направлении: сначала при увеличении до 1ятах {Ехтах), затем при снижении ДО I^min (Exmfn).
Для ЭМ постоянного тока в режиме НГ желательно снять полную кривую намагничивания от +7В/ИСХ до -1ътах, причем циклы перемагничивания повторяются до тех пор, пока напряжения Ехтах не станут повторяться. Очевидно, что Етах не должно быть более допустимого при испытании межвитковой изоляции (13 Цюм) -
За характеристику намагничивания принимается средняя линия полученных кривых намагничивания (петель).
На кривой намагничивания (рис. 3.37) отмечаются следующие характерные точки: 7В,ном — при (Е/л)ном; — составляющая тока возбуждения, компенсирующая падение МДС в воздушном зазоре; Ед — ЭДС, отсекаемая на оси Е, касательной к кривой намагничивания в точке Еном-
Существует несколько коэффициентов, характеризующих степень насыщения магнитопровода:
Рис. 3.37. Кривая намагничивания
по току возбуждения: ^нас/ ~ Zb.ном/Zb6>
Е
по ЭДС:
^нас е “ ^/^ном»
по отношению магнитных проводимостей:
^насД ^homZb.hom/ (^ном — ^)Zb8> ^насД ~ ^нас//1 “ ^нас
для характеристики без насыщения:
~ 0, ^нас! — 1» ^нас е ““ Ф
для характеристики с сильным насыщением:
^ном» ^нас/ ^нас е ~ 1-
Определение потерь при XX см. гл. 4.
3.6.3. Определение характеристик (параметров) КЗ. Опыт КЗ дает возможность определения МДС, активных и индуктивных сопротивлений рассеяния якорных обмоток при отсутствии главного потока. Определение потерь КЗ см. гл. 4.
Определение потоков рассеяния, создаваемых обмотками при наличии главного потока, можно выполнить с помощью флюксметра.
1. Для ЭМ постоянного тока опыт КЗ дает возможность предварительной отладки коммутации, в том числе регулировки поля ДП (см. гл. 6). В связи с влиянием главного поля на поле в коммутационной зоне и насыщением ярма рабочим потоком при реальной нагрузке ЭМ может потребоваться корректировка поля ДП (как правило — усиления). Опыт КЗ дает также возможность определить МДС FKfT (см. п. 3.5.1), а статическим методом может быть определена размагничивающая МДС, равная F^.
Опыт КЗ проводится при независимом возбуждении ЭМ малыми токами /в при отключенных последовательных обмотках на ГП. Предварительно при постепенном увеличении частоты вращения должна быть проверена устойчивость КЗ, т. е. отсутствие самопроизвольного роста 7К. Если это имеет место, то при небольших/к в цепь якоря
Рис. 3.38. Определение МДС токов коммутации
может быть введено сопротивление. При больших 7К для обеспечения устойчивости на ГП через один полюс наматывается питаемая от шунта в цепи /к одновитковая размагничивающая обмотка. Перед опытом ЭМ должна быть размагничена. Настройка ДП производится методом ПО в соответствии с указаниями гл. 6.
Определение МДС токов коммутации FKfT проводится на вращающейся невозбужденной ЭМ при питании якоря и ДП от внешнего источника по схеме рис. 3.38. Измерительная обмотка, намотанная на ГП, включается на флюксметр Ф. Предварительно методом ПО (см. гл. 6) проводится определение средней линии безыскровой зоны для двух-трех чисел витков обмотки ДП (шунтированием обмотки или намоткой дополнительных витков). Опыт проводится компенсационным методом, для чего одновременно с замыканием контактора Кх и подачей тока I в якорь в обмотку возбуждения с помощью контактора К2 может пропускаться небольшой ток Д?в.
Сначала при неподвижной машине определяется ток Д?ва, который компенсирует неизбежную неточность установки нейтрали (контролируется по неизменным показаниям флюксметра до и после включения тока I ). Этот опыт можно делать при небольшом токе I и затем пересчитывать значение Д?ва = I (щетки должны быть тщательно притерты, якорь сдвинут в направлении вращения).
После этого аналогичные опыты проводят на вращающейся ЭМ при нескольких числах витков обмотки ДП. Полученные при этом (из условия неизменности отсчета флюксметра) значения Д?в позволяют определить FK т = Д/в - Д/Вд в зависимости от настройки ДП (тока подпитки-отпитки) при различных значениях I.
Скорость нарастания тока якоря при включении на вращающейся ЭМ не должна быть большой (ее можно, например, регулировать возбуждением питающего якорь генератора), чтобы не имело место искрение из-за запаздывания потока ДП.
Аналогичная методика может использоваться для определения FK>T в ЭМ без ДП в зависимости от угла сдвига щеток по отношению к нейтрали.
Определение проводится по схеме для неподвижной ЭМ (рис. 3.39). На главный полюс наматывается измерительная обмотка, включенная на флюксметр. Все обмотки возбуждения, кроме одной с независимым возбуждением FB, отключаются. Якорь ЭМ тщательно затормаживается. Устанавливается заданное значение тока возбуждения ?в, и с помощью внешнего источника через якорь пропускается заданный ток I. Во избежание порчи коллектора под щетки закладывается фольга. Ток I может включаться и выключаться с помощью контактора Kl9 при этом флюксметр Ф будет показывать изменение потока полюса на ДФ.
Для определения Ф целесообразно применить компенсационный метод, согласно которому при включении тока I одновременно с помощью контактора К2, замыкающего реостат, на величину Д/в увеличивается ток /в. Значение Д/в подбирается таким образом, чтобы после включения контакторов и К2 показания флюксметра не изменялись, тогда
Ф = Д(вИ’в/(/и’я),
где wB, wa - числа витков обмотки возбуждения и якоря на полюс.
Для увеличения точности определения (исключения FHsina) опыт проводится при двух направлениях тока якоря и подсчитывается среднее значение Ф = F(I, iB).
2. Для трехфазных асинхронных ЭМ определяются ZK, JVK, и пусковой момент Мп. Опыт проводится при заторможенном роторе с соблюдением всех правил техники безопасности при двух напряжениях: ^ном/3,8 (табл. 2, ГОСТ 7217-87 ’’Электродвигатели трехфазные асин-
Рис. 3.39. Определение размагничивающей МДС реакции якоря
Рис. 3.40. Графическое определение тока КЗ при номинальном напряжении
хронные. Методы испытания”) и t/HOM + 10% (50 Гц) при мощности АД Р < 100 кВт и 0,4(/НОМ (не менее) при мощности Р > 100 кВт (50 Гц). Опыт проводится до токов 7К > 2 -г 2,5/ном (для двигателей мощностью более 1000 кВт). Испытание начинается с максимальных токов (напряжений), что обеспечивает более стабильную температуру обмоток в процессе опыта ®оп.
При испытаниях измеряются: ик,1к^Рк и для двигателей до 100 кВт— Мл (для двигателей большей мощности ГОСТ 7217-87 допускает расчетное определение 7ИП). Снимается пять-семь точек, причем для двигателей мощностью до 10 кВт затраченное на измерения одной точки время должно быть < 5 с, а мощностью более 10 кВт должно быть < 10 с. После каждой точки измеряется сопротивление (превышение температуры) обмотки статора Rr и ротора R2. Целесообразно также заложить термометры на обмотку, на сталь статора и ротора.
Если в опыте не удается определить величину 7к,ном ПРИ ^'ном> то она определяется экстраполяцией по рис. 3.40:
^К,ном “ Лс (^ном “ Ц<)/ (^К — ^к) •
Пусковой момент, Н • м, определяется из формулы
Мл = 0,9 • 9,55 pKjM2/«c. (3.32)
Потери в меди ротора, Вт
Рк,м2 — Рк — Рм1 ~ Рс9 (3.33)
где Рк — мощность в опыте КЗ; рм1 =3I^Rl - потери в меди статора; рс — потери в стали при напряжении UK.
Пусковой момент 2ИП>НОМ при 7к,ном определяется из формулы
Мщном ~ (Лс,ном/Лс)2 • (3.34)
Величины ZK, Хк, RK определяются из следующих расчетов:
ZK =t/K/(x/TzK); (3.35)
Rk = Pk/qi^; (336)
Хк = Vz2K - R2\ (3.37)
Если R2 — не измеряется (при КЗ роторе), то R2 ~RK - Ri.
Для контроля проводятся также расчеты следующих параметров:
COS — ^к/^4сЛк) > ~ Z^COS <£к;
— ZKsin
Полученные при температурах обмоток в опыте КЗ (для статора Gj и для ротора 02,°С) значения RK и ZK приводятся к значениям Як>ст, 120
I** A
рк, к Вт
80 h W -
60 -300
4Z7 - 200 - KO
20
- WO
cosy
- 0,5
0,4
Рис. 3.41. Характеристики КЗ
о 0
Zk,Ct при стандартной температуре 0СТ, т.е.
^К,СТ ^1^01 ^2^02» (3.38)
*0 = (235+ ©ст)/(235 + 0). (3.39)
Если 02 не измеряется, то
^к,ст ~^к^01> (3.40)
Zk,ct = + *’,„ (3.41)
Поскольку пусковой момент зависит от R2 и Ri, то полученное в опыте значение Мп приводится к стандартной температуре
Мп,ст = ЛГЛ(1 + А)1(к& + А/к®) . •
Л = XK/RK. (3.42)
При увеличении температуры обмоток Мп крупных АД обычно увеличивается, малых АД — уменьшается, при этом возможно и немонотонное изменение Мп.
Пример кривой с результатами опыта КЗ приведен на рис. 3.41.
Рис. 3.42. Схема трехфазного КЗ:
а — рекомендуется; б — не рекомендуется
Рис. 3.43. Определение продольной МДС обмотки якоря
Для АД с КЗ ротором с двойной клеткой или глубоким пазом для построения круговой диаграммы кроме опыта КЗ при номинальной частоте проводится такой же опыт при частоте 5 Гц и соответственно пониженном £/к (ГОСТ 7217-87).
Для определения коэффициента Ci = 1 + |Zi/Z^| величину а затем Zj =v X? + Л? можно определить по опыту с вынутым ротором (ГОСТ 10169-77).
Для АЭМ с фазным ротором значения сх и с2 можно определить, проведя два опыта КЗ:
при питании первой обмотки (ток в ней 71к) и замкнутой накоротко второй обмотке (ток /к2);
при питании второй обмотки (ток /2к) и замкнутой первой обмотке (ток 7К1) (все величины с индексом 2 приведены к обмотке 1),
^2k/4ki; с2”Лк/Ас2*
3.6.4. Определение параметров СМ. Методики определения индуктивных и активных сопротивлений СМ, в том числе Xs, Хо, и постоянных времени приведены в ГОСТ 10169-77 ’’Машины электрические трехфазные синхронные. Методы испытаний”, поэтому ограничимся лишь изложением некоторых дополнительных методов и замечаниями, которые могут оказаться полезными.
Продольная МДС обмотки якоря Fd определяется по опыту симметричного установившегося КЗ по схеме рис. 3.42. Для этой цели используется ’’треугольник КЗ” по рис. 3.43. Ток (МДС) возбуждения гв>к при токе КЗ /к имеет две составляющие: ZpK, обеспечивающую 122
Рис. 3.44. Определение действительных (насыщенных) значений Х& и Хц статическим методом
создание по оси d небольшого потока Фк, индуцирующего в обмотке якоря ЭДС и составляющую /в?я<г, МДС которой равна и противоположна продольной МДС якоря /Ksin .
Для определения составляющей /дк и тем самым гв>я<? проводится необходимое построение по рис. 3.43. Опустив из точки А характеристики XX перпендикуляр на ось абсцисс, получаем значения и
Для крупных ЭМ, для которых Ra/Xs < 0,2, принимается обычно Дс^к ~ /к^>
Простейшим методом приближенного определения Ха является метод синхронного вращения СМ в режиме ненагруженного двигателя с невозбужденным ротором при напряжении на зажимах U и токе /н>д; Xj =t//7H>flsin^ — угол сдвига фаз между U и /не-
действительные (насыщенные) значения Ха и Хд могут быть определены на неподвижной ЭМ при питании обмотки якоря постоянным током. Значение потока при этом определяется с помощью флюксметра (метод Ковача). Схема опыта показана на рис. 3.44. По обмоткам В—С пропускается постоянный ток /_, эквивалентный действующему значению переменного тока I
/= = /_х/з/2? (3.43)
Для уменьшения постоянной времени крупных ЭМ обмотка возбуждения замыкается на сопротивление, в 4—5 раз большее, чем ее сопротивление. Ось d находится по минимуму напряжения на разомкнутой обмотке возбуждения при питании небольшим током обмотки А. После установления заданной величины /_ замыкается выключатель К2 и флюксметром Ф измеряется поток Ф1? возбужденный в обмотках В и С током I- ,
xd = Ф1 /24 . (3.44)
Рис. 3.45. Определение Xq при насыщении магнитопровода
По данным опыта с учетом (3.43) строится зависимость Ха = F(7~).
При этом для определения цены деления флюксметра может использоваться ненасыщенное значение Xd, полученное по методам, приведенным в ГОСТ 10169-77. Для определения цены деления можно также использовать показания флюксметра при отсутствии тока в обмотке якоря и при замкнутом выключателе К2, при замыкании на себя обмотки возбуждения с током fB (до замыкания). Сравнивая отсчет флюксметра с величиной ЭДС Е при токе zB, по кривой намагничивания можно определить искомый масштаб.
Определение Xq производится тем же способом при установке индуктора по оси q. Определение Xq можно провести и при наличии потока возбуждения, создаваемого обмоткой индуктора. Однако при этом, поскольку возникают вращающие моменты, близкие к рабочему, должно быть обеспечено надежное стопорение вала ЭМ.
В тех случаях, когда производить точный поворот ротора затруднительно (для крупных ЭМ), опыт проводится 3 раза с подключением по очереди обмоток A-В, В—С, С—А. Если в этих опытах определяются индуктивные сопротивления Хл, Хв, Хс,то
Xd = Хср + ДХ; Xq = Хср - ДХ; (3.45)
Хср = (Ха + Хв + Хс)/3;__________________________________ (3.46)
ДХ = 2/3 у/ Xl + Хв2 + Хс2- (ХаХв + ХаХс + ХВХС) ’ (3.47)
Определение насыщенного значения Xq может выполняться при неподвижной ЭМ методом, описанным в [0.5], схема которого приведена на рис. 3.45. Якорная обмотка питается при этом от источника переменного тока с регулируемым напряжением (0 + 0,25) Цюм- В цепь обмотки возбуждения включается дроссель ДР, уменьшающий погрешность от возможной (минимальной) взаимной индуктивности между обмотками возбуждения и якорной.
Определяется Xq:
Хд = y/(U/y/3I)2 - (Pf3I2)2 (3.48)
и строится на зависимость Xq =F(iBf I).
Метод пригоден для ЭМ, не имеющих массивных частей магнитопровода и успокоительной обмотки (она может быть разомкнута).
3.7. ИЗМЕРЕНИЕ УГЛА 6 МЕЖДУ ЭДС Ed
И НАПРЯЖЕНИЕМ НА ЗАЖИМАХ U СИНХРОННЫХ ЭМ
Поскольку фаза ЭДС жестко связана с угловым положением индуктора-вала, определение угла 5 сводится к определению угла поворота вала при нагружении СМ относительно вектора U. При XX СМ в генераторном режиме и если механические потери относительно малы, то в двигательном 6 равен нулю, что позволяет найти точку его отсчета.
Наиболее просто угол 6 может быть определен с помощью стробота-хометра СТ (рис.3.46,а). При этом методе на вращающуюся вместе с ротором деталь наносится метка, освещаемая стробоскопом с частотой вспышек, синхронизированной с частотой напряжения (А При
Сеть
Сеть
Рис. 3.46. Определение угла 6 между ЭДС и напряжением синхронной машины: а — с помощью строботахометра СТ; б — с помощью тахогенераторов переменного тока СТГ
вращении ИСМ метка кажется неподвижной, при нагрузке она смещается на угол 5. Для отсчета 5 в цепь синхронизации вспышек стробоскопа включается небольшой измерительный фазорегулятор (фазовращатель) ФВ, выполненный, например, на базе трехфазного сельсина, с угловой шкалой поворота ротора. При XX ИСМ фазовращатель ставится на нулевую отметку шкалы и против метки на детали, связанной с валом, на неподвижной части ИСМ ставится соответствующая метка. При нагрузке метка на вращающейся части смещается относительно неподвижной. Поворотом ротора ФВ метки совмещаются; угол 6 отсчитывается при этом по шкале ФВ.
Заметим, что чем больше пар полюсов имеет ИСМ, тем меньший фи; зический угол соответствует 1° электрического угла и для получения достаточно точных отсчетов для размещения метки должны выбираться детали большего диаметра, например бандажи ротора.
При испытании гидрогенератора для определения 6 могут использоваться связанные с его валом СГ, питающие регуляторы частоты и напряжения [3.19].
Контактные методы определения 5 основываются (рис. 3.46, б) на применении двух тахогенераторов переменного тока СТГ1 и СГГ2, один из которых соединяется с концом вала ИСМ, а второй приводится во вращение от СД, питающегося от зажимов ИСМ. С помощью потенциометров напряжения СТГ1 и СТГ2 уравниваются.
Угол 5 определяется двумя способами:
поворотом статора СТГ2 на измеряемый по шкале угол 6, соответствующий нулевому отсчету вольтметра V\
измерением показаний вольтметра (без поворота статора СГГ2),
ев = 2ЕСТГ sin 6/2.
В качестве вольтметра используется вольтметр переменного тока с малым собственным потреблением (электронной или выпрямительной системы).
3.8. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ РОТОРА ОТНОСИТЕЛЬНО ОСИ ВРАЩЕНИЯ
Существует ряд методов определения J:
1. Для определения J до сборки ЭМ ГОСТ 11828-86 рекомендует подвешивание предварительно отбалансированного ротора за ’конец вала на высокопрочной струне (механические напряжения в струне должны быть небольшими).
J, кг • м2, определяется по отношению периода крутильных колебаний Гэт подвешенного на этой же струне эталонного цилиндра с известным /эт к периоду крутильных колебаний Т исследуемого ро-
Рис. 3.47. Определение момента инерции ротора
тора:
J = /„(Т/Т,,)2. (3.49)
Длина струны выбирается из условий Т > 1 с. /эт должен быть близким к J.
Существуют методы [3-4] и стенды (Каунасский политехнический институт) для автоматического измерения Т,
2. Для определения J может также применяться подвес на призмах по рис. 3.47:
J = Mr (0,248 Т2 - г ), (3.50)
где М — масса ротора, кг; г — радиус, м; Т — период колебаний, с.
3. Для определения J в собранных ЭМ с подшипниками качения ГОСТ 11828-86 рекомендует метод вспомогательного маятника с массой ш, прикрепленного с помощью рычага минимальной массы к концу вала с радиусом до центра тяжести массы а, м
J = та (0,248 Т2 ~ а), (3.51)
где Т — период колебаний, равный 3—8 с.
4. В собранных ЭМ J может определяться методом выбега (см. гл. 4) при известном значении рмх = F (п).
5. Следует упомянуть также видоизмененный метод выбега, предложенный Бутом и Трута, не требующий измерения ускорений и времени выбега. Согласно этому методу счетчиком оборотов измеряется полное число оборотов N ротора невозбужденной ЭМ при выбеге от частоты вращения щ (угловая скорость coj) до остановки. Предварительно должна быть определена зависимость рмх - F(co).
Момент инерции ротора
J = 27Г7У/Л,
где А — определяемая планиметрированием площадь на графике ы21Рълх = F(cS). Площадь А ограничивается тремя линиями: кривой со2/рмх, осью абсцисс (ось со) и прямой, параллельной оси ординат и проходящей через точку со = coj.
6. Момент инерции ротора относительно оси вращения может быть определен как произведение массы ротора М на квадрат радиуса инерции Аи:
J = MR2, и’ где /?и = yjj/м'.
Вместо J иногда используется ’’маховой момент”
GD* = Mg{2RK)* = 4gJ,
где G — вес ротора; g — ускорение свободного падения.
Глава четвертая
ОПРЕДЕЛЕНИЕ ПОТЕРЬ И КОЭФФИЦИЕНТА
ПОЛЕЗНОГО ДЕЙСТВИЯ
4.1. КЛАССИФИКАЦИЯ ПОТЕРЬ
При работе ЭМ часть энергии тратится на нагрев ее элементов. Потери энергии (в дальнейшем — потери) различаются по своей физической природе, месту локализации и режиму, при котором они возникают. Перечень потерь и принятых для них обозначений приведены в табл. 4.1.
Таблица 4.1
Потери Обозначение
Потери в меди В якорных обмотках:
основные Рм,ос
добавочные 1 и 11 рода Рм,дЪ Рм,д11
добавочные коммутационные Рм,к
от вытеснения магнитного потока в пазы Рм,в,п
В успокоительных обмотках:
в обмотках СМ Ру
в успокоительных обмотках от обратно Ру,о,в
вращающегося поля Потери в стали
от гистерезиса Рс,гс
от вихревых токов Рс,в
в якоре Рс,я
в зубцах Pcz
в ярме Pci
Продолжение табл. 4.1
Потери Обозначение
основные в якоре при холостом ходе увеличение основных потерь при нагрузке Поверхностные и пульсационные от высших гармоник поля в воздушном зазоре: Рс,я, ос Рс,х Дрс,н
в якоре в якоре при холостом ходе в якоре при нагрузке в индукторах (полюсах) в индукторах при холостом ходе в индукторах при нагрузке Потери в конструкционных деталях при холостом ходе при нагрузке Рс,я,п Рс,я,п,х Рс,я,п,н» Рс,д II Рс,и Рс,и,х Рс,и,н» Рс,д II Ркд,х Рк,д,н, Рд1
Потери на тренне и вентиляцию (механические) от трения в опорах от трения щеток вентиляционные двух ЭМ (агрегата) Рмх Рт,о Ptju Рвт Рмх, аг
Потерн в роторе АЭМ Потери в обмотках возбуждения Потери в скользящем контакте электрические Потери во вспомогательных устройствах Добавочные потери: Р2 Рв Рс,к^ Рве,у Рд
1 или II рода в меди в стали РдЬ РдП Рм,д Рс,я
4.1.1. Потери в якорных обмотках — рм (’Потери в меда")- Они состоят из основных рм>Ос и добавочных рм>д потерь.
Основные потери
Рм.ос = /2Я= , (4.1)
где I — действующее значение тока, — сопротивление обмотки, измеренное при постоянном токе, отсутствии переменных магнитных полей и постоянной плотности тока в сечениях проводника. рм>ос определяются расчетом.
В ЭМ, однако, имеются переменные магнитные поля, проникающие в проводники обмотки и вызывающие появление в них вихревых то
ков и добавочных потерь рм>д. Напомним, что рм>д = Л4/2> где h — высота проводника, f — частота изменения потока.
Причиной появления Рм,д могут быть поля рассеяния тока в проводниках обмотки якоря ЭМ переменного тока. Эти поля, изменяющиеся с основной частотой j\ = р nJ (X), вызывают добавочные потери I рода — рм д I, что эквивалентно увеличению сопротивления обмотки до значения Ra >R-9 где Ra — активное сопротивление.
Потери в меди
Рм ~ Рм,ос Рм,д1 I > (4«2)
Ra=PJI2, (43)
где рм — потери, определенные из опыта,
Рм,д1 ~ Рм — Рм,ос ~~ Рм — ^=0» (4-4)
где — сопротивление обмотки при температуре опыта ©.
Коэффициент увеличения сопротивления
&R “ — 1 + Рм,д1/Рм,ос* (4-5)
Следует иметь в виду, что при повышении © и R__ потери рм>Ос (при постоянном значении Л) увеличиваются, в то время как Рм,д1 уменьшаются (они обратно пропорциональны R)° поэтому kR зависит от ©.
Приведение kR к стандартной температуре 0СТ производится по формуле
= 1+ (4.6)
где кф соответствует (3.39).
Другим источником добавочных потерь в меди, главным образом в АЭМ с двусторонней зубчатостью и малым воздушным зазором, являются потоки дифференциального рассеяния, проходящие через воздушный зазор.
При насыщенных зубцах и значительных МДС обмоток пульсация потоков дифференциального рассеяния (с зубцовой частотой ротора в статорных зубцах и наоборот) создает пульсацию потоков рассеяния, замыкающихся через пазы, в результате чего возникают потери на вихревые токи в проводниках обмотки. Высокая частота этих пульсаций способствует возникновению значительных потерь.
Эти потери, возникающие вследствие процессов с частотой, более высокой, чем основная, называются добавочными потерями II рода — Рм.д11- В отличие от добавочных потерь I рода, которые поглощают часть электрической энергии, полученной из сети или генерируемой в рабочей обмотке, они покрываются за счет механической энергии ро
тора (они создают момент, тормозящий вращение). Это принципиальное обстоятельство позволяет разделить добавочные потери на потери I и II рода.
Напомним, что в машинах постоянного тока изменение потока рассеяния проводников якоря, проходящих через коммутационную зону с частотой /к = А>?/60, где К — число пластин коллектора, также создает коммутационные добавочные потери II рода — рм,к.
Очевидно, что потери рм>д1 возникают при прохождении по обмотке переменного тока, а рм>дп, кроме того, и при вращении ротора. Эти потери определяются в режимах КЗ по мощности, затрачиваемой в цепи якоря (рм,д1), и мощности, подведенной к валу (рм,дп)-
4.1.2. Потери в стали — рс возникают в активной стали ЭМ. Прохождение переменного магнитного потока вызывает потери на гистерезис Рс,гс и вихревые токи рс в.
В активной стали зубцов и ярма якоря, перемагничиваемых с частотой /1, 1-я гармоническая магнитного поля создает распределенные в объеме якоря потери, которые назовем основными:
Рс,я,ос “ Pcz + Рс/ (4-7)
Кроме этих потерь, в особенности в АЭМ (из-за двусторонней зубчатости, малого воздушного зазора), в обращенном к воздушному зазору слое активной стали зубцовые гармонические поля при XX создают поверхностные (от вихревых токов) и пульсационные (от гистерезиса) потери рс,я,п- Так что в общем случае потери в стали якоря
Рс,я — Рс,я,ос + Рс,Я,П- (4.8)
При наличии зубцов якоря зубцовые гармонические поля в зазоре при XX создают также поверхностные и пульсационные потери в полюсных наконечниках рс,и,х индукторов (полюсов), которые могут иметь существенное значение при массивных полюсах и при неудовлетворительной шихтовке полюсов.
Потери рс>х =Рс,я,ос + Рс,я,п,х + Рс,и,х определяются из опыта XX и используются в дальнейшем для определения потерь в стали рс при всех режимах:
Рс =Рс,х(Е/Ех)2, (4.9)
где Е — ЭДС обмотки якоря в режиме, для которого определяется значение рс, а Ех — ЭДС этой обмотки в опыте XX, при котором определено значение рс>х.
Следует отметить, что в ЭМ постоянного тока с высоким насыщением оснований зубцов (Bz > 2 Тл) при XX возникают потери в меди обмотки якоря от вытеснения потока в паз рм>в>п. Эти потери для подобных ЭМ являются частью потерь рся и при расчете по (4.8) должны
быть учтены. Они могут быть определены с помощью тарированного двигателя как разность потерь рс>я якоря с обмоткой и без нее.
Для вновь проектируемых ЭМ необходимо иметь возможность предварительного расчета рс, для чего используются основанные на опытных данных эмпирические формулы.
В качестве примера приводим формулу для определения рс якорей тяговых двигателей [4.6]
Рс = оЛт>с(Л//ст)а[б. (В/Вст)0 +
+ GZ(BZ/BCT)^(BZ/BO)7], (4-10)
где и — удельные потери электротехнической стали, определенные стандартным методом при /ст = 50 Гц и Вст = 1 Тл; ктс — коэффициент увеличения потерь в стали, вызванного технологическими причинами (наклепом при штамповке, поверхностными замыканиями листов и т. п.); fi — частота перемагничивания; G., Gz — масса ярма и зубцов, кг; В. — среднее значение индукции в ярме; Bz — индукция на 1/3 высоты зубца; а = 1,3 1,5; 0=2; 7=0 для Bz < 1,8 2 Тл; 7=3 для Bz >2Тл; BQ= 1,6 Тл.
Определение рся якоря без обмотки (рм>в,п =0) позволяет отработать оптимальную технологию изготовления пакета якорной стали (режимы термообработки листов ит.п.), при которой достигается минимальное значение рс>я.
При появлении тока в якорной обмотке СМ кроме потерь рси>х появляются поверхностные и пульсационные потери в полюсных наконечниках индуктора рс>и>н, вызванные высшими гармоническими МДС обмотки (до гармоник зубцовых порядков включительно).
Поля этих гармонических перемещаются относительно индуктора, в том числе и в обратном его вращению направлении, что создает пульсации поля повышенной частоты. Потери в стали индуктора рс>ин относятся поэтому к добавочным потерям II рода.
В ЭМ с массивными роторами (турбогенераторах) эти потери могут быть значительны.
При наличии успокоительных обмоток поля высших гармонических МДС якоря вызывают потери ру в этих обмотках.
В этом случае потери от высших гармонических МДС якоря
Рв,г ~~ Рс,и,н Ру Ру (4.И)
При однофазных режимах СМ обратно вращающееся поле (ОВП) якоря создает в успокоительных обмотках и в стали индуктора значительные потери
РоВП ~ ру,ОВП Рс,овп Ру,овп* (4.12)
В АЭМ с КЗ ротором, особенно при залитой беличьей клетке и скосе пазов [4.1.3], могут возникать значительные токи и поверхностные потери в роторе, индуцированные полями высших гармонических. Для их уменьшения рекомендуется изолирование клетки от стали, удаление перемычек от затекания сплава в шлиц между головками зубцов.
Пульсация потока в отдельных зубцах создает поверхностные и пульсационные потери в них. Эти потери обозначим рс,д 11-
Природа этих потерь та же, что и потерь рм>дц, поэтому под добавочными потерями II рода в АЭМ будем подразумевать сумму
РдП = Рм,дП + РсдП- (4-13)
Наложение при нагрузке поля якоря на поле возбуждения вызывает увеличение максимальной индукции в зубцах и в воздушном зазоре и увеличение потерь в стали якоря на ДрСэН. Заметное значение Дрс,н может приобретать в некомпенсированных ЭМ постоянного тока.
4.1.3. Потери в конструкционных деталях (нажимных шайбах, плитах, обмоткодержателях, бандажах, щитах и т. п.) ркд. Они возникают при воздействии переменных потоков рассеяния обмотки возбуждения и обмотки якоря.
Соответственно возникают потери рк,д>х (входящие в потери XX) и нагрузочные добавочные потери Рк,д,н (входящие в потери КЗ). Эти потери являются добавочными потерями I рода. Полученное из опыта КЗ значение Ra учитывает потери рк,д,н-
Добавочные потери I рода представляются суммой
Рд! = Рм,д1 + Ркд,н- (4-14)
4.1.4. Механические потери рмх. Они включают в себя потери на трение в опорах pTjO, в узлах токосъема (щетках) рТ1Ц и вентиляционные ротери двт, которые в случае самовентиляции включают потери на привод вентилятора, и во всех случаях потери на вихреобразование и трение врашаюшихся частей о воздух:
Рмх ~’ Рт,о + Рт,щ + Рвт- (4-15)
Потери рт о и рвт определяются по опыту XX, потери рт щ — по опыту КЗ.
Согласно ГОСТ 11828-86 при подсчете КПД учитываются только потери в подшипниках ЭМ (за исключением гидрогенераторов).
4.1.5. Потери в роторе АЭМ р2- Электромагнитная мощность вращающегося поля Рэы = Af3Mcoc, где сос — угловая синхронная частота вращения.
Мощность ротора Рр = 7Иэмсор - Рэы (1 — s).
Разность Рэм - Рр равна потерям в роторе р2:
Pl ^3MS ^ps/(l~s).
(4-16)
133
Для однофазных ЭМ, учитывая потери от обратно вращающегося поля, в выражение для подставляется величина 2s.
Для двигателя
” Р1 “ PcTJ (4-17)
для генератора
Рэм = А + 2рст, (4.18)
где Pi — потребляемая из сети мощность, Р2 — отданная в сеть мощность.
Потери в статоре
Рсл ~ Рм,ос + Рс + Рд1
Мощность на валу
Л>л =РР 1 (Рмх + РдП), (4-19)
где знак ’’минус” для двигателя, ’’плюс” — для генератора.
ПриXX Рвп —0; Рр —рмх +Рд11э s~sx-
Потери в роторе при XX
Р1Х ~ (рмх Рд11)5х/(1 *х) pMXSX- (4.20)
4.1.6. Потери в обмотках возбуждения рв. Они определяются как произведение тока и напряжения, питающего цепь возбуждения.
Потери в обмотках возбуждения ЭМ постоянного тока, соединенных последовательно с якорем, относят к основным потерям в цепи рабочих обмоток.
В СМ в случае пристроенного возбудителя к потерям возбуждения относят все потери возбудителя за исключением механических, 'которые учитываются совместно с механическими потерями машины.
К потерям на возбуждение следует отнести и потери в переходном контакте на контактных кольцах возбуждения.
4.1.7. Электрические потери в скользящем контакте pCKj3. Они определяются как произведение падения напряжения под щетками и тока. ГОСТ 11828-86 устанавливает расчетные значения падения напряжения под щеткой одной полярности, равные 1 В для угольных и графитных щеток и 0,3 В для угольно-графитных и металло-графитных щеток.
4.1.8. Потери в вспомогательных устройствах рвс>у. Согласно ГОСТ 11828-86 при определении КПД учитываются также потери в вспомогательных устройствах, к числу которых относятся:
потери в регулировочных реостатах, постоянно включенных нерегулируемых сопротивлениях, катушках индуктивности и тому подобных приборах и аппаратах, необходимых для работы машины в номинальном режиме;
134
потери в возбудителе, подвозбудителе, пусковом электродвигателе и других вспомогательных электрических машинах, если они приводятся от вала испытуемой машины.
4.1.9. Добавочные потери. Понятие ’’добавочные потери” нуждается в дополнительном уточнении. При исследовательских работах критерием для отнесения потерь к этой категории является их физическая природа (см. § 4.1). При промышленных испытаниях ЭМ к числу добавочных относят потери, которые не входят в экспериментально определенные потери XX и определенные расчетом основные потери в обмотках.
В этом случае в состав добавочных входят потери, вызванные полями рассеяния тока нагрузки (’’добавочные потери при нагрузке” — по МЭК). По стандартам США они называются Stray Load Loses (SLL).
4.1.10. Погрешность определения суммы потерь. Как следует из приведенной выше классификации, pMtOC определяются расчетом. Все остальные потери в СМ и МПТ могут определяться экспериментально в режимах XX и КЗ.
Если используются только опыты XX, то суммарные потери (без потерь на возбуждение)
Pj} ~ Рм,ОС Рх Рд> (4*21)
где рд - добавочные потери при нагрузке.
Эти потери могут вычисляться как определенная часть номинальной мощности, установленная ГОСТ 11828-86 или нормативной документацией на конкретные типы ЭМ.
Более точным является определение р^ с использованием потерь рк, определенных в режимах КЗ. Этот метод рекомендуется ГОСТ 11828-86 для СМ мощностью более 100 кВ • А,
= Рх + Рк (4.22)
(рк не включает рмх).
Потери определяются в этом случае с погрешностью ± Др из-за того, что потоки рассеяния в режимах КЗ и потери рд1 и рдц могут быть несколько больше действительных при нагрузке. Потери в стали, наоборот, за счет отсутствия местных насыщений, вызванных наложением потока якоря на поток возбуждения (хотя они и приводятся к ЭДС, имеющей место при нагрузке), несколько меньше действительных (не учитывается Дрс,н) •
Однако в целом вычисление КПД (больших, чем 0,85) по сумме отдельных потерь, определенных в режимах XX и КЗ, является наиболее точным, а для крупных ЭМ единственно возможным.
Следует иметь в виду, что определение погрешности ± Ар, как разности Др =Р'£ — (рк + рх), где величина р^ = - Рг — суммарные
потери, определенные из опыта, имеет смысл лишь при условии (см.
п. 1.2.4), что Ар/р^ >10 v^i + a2, где fli, д2 — наибольшая (относительная) погрешность в определении Л и Р2 соответственно. Если, например, = 0,2%, то может быть оценена погрешность лишь
большая, чем 10 >/0^2 + 0,2 == 6,3%.
Это замечание следует учитывать во всех случаях определения добавочных потерь.
Для более точного определения величины ± Др и нужны специальные методы, например калориметрические исследования на моделях ЭМ.
В связи с ростом удельной мощности ЭМ и требованием экономии энергоресурсов вопросы снижения добавочных потерь приобретают все более существенное значение. Разработка методов выявления и оценки отдельных составляющих этих потерь и мероприятий по их уменьшению является одной из актуальных задач испытания [4.5].
4.2. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ СУММЫ ПОТЕРЬ
Достоинством этих методов является определение реальных потерь, имеющих место в заданных режимах. В ряде случаев, например при испытании коллекторных ЭМ переменного тока, эти методы являются единственно возможными.
В том случае, когда сумма потерь р^ определяется как разность подведенной Рх и отданной Р2 мощности, погрешность в определении р^ в Р\1р^ раз больше, чем суммарная погрешность измерения Рх и Р2 (см. п. 1.2.4). Если, например, Р\ - электрическая мощность, измеряемая с точностью ± (0,2 -г 0,5)%, а Р2 — механическая мощность, измеряемая с точностью ± (0,5 + 1)%, то при р^Р\ = 0,1 (КПД составляет 0,9) погрешность в определении р^ может быть равна 7—15%, в то время как допуск на р^ согласно ГОСТ 183-74 равен 10—15%. Поэтому этот метод рекомендуется для р^]Р\ > 0,15, т. е. для КПД < 85%.
Во всех случаях при измерениях Pi и Р2 должны применяться меры по уменьшению погрешности, изложенные в гл. 1.
Точность определения КПД может быть существенно повышена, если проводить испытание двух одинаковых ЭМ по схеме возвратной работы и в особенности по схеме взаимной нагрузки.
В первом случае точность повышается за счет увеличения отношения p^Pi в два раза и возможности измерения двух электрических мощностей (точность таких измерений практически выше, чем механических) .
Во втором случае непосредственно измеряется величина р^, что делает возможным определение добавочных потерь.
Схемы возвратной работы и взаимной нагрузки рассмотрены в гл. 3, здесь отметим вопросы, связанные с повышением точности определения потерь:
для испытания должны подбираться тщательно проверенные и подготовленные ЭМ, имеющие практически одинаковые параметры и потери;
измерения должны проводиться при полностью установившемся тепловом состоянии всех элементов ЭМ при постоянной частоте вращения;
должна быть тщательно отработана методика измерения сопротивления вращающихся обмоток и обмоток переменного тока, поскольку от этого зависит точность определения основных потерь в обмотках, составляющих значительную часть и практически возможность оценки добавочных [4.2].
4.2.1. Определение и рд ЭМ постоянного тока методом взаимной нагрузки. ЭМ должны иметь тщательно отлаженную коммутацию в тех режимах, в которых они будут работать в схеме, и практически одинаковую частоту вращения в обоих направлениях при номинальном токе. Кроме напряжения сети должно измеряться напряжение на коллекторе (на изолированных щетках) — UKn.
Если используется схема взаимной нагрузки (см. рис. 3.1) без вольтодобавочной ЭМ, в которой магнитные потоки двигателя и генератора различны (режим устанавливается регулировкой тока возбуждения), то для приближения суммы потерь в стали двух ЭМ к значению 2рс напряжение на зажимах схемы устанавливается равным ЭДС якоря в номинальном режиме — FHOM-
Сумма потерь двух ЭМ
= р2дв + рЕг = UI ’ (4-23)
где Un I — напряжение и ток сети.
Добавочные потери двух ЭМ
Рд2 Рд,дв + Рд,г — IU — [(/дв^я,дв + /Ля,г) +
+ 2Дг/ш (7дВ + Zr) + (рСудВ + Рс,г) Рмх,аг]» (4-24)
где /дв, 1Т — токи двигателя и генератора; Яя#дв, ^я,г — сопротивления якорных цепей при температуре опыта; рсдв, рс,т — потери в стали при ЭДС генератора Ет - £4о1д»+ 4^я,г и ЭДС двигателя £дв = = ^клдв - 4в^ядв'. ДЫщ ~ падение напряжения под щеткой одной полярности (по ГОСТ 11828-86); РМх,аг — механические потери агрегата из двух спаренных ЭМ, определяемые из опыта XX при питании одной из ЭМ.
Потери в параллельных обмотках возбуждения, если их токи не входят в 1С9 должны учитываться отдельно.
Добавочные потери делятся между ЭМ пропорционально электромагнитной мощности:
Рд,дв “ РдХ ^дв Лхв/ (^дв Лхв + ЕТ1Т)\ (4-25)
Рд,г “ РдЕ ~ Рд,дв- (4.26)
При работе двигателей постоянного тока в цепях пульсирующего тока переменные составляющие напряжения и тока могут вызывать значительные дополнительные потери. Для исследования этих потерь используются схемы с наложением на постоянный ток через блокировочные конденсаторы переменного тока заданной частоты и амплитуды [1.3].
Для крупных ЭМ при этом могут использоваться схемы возвратной работы (см. гл. 3).
Измерение мощности дополнительных потерь (она равна мощности, передаваемой источником переменного тока в схему) выполняется согласно п. 1.3.5.
В ЭМ небольшой мощности дополнительные потери определяются в реальных схемах регулирования при заторможенном якоре.
4.2.2. Определение р^ синхронных ЭМ. При определении суммы потерь СМ кроме указанного в гл. 3 метода нагружения двух ЭМ с угловым смещением роторов (статоров) может использоваться схема, в которой две одинаковые неспаренные СМ работают от одной сети: одна с недовозбуждением, другая с перевозбуждением. Токи в якорных обмотках ЭМ при этом могут достигать значения 60—70% номинальных. Точной регулировкой возбуждения добиваются минимального значения тока сети I при потребляемой из сети мощности — Р (без потерь на возбуждение). Потери одной ЭМ р^ = Р/2.
4.2.3. Определение р^ асинхронных ЭМ. Для АЭМ определение р^ проводится по схеме возвратной работы с использованием двух сетей с разными частотами:
Р£ = Р£дв + pSr = Р1 ~Р*’
где Pi — потребляемая двигателем из сети и Р2 — возвращаемая генератором в сеть мощности.
Добавочные потери двух ЭМ (двигателя и генератора)
РдХ = Ръ - [<Рм ,ОС,ДВ Рм,ос,г ) + (Р2дв + Р2г) +
+ (Рс,дв + Рс,г) Рмх,аг]» (4.27)
где рм,ос,дв» Рм,ос,г ~ основные потери в обмотках статоров; р2дв и р2т — потери в обмотках ротора, рс,дв и Рс,г — потери в стали при XX; РМх,аг ~ механические потери двух спаренных ЭМ (п. 4.3.1). 138
Рис. 4.1. Добавочные потери АЭМ:
1 - в режиме двигателя; 2 - в режиме генератора; 3 - средние значения
Добавочные потери распределяются между двигателем и генератором пропорционально квадрату тока нагрузки (приведенного тока ротора) I 2 = I 2 — Z 2. Поскольку потери в роторе = 12, добавочные потери рд распределяются пропорционально потерям в роторе:
р2дв ^ЭМэДВ^ДВ» ^эм,дв -^1 Рм,ос,дв ~~ Рс,дв>
Р2г ~’ Рэм,г^г? ^эм,г ?2 + Рм,ос,г + Рс,г»
(4.28)
где $ — скольжение.
Добавочные потери в двигателе Рд,дв = РдУ р2дв/(р2дв + р2г) > Рд,г = РдЕ ~ Рд,дв«
Величины Рд,дв и Рд,г приведены на рис. 4.1 и в зависимости от р2 рд для данного типа АЭМ принимаются по средним значениям на кривой 3. При определении КПД зти потери относятся к току статора I i.
43. МЕТОДЫ ОПРЕДЕЛЕНИЯ ОТДЕЛЬНЫХ
СОСТАВЛЯЮЩИХ СУММЫ ПОТЕРЬ
Для определения отдельных составляющих потерь может использоваться метод тарированного двигателя — метод ТД, метод самоторможения (выбега) — метод МВ.
Для определения потерь холостого хода рх можно использовать метод работы ЭМ в режиме ненагруженного двигателя (собственно метод XX) — метод НД.
В качестве ТД можно использовать балансирные установки, которые работают в режиме двигателя, устройства для измерения мощности на валу (см. гл. 3). В качестве ТД часто используют двигатель постоянного тока, прошедший тщательное тарирование, т. е. определение отдельных потерь и мощности на валу для всех режимов (п, Af), в которых он работает.
Для обеспечения достаточной точности определения потерь ИМ методом ТД потери ТД должны быть в 3—5 раз меньше измеряемых. При широком диапазоне регулирования ТД обеспечить такое отношение потерь удается не всегда, но все же желательно, чтобы мощность ТД была не более чем в 3—5 раз больше минимальной измеряемой. Напряжение на коллекторе ТД должно измеряться с помощью изолированных щеток.
С целью уменьшения добавочных потерь ТД должен иметь безыскровую коммутацию и хорошее состояние коллектора, увеличенный воздушный зазор (или компенсационную обмотку), разделенные по высоте проводники обмотки якоря. Поскольку механические потери в ТД могут изменяться (например, при износе щеток), тарировка его должна периодически поверяться.
Достаточно универсальным и простым является метод МВ (см. § 4.4). Он применяется для ЭМ мощностью более 1—5 кВт, после сборки машины на месте установки. Метод используется и для контроля неизменности потерь в эксплуатации.
4.3.1. Определение методом НД. Метод НД применим для большинства типов ЭМ, способных работать в режиме двигателя. При использовании этого метода надо предусматривать следующее. Амперметры в цепи тока 1Х и токовые обмотки ваттметров должны быть постоянно надежно зашунтированы через контакты реле, которые размыкаются лишь на время измерения, после того, как заданный режим XX полностью установится. Для этого в цепь включаются амперметры на большую силу тока. Это связано с тем, что при регулировании режима ток Zx резко возрастает.
Все измерения проводятся при установившихся токе, частоте вращения, температуре всех элементов, включая подшипники.
Машины постоянного тока. Испытуемая машина запускается двигателем при холостом ходе с независимым возбуждением. Последовательные обмотки возбуждения отключаются. Измеряются ток якоря /ях и напряжение на коллекторе С7КЛ. Для машины с рабочим напряжением до 250 В напряжение на коллекторе должно измеряться с помощью изолированных щеток, что позволяет исключить падение напряжения под щетками и связанную с ним возможную погрешность (для машин с напряжением на коллекторе более 250 В такой метод также является желательным).
В качестве изолированных щеток используют 2 щетки (по одной на каждую полярность), оклеенные лакотканью после легкой опиловки, щеточные канатики которых отъединены от цепи якоря и присоединены к вольтметру.
В надежном контакте изолированных щеток с коллектором можно убедиться по отсутствию колебаний стрелки вольтметра, а также по разности напряжений на рабочих и изолированных щетках, которая должна быть не более 2 В.
Рис. 4.2. Потери XX в машинах постоянного тока:
а - кривая рх = F (Е[п) при п = const; б - разделение потерь XX на рс и рмх
Потери XX
Рх ~' Рс РмХ ~ — Ai,X^H®)Zh,X5 (4.29)
где RaQ — сопротивление якорной цепи при температуре испытания.
Для разделения потерь На рс и рмх определяется рх в зависимости от ЭДС при неизменной частоте вращения и, что достигается регулировкой тока возбуждения. Строится зависимость рх от (Е/ п) 2 (рис.4.2,а, б). Экстраполяция кривой (прямой) рх на ось ординат отсекает на этой оси потери рмх. Проведя этот опыт при нескольких частотах вращения, получают зависимость рых от и.
Для повышения точности экстраполяции желательно измерение рх до возможно низких значений Е/ п. Однако по мере снижения Е/ п растет Zx, что приводит к появлению добавочных потерь и снижает точность опыта; поэтому (Е/и)т/л ограничивают значением, при котором 1Х (0,2 т 0,25) 7НОМ.
В режиме (Е/ ri) min иногда наблюдаются медленные изменения значений тока холостого хода и скорости вращения. Для стабилизации режима можно включить согласно с обмоткой независимого возбуждения последовательную обмотку возбуждения. Для двигателей последовательного возбуждения точка Emtn снимается при естественной схеме двигателя.
С целью повышения точности определения рс желательно иметь по возможности малые рмх. Опыт XX целесообразно проводить поэтому с минимальным (при номинальной плотности тока под щетками) числом щеток на коллекторе, тем более что рт>щ при XX могут быть суще-
Рис. 4.3. Графическое определение Q
Вт/Гц
ственно выше номинальных (гл. 6). РТ1Щ определяют по опыту КЗ с использованием ТД.
Для разделения рс на потери от гистерезиса pCtTC и вихревых токов рсв снимается зависимость рс от частоты перемагничивания / (частота вращения и) при постоянном значении Е/п. Учитывая, что рс,гс =Ci/; Pc,B = G/2', Рс =Рс,гс + Рс^, строится зависимость pdf = C\ + C-j = ~ F(f), экстраполяция которой на ось pc/f (f = 0) отсекает на этой оси отрезок, равный G, соответствующий потерям рс,гс на 1 Гц (рис. 4.3). Метод определения и разделения рмх см. в п. 4.3.2.
Асинхронные двигатели. Двигатель запускается вхолостую при соединении обмоток звездой. Измеряются линейные и фазные напряжения и токи, частота тока питающей сети, скольжение, потребляемая мощность рх (низкокосинусными ваттметрами), представленные на рис. 4.4.67,
Рх = Рс + Рмх + Р2х + ДРм. (4-30)
где поправка Дрм =m!$Ra (т — число фаз); Ra — активное сопротив-ление фазы, берется либо RKf2 (Як — сопротивление по опыту КЗ), либо по опыту КЗ без ротора. Для АД на 50 Гц вместо Ra может использоваться
Потери в роторе при XX — р2х см- в п- 4.1.5. Значение р2х обычно мало; однако если оно должно учитываться, то следует предварительно определить рмх (например, методами МВ или ТД).
Для разделения потерь рс и рмх строится зависимость рс + рмх = = F(E2), где Е = U — ГхХк/2, Хк — индуктивное сопротивление обмотки статора (берется по опыту КЗ). Экстраполяция этой кривой на ось рх, когда (Е=0) определяет pMjX (рис. 4.4,6).
Минимальное напряжение в опыте XX лимитируется резким возрастанием тока и скольжения и, в зависимости от значения рм>х, составляет (0,2 4-0,3) 1/ном.
Синхронные ЭМ. Опыт проводится при токах возбуждения, соответствующих минимальному значению потребляемого из сети тока для заданного напряжения на зажимах.
Рис. 4.4. Потери XX в асинхронных двигателях:
а - кривые рх = F(U) и fx = F(U); б - разделение потерь рх на рс и рмХ;
~ ^х> 2 — Рх> 3 ~ Рс, 4 ~ Рмх
Разделение потерь рх на потери рс и рмх выполняется тем же методом, что для АД. ЭДС обмотки Е = U— I*Ra .
4.3.2. Определение потерь рк в опыте КЗ. Потери рк могут определяться методами ТД и МВ.
При проведении опытов КЗ должны учитываться общие положения, изложенные в гл. 3 и направленные, в частности, на возможную стабили
зацию температуры в опыте.
Машины постоянного тока. Целью испытаний в режиме КЗ является наладка коммутации, определение потерь на коллекторе (рс,к,э + Рт,щ) и при достаточно высокой точности опыта оценка добавочных потерь Рм>д-Опыт проводится по схеме 4.5.
Мощность, подведенная к валу,
Р1к “ Рм,ос + Рм,д +
Рис. 4.5. Схема опыта КЗ
+ Рмх + АРс + Рвша (4.31)
где рм,о с — основные потери в обмотке якоря; рВ1П — потери во внешней цепи (сопротивление /?вш), через которые проходит ток КЗ — 7К;
Рвш ~ Рс,к,э + ^к^вш “ ^кл^к»
Рс,к,э — (^кл “
Величина Дрс — небольшие потери в стали при ЭДС якоря Ек = UKn -- IkRrq определяется по кривой рс ~F{E/п), снятой при XX.
Для определения рмх строится зависимость PiK - Дрс = F(/*), которая экстраполируется на ось /к = 0. Для определения зависимо-стирмх^^ОО опыт КЗ проводится при нескольких значениях и.
Для определения рт,щ проводится опыт на невозбужденной ЭМ с поднятыми щетками. В этом случае определяется сумма
Рт,оп + Рвт» Рт,щ Рмх — (Рт,оп + Рвт)•
Величину рвт можно приближенно учесть по уменьшению потерь в опыте XX с закрытыми входными и выходными вентиляционными отверстиями.
Величину рт>щ можно определить также, проводя опыт КЗ при различных токах 1К и соответственно измененном числе щеток (при постоянной плотности тока в них). При этом рт,щ изменяются пропорционально числу щеток: рм>ос + Рм,д = что поэволяет определить Рт,щ-
Из (4.31) может быть определена величина рм>д. Точность такого определения, однако, невелика.
Асинхронные ЭМ. Опыт КЗ при неподвижном роторе, проводящийся на АЭМ для определения параметров схемы замещения и пусковых режимов, дает возможность определения лишь суммарных потерь КЗ, причем в условиях, отличных от номинальных (s = 1).
С точки зрения контроля добавочных потерь 1 рода этот опыт может рассматриваться как ориентировочный, дающий, например, возможность сравнить однотипные ЭМ после внесения каких-либо расчетных или конструктивных изменений. Определение добавочных потерь см. в 4.3.3.
Синхронные ЭМ (многофазные). Рабочая обмотка замыкается через амперметры накоротко (см. гл. 3). Ток /к регулируется возбуждением в пределах (1,5 -г 0,25) /ном •
Мощность, подведенная к валу,
Fjk ~ Рм,ос + Рд + &Рс + Рмх* (4-32)
Значение Дрс определяется по кривой pc=F(E2) для ЭДС, взятой из кривой Е = F(iB) для тока возбуждения в опыте КЗ — ?пк (см-рис. 3.43). 144
Потери рмх определяются из опыта с невозбужденной ЭМ при разомкнутой обмотке якоря, рм>ос — рассчитываются. Из (432) могут быть определены потери рд.
При проведении опыта КЗ целесообразно накладывать специальную измерительную обмотку, например на клинья статора, по возможности близко к воздушному зазору. Ось этой обмотки должна совпадать с осью одной из фаз обмотки. Первая гармоника напряжения, измеренная с помощью анализатора гармоник на этой обмотке, пропорциональна ЭДС в рабочей обмотке при КЗ.
Определить активное сопротивление обмотки Ra и потери рд1 в ЭМ переменного тока можно из опыта КЗ без ротора. В этом случае к рабочей обмотке через измерительную схему подводится напряжение номинальной частоты U, регулируемое в пределах (0 + 0,2)17НОМ, позволяющее установить ток 1К- (1,5 ^0,25)/НОМ.
Подведенная к обмотке мощность
^к,б,р — Рм.ос + Рд1 + АРс» (4.33)
где Дрс берется по кривой рс = F(E) для Е & t/K>6>psin^K; рм>ос ~ рассчитываются.
Результаты определения Рк,6>р - Дрс строятся в зависимости от /*, что позволяет провести графическое выравнивание результатов измерения.
Активное сопротивление обмотки
Ка ~ С^к,б,р “ ^Рс)1т^кг
откуда с учетом (4.2) и (4.14) могут быть определены потери рдт .
Величины Ra и kR приводятся к расчетной (стандартной) температу-ре (4-1) -
Потери рк,д,н в щитах при нагрузке можно оценить, проведя опыт КЗ без ротора со снятыми щитами.
Синхронные ЭМ (однофазный режим), В этом случае появляется обратно вращающееся поле (ОВП), создающее значительные потери Ровп [0-5] • Эти потери можно определить в опыте однофазного КЗ по (4.32), поскольку все остальные его составляющие могут быть определены отдельно.
При этом значение потерь ровп может быть преувеличенным, поскольку ток КЗ может иметь значительные 3-ю и 5-ю гармонические составляющие.
Согласно [0.5], потери ровп следует определять в режиме однофазного ненагруженного двигателя без возбуждения с питанием от сети через фильтр с параметрами X,R, с частотной характеристикой, при которой форма потребляемого из сети тока близка к току при номинальной нагрузке.
Потребляемая при однофазном питании из сети мощность
^к,оф ~ Рм,ос + Рд1 + Ровп + Арс + Рмх- (4*34)
При этом Дрс определяются по кривой рс -F(E) для ЭДС, измеренной на свободной фазе (если однофазный режим выполняется.на ЭМ с трехфазной обмоткой), или на выводах уложенной в расточку статора временной обмотки с осью, сдвинутой на 90° относительно оси рабочей обмотки.
4.3.3. Определение добавочных потерь рдь рдц АЭМ. Методы исследования добавочных потерь [4.1,4.2,4.7], ГОСТ 27217-87.
Мы приводим здесь два метода определения рд] и рдц, рекомендованных стандартом США ANSI. IEE Std 112-1978.
Метод возбуждения ротора постоянным током при синхронном вращении (МСВ). Метод применяется для двигателей с фазным ротором. Ротор приводится тарированным двигателем во вращение с синхронной скоростью. Одна из обмоток, например статорная, замыкается накоротко (см. рис. 3.42) через амперметры, вторая питается постоянным током, значение которого в каждой фазе соответствует мгновенному значению фазного тока трехфазной системы в любой произвольно взятый момент времени.
Поскольку форма поля зависит от соотношения токов фаз, целесообразно провести опыт для двух-трех характерных соотношений токов.
Если подведенная к валу мощность при возбужденном роторе рвл, а при невозбужденном Рмх, то добавочные потери
Рд1 + Рд11 “ Рд “ ^вл ~ ^мх “ Рм,ос- (4.35)
Ток статора Ц, к которому относятся определенные из опыта потери рд, рассчитывается из выражения Ц = V , где — ток
КЗ в опыте, /х — ток XX.
Метод встречного вращения (МВВ). АЭМ с КЗ ротором или замкнутым накоротко фазным ротором вращается с помощью тарированного двигателя против поля с синхронной скоростью вращения. При этом зубцовая частота имеет свое нормальное значение, но частота тока в роторе равна двойной частоте сети (s = 2). К статору подводится такое регулируемое напряжение, чтобы получить ток статора 7К.
Сумма мощностей, подведенных к двигателю из сети Р± и к валу Рвл, расходуется на потери в двигателе,
В1 + Гвл — pMjOC + рд1 + РдН + р2 + Рмх» (4.36)
где рмх определяется как мощность, подведенная к валу при отключенной от сети статорной обмотке,
р2 ~~ B3Ms — [Pj — (рм,ос + Рд1)]2^ (437)
Рд11 “ Ввл — Pi ~ры* + (Рм.ос + РдТ)- (4.38)
Согласно (4.33),
Рм,ос + Рд1 “ ?к,б,р “ ^Рс-
Потери рд1, рдп строятся в зависимости от I2 и при определении КПД относятся к току = v + I*-
4.3.4. Определение потерь АД малой мощности. По мере уменьшения номинальной мощности АД происходит естественное уменьшение КПД, относительный рост потерь и увеличение скольжения, которое для асинхронных микродвигателей (МАД) может составить 20—50% [0.10]; отношение сопротивления вторичной цепи Я2/$ к сопротивлению Я i + + Лп>с (см. рис. 3.26) даже в режиме КЗ (s = 1) становится больше 1. Это приводит к тому, что ток, потребляемый двигателем при изменении нагрузки на валу от нуля до Рном, меняется незначительно.
Магнитный поток при КЗ уменьшается также незначительно (на 20— 30%)., в связи с чем поправка Дрс приобретает существенное значение.
В режиме XX МАД имеют значительный ток /х, скольжение sx и соответственно значительные потери в меди статора и в роторе.
Для определения потерь в стали статора рс МАД проводится опыт ’’идеального” XX (ИХХ), при котором к статору подводится регулируемое напряжение номинальной частоты, а ротор приводится во вращение тарированным двигателем с синхронной скоростью.
В этом случае потери в роторе р2 отсутствуют, механические потери Рмх компенсируются с помощью тарированного привода.
Напряжение при котором в режиме ИХХ определяются потери в стали, устанавливается из условия равенства ЭДС £и>н измерительной обмотки [с шагом, равным полюсному делению], уложенной в расточку статора, при номинальном режиме (напряжение на зажимах t/HOM) и в режиме ИХХ.
При напряжении в режиме ИХХ имеет место ток /и>х и к статору подводится мощность
^и,х ~ Рм,ос Рд! + Рс-
Потери в меди статора рм>ос + рд1 определяются из опыта КЗ без ротора (4.33); они равны Лс,б,р - ДРс> гДе поправка на потери в стали в этом режиме Дрс = рс(Ек^/9 FK,6,p “ ЭДС измерительной обмотки.
С учетом (4.39) получим
Рс = Ри,х - Рк,б,р1 [ J - (Лк,б,р/ЛИ,н)2] • (4.39)
Этот опыт может быть проведен и при отсутствии КЗ обмотки на роторе.
При определении рс указанным методом нужно иметь в виду следующее. Хотя потери в роторе при s = 0 отсутствуют, наличие гистерезиса
в роторной стали создает магнитный ноток Фр>гс, который, взаимодействуя с потоком статора Ф (между ними имеется небольшой гистерезисный угол), создает момент, стремящийся ускорить вращение ротора, если поток Фр,Гс отстает от Ф (двигательный режим), и замедлить вращение ротора, если Фр,гс опережает Ф (генераторный режим). Наличие этого гистерезисного момента, не зависящего от скольжения и соответственно от мощности ДРГС, приводит к тому, что небольшое угловое смещение ротора относительно поля при синхронном вращении приводит либо к передаче части энергии или из сети в ротор, либо от вала в сеть.
Потребляемая из сети мощность претерпевает при этом скачкообразное изменение на величину 2ДРГС — так называемый ’’гистерезисный скачок”, что позволяет определить ДРГС.
В опыте ИХХ, воздействуя на тарированный привод (в качестве такого привода может, например, использоваться СМ на балансирном подвесе), следует определить пределы изменения Рих и в качестве Рих принять среднее ее значение.
Добавочные потери МАД могут определяться из опыта номинальной нагрузки с точным измерением величин Pi,P2, /ном, 5ном»
Рд = Pl -Pi - [ Рм,ос + Pi + Рс + Рмх] , (4.40)
где рс определяется по опыту ИХХ, рмх — с помощью тарированного привода.
Если необходимо разделить рд, то для определения рд1 используется опыт КЗ без ротора при токе 1НОм (с поправкой Дрс).
Хотя точность определения рд указанными методами не велика, наличие значительных рд в МАД позволяет применить эти методы для их оценки.
4.3.5. Исследование распределения потерь в ЭМ. Потери в отдельных частях ЭМ и их распределение по объему этих частей могут исследоваться с помощью измерения скорости нарастания превышения температуры этой части во времени dr/ dt в начальной точке кривой нагрева (в момент возникновения потерь) при т = 0. Как следует из (5.2), в этом случае р = С dr/dt.
Если известна теплоемкость С исследуемой части, то, определив по наклону касательной кривой в точке т =0 значение dr/dt, можно определить р.
Таким путем могут быть определены и разделены добавочные потери в меди и стали, потери в зубцах и в ярме, потери в конструктивных узлах и т. д.
4.4. МЕТОД ВЫБЕГА (САМОТОРМОЖЕНИЯ) (МВ)
Если на вращающийся с частотой п ротор с моментом инерции J действует замедляющий момент Af, то замедление dn/dt (—п) определяется из уравнения
М = Jh. (4.41)
Умножая обе части (4.41) на й, получим
р = 1,075 Jnn/10, (4.42)
где р — замедляющая (отбираемая от ротора) мощность, Вт; J — момент инерции, кг-м2; п — частота, об/мин; h — производная частоты, об/мин с.
Если прекратить подвод мощности к вращающемуся ротору ЭМ, то его замедление п (самоторможение, выбег) будет мерой потерь в ЭМ. Если J известно, то, измерив п и й, можно, согласно (4.42), определить р. Замедление должно измеряться в момент прохождения ротором частоты вращения и, для которой определяются потери:
п = Ли/ Дг. (4.43)
Определение J дано в § 3.8. Уравнение (4.42) может использоваться для определения J, если известны потери, р (например из опыта XX). Согласно (4.42)
J = 9,3 р/пп. (4.44)
Для определения J могут использоваться и другие известные потери, например потери в трансформаторах, питаемых от ЭМ (см. ГОСТ 11828-86).
Задавая различные режимы, например выбег отключенной от сети ЭМ без возбуждения, с возбуждением, при КЗ, можно определить отдельные потери.
Если во всех опытах потери определяются для одной скорости вращения, например для п = и величина п = Ln/Дг определяется для одинакового интервала снижения скорости, например Дл = = (1,08 + 0,92)я^ом или (1,05 4- 0,95)л^ом, то потери в трех опытах Pi, Р2> Рз обратно пропорциональны временам , Дг2, Дг3, в течение которых частоты вращения снизились на одинаковые значения:
Pi/Pi =ДГ1/Д/2. (4.45)
Если J известен, то для определения рмх проводится первый опыт без возбуждения (с разомкнутой обмоткой якоря), при этом время выбега составляет Дг1в
Для определения рх =рс + рых проводится второй опыт с возбуждением при Е = Еном (с разомкнутой обмоткой якоря), при этом время
выбега составляет Дг2; для определения рк в третьем опыте, с КЗ обмоткой якоря и током 1К =ZHOM п = ^ном» время выбега Дг3. В последнем случае определяется рк = рм>ос + Рд + Рмх» что позволяет определить рд.
Если в точке «=«нОм Л< несколько отличается от 1НОЪЛ, то рд,Ном = = Рд(Дюм/^к)2- Если J неизвестно, в то время как известны потери рх, то рмх =рхДг2/Д^1- Если принятые при снятии кривой выбега интервалы времени Дг >3 с, измерения Ди и Дг проводятся с помощью цифрового частотомера и секундомера. Для Дг < 2 с можно использовать цифровой частотомер с выходом на цифропечатающее устройство. Временные интервалы между измерениями задаются автоматически с помощью часового устройства — таймера [4.4]. Для малых Д/ можно использовать прямое измерение и регистрацию (или осциллографиро-вание) ускорений.
Глава пятая
НАГРЕВ. ОХЛАЖДЕНИЕ
5.1. ТЕПЛОВЫЕ ПРОЦЕССЫ
Температура какой-либо нагретой части машины 0 является суммой температуры охлаждающей среды tOtC и превышения температуры этой части над температурой охлаждающей среды т:
е = т + to>c. (5.1)
Превышение температуры зависит от потерь в частях ЭМ и условий теплоотдачи (имеется в виду установившаяся температура); оно является функцией мощности, которую развивает ЭМ, ее КПД и эффективности системы теплоотдачи.
Температура отдельных частей ЭМ лимитируется рядом факторов: для изолированных обмоток и частей, соприкасающихся с изоляцией— тепловым старением изоляционных материалов, для подшипников — тепловым старением смазочных материалов, для коллекторов и контактных колец — ухудшением условий коммутации, снижением твердости рабочих поверхностей.
Допустимые превышения температур обмоток и других частей ЭМ для различных по теплостойкости классов изоляции при определенной температуре охлаждающей среды (40 °C) устанавливаются ГОСТ 183-74.
Следует иметь в виду, что срок службы изоляционных и смазочных материалов в сильной степени зависит от температуры. Повышение температуры на 10—15 °C сокращает срок службы этих материалов 150
Рис. 5.1. Простейшая тепловая модель ЭМ (однородного тела):
С — теплоемкость; р — потери; Кго - теплоотдача; 7 — превышение температуры
примерно в два раза. Поэтому особую важность приобретает при конструировании и изготовлении ЭМ достижение минимальной разницы между средней температурой и температурой наиболее горячей точки (не более 5—10 °C для изоляции классов А—Н соответственно).
5.1.1. Кривые нагрева—остывания. Для однородного тела либо с равномерно распределенными в его объеме источниками тепла (или потерями), либо с бесконечно большой внутренней теплопроводностью рис. 5.1 кривая нагрева, т. е. зависимость превышения температуры т от времени с момента возникновения потерь (постоянных по значению) , может быть определена из уравнения теплового баланса
Cdr/dt + Хтот = р,
(5-2)
где р — потери, Вт; Кто — теплоотдача, Вт/К; С — теплоемкость тела, Дж/К; Ктот — количество тепла, рассеиваемое системой охлаждения в единицу времени; Cdr/ dt — количество тепла, воспринятое телом в единицу времени.
В начальный момент тело имеет температуру окружающей среды и превышение температуры равно нулю.
Разделив все члены уравнения (5.2) на Кто, получим
(C/K^dr/dt + т = р/^то. (5.3)
При установившемся тепловом состоянии превышение температуры 7у не изменяется (dr/dt =0), и, следовательно, 7у Обозначив
С/^ГТо = Г, получим
Tdr/dt + 7 = 7у. (5.4)
Решив это уравнение, получим выражение для кривой нагрева 2, представленной на рис. 1.14,
1-=Ту(1_е-г/Т) (5.5)
Теплоемкость С = cG, где с — удельная теплоемкость (табл. 5.1), G — масса тела.
Кривая остывания 1 на рис. 1.14 может быть определена из уравне-
Таблица 5.1
Материал Плотность Удельная теплоемкость, Дж/(кг К) Теплопроводность, Вт/(мК)
Медь 8,9 кг/дм3 390 375
Сталь 7,7 кг/дм3 480 (20 4-50)/(3 4-5)*
Алюминий 2,7 кг/дм3 9G0 205
Изоляция 1-5-2 кг/дм3 1250 0,14-0,2
Воздух* * 1,29 кг/м3 1000 0,025***
* Вдопь/поперек листов.
** Сухой воздух при давлении 101,3 кПа и температуре 273 К (0 °C) - см. п. 5.5.2.
*** Неподвижный воздух в тонком (порядка нескольких микрометров) слое.
ния (5.3), если положить в нем р =0. Для этого случая
T=roe~t/T, (5.6)
где т0 — превышение температуры в момент отключения нагрузки.
Примененное выше отношение С/ КТО9 имеющее размерность времени, называется постоянной времени — Г, с. Она равна времени, в течение которого перегрев тела при отсутствии теплоотдачи достиг бы своего установившегося значения ту. В этом случае перегрев тела возрастает с течением времени прямолинейно по касательной к началу кривой нагрева (рис. 1.14).
В начальный момент времени t = 0, т = 0 при отсутствии теплоотдачи (Ктот = 0) скорость нагревания тела, ° С/с, равна $т = dr/dt -р/С, где р — возникающие в этот момент в теле потери, Вт. Для проводника с плотностью тока J, А/мм2,
= J2 • 106/o?C =J*/N, (5.7)
где о — удельная электрическая проводимость, мкСм/м; 7 — плотность материала, кг/м3; С — удельная теплоемкость материала проводника, Дж/(кг-К).
При температуре 20 °C о для медных проводников имеет значение 57, для алюминиевых — 35, значения 7 см. в табл. 5.1. Коэффициент N— 200 для меди и 86 — для алюминия.
Если имел место установившийся режим dr/ dt =0; & = ©у с плотностью тока А, то увеличение в момент времени t =0 плотности тока до значения J2 будет причиной повышения температуры проводника сверх ©у со скоростью $т = (J2 — где N подсчитывается по § 5.6 с учетом уменьшения значений о при ©у>20°С.
Рис. 5.2. Графическое определение установившейся температуры:
т - кратность увеличения отрезков Дт для уточнения экстраполяции
Строго говоря, ЭМ не является однородным телом или телом с бесконечно большой внутренней теплопроводностью. Однако, несмотря на зто, процесс нагревания ЭМ с достаточной для практики точностью может быть представлен уравнением (5.5) с постоянной времени, определенной экспериментально (см. § 1.5). Это обстоятельство дает возможность определения 7у и 70 путем экстраполяции.
При определении ту применение экстраполяции позволяет существенно сократить время испытания, поскольку достижение < 1 ° С/ч, характеризующей установившийся режим, требует значительного времени. Разумеется, что экспериментально установленное значение 7у является более точным.
Экстраполяция основана на соотношении
Дт/At = = (ту - т)/Г,
вытекающем из (5.4). Прямая $т =/(т) — линия а—б на рис. 5.2 — отсекает на оси т отрезок, равный ту. Для ее построения (рис. 5.2) влево от оси т откладываются значения Дт, увеличенные для повышения точности экстраполяции в m раз. Интервалы времени Дг равны друг другу.
Для вращающихся обмоток якорей ЭМ постоянного тока и обмоток переменного тока, сопротивление которых можно измерить после остановки, экстраполяция кривой остывания на момент выключения тока и вентиляции (у ЭМ с принудительной вентиляцией) позволяет определить значение 70 и, если тепловой режим был установившимся, равное ему значение 7у. Для уточнения результатов экстраполяции ГОСТ 11828-86 рекомендует построение спрямленной кривой т - F(t) на полулогарифмической бумаге (рис. 1.15). Экстраполяция кривой остывания дает, однако, достаточно точные результаты только в том случае, если время от момента выключения тока до первого замера сопротивления обмотки не слишком велико.
5.1.2. Физическая модель теплового процесса. Простейшая модель на рис. 5.1, для которой справедливо уравнение (5.2), не отражает, однако, важнейшего параметра тепловых процессов — внутренней теплопроводности X и возникающих в ЭМ при прохождении тепловых потоков внутренних перепадов температуры Д7 между обмоткой и ох-
Рис. 5.3. Двухэлементная тепловая модель (а), конструктивная схема якорной обмотки (б) и схема подогрева охлаждающего воздуха (в):
индексы: с - сталь, м - медь; См, Сс - теплоемкости; Рм> рс — потери; ^т,о,м “ суммарная теплоотдача от меди в воздух (например, в лобовых частях); ^т,о,с “ суммарная теплоотдача от стали в воздух, продуваемый через воздушный зазор между статором и ротором и через вентиляционные каналы в стали; 7М, тс “ превышения температуры; Хи — теплопроводность изоляции; в^>вх* ®Ь,вых “ температура охлаждающего воздуха на входе и выходе в вентиляционные каналы; 0С — температура стали
лаждающей средой. Более корректная простейшая тепловая модель якорной обмотки, уложенной в пазы активной стали, для ЭМ с воздушным охлаждением приведена на рис. 5.3, а—в.
Заметим, что в связи с конечной теплопроводностью меди и стали Хм, (не учитываемых в модели по рис. 5.3) их температура может быть неравномерной (например, повышенная температура стали внутри сердечника). Порядок величин С и X виден из табл. 5.1.
Двухэлементная модель на рис. 5.3 объясняет возможную аномалию кривой остывания обмоток, когда в течение первых после выключения нагрузки и остановки ЭМ моментов времени температура обмотки повышается. Происходит это за счет перераспределения тепла, накопленного в наиболее нагретых частях активной стали, не соприкасающихся с обмоткой, после прекращения теплоотдачи в вентилирующий воздух. Аналогичное влияние может оказывать коллектор.
Температурные перепады в изоляции Дти и на теплорассеивающих поверхностях уменьшают допустимую по нагреву мощность ЭМ, а в ЭМ с воздушной вентиляцией повышают уровень воздушного шума.
Это объясняется тем, что при наличии указанных перепадов уменьшается температура теплорассеивающих поверхностей и для отбора тепла требуются большие объем и скорость движения воздуха.
Следует отметить, что введенная в (5.2) суммарная теплоотдача Кто в соответствии с физическим смыслом процесса должна быть представлена как: KTG = kTOS, где &то — удельная теплоотдача на единицу площади, S — площадь теплорассеивающей поверхности, ту = = р/ S кто.
Плотность теплового потока р/S определяет, таким образом, ту и является фактором, определяющим в первую очередь выбор конструктивных и технологических мероприятий при создании ЭМ (’’фактор нагрева”).
5.2. МЕТОДЫ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ
Измерение температуры может производиться следующими методами:
1. Методом сопротивления (измеряется средняя температура обмоток) ;
2. Методом встроенных или заложенных термоиндикаторов (измеряется температура поверхности, с которой контактирует термоиндикатор) .
При измерении термоиндикатором температуры поверхности изоляции обмоток эта температура, из-за наличия перепада в изоляции, несколько ниже температуры проводника. Это обстоятельство сближает среднюю температуру, полученную по методу сопротивления, с температурой, измеренной термоиндикатором в горячей точке. В связи с этим ГОСТ 183-74 не устанавливает для нормальных машин существенной разницы допустимых температур для двух указанных выше методов измерения.
Для новых машин, в особенности для машин с очень высоким использованием, при исследовании опытных образцов следует тщательно выявлять и определять температуру наиболее нагретых точек.
3. Пирометрический метод, при котором температура поверхности более горячей, чем соседние с ней, может определяться измерением интенсивности инфракрасного излучения [5.2].
Рассмотрим подробнее отдельные методы измерения температур.
5.2.1. Метод сопротивления. Этот метод, основанный на измерении сопротивления в ненагретом (холодном) и нагретом (горячем) состоянии, применим для большинства обмоток эа исключением обмоток с очень малым сопротивлением (менее 1СГ3 Ом), в том числе короткозамкнутых. Метод базируется на установленной опытным путем зависимости между температурой и сопротивлением проводниковых материалов — меди, алюминия. Для чистой электролитической меди, применяемой для изготовления проводов, эта зависимость приведена на рис. 5.4 и выражается формулой
R2/Rr = (235+ ©2)/(235 + ©О, (5.8)
где R2 — сопротивление обмотки при температуре ©2; R\ — сопротивление обмотки при температуре ©х.
Для алюминия применима та же формула с заменой числа 235 на 245.
Формула (5.8) является основной для всех расчетов, связанных с применением метода сопротивления; для определения превышения
Рис. 5.4. Изменение сопротивления меди в зависимости от температуры
температуры обмотки т она несколько преобразуется:
т - &2 — ®1 =
= (*2/*i - 1) (235+ ©я). (5.9)
Считается, что 7?! соответствует сопротивлению обмотки в холодном состоянии до пропускания по ней тока, a R2 — сопротивлению нагретой обмотки. Заменим обозначения в индексе: ”1” на ”х”, а ”2” на ”г”:
Гг/х = (*г/*х ~ О (235 + ©х). (5.10)
Формула дает превышение температуры над температурой холодной обмотки ©х, в то время как интерес представляет превышение температуры над температурой охлаждающей среды Го,с.
Температура охлаждающей среды fo>c, измеряемая во время тепловых испытаний, может отличаться от температуры обмотки в холодном состоянии ©х, измеряемой при определении холодного сопротивления.
Очевидно, что
^г/о.С ” UW*X 1)/(235 + ©х) + ©х — tO,C‘ (5-11)
Сопротивление можно измерять методом вольтметра—амперметра, логометрическими приборами, измерительными мостами.
Метод вольтметра—амперметра (сокращенно способ V-A, см. рис. 1.2) позволяет осуществлять непрерывный контроль сопротивления (температуры) неподвижных обмоток, питаемых постоянным током. Точность его ниже, чем при измерении мостами. Схема на рис. 1.2, а применяется для измерения сопротивлений R > 1 Ом, на рис. 1.2, б - R < 1 Ом.
Для обмоток, доступных для измерения только в обесточенном состоянии и после остановки ЭМ (обмотки, связанные с коллектором), целесообразнее применять измерительные мосты — двойные для R < < 1 Ом и одинарные для R > 1 Ом, дающие более точные результаты.
Весьма удобными для этой цели, однако менее точными, являются логометрические приборы, дающие непосредственный отсчет сопротивления. С помощью специальной схемы можно получить на таких приборах непосредственный отсчет превышения температуры.
Поскольку температурный коэффициент сопротивления проводниковых материалов относительно невелик (примерно 0,4% на 1 °C), опре-156
деление превышения температур по методу сопротивления требует весьма высокой тщательности при проведении эксперимента.
Так как превышение температуры вычисляется по разности горячего и холодного сопротивлений, то возникающая погрешность может быть значительно больше, чем максимальная допустимая погрешность при измерении горячего и холодного сопротивлений, определяемая классом точности измерительной аппаратуры.
Так, при измерении превышения температуры, равного 100 °C (RT/RX - 1,4), методом V—A с приборами класса точности 0,5 основная погрешность (см. табл. 1.7) может быть равна 0,5(1 + 1,4)/0,4, что составляет 3%, или 3 °C, а если учесть, что отсчеты могут производиться на середине шкалы и возможно появление дополнительной погрешности, то следует считаться с возможной ошибкой примерно 5 °C. Если применить приборы класса точности 0,2, то погрешность может составить примерно 3 °C, в то время как применение мостов класса точности 0,1 может снизить погрешность до 1—2 °C.
Разумеется, в указанной выше погрешности измерения не учитывается погрешность в определении превышения температуры обмоток, доступных только после остановки ЭМ, возникающая в связи с необходимостью внесения поправки на остывание обмотки за время остановки.
Поскольку базовыми величинами для подсчета превышения температуры являются Ях и 0Х, они должны быть измерены достаточно точно.
Измерения проводятся до пропускания по обмотке рабочих токов и в хорошо доступных для измерения точках. Термометры расширения закладываются внутрь ЭМ (на обмотки, сталь статора и ротора, коллектор) и устанавливаются на корпусе.
Вместо термометров расширения, в особенности для малых ЭМ, целесообразно использовать термоиндикаторы типов ТТЦ1, ТТЦ1-01, не требующие времени для их прогрева.
Если показания термометров, заложенных в машину, после 15— 30 мин пребывания внутри нее, отличаются друг от друга не более чем на 1 и (с учетом естественной разницы их показаний на воздухе до закладки) и не более чем на 3 °C от температуры окружающего воздуха, то можно считать, что внутри машины имеет место одинаковая температура всех ее частей, равная температуре окружающего воздуха.
Если же разница в показаниях термометров больше, чем указано выше, то, очевидно, имел место предварительный нагрев и машину следует остудить. Нагрев мог иметь место и при технологических процессах, например, сушке. Для крупных машин в этом случае может потребоваться значительное время (измеряемое десятками часов).
Температура окружающего машину воздуха го>в измеряется с помощью нескольких термометров (два-три), установленных в разных точках на расстоянии 1—2 м от машины на середине ее высоты. Тер
мометры должны быть защищены от подогрева горячим воздухом, выходящим из машины, и за счет лучеиспускания. Если воздух подводится по трубам, в том числе при замкнутом цикле вентиляции, температура входящего в машину воздуха измеряется одним-двумя термометрами во входном патрубке. При разомкнутом цикле вентиляции с забором воздуха из помещения показания термометров во входном патрубке не должны сильно отличаться от показаний термометров, измеряющих температуру окружающего воздуха. Большая разница в этих температурах может иметь место за счет частичного засасывания в машину горячего воздуха из выходного патрубка. Это обстоятельство должно быть устранено.
Температура выходящего воздуха измеряется в выходном отверстии. Здесь следует иметь в виду, что в машинах с самовентиляцией воздух в выходном патрубке обычно сильно завихрен. В части выходного окна может даже иметь место всасывание воздуха извне, поэтому температура в различных точках окна может сильно разниться. Для измерения температуры выходящего воздуха следует найти место с наибольшей температурой.
При двухкамерном вентиляторе целесообразно, если зто позволяет размер выходного патрубка, кроме измерения средней температуры выходящего воздуха проконтролировать температуру обеих струй. Для этого может потребоваться установка в выходном патрубке легкой временной перегородки (из жести, электрокартона и т. п.).
При водяном охлаждении измеряется температура воды, входящей и выходящей из машины или воздухоохладителя. Поскольку разница этих температур невелика (несколько градусов), следует, как указывалось выше, применять термометры с ценой деления 0,1 С. Термометры вставляются в гильзы (стаканы), вваренные в подводящий и отводящий патрубок. Для уменьшения ошибки из-за перепада температур между головкой термометра и стаканом заливается масло или засыпаются мелкие медные опилки.
Измерение сопротивления производится не менее трех раз подряд, и за Rx принимается среднее для трех измерений значение. При измерении методом V—A каждое из трех измерений производят при трех близких значениях измерительного тока, а методом моста — после каждого измерения производится его разбалансировка.
Разумеется, что результаты трех измерений не должны отличаться друг от друга более чем на допустимую погрешность. При этом может иметь место систематическое увеличение сопротивления с каждым последующим отсчетом, что является результатом нагрева обмотки в процессе измерения. Обычно измерительный ток составляет не более 10—15% номинального. Если почему-либо желательно его увеличить, то следует учитывать возможную скорость повышения температуры (5.7).
Измеренное сопротивление Rx, соответствующее температуре 0Х, приводят к температуре 20 °C (если нет других указаний) по формуле
R20 = Rx (235 + Ox)/255, (5.12)
и при подсчете превышений температур используют в качестве Rx ех =20 °с.
При дальнейших тепловых испытаниях, независимо от того, при какой температуре охлаждающей среды го>с они ведутся, уже нет необходимости каждый раз измерять RX9 поскольку изменение fOjC учитывается в (5.11). После длительных перерывов в испытании, когда машина успевает полностью остыть, рекомендуется повторять определение Rx> для того чтобы убедиться в его неизменности (разумеется, что сравниваются приведенные величины, т. е. R2о) -
Для неподвижных обмоток малого сопротивления, включенных в цепь постоянного тока (последовательные и компенсационные обмотки, обмотки добавочного полюса), как указывалось выше, при включении вольтметров, измеряющих падение напряжения в этих обмотках, необходимо следить за тем, чтобы к измеряемому падению напряжения в обмотке не добавлялось падение напряжения в каких-либо контактах и соединениях. Проводники вольтметра бывает иногда целесообразно припаять непосредственно к зажимам обмотки.
Для вращающихся обмоток возбуждения, питающихся через кольца, для измерения падения напряжения применяются изолированные от тока возбуждения щетки, к которым присоединяются концы вольтметра.
5.2.2. Измерение сопротивления якорей коллекторных ЭМ. Для обмоток вращающихся якорей, связанных с коллектором, измерение сопротивления производится до начала испытания для холодного сопротивления, после обесточивания обмотки и остановки ЭМ для горячего сопротивления.
В этом случае следует различать два сопротивления обмотки якоря: расчетное (номинальное) сопротивление постоянному току RK и холодное сопротивление якорной обмотки Rx (обычно Rx < Ra), служащее для определения превышений температур.
Измерение Rfl и сравнение его с расчетным значением позволяет выявить различные дефекты обмоток: ошибку в схеме или числе витков, плохое качество паек, вытяжку тонкого провода при намотке и т. п. Это сопротивление должно измеряться в точках подвода тока, т. е. в случае якорных обмоток постоянного тока на пластинах коллектора, отстоящих на Kjlp пластин друг от друга.
Простейшим способом измерения Rn является измерение падения напряжения в якорной обмотке при пропускании в неподвижный якорь небольшого измерительного тока через щетки, которые должны быть тщательно притерты.
Падение напряжения измеряется на изолированных от щеткодержателей щетках. Если рабочие щетки перекрывают больше двух пластин, рекомендуется измерить падение напряжения на нескольких парах разнополярных щеток и взять среднее значение. Целесообразно повторить замеры после двух-трех поворотов якоря на небольшой угол.
При измерении Ах, а затем на тех же (отмеченных) пластинах Rr необходимо иметь в виду следующие соображения: для определения превышения температуры можно использовать и измерение /?я>х и Яя>г ПРИ питании якоря через щетки, однако в этом случае возможна погрешность из-за изменения токораспределения под щетками. Более точные результаты получаются при поднятых щетках. Для измерения выбираются наиболее доступные пластины с расстоянием между ними Кх пластин (шаг пластин), по возможности близком к Kf2p = = Кт (т — полюсное деление).
Однако в ряде случаев (крупные машины с большим числом щеток и т. п.) обеспечить быстрый подъем щеток для измерения горячего сопротивления нельзя. В этом случае холодное и горячее сопротивления измеряются при минимально возможном шаге пластин Кх для пластин, расположенных на возможно большем удалении от щеток [0.9].
При измерении холодного и горячего сопротивлений пластины коллектора, на которых производится измерение, должны находиться в одном и том же положении относительно щеток.
Минимально возможное для измерения сопротивление определяется чувствительностью измерительной аппаратуры.
В ГОСТ 10159-79 рекомендуется соблюдение условия Кх Кт! (3-^4). Рекомендации VDE и IEC по выбору коллекторных пластин приведены на рис. 5.5.
Для простых Волновых обмоток (2а = 2; 2р = 4) существует приведенное ниже соотношение между Rx с шагом пластин Кх и Ra с шагом пластин Кт: Ra = RXK*/(2КТКХ - К*}.
В обмотках с уравнительными соединениями может иметь место раз^ ница температуры уравнительных соединений и проводников в пазах, в то время как метод сопротивления дает среднюю температуру. В таких обмотках желательно проконтролировать температуру проводников в пазах с помощью термоиндикаторов.
В обмотках с неполным числом уравнительных соединений желательно, чтобы Rx измерялось на пластинах, не связанных с уравнительными соединениями. В многоходовых обмотках Rx следует измерять на пластинах, принадлежащих к одному обходу. Во всех случаях измерения Rx необходимо знать схему обмотки.
Измерение Rx < 1 Ом проводится двойным мостом с помощью щупов, которые прижимаются к нерабочей поверхности коллекторных пластин. Для подвода измерительного тока и измерения падения 160
Рис. 5.5. Выбор коллекторных пластин для измерения /?х и Rr якорной обмотки: а - по VDE 0530,6 - по VDE 0535, в - по IEC 48
напряжения применяются отдельные щупы, объединенные попарно в общей рукоятке.
Во избежание повревдения гальванометра моста перенапряжением щупы тока делаются длиннее, чем щупы напряжения, и могут перемещаться в рукоятке, сжимая пружину. В результате цепь напряжения при отводе щупов размыкается до разрыва цепи тока. Щупы напряжения во всех случаях (и при одинарном мосте) должны быть из материалов, не создающих термопар при соприкосновении с коллектором, контактными кольцами, выводами обмоток и т. п. (латунь, бронза, медь).
Особое значение для точности определения температуры приобретает быстрота, с которой производятся первые отсчеты горячего сопротивления. Применяется ряд мер для убыстрения остановки. Одновременно с выключением тока и принудительной вентиляции запускается секундомер, по которому ведется отсчет времени замеров сопротивления для кривой остывания. Если нагрузкой является электрический генератор, то форсировкой его возбуждения создается дополнительное торможение, а затем, когда скорость вращения упадет, производится механическое торможение наложением (лучше с двух сторон) брусьев-колодок на полумуфты сочленения между испытуемой машиной и генератором.
При подъеме щеток во избежание ожогов должны применяться тонкие перчатки.
После остановки якорь поворачивается в положение, при котором наиболее доступны пластины, отмеченные при измерении холодного сопротивления, затормаживается в этом положении, после чего на отмеченные пластины устанавливаются измерительные щупы и снимается кривая остывания якоря.
Первый отсчет (сопротивление и время его снятия, протекшее с момента выключения тока), поскольку он в значительной мере определяет точность экстраполяции и значение превышения температуры в момент остановки, должен быть снят в течение возможно более короткого времени. Для машин мощностью 5—500 кВт это время не долж
но превышать 30—60 с. После первой следует снять еще три-четыре точки с минимально возможным интервалом времени, а затем еще три-четыре точки с равными интервалами, с таким расчетом, чтобы последняя точка соответствовала времени 10—20 мин. Согласно ГОСТ 11828-86, если время измерения не превышает 15—20 с, за Кг принимается наибольшее из трех измерений. Если RT в начале измерений растет, то за RT принимается наибольшее из измеренных значений.
5.2.3. Измерение сопротивления обмоток переменного тока. Для трехфазных обмоток, в случае когда выведены только три конца и сопротивления, измеренные между ними, 1?12, Я2з, ^31, сопротивление первой фазы Я] (выводные концы фазы 1, 4) при соединении обмоток фаз в звезду
Rx =(Д12-Д23+ (5.13)
при соединении в треугольник
-Rj ~ [2^31^23^(^31 + ^23 *“ ^12)] “ (Лз1 + ^23 “ ^12)- (5-14)
Сопротивление обмотки второй фазы (выводные концы 2, 5) определяется из (5.13) или (5.14) путем круговой последовательной замены индексов (К|2 на ^23, ^23 на R31, R31 на Я12).
Сопротивление обмотки третьей фазы (выводные концы 3, 6) определяется из выражения для второй с соответствующей круговой заменой индексов.
Если расхождение в измеренных значениях Ru = Я12,Я23, R31 не превышает 2% при соединении фаз звездой и 1,5% — треугольником, то сопротивление фазовых обмоток R& можно определять из выражений Яф = RK/2 при соединении звездой и R& = 3RK/2 треугольником. Измерение RT проводится после отключения ЭМ от сети и затухания нестационарных напряжений на обмотках. При этом для СМ используется гашение поля до значений ЭДС, близких к нулю. Для определения превышений температур применяется экстраполяция кривой остывания.
В АЭМ приходится считаться с возможностью появления в обмотке ЭДС зубцовой частоты от магнитных потоков, созданных измерительным током, если измерение проводится при вращающемся роторе.
5.2.4. Измерение сопротивления обмоток переменного тока без отключения от сети. Для этих обмоток более точным может оказаться метод непрерывного измерения сопротивления [5.3-5.6; 4.2], при котором по обмотке одновременно с переменным током Лм протекает измерительный постоянный ток /и и определяется напряжение i^R-(рис. 5.6, а); значение тока должно быть таким, чтобы оно не вызывало увеличения превышения температуры обмотки более чем на 0,5% допустимого, т. е. /и < (2 + 5) % Z<~ .
Рис. 5.6. Измерение сопротивления обмотки, обтекаемой переменным током: а — общая схема; б — схема блока компенсации напряжения переменного тока (БКН); в - схема блока питания измерительным постоянным током (БП); КТ1—КТЗ - обмотки компенсирующих трансформаторов; Кр1 - конденсатор; ФР - фазорегулятор; ТР — регулировочный трансформатор; Др — дроссель;
Кр2 - шунтирующий конденсатор
Измерение R_ может осуществляться также измерительными мостами [5.3].
Для защиты измерительных цепей постоянного тока от ЭДС переменного тока применяют каскад компенсирующих трансформаторов (рис. 5.6, б). Для повышения точности компенсации используются вторичные обмотки трансформаторов (КТ1—КТЗ) с отпайками через один виток, а для компенсации углового сдвига, вносимого конденсатором Кр1 — регулировочный трансформатор ТР с питанием через фазорегулятор ФР. Вольтметр целесообразно шунтировать конденсатором.
Цепи питания и измерения постоянного тока могут кроме указанных выше КТ защищаться включенным последовательно в схему питания дросселем Др, а также шунтированием амперметра емкостью Кр2 (рис. 5.6, в).
Измерение Rx и Rr должно производиться теми же приборами и той же схемой.
Следует иметь в виду, что если не принять специальных мер для блокирования пути измерительного тока в сеть переменного тока, питающего обмотку ИМ, то измерение станет невозможным. Такое блокирование производится либо путем кратковременного отключения питания, либо, для ЭМ небольшой мощности, особенно при повышенной частоте, включением разделительных конденсаторов большой емкости [5.5].
Для крупных высоковольтных трехфазных ЭМ согласно [5.4] для измерения R__ можно использовать нулевые точки обмотки ИМ и дру-
Рис. 5.7. Измерение сопротивления одной фазы обмотки:
а - низковольтной (< 440 В) с соединением фаз треугольником; б - высоковольтной с соединением фаз звездой; ИЭМ - испытуемая ЭМ; НМ - нагрузочная ЭМ; TH ~ трансформатор напряжения; ПП — пробивной предохранитель; БКН — блок компенсации напряжения; БП — блок питания; KI, К2, КЗ - контакты выключателей, размыкаемые на время измерения
гих ЭМ или трансформаторов с соединением фазовых обмоток звездой, подключенных к той же сети (рис. 5.7,а, б). Схема особенно удобна для ИМ, имеющих обмотки со схемой ’’двойная звезда”. Как видно из рис. 5.7, б, для измерения напряжения используется нулевая точка трансформатора напряжения ТН9 для подвода измерительного тока — нулевая точка нагрузочной электрической машины НМ. Для защиты
от случайных перенапряжений все нулевые точки заземляются через пробивные предохранители ПП с пробивным напряжением < 100 В.
Вообще вопросы техники безопасности при использовании схем непрерывного измерения стоят весьма остро, и все необходимые для ее обеспечения мероприятия (заземление, контроль сопротивления изоляции, предотвращение прикосновения к элементам схемы и т. д.) должны быть выполнены.
Полная гальваническая развязка схем переменного и постоянного токов возможна при использовании трансформаторов постоянного тока [5.6]. Точность этих схем, однако, несколько ниже (погрешность 1%).
Метод непрерывного измерения сопротивления позволяет измерить небольшие изменения сопротивления (температуры) и добавочные потери [4.2].
5.2.5. Измерение температуры вращающихся короткозамкнутых обмоток (’’беличьей клетки”, успокоительных обмоток). Наиболее просто эта температура может быть измерена с помощью термометра, прижимаемого к замыкающим кольцам или стержням обмотки после остановки ротора. Кривая остывания экстраполируется на момент выключения тока.
Превышение температуры клетки короткозамкнутого ротора АД может быть определено по измерению скольжения в холодном (sx) и горячем (sr) состояниях ротора при постоянном моменте нагрузки на валу по формуле
гг/х = {[c/srО — sr)/sxО “sx)] — 1] (235+ ®х)> (5.15)
где 0Х — температура ротора в холодном состоянии (до начала режима нагрузки); Cj =0,98 \J/1х, Лг~ ток статора при холодном и горячем АД.
Во избежание подогрева ротора пусковыми токами, приводящего к большой погрешности, ротор АД должен быть развернут до номинальной скорости нагрузочным генератором.
Формула (5.15) предусмотрена для медной клетки; в случае алюминиевой клетки вместо числа 235 в (5.15) должна быть подставлена величина 1/«а, обратная экспериментально определенному температурному коэффициенту сопротивления аа алюминиевого сплава, иэ которого выполнена клетка.
5.2.6. Правила использования термоиндикаторов. Заложенными ТИ называют термоиндикаторы, заложенные в обмотки и активную сталь при изготовлении ЭМ в такие точки, которые после изготовления недоступны (например, на дно паза, между секциями в пазу и т. п.). Встраиваемыми ТИ называют ТИ, встроенные в готовую ЭМ на период испытания.
Использование ТИ в том случае, когда они не устанавливаются, а прикладываются на время измерения, носит название методы термометра.
С помощью ТИ измеряют температуры обмоток (желательно в наиболее горячих точках), подшипников (наружной обоймы подшипников качения, вкладышей подшипников скольжения, смазочного масла), охлаждающего машину хладагента и т. п.
В качестве ТИ используются термометры расширения (для измерения медленно изменяющихся температур), термометры сопротивления, термопары, терморезисторы.
Для быстрых измерений температуры, в особенности температуры вращающихся частей после их остановки, следует рекомендовать современные термоиндикаторы типов ТТЦ1, ТТЦ1-01 с практически безынерционным термощупом (термометром сопротивления) и цифровым отсчетным устройством.
Для измерения температуры наиболее нагретых точек обмотки ТИ закладываются на дно паза, между секциями в пазу и т. д. Встраиваемые ТИ устанавливают на лобовые части обмоток, пазовые части обмоток (под клин), между листами активной стали и другие доступные части ЭМ.
Рекомендуется закладывать не менее шести ТИ, с равномерным распределением их по окружности, а в осевом направлении — в точки, где ожидаются наибольшие температуры. Для крупных машин число ТИ берется значительно большим.
ТИ, предназначенные для измерения температуры обмотки при двух изолированных сторонах секций в пазу, рекомендуется помещать между ними; при трех и более изолированных сторонах секций — в местах, где ожидаются наибольшие температуры.
Температура активной стали измеряется ТИ, помещенным на дно паза и в зубцы.
Основная погрешность при измерении с помощью ТИ возникает за счет возможного перепада температур между ТИ и точкой, температура которой определяется.
Если ТИ закладывается между двумя сторонами секций (стержнями) в пазу, то при наличии определенной теплопроводности поперек и вдоль слоев изоляции на температуру ТИ будет оказывать влияние не только температура проводников обмотки, но и температура стенок паза, т. е. температура стали. Это влияние будет тем больше, чем больше разность температуры обмотки и активной стали. Следует учитывать это обстоятельство внесением поправок в показания ТИ, измеряющих температуру обмотки в пазу. При исследованиях нагревания крупных машин целесообразно для нахождения поправок проводить тепловое моделирование паза, при котором определяются показания ТИ при известных температурах проводников (стержней) и стенок паза.
При закладке или встраивании ТИ в обмотки должны соблюдаться правила техники безопасности. ТИ должны закладываться в части обмоток, наиболее близкие к заземленным выводам, с тем чтобы электрический потенциал места установки относительно земли был наименьшим. Усиленная изоляция ТИ означает возможность увеличения ошибки иэ-эа перепада температур в изоляции. Выводы ТИ тщательно изолируются. При наличии переключателя заземляется общий полюс переключателя, к которому подключаются все выводы (по одному).
После остановки термометрами измеряются температура поверхности коллекторов, контактных колец, бандажей, активной стали, а также проводятся контрольные измерения температуры поверхностей обмоток.
Из существующей номенклатуры термометров расширения применяются так называемые ’’палочные” термометры типа ТЛ небольшого диаметра. При исследовании ЭМ с воздушным охлаждением применяются термометры с ценой деления 0,5—1 °C и погрешностью не выше ± 1 °C.
В случае водяного охлаждения для измерения температуры воды нужны термометры с ценой деления 0,1 °C и погрешностью не выше + 0,2 °C.
Для исключения возможности получения ошибочных результатов от подогрева ртути вихревыми токами рекомендуется применение спиртовых термометров.
Плотный контакт между головкой термометра и измеряемой поверхностью достигается с помощью фольги, которой обертывают головку термометра. Кроме того, снаружи место контакта укрывается ватой, войлоком и т. п. Для установки термометров может быть использована изоляционная замазка, которая накладывается на обмотанную фольгой и прижатую к поверхности головку термометра.
На механических деталях (корпусах, подшипниках) целесообразно устанавливать головку термометра, обмотанную фольгой, в отверстие для крепежа и уплотнять сверху ватой, войлоком и т. п.
Термопары (ТП) получают путем пайки или сварки зачищенных концов двух проволок из различных материалов. Применяются ТП медь— константан и хромель—копель. ТП хромель—копель обладают наибольшей термо-ЭДС. Для ТП, установленных на поверхности обмоток, активной стали, в пазу и т. п., целесообразно к головке ТП припаять тонкую медную пластину, улучшающую контакт.
Для измерения температуры лобовых частей ТП бандажируются к ‘ поверхности изоляции (до нанесения наружных защитных слоев ленты).
Для измерения температуры щеток головка ТП опускается в отверстие, высверленное в щетке по возможности близко к контактной поверхности. Для измерения температуры подшипников качения головка ТП прижимается пружиной к наружной обойме.
Таблица 5.2
Материал Термо-ЭДС, мВ
термопары 100 °C 200 °C
Медь—константан 4,14 8,38
Хромель-копель 6,95 14,65
В тех случаях, где это возможно, головку ТП целесообразно погружать в небольшое отверстие, высверленное в детали, например в замыкающих кольцах или стержнях КЗ роторов.
При изготовлении ТП должна учитываться необходимая длина проволок, из которых сварена ТП и являющихся одновременно выводами, поскольку напайка выводов не допускается.
При присоединении выводов ТП к зажимам измерительного прибора в месте присоединения образуются два контакта, эквивалентные (поскольку все зажимы выполнены иэ одного материала, например меди) одной термопаре из тех же материалов, что и основной спай, ЭДС которой вычитается из ЭДС основного спая. Поэтому показания термопары пропорциональны разности температур, соответствующих головке (горячий спай) и концам выводов, присоединенных к измерительной аппаратуре (холодный спай).
Это обстоятельство весьма важно. В случае передачи показаний ТП с вращающихся частей через скользящий контакт оно обусловливает необходимость применения специальных схем (см. ниже). Термо-ЭДС при температуре горячего спая 100 и 200 °C и температуре холодного спая 0 °C приведены в табл. 5.2.
Для измерения термо-ЭДС применяются магнитоэлектрические милливольтметры, которые, однако, обладают заметным собственным потреблением, вследствие чего на их показаниях сказываются сопротивления выводных концов, переходные сопротивления контактов переключателей и т. п. Поэтому при работе с термопарами целесообразно применение компенсационных (нулевых) методов. Потенциометры, компенсирующие термо-ЭДС, могут быть как ручными, так и автоматическими. Автоматические обычно содержат устройства для компенсации ЭДС холодного спая, что позволяет градуировать прибор прямо по температуре горячего спая.
Для изготовления ТП обычно применяется проволока диаметром 0,5—0,8 мм. Для измерения температуры небольших поверхностей, а также в тех случаях, когда измеряются быстроменяющиеся температуры, с целью получения минимальной погрешности ТП выполняется из тонких (диаметром 0,25 мм и менее) проволок.
При этом в связи с большим сопротивлением выводных концов пригодны только потенциометрические (нулевые) методы измерения термо-ЭДС.
ТП, установленные на обмотке, должны быть достаточно надежно изолированы от токоведущих частей. Изоляция между ТП и обмоткой должна проверяться мегаомметром, а также на электрическую прочность. Общий вывод ТП в этом случае целесообразно заземлить. ТП, установленные на заземленные части (корпуса, подшипники и т. п.), не должны изолироваться от последних. Общий вывод ТП в этом случае заземлять нельзя.
Термометры сопротивления (ТС) выполняются из тонкой медной или платиновой проволоки, намотанной обычно на изоляционную слюдяную пластинку. Снаружи термометр защищается двумя тонкими слюдяными пластинками.
Медные ТС применяются для диапазона температур от —20 до + 100 °C (при длительном воздействии температур более 100 °C возможно окисление тонкого медного провода и изменение его сопротивления) ; платиновые — для диапазона температур от —20 до + 500 °C. Для увеличения точности измерения в этом случае применяются двойные выводы (отдельно для подвода тока, питающего ТС и для измерения напряжения) [0.9].
Использование термореэисторов в качестве ТИ дает ряд существенных преимуществ перед ТС. Температурный коэффициент сопротивления терморезисторов составляет 2,5—6% на 1°С. Терморезисторы имеют сопротивления порядка 1—1000 кОм, в связи с чем влияние сопротивления выводных концов и различных контактных сопротивлений не вызывают заметной погрешности. Терморезисторы имеют весьма малые габаритные размеры. Они включаются в плечо неуравновешенного измерительного моста. В качестве измерительного прибора при этом применяется гальванометр или микроамперметр [5.1].
5.2.7. Измерение температуры вращающихся частей. При измерении температуры вращающихся частей возникает дополнительная задача обеспечения необходимой точности измерения, связанная с передачей показаний от вращающихся ТИ.
Наиболее перспективными являются методы бесконтактной передачи показаний ТИ с помощью врашающихся вместе с обмоткой полупроводниковых генераторов среднечастотного диапазона, частота которых составляет 5—10 кГц. Она изменяется в зависимости от сопротивления (температуры) ТИ и измеряется неподвижным приемником [5.7]. Указанные методы позволяют получить в лабораторных условиях достаточно высокие точности измерения температур (до ± 0,5 °C).
Передача показаний ТИ через скользящий контакт может вносить заметную погрешность из-эа сопротивления контакта и наличия термо-ЭДС, возникающих в нем.
Механическое несовершенств^ контакта и вызванное этим обстоятельством колебание его сопротивления в больших пределах может вызывать значительные помехи при измерении, особенно при осциллографической записи быстро изменяющихся процессов нагревания.
Термо-ЭДС в контакте возникает даже в том случае, если кольцо и щетка выполнены из одного материала. Это объясняется тем, что из-за наличия оксидной пленки на поверхности кольца (на политуре) в скользящем контакте появляются две термопары: кольцо—пленка политуры и пленка политуры—щетка, температуры которых неодинаковы.
В неблагоприятных случаях термо-ЭДС двух токосъемников (за исключением ртутных) может достигать 500—600 мкВ, что в случае применения термопар медь—константан, развивающей термо-ЭДС 50 мкВ на 1 °C, может вызвать ошибку до 10—12 °C.
Переходное сопротивление двух токосъемников (за исключением ртутных) может иметь порядок 10”2 — 10г1 Ом и более, что для медного ТС с сопротивлением 10 Ом может в неблагоприятном случае вызывать погрешность до 2,5 °C (очевидно, что погрешность, вызванная сопротивлением токосъемника, обратно пропорциональна сопротивлению ТС). При подогреве токосъемников до 70—80 °C термо-ЭДС уменьшается до 20—30 мкВ, а сопротивление до 1СГ2 — 10г3 Ом.
Наименьшую ошибку создают ртутные контакты, особенно в случае записи нестационарных тепловых режимов на осциллограф. Однако они не рекомендуются из-за токсичности ртути.
При кратковременных измерениях хорошие результаты дает контактная пара: медное (латунное, бронзовое) кольцо и медная проволока (струна), натянутая с помощью пружины, или простая пружина, например из бериллиевой бронзы, могут применяться также щетки из медной сетки. Хорошие результаты при высокой окружной скорости (> 15 м/с) дает смазка контактной поверхности специальным бальзамом (см, гл. 6). При длительно работающих контактах на кольцах из указанных выше материалов могут применяться серебряно-графитные щетки или медно-графитные (бронзо-графитные) щетки с большим содержанием меди (бронзы).
Кроме указанной выше контактной смазки для очистки поверхности кольца от оксидных пленок, увеличивающих сопротивление контакта, могут применяться щетки (особенно с абразивными добавками, не включенные в цепь), которые за счет повышенного трения очищают поверхность кольца. Во всех случаях желательно иметь не менее двух параллельно работающих щеток (струн). Кольца должны иметь минимальные биение и некруглость, хорошо отшлифованную поверхность, должны быть защищены от загрязнения.
При большом числе точек измерения на тихоходных роторах (п < < 600 об/мин) с целью сокращения количества контактных колец применяются размещенные в роторе устройства — шаговые искатели, подключающие термопары поочередно к двум-четырем кольцам. Управление этими искателями осуществляется через два кольца управления [5.8].
Рис. 5.8. Измерение температуры вращающихся частей термопарами:
КК — контактные кольца; 777г — термопара в исследуемой (’’горячей”) точке; ТПХ — термопара ’’холодный спай”
В случае применения термопар для измерения температуры вращающихся частей в месте присоединения их выводов к контактным кольцам образуются новые термопары, большие термо-ЭДС которых делает измерение практически невозможным. В этом случае на вращающейся части в доступном месте (обычно на торце вала) размещается термопара ТПХ9 включенная последовательно с термопарой 777г, заложенной в исследуемую точку (рис. 5.8). Температура вблизи этой термопары должна быть доступна для измерения неподвижным термометром или термопарой ТП.
В такой схеме к контактным кольцам КК подходят проводники из одного материала. Из того же материала должны быть сделаны КК. Практически речь идет здесь о термопарах медь—константан и медных кольцах. В такой схеме измеряется разность температур холодного и горячего спаев, а поскольку температура холодного спая известна, то может быть определена и температура в исследуемой точке.
5.3. ОБЩИЕ ПРАВИЛА ПРОВЕДЕНИЯ
ТЕПЛОВЫХ ИСПЫТАНИЙ
Тепловые испытания (испытания на нагревание) в продолжительном режиме 51 для определения установившейся температуры могут начинаться при любом тепловом состоянии ЭМ (для сокращения времени испытания она может быть предварительно подогрета). Подогрев не должен быть чрезмерным, с тем чтобы ни одна обмотка в процессе подогрева не имела температуру больше установившейся. Это обстоятельство связано с тем, что в противном случае она в процессе режима будет остывать и, поскольку процесс остывания весьма медленный, при определении нагрева может получиться завышенный результат. Поэтому первый тепловой режим следует вести без подогрева. Подо-
грев может производиться за счет ослабления вентиляции или за счет небольшой равномерной токовой перегрузки обмоток.
Установившееся состояние определяется неизменностью превышения температуры по отношению к охлаждающей среде, а не неизменностью температуры.
Следует иметь в виду, что температура охлаждающей среды, например воздуха, при испытаниях не должна сильно меняться, поскольку измеренное при этом превышение температуры может отличаться от действительного на значение, близкое к изменению этой температуры. Если почему-либо нет возможности довести режим до конца, то может быть применена экстраполяция по рис. 5.2. Температуры обмоток в момент прекращения режима должны быть не менее 80—90% установившихся.
Кратковременный режим 52, например часовой, может проводиться только начиная с холодного состояния ЭМ, так как превышение температуры за определенное время (например, за 1 ч) зависит от начальной температуры ЭМ (зто видно из рис. 1.14). Поэтому при проведении кратковременных режимов необходимо во избежание заметной ошибки весьма быстро установить заданный режим (по току, напряжению, частоте вращения).
Например, часовой режим должен быть установлен за время, не превышающее 1—2 мин. При более кратковременных режимах это время должно быть соответственно меньше.
Если проводят повторно кратковременные режимы 53—55, то они должны длиться до тех пор, пока температуры в начале и в конце рабочего периода не начнут повторяться.
Измерения температуры в соответствии с указанием ГОСТ 11828-86 проводят после прохождения половины времени последнего периода работы.
5.4. КОСВЕННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ
УСТАНОВИВШИХСЯ ПРЕВЫШЕНИЙ ТЕМПЕРАТУРЫ
Поскольку теплоотдача при неизменных условиях охлаждения мало зависит от температуры, превышение температуры какой-либо обмотки (детали) можно рассматривать и экспериментально определять как сумму превышений температуры, вызванных потерями в ней самой и других частях ЭМ; каждая из составляющих превышения температуры пропорциональна вызывающим ее потерям. Определение отдельных превышений температуры может производиться при XX, КЗ и других режимах, не требующих полной мощности.
Поскольку при косвенных методах определения превышений температур потери в ЭМ (главным образом различного рода добавочные потери) могут отличаться от потерь при номинальном режиме, косвенные методы определения превышения температуры являются при-172
ближенными и могут считаться достаточными, если определенные по ним превышения температур на 5—10% меньше допустимых.
Превышение температуры обмотки, условно обозначенной индексом ”1”, может быть представлено как сумма
Т1 = Тц+Т12+т13+ ... + Т1„, (5.16)
где 711 — превышение температуры, вызванное потерями в самой обмотке; 7j2 Tin “ превышение температуры, вызванное потерями
-г рп в других элементах ЭМ.
Полагая 7 = рК, где р — потери, а К - коэффициент, °С/Вт, получим
71 = Р1Кц + + ... + РпК1п,
вынося piK\ 1 за скобки, получим
т1=р1Кц[1 + р2Кг2/GMG1) + ••- + AAi«/(Pi*ii)] ••• (5.17) или
Ъ = /Сырг1, (5.18)
где рг^ — ’’греющие потери”обмотки, т. е. потери, эквивалентные потерям в самой обмотке, дающим суммарное превышение температуры 7j.
Величина К1п/Кц < 1 является коэффициентами влияния ’’чужих” для обмотки потерь. Очевидно, что чем эффективнее вентиляция, тем меньше коэффициент К1п/ Кц; наибольшее значение он имеет для закрытых ЭМ и наименьшее — для прямого охлаждения обмоток, например водой. Если известен коэффициент Kr i, то можно определить 7! для любого режима ЭМ.
Если возможно проведение двух тепловых испытаний, отличающихся только значением одной из составляющих рт потерь рп, то
Кщ/Кгг =(7,-71’)/(p„-pi;),
где 7i, 71 — превышение температуры интересующей нас обмотки в режимах с потерями рп, р\
Однако в ряде случаев изменение только одной составляющей потерь рт невозможно. Так, например, при изменении тока и потерь в обмотке возбуждения одновременно изменяется магнитный поток и потери в стали. В этом случае целесообразно изменить соотношение этих потерь путем, например, перехода на более насыщенный участок кривой намагничивания. Возможно также применение искусственных схем, когда часть обмотки возбуждения (на каждом полюсе) включается навстречу другой.
Для случая определения превышения температуры якорной обмотки 71 по (5.16) учитываются следующие потери: Pi — потери в меди
этой обмотки; р2 — в стали, в которую уложена обмотка, р3 — в обмотке возбуждения (или в обмотке ротора АЭМ); р4 — механические и вентиляционные (заметное влияние этих потерь на нагрев имеет место в быстроходных ЭМ — турбомашинах), р5 — потери на коллекторе.
5.4.1. Косвенное определение л синхронных ЭМ и ЭМ постоянного тока. Для этой цели определяются потери и установившиеся превышения температур в следующих режимах:
КЗ (7К = Дюм)> потери Pi, рз, р4, р5'9 превышения температуры 7 к» 1»
XX (Ux = Цюм)', потери р2, Рз> Рь\ превышения температуры ^вх-
Опыт вращения без возбуждения для быстроходных ЭМ:
« = ^ном> потери р4; превышение температуры тмх>в;
+ ~ 7МХ,В» (5-19)
тмх,в вычитается, поскольку оно учитывается дважды: в режимах XX и КЗ.
Для определения превышения температуры обмотки возбуждения тв дополнительно к трем указанным выше опытам проводится определение установившейся температуры обмотки возбуждения при XX и U= UHOM х (1,2 ± 5%) (для ЭМ с Цюм 3 кВ при этом размыкается нейтраль). Полученные из трех опытов значения тв строятся в зависимости от потерь <ВЛВ- Номинальное значение тВ1НОМ находится по номинальному значению потерь в обмотке возбуждения.
Для СМ косвенное определение превышения температур может проводиться в режиме синхронного компенсатора (СК) (см. ГОСТ 10169-77).
В машинах постоянного тока необходимо учитывать, что потери на трение щеток о коллектор при XX могут быть значительно выше, чем при номинальном режиме. Это особенно существенно для низковольтных машин. Поэтому целесообразно проводить режим XX и режим не-возбужденной машины (если он необходим) при поднятых щетках и вращении машины посторонним двигателем или проводить режим XX при минимально необходимом числе щеток, если испытания проводятся в двигательном режиме.
Если необходимо оценить раздельно влияние на нагрев обмотки якоря потерь в активной стали и потерь в обмотке возбуждения, то следует провести два режима XX с разным насыщением и, следовательно, различным соотношением потерь в стали и обмотке возбуждения.
Для определения влияния потерь на коллекторе (для низковольтных машин с относительно большими потерями на коллекторе) можно провести два режима КЗ: один при полном числе щеток и номинальном токе и второй при половине числа щеток и половине номинального тока.
174
Можно использовать также ряд методов, соответствующих конкретным типам машин постоянного тока.
Так, например, для коротких машин с сильной принудительной вентиляцией (тяговых двигателей), у которых коэффициент теплоотдачи мало зависит от скорости вращения якоря, а потери на коллекторе относительно малы (при высоких напряжениях на коллекторе), определение влияния потерь в стали может быть сделано с помощью режимов при неподвижном или медленно вращающемся якоре, когда потери в стали отсутствуют.
5.4.2. Определение превышения температуры обмоток АЭМ в режимах искусственного нагружения см. в ГОСТ 7217-87-
5.5. ОХЛАЖДЕНИЕ
Охлаждение производится путем отбора тепла с теплорассеивающих поверхностей движущимся относительно этих поверхностей хладагентом, который при этом нагревается. Если в единицу времени перемещается объем Qc, м3/с, хладагента с плотностью Уха, кг/м3, теплоемкостью Сха, Вт • с/кг - ° С, и средним для всего объема превышением температур тха, которое он получает, проходя через ЭМ, то количество тепла, Вт, которое он уносит в 1 с, составляет
Р ~ Qc Тха^ха^ха’ (5.20)
5.5.1. Воздушное охлаждение. Для перемещения воздуха применяются следующие системы вентиляции: с естественным перемещением воздуха, охлаждающего корпус (закрытые ЭМ); с внешним обдувом корпуса вентилятором, сидящим на валу ЭМ; с продувкой воздуха через ЭМ вентилятором, сидящим на валу; с продувкой воздуха от отдельного вентилятора, имеющего собственный привод.
Во втором и третьем случаях имеет место самовентиляция, в последнем случае — принудительная вентиляция.
Для продуваемых ЭМ существует большое разнообразие схем прохождения воздуха внутри ЭМ [0.3; 5.9; 5.13; 5.14], которые в наиболее общей форме можно классифицировать как схемы с осевым, радиальным и смешанным направлениями воздушных потоков.
Условиями для выбора той или иной схемы вентиляции являются: получение достаточно эффективного охлаждения, равномерное распределение температуры и допустимый уровень шума, создаваемый вентиляционной системой. При этом учитываются: распределение потерь, геометрия активного ядра, частота вращения и ряд других факторов.
Наряду с обеспечением охлаждения обмоток и активной стали система вентиляции должна обеспечивать эффективное охлаждение под
шипников (опор) и узлов токосъема. Нагретый в ЭМ воздух, как правило, не должен подогревать опоры и коллекторы.
Объем вентилирующего воздуха, проходящего через ЭМ, весьма велик. В течение 1 ч его масса может превышать массу самой ЭМ. Содержащаяся в воздухе пыль оседает в вентиляционных каналах и способствует постепенному ухудшению охлаждения (вплоть до полной закупорки каналов).
Поэтому для крупных ЭМ применяется вентиляция по замкнутому циклу, в которой внутри ЭМ циркулирует чистый воздух. Для очистки воздуха от щеточной пыли в коллекторных ЭМ используются фильтры. Для охлаждения воздух пропускается через теплообменники воздух— вода или воздух—воздух.
5.5.2. Параметры воздуха. Входящие в (5.20) плотность ?в и теплоемкость Св зависят от температуры 0В и давления. Для разомкнутых вентиляционных систем, использующих воздух из окружающего ЭМ пространства, ?в зависит от атмосферного давления В :
\ = 1,29 Кв*в, (5.21)
здесь
= 273/(273 + Ов); (5.22)
*в = Япа/Ю1 325 = Вр>с/760, (5.23)
где ВПа — давление, Па; Вр>с — давление, мм рт. ст. (1 атм. — 101 325 Па — 760 мм рт. ст.); 0В, °C; Св — 1000 Дж/кг • К.
Определенное влияние на увеличение теплоемкости воздуха имеет содержащийся в нем водяной пар, масса которого характеризуется относительной влажностью воздуха, %,
*Р ~ ?п/Рп,н,
где Рп — парциальное давление водяного пара; Рщн — парциальное давление насыщенного водяного пара при температуре воздуха 0В. При = 100% парциальное давление достигает своего насыщенного значения и начинается выпадение влаги. При рабочих температурах 0В до 50 °C влияние влажности на теплоемкость невелико; с ростом <р (вплоть до 100%) теплоемкость возрастает на 4—5% [5.12]. Однако относительная влажность имеет существенное влияние на сопротивление изоляции ЭМ.
Простейшими приборами для определения относительной влажности являются волосяной гигрометр и прибор, содержащий сухой и влажный термометры [5.1]. В последнем случае для увеличения точности можно использовать термометры с ценой деления 0,1 °C.
Температура воздуха
®в — ®в,вх. + (5.24)
Ориентировочно можно считать, что превышение температуры воздуха, проходящего через ЭМ,
тв ~ ®об/6 ~ 7,
где 0об " температура обмотки; ®BjBX ~ температура воздуха, входящего в ЭМ. Необходимый объем вентилирующего воздуха, м3/мин, при 0В = 50 ° С, давлении В = 101 325 Па (1 атм)
Q = (53-г55)р/тв, (5.25)
где р — потери, кВт.
Для тв = 25 °C Q/p = 2 -г 2,2 м3/мин • кВт. Заметим, что простой форсировкой вентиляции (увеличением Q) в конкретной ЭМ поднять величину Q/p сверх указанной выше затруднительно, так как при этом снижается тв.
5.5.3. Параметры вентиляционных систем. Вентиляционные системы характеризуются объемом воздуха, проходящим через ЭМ в единицу времени (расходом), и полным избыточным (по отношению к атмосферному) давлением h, которое вентилятор системы должен развивать для преодоления аэродинамических сопротивлений воздуховода [5.10].
Движущуюся по воздуховоду струю воздуха можно характеризовать двумя видами давления.
Статическое давление (избыточное по отношению к атмосферному) йс, которое воздух, сжатый при проходе через вентилятор, оказывает на единицу поверхности стенки воздуховода, параллельной движению струи. Это давление является мерой потенциальной энергии, переданной вентилятором воздуху. Статическое давление измеряется через отверстие в стенке воздуховода (диаметром примерно 1 мм); ось отверстия перпендикулярна направлению движения воздушной струи, а плоскость отверстия строго параллельна ему. Определенное влияние на точность измерения hc оказывает форма кромок отверстия.
Динамическое давление hR характеризует кинетическую энергию 1 м3 воздуха. Это давление, которое движущаяся воздушная струя (дополнительно к давлению йс) оказывает на единицу поверхности площадки, расположенной перпендикулярно направлению ее движения (площадка должна быть настолько малой, что ее внесение в поток не вызывает заметного изменения скоростей и расхода).
Полное давление на такую площадку
h = hc + Лд. (5.26)
Если измерить h и Лс, то можно вычислить динамическое давление
Лд =Л-ЛС. (5.27)
Поскольку
йд = V2/2’ <5'28)
где v — скорость воздуха в точке измерения, то, определив йд, можно определить v , и если эта скорость постоянна на площади S, то расход, м3/мин, через эту площадь воздуховода
e=vS60. (5.29)
Для того чтобы обеспечить расход воздуха <2В, вентилятор должен создавать давление йвт, расходуемое на преодоление местных аэродинамических сопротивлений воздуховода, вызывающих перепады статического давления на отдельных его участках йс/- и создание динамического напора струи воздуха, выходящей из ЭМ,
^вт = ^с/ + ^д,вых = •
1=1
Расход воздуха через вентилятор и воздуховод пропорционален объему камер вентилятора, наполняющихся и опорожняющихся за п об/мин; т. е. Св = п-
Поскольку давление, развиваемое вентилятором, Лвт = и2, а давление, теряемое в воздуховоде, Лвв = v2 = Св — и2> равенство hBT = = йвв поддерживается автоматически при всех частотах вращения вентилятора и расходах воздуха.
Необходимая для привода вентилятора мощность, Вт
Рвт = Qhl<® т?вт, (5.30)
где Q — подача, м3/мин; h — давление, Па; 17 — КПД вентилятора
(0,2 4-0,4). ВТ
Параметры охлаждающего воздуха влияют на превышение температуры [5.12]. ГОСТ 183-74 устанавливает допустимые превышения температур обмоток при температуре охлаждающего воздуха fOB = = 40 °C, высоте над уровнем моря не более 1000 м, и барометрическом давлении не ниже (87 -г91) • 103 Па.
Для условий, отличающихся от указанных, ГОСТ 183-74 устанавливает поправки на допустимое превышение температуры.
При повышении fOjB температура обмотки и ее сопротивление увеличиваются, что при постоянном значении тока увеличивает потери и соответственно превышения температуры т.
При изменении fo,Bi до Zo>b2
Т1/т2= (1+ Чв2/235)/(1+ ГО,В1/235).
р Для обмотки, заложенной в пазы стального сердечника, зто отношение будет несколько меньше, поскольку влияющие на нагрев обмотки
Рис. 5.9. Измерение давлений в воздуховоде:
а - определение нулевого отсчета; б - h с; в - йд; г - йд (с использованием трубки Прандтля); 1 - воздуховод; Р - резервуар микроманометра; ИТ - измерительная трубка микроманометра
потери в стали уменьшаются с ростом ее температуры. ГОСТ 11828-75 не требует введения поправок, если значение to в лежит в пределах 10-40 °C.
При изменении Го,в и атмосферного давления несмотря на неизменный объем вентилирующего воздуха, превышение температуры будет изменяться в связи с изменением у . Подсчитать изменение тв и соответствующее ему изменение превышения температуры обмоток можно по (5.20) с учетом (5.21—5.23), при этом ®в>вх - fo,B.
5.5.4. Измерение скорости воздуха. Для этой цели используются приборы: микроманометры, анемометры, термоанемометры, масс-метры.
Для измерения давлений h9 hCt йд применяются микроманометры типа ММН с наклонной измерительной трубкой (ИТ). Микроманометры за счет изменения угла наклона трубки имеют пять пределов измерения —от 6 до 24 мм вод. ст. (1 мм вод. ст. =9,8 Па).
Класс точности прибора 0,5—1 при В - 101 325 Па; 0В = 10 35 °C, <р = 30 -г 80%. Чувствительность (минимальный отсчет) составляет 0,15 и 0,3% пределов измерения. Микроманометры пригодны при изменениях в 1 ч скорости воздуха < 10% и температуры <0,5 °C.
Имеющийся в микроманометре кран-переключатель задает три режима измерения (рис. 5.9, а—в):
1. Полость над резервуаром (Р) и конец ИТ соединены между собой. Микроманометр не сообщается с атмосферой. В этом положении устанавливается нулевой отсчет (рис. 5.9, а);
2. Резервуар соединяется с датчиком hc, а конец ИТ сообщается с атмосферой (рис. 5.9,6). Измеряется йс;
3. Резервуар соединяется с датчиком давления h, а конец ИТ с датчиком hc (рис. 5.9,в). Измеряется йд.
Источником погрешностей при работе с микроманометрами кроме неточной установки (она контролируется ватерпасом) может быть попадание пузырька воздуха в сочленение между резервуаром и ИТ при слишком быстром заполнении микроманометра водой (спиртом) . В этом случае при изменении наклона ИТ резко изменяется нулевой отсчет.
Резиновые трубки, соединяющие микроманометры с датчиком, должны плотно обжимать штуцеры и иметь достаточную (примерно 4 мм) толщину стенки. Наличие утечки в пневмосхеме дает тем большую погрешность, чем меньше измерительные отверстия в датчиках.
В качестве датчиков полного давления могут применяться одинарные трубки (в каналах малого сечения в качестве таких трубок можно использовать, например, иглы для медицинских шприцев). Статическое давление может измеряться через отверстие диаметром 0,5— 1 мм в стенке воздуховода.
Для одновременного измерения h и hc (рис. 5.9, г) рекомендуются двойные трубки Прандтля (ГОСТ 12259-75) с нормированным отношением размеров. Минимальный диаметр трубки примерно 6 мм, таким образом, она пригодна для воздуховодов с диаметром более 60 мм.
Для непосредственного измерения скорости воздуха применяются анемометры. Для крупных ЭМ с большим сечением воздуховодов применяют крыльчатые или чашечные анемометры. Удовлетворительная точность измерений возможна для воздуховодов с диаметром, в 6—10 раз большим диаметра ротора анемометра.
Использование анемометров целесообразно для проверки условий вентилирования в эксплуатации путем измерения скорости в какой-либо контрольной точке и сравнения ее значения с полученным на предприятии при выпуске ЭМ.
Наиболее совершенным методом измерения скорости воздуха является метод термоанемометра. Принцип действия термоанемометра основан на зависимости температуры и электрического сопротивления тонкой нагретой платиновой нити, через которую пропускается постоянный ток, от скорости воздуха, обдувающего нить. Длина нити 3—5 мм, диаметр 0,1 мм, температура нити примерно 500 °C, что снижает погрешность от изменений температуры воздуха.
В лабораторных образцах длина нити 1 см, диаметр 10 мкм, температура примерно 1000 °C.
Такой датчик позволяет исследовать нестационарные (пульсирующие) скорости воздуха (газового потока). Применение специальных схем компенсации тепловой инерции нити позволяет измерять высоко-180
частотные пульсации скорости и тем самым исследовать вихревые процессы, что применяется для исследовательских целей.
В настоящее время появились термоанемометры промышленного типа с измерительной цилиндрической головкой-датчиком диаметром 13 и длиной 15 мм. Нить находится в центре просверленного в головке, перпендикулярно к оси цилиндра, отверстия диаметром 10 мм. Термоанемометры измеряют скорости воздуха с предельными значениями 1,5 и 25 м/с. Цена деления прибора 0,02 и 0,1 м/с соответственно. Они могут работать при температурах воздуха до 80 °C.
Определение скорости воздуха методом
Рис. 5.10. Схема масс-метра
массметра производится путем пропускания его через нагревательный элемент постоянной мощности и измерения среднего значения температуры подогрева воздуха (3—6 °C).
Устройство для подогрева и измерения температуры, собственно массметр, встраивается, например, в измерительный трубопровод
(5 на рис. 5.11) вместо трубки Прандтля. Схема массметра приведена на рис. 5.10.
Нагревательный элемент 1 с целью увеличения поверхности тепло-
отдачи выполняется в виде сетки. Расходуемая в нем мощность измеряется ваттметром. Датчики температуры 2, 3 выполняются как
усредняющие, например в виде определенного числа последовательно включенных термопар, распределенных по сечению, либо в виде сетки
Рис. 5.11. Измерение подачи воздуха, проходящего через ЭМ, с помощью герметичной камеры:
I — герметичная камера; 2 - микроманометр, измеряющий йс; 3 — воздуховод; 4 - микроманометр, измеряющий 5 - вентилятор
Рис. 5.12. График для выбора диаметра измерительного воздуховода
из эмалированного медного провода, средняя температура которой измеряется методом сопротивления. Измерительное устройство 4 определяет
“ ^х-
Количество воздуха подсчитывается по (5.20) с учетом (5.21) и (5.24).
Хотя метод массметра сложнее манометрических методов, он существенно облегчает возможность автоматизации измерений.
5.5.5. Измерение расхода воздуха. Для этой цели используются следующие методы [5.11]:
Метод герметичной камеры, применяемый для ЭМ с самовентиля-цией, является наиболее точным (рис. 5.11). Входные вентиляционные отверстия ЭМ вводятся в камеру 1. Стыки между стенками камеры и ЭМ тщательно уплотняются (замазываются). Объем камеры должен выбираться в пределах 0,1—0,5 объема воздуха, проходящего через ЭМ за 1 мин. Большие объемы камеры предпочтительнее.
В камеру через измерительный воздуховод 3 подается воздух от вентилятора 5 с регулируемой в широком диапазоне частотой
вращения.
В воздуховоде 3 на достаточном удалении от вентилятора, чтобы избежать погрешностей от вихреобразования, располагается датчик (трубка Прандтля). Если по условиям размещения подача воздуха в 3 производится под углом, то рекомендуется применение спрямляющей решетки. Диаметр воздуховода определяется из условия получения скоростей и давлений, достаточных для точного измерения их микроманометрами. Верхний предел скорости при этом примерно 18 м/с (йд =20 мм вод. ст.), нижний — примерно 6 м/с (йд = 2 мм вод. ст.). Диаметры измерительного воздуховода, в зависимости от подачи воздуха, приведены на рис. 5.12.
Измерительный воздуховод тарируется таким образом, чтобы получить зависимость йд в центре его сечения от подачи Q. Для этого воздуховод разбивается на пять кольцевых сечений равной площади и в точках, отстоящих от центра на 0,158; 0,274; 0,353; 0,418, 0,475 диаметра измерительного воздуховода, и по обе стороны одного диаметра производятся десять измерений давления йд.
Скорости определяются из (5.28):
V - = 1,41 \/Лд/7в',
(5.31)
где 7в определяется по (5.21); йд выражено в паскалях.
Средняя скорость
г ср = 0,1 (Vj + V2 + . . . + Vio).
В случае, если имеет место значительная (> 1,2) неравномерность скоростей по сечению, измерения проводятся по двум взаимно перпендикулярным диаметрам (20 измерений). В этом случае
vcp = 0,05(Vi + v2 + ... + v20).
Подача воздуха через воздуховод, м3/с,
Q = vcpS, (5.32)
где S — площадь сечения воздуховода, м2.
При тарировании измеряется также скорость уц в центре сечения (или вообще в точке, где она в дальнейшем будет измеряться) и строится тарировочная кривая Q =f(yn).
При определении подачи воздуха, обеспечиваемого системой само-вентиляции после запуска ИЭМ, вентилятор 5 приводится во вращение со скоростью, при которой в камере 1 устанавливается давление, равное атмосферному (показания микроманометра 2 на рис. 5.11, измеряющего разность давлений в 7, и атмосферного равны нулю).
При этом режиме подача Q через воздуховод 3 точно равна подаче через ЭМ в нормальных условиях работы вентиляционной системы.
Метод измерительного коллектора менее точен, однако более преют. По этому методу определяется подача без компенсации измерительного перепада путем измерения перепада статического давления (разряжения) hc на входном коллекторе (сопле) (рис. 5.13).
Рис. 5.13. Измерение подачи воздуха через ЭМ с помощью измерительного коллектора:
1 — патрубок; 2 — измерительный коллектор; 3 — микроманометр; ТЭцх — диаметр входного вентиляционного отверстия ЭМ
Подача
Q =КОП 1,41 (5-33)
где Kon -- опытный коэффициент подачи, определяемый путем тарирования (например, с помощью герметичной камеры).
Применение указанных выше устройств не вызывает существенного уменьшения подачи; точность его определения составляет ± 5%.
5.5.6. Вентиляционные испытания ЭМ с принудительной вентиляцией. Испытания заключаются в определении зависимости статического давления на входе в ЭМ от расхода воздуха (кривая Q—h ’’подача-давление”) и одновременно в установлении связи между подачей и давлением воздуха в какой-либо легкодоступной в эксплуатации точке ЭМ, например в полости над коллектором.
Первое из этих испытаний необходимо для подбора вентилятора; второе для контроля в эксплуатации количества воздуха, которое получает ЭМ и соответствующей регулировки системы воздухоснаб-жения (например, перераспределения воздуха между параллельно питающимися ЭМ).
Для определения кривой Q-h используются установки по рис. 5.11, но без камеры 7. Воздуховод 3 плотно присоединяется при этом через патрубок с плавно увеличивающимся сечением к входному вентиляционному фланцу ЭМ. Одновременно с измерением давления на входе с помощью трубки достаточной длины (диаметр отверстия примерно 1 мм) измеряется давление внутри ЭМ в точке, защищенной от воздействия струи входящего воздуха. Это условие проверяется путем небольших перемещений контрольной трубки; при этом не должно быть значительных изменений давления, измеренного с помощью трубки. Координаты выбранной точки и давление указываются в инструкции по эксплуатации.
5.5.7. Расход воды при водяном охлаждении. Необходимое количество воды л/с с учетом плотности увд = 1000 кг/м3 и удельной теплоемкости С^д “4,18 кДж/кг • К составляет
Овд = Р/4,18твд, (5.34)
где р — потери, кВт; твд — превышение температуры воды, К.
Значение твд обычно составляет 2—5 °C и для его измерения должны применяться термометры с ценой деления 0,1 °C.
Для измерения расхода и давления воды применяется стандартная аппаратура: расходомеры, манометры, дифманометры и т. д. [5.1]. При небольшом расходе может применяться мерный бак и секундомер.
Глава шестая
ТОКОСЪЕМ И КОММУТАЦИЯ
6.1. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В УЗЛАХ ТОКОСЪЕМА
В настоящей главе кратко рассмотрены процессы прохождения тока через скользящий контакт (СК) в узлах токосъема (УТ): щетки — контактное кольцо и щетки — коллектор ЭМ.
Рассмотрены процессы коммутации — переключения и реверсирования тока в секциях якоря, которые определяют работу УТ в коллекторных ЭМ постоянного и переменного тока, а также методы испытания и наладки этих узлов.
Процессы в СК зависят от ряда электрических факторов: индуктивности цепей, в которых он работает, плотности тока под щеткой, а для коллекторных ЭМ, кроме того, и от напряжения между пластинами коллектора и сбалансированности реактивной и коммутирующей ЭДС в секциях якоря, замкнутых щеткой.
Необходимо, однако, подчеркнуть, что по мере увеличения частоты вращения и окружной скорости рабочих поверхностей контактных колец и коллекторов для работы СК решающее значение приобретают механические факторы: отклонение формы поверхности от цилиндрической, качество поверхности (в том числе и качество продорожки), уровень вибрации якоря, щита и траверсы щеткодержателей [6.7].
Следует отметить также существенное влияние на трение и износ контактных поверхностей в СК химического состава, температуры и влажности воздуха, охлаждающего УТ.
Из сказанного выше видно, что наладка коммутации относится к числу наиболее сложных экспериментальных работ, выполняемых испытательными станциями. Несмотря на появление ряда специальных приборов, облегчающих ее выполнение, успех в этой работе, особенно при создании новых ЭМ, зависит от опыта испытательного персонала и понимания им сути физических процессов в СК.
6.1.1. Передача тока через СК. При соприкосновении двух плоских токопроводящих поверхностей действительный контакт имеет место лишь между отдельными выступами, площадь которых составляет незначительную часть (менее 1/100) общей площади. Площадь действительного контакта зависит от упругих свойств, чистоты поверхности, удельного нажатия, наличия оксидных пленок и т. д. [6.1.2].
Действительная плотность тока в точках контакта во много раз превышает среднюю. Передача тока происходит за счет электронной проводимости без взаимного переноса материала электродов и их разрушения электрозрозионными процессами. Износ контактирующих поверхностей происходит из-за термических факторов (раскаливания и сгорания отдельных выступов при чрезмерной плотности тока), электрохимических факторов, связанных с проникновением химиче-
Рис. 6.1. Контактные зоны под щеткой
ски активных веществ из окружающей среды, и механического износа (трения) при взаимном перемещении поверхностей. Механизм контактирования объясняет, в частности, известный факт уменьшения силы трения между щеткой и коллектором при пропускании тока. Нагрев контактных выступов уменьшает их прочность и необходимое для разрушения усилие.
При работе щетки на вращающемся коллекторе вследствие неизбежной вибрации и отклонения формы поверхности коллектора от цилиндрической кривизна поверхности щетки получается меньшей, чем у коллектора (рис. 6.1). Поверхность соприкосновения при этом можно разделить на две зоны: зону непосредственного контактирования (ЗНК), площадь или тангенциальная ширина которой тем меньше, чем сильнее вибрация щетки (при очень сильной вибрации ЗНК может периодически исчезать), и клиновидный воздушный зазор, в который переходит ЗНК. При вращении коллектора сила трения поворачивает (опрокидывает) щетку таким образом, что ЗНК передвигается на набегающий край, а клиновидный зазор расширяется в направлении к сбегающему краю щетки. У нормально работающих ЭМ под сбегающим краем щетки он равен примерно 4—10 мкм.
Факт более устойчивого контактирования щеток на набегающем крае используется при наладке коммутации. Следует отметить, что сказанное выше справедливо и для торцевых коллекторов.
Прохождение тока через начальный участок клиновидного зазора возможно через проводящие ток продукты износа СК: угольную и медную пыль. При достаточной плотности тока пылевые частицы могут сгорать со слабым искрением под щеткой. Этот процесс, однако, не связан с электроэрозией электродов, в связи с чем эту пылевую зону (ПЗ) условно включим в ЗНК и будем называть зоной устойчивого контактирования. Следует отметить, что зоны не имеют резко очерченных границ и при вибрации щетки перемещаются (плавают) в тангенциальном направлении.
6.1.2. Газоразрядные процессы. Прохождение тока через зазор под сбегающим краем щетки возможно только в виде искрового или более мощного дугового газоразрядного процесса (ГРП).
При искровой форме токи относительно малы, напряжения велики. Дуговая форма соответствует более интенсивной ионизации зазора и протекает при относительно больших токах и низких напряжениях (малом падении напряжения у катода).
В случае ГРП под щеткой имеются ввиду микродуговые ГРП весьма малой мощности. Однако в связи с весьма высокой коллекторной частотой повторения импульсов до десятков килогерц и высокой плотностью тока в катодной точке эти ГРП способны вызывать сильную электроэрозию щеток и коллектора.
Для возникновения ГРП в находящемся в зазоре газе (смесь воздуха, проводящей пыли, паров материала электродов) должна произойти начальная ионизация.
Причиной ионизации могут быть эмиссия электронов раскаленной контактной точкой и последующий разрыв контакта из-за вибрации щетки, сопровождающейся ’’дугой подъема”, а также появление высоких градиентов напряжения (при малых зазорах), обусловленных импульсом напряжения самоиндукции секций при разрыве тока на сбегающем крае щетки.
Первая причина (механическая) характерна при несовершенной работе щеток, вторая (электрическая) — при неотлаженном процессе коммутации.
ГРП вызывают взаимный перенос материала катода и анода и разрушение — электрическую эрозию их поверхности; хотя общими закономерностями такого переноса является перенос материала катода на анод при искровой и материала анода на катод при дуговой форме ГРП, электроэрозионные процессы в СК в сильной степени зависят от материала контактной пары щетка—коллектор.
ГРП имеют колебательный характер со спектром частот напряжений на электродах в диапазоне 0,01—1000 МГц и сопровождаются электромагнитным излучением в виде свечения (искрения) с частотой примерно 1014 Гц и радиопомех (гл. 8).
При отсутствии процессов электроэрозии (или весьма слабой степени их) коллектор имеет глада ую блестящую поверхность, покрытую ’’политурой”. Щетки имеют зеркальную контактную поверхность.
Политура представляет собой тонкую пленку закиси меди и втертых в поверхность коллектора частиц графита. Она играет существенную роль в работе скользящего контакта. С ее помощью (при наличии влаги в окружающем машину воздухе) образуется жидкостная пленка, снижающая трение. Она влияет также на падение напряжения между щеткой и коллектором и обусловливает его зависимость от полярности.
При наличии эрозионных процессов на сбегающих краях коллекторных пластин появляются черные матовые полоски, а при брл^е сильной степени эрозионных процессов черные матовые пятна — отпечатки щеток на поверхности пластин и контактных колец. Эти полоски и отпечатки (подгары) образуются за счет распыления материала щет
ки и переноса его на коллектор. На поверхности пластин образуются устойчивые соединения материала пластин с углем, содержащимся в щетках, которые не смываются растворителями (бензином). Политура при этом частично (в местах подгаров) разрушается, что вызывает увеличение коэффициента трения в этих местах и повышенный износ щеток. Это обстоятельство приводит также к усилению вибрации щеток, ухудшению контакта их с коллектором и прогрессирующему ухудшению коммутации.
Эрозия щеток проявляется в виде матовых поперечных полос на блестящей контактной поверхности.
При более сильных эрозионных процессах может иметь место перенос меди на контактную и даже боковую поверхность щетки, оплавление краев пластин, растрескивание краев щетки и т. д. При таких явлениях работа машины невозможна даже в кратковременных режимах.
6.1.3. Оценка качества коммутации. Для оценки качества коммутации используется то обстоятельство, что ГРП сопровождаются излучением света, причем существует связь между интенсивностью ГРП и интенсивностью (яркостью, количеством светящихся точек и т. п.) свечения (искрения).
Классификация степеней искрения (1, 1 i/4, 1 1/2, 2, 3) приведена в ГОСТ 183-74 (табл. 4) и СТ СЭВ 1346-78. В основу классификации положены интенсивность искрения и состояние поверхности коллектора и щеток. Степень искрения и состояние коллектора и щеток проверяются по истечении времени, необходимого для достижения практически установившейся температуры, но не менее 2 ч для ЭМ мощностью до 100 кВт, 4ч — для мощности 100—300 кВт, 8ч — для 300—1000 кВт и 16 ч — свыше 1000 кВт.
Следует подчеркнуть, что визуальная оценка состояния поверхности коллектора в определенной мере субъективна и зависит от случайных факторов (например, характера освещенности).
Предусмотренная ГОСТ 183-74 промывка поверхности коллектора бензином не исключает полностью ошибок в этой оценке. Опыт применения визуальных методов оценки качества коммутации — степени искрения — говорит о том, что не всякое почернение пластин коллектора является свидетельством недопустимого искрения. Так, например, поперечные черные риски на коллекторной поверхности являются результатом начальной фазы образования политуры и вполне допустимы. Следует подчеркнуть, что при высоком использовании современных ЭМ и напряженной коммутации почернение краев пластин и матовые полосы на контактной поверхности щеток в ряде случаев неизбежны (недопустимы хаотически расположенные на коллекторе почернения краев пластин — см. п. 6.7.3).
Главным критерием качества коммутации (установленным МЭК) является надежное выполнение ЭМ ее рабочих функций, т. е. стабиль-188
ность степени искрения при работе ЭМ по рабочему циклу, установленному ТУ на ЭМ (например, в течение приведенного выше времени, установленного ГОСТ 183-74). Внедрение приборов количественной оценки коммутации (п. 6.7.7) становится все более необходимым.
6.2. КОММУТАЦИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
ПОСТОЯННОГО ТОКА
Основное условие безыскровой работы заключается в том, чтобы к моменту, когда сбегающая кромка коллекторной пластины, выходящей из-под щетки, покидает зону устойчивого контакта, ток между этой пластиной и щеткой обращался бы в нуль. В этом случае в зоне газового разряда нет разрыва тока и невозможны перенапряжения, вызывающие ГРП.
Сформулированное выше является также условием того, чтобы к моменту, когда прекращается соприкосновение сбегающей пластины с зоной устойчивого контакта, был бы полностью закончен процесс реверсирования тока в секции. Если это условие не будет соблюдено, то будет иметь место разрыв тока между пластиной и щеткой и принудительное, почти мгновенное, окончание процесса реверсирования тока в секциях (см. 6.2, 6). Самоиндукция секций обусловливает в этом случае появление импульсных перенапряжений [6.2, 3].
6.2.1. Изменение тока в секции и в пластинах. На рис. 6.2, а приведен график изменения токов, текущих через коллекторные пластины 77н и Лс, 1ПД1, 1п>с (’’набегающий” и ’’сбегающий” соответственно), и тока включенной между ними секции обмотки /с за период коммутации Тк, в течение которого пластины замкнуты щеткой, имеющей ширину (при постоянной частоте вращения на графике можно откладывать вместо Гк).
График на рис. 6.2, а соответствует случаю, когда в секции, замкнутой щеткой, не возникает ЭДС самоиндукции eR. Такой случай может иметь место при очень медленном вращении якоря, либо если приняты меры для введения в секцию коммутирующей ЭДС вращения ек, равной и противоположной ЭДС самоиндукции. Кроме того, рис. 6.2, а соответствует случаю, когда сопротивление секции Rc (точнее, отношение RjLQ, где Lc — коэффициент самоиндукции) настолько мало, что им можно пренебречь. В этом случае имеет место ’’прямолинейная” коммутация, когда токи inii, znc пропорциональны площади соприкосновения пластин со щеткой и плотность тока под щеткой постоянна. Как видно из рис. 6.2, а, плотность тока на набегающем и сбегающем краях щетки, когда она перекрывает пластину на ширине Д&, т. е. отношения /ПН/Д& и in jbb соответственно равны tgaH и tgac.
Наличие самоиндукции секций и ЭДС eR замедляет процесс реверсирования тока, что приводит к замедленной коммутации (рис. 6.2, б,
Рис. 6.2. Изменение тока в секции, замкнутой щеткой:
а — "прямолинейная коммутация”; б - различные формы кривой тока в КЗ секции; 1 - замедленная коммутация (недокоммутация); 2 — ускоренная коммутация со ’’ступенью малого тока” (без разрыва тока на сбегающем краю щетки) ; 3 — сильно ускоренная коммутация (перекоммутация); в — влияние сопротивления секции на форму тока; г - влияние неодинаковых сопротивлений секций в случае искрения пластины, связанной с секцией С2; д - влияние неодинаковых сопротивлений секций в случае искрения пластины, связанной с секцией С1
кривая 7), характеризующейся повышенной токовой нагрузкой сбегающего края щетки. Разница между действительным током в секции и током в ней при прямолинейной коммутации называется добавочным током коммутации 1к>д. Этот ток в отличие от рабочего тока 1Я, текущего вдоль шетки, замыкается поперек щетки, вызывая перегрузку одного ее края и разгрузку другого. Как видно из рис. 6.2, б, на сбегающем краю щетки может в этом случае иметь место разрыв тока и весьма высокая плотность тока (ас~90°).
При разрыве тока освобождается запасенная в магнитном поле секции энергия ZczK2jtt/2, вызывающая импульс напряжения и ГРП.
Очевидно, что для обеспечения безыскровой работы, в соответствии с сформулированным выше условием, процесс коммутации должен
быть ускорен. Ускорение достигается с помощью внешнего магнитного поля, например поля добавочных полюсов, индуктирующего в секциях, замкнутых щеткой, так называемую коммутирующую ЭДС ек, направленную против реактивной ЭДС.
Если ек будет точно компенсировать реактивную ЭДС eR и сопротивление секций будет очень мало, то получается прямолинейная коммутация. Прямолинейная коммутация не означает, однако, безыскровую коммутацию, так как равенство плотностей тока на набегающем и сбегающем краях при существенно различных контактных условиях не гарантирует отсутствие искрения. Ток между сбегающей пластиной и щеткой при прямолинейной коммутации существует до последнего момента коммутации и его разрыв при неполностью идентичных условиях коммутации отдельных секций всегда возможен.
Для получения безыскровой коммутации за счет усиления ек стремятся к еще большему ускорению процесса, при котором можно получить форму тока, соответствующую кривой 2 на рис. 6.2, б. При этом' плотность тока на сбегающем краю щетки обращается в нуль. В кривой тока секции образуется при этом ’’ступень малого тока”, т. е. пологий участок в конце периода коммутации. Предел ускорению процесса коммутации ставит повышенная плотность тока на набегающем краю щетки (перекоммутация), которая может привести к искрению набегающего края, особенно при повышенном уровне вибрации щетки. Кроме того, если слишком ускорить коммутацию, то ек вызывает в КЗ секции добавочный ток коммутации обратного знака. Разрыв этого тока на сбегающем краю щетки также вызывает искрение (рис. 6.2, б, кривая 5). Такой случай может иметь место при неодинаковых сопротивлениях секций стержневой обмотки вследствие некачественной пайки стержней и уравнительных соединений с коллектором и между собой. Сопротивление секции сказывается в увеличении плотности тока на сбегающем и набегающем краях щетки (рис. 6.2, в). Если для секции С1 с минимальным сопротивлением коммутация близка к безыскровой, то для секции С2 с максимальным сопротивлением (рис. 6.2, г) плотность тока на сбегающем краю будет увеличенной (угол а^) и мо“ жет иметь место искрение. Если ускорить коммутацию так, чтобы для секций С2 появилась ступень малого тока, то для секций С1 будет иметь место перекоммутация и искрение на пластинах, связанных с этой секцией (рис. 6.2, д).
6.2.2. Прямолинейная коммутация. Понятие процесса прямолинейной коммутации (ПК), характеризующейся постоянной скоростью изменения тока в замкнутой щеткой секции, дает четкие исходные положения для расчета и настройки коммутации.
Среднее значение реактивной ЭДС секции при ПК, В,
eR = Lcdijdt = Lc2iJT^ = 2Xwc^W-10"8, (6Л)
где Тк = бщ/рк; X — магнитная проводимость для потока рассеяния 191
секции при длине пакета стали 1 см; рк — окружная скорость коллектора, см/с; wc — число витков в секции; А — линейная нагрузка якоря, А/см; v — окружная скорость якоря, см/с; I — длина пакета стали, см; Л = 5 -г Ю, и она тем больше, чем больше отношение h^Jb^ (йп и Ьп — высота и ширина паза).
Если бы удалось обеспечить условие ек = -eR для каждого момента времени коммутации и для каждой секции, то не было бы ограничения мощности ЭМ постоянного тока по коммутации.
Однако в реальной ЭМ, вследствие ряда конструктивных (размещения обмотки в пазах) и технологических причин (механической не-симметрии, разницы в сопротивлениях секции и т. п.) создаются неодинаковые условия коммутации отдельных секций и, следовательно, не может быть получена одинаково совершенная компенсация eR для каждой секции обмотки якоря. В результате имеет место остаточная ЭДС Дед, способная вызывать искрение и ограничивающая максимальный допустимый ток якоря — ток искрения /и. Чем меньше отношение Двд/ед, тем выше степень компенсации (/— teR/eR) и тем выше коммутационное совершенство ЭМ. Возможность достижения высоких степеней компенсации, близких к 1, зависит от коммутационных свойств обмоток и щеток, параметров коммутирующего поля, технологических причин.
Индукция под дополнительным полюсом, Тл,
Вд>п = ХЛ . 10-4. (6.2)
6.2.3. Коммутационные свойства обмоток. Они оцениваются значением eR, относительным изменением этой величины в процессе коммутации, стабильностью коммутационных параметров (индуктивности секций). Значение eR в первую очередь зависит от числа витков в секции, связанного в свою очередь с напряжением между пластинами коллектора.
При размещении обмоток в пазах ЭДС eR секций зависит уже не только от самоиндукции, но и от взаимной индукции по отношению к другим коммутирующим секциям, стороны которых лежат в тех же пазах. Количество замкнутых щеткой секций, лежащих в одном пазу 0, периодически увеличивается от нуля до и затем снова уменьшается до нуля. Соответственно по ступенчатой кривой изменяется общий объем тока КЗ секций, суммарный поток рассеяния паза и eR.
Очевидно, что придать такой же характер изменения величине ек невозможно. Она изменяется во времени по плавной кривой, соответствующей средним значениям eR. В результате появляется составляющая некомпенсированной ЭДС Двд, изменяющаяся во времени с коллекторной частотой.
расположение секций в пазах приводит также к различию их конечных имеющих место в конце процесса коммутации индуктивностей.
Для секций, выходящих из коммутации, при наличии в пазах других замкнутых щеткой секций, вследствие магнитной связи между ними имеет место демпфирование быстрых изменений потока рассеяния в момент разрыва щеткой добавочного тока коммутации (за счет индуцирования токов в секция, замкнутых щеткой), уменьшение индуктивности и импульса напряжения между щеткой и пластиной. Для секции, выходящей из зоны коммутации последней (в пазу), это не имеет места, что создает ухудшенные условия коммутации этой секции. Такая неидентичность проявляется часто в виде почернения пластин, расположенных на расстоянии К/Z друг от друга. Если с целью устранения этого явления усилить ек, то может ухудшиться коммутация других секций (перекоммутация). Для устранения этого явления могут применяться обмотки, у которых последняя секция (для нереверсивных ЭМ) или первая и последняя секции в пазу (для реверсивных) имеют меньшее число витков.
Конечная индуктивность секций зависит от степени магнитной связи их с замкнутыми щеткой секциями того же паза и от степени магнитной связи с секциями, замкнутыми щетками другой полярности. В то время как первые связи должны быть по возможности сильными и одинаковыми для всех секций, вторые должны быть по возможности слабыми.
Первое условие зависит от типа и схемы обмотки, второе, главным образом, от укорочения шага. Особенно высокими коммутационными свойствами обладают ступенчатые обмотки, у которых выравниваются коммутационные условия для всех секций, а также петлевые обмотки с полным числом уравнительных соединений, лягушачьи обмотки и обмотки с параллельными секциями [0.9, 6.3].
Существенным фактором является также реакция обмотки на возможный местный дефект коллекторной поверхности, приводящий к периодическому изменению нагрузки отдельных бракетов щеткодержателей. При этом периодически изменяется ток в уравнительных соединениях. Для того чтобы этот процесс не сопровождался ухудшением коммутации, индуктивность уравнительных соединений должна быть минимальной. Для этой цели лягушачья обмотка (у которой секции волновой обмотки, обладающие заметной индуктивностью, играют роль уравнительных соединений) иногда снабжается уравнительными соединениями со стороны коллектора.
Следует иметь в виду, что в многоходовых обмотках, у которых с соседние пластины коллектора принадлежат к разным ветвям обмотки, между этими пластинами могут появляться значительные напряжения, индуцированные полем главных или добавочных полюсов, ухудшающие коммутацию. Эти обмотки, особенно при неполном числе уравнительных соединений, особо чувствительны к механическим дефектам (дефектам коллекторной поверхности, вибрации щеток и т. п.), так как они приводят к мгновенному перераспределению тока по 193
параллельным ветвям обмотки, что сопровождается импульсами напряжения и искрением. Характерно, что при этом может наблюдаться искрение и появление следов эрозии под серединой щетки.
6.2.4. Значение индукции коммутирующего поля и формы ее кривой. Поскольку eR = /я, необходимо, чтобы выполнялось условие ек = /я. В случае применения добавочных полюсов (ДП) это достигается за счет возбуждения этих полюсов током якоря и отсутствия насыщения в магнитной цепи.
Условие ек = /я, однако, может нарушаться при больших токах вследствие насыщения стальных участков магнитопровода, по которому замыкается поток ДП, и запаздывания этого потока при быстрых изменениях /я. Причиной такого запаздывания являются токи, индуцируемые в массивных частях магнитопровода и в сердечнике ДП при изменениях его потока. Появляющаяся в результате ЭДС ^eR ограничивает наибольший допустимый по искрению ток якоря, а при нестационарных режимах может приводить к повреждению УТ вплоть до появления кругового огня.
Для уменьшения влияния насыщения (спрямления характеристики намагничивания) и уменьшения запаздывания потока ДП увеличивается МДС обмотки и одновременно (для сохранения необходимого значения потока) увеличивается воздушный зазор. Поскольку увеличение воздушного зазора между якорем и наконечником ДП сверх определенного значения нежелательно, так как в коммутационную зону начинает проникать поле главных полюсов, с помощью немагнитной прокладки между магнитопроводом и ДП создается второй воздушный зазор.
Если эти меры недостаточны, например для электродвигателей, работающих при ударных нагрузках, электродвигателей постоянного тока, работающих от пульсирующего напряжения (с питанием от выпрямителей и т. п., см. § 1.3), то применяются шихтованный магнитопровод и сердечник ДП.
Для уменьшения запаздывания применяются также реакторы (индуктивные шунты), включаемые параллельно обмоткам ДП [6.17]. Для создания оптимального коммутационного поля в крупных приводах ЭМ возможно применение систем автоматического корректирования МДС обмотки ДП-
Ступенчатый характер изменения ек во времени накладывает определенные условия на форму коммутирующего поля (особенно вблизи сбегающего края) и тем самым на форму наконечников добавочных полюсов.
Форма наконечников ДП играет особо существенную роль при многоходовых обмотках с широкими щетками. Для простых обмоток и при относительно узкой щетке форма наконечника ДП, по-видимому, имеет меньшее значение, чем ширина наконечника и размер воздушного зазора между якорем и ДП- Обязательным является, однако, такой 194
суммарный (интегральный) эффект действия ек, чтобы к моменту выхода секции (пластины) из зоны непосредственного контакта не-скоммутированный ток был бы достаточно мал.
Следует также отметить возможность колебания поля ДП и значения ек (особенно при малом зазоре между наконечником и якорем и при узком наконечнике) вследствие изменения проводимости, обусловленной наличием зубцов якоря, что нежелательно.
Степень согласования формы кривых eR и ек в существенной мере зависит от ширины щетки.
С точки зрения уменьшения длины коллектора выгодно иметь по возможности широкую щетку, однако при этом расширяется коммутационная зона и ее края могут попадать под воздействие поля ГП, что недопустимо. Увеличение удлиняет период коммутации, что уменьшает eRi однако рост числа перекрытых щеткой пластин Р и числа одновременно коммутирующих секций в пазу примерно во столько же раз увеличивает ее.
Однако при увеличении Р возрастает число ступеней в кривой eR при уменьшении высоты ступени AeR, что благоприятно для коммутации. Увеличение Ьщ обычно положительно сказывается на механической устойчивости контактирования. Дать оценку суммарного влияния всех указанных выше факторов можно только экспериментально.
В ЭМ без ДП можно улучшить коммутацию введением в коммутирующую секцию ЭДС вращения, индуцированной в этой секции магнитным потоком, проходящим между краем наконечника ГП и якорем. Для этой цели щетки сдвигаются с нейтрали по направлению вращения якоря у генераторов и против направления вращения у двигателей. Компенсация ЭДС eR в этом случае несовершенна и для получения удовлетворительной коммутации при различных токах якоря может потребоваться изменение сдвига щеток.
6.2.5. Коммутирующие свойства щеток. По причинам, изложенным выше, в реальных ЭМ всегда имеет место нескомпенсированная коммутирующим полем остаточная ЭДС &eR, изменяющаяся с частотой KnfbQ. Ограничение добавочных токов коммутации и искрения, вызванных этой ЭДС, зависит от коммутирующих свойств щеток.
При отклонении коммутации от прямолинейной, когда нарушается равенство плотностей тока под щеткой, падение напряжения между щеткой и сбегающей и набегающей пластинами становится различным. Разность этих двух напряжений всегда направлена так, чтобы выравнивать плотности тока. Она может рассматриваться как коммутирующая ЭДС, развиваемая щеткой. В случае замедленной коммутации зта ЭДС стремится ускорить процесс; в случае ускоренной — замедлить. Ее действие особо важно в стадии, непосредственно предшествующей разрыву цепи короткого замыкания секции. Коммутирующая ЭДС ек>щ может быть измерена (см. п. 6.8.6).
Хотя понятие коммутирующих свойств щетки шире понятия коммутирующей ЭДС, в первом приближении можно считать, что коммутирующие свойства тем выше, чем больше переходное падение напряжения в контакте щетка—коллектор. Этот параметр входит в число приводимых в стандартах и каталогах на щетки, что позволяет с учетом других стандартных параметров [6.9] провести первоначальный выбор марок щеток, которые желательно опробовать на ЭМ данного типа. В общем справедливо правило, согласно которому для ЭМ с высоким значением eR применяются щетки с большим переходным падением напряжения.
Прямым способом оценки коммутирующих свойств щеток является определение относительной ширины зоны безыскровой коммутации на типовой ЭМ [6.1].
Рекомендации по применению конкретных марок щеток приводятся в [6.9].
6.2.6. Круговой огонь. При работе ЭМ постоянного тока с напряжением на коллекторе > 200 В возможно возникновение мощной дуги, перебрасывающейся по коллектору, замыкающей щеткодержатели разной полярности и питающую сеть накоротко. Термическое действие такой дуги выводит обычно УТ из строя. Причиной кругового огня может быть загрязнение ’’дорожек” маслом, содержащим угольную пыль, и наличие заусенцев на краях пластин.
Другой причиной может быть сильное искрение с выбросом дуги из-под сбегающего края щетки при условии, что напряжения между пластинами вблизи этого края достигают 30—50 В. Такой режим может возникать в ЭМ без компенсационной обмотки при ударных токах КЗ (например, на тяговых двигателях при отрыве и обратном касании токосъемника и контактного провода, особенно в режимах большой скорости при ослабленном потоке возбуждения).
Для проверки стойкости тяговых электродвигателей, питаемых от контактной сети, к круговому огню проводится опыт включения вращающегося двигателя после краткого перерыва питания под напряжение с постепенным увеличением напряжения до значения, когда после включения возникает круговой огонь или (что лучше) его начальная фаза. При таких испытаниях подбираются индуктивные шунты и проверяются другие способы форсировки поля ДП и защиты от кругового огня. Эти испытания с целью уменьшения степени повреждения УТ проводятся с включением в цепь быстродействующей защиты, способной разорвать цепь питания за время, меньшее, чем время прохода коллекторной пластиной расстояния между щеткодержателями разной полярности, и системы гашения поля.
Аналогичным испытаниям могут подвергаться генераторы с постепенным повышением ударного тока КЗ.
6.3. ТОКОСЪЕМ ЧЕРЕЗ КОНТАКТНЫЕ КОЛЬЦА [6.4 ]
Хотя условия работы КК представляются облегченными (отсутствует eR, меньше вероятность деформации поверхности), существуют специфические обстоятельства, затрудняющие токосъем через КК. Они связаны с низким напряжением и большими токами, неизменной полярностью колец в цепях постоянного тока, наличием воздушной подушки, ухудшающей контактирование щеток при высоких скоростях вращения.
Наличие вибрации щеток приводит к тому, что в контакте имеют место ионный перенос материала электродов, возникающий при разрыве тока через контактирующие точки, и электроэрозия колец и щеток.
В практике эксплуатации ЭМ хорошо известны случаи появления черных отпечатков щетки в определенных местах КК, работающих в цепях обмоток возбуждения СГ, связанные с прохождением через КК токов КЗ, индуцированных в обмотке возбуждения обратно вращающимся полем при однофазной или несимметричной нагрузке СГ.
При работе КК в цепях обмоток возбуждения при малом числе параллельно работающих шеток, особенно в том случае, если они расположены по одну сторону КК, и при сильной их вибрации, при которой имеет место заметное изменение проводимости (отрыв щеток), высокая индуктивность этих обмоток создает импульсы напряжения, достаточные для возникновения ГРП.
Большие токи (в килоамперах) связаны с тем обстоятельством, что роторные обмотки, в цепях которых работают КК, обычно имеют малое число витков (по условиям механической прочности и использования объема). Вопросы равномерного распределения тока между большим числом щеток, работающих на КК, стоят поэтому весьма остро.
Неизменная полярность КК в цепях постоянного тока ставит также проблему выравнивания взносов КК разной полярности.
При медьсодержащих кольцах (в состав входят медь, бронза) и медно-графитовых щетках изнашивается соединенное с зажимом ’’минус” возбудителя анодное кольцо с направлением тока от кольца на щетку. Ионные процессы разрушают политуру и поверхность этого кольца. На катодном кольце с направлением тока от щетки на кольцо за счет переноса и внедрения в поверхность КК частиц углерода щетки образуется толстый слой политуры. Для выравнивания взносов применяется периодическая смена полярности КК.
Исследования, проведенные в этом направлении, показали, что существенное влияние на износ имеют материалы контактной пары щетка-кольцо, что позволило дать следующие рекомендации по выбору щеток с целью уменьшения износа контактной пары: для КК из бронзы или латуни - щетки 611М (61 ЮМ), ЭГ4; для стальных КК - щетки 611М для КК полярности ’’плюс” и ЭГ2АФ — для полярности ’’минус” [6-4].
При вращении КК воздух нагнетается в зазор между щеткой и КК. Создается воздушная подушка, стремящаяся поднять щетку и ухудшающая контактирование. Для устранения этого явления, которое становится заметным при окружных скоростях КК > 30 м/с, на поверхности КК рекомендуется выполнять винтовые канавки, а для особо быстроходных колец (ТГ) систему из двух канавок встречного направления, делящих поверхность КК на ромбовидные площадки.
Определенные успехи в улучшении работы УТ с КК (уменьшение износов, увеличение плотности тока) достигнуты за последнее время с помощью введения в щетки специальных пропиточных составов и применения специальных смазок-бальзамов с восстанавливающими свойствами, уменьшающими падение напряжения в оксидных пленках (политуре) [6.5].
6.4. ОБЕСПЕЧЕНИЕ НАДЕЖНОЙ РАБОТЫ
ЩЕТОЧНОГО АППАРАТА
6.4.1. Распределение тока между параллельно работающими щетками. Важную роль здесь играет канализация тока внутри УТ: равенство сопротивлений токоведущих цепей от зажимов ЭМ до щетки, в том числе низкие и стабильные переходные сопротивления в местах крепления шин друг к другу, наконечников щеточных токоподводов (канатиков) , крепление токоподвода к щетке и т. п.
Следует иметь в виду, что контактные сопротивления щетка—коллектор из-за отрицательного температурного сопротивления графита при нагреве уменьшаются. Поэтому при случайном увеличении тока через щетку и повышении ее температуры начинается неустойчивый процесс (термическая неустойчивость) постепенного увеличения тока через щетку и разгрузки параллельно работающих щеток, вплоть до выхода ее из строя. Процесс повторяется со следующей наиболее нагруженной щеткой, и так до выхода из строя всего УТ.
Для исключения термической неустойчивости система токоподвода должна иметь не только равные и стабильные сопротивления параллельных цепей, но и определенное минимальное сопротивление, стабилизирующее токораспределение (падение напряжения в токоподводах при номинальном токе примерно 0,3—0,7 переходного падения напряжения под щетками).
Система шин должна быть симметричной, причем для ЭМ с большими токами прокладка шин должна быть бифилярной, для того чтобы обеспечивать малое влияние МДС шин на магнитное поле в зазоре.
Щетки на КК желательно располагать попарно по диаметру, что несколько снижает влияние ’’оборотной” вибрации.
6.4.2. Система изоляции элементов узлов токосъема. В ней должна быть исключена возможность прохождения тока между обоймой щеткодержателя и щеткой при увеличении сопротивления заделки токопод-198
вода в тело щетки или в место крепления наконечника. Термическое действие таких ’’блуждающих” токов неоднократно было причиной аварии УТ. Для исключения этого явления обойма щеткодержателя должна быть изолирована от системы токоподвода. Чтобы предупредить прохождение тока через пружину щеткодержателя, его нажимной палец должен быть изолирован от щетки, а в случаях, когда применяются щетки без токоподвода и ток подводится через контактную накладку нажимного пальца, должен быть предусмотрен гибкий шунт большого сечения, исключающий прохождение тока через конструкцию щеткодержателя.
6.4.3. Расширение зоны устойчивого контактирования. Существенные успехи достигнуты здесь за счет применения разрезных щеток, т. ё. щеток, разделенных по ширине на две (и более) узкие щетки, имеющие возможность самостоятельного радиального перемещения в щеткодержателе под действием упругой демпфирующей прокладки. При такой конструкции щеток образуются два (и более) набегающих края, что расширяет ЗНК. Кроме того, при этом уменьшается значение eR, действующей между краями щеток:
В практике известно много примеров, когда применение разрезных сдвоенных щеток позволяло обеспечить удовлетворительную коммутацию крупных и быстроходных ЭМ постоянного тока. Следует иметь в виду, что в некоторых случаях применение более узких щеток с уменьшенным значением (3 ухудшает механические условия работы щеток. Применение большего числа параллельно работающих щеток ужесточает требования к системе токораспределения. Щеточные токопод-воды каждой половины щетки должны иметь по возможности большие сечения. Минимально возможная ширина половины щетки примерно 5 мм.
Следует упомянуть также о возможности применения составных щеток, у которых набегающая половина (нереверсивные ЭМ) имеет низкое переходное падение, а сбегающая — высокое, что позволяет улучшить коммутацию без увеличения электрических потерь под щеткой.
Значительные успехи достигнуты за последнее время в создании и применении волокнистых щеток [6.6], представляющих собой пакет упругих проводящих волокон, например угольных, объединенных в общей головке, к которой подводится ток. Такой пакет создает многоточечный контакт с большой суммарной площадью, что позволяет поднять среднюю плотность тока под щеткой на порядок и более.
6.4.4. Щеткодержатели. Динамика движения щетки. Щеткодержатели (ЩД) должны обеспечивать постоянство силы давления на щетки и направления действия згой силы при уменьшении высоты щетки (ее срабатывания). Трение между щеткой и обоймой ЩД и в шарнирах ЩД должно быть минимальным.
I Рис. 6.3. Силы, вызывающие тангенциаль-
IР* ную вибрацию щеток
I \ \ I Размеры окна радиального ЩД
I \ р \| должны соответствовать документа-
\ t ции. При больших зазорах между
\ щеткой и ЩД сила трения между
щеткой и коллектором опрокидыва-ет щетку на набегающий край, что ' X способствует западанию его в до-
рожки и возбуждению сильных поворотных и тангенциальных колебаний щетки с коллекторной частотой /к = *и/60.
Механизм таких колебаний, которые могут сопровождаться сильным шумом высокого тона и вибрацией, виден из рис. 6.3. Сила трения Рт>щ опрокидывает щетку на набегающий край и прижимает ее к обойме ЩД, что вызывает силу реакции ЩДРу>щ и упругую деформацию щетки. Плотность тока на набегающем краю при этом увеличивается и сила трения падает. Сила упругости щетки и давление нажимного пальца Рн поворачивает щетку в обратном направлении, что уменьшает плотность тока на набегающем краю и увеличивает силу трения, после чего процесс повторяется. Аналогичный процесс возникает на продоро-женном коллекторе за счет изменения силы трения при прохождении набегающего края щетки через дорожку. Боковая поверхность щетки при этом сильно изнашивается. Разумеется, имеются в виду весьма малые перемещения и сжатия щетки. Собственная частота таких колебаний щетки может быть того же порядка, что и частота возбуждающей силы или кратная ей, что способствует возбуждению сильных колебаний щетки.
Причиной таких колебаний, кроме чисто механических факторов (плохо выполненная продорожка, большой зазор между щеткой и обоймой ЩД и т. п.), может быть плохое качество материала щетки (для одной и той же марки), связанное с отклонениями в технологии ее изготовления (неоднородностью структуры, повышенной зольностью и т. п.), в результате чего щетка имеет повышенный и нестабильный коэффициент трения.
У нереверсивных ЭМ более устойчивое контактирование может быть достигнуто с помощью реактивных ЩД.
Что касается динамических свойств ЩД, то их не следует переоценивать. Обеспечить работоспособность УТ при несовершенной поверхности коллектора за счет динамических свойств системы щетка—ЩД нельзя. Ускорение щетки может создаваться только за счет уменьшения давления щетки на коллектор, вплоть до его исчезновения при отрыве
щетки, когда усилие пружины ЩД сообщает щетке максимальное ускорение в направлении к коллектору.
Если предположить, что отклонение поверхности коллектора от цилиндрической формы имеет характер синусоиды с числом полуволн 2т и с углом ад - 360/2т каждая, где 2т = 2 (биение), 2т = 3 и 2т (эллипс) и т. д. вплоть до значения 2т ~ К (дефект ’’коллекторная ступень”), то можно подсчитать амплитудное значение отклонения радиуса коллектора Д/?к,м такой синусоиды (от цилиндра), соответствующее отрыву щетки.
Результаты расчета для удельного давления пружины щеткодержателя на щетку 200 г/см2 и массы щетки 20 г приведены в табл. 6.1.
Из табл. 6.1 видны сильное влияние ад на ДЯК>М и недопустимость коллекторной ступени. Приведенный выше Приближенный расчет не учитывает упругость щеточного материала, улучшающую контактирование при небольших (доли микрометра) коллекторных ступенях.
Хотя ДКк>м = р, повышение удельного давления сопряжено с увеличением потерь и износа щеток и не может рассматриваться как средство компенсации несовершенной поверхности коллектора. Чем выше динамические свойства ЩД, тем больше показатель ’’крутизна дефекта” ДЛк>м/«д, при котором еще возможна удовлетворительная коммутация.
Динамические свойства щеткодержателей характеризуются собственной частотой системы щетка—ЩД которую желательно иметь по возможности высокой. Этому, однако, препятствует требование постоянства давления на щетку при ее срабатывании, что заставляет выбирать пружины с малой жесткостью, но с большим предварительным сжатием, превышающим допустимый износ щетки в 4—5 раз. Собственная частота системы щетка—ЩД имеет обычно порядок десятков герц [6.7].
Для улучшения динамических свойств ЩД применяется система с двумя пружинами, из которых одна (мягкая) действует на нажимной механизм и компенсирует износ щетки, а вторая (жесткая) между нажимным пальцем и щеткой спо-
собствует ее малым перемещениям с более высокой частотой, что в зна- Таблица 6.1
чительной мере компенсирует отрицательное влияние инерции нажимного механизма. Хорошими динамическими свойствами обладают ЩД с рулонной пружиной, упругость желобчатого А^к,М’ мКм град и» об/мин 600 1000 1500 3000 45 1500 540 240 60
поперечного сечения которой не за- 30 700 250 ПО 28
висит от высоты (износа) щетки. 10 80 30 13 3,2
Оценка динамических свойств ЩД 2 3 1 0,5 0,12
может быть выполнена либо путем
Рис. 6.4. Схема для сравнительной оценки динамических свойств щеткодержателей
установки двух ЩД на специальный КЗ коллектор, либо на ЭМ, для которой они предназначены. ЩД изолируются друг от друга, и через щетки и коллектор пропускается ток от аккумулятора (рис. 6.4). Оценка динамических свойств проводится по отношению переменной составляющей тока , измеренной с помощью чувствительного электронного вольтметра (ЭВ) или электронно-лучевым осциллографом (ЭО) на безындукционном шунте, к постоянной составляющей тока
/ /„ . Такая оценка дается как относительная для различных конструкций ЩД, частот вращения, марок щеток и т. д. Для хороших конструкций ЩД 4% (об испытаниях ЩД см. в СТ СЭВ
1377-78).
6.5. ТРЕБОВАНИЯ К ТЕХНОЛОГИИ
Технология изготовления и сборки ЭМ играет важнейшую роль в достижении требуемых коммутационных параметров и сохранении их в течение заданного ресурса (надежности).
Ниже приводятся основные вопросы, определяющие требования к технологии со стороны коммутации:
1. Обеспечение строгой цилиндричности поверхности коллектора, сохраняющей форму при действии механических и тепловых воздействий. Формовка и контроль состояния поверхности коллектора в процессе производства при воздействии механических (повышенной частоты вращения) и тепловых факторов, превышающих эксплуатационные, являются обязательными. Кромки пластин должны совпадать с осью коллектора. При сборке коллекторов с большим числом пластин их чередование должно проводиться с учетом их ширины (допуска), чтобы избежать нарастающего углового смещения оси пластин. При обточке коллектора должна быть обеспечена строгая соосность
Рис. 6.5. Про дорожка коллектора: а - нормально; б, в - недопустимо
его поверхности и рабочей поверхности цапф вала. Коллектор должен быть тщательно продорожен (рис. 6.5).
2. Пайка проводников обмотки к коллектору и между собой, исключающая недопустимую разницу в сопротивлении секций.
3. В пределах допусков должны быть следующие расстояния: между ГП и ДП и воздушные зазоры между ними и якорем, между бра-кетами щеткодержателей (ось бракетов должна быть параллельна оси ЭМ).
4. Размеры щеткодержателей должны соответствовать чертежу.
Перечисленные выше требования по существу являются требованиями полной симметрии ЭМ. Кроме того, должны быть обеспечены тщательная балансировка якоря и соосность опор. Для улучшения точности хода желательно применение упругого осевого нажатия на шарикоподшипники, устраняющего радиальный люфт (зазор) в них. Вибрация йсех элементов ЭМ, в особенности связанных с УТ, должна быть минимальной.
6.6. ОСОБЕННОСТИ КОММУТАЦИИ КОЛЛЕКТОРНЫХ
ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА [0.1,6.8,14,16]
В этих ЭМ кроме ЭДС eR, существующей только при вращении, поток возбуждения индуцирует в секциях обмотки якоря, замкнутых щеткой, трансформаторную ЭДС ет, которая при пуске и малых частотах вращения не может быть компенсирована коммутирующей ЭДС вращения ек.
Это обстоятельство, особенно для ЭМ с затяжным пуском при больших моментах на валу, требует применения щеток с высоким переходным падением напряжения и с высоким сопротивлением, ограничивающим поперечные токи КЗ до значений, не вызывающих прогрессирующего ухудшения политуры коллектора.
Наличие ет и необходимость совпадения не только значений, но и фаз ет и ек затрудняют компенсацию ЭДС в КЗ секции и достижение безыскровой коммутации ЭМ.
Поэтому применение щеток с высоким переходным падением напряжения необходимо и для коллекторных ЭМ с легким пуском (двигателей для вентиляторов, пылесосов, электроинструмента, универсальных двигателей и т. п.), тем более, что коммутирующая ЭДС создается в этих машинах сдвигом щеток.
Существуют, однако, обстоятельства, облегчающие коммутацию ЭМ^ переменного тока — периодическое прекращение ГРП и определенна^ степень деионизации зазора щетка—коллектор при прохождении токй через нуль, а также смена полярности щеток. В результате, даже при степени искрения до двух баллов, состояние коллектора и щеток остается вполне удовлетворительным, что подтверждается блестящей однородной политурой и зеркалом щеток.
6.7. ПРАКТИЧЕСКИЕ МЕТОДЫ ИССЛЕДОВАНИЯ
И НАЛАДКИ КОММУТАЦИИ
6.7.1. Подготовка узлов токосъема. Она включает в себя следующие работы.
Проверка отклонения радиуса поверхности коллектора Д7? проводится с помощью индикатора с ценой деления 1 мкм, имеющего на конце щупа насадку со сферической поверхностью. Якорь (ротор) при этом медленно поворачивается до полного оборота. При измерении на продо-роженном коллекторе радиус насадки должен быть по возможности большим, чтобы перемещение щупа при проходе дорожки было минимальным. Результаты измерения представляются в виде профилограммы, т. е. зависимости АЛ от угла поворота ротора; на профилограмме отмечаются точки с максимальным AR и максимальной крутизной а в виде дроби ДК/ а (6.44). Допустимые значения биения поверхности коллекторов и КК устанавливаются ОСТ 16.800.605-78 в зависимости от частоты вращения и диаметра коллектора. Это значение зависит не только от формы поверхности коллектора, но и от степени несоосности оси коллектора и цапф вала и определяется уровнем технологии изготовления ЭМ.
Местные дефекты с большой крутизной (« < 10°), в том числе поддающийся измерению дефект ’’коллекторная ступень”, недопустимы, так как они свидетельствуют о неудовлетворительной технологии изготовления коллекторов.
Указанные выше измерения Д7? проводятся на холодных и нагретых коллекторах. При изменении конструкции или материалов коллектора их следует производить несколько раз в процессе испытания, в частности после испытания на повышенную частоту вращения и перегрузку.
Ценную информацию о состоянии коллекторной поверхности при вращении ЭМ (наряду с наблюдением за состоянием) дает аппаратура, указанная в п. 6.7.7.
Проверка схемы обмотки и качества пайки (сварки} соединений стержневых обмоток проводится путем измерения падения напряжения между соседними пластинами Дмк, мВ, при пропускании через обмотку небольшого тока. Ток может подводиться через щупы, отстоящие друг от друга на определенное удобное число пластин и прижатые к нерабочей поверхности коллектора. Щетки при этом должны быть подняты. 204
Расстояние между щупами не играет при этом особой роли, однако оно Должно сохраняться неизменным при всех измерениях, выполняемых При одном полном обороте якоря. Ток может подводиться и через одну-две щетки, оставленные на двух соседних бракетах щеткодержателей, спиленных таким образом, чтобы их ширина была несколько менее коллекторного деления. Напряжение между соседними пластинами, расположенными между пластинами, к которым подводится ток, измеряется с помощью шупов и милливольтметра.
В случае, если схема обмотки правильна и места паек стержневых обмоток имеют одинаковые сопротивления, то в простых волновых обмотках без уравнительных соединений значения Днк одинаковы. Для более сложных обмоток (с уравнительными соединениями, многоходовых) значения Днк могут не быть одинаковыми, однако распределение этих значений должно точно повторяться при переносе точек питания (повороте якоря) на одно и то же число пластин. Отклонение от этой закономерности, ’’привязанное” к определенным пластинам, указывает на наличие дефектов. Измерение следует проводить на холодной и горячей обмотках.
Притирка щеток проводится в несколько приемов. Предварительная грубая обработка щеток проводится на приспособлении с диаметром абразивного цилиндра, равным диаметру коллектора.
Затем щетки притираются стеклянной шкуркой, которая в случае нереверсивной ЭМ протягивается под щеткой только в направлении вращения. Сначала применяется более грубая шкурка, а затем самая тонкая.
Пришлифовка шеток производится на холостом ходу машины до тех пор, пока не менее примерно 70% поверхности шеток будет представлять собой блестящее зеркало. При этом важно, чтобы блестящие участки были по всей ширине щетки, что указывает на отсутствие завала краев в результате неправильного направления шкурки при притирке.
Для машин с большим числом щеток для ускорения пришлифовки щеток иногда применяется метод шлифовки поверхности коллектора на ходу при наложенных щетках с помощью искусственной пемзы, не содержащей твердых включений, царапающих коллектор. Следует иметь в виду, что пыль от пемзы является проводящей и должна быть тщательно удалена из машины после окончания пришлифовки.
Вообще после притирки и пришлифовки щеток коллекторная полость и вся машина должны быть тщательно продуты для полного удаления щеточной пыли. Продувка должна быть направлена так, чтобы щеточная пыль не попадала внутрь машины. В тех случаях, где зто возможно, целесообразно защищать торцевую поверхность петушков коллектора и катушек возбуждения от попадания на них угольной пыли при притирке щеток экранами из электроизоляционного картона.
Проверка щеточной траверсы проводится по следующим параметрам на соответствие чертежам:
расстоянию между нижним краем щеткодержателя и коллекторам расстоянию между щетками разных полярностей (для проверки зта/х расстояний щетки должны быть притерты и пришлифованы к коллектору) . Для проверки симметрии расстановки щеток на коллектор под щетки плотно укладываются полоска бумаги и острым карандашом, на ней делается отметка вдоль одного и того же края щеток на всех щеточных болтах (бракетах) траверсы. Затем, вытащив бумагу и измерив расстояние между отметками, можно судить об отклонениях в расстоянии между щетками от полюсного деления по коллектору;
параллельности краев щеток и краев коллекторных пластин. Это условие легко проверяется путем поворота коллектора до совпадения края коллекторной пластины с краями шеток. При этом должно иметь место практически полное совпадение краев щеток и пластины. Если этого нет, то щетка, сбегающая последней, будет искрить. У машин с легкими условиями коммутации может быть допущена незначительная непараллельность щеток и пластин;
давлению на щетки, которое проверяется с помощью динамометра. Им поднимают нажимной палец щеткодержателя. Между щеткой и коллектором закладывается полоска тонкой бумаги. Отсчет динамометра берется в момент, когда полоска бумаги может быть свободно вытянута из-под щетки.
Более правильным является метод измерения давления, при котором динамометр измеряет давление на контактной поверхности щетки (для этого шеткодержатель должен быть установлен в приспособлении). Измерение проводится при медленном перемещении щетки вниз до заданной глубины погружения в щеткодержатель и затем в обратном направлении. При этом получаются два результата, даюшие возможность оценить силу трения между щеткой и обоймой щеткодержателя и в его деталях (шарнирах, оси, местах зацепления пружин и т. п.).
Установка нейтрали в ЭМ постоянного тока с ДП должна обеспечить строго перпендикулярное расположение электрической оси обмотки якоря (оси щеток) относительно оси ГП. Это можно проверить по отсутствию взаимной индукции между этими обмотками. С этой целью к двум щеткам разной полярности подключается милливольтметр (гальванометр) с двусторонней шкалой. Цепь якоря должна быть разомкнута, щетки тщательно притерты. Крепление траверсы щеткодержателей должно быть ослаблено лишь настолько, на сколько это требуется для небольшого поворота ее в обе стороны (постукиванием молотком через деревянный брусок). Включая и выключая небольшой ток, например от аккумулятора, в обмотке возбуждения и поворачивая траверсу, добиваются минимального (близкого к нулю) отклонения галь
ванометра. После закрепления траверсы опыт повторяется 2—3 раза после поворота якоря (в сторону вращения для нереверсивных ЭМ). \ Предполагается, что в процессе сборки и подготовки ЭМ к испытаниям (гл. 2) выполнены также все необходимые контрольные операции, кроме указанных выше, в том числе: измерены зазоры под ДП и^ГП, расстояние между наконечниками ДП и ГП, проверен уровень вибрации при тех же режимах и на той установке, на которой будет вертись отладка коммутации.
,6.7.2. Последовательность наладочных работ. Для машин постоянного тока с ДП наладку коммутации после выполнения работ по п. 6.7.1 следует начинать с опыта регулировки поля ДП, так называемого опыта подпитки и отпитки (ПО) обмотки ДП. Метод позволяет проводить не только оптимальную регулировку поля ДП, но и диагностировать причины, нарушающие коммутацию.
Предварительно, путем длительной работы при нагрузке, которая не вызывает сильного искрения, создается слой политуры на коллекторе. Это условие обязательно для машин с тяжелыми условиями коммутации. Для машин с легкими условиями коммутации этот слой может быть создан в процессе наладки коммутации, однако окончательная регулировка ДП должна быть сделана при наличии политуры на коллекторе.
Если опыт ПО позволяет получить удовлетворительную коммутацию, то остается только отрегулировать значения воздушных зазоров в магнитной цепи добавочного полюса в соответствии с данными опыта. Если же удовлетворительная коммутация в опыте не достигается, то необходимо исследовать, является ли зто результатом электрических или механических причин.
По характеру искрения можно установить причины искрения. Искрение из-за механических причин неустойчиво, отдельные светящиеся точки ’’перебегают” с места на место, появляются под различными щетками. При усилении поля ДП искрение не исчезает, а переходит со сбегающего края на набегающий.
Для того чтобы разделить механические и электрические причины, можно провести опыт ПО при пониженной на 25—30% частоте вращения и при соответственно повышенном на 25—30% токе. При этом eR остается неизменной и изменяются лишь механические условия коммутации. Если в этом опыте удается получить существенное улучшение коммутации, то следует устранить механические причины. Речь при этом может идти о состоянии коллекторной поверхности и уровне вибрации, который должен быть тщательно проконтролирован. (Заметим, что грубую оценку уровня вибрации щеток можно дать на выбеге при отсутствии напряжения на коллекторе при прикосновении ногтя к головке щетки.) Помощь в установлении диагноза могут дать наблюдения за коллекторной политурой и измерение • профиля коллектора на ходу.
Улучшение механических условий может быть достигнуто проточкой коллектора с предварительной формовкой коллектора или без нее^ балансировкой якоря на станке или в собственных подшипниках, в некоторых случаях сменой подшипников качения или переборкой подшипниковых узлов. /
Если после улучшения механических условий необходимое улучшение коммутации не достигается, то следует попробовать другие марки щеток, в том числе применить сдвоенные (разрезные) щетки, если это не заложено в конструкцию.
В том случае, когда в опыте ПО при сниженной скорости вращения после улучшения механических условий удовлетворительная коммутация не получается, необходимо исследовать, насколько правильно выбрана форма наконечника ДП, особенно его ширина, а также убедиться в отсутствии влияния поля ГП на коммутацию.
Вообще в тех случаях, когда наконечник добавочного полюса недостаточно широк, на краях зоны коммутации не может быть обеспечено нужное для всех режимов машины коммутирующее поле. Для установления этого факта проводится опыт ПО при пониженном напряжении (или КЗ для генератора), когда главное поле ослаблено. Вся серия опытов ПО проводится при одном положении щеточной траверсы. Если при этом достигается лучшая коммутация, то следует расширить наконечник добавочного полюса.
В тех случаях, когда плотность тока под щеткой это позволяет, можно попробовать сузить щетку, в случае если она перекрывает большое число (больше трех) коллекторных пластин. При этом может быть получено некоторое улучшение коммутации за счет сокращения ширины коммутационной зоны.
Если по опыту ПО в режиме пониженного напряжения установлено, что поток возбуждения мало влияет на коммутацию, то, учитывая сказанное в § 2.5 о форме кривой е#, можно попробовать несколько расширить щетку. Для проверки влияния этого фактора можно сдвинуть половину щеток одного бракета относительно другой половины (с соответствующей установкой нейтрали).
67.3. Анализ состояния коллектора. Значительную помощь при исследовании коммутации оказывает анализ состояния поверхности коллектора. Если в результате искрения на коллекторе появляются одна-две пластины с матовой почерневшей поверхностью, то зто указывает на механический дефект коллекторной поверхности, при котором в каком-либо месте ухудшается контакт щеток с коллектором. Таких пластин может быть и несколько, причем они располагаются в случайных местах, без определенной закономерности. В случае механического дефекта почернения бывают обычно очень сильными.
Такая же картина распределения матовых почерневших пластин получается и вследствие плохих паек между секцией и коллектором или между уравнительными соединениями и коллектором.
В машинах с высокой eR (порядка 8—10 В и более) при больших окружных скоростях коллектора влияние отклонений, обусловленных нарушениями технологии, например разницей сопротивлении мест паек, может приводить к почернению большой группы пластин.
I Если в результате искрения на коллекторе появляются матовые почерневшие пластины, расположенные с определенной закономерностью (обычно через столько пластин, сколько их приходится на паз без одной), то зто свидетельствует о наличии чисто электрической причины искрения — неудовлетворительной компенсации eR. При этом чернеют пластины, соединенные с крайней в пазу секцией, у которой условия коммутации тяжелее, так как она выходит из короткого замыкания последней. Такой характер почернения, называемый ’’зеброй”, может быть также следствием недостаточной коммутирующей способности щеток, причем не только за счет применения марки щеток, не соответствующей документации, но и за счет большого разброса параметров различных партий щеток одной марки.
Определенная закономерность распределения почерневших пластин позволяет сделать вывод о наличии электрических причин нарушения коммутации.
Наличие светлых полос на краях пластин вблизи дорожек указывает на ’’завал” краев при шлифовке.
Поверхность щеток должна быть зеркальной. Наличие матовых полос в середине контактной поверхности щеток и переломов (граней) зеркала свидетельствует механически неустойчивой их работе. Матовые полосы на краях щеток указывают на неудовлетворительную коммутацию. Выработка боковых плоскостей щетки, соприкасающихся с обоймой щеткодержателя, является следствием перемещения щетки при вибрации. При сильной вибрации износ боковой поверхности щетки придает ей форму ’’сапожка”.
Если описанные выше наладочные работы не привели к достижению удовлетворительной коммутации, то в задачу испытательного персонала входит подготовка совместно с техническим отделом предприятия предложений по радикальным конструктивно-технологическим мероприятиям, целесообразность которых устанавливается на основе опыта наладки.
6/7,4. Регулировка поля ДП методом подпитки-отпитки (ПО). Регулировка поля ДП этим методом производится за счет усиления (подпитка) и ослабления (отпитка) МДС обмотки ДП при одновременном наблюдении искрения (в опыте участвуют двое).
Для этой цели параллельно с обмотками ДП, которые выделяются в одну цепь, один конец которой должен быть заземлен, подключаются через сопротивление реверсирующий переключатель и амперметр, низковольтный генератор постоянного тока. Регулируя возбуждение последнего и переключая полярность, можно установить в обмотках ДП
Рис. 6.6. Схема опыта ПО
кроме рабочего тока/ трк ПО ± Azn требуемых значений и знака (рис. 6.6). Ослабить МДС обмотки ДП — Д<п можно и с помощью реостата.
Если по схеме ЭМ обмотки ДП включены по обе стороны якоря, то можно проводить опыт ПО на половине ДП (ГОСТ 10159-79), но при условии, что в нее входят все ДП одной полярности.
В ряде случаев целесообразно сохранение схемы соединений обмоток полюсов при больших токах (требования техники безопасности). Для проведения опыта ПО в этом случае следует наложить на ДП временные обмотки, через которые пропускается ток ПО.
Для таких способов регулирования поля при изменениях режима сохраняется автоматическая связь между током якоря и током ДП, что дает возможность проводить опыт без кратковременного сильного искрения, нарушающего политуру и поверхность щеток (по этой причине следует избегать отдельного питания обмотки ДП).
Установить направление тока Д/п можно по следующему правилу. Если, не меняя возбуждение генератора ПО, при протекании тока I по обмотке ДП переключить (реверсировать) полярность генератора, то больший ток является током отпитки —Д/п.
Обычно сначала пробуют усилить поле ДП. Если при этом коммутация улучшается, то по достижении наилучшей коммутации отсчитываются токи якоря / и подпитки + Д/П. Поле ДП продолжают усиливать до тех пор, пока не начнется ухудшение коммутации. В этот момент берется второй отсчет /, + Д/П. Обе точки в этом случае находятся в области подпитки.
Если при включении и усилении тока подпитки улучшения коммутации не происходит, то определяется точка/, +Д/П, при которой начинается ухудшение коммутации, после чего + Д/п уменьшается до нуля и реверсируется, т. е. превращается в ток отпитки —Д/п. Усиливая этот ток, добиваются ухудшения коммутации и снимают вторую точку /, —Д/п, лежащую уже в области ослабленного поля ДП.
Наконец, в случае, если даже минимальный ток подпитки ухудшает ^коммутацию, производится реверсирование тока ПО и обе точки снижаются в области отпитки.
При проведении опыта ПО, вследствие изменения падения напряжения на обмотке ДП и воздействия добавочных токов коммутации на поле возбуждения ЭМ, изменяется ее режим. Поскольку отсчеты I и Д?п берутся одновременно, это обстоятельство само по себе не существенно. Однако при испытаниях в двигательном режиме меняется также частота вращения. Поскольку для анализа условий коммутации желательно разделить влияние различных факторов и снять группу точек Aid I ПРИ постоянной частоте вращения, ее следует поддерживать воздействием на ток возбуждения. При контрольных испытаниях это не требуется и опыт ПО проводится при нагрузках и частотах вращения, оговоренных ТУ.
Определение точек /, Ain может проводиться по моменту, когда заданная степень искрения переходит в более сильную или наоборот, когда искрение от более сильного спадает до заданного. Второй способ несколько надежнее, но во всяком случае все точки одного опыта должны определяться одинаковым способом. Разумеется, что наиболее четко определяются точки опыта ПО в тех случаях, когда достигается безыскровая коммутация.
В тех случаях, когда при различных токах якоря достигаются различные наилучшие степени искрения (например, при 7НОМ достигается класс 1, а при оговоренном ТУ lmax ~ 1,5/ном — класс 1 1/2), следует каждый раз снимать две точки Дгп/7: одну при наилучшем достижимом классе и вторую, соответствующую классу коммутации, при наибольшем токе.
При снятии зоны следует ориентироваться на отдельные щетки, имеющие более узкую зону, т. е. более подверженные искрению. Следует иметь в виду, что резкой разницы в искрении отдельных щеток при снятии опыта подпитки не должно быть, так как зто указывает на недостаточную предварительную отладку машины, без чего опыт подпитки проводить не следует.
При снятии точек подпитки необходимо, кроме того, контролировать набегающие края щеток, хотя снятие зоны ведется в основном по сбегающим краям. Это можно сделать с помощью узкого стеклянного зеркальца на длинной ручке из изоляционного материала. Если при подпитке первыми начинают искрить набегающие края, зона ограничивается соответствующими значениями тока подпитки с указанием, что они сняты по набегающим краям. Опыт ПО следует вести на ЭМ, коллектор которой прогрет до рабочей температуры, причем для точности опыта отсчеты точек берут 2—3 раза.
Если при максимальных токах якоря отсутствует сильное искрение, опыт можно вести при любом направлении изменения тока якоря от
малого к большому и наоборот. Если же при больших токах якоря можно ожидать (при отсутствии тока ПО) сильное искрение, лучше снимать эти точки последними, с тем чтобы в случае ухудшения контакт-* ной поверхности щеток или коллектора не исказить остальные резулы татые
Результаты опыта ПО добавочных полюсов изображаются графически таким образом, что по оси абсцисс откладываются токи якоря,* а по оси ординат — значения тока подпитки и отпитки в процентах, отнесенные к соответствующему току якоря. Соединяя полученные таким образом точки для одного класса коммутации двумя кривыми (одной — для тока подпитки, другой — для тока отпитки или иначе: одной — для большего значения, другой — для меньшего значения тока подпитки или отпитки), получаем ограниченную этими кривыми зону наилучшей коммутации. Характер этой зоны (ее ширина, наклон средней линии, расстояние средней линии от оси абсцисс) позволяет получить общее представление о причинах, нарушающих коммутацию и произвести ее наладку. На рис. 6.7 изображены характерные зоны для определенных классов коммутации.
Поскольку искрение вызывается некомпенсированной частью eRi пропорциональной току якоря, ширина зоны уменьшается (рис« 6.7, а) с увеличением тока якоря и обращается в точку при каком-то определенном его значении, что означает невозможность получения данного класса коммутации при больших токах. Чем больше степень искрения, тем шире соответствующая ей зона.
Если дополнительные полюсы слабы, то этому случаю соответствует, как показано на рис. 6.7, б, зона 7, если они слишком сильны — зона 2.
Рис. 6.7. Зоны коммутации:
1 — поле ГП ослабляет поле ДП; 2 - поле ГП усиливает поле ДП
Насыщение магнитной цепи ДП приводит к изгибу средней линий зоны наверх при больших токах, что видно из рис. 6.7, в (ширина зоны при этом увеличивается за счет уменьшения влияния тока подпит1 ки на рост потока ДП). При закрытых пазах якоря и бандажах из стальной магнитной проволоки за счет потока рассеяния КЗ секций может иметь место изгиб средней линии зоны в область подпитки при малых токах якоря, исчезающий при увеличении тока якоря и насыщения указанных путей рассеяния (рис. 6.7, г).
Влияние магнитного поля главных полюсов может проявляться в двух направлениях и приводит к наклону средней линии зоны (рис. 6.7, д). Оно может быть результатом технологических несимметрий при установке полюсов и щеткодержателей, применения щеток слишком большой ширины, слишком узкого наконечника добавочного полюса. В определенной степени оно есть и у правильно собранной машины постоянного тока и сказывается в том, что средние линии зон наилучшей коммутации, снятые при различных токах возбуждения главных полюсов, несколько смещаются вверх или вниз. Разумеется, что наклон и изгиб средней линии зоны являются нежелательными, поскольку в этом случае регулировкой числа витков или зазора под добавочным полюсом можно добиться только частичного совмещения средней линии зоны с осью абсцисс.
Ширина зоны зависит, в первую очередь, от eR и от того, насколько совершенна ее компенсация. Она зависит также от механических свойств коммутирующего узла и свойств щеток. При eR = 1—2 В она имеет порядок 10—20%; при eR > 10 В она сужается до 0,5—1%. Очевидно, что с точки зрения эксплуатационной надежности желательно иметь по возможности широкую зону допустимого класса искрения.
Для однотипных машин сравнение ширин зоны наилучшей коммутации позволяет судить о механическом совершенстве коммутирующего узла, а сравнение ширин зоны какого-либо определенного (наилучшего достижимого) класса коммутации, полученного на одной и той же машине для щеток различных марок, является одним из основных критериев степени пригодности этой марки щетки для данного конкретного типа машины.
6.7.5. Регулировка воздушных зазоров в магнитной цепи добавочных полюсов. Расстояние между средней линией зоны наилучшей коммутации, полученной в опыте ПО, и осью I — показывает, насколько должно быть усилено или ослаблено поле в зазоре ДП — якорь.
Средняя линия зоны после регулировки должна по возможности близко (во всяком случае при токах, при которых будет работать ЭМ) совпадать с осью абсцисс. Считается благоприятным небольшое усиление поля ДП (средняя линия зоны располагается при этом на 1/5—1/6 ее ширины, ниже оси абсцисс).
Для регулирования поля в зазоре ДП—якорь могут быть либо изменены значения воздушных зазоров в магнитной цепи ДП, либо, например в ЭМ, где ДП составляет часть штампованного листа статора, изменена МДС обмотки ДП. Следует иметь в виду, что по причинам, указанным в п. 6.2.4, в ЭМ с напряженной коммутацией значительное (более +25—30%) изменение значения зазора ДП—якорь по сравнению с имевшим место в опыте ПО может привести к ухудшению коммутации. Целесообразно для таких ЭМ, особенно в опытных образцах, предусматривать некоторое количество тонких магнитных и немагнитных прокладок между затылком ДП и ярмом.
Регулируя количество магнитных и немагнитных прокладок таким образом, чтобы их суммарная толщина оставалась неизменной, можно регулировать поле в зазоре ДП—якорь без изменения значения этого зазора.
Поскольку магнитная индукция между затылком ДП и ярмом 7?дп>3 из-за наличия потока рассеяния (особенно в ЭМ без КО) в 3—4 раза выше индукции Вдп в зазоре ДП—якорь, толщина немагнитной прокладки, дающей определенное изменение поля в зазоре ДП—якорь в 3—4 раза меньше значения, на которое должен быть для этой цели изменен зазор ДП—якорь.
Если воздушный зазор ДП—якорь в опыте ПО был равен 51, а средняя линия зоны расположена на расстоянии ± Дгп>ср/ 7, обозначенном zn,cp> то> считая, что вся МДС обмотки ДП приходится на воздушный зазор, новый воздушный зазор 62, при котором зона расположится симметрично относительно оси абсцисс, определится из уравнения
62 = (6.3)
с == i/a ± сР<а (6.4)
Величина d берется из табл. 6.3.
В табл. 6.3 м^п, — число витков на полюс обмотки добавочного полюса и компенсационной обмотки; — число витков вре-
Таблица 6.3
Наличие КО Обмотка, через которую проходит ток Д/п d
Нет Обмотка ДП ^Цп/^П ~ ^,3
Нет Временная обмотка ДП
Есть Обмотка ДП ^п/Ь^ДП + Wo — Wjs]
Есть Обмотка ДП + КО ^дп + Wo/[Wn + Wo ” W,3]
Есть Временная обмотка ДП ^дщв/Ь^дп + Wo — W,s]
менной обмотки (на полюс), накладываемой на ДП в опыте ПО; wH>3 — эффективное число витков якоря (на полюс),
%,Э = wc [ (К/2р) - 0] 12а , (6-5)
где wc — число витков в секции; К — число коллекторных пластин; (3 — число коллекторных пластин, перекрытых щеткой; 2р, 2л — число пар полюсов и параллельных ветвей обмотки якоря соответственно.
Если в опыте ПО в исследуемой ЭМ имелась немагнитная прокладка между затылком ДП и ярмом толщиной Д15 а зазор ДП—якорь равен 61, то толщина новой прокладки
Д2 = Д1С + 61 (е — 1)/т. (6.6)
При этом предполагается, что за счет регулирования числа магнитных прокладок зазор остается неизменным.
Значение т = Вдщз/ ^дп может быть ориентировочно принято равным 2—3. Целесообразно для уменьшения количества переборок ЭМ при регулировке коммутации определить ее экспериментально. Для этой цели следует измерить флюксметром (с помощью измерительной обмотки при неподвижной ЭМ) поток Фдп, проходящий через наконечник ДП с шириной Ьдп, и поток Фдп>3, проходящий через затылок ДП с шириной £дП,з (см- п- 3.6.1):
т “ Фдп,з^дп/Фдд^дп,з‘
6.7.6. Определение потенциальной диаграммы щетка—коллектор. ’Падение напряжения в контакте щетка—коллектор, в первую очередь, определяется плотностью тока. Поэтому, если измерить падение напряжения между телом щетки и пластинами коллектора — под набегающим краем, под серединой щетки и сбегающим краями (рис. 6.8, д),то мож
Рис. 6.8. Потенциальная диаграмма и конструктивная схема устройства для ее определения:
а - потенциальная диаграмма при замедленной (?), близкой к прямолинейной
(2) и ускоренной (5) коммутациях; б - конструктивная схема; РЩ - рабочая щетка; ИЩ — измерительные щетки
но судить о плотности тока в этих точках, а следовательно и о характере коммутации. Измерение указанных падений напряжения проводится вольтметрами постоянного тока, например с помощью устройств по рис. 6.8, б.
Потенциальные диаграммы могут использоваться при наладке коммутации машин постоянного тока без ДП и регулировке поля ДП. Ос-циллографирование падений напряжения в контакте щетка—коллектор может оказать пользу при исследовании коммутации переходных режимов. Следует, однако, сказать, что метод потенциальных диаграмм при тяжелых механических условиях не всегда дает четкую корреляцию с классом коммутации. Поэтому для ЭМ с ДП метод ПО предпочтителен.
Измерение потенциальных диаграмм используется при определении действительных электрических потерь в СК при исследовании добавочных коммутационных потерь.
6.7.7. Контроль и наладка коммутации с помощью приборов количественной оценки. При любом методе оценки коммутации в конечном счете целью является определение интенсивности злектрозрозионных процессов в СК. Основной методикой в настоящее время является визуальная оценка степени искрения, для которой созданы единые международные нормативы (шкала степеней искрения). Такие достоинства этого метода, как универсальность и простота, бесспорны. Если для безыскровой коммутации визуальный метод обеспечивает достаточно точные количественные характеристики (например, ширину зоны), позволяющие сравнивать и совершенствовать ЭМ, то для степеней искрения И/4; ^/2', полученные визуальным методом оценки (как,
впрочем, и сама шкала) носят качественный характер и могут содержать значительные субъективные погрешности, которые можно уменьшить применением метода экспертных оценок, но при этом возрастает трудоемкость испытания. Во всех случаях, конечно, предусматривается возможность длительных испытаний с контролем состояния рабочих поверхностей и их износов, но это приводит к многократному увеличению трудоемкости и энергоемкости испытаний, неприемлемым при серийном выпуске ЭМ.
Кроме указанных выше недостатков визуальному методу также присущ существенный в современных условиях недостаток: он не может быть использован для автоматизации контроля и наладки коммутации при серийном выпуске ЭМ.
Поэтому весьма актуальной с точки зрения повышения надежности ЭМ является задача разработки методов и аппаратуры контроля коммутации, способных давать количественную оценку процесса.
В настоящее время разработаны и совершенствуются опытные образцы таких приборов (головная организация — Омский институт инженеров железнодорожного транспорта Минвуза РСФСР).
Первым этапом по замене визуального контроля было применение фотодатчиков, на основе которых созданы фотоиндикаторы искрения типа ИИ [6.10], имеющие выход на стрелочный измерительный прибор и злектронно-лучевой осциллограф. Прибор дает возможность измерения среднего фототока (средней интенсивности искрения), наблюдения формы и определения амплитудных значений наиболее ярких вспышек искрения и нахождения пластин, с которыми эти вспышки связаны. Такой объем информации позволяет находить связи с видимым искрением с учетом особенностей зрительного восприятия искрения и диагностировать причины неудовлетворительной коммутации (например, неидентичности коммутации отдельных секций и др.). Прибор дает возможность автоматически определять зоны с заданной степенью искрения при существенном повышении безопасности испытания. Работа, как и во всех случаях применения приборов количественной оценки при серийном выпуске ЭМ, может вестись при закрытых коллекторных люках. К числу недостатков прибора относится большой объем фотодатчиков и невозможность сканирования (т. е. поиска наиболее ярких точек), осуществляемого наблюдателем. Применение волоконной оптики позволит, очевидно, компенсировать эти недостатки.
Следует отметить, что метод фотоиндикатора, как и другие методы количественной оценки, может использоваться только для относительных измерений на конкретных типах ЭМ, причем для привязки их показаний к шкале искрения ГОСТ 183-74 их необходимо тарировать с помощью визуальных методов.
Это, однако, не умаляет их достоинств, поскольку относительные измерения позволяют совершенствовать ЭМ и проводить контроль при их серийном выпуске.
Вторым направлением создания приборов количественной оценки является использование в качестве относительного критерия качества коммутации параметров импульсов напряжения высокой частоты, возникающих при коммутации (амплитуды, продолжительности, количества в секунду).
Причиной их появления являются ГРП между сбегающим краем щетки и коллектором. Частота напряжения этих импульсов лежит в диапазоне 15—1000 кГц, причем между отмеченными выше параметрами и степенью искрения ЭМ определенного типа существует достаточно устойчивая корреляция, т. е. имеется возможность тарирования приборов по степени искрения [6.11—6.13,6.15].
Измерить эти напряжения можно между рабочей и вспомогательной щеткой (рис. 6.9, с) или между разнополярными щетками (рис. 6.9, б) через разделительный фильтр высокой частоты, не пропускающий напряжения с частотой ниже 10—20 кГц (в том числе зубцовые и коллекторные) (рис. 6.9, в). В простейшем случае в качестве фильтра используется конденсатор. Способ вспомогательной шетки дает более четкую информацию, однако он неприемлем при серийных испытаниях. В каче-217
Рис. 6.9. Оценка коммутации с помощью микроамперметров:
а ~ включение между рабочей и вспомогательной щетками; б - включение между разнополярными щетками; в — схема индикатора; С - 0,1-0,3 мкФ (изоляция 1-3 кВ); ФВЧ - фильтр высокой частоты (с частотой среза 10-20 кГц); R - переключаемое добавочное сопротивление 100—200 кОм, fl А - микроамперметр на 10—50 мкА
стве ИИ используется микроамперметр (10—50 мкА). Показания ИИ приблизительно пропорциональны в этом случае отмеченным выше параметрам импульсов и интенсивности искрения.
При работе с ИИ при напряжениях на коллекторе более 30 В должны соблюдаться все правила техники безопасности, включая защиту от прикосновения к зажимам. Разделительные конденсаторы должны иметь соответствующее рабочее напряжение. Корпус ИИ должен быть заземлен.
Регулирование ДП производится путем определения тока в опыте ПО, соответствующего минимальному показанию ИИ (для этого строится U-образная кривая). Если нужно установить характер добавочного тока, разрываемого на сбегающем краю щетки, т. е. оценить, имеет ли место перекоммутация, то для этой цели используется тот факт, что пе-рекоммутация приводит к перемене полярности импульса. ИИ получают в этом случае два каната с отдельным измерением импульсов обеих полярностей (рис. 6.9, в).
В качестве ИИ можно использовать амплитудный электронный вольтметр, включенный по схеме рис. 6.10. В этом случае сравниваются амплитудные значения импульсов в однотипных ЭМ, что позволяет дать оценку технологическому обеспечению коммутации. Для этой цели разделительный фильтр пропускает коллекторную и более высокие частоты. ИИ по рис. 6.10, б9 включенный на разнополярные щетки, измеряет при этом также напряжения коллекторной частоты, вызванные воздействием МДС добавочных токов коммутации на главное поле (т. е. оценивает значение этих токов). При этом контролируются также возможные технологические ошибки (например, толщина про-218
Рис. 6.10. Оценка коммутации с помощью амплитудных электронных вольтметров:
а — схемы включения; б - схема индикатора; С - 0,1-0,3 мкФ (изоляция 1-3 кВ); R — 1-2 кОм; ЭВ - электронный вольтметр постоянного тока
кладок между ДП и корпусом) при сборке ЭМ и качество коллектора.
Следует иметь в виду, что при использовании электронных вольтметров во избежание помех от наводок необходимо заземление бракета щеткодержателей одной полярности и соответствующего зажима прибора (рис. 6.10).
Все указанные функции могут выполнять ИИ типа КК2У4, кроме того, имеющего повышенную чувствительность при слабом искрении [6.13].
Параметры элементов схем по рис. 6.9, 6.10 зависят от параметров ЭМ, для испытания которых они предназначаются. Приведенные на указанных рисунках параметры даны как информация о порядке значений для этих величин.
При включении ИИ на разнополярные щетки параллельно прибору оказывается включенной емкость обмотки якоря относительно земли, значение которой в сильной степени зависит от размеров и конструкции ЭМ и может влиять на показания. Этот фактор также обусловливает использование прибора для относительных измерений на однотипных ЭМ. Параллельно прибору оказываются также включенными нагрузка (при испытании генератора) и конденсаторы защиты от радиопомех.
Для уменьшения влияния волнового полного сопротивления нагрузки и помех питающей сети (при испытании двигателей) якорь ЭМ должен располагаться между обмотками ДП, играющими в этом случае роль защитных дросселей. Может потребоваться отключение помехозащитных конденсаторов.
Кроме приборов количественной оценки при наладке коммутации можно использовать приборы для контроля поверхности коллекторов во время вращения.
В настоящее время Омским институтом инженеров железнодорожного транспорта Минвуза РСФСР (головной организацией по разработке приборов для оценки и наладки коммутации) и ВНИИЭлектромаш (г. Ленинград) разработан комплекс приборов, в том числе: индикаторы искрения ПКК2У4, ПКК2М для включения с контактной щеткой, ИИРП-2, ПКК4 для включения на разнополярные щетки, ПКК-К для включения с емкостным датчиком; анализаторы коммутации АК-1М, АК-2 АСК 18-2 для определения коммутационных свойств обмоток и анализаторы вибрации щеток АВ-2, а также профилометры для определения профиля коллектора при вращении — ИПК-Ш, ИПК-1Т, ПКП-1.
Глава седьмая
ВИБРАЦИЯ И ШУМ ЭЛЕКТРИЧЕСКИХ МАШИН
7.1. ИСТОЧНИКИ ШУМА И ВИБРАЦИИ
Основными источниками вибрации и шума ЭМ являются: остаточный дисбаланс (неуравновешенность) ротора, наличие эллипса цапфы вала, наличие электромагнитных сил (магнитного шума) и аэродинамических сил. Кроме того, вибрации и шум возникают от подшипников качения и щеточного узла. Зная амплитуды и частоты отдельных составляющих колебательного процесса, т. е. его спектр, можно выявить источники этих колебаний. Пример спектрограммы вибрации приведен на рис. 7.1.
Рис. 7.1. Спектрограмма вибрапии электродвигателя
7.1.1. Остаточная неуравновешенность ротора. При вращении ротора с массой Л/р и угловой скоростью gjj ~2тгт2/6О ~ 0,1и несовпадение центра масс (ЦМ) ротора с осью вращения на величину е, называемую удельным дисбалансом (рис. 7.2), вызывает появление приложенной к ЦМ радиальной центробежной силы^ц =Мрс^е [7.9]. В случае если корпус ЭМ установлен на ’’мягкие” амортизаторы (собственная частота колебаний корпуса на амортизаторах < 0,25Л), сила Fn вызы-220
вает колебательные перемещения корпуса с амплитудой ак -еМ^К^М^^ где 7ИК — масса корпуса, а Кп — динамический коэффициент усиления вибрации, зависящий от динамических свойств системы ротор—вал—опоры (собственная частота колебаний gjPjC ротора массой Мр и жесткостью вала и опор Св>о), Кд = — (coi/top,0)2]; масса машины
Мм ~Мр + Мк. Для ’’жесткого” ротора i ,с 1, як = ^Ир/Л£м и уско рение корпуса = ъ)*еМр1(Мы >/2).
При статической неуравновешенности (параллельном смещении оси ротора относительно его главной центральной оси инерции), когда е двух половин ротора равны по значению и по фазе, корпус перемещается параллельно оси вращения. Если имеется динамическая неуравновешенность (ось вращения ротора пересекается с главной центральной осью инерции ротора), то оба е равны, но находятся в противофазе, а корпус ЭМ совершает поворотные колебания [7.9]. Значение может изменяться из-за тепловой деформации ротора [7.16] и смещения проводников в пазах или в лобовой части ротора под действием Fu.
В системе ротор—вал—опоры кроме простейших колебаний, принадлежащих к первой форме колебаний (например, одна полуволна между опорами) с частотой сор>с = 2тг \Асв>о/ЛГр, у длинных валов могут возникать колебания более сложной формы (например, с собственными
частотами 2,5 -г 4<jp>c, принадлежащих ко второй форме колебаний). Двоякая жесткость ротора (например, за счет длинного шпоночного паза) может быть причиной резонансных колебаний при coi = cjp>c/2.
7.1.2. Эллипс цапфы вала. Кинематическое возбуждение вибрации за счет принудительного перемещения оси вала с частотой 2&i создает эллипс цапфы (шейки) вала [7.16]. При посадке внутреннего кольца подшипника на вал [7.4] с натягом примерно 1/2 этого натяга проявляется как эллипс беговой дорожки подшипника. Таким же образом,
Рис. 7.2. Возможные случаи дисбаланса:
а - статический дисбаланс; б — динамический; в — смешанный
но в меньшей степени проявляется и некруглость (гранность) цапфы вала до 3—4 порядка.
7.1.3. Подшипники качения. Подшипники качения являются источником возмущающих сил с широким спектром частот от/i до десятков и даже сотен килогерц (акустическая эмиссия) [7.4].
Отклонения размеров и формы вращающихся колец (при разностен-ности — радиальные биения, при наклоне плоскости беговой дорожки — осевые биения в подшипниках) создают радиальную и осевую вибрации вала с частотами (1 2)f\, так называемую неточность хода. Значение
осевой вибрации зависит не только от осевого (торцевого) биения беговой дорожки вращающегося кольца, но и от наклона плоскости упорных торцов на валу и в корпусе, в который посажен подшипник. Осевая и радиальная вибрации подшипников тем больше, чем больше начальный зазор в подшипнике и угол контакта. Радиальное биение вращающегося кольца компенсируется при уравновешивании ротора.
Гранность (с числом граней примерно до 20) и волнистость (с числом волн до 100—200) беговых дорожек создают вибрации с частотами, примерно равными (10—200)/!. При малом числе волн (граней) имеет место кинематическое возбуждение — малое перемещение оси вращения, а при большом числе волн — распространение деформационных волн в кольцах. При некоторых соотношениях чисел волн на вращающемся и неподвижном кольцах волнистость может проявляться особенно сильно. Гранность и волнистость шариков, например вследствие износа их поверхности из-за высокой скорости вращения шариков, может создавать вибрацию с частотами порядка десятков килогерц.
Переменная жесткость подшипника из-за изменения на одно из тел качения, находящихся в зоне нагружения (например, 4 или 5 шариков из 8), создает вибрацию с частотой fz =/Спгтю гДе fen ~ частота вращения сепаратора, a zT>K — число тел качения (шариков или роликов); fen % (1 ~ dTtK/DQ)l2, где dT>K - диаметр тел качения, DQ - диаметр, проходящий через центры тел качения.
Для подшипников серии 300 /сп примерно равна 0,38/1. Эта вибрация тем сильнее, чем больше контактное давление (нагрузка) и зазор свободного подшипника. Что касается вибрации из-за разноразмерности шариков, частота которой носит случайный характер в диапазоне частот от /сп до (/спит,к)/2, то следует отметить, что, в связи с высокой точностью изготовления шариков, для подшипников классов 5 и более точных она практически не проявляется.
По указанным выше причинам возбуждаются также резонансные колебания элементов подшипника с частотами примерно 0,5—10 кГц (в зависимости от размеров подшипника), вплоть до частот резонанса шариков (порядка сотен килогерц). Они могут быть обнаружены при узкополосном анализе спектров вибрации подшипника при изменении частоты вращения. Значения их могут при этом изменяться мало, если 222
они лежат в зоне возмущающих сил с непрерывным спектром, или значительно, если они лежат в зоне действия дискретных сил в начале спектра. Однако частота, на которой они проявляются, остается неизменной.
В связи с тем что частота вращения сепаратора некратна частоте вращения вала и изменяется в небольших пределах в зависимости от нагружения, вибрация подшипников качения носит характер стационарного случайного процесса, создающего непрерывный частотный спектр в широком диапазоне частот, характеризующийся среднеквадратической спектральной плотностью мощности.
При появлении каких-либо дефектов на поверхностях тел качения, недостаточной толщине смазочной пленки, при которой возможно зацепление вершин микронеровностей (от шероховатости), наличии зазоров между телами качения и беговыми дорожками (от неточности изготовления и сборки ЭМ и подшипников качения), нарушении в работе системы упругого осевого нажатия, например при заклинивании плавающего подшипника, или без него, в подшипнике качения возникают ударные процессы возбуждения сил с крутым фронтом нарастания и широким спектром частот. Для обнаружения этих дефектов, независимо от числа повторения импульсов, наиболее информативной является полоса частот 20—40 кГц.
На измерении уровня этих вибраций с помощью резонансных пьезодатчиков с собственной частотой 20—40 кГц основан прибор для диагностики состояния подшипников качения типа ИСП-1. Дефекты сборки ЭМ и дефекты на рабочих поверхностях подшипников качения вызывают амплитудную модуляцию высокочастотной (1 кГц) части вибрационного спектра подшипника, что позволяет с помощью прибора диагностировать состояние подшипника по уровню и спектральному составу кривых модуляции. Для выделения этих кривых используются схемы демодуляции (например, схемы ВФК см. [2.6, 3.4]).
Информацию о появлении дефектов дают амплитуды спектральных составляющих этих кривых вблизи частот, равных или кратных частоте вращения /вр = /{£60, частотам fz и /сп, а также частоте вращения тел качения/т>к =/Сп[Д>/(^т,к + 0L
7.1.4. Электромагнитные силы. Перемещающиеся в воздушном зазоре ЭМ магнитные поля создают различно направленные силы (главным образом радиальные), которые вызывают переменную деформацию статора (корпуса) и излучение воздушного шума [7.16]. Наибольшее значение при этом имеют силы, распределение которых вдоль зазора и частота изменений, вызывают собственные резонансные колебания статорного кольца. Характер форм колебаний статора (в случае симметричного кольца), имеющих различный порядок г, показан на рис. 7.3. Податливость кольца Хк = R3/(h/R)2, где R — средний радиус кольца, h — эквивалентное значение высоты статорного кольца и кор-
Рис. 7.3. Характер колебаний статоров электрических машин
пуса в радиальном направлении. Очевидно, что чем больше А, тем меньше собственная частота колебаний кольца /кс (100 Гц — 4 кГц). Наибольшую податливость имеет кольцо с деформацией порядка г = 2 (эллипс) и с числом полуволн 2г = 4. В ЭМ с вращающимся двухполюсным полем такую деформацию вызывают основные гармоники поля. Вызываемые этими гармониками в воздушном зазоре электромагнитные силы, пропорциональные квадрату индукции, изменяются с частотой 2/с. Квадрат синусоидально изменяющейся индукции с частотой fc создает силу притяжения, которая может быть разложена на постоянную или по окружности статора (силу сжатия), вызывающую деформацию нулевого порядка, и наложенную на нее синусоидально распределенную силу с числом полюсов 4р. Хотя частота изменения этой силы (2/с) обычно ниже собственной частоты деформации кольца /кс, ее большое значение приводит к тому, что в двухполюсных синхронных ЭМ зти вынужденные колебания определяют уровень магнитного шума.
Кроме этой силы в воздушном зазоре ЭМ имеют также место силы от взаимодействия высших гармонических полей статора и ротора. При этом в зависимости от состава этих гармонических, в особенности зубцовых, определяемых в ЭМ с двоякой зубчатостью числом зубцов» статора и ротора, могут возникать разностные (дифференциальные)* поля с небольшим числом пар полюсов рд — z2 — (zt ± р) и высокой* угловой скоростью вращения в зазоре сод = ыг2/рп (при скольжении $-->0).
Эти поля могут вызывать резонансные колебания статорного кольца,, тем более опасные, чем ниже их порядок. Следует отметить, что в ре-1 альных несимметричных конструкциях статоров и корпусов ЭМ возможно возбуждение эллипсных резонансных колебаний даже за счет полей с большим числом пар полюсов, вплоть до рассмотренных выше", дифференциальных зубцовых полей.
В машинах постоянного тока при 2р < 4 и значительной высоте сер?-дечников главных полюсов (ГП) и добавочных полюсов (ДП) вибра* ционная деформация корпуса может также вызываться тангенциальными магнитными силами, действующими на краях полюсных наконечников [7.4, 7.16]. Возможно возникновение резонансных изгибных колебаний сердечников ДП.
Существенное влияние на уровень магнитных вибраций оказывает эксцентриситет воздушного зазора.
7.1.5. Аэродинамические силы. Основными источниками аэродинамического шума ЭМ являются: вентилятор (если он имеется), выступающие части ротора, а также радиальные вентиляционные каналы. Интенсивность излучаемого шума зависит от того, насколько удачны аэродинамические и акустические характеристики вентилятора и вентиляционных каналов, т. е. правильно выбраны конструктивные формы и геометрические размеры вентиляционной системы. Причинами возникновения аэродинамического шума являются:
составляющие шума, вызываемые срывом вихрей с задней кромки лопастей вентилятора и торцевых поверхностей вращающегося ротора, а также составляющие, определяемые турбулентностью воздушного потока при обтекании различных препятствий;
звуки сиренной тональности с дискретными частотами, обусловленные препятствиями на выходе воздушного потока из вентиляторного колеса;
тональные звуки с дискретными частотами, вызванные периодическими колебаниями давления на отдельных участках аэродинамической цепи (например, пульсации потока воздуха на выходе радиальных вентиляционных каналов ротора и входе радиальных вентиляционных каналов статора).
В современных высокооборотных вентилируемых машинах, особенно открытого и защищенного исполнения, аэродинамический шум преобладает над другими видами источников шума. Правильно сконструированная в акустическом отношении машина имеет сплошной спектр частот шума [7.4, 7.5].
7.1.6. Шум щеток. Повышенный шум щеток обычно связан с дефектами щеточноколлекторного узла, ухудшающими кинематику движения щетки в щеткодержателе (см. гл. 6), в том числе с резонансными вибрационными процессами в траверсах и щитах. Он возникает от трения щетки о коллектор, а уровень его зависит от состава щеток и политуры коллектора.
Уровень шума зависит также от токовой нагрузки (он больше при XX) и температуры коллектора.
Спектр щеточного шума имеет диапазон частот 1—8 кГц, кратных коллекторной частоте (к • и/60), где к — число коллекторных пластин.
7.1.7. Определение уровней шума и вибрации, создаваемых отдельными источниками. Для этой цели проводится снятие спектров вибрации и шума ЭМ при максимально возможном ослаблении всех действующих в данном частотном диапазоне источников, кроме исследуемого. Так, для определения интенсивности механических источников (остаточная неуравновешенность ротора, подшипники качения) с уменьшением магнитного потока снижают магнитные силы так, чтобы уровень магнитных вибраций был на 6—10 дБ ниже механических.
Для ЭМ с достаточным временем выбега интенсивность механических источников можно определять на выбеге при отключенной ЭМ и отсутствии токов в обмотках. Следует иметь в виду, что в реальных ЭМ может иметь место связь между магнитными и механическими вибрационными силами и при исключении одного источника вибрации уровень вибрации от другого может несколько отличаться от действительного значения. Для учета этого обстоятельства следует определить зависимость уровня механической вибрации от напряжения. Следует также определить наличие и значение ’’чужой” вибрации, имеющей ту же частоту, но не зависящей от изменяемой в опыте величины (например, напряжения).
Для определения уровня магнитных вибраций желателен перевод ЭМ на подшипники скольжения. Для уменьшения аэродинамического шума должен быть снят вентилятор и заглушены вентиляционные окна корпуса. Щеточный шум можно уменьшить, оставив на коллекторе только щетки, пропускающие ток XX.
Для выделения составляющих вибрации, связанных с резонансными процессами, производится сравнение спектров при изменении частоты вращения (механические вибрации) или частоты питающего напряжения (магнитные вибрации). Все измерения проводятся в одних и тех же точках: на корпусе или местах крепления ЭМ.
При исследовании вибрации, создаваемой отдельными источниками, датчики устанавливаются возможно близко к месту их возникновения: на гнездах подшипников, наружных кольцах подшипников качения, корпусах, активной стали статора и т. д.
Наиболее просто и точно зти испытания проводятся при XX ЭМ. Исследования вибрации под нагрузкой требуют особого внимания к механическим соединениям, центровке ЭМ и учета помех от этих факторов на частоте вращения и кратных ей частотах.
7.2. ИЗМЕРЕНИЕ ШУМА ЭЛЕКТРИЧЕСКИХ МАШИН
Шумовые характеристики ЭМ нормируются общесоюзными и отраслевыми стандартами, а также техническими условиями на конкретные виды изделий. В настоящее время введен ГОСТ 16372-84 (СТ СЭВ 1348-78) на допускаемые уровни шума ЭМ. Уровень шума большинства ЭМ, измеренный по шкале А, в том числе двигателей единых серий, находится в пределах 65—90 дБ (А). Однако существуют ЭМ, которые имеют как малые уровни шума до 20—30 дБ (А), так и большие уровни-до 100-110 дБ (А).
Измерение и анализ шума, позволяют эффективно выявить дефекты конструкции или изготовления узлов ЭМ. Методы контроля шумовых характеристик ЭМ определяются ГОСТ 11929-87 (СТ СЭВ 828-77).
7.2.1. Шумовые характеристики и единицы измерения. Звуком называются воспринимаемые человеческим слухом изменения давления в 226
воздухе, воде или иной среде, т. е. звук — это волновое колебание частиц упругого тела или среды. Частота колебаний имеет диапазон 20— 20000 Гц. Звук распространяется со скоростью около 340 м/с в воздухе, 1500 м/с в воде, 5000 м/с в металле и 50 м/с в резине, при температуре окружающей среды 20 °C.
Важной характеристикой звука является частота колебаний /, Гц, f = c!K
где с — скорость звука, м/с; X — длина волны, м.
При распространении звука в воздухе возникают продольные волны, создающие сжатия и разряжения, т. е. добавочное давление по отношению к среднему давлению в воздухе. Пульсации добавочного давления называются звуковым давлением р, которое измеряется в паскалях (Па).
При распространении звуковой волны происходит передача энергии. Количество звуковой энергии, передаваемой в течение одной секунды, называется звуковой мощностью Р. Звуковая мощность, передаваемая через единицу поверхности, перпендикулярной направлению звуковой волны, называется интенсивностью звука (7 ).
Свойство среды оказывать сопротивление распространению в ней звуковых волн называется акустическим сопротивлением. Удельное акустическое сопротивление равно рс, где р — плотность среды, кг/м3; с ~ скорость звука, м/с.
Численное значение его для воздуха при нормальных условиях равно 42 кг/м2 • с, или 42 Па • с/м.
Колебательная скорость частиц воздуха v , м/с, при распространении звуковой волны в свободном звуковом поле
V = рКрс).
Интенсивность звука, Вт/м2,
Т= р=7(ре).
Если источник излучает звуковую мощность Р, то на условной сфере радиуса г, окружающей этот источник, средняя интенсивность звука, Вт/м2,
7= Р/(4тгг2);
при этом средняя звуковая мощность, Вт, Р = 4irr2p2/(pc).
Если излучение ограничено полусферой, то
7= Р/(2тгг2);
Р = 2п г2р2/{рс).
Максимальные и минимальные звуковые давления ртах, pmin* звуковые МОЩНОСТИ Рупах, Pmin И ИНТеНСИВНОСТЬ звука lynax , воспринимаемые человеком как звук, называются пороговыми. Нижний предел чувствительности среднего человеческого уха (’’порог слышимости”) на частоте 1000 Гц характеризуется звуковым давлением около Pmin = 2 - 1(FS Па, что соответствует звуковой мощности Pmin = = НГ12 Вт и интенсивности звука Imin = 1 (Г12 Вт/м2. Верхний предел чувствительности (”порог болевого ощущения”) на частоте 1000 Гц соответствует ртах = 2 • 102 Па, Ртах =102 Вти/^дх =102 Вт/м2.
Таким образом, в диапазоне восприятия ухом звука звуки по интенсивности могут различаться в 1014 раз. Весь обширный диапазон значений звукового давления, интенсивности и мощности выражают не многозначными числами, а логарифмами отношений этих значений к значениям, соответствующим порогу слышимости при эталонной частоте, равной 1000 Гц. Эти отношения называются: уровень интенсивности звука Li , уровень звукового давления £р, уровень звуковой мощности Lр. Они измеряются в относительных единицах — децибелах (дБ). Уровень интенсивности звука определяется по формуле
г 2
Li= 101g—— = 101g—— = 201g — = L. 1 0 Po
Вычисляемый по этой формуле уровень принято называть уровнем звукового давления. Для того чтобы уровни звукового давления соответствовали уровням интенсивности звука, в качестве пороговой (нулевой) величины звукового давления выбрано р0 ~Pmin = 2 • 1(Г5 Па, соответствующее пороговой (нулевой) величине интенсивности 70 = = Imin = 1(Г12 Вт/м2. Уровень звуковой мощности источника шума определяется по формуле
1р = Ю 1g ’
где Ро = Pmin — 1СГ12 Вт — пороговая (нулевая) величина звуковой мощности.
Значения нулевых уровней Io, PQ, р0, указанных выше, приняты как международные.
Суммарный уровень шума Ln нескольких источников в равноудаленной от них точке можно определить по формулам.
Если источники шума одинаковы, то суммарный уровень шума
Ln = Li + 10 1g л,
где Li — уровень шума одного источника; п — число источников шума.
Значения добавки к уровню шума одного источника 101g и приведены ниже:
Число источников шума 1 2 3 4 5 6 8 10 20 30 40 100
101g п, дБ........ 0 3 5 6 7 8 9 10 13 15 16 20
При совместном действии двух различных источников с уровнями шума Li и L2 суммарный уровень
L = + AZ,
где L1 — больший из двух суммируемых уровней шума; AZ — добавка, определяемая по номограмме на рис. 7.4.
Рис. 7.4. Номограмма добавок для суммирования уровней шума
Если разность уровней двух источников превышает 10 дБ, то уровень менее громкого источника можно не учитывать.
Чувствительность уха к звукам разной частоты не одинакова, поэтому субъективное ощущение громкости звука зависит не только от звукового давления, но и от частоты. В связи с этим, по аналогии с понятием уровня интенсивности звука, введено понятие уровня громкости звука, единица измерения которого называется фоном. Уровень звука в фонах показывает, сколько децибел имеет равный с ним по громкости звук с частотой 1000 Гц. Следует иметь в виду, что уровень в фонах характеризует субъективное восприятие громкости только для звуков, называемых чистыми тонами, т. е. имеющих одну определенную высоту.
Для шумов, характеризуемых не одной частотой, а наличием многих частот, оценка уровней громкости в фонах не соответствует действительному восприятию человека. Примерному восприятию человеком громкости соответствует характеристика, измеренная шумомером с так называемой коррекцией А. Эта коррекция обеспечивает существенное ослабление чувствительности прибора на низких частотах и небольшое увеличение чувствительности на высоких частотах. Шумомер измеряет уровень звука £л, выраженный в децибелах по шкале А.
Таким образом, уровень шума является общим понятием, и он может быть охарактеризован уровнем звукового давления, уровнем звуковой мощности, уровнем интенсивности, уровнем звука и уровнем громкости. Уровни звуковой мощности и интенсивности непосредственно не могут быть измерены и определяются пересчетом из уровней зву-
кового давления. Так как уровень звуковой мощности характеризует всю мощность, излучаемую ЭМ, то он не является функцией расстояния от ЭМ. Уровень звукового давления и уровень громкости зависят от расстояния, на котором они измеряются. Большинство ЭМ можно рассматривать как шаровые излучатели, поэтому уровень звукового давления находящейся в свободном звуковом поле ЭМ всегда уменьшается на 6 дБ (в 2 раза) при удвоении расстояния от ЭМ.
Для того чтобы получать сопоставимые результаты измерений уровня шума, необходимо определять их на одинаковом расстоянии от ЭМ. Таким стандартным расстоянием в соответствии с ГОСТ 11929-87 (СТ СЭВ 828-77) является 1 м от наружного контура машины.
Важной характеристикой шума ЭМ является показатель направленности излучения (7, определяемый как разность между уровнем звука или звукового давления в данной точке и средним уровнем на измерительной поверхности, включающей данную точку:
G — Lf — LtfiA + 3 или G = Lf — Lai + 3, (7.1)
где Lf — уровень звука (или уровень звукового давления в полосах частот) в измерительной точке по заданному направлению, дБ (Л) или дБ; LdiA или Lai — средний уровень звука или звукового давления, определяемый по п. 7.1 ГОСТ 11929-87.
При анализе шума представляют интерес не только общие уровни звукового давления, мощности и интенсивности, но и распределение их по частотам или частотным полосам, т. е. частотный спектр шума. Используются спектры уровней звуковой мощности или звукового давления. Они могут определяться в различных полосах частот — октавных, третьоктавных или более узких. Спектр шума может быть сплошным, тональным (дискретным) или смешанным. Виды спектров показаны на рис. 7.5, а—в. Тональным спектром называется спектр, в котором имеются слышимые дискретные частоты. Шум считается тональным, если на частотах свыше 300 Гц уровень звукового давления в одной третьоктавной полосе превышает уровни звукового давления в соседних третьоктавных полосах частот не менее чем на 10 дБ.
7.2.2. Стандартные методы измерения шума электрических машин. В соответствии с ГОСТ 11929-87 (СТ СЭВ 828-77) шумовые характеристики ЭМ определяются одним из следующих методов: в свободном звуковом поле над звукоотражающей плоскостью, или в реверберационном помещении (технические методы), или ориентировочным методом [7.3,7.10,7.11,7.23].
При испытаниях можно определить следующие характеристики: спектр уровней звуковой мощности в октавных частотных полосах Lp°9 корректированный уровень звуковой мощности LPA'9 средний уровень звука на расстоянии 1 м от наружного контура машиныХaiа» средний уровень звукового давления^ октавных полосах на расстоянии 1 м от наружного контура машиныLd\\ показатель направленности (7. 230
Уровень звукового давления ,р б Уровень звукового давления^ Уровень звукового давления,рб
110 100 90
80 70
60
50
40
50
20
збтйяЮ 2*62 3 4 5Б7910гчв2 3 k 5 6 7, 10* ‘/582 3 k 5 6 <Гц а)
110 100
90
80
70
60
50
40
50
20
звиЮгчб2 3 95Б81О29в2 3 9 5 Б 8 10* 9682 3 9 г Б8,Гц Л
20
70
60
50
40
50
110 100 90 во
Рис. 7.5. Виды спектров шума:
а — сплошной; б — смешанный; в - тональный
5 $78 10 29 в 2 3 9 56 8 10г 982 3 9 5 Б 8 10* 9 882 3 9 5 б.Ги, В)
Указанные выше характеристики определяются в октавных полосах со среднегеометрическими частотами от 63 до 8000 Гц (т. е. в диапазоне частот 45—112000 Гц), если в стандартах или технических условиях на машины конкретного типа нет других указаний. Допускается проводить определение характеристик в октавных полосах со среднегеометрическими частотами от 125 до 8000 Гц, если невозможно обеспечить условия измерений, указанные ниже, в октавной полосе со среднегеометрической частотой 63 Гц. Выбор характеристик определяется видом испытаний (п. 1.3—1.5 стандарта).
При техническом методе определения шумовых характеристик в свободном звуковом поле над звукоотражающей плоскостью измерения проводятся в заглушенных камерах со звукоотражающим полом; на открытых площадках; в помещениях объемом не менее 1000 м3 для измерений в полосах со среднегеометрическими частотами начиная с 63 Гц, и не менее 200 м3 — для измерений в полосах со среднегеометрическими частотами, начиная со 125 Гц.
Контроль определения шумовых характеристик в реверберационном помещении проводится по ГОСТ 12.1.027-80.
При ориентировочном методе измерения проводятся на открытой площадке над звукоотражающей плоскостью или в помещениях объемом более 70 м3.
Пригодность помещения или измерительного пространства определяется по п. 5.1.2,5.1.3, 5.4.1 и приложению 3 ГОСТ 11929-87.
При измерении уровня шума ЭМ должна быть установлена так, чтобы исключить влияние на результаты измерений посторонних вибраций и исключить передачу вибрации от испытуемой машины к другим устройствам, могущим стать источниками звуковых помех. Для этого, независимо от способа установки при эксплуатации, ЭМ устанавливают на виброизолированном фундаменте (или поворотном столе) на амортизаторах или применяют упругую подвеску. Жесткую установку (подвеску) допускается применять в следующих трех случаях: когда проверкой установлено, что такой способ не изменяет шумовых характеристик ЭМ; когда технически невозможна упругая установка ЭМ; когда данный способ указан в стандарте или технических условиях на ЭМ конкретного типа.
При измерениях шумовых и вибрационных характеристик ЭМ способы установки примерно одинаковы и те различия, которые все-таки имеются, мы рассмотрим ниже (ГОСТ 11929-87, ГОСТ 12379-75). При упругой установке ЭМ могут использоваться различные приспособления, связанные с ЭМ, которые совершают колебания вместе с ней как единое целое. Совокупность всех этих приспособлений называется дополнительной массой, и она не должна превышать 0,1 массы ЭМ. Масса фундамента, на который устанавливается ЭМ, должна превышать массу этой машины не менее чем в 10 раз.
Для исключения явления резонанса частота свободных колебаний /0 испытуемой машины при упругой установке должна удовлетворять следующему условию:
при измерении шума
Л <
при измерении вибрации (включая перемещение в направлении измерения вибрации)
Л<о.25/тИ.
где fmin — наименьшая возможная частота вынужденных колебании машины при измерениях, Гц.
Для вращающихся машин (при отсутствии автоколебаний)
fmin = Wwfn/60,
где nmin — наименьшая частота вращения ЭМ, об/мин.
Для машин мощностью более 1000 кВт, а также для машин с fmin < < 17 Гц допускается измерять шумовые характеристики при
/о < °’75 fmin и
Для ЭМ с частотой вращения до 25 Гц при измерениях вибрации допускается производить измерения при /0 ^^fmin (по вибрационной скорости) и /о < 0,5/w .п (по вибрационному ускорению).
При измерениях ЭМ должна иметь такое же положение, как и при нормальной эксплуатации. Если машина предназначена для работы в различных положениях, то ее испытывают в горизонтальном положении (при отсутствии других указаний в стандарте или технических условиях). Метод упругой установки обеспечивает получение объективных шумовых и вибрационных характеристик ЭМ, так как конструкция стенда практически не влияет на результат измерений.
При измерениях шума к установке предъявляются дополнительные требования:
если при упругой установке образуется расстояние между звукоотражающей плоскостью и опорной поверхностью машины, то оно должно быть не более 0,l/wax (Jmax — максимальный размер машины);
при измерениях в свободном звуковом поле машину устанавливают примерно посредине звукоотражающего пола в закрытом помещении или над звукоотражающей плоскостью в свободном пространстве.
Указанные выше требования к собственным частотам упругой установки обеспечиваются правильным выбором упругих элементов (амортизаторов). Амортизаторы выбираются с учетом допустимых механических нагрузок и жесткости. С. этическое перемещение центра тяжести ЭМ, с учетом дополнительной л'зссы, не должно превышать половины максимального допустимого прогиба (перемещения) упругого элемента.
Рассмотрим порядок выбора амортизаторов [7.17, 7.14]:
1. По наименьшему рабочему числу оборотов п машины рассчитывается собственная частота колебаний /0 на частоте вращения.
2. По числу крепежных отверстий выбирается схема размещения амортизаторов.
3. По массе машины определяется типоразмер амортизатора и рассчитывается собственная частота колебаний ЭМ по формуле
/о = -- у/7/М,
27Г
где с — динамическая жесткость амортизатора по оси, перпендикулярной плоскости установки, Н/м; М — масса машины, приходящаяся на один амортизатор, кг.
Снижение собственной частоты колебаний машины достигается для некоторых типов амортизаторов (например, АКСС и АКСС-И) увеличением весовой нагрузки (применением меньшего типоразмера амортизаторов) . Допускается 2,5-кратная перегрузка.
В тех случаях, когда динамическая жесткость применяемых амортизаторов не известна, для приближенной оценки собственной частоты колебаний машины можно воспользоваться формулой
/о = ОЛЛ/Т.
где 6 — линейная деформация амортизатора (или упругой подвески) под действием веса машины, м.
4. После проведения расчета сравниваются собственные частоты: заданная и расчетная. Если расчетная частота выше заданной, то выбираются амортизаторы меньшей жесткости или же делается каскадное (последовательное) соединение амортизаторов. При каскадаом соединении амортизаторов собственная частота колебаний ЭМ в V т раз меньше (т — число каскадов), чем собственная частота на амортизаторах того же типа при отсутствии каскада.
Экспериментальное определение собственной частоты колебаний ЭМ рекомендуется проводить при возбуждении колебаний с плавно изменяемой частотой. Возбуждение осуществляют при помощи вибратора, или изменением частоты вращения ЭМ с преднамеренно неуравновешенным ротором, или по свободным колебаниям.
К амортизаторам предъявляются следующие требования:
амортизаторы должны иметь одинаковую жесткость и высоту;
чистота поверхности амортизатора Ra должна быть не меньше 2,5 мкм; максимально допустимое отклонение по жесткости составляет 10%, по высоте 1%.
Из-за несоблюдения этих требований при измерении вибрации показания приборов будут нестабильны и с большими погрешностями изме-
Рис. 7.6. Расположение точек измерения
рения, так как нагрузка будет распределена на амортизаторах неравномерно, что скажется на собственной частоте колебаний ЭМ.
Выбор режимов работы ЭМ при определении шумовых характеристик производится в соответствии с п. 5.10, 5.11 ГОСТ 11929-87.
При определении шумовых характеристик ЭМ техническим методом в свободном звуковом поле над звукоотражающей поверхностью (метод 1) точки измерения располагаются на измерительной поверхности, охватывающей ЭМ и опирающейся на звукоотражающую плоскость
(см. п. 6.1.1 ГОСТ 11929-87). ИП должна находиться на измерительном расстоянии d от корпуса машины, форму которого условно считают параллелепипедом с размерами llt l2, h (при определении этих размеров не учитываются концы валов, коробки выводов, рым-болты и т. п.). Измерительное расстояние d выбирается по п. 6.1.2 ГОСТ 11929-87 в зависимости от размера ЭМ, помещения и уровня шума помех, а число точек измерения и их положение — по п. 6.1.3, 6.1.4. Стандартное измерительное расстояние принимается равным 1 м.
При обработке результатов измерений необходимо знать площадь измерительной поверхности и значение поправочного коэффициента К. Площадь измерительной поверхности S, м2, вычйсляют по формуле
S = 4(аЬ + ас + Ьс)
а + Ъ +с а + b + с + 2
Размеры, а, Ь, с измерительной поверхности (рис. 7.6) вычисляют по формулам:
а = 0,5 /1 + J; b = 0,5l2 + d\ с = /3 + J,
где Zi, 12 — размеры основания параллелепипеда, ограничивающего ЭМ, м; /з — высота параллелепипеда, м, d — измерительное расстояние, м.
Коэффициент К определяется методикой, изложенной в приложении 3 ГОСТ 11929-87. Коэффициент К дает возможность оценить качество
235
звукового поля и учитывает коррекцию отраженного звука в испытательном пространстве.
Определение шумовых характеристик ориентировочным методом (метод 3) предусматривает расположение точек измерения такое же, как и при определении методом 1, но количество точек измерения и их расположение выбираются по п. 6.3, 6.4 этого стандарта.
7.2.3. Проведение измерений. Перед измерением шума работающей ЭМ следует измерить шум помех при отключенной ЭМ. Помехи могут создаваться аэродинамическими потоками вблизи микрофонов, вибрациями, передаваемыми на измерительные приборы, влиянием электрических или магнитных полей и другими источниками шума. Шум помех оценивается теми же величинами и в тех же измерительных точках, что и шум испытываемой машины. Шум помех можно не учитывать, если он на 10 дБ ниже уровня шума, измеренного при включенной машине.
При техническом методе измерения, если разность между уровнем измеренного шума и уровнем помехи ДА < 6 дБ (во всех октавных или третьоктавных полосах) или если она менее 10 дБ и колеблется во времени, то результат измерений в данной полосе частот в данной точке измерения не может быть оценен.
При ДА > 6 дБ из уровней, измеренных при работе машины, следует вычесть значение Д, приведенное ниже:
Д^,дБ 6-8 9-10 Более 10
Д, дБ 1 0,5 0
При ориентировочном методе измерения допускается проводить измерения при ДА > 3 дБ. Для этого случая поправка Д приведена ниже:
ДА, дБ 3 4-5 6-10 Более 10
Д, дБ 3 2 1 0
Во время проведения измерений микрофон должен находиться в измерительной точке и направлен к испытываемой машине. Между микрофоном и машиной не должны находиться люди или предметы, искажающие звуковое поле. Расстояние между микрофоном и испытателем должно быть не менее 0,5 м. В каждой измерительной точке следует измерить уровень звука по шкале А и, если необходимо, уровни звукового давления в октавных полосах со среднегеометрическими частотами от 63 до 8000 Гц или в третьоктавных полосах частот со среднегеометрическими частотами от 50 до 10000 Гц. Измеряемые уровни звукового давления или уровни звука по шкале А надо усреднить по времени. Для этого в шумомере устанавливается временная характеристика 5 (медленно). При колебаниях показания шумомера < 5 дБ следует от
считать среднее показание. При колебаниях > 5 дБ надо применять интегрирующие шумомеры.
7.2.4. Обработка результатов измерения. Средний уровень звука (или звукового давления) Т, дБ (А) или дБ, на измерительной поверхности вычисляется по формуле
~L = 101g(—— Е Ю0’11'' ) - К, (7.2)
\ " i=l /
где L. — уровень звукового давления в i-й измерительной точке; п — число измерительных точек.
Если значения отличаются друг от друга не более чем на 5 дБ, то L можно вычислить по формуле
— 1 п
L = —~ S Li — К, п i = ]
В тех случаях, когда измерительное расстояние отличается от 1 м, средние уровни, получаемые по формуле (7.2), допускается приводить к 1 м по формуле
+ 201g(d + 1тах12)Ю + 1тах12). (7.3)
При d< 1,35 lmax или Imaxflmin > 2 расчет по (7.3) следует считать ориентировочным.
Уровень звуковой мощности в полосах частот или корректированный уровень звуковой мощности вычисляют по формуле
LP (или Lpa) = L + 10 lg(S/S0);
где L — средний уровень звукового давления в полосе частот или средний уровень звука, дБ или дБ A; S — площадь измерительной поверхности, м2; So = 1 м2.
Показатель направленности G при измерениях техническим методом в свободном звуковом поле над звукоотражающей поверхностью вычисляется по (7.1).
7.2.5. Приборы для измерения шума. Для определения шумовых характеристик ЭМ применяют шумомеры 1-го или 2-го класса при техническом методе измерения и 1, 2 или 3-го класса при использовании ориентировочного метода. Шумомеры должны удовлетворять требованиям ГОСТ23941-79 (СТСЭВ547-77),ГОСТ 17187-81 (СТСЭВ 1351-78). Кроме шумомеров при определении шумовых характеристик ЭМ применяют октавные или третьоктавные полосовые фильтры, удовлетворяющие требованиям ГОСТ 17168-82 (СТ СЭВ 1807-79), а также измерительные тракты, имеющие аналогичные характеристики и удовлетворяющие требованиям указанных выше стандартов. Шумомер, вклю-
Выход
Рис. 7.7. Упрощенная схема шумомера
чая микрофон, должен быть предназначен для измерения в свободном звуковом поле. Кроме указанных выше приборов могут применяться анализаторы частот, измерительные магнитофоны, самописцы уровня.
Характеристики акустических измерительных приборов, конструкции и их типы описаны в [7.1, 7.3, 7.10, 7.13, 7.18], в информационных материалах фирм-изготовителей, например [7.21, 7.22]. В соответствии со специализацией, основным поставщиком приборов для виброакус-тических измерений в странах СЭВ является ГДР. Очень широкое распространение получили приборы фирмы ”Брюль и Къер”, Дания.
Шумомер — прибор для измерения уровня звука, имеющий частотные характеристики, обозначаемые по стандартам А, В, С, D, Лин, и временные динамические характеристики, обозначаемые F, S, I, Пик или некоторые из них. Шумомеры 1-го класса предназначены для точных измерений (частоты 20 Гц — 12,5 кГц), 2-го класса — для измерений нормальной точности (частоты 20 Гц — 8 кГц) и 3-го класса — для ориентировочных измерений (частоты 31,5 Гц — 8 кГц).
Устройство обычного шумомера представлено на схеме рис. 7.7. Шумомер является электронным измерительным прибором, реагирующим на звук, аналогично человеческому слуху, и обеспечивающим объективное измерение уровней звука или звукового давления. Воспринимаемый микрофоном шумомера звук преобразуется в электрический сигнал. Усиленный входным усилителем У1 электрический сигнал подводится к блоку частотной коррекции (БЧК), содержащему стандартные корректирующие схемы А, В, С, D, Лин, или к внешнему фильтру. Усиленный выходным усилителем У2 электрический сигнал подается на блок детекторов (БД), а с выхода его — на стрелочный измерительный прибор (ИП) или после преобразования — на цифровой индикатор. БД стандартного шумомера содержит детектор среднеквадратических значений (СКЗ), пиковый детектор, цепи усреднения, формирующие временные динамические характеристики шумомера F (быстро), S ( медленно),/ (импульс) и Пик, и схему запоминающего устройства (ЗУ), служащего для фиксации максимального пикового 238
или среднеквадратического значения сигнала, измеряемого в импульсном режиме шумомера. СКЗ характеризует энергию исследуемого процесса и пропорционально количеству энергии измеряемого шумомером звука или шума.
При измерении звука с меняющимся уровнем нужно, чтобы отклонение стрелки шумомера точно соответствовало этим изменениям. Однако слишком быстрые изменения уровня измеряемого звука могут быть причиной быстрых флюктуаций стрелки измерительного прибора, затрудняющих снятие показаний с прибора. Поэтому по международным рекомендациям и по стандартам применяются две динамические характеристики шумомера F (быстро) и S (медленно). При быстрых флюктуациях стрелки измерительного прибора при работе в режиме F следует установить шумомер в режим S. При слишком больших флюктуациях стрелки измерительного прибора шумомера, работающего в режиме S, необходимо определить среднее отклонение стрелки и отметить в протоколе измерения максимальные и минимальные показания измерительного прибора.
При измерениях кратковременных и импульсных звуков используются динамические характеристики шумомера: I (импульс) или Пик.
В приборе есть встроенный генератор эталонной частоты (ГК), выдающий электрический сигнал определенной величины, необходимой для калибровки электрического тракта шумомера.
Шумомеры имеют выходы переменного или постоянного тока, могут иметь цифровой выход. Эти выходы предназначены для подключения внешних анализирующих, регистрирующих и вычислительных устройств. Кроме обычных шумомеров выпускаются интегрирующие шумомеры, предназначенные для измерения эквивалентного уровня звука. Для калибровки шумомера в процессе эксплуатации применяют пистонфоны — калибраторы, создающие акустический сигнал с определенным уровнем звукового давления на опорной частоте, по которому регулируется коэффициент усиления прибора.
Все шумомеры подвергаются периодически (один раз в год) государственной поверке.
Технические характеристики шумомеров, используемых при измерениях шума ЭМ, выпускаемых отечественной промышленностью и некоторыми зарубежными фирмами, приведены в табл. П1 приложения.
7.3. ИЗМЕРЕНИЕ ВИБРАЦИИ ЭЛЕКТРИЧЕСКИХ МАШИН
Измерение вибрации ЭМ позволяет контролировать качество и надежность ЭМ, решать вопросы диагностики, амортизации и виброизоляции. Методы оценки вибрационных характеристик ЭМ (собственной вибрации) при периодических, типовых и приемо-сдаточных испытаниях устанавливаются ГОСТ 12379-75 (СТ СЭВ 2412-80).
7.3.1. Параметры вибрации и измеряемые величины. Периодическая вибрация может характеризоваться несколькими колебательными параметрами одновременно [7.17]. К параметрам линейной вибрации относятся перемещения, скорость, ускорение, резкость, сила и мощность, к угловой вибрации — угол поворота, угловая скорость, угловое ускорение, угловая резкость, момент сил. К параметрам обоих видов вибрации относятся фаза, частота и коэффициент нелинейных искажений. Мгновенное значение координаты точки при колебательном движении, называемое смещением, обозначают х.
Первая производная смещения по времени называется скоростью:
v = ds/dt = х;
вторая — ускорением
а = d2s/ dt = х;
третья — резкостью:
и = d3s/dt
Для гармонического процесса смещение х описывается уравнением х = x0cos(cof + </>),
где х — смещение в момент времени х0 — амплитудные значения смещения; gj = 2тг/ - угловая частота колебаний; f — частота колебаний; t — время; у — начальная фаза колебания.
Уравнение скорости:
где v — скорость в момент времени Г; г0 — амплитудное значение.ско-рости.
Уравнение ускорения
а = + </>),
где а ~ ускорение в момент времени а0 — амплитудное значение ускорения.
Амплитудные значения смещения х0, скорости v0 и ускорения а0 связаны соотношением
«о = Wo = <^2«о-
Для количественной оценки амплитудных значений вибрации можно использовать различные значения. Обозначим х, г, а общим символом X. Физическая величина X для периодического процесса и эргодического случайного процесса характеризуется четырьмя значениями:
Рис. 7.8. Графическое изображение значений периодического сигнала:
а — пиковое; б — среднее; в — квадрат среднеквадратического
двойной амплитудой, пиковым значением, средним значением и среднеквадратическим значением. Все
приводимые ниже математические определения относятся к величине вибрации X(f), где X — мгновенное значение параметра. Пределы интегрирования — от t до t + Г, где Т ~ =
Двойная амплитуда показывает полный размах колебаний и является важным параметром, тогда как смещение механических колебаний детали машины является критическим с точки зрения максимально допустимых механических напряжений и зазоров.
Пиковое значение Хпик = Хтах
, где Xmax(f) — максимальное
значение внутри интервала Т. Пиковое значение эффективно при оценке кратковременных механических ударов и т. п. Среднее значение
Л = J ср 7
J \X(t)\dt.
Среднее значение показывает временное развитие исследуемых вибраций, но его практическое применение ограничено вследствие того, что оно не имеет непосредственной связи ни с какой физической величиной этих колебаний.
Среднеквадратическое значение (СКЗ)
СКЗ
у j |Х(оРл.
СКЗ вибрации является самой важной характеристикой, так как в ней учитывается временное развитие исследуемых колебаний и она непосредственно отражает значение, связанное с энергией и, следовательно, с разрушающей способностью этих колебаний.
На рис. 7.8 показаны значения двойной амплитуды, пикового (рис. 7.8, а), среднего (рис. 7.8, б) и СКЗ2 (рис. 7.8, в) для гармони-
ческого, периодического и случайного процессов. Для чисто гармонических колебаний соотношения между различными величинами имеют вид
СКЗ
Y = I V
.—, Лср .—> -ЛПИКФ
2 V2 V2
В более общем виде
^Сскз ~ КфА'ср — ^ПИК)
Ла
-Хф ” ^скз/^ср и ~ ^пикМскз-
Коэффициенты Кф и Ка называются соответственно коэффициентом формы и коэффициентом амплитуды и дают представление о форме волны изучаемых вибраций.
Для чисто гармонических колебаний
Кф = 2ir/(2\/2) = 1,11 и Ка =
2 = 1,41.
Абсолютные значения смещения, скорости и ускорения измеряются в мкм, мм/с и м/с2 соответственно.
Относительные значения (уровни) скорости и ускорения могут выражаться в децибелах и рассчитываться по формулам
ГдБ = 201g(p/p0),
где v — измеренная величина скорости, мм/с; v0 = 5 * 10"5 мм/с — условный нулевой уровень скорости,
адБ = 201g(a/ao),
где а — измеренная величина ускорения, м/с, а0 =3 • 1(Г4 м/с2 — условный нулевой уровень ускорения.
Для упрощения перевода абсолютных значений скорости и ускорения в относительные можно воспользоваться таблицами из приложения 1 к ГОСТ 12379-75 (СТ СЭВ 2412-ВО). По этому же стандарту в качестве основных измеряемых величин рекомендуются величины СКЗ скорости vCK3 и ускорения дскз. Для тех случаев, когда необходимо знать смещение, амплитуда смещения рассчитывается по следующей формуле:
s = 3,58.1СГ4 вскз//2 = 2,24 -102 vCK3/f,
где аскз — СКЗ ускорения, м/с2; гскз — СКЗ скорости, мм/с; f — частота, на которой проводится измерение, Гц.
Для оценки качества балансировки роторов ЭМ необходимо знать смещение на частоте вращения. Для наиболее распространенных ско-242
Таблица 7.1
п, об/мин Л Гц мкм 2s, мкм
750 12,5 229яскз = 18vCK3 458аскз = 36ускз
1000 16,7 128яскз = 13,4vCK3 256дскз — 26,8ускз
1500 25 57,2лскз ~ 9ускз 114,4яскз = 18vCK3
3000 50 14,3аскз = 4,5vCK3 28,6дскз = 9ускз
6000 100 3,58дскз — 2,25vCK3 7,6дскз = 4,5ускз
ростей вращения значения амплитуды смещения (s) и двойной амплитуды смещения (2s) в зависимости от ускорения (аскз) и скорости (гскз) на частоте вращения (f) приведены в табл. 7.1. В случае необходимости можно производить пересчет скорости из ускорения или наоборот по формулам:
®скз = 6,25 • 10 1>скз/>
^СКЗ = 1,59-10 *^скз//з
где аскз — ускорение, м/с2; гскз — скорость, мм/с; f — частота, на которой проводится измерение, Гц.
7.3.2. Методы измерения вибрации. Как указывалось выше, измерения вибрации ЭМ проводятся в соответствии с ГОСТ 12379-75 (СТ СЭВ 2412-80) для ЭМ массой 0,5—2000 кг и частотой вращения от 600— 30000 об/мин, а для машин, имеющих массу свыше 2000 кг, по ГОСТ 20815-75 (СТ СЭВ 1097-78).
Измерения вибрации проводятся в диапазоне от рабочей частоты вращения до 2000 Гц при определении общего уровня виброскорости vCK3. Для тех ЭМ, у которых рабочая частота вращения до 3000 об/мин, можно измерять гскз до 1000 Гц. Необходимость проведения измерений вибрационной скорости в диапазоне частот до 2000 Гц или вибрационного ускорения в диапазоне частот до 10000 Гц, если в диапазон измерений входят частоты свыше 2000 Гц, а также необходимость спектрального анализа обычно устанавливается заказчиком в стандартах или технических условиях на конкретные типы электрических машин.
В качестве измерительной аппаратуры используются виброизмери-тельные приборы, выполненные в соответствии с требованиями ГОСТ 25275-82 (СТ СЭВ 3173-81) и ГОСТ 25865-83, а также октавные и третьоктавные фильтры — по ГОСТ 17168-82 (СТ СЭВ 1807-79), которые обеспечивают измерения необходимых параметров вибрации. Класс точности виброизмерительных приборов, отградуированных в абсолютных единицах должен быть не более 15, а градуированных в децибелах — не более 1,5.
При контроле вибрации ЭМ следует применять упругую установку. При этом должна обеспечиваться свобода вибрационных перемещений испытуемой машины путем введения упругих элементов, которые могут быть расположены ниже или выше опорных точек крепления ЭМ. В тех случаях, когда упругая установка ЭМ технически невозможна и имеется соответствующее указание в стандарте или ТУ на конкретный тип ЭМ, допускается жесткая установка. Требования к фундаментам, собственным частотам упругоустановленной машины и правила выбора амортизаторов приведены в п. 7.2.2.
Точки измерения и условия работы ЭМ во время испытаний выбираются в соответствии с ГОСТ 12379-75 (СТ СЭВ 2412-80). Число и расположение точек измерения может быть изменено при наличии специальных указаний в стандартах или ТУ на конкретные типы ЭМ.
В качестве преобразователей механических колебаний в электрические в ЭМ преимущественно применяются виброизмерительные пьезоэлектрические преобразователи (ВИП), устанавливаемые в точках измерения на ЭМ. Способ закрепления преобразователя влияет на частотные характеристики всего измерительного тракта и, следовательно, на точность измерений.
Рекомендуются следующие основные способы установки ВИП (рис. 7.9):
1. Способ установки преобразователей с помощью металлической шпильки показан на рис. 7.9, а (для максимальной температуры 1000 °C). При таком креплении получаются наиболее надежные результаты измерения, так как обеспечивается полное совпадение частотной характеристики с калибровочной кривой. Такой же результат дает ввертывание преобразователя в резьбовое отверстие на вибрирующей поверхности (в том случае, если на наружной поверхности датчика имеется резьба). Для получения хорошего механического контакта с вибрирующей поверхностью применяются силиконовые смазки ПМС-400, ПМС-600 или масло К-17, позволяющие устранить резонансы резьбы.
2. Способ установки ВИП с помощью специальной мастики показан на рис. 7.9, б (для максимальной температуры 40 °C). При этом способе крепления между преобразователем и опорной вибрирующей поверхностью наносится тонкий слой мастики. Если мастика достаточно твердая, то частотная характеристика также совпадает с калибровочной кривой. Применение мягких мастик снижает коэффициент преобразования ВИП на частотах выше 3000 Гц. К такому же результату приводит повышение температуры опорной поверхности. Этот метод крепления очень широко распространен.
3. Способ крепления с помощью постоянного магнита показан на рис. 7.9, в (для максимальной температуры 150 °C). Этот способ удобен тем, что позволяет быстро устанавливать ВИП в точке измерения, 244
Тонкий слой силиконовой смазки
Стальная шпилька
Частота. Гц
100 200 SOO 1к 2* 5к Юк 20 к 50* ЮОк
Рис. 7.9. Способы установки виброизмерительных преобразователей:
а - крепление металлической шпилькой; б - крепление на мастике; в - крепление постоянным магнитом
однако он имеет ряд недостатков. Одним из существенных недостат-к является снижение собственной резонансной частоты крепления ВИП примерно до значения 3000 Гц, что ограничивает верхнюю границу частотного диапазона измерений до 1000 Гц. Кроме того, повышение температуры поверхности снижает силу притяжения магнитного прихвата, что изменяет частотную характеристику ВИП и увеличивает погрешность измерения.
Для установки ВИП на ЭМ необходимо подготовить опорную площадку, которая должна иметь поверхность, обеспечивающую плотное прилегание к ней опорной поверхности ВИП. По размерам площадка должна быть больше, чем поверхность фланца или основания ВИП, и иметь шероховатость не выше /? = 1,25 мкм с отклонением от плоскостности не более 0,01 мм. Резьбовое отверстие для крепления ВИП должно быть выполнено под углом 90 ± 0,5° к опорной поверхности. Резьбовое гнездо должно также иметь фаску, равную 1,2—1,4 высоты профиля резьбы.
При выборе крепления ВИП отдается предпочтение способам, рекомендуемым предприятием-изготовителем ВИП. При всех способах крепления желательно убедиться в отсутствии резонансов крепления в контролируемом диапазоне частот, что проверяется калибровкой преобразователей на образцовом вибростенде с выбранным способом крепления.
При контроле вибрации ЭМ помехи от внешней вибрации в принятых точках измерения не должны превышать 25% нормируемой величины, а при измерении ускорений в децибелах необходимо, чтобы уровень полезного сигнала превышал уровень помех на 8—10 дБ. Помехи от внешней вибрации следует определять при неработающей ЭМ, но при включении всех вспомогательных стендовых механизмов, обеспечивающих работу ЭМ.
Измерения вибрации при периодических, типовых и приемо-сдаточных испытаниях проводятся в порядке, предусмотренном стандартами или ТУ на конкретные типы ЭМ после испытания по программе приемосдаточных испытаний, но до испытаний на внешние механические воздействия и испытания на ресурс. Условия работы машины во время испытаний, при которых контролируется вибрация, приведены в ГОСТ 12379-75 (СТ СЭВ 2412-80).
7.3.3. Оформление результатов испытаний. Протокол испытаний по определению вибрации ЭМ должен содержать следующие данные:
тип и заводской номер, наименование предприятия-изготовителя, номер стандарта или ТУ на ЭМ;
основные номинальные данные ЭМ;
способ установки машины с указанием собственных частот и наличие упругой установки;
режим работы при испытаниях;
измеряемую величину;
тип и номер вибропреобразователей и измерительных приборов; результаты измерения вибрации в отдельных точках, в том числе данные спектрального анализа;
класс вибрации для машины в соответствии с ГОСТ 16921-ВЗ; место, дату испытания, фамилию испытателя.
Содержание протокола измерения вибрации при необходимости может быть расширено или изменено.
7.3.4. Аппаратура для измерения вибрации. Для измерений вибраций используются специализированные приборы-виброметры либо измерительные тракты, составленные из отдельных функциональных блоков: измерительного ВИП,, предусилителя, измерительного усилителя, регистрирующего прибора, анализирующего устройства и других блоков в зависимости от той конкретной задачи, которая ставится при измерении вибрации ЭМ.
Устройство виброметра рассмотрим на типовой структурной схеме виброметра рис. 7.10. На вход предусилителя (ПУ) (усилитель напряжения или заряда) подается сигнал с пьезоэлектрического ВИП, устанавливаемого на испытуемую ЭМ. Предусилитель предназначен для согласования высокого выходного полного сопротивления преобразователя со сравнительно низким входным полным сопротивлением последующих каскадов. Каскад электронных интеграторов (И) обеспечивает как измерение ускорения, так и скорости, и смещения механических колебаний. Предусмотренные в приборе регулируемые фильтры верхних и нижних частот (ФВЧ и ФНЧ) позволяют устанавливать частотный диапазон прибора согласно требованиям к измеряемой полосе частот или в соответствуй с рабочим часютным диапазоном ВИП. Эти фильтры можно также ис юльзовать для подавления высокочастотных или низкочастотных помех. С выходом усилительного каскада (У2) соединен блок детекторов (БД), с которого постоянное напряжение, пропорциональное измеряемой величине, после преобразования в каскаде линейно-логарифмического преобразователя (ЛЛП) поступает на измерительный прибор (ИП) с логарифмической шкалой, перекрывающей две декады, БД определяе! вреднее или СКЗ, или двойную
амплитуду, подлежащего измерению сигнала. В составе блока может быть предусмотрено запоминающее устройство, хранящее максимальное значение сигнала.
В виброметре имеется встроенный генератор эталонной частоты (ГК), выдающий электрический сигнал определенной величины, необходимый для калибровки электрического тракта виброметра.
Вместе с виброметром можно применять внешние фильтры, обеспечивающие частотный анализ исследуемых механических колебаний. Виброметр имеет выходы переменного и постоянного напряжений, предусмотренные для подключения осциллографов, измерительных магнитофонов и регистрирующих приборов, например самописца уровня.
Виброизмерительные преобразователи. Используемые при измерении вибрации пьезоэлектрические ВИП широко применяются благодаря своей малой чувствительности к внешним электромагнитным полям, высокой надежности, широкому частотному и динамическому диапазону. Они имеют небольшие размеры и массу, легко размещаются в труднодоступных местах, позволяют работать при высоких и низких температурах [7.1]-
Принцип действия пьезоэлектрического ВИП заключается в прямом пьезоэффекте, при котором происходит преобразование механической энергии в электрическую. ВИП состоит из чувствительного элемента, расположенного в корпусе, который крепится к основанию, и соединительного кабеля. Различают три варианта конструкции ВИП. В первом варианте используют деформацию сжатия—растяжения, во втором — деформацию сдвигов и в третьем — деформацию изгиба. На выходе ВИП генерируется электрический сигнал, пропорциональный колебательному ускорению.
Качество ВИП определяют следующие метрологические и эксплуатационные характеристики:
коэффициент преобразования по заряду или по напряжению;
рабочий диапазон частот;
динамический диапазон;
собственная емкость и емкость кабеля;
рабочий диапазон температур;
масса ВИП, его габаритные размеры и свободный объем для установки;
требования к посадочным местам на объекте измерения;
момент крепления (кроме приклеиваемых ВИП);
коэффициент поперечного преобразования;
ддина кабеля;
ресурс работоспособности.
Промышленностью выпускаются различные виды ВИП, которые можно классифицировать по применению. Небольшая группа ВИП общего назначения удовлетворяет требованиям большинства нормальных об-248
ластей измерения и анализа механических колебаний, другие ВИП разработаны с учетом получения оптимальных характеристик в определенных областях применения, например малогабаритные и легкие ВИП — для измерения механических колебаний с большими амплитудами и высокими частотами, двух- и трехкомпонентные ВИП — для одновременного измерения в двух или трех взаимно перпендикулярных направлениях; ВИП для работы при высоких температурах, измерения больших ускорений; образцовые — для калибровки методом сравнения и другие.
Основные технические характеристики пьезоэлектрических ВИП отечественного и зарубежного производства, применяемые для из мерения вибрации ЭМ, приведены в [7.1, 7.13, 7.21, 7.22].
Пьезоэлектрические ВИП являются датчиками с большим полным сопротивлением, на выходе которых электрический сигнал имеет относительно малую амплитуду и мощность. Следовательно, при измерениях необходимы согласующие усилители (СУ), входы и выходы которых соединяются соответственно с выходом ВИП и входом измерительной, анализирующей или регистрирующей аппаратуры. Основными функциями СУ являются: преобразование высокого полного сопротивления ВИП в более низкий, усиление электрических сигналов ВИП по мощности и по напряжению. С ВИП используются следующие согласующие усилители: усилитель напряжения и усилитель заряда. В [7.1, 7.13, 7.21, 7.22] приведены характеристики СУ различных типов.
Усилители напряжения применяются тогда, когда входное полное сопротивление СУ должно быть как можно выше и иметь неемкостный характер, для того чтобы уменьшить до минимума электрическую нагрузку ВИП. Однако в этом случае длина кабеля, соединяющего СУ с ВИП, должна быть стандартной, так как емкость кабеля оказывает существенное влияние на чувствительность ВИП, значительно понижая ее.
Усилитель заряда применяют тогда, когда необходимо при измерениях использовать длинные кабели, так как сильная внутренняя емкостная обратная связь в СУ создает очень большую входную емкость и подсоединение параллельно большой емкости длинных соединительных кабелей почти не снижает общей чувствительности системы, содержащей ВИП и СУ, и не сужает ее частотный диапазон в области низких частот.
Общие уровни вибрации определяются с помощью виброметра, а уровни вибрации в полосах частот — с помощью частотных анализаторов. Основным требованием к приборам, предназначенным для измерения вибрации ЭМ, является малая чувствительность к внешним электромагнитным полям. Этим требованиям удовлетворяют только приборы с пьезоэлектрическими ВИП.
Рис. 7.11. Схема системы для измерения вибраций:
ВИП — виброизмерительный преобразователь; УС — усилитель согласующий; У И — измерительный усилитель; ФП — полосовой фильтр; СУ — самописец уровня
В приборостроении существует тенденция по разработке комплексов средств измерения вибрации, представляющих собой совокупность функционально законченных измерительных устройств, характеризующихся метрологической, информационной, конструктивной и эксплуатационной совместимостью, осуществляющих измерения, обработку и регистрацию результатов измерения. Устройства, предназначенные для работы в системе, могут использоваться и в качестве самостоятельных приборов. Приведем пример построения простейшей системы для измерения вибрации ЭМ. Такая система будет состоять из следующих устройств: пьезоэлектрического ВИП, согласующего усилителя, измерительного усилителя, самописца уровня и полосового фильтра (рис. 7.11).
Наиболее широко применяются для контроля и исследования вибраций ЭМ агрегатный комплекс средств измерения вибрации (АСИВ), разработанный отечественной промышленностью, приборы объединения RFT, ГДР, и фирмы ’’Брюль и Къер” (Briiel & KjKr), Дания [1.1, 7.21, 7.22].
Принципы построения виброизмсритсльных систем, их технические характеристики и рекомендации по применению широко освещены в литературе [7.13, 7.20].
В табл. П2, ПЗ, П4, П5 и П6 приложения приведены данные некоторых отечественных и зарубежных виброметров, пьезоэлектрических ВИП, согласующих и измерительных усилителей, частотных фильтров и спектрометров, применяемых в системах для измерения вибрации электрических машин.
Поверка виброметров или виброизмерительных трактов с пьезоэлектрическими ВИП проводится в соответствии с ГОСТ 8.246-77, а с индукционными преобразователями — в соответствии с ГОСТ 8.245-77. Поверку проводят органы государственной или ведомственной метрологической службы. При поверке приборов проводят их градуировку, сравнивают результаты градуировки, в частности частотную характеристику, коэффициент преобразования, с характеристиками, приведенными в технической документации на приборы. При положительных результатах поверки выдается свидетельство о поверке. Периодичность поверки виброизмерительной аппаратуры — раз в один год. 250
ТА. МЕТОДЫ ЧАСТОТНОГО АНАЛИЗА СПЕКТРА
И ВЫДЕЛЕНИЯ СОСТАВЛЯЮЩИХ РАЗЛИЧНОГО ПРОИСХОЖДЕНИЯ
В приборах, применяемых для виброакустических измерений, используется преобразование акустических величин (звукового давления) или механических колебаний (колебательного ускорения) в пропорциональные им и соответствующие по частоте значения напряжения и тока. Поэтому приборы для частотного анализа в настоящее время являются чисто радиоэлектронными и производится частотный анализ соответствующих электрических сигналов. Основные положения спектрального анализа гармонических и случайных процессов изложены в [7.2, 7.8,7.12,7.15, 7.19].
Спектральным анализом называется определение амплитуд и частот колебаний, входящих в состав сложного сигнала. При подробном анализе выявляются элементарные частотные составляющие сигнала, а при общем — роль отдельных частотных участков в общем спектре сигнала. С помощью приборов для анализа выявляют в исследуемом сигнале наличие частотных участков с шириной полосы, определяемой поставленной задачей. Проведение спектрального анализа колебательного процесса является сложной задачей, и главную роль в ее решении играет правильная методика измерений и оценка полученных результатов, для чего должны быть четко определены основные параметры анализирующих устройств.
Аналоговые методы анализа. Анализирующие свойства прибора характеризуются разрешающей способностью, динамическим диапазоном и временем анализа. Разрешающая способность анализатора — зто способность разделять смежные частотные составляющие сигнала. Она определяется частотным интервалом, при котором две смежные частотные составляющие разделяются провалом, достигающим 50% максимального значения (рис. 7.12). Разрешающая способность зависит от параметров фильтра и скорости анализу. Максимальная разрешающая способность наблюдается в статическом режиме. Увеличение скорости анализа уменьшает разрешающую способность. При правильном выборе скорости анализа в соответствии с выбранной шириной полосы пропускания изменение разрешающей способности анализатора сравнительно невелико и его можно не учитывать.
Время анализа сигналов, с, имеющих дискретный спектр, в анализаторе со ступенчатым переключением фильтров для каждого фильтра рассчитывается по формуле
1,5/Д/,
где Д / — ширина полосы пропускания фильтра, Гц.
Общее время анализа суммируется для всех полос.
Ширина полосы фильтра определяется разностью высшей и низшей частот, на которых коэффициент передачи фильтра К снижается на 3 дБ,
Рис. 7.12. К определению разрешающей способности анализатора
т. е. всех тех частот, где сигнал падает до уровня 0,707 от значения в полосе прозрачности (рис. 7.13). Такое определение вызвано тем, что реальная частотная характеристика фильтра значительно отличается от характеристики идеального прямоугольного фильтра.
Для последовательного анализатора с плавным изменением частоты анализа скорость анализа находят из выражения
Д/2/4.
Отсюда время анализа всего спектра будет равно (здесь и далее время в секундах)
t = (Л-/1)/Г> 4(/2-Л)/(Д/2),
где /2 и Л — граничные частоты диапазона. Время, необходимое для анализа в случае плавного линейного изменения частоты при постоянной относительной ширине полосы пропускания,
t - 4Q2/fi при
где Q = /Ср/Д/ = const — относительная полоса пропускания во всем исследуемом диапазоне частот.
Время анализа случайных процессов при ступенчатом переключении фильтров в полосе равно
Д^ = 4/Д/.
Время анализа участка спектра, содержащего случайный сигнал, при постоянной ширине полосы пропускания равно
t > 44(/2-Я)/(«2Д/2),
где А ~ постоянная, зависящая от вида фильтра, способа детектирования и интегрирования (значение колеблется в пределах 0,04—1); 5 —
Рис. 7.14. Структурная схема гетеродинного анализатора:
У В — усилитель входной; С — смеситель; Г — гетеродин; УПЧ — усилитель промежуточной частоты; Д — детектор; ИВ — выходной индикатор
относительная среднеквадратическая погрешность (обычно 5 -0,1).
Время анализа спектра случайного сигнала при постоянной относительной полосе пропускания равно
t >
Динамический диапазон анализатора определяется как отношение максимальных и минимальных значений гармонических составляющих в рабочем диапазоне частот прибора.
Разложение сложного колебания на составляющие его спектра может быть произведено двумя различными способами: последовательным или параллельным (одновременным) анализами колебаний. При последовательном анализе спектр сигнала получается с помощью одного частотно-избирательного элемента (фильтра), параметры которого можно изменять, или с помощью набора избирательных элементов, подключаемых поочередно. Такой анализ не может быть произведен быстро, так как требуется время, чтобы переходные процессы в частотно-избирательном элементе не исказили результат измерений. Последовательный метод спектрального анализа пригоден для стационарных колебаний.
При параллельном анализе используется набор фильтров, настроенных на разные частоты, входы которых соединяются параллельно. Все фильтры вместе охватывают весь необходимый частотный диапазон. На выходах фильтров получают все составляющие исследуемого колебания, что позволяет зафиксировать одновременно все точки спектра. Время анализа всего спектра частот, в основном, определяется временем установившегося процесса в одном фильтре.
Для анализа колебаний (вибрации и шума) применяют два вида аналоговых анализирующих устройств: гетеродинный и фильтровый анализаторы. Гетеродинный анализатор (рис. 7.14) позволяет каждую частоту сложного колебания поочередно подстраивать к частотам вспомогательных колебаний гетеродина. Прибор измеряет разность частот гетеродина и гармоник, причем эта частота меньше частоты режущего фильтра. Гетеродинный анализатор обеспечивает анализ с
Рис. 7.15. Структурная схема анализатора с плавно перестраиваемым фильтром:
УВ - усилитель входной; ФП — фильтр с плавной настройкой; УО - усилитель оконечный; Д - детектор; ИВ — выходной индикатор
постоянной полосой пропускания в рабочем диапазоне частот. Краткие характеристики анализаторов гетеродинного типа приведены в табл. П7 приложения. Анализатор типа СК4-56 предназначен для исследования спектров сигналов произвольной формы, а также спектров стационарных шумов в диапазоне частот от 10 Гц до 60 кГц. Гетеродинный частотный анализатор типа 2010 (фирмы ’’Брюль и Къер”) позволяет проводить исследование звука и механических колебаний, измерять спектральную плотность мощности в диапазоне частот от 2 Гц до 200 кГц. В приборе имеется программное управление шириной полосы пропускания и постоянной времени усреднения, а также автоматическая компенсация ширины полосы пропускания при измерении спектральных плотностей мощности.
В состав фильтровых анализаторов частот входит плавно настраиваемый полосовой фильтр, в котором предусмотрено устройство, изменяющее относительную ширину полосы пропускания фильтра (рис. 7.15). Краткие характеристики анализаторов частот с плавной настройкой и постоянной относительной полосой пропускания приведены в табл. П8 приложения.
В состав другого вида фильтровых анализаторов входит набор электрических фильтров, настроенных на определенную полосу частот. Верхняя и нижняя границы полосы пропускания каждого фильтра последовательно перекрывают рабочий диапазон частот. В зависимости от отношения граничных частот полос пропускания фильтров, анализаторы частот получили названия октавных и третьоктавных (в акустике такие анализаторы называются спектрометрами). Интервал, ограниченный частотами с отношением /в//ш = 2, где /в и /н — верхняя и нижняя граничные частоты, называется октавой.
Средние частоты определяются как среднегеометрические от граничных частот полос, т. е.
/с = VTbAT-
Средние частоты фильтров выбираются согласно предпочтительному ряду частот, для акустических измерений. Распределение частот для октавных и третьоктавных фильтров в герцах приведено в табл. 7.2.
Частотные характеристики идеального и реального полосового фильтров показаны на рис. 7.16. Характеристики октавных и треть-
Октавные частотные полосы Третьоктавные частотные полосы
Среднегеометрические частоты Граничные частоты Среднегеометрические частоты Граничные частоты
0,8 0,72-0,9
1 0,7-1,4 1 0,9-1,2
1,25 1,12-1,4
1,6 1*4-1,8
2 1,4-2,8 2 1,8-2,2
2,5 2,2—2,8
3,15 2,8-3,6
4 2,8-5,6 4 3,6-4,5
5 4,5-5,6
6,3 5,6-7,2
8 5,6-11,2 8 7,2-9
10 9-11,2
12,5 11,2-14
16 11,2-22,5 16 14-18
20 18-22,5
25 22,5-28
31,5 22,5-45 31,5 28-36
40 36-45
50 45-56
63 45-90 63 56-72
80 72-90
100 90-112
125 90-180 125 112-140
160 140-180
200 180-225
250 180-355 250 225-280
315 280-360
400 360-450
500 355-710 500 450-560
630 560-720
800 720-900
1000 710-1400 1000 900-1120
1250 1120-1400
1600 1400-1800
2000 1400-2800 2000 1800-2250
2500 2250-2800
3150 2800-3600
4000 2800-5600 4000 3600-4500
5000 4500-5600
Продолжение табл. 7.2
Октавные частотные полосы Третьоктавные частотные полосы
Среднегеометри- Граничные Среднегеометри- Граничные
ческие частоты частоты ческие частоты частоты
6300 5600-7200
8000 5600-11 200 8000 7200-9000
10 000 9000-11 200
12 500 11 200-14 000
16 000 11 200-22 400 16 000 14 000-18 000
20 000 18 000-22 400
октавных фильтров должны удовлетворять требованиям ГОСТ 17168-82 (СТ СЭВ 1807-79). Структурная схема спектрометра приведена на рис. 7.17.
В настоящее время получил распространение модульный принцип конструирования измерительной аппаратуры, поэтому аналоговый спектрометр собирается из двух модулей: измерительного усилителя и набора полосовых фильтров, каждый из которых может при необходимости функционировать самостоятельно. Технические характеристики некоторых спектрометров, измерительных усилителей и полосовых фильтров приведены в [7.1,7.13,7.21,7.22].
Цифровые методы анализа позволяют вести обработку сигнала в реальном масштабе времени, получать аналого-цифровое отображение
Рис. 7.16. Характеристики полосовых фильтров 2-го класса для измерений нормальной точности:
а - октавный фильтр; б — третьоктавный фильтр
Рис. 7.17. Структурная схема спектрометра с полосовыми фильтрами:
УВ - усилитель входной; ПФ1, ПФ2, ПФЗ, . . ., ПФИ — полосовые фильтры; УО - усилитель оконечный; Д - детектор; ИВ - выходной индикатор
информации на экране дисплея, повысить точность и стабильность измерений, анализировать стационарные, нестационарные и импульсные процессы. Применение процессоров и цифровых методов обработки сигнала расширяет функциональные возможности приборов и дает возможность использовать приборы совместно с ЭВМ и в автоматизированных измерительных системах.
Математическим основанием частотного анализа является преобразование Фурье (7.15). В общем виде соответствующие отношения выражаются парой интегралов Фурье:
S(w) =-2- f /(Oexp(-/wr)dr; (7.4)
Z7r — co
f(t) = f S(cu)exp(/wt)dcu. (7.5)
Выражение (7.4) определяет преобразование временной функции f (г) в комплексный спектр S (си), содержащий составляющие с угловыми частотами си (си - 2л/, / — частота, Гц). Выражение (7.5) относится к обратному преобразованию спектральных составляющих во временную область, т. е. к преобразованию спектров в функцию времени.
Дискретные эквиваленты выражений (7.4) и (7.5) можно записать в виде
1
= "лГ 2 /(и)ехр(-/-27rwfc/7V); (7.6)
7V и = 0
N-1
f(n) = S F(k)exp(J2irnk/N). (7.7)
к = 0
Выражения (7.6) и (7.7) являются математической основой дискретного преобразования Фурье (ДПФ), в котором вместо простирающихся
Рис. 7.18. Дискретное преобразование Фурье сложной функции времени (действительная часть)
от —00 до 00 непрерывных функций F(w) n/(z) учитываются образуемые дискретными значениями функции F(k) и
Приращение в частотной области равно Д/, т. е. интервал между смежными дискретными значениями, и At — приращение во временной области; соответствующая дискретному значению F(k) частота равна ЯД/, а соответствующее дискретному значению /(и) время составляет иДл Определяемое выражением (7.6) преобразование называется прямым ДПФ, а выражение (7.7) является определением обратного ДПФ. ДПФ делает возможным применение вычислительных машин. Однако численное ДПФ является процессом трудоемким и малоэффективным, так как при преобразовании N значений нужно N2 умножений комплексных чисел. Более эффективным является быстрое преобразование Фурье (БПФ), выражаемое аналогичным ДПФ алгоритмом, но уменьшающим число необходимых умножений до Mog2N(MnA). В процессе прямого преобразования Фурье N дискретных значений во временной области преобразуются в N комплексных значений в частотной области. Число дискретных значений N равно 2 в определенной степени. Дискретные значения в комплексной частотной области расположены на равных расстояниях в частотном диапазоне от нуля до частоты выборки. Кроме того, результирующий спектр является периодическим с равным частоте выборки периодом, т. е. N комплексных дискретных значений повторяются вдоль оси частот с периодом, равным частоте выборки дискретных значений. Из периодичности спектров (рис. 7.18), получаемых в процессе 'прямого преобразования, следует, что дискретные значения, находящиеся между частотой выборки fs (часто-
та Найквиста), являются представлением отрицательных частотных составляющих, а представлением положительных частотных составляющих являются дискретные значения, находящиеся между нулем и частотой Найквиста. Если предположить, что большинство физических процессов происходит в действительной области, процесс преобразования значительно упростится. В этом случае получаемые частотные спектры являются сопряженными и четными, а их составляющие с положительными и отрицательными частотами имеют определенную взаимосвязь. Для определения таких спектров нужны лишь составляющие
с положительными или отрицательными частотами. Поэтому N действительных значений во временной области можно преобразовать в N/2 комплексных значений в частотной области.
При обработке результатов учитывается преобразование исходных функций времени в спектр с частотами от нуля до частоты Найквиста. Дискретные значения в частотной области, определяемые в процессе описанного выше преобразования Фурье, имеют вид
F(i) = а. + ]Ы .
Каждой составляющей F (i) с положительной частотой +/ соответствует составляющая с отрицательной частотой — f, т. е. F(— i) = = a. — jbi.
Относящаяся к частоте i мощность определяется суммой мощностей составляющих с положительной и отрицательной частотами, т. е. 2 (а? + Ь2). Соответствующие значения нескольких спектров можно подвергать усреднению с целью определения средних значений мощности, а затем после извлечения квадратного корня — определения СКЗ отдельных составляющих.
Упрощенная структурная схема узкополосного частотного анализатора типа 2031 фирмы ’’Брюль и Къер” в реальном масштабе времени показана на рис. 7.19. Электронное устройство прибора 2031 образует шесть блоков: аналоговый входной блок процессора (АВБП), центральный процессор (ЦП), дисплей (Д), блок универсального устройства сопряжения (УУС), блок аналогового выхода (БАВ) и блок управления (БУ). В приборе используются две 16-разрядные соединительные магистрали (Y и Д), способствующие обмену информацией между указанными выше блоками. Посредством универсальной соединительной
магистрали (УСМ) через УУС осуществляется ввод (вывод) данных, дистанционное управление, индикация и связь с другими цифровыми приборами. Общее время управляемого главной программой цикла обработки информации, т. е. коррекции, преобразования Фурье, вычисления значения спектральной мощности и усреднения, составляет 200 мс. Благодаря применению буферных памятей, способствующих одновременному вводу и преобразованию информации, прибор работает в реальном масштабе времени от 0—10 Гц до 0—2 к Гн. Разрешение по частоте Р анализатора 2031 равно 1/400 его верхнего предела рабочего диапазона. Верхние пределы рабочего частотного диапазона 10 Гц — 20 кГц, а дискретная настройка по порядку 1—2—5. Краткие характеристики узкополосных анализаторов в реальном масштабе времени приведены в табл. П9 приложения.
Узкополосные частотные анализаторы в реальном времени обеспечивают: спектральный и статистический анализы сигналов, изменяющихся во времени; измерения амплитудного спектра мощности, плотности распределения амплитуд; анализ периодических, случайных и однократных процессов; выделение сигналов из шумов, порядковый анализ (с применением дополнительных блоков), допусковый контроль по спектрам, сличение спектров; выбор и запоминание максимальных значений, линейное и экспоненциальное усреднения спектров. Имеют цифровой отсчет основных параметров спектра, выход на аналоговые и цифровые регистрирующие устройства и связь с внешней ЭВМ.
Цифровые частотные анализаторы (спектрометры) измеряют и отображают на экране октавные и третьоктавные частотные спектры в реальном времени. Работа приборов основывается на применении цифровой техники, в частности цифровых методов частотной фильтрации, определении СКЗ значения и усреднения.
Рассмотрим принцип работы двухполюсного цифрового фильтра, обобщенная схема которого приведена на рис. 7.20. Этот фильтр относится к группе рекурсивных фильтров, т. е. к фильтрам, обратная связь которых гарантирует выходной сигнал фильтра в определенный момент времени в форме явной функции предшествующих этому моменту значений входных и выходных сигналов. Характеристика такого фильтра, т. е. форма его частотной кривой, относительная ширина полосы пропускания и конфигурация — фильтр нижних частот, фильтр верхних частот, полосовой или заграждающий фильтр — зависит от коэффициентов умножительных устройств Ло, At, А2, Bi, В2. Рабочий частотный диапазон фильтра определяется задержкой z-1. Задержка z"1 идентична элементарному интервалу выборки при предположении мгновенного выполнения операций сложения и умножения. Следовательно, рабочий диапазон фильтра можно регулировать путем настройки интервала выборки, например увеличения интервала- выборки вдвое приводит к сдвигу рабочего частотного диапазона фильтра на октаву ниже при сохранении относительной 260
Рис. 7.20. Обобщенная схема
двухполюсного рекурсивного цифрового фильтра
ширины полосы пропускания. Свойства и параметры цифрового фильтра, относящиеся к времени реакции и сдвигу фазы, практически идентичны соответствующим характеристикам аналогового фильтра. Передаточную функцию цифрового фильтра на рис. 7.20 можно определить выражением
н (z) =Н0
А о + /Ц/4 + A2Z
1 - B\z 1 — BqZ
где z-1 — преобразование, является дискретным преобразованием Лапласа, в котором оператор z-1 заменяет нормальный оператор Лапласа s.
Эти два оператора можно взаимно преобразовать, пользуясь тождеством
z 1 = ехр(—st).
В основе цифровых фильтров анализатора 2131 фирмы ’’Брюль и Къер” лежит специальная форма z-преобразования, называемая согласованным z-преобразованием (рис. 7.21). Обобщенная передаточная функция такого цифрового фильтра определяется выражением
Н (2) =Я0 -------
1 - В iZ 1 - B2Z 2
Время, затрачиваемое реальными цифровыми фильтрами в процессе умножения, играет важную роль при сравнении с интервалом выборки z"1. Поэтому время задержки подбирается таким, чтобы оно вместе с временем умножения равнялось интервалу выборки. На вход цифрового фильтра подается последовательность дискретных дан-
Рис. 7.22. Упрощенная структурная схема цифрового частотного анализатора (спектрометра) типа 2131
ных, представляющая собой временную функцию анализируемого сигнала. Цифровой фильтр обрабатывает эти данные и выдает на выход соответствующую последовательность дискретных данных, представляющих собой временную функцию сигнала после фильтрации.
Упрощенная структурная схема цифрового частотного анализатора 2131 приведена на рис. 7.22.
В соответствии с этой схемой можно выделить три основные секции прибора 2131: входной усилитель и блок фильтра, детектор СКЗ с устройством усреднения и выходной блок с устройствами управления и индикации. Входной усилитель и блок фильтра обеспечивают формирование, аналого-цифровое преобразование и частотный анализ поступающего на вход сигнала. Цифровой сигнал от блока фильтра возводится в квадрат, усредняется и логарифмически преобразуется в уровни СКЗ (в децибелах) во второй секции прибора, содержащей детектор СКЗ и устройство усреднения. Выходная секция, содержащая устройство управления, индикации и изображения данных, управляет изображением проанализированных и усредненных данных электронно-лучевой трубки и выдачей спектральных данных на внешние приемники информации. Эта секция также управляет вводом циф
ровых данных от внешней аппаратуры. Интервал времени между двумя очередными цифрами обмена информацией (44 мс) обеспечивает возобновление изображаемого на экране злектронно-лучевой трубки спектра. В табл. П10 приложения даны основные характеристики цифровых частотных анализаторов (спектрометров). Эти приборы применяются для частотного анализа стационарных и импульсных процессов в реальном масштабе времени, анализа и регистрации данных для их последующей цифровой обработки, анализа спектров шума и вибраций, при измерениях спектра электромагнитных полей и др.
Существует новый класс приборов для частотного анализа, основой которого является процессор. Все необходимые программы хранятся либо в памяти системы, либо могут храниться отдельно на кассетах или магнитных дисках. Комплекс программ позволяет сочетать в системе практически все функциональные возможности, необходимые для всестороннего анализа различных сигналов.
Выбор вида анализа и параметров анализатора. В практике вибро-акустических измерений [7.8, 7.19] наиболее часто встречаются следующие виды сигналов:
периодические сигналы сложной формы. Их спектр характерен наличием дискретных частотных составляющих, амплитуды и фазы которых находятся в определенных соотношениях между собой;
случайные стационарные сигналы, амплитуды которых распределены по нормальному закону, содержащие широкий набор частотных составляющих со случайными амплитудами и фазами;
сумма периодических и случайных сигналов. Это наиболее распространенный вид реальных сигналов;
нестационарные сигналы.
Чтобы результаты анализа дали четкий ответ на поставленные вопросы при выявлении источников шума и вибрации, необходимо правильно выбрать вид анализа и параметры анализирующих приборов. Первоначально надо решить, каким способом будет анализироваться исследуемый процесс: непосредственно или будет расшифровываться запись, сделанная на магнитной ленте. Учитывая, что современная аппаратура сложна, желательно устанавливать ее стационарно, и поэтому можно рекомендовать применение записи процесса на магнитную ленту. Кроме того, магнитная запись нестационарных процессов обеспечивает наилучшие возможности анализа. Выбор между одновременным и последовательным анализом не имеет принципиального значения и определяется целесообразным временем анализа и наличием аппаратуры.
Если цель измерений — выявить отдельные дискретные составляющие (например, отыскивается их источник), то лучше всего применять узкополосный анализ с постоянной шириной полосы пропускания. Ширину полосы пропускания не следует выбирать слишком узкой, так как дискретные составляющие, обусловленные работой ЭМ, не явля-
ются строго стабильными (частотные составляющие несколько флюктуируют по частоте и амплитуде). При излишне узкой полосе пропускания на выходе анализатора сигнал будет также сильно флюктуировать, поэтому результаты анализа могут быть искажены. Чаще всего в звуковом диапазоне частот применяется анализ с полосой пропускания 10— 20 Гц.
В виброакустике наиболее распространен третьоктавный анализ. Для того чтобы правильно выявить характер спектра, необходимо, чтобы полоса анализа была не менее чем в четыре раза уже того участка спектра, который исследуется. Для выбранной полосы анализа и ожидаемого вида спектра определяется время анализа.
Для узкополосного анализа с постоянной полосой пропускания Д/ — время анализа, с, определяется приближенным выражением
t = 4р/2/Д/2,
где р = 1 (для дискретного спектра); р 4 (для случайного стационарного сигнала); f2 — верхняя граничная частота исследуемого диапазона.
Для анализа в более широкой полосе с постоянной относительной полосой пропускания
t = bpQ^lfi,
где Q = /ср/Д/ — добротность анализатора; Д — нижняя граничная частота исследуемого частотного диапазона.
Зная требуемое время анализа, можно определить необходимую скорость настройки анализатора.
Целью спектрального анализа виброакустических процессов в ЭМ, кроме непосредственной информации (например, определения частот основных гармоник, выявления отдельных участков спектра наибольшей интенсивности), является сравнение между собой спектров различных процессов.
Для сравнения результатов анализа измеряемого сигнала, проведенного различной аппаратурой (после внесения калибровочных поправок) , измеряемые значения должны быть оценены по отношению к одним и тем же уровням. Результаты измерений, сделанных в полосах конечной ширины, приводятся к спектральным уровням по формуле
А\=Ап — J-Д/,
где Ai — спектральный уровень сигнала, дБ; Ап — уровень сигнала в полосе Д/, дБ; Д/ — ширина полосы, дБ, относительно 1 Гц.
Значение поправки 1/2 Д/ можно определить по графику, данному на рис. 7.23. По оси абсцисс откладывают значение Д/, по вертикали 264
Рис. 7.23. Поправка для перевода уровней в частотных полосах разной ширины в полосу 1 Гц
получают значение поправки. Полученные результаты относят к среднегеометрическому из значений граничных частот полос. В случае приведения результатов анализа с постоянной относительной полосой пропускания, поправку к спектральным уровням можно определить также по графику, данному на рис. 7.23. При этом поправку находят по значению средней частоты фильтра, откладываемой по оси абсцисс. Каждой ширине полосы соответствует своя прямая на графике. Результаты приведения к спектральным уровням (перевод значений из одной полосы в другую) справедливы только для сигналов, имеющих сплошной равномерный спектр в широком диапазоне частот (например, стационарный случайный сигнал). Во всех других случаях приведение является приближенным. Максимальная ошибка будет при сравнении результатов анализа сигнала, содержащего дискретные частоты, с сигналом со сплошным спектром.
7.5. ДОПУСТИМЫЕ УРОВНИ ШУМА И ВИБРАЦИИ
Вибрационные и шумовые характеристики ЭМ нормируются общесоюзными стандартами, отраслевыми стандартами и техническими условиями на конкретные виды ЭМ [73,7.26].
Нормы допустимых уровней шума для большинства ЭМ с номинальной мощностью от 0,25 до 1000 кВт (кВ - А) и с номинальной частотой вращения от 600 до 3750 об/мин устанавливаются ГОСТ 16372-84. За нормируемый уровень шума принимается средний уровень звука на расстоянии d = 1 м от контура машины при наличии звукоотражающего пола (bjiyi) либо корректированный уровень звуковой мощности (£рл)- Требования к машинам меньшей мощности приведены в ГОСТ 16264-78. На основе общих для всех ЭМ стандартов выбираются соответствующие допустимые уровни шума отдельных типов или серий ЭМ.
Нормы допустимых вибраций для вращающихся ЭМ общего и специального применения с массой машин от 0,25 до 2000 кг и с рабочей частотой вращения от 600 до 12 000 об/мин устанавливаются ГОСТ 16921-83 (СТ СЭВ 2412-80). В качестве нормируемого параметра вибрации принято среднеквадратическое значение вибрационной скорости. Для ЭМ отдельных типов, когда в соответствии со стандартами или техническими условиями проводят спектральный анализ вибрации, дополнительно нормируются спектральные составляющие вибрационной скорости или вибрационного ускорения. Допустимые значения вибрационной скорости дифференцированы в зависимости от требований, предъявляемых к ЭМ, и высоты оси вращения.
Допустимые значения вибрации для вращающихся ЭМ общего назначения массой свыше 2000 кг и частотой вращения до 3000 об/мин приведены в ГОСТ 20815-75 (СТ СЭВ 1097-78). При оценке вибрации ЭМ в качестве нормируемых параметров устанавливаются: средне
квадратическое значение вибрационной скорости, мм/с, в диапазоне частот 10—1000 Гц; среднеквадратическое значение вибрационной скорости, мм/с, в октавной полосе частот, включающей в себя частоту вращения ротора или якоря; пиковое значение вибрационного перемещения, мкм.
Допустимые значения остаточных дисбалансов роторов оговорены в ГОСТ 12327-79. Данный стандарт распространяется на ЭМ с жесткими роторами массой от 0,01 до 1000 кг и рабочей частотой вращения до 30000 об/мин. Показателем качества балансировки ротора служит точность его балансировки — величина ecu, мм - рад/с, равная произведению удельного остаточного дисбаланса ротора е на угловую скорость вращения ротора си, соответствующую рабочей частоте вращения. Класс точности балансировки или более жесткие требования по точности балансировки должны указываться в стандартах или технических условиях на конкретные виды машин.
7.6. ТОЧНОСТЬ ИЗМЕРЕНИЯ ШУМА И ВИБРАЦИИ
Применяемые для измерения шума приборы—шумомеры измеряют звуковое давление. Показания прибора, регистрирующего измеряемое звуковое давление, при повторных измерениях могут меняться в зависимости от: нестабильности во времени и пространстве излучаемого акустического сигнала; недостаточной точности градуировки делителей, используемых в тракте; недостаточной точности градуировки микрофонов; влияния направленности микрофона (совместно с точностью установки микрофона в одну и ту же измерительную точку поля), а также в зависимости от влияния внешних факторов: температуры среды, атмосферного давления, влажности воздуха, наличия сильных электромагнитных полей.
Для того чтобы исключить влияние фактора нестабильности излучаемого акустического сигнала источником звука (ЭМ), необходимо, чтобы между началом работы ЭМ и началом измерения был промежуток времени, достаточный для того, чтобы ЭМ работала в установившемся режиме.
В связи с тем что большинство измерений проводится в помещении, всегда можно ожидать влияния стен помещения и элементов крепления на акустическое поле, создаваемое в месте измерения. Для стационарного сигнала характерным является появление пространственных неоднородностей поля. В этом случае, при повторных измерениях, микрофон может попасть в близко расположенные, но различные по значению зоны поля, что будет давать разброс показаний прибора. Поэтому перед измерениями необходимо убедиться в отсутствии существенной неоднородности звукового поля, сделав несколько замеров вблизи точки измерения.
При проведении сравнительных измерений с одной и той же аппаратурой надо стремиться к использованию одной и той же шкалы прибора и тех же положений регулировочных органов измерительного тракта. На точность градуировки измерительных микрофонов, как упоминалось выше, влияют такие внешние факторы, как температура, влажность и давление. Поэтому измерения следует проводить в условиях, при которых выполнена градуировка. В случае отклонения от этих условий возможны большие ошибки, так как чувствительность многих из применяемых в настоящее время микрофонов от них сильно зависит. Следует учесть, что эти факторы влияют на распределение акустического поля в помещениях, потому что звукопоглощающие свойства любых звукопоглощающих конструкций зависят от температуры и влажности. При правильном учете всех перечисленных факторов измерения акустического давления будут характеризоваться стабильностью и точностью [7.8,7.10].
Погрешности, присущие приборам для измерения вибрации, можно разделить на четыре группы [7.17]: основные погрешности; дополнительные погрешности; искажения показаний приборов, обусловленные воздействием внешних факторов; искажения показаний, связанные с превышением предельных значений рабочей характеристики.
Основная погрешность определяет максимально возможную ошибку прибора при нормальных условиях его работы в пределах установленного рабочего диапазона. В нее входят погрешность нелинейности рабочей характеристики и погрешность градуировки, неточность делителей напряжения, погрешность отсчетного устройства.
Дополнительная погрешность включает в себя ошибки, связанные с зависимостью чувствительности прибора от частоты, погрешности, обусловленные нестандартной формой входного сигнала, а также искажения в кабеле при его деформации и т. д.
К искажениям показаний прибора, связанным с воздействием внешних факторов, относятся температурная погрешность, погрешность от воздействия на прибор атмосферного давления, влаги, внешних электрических и магнитных полей, внешней вибрации; погрешность, связанная с поперечной чувствительностью ВИП.
Выход за пределы рабочей характеристики прибора по частотному и амплитудному диапазону измерений во многих случаях приводит к появлению значительной погрешности измерения. Кроме того, большие погрешности измерения из-за искажения показаний могут иметь место при собственных шумах прибора, уровень которых превышает заданное граничное значение, что может быть обнаружено при проверке прибора в соответствии с инструкцией по эксплуатации.
Искажения могут быть связаны с влиянием способа установки ВИП на измеряемом объекте (состоянием поверхности места измерения, перпендикулярностью резьбовых отверстий для крепления датчика, 268
наличием уплотнительных шайб и переходников и т. п.), а также с влиянием способа установки электрической машины (правильным выбором амортизаторов, состоянием амортизаторов и поверхности мест крепления и т. д.).
Для устранения обратного воздействия ВИП на измеряемый объект масса ВИП не должна превышать 0,05 массы машины. Чтобы уменьшить влияние помех от внешних электромагнитных полей следует:
соединительные кабели ВИП располагать как можно дальше от силовых кабелей и по возможности перпендикулярно к ним;
заземлять корпус испытуемой машины;
в случае отсутствия электрического контакта между ВИП и ЭМ заземлять корпус ВИП;
при наличии сильных электромагнитных полей рассеяния устанавливать только один ВИП, так как установка на машину нескольких датчиков, имеющих гальваническую связь с ЭМ, одновременно приводит к образованию замкнутых контуров, в которых наводится ЭДС помехи, либо ВИП, установленные на ЭМ, должны быть изолированы от нее.
Более подробно вопросы точности виброакустических измерений рассматриваются в [7.6,7.8,7.10].
7.7. ХАРАКТЕРИСТИКИ ВИБРОАКУСТИЧЕСКИХ ПРОЦЕССОВ, ИСПОЛЬЗУЕМЫЕ В ЦЕЛЯХ ДИАГНОСТИКИ
Кроме временной реализации виброакустических процессов и спектра мощности, рассмотренных в предыдущих разделах главы, представляют значительный интерес функции корреляции, взаимный спектр [7.2,7.4,7.12,7.19].
Функция автокорреляции
1 т
Кхх(т) = lim -- f x(r)x(r + T)dt
•p ->-oo 1 0
случайного процесса x(r) несет в себе ту же информацию, что и энергетический спектр Sxx(co), так как зти функции связаны между собой парой преобразований Фурье:
*хх(т) - f S^^e^'dcr, __ оо оо
= f Kxx(f)e~iwTdT. __оо
Практически встречаются случаи, когда поведение функции автокорреляции более наглядно, чем спектр мощности, отражает состояние ди
агностируемой машины. Так, например, при появлении дефекта, связанного с возбуждением периодического процесса с периодом Г, акустический сигнал х(Т) можно представить как сумму периодической A(t) и шумовой Z (г) компонент х(г) = А (г) + Z (г).
При значениях т, превышающих интервал корреляции т0 шумового процесса, функция автокорреляции становится периодической, с периодом Т. По значению нормированной функции корреляции можно определить отношение энергии периодической компоненты к энергии всего сигнала, т. е. может быть сформирован признак дефекта, вызывающего изменения соотношений периодической и шумовой компонент в акустическом сигнале.
Очень часто в диагностических целях используют свойства функции взаимной корреляции Кху(т) колебательных процессов x(t) и у (Г), измеренных в двух точках конструкции механизма. По результатам анализа можно судить о вкладе различных источников возбуждения вибрации в общий колебательный процесс, сигнал от которого измерен в данных точках.
Преобразование Фурье от функции взаимной корреляции
Sxy(co) = f Kxy(r)eiGyrdT
—оо
— взаимная спектральная плотность мощности (взаимный спектр). Его используют для формирования диагностических признаков. Модуль взаимного спектра | Sxy (со) | характеризует распределение по частоте энергии взаимодействия колебательных процессов x(r) uy(t). Одно из применений взаимного спектра — оценка передаточной функции объекта Н (i со) при отклонении ее от нормы. Если при проявлении дефекта меняется характер передаточной функции узла (смещаются собственные частоты, например за счет изменения жесткости какого-либо сопряжения, изменяется амплитуда при изменении коэффициента демпфирования или фазовый сдвиг между входным воздействием и реакцией на выходе), то любой из этих параметров может быть использован в качестве диагностического признака.
Глава восьмая
ПОМЕХИ РАДИОПРИЕМУ (РАДИОПОМЕХИ)
8.1. ИСТОЧНИКИ ИНДУСТРИАЛЬНЫХ РАДИОПОМЕХ
Источниками индустриальных радиопомех (РП) в ЭМ являются электромагнитные поля токов высокой частоты (с крутым фронтом изменения тока во времени), возникающие в скользящем контакте ЭМ, особенно при коммутационных процессах.
Источниками РП могут быть также входящие в состав ЭМ устройства с полупроводниковыми элементами, регуляторы с контактами и т. п.
Энергия поля РП может излучаться как через зажимы ЭМ, так и непосредственно в окружающее пространство.
В первом случае она может быть охарактеризована напряжением (и мощностью), измеряемым на зажимах ЭМ; во втором случае — напряженностью поля и мощностью излучения измеряемыми с помощью антенны. При этих измерениях устанавливаются уровни этих величин в децибелах, т. е. логарифм их отношений к пороговым значениям, соответствующим нулевым уровням.
РП могут проявляться в полосе частот 0,01—1000 МГц, однако РП, создаваемые ЭМ, контролируются в полосе частот 0,1—30 МГц (напряжение, мкВ) и 0,1—300 МГц (напряженность поля, мкВ/м).
Уровень помех, создаваемых коллекторными машинами, определяется главным образом качеством коммутации и коммутационными параметрами (он зависит, в частности, от числа витков в секции). Кроме того, он* зависит от емкости обмоток и соединительных элементов по отношению к земле и их индуктивности при частотах РП.
Явно выраженной зависимости уровня РП от мощности машин не установлено.
Для конкретного типа ЭМ при неизменных условиях контроля существует достаточно определенная связь между уровнем РП и качеством коммутации [6.15], что может быть использовано для контроля качества коммутации ЭМ в автоматизированных испытательных установках.
Основные положения, определяющие методы испытания источников индустриальных РП, устанавливают ГОСТ 16842-82, СТ СЭВ 784-77, ГОСТ 11001-80, СТ СЭВ 502-84; ГОСТ 16842-82 также предусматривает контроль мощности (с помощью поглощающих клещей) и мощности излучения РП.
8.2. ДОПУСТИМЫЕ УРОВНИ РАДИОПОМЕХ
Допустимые уровни РП в децибелах и методика их определения регламентируются [8.1].
Вопросы отнесения отдельных устройств, являющихся источниками РП, к той или иной группе норм в случае необходимости решает Государственная инспекция электросвязи Министерства связи СССР.
Для ЭМ, работающих в сетях жилых домов (норма 1—72) и вне этих сетей (норма 8—72) допустимые уровни помех РП приведены в табл. 8.1. Перевод уровня РП в децибелах L в напряжения (7, мкВ, производится по формуле
U = io*,/20.
Допустимый уровень помех L, дБ
Частота, МГц В жилых домах Вне жилых домов
1 2 3
0,1-0,5 74 70-60 60 80
0,5-6 66 60-52 52 —
6-30 66 52 52 —
0,5-2,5 — — — 74
2,5-30 — — — 66
Примечание. 1 — на сетевых зажимах; 2 — на сетевых зажимах переносных устройств; 3 - на зажимах подключения внешних устройств (нагрузки, регуляторов, переключателей).
8.3. СХЕМЫ ИЗМЕРЕНИЯ НАПРЯЖЕНИЯ РАДИОПОМЕХ
Схемы рис. 8.1—8.3 применяются при потребляемых токах до 25 А. В этих случаях применяются эквиваленты сети, схемы которых приводятся в ГОСТ 11001-80. В тех случаях, когда исследуемое устройство при эксплуатации находится в руках, используется схема рис. 8.2, в которой показан эквивалент руки 6, соединенный металлической фольгой с корпусом устройства. Схема рис. 8.3 применяется в тех случаях, когда исследуемое устройство имеет зажимы для подключения внешних устройств. В этом случае в схему вводятся разделительные устройства (гальванические развязки) (РУ) и переключатель фаз (ПФ) (схемы РУ и ПФ по ГОСТ 11001-80).
Для устройств, потребляющих более 25 А (рис. 8.4), в схеме испытания используются РУ и ПФ, вместе составляющие пробник напряжения (ГОСТ 11001-80).
Измерение РП возможно, если напряжение помех, проникающих из сети, не менее чем на 10 дБ меньше уровня РП, создаваемого исследуемым устройством. Проверка этого условия проводится измерением РП по приведенным выше схемам при неработающем устройстве, соединенном с сетью через емкость 0,25 мкФ в каждом проводе. Указанной емкостью шунтируются контакты сетевого выключателя в положении ’’выключено”, а если выключатель встроен в устройство, то оно соединяется с сетью через указанные выше емкости при включенном выключателе.
При всех видах измерения РП весьма важно расположение элементов схем рис. 8.1—8.4 относительно экранирующих поверхностей и друг друга. Оно должно соответствовать указаниям ’’Общесоюзных норм допускаемых индустриальных радиопомех”.
Рис. 8.1. Схема измерения РП при токах до 25 А:
1 — исследуемое устройство; 2 — эквивалент сети; 3 — экранирующая поверхность; 4 — измеритель помех; 5 — коаксиальный кабель
Рис. 8.2. Схема измерения РП ручных устройств:
1-5 - по рис. 8.1; 6 - эквивалент руки (ГОСТ 16842-82)
Рис. 8.3. Схема измерения РП устройства, имеющего сетевые и выходные зажимы:
1—3 — по рис. 8.1; 4 — внешнее устройство; 5 — разделительное устройство; 6 — переключатель фаз; 7 — измеритель помех; 8 — коаксиальный кабель
Рис. 8.4. Схема измерения РП при токах более 25 А:
1 - исследуемое устройство; 2 — разделительное устройство; 3 - переключатель фаз; 4 — пробник напряжения; 5 — измеритель помех; 6 — коаксиальный кабель
У машин с допустимым напряжением РП до 1000 мкВ измерения можно проводить непосредственно на испытательном стенде. Следует принять меры к тому, чтобы через провода, связывающие испытуемую машину с питанием или нагрузкой, не попадали внешние помехи от генераторов испытательной станции. . Для этой цели в непосредственной близости от испытательного стенда в провода, связывающие машину с питанием или нагрузкой, включается фильтр (например, могут быть использованы фильтры, входящие в схему высокочастотных закалочных установок).
В ряде случаев бывает достаточно снабдить собственные генераторы испытательной станции простейшей защитой от радиопомех в виде конденсаторов, включенных между зажимами и корпусом генераторов. Для ЭМ с допускаемым напряжением 250 мкВ и ниже определение уровня радиопомех следует проводить в экранированной камере, обшитой заземленными железными листами или медной сеткой.
Все провода (сети, нагрузки), проходящие в экранированную камеру, должны иметь фильтры, защищающие от проникновения внешних помех внутрь экранированной камеры.
Методы контроля напряженности поля и мощности излучения РП должны соответствовать ГОСТ 16842-82.
Для контроля РП в диапазоне частот 0,01—30 и 25—1000 МГц используются выпускаемые ГДР и соответствующие ГОСТ 11001-80 (СТ СЭВ 502-84) приборы: измерители напряжения типов SMV11; SMV21 и измерители напряженности поля и уровня напряженности поля типов FSM11, FSM21[8.5].
8.4. ЗАЩИТА ОТ РАДИОПОМЕХ,
ГЕНЕРИРУЕМЫХ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ [8.2, 8.3, 8.4]
Она осуществляется включением между зажимами ЭМ и ее корпусом (землей) конденсаторов емкостью 0,05—2 мкФ. Ориентировочные данные о емкости конденсаторов, включаемых между зажимами якоря и корпусом Ся и зажимом шунтовой обмотки и корпусом Сш, в зависимости от мощности машин постоянного тока при допускаемом уровне помех до 1000 мкВ на частоте 0,16 МГц приведены в табл. 8.2.
Рабочее напряжение конденсаторов, включенных на зажимы якоря, выбирается в 1,5—2 раза большим, чем максимальное рабочее напряжение машины. Для конденсаторов, присоединенных к зажимам шунтовой обмотки, это отношение повышается до 2—3 с учетом возможных перенапряжений на зажимах шунтовой обмотки при ее отключении.
При выборе рабочего напряжения конденсаторов, в особенности у низковольтных машин, должно быть учтено также напряжение измерителей сопротивления изоляции (мегаомметров), которыми производится профилактическая поверка установки без отключения конденсаторов.
Емкость, мкФ Мощность, кВт
До 2 2-5 5-50 50-100 1000-5000
Ся 0,1-0,2 0,25 0,5 1-1,5 2
Сц] 0,1-0,2 0,25 0,25 0,25 0,25
В некоторых случаях конденсаторы включаются не только на выходные зажимы, но и непосредственно между щеткодержателем и корпусом. Большое значение имеет при этом длина проводов, присоединяющих конденсатор. Чем они длиннее, тем выше их индуктивность и тем хуже действует защита в области высоких частот. Наиболее эффективны в качестве защиты проходные конденсаторы. Целесообразно симметрировать схему машины, т. е. включать якорь между разделенными на две одинаковые цепи последовательными обмотками и обмотками добавочных полюсов. Для небольших машин с допустимым напряжением помех до 100 мкВ кроме конденсаторов применяются включенные последовательно с якорем специальные высокочастотные дроссели.
Для машин с пластмассовыми корпусами для осуществления защиты от РП иногда прибегают к нанесению на внутреннюю поверхность корпуса проводящего покрытия (окраской, металлизацией), не нанося при этом ущерба для изоляции щеткодержателей, укрепленных в корпусе.
При включении конденсаторов защиты от РП между зажимами (щеткодержателями) и металлическим корпусом двигателя корпус может оказаться под напряжением относительно земли. Поэтому в тех случаях, когда возможно прикосновение руки человека к неза-земленному корпусу, емкостный ток (при переменном токе) не должен превышать 1 мА, а ток утечки (при постоянном токе) 5 мА, при которых не создается неприятных ощущений.
Этим требованиям отвечает суммарная емкость защитных конденсаторов 0,013/0,023 мкФ, соответственно, при напряжении 220/127 В. Для устройств, касающихся кожного покрова, например электробритвы, машинки для стрижки волос и т. п., этот ток не должен превышать 0,3 мА.
Лучшим решением с точки зрения техники безопасности при отсутствии заземления является изолирование двигателя от корпуса прибора, куда он встроен, или применение защитного пластмассового корпуса.
Подбор схем защиты и входящих в нее элементов (конденсаторы) производится обычно экспериментальным путем (ЭМ должна при этом иметь отлаженную коммутацию).
Глава девятая
АВТОМАТИЗАЦИЯ ИСПЫТАНИЙ
Увеличение объема выпуска ЭМ и, особенно, необходимость снижения трудоемкости их производства приводят к необходимости автоматизации испытаний, в первую очередь приемо-сдаточных.
Комплексная автоматизация испытаний предполагает взаимосвязанную автоматизацию управления испытательной установкой, сбора, обработки, анализа и регистрации получаемых данных.
Автоматизация испытаний позволяет уменьшить трудоемкость подготовки и проведения испытаний, увеличить точность результатов и их достоверность, сократить число испытателей.
Автоматизация улучшает условия труда и технику безопасности [9.2,9.15].
В системах автоматизированных испытаний можно выделить три подсистемы:
1. Автоматическое измерение контролируемых величин, их обработку и сравнение с допустимыми значениями, выдачу протоколов испытаний.
2. Механические операции по перемещению изделий, подключение и отключение питающих и измерительных проводов, прижим и отвод ВИП, термопреобразователей, соединение с моментомерами, нагрузочными или приводными установками, торможение АЭМ в опыте КЗ и т. п.
Для этих операций необходимо применение элементов робототехники [9.9,9.10,9.11], конвеерных или роторных устройств [9.7].
3. Систему управления, обеспечивающую необходимую последовательность и синхронизацию операций в соответствии с программой испытания. Функции 1-й и 3-й подсистем и управление 2-й подсистемой осуществляются с помощью управляющих вычислительных машин.
9.1. ОБЩИЕ ПРИНЦИПЫ АВТОМАТИЗАЦИИ ИСПЫТАНИЙ
Следует иметь в виду, что автоматизация испытаний может быть успешной лишь в том случае, если она предусматривается уже на стадии проектирования ЭМ, при разработке технологии изготовления и технологии контроля на всех операциях в процессе производства, при разработке технических условий и программы испытаний [9.7].
При проектировании ЭМ должна быть обеспечена доступность ко всем местам подключения токоведущих элементов схемы испытания и ко всем местам установки измерительных преобразователей.
Одновременно с внедрением автоматизации приемо-сдаточных испытаний (ПСИ) ЭМ целесообразно использование автоматизации сборочных работ (операции узловой и общей сборки) и автоматизации
технологического контроля на таких операциях, как, например, сборка статора и якоря (контроль сопротивления обмоток, межвитковой изоляции и сопротивления изоляции обмоток), статическая и динамическая балансировка роторов и вентиляторов с соответствующей маркировкой в сопроводительной документации узла.
Наибольшую эффективность автоматизация ПСИ будет иметь тогда, когда имеется хорошо отлаженный производственный процесс с устойчивой технологией. В этом случае программа ПСИ может быть существенно упрощена в связи с переводом некоторых видов испытаний, наиболее трудных для автоматизации (например, испытания под нагрузкой), в категорию выборочных периодических. При этом возможно также сокращение времени некоторых видов испытаний (например, испытания прочности изоляции по ГОСТ 183-74 и др.). В полной мере должна использоваться также такая возможность уменьшения трудоемкости и энергоемкости ПСИ, как выбор простейших параметров (например, параметров холостого хода и короткого замыкания) , сочетание которых определяет значения нормируемых параметров (см. гл. 3) и применение искусственных методов нагружения, не требующих механического соединения нагрузочного устройства с испытуемой ЭМ.
Оценка контролируемых параметров может проводиться двумя способами. Для таких испытаний, как проверка сопротивления обмоток, сопротивления изоляции, электрической прочности изоляции, испытание на отсутствие межвитковых замыканий, результаты испытаний могут отмечаться по способу ДА—НЕТ (годен—негоден), путем сравнения измеренного значения с заданным. Такой же метод оценки применим и для других параметров. Для изучения стабильности технологического процесса могут использоваться также измерение и фиксация значения контролируемого параметра, если оно выходит за пределы допуска, или (для более крупных ЭМ) измерение и фиксация контролируемых параметров независимо от того, попадают они в зону допуска или нет, но с отметкой о годности или негодности на основе автоматического сравнения с заданными предельными значениями.
9.2. ПРОГРАММА ИСПЫТАНИЙ
В программу-минимум автоматизированных приемо-сдаточных испытаний (АПСИ), если нет других указаний в стандартах или ТУ на конкретные виды ЭМ, могут быть включены следующие испытания (измерения).
Для всех ЭМ. Измерение сопротивления изоляции, сопротивления обмоток, напряжения тока, мощности, частоты вращения при XX (после обкатки). Определение максимального и минимального моментов. Нагружение обмоток номинальным током (искусственными методами, см. ниже). Проверка механической прочности при реверсах. Изме-277
рение шума и вибрации в режиме XX. Измерение электрической прочности изоляции.
Для АД (помимо испытаний, указанных для всех ЭМ) измерение напряжения, тока, мощности и пускового момента при КЗ. Определение максимального и минимального моментов производится выборочно методом, указанным в гл. 3 (по ускорению).
Для коллекторных ЭМ (помимо испытаний, указанных для всех ЭМ). Отладка и проверка коммутации при номинальном режиме. Измерение радиопомех.
С точки зрения упрощения и удешевления систем АПСИ желательно, чтобы максимальное число испытаний проводилось методами, не требующими соединения с валом испытуемой ЭМ. В основе таких методов лежит измерение частоты вращения и ее изменений (при пуске, выбеге и т. п.) с помощью фотодатчиков и обработки этих данных с помощью электронных схем. Таким методом можно определять частоту вращения и скольжения, пусковой и др. моменты (в процессе разгона, см. гл. 3), потери (по выбегу) [3.4,9.6].
Для СМ нагружение рабочих обмоток током, близким к номинальному, может проводиться без сочленения с другой ЭМ в режиме синхронного компенсатора.
Для АЭМ нагружение обмоток статора и ротора током может проводиться в режиме двухчастотного питания (гл. 3). Можно также использовать схемы Костенко—Кузнецова с питанием последовательно включенных статорных обмоток однофазным переменным и постоянным током.
Класс коммутации может определяться автоматически приборами ПКО (гл. 6). Следует отметить, что для применения этих приборов и для измерения радиопомех в схеме питания испытуемой ЭМ должны предусматриваться фильтры, защищающие от проникновения радио-помех, генерируемых источниками питания.
Определение уровня шума в том случае, когда он выше уровня шума в помещении испытательной станции не менее чем на 3 дБА и постоянная помещения составляет 7 дБА (см. ГОСТ 12.1.028-80 и гл. 7), может проводиться без транспортировки ИМ в заглушенную камеру. В других случаях в системе АПСИ должна предусматриваться такая камера. О стендах для измерения вибрации см. в [9.7].
Температура неподвижных обмоток переменного тока, в частности АД герметичных моноблочных механизмов, например холодильных компрессоров, может измеряться методами, изложенными в п. 5.2.1.
Скольжение герметичных АД в большинстве случаев можно измерить методом измерительной катушки (п. 3.3.2).
Температура деталей ЭМ, превышающих температуру окружающей среды на 30—40 °C, может измеряться дистанционно с помощью тепловизоров [5.2]. Определение скоростей и объемов вентилирующего воздуха для систем автоматизированного испытания может измеряться термоанемометрами и масс-метрами (гл. 5).
9.3. СРЕДСТВА АВТОМАТИЗАЦИИ ИСПЫТАНИЙ
Для автоматизации измерений разработан комплекс агрегатных средств электроизмерительной техники (АСЭТ), охватывающий основную номенклатуру цифровых электронных приборов и устройств измерительной техники, обеспечивающий согласованность их технических и эксплуатационных параметров и характеристик в соответствии с требованиями, вытекающими из необходимости совместного использования их в многоблочных средствах [9.5] — информационных измерительных системах (ИИС) и измерительно-вычислительных комплексах (ИВК). ИИС и ИВК в области электроизмерительной техники представляют собой класс средств измерений высшей сложности и предназначены для получения, преобразования, хранения и представления информации.
Особенность ИВК заключена в том, что в его состав входит универсальная ЭВМ. При этом в функции ЭВМ входит не только обработка измерительной информации и обеспечение управления функционированием комплекса, но и непосредственное участие в измерениях (косвенных измерениях, измерениях с коррекцией и т. п.). Метрологические характеристики ИВК нормируются с учетом параметров ЭВМ и особенностей математического обеспечения. ИИС в отличие от ИВК могут включать в свой состав первичные измерительные преобразователи и обычно выполняются в виде многоканальных устройств.
АСЭТ представляет собой совокупность характеризующихся совместимостью средств электроизмерительной техники, обеспечивающих автоматизацию измерений в промышленности, при испытаниях, в научных исследованиях и построения ИИС и ИВК, а также для применения в составе информационных и управляющих систем, создаваемых на основе других агрегатных комплексов, Государственной системы промышленных приборов и средств автоматизации (ГСП).
Основным нормативным документом, определяющим структуру АСЭТ и требования, предъявляемые к входящим в его состав устройствам, является ОСТ 25170-73 ’’Общие технические требования АСЭТ”. Совместимость устройств АСЭТ определяется стандартами на общие технические требования (ГОСТ 12997-84, ГОСТ 22261-82), принципы агрегатирования (ГОСТ 26.203-81, ГОСТ 22316-77), приборный интерфейс* (ГОСТ 26.003-80, ОСТ 25857-79), стандарты ГСП и др.
В состав приборов и устройств АСЭТ входят: измерительные усилители постоянного тока, коммутаторы, аналого-цифровые и цифро-аналоговые преобразователи, вольтметры, амперметры, ваттметры,
* Интерфейс — совокупность электрических, механических и программных средств, позволяющих соединить между собой элементы автоматической системы обработки данных.
мосты, частотомеры, приборы для магнитных измерений, самопишущие приборы, цифропечатающие устройства, измерительные преобразователи и другие виды приборов и устройств.
Получение и первичную обработку информации от контролируемого объекта осуществляют измерительные преобразователи. Измерительные преобразователи по форме представления выходной величины делятся на аналоговые и дискретные. Измерительные преобразователи с дискретным выходом (частотным) преобразуют входную непрерывную величину в дискретную (частоту). Аналоговые преобразователи имеют унифицированный выходной сигнал в виде тока 0—5 мА на нагрузке до 3 кОм или постоянного напряжения 0—10 В на нагрузке 100 кОм и более. Преобразователи применяются для измерений постоянного и переменного токов, частоты, напряжения постоянного тока, трехфазной активной и реактивной мощностей, напряжения переменного тока, коэффициента мощности и т. п. Измерительные преобразователи характеризуются рядом параметров, важнейшими из
Рис. 9-1. Структурная схема автоматизированной системы измерения параметров асинхронных электродвигателей
которых являются точность преобразования, быстродействие и перегрузочная способность.
Использование АСЭТ в ИИС рассмотрим на примере [9.1]. На рис. 9.1 показан возможный состав системы, состоящей из измерительных преобразователей электрических величин, универсальных цифровых измерительных приборов и средств регистрации, позволяющих измерять электрические, механические и другие параметры при проведении некоторых видов испытаний АД. Система обеспечивает автоматическое сравнение результатов измерений с предварительно установленными уставками и выдачу сигналов, информирующих о превышении заданных значений контролируемых величин.
С помощью такой системы повышается точность измерений и сокращается время их регистрации. Измеренные системой параметры регистрируются в виде, удобном для ввода в ЭВМ. Используемые в системе цифровые приборы и коммутаторы имеют на выходе унифицированные сигналы, обеспечивающие дистанционно-программное управление режимом работы, что позволяет непосредственно присоединять их к управляющим ЭВМ и автоматизировать процесс испытаний.
Показанный на рис. 9.2 автоматический цифровой стенд для испытания асинхронных электродвигателей [9.4] обеспечивает автоматическое измерение * входных и выходных параметров трехфазных АД при различных уровнях нагрузки; преобразование полученных аналоговых сигналов в цифровые сигналы и регистрацию цифровых сигналов, нормированных с учетом соответствующих масштабов, с их распечаткой в виде графиков и протоколов. В состав стенда входит настольная цифровая вычислительная машина (ЭВМ). Измеряемыми входными параметрами являются фазные напряжения и токи, потребляемая электрическая мощность, сопротивление обмотки статора. Измеряемые выходные параметры: крутящий момент, частота вращения и выходная мощность.
Развитие агрегатных средств вычислительной техники, мини-ЭВМ и микроЭВМ позволяет перейти к агрегатным принципам построения ИИС. Типовыми (универсальными) ИВК с широкой областью применения являются ИВК-20 и ИВК-10, выпускаемые серийно. Они имеют базовые комплекты СМ-3 и СМ-4, соответственно, управляющего вычислительного комплекса и стойку измерительную, набранную из средств АСЭТ, построены по магистральной структуре с использованием интерфейса ’’Общая шина” и агрегатному принципу на уровне приборов [9.13].
Схема системы для автоматизированных испытаний электрических машин постоянного тока (ЭМПТ), в которой используется ИВК, приведена на рис. 9.3. Схема дает возможность проведения испытаний по приведенной выше программе-минимум.
Электрические величины цепей постоянного тока (токи и напряжения в цепях якоря и возбуждения) преобразуются с помощью изме-281
Рис. 9.2. Структурная схема автоматического цифрового стенда для испытаний асинхронных электродвигателей
283
Рис. 9.3. Структурная схема автоматизированной системы испьгганий электрических машин постоянного тока:
М — муфта; Э - электромагнитный привод муфты; Т — тормоз; ТП — термопреобразователь ТКХ; УС — устройство сопряжения; РОШ — блок расширения общей шины; ПР - процессор СМ-3; ОЗУ - оперативное запоминающее устройство СМ-3101; УВПМД - устройство внешней памяти на магнитных дисках СМ-5402; У ВВП — устройство ввода-вывода перфолен-точное СМ-6202; АЦП — алфавитно-цифровое печатающее устройство СМ-6300; АЦВТ - алфавитно-цифровой видеотерминал СМ-7205
рительных преобразователей Е7012/1 и Е7013 в унифицированный сигнал постоянного тока напряжением 0—10 В. Сопротивления якоря и обмотки возбуждения определяются с помощью функционального преобразователя (преобразователя отношения напряжений) Ф5178. Для определения превышения температуры якоря предусматриваются остановка якоря с помощью тормоза и измерение сопротивления якорной обмотки как отношения напряжения на коллекторе к измерительному току, протекающему через якорную цепь. Напряжение на коллекторе измеряется (до и после теплового испытания) с помощью двух изолированных щеток (см. гл. 5).
Измерение выходных сигналов преобразователей производится интегрирующим вольтметром постоянного тока Щ1516, имеющим диапазон измерений 10 мкВ — 500 В (переключение поддиапазонов и выбор полярности автоматические). Кроме того, с помощью вольтметра измеряется температура отдельных частей машины с использованием термометров сопротивления ТКХ и измерительного преобразователя температуры в напряжение UI72.
Подключение измеряемых точек к вольтметру Щ1516 обеспечивает коммутатор ФК78, имеющий следующие режимы работы: циклический непрерывный опрос измерительных каналов, циклический однократный, адресный. Управление коммутатором ручное или от управляюще-вычислительного комплекса (УВК) СМ-3 по заданной программе.
Для исследования вращаюшего момента используется балансирное нагрузочное (или приводное) устройство, либо торсионный моментомер (см. гл. 3). В данной установке значение вращающего момента измеряется цифровым тензометрическим прибором Ф4231 с использованием балансирной машины и силоизмерительных тензорезистор-ных датчиков.
Частота вращения испытуемой ЭМПТ измеряется электронно-счетным частотомером Ф5298 с помощью фотоэлектрического преобразователя частоты вращения ПДФЗ, устанавливаемого либо со стороны вала ЭМПТ, либо со стороны нагрузочного устройства. Частотомер может работать совместно с цифро-печатающим устройством Щ6800К, посредством которого регистрируется на бумажной ленте информация, получаемая от частотомера.
Через устройство сопряжения вольтметр, коммутатор, частотомер и тензометрический измеритель вращающего момента подключаются к магистрали ОШ (общая шина). К этой магистрали через такие же устройства сопряжения подключаются источник калиброванного напряжения Ф7046/7 для калибровки вольтметра и графопостроитель Н307.
Приборная магистраль ОШ соединяется с магистралью ОШ управляющего вычислительного комплекса через специальный блок РОШ (расширение ОШ).
В состав базового комплекса СМ-3 входят следующие устройства: процессор СМ-3, оперативное запоминающее устройство СМ-3101, устройство внешней памяти на магнитных дисках СМ-5402, устройство ввода-вывода перфолентное СМ-6202, алфавитно-цифровое печатающее устройство СМ-6300 и алфавитно-цифровой видеотерминал СМ-7205 [9.13].
Информация от коммутатора и измерительных приборов поступает на УВК. При этом обеспечиваются: автоматические измерения исследуемых параметров, первичная обработка результатов измерения (масштабирование, линеаризация характеристик датчиков: термометров сопротивления, тензодатчиков), получение результатов косвенных измерений, сравнение сигналов с уставками и выдача сигналов отклонения от норм, управление работой измерительных приборов и коммутатора, вывод информации в виде графиков, таблиц и текста, хранение информации и выдача соответствующих сигналов для управления объектом испытаний, которые могут быть использованы для стабилизации задаваемых режимов.
Реализация возможностей системы обеспечивается не только с помощью технических средств, входящих в нее, но и средствами программного и алгоритмического обеспечений, как типовыми, так и разрабатываемыми пользователем применительно к конкретным задачам эксперимента и испытаний. Система обеспечивает контроль метрологических характеристик входящих в нее приборов и блоков.
Проверка класса коммутации проводится с помощью прибора ПКО (см. гл. 6) и импульсного вольтметра в номинальном режиме, подключенных к зажимам испытуемой ЭМПТ. При этом проверяются лишь исправность и выполнение наладочной технологии (например, притирка щеток коллекторного узла). Предполагается, что все остальные факторы, определяющие качество коммутации: исправность обмотки и коллекторной поверхности, зазор под ДП, установка нейтрали проведены на предшествующих контрольных операциях (в сборочном цехе). Если коммутация неудовлетворительная, ЭМПТ бракуется и переводится для проведения отладочных работ на аналогичный стенд, не стоящий в выпускаемом потоке.
Для измерения радиопомех, создаваемых испытуемой ЭМПТ (см. гл. 8), в установке используется тот же импульсный вольтметр, что и при определении класса коммутации.
Измерения вибрации и шума (см. гл. 7) производятся с помощью измерительного комплекта, состоящего из вибропреобразовательных преобразователей (ВИП) ДН-1, устанавливаемых на ЭМПТ, согласующих усилителей ПВ-1 для ВИП, конденсаторного микрофона М-101 с предусилителем ПМ-1, измерительного усилителя ПИ-1 и октавного-треть-октавного электронного фильтра ФЭ-1. Запись результатов измерения (октавные спектры и общий уровень шума, третьоктавные спектры и
общий уровень вибрации) производится с помощью самописца уровня ’’Грифель” или 02013 (ГДР).
В настоящее время развитие ИВК идет в направлении совершенствования структуры, технических и программных средств, в частности’ дальнейшее развитие ИВК по структуре, основанное на более широком использовании серийных средств АСЭТ, децентрализация управления в связи с использованием в системах контроллеров подсистем мик-роЭВМ и программируемых измерительных приборов на микропроцессорах. Последнее важно для разгрузки центральной ЭВМ и возможности автономного использования отдельных подсистем ИИС, что увеличивает надежность всей системы. При этом лучше используются производственные возможности предприятий-потребителей данных систем.
Перспективными являются микросредства управляющей вычислительной техники (МСУВТ) серии В7, разработанные во ВНИИЭМ с целью удовлетворения потребностей электротехнической промышленности в средствах для создания автоматизированных систем управления технологическими процессами (АСУТП), автоматизированных систем управления электрооборудованием (АСУЭ), использующих новейшие достижения микроэлектроники и управляющей вычислительной техники. Применение этих микросредств расширит возможности разрабатываемых автоматизированных управляющих систем, а также систем, позволяющих автоматизировать испытания ЭМ на производстве [9.8,9.12].
Первые опыты по созданию автоматизированных испытательных систем, реализованных на микросредствах управляющей вычислительной техники серии В7, отражены в работе коллектива сотрудников ВНИИЭМ ’’Автоматизированная испытательная система двигателей постоянного тока” [9.15].
АИС ДП предназначена для проведения испытаний в автоматическом режиме по заданной программе. Она обеспечивает контроль и индикацию измеряемых и регистрируемых параметров, определение параметров расчетным путем, выдачу по установленной форме протоколов испытаний.
При создании АИС ДП на первом этапе предусмотрено проведение электрических испытаний (ЭИ) в объеме приемо-сдаточных испытаний. Так как объем выполняемых испытаний в данной системе определяется только наличием необходимых устройств дистанционного регулирования, датчиков и измерительных преобразователей, устройств связи и программного обеспечения, то АИС ДП позволяет при необходимости провести на стенде автоматические режимы по программе периодических или типовых испытаний.
В состав стенда АИС ДП входят: нагрузочное устройство, источники питания, устройства дистанционного бесконтактного регулирования напряжения, измерительные преобразователи, управляющая вы-286
числительная машина (УВМ), обеспечивающая проведение испытаний по заданной программе, устройства связи и периферийные устройства: дисплей и телетайп.
Структурная схема автоматизированной испытательной системы двигателей постоянного тока (АИС ДП) приведена на рис. 9.4. На ней показаны связи между измерительными элементами, установленными в силовых цепях испытательного стенда, и платами УВМ, а также между исполнительными элементами испытательного стенда и платами УВМ.
Для измерения напряжения используются нормирующие измерительные преобразователи Е846НП/2 (43, Л4), для измерения тока — нормирующие измерительные преобразователи Е827НП/2 (4Ъ Л2), которые кроме преобразования сигналов обеспечивают гальваническую развязку силовых цепей и УВМ. Сигналы с измерительных преобразователей тока и напряжения поступают на входы аналого-цифрового преобразователя платы*АВВ, которые затем в цифровом коде заносятся в оперативную память УВМ. С датчика частоты вращения ДВ испытуемой ЭМ М, выполненного в виде диска с 60 отверстиями, и фотодатчика электрические импульсы подаются на вход частотомера типа 43-54. С выхода частотомера сигнал частоты врашения в цифровом коде подается на два порта ввода параллельного программируемого интерфейса, расположенного на плате МВ (плата служит также-для расширения памяти) . После считывания данных из этих портов они заносятся в оперативную память УВМ. Для синхронизации работы частотомера и УВМ предусмотрен сброс частотомера, после чего он начинает счет импульсов. Сброс осуществляется входными импульсами, поступающими с платы ЦВВ на специальный вход частотомера. Управление исполнительными элементами испытательного стенда производится с помощью плат АВВ и ЦВВ (контакторы KI, К2). Нужный уровень напряжения на выходах генераторов М3 и М4 устанавливается с помощью задания на входах тиристорных возбудителей ТВ1 и ТВ2 необходимого уровня задающих аналоговых сигналов U3j и U32, формируемых платой АВВ на ее цифро-аналоговых выходах. Плата УВМ типа ПМВ обеспечивает управление всей микросистемой. На ней расположен микропроцессор, часть оперативной и постоянной памяти, программируемый последовательный интерфейс ввода-вывода, через который с помощью узла микросистемы типа УСМ осуществляется связь с дисплеем и телетайпом.
Все платы получают питание от блока питания БП. Основным органом управления для оператора при проведении испытаний в автоматическом режиме является клавиатура дисплея. Телетайп, работая в автоматическом режиме, выдает по окончании испытаний протокол, форма и содержание которого предусмотрены программой. Протокол приемо-сдаточных испытаний двигателя постоянного тока типа АПТ, заводской № 567, приведен в табл. 9.1.
Рис. 9.4. Структурная схема автоматизированной испытательной системы двигателей постоянного тока:
ТВ1 и ТВ2 - тиристорные возбудители; Ml и М2 ~ приводные двигатели генераторов G1 и G2 соответственно; ОВ1 и ОВ2 -шунтовые обмотки возбуждения генераторов G1 и G2; УВМ - управляющая вычислительная машина; АВВ - плата аналого-цифрового преобразователя; ЦВВ - плата цифро-аналогового преобразователя; МВ - плата расширителя памяти и параллельного интерфейса; ПМВ - плата с микропроцессором, оперативной и постоянной памятью, последовательным интерфейсом ввода-вывода
Таблица 9.1
г, м/с я 7я> А t%. в 7в» А и, об/мин м, ! Н-см р2, Вт кпд % е. °C
00/10 7,8 25,2 23,3 1,9 1920 60,84 122,8 50,6 31,4
00/20 7,8 25,1 23,3 1,9 1911 60,60 121,7 50,4 33,7
00/30 7,8 25,4 23,3 1.9 1896 61,31 122,1 50,1 33,7
00/40 7,8 25,4 23,3 1,9 1878 61,31 121,0 49,7 36,0
00/50 8,0 25,6 23,3 1,9 1884 61,78 122,3 48,9 36,0
01/00 7,4 34,6 15,9 1.2 1954 83,48 171,4 61,8 43,0
01/10 8,4 16,8 22,7 1,9 2421 40,56 103,2 55,9 30,2
01/20 7,8 25,8 23,3 1,8 1858 62,25 121,5 49,4 38,4
01/30 7,8 25,5 23,5 1,8 1898 61,55 122,7 50,3 40,3
01/40 8,0 25,5 23,5 1,8 1910 61,55 123,5 49,7 42,6
01/50 8,0 25,2 23,5 1,8 1930 60,84 123,4 50,1 42,6
02/00 7,8 25,6 23,5 1,8 1908 61,78 123,8 50,6 40,3
02/10 10,6 21,3 23,5 1,8 3051 51,41 164,8 61,2 42,6
02/20 10,8 20,0 23,5 1,8 3176 48,11 160,5 62,1 42,6
02/30 10,8 20,1 23,5 1.8 3202 48,34 162,6 62,7 42,6
Примечания: 1. Температура окружающей среды 2. Атмосферное давление 3. Влажность воздуха 4. Сопротивление изоляции обмоток, МОм: в холодном состоянии (до режима): якоря обмотки возбуждения в горячем состоянии (после режима) : якоря обмотки возбуждения 5. Коммутация двигателя по ГОСТ 183-74. 32 °C. 1011 ГПа. 25%. 87,4 96,6 87,2 97,0
Программное обеспечение (ПО) системы АИС ДП состоит из универсального проблемно-ориентированного ядра, обеспечивающего работу испытательного комплекса в режиме реального времени и осуществляющего сбор, контроль и отображение информации от объекта, а также специализированного функционального ПО, выполняющего операции, обусловленные спецификой решаемой задачи (программа подготовки испытаний, управления электродвигателем в процессе испытаний и завершения испытаний).
В качестве базового языка программирования выбран язык высокого уровня ПЛ/М, для составления отдельных программ использован МАКРОАССЕМБЛЕР. Комплекс работает под управлением программного монитора В7 и использует его сервисные программы для связи с дисплеем и телетайпом. Общий объем программного комплекса вместе с монитором составляет около 30 Кбайт.
Развитие АИС в будущем возможно в следующих направлениях:
1. С целью повышения качества ЭМ целесообразно увеличение числа контролируемых параметров в процессе испытаний. Для этого необходима разработка новых измерительных средств: измерительных преобразователей для точного и одновременного определения частоты вращения и момента на валу; приборов для оценки степени искрения на коллекторах; приборов для оценки изменения профиля коллектора в рабочих режимах; приборов для дистанционного бесконтактного измерения температуры вращающихся частей; схем и устройств для измерения активного сопротивления обмоток и сопротивления изоляции обмоток ЭМ в рабочих режимах.
2. Создание банка программ, дающего возможность варьировать объем исследований или испытаний различных ЭМ.
3. Применение АИС для диагностики изделий и статистической обработки полученных в процессе испытаний результатов.
Современный уровень микропроцессорной техники позволяет создавать достаточно простые и недорогие испытательные системы, применение которых может быть экономически оправдано даже при мелкосерийном производстве, тем более, что такие системы в перспективе могут стать частью автоматизированной системы управления технологическими процессами.
ПРИЛОЖЕНИЕ
ТЕХНИЧЕСКИЕ ДАННЫЕ ПРИБОРОВ ДЛЯ ВИБРОАКУСТИЧЕСКИХ ИЗМЕРЕНИЙ И ЧАСТОТНОГО АНАЛИЗА
Таблица П1
Шумомер Изготовитель Микрофон Частотный диапазон, Гц Динамический диапазон, дБ Частотная ха-ракте-ристи-ка Временные характеристики Фильтры Вид индикации Габаритные размеры, мм Масса, кг
вшм-ооз СССР Конденсаторный 20-20 000 25-140 Шумомеры класса 1 А, В, С, ’’Быстро”, Лин ’’Медлен- но”, ’’Импульс” Встроенные октавные фильтры Цифровой жидкокристаллический индикатор 280 X100 X X 220 4
вшв То же То же 10-20 000 25-140 То же ’’Быстро”, ’’Медленно” То же Стрелочный прибор 100 X 280 X X 240 4,5
00 017 ГДР Конденсаторный: 1" 1/4 10-20 000 30-40 000 30-100000 19-140 (по шкале А) А, В, С, D, Лин ’’Быстро”, ’’Медленно”, ’’Импульс”, ’’Хранение им- Встроенные октавные фильтры (12-полос-ные) То же 318 X114 X X 190 4
пульса”, "Хранение пика”
Продолжение табл. П1
Шумомер Изготовитель Микрофон Частотный диапазон, Гц Динамический диапазон, дБ Частотная ха-ракте-ристи-ка Временные характеристики Фильтры Вид индикации Габаритные размеры, мм Масса кг
00023 ГДР Конденсаторный: 1” V2" 1/4 10-20 000 30-40 000 30-100 000 19-140 (по шкале А) А, В, С, D, Лин "Быстро”, ’’Медленно”, ’’Импульс”, ’’Хранение импульса”, ’’Хранение пика” Встроенные октавные и третье ктав-ные фильтры Стрелочный прибор 318X114 X X 190 Примерно 4
00024 То же Конденсаторный 1/2" 20-20 000 35-140 (по шкале А) А, Лин ’’Быстро”, ’’Медленно”, ’’Импульс”, ’’Хранение импульса” Внешние октавные и третьок-тавные фильтры типа 01 016 и 01 017 п 105 X 85 X X 380 1,2
2230 Дания, фирма ’’Брюль и Къер” То же 10-50 000 24-130 А, С, Лин ’’Быстро”, ’’Медленно”, ’’Импульс”, ’’Пиковые значения”, ’’Хранение пик^’ Внешние октавные и третьок-тавные фильтры типа 1624 и 1625 Цифровой и аналоговый жид-кокрис-талличе-ский индикатор 370 X 85 X Х47 0,86
Шумомеры класса Л
Ш71 СССР - 31,5-8000 30-140
Внешние Стрелоч- 116 X100 X 2,5
октавные ный при- X 520
фильтры бор
Таблица П2
Виброметр Частотный диапазон, Гц Диапазоны измерений Тип ВИП Детектор Индикатор Уровень собственных шумов Габаритные размеры, мм Масса, кг
ВМ-1 1,4-8000 1,4-2800 1,4-500 Ускорение 3,1 • Ю“2-103 м/с2 Скорость 3,55 Ю"1 - 52 мм/с Смещение 12,5-102 мкм ДН-4 дн-з ДН-5 СКЗ,’’Размах” Стрелочный прибор Не более 6 дБ относительно минимального измеряемого сигнала 360 X 310 X X 180 10
00 042 0,5-4000 10-1000 3,15-4000 Ускорение 2 • 10"*-103 м/с2 Скорость 5 • Ю-2 - 3 • 102 мм/с 5 • 10-2 — 3 • 102 мм/с КС 50 СКЗ,’’Быстро”, ’’Медленно” Тоже — 210 X110X х зоо Примерно 3,3
00 031 1-4000 10-1000 Ускорение 5,3 • 10-2 - 3 • ГО2 м/с2 Скорость 1,5 • 10'1 - З Ю2 мм/с КД 35м СКЗ, ’’Быстро”, ’’Медленно” »» Не более 10 дБ относительно минимального измеряемого сигнала 105 X 60 X Х285 1,6
Продолжение табл. П2
Виброметр Частотный диапазон, Гц Диапазоны измерений Тип ВИП Детектор Индикатор Уровень собственных шумов Габаритные размеры, мм Масса, кг
2511 0,3-1000 или 15 000 Ускорение 10-2 - 102 м/с2 Скорость 10"1 - 103 мм/с Смещение 10-3 - 10 мм 4370 СКЗ, "Размах”, ’’Хранение максимального значения”, ’’Быстро”, "Медленно” Стрелочный прибор Ускорение Ю-3 м/с2 Скорость 10-2 мм/с Смещение 1,5 -10-1 мкм 133 X 210 X X 200 2,4
00 032 1-10 000 1-10 000 1-1000 Ускорение 3,2 • 10"2 - 32 Ю2 м/с2 Скорость 32 Ю-2 - 32 103 м/с Смещение 3,2 • 10-3 - 100 мм КД-35а СКЗ, + Пик, -Пик То же 256 X182 X X 310 9
00 033 1-10 000 Ускорение 3,2 • 10-2 - 3,2 • 102 м/с2 Скорость 32 • 10-2 - 3,2 -103 м/с Смещение 3,2 • 10‘3 - 100 мм КД-35а То же Стрелочный прибор, осциллоскоп 540 X182 X X 310 18
Таблица ИЗ
Вибро-измеритель-ный преобразователь Изготовитель Коэффициент преобразования по зарядам пКл/м • с 2 Коэффициент преобразования , по напряжению, мВ/м • с*2 Рабочий диапазон частот*, Гц Частота установочного резонанса, кГц Относительный коэффициент поперечного преобразования, % Максимальная рабочая температура, Габаритные размеры, мм Масса, г Принцип действия (вид колебаний) Подсоединение кабеля
ДН-1 СССР — 1,0 + 15% 0-20 000 40 ± 10 + 70 ф 12,6 X 36 20 Сжатие —
ДГ-1 — 1,0+15% 0-15 000 40 ± 10 + 70 ф 12,6 X 23 20 — —
ДГ-1 — 1,0 + 15% 0-15 000 40 ± 10 + 500 ф 36 X 22 20 — —
дн-з — 10 + 10% 0-4000 16 ±5 + 70 ф 24 X 27 60 — —
ДН-4 — 1,0 ± 10% 0-12 500 40 ±5 + 70 ф 14 X 19 13 Сжатие —
ДН-5 — 31,5 ± 10% 0-500 2 ±5 + 70 ф 28 X 22 40 Изгиб —
Д13 — 6,3 + 15% 0-4000 25 ± 10 + 70 ф 28 X 28 50 Сжатие —
Д14 — 2,0 + 15% 0-10 000 30 ± 10 + 70 Ф16Х23 15 —
Д23 — 0,2 + 15% 100-50 000 120 ± 10 + 70 ф 13X10 4 — —
ДН2 — 10 ± 10% 0-3000 12 ± 10 + 120 ф 24 X 30 134 — —
ДН6 — 31,5 + 10% 0-500 1,5 ±5 + 70 62 X 56 X 35 170 Изгиб —
ДН9 — 2 ± 10% 31,5-250 0,8 ± 10 + 120 046 X 21 200 Сжатие —
ДН2-1 — 1,0 ± 15% 0-7000 29 ± 10 + 70 34 X 34 X 34 17 — —
ДНЗ-1 - 1,0 + 15% 0-7000 25 ± 10 + 70 34 X 34 X 34 23 — —
КВ 12 ГДР - 300 0-120 0,4 ±5 + 80 33,5 X 53X33,5 150 Изгиб Боко-
вое
КВ И — 10 0-600 2 ±5 + 80 14 X 14 X 31 15 99 »»
КД 40 — 10 0-2400 8 ±5 + 150 ф 17X34 65 Сжатие Осевое
40 КД41 — 10 0-4500 15 ± 5 + 150 ф 19 X 28,5 60 Боко-
</» вое
Продолжение табл. ПЗ
Вибро- Изго- Коэффици- Коэффици- Рабочий Частота Относи- Макси- Габаритные Масса, Принцип Под-
изме- тови- ент преоб- ент преоб- диапазон устано- тельный мальная размеры, мм г действия соеди-
ритель-ный преобразователь тель разования по зарядам, пКл/м • с"2 разования по напряжению, мВ/м • с-2 частот *, Гц вочного резонанса, кГц коэффициент поперечного преобразования, % рабочая температура, °C (вид колебаний) нение кабеля
КД42 - 10 0-4500 15 ± 5 + 150 ф 19X35 65 99 Осевое
КД45** - 10? 2% 0-4500 15 ± 5 + 150 ф 19 X 28,5 45 99 Боковое
КД38 — 5 0-6000 20 ±5 + 150 ф 17 X 30 45 99 Осевое
КД37 . - 5 0-6000 20 ±5 + 150 ф 17 X 24 45 99 Боковое
КДЗб — 5 0-3,6 12 ±5 + 150 Ключ 17 X 29,5 45 99 Осевое
КД35** 5 ± 3% 5 ±2% 0-6000 20 ± 5 + 150 ф 17 X 23,5 28 99 Боковое
КД39 — 3 0-7500 25 ± 5 + 150 ф 17 X 30 20 99 Осевое
КД32** 2 ± 3% 2 ±2% 0-9000 30 ± 5 + 150 ф 12(14) X 19 20 99 Боковое
КД29 — 3 0-10 500 35 ±5 + 150 012(14) Х19 20 99
KS50 2 2 0-7500 25 ± 4 + 150 ф 19X31 55 Сдвиг Осевое
KS51 2 2 0-7500 25 ± 4 + 150 ф 19 X 25 50 99 Боковое
КД34 - 0,5 0-15 000 50 ±5 + 150 ф 12 (14) X 26 20 Сжатие Осевое
кдзз** 1 ±3% 1 ± 2% 0-13 500 45 ±5 + 150 012(14) Х19 18 Боко* вое
кдзо — 1 0-6000 20 ±5 + 150 Ключ 14 х 24 20 99 Осевое
КВ 10 КД91 - 1 0,4 0-3000 0-15 000 10 50 ± 10 ± 10 + 80 + 150 10 X 10 X 20 7 Х7 X И 20 1,8 Изгиб Сжатие Боковое 33
4374 Дания, 0,11 0,18 0-26 000 85 < 5 + 250 ф 5 X 6,7 0,65 Срез »»
4375** Брюль 0,316 ± 2% 0,48 0,1-16 500 55 <4 + 250 ф 7,3X11 2,4 »»
4393** и Къер 0,316 ± 2% 0,48 0,1-16 500 55 <4 + 250 ф 7,3 X 11 2,2 33
4371** 1 ±2% 0,8 0,1 - 12 600 42 <4 + 250 ф 13,5 X 19,6 И ,,
4391** 1±2% 0,8 0,1-12 000 40 <4 + 180 ф 15 X 31,2 16 »» Осевое
4390** 3,16 ± 2% — 0,3-8400 28 < 4 + 125 ф 14 X 21 17 Боко-
4382** 3,16 ± 2% 2,6 0,1-8400 28 <4 + 250 ф 14 X 26 17 вое Осевое
4383** 3,16 ± 2% 2,6 0,1-8400 28 < 4 + 250 ф 14 X 21 17 Срез Боко-
4370** 10 ±2% 8 0,1-5400 18 <4 + 250 ф 20,5 X 26 54 »» вое Осевое
4381** 10 ±2% 8 0,1-5400 18 <4 + 250 ф 20,5 X 22,6 43 зз Боко-
4378** 31,6 ± 2% 26 0,1-3900 13 < 4 + 250 ф 29,6 X 38 175 3» вое Осевое
4379** 31,6 ± 2% 26 0,1-3900 13 <4 + 250 ф 29,6 X 32,5 175 Боко-
8318** 8306** 31,6 ± 2% 1000 ± 2% 1000 ± 2% 0,1-1000 0Д-1000 6,5 4,5 <5 + 85 + 85 ф 40,6 X 58,3 ф 49 X 57 470 500 Сжатие вое 33 33
4366** 4,8 4 0,1-8100 27 < 4 + 250 ф 15,5 X 19,1 28 Срез
4367 2,2 1,8 0,1-9600 32 < 4 + 250 ф 13,5 X 16,0 13 зз
4368 4,8 4 0,1-8100 27 <4 + 250 ф 15,5 X 24,4 30 33 Осевое
4369 2,2 1,8 0,1-9600 32 < 4 + 250 ф 13,5 X 23,5 14
8309 0,004 0,04 1-54 000 180 <5 + 180 ф 7 X 10,8 3 (без Сжатие Боко-
кабеля) вое
Продолжение табл. ПЗ
Вибро-измеритель-ный преобразователь Изготовитель Коэффициент преобразования по зарядам, пКл/м • с"2 Коэффици- Рабочий Частота установочного резонанса, кГц Относительный коэффициент поперечного преобразования, % Максимальная рабочая температура, °C Габаритные размеры, мм Масса, г Принцип действия (вид колебаний) Подсоединение кабеля
ент преобразования по напряжению, мВ/м - с"2 диапазон частот*, Гц
4321** 8305 i 1 ±2% 0,125 0,8 0,1-12 000 0,1-4500 (2%) 40 32 <4 < 2 + 250 + 200 34,1 X 28,6 X 17 55 ф 15,5 X 29,1 40 Срез Сжатие Боковое, осевое Боковое
8308** 1 ± 2% 0,9 1-9000 30 <3 +400 (180) ф 22,9 X 30 100 - 99
8315** 10 ± 2% 2,5 0,1-8400 28 <4 + 250 ф 22,9 X 37,2 102 Срез »’
8310** 8317** 1 ±2% 3,16 ± 2% 0,55 1-9000 0,2-7800 30 26 < 3 < 4 + 400 + 125 ф 22,9 X 30 ф 22,9 X 36,2 100 (без кабеля) 112 Сжатие Срез 99
* Нижняя граничная частота диапазона определяется входным сопротивлением согласующего усилителя.
** Нормализованная чувствительность.
Таблица IJ4
Согласующий усилитель для вибро-измерительных преобразователей ПВ-1 ПВ-2/ПВ-7
Изготовитель СССР
Усилитель Напряжения
Частотный диапазон, Гц 2-20 000 1,4-20 000
Коэффициент усиления, дБ 0-20 1,0 ± 0,5
Настройка коэффициента усиления Плавная -
Рабочие режимы Ускорение Ускорение
Собственный шум 20 (1000 пФ) мкВ 25 (1000 пФ) мкВ
Регулируемые пределы Нижний частоты - -
Верхний - -
Входное сопротивление
1 ГОм/14пФ 1,3 ГОм
40
2626
2635
2650
Дания, БрюльиКъер
Заряда Заряда-напряжения
0,3-100 000 0,1-200 000 0,3-200 000
-20 - + 60 -40 - + 80 -20-+ 40
3 десятичные 3 десятичные 4 десятичные
цифры цифры цифры
Ускорение Ускорение, скорость, смешение Ускорение
5 X 10"3 пКл 5 X 10“3 пКл 5 X 10"3 пКл 5 мкВ
0,3; 3; 10; 30 Гц 0,2; 1; 2; 10 Гц 0,3; 3; 2000 Гц
0,3; 3; 10; 30; 100 кГц 0,1; 1; 3; 10; 30; 100 кГц 1; 3; 10; 30 кГц
> 10 ГОм > 10 ГОм Заряд 5 ГОм
Напряжение:
5 ГОм/Ю пФ
u> о о
Продолжение табл. П4
Выходное сопротивление, Ом < 100 Сопротивление нагрузки не менее 100 кВт < 10 < 1 < 1
Габаритные размеры, мм ф 34X165 ф 24 X 200 133 X 66 X 200 133 X 66 X 200 133 X 140 X 200
Масса, кг 0,4 0,4/0,46 1,75 1,45 1,5
Таблица П5
Измерительный усилитель ПИ-1 ПИ-2 2610 2636*
Частотная характеристика Линейная 2-200 000 Гц 1,4-10 000 (12 500) Гц 2—200 000 Гц 1-200 000 Гц
Коррекция А, В, С А, В, С 22,4 Гц; А 22,4 Гц; 22,4 кГц; А, В, С, Д
Внешние фильтры + + + +
Рабочие режимы СКЗ, "Быстро”, "Медленно” + - + 20 с, + хранение + 0,1 - 30 с, + хранение
Импульс + - - + хранение
Пиковое значение + хранение - - + хранение
Диапазоны Напряжение 10 мкВ - 300 В 10 мкВ - 30 В 10 мкВ - 30 В
Усиление + 100 -50 дБ 100 + 100 - -30 дБ +100 30 дБ
Индикатор Стрелочный прибор Стрелочный Стрелочный Стрелочный прибор прибор прибор
Входы Предусилитель, прямой Предусилитель, Предусилитель, Предусилитель, прямой прямой прямой
Выходы - - Линейный перемен- Линейный постоянно- ного тока, логариф- го и переменного тока, мический постоян- логарифмический по-ного тока стоянного тока
Габаритные размеры, мм 570 X 382 X 227,5 360 X 310 X160 133 X 430 X 200 133 X 430 X 200
Масса, кг Не более 20 7,5 5,2 6,5
* Универсальное устройство сопряжения по МЭК/ИИЭР/ИМС (цифровое управление).
Фильтр (спектрометр) ФЭ-1 01016
Изготовитель СССР ГДР
Избирательный диапазон анализируемых частот, Гц 1,8-200 000 31,5-63 000
Поддиапазон анализируемых частот
Линейный диапазон частот, Гц 2-200 000 10-200 000
Полосовые фильтры 16 октавных и 50 третьоктавных фильтров 12 октавных фильтров
Ширина полосы пропускания Октава, 1/3 октавы Октава
Сопротивление нагрузки, кОм не менее 0,6 100
Выходное сопротивление, кОм 0,3
Входное сопротивление, кОм не менее 100 100
Коррекция АД С -
Индикация
01017
01025
01024
ГДР гдр ГДР
313-16 ооо 0,2-20 000 2-160 000
0,2-200 2-2000 20-20 000 Программирование частотного диапазона
2-200 000 2-200 000
28 третьоктавных фильтров 17 октавных и 50 третьоктавных фильтров
1/3 октавы (3; 23)% Октава, 1/3 октавы
0,1 0,1
>300 100 100
Стрелочный прибор
Стрел очнай-при-бор, цифровая индикация сред-
ней частоты фильтра
Управление Ручное, автоматическое Ручное Ручное Ручное,автоматическое Ручное","йвто-матическое
Габаритные размеры, мм 570X570X X 420 105 X 60 X 188 105 X 60 X 198 285 X 60 X 105 540 X 182 X 310
Масса, кг 35 0,9 1,0 1,8 18
Фильтр (спектрометр) 1624 1625 1621 1617 1618 ВФШ-001
Изготовитель Дания, Брюль и Къер Дания, Брюль и Къер Дания, Брюль и Къер Дания, Брюль и Къер Дания, Брюль и Къер СССР
Избирательный диапазон анализируемых частот, Гц 22—22 000 (31,5-16 000) 18-22 000 (1/3 октавы) 14-28 000 (октава) 0,2-20 000 1,4-180 000 1,4-22 000 2-2000
Поддиапазон анализируемых частот, Гц 0,2-2 2-20 200-2000 20-200 2000-20 000 2-6,33 6,33-20 20-63,3 63,3-200 200-633 633-2000
Линейный диапазон частот, Гц 5-75 000 3-75 000 1-200 000 1-28 200
Полосовые фильтры 10 октавных фильтров 11 октавных и 31 треть- 14 эквивалентных октавных фильтров
октавный фильтр 50 третьоктавных фильтров 41 третьоктав-ный фильтр
Ширина полосы пропускания Октава Октава, 1/3 октавы (3; 23)% Октава, 1/3 октавы Октава 1/3 октавы 1/10 октавы (7%)
Продолжение табл, П6
Фильтр (спектрометр) 1624 1625 1621 1617 1618 ВФШ-001
Сопротивление 10//1 нФ 10//1 нФ 25 50//1 нФ 50//1 нФ 10
нагрузки, кОм не менее Выходное сопро- 0,005 0,005 0,0005 0,05 0,05
тивление, кОм Входное сопро- 10 10 1000 1000//100нФ 1000/100 нФ 100
тивление, кОм не менее Коррекция — — -г- А,В,С,Д А
Индикация Управление Цифровая индикация средней частоты фильтра Ручное, полу- Ручное, Ручное, Цифровая индикация средней частоты фильтра Ручное, автоматическое Ручное
Габаритные раз- автоматическое 5 X 85 X 47 автоматическое 105 X 85 Х47 автоматическое 133 X 140 X 200 133 X 430X200 133 X430X200 360 X 310 X 240
меры, мм Масса, кг 0,45 0,45 2,2 6,5 6,3 9
Параметр Анализатор
СК4-56 2010
Изготовитель СССР Дания (фирма ’’Брюль и Къер”)
Диапазон частот 10 Гц — 60 кГц 2 Гц — 200 кГц
Полоса обзора 50 Гц - 50 кГц (дискретно через 1, 2, 5) 2 Гц - 2 кГц 20 Гц - 20 кГц 200 Гц - 200 кГц
Полоса пропускания на уровне - 3 дБ Погрешность измерения: 3,10, 30,100, 300 Гц 3,16; 10; 31,6; 100; 316; 1000 Гц
уровней отношений уровней 5-8% ± (3-10)% ± 0,1 дБ
Уровень собственных шумов в полосе пропускания 3 Гц 500 нВ (10 Гц) 200 нВ (20 Гц) 30 нВ (1 кГц) 0,6 мкВ
Динамический диапазон по интермодуляционным искажениям, по гармоническим составляющим 80 дБ 90 дБ 85 дБ
Уровень максимального входного сигнала 8 В 300 В
Неравномерность АЧХ ± 3% (20 Гц - 20 кГц) ± 5% (10 Гц - 60 кГц) ± 0,2 дБ (10 Гц - 50 кГц) ± 0,5 дБ (2 Гц - 200 кГц)
Время развертки 0,02-50 с -
Габаритные размеры, мм 480 X 160 X 555 480 X 200 X 380
Масса, кг 22 21
L0 О
Частотный анализатор перестраиваемый
Параметр или узел АСИЧ АСЗЧ 01021 2120
СССР СССР ГДР (’Тоботрон”) Дания (фирма ’’Брюль и Къер”)
Ширина полосы пропускания 6; 21%-ный полосовой фильтр Блок частотного анализатора 6; 21%-ный полосе- 1,5; 3; 6; 12; вой фильтр 24%-ный полосо- вой фильтр, заграждающий фильтр, фильтр ПЧ, фильтр ВЧ 1; 3; 10; 23%-ный полосовой фильтр, заграждающий фильтр, фильтр НЧ, фильтр ВЧ
Средняя частота Развертка Управление Коррекция 1-1000 Гц Плавная Ручное, дистанционное (механическое) 20-20 000 Гц То же Ручное, дистанционное (механическое) 0,2 Гц - 20 кГц То же Ручное, дистанционное (управляющим напряжением) Л, Д С, D 2 Гц - 20 кГц Плавная - гиперболическая Ручное и дистанционное (механическое) Л, Д С, D
Частотный диапазон 1-1000 Гц
Диапазон напряжения 100 мВ - 10 В
Коэффициент усилителя —
Индикатор
Блок измерительного усилителя
20-20 000 Гц 0,5 Гц - 200 кГц
100 мВ - 10 В 1 мВ - 30 В
-20 - + 60 дБ Стрелочный прибор
2 Гц-200 кГц 10 мкВ - 300 В -30-+120 дБ
Режим индикации:
СКЗ Есть
Пик Импульс Вход Выходы: Есть Нет
переменный ток, линейный (максимальное значение) постоянный ток, линейный постоянный ток, логарифмический Габаритные размеры, мм Масса, кг 3,16 В Нет Нет 407 X 513X272 30
Есть ’’Быстро”, ’’Быстро”,
’’Медленно” ’’Медленно”, 0,1—ЗООс
Есть Нет Есть
Нет Есть ”Хранение”
Предусилитель, прямой
3,16 В Есть Есть
Нет Есть 60 дБ
Нет Есть 50 дБ
407 X 513 X 272 540 X 182 X 310 280 X 380 X 200
30 18 И
Анализаторы в реальном масштабе времени
Параметр СК4-71 СК4-72 2031 2033 2034
СССР СССР Дания (фирма ’Ърюль и Къер”)
Назначение Различные функции Измерения амплитуд- Анализ акустических процессов и механических ко-
моделируются про- ного спектра мощно- лебаний; анализ нестационарных процессов; изме-
граммными сред- сти, плотности рас- рения и анализ кратковременных, импульсных и
ствами, хранящими- пределения ампли- ударных процессов; гармонический анализ физи-
ся в памяти системы туд; анализ периодических, случайных и однократных процессов” выделение сигналов из шумов, порядковый анализ, допус-ковый контроль по спектру, сличение спектров ческих процессов
Число входных каналов 2 16 1 1 2
Диапазон частот 0-50 кГц 0,05 Гц - 20 кГц (9 поддиапазонов) 0 Гц - 20 кГц 0 Гц - 20 кГц 0 - 25,6 КГц (11 поддиа- (11 поддиа- (15 поддиапа- пазонов) пазонов) зонов)
Анализ в реальном масштабе времени в диапазонах частот — — 0—22 кГц 0-2 кГц 0-800 Гц в двух каналах, 0-1600 Гц в одном канале
Число частотных 32—2048 200 400 400* 801
каналов
Полоса пропускания каналов, Гц
5 • 10-5 - 100
Динамическое запоминающее устройство емкостью Динамический диапазон, дБ Пределы входного напряжения, В (среднеквадратическое значение) Число усреднений статистически независимых реализаций 60 0,08-8 1-32 767 60 0,08-8 1-1024
Погрешность измерения частоты гармонической составляющей, % 0,1 (от верхней частоты поддиапазона) —
Погрешность измерения отношения амплитуд спектральных составляющих 1 дБ (до 40 дБ) 6 дБ (выше 40 дБ) -
Интервал корреляции 10 мс - 5000 с —
Число точек корреляционной функции 128-4096 -
2,5 • 10"2 -i-50 2,5 • 10"2 - 50 2,5 • IO"3 - 5 2 • 10“3 - 32
1024 значе- (при расширении масштаба в 10 раз) 10 240 значе- 2048 значе-
ний ний ний
70 70 80
42 • 10"s-42 42 • l(Ts-42 10"2-42
1-2048 1-2048 1-32 767
0,01 0,01 0,01
1дБ 1 дБ 1 дБ
Продолжение табл. П9
Параметр Анализаторы в реальном масштабе времени СК4-71 СК4-72 2031 2033 2034 СССР СССР Дания (фирма ’Ърюль и Къер”)
Выход - Экран электронно-лучевой трубки; цифровой выход (регистрация на цифровом графическом самописце
2313); аналоговый выход по постоянному току (регистрация на двухкоординатном самописце); устройство сопряжения по МЭК 625-1.
Габаритные размеры, 1200 X 1985 X 900 600 X 200 X 900 310 X 430 X 500 310 X 430 X 500 310 X 430 X 500
мм Масса, кг 440 X 1100 X 420 550 215 22 22 35
* Имеется возможность поочередного расширения разных участков частотного диапазона в 4000 (максимально) узких частотных полосах с одновременным изображением 400 полос на экране ЭЛТ.
Таблица П10
Анализатор спектра* Ф4325 (СССР) 2131 (Дания, фирма ’’Брюль и Къер”)
Блок частотного анализатора
Ширина полосы пропус- Третьоктавные Октавные и третьоктавные
кания фильтры фильтры (с самописцем 2313 возможна 1/12 октавы)
Средняя частота, Гц 1-20 000 1,6-20 000
Управление Ручное Ручное, автоматическое, дистанционное управление самописцами
Коррекция — А
Блок измерительного усилителя
Диапазон напряжений 1 мВ - 300 В 1 мкВ - 100 В
Коэффициент усиления, дБ (-40) - (+ 50) (-50) - (+ 50)
Индикатор Режим индикации: Электронно-лучевая трубка
СКЗ Есть 0,03-128 с, + хранение
среднее Есть —
Пик Есть —
Вход Выход: Прямой Прямой, есть предусилитель
входное сопротивление нагрузки (полное) не менее 0,5 мОм 1 мОм/ЮО пФ
выходного сопротивления, не более — 100 Ом
переменного тока, Есть Только блок предусили-
линейный теля
постоянного тока, — 60 дБ, логарифмический
линейный с 2307
постоянного тока, — 60 дБ, логарифмический
логарифмический с 2308
Уровень собственных Не более 40 дБ по от- —
шумов, не более клонению к конечному значению выбранного диапазона измерений
Основная погрешность ± 0,5 дБ ± 0,4 дБ в диапазоне на
измерений 30-40 дБ ниже максимального значения
Габаритные размеры, мм 495 X 520 X 510 310 X 430 X 500
Масса, кг 50 29
* Анализ электрических сигналов в реальном масштабе времени.
СПИСОК ЛИТЕРАТУРЫ
Общая
0.1. Петров Г. Н. Электрические машины. Ч. I и II. М.: Энергия, 1963, 1974.
0.2. Иванов-Смоленский А. В. Электрические машины. М.: Энергия, 1980.
0.3. Алексеев А. Е. Конструкция электрических машин. М.-Л.: Госэнергоиз-дат, 1958.
0.4. Геллер Б., Гамата В. Дополнительные поля, моменты и потери мощности в асинхронных машинах: Пер. с англ./ Под ред. 3. Г. Каганова. М.: Энергия, 1981.
0.5. Паластин Л. М- Синхронные машины автономных источников питания. М.: Энергия, 1980.
0-6. Радин В. И. Разработка новых единых серий электромашин// Электротехника. 1983. № 1. С. 2-3.
0.7. Асинхронные двигатели общего назначения/ Е. П. Бойко, Ю. В. Гаинцев, Ю. М. Ковалев и др. М.: Энергия, 1980.
0.8. Нюрнберг В. Испытание электрических машин. Пер. с нем. М.-Л.: Гос-энергоиздат, 1959.
0.9. Жерве Г. К. Промышленные испытания электрических машин. Л.: Энергоатомиздат, 1984.
0.10. Испытания электрических микромашин/ Н. В. Астахов, Е. М. Лопухина, И. Л. Осин и др. М.: Высшая школа, 1984.
0.11. Испытания электрических машин. Т. 1-5/ Я. Башта, Ф. Кулда и др. Прага. Изд. SNTL, 1960-1964.
0.12. Охрана труда в электроустановках: Учебник для вузов/ Б- Н. Князевс-кий, Т. П. Марусов, Н. А. Чекалин, Н. В. Шипунов. М.: Энергоатомиздат, 1983.
0.13. Кулебакин В. С. Испытание электромашин и трансформаторов. М.-Л.: ОНТИ. НКТП. 1935.793 с.
0.14. Гольдберг О. Д. Качество и надежность электрических машин. М.: Энергия, 1968.
К гл. 1
1.1. Ивоботенко Б. А., Ильинский И. Ф-, Копылов И. П. Планирование эксперимента в электромеханике. М.: Энергия, 1975.
1.2. Захарян В. М. Некоторые вопросы испытания малых электродвигателей// Вестник электропромышленности. 1959. № 3. С. 27—30.
1.3. Скобелев В. Е. Двигатели пульсирующего тока. Л.: Энергоатомиздат, 1985.
1.4. Элькинд ТО. М. Экспериментальное исследование электромеханических процессов в синхронных машинах. М.-Л.: Госэнергоиздат, 1961.
1.5. Вентцель Е. Е. Теория вероятностей. М.: Физматгиз, 1962.
1.6. Сорокер Т. Г., Гольдберг О. Д. Статистический контроль качества асинхронных двигателей в серийном производстве// Вестник электропромышленности. 1956. № 5. С. 19-25.
1.7. Справочник по электроизмерительным приборам/ Под ред. К. К. Илю-нина. Л.: Энергоатомиздат, 1983.
1.8. Каталог изделий промышленности средств связи 87/88. Радиоизмеритель-ные приборы. 24-е изд., испр. и доп. М.: ЦООНТИ ’’Экое”, 1987. С. 214.
1.9. Электрические измерения/ Л. И. Байда, М. С. Добротворский, Е. М. Душин и др. Л.: Энергия, 1980.
1.10. Чечурина Е. М. Приборы для измерения магнитных величин. М.: Энергия, 1969.
1.11. Электроизмерительные приборы: Каталог. Приборы и средства автоматизации. Ч. 3. Разд. 3.1.3. М.: ЦНИИТЭприборостроения, 1987. С. 180.
Кгл. 2
2.1. Кулаковский В, Б. Работа изоляции в генераторах. М.: Энергоиздат, 1981.
2.2. Мусаэлян Э. С. Проверки и испытания при монтаже турбогенераторов. М.-Л.: Госэнергоиздат, 1962.
2.3. Бажанов С. А. Испытание электрооборудования блочных станций. М.: Энергия, 1979.
2.4. Бажанов С. А., Воскресенский В. Ф. Испытание изоляции повышенным напряжением выпрямленного тока. М.: Энергия, 1964.
2.5. Испытание витковой изоляции электрических машин. Сб. статей/ Под ред. Л. Г. Мамиконянца. М.-Л.: Госэнергоиздат, 1959.
2.6. Линзель К. Определение витковых замыканий при наличии уравнительных соединений// ”Электри” (ГДР, Берлин). 1983. № 8. С. 10-12 (нем.). Аннотация на русск. яз.
2.7. Фокин В. А. Способ проверки целости стержней роторов асинхронных двигателей. Вестник электропромышленности. 1959. № 3. С. 68, 69.
2.8. Теодореску Дан. Новый способ определения литейных дефектов стержней КЗ роторов. Вестник электропромышленности. 1983. №7. С. 52-54.
2.9. Тун А. Я., Иванов А. О. Наладка электрических машин электроприводов. М.-Л.: Госэнергоиздат, 1963.
2.10. Коварский Е. М., Каплин А. И. Снижение вибрации многополюсных синхронных электрических машин// Сб. Электротехн. пр-сть. Сер. Электрические машины-1976. Вып. 5 (63). С. 20, 21.
2.11. Трунин Е. С. Электромагнитная балансировка поля роторов гидрогенераторов// Электротехника. 1974. № 7. С. 3-5.
2.12. Малыгин В. М., Горбунов А. Г., Коварский Е. М. Ударно-импульсный метод диагностики начального разрушения подшипников качения// Электротехника. 1981. № 1. С. 27-29.
2.13. Горбунов А. Г., Малыгин В. М., Глянчук В. Ф. Диагностика состояния пластичных смазок в подшипниковых узлах// Сб. Электротехн. пр-сть. Сер. Электрические машины. 1981. Вып. 5 (123). С. 21-23.
К гл. 3
3.1. Ошурков П. В., Кравец Э. С., Шмонина Л. И. Экспериментальное исследование режимов взаимной нагрузки турбогенераторов// Электротехника. 1975. №1.С. 16-18.
3.2. Левин В. И. Схема нагрузочных испытаний четырехполюсных асинхронных двигателей мощностью свыше 100 кВт// Вестник электропромышленности. 1963. № 2. С. 63-64.
3.3. Шарипов А. М. Метод испытания крупных асинхронных двигателей с короткозамкнутым ротором под нагрузкой// Сб.: Исследование электромагнитных полей, параметров и потерь в мощных электрических машинах. М.-Л.: Наука, 1966.
3.4. Потапов Л. А., Зотин В. Ф. Испытание микродвигателей в переходных режимах. М.: Энергоатомиздат, 1986.
3.5. Потапов Л. А., Юферов Ф. М- Измерение вращающих моментов и скоростей вращения микроэлектродвигателей. М.: Энергия, 1974.
3.6. Кац С. М. Балансирные динамометры для измерения вращающего момента. М.-Л.: Госэнергоиздат, 1962.
3.7. Хрущев В. В., Забелло В. И., Ускова И. Г. Прецизионные тахогенераторы и компенсационные измерители скорости// Сб. Электротехн. пр-сть. Сер. Электрические машины. 1974. Вып. 12(46). С. 14—17.
3.8. Черток Б. Н., Архипенко В. А., Фольмер В. А. Прибор для измерения пускового момента// Сб. электротехн. пр-сть. Сер. Электрические машины. 1974. Вып. 12(46). С. 9,10.
3.9. Акимов Л. В., Литвинов О. И., Спанцирети Н. П. Устройство для экспресс-динамометрических испытаний асинхронных двигателей с короткозамкнутым ротором// Электротехника. 1975. № 3. С. 47-49.
3.10. Совершенствование динамометрических испытаний асинхронных двигателей/ Л. В. Акимов, Ю. Г. Борзяк, О. И. Литвинов и др.// Электротехника. 1978. №9. С. 45,46.
3.11. Воскресенский А. П. Одностороннее магнитное притяжение в асинхронных двигателях// Вестник электропромышленности. 1958. №4. С. 15—18.
3.12. Архипенко В. А., Черток Б. Н. Влияние числа и скоса пазов на пусковые и акустические характеристики трехфазных асинхронных двигателей// Электротехника. 1975. № 3. С. 38-41.
3.13. Соколов А. А., Пашинская И. И., Черток Б. Н. Выбор чисел пазов унифицированного ротора трех- и однофазных асинхронных двигателей// Электротехника. 1978. № 9. С. 31-33.
3.14. Барсуков И. А., Зеличенко Э. И. Измерение модуляции напряжения генераторов и преобразователей// Электротехника. 1963. № 5. С. 61—63.
3.15. Житомирский С. И., Воробьева И. А. Статистический контроль асинхронных двигателей при контрольных испытаниях// Вестник электропромышленности. 1956. № 12. С. 12-15.
3.16. Гольдберг О. Д. Методика расчета контрольных диаграмм для статистического контроля качества асинхронных двигателей// Информационно-технический сб. ЦБТИ электропромышленности. 1958. Вып. 7 (136). С. 27-39.
3.17. Пангеи А. М. Экспериментальное исследование распределения поля гистерезисного двигателя// Сб. Электротехн. пр-сть. Сер. Электрические машины. 1970. Вып. 3. С. 11-14.
3.18. Блэк Г., Дудзиковский И., Шэпп К. Новый метод и устройство для исследования магнитного поля в электрических микро машинах// Электротехника. 1980. №2. С. 37,38.
3.19. Худабашев К. А. и др. Метод определения основных параметров установившегося режима синхронных машин// Вестник электропромышленности. 1957. №11. С. 65-69.
3.20. Рябенький В. М., Пеккер Б. Н. Алгоритм определения параметров напряжения трехфазной сети// Техническая электродинамика. Киев, 1987. № 1. С. 99,100.
К гл. 4
4.1. Гаинцев Ю. В. Добавочные потери в асинхронном двигателе. М.: Энергоиз-дат, 1981.
4.2. Шарипов А. М-, Иванов В. К., Костылев А. И. Определение добавочных потерь машин переменного тока// Электротехника. 1969. № 6. С. 42-46.
4.3. Радин В. И., Радина Е. В. Снижение потерь в асинхронных двигателях// Электротехника. 1962. №6. С. 31-33.
4.4. Повышение точности измерения потерь методом самоторможения/ А. М. Шарипов, Л. А. Медынский, В. Д. Литвиненко, Ф. Ф. Шайнуров// Электротехника*. 1986. № 11. С. 25-28.
4.5. Шарипов А. М. К введению в стандарты на методы испытания асинхронных двигателей способов определения нагрузочных добавочных потерь// Электротехника. 1986. № 11. С. 37-40.
4.6. Рабинович А. А. Вычисление железных потерь в машинах постоянного тока// Электрическая тяга. ОНТИ. Госэнергоиздат. 1933. № 3. С. 13,14.
4.7. ГОСТ 7217-87 (СТ СЭВ 168-85). Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний.
К гл. 5
5.1. Иванова Г. М., Кузнецов Н. Д-, Чистяков В. С. Теплотехнические измерения и приборы. М.: Энергоатомиздат, 1984.
5.2. Жуков А. Г., Горюнов А. Н-, Кальфа А. А. Тепловизионные приборы и их применение. М.: Радио и связь, 1983.
5.3. Стандарт СЭВ 1107-78. Машины электрические вращающиеся. Метод определения сопротивления обмоток без отключения электрической машины от сети.
5.4. Шарипов А. М. Измерение сопротивлений обмоток электрических машин под напряжением// Сб. Электротехн. пр-сть. Сер. Электрические машины. 1982. Вьш. 10(140). С. 3-5.
5.5. Мясников Н. А., Коварский Е. М. Непрерывное измерение перегрева обмоток переменного тока// Приборы и средства автоматизации. М.: ОНТИприбор. 1964. №10. С. 44.
5-6. Устройство для измерения температуры обмоток переменного тока/ В. А. Алимов, Л. И. Достов, В. П. Жибура, Т. А. Тебеашвили// Сб.: Электросила. 1983. № 35. Л., Госэнергоиздат.
5.7. Чивадзе 3. Д., Вайнштейн Б. 3., Сладкин В. А. Устройство для непрерывного контроля и дистанционного измерения температуры вращающихся частей ЭМ. Сб.: Электротехн. пр-сть. Сер. Электрические машины. 1970. Вьш. 3. С. 21-22.
5.8. Богаенко И. Н., Шатунов М. А. Тепловые исследования двигателей главных приводов// Электротехника. 1975. № 3. С. 15-17.
5.9. Кухарский М. П., Самарский С. С. Охлаждение асинхронных двигателей с помощью центробежно-тепловых труб// Сб.: Электротехн. пр-сть. Сер. Электрические машины. 1977. Вьш. 11 (81). С. 3,4.
5.10. Виноградов В. Н. Исследование вентиляторов электрических машин. Л-: Энергия, 1970.
5.11. ГОСТ 12259-75 (СТ СЭВ 136-74). Методы определения расхода охлаждающего газа.
5.12. Жерве Г. К. Нагревание электрических машин при различных условиях работы// Вестник электропромышленности. 1935. № 9. С. 28-36.
5.13. Борисенко А. И., Данько В. Г., Яковлев А. И. Аэродинамика и теплопроводность в электрических машинах. М.: Энергия, 1974.
5.14. ТубисЯ. Б., Фанарь М. С. Интенсификация охлаждения асинхронных двигателей закрытого исполнения// Электротехника. № 10. С. 58-62.
К гл. 6
6.1. Лившиц П. С. Скользящий контакт электрических машин. М.: Энергия, 1974.
6.2. Лавринович Л. Л. Искрение в скользящем контакте// Вестник электропромышленности. 1957. № 2. С. 30-33.
6.3. Толкунов В. П. Теория и практика коммутации машин постоянного тока. М.: Энергия, 1976.
6.4. Глускин А. Я., Зайчиков В. Г. Некоторые особенности работы узла токосъема с контактных колец// Материалы IV Всесоюзной конференции по коммутации/ ОМИИТ. Омск. 1969. С. 72-75.
6.5. Фридман Г. Н., Пономарева А» А., Атаева О. В. Контактный бальзам для высоконагруженного скользящего контакта// Сб.: Электротехн. пр-сть. Сер. Электротехнические материалы. 1984. Вып. 10 (171). С. 9-12.
6.6. Фридман Г. Н., Пономарена А. А., Фомичева Т. И. Разработка контактных пар с высокими нагрузками и прецизионными контактными характеристиками// Сб.: Коммутация электрических машин/ АН УССР, Харьков, 1984. С. 73,74.
6.7. Механика скользящего контакта/ В. Я. Нэллин, Н. Я. Богатырев, И. И. Туктаев и др. М.: Транспорт, 1966.
6.8. Бодров Н. Н., Давидович Я. Г. Скользящий контакт многофазных коллекторных машин. М.: Энергия, 1980.
6.9. Лившиц П. С. Справочник по щеткам электрических машин. М.: Энерго-атомиздат, 1983.
6.10. Измерение интенсивности искрения на коллекторе электрической машины/ В. Ф. Идрисов, А. Я. Цирулик, Г. А. Сипайлов, В. С. Стукач// Сб.: Электротехн. пр-сть. Сер. Электрические машины. 1977. Вып. 11 (81). С. 16-18.
6.11. Лавринович Л. Л. Настройка коммутации при помощи приборов// Вестник электропромышленности. 1959. №4. С. 16-22.
6.12. Курбасов А. С. Приборы для контроля коммутации тяговых электродвигателей// Вестник электропромышленности. 1963. № 6. С. 53-56.
6.13. Прибор контроля коммутации ПКК 24/ М. Ф. Карасев, А. В. Сазонов, В. Д. Авилов и др.// Сб.: Электротехн. пр-сть. Сер. Электрические машины. 1979. Вып. 6(100).С. 16,17.
6.14. Бобров И. И., Давидович Я. Г. Исследование поперечных токов, токорас-пределения в щетках многофазных коллекторных электродвигателей// Промышленная энергетика. 1977. № 8. С. 28,29.
6.15. Исследование возможности объективной оценки искрения электрощеток/ В. А. Лотт, В. В. Поротиков, И. И. Бодров и др.// Сб.: Электротехн. пр-сть. Сер. Электротехнические материалы. 1977. Вып. 11 (88). С. 10-11.
6.16. Щетки электрических многофазных коллекторных машин. Каталог 24.00.01-86/ Информэлектро, 1986.
6.17. Дуэйн В. М. Разработка методов повышения коммутационной надежности высокоиспользованных машин постоянного тока: Автореф. дис. . . . канд. техн. наук. М., 1987.
К гл. 7
7.1. Агрегатный комплекс средств измерения вибрации/ В. А. Маленький, И. М. Недужко, Б. Г. Орлов и др. М.: Машиностроение, 1983.
7.2. Бендан Дж., Пирсол А. Измерение и анализ случайных процессов: Пер. с англ. М.: Мир, 1974.
7.3. Борьба с шумом на производстве: Справочник/ Е. Я. Юдин, Л. А. Борисов, И. В. Горенштейн и др./ Под общ. ред. Е. Я. Юдина. М.: Машиностроение, 1985.
7.4. Вибрация и вибродиагностика судового электрооборудования/ А. Л. Александров, А. В. Барков, Н. А. Баркова и др. Л.: Судостроение, 1986.
7.5. Городецкий Э. А. Связь габаритных и номинальных данных асинхронных двигателей с уровнем вентиляционного шума// Тр. ВНИИЭМ. 1976. Т. 46. С. 43-50.
7.6. Измерение параметров вибрации и удара: Учебное пособие для Всесоюзного института повышения квалификации руководящих и инженерно-технических работников в области стандартизации, качества продукции и метрологии (ВИСМ)/ В. С. Шкаликов, В. С. Пеллинец, Е. Г. Исакович и др. М.: Изд-во стандартов, 1980.
7-7. Каплин А. И., Коварский Е. М., Муркес Н. И. Обеспечение требуемых виб-рошумовых характеристик электрических двигателей 4А// Электротехника. 1976. №10. С. 21-23.
7.8. Клюкин И. И., Колесников А. Е. Акустические измерения в судостроении. Л.: Судостроение, 1982.
7.9. Коварский Е. М. О расчете вибрации электрических машин// Электротехника. 1974. № 12. С. 27-31.
7.10. Лопашев Д. 3., Осипов Г. Л., Федосеева Е. Н. Шумовые характеристики и методы их определения. М.: Изд-во стандартов, 1983.
7.11. Муркес Н. И. Методы измерения шумовых характеристик электрических машин// Конструирование и изготовление электрических машин с улучшенными виброакустическими характеристиками. Сб. докладов/ Вып. 2. Измерение шума и вибрации. М.: Информэлектро, 1968.
7.12. Новиков А. К. Статистические измерения в судовой акустике. Л.: Судостроение, 1985.
7.13. Приборы и системы для измерения вибрации, шума и удара: Справочник,— В 2-х книгах/ Под ред. В. В. Клюева. М.: Машиностроение, 1978.
7.14. СУровцев Ю. А. Амортизация радиоэлектронной аппаратуры. М.: Сов. радио, 1974.
7.15. Харкевич А. А. Спектры и анализ. Избранные труды. М.: Наука, 1973. Т.2.
7.16. Шубов И. Г. Шум и вибрации электрических машин. - 2-е изд., перераб. и доп. Л.: Энергоатомиздат, 1986.
7.17. Янко Ю. И. Измерение вибрации электрических машин// Конструирование и изготовление электрических машин с улучшенными виброакустическими характеристиками. Сб. докладов/ Вып. 2. Измерение шума и вибрации. М.: Информэлектро, 1968.
7.18. 'Acoustic Noise Measurements/ J. R. Hassel, M. Sc. and K. Zaveri, M. Phil. Briiel and Kfaer, 1979.
7.19. Application of В and К equipment to Frequency Analysis/ R. B. Randall, B. Tech. B. A. 2nd edition. Briiel and Kj«r, 1977.
7.20. Broch J. T. Mechanical Vibrations and Shock measurements. 2nd edition. Briiel and Kjxr, 1984.
7.21. Акустическая и виброизмерительная техника: Каталог. ГДР. Роботрон, 1987.
7.22. Электронная аппаратура: Каталог 1988/89. Дания, ’’Брюль н Къер”, 1988.
7.23. ГОСТ 23941-79 (СТ СЭВ 541-77). Шум. Методы определения шумовых характеристик. М.: Изд-во стандартов. 1984.
7.24. ГОСТ 12.1.027-80 (СТ СЭВ 1414-78). Шум. Определение шумовых характеристик источников шума в реверберационном помещении. Технический метод. М.: Изд-во стандартов, 1985.
7.25. ГОСТ 12.1.034-81 (СТ СЭВ 1931-79). ССБТ. Вибрация. Общие требования к проведению измерений. М.: Изд-во стандартов, 1985.
7.26. ГОСТ 20832-75. Система стандартов по вибрации. Машины электрические вращающиеся массой до 0,5 кг. Допустимые вибрации. М.: Изд-во стандартов, 1983.
К гл. 8
8.1. Общесоюзные нормы допускаемых индустриальных радиопомех. Нормы 1-72,9-72. М.: Связь, 1973; Нормы 1-Б80. М.: Радио и связь, 1981.
8.2. Авербух С. X., Жондецкая О. Д., Гончарова В. Б. Проектирование систем подавления радиопомех от электрических машин// Вестник электропромышленности. 1957. №9. С. 21-23.
8.3. Щербакова К. С. Радиопомехи, создаваемые бытовыми электродвигателями, и способы их подавления// Вестник электропромышленности. 1959. № 4. С. 12-14.
8.4. Фастовский И. А., Фурманов И. М. Поиск индустриальных радиопомех и их исследование. Л.: Судпромгаз, 1959.
8.5. Радиоизмерительная аппаратура производства ВНР, ГДР, ПНР и ЧССР, рекомендованная для импорта. Изд-во Минрадиопрома, 1973.
К гл. 9
9.1. Автоматизация измерения при испытаниях и исследованиях асинхронных двигателей/ Е. Б. Ковалев, Н. Н. Ткачук, В. В. Непочатов, В. Г. Брага// Сб.: Электротехн. пр-сть. Сер. Электрические машины. 1984. Выл. 4(158). С. 3, 4.
9.2. Кузмичев Д. А., Радкевич И. А., Смирнов А. Д. Автоматизация экспериментальных исследований: Учебное пособие. М.: Наука, 1983.
9.3. Ориатский П. П. Автоматические измерения и приборы (аналоговые и цифровые). 5-е изд., перераб. и доп. К.: Вища школа. Головное изд-во. 1986.
9.4. Автоматический цифровой стенд для испытания асинхронных электродвигателей. Pieper W. NeBwerter an asynchronmotoren// Werkstattstechnik, 1982. Vol. 72. N 11. P. 631 -634// Экспресс-информация. Испытательные приборы и стенды. 1983, №35. С. 24-27.
9.5. Леонтьев Д. И. Измерительные приборы и системы// Новое в жизни, науке и технике. Сер. Радиотехника и связь. М.: Знание. 1982. № 10.
9.6. Лейтман М. Б» Автоматическое измерение выходных параметров электродвигателей (методыи аппаратура). М.: Энергоатомиздат, 1983.
9.7. Механизация сборочных и контрольно-испытательных работ при производстве асинхронных двигателей массовых серий// И. С. Бронников, Н. С. Михайленко, В. Н. Волобуев и др.// Электротехника. 1976. № 10. С. 33-36.
9.8. Никитин Ю. А., Шереметьевский Н. Н. Автоматизация - важнейшее направление повышения технического уровня электротехнического оборудования// Электротехника, 1979. № 4. С. 2-4.
9.9. Рапопорт Г. Н. Применение промышленных роботов в машиностроении. М.: Машиностроение, 1985.
9.10. Системы управления промышленными роботами и манипуляторами. Л.: ЛГУ, 1980.
9.11. Современные промышленные роботы: Каталог// AM PC. Автоматизированные манипуляторы и робототехнические системы/ Под ред. Ю. Г. Козырева и Н. А. Шифрина. М.: Машиностроение, 1984.
9.12. Средства автоматизации управления электротехническими системами/ Под общ. ред. Н. Н. Шереметьевского// Тр. ВНИИЭМ, 1980. Т. 62.
9.13. Технические средства АСУ: Справочник. В 2-х томах. Технические средства ЕС ЭВМ/ Под общ. ред. Г. Б. Кезлинга. Л.: Машиностроение. Л.: 1986. Т. 1.
9.14. Технические средства АСУ: Справочник. В 2-х т. Технические средства СМ ЭВМ/ Под общ. ред. Г. Б. Кезлинга. Л.: Машиностроение. 1986. Т. 2.
9.15. Автоматизированная испытательная система двигателей постоянного тока. Теория, комплексное проектирование электрических машин/ А. Г. Брук, 3. Б. Варганов, Ю. М. Косой, С. Н. Плеханов и др.// Тр. ВНИИЭМ, 1987. Т. 84.
ОГЛАВЛЕНИЕ
Предисловие......................................................... 3
Список принятых сокращений.......................................... 4
Глава первая. Основные вопросы методики испытании................... 5
1.1. Классификация испытаний..................................... 5
1.2. Основные принципы построения методики....................... 6
1.3. Измерение электрических величин............................ 16
1.4. Измерение параметров переходных процессов.................. 24
1.5. Графическая обработка результатов измерения................ 29
1.6- Статистические исследования результатов испытания.......... 32
1.7. Краткая характеристика электроизмерительных приборов....... 35
1.8. Требования техники безопасности............................ 52
Глава вторая. Испытания в процессе производства.................... 53
2.1. Испытание электрической изоляции........................... 54
2.2. Контроль обмоток........................................... 63
2.3. Контроль магнитной симметрии............................... 66
2.4. Проверка состояния подшипников............................. 72
Глава третья. Характеристики. Параметры............................ 73
3.1. Виды характеристик.......................................... 73
3.2. Методы нагружения электрических машин....................... 74
3-3. Методы измерения механических величин....................... 79
3.4. Электромагнитные процессы.................................. 89
3.5. Определение характеристик. Схемы замещения................ 103
3.6. Экспериментальное определение параметров.................. 113
3-7- Измерение угла 8 между ЭДС Е^ и напряжением на зажимах синхронных ЭМ ................................................. 125
3.8. Определение момента инерции ротора относительно оси вращения. . . 126
Глава четвертая. Определение потерь и коэффициента полезного действия 128
4.1. Классификация потерь...................................... 128
4.2. Экспериментальное определение суммы потерь................ 136
4.3. Методы определения отдельных составляющих суммы потерь.... 139
4.4. Метод выбега (самоторможения) (МВ)........................ 149
Глава пятая. Нагрев. Охлаждение................................... 150
5-1. Тепловые процессы.....................". ............. 150
5.2. Методы измерения температуры.............................. 155
5.3. Общие правила проведения тепловых испытаний............... 171
5.4. Косвенные методы определения установившихся превышений температуры ...................................................... 172
5.5. Охлаждение................................................. 175
Глава шестая. Токосъем и коммутация............................... 185
6.1. Физические процессы в узлах токосъема...................... 185
6.2. Коммутация электрических машин постоянного тока........... 189
6.3. Токосъем через контактные кольца........................... 197
6.4. Обеспечение надежной работы щеточного аппарата............ 198
6.5. Требования к технологии................................... 202
6.6. Особенности коммутации коллекторных электрических машин переменного тока............................................... 203
6.7. Практические методы исследования и наладки коммутации..... 204
Глава седьмая. Вибрация и шум электрических машин................. 220
7.1. Источники шума и вибрации................................. 220
7.2. Измерение шума электрических машин........................ 226
7.3. Измерение вибрации электрических машин.................... 239
7.4. Методы частотного анализа спектра и выделения составляющих различного происхождения........................................ 251
7.5. Допустимые уровни шума и вибрации......................... 266
7.6. Точность измерения шума и вибрации........................ 267
7.7. Характеристики виброаку этических процессов, используемые в целях диагно стики................................................ 269
Глава восьмая. Помехи радиоприему (радиопомехи)................... 270
8.1. Источники индустриальных радиопомех....................... 270
8.2. Допустимые уровни радиопомех.............................. 271
8.3. Схемы измерения напряжения радиопомех..................... 272
8.4. Защита от радиопомех, генерируемых электрическими машинами 274
Глава девятая. Автоматизация испытаний............................ 276
9.1. Общие принципы автоматизации испытаний.................... 276
9.2. Программа испытаний....................................... 277
9.3. Средства автоматизации испытаний.......................... 279
Приложение...................................................... 291
Список литературы................................................. 312
Производственное издание
Коварский Ефим Михайлович
Янко Юрий Иванович
ИСПЫТАНИЕ ЭЛЕКТРИЧЕСКИХ МАШИН
Редактор Ю. М. Косой
Зав. редакцией М. П. Соколова
Редактор издательства И. В. Боцманова
Художественные редакторы В. А. Гозак-Хозак, Г И. Панфилова
Технический редактор Н. М. Брудная
Корректор Л. А. Гладкова
ИБ 1402
Набор выполнен в издательстве. Подписано в печать с оригинала-макета 19.12.89. Т-17363. Формат 60 х 88 1/16. Бумага офсетная № 2. Печать офсетная. Усл. печ.л, 19,60. Усл.кр.-отт, 19,6. Уч.-изд.л. 21,63. Тираж 18 000 экз. Заказ 6905. Цена 1 р. 40 к.
Энергоатомиздат, 113114, Москва, М-114, Шлюзовая наб., 10.
Отпечатано в ордена Октябрьской Революции и ордена Трудового Красного Знамени МПО ’’Первая Образцовая типография” Государственного комитета СССР по печати. 113054, Москва, Валовая ул., 28.