/

























































































































































































































































































































































































































































































































Текст
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ
СССР
О I) 1 □ Е О
М1881ЕЕ
ЕЫО^ЕЕКИХЮ
ЕсШед Ьу
А. Е. РЫСКЕТТ, 8. КАМО
МССШАХУ — Н1ЬЬ ВООК СОМРАЖ, 1К'С.
■МЕМ уокк товомто ьомоом
КОНСТРУИРОВАНИЕ
УПРАВЛЯЕМЫХ
СНАРЯДОВ
Под редакцией
А. Е. ПАКЕТА и С. РАМО
Перевод
с английского
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СССР
Москва — 1963
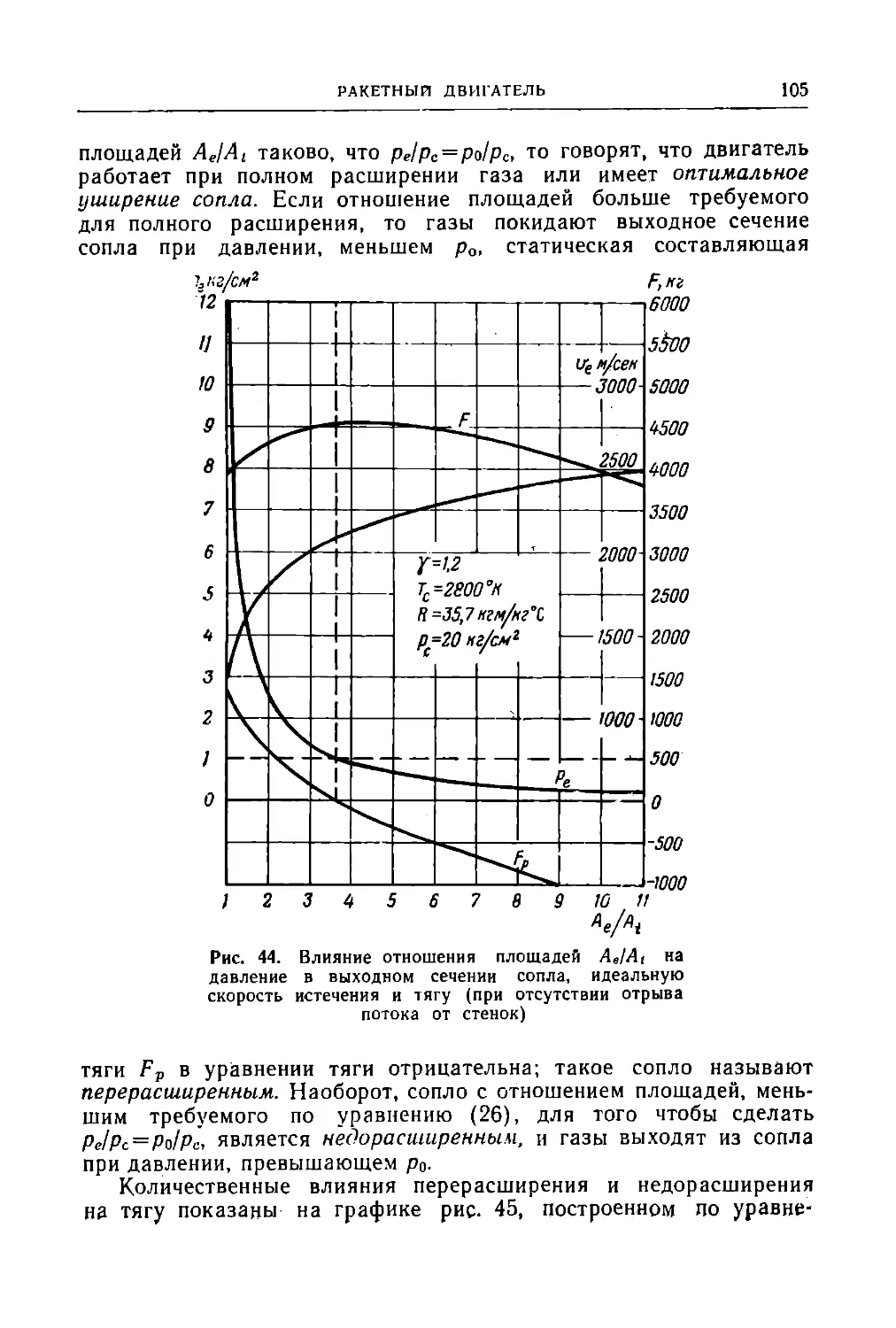
КОНСТРУИРОВАНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ
Под редакцией А. Е. Пакета и С. Рамо
(Перевод с английского)
Книга представляет собой обзор основных вопросов отдельных
областей науки и техники, имеющих отношение к управляемым сна¬
рядам. Цель ее дать инженеру-конструктору полное представление
об основных проблемах управляемых снарядов во всех смежных об¬
ластях, с тем чтобы в процессе проектирования он мог обеспечить
оптимальное решение задач в своей специальной области.
В книге освещены вопросы аэродинамики, двигателей и управ¬
ления снарядами. Основное внимание уделено управлению и наве¬
дению снарядов, в связи с чем рассмотрены проблемы радиолока¬
ции, приборной гироскопии, автоматического регулирования, счетно¬
решающих устройств и др. элементов и применительно к ним —
вопросы теории информации и теории вероятности.
Книга представляет интерес для офицеров, адмиралов и генера¬
лов Советской Армии, связанных в своей работе с управляемыми
снарядами. Она может быть рекомендована в качестве пособия ин¬
женерам — конструкторам управляемых снарядов, а также слуша¬
телям и студентам соответствующих военных и гражданских учеб¬
ных заведений.
Перевод с английского А. Г. Русина, Г. М. Смахтина
и Н. М. К о л п а к о в а.
Под редакцией канд. техн, наук И. Н. Рогачевского,
канд. техн, наук Н. Г. Дубравского и Г. Д. Крысенко
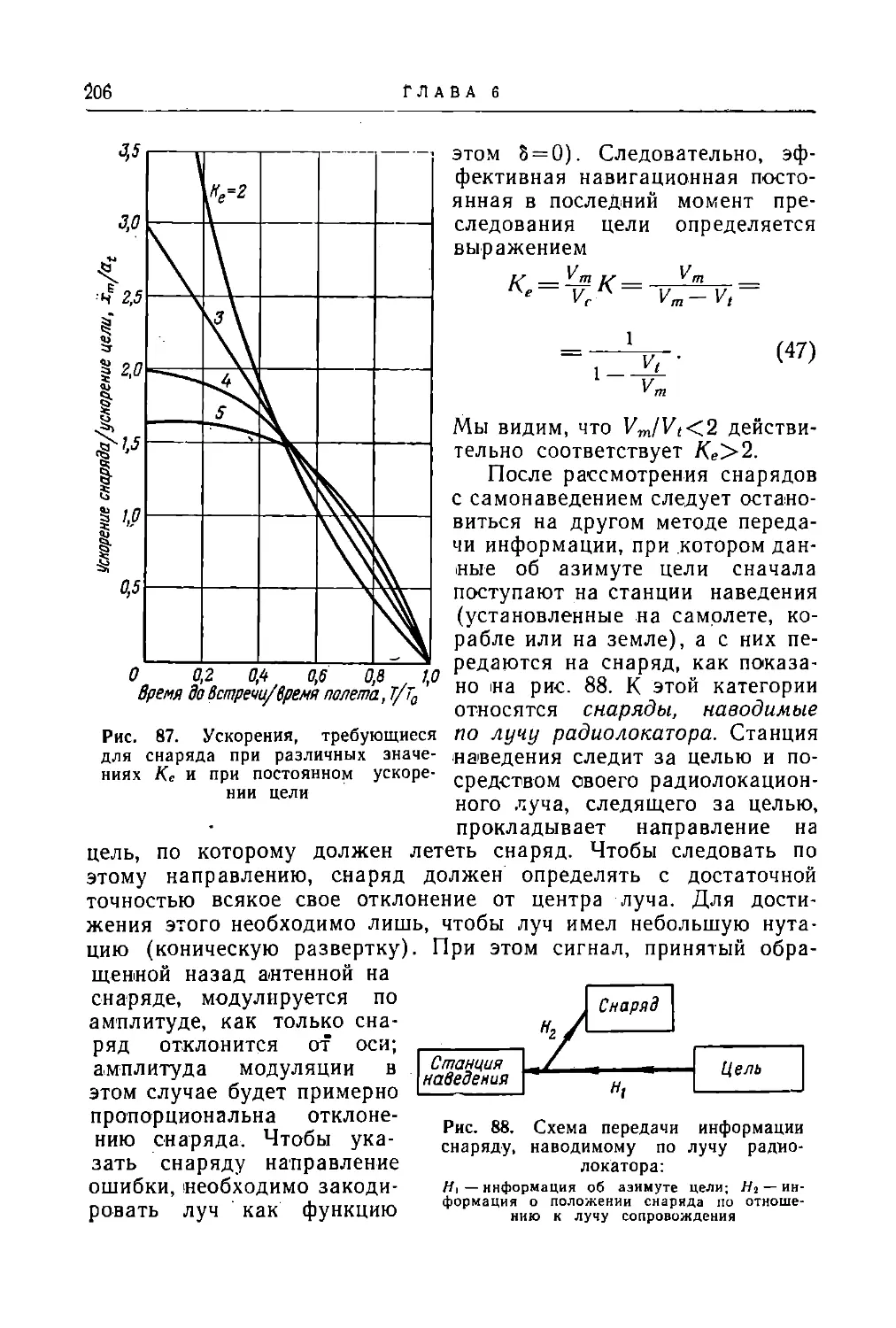
ПРЕДИСЛОВИЕ
Бурные темпы развития управляемых снарядов, наступление эры
космических полетов и опасность возникновения «кнопочной»
войны — вот вопросы, которые в последнее время занимают умы как
специалистов, так и неспециалистов. Непосвященные представляют
себе конструирование управляемых снарядов как нечто совершенно
новое, необычное и даже окруженное атмосферой таинственности.
Многие проблемы действительно являются новыми, однако здесь
больше старых проблем, выступающих в новой форме и в новых ком¬
бинациях. Проектирование управляемых снарядов требует одновре¬
менного принятия согласованных решений по различным вопросам
аэродинамики, двигателей, электроники, техники измерений и др. Вза¬
имная связь и взаимная обусловленность этих вопросов делают за¬
дачу поиска компромиссных решений в отношении отдельных элемен¬
тов и всей системы в целом во много раз более сложной, чем реше¬
ние проблем в какой-либо отдельной области техники.
Признание этого факта привело к принятию концепции «проекти¬
рования системы», которая требует предпочтительного отношения
к вопросам оптимизации системы в целом по сравнению с вопросами
оптимизации отдельных ее элементов. Этот новый термин, по суще¬
ству, не содержит ничего нового, поскольку такой подход всегда ле¬
жал в основе создания хорошей конструкции. Однако современный
уровень развития техники, нашедший свое наиболее яркое выраже¬
ние в управляемых снарядах, и все возрастающая (и, очевидно, не¬
избежная) специализация отдельных областей техники требуют со¬
средоточения основного внимания на проблемах, связанных со всей
системой в целом.
Вот почему инженер-конструктор управляемых снарядов должен
быть в состоянии не только решать задачи в своей узкой специаль¬
ной области, но и достаточно хорошо представлять себе проблемы
смежных областей, имеющие влияние на эффективность действия
всей системы. Инженеры-конструкторы должны быть способны нахо¬
дить рациональные компромиссные решения между противоречивыми
требованиями отдельных элементов системы снаряда и оценивать
эти компромиссы с точки зрения их конечного влияния на работу
всей системы.
Из сказанного не следует делать вывод, что узкая специализация
в различных областях науки и техники является чем-то нежелатель¬
6
ПРЕДИСЛОВИЕ
ным. Наоборот, ее необходимо углублять, с тем чтобы наиболее полно
изучить все возможности, кроющиеся в отдельных узких областях
науки и техники. Нельзя думать, что, имея лишь поверхностные зна¬
ния во всех областях, без исчерпывающих знаний в какой-либо од¬
ной из них, можно принимать ответственные решения при проектиро¬
вании снаряда. В то же время надо признать, что расширение зна¬
ний в смежных областях науки и техники позволит инженерам внести
больший вклад в решение общих проблем системы.
Эти соображения породили мысль о создании данной книги, пред¬
ставляющей собой обзор основных вопросов по отдельным областям
науки и техники, связанным с проектированием управляемых снаря¬
дов. Различные главы книги рассчитаны на тех инженеров и ученых,
которые, обладая хорошей общей подготовкой, имеют глубокие зна¬
ния в какой-либо одной, специальной области, но недостаточно зна¬
комы со смежными областями.
Книга не представляет собой справочника по вопросам конструи¬
рования управляемых снарядов. Она не может также служить источ¬
ником текущей информации, используемой инженерами в их повсе¬
дневной работе. Задача книги состоит в том, чтобы помочь инжене¬
ру-конструктору лучше понять характер тех проблем, которые возни¬
кают перед его коллегами в смежных областях, и дать ему основу
для полезного обсуждения общих или перекрещивающихся вопросов.
Для углубления знаний в своей области специалист должен обра¬
щаться к постоянно издаваемой обширной технической литературе
по соответствующим специальным вопросам. Данный же труд дол¬
жен обеспечить ему в доступной форме знакомство с основами тех
областей науки и техники, которые не являются его специальностью.
Если в этом отношении книга окажет ему помощь, то можно счи¬
тать, что цель ее издания достигнута.
А. Е. Пакет
С. Рамо
ГЛАВА 1
ОБЩИЕ ПРИНЦИПЫ РАЗРАБОТКИ
УПРАВЛЯЕМОГО СНАРЯДА И ЕГО ЭЛЕМЕНТОВ
П. Джонсон 1
1 — 1. ВВЕДЕНИЕ
Управляемый снаряд, как и любой другой летательный аппа¬
рат, стартует с места его запуска и через некоторое время, при нор¬
мальном полете, достигает назначенной точки или района. В зави¬
симости от места расположения точки пуска снаряда и цели раз¬
личают четыре класса управляемых снарядов: «земля — земля»,
«воздух — земля», «земля — воздух» и «воздух — воздух».
Для обеспечения требуемой точности попадания в цель необхо¬
димо осуществлять наведение снаряда. Неуправляемые снаряды,
например стрела или артиллерийский снаряд, после выстрела сле¬
дуют по предопределенной траектории. Такая траектория может не
удовлетворять условиям попадания в цель из-за ошибок прицели¬
вания, случайных отклонений характеристик орудия и снарядов от
нормальных или из-за непредвиденного перемещения цели. При на¬
ведении управляемого снаряда, в процессе его полета к цели опре¬
деляются отклонения действительной траектории от требуемой. На
основе оценки этих отклонений производится корректирование
курса или траектории движения снаряда.
В таком летательном аппарате, как самолет, главным элемен¬
том системы наведения является летчик. В управляемом же сна¬
ряде функции летчика выполняются соответствующими приборами
и механизмами. Поэтому управляемый снаряд не требует излиш¬
них объемов, дополнительного веса конструкции, ограничений по
допустимым перегрузкам и т. д., которые обусловлены присутст¬
вием на борту летчика. Однако ряд таких качеств, свойственных
человеку, как острота ума, способность к анализу и визуальному
восприятию окружающей обстановки, не так просто получить от
системы, наведения, в которой человек не участвует. В связи с этим
наиболее сложной проблемой проектирования управляемых снаря¬
дов является, как правило, проблема системы наведения. При этом
создание управляемого снаряда нельзя рассматривать как простое
1 Сотрудник фирмы «Рамо-Вулдридж корпорейшн».
8
ГЛАВА I
механическое добавление аппаратуры наведения к неуправляе¬
мому снаряду или же как механическую замену пилота соответст¬
вующими приборами. Короче говоря, управляемый снаряд—это не
артиллерийский снаряд с системой наведения и не самолет без. лет¬
чика. Введение системы наведения в снаряд связанно с необходи¬
мостью учета ее специфики при проектировании других элементов
снаряда. В свою очередь конструкция снаряда настолько глубоко
влияет на систему наведения, что приходится изыскивать опти¬
мальный вариант всего управляемого снаряда в целом, а не от¬
дельных составных частей его. Однако при фактической разработ¬
ке управляемого снаряда удобно делить его на основные узлы, ко¬
торые представляют собой предмет изучения и творчества специа¬
листов в конкретных, сравнительно узких, областях. Вследствие
этого самая трудная задача при проектировании управляемого
снаряда связана с рассмотрением и обеспечением взаимодействия
всех элементов снаряда.
При проектировании управляемого снаряда разработчик дол¬
жен решить следующие основные проблемы.
1—2. ВЫБОР ДВИГАТЕЛЬНОЙ УСТАНОВКИ
Для управляемого снаряда можно использовать двигательную
установку любого типа. В зависимости от предъявляемых требова¬
ний можно выбрать поршневой, турбовинтовой, турбореактивный,
прямоточный воздушно-реактивный или ракетный двигатель;
в случае проектирования планирующего снаряда можно использо¬
вать составляющую силу тяжести. Отсутствие летчика позволяет
допустить для снаряда более высокие ускорения, неприемлемые в
пилотируемом летательном аппарате. Если нельзя использовать
в качестве рабочего тела или источника кислорода атмосферный
воздух, то следует выбрать ракетный двигатель.
Кроме того, выбор типа двигателя определяется конструкцией
снаряда в целом, а также экономическими факторами, так как
управляемый снаряд обычно предназначается для однократного
использования.
1—3. ВЫБОР АЭРОДИНАМИЧЕСКОЙ СХЕМЫ
Для того чтобы перехватить движущуюся цель, снаряд должен
иметь достаточную скорость. Современные снаряды, как правило,
обладают сверхзвуковой скоростью. Для снаряда с наименьшим
сопротивлением при сверхзвуковой скорости полета оптимальной
аэродинамической формой является тело вращения большого удли¬
нения с заостренной носовой частью и крылом малой относитель¬
ной толщины и удлинения. Однако на практике приходится отсту¬
пать от идеальной аэродинамической формы и искать компро¬
ОБЩИЕ ПРИНЦИПЫ РАЗРАБОТКИ УПРАВЛЯЕМОГО СНАРЯДА
9
миссное решение, как, например, при необходимости обеспечения
выхода струи газов реактивного двигателя в хвостовой части кор¬
пуса летательного аппарата.
Чтобы снаряд имел наименьшие габариты и вес, каждое из
возможных компромиссных решений должно быть тщательно про¬
анализировано.
Снаряд должен быть устойчивым в полете. Продольная устой¬
чивость обеспечивается расположением центра масс впереди цен¬
тра давления. Полная устойчивость снаряда может быть достиг¬
нута только применением соответствующей системы управления.
Не следует делать летательный-аппарат чрезмерно устойчивым,
так как снаряд должен легко реагировать на команды управления.
Компоновка снаряда должна быть такой, чтобы центр масс нахо¬
дился в оптимальной точке и обеспечивал ему необходимый запас
устойчивости.
Управление полетом снаряда подобно самолету осущест¬
вляется аэродинамическими поверхностями управления.
Сложной задачей аэродинамического проектирования снаряда
является получение необходимых характеристик управляемости в
условиях, когда рулевые поверхности расположены в зоне возму¬
щенного потока, создаваемого передней частью снаряда.
1—4. КОНСТРУКЦИЯ
Получение необходимых характеристик прочности снаряда при
малом его весе является основной задачей конструктора. При по¬
лете со сверхзвуковой скоростью воздух в пограничном слое на¬
гревается до высокой температуры. В этих условиях желательно
свести до минимума поглощение тепла снарядом, по крайней мере
на основной части траектории полета. Так как проблема теплоза¬
щиты конструкции еще не решена полностью, обеспечение прочно¬
сти при высоких температурах имеет большое значение.
Однако запас прочности должен быть относительно небольшим,
ибо нецелесообразно чрезмерно увеличивать вес только для того,
чтобы совершенно исключить возможность случайного разрушения
снаряда в полете.
1—5. СИСТЕМА НАВЕДЕНИЯ И УПРАВЛЕНИЯ
Граница между понятиями наведение и управление в некоторой
степени условна. Однако-иногда целесообразно различать систему
наведения, которая определяет отклонения реальной траектории от
заданной и вырабатывает команды для ее корректирования, от си¬
стемы управления, которая преобразует эти команды в необходи¬
мые отклонения рулей для возвращения снаряда на требуемую
траекторию.
10
ГЛАВА 1
Сравнительно просто осуществить управление в том случае,
когда заданная траектория полета между точками пуска и цели
совпадает с траекторией, по которой этот снаряд следовал бы сам
при отсутствии случайных ошибок. В этом случае система управ¬
ления должна лишь обеспечить компенсацию небольших случай¬
ных ошибок.
С другой стороны, несовпадение действительной траектории
с заданной является необходимым, поскольку работа системы на¬
ведения основана на измерении отклонений действительного поло¬
жения снаряда от расчетного. Так, например, хотя естественной тра¬
екторией снаряда класса «земля — земля» малой дальности дейст¬
вия ', двигающегося в поле земного тяготения, является баллисти¬
ческая кривая, для системы наведения такого снаряда проще за¬
дать в качестве опорной траектории прямую линию между точкой
пуска и целью, хотя для системы управления обеспечить следова¬
ние снаряда по такой траектории труднее. Как и в других обла¬
стях техники, при разработке управляемого снаряда приходится
искать компромиссные решения между противоречивыми требова¬
ниями систем наведения и управления.
Для наведения снаряда дальнего действия класса «земля —
земля», летящего на постоянной высоте (на маршевом участке
траектории), систему наведения можно осуществить по принципу
навигационных систем, применяемых на пилотируемых самолетах.
Для этого можно использовать методы самолетовождения по кар¬
те, метод счисления пути, ориентирование по звездам, по ком¬
пасу, а также радионавигационную систему типа «Лоран». В пи¬
лотируемом летательном аппарате необходимая для наведения
информация может быть получена из нескольких источников, по¬
добных перечисленным выше.
В этом случае путем сравнения полученных данных с заданны¬
ми можно с достаточной надежностью определить действительный
курс и положение самолета. В управляемом снаряде такое обилие
информации излишне. Для него приходится заранее выбирать один
из методов наведения, что делается на стадии проектирования.
Для управляемого снаряда небольшой дальности действия,
когда вся траектория полета или большая ее часть может наблю¬
даться или контролироваться из одной точки, задача наведения,
очевидно, будет более простой. В этом случае принципиально воз¬
можны несколько методов наведения. Например, отклонения от за¬
данного курса можно наблюдать с помощью приборов, находя¬
щихся на стартовой позиции. В этом случае на снаряде должна
находиться аппаратура для приема и исполнения передаваемых
команд управления. Прямолинейная траектория от точки старта
1 В пределах такой дальности, когда можно пренебречь кривизной земной
поверхности. — Прим. рег).
ОБЩИЕ ПРИНЦИПЫ РАЗРАБОТКИ УПРАВЛЯЕМОГО СНАРЯДА
11
до цели может быть обозначена, например, радиолучом. Тогда
снаряд должен без вмешательства оператора фиксировать откло¬
нения от оси луча и возвращаться на заданный курс.
Управляемый снаряд, оснащенный системой самонаведения, мо¬
жет опознавать цель на фоне местных предметов и получать дан¬
ные о положении цели от собственных бортовых приборов. Эти
данные являются входной информацией для решения задачи
встречи с целью. Цель может иметь различные, по физической при¬
роде, контрасты и излучать энергию, которую улавливает система
самонаведения снаряда. В других случаях цель может распозна¬
ваться по отраженной энергии, излучаемой устройствами, находя¬
щимися на борту снаряда или вне его.
1—6. ПРОБЛЕМА СОЗДАНИЯ СНАРЯДА В ЦЕЛОМ
При разработке управляемого снаряда как комплексной систе¬
мы должен быть отработан каждый элемент его, при этом необхо¬
димо добиться выполнения заданных функций каждым из элемен¬
тов снаряда при возможно меньших весе, объеме, мощности и
стоимости их при максимальной эксплуатационной надежности.
Успех работы над каждым конкретным элементом снаряда
нельзя предвидеть с определенной точностью. Кроме того, характе¬
ристики каждого элемента определяются не какими-то абсолютны¬
ми требованиями, а тем, что он должен работать совместно со все¬
ми другими разработанными элементами. Поэтому в начальной
стадии работы необходимо определить, какие усовершенствования
могут быть внесены, исходя из общего уровня развития данной об¬
ласти, в каждый элемент — в рамках имеющегося времени и ква¬
лификации специалистов, — и затем проектировать систему сна¬
ряда, которая содержала бы также и такие элементы, которые
прежде не создавались.
Наряду с этим по мере развертывания работ целесообразно
продолжать совершенствовать проект вбей системы в целом и улуч¬
шать конструкцию каждого ее элемента. Это позволит доработать
и улучшить те элементы системы, работа над которыми проходила
не так успешно, как предполагалось, и использовать новые дости¬
жения, которые первоначально не были введены в разработку.
Такая методика конструктивной проработки предполагает на¬
личие высокой компетенции в области проектирования отдельных
элементов системы. Она требует разумной фантазии, инженерной
эрудиции и стремления пойти на некоторый риск ради проверки
на практике новых идей.
Коллектив конструкторов-разработчиков должен быть так орга¬
низован и руководство им должно осуществляться так, чтобы все
части его постоянно работали над системой управляемого снаряда
одного и того же класса и назначения.
ГЛАВА 2
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ
СНАРЯДОВ
А. Е. Пакет1
2—1. СОДЕРЖАНИЕ ПРЕДМЕТА
Общей отличительной чертой реактивных управляемых снаря¬
дов является то, что они совершают движение в атмосфере или по
крайней мере частично в атмосфере. Поэтому некоторые из сил,
действующих на снаряд в полете, создаются в результате взаимо¬
действия воздушного потока со снарядом. В связи с этим основной
задачей аэродинамики является определение и расчет сил, дейст¬
вующих на тело при его движении в воздухе. Эти силы нужно
знать, чтобы установить характеристики движения элементов тра¬
ектории реактивного снаряда, что необходимо для создания систе¬
мы управления снарядом. Кроме того, значения этих сил являются
исходными данными при расчете конструкции на прочность сна¬
ряда.
Практически специалист в области аэродинамики должен рас¬
считать параметры движения снаряда, от которого зависят силы,
действующие на снаряд и в свою очередь определяющие движение
снаряда. Наряду с этим аэродинамику приходится заниматься во¬
просами устойчивости и управляемости снаряда. Он должен также
заниматься определением деформаций корпуса снаряда под воз¬
действием аэродинамических нагрузок. Эти деформации оказы¬
вают в свою очередь влияние на аэродинамические нагрузки. Мо¬
жет потребоваться, кроме того, выполнить расчет взаимного влия¬
ния газовой струи силовой установки и воздушного потока, обте¬
кающего снаряд.
Другими словами, хотя специалист в области аэродинамики в
основном работает в своей области знаний, то есть занимается
расчетом аэродинамических сил, он вынужден постоянно об¬
ращаться к смежным областям, так как действие аэродинамиче¬
ских сил может рассматриваться лишь во взаимодействии с си¬
лами, действующими на систему в целом. Поэтому в современных
1 Сотрудник самолетостроительной фирмы Хьюза.
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
13
условиях границы проблем, входящих в практическую аэродина¬
мику, весьма неопределенны. Эта неопределенность в некоторой
степени существовала и раньше, как существует сейчас, в аэроди¬
намике обычных пилотируемых самолетов. Управляемые снаряды
могут быть классифицированы различным образом. Для удобства
рассмотрения вопросов, излагаемых в настоящей главе, примем
классификацию, которая наиболее полно отражает основные аэро¬
динамические проблемы.
Согласно этой классификации все управляемые реактивные сна¬
ряды делятся на следующие группы.
Управляемые реактивные снаряды малой дальности полета,
предназначенные для поражения воздушных целей.
К этой группе относятся снаряды класса «земля — воздух» и
класса «воздух — воздух». Под малой дальностью следует пони¬
мать дальности от 1,5 до 50 км. Для снарядов этой группы ско¬
рость и маневренность должны быть такими же или выше скоро¬
сти и маневренности самолетов, против которых они предназначе¬
ны. Это означает, что в настоящее время такие снаряды должны
иметь сверхзвуковые скорости в пределах от 300 до 1200 м/сек и
маневренность, характеризуемую располагаемыми перегрузками
от 3 до 15 Очевидно, что основными аэродинамическими про¬
блемами для этих снарядов являются высокая точность управле¬
ния и высокая маневренность. Лобовое сопротивление и коэффи¬
циент полезного действия силовой установки имеет для этих сна¬
рядов второстепенное значение.
Близко к первой группе стоят снаряды класса «земля — земля»
малой дальности полета, которые в основном отличаются тем, что
для них не требуется такой высокой скорости и маневренности.
Для обеих рассмотренных групп снарядов энергия, необходи¬
мая для движения снаряда, относительно мала, а энергия, необ¬
ходимая для управления, относительно велика. Поэтому создание
для них высокоэффективной системы управления имеет чрезвы¬
чайно большое значение. Очевидно, что критерием прочности для
этих снарядов могут служить главным образом нагрузки при ма¬
неврировании.
К третьей группе снарядов относятся крылатые ракеты средней
дальности, предназначенные для поражения как наземных, так и
воздушных целей. Значительная часть полета таких снарядов про¬
ходит на постоянной высоте в плотных слоях атмосферы. Поэтому
для них низкое лобовое сопротивление и высокое аэродинамиче¬
ское качество являются важными факторами. В среднем диапазоне
дальностей — от ста до тысячи километров — требуется высокая
точность попадания, что может быть обеспечено высокой манев¬
ренностью снаряда. Критерием прочности таких снарядов могут
служить аэродинамические нагрузки от порывов ветра, нагрузки
при маневрировании или же обе нагрузки, вместе взятые.
14
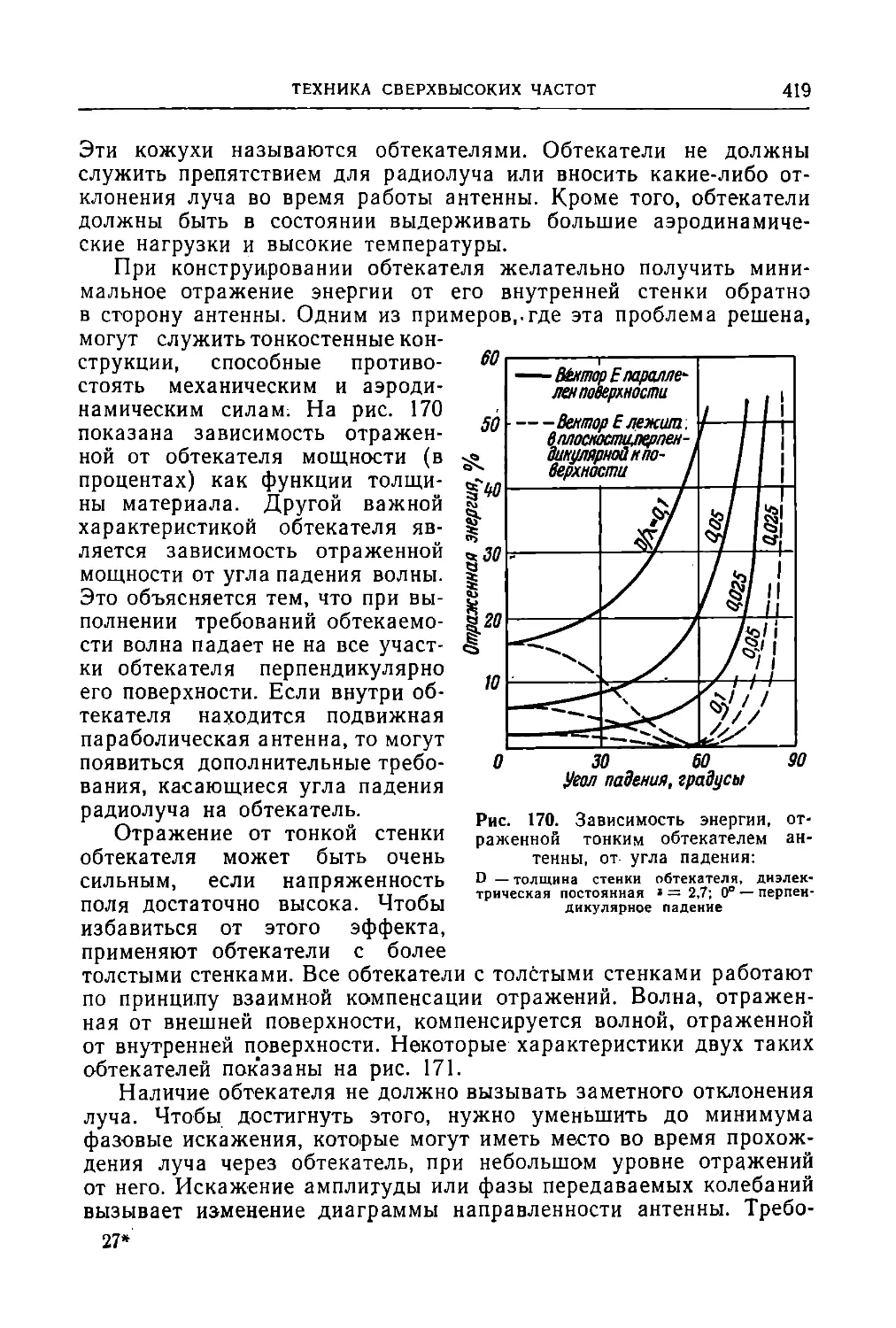
ГЛАВА 2
К следующей группе относятся крылатые ракеты большой даль¬
ности полета, покрывающие расстояния в несколько тысяч кило¬
метров. Малое лобовое сопротивление и большое аэродинамиче¬
ское качество являются основными аэродинамическими критериями
при проектировании этих ракет. Важным требованием является
также хорошее сочетание аэродинамической схемы с конструкцией
силовой установки. Большая дальность требует высокого значения
отношения веса топлива к сухому весу ракеты. Это в свою очередь
требует создания очень легкой конструкции, что повышает значе¬
ние взаимодействия упругих деформаций и аэродинамических
сил.
Наконец, к последней группе относятся баллистические ракеты
малой, средней и большой дальности. В первом приближении мож¬
но сказать, что они летят по траектории, определяемой в основном
скоростью в конце активного участка траектории и силой тяжести.
Для этих ракет, вообще говоря, проблемы малого лобового сопро¬
тивления и аэродинамического управления не имеют большого зна¬
чения. При этом чем больше дальность полета баллистической ра¬
кеты, тем меньшее значение приобретают эти проблемы. Ниже мы
увидим, что достижение больших дальностей полета связано
с чрезвычайно высокими начальными скоростями, а так как даль¬
ность приблизительно пропорциональна квадрату начальной ско¬
рости, то даже средние дальности полета требуют довольно высо¬
кой скорости. Главной аэродинамической проблемой при этом ста¬
новится нагрев .ракеты. Вследствие малой величины отношения
веса конструкции ракеты к ее стартовому весу эффект упругих.де-
формаций в данном случае может стать одной из основных про¬
блем при проектировании ракеты.
Проблемы аэродинамического проектирования перечисленных ти¬
пов ракет можно также подразделить в соответствии со скоростями
полета. Как мы увидим ниже, скорость распространения звука
в воздухе, составляющая примерно 305—335 м/сек, является кри¬
тическим параметром. На околозвуковых скоростях полета, лежа¬
щих примерно в пределах 0,8—1,2 скорости звука, влияние сжи¬
маемости воздуха весьма существенно. Эта область скоростей ха¬
рактеризуется быстрым нарастанием эффекта сжимаемости, рез¬
ким изменением аэродинамических параметров и, следовательно,
трудностью обеспечения управления ракетой. Вследствие резких
изменений аэродинамические параметры с трудом поддаются ана¬
литическому расчету, а равно и экспериментальным измерениям в
данной области скоростей.
При малых сверхзвуковых скоростях большую роль играет ло¬
бовое сопротивление, связанное с образованием ударной волны.
При более высоких сверхзвуковых скоростях, например превышаю¬
щих скорость звука более чем в 3—4 раза, на первый план выходит
влияние аэродинамического нагрева.
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
15
Высота траектории полета также выдвигает свои аэродинами¬
ческие проблемы. На малых высотах, в относительно плотных
слоях атмосферы, средний свободный пробег молекул настолько
мал по сравнению с другими линейными размерами, характери¬
зующими полет ракеты, что атмосферу можно в первом приближе¬
нии рассматривать как сплошную непрерывную среду. Эта харак¬
теристика может быть аналитически определена соответствующи¬
ми безразмерными параметрами, она практически верна для вы¬
сот порядка 60 000—75 000 м. На высотах, превышающих 75 000 м,
средний свободный пробег молекул настолько велик, что атмосфе¬
ра начинает проявлять себя как совокупность отдельных молекул
с определенным законом распределения их скоростей. Аэродина¬
мические силы и аэродинамический нагрев в этой области высот
весьма несущественны, за исключением случаев длительного по¬
лета на этих высотах ракет или искусственных спутников Земли.
Обычно же аэродинамический нагрев незначителен уже на высо¬
тах более 45 000 м, так как на этой высоте плотность воздуха
уменьшается приблизительно до 0,13% от своего значения на
уровне моря.
2—2. МЕТОДЫ ПОДХОДА
Физические законы, определяющие движение воздуха, хорошо
известными дифференциальные уравнения, описывающие это дви¬
жение, могут быть написаны с достаточной точностью. Однако точ¬
ного решения этих уравнений для инженерных задач практически
почти никогда не требуется. В основе аэродинамического проекти¬
рования лежат приближенные методы расчета.
Применение быстродействующих электронно-вычислительных
машин несколько продвинуло вперед использование более точных
уравнений движения. Однако сложность постановки точной задачи
оправдывает применение последнего метода лишь тогда, когда не¬
обходимо произвести громоздкие расчеты с целым рядом перемен¬
ных величин.
Кроме того, в некоторых разделах аэродинамики даже основ¬
ные физические законы обтекания исследованы еще недостаточно
полно. Характерным примером этого является турбулентный по¬
ток, движение в котором может быть описано лишь с помощью
средней скорости. Этой области посвящено много теоретических
трудов и экспериментальных работ, однако задача теоретически
точного описания турбулентного потока еще не решена.
Очевидно, что для проверки приближенных расчетов необходи¬
мы материалы экспериментальных исследований. Основной базой
для их получения является аэродинамическая труба.
В аэродинамической трубе закрепляется исследуемая модель и
подвергается воздействию воздушного потока. В трубе процзво-
16
ГЛАВА 2
дится измерение моментов сил, действующих на модель и ее эле¬
менты в условиях полета, а также определяется распределение
давления по ее поверхности.
Однако эксперименты в аэродинамической трубе связаны
с определенными допущениями и ошибками, зависящими от спо¬
соба крепления модели, характера обтекающего модель воздуш¬
ного потока, от размеров рабочего сечения трубы, масштаба мо¬
дели и т. п. Это приводит к ошибкам при перенесении результатов
трубного эксперимента на натуру.
Большое преимущество аэродинамического трубного экспери¬
мента состоит в том, что с его помощью можно быстро получить
большое количество достаточно точ¬
ных экспериментальных данных для
широкого диапазона условий.
Бросковые испытания, позволяю¬
щие вести наблюдение за опытными
или макетными образцами в неупра¬
вляемом полете, необходимы в тех
случаях, когда результаты теорети¬
ческого расчета или эксперимента
в аэродинамической трубе вызы¬
вают сомнения. Трудности броско¬
вых испытаний связаны в основном с точностью методики наблю¬
дений, регистрацией параметров и относительно небольшим коли¬
чеством данных, которые могут быть получены в результате
одного пуска.
Очевидно, что на практике все описанные методы исследования
дополняют друг друга, а неизбежное при этом некоторое дублиро¬
вание необходимо вследствие недостаточной достоверности резуль¬
татов при исследовании только одним методом. Таким образом,
общие рассуждения о преимуществах одного метода исследования
по сравнению с другими не имеют практического смысла, так как
обычно требуется применение всех методов в совокупности.
Для облегчения чтения последующего материала приведем пе¬
речень основных величин и обозначений, используемых в аэроди¬
намике.
Система аэродинамических сил, действующих на летательный
аппарат в полете, представленная в прямоугольной системе коор¬
динат, показана на рис. 1,
где Ь— подъемная сила; направлена перпендикулярно направле¬
нию движения и располагается, как правило, в плоскости
симметрии модели;
О— сила лобового сопротивления; располагается вдоль каса¬
тельной к траектории полета и направлена противополож¬
но направлению движения;
К— боковая сила; направлена перпендикулярно I и О;
Рис. 1. Система координат сил
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
17
М—момент тангажа относительно оси у, перпендикулярной
направлению полета и лежащей в горизонтальной пло¬
скости.
Показанная на рис. 1 система координат связана с потоком, об¬
текающим летательный аппарат. При анализе вопросов устойчиво¬
сти часто применяется другая система координат, оси которой свя¬
заны с летательным аппаратом.
Кроме указанных, к числу основных аэродинамических пара¬
метров относятся:
и, V, 11) — проекция скорости на оси х, у, г соответственно;
II— скорость невозмущенного потока, скорость движения или
средняя скорость движения;
р— массовая плотность воздуха;
р— кинематический коэффициент вязкости;
р—давление воздуха;
Т—температура воздуха;
а —скорость звука;
ср— удельная теплоемкость при постоянном давлении:
сг—удельная теплоемкость при постоянном объеме.
Аэродинамические силы и моменты выражаются следующими
формулами:
й = ±№8Со,
М = ±-№81См,
где: 5—характерная площадь;
I—характерная длина;
-у-рб/2—скоростной напор, имеет размерность удельного дав¬
ления;
Сь—коэффициент подъемной силы;
— коэффициент лобового сопротивления;
См— коэффициент момента тангажа.
Коэффициенты Сь, Сд и См определяются теоретически или
экспериментально для тела заданной формы и угла атаки и яв¬
ляются функциями безразмерных величин—критериев подобия.
Одним из таких наиболее важных безразмерных критериев яв¬
ляется число Маха, выражающее отношение скорости невозмущен¬
ного потока к скорости звука.
М=~.
2—405
18
ГЛАВА 2
В дальнейшем мы увидим, что плотность воздуха значительно
изменяется, когда число М приближается к единице или превосхо¬
дит ее. Поэтом^' число М является мерой проявления эффекта
сжимаемости. При малых значениях числа М воздух обычно рас¬
сматривается несжимаемым. Важным аэродинамическим крите¬
рием является также число Рейнольдса.
1А
где I — характерная длина.
Число Рейнольдса пропорционально отношению сил инерции
к силам вязкости. При малых числах /?е влияние сил вязкости зна¬
чительно, а при больших числах воздух можно во многих случаях
считать невязкой средой и значением вязкости пренебрегать. В не¬
которых случаях, при больших значениях числа Рейнольдса, влия¬
ние вязкости ограничено в основном тонким слоем, прилегающим
к поверхности обтекаемого тела. Этот слой в аэродинамике назы¬
вается пограничным слоем.
Отношение удельных теплоемкостей -[ — ср/ск приобретает зна¬
чение при необходимости учета сжимаемости воздуха.
Наряду с перечисленными существуют другие безразмерные
критерии, получаемые на основе других переменных, характери¬
зующих свойства воздуха. Эти критерии будут рассмотрены ниже.
2—3. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
Система уравнений, называемых уравнениями Навье-Стокса,
является исходной для решения основных задач теоретической
аэродинамики. Она состоит из уравнений Ньютона для идеального
газа, учитывающих вязкость и изменение плотности среды, а так¬
же уравнений сохранения массы и энергии. Такая система уравне¬
ний является достаточной для определения основных параметров
данного потока. Неизвестными, зависящими от положения в си¬
стеме координат и времени, являются три составляющих скорости
и, V и но, давление р и температура Т. Зная эти величины, легко
получить значение и других неизвестных. Так как система состоит
из пяти уравнений: трех уравнений Ньютона и уравнений сохра¬
нения массы и сохранения энергии, то она является полной
(замкнутой).
Ниже приводятся основные допущения, принимаемые при ре¬
шении уравнений.
2—3.1. Стационарность потока
Во многих практических задачах поток действительно является
стационарным, т. е. неменяющимся во времени, если его рассмат¬
ривать -в соответствующей, например в связанной, системе коор-
АэродййамйкА управляемых реактивных снарядов
15
динат. Во многих других случаях скорость изменения потока до¬
статочно мала, и поэтому каждое последовательное мгновенное со¬
стояние можно рассматривать как стационарное.
2—3.2. Отсутствие вязкости
В большинстве задач вязкость не играет существенной роли, за
исключением задач пограничного слоя. Такое приближение вполне
приемлемо при больших числах Рейнольдса. Таким образом, ис¬
ключение составляют случаи, когда плотность очень мала, что
имеет место при очень больших высотах полета, или когда скоро¬
сти и (или) линейные размеры тела малы, например в случае
падения капли воды или масла. В невязком потоке проекция век¬
тора скорости может быть выражена производной от потенциала
скоростей, поэтому такие потоки принято называть потенциаль¬
ными.
Уравнение, определяющее потенциал скоростей для сжимае¬
мого стационарного потока, является нелинейным, поэтому его ре¬
шение затруднено. В некоторых случаях для его решения исполь¬
зуется численный метод или метод последовательных приближений.
2—3.3. Несжимаемость потока
Ниже мы увидим, что если скорости во всех точках потока в
сравнении со скоростью звука малы, то плотность практически
можно считать постоянной. В этом случае уравнение потенциала
скоростей становится уравнением Лапласа, для решения которого
существуют весьма эффективные методы. Однако точные решения
уравнений для течения в пограничном слое остаются практически
невозможными.
2—3.4. Отсутствие больших возмущений потока
Это, наиболее важное для практики, допущение возможно бла¬
годаря тому, что во многих случаях плоский стационарный поток
с помещенным в нем тонким телом может рассматриваться как
поток, скорость которого мало отличается по величине и направ¬
лению от скорости невозмущенного потока.
Уравнения упрощаются путем исключения из них членов, содер¬
жащих произведения, и вторые производные скоростей возмущения.
Это допущение позволяет преобразовать уравнения для сжимае¬
мого потока в линейные. Большая часть важных инженерных рас¬
четов в аэродинамике высоких скоростей (для сжимаемого потока)
и значительная часть расчетов для малых скоростей основаны на
этом допущении. Хотя это допущение почти всегда не является
справедливым для некоторых областей потока и зачастую не до¬
статочно точно отвечает остальной части потока, приходится удив¬
2*
20
ГЛАВА 2
ляться, что расчеты, основанные на этом приближении, всегда ока¬
зываются полезными и надежными. Метод малых возмущений осо¬
бенно хорошо приложим к потокам, обтекающим тонкие крылья и
тонкие корпуса. К счастью, высокоскоростные самолеты и реактив¬
ные снаряды требуют тонких крыльев и корпусов, создающих ма¬
лые возмущения.
Имеется много других приближений для решения специальных
задач. Например, поток, в котором влияние сжимаемости значи¬
тельно, а число Маха мало, может рассматриваться как случай
небольшого возмущения несжимаемого потока.
В тонком пограничном слое, прилегающем к поверхности тела,
где вязкость имеет большое значение, могут быть использованы и
другие приближения. Можно показать, что толщина пограничного
слоя по отношению к любой характерной длине уменьшается по
мере увеличения числа Рейнольдса. Приближения, обычно прини¬
маемые при решении задач для пограничного слоя, основаны на
высоком значении числа Рейнольдса и малой толщине слоя. По¬
этому наличие пограничного слоя оказывает незначительное влия¬
ние на остальную часть потенциального потока.
Некоторые важные величины можно получить путем анализа и
частичного решения известных равенств, не проводя полного реше¬
ния системы уравнений движения потока, обтекающего данное
тело.
К ним можно отнести следующие:
1. В потенциальном потоке любое малое возмущение распро¬
страняется со скоростью звука а, определяемой выражением
а = ]/ 4-•.
V а?
Для идеального газа давление и плотность в потенциальном потоке
подчиняются изэнтропическому закону
Р = СОП8(ХрТ» (1)
из которого мы находим, что
а2 = = 1ЯТ. (2)
В английских мерах
а (фут1сек) = 49, Г И Г (Г в градусах Ренкина).
2. В стационарном потенциальном потоке соотношение давле¬
ния и скорости определяется уравнением энергии. Для идеального
газа с постоянной величиной у это соотношение будет
<3>
(3)
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
21
Здесь I/ — полная скорость в любой точке потока; р0 (постоян¬
ная величина) —давление в точке, где (7=0; эта точка называется
критической (точка полного торможения потока); а0 (величина по¬
стоянная) — скорость звука в критической точке. Уравнение пока¬
зывает, что при 7/ = 0 р = Ро и что с увеличением скорости давление
падает.
Из этого уравнения ясно, что если всюду 17<^а0, то относитель¬
ное изменение давления, а следовательно, и плотности мало. Для
случая несжимаемого потока уравнение упрощается и принимает
вид
Р = Ро-4р6/2' (4)
Это известное уравнение Бернулли. Таким образом, скоростной
напор '/2 ри2 есть разность между давлением в критической точке
и статическим давлением в свободном несжимаемом потоке. Пе¬
редняя часть тела с тупым носом в стационарном потоке испыты¬
вает воздействие давления.
3. Возмущения в стационарном несжимаемом потенциальном
потоке, обтекающем тело, распространяются во всех направлениях.
Линии обтекания симметричного тела показаны на рис. 2, а, форма
потока симметрична. С некоторым изменением эта форма потока
также справедлива для дозвукового сжимаемого потока, в котором
всюду 1}<а.
С другой стороны, в стационарном сжимаемом потоке при
сверхзвуковой скорости ((/>а) можно считать, что возмущения,
создаваемые телом, распространяются по потоку со скоростью а
относительно потока. Поэтому можно представить, что поток со¬
стоит из ряда стоячих волн, расположенных под углом к потоку,
как показано на рис. 2,6. При небольших возмущениях компонента
скорость, перпендикулярная к этим волнам, является скоростью
звука а. Угол наклона волн в этом случае определяется формулой
? = 81П-1 = 81П-1 (5)
Этот угол называется углом Маха. Впереди этих волн поток нахо¬
дится в невозмущенном состоянии.
Эта концепция волн возмущения и полей возмущения имеет
большое значение при расчетах и изображениях полей сверхзву¬
кового потока. Совершенно очевидно, что влияние любого возму¬
щения в потоке ограничено областью, лежащей сзади первой вол¬
ны. Рассмотрим, например, рис. 2, в, на котором в плане представ¬
лен тонкий корпус с прямоугольным крылом. Влияние тела на по¬
ток ограничено областью позади волн А; таким образом, концы
крыльев не будут испытывать влияния тела в потоке. С другой
стороны, влияние концов крыльев ограничено областью позади
22
Глава 2
волн В; можно сказать, что впереди этих волн корпус находится
в таких условиях, как если бы крыло имело бесконечный размах.
Точнее, влияние возмущения в трехмерном потоке ограничено внут¬
ренней областью конуса, половина угла которого равна углу
Маха В. Конус расширяется в направлении течения потока; он на¬
зывается конусом Маха.
Рис. 2. Типичные картины обтекания:
а) дозвуковое течение; б) малое возмущение в сверхзвуковом потоке; в) поля воз»
мущений в сверхзвуковом потоке; г) сильное возмущение в сверхзвуковом потоке
Сильное возмущение может распространяться как скачок с раз¬
рывом скорости, превышающей местную скорость звука. Например,
тупоносое тело на рис. 2, г при числе Маха свободного потока У/а,
превышающем единицу, создает сильную ударную волну непосред¬
ственно перед собой; эта волна движется со скоростью I/ перед
головной частью тела. Далее, по сторонам тела она становится
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
23
слабее и поэтому искривляется по отношению к потоку, прибли¬
жаясь на значительном удалении от тела к значению угла Маха.
Во фронте такой волны происходит скачок давления, температуры
и скорости, который называется скачком уплотнения.
Некоторые из этих явлений могут быть изучены на примере
установившегося потока в сопле, показанном на рис. 3. Допустим,
что в сечении 1 скорость мала и поток можно считать несжимае¬
мым. Приемная трубка полного давления будет показывать давле¬
ние /?о в критической точке. По мере движения потока к сечению 2,
при еще незначительном изменении плотности, уменьшающаяся
площадь сечения канала вызывает повышение скорости, — чтобы
обеспечить постоянство расхода, вследствие чего давление сни¬
жается. Анализ уравнения (1) и (3) показывает, что по мере уве¬
личения скорости падение плотности становится существенным и
в сечении 3 темп падения плотности равен темпу возрастания ско¬
рости. В этом сечении местное число Маха равно единице, а пло¬
щадь сечения канала достигает минимума. Это сечение называется
критическим сечением сопла.
Если скорость продолжает возрастать за пределами критиче¬
ского сечения, темп падения плотности превысит темп возраста¬
ния скорости, и, таким образом, канал должен снова расшириться,
чтобы вместить сверхзвуковой поток. Малое возмущение, пока¬
занное в сечении 5, создает косой скачок уплотнения. Поток может
теперь пройти и через сильный скачок уплотнения, как показано
в сечении 6. Это приведет к значительному повышению давления
и падению скорости ниже скорости звука. Приемник полного дав¬
ления позади скачка уплотнения покажет, что давление рт меньше
давления ро, т. е. что поток не был все время потенциальным. Ска¬
чок уплотнения является фактически механизмом рассеивания
энергии потока.
Рис. 3. Установившийся поток в сверхзвуковом сопле
!4
ГЛАВА 2
2—4. ВОПРОСЫ ЛОБОВОГО СОПРОТИВЛЕНИЯ
Рис. 4. Области срыва потока:
а) необтекаемое тело; б) обтекаемое тело
1. Силы трения 2. Спутная струя
Задача расчета сопротивления тела, движущегося в жидкости,
вероятно, самая старая и в то же время самая трудная в аэроди¬
намике. Трудность становится очевидной сразу же при рассмотре¬
нии несжимаемого потенциального потока вокруг симметричного
тела, как это показано на рис. 4, а. Ввиду отсутствия вязкости един¬
ственными силами, действующими на тело, являются силы давле¬
ния, направленные перпендикулярно к поверхности. Более того, из
симметрии формы потока и соот¬
ношения между давлением и ско¬
ростью, выраженного уравнением
(4), ясно, что распределение дав¬
ления будет симметричным и ло¬
бовое сопротивление отсутствует.
Теоретически можно показать, что
лобового сопротивления не будет
для любого тела в несжимаемом
невязком потоке при отсутствии
в нем циркуляции. Этот удиви¬
тельный вывод, известный как па¬
радокс Даламбера, с самых дав¬
них пор был серьезным препятст¬
вием к разработке теоретической
механики жидких тел ввиду его
очевидного противоречия практи¬
ческому опыту инженеров.
Хорошо известно, что реальное тело в реальной жидкости ис¬
пытывает лобовое сопротивление даже при очень малых числах
Маха. Это лобовое сопротивление при малой скорости порождается
двумя причинами, как это показано на рис. 4: 1) силами трения,
возникающими в результате действия вязкости в пограничном слое,
и 2) действием сил давления, возникающих в результате срыва
потока и образования спутной струи. Срыв потока вызывается
действием вязкости в пограничном слое. Оба эти эффекта состав¬
ляют профильное сопротивление. Как показано на рис. 4, б, для
хорошо обтекаемого тела влияние второй силы мало, большая же
часть лобового сопротивления вызывается сопротивлением трения
обшивки. Точный расчет трения обшивки, как правило, очень тру¬
ден, и в инженерной практике прибегают к приближениям. Один
из приближенных методов, оказавшийся приемлемым в большин¬
стве случаев, основан на допущении, что пограничный слой так же
действует на тело, как и на плоскую пластину, вдоль которой гра¬
диент давления не меняется.
Образование пограничного слоя и величина трения плоской пла¬
стины определяются в. основном числом Рейнольдса Де, куда входит
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
25
длина I, измеренная от передней части тела или от начала погра¬
ничного слоя. Влияние сжимаемости или числа Маха также может
учитываться, но оно почти не меняет обшей картины, а также и
метода подхода. При малых значениях /?е (значительно меньших
106) течение в пограничном слое, по всей вероятности, будет ла¬
минарным. Линии обтекания в пограничном слое идут плавно,
слоисто. При больших числах Рейнольдса течение в пограничном
слое становится турбулентным, то есть в нем происходят значи¬
тельные местные колебания скорости. Пограничный слой будет
завихрен, плавность течения и слоистость теряются. Переход от ла¬
минарного к турбулентному течению может произойти примерно
в пределах чисел Рейнольдса 106— 107. На положение переходной
точки сильно влияют такие факторы, как градиент давления вдоль
потока, шероховатость поверхности и теплопередача. Значительные
усилия в современной теоретической механике жидких тел направ¬
лены на определение более точного положения точки перехода.
Турбулизация течения вызывает значительное увеличение мест¬
ного коэффициента трения пластинок, в связи с чем форма и раз¬
витие турбулентного пограничного слоя совершенно отличаются от*
случая ламинарного течения. Мы можем представить силу сдвига
в форме коэффициента трения обшивки:
сила сдвига/единица площади
Коэффициент трения обшивки, полученный из теории плоской
пластинки, показан на рис. 5 как функция числа Не для нескольких
чисел Маха. По оси ординат отложены средние значения коэффи¬
циента трения обшивки для длины I, определяющей число Рей¬
нольдса. Расчет ламинарного течения получается из решения точ¬
ных дифференциальных уравнений.
Расчет турбулентного течения производят путем приближенных
вычислений, точность которых в значительной степени зависит от
принятых допущений; при этом разные исследователи дают раз¬
личные результаты. Результаты, приведенные на графике рис. 5,
хорошо согласуются с опытными данными.
При сверхзвуковых скоростях появляется дополнительный
источник лобового сопротивления. Из рис. 2, б можно видеть, что
поле потока и распределение давления вдоль потока вокруг сим¬
метричного тела не симметричны, в связи с чем может существо¬
вать сопротивление давления. Можно показать, что тело конечного
размера в невязком сверхзвуковом потоке всегда обладает сопро¬
тивлением давления и что это сопротивление связано с образова¬
нием волн, которые характеризуют поле потока. Отсюда это сопро¬
тивление называется волновым.
26
ГЛАВА 2
Некоторые типичные особенности волнового сопротивления
можно наблюдать при изучении потока, обтекающего двухмерное
тело, подобное показанному на рис. 6. Если тело тонкое и возму¬
щение мало, можно показать, что изменение местного давления
Р1 — в любой точке зависит только от угла 6 между касатель¬
ной к данной точке и направлением свободного потока, если не
считать числа Маха и скоростного напора. Действительно, коэффи¬
циент местного давления равен
Р1 Роо 20! (7\
()
Распределение давления, соответствующее тонкому профилю при
сверхзвуковой скорости, показано на рис. 7. Следует обратить вни¬
мание на положительные давления в передней и отрицательные дав¬
ления в задней части профиля. Для сравнения показано распреде¬
ление давления по тому же профилю при дозвуковой скорости.
Так как величина сопротивления нормального давления пропор¬
циональна величине местного угла 6, то можно видеть, что каждый
Рис. 5. Осредненный коэффициент трения обшивки
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
27
элемент площади имеет величину лобового сопротивления, пропор¬
циональную 92. Из вышесказанного также можно сделать вывод,
что лобовое сопротивление тонкого профиля в двухмерном потоке
пропорционально квадрату отношения толщины профиля к хор¬
де 1/с (рис. 6).
Рассмотрим пример расчета коэффициента сопротивления
крыла бесконечного размаха с параболическим профилем, пока¬
занным на рис. 6. Местный угол для точек верхней поверхности
такого профиля определяется формулой
0 = -0о^«
где х — абсцисса точки профиля, измеряемая от его средней точки,
а с — хорда. Угол в0 — половина угла, образованного касательны¬
ми к передней кромке (рис. 6).
Величина коэффициента лобового сопротивления каждой эле¬
ментарной площадки исходя из уравнения (7) будет
д йх х2ах
аСп = с„ о — = - —.
и р с ум2 — 1 с
Рис. 6. Сечение крыла в двухмерном потоке
28
ГЛАВА 2
Интегрируя по всей длине хорды и умножая на 2, чтобы учесть
лобовое сопротивление обеих —верхней и нижней — поверхностей,
получим
4 ео
° — 3 /Л]2_ 1 •
Угол во связан с относительной толщиной выражением 0о = 2//с,
и, таким образом, коэффициент лобового сопротивления
Сд = 4 • (8)
Таким же способом мы можем рассчитать коэффициент лобо¬
вого сопротивления крыла с ромбовидным или с трапецевидным
профилем, имеющим максимальную толщину в средней точке. Фор¬
мула в таком случае примет следующий вид:
Таким образом, для профилей одной и той же относительной
толщины параболический профиль имеет лобовое сопротивление
приблизительно на 30% больше, чем ромбовидный профиль.
Однако для сплошных сечений одинаковой прочности, когда
голщина параболического профиля меньше, можно показать, что
параболический профиль имеет меньшее лобовое сопротивление.
Лобовое сопротивление корпуса (фюзеляжа) при сверхзвуко¬
вых скоростях имеет от формы тела более сложную зависимость.
Для тупоносых тел коэффициент лобового сопротивления почти не
зависит от числа Маха. Приближенная теория показывает, что ло¬
бовое сопротивление пропорционально квадрату отношения тол¬
щины тела к его длине, или квадрату относительного удлинения.
Самый грубый линейный метод расчета лобового сопротивле¬
ния тонких корпусов показывает, что коэффициент лобового сопро¬
тивления не зависит от числа Маха, он зависит лишь от распре¬
деления площадей поперечного сечения по длине тела. Этот важ¬
ный результат впервые получил Карман; позднее Сирс использовал
его для приближенного расчета оптимальных форм корпусов при
различных условиях, относящихся к объему, площади поперечного
сечения и другим ограничивающим- факторам.
Все полученные таким образом оптимальные формы тел имели
закругленный нос с уменьшением наклона образующей по мере
увеличения радиуса. Оптимальный результат, полученный Карма¬
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
29
ном для тела данного профиля, характеризуется коэффициентом
лобрвогр сопротивления, определяемым формулой
(4Л
где <1—максимальный диаметр тела, I — длина; коэффициент от¬
несен к площади поперечного сечения тела. Предполагается, что
тело имеет тупое основание с максимальной толщиной у основания,
и лобовое сопротивление, благодаря пониженному давлению на
основание, в расчет не принимается. Форма такого тела показана
на рис. 8.
Рис. 7. Распределение давления по телу вращения
Хотя вышеуказанное приближение довольно грубо, оно дает
удивительно хороший результат при числе Маха, близком к 1, для
очень тонких тел. Данное приближение можно использовать для
расчета лобового сопротивления очень тонкие несимметричных тел,
как, например, крылья и элементы оперения малого удлинения.
Эта теория, точность которой возрастает с приближением числа
Маха к единице, дает удивительный результат, заключающийся
30
ГЛАВА 2
в том, что даже для несимметричных тел коэффициент лобового
сопротивления в значительной степени зависит от характера рас¬
пределения площадей поперечного сечения вдоль потока. Важность
этого явления только сравнительно недавно стала очевидной для
инженеров, особенно после экспериментальных работ Уиткомба
и других.
Это так называемое правило площадей показывает, что данные
об оптимальной форме — по лобовому сопротивлению сверхзвуко¬
вого снаряда — по крайней мере при малых сверхзвуковых скоро¬
стях могут быть получены путем изучения распределения суммар¬
ной площади поперечного сечения вдоль потока и сравнения ее
с распределением площади у тел оптимальных форм. Это правило
позволяет сделать вывод, что отрицательный эффект внезапного
увеличения площади, например за счет установки крыльев, может
быть частично компенсирован уменьшением площади фюзеляжа
в том же поперечном сечении.
Из предыдущего рассмотрения источников лобового сопротив¬
ления можно сделать несколько важных выводов.
Во-первых, поскольку дозвуко¬
вое лобовое сопротивление яв¬
ляется в основном результатом
трения обшивки (для хорошо об¬
текаемого тела), а сверхзвуковое
лобовое сопротивление содержит,
кроме того, значительную прибав¬
ку за счет волнового сопротивле¬
ния, то, очевидно, должен суще¬
ствовать внезапный скачок в из¬
менении коэффициента лобового
сопротивления при приближении
к числу Маха, равному единице. Столь резкое возрастание лобо¬
вого сопротивления, называемое околозвуковым пиком сопротивле¬
ния, создает своего рода «барьер» для самолетов, которые спе¬
циально не рассчитаны для его преодоления.
Во-вторых, можно установить необходимые способы уменьше¬
ния сверхзвукового лобового сопротивления. При дозвуковых ско¬
ростях толщина тела не имеет большого значения, но при сверх¬
звуковых скоростях, учитывая, что лобовое сопротивление пропор¬
ционально квадрату толщины, становится абсолютно необходимым
делать крылья возможно более тонкими, а носовую и хвостовую
части корпуса к тому же еще возможно более удлиненными.
Соотношение между давлением и числом Маха, данное в урав¬
нении (7) для крыла бесконечного удлинения в двухмерном потоке,
показывает, что давление, а следовательно, и лобовое сопротивле¬
ние должны стремиться к бесконечности по мере приближения
числа Маха к единице. Однако более точный теоретический расчет
Рис. 8. Оптимальная оживальная
форма Кармана
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
31
показывает, что для реальных крыльев конечного удлинения это
правило не действительно. Фактически рост лобового сопротивле¬
ния при М = 1 зависит главным образом от относительного удли¬
нения крыла, которое для прямоугольного крыла является отно¬
шением размаха к хорде. Лобовое сопротивление крыла становится
меньше с уменьшением относительного удлинения. И действи¬
тельно, этот вывод можно сделать и из рассмотренного выше пра¬
вила площадей, которое предполагает, что лобовое сопротивление
тела уменьшается с уменьшением отношения ширины к длине.
Этот же метод исследования показывает, что лобовое сопротив¬
ление крыльев зависит и от других геометрических характеристик
крыла. Стреловидность передней кромки ведет к снижению
прироста волнового сопротивления, и в этой связи интересно рас¬
смотреть треугольные крылья. Можно привести простое физи¬
ческое объяснение общего характера этого явления. На рис. 9 по¬
казано крыло с положительной
стреловидностью и небольшим
сужением. Передняя кромка рас¬
положена под таким углом, что
компонента скорости оп свобод¬
ного потока И, перпендикулярная
передней кромке, меньше ско¬
рости звука а. Легко видеть, что
это положение требует, чтобы
угол в был меньше чем агсзт 4
Если бы передняя кромка крыла была перпендикулярна по¬
току I/, то коэффициент лобового сопротивления имел бы сверх¬
звуковую характеристику, выраженную уравнением (8). Если же
обтекание крыла определяется главным образом скоростью, пер¬
пендикулярной передней кромке, мы вправе ожидать, что в случае,
представленном на рис. 9, крыло будет иметь дозвуковые харак¬
теристики, а следовательно, почти нулевое волновое сопротивле¬
ние. Более точный расчет показывает, что волновое сопротивление
для стреловидного крыла не равно нулю, но оно может быть зна¬
чительно уменьшено-, особенно вблизи М=1.
Передняя кромка крыла, показанного на рис. 9, с углом 0,
меньшим угла Маха, ввиду дозвуковой скорости обтекающего ее
потока называется дозвуковой передней кромкой. Передняя же
кромка с углом 6, большим угла Маха, называется сверх¬
звуковой.
Некоторые из рассмотренных выше положений иллюстрируются
на рис. 10. Высокое дозвуковое лобовое сопротивление шара объ¬
ясняется в основном срывом потока из-за его плохой аэродинами¬
ческой формы; прирост околозвукового лобового сопротивления
в этом случае также велик. Лобовое сопротивление тонких крыльев
Рис. 9. Стреловидное крыло
32
ГЛАВА 2
на малой скорости слабо зависит от изменения формы, так как оно
является главным образом сопротивлением трения обшивки. При¬
рост околозвукового лобового сопротивления зависит в основном
от относительного удлинения и относительной толщины крыла.
Рис. 10. Изменение лобового сопротивления
в зависимости от числа Маха:
а) лобовое сопротивление тел, отнесенное к площади по¬
перечного сечения; б) лобовое сопротивление крыльев, от¬
несенное к площади крыла
Выше было указано, что существуют удобные теоретические ме¬
тоды для приближенного расчета лобового сопротивления для чи¬
сто дозвуковых и чисто сверхзвуковых режимов. Было также
отмечено, что характер потока и лобового сопротивления быстро и
сильно меняется при переходе из одного режима обтекания в дру¬
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
33
гой. Эта переходная зона называется зоной околозвуковых скоро¬
стей. Для большинства практических случаев эта зона лежит при¬
близительно в пределах от Л4 = 0,9 до М=1,1. При высоких около¬
звуковых скоростях поток характеризуется появлением местных
сверхзвуковых зон около обтекаемого тела, хотя скорость свобод¬
ного потока и большая часть поля имеют дозвуковой характер.
В этих местных зонах могут наблюдаться скачки уплотнения и.дру-
гие типично сверхзвуковые явления. Этот смешанный характер по¬
тока, наряду с его очень быстрым изменением с числом Маха,
имеет две важные черты:
1) подробное аналитическое изучение таких околозвуковых по¬
токов является очень трудным и практически неприменимым и
2) смешанный поток очень чувствителен к малым возмущениям и
к влиянию пограничного слоя. Последнее приводит к неустойчиво¬
сти потока и значительному быстрому периодическому изменению
аэродинамических сил, что может вызвать: околозвуковой флаттер
крыла.
Можно предположить, что величина и скорость изменения ха¬
рактеристик околозвуковой переходной зоны могут быть умень¬
шены теми же способами, с помощью которых можно уменьшить
прирост околозвукового лобового сопротивления. Тонкие корпуса
с большим относительным удлинением и тонкие крылья с малым
относительным удлинением оказываются в большой степени сво¬
бодными от отрицательных околозвуковых явлений.
До сих пор лобовое сопротивление тела рассматривалось в усло¬
виях отсутствия подъемной силы. Когда крыло или корпус имеет
угол атаки по отношению к свободному потоку, то, как правило,
возникает подъемная сила, направленная перпендикулярно потоку.
Подъемная сила вызывает появление сопротивления, которое на¬
зывается индуктивным. Рассмотрению возникновения подъемной
силы и связанного с ней индуктивного сопротивления посвящен
следующий раздел. Однако здесь можно отметить, что индуктивное
сопротивление во многих случаях может быть таким же большим
или даже, большим, чем рассмотренное нами лобовое сопротивле¬
ние при пулевой подъемной силе, и что оно, являясь функцией
числа Маха, проявляет те же особенности, что и лобовое сопротив¬
ление при нулевой подъемной силе.
2—5. ПОДЪЕМНАЯ СИЛА
Возникновение подъемной силы на крыле непосредственно свя¬
зано с циркуляцией потока вокруг крыла. Эту мысль легче всего
проверить на отдельных случаях обтекания простых тел в несжи¬
маемом потоке. На рис. 11, а показано тупое тело, расположенное
под углом атаки к потоку, являющемуся полностью обратимым по¬
тенциальным потоком. Те же условия симметрии, которые позво-
3-405
34
ГЛАВА 2
лили нам раньше сделать вывод, что такое тело не будет иметь
лобового сопротивления, подсказывают, что это тело не будет ис¬
пытывать подъемной силы. Однако тело будет иметь продольный,
опрокидывающий момент. Такой же тИп потока может быть реали¬
зован в невязкой среде вокруг плоской пластины, установленной
под некоторым углом атаки, как показано на рис. 11,6. В этом слу¬
чае также не будет подъемной силы.
Рис. 11. Возникновение подъемной силы
Однако при таком характере потока развиваются очень высо¬
кие скорости у задней кромки, вблизи точки А, которые в реаль¬
ной жидкости даже с небольшой вязкостью приводят к появлению
очень больших сил сдвига и в конечном счете к срыву потока с зад¬
ней кромки в точке А. Следующая ступень в этом процессе — обра¬
зование вихря в точке А, как показано на рис. 11, в, который сры¬
вается с крыла и уносится свободным потоком. Процесс образо¬
вания вихря и последующий срыв его с аэродинамической поверх¬
ности приводят к сдвигу всей! структуры потока и получению ко¬
нечной его конфигурации, показанной на рис. 11, а. Срыв вихря
с задней кромки приводит к возникновению циркуляции потока
вокруг аэродинамической поверхности в направлении стрелки С.
Циркуляция Г определяется здесь как интеграл скорости по зам¬
кнутому контуру С.
Таким образом, от симметричного потока без подъемной силы
(рис. 11,6) мы пришли к несимметричному потоку (рис. 11, а). Так
как в последнем случае средняя скорость на верхней стороне не¬
сущей поверхности больше, чем на нижней, то давление на верх¬
нюю поверхность будет меньше давления на нижнюю поверхность,
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
35
благодаря чему создается подъемная сила. Можно показать, что
подъемная сила пропорциональна величине циркуляции и что для
профиля в двухмерном потоке будет действителен следующий за¬
кон
подъёмная сила на единицу размаха крыла = рё/Г. (9)
Используя изложенную выше теорию малых возмущений, можно
показать, что циркуляция прямо пропорциональна углу атаки <х,
то есть углу между средней хордой несущей поверхности и направ¬
лением свободного потока. Для описанной выше плоской пластины
в дозвуковом потоке коэффициент подъемной силы, отнесенный
к площади ее проекции, будет определяться формулой
Сь = 2ка. (10)
Эта формула достаточно точна для пластинки в двухмерном
потоке. Для дозвукового потока, когда относительное удлинение
крыла велико, она также оказывается достаточно точной. Однако
по мере уменьшения относительного удлинения коэффициент при¬
роста подъемной силы на единицу угла атаки уменьшается.
Приведенная выше простая
формула показывает, что подъем¬
ная сила должна линейно возра¬
стать вместе с углом атаки. Фор¬
мула остается справедливой до
тех пор, пока продолжает сохра¬
няться структура потока, показан¬
ная на рис. 11,г. Однако в реаль¬
ной жидкости, при некотором зна¬
чении угла атаки, наличие погра¬
ничного слоя на верхней поверхности крыла вызовет срыв потока
с нее и появление турбулентной спутной струи, как показано на
рис. 12. Этот срыв может произойти при угле атаки от 10 до 20°
(в зависимости от формы несущей поверхности), который назы¬
вается критическим и обычно является тем пределом, до которого
коэффициент подъемной силы может увеличиваться.
Возникновение подъемной силы на аэродинамическом профиле
в двухмерном сверхзвуковом потоке следует той же закономерно¬
сти, но рассчитать эту силу можно более простым способом.
Остается в силе тот же закон, связывающий давление возмуще¬
ния с местным наклоном поверхности, который выражен уравне¬
нием (7). Из этого можно сделать вывод, что коэффициент подъем-
1 Известен как закон проф. Н. Е. Жуковского. — Прим. ред.
3*
Рис. 12. Срыв потока при потере
скорости
36
ГЛАВА 2.
ной силы зависит от угла атаки и числа Маха в соответствии
с уравнением
Сь= 4а_(11)
ь ум2 — 1 ' ’
Влияние величины относительного удлинения на характери¬
стики сверхзвуковых крыльев может быть качественно определено
путем использования понятия полей возмущения в сверхзвуковом
потоке. На рис. 13 изображена в плане прямоугольная несущая
поверхность при сверхзвуковой скорости течения; часть этой по¬
верхности в зоне А ведет себя так, как если бы ее размах являлся
бесконечным. В оконечных зонах
В подъемная сила уменьшается
до половины того значения, кото¬
рое она имеет в зоне А. Таким
образом, по мере уменьшения от¬
носительного удлинения Ь/с коэф¬
фициент подъемной силы, соглас¬
но уравнению (11), также умень¬
шается.
Рассмотренный выше метод
расчета подъемной силы как для
дозвуковых, так и для сверхзвуко¬
вых несущих поверхностей осно¬
ван на рассмотрении крыла бесконечно большого относительного
удлинения. Расчет подъемной силы крыльев становится все более
затруднительным, по мере того как значения относительного удли¬
нения приближаются к средним или малым значениям (порядка
1 или 2). Для этой цели используется общее определение относи¬
тельного удлинения посредством размаха крыла Ь и площади по¬
верхности 5, а именно:
лг> Ъ2
относительное удлинение = Ак = -у.
Очень полезный теоретический результат можно получить из
предельного случая, когда относительное удлинение крыла при¬
ближается к нулю. Метод вычисления, применяемый при этом,
иногда называют приближением для тонкого тела. С помощью
этого метода можно показать, что коэффициент подъемной силы,
отнесенной к площади несущей повер-хности, становится пропор¬
циональным относительному удлинению, по мере того как послед¬
нее приближается к нулю. И действительно, для распространенных
форм крыльев, в том числе прямоугольных и треугольных, нахо¬
дим, что
Сд д/?а, при АН 0; -> 0. (12)
Рис. 13. Зоны возмущения на сверх¬
звуковом крыле
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
37
Из этого уравнения вытекает интересное физическое толкова¬
ние зависимости подъемной силы. Если мы определим коэффи¬
циент подъемной силы, применяя не площадь крыла 5, а квадрат
его размаха, то есть
подъемная сила г 8
-у
то, учитывая предыдущее уравнение, мы видим, что
= (14)
Другими словами, при приближении относительного удлинения
к нулю подъемная сила зависит только от квадрата размаха крыла
и не зависит от его площади.
Для крыльев обычной формы в плане и в современных преде¬
лах относительных удлинений допущение о линейности коэффи¬
циентов позволяет использовать некоторые весьма эффективные ме¬
тоды решения путем подстановки основных элементарных реше¬
ний в уравнения потока. Одним из таких методов является реше¬
ние задачи конического течения, в котором все параметры возму¬
щений (скорость и давление) постоянны вдоль конических лучей,
проведенных из точки возмущения. Конечно, все возмущения в по¬
токе ограничены поверхностью конуса Маха, вершина которого
расположена в точке возмущения, а ось направлена вдоль потока.
Так, например, зоны возмущения от концов крыла (рис. 13) явля¬
ются коническими течениями. Посредством использования кониче¬
ских течений можно аналитически рассчитать характеристики
крыльев простых форм.
На основании рис. 13 можно предположить, что существует
связь между влиянием относительного удлинения и влиянием числа
Маха. И это оказывается верным как для дозвуковых, так и для
сверхзвуковых скоростей. Действительно, можно доказать, Что для
ряда геометрически подобных несущих поверхностей коэффициент
подъемной силы зависит в основном от одного параметра, назы¬
ваемого приведенным относительным удлинением, которое опре¬
деляется как
/?Д/? = АВ — М2 (для дозвукового потока)
или
= —1 (для сверхзвукового потока).
Коэффициент подъемной силы, отнесенный к квадрату раз¬
маха крыла, может быть изображен как функция только этого
параметра. Типичный график коэффициента подъемной силы для
38
ГЛАВА 2
треугольного крыла как при дозвуковых, так и при сверхзвуко¬
вых скоростях показан на рис. 14. Изменение коэффициента подъ¬
емной силы прямоугольного крыла имеет такой же характер. Ис¬
пользуя приведенные выше данные и, в частности, данные с гра¬
фика на рис. 14, мы можем изучать характеристики некоторых ти¬
пичных крыльев в функции от числа Маха. На рис. 15 показано
изменение коэффициента подъемной силы (здесь — отнесен к пло¬
щади крыла) в зависимости от числа Маха для нескольких ти¬
пичных форм крыла. Из этого графика можно сделать следующие
важные выводы;
1. Коэффициент подъемной силы прямоугольного крыла с
большим относительным удлинением подвержен сильной зависи¬
мости от числа М, особенно в области М=1. Как можно было
предположить на основе приведенного выше рассмотрения лобо¬
вого сопротивления, высокие скорости изменения параметров в
зоне околозвуковых скоростей приводят к тому, что такой поток
трудно рассчитать, так как он отличается большой неустойчиво¬
стью и резкими изменениями подъемной силы. Например, влияние
толщины крыла конечного размаха в зоне околозвуковых ско¬
ростей может проявиться в резком падении кривой подъемной
силы вблизи Л4=1, как это показано пунктирной линией на рис. 15.
2. Малое относительное удлинение уменьшает влияние числа
Маха и. в некоторой степени сглаживает резкие изменения коэф¬
фициента подъемной силы в зоне околозвуковых скоростей. Для
треугольного крыла с очень малым относительным удлинением
(рис. 15) влияние числа Маха незначительно во всем диапазоне
скоростей.
Рис. 14. Подъемная сила треугольного крыла
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
39
Тело вращения, расположенное под углом атаки к потоку, так¬
же может создавать подъемную силу в соответствии с общими
принципами образования подъемной силы крыла. Используя при¬
ближенный метод расчета обтекания тонкого тела, описанный
Рис. 15. Изменение производной коэффициента подъ¬
емной силы по углу атаки крыльев различной
формы в зависимости от числа Маха
выше, применительно к тонким крыльям, можно получить необхо¬
димые данные о подъемной силе тела вращения. Можно пока¬
зать, что подъемная сила в любом сечении такого тонкого тела
пропорциональна скорости изменения поперечной площади в дан¬
ном сечении, как это показано на рис. 16, а. Согласно этому пол¬
ная подъемная сила, действующая на тело, будет пропорцио¬
нальна интегралу скорости изменения площади сечения по всей
длине тела. Таким образом, мы получаем:
подъемная сила = -у рб/2.
где 5ь — площадь данного среза тела. Эта простая формула пред¬
полагает, что срыва потока на поверхности тела не происходит,
за исключением заднего среза; она указывает на линейный харак-
40
ГЛАВА 2
тер изменения подъемной.силы с изменением угла атаки. В дей¬
ствительности поток стремится оторваться от верхней поверхности
тела при относительно малых углах атаки, что приводит к более
быстрому возрастанию подъемной силы, пропорциональному ква¬
драту угла атаки. Типичное изменение коэффициента подъемной
силы от угла атаки показано на рис. 16,6.
Рис. 16. Подъемная сила тела вращения
ние. 17. Вихревая пелена крыла
Циркуляция потока вокруг несущего крыла эквивалентна рас¬
пределению системы вихрей в плоскости крыла и перпендикулярна
направлению движения свободного потока. Эти вихри не закан¬
чиваются у концов крыльев, а сбегают с них и уносятся потоком,
при этом их оси совпадают с направлением местного течения. Со¬
здается структура потока, показанная на рис. 17. Система вихрей
вызывает в спутной струе крыла
движение воздуха вниз. Такое от¬
клонение скорости потока, называе¬
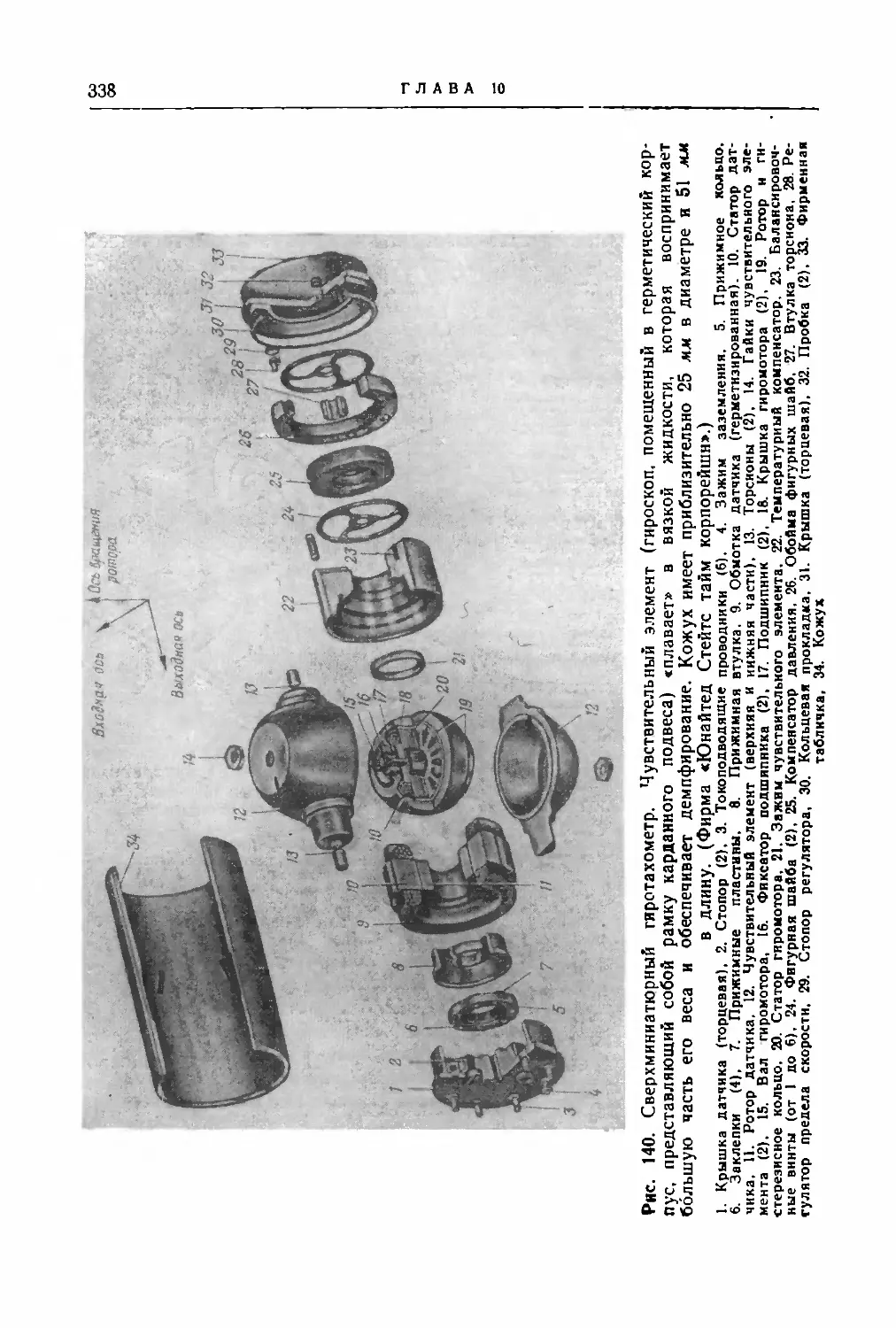
мое скосом потока, имеет очевид¬
ную физическую связь с возникно¬
вением подъемной силы на крыле,
являясь результатом изменения ко¬
личества движения воздуха позади
крыла в связи с образованием подъ¬
емной силы на крыле. Ясно, что
по мере того как циркуляция Г вокруг крыла возрастает, скорость
скоса потока также будет возрастать. Величина циркуляции,
приходящаяся на единицу угла атаки при уменьшении отно¬
сительного удлинения, имеет тенденцию к увеличению, поэтому
влияние скоса потока будет особенно сильным для крыльев малого
относительного удлинения, Это влияние может иметь большое зна¬
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
41
чение в управляемых снарядах, где по различным причинам
желательно иметь крылья малого относительного удлинения и где
может возникать необходимость помещать стабилизирующие или
рулевые поверхности вблизи сильного поля скоса потока с крыльев.
Такое взаимодействие между крылом и оперением может вызы¬
вать нарушения устойчивости и поэтому требует особого внимания
при проектировании.
Индуктивное сопротивление, или сопротивление, вызываемое
подъемной силой, может рассматриваться как результат отклоне¬
ния вектора подъемной силы от перпендикуляра к направлению
потока, как это показано на рис. 18. Можно показать, что для не¬
сущей поверхности в двухмерном сверхзвуковом потоке вектор
подъемной силы направлен перпендикулярно к этой поверхности.
Поэтому коэффициент индук¬
тивного сопротивления опреде¬
ляется формулой
= аСь.
С другой стороны, можно
показать, что для несущей по¬
верхности в двухмернрм до¬
звуковом потоке вектор подъ¬
емной силы является, теорети¬
чески, перпендикуляром к век¬
тору скорости свободного по¬
тока и в этом случае индуктивное сопротивление отсутствует.
Для сверхзвуковых несущих поверхностей конечного размаха
вектор подъемной силы может быть несколько наклонен вперед
относительно перпендикуляра к поверхности, если угол стре¬
ловидности передней кромки крыла больше угла конуса Маха.
Однако этот наклон не может быть больше, чем а/2. У дозвуко¬
вой несущей поверхности конечного размаха вектор подъемной
силы наклонен назад по отношению к перпендикуляру к направ¬
лению движения свободного потока. Таким образом, малое отно¬
сительное удлинение крыла способствует увеличению индуктив¬
ного сопротивления при дозвуковых скоростях, а при сверхзвуко¬
вых скоростях в некоторых случаях может уменьшить индуктив¬
ное сопротивление.
Из сказанного выше, следует, что суммарный коэффициент ло¬
бового сопротивления выражается формулой
Со = СОа + КС1 (15)
где Сп0 лобовое сопротивление при нулевой подъемной силе;
ДТ?2— индуктивное сопротивление:
Рис. 18. Векторы подъемной силы и ин
дуктивного сопротивления
42
ГЛАВА 2
К— константа, зависящая от числа Маха, относительного
удлинения и формы крыла в плане. При таком законе
изменения коэффициента лобового сопротивления ма¬
ксимальное отношение подъемной силы к лобовому
сопротивлению получается тогда, когда индуктивное со¬
противление равно лобовому сопротивлению при нуле¬
вой подъемной силе. При этом условии находим, что
Таким образом, максимальное аэродинамическое качество уве¬
личивается при уменьшении коэффициента лобового сопротивле¬
ния Со и уменьшении коэффициента К. Можно показать, что при
дозвуковых скоростях откуда следует, что крылья
большого относительного удлинения имеют меньшее индуктивное
сопротивление. Таким образом, крылатые снаряды, и главным
образом дозвуковые снаряды дальнего действия, должны иметь
большие относительные удлинения, если это не идет в разрез с
другими требованиями.
При дозвуковых скоростях можно получить высокие значения
аэродинамического качества. Если минимальный коэффициент ло¬
бового сопротивления лишь немного больше суммарного сопротив¬
ления трения обшивки и сопротивления фюзеляжа, то для кры¬
латого аппарата может быть получено ССо =0,008. При относи¬
тельном удлинении, равном 8, максимальное значение аэродина¬
мического качества будет около 28. В действительности по раз¬
личным причинам эта цифра будет несколько меньше.
Как мы уже видели, при сверхзвуковых скоростях К~1/СЛэ.
При этих скоростях максимальное аэродинамическое качество
не будет столь большим из-за более высоких значений К и СВо.
Например, вполне приемлемой величиной наклона кривой подъем¬
ной силы при Л1 = 2 для крыла сравнительно малого относитель¬
ного удлинения считается 2. Минимальный коэффициент лобового
сопротивления будет в значительной степени зависеть от отноше¬
ния площади крыла к площади фюзеляжа, которое для крылатого
снаряда может быть равным примерно 0,02. Соответствующее тео¬
ретическое значение максимального аэродинамического качества
будет равно примерно 5. Вследствие возрастания лобового сопро
тивления за счет балансировки (отклонения поверхностей управ¬
ления) и по другим причинам фактическое аэродинамическое ка¬
чество будет значительно меньшим. Поэтому требуется очень тща¬
тельный выбор характеристик снаряда при проектировании, чтобы
в сверхзвуковом диапазоне скоростей получить аэродинамическое
качество больше 5 или 6.
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
43
2—6. ПРИМЕНЕНИЕ. ПРОБЛЕМЫ ЛЕТНЫХ КАЧЕСТВ
Предшествующее рассмотрение вопросов проектирования сна¬
ряда опиралось на использование методов аэродинамики. Требо¬
вания, связанные с конкретным проектом, которые определяют
аэродинамические задачи, зависят от типа и назначения управляе¬
мого снаряда. В начале этой главы снаряды были классифициро¬
ваны как снаряды малой, средней и большой дальности полета.
В качестве критерия «малой» дальности с точки зрения аэроди¬
намики мы можем использовать отношение энергии, затраченной
на преодоление лобового сопротивления, к средней кинетической
энергии движения КЕ снаряда.
Если Н — дальность снаряда, т — его масса и V — средняя
скорость, то
затраченная энергия ОН Г1КТ
КЕ '•
к -?■- ту2
или
Ер пг В . 2т
— где
Здесь Ср—некоторый эквивалентный средний коэффициент
лобового сопротивления, а I — параметр длины, зависящий от фи¬
зических характеристик снаряда и средней плотности воздуха р.
Назовем его баллистической длиной. Если отношение Еп/Ек равно
или меньше единицы, то снаряд, согласно условию, действительно
является снарядом ближнего действия. Следует заметить, что
баллистическая длина I изменяется с высотой, но на заданной
высоте она пропорциональна физическим размерам или длине
снаряда. Таким образом, большой снаряд может иметь большую
дальность, чем малый снаряд, и все же оставаться в классе сна¬
рядов малой дальности.
Для этого класса снарядов траектория может быть активно¬
пассивного типа; то есть сначала снаряд разгоняется до соответ¬
ствующего значения скорости, а затем остающуюся часть расстоя¬
ния пролетает по инерции. Или же после разгона снаряда спе¬
циальная силовая установка поддерживает необходимую скорость.
Во всяком случае, если отношение ЕВ1ЕК равно или меньше еди¬
ницы, то величина минимального лобового сопротивления, хотя
она и имеет значение, не будет являться самой острой проблемой
проекта.
Маневренность снаряда ближнего действия является одной из
наиболее важных характеристик. Маневренные свойства снаряда
можно описать различными способами. Основными параметрами,
характеризующими маневренность, являются: п — максимальная
44
ГЛАВА 2
перегрузка, выражаемая через ускорение силы тяжести -у—
максимальная скорость поворота траектории полета в градусах
или радианах в секунду и г—радиус разворота. Соотношения
между этими параметрами таковы:
п ~ ~2~ Р^2' ’
V С ь
Т = 1Г = ~ = '1,-Т-' (17)
_ V2 I
~п§~су
Следует обратить внимание на то, что радиус разворота зави¬
сит только от баллистической длины и коэффициента подъемной
силы; малый радиус разворота требует малой удельной нагрузки
на крыло У7/5 и высокого значения коэффициента подъемной
силы. Больше того, при прочих равных условиях небольшой сна¬
ряд может сделать разворот с меньшим радиусом, чем большой
снаряд. Следовательно, скорость разворота у пропорциональна V,
а п, пропорционально V2. В зависимости от назначения снаряда,
типа системы управления и вида траектории любой из этих трех
параметров может оказаться наиболее существенным при опреде¬
лении маневренности.
И еще один параметр, связанный с маневренностью, оказы¬
вается важным при расчете траектории и анализе характеристик
системы наведения снаряда. Это — величина угла атаки, отнесен¬
ная к единице угловой скорости поворота; иногда этот параметр
называют постоянной времени разворота.
а I
I 2/8
Величина эта имеет размерность времени, необходимого для
поворота траектории полета на угол, равный углу атаки.
Маневренность снаряда, выраженная любым из вышеуказан¬
ных параметров, ограничена максимальным значением коэффи¬
циента подъемной силы Сь. При некотором предельном значении
угла атаки на сверхзвуковой несущей поверхности происходит
явление, сходное с дозвуковым срывом потока, — кривая подъем¬
ной силы начинает опускаться, а затем достигает прежнего мак¬
симума. Это — верхний предел Сь, но обычно лобовое сопротив¬
ление вблизи этой точки настолько велико, что на Сь должно
быть наложено ограничение. Это ограничение может, например,
быть наложено, исходя из условий эффективности рулей.
Снаряд, который должен действовать в широком диапазоне вы¬
сот, обычно встречается с необходимостью резко маневрировать
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
45
и на малой высоте, поэтому по соображениям прочности необхо¬
димо искусственно ограничивать пределы отклонения рулевых по¬
верхностей. На большой высоте эти пределы ограничиваются ве¬
личиной СЛтах и падением плотности воздуха, так же как это про¬
является в величине баллистической длины /ив представленных
выше равенствах.
Как только дальность становится очень большой и согласно
приведенной классификации соответствует снарядам средней и
большой дальности, эффективность снаряда на маршевом участке
полета начинает доминировать над аэродинамическими характе¬
ристиками. Становится необходимым учитывать расход топлива,
который является важным фактором для веса снаряда, влия¬
ющим не только на его начальный вес, но й на вес конструкции
и приобретающим решающее значение при очень больших даль¬
ностях. Следовательно, при решении задачи летных качеств сна¬
ряда должны учитываться характеристики силовой установки.
В целях упрощения изложения вопроса разобьем силовые
установки на три группы: двигатели внутреннего сгорания с воз¬
душным винтом, воздушно-реактивные двигатели и ракетные дви¬
гатели. Расход топлива для двигателей первой группы обычно вы¬
ражается удельным расходом:
вес топлива/час
замеренная мощность (на валу)’
Если мы определим коэффициент полезного действия винта т]р
как отношение полезной (тяговой) мощности к замеренной, то
расход топлива можно записать так:
(/№ ат 5 гк «. 5 _
<11 ах Цр ь/о
где х — расстояние вдоль траектории полета и V — скорость. Для
маршевого участка полета принимаем, что подъемная сила В
равна весу 1Г. Откуда, интегрируя уравнение, получим дальность
полета.
где №1 и №2— начальный и конечный вес снаряда; следовательно,
(№, — №2)—вес топлива.
Для воздушно-реактивных двигателей расход топлива обычно
определяется так:
вес топлива/час „
<? = тяга ' = удельный расход топлива.
46
Г Л А 6 А 2
Уравнение, аналогичное вышеприведенному, будет выглядеть
так:
атю г/да 117
— ах ~ С~ЦО-
Если скорость V постоянна, то имеем
* = (19)
Значение этих уравнений состоит в том, что: 1) параметр 5 для
поршневых двигателей приблизительно постоянен, тогда как коэф¬
фициент полезного действия винта можно принять постоянным
только в диапазоне средних дозвуковых скоростей; по мере при¬
ближения к числу М=1 он снижается; 2) параметр с для реактив¬
ных двигателей можно считать постоянным при малых скоро¬
стях и возрастающим при высоких скоростях. Положение точки
начала возрастания удельного расхода зависит от конструкции
двигателя, и она может лежать в диапазоне сверхзвуковых ско¬
ростей.
Из уравнения (18) следует, что летательный аппарат, приводи¬
мый в движение винтом, должен летать на такой скорости, когда
значение велико. Коэффициент полезного действия реактив¬
ного двигателя растет с ростом скорости V вплоть до того предела,
где возрастание с становится весьма существенным. Эта величина
должна рассматриваться с учетом влияния скорости полета на
отношение Ь/О.
Эти параметры расхода топлива можно также выразить через
величину полного коэффициента полезного действия; если Н ве¬
личина энергии, выделяемой единицей веса топлива, то полный
коэффициент полезного действия будет:
_ V Чр полезная механическая работа
сЛ хЛ энергия топлива
С помощью этого параметра дальность определяется как
# = (20)
Общий характер изменения т]0 в зависимости от скорости по¬
лета для нескольких типов силовых установок показан на рис. 19,
однако характер течения к. п. д. сильно зависит от особенностей
конкретной конструкции.
Из приведенных выше уравнений следует, что дальность по¬
лета прямо пропорциональна величине аэродинамического каче¬
ства — А/Д и что отношение весов Ц7|/и72 изменяется по экспонен¬
циальному закону в зависимости от дальности полета и аэроди¬
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
47
намического качества летательного аппарата Л//). Это значит, что
важность Ь/О как конструктивного параметра по мере увеличения
дальности возрастает, для снарядов большой дальности необхо¬
димо очень тщательно определять оптимальное аэродинамиче¬
ское качество. Из предыдущего мы знаем, что Ь/И является функ¬
цией числа Маха и угла атаки (или коэффициента подъемной
Рис. 19. Зависимость коэффициентов полезного дей¬
ствия двигателей от числа Маха
/ — поршневой, 3 — турбореактивный, 3 — прямоточный
силы). Если мы хотим получить оптимальный результат при опре¬
деленных значениях М и а, то, учитывая зависимость т)0 от М, не¬
обходимо, чтобы полет проходил при постоянных величинах М и а.
Кроме того,
Ь=№ = ±-^Сь-8,
откуда следует, что величина ро2 должна уменьшаться, так как
во время полета уменьшается вследствие расхода топлива. Это
значит, что при постоянном М и, следовательно, постоянной ско¬
рости V высота полета должна возрастать.
Предыдущее рассуждение не может быть применено к балли¬
стическому снаряду с ракетной силовой установкой или к любому
другому снаряду, скорость которого значительно изменяется во
время полета.
Характеристику ракетной силовой установки можно выразить
через удельный импульс I.
, кг тяги
* кг топлива/се/г
48
ГЛАВА 2
Рис. 20. Дальность полета:
а) баллистического снаряда с ракетным двигателем;
б) снаряда с турбореактивным двигателем в зависимо¬
сти от относительного веса. — начальный вес, —
конечный вес. — вес топливу
Скорость, достигаемая ракетой без учета аэродинамического
сопротивления и составляющей силы тяжести вдоль оси тяги,
определяется из дифференциального уравнения
В <И ~ 1 ~ 1 <Н ‘
Для одноступенчатой ракеты решение принимает вид
, , И', . IV!
= = (21)
Произведение иногда называют эффективной скоростью ис¬
течения реактивной струи с.
Вообще говоря, траектории всех снарядов, кроме баллистиче¬
ских снарядов очень малой дальности, таковы, что лобовое сопро¬
тивление не является фактором первостепенной важности при
определении дальности полета. Тяга ракетного двигателя дей¬
ствует в течение сравнительно короткого промежутка времени, так
что максимальная скорость достигается ракетой почти в самом
начале полета. С ростом дальности необходимо принимать во
внимание кривизну земли, и траектория становится частью
эллипса Кеплера, при
этом дальность увели¬
чивается быстрее, чем
квадрат скорости. На¬
конец, приблизительно
при скорости 26 000 фу¬
тов в секунду (8000
м/сек.) снаряд может
выйти на круговую
орбиту вокруг Земли
и бесконечно вращать¬
ся по этой орбите.
Строго говоря, теоре¬
тически эта орбита
будет проходить на
уровне поверхности
Земли; реальная орби¬
та, для которой лобо¬
вое сопротивление бу¬
дет практически не¬
существенным, будет
находиться на боль¬
шой высоте и потре¬
бует несколько мень-
щрй скоростц.
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
49
Рис. 21. Изменение отношения
начального веса к весу конструк¬
ции и полезной нагрузки в зави¬
симости от дальности для сна¬
рядов:
а) с ракетным двигателем; б) с тур¬
бореактивным двигателем
Существуют разные способы сравнения характеристик снаря¬
дов, имеющих различные типы силов'ых установок. Вероятно, са¬
мым простым способом явится построение графика отношения ве¬
сов Г,/Г2 по дальности для типичных величин этих параметров.
Такой график для одноступенчатой баллистической ракеты и
снаряда со сверхзвуковым турбореактивным двигателем показан
на рис. 20. Из графика видно, что баллистическая ракета стано¬
вится выгодной с точки зрения веса только при очень больших
дальностях — порядка половины
окружности Земли.
Изучая рис. 20, нужно рассмот¬
реть роль еще одного фактора, а
именно: конечный вес №2 слагается
из веса конструкции, полезной на¬
грузки и веса силовой установки.
Вес силовой установки для ракет¬
ного снаряда может составлять
очень небольшую долю от полного
веса №1, тогда как для турбореак¬
тивного снаряда он составляет зна¬
чительно большую его часть. Таким
образом, при очень малых потреб¬
ных дальностях снаряда, когда за¬
пас топлива может быть очень не¬
большим, снаряд с ракетным двига¬
телем имеет преимущество. А так
как для снаряда с турбореактив¬
ным двигателем полный вес непре¬
рывно растет с увеличением дально¬
сти, то имеется некоторая даль¬
ность, при которой вес турбореак¬
тивной силовой установки поглотит
всю полезную нагрузку. Общий характер этой зависимости можно
увидеть, если построить график отношения то есть полного
веса к весу конструкции и полезной нагрузки, принимая целесооб¬
разные значения веса силовой установки. Эта зависимость пока¬
зана на рис. 21.
При возрастании отношения полного веса к весу полезной на¬
грузки повышается роль минимального веса конструкции и значе¬
ние конструктивной проработки проекта. В этой связи необходимо
тщательно взвесить взаимовлияние лобового сопротивления, подъ¬
емной силы, веса конструкции и компоновочной схемы.
Отношение полного веса к весу полезной нагрузки для ракет¬
ного снаряда может быть улучшено путем использования мно¬
гоступенчатой ракеты. При этом процесс разгона снаряда делится
на несколько этапов. В конце работы первой ступени ее ракетный
4—405
50
ГЛАВА 2
двигатель, баки и другие агрегаты или часть их отделяются,
уменьшая таким образом вес ставшего бесполезным груза, кото¬
рый должен получить дополнительный разгон от второй ступени.
Отделение ступеней ракеты повторяется по окончании работы
каждой ступени.
Несколько упрощенный анализ поможет понять, как может
быть увеличена суммарная скорость разгона для заданного отно¬
шения полного веса к весу полезной нагрузки при использова¬
нии нескольких разгонных ступеней1. Допустим, что ступени 1, 2,
3 и т. д. сообщают скорости о2, V3 и т. д., определяемые фор¬
мулами
, «'1 , УГг
= = т. д
Ут । V* 2
Здесь IV7! — начальный вес составной ракеты; УРп— начальный
вес п-й ступени и IV7',—конечный вес п-й ступени. Суммарная
скорость разгона для ступеней будет
0 1 1 2 1 " 6 и/2 «4
Теперь допустим, что по окончании работы первой ступени
сбрасывается вес — И72, пропорциональный начальному весу,
1Г; — 1Г2 =
Отсюда следует, что в сброшенный вес входит вес двигателя и кон¬
струкции, которые пропорциональны IV7!. Допустим также, что
сбрасываемый в конце работы каждой ступени вес изменяется та¬
ким же образом.'Такая система соответствует многоступенчатому
Снаряду, состоящему из нескольких отдельных ракет, запускае¬
мых последовательно. Ее иногда называют последовательной си¬
стемой. Тогда мы можем записать
у -е\ое (22)
°~ + г2 кг2 + и/,кмы + Го ■ 1 ’
Вес Го можно считать полезной нагрузкой. Конечно, в конце
работы последней ступени уже не имеет значения, будет ли сбро¬
шен вес так как вся последняя ступень' получит полную
скорость.
Задача состоит в том, чтобы определить веса промежуточных
ступеней 1Г2, IV7 з и т. д. так, чтобы конечная скорость ц0 была мак¬
симальной для данного отношения Это простая задача на
определение максимума с несколькими переменными, и она мо¬
жет быть сравнительно легко решена. Исследование симметрии
■ 1 Это соотношение впервые получено К. Э. Циолковским и цосрт название
уравнения Циолковского.— Прим, рей-
аэродинамика управляемых реактивных снарядов
51
Рис. 22. Скорость разгона многоступенчатой ракеты при последова¬
тельной работе ступеней
4*
уравнения (22) подсказывает, что оптимум будет получен при
условии равенства весовых отношений в каждой ступени; и дей¬
ствительно это оказывается так. Таким образом,
№, №2 _ _ ^Л-
+ №2 — К№2 + №3 •' • + №0
и, следовательно,
№1
№2 IV, — • • • ц/0 •
Отсюда мы видим, что отношение полного веса к весу полез¬
ной нагрузки будет
полный вес №[ №1 №2
полезная нагрузка №0 №2 №3 ‘‘ №0 \ №0 /
Суммарную скорость разгона мы можем теперь записать
/ №„ ттг
= с 1о& I + №0 ) = с 10& “г 5 ТрГ• (23)
На рис. 22 показаны типичные кривые Оо в зависимости от от¬
ношения веса Г1/Го для нескольких значений Д — числа ступе-
52
Глава Ъ
ней. Эти кривые построены для удельного импульса 225 сек и ве¬
личины К=0,1, которые лежат в пределах оптимальных значений.
Следует заметить, что двух- или трехступенчатая ракета имеет су¬
щественное преимущество перед одноступенчатой, особенно при
высоких значениях УУ/№0. Следует также заметить, что есть пре¬
делы оптимального числа М ступеней, свыше которого для дан¬
ного отношения скорость будет понижаться. Можно по¬
казать, что для заданных К и существует оптимальная ве¬
личина (V, которую для очень малых значений К можно опреде¬
лить по приближенной формуле
".,. = 108^- (24)
Для обычных значений К оптимальное число /V несколько меньше
вычисленного по данной формуле.
Величина, ближайшая к МОрь представляет собой наилучший
выбор числа ступеней. Очевидно, что оптимальное число ступеней
довольно мало даже для самых больших ракет; например, три
ступени являются оптимумом для лежащего в пределах от
20 до 40.
Следует отметить, что вышеприведенные данные, и в частности
замечания относительно оптимального числа ступеней, относятся
к конкретному случаю веса каждой ступени после окончания ее
работы. Можно разработать различные варианты систем, которые
будут иметь несколько другие характеристики. Например, можно
представить себе многоступенчатый ракетный двигатель с отделе¬
нием двигателей по ступеням, при этом каждый двигатель надо
рассматривать как обеспечивающий только часть тяги, необходи¬
мой для разгона дополнительного веса, связанного с этой сту¬
пенью. Следовательно, сбрасываемый вес будет
^-^ = /<(1^-1^).
Такое использование двигателей иногда называют параллель¬
ным, так как отдельные ракетные двигатели работают одновре¬
менно. Получаемая с помощью такой системы скорость для опти¬
мальных межступенчатых весов оказывается равной
^0 = С 10? -р -д-.^ .
.-К + К(^
Эта скорость несколько превосходит скорость, данную в уравне¬
нии (23). Кривые 1>0 в зависимости от приведены на
рис. 23. Можно показать, что оптимальное число ступеней в этом
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
53
Рис. 23. Скорость разгона многоступенчатой ракеты при параллельной
работе ступеней
Рис. 24. Изменение скорости разгона в зависимости от числа
ступеней
54
ГЛАВА 2
случае бесконечно и что при М, стремящемся к бесконечности,
суммарная скорость разгона приближается к величине, определяе¬
мой
^Ошах^С1—
По аналогии с уравнением (21) мы можем рассматривать эту
ракету как такую, которая непрерывно сбрасывает части кон¬
струкции и ракетный двигатель с такой скоростью, с какой выго¬
рает топливо, и которая, следовательно, имеет эффективный
удельный импульс, уменьшаемый множителем (1 — К).
На рис. 24 показаны кривые Vо в зависимости от числа ступе¬
ней М для отношения весов №|/№о = 5О как для последовательной,
так и параллельной работы двигателей отдельных ступеней.
Баллистический снаряд из-за присущей ему простоты и высо¬
кой скорости может иметь значительные преимущества в ряде
случаев. Однако при больших дальностях, как показывают преды¬
дущие расчеты, необходимые скорости могут стать очень боль¬
шими, что потребует рассмотрения некоторых особых аэродинами¬
ческих проблем. Наиболее важной из них является нагрев, воз¬
никающий в результате трения обшивки при очень больших чис¬
лах М. Расчеты траекторий снарядов показывают, что за исклю¬
чением снарядов, имеющих очень малые дальности, траектории
проходят по большей части на такой высоте, где аэродинамиче¬
ские силы и нагрев несущественны. Однако, на нисходящей ветви
траекторий, на высотах от 20 до 40 миль (32—64 км) аэродина¬
мические явления становятся снова существенными. Именно на
фазе входа ракеты в атмосферу существуют серьезные и, в неко¬
торой степени, все еще нерешенные аэродинамические проблемы.
2—7. АЭРОДИНАМИЧЕСКИЙ НАГРЕВ
Решение задачи о передаче тепла от воздуха телам, движу¬
щимся в нем с малыми скоростями, является в основном обычной
технической задачей; обеспечение теплопередачи становится за¬
труднительным только тогда, когда появляется значительная раз¬
ница между температурой воздуха и тела. По этой причине явле¬
ние теплопередачи обычно не заслуживает серьезного внимания
при создании машин, движущихся с малой скоростью. С другой
стороны, при больших скоростях передача тепла телу становится
важным фактором, даже если температура свободного потока
того же порядка или ниже, чем температура тела. Основной при¬
чиной этого является тот факт, что энергия движения воздуха
становится очень большой по сравнению с его тепловой энергией.
В пограничном слое, под воздействием вязкости, значительная
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
55
часть этой кинетической энергии превращается в тепловую, что
приводит к возникновению высоких температур в пограничном
слое.
В качестве меры теплового эффекта используется отношение
Ц-
*Е = ± = = (25)
энтальпия срТ 2 а2 2 ' '
Если скорость движущегося воздуха Е) уменьшается изэнтро-
пически до нуля, как, например, в точке полного торможения, то
вся его кинетическая энергия КЕ должна проявиться в форме
энтальпии, или теплосодержания. Рост температуры, получаемый
из вышеприведенного уравнения или из уравнений (1), (2) и (3),
в разделе 2—3, определяется формулой
ДГ = ^- = Ц^М27’. (26)
-ьСр *
Полученная таким образом конечная температура называется
температурой полного торможения. Она определяется формулой
Г0 = г(1 + ^/И2). (27)
Из формулы видно, что высокие температуры полного тормо¬
жения возникают при больших числах Маха. В стратосфере при
Т=—55° С находим, например, что при М — 2 7'0= 120°С; при
М = 4 70 = 650° С; при М=6 7о=151О°С.
Важной особенностью течения в пограничном слое является
то, что частицы воздуха, лежащие на поверхности тела, имеют
нулевую скорость, то есть воздух не «скользит» по поверхности
тела (при обычных скоростях и плотностях воздуха). Процесс
уменьшения скорости до нулевой в данном случае не является
изэнтропическим, но под действием сил вязкости большая часть
кинетической энергии превращается в тепло. Температура воз¬
духа вблизи тела в ходе этого процесса (при условии отсутствия
теплопередачи) может быть записана
Гг = т(1 + г^Л42), (28)
где г — коэффициент восстановления. Этот коэффициент опреде¬
лен экспериментально, он лежит в пределах 0,75—0,85, в зависи¬
мости от условий в пограничном слое. Если поверхность тела
приобретет температуру Тт, то теплопередачи не будет, поэтому
Тт иногда также называют равновесной температурой.
Коэффициенты теплопередачи обычно определяются в зависи¬
мости от разности температур. Если Т8 фактическая температура
56
ГЛАВА 2
поверхности тела в высокоскоростном потоке, то мы можем опре¬
делить коэффициент теплопередачи как
ь теплота/единица площади-сек
’ Тг — Т3 “
= тГТ,- <м>
Этот коэффициент имеет тот недостаток, что он не является
безразмерным. Поэтому существуют другие коэффициенты, не
имеющие размерности. Мы будем пользоваться коэффициентом
теплопередачи, имеющим некоторый полезный физический смысл.
Иногда его называют числом Стэнтона. Оно выражается фор¬
мулой
Сн = ,, = 4г . (30)
н ^ср(Тг — Т3) ?1кр ' >
Так как р(7—массовый расход воздуха свободного потока
через единицу площади, то величину р[}ср(Тг— Т3) можно рас¬
сматривать как количество тепла в свободном потоке, проходя¬
щее через единицу площади. Таким образом, Сн — отношение ко¬
личества тепла, проходящего через единицу площади поверхности,
к количеству тепла, проходящему через единицу площади в сво¬
бодном потоке.
Далее можно проследить интересную аналогию между тепло¬
передачей и трением обшивки. Вспомним, что коэффициент тре¬
ния обшивки был определен как
г сила сдвига/единица площади
где рИ2 можно представить как количество движения на единицу
площади в свободном потоке. Так как процесс в пограничном слое,
превращающий часть этого количества движения в силу сдвига
(трения) на поверхности тела, в основном является тем же про¬
цессом, который превращает часть теплового потока в теплоту,
передаваемую поверхности, то очевидно, что должна существовать
простая связь между Сн и С/. Анализ показывает, что в извест¬
ном приближении это справедливо, и в широком диапазоне усло¬
вий для воздуха мы находим
Сн=4СЛ (32)
Это отношение зависит от другого безразмерного параметра, кото¬
рый выражает отношение вязкости к теплопроводности. Этот па¬
раметр называется
числом Прандтдя — Рг = -ц,
аэродинамика управляемых реактивных снарядов
5?
где К—теплопроводность воздуха. Более точные теоретические рас¬
четы или экспериментальные данные позволяют представить Сн гра¬
фически как функцию числа Рейнольдса /?е и числа Прандтля Рг.
Значение приближенного соотношения Си и С/ [уравнение (32)]
состоит в том, что оно позволяет использовать ранее полученные
данные С( (см., например, рис. 5), для того чтобы с хорошей точ¬
ностью оценить величину Сн. Это соотношение подчеркивает силь¬
ную зависимость теплопередачи от того, каков пограничный слой —
ламинарный или турбулентный. На основании графика изменения
коэффициента трения, приведенного на рис. 5, можно усмотреть,
что Си будет непрерывно уменьшаться с уменьшением числа Рей¬
нольдса как в ламинарном, так и в турбулентном пограничном
слое, однако при данном числе Рейнольдса теплопередача для
турбулентного пограничного слоя может быть в 5—10 раз больше,
чем для ламинарного слоя. Следовательно, при проектировании
высокоскоростных снарядов очень важно знать, где пограничный
слой будет ламинарным и где турбулентным.
Как указано в разделе 2—4, задача определения положения
точки перехода (точки, в которой ламинарный пограничный слой
переходит в турбулентный) в настоящее время полностью еще не
решена. Число Рейнольдса, при котором происходит этот переход,
зависит от возмущений, имеющихся в свободном потоке, от сте¬
пени шероховатости поверхности и. от градиента давления на по¬
верхности в направлении потока. На него также может оказывать
значительное влияние теплопередача от пограничного слоя к по¬
верхности тела. Приближенные расчеты устойчивости погранич¬
ного слоя показывают, что величина теплового потока из погра¬
ничного слоя к поверхности может оказывать сильное стабилизи¬
рующее влияние, увеличивая число Рейнольдса, при котором про¬
исходит переход. Это стабилизирующее влияние может быть осо¬
бенно значительным при больших числах Маха, когда (если пер¬
воначальная температура поверхности низка по сравнению с рав¬
новесной температурой пограничного слоя) теплопередача может
быть чрезвычайно большой.
Пользуясь уравнениями (30, 31 и 32), можно дать еще одно
интересное физическое толкование. Представим себе тонкое тело,
движущееся в воздухе, например плоскую пластину, расположен¬
ную по потоку, движение которой замедляется только под дейст¬
вием сил трения. Тогда скорость потери кинетической энергии
будет а 1
~ (КЕ) = ои=с,- 4- Р^2^-
Если пластина имеет температуру свободного потока, то из урав¬
нения (26) видим, что приближенно
т _т _ &_
' 1*—2ср-
58
ГЛАВА 1
Применяя уравнения (30) и (32), находим, что скорость передачи
теплового потока в тело будет равна
^ = с„-е-^5 = ±А(те). (за)
Можно видеть, что примерно половина кинетической энергии, по¬
терянной телом за счет трения, передается телу в виде тепла;
другая половина поглощается пограничным слоем и спутной
струей. Таким образом, за счет трения тело и воздух нагреваются
Приблизительно поровну.
Имея величины й, полученные вдоль поверхности тела, не¬
трудно рассчитать изменения температуры тела, движущегося
в воздухе, учитывая при этом теплоемкость и теплопроводность
самого тела. Точные решения уравнений теплопередачи редко
нужны на практике, и поэтому обычно допускаются различные
приближенные решения. Например, для тела с тонкой металличе¬
ской обшивкой теплопроводность обшивки обычно настолько вы¬
сока, что можно считать, что каждый элемент обшивки имеет
одинаковую температуру по всей ее толщине, а теплопроводностью
между соседними элементами можно пренебречь.
Снаряд малой дальности, особенно при скорости, которая зна¬
чительно изменяется во время полета, не будет находиться в теп¬
ловом равновесии с воздушным потоком, за исключением, может
быть, лишь некоторых областей на снаряде. Максимальные тем¬
пературы на снаряде, очевидно, будут ниже максимальных равно¬
весных температур или температур восстановления, возникающих
во время полета; в противном случае конструктивно-термические
условия проектирования были бы чрезвычайно жесткими. С дру¬
гой стороны, снаряд дальнего действия, или крылатый снаряд,
почти наверняка достигнет термического равновесия, поэтому тем¬
пературой его обшивки будет температура восстановления. Бал¬
листический снаряд обычно не достигает равновесных температур
в начальной фазе полета при прохождении плотных слоев атмо¬
сферы. Точно так же он не достигнет равновесных температур при
обратном входе в атмосферу. Это является положительным обстоя¬
тельством, так как ясно, что такие температуры были бы губи¬
тельны даже при числах М равных 5 или 6. Поскольку скорость
теплопередачи исключительно велика, ее расчет должен произво¬
диться весьма тщательно.
При изложении материала мы пренебрегли различными тон¬
костями, которые выявляются при детальном изучении диффе¬
ренциальных уравнений, описывающих термический пограничный
слой. Например, теплопередача Сн является также функцией рас¬
пределения тепла в пограничном слое; то есть на теплопередачу
в данной точке оказывает влияние распределение температуры
над поверхностью и количество теплоты, которое было выведено
АЭРОДИНАМИКА УПРАВЛЯЕМЫХ РЕАКТИВНЫХ СНАРЯДОВ
59
из пограничного слоя. На теплопередачу действуют и другие
факторы, как, например, градиент давления, действующий вдоль
или перпендикулярно поверхности. Понятие пограничного слоя
совершенно исчезает в точке полного торможения на тупоносом
теле, поэтому в таком случае должен быть применен какой-то
другой метод. Однако более простые методы удовлетворяют тре¬
бованиям и широко применяются, позволяя в большинстве практи¬
ческих случаев решать проблему теплопередачи с достаточной для
техники точностью.
2-8. ГИПЕРЗВУКОВЫЕ СКОРОСТИ И БОЛЬШИЕ ВЫСОТЫ
Предыдущее изложение материала связано главным образом
с проблемами, в которых воз’дух рассматривался как сплошная
среда, а поток считался в значительной своей части потенциаль-.
ным. На практике техника сталкивалась с задачами, в которых
возмущения установившегося потока могли считаться малыми.
При очень больших скоростях или при очень малых плотностях
воздуха некоторые или все эти условия естественно нарушаются.
Понятие сплошности среды означает, что молекулы газа нахо¬
дятся настолько близко друг от друга, что они сталкиваются ме¬
жду собой чаще, чем с каким-либо другим предметом в потоке;
то есть средний путь свободного пробега молекул значительно
меньше любых размеров тел, участвующих в процессе обтекания.
Однако из кинетической теории газов известно, что
Л4 _ средний путь свободного пробега молекул
Т<е ~ I
где I — характерная длина, входящая в число Рейнольдса — Не. По
мере того как это отношение увеличивается, приближаясь к еди¬
нице, поток все больше и больше отходит от идеальной модели, опи¬
санной раньше. По мере приближения к условиям, когда средний
путь свободного пробега молекул становится равным или превы¬
шает размеры самого тела, поток ведет себя как совокупность не¬
зависимых молекул и законы изменения аэродинамических сил
становятся совершенно отличными от законов, которые рассма¬
тривались выше. Такой случай иногда называют режимом свобод¬
ных молекул или режимом Ньютонова потока. Средний путь сво¬
бодного пробега молекул воздуха на уровне моря равен приблизи¬
тельно 6Х10-6 см. На-высоте 50 миль (80 км) плотность воздуха
уменьшается примерно в 4Х10-5 раз, поэтому средний свободный
путь пробега молекул увеличивается примерно до 1,5 мм. На боль¬
ших высотах такое изменение структуры потока должно, безу¬
словно, стать существенным для тел конечного размера.
60
ГЛАВА 2
При очень малых числах Рейнольдса, характерных для этих
больших высот, толщина пограничного слоя становится большой.
Когда отношение среднего пути свободного пробега к толщине
пограничного слоя достигает нескольких процентов, в характере
пограничного слоя и в законах, определяющих трение обшивки и
теплопередачу, происходят значительные изменения. Например,
условие отсутствия скольжения на поверхности тела, о котором
говорилось раньше, нарушается. Такой случай иногда называют
случаем «скользящего потока». Можно показать, что отношение
среднего пути свободного пробега молекул к толщине погранич¬
ного слоя 8 выражается
средний путь свободного пробега молекул М
В ~У~Кё'
Это отношение возрастает с увеличением скорости, а также
с уменьшением плотности. На высоте около 64 км это отношение
равно приблизительно 0,1 для тела длиной 1 фут (0,3 л) при
скорости 714= 10. Влияние «скользящего потока» должно стано¬
виться существенным на высотах, значительно превышающих
приведенную в примере высоту.
Плотность атмосферы с высотой изменяется приблизительно
экспоненциально с коэффициентом 10 на каждые 16—19 км. По¬
этому переходная зона, в которой вышеназванные явления начи¬
нают становиться существенными, относительно невелика по вы¬
соте, находясь в пределах примерно от 64 до 96 км. Кроме того,
ввиду очень малой плотности воздуха еще не известно, будут ли
эти особенности иметь большое значение для технических проек¬
тов. Например, плоская аэродинамическая поверхность при угле
атаки 10°, числе А4=10 и высоте примерно 64 км создает подъем¬
ную силу порядка 15 кг!м?. На высоте 96 км эта сила определенно
будет незначительной для любого тела, кроме искусственного спут¬
ника Земли.
На меньших высотах, где действуют законы газовой динамики,
эти особенности при числах М = 10-5-40 могут представить интерес
в отношении баллистических снарядов. С точки зрения классиче¬
ской аэродинамики в этом случае основная особенность состоит
в том, что все возмущения являются сильными возмущениями и
преобладают нелинейные зависимости. Кроме того, высокие тем¬
пературы полного торможения и температуры восстановления не¬
сомненно внесут новые усложнения в обычную модель газа, вклю¬
чая, например, явления диссоциации и излучения. В настоящее
время очень мало известно о влиянии этих явлений на картину
обтекания. Эта область представляет собой один из наиболее
интересных разделов аэродинамической науки.
ГЛАВА 3
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ
В ПОЛЕТЕ
У. М. Бликни 1
3—1. ВВЕДЕНИЕ
Предмет стабилизации полета и управления применительно
к летательным аппаратам в целом очень широк, и имеющаяся по
нему литература обширна. Мы не будем пытаться рассматривать
весь имеющийся материал или хотя бы относящийся к основным
аспектам обширной задачи проектирования реактивных снарядов,
так как нельзя провести четкую грань между применением этого
материала к снарядам и к пилотируемым самолетам. Вместо этого
упор будет сделан на те аспекты его применения к снарядам, ко¬
торые значительно отличаются от проблем устойчивости и управ¬
ляемости обычных самолетов или же рассматриваются под дру¬
гим углом зрения. Поэтому нижеследующие замечания будут от¬
носиться к тем классам снарядов, которые больше всего отлича¬
ются от обычных самолетов, а именно к высокоманевренным и
высокоскоростным снарядам и снарядам малой дальности дей¬
ствия, хотя при изложении материала будут, по мере возможно¬
сти, сохранены и общие положения.
3—2. НОРМАЛЬНАЯ СИЛА
В этом разделе подробно рассматриваются проблемы, связан¬
ные с превращением сигнала ошибки в силу, поворачивающую
снаряд в сторону цели. Этой силой может быть составляющая
реактивной тяги, направленная перпендикулярно скорости
(рис. 25), или аэродинамическая сила (рис. 26), или же обе эти
силы в комбинации. Предпочтение следует отдавать аэродина¬
мической силе в тех случаях, когда скорость и плотность воздуха
достаточны для ее создания, так как эффективность этого способа
с учетом веса и лобового сопротивления — двух факторов, опре¬
1 Сотрудник самолетостроительной фирмы Хьюза.
62
ГЛАВА 3
деляющих потребную тягу, — обычно значительно выше. Когда же
скорость снаряда слишком мала, как это может иметь место
у снарядов класса «земля—земля» ближнего радиуса действия
или на чрезвычайно больших высотах, где проходят траектории
баллистических снарядов дальнего действия, применение реактив¬
ной силы для управления заслуживает серьезного внимания. Ко¬
нечно, если для создания тяги необходим реактивный двигатель,
его использование дополнительно для создания нормальной силы,
Рис 25. Боковая сила, создаваемая реактив¬
ной струей:
1. Сила реактивной струи. 2. Боковая сила. 3. Ско¬
рость
Рис. 26. Поворот с помощью аэродинамической подъем¬
ной силы:
I. Подъемная сила. 2. Управляющий момент. 3. Скорость
как в ракете Фау-2, может быть экономически выгодно. Если при¬
нят реактивный двигатель, управление и стабилизация будут
обеспечиваться бортовыми приборами, например гироскопами, и
услуги аэродинамика уже не требуются.
3—3. РОЛЬ АЭРОДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
Для того чтобы снаряд попал в цель, необходимо преду¬
смотреть устройства, с помощью которых можно вызвать появле¬
ние нормальной (в рассматриваемом случае, аэродинамической
подъемной) силы и управление ею. От величины боковой силы
зависят скорость поворота траектории, нормальное ускорение и
другие параметры, величина которых определяется величиной
сигнала ошибки. Под «аэродинамическим управлением» подразу¬
мевается способ, с помощью которого создается и изменяется подъ-
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ 63
емная сила. Под «стабилизацией», в широком смысле этого слова,
понимают способ изменения подъемной силы, в зависимости от
управляющего движения. Оба эти понятия, включающие аэроди*
намическую силу и способ управления ею, составляют аэродина¬
мическое звено в системе управления.
Имеется много методов осуществления управления, возможно,
столько же, сколько разработано проектов реактивных снарядов.
Ниже перечислены конструктивные параметры, определяющие
характер системы управления, значение которых, в разных слу¬
чаях, различно: 1) площадь крыла, от которой в основном зави¬
сит скорость поворота; 2) величина лобового сопротивления, влия¬
ющая на дальность полета и вес двигательной установки;
3) мощность рулевых механизмов; 4) скорость ответной реакции;
5) линейность характеристик системы; 6) стоимость и 7) надеж¬
ность. Все эти моменты более или менее очевидны, но неопытный
инженер может недооценить той очень большой роли, которую
играет последний пункт—надежность — в выборе аэродинамиче¬
ских схем. Именно в целях достижения надежности во многих
случаях проводятся очень дорогостоящие исследования, целью
которых является получение оптимальных аэродинамических
схем, когда лучшие характеристики можно было бы получить пу¬
тем использования бортового оборудования обычной надежности.
3—4. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
И БАЛАНСИРОВКА
Так как величина подъемной силы изменяется в зависимости
от угла атаки, то средством управления является момент подъ¬
емной силы, с помощью которого достигается необходимое поло¬
жение снаряда по отношению к траектории полета (рис. 26). Если
снаряд статически устойчив, то имеется балансировочный угол
атаки для каждого управляющего момента и, следовательно,
определенного значения подъемной силы. Ее величина, выражен¬
ная через управляющую силу (рис. 27), определяется формулой
Лг=^(1 (О
где Ьс — управляющая сила, 1С — положение точки ее приложения
по отношению к центру тяжести и /0 — положение точки приложения
подъемной силы, связанное с углом атаки; 10 называют запасом
статической устойчивости, а Цт — подъемная сила балансировки.
Если 1о — отрицательно, то уравнение (1) выражает случай
(неустойчивого равновесия. Такая схема может быть приемлема
лишь, если управляющая сила возникает от сигнала по углу атаки
или от сигнала ошибки. В этом случае устойчивость обеспечивается
84
ГЛАВА 3
бортовой аппаратурой, состоящей из акселерометра, демпфируют
щего гироскопа, указателя угла атаки и других приборов, чув¬
ствительных к изменению угла тангажа снаряда. Этот способ
управления освобождает аэродинамика от многих трудных проб¬
лем, но может явиться нежелательным с точки зрения сложности
Рис. 27. Соотношение между подъемной силон и управ¬
ляющей силой
системы управления и ее надежности. При дальнейшем изложении
материала основное внимание будет уделено методам и трудно¬
стям, связанным с решением аэродинамических задач, а не поискам
возможностей переложить всю тяжесть на конструкторов борто¬
вых схем и приборов.
3—5. СПОСОБЫ УПРАВЛЕНИЯ
Управляющая сила может быть приложена в любой точке по
длине снаряда (рис. 28), но вышеприведенное уравнение показы¬
вает, что эффективность ее действия прямо пропорциональна уда¬
лению /о от центра давления. Кроме того, если она будет прило¬
жена впереди этой точки, то это будет способствовать увеличе¬
нию полной подъемной силы, а если сзади — то уменьшению ее.
Рис. 28. Способы создания управляющих сил:
1. Отклонение силы тяги. 2. Газовые рули. 3. Управляющие реактивные
двигатели. 4. Рули высоты в обычной схеме, 5. Рули высоты в схеме
«утка». 6. Поворотное крыло
Управляющая сила на снаряде может создаваться с помощью
работающего двигателя путем: 1) отклонения сопла; 2) от клоне-
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
63
ния газовых рулей в реактивном сопле; 3) установки отдельных
управляющих реактивных двигателей; 4) отклонения рулей вы¬
соты, расположенных позади крыла, как в схеме самолета; 5) от¬
клонения рулей высоты, расположенных вблизи носовой части и
6) отклонения основных несущих поверхностей, расположенных
вблизи центра тяжести.
3—6. СИЛОВЫЕ ПРИВОДЫ
Рассмотрим в качестве примера небольшую поверхность управ¬
ления, имеющую переднее расположение, известное под назва¬
нием схемы «утка». Для поворота этой поверхности требуется ме¬
ханическая сила, величина которой зависит от требуемой скорости
поворота и величины противодействующего момента. Кроме мак¬
симальной силы, необходимой в каждый данный момент для по¬
ворота рулей, конструктор должен рассчитать суммарную энер¬
гию, которая потре¬
буется для управления
в полете. Обе эти ве¬
личины могут быть
уменьшены за счет вы¬
бора соответствующей
аэродинамической ба¬
лансировки, но идеаль¬
ную балансировку
обычно получить нель¬
зя, так как положе¬
ние точки приложе¬
ния подъемной силы
(рис. 29) благодаря отклонению рулей высоты изменяется в зави¬
симости от изменения угла атаки и скорости снаряда.
Другим возможным способом уменьшения силы и энергии,
расходуемых на управление, является применение реверсивного
силового привода, который преодолевает только мгновенный про¬
тиводействующий момент вместо того, чтобы расходовать энергию
на каждое движение, как если бы он преодолевал максимальный
момент снаряда. Такой способ позволяет производить отклонение
рулей высоты независимо от управляющего сигнала в ответ на
изменение внешних моментов и добавляет для системы управле¬
ния степень свободы, что может явиться важным обстоятельством
при решении вопросов динамической устойчивости и флаттера.
Кроме того, реверсивные системы управления иногда желательны
с точки зрения проектирования (например, может оказаться пред¬
почтительным пневматический силовой привод с «мягким» соеди¬
нением), и тогда аэродинамик должен учитывать шарнирный
момент рулей как важный элемент в системе управления.
Рис. 29. Типичные изменения положения центра
давления на поверхности управления:
а—угол атаки; 6— угол отклонения поверхности управ¬
ления
5-405
66
ГЛАВА 3
3—7. ДЕКРЕМЕНТ ЗАТУХАНИЯ И ЧАСТОТА КОЛЕБАНИЙ
При. заданной управляющей силе постоянная составляющая ча¬
стоты колебаний снаряда в вертикальной плоскости приближенно
определяется по формуле
„0=1//И1Д. (2)
где Производная подъемной силы По углу атаки в радиа¬
нах;
V— скорость полета;
/ — момент инерции снаряда относительно поперечной оси,
проходящей через центр тяжести.
Декремент затухания колебаний определяется приближенной
формулой
х=4(^+ч+^)> с3)
где Мч п — продольные моменты от изменения угла тангажа
при постоянном угле атаки и от изменения угла атаки при по¬
стоянном тангаже. Оба момента отнесены к произведению VI.
Свободные колебания снаряда
описываются уравнением
а = а0 е~Ц 51П IV а>2 — X2 . (4)
Характер реакции на действие
управляющей силы для различ¬
ных местоположений управляю¬
щей силы при одной и той же
собственной частоте и затухании
показан на рис. 30. Из рисунка
видно, что переднее расположе¬
ние рулей более эффективно, чем заднее, и что если эффективность
рулей не имеет большого значения, т. е. если имеется сила, доста¬
точная для быстрого поворота больших управляющих поверхно¬
стей, то размещение управляющей силы вблизи центра давления
может применяться для того, чтобы уменьшить время реакции.
3—8. ХАРАКТЕРИСТИКИ РЕАКЦИИ
Основная задача конструктора — обеспечить на протяжении
всего полета расчетные значения параметров: времени, высоты,
скорости и положения в пространстве (рис. 31). Время становится
независимым параметром, так как положение центра тяжести сна-
Рис. 30. Влияние расположения упра¬
вляющей силы на подъемную силу:
а) переднее, б) заднее, в) центральное
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
67
ряда является функцией времени полета. Твердые топлива обычно
размещаются в задней части снаряда, поэтому центр тяжести
с течением времени перемещается вперед. Желательно иметь мак¬
симальную устойчивость при старте, чтобы свести к минимуму на¬
чальные ошибки. На практике, как правило, происходит обратное.
Таким образом, требуется точная компенсация ошибки, допущен¬
ной при запуске, управляющей силой в полете.
Рис. 31. Зависимость летных характеристик от че*
тырех переменных
Проблему запуска нелегко анализировать. Обычно желательно
сообщить снаряду высокое ускорение, чтобы быстрее освободить
пусковую установку и сообщить снаряду необходимую для аэро¬
динамического управления скорость до того момёнта, как снаряд
удалится на слишком большое расстояние. При этих условиях,
если нет крена, расчет траектории делится на две задачи, в кото¬
рых основными силами являются сила тяги, подъемная сила и
сила тяжести, а основными моментами — момент от подъемной
силы, равный произведению подъемной силы на /0, и моменты за
счет тягового и аэродинамического эксцентриситета. Уравнения
не будут содержать подъемной силы, возникающей из-за аэроди¬
намического эксцентриситета, если в качестве оси проекций ис¬
пользуется ось нулевой подъемной силы. Продольные моменты
Мч и М-а упомянутые в предыдущем разделе, имеют большое
значение при решении задачи запуска.
Приводим уравнения подъемной силы и моментов
УТ=(1/+ Ав^)(0 —Г) + АУ;
1Ь = -ВтУЧ,{Ь-^-{Мч + М^У1Ь + 1В, (5)
где у — угол наклона траектории полета и 0 — угол оси снаряда,
измеренный относительно неподвижной оси в пространстве.
5*
68
ГЛАВА 3
Если и ускорение разгона V постоянны, то эти уравнения мо¬
гут быть записаны следующим образом:
$ = (ф + ’)(«-7) + 4; (6)
/У2 ® / 9/Д \ / 4" \
;& = -/(*)* (0-т)- — ум+в1 + В^ (7)
при
, V , 1
I = — = Ст; С2 = —;—— ;
V кУ.
/Л.
+ Д2х2> А) / (т).
В этой безразмерной форме величина А может быть связана
или с компонентой силы тяжести, или компонентой ускорения
силы тяги, перпендикулярной к элементу траектории, деленной
на V, при этом В\ с плечом момента тяги, создаваемым эксцентри¬
ситетом, делится на единицу длины Н^/т, а В2 с плечом мо¬
мента аэродинамического эксцентриситета делится на /А2!/2.
Независимая переменная т является безразмерной скоростью
по отношению к скорости, при которой скорости поворота, вызы¬
ваемые тягой и подъемной силой, равны. Если пренебречь измене¬
ниями относительно несущественного коэффициента (2И?+7И-в)/Аа
[величины в пределах 1—2 наиболее характерны в сравнении с ве¬
личиной /(т) порядка 100—1000], то важными параметрами ока¬
жутся только то, ^(т0) и Г(т), которые определяют начальную ско¬
рость, начальный запас устойчивости и скорость изменения устой¬
чивости.
Два приведенных выше уравнения соответствуют одному урав¬
нению третьего порядка, которое, следовательно, имеет три неза¬
висимых однородных решения (соответствующих отсутствию функ¬
ций, зависящих от эксцентриситета тяги или аэродинамического
эксцентриситета) с тремя необходимыми граничными условиями.
Одно из этих трех решений соответствует у=0=сопз1, т. е. полету
по прямой линии с нулевой подъемной силой вдоль траектории
пуска. Два других решения можно выразить с помощью любого
из двух начальных условий; этими двумя условиями, которые
представляют наибольший интерес с физической точки зрения,
являются начальный угол атаки а0 = т0—во и начальная угловая
скорость снаряда 0о. Наибольший интерес в окончательном реше¬
нии представляет переменная величина — угол наклона траекто¬
рии полета у. Таким образом, мы имеем два решения этих одно¬
родных уравнений, и уа, вытекающих из а0 и 0О соответственно.
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
69
Кроме того, есть три других решения, относящихся к величинам
возмущения или сил, которые можно назвать уА, тВ1 и тв,2.
Для случая /' = 0 решения могут быть представлены сложными
интегралами ошибок, однако эти функции нельзя представить в
виде таблиц и диаграмм.
Типичные решения для 6 = 7 = 0 при т = то, полученные с по¬
мощью моделирующего устройства (рис. 32), показывают боль¬
шую роль начальной устойчивости и ее влияние на ошибку запу¬
ска, обусловленную только эксцентриситетом тяги. Величины па¬
раметров /о, Г и то, показанные на рисунке, представляют практи¬
ческий интерес.
Таким образом, на зависимость поведения снаряда от времени,
как параметра полета, сильное влияние оказывают перемещения
центра тяжести. Точно так же па эту зависимость от скорости, как
независимого параметра, оказывают влияние изменения /0 вслед¬
ствие перемещения точки приложения подъемной силы из-за изме¬
нения угла а. Изменение скорости, оказывая различное влияние
на подъемную силу различных элементов снаряда из-за распро¬
странения возмущений (со скоростью звука), может передвинуть
точку приложения подъемной силы в любом направлении. По
этой причине реакция по скорости обычно изображается в виде
функции числа М. Основной задачей аэродинамика является опре¬
деление такой геометрической формы планера снаряда, которая бы
максимально соответствовала расчетному положению точки при¬
Рис. 32. Зависимость ошибки Запуска от устойчивости
70
ГЛАВА 3
ложения подъемной силы в пределах летных чисел М проектируе¬
мого снаряда. С изменением величины /0 связана задача аэроди¬
намической балансировки сил на управляющих поверхностях, ко¬
торые также являются функцией скорости и в свою очередь влияют
на управляющую силу.
Третий тип изменения реакции зависит от положения снаряда
по отношению к воздушному потоку. Двумя наиболее важными па¬
раметрами при описании положения снаряда в пространстве яв¬
ляются угол атаки а и угол крена <р; последний определяется
углом, на который необходимо повернуть снаряд, чтобы его пло¬
скость совпала с плоскостью отсчета угла атаки. Полное описа¬
ние положения снаряда в пространстве включает, кроме того,
углы отклонения рулей управления.
Не совсем строгое предположение о линейной зависимости
подъемной силы от угла а обычно приводит к разочарованию при
первом же столкновении с упрямыми фактами. Среди причин,
объясняющих это явление, главными являются влияние спутной
струи и возмущений потока (обычно называемых «срывом потока»)
от расположенных впереди элементов на рулевые поверхности.
Другим важным источником этого неприятного явления служит
корпус снаряда, создающий значительную часть подъемной силы,
но которая в большой степени нелинейна, а точка ее приложения —
подвижна. Изменение формы крыльев, в частности применение
крыльев с малым относительным удлинением, необходимым в
условиях сверхзвукового полета, еще более усугубляет нелиней¬
ность аэродинамических характеристик.
Когда тип управления таков, что при соответствующем вход¬
ном сигнале изменяется положение крена, то дальнейшее измене¬
ние устойчивости происходит по мере того, как рули управления,
расположенные сзади, перемещаются по отношению к спутной
струе и индуктивным потокам от корпуса и передних рулей, если
таковые имеются.
Когда эти факторы, определяющие положение центра давле¬
ния, суммируются, то неудивительно, что реакция, которая так
сильно зависит от запаса устойчивости, изменяется сверх допусти¬
мых пределов. Необходимость удерживать это изменение в опреде¬
ленных границах является третьим исходным параметром наряду с
ошибкой пуска и величиной управляющей силы, который учиты¬
вается при определении запаса устойчивости, так как относитель¬
ное (в процентах) изменение последней уменьшается при возрас¬
тании абсолютной величины запаса.
Диапазон высот, в котором должен действовать снаряд, яв¬
ляется четвертой причиной изменения его реакции. Это изменение
можно рассчитать, если пренебречь влиянием аэроупругости и по¬
граничного слоя. Диапазон изменения характеристик управляемо¬
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
71
сти в зависимости от изменения высоты очень велик. Так, напри¬
мер, при постоянном числе Маха скорость поворота изменяется в
12 раз, а подъемная сила—в 14 раз при изменении высоты от
18 000 м до уровня моря.
Таким образом, определение характеристик ускорения от аэро¬
динамической силы является основным вкладом аэродинамика в
систему реактивного снаряда. Решение этой задачи связано с мно¬
гочисленными трудностями, однако затраченные усилия могут
много дать для достижения надежности и хороших летных харак¬
теристик.
3—9. УПРАВЛЕНИЕ ПО КУРСУ
До сих пор реакция снаряда на сигнал поворота рассматрива¬
лась без учета направления поворота. Сигнал, естественно, должен
быть разложен в системе координат снаряда на угловую и линей¬
ную величины или на две прямоугольные компоненты. Аэродинами¬
ческие проблемы решались бы проще и характеристики стали бы
лучше, если бы подъемная сила создавалась только в одном на¬
правлении по отношению к снаряду, с тем чтобы он накренялся
при выполнении поворота, как это происходит с самолетом. Одна¬
ко в отличие от пилотируемого самолета управляющие сигналы
обычно подвержены действию помех. Поведение снаряда может
стать беспорядочным, если постоянный сигнал поворота будет сла¬
бее уровня помех. В этом случае могут появиться сигналы крена
до 180° в обоих направлениях. При реакции снаряда в двух на¬
правлениях (управляющие сигналы вверх и вниз) сигналы крена
могут быть уменьшены до 90°, а при реакции в трех или четырех
направлениях крен вообще не потребуется. В общем, тип управ¬
ления «крен — поворот» предпочтительнее там, где сила тяжести
является главным моментом, определяющим необходимую подъ¬
емную силу, как это имеет место в случае реактивных снарядов
дальнего действия. Для снарядов малой дальности, и особенно для
снарядов, предназначенных для действий по воздушным целям,
маневренные перегрузки могут во много раз (до 40) превышать
силу тяжести, и поэтому время задержки между сигналом и реак¬
цией снаряда может приводить к нежелательным последствиям.
Больше того, необходимость крена перед поворотом усложняет
проблему фильтрации полезного сигнала поворота из помех.
Следовательно, чтобы упростить и улучшить условия работы
бортового оборудования, аэродинамик должен решать сложные
задачи устойчивости снаряда крестообразной схемы, который мо¬
жет поворачиваться в любом направлении без крена. В этом слу¬
чае можно разделить управляющий сигнал на две прямоугольные
составляющие; при этом каждая из них управляет отдельными ру¬
72
ГЛАВА 3
лями и позволяет производить фильтрование сигнала в каждом
канале отдельно.
Изменение устойчивости при крене <р, о котором говорилось
выше, и влияние угла атаки на эффективность рулей могут теперь
привести к тому, что сигнал в одном канале будет действовать
на реакцию в другом и могут возникнуть «перекрестные воздейст¬
вия». Существо этого явления состоит в том, что снаряд в дейст¬
вительности поворачивается в направлении, которое не является
направлением векторной суммы двух управляющих компонент, и
точность наведения снаряда ухудшается. Это одна из менее зна¬
чительных проблем, но она должна учитываться при оценке веро¬
ятности наведения снаряда.
3—10. МОМЕНТ КРЕНА И УПРАВЛЕНИЕ
КРЕНОМ
Вопрос о том, по какой схеме будет осуществляться разворот
снаряда во время полета (с креном или без крена), зависит от
способа, при помощи которого управляющие сигналы преобразу¬
ются в координаты снаряда. Однако при этом всегда существует
предел крена, определяемый способностью снаряда удерживать
управляющую силу в требуемом направлении. Моменты крена
возникают по причине начальной асимметрии, возмущений потока
от впереди расположенных элементов (передние рули) и от асим¬
метричных потоков при движении со скольжением.
Управление моментами, возникающими по причине начальной
асимметрии, не представляет трудности, так как они действуют,
как правило, в одном направлении и слабо изменяются, в то
время как два других вида моментов могут быть значительно
больше и могут быстро изменяться, поскольку зависят от управля¬
ющих сигналов. Рассчитать эти моменты в сложных конфигура¬
циях, например в крестообразной схеме, практически невозможно,
поэтому обычно проводят измерения моментов в аэродинамической
трубе, прежде чем установить требования по управлению креном.
Трудность, ограничивающая свободу конструктора в выборе ме¬
ста установки элеронов, заключается в том, что они, как правило,
не могут быть расположены впереди крыльев, так как создавае¬
мый ими момент в значительной степени погашается, а иногда и
реверсируется расположенными сзади неподвижными плоскостями
(рис. 9).
Не говоря уже о быстроте, которая требуется для управления
креном снарядов с корпусом большого,удлинения, тот факт, что
существует аэродинамическая связь между вращающими момен¬
тами и реакцией на действие рулей, а также внутренняя связь
между угловой скоростью крена и разложением управляющих сиг¬
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
73
налов на составляющие, иногда выдвигает сложную задачу обес¬
печения динамической устойчивости, в какой-то степени сходную с
колебаниями крена, которые хорошо известны конструкторам са¬
молетов.
3—11. АЭРОУПРУГОСТЬ
Тот факт, что конструкция планера снаряда не может быть сде¬
лана абсолютно жесткой, приводит к появлению дополнительных
проблем устойчивости и управляемости. Простейшие из них вызы¬
ваются деформацией несущих поверхностей, что изменяет картину
распределения подъемной силы. Это изменение имеет тенденцию
приобретать максимальное значение на самой малой высоте и са¬
мой большой скорости, поэтому запас устойчивости нельзя полно¬
стью рассчитать для всех высот, так же как и данные трубного экс¬
перимента не могут быть непосредственно использованы для опре¬
деления этой зависимости от скорости. Из-за разнообразия форм
деформации часто очень трудно анализировать их аэродинамиче¬
ское влияние, а моделирование в аэродинамической трубе требует
очень тщательных расчетов как самого проекта, так и модели.
Деформация также оказывает влияние на реакцию снаряда че¬
рез величину управляющей силы, которую в этом случае также
нелегко рассчитать.
3-12. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
По мере перехода от нескоростных летательных аппаратов
большой дальности к более скоростным аппаратам с небольшой
дальностью действия все более увеличивается разница между реак¬
тивными снарядами и самолетами и вместе с тем оказывается, что
вопросы динамической устойчивости требуют меньшего внимания.
Например, длиннопериодические колебания, появляющиеся в го¬
ризонтальном полете в гравита¬
ционном поле, не представляют
собой проблемы, когда маневрен¬
ные нагрузки и силы лобового со¬
противления велики. Эти колеба¬
ния быстро затухают, по мере
того как лобовое сопротивление
приближается к 1 а период ко¬
лебаний, который увеличивается
с возрастанием скорости, стано¬
вится слишком большим, чтобы
представлять какой-либо интерес.
Рис. 33. Механизм реверса крена
в схеме с передними элеронами
74
ГЛАВА 3
Колебания крена, тангажа и курса (рыскания), о которых го¬
ворилось выше, не представляют собой проблемы аэродинамиче¬
ской устойчивости в чистом виде, так как они требуют наличия
бортовой аппаратуры управления как существенного элемента си¬
стемы. Однако в этом случае аэродинамические моменты, как, на¬
пример, момент крена в зависимости от угла атаки и угла крена,
настолько трудно рассчитать, а период колебаний настолько мал
в сравнении с типичными постоянными времени в системе управ¬
ления креном и тангажом, что до проведения летных испытаний
может оказаться невозможным получить устойчивый снаряд.
Аэродинамическое затухание колебаний тангажа, которое опре¬
деляется уравнением
Х = 4(4 + Л79 + Л1-), (3)
для данного снаряда пропорционально произведению ра, являю¬
щемуся функцией числа М, где р — плотность воздуха и а — ско¬
рость звука. Величина ра, подобно скорости поворота, изменяется в
14 раз при уменьшении высоты с 18 000 м до уровня моря, и вполне
возможно, что на больших высотах время затухания станет слиш¬
ком большим для удовлетворительного управления, если не приме¬
нить систему управления с обратной связью. Аэродинамическое за¬
тухание трудно сколько-нибудь существенно увеличить за счет
конструкции планера снаряда. Это тот случай, когда аэродинамика
оказывается неэффективной в деле упрощения бортовых элемен¬
тов системы управления. К преимуществам, достигаемым с по¬
мощью применения специальных устройств в системах управления
для улучшения характеристик затухания, относятся уменьшение
лобового сопротивления, отсутствие ограничений углов атаки и
уменьшение нагрузок на конструкцию.
Затухание колебаний крена представляет собой другой пара¬
метр, который трудно поддается управлению с помощью аэродина¬
мических средств. Аэродинамическое затухание может в какой-то
мере помогать системе управления креном, но его эффективность
на больших высотах едва ли будет достаточной.
3—13. БАФТИНГ И ФЛАТТЕР
Существует два вида динамической неустойчивости, которые
присущи как самолетам, так и реактивным снарядам. Один вид
связан с особенностями течения в пограничном слое крыла. Вслед¬
ствие периодического срыва потока или турбулентности спутной
струи, проходящей над расположенными сзади поверхностями, со¬
здаются переменные аэродинамические нагрузки. Эти, так называе¬
мые бафтинговые, нагрузки чаще всего возникают при больших
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
75
углах атаки, хотя скачки уплотнения, тупые задние кромки или
шероховатые поверхности могут возбуждать эти явления и при
малых углах. Как правило, величина этих сил в какой-то степени
определяется величиной подъемной силы. Снаряд, развивающий
подъемную силу, которая, например, в 30 раз превышает его вес,
в некоторых условиях полета может испытывать очень сильные
вибрационные нагрузки.
Снаряд, летающий на различных высотах при постоянных (при¬
близительно) отношениях подъемной силы к весу, может испыты¬
вать бафтинговые нагрузки возрастающей величины по мере воз¬
растания высоты за счет увеличения угла атаки, хотя, если баф¬
тинг возникает при малых углах, величина его будет в общем
уменьшаться с увеличением высоты.
Второй вид динамической неустойчивости возникает из-за упру¬
гих деформаций конструкции и переменных аэродинамических на¬
грузок, вызываемых этими деформациями. Этот вид неустойчивости
1называется флаттером и представляет собой одну из основных про¬
блем при проектировании самолетов. Эта проблема становится ме¬
нее значительной по мере перехода от схем обычных самолетов к
схемам высокоманевренных реактивных снарядов с корпусом
большого удлинения. Это происходит отчасти потому, что в связи
с повышенными требованиями к прочности конструкции дости¬
гается большая жесткость; а отчасти потому, что схемы с корпу¬
сами очень большого удлинения, необходимыми для получения
высоких скоростей, естественно являются более жесткими; и ча¬
стично потому, что при сверхзвуковых скоростях возмущения в
потоке от отклоненных рулей не распространяются вперед, где они
могут оказывать влияние, способствующее неустойчивости.
В то время как флаттер обычных жестко закрепленных крыльев
представляет сравнительно редкое явление, аналитические иссле¬
дования и экспериментальные методы борьбы с флаттером для
схем с корпусом большего удлинения недостаточно эффективны и
очень трудно установить правила проектирования, которые по¬
могли бы исключить появление флаттера.
Опасно было бы предполагать, что с увеличением скоростей
этот вид флаттера будет играть меньшую роль. Когда необходимо
принять выгодную с точки зрения веса конструкцию, задача обес¬
печения достаточной жесткости и гладкости обшивки под воздей¬
ствием сильного аэродинамического нагрева и значительных тем¬
пературных градиентов представляется довольно трудной.
Для флаттера, известного под названием флаттера рулей, зна¬
чение большого удлинения и маневренности не очень велико. Важ¬
ным конструктивным параметром, оказывающим влияние на флат¬
тер рулей и иногда не учитываемым в - эскизных проектах, яв¬
ляется запас статической устойчивости /0, который в значительной
76
ГЛАВА 3
степени определяет размер рулей относительно стабилизатора, а
следовательно, и подверженность флаттеру. Таким образом, за
счет точного учета /0 может быть получен положительный ре¬
зультат.
3—14. ОБЩАЯ БАЛЛИСТИКА
Проблема устойчивости является частью более общей проблемы
полета с неподвижными органами управления. Последняя пробле¬
ма в условиях отсутствия тяги является областью, охватываемой
баллистикой — одной из древнейших наук, но в то же время и до
сих пор остающейся одной из самых активных наук, особенно при¬
менительно к оперенным снарядам, где аэродинамическая теория
несущих поверхностей находит свое прямое применение.
Новый элемент в баллистике появляется тогда, когда действует
сила тяги ракетного двигателя, и именно здесь конструктор сталки¬
вается с наиболее общей задачей неуправляемого полета (сила
тяги может одновременно придавать вращение, как это имеет
место в ракетах, стабилизируемых вращением) при изучении фаз
запуска и разгона снаряда. Ему необходимо знать не только ха¬
рактеристики рассеивания, на которые оказывают влияние разброс
параметров снаряда и пусковой установки, а также характер ма¬
неврирования самолета (если снаряд запускается с самолета).
Необходимо обеспечить целостность конструкции снаряда при
неустановившихся углах атаки и принять меры обеспечения безо¬
пасности обслуживающего персонала и оборудования в случае вы¬
хода из строя системы управления снарядом.
В разделе 3—8 даны упрощенные уравнения для расчета рас¬
сеивания невращающихся снарядов. Здесь эти уравнения будут
применены для определения собственных угловых скоростей крена,
так как величины гироскопических сил и силы Магнуса важны в
том случае, когда следует учитывать возможность неисправностей
системы управления и меры безопасности, а также когда они могут
быть необходимы для получения нужных угловых скоростей крена
с целью уменьшения рассеивания.
При анализе уравнений движения вращающегося снаряда при¬
нято, что снаряд имеет одинаковые характеристики в плоскости
продольного движения (плоскости симметрии) и в плоскости ры¬
скания (плоскости курса). Это дает возможность использовать
сложные переменные для описания движения и сил, а также по¬
зволяет применить линейную теорию для крестообразных схем в
общей постановке. Принятие условия симметрии позволяет отде¬
лить уравнения вращающего момента крена и продольной силы от
четырех других уравнений, так что осевые компоненты линейной и
угловой скорости можно считать «^программированными» или за¬
Стабилизация снаряда и управление им в полете
77
данными независимо; и линеинои зависимости аэродинамических
сил от этих двух переменных не требуется. Нелинейность в дру¬
гих случаях не всегда делает уравнения непригодными; она может
только ограничить предел, в котором коэффициенты могут счи¬
таться постоянными.
При сочетании произвольных программ крена и тяги, в усло¬
виях переменной плотности воздуха, изменяющейся массы снаряда
и положения его центра тяжести применение безразмерных коэф¬
фициентов, используемых в аэродинамике или баллистике, ника¬
ких преимуществ не дает, и их буквенные обозначения применя¬
ются для достижения максимальной краткости. Использование
приведенной длины превратит коэффициенты и их производные в
безразмерные величины.
В связанной системе координат два уравнения момента и два
уравнения нормальной силы принимают форму
В'Я-{В— А)рг = М2; I
Вг + (В — А) рд = М3; I
ъ + гУ — ры) = ~;
2 (9)
^-^ + /п> = 4,
где ось х — продольная ось снаряда; угловые скорости вокруг
осей х, у и г — р, д и г соответственно; линейные скорости вдоль
этих осей — I), V и де; моменты сил У и 2 относительно осей у и г —
М2, М3; А и В — осевые моменты инерции относительно осей
X и у.
Выразим тангаж и рыскание в новой комплексной системе коор¬
динат, в которой ось х связана с продольной осью снаряда, а оси
у и г (действительная и мнимая) не вращаются в пространстве
вокруг оси х.
Комплексную угловую скорость можно определить формулой
ш = (^+гг)А (10)
где <р = р.
Выразим скорости, силы и моменты в этой же системе координат
и = — I (у + где) (11)
/И=(Л/24-/7И3)е'’;
Г = -1(У +17.)^. (12)
Далее, если положить
<13>
78
ГЛАВА 3
подстановка этих функций в первоначальные четыре уравнения
сил и моментов приведет к следующим двум комплексным урав¬
нениям:
и! — ш = (14)
т1] ' '
Силы и моменты могут быть выражены в форме
^ = «.» + М»' + ^» + 4;
М Н (1э)
^ = Л^а« + Л4;ц' + +
Здесь шесть коэффициентов являются комплексными. Действитель¬
ные части коэффициентов нормальной силы представляют со¬
бой обычные, или «прямые», аэродинамические силы; таким обра¬
зом, - и представляет собой силу в той же плоскости, что
и и, следовательно лежащую в плоскости угла атаки. То же самое
относится и к действительным частям коэффициентов момента М{.
Мнимые части /V, и представляют собой боковые силы и мо¬
менты, перпендикулярные их коэффициентам. Такие силы и мо¬
менты обычно возникают только при наличии достаточно высокой
скорости вращения; они связаны с аэродинамической циркуляцией,
возникающей вокруг снаряда под действием вращения и называ¬
ются силами и моментами Магнуса. До настоящего времени они
представляли интерес в основном для баллистиков.
Направление силы Магнуса может иметь любой знак в зависи¬
мости от формы снаряда, угла атаки и скорости вращения. Фак¬
торы, влияющие на эту силу, подробно не изучены; коэффициенты
могут иметь значительную нелинейность как по углу атаки, так и
по скорости вращения.
Все коэффициенты момента имеют тот же знак, что и соответ¬
ствующий коэффициент нормальной силы, если точка приложения
силы находится сзади центра тяжести. Величины С и Н — соответ¬
ственно функции силы и момента из-за эксцентриситета тяги или
силы тяжести.
Все действительные коэффициенты могут быть выражены в ве¬
личинах производных обычных аэродинамических коэффициентов
без использования У. Следовательно, они зависят от У только
из-за влияния чисел М и Рейнольдса. При этом же предположе¬
нии все мнимые коэффициенты независимы от У, если отноше¬
ние р/У постоянно. Поэтому они являются функциями крена V и
могут в некотором диапазоне считаться пропорциональными у.
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
79
Следует заметить, что особый подход в определении II и Е при¬
водит к уравнениям, которые становятся полностью действитель¬
ными при отсутствии угловой скорости крена.
Исключение ш дает одно уравнение второго порядка
»-- [с + -108'
- [(1 + М,) М. - 0Л7. + М..] 1^- =
=т^Д<| + ЛУ4 + (г-г-(4)’1 <16>
где ^ = М^-^-/V + 1о§/(1 —Л/д), где индекс (') штрих обозначает, как
и раньше, дифференцирование по х.
Интересным свойством этого уравнения является отсутствие
скорости 17 в левой части. Для случая невращающегося снаряда
это означает, что при постоянных коэффициентах колебания не за¬
висят от тяги, чго особенно удобно для анализа этапа разгона
снаряда. Это упрощение имеет место только тогда, когда перемен¬
ными являются нормальная скорость и осевое расстояние, и оно
требует использования этих переменных вместо угла атаки, угло¬
вой скорости, угла наклона траектории и т. д. как функций вре¬
мени или скорости вместо расстояния. Конечно, угол наклона
траектории и положение снаряда можно получить простым интег¬
рированием У как функции х.
Наша цель сейчас качественно исследовать влияние скорости
крена на характер решений, так как решения и их физическое зна¬
чение для действительного уравнения при постоянных или почти
постоянных коэффициентах хорошо известны. Если принять и
ЕЦ за действительные (эти коэффициенты обычно невелики), а
все другие — за линейные функции V, то коэффициент при и'
становится линейным, а коэффициент при и — квадратичной функ¬
цией V.
Режимы движения снаряда удобно анализировать, если рассма¬
тривать однородную форму уравнения (16), т. е. если приравнять
правую часть уравнения к нулю. Мы можем сгруппировать члены
в соответствии со степенями V путем введения новых параметров
(1 + лил^+/<
- 2т)0 = + 1ое' (1 - 1ое' (1 - А- )
и
. Г (1 + + лг'
80
ГЛАВА 3
В этих уравнениях обозначает действительную часть Мч
и т. д.; п — параметр вращения. Для малых значений коэффициен-
тов МагНуса и т. д.) имеем
1
п. Ж-к- V.
2т]о
Параметр 7]0 представляет собой общую форму коэффициента
затухания X невращающегося снаряда (уравнение 3), отнесенного
к расстоянию, а не к скорости. Для случая движения с постоян¬
ной скоростью, когда коэффициенты с изменением х не изменя¬
ются, мы видим, что предыдущее замечание о X соответствует усло¬
вию, когда мы пренебрегаем и Щ; коэффициент тот же,
что и Аа. В этом случае мы имеем
7] • х — — М.
Введя дополнительные параметры а, Ь и с для обозначения
действительной и мнимой частей третьего члена уравнения (16),
линейные и квадратические функции, V (или п), получим оконча¬
тельную форму уравнения (16)
а" + 2т)0 (1 — 1п) и' + т?0 (с + ИЬп + ал2) и = 0. (17)
Если А (х)
определяется
« = ехр У А (х) (1х, (18)
то уравнение для А становится
А' А2 -|~ 2т)0 (1 — /л) А (с ИЬп -|- ал2) = 0. (19)
Сложная функция А может рассматриваться как мгновенная
характеристика движения, параметры которого непрерывно изме¬
няются вдоль траектории.
Из уравнения (18) следует, что д.и1<1х= А(х)а.
Таким образом, А(л:) представляет собой сложный коэффи¬
циент, на который умножается величина и в каждой точке траек¬
тории, чтобы получить его инкремент в х. Его мнимая часть яв¬
ляется «частотой» спирального вида (вращение вектора поперечной
скорости на единицу расстояния), так как и — комплексная попе¬
речная скорость, действительная часть которой дает скорость ро¬
ста или падения по отношению к пройденному расстоянию.
Если параметры а, Ь, с, т)0 и п в уравнении (19) меняются с
изменением х (как в общем случае движения снаряда с перемен¬
ной скоростью), то уравнение не имеет простого решения. Однако
если эти параметры постоянны (что может быть принято в каче¬
стве допущения, особенно если п изменяется медленно), то урав¬
нение может быть решено. Такое решение позволяет анализировать
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
81
общее влияние вращения на условия устойчивости. Простейший
способ решения состоит в допущении, что Л =сопв1 (Л'=0), так
что ц = ехр Ах. Это, конечно, представляет собой также и общее
решение уравнения (17) при постоянных параметрах. Тогда мы
имеем
= — 1 + * [п +Ил2 (1 + а) + ‘21п (1 -|- Ь) + с— 1]. (20)
Влияние вращения вводится через параметр п. Так как для
п = 0
и = ехр [— -»)о (1 ± — 1)] х,
то поведение снаряда может быть показано на графике Л/т)0
(при возрастании п) от начальной точки (—1 ±гУс—1). Оче¬
видно, что с является параметром статической устойчивости и за¬
висит главным образом от он нормализуется при величине,
для которой существует критическое затухание. Параметр Ь зави¬
сит в основном ог величин момента Магнуса и нормальной силы
(своим возникновением они обязаны углу атаки), выраженных ко¬
эффициентами Л/' и М?', этот параметр содержит также и все
другие коэффициенту. Подобно с, он может иметь любой знак.
Параметр а определяется главным образом №* и имеет значе¬
ние только при очень высоких скоростях крена, когда нормальная
сила Магнуса приближается к нормальной силе. В нашем случае
параметром а можно пренебречь, а кривая Л/т]0 при п = оо прини¬
мает значение Ь. Для корня, взятого со знаком плюс,— это .низко¬
частотный режим с асимптотой — (2 + 6), а для корня со знаком
минус — высокочастотный режим. График (рис. 34) показывает
поведение функции при малом с для а = 0. Координатами являются
действительные и мнимые части А. Параметры Ь и с неизменны
вдоль каждой кривой, их значения (с, Ь) показаны у каждой кри¬
вой; п изменяется вдоль кривых, увеличиваясь в направлении стре¬
лок. Если 6<0 и с>0 (условие статической устойчивости),—
снаряд устойчив при всех скоростях вращения. Рассмотрим, на¬
пример, кривую, обозначенную (0,5, —1), на рис. 34. Если знак Ь
изменится, то снаряд, первоначально бывший устойчивым, станет
неустойчивым при увеличении скорости вращения (см. кривую
2; 1). Это не является общим условием для вращающихся снаря¬
дов, но это возможно. Более общим условием является 6<0.
В этом случае статически неустойчивый снаряд становится устой¬
чивым при достаточной скорости вращения, как это показывает
кривая (—1; —0,8), и устойчивый снаряд имеет меньший декремент
затухания, но никогда не становится неустойчивым при увеличе¬
нии скорости вращения.
6—405
82
ГЛАВА 3
График показывает, что если с лежит между 0 и 1,0, то невра-
щающийся снаряд не колеблется, но при любой конечной скорости
вращения всегда существует колебательный режим, как это пока¬
зано мнимой частью А. График также показывает высокочастот¬
ные или нутационные колебания в ответвлениях кривых левее
—1,0. Эти области всегда устойчивы для обычных значений вели¬
чины Ь.
Рис. 34. Устойчивость вращающихся снарядов
Это краткое изложение теории устойчивости вращающихся сна¬
рядов является более общим, чем материал, приведенный в статьях
по этому вопросу, в том отношении, что в нем не указываются
ограничения величин действующих сил и постоянство параметров
окружающей среды. Однако применение данной теории для реак¬
тивных снарядов в какой-то степени ограничено, так как исходит
из одинаковых условий для тангажа и рыскания.
Влияние сил, возникающих в реактивных или ракетных двига¬
телях от внутреннего потока, от вращения подвижных частей
и т. д., может быть выявлено без особых трудностей.
Еще много должно быть сделано для разработки практических
методов решения уравнения А с переменными параметрами и для
численного решения неоднородного уравнения относительно и.
СТАБИЛИЗАЦИЯ СНАРЯДА И УПРАВЛЕНИЕ ИМ В ПОЛЕТЕ
83
Решение должно удовлетворять условию, что параметры п и с бы¬
стро изменяются.
Родственной проблемой, для которой изложенная здесь линей¬
ная теория не подходит, является проблема расчета траекторий с
большими управляемыми поворотами во время разгона снаряда
после пуска. Но для этого случая вращение обычно не допускается,
и прямое численное интегрирование дает удовлетворительный ре¬
зультат.
3—15. ЗАКЛЮЧЕНИЕ
В данной главе была сделана попытка изложить общие поло¬
жения и характер основных задач, стоящих при проектировании
реактивных снарядов, в довольно широкой области вопросов устой¬
чивости и управления снарядов. Для достижения наилучших ре¬
зультатов на практике следует использовать все аспекты аэроди¬
намической науки и техники. Ясно, что очень важным вкладом
в эффективность оружия является надежность, и аэродинамик на¬
правляет главное усилие на достижение этого качества путем обес¬
печения надежных характеристик электрического и механического
оборудования при минимальной его сложности. Возможно, что это
есть наиболее ценный вклад, который должен сделать аэродинамик.
6»
ГЛАВА 4
РАКЕТНЫЙ ДВИГАТЕЛЬ
М. к. Биб
4—1. ВВЕДЕНИЕ
4—1.1. История
Время открытия принципа работы ракетного двигателя затеря¬
лось в глубокой древности. Хотя пороховые ракеты в качестве дви¬
гателей применялись на примитивных снарядах в течение послед¬
них шести — семи столетий, серьезное внимание со стороны мате¬
матиков и других ученых на применение ракетных двигателей в
больших высотных летательных аппаратах было обращено только
в начале двадцатого века.
Интересно отметить, что в большинстве первых солидных ра¬
бот, выполненных такими учеными, как Константин Циолковский
в России, Германн Оберт в Германии и Робер Эсно-Пельтри во
Франции, ракетный двигатель рассматривался как средство осу¬
ществления межпланетного полета. Проведенные в то же время
доктором Робертом Годдардом исследования преследовали более
скромные цели; его работы подкреплялись положительными
результатами многих экспериментов. Работы доктора Годдарда
явились большим вкладом в фундамент современной ракетной
науки.
4—1.2. Характеристики ракетного двигателя
В принципе ракетный двигатель представляет собой одну из
самых простых форм теплового двигателя. Он состоит в основном
из камеры сгорания, в которой при высоком давлении быстро
сжигается большое количество топлива, и сопла, через которое об¬
разующиеся газы выбрасываются назад с очень высокой скоростью
с целью получения реактивной движущей силы.
Ракетный двигатель является единственным в своем роде среди
тепловых двигателей с точки зрения некоторых важных характе¬
ристик. Прежде всего следует отметить, что топливо ракетного дви¬
РАКЕТНЫЙ ДВИГАТЕЛЬ
85
гателя содержит как горючее, так и окислитель для его сгорания.
Следствием этого являются два- весьма важных обстоятельства.
Во-первых, характеристики ракеты почти не зависят от окружаю¬
щего атмосферного давления и фактически даже несколько улуч¬
шаются при увеличении высоты, в то время как тяга воздушно-
реактивных двигателей неизбежно снижается, достигая нуля
на предельных высотах. Ракетный двигатель поэтому превосхо¬
дит другие двигатели в области больших скоростей и высот по¬
лета в пределах земной атмосферы и является также единствен¬
ной известной двигательной установкой, способной приводить в
движение летательный аппарат за пределами земной атмосферы.
Ракету можно также использовать в качестве ускорителя для на¬
чального разгона снаряда до скорости полета, обеспечивающей
удовлетворительные характеристики воздушно-реактивных двига¬
телей.
Ракетная тяга не зависит от скорости полета, и эффективная
мощность ракетного двигателя поэтому прямо пропорциональна
скорости полета. Отсутствие воздухоподводящих каналов и машин
для подачи воздуха, как компрессоры, поршни, цилиндры, дает
ракетному двигателю еще одно преимущество: по сравнению со
всеми другими двигательными установками ракетный двигатель
можно спроектировать обычно с минимальной фронтальной поверх¬
ностью и с минимальным лобовым сопротивлением, весом и объе¬
мом на единицу развиваемой тяги.
С другой стороны, ракетный двигатель имеет серьезные органи¬
чески присущие ему недостатки. Наличие окислителя в топливе
приводит к относительно огромному расходу топлива на еди¬
ницу тяги. Это обстоятельство во многих случаях серьезно огра¬
ничивает целесообразность применения ракетного двигателя вслед¬
ствие чрезвычайно большого веса топлива, необходимого даже для
самого кратковременного полета. Отсюда не следует, что ракет¬
ному двигателю вообще присущ низкий термический к. п. д., как
это иногда утверждают. Это просто означает, что использование
уникальных преимуществ, вытекающих из независимости процесса
горения топлива в ракетных двигателях от внешней среды, сопря¬
жено с необходимостью транспортирования и ускорения, наряду с
горючим, также большого количества окислителя. Так как вес
окислителя обычно в несколько раз больше веса горючего, этот
минус очень велик. К сожалению, данный недостаток является
неотъемлемым свойством принципа работы ракетного двигателя
и вряд ли будет в значительной степени смягчен вероятными до¬
стижениями в области химии топлив и технологии ракетных дви¬
гателей.
Как будет более подробно показано ниже, термический к. п. д.
ракетного двигателя вполне сопоставим с термическими к. п. д.
других тепловых двигателей. Хотя полный к. п. д. ракетных двига¬
86
ГЛАВА 4
телей весьма сильно зависит от скорости полета снаряда, он мо¬
жет при благоприятных условиях превосходить полный к. п. д. дру¬
гих тепловых двигателей. .
Как очевидно из указанного выше, ракетные двигатели наибо¬
лее целесообразны в тех случаях применения, когда требуется
большая тяга в течение краткого периода времени. Ракетные дви¬
гатели уже применяются в ряде специальных случаев в качестве
авиационных двигателей, в том числе:
1. Основной маршевый двигатель обладающего весьма высо¬
кими летными характеристиками истребителя-перехватчика не¬
большого радиуса действия;
2. Двигатель-ускоритель для форсирования летных качеств са¬
молета или для работы в чрезвычайных условиях, когда необхо¬
дима очень высокая тяга в течение коротких периодов времени;
3. Стартовая ракета для облегчения взлета многих типов са¬
молетов.
Помимо этого, по-видимому, нет принципиальных препятствий
к тому, чтобы транспортный самолет, снабженный ракетными дви¬
гателями, смог в конечном итоге, следуя по полубаллистической
траектории, пересечь американский континент в течение одного
часа. И все же ракетный двигатель играет доминирующую роль
только как силовая установка управляемых и неуправляемых ле¬
тающих снарядов всех типов. Вероятно, в ближайшем будущем
немного будет таких снарядов, на которых не будет применяться
ракетный двигатель либо как основная маршевая силовая уста¬
новка, либо как ускоритель для создания необходимой взлетной
тяги при использовании ПВРД.
4—1.3. Основная терминология
Ракетные двигатели для управляемых снарядов обычно класси¬
фицируются в зависимости от того, работают ли они на твердом
или на жидком топливе. Их можно также классифицировать в за¬
висимости от назначения, т. е. служат ли они в качестве ускорите¬
лей для получения начального разгона снаряда или в качестве
маршевых двигателей для сохранения заданной скорости. Один и
тот же двигатель может, конечно, проектироваться для выполне¬
ния обеих этих функций, хотя обычно это не делается.
В ракетном двигателе твердого топлива (РДТТ) горючее и
окислитель, необходимый для его сгорания, а также различные
отверждающие, стабилизирующие и катализирующие агенты сме¬
шиваются вместе. Твердое топливо обычно может быть отлито,
запрессовано или иным способом сформовано в твердый топлив¬
ный заряд или шашку точной геометрической формы внутри ка¬
меры сгорания. На рис. 35 дан эскиз типичного двигателя твер¬
дого топлива с топливной шашкой внутреннего горения.
ракетный двигатель
87
В жидкостных ракетных двигателях (ЖРД) могут быть ис¬
пользованы двухкомпонентные или однокомпонентные топлива.
В двухкомпонентной системе горючее, как керосин или спирт, и
окислитель, как жидкий кислород или азотная кислота, находятся
на летательном аппарате в отдельных баках. Из этих баков они
подаются в камеру сгорания с помощью насосов или путем вы¬
теснения их из баков поступающим туда под давлением инертным
газом. На рис. 36 показаны схематически основные элементы
ЖРД, работающего на двухкомпонентном топливе.
Рис. 35. Типичный двигатель твердого топлива с бронированным литым
зарядом внутреннего горения:
1. Камера сгорания, 2. Сопло, 3. Топливная шашка, 4. Ингибитор (бронирующее,
покрытие), 5. Входная часть сопла, 6. Горловина сопла, 7. Выход (срез) сопла
Рис. 36. Основные элементы двухкомпонентной системы
жидкостного ракетного двигателя:
1. Топливные баки, 2. Топливные насосы, 3. Ракетный двигатель,
4. Горючее, 5. Окислитель, 6. Вспомогательное топливо, 7, Тур¬
бина ТНА, 8. Распылительная головка, 9. Камера сгорания,
10. Охлаждающая рубашка, 11. Сопло
Однокомпонентное ракетное топливо, как показывает само на¬
звание, представляет жидкость, содержащую в себе и горю¬
чее, и окислитель. Его применение значительно упрощает систему
подачи топлива, сводя к минимуму количество необходимых трубо¬
проводов, насосов и баков. Однокомпонентное ракетное топливо
должно быть стабильно при нормальных давлениях и температурах,
и в то же время должно быстро разлагаться под воздействием
тепла и давления или же в присутствии катализатора. В этом от¬
ношении жидкое однокомпонентное ракетное топливо вполне ана¬
логично твердому топливу.
88
ГЛАВА 4
Классификация, применяемая в отношении твердых топлив,
связана в основном с особенностями работы двигателя и типом
используемого топлива. Поэтому классификация двигателей твер¬
дого топлива будет дана в том разделе, в котором рассматрива¬
ются характеристики этих двигателей.
4—1.4. Основные параметры
Общие характеристики ракетного двигателя выражаются не¬
сколькими простыми параметрами, которые будут определены
здесь, а более подробно рассматриваются ниже.
Полный импульс, выражаемый в кг/сек, есть интеграл тяги по
всему времени работы двигателя.
Удельный импульс, выражаемый в кгсек/кг (или кг/(кг/сек),
есть отношение тяги в кг к расходу топлива в кг за секунду.
Удельный импульс можно рассматривать либо как количество
кг • сек импульса, создаваемого одним кг топлива, либо как коли¬
чество кг тяги, создаваемое при расходе 1 кг топлива в секунду.
Общий удельный импульс есть отношение полного импульса
в кг ■ сек к общему весу силовой установки и топлива в кг. Выра¬
жается он в кг • сек/кг.
4—2. ОСНОВНЫЕ ПРИНЦИПЫ
4—2.1. Объем рассмотрения
Хотя еще многое предстоит сделать в области практической
разработки ракетных двигательных установок, основные принципы
ракетной техники, за исключением, возможно, некоторых явлений
процесса горения, достаточно ясны. Эти принципы затрагивают
многие области физики и химии, и в рамках данной книги можно
дать лишь краткое изложение основных положений. Эти принципы,
применимые как к жидкостным ракетным двигателям, так и к
ракетным двигателям твердого топлива, рассматриваются здесь в
следующих четырех основных направлениях.
1. Вывод основного уравнения ракетной тяги, включающего
скорость истечения продуктов сгорания, расход топлива и влияние
атмосферного давления.
2. Рассмотрение внутренней баллистики ракеты, включающей
процессы горения и течения газа внутри камеры двигателя. Сюда
относится вывод выражений для скорости истечения и расхода
топлива, входящих в уравнение тяги, и анализ влияния различных
рабочих условий на величину скорости истечения.
3. Повторное рассмотрение уравнения тяги для определения
эффективной скорости истечения и коэффициента тяги и для опре¬
деления влияния условий работы на величину тяги.
РАКЕТНЫЙ ДВИГАТЕЛЬ
89
4. Анализ коэффициентов полезного действия и энергетических
соотношений двигателя. Сюда входит рассмотрение зависимостей
между явлениями внутренней баллистики двигателя и скоростью
полета снаряда, оказывающей основное влияние на полноту ис¬
пользования располагаемой энергии топлива.
4—2.2. Тяга и принцип количества движения
Как и для других реактивных двигателей, характер образова¬
ния тяги ракетного двигателя можно показать с помощью исполь¬
зования теоремы о количестве движения. Соотношение между си¬
лами давления газов, действующими на стенки ракетного двига¬
теля, и силой, создаваемой изменением количества движения про¬
дуктов сгорания, вытекающих через реактивное сопло, можно ис¬
пользовать для вывода основного уравнения ракетной тяги
следующим образом.
На рис. 37 показана схема ракетного двигателя, работающего
при постоянном внутреннем и внешнем давлении. Силы аэродина¬
мического сопротивления, возникающие за счет скорости снаряда,
не учитываются в данном анализе, который одинаково применим
к двигателю, работающему как в полете, так и на испытательном
стенде. Чистая сила или тяга Е, передаваемая двигателем сна¬
ряду, должна равняться сумме внутренних и внешних сил давле¬
ния газов, действующих на стенки двигателя, то есть
/=•=У + у/?0 (1)
где рг — внутреннее давление газов;
р0 — атмосферное давление;
А1 и Ао — соответственно внутренняя и наружная поверхности, на
которые действуют указанные давления.
Первый интеграл уравнения (1) можно пояснить, рассматривая
силы, действующие на внутреннюю контрольную поверхность,
ограниченную стенками двигателя, как показано затенением на
рис. 37,6. Если силы, действующие в направлении вектора тяги,
принять положительными, то эта поверхность подвержена дейст¬
вию двух сил, направленных вдоль оси симметрии. Этими силами
будут: — Г Рг(1А{ и реАе, где ре и Ае — соответственно давление и
площадь сопла в выходном сечении. Далее будет показано, что ре
и ро не обязательно равны друг другу. Согласно теореме о количе¬
стве движения, скорость изменения количества движения в выход¬
ном сечении сопла должна равняться интегралу всех сил, дейст¬
вующих на контрольную поверхность. Поэтому
— ^р^ + реАе = — тъе, (2)
где т—массовый расход газа, а Vе — средняя скорость реактив¬
ной струи на срезе сопла, параллельная оси симметрии.
ЙО
ГЛАВА 4
Второй интеграл уравнения (1), определяющий влияние атмо¬
сферного давления на тягу двигателя, можно пояснить, рассматри¬
вая баланс внешних сил, действующих на двигатель, когда он не
работает и если бы выходное сечение сопла было закрыто крыш¬
кой, как показано на рис. 37, а. В этих условиях силы внешнего
давления можно рассматривать разделенными на две части, а
именно:
1. Сила, создаваемая атмосферным давлением на крышку
сопла.
2. Интеграл сил внешнего давления, действующих на всю
внешнюю поверхность, за исключением крышки сопла. Так как эти
внешние силы находятся в равновесии, то
а4 = —(3)
Подстановкой уравнений (2) и (3) в уравнение (1) получаем
основное уравнение тяги
Р = тъе + (ре — р0) Ае. (4)
Уравнение (4) показывает, что тяга является суммой двух'
членов.
1. Скоростная составляющая, или кинетическая тяга Рт = тве,
создается изменением количества движения газа, вытекающего че¬
рез сопло. Эта величина является основной составляющей тяги, и
выражение тое ясно показывает необходимость высокой скорости
истечения продуктов сгорания, если тягу надо получить при мини¬
мальном расходе топлива.
Рис. 37. Силы давления, действующие на ракетный дви¬
гатель
ракетный двигатель
91
2. Статическая составляющая тяги Рр = (ре — ро) Ае полу¬
чается за счет сил давления у среза сопла. Эта составляющая
определяется атмосферным давлением р0 и геометрией сопла, опре¬
деляющей ре. Статическая составляющая тяги может прибав¬
ляться к кинетической составляющей или вычитаться из нее в за¬
висимости от того, является ли разность (ре — р0) положительной
или отрицательной. Относительное влияние обеих составляющих
тяги будет рассмотрено в параграфе 10, где будет показано, что
максимальная тяга получается при ре=р0.
Уравнение (4) определяет характер зависимости тяги ракетного
двигателя от скорости истечения продуктов сгорания ое и массо¬
вого расхода топлива т. Оба эти фактора будут рассмотрены в
параграфах 7 и 8, после чего тяговые характеристики будут иссле¬
дованы подробнее.
4—2.3. Камера сгорания
Ракетное топливо обладает массой и легко выделяющейся хи¬
мической энергией. Уравнение (4) показывает, что масса топлива,
так же как и его энергия, является основным фактором образо¬
вания тяги. Короче говоря, скорость изменения количества движе¬
ния, выражаемая тае, определяется массой топлива т, выбрасы¬
ваемой из ракеты при расходе т со скоростью уе. Таким образом,
назначение камеры сгорания, которая, по существу, представляет
собой генератор газа, заключается в том, чтобы подготовить массу
топлива для выбрасывания при наивысшей возможной скорости пу¬
тем преобразования ее из твердого или жидкого состояния в газо¬
образное при максимальной практически допустимой температуре.
В жидкостном ракетном двигателе в камере сгорания имеются
форсунки, через которые топливные компоненты впрыскиваются в
камеру с высокой скоростью. В этом случае функцией камеры сго¬
рания является обеспечение впрыскивания, распыления, нагрева¬
ния, испарения и реакции компонентов топлива до истечения вы¬
хлопных газов через сопло. Если используются двухкомпонентные
ракетные топлива, смешение или по крайней мере перемешива¬
ние капель горючего и окислителя является важной функцией ка¬
меры сгорания. На рис. 38 показана типичная камера сгорания.
В этом примере регенеративное охлаждение камеры осущест¬
вляется при прохождении горючего через наружную охлаждаю¬
щую рубашку перед впрыскиванием горючего в камеру сгорания.
В ракетных двигателях твердого топлива предварительно смешан¬
ное топливо, содержащее как окислитель, так и горючее, поме¬
щается непосредственно внутри камеры сгорания. Форма топлив¬
ного заряда диктуется главным образом соображениями внутрен¬
ней баллистики и теплопередачи.
92
ГЛАВА 4
В отличие от процесса истечения газа через сопло Лаваля, тео¬
рия которого вполне разработана, теория горения топлива в теп¬
ловых двигателях еще недостаточно развита. Чрезвычайно слож¬
ные зависимости между физическими и химическими процессами
впрыскивания, нагревания, испарения и горения компонентов топ¬
лива ставят непреодолимые трудности строгому математическому
анализу. Хотя проектирование камеры сгорания является в ка¬
кой-то степени эмпирическим делом, это не помешало разработать
камеры с небольшим весом, обладающие высокими характери¬
стиками.
Рис. 38. Камера сгорания жидкостного ракетного двигателя:
4. Окислитель, 2. Распылительная головка, 3. Охлаждающая рубашка,
4. Горючее
Эффективное преобразование химической энергии в кинетиче¬
скую энергию реактивной струи подразумевает высокую степень
завершения процесса сгорания до того, как выхлопные газы рас¬
ширяются, вытекая через сопло. Однако, как указывается в пара¬
графе 4, полнота сгорания углеродных горючих ограничена фунда¬
ментальными свойствами продуктов сгорания при высоких темпе¬
ратурах. Поэтому усилия проектировщиков направляются не
столько на получение наиболее полного сгорания, сколько на до¬
стижение предельной полноты сгорания, определяемой основными
химическими соображениями, в камере минимального объема и
веса. Самое трудное препятствие на пути получения легкой камеры
заключается в огромном количестве тепла, отдаваемого за единицу
времени в стенки камеры, которое может превышать в 8 и более
раз соответствующую величину в промышленных топках, имею¬
щих высокие характеристики. В типичном ракетном двигателе с
тягой 2500 кг, работающем на топливной смеси с теплотой сгора¬
ния ПО ккал]кг и температурой горения ~3000° К, полное выделе¬
ние тепла может достигать 750 000 ккал/мин в камере сгорания
объемом менее 30 куб. дм. Проектирование хороших камер сгора¬
ния в таких условиях стало возможным благодаря продуманным
ракетный двигатель
93
методам охлаждения стенок камеры и благодаря тому, что только
3—4% всей теплоты сгорания передается стенкам камеры. Осталь¬
ное тепло преобразуется в полезную кинетическую энергию или
рассеивается как тепло реактивной струи.
Основная часть реакции горения происходит в газообразной, а
не в твердой или жидкой фазе. Для завершения процессов нагрева,
испарения, смешения и сгорания, прежде чем газ достигнет входа
в сопло, требуется определенное время. Это время является основ¬
ным фактором, определяющим размеры камеры. Вследствие того
что оно изменяется в зависимости от типа топлива, давления в ка¬
мере и эффективности системы впрыска, различные методы, раз¬
работанные для проектирования камер сгорания, сильно зависят
от эмпирических факторов.
4—2.4. Реактивное сопло и скорость истечения
В ракетном двигателе почти всегда используется сопло Лаваля,
или сужающееся — расширяющееся сопло, в котором газы, посту¬
пающие под высоким давлением из камеры сгорания, расширяются
и образуют реактивную струю, обладающую высокой скоростью.
Значение и относительная про¬
стота ракетного сопла становятся
очевидными, если осознать тот
факт, что это сопло выполняет
ту же функцию в ракетном двига¬
теле, которую в поршневом авиа¬
ционном двигателе выполняют
поршни, кривошипно-шатунный
механизм, клапаны и воздушный
винт. Эта функция заключается
в том, чтобы преобразовать теп¬
ловую энергию топлива в движу¬
щую тягу с минимумом потерь
преобразования. Самым важным
показателем реактивного сопла
является его способность преоб¬
разовывать тепловую энергию в кинетическую энергию при наи¬
высшей возможной скорости истечения газа. Важность получения
весьма высокой скорости истечения станет очевидной из последую¬
щего рассмотрения характеристик ракетного двигателя.
Можно показать, что, когда отношение давления в камере
сгорания к давлению окружающего воздуха рс/р0 возрастает сверх
некоторого минимального значения, определяемого как критиче¬
ское отношение давлений р*, скорость газа в горловине сопла
будет достигать и оставаться равной скорости звука, соответствую¬
щей состоянию газа в этом сечении. Это справедливо, независимо
от того, имеется ’ли расширяющаяся часть сопла, показанная на
Рис. 39. Сопло Лаваля:
1. Сужающаяся часть, 2. Расширяющая¬
ся часть, 3. Вход, 4. Критическое сечение,
5. Выход
94
ГЛАВА 4
рис. 39, или ее нет. Таким образом, поскольку у всех ракетных
двигателей, используемых на снарядах рс/Ро>Р*, простое сужаю¬
щееся сопло без расширяющегося конуса было бы достаточным
для образования реактивной струи, если бы не требовалось повы¬
сить скорость истечения продуктов сгорания до величины, значи¬
тельно большей скорости звука, получаемой в горловине сопла.
Но такое увеличение скорости имеет весьма важное значение и до¬
стигается при добавлении расширяющейся части к соплу. Количе¬
ственное влияние расширяющегося сопла станет ясным далее при
рассмотрении ракетной тяги. Однако физический характер про¬
цесса увеличения скорости истечения газа в сопле Лаваля можно
понять из следующих упрощенных молекулярно-кинетических со¬
ображений.
Движение молекул через сопло можно представить в любой мо¬
мент времени как сочетание средней скорости, направленной более
или менее вдоль сопла, и беспорядочных хаотических флюктуаций
скорости во всех направлениях около указанной средней скоро¬
сти, характеризующих тепловую энергию молекул. Когда поток
проходит через сужающуюся часть сопла, средняя скорость должна
увеличиваться, для того чтобы сохранить массовый расход посто¬
янным. Это увеличение средней скорости получается за счет скоро¬
стей беспорядочного движения молекул или тепловой энергии.
Уменьшение этих скоростей, наряду с тем, что молекулы отдаля¬
ются в среднем друг от друга несколько больше по мере их уско¬
рения, проявляется как падение давления. Когда достигается гор¬
ловина сопла, средняя скорость молекул приближается к величине
того же порядка, что и среднее значение скорости беспорядочных
флюктуаций.
За горловиной сопла уменьшение плотности (количества моле¬
кул в единице объема) происходит быстрее возрастания средней
скорости. При стационарном течении газа это означает, что сопло
должно расширяться, для того чтобы обеспечить постоянный мас¬
совый расход газа. Увеличивающаяся средняя скорость продол¬
жает влиять на тепловую энергию или энергию беспорядочных ско¬
ростей молекул так, что температура продолжает падать.
То обстоятельство, что средняя молекулярная скорость стано¬
вится больше среднего значения скоростей беспорядочных движе¬
ний молекул, означает, что возмущение не может распространиться
против потока в этой части сопла; поэтому падение давления на
выходе из сопла не может влиять на условия течения в горло¬
вине.
Самыми важными параметрами работы ракетного сопла яв¬
ляются скорость истечения Vе и массовый расход газа т. Мы рас¬
смотрим здесь выражения для этих переменных, прежде чем вер¬
нуться к более подробному рассмотрению уравнения тяги.
Ракетный двигатель
95
На основании закона сохранения энергии можно показать, что,
если пренебречь потерями тепла, увеличение кинетической энер¬
гии газа при расширении его между входным и выходным сече¬
ниями сопла равно уменьшению его энтальпии между этими же
сечениями; таким образом ',
2 2
V V
= = (б)
Используя уравнение состояния
~ = (6)
и изэнтропическое отношение между давлением, температурой и
плотностью
(?)
/?2 \ Т2 / \ р2 /
уравнение (5) можно решить относительно скорости истечения
■ ДНТ
1 — (—) т • (8)
7 — 1 М \ Ре / '
Скорость цс в уравнении (5) обычно мала по сравнению с и ею
в уравнении (8) пренебрегают. Далее, уравнение (8) основывается
на предположении, что течение газа — изэнтропическое и одномер¬
ное и что газ подчиняется законам идеального газа. Эти допу¬
щения дают достаточную для инженерных расчетов точность.
Детальный анализ переменных ре, рс, Тс, у и М в уравнении (8)
позволяет в значительной степени понять основные принципы ра¬
боты и предельные возможности ракетного двигателя. Первые две
из этих переменных в определенных узких пределах могут уста¬
навливаться конструктором. Последние три становятся в значи¬
тельной степени фиксированными, как только выбран тип топлива.
Член [1—(Ре/Ре)(1~}) т]> часто называемый идеальным термодинами¬
ческим к. п. д., дает количественное выражение влияния отноше¬
ния давления в сопле ре1рс (степени расширения) и показателя
адиабаты у на ое. На рис. 40 показано влияние этих факторов на
идеальный термодинамический к. п. д. Когда давление на срезе
сопла приближается к нулю, тр стремится к единице. Таким обра¬
зом, если бы можно было осуществить расширение до полного
вакуума так, чтобы тр=1, то полное преобразование тепловой
энергии топлива в кинетическую энергию создало бы максималь¬
ную скорость истечения, достижимую при использовании данного
1 Перечень обозначений дан в конце главы.
96
ГЛАВА 4
гис. 40. Влияние степени расширения рс/ре и показателя адиабаты 7
на идеальный термический к. п. д. гц
Рис, 41. Влияние степени расширения и показателя адиабаты на идеальную
скорость истечения
РАКЕТНЫЙ ДВИГАТЕЛЬ
97
Топлива. Следует, однако, заметить, что даже на двигателе, пред¬
назначенном для работы в вакууме, нельзя получить это идеаль¬
ное условие, так как расширение газа до нулевого противодавле¬
ния потребовало бы бесконечно большой площади выходного се¬
чения сопла.
Рис. 40 и 41 показывают, что тц возрастает при возрастании у.
Но для получения высокой скорости истечения желательны низ¬
кие значения у. Однако пределы изменения у для практически
Рис. 42. Влияние давления и температуры в камере на идеальную ско¬
рость истечения (7 и Л1 приняты постоянными)
применяемых ракетных топлив довольно узки, и поэтому вели¬
чина у является второстепенным фактором с точки зрения возмож¬
ности улучшения характеристик ракетного двигателя.
Хотя повышение давления в камере, как показано на рис. 42,
дает значительное увеличение скорости истечения, у этого способа
получения высоких характеристик имеется много практических
ограничений. При повышении давления в камере жидкостного ра¬
кетного двигателя вес камеры сгорания, топливных насосов, кла¬
панов и трубопроводов быстро возрастает. Для каждой конструк¬
ции двигателя обычно существует оптимальное давление в камере,
превышение (или уменьшение) которого приводит к уменьшению
общего удельного импульса. Равным образом, так как повышение
давления в камере связано с более высокой температурой внутри
камеры, отсутствие возможности охладить камеру сгорания и
сопло является еще одним ограничением на пути повышения дав¬
ления в камере. В двигателях твердого топлива увеличение ско¬
рости истечения продуктов сгорания, получающееся в результате
7-405
98
ГЛАВА 4
более высокого давления в камере сгорания, обычно более чем пе¬
рекрывается приращением веса, связанным с необходимостью
обеспечения прочности камеры. Таким образом, относительно низ¬
кие давления в камере сгорания способствуют получению высокого
общего удельного импульса.
Давление в камерах сгорания большинства современных ЖРД
составляет 20—40 кг/см2, и, по-видимому, нельзя ожидать серьез¬
ного улучшения характеристик при дальнейшем увеличении дав¬
ления. В двигателях твердого топлива, по причинам, приведенным
Рис. 43. Влияние ТС!М на идеальную скорость истечения
в параграфе 17, диапазон практически применяемых давлений
в камере сгорания гораздо шире, чем в ЖРД, и составляет при¬
мерно 14—140 кг/см2.
Отношение Тс/М в уравнении (8) дает больше возможностей
для улучшения характеристик, чем степень расширения. Но и
в этом направлении жесткие практические ограничения затруд¬
няют получение очень высокой скорости истечения. На рис. 43, по¬
казывающем влияние отношения Тс/М на скорость истечения,
видно, что топлива, которые создают наивысшую температуру
в камере сгорания и продукты сгорания которых имеют минималь¬
ный средний молекулярный вес, являются наилучшими. Уже ука¬
зывалось выше, что трудность охлаждения двигателя составляет
одно из практических ограничений, накладываемых на повышение
температуры в камере сгорания. Это показал опыт немецкого
снаряда Фау-2, в котором топливными компонентами были жидкий
кислород и смесь 75% этилового спирта с 25% воды. Добавление
воды снизило температуру горения лишь в небольшой степени. Но
РАКЕТНЫЙ ДВИГАТЕЛЬ
99
оно помогло решению проблемы охлаждения двигателя другим
путем, а именно — повышением охлаждающей способности горю¬
чего, которое пропускалось через охлаждающую рубашку двига¬
теля перед подачей в камеру сгорания. Это усиление эффекта
охлаждения объяснялось повышением точки кипения и удельной
теплоемкости, создаваемым разбавлением спирта водой.
Более принципиальное ограничение повышения температур
горения связано с явлением диссоциации продуктов сгорания.
В процессах сгорания, заключающихся в окислении углеводород¬
ных горючих при нормальных давлениях в камере, продукты сго¬
рания при температурах ниже 1700—2000° С состоят в основном
из СО2 и Н2О. Когда температура поднимается выше указанного
уровня, прогрессивно возрастающее количество молекул СО2 и
Н2О диссоциирует в более простые молекулы СО, Н2 и О2, а при
еще более высоких температурах — в одноатомные продукты. След¬
ствием увеличения давления в камере является уменьшение сте¬
пени диссоциации, но этот эффект незначителен по сравнению
с противоположным эффектом повышения температуры. В резуль¬
тате диссоциации, которая поглощает часть тепла реакции, не вся
тепловая энергия горючего становится доступна для преобразова¬
ния в кинетическую энергию. При температурах порядка 2500—
2800°С потери в скорости истечения могут составить примерно 10%.
При еще больших температурах интенсивность поглощения энергии
на диссоциацию возрастает, что ограничивает максимальную тем¬
пературу горения величйной приблизительно 3000° С для углеводо¬
родных горючих, выделяющих тепло в процессе окисления. Тем¬
пературы горения порядка 2500° С — 3000° С уже применяются,
и кажется маловероятным дальнейшее заметное их повышение.
Этот вывод потребуется пересмотреть, если будут найдены методы
практического использования некоторых высококалорийных топ¬
ливных систем, как фтор-водород или фтор-гидразин. Эти сочета¬
ния могут дать гораздо более высокие температуры и скорости
истечения по сравнению с обычными углеродными горючими. Но
применение подобных более высококалорийных топлив требует
решения ряда трудных практических задач, что делает их исполь¬
зование весьма проблематичным.
Уравнение (8) показывает, что V прямо пропорционально 1/2И.
Физический смысл того, что низкие значения М увеличивают ае,
можно уяснить из молекулярной теории. Зейферт, Милле и Сам¬
мерфилд показывают это, рассматривая работу двух ракетных
двигателей при одном и том же давлении и температуре в камере
и истечении в вакуум. Один двигатель содержит идеальные моле¬
кулы с массой М, а другой — молекулы с массой 100 М. Принцип
равномерного распределения энергии требует, чтобы средняя кине¬
тическая энергия молекул обоих газов была равна, т. е. '/2 Мо2 =
«'/2(100 М) (у/10)2. Среднее количество движения легких и тяже-
7*
100
ГЛАВА 4
лых молекул будет и 100 М(ц/10) = 10 Мо соответственно. Так
как массовый расход один и тот же, то на каждую тяжелую моле¬
кулу будут выбрасываться 100 легких молекул, так что полное
изменение количества движения,а следовательно и тяга, создавае¬
мые легкими молекулами, будут превышать соответствующие па¬
раметры для более тяжелых молекул в 10 раз. При одном и том
же массовом расходе это приведет к отношению скоростей истече¬
ния 10 : 1 в пользу легких молекул.
Значения М для большинства обычных топлив составляют от
примерно 17 (для жидкого кислорода и гидразина) до 25 (для
красной дымящей азотной кислоты и анилина). Значение М для
системы фтор-водород составляет 9, а для системы кислород-водо-
род — около 10. Эти два последних значения можно рассматри¬
вать скорее в качестве теоретического низшего предела из-за
серьезных ограничений, связанных с другими свойствами этих
топлив. Эти ограничения будут упомянуты в параграфе 4—3.1.
Итак, скорость истечения ограничивается главным образом
диссоциацией газов, температурными ограничениями конструк¬
ционных материалов и молекулярными весами продуктов сгора¬
ния. В настоящее время реализуются скорости истечения до-
2400 м/сек. Теоретическая величина скорости истечения для си¬
стемы Н2—О2, равная 3350 м/сек, по-видимому, представляет со¬
бой верхний предел для химических топлив.
4—2.5. Расход топлива
Второй важный параметр в уравнении тяги — массовый рас¬
ход т можно определить просто из условия неразрывности тече¬
ния, которое требует, чтобы расход газа в секунду через все се¬
чения сопла оставался постоянным. Это можно выразить так:
= = (9)
где р( и — плотность и скорость газа в критическом сечении
сопла, а А( — площадь критического сечения сопла. Можно пока¬
зать, что скорость звука в горловине сопла
= = (10)
и плотность в критическом сечении сопла
(11)
С помощью уравнения (6) уравнение (11) можно переписать
так:
ракетный двигатель
101
Подстановкой выражений из уравнений (10) и (12) в уравне¬
ние (9) находим, что массовый расход
= (13)
где
т+1
<14)
и
= (15)
4—2.6. Тяга и эффективная скорость истечения
Выражения идеальной скорости истечения и массового рас¬
хода определены уравнениями (8) и (13). Желательно теперь рас¬
смотреть влияние этих переменных на тягу, выраженную уравне¬
нием (4)
Л = + — р0) Ае.
Этому уравнению можно придать две другие формы, обе из кото¬
рых полезны для расчетов параметров и характеристик. Следует
вспомнить из параграфа 7, что ие есть идеальная скорость, выве¬
денная при допущении изэнтропического течения идеального газа.
Было принято также, что поток газа на срезе сопла направлен
аксиально, в то время как в действительности расширяющаяся
форма выходной части сопла создает небольшие радиальные со¬
ставляющие скорости, которые несколько уменьшают тягу. Кроме
того, измерять и ре экспериментальным путем .непрактично.
Поэтому целесообразно изменить уравнение тяги так, чтобы оно
позволяло определять фактические характеристики двигателя и
чтобы входящие в это уравнение параметры можно было бы
удобно измерять.
В первой модификации уравнения (4) это выполняется путем
введения понятия эффективной "скорости истечения с, так что
р = тс = ^-с. (16)
Таким образом, если Р и т измеряются на испытательном
стенде, то можно определить действительное значение с. Из урав¬
нений (4) и (16) видно, что с можно вычислить с помощью сле¬
дующего выражения:
с = ш^+ (ре — ро)А-, (17)
т
102
ГЛАВА 4
если внести поправочный коэффициент
о> = Х5, (18)
учитывающий отличие идеальной скорости истечения ое в уравне¬
нии (8) от действительной скорости. 5 учитывает потери энергии
в реальном сопле, а X — радиальную составляющую скорости,
обусловленную расширяющейся формой сопла. Исходя из гео¬
метрии сопла, можно показать, что
Х = Ц-(1 + соза), (19)
где а — половина угла раствора выходного конуса сопла
(рис. 39). Потеря в скорости истечения из-за наличия радиаль¬
ных Составляющих незначительна и равна около 2% для а=15° и
3% для а = 20°. В хорошо спроектированном сопле с небольшим
углом конуса коэффициент ш может колебаться от 0,95 до 0,98.
Эффективная скорость истечения с равна фактической скоро¬
сти истечения только при ре = р0 и <о=1, как это видно из уравне¬
ний (17) и (18). Тем не менее с является чрезвычайно полезным
параметром, так как и т и Е можно измерить экспериментальным
путем, и, таким образом, с становится исходным критерием оценки
действительных характеристик двигателя. Для этого, однако,
уравнение (16) обычно переписывают так:
<20>
где /Уд — удельный импульс, определение которого дано в пара¬
графе 4—1.4. Уравнение (20) показывает, что удельный импульс и
эффективная скорость истечения эквивалентны и могут использо¬
ваться взаимозаменяемо с учетом переводного множителя §.
Так как удельный импульс является мерой тяги на единицу
расхода топлива, то обратная ему величина
71- = 1Г5 (21)
'уд
представляет собой удобное выражение удельного расхода топ¬
лива 117,. Эту величину можно измерять в кг!сек на кг тяги. Вели¬
чины И73 в реальных ракетных двигателях весьма внушительны.
Для типичного ЖРД с тягой 2500 кг и удельным импульсом
200 кг сек/кг удельный расход топлива составляет 18 кг/час на
кг тяги, а секундный расход топлива—12,5 кг/сек. Расход топ¬
лива на ракете Фау-2, имевшей ЖРД с тягой 25 400 кг, составлял
125,2 кг/сек. Эта величина примерно в 10 раз больше удельного
расхода топлива в сверхзвуковом ПВРД. Но делая сравнения
РАКЕТНЫЙ ДВИГАТЕЛЬ
103
подобного рода, следует еще раз подчеркнуть, что ракета несет
на себе свой собственный окислитель, получая за счет этого осо¬
бые преимущества, о которых упоминалось ранее.
4—2.7. Тяга и коэффициент тяги
Вторая полезная форма уравнения тяги получается при под¬
становке значений иеи тиз уравнений (8) и (13) в уравнение (4),
что для Х= 1 дает
У7 = Т'рсА( |/+ (ре — р0) Ае. (22)
Первый член правой части уравнения (22), представляющий
тягу, создаваемую за счет изменения количества движения, прямо
пропорционален давлению в камере и площади критического се¬
чения сопла. Это позволяет ввести понятие коэффициента тяги Ср,
определяемого выражением
> = (23)
где
Сл = Г' (24)
г 7 * рс /ц
Уравнение (23) показывает, что фактический коэффициент тяги
можно определить путем измерения тяги, давления в камере и
площади критического сечения сопла. Равным образом уравне¬
ние (24) позволяет вычислить теоретический коэффициент
тяги Сл , который зависит только от у и ре/Рс [если ре = Ро, так
что статическая составляющая тяги в уравнении (24) равна нулю].
Поскольку этот теоретический коэффициент тяги не учитывает по¬
терь энергии в реальном сопле, то необходимо отличать его от
действительной величины Ср, получаемой из уравнения (23).
Действительный коэффициент тяги обычно на 2—8% ниже теоре¬
тического значения.
Уравнение (23) объясняет специфическую для ракетных дви¬
гателей трудность дросселирования, т. е. получения тяги, меньшей
расчетного ее значения. Существенное понижение тяги можно осу¬
ществить, только изменяя давление в камере - и (или) площадь
критического сечения сопла. Управление последней едва ли прак¬
тически осуществимо при современном состоянии ракетной тех¬
ники из-за серьезного увеличения веса и сложности, присущих
соплу с регулируемой площадью критического сечения. Понижение
тяги с помощью уменьшения рс уменьшает степень расшире¬
ния рс/ре и приводит к уменьшению скорости истечения газа, что
видно из уравнения (4) и рисунка 41.
104
ГЛАВА 4
Уже указывалось (параграф 6), что тяга при конкретном соче¬
тании у и отношения давлений ре/рс достигает максимума при ре=
= р0, когда статическая составляющая тяги Рр обращается в нуль.
Но достижение этого идеального случая скорее является исклю¬
чением, а не правилом. Это объясняется тем, что изменения вы¬
соты полета или давления в камере и неизбежные компромиссные
решения при определении размеров сопла служат причиной нару¬
шения равенства между ре и р0. Поэтому следует рассмотреть
возможное уменьшение тяги из-за неравенства между ре и р0-
Цукроу показал конечное влияние на тягу параметров уе и р0,
когда последние изменяются вследствие изменения степени уши¬
рения (отношения площадей выходного и критического сечений)
сопла е = Ае/А(. Рис. 10 и последующие показывают это влияние.
Когда Ае и, следовательно, Ае/А{ возрастают из-за увеличения
длины расширяющейся части сопла, то давление на срезе сопла ре
падает, а скорость истечения ае возрастает из-за увеличения рас¬
ширения газов. Эти изменения не влияют на условия в камере
или в горловине сопла, так как скорость течения в выходном ко¬
нусе— сверхзвуковая, и изменения давления в нем не могут пе¬
редаваться против потока. При малых значениях степени уши¬
рения давления ре падает быстрее, чем возрастает Ае/А(, тем са¬
мым уменьшая статическую составляющую тяги Рр=Ае(ре—р0).
Но соответствующее этому увеличение ое таково, что кинетическая
составляющая тяги Рт возрастает быстрее, чем уменьшается Рр,
что приводит к увеличению чистой тяги Р. Когда отношение пло¬
щадей становится таким, что ре=ро, РР = 0 и Р достигает макси¬
мума. Дальнейшее увеличение степени уширения продолжает при¬
водить к увеличению ое и Рт. Но при этом Рр становится отрица¬
тельным и уменьшается быстрее, чем возрастает Рт. В результа¬
те тяга Р падает, если Ае/А/ продолжает возрастать.
Уравнение, определяющее зависимость между Ае/А{, ре/рс и 7,
можно получить, рассматривая условие неразрывности течения,
которое требует, чтобы рэАеае — р(А(цг. Отсюда находим
— = -А = . (25)
е Ае рм
Используя уравнения (8), (10) и (11) и изэнтропические соотно¬
шения, уравнение (25) можно представить так:
— 1 . / г
<26>
Уравнение (26) можно использовать для определения отноше¬
ния площадей е, необходимого для получения любого отношения
давлений ре1рс, если 7 для данного газа известна. Если отношение
РАКЕТНЫЙ ДВИГАТЕЛЬ
105
площадей Ае1А[ таково, что ре/рс = ро/рс, то говорят, что двигатель
работает при полном расширении газа или имеет оптимальное
уширение сопла. Если отношение площадей больше требуемого
для полного расширения, то газы покидают выходное сечение
сопла при давлении, меньшем р0, статическая составляющая
Рис. 44. Влияние отношения площадей 4в/Д| на
давление в выходном сечении сопла, идеальную
скорость истечения и тягу (при отсутствии отрыва
потока от стенок)
тяги Рр в уравнении тяги отрицательна; такое сопло называют
перерасширенным. Наоборот, сопло с отношением площадей, мень¬
шим требуемого по уравнению (26), для того чтобы сделать
Ре1Рс=Ро1Рс, является недорасширенны.м, и газы выходят из сопла
при давлении, превышающем р0.
Количественные влияния перерасширения и недорасширения
на тягу показаны на графике рис. 45, построенном по уравне¬
106
.ГЛАВА 4
ниям (24) и (26). Геометрическое место точек максимальных
коэффициентов тяги, показанное на графике пунктиром, дает зна¬
чения СР при условии ре=Ро Для любых значений рс/Ро- Эти мак¬
симумы определяются путем подстановки ре = Ро в уравнения (24)
и (26). Эта пунктирная кривая, таким образом, определяет усло¬
вия оптимального расширения. Область, лежащая выше ее, со¬
ответствует недорасширению, а ниже ее — перерасширению.
Рис. 46. Изменение коэффициента тяги в зависимости от отношения
площадей и степени расширения рс1ро
Выбор отношения площадей сопла для данного снаряда обычно
основывается на компромиссе между характеристиками, требуе¬
мыми от двигателя на различных высотах полета, и конструктив¬
ными и аэродинамическими соображениями. Как правило, стрем¬
ление достигнуть меньшего веса и малой длины сопла является
сильным побудительным мотивом в пользу допущения небольшого
недорасширения с сопутствующей ему незначительной потерей
в тяге.
Количественное значение повышения тяги, создаваемого расши¬
ряющейся частью сопла, можно видеть на рис. 45. Для типичного
двигателя твердого топлива, имеющего рс/ро=100, е= 12 и у=1,2,
Ср для оптимального расширения составляет 1,65. При тех же ус¬
ловиях, но без расширяющегося конуса сопла Ср будет состав¬
лять 1,24, что дает потерю в тяге, равную 25%.
РАКЕТНЫЙ ДВИГАТЕЛЬ
107
4—2.8. Характеристическая скорость истечения продуктов сгорания
При проектировании ракетных двигателей для оценки и сравне¬
ния характеристик топлив и камер сгорания как генератора газа
широко применяется еще один параметр. Этим параметром
является характеристическая скорость с *, которую можно полу¬
чить из уравнений (16) и (23) следующим образом:
с = -4 = -^4- = Сес\ (27)
т т
РсА<
где
с* = Мк (28)
т
и имеет размерность скорости. Из уравнения (28) очевидно, что с *
можно определить, измеряя значения рс, А(, т. Параметр с* вме¬
сте со значением СР из уравнения (24) и эмпирическим коэффи¬
циентом ш можно использовать для вычисления по уравнению (27)
эффективной скорости истечения.
Используя уравнение (13) и зная, что скорость звука в камере
равна ас=УзрДТ,., уравнение (28) можно переписать так:
= (29)
Уравнение (29), из которого можно вычислить теоретические зна¬
чения с *, показывает, что этот параметр зависит только от
свойств газов продуктов сгорания. Поэтому его можно применять
в качестве критерия оценки характеристик топлива, независимого
от степени эффективности сопла. Опытным путем было найдено,
что значения с*, вычисленные по уравнению (29), приблизительно
на 10% больше значений, полученных из измеренных величин
с помощью уравнения (28).
4—2.9. Коэффициенты полезного действия ракетного двигателя
Понятие к. п. д. не имеет особого значения для расчета харак*
теристик снарядов, снабженных ракетным двигателем. Удельный
импульс, общий удельный импульс и отношение масс ракеты
являются более практичными критериями оценки характеристик
двигателя. Но понятие к. п. д. все же обеспечивает в значительной
степени оценку эффективности использования ракетой располагае¬
мой энергии и влияния скорости полета на это использование.
ЮЗ
ГЛАВА 4
Имеется несколько определений к. п. д. ракетного двигателя, и
то или иное конкретное определение необходимо иметь в виду при
сравнении числовых значений. Понятие, рассматриваемое здесь,
предполагает к. п. д. снаряда, снабженного ракетным двигателем
в установившемся движении и летящего по горизонтальной траек¬
тории с тягой, равной лобовому сопротивлению, так что скорость
полета является постоянной величиной.
Принято рассматривать два к. п. д. ракетного двигателя,
а именно:
Термический коэффициент полезного действия тр, который ха¬
рактеризует эффективность преобразования энтальпии топлива в
кинетическую энергию реактивной струи.
Полетный или тяговый коэффициент полезного действия т]р, ко¬
торый характеризует эффективность преобразования кинетической
энергии реактивной струи в полезную работу перемещения сна¬
ряда.
Термический и тяговый к. п. д. можно объединить, получив
выражение полного к. п. д.
Рассматривая сначала термический к. п. д., можно переписать
уравнение (8) так, чтобы выразить идеальный термодинамический
к. п. д. тр как отношение кинетической энергии продуктов сгора¬
ния к энтальпии топлива:
21 Е!
= <»»
(7-1)
где 'и2е/2§ — кинетическая энергия, а [у/(т—1)]/?7с— энтальпия.
Уравнение (30) показывает, что максимальному преобразованию
энтальпии в кинетическую энергию соответствует ре=0, так
что т]г=1. Если бы в двигателе не было потерь тепла и энергии,
действительный термический к. п. д. равнялся бы идеаль¬
ному к. п. д., т. е.
П/шах^7!^ = 1~~ СЙ~) • (31)
7-1
Однако, как показывает рис. 40, идеальные термические к. п. д. для
любой практически осуществимой степени расширения не превы¬
шают 0,60. Сверх того, некоторые потери энергии в двигателе
уменьшают действительный термический к. п. д. тц до значений
существенно меньших идеальных величин, получаемых с помощью
уравнений (30) и (31). В камере эти потери являются следствием
теплоотдачи в стенки и неполного сгорания. Потери в сопле про¬
исходят из-за теплоотдачи, трения и турбулентности. Равным об¬
РАКЕТНЫЙ ДВИГАТЕЛЬ
109
разом, свойства газов значительно отклоняются от требований
законов идеального газа. Действительный термический к. п. д.,
равный 0,5, можно считать хорошим.
Полетный к. п. д. при условии постоянства тяги и скорости по¬
лета снаряда можно выразить так:
полезная работа/сек <79'1
полезная работа/сел + потери кинетической энергии в струе/сел ’ ' '
что согласно уравнению (16) дает
— сУ
= [ ^(с-1/у I = ’ (33)
ё С + [ I
где г=У/с. Второй член в знаменателе уравнения (33) является
следствием неравенства скорости струи с (относительно снаряда)
и скорости полета снаряда У. Таким образом, по отношению к не¬
подвижному наблюдателю (с Земли) (с—У) есть скорость,
а (с—У)2/2&— кинетическая энергия выбрасываемых газов, не
участвующая в создании тяги. Если скорость снаряда равна ско¬
рости истечения, то есть У=С, полетный к. п. д. по уравнению (33)
составляет 100%. Но когда скорость полета становится больше
или меньше скорости истечения, полетный к. п. д. быстро падает.
Например, при скорости снаряда 540 м/сек и скорости истечения
1800 м/сек, дающих г=0,3, полетный к. п. д. составляет 55%. Если
скорость полета уменьшается до 180 м/сек, так что г=0,1, полет¬
ный к. п. д. равен 20%. Требование близости скорости полета
к скорости истечения для получения высокого полетного к. п. д.
является принципиальной характеристикой ракетного двигателя.
Однако это требование трудно осуществимо на практике.
Выражение для полного к. п. д. т]0 при любом значении г и тц
можно получить из следующего отношения:
полезная работа/се« /чал
полная располагаемая энергия/се« ’ ' '
Помимо своей энтальпии 6, топливо обладает кинетической энер¬
гией Е2/2^, полученной от топлива, ранее израсходованного на
ускорение снаряда до скорости V. Поэтому уравнение (34) можно
переписать так;
(—}сУ
По = 9-=—Г = ~~ • (35)
+ Нг/
Но У/с = г, а
Н = (36)
по
ГЛАВА 4
Поэтому
По = -4— . (37)
— + г2 .
Можно заметить из уравнений (33) и (37), что выражения для тя¬
гового к. п. д. и полного к. п. д. идентичны, за исключением того,
что в уравнении (37) полного к. п. д. энтальпия увеличена в отно¬
шении 1/т](, чтобы учесть тепловые потери.
Максимально достижимый полный к. п. д. тдо.тах для любого
значения термического к. п. д. получается, когда значение г удо¬
влетворяет уравнению
А = 4 — = °- (38)
аг аг 1 , , ' '
— + Г2
Это значение равно
^,тах= /4’ (39>
что при подстановке в уравнение (37) дает
Чо,тах = ^Л (4°)
Таким образом, двигатель, работающий с термическим к. п. д.
49%, может достигнуть максимального полного к.п. дАО,49=70%.
Парадокс, заключающийся в превышении полным к. п. д. терми¬
ческого к. п. д., является просто следствием того, что в уравнении
для т]о учитывается располагаемая кинетическая энергия неизрас¬
ходованного топлива, которая не входит в выражение для •»](. На
рис. 46 кривые, построенные по уравнениям (37), (39) и (40) для
различных значений т](, показывают изменение полного к. п. д.
в зависимости от отношения скоростей и термического к. п. д.
Интересно отметить, что максимумы полных к. п. д. для любых
значений т)(, меньших 100%, соответствуют значениям г>1.
Очевидно, что средний к. п. д., рассматриваемый по всей траек¬
тории, включая участок начального разгона снаряда, будет ниже
мгновенных значений, рассмотренных выше, так как на каком-то
участке траектории некоторая часть энергии топлива будет израс¬
ходована для ускорения остального топлива.
Приведенные выше энергетические зависимости приводят
к интересному выводу: в то время как высокий термический к. ш д.
всегда желателен, это не обязательно справедливо по отношению
к полному к. п. д. Из уравнения (39) и рис. 46 видно, что при дан¬
ных значениях скорости снаряда и термического к. п. д. значение
эффективной скорости истечения продуктов сгорания с= УУту
является единственным и поэтому, в соответствии с уравнения-
РАКЕТНЫЙ ДВИГАТЕЛЬ
111
ми (36) и (39), для получения максимального полного к. п. д.
необходимо топливо с определенным значением
к = = (41)
2^/ 2^ ' >
Из уравнения (41) вытекает, что для получения максимального
полного к. п. д. при малой скорости полета снаряда необходимо
топливо с низкой энтальпией. Для такого топлива суммарная по¬
лезная энергия, равная т)0 (Л + У2/2§), может быть меньше, чем для
Рис. 46. Изменение полного к. п. д. в зависимости от отношения скоро¬
стей и термического к. п. д.
более калорийного топлива, дающего более низкий т]0. Так как
произведение 7]0(/Ц- У2/2^) является важным критерием при рас¬
смотрении характеристик двигателя, то очевидно, что для малых
значений V горючее, дающее низкий полный к. п. д., будет луч¬
шим.
Уместно заключить рассмотрение основных принципов ракет¬
ных двигателей подтверждением важности высокой скорости исте¬
чения продуктов сгорания для получения хороших характеристик
ракетного двигателя. Основные параметры, рассмотренные выше,
указывают на то, что создание тяги при минимальном расходе
топлива требует максимально возможной скорости истечения. Что
скорость истечения является одной из основных баллистических
характеристик снаряда, очевидно из того, что дальность данного
112
ГЛАВА 4
баллистического снаряда при определенном количестве топлива
будет приблизительно пропорциональна квадрату эффективной
скорости истечения. Равным образом можно показать, что осуще¬
ствление космического полета на летательном аппарате, снабжен¬
ном ракетным двигателем, будет зависеть в значительной степени
от возможностей получения весьма больших скоростей истечения.
Эти соображения оправдывают стремление конструкторов ракет¬
ных двигателей ко все более и более высоким скоростям истече¬
ния.
4—3. ЖИДКОСТНО-РАКЕТНЫЕ ДВИГАТЕЛИ
4—3.1. Жидкие топлива
В отличие от воздушно-реактивных двигателей, в которых мо¬
гут применяться лишь относительно немногие топлива, для ЖРД
пригодны многочисленные различные сочетания горючих и окис¬
лителей. Эти сочетания укладываются в довольно узкий диапазон
значений удельного импульса, но чрезвычайно различны по своим
физическим и химическим свойствам. По этой причине выбор топ¬
ливной комбинации часто основывается больше на таких практи¬
ческих характеристиках, как температура кипения, токсичность,
коррозийность и химическая стойкость, чем на одних баллистиче¬
ских характеристиках.
Удельный импульс и плотность являются наиболее важными
критериями характеристик жидких ракетных топлив. Помимо вы¬
сокого удельного импульса, желательно, чтобы средняя плотность
топлива (горючего и окислителя) была высокой, чтобы свести
к минимуму объем и вес топливных баков. Совместное влияние
обоих этих факторов- можно выразить с помощью объемного им¬
пульса, который является произведением средней плотности и
удельного импульса топлива и, таким образом, представляет собой
удельный импульс на единицу объема топлива. Так как высокий
удельный импульс обычно сопровождается малой плотностью, от¬
носительное значение обоих этих факторов должно оцениваться
в каждом проекте снаряда. В общем для больших снарядов или
снарядов, встречающих небольшое сопротивление воздуха, раз¬
меры топливных баков и, следовательно, плотность топлива
играют относительно менее важную роль. Для небольших высоко¬
скоростных снарядов, используемых в пределах атмосферы, тре¬
бование высокой плотности топлива может иметь большее значе¬
ние, чем требование высокого удельного импульса. Хотя для обес¬
печения такого выбора при проектировании были выполнены
обобщающие работы, однако обычно приходится дополнительно
проводить обширные проектные исследования различных конкрет¬
ных конфигураций снарядов с различными топливами, чтобы опре¬
ракетный двигатель
113
делить относительную важность плотности и удельного импульса
топлива.
Факторы, определяющие удельный импульс топлива, можно
охарактеризовать следующим образом: если уравнение (8) напи¬
сать
/
<42)
то видно, что удельный импульс возрастает при увеличении
энтальпии йс, но падает при увеличении молярной удельной тепло¬
емкости с'р. То обстоятельство, что
= (43)
1 — 1 М '
вновь подчеркивает уже отмеченную в § 4—2.4 желательность ис¬
пользования топлива, в котором высокая энтальпия сочетается
с низким молекулярным весом.
Исходя из этих основных соображений, можно теоретически
исследовать потенциальные ракетные топлива. Это можно осуще¬
ствить путем выбора элементов из периодической системы и оценки
их достоинств при использовании в качестве топливных компонен¬
тов, сравнивая их молекулярные веса, удельные теплоемкости и
теплоту образования соответствующих им продуктов сгорания.
Так, можно показать, что в качестве горючих компонентов водо¬
род, литий, бериллий и бор обладают отличными качествами,
а углерод — относительно низкими. Равным образом оказы¬
вается, что фтор, озон и кислород являются наилучшими окисли¬
тельными агентами.
Теоретические характеристики вычислены для многих топлив¬
ных систем. Характеристики некоторых типичных систем приве¬
дены в таблице 1. Система жидкий водород — фтор и жидкий во¬
дород— жидкий кислород включены в таблицу для того, чтобы
показать своего рода идеальный предел характеристик, достижи¬
мых при химических топливах. Однако вследствие их неблаго¬
приятных физических и химических свойств весьма сомнительно,
чтобы эти системы стали практически реализуемыми топливами.
Из таблицы видно, что потенциальное увеличение удельного им¬
пульса по сравнению с удельным импульсом, полученным на не¬
мецкой ракете Фау-2, составляет всего около 50%.
Рис. 47 показывает, что соотношение компонентов смеси, т. е.
весовое отношение окислителя к горючему в топливе значительно
влияет на удельный импульс, температуру в камере сгорания и
объемный импульс. Таким образом, соотношение компонентов
является важным параметром при баллистическом расчете снах
ряда.
8-405
114
ГЛАВА 4
Таблица 1
Расчетные характеристики типичных топливных систем для ЖРД
Горючее и окислитель
Химическая
формула
Теоретический удель¬
ный импульс,
кг сек)кг
Плотность, г!см*
Объемный импульс,
г сек/см*
Коэффициент соотно¬
шения компонентов,
окислитель/горючее
Температура горе¬
ния, ° С
Отношение удельных
теплоемкостей, т
Средний молекуляр¬
ный вес*
Двухкомпонентные топлива
Анилин — красная
дымящая азотная
кислота
С6Н0МН2 —
НЫО3-МО2
200
1,376
302,72
3,0
2796
1,22
25,4
Бензин** — жидкий
кислород
^8^18 ’ Оз
242
0,976
236,16
2,6
3021
1,22
22,7
75% спирта, 25%
воды — жидкий
кислород
С2Н6ОН,
Н2О — 02
239
0,988
236,32
1,3
2804
1,27
22,4
Гидразин — жидкий
кислород
%н4 — 02
261
,1,056
275,2
0,67
2810
1,27
17,5
Жидкий водород—
фтор .......
н2-р2
357
0,221
78,88
4,7
2832
—
9,1
Жидкий водород —
жидкий кисло¬
род***
н2-о2
352
0,283
99,68
3,8
2782
1,25
9,8
Однокомпонентные топлива
Нитрометан ....
СН3МО2
218
1,136
247,68
-
2180
1,25
20,1
87% перекись водо¬
рода
Н2О2 4” Н2О
126
1,417
177,4
—
704,4
1,26
21,9
* — продуктов сгорания;
** — октан;
*** —давление в камере 24 кг/слЛ
Характеристики исчислены, предполагая давление в камере 21 кг]см2 и рас¬
ширение до 1 кг/сл2. Расчетные значения удельного импульса примерно на 10°/р
рргше величин, достигнутых на практике.
РАКЕТНЫЙ ДВИГАТЕЛЬ
115
Помимо выше приведенных характеристик, определяющих бал¬
листические свойства, существует большое количество практиче¬
ских требований к ракетному топливу. К ним относятся:
1) умеренная токсичность, 2) высокая температура кипения и
удельная теплоемкость, если топливо используется для охлажде¬
ния двигателя, 3) низкая точка замерзания и хорошая химиче¬
ская стойкость, требуемые по эксплуатационным соображениям,
4) низкое давление паров для упрощения конструкции насосов и
Рис. 47. Влияние коэффициента соотношения компонентов на расчетные
характеристики топлива гидразин — жидкий кислород
для уменьшения выпаривания топлива из баков, 5) удовлетвори¬
тельная воспламеняемость для обеспечения достаточно малых
задержек воспламенения и 6) умеренная коррозионная агрессив¬
ность. Необходимыми условиями, очевидно, являются умеренная
стоимость топлива и его доступность. Ни одна из известных топ¬
ливных систем не удовлетворяет всем этим требованиям. Боль¬
шинство удовлетворяет только немногим из них.
Полезным свойством некоторых топлив, как, например, анилин —
красная дымящая азотная кислота, является их способность само¬
воспламеняться при смешивании. Это свойство позволяет обхо¬
диться без сложных воспламеняющих устройств. С другой сто¬
роны, это качество увеличивает потенциальную опасность такого
топлива при случайном смешивании компонентов вне камеры
8*
116
ГЛАВА 4
сгорания вследствие течи или другой неисправности в системе
подачи топлива.
Сочетание гидразина с жидким кислородом можно привести
в качестве примера перспективных топливных систем. Рис. 47 по¬
казывает, что это сочетание дает хороший удельный импульс и
объемный импульс даже при относительно низких температурах
в камере сгорания. Хотя эта. система токсична, ее потенциальная
доступность и легкость обращения с ней, наряду с хорошими ха¬
рактеристиками, делают гидразин привлекательным топливным
компонентом. Его применение с азотной кислотой в качестве
окислителя также выгодно там, где условия эксплуатации и снаб¬
жения не позволяют использовать жидкий кислород. Жидкий кис¬
лород, имеющий низкую температуру кипения (—183° С) и высокую
скорость испарения, вполне приемлем, когда его можно получать
в непосредственной близости от стартовой позиции, и весьма не¬
практичен, если его необходимо перевозить на большие расстоя¬
ния. Сочетание жидкого водорода с фтором дает идеальный верх¬
ний предел в отношении баллистических характеристик. Зато оно
являет собой пример крайне неприятных физических и- химиче¬
ских свойств. Фтор представляет собой самый мощный из извест¬
ных окислителей, он сам воспламеняется при соприкосновении
почти с любым горючим и со многими «негорючими» материа¬
лами, в том числе со стеклом, песком, асбестом. Фтор весьма ток¬
сичен и агрессивен.
В общем, как указывалось в § 4—2.4, теоретический удельный
импульс около 350 кг сек/кг, по-видимому, является максимумом,
достижимым при молекулярных реакциях. Можно ли будет при¬
менить атомную энергию для повышения характеристик ракетных
двигателей сверх указанного предела, — предстоит еще выяснить.
4—3.2. Особенности конструкции
Общие принципы, изложенные в предыдущем разделе, можно
применить непосредственно для определения конфигурации и для
расчета характеристик ракетного двигателя в соответствии с тре¬
бованиями баллистики снаряда. Но как и в случае других двига¬
телей для летательных аппаратов, гораздо более сложные пробле¬
мы связаны с подробным определением расчетных параметров,
необходимых для обеспечения требуемых характеристик двига¬
теля в сочетании с приемлемой надежностью, минимальным весом
и умеренной стоимостью. Хотя по сравнению с другими двигате¬
лями ракетный двигатель менее сложен механически, проектиро¬
вание его связано с решением весьма трудных металлургических
проблем из-за высокой теплонапряженности, возможности терми¬
ческого удара вследствие быстрого нагревания и коррозийной
РАКЕТНЫЙ ДВИГАТЕЛЬ
117
агрессивности и воздействия низких температур топлив. В после¬
дующих параграфах объясняется природа некоторых из этих про¬
блем и указываются методы, применяемые для их решения.
Рис. 48. Камера сгорания немецкого ЖРД Вальтер
109—509:
1. Отвод горючего, 2. Охлаждающая рубашка, 3. Подвод горючего
Рис. 49. Турбонасосный агрегат немецкого ЖРД Вальтер 109—509:
1. Насос подачи окислителя, 2. Шпековый бустер-насос для подачи окисли¬
теля, 3. Выход парогаэа, 4. Турбина, 5. Шнековый бустер-насос для подачи
горючего, 6. Насос подачи горючего
Хотя ЖРД могут иметь тягу от нескольких сотен килограммов
до нескольких сотен тонн, принципы конструирования всех таких
двигателей весьма сходны. Основные конструктивные элементы ти¬
пичного ЖРД на двухкомпонентном топливе даны на рис. 48 и 49.
На этих рисунках показаны камера сгорания и турбонасосный
118
ГЛАВА 4
агрегат немецкого ЖРД Вальтер 109—509. Этот двигатель, веся¬
щий 177 кг, имеет тягу от 200 кг при давлении в камере 4,2 кг/см2,
до 1700 кг при давлении 9,5 кг/см2. Горючим является смесь
спирта, гидразин-гидрата и воды, а окислителем — 80%-ная пере¬
кись водорода. Удельный импульс при максимальной тяге состав¬
ляет 180 кг сек/кг.
Одной из самых трудных проблем при проектировании ракет¬
ного двигателя является обеспечение надлежащего охлаждения
камеры сгорания и сопла. Выделение тепла, указанное в пара¬
графе 4—2.3, соответствует среднему тепловому потоку от 0,8 до
0,12 ккал/см2 сек через стенки камеры и сопла. При небольшой
длительности работы (примерно до 30 сек) стенки можно сделать
достаточно массивными для поглощения передаваемого им тепла.
При большей продолжительности работы двигателя используются
различные специальные методы вспомогательного охлаждения.
Такими методами являются:
1. Регенеративное охлаждение, при котором один из топлив¬
ных компонентов до впрыскивания в камеру сгорания пропу¬
скается через охлаждающие рубашки, окружающие сопло и ка¬
меру. Это осуществимо и не приводит к появлению неустойчивого
состояния — непрерывного возрастания температуры стенки, так
как только несколько процентов тепла, возвращаемого в камеру
сгорания с охладителем, вновь передается стенкам. Регенератив¬
ное охлаждение имеет еще преимущество в том, что использует
часть тепловой энергии, которая в противном случае была бы по¬
теряна. На рис. 48 показана типичная охлаждающая рубашка.
Минусом регенеративного охлаждения является то, что оно осу¬
ществимо только с топливами, имеющими необходимые физиче¬
ские и химические свойства. Такими свойствами являются высо¬
кие удельная теплоемкость и температура кипения и надлежа¬
щая химическая стойкость при повышенных температуре и давле¬
нии. Кроме того, практически количество тепла, которое можно
с помощью этого метода отвести от стенок камеры, ограничено.
2. Пленочное охлаждение состоит в подаче части (12% на ра¬
кете Фау-2) топлива на внутренние стенки камеры через неболь¬
шие отверстия в стенке. При таком методе охлаждение дости¬
гается за счет наличия охлаждающей пленки и ее испарения.
Этот метод имеет то преимущество, что охладитель можно по¬
давать только на критические в отношении перегрева участки.
3. Охлаждение выпотеванием является вариантом пленочного
охлаждения. Стенки, подлежащие охлаждению, в этом случае де¬
лаются из пористого материала, сквозь который может подаваться
охладитель.
Материалы, используемые для камер сгорания и сопел ракет¬
ного двигателя, в основном представляют собой сплавы, низко¬
углеродистую сталь, алюминий и нержавеющую сталь. Высокая
ракетный двигатель
119
прочность при повышенных температурах, высокая теплопровод¬
ность и стойкость в отношении коррозии являются основными тре¬
бованиями к этим материалам. Там, где применяются такие агрес¬
сивные компоненты топлива, как азотная кислота, выбор мате¬
риала может определяться в первую очередь его сопротивлением
коррозии.
Другой проблемой, решением которой постоянно заняты кон¬
структоры ЖРД, является совершенствование распылительной
головки, с помощью которой топливо подается в камеру сгорания.
Было испытано множество различной степени сложности проектов;
все они преследовали одну цель — распыление компонентов топ¬
лива для облегчения испарения и смешения их в возможно более
короткое время и при минимальном падении давления в форсун¬
ках. Головки ЖРД, проектируемые в основном эмпирическим
путем, способны обеспечить удельные импульсы, превышаю¬
щие 90% их теоретического значения. На рис. 50 схематически
показаны два типа головок. На рис. 50, а представлена стандарт¬
ная распылительная головка с пересекающимися струями, в кото¬
рой окислитель и горючее выбрасываются через отверстия, рас¬
положенные по концентрическим окружностям. Отверстия располо¬
жены попарно так, что каждая струя окислителя пересекает соот¬
ветствующую струю горючего. Установлено, что при таком типе
распылительной головки теплоотдача в стецки камеры довольно
Рис. 50. Типичные распылительные головки ЖРД
120
ГЛАВА 4
чувствительна к направлению струи топлива после столкновения
струек горючего и окислителя. Так, возможно падение характе¬
ристик двигателя или даже выход из строя камеры, если резуль¬
тирующее направление потока топлива после столкновения струй
окислителя и горючего не будет близким к осевому. На рис. 50,6
показаны струйные форсунки, применявшиеся на ЖРД ракеты
Фау-2. В этой конструкции струи топливных компонентов не
сталкиваются, а направляются в форкамеру, в которой распыле¬
ние, турбулентность и диффузия способствуют испарению и сме¬
шению.
Важной составной частью ракетной силовой установки
является система подачи топлива, необходимая для подвода ком¬
понентов из баков к форсункам при давлении, несколько превы¬
шающем давление в камере сгорания. Имеется ряд способов осу¬
ществления этой подачи, однако наиболее употребительными
являются вытеснение топлива давлением газа, подаваемого к топ¬
ливным бакам, и применение турбонасосов.
Если количество топлива относительно невелико, т. е. когда
время работы и тяга двигателя, невелики, как, например, в сна¬
рядах класса «воздух—воздух», соображения общего веса, стои¬
мости и времени разработки диктуют применение вытеснительной
подачи. Осуществляется она с помощью инертного газа, находя¬
щегося в баллонах, или с помощью реакции твердого или жидкого
топлива в топливных баках, или в отдельном генераторе газа.
Когда же требуется большая тяга и большая длительность ра¬
боты ЖРД, как, например, на снаряде ВМФ США «Викинг», при¬
менение вытеснительной системы неэффективно, и компоненты
обычно подаются с помощью турбонасосов. Время работы двига¬
теля, для которого турбонасосная система становится легче вытес¬
нительной системы, составляет приблизительно 1 мин для тяги
порядка 500 кг и 10 сек для тяги порядка 10 т. Очевидно, что эти
цифры весьма приблизительны.
Применение центробежных насосов для подачи компонентов
топлива стало почти обычной практикой благодаря их высокой
производительности, хорошему к. п. д. и компактности конструк¬
ции. Равным образом, газовая и паровая турбины оказались
эффективным приводом для топливных насосов. Турбонасосный
агрегат двигателя Вальтер (рис. 49) можно считать типичным,
агрегатом такого рода. На ракете Фау-2 и в двигателе Вальтер
турбина работает на парогазе — продукте разложения перекиси
водорода в отдельном газогенераторе. Были предложены и испы¬
таны также и другие системы, в которых турбина приводится с
помощью:
1. продуктов реакции топливных компонентов основного дви¬
гателя, отбираемых из топливных насосов в отдельный газогене¬
ратор;
РАКЕТНЫЙ ДВИГАТЕЛЬ
121
2. газа, отбираемого из камеры основного двигателя;
3. колеса турбины, помещенного в реактивной струе основного
двигателя;
4. колеса турбины, установленного внутри камеры двигателя.
Два последних метода имеют преимущество в том, что позво¬
ляют сэкономить в весе и упростить систему за счет отсутствия
отдельного газогенератора, а также исключить потери тепла, при¬
сущие газогенератору.
4—4. РАКЕТНЫЕ ДВИГАТЕЛИ ТВЕРДОГО ТОПЛИВА
4—4.1. Общие соображения
Из рис. 35 и приведенного выше краткого описания ракетных
двигателей твердого топлива очевидно, что этот тип двигателя со¬
держит определенное количество твердого топлива и соответ¬
ствующее количество тепловой энергии. Эта энергия в свою оче¬
редь характеризует определенную величину импульса; двигатель
Рис. 51. Типичные тяговые характеристики нескольких РДТТ с одним
и тем же полным импульсом
можно спроектировать так, чтобы получить большую тягу в те¬
чение краткого времени, либо небольшую тягу в течение соответ¬
ственно большего промежутка времени.
Баллистические свойства двигателя твердого топлива обычно
представляются его тяговой характеристикой, показывающей за¬
висимость тяги от времени работы двигателя. На рис. 51 показаны
три такие кривые, которые можно получить при примерно одном
и том же весе заряда топлива. Две кривые характеризуют
122
ГЛАВА 4
двигатели, создающие приблизительно равномерную тягу на про¬
тяжении всего периода горения топлива. Третья кривая характери¬
зует двигатель, в котором создается два уровня тяги: высокая
тяга в начальный период для разгона снаряда и низкая тяга в по¬
следующий период для поддержания маршевой скорости снаряда.
Помимо баллистических характеристик имеются другие важные
особенности двигателей твердого топлива. Эти особенности имеют
отношение к надежности, безопасности, стоимости и вопросам
эксплуатации и снабжения. Однако, несколько упрощая, можно
утверждать, что основная задача химика, работающего в области
твердых топлив, заключается в том, чтобы получить химические
Рис. 52. Типичные конфигурации зарядов твердого топлива:
а) торцового горения; б) внутреннего горения, со звездчатым ка¬
налом; в) вафельный; г) трубчатый с внутренним стержнем;
д) крестообразного сечения; е) трубчатый
соединения, которые обеспечат наибольшую площадь под тяговой
характеристикой на один кг топлива, т. е. наибольший удельный
импульс. С другой стороны, задачей конструктора двигателя
является осуществление такой тяговой характеристики, которая
обеспечила бы требуемые баллистические свойства снаряда. При
данном топливе эта последняя задача решается в основном путем
выбора надлежащей геометрии топливного заряда и сопла. На
рис. 52 показаны некоторые из многих конфигураций топливных
зарядов, применявшихся для получения определенных характери¬
стик двигателя.
Хотя проектирование двигателей твердого топлива в основном
основывается на уже рассмотренных принципах, для понимания
баллистических характеристик весьма важны некоторые спе¬
циальные понятия. Основные из них излагаются в парагра¬
фах 4—4.2 и 4—4.3.
РАКЕТНЫЙ ДВИГАТЕЛЬ
123
4—4.2. Скорость горения
Твердые ракетные топлива горят только по поверхности, и при¬
нято считать, что поверхность горения перемещается в перпен¬
дикулярном к ней направлении. Таким образом, скорость горе¬
ния г, выражаемая в см/сек, является расстоянием, на которое
смещается поверхность горения по нормали к ней в единицу вре¬
мени. В противоположность обычному ошибочному представлению
реакция горения твердых ракетных топлив не совершается со ско¬
ростью взрыва. Значения г почти для всех топлив, применяемых
в двигателях летающих снарядов, лежат между 0,25 и 2,5 см/сек.
Было определено эмпирическим путем, что скорость горения зави¬
сит в значительной степени от давления в камере рс и темпера¬
туры топливного заряда. На нее влияет также скорость потока
газа, параллельного поверхности горения. Последним фактором
можно пренебречь для топливной шашки торцового горения, пока¬
занной на рис. 52,а, в которой поверхность горения не подвер¬
жена эрозии от высокой скорости потока газа. В этом случае ско¬
рость горения можно выразить следующим образом;
Г = ар", (44)
где постоянная а зависит от температуры заряда, а постоянная п
считается независимой от этой температуры. В других типах дви¬
гателей, как, например, в двигателе с зарядом внутреннего горе¬
ния (рис. 52,6), участки поверхности горения в ближайшей
к соплу части центрального канала размываются обладающим вы¬
сокой скоростью потоком газов. При соответствующем сочетании
свойств топлива со скоростью газа это приводит к явлению, из¬
вестному под названием эрозионного горения. Эрозионное горение
характеризуется ненормально высокими местными скоростями го¬
рения некоторых участков горящей поверхности заряда. Меха¬
низм действия эрозионного г.орения, увеличивающий скорость го¬
рения, недостаточно ясен, однако следствием его является
неравномерное расходование топлива, часто сопровождаемое
ненормальным эрозионным забросом давления при запуске дви¬
гателя. Некоторые топлива более подвержены эрозионному горе¬
нию по сравнению с другими. Топлива с более низкой скоростью
горения, по-видимому, более подвержены эрозионному горению,
чем топлива с более высокими скоростями горения. В условиях
эрозионного горения уравнение (44) следует изменить, чтобы
учесть влияние скорости газа на скорость горения. В настоящее
время эти поправки, а также химические и геометрические меры,
используемые для сведения к минимуму эрозионного горения,
в значительной степени находятся эмпирическим путем. В пара¬
графе 4—4.3 показывается, что показатель п в уравнении скорости
горения имеет определяющее значение для внутренней баллистики
ракетных двигателей твердого топлива.
124
ГЛАВА 4
4—4.3. Равновесное давление в камере сгорания
Знание характера изменения скорости горения в зависимости
от давления позволяет рассчитать рабочее давление в камере сго¬
рания и составить представление о степени устойчивости этого
давления.
По условию неразрывности потока вес топлива, выгорающего
в секунду в камере, должен равняться весу газа, выбрасываемому
через сопло в секунду, плюс вес газа, требуемого для замещения
массы топлива, выброшенного из камеры За то же время. Для
стационарных условий это можно выразить так1:
44=+4 <*>
Левая часть уравнения представляет собой скорость, с которой
выгорает топливо. Первый член в правой части уравнения, опре¬
деляющий весовой расход газа через сопло, взят из уравне¬
ния (13) и преобразован в единицы веса. Последний член в пра¬
вой части уравнения есть скорость изменения веса газа в камере.
После дифференцирования этот член дает выражение рс(д/сП) Ус +
+ 1/с (<//*//) рс. Так как изменение объема камеры является только
следствием выгорания твердого топлива, то рс((//с?/) Ус = рсАрг/100,
и так как в установившемся состоянии плотность газа постоянна,
то Ус (п7Л) рс = 0. Подставляя эти выражения в уравнение (45),
а также учитывая, что г=арпс, и обозначая Кк=Ар/А{, получаем
для равновесного давления в камере сгорания ред выражение:
1 1
„ Г (Рр —Рг)д~|1-я
Рея ~ I 100Г'^ з • (46)
Это уравнение является основным при расчете двигателей твердого
топлива. Так как ас = уравнение (46) показывает, что рав¬
новесное давление в камере зависит от характеристик топлива 7,
о, Рр. рс» /?, Те и п и что, если не учитывать эрозионное горение, раз¬
мер и форма двигателя представлены в этом уравнении только
через отношение Кх = Ар/А(. Уравнение (46) показывает также,
как сильно зависит равновесное давление в камере от показа¬
теля п в законе скорости горения, выраженном уравнением (44).
Например, если п = 0,8, то уравнение (46) показывает, что давле¬
ние в камере изменяется пропорционально пятой степени Кх и,
следовательно, при данной площади критического сечения сопла —
пропорционально пятой степени площади поверхности горения
топлива. Таким образом, случайная трещина в топливной шашке,
1 В этом уравнении площадь Ар выражена в м2, рР — в кг/м3, рс — в кг/м2,
V» — в л3, а г — в см/Сек.— Прим, ред.
ракетный двигатель
125
увеличивающая площадь горения на 5%, приведет к повышению
давления в камере на 28%. Уравнение (46) показывает также,
что влияние других характеристик топлива на равновесное давле¬
ние весьма усиливается при больших значениях п. Эти факторы
диктуют выбор топлив с низкими значениями п для уменьшения
чувствительности равновесного давления в камере к малым изме¬
нениям характеристик топлив. При проектных расчетах член урав¬
нения (46), заключенный в квадратные скобки, можно считать
постоянным при данной температуре, и соотношение между Км
Рис. 53. Зависимость изменения равновесного давления в камере
от отношения площадей
и равновесным давлением в камере можно определить экспери¬
ментальным путем для конкретного топлива. На рис. 53 представ¬
лена эта зависимость для типичного высококачественного твер¬
дого топлива.
Величина п. важна также для оценки степени устойчивости
поддержания равновесного давления в камере. Если пренебречь
последним членом уравнения (45), который невелик по сравнению
с другими членами, то это уравнение представляет собой уравне¬
ние баланса между скоростью образования газа при горении
топлива и скоростью расходования газа через сопло. Если на¬
чертить кривые зависимости от давления в камере величины ле¬
вого члена уравнения (45), определяющего скорость образования
газа, и величины первого члена в правой части того же уравнения,
определяющего скорость истечения газа через сопло, то пересе¬
чение этих кривых определит равновесное давление в камере сго¬
рания. Типичные кривые этого типа показываются на рис.. 54.
График на рис. 54, а построен для показателя п<1, и кривая обра¬
зования газа имеет выпуклость кверху. В этих условиях равно-
126
ГЛАВА 4
весне устойчиво. Если по какой-нибудь причине давление в ка¬
мере возрастет сверх равновесного значения, скорость расхода
газа превысит скорость его образования, и давление в камере
вернется к равновесному значению. Аналогично падение давле¬
ния ниже равновесного уровня будет нарушать равновесие системы
так, что равновесие восстановится. При показателе п> 1 кривая
образования газа будет вогнута вниз, как показано на рис. 54,6.
Рис. 54. Влияние показателя п в уравнении скорости горения на устой¬
чивость давления в камере
Из относительной крутизны кривых в точке пересечения видно,
что повышение давления сверх равновесного значения будет при¬
водить к прогрессирующему увеличению давления до тех пор,
пока камера двигателя не разрушится. Эта зависимость показы¬
вает, что для устойчивости процесса п должно быть меньше 1. Для
обеспечения достаточной надежности на практике п следует брать
не более 0,85.
4—4.4. Соображения по проектированию
Рассмотренные характеристики горения твердых топлив дают
некоторый ключ к методу проектирования элементов двигателя.
Из уравнения (23) известно, что тяга пропорциональна давлению
в камере. Поэтому требуемая величина тяги устанавливается, как
правило, выбором надлежащей поверхности горения Ар, опреде¬
ляющей давление в камере. Время горения определяется линей¬
ным размером топливной шашки, нормальным к поверхности го¬
рения. В горящей с торца шашке (рис. 52, а) этот размер представ¬
ляет собой длину шашки. В топливной шашке с горением по
внутренней поверхности (рис. 52,6) этой величиной является тол¬
щина стенки (свод) шашки. Зная удельный импульс, плотность,
РАКЕТНЫЙ ДВИГАТЕЛЬ
127
константы закона скорости горения и зависимость рс от для
дат ого топлива, можно относительно просто, хотя и с большой
затратой труда, определить конструкцию заряда, которая обеспе¬
чит заданную тяговую характеристику (кривую изменения тяги по
времени). К сожалению, в большинстве случаев все необходимые
данные топлива редко имеются налицо в начальной стадии про¬
ектирования, и разработка двигателя часто является эмпириче¬
ским, связанным с дальнейшей доводкой процессом.
Двигатели твердого топлива обычно являются «неохлаждаемы-
ми», т. е. в них не предусматривается никакой специальной си¬
стемы охлаждения, как это обычно имеет место в жидкостном ра¬
кетном двигателе. Температуры горения вплоть до 2800° С явля¬
ются обычными в РДТТ. Так как температура плавления стали
приблизительно в два раза ниже этой величины, то стенки камеры
и сопла должны делаться достаточно массивными, чтобы аккумули¬
ровать большое количество тепла не расплавляясь, или же для
защиты стенок камеры следует использовать огнеупорные мате¬
риалы или другие средства. В случае заряда внутреннего горения
(рис. 52,6), стенки камеры защищаются слоем несгоревшего топ¬
лива, и в таком случае можно применить тонкостенную камеру из
стального сплава, не опасаясь потери прочности. Для изготовле¬
ния камер двигателей и сопел применялись малоуглеродистые
стали, слоистые пластики и нержавеющая сталь.
Для формования топливного заряда и помещения его вну¬
три камеры сгорания применяется много методов. Самыми распро¬
страненными методами придания надлежащей формы зарядам яв¬
ляются литье и прессование. Заряды могут отливаться либо в от¬
дельные гильзы с последующей установкой в камере, либо непо¬
средственно в камеру и связываться (склеиваться) с ее стенками.
Заряды ингибируются путем покрытия инертным материалом тех
поверхностей, где горение не желательно. Заряды, которые не
связываются со стенками камеры, обычно крепятся к ней посред¬
ством металлических держателей.
Для сведения к минимуму веса конструкции обычно желатель¬
но иметь в камере сгорания низкое давление. Хотя удельный им¬
пульс топлива возрастает при повышении давления, степень этого
возрастания меньше степени возрастания веса камеры и сопла,
которое приблизительно пропорционально давлению в камере сго¬
рания. С другой стороны, более низкое давление в камере обычно
приводит к меньшей скорости горения. Поэтому, когда требуется
непродолжительное время горения, выбор величины давления
в камере сгорания может быть следствием компромисса между
требованиями в отношении удельного импульса и в отношении
скорости горения. Другим фактором, ограничивающим мини¬
мальное давление в камере сгорания РДТТ, является предел го¬
рения топлива, рассматриваемый в следующем параграфе. Вслед-
128
ГЛАВА 4
ствие наличия этого фактора и необходимости достижения высо¬
ких скоростей горения большинство двигателей твердого топлива
работают при давлениях в камере сгорания, значительно превы¬
шающих давление, соответствующее максимуму общего удельного
импульса
4—4.5, Твердые топлива
Перед рассмотрением конкретных особенностей типичных твер¬
дых топлив полезно отметить некоторые свойственные всем твер¬
дым ракетным топливам характеристики. Эти характеристики, на¬
ряду с основными баллистическими и физико-химическими свой¬
ствами, определяют общую применимость того или иного топлива.
а. Предел горения. Многие твердые топлива не могут
устойчиво гореть при атмосферном давлении и даже при значи¬
тельно более высоких давлениях внутри камеры сгорания ракет¬
ного двигателя. Следовательно, часто имеется минимальное дав¬
ление, ниже которого топливо не будет надежно и устойчиво го¬
реть. Для каждого нового топлива этот предел должен опреде¬
ляться экспериментальным путем. Расчетное давление в камере
сгорания должно превышать этот предел с достаточным запасом.
Для некоторых топлив предел горения составляет только несколь¬
ко атмосфер; другие не могут надежно гореть при давлении ниже
100 кг/см,2, и этот фактор накладывает определенные ограничения
на минимальное давление в камере сгорания.
б. Влияние температуры. На баллистические характе¬
ристики, а также на физические свойства твердых топлив значи¬
тельно влияет температура заряда при запуске двигателя. Топлив¬
ный заряд, имеющий высокую температуру в момент воспламене¬
ния, будет гореть с большей скоростью и поэтому создаст более
высокое давление в камере сгорания и более высокую тягу, но он
будет иметь соответственно меньшее время горения, чем при нор¬
мальной температуре. Заряды, имеющие при воспламенении низ¬
кую температуру, дают противоположный эффект. Эта темпера¬
турная чувствительность обычно определяется уравнением
У = -^--100, (47)
Рс атр- ’ 4 '
где У есть температурная чувствительность, выражаемая в процен¬
тах изменения давления в камере сгорания на 1 градус изменения
температуры, а Тр — температура заряда в момент воспламене¬
ния. Для двигателя, имеющего давление в камере 70 кг/см2 при
20° С и равномерную температурную чувствительность 0,45% на
1°С, давление в камере сгорания при —45° С будет составлять
1 Отношение полного импульса к весу конструкции.— Прим. ред.
РАКЕТНЫЙ ДВИГАТЕЛЬ
129
50 кг!см2, а при 65° С — 85 кг/сж2. Температурная чувствительность
является одним из самых серьезных недостатков твердых топлив.
Для того чтобы камера могла выдержать повышенное давление,
соответствующее максимально возможной температуре топлива,
приходится увеличивать вес двигателя. Температурная чувстви¬
тельность создает отклонения тяговых характеристик, столь важ¬
ных с точки зрения выдерживания траектории полета снаряда.
Нежелательные физические и химические явления в твердых
топливах имеют место также при крайних температурах окружаю¬
щей среды. При низкой температуре (от 0 до —56° С) многие топ¬
ливные заряды дают трещины из-за усадки и становятся чрезвы¬
чайно хрупкими. При высокой температуре (50—70°С) некото¬
рые топлива деформируются и иные из них показывают серьезное
ухудшение химических и физических свойств, что сказывается на
характеристиках двигателя и безопасности его работы.
Основные твердые ракетные топлива, применяемые в двигате¬
лях управляемых снарядов, сильно различаются по составу, мето¬
дам изготовления и характеристикам. Их основные характери¬
стики коротко описываются в последующих параграфах под об¬
щими названиями двухосновных ракетных топлив и смесевых топ¬
лив. Относительные характеристики этих топлив приводятся в
таблице 2.
Таблица 2
Характеристики типичных твердых топлив
Топливо
Удельный
импульс,
кг сек!кг
Скорость
горения,
см)сек*
Показатель
скорости
горения,
л**
Темпера¬
турная
чувстви¬
тельность,
°'о/°С
Плотность,
г'см*
Объемный
импульс,
г •сек; см*
Смесевое
200
2,54
0,75
0,54
1,842
368,4
Литое двухосновное
190
1,016
0,4
1,17
1,522
288,6
Прессованное двух¬
основное
* При рс = 105 к
* * В уравнении
210
г/см\
= “Рс-
2,032
0,82
1,26
1,601
336,2
Двухосновные топлива получили свое название в связи с тем,
что они в основном состоят из двух взрывчатых веществ — нитро¬
целлюлозы и нитроглицерина, в то время как одноосновные топ¬
лива, которые непригодны в качестве ракетных топлив, содержат
9—405
130
ГЛАВА 4
только нитроцеллюлозу. Помимо этих основных ингредиентов,
двухосновные топлива содержат небольшое количество пластифи¬
каторов для улучшения их технологических свойств и стабилизи¬
рующих присадок для замедления разложения топлив при хра¬
нении.
Двухосновные топлива изготавливаются двумя различными
методами, а именно — отливкой и прессованием. При изготовлении
литого заряда нитроцеллюлозный порошок продавливается через
узкие отверстия, образуя трубки (диаметром 0,8—1,5 мм), которые
затем нарезаются на небольшие таблетки. Эти таблетки вместе
с нитроглицерином затем отверждаются при повышенной темпе¬
ратуре в формах, на которые изнутри наносится слой инертного
соединения, служащий для образования ингибирующего покрытия
изготовляемого заряда.
Литые двухосновные топлива обычно имеют несколько мень¬
ший удельный импульс и скорость горения по сравнению с прессо¬
ванными двухосновными и смесевыми топливами. Но этот способ
производства дает большую гибкость при выборе размеров и гео¬
метрии шашки, чем это возможно при прессовании топлив.
При изготовлении прессованных двухосновных топлив ингре¬
диенты смешиваются до коллоидальной консистенции и затем
прессуются в листы. Эти листы сворачиваются в рулоны, которые
затем продавливаются под высоким давлением через отверстия
матрицы пресса для образования топливного заряда точного диа¬
метра. После этого заряды нарезаются по длине и в них высвер¬
ливаются каналы. Производство прессованных двухосновных топ¬
лив сложнее и дороже производства смесевых топлив, к тому же
размеры заряда ограничиваются возможностями пресса.
Как видно из таблицы 2, прессованные топлива имеют высокий
удельный импульс и высокие скорости горения. Они также имеют
то преимущество, что продукты их сгорания относительно (хотя
и не совсем) бездымны. Но температурная чувствительность этих
топлив обычно, довольно высока, а их химическая стойкость при
хранении в условиях повышенных температур хуже смесевых
топлив.
Смесевые топлива — это такие топлива, в которых различные
типы синтетического каучука или пластмассы, служащие в каче¬
стве горючего и связующего вещества, смешиваются с окислитель¬
ными агентами как хлораты, перхлораты или нитраты. Производ¬
ство этих топлив относительно просто и недорого. Обычно горю¬
чее, находящееся в состоянии вязкой жидкости, и тонко измель¬
ченный окислитель смешиваются и затем заливаются непосредст¬
венно в двигатель или форму. Затем смесь полимеризуется при
повышенной температуре до отверждения. Каналы, образующие
поверхность горения заряда, можно выполнить во время заливки
с помощью сердечников, удаляемых после завершения процесса
ракетный двигатель
131
полимеризации. Некоторые смесевые топлива непосредственно
связываются со стенками камеры во время полимеризации. Дру¬
гие отливаются в отдельную форму для образования заряда, ко¬
торый затем устанавливается в корпусе двигателя.
Из таблицы 2 видно, что баллистические характеристики сме¬
севых и двухосновных топлив довольно сходны между собой. Ти¬
пичное смесевое топливо может иметь несколько меньший удель¬
ный импульс, но более высокий объемный импульс, чем соответст¬
вующее ему двухосновное топливо.
Баллистические характеристики, а также физические свойства
смесевых твердых топлив регулируются в значительной степени
типом, состоянием и пропорцией применяемого окислителя. На¬
пример, перхлорат калия дает более высокую скорость горения,
чем перхлорат аммония и, следовательно, может применяться один
или в сочетании с перхлоратом аммония для получения желаемой
скорости горения. На скорость горения значительно влияет также
размер частиц окислителя; уменьшение частиц ведет к повышению
скорости горения. Интересно отметить, что хотя температура горе¬
ния топлива, образованного на базе перхлората аммония, значи¬
тельно ниже температуры горения топлива на перхлорате калия,
удельный импульс топлива на перхлорате аммония будет выше
из-за более низкого молекулярного веса продуктов сгорания. Газы,
образующиеся при сгорании топлив на перхлорате калия, дают
плотный белый дым вследствие того, что одним из продуктов их
сгорания является твердый хлорид калия, видимый в выхлопе.
В то же время топливо на базе перхлората аммония дает относи¬
тельно бездымный выхлоп.
Сравнение баллистических характеристик типичных жидких и
твердых топлив, приведенных в таблицах 1 и 2, показывает, что
жидкие топлива имеют значительно более высокий удельный
импульс, но что этот фактор более чем компенсируется большим
объемным импульсом твердых топлив. Это позволяет для некото¬
рых случаев применения создать ракетный двигатель твердого
топлива с большим общим удельным импульсом, чем можно полу¬
чить от ЖРД.
Труднее, по-видимому, предсказать практический предел увели¬
чения удельного импульса для твердых топлив, чем для жидких.
Исходя из соображений, сходных с описанными в§ 4—3.1 для жид¬
ких топлив, химики, занимающиеся топливами, считают теорети¬
чески возможными удельные импульсы твердых топлив около
350 кг сек/кг. Однако, как и в случае жидких топлив, это пред¬
ставляется осуществимым только при использовании материалов,
продукты сгорания которых содержат соединения, богатые лег¬
кими элементами, как водород, фтор, алюминий, литий и бор.
Имеется много весьма трудных проблем, связанных с производ¬
ством устойчивых твердых топлив, продукты сгорания которых
0»
132
ГЛАВА 4
могут давать подобные соединения. В ближайшем будущем, ве¬
роятно, удельный импульс практически используемых твердых
топлив, дающих продукты сгорания, состоящие из водорода,
углерода, кислорода и хлора, будет ограничиваться величиной по¬
рядка 250 кг сек!кг.
4—5. ХАРАКТЕРИСТИКИ РАКЕТНЫХ ДВИГАТЕЛЕЙ
4—5.1. Сравнение ракетных двигателей твердого и жидкого топлива
Сравнение преимуществ ПВРД и ракетного двигателя не вхо¬
дит в рамки данной главы. Здесь также не будет рассматриваться
конкретное применение ракетных двигателей на различных типах
управляемых снарядов. Тем не менее следует коротко отметить
два фактора, важных при любом рассмотрении вопроса о приме¬
нении ракетных двигателей в качестве двигателей управляемых
снарядов. Этими факторами являются: 1) относительная целесо¬
образность применения двигателей твердого и жидкого топлива и
2) значительное влияние отношения масс1 на характеристики сна¬
ряда, снабженного ракетным двигателем.
Характерные преимущества и недостатки двигателей твердого
и жидкого топлива, применяемых на снарядах, приведены в таб¬
лице 3. Они кратко рассматриваются ниже.
Таблица 3
Сравнение двигателей на твердом и жидком топливе
Двигатели твердого топлива
Жидкостно-ракетные двигатели
преимущества
недостатки
преимущества
недостатки
Надежность
Конструктивная
простота
Простота обслу¬
живания в поле¬
вых условиях
Низкая стои¬
мость
Высокий объем¬
ный импульс
Хорошая транс¬
портабельность
Чувствитель¬
ность к темпера¬
туре
Нерегулируемая
тяга
Ухудшение ка¬
чества топлива за
время хранения
Ограниченная
продолжитель¬
ность работы
Отсутствие чув¬
ствительности к
температуре
Регулируемая
тяга
Химическая
стойкость двух¬
компонентных
топлив
Продолжитель¬
ная работа
Высокий удель¬
ный импульс
Обилие топлив
Сложность кон¬
струкции
Сложность об¬
служивания в по¬
левых условиях
Высокая стои¬
мость
1 Под отношением масс здесь понимается отношение массы топлива к пол¬
ной массе снаряда.
ракетный двигатель
133
Выдающимся свойством двигателя твердого топлива является
простота его устройства благодаря отсутствию насосов, турбин и
регулирующих устройств, которые свойственны ЖРД. Эта про¬
стота является основой большинства преимуществ двигателя
твердого топлива, а именно: 1) присущей ему большей надеж¬
ности, 2) относительной простоты эксплуатации, в то время как
эксплуатация ЖРД связана с решением обширных проблем об¬
служивания, проверки, регулировки и заправки топливом и 3) низ¬
кой его стоимости.
В таблице 3 преимущество с точки зрения стоимости отводится
твердым топливам. Такое обобщение строго не является справед¬
ливым, так как преимущество по стоимости может меняться в за¬
висимости от конкретной конструкции двух сравниваемых типов
двигателей и их конкретного применения. В некоторых случаях
гораздо более высокие стоимости, связанные со сложным механи¬
ческим оборудованием жидкостно-ракетных двигателей, в значи¬
тельной степени компенсируются более высокой стоимостью
одного килограмма твердого топлива. Но кажется вероятным, что
стоимость производства некоторых новейших твердых топлив бу¬
дет снижаться, по мере того как технология их производства бу¬
дет выходить из стадии эксперимента. В таком случае двигатели
твердого топлива будут иметь явное экономическое преимущество
при использовании на снарядах, где силовая установка по своему
характеру является системой однократного применения.
Основными преимуществами жидкостно-ракетного двигателя
являются его высокий удельный импульс, способность к длитель¬
ной работе, возможность регулирования тяги и температурная
нечувствительность. Регулирование тяги менее важно для управ¬
ляемых снарядов, чем для самолетов, снабженных ракетными
двигателями. Но там, где соображения наведения снаряда требуют
точной регулировки тяги, силовая установка на жидком топливе
имеет безусловное преимущество.
Ни твердые, ни жидкие топлива не имеют особых преимуществ
с точки зрения их транспортировки и хранения. Выбирать прихо¬
дится между перевозкой, хранением и заправкой опасных в обра¬
щении жидкостей, как жидкий кислород или азотная кислота, с
одной стороны, и заранее снаряженными твердым топливом дви¬
гателями с их склонностью к взрыву — с другой. Практически все
твердые топлива при перевозке и хранении должны быть защи¬
щены в той или иной степени от чрезмерных изменений темпера¬
туры окружающей среды. В свою очередь продолжительность хра¬
нения сжиженных газов, как жидкий кислород, который кипит
при —183° С, фактически эфемерна.
Жидкостно-ракетные двигатели обычно применялись на высот¬
ных или средней дальности снарядах, как «Викинг» или Фау-2.
Но, по-видимому, нет ни теоретических, ни практических основа¬
134
ГЛАВА 4
ний утверждать, что большие двигатели твердого топлива с экви¬
валентными характеристиками и продолжительностью работы не
могут быть разработаны для снарядов подобного типа. Разра¬
ботка топливного заряда внутреннего горения, допускающего
применение легкой камеры сгорания, и разработка топлив с доста¬
точно низкими скоростями горения при больших топливных за¬
рядах, вероятно, снимет ограничения в отношении размеров дви¬
гателей твердого топлива и позволит применять их на летающих
снарядах упомянутых типов.
Хотя пределы увеличения размеров и продолжительности ра¬
боты двигателей твердого топлива трудно непосредственно предви¬
деть, можно полагать, что этот тип двигателей будет использо¬
ваться главным образом в качестве ускорителя с высокой тягой и
небольшой продолжительностью работы для начального разгона
управляемых снарядов. Присущие ему надежность и простота
делают заманчивым применение этого двигателя на снарядах,
запускаемых с самолетов, где экипаж подвержен опасностям,
связанным с неисправностью или аварией ракеты.
4—5.2. Отношение масс
Важность высокой скорости истечения продуктов сгорания и
высокой плотности топлива для характеристик снаряда неодно¬
кратно подчеркивалась в предыдущих параграфах. В заключение
целесообразно показать количественное влияние отношения масс
на характеристики снаряда и зависимость между скоростью исте¬
чения и отношением масс.
Уравнение движения баллистического снаряда по вертикаль¬
ной траектории, при отсутствии сопротивления, можно написать
следующим образом:
Р = — с^г = т-аг + т& (48)
где т — мгновенная полная масса снаряда, V — скорость полета,
Р =—с(<1т/сИ)—из уравнения (Гб). Знак минус является следст¬
вием того, что т по времени убывает, тогда как V возрастает.
После интегрирования уравнение (48) можно написать в виде
■~=е с , (49)
где /Ио — начальная полная масса и ть — конечная масса снаряда,
когда все топливо израсходовано. Так как тъ = т0 — тр, то урав¬
нение (49) можно написать следующим образом;
(^+^)
- = е , (50)
1 тр
ракетный двигатель
135
где тр1т0 — отношение масс, определение которого дано в преды¬
дущем параграфе, а с заменено §1УЛ.
Уравнение (50), график которого приведен на рис. 55, опреде¬
ляет зависимость между отношением масс и отношением скоро¬
стей Уь/с. Пренебрежение аэродинамическим сопротивлением
в уравнении (50) приводит к относительно небольшой ошибке,
особенно для снарядов, у которых отношение полной массы к пло¬
щади поперечного сечения велико, как в ракетах «Викинг» и
Фау-2. Во всяком случае пренебрежение аэродинамическим со¬
противлением не повлияет на справедливость общих выводов, сле¬
дующих из рис. 55.
Рис. 55. Влияние отношения масс и удельного импульса
на максимальную скорость снаряда (время горения 1 мин',
аэродинамическое сопротивление не учитывается)
Из рисунка видно, что отношение масс оказывает большое
влияние на максимальную достижимую скорость и, следовательно,
на максимальную дальность полета. В снаряде, имеющем удель¬
ный импульс 200 кг сек/кг и время горения 1 мин, увеличение от¬
ношения масс от 0,7 до 0,8 увеличивает скорость (при отсутствии
лобового сопротивления) на 45%. Потребовалось бы увеличить
удельный импульс на 34%, чтобы получить то же самое увели¬
чение скорости, если бы отношение масс сохранялось постоянным,
равным 0,7. Влияние на характеристики снаряда такого измене¬
ния отношения масс можно проиллюстрировать расчетным путем
для ракеты Фау-2 с учетом лобового сопротивления. Эта ракета
имела полный вес 14 тонн, из которого вес топлива составлял
9,6 тонн, а удельный импульс двигателя — 200 кг сек/кг. Если бы
боевую головку весом 1050 кг, составляющую всего 7,9% полной
массы, заменить эквивалентным весом топлива, то отношение масс
увеличилось бы на 10%. Однако скорость полета к моменту вы¬
136
ГЛАВА 4
горания топлива увеличилась бы приблизительно на 40%, а мак¬
симальная высота по вертикальной траектории увеличилась бы
почти вдвое.
Этот пример, используя только один тип траектории снаряда,
показывает большое значение изменения величины отношения
масс. Но когда важна дальность, как для большинства случаев
применения снарядов, можно всегда показать, что за счет отно¬
сительно небольшого уменьшения веса конструкции можно полу¬
чить большой выигрыш в характеристиках снаряда.
Условные обозначения, использованные в
г л а в е 4.
Буквы латинского алфавита
А—площадь, м2
А — 1/Л, 1/427 ккал/кгм
а—скорость звука, м!сек
а—постоянная в уравнении скорости горения, г=ар"
с—эффективная скорость истечения из сопла, м/сек
СР—коэффициент тяги, безразмерный
С/-теор — теоретический коэффициент тяги, безразмерный
ср — удельная теплоемкость при постоянном давлении,
ккал!кг°С
с'—молярная удельная теплоемкость при постоянном дав¬
лении, ккал/моль0С
с„— удельная теплоемкость при постоянном объеме,
ккал!кг° С
с* — характеристическая скорость, м/сек
Р— тяга, кг
рт—составляющая тяги, создаваемая изменением количе¬
ства движения, кг
Рр—составляющая тяги, получаемая за счет разности дав¬
лений, кг
&—ускорение силы тяжести, м/сек2
Ъ—энтальпия, кгм/сек
/уд— удельный импульс, кг сек/кг
— механический эквивалент тепла, 427 кгм/ккал
■— отношение площади поверхности горения топлива к пло¬
щади критического сечения сопла, безразмерное
М—молекулярный вес, кг/моль
т— масса, кг сек2/м
т — массовый расход, кг сек/м
п — показатель в законе скорости горения, г=ар*
р—давление, кг/м2
р—равновесное давление в камере сгорания, кг/м2
РАКЕТНЫЙ ДВИГАТЕЛЬ
137
р*—критическое значение степени расширения рс/ро, вели¬
чина безразмерная
/?—газовая постоянная, кгм/кг°С
К'—универсальная постоянная для идеальных газов = #М =
= 848 кгм/моль° С
г—скорость горения, см/сек
г — отношение скоростей У/с, величина безразмерная
г—коэффициент соотношения компонентов топлива, вес
окислителя/вес горючего
тах — отношение скоростей, соответствующее максимальному
полному к. п. д.
5 — поправочный коэффициент к скорости истечения* без¬
размерный
Т — температура, °С или °К
I— время, сек
1Ь—время горения, сек
V—скорость полета снаряда, м/сек
Уь— скорость полета снаряда к моменту выгорания топлива,
м/сек
V— скорость течения газа, м/сек
—удельный расход топлива, (кг/сек) /кг
■а;—весовой расход топлива, кг/сек
У— температурная чувствительность, изменение давления
в %/°С
Буквы греческого алфавита
а.— половина угла конуса раствора сопла, в градусах
у — отношение удельных теплоемкостей = ср/с„
е — уширение сопла = Ае/А(
— идеальный термодинамический к. п. д.
7;0 — полный коэффициент полезного действия
П/ — термический к. п. д.
7)р — полетный (тяговый) к. п. д.
X — поправочный коэффициент для угла раствора сопла,
безразмерный
р — плотность, кг/м3
Г ( т + 1 )
<о — поправочный коэффициент к скорости истечения
ГЛАВА 5
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ
ДВИГАТЕЛИ
Л. Стулман1
5—1. ВВЕДЕНИЕ
Прямоточный воздушно-реактивный двигатель (ПВРД) с кон¬
структивной точки зрения является самым простым из воздушно-
реактивных двигателей, поскольку в отличие от турбореактивного
двигателя турбина и компрессор в нем отсутствуют, а поступаю¬
щий воздух сжимается аэродинамически. На рис. 56 показан ти¬
пичный сверхзвуковой прямоточный воздушно-реактивный двига¬
тель; его основными узлами являются диффузор, в котором сжи¬
мается поступающий воздух; камера сгорания, в которой к воз¬
духу подводится тепло, и реактивное сопло.
Как видно из рисунка, прямоточный воздушно-реактивный дви¬
гатель не имеет движущихся частей, а тяга возникает за счет
его движения вперед,
когда кинетическая
энергия высокоско¬
ростного потока, попа¬
дающего в воздухоза¬
борник, превращается
в диффузоре в давле¬
ние. Воздух, проходя¬
щий через камеру
сгорания, обеспечивает
кислород, необходи¬
мый для процесса
горения, и смесь воз¬
духа и газов нагре¬
вается до высокой
температуры (порядка
1400°С), что вызывает
падение давления на
участке от входного
до выходного сечений
Рис. 56. Типичный сверхзвуковой прямоточный
воздушно-реактивный двигатель
1 Сотрудник самолетостроительной фирмы Хьюза.
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
139
камеры сгорания. В реактивном сопле происходит дальнейшее
расширение потока до давления окружающей среды. Таким обра¬
зом, сочетание камеры сгорания с реактивным соплом позволяет
поддерживать высокий избыток давления на входе в камеру сго¬
рания или на выходе из диффузора сверх давления в невозмущен¬
ном потоке. Этот прирост давления внутри диффузора создает
большую часть тяги.
Тяга прямоточного, воздушно-реактивного двигателя на еди¬
ницу площади его поперечного сечения увеличивается с увеличе¬
нием скорости полета и при достижении скоростей, соответствую¬
щих М = 1,5—2,5, становится сравнимой с лобовой тягой турбо¬
реактивного двигателя. При дальнейшем увеличении скоростей
полета прямоточный воздушно-реактивный двигатель уже превос¬
ходит по своим характеристикам турбореактивный двигатель.
Основные недостатки прямоточного двигателя заключаются в том,
что при его применении требуется дополнительный двигатель для
старта и разгона снаряда до сверхзвуковых скоростей, а также
в том, что работа камеры сгорания ограничена определенной вы¬
сотой полета, как это имеет место и с турбореактивными двигате¬
лями. Однако до этих предельных высот и при скоростях полета,
превышающих М = 2, чрезвычайно простое устройство прямоточ¬
ного воздушно-реактивного двигателя делает его весьма пригод¬
ным для установки на управляемые снаряды.
В этой главе будут кратко изложены основы теории прямоточ¬
ного воздушно-реактивного двигателя. Особое внимание будет уде¬
лено рассмотрению вопроса о разделении систем внутренних и
внешних сил, а также определению важных газо-термодинамиче¬
ских параметров, от которых зависят характеристики двигателя.
Кроме того, будут теоретически исследованы и сопоставлены
с имеющимися экспериментальными данными характеристики от¬
дельных элементов прямоточного двигателя. И наконец, для обо¬
снования оптимального режима работы с учетом скорости и вы¬
соты полета будут изложены и применены методы расчета тяго¬
вых характеристик прямоточных воздушно-реактивных двигателей.
5—2. ТЕОРИЯ ПРЯМОТОЧНОГО ДВИГАТЕЛЯ
5—2.1. Отделение сил тяги от сил лобового сопротивления
Для воздушно-реактивных силовых установок общая резуль¬
тирующая сила должна быть соответствующим образом разло¬
жена на внутренние движущие силы и внешние аэродинамические
силы, с тем чтобы можно было произвести независимую оценку
каждой из них. Это разложение в какой-то степени произвольно.
Однако к настоящему времени в-США Национальным консульта¬
тивным комитетом по аэронавтике совместно с двигателестрои¬
140
ГЛАВА 5
тельными фирмами принято стандартное определение тяги, из ко¬
торого вытекает определение внешней аэродинамической силы.
В зависимости от внешней геометрической конфигурации сило¬
вой установки может потребоваться дальнейшая разбивка внеш¬
них аэродинамических сил. Как правило, решающим фактором,
влияющим на выбор этой разбивки сил, является положение вход¬
ного воздухозаборника. Рассмотрим следующие два случая.
1. Воздухозаборник расположен в носовой части фюзеляжа
или на передней кромке крыла.
2. Воздухозаборник расположен позади носовой части фюзе¬
ляжа так, что значительная часть внешней поверхности фюзеляжа
омывается воздухом, входящим в воздухозаборник.
Последующие выводы будут сделаны в общем виде, примени¬
мом к подъемной силе, лобовому сопротивлению и силе тяги, но
Рис. 57. Геометрия потока двигателя и элементы контрольной поверхности
они будут сведены к силам, которые параллельны только траек¬
тории полета, т. е. к тяге и лобовому сопротивлению. Движущая
сила и внешняя аэродинамическая подъемная сила легко могут
быть получены из вышеуказанного общего решения.
Результирующая сила, действующая на прямоточный воздуш¬
но-реактивный двигатель, движущийся с постоянной скоростью
в жидкой среде, может быть выражена через силы внешнего дав¬
ления и силы трения, действующие на тело и условия входа и вы¬
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
141
хода потока, путем применения законов движения Ньютона в
форме теоремы о количестве движения. В частности, если мы рас¬
смотрим контрольную поверхность, которая полностью охватывает
прямоточный двигатель, то результирующая сила, действующая на
двигатель, будет равна сумме потока количества движения, про¬
ходящего через контрольную поверхность, и сил давления, дейст¬
вующих на эту поверхность.
Контрольная поверхность для общей конфигурации тела с ка¬
налом показана на рис. 57; она состоит из поверхности трубки
тока (об и ей), охватывающей воздух, который поступает в ка¬
нал, и продленной вперед настолько, чтобы получить условия не¬
возмущенного потока в ее входном сечении Ао- Остальная часть
контрольной поверхности состоит из поверхности фюзеляжа Ье и
заканчивается выходной площадью Ае. Таким образом, чистая
векторная сила, действующая на тело, находящееся внутри кон¬
трольной поверхности, составляет
Гк= \рйз + ] у{?у-йз) — 1ае, (1)
К. п. к. п.
где Тае — сила трения, действующая на контрольную поверхность,
исключая площадь входного и выходного отверстий; р, р и V —■
соответственно давление, плотность и скорость.
Теперь, допуская, что р, р и V постоянны по сечениям Ао и Ае
или, если они не постоянны, то, беря соответствующие средние
значения, получаем
| р йз = р0 Ао + ре Ае + | р йз; (2)
к. п. ае
IV (ру • йз) = теуе — тйу0, (3)
где т — массовый расход в сечениях, указанных индексами.
Таким образом,
гя = — и+ ] Р<& + теуе — тоУо-|-Мо + лАг (4)
ае
Теперь, прибавляя и вычитая р0А.е и | ройз,
ае
получаем'
гк= — и + I (Р — А») + {теуе — тоуа + (ре — р0) Аг] +
ае
+р0 | ^8 + Ае + Ао . (5)
-ае
Но
| йз + А, + Ао = 0.
ае
142
ГЛАВА 5
Таким образом, результирующая сила равна
Г₽= — и + | (Р — Ро) + [теУе — тоуо + (ре — р0) АД. (6)
- ае
Учитывая составляющую силы, параллельную расчетной оси
фюзеляжа, получим Рх = Р-1.
Тогда
- и • 1=(О/)а1,+(ддс - (^л,,
так как (Г>/)аА =0, поскольку жидкость за пределами погранич¬
ного слоя на поверхности фюзеляжа может рассматриваться как
невязкая и
[ (Р — РоИА-1 = | (р — р0)<7Ах=( [+ П (р — р0)(!Ах.
ае ае \а& Ье)
Таким образом,
Рх = + [ (р — р0) йАх + | (р — д>) ЛАХ +
аЬ Ье-
полная сила лобового сопротивления = 2)
+ [теуе• 1 — т0у0 + (ре — р0) Ае • I] . (7)
сила тяги двигателя = Г
Сила тяги, параллельная оси фюзеляжа, по принятому опреде¬
лению выражается второй скобкой уравнения (7), а остальные
члены сгруппированы в первой скобке и считаются лобовым со¬
противлением. Тяга двигателя, как она определена выше, выра¬
жена только через условия на выходе и в невозмущенном потоке и
не зависит от условий течения во входной части диффузора. Это
особенно удобно для оценки характеристик камеры сгорания и
сопла прямоточного двигателя, так как не требует полных испыта¬
ний двигателя в свободной струе. Это значит, что диффузор мож¬
но заменить трубой, соединяющей источник подачи воздуха
с камерой сгорания, и измерять только условия на выходе; впо¬
следствии могут быть внесены поправки для получения полной
тяги в требуемых условиях свободного, потока, используя выра¬
жение, данное в уравнении (7). Кроме того, че и Ае обычно пер¬
пендикулярны оси фюзеляжа, поэтому
• 1 = Уе и Ае • I = Ае.
Таким образом, разложение тяги и лобового сопротивления
принимает вид
РХ = Р — В,
где сила тяги двигателя равна
= т^е — т<Рй + (Ре — Ро) 4 (8)
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
143
а лобовое сопротивление определяется формулой
/)= (7)/)^ + $(р — р0)ЛАх + [(р — Ро)(1Ах . (9)
аЬ ре
сопротивле- аддитивное лобовое сопротивление обечайки
ние трения сопротивление диффузора плюс донное
обшивки сопротивление
Упрощенное представление сил тяги и лобового сопротивления,
данное в уравнениях (8) и (9), можно получить путем рассмотре¬
ния прямоточного двигателя симметричной конфигурации, пред¬
ставленного на рис. 56. Обычно площадь реактивного сопла под¬
бирается так, что ре=ро- Тогда тяга прямоточного двигателя Р
становится
Р = теъе — т0Ф0 - та (Фе —
то есть является разностью между количеством движения на вы¬
ходе и количеством движения на входе в условиях невозмущен¬
ного потока. Лобовое сопротивление обечайки диффузора плюс
донное сопротивление является интегралом давлений, действую¬
щих на внешнюю поверхность от входной кромки обечайки (се¬
чение /) до выходного среза сопла (сечение 5). Аддитивное лобо¬
вое сопротивление есть сопротивление давления, действующего на
поверхность трубки тока, разделяющую внутренний и внешний
потоки, и интегрируемого от скачка уплотнения на конусе диф¬
фузора до входной кромки диффузора.
5—2.2. Внешние силы сопротивления для осесимметричного лобо¬
вого воздухозаборника
Дальнейшее рассмотрение будет посвящено осесимметричным
лобовым воздухозаборникам, так как они часто применяются
на летающих снарядах. Для воздухозаборников, расположенных
позади носовой части фюзеляжа, вышеприведенные уравнения
(8) и (9) также можно применить для разделения сил тяги и ло¬
бового сопротивления, но в этом случае необходима дальнейшая
разбивка сил сопротивления, чтобы получить практически полез4
ные определения составляющих сопротивления.
Некоторые типичные осесимметричные лобовые воздухозабор¬
ники показаны на рис. 58.
При дозвуковом невозмущенном течении площадь захвата
Ао расположена на бесконечном удалении впереди 'Воздухозабор¬
ника (рис. 58,а). В первом приближении лобовое сопротивление
определяется формулой
О = (О/)Ье + Оае (Рае — донное сопротивление),
144
ГЛАВА 5
так как рассмотрением количеств движения можно показать, что
И + [}(р — рп)(1А^0.
\аЬ Ье /
Рис. 58. Типичные симметричные лобовые воздухозаборники и раз¬
личные режимы течения в них
При сверхзвуковом невозмущенном потоке должны возникнуть
скачки уплотнения либо перед воздухозаборником, либо у его
кромок, и, таким образом, сечение захвата может быть располо¬
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
145
жено на определенном расстоянии впереди воздухозаборника. Со¬
ответственно, возникает лобовое сопротивление давления, так как
имеют место скачки уплотнения. Далее, существуют два различ¬
ных режима течения, как это показано на рис. 58, б, соответствую¬
щие сверхзвуковым или дозвуковым условиям на входе, опреде¬
ляемым положением входного скачка уплотнения. При сверх¬
звуковом обтекании входа прямой скачок возникает внутри
диффузора, так как поток на выходе из диффузора дозвуковой.
При дозвуковом обтекании входа прямой скачок устанавливается
впереди воздухозаборника. В первом случае режим называется
сверхкритическим, во втором — докритическим. Условия критиче¬
ского течения возникают тогда, когда входной скачок возникает
точно на кромке воздухозаборника. Два типичных сверхзвуковых
воздухозаборника показаны на рис. 58. Рис. 58, б показывает от¬
крытый лобовой воздухозаборник. На сверхкритическом режиме
площадь захвата расположена у входного канала, и, таким обра¬
зом, внешнее лобовое сопротивление определяется
ГМРД, + {(р — А) &А + .[ (р — р0) ЛА.
ос <1е
сопротивление донное
обечайки сопротивление
диффузора
На докритическом режиме отошедший скачок уплотнения и пло¬
щадь захвата расположены впереди воздухозаборника, и расход
воздуха через канал снижается, что дает добавочное лобовое
сопротивление, а именно аддитивное лобовое сопротивление
| (р — Ро)с1А. На рис. 58, в показан воздухозаборник внешнего
аЬ
сжатия с косым скачком уплотнения. Для сверхзвукового вте¬
кания
^ = (^/)*г + $(р — Ро)<1А+ ^(р — р^/ТА + $ (р — Ро) <1А.
аЬ Ьс Ле
аддитивное сопротивление донное
сопротивление обечайки диффузора сопротивление
Для дозвукового втекания получается та же формула, но
в этом случае аддитивное лобовое сопротивление увеличивается
из-за отошедшего прямого скачка.
В последующих разделах будут более подробно рассмотрены
методы определения внешнего сопротивления сверхзвуковых диф¬
фузоров.
5—2.3. Тяговые характеристики прямоточного двигателя
Схема типичного сверхзвукового прямоточного воздушно-ре¬
активного двигателя, на которой показаны его основные элементы,
дана на рис. 56. Двигатель может быть либо двухмерным, Либр
10—405
146
ГЛАВА 5
осесимметричным. Диффузор преобразовывает кинетическую энер¬
гию входящего воздуха в высокое давление и малую скорость
в сечении 2. В этом сечении добавляется топливо, которое смеши
вается с воздухом; последующее горение смеси, происходящее
в основном в районе стабилизатора пламени, увеличивает полную
энергию (или температуру торможения) потока, так чго в сече¬
нии 3 (после завершения горения) воздух и продукты сгорания
имеют высокую температуру и, следовательно, высокую скорость.
Обычно отношение давлений рзе/ро1 достаточно велико, что позво¬
ляет получить дополнительную тягу за счет расширения воздуха
в сопле Лаваля до р& = ро-
Удобно использовать безразмерный параметр тяги, аналогично
безразмерному коэффициенту лобового сопротивления; этот пара¬
метр определяется как коэффициент тяги Ст, выражаемый через
скоростной напор в невозмущенном потоке и площадь входного
сечения камеры сгорания А2:
ст=\— -. (10)
Теперь определим функциональную связь между коэффициен¬
том тяги и такими внутренними газотермодинамическими пара¬
метрами, как характеристики диффузора й подвод тепла. Для
этого примем, что поток — одномерный.
Используя уравнение (8) и принимая, что соответствующее
сопло обеспечивает полное расширение, так что ръ = ре, получим
/? = ^5г'5 —^0 = ^0 Г(1 +^) ^5 — ^0] • (Л)
В этом уравнении —массовый расход топлива, — от¬
ношение веса топлива к весу воздуха, а числовые индексы отно¬
сятся к сечениям, показанным на рис. 56.
Используя условия сохранения количества движения, энергии
и массы применительно к внутреннему потоку, можно определить
скорость на выходе ц5 с помощью следующих данных: условий
невозмущенного потока (число М, статическое давление и темпе¬
ратура); давления торможения и числа М на выходе из диффу¬
зора; количества подведенного тепла в камеру сгорания. Кроме
того, принимается, что термодинамические постоянные газа 7 и В
не изменяются при изменении температуры. Принятие для всего
течения значений у и /?, соответствующих невозмущенному потоку,
вносит лишь небольшие ошибки.
Таким образом,
^ = 7^4(1+ -^)в-Л/0], (12)
1 Параметры, отмеченные индексом «5», относятся к заторможенному пото¬
ку,— Прим. ред.
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
147
мЦ 1 + 1А. м> у
₽=1/1+%^+-^ (13)
1=\ /,_/ к
т)о = А- — коэффициент полезного действия диффузора
Р*о
Рь = Ро!
цп = ——коэффициент полезного действия сопла (~95%)
, •
Параметры а, 0 и 6 можно назвать соответственно парамет¬
рами расхода, подвода тепла и потерь давления. Они в опреде¬
ленной степени взаимосвязаны, так как являются функциями
М2, АТ8 и т]в соответственно, которые в свою очередь связаны
с характеристиками камеры сгорания. Как видно из уравнений
(12) и (13), важными газотермодинамическими параметрами,
влияющими на тягу, являются коэффициент полезного действия
диффузора т]С и подвод тепла &Т8. Далее будет показано, что
с увеличением АТ,, т)В уменьшается лишь незначительно. Для всех
практических целей можно считать, что для данного количества
подведенного тепла тяга изменяется прямо пропорционально
5—3. АНАЛИЗ ЭЛЕМЕНТОВ ПРЯМОТОЧНОГО ДВИГАТЕЛЯ
5—3.1. Диффузор
Как указано в разделе 5—2, основными характеристиками диф¬
фузора являются восстановление давления торможения и внешнее
сопротивление. Для дозвукового свободного потока (дозвуковой
скорости полета) потери давления торможения невелики (порядка
5%) и связаны в основном с взаимодействием вязких газов со
стенками диффузора. Однако при сверхзвуковых скоростях сво¬
бодного потока наличие скачков уплотнения вблизи входного ка¬
нала вызывает неизбежные потери давления торможения из-за
возрастания энтропии, которое имеет место в скачке уплотнения.
10»
148
Глава 5
Обычно потери от вязкости внутри диффузора малы по сравнению
с потерями в скачке уплотнения. Исследования сверхзвуковых
диффузоров показывают, что при скоростях полета Л4>1,5 диф¬
фузор, который обеспечивает внешнее сжатие в системе косых
Рис. 59. Характеристики диффузора с косым скачком уплот¬
нения
скачков уплотнения, значительно лучше простого открытого ло¬
бового диффузора с одним прямым скачком на входе. В соответ¬
ствии с этим дальнейшее изложение будет посвящено первому
типу диффузоров, называемых диффузорами с косым скачком
уплотнения.
Схема типичного сверхзвукового диффузора с косым скачком
уплотнения показана на рис. 59. При дозвуковых, но относительно
больших значениях М2 диффузор работает в сверхкритическом ре¬
жиме, при котором Л41>1, и должны иметь место внутренние
скачки уплотнения, чтобы снизить скорость в конце диффузора
до М2<1. При сверхкритических режимах диффузора массовый
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
149
расход должен оставаться постоянным; таким образом, справед¬
ливы следующие уравнения:
то = Р<АА = ?2^гА2 = Ро^о-^г ) >
(И)
4-(т+»
(7 1 \ Л
1 + ^Л1Л (Т-0
1 + Д=1 м2 у
Следовательно, для данного значения Л40, увеличивается,
когда Л42 уменьшается, и, соответственно, внутренний прямой ска¬
чок смещается по направлению к входной кромке. При дальней¬
шем уменьшении М2 прямой скачок уплотнения выходит наружу
и устанавливается перед воздухозаборником; благодаря дозвуко¬
вому потоку на входе массовый расход снижается, а т;п или
Рис. 60. Восстановление давления в сверхзвуковом диффузоре на
критических режимах
150
ГЛАВА 5
остается постоянным, или незначительно уменьшается (см.
рис. 59). Типичный график тщ как функции относительного рас¬
хода Л0М1 для различных чисел М свободного потока приведен
на рис. 59. Оптимальным рабочим режимом с точки зрения макси¬
мального расхода и максимального восстановления давления яв¬
ляется критическая точка.
На рис. 60 дан график зависимости степени восстановления
давления в критическом точке от числа М полета для типичного
Рис. 61. Лобовое сопротивление давления типичного
диффузора (критический режим)
диффузора с косым скачком уплотнения и для простого открытого
лобового диффузора (с прямым скачком). Преимущество первого
типа диффузора в восстановлении давления значительно.
Внешнее лобовое сопротивление давления может быть полу¬
чено теоретически путем использования метода характеристик.
Величины сопротивления обечайки диффузора и аддитивного
сопротивления для типичного диффузора с косым скачком уплот¬
нения, работающим в критической точке, показаны на рис. 61.
Аддитивное сопротивление отпадает, когда косой скачок касается
входной кромки обечайки.
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
151
При докритическом течении аддитивное сопротивление значи¬
тельно возрастает по сравнению с сопротивлением на критическом
или сверхкритическом режимах благодаря наличию области вы¬
сокого статического давления за отошедшим прямым скачком.
Рис. 62. Влияние докритического режима на
аддитивное лобовое сопротивление при Мо= 1,8
Количественные данные приведены на рис. 62. Это является еще
одним основанием для использования прямоточного двигателя
в критическом режиме.
5—3.2. Камера сгорания
Рассмотрение работы камеры сгорания с использованием упро¬
щенных одномерных газотермодинамических уравнений будет про¬
ведено главным образом с целью определения основных парамет¬
ров системы.
Типичная камера сгорания прямоточного двигателя показана
на рис. 56. Топливо впрыскивается у входного сечения камеры
сгорания и смешивается с воздухом; воспламенение происходит
у стабилизатора пламени, где протекает большая часть процесса
горения. Основная функция стабилизатора пламени — стабилизи¬
ровать горение. Считается, что это осуществляется созданием
152
ГЛАВА 5
крупномасштабной турбулентности за плохообтекаемыми элемен¬
тами стабилизатора и возникновением вследствие этого зоны ре¬
циркуляции. С помощью этой рециркуляции горячие продукты
сгорания подаются к турбулизирующим экранам стабилизатора,
где они выполняют функцию непрерывного источника воспламе¬
нения свежей смеси, обтекающей эти экраны.
Для целей анализа принимается, что горение заканчивается в
сечении 3. Принимая, что константы газа не изменяются во время
горения, можно написать соотношение количеств движения между
входным и выходным сечениями следующим образом:
А+(1— ^)р2^2=Рз + Рз^з, (15)
где к — коэффициент, учитывающий аэродинамическое сопротив¬
ление стабилизатора пламени. Условие сохранения энергии дает:
т0Ср1\ + <2 = Ср7\ (т0 + т}), (16)
где — количество тепла, подводимого в камере сгорания. Усло¬
вие постоянства массового расхода определяется формулой
I тг\
И + ^Р2г'2 = Рз^з- (17)
Уравнение энергии (16) определяет увеличение температуры
торможения Т8 как функции подведенного тепла С). Таким обра¬
зом, либо отношение температур торможения Т3 /Г , либо С/
можно считать независимой переменной в процессе горения. Из¬
менение других интересующих нас величин, как статическая тем¬
пература, число М, статическое давление и давление заторможен¬
ного потока, целесообразно выражать через эти переменные. Пре¬
небрегая относительно небольшим расходом топлива гп/ и исполь¬
зуя известные соотношения между числом М, давлением и плот¬
ностью, находим
= 1 + т0СрТ,2 •
Изменение числа М по камере сгорания дается уравнением:
Л3 ^(1+^^) 1+(1-й)^2
Л?- (1 + 1УИ2)2 Х л^1 + .хгИ ^0 •
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
153
Изменения статического давления и давления торможения
(20)
/>2 1 + 7Л|2 4 7
= л (1 + %~ V 21)
1 + ±=± Л42 / ’
Изменение статической температуры
_ м2з 1 + (1-*)й*! ,99
1\ (1+7Л42)2 Л42 >
Из уравнений (18) и (19) видно, что при данных значениях
М2<1 и Т2, М3 увеличивается с увеличением Тх (или <2). Однако
Т8 достигает максимума при М3=1, после чего дальнейший под¬
вод тепла без изменения М2 невозможен. Таким образом, в камере
сгорания с постоянной площадью поперечного сечения подвод
тепла увеличивает статическую температуру, и при неизменных
условиях на входе (а следовательно, и при постоянном расходе)
плотность уменьшается, что в свою очередь вызывает увеличение
скорости. Скорость увеличивается до тех пор, пока не будет до¬
стигнута местная скорость звука (запирание), после чего без из¬
менения условий на входе невозможно дополнительно сообщить
тепло. В действительности на прямоточном двигателе, если М3= 1,
дальнейшее добавление тепла не изменяет М3, но снижает М2.
Что касается статической температуры Т3, то уравнение (22) по¬
казывает, что (Т’3)тах достигается при М3=\/У-[. Для иллюстра¬
ции характера изменения вышеуказанных параметров по мере
подвода тепла отношение температур Т3/Т2 нанесено на рис. 63
как функция отношения у— для различных постоянных вели¬
чин М2.
Теоретическая температура торможения, получаемая по урав¬
нению (19), должна быть несколько изменена, так как действи¬
тельный процесс горения не является идеальным. Предложен
«импульсный к. п. д.», который определяется выражением
/ т (у А ■
/ 1 ' ^действ.
■/ Т ' 1-' (V ) *
^Зтеорет е теоРеТ*
154
ГЛАВА 5
Рис. 63. Теоретические характеристики
камеры сгорания
Рис. 64. Теоретическое возрастание темпера¬
туры торможения при сгорании н-октана
в воздухе
ПРЯМОТОЧНЫЕ. ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ 155
где Т^теорет. — температура, получаемая для данного подвода
тепла <2 согласно уравнению (18). Кроме того, применяется коэф¬
фициент полноты сгорания т)с, определяемый как -
ту, соответствующий (7\,)теорет
\ //действ.
Подвод тепла (2теорет. или эквивалентный прирост температуры
торможения {Т3—7\2)теорет. достигается при сгорании смеси
топлива и воздуха. Обычные топлива, как бензин или керосин, со¬
стоят в основном из углеводородов, и экзотермическая химическая
реакция осуществляется прежде всего путем окисления углерода
и водорода. Следовательно, при данном количестве воздуха выде¬
ление тепла будет увеличиваться при добавлении горючего до тех
пор, пока не будет израсходован весь кислород воздуха. Таким
образом, существует максимальное отношение количества топлива
к количеству воздуха (отношение топливо-воздух при кото¬
ром достигается максимальное выделение тепла. Это отношение
называется стехиометрическим. Для бензина стехиометрическое
отношение топливо-воздух равно 0,067. Отношение —
к (/Пу//и0)стехиометрия, называется эквивалентным отношением у1.
Выше мы рассматривали термодинамические постоянные газа
7 и /? как неизменные на всем протяжении камеры сгорания.
В действительности, они несколько изменяются по причине увели¬
чения температуры, которое вызывает также более сложные хими¬
ческие реакции, как, например, диссоциацию газа. Однако
имеется возможность учесть все эти факторы и получить в итоге
т>
прирост температуры торможения как функцию состава смеси —■
/Ид
и температуры торможения на входе. Такой расчет для типичного
топлива — н-октана выполнен. Результаты этого, расчета даны на
рис. 64, они могут также применяться для топлива типа бензина
или керосина. . .
Что касается экспериментальных характеристик камеры сгора¬
ния, то наиболее пригодными являются данные, приведенные в
некоторых источниках. Коэффициент потерь давления на стабили¬
заторе пламени к обычно близок к единице. Коэффициент пол¬
ноты сгорания и импульсный к. п. д. являются функцией типа
топлива, характеристик системы впрыска топлива, конструкции
'.Отношение ф является величиной, обратной коэффициенту избытка возду¬
ха а, используемому в советской литературе.— Прим. рвд.
156
ГЛАВА 5
стабилизатора пламени, длины камеры сгорания и условий на
входе. Величины этих к. п. д. как функций ср, скорости и темпера¬
туры воздуха на входе в камеру представлены на рис. 65 для
Рис. 65. Характеристики камера сгорания. Экспе¬
риментальные данные. Размеры в мм
пентана; они получены на экспериментальной камере сгорания
при условиях на выходе, соответствующих уровню моря. Анало¬
гичные результаты получены и при использовании в качестве
топлива керосина.
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
157
5—3.3. Реактивное сопло
Коэффициент полезного действия сопла, определяемый по фор¬
муле т)я = р51/р3з, обычно составляет 95—100%, если надлежа¬
щим образом выбрана конфигурация расширяющейся части
сопла.
Отношение площадей Л4/А2 может быть определено по пара¬
метрам в сечении 2 путем использования условия равенства мас¬
совых расходов. Точно так же отношение площадей Л5/Д3, необхо¬
димое для полного расширения газа до давления окружающей
среды, может быть определено по параметрам в сечении 3. Таким
образом,
-2-(т4-1)
г тетр ЛТ-1
ф = -А—2 ' — 1/ ; (23)
Цк. — 1 / 1 м х
А3~Г 2 Х
X . (24)
2.1 т—11~2~
5—4. ХАРАКТЕРИСТИКИ ПРЯМОТОЧНОГО ВОЗДУШНО-
РЕАКТИВНОГО ДВИГАТЕЛЯ
Характеристики по тяге и расходу топлива силовой установки
с ПВРД в целом могут быть построены путем использования ме¬
тодов и данных, приведенных в предыдущих разделах. Для этого
необходимо согласовать газотермодинамические параметры на
входе и на выходе камеры сгорания с соответствующими парамет¬
рами диффузора и реактивного сопла.
С целью получения лучшего представления о возможных ха¬
рактеристиках прямоточного двигателя коэффициент тяги и удель¬
ный расход топлива определяются как функции Мо, То, М2 и Тх
для режимов течения в диффузоре и сопле, дающих максималь¬
158
ГЛАВА 5
ную тягу. Для диффузора это соответствует работе в критической
точке, а для реактивного сопла — расширению до давления окру¬
жающей среды на срезе сопла. Вышеуказанные условия работы
обычно считаются расчетными.
Последовательность вычисления для расчетной точки следую¬
щая:
а) Задано: Мо, То, М2, Таз, ца.
б) Вычисляются:
1. Т^Т^ + ^м2)-,
2. М3 определяется из уравнения (19);
3. р!з1р3г определяется из уравнения (21);
4. тщ определяется по величине Л40 из рис. 59;
5. Ст определяется из уравнений (12) и (13);
6. (7\з)теорет определяется по Т и т;/ с помощью графиков
типа рис. 65;
7. (Щ//т0)тсорет. определяется по (Т’|5з)теорет. и рис. 64;
8. А0/А2 определяется из уравнения (14);
9- /”/=(ЖореТ. Ш Ш беРеТСЯ И3 РИС' 65'
10. Л4/А2 и А5/А3 определяются из уравнений (23) и (24).
Вышеприведенные расчеты обычно производятся только в слу¬
чаях, когда А5/Аз<1, так как при А5/А3>1 внешнее лобовое со¬
противление будет возрастать быстрее, чем прирост в тяге, полу¬
чаемый за счет расширения газа до давления окружающей среды.
Для случая Д5/А3=1 расчет Ст несколько видоизменяется.
На рис. 66 и 67 даны характеристики тяги и расхода топлива
прямоточного двигателя в расчетной точке, подсчитанные по ме¬
тоду, подобному указанному выше, для скорости полета Л40=2
и 3. В качестве топлива использовался керосин. В расчетах при¬
нималась температура окружающей среды, соответствующая вы¬
соте полета около 6 км. Однако полученные данные применимы
для всех высот полета, поскольку влияние изменения атмосферной
температуры на характеристики прямоточного двигателя неве¬
лико. Коэффициент тяги Ст дан как функции М2 для различных
температур торможения 7\з на выходе из камеры сгорания.
Рис. 66 -показывает, что как для Л4о=2, так и для Л40=3 макси¬
мальная тяга создается немного раньше установления и режима
задирания выходного сечения камеры сгорания.
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ двигатели
159
Рис. 66. Тяговые характеристики прямоточного
воздушно-реактивного двигателя
Рис. 67. Характеристики по расходу топлива прямое
точного воздушно-реактивного двигателя
160
ГЛАВА 8
В таблице 1 приводятся типичные характеристические пара¬
метры: коэффициент эффективной тяги СГэф) удельный импульс
По эффективной тяге и эффективная лобовая тяга (отнесенная к
площади поперечного сечения камеры сгорания), соответствующие
стехиометрическому составу смеси — 7\2 =1950°С, как сле¬
дует из рис. 64), полученные из рис. 66 и 67 *. В таблице также
приведено сравнение с ракетной силовой установкой.
Таблица 1
м„
С7
со'
С-р ж
' эф
Эффективный
удельный
импульс, сек
7 Эффективная тяга\
А2 <
(кг.'м2} на ур. м.
ПВРД со стехиометрическим составом смеси, на расчетном режиме
1
0,95
1,30
0,10
0,10
0,85
1,2
1060
1000
25000
78000
Ракетный двигатель
180—230
50000—150000
независимо от
высоты
* По скромной оценке.
5—5. ПРИМЕНЕНИЕ ПРЯМОТОЧНЫХ ДВИГАТЕЛЕЙ
5—5.1. Общие соображения
Используя основные характеристики ПВРД, рассмотренные в
предыдущих разделах, мы можем теперь очертить возможные
области применения прямоточных воздушно-реактивных двига¬
телей.
Область возможных скоростей и высот полета представляет
наибольший интерес; она ограничивается следующими факторами.
1. Тягой как функцией скорости и высоты.
2. Пределами устойчивости горения.
3. Конструктивными пределами камеры сгорания и диффузора.
Дальнейшее рассмотрение, носящее полуколичественный ха¬
рактер, будет посвящено анализу указанных выше факторов,
чтобы показать, как характеристики различных узлов прямоточ¬
ного двигателя влияют на его эксплуатационные возможности.
Наконец, будет проведено сравнение отношения тяги двига¬
теля к его весу для ПВРД и других видов силовых установок.
1 Эффективная тяга силовой установки равна тяге двигателя минус лобо¬
вое сопротивление установки.— Прим. ред.
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДЁИгАТЕЛЙ
161
5—5.2. Тяга прямоточного двигателя
Максимальная тяга прямоточного двигателя для высоты и
числа М полета, принятых за расчетные, достигается при следую¬
щих условиях:
1. Диффузор работает в критическом режиме, что достигается
выбором соответствующего отношения площадей входа и выхода.
Это отношение увеличивается с увеличением числа М полета.
2. Камера сгорания работает с максимальным выделением
тепла, что соответствует стехиометрическому отношению топливо—
воздух.
3. Реактивное сопло имеет максимальную, практически целе¬
сообразную площадь выходного сечения. Обычно она немного
меньше площади поперечного сечения камеры сгорания, так как
оптимальная скорость на выходе из камеры соответствует Л4~0,9.
Кроме того, если это возможно, желательно, чтобы площадь вы¬
ходного сечения была значительно больше площади горловины
сопла для обеспечения расширения газа до давления окружаю¬
щей среды.
Этот верхний предел тяги прямоточного двигателя удобнее
всего представить в виде коэффициента эффективной тяги СГэф
в функции числа М полета, как это сделано на рис. 68, с исполь¬
зованием характеристик диффузора и камеры сгорания. Подобные
характеристики в известной степени зависят от высоты, так как Ст
является функцией температуры окружающей среды То (см. урав¬
нения 12 и 13).
Таким образом, при данном числе М полета Ст будет немного
возрастать с увеличением высоты (так как То уменьшается) до
тех пор, пока не будет достигнута тропопауза — высота 11 км, —
выше которой коэффициент Ст остается постоянным. Можно так¬
же показать, что характеристики горения зависят от давления,
так что при давлениях на входе в камеру сгорания р2, меньших
приблизительно 2/3 атм, происходит быстрое уменьшение как
импульсного к. п. д., так и полноты сгорания.
Так как
Рг — ЧоРо (1 + Мо) ’ Ст=/(-гУ),
то для данного Мо, Ст начнет падать, если высота достаточно воз¬
растет.
По мере возрастания Л40, как видно из рис. 68, (Стэф)тая воз¬
растает и достигает максимума при М0~3,5. Наличие этого мак¬
симума объясняется уменьшением тепловыделения в камере сго¬
рания ДТ8 при возрастании температуры торможения на входе в
/ V 1 \
камеру Т2 = То (1 -) — Л42), как показано на рис. 64.
11-405
162
ГЛАВА 8
При работе на нерасчетных режимах, когда геометрия диффу¬
зора и реактивного сопла остается неизменной, в то время как
скорость Л40 отклоняется от значения, соответствующего критиче¬
скому режиму диффузора, происходит резкое падение Стэф. Это
также показано на рис. 68. При числах М полета, меньших соот¬
ветствующих расчетной точке, диффузор работает в докритиче-
ском режиме, что сопровождается наличием большого аддитив¬
ного лобового сопротивления. При числах М, больших, чем это
требуется для работы в расчетной точке, диффузор работает в
сверхкритическом режиме с соответствующим снижением давле¬
ния торможения на выходе из диффузора.
Рис. 68. Характеристики максимальной тяги прямоточного дви¬
гателя. Температура окружающей среды —23° С. Площадь вы¬
ходного сечения — максимальная, практически приемлемая.
Топливо — керосин при стехиометрическом составе смеси. Сверх¬
звуковой многоскачковый входной диффузор: площадь входного
сечения для кривых 1—3 последовательно возрастает
На рис. 68 показана также для сравнения типичная кривая
коэффициента лобового сопротивления снаряда СВт в функции
Л10. На рисунке видно, что первое равенство тяги и лобового со¬
противления достигается вблизи Мо=1, в то время как при Мо> 1
всегда имеется избыток тяги, пока не будут достигнуты чрезвы¬
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
163
чайно большие скорости. Таким образом, нижний предел скоро¬
сти должен находиться вблизи Л40=1.
Площади сечения А2 и Ат характеризуют размеры прямо¬
точного двигателя и снаряда соответственно, и так как
(Сг )тмА2 = С^, 4 при установившемся полете, то при уве¬
личении Мо сверх Л1о=1 происходит быстрое уменьшение разме¬
ров прямоточного двигателя по отношению к размерам снаряда.
5—5.3. Ограничения по высоте
С уменьшением давления происходит не только снижение пол¬
ноты сгорания, но существует также минимальный предел давле¬
ния, ниже которого процесс сгорания не может продолжаться.
Следовательно, для данной скорости полета имеется соответствую¬
щий предел максимально допустимой высоты применения ПВРД.
Рис. 69. Характеристики устойчивости горения. Дисковый
стабилизатор пламени (о — фут/сек, р — фунт/кв. дюйм,
д — дюйм)
11*
164
ГЛАВА 5
Режим устойчивого горения является функцией уровня давле¬
ния в камере сгорания Рг, отношения веса топлива к весу воз¬
духа, скорости воздуха в районе стабилизатора пламени V и диа¬
метра стабилизатора пламени й. Экспериментальные исследова¬
ния устойчивости горения показывают, что можно нанести обоб¬
щенную границу устойчивости в координатах двух параметров
т}1т0 и где а~1, а 6 = 0,84-1,0 в зависимости от формы
стабилизатора пламени. Такие данные приведены на рис. 69 для
дискового стабилизатора пламени. Нижняя и верхняя ветви кри¬
вой границы устойчивого горения называются пределами бед¬
ного и богатого срыва горения, соответственно.
Как видно из рис. 69, существует максимальное значение пара¬
метра о/р0’95^0’85, выше которого процесс горения поддерживаться
не может. Таким образом, для данной конфигурации прямоточ¬
ного двигателя и скорости полета можно установить минимальное
давление (следовательно, и соответствующую максимальную вы¬
соту), обеспечивающее устойчивое горение. На рис. 69 показаны
кривые зависимости — от параметра ц/р°’95б?°’85 для двигателя по-
^0
стоянкой геометрии при М0 = 2 на различных постоянных высотах,
наложенные на кривую границы устойчивости. По мере увеличе-
ния высоты полета зона допустимых значении постепенно су¬
жается, . пока, наконец, не будет достигнут высотный предел по
устойчивости горения — примерно 24 км.
5—5.4. Пределы по прочности конструкции
На данной высоте при увеличении числа М полета уровень
давлений и температур на выходе из диффузора возрастает.
Кроме того, внешняя оболочка диффузора и камеры сгорания
благодаря аэродинамическому нагреву также практически нахо¬
дятся при температуре торможения. Поэтому теплоотдача обо¬
лочки камеры сгорания уменьшается, что вызывает повышение ее
температуры. На малых высотах при высоких скоростях полета
указанные температуры и давления могут стать настолько боль¬
шими, что потребовалось бы недопустимое увеличение веса кон¬
струкции вследствие того, что прочность материалов с возраста¬
нием температуры уменьшается. Следовательно, существует
практический верхний предел чисел М полета.
5—5.5. Область скоростей и высот полета прямоточного двигателя
Если учесть рассмотренные выше рабочие пределы прямоточ¬
ного двигателя, можно очертить приблизительную область его
эксплуатационных высот и скоростей полета, рис. 70. Из рисунка
ПРЯМОТОЧНЫЕ ВОЗДУШНО-РЕАКТИВНЫЕ ДВИГАТЕЛИ
165
Рис. 70. Примерная область возможных скоро¬
стей и высот полета при применении прямоточ¬
ных двигателей
Рис. 71. Сравнение различных силовых установок по отно¬
шению тяги к весу. В вес силовой установки включены
веса всех элементов, необходимых для создания тяги,
а также вес гондолы. Каждая точка кривых представ¬
ляет расчетную точку двигателя, конструкция которого
рассчитана на нагрузки, соответствующие этой точке
166
ГЛАВА 5
видно, что имеется довольно широкий диапазон рабочих скоро¬
стей и высот, позволяющих применение ПВРД на управляемых
снарядах.
5—5.6. Сравнение отношений тяги двигателя к весу
Еще одним важным характеристическим параметром силовой
установки является отношение ее тяги к весу. На рис. 71 представ¬
лены приблизительные значения этого параметра в функции
числа М полета для прямоточного воздушно-реактивного двига¬
теля в сравнении с другими силовыми установками. Рисунок об¬
наруживает значительное преимущество сверхзвукового прямо¬
точного воздушно-реактивного двигателя над турбореактивным.
Условные обозначения, использованные в гл. 5
Размерные величины
Р# — результирующая сила
Р — тяга прямоточного двигателя
И — внешнее лобовое сопротивление прямоточного двигателя
А—площадь поперечного сечения внутренней трубки тока
Ат — характеристическая площадь реактивного снаряда
х — координата, параллельная условной оси фюзеляжа
V — СКОРОСТЬ
Р — плотность
г — радиус внутренней трубки тока
р — давление
5 — площадь контрольной поверхности
Т — абсолютная температура
т —: внутренний массовый расход
/Пу — массовый расход топлива
Со — удельная теплоемкость при постоянном давлении
Н — газовая постоянная
С} — подведенное тепло
Безразмерные величины
СТ =—1 коэффициент тяги двигателя
Ро^О ^2
Ст-8ф = СТ — Со,
Со = —। коэффициент полного внешнего лобового
■у ро^'о А?
сопротивления прямоточного двигателя
Прямоточные воздушно-реактивные двигатели
167
лобовое сопротивление снаряда
1 о '
С' А
Р лобовое сопротивление снаряда °т т
°т 1 2 л А2
-2~Ро^оА2
Соа—коэффициент аддитивного лобового сопротивления
Сон—коэффициент лобового сопротивления обечайки диффу¬
зора
7 — отношение удельных теплоемкостей при постоянном дав¬
лении и объеме
у - среднее арифметическое значений 7, соответствующих
статической и полной температурам
"7
отношение веса топлива к весу воздуха
/Я/
ср = —г - — — эквивалентное отношение
(,/Яу)стехиометрич.
—коэффициент полезного действия диффузора = Р^Р!:а
т)л—коэффициент полезного действия сопла = р^р^
^—импульсный коэффициент полезного действия камеры
сгорания = 1/ —действ. _
’ ( 78э )теорет.
Щу, соответствующее (ТкЪеорет.
7) — коэффициент полноты сгорания = т—т -—г—
("*/)действ.
а, р, 0—параметры тяги (см. уравнение 13)
ГЛАВА 6
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ
УПРАВЛЯЕМЫХ СНАРЯДОВ
77. Адлер1
6—1. ВВЕДЕНИЕ
Хотя оба рассматриваемые в этой главе предмета отличаются
друг от друга, между ними существует тесная связь. В самом
деле, наведение снаряда можно рассматривать в основном как
процесс передачи информации. В снарядах, наводимых, напри¬
мер, с помощью телеметрической (командной) системы наведения
или системы наведения по лучу, снаряд получает свою информа¬
цию о наведении от источника на стартовой площадке; в снарядах
же, имеющих систему управления с самонаведением, информация
получается непосредственно путем измерения положения цели.
В конечном счете эта информация поступает в систему рулевого
управления снарядом. С процессом передачи информации связаны
задачи измерения, кодирования, модуляции, выбора надлежащей
величины отношения сигнал-шум, ширины полосы частот. Все эти
задачи относятся к области теории информации.
Так как современная теория информации — применение стати¬
стики и теории вероятности к проектированию систем связи — от¬
носительно новая область науки, предполагается, что читатель не
знаком с ней. Поэтому большая часть этой главы посвящена рас¬
смотрению ее теоретических основ и основных зависимостей, и
только относительно малая часть главы посвящается применению
теории информации в реальных системах наведения. Поскольку
данная глава имеет, таким образом, строго вводный характер, чи¬
тателю не следует испытывать разочарование, если после ознаком¬
ления с ней он не будет в состоянии сразу спроектировать более
совершенный снаряд. Однако предполагается, что читатель полу¬
чит некоторое представление об упомянутых выше проблемах и о
той роли, которую они играют при анализе и проектировании сис¬
тем управляемых снарядов.
1 Сотрудник самолетостроительной фирмы Хьюза.
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 169
6—2. ОПРЕДЕЛЕНИЕ ИНФОРМАЦИИ
Для того чтобы здраво судить о данном предмете, нам потре¬
буется рассмотреть, что представляет собою то, что передается по
каналам связи. Поэтому мы начнем с количественного и обще¬
применимого определения понятия «информации».
Рассмотрим сначала очень простую модель системы связи: ис¬
точник, который может выбрать конкретный элемент сообщения
или символ из группы, состоящей из М различных возможных эле¬
ментов сообщения; источник соединен с приемником каким-нибудь
каналом связи и посылает последовательность сообщений. В виде
печатных или телеграфных знаков, например, эти элементы со¬
общения могут рассматриваться как буквы алфавита (М = 26) 1
или, для очень простого типа снаряда, они могут быть сочета¬
ниями команд: вверх, вниз, направо, налево (М = 4). Во всех этих
случаях информация создается в процессе селекции (выбора).
Именно идея селективной информации нашла применение в тех¬
нике в отличие от, возможно, более знакомого понятия семанти¬
ческой информации (тот факт, что некоторые сообщения имеют
смысловое значение, не играет большой роли при проектировании
телеграфной системы). Количество информации, соответствующее
выбору из возможных символов, разумеется, представляет со¬
бой возрастающую функцию А/, ЦМ). (В случае передачи изобра¬
жения, например, яркость определенного пятна можно определять
просто словами «светлое» или «темное» (М = 2) или с помощью
нескольких оттенков серого цвета; в последнем случае, несом¬
ненно, может быть передано больше информации.) Теперь пред¬
положим, что произведено два последовательных выбора. Так как
количество возможных последовательностей из двух элементов
равно №, значит, два последовательных выбора можно рассмат¬
ривать как выбор из № символов; подобным же образом т по¬
следовательных выборов эквивалентно выбору из Мт элементов
и потому соответствуют количеству информации ЦА/"1). Функция /
в этом случае должна, очевидно, быть такой, чтобы информация,
получаемая при пг выборах из А/ символов, равнялась информа¬
ции, соответствующей одному выбору из 1\/т символов, или
/ге/(Л/)=/(ДГ).
Так как этому соотношению удовлетворяет логарифмическая
функция, количество информации И, получаемое при одном вы¬
боре из М символов, будет определяться как
Я = л1о^,Л? (1)
1 Число букв в латинском алфавите.— Прим, ред.
170
ГЛАВА 6
Удобно взять а=1 и Ь = 2. Тогда одна единица информации будет
соответствовать ^=2, т. е. выбору между двумя равновероятными
альтернативами («да» или «нет»). Эту единицу обычно называют
двоичной единицей. Приведенное выше определение информации
может показаться несколько произвольным; однако оно оправды¬
вается тем, что на практике дает полезные и логические резуль¬
таты.
Такое определение информации применимо только в том слу¬
чае, когда /V возможных исходов равновероятно. Во многих слу¬
чаях, однако, некоторые исходы будут иметь более высокую ве¬
роятность появления по сравнению с другими. В телеграфии, на¬
пример, буквы Е и Т передаются чаще, чем, скажем, буквы 2 и С.
Ясно, что информация, полученная при выборе, будет меньшей,
если этот выбор имеет высокую вероятность или частоту повто¬
рения: если мы хорошо знаем, что собирается сказать оратор,
прежде чем он откроет рот, в его речи будет содержаться мало
новой информации. В этом случае представляется логичным за¬
ключить, что информация, полученная при выборе элемента со¬
общения вероятности р, должна определяться некоторой возрас¬
тающей функцией 1/р. Здесь снова оказывается уместной лога¬
рифмическая функция, что можно видеть при рассмотрении сооб¬
щения, составленного из двух символов, которые имеют (незави¬
симые) вероятности появления Р1 и рг- Вероятность этого сообще¬
ния будет составлять Р1Р2, а количество его информации —
1о&(1/Р1Р2), что, как видно, в самом деле равно 1о^(1/Д1) +)
+ 1о^(1//?2). т. е. сумме информаций от каждого выбора. Однако
содержание информации конкретного символа или сообщения
фактически не является тем количественным критерием, которым
можно характеризовать источник информации, так как проект си¬
стемы зависит не от того, что фактически посылается, а от того,
что можно было бы послать. Более полезной характеристикой
является среднее количество информации на единицу сообщения,
которая выявляется при усреднении информации, получаемой от
каждого символа с весом, равным вероятности появления:
А
<2>
л=1
Значения рп должны, конечно, удовлетворять условию
л
2^=1- с3)
п=1
Интересно здесь заметить, что Н получает максимальное зна¬
чение, если сделать все рп равными между собой. Чтобы наиболее
эффективно использовать Ы имеющихся символов, их следует при¬
менять с одинаковой частотой. В этом случае Н станет равным
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 1'71
Рис. 72. Информационная функ¬
ция для двух возможных выбо¬
ров при вероятностях р\ и р2
(Р1 +Р2= 1)
10^2^ (наш предыдущий вывод), что можно получить, подставляя
в уравнение (2) рп = \/М. График изменения И в зависимости от
вероятности выбора символов изображен на рис. 72 при М = 2.
Вышеуказанное определение информации можно было бы
обобщить еще больше, если учесть взаимозависимость среди сле¬
дующих друг за другом символов в сообщении. В английском
языке, например, по существу, нет выбора при отборе буквы, сле¬
дующей за буквой д. Практически этой буквой всегда будет
буква и. Хотя этот вопрос здесь
подробно рассматриваться не бу¬
дет, должно быть ясно, что если ве¬
роятности следующих друг за дру¬
гом символов не независимы, то ко¬
личество информации будет меньше.
Мера использования источником
набора символов выражается эф¬
фективностью т], определяемой как
отношение действительной величи¬
ны Н к 1о^2М, т. е. максимальному
значению Н. Величина о?=(1—т])
называется избыточностью. Она яв¬
ляется мерой вероятностной взаим-.
ной зависимости между символами
сообщения. Для английского язы¬
ка, например, можно показать, что
к; несколько меньше половины, сле¬
довательно, только около поло¬
вины букв, которыми пишут на английском языке, зависят от на¬
шего выбора, другая же половина их диктуется структурой языка.
Максимально возможное сжатие сообщения, равное ц, получается
при таком «кодировании» сообщения, которое позволяет удалить
всю избыточность (см. пример в разделе 6—6).
Вероятно, будет полезно дать здесь некоторые простые чис¬
ловые примеры количества информации. Они могут служить в ка¬
честве основы для сравнения скоростей передачи информации
радиолокатором и управляемыми снарядами, вычисленных ниже.
Рассмотрим сначала информацию, передаваемую с помощью ан¬
глийского языка. Если не принимать во внимание избыточность, то
содержание информации среднего пятибуквенного слова будет со¬
ставлять 5 1 о^г 26 или 23,5 дв. ед. Но из-за избыточности в
английском языке, о которой говорилось выше, это значение
уменьшается приблизительно до 9 дв. ед. на каждое слово. Сред¬
няя скорость речи, составляющая около 200 слов в минуту, таким
образом, соответствует скорости передачи информации в 30 де. ед.
в секунду. Обычная книга, содержащая 100 000 слов, эквивалентна
172
ГЛАВА 6
приблизительно 1 миллиону двоичных единиц. При соответствую¬
щем кодировании эту информацию можно было бы сохранять в
запоминающем устройстве, используя 1 миллион ячеек, как реле
или триггерные цепи, с двумя устойчивыми состояниями. Это
устройство, имеющее 21 000 000 возможных состояний, могло бы за¬
помнить также всякую другую книгу на 100 000 слов (возможное
количество таких книг «ограничивается» числом 21000 000). Теперь,
если мы рассмотрим работу оператора, вычисляющего на на¬
стольном счетно-решающем устройстве какую-нибудь таблицу со
скоростью одного шестизначного (в десятичной системе) числа
за каждые 5 секунд, то увидим, что он будет давать информацию
со скоростью 1/5x6 1о^2 Ю или 4 дв. ед. в секунду. Наконец, при¬
меним уравнение (1) к проблеме взвешивания монет, где тре¬
буется найти, при минимальном количестве взвешиваний, одну
монету из группы в 12 монет, отличающуюся по весу от всех
остальных монет. Требуемое количество информации равно 1о^2 12
(выбор одного из двенадцати) плюс 1о^2 2 (определение, тяжелая
или легкая эта монета), т. е. 4,58 дв. ед. Каждое взвешивание,
дающее один из трех возможных результатов (легче, тяжелее,
равновесие), дает 1о^23 или 1,59 единиц информации. Теория
информации говорит нам в этом случае, что три взвешивания да¬
дут достаточную информацию для решения проблемы. И задача
действительно решается при трех взвешиваниях, но это предо¬
ставляем сделать читателю как упражнение.
До сих пор мы рассматривали случай дискретных сообщений,
или сигналов. Однако часто приходится иметь дело с непрерыв¬
ными величинами (напряжение тока, положение вала), которые
могут принимать любые значения в пределах некоторого диапа¬
зона величин. Если мы обозначим непрерывную переменную бук¬
вой х, а р(х) —ее плотность вероятности, тогда мы сможем опре¬
делить функцию информации, аналогичную уравнению (2) путем
замены суммы интегралом
^'= ] Р (*) 1о&2 уА ах_ (4)
— ОО
Однако есть существенная разница между этой информационной
функцией и функцией, определенной в уравнении (2). Последняя
является абсолютной мерой информации (в единицах информации
на отсчет), в то время как Н' будет зависеть от системы коорди¬
нат, в которой измеряется х. Предположим, например, что х рав¬
номерно распределяется между нулем и х0, так что
если 0<х<2х0;
р(х)= х°
0, если х < 0 или х > х^
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 173
Тогда
я; = I —10^2 — 1о^2 х0 Ах = 10^2 х0.
Ад Ад
О
Теперь, если х, скажем, является расстоянием до цели самолета,
то Н\, очевидно, будет принимать различные значения в зависи¬
мости от того, будет ли максимальная дальность х0 выражаться
в километрах и метрах или милях, ярдах и футах; в действитель¬
ности Н' может быть даже отрицательной величиной. Заметим,
однако, что разности между информационными функциями не¬
прерывных переменных не зависят от системы координат и могут
быть выражены опять-таки в двоичных единицах. В качестве при¬
мера рассмотрим снова равномерно распределённую переменную
у, но теперь ограниченную интервалом
Соответствующая информационная функция будет
■Гр
2
0 т
Разность между этой функцией и функцией, найденной выше, в
этом случае будет равна:
= Н’х — Н'у - 10^ х0 — 1о^2 = 1ое2 2=1,
т. е. одна дв. ед. Этот ответ, конечно, логичен, так как мы
могли бы свести распределение х к распределению у, производя
один двоичный выбор, а именно, определяя, находится ли х
между нулем и х0/2 или между х0/2 и х0. Произвольность распре¬
деления х, (Н'х) была бы в этом случае уменьшена на одну дв. ед.,
приводя снова к результату, указанному выше. Мы увидим да¬
лее, что все существенные величины (например, пропускная спо¬
собность канала) действительно зависят только от разностей
между функциями Н' и всегда получаются положительными. Еди¬
ницы, в которых измеряется само Н', можно назвать «относитель¬
ными двоичными единицами» — относительными к количеству ин¬
формации равномерного распределения в единичном интервале
[р(х) = 1; для которого Н' равно нулю.
Теперь будут сформулированы без вывода два важных свой¬
ства этой информационной функции. Первое заключается в том,
что если область изменения переменной ограничивается заданным
диапазоном, то Н' делается максимальным, при условии что
плотность вероятности равномерна. Это, очевидно, соответствует
самой большой априорной неопределенности относительно дейст¬
174
ГЛАВА в
вительного значения переменной и поэтому наибольшему выиг¬
рышу в информации, когда определяется некоторое значение. Это
можно сравнить со случаем дискретного выбора, при котором Н
становится максимальным при равенстве вероятностей всех воз¬
можных случаев выбора. Второе важное свойство заключается в
том, что если среднеквадратическое отклонение а какой-либо пере¬
менной фиксировано, то Н' становится максимальным, при усло¬
вии что распределение вероятности гауссово или нормальное, т. е.
если
Р(-«) = тт=е 232 • (5)
• у 2ла
Соответствующее значение Я' равно
/у' = — ] р (х) 1о^3р (х) дх = 1о^з И2кеа относительных дв. ед. (6)
00
Если же х является напряжением или силой тока, тогда о2 будет
пропорционально средней мощности. Мы видим в этом случае, что
при данной-мощности сигнала, если статистику сигнала сделато
гауссовой, содержание информации становится максимальным.
К этому мы вернемся несколько позже.
6—3. ШИРИНА ПОЛОСЫ ДИАПАЗОНА И СКОРОСТЬ
ПЕРЕДАЧИ ИНФОРМАЦИИ
Скорость, с которой некоторая непрерывная переменная может
передавать информацию, зависит не только от распределения
своей вероятности, но также и от своего спектра частот. Рассмот¬
рим эту связь между скоростью информации и спектром частот.
Возьмем график изменения напряжения, получаемого, на¬
пример, в микрофоне во время речи человека, и поставим вопрос,
какое количество ординат пришлось бы взять, чтобы воспроизве¬
сти эту кривую с достаточной точностью. Одно значение в секунду,
видимо, было бы недостаточным, так как в этом интервале может
произойти много значительных изменений. Миллион значений в
секунду, с другой стороны, было бы излишне много, так как
последовательные дискреты в этом случае отличались бы только
на очень небольшую величину: причина этого, конечно, в том,что
голос человека не содержит частот свыше 5000 гц и, следова¬
тельно, Е(/) не может заметно измениться за промежуток вре¬
мени, гораздо более короткий, чем один период самой высшей су¬
ществующей частоты. Предположим в этом случае, что наиболее
длительный допустимый интервал между дискретными значе¬
ниями будет примерно составлять 'Л периода наивысшей имею¬
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 175
щейся частоты, т. е. около 0,0001 сек для голоса человека. Можно
показать гораздо более точным методом, что это положение дей¬
ствительно верно. Если спектр функции У{ не содержит частот
выше 117 гц, то в этом случае можно определить полностью пу¬
тем задания ее значений через каждые '/2 У7 .сек *. Доказано, что
имеется только одна-единственная функция, которая проходит че¬
рез все эти точно определенные точки отсчетов и имеет спектр,
ограниченный полосой ХЕ. Ясно, что для определения функции в
интервале времени Т сек 2ХЕТ отсчетов должно быть достаточ¬
ным количеством. Можно показать далее, что любой ряд 2 ХЕТ
независимых чисел достаточен для определения функции с огра¬
ниченной полосой в течение Т сек. Можно также определить функ¬
цию, задавая ее значения 17(/) и ее наклон дУ/сП в точках отсчета,
взятых через одну, т. е. при интервалах 1/1Г.
В системах связи мы часто имеем дело с модулированными сиг¬
налами, которые имеют спектр с ограниченной полосой, серединой
которой является значение несущей частоты. В этом случае можно
также показать, что если ХЕ ширина высокочастотного спектра, то
кривую опять определяют 2 ХЕТ отсчетов. Обычно поведение та¬
кого сигнала описывается значениями амплитуды (огибающей) и
фазы, даваемых каждую \/ХЕ сек. Таким образом, амплитудная
модуляция, например, состоит в изменении величины амплитуды
при сохранении значений фазы постоянными. Заметим, что в этом
случае ширина полосы высокой частоты ХЕНР располагается ог
(7С —ХЕЬР) до (/с + ^ьк), где /с является несущей частотой, а
спектр модулирующего сигнала низкой частоты распространяется
от нуля до ХЕЬР. Следовательно, подача значений огибающей несу¬
щей с интервалами 1/и7Нк эквивалентна подаче дискрет со ско¬
ростью '/г Х?ьр, что, как мы уже знаем, достаточно для полного
описания низкочастотной функции.
Имеется возможность показать путем простого рассуждения,
почему 2 ХЕТ параметров достаточно для описания сигнала с огра¬
ниченной полосой. Если мы интересуемся только интервалом
между нулем и Т, то можем разложить У(1) в ряд Фурье. Полу¬
ченный спектр будет в этом случае состоять из компонентов -час¬
тоты при 1/7', 2/Т, ... , п/Т, ..... М/Т. Наивысшая частота
М/Т, согласно гипотезе, равна ХЕ. Следовательно, имеется М = ТХЕ
различных частотных составляющих, каждая из которых имеет
косинусный и синусный компоненты (или амплитуду и фазу), и,
значит, потребуется всего 21177’ значений для полного описания2.
Кроме того, имеется также постоянная составляющая, так что
1 Теорема В. А. Котельникова.— Прим. ред.
а Правило, согласно которому переменную можно описать путем дачи ком¬
понентов ее спектра каждые 1/Т гц, часто называется «теоремой отсчетов в час¬
тотной области», а описание с помощью значений амплитуд через каждые
1/2 сек называется «теоремой отсчетов в области времени».
176
ГЛАВА 6
фактически мы получаем (2 М^Т+1) параметров. Это небольшое
расхождение не должно нас беспокоить, так как вышесказанное
не предназначено служить в качестве твердого доказательства.
Далее, можно показать, что если функция ограничивается интер¬
валом Т и ее нулевое значение находится вне этого интервала, то
в этом случае ее спектр не может лежать в пределах любой огра¬
ниченной полосы, а будет теоретически распространяться до бес¬
конечности, уменьшаясь как некоторая отрицательная степень
частоты. Поэтому значение ширины полосы 1^, которое должно
применяться при определении интервала дискретности, в какой-то
степени произвольно и на практике берется как некоторое значе¬
ние частоты, при которой компоненты спектра уменьшаются до
незначительной величины.
Основываясь на том, что необходимы только 2 значений
в секунду, мы можем определить скорость информации для непре¬
рывного сигнала. По уравнению (4) информация, передаваемая
каждой точкой отсчета, равна
+“
/7' = - ]’ р(У)1оёр(У)<1У,
где р(У) является плотностью вероятности Е(/‘) (и предпола¬
гается независимой от времени и потому одинаковой в каждой
точке). Поэтому скорость передачи информации равна
А' = 2№Н' относительных дв. ед./сек. (7)
6—4. СКОРОСТЬ ПЕРЕДАЧИ СООБЩЕНИЯ ПРИ
НАЛИЧИИ ШУМОВ
Практически в любой системе связи мы встречаемся с пробле¬
мой шума. В общем его воздействие состоит в искажении сигнала,
что создает в пункте назначения неуверенность в достоверности
сообщения. Ясно, что количество передаваемой информации, та¬
ким образом, уменьшается. Следующий пример служит для иллю¬
страции этого уменьшения. Предположим, что источник передает
ряд двоичных чисел, представленных, скажем, отрицательными
импульсами (нулями) и положительными импульсами (едини¬
цами), причем оба типа импульсов применяются с одинаковой
средней частотой при скорости 1000 импульсов в секунду. Если бы
не было шума, то каждый принятый импульс давал бы одну
двоичную единицу информации. Предположим, однако, что шум
способен изменить 10% полученных импульсов (0 на 1 или 1 на
0). Можно подумать, что так как в секунду принимается 900 пра¬
вильных импульсов, то соответствующая суммарная скорость ин¬
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 177
формации составляет 900 дв. ед./сек; однако при этом не прини¬
мается во внимание незнание того, какие из сигналов ошибочны.
Чтобы найти надлежащую поправку, допустим, что в данный мо¬
мент мы имеем источник, который может давать только нули. По¬
лучаемая информация определенно равна нулю, так как р(0) = 1,
р(1) =0 (см. уравнение 2). Однако на приемной станции в сред¬
нем 10% нулей будет появляться как единицы, так что р(0)=0,90
и р(1)=0,10. Соответствующая вероятная «информация» будет
равна
Нп =р (0) 1ое + р (1 )1од = 0,47.
Следовательно, кажется, что источник посылает 470 дв. ед./сек,
в то время как в действительности он не дает информации вообще.
Следовательно, с такой скоростью на принимающей станции акку¬
мулируется ложная {отрицательная) информация или ошибки.
Мы видим в этом случае, что при наличии шума мы должны опре¬
делить новое количество — чистую полученную информацию; мы
будем называть ее переданным сообщением. В приведенном выше
примере будет логичным определить скорость сообщения у как
разность между скоростью передачи информации 60 на выходе и
скоростью передачи ошибки Кп:
у = /г0 — Ь„ — Ю00 — 470 = 530 дв. ед./сек.
В крайнем случае, когда шум настолько велик, что на выходе
одинаково вероятно получить 0 или 1, независимо от того, каков
был входной символ, скорость передачи ложной информации со¬
ставит 1000 ('/21о^22+ '/г 1о^22) или 1000 дв. ед.1сек и, следова¬
тельно, д = 0 (как и предполагалось) (хотя фактически половина
выходных символов случайно может оказаться правильной).
Так как мы старались только показать правдоподобность полу¬
ченного выше результата без какого-либо вывода, будут установ¬
лены определенные условия его применимости. Для дискретных
символов, посылаемых со скоростью п символов в секунду, ско¬
рость сообщения дается с помощью выражения
у = — Нп = п{Н0 — Нп) дв. ед./сек, (8)
если все входные символы используются с одинаковой средней
частотой, а шум и сигнал независимы, т. е. шум с одинаковой ве¬
роятностью искажает все символы сигнала. Для непрерывного сиг¬
нала соответствующее выражение для у
? = /г0 — - 2 Г (Я' — Н'п) дв. ед./сек (9)
сохраняет силу, если шум накладывается • на сигнал (принятый
сигнал является суммой входного сигнала и шума) и не зависит
12-405
178
ГЛАВА 6
от сигнала. К счастью, это условие имеет место в большинстве
случаев, представляющих практический интерес. Чтобы дать чис¬
ловой пример, предположим, что управляющее напряжение сиг¬
нала управления гипотетического снаряда может изменяться от
—50 до +50 вольт с равной вероятностью и включает (нормально
распределенный) термический шум со средним квадратическим
значением в 1 в; если этот сигнал ограничен по частоте, скажем,
до 1 гц, тогда скорость передачи будет равна
д = 2 (1о^2100 — 1о^2 И 2*е) = 9,2 дв.ед.)сек.
6—5. ПРОПУСКНАЯ СПОСОБНОСТЬ КАНАЛА
Теперь мы можем определить очень важную величину, а имен¬
но, пропускную способность канала связи, где словом канал мы
обозначаем любую среду для передачи сигнала. Пропускная спо¬
собность канала определяется как максимальное значение скоро¬
сти сообщения <7, которое достигается путем подходящего выбора
статистических характеристик сигнала, на которых наложены ка¬
кие-либо ограничения. Чаще всего ограничивается средняя вели¬
чина или пиковое значение мощности сигнала. При ограничении
средней мощности и гауссовом характере шума пропускная спо¬
собность равна
С = тах[21Г(Я'-/7я)], (10)
где Н'из уравнения (5), И—мощность шума. Зна¬
чение С будет наибольшим, если функция информации выходного
сигнала Но имеет максимальное значение. Как мы уже видели в
разделе 6—1, это будет иметь место, если выходной сигнал нор¬
мально распределен, так как фиксированная мощность соответ¬
ствует фиксированному а. Так как общая средняя мощность вы¬
ходного сигнала равна (И+Р), где Р есть мощность сигнала, мы
имеем
и, следовательно,
С = 2 М7 [1О& И2ке (Р+Щ — 1од2
или
С = 1Г 1оё2 дв. ед./сек. (11)
Эта величина является максимальной скоростью передачи сооб¬
щения, возможной при данной ширине полосы № и отношении
сигнал-шум Р/И. Она является мерилом, с которым мы можем
сравнивать любое звено связи, встречаемое на практике. Кроме
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 179
того, эта формула применима также как уравнение передачи со¬
общения: полное сообщение, которое может быть передано за
Т сек, равно
ц = СТ=Х7Т 1оё2дв. ед. (12)
Оно показывает, как время, ширина полосы и мощность сигнала
(три характеристики сигнала) взаимно заменяемы, по крайней
мере в идеальном случае, при получении данного значения 0.
Уравнение (11) можно вывести также более простым, хотя и
чисто эвристическим методом, считая, что сигнал состоит из ряда
импульсов изменяющейся высоты. Предположим, что максималь¬
ный уровень сигнала с наложенным шумом равен а среднее
квадратическое значение напряжения шума равно Уп- Если наи¬
меньшее приращение сигнала, которое можно различить при нали¬
чии шума, предполагается равным Уп, то в таком случае наиболь¬
шее общее количество значимых уровней в каждом импульсе равно
Уп+з/Уп- Информация, получаемая при определенной амплитуде
импульса, равна поэтому (о^Уп+в/Уп). Так как форма сигнала
полностью воспроизводится 2 ХУ значениями амплитуд в секунду,
то можно видеть, что максимальная скорость сообщения будет со¬
ставлять 21Г1ое2(Уп+8/У„). Это выражение эквивалентно уравне¬
нию (11), так как квадрат напряжения пропорционален мощности.
В действительности точное совпадение формул чисто случайно
вследствие несколько произвольного характера вывода (в частно¬
сти, ограничение средней мощности особо не использовалось).
Если средняя мощность является единственным ограничением,
то в этом случае может показаться, что скорость сообщения можно
увеличивать неограниченно путем все большего расширения ис¬
пользуемой полосы частоты. Однако практически во всех случаях
мощность шума будет возрастать вместе с возрастанием ХУ,
обычно прямо пропорционально; т. е. ^ = пйXУ, где п0 является
спектральной плотностью мощности шума в ваттах на гц. Таким
образом,
С=ЙПо&2^1 +дв. ед.1сек, (13)
что и представлено на рис. 73. Можно видеть, что пропускная спо¬
собность становится максимальной при ХУ—”оо; однако скорость
приращения становится очень малой за пределами единицы отно¬
шения сигнал-шум. Используя то положение, что 1п(\ + 1/х) ~\/х
для большого значения х, можно видеть, что максимальное значе¬
ние С для данной средней мощности Р будет равно
Стах = -^-1ое2 е дв. ед./сек. (14)
12»
180
ГЛАВА 6
Если бы даже можно было ликвидировать все другие источники
шума, в любой физической системе все же имел бы место терми¬
ческий шум. Спектральная плотность этого шума равна кв вт/гц,
где к— постоянная Больцмана, а 6 — абсолютная температура.
Рис. 73. Пропускная способность канала в зависимости от
ширины полосы при постоянной мощности сигнала Р и
спектральной плотности шума пд
Следовательно, для того чтобы передать единицу сообщения в этих
идеализированных условиях, необходимо, чтобы
СТ = 1ое, е = 1 дв. ед.
Но РТ является энергией, расходуемой за время Т. Мы видим, в
таком случае, что минимальное количество энергии, необходимой
для передачи информации, равно
Д = А01о^е 2 3 х 10-24 дж./дв. ед. (15)
для 0, близкой к комнатной температуре. Хотя это количество
энергии может показаться очень незначительным (1 ■ мквт будет
соответствовать скорости сообщения ЗХ Ю17 дв. ед./сек), интересно
заметить, что хороший радиолокационный приемник может при¬
близиться к этому пределу по меньшей мере до величины, отли¬
чающейся на несколько порядков.
Для случая ограничения пиковой мощности, в отличие от сред¬
ней мощности, простых формул для пропускной способности канала
не имеется, Однако можно показать, что если Рр является пико¬
вой мощностью и М—мощность шума (средняя),
/ 2Р \ / 2Р \
1ое3 (1 + ^4) < с < ур 1ое2 (1 + , (16)
теория информации и найеДенИе управляемых Снарядов 181
где выражение верхнего предела является только приближенным.
Типичным примером системы, ограниченной как по средней, так и
по пиковой мощности, является радиолокационный передатчик:
пробой диэлектрика ограничивает пиковую мощность, а нагрева¬
ние лампы ограничивает среднюю мощность. В таком случае С рав¬
но наименьшему из значений, получаемых из выражений (11)
или (16).
В заключение этого раздела применим уравнение пропускной
способности канала к речи. Найдено, что речь воспринимается
только при отношении сигнал-шум, равном около 15 дб, и при ши¬
рине полосы 1000 гц. Эти цифры соответствуют С = 5000 дв. ед./сек,
что значительно больше фактической скорости в 30 дв. ед./сек, най¬
денной в разделе Г (основанной только на частотах слов или букв);
это объясняется языковой избыточностью и неоптимальным ис¬
пользованием пропускной способности канала. Для хорошего вос¬
производства речи ширина полосы 3000 гц и отношение сигнал-
шум 40 дб почти достаточны. Это соответствует С~
— 100 000 дв. ед./сек. Но помимо «содержания слова» большое ко¬
личество информации можно передать в этом случае с помощью
интонаций, модуляции голоса и индивидуальных особенностей речи
говорящего.
6—6. КОДИРОВАНИЕ И ДЕШИФРОВАНИЕ
Для того чтобы передать сообщение, его необходимо преобра¬
зовать в электрический сигнал, удобный для канала связи. Как
показано на рис. 74, этот процесс преобразования обычно требует
Рис. 74. Передача сообщения
кодирования и модуляции, хотя различие между обоими процес¬
сами не всегда четко проводится. Представляется полезным раз¬
личать те процессы кодирования и дешифрования, которые исполь¬
зуют известные статистические свойства сигнала, и те, которые их
не используют. Первые будут рассмотрены в настоящем, а послед¬
ние в 7 разделе.
182
ГЛАВА 6
6—6.1. Кодирование
Оптимальное кодирование сообщений для свободного от шума
канала совершенно отличается от кодирования для канала с шу¬
мом. В первом случае мы обычно имеем дело с дискретными сиг¬
налами (подобными тем, которые используются в телеграфии или
в кодо-импульсной модуляции). Приходится мириться с некоторой
потерей мощности сигнала, чтобы получить «чистые» импульсы
сигнала, и основной целью в этом случае является сжатие сооб¬
щения в процессе кодирования, с тем чтобы наиболее эффективно
использовать канал и возместить потери в мощности сигнала.
В случае сигналов с шумом мы, наоборот, намеренно вводим из¬
быточность, чтобы сделать сигнал менее уязвимым шумом.
Следующий простой пример явится иллюстрацией кодирования
без помех. Предположим, что мы имеем источник, который может
передавать четыре возможных сообщения М\, М2, М3 и М4, исполь¬
зуемых соответственно с вероятностями ’/2, 'А, '/в и '/з. Информа¬
ция на каждое сообщение поэтому составляет ('/21о^ 2+'/ч 1о^ 4 +
-Р/ч 1о& 8), или 7/4 дв. ед. на сообщение. Так как макси¬
мальная информация будет равна 1о^2 4, или 2 дв. ед. на сообще¬
ние, то избыточность составляет '/в и т) = 7/8. Если используемый
канал имеет четыре символа дискретных сигналов (скажем, четыре
различных уровня напряжения): 5Ь $2, 53, 54, то в этом случае мы
сможем с помощью надлежащего кодирования использовать
в среднем только семь сигналов 5 на восемь сообщений М. Для
осуществления этого мы сначала закодируем сообщение в двоич¬
ный (двухзначный) код следующим образом *:
Л4]-> 0;
М2 -> 10;
2И3 110;
,444-> 111.
Для двухсигнального канала этот код оптимален по двум
причинам. Так как
р(0) 2^4'8 ,
р(1) 4 +1 2 х -г +3 х -г
оба сигнала будут использоваться с одинаковой вероятностью, при¬
чем каждый будет передавать 1 дв. ед., полностью используя про¬
пускную способность канала. При использовании коротких кодов
1 Здесь показан пример обычного процесса кодирования, известного под
названием «кодирование Фэно-Шеннона».
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 183
для сообщений с большой вероятностью 1 * * среднее количество сиг¬
налов на сообщение уменьшается — в данном случае до минималь¬
ного значения 7/4 символов (или единиц) на сообщение. Так как
мы постулировали четырехсигнальный канал, то должны переко¬
дировать нули и единицы в четыре 5. Соответствующий код имеет
следующий вид:
00->5,;
01 52;
Ю 53;
11->54.
Легко установить, что все 5 будут употребляться с одинаковой
вероятностью, полностью используя пропускную способность ка¬
нала. Например, если канал может передавать 100 сигналов в се¬
кунду, скорость информации будет 10010824 = 200 дв. ед./сек,
а если бы мы преобразовали сообщения непосредственно в сиг¬
налы без кодирования (Л4,—>14 и т. д.), скорость составляла бы
только 100X7/4=175 дв. ед./сек. Ниже приводится типичная по¬
следовательность. Заметьте, что 16 символов канала связи несут
информацию, содержащуюся в 19 символах источника, что соот¬
ветствует сжатию 16/19 = 0,845. При достаточно длинных последо¬
вательностях это значение будет приближаться к истинному сред¬
нему значению т] = 7/8 = 0,875. Отметим также вносимую задержку,
которая характерна при этом типе кодирования, и тот факт, что
двоичный код можно считывать правильно даже при отсутствии
интервалов между знаками (в коде Морзе интервал между зна¬
ками букв необходим).
I—^МХМ2 Л/4 Мх М3 М4 М1МгМ2М1 МХМ3 МХМХ М2 МХМ3 МХМХ
А 0 0 1 1 10 1 1 01 11 0 1 01 00 0 1 10 0 0 1 0 0 1 10 о о
, «91 <5*4 5"з «94 «92*«94 32 5ч «91 «92 «93 «94 «93 «92 *9э «91
В 0 0 1 11 0 1 10 11 1 0 10 10 0 0 11 0 0 0 1 0 0 11 0 0 0
1—> мхмх М4МХ м3 М4МХМ2М2МХ мх М3МХМХ М2МХ М3МХМХ
А — кодирующее устройство (сообщения -» сигналы);
В — дешифратор (сигналы сообщения).
К сожалению, «эффективный» сигнал с отсутствием избыточ¬
ности или с малой избыточностью является крайне уязвимым со
стороны шума. Избыточность сигнала позволяет принимающему
угадывать сигналы, искаженные шумом, и, следовательно, позво¬
ляет иметь в передаваемом симнале отределенное коничество оши-
док, не девая его бессныслемным или нетрафильным, что иллю-
1 Подобная процедура используется в коде Морзе, где краткие кодовые сиг¬
налы применяются для часто используемых букв, как буквы Е, Т, А, а длинные
кодовые сигналу — для редко встречающихся букв, как 2 и С/.
184
ГЛАВА 6
стрируется настоящим предложением. Простейший и самый обыч¬
ный метод введения избыточности состоит в использовании
повторения. Так, для дискретных сигналов каждый символ может
повторяться три раза; на приемной станции символ в этом случае
будет принят правильно, если он будет появляться по меньшей
мере дважды. Усовершенствованием этого метода было бы повто¬
рение сообщений малой вероятности (которые передают большую
часть информации) большее количество раз, чем сообщений, обла¬
дающих высокой частотой повторения. Метод повторения требует
высокой скорости подачи сигналов, т. е. большой ширины полосы
и, следовательно, большей пропускной способности канала. В слу¬
чае непрерывного сигнала эффект, подобный повторению, можно
также получить с помощью схем, в которых ширина полосы (ка¬
нала) сигнала делается больше, чем ширина полосы (источ¬
ника) сообщения На принимающей станции сигнал в этом
случае интегрируется, или «сглаживается», с наблюдательным
временем около 1/2 1Гт сек, тем самым воспринимая среднее зна¬
чение ^8/^т сигналов. Создано большое количество более совер¬
шенных кодов, ликвидирующих, например, ошибки, связанные с
элементами самопроверки или обратной связи и каналами коррек¬
ции ошибок, что позволяет более эффективно использовать про¬
пускную способность канала. Однако оборудование передающих
и принимающих станций, необходимое для кодирования и деши¬
фрования, обычно является довольно сложным и делает примене¬
ние этих кодов на управляемых снарядах непрактичным.
6—6.2. Дешифрование
Здесь будет рассмотрен только случай сигнала с шумом, так
как в случае сигнала, свободного от шума, дешифратор представ¬
ляет собой устройство, обратное кодирующему. Проблема в этом
случае заключается в следующем: как обработать принятый сиг¬
нал, являющийся суммой (или возможно более сложной функ¬
цией) первоначального сигнала и шума, чтобы получить как
можно больше содержащейся в нем информации? Эта проблема
является одной из центральных в теории информации.
Обычно сигнал и шум имеют различные спектры частоты, и
это обстоятельство можно использовать для их разделения (по
крайней мере частичного) с помощью подходящих фильтров.
В управляемом снаряде с радиолокационным приемником, напри¬
мер, полоса пропускания промежуточной частоты имеет порядок
Мгц, в то время как вся информация по управлению собственно
покрывает спектр всего в несколько гц. Фильтр нижних частот по¬
этому позволит избавиться от большей части шума и пропустить
Полезные компоненты сигналов. Заметьте, что хотя действитель¬
теорий Информации и наведение управляемых снарядов 185
ное поведение функции сообщения, конечно, неизвестно, мы дол¬
жны знать ее спектр, чтобы быть в состоянии спроектировать под¬
ходящий фильтр. Особенно мы должны знать спектр мощности
сигнала, усредненной по большому количеству типичных сигналов.
Далее, так как спектры сигнала и шума обычно частично пере¬
крываются, большая фильтрация шума приведёт к большему
ослаблению компонентов сигнала. Это аналогично положению при
расчете фильтра, ослабляющего шум иголки в фонографе: удале¬
ние (высокочастотного) шума от иголки должно балансироваться
так, чтобы не допустить ухудшения качества звучания. В каждом
случае о «лучшем» фильтровании можно говорить с определен¬
ностью только в сравнении с каким-либо критерием. Для случая
с фильтром, ослабляющим шум от иголки в фонографе, таким кри¬
терием будет удовольствие слушающего; в системах связи им
обычно является так называемый критерий среднеквадратического
значения, который требует, чтобы среднее значение квадрата раз¬
ности между выходом фильтра и истинным сигналом было мини¬
мальным. На основе этого критерия возможно создание оптималь¬
ного линейного фильтра (фильтра Винера), если известны спектры
мощности сигнала и шума. На практике эти спектры обычно точно
не известны, но хорошая «инженерная догадка» в этом случае
обычно возможна.
Вместо критерия среднеквадратического значения возможно
более выгодно в некоторых случаях довести отношение сигнал-
шум на выходе фильтра до максимума. Такой критерий пикового
сигнала будет подходящим, например, при попытке обнаружить
цели на радиолокационном индикаторе типа А.
Можно, кроме того, спроектировать специальный фильтр
(фильтр Норта), который использует всю информацию, содержа¬
щуюся в форме импульса для выделения максимальной амплитуды
(выход фильтра от возвращенного радиолокационного импульса
выглядит как большой пик шума).
Можно придумать несколько других критериев оптимального
дешифрования, например, сведение к минимуму абсолютного зна¬
чения (вместо среднеквадратического значения) ошибки. К сожа¬
лению, до сих пор не было сделано крупных полезных достижений
в этой области, за исключением рассмотренных случаев. Однако
следует заметить, что в настоящее время проводится значительная
работа над нелинейными фильтрами ’, которые используют тот
факт, что распределения вероятностей сигнала и шума отлича¬
ются друг от друга, с тем чтобы добиться лучшего отделения при¬
нятого сигнала от шума.
1 Параметры линейного фильтра (усиление, постоянные времени и т. д.) не
зависят от входного сигнала (хотя они могут зависеть от времени), в то время
как параметры нелинейного фильтра зависят от амплитуды сигнала.
186
ГЛАВА 6
6—7. МОДУЛЯЦИЯ
Практически во всех системах связи управляемых снарядов
Применяется модуляция высокочастотной несущей. Это объяс¬
няется двумя основными причинами. Во-первых, эффективного
излучения и распространения электромагнитной энергии можно
достигнуть только на высоких частотах, и, во-вторых, в системах
модуляции возможно лучшее подавление помех, так как увеличен¬
ная ширина полосы дает высокое отношение сигнал-шум. Именно
это улучшение отношения сигнал-шум будет рассмотрено в дан¬
ном разделе.
Общая схема системы модуляции показана на рис. 74. Начнем
с первоначальной функции сообщения, имеющей низкочастотную
ширину полосы Низкочастотный сигнал применяется для мо¬
дулирования высокой несущей частоты; сообщение в этом случае
содержится в высокочастотной полосе середина которой
равна несущей частоте. На приемной станции высокочастотный
сигнал демодулируется (или детектируется) и снова восстанавли¬
вается низкочастотный сигнал. Идеальную зависимость между
Ннр (отношение (по мощности) сигнала к шуму модулирован¬
ного сигнала) и^г (соответственная величина демодулированпого
сигнала) можно получить из уравнения (11). Если при демодуля¬
ции сообщение нисколько не искажается, то скорости сообщения
должны быть равными, так что
Я == 1о^2 (1 + Нцр) =УРьр 10^2 (1 + Нрр),
предполагая, что пропускная способность канала используется
полностью (д = С). Решая уравнение относительно Ньр, находим
/?^ = (1+/?я/?)^/^-1, (17)
или для достаточно высоких значений /?
(18)
Полученная формула выражает оптимальное соотношение; ни
одна система модуляции не сможет улучшить отношение сигнал-
шум в большей степени. Заметим, однако, что это идеальное соот¬
ношение на самом деле очень благоприятно; если, например,
/?нг=Ю, то, применяя У'нр, равное мы сможем увеличить
И в тысячу раз. Важность систем модуляции теперь должна быть
очевидна для случая применения на управляемых снарядах, где
точность (Ньр) имеет первостепенное значение, тогда как ширина
полосы высокой частоты (И^нк) такого значения не имеет1. Одним
из простейших типов модуляции является модуляция при одно¬
1 В этом заключается отличие от радиосвязи и высокочастотного телефони¬
рования, где ширина полосы из-за большого количества примыкающих каналов
имеет также первостепенное значение.
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 187
полосной передаче. В частотной области это соответствует просто
смещению спектра сигнала в область высоких частот. При этом
ширина полосы не увеличивается и поэтому улучшение отношения
сигнал-шум невозможно. Сре¬
ди систем, в которых И7НК>
>^ЬР, одной из наиболее из¬
вестных и чаще всего приме¬
няемых, является частотная
модуляция (рис. 75). Из лю¬
бого элементарного учебника
по данному вопросу можно
узнать, что улучшение отноше¬
ния сигнала к шуму равно
ДЬР = к(^ )ДНР, (19)
где для широкополос¬
ной ЧМ — полная девиация
частоты, соответствующая
100-процентной модуляции
(максимальному сигналу),
к — постоянная близкая к единице. Можно видеть, что вме¬
сто идеальной экспоненциальной скорости увеличения отноше¬
ние напряжений сигнала и шума растет в зависимости от ширины
полосы только линейно. Следующим простым примером можно
считать широтноимпульсную мо¬
дуляцию. В этом случае ЙВР бу¬
дет зависеть от точности, с кото¬
рой можно определить положение
фронтов импульса во времени. Из
рис. 76 можно видеть, что для
данного уровня шума (показан
пунктиром) ошибка Д(будетпро¬
порциональна времени возраста¬
ния (или уменьшения 1Т). Но так
как время 1Т в свою очередь при¬
близительно равно величине об¬
ратной ширины полосы, то выход¬
ное отношение сигнал-шум будет
опять пропорциональным нг-
Приблизительно линейное повышение отношения сигнал-шум
по напряжению в действительности характерно для всех систем
модуляции, в которых некоторый параметр высокочастотных ко¬
лебаний (частота, фаза, ширина импульса) изменяется непрерывно
в соответствии с изменением амплитуды первоначального сигнала.
На рис. 75 приведено несколько таких систем.
Рис. 75. Типичные системы моду¬
ляции
Рис. '76. Погрешность от шумов
в широтно-импульсной модуляции:
Уп — напряжение шумов; — вре¬
мя нарастания или спадания; —
погрешность во времени
188
ГЛАВА 6
Совсем другое положение имеет место при так называемых
системах кодоимпульсной модуляции. Чтобы проиллюстрировать
основную идею этих систем, предположим, что требуется передать
расстояние до цели, скажем, 238 миль, в три пункта. Необходим'ое
отношение сигнал-шум в этом случае должно быть равно около
1000 по напряжению или 106 по мощности при использовании
простой амплитудной модуляции. Теперь вместо выражения ин¬
формации в виде одной амплитуды (скажем, в 238 вольт) можно
было бы разбить информацию на три последовательных импульса
с относительными амплитудами в 2, 3 и 8 вольт. Когда какое-
нибудь число передается таким цифровым методом, необходимое
отношение сигнал-шум снижается приблизительно до 10. Однако
ширину полосы приходится увеличивать в три раза, чтобы быть
в состоянии послать в три раза больше значений амплитуды за
то же самое время. Обобщая этот пример, видим, что можно
получить отношение сигнал-шум по напряжению в 10п(Кьр = 102п)
при использовании ширины полосы канала в п раз больше шири¬
ны полосы сообщения, если отношение сигнал-шум в канале, не¬
сколько больше, чем Ю(/?Нг> 100). Именно это и выражает урав¬
нение (18).
Только что рассмотренный пример дан в единицах знакомой
нам десятичной системы. На практике более удобной считается
двоичная система В ней необходимы только два символа, соот¬
ветствующие 0 и 1; для обозначения их не надо использовать ни
ширину и величину импульса, ни отрицательные, ни положитель¬
ные импульсы. Приемник должен лишь распознавать сигнал, кото¬
рый может иметь только два значения. Система может, следова¬
тельно, работать при очень малых отношениях сигнал-шум. Из
рис. 77 значение, равное приблизительно 8, кажется наиболее под¬
ходящим. Отношение сигнал-шум, по мощности равное 3, было бы
в действительности идеальным минимальным значением, необхо¬
димым для того, чтобы, согласно уравнению (И), иметь одну
дв. ед. на импульс. Процесс двоичной кодоимпульсной модуляции
(КИМ) теперь может быть охарактеризован следующим образом.
Начинают с сигнала, ограниченного полосой гц. Определяют
величину сигнала с интервалами в 1/2 сек, и амплитуда каж¬
дого дискретного значения преобразуется в ближайшее к ней дво¬
ичное число. Для осуществления этого сначала выбирают необхо¬
димую точность, скажем 1/64 или 1/26(/?ьк~212). Весь возможный
диапазон амплитуд сигнала (скажем, от 0 до 64) в этом случае
1 В десятичной системе цифры числа есть множители, на которые умножа¬
ются уменьшающиеся степени 10; так, 1823= 1X103+2Х 102+8х Ю’+ЗХ 10°. По¬
добным образом в двоичной системе исчисления, где применяются только две
цифры, 0 и 1, указанные цифры обозначают множители уменьшающихся степе¬
ней 2; так, 1011 = 1 Х24+ОХ23+1Х21 + 1 Х2° и соответствует числу 19 в деся¬
тичной системе.
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 189
делится на 64 уровня (0,1, 63). Если полученным значением
оказывается, например, 28,3, то ближайшим к нему уровнем будет
28, и соответствующее число в двоичной системе 011100, а сигнал,
Рис. 77. Скорость сообщения в системах кодо-импульсной модуляции.
Сообщение на импульс составляет половину значения, показываемого
по оси ординат
№ — количество уровней сигнала
Рис. 78. Модулированный сигнал в
двоичном коде (соответствующий
числу 28 в десятичной системе)
соответствующий данной кодовой группе при модулировании высо¬
кочастотных колебаний, мог бы иметь вид, показанный на рис. 78.
В приемнике имеет место обратный процесс. Можно видеть, что
для достаточно большого зна¬
чения Янр, превышающего по¬
рог шума (рис. 77), зави¬
сит экспоненциально от коли¬
чества импульсов на кодовую
группу и, следовательно, от
ширины полосы, т. е.
ж (2" )2 = 22 'Х'нг1 'Х'ьр, (20)1
поскольку соглас¬
но теореме отсчетов. Как уже
упоминалось, КИМ, таким
образом, обеспечивает ширину
полосы для отношения сигнал-
шум при идеальной экспоненциальной скорости. Кроме того, ско¬
рость сообщения при КИМ находится поблизости от максималь¬
* Более строгий анализ показывает, что отношение пикового сигнала к средне¬
квадратическому значению шума в действительности равно 2)/3 2Л и, следова¬
тельно, определенный на этой основе, будет фактически в 12 раз больше
величины, получаемой из уравнения (20). Шум, о котором мы говорим здесь, яв¬
ляется квантующим шумом из-за округления первоначальной функции до бли¬
жайшего двоичного уровня, а не шумом от внешних источников; последние в ос¬
новном не оказывают никакого воздействия, когда отношение сигнал-шум пре¬
восходит 9 дб.
190
ГЛАВА 6
ного значения С, получаемого по уравнению (И). Как можно ви¬
деть из графика на рис. 77, построенного с помощью уравне¬
ния (8), для двоичной КИМ необходимо лишь примерно на 9 дб
больше мощности, чем идеальному каналу, хотя его вероятностное
распределение сигнала фактически совершенно отличается от
идеального гауссового распределения.
Интересной особенностью показанных кривых является резко
выраженный пороговый эффект. Эта особенность также хорошо
известна в частотной модуляции [Уравнение (19) фактически
справедливо только свыше определенного порогового отношения
сигнал-шум.] и, вероятно, характеризует все системы, работающие
при увеличенной ширине полосы. Ниже критического отношения
сигнал-шум (обычно вблизи единицы) все эти кривые резко па¬
дают и канал забивается шумом.
6—8. ПРИМЕНЕНИЕ К РАДИОЛОКАТОРАМ
Сначала рассмотрим поисковые радиолокаторы, которые вы¬
полняют важную функцию в любой системе ЗУРС, обнаруживая
цели и определяя их положение и скорости. Попытаемся найти
объем сообщения, требуемый от такого радиолокатора только для
информации о дальности. Предположим, что желательно опреде¬
лить дальность с точностью, соответствующей длине одного им¬
пульса, т. е. до ст/2м, где -с — продолжительность одного импульса
и с — скорость света. Затем, если предположить, что цель первона¬
чально находится на любой дальности от нуля до /?тах с равной
вероятностью, требуемый объем сообщения 1 будет составлять
<2 = 1о^г/?тах — 10^2 4 = 1оИ2 7^7 дв. ед., (21]
так как максимальная дальность Яшах такой установки равна
с/2/т, где /т является частотой следования импульсов. Для импульс¬
ного радиолокатора ф можно получить Д. раз в секунду, так чтс
максимальная скорость составляет
1 Если берется более практическое предположение о нормальном распреде¬
лении погрешности в измерении расстояния, тогда в основном тот же результат
о
получается, если считать, что , так как в этом случае
<2 = 1ое2/?тах — 10^2 У2йкК =
== 10&2 -^7 —10&2 V^е = 10&2 7^ дв. ед.
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 191
Например, для /г=103сек-1 и т=1 мксек, <7= 1031о^2103« 104.
Сравним теперь эту скорость с имеющейся пропускной способ¬
ностью канала. Для обычных небольших значений рабочего цикла
/т~ пропускная способность будет ограничиваться средней мощ¬
ностью, равной 1г^Рр, где Рр является мощностью принятого сиг¬
нала в течение одного импульса. Так как Ширина Полосы, необ¬
ходимая для пропускания импульса длиной т, равна около 1/т гц,
то уравнение (11) дает
С = 4-10^(1+/^)- (23)
или, при достаточно малом (скажем, менее 100),
1оё2е.. (24)
Следовательно, при указанном значении /г, С—^Рр/!^. Можно
видеть, что потребуется величина отношения сигнал-шум боль¬
шая 10, чтобы получить вычисленное значение ц. В действитель¬
ности найденное значение д слишком велико, так как информация
о дальности требуется не при каждом импульсе, а только, скажем,
каждую 0,1 сек (что соответствует изменению дальности около
30 м для цели, обладающей звуковой скоростью). Следовательно,
требуемое ц составляет только 102 дв. ед./сек, что можно получить
с уменьшенным значением РР/№. На практике пользуются преиму¬
ществом этой низкой требуемой скорости, интегрируя ряд последо¬
вательных импульсов; для индикатора с модуляцией яркости (по¬
каз типа индикатора кругового обзора) этот процесс эффективно
осуществляется с помощью экрана длительного свечения, который
имеет тенденцию усиливать интенсивность от последовательных
импульсов.
Помимо информации о дальности поисковые радиолокаторы
должны также обеспечивать информацию о направлении. Если
допустить, что охватываемый общий телесный угол будет равен
й стер, а телесный угол диаграммы направленности — ш[~тгХ
X (ширина луча)2], то мы можем считать, что поиск будет охва-
^тах 2
тывать свыше -^2 - - различаемых пространственных элемен¬
тов. Следовательно, чтобы обнаружить цель и определить ее по¬
ложение в пространстве, необходимо количество сообщения, рав¬
ное приблизительно 1о^2 ■ $ дв. ед. Предположим, например,
что радиолокатор сканирует свыше тг стер за 10 сек и имеет ши¬
рину луча 1°, так что Й/ш~3300 и цель в любом угловом элементе
192
Г Л А & А б
получает три импульса при каждом облучении (для /г= 1000 гц);
в этом случае скорость сообщения будет равна
А-1оё.,(1000 X 3300),
или несколько более 2 дв. ед./сек. Эта скорость чрезвычайно низка,
особенно в свете хорошо известного факта, что такие поисковые
радиолокаторы должны работать при относительно высоком отно¬
шении сигнал-шум, соответствующем гораздо большим пропуск¬
ным способностям канала, чем приведенное выше. Причина этого
противоречия кроется в том, что система могла бы фактически
иметь дело с гораздо большим количеством целей, теоретически
до З.ЗХ106 целей. Так как каждый элемент может быть занят или
не занят, то возможно 23'зх16в различных сочетания (соответствую¬
щих различимым отметкам на экране индикатора кругового об¬
зора); поэтому при определении одного из них радиолокационная
установка фактически передает З.ЗХ106 дв. ед. Истинная скорость
сообщения, таким образом, будет составлять 330 000 дв. ед./сек
при 10-секундном сканировании. Фактически, конечно, только не¬
большая часть из 23’ЗХ1°в возможных положений цели может
в действительности когда-либо иметь место по очевидным практи¬
ческим причинам, что значительно уменьшает приведенную выше
скорость. Тем не менее мы можем заключить, что поисковые
радиолокаторы могут передавать большое количество информа¬
ции и, следовательно, должны работать при довольно высоком
отношении сигнал-шум1,
Рассмотрим теперь следящие радиолокаторы, которые состав¬
ляют .основную часть системы наведения почти всех снарядов с са¬
монаведением или наведением по лучу. Проблема здесь заклю¬
чается не в том, чтобы определить, есть ли цель и где она нахо¬
дится, а лишь обнаружить относительно небольшие отклонения
координат цели от их ранее известных значений. Для радиолока¬
тора с теми же параметрами, как у приведенного выше (/г =
= 103 сек-1, т = 1 мксек), дальность цели будет известна в преде-.
лах около 150 м в любое время, при условии, что радиолокатор
следит надлежащим образом (цель в пределах стробимпульса
дальности)2. Единственная информация, необходимая для следя¬
щих цепей по дальности, сводится просто к информации о том,
находится ли цель налево или направо от центра стробимпульса
дальности, т. е. необходима 1 дв. ед. информации. Эта информа¬
ция должна поступать через достаточно короткие интервалы, так
чтобы за эти интервалы дальность не могла измениться более,
1 Заметим, однако, что принятая мощность возрастает в зависимости от ко¬
личества целей, так как каждая цель возвращает эхо-импульс.
2 Для обычной следящей системы с равносигнальной зоной стробимпульс
дальности имеет ширину одного импульса или 150 м на 1 мксек импульс.
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 1§3
чем на долю ширины строба, скажем на 30 м. Если предполо-
жить, что скорость сближения снаряда с целью равна 600 м/сек,
то информация будет необходима каждые 0,05 сек1, что соответст¬
вует скорости 20 дв. ед./сек. Обычно для пропорционального управ¬
ления желательно определение величины ошибки, а также ее
знака; для восьми различаемых уровней ошибки, например, по¬
требовалось бы 60 дв. ед./сек. В любом случае можно видеть, что
скорости сообщения будут мало сравнимы со скоростями, найден¬
ными для поисковых радиолокаторов. Однако ширина полосы
приемника все еще должна быть приблизительно равной обратной
величине ширины импульса. Согласно уравнению (11) или (23)2,
можно сделать вывод в этом случае о том, что следящие радиоло¬
каторы должны работать при гораздо меньших отношениях сиг¬
нал-шум, чем поисковые радиолокаторы. Это на самом деле имеет
место на практике: автоматическое слежение за целями возможно
при отношениях сигнал-шум (Рр/М) меньших единицы, в то Время
как для поиска и обнаружения необходимы довольно высокие от¬
ношения сигнал-шум.
Подобные выводы справедливы как для слежения по даль¬
ности, так и для сопровождения по углу. В последнем случае ши¬
рина луча (В№) занимает место стробимпульса дальности в том
смысле, что для надлежащего сопровождения угол между линией
визирования на цель и осью антенны должен быть в пределах
около одного ВГ. Для обычной величины ВИ7, равного 10°, на¬
пример, положение цели всегда будет известно, если она будет
находиться внутри телесного угла в 4тс31п2 (В 1^/2) = (0,0076) X
Х4тг стер. Основная необходимая информация будет опять заклю¬
чаться в знаке ошибки и составлять 14 = 2 дв. ед., если учиты¬
вать рыскание и тангаж. При радиолокаторе с конической раз¬
верткой эту информацию можно подавать каждый цикл сканиро¬
вания, или через каждую 0,01 сек для обычной частоты сканиро¬
вания в 100 гц. Для принятого выше значения ВГГ можно допу¬
1 Заметим, что каждый импульс может фактически нести всю информацию
по дальности. Таким образом, при /г=1000 сект' возможная избыточность со¬
ставляет около 1—20/1000, или 98%.
2 Можно возразить, что уравнение (23) не является подходящим для приме¬
нения к следящему радиолокатору, так как шум пропадает между импульсами.
В этом случае радиолокатор можно рассматривать как систему, которая имеет
среднее отношение сигнал-шум рР/М, но может получать информацию только
тогда, когда строб открыт, т. е. в течение доли, равной т/г от общего имеюще¬
гося времени. Соответствующая пропускная способность будет, таким образом,
равна
1 / Рп\ I Ра\
С = 1О83 (• + -лг) =Л 10^2 (1 + .
Хотя эта величина обычно меньше, чем С в уравнении (23), здесь для низкого
отношения сигнал-шум С'~С.
13—405
194
ГЛАВА 6
стить ошибку около 2°, соответствующую получению информации
каждые 0,4 сек, допуская максимальную скорость поворота линии
визирования 5 град/сек. Таким образом, возможная избыточность
будет составлять 1—0,01/0,4, или 97,5%, а требуемая скорость со¬
общения— 2/0,4 = 5 дв. ед./сек (или несколько выше, если жела¬
тельно учитывать величину отклонения оси антенны от линии ви¬
зирования на цель). Эти цифры, являющиеся более или менее
обычными для применения на управляемых снарядах, вполне срав¬
нимы с цифрами, найденными выше для систем сопровождения
по дальности, и в этом случае применим сделанный ранее вывод:
в надлежащим образом спроектированной системе сопровождение
по углу возможно при отношении сигнал-шум меньшем единицы.
6—9. ПРОБЛЕМЫ УПРАВЛЯЕМЫХ СНАРЯДОВ
Так как большая часть основ теории информации разрабаты¬
валась учеными, заинтересованными в первую очередь в развитии
телефонии, радиосвязи и телевидения, основное внимание в опу¬
бликованной литературе уделялось применению теории инфор¬
мации в этих областях. Поэтому во многих случаях невозможно
применить «стандартную» теорию информации в ее современном
виде к системам управляемых снарядов без существенного ее раз¬
вития и изменения. Непосредственное применение теории инфор¬
мации в какой-то мере возможно, например, к снарядам с команд¬
ными системами наведения, которые имеют относительно простую
линию связи такого типа, как на рис. 74. Некоторые дополнитель¬
ные соображения в этом случае заключаются в том, что отноше¬
ние сигнал-шум здесь не является постоянной величиной, а изме¬
няется во время полета, тип применяемой системы кодирования
и модуляции будет частично определяться тем условием, что за¬
паздывание на время кодирования должно быть очень мало, обо¬
рудование на приемной станции (на снаряде) должно быть про¬
стым и надежным, а оборудование на передающей станции может
быть относительно сложным.
Хорошим примером, иллюстрирующим некоторые теоретические
проблемы информации, связанные с управляемыми снарядами,
может служить расчет фильтра или передаточной функции сна¬
ряда с самонаведением, использующим метод пропорционального
наведения *. Первой задачей в этом случае должно быть измере¬
ние каким-либо образом скорости поворота линии визирования а
и получение лучшей оценки ее истинного значения с помощью со¬
ответствующей операции с измеренной о, которая обычно значи¬
1 Описание метода пропорционального наведения см. в разделе 6—10.
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 195
тельно искажена помехами. Если мы попробуем это сделать с по¬
мощью стандартного фильтра Винера (см. раздел 6), то найдем,
что параметры этого фильтра зависят от отношения сигнал-шум и
от ширины полос спектра сигнала и шума. Но все три величины
изменяются в зависимости от дальности, и потому собственно сиг¬
нал имеет очень узкий спектр. При относительно малых дально¬
стях внутренние шумы уже не важны, но радиолокационные шумы
цели (угловая сцинтилляция или мерцание) постоянно возрастают,
приблизительно обратно пропорционально дальности. Спектр
этого шума гораздо уже, чем спектр шумов приемника, но не¬
сколько расширяется по мере уменьшения расстояния, как и спектр а.
Вначале можно попытаться найти более или менее оптимальный
фильтр для критических конечных условий наведения. Более слож¬
ный путь учета всех этих вариаций заключался бы в использова¬
нии фильтра с параметрами, зависящими от дальности и регули¬
руемыми так, чтобы создать на любой дальности оптимальный
фильтр для имеющихся там условий. Независимо от практических
трудностей в осуществлении такой меняющейся по времени си¬
стемы этот метод не учитывает основного переходного процесса,
который возникает из-за вводимого уменьшения расстояния, и по
этой причине дает плохие результаты. Более здравый подход за¬
ключается в том, чтобы попытаться распространить теорию Ви¬
нера на меняющиеся по времени системы. В действительности все
такие процессы сведения к минимуму используются, наиболее
эффективно не за счет попыток свести к минимуму среднеквадра¬
тическую ошибку о, а путем вывода (линеаризованных) уравне¬
ний траектории, решения их относительного промаха и затем све¬
дения к минимуму среднеквадратического значения этого про¬
маха 1 с помощью соответствующего выбора параметров фильтра
и постоянной навигации (усиления). Результаты, конечно, будут
зависеть от сделанного допущения в отношении маневров цели
(статистических или других) ошибок при запуске, шумов цели и
тому подобных причин. К сожалению, математические трудности,
встречаемые при этом аналитическом подходе, позволяли его при¬
менение только в некоторых относительно простых случаях.
Для того чтобы быть практически осуществимой, всякая кон¬
струкция фильтра должна учитывать ограниченные возможности
снаряда по ускорению, а также ограниченный динамический диа¬
пазон электрических цепей. Иначе этот фильтр не сможет сгладить
в достаточной степени шумы, заставляя рули благодаря только
одним сигналам шума перескакивать назад и вперед между стопо¬
1 Хотя истинным критерием оптимальной системы является максимальная
вероятность поражения цели (с учетом очертания цели, размера боевой головки,
типа взрывателя и т. д.), оба экстремума всегда расположены достаточна
близко друг от друга.
13*
196
ГЛАВА 6
Рис. 79. Схема обратной связи, возникаю¬
щая из-за движения снаряда:
®— поворот линии визирования (входной сиг¬
нал); о?— ложный поворот линии визирования,
создаваемый движением снаряда; кажущийся
поворот линии визирования; Т — скорость пово¬
рота снаряда (выходной сигнал)
рами; истинный же средний сигнал в этом случае будет почти
или совершенно потерян. Всякую оптимизацию фильтра поэтому
приходится осуществлять в условиях ограничения, сводящегося
к тому, что среднеквадратическое значение вызываемое шумом,
должно быть не больше некоторой определенной части допусти¬
мого ускорения.
Следующее соображение, которое необходимо учитывать при
проектировании фильтра, связано с устойчивостью. Как показано
на схеме рис. 79, существует один или несколько путей, по кото¬
рым движения снаряда могут воздействовать на показания, полу¬
чаемые от следящей антен¬
ны, и тем самым вводить
ложную скорость поворота
линии визирования о8. Так
как а8 взаимосвязано с 7,
этот эффект имеет характер
обратной связи и, следова¬
тельно, эта система допу¬
скает возможность колеба¬
ний или совершенно недо¬
статочного демпфирования.
Эта проблема является весь¬
ма критической во многих
снарядах с самонаведением
и определяет используемые
максимальное усиление К и минимальное общее запаздывание.
Кроме того, проектировщику фильтра всегда приходится учиты¬
вать более или менее неизменяемую функцию аэродинамической
чувствительности снаряда, которая вводит дополнительную за¬
держку и обычно характеризуется очень низким затуханием.
Хотя перечень ограничений и соображений, которые необхо¬
димо учитывать при проектировании фильтра, можно было бы
продолжить почти до бесконечности, читатель, вероятно, получил
достаточное представление о сложности этой проблемы. Поэтому
мы заключим наше изложение простым расчетом, относящимся
к оценке требуемой скорости сообщения для типового снаряда.
Предположим, что для должного пропорционального управления
требуется около четырех различаемых выходных уровней (ускоре¬
ния). Предположим далее, что уровень перекрестных помех не
должен превышать 30% (т. е. если определенное ускорение дол¬
жно вызываться только по рысканию, то в этом случае может по¬
явиться в ложном тангажном ускорении не более 30% величины
данного ускорения). Это требование можно удовлетворить, имея
12 различаемых направлений ускорения, располагающихся в про¬
странстве с отклонением на 30° друг от друга по оси крена, так
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 197
Рис. 80. Определе¬
ние ошибки уско¬
рения, вызванной
наличием перекре¬
стных связей:
1. Фактически прило¬
женный вектор уско¬
рения. 2. Требуемый
вектор ускорения.
3. Перекрестная со¬
ставляющая
путем замедлен-
как ошибка по направлению не может в этом случае превысить
15°, что соответствует перекрестным наводкам, равным зш 15° =
= 0,26, как показано на рис. 80. Поэтому мы можем различать
4X12 = 48 различных векторов ускорения или, точнее, только
3X12+1=37 различных векторов, так как для сигналов, близких
к нулю, нет необходимости знать направления. Информация, со¬
ответствующая команде об ускорении, поэтому составляет
1о^2 37 = 5,2 дв. ед. Скорость информации будет
зависеть от ширины полосы используемого
фильтра. В качестве типичной постоянной вре¬
мени здесь будет приниматься значение,
равное 0,5 сек, хотя эта величина для различ¬
ных снарядов может в значительной степени от¬
личаться. Соответствующая полоса частот будет
приблизительно равна 1 / (2т: X 0,5) =0,32 гц,
что приводит к довольно малой скорости сооб¬
щения
? = 2 X 0,32 X 5,2 — 3,3 дв. ед./сек.
Если мы сравним эту цифру со скоростью
информации 30 дв. ед./сек, найденной для
речи, мы увидим, что можно подавать на этот
снаряд необходимую информацию по наведению
ной речи, при условии, конечно, что оператор знает соответствую¬
щие слова (команды).
Названные значения точности и ширины полосы были выбраны
несколько произвольно. Можно сделать простой расчет для гру¬
бой проверки правильности этих цифр. Рассмотрим снаряд не¬
большой дальности с полетным временем 10 сек и скоростью
сближения с целью 600 м/сек. Не трудно запустить снаряд так,
чтобы ошибка в его траектории полета (из-за ошибки в первона¬
чальном прицеливании, отклонений от ветра и эксцентриситета
тяги двигателя и т. д.) имела среднее квадратическое значение
меньше 10°. Соответствующее рассеивание относительно цели,
при отсутствии всякого наведения, будет составлять в этом слу¬
чае 10х600Х51п 10°, или около 1050 м. Характер рассеивания
будет, вероятно, близок к двухмерному гауссову распределению:
Р (х, у)=р (X) р (у) = —Ц- е~ ^г+^/2'1, (25)
2т»о
где х и у обозначают горизонтальное и вертикальное смещения
снаряда от центра цели, а ао=Ю5О м. С помощью уравнения (6)'
находим соответствующую информационную функцию:
Н, = — [ [ Р (х, У) 1о^2 [р (х,у)] Лх ау = 1о& (2кеа2). (26)
198
ГЛАВА 6
Уменьшение этого рассеивания является целью наведения.
Хотя фактическое значение допустимого промаха будет зависеть
от размеров цели и радиуса поражения боевой головки снаряда,
кажется определенным, что среднеквадратическое отклонение 01 в
3 м по х и у должно быть достаточно малым почти при всех об¬
стоятельствах. В этом случае соответствующая требуемая инфор¬
мационная функция будет
= 10^(2^), (27)
и сообщение, которое необходимо дать в системе наведения,
будет _
С = — = 21ое2-^-=; 21о§2 350= 16,9 дв. ед. (28)
Поэтому средняя скорость информации в течение предположен¬
ного времени полета в 10 сек составит около 1,7 дв. ед./сек, или,
грубо, половину найденного выше значения, что показывает, что
использованные значения точности и ширины полосы были на
самом деле достаточными и правильными по величине.
6—10. ОСНОВНЫЕ СИСТЕМЫ НАВЕДЕНИЯ
В этом заключительном разделе будут описаны основные типы
систем наведения и их отличительные характеристики. Каждая
система будет представлена и классифицирована по методу пере¬
дачи информации наведения в
бортовую систему управления
снарядом.
Самым простым методом
передачи является передача
информации непосредственно
от цели к снаряду (рис. 81).
К этой категории относятся
Дак называемые самонаводя-
щиеся снаряды. Эти снаряды снабжены головкой самонаведения,
способной определить и следить за линией визирования цели.
В основном головка самонаведения может быть трех типов: 1) она
может быть пассивной, работающей на обнаружении электромаг¬
нитной или звуковой энергии, испускаемой целью; может быть
также использован тепловой или инфракрасный чувствительный
элемент; 2) она может быть активной, использующей собствен¬
ный передатчик для «подсветки» цели подобно обычному радио¬
локатору; 3) наконец, она может быть полуактивной, использую¬
щей станцию на стартовой площадке или на самолете для облуче¬
ния цели и последующего самонаведения по отраженному сигналу.
Самым простым и наиболее известным видом самонаведения
является наведение по кривой погони, при котором снаряд всегда
Рис. 81. Линия передачи информа¬
ции в снарядах с самонаведением:
Н “ информация об азимуте линии визи¬
рования цели
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 199
нацеливается прямо на цель, подобно собаке, преследующей
зайца. Единственной необходимой информацией о цели является
информация об ее азимуте, т. е. направлении линии визирования.
Снаряду в этом случае приходится только удерживать свой век¬
тор скорости так, чтобы он совпадал с линией визирования. Это
можно осуществить приблизительно с помощью неподвижного,
обращенного вперед чувствительного элемента, который обнару¬
живает любые отклонения оси снаряда от линии визирования и
затем посылает корректирующие сигналы на рули. Уравнение
для идеального наведения по кривой погони можно легко вывести,
исходя из расстояния Д между снарядом и целью и угла |3 между
направлением линии визирования и вектором скорости снаряда.
Для неманеврирующей цели будет, очевидно, справедливым сле¬
дующее уравнение:
Л=У/со8 0-Ут, (29)
= (30)
где У{ — скорость цели,
Ут — скорость снаряда.
Интегрируя эти уравнения, можно получить:
к — I 5‘п ? У~‘ I1 + с08Ро\* /о) ,
По~ (зМо/ (1+ созрЬ
6 V/ Г1 + созРо\ (51п
Ко ( 1+соЧ? (зМо)*-1 ’ ( }
где к=Ут/У1г а 7?0 и Ро характеризуют начальные условия. Из
этих уравнений можно показать, что ₽ -> 0, когда /? -> 0, т. е.
система всегда выводит снаряд для удара в хвост цели. Далее,
конечное ускорение задается уравнением
? I/ • о если 1<А<2;
ат = Р ’ если к =2:
^«0(1 +созр0) если к>2
Таким образом, требуемое конечное ускорение становится беско¬
нечно большим при отношении скоростей, большем чем 2:1. Во
всяком случае траектория снаряда представляет собой непрерыв¬
ную кривую. На рис. 82 показаны две примерные траектории
снаряда.
Мы видим, что наведение по простой кривой погони требует,
чтобы снаряд следовал по изогнутой траектории даже в случае,
когда цель летит по прямой, на что расходуется значительная
часть его ускорения. Так как помимо этого необходимо корректи¬
ровать первоначальные ошибки прицеливания, преодолевать силы
тяготения и снос, а также повторять маневр цели, преследующий
снаряд, чтобы быть эффективным вообще, должен обладать очень
высокой маневренностью.
200
ГЛАВА 6
Более желательной траекторией является такая, при которой
вектор скорости снаряда опережает линию визирования на такой
угол, чтобы при неманеврирующей цели снаряд летел к точке
встречи с целью по прямой линии, как показано на рис. 83. Такой
траектории желает охотник для своей пули, когда стреляет по
зайцу, предполагая, что заяц будет продолжать бежать по пря¬
мой линии. Характерной чертой это¬
го метода наведения является по¬
стоянство направления линии визи¬
рования в пространстве, достигае¬
мое выравниванием относительной
скорости снаряда-цели по линии ви¬
зирования (а не фактической ско¬
рости снаряда, как в наведении по
кривой погони); поэтому в коорди¬
натах цели снаряд будет казаться
выходящим прямо на цель, хотя он
будет направлен в сторону от цели
на величину угла упреждения. Не
трудно показать, что если снаряд
сможет сохранять направление ли¬
нии визирования постоянным,
встреча с целью всегда состоится,
даже если цель будет маневриро¬
вать. К сожалению, такое наведение
с постоянным упреждением требует,
чтобы снаряд мог обнаруживать и
немедленно корректировать все из¬
менения направления линии визиро¬
вания.
Более практичным методом является так называемое пропор¬
циональное наведение. Пока снаряд находится на направлении
перехвата, что показывается нулевым поворотом линии визиро¬
вания, никаких команд управления не дается. Любой поворот ли¬
нии визирования, показывающий отклонение от направления пере¬
хвата, обнаруживается снарядом, который затем поворачивается
со скоростью, пропорциональной этому повороту, в таком направ¬
лении, чтобы уменьшить скорость поворота линии визирования и
вернуться обратно на курс с постоянным азимутом. Так, если у и
о обозначают соответственно азимутные углы вектора скорости
снаряда и линии визирования, измеренные относительно любых
фиксированных опорных линий, то в этом случае снарядом управ¬
ляют так, чтобы удовлетворять уравнению
Т = №. (34)
где К — постоянная, обычно равная 3—5.
Рис. 82. Траектории наведения по
кривой погони
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 201
Благодаря значительной практической ценности метода пропор¬
ционального наведения будет интересным проиллюстрировать его
характеристики путем вывода некоторых типичных для этого
метода траекторий снаряда. Чтобы
сделать это, нам необходимо объеди¬
нить уравнение наведения (29) с соот¬
ветствующей кинематикой снаряда-
цели, как схематично показано на
рис. 84. Так как эти уравнения геомет¬
рической обратной связи содержат
тригонометрические функции и, следо¬
вательно, в основном являются нели¬
нейными, нужно их линеаризовать,
чтобы определить траекторию снаряда
аналитически. Поэтому необходимо,
чтобы движения снаряда и цели пред¬
ставлялись в виде относительно не¬
больших возмущений, налагаемых на
некоторые эталонные, или «усреднен-
Рис. 84. Схема передаточной
функции снаряда и кинемати¬
ческой обратной связи
Рис. 83. Траектория наведения с постоян¬
ным пеленгом на цель
202
ГЛАВА 6
Рис. 85. Система координат для
анализа траекторий при пропор¬
циональном наведении:
Ло — начальное положение снаряда;
Во — начальное положение цели*
ДоВоСо — начальный треугольник пере*
хвата цели (опорная система отсче¬
та); В{ — опорное положение цели в мо¬
мент Г; В'1 — фактическое положение
цели в момент Г; 4г—опорное поло¬
жение снаряда в момент Т;А\ —фак¬
тическое положение снаряда в мо¬
мент Т до встречи с целью; б — угол
упреждения
ные», движения; в этом случае членами более высокого порядка
в уравнениях возмущенного движения можно было бы пренебречь.
На рис. 85 показана наиболее удобная система отсчета. Она
представляет собой начальный треугольник перехвата цели
А0В0С0. Здесь В$С0 — траектория
цели, а АоСо — соответствующее на¬
правление полета снаряда на пере¬
хват цели при постоянном пеленге
на цель. Время полета снаряда до
встречи с целью в этом случае опре¬
деляется как
Т = (35)
где Но=АоВо, а Ус — скорость сбли¬
жения снаряда с целью. В этом слу¬
чае положение снаряда в любой мо¬
мент времени Т можно определить
путем некоторого отклонения дей¬
ствительных положений снаряда и
цели от опорного треугольника пе¬
рехвата, как показано на рис. 85.
Так как на поворот линии визиро¬
вания оказывают влияние только
отклонения, перпендикулярные к
ней, то важной координатой яв¬
ляется хт — отклонение снаряда по
нормали к линии визирования.
Если цель начнет маневрировать,
ее положение можно определить
таким же образом с помощью х{ —
перпендикулярного смещения от
усредненного прямолинейного курса
цели В0Са. Наконец, направление
линии визирования и- вектора ско¬
рости снаряда можно выразить
через отклонения от начальных направлений о и у. При небольших
отклонениях от направления перехвата, т. е. для небольших зна¬
чений о и у, как видно из рис. 85, можем получить
0 = Х‘^тт- (36)
и убедиться, что угол у связан со смещением снаряда следующим
соотношением:
^т = ^тТС08 0. (37)
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 203
Следовательно, уравнение наведения у = Ка можно переписать
следующим образом:
А хт _ & Х1 хт /ооч
<н утс<къ аг уст • ' О)
Однократное интегрирование теперь дает
Тхт + хт = х{ + Тхт0, (39)
у с * с
где постоянная интегрирования была определена, исходя из по¬
грешности в начальной скорости хйо, соответствующей погреш¬
ности начального прицеливания то = Хто/Кп соз 8. Если снаряд будет
лететь достаточно близко к направлению перехвата, то изменения
значений созВ и 17 будут очень малыми и, следовательно, можно
допустить, что коэффициент КУтсоэЗ/Рс будет постоянным. Этот
коэффициент называется эффективной навигационной постоянной
и обозначается К.е. Мы видим, таким образом, что траектория сна¬
ряда характеризуется простым линейным дифференциальным
уравнением первого порядка, решение которого всегда можно
найти с помощью квадратуры.
Рассмотрим, например, случай погрешности при начальном
прицеливании (несовершенный пуск), приводящий к погрешности
в начальной скорости хт0, направленной перпендикулярно к линии
визирования. При этом допускается, что цель не будет маневри¬
ровать (Х| = 0). Решение соответствующего уравнения траектории
Тхт + Кехт = Т'хта (40)
получается следующим образом:
-• =—тАгт—; <42>
^=-*«(^Г!- (43>
То
Кривые этих уравнений показаны на рис. 86. Из рисунка видно,
что с увеличением навигационной постоянной большее корректи¬
рующее ускорение должно быть сообщено снаряду в начале по¬
лета, что приводит к более спрямленной траектории вблизи точки
встречи.
204
ГЛАВА 6
Рис. 86. Характеристики траектории снаряда при наличии на¬
чальной ошибки прицеливания (Ке— эффективная навигацион¬
ная постоянная): а) смещение; б) скорость; в) ускорение
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 205
Представляет также интерес случай, когда цель маневрирует
определенным установившимся образом. Уравнение (39) в этом
случае принимает вид
Тхт + Кехт = = Неа^Ть-ТУ , (44)
где сц — ускорение цели, направленное перпендикулярно к линии
прицеливанияЭто уравнение решается следующим образом:
хш 1 Т
Т-2-1 К,_1ГО-Г
+ ^-,-,^^2) К.Ф2, (45)
а^г
что соответствует ускорению снаряда, равному
^*2>1 (46)
^ = —21п^, Ке = 2.
То е
Кривые уравнения (46) приведены на рис. 87. Мы видим, что уве¬
личение навигационной постоянной опять ведет к уменьшению
необходимого конечного ускорения снаряда. На практике, однако,
считают нецелесообразным применять значения Ке больше 4—5
из-за стремления уменьшить влияние шума, которое, в противном
случае, при большом усилении значительно возрастает.
Интересным следствием уравнений (43) и (46) является то,
что Ке должно превышать 2, чтобы ускорение снаряда оставалось
ограниченным. Поэтому при выборе допустимого усиления для
таких снарядов следует поступать осторожно, чтобы избежать
слишком малого значения навигационной постоянной. Требование
Ке=2 случайно является также эквивалентным условию Ут/У(<2,
необходимому для получения ограниченного' ускорения при само¬
наведении по кривой погони (ср. уравнение 33). Наведение по
кривой погони является лишь частным случаем пропорционального
наведения, когда навигационная постоянная равна единице (при
1 Составляющая любого ускорения цели вдоль линии визирования не вызо¬
вет никакого ускорения снаряда, а будет влиять только на скорость сближения
снаряда с целью.
206
ГЛАВА 6
Рис. 87. Ускорения, требующиеся
для снаряда при различных значе¬
ниях Ке и при постоянном ускоре-
нии цели
этом 8 = 0). Следовательно, эф¬
фективная навигационная посто¬
янная в последний момент пре¬
следования цели определяется
выражением
Д' V т м- У'т
е Ут-У'
“732Г- (47)
V.
Мы видим, что Ут/У(<2 действи¬
тельно соответствует Ке>2.
После рассмотрения снарядов
с самонаведением следует остано¬
виться на другом методе переда¬
чи информации, при котором дан¬
ные об азимуте цели сначала
поступают на станции наведения
(установленные на самолете, ко¬
рабле или на земле), а с них пе¬
редаются на снаряд, как показа¬
но на рис. 88. К этой категории
относятся снаряды, наводимые
по лучу радиолокатора. Станция
наведения следит за целью и по¬
средством своего радиолокацион¬
ного луча, следящего за целью,
прокладывает направление на
цель, по которому должен лететь снаряд. Чтобы следовать по
этому направлению, снаряд должен определять с достаточной
точностью всякое свое отклонение от центра луча. Для дости¬
жения этого необходимо лишь, чтобы луч имел небольшую нута¬
цию (коническую развертку). При этом сигнал, принятый обра¬
щенной назад антенной на
снаряде, модулируется по
амплитуде, как только сна¬
ряд отклонится от оси;
амплитуда модуляции в
этом случае будет примерно
пропорциональна отклоне¬
нию снаряда. Чтобы ука¬
зать снаряду направление
ошибки, необходимо закоди¬
ровать луч как функцию
Рис. 88. Схема передачи информации
снаряду, наводимому по лучу радио¬
локатора:
Я|—информация об азимуте цели; Нч — ин¬
формация о положении снаряда по отноше¬
нию к лучу сопровождения
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 207
Рис. 89. Траектории снаряда, наводимого по лучу
радиолокатора:
к — отношение скорости снаряда к скорости цели;
п — высота цели
ориентации снаряда; например, радиочастоту или частоту повторе¬
ния импульсов можно так изменять за период развертывания луча,
что самая низкая частота будет соответствовать нижнему поло¬
жению луча при его вращении. В этом случае, если снаряд летит
над лучом, модуляция частоты и амплитуды будет в фазе; если он
летит ниже луча, модуляция частоты и амплитуды будет сдвинута
по фазе. Максимальная частота будет иметь место при минималь¬
ной амплитуде. Таким
образом, снаряд смо¬
жет определить напра¬
вление своего отклоне¬
ния. Для корректиров¬
ки своего положения
снаряд должен знать
опорное направление,
что требует установки
на борту снаряда инер-
циональной опорной
системы (такой, как
гировертикаль).
Для снаряда класса
«земля — воздух», на¬
водимого по лучу, точ¬
ка запуска, конечно,
будет неподвижной.
Типичные траектории
для этого случая пока¬
заны на рис. 89; соот¬
ветствующие им урав¬
нения довольно слож¬
ны и здесь приводить¬
ся не будут. Видно,
что чем ниже отноше¬
ние скоростей снаряда
и цели, тем выше ускорение, требуемое для снаряда, чтобы
удержаться в луче Максимальное ускорение имеет место в
конце полета; в этом случае ускорение снаряда, создаваемое за
счет помех слежения (случайных отклонений луча), является
также наибольшим. Более существенным, недостатком снарядов,
наводимых по лучу, является ухудшение точности стрельбы
с увеличением расстояния от пусковой установки до цели, вызы¬
ваемое определенной угловой шириной радиолокационного луча,
1 Траектории наводимых по лучу снарядов, показанные на рис. 89, фактиче¬
ски все геометрически подобны в том смысле, что траектория при К=4, напри-*
мер, является нижней половиной кривой, соответствующей К=2, растянутой
р два раза.
208
ГЛАВА 6
следящего за целью, что ограничивает максимальную полез¬
ную дальность наведения (если не применять самонаведение
на конечном участке) и приводит к тому, что рассеяние снаряда
около оси луча достигает максимума у цели. Следовательно,
для повышения точности желательно использовать возможно
более тонкий луч. Но это еще более осложняет проблему ввода
и захвата снаряда лучом, которая особенно сложна для сна¬
рядов класса «воздух — воздух». Подобные снаряды должны
запускаться вперед вдоль оси самолета, в то время как луч, со¬
провождающий цель, может быть отклонен на определенный
угол (за исключением случаев лобовой атаки и удара в хвост про¬
тивника). Для решения этой
■проблемы можно использо¬
вать более широкий луч для
захвата и наведения снаря¬
да на начальном участке
или же заставить самолет-
носитель лететь сначала по
кривой погони, пока не
вступит в действие система
наведения на снаряде; са¬
молет в этом случае должен
резко поворачиваться, чтобы попытаться попасть на курс с по¬
стоянным пеленгом и тем самым свести к минимуму ускорение сна¬
ряда, требующееся при повороте линии визирования.
Теперь рассмотрим тип снарядов, управляемых с помощью
командных систем наведения. В этом случае станция наведения
определяет положение как цели, так и снаряда и на основе этой
информации передает соответствующие команды в систему управ¬
ления снарядом (рис. 90). Весьма простым вариантом такой ко¬
мандной системы могла бы служить оптическая система, в которой
оператор постоянно наблюдает за целью через какой-нибудь опти¬
ческий прицел и удерживает эту цель на перекрестье последнего.
Он наблюдает также за любым отклонением положения снаряда
от линии визирования на цель и приводит в действие ручку управ¬
ления командного прибора, который в этом случае вырабатывает
корректирующие команды для посылки на снаряд с помощью со¬
ответствующим образом кодированного передатчика или же по
проводам (как в одном из первых немецких снарядов класса
«воздух — воздух», снаряде Х4). В этом случае снаряд управ¬
ляется командами для следования вдоль луча на цель. Более
сложной системой была бы такая, в которой для сопровождения
цели и снаряда используются отдельные радиолокационные лучи.
В этом случае на станции наведения счетно-решающее устройство
вычисляет оптимальную траекторию для снаряда и посылает на
цего соответствующие команды. Эта траектория в целом не будет
Рис. 90. Схема передачи информации в сна-,
рядах с командным наведением:
— информация о положении (и скорости)
цели; //2 — информация о положении (и скоро¬
сти). снаряда; Нз — команды, исходящие от опе¬
ратора или счетно-решающего устройства на
станции наведения
ТЕОРИЯ ИНФОРМАЦИИ И НАВЕДЕНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ 209
проходить вдоль луча «станция наведения — цель». Для снаряда
класса «земля — воздух», например, желательной траекторией
может быть такая, которая для быстрейшего вывода снаряда из.
плотных, имеющих высокое сопротивление нижних слоев атмо¬
сферы, чтобы сохранить скорость на начальном участке, восхо¬
дит почти вертикально, а затем, на конечном участке, переходит
в траекторию с почти постоянным пеленгом на цель.
К категории снарядов с командным управлением мы можем
отнести также баллистические снаряды дальнего действия, в кото¬
рых на начальном восходящем участке траектории регулируются
тяга и курс. В этом случае
информация о положении
цели получается косвенным
образом: по картам, дан¬
ным разведки, топосъемки
или с помощью других
средств.
Существенным преиму¬
ществом командного наве¬
дения является то, что сна¬
ряду не надо иметь свой соб¬
ственный «мозг», а только
приемник («уши») и бортовую систему управления («мускулы»).
Все вычислительное и следящее оборудование находится на стар¬
товой позиции, чем сводится к минимуму оборудование, необходи¬
мое на снаряде. Неудивительно поэтому, что за исключением сна¬
рядов Фау-1 и Фау-2 все из более чем дюжины управляемых сна¬
рядов, разработанных во время второй мировой войны (большин¬
ство из них в Германии), имели командное управление. И только
после того как уровень миниатюризации и надежности компо¬
нентов повысился, стало возможным возлагать на снаряд выпол¬
нение все большей части общей задачи наведения. Сочетанием
первого и третьего типа снарядов, описанных выше, является сна¬
ряд с командным наведением и самонаведением, схема передачи
информации для которого показана на рис. 91. Снаряд снабжен
развертывающим устройством или головкой самонаведения (на¬
пример, телевизионной камерой) и посылает информацию о поло¬
жении цели назад, на станцию наведения. Таким образом, он дей¬
ствует как «глаз» станции наведения, которая в свою очередь
вычисляет и передает на снаряд соответствующие корректирую¬
щие команды для обеспечения самонаведения снаряда на
цель.
В заключение рассмотрим снаряды дальнего действия класса
«земля — земля», которые выходят на цель с помощью непрерыв¬
ного наведения. Их наведение более всего напоминает наведение
обычных самолетов или кораблей. Различные средства наведения
Рис. 91. Схема передачи информации в сна¬
рядах со смешанным наведением (команд¬
ным наведением и самонаведением):
— информация о положении цели (относи¬
тельна курса снаряда); Яз — команды наведения
И—405
210
ГЛАВА 6
рассматриваются подробно в главе 7. Во всех случаях информа¬
ция о положении цели должна сначала подаваться на станцию
наведения, где она используется для предварительной установки
необходимого курса в снаряде. В полете снаряд получает инфор¬
мацию о своем собственном положении одним из методов, опи¬
санных в данной главе, и использует эти данные для корректи¬
ровки любого отклонения фактической траектории от требуемой.
ГЛАВА 7
РЕШЕНИЕ НАВИГАЦИОННЫХ ЗАДАЧ
ПРИ НАВЕДЕНИИ УПРАВЛЯЕМЫХ СНАРЯДОВ
Д. М. Уэрт1
7—1. ВВЕДЕНИЕ
Навигация — это наука или искусство определения в любой мо¬
мент времени местоположения корабля или самолета, а также
искусство вождения корабля или самолета из одного пункта в дру¬
гой. Термин пункт в этом определении обычно означает место или
точку на поверхности земли, заданную в градусах широты и дол¬
готы или в иной системе неподвижных земных координат. По этой
причине навигация почти всегда связана с использованием карт и
таблиц.
Но когда понятие навигации относится к управляемым снаря¬
дам, то под задачей навигации подразумевают не только определе¬
ние местоположения управляемого снаряда, но и управление его
полетом. Под местоположением в данном случае понимается поло¬
жение снаряда относительно поверхности земли. Однако когда речь
идет об управляемых снарядах, предназначенных для поражения
подвижных целей, то в этом случае под местоположением снаряда
подразумевается относительное положение, т. е. положение сна¬
ряда -относительно цели.
Например, назначением зенитного управляемого снаряда яв¬
ляется перехват и уничтожение вражеского самолета еще до того,
как последний выполнит свою задачу. Для такого снаряда совсем
не важно определение точного местонахождения его в градусах
широты и долготы. Гораздо важнее определить расстояние
и направление от снаряда к самолету, а также скорость, с кото¬
рой меняется их взаимное положение. Таким образом, чтобы пере¬
вести такой снаряд из одного положения в другое, необходимо
управлять положением этого снаряда, например, относительно са¬
молета, перехват которого требуется осуществить.
Относительное положение имеет также исключительно важное
значение и для наведения управляемых снарядов дальнего дейст¬
1 Сотрудник самолетостроительной фирмы «Норт америкен авиэйшн».
14*
212
ГЛАВА 7
вия класса «земля — земля». Навигационные системы, применяе¬
мые для наведения управляемых снарядов, почти не нуждаются
в выходных данных, которые непосредственно отсчитывались бы
в обычных географических координатах. Эти координаты чаще
всего представлены в виде оборотов вала, напряжений, двоичных
чисел (в электронных цифровых счетно-вычислительных машинах)
и т. п.; хотя для управляемого снаряда единственными важными
данными являются данные о его положении относительно требуе¬
мой траектории, которая задана с помощью внешней информации
или предварительно введенной программы.
На основании вышеизложенных рассуждений становится оче¬
видным, что термин управляемый снаряд вполне можно заменить
термином навигированный снаряд1. Последний термин указывает
на то, что движение снаряда и все стадии управления им могут
являться (и часто являются) неотъемлемыми элементами навига¬
ционной системы или системы наведения управляемых снарядов
(см. гл. 7).
Однако в дальнейшем для облегчения понимания процессов
управления термин наведение мы будем применять только для тех
случаев, когда управление связано с отработкой управляющих
сигналов, что соответствует операциям, которые обычно выполня¬
ются штурманом самолета. А те операции, которые обычно выпол¬
няет пилот самолета, осуществляются другой системой управле¬
ния— системой регулирования.
Пользуясь этим несколько ограниченным толкованием термина
наведение, можно сделать некоторое разграничение между систе¬
мой наведения и системой управления, сказав, что аппаратура
наведения вырабатывает команды управления, тогда как аппара¬
тура управления заставляет снаряд следовать им.
Однако на практике подобное разграничение не всегда можно
провести вследствие того, что обе системы настолько тесно связа¬
ны друг с другом, что фактически составляют единое целое. Тем
не менее для лучшего понимания рассматриваемых в этой главе
вопросов мы будем считать, что такое разделение вполне возмож¬
но, и дальнейшее рассмотрение вопросов управления начнем с про¬
блем и возможных методов определения относительного положе¬
ния беспилотного летательного аппарата или снаряда и выра¬
ботки команд управления.
Хотя между обычной аэронавигацией, в том ее виде, в каком
она выполняется штурманом самолета, и наведением управляемых
снарядов, осуществляемым автоматическими чувствительными
приборами и вычислительными устройствами, имеется большая
разница, тем не менее основные принципы управления в обоих
случаях одинаковы. Вот почему проблему наведения управляемых
1 Т, е. управляемый системой счисления пути.— Прим. ред.
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ213
снарядов удобно разбить на три больших раздела так, как это
сделано в аэронавигации, а именно: 1) счисление пути; 2) пилоти¬
рование; 3) астронавигация. Благодаря такому разделению
можно будет показать, в какой степени основные принципы и
представления обычной аэронавигации могут быть перенесены не¬
посредственно в область наведения управляемых снарядов.
Однако следует заранее оговорить, что любой попытке исполь¬
зовать обычную навигационную аппаратуру в управляемых снаря¬
дах должен предшествовать всесторонний анализ основных задач,
которые будет выполнять управляемый снаряд.
Большая часть обычного аэронавигационного оборудования
предназначается лишь для определения местоположения самолета,
вследствие чего задача выработки команд управления возлагается
на штурмана с его вспомогательными средствами. Но на борту
управляемого снаряда нет штурмана, поэтому система наведения
снаряда должна быть сконструирована так, чтобы она могла в
первую очередь вырабатывать управляющие сигналы.
Разумеется, что ответ на вопросы: где летит снаряд, куда он
направляется — зависит от тех задач, которые он должен выпол¬
нить. Например, управляемый снаряд, направленный на подвиж¬
ную цель, должен быть обеспечен такими техническими сред¬
ствами, которые могли бы определить нужную ему траекторию, в
зависимости от движения цели. (Различные решения этой про¬
блемы будут рассмотрены позднее, в разделе 7—3.)
Но управляемый снаряд класса «земля — земля» чаще всего
уже имеет заранее рассчитанную траекторию или целое семейство
траекторий, по которым он должен следовать.
Вот почему первым шагом при проектировании или выборе
системы наведения для того или иного типа снаряда является
определение вида траекторий, по которым снаряд должен будет
следовать (см. гл. 6).
Далее, необходимо установить те параметры траектории, кото¬
рыми нужно или можно управлять. И только после того как эти
условия будут выполнены, можно приступить к решению задачи
проектирования специальной системы наведения, обеспечивающей
выработку команд управления для того или иного типа сна¬
рядов.
Иногда имеется возможность получить команды управления
непосредственно, как это, например, имеет место в самонаводя-
щихся бомбах. Однако в большинстве управляемых снарядов
нельзя получить команды управления, не зная истинного положе¬
ния снаряда, которое постоянно сравнивается с требуемым поло¬
жением.
Вот почему большая часть этой главы будет посвящена обзору
различных аэронавигационных средств, используемых для опреде¬
ления истинного положения управляемого снаряда, и рассмотре¬
214
ГЛАВА 7
нию возможных методов их использования в целях решения про¬
блемы наведения управляемых снарядов.
Для читателей, незнакомых с аэронавигационной терминоло¬
гией, мы дадим следующие упрощенные определения:
Большой круг — геометрическое место точек на сферической
поверхности, лежащих в плоскости, проходящей через центр сферы.
Расстояние по ортодромии — расстояние, измеряемое по дуге
большого круга. Это кратчайшее расстояние между любыми двумя
заданными точками на поверхности Земли.
Направление полета — направление, совпадающее с продольной
осью самолета.
Воздушная скорость — скорость самолета относительно окру¬
жающей воздушной среды. Она всегда измеряется по направле¬
нию полета.
Курс самолета — заранее назначенное направление или линия
полета, проведенная на поверхности Земли.
Траекторией называется след фактического движения объекта
в пространстве. Проекция траектории на поверхность Земли назы¬
вается маршрутом.
Путевая скорость — скорость самолета относительно поверхно¬
сти Земли. Она всегда измеряется вдоль маршрута.
Угол сноса — угол между направлением полета и линией марш¬
рута.
Азимут — угол между меридианом и направлением от наблюда¬
теля к ориентиру.
Бортовая аппаратура управления снаряда имеет дело главным
образом с воздушной скоростью и направлением полета, которые
определяются относительно окружающей воздушной среды, в то
время как аппаратура наведения управляемых снарядов дальнего
действия класса «земля — земля» имеет дело в основном с путе¬
вой скоростью и траекторией, которые измеряются относительно
земли. Разность между координатными системами, принятыми
в обоих случаях, соответствует перемещению воздушной среды
относительно земли, что называется обычно ветром.
7—2. СЧИСЛЕНИЕ ПУТИ
Счислением пути называется метод определения места посред¬
ством учета направления полета и пройденного расстояния, начи¬
ная от какой-то точки, взятой за исходную. Счисление пути — это
основной и наиболее важный метод аэронавигации, используемый
штурманом самолета. Летчик-штурман обычно наносит курс само¬
лета на аэронавигационную карту и с помощью метода счисления
пути определяет положение самолета как функцию времени в за¬
висимости от предполагаемой или измеренной путевой скорости.
Опытный штурман использует и другие средства навигации как
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ215
средство для уточнения положения самолета, найденного посред¬
ством метода счисления пути.
Самый простой метод использования принципов счисления пути
в навигации управляемых снарядов заключается в измерении век¬
тора путевой скорости (последний состоит из двух составляю¬
щих — направления полета, т. е. траектории, и путевой скорости).
При достаточно точном измерении вектора путевой скорости на
борту снаряда можно получить непрерывную индикацию местопо¬
ложения с помощью простейшего интеграла. -Различные виды ра¬
диолокационной аппаратуры и других систем, определяющих на¬
правление (магнитных и гироскопических), дают возможность
(по крайней мере теоретически) осуществлять навигацию посред¬
ством этого метода.
Менее простой, но легко поддающийся автоматизации, метод
счисления пути требует измерения истинной воздушной скорости
и направления полета. Точность подобной системы зависит от
точности учета влияния ветра. Счетно-решающий прибор, необхо¬
димый для внесения известных поправок на ветер, очень прост по
устройству. Однако при этом необходимо или заранее определить
величину поправки на ветер, которая вводится в счетно-решающий
прибор, или же контролировать величину сноса и путевой скоро¬
сти, с тем чтобы замеченное влияние ветра можно было периоди¬
чески корректировать. Приборы, основанные на этом принципе,
используются для автоматического нанесения положения самолета
на аэронавигационную карту или же для подачи данных в кон¬
трольно-измерительные приборы с непосредственным отсчетом,
которые показывают курс или направление полета, а также рас¬
стояние до места назначения. Такие приборы некоторое время при¬
менялись в пилотируемых самолетах.
Имеется другой способ использования метода счисления пути
для решения навигационной задачи на управляемых снарядах, ко¬
торый состоит в определении изменений, происшедших в положе¬
нии снаряда, посредством измерения ускорений, которым был под¬
вергнут снаряд. Но этот метод обычно относят к так называемой
инерциальной навигации.
Ускорением называется отношение приращения скорости к про¬
межутку времени, в течение которого это приращение произошло.
Если проинтегрировать измеренные ускорения, можно получить
путевую скорость. Вторичное интегрирование позволяет опреде¬
лить пройденное расстояние.
Если имеются приборы, которые чувствительны к изменениям
ускорения и реагируют на любые изменения скорости, вызванные
ветром, двигательной установкой или системой управления сна¬
ряда, то система, основанная на интегрировании ускорений, не
требует внесения поправок на ветер, не требует учета угла сноса
и т. п. Однако имеется один фактор, который усложняет задачу:
216
ГЛАВА 7
приборы, чувствительные к ускорениям, не могут отличить уско¬
рений, вызванных изменениями скорости снаряда, от ускорений,
обусловленных земным притяжением. Поэтому точность инерци¬
альной навигации зависит от точности измерения, гравитационных
сил, действующих на снаряд в тот или иной момент времени.
Более подробно принципы инерциальной навигации будут рас¬
смотрены в разделе 7—4. «
Если скорость и направление полета управляемого снаряда
определяются с помощью наземного радиолокатора, исполь¬
зующего принцип Допплера, то положение снаряда определяется
наземным счетно-решающим прибором, а команды управления
передаются по радио. Такие системы нашли применение в первой,
разгонной ступени баллистических снарядов.
Баллистическим снарядом называют снаряд, который, подобно
артиллерийскому снаряду, выброшенному из канала ствола ору¬
дия, движется по баллистической траектории. Первая фаза полета
управляемого снаряда, когда двигатель снаряда включен и рабо¬
тает (активный участок траектории), подобна периоду нахождения
артиллерийского снаряда в канале ствола пушки. Но как только
работа двигателя прекратится, траектория снаряда будет опреде¬
ляться только силой тяжести и вращением Земли. Так же как и в
случае артиллерийского снаряда, вероятная точка падения балли¬
стического снаряда будет определяться скоростью и положением
снаряда в момент выключения двигателя. Поскольку снаряд с ра¬
ботающим двигателем летит непродолжительное время, этот уча¬
сток траектории проходит над своей территорией, и наземные стан¬
ции наведения, передающие на снаряд команды управления по ра¬
дио, могут быть защищены от радиопомех, создаваемых против¬
ником.
Системы наведения такого типа, включая и другие системы,
использующие передачу радиокоманд (например, такие, как теле¬
визионная система наведения), относятся к общей категории си¬
стем наведения и управления, которых нет в обычной аэронавига¬
ции. Однако такие системы логически переходят в другую обшир¬
ную категорию систем, известных как системы пилотирования.
7—3. ПИЛОТИРОВАНИЕ
Пилотированием называется метод вождения самолета из од¬
ного пункта в другой путем сличения своего местонахождения по
ориентирам местности или известным объектам на поверхности
землц. В наиболее широком смысле под пилотированием подразу¬
меваются любые методы навигации, которые основаны исключи¬
тельно на ориентировке по наземным ориентирам или явлениям
природы.
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ217
В наиболее известных методах пилотирования. используются
радиопеленгаторы, радиомаяки, видимые ориентиры, радиолока¬
ционные карты местности или же измерения расстояния до двух
или более известных точек с помощью радиолокатора. Сюда же
входят и такие электронные средства навигации, как, например,
«Лоран».
Одно измерение, сделанное относительно известной точки на
земле, дает поверхность положения самолета, а пересечение двух
поверхностей положения дает линию положения. В аэронавигации
или при решении навигационных задач в управляемых снарядах
измерение высоты позволяет получить поверхность положения,
Рис. 92. Круговая линия положения, полученная при одном измерении
расстояния и высоты:
1. Круговая линия положения при расстоянии от маяка и высоте К. 2. Поверх¬
ность постоянной высоты Л» 3. Поверхность Земли, 4. Маяк, 5. Сфера положения
с радиусом равным расстоянию до маяка
лежащую на известном расстоянии от поверхности земли (над
уровнем моря). Следовательно, когда высота известна, достаточно
произвести лишь еще одно измерение, чтобы получить линию поло¬
жения. Например, на рис. 92 показано, как измерение одного
только расстояния до маяка вполне достаточно, чтобы решить,
что наблюдатель находится в какой-то точке на поверхности сферы
с известным радиусом /? и центром в точке нахождения маяка.
Пересечение этой сферы с поверхностью известной высоты Н дает
нам круговую линию положения. Чтобы найти место наблюдателя
на этой линии положения, необходимо произвести еще одно изме¬
рение (например, определить пеленг на маяк). В обычной аэрона¬
вигации точка перенесения двух линий положения (или трех по¬
верхностей положения) называется засечкой. Засечки использу¬
ются штурманом для внесения поправок и уточнений в найденном
методом счисления пути положений самолета.
Подобный же принцип определения местоположения может
быть использован и в наведении управляемых снарядов, хотя в
последнем случае обычно более желательно иметь непрерывные
линии положения, из которых можно получить непрерывную це¬
218
ГЛАВА 7
почку засечек, а следовательно, непрерывную индикацию положе¬
ния снаряда.
Полет прямо на передающую радиостанцию может быть вы¬
полнен с одной линией положения. В этом случае, когда пилот
будет пролетать прямо над радиостанцией, он получит одну за¬
сечку. Подобно этому, для наведения на цель самонаводящегося
снаряда достаточно иметь одну линию положения, проходящую
через цель. Однако для большинства- других типов автономных
систем наведения необходимо иметь как минимум одну засечку.
В обычной аэронавигации слово пилотирование имеет два зна¬
чения: 1) собственно пилотирование, или пилотаж, при котором
для определения положения самолета используют главным обра¬
зом наземные видимые ориентиры, и 2) радионавигация, когда
используются электронные средства навигации. Для наведения
управляемых снарядов, однако, видимые ориентиры используются
относительно редко, но зато такие явления природы, как магнит¬
ное поле Земли, имеют намного большее значение. Поэтому вме¬
сто упомянутых выше значений слова «пилотирование» нам удоб¬
нее под этим словом подразумевать: 1) системы, имеющие дело
главным образом с расстояниями и пеленгами, 2) все остальные
средства навигации.
К первой категории относятся такие системы специального
назначения, как «Консоль» (английский улучшенный вариант
уникальной электронной системы навигации, называемой «Боппе»,
разработанной немецкими инженерами во время второй мировой
войны). Эти системы позволяют определить пеленг передающей
радиостанции путем подсчета точек и тире и сопоставления со
специальными таблицами, картограммами или номограммами.
При использовании этих систем для управляемых снарядов могут
потребоваться специальные счетно-вычислительные машины.
К этой же категории относятся также и те системы, которые
обычно используют радиомаяки, предназначенные главным обра¬
зом для вождения самолетов гражданской авиации.
Низкочастотная радиомаячная система излучает радиолуч.
Система радиолуча известна многим штурманам и пилотам. Два
радиопередатчика передают кодированные по азбуке Морзе буквы
А (—) й П (—) соответственно. Эти сигналы,, которые можно
принять на обычном самолетном радиоприемнике, передаются по
времени так, чтобы точка буквы А попала в интервал между тире
и точкой буквы Ы, а тире буквы А попало в интервал между двумя
следующими друг за другом буквами М. Если принимаемый сиг¬
нал будет представлять собой звук определенного установивше¬
гося характера (тона) с одинаковой мощностью сигналов А и К
это значит, что самолет летит правильным курсом. Таких равносиг-
«альных зон (пеленгов) у маяка четыре.
В США за последние годы несколько низкочастотных радио¬
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ219
маяков было установлено дополнительно, а некоторые из них были
заменены на более гибкую систему радиомаяков, известную под
названием УОК '. Антенна радиостанции в системе УОК имеет
диаграмму направленности в виде восьмерки, которая вращается
и создает амплитудную модуляцию сигнала с частотой 30 гц1 2. Из¬
лучаемый частотно-модулированный сигнал модулируется также
частотой 30 гц. В любой точке вблизи этой станции интенсивность
принимаемого сигнала в силу вращения диаграммы направленно¬
сти становится максимальной каждый раз, когда ось диаграммы
направленности проходит через эту точку, т. е. модулируется с ча¬
стотой 30 гц. На самолете имеется специальный радиоприемник,
который выделяет амплитудно-модулирочанный 30-гц сигнал, по¬
лучающийся вследствие вращения радиолуча, а потом сравнивает
фазу этой модуляции с фазой излучаемого частотно-модулирован-
ного сигнала и на основе этого автоматически определяет пеленг
на передающую станцию.
Такие системы, как «Консоль», низкочастотные зональные ра¬
диомаяки и УОК дают возможность получить одну линию положе¬
ния, поэтому для получения засечки необходимо иметь другую
линию положения, которую можно получить с помощью той же или
совершенно другой системы. Вот почему для совместной работы с
системой УОК была разработана специальная вспомогательная
аппаратура ОМЕ3, предназначенная для измерения расстояний.
Установленная на борту самолета дополнительная аппаратура
определяет расстояние в милях до станции системы УОК, где рас¬
положен также передатчик системы ВМЕ.
Хотя системы наведения управляемых снарядов, предназначен¬
ных для действия по подвижным целям, не всегда имеют дело не¬
посредственно с пеленгом и расстоянием, эти параметры весьма
важны при решении задачи перехвата. Поэтому если эти вели¬
чины не определяются непосредственно, то они обычно вычисля¬
ются на основе другой информации.
Как уже указывалось, для самонаводящегося снаряда теоре¬
тически вполне достаточно и одной линии положения. Однако
управляемые снаряды, предназначенные для перехвата высоко¬
скоростных целей, обычно необходимо нацеливать в упрежден*
ную точку перехвата, а не прямо на цель.
В главе 6 был рассмотрен один из методов, который исполь¬
зован в швейцарском снаряде класса «земля — воздух» «Эрликон»,
наводящемся на цель по лучу радиолокатора. В этом снаряде один
1 УОН — сокращенно от Уегу-Ы^Ь-Ггедиепсу огптдиесЫопа] гап^е—УКВ
всенаправленный радиомаяк.
2 Для модуляции частотой 30 гц антенна с диаграммой направленности
в виде восьмерки должна вращаться со скоростью 15 об]сек. — Прим. ред.
’-РМЕ—Ш51апсе теа$ипп° еди!ртеп1 — дальномерное оборудование.
220
ГЛАВА 7
радиолокационный луч был использован в качестве линии положе¬
ния, по которой снаряд должен следовать в полете. Ось этого
луча направляется в точку встречи с помощью другой наземной
радиолокационной установки.
Любая автономная система наведения, предназначенная для
наведения управляемого снаряда на скоростную цель, должна
иметь аппаратуру для определения относительных значений на¬
правления и расстояния, а также скоростей, с которыми эти вели¬
чины изменяются, что необходимо для выработки команд управле¬
ния при наведении снаряда в упрежденную точку перехвата.
Среди других средств навигации, пригодных для наведения сна¬
рядов, можно указать большое число различных систем, причем
прежде всего те, которые не связаны непосредственно с измере¬
ниями расстояний и пеленгов. Наиболее известными из них явля¬
ются системы «Лоран», «Декка» и «Джи». Все они в принципе
одинаковы, но различны в деталях.
Эти системы известны под названием гиперболических и осно¬
ваны на том законе, что разность расстояний между любой точ¬
кой на гиперболе и двумя неподвижными точками, называемыми
фокусами, всегда постоянна (см. рис. 93).
С помощью обычного радиолокатора расстояние до той или
иной точки определяется путем измерения времени, необходимого
для прохождения электромагнитной волны от передатчика до этой
точки и обратно. В гиперболической системе нет нужды иметь на
борту передатчик, так как расстояние определяется с помощью
специальных радиоприемников путем измерения разности во вре¬
мени приема двух радиосигналов, идущих от двух достаточно раз¬
несенных друг от друга радиопередающих станций.
В навигационной системе дальнего действия типа «Лоран»
главная (ведущая) станция излучает импульсный радиосигнал, ко¬
торый с некоторой строго постоянной задержкой во времени запу¬
скает вспомогательную (ведомую) станцию, работающую, на той
же самой частоте. Для определения одной гиперболической линии
положения достаточно найти разность во времени между приходом
сигналов от двух станций.
Чтобы найти две гиперболические линии положения, необхо¬
димые для определения места самолета, нужны по меньшей мере
три передающие станции (см. рис. 93).
Хотя система «Лоран» сама по себе широко используется гра¬
жданской авиацией для аэронавигации, для навигации управляе¬
мых снарядов она малопригодна, во-первых, в силу подверженно¬
сти создаваемым противником радиопомехам; во-вторых, в силу
возможности использования радиопередающих станций этой си¬
стемы одновременно и противником; и, кроме того, в силу своей
уязвимости для самих самонаводяшихся снарядов. Разумеется,
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ221
некоторые из вышеперечисленных недостатков присущи в той или
иной степени всем радиоэлектронным системам навигации.
При рассмотрении всех этих средств навигаций мы должны
четко представить себе, что линии положения можно получить (ко¬
нечно, с различной степенью точности) путем использования любого
Рис. 93. Гиперболические линии положения:
1. Станция № 1, 2. Станция Кв 2, 3. Станция Кв 3, 4. Засечка местополо¬
жения, 5. Линия положения, где разность — /?2) постоянна, 6. Линия
положения, где разность (₽, — /?2) постоянна
явления природы или явления, созданного искусственно. Напри¬
мер, есть предположение, что почтовые голуби определяют линию
положения посредством нахождения линий равного магнитного
склонения и производят засечку, когда эта линия положения до¬
стигает определенной широты. Способность голубей определять
линию положения на определенной широте многие склонны объяс¬
нять их чувствительностью к ускорению Кориолиса, однако это
трудно подтвердить.
222
ГЛАВА 7
7—4. АСТРО- И ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ
Под астронавигацией часто понимают метод определения место¬
нахождения какого-либо объекта с помощью небесных тел (Солн¬
ца, Луны, планет и звезд). Однако место объекта может быть вы¬
ражено в величинах только по отношению к предварительно уста¬
новленным опорным точкам (реперам). При использовании, на¬
пример, метода счисле¬
ния пути положение
объекта выражалось
относительно извест¬
ной начальной точки.
В навигационных ме¬
тодах, названных выше
пилотированием, поло¬
жение выражалось от¬
носительно радиомая¬
ка, обычной радиостан¬
ции, магнитных полю¬
сов Земли или какой-
нибудь частной коор¬
динатной сетки (на¬
пример, в системе
«Лоран»), фиксирован¬
ной относительно из¬
вестных ориентиров на
земной поверхности. В
астрономической нави¬
гации положение вы¬
ражается в единицах
земной геоцентриче¬
ской системы коорди¬
нат, которая фиксиро¬
вана относительно оси
вращения Земли.
Если бы Земля была однородным невращающимся шаром, то
каждая точка на земной поверхности была бы равноудалена от
центра Земли и линия отвеса всегда была бы направлена к этому
центру. Следовательно, знания высоты над Землей и знания на¬
правления линии отвеса, выраженной в какой-либо неземной си¬
стеме координат, всегда было бы достаточно для фиксации поло¬
жения.
Но Земля не есть однородное тело правильной сферической
формы, поэтому направление линии отвеса отклоняется вслед¬
ствие влияния центробежной силы, обусловленной вращением Зем-
Рис. 94. Взаимозависимость между широтой и
силой тяжести:
1. Сила земного притяжения, 2. Центробежная сила,
обусловленная вращением Земли, 3. Максимальный угол
равен 11,6 мин на широте 45е, 4. Сила тяжести, 5. Гео¬
центрическая широта, 6. Местная вертикаль, 7. Экватор,
8. Географическая широта, 9. Рефренц-эллипсоид при¬
ближенной формы Земли, 10. Максимальное расхожде¬
ние центров достигает 26,6 миль на широте, близкой
к 90е
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ223
ли, и не показывает истинного направления к центру Земли
(рис. 94).
Но так как направление силы тяжести, которое показывает ли¬
ния отвеса, различно для различных точек Земли, то в астронави¬
гации оно служит в качестве линии отсчета. Эта линия отсчета,
точнее линия, идущая в противоположную сторону от направле¬
ния силы тяжести, называется местной вертикалью.
Направление местной вертикали имеет важное значение как
в астронавигации, так и в инерциальной навигации. В астронави¬
гации положение объекта определяется посредством отсчета угла
между направлением местной вертикали и направлением линии
визирования на то или иное небесное тело. В инерциальной нави¬
гации прокладывается кривая изменений направления местной
вертикали относительно инерциальных ориентиров как функции
движения по поверхности Земли. Так как Земля вращается отно¬
сительно неподвижных звезд, то для определения положения объ¬
екта на Земле с помощью методов астронавигации нужно знать,
кроме направления местной вертикали, также точное время суток
и дату замера.
На рис. 94 можно заметить, что сглаженная форма Земли
близка к эллипсоиду вращения. Этот эллипсоид в одних точках
может очень сильно приближаться к действительной форме Земли
и в значительной степени отличаться от нее в других точках. Пог
этому в различных странах при изготовлении карт и таблиц и при
определении географических координат (широты и долготы) того
или иного места используется большое число различных эталонных
рефренц-эллипсоидов. Это обстоятельство является одной из при¬
чин существующих разногласий в местоположении одних и тех же
точек земного шара на различных картах. Однако все эти различ¬
ные рефренц-эллипсоиды в достаточной степени подобны, поэтому
международное гидрографическое общество приняло компромисс¬
ное решение и выбрало единый эллипсоид вращения, который был
назван международным эллипсоидом вращения.
В международном эллипсоиде вращения экватором является
окружность радиусом в 6 378 388 м и расстоянием от центра эллип¬
соида до любого полюса, равным приблизительно 6 356 911 м.
Разность этих двух величин (сплюснутость) равна > так чт0
для практических целей, за исключением определения географиче¬
ской широты, в качестве радиуса Земли можно вполне использо¬
вать приближенное его значение, равное 6380 км.
Большинство методов пилотирования основано на использова¬
нии местных координат, т. е. координат, связанных с какими-
нибудь ориентирами, расположенными в известных местах. Однако
как астронавигация, так и инерциальная навигация требуют
использования геоцентрических координат, т. е. координат, связан-
224
ГЛАВА ?
ных с осью вращения Земли (т. е. линией, соединяющей южный
географический полюс с северным географическим полюсом
Земли) или с экваториальной плоскостью (т. е. плоскостью, прохо¬
дящей через центр Земли перпендикулярно оси вращения).
Геоцентрическая система координат в большинстве случаев
показывает место на Земле в градусах широты, северной или
южной, считая от экватора, и долготы, восточной или западной,
считая от нулевого меридиана, проходящего через Гринвич (Ан¬
глия).
Географическая широта, используемая при составлении карт и
таблиц,— это угол, лежащий между линией, перпендикулярной к
сглаженной поверхности Земли (рефренц-эллипсоид вращения),
и плоскостью экватора (рис. 94). За исключением некоторых ис¬
кажений, вызываемых различной плотностью Земли, а также раз¬
личной ее формой в различных местах (что вызывает местные от¬
клонения направления силы тяжести), географическая широта во
всем подобна астрономической широте. Астрономическая широта
есть угол, образованный местной вертикалью и плоскостью эква¬
тора. Местные отклонения в направлении силы тяжести, которые
вызывают местные расхождения между значениями географиче¬
ской и астрономической широт, редко достигают значений, боль¬
ших полминуты дуги меридиана, а на больших площадях земной
поверхности среднее значение местных отклонений, по существу,
равны нулю.
Геоцентрическая широта, очень удобная при анализе инерциаль¬
ных навигационных систем, есть угол между линией, направлен¬
ной к центру Земли, и плоскостью экватора (рис. 94). Максималь¬
ное расхождение между географической и геоцентрической широ¬
тами имеет место на широтах, равных 45°, и равно 11,6'.
В астронавигации чаще всего в качестве единицы измерения
длин и расстояний служит морская миля (1852 л<), которая
почти на 15% длиннее сухопутной (1609 м). На практике
астронавигатор (штурман) пользуется морской милей, равной
длине дуги на поверхности Земли в 1 минуту по широте. Однако
это приводит к увеличению длины морской мили на 1% при изме¬
рении между экватором и любым из полюсов. Поэтому на 1 июля
1954 года международным соглашением была утверждена длина
морской мили, равная 6076,103 333.:. футов (—1853 м).
Для любого метода определения места, включающего измере¬
ние направления от известной опорной точки (репера), ошибка
в определении места равна ошибке углового измерения, умножен¬
ной на расстояние от наблюдателя до опорной точки. На расстоя¬
нии около 57 морских миль до радиостанции ошибка в определе¬
нии места в 1 морскую милю соответствует ошибке в пеленге в один
градус. На поверхности Земли (при расстоянии до центра Земли,
приблизительно равном 3435 морским милям) ошибка в ©пределе¬
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 225
, е 1
нии места в 1 морскую милю соответствует ошибке в градуса
или 1 минуту дуги меридиана в плоскости местной вертикали.
В одном из методов навигации предлагалось использовать
изменение положения Луны относительно неподвижных звезд как
функцию движения по поверхности Земли. Так как расстояние от
Луны до поверхности Земли почти в 60 раз больше расстояния от
центра Земли до ее поверхности, то ошибка в определении места
в 1 морскую милю соответствует угловому перемещению линии
визирования Луны только на минуты или 1 секунду дуги ме¬
ридиана.
Другие небесные тела настолько удалены от Земли, что на¬
правление на них совершенно не изменяется от изменения поло¬
жения наблюдателя на поверхности Земли. Поэтому линии визи¬
рования небесных тел определяют собой только опорные направле¬
ния. Исходя из этого, в астронавигации для определения места на
Земле используется ориентация местной вертикали относительно
этих опорных направлений.
В астронавигации основное значение имеет правильное измере¬
ние угла между местной вертикалью и линией визирования небес¬
ного тела. Одно такое измерение дает окружность положения, а
два и более — засечку.
Техника и методы, используемые в астронавигации, вполне при¬
емлемы и для наведения управляемых снарядов. Отличаясь лишь
в некоторых деталях, они в основных Принципах остаются неиз¬
менными.
Всем известно, что Луна вращается по своей орбите вокруг
Земли, а Земля и другие планеты вращаются по своим орбитам
вокруг Солнца, а вся солнечная система в свою очередь дви¬
жется относительно других звезд. Однако в астронавигации Землю
нужно рассматривать как центр вселенной, вокруг которой враща¬
ются все небесные тела.
Кажущееся движение небесных тел относительно Земли вы¬
звано, главным образом, тем обстоятельством, что Земля вра¬
щается вокруг своей оси. Это вращение Земли приводит к тому, что
наблюдателю на Земле кажется, что все небесные тела восходят
на востоке и заходят на западе, тогда как собственное движение
Луны и других планет по своим орбитам несколько изменяет ка¬
жущиеся периоды их вращения вокруг Земли.
Так как для жизни на Земле самым главным небесным телом
является Солнце, то его кажущийся период вращения вокруг'Зем¬
ли был взят за основу при измерении времени в днях, часах, ми¬
нутах и т. д. Полдень — это время, когда солнце находится в зе¬
ните или несколько, севернее или южнее его, в зависимости от
полушария, в котором находится наблюдатель. Однако имеющиеся
колебания скорости движения Земли при ее вращении по своей
15—405
226
ГЛАВА 7
эллиптической орбите вокруг Солнца и существующий наклон
земной оси вращения на 23,5° от перпендикуляра, опущенного на
плоскость земной орбиты, ведут к тому, что продолжительность
промежутка времени между двумя определенными следующими
друг за другом полднями изменяется от года к году. Поэтому
было решено ввести средние солнечные сутки как усредненное зна¬
чение всех суток в году. Солнечное, или кажущееся, время (время,
которое показывается солнечными часами) опережает среднее сол¬
нечное, или,, иначе, гражданское, время и в ноябре уходит вперед
более чем на 16 минут.
Обычные часы отсчитывают промежутки среднего солнечного
времени, но не отмечают истинного среднего солнечного времени в
месте нахождения наблюдателя. Ввиду того что среднее солнечное
время на различных долготах различно, весь земной шар разделен
на 24 часовых пояса, и для каждого пояса установлено поясное
время, для того чтобы все часы, находящиеся в этом часовом
поясе, могли показывать одно и то же среднее солнечное время.
Нулевой меридиан, от которого ведется счет долгот, проходит
через Гринвич (Англия), поэтому время в Гринвиче было взято
в качестве опорного времени, которое используется в астронави¬
гации. Это время называется гринвичским средним временем.
Тихоокеанское поясное время всегда отстает на 8 часов от
среднего гринвичского времени. Поэтому если Солнце в момент
местного полдня находится немного южнее наблюдателя, а хроно¬
метр (точные навигационные часы) показывает 20.00 часов (8 ча¬
сов пополудни) среднего гринвичского времени, то наблюдатель,
по всей вероятности, находится где-нибудь в Калифорнии. Это
слишком элементарный подход к астронавигации. Разумеется,
такое определение места можно улучшить посредством более точ¬
ных измерений углового положения Солнца и определения разно¬
сти между просто солнечным и средним солнечным временем из
уравнения времени, приведённого в «Морском астрономическом
ежегоднике», и, наконец, путем производства некоторых расчетов.
Подобного рода процедура является типичной при определении
долготы методами астронавигации.
По существу, такая же процедура может быть использована и
при определении долготы с помощью звезд вместо Солнца. Однако
вследствие того, что Земля оборачивается вокруг Солнца один
раз в год, звезда, которая весной находилась в том же направле¬
нии, что и Солнце, осенью будет находиться в противоположном
направлении. Последнее обстоятельство вызвано тем, что Земля
вращается относительно звезд быстрее, чем относительно Солнца,
и для описания положения небесных тел необходимо использо¬
вать небесные координаты.
Движение солнечной системы относительно звезд и движение
звезд относительно друг друга создают видимые угловые переме¬
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 227
щения, названные собственными движениями. Хотя относительные
скорости движения звезд очень велики, однако охватываемые рас¬
стояния столь огромны, что наибольшее наблюдавшееся соб¬
ственное движение какой-либо звезды не превышало 10,3" дуги
в год. По этой причине звезды считают «неподвижными».
При определении видимого положения звезд собственное дви¬
жение звезд не так важно, как явление, называемое аберрацией
света, вызываемое движением Земли вокруг Солнца со скоростью
29,77 км!сек. Как совершенно вертикально падающие капли
Рис. 95. Земная и небесная системы координат:
1. Положение наблюдателя. 2. Местная вертикаль, 3. Долгота, 4. Экватор,
5. Широта. 6. Нулевая долгота (Гринвич), 7. Географическое место светила,
8. Линия визирования звезды, 9. Гринвичский часовой угол звезды, 10. Гринвич¬
ский часовой угол точки весеннего равноденствия, II. Западный часовой угол
звезды, 12. Склонение звезды, 13. Плоскость экватора, 14. Направление точки
весеннего равноденствия
дождя кажутся наблюдателю, сидящему в движущемся по¬
езде или самолете, падающими под углом, точно так же свет, па¬
дающий от звезды, наблюдаемой под прямым углом к направле¬
нию движения Земли, кажется как бы приходящим из точки, на¬
ходящейся чуть впереди истинного положения звезды. Это смеще¬
ние имеет период колебания в один год (годичная аберрация) и
достигает максимального значения, равного 20,5" дуги. Поскольку
Луца и планеты движутся по своим орбитам, их видимые движе¬
ния будут более сложными, поэтому они менее удобны для ис¬
пользования в астронавигации.
Одна из основных задач «Морского астрономического ежегод¬
ника» — представить подробные данные о видимых положениях
небесных тел, как функций времени и даты (числа и месяца). Эти
данные приводятся в ежегоднике в градусах небесных координат
(«склонения» и «западного часового угла»), которые, по суще¬
ству, эквивалентны «широте» и «долготе» на Земле (см. рис. 95).
15»
228
ГЛАВА 7
Склонение — это угловое положение объекта (северное или
южное) относительно небесного экватора, который эквивалентен
земному экватору и расположен в той же плоскости.
Звезда, имеющая то или иное склонение, всегда кажется вра¬
щающейся вокруг Земли в зените на соответствующей параллели
широты. Например, звезда Денеб, имевшая в 1954 году склонение
45°07', всегда находилась прямо в зените в любой точке парал¬
лели, проходящей черз 45°07' северной широты. Зная название
звезды, которая находится в зените, и определив ее склонение по
звездной таблице, можно сразу же определить астрономическую
широту на Земле.
Западный часовой угол — это угловое положение, отсчитанное
в западном направлении от точки весеннего равноденствия. Точка
весеннего равноденствия (также известная как точка Овна) есть
точка, в которой видимый путь Солнца пересекает небесный
экватор и переходит с юга на север. Таким образом, это есть точ¬
ка (относительно звезд), в которой Солнце должно оказаться при¬
мерно 21 марта, когда продолжительность дня и ночи становится
равной.
Время, необходимое для того, чтобы Земля один раз оберну¬
лась вокруг своей оси вблизи точки весеннего равноденствия, на¬
звано звездными сутками, их продолжительность равна 23 часам
56 минутам и 4,09 секундам среднего солнечного времени. Для
удобства звездные сутки, так же как и солнечные, разбиты на
24 часа, или на 1440 минут, или на 86 400 секунд звездного вре¬
мени.
Два вышепоказанных примера использования методов астро¬
навигации для определения широты и долготы, к сожалению, легче
применить в теории, чем на практике, ибо в обоих примерах ис¬
пользованы известные небесные тела в определенное конкретное
время. Чтобы избежать возможных трудностей, были разработаны
более общие методы астронавигации.
Точка на земле, над которой данная звезда в определенный мо¬
мент времени находится в зените, называется географическим
местом светила. Это точка перемещается по соответствующей ши¬
роте и делает один полный оборот за одни звездные сутки.
Разность долгот (отсчитываемая к западу от Гринвича) между
географическим местом светила и гринвичским меридианом назы¬
вается гринвичским часовым углом звезды. Точно так же, как
гринвичское среднее солнечное время является отсчетом западной
долготы того места, где среднее солнце достигло высшей точки
(кульминации), гринвичский часовой угол является отсчетом за¬
падной долготы любого географического места светила. И дейст¬
вительно, гринвичское среднее солнечное время и гринвичский
часовой угол среднего солнца равны, если выражены в одних и
тех же единицах. (Часовой угол среднего солнца увеличивается
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 229
на 15° в час, или на 360° в день, и, следовательно, 15° часового
угла соответствуют одному часу времени.)
«Морской астрономический ежегодник» дает гринвичский часо¬
вой угол точки весеннего равнодействия как функцию среднего
гринвичского времени суток и даты и, кроме того, дает западный
часовой угол и склонение основных звезд, используемых в астро¬
навигации в качестве ориентиров. Сумма гринвичского часового
угла точки весеннего равноденствия и западного часового угла
звезды равна гринвичскому
часовому углу звезды (см.
рис. 95). Как гринвичский
часовой угол, так и склоне¬
ния даны в виде таблиц от¬
дельно для Солнца, Луны
и основных планет. Если
наблюдатель сможет уста¬
новить наименование одно¬
го из небесных тел, которое
находится прямо в зените
над ним в какое-то опреде¬
ленное время, то он сразу
сможет определить свое
местонахождение на земной
поверхности, обратившись
для этого к «Морскому
астрономическому ежегод¬
нику». Однако такого рода
идеальный случай встре¬
чается довольно редко, го¬
раздо чаще требуется опре¬
делить направление мест¬
ной вертикали относитель¬
но небесных тел.
Все небесные тела, за исключением Луны, настолько удалены
от Земли, что незначительные изменения в наблюдаемом направ¬
лении, возникающие из-за изменения положения наблюдателя на
Земле, не могут быть измерены. Отсюда, угол между местной вер¬
тикалью и линией визирования звезды (пренебрегая пока что та¬
кими возможными ошибками, которые вызываются явлениями
рефракции) прямо показывает угловое расстояние между наблю¬
дателем и географическим местом светила (см. рис. 96).
В некотором приближении морскую милю можно принять рав¬
ной 1 минуте дуги большого круга, измеряемой на поверхности
Земли. Отсюда, если линия визирования звезды образует с мест¬
ной вертикалью угол, равный 40° (т. е. высота светила равна 40°),
то наблюдатель должен находиться в какой-то точке на круговой
Рис. 96. Соотношения между местопо¬
ложением на Земле и линией визиро¬
вания звезды:
I. Местная вертикаль, 2. Линия визирования
звезды* из точки наблюдения, 3. Местополо¬
жение наблюдателя (точка наблюдения),
4. Линия визирования звезды из центра
Земли, 5. Расстояние между наблюдателем и
географическим местом светила (измеряемое
в морских милях), 6. Угол между местной
вертикалью и линией визирования звезды
(измеряемый в дуговых минутах), 7. Боль¬
шой круг, проходящий через точку наблю¬
дения и географическое место светила,
8. Географическое место светила
230
ГЛАВА 7.
Рис. 97. Круг равных высот небесного
тела:
1. Конус положения содержит все вертикали,
дающие, наблюденный угол с линией визи*
рования звезды, 2. Круг равных высот (пере¬
сечение конуса положения н поверхности по*
стоянной высоты), 3. Центр Земли
линии положения (иначе называемой кругом равных высот) с ра¬
диусом в 2400 морских миль (40x60 = 2400) от географического
места светила (рис. 97). Измерив угол между местной вертикалью
и другой звездой, мы получим второй круг равных высот светила;
пересечение этих двух линий положения даст засечку и покажет,
что наблюдатель находится на одной из двух возможных точек на
Земле. В том случае, когда метод счисления пути окажется недо¬
статочным для определения, какая из двух засечек показывает
истинное положение наблюдателя, необходимо произвести третье
измерение, в результате которого задача будет решена.
На практике для измере¬
ния углового положения (или
высоты) небесного тела ис¬
пользуется секстант. Секстан¬
том измеряют угол между ли¬
нией визирования и линией го¬
ризонта, а не местной верти¬
кали, но так как линия гори¬
зонта расположена под пря¬
мым углом к местной вертика¬
ли, то измерение любого угла
дает одинаковый результат.
Выше было сказано, что
для определения положения
на Земле методами астронави¬
гации необходимо знать сле¬
дующие основные данные:
1. Небесные координаты
видимых небесных тел.
2. Точное время.
3. Высоту небесного тела.
Для летчика-штурмана или для системы наведения управляе¬
мого снаряда не столь трудно определить небесные координаты и
время. Гораздо труднее, но тем не менее вполне возможно, создать
прибор для автоматического слежения за линией визирования
звезды. Теперь остается одна проблема (не считая трудностей при
измерении углов) —это проблема определения местной вертикали
в полете.
В авиационной астронавигации обычно используется секстант
с уровнем, в котором местная вертикаль определяется по уров¬
ню или же с помощью иного устройства, чувствительного к на¬
клону.
Как уже отмечалось, невозможно установить различие между
ускорениями, обусловленными изменениями в движении летящего
объекта и изменениями в силе тяготения. Уровень, маятниковый
уклонометр и акселерометр чувствительны как к ускорениям са¬
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 231
мого объекта, так и к изменениям силы земного притяжения. Лю¬
бой из этих приборов может быть использован для определения
направления местной вертикали благодаря своей чувствитель¬
ности к направлениям силы тяжести, при условии отсутствия го¬
ризонтальных составляющих ускорений. Однако последнее усло¬
вие не выполнимо даже для объекта, летящего с постоянной путе¬
вой скоростью, ибо он подвергается воздействию ускорения Ко¬
риолиса. Конечно, поправку на ускорение Кориолиса можно
было бы определить, но не всегда возможно выдерживать по¬
стоянную путевую скорость в полете. Точность навигации, осно¬
ванной ла использовании секстанта с уровнем, связанного с усред¬
нителем, зависит от правильности взятого за основу допущения,
что усредненное значение неизвестных горизонтальных ускорений,
по существу, будет равно нулю за период производства измере¬
ний. Допущение становится более несостоятельным с возраста¬
нием скорости самолета или снаряда.
Летчики-штурманы довольно успешно используют методы аст¬
ронавигации. Однако создать автоматизированную навигационную
систему, которая могла бы дать такую же точность, какую дает
летчик-штурман, хотя и возможно, но технически трудно. Наибо¬
лее серьезной проблемой при этом является определение тем или
иным путем направления местной вертикали с достаточной сте¬
пенью точности. Известно, что ошибка в 1 минуту дуги в опреде¬
лении направления местной вертикали приводит к ошибке в 1 мор¬
скую милю, а отклонение в одну минуту в кажущемся направле¬
нии силы тяжести возникает при- горизонтальном ускорении, рав¬
ном всего 0,0028 м/сек.2. При больших скоростях полета горизон¬
тальная составляющая центростремительного ускорения, равная
такой величине, вызывается за счет очень незначительного измене¬
ния направления полета.
Если имеются лишь горизонтальные ускорения, вызванные кри¬
визной траектории полета, тогда направление вертикали, показы¬
ваемое секстантом с уровнем, будет отклоняться от своего истин¬
ного значения на угол, прямо пропорциональный квадрату скоро¬
сти и обратно пропорциональный радиусу кривизны траектории.
В таблице 1 приведены радиусы кривизны и соответствующие им
скорости изменения направления для различных скоростей при от¬
клонении, равном одной минуте (или ошибке в 1. морскую милю).
Основная разница в принципе двух методов навигации — астро¬
номической и инерциальной — заключается в способе учета
ускорений и силы тяжести. Как уже указывалось, обычная астро¬
навигация определяет направление местной вертикали из усреднен¬
ного значения направления силы тяжести, и, следовательно, точ¬
ность астронавигации зависит от правильности допущения, что
усредненное горизонтальное ускорение будет, по существу, равно
нулю за период производства измерений. Если мы будем рас-
232
ГЛАВА Т
Таблица 1
Кривизна траектории, соответствующая ошибке в I морскую милю
(Ошибки, вызываемые отклонением направления местной вертикали,
отмеченным секстантом с уровнем)
Скорость самолета, км 1 час
Радиус кривизны траекто¬
рии, км
Скорость изменения направле¬
ния полета при пренебрежении
влияниями ветра и ускорения
Кориолиса, град!час
185
925
11,4
370
3 700
5,7
555
8 325
3,8
740
14 800
2,8
925
23 200
2,3
1850
92 500
1,1
сматривать силу тяжести в качестве требуемого полезного сиг¬
нала, а возмущающие случайные горизонтальные ускорения — как
шум, то точность астрономической навигации при больших скоро¬
стях полета будет ограничиваться неизбежным низким отноше¬
нием сигнал-шум. Инерциальная навигация теоретически не со¬
держит в себе такого серьезного ограничения. Наоборот, в инер¬
циальной навигации горизонтальное ускорение является полезным
сигналом, который используется для определения изменений в по¬
ложении объекта, а сила тяжести является точно установленной
функцией места объекта на земной поверхности.
Инерциальную навигацию можно определить как навигацию,
основанную на автоматическом определении и вычислении всех
динамических уравнений движения, по которым осуществлялся
полет. Классическая динамика основана на ньютоновских законах
движения, которые в свою очередь базируются на инерциальной
системе координат.
Обычно в качестве осей в инерциальной системе координат
берут направления линий визирования неподвижных звезд. Следо¬
вательно, в противоположность астрономической навигации, где
звезды и все небесные тела считались как бы движущимися во¬
круг Земли, в инерциальной навигации, наоборот, считают, что
Земля вращается вокруг своей оси, а звезды остаются неподвиж¬
ными.
Закон, гласящий, что «сила равна массе, умноженной на уско¬
рение», например, будет неверен, если направление скорости выра¬
жено не в инерциальной системе координат, а величина скорости
выражена не относительно опорной точки, в которой ускорение от¬
сутствовало. Так, шарик, катящийся в вагоне поезда, не движется
с постоянной скоростью по прямой относительно вагона, если
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 233
поезд идет по кривой или же набирает скорость после оста¬
новки.
Одним из основных законов динамики является закон сохране¬
ния количества углового движения. Как следствие этого закона,
ось вращения свободного гироскопа будет сохранять постоянное
инерциальное направление при отсутствии воздействия внешних
моментов (см. гл. 10), и всякое твердое тело с симметрично рас¬
пределенной массой при тех же условиях будет сохранять по¬
стоянную инерциальную угловую скорость.
Местная вертикаль любой фиксированной точки на Земле вра¬
щается с постоянной угловой скоростью относительно инерциаль¬
ной системы координат. (Эта угловая скорость равна произведе¬
нию угловой скорости вращения Земли на косинус широты.) Сле¬
довательно, никаких внешних моментов не требуется для удержа¬
ния маятника в равновесии так, чтобы направление подвеса маят¬
ника совпадало с направлением местной вертикали, до тех пор
пока точка подвеса маятника остается неподвижной относительно
Земли.
Любая скорость, направленная вдоль поверхности Земли (т. е.
горизонтально), сообщает дополнительную угловую скорость мест¬
ной вертикали наблюдателя. Если общая угловая скорость местной
вертикали относительно инерциального пространства (которая яв¬
ляется суммой движения, вызванного вращением Земли, и движе¬
ния объекта относительно Земли) постоянна, то также никакого
момента не требуется, чтобы удержать маятник в таком положе¬
нии, когда его направление совпадает с направлением местной вер¬
тикали. Однако в том случае, когда движение в горизонтальном
направлении относительно Земли таково, что оно изменяет угло¬
вую скорость местной вертикали относительно инерциального про¬
странства, для удержания маятника в таком положении, когда
его направление совпадает с направлением местной вертикали,
необходимо приложить некоторый момент.
Горизонтальное движение, изменяющее инерциальную угловую
скорость местной вертикали, всегда будет создавать горизонталь¬
ные составляющие ускорения. Эти ускорения, будучи приложен¬
ными к маятнику, вызовут угловое ускорение маятника.
Рассмотрим маятник с распределенной массой, движущейся по
траектории, проходящей в плоскости экватора (см. рис. 98). По¬
ложение маятника относительно Земли можно определить с по¬
мощью угла ф и расстояния /? от центра Земли до точки подвеса
маятника. В этом случае угловая скорость местной вертикали,
проходящей через маятник относительно Земли, будет равна ф.
Любые изменения горизонтальной скорости создают в конечном
счете угловое ускорение местной вертикали ф и соответствующее
ему линейное ускорение маятника /?ф.
234
ГЛАВА 7
Рис. 98. Движение физического маят¬
ника по экватору:
О — угловая скорость вращения Земли,
2. Центр тяжести, 3. Точка опоры, 4. Ну¬
левой меридиан, 5. Западная долгота,
6. Местная вертикаль. 7. 4* — угловая ско¬
рость вращения местной вертикали отно¬
сительно Земли, 8. Северный полюс,
9. Экватор Земли
Пусть
т, — масса маятника;
I—длина маятника (расстояние от его центра тяжести до
точки подвеса), тогда
—— есть сила реакции, а
т1К^ — момент, действующий на маятник.
Этот момент создает угловое ускорение маятника относительно
г
инерциального пространства, равное , где / — момент инер¬
ции маятника относительно его точки подвеса. Полученное выра¬
жение говорит, что если маятник
первоначально был уравновешен
и его направление совпадало с
направлением местной вертика¬
ли, то любое горизонтальное
ускорение вызовет одновремен¬
ное угловое ускорение маятника
по величине прямо пропорцио¬
нально угловому ускорению мест¬
ной вертикали.
Коэффициент пропорциональ¬
ности при этом будет равен
т!К
7~
Если бы коэффициент пропор¬
циональности можно было сде¬
лать равным единице, тогда
угловое ускорение маятника бы¬
ло бы равно угловому ускорению
местной вертикали и направле¬
ние подвеса маятника всегда бы
совпадало с направлением мест¬
ной вертикали. Чтобы получить
коэффициент пропорциональности, равный единице (т. е. настроить
маятник по Шулеру), нужно сделать так, чтобы произведение пг1
на расстояние до центра Земли /? было равно моменту инерции
/ маятника.
Период собственных колебаний маятника с распределенной
массой равен
2к 1/ —,
г т1§ ’
где § — ускорение силы тяжести.
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 235
Благодаря настройке маятника по Шулеру , период
колебания маятника становится равным
2к ,
у в
или, приблизительно, 84,4 минуты.
Интересно отметить, что если в вышеприведенном примере с
маятником, движущимся по экватору, расстояние /? до центра
Земли не постоянно, то горизонтальная составляющая ускорения
будет определяться другим выражением, а именно:
+ 2/?(ф - а) = 4 (4) ~
где Й— угловая скорость вращения Земли — величина постоянная,
и, следовательно, разность (ф— й) представляет инерциальную
угловую скорость местной вертикали.
Член 2/? (ф— й) является ускорением Кориолиса, или кажу¬
щимся горизонтальным ускорением, появляющимся вследствие
наличия радиальной составляющей ск > ости при постоянной ско¬
рости вращения.
Уравняв результирующий момент на маятнике со скоростью из¬
менения его углового количества движения, мы получим следую¬
щее выражение:
Момент = /?2 (ф — й) = (7<о),
где ш — угловая скорость маятника относительно инерциального
пространства.
Если произведение т1 остается пропорциональным расстоя¬
нию 7? (т. е. т1 = кН), а момент инерции маятника остается про¬
порциональным квадрату расстояния /? с тем же самым коэффи¬
циентом пропорциональности (т. е. / = й/?2), то вышеприведенное
уравнение примет вид:
4[/?2(Ф-й)] = А[/?2(ш)]
и, следовательно,
I с\ . СОП5(
ф —Й = о> + —
Последнее говорит о том, что если маятник первоначально вра¬
щался с угловой скоростью, равной угловой скорости местной вер¬
тикали, то его инерциальная угловая скорость будет всегда изме¬
няться в точном соответствии с инерциальной угловой скоростью
местной вертикали, независимо от изменений по высоте.
236
ГЛАВА ?
Применение такого физического маятника, который был опи¬
сан выше, теоретически вполне возможно, но не практично, ибо
расстояние между точкой подвеса и центром тяжести физиче¬
ского маятника Шулера должно быть порядка нескольких мил¬
лиардов сантиметров,- Однако существуют другие способы и ме¬
тоды применения принципа маятника Шулера, чтобы определить
в полете направление местной вертикали, независимо от внеш¬
них ускорений.
Как будет показано в главе 10, одним из основных свойств
гироскопа является его способность создавать во время своего
вращения высокие инерциальные противодействующие моменты.
Воспользовавшись этой особенностью гироскопа, Шулер предло¬
жил конструкцию гиромаятника с периодом собственных колеба¬
ний, равным 84 минутам. Гиромаятник Шулера можно сконструи¬
ровать легче, чем физический маятник с таким же периодом коле¬
баний, который был описан выше.
Два других теоретических маятника — маятник с длиной нити
подвеса, равной радиусу Земли, и маятник с подвесом бесконеч¬
ной длины — часто используются в теоретических исследованиях
основных свойств колебаний с 84-минутным периодом.
Как известно из механики, период колебания обычного маят¬
ника, масса которого удерживается на нити, подвешенной к ка¬
кой-либо точке подвеса, равен
2к|/ —,
' ё
где I — длина нити подвеса.
Если бы можно было такой маятник подвесить так, чтобы его
точка подвеса находилась' на поверхности Земли, а центр тяжести
в центре Земли, то длина I нити была бы равна радиусу Земли /?,
а период колебания такого маятника был бы равен
2к 1/ — = 84,4 мин.
г ё
Нить такого маятника, в том случае когда последний нахо¬
дился бы в покое, была бы всегда направлена к центру Земли и
указывала бы направление местной вертикали, несмотря на го¬
ризонтальные перемещения точки подвеса.
Еще больший интерес представляет маятник, подвешенный над
Северным полюсом Земли на нити бесконечной длины. Масса та¬
кого маятника должна была бы двигаться в плоскости, касатель¬
ной к Земле в точке Северного полюса (рис. 99), Нить подвеса
оставалась бы параллельной земной оси, несмотря на горизон¬
тальное движение подвешенной массы маятника, и, следовательно,
всегда показывала бы местную вертикаль полюса. Ускорение
силы тяжести ё< действующее на массу т, создавало бы силу тё.
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 237
направленную прямо к центру Земли. Если массу маятника пе¬
реместить на расстояние х от полюса по касательной плоскости,
тогда сила тяжести разложится на две составляющих: составляю-
т§х
щую в касательной плоскости направленную к полюсу, и со¬
ставляющую 1—действующую по направлению нити под¬
веса. Разумеется, что составляющая, действующая по направле¬
нию нити подвеса, будет уравновешена натяжением нити подвеса,
тогда как составляющая, направленная к полюсу, будет
создавать ускорение массы маятника, направленное к полюсу.
Результирующее ускорение (а =—х) будет относиться к прило¬
женной силе = -дг) на основании второго закона Ньютона
(Р=та). Следовательно, уравнение движения массы будет
тех
Рис. 99. Маятник с бесконечно длинной нитью подвеса:
1. Точка подвеса нити бесконечной длины. 2. Направление
результирующего ускорения, 3. Точка Р, 4. Составляющая
силы тяжести, 5. Масса т, 6. Плоскость, касательная к по¬
верхности Земли в точке Северного полюса, 7. Инерциаль¬
ная сила реакции, 8. Сила тяжести, 9. Местная вертикаль
полюса
238
ГЛАВА ?
Так как гравитационная масса т в левой части уравнения равна
инерционной массе т в правой части, то их можно сократить, и
уравнение движения упростится и примет вид:
^+(^)x = 0.
Это дифференциальное уравнение движения является уравне¬
нием простого (синусоидального) колебательного движения с пе¬
риодом колебания, равным
•
2гс = 84,4 мин.
Хотя пример с маятником с подвесом бесконечной длины имеет
лишь чисто теоретический интерес, однако выводы из вышеприве¬
денного анализа имеют большое практическое значение.
Вернемся снова к рисунку 99. Пусть точка Р будет местопо¬
ложением наблюдателя, задача которого, как штурмана, — до¬
стичь Северного полюса. Предположим, что он обеспечен гиро¬
скопами, следящими телескопами, секстантами и т. д., с помощью
которых может точно установить направление земной оси. Кроме
того, пусть он имеет обычный маятник, с помощью которого мо¬
жет определить направление местной вертикали. Если наблюда¬
тель движется по Земле, стремясь попасть на полюс, то ему нужно
прийти в такую точку, где его маятник будет находиться в покое
с направлением нити подвеса, параллельным земной оси. В этом
случае наблюдатель будет знать, что он достиг полюса. Но если
наблюдатель будет лететь на самолете и попытается таким же
образом определить точку полюса, то в этом случае он столкнется
с новым фактором.
Предположим, что направление маятника первоначально сов¬
падало с направлением земной оси; тогда в точке наблюдения
сила земного притяжения заставит маятник занять такое поло¬
жение, что его направление будет совпадать с направлением мест¬
ной вертикали. Однако вследствие инерции маятника его направ¬
ление не сразу станет параллельным направлению местной верти¬
кали, а вначале получит ускорение точно такое же, как и в слу¬
чае с маятником, имеющим подвес бесконечной длины, ибо в том
и другом случаях начальные ограничения свободы движения, соз¬
даваемые нитью подвеса, одинаковы.
Если же наблюдатель одновременно получает такое же ускоре¬
ние, как и маятник, то направление маятника все время будет
оставаться параллельным земной оси, и наблюдатель не будет
иметь возможности определить, находится ли он на полюсе или
в другой точке.
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 239
Решением для вышеприведенного дифференциального уравне¬
ния
л+(-к)х = °
является
X = Хо СОЗ (ш/) + т/о 81П (ш/),
где х0— начальное местонахождение;
&0—начальная скорость (в момент времени / = 0);
Ш — V X ~ 84,4’
Хотя это уравнение получено в ходе анализа частного случая
навигации, но, по существу, такое же уравнение можно получить
из анализа (любым математическим методом) распределения
ошибок горизонтального положения в навигационной системе,
основанной на чувствительных к ускорениям приборах.
Это уравнение имеет очень большое значение для описания
техники наведения управляемых снарядов.
Из него следует, что штурман или автопилот, в случае если
они получают данные исключительно на основе ■ инерциальных
измерений, производимых в полете, для определения места
должны обеспечить такую траекторию полета, которая будет
колебаться около заданной траектории с периодом, равным
84 минутам. Однако оно также показывает, что если посредством
какого-нибудь независимого измерения будет возможно опреде¬
лить положение и скорость объекта в какой-то начальный момент
времени 1 = 0, то в любой последующий момент времени место¬
нахождение объекта может быть полностью определено.
Эти положения приводят к следующему общему правилу:
Если в полете невозможно произвести независимые определе¬
ния местоположения или скорости, то для точной навигации с по¬
мощью инерциальных средств нужна непрерывно действующая
система, которая смогла бы проследить за всеми изменениями
местоположения объекта на траектории, начиная с момента
старта.
Способность проследить за изменением положения местной вер¬
тикали наблюдателя с момента вылета является главной особен¬
ностью инерциальной навигации в отличие от астронавигации.
Эта же способность подводит инерциальную навигацию под
общую категорию систем навигации методом счисления пути.
Первым логическим требованием к тому, чтобы сделать нави¬
гацию посредством секстанта с уровнем непрерывной, является
необходимость лететь таким курсом, чтобы пузырек уровня не от¬
клонялся от своего правильного положения относительно фиксц-
240
ГЛАВА 7
Рис. 100. Пружинный акселерометр:
1. Направление ускорения, 2. Отклонение
массы, х : : выходному сигналу, 3. Сила,
создаваемая пружиной. — кх, 4. Масса— т,
5. Ось чувствительности акселерометра
рованных звезд. Разумеется, это потребует предварительных рас¬
четов тех ускорений, которым будет подвергаться летящий объект
в любой точке предполагаемой траектории полета. Более того, это
потребует необходимости совпадения во всех точках действитель¬
ной траектории полета с предварительно вычисленной траекто¬
рией. Хотя такая простая система навигации и будет теоретиче¬
ски точной, тем не менее практические задачи управления реаль¬
ным самолетом с требуемой точностью при наличии переменного
ветра делают такую простую систему интересной только с чисто
теоретической точки зрения.
Рассмотрение практических возможностей систем, осуществ¬
ляющих полет строго по заранее вычисленным траекториям, при¬
водит к единственному логиче¬
ски правильному выводу, что
определение направления си¬
лы тяжести только инерциаль¬
ными средствами практически
недостаточно для того, чтобы
точно установить направление
местной вертикали.
И сила тяжести и ускоре¬
ние объекта являются вектор¬
ными величинами, т. е. они ха¬
рактеризуются величиной и на¬
правлением. Следовательно, в
том случае, когда измерения
только направления вектора недостаточно, единственно возможным
выходом из положения будет измерение его еще и по величине.
А так как обычный маятник или уровень не могут измерять вели¬
чину вектора, то, очевидно, для инерциальной навигационной си¬
стемы высокой точности требуются более сложные приборы, чув¬
ствительные не только к ускорениям движения, но и к ускорениям
силы тяжести. Таким прибором, чувствительным к ускорениям
любого вида, является акселерометр.
Эти соображения дают возможность прийти ко второму об¬
щему правилу:
Точная навигация с помощью инерциальных средств требует
применения чувствительных приборов, которые реагируют как
на величину, так и на направление приложенных к ним уско¬
рений.
Акселерометр обычного типа состоит из массы пг, подвешенной
на пружинах (см. рис. 100). Если этому прибору с массой т со¬
общить ускорение а, направленное параллельно его оси чувстви¬
тельности, то для этого потребуется сила, равная Р = та. Такая
сила получается за счет натяжения пружины, и она пропорцио¬
нальна смещению пружины. Если постоянная пружины (измеряв-
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ241
Рис. 101. Применение акселерометра:
1. Направление горизонтальной составля-
ющей ускорения, 2. Северный полюс,
3. Выходной сигнал акселерометра =
4. Местная вертикаль, 5. Широта, 6. Эква¬
тор, 7. Расстояние по дуге большого круга
мая в единицах силы на единицу смещения) равна к, то пружина
отклонится на длину х, причем
кх = та,
или
Л=ШХ-
Поскольку величины к и т постоянны, то отклонение пру¬
жины, которое можно измерить, будет прямо пропорционально
приложенному ускорению.
Существует много разновидностей акселерометров, в которых
применяются тензометры, магнитные противодействующие силы
(электрическая пружина) й т. д.,
но по своей сущности, все они
подобны механическому акселе¬
рометру, показанному на рис. 100,
т. е. у всех у них выходной сиг¬
нал пропорционален приложен¬
ному к ним ускорению.
Использование акселеромет¬
ров в инерциальной навигации
можно продемонстрировать пу¬
тем вторичного рассмотрения за¬
дачи с наблюдателем, которому
нужно достичь Северного полю¬
са, хотя на сей раз он вместо
маятника будет пользоваться
акселерометром и всеми другими
приборами, которые необходимы
для определения опорных осей
инерциальной системы координат
(рис. 101).
Пусть наблюдатель вылетел с
какой-то точки, находящейся на
экваторе (широта равна нулю).
Нужная ему точка приземления —
Северный полюс (широта 90°), следовательно, его навигационная
задача состоит в достижении 90° северной широты.
Зная свое местоположение в момент вылета, он устанавливает
горизонт акселерометра (перпендикуляр к местной вертикали) и
ориентирует направление оси чувствительности акселерометра
так, чтобы прибор был чувствителен к ускорениям, возникающим
по направлению север—юг. Пренебрегая изменениями высоты по¬
лета, будем считать, что его линейное ускорение в направлении
север — юг равно расстоянию от него до центра Земли К, умно¬
женному на вторую производную по времени от занимаемой им
16-405
242
ГЛАВА 7
геоцентрической широты (X). Его акселерометр, следовательно,
будет иметь на выходе следующие показания:
а = /?Х
Первый интеграл, взятый от этого значения, даст нам скорость
в направлении север—юг
У = НК
а второй интеграл — расстояние по дуге большого круга <!=№..
Поскольку радиус Земли и высота полета над Землей всегда
известны, то известно и значение величины /?, следовательно,
пройденное расстояние всегда можно определить. Однако прой¬
денное расстояние для решения задачи навигации имеет второ¬
степенное значение. Для того чтобы он мог считывать со своего
акселерометра данные об ускорении в направлении север—юг, он
должен обеспечить, чтобы ось чувствительности акселерометра
была всегда направлена горизонтально, ибо иначе на акселеро¬
метр будут действовать не только ускорения, обусловленные
движением, но и ускорения силы тяжести, а это приведет
к ошибкам. Последнее легко выполнимо, так как вращение мест¬
ной вертикали наблюдателя пропорционально изменению широты,
которое в свою очередь пропорционально двойному интегралу по
времени, взятого от значения показания акселерометра. Таким
образом, изменение широты равно
I Г *
х = А-1 [ /?х а- а/-,
о 1о
направление силы тяжести поворачивается тоже на такой же
угол. Поскольку предполагается, что независимые измерения
опорных направлений инерциальной системы координат будут
обеспечены, требование сохранения горизонтального положения
акселерометра в любой момент времени сводится к проблеме вра¬
щения оси чувствительности акселерометра на угол, пропорцио¬
нальный величине двойного интеграла, взятого от выходного сиг¬
нала акселерометра. Тогда, когда этот угол станет равным 90°,
наблюдатель достигнет Северного полюса. (Следует заметить, что,
поскольку Земля вращается вокруг своей оси, направление север-
юг не остается неподвижным в инерциальном пространстве, а из¬
меняет свое направление со скоростью, зависящей от широты;
чтобы учесть это вращение, в задачу вводится время.)
При решении этой упрощенной задачи навигации сделаны сле¬
дующие допущения:
1. Выходной сигнал акселерометра пропорционален второй
производной по времени от широты места наблюдателя (считая
рысоту над Землей постоянной, а Землю — шаром).
решение навигацион. задач при иавёДеИНи управляем. Снарядов 243
2. Акселерометр оставался в горизонтальном положении бла¬
годаря повороту его оси чувствительности на угол, пропорцио¬
нальный двойному интегралу от значения выходного сигнала
акселерометра.
На рис. 102 показано такое положение, которое могло бы соз¬
даться, если бы тот же наблюдатель находился на Северном по¬
люсе, но полагал бы, что в дей¬
ствительности он находится в не¬
сколько другом месте, скажем,
на расстоянии х миль от полюса,
где угловое смещение между его
действительным положением и
предполагаемой местной верти¬
калью составляло бы
’=!■
В этом случае наблюдателю
нужно было бы прежде всего
ориентировать ось чувствитель¬
ности своего акселерометра пер¬
пендикулярно местной вертикали
своего предполагаемого местопо¬
ложения, что привело бы к тому,
что ось чувствительности аксе¬
лерометра была бы наклонена
относительно истинной местной
вертикали на угол ошибки 0.
Следовательно, сила тяжести
имела бы составляющую
(т^51п0), направленную по оси
чувствительности акселерометра,
а показания акселерометра
были бы таковы, словно акселерометр движется к полюсу с уско¬
рением, равным
а = ^81П0,
в направлении, которое должно было бы уменьшить угол
ошибки 0.
Воспользовавшись теми же допущениями, что и раньше, на¬
блюдатель мог бы рассматривать выходной сигнал акселеро¬
метра з1п 0) как ускорение, направленное к северу (—х=—В в).
Следовательно, он продолжал бы поворачивать свой акселеро¬
метр на угол, пропорциональный двойному интегралу от величины
выходного сигнала. Таким образом, его предполагаемое положе-
Рис. 102. Предполагаемая ошибка
в местоположении:
1. Выходной сигнал =^з!п9, 2. Сила тяже¬
сти, 3. Предполагаемое ускорение =—
4. Действительная местная вертикаль,
5. Северный полюс, 6. Предполагаемое
местоположение, 7. Предполагаемая мест¬
ная вертикаль
16*
244
ГЛАВА 1
ние стало бы приближаться к истинному и его ошибка по ши¬
роте в стала бы колебаться в соответствии с дифференциальным
уравнением
^81Пб = — /?0.
Так как синус малого угла почти равен углу, выраженному
. X
й радианах, то зш6~0= следовательно, вышеприведенное диф¬
ференциальное уравнение можно было бы привести к линейному
виду путем замены 51п0 на 0. Поскольку угловая ошибка 0 равна
ошибке горизонтального положения х, деленной на расстояние /?
до центра Земли, то вышеприведенное дифференциальное урав¬
нение можно заменить уравнением вида х + — 0.
Можно показать, что это приведенное к линейному виду урав¬
нение идентично с ранее выведенным уравнением движения, не со¬
держащим ошибки, которая может быть определена только с по¬
мощью инерциальных средств. Однако на сей раз интерпретация
этого уравнения несколько иная, ибо х теперь является скорее пред¬
полагаемой ошибкой положения, чем фактической. На этот раз вы¬
шеприведенное уравнение говорит, что в предполагаемой инер¬
циальной системе навигации, основанной на измерении горизон¬
тальных ускорений, любые ошибки будут колебаться около нуля
с периодом, равным 84 мин.
Ранее уже говорилось, что если предполагаемое местоположе¬
ние неподвижно, а истинное горизонтальное положение колеблется
около него с 84-минутным периодом, то эти колебания не могут
быть замечены с помощью только одних чисто инерциальных
средств. Здесь было показано (по крайней мере, на одном примере
предполагаемой инерциальной системы навигации), что если истин¬
ное положение фиксировано, то предполагаемое горизонтальное
положение будет колебаться около него с периодом, равным
84 мин. В любом случае ошибка в определении местоположения
равна разности между истинным и предполагаемым положением.
Можно показать, что эти выводы имеют общий характер, поэтому
на основании их можно вывести третье правило:
В инерциальных системах навигации любая ошибка в горизон¬
тальном положении будет всегда иметь составляющую, колеблю¬
щуюся с периодом, равным 84 мин.
Ошибки, не носящие колебательного характера, могут возник¬
нуть из-за некоторого наклона акселерометра или из-за неточности
начальной ориентации осей инерциальной системы координат, но
эти ошибки, если они имеются, всегда будут сопровождаться коле¬
баниями с 84-минутным периодом около постоянной ошибки по¬
ложения. То обстоятельство, что эти ошибки имеют колебатель¬
ный характер, говорит о том, что в любой инерциальной системе
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 245
навигации (при отсутствии наклона акселерометра) местная
вертикаль, определяемая с помощью приборов, стремится прибли¬
зиться к истинной местной вертикали, так же как обычный маятник
стремится занять такое положение, когда его направление совпа¬
дает с направлением местной вертикали. В каждом случае ошибка
скорости, накопленная в результате ускорения, направленного на
устранение ошибки, вызывает прохождение равновесного положе¬
ния, т. е. приводит в конечном счете к колебаниям.
Как уже указывалось в этой главе, горизонтальное ускорение,
равное 0,0028 м/сек2. эквивалентно изменению местной вертикали
на 1 мин дуги, или ошибке в определении местоположения в 1 мор¬
скую милю. Таким образом, наклон акселерометра во время изме¬
рения ускорения дает смещение в вычисленном направлении мест¬
ной вертикали и, следовательно, ошибку в вычисленном местопо¬
ложении. При наличии наклона акселерометра вычисленная мест¬
ная вертикаль будет колебаться около линии, смещенной от дей¬
ствительной местной вертикали, а вычисленное местоположение бу¬
дет колебаться около точки, которая сдвинута от истинного место¬
положения на 1 морскую милю на каждые 0,0028 м/сек,2 погреш¬
ности в ускорении, или на 6,4 м на каждую миллионную долю
ускорения силы тяжести
Нужно особенно отметить, что наклон во время считывания
ускорения (которое может быть вызвано рассогласованием , недо¬
статочной или плохой калибровкой, трением и т. д.) дает в резуль¬
тате смещения в расчетном местоположении, если для этого ис¬
пользовалась инерциальная навигационная техника; но он не соз¬
дает ошибки в местоположении, которая растет пропорционально
квадрату времени. Это совершенно отличается от обычного поло¬
жения, когда расстояние 5, получаемое при постоянном ускоре¬
нии а, определяется формулой
8 = ^-а12.
Увеличение ошибки положения ограничивается тем обстоятель¬
ством, что ошибка в горизонтальном положении дает в результате
ошибку в вычисленном направлении силы тяжести (местной верти¬
кали) и создает неизвестную составляющую силы тяжести (ко¬
торая на акселерометре отмечается как ускорение движения) все¬
гда в таком направлении, которое стремится уменьшить ошибку
положения.
Этот основной фактор является причиной колебательного ха¬
рактера любых навигационных ошибок, которые могут появиться
в инерциальной системе навигации. Вследствие этого инерциальная
система навигации иногда сравнивается с поведением маятника с
84-минутным периодом колебания.
246
ГЛАВА 1
Когда выясняется, что инерциальная система навигации подоб¬
на 84-минутным маятникам, тогда становится очевидным, что та¬
кая система навигации отличается от метода счисления пути в
самом главном: обычный метод навигации счислением пути учиты¬
вает пройденное расстояние вдоль траектории, тогда как инер¬
циальная навигация дальнего действия учитывает изменения в на¬
правлении местной вертикали. При полетах, продолжительность ко¬
торых меньше 84 мин (основной период колебания), в инерциаль¬
ной системе навигации измеряется пройденное расстояние, а при
полетах большой продолжительности местоположение, определяе¬
мое посредством инерциальной навигационной техники, обычно ока¬
зывается весьма близким к географическому положению, найден¬
ному посредством астрономических измерений и обычной астро¬
номической навигационной техники.
Практически в инерциальной системе навигации обычно невоз¬
можно ориентировать оси чувствительности акселерометров точно
перпендикулярно направлению местной вертикали, поэтому часто
требуется внесение поправок на известную составляющую ускоре¬
ния силы тяжести действующую по оси чувствительности аксе¬
лерометра. Эти поправки, а также поправки на изменения центро¬
бежной силы, кориолисова ускорения и т. д. заставляют приме¬
нять счетно-решающие устройства вместе с системой точного вре¬
мени, для того чтобы учесть вращение Земли. Но эти уточнения не
изменяют, однако, основных принципов, рассмотренных в общих
чертах выше.
Надо также заметить, что, для того чтобы правильно установить
направление оси чувствительности акселерометров, необходимо
прежде всего установить опорные направления. Такую систему
опорных направлений можно получить с помощью гироскопов на¬
правления, оси вращения которых при отсутствии внешних момен¬
тов остаются неизменными в инерциальном пространстве (см.
гл. Ю), или же с помощью аппаратуры слежения за звездами, ко¬
торая определяет опорные направления осей в инерциальной си¬
стеме координат по линии визирования небесных тел. В обоих слу¬
чаях любая ошибка в I мин дуги повлечет за собой такой же ве¬
личины ошибку в вычисленном направлении местной вертикали,
что дает в результате усредненную ошибку в расчетном местополо¬
жении в I морскую милю.
Ранее было сказано, что как инерциальная, так и астрономиче¬
ская навигация используют следующие основные параметры:
I) внеземные опорные направления осей координат;.
2) время;
3) направление местной вертикали.
В астронавигации эти параметры измеряются непосредственно,
а затем с помощью различных формул, таблиц, расчетов опреде¬
ляется местоположение, которое наносится на карту. В инерциаль¬
РЕШЕНИЕ НАВИГАЦИОН. ЗАДАЧ ПРИ НАВЕДЕНИИ УПРАВЛЯЕМ. СНАРЯДОВ 247
ной навигации используются эти же самые параметры, но в этом
случае их нелегко отделить друг от друга.
Основные параметры, используемые в инерциальной навигации,
связаны между собой примерно таким же образом, как и про¬
цессы наведения и управления, которые иногда невозможно отде¬
лить друг от друга. Например, если к гироскопу приложить рас¬
считанный момент, заставляя гироскоп прецессировать таким
образом, что направление его оси всегда будет совпадать с на¬
правлением местной вертикали, то гироскоп будет показывать на¬
правление местной вертикали, поскольку будет известно его угло¬
вое перемещение относительно опорных инерциальных направле¬
ний за известное время.
В заключение следует сказать, что из всех рассмотренных нами
систем навигации единственной системой, которая не имеет каких-
либо серьезных ограничений по точности, помехоустойчивости или
возможности использования ее вероятным противником (путем из¬
лучения радиоволн, которые могут быть использованы для само¬
наведения), является инерциальная система. Это, однако, не сле¬
дует понимать в том смысле, что инерциальная навигация является
единственно возможным способом наведения управляемых снаря¬
дов дальнего действия.
Основные принципы и законы, на которых зиждется инерциаль¬
ная навигация, были известны еще во времена Исаака Ньютона,
двести лет назад. Однако только в последние годы развитие тех¬
нического прогресса в приборостроении достигло такого состояния,
что стало возможным использование этих законов на практике
для целей навигации.
Поскольку лучшие гирогоризонты (авиагоризонты) и гироскопы
направления, использующиеся в современной авиации, имеют вели¬
чину ухода (дрейфа) от 1 до 10 град.]час, то очевидно, что, если
такие гироскопы использовать в качестве датчиков опорных на¬
правлений в инерциальной навигации, они могут дать в результате
ошибку положения от ПО до 1100 км за 1 час полета. Таким же
образом, если в инерциальной навигации используются акселеро¬
метры с пределом измерения ± 1^ и точностью 0,1%, то они дадут
среднюю ошибку положения в 6400 метров. (Эти ошибки, разу¬
меется, являются дополнительными к тем ошибкам, которые возни¬
кают за счет всевозможных упрощений, допускаемых в вычисли¬
тельных устройствах при решении геометрических и динамических
навигационных задач.)
Инструментальная точность приборов инерциальной системы на¬
вигации должна находиться на уровне точности измерительных при¬
боров, применяемых в крупнейших исследовательских лаборато¬
риях мира, для измерения силы и расстояний. Достижение такой
точности приборов, работающих в очень тяжелых условиях, кото¬
248 Г Л А В А 7
рым подвержен управляемый снаряд, является одной из наиболее
трудных инженерных проблем.
Из сделанного в этой главе анализа надо понять, что нет и не
может быть простого и единственного ответа при решении пробле¬
мы наведения управляемых снарядов.
При решении технической задачи выбора или проектирования
системы наведения для того или иного определенного класса
снарядов использование той или иной системы навигации будет
диктоваться такими специфическими требованиями, предъявляе¬
мыми к этому типу снарядов, как точность, универсальность, огра¬
ничения по весу и размерам, уязвимость. Поэтому вполне ве¬
роятно, что при этом будут использованы все важнейшие дости¬
жения техники управляемых снарядов если не для всех, то, во
всяком случае, для большинства основных методов наведения.
ГЛАВА 8
СЛУЧАЙНЫЕ ЯВЛЕНИЯ И ТОЧНОСТЬ
НАВЕДЕНИЯ И УПРАВЛЕНИЯ
Р. Г. Делано1
8—1. ИСТОЧНИКИ ПОМЕХ В СИСТЕМЕ УПРАВЛЕНИЯ
Системы управления реактивных снарядов подвержены дейст¬
вию различных видов помех, из которых наиболее существенны
встречающиеся в системах наведения или в системах сопровожде¬
ния цели, таких как радиолокатор. Если снаряд управляем, то
ошибки, или помехи, в системе наведения предопределяют предел
точности, с которой снаряд может попасть в цель. Некоторые источ¬
ники шумов (помех) почти неизбежны и в силу слабости сигна¬
лов, поступающих для целей управления, играют важную роль.
Например, техника радиолокации и электроника долгое время
имели дело с такого рода помехами, как шумы антенны, шумы де¬
текторного каскада, тепловые шумы, дробовой шум в лампах,
шумы местного гетеродина, и некоторыми другими весьма внуши¬
тельными источниками шумов, вносимыми в общие шумы прием¬
ника. Хотя и не все перечисленные выше источники шумов порож¬
дены термодинамической природой материи, однако большая часть
их была достаточно изучена, чтобы можно было с большей или
меньшей точностью предсказать величину общего шума приемника,
работающего в обычных условиях. Когда из большого числа раз¬
личных приборов, способных выполнять те же самые функции, не¬
обходимо выбрать нужный прибор, величина шума является опре¬
деляющим фактором.
Помехи второго рода, которые влияют на характеристики
управляемого снаряда, обусловлены окружающей средой, через
которую поступает основная информация наведения. Природа
этих сигналов зависит от системы, используемой для запуска сна¬
ряда и управления им, и может показаться, что есть, по крайней
мере, какая-то возможность с помощью тех или других средств
снизить этого рода помехи до нуля. Тем не менее в реальных усло¬
виях работы интерферирующие сигналы или неизбежные флюк-
1 Сотрудник Корпорации лабораторий систем.
250
ГЛАВА 8
туации некоторых параметров сигналов, из которых получают
информацию о положении-цели или снаряда, вызывают шумы, по
своей природе близкие внутренним шумам приемника. И когда
дело касается величины и природы помех, а также характера
влияния этих помех на работу снаряда, большую роль играет пра¬
вильный выбор и правильное проектирование системы наведения.
Третья группа ошибок, которой будет уделено меньше внима¬
ния, включает ошибки, вызванные дрейфом, разбалансировкой,
микрофонным эффектом, нежелательными нелинейностями и
флюктуациями, которые создаются трением, плохим электрокон¬
тактом, искрением, утечкой и тому подобными недостатками,
имеющимися в аппаратуре. Чтобы устранить источники этих по¬
мех, необходимо приложить много усилий при проектировании
аппаратуры и затем подвергнуть ее испытаниям. Эти шумы часто
оказывают существенное влияние на конструкцию и характер
работы системы, но их нельзя легко проанализировать обычными
методами и они не являются основными физическими источниками
ошибок, если не считать их косвенного влияния.
Если подвижная цель уже сопровождается радиолокатором, то
на максимальной дальности внутренние шумы приемника могут
преобладать над сигналами от цели. На максимальной дальности
приходится сталкиваться с задачами обнаружения и опознавания.
Для первичного обнаружения цели, вообще говоря, требуется
большее отношение сигнал-шум, чем для сопровождения цели,
которая уже обнаружена и положение которой определено. Но
если учесть, что при наведении нужно определять координаты с
такой точностью, при которой промах не выходит из заданных
границ, то станет почти очевидным, что дальность, соответствую¬
щая началу наведения, оказывается существенно меньшей, чем
дальность обнаружения. По крайней мере, на дальности, с которой
начинается такое сопровождение, внутренние шумы приемника
должны быть существенно меньше.
На всех дистанциях шумы, обусловленные отражениями от
земной поверхности (шумы фона), от облаков или воды, и любые
шумы, присущие сигналу, идущему от цели, должны быть проана¬
лизированы, определены, измерены и учтены при определении точ¬
ности наведения снаряда, поскольку в любой системе управления
всегда имеются такого рода шумы. Понимание природы таких
шумов может помочь найти удачные методы борьбы с ними. Наи¬
более известным из этих методов в импульсной радиолокации
является применение стробирования по дальности. Вероятно, наи¬
меньшее количество такого рода помех будет появляться в том
случае, когда цель неподвижна и имеет точно определенное геог¬
рафическое положение и снаряды запускаются по заранее вычис¬
ленной траектории, без каких-либо дополнительных непосред¬
ственных определений местоположения цели. Во всех других слу¬
случайные явления и точность наведения и управления
251
чаях снаряд должен быть приспособлен к возможностям, установ¬
ленных на нем приборов, служащих для определения положения
цели (например, радиолокатора), и к особенностям цели. В част¬
ности, большинство целей имеют сложную конфигурацию, и от¬
раженные от них радиолокационные сигналы, отображаемые на
радиолокационных индикаторах в виде точечных источников сиг¬
нала, имеют значительные флюктуации по кажущейся дальности,
угловому положению и размеру цели.
Степень влияния этих флюктуаций на управляемый снаряд
зависит от типа применяемого радиолокатора, от типа системы
наведения (командная, по лучу, самонаведение и др.), от вида
бортовой системы управления, а также от конкретного выбора пе¬
редаточных функций фильтров, коэффициентов усиления и других
важных параметров системы и прочих факторов (включая и шум),
которые оказывают на них влияние. Полная оценка всех или
большей части относящихся к делу факторов должна произво¬
диться как аналитическими методами, так и методами моделиро¬
вания. Аналитические или теоретические методы применяются
тогда, когда имеют дело с начальными или более обширными за¬
дачами, методы моделирования — когда нужно получить конкрет¬
ные ответы для рассмотренных систем или ситуаций, эксперимен¬
тальная же проверка производится, когда нужно определить те
параметры, которые нельзя измерить лабораторным путем.
8—2. ПОНЯТИЕ О СЛУЧАЙНЫХ ВЕЛИЧИНАХ
Понимание основных положений теории вероятности очень су¬
щественно для изучения шумов. Однако теорию вероятности
очень трудно осветить в нескольких небольших разделах. Случай¬
ные величины, представляющие _для нас интерес, обычно описы¬
ваются непрерывными плотностями вероятности Р(х), где случай¬
ная величина х обычно является функцией времени, которую
было бы правильно представлять себе, как некоторую функцию,
выбираемую из (непрерывного) пространства выборок или из бес¬
конечного множества с вероятностью или мерой плотности вероят¬
ности, соответствующей функции Р(х).
Вероятность наиболее легко определяется или выражается в
тех случаях, когда дискретная вероятность связана с отдельным
событием. Так, например, вероятность выпадения шестерки -при
бросании игральной кости равна 1/е- В задачах радиосвязи и ра¬
диолокации, представляющих интерес, случайными величинами
являются обычно значения напряжений, которые не могут быть
описаны рядом дискретных вероятностей; можно сказать, что они
могут появиться где-то в пределах определенного конечного или
бесконечного интервала значений. Отсюда, по той же самой при¬
252
ГЛАВА 8
чине, по которой на любом отрезке прямой конечной длины
имеется бесконечное число точек, вероятность появления того или
иного напряжения точно заданной величины обычно равна нулю.
Однако вместо дискретных вероятностей, связанных с каждой от¬
дельной точкой, при такой ситуации обычно берется плотность
вероятности Р(х), которая при умножении на бесконечно малое
приращение <1х определяет вероятность появления величины х на
этом конечном интервале (1х. Путем интегрирования по любому
соответствующему интервалу х может быть определена соответ¬
ствующая дискретная вероятность появления события в этом
интервале.
Плотность вероятности можно также рассматривать как произ¬
водную от функции распределения вероятности Р(Х[), которая
является просто вероятностью того, что случайная величина х
рав.на или меньше, чем частное значение, скажем, хь Понятие
плотности вероятности можно также распространить на любое
число измерений, где наблюдаемая величина должна быть точкой,
находящейся не на линии, а в п-мерном пространстве. Вновь дис¬
кретные вероятности получаются интегрированием в некотором
объеме этого пространства.
Наиболее важными свойствами функции Р(х) являются
| Р(х)</х= 1, (1)
т. е. по определению существование величины х является досто¬
верным событием.
Величина
Р(х).= у Р(и)<111 (2)
ОО
называется функцией распределения вероятности. Среднее значе¬
ние некоторой функции от случайной величины
7(х)= | /\х)Р{х)ах, (3)
где Цх) есть любая функция от (х), как, например, х, х2,
(х —х)2, 51П ах и т. д.
При описании физических явлений наиболее часто встречается
нормальный, или гауссов, случайный процесс. В действительности
он настолько обычен, что статистики часто становятся в тупик,
если его не встречают. Основная причина важности этого нор¬
мального закона обусловлена его свойствами, обобщенными в
приводимой ниже центральной предельной теореме.
СЛУЧАЙНЫЕ ЯВЛЕНИЯ И ТОЧНОСТЬ НАВЕДЕНИЯ И УПРАВЛЕНИЯ 253
Рассмотрим величину
Л
= X, + Х2 + Х3 + .. . + ха = 2 ХА> (4)
Й=1
где X/, — независимые случайные величины с конечными средне¬
квадратическими значениями, которые характеризуются каждая
своей плотностью распределения вероятности Рь(х). Такими не¬
зависимыми случайными величинами могут быть отдельные
ошибки или движения отдельных электронов, вносящих свою
долю шумов в общий шум. Если не останавливаться на быстроте
сходимости ряда, то основная предельная теорема1 состоит в том,
что когда п приближается к бесконечности, распределение за
приближается к нормальному распределению:
Уп~т)2
РЛ5а)^'е 2” . (5)
у 2ка
Причем при любом значении п вообще легко можно показать, что
Л
т-~8" = '2**’ (6)
А=1
а дисперсия зп
л л
4=1 А=1
Этой теоремой объясняется, что нормальное или гауссово рас¬
пределение довольно широко встречается в природе. Когда ка¬
кая-нибудь физическая величина, или, иначе, какое-нибудь изме¬
рение некоторой определенной физической величины, обусловли¬
вается суммой многих небольших случайных влияний, которые
независимы друг от друга, то результирующее значение, или изме¬
рение, будет иметь нормальную плотность вероятности. Разу¬
меется, одно-единственноё наблюдение этой величины не может
установить существование каких-нибудь вероятностных законов,
характеризующих вероятность его появления. Только тогда, когда
произведено множество измерений, соответствие нормальному
распределению величины может быть подтверждено со все расту¬
щей (с возрастанием числа наблюдений) достоверностью. Но раз
такой закон вероятности появления события установлен или пред¬
полагается его справедливость, то сразу же любое одиночное на¬
блюдение или любое число наблюдений появляются в соответ¬
ствии с уста!новленным законом.
1 Строгое доказательство этой теоремы дано впервые А. М. Ляпуновым.—^
Прим. ред.
254
ГЛАВА 8
Уравнение (5) показывает, что сумма многих отдельных не¬
зависимых источников ошибок имеет в действительности очень
малую вероятность того, что она будет отличаться от своего сред¬
него значения на каких-нибудь 5 или 10 среднеквадратических
отклонений. Так, теоретическая вероятность того, что все элек¬
троны в каком-нибудь сопротивлении случайно станут двигаться
в одном направлении, является ничтожно малой. Последнее есть
научная форма для выражения того, что такое движение практи¬
чески невозможно.
8—3. КОРРЕЛЯЦИОННЫЕ ФУНКЦИИ И СПЕКТРАЛЬНАЯ
ПЛОТНОСТЬ
Независимость случайных величин требует определения. Лю¬
бое число п случайных величин может иметь совместную плот¬
ность вероятности Р(Х\, х2, ...хп). Таким образом, Р есть
функция в /г-мерном пространстве.
Величины являются полностью независимыми, если Р может
быть разложено на множители:
Р(х„ х2,...., х„) = Рх (хЦ Р, (х,) ...Рп (х„). (8)
При этом условии среднее значение (математическое ожидание),
любой функции от
ОО ОО ОО
7(%1)= { ] ... | №) х
X Р(хх, х2,.. . ,хл) йхх,с1х2, . ,.,(1хп (9)
становится независимым от любого другого х, так как применение
уравнения (1) сводит уравнение (9) к уравнению (3), если урав¬
нение (8) имеет силу. Независимость предполагает, что сведения
о каком-либо Хк не вносят чего-либо нового в наше представление
о х3 (при /=А&). Конечно, такую формулировку идеи независи¬
мости трудно использовать в сложных задачах, где совместная
плотность вероятности не может быть составлена. В силу этого
независимость друг от друга двух величин, изменяющихся стати¬
стически, часто трудно установить. Подобным же образом нали¬
чие какой-то степени корреляции между случайными величинами
не говорит со всей определенностью о том, что между ними суще¬
ствуют больше чем случайные взаимоотношения (например, связь
между ценой на пшеницу с циклом солнечной активности), хотя
и может навести на мысль о существовании взаимосвязи. В каче¬
стве меры степени корреляции между двумя случайными величи¬
нами часто используется коэффициент корреляции. Коэффициент
СЛУЧАЙНЫЕ ЯВЛЕНИЯ И ТОЧНОСТЬ НАВЕДЕНИЯ И УПРАВЛЕНИЯ 255
корреляций случайных величин %1 и х2 с математическими ожида¬
ниями т.\ и т2 и со среднеквадратическими отклонениями о; и <з2
соответственно определяется как усредненное значение произве¬
дения
(х, — (х2 — т2)
Р = •
Однако этот частный коэффициент р полностью определяет взаи¬
мосвязь между случайными величинами только тогда, когда каж¬
дая из них подчиняется нормальному закону распределения ве¬
роятности. В этом частном случае совместная плотность распре¬
деления вероятности может быть выражена в виде
_4(“1+“2"2р“‘"2)
Р (х„ X.) = 1-== е , (10)
2ла1а2 ]/ 1 — р2
где величина и вносится для упрощения выражения
х, — т, х2 — т2 ,
и , = -! 1 и и2 = — ?. (11)
' а, 2 <г2 ' '
Можно заметить, что р полностью описывает функцию Р(Х), х2) и
что когда р равно нулю, то Р(х1у х2) может быть разложена на
множители; следовательно, случайные величины являются неза¬
висимыми. Здесь отсутствие корреляции случайных величин пред¬
полагает их независимость. В иных же случаях равенство нулю
корреляции р еще не говорит о наличии или отсутствии независи¬
мости между случайными величинами. Коэффициент корреляции,
однако, дает количественную меру степени, с которой можно на¬
деяться, что две случайные величины будут различаться.
Пусть величины лц и х2 в вышеприведенных уравнениях явля¬
ются двумя составляющими вектора в декартовой системе коор¬
динат. Будем считать, что математические ожидания и дисперсии
х, и х2 одинаковы, а коэффициент корреляции р равен нулю.
В этом случае модуль вектора Е подчиняется закону распределе¬
ния Релея, а аргумент (направление вектора) распределен по за¬
кону равной вероятности в пределах от 0 до 2.
В самом деле, двухмерная вероятность нахождения конца век¬
тора на площадке 6А
Р (х1. х2) <1А-+ Р(Е соз О, Е 81п 6) X
ХЕЖ(1Е = 4^ е 2’2 Е ад йЕ = 4е 2,2 ), (12)
где Е неявно содержит х{ и х2 ; Е^х'^ х?.
256
ГЛАВА 8
Что же касается собственно величины Е, то она подчиняется
закону:
Р(Е) = -^е (13)
называемому законом распределения Релея.
Выполненное здесь преобразование заключается в том, что
объем, ограниченный цилиндром под поверхностью вращения
(уравнение 10), преобразуется в площадь, ограниченную кривой,
которая описывает длину (абсолютную величину) вектора Е с ко¬
ординатами хь х2. Часто наблюдаемой величиной является именно
только абсолютная величина, например, если Е есть огибающая
узкополосного сигнала с двумя квадратурными составляющими,
которые независимы и подчинены закону Гаусса.
Если перейти к рассмотрению случайной переменной, являю¬
щейся функцией времени, то можно рассматривать Х\, х2,. .. хп
как значения х, принимаемые соответственно в моменты времени
/1, /2...(п. Из сказанного ранее следует, что если х(() подчи¬
няется нормальному закону распределения Гаусса, то математиче¬
ские ожидания произведений Х]ХК для всех возможных значений
/ и к полностью определяют случайную величину. Для стационар¬
ного процесса (статистика которого не изменяется в зависимости
от времени) произведение х,хк является функцией только абсо¬
лютного значения разности времени —Д, т. е. является четной
функцией — ^л = т. Для любой величины вообще корреляцион¬
ная функция <р(т)=х3хй достаточно много говорит об изменении
этой величины во времени. Оказывается, можно также установить
связь с общим понятием спектра Фурье, или спектральной плот¬
ности х(1), посредством теоремы Винера — Хинчина:
<р(т) = -1- ] Ф(ш)Ла). (14)
— ао
Спектральная плотность в этом выражении является четной функ¬
цией частоты. Таким образом, корреляционная функция и спек¬
тральная плотность являются, по существу, просто преобразова¬
ниями Фурье друг от друга.
Это преобразование может быть взято в качестве определения
спектральной плотности.
Приближенно можно считать, что спектральная плотность дает
общее количество мощности или средний квадрат амплитуды гар¬
монических составляющих разложения Фурье случайной перемен¬
ной х(/) на данной угловой частоте о>.
Поскольку Ф(ш), подобно плотности вероятности, определена
как предел, ее нужно проинтегрировать по конечной полосе час¬
тот для того, чтобы получить соответствующее среднеквадратиче¬
СЛУЧАЙНЫЕ ЯВЛЕНИЯ И ТОЧНОСТЬ НАВЕДЕНИЯ И УПРАВЛЕНИЯ 25?
ское значение для составляющих сигнала х(1) в этой полосе час¬
тот. В этом случае уравнение (14) показывает взаимосвязь
между спектральными свойствами случайной величины х(1) и
корреляционной функцией ср (х), которая характеризует взаимо¬
связь между значениями случайной величины в различные мо¬
менты времени, т. е. между значениями х, разделенными времен¬
ным интервалом х. Таким образом, это соотношение дает возмож¬
ность произвести преобразование из временной области в час¬
тотную и наоборот.
Коэффициент 2тс всегда бывает камнем преткновения при поль¬
зовании преобразованием Фурье, поскольку не все авторы вклю¬
чают этот коэффициент в выражение для спектральной плотности.
Путаницы можно избежать, если учитывать, что <р(0) по опреде¬
лению равно среднему квадрату х2 случайной величины х (или
величины х — т, если математическое ожидание не равно нулю).
Спектральная плотность имеет такое свойство, что если функ¬
ция х(1) пропускается сквозь линейный фильтр, имеющий функ¬
цию передачи У(ш), то среднеквадратическое значение сигнала на
выходе хь(1) при установившемся режиме будет
4 = -2-- У ФИ1^(“)12^- (15)
Поскольку как Ф (ш), так и | У (<*>)|2 = УК* являются четными
функциями частоты, в уравнении (15) более удобно считать функ¬
цию Ф(ш) равной нулю для отрицательных частот и увеличивать
ее значение вдвое для положительных частот при производстве
интегрирования й интегрировать в пределах от 0 до оо (вместо
— оо; +оо).
Здесь Ф (ш) должна иметь размерность в2/гц [или в в2 сек].
Следует быть осторожным, чтобы избежать недоразумений, свя¬
занных с удвоением величины спектральной плотности, поскольку
одни авторы избегают применения отрицательных частот, а дру¬
гие считают частоту изменяющейся в пределах от —оо до +оо.
/
8—4. БЕЛЫЙ ШУМ
Понятие о белом шуме является очень полезным математиче¬
ским инструментом и вполне естественно возникает в связи с та¬
кими физическими явлениями, как дробовой эффект и тепловые
флюктуации.
Под белым шумом понимают случайные флюктуации, величина
которых подчиняется закону Гаусса, а мощность распределена
равномерно по всему спектру частот. Флюктуации могут рассмат¬
риваться как белый шум по отношению к любому данному кон-
17-405
258
глава й
туру, если за промежуток времени, малый по сравнению со вре¬
менем переходного процесса контура, появляется большое число
независимых случайных возмущений, накладывающихся друг на
друга. В этом случае суммарное возмущение будет гауссовым, оно
не будет зависеть от возмущения, имевшего место в другой, не
перекрывающийся с данным, интервал времени. Таким образом,
интеграл от напряжения шума на любом, по существу, беско¬
нечно малом промежутке времени <Л1 является гауссовой величи¬
ной с фиксированными средним значением и дисперсией; при этом
как среднее значение, так и дисперсия (равная среднеквадратиче¬
скому отклонению) пропорциональны интервалу <11. Если мы обо¬
значим весовую функцию любого линейного устройства через
так что выходной сигнал равен
Ц>(0 = | У1п ((-г)ЛГ(г) (16)
о
то при входном сигнале типа белого шума, благодаря независи¬
мости белого шума на различных интервалах, дисперсия выход¬
ной величины Уо равна
*
Щ = (17)
О
С другой стороны, согласно уравнению (15),
| Ф(ш)|Г(ш)|Мш. (18)
Если для функции веса К(-с) существует преобразование
Фурье, то оно связано с функцией веса известным соотношением:
± | |У(а>)|2^ш= ] |/<«)|2Л=р/<(г)|Мт. (19)
— оо — оо 0
Отсюда следует, что Ф (ш) должно быть постоянной величиной Фо
при всех значениях ш и что по есть просто спектральная плот¬
ность Фо. Если полагать, что спектральные плотности существуют
только на положительных частотах, тогда величина п0 в уравне¬
нии (17) равна */2 Мь где Мо = 2Фо, или Ф (ш)+Ф (—ш). Полезным
математическим представлением гауссового случайного шума яв¬
ляется разложение по ортогональным функциям и, в особенности,
разложение по тригонометрическим функциям (з1п и соз). Это
разложение может быть представлено в виде
сс
V (/) = (ал 81П Пша1 + Ря СОЗ п<и>а{), (20)
Л=1
где ап и рп являются независимыми гауссовыми коэффициентами.
случайные явления и точность наведения и управления
259
Нормальный закон распределения коэффициентов относится к
пространству выборки величин ап и (Зп, определяемых посредством
всех возможных выборок У(() длиной — = Та. Можно заметить,
ша
ЧТО
+ = (21)
П=1 л=1 л=1
и что корреляционная функция
т (т)=тжт=5 (4 +-И) с°8 <22)
п=1
Сравнивая последнее равенство с уравнением (14), получаем, что
квадрат коэффициента а2 соответствует
[Ф (лша) + Ф (- Лша)] = Ф (Лш0) = 2 Ф (Лшв),
т. е. спектральной плотности.
8—5. ШУМЫ В СИСТЕМАХ НАВЕДЕНИЯ И УПРАВЛЕНИЯ
При решении общей задачи выделения сигнала на фоне шума
может случайно получиться результат, носящий вполне общий ха¬
рактер. Однако такого рода средство не настолько действенно, как
хотелось бы, и часто приходится видоизменять реальную задачу,
преобразуя ее к типу задач, разрешимых общими методами. При¬
мером такого видоизменения задачи является применение линей¬
ных операций по отношению к сигналу и шуму. Желательные
нелинейности встречаются значительно реже, чем нежела¬
тельные.
Винер получил решение, по крайней мере в теории, для сле¬
дующей задачи. Предположим, что сигнал и шум являются гауссо¬
выми случайными величинами, которые суммируются линейно и
могут быть, а могут и не быть, взаимосвязаны. Из их спектраль¬
ных плотностей и коэффициентов корреляции можно найти ли¬
нейный фильтр, сводящий к минимуму среднеквадратическое от¬
клонение выходного сигнала от входного. Это решение можно рас¬
пространить на случай, когда на характерйстики, которыми
может обладать выходной сигнал, накладываются различные огра¬
ничения (например, ограниченное среднеквадратическое значение
второй производной). Среднее квадратическое отклонение — это
критерий, который специально предназначен для анализа гауссо-
17*
260
ГЛАВА 8
вых случайных величин и линейных операций, но часто может слу¬
жить удобным критерием качества. Во многих ситуациях вполне
возможно представлять сигнал или некоторую часть его в виде
гауссовой случайной величины, особенно, если линейный фильтр
должен быть оптимален только в статистическом смысле, т. е. при
усреднении по большому числу различных возможных входных
сигналов, совокупность которых может иметь гауссово распреде¬
ление.
Средняя квадратическая ошибка может оказаться вполне под¬
ходящей величиной, которую следует минимизировать, а спект¬
ральная плотность сигнала и шума может быть определена апри¬
орно. С другой стороны, на практике можно столкнуться с боль¬
шим числом спектров сигнала и шума.
Разумеется, что решение Винера не исчерпывает возможностей
оптимизации даже линейных систем. Другой пример, хорошо из¬
вестный в литературе, — это фильтр Норта. Если дана серия
сильно разнесенных периодических импульсов, появляющихся в
белом гауссовом шуме, то можно получить полную характери¬
стику фильтра, который обеспечивает максимальное отноше¬
ние пикового сигнала к среднему квадратическому выход¬
ному шуму. Этот критерий особенно хорош тогда, когда пики им¬
пульсов являются важными чертами сигнала. В последнем слу¬
чае фазовые свойства оптимального фильтра определяются фазо¬
выми характеристиками формй волны сигнала. В случае фильтра
Винера, который усредняет квадратическую ошибку в любых воз¬
можных комбинациях сигнала и шума, т. е. по всем моментам вре¬
мени, фазовые свойства сигнала не учитываются, наоборот, пред¬
полагаемая форма сигнала заранее исключает такие свойства, по¬
скольку спектральная плотность, описывающая случайную гаус¬
сову величину, не содержит информации о фазе, даже если она
(фаза) существует.
В обоих приведенных примерах, которые превосходны сами по
себе, не остается большего простора для воображения со стороны
исследователя при определении тех требований,, которым должна
удовлетворять наиболее оптимальная система. Дело науки —
привести все такие критерии к объективным показателям, хотя бы
за счет точности описания объекта оптимизации, с тем чтобы в ко¬
нечном итоге добиться обобщенных выводов. Однако часто тре¬
буется глубокое понимание истинной природы проблемы, чтобы
иметь возможность полно и точно сформулировать влияние шума,
которое желательно снизить. Или другой пример: следящий ра¬
диолокатор должен сопровождать цель по азимуту (по углу) и
по дальности или по скорости. Наиболее критический из этих двух
видов сопровождения, скажем слежение по дальности, подвер¬
жен срывам. Средняя квадратическая ошибка сопровождения
сама по себе не играет большой роли, за исключением того, что
случайные явления и точность наведения и управления
261
она связана с важным эффектом, а именно с вероятностью пол¬
ного срыва сопровождения или потери цели или, говоря более
точно, с вероятностью неудач в единицу времени. Сведение до ми¬
нимума этой величины, по-видимому, будет совершенно отли¬
чаться от процесса увеличения до максимума отношения сигнал-
шум, определенного каким-либо произвольным способом или из¬
меренного в какой-нибудь несоответствующей точке.
Другой пример сложной ситуации можно наблюдать, когда
оператор радиолокатора, обозревая экран в поиске новых целей,
принимает определенное решение на основе того, что он видит.
Способ отображения и решения, которые необходимо принять, мо¬
гут тоже, строго говоря, являться частью задачи оптимизации.
Однако при некоторых условиях они могут быть либо неизмен¬
ными, либо, по крайней мере, оставаться относительно негибкими.
Разумеется, оператор не может извлечь из изображения на экране
больше сведений, чем там имеется, и ценность анализа в том и
заключается, чтобы путем наилучшей обработки информации из¬
влечь из нее как можно больше сведений. Однако некоторые ме¬
тоды анализа позволяют упростить сложную, фактически наблю¬
даемую картину, но, кроме того, многие важнейшие параметры, та¬
кие, например, как выбор ширины полосы частот, могут зависеть
от умения наблюдателя использовать для своих целей различные
свойства сигнала. Ценность окончательной информации опреде¬
ляет весь смысл оптимума, хотя наиболее показательным крите¬
рием является то, что система увеличивает до максимума вероят¬
ность обнаружения цели в единицу времени (или за фиксирован¬
ный промежуток времени) при заданном уровне вероятности полу¬
чения ложного обнаружения только из-за шума. Задача такого
рода, включающая в себя непрерывный ряд решений о наличии
или отсутствии отраженных от цели сигналов в одном из многих
положений радиолокационного луча, почти аналогична задачам,
существующим в теории выборок и контроля качества.
Даже в линейных следящих системах, где такие величины, как
среднеквадратическое значение ошибки слежения, обусловленной
шумами, достаточно характеризует влияние шума на систему,
очень редко можно произвести оптимизацию, в истинном значе¬
нии этого слова, без анализа неслучайных эффектов, которые вос¬
производят движения цели или радиолокационной станции. Эта
задача обычно сводится к следующему: можно добиться сколь
угодно хорошей реакции на скорость и ускорение цели за счет
того, что реакция на шумы будет исключительно плохой, и наобо¬
рот. В зависимости от вида компромисса, который может быть до¬
пущен при вариации основными физическими параметрами си¬
стемы, необходимо сделать характеристику системы с точки
зрения перемещений цели, а также характеристику системы отно¬
сительно шума настолько плохими, насколько это допустимо с
262
ГЛАВА 8
точки зрения общей характеристики системы. Но здесь проекти¬
ровщик системы вновь должен установить из других источников
критерий, который подсказал бы ему, насколько вялой может быть
реакция системы на шум или на сигнал, прежде чем какой-то пре¬
дельный показатель качества системы, как, например, вероят¬
ность поражения цели, изменится в значительной степени. Далее,
способность системы следовать за изменениями сигнала или от¬
зываться на шум должна быть оценена с точки зрения двигате¬
лей, необходимых для перемещения радиолокационной антенны
или создающих ускорение снаряда. Если система не может быть
переконструирована, то постоянные замкнутого контура всей сле¬
дящей системы должны быть взяты близкими к таким значениям,
которые сводят к минимуму шум и дают реакцию на сигнал, со¬
гласующуюся с допустимой характеристикой. Вредные влияния
насыщения, какие, например, могут возникнуть из-за недостаточ¬
ной фильтрации шума, можно продемонстрировать на простом
примере. Если мы вообразим медленно изменяющуюся «постоян¬
ную составляющую» с наложенным гауссовым шумом, то можно
представить себе, как происходит предотвращение выхода сиг¬
нала (по абсолютной величине) за уровень ограничения, обуслов¬
ленного насыщением системы. При любом частном значении сиг¬
нала его среднее значение с наложенным шумом при ограничении
типа насыщения может быть определено так, как это предлага¬
лось в предыдущем разделе (среднее значение любой функции
случайной величины всегда может быть вычислено). Легко понять
(хотя точные расчеты надо производить численно), что, когда
сигнал растет линейно, среднее значение сигнала в условиях на¬
сыщения растет значительно медленнее и в конечном счете
ассимптотически приближается к пределу насыщения. Даже если
сигнал сам по себе никогда не выходит за пределы линейного уча¬
стка, то, если шум велик по сравнению с пределами насыщения,
сигнал будет испытывать сильное ослабление из-за насыщения и
отчасти будет также искажаться. Разумеется, шум также будет
искажаться из-за насыщения. Регулировка величины шума с
целью предупредить появление насыщения является одной из
главнейших задач, по крайней мере некоторой части линейной
фильтрации в любой системе управления.
Правильная фильтрация требуется не только для системы
управления снарядом или для антенны радиолокатора. Нелиней¬
ные операции могут не только следовать за фильтрацией, но и
предшествовать ей в аппаратуре наведения. Если сведения по со¬
провождению цели получаются с помощью электромагнитного из¬
лучения, то в каком-то месте тракта надо преобразовать несу¬
щую частоту модулированного сигнала из некоторого большого
конечного значения в нулевую частоту, или в постоянный ток. Эта
мысль является более общим выражением того, что сигнал дол¬
СЛУЧАЙНЫЕ ЯВЛЕНИЙ и ТОЧНОСТЬ НАВЕДЕНИЯ И управления 263
жен быть детектирован нелинейным прибором, прежде чем он
сможет получить отличное от нуля среднее значение, т. е. до того,
как он получит те качества, которые необходимы для действи¬
тельных сигналов управления. Это обстоятельство сразу приводит
к необходимости анализа влияния нелинейных приборов на сиг¬
налы и шум.
Если шум по сравнению с модулированным сигналом, в кото¬
ром он встречается, незначителен, то в некоторых случаях он мо¬
жет быть снижен или вовсе устранен с помощью различных уст¬
ройств. Например, шум в группе импульсов может быть практи¬
чески исключен путем ограничения детектированных импульсов
до такой степени, что шум почти нигде не заставляет импульсы
снижаться ниже предельного значения, и, кроме того, он может
быть исключен стробированием импульсов. Такое ограничение
само по себе исключает всякую полезную амплитудную модуля¬
цию, которой могут обладать импульсы, кроме данных, извлекае¬
мых из самого существования импульсов. Так, например, если при¬
меняется амплитудное ограничение, то дальность сопровождаемой
цели может получаться с меньшими погрешностями, обусловлен¬
ными шумами.
Так как шумы, возникающие в физических системах, часто бы¬
вают «белыми» или обладают очень широкой полосой частот, то
первая мера предосторожности, которая обычно принимается для
снижения шума, состоит в ограничении ширины полосы частот
цепей или приборов, по которым сигнал проходит через систему
(при условии пропускания сигнала без чрезмерного искажения),
с тем чтобы снизить шум и, возможно, получить высокое отноше¬
ние сигнал-шум. Однако часто, после того как такая предосторож¬
ность принята или в результате ее, система может оказаться под
воздействием столь малых отношений сигнал-шум, которые могут
на практике случайно оказаться слишком низкими.
При низких отношениях сигнал-шум распределение вероятно¬
сти сигнала с наложенным шумом почти подобно распределению
вероятности одного шума; распределение вероятности нелиней¬
ностей не особенно сильно увеличивает сигнал относительно шума
и очень часто серьезно ослабляет его. Например, ослабление, по¬
лучаемое в результате демодуляции (детектирования огибающей
сигнала) или другого некогорентного процесса детектирования,
нельзя устранить просто за счет улучшения линейности схемы.
При таком детектировании, если входное отношение меньше еди¬
ницы, выходное отношение сигнал-шум приблизительно равно
квадрату соответствующим образом определенного входного отно¬
шения сигнал-шум. Оставим на время вопрос о расширении спек¬
тра, вызываемого детектированием (сущность этого явления мо¬
жет быть понята путем рассмотрения идеального детектора с
квадратичной характеристикой в его наиболее символической
264
ГЛАВА 8
форме). Обозначив сигнал •$(/), а шум — М(^), будем иметь де¬
тектированный выходной сигнал:
(5 + /V)2 = 52 + 25АГ + №.
Выходной сигнал равен 52(^), или, точнее, постоянной, или
низкочастотной, части сигнала 52(/). В этом случае член №(/),
по-видимому, значительно превосходит член 2 5(/) Л/(/) в рас¬
сматриваемой полосе частот, так что можно считать отношение
сигнал-шум равным отношению 52/№, соответственно усреднен¬
ному в рассматриваемой полосе.
Примем без особого доказательства, что снижение отношения
сигнал-шум, показанное в вышеприведенном выражении, не ха¬
рактерно для квадратического детектирования, хотя и является
основным для самого процесса детектирования. При низком от¬
ношении сигнал-шум сигнал неизбежно подавляется относительно
шума в процессе детектирования. Отсюда логически следует (как
вывод из этого обстоятельства), что очень важно регулировать
ширину полосы частот перед детектированием, с тем чтобы полу¬
чить входное отношение сигнал-шум как можно выше. Сужение
полосы после детектирования оказывает меньшее влияние на уве¬
личение выходного отношения сигнал-шум, чем сужение полосы
перед детектированием. Другим преимуществом наиболее ран¬
него сужения полосы является снижение опасности возникновения
насыщения системы при очень большом уровне шума, при серь¬
езном ослаблении сигнала за счет такого сужения ширины полосы
частот. Сужение полосы частот до детектирования осуществить
труднее, чем сужение полосы после детектирования, потому что
входные цепи должны быть настроены на несущую частоту сиг¬
нала, а это в свою очередь может потребовать внесения соответ¬
ствующей регулировки частоты или передаваемого сигнала в пере¬
датчике, или средней частоты фильтра в приемнике, или же там
и тут одновременно.
Эти соображения полностью применимы только к шуму, кото¬
рый поступает в сигнал извне, а не к шуму, который появляется
в результате флюктуации определенных характеристик самого
сигнала.
Другой задачей в области низких отношений сигнал-шум
является проблема сохранения усиления системы относительно
сигнала неизменным. Поскольку распределение вероятности сиг¬
нала с наложенным шумом лишь немного отличается от распре¬
деления вероятности самого шума (ввиду подавляющего действия
детектирования вышеприведенное положение особенно правильно
для сигнала с наложенным шумом после детектирования), то, для
того чтобы систему сделать нечувствительной к изменениям
амплитуды входного сигнала, вводится автоматическая регули¬
ровка усиления (АРУ), которая поддерживает какую-нибудь от¬
СЛУЧАЙНЫЕ ЯВЛЕНИЯ И ТОЧНОСТЬ НАВЕДЕНИЯ И УПРАВЛЕНИЯ 265
дельную характеристику сигнала (например, среднее значение)
постоянной, В результате этого усиление системы становится
функцией отношения сигнал-шум.
Хотя теоретически это не столь важно, тем не менее сужение
ширины полосы частот после детектирования также может быть
полезно для того, чтобы избавиться от насыщения. Примером ис¬
пользования такой возможности является схема радиолокацион¬
ной станции с конической разверткой луча, в которой отфильтро¬
вывается и усиливается модуляция развертки или сигнал угловой
ошибки. Однако обычно нет необходимости иметь больше одного
некогерентного детектирования. Детектирование сигнала угловой
ошибки неизменно когерентно, т. е. выполняется с помощью фазо¬
вого детектора. В фазовом детекторе сильный опорный сигнал,
имеющий частоту развертки, смешивается с сигналом, получен¬
ным из эхо-сигнала, в результате чего происходит линейное пре¬
образование всего сигнала и составляющих шума в более низкую
частоту, а сигнал с частотой развертки преобразуется в нулевую
частоту, т. е. в постоянный ток. Таким образом, сужение полосы
сигнала на входе фазового детектора не имеет теоретического зна¬
чения (если предполагать идеальную линейность схемы), но мо¬
жет получить серьезное практическое значение.
Идеальным решением многих проблем шума является возмож¬
ность когерентного детектирования по всей системе. Когерентное
детектирование — это процесс смешения эхо-сигнала с опорным
сигналом, находящимся в фазе с эхо-сигналом, чтобы получить
эхо-сигнал приведенным к нулевой частоте. Этот процесс предпо¬
лагает монохроматическое (или модулированное монохроматиче¬
ски) излучение, но, кроме того, что более существенно, заключает
в себе способность приемника предсказать или проследить фазо¬
вый угол радиочастотного излучения, полученного приемником от
цели. Поскольку этот фазовый угол, когда цель имеет сложную
конфигурацию, подвержен неизбежным флюктуациям и поскольку
в любом случае сопровождение по дальности в пределах доли
длины радиоволны очень затруднительно, то возможность избе¬
жать снижения отношения сигнал-шум при детектировании этим
методом редко может быть реализована на практике.
И наконец, рассмотрим влияние детектирования на ширину по¬
лосы частот шума и на распределение вероятностей. При высо¬
ком отношении сигнал-шум линейный и квадратический детекторы
будут просто смещать спектр входного сигнала так, что его центр
будет находиться вблизи нулевой частоты, вместо того чтобы быть
на частоте сигнала. При этом спектр шума сохранит форму оги¬
бающей на выходе такой, какой она была на входе; например, ши¬
рина полосы частот на входе в четыре Мгц создает ширину по¬
лосы частот на выходе в два Мгц. Напротив, при низком отноше¬
нии сргнал-шум может произойти свертывание входного спектра
266
ГЛАВА 8
самого с собой, что, вообще говоря, означает, что выходной спектр
будет иметь отличную от входного форму и большую ширину.
Например, если на входе полоса частот равна 4 Мгц, то на выходе
та же полоса равна 4 Мгц, но измеряемая уже от нулевой час¬
тоты.
Распределение вероятности сигнала с наложенным шумом
после детектирования также отличается от того закона, который
они имели до детектирования; и когда происходит дополнительная
фильтрация шума, который теперь не имеет распределения Гаусса,
распределение вероятности изменяется снова, обычно в направле¬
нии, ведущем обратно к распределению Гаусса. Подобный же про¬
цесс происходит при интегрировании импульсов сигнала с нало¬
женным шумом либо математическими методами, либо на экране
индикаторной электронно-лучевой трубки. Такие явления играют
важную роль там, где особенности закона распределения вероят¬
ности напряжения оказывают значительное влияние на полезный
сигнал, например в случае, когда особенно существенна вероят¬
ность больших пиков шума.
8—6. СТАТИЧЕСКИЕ ФЛЮКТУАЦИИ В СИГНАЛАХ,
ОТРАЖЕННЫХ ОТ ЦЕЛИ
Максимально возможная точность наведения определяется не
только одним тепловым шумом и шумами приемника, поскольку
посредством улучшения конструкции часто можно добиться, что
в течение всего полета будут приниматься достаточно сильные сиг¬
налы. Более существенными в проблеме получения высокой точ¬
ности являются свойства цели как источника сигналов сопровож¬
дения (радиолокационных эхо-сигналов, звуковых или тепловых
сигналов) и влияние результирующих сигналов на точность со¬
провождения радиолокатором управляемого снаряда или другим
эквивалентным ему устройством, или же наземным радиолокато¬
ром наведения, если используются снаряды с наведением по лучу
или командным управлением. Дополнительные вопросы, имеющие
прямое отношение к проблеме точности, связаны со свойствами
отражений от земли, моря или искусственно создаваемых отража¬
телей (например, разбрасываемых металлических лент). Эти во¬
просы касаются способности радиолокационной станции вести
слежение за целью при наличии таких помех и при том уровне
шума, который создается упомянутыми источниками. Первым дол¬
гом рассмотрим свойства цели.
При высоком отношении сигнал-шум почти не возникает во¬
прос о возможности следить за целью, по крайней мере в преде¬
лах дальности слежения. Более существенным будет вопрос о ве¬
личине сигнала ошибки по угловым координатам как его полез¬
СЛУЧАЙНЫЕ ЯВЛЕНИЯ И ТОЧНОСТЬ НАВЕДЕНИЯ И УПРАВЛЕНИЯ 267
ной составляющей, так и помехи в замкнутом контуре следящей
системы антенны. Один из источников шума — амплитудная
флюктуация или замирание огибающей сигнала — заставляет ра¬
диолокатор с последовательным переключением диаграммы на¬
правленности (например, у радиолокатора с конической разверт¬
кой) создавать ложный сигнал ошибки на частоте биений, являю¬
щейся разностью между частотой развертки и частотой замира¬
ния. Поскольку замирание огибающей обычно имеет свойства слу¬
чайного шума с узкой полосой частот, его спектр мощности
непрерывен; при наложении на частоту развертки возникают бие¬
ния, которые сдвигают спектр замираний на частоту развертки,
так что на выходе, в диапазоне низких частот, теперь оказыва¬
ются составляющие замирания, близкие к частоте развертки. Так
как большая часть спектра замирания обычно расположена зна¬
чительно ниже частоты развертки, то обычно (что вместе с тем и
желательно) на выходе имеется только небольшая часть энергии
флюктуаций. Но даже и в этом случае шумы такого рода, (зами¬
рания) являются основным источником ошибок в радиолокацион¬
ной системе сопровождения с последовательным переключением
диаграммы. Если форма спектральной плотности флюктуаций
постоянна, то среднеквадратическое значение угловой ошибки
сопровождения, обусловленной этим источником, является по¬
стоянным. Поэтому при достаточно больших дальностях средне¬
квадратическая ошибка сопровождения всегда будет больше раз¬
мера цели и величина ошибки примерно одинакова в обоих кана¬
лах: угла места и азимута.
Для многих типов целей, а также таких отражателей, как ме¬
таллические ленты, поверхность земли или воды амплитуда оги¬
бающей эхо-сигнала следует релеевскому закону распределения
вероятностей. Распределение вероятности непосредственно уста¬
навливает соотношения между математическим ожиданием и дис¬
персией, хотя и не дает никаких сведений о спектральных свой¬
ствах флюктуирующей части. Теоретическое объяснение релеев-
ского распределения непосредственно предстает в виде
предполагаемой модели, состоящей из большого числа независи¬
мых отражателей, положения которых изменяются так, чтобы за¬
ставить отраженные от них сигналы давать все значения фаз
радиочастоты, какие только возможны. Упомянутая аппроксима¬
ция с помощью подобной модели кажется вполне приемлемой и
обоснованной, если релеевское распределение амплитуд действи¬
тельно наблюдается.
Эта модель цели была использована также для того, чтобы
вывести свойства сигнала угловой ошибки, исходя из предполо¬
жения, что многие различные источники отраженных сигналов
находятся в определенном конечном телесном угле, обычно огра¬
ниченном оптическим силуэтом физической цели. Оказывается,
268
ГЛАВА й
вовсе не бесполезно показать, что в большинстве случаев слеже¬
ния цель можно рассматривать как точечный источник, флюктуи¬
рующий по амплитуде и перемещающийся взад — вперед по цели
с гауссовым распределением и с определенным средним значением
и средним квадратическим отклонением. В действительности,
гауссов характер шума получается только тогда, когда, во-первых,
АРУ достаточно медленна и не может повлиять на распределе¬
ние вероятности из-за реагирования на амплитудную флюктуа¬
цию и, во-вторых, следящая система сопровождения достаточно
инерционна и антенна не может точно следовать за мгновенными
положениями равносигнальной зоны. Мгновенное положение рав¬
носигнальной зоны не имеет гауссового распределения ни в одной
из плоскостей слежения.
При очень большом числе источников отражения, достаточном
для создания релеевского закона распределения огибающей Е(1),
можно показать, что, когда цель захватывает лишь небольшой
угол сравнительно с шириной луча, общий сигнал ошибки [до его
умножения на коэффициент усиления, который может быть неко¬
торой функцией профильтрованной огибающей Е(/)] равен
<7(/) = 6/а(/)-^(/), (23)
где С7а распределено по закону Гаусса и имеет средний квадрат
— РЕ2#2
ТС 0
а В2 — средний квадрат углового отклонения источников от сред¬
ней линии визирования (взвешенного в соответствии со средне¬
квадратическими амплитудами отдельных источников). Функция
(/(/) в том виде, в каком она дана здесь, не содержит тех состав¬
ляющих огибающей Е(1), которые близки к частоте развертки и
создают мнимый шум. Здесь допущено некоторое упрощение, по¬
скольку считается, что сигнал 11(1) подается в один из каналов
углового сопровождения — либо в канал азимута, либо в канал
угла места — и что сигнал (/(/) равен по амплитуде сигналу
ошибки, т. е., другими словами, равен по амплитуде синусоиде
частоты сканирования, которая предетектирована по фазе для
получения сигнала ошибки. В известном смысле 1!а есть шум, а
ЬогЕ — полезный сигнал. Если огибающая не имеет замираний,
такое различение будет, очевидно, правильным. Ьо — это величина
сигнала ошибки, соответствующая единичному углу ошибки; Ьа
является постоянным параметром антенной системы. Е(1)—не-
модулированная огибающая. Можно показать, что Ыа(1) и Е(1)
статистически независимы, когда число источников отражения
велико.
случайные Явления и точность наведения и управления 269
Способность выделить сигнал ошибки указанным способом не
может быть использована в том случае, когда цель охватывает
собой большую часть ширины луча или даже всю ширину, и в
этом случае средний и среднеквадратический сигналы ошибки дол¬
жны быть вычислены как функция от е (угловая ошибка). Под
«хорошим» сопровождением обычно подразумевают случай, когда
антенна все время направлена достаточно близко к положению
равносигнальной зоны. Проблема близкой цели может возникнуть
только в случае, когда радиолокатор установлен на снаряде, но
следует иметь в виду, что небольшие антенны, которыми снаб¬
жены управляемые снаряды среднего размера, так или иначе
дают довольно широкие диаграммы направленности. Следует так¬
же отметить, что проблема большой цели очень часто бывает
весьма важной.
Необходимо раскрыть две концепции, которые связаны с физи¬
ческой интерпретацией уравнения (23). Если Е(1) и флюк¬
туируют столь медленно, что антенна вполне может следовать за
положением равносигнальной зоны, то величина ошибки опреде¬
ляется следующим уравнением:
_ /24)
Естественно, 11а также пропорционально величине Ьо, так что ве¬
личина бо является функцией только свойства цели, и в этом слу¬
чае направление оси антенны определяется действительным фазо¬
вым фронтом. Величина ео определяется как кажущееся направ¬
ление оси антенны радиолокатора, и его статистические свойства
можно легко выразить с помощью величин С1а и Е. Закон распре¬
деления ео не является нормальным.
Обычно флюктуации как в значении 11а, так и в значении Е
будут порядка нескольких гц в секунду, и следящая система со¬
провождения, как правило, имеет настолько большую инерцию,
что антенна не может следить за изменением положения кажу¬
щегося направления. В промежуточных случаях труднее управ¬
лять антенной, но в случае очень медленного слежения, при хо¬
рошем сопровождении, величина е всегда достаточно близка
к нулю, а флюктуирующей частью можно пренебречь. Если в
уравнении (23) Е(1) замещается величиной Е (его средним зна¬
чением), то уравнения следящей системы сопровождения стано¬
вятся уравнениями с постоянными коэффициентами, с функцией
Ца(/) в качестве вынуждающей функции. Выходным сигналом
тогда будет являться некоторая величина, являющаяся результа-
том прохождения ■ через фильтр, которую мы определяем
270
ГЛАВА в
Рис. 103. Математическое представ¬
ление цели в плоскости, перпендику¬
лярной к линии визирования:
1. Фиксированная точка на цели, 2. Ось
антенны
как эффективное направление оси антенны радиолокатора. Ее
зредний квадрат при линейном рассмотрении равен
н
(25>
П=1
где — средний квадрат амплитуды сигнала от некоторого п-го
отражателя из числа № отражателей, угловое отклонение которого
от среднего направления оси антенны радиолокатора равно 8П-
Среднее направление оси антен¬
ны радиолокатора определяется
следующим выражением:
н
2^л = 0. (26)
Л=1
Значение 8П приблизительно рав¬
но где йп — линейное откло¬
нение, а В — дальность до цели
(см. рис. 103).
Хотя в большинстве случаев
цель производит такой эффект,
как если бы она была точечным
источником, который движется
так, что случайные отклонения
имеют гауссов характер и дис¬
персию г;2, должно быть ясно, что если значение е искусственно
сделать большим, т. е. таким, чтобы луч антенны был далеко от
цели, то член &ое[^(С) —7?] может стать очень большим, настолько
большим, что фактически затемнит истинный шум Это важ¬
ное обстоятельство затрудняет измерения значения т]2.
Эквивалентное число для т;2 можно получить, представив себе
случай одинаковых источников, равно размещенных в простран-
Д2
стве по некоторой длине Е на расстоянии Я. Тогда г]2 = ■
Кроме этого «мерцания», или угловой сцинтиляции, имеет
место шум, вносимый флюктуацией в значение Е (I) на частоте,
близкой к частоте развертки Легко показать, что если спект¬
ральная плотность Е(() равна Ф (ш), то низкочастотная спектраль-
случайные явления и точность наведения и управления
271
ная плотность шума в каждом канале, обусловленная этим источ¬
ником, равна
— +2~ рад21гц или град2(гц.
Если сигнал Е(() имеет релеевское распределение, то справед¬
ливо соотношение:
ео
| = (27)
— во
Можно показать, что для цели, составленной из любого числа
источников с постоянной амплитудой, эквивалентная величина для
г;2 всегда мала, но не меньше, чем результат действия множества
источников, определяемых уравнением (25).
Таким образом, метод расчета, основанный на предположе¬
нии множества источников, устанавливает верхний предел воз¬
можного углового шума.
Немного более сложная задача, которую мы не можем рас¬
смотреть здесь из-за недостатка места,— это вопрос влияния
АРУ, в частности БАРУ, на спектры, среднеквадратические
амплитуды, закон распределения, средние значения различных
направлений оси антенны радиолокатора и сигналы ошибки.
Другим вопросом, также не рассматриваемым здесь, является
вопрос о степени, с которой спектр угловых и амплитудных по¬
мех может быть предсказан из возникающей тактической ситуа¬
ции, и о влиянии его на выбор частоты развертки и на промах,
вносимый шумом для выбранного метода наведения. Такие во¬
просы требуют более детального анализа.
При приложении этих идей к действительным характеристикам
управляемого снаряда необходимо рассмотреть влияния шума,
обусловленного вибрацией рулевых приводов управляемого сна*
ряда и других узлов радиолокатора и управляющих сервомеха¬
низмов, ‘которые работают в режиме насыщения. Наконец, метод
наведения и фактические численные параметры системы наведе¬
ния оказывают свое влияние на характер воздействия шума на
величину промаха. Для решения этих задач кинематики управляе¬
мого снаряда могут и должны быть использованы как можно
чаще аналитические методы, хотя часто, когда физическая про¬
блема становится слишком трудноразрешимой другими методами,
лучше использовать метод моделирования (этот метод будет рас¬
смотрен в последних главах).
Последний весьма важный вопрос касается использования ве¬
роятности поражения цели в качестве критерия, посредством ко¬
торого оценивается работа управляемого снаряда.
272
ГЛАВА 8
В той мере, в какой методы оптимизации используют различ¬
ные критерии, например среднюю квадратическую величину про¬
маха или среднюю величину абсолютного значения промаха, они
обеспечивают только приближение к оптимуму. Что касается та¬
ких ограничений, как максимальное ускорение управляемого сна¬
ряда или максимальная скорость вращения снаряда при каком-то
определенном маневре цели, очень важно использовать точные
измерения рабочих параметров. Очевидно, нет смысла считать,
что ошибка по дальности в 30 м в пять раз хуже по сравнению
с ошибкой в 6 м, если в обоих случаях нет никакой вероятности
поражения цели.
Таким образом, мы видим, что фактическое распределение
вероятности ошибок весьма важно для решения проблемы точ¬
ности.
ГЛАВА 9
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
Р. К. Рони'
9—1. ВВЕДЕНИЕ
Вероятно, нет другой такой области техники, где бы следящие
системы, именуемые также сервомеханизмами, так широко ис¬
пользовались, как в технике управления снарядами. За короткий
период развития теории следящих систем было много попыток
дать определение следящей системы. Для инженера или научного
работника, впервые знакомящегося с этим предметом, такие опре¬
деления очень важны. В рамках данной главы под следящей си¬
стемой (сервомеханизмом) будем понимать любую активную регу¬
лирующую систему, в которой сигналы управления образуются с
помощью обратной связи. Это определение дано скорее с точки
зрения использования его в теоретических исследованиях, чем с
точки зрения функций, выполняемых аппаратурой, и, пожалуй,
правильнее было бы употребить более общий термин — система
управления с обратной связью. Слово «механизм» здесь умыш¬
ленно опущено, так как оно подразумевает механические и кине¬
матические элементы, что излишне ограничивало бы это опреде¬
ление: С этой общей точки зрения регулятор напряжения, поддер¬
живающий постоянное напряжение чисто электронным путем,
является такой же типичной следящей системой, как и самая тя¬
желая орудийная система наводки. Система управления с обрат¬
ной связью в ее наиболее простой общей форме показана на
рис. 104. Здесь в] является регулируемой переменной величиной;
она может представлять, например, положение вала, напряжение
генератора, температуру в котле, скорость снаряда или любую
другую величину, которую необходимо регулировать. 90 является
регулирующей или управляющей величиной; она может представ¬
лять, например, желаемую скорость самолета, желаемое поло¬
жение цели и т. д. А — регулятор или управляющее устройство.
В — цепь обратной связи. Регулятор, который может состоять из
электродвигателя, гидропривода, электронной лампы или любого
1 Сотрудник самолетостроительной фирмы Хьюза.
18-405
274
ГЛАВА 9
другого источника мощности совместно с усилителями, реле и т. п.,
реагирует на сигнал ошибки е, являющийся разностью входной
управляющей величины во и сигнала обратной связи В 0Р Из
рис. 104 получаем основное уравнение системы с обратной
связью:
01 = Ае = А(6о —50,);
й А А (1)
61 = Т+АВ6о-
Часть системы, обозначенная прямоугольником А, включает в
себя как привод системы, так и его нагрузку, и поэтому ее дина¬
мические и статические характеристики могут отличаться от же¬
лаемых. Например, скорость дви¬
гателя зависит не только от по¬
ложения дросселя, но и от вели¬
чины нагрузки. Поэтому имеется
устройство для измерения выход¬
ной величины (в нашем случае
скорости), соответствующая
функция которой В, сравнивае¬
мая со входным сигналом, позво¬
ляет существенно регулировать
соотношение между командой и
результатом ее исполнения, как
это показано в уравнении (1).
Применение следящих систем в технике управления снарядами
можно разделить на две основные области: 1) область информа¬
ционных систем, т. е. систем наведения, навигации, и 2) область
систем бортовой стабилизации или автопилотов. В первой из них
мы затронем вопросы, связанные с установившейся (долгоперио¬
дичной) точностью и ослаблением возмущений при работе в усло¬
виях помех. Во -второй области нас будут больше интересовать во¬
просы скорости переходного процесса и коротко периодической
устойчивости при ограничениях по мощности.
Не всегда легко, да и нет необходимости, выделять в общей
системе систему наведения и систему стабилизации. Но вообще
говоря, аппаратура наведения вырабатывает команды управления,
поступающие на автопилот: курс, траекторный угол, боковое
ускорение и т. д., а устройство стабилизации или автопилот, ко¬
торый ведет корпус снаряда по заданному курсу или поворачи¬
вает его в соответствии с командой, должен главным образом
обеспечивать стабилизацию по курсу, по тангажу и по крену при
воздействии всех возмущений, таких как порывы ветра и т. п.
Управление положением корпуса снаряда обычно осуществляется
посредством передвижения различных плоскостей управления:
рулей высоты, рулей поворота, элеронов; или с помощью газовых
Рис. 104. Общая блок-схема системы
с обратной связью
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
275
рулей, которые обеспечивают необходимые моменты и ускорения.
Мощность, необходимая для выполнения этих задач, зависит от
размера ракеты и ее скорости и всегда существенна. Время пере¬
ходного процесса следящих систем управления по необходимости
должно быть меньше периода переходных процессов по тангажу,
курсу и крену.
При изложении теории следящих систем и систем с обратной
связью нужно выявить те соображения, которыми руководству¬
ются при проектировании, и найти критерии, по которым оцени¬
вается работа следящей системы, особенно систем, применяемых
в технике управления снарядами. Как мы в дальнейшем увидим,
одним из важнейших критериев является критерий устойчивости,
которым мы и займемся в первую очередь.
9—2. МАТЕМАТИЧЕСКИЙ АППАРАТ
Чтобы подойти с пониманием к вопросам теории и расчета
следящих систем, необходимо дать определения некоторым мате¬
матическим понятиям. На немногих страницах данной главы трудно
дать больше, чем голые формулировки определений для большин¬
ства математических выражений и величин, которыми придется
пользоваться. Подробности можно найти в соответствующей лите¬
ратуре по теории автоматического регулирования.
Операторные методы
Ограничимся вначале рассмотрением линейных систем. Линей¬
ной называется такая динамическая система, действие кото¬
рой можно описать системой линейных дифференциальных уравне¬
ний:
( А1 а^~т + А1 п 1-^-т- + --'+Лю01') + ■•• +
I I, П дфП 1 1» Л — 1 ^^Л—1 1 1 1,0 А I 1 '
+ (*1,я5 + "-+МЛ) = М0;
•••••••••••••••••
(АМ, п + • • • + АГГ, О, Л ) + • • • +
/ лг \
+ ^.л^ + -- + ^.о0^=О.
(2)
18*
2?6
ГЛАВА 3
Из числа линейных систем рассмотрим только линейные си¬
стемы, у которых коэффициенты А и М постоянны.
Применяя операторные обозначения, можно записать эти урав¬
нения при нулевых начальных условиях (т. е. для случая, когда
система первоначально находится в покое) в виде:
(Л, пРП + п-\РП *+'•• + Л,0) 01 + • • • +
+ (^1,Х + ... + М,о)о„ = 0о(р);
::::::::::::::::: (з>
Илг, пРП + • • • + Ан, о) е1 + • • • +
+ (^,Х + -- + ^,о)0лг = О.
Здесь р— оператор дифференцирования по времени: Р= или
Символ р — переменная преобразования.
Таким образом, дифференциальные уравнения линейной си¬
стемы преобразуются в систему алгебраических уравнений отно¬
сительно параметра р. Алгебраическая система уравнений всегда
имеет решение относительно любой из переменных 01, я в виде
’■ = 5^’•(/>) (4)
или
во ~ М/0 “ ( а)
Величина У1 = |-^ называется передаточной функцией системы.
Знаменатель Н(р) является, очевидно, (развернутым) детермина¬
том системы уравнений (3) и называется характеристической
функцией, поскольку, как мы в дальнейшем увидим, он полностью
характеризует физическую систему, независимо от того, где нахо¬
дятся ее вход и выход (0О, 01). Хотя это и не существенно при опе¬
раторном методе расчета, тем не менее надо сказать, что в слу¬
чае системы обыкновенных линейных дифференциальных уравне¬
ний, таких, какие, например, мы рассматриваем, функции §{р) и
А(р) являются полиномами. Представление в виде выражения
(4а) является чисто формальным, и указанная операция не имеет
никакого математического смысла до тех пор, пока должным
образом не определена. Чтобы выразить 01 (/) через 0О, необхо¬
димо получить математическое выражение преобразования, обрат¬
ного данному.
СЛЁДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ бСЯзЬ
27?
Пусть входное воздействие во(О является постоянной величи¬
ной, приложенной внезапно, подобно тому как прикладывается к
электрической цепи напряжение батареи при замыкании выклю¬
чателя. Такое воздействие называется обычно ступенчатой функ¬
цией. Тогда выходная величина 61 (/) может быть получена путем
обратного преобразования, которое для этого типа входного сиг¬
нала и для частного случая нулевых начальных условий будет
просто разложением Хевисайда:
Л(0) + 2^ Р1Н(Р1) ’
;=1
где р{ есть ьй корень функции Н(р). Очевидно, если функция
Н(р) является полиномом, то число корней равно степени поли¬
нома или наивысшему порядку производной.
Рис. 105. РС— фильтр и соответствующий переходный
процесс
Чтобы проиллюстрировать сказанное, получим передаточную
функцию и переходную характеристику системы, схема которой
дана на рис. 105. В этом случае 6о(0 является ступенчатой функ¬
цией амплитуды Е, приложенной в момент времени /, начало от¬
счета которого совпадает с моментом замыкания ключа. Диффе¬
ренциальное уравнение этой системы будет:
^+4=4
или в операторном виде
(ЯСР+ 1)е = Е. (7)
Следовательно, передаточная функция равна
Г — — — 1 — 1 — ^0’)
Е КСр + \ ч> + \—11(Ру
2?8
ГЛАВА О
где
е(р) = 1; 1
Л(р) = тр + 1;
т = НС; [ (9)
А' (р) = = т.
'■г/ ар )
Ясно, что /г(р) имеет один корень: Р[ = 1-, так что уравнение
(5) принимает вид:
1 1
е=Е 4+У|744- =И1-е~т). (Ю)
"/^1 ( х ] Т
Обычный метод представления схемы, данной на рис. 105 посред¬
ством его передаточной функции, показан на рис. 106. Звено,
обладающее такой передаточной функцией, иногда называется
фильтром первого порядка с постоянной времени т. Хотя приве¬
денный пример может показаться
тривиальным, тем не менее он
позволяет продемонстрировать те
элементы операторных методов,
которые обычно крайне важны
во всей теории следящих систем.
Хотя уравнения (3) и (4)
имеют силу только для случая
нулевых начальных условий, ме¬
тод преобразования Лапласа может быть применен и тогда, когда
начальные условия отличны от нуля. Кроме того, при анализе
устойчивости системы начальные условия не существенны.
Заметим, что, хотя уравнения (5) или (10) определяют пере¬
ходную характеристику только для единичного возмущения, эта
характеристика полностью определяет реакцию системы на любую
форму возмущения посредством суперпозиции (наложения), ибо
любой входной сигнал /(/) может быть представлен в виде пре¬
дела суммы ступенчатых функций, как это, например, представ¬
лено на рис. 107.
Если суммирование, показанное на рис. 107, берется как пре¬
дел, мы получаем интеграл суперпозиции
I
/(0=/(0)с(/)+ ]У(г)с(/-г)Л, (10а)
О
Рис. 106. Представление схемы, при¬
веденной на рис. 105, посредством
передаточной функции
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
279
Рис. 107. Представление произвольной функ¬
ции времени посредством суммирования сту¬
пенек
где с(/—т) является, согласно уравнению (5), реакцией на еди¬
ничное ступенчатое возмущение, приложенное в момент /'=т; /(/)
является реакцией на произвольное возмущение /(/); /'(/) пред¬
ставляет производную (1//Л1. В более удобной форме интеграл
(10а) будет иметь вид
Г
/(/)= |/(т)с'(/—т)Л. (Юб)
о
Развернув уравнение (Юб), с учетом выражения (5), мы получим
о
(10в)
I ‘ О
Теперь, поскольку уравнение (5) полностью определяется пере¬
даточной функцией (4), мы можем сказать, что линейная система
полностью описывается посредством своей передаточной функции.
Заметим также, что
поведение линейной си¬
стемы определяется с
точностью до постоян¬
ных коэффициентов по¬
люсами У(р), т. е. кор¬
нями характеристиче¬
ской функции /г(р).
Это положение являет¬
ся, по-видимому, основ¬
ной «особой точкой» во
всей теории линейных
следящих систем. Ос¬
тальная часть главы
посвящается главным
образом влиянию рас¬
положения этих кор¬
ней.
Исследуем один член уравнения (5) (или, как увидим в даль¬
нейшем, пару членов, когда это относится к случаю комплексных
корней): Р1{
0 /11)
Здесь Р1 — корень полинома с действительными коэффициентами.
Следовательно, он может быть положительным и отрицательным,
действительным и мнимым или же комплексным, причем комп-
280
ГЛАВА 9
Рис. 108. Комплексная плоскость:
а) представление комплексной точки в пло-
скости р\ в) расположение корней в плоско*
сти р. Корни: /)е~с>/—статически устойчи¬
вый; 2) — статически неустойчивый;
3) е~ аа/соз ш3/ — демпфированная синусоида;
4) с^/созф^/ — неустойчивая синусоида;
3) соа «б/— недемпфированная синусоида.
лексные или мнимые корни встречаются в виде сопряженных пар.
Каждый корень или нуль, следовательно, характеризуется дей¬
ствительной и мнимой частями:
А = а/ + /Ч
и все возможные корни могут быть представлены точкой на пло¬
скости с координатами а, ш, называемой плоскостью р (рис. 108, а).
Заметим, что если р<— отри¬
цательное действительное чис¬
ло или имеет отрицательную
действительную часть, то член
(11) убывает со временем до
нуля, и мы называем р, устой¬
чивым корнем. Если же чи¬
сло Рг — положительное или
имеет положительную часть,
тогда член (11) неограниченно
возрастает по экспоненте, и
мы называем р, неустойчивым
корнем. Если р,— чисто мни¬
мая величина /ш», тогда вме¬
сте с его сопряженной величи¬
ной имеем
“ЬУМ'О!) +
. Л ( — 7Ш1) р-л»!*"] _
+ _уШ1Л'( — >,)
= 0О (а соз + Ь 81П ш^), (12)
где
ё ОО = д + У»
./«цЛ' оо 2 ’
так что мы называем его коле¬
бательным корнем; он не рас¬
тет и не уменьшается со вре¬
менем.
Расположение корней рх показано на рис. 108, в. Из рисунка
видно, что все полюсы в правой полуплоскости дают неустойчи¬
вые члены, полюсы же на левой полуплоскости дают устойчивые
члены, а полюсы на мнимой оси (или действительной частотной
оси) дают недемпфированные колебательные члены. Мнимая ось р
называется действительной частотной осью, так как р=±/ш со-
ртветствуют цистой синусоиде с угловой частотой о/.
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
281
Поучительно в этом месте показать отношение между полу¬
ченными переходными характеристиками и установившейся реак¬
цией на синусоидальное возмущение, которая называется частот¬
ной характеристикой. Если в уравнении (10в) положить ^(/) =
= ер°‘, то оно приобретет вид.
1 = V е11 — 1 ё(Р1) ер°1 - ер‘‘
V Л'(Р1) Ро~Р1 2* Л'(Р1) Ро — Р1 '
В случае, когда все Р{ имеют отрицательные действительные ча¬
сти, т. е. корни системы устойчивы, при неограниченном возра¬
стании 1(р0
что является разложением на простые дроби выражения
г К (Ро) I К(Ро) I ера+гг
1У) — е й (р0) | Л (р0) |
Полная реакция системы состоит, очевидно, из переходного
процесса, который соответствует членам е , и установившегося
процесса, соответствующего еРа‘. Колебания системы на собствен-
ных частотах е постепенно затухают, и остаются установив¬
шиеся вынужденные колебания на частоте возбуждения р0. Та¬
ким образом, передаточная функция уравнения (4а) при под¬
становке р=]ш дает установившуюся реакцию линейной системы
на синусоидальное возмущение угловой частоты ш.
Отметим, что передаточная функция относительно действитель¬
ного переменного ш имеет тот же смысл, что импеданс (комплекс¬
ное усиление) в теории переменных токов.
Например, если на вход цепи рис. 105 или 106 в качестве во или
е0 вместо ступенчатой функции подать синусоиду, т. е.
е = Е соз о>/ = Ке Ее1иЛ; (Ке — действительная часть), (13)
то в установившемся режиме получим:
г1 = Г(>)(,о_Ке-п^7г'- =
р р
= 1/1-г-2-2 С05((и/~<Р)~> 1/1 , 22СО5Ш(*—О; 04)
]/ 1 + т2ш2 ф.,0 у 1 + т2»2
<р = агс(^ тш. (15)
Таким образом, мы видим, что оператор р = а+]ш является обоб¬
щенной частотой.
282
Глава а
Существенный интерес представляет характеристическая функ¬
ция системы 2-го порядка или, при выражении через плоскость р,
системы с одной парой корней — действительных или комплекс¬
ных.
4^=(1-<)(1 + 1) = 1+2стг+(чУ’ <16>
А.2 = -ш0(С±Г^Т). (17)
Величина называется коэффициентом затухания. Если ^<1 —
полюсы системы комплексные, если ^>1 — полюсы действитель¬
ные. Значение ^=1 соответствует
критическому затуханию. Соот¬
ветствующие реакции на единич¬
ное ступенчатое возмущение и ча¬
стотные характеристики для пере¬
даточной функции пока¬
заны на рис. 109, а соответствую¬
щее расположение полюсов — на
Рис. 109. Переходные характери¬
стики и амплитудно-частотные
характеристики системы с одной
парой полюсов (см. рис. ПО)
Рис. ПО. Положение полюсов для си¬
стемы второго порядка
рис. ПО. Любая характеристическая функция может быть разло¬
жена на члены первого и второго порядка, так что полная реакция
системы представится комбинацией переходных процессов, пред¬
ставленных на рис. 105 и 109.
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
283
9—3. РАСЧЕТ СЛЕДЯЩИХ СИСТЕМ.
КРИТЕРИЙ УСТОЙЧИВОСТИ
Возвращаясь к рис. 104 и уравнению (1), мы можем определить
коэффициенты усиления А и В как передаточные функции, уста¬
навливающие любые желаемые динамические соотношения между
значениями 9о и е и между 9] и 02- Подобным же образом урав¬
нение (1) определяет передаточную функцию замкнутого контура
Рис. 111. Радиолокационная следящая система
между значениями 91 и 9о. Теперь мы остановимся на том, как
выбрать функции А и В, чтобы получить желаемую передаточную
функцию замкнутой системы
08)
при учете тех ограничений, которых необходимо придерживаться.
Чтобы проиллюстрировать нашу задачу, рассмотрим ситуацию,
представленную на рис. 111.
Наша система должна отслеживать линию визирования на са¬
молет с помощью антенны радиолокатора. Радиолокационный при¬
емник вырабатывает напряжение, прдпорциональное углу между
осью антенны и линией направления на цель. Двигатель, связан¬
ный с антенной, создает вращающий момент, пропорциональный
приложенному напряжению. Движение антенны, при приложении
момента Т, может быть записано прямо в операторном виде сле¬
дующим образом:
/р291 -|- Вр\ = Т
или , ,
’. = -5йтгг= (19)
284
ГЛАВА 9
где В — коэффициент вязкого демпфирования, а / — момент инер¬
ции антенны, двигателя и связанной с ними зубчатой передачи.
Казалось бы, для решения задачи теперь достаточно прило¬
жить напряжение рассогласования (сигнал ошибки), предвари¬
тельно усилив его к приводному двигателю так, чтобы антенна
начинала быстро вращаться при наличии сигнала ошибки. В этом
в действительности и состоит общий метод, обеспечивающий
в принципе хорошую работу системы, если пренебречь запазды¬
ваниями, которые всегда имеют место. Однако как в рассмотрен¬
ной системе, так и вообще в большинстве систем, связанных с
управлением снарядами, всегда существует важный фактор, кото-
Рис. 112. Блок-схема системы, представленной на рис. 111
рым нельзя пренебрегать,— наличие помех (шумов). Впослед¬
ствии мы увидим, что даже если в системе нет других непредна¬
меренных запаздываний, тем не менее шум, или посторонние слу¬
чайные входные сигналы, требуют применения дополнительного
фильтра, что обычно вносит дополнительную задержку по вре¬
мени. Такой фильтр показан на схеме рис. 111. Очень простой
фильтр представлен на рис. 105. Мы уже видели, каким образом
он вносит задержку во времени или отставание по фазе в свою
передаточную функцию. Полная блок-схема показана на рис. 112.
Подставляя в уравнение (18) передаточную функцию из рис. 112,
получим
К
у _ (ЪР + 1) (1р2 + Вр) _ 1
* ь к — / В \ Г/ / \ “1 *
1 + + 1)(4>2 + Вр) ■ 1 + (т/р1('в’)р+ + 1}
Может показаться, что чем больший коэффициент усиления мы
возьмем по замкнутому контуру, тем быстрее будет обрабаты¬
ваться любая ошибка и тем лучше будет слежение. Однако это
верно только до определенного момента, так как дальнейшее
увеличение усиления ограничивается устойчивостью работы си¬
стемы. Рассмотрим вначале случай, когда величина Т1 (постоянная
времени фильтра) равна нулю. В этом случае знаменатель урав,
нения (20) будет просто квадратичным трехчленом, который мо¬
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
285
жет быть прямо решен относительно его корней, т. е. полюсов пе¬
редаточной функции У(р):
1 + ^р(Л + ^р) = 1-4-2 + /—^=-У;
К \ К г/4К/ |/А Д )
о>0=/^; (21)
с=-Л_.
У4К1
Таким образом, мы видим, что затухание уменьшается с увели¬
чением коэффициента усиления К. Обращаясь к рис. 109, можно
видеть, что увеличение К сначала приводит к более быстрому от¬
рабатыванию ошибки примерно до ^=0,5, а затем, при дальнейшем
увеличении, появляется значительное перерегулирование при
очень медленном затухании колебаний. При этом появляется боль¬
шая чувствительность к движениям цели и помехам на частоте о)0.
Однако эта система при любом конечном коэффициенте усиле¬
ния еще не становится неустойчивой.
Если теперь ввести постоянную времени фильтра хь то урав¬
нение (20) становится кубическим, и его корни не могут быть най¬
дены непосредственно. Для анализа работы более сложных систем
потребуются специальные методы.
9—3.1. Критерий Рауса
Критерий Рауса позволяет установить количество корней поли¬
нома с положительными действительными частями, не прибегая
к фактическому отысканию этих корней. Этот метод, основанный
на декартовом правиле знаков, дается здесь без доказательства
и глубокого рассмотрения. Если коэффициенты полинома
апРп + «Л-1РЛ-1 + - - • + а0 = 0
расположены в ряды следующим образом:
ап ап—2 ап—4
&П—1 ®п—3 ап—5
^П—1аП — 2 апап — 3 ал — 1ап—* апап~3 .. ~ „
— и 1, д,.
дя-1 дл-1
И Т. Д., И Т. Д.,
то, за некоторыми исключениями, которые пока что нас не инте¬
ресуют, число корней с положительными действительными частями
286
ГЛАВА 9
равно числу смен знаков в первой колонке. Применим этот крите¬
рий к уравнению (20). Первая колонка имеет вид
4’.
4(4+’.)
В 1
к 4(4)+’.]'
Поскольку все величины, обозначенные отдельными буквами, по¬
ложительны, критерий Рауса требует
> Т1 ВГ I . т I = 1 . в (22)
или
х<-в(ф+4)-
Иными словами, имеется некоторое конечное усиление, при кото¬
ром система становится самовозбуждающейся и при превышении
которого она становится неустойчивой.
К сожалению, когда система становится более сложной, как
это часто и бывает, даже критерий Рауса становится громоздким
и неудобным. Даже при простом кубическом уравнении, которое
мы рассматривали, критерий в том виде, в каком он был исполь¬
зован нами, дает очень мало полезных сведений о регулирующей
системе при усилениях ниже критических значений.
4—3.2. Критерий Найквиста
Найквист показал, что с помощью нескольких теорем, взятых
из теории функций комплексного переменного, устойчивость или
неустойчивость линейной системы произвольной сложности может
быть относительно легко установлена.
Его метод состоит, по существу, в конформном отображении
плоскости р на плоскость У с помощью передаточной функции.
Задача в основном сводится к определению того, лежит ли какой-
нибудь из полюсов У в правой полуплоскости р, соответствующей
положительным действительным частям в характеристических
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
287
корнях рх. Для того чтобы продемонстрировать метод, обратимся
вначале к передаточной функции в уравнении (8) или на рис. 106:
<8)
р = а + уш.
Для каждой точки, лежащей на плоскости р, имеется точка на
плоскости У, определяемая уравнением (8). Особый интерес пред¬
ставляют те точки, которые соответствуют действительным часто¬
там, т. е. мнимой оси, р=/ш. Если мы отобразим ось /ш на пло¬
скости У, то уравнение (8) даст контур1, показанный на рис. 113.
Можно легко доказать, что этот контур является окружностью:
у 1 1 1 2 — 1 — хр 1 — хр 1 — /ты
2 1 + тр 2 2(1+тр) 2(1 + тр) 2(1+/тш) ’
к = 4 +
<Р = агс(^ тш. (23)
Уравнение (23) соответствует окружности с радиусом у и цен-
тром у +/о.
Заметим, что этот контур также является геометрическим ме¬
стом точек комплексного установившегося коэффициента усиления
при синусоидальном воздейст¬
вии с частотой ш и, таким об¬
разом, может быть построен
посредством эксперименталь¬
ных измерений, с помощью лю¬
бого прибора, независимо от
его физической сущности.
Важно заметить, что в про¬
стых случаях (таких, как рас¬
сматриваемый) полная правая
полуплоскость р, т. е. площадь,
ограниченная контуром, ото¬
бражается внутри контура на
плоскости У. Ясно, что никаких полюсов или нулей У в пределах
правой полуплоскости р не имеется, так как контур на пло¬
скости /ш является конечным и не охватывает начало координат
на плоскости У. Очевидно, что если У принимает нулевое значе¬
ние где-либо на правой полуплоскости, то точка У=0 попадет
внутрь контура.
Рис. 113. Конформное отображение пря¬
мой р=/ш на плоскость У
1 Этот контур называется амплитудно-фазовой характеристикой.— Прим.ред,
288
ГЛАВА 9
В случае более сложных преобразований, например для мно¬
гоконтурных систем, для сложных замкнутых контуров на пло¬
скости У или при наличии полюсов в правой полуплоскости, опре¬
делить расположение полюсов на плоскости отображения бывает
не так просто. Однако совершенно общий критерий устойчивости
выводится из теоремы вычетов Коши: излишек числа нулей над
числом полюсов функции У (р) в правой половине плоскости р ра¬
вен уменьшению фазового угла У (р), деленному на 2тг, т. е. числу
полных оборотов радиуса — вектора вокруг начала координат в на¬
правлении вращения часовой стрелки при изменении р от —/оо до
+/оо. При этом нужно иметь в виду, что если по оси /ш имеются
нули У (р), то при отображении контура эти точки должны быть
исключены. Таким образом, .если число неустойчивых полюсов
функции У(р) известно, то число нулей определяется подсчетом
числа оборотов отображения вокруг начала координат по ходу
часовой стрелки.
Теперь обратимся снова к основному уравнению обратной
связи (18) и, имея в виду, что нас интересует определение его
полюсов, заметим, что полюса Уь являются нулями величины
(1+АВ), кроме единственного случая, при котором А и В имеют
идентичные полюса и нули соответственно. Иными словами, вели¬
чина Уь бесконечна, т. е. имеет полюс в каждой точке, где
АВ — — 1. (24)
Таким образом, если уравнение (24) действительно в любой точке
правой половины плоскости р, то следящая система неустойчива.
АВ называется усилением или передаточной функцией разомкну¬
той цепи и представляет собой передаточную функцию, взятую
один раз вокруг полного контура обратной связи. Она может
быть определена как функция
действительной частоты (т. е.
вдоль мнимой оси р) посредством
экспериментального измерения в
разомкнутом контуре. Геометри¬
ческим местом точек комплексно¬
го коэффициента усиления, най¬
денного экспериментальным или
расчетным путем, является ото¬
бражение оси /ш, или границы ле¬
вой и правой половины плоскости.
Если точка АВ = — 1 лежитвнутри
этого контура, т. е. если контур,
являющийся изображением оси/ш,
охватывает точку (—1,0) при
движении по часовой стрелке, то
Уь имеет полюс в правой поло-
Рис. 114. Примеры диаграммы Най¬
квиста устойчивой и неустойчивой
систем
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
289
вине плоскости р, как это показано, например,, на рис. 114. Здесь,
как обычно, показана только положительная половина оси /ш, так
как отрицательная половина всегда является зеркальным отобра¬
жением относительно действительной оси.
Заметим, однако, что если функция АВ имеет полюс в правой
половине плоскости (т. е. если разомкнутая система сама по себе
неустойчива), то изображение У(р) должно обойти по часовой
стрелке точку —1 по крайней мере один раз или столько раз,
Рис. 115. Диаграмма Найквиста для радиолокационной следящей системы:
а —с фильтром; б — без фильтра (т, = 0)
сколько имеется неустойчивых полюсов функции АВ, для того
чтобы величина 1+ДВ не имела нулей в правой половине пло¬
скости
Обычно не ожидают, что можно встретиться с системой, не¬
устойчивой при разомкнутой цепи обратной связи. Тем не менее
это возможно (особенно в задачах, связанных с автопилотом),
когда энергия, создающая отрицательно демпфированный корень
(самовозбуждение), черпается из встречного воздушного потока.
Прилагая этот критерий к примеру, данному на рис. 112, мы по¬
лучим контуры, показанные на рис. 115. Заметим, что контуры
системы, не имеющей фильтра для подавления шумов, приближа¬
ются к точке —1, но никогда не охватывают ее. Такое поведение
соответствует тем замечаниям, которые уже приводились после
1 Т. е. чтобы замкнутая система все же была устойчивой.— Прим. ред.
19—405
290
ГЛАВА 9
уравнения (21). Кроме того, надо отметить полное соответствие
этих результатов с результатами, полученными при использовании
критерия Рауса при наличии цепи с постоянной времени ть Диа¬
грамма Найквиста очень удобна для анализа сложных систем,
или систем высшего порядка, и может быть использована для по¬
лучения большого количества информации о работе системы, све¬
дений об устойчивости. Она особенно наглядно показывает, каким
образом внесение дополнительного фазового запаздывания в зам¬
кнутый контур приводит к снижению устойчивости или (что рав¬
носильно) уменьшает допустимый коэффициент усиления разом¬
кнутой цепи. Диаграмма также показывает, каким образом до¬
полнительные компенсирующие цепи или функции могут быть
использованы для придания контуру такой формы, которая позво¬
лила бы обойти критическую точку. Как мы увидим, однако, ком¬
пенсирующие схемы не могут быть выбраны без учета влияния
случайных возмущений (шума системы) и насыщения.
9—3.3. Корневой годограф
Новый метод анализа, получивший распространение благодаря
работам Эванса, прямо показывает расположение всех корней
характеристической функции, или, вернее, геометрическое место
точек всех корней при изменении
какого-нибудь параметра систе¬
мы (обычно коэффициента усиле¬
ния). Возьмем функцию
у = (р-р,)(р-рг)( )•••. (25)
(Р — 41) (Р — 9г) 4
Нули У будут, очевидно, р2...,
а полюсы —91, 9г Заметим,
что при любом значении р вели¬
чина У всегда является произве¬
дением векторов, соединяющих
точки рь р2 и т. д. с точкой р, деленным на произведение векторов,
связывающих точки 91, 92 и т. д. с точкой р, как показано на
рис. 116, т. е. если У=Уе^, то
|Г| = |а|-[Ь|-[с|.|<Ц-*
? = ?а + ъ + ?г — ?</ — ••• (26)
Применяя это положение к величине АВ или, что более удобно,
к величине \/АВ в уравнении обратной связи, мы видим, что
уравнение (24) может быть удовлетворено только тогда, когда
2 ^ + *?* + • • • = 180° ‘
71=1,3,5,... (27)
Рис. 116. Векторное представление
для функции (Р-Р.)(Р-Р2)(Р-Рз)
Р — 91
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
291
и что, когда уравнение (27) удовлетворяется, всегда будет какой-
то коэффициент усиления, который удовлетворяет уравнению (24).
Следовательно, любая точка р, которая удовлетворяет уравнению
(27), является корнем уравнения (24) или полюсом Уь Для не¬
которого частного значения коэффициента усиления. Геометриче¬
ское место всех точек, удовлетворяющих уравнению (27), назы¬
вается корневым годографом. Чтобы продемонстрировать этот
метод, мы можем снова взять в качестве примера рис. 112 и
уравнение (20). Функция, корни которой мы ищем, если обозна¬
чить ~о-=х2, имеет вид
(28)
или
(р — 0)(р —}(р — = — (28а)
—т, / —Т] / •8т1т2 1х1 ' '
Точки Р1 = — 1/ть Рг= — Рз = 0 показаны на рис. 117. Ясно,
что любая точка на отрицательной действительной оси слева от
Р\ дает <р1 = <р2 = <рз= 180°, следовательно, ф1 + <р2 + фз = 3-180° и, та¬
ким образом, удовлетворяет уравнению (27). Подобным же
образом любая точка между р2 и р3 дает <р1 = ф2 = 0, <р3= 180° и
тоже удовлетворяет уравнению (27). Точка, слегка смещенная от
средней точки линии р2 — р3, дает ф1~0, <рг = е, <р3 = 180° — е, что
тоже удовлетворяет уравнению (27). Далее, когда р очень велико,
уравнение (28а) принимает вид
X 1 _ К 1 _
р3 - В^ |р|э ~
= —1 — /'— + — ) А Ц--> — 1, (286)
так что фазовые углы определяются как три значения
. п к
) з ""Ъ 3
кубического корня из —1: —1, е , е , с соответствующими
фазовыми углами: <р = —180°, <р = 60°, <р = —60°.
Действительные асимптоты корневого годографа определяются,
в общем случае, выражением
л т
1 2 а —2 а I.
р К{П т} 1 п-т = Кп~п . (28в)
Последний член определяет положение центра тяжести нулей и
полюсов АВ. Величина (п—т) является разностью количества
нулей и полюсов передаточной функции замкнутого контура АВ.
19*
292
ГЛАВА 9
Эти асимптоты (показаны на рис. 117) дополняют существенные
части корневого годографа.
При возрастании коэффициента К от нуля корни уравне¬
ния (28а) перемещаются от точек р\, р2, Рз по изображенным на
рис. 117 траекториям, уходя в бесконечность при неограниченном
возрастании К. Мы снова видим, что при некотором конечном
значении усиления пара корней переходит в область неустойчи¬
вости и при значительно меньшем усилении пара корней имеет
Рис. 117. Корневой годограф уравнения (28а)
сильную колебательную способность. Нет особого смысла вы¬
яснять, какой из методов определения устойчивости: метод Найк¬
виста или метод корневого годографа — важнее для анализа или
расчета систем регулирования с обратной связью. Эти методы
фактически дополняют друг друга, и максимальная выгода полу¬
чается при координированном применении обоих методов. Метод
корневого годографа обладает преимуществом, когда желательно
иметь подробные сведения о работе в переходном режиме, по¬
скольку он показывает возможное размещение действительных
корней характеристической функции. Диаграмма же Найквиста
позволяет более четко определить границы устойчивости относи¬
тельно допустимых характеристик системы, т. е. коэффициента
усиления и фазового сдвига. Метод Найквиста особенно приме¬
ним при анализе нежелательных, или паразитных, обратных свя¬
зей, таких как связи через упругие деформации корпуса снаряда
в системе автопилота, когда аналитическое описание механизма
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
293
обратной связи, обусловленное необходимостью определения по¬
люсов и нулей, окажется слишком затруднительным, в то время
как диаграмма Найквиста может быть довольно просто построена
посредством измерения.
9—4. НЕКОТОРЫЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ
В предыдущих параграфах мы занимались анализом системы
с обратной связью, т. е. определением устойчивости или место¬
положения полюсов системы заданной структуры. Если удовле¬
творительного результата . получить не удается, то необходимо
решить задачу синтеза, чтобы получить структуру, дающую удов¬
летворительные результаты. В общем виде это можно представить
как получение достаточно большого усиления на низкой частоте
при сохранении соответствующего запаса устойчивости или соот¬
ветственно демпфированных корней. Таким образом, основной
проблемой, стоящей перед конструктором, становится выбор эле¬
ментов и передаточных функций, которые позволили бы получить
наибольшее возможное усиление на низких частотах, совместимое
с устойчивостью, т. е. проблема обеспечения устойчивости без
чрезмерных потерь в усилении низкой частоты. Из диаграммы
Найквиста (например, рис. 115, а) мы видим, что допустимое уси¬
ление системы может быть увеличено, если удастся найти сред¬
ство уменьшения суммарного запаздывания по фазе на частоте,
при которой | АВ |^1. Это может быть достигнуто путем введения
фазоопережающего звена, описываемого передаточной функцией:
У2 = 1 + атр , (29)
2 1 + хр ’ у '
где а>1. Эта функция реализуется с помощью очень простой элек¬
трической цепи. Максимальное опережение по фазе, получаемое
посредством этой функции, достигается при частоте р=/(1/1^ат)
и составляет
^агсщп .
На этой частоте коэффициент усиленияповышается до |У|=1/"а,
а предельный коэффициент усиления возрастает до Ит|У|=а.
Улучшение, которое можно получить таким способом, иллюстри¬
руется рис. 118.
Описанный здесь способ так называемой компенсации отста¬
вания по фазе может быть также объяснен посредством корневого
годографа. Рассмотрим, например, рис. 117. Как указывалось
выше, асимптоты корневого годографа исходят из центра тяже¬
сти полюсов и нулей функции АВ, причем при определении
294
ГЛАВА 9
центра тяжести нулям приписывается отрицательный вес. Заметим
теперь, что передаточная функция уравнения (29) имеет нуль
р =— 1/а-с и полюс р = — 1/т. Таким образом, эта функция вносит
как бы пару сил, создающую момент, направленный против хода
часовой стрелки. Благодаря этому центр тяжести системы сдви¬
гается влево, что показано
на рис. 119. Сдвиг центра
тяжести смещает часть кор¬
невого годографа вблизи
асимптот в левом направле¬
нии, т. е. в область устойчи¬
вости, или по крайней мере
увеличивает частоту, при
которой корневой годограф
переходит в область неус¬
тойчивости.
Степень эффективности
такого простого способа ком¬
пенсации фаз с целью улуч¬
шения устойчивости систе¬
мы с обратной связью зави¬
сит от конкретных характе¬
ристик системы в области
частот неустойчивости. Очень
часто, к сожалению, такими
Рис. 119. Корневой годограф, иллюстри¬
рующий стабилизирующий эффект ком¬
пенсации пары полюс — нуль (рс, <7с)
(ср. рис. 118)
Рис. 118. Диаграмма Найквиста, иллюстрирующая
улучшение устойчивости с помощью компенсации от¬
ставания по фазе
Следящие системы и обратная связь
295
Рис. 120. Представление передаточ¬
ной функции посредством системы
векторов
простыми средствами достигается весьма небольшое улучшение об¬
щей характеристики системы. Так бывает, если передаточная функ¬
ция контура характеризуется несколькими полюсами, постоянные
времени которых малы по сравнению с периодом, при котором си¬
стема с обратной связью становится неустойчивой, иными сло¬
вами, если центр тяжести полюсов уже и без того сильно удален
от интересующего нас участка корневого годографа. В этом слу¬
чае часто обнаруживается, что увеличение усиления на частоте,
высокой относительно нулевой ча¬
стоты фазоопереж.ающего звена,
ведет к нарушению устойчивости,
когда диаграмма Найквиста
пересекает, в конце концов, отри¬
цательную ось (пересечениефаз),
что приводит к уменьшению об¬
щего допустимого усиления кон¬
тура. Для того чтобы вполне оце¬
нить значение выбора переда¬
точной функции для улучшения
устойчивости системы, необходи¬
мо иметь представление об ос¬
новных ограничивающих факто¬
рах линейных передаточных
функций, в особенности о взаимо¬
отношении амплитудной и фазо¬
вой. характеристик при действи¬
тельных частотах.
Ранее отмечалось (уравнение 4а), что любая линейная пере¬
даточная функция может быть представлена как отношение мно¬
гочленов, которые в свою очередь могут быть разложены на мно¬
жители, содержащие нули и полюсы передаточной функции, как
показано в уравнении (25):
у _. (Р~ Р1)(Р~ Р8)( )••■(/>—Рл) /9ггч
(р — ?1)(Р — 72).--(Р — 4т) ' '
Мы видели также, что каждый из сомножителей для любого зна¬
чения р представляет собой вектор, соединяющий точки р\, р2, д\,
д2 и т. д. с точкой р. В частности же, для действительной ча¬
стоты ш, р есть мнимое число /ш, как это видно из рис. 120.
Заметим теперь, что если все полюсы лежат в левой половине
плоскости, т. е. функция является устойчивой, и все нули также
лежат в левой половине плоскости, то при очень большом возра¬
стании ш суммарный сдвиг фазы будет
(п т \
~ = т —<з())
1 ' 1'7
296
ГЛАВА 9
а абсолютная величина амплитуды будет
Нт | V | = | р \п~т = шп~т.
р-Ч™
Отсюда видно, что предельный сдвиг фазы и скорость изменения
амплитуды с частотой однозначно связаны между собой. Такая
функция (т. е. устойчивая функция со всеми нулями в левой по¬
ловине плоскости) получила название минимально-фазовой функ¬
ции. Боде показал, что для минимально-фазовых функций зави¬
симость фазы и амплитуды может быть выражена в следующем
более общем виде:
? (шг) ~ ~ ° 1о^ I м + I (11о^ ш
1 ' с' Г. д. 10{* О) Ь | <0 — ы0 | 6
— ОО
или
ОО
<р(®с) = -7 1ое| “ |1ое°(ш)- (31)
Таким образом, как и раньше,
<31а>
Следовательно, если точно установлена одна из величин (сдвиг
фазы или усиление), то другая величина также определяется не
только при частоте, стремящейся к бесконечности, но и при всех
частотах. Следует заметить, что выражение в квадратных скобках
в уравнении (31а) является тангенсом угла наклона амплитудной
характеристики, если ее построить на логарифмическом графике.
Уравнение (31а) выражено в Натуральных логарифмах. Обычно
более удобно выражать амплитуду в десятичных логарифмах,
а частоту в октавах (степени 2). В этом случае уравнение (31а)
принимает следующий вид:
Нт?(ш) = 4децибелд/октава-, (316)
т. е. падению усиления в 6 децибел на октаву соответствует
сдвиг фазы на минус 90°. Такой сдвиг фазы, характерный для ми¬
нимально-фазовой функции, является наименьшим возможным
сдвигом для любой устойчивой функции с амплитудной харак¬
теристикой данного типа. В справедливости указанного положения
нетрудно убедиться, обратившись к рис. 121, где в положительной
половине плоскости добавлен нуль д\. Очевидно, что добавление
этого нуля к амплитудной характеристике может быть компенси¬
ровано нулем который займет диаметрально противополож-
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
297
Рис. 121. Влияние нуля в пра¬
вой половине плоскости на
фазовые характеристики
ное положение относительно оси р=/ш, как показано на рисунке.
Однако дополнение, вносимое в отрицательный сдвиг фазы рас¬
положенным слева нулем, будет меньше на угол 0. Таким обра¬
зом, при реальной частоте запаздывание по фазе любой функции
с нулем в правой половине плоскости будет больше, чем у функ¬
ции, которая имеет ту же амплитудную характеристику, но все
нули которой лежат в левой половине плоскости. Как следствие
этого факта, добавление к передаточ¬
ной функции контура нуля в правой
половине плоскости почти всегда (за
редкими исключениями) уменьшает
устойчивость системы с обратной
связью. Взаимозависимость амплитуд¬
ной и фазовой.характеристик имеет
первостепенное значение при разра¬
ботке следящих систем. Причиной это¬
го является, во-первых, то, что, если
мы хотим ввести передаточную функ¬
цию для достижения большого усиле¬
ния на низких частотах, мы можем
сделать это только за счет запаздыва¬
ния по фазе на высоких частотах,
что усугубляет проблему устойчивости, согласно критерию устой¬
чивости Найквиста. Иначе говоря, это означает, что мы не можем
вводить фазоопережающие звенья для компенсации фазового
сдвига на критических частотах без того, чтобы не увеличить
усиление на еще более высоких частотах. Последнее следствие мо¬
жет иметь или не иметь значение, в зависимости от таких факторов,
как шум в системе или наличие других плохо демпфированных
корней на высоких частотах.
9—5. ШУМ В СИСТЕМЕ УПРАВЛЕНИЯ
Ранее уже упоминалось о влиянии шума в системах управле¬
ния, следствием которого является необходимость введения допол¬
нительных фильтров, а также ограничений, накладываемых на
компенсирующие цепи. Общие свойства шума и случайных явле¬
ний рассматриваются в другой главе. Почти все системы с обрат¬
ной связью, применяемые при управлении снарядами, подвержены
в какой-либо степени влиянию шума или нежелательных входных
сигналов. Это особенно относится к тем системам, у которых пер¬
вичные входные сигналы соответствуют информации о динамике
наведения снаряда. Не считая основных проблем, касающихся
точности наведения и т. п.-, наибольший интерес с точки зрения
расчета системы управления представляют вопросы мощности и на¬
сыщения.
298
ГЛАВА 9
Если входной сигнал содержит помеху, энергия которой рас¬
пределена в полосе частот более широкой, чем частотный диапа¬
зон следящей системы, т. е. если спектральная плотность шума
остается конечной на частотах много больших, чем полоса пропу¬
скания системы (по половинной мощности.), то относительно этой
системы можно считать полосу частот помехи неограниченной.
Так как любая физическая система может рассматриваться как
линейная лишь в пределах ограниченной области переменных ве¬
личин, то придется рассматривать уровни энергии не только на
входе и выходе системы, но и в каждой ее точке. Управление
уровнем энергии при наличии широкой полосы шума достигается
введением фильтров (как было показано в приведенной в качестве
примера задаче) и тщательным выбором стабилизирующих цепей.
Необходимую фильтрацию входных величин нужно осуществлять
везде, где это возможно вне замкнутого контура, так как введение
фильтров, в общем, отрицательно сказывается на устойчивости.
Основной процесс фильтрации заключается в сглаживании или
осреднении по времени, так что он влечет за собой задержку по
времени или запаздывание по фазе. Влияние последних двух
обстоятельств уже отмечалось выше. Величина вносимого запа¬
здывания по фазе определяется общим затуханием или крутизной
сигнала, что видно из уравнений (31) и (31а). Часто, однако,
приходится вводить фильтры в цепь обратной связи, что
имело место в рассмотренном выше примере, где единственным
способом обработки информации, связанной непосредственно
с линией визирования, была ее обработка в виде функции рассо¬
гласования.
Точно так же, как фильтр низких частот стремится создать
в цепи запаздывание по фазе или задержку по времени, так и
фазоопережающий контур стремится создать дефильтрующий
эффект, т. е. он всегда «подчеркивает» сигналы на частоте, боль¬
шей, чем частота, при которой происходит запаздывание по фазе.
Следовательно, не всегда имеется возможность ввести в цепь
обратной связи передаточную функцию по своему выбору (даже
при соответствии обычным условиям устойчивости), если в цепи
имеется какой-либо источник шума или ограничения в отношении
линейности.
9—6. ПОВЕДЕНИЕ СИСТЕМЫ В ПЕРЕХОДНОМ ПРОЦЕССЕ
В качестве критерия для определения характеристики следя¬
щей системы, удовлетворяющей требованиям по устойчивости,
часто используют ее переходную функцую, т. е. переходный про¬
цесс при единичном ступенчатом воздействии. Переходная функ¬
ция характеризуется двумя важными величинами: 1) величиной
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
299
перерегулирования и 2) скоростью реакции на скачок входной ве¬
личины. Из этих двух величин легче дать однозначное определе¬
ние величине перерегулирования. Согласно рис. 122 величина пе¬
ререгулирования определяется
обычно как отношение Ь/а, где
а — требуемое изменение выход¬
ного сигнала, а Ь + а — первый
максимум выходного сигнала.
Даже такое определение теряет в
какой-то мере смысл, когда речь
идет о реакции на входные воз¬
мущающие сигналы системы,
задачей которой является сохра¬
нять выходной сигнал неизмен¬
ным, что, например, имеет место
в системе управления снарядом
по крену при воздействии на нее возмущающих моментов. Вели¬
чина перерегулирования, однако, может приобрести общность, если
рассматривать соответствующую величину, связанную с выходным
сигналом. Например, в только что упоминавшейся системе управ¬
ления по крену такой подходящей величиной будет не величина
крена и не скорость изменения крена, а управляющий момент,
который уравновешивает возмущающий момент. Часто представ¬
ляется удобным связы¬
вать переходную функ¬
цию с затуханием един¬
ственной пары корней,
т. е. с простой систе¬
мой второго порядка
(см. рис. 109), однако
этому не следует при¬
давать слишком боль¬
шое значение. На
рис. 123 показана вели¬
чина перерегулирова¬
ния (в процентах) как
функция коэффициента
затухания.
Определение време¬
ни переходного процес¬
са или задержки по
времени представляет
несколько большую
трудность. Строго го¬
воря, время, необходи¬
мое для того, чтобы в
Рис. 122. Переходная характеристика
(реакция на единичное ступенчатое
воздействие)
Рис. 123. Зависимость величины перерегулирова¬
ния в процентах ст коэффициента затухания
в системе второго порядка
300
ГЛАВА 9
Рис. 124. Задержка по времени, вы
раженная через интеграл реакции
любой линейной системе выходной сигнал стал статически равен
своему окончательному значению, равно или нулю или бесконеч¬
ности. Конечно, практическое значение этого положения весьма
невелико. Некоторые авторы предлагали определить время пере¬
ходного процесса как время, после которого выходной сигнал
отклоняется от своего окончательного значения не более, чем
на определенное число процен¬
тов (например, на 5%). К со¬
жалению, такое определение
в известной степени произволь¬
но. Подходящей мерой скоро¬
сти реакции может служить
линейная задержка по времени
или скорость изменения фазы
на низких частотах. Пред¬
положим, что на рис. 124
представлена реакция на сту¬
пенчатое воздействие функции
у _ в 1 _ 1 -Н ЪР + ар2 4-... , п 9.
0о 1 Ьр-'- + ... ’ I'32-'
окончательное значение кото¬
рой нормировано до единицы.
Тогда интеграл разности между входной и выходной функциями,
показанной на рис. 124,а (заштрихованные участки), будет как
раз равен линейной задержке по времени, т. е.
г=[ =Т1-Т!! (33)
о
или, как показано на рис. 124,6, т есть время, на которое должна
задерживаться эквивалентная ступенчатая функция, чтобы инте¬
грал ее разности был равен нулю.
Истинность уравнения (33) подтверждается следующим
дифференциальным уравнением:
(1 + Т1Р + • • •) 01 = (1 + Т">Р + •••) 0о
б1 — ео = тг0о + аё0... — тД — 60! —...
[ 0! — 0О Л1 = т2Д60 + аД0 + ... — •с1 Д0] — 6Д0 —... = (т2 — тх) 0О + 0.
о
Рассматривая последнее равенство за время более длительное
по сравнению с т, т. е. когда прекращается заметное приращение
интеграла (33), можно определить т как время, в течение которого
СЛЕДЯЩИЕ СИСТЕМЫ И ОБРАТНАЯ СВЯЗЬ
301
импульс выходной величины становится равным общему импульсу
ниже входного сигнала. Заметим, что с точки зрения рассмотрен¬
ной ранее задачи управления по крену общее количество движе¬
ния, сообщенное системе разностью между возмущающим и
управляющим моментами, равно т-М, где М — величина возму¬
щающего момента.
При таком определении задержка по времени может также
рассматриваться как скорость изменения фазы на низких частотах,
или, другими словами, как величина наклона фазовой частотной
характеристики. Отметим, что для очень низкой частоты
Кт У = 1 — (\ — т2) р — (Ь — а + — т=2) р2 + ... (34)
Р-0
Пт = — (т, — т2).
ш,о ' 1 2
Такого результата можно было ожидать, так как сдвиг фазы си¬
нусоиды равен ее частоте, умноженной на сдвиг по времени. На
основании уравнения (34) можно сделать вывод, что задержка
реакции системы в переходном процессе по времени может быть
найдена путем частотных измерений или наоборот.
9—7. ВЫВОДЫ
Устойчивость не является единственным критерием для созда¬
ния оптимальной следящей системы. Однако другие критерии
можно применять лишь по отношению к устойчивым системам.
Какой-либо отдельный критерий может иметь первостепенное зна¬
чение лишь для одной области применения системы и в то же
время быть маловажным для другой области. Например, может
возникнуть вопрос, почему мы ограничиваемся линейными систе¬
мами. Кроме той очевидной причины, что такие системы легче под¬
даются анализу, линейность играет весьма важную роль в опрёде-
ленных областях применения, касающихся информационных
устройств и шумов, в то время как большая скорость реагирования
или меньший расход мощности могут быть получены с помощью
нелинейных устройств, особенно каскадами насыщения, когда кри¬
тическим фактором является скорость или мощность. Точно
так же перерегулирование в переходном процессе может приве¬
сти к тяжелым последствиям, если оно имеет место в автопилоте,
который управляет нагруженным до предела самолетом, в то
время как длительные ошибки или ошибки установившегося ре¬
жима имеют гораздо большее значение для аппаратуры наведения
и навигации, как, например, в устройстве, считывающем положе¬
ние какой-либо звезды. Во всех случаях следует помнить, что
каждый сервомеханизм, входящий в систему управляемого сна¬
302
ГЛАВА 9
ряда, как, например, привод рулей поворота и высоты или следя¬
щая система антенны радиолокатора, является составной частью
более широкой системы с обратной связью — всей системы управ¬
ления и наведения снаряда. Следовательно, как мы видели, запаз¬
дывания по фазе на низкой частоте или задержки по времени
должны в общем быть сведены до минимума при достаточной
фильтрации шумов, соблюдении ограничений по мощности и, ко¬
нечно, устойчивости.
ГЛАВА 10
ПРИБОРНАЯ ГИРОСКОПИЯ
Дж. А. Ван Лир, Г. А. Лассен1
10—1. ВВЕДЕНИЕ
Гироскопические приборы применяются в управляемых реак¬
тивных снарядах, так же как в авиации и других областях техники,
для того, чтобы следить за изменением направления осей, связан¬
ных со снарядом. Направление этих осей определяет положение
физического тела реактивного снаряда относительно системы ко¬
ординат, неподвижной в инерциальном пространстве, то есть
в пространстве, неподвижном относительно звезд. Таким образом,
одна система координат, так сказать, связана с реактивным сна¬
рядом, а другая лежит вне его. С помощью гироскопов мы можем
определять и контролировать положение реактивного снаряда
в каждый данный момент, но направление его движения непо¬
средственно не определяется, так как гироскопы позволяют опре¬
делять лишь угловое положение снаряда в пространстве, но не
направление его полета (траекторию) 2.
В данной главе излагаются основы работы гироскопических
устройств и в доступной форме показываются различные области
применения гироскопов. Кроме того, дается краткое описание
принципов разработки типичных конструкций гироскопических
приборов, а также анализируется влияние некоторых конструктив¬
ных особенностей на точность определения направления.
10—1.1. Приборная гироскопия
«Приборная гироскопия» в том смысле, в каком этот термин
употребляется в данной работе, означает применение гироскопи¬
ческих устройств в качестве чувствительных элементов системы
управления самолета или управляемого реактивного снаряда. Ги¬
роскоп представляет собой быстро вращающееся тело с опорами,
подвесом, приводом и измерительными элементами.
1 Сотрудники самолетостроительной фирмы Хьюза.
2 Здесь имеется в виду, что траекторный и путевой углы снаряда отли¬
чаются от углов тангажа и рыскания, измеряемых гироскопами, на величину
углов атаки и скольжения соответственно.— Прим. ред.
304
ГЛАВА 10
Гироскоп может выполнять следующие три функции:
1. Сохранять постоянное направление, независимо (в опреде¬
ленных пределах) от движения объекта *.
2. Определять до двух составляющих угловой скорости
объекта.
3. Определять составляющие угловой скорости и углового
ускорения относительно какой-либо одной оси.
В обычных самолетных гироскопических устройствах эти за¬
дачи решаются с помощью следующих приборов:
— постоянное направление — гироскоп направления, гирогори¬
зонт, стабилизированная платформа, автопилот;
• — угловая скорость — указатель угловой скорости поворота,
автопилот;
— угловое ускорение — автопилот,
Строго говоря, автопилот не является гироскопическим прибо¬
ром, а представляет собой функциональное устройство, которое
вместо пилота заставляет самолет совершать заранее намеченный
маневр, несмотря на влияние различных возмущающих факторов.
В автопилот .обычно входит несколько гироскопических приборов
и соответствующих сервомеханизмов. Подробные технические ха¬
рактеристики каждого из этих устройств определяются конкрет¬
ными задачами, которые оно должно решать, требуемой точно¬
стью работы и прежде всего летными данными конкретного само¬
лета, на который оно должно быть установлено.
Система управления реактивного снаряда аналогична самолет¬
ному автопилоту и связанным с ним органам управления; в дейст¬
вительности эта система играет даже более значительную роль,
так как она является основным элементом конструкции самого
реактивного снаряда.
В связи с тем что на реактивном снаряде нет пилота, к его
приборному оборудованию предъявляется много новых и более
сложных требований. Гироскопические приборы здесь не являются
помощниками пилота — они выполняют его функции и должны
быть настолько точными, чтобы выполнять их самостоятельно и
правильно. По существу, пилот уже не в состоянии решать возла¬
гаемые на приборы задачи, даже если бы его можно было поме¬
стить в реактивный снаряд. При современных скоростях и манев¬
ренных возможностях время реакции пилота слишком велико.
Кроме того, присутствие пилота ограничивало бы допустимые пе¬
регрузки десятью § или даже меньшей величиной. От приборов
беспилотного управляемого реактивного снаряда можно требовать
безотказной работы при перегрузках в 50 и 100 Таким образом,
вследствие этих более сложных условий работы приборов и более
1 Здесь и в дальнейшем под объектом подразумевается управляемый реак¬
тивный снаряд или самолет.— Прим, перед.
ПРИБОРНАЯ ГИРОСКОПИЯ
305
жестких требований к ним, а также в связи с большими ограни¬
чениями по весу и габаритам, и почти для каждого конкретного
случая применения гироскопа в управляемом реактивном сна¬
ряде необходима специальная разработка прибора.
10—1.2. Предварительные замечания
1. Особенности гироскопов. Действие гироскопа имеет некото¬
рые особенности, которые могут показаться необычными и труд¬
ными для понимания. Эти особенности одинаковые для любого
гироскопа, каковы бы ни были различия в конструкции и в при¬
менении. Приборная гироскопия имеет сходство с геометрической
оптикой, где имеется в основном лишь один простой общий прин¬
цип— закон преломления, который находит различные примене¬
ния в конструкции линз фотоаппаратов, астрономических телеско¬
пов, современных фотоэлектрических спектрофотометров и т. п.
Точно так же в приборной гироскопии мы имеем дело лишь с од¬
ним основным принципом действия гироскопа и многими спосо¬
бами его использования в различных приборах, предназначенных
для определения положения и угловой скорости объекта. Понима¬
ние этого основного принципа действия гироскопа позволяет
понять особенности любого гироскопического прибора и правильно
подойти с инженерной точки зрения к изучению существующих
конструкций и внесению в них изменений при разработке новых
приборов. Хотя вращающийся гироскоп всегда создает несколько
необычное ощущение при непосредственном контакте с ним, зна¬
ние принципа действия гироскопа позволяет понять сущность
происходящих в нем явлений.
2. Трехмерная природа гироскопии. Любая задача, решаемая
с помощью гироскопа, является, по существу, трехмерной зада¬
чей. С другой стороны, при техническом обучении и в инженерной
практике в большинстве случаев ограничиваются рассмотрением
какого-либо явления одновременно лишь в двух измерениях. Это
обстоятельство в значительной степени объясняет трудности в по¬
нимании гироскопии. Приводимые ниже рисунки выполнены по
большей части в перспективе с обозначениями, взятыми из трех¬
мерного векторного анализа, что способствует пониманию изла¬
гаемых вопросов.
10—2. ОСНОВЫ ДЕЙСТВИЯ ГИРОСКОПА
10—2.1. Качественное описание
Для первого качественного восприятия гироскопического
эффекта нужно представить себе, что вращающийся ротор с под¬
шипниками и рамкой находится в руке между большим и указа-
20-405
306
ГЛАВА 10
тельным пальцами, как показано на рис. 125. Попытаемся накло¬
нить гироскоп, поднимая большой палец и опуская указательный.
Если ротор достаточно массивен и его скорость вращения велика,
мы почувствуем, что не в состоянии сделать это. Вместо того
чтобы наклониться в предполагаемом направлении, гироскоп по¬
вернется в горизонтальной плоскости, неодолимо перемещаясь из
положения, показанного пунктиром, в положение, показанное
Рис. 125. Гироскопическая прецес¬
сия под действием приложенного
вращающего момента
Рис. 126. Производная от единичного
вектора по времени
сплошной линией, и будет продолжать двигаться в этом направ¬
лении до тех пор, пока пальцы будут стремиться наклонить его1.
Это движение называется гироскопической прецессией и характе¬
ризуется перемещением гироскопа вокруг оси, расположенной под
прямым углом к оси прилагаемого момента. Это кажется необыч¬
ным, поскольку мы привыкли к тому, что при воздействии на ка¬
кой-либо предмет он послушно следует в том же направлении,
в котором мы прилагаем силы, а не под прямым углом, как это
имеет место в данном случае. Хотя такое поведение гироскопа и
воспринимается нами как противоестественное, однако мы легко
можем прийти к пониманию его сущности.
10—2.2. Векторное представление основных величин
]. Единичный вектор направления вращения. Прежде всего
следует описать наблюдавшееся нами явление с помощью вектор-
1 Для осуществления подобного эксперимента необходимо, чтобы ротор ве¬
сил около 225 г и вращался со скоростью нескольких тысяч оборотов в минуту.
В противном случае посторонние силы (помимо тех, с помощью которых мы
преднамеренно воздействуем на гироскоп) будут затемнять тот эффект, который
мы хотели бы наблюдать. Кроме того, ротор должен быть полностью изолирован
от внешней среды для предотвращения опасности в случае его срыва, ибо энер¬
гия вращающегося ротора весьма значительна. Для того чтобы проверить гиро¬
скопический эффект, можно использовать игрушечный гироскоп, хотя он слиш¬
ком слаб и полностью удовлетворить нас не может. В этом случае гироскоп
удерживается между большим и указательным пальцами, как указано на
рис. 125, и раскручивается с помощью шнурка.
приборная гироскопия
307
ных величин. При изучении гироскопа наибольший интерес пред¬
ставляет направление оси вращения. Для того чтобы выразить
это направление с помощью условных обозначений, не прибегая
к системам координат, введем вектор, переменный по направлению
оси вращения (а следовательно, и угловой скорости ы), но с по¬
стоянной длиной, равной единице. Это единичный вектор направ¬
ления вращения 1ш, представленный на рис. 125 линией ОВ. Ин¬
декс ш указывает на то, что этот единичный вектор всегда имеет
направление угловой скорости вращения. Тогда
и = ш1ш. (1)
Таким способом мы получаем четкое различие между абсолютной
величиной угловой скорости ш и ее направлением 1ш, что позво¬
ляет оперировать с ними порознь. Этот единичный вектор направ¬
ления вращения очень удобен как при умозрительном, так и при
математическом определении перемещения оси вращения.
2. Качественное правило гироскопической прецессии. В поло¬
жении, представленном на рис. 125, вектор направления враще¬
ния ОВ поворачивается в горизонтальной плоскости, так что его
конец перемещается влево и к наблюдателю — в направле¬
нии ВС. Это движение происходит в результате попытки накло¬
нить рукой гироскоп, что может быть представлено или парой
сил: Р и —Р, приложенным к концам оси гироскопа, или, лучше,
эквивалентным вращающим моментом Т, перпендикулярным оси
вращения. Следует заметить, что перемещение точки В происходит
в направлении, параллельном Т. Теперь мы можем выразить ка¬
чественное правило гироскопической прецессии в общей форме:
вращающий момент, приложенный перпендикулярно к оси враще¬
ния, заставляет конец вектора угловой скорости вращения пере¬
мещаться параллельно вращающему моменту. Это правило выве¬
дено умозрительно, однако мы почти подготовлены к тому, чтобы
вывести количественный закон гироскопа, который это правило
включает.
3. Производная от единичного вектора по времени. Нам по¬
требуется сделать еще одно предварительное замечание. На
рис. 126 представлен произвольно взятый единичный вектор 1,
который поворачивается в плоскости рисунка, причем начало его
неподвижно. Положения его в моменты времени / и / + Л обо¬
значены соответственно через ОА и ОВ. Следовательно, АВ пред¬
ставляет собой линейное смещение вектора с!Л за время сП, а а0—
угловое смещение вектора 1. Однако в связи с тем что длина
вектора равна единице, то
сП = | сП [ (2)
(модуль вектора сП) и
(3)
20»
308
ГЛАВА 10
Таким образом, величина производной от любого единичного век¬
тора по, времени равна угловой скорости его вращения (скаляр¬
ной величине). Направление этой производной, как мы видим, сов¬
падает с направлением, в котором перемещается конец единич¬
ного вектора. Этот общий вывод в применении к единичному век¬
тору 1ш угловой скорости вращения дает эффективный математи¬
ческий способ полного описания прецессионного движения. Ско¬
рость, с которой происходит поворот оси вращения гироскопа,—
угловая скорость прецессии — дается модулем вектора производной
по времени </1 а направление движения соответствующего конца
оси гироскопа — направлением этого же вектора. Теперь мы го¬
товы к тому, чтобы путем анализа динамики выразитьче¬
рез вращающий момент, действующий на гироскоп.
10—2.3. Закон гироскопа
1. Вывод закона гироскопа. Динамической величиной, имею¬
щей первостепенное физическое значение, является момент коли¬
чества движения вращающегося ротора Н1, который показан на
рис. 125 в виде вектора ОА. Практически ротор в любом случае
вращается вокруг своей оси симметрии так быстро, что его мо¬
ментом количества движения относительно какой-либо иной оси
можно полностью пренебречь. Поэтому можно написать
Н = /(о, (4)
где / — осевой момент инерции ротора относительно оси симме¬
трии. Из уравнения (4) следует, что вектор Н имеет то же на¬
правление, что и вектор и, и пропорционален ему с коэффициен¬
том пропорциональности, равным /.
Закон гироскопа выводится из второго закона Ньютона в от¬
ношении движения твердого тела: производная от вектора мо¬
мента количества движения тела равна вектору вращающего мо¬
мента, приложенного к нему. Это положение является точной
параллелью второго закона Ньютона для материальной точки:
производная от вектора количества движения материальной точки
равна вектору силы, приложенной к ней. Чтобы показать, на¬
сколько естественно ожидать от гироскопа поведения, которое уже
было описано выше, сопоставим движение материальной точки
под воздействием приложенной силы и движение вращающегося
ротора гироскопа (или гироскопического элемента) под воздейст¬
вием приложенного момента.
1 Называемый также кинетическим моментом.— Прим. ред.
ПРИБОРНАЯ ГИРОСКОПИЯ
309
Рис. 127.
а. Масса, скорость и сила; б. Гироскопический элемент, угловая скорость и вра¬
щающий момент
Материальная точка и сила
Гироскопический элемент и вращающий момент
Введем единичный вектор направ¬
ления скорости 1ч, соответствующий
единичному вектору угловой ско¬
рости вращения 1ш.
V = Г1г. (5')
Как показано на рис. 127, а, мы рас¬
сматриваем движение материальной
точки с массой т под действием си¬
лы Г; при этом принимаем, что си-
Мы уже имеем
ш = (5)
Как показано на рис. 127,6, мы рас¬
сматриваем движение гироскопиче¬
ского элемента под действием вра¬
щающего момента Т; при этом при-
ла Р и мгновенная скорость V лежат
в плоскости рисунка. Количество дви¬
жения определяется по формуле
М = т>! = (6')
Второй закон Ньютона для мате¬
риальной точки выражается форму¬
лой
Подставляя значение М из уравне¬
ния (6') в уравнение (7'), получим
Р = (8-)
нимаем, что момент Т и мгновенная
угловая скорость ш лежат в пло¬
скости рисунка.
Момент количества движения (ки¬
нетический момент) определяется по
формуле
Н = 1ш = 1ш1 ш. (6)
Второй закон Ньютона для твер¬
дого тела выражается формулой
т-4г- <7>
Подставляя значение Н из урав¬
нения (6) в уравнение (7), получим
т-/+ “-цг;- (8)
310
ГЛАВА 10
Продолжение
Материальная точка и сила
Гироскопический элемент и вращающий момент
Разложим теперь силу Р на две
составляющие вдоль скорости и в
направлении ей перпендикулярном со¬
ответственно. Скалярные значения
этих составляющих обозначим через
Г. и Р . Для этой цели введем но¬
вый единичный вектор ^.перпенди¬
кулярный 1„ и расположенный в пло-
Разложим теперь Т на две состав¬
ляющих по направлению вдоль ско¬
рости и в направлении ей перпенди¬
кулярном соответственно. Скалярные
значения этих составляющих обозна¬
чим через Тт и Г л. Для этой цели
введем новый единичный вектор 1 1,
перпендикулярный 1ш и расположен-
Рис. 128.
о. Разложение вектора силы; б. Разложение вращающего момента
скости, проходящей через 1„ и Р,
как показано на рис. 128, а.
Е =/=•„!„ + /\1±. (9')
Из уравнения (8') и (9') получим
+ Вх 1 х = т 1о +
а1 /
Это векторное уравнение дает два
уравнения для составляющих — одно
скалярное и другое векторное. Так
как коэффициенты 1„ в обеих частях
уравнения должны быть равны меж¬
ду собой, то
ный в плоскости, проходящей через
1 ш и Т, как показано на рис. 128,6.
Т = гш1ю +7\1±. (9)
Из уравнений (8) и (9) получим
Тт + Тх1 х = 1 (тг1<о +
+ (10)
Это векторное уравнение дает два
уравнения для составляющих — одно
скалярное и другое векторное. Так
как коэффициенты 1 т в обеих частях
уравнения должны быть равны меж¬
ду собой, то
(11)
<Н 1 •
ПРИБОРНАЯ ГИРОСКОПИЯ
311
Продолжение
Уравнение (12) выражает основной закон гироскопа, который
мы и стремились получить. Векторная форма уравнения (12)
удобна для зрительного восприятия; это уравнение подтверждает
ранее установленное правило для направления прецессии: вра¬
щающий момент, приложенный перпендикулярно оси вращения,
заставляет конец вектора направления вращения двигаться па¬
раллельно этому вращающему моменту.
Если рассматривать только абсолютные величины и принять шр
за абсолютную величину угловой скорости прецессии, то
|т| = -д <13>
и
Т^=Наур = 1шшр. (14)
Материальная точка и сила
Гироскопический элемент и вращающий момент
Таким образом, скорость изменения
абсолютной величины линейной ско¬
рости равняется частному отделения
вставляющей силы по оси скорости
ча массу. (Этот результат точно со¬
ответствует тому, что можно полу¬
чить исходя из элементарной меха-
чики одноразмерного движения.)
Второе уравнение для составляю¬
щих имеет следующий вид:
/71 Е Е,
^Г= — 1 , = тт-1 (12')
<П ту х М х
Таким образом, скорость измене¬
ния направления вектора линейной
скорости равняется частному от де¬
ления векторной составляющей си¬
лы, перпендикулярной к оси ско¬
рости, на количество движения.
Этот результат легко может быть
преобразован в известное уравнение
кругового движения материальной
точки под действием центростреми¬
тельной силы:
Е - ту2/г.
Таким образом, скорость измене¬
ния абсолютной величины угловой
скорости равняется частному от де¬
ления составляющей вращающего
момента по оси угловой скорости на
момент инерции. (Этот результат
точно соответствует тому, что мож¬
но получить исходя из элементарной
механики одноразмерного движе¬
ния.)
Второе уравнение для составляю¬
щих имеет следующий вид:
<ЛШ Л Т<
(12)
Таким образом, скорость изменения
направления вектора угловой ско¬
рости — скорость прецессии оси вра¬
щения по величине и направлению —
равняется частному от деления век¬
торной составляющей вращающего
момента, перпендикулярной оси вра¬
щения, на момент количества движе¬
ния (кинетический момент).
312
ГЛАВА 10
Уравнение (14) выражает основной закон гироскопа, в скаляр¬
ной форме.
2. Парадоксы. В реакции гироскопа на вращающий момент,
приложенный перпендикулярно его оси вращения, мы наблюдаем
три парадокса: во-первых, вместо движения в направлении при¬
ложения сил или вращающего момента реакция гироскопа состоит
в прецессионном движении; во-вторых, как показывает уравне¬
ние (12), в противоположность реакции на составляющую вра¬
щающего момента (параллельную вектору угловой скорости), ко¬
торая выражается уравнением (11), реакция гироскопа представ¬
ляет собой не возрастающую, а постоянную скорость вращения;
в-третьих, на практике реальное движение, в котором проявляется
реакция гироскопа, оказывается очень Медленным.
3. Устойчивость гироскопа. Третья из перечисленных выше осо¬
бенностей может быть проиллюстрирована сравнительным число¬
вым примером. Вообще, гироскоп не является единственным сред¬
ством сохранения определенного направления при приложении ну¬
левого вращающего момента — эту же задачу решает и «масса
в покое». Разница заключается в реакции, в случае приложения
вращающего момента.
Рассмотрим два устройства для сохранения определенного на¬
правления в инерциальном пространстве.
1. Гироскоп весом 0,45 кг, вращающийся с умеренной ско¬
ростью 10 000 об/мин.
2. «Масса в покое» той же плотности и формы, что и гироскоп,
но больше его, причем отношение их размеров определяется линей¬
ным масштабным коэффициентом /. Предположим, что вращаю¬
щие моменты, действующие на каждое тело, пропорциональны их
относительным весам и масштабным коэффициентам. Как мы
только что видели, зависимость движения этих устройств от вре¬
мени различна, так что нам необходимо задать определенную
длительность опыта, например / = 3 мин. (Большая продолжитель¬
ность опыта ставит гироскоп в более выгодные условия.) Напи¬
шем соответствующие выражения для средних угловых скоростей
этих устройств за время I. Для гироскопа это будет
(15)
где ш! — угловая скорость прецессии гироскопа;
Т\—приложенный к гироскопу вращающий момент (приня¬
тый перпендикулярным к оси вращения);
?! — момент инерции гироскопа;
ш — угловая скорость вращения гироскопа.
Для «массы в покое» соответствующие величины обозначим
с помощью индекса 2.
ПРИБОРНАЯ ГИРОСКОПИЯ
313
Средняя угловая скорость за время I, (ш2)ь определяется как
половина угловой скорости, которую приобрело бы тело за
время I
= (16)
Если приравнять правые части уравнений (15) и (16) и выполнить
соответствующие преобразования, то можно определить условия
получения одинаковых средних угловых скоростей (а следова¬
тельно, и равных угловых смещений) за время /:
>=4- <17>
При сделанном допущении относительно плотности и формы
гироскопа и «массы в покое» /2=7®Л и Т2 = /*Т\. Подстановка этих
отношений, а затем и числовых значений в уравнение (17) дает
/ = 4= 10%2д-Х-~10Г1. (18)
Весовой коэффициент равен кубу масштабного коэффициента
или 101®. Следовательно, при указанных выше допущениях, если
взять гироскоп в виде цилиндра радиусом 2,5 см, то «масса в по¬
кое», взятая также в виде цилиндра и способная так же хорошо
сохранять заданное направление, должна иметь радиус 3 км и
весить около 5Х1011 тонн. Такова устойчивость гироскопа, до¬
стигаемая за счет быстрого вращения.
10—2.4. Свободный гироскоп
До сих пор мы рассматривали вращающийся гироскопический
элемент, или ротор, как изолированное тело. В действительности
гироскопические приборы делятся на два больших класса.
Гироскоп с тремя степенями свободы1, или свободный гиро¬
скоп, сконструирован таким образом, что его ось вращения номи¬
нально не имеет никаких ограничений. Она может принимать
любое направление (в определенных пределах) относительно ко¬
жуха прибора. Так как для определения направления линии тре¬
буются две угловые координаты, такой прибор обеспечивает оси
вращения две степени свободы. (Свобода вращения ротора во¬
круг своей оси является третьей степенью свободы.)
1 В оригинале автор применяет термины «двухстепенный» и «одностепен¬
ный» гироскопы (без учета степени свободы собственного вращения ротора).
При переводе использована терминология, принятая в отечественной литературе,
и термины «двухстепенный» и «одностепенный» соответственно заменены па
«трехстепенный» и «двухстепенный».— Прим. ред.
314
ГЛАВА 10
Дальше будет показано, что гироскоп с двумя степенями сво¬
боды можно рассматривать как частный случай свободного гиро¬
скопа.
1. Подвесы. Идеальный случай. У большинства приборов,
в основу которых положен принцип свободного гироскопа, две
степени свободы оси ротора получаются при помощи двух подве¬
сов, показанных на рис. 129 в виде прямоугольных рамок. На
рис. 129, а, например, внутренняя рамка несет подшипники ротора
и еще одну пару подшипников, при помощи которых она шар¬
нирно соединяется с внешней рамкой; последняя же в свою оче¬
редь шарнирно соединена с кожухом. Формы рамок зачастую
Рис. 129. Гироскоп с тремя степенями свободы в карданном подвесе
весьма сильно отличаются от показанной на рисунке. Рамки часто
выполняются в виде колец, неполных колец, цилиндрических или
сферических оболочек и т. п., очень мало похожих или совсем не
похожих на рамки, показанные на рисунке. Важнейшей особен¬
ностью любой рамки, как внутренней, так и внешней, является то,
что она имеет две оси, расположенные под прямым углом друг
к другу, которые вращаются в подшипниках.
Легко заметить, что такое устройство позволяет оси вращения
принимать любое угловое положение: внешняя рамка может вра¬
щаться вокруг оси С—С' и располагать ось вращения в любой
желаемой вертикальной плоскости, проходящей через С—С'; вну¬
тренняя рамка может вращаться вокруг оси В—В' и принимать
любое направление в избранной вертикальной плоскости.
На рис. 129, б и 129, в представлено то же устройство
с иным расположением осей. Рис. 129, б отличается от рис. 129, а
только тем, что вся конструкция повернута по часовой стрелке
вокруг оси А—А'. В конструкции, показанной на рис. 129, в, ось
вращения ротора в нормальном состоянии занимает вертикальное
ПРИБОРНАЯ ГИРОСКОПИЯ
315
положение. Во всех трех рисунках использована одна и. та же
система осей; С—С' — ось, закрепленная на кожухе, В—В' — ось
подшипников, соединяющих внутреннюю рамку с внеш¬
ней, А—А'— ось, перпендикулярная к первым двум осям. Эти
оси удобно использовать в качестве координатных осей, однако
следует заметить, что ось вращения ротора совпадает с осью А—А'
только в одном положении, когда рамки взаимно перпендику¬
лярны.
Рис. 130. Прецессия гироскопа в карданном подвесе
Рассмотрим идеальную систему подвеса при допущении, что ее
элементы не имеют инерции, а все подшипники, включая подшип¬
ники ротора гироскопа, не имеют трения. Такая идеальная си¬
стема не может передавать никакого вращающего момента на ро¬
тор, так как ни одна составляющая вращающего момента не бу¬
дет передаваться конструкцией относительно какой-либо оси ко¬
ординат— А—А', В—В' или С—С'. Следовательно, если исклю¬
чить заметное влияние сил трения или инерции, то вращающийся
ротор гироскопа будет сохранять любое начальное положение, не¬
зависимо от изменения положения кожуха прибора.
2. Прецессия гироскопа в карданном подвесе. Пусть к одному
концу внутренней рамки гироскопа будет подвешен небольшой
груз, как показано на рис. 130. Допустим, что за исключением
влияния указанного груза вся конструкция находится в статиче¬
ском равновесии, а вращающими моментами, вызываемыми си¬
316
ГЛАВА 10
лами трения, можно пренебречь. Вес дополнительного груза вме¬
сте с дополнительной реакцией подшипников рамки, направлен¬
ной вверх, составляют пару сил (на рисунке XV и —которые
создают вращающий момент Т, перпендикулярный к оси враще¬
ния ротора. Согласно сделанному нами анализу поведения гиро¬
скопа этот вращающий момент вызовет прецессию, заставляющую
конец вектора угловой' скорости вращения ротора 1ш переме¬
щаться в направлении, параллельном Т, то есть весь гироскоп
повернется против часовой стрелки (если смотреть сверху) вокруг
вертикальной оси С—С'. Заметим, что наклона внутренней рамки
не произойдет, в противоположность тому, что имело бы место,
если бы ротор не вращался.
3. Движение под действием вращающего момента, вызываю¬
щего прецессию. Если предположить, что трение отсутствует, то
при вращающемся роторе наклона внутренней рамки (как реак¬
ции на приложение горизонтального вращающего момента) пе
должно быть. В действительности же при наличии в подшипни¬
ках рамки некоторого трения мы будем наблюдать медленное от¬
клонение горизонтальной рамки как раз в том направлении, в ко¬
тором можно было бы ожидать ее наклона под воздействием
приложенного вращающего момента. Рассмотрим подробно,
используя рис. 130, чем вызывается такой наклон. Движение гиро¬
скопа против часовой стрелки встречает на подшипниках С и С'
сопротивление трения, направленное по часовой стрелке, при этом
возникает вращающий момент, который можно представить в виде
вектора Т', проведенного из центра вниз. Этот вращающий мо¬
мент создает дополнительную прецессию гироскопа, которая за¬
ставляет конец вектора угловой скорости вращения двигаться
вниз. Отсюда следует, что этот наклон является не непосредст¬
венной реакцией на вращающий момент, вызываемый грузом,
а дополнительной прецессией, вызываемой сопротивлением тре¬
ния, которое встречает первичная прецессия.
4. Ограничение прецессии. Опрокидывание. Складывание ра¬
мок. Предположим, что мы усиливаем указанный выше эффект,
вставив в гироскоп палец, пытаясь воспрепятствовать вращению
внешней (вертикальной) рамки. Немедленно произойдет два пора¬
зительных явления. Во-первых, мы обнаружим, что осуществить
наше намерение абсолютно невозможно, — прецессия будет про¬
должаться вопреки всем нашим усилиям. Во-вторых, наклон гори¬
зонтальной рамки, ранее едва заметный, становится теперь бы¬
стрым и даже стремительным, по мере того как, пытаясь задер¬
жать нормальную прецессию, мы создаем все больший и больший
вращающий момент, направленный вниз (при этом сила и плечо
рычага горизонтальны). Сейчас ул?е должно быть ясно, что про¬
исходит: с помощью пальца мы создали большой вращающий
ПРИБОРНАЯ ГИРОСКОПИЯ
317
Рис. 131. Складывание рамок
мбмент, и последовала естественная реакция гироскопа (естествен¬
ная именно для гироскопа) в виде соответствующей прецессии.
То же самое произойдет и в том случае, если по конструкции
гироскопа внешняя рамка ограничена в своем угловом переме¬
щении. Такое ограничение может быть создано при помощи упо¬
ров на кожухе прибора. Если в результате продолжающегося
прецессионного движения или вследствие вращения кожуха при¬
бора при неподвижном гироскопе рамка достигает упора, разви¬
вается очень большой и неконтролируемый вращающий момент,
вызывающий стремительное прецессионное движение гироскопа.
Это движение обычно ограничивается
другими упорами, в результате чего
возникает дополнительная неконтро¬
лируемая прецессия. Этот комплекс
стремительных движений называется
опрокидыванием. Опрокидывание ве¬
дет к тому, что гироскоп теряет свои
стабилизирующие свойства, и, кроме
того, оно может быть настолько стре¬
мительным, что вызовет серьезную
поломку гироскопа.
Нельзя избежать опрокидывания
простой ликвидацией всех упоров.
Если окажется, что гироскоп пришел
в положение, показанное на рис. 131,
когда ось вращения ротора лежит в
плоскости ВВ'—СС' и, таким образом,
все оси подшипников находятся в од¬
ной плоскости, от кожуха прибора на
вращающийся ротор могут быть переданы весьма значительные
вращающиеся моменты, .которые вызовут стремительную прецес¬
сию. Описанное положение носит название складывания рамок
гироскопа, и его возникновения следует избегать.
5. Нутация. Мы рассматриваем гироскоп в основном как
устойчивую или установившуюся систему, основываясь на пред¬
посылке, что все действующие на гироскоп вращающие моменты
постоянные или медленно изменяются по времени. Практически
эта предпосылка не вводит почти никаких ограничений, ибо
имеющий для нас значение масштаб времени измеряется временем
одного оборота ротора гироскопа, что для гироскопа со скоростью
вращения ротора 12 000 об/мин составляет 5 мсек.
Термин «нутация» относится к неустановившемуся прецессион¬
ному колебанию оси гироскопа, вызываемому импульсным или
скачкообразным вращающим моментом. Если, например, по внут¬
ренней рамке свободного гироскопа нанести резкий удар, то ось
вращения ротора начнет описывать эллиптическую кривую С
318
ГЛАВА 10
частотой порядка частоты вращения гироскопа. При абсолютном
отсутствии трения это движение могло бы длиться сколь угодно
долго, но в любом практическом случае, благодаря потерям энер¬
гии на преодоление сил трения в подшипниках рамок или под
воздействием других демпфирующих средств, оно постепенно за¬
тухает. Обычно имеет место относительно небольшое количество
таких колебаний, продолжающихся в общей сложности менее се¬
кунды. Потери энергии на единицу времени пропорциональны ча¬
стоте колебания, а начальная амплитуда колебания, вызванного
Рис. 132. Прецессия во время пуска гироскопа:
а — вращающие моменты, действующие на внутреннюю рамку; б — вращаю¬
щие моменты, действующие на ротор; 1 — статор; 2 — реакция внешней
рамки; 3 —реакция подшипников ротора; 4 — реакция двигателя
данным возмущающим импульсом, обратно пропорциональна ско¬
рости вращения ротора. Если гироскопический прибор во всех
иных отношениях сконструирован хорошо, то нутация почти ни¬
когда не вызовет каких-либо неприятностей. В действительности,
для того чтобы вообще обнаружить нутацию, даже в том случае,
если мы преднамеренно вызываем ее, необходимо значительно
снизить скорость вращения ротора.
6. Разгон и замедление свободного гироскопа. Уход (дрейф),
вызываемый сопротивлением воздуха. Когда свободный гироскоп
с приводом от электродвигателя (рис. 132) разгоняется или за¬
медляет свое вращение, происходит весьма интересное и поучи¬
тельное явление прецессии. Если при разгоне гироскопа внутрен¬
няя рамка была первоначально наклонена к плоскости, перпенди¬
кулярной внешней рамке, то прежде всего появляется временное
нутационное дрожание. По мере затухания этого переходного
явления становится заметным явное прецессионное движение —
ПРИБОРНАЯ ГИРОСКОПИЯ
319
прецессия внутренней рамки по направлению к горизонтальной
плоскости. Несмотря на относительно установившийся характер,
эта прецессия идет с замедлением и стремится поставить внутрен¬
нюю рамку под прямым углом к внешней рамке. Во всех других
отношениях гироскоп к этому времени совершенно устойчив.
После выключения двигателя происходит обратная прецессия,
причем внутренняя рамка в ходе своей прецессии все больше и
больше отклоняется с возрастающей скоростью от положения,
перпендикулярного к внешней рамке, пока вся система подвеса
не начнет вращаться вместе с ротором.
Можно сразу заметить, что пусковой момент двигателя совпа¬
дает с осью ротора — направление его вращения определяется
единичным вектором 1ш. Однако мы видели при выводе, да это,
несомненно, и так ясно, что такой вращающий момент лишь
изменяет скорость вращения, но не вызывает никакой прецессии.
Почему же прецессия все-таки возникает?
Ответ на этот вопрос мы найдем, если рассмотрим вращающие
моменты, возникающие как реакция на пусковой момент. Рас¬
смотрим вращающие моменты, действующие на внутреннюю
рамку.
Как показано на векторной диаграмме (рис. 132, а), при нали¬
чии вращающего момента электродвигателя имеется: во-первых,
реакция РО воздействия электродвигателя на внутреннюю рамку
в направлении по часовой стрелке, равная силе, с которой дви¬
гатель воздействует на ротор против часовой стрелки; во-вторых,
реакция кожуха прибора, передаваемая через внешнюю рамку.
Эта реакция может быть только перпендикулярна к обеим осям
подшипников внешней рамки и, следовательно, имеет направле¬
ние Оф. Однако только этих двух вращающих моментов недоста¬
точно для того, чтобы внутренняя рамка находилась в равно¬
весии. Чтобы замкнуть векторную диаграмму, необходим третий
вращающий момент, каким и является момент, возникающий бла¬
годаря радиальной нагрузке подшипников ротора. Так как этот
вращающий момент должен быть перпендикулярен к оси этих
подшипников, мы восстанавливаем из точки Р перпендикуляр до
пересечения оси А—А' в точке (?. Вектор представляет собой
третий вращающий момент, который возникает вследствие враще¬
ния ротора и который вместе с двумя другими моментами под¬
держивает равновесие внутренней рамки.
Теперь мы можем перейти к рассмотрению ротора, представ¬
ленного отдельно нарис. 132, б. Вектор /’С?, обратный вектору
представляет вращающий момент, передаваемый внутренней рам¬
кой на ротор. Этот вращающий момент перпендикулярен оси вра¬
щения ротора и направлен таким образом, что вызывает прецес¬
сию ротора, стремящуюся расположить внутреннюю и внешнюю
320
ГЛАВА 10
рамки под прямым углом друг к другу, что мы и наблюдали. Суть
рассматриваемых явлений заключается в том, что только часть
вращающего момента, являющегося реакцией на момент электро¬
двигателя, может передаваться от кожуха прибора через внешнюю
рамку. Другая его часть передается от самого вращающегося ро¬
тора через подшипники на внутреннюю рамку; при этом ротор
прецессирует под влиянием реакции внутренней рамки.
Если 7'ш есть величина вращающего момента, передаваемого
на ротор от внутренней рамки и направленного вдоль оси вра¬
щения ротора, а —величина результирующего вращательного
момента, вызывающего прецессию, то из векторного треугольника
можем записать
(19)
а уравнение (12) дает для скорости прецессии или ухода
шр— /ш • (2°)
В дальнейшем мы увидим ряд других примеров (причем, некото¬
рые из них имеют большое практическое значение) вращающих
моментов, направленных вдоль оси вращения ротора, которые
возникают в результате взаимодействия ротора и внутренней
рамки. Приведенные выше уравнения относятся ко всем таким
случаям.
В заключение отметим, что, по мере того как ротору сооб¬
щается все большая скорость вращения, в (а следовательно, и
1(тв) уменьшается; уменьшается также момент, вызывающий пре¬
цессию (при условии, что кожух прибора неподвижен). При этом
все время происходит возрастание момента количества движения
(кинетического момента), что также ведет к все большему замед¬
лению прецессии.
Что касается гироскопа, ротор которого вращается с замедле¬
нием, например, вследствие трения в подшипниках ротора, то
к нему применимы все рассуждения вышеприведенного анализа.
Однако теперь вектор вращающего момента, направленный вдоль
оси вращения, противоположен вектору угловой скорости враще¬
ния, а векторная диаграмма имеет такой же вид, как на рис.132,
за исключением того, что направление всех векторов изменяется
на обратное. По-прежнему остается в-силе уравнение (20), но мо¬
мент, вызывающий прецессию, имеет теперь такое направление,
что он стремится «оттянуть» вектор угловой скорости вращения
ротора подальше от оси А —А'. Хотя при малых значениях в пре¬
цессией или уходом можно было бы пренебречь, однако ее вели¬
чина становится весьма существенной при возрастании 0 до зна¬
чений порядка 45°, что может вполне иметь место при маневре
реактивного снаряда. Скорость ухода имеет тенденцию возрастать
ПРИБОРНАЯ ГИРОСКОПИЯ
321
со временем, так как ш уменьшается, а 1^0 увеличивается при
уходе. Обычно за время работы гироскопа эти изменения невелики,
но если они продолжаются длительное время, то приводят к опро¬
кидыванию.
Ротор гироскопа, вращающийся с замедлением, получает отри¬
цательное ускорение также и от вращающего момента, вызывае¬
мого сопротивлением воздуха. Однако в случае конструкции с от¬
крытой рамкой, как показано на рисунке, реактивный вращающий
момент, вызываемый сопротивлением воздуха, в основном воспри¬
нимается не рамками, а кожухом прибора. Таким образом, этот
вращающий момент вызывает весьма незначительный уход, а за¬
частую и вовсе его не вызывает. Если же внутренняя рамка пред¬
ставляет собой сплошную оболочку, внутри которой помещается
ротор, то на нее будет действовать реактивный момент от сопро¬
тивления воздуха и при определении значения Тш в уравнении
(20) этот реактивный момент необходимо прибавить к моменту,
вызываемому трением в подшипниках.
Этот эффект ухода имеет также место и в случае гироскопа
с открытым ротором, имеющим постоянную скорость вращения.
Постоянство скорости вращения поддерживается встроенным элек¬
тродвигателем, который преодолевает как силу трения, так и силу
сопротивления воздуха; при этом вращающий момент, развивае¬
мый электродвигателем при постоянной скорости вращения, можно
разделить на две части:
1) вращающий момент, требуемый для преодоления силы тре¬
ния на подшипниках, и
2) вращающий момент, требуемый для преодоления силы со¬
противления воздуха.
Первая часть соответствует вращающему моменту, вызывае¬
мому трением в подшипниках, и поэтому не вызывает реакции
системы подвеса. Действие этого вращающего момента не вызы¬
вает никакого ухода. Вторая же часть вызывает реакцию системы
подвеса точно так же, как в случае вращающего момента, прило¬
женного для разгона ротора. Следовательно, здесь применимы
те же рассуждения ,и имеющий место уход по направлению к 0 = 0
определяется согласно уравнению (20), причем Тш равно вращаю¬
щему моменту, преодолевающему сопротивление воздуха.
10—3. ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ
Гироскопические приборы призваны выполнять одну (или бо¬
лее) из трех функций гироскопа: определять и измерять угловое
смещение, угловую скорость или угловое ускорение. При этом
определяемое угловое движение характеризуется по отношению
к инерциальному пространству, однако все операции по его изме¬
рению происходят внутри прибора.
21-405
322
Г .'I А В А К)
Выдаваемые такими приборами сигналы могут использоваться
в реактивных снарядах различными способами. Хотя конкретные
сведения о применении этих приборов в настоящее время засекре¬
чены, большая часть способов применения их может быть иллю¬
стрирована схемами авиационных приборов.
10—3.1. Приборы, основанные на свободном гироскопе (с тремя
степенями свободы)
Типичным для свободного гироскопа является то, что он
используется для сохранения направления, неподвижного относи¬
тельно инерциального пространства. Так как обычно опреде¬
ляется положение некоторой оси, неподвижной относительно объ¬
екта по отношению к указанному выше неподвижному направле-
Рис. 133. Самолетная гировертикаль. Ось цилиндриче¬
ского кожуха, направленная вдоль продольной оси
самолета, соответствует оси В — В' на рис. 129, б. Один
из подшипников, соединяющих внешнюю рамку с ко¬
жухом, показан в центре слева; подшипник, соединяю¬
щий внутреннюю рамку с внешней, показан в центре
справа. Статор двигателя, скрепленный с внутренней
рамкой, показан в узле, расположенном вертикально,
причем статор дан не в разрезе; статор окружен рото¬
ром, который скреплен с центральным валом. В раз¬
резе видны подшипники вала ротора (нижний подшип¬
ник больше верхнего). (Фирма «Саммерс гироскоп
компани».)
ПРИБОРНАЯ ГИРОСКОПИЯ
323
Рис. 134. Гировертикаль, или искусственный гирогоризонт. В данном слу¬
чае вдоль продольной оси самолета расположена ось внешней рамки
(ось С — С' на рис. 129, а) . Чашеобразный ротор, установленный на валу
и вращающийся вместе с ним, окружает статор двигателя. Внутренняя
рамка является продолжением статора; один из подшипников, которыми
она соединяется с внешней рамкой, виден справа от вертикального вала.
(Фирма «Бендикс авиэйшн корпорейшн».)
н.ию, такие приборы часто называют гироскопами положения, в
отличие от скоростных гироскопов или гиротахометров, опреде¬
ляющих угловую скорость объекта вокруг заданной оси.
1. Примеры гироскопов положения.
а) Самолетная гировертикаль, или гирогори¬
зонт. При слепом полете, например в облаках, необходимо иметь
искусственный горизонт. Такой искусственный горизонт можно по¬
лучить при помощи свободного гироскопа, подобного тому, кото¬
рый изображен на рис. 129, в. Перед взлетом или во время полета
с визуальной ориентировкой ось вращения ротора гироскопа уста¬
навливается вертикально. После этого она сохраняет заданное ей
направление со степенью точности, зависящей от точности изготов¬
ления и длительности времени использования. Общее представле¬
ние о деталях реальной конструкции гировертикали можно полу¬
чить из рис. 133 и 134.
21*
324
ГЛАВА 10
Рис. 135. Гироскоп направления
(Фирма «Саммерс гироскоп ком-
пани».)
б). Гироскоп направления. Для фиксации определен¬
ного направления (азимута) ось вращения ротора должна быть
расположена горизонтально, так как показано на рис. 129, а. Ось
вращения ротора гироскопа устанавливается первоначально гори¬
зонтально в любом заданном направлении, например на Север. За¬
тем она сохраняет это направление в течение довольно длитель¬
ного времени, независимо от дви¬
жения или положения самолета.
Промышленный гироскоп направ¬
ления показан на .рис. 135.
в) Гиро стабилизирован¬
ная платформа. При помощи
комбинации двух свободных гиро¬
скопов, один из которых располо¬
жен согласно рис. 129, а или 129,6,
а другой — согласно рис. 129, в,
можно стабилизировать платфор¬
му, которая будет сохранять опре¬
деленное положение, неподвижное
относительно инерциального про¬
странства. Гироскопы устанавли¬
ваются на платформе, и специаль¬
ные датчики определяют угловые
отклонения платформы относитель¬
но рамок карданного подвеса.
Вспомогательные силовые приво¬
ды, управляемые сигналами датчи¬
ков перемещают платформу отно¬
сительно трех взаимно перпенди¬
кулярных осей таким образом,
чтобы уничтожить возникшее рассогласование, а выходные сиг¬
налы датчиков максимально приблизить к нулю.
2. Вспомогательные устройства.
а) Арретир и механизм поддержания верти¬
кали. Любой свободный гироскоп должен иметь какое-либо ме¬
ханическое устройство для удержания рамок и, следовательно, оси
ротора в неподвижном положении относительно кожуха в то вре¬
мя, когда прибор не работает или в период разгона ротора. Такое
устройство обычно представляет собой коробку или «клетку» с вы¬
резами или другими ограничителями для рамок подвеса, которая
вдвигается в гироскоп и удерживает его в нормальном положении.
Гировертикали, кроме того, снабжены механизмами поддержания
вертикали, которые компенсируют ошибки гироскопа и застав¬
ляют ось ротора прецессировать обратно к вертикальному поло¬
жению. Ошибки гироскопа возникают по двум основным при¬
чинам: 1) абсолютно точный гироскоп сохраняет направление, не-
ПРИБОРНАЯ ГИРОСКОПИЯ
325
подвижное относительно инерциального пространства, в то время
как местная вертикаль, связанная с земной поверхностью, пово¬
рачивается, по мере того как самолет летит вокруг Земли;
2) уход, вызываемый небалансом, трением и т. п., вносит ошибки,
которые за продолжительное время работы прибора могут достичь
весьма значительных величин. Механизм поддержания вертикали
обычно состоит из переключателя, связанного с маятником и при¬
водящего в действие соответствующие датчики моментов. Так как
маятник определяет лишь кажущееся направление силы тяжести
(складывающееся из истинного направления силы тяжести и реак¬
ции на ускорение самолета), то механизм поддержания вертикали
должен действовать достаточно медленно, чтобы избежать оши¬
бок, которые могут возникнуть по указанной выше причине во
время обычного виража самолета.
б) Датчики моментов. Перемещение оси ротора гиро¬
скопа достигается обычно за счет встроенных датчиков моментов,
воздействующих на рамки подвеса. В качестве датчиков моментов
могут служить электродвигатели, фрикционные муфты любой кон¬
струкции или другие элементы, выбор которых зависит от особен¬
ностей условий работы.
в) Датчики сигналов. Механическое или электрическое
устройство, встроенное в гироскоп для определения углового сме¬
щения рамки относительно кожуха прибора или другой рамки,
называется датчиком сигналов. Часто таким датчиком служит
потенциометр — делитель напряжения электрического тока, со¬
стоящий из проволочного сопротивления, закрепленного на одной
детали, и щетки, прикрепленной к другой детали, которая переме¬
щается относительно первой. Другим широко распространенным
типом датчика сигналов является индукционное устройство, по¬
добное сельсину и работающее на переменном токе.
Основным требованием к датчику является то, что он должен
обнаруживать угловое смещение рамки гироскопа, не создавая
при этом заметного вращающего момента.
3. Уход свободного гироскопа. При решении вопроса о приме¬
нении какого-либо существующего или разрабатываемого прибора,
основанного на принципе свободного гироскопа, необходимо оце¬
нить его ошибки. Поэтому основной проблемой, стоящей перед
конструктором, является ограничение возможных ошибок соответ¬
ствующими пределами. Приложение к ротору гироскопа любой
составляющей вращающего момента по нормали к оси вращения
ротора заставляет ось ротора прецессировать, что видно из урав¬
нения (12). Такая прецессия называется уходом, если она яв¬
ляется следствием нежелательного вращающего момента или вы¬
зывается побочным эффектом полезного вращающего момента;
например, как было показано выше, уход вызывается вращающим
моментом, развиваемым электродвигателем гироскопа. Помимо
326
ГЛАВА 10
того что величина этих вращающих моментов находится в прямой
зависимости от окружающих условий, в первую очередь от движе¬
ния объекта, на котором установлен гироскоп, она зависит и от
таких факторов, как конструктивное выполнение и особенности
конкретного прибора, качество отдельных узлов и деталей (на¬
пример, подшипников подвеса), предварительный натяг подшип¬
ников, герметизация и балансировка всего устройства.
а) Причины возникновения ухода гироскопа.
Ряд причин возникновения ухода является общим для всех гиро¬
скопических приборов с тремя степенями свободы. Следует, од¬
нако, отметить, что у каждого конкретного прибора могут быть
дополнительные источники ухода. Ниже дается описание этих
общих причин, а также приводятся результаты их математиче¬
ского анализа. Вывод соответствующих формул и уравнений
дается в приложении к данной главе.
Трение. В обычном гироскопическом приборе с тремя степе¬
нями свободы ротор гироскопа имеет свободу вращения относи¬
тельно осей подвеса внешней рамки, внутренней рамки и ротора.
Момент трения в подшипниках или любой другой вращающий
момент, влияющий на свободу вращения вокруг этих осей, при¬
водит к соответствующей прецессии. Типичными источниками не¬
желательных вращающих моментов такого рода являются: тре¬
ние в подшипниках рамки, трение на контактном кольце, трение
щетки потенциометра датчика сигнала положения, упругий мо¬
мент токоподводящих проводников, трение в подшипниках ротора,
вращающий момент электродвигателя гироскопа и т. п. в зависи¬
мости от конкретной конструкции.
Небаланс. Ротор гироскопа должен находиться в статиче¬
ском и динамическом равновесии относительно своей оси враще¬
ния, хотя в этом случае небаланс приводит к вибрации и только
косвенно влияет на уход. Далее, ротор гироскопа вместе с вну¬
тренней рамкой должен находиться в статическом равновесии
относительно оси внутренней рамки, а вместе с внутренней и внеш¬
ней рамками он должен, в свою очередь, быть в статическом рав¬
новесии относительно оси внешней рамки. Небаланс может воз¬
никнуть в результате нарушения равновесия при изготовлении при¬
бора, изменения температуры или отклонения (изгиба) различ¬
ных деталей под действием нагрузок от сил инерции. В связи
с последней причиной общее признание завоевывает термин «изо¬
эластичность». Гироскопический прибор считается изоэластичным,
если смещение центра тяжести каждого из указанных выше соче¬
таний ротора (с одной или двумя рамками карданного подвеса)
под действием сил инерции происходит только в плоскости, опре¬
деляемой вектором ускорения и осью, относительно которой тре¬
буется сохранять равновесие. При соблюдении этих условий от¬
клонение (изгиб) различных деталей под действием ускорения не
ПРИБОРНАЯ ГИРОСКОПИЯ
327
Рис. 136. Геометрия гироскопа с тре¬
мя степенями свободы
ведет к возникновению вращающего момента и, следовательно,
ухода. Очень тщательно разработанная конструкция прибора при¬
ближается к «изоэластичному идеалу», у которого соблюдаются
эти условия. Однако в связи с тем что в данном процессе уча¬
ствуют значительные массы, даже небольшое отклонение от изо¬
эластичности может привести к существенным скоростям ухода.
Уход, вызываемый уско¬
рениями на подвесе.
В большинстве случаев направ¬
ление, указываемое концом оси
свободного гироскопа, использует¬
ся как исходное направление для
привязки к инерциальному про¬
странству. В то же время само¬
лет, реактивный снаряд или дру¬
гой объект, на котором установ¬
лен гироскоп, двигается с угловы¬
ми скоростями, намного превос¬
ходящими допустимые скорости
ухода гироскопа. При этих об¬
стоятельствах часто возникает
значительный и даже иногда пре¬
обладающий уход гироскопа, вы¬
зываемый вращающими момента¬
ми, требуемыми для того, чтобы
рамки гироскопа могли переме¬
щаться в соответствии с угловы¬
ми движениями объекта, на кото¬
ром установлен гироскоп.
Это особенно справедливо в
отношении гироскопов с внешним
подвесом, где инерция подвеса
часто превосходит инерцию ро¬
тора гироскопа. В настоящее время существует тенденция к тому,
чтобы попытаться обойти эту трудность (а равно и другие труд¬
ности), установив гироскоп на стабилизированной платформе.
Однако даже в этом случае уход, возникающий по указанной при¬
чине, может все же быть весьма значительным, что требует от
конструктора принятия специальных мер для уменьшения инерции
подвеса.
б) Обозначения. Для того чтобы проанализировать уход,
вызываемый указанными причинами, необходимо разработать под»
ходящую систему обозначений. На рис. 136 приведены пара¬
метры типичного гироскопа. При проведении анализа удобно
использовать инерциальное пространство для отсчета угловых ско¬
ростей и векторных производных по времени, а также привязать си¬
328
ГЛАВА 10
стемы координат к объекту, внешней рамке, внутренней рамке и
ротору гироскопа, соответственно обозначенным, как показано на
рисунке цифрами 1, 2, 3 и 4. Нет необходимости привязывать осо¬
бую систему координат к инерциальному пространству, которое
можно обозначить цифрой 0.
Системы координат выбираются таким образом, что 6, <р и ф
в точности соответствуют углам Эйлера из области классической
механики. Обычные допуски при механической обработке позво¬
ляют принять (исключая рассмотрение небаланса), что все три
оси подшипников пересекаются в одной точке, называемой цен¬
тром подвеса, которая является общим началом для всех четырех
систем координат. Единичные векторы используются, как показано
на рис. 136, для определения направлений осей х, у и г в каждой
системе координат. Остальные обозначения лучше всего объяснить
с помощью типичных примеров.
ю2— угловая скорость внешней рамки 2 относительно
инерциального пространства.
ш2л. = а>2 - — составляющая <о2 по направлению 1 .
^.=4(М=4(”=Л)
Т2—суммарный вращающий момент, приложенный
к внешней рамке 2.
Т]2—вращающий момент, передаваемый от объекта 1
на внешнюю рамку 2.
^12гг= Т]2 • 1гг
а — отношение ускорения центра подвеса относительно
инерциального пространства к ускорению силы
тяжести (безразмерная величина)1.
ЛУз = а,,У>-
— момент инерции внутренней рамки 3 относительно
оси 1,.
Мы принимаем, что основные оси инерции совпадают с си¬
стемами координат для внешней рамки 2, внутренней рамки 3 и
ротора 4.
Определить, с какими деталями связано появление небаланса,
практически невозможно, так как, например, любая ошибка при
изготовлении детали, вследствие которой пересечение осей внут¬
ренней и внешней рамок будет недостаточно точным, приведет
к небалансу относительно оси внешней рамки, хотя бы сама внеш¬
няя рамка и была идеально уравновешена. Наоборот, следует
1 Насто называется перегрузкой.— Прим. ред.
ПРИБОРНАЯ ГИРОСКОПИЯ
329
иметь в виду, что статическое равновесие системы ротор гироско¬
па— внутренняя рамка относительно оси внутренней рамки 1Х —•
может быть получено путем установки противовесов к внутренней
рамке по осям и 1г, так же как статическое равновесие си¬
стемы ротор гироскопа — внутренняя рамка — внешняя рамка от¬
носительно оси внешней рамки 1г2 достигается установкой проти¬
вовесов к внешней рамке по осям 1Ха и 1уг. Таким образом, неба¬
лансы определяются компенсирующими моментами противовесов,
устанавливаемых на внутренней и внешней рамках вдоль векторов
1„, Ь, 1Г и Небалансы обозначаются соответственно
Уз ^2 Уг
О, 1/Хг и и имеют размерность момента.
в) Результаты анализа. Выводы уравнений для ухода,
вызываемого трением, небалансом и ускорениями на подвесе, при¬
ведены в приложении к данной главе. Результаты анализа, пред¬
ставленные .в данном разделе, выражены через составляющие
движения объекта, на котором установлен гироскоп, в той системе
координат, которая позволяет придать указанным результатам наи¬
более простую форму. В упомянутом приложении приводятся
также и эти результаты, выраженные через координаты объекта.
Трение. Приведенное ниже уравнение позволяет определить
скорость ухода, вызываемого вращающими моментами, действую¬
щими вдоль каждой из трех осей подшипников:
ЛЛ2.1 г. = Тсозес 0+ Т23хг 1 Хз — Т3^ с!ё 01^. (21)
Отсюда следует, что «жесткость» гироскопа, или отношение
вращающего момента к скорости вызываемого им ухода, прямо
пропорциональна моменту количества движения гироскопа или
его кинетическому моменту. Это положение справедливо, конечно,
для ухода, вызываемого любыми причинами. Следует заметить,
что согласно этому уравнению по мере приближения в к 0 или
180° скорость ухода приближается к бесконечности. Эта аномалия
объясняется тем допущением, которое мы сделали в уравнении
(12), а именно — единственным существенным моментом количе^
ства движения системы является кинетический момент гироскопа.
Предыдущее уравнение, однако, полностью сохраняет силу для
любых приемлемых скоростей ухода и показывает лишь, что при
приближении 0 к 0° гироскопический прибор становится абсо¬
лютно бесполезен в качестве инструмента для ориентации в про¬
странстве. Заметим также, что при 0 = 90° вращающий момент
на оси ротора (трение в подшипниках ротора или вращающий
1 —кинетический момент гироскопа, — угловая скорость прецес¬
сии—на основании уравнения (3).
В правой части уравнения даны значения моментов, вызывающих прецес¬
сию. — Прим. ред.
330
ГЛАВА 10
момент электродвигателя гироскопа) не оказывает влияния на
уход. Далее нужно отметить, что преднамеренное введение управ¬
ляемых вращающих моментов и Т2зЛ1 может быть исполь¬
зовано как способ изменения ориентации гироскопа (коррекция
положения), причем вызываемые этим движения будут направ¬
лены под прямым углом. Это значит, что если объект, на котором
установлен гироскоп, не вращается, а единственными прилагае¬
мыми вращающими моментами являются Т12г и /^.то
Лгш42/0= — созес 0 (22)
и
"Ч? = т^Хг созес 0. (23)
В общем, величина вращающих моментов, представленных
в уравнении (21), может быть определена лишь с помощью изме¬
рений, проведенных на конкретном приборе и связанных с усло¬
виями окружающей обстановки. Однако что касается влияния
в этом отношении кулоновского и вязкостного трения, то необхо¬
димо по крайней мере знать соответственно знак и величину 0, <р
и ф. Это довольно просто установить для ф, где скорость ротора
ш4г всегда является преобладающей величиной; значительно слож-
мее решается вопрос в отношении 6 и <р, являющихся функциями
как суммарного ухода, так и движения объекта. Уравнения для
этих величин будут иметь вид
Г. Л.> (24)
И
<Р = — <% — 0ш1у! + созес 6 (12, • 1А), (25)
где 1г—суммарный уход (скорость прецессии гироскопа), а ф
«>! и ш1гг — составляющие угловой скорости объекта. Обычно
и являются доминирующими величинами, поэтому
в основном только они одни с достаточной степенью точности опре¬
деляют 6 и <р. Время от времени, однако, необходимо проводить
повторение расчетов, включая и определение 0 и ср, на основании
самых надежных имеющихся в распоряжении данных, а также и
уточнение этого определения с помощью уравнения (21).
Небаланс. Скорость ухода, вызываемого небалансами при
наличии линейного ускорения объекта, определяется следующим
уравнением
/4 «>4 1 = созес 0 [— II а + II а ] 1 +
+ в — С/,,11,.4- [-(/,«,. + 1„. (26)
Отсюда вновь следует, что скорость ухода становится очень боль¬
шой, когда 0 приближается к 0 или 180°.
ПРИБОРНАЯ ГИРОСКОПИЯ
331
Уход, вызываемый ускорениями подвеса. В
основу приведенного ниже уравнения для ухода, вызываемого
ускорениями подвеса, положены вращающие моменты, которые
необходимо приложить к рамкам подвеса, чтобы они двигались
в соответствии с угловыми перемещениями объекта при сохране¬
нии неподвижного направления оси ротора гироскопа в простран¬
стве. В необычных условиях, когда уход (или скорость прецессии)
настолько велик, что вносит существенные изменения в движение
рамок, результаты этого уравнения можно рассматривать как
первое приближение, подобно тому как это было описано для
случая ухода гироскопа под действием трения.
Ч“<».=созес ’ (Ч. с,в ’(Ч + Ч) + “'Л, К7’.+Д,—А,) +
+ с18’в(/ь + /„)1|1„. (27)
Из принятого ранее допущения, что ось ротора гироскопа абсо¬
лютно неподвижна в пространстве, вытекает, что внутренняя
рамка 3 может вращаться только вокруг оси ротора гироскопа, а
поэтому /Зг есть единственный момент инерции для внутренней
рамки 3, который нужно учитывать. Точно так же все вращаю¬
щие моменты, необходимые для придания ускорения внешней
рамке 2, могут быть переданы через объект /, за исключением тех,
которые действуют по оси следовательно, при появлении
ускорения из моментов инерции внешней рамки нужно учитывать
только /2 Остальные выражения не столь очевидны, и их вывод
приведен в соответствующем разделе приложения. В общем, они
связаны с динамическим небалансом рамок при вращении вокруг
второстепенных осей или с ускорениями подвеса при установив¬
шемся вращательном движении объекта!. В приложении приво¬
дится также форма уравнения, в котором используются состав¬
ляющие угловой скорости объекта.
Здесь, так же как и' в других выражениях для ухода, с при¬
ближением в к 0 или 180° скорость ухода становится очень боль¬
шой, причем в данном случае это нарастание скорости происхо¬
дит даже более быстро.
4. Ограничительные упоры и опрокидывание. Если в обычный
гироскопический прибор с тремя степенями свободы ввести какое-
либо устройство (например, жесткие упоры), которое ограничи¬
вает угловое движение и уменьшает количество степеней свободы
вращения с трех до двух, то это приведет к резким изменениям в
поведении прибора. В общем, если упоры и остальная часть гиро¬
скопа достаточно жестки, прибор динамически ведет себя так, как
если бы ротор не вращался. Например, если ось внешней рамки
гироскопа застопорена, то при приложении вращающего момента
к внутренней рамке по оси (рис. 136) гироскопу будет придано
332
ГЛАВА 10
ускорение вокруг этой оси, как если бы здесь не участвовали ни¬
какие гироскопические силы, то есть
■0 = 7^Й-. (28)
На первый взгляд может показаться, что при помощи весьма
незначительных моментов можно быстро достичь очень больших
скоростей прецессии. Этот вывод, однако, совершенно ошибочен,
хотя моменты, вызывающие прецессию с большой скоростью, возни¬
кают и действуют благодаря наличию устройств, ликвидирующих
одну степень свободы системы. При определенных условиях, осо¬
бенно на практике, когда упоры заставляют гироскоп двигаться
под влиянием перемещений объекта, на котором он установлен,
развиваемые при этом силы могут быть настолько большими, что
гироскоп будет разрушен.
5. Характеристики гироскопа.
а. Входные и выходные величины. В соответствии
с уже установившимся способом описания как механических, так
и электрических устройств гироскопические приборы также харак¬
теризуются входными и выходными величинами. Так как свобод¬
ный гироскоп представляет собой в основном устройство для
определения направления, значения его входных и выходных вели¬
чин выражаются в углах. Входная величина представляет собой
угловое смещение (относительно инерциального пространства) не¬
которой линии, неподвижной относительно кожуха прибора, за
время, прошедшее от начала отсчета (то есть с момента расстопо-
рения гироскопа) до момента снятия показаний; это угловое сме¬
щение может быть выражено, например, при помощи двух углов.
Выходной величиной является пара угловых показаний, снятых
с рамок подвеса или какого-либо иного индикаторного устрой¬
ства, которым может быть снабжен гироскоп. Если На гироскопе
установлены электрические датчики, то выходные величины выра¬
жаются через напряжение, смещение фаз и тому подобное. Если
гироскоп имеет датчики моментов, которые в ответ на электриче¬
ские входные сигналы создают прецессию, выходные величины
будут выражены при помощи угловой скорости.
Важнейшим параметром, определяющим качество конкретной
конструкции какого-либо существующего или проектируемого ги¬
роскопа, является его характеристика по скорости ухода. Обычно
этот параметр служит определяющим фактором при решении во¬
проса о пригодности или непригодности прибора для конкретной
области применения.
б. Гироскоп с тремя степенями свободы и
упругими ограничителями. Рассмотрим теперь гироско¬
пический прибор, представленный на рис. 137. Это — свободный
гироскоп, к которому добавлены упругие ограничители (в вил?
ПРИБОРНАЯ ГИРОСКОПИЯ
333
пружин), установленные между внешней рамкой и кожухом при¬
бора и между внутренней и внешней рамками. Представим себе,
что такой прибор помещен в управляемый реактивный снаряд,
причем его внешняя ось подвеса расположена вдоль оси крена
снаряда. Для нас представляет интерес проследить за поведением
прибора во время крена.
Пусть реактивный снаряд летит по своей траектории и повора¬
чивается в плоскости крена с постоянной угловой скоростью в
направлении, указанном на рисунке (то есть по направлению ча¬
совой стрелки, если смотреть сзади). В момент, зафиксированный
Рис. 137. Гироскоп с тремя степенями свободы и пру¬
жинными ограничителями:
1 — входная ось, 2 —внутренний ограничитель, 3 — внешний
ограничитель, 4 — шкала угловой скорости, 5 — шкала углового
ускорения
на рисунке, конец единичного вектора угловой скорости вращения
ротора опускается вниз, следовательно, на ротор гироскопа дол¬
жен действовать вращающий момент, вектор которого направлен
вниз. Такой вращающий момент получается вследствие действия
силы, создаваемой внутренней пружиной, причем указатель будет
находиться где-то на ближней (положительной) части шкалы
«угловой скорости». Чем больше угловая скорость крена, тем
больше должен быть вращающий момент, вызывающий прецес¬
сию, которая позволяет гироскопу следовать за креном реактив¬
ного снаряда, и тем дальше указатель на внутренней рамке под¬
веса будет отклоняться в направлении ближнего края шкалы.
334
ГЛАВА 10
Если угловая скорость снаряда по крену остается постоянной,
то напряжение создается лишь на внутреннем ограничителе, а по¬
казания на шкале у внешнего ограничителя равны нулю. Но если
угловая скорость крена возрастает, будут возрастать и показания
по шкале внутреннего ограничителя, так как внутренняя рамка
будет вращаться относительно внешней. Это будет уже другое
прецессионное движение, которое отводит конец вектора кинетиче¬
ского момента направо и от наблюдателя. Это, конечно, потребует
вращающего момента идентичного направления, вызываемого си¬
лой, направленной влево и от наблюдателя и создаваемой внеш¬
ним ограничителем. Таким образом, мы видим, что во время воз¬
растания скорости положительного крена показания у внешнего
ограничителя будут сниматься с правой (положительной) части
шкалы. Смещение внутренней рамки относительно внешней ука¬
зывает мгновенную угловую скорость объекта, а смещение внеш¬
ней рамки относительно кожуха прибора указывает угловое
ускорение объекта.
При использовании такого гироскопа в самолетном автопилоте
или в системе наведения и управления реактивного снаряда мо¬
гут применяться и другие типы датчиков — пневматические, элек¬
трические, магнитные и т. п.; однако принцип работы прибора
остается прежний.
Пусть вращающий момент, создаваемый внутренним ограни¬
чителем, будет —к§, где в — угловое смещение внутренней рамки
относительно ее нормального положения, выраженное в радиа¬
нах, а к — коэффициент жесткости пружины (момент, вызываю¬
щий смещение пружины на угол в 1 радиан). Тогда, на основании
закона прецессии гироскопа, будет:
— кЬ = Т = 1<ы»р, (29)
•,=-4’- (3°)
где шр — скорость прецессии гироскопа вокруг оси крена относи¬
тельно инерциального пространства, равная, по существу, ско¬
рости вращения реактивного снаряда в плоскости крена (скорости
крена). Это — уравнение градуировки для угловой скорости. Да¬
лее, если пренебречь рысканьем реактивного снаряда относительно
инерциального пространства, то скоростью изменения в изме¬
ряется скорость прецессионного движения вокруг оси рысканья
ш- это движение вызывается вращающим моментом, который
создается внешним ограничителем. Дифференцируя уравнение
(30), мы получаем
= = (31>
ПРИБОРНАЯ ГИРОСКОПИЯ
335
Рис. 138. Гиротахометр с двумя
степенями свободы и упругим
пружинным ограничителем:
1 ~ входная ось, 2 — ось вращения ро¬
тора, 3 — шкала угловой скорости, 4 —
выходная ось
Обозначив теперь угловое смещение внешней рамки через <р и при¬
менив закон гироскопа, из уравнения (31) получим
-Л'? = Г = (32)
Таким образом,
Это — уравнение градуировки для углового ускорения.
При выводе уравнений (30) и (33) мы рассматривали только
основные величины, пренебрегая различными паразитными явле¬
ниями, которые следует учитывать при подробном анализе, а
именно: нарушение ортогональности плоскостей рамок (в этом
случае нужно учитывать косинус угла, на который рамки смести¬
лись от взаимно перпендикулярного
друг другу положения), инерция
рамок и момент инерции ротора от¬
носительно оси, перпендикулярной
его оси вращения.
Имея на выходе прибора <вели-
чину, пропорциональную скорости
крена, конструктор системы управ¬
ления может разработать специаль¬
ную подсистему системы управле¬
ния, которая может удерживать
скорость крена в пределах заданно¬
го значения. Подсистема управле¬
ния креном может быть сделана бо¬
лее эффективной и быстродействую¬
щей, если в ней используется так¬
же и выходная величина углового
ускорения, хотя это и делает всю
систему значительно более слож¬
ной.
в, Скоростной гироскоп
(г и р о т а х о м етр). Основная
функция гироскопа — определение скорости кре-
н а. Если нас удовлетворяет получение на выходе прибора лишь
угловой скорости, тогда нет необходимости внешний органичи-
тель, показанный на рис. 137, делать упругим. Он может быть
жестким, и, следовательно, вся внешняя рамка гироскопа может
быть выполнена заодно с кожухом прибора. Полученный таким
образом более простой прибор, представленный на рис. 138,
и есть скоростной гироскоп или гиротахометр, который находит
весьма широкое применение. Он имеет только две степени свободы
336
ГЛАВА 10
и один пружинный ограничитель. Предшествовавшие рассужде¬
ния показывают, что отклонения этого ограничителя будут пропор¬
циональны мгновенной угловой скорости относительно входной
оси, показанной на рисунке.
При рассмотрении гиротахометра с помощью схемы на рис. 137
гироскопический элемент был принят изолированным, чтобы вы¬
явить все действующие на него вращающие моменты. Мы видели,
что вращательное движение с определенной скоростью вокруг вход¬
ной оси вызывает вращающий момент относительно этой же оси,
который передается через внешний ограничитель на вращающийся
ротор. Этим вращающим моментом вызывается прецессия относи¬
тельно выходной оси, причем внутренний ограничитель противо¬
действует этой прецессии; вращающий момент, создаваемый внут¬
ренним ограничителем, заставляет гироскоп прецессировать отно¬
сительно входной оси и следовать за движением кожуха. Из рас¬
смотрения особенностей гиротахометров можно сделать следую¬
щий краткий вывод: вращение относительно входной оси сопро¬
вождается возникновением вращающего момента, который вызы¬
вает прецессию относительно выходной оси. При этом прини¬
мается, что можно пренебречь вращающим моментом относи¬
тельно входной оси, вызываемым взаимодействием кожуха и
рамки (рис. 138), а также рамки и гироскопического элемента, во
время любого изменения входной скорости. Этот вращающий мо¬
мент, создаваемый внешним ограничителем (рис. 137), скрыт в
конструкции реального гиротахометра (рис. 138) и передается от
кожуха на рамку в виде радиальной нагрузки подшипников вы¬
ходной оси, а отсюда и на гироскопический элемент через его под¬
шипники. Так как этот вращающий момент не входит в уравнение
градуировки (30), то им можно пренебречь, за исключением слу¬
чаев, когда необходимо провести детальную разработку кон¬
струкции.
Присущие гироскопу ошибки и паразитные явления. В первом
приближении гиротахометр дает истинное отображение мгновен¬
ной скорости углового движения относительно входной оси.
Однако имеются определенные паразитные явления, вызываемые
тем, что во время работы гироскопа рамка не располагается точно
под прямым углом к входной оси. По этой причине эффективный
кинетический момент, определяющий собой угловую скорость пре¬
цессии относительно выходной оси, не соответствует в точности
номинальному кинетическому моменту ротора, а является произ¬
ведением последнего на косинус угла отклонения.
Вследствие того что во время работы гироскопа ось вращения
ротора не перпендикулярна входной оси, существует также не¬
большая чувствительность гиротахометра к скорости вращения
относительно оси его собственного вращения, перпендикулярной
как входной, так и выходной осям. Ось вращения ротора слегка
ПРИБОРНАЯ ГИРОСКОПИЯ
337
отклонена от этой оси. Указанная чувствительность количественно
выражается через синус угла отклонения и называется попереч¬
ной чувствительностью. В связи с тем что гироскоп с подвесом, со¬
стоящим из рамки с подшипниками, обладает определенным мо¬
ментом инерции относительно выходной оси, гиротахометр имеет
также паразитную чувствительность к угловому ускорению отно¬
сительно выходной оси. Эта чувствительность количественно про¬
порциональна величине момента инерции подвеса.
Демпфирование. Упру¬
гость ограничителя и мо¬
мент инерции гироскопа с
подвесом приводят к тому,
что такая система представ¬
ляет собой как бы гармони¬
ческий вибратор — источник
крутильных колебаний. При
отсутствии демпфирования
такой вибратор под дейст¬
вием какого-либо возмущаю¬
щего импульса будет совер¬
шать простое гармоническое
движение, и эти колебания
будут возбуждаться любым
резким изменением угловой
скорости объекта относи¬
тельно входной оси. Для
того чтобы гасить движения
вокруг выходной оси, гиро¬
скоп всегда снабжают демп¬
фирующим устройством, ча¬
сто в виде воздушного амор¬
тизатора, который обычно
разрабатывается для демп¬
фирования приблизительно на границе устойчивости. Если отсут¬
ствует точное статическое равновесие, такое же колебание воз¬
буждается и поперечной вибрацией кожуха прибора, который вос¬
принимает колебания реактивного снаряда во время полета.
Определение скорости тангажа и рыскания. До сих пор мы
рассматривали применение гиротахометра с точки зрения опре¬
деления скорости крена. Очевидно, что это же самое устройство
можно использовать для измерения мгновенной скорости враще¬
ния реактивного снаряда в плоскостях тангажа и рыскания.
Основные особенности конструкции. На рис. 139 схематически
показана конструкция гиротахометра, в какой-то мере прибли¬
жающаяся к реальной. Функции подшипников рамки и упругих
ограничителей выполняют торсионные стержни, которые не только
Рис. 139. Гиротахометр с торсионными
стержнями, выполняющими функции осей
подвеса и упругих ограничителей:
1 — ось вращения ротора, 2 —входная ось, 3 —
рамка, 4 —датчик, 5 — демпфер, 6 —выходная
ось, 7 — торсионный стержень, 8 — балансировоч¬
ные винты
22—405
338
ГЛАВА 10
Рис. 140. Сверхминиатюрный гиротахометр. Чувствительный элемент (гироскоп, помещенный в герметический кор¬
пус, представляющий собой рамку карданного подвеса) «плавает» в вязкой жидкости, которая воспринимает
большую часть его веса и обеспечивает демпфирование. Кожух имеет приблизительно 25 мм в диаметре и 51 мм
в длину. (Фирма «Юнайтед Стейтс тайм корпорейшн».)
1. Крышка датчика (торцевая), 2. Стопор (2), 3. Токоподводящие проводники (6), 4. Зажим заземления, 5. Прижимное кольцо,
6. Заклепки (4), 7. Прижимные пластины, 8. Прижимная втулка, 9. Обмотка датчика (герметизированная). 10. Статор дат¬
чика, И. Ротор датчика, 12. Чувствительный элемент (верхняя и нижняя части), 13. Торсионы (2), 14. Гайки чувствительного эле¬
мента (2), 15. Вал гиромотора, 16. Фиксатор подшипника (2), 17. Подшипник (2), 18. Крышка гиромотора (2), 19. Ротор н ги¬
стерезисное кольцо, 20. Статор гиромотора, 21. Зажим чувствительного элемента. 22. Температурный компенсатор, 23. Балансировоч¬
ные винты (от 1 до 6), 24. Фигурная шайба (2), 25. Компенсатор давления, 26. Обойма фигурных шайб, 27. Втулка торсиона, 28. Ре¬
гулятор предела скорости, 29. Стопор регулятора, 30. Кольцевая прокладка, 31. Крышка (торцевая), 32. Пробка (2), 33. Фирменная
табличка, 34. Кожух
ПРИБОРНАЯ ГИРОСКОПИЯ
339
используются как опорные подшипники, но также обеспечивают
требуемое ограничение углового движения и создают необходимое
упругое противодействие. Датчик показан схематически в виде
потенциометра. В действительности же применять здесь потенцио¬
метр невыгодно в связи с малым диапазоном угловых перемеще¬
ний. Обычно применяются различные электромагнитные устрой¬
ства, из которых типичным является трансформатор с Ш-образ-
ным сердечником и переменным магнитным сопротивлением.
Реальная или разрабатываемая система с рамкой на подшип¬
никах должна быть возможно более точно статически уравнове¬
шена относительно выходной оси, так как в противном случае со¬
ставляющие линейного ускорения вдоль входной оси или вдоль
оси вращения вызовут ложные показания прибора. Такие ускоре¬
ния могут возникнуть не только вследствие ускорения всего реак¬
тивного снаряда в целом, но также из-за местных вибраций из¬
гиба, передаваемых на прибор от снаряда.
На рис. 140 показан в разобранном виде сверхминиатюрный
гиротахометр, в котором в качестве опор рамки применены тор¬
сионные стержни.
Основными характеристиками гироскопа являются те его ха¬
рактеристики входных и выходных параметров, которые конструк¬
тор системы предписывает конструктору гироскопа или же полу¬
чает от него, и в соответствии с которыми разрабатывает всю си¬
стему.
Ниже приводятся основные параметры, характеризующие ги¬
роскоп относительно всей системы.
Чувствительность — отношение, при установившемся режиме,
выходной величины (вольты, миллиамперы, сдвиг фазы и т. д.)
к входной величине угловой скорости (радианы в секунду или гра¬
дусы в секунду) '.
Диапазон измерений — диапазон угловой скорости на входе
(в обе стороны от нуля), для которого прибор дает выходные ве¬
личины с заданной точностью.
Недемпфированная собственная частота — частота основного
резонансного колебания гироскопа при полном отсутствии демп¬
фирования или при таком демпфировании, которым можно пре¬
небречь.
Коэффициент демпфирования — отношение действительного
демпфирования к критическому затуханию основного резонанс¬
ного колебания гироскопа.
* Хотя указанное отклонение, когда оно связано с гироскопами и другими
элементами, часто .называется «чувствительностью», все больше и больше спе¬
циалистов склоняется к тому, что для всех таких отношений входных и выход¬
ных характеристик наиболее подходящим термином будет «отзывчивость».
22*
340
ГЛАВА 10
Перечисленные выше параметры можно в общем назвать но¬
минальными характеристиками. Но имеется множество и других
параметров, которые определяют отклонение реальной конструк¬
ции от идеального гироскопа; некоторые из них приводятся
ниже.
Разрешающая способность — минимальное изменение угловой
скорости на входе, которое можно обнаружить в виде значимого
изменения выходного сигнала гироскопа, за исключением эффекта
шума. Типичным фактором, определяющим эту величину,
является шаг обмотки потенциометра (расстояние между вит¬
ками).
Шум — нежелательные составляющие выходного сигнала ги¬
роскопа, которые не отражают нормальные входные величины или
явления, присущие гироскопу, как, например, помехи, связанные
с системой датчиков, собственная вибрация, создаваемая динами¬
ческим небалансом ротора и так далее. Соответствующая ве¬
личина минимального различимого входного сигнала называется
порогом шума.
Статический небаланс, поперечная чувствительность, чувстви¬
тельность к ускорению—паразитные явления, присущие гиро¬
скопу и уже описанные выше.
Нижеприведенные величины характеризуют в общем виде от¬
клонения от точной (идеальной) пропорциональности выходного
сигнала угловой скорости на входе. Влияние этих величин иногда
объединяют под общим термином «линейность» (подразумевая от¬
клонение от линейности).
Мертвая зона — наличие таких участков на входе, для кото¬
рых не происходит изменения выходной величины в связи со ста¬
тическим трением, люфтом и другими подобными факторами.
Гистерезис — результат такого явления, когда величина вы¬
ходного сигнала гироскопа, полученного при определенной угло¬
вой скорости на входе, зависит от предшествующих входных ве¬
личин.
Сдвиг нуля — отклонение градуировочной кривой от нуля на
выходе при нулевой скорости на входе.
Линейность — отклонение градуировочной кривой от оптималь¬
ной апроксимированной прямой *.
г. Интегрирующий гироскоп. Дальнейшее развитие
гироскопа с двумя степенями свободы привело к созданию в при¬
борной лаборатории Массачузетского технологического института
интегрирующего гироскопа. Отличительной чертой этого прибора
является отсутствие упругого ограничителя рамки в виде пружины
и то, что основную роль в нем играет демпфирующее устройство.
1 Эту величину правильнее было бы назвать нелинейностью.
ПРИБОРНАЯ ГИРОСКОПИЯ
341
Создаваемое им вязкое ограничение стало единственным факто¬
ром, ограничивающим вращение рамки вокруг своей оси. Рамка,
представляющая собой герметичный цилиндр, симметричный от¬
носительно оси подвеса, помещена в расположенный соосно ци¬
линдрический внешний кожух. Пространство между двумя цилин¬
драми заполнено специальной жидкостью, которая выполняет две
Рис. 141. Интегрирующий гироскоп. Вхбдная ось расположена по
диаметру кожуха, т. е. перпендикулярно оси ротора. Размеры та¬
ких гироскопов обычно составляют приблизительно от 76 мм в диа¬
метре на 152 мм в длину при весе 2,085 кг до 45 мм в диаметре на
58 мм в длину при весе 0,225 кг. (Фирма «Миннеаполис — Хо-
ниуэлл)»
важные функции: 1) вследствие своей вязкости создает характер¬
ное для прибора динамическое ограничение рамки; 2) разгружает
основную опору рамки (в которой заключен ротор с соответствую¬
щим приводом) от действия силы тяжести и сил инерции, причем
это особенно относится к вибрационным и ударным нагрузкам.
Подшипники на камнях центрируют рамку в кожухе и воспри¬
нимают остаточные нагрузки. На одном конце рамки установлен
сельсинный (или магнесинный) датчик сигналов, а на другом —
генератор (датчик) вращающего момента. Расположение входной
и выходной осей и оси вращения такое же, как показано на
рис. 138 для обычного гиротахометра; ось рамки снова является
входной осью. Вид интегрирующего гироскопа в разрезе представ¬
лен на рис. 141.
342
ГЛАВА 10
Вращение всего прибора вокруг входной оси относительно
инерциального пространства вызывает прецессионное движение
относительно выходной оси, которое встречает лишь сопротивле¬
ние вязкой жидкости. Основы поведения интегрирующего двухсте¬
пенного гироскопа можно понять, рассматривая его как еще один
частный случай гироскопа с тремя степенями свободы (см.
рис. 137), но с заменой упругого ограничителя внутренней рамки
Рис. 142. Схема интегрирующего гироскопа:
1 — выходная ось, 2 —исходное направление, неподвижное относи*
тельно инерциального пространства, 3 — направление, неподвиж*
ное относительно кожуха, 4 — входная ось, 5 — ось вращения
ротора
на вязкостный, как показано схематически на рис. 142. В реаль¬
ном приборе внешняя рамка отсутствует, но на рисунке она пока¬
зана в виде очень жесткого упругого ограничителя, который от¬
ражает установку оси рамки в приборе. Действительно, упругость
прибора включает также упругость конструкции и подшипников
рамки.
Пусть <р' будет угол, на который весь прибор (или объект, на
котором он установлен) поворачивается вокруг входной оси отно¬
сительно инерциального пространства за время I. Приняв обо¬
значения, подобные тем, которые были использованы на рис. 137,
ПРИБОРНАЯ ГИРОСКОПИЯ
343
выразим отклонение внутренней рамки от нормали через в и от¬
клонение (гипотетическое) внешней рамки через <р. При отклоне¬
нии ф' в положительную сторону, ф приобретает отрицательное
значение, так как гироскоп стремится сохранить неподвижное по¬
ложение в пространстве. Внешний ограничитель будет создавать
вращающий момент
Г = А'ф, (34)
который будет заставлять гироскоп прецессировать относительно
выходной оси со скоростью
0 = --^ = -4^> (35)
/(О /О) ' 7
где к'—коэффициент жесткости внешнего ограничителя. Этому
движению противодействует вращающий момент, создаваемый
вязкостью
Т = — сО, (36)
где с — коэффициент «вязкостного демпфирования». Вращающий
момент Т вызывает прецессию вокруг входной оси относительно
инерциального пространства со скоростью
ф'-ф = --^ = ^. (37)
Дифференцируя уравнение (35) и используя полученный ре¬
зультат для того, чтобы исключить ф из уравнения (37), получим
-■^■0 + 6 = 4?'. (38)
Первый член этого уравнения должен быть весьма малым, если,
как мы предполагаем, конструкции рамки и подшипников доста¬
точно жестки (т. е. при очень большом к'), и, следовательно, мы
можем его опустить. Интегрируя получившееся в результате этого
уравнение, получим приближенное выражение
9-6о = 4-(<?'-<Ро). (39)
где исходными величинами являются 0О и фц. Уравнение (39) по¬
казывает основное свойство интегрирующего гироскопа: изменение
угла отклонения рамки (угла на выходе, воспринимаемого дат¬
чиком) прямо пропорционально углу, на который повернулся ко¬
жух прибора вокруг входной оси относительно инерциального про¬
странства. Таким образом, интегрирующий гироскоп является
эффективным двухстепенным гироскопом положения. Его кон¬
струкция предусматривает диапазон измерений направления в пре-
344
ГЛАВА 10
делах ±5°. Это не является существенным ограничением в обыч¬
ных областях применения, как, например, в стабилизированных
платформах. Номинальное значение коэффициента пропорцио¬
нальности /ш/с, как правило, приводят к единице, но при желании
можно добиться его большего или меньшего значения.
Предыдущие рассуждения были весьма общими — мы не
только пренебрегали угловым ускорением, которое было просто
опущено, но мы совершенно не учитывали момент инерции рамки
и ряд других величин.
Подаваемые на датчик вращающего момента сигналы также
создают вращательное движение рамки, которое преодолевает
вязкостное сопротивление с определенной скоростью. Этим путем
вводится коррекция, т. е. выходные сигналы изменяются так, буд¬
то направление входной оси повернулось относительно инерциаль¬
ного пространства с мгновенной скоростью, пропорциональной
приложенному вращающему моменту. Это свойство интегрирую¬
щего гироскопа позволяет обеспечить гибкое управление и взаимо¬
действие платформы, стабилизированной в пространстве с помо¬
щью таких гироскопов, с другими приборами и оборудованием.
Можно осуществить такое соединение интегрирующего гиро¬
скопа, что он будет действовать как простой гиротахометр. Вы¬
ходной сигнал датчика усиливается и подается на генератор (дат¬
чик) вращающего момента, чтобы получить пропорциональный
углу вращающий момент, который в обычных приборах создается
пружиной. При этом образуется «электрическая пружина», ко¬
торая заменяет собой механическую. Достоинством «электриче¬
ской пружины» является то, что «коэффициент жесткости» ее
может регулироваться электрическим путем.
д. Обзор функций гироскопа. Теперь можно несколько
более определенно описать различные функции, которые может
выполнять гироскоп.
Мы видели, что свободный гироскоп с тремя степенями сво¬
боды сохраняет направление оси вращения неподвижным относи¬
тельно инерциального пространства, если на гироскопический
элемент не действуют никакие вращающие моменты. Такой гиро¬
скоп можно также использовать для измерения двух составляю¬
щих вектора угловой скорости вращения какого-либо заданного
направления. Осуществляется это следующим образом: ось вра¬
щения ротора гироскопа привязывается к этому направлению и
следует за ним с помощью следящей системы, которая передает на
гироскоп вращающие моменты, создающие необходимую прецес¬
сию. Эти моменты пропорциональны составляющим угловой ско¬
рости этой линии, причем координатные оси, относительно кото¬
рых берутся эти составляющие, неподвижны относительно кожуха
прибора.
Мы видели также, что гироскоп с тремя степенями свободы и
ПРИБОРНАЯ ГИРОСКОПИЯ
345
упругими пружинными ограничителями на обеих рамках измеряет
угловую скорость и угловое ускорение относительно оси внешней
рамки, другими словами, составляющие угловой скорости и угло¬
вого ускорения вдоль этой оси. Заметим, что во всех этих случаях
число составляющих величин, которые мы можем измерять, со¬
ответствует числу степеней свободы без одной, т. е. — две вели¬
чины.
Соответственно, гиротахометр с двумя степенями свободы из¬
меряет лишь одну составляющую величину — составляющую угло¬
вой скорости объекта относительно входной оси, а интегрирую¬
щий гироскоп, который также обладает двумя степенями сво¬
боды, может измерять или угловое смещение относительно одной
оси, или соответствующую составляющую угловой скорости.
Полный комплекс трех ортогональных пространственных ко¬
ординат может быть стабилизирован двумя способами: 1) с по¬
мощью пары гироскопов с тремя степенями свободы, расположен¬
ных таким образом, чтобы их оси были перпендикулярны друг
другу и 2) с помощью трех интегрирующих гироскопов с двумя
степенями свободы каждый.
Во всех случаях применения гироскопических приборов в
управляемых реактивных снарядах они используются как эле¬
менты замкнутых систем с обратной связью, что было уже пока¬
зано выше на ряде примеров использования гироскопов. Это выте¬
кает из того, что действие управляемых реактивных снарядов
должно быть по своему характеру автоматическим. Даже в обыч¬
ном самолете пилот, который следит за показаниями приборов и
реагирует на них, воздействуя на органы управления самолета,
рассматривается в наши дни как звено в системе с обратной свя¬
зью. Часто в единую систему входит несколько цепей регулиро¬
вания, например, местные цепи для стабилизации приборов в до¬
полнение к общей системе управления, охватывающей также аэро¬
динамику реактивного снаряда. Разработка подобных цепей ре¬
гулирования для обеспечения стабилизации требует рассмотрения
поведения гироскопа при работе в неустановившемся режиме.
Для простоты в данной главе мы ограничились рассмотрением
лишь установившегося режима работы гироскопа, при котором
основное значение имеют кинетический момент и приложенные
вращающие моменты. При изучении поведения гироскопа в .не¬
установившемся режиме следует учесть, что существенное значе¬
ние приобретают также инерция рамки, демпфирование и соб¬
ственные незатухающие колебания. Чтобы составить себе полное
представление о роли гироскопов в управляемых реактивных сна¬
рядах, необходимо глубоко уяснить конструкцию и принципы ра¬
боты систем автоматического регулирования.
е. Гироскоп с двойным вращением. В работе
Хэйса и Зэлона описано новое интересное устройство для стаби¬
346
ГЛАВА 10
лизации заданного направления. Их «гироскоп с двойным враще¬
нием» представляет собой платформу, подвешенную в кардане и
имеющую три степени свободы. На платформе под прямым углом
к ней установлены два двухстепенных гироскопа с датчиками, но
без ограничителей, причем их оси вращения располагаются
встречно-параллельно. Исходное направление вращения стабили¬
зируется непосредственно гироскопическими силами и прецесси¬
рует под воздействием градуированных сервомеханизмов, причем
следящие устройства нужны лишь для преодоления сил трения и
инерции карданного подвеса платформы. Здесь мы опять сталки¬
ваемся с тем, что можно назвать принципом кратности: два гиро¬
скопа с двумя степенями свободы, применяемые для стабилиза¬
ции направления в пространстве, определяемого двумя углами, в
принципе эквивалентны одному гироскопу с тремя степенями сво¬
боды.
ж. Гиротрон. Фирма «Сперри гироскоп компани» разрабо¬
тала устройство, которое по своей конструкции резко отличается
от любого гироскопа, однако оно может определять собственную
скорость вращения относительно входной оси, так же как и гиро¬
тахометр. Это устройство, получившее название гиротрон, в основ¬
ном представляет собой электрически возбуждаемый камертон,
ось симметрии которого является входной осью. Так как ножки
камертона совершают колебательные движения по направлению
друг к другу и обратно, то величина момента инерции камертона
колеблется вокруг своего среднего значения. Поэтому, если камер¬
тон вращается вокруг своей оси симметрии с постоянным момен¬
том количества движения, его угловая скорость будет также ко¬
лебаться. В основании камертона имеется торсион и датчик, ко¬
торый при вращении кожуха с постоянной угловой скоростью
создает пульсирующий электрический сигнал, амплитуда которого
определяется угловой скоростью. Судя по имеющимся сведениям,
можно добиться, чтобы это устройство обладало удовлетворитель¬
ной чувствительностью, сравнимой, возможно, с- чувствительно¬
стью обычных гиротахометров. Гиротрон проще, чем обычный ги¬
ротахометр, если не считать устройств, необходимых для привода
и усиления сигналов.
10—4. НЕКОТОРЫЕ ПРАКТИЧЕСКИЕ ВОПРОСЫ
КОНСТРУКЦИИ гироскопа
10—4.1. Общая часть
Каждый из многочисленных практических вопросов конструк¬
ции гироскопического прибора должен рассматриваться с точки
зрения основного принципа гироскопа, то есть зависимости скоро¬
ПРИБОРНАЯ ГИРОСКОПИЯ
347
сти прецессии от кинетического момента и вращающего момента,
и требований, зависящих от конкретных условий его применения.
Отправным пунктом всегда служит величина кинетического мо¬
мента ротора, которую обычно стараются сделать по возможности
больше. Для свободного гироскопа большой кинетический момент
уменьшает уход, создаваемый нежелательными, однако неизбеж¬
ными, возмущающими моментами, хотя и увеличивает требования
к датчикам моментов, которые должны создавать заданные ско¬
рости прецессии. Для гиротахометра большой кинетический мо¬
мент уменьшает зависимость чувствительности прибора от внеш¬
них возмущений (помех). Эти соображения ведут к созданию вы¬
соких скоростей вращения ротора и такому распределению масс,
которое позволяет получить возможно больший момент инерции
при данной массе ротора.
Современная тенденция заключается в миниатюризации и
сверхминиатюризации как в данной, так и в других областях при¬
боростроения, чему может служить примером сверхминиатюрный
гиротахометр, разработанный фирмой «Сэндерс ассошиэйтс» и вы¬
пускаемый фирмой «Юнайтед Стэйтс тайм корпорейшн». Воз¬
можно, что действительные размеры гироскопа, которые практи¬
чески наиболее пригодны для данной области применения, больше
всего зависят от достигнутого уровня конструирования и произ¬
водства приборов на том производстве, которое их разрабатывает
и выпускает.
Большинство гироскопов в наши дни делаются герметичными,
то есть пыле- и влагонепроницаемыми, и заполняются гелием или
водородом, чтобы уменьшить влияние сопротивления окружаю¬
щей среды на ротор и улучшить условия теплопередачи.
10—4.2. Привод ротора
1. Зависимость регулирования скорости от области применения
гироскопа. Свободный гироскоп при применении его в качестве
«гироскопа положения» или для стабилизации не требует точного
регулирования скорости вращения ротора, так как от этой скоро¬
сти зависят только паразитные явления, то есть уход. Что же ка¬
сается гиротахометров, то будь это гироскоп с ограничителями,
двухстепенный гироскоп или прецессионный свободный гироскоп,
его чувствительность (или «отзывчивость») прямо пропорцио¬
нальна скорости вращения ротора. Поэтому в тех областях при¬
менения, где требуется высокая точность измерения, скорость вра¬
щения ротора должна также точно регулироваться. Эти сообра¬
жения могут оказаться решающим фактором при выборе типа
привода ротора.
2. Различные виды приводов. Раньше многие типы гироскопов,
устанавливаемые как на самолетах, так и в торпедах, имели пнев-
348
ГЛАВА 10
магический привод. Это хотя и неточный, но надежный вид при¬
вода, который особенно хорошо использовать в тех случаях,когда
гироскоп может получить начальный разгон, а затем постепенно
замедлять скорость вращения в течение времени своей работы.
Современные конструкции гироскопов имеют электрический при¬
вод с использованием постоянного или переменного тока. Преиму¬
щество двигателя на постоянном токе заключается в его большом
пусковом моменте, а существенным недостатком является обяза¬
тельное наличие коллектора и щеток и связанные с этим про¬
блемы истирания щеток и срока их службы. Создаваемые коллек¬
тором электрические помехи могут воздействовать на соседние
цепи. В настоящее время широкое применение находят электро¬
двигатели на переменном токе как короткозамкнутого, так и гис¬
терезисного типа. Независимо от своего типа, приводной электро¬
двигатель гироскопа имеет обычно обращенную схему, при кото¬
рой стационарное магнитное поле создается вокруг неподвижного
вала, а якорь, представляющий одно целое с ротором, вращается
вокруг статора. Такая компоновка двигателя представляет для
производства несколько большие трудности, чем обычный электро¬
двигатель, однако она дает значительные преимущества в виде
большого момента инерции при заданном весе и габаритах.
10—4.3. Подшипники
Среди всех проблем, встречающихся при разработке и произ¬
водстве гироскопов, наибольшее значение имеет проблема под¬
шипников. Подшипники играют главную роль в гироскопе потому,
что нам удается приблизиться к идеальному гироскопическому
элементу, сохраняющему неподвижное положение относительно
инерциального пространства лишь в такой степени, в какой мы
можем ликвидировать трение в подшипниках подвеса. Конструк¬
ция гироскопа ставит перед нами две различные проблемы под¬
шипников, отражающие два вида их применения. Подшипники ра¬
мок подвеса должны нести свою нагрузку с возможно минималь¬
ным трением в условиях малой подвижности. Они работают в ре¬
жиме «пуск — остановка», и для них основное значение имеет мо¬
мент пуска. С другой стороны, требования к подшипникам ротора
в отношении трения гораздо менее жестки, но эти подшипники
должны работать при высоких скоростях с минимальным износом.
1. Шариковые подшипники. В подавляющем большинстве гиро¬
скопов как для ротора, так и для рамок применяются шариковые
подшипники. Тем не менее тот вид работы, который требуется от
подшипников в гироскопе, ни в коей мере не является типичным
для шариковых подшипников. Подшипники ротора работают при
очень высоких скоростях, а подшипники рамок — при очень низ¬
ких скоростях. Лишь недавно существенный прогресс в этой обла¬
ПРИБОРНАЯ ГИРОСКОПИЯ
349
сти был достигнут благодаря новым разработкам конструкций
подшипников, особенно для применения в гироскопах.
В связи с тем что необходимо поддерживать точное статиче¬
ское равновесие как в подшипниках ротора, так и в подшипниках,
рамок, нельзя допускать ни радиального, ни осевого зазора. Этим
требованиям отвечает применение сдвоенных пар подшипников
с наклонными корпусами и с предварительным натягом. Однако
предварительный натяг подшипников увеличивает трение, так что
необходимо соблюдать высокую точность, чтобы достичь необхо¬
димого оптимального значения обеих величин. Выбор сепаратора,
разделяющего шарики в подшипнике рамки, представляет особую
проблему, ибо шарики стремятся скопиться в одном месте и
трутся о сепаратор, создавая так называемый эффект «наматыва¬
ния». При тех, в основном статических, условиях, в которых при¬
ходится работать подшипнику рамки, точно обработанные поверх¬
ности его обойм и шариков особенно чувствительны к местным
повреждениям, вызываемым ударными и вибрационными на¬
грузками. Такие же повреждения и подшипников ротора, и под¬
шипников рамок могут иметь место при перевозках. При исполь¬
зовании подшипников там, где требуется особая точность, недо¬
статочно лишь заказать хорошие подшипники и предположить, что
каждый из них в отдельности отвечает предъявляемым требова¬
ниям. Правильнее было бы подвергнуть их, каждый в отдельности,
самому тщательному осмотру и испытанию на вращение. Поме¬
щение, где производится проверка и сборка, должно быть сво¬
бодным от пыли и иметь необходимую температуру и влаж¬
ность.
2. Смазка, уход и срок службы. Срок годности, который можно
ожидать от точных гироскопических приборов как в условиях хра¬
нения, так и в условиях их эксплуатации, полностью зависит от
подшипников. Однако никаких выводов из общепринятых сроков
службы для шариковых подшипников сделать нельзя, так как эти
сроки определяются при умеренных скоростях и более или менее
постоянных нагрузках. Существенное значение для продления
срока службы прибора имеет специальная смазка и способ его
хранения. После получения с завода подшипники чистятся, осмат¬
риваются, смазываются небольшим, точно отмеряемым количе¬
ством масла, которое наносится с помощью медицинского шприца,
и испытываются на вращение. Те из них, которые признаны при¬
емлемыми, вновь упаковываются и хранятся в специальных шка¬
фах при повышенной температуре, чтобы предотвратить конден¬
сацию на них влаги. Этот тщательный уход оправдан не только с
точки зрения получения гироскопов, отвечающих в самом начале
своей работы предъявляемым к ним требованиям, но также и с
точки зрения их дальнейшей безотказной и точной работы. Срок
годности прибора при хранении, пожалуй, не менее важен, чем
350
Г Л А В А 10
срок его эксплуатационной службы. Даже при полной герметиза¬
ции прибора длительное высыхание или вытекание смазки могут
положить предел его годности при хранении. При эксплуатации
.прибора следует особенно следить за износом подшипников ро¬
тора. Необходимо привести ротор в точное динамическое равнове¬
сие, чтобы предохранить подшипники ротора от биения, которое
в противном случае может возникнуть во время работы гиро¬
скопа.
Время, затрачиваемое управляемым реактивным снарядом для
выполнения боевой задачи, невелико, и требуемый от его гироско¬
пических приборов срок службы определяется не этим. Гироскопы
должны конструироваться и производиться с таким расчетом,
чтобы их эксплуатационный срок службы охватывал и время, от¬
водимое на заводские и полевые испытания как прибора, так и
реактивного снаряда.
10—4.4. Надежность
Самая главная проблема заключается в том, чтобы сделать
гироскопические приборы, так же как и все узлы управляемого
реактивного снаряда, в высокой степени надежными, ибо в связи
с ограниченностью функций каждого прибора сделать их взаимо¬
заменяемыми не представляется возможным. Выход из строя
одного прибора будет означать выход из строя всего реактивного
снаряда. Гироскопические приборы самолета помогают пилоту, а
гироскопические приборы реактивного снаряда сами выполняют
его функции.
Хотя надежность часто рассматривают как отдельный вопрос,
она не является таким качеством, которое можно добавить к кон¬
струкции. Надежность — это всеобъемлющая характеристика
совершенства конструкции и производственного процесса. Для
гироскопа, так же как и для любого другого электромеханического
устройства, получаемая в конечном итоге надежность есть мера
того, насколько тщательно и удовлетворительно было разрешено
великое множество конструктивных и производственных проблем.
Практически все составные элементы гироскопа разрабатываются
и изготовляются специально для использования в конкретном ги¬
роскопе, в то время как важнейшие детали электронной системы
управляемого реактивного снаряда (например, электронные лам¬
пы) разрабатываются, конструируются и производятся серийно.
В связи с чрезвычайно жесткими условиями, которые ставит пе¬
ред конструктором необходимость создания весьма легкого и ком¬
пактного прибора, разработка надежной конструкции сложного ги¬
роскопического прибора, отвечающего этим требованиям, зависит
от широкой программы испытаний в разнообразных условиях с
целью выявления слабых мест с последующим их устранением.
ПРИБОРНАЯ ГИРОСКОПИЯ
351
Приложение к гл. 10
ВЫВОД ОБЩИХ ВЫРАЖЕНИЙ ДЛЯ УХОДОВ ГИРОСКОПА
Г. А. Лассен
Приведенные здесь выводы являются дополнением к разделу 10—3 главы 10
по вопросу об уходах гироскопа. Здесь использованы рисунки и буквенные обо¬
значения из указанного раздела.
1. Трение.
Предположим, что моменты Т\2г, 7гэл-2 Т&г3- направленные вдоль осей под¬
веса, известны. Пренебрегая ускорениями карданного подвеса и небалансами
(они учитываются ниже, в параграфе 3), имеем
Т4 = Т12 = Т23 = Тз.. (1)
Также
Азх, = Т4Хг = Т4Хг, (2)
= О)
и
ТПг> = Т4г, = 7\га соз 0 + Т4уг з!п 0. (4)
Подстановка уравнения (3) в (4) и решение последнего относительно Т4 а
даст значение момента в направлении 1У1
Г= созес ОТ 12г1 — с1§ 67’м2>. (5)
Полный момент, приложенный к ротору гироскопа, следовательно, равен
т< = Тпх}Х) + (со5ес ъТпг, - с‘е вгМг5) »у, + (6)
а скорость ухода, соответствующая этому моменту, равна
к, = Аэх,1д-, + (собес 0Г12г_ — с<8 0ГМг.) 1у,- (7)
(Так как составляющая момента вдоль оси 12з никакого ухода гироскопа не
вызывает, то в уравнении (7) она отсутствует.)
2. Небаланс.
Моменты, обусловленные небалансами Пх и передаются непосредст¬
венно на платформу, за исключением суммы 7'232г составляющих этих момен¬
тов, направленных по внешней оси карданного подвеса, которая передается на
внутренний карданный подвес.
Кроме того, момент ТПу реакции платформы, перпендикулярный к внут¬
ренней и внешней осям карданного подвеса, может быть передан ей через внеш¬
ний карданный подвес на внутренний. Следовательно, ,
Т23 = + 7’1зУг1у1 = 7*23^ СОЗ 0 + 51П 0)
+ Т13У1 ( — 1г> 81П 0 + 1у> СОЗ 0)а (8)
где
т^ = -их*уАЩ*Х1. О)
Моменты 7/уз и 1}^, обусловленные небалансами, передаются прямо.на ро¬
тор гироскопа, за исключением суммы их составляющих в направлении 1уа, ко¬
торая равна нулю, так как взаимно уничтожается вместе с моментом реакции
Эти моменты равны
йх, Ф (— + ^г,ау,) ^х,. (19)
352
ГЛАВА 10
Следовательно, полный момент, приложенный к ротору гироскопа, определяется
из следующего выражения:
т< = тм = (- ЧхаУ1 + (1г, со8 9 + 1у, 8‘п 9) +
+ т (- Ь,51п 9 + Ъ,со5 9) + а*3 (Ш, - <4Л,) +
+ (-^Л, + ^ау,)Ч. (")
Теперь
Т„-1г,=0, (12)
так как никакой момент не может быть передан через опоры ротора гироскопа;
поэтому
соз 8 (— иХгау2 + 17уах) - 1\3уг $1п 8 + 1/уаХз = 0 (13)
Г13у2 = С18 6 (- аУ1 + С/уаХ2 ) + созес 6(/у . (14)
Путем подстановки значения Г13у2 в уравнение (11) определяем Т4 и соответ¬
ствующий уход, обусловленный небалансом
= т< =со5ес 9 (- ихгаУ1 + "у°х3) 1У, +
+ ах, (^у, 9 — + (“ Уу3аг3 + ^43ауэ) (15)
Это выражение может быть преобразовано так, чтобы составляющие ускорения
были выражены в системе координат, связанной с платформой. В результате
имеем
Кг Ц = созес 8 [(/Х2 (аХ1 зт ср — ауз соз ср) +
+ (Цу2 + Уу, СО5 8 — 17^ 51П 8) (а^ соз ср + ауз зт ср)]. —
— [((7^ 81п 8 + 6/г> соз 8) (аХз зт ср - а^соз ср) +
+ (^лсоз6-1/г>5ш6)аг1] • (16)
3. Уходы, вызванные ускорением карданного подвеса.
Момент, сообщенный платформой внешнему кольцу карданного подвеса, ра¬
вен сумме динамического момента, вызывающего движение внешнего кольца кар¬
данного подвеса и момента, передаваемого от внешнего кольца карданного под¬
веса на внутреннее. Аналогично момент, сообщенный внутреннему кольцу кар¬
данного подвеса, равен сумме момента, вызывающего движение внутреннего
кольца, и момента, передаваемого от внутреннего кольца к ротору гироскопа.
Следовательно,
Т12*= Т2 + Т23 (17)
И
Т2э = Т3 + Тм. (18)
Теперь предположим, что подшипники не имеют трения:
= 0, (19)
Т-2ЭХ, = 0 (20)
II
7'Мг, = 0. (21)
Приборная гироскопия
353
Определяя составляющие из уравнения (17) и учитывая уравнение (19), по¬
лучим
Т^2=-Т.г2. (22)
Подобная же операция с уравнениями (18) и (21) даст
Лзг, = СО5 0 Г23га — 51П 0 (23)
Подставляя уравнение (22) в уравнение (23) и решая относительно 7'2Эу2, будем
Лз>2 = —^8 0 7^ —созес 0 7^. (24)
Полный момент Т23 из уравнений (20), (23) и (24), следовательно, равен
Т23 = — (с(е 0 1уг + Ъ2) - созес 0 ГЭга 1Л. (25)
При передаче на внутренний карданный подвес Т23 становится равным
Т23 = — созес 0 Г2га 1Л — Т3га (с!§ 0 1Л — 1га). (26)
Подставляя это значение в уравнение (18), получим
тм = - ЛХЛ3 - (созес 0 Г2га + ТзЛ + С18 0Т3г>) 1^. (27)
Теперь, если предположить, что главные оси инерции внешней рамки 2 и внут-.
ренней рамки 3 направлены го соответствующим осям координат, вышеприве¬
денные моменты можно получить из уравнений Эйлера относительно главных
осей, т. е.
= Вг “222 + (Цу — Цх) “2^ “2Ь, (28)
тзг, = Зг, + (Цу — Цх) шзх, ШЭЛ, (29)
= Цхш3х, + (7эг ~ Цу) тЭу3шз2з, (30)
Т'зу, = Цу шзУз + (Цх — Цг) шзг, ызх,- (31)
Если прецессия гироскопа настолько мала по сравнению с перемещениями плат¬
формы, что ее влиянием можно пренебречь, то “>ЗЛ-3 и шзуз можно считать рав¬
ными нулю (с небольшой ошибкой),и полный момент, приложенный к ротору
гироскопа, будет равен
тм = — созес 0 [/2г ш2га + (/2у — Цх) и>2Ха ш2>,а] —
— с1еОЛг“зг, 1Л. (32)
Теперь осталось выразить составляющие угловой скорости в уравнении (32)
через перемещения платформы. Снова воспользуемся предположением, что
шзг3=“зуз =0.
Следовательно,
“э = <%, 1г, = “зг, (соз 01га - 5Ш 0 1Л). (33)
Таким образом,
®з = ®2 + 01 Хг = ®1 4- 9 4“ 01^2> (34)
Разбивая уравнение (34) на его составляющие, получим
в = - “>1Х2. (35)
“зг> = — созес 0Ш1Л (36)
И
9 = соз 0(оЭг — . (37)
23-405
354
ГЛАВА 10
Подставляя уравнение (36) в уравнение (37), получим
<р = — (38)
Предыдущие уравнения позволяют вычислить нужные члены угловой скорости
и ускорения
“2Х, = (39)
“гЛ ~ Ш1У»’ (40)
“2г, = — с1В (4П
“2г, = — с12 0“1Ь + созес2 000»^ = — с1в 0“1Л —
— созес2 Ош!Хг ш1л, (42)
ы32' = — созес 0 + созес 0 с1§ 00ш1л = — созес 0о>1л —
— созесОс1е0“1^“1>а. (43)
Подстановка этих значений в уравнение (32) и последующие упрощения надут
нам полный момент, приложенный к ротору гироскопа, и соответствующая ско¬
рость ухода будет равна
= со5ес 6 { с18 8 (;2г + 7эг) “1у, +
+ [(/2г + \ - Ч) + С‘В2 9 (\ + \)] “1Л ) !у,- (44)
Это выражение может быть преобразовано так, чтобы составляющие угловой
скорости и ускорения были выражены в системе координат, связанной с плат¬
формой
Например,
“1Л = — “1А 51п <р + соз у. (45)
и
= — “1Х, 5>П <р + 0>1л СОЗ ф — <р СОЗ <р + о»^ з(п <р). (46)
По выполнении такого преобразования уходы, вследствие ускорения карданного
подвеса, будут равны
4г“«г. к = С05ес 9 {с18 9 (/2г + Ч) [(“‘у. со8 ? — “‘ж. 5*п <р) +
+ “1г, (“1Л V + “1х, со8 + От- ~~ ^2у) +
+ С182 9 (Аг + Лг)"| [(“>?Л — “12Х1) «>п 2<Р +
+ 2“1у1 “1х, С05 2?1} 1у,‘ (47)
ГЛАВА И
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
Б. Ф. Миллер 1
11 — 1. ВВЕДЕНИЕ
Достигнутые за последние годы успехи в технике управляемых
снарядов в значительной мере обязаны разработкам новых ме¬
тодов и аппаратуры, необходимых для обеспечения радиосвязи
между управляемым снарядом, находящимся в полете, и наземной
или самолетной радиостанцией. Общее проектирование систем
радиосвязи производится очень тщательно, с тем чтобы послед¬
ние смогли выполнить ту специфическую работу, для которой они
предназначены. Особое внимание при проектировании уделяется
тому, чтобы аппаратура связи, находящаяся на борту снаряда,
имела минимальные размеры и вес, а также минимальное потреб¬
ление электроэнергии. Не говоря об ограничениях, накладываемых
характеристиками используемой аппаратуры, надежность и непре¬
рывность действия таких систем радиосвязи во время полета
снаряда в значительной степени зависят от колебаний величины
затухания сигнала во время прохождения его от передатчика к
приемнику.
В системе связи с управляемым снарядом -одна из оконечных
станций радиоканала находится в состоянии непрерывного быст:
рого перемещения относительно другой оконечной станции. От¬
сюда как длина, так и геометрическая форма траектории распро¬
странения радиосигнала может быстро изменяться со временем,
что вызывает соответствующие изменения интенсивности прини¬
маемого сигнала. Поэтому проектирование системы радиосвязи
с управляемым снарядом должно включать в себя надлежащую
оценку таких факторов, которые оказывают влияние на распро¬
странение радиоволн в том случае, когда требуемое качество ра¬
боты системы связи должно быть достигнуто при минимальной
выходной мощности передатчика.
Методы расчета величины затухания радиосигнала даны в тео¬
рии распространения радиоволн. Эта теория пытается как можно
более полно учесть (насколько это позволяет современное состоя¬
ние науки) влияние всех параметров, которые воздействуют на
1 Сотрудник фирмы «Рамо-Вулдридж корпорейшн».
23*
356
ГЛАВА II
распространение, отражение и преломление радиоволн. Так как
таких параметров много, то выведенные общие уравнения очень
сложны по своей форме, что сильно затрудняет их использование
для расчетов и для получения решений специфических техниче¬
ских проблем. Но если число определенных физических перемен¬
ных ограничено в достаточной степени, то для некоторого типа за¬
дач, рассматривающих распространение радиоволн, всегда можно
сравнительно легко найти решение. В этой главе дается материал,
который является как бы введением в теорию распространения ра¬
диоволн. Кроме того, в данной главе рассматриваются некоторые
соотношения, показывающие, насколько полезным может быть
анализ механизма распространения радиоволн при управлении
снарядом.
11—2. ОБЩИЕ ПОЛОЖЕНИЯ
Расстояние, на которое может быть передан радиосигнал, за¬
висит от эффективной мощности, излучаемой радиопередатчиком,
от величины затухания радиосигнала на трассе его распростране¬
ния до приемника и от величины напряженности поля в точке раз¬
мещения приемной антенны, необходимой для подавления шумов
и других мешающих сигналов, которые могут иметь место
во время приема.
В общем случае величина затухания радиосигнала зависит от
самых разнообразных факторов, к которым относятся: частота,
на которой ведется передача; высота передающей и приемной
антенн над землей; электрические характеристики той части зем¬
ной поверхности, над которой распространяется радиосигнал;
характер почвы; кривизна поверхности Земли; изменение диэлек¬
трической постоянной воздуха с высотой; географическое положе¬
ние конечных пунктов радиоканала (точек расположения прием¬
ника и передатчика); время дня, время года и фаза солнечной
активности. Не существует единого достаточно точного метода
определения величины затухания радиосигнала расчетным путем,
который учитывал бы всю совокупность упомянутых выше факто¬
ров, оказывающих влияние на величину затухания. Но тем не ме¬
нее предсказать величину затухания всегда можно, а зная вели¬
чину затухания радиосигнала, всегда можно рассчитать напря¬
женность поля в точке расположения приемной антенны с точно¬
стью, которая вполне удовлетворит большинству требований.
В том случае когда мы пренебрегаем влияниями тропосферы
и ионосферы, расчет напряженности дальнего поля, создаваемого
передатчиком, расположенным на гладкой сферической поверхно¬
сти Земли, обладающей определенной электропроводностью, пред¬
ставляет собой дифракционную задачу и исходит из решения
уравнений поля, составленных Максвеллом. Следует учитывать
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
357
изменение вида этих уравнений для действительных точек и их
отражений, а также требования, возникающие из особенностей пе¬
редающей антенны и из граничных условий, которые должны
быть удовлетворены на поверхности Земли. Непосредственное ре¬
шение, полученное для этой задачи, имеет вид очень медленно
сходящегося бесконечного ряда и непригодно для решения техни¬
ческих проблем. Однако его можно изменить путем использова¬
ния интегральных преобразований, выполненных Уотсоном, и не¬
которых других дополнительных операций, с тем чтобы получить
многие формы этого уравнения, пригодные для численных расче¬
тов. Требуемая краткость изложения не позволяет дать здесь раз¬
вернутую теорию, и читатель, желающий ознакомиться с ней бо¬
лее подробно, может обратиться к литературе, посвященной дан¬
ному вопросу. Здесь же, вероятно, будет вполне достаточно пока¬
зать ту строгую теорию распространения электромагнитных волн
вокруг сферической проводящей поверхности Земли, которая была
специально разработана и приведена к форме, удобной для тех¬
нических расчетов. Существенные особенности этой теории, пред¬
ставляющие интерес в данный момент, могут быть обобщены сле¬
дующим образом. Если известно значение мощности передатчика,
то напряженность поля, создаваемого у поверхности Земли, зави¬
сит главным образом от расстояния от точки наблюдения до пере¬
датчика, от рабочей частоты и от электрических свойств поверх¬
ности Земли. Требуемое значение напряженности поля можно
легко получить в точке, находящейся за линией радиогоризонта,
когда используются низкие частоты, и для менее удаленных точек
по мере увеличения частоты передатчика. Если же точка приема
удаляется от передатчика на такие расстояния, что на распростра¬
нение радиоволн существенное влияние оказывает дифракция сиг¬
нала вокруг Земли, то затухание сигйала растет экспоненциально
с расстоянием, т. е. так быстро, что оно резко ограничивает воз¬
можность использования явления дифракции радиоволны в каче¬
стве механизма передачи радиосигналов на очень большие рас¬
стояния.
К счастью, радиосигналы ма некоторых частотах радиоспектра
могут отражаться от ионосферы, ибо если бы этого не было, то
было бы почти невозможно осуществить передачу радиосигналов
на большие расстояния. Это я;вление состоит в том, что сигналы,
падающие На ионосферу, отражаются от нее обратно на Землю
на самых различных расстояниях от точки передачи. Последова¬
тельные отражения радиосигнала от ионосферы и земной поверх¬
ности позволяют ему распространяться на очень большие расстоя¬
ния, причем его затухание при отражении увеличивается незна¬
чительно. За исключением частот ниже нескольких сотен килогерц,
этот процесс ионосферного распространения представлял до на¬
стоящего времени единственный возможный путь распространения
358
ГЛАВА 11
радиоволн, обеспечивающий передачу радиосигналов на расстоя¬
ния, превышающие несколько сотен километров.
Однако за последнее десятилетие было найдено, что в точках,
далеко отстоящих от линии радиогоризонта передатчика, можно
получить интенсивность сигнала намного большую, чем можно
ожидать по теории распространения радиоволн за счет дифрак¬
ции, причем в условиях, совершенно несовместимых с требова¬
ниями нормального ионосферного распространения. Так, напри¬
мер, передачу за линию радиогоризонта можно осуществить на
частотах значительно больших, чем те, которые ранее использо¬
вались для передачи за счет ионосферного распространения. Так
как подобный процесс распространения радиоволн зависит от рас¬
сеивания энергии радиосигнала в тропосфере или в ионосфере, то
такой вид передачи получил название «передачи за счет рассеи¬
вания». Достигнутые в этой области успехи значительно расши¬
рили спектр частот, которые можно использовать для целей ра¬
диосвязи.
11—3. РАЗЛИЧНЫЕ ВИДЫ РАСПРОСТРАНЕНИЯ
РАДИОВОЛН
Сигнал, излучаемый передающей антенной Т (рис. 143), можно
разложить на несколько составляющих, из которых одна или бо¬
лее создают напряженность поля достаточной величины в области
приемной антенны /?, удаленной на некоторое расстояние от пере¬
датчика. На рисунке схематически изображены три составляющих
радиосигнала. Прямая волна*— это составляющая, распростра¬
няющаяся по прямой, соединяющей точки Т (передатчик) и Р
(приемник). Ее амплитуда изменяется обратно пропорционально
величине расстояния. Волна, отраженная от Земли,— это состав¬
ляющая, которая достигает точки Р после того, как она отрази¬
лась от земли в какой-либо точке, лежащей между пунктами Т и
ее амплитуда также изменяется обратно пропорционально рас¬
стоянию от передатчика. Сумма прямой и отраженной от земли
волн дает простраАственную составляющую земной волны.
Когда волна, направленная к земной поверхности, падает на
нее почти по касательной, она претерпевает изменение фазы при¬
мерно на 180°. В этом случае наложение двух волн (прямой и от¬
раженной от Земли) в точке приема приводит к их значительному
взаимному ослаблению и полный сигнал в приемной антенне соз-
1 Здесь и далее терминология, относящаяся к различным видам распростра¬
нения радиоволн, по возможности выдержана в соответствии со сборником «Тер-,
микология распространения радиоволн» (М., Изд-во АН СССР, 1957) и книгой
М. П. Долуханова «Распространение радиоволн» (М., Связьиздат, 1960). В слу¬
чаях принципиальных расхождений между этими двумя трудами предпочтение
отдавалось последнему.— Прим, ред.
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
359
дается составляющей второго порядка от поля излучения, назы¬
вающейся поверхностной составляющей земной волны. (Здесь
пока не учитывается составляющая, отраженная от ионосферы.)
Амплитуда поверхностной составляющей с расстоянием умень¬
шается экспоненциально, а на больших расстояниях от передат¬
чика она начинает уменьшаться обратно пропорционально квадра¬
ту расстояния. Она достигает наибольшего значения у поверхности
Рис. 143. Трассы различных составляющих излучения
Земли и быстро падает с увеличением высоты над Землей. Сумма
поверхностной и пространственных составляющих образует так
называемую земную волну.
Когда частота излучаемого сигнала соответствует преобладаю¬
щим условиям ионосферного распространения, часть энергии, из¬
лученной вверх, может испытать в ионосфере преломление, доста¬
точное для того, чтобы вернуться назад на Землю. Эта составляю¬
щая излучения названа ионосферной волной. Именно она дает
возможность установить связь на очень большие расстояния.
П—4. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ВЫБОР РАБОЧЕЙ
ЧАСТОТЫ
Поскольку характер распространения различных составляю¬
щих радиосигнала сильно изменяется в зависимости от частоты,
оказалось удобным разделить весь спектр радиочастот на отдель¬
ные частотные полосы, в пределах которых наблюдаются более
или менее одинаковые условия распространения радиоволн. Обо¬
значения частотных полос.и их границ даны в таблице 1,
ЗбО
ГЛАВА 1!
Таблица 1
Наименование диапазона
Сокращен¬
ное обо¬
значение
Граничные частоты
Длины волн
Сверхдлинные волны ....
СДВ
10—30 кгц
свыше 10 000 м
Длинные волны
дв
30—300 кгц
1000—10 000 м
Средние волны
св
300—3000 кгц
100—1000 м
Короткие волны
кв
3—30 Мгц
10—100 м
Метровые волны
МВ
30—300 Мгц
1-10 м
Дециметровые волны ....
ДЦВ
300—3000 Мгц
10—100 см
Сантиметровые волны ....
смв
3000—30 000 Мгц
1—10 см
Передача на СДВ характеризуется относительно небольшим
затуханием земной волны на единицу расстояния вдоль траекто¬
рии распространения и почти зеркальным отражением ионосфер¬
ной волны от нижней границы ионосферы. Затухание земной
волны растет главным образом за счет ее рассеивания и потерь
в почве. В этой полосе частот необходимая интенсивность поля,
создаваемая земной волной, может быть получена на расстояниях
свыше 1600 км от передатчика. Ионосферная волна этой полосы
частот распространяется на очень большие расстояния за счет
последовательного отражения от ионосферы и земли. Она ведет
себя так, словно она заключена между двумя сферическими по¬
верхностями, образованными ионосферой и землей. Разумеется,
каждый раз, когда сигнал отражается, он теряет некоторую часть
своей энергии. По сравнению с передачей на более высоких часто¬
тах величина затухания СДВ почти не зависит от времени суток,
года и т. д. Поэтому передача на этих частотах вполне может
быть использована для установления связи между двумя точ¬
ками, удаленными на очень большие расстояния.
Распространение длинных волн характеризуется почти теми же
самыми свойствами, что и распространение СДВ, с тем, однако,
отличием, что амплитуда земной волны заметно падает с расстоя¬
нием по мере увеличения рабочей частоты и приближения ее к
верхней границе этой полосы частот. В этой полосе частот пере¬
дача на большие расстояния достигается почти исключительно
за счет распространения ионосферной волны, но и она ограничи¬
вается ночным временем суток, ибо днем энергия ионосферной
волны высокочастотной части диапазона ДВ сильно поглощается
ионосферой.
Средние волны очень широко используются различными широ¬
ковещательными станциями и множеством других радиослужб.
Дальность распространения земной волны этой полосы частот
меньше, чем длинных волн, причем характер распространения
волны очень сильно зависит от рабочей частоты и .проводимости
почвы. Передача земной волной на частотах, расположенных в
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
361
верхней части этого диапазона, используется только различными
спецслужбами для установления связи на очень короткие расстоя¬
ния. На частотах ниже 1,5 Мгц ионосферная волна днем почти не
распространяется, но по мере увеличения частоты дальность рас¬
пространения ионосферной волны постепенно р'астет. В ночное
время ионосферная волна распространяется достаточно далеко и
используется для установления связи на расстояниях, значительно
больших, чем дальность распространения земной волны, если ра¬
бочая частота лежит почти у верхней границы диапазона.
Короткие волны используются главным образом для установ¬
ления связи ионосферной волной на средние и большие расстоя¬
ния, так кан для этих частот ионосфера является средой, которая
обеспечивает достаточно эффективное отражение сигнала. Много¬
кратное отражение радиоволны от ионосферы и земли позволяет
установить связь на очень больших расстояниях. Однако наличие
многих путей распространения радиосигнала и имеющиеся флюк¬
туации характеристик ионосферы приводят к быстрым и сильным
изменениям интенсивности поля в точке приема, что значительно
снижает надежность коротковолновой связи, использующей ионо¬
сферную волну.
Радиосигналы, имеющие частоту, находящуюся в низкочастот¬
ной части диапазона КВ, обычно отражаются от ионосферы эпи¬
зодически. Радиосигналы, имеющие частоты, расположенные в
высокочастотной части этого диапазона или в более высокочас¬
тотных диапазонах, возвращаются на землю только благодаря
рассеиванию. Следовательно, системы связи, работающие на УКВ,
могут использовать для передачи сигнала или земную волну, или
волну, распространяющуюся за счет рассеивания в ионосфере.
В том случае когда для передачи используется земная волна,
большая часть энергии принимаемого сигнала передается ее про¬
странственной составляющей, поскольку с увеличением расстоя¬
ния от приемника до передатчика поверхностная составляющая
испытывает очень большие затухания. Поэтому связь посредством
земной волны ограничена расстояниями прямой видимости между
приемной и передающей антеннами, и, следовательно, дальность
связи полностью зависит от высоты антенн над поверхностью
земли. С другой стороны, распространение за счет рассеивания в
ионосфере позволяет установить связь на расстояниях, значи¬
тельно больших, чем до линии радиогоризонта передатчика, на
частотах, расположенных в диапазонах метровых, дециметровых
и сантиметровых волн, но при этом необходимо, чтобы передатчик
имел очень большую мощность, а антенны обладали очень боль¬
шими коэффициентами усиления.
Системы связи управляемых снарядов работают почти исклю¬
чительно на метровых и дециметровых волнах. Это обусловлено
уем, что антенны и аппаратура, необходимые для работы на этрк
362
ГЛАВА И
частотах, имеют меньший вес и размеры по сравнению с аппара¬
турой и антеннами, работающими на более низких частотах.
Кроме того, более низкочастотные диапазоны перегружены сигна¬
лами других радиослужб, что сильно мешает работе системы свя¬
зи с управляемыми снарядами.
11—5. ПЕРЕДАЧА НАЗЕМНОЙ ВОЛНЕ
Если линия, проведенная от приемной антенны к передающей,
не прерывается выпуклостью земной поверхности, обусловленной
шаровидной формой Земли, то в этом случае говорят, что прием¬
ная антенна находится в пределах прямой видимости или выше
радиогоризонта передатчика. Расстояние прямой видимости для
радиочастот обычно немного превышает расстояние оптической
прямой видимости, в силу того что естественное уменьшение ди¬
электрической постоянной атмосферы с высотой вызывает искрив¬
ление радиолуча к поверхности земли. Это обстоятельство можно
учесть, принимая, что эквивалентный радиус Земли в к раз
больше ее действительного радиуса а, т. е. равен ка\ величина ко¬
эффициента к в среднем равна 4/з. Соответствующее значение
эквивалентного радиуса Земли будет 8500 км. Воспользовавшись
последним значением, можно показать, что если высоты передаю¬
щей и приемной антенн равны А1 и /г2 метров соответственно, то
максимальное расстояние прямой видимости почти точно опреде¬
ляется формулой
аь (км) = 1,61 (ИбД6Л[ + Кб,56Л2). (1)
Напряженность поля земной волны равна векторной сумме на¬
пряженностей полей ее поверхностной составляющей, прямой вол¬
ны и волны, отраженной ст земли. На практике в большинстве слу¬
чаев преобладающее значение из вышеуказанных составляющих
напряженности поля имеет одна или две. Если это так, тогда
выражения для напряженности поля, создаваемого земной волной,
вероятно, будут иметь весьма простую форму. Однако небходи-
мо следить за тем, чтобы эти простые выражения, выведенные
для расчета напряженности поля, использовались только в тех
пределах, в которых они действительны. В основном их использо¬
вание ограничено случаями расположения приемной антенны
в пределах прямой видимости от передающей антенны, однако и
не слишком близко к радиогоризонту.
Решения, полученные Нортоном для напряженности поля,
создаваемого земной волной, оказались особенно удобными для
численных расчетов. Когда высота антенны над землей, выражен¬
ная в длинах волны, очень мала и землю можно считать плоской,
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
363
напряженность поля земной волны создается главным образом
поверхностной составляющей и определяется следующим соотно¬
шением:
= (2)
где Ео представляет собой значение напряженности поля в свобод¬
ном пространстве на единичном расстоянии от передатчика, нахо¬
дящегося в свободном пространстве; при этом ток в антенне этого
передатчика должен быть равен току в действительной антенне,
расположенной вблизи земли; й — расстояние от передатчика, вы¬
раженное в тех же единицах, как и в формуле, определяющей Ео\
А — коэффициент, учитывающий влияние электрических свойств
земли на величину затухания сигнала.
Значение величины Е3 можно всегда определить, зная вели¬
чину мощности, излучаемой антенной, а также значения некото¬
рых других факторов, учитывающих ее Направленность. Так, на¬
пример, напряженность поля в свободном пространстве на рас¬
стоянии 1 км от полуволнового диполя определяется посредством
следующего выражения:
СОЗ I -у- СОЗ <р
Д0 = 222КЛ Ж (3)
где —излучаемая мощность, выраженная в киловаттах, а ср —
угол между осью антенны и линией, идущей от антенны до точки,
в которой определяется значение Ей.
Коэффициент А можно найти графически, через вспомогатель¬
ный параметр Р, называемый иногда «численным расстоянием» и
определяемый с помощью формул:
лг2 соз2 Ь" , „ .
р = соБ ь,- (для вертикально поляризованной волны)
или
Р = ~Т"с^~Ь' (для г0Ри30нтальн0 поляризованной волны), (4)
где
18 000о , . Л! + л2 а
И
X — длина волны;
о—проводимость земли, выраженная в —*^-/лг2;
е — диэлектрическая постоянная земли;
/мгц — частота в Мгц.
364
ГЛАВА 11
Рис. 144. Геометрические соотношения для расчетов поля
над ровной земной поверхностью
Рйс. 145. Изменение коэффициента затухания А с численным расстоянием р
Величины й, г2, Н2 и ф схематически представлены на
рис. 144; (1, г2, К\, Н2 и X должны быть выражены в тех же едини¬
цах. Высоты и К2 обозначают средние возвышения антенн над
землей. Значения коэффициента А в зависимости от р даны
на рис. 145, где
Ь = 2Ь" — Ь' (для вертикальной поляризации)
6 = 180° — Ь' (для горизонтальной поляризации).
Для значений р>20, Типичные значения <з и е даны в таб¬
лице 2.
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
365
Таблица 2
Характер поверхности земли
1
ом-м
•
Морская вода
4
80
Пресная вода
5ХЮ-3
80
Пахотные земли с небольшой холмистостью . .
1ХЮ-2
15
Пастбищные земли средней холмистости и ле-
спетости
5ХЮ-3
13
Болотистые, покрытые лесом, равнинные про-
странства
8ХЮ-3
12
Сухие, равнинные прибрежные земли
2ХЮ-3
10
Гористая местность
1ХЮ-3
5
Города, жилые массивы
2ХЮ-3
5
Города, промышленные районы
1ХЮ-4
3
Следует отметить, что численное расстояние пропорционально
действительному расстоянию. Величина р является функцией отно¬
шения /2/о и преобладающей составляющей полного сопротивления
земной поверхности. Уравнение (2) справедливо в пределах даль¬
ностей до 80//^ч км, за которыми уже нужно учитывать влияние
кривизны земной поверхности. Его область применения также
ограничена высотами антенн, которые удовлетворяют соотноше¬
нию
(41 + 7г) <0.01»
где
1
/с052 Ь» \ 2
9! 2 = —>— (■ к,) (для вертикальной поляризации)
Л \Л СУЬ О / ,
ИЛИ 1
2яЛ] 2 / х \ 2
91,2 = —ГксоГУ/ (Для г0Ри30нтальн°й поляризации).
Величина 9 называется приведенной высотой антенны; она
является функцией высоты антенны, выраженной в длинах
волны, и преобладающего параметра качества почвы на исполь¬
зуемой частоте.
Обычно напряженность поля поверхностной составляющей зем¬
ной волны составляет небольшую долю полной напряженности
поля в системах связи управляемых снарядов, ибо используемые
частоты и высоты антенн дают в результате напряженность про¬
странственной составляющей, значительно превышающую значе¬
ния напряженностей, создаваемых поверхностной составляющей.
Знание величины напряженности поля, созданного поверхностной
составляющей, тем не менее может оказаться полезным, ибо
366
ГЛАВА 11
в определенном диапазоне значений приведенных высот антенн
полная напряженность поля определяется векторной суммой трех
составляющих земной волны; и Нортон показал, что когда одно¬
временно удовлетворяются условия
/?>20; р> 1ОЯ1ЯЕ, р> 100 (^ + ^2), (6)
тогда напряженность поля в точке приема для антенн со средними
приведенными высотами может быть определена из уравнения
= (7)
Функции /(9) называются высотными множителями и для случая
ровной поверхности земли определяются посредством следующего
уравнения:
1
/(?) = [1 + Я2 - 2<7С08 (-|- + 4)] 2 • - (8)
На рис. 146 представлен график значений /(<?) в зависимости
от <?.
Уравнение (7) выведено на основании предположений, что
земная поверхность плоская, что численные расстояния велики и
что изменение фазы на обратную у волны, отраженной от земли,
происходит в точке отражения. Это уравнение может быть
использовано для антенн высотой менее чем 600//^ц метров.
Рис. 146. Изменения величины высотных множителей / (?) с вы¬
сотой антенны д
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
367
Вышеприведенные уравнения не могут быть непосредственно
использованы в тех случаях, когда требуется учитывать кривизну
Земли. Многие ученые вывели решения, учитывающие явление
дифракции радиоволн, которое становится значительным вблизи
радиогоризонта и за его линией. Эти решения здесь не приводятся.
Обычно антенны системы связи с управляемым снарядом ра¬
ботают на больших приведенных высотах, высоко над линией ра¬
диогоризонта, и при этих условиях, для определения значений на¬
пряженности поля нужно проделать довольно простые операции,
Рис. 147. Геометрические соотношения для расчетов поля
с учетом сферичности земной поверхности
ибо влиянием поверхностной составляющей можно полностью
пренебречь. Напряженность поля в этом случае можно определить
из следующего выражения:
2пг । — /2-ЧГ2
Е ЕрХ е। ЕШ Ер2 е ^0^
Г1 г2
где первый член представляет напряженность, создаваемую пря¬
мой волной, тогда как второй член — напряженность, создаваемую
волной, отраженной от земли. Здесь Еох и Е02 являются значения¬
ми Ео для траекторий, направленных вдоль г\ и г2' соответствен¬
но; ] = У—1- Трассы г\ и г'2 вместе с другими параметрами
изображены на рис. 147. Величина й является коэффициентом
расхождения, который учитывает более быстрое уменьшение на¬
пряженности поля волны после ее отражения от сферической по¬
верхности Земли по сравнению с отражением от плоской поверх¬
ности. Коэффициент расхождения определяется формулой
М1+^) (10)
368
ГЛАВА 11
величины д, (1\, д2 и ф' показаны на рис. 147. Могут также ока¬
заться полезными следующие дополнительные соотношения:
Л, Лп А, Ло
9? а22
/г.= к.-— ; п^ = !12 — .
1 1 2ка’ 2 2 2ка
Величина /?' является коэффициентом отражения от земли и опре¬
деляется формулой
О' _ _ п2 51п ф' — /п2 — Соз2 <|/ (дЛя вертикальной
л2 зш Ф' + )/п2 — соз2 Ф' поляризации) '
или
_ ^'9 __ 8шф'— /л2 —со8гф' (для горизонтальной /|2)
81п ф' + )/л2 —со82ф' поляризации); ' '
здесь л2 = е—/60 ок.
Для антенн, высота которых мала по сравнению с расстоянием
между ними (7/тф'<0,1), уравнение (9) можно преобразовать
к виду.
—Л2
Ен = ^ \+ВН!е “ , (13)
которое также можно записать в виде
г / - -м!
р I 4‘тсЛч Лл \ 2
Дн = ^[1 + (0/?)2 + 20/?со8^7^8?)] • (14)
Поскольку уравнения (9), (13) и (14) фактически представ¬
ляют оптико-геометрические решения, они должны быть ограни¬
чены в использовании расстояниями, при которых значение ф'
превосходит величину э> так как на больших расстояниях
поверхностная составляющая может существенно изменить общую
напряженность поля. Это не слишком жесткое ограничение, по¬
скольку в большинстве чисто практических случаев позволяет
использовать эти уравнения на расстояниях, приближающихся
к пределам прямой видимости.
Вышеприведенные выражения для определения напряженно¬
сти поля, создаваемого антеннами различной (низкой, средней и
большой) высоты, могут быть применены к различным случаям
распространения метровых и дециметровых волн в пределах пря¬
мой ридимости. Однако, когда предел применимости приведенных
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
369
здесь уравнений недостаточен, необходимо прибегнуть к помощи
более сложного анализа, изложенного в нескольких статьях, со¬
держащихся в списке литературы в конце данной главы.
Для иллюстрации применения некоторых уравнений напряжен¬
ности поля рассмотрим два примера:
а) управляемый снаряд поднимается с земли по прямолиней¬
ной траектории, направленной под углом 5°43' (наклон траекто¬
рии— 0,10);
б) снаряд летит по подобной же траектории до высоты 2000 м,
после чего следует горизонтально.
Предположим, что 10-ваттный передатчик, работающий на ча¬
стоте 150 Мгц, находится на земле на расстоянии 1 мили (1,6 км)
от места пуска снаряда и что выходной сигнал излучается вер¬
тикальным полуволновым диполем, средняя точка которого нахо¬
дится над землей на высоте, равной длине волны. Проекция
курса снаряда на поверхность земли совпадает с радиальным про¬
должением линии, идущей от передающей антенны. Когда снаряд
находится на пусковой установке, высота его приемной антенны
пусть будет равна 0,2 длины волны. Значения диэлектрической
постоянной земли и ее проводимости возьмем равными 10 и
5Х10-3 соответственно.
Вначале получим решение для напряженности поля, создавае¬
мого поверхностной составляющей. Выразив все линейные вели¬
чины в метрах, возьмем следующие значения для примера а:
/мгц = 15°; X = 2; е = 10; а = 5 X Ю”3;
Р( = 0,01; Ео = 22,2 на расстоянии 1 км-
1, о «. <1 1610 , п .
— А ^2 — —щ Ь 0,4;
х = 0,6; л2 = 10 — 0,6/
Перед пуском снаряда
1& Ф = 0,00149; соз ф дг 1,000;
Ь' = 15,00; Ь' = 86° 11'9"; соз Н = 0,06652;
Ь" = 16,667; Ь" = 86°33'59"; соз Ь" = 0,05989;
= 0,0899; Ь = 86О56'49";
X СО5 О’’ ’
^ = 1,884; ^2 = 0,377;
Р = 227,6; А = дД;
= 0,0604 — .
м
24-405
370
ГЛАВА II
Находим высотные множители /(<71) и /(<72). которые имеют
значения 2,14 и 1,12 соответственно. Таким образом, напряжен¬
ность поля в точке приема определяется уравнением (7); она
равна 0,145 мв/м.
После пуска и прохождения расстояния около 30 м по траек¬
тории высота антенны снаряда будет достаточно велика, чтобы на¬
пряженность поля в точке приема можно было бы вычислить
Рис. 148. Вычисленная напряженность поля в точке приема в зависимости
от расстояния
методами, применяемыми для высоких антенн. Так, например,
когда снаряд пройдет расстояние в 2 мили (3,2 км) от место¬
нахождения передатчика, будет равно 2, Н2= 161,4, а другие
параметры будут им^ть следующие значения:
1
ф' = 0,0507; (д ф' > ’ = 0,00334;
/3=1,0; /? = 0,713 е~'179029';
4 тс Л' /г'
—^2. = 0,633 рад = 36°5'.
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
371
При <1=2 мили (3,2 км), -^5=6,880 мв/м, и коэффициент от
этой величины в уравнении (14) будет равен 0,590. Таким обра¬
зом, напряженность поля в точке приема на расстоянии 2 миль
(3,2 км) от передатчика и при подъеме снаряда будет рав¬
на 4,061 мв/м.
Кривые напряженности поля в функции расстояния для обоих
рассмотренных примеров даны на рис. 148.
11—5.1. Заключение по вопросу распространения земной волны
Связь посредством земной волны со снарядом, находящимся
в полете, может оказаться достаточно эффективной в том случае,
когда траектория снаряда остается выше линии радиогоризонта
передатчика. Громоздкое и тяжелое оборудование может'быть за¬
менено на более легкое и удобное при работе на частотах в по¬
лосе МВ и ДЦВ. За время полета управляемый снаряд может
пересечь последовательно зоны, в которых поверхностная состав¬
ляющая земной волны, сочетание поверхностной и пространствен¬
ной составляющих и, наконец, одна пространственная составляю¬
щая позволяют поддерживать непрерывную связь со снарядом.
Приведенные ранее уравнения дают возможность рассчитать ин¬
тенсивность поля в точке приема при различных условиях распро¬
странения. Для тех условий, при которых напряженность поля
нельзя определить с помощью этих уравнений, были даны ука¬
зания, в каком источнике можно найти более подробные сведе¬
ния и методы для определения напряженности поля, создавае¬
мого земной волной при иных условиях.
11—6. РАСПРОСТРАНЕНИЕ ИОНОСФЕРНОЙ ВОЛНЫ
11—6.1. Строение ионосферы
Если требуется установить радиосвязь между двумя далеко
отстоящими друг от друга точками, когда приемная антенна на¬
ходится значительно ниже линии радиогоризонта передатчика и
практически невозможно (в силу физических или экономических
причин) использовать земную волну или распространение за счет
рассеивания, следует применять передачу посредством ионосфер¬
ной волны. При этом ионосфера служит как бы зеркалом для
отражения энергии сигнала обратно на землю на значительных
расстояниях от передатчика.
Ионосферой называется та часть верхних слоев атмосферы,
которая простирается в высоту от 50 до 500 км, где степень иони¬
зации имеющихся газов достаточна для образования свободных
24*
372
ГЛАВА 11
Рис. 149. Схема строения ионо¬
сферы
электронов в количестве, необходимом для того, чтобы оказывать
влияние на распространение электромагнитных волн. На рис. 149
схематически показано строение ионосферы. В дневное время
имеется три отдельных слоя, которые могут отражать радио¬
волны. Их называют, в порядке возрастания высоты и концентра¬
ции электронов, слоями Е, Ех и Е2, они располагаются на высо¬
тах 100, 200 и 300 км соответственно.
Ниже слоя Е лежит слой с меньшей концентрацией электро¬
нов, называемый слоем й, который
очень сильно поглощает волны не¬
которых частот и отражает волны
очень низкой частоты.
Концентрация электронов внут¬
ри всех слоев уменьшается в ноч¬
ное время; при этом концентрация
электронов в слое Е снижается на¬
столько, что этот слой уже не мо¬
жет отражать радиоволны высокой
частоты. Кроме того, ночью слои
Ех и Е2 соединяются в один слой/7,
за счет которого и происходит
ионосферное распространение ра¬
диоволн в ночное время.
Полагают, что имеется несколь¬
ко факторов, порождающих иони¬
зацию верхних слоев атмосферы,
однако считается, что это явление
происходит главным образом под
действием ультрафиолетового из¬
лучения солнца.
Чепмен разработал подробную теорию образования ионизиро¬
ванных слоев и указал, что ионизация происходит главным обра¬
зом за счет поглощения монохроматического ультрафиолетового
излучения солнца, и эта теория, кажется, вполне способна объ¬
яснить образование большинства известных ионизированных слоев
атмосферы. Скорость образования ионов изменяется с высотой
в пределах каждого слоя; она достигает максимального значения
в середине слоя и падает до минимального значения на верхней
и нижней его границах.
Простая синусоидальная волна распространяется в свободном
пространстве со скоростью с = (моео) 2 > где и0 и ео обозначают
соответственно магнитную и диэлектрическую проницаемость
среды. Скорость, определенная таким способом, называется фазо¬
вой скоростью волны, ибо она соответствует скорости распростра¬
нения любой произвольно взятой точки постоянной фазы на лю¬
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
373
бом периоде волны. Эта скорость равна скорости света в свобод¬
ном пространстве и обычно обозначается буквой с; она не зависит
от частоты, поскольку ни магнитная, ни диэлектрическая прони¬
цаемость пространства не зависят от частоты.
Когда простая синусоидальная волна распространяется в ио¬
низированной среде, имеющей ничтожно малое поглощение, как,
например, в ионосфере, то ее фазовая скорость определяется маг¬
нитной и диэлектрической проницаемостью этой среды. Магнитная
проницаемость в данном случае равна проницаемости свободного
пространства, но диэлектрическая проницаемость определяется
выражением
№
ео 4и2/2/п ’
где / представляет частоту волны, а Л/ — число ионов на один
кубический метр воздуха, обладающих зарядом е и массой т.
г-, Йе2 „ ■
Положив величину 4тс2е - равной /*,, фазовую скорость можно
выразить в виде
<15)
/. 2
к /2 /
если предположить, что значительное число имеющихся ионов
представляет собой электроны, величина становится рав¬
ной 80,5 М. Здесь'нужно отметить два момента. Первое, это то,
что фазовая скорость в ионизированной среде зависит от частоты;
среда, следовательно, является рассеивающей. Второе, это то, что
фазовая скорость в ионосфере больше скорости света в свобод¬
ном пространстве.
Импульсный сигнал или модулированный незатухающий сину¬
соидальный сигнал можно представить в виде суммы большого
числа простых синусоидальных составляющих. Когда такие со¬
ставляющие передаются через ионизированную, среду, каждая со¬
ставляющая распространяется с фазовой скоростью, зависящей
от ее частоты. Таким образом, огибающая модулированного
сигнала имеет как искажения, так и скорость, отличающуюся от
фазовой скорости любой ее составляющей. Скорость огибающей
модулированного сигнала называется его групповой скоростью; ее
величина, по существу, равна скорости, с которой распростра¬
няется энергия волны. Для такой среды, как ионосфера, можно
без труда показать, что если полоса частот сигнала мала по срав¬
нению с несущей частотой, то произведение фазовой и групповой
374
ГЛАВА И
скоростей равно квадрату скорости света; следовательно, группо-
I Г2 \12
/1 I К]
вая скорость определяется выражением .
Поскольку показатель преломления среды может быть выра¬
жен в виде отношения скорости электромагнитной волны в сво¬
бодном пространстве к ее фазовой скорости в данной среде, то,
следовательно, показатель преломления ионосферы становится
/, /дА 2 г
равным ,и лишь волны, частота которых выше, чем )дг,
могут в ней распространяться.
Таким образом, если радиоволна частоты / направляется вер¬
тикально вверх в ионосферу, она не пройдет .дальше вверх, когда
достигнет области, где концентрация ионов достаточна для того,
чтобы значение стало равным /, и будет отражена обратно на
землю с той высоты, в которой подобная концентрация ионов
существует. Если значение / больше /и на любой высоте слоя,
волна пробивает ионизированный слой и проникает в простран¬
ство, расположенное выше его. Значение' /и, соответствующее
области максимальной ионной концентрации в слое, называется
критической частотой ионизированного слоя и обозначается /0.
Высота слоев определяется путем измерения времени, необхо¬
димого для того, чтобы импульсный сигнал, направленный верти¬
кально вверх, отразился от ионосферы и вернулся назад на землю.
Половина произведения этого промежутка времени на скорость
света дает действующую высоту отражающего слоя. Найденная
таким образом высота всегда больше действительной, так как
здесь не учитывается уменьшение групповой скорости сигнала во
время его прохождения по ионизированной части траектории.
Магнитное поле земли также отчасти влияет на свойства ионо¬
сферы. Однако для большинства чисто практических случаев сте¬
пень оказываемого им влияния несущественна и в нашем анализе
не будет учитываться.
11—6.2. Характеристики ионизированных слоев
Для того чтобы получить надежные данные, которые позво¬
лили бы лучше понять строение и характеристики ионосферы, по
всему миру создано большое число ионосферных станций. На этих
станциях регулярно измеряют действующую высоту и критические
частоты слоев. На рис. 150 графически представлены данные, по¬
лученные во время таких наблюдений.
В ионосфере проявляются ясно выраженные суточные и годо¬
вые изменения, на которые накладываются изменения с периодом,
равным 11 лет, соответствующие периоду солнечной активности.
Слой Е имеет почти неизменную действующую высоту, равную
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
375
примерно 115 км как в течение суток, так и в течение года.
Однако критическая частота этого слоя претерпевает регулярные
суточные и сезонные изменения. В течение дня она изменяется
Рис. 150. Действующие высоты и критические частоты
ионосферных слоев. (По данным наблюдений в Сан-Фран¬
циско. Калифорния, октябрь 1955 г.)
в соответствии с высотой солнца, резко увеличиваясь от очень
низкого значения, которое имелось ночью, до вполне поддаю¬
щейся измерению значительной величины как раз перед восходом
солнца, достигая максимума в полдень, и затем уменьшается до
своего ночного значения вскоре после захода солнца. Дневное
максимальное значение критической частоты несколько больше
376
ГЛАВА 11
летом, чем зимой. Слой Е используется для передачи в дневное
время на ионосферной волне на расстояния до 1600 км.
Слой Г) существует только днем. Его полуденная действую¬
щая высота составляет около 225 км, причем она довольно устой¬
чиво сохраняется в различные времена года. Характер суточных
изменений критической частоты слоя Е1 почти такой же, как
у слоя Е: она имеет максимальное значение в полдень, ее зимние
значения обычно меньше летних. Слой Гу иногда используется
для дневных передач на средние расстояния; его использование
часто, однако, ограничивается, потому что сигналы достаточно
большой частоты, падающие под углом и пробивающие слой Е,
часто пробивают также и слой Гу
Что касается слоя Г2, то его действующая высота и критиче¬
ская частота сильно изменяются как в течение суток, так и от
сезона к сезону. Действующая высота этого слоя в течение лета
колеблется от 300 до 400 км, уменьшаясь в зимнее время даже
до 225 км. Однако критическая частота слоя Г2 зимой заметно
выше, чем летом. Связь на большие расстояния обычно осущест¬
вляется за счет отражения сигнала от слоя Р2.
Цикл солнечной активности не оказывает заметного влияния
на действующую высоту слоев, но сильно влияет на величину
критических частот. Значения критической частоты слоя Г2 в годы
повышенной активности солнца (максимальное количество сол¬
нечных пятен) могут быть почти в два раза выше значений кри¬
тической частоты, измеряемой в годы минимальной активности
солнца.
В ионосфере часто возникают различные отклонения от регу¬
лярных изменений характеристик слоев, которые оказывают замет¬
ное влияние на распространение радиоволн. Так, было замечено,
что часто радиоволны отражаются от слоя Е при частотах выше
критической частоты этого слоя. Это явление приписывается су¬
ществованию электронных облаков с необычайно высокой кон¬
центрацией электронов. Эти облака располагаются в пределах или
немного выше слоя Е, образуя спорадический слой Е, Размеры
таких облаков изменяются; они перемещаются в верхних слоях
атмосферы хаотически. Концентрация электронов в этих облаках
иногда настолько велика, что позволяет вести передачу на ионо¬
сферной волне на частотах, превышающих 60 Мгц.
Иногда сигналы, передаваемые ионосферной волной, внезапно
пропадают в течение периодов, которые длятся от нескольких
минут до нескольких часов. Это явление, часто называемое эф¬
фектом Деллинджера, возникает в результате внезапного образо¬
вания областей с высокой ионной концентрацией, лежащих между
слоем Е и землей, которые полностью поглощают всю энергию
отраженных от ионосферы сигналов. Начало этого явления совпа¬
дает с появлением солнечны^ возмущений, и поэтому предпола¬
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
377
гается, что оно вызывается «взрывами» интенсивного ионизирую¬
щего излучения, появляющегося во время солнечных извержений.
Явление замирания наблюдается одновременно на всей освещен¬
ной солнцем поверхности земли.
Явления, приписываемые сильной бомбардировке верхних
слоев атмосферы заряженными корпускулярными частицами со
стороны солнца, вызывают «ионосферные бури». Такие бури
обычно длятся несколько дней, в течение которых поглощение
энергии высокочастотных сигналов необычайно велико и крити¬
ческие частоты слоев сильно падают. Передача отраженной волной
серьезно нарушается в высоких широтах, но в экваториальных
областях она может ухудшиться лишь незначительно.
11—6.3. Максимальная применимая частота
Поведение радиоволны, падающей наклонно на ионосферу,
может быть понято из рис. 151. На рисунке показан узкий радио¬
луч, исходящий из точки Т и направленный на ионосферу. Верхняя
Рис. 151. Траектория фронта радиоволн при отражении ее от ионо¬
сферы. (Направленный сигнал взят лишь для целей лучшей иллю¬
страции.)
часть фронта волны входит в ионосферу раньше нижней части и,
следовательно, является первой частью фронта волны, испытываю¬
щей увеличение фазовой скорости, что вызывается пониженным
коэффициентом преломления ионосферы. Это заставляет волну
отклоняться в сторону земли, и при достаточно большом прелом¬
378
ГЛАВА 11
лении волна может вернуться на землю в точке Р. Можно пока¬
зать, что максимальная частота волны, отраженной обратно на
землю от плоской ионосферы, связана с следующим соотноше¬
нием:
/=/мзес1, (16)
где I — угол, образованный радиолучом с вертикалью в точке
вхождения луча в ионосферу (в точке преломления).
Радиоволны, имеющие частоту ниже критической частоты дан¬
ного слоя, возвращаются на землю независимо от величины угла
падения на ионосферу, поэтому на таких частотах можно осу¬
ществить передачу отраженной волной даже в том случае, если
точка приема находится в непосредственной близости от передат¬
чика. Однако, когда частота передаваемой волны больше критиче¬
ской частоты слоя, тогда сигнал возвращается на землю только
в том случае, если его угол падения на ионосферу больше мини¬
мального значения, определяемого отношением у. Расстояние от
передатчика до точки, где впервые обнаруживается отраженная
волна, зависит от угла падения волны на ионосферу, и для лю¬
бого заданного расстояния от точки приема до передатчика суще¬
ствует максимальная частота, величина которой зависит от кри¬
тической частоты слоя и высоты слоя, который может быть
использован для установления связи на этом расстоянии. Эта ча¬
стота называется максимальной применимой частотой. Минималь¬
ное расстояние от передатчика до точки, на которой сигнал с ча¬
стотой />/о может быть принят, называется радиусом зоны мол¬
чания.
11—6.4. Виды распространения
Распространение ионосферной волны между двумя точками, на¬
ходящимися на земле или над землей, происходит благодаря
одному или нескольким отражениям от слоев ионосферы и по¬
верхности земли. Каждое сочетание отражений называется видом
распространения. Виды распространения определяются в зависи¬
мости от числа ионосферных отражений и слоя, от которого про¬
изошло отражение. Таким образом, передача вида «одно отраже¬
ние Е» использует одно отражение от слоя Е; передача вида «два
отражения Е2» состоит из двух последовательных отражений
в слое Е2 с отражением от земли в середине траектории.
Вид распространения является «активным», если расстояние
между передатчиком и приемником меньше предельного расстоя¬
ния для этого вида и используемая частота меньше максимальной
применимой частоты для данного вида. Вид распространения для
слоя Е будет активным, однако, только в случае, если используе¬
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
379
мая частота достаточно высока, чтобы сигнал мог пройти сквозь
слой Е с требуемым углом падения; минимальная частота, спо¬
собная пройти в этом случае сквозь слой Е, называется предель¬
ной частотой слоя Е (наименьшей применимой частотой).
11—6.5. Напряженность поля ионосферной волны
Напряженность поля, создаваемого в районе приемной ан¬
тенны, расположенной на значительном удалении от передатчика,
за счет распространения переданного сигнала на ионосферной
волне, прямо пропорциональна напряженности пространственной
волны, излучаемой передатчиком, и обратно пропорциональна за¬
туханию, происшедшему на пути распространения. Однако зату¬
хание ионосферной волны может быть предсказано только в ста¬
тистическом смысле, ибо напряженность поля в точке приема
обычно подвержена случайным колебаниям во времени около
своего среднего значения. Более быстрые изменения напряжен¬
ности, которые продолжаются от долей секунды до нескольких
минут, называются замираниями. Имеется несколько видов зами¬
рания. Принимаемый сигнал ионосферной волны обычно состоит
из суммы большого числа составляющих с относительно неболь¬
шой амплитудой и различными фазами, которые достигли прием¬
ной антенны разными путями, имеющими самую различную длину.
Отдельные длины траекторий изменяются со временем в зависи¬
мости от флюктуаций в характеристиках ионосферы, что вызывает
беспорядочное изменение фазы составляющих сигнала. Результи¬
рующие флюктуации напряженности называются интерференцион¬
ными замираниями.
Независимо от поляризации передаваемой волны принимаемый
сигнал ионосферной волны испытывает постоянно изменяющуюся
поляризацию. Поскольку линейно поляризованная приемная
антенна чувствительна только к волнам, поляризованным в одной
плоскости с ней, то выходное напряжение антенны изменяется при
изменении мгновенной поляризации ионосферной волны и, таким
образом, получается явление, названное поляризационным зами¬
ранием:
Изменения напряженности поля в точке приема, возникающие
вследствие изменений величины поглощения энергии ионосфер¬
ной волны ионосферой, называют замиранием при изменении по¬
глощения.
Изменения напряженности поля в точке, расположенной на
краю зоны молчания, которые вызываются изменениями величины
радиуса зоны молчания, называются замиранием зоны молчания.
Закон распределения Релея хорошо применим для описания ха¬
рактера временного распределения напряженности поля в точке
приема, которое создается интерференционным замиранием.
380
ГЛАВА 11
Если Ет представляет медианное значение напряженности поля,
то выражение (
(17)
определяет часть времени Т, в течение которого мгновенная на¬
пряженность поля превышает значение Е. Для этого распределе¬
ния медианное значение напряженности Ет на 1,6 дб ниже, чем
однородная напряженность, т. е. напряженность, существующая
при отсутствии замираний. Действие поляризационного замира¬
ния состоит в том, что оно снижает медианную напряженность
поля до уровня, лежащего на 3,0 дб ниже напряженности одно¬
родного поля. Сочетание влияний интерференционного и поляри¬
зационного замирания, таким образом, снижает медианную напря¬
женность поля в точке приема до уровня, лежащего на 4,6 дб
ниже напряженности однородного поля.
Напряженность поля при отсутствии «поглощения» падающей
волны в районе приемной антенны, достаточно удаленной от пере¬
датчика, определяется как медианная напряженность поля, кото¬
рая будет наблюдаться с помощью линейно поляризованной
антенны, если никакого поглощения энергии сигнала в ионосфере
не происходит. Значение этой величины при передаче с однократ¬
ным отражением может быть найдено приближенно путем умень¬
шения напряженности поля, вычисленного на основе обратной
пропорциональности расстоянию на 4,6 дб, с тем чтобы компенси¬
ровать потери на замирание. Таким образом, если напряженность
поля, полученную за счет излучения в точке, находящейся на
единичном расстоянии от передающей антенны (при угле возвы¬
шения 0), и необходимую для создания заданного поля в районе
приемной антенны, обозначить Е9, то напряженность при отсутст¬
вии поглощения определяется приближенно посредством следую¬
щего выражения:
0,295 Ей
Е,т=— • (18)
У «1 + (4)
где Иь — эффективная высота слоя, й — расстояние между пере¬
дающей и приемной антеннами; и й измеряются в тех же ли¬
нейных единицах, какие были использованы для расчета Ец.
Для вида распространения с п-кратным отражением при длине
каждого скачка равной й напряженность поля без поглощения
может быть вычислена из соотношения
Еи{пй) = ^^ЕМ (19)
коэффициент 0,63 учитывает усредненные потери энергии сигнала
при каждом отражении от поверхности земли.
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
381
Действительная напряженность поля падающей волны в рай¬
оне приемной антенны отличается от значения, полученного при
отсутствии поглощения на коэффициент, который учитывает по¬
тери от поглощения и потери рассеяния в ионосфере. Таким обра¬
зом, действительная напряженность поля падающей волны Е^ мо¬
жет быть записана в виде
Е1(а) = Еи(4)е~^1, (20)
где а представляет затухание сигнала на единицу длины траек¬
тории распространения, а (11 есть один из элементов длины этой
траектории.
Расчет интеграла затухания потребовал бы подробных сведе¬
ний об изменении а вдоль действительной траектории распростра¬
нения волны, а такие сведения практически получить невоз¬
можно. Поэтому обычно принято определять медианную напря¬
женность поля падающей ионосферной волны из графиков, по¬
строенных Центральной лабораторией распространения радиоволн
или Корпусом связи армии США на основе материалов анализа
многочисленных измерений напряженности поля падающей волны.
Часть графиков содержит кривые, отражающие медианное зна¬
чение напряженности поля падающей волны в функции частоты
для нескольких видов распространения на определенных рас¬
стояниях, выраженных посредством коэффициента поглощения А.
При расчете коэффициента А принимается во внимание измене¬
ние солнечной активности в зависимости от времени дня, года и
количества солнечных пятен. Приведение здесь большого числа
графиков, необходимых для определения напряженности поля
падающей ’ волны, а также инструкций по их использованию вы¬
ходит за пределы данной главы; и читатель, который желает по¬
знакомиться с ними; чтобы получить более подробную информа¬
цию, должен обратиться к литературе, изданной Центральной
лабораторией распространения радиоволн Национального бюро
стандартов.
Если используемая частота близка к максимальной рабочей
частоте, потери поглощения всегда сводятся к минимуму, однако
быстро увеличиваются по мере уменьшения частоты. Поскольку
суточные изменения высоты и критической частоты слоя Е отно¬
сительно незначительны, то обычно можно использовать частоты,
имеющие лишь немного меньшее зна!чение по сравнению с макси¬
мальной применимой частотой этого слоя. Однако изменения вы¬
соты и критической частоты слоя Е2 слишком велики для того, чтобы
рекомендовать этот слой к использованию на частотах, превышаю¬
щих 85% максимальной применимой частоты в том случае, когда
требуется достаточно высокая надежность и непрерывность связи.
382
ГЛАВА 11
11—6.6. Многопутное распространение
Известно; что энергия сигнала ионосферной волны достигает
приемной антенны по многочисленным путям. В том случае когда
распределение напряжённости поля падающей волны как функция
вертикального угла прибытия сигнала имеет два или больше мак¬
симумов, то вероятно, что одновременно существует столько же
различных путей распространения неодинаковой длины. Состав¬
ляющие поля падающей волны, прибывшие по путям иным, чем
самый короткий, будут запаздывать по времени прибытия, относи¬
тельно сигнала, пришедшего по наиболее короткому пути. Это
опоздание для удобства назовем задержкой повторного сигнала.
В случае модулированных незатухающих сигналов действие та¬
кой задержки может проявиться в форме сильного искажения мо¬
дуляционной огибающей вследствие ясно выраженного интерфе¬
ренционного замирания, тогда как в случае импульсной модуля^
иии действие задержки может выразиться в появлении нескольких
перекрывающих друг друга или разнесенных импульсов на выходе
приемника от каждого переданного импульса. В последнем случае
искажение передаваемого сообщения может быть исключено, если
используемая длина импульса взята значительно больше, чем
максимальная задержка повторного сигнала.
Задержка повторного сигнала приближается к нулю, когда ис¬
пользуемая частота приближается к максимальной применимой
частоте для данного расстояния. Если используемая частота не
превышает половины максимальной применимой частоты, величина
задержки повторного сигнала может достигать нескольких милли¬
секунд. Иногда задержка повторного сигнала может оказаться
слишком большой, что может очень сильно уменьшить скорость
передачи сигналов.
И—6.7. Заключение по распространению ионосферной Ьолны
Ионосферное распространение или распространение ионосфер¬
ной волной пригодно для установления связи на расстояниях,
простирающихся от сотен до многих тысяч километров. Величина
затухания сигнала уменьшается до минимума, когда рабочая ча¬
стота приближается к максимальной применимой частоте, хотя
из-за наличия замираний она меняется обычно в широких преде¬
лах. В каждый период времени оптимальная рабочая частота за¬
висит от расстояния, на которое необходимо установить связь, и
от степени ионизации того ионосферного слоя, от которого сигнал
отражается. Предсказание оптимальной рабочей частоты имеет
только чисто статистическое значение, и оптимальная рабочая час¬
тота должна отчасти изменяться в зависимости от эксперимен¬
тальных данных, полученных в течение длительного промежутка
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
383
времени. Вообще говоря, нет такой единой частоты, которая была
бы одинаково желательна для работы как на длинных, так и ко¬
ротких дистанциях. Поэтому с использованием ионосферной
волны для связи с управляемыми снарядами связано множество
трудностей по определению оптимальной рабочей частоты, с кото¬
рыми обычно не сталкиваются в системах связи, предназначенных
для других целей.
11—7. РАСПРОСТРАНЕНИЕ ЗА СЧЕТ РАССЕЯНИЯ
11—7.1. Природа явления
Еще менее десятка лет тому назад считалось, что передача
радиосигналов в пункты, находящиеся за линией радиогоризонта
передатчика на частотах выше тех, которые пригодны для ионо¬
сферного распространения, может осуществляться только благо-1
даря дифракции сигнала вокруг Земли. Поскольку известно, что
за линией горизонта затухание дифрагированного сигнала с рас¬
стоянием растет экспоненциально, считалось, что практическое
применение частот в полосе УКВ и выше для целей связи ограни¬
чено, по существу, пределами прямой видимости из пункта рас¬
положения передающей антенны. Однако вскоре после второй ми¬
ровой войны ряд измерений распространения радиоволн показал,
что сигналы с уровнем, значительно превышающим дифракцион¬
ный, могли быть приняты устойчиво в точках, лежащих далеко
за линией радиогоризонта. Из этих и ряда других наблюдений;
последовавших за ними, стало очевидно, что существует какой-то
новый, .еще не открытый вид распространения радиоволн.
Объединенными усилиями было установлено, что это — распро¬
странение за счет рассеяния энергии сигнала в различной
среде.
Различают два вида распространения за счет рассеяния: пер¬
вый получил название тропосферного рассеяния, а второй — ионо¬
сферного. Считают, что тропосферное рассеяние является результа¬
том того, что часть энергии сигнала, излучаемого передатчиком,
вследствие имеющихся флюктуаций и отклонений электрических
свойств тропосферы от нормы рассеивается или частично отра¬
жается к земле.. Ионосферное рассеяние объясняется также влия¬
нием неравномерностей в распределении и движении ионов в
нижних слоях ионосферы, турбулентных флюктуаций, происходя¬
щих в ионосфере, и другими причинами. Хотя физические явле¬
ния, происходящие при распространении радиоволны за счет рас¬
сеяния, еще не совсем выяснены, теоретики показали, что некото¬
рые из предполагаемых видов рассеяния Должны давать эффекты-,
сопоставимые с наблюдаемыми в действительности.
384
ГЛАВА И
Рис. 152. Геометрия линии радио¬
связи с использованием рассеяния,
показывающая общий объем про¬
странства V, образованный диаграм¬
мами направленности приемной и пе¬
редающей антенн
11—7.2. Потери при тропосферном рассеянии
На рис. 152 показаны основные геометрические параметры
трассы распространения за счет рассеяния, где Т и представ¬
ляют собой передатчик и приемник, соответственно находящиеся
друг от друга на расстоянии Л, измеряемом по дуге земной поверх¬
ности. На обоих конечных пунктах использованы остронаправлен¬
ные антенны, которые ориентированы так, чтобы пространственные
диаграммы направленности пересекались в вертикальной пло¬
скости, проходящей через точки Т и /?, и в общем для них объ¬
еме V тропосферы. Передача из точки Т в точку /? возможна в
силу того, что некоторая часть энергии, излучаемой передатчиком
из точки Т, рассеивается общим
объемом V по направлению к
точке /?.
Букер и Гордон в статье,
опубликованной в 1950 году, да¬
ли предварительный теоретиче¬
ский анализ тропосферного рас¬
сеяния. Они считали, что тропо¬
сферное рассеяние вызывается
неоднородностями, или флюктуа¬
циями, диэлектрической постоян¬
ной тропосферы, которые появ¬
ляются за счет турбулентных
движений воздушных масс. Мас¬
штаб и размеры турбулентных движений были тогда вычислены и
должны были находиться в пределах от 10 см до 10 л; более со¬
временные определения размеров турбулентностей показывают,
что их величины колеблются от 20 м до 130 м около среднего зна¬
чения, приблизительно равного 50 м. Эти величины вполне срав¬
нимы с интересующими нас длинами волн при тропосферном рас¬
сеянии и создают направленность большей части рассеянной энер¬
гии внутри угла Х/2к/ радиан от направления первоначального
распространения сигнала (X —длина волны, а I—размер турбу¬
лентности). Таким образом, рассеянная энергия имеет тенденцию
к острой направленности, и в точках, лежащих за пределами ли¬
нии горизонта, приемник не находится в пределах основного рас¬
сеянного луча. Отсюда, принимаемая мощность намного ниже, чем
значение мощности в свободном пространстве, находящемся на
таком же расстоянии от передатчика, и эта характеристика рас¬
пространения за счет рассеяния надолго задержала признание его
в качестве вида распространения сигнала.
Для тех случаев, когда длина волны используемого сигнала
мала по сравнению с размером турбулентности, Гордон показал,
что горизонтальный угол распространения рассеянного излучения
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
385
в сторону приемника определяется приближенно из следующего
выражения:
__2_
3 ка '
где ка — эффективный радиус Земли с учетом нормальной атмо¬
сферной рефракции, а <1—расстояние между передатчиком и при¬
емником, как это показано на рис. 152. Подобный же результат
получается и для вертикального угла распространения при тех же
самых условиях. Таким образом, уменьшение углов раствора диа¬
граммы направленности антенны до величины ас даст в результате
увеличение принимаемой мощности, прямо пропорциональное уве¬
личению коэффициента усиления антенны. Однако дальнейшее
уменьшение угла раствора приводит в конечном счете к ухудше¬
нию работы антенны (хотя оно и дает наивысший теоретически
возможный коэффициент усиления антенны), потому что в этом
случае будет приниматься только часть рассеянной мощности.
Поскольку ширина диаграммы направленности антенны с диамет¬
ром раскрыва О приблизительно равна Х/Р, максимальный полез¬
ный диаметр раскрыва антенны будет равен
р КЛкаП
(1 ’
где К—постоянная, равная примерно 3/2.
Букер и Беттэнкур распространили первоначальную теорию Бу¬
кера— Гордона на случай больших размеров турбулентностей и
показали, что если используются антенны, имеющие углы раствора
диаграмм направленности в свободном пространстве а на обоих
концах линии связи, работающей за счет рассеяния, то отношение
принимаемой посредством рассеяния мощности Рг к значению
мощности Р), которая была бы принята в свободном пространстве
на таком же расстоянии от передатчика, определяется посредством
следующих выражений:
Р. 2Жх»
= ( Заг “"V % (21)
(для остронаправленных антенн);
А. = 0,86-^5р; л>ас (22)
(для антенн с широким лучом).
Здесь 8Р — параметр рассеяния, определяемый выражением
~ 2п1 ’
25—405
386
ГЛАВА И
где (Де/е)2 является среднеквадратической девиацией от среднего
значения диэлектрической постоянной. Данные, полученные во
время рефрактометрических замеров с самолета, показывают, что
значения 5Р могут лежать в пределах от 10-14 до 10~15 для высот
3600 м и менее.
Оценка порядка величины потерь рассеяния с помощью урав¬
нений (21) и (22) может быть улучшена, если применить эти выра¬
жения для типовых условий, при которых д равно 160 км
(100 миль), а 5Р— 10~14. В этом случае ас будет равно 0,72°. Тогда
на основании уравнения (21) мощность, принимаемая антенной с
шириной раствора диаграммы направленности 0,6°, будет на
63,4 дб ниже соответствующего значения мощности в свободном
пространстве: уравнение (22) показывает, что мощность, принимае¬
мая антенной с широким раствором диаграммы направленности
(а>0,72°), будет только на 54,4 дб ниже уровня мощности в сво¬
бодном пространстве.
Интересно сравнить эти расчеты с данными, полученными экс¬
периментальным путем. В 1953 году Булингтон обобщил несколь¬
ко серий экспериментальных данных и сделал вывод, что в точ¬
ках, лежащих далеко за пределами линии горизонта, принимае¬
мая мощность почти не зависит от частоты, высоты антенны и
условий погоды; что медианное значение напряженности рассеян¬
ного сигнала было почти на 55 дб ниже ее значения в свободном
пространстве на расстоянии 160 км от передатчика; и что потери
рассеяния увеличились приблизительно на 18 дб, когда длина
трассы передачи была удвоена. Джеркс в более поздних исследо¬
ваниях усреднил четыре серии экспериментальных данных, чтобы
получить эмпирическое выражение для потерь рассеяния относи¬
тельно затухания в свободном пространстве. Это выражение имеет
следующий вид:
АД в дб) = 57 + 0,12 (</' — 100) при ^'>100 миль, (23)
где д'—расстояние в милях. Общие потери распространения меж¬
ду передатчиком и приемником могут быть найдены путем добав¬
ления к значению, найденному из выражения (23), потерь распро¬
странения в свободном пространстве, найденных из выражения
(в дб) = 36,6 + 201од д'/Мгц, (24)
где /Мщ— частота в Мгц-, чтобы получить чистые потери распро¬
странения для данного частного случая, действительное усиление
антенны необходимо вычислять по сумме (А5 + Ау).
Данные, необходимые для подтверждения справедливости урав¬
нения (23) для расстояний, превышающих 480 км (300 миль),
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
387
очень неопределенны; поэтому имеются сомнения относительно
пределов, в которых оно остается справедливым. Необходимо по¬
мнить также, что тропосфера простирается только до высоты 10—
11 км, что ограничивает дальность передачи с помощью тропосфер¬
ного рассеяния расстояниями до 800 км (500 миль).
11—7.3. Замирания
Сигналы, принимаемые за счет тропосферного рассеяния, испы¬
тывают как медленные, так и быстрые замирания, что достаточно
показательно для изменения амплитуды сигнала в зависимости от
времени для данного вида распространения радиоволн. Медленные
замирания, соответствующие постепенным изменениям уровня сиг¬
нала в течение длительных периодов (часа и более), появляются
за счет изменений среднего значения показателя преломления
тропосферы. Буллингтон, Инкстер и Дарки на основании наблю¬
дений, произведенных в течение одного года, показали, что мед¬
ленные (в течение часа) изменения медианных уровней сигнала
стремятся следовать логарифмически нормальному закону распре¬
деления со средним отклонением, равным примерно 8 дб. Они на¬
шли также явные доказательства сезонного изменения усреднен¬
ного уровня принимаемого сигнала; потери распространения на
траектории передачи были на 13—20 дб больше в зимние месяцы,
нежели в летние.
Быстрые замирания вызываются волновой интерференцией
компонентов сигнала, распространяющихся по различным много¬
численным трассам, происходящей в точке приема. Если рассеи¬
вающие центры в общем объеме V, образованном пересечением
пространственных диаграмм направленности приемной и передаю¬
щей антенн, будут стационарны, то подобные замирания происхо¬
дить не будут. Однако эти центры обладают как турбулентными,
так и дрейфовыми скоростями, вследствие чего длина каждой от¬
дельной трассы распространения подвергается случайным измене¬
ниям со временем. Соответствующие изменения фазы составляю¬
щих сигнала, поступающих в приемную антенну, вызывают отно¬
сительные изменения амплитуды принятого сигнала.
Экспериментально установлено, что кратковременные измене¬
ния амплитуды принятого сигнала удовлетворяют закону распре¬
деления Релея. В соответствии с этим реальная напряженность
принимаемого сигнала должна превышать уровень, лежащий на
8 дб ниже медианного, в течение 90% времени и должна превы¬
шать уровень, лежащий на 18 дб ниже медианного, в течение 99%
времени. Были измерены скорости замирания, которые колебались
в пределах от значения, меньшего 0,1 гц, до 10 гц.
25*
388
ГЛАВА. 11
11—7.4. Ширина полосы канала связи тропосферного распростра¬
нения
Пространственная протяженность рассеивающего объема стре¬
мится ограничить ширину полосы частот канала, которая может
быть использована. Рассматривая рис. 152, можно заметить, что
составляющая сигнала, распространяющаяся по траектории ТВ#,
будет иметь задержку по времени прибытия к приемнику относи¬
тельно составляющей, имеющей более короткую траекторию рас¬
пространения ТАР. Если время задержки сравнимо по величине
с полупериодом наивысшей значащей модулирующей частоты,
то появляются большие потери глубины модуляции на этой часто¬
те и соответствующее искажение огибающей. Для остронаправлен¬
ных антенн Букер и Беттэнкур вывели формулу ширины полосы,
имеющую вид
= (при а<С ас)
и для слабонаправленных антенн —
о 4,7 с (Ла)2 ,
Вь = —а3— (°РИ
где с — скорость света. Расчеты, произведенные с помощью этих
выражений, для типовых условий показывают, что легко можно
получить полосы шириной от 1 до 10 Мгц.
11—7.5. Потери ионосферного рассеяния
Геометрические соотношения для линий связи с ионосферным
рассеянием отличаются от изображенных на рис. 152 главным об¬
разом тем, что оси антенн Т и /? имеют угол возвышения, доста¬
точный для того, чтобы получить пересечение диаграмм направ¬
ленности в общем для них объеме ионосферы, который находится
в средней части траектории. Высота, на которой появляется рас¬
сеяние, лежит, по-видимому, в пределах 75—80 км днем и
85—90 км ночью. Максимальная длина трассы связи при ионо¬
сферном рассеянии будет, таким образом, приблизительно равна
2000 км.
Несколько исследователей, работающих в области ионосфер¬
ного рассеяния, вывели соотношения между мощностью Рт сигна¬
ла, принимаемого при ионосферном рассеянии, и мощностью Рх, из¬
лучаемой передатчиком. Бейли и Бейтман, применив теорию рас¬
сеяния Букера — Гордона, получили следующее выражение:
Рг^РтчХ Дэт2* /9с\
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
389
где /—частота передаваемого сигнала;
/я—частота плазмы в рассеивающем объеме, найденная для
уравнения (15);
А—площадь раскрыва приемной антенны;
X—угол между электрическим вектором падающей волны и
направлением распространения рассеянной волны;
у—угол изменения направления распространения падающей
волны после ее рассеивания в ионосфере;
I—расстояние от средней точки рассеивающего объема до
приемной антенны.
Вилларе и Вайскопф вывели соответствующие соотношения,
основанные на теории рассеяния за счет турбулентных флюктуа¬
ций в нижних слоях ионосферы. Эти соотношения имеют следую¬
щий вид:
Рт _ /лг А 8ш2х /п(-ч
/з 3
И
рг А 51п2 х . .
р, ~ /И / 1 \ и • 'Г1 '
Р (>!»+)
Первое уравнение используется для более низких частот рассмат¬
риваемого диапазона, а второе — для более высоких. Можно заме¬
тить, что уравнения (25) и (26) лишь немного отличаются друг от
друга на более низких частотах.
Р
Вследствие крайне сильной зависимости отношения от час¬
тоты можно предполагать, что применение ионосферного рассея¬
ния окажется наиболее целесообразным на частотах, лишь незна¬
чительно превышающих максимальную применимую частоту. Экс¬
периментальные данные подтверждают этот вывод и наводят на
мысль, что на частотах, превышающих 75 Мгц, возможно лишь
ограниченное использование ионосферного распространения.
Бейли, Бейтман и Кирби провели обширные исследования в
области ионосферного распространения. Они исследовали кратко¬
временный и долгосрочный характер сигналов, эффективные вы¬
соты рассеивания, зависимость интенсивности принимаемого сиг¬
нала от угла рассеяния, изменение принимаемой мощности с час¬
тотой сигнала, влияние поляризации передаваемого сигнала и
многое другое, касающееся вопроса ионосферного рассеяния.
В большинстве экспериментов использовались передатчики с вы¬
ходной мощностью около 40 кет, причем в обоих конечных пунк¬
тах трассы радиосвязи были установлены антенны, имеющие уси¬
ление от 12 до 18 дб. Длина трассы, измеренная по поверхности
390
ГЛАВА 11
Земли, составляла примерно от 1250 км до 2250 км с небольшим.
Результаты их работы показали, что:
1. На трассах длиной около 1250 км медианное значение по¬
терь при передаче на частоте 50 Мгц, скорректированное с учетом
усиления используемых антенн, находится в пределах 220 дб.
2. Скорость кратковременных замираний при частоте 50 Мгц
находится главным образом в пределах от 0,2 до 5 гц, а флюктуа¬
ции уровня сигнала в общем согласуются с законом распределе¬
ния Релея.
3. Кратковременные, но сильные увеличения интенсивности сиг¬
нала появляются в результате метеорной ионизации в рассеиваю¬
щем объеме, образованном пересечением пространственных диа¬
грамм направленности приемной и передающей антенн. Такая
ионизация часто сопровождается допплеровским сдвигом частоты
принимаемого сигнала; величина сдвига колеблется от нулевой
частоты до нескольких килогерц. На частоте 50 Мгц напряжен¬
ность составляющих Допплера необычайно мала по сравнению
с напряженностью составляющих обычного рассеяния, принимае¬
мых одновременно.
4. Дневные изменения напряженности принимаемого сигнала
происходят как в средних, так и в высоких географических широ¬
тах; минимальный уровень сигнала обычно наблюдается по вече¬
рам между 19 и 21 часами по местному времени в средней точке
траектории. Максимальный уровень сигнала наблюдается в
полдень.
5. Из сравнения одновременных передач на частотах 27, 77
и 49,8 Мгц и на 49,8 и 107,8 Мгц, произведенных по одной и той же
радиолинии, видно, что показатель степени частотных множите¬
лей, содержащихся в уравнениях (25) — (27), не постоянен, а из¬
меняется в пределах от 4 до 12. Его полуденное медианное значе¬
ние при благоприятных условиях распространения сигнала дости¬
гает 5 на нижних частотах и 8 на верхних частотах. Эти значения
уменьшаются, когда сигнал имеет невысокий уровень.
6. Показатель степени коэффициента 51П у в уравнениях
(25) — (27) колеблется в пределах от 6 до 9 для передач, веду¬
щихся днем на частоте 50 Мгц.
7. Использование ионосферного рассеяния, вероятно, будет
наиболее целесообразным при передачах на расстоянии от 950 до
1900 км на частотах, лежащих в пределах от 25 до 60 Мгц.
8. Сравнение экспериментальных данных с расчетными, полу¬
ченными на основании тех или иных теорий распространения за
счет ионосферного рассеяния, выявило некоторые несоответствия
в этих теориях.
Обширная программа исследований в области ионосферного
рассеяния была осуществлена и описана Абелем, де Беттэнкуром,
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
391
Чисхольмом и Роше; их выводы основываются на длительных
(почти 13 000 часов) измерениях, выполненных большей частью
во время передач на трассе длиной примерно 1700 км, располо¬
женной в средних географических широтах. Полученные данные
касаются эффективной высоты рассеяния, медленных и быстрых
замираний, а также суточных и годовых характеристик уровня
сигнала, которое подтверждают выводы, сделанные Бейли, Бейт¬
маном и Кирби. Кроме того, было замечено, что уровни принимае¬
мого сигнала испытывают ежегодные изменения, которые, по-ви¬
димому, зависят от солнечной активности, причем более высокие
значения уровней сигнала совпадают с периодами наибольшего
количества солнечных пятен. Судя по данным, использованным
для вычисления показателя степени частотного члена в уравнении
принимаемой мощности, видно, что наиболее вероятные его значе¬
ния находятся в пределах 3—4 при колебании фактически изме¬
ренных значений от 1 до 7. Последние зависят от более высокого
из двух принимаемых уровней частот сигнала, излучаемых одно¬
временно общим удаленным источником.
11—7.6. Ширина полосы частот каналов связи, работающих за счет
ионосферного рассеяния
Полезная ширина полосы канала связи при ионосферном рас¬
сеянии, подобно ширине полосы при тропосферном рассеянии,
в основном определяется величиной задержки повторного сигнала.
Уменьшение значения задержки повторного сигнала достигается
главным образом соответствующей геометрией траектории рас¬
пространения, как уже ранее было показано для случая тропо¬
сферного рассеяния. Однако в случае ионосферного рассеяния до¬
полнительные многопутности могут возникнуть вследствие отраже¬
ний сигнала от ионизированных воздушных столбов, создаваемых
метеорами, пересекающими рассеивающий объем, образуемый пе¬
ресечением пространственных диаграмм направленности приемной
и передающей антенн, а также за счет отражений на трассе от
спорадических ионизированных облаков слоя Е и метеорной иони¬
зации. При небольших расстояниях передачи эти эффекты в ко¬
нечном счете могут дать задержку повторного сигнала порядка
нескольких миллисекунд и соответственно этому требуемую ши¬
рину полосы менее 1 кгц.
Задержки повторного сигнала, возникающие вследствие спора¬
дических отражений на трассе распространения сигнала, могут
быть исключены довольно эффективно путем применения остро¬
направленных передающей й приемной антенн, диаграммы направ¬
ленности которых имеют очень небольшие боковые лепестки. Такие
антенны также уменьшают обычную задержку повторного сиг¬
нала благодаря сокращению эффективного рассеивающего объема.
392
1'ЛаПА и
общего для обеих антенн. Наконец, поскольку разница в длине
самого длинного и самого короткого путей распространения через
рассеивающий объем уменьшается при увеличении длины трассы
связи, то уменьшение задержки повторного сигнала может быть
достигнуто за счет увеличения расстояния между передатчиком
и Приемником. Практически могут быть реализованы полосы ча¬
стот от нескольких кгц до 50 кгц и более, причем достижимое
значение ширины полосы будет зависеть главным образом от
длины пути распространения и характеристик используемых ан¬
тенн.
11—7.7. Особые свойства ионосферного рассеяния
Распространение радиоволн за счет ионосферного рассеяния
обладает несколькими специфичными свойствами, которые пред¬
ставляют большой интерес и важность. Так, было установлено,
что внезапные ионосферные возмущения, которые вносят сильное
затухание или даже полный перерыв связи ионосферной волной
на высоких частотах, вызывают заметное увеличение уровня сиг¬
налов , распространяющихся за счет ионосферного рассеяния.
Это явление наблюдалось как в средних, так и в более высоких
Географических широтах. Интенсивное полярное сияние, которое
обычно полностью прерывает распространение ионосферной волны,
также способствует улучшению распространения за счет ионосфер¬
ного рассеяния в районах сияния. Отсюда очевидно, что распро¬
странение с использованием рассеяния является пригодным для
установления очень надежной радиосвязи на дальние расстояния
в тех географических областях, где прежде это было наиболее
трудно осуществить.
11—7.8. Заключение по вопросу свойств распространения за счет
рассеяния
Распространение радиоволн за счет рассеяния дает возмож¬
ность установления радиосвязи на частотах более высоких, чем те,
которые используются для связи ионосферной волной, и на рас-
стоя1ния от 160 км до 2000 км и более. Системы связи, работающие
за счет тропосферного рассеяния, могут успешно применяться на
расстояниях, простирающихся от линии радиогоризонта до 800 км,
тогда как системы связи, работающие за счет ионосферного рас¬
сеяния, могут быть использованы на дальностях от 800 км до
2000 км. При обоих видах связи требуются сравнительно мощные
передатчики и остронаправленные антенные системы, для того
чтобы получить необходимые отношения сигнал-шум.
Потери распространения при тропосферном рассеянии мало
зависят от частоты, вследствие чего для установления радиосвязи
РАСПРОСТРАНЕНИЕ РАДИОВОЛН
393
за счет тропосферного рассеяния может быть использована по¬
лоса частот, выходящая за пределы КВ-диапазона. С другой сто¬
роны, потери при ионосферном рассеянии с ростом частоты растут
очень быстро; следовательно, такие линии связи, вероятно, дол¬
жны использоваться на частотах ниже 60 Мгц.
При современном состоянии теории распространения радио¬
волн за счет рассеяния маловероятно, чтобы на линиях связи
с управляемыми снарядами были использованы эти виды распро¬
странения, ибо требуемые мощности передатчиков и коэффициенты
усиления антенн могут быть получены лишь на очень больших
управляемых снарядах. Однако возможно, что в дальнейшем раз¬
витии этого вида связи вышеназва1нные трудности настолько
уменьшатся, что его использование для управляемых снарядов
будет даже заманчивым.
11—8. ЗАКЛЮЧЕНИЕ
Проблемы, связанные с обеспечением надежной и непрерывной
связи с управляемым снарядом дальнего действия в течение всего
периода полета, очень трудны для решения. В то время когда
снаряд находится в пределах прямой видимости с передатчика,
можно сравнительно легко использовать линии связи земной вол¬
ной, работающие в диапазоне метровых или дециметровых волн.
Однако в последней стадии полета снаряда единственным прак¬
тически осуществимым видом связи будет связь посредством ионо¬
сферной волны на коротких волнах. Поэтому непостоянство связи
с отражением радиоволн от ионосферы должно быть подвергнуто
очень тщательному анализу во время разработки технических
условий на такую систему связи. Весьма вероятно, что появится
необходимость последовательного изменения величины несущей
частоты, чтобы сохранить постоянство используемого вида распро¬
странения радиоволн с минимальным затуханием сигнала, но
даже и этот метод может оказаться недостаточным или бесполез¬
ным, в том случае когда высота, достигнутая снарядом, будет
такова, что потребуется пробивать верхние слои ионосферы. Кроме
того, можно предвидеть дополнительные усложнения в том случае,
если траектория снаряда будет переходить из дневной в ночную
области ионосферы или наоборот, ибо в зоне перехода наблюда¬
ются очень резкие изменения по времени высоты слоя и критиче¬
ской частоты. Ни в одной другой области радиосвязи не суще¬
ствует подобного рода проблем, и, по всей вероятности, потре¬
буется еще проделать очень большую работу по исследованию
и разработке методов и аппаратуры связи, прежде чем можно
будет получить приемлемое решение общей задачи связи с управ¬
ляемыми снарядами.
ГЛАВА 12
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
Р. Б. Мачмор 1
12—1. ВВЕДЕНИЕ
В этом весьма кратком обзоре, посвященном обширной области
сверхвысоких частот (микроволн), имелось в виду, во-первых,
изложить некоторые основные принципы электромагнитной теории;
во-вторых, использовать эту теорию при качественном описании
типовой микроволновой аппаратуры (для сокращения обзора
используются многочисленные физические примеры и аналоги);
в-третьих, привести основные формулы и экспериментальные дан¬
ные, необходимые для получения приближенных количественных
представлений относительно характера работы той или иной ра¬
диолокационной системы или системы связи.
Термин «микроволны»2, разумеется, относится к коротким
электромагнитным волнам, которые используются в радиолока¬
ционной технике и технике связи. К микроволновому диапазону
обычно относится та часть электромагнитного спектра, которая
лежит в пределах частот от одной тысячи до нескольких сот тысяч
мегагерц (волны длиной от 30 см до нескольких мм). Этот диа¬
пазон рассматривается отдельно главным образом потому, что
колебания охватываемых им частот требуют определенного типа
аппаратуры генерирования и передачи энергии. Эта аппаратура
удобна в применении, мала по своим размерам и значительно от¬
личается по принципам работы от аппаратуры, используемой в
других диапазонах.
Приставка «микро» использована чисто относительно; волны
этого диапазона, разумеется, очень коротки по сравнению с вол¬
нами длиной в десятки, сотни и тысячи метров, применяемыми
в технике дальней радиосвязи. Но в свою очередь волны микро¬
диапазона очень длинны по сравнению со световыми волнами.
В 'настоящее время сантиметровый диапазон волн освоен в доста¬
точной степени, так как используемая в этом диапазоне аппара-
1 Сотрудник лаборатории космической техники фирмы «Рамо-Вулдридж
корпорейшн».
2 В советской технической литературе чаще используется термин «сверхвысо¬
кие частоты (СВЧ)».— Прим. ред.
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
395
тура имеет вполне приемлемые значения размеров и допусков.
Энергия электромагнитных волн длинноволнового диапазона
(длина волны порядка нескольких метров и больше) очень легко
канализируется по проводам. Если же длина волны X намного
больше максимального размера прибора, то при математическом
описании системы можно внести определенные упрощения. При
этом основное внимание стараются сосредоточить на проводах и
протекающих по ним электрических зарядах. Такая «концепция
цепей» целиком верна только для однонаправленных полей (по¬
стоянный ток) и приблизительно справедлива для переменных
полей, частота которых не превышает десятков мегагерц. Эти
математические приближения постепенно, с повышением частоты,
становятся неверными, а в диапазоне СВЧ даже недопустимыми.
Здесь уже необходим полный и строгий анализ поведения волн, и
основное внимание следует обращать не на токи, протекающие
в проводниках, а на поля в пространстве, ограниченном проводни¬
ками или окружающем последние.
Другой эффект наблюдается при рассмотрении генераторных
ламп диапазона СВЧ. Если размеры лампы сравнимы с длиной
волны, то время, необходимое электрону для пролета вдоль лампы
(в вакууме) становится сравнимым с периодом колебаний поля.
Это вносит затруднения при анализе и заставляет перейти к иным
принципам работы приборов.
В более коротковолновой части спектра, за диапазоном СВЧ,
лежит область световых волн. Пока в силу исторически сложив¬
шихся обстоятельств развитие техники СВЧ опиралось больше
всего на достижения в области более низких частот, но многое
было заимствовано и из оптики (особенно при анализе вопросов,
связанных с антеннами).
При рассмотрении проблемы микроволн очень важно полное
понимание теории электромагнетизма. Следующий раздел начи¬
нается с рассмотрения основных законов электромагнетизма и
включает в себя идеи и понятия электромагнитного поля без ка¬
ких-либо приближений.
12—2. ОСНОВНЫЕ ЗАКОНЫ ЭЛЕКТРОМАГНЕТИЗМА
Основные законы электромагнетизма иллюстрируются уравне¬
ниями Максвелла. Эти уравнения являются комбинацией некото¬
рых частных законов, касающихся электрических и магнитных
полей и электрических зарядов. Исходные законы, на основании
которых выводятся уравнения Максвелла, были вначале получены
эмпирически. Их нашли экспериментальным путем при решении
некоторых специальных задач. Допустив, что эти законы носят
более общий характер, чем первоначально предполагалось, Мак¬
396
ГЛАВА 12
свелл и его сотрудники смогли доказать, что расширение общности
выдвинутых гипотез справедливо, поскольку оно дает теоретиче¬
ские результаты, полностью совпадающие с экспериментальными
данными. Ниже приводится формулировка этих законов в том
виде, который наиболее пригоден для наших целей. При этом
предполагается, что элементарные понятия об электрическом за¬
ряде и электрическом и магнитном полях уже известны читателю.
Основной закон электромагнитной индукции (закон Фарадея)
выражается следующим соотношением
^Е.Й8 = -4-УрН^5, (1)
с з
где Е — вектор электрического поля;
с1з— единичный вектор, направленный вдоль любого замкну¬
того контура С. Скалярное произведение Е-с?з должно быть про¬
интегрировано по этому контуру в направлении по часовой стрелке
(если смотреть по направлению вектора дз). Правая часть урав¬
нения (1) равна взятой со знаком минус производной по времени
от интеграла функции |з.Н-й8, взятого по любой поверхности 8,
ограниченной контуром С.
Величина Н представляет собой вектор магнитного поля, а б?8 —
единичный вектор, нормальный к поверхности 5 и по величине
пропорциональный дифференциалу площади в любой точке. Вели¬
чина р называется магнитной проницаемостью, и она характери¬
зует магнитные свойства среды. Здесь и при последующем изло¬
жении среда предполагается однородной и изотропной. Произве¬
дение рН называется магнитным потоком и часто обозначается
буквой В.
Следующее выражение представляет собой напряжение элек¬
трического поля
У=|Е-Л, (2)
с
где символ } означает интегрирование вдоль любого контура,
С
замкнутого или незамкнутого. Поэтому величина V зависит от кон¬
тура интегрирования С.
Согласно уравнению (1), напряжение вдоль замкнутого кон¬
тура равно взятой со знаком минус скорости изменения магнит¬
ного потока, проходящего перпендикулярно произвольно выбран¬
ной поверхности, опирающейся на контур С.
Простой физический опыт, подтверждающий закон Фарадея
1 В данной главе векторные величины представлены жирными буквами; те
же самые буквенные обозначения, набранные курсивом, выражают скалярную
величину вектора. Все уравнения написаны в системе единиц МКС (метр-кило-
грамм-секунда).
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
39?
[уравнение (1)], состоит в изменении магнитного поля, проходящего
через катушку. Любое изменение магнитного поля вызывает по¬
явление на концах катушки электрического напряжения. На этом
принципе основано действие электрических генераторов; магнит
приводится во вращение так, что его поле, пересекая катушку (или
катушки), непрерывно изменяется вследствие механического вра¬
щения. На концах катушки появляется индуцированное таким
образом напряжение (криволинейный интеграл берется вдоль про¬
вода катушки, концы которой представляются замкнутыми).
Работа трансформатора переменного тока также основана на
законе Фарадея. Изменение магнитного поля в трансформаторе
производится путем изменения величины тока, проходящего по
обмотке и создающего магнитное поле, которое подчиняется урав¬
нению (3). Считается, что уравнение (1) справедливо для любой
среды (проводящей или непроводящей). Таким образом, рассмат¬
риваемая поверхность может быть любой поверхностью, которая
обособлена в пространстве. *
Закон магнитной индукции (закон Био-Савара') в формули¬
ровке Максвелла имеет вид
=А[еЕ-</8+ [ (3)
С 5 5
В этом выражении Л — вектор плотности тока, т. е. скорость
изменения потока электрического заряда во времени в данном
направлении. Другим параметром среды является диэлектриче¬
ская проницаемость е. Произведение диэлектрической проницае¬
мости на напряженность электрического поля еЕ называется век¬
тором электрического смещения (часто обозначается буквой В),
деЕ
а величина называется током смещения.
Магнитодвижущая сила по аналогии с уравнением (2) опреде¬
ляется соотношением в виде криволинейного интеграла. Следова¬
тельно, из уравнения (3) вытекает, что магнитодвижущая сила
вдоль замкнутого контура С равна суммарному току (включая
ток проводимости и ток смещения), проходящему через любую
поверхность 5, опирающуюся на контур С. Таким образом, урав¬
нения (1) и (3) взаимно дополняют друг друга: изменение напря¬
женности магнитного поля создает электрическое поле, а электри¬
ческий ток (или изменения напряженности электрического поля)
создает магнитное поле.
На основании закона Ома
3=^Е, (4)
1 Его часто называют также законом Ампера. Название «закон Био-Са¬
вара» является исторически более правильным.
398
Г Л А Й А И
где § — третий параметр среды, называемый проводимостью;
уравнение (3) может быть записано в виде:
фн-Л = -^-|’еЕ-<*5 + ^Е-д8. (5)
с $ .у
Коэффициент § является мерой силы тока, проходящего в данной
среде при наличии электрического поля. Большое значение § озна¬
чает, что даже небольшое поле может вызвать большой ток.
Следовательно, вещество с большим значением § является хо¬
рошим проводником электрических зарядов, а с. малым § — пло¬
хим проводником.
Необходимо рассмотреть еще один закон — закон сохранения
электрического заряда. Обозначая плотность заряда на единицу
объема буквой р, можем записать:
ф;.^5 = -4Ур^. (6)
5 V
Таким образом, электрический ток, выходящий из замкнутой по¬
верхности 8, равен взятой со знаком минус скорости изменения
заряда внутри объема V, ограниченного поверхностью 8. Иными
словами, электрический заряд нельзя ни уничтожить, ни создать.
В свободном пространстве нет никаких зарядов, способных
вызвать ток при наличии электрического поля, т. е. при § = 0.
Уравнение (5) для этого случая примет вид
=-^-рЕ-дЗ. (7)
С 8
Самый интересный и важный для наших целей вывод из урав¬
нений (1) и (7) заключается в том, что эти уравнения имеют
решение в виде бегущей волны. Чтобы убедиться в этом хотя бы
на упрощенном примере, построим поле таким образом, чтобы оно
удовлетворяло указанным уравнениям, но в то же время было
как можно более простым. Для этого начнем только с одной
составляющей вектора магнитного поля, а затем сделаем наибо¬
лее простые дополнения, которые потребуются для получения
частного решения. Если не требуется точное решение, то все про¬
странственные производные следует приравнять нулю. Исключения
из этого правила будут сделаны впоследствии по мере необхо¬
димости.
Вначале предположим, что вектор Н направлен вдоль оси г,
как это показано на рис. 153. Если С (рис. 153) представляет со¬
бой небольшой прямоугольник со сторонами йх, йу в плоскости
ху, то к этому контуру можно применить уравнение (1). Пусть
поверхностью 8 является часть плоскости ху, ограниченная ука¬
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
399
занным прямоугольником, тогда, правая часть уравнения (1) при¬
мет вид
-4 <8)
5*
На величину ф Е ■ дз будет влиять только составляющая век-
с
тора напряженности электрического поля Е, находящаяся в пло¬
скости ху. Поэтому предположим,
что вектор Е направлен по осих.
Если Е вектор постоянный, то его
составляющие на одной полови¬
не периметра контура С будут
компенсировать составляющие на
другой половине периметра, и,
следовательно, интеграл ф Е-Л
с
будет равен нулю. В том слу¬
чае когда задачу нельзя упро¬
щать, должно выполняться нера¬
венство 4^- 0. При этом инте-
ау г
грал по одной стороне контура С
не будет компенсирован интегра¬
лом по другой его стороне и будет получен результат, отличный
от нуля. Проведя необходимое интегрирование, получим
+ О)
С
интегралы в направлении оси у обращаются в нуль. Из уравнений
(8) и (9), согласно уравнению (1), получим
дЕ дН
= 0°)
Аналогичным образом, для плоскости уг можно записать
дН дЕ ,,,.
-щг = е^г; (11)
, г. дН , „
в этом случае необходимо, чтобы Ф 0.
Система дифференциальных уравнений (10) и (11) в частных про¬
изводных имеет решение:
Н—‘4/^/.('-^) + в/р= (' + !)• 02)
Рис. 153. Контур интегрирования для
уравнения (8)
400
ГЛАВА 12
которое может быть проверено прямой подстановкой. Здесь А и В
являются произвольными постоянными, а /1 и /2— функциями про¬
извольного вида.
Величина с = —^= имеет размерность скорости. Очевидно, что
И 4х
при любом виде функций /1 и /г они представляют процесс, рас¬
пространяющийся с течением времени соответственно направо или
налево по оси у со скоростью 5. Эти функции, следовательно,
представляют волны, бегущие в положительном и отрицательном
направлениях. Постоянные А и В и функции Ц и /2 могут быть
выбраны так, чтобы они соответствовали начальным и граничным
условиям. В качестве и /2 могут быть взяты функции синус и
косинус, поскольку на основании теоремы Фурье любая функция
может быть представлена как сумма ряда косинусоидальных и
синусоидальных колебаний. Иногда используют и другие функ¬
ции; обычно выбирают ряд ортогональных функций, которые яв¬
ляются наиболее соответствующими выбранным граничным усло¬
виям.
Полученное решение справедливо при предположении, что про¬
странство ничем не ограничено, так как никаких разрывов непре¬
рывности не было установлено. Надо полагать, что поля будут
резко изменяться в тех местах, где свойства пространства изменя¬
ются скачкообразно. Например, на границе между вакуумом и
металлом образуется как бы демаркационная поверхность для
полей.
Соответствующие условия, необходимые для применения
в практических задачах, могут быть выведены из уравнений (1)
и (5). В частности, на границе между свободным пространством
и идеальным проводником (для которого ё = <х>) тангенциальная
составляющая напряженности электрического поля равна нулю.
В этом можно убедиться, написав уравнение (1) для контура, по¬
казанного на рис. 154. Если уменьшать размеры контура интегри¬
рования, то в результате интеграл по площади (правая часть
уравнения (1) будет равен нулю. Следовательно, криволинейный
интеграл (левая часть уравневния (1) также будет равняться
нулю, а так как ^металл = 0 (в силу бесконечной проводимости ме¬
талла1). ^пространство также должно быть равно нулю.
Подобным же образом с помощью уравнения (5) можно дока¬
зать, что разность тангенциальных составляющих напряженности
магнитного поля на границе двух сред должна быть равна по¬
верхностному электрическому току, текущему под прямым углом
1 Вывод, что Е=0 при вытекает из закона Ома, уравнение (4). При
применении этого уравнения следует иметь в виду, что / остается конечной ве¬
личиной, если энергия поля конечна. Поскольку это справедливо для реальных
ристем, то следует вывод, что Е=0-
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
401
к направлению полей. Из уравнения (1) следует, что поскольку
внутри идеальйого проводника Е = 0, то Н должно быть также
равно нулю, а следовательно, тангенциальная составляющая на¬
пряженности магнитного поля вблизи идеального проводника
равна поверхностному току, протекающему перпендикулярно век¬
тору Н.
Подобным же образом могут быть получены выражения для
нормальных составляющих поля. Применив уравнения (1) и (5)
к небольшим контурам, находящимся внутри поверхности, по¬
лучим
^"нормальное 0 (16)
^нормальное := 6' (14)
где о — поверхностная плотность заряда.
Получив соответствующие граничные условия, которые должны
всегда удовлетворять уравнениям поля, вернемся назад и произ¬
ведем проверку решений, для того чтобы убедиться, насколько
они соответствуют граничным условиям заданного пространства.
Из анализа свойств решений (уравнение 12) становится оче¬
видным, что нужно рассматривать только одно решение из двух.
Другое решение может быть получено непосредственно из урав¬
нений (1) и (5).
Предположим, что Е представлено в виде
Е = АД (/- + В/2 . (15)
Представим теперь себе, что граничная плоскость перпендику¬
лярна к оси у и слева от нее находится свободное пространство,
а справа — идеальный проводник. Вектор электрического поля
касателен к этой плоскости, и, следовательно, на границе он дол¬
жен быть равным нулю. Чтобы это было справедливо, необходимо
выполнение равенства
+ (16)
20-405
Рис. 154. Контур интегрирования для величины Е у границы
проводника
402
ГЛАВА 12
в граничной точке с координатой уь- Чтобы равенство (16) было
справедливо для любого момента времени, необходимо и доста¬
точно, чтобы А=—В, а функция имела бы тот же вид, что и
функция /г-
Таким образом, на поверхности идеального проводника Е = 0,
а в свободном пространстве (слева от границы)
Е= + (17)
Внутри проводника Е всегда считается равным нулю.
Простейшее объяснение этого уравнения состоит в следующем.
Величина Е представляет собой сумму двух волн, одна из которых
движется налево, а другая — направо, причем первая волна яв¬
ляется отражением второй волны от поверхности металла. Не¬
сколько усложняя доказательство, можно показать, что волна,
падающая на идеальный проводник под углом а, отразится от него
под таким же углом. В этом состоит так называемый закон отра¬
жения Снелла.
Для неидеальных проводников тангенциальные составляющие
напряженности электрического поля будут по-прежнему на границе
двух сред равны между собой, но не обязательно будут равняться
нулю. Для проводников, применяемых в технике СВЧ, коэффи¬
циент § настолько велик, что тангенциальная составляющая Е
весьма мала, однако не равна нулю.
Пусть падающая волна движется слева и приближается к гра¬
нице неидеального проводника. Выражение для напряженности
электрического поля в свободном пространстве можно, как и
раньше, записать в виде
Пространство = Л/. (18)
Но в рассматриваемом случае характер электрического поля
в металле несколько изменился. Поэтому теперь нужно исполь¬
зовать полное выражение для закона магнитной индукции [урав¬
нение (5)], т. е. необходимо учитывать член, содержащий произ¬
водную по времени.
До сих пор предполагалось, что изменения физических вели¬
чин во времени происходят по закону синусоиды. Предстоящая за¬
дача намного облегчится, если происходящие изменения учиты¬
вать множителем е1ш1 (справедливость такого положения легко
доказывается). Величина ш является параметром, выражающим
угловую скорость в радианах в единицу времени. По окончании
расчета выбирается либо вещественная, либо мнимая часть реше¬
ния, поскольку нам нужен реальный ответ на реальную задачу.
Взяв комплексный экспоненциальный множитель е‘ш1 в качестве
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
403
предполагаемого закона изменения по времени, уравнение (5)
можно записать в виде
фн-Л = (19)
с з
Теперь можно получить такое же решение, как и раньше, однако
функции Ц и (2 должны быть комплексными экспоненциальными
функциями времени, как это постулировалось при написании
уравнения (19).
Следовательно, для области металла уравнение будет иметь
вид
^металл = Ч (20)
где
_ 1
т V + ё)
Очевидно, что это не простая волна, но ее можно привести
К виду ^пространство При У = Уъ, ЁСЛИ фуНКЦИИ И /2 ЯВЛЯЮТСЯ ТЭК-
же комплексными экспоненциальными функциями.
В результате этого мы получим комплексную падающую экспо¬
ненциальную волну с амплитудой А, отраженную волну с ампли¬
тудой В и преломленную волну с амплитудой С. Кроме того, на
границе мы должны иметь
^пространство = ^металл = К ’ + Вв К С ! = Св к ‘щ/, (21)
откуда
А = — В+С. (22)
Соотношение между В и С определяется величиной проводимости
металла
Заметим, что ст — величина комплексная, и, следовательно,
волна в металле, определяемая членом Се1т<1~ ),может быть
записана в виде Се , где а и в — величины постоянные.
Чтобы получить физически реализуемое решение, величина а дол¬
жна быть отрицательной, ибо в противном случае с увеличением у
поле будет расти беспредельно. При отрицательном значении а
поле в металле уменьшается по экспоненциальному закону; потери
энергии объясняются выделением тепла в металле.
Комплексная волна в металле обычных проводников на часто¬
тах СВЧ диапазона быстро затухает в пределах очень малого
расстояния.
26*
404
ГЛАВА 12
На рис. 155 показаны кривые, характеризующие глубину, в пре¬
делах которой волна в металле ослабляется в е раз. Заметим, что
глубина проникновения тока в металл очень мала, и, по существу,
любой сверхвысокочастотный ток в металле проходит по поверх¬
ности проводника. Токи таких частот почти совершенно не про¬
никают в глубь проводника.
Рис. 155. Теоретическая зависимость глубины проникновения поля в ме¬
талл от частоты для различных проводников
До сих пор не было упомянуто о силах взаимодействия про¬
водников, находящихся в электромагнитном поле, с электриче¬
скими токами. Знание этих сил необходимо для понимания работы
электронной лампы.
Согласно закону Кулона
Г = 9Е, (23)
где Г — вектор силы, действующей на элементарный заряд д в
электрическом поле Е. Заряд д испытывает воздействие силы в
направлении электрического поля, которое пропорционально вели¬
чине этого поля.
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
405
Закон Ампера устанавливает взаимосвязь между величиной
силы, действующей на заряд силой тока и напряженностью маг¬
нитного поля:
Г = <?И(УХН). (24)
Таким образом, вектор силы, действующей на элементарный
заряд д, движущийся в однородной изотропной среде с магнит¬
ной проницаемостью р со скоростью V (вектор), равен произведе¬
нию ^р, умноженному на векторное произведение (уХН). Эта
сила, следовательно, всегда направлена под прямым углом к пло¬
скости, в которой лежат векторы у и Н.
Энергию электрического и магнитного полей можно определить
на основании законов механики посредством вычисления, напри¬
мер работы, необходимой для создания электрического поля по¬
средством переноса единичного заряда из бесконечности в данную
точку поля. Энергия V, накопленная в обоих полях, будет равна
^/ = -2-+ (25)
V V
интегралы берутся по всему пространству, содержащему поля.
Энергия накапливается и сохраняется полями; если же поля
перемещаются, то считается, что и энергия движется вместе
с ними. В действительности, произведя чисто математические опе¬
рации над уравнениями поля, можно получить следующие резуль¬
таты (для диэлектрического пространства, не содержащего источ¬
ников энергии):
ф(Е X Н)-^8 = — \(Е2 + Н*)<1У. (26)
3 V
Полученное уравнение имеет форму, аналогичную, например,
уравнению (6). Правая часть уравнения представляет собой ско¬
рость изменения энергии по времени в пределах данного объема,
взятую со знаком минус. Уравнение (26) можно объяснить иначе:
векторное произведение Ех Н (называемое вектором Пойнтинга)
характеризует направление и плотность потока энергии, выходя¬
щей из объема V через облекающую его поверхность 5. Такого
рода объяснения даются часто; они не противоречат каким-либо
экспериментальным данным и являются очень удобной основой
для непринужденного мышления.
Надо заметить, что векторное произведение ЕхН направлено
под прямым углом как к вектору Е, так и к вектору Н. Для полей,
показанных на рис. 153, оно направлено в сторону либо положи¬
тельной, либо отрицательной ветви оси у, в зависимости от знаков,
которые имеют члены в уравнении (12). Следовательно, поток
энергии движется по направлению перемещения волны.
406
ГЛАВА 12
12—3. ВОЛНОВОДЫ И ОБЪЕМНЫЕ РЕЗОНАТОРЫ
В предыдущем разделе дан краткий анализ простой электро¬
магнитной волны. В ходе анализа были сделаны некоторые упро¬
щения; мы полагаем, что вектор напряженности электрического
поля Е имеет лишь одну составляющую Ех, направленную по
оси х, и соответственно этому вектор напряженности магнитного
поля Н имеет единственную составляющую Нг, направленную по
оси г. Кроме того, было сделано предположение, что векторы Е и
Н имеют пространственные производные только в направлении
оси у. Очевидно, рассмотренные волны должны иметь векторы
Е и Н неизменными во всех плоскостях, перпендикулярных оси у,
поэтому такие волны называются плоскими. Они будут иметь
место в свободном пространстве,
если рассматриваемая часть про¬
странства удалена от источника
возбуждения на достаточно боль¬
шое расстояние.
Понятно, что есть и другие,
более сложные типы волн. Рас¬
смотрим, например, полую трубу
прямоугольного сечения, изготов¬
ленную из идеального провод¬
ника (рис. 156). Пусть направле¬
ние осей х, у, г выбрано так, как
это показано на рисунке. Подадим рассмотренную нами ранее
плоскую волну с составляющими Ех и Нг внутрь трубы. Для этого
просто «вырежем» из волны прямоугольный отрезок и «вставим»
его в трубу. Он не будет действовать вследствие существующих
граничных условий. Составляющая вектора напряженности элек¬
трического поля, параллельная плоскостям а—а, должна быть
равна нулю, и составляющая вектора напряженности магнитного
поля, перпендикулярная к этим плоскостям, также должна рав¬
няться нулю. Простая плоская волна не удовлетворяет этим гра¬
ничным условиям (за исключением тривиального случая, когда поле
повсюду равно нулю). Это объясняется тем, что на основании на¬
чальных предположений составляющие Ех и Нг не изменяются
в направлении оси г, и, следовательно, поле не может быть равным
нулю на границах и конечным в других точках.
Теперь, чтобы удовлетворить изменившимся условиям задачи,
предположим, что составляющая Ех изменяется в пространстве
в направлении осей у и г. Написав уравнение (1) для элементар¬
ного квадрата в плоскости ху, можно получить следующее выра¬
жение (см. уравнение 10):
дНг дЕл
= (27)
Рис. 156. Прямоугольная призмати¬
ческая труба
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
407
Аналогично для элементарного квадрата в плоскости хх най-
05„
дем, что величина может быть конечной, как это предпола¬
галось раньше, только для случая, когда составляющая Ну не
равна нулю, потому что в одной части уравнения появляется по¬
верхностный интеграл от Ну. Отсюда следует вывод, что к при¬
нятым предположениям необходимо добавить еще одно условие:
чтобы составляющая Ну также имела конечную величину. Полу¬
ченное при этом уравнение будет иметь вид
р. —/- = . (28)
г д1 дг ' '
Наконец, написав уравнение (7) для бесконечно малого квадрата,
находящегося в плоскости уг, получим
41 + ^ = .-^. (29)
дг 1 ду д1 ' '
Для системы уравнений (27), (28) и (29) существует следующее
решение, удобное для наших целей;
Дд = Д81п-^е ' ' г’а', (30)
где А и В — произвольные постоянные, п. — любое целое число,
оп — скорость, ш — угловая частота. Очевидно, что выражения для
составляющих Нг и Ну можно получить из уравнения (30), исполь¬
зуя уравнения (27) и (28).
Как и ранее, будем считать, что внутри трубы имеется две
группы бегущих волн, распространяющихся в противоположных
направлениях. В каждом направлении движется бесконечное
число волн соответственно бесконечному числу вариантов выбора
значений п. Каждая из этих волн характеризуется своей ско¬
ростью цп, которая вовсе не обязательно должна быть величиной
вещественной. Эта скорость определяется следующим выражением:
А = • л , (31)
1
где, как и раньше, скорость света с равна —=.
V
Из уравнений (30) и (31) можно сделать два важных вы¬
вода:
Во-первых, если скорость оп является величиной вещественной,
то она больше скорости света с. Таким образом, в волноводах
(так называются полые трубы, аналогичные показанной на
408
ГЛАВА 13
Рис. 157. Структура поля для некоторых типов волн в волноводах
различной формы
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
409
рис. 156) фазовая скорость больше, чем в свободном пространстве.
Во-вторых, если скорость ип— величина мнимая, то уравнение
(30) содержит действительный экспоненциальный множитель, т. е.
возбужденное поле постепенно затухает и не будет распростра¬
няться в виде волны. Частота, при которой скорость Vп становится
мнимой величиной, в соответствии с уравнением (31) называется
критической частотой. На частотах больших критической распро¬
странение волн происходит без потерь (в идеально проводящих
металлических трубах), тогда как на частотах ниже критической
появляется затухание, растущее по экспоненциальному закону
с увеличением расстояния.
Очевидно, что полученное выше решение является частным
решением. На рис. 157 показана структура полей для нескольких
типов волн в волноводах различной формы. Поля, соответствую¬
щие уравнению (30), изображены на рис. 157, а, б ив. Около каж¬
дой схемы структуры поля указана критическая длина волны и
приведено обозначение данного типа волн '. Каждый вид волны
называется типом колебаний.
Обычно волноводы используются на частотах, где может суще¬
ствовать только один тип колебаний. Из рис. 157 видно, что макси¬
мальный диапазон работы круглых волноводов по частоте равен
2:1, однако этот диапазон обычно полностью не используется.
Коаксиальные линии (рис. 157, г) могут работать, начиная с нуле¬
вой частоты и кончая частотой первого высшего типа колебаний.
Таким образом, они могут быть использованы в тех случаях, когда
очень важно иметь широкую полосу пропускания.
Как уже объяснялось в разделе 12—2, в металлических стен¬
ках волновода поля практически отсутствуют. Энергия главным
образом переносится волнами, движущимися в пространстве
внутри волновода (см. рис. 156). Та небольшая часть энергии,
которая проникает в металлические стенки, вызывает потери
только благодаря неидеальным проводящим свойствам стенок
волновода. На рис. 158 показаны некоторые кривые, характери¬
зующие потери мощности на единицу длины для большинства
обычно используемых волноводов и типов колебаний.
В реально действующей аппаратуре необходимо не только
учитывать потери мощности при передаче, но и решить вопрос
о напряжении пробоя. Величина этого напряжения может быть
вычислена с помощью уравнения (2), откуда можно определить
его максимальное значение для различных волноводов и типов
колебаний. Максимальный градиент напряжения, при котором еще
1 Это обозначение основано на значениях определенных постоянных, появ¬
ляющихся при решении волновых уравнений. Они представляют, по существу,
количество полуволн по координатным осям, лежащим в плоскости поперечного
сечения волновода (числа т и п),
410
ГЛАВА 14
не возникает опасность пробоя в воздухе, является функцией
плотности воздуха. На рис. 159 показана зависимость допустимой
мощности, передаваемой по волноводу, от его размеров и высоты
над уровнем моря для нескольких наиболее часто используемых
волноводов.
Рис. 158. Потери энергии на единицу длины для обычных волноводов и типов
волн
Когда волна, распространяющаяся по волноводу, встречает
какое-либо препятствие (таким препятствием может быть любое
изменение геометрической формы бесконечно длинной прямой
трубы с постоянным поперечным сечением), то, как уже говори¬
лось в разделе 12—2, какая-то часть энергии волны будет отра¬
жаться. Одной из задач, стоящих перед конструктором волновод¬
ной системы передачи, является сведение такого рода отражений
к минимуму. Отраженная волна возвращается обратно по волно¬
воду и может вывести из строя генератор, питающий линию пе¬
редачи. Кроме того, эта волна увеличивает напряжение в линии.
Штепсельные разъемы, фланцы, изогнутые секции волновода и
тому подобные элементы волноводных систем должны быть скон¬
струированы так, чтобы свести эти отражения к минимуму. Для
этого существуют два основных метода: /) уменьшать внутренние
неоднородности волноводов; 2) добиваться компенсации отражений
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
411
от различных неоднородностей. В большинстве волноводных си¬
стем применяются оба эти метода. Одновременно производится
расчет потерь и напряжения пробоя. Это необходимо при решении
задачи размещения линии передачи в заданном объеме с учетом
подвижных соединений и гибких сочленений.
Рис. 159. Зависимость допустимой мощности, передаваемой по волноводу,
от размеров волновода и высоты над уровнем моря
Как уже отмечалось выше, волноводные линии передачи при
отсутствии внутренних отражений могут быть использованы
в относительно широкой полосе частот. Если же требуется более
высокая чувствительность к изменениям частоты, то использу¬
ются объем'ные резонаторы.
412
ГЛАВА 12
Представим себе синусоидальную волну, распространяющуюся
вдоль волновода, и допустим, что рис. 160 представляет зависи¬
мость величины напряженности электрического поля от расстоя¬
ния. Напряженность будет иметь
форму синусоидальной волны,
Рис. 160. Зависимость величины на¬
пряженности электрического поля от
расстояния
которая движется в направлении, показанном стрелкой. Длина
волны в волноводе обозначается Хв. Если в правом конце волно¬
вода поместить проводящую металлическую пластинку, то волна
отразится от нее. Предположим, что в левом конце волновода по¬
ставлена вторая проводящая металли¬
ческая пластинка. Тогда отраженная
волна отразится уже вторично от ле¬
вого конца волновода. Теперь уже к
правому концу волновода движутся две
волны. Если вторая металлическая
пластинка с левой стороны волновода
была помещена соответствующим об¬
разом, то эти волны — прямая и вто¬
рично отраженная — взаимно усилят
друг друга. Усиленная волна отра¬
зится снова от правого конца, и про¬
цесс будет повторяться бесконечно.
Простые соображения приводят к вы¬
воду, что усиление будет происходить
в том случае, если металлические пла¬
стины расположены друг от друга на
расстоянии, кратном Хя/2. Если в ре¬
зонатор, образованный двумя пла¬
стинами, закрывающими оба конца
отрезка волновода, ввести небольшую
мощность, то благодаря многократ¬
ному усилению внутри резонатора
создается заметное по величине поле.
Это имеет место в том случае, когда
длина волны выбрана верно. При
этих условиях резонатор будет резо¬
нировать.
Рис. 162. Типовые значения <2
для объемных резонаторов раз¬
личных геометрических форм.
Р для медных резонаторов
в функции частоты.
1. Цилиндрический резонатор дли*
ной. равной диаметру; тип колеба¬
ний ТЕои. 2. Цилиндрический резо¬
натор длиной, равной диаметру;
тип колебаний ТЛЬю. 3. Кубиче¬
ский объемный резонатор; тип ко¬
лебаний ТЕю|. 4. Коаксиальный
объемный резонатор с отношением
внешнего диаметра к внутрен¬
нему = з,б и длиной, равной выс¬
шему диаметру; тип колебаний
ТЕМ. Нижний индекс в обозначе¬
нии типа колебания означает раз¬
меры объемного резонатора, выра¬
женные в половинной длине волны
Рис. 161. Микроволновая энергия,
введенная в объемный резонатор
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
413
Резонаторы такого типа используются для создания больших
полей при небольшой мощности входного сигнала, а также в ка¬
честве фильтров и волномеров. В двух последних случаях энергия
обязательно должна проходить через объемные резонаторы. СВЧ-
сигнал может вводиться в них через небольшое отверстие в стенке
волновода, как это показано на рис. 161. Волна будет усиливаться
только в момент резонанса и, таким образом, только при резо¬
нансе поле внутри цилиндрической полости будет достаточно боль¬
шим для того, чтобы наводить заметное по величине поле в вы¬
ходном волноводе.
Избирательность резонатора зависит от степени усиления коле¬
баний, которая в свою очередь определяется потерями передачи
энергии волн, проходящих через резонатор в обоих направлениях.
Величина, которая характеризует эти потери как меру избиратель¬
ности, называется добротностью и обозначается буквой (). Вели¬
чина С? равна значению резонансной частоты, деленному на раз¬
ность между частотами, на которых выходной сигнал уменьшается
в 2 раза по мощности по сравнению с сигналом на резонансной
частоте. Величина (2 также равна отношению накопленной энер¬
гии к энергии потерь за один период. Приведенные формулировки
определяют порядок расчета значения добротности. Типовые зна¬
чения добротности для объемных резонаторов различной формы
приведены на рис. 162. Для получения более сложных частотных
характеристик можно использовать сочетание нескольких резо¬
наторов.
12—4. АНТЕННЫ И ОБТЕКАТЕЛИ
Направленные электромагнитные волны в определенных про¬
странственных пределах возможно получить не только внутри вол¬
новодов, но и вне их. Например, волна может быть направлена
с помощью двух параллельных проводов (это обычная низкоча¬
стотная линия передачи), одного провода диэлектрического стерж¬
ня и всевозможных других типов линий передачи. Кроме того,
в свободном пространстве имеет место большое количество раз¬
личных типов ненаправленных волн.
Частным видом направленной антенны, представляющей осо¬
бый интерес, является коническая линия, показанная на рис. 163.
Она состоит из двух конусов, обращенных вершинами друг
к другу. Такая антенна излучает сферические волны, распростра¬
няющиеся как внутри, так и вне конусов.
Если размеры конусов ограничены, то длина конусов должна
быть выбрана очень тщательно. Это делается посредством согла¬
сования амплитуд прямых и отраженных волн, как это было
объяснено выше, за исключением полезных составляющих спектра
сигнала. Сферические волны на конусах и в свободном простран¬
414
ГЛАВА 12
стве за конусами образуют полный ортогональный ряд, и на
основании известных свойств таких рядов из серии колебаний
можно составить любую ограниченную функцию. Это почти то же
самое, что использовать одномерные ряды Фурье.
По поверхности конусов распространяется одна серия периоди¬
ческих колебаний, а в пространстве за конусами — другая серия.
Внешняя серия волн представляет собой передаваемую или, в на¬
шем случае, излучаемую энергию. Она распространяется от кону¬
сов в виде постепенно расширяю¬
щейся волны, уходящей в свобод¬
ное пространство.
Антенна, показанная на рис.
163, обычно называется диполем.
Форма вибраторов не обязатель¬
но должна быть конической, как
это показано на рисунке. Чаще всего диполь состоит просто из
двух проводов, помещенных конец к концу и возбуждаемых в се¬
редине. Длины проводников обычно выбираются исходя из тех же
соображений, как и в случае объемных резонаторов. При резонансе
создаются более сильные поля и излучается большая энергия.
Сферические волны, излучаемые диполем, разумеется, могут
быть получены и другими путями. Например, открытый с одного
конца полый волновод будет излучать так же, как и диполь. Дру¬
гим примером может служить щель, прорезанная в боковой или
торцевой стенке волновода. Размеры щели выбираются таким
образом, чтобы имел место резонанс и через щель излучалась
значительная энергия. Используется и ряд других устройств, по¬
добных описанным.
В разделе 12—2 уже упоминалось, что закон Снелла (закон
отражения), справедливый в области оптики, применим и к пло¬
ским электромагнитным волнам. Небольшой участок сферической
волны всегда можно рассматривать как плоскость, и для неболь¬
ших площадей волны применять закон отражения. Далее, необ¬
ходимо упомянуть, что законы рефракции (преломления) для
радиоволн те же самые, что и для световых волн. Применимость
этих законов оптики к колебаниям волн диапазона СВЧ навела на
мысль использовать в технике СВЧ такие приборы, как линзы,
зеркала и т. п.
На рис. 164,а показано применение параболического зеркала
для фокусировки сферической волны в узкий параллельный пучок.
На рис. 164,6 изображена линза, обеспечивающая переходотсфе-
рической волны к плоской волне. На рисунке показаны линии
фазового фронта, представляющие собой линии постоянных фаз,
Линза выполнена из материала, скорость распространения волны
в котором ниже, чем в окружающей среде. Она является полным
аналогом линз, используемых в оптике.
Рис. 163. Конический волновод
(диполь)
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
415
На частотах диапазона СВЧ существует некоторая свобода
в выборе диэлектрических материалов для линз. Из пояснений
к уравнению (12) видно, что фазовая скорость волны с=~4=.
У ер.
Существует много материалов, которые обеспечивают широкий
диапазон значений диэлектрической постоянной е при небольших
потерях мощности. Ассортимент этих материалов можно даже рас¬
ширить путем создания искусственных диэлектриков.
В диэлектрике естественно¬
го происхождения увеличение
диэлектрической постоянной
вещества является функцией
поляризуемости молекул, т. е.
степени, до которой связанные
заряды внутри молекул могут
быть разделены, создавая та¬
ким образом внешнее поле.
Это наведенное поле внешне ничем не отличается от приложен¬
ного поля и рассчитывается посредством умножения величины Е
в уравнении (3) на диэлектрическую постоянную е, которая для
диэлектриков больше, чем для свободного пространства.
Искусственные диэлектрики могут создаваться посредством
распределения по всему объему большого числа поляризованных
искусственных «молекул». На практике
в качестве таких молекул используют
просто крупицы металла. Внутри ме¬
талла имеются свободные заряды, кото¬
рые под действием приложенного поля
могут перемещаться и поляризовать каж¬
дую крупицу металла. В качестве метал¬
лических вкраплений обычно служат
опилки металла, имеющие форму ша¬
риков, дисков, стерженьков и т. п.
Размеры этих вкраплений должны быть значительно меньше
длины волны, для того чтобы их можно было рассматривать как
«молекулы». Линзы, выполненные таким образом, показаны на
рис. 165.
Другим типом антенн из искусственных диэлектриков являются
волноводные линзы, показанные на рис. 166, а. В разделе 12—3
уже упоминалось, что в полом волноводе фазовая скорость волны
больше, чем в свободном пространстве. Линза, показанная на
рис. 166, а составлена из отрезков волноводов, собранных в виде
решетки, которая облучается сферической волной. Внутри такой
линзы фазовая скорость больше, чем в свободном пространстве,
поэтому коэффициент преломления линзы меньше единицы.
В этом случае собирающая линза имеет вогнутую поверхность
Рис. 164.
а. Параболический отражатель; б. Линза
Рис. 165. Линза с искусст¬
венным диэлектриком
416
ГЛАВА 12
вместо выпуклой, как это имеет место у оптических линз
(рис. 166,6).
Так же, как в оптике, плоскую волну, выходящую из линзы
или из параболического зеркала, можно принять за волну, выхо¬
дящую из отверстия в экране. Явление дифракции, происходящее
в оптике, имеет место и здесь. Далее, как и в оптике, здесь могут
Рис. 166:
а) Линза с решеткой волноводов, облучаемая сферической волной
(волноводная линза); б) двояковогнутая собирательная линза (коэф¬
фициент преломления < 1)
быть введены в рассмотрение зоны Фрезнеля—Фраунгофера. На не¬
большом расстоянии впереди апертуры антенны имеем почти пло¬
скую волну с непрерывным расширением фазового фронта. В зоне
Фраунгофера луч становится коническим и распространяется да¬
лее, имея сферический фазовый фронт.
Рис. 167. к расчету поля антенны с круглой апертурой для
случая равномерного распределения напряженности поля по
всей апертуре
В зонах Фраунгофера угловое расширение луча зависит от
размеров апертуры, градиента раопределения поля по апертуре
и длины волны. Для круглой апертуры с равномерным распреде¬
лением напряженности поля по всей апертуре (см. рис. 167) на¬
пряженность электрического поля на расстоянии Я от апертуры
определяется следующей формулой:
Е = КтГ +Д. ■ (32)
X
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
417
где К — постоянный вектор, выражающий напряженность и поля¬
ризацию источника возбуждения, а — бесселева функция пер¬
вого рода и первого порядка. Уравнение (32) в нормализованном
виде графически представлено на рис. 168. Ширина угла между
точками, где излучаемая мощность равна 1/2 максимальной мощ¬
ности, составляет 1,02Х/аГ радиан.
Рис. 168. Относительная величина напряженности поля на большом рас¬
стоянии от антенны с круглой апертурой как функция угла, отсчитанного
от перпендикуляра к плоскости апертуры
Обычно распределение поля в апертуре антенны не равно¬
мерно, и напряженность слегка снижается к ее краям. Это не¬
сколько расширяет луч и одновременно снижает уровень боковых
лепестков. Последнее является желаемым фактором. Средняя ши¬
рина луча приблизительно равна 1/2Х/Й.
Усиление антенны определяется как отношение мощности, излу¬
чаемой в заданном направлении, к мощности, которую мог бы
излучать в этом направлении изотропный излучатель. Для остро¬
направленных антенн усиление, очевидно, будет высоким. Для
антенлы, показанной на рис. 167, усиление в направлении макси¬
мума диаграммы направленности равно
0 = ^; (33)
вследствие неравномерности распределения поля по апертуре зна¬
чения усиления антенны получаются несколько меньшими.
Типовым значением для усиления будет
0=7,3<ЯЛ
27—405
418
ГЛАВА 12
Для обычной апертуры антенны с равномерным распределе¬
нием поля и при постоянной его фазе максимальное значение
усиления равно
0=^, (34)
где А — площадь апертуры.
Формула (34) может быть преобразована в выражение
Л = (35)
определяющее эквивалентную площадь антенны, усиление которой
известно. При работе на прием антенна облучается падающей
плоской волной. В этом случае можно считать, что антенна отби¬
рает от плоской волны всю ту энергию, которая проходит через
апертуру площадью А. Применение этого положения иллюстри¬
руется в главе 13.
Рис. 169. Некоторые типы антенн:
в) рупорная антенна; б) рупорная антенна с линзой; в) диэлектрическая стержне¬
вая антенна
На рис. 169 показаны еще некоторые типы антенн. На
рис. 169, а изображена рупорная антенна. Для получения такой
антенны волновод просто расширяется в конце, для того чтобы
поле создавалось в большей апертуре. Часто в раскрыв рупора
вставляются линзы, как это показано на рис. 169,6. На рис. 169, с
представлена диэлектрическая антенна. Волна излучается в про¬
странство диэлектрическим волноводом, выполненным в виде
стержня. Еще одним возможным вариантом антенны, не показан¬
ным на рис. 169, является ряд диполей, запитываемых отдельно.
Получение однородного поля по всей апертуре можно достигнуть
с помощью большого числа отдельных диполей, распределенных
по всей площади апертуры и возбуждаемых соответствующим
образом. Иногда используются целые решетки, состоящие из таких
диполей. Эти решетки часто сочленяются с отражателями той или
иной формы.
В наземной или корабельной аппаратуре антенны часто оста¬
ются открытыми, но в самолетной аппаратуре антенны необходимо
закрывать кожухами для удовлетворения условий обтекаемости.
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
419
Рис. 170. Зависимость энергии, от¬
раженной тонким обтекателем ан¬
тенны, от угла падения:
В — толщина стенки обтекателя, диэлек¬
трическая постоянная ’ — 2,7; 0е — перпен¬
дикулярное падение
Эти кожухи называются обтекателями. Обтекатели не должны
служить препятствием для радиолуча или вносить какие-либо от¬
клонения луча во время работы антенны. Кроме того, обтекатели
должны быть в состоянии выдерживать большие аэродинамиче¬
ские нагрузки и высокие температуры.
При конструировании обтекателя желательно получить мини¬
мальное отражение энергии от его внутренней стенки обратно
в сторону антенны. Одним из примеров,.где эта проблема решена,
могут служить тонкостенные кон¬
струкции, способные противо¬
стоять механическим и аэроди¬
намическим силам; На рис. 170
показана зависимость отражен¬
ной от обтекателя мощности (в
процентах) как функции толщи¬
ны материала. Другой важной
характеристикой обтекателя яв¬
ляется зависимость отраженной
мощности от угла падения волны.
Это объясняется тем, что при вы¬
полнении требований обтекаемо¬
сти волна падает не на все участ¬
ки обтекателя перпендикулярно
его поверхности. Если внутри об¬
текателя находится подвижная
параболическая антенна, то могут
появиться дополнительные требо¬
вания, касающиеся угла падения
радиолуча на обтекатель.
Отражение от тонкой стенки
обтекателя может быть очень
сильным, если напряженность
поля достаточно высока. Чтобы
избавиться от этого эффекта,
применяют обтекатели с более
толстыми стенками. Все обтекатели с толстыми стенками работают
по принципу взаимной компенсации отражений. Волна, отражен¬
ная от внешней поверхности, компенсируется волной, отраженной
от внутренней поверхности. Некоторые характеристики двух таких
обтекателей показаны на рис. 171.
Наличие обтекателя не должно вызывать заметного отклонения
луча. Чтобы достигнуть этого, нужно уменьшить до минимума
фазовые искажения, которые могут иметь место во время прохож¬
дения луча через обтекатель, при небольшом уровне отражений
от него. Искажение амплитуды или фазы передаваемых колебаний
вызывает изменение диаграммы направленности антенны. Требо-
27*
420
ГЛАВА 12
Рис. 171. Отражение энергии от обтекателя антенны:
а) толстый обтекатель Л/Х = 0,26 (Л—толщина стенки обтекателя); диэлектриче¬
ская постоянная е=4,0; б) обтекатель типа «сэндвич». В середине — диэлектрик
с 6= 1,4; Л =0,19 А. По краям два диэлектрических слоя с«=4,0 толщиной Л=0,04А
вания, касающиеся отклонений радиолуча, из-за действия обтека¬
теля должны устанавливаться на основе анализа работы системы
в целом, а не только СВЧ-тракта.
12—5. ГЕНЕРАТОРЫ МОЩНОСТИ И УСИЛИТЕЛИ
Применение вакуумных ламп в диапазоне СВЧ должно отли¬
чаться от их использования на более низких частотах по двум
основным причинам. Во-первых, применение проволочных соеди¬
нений для СВЧ-радиоламп является неудовлетворительным; рас¬
сматривая поля, внешние по отношению к проводам, видно, что
эти поля воздействуют на электроды ламп за счет направленности
волновых потоков. Во-вторых, движение электронов происходит
относительно медленно по сравнению с частотой изменения поля.
Уравнение (23) определяет силу, действующую на заряженную
частицу в электрическом поле. Например, для электрона, имею¬
щего заряд е и массу т, расстояние <1, которое он проходит за
время I из состояния покоя, равно
• <зб)
как это вытекает из уравнения (23) и первого закона Ньютона.
Для напряжения в 10 вольт, которое приложено к электродам, на¬
ходящимся на расстоянии 0,1 дюйма (2,54 мм) друг от друга, рас¬
стояние, пройденное электроном за время 10-9 сек, составляет
0,0137 дюйма (0,35 мм). За это в.ремя проходит один полный пе-
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
421
Рис. 172. Усилительная
лампа диапазона СВЧ
с объемными резонато¬
рами:
1) Анод, 2) Сетка, 3) Вы¬
ходной резонатор. 4) Ка¬
тод, 5) Входной резонатор,
6) Подогреватель
риод колебаний частоты 1000 Мгц. Электромагнитная волна со¬
вершит одно полное колебание за время, в течение которого элек¬
трон пройдет только 7,3% длины зазора между электродами. Если
считать, что поле Е создается напряжением постоянного тока и до¬
полнительно небольшим полем тока СВЧ, то очевидно, что влия¬
ние СВЧ-поля будет полностью усредняться вследствие того, что
за время движения электрона через зазор совершается большое
количество циклов колебаний.
Только что рассмотренное явление мо¬
жет быть сведено к минимуму путем соот¬
ветствующего изменения конструкции лам¬
пы. Такие лампы могут применяться на
частотах выше 6Х109 гц. Примером подоб¬
ной конструкции может служить лампа, по¬
казанная на рис. 172. Чтобы исключить ис¬
пользование проволочных выводов, лампы
выполняются так, что их катод, сетка и
анод являются частями объемных резона¬
торов. Эти резонаторы служат входным и
выходным резонансными контурами. Связь
линий передачи или волноводов с объем¬
ными резонаторами (на рисунке не пока¬
заны) может быть осуществлена с помо¬
щью небольших отверстий (см. рис. 161), петель связи и т. д.
Время пролета электрона, т. е. время, необходимое электрону для
преодоления расстояния между катодом и анодом, сокращается
за счет того, что расстояние между этими элементами лампы рав¬
но всего нескольким тысячным долям дюйма.
Применение ламп подобной конструкции на более высоких час¬
тотах ограничено, по-видимому, чисто механической проблемой
точности крепления сетки вблизи горячего катода, но так, чтобы
они не касались друг друга. Основная трудность здесь состоит
в том, что напряженность поля в зазоре сетка — катод мала, а
электроны начинают двигаться, по существу, из состояния покоя.
Поэтому время, необходимое электронам для прохождения за¬
зора, будет относительно велико. Для того чтобы обойти это пре¬
пятствие, нужно несколько изменить подход к решению за¬
дачи.
На рис. 173 показан клистрон, входной резонатор которого от¬
делен от катода. Электроны предварительно ускоряются благодаря
действию постоянной разности потенциалов, существующей
между катодом и ускоряющим электродом. Поэтому электроны
за время пролета между сетками входного резонатора получают
довольно ощутимую скорость. Действие приложенного к зазору
поля резонатора также несколько отлично по сравнению с преды¬
дущей лампой.
422
ГЛАВА 12
Рис. 173. Расположение элемен¬
тов клистрона:
1) траектории электронов, 2) подогре¬
ватель, 3) катод, 4) коллектор, 5) уско¬
ряющий анод, 6) входной резонатор,
7) выходной резонатор
В примере с лампой, показанной на рис. 172, предполагается,
что поле в промежутке сетка — катод действует как вентиль. Когда
напряженность поля велика, большое количество электронов про¬
ходит в выходной зазор. При малой напряженности поля только
некоторые электроны достигают выходного зазора. Пульсирую¬
щий ток, протекающий через вы¬
ходной зазор, наводит соответ¬
ствующее поле в выходном резо¬
наторе.
Клистрон же работает несколь¬
ко иначе.
Поскольку скорость электронов
в зазоре высока, нужно иметь очень
сильные поля для того, чтобы мож¬
но было модулировать поток элек¬
тронов так же, как это делается
в обыкновенном триоде. Малые по¬
ля не могут заметно изменить число
электронов, выходящих из входного
резонатора в единицу времени.
Однако поле в зазоре вызывает незначительные, но периодиче¬
ские изменения в скорости электронов благодаря попеременному
воздействию на них ускоряющего и замедляющего СВЧ-полей.
Следовательно, поток электронов, выходящий из входного резо¬
натора, очень незначительно промодулирован по амплитуде, но
зато в нем имеет место некоторая модуляция по скорости.
Эффект, создаваемый модуляцией по скорости, иллюстри¬
руется рис. 174. После выхода из зазора входного резонатора по¬
ток электронов движется
вправо. Некоторые из элек¬
тронов движутся быстрее,
другие медленнее, в зависи¬
мости от скорости, которая
была им придана в зазоре
входного резонатора. В ре¬
зультате электроны, имею¬
щие большую скорость, со¬
единяются с электронами,
движущимися с меньшей скоростью. Таким образом происходит
группирование электронов (см. рис. 174). При правильном разме¬
щении выходного резонатора относительно входного можно полу¬
чить амплитудно модулированный пучок электронов, наводящий
поле на выходе клистрона, аналогично обычному триоду. При
конструировании лампы необходимо согласовать величины уско¬
ряющего напряжения и расстояния I (см. рис. 173), так чтобы сиг¬
нал на выходе клистрона был максимальным.
Рис. 174. Эффект модуляции по скоро¬
сти в клистроне
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
423
Рис. 175. Отража¬
тельный клистрон:
1) катод, 2) подогрева¬
тель, 3) отражатель,
4) ускоряющий анод,
5) траектории электро¬
нов, 6) резонатор
Показанная на рис. 173 лампа является усилителем. Чтобы по¬
лучить генераторную лампу, необходимо подать выходной сигнал
на вход лампы. Если при этом коэффициент усиления больше еди¬
ницы и соблюдается правильная фазировка сигнала, то имеет
место самовозбуждение. Типовым генератором этого диапазона
является отражательный клистрон, показанный на рис. 175. Отра¬
жатель создает тормозящее поле, так что электроны движутся по
траекториям, показанным пунктирными линиями. Поток электро¬
нов отражается назад и попадает в тот же ре¬
зонатор, который одновременно является вход¬
ным и выходным резонатором, а также слу¬
жит элементом межрезонаторной связи. Важ¬
нейшими преимуществами такого рода ламп
являются более простая конструкция и более
простой процесс настройки. Отражательные
клистроны могут быть использованы на часто¬
тах значительно больших, чем обычный триод.
Разработаны клистроны, предназначенные
для работы на частоте 4Х1010 гц. Коэффи¬
циент полезного действия клистрона очень
низок. Его величина колеблется от 30%
для мощных усилителей до нескольких
процентов для маломощных отражательных
ламп.
Другим типом СВЧ-усилителя является лампа бегущей волны
(ЛБВ). Представим себе направленную волну со структурой элек¬
трического поля, показанной на рис. 176, а. Распределение ампли¬
туд электрического поля вдоль оси показано на рис. 176, б; стрелки
указывают направление силы, которая действует на электрон, на¬
ходящийся в поле.
Скорость волны равна V (предполагается, что она намного
меньше скорости света с). Электронный поток, протекающий по
лампе, показан отдельно на рис. 176, в. Считается, что средняя
скорость электронов ое немного больше скорости волны V.
Плотность точек, изображенных на рис. 176, в, иллюстрирует
процессы, происходящие в электронном луче. Средняя скорость
электронов больше скорости волны, таким образом любой электрон
«скользит» по волне, попеременно ускоряясь и замедляясь под
воздействием указанных сил. Чтобы пройти область торможения,
электрону требуется больше времени, следовательно, в этих обла¬
стях плотность электронов будет больше. Области ускорения
электроны проходят быстро, и в каждый данный момент времени
там находится лишь несколько электронов. Поэтому в луче начи¬
нается процесс группирования электронов в областях тормозящего
поля,
424
ГЛАВА 12
Рис. 176. Лампа бегущей волны:
а) структура электрического поля, б) распределение амплитуд электриче¬
ского поля вдоль волновода, в) пучности электронов
Рис. 177. Усилительная лампа бегущей волны:
1) входная линия, 2) выходная линия, 3) катод,
4) траектории электронов, 6) подогреватель, 6) уско¬
ряющий анод, 7) спираль, 6) коллектор
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
425
При торможении электроны теряют свою кинетическую энер¬
гию и отдают ее высокочастотному полю резонатора. Устройство,
преобразующее кинетическую энергию электронов в энергию вы¬
сокочастотного поля, вполне может быть использовано в качестве
усилителя. Устройство такого усилителя показано на рис. 177.
Волна подается из входной коаксиальной линии на провод, намо¬
танный в виде спирали. Заметим, что волна движется по проводу
(вокруг спирали) со скоростью света с = —=. Скорость распро-
странения волны вдоль оси трубки, очевидно, намного ниже ско¬
рости света с. Можно показать, что структура поля внутри спи¬
рали почти такая же, как на рис. 176, а. Взаимодействие электро¬
нов с полем, как это только что
рассматривалось, создает нара¬
стающую волну, так что сигнал
на выходе будет больше сигнала
на входе.
Лампы бегущей волны могут
работать на частотах значитель¬
но более высоких, чем любые
другие, рассмотренные выше лам¬
пы. Преимущество ЛЕВ заклю¬
чается в том, что у них отсут¬
ствуют малые зазоры, характер¬
ные для триодов или клистронов.
Это облегчает производство ЛБВ.
Одним из вариантов лампы
бегущей волны является магне¬
трон *. В магнетроне электроны
вынуждены двигаться по прибли¬
зительно спиральным траекто¬
риям, как это показано на рис. 178, тогда как бегущая волна вра¬
щается в кольцеобразном пространстве между катодом и анодом.
Спиральная форма траекторий электронов обусловливается
имеющимся в пространстве анод — катод сильным постоянным
электрическим полем (дополнительно к высокочастотному полю,
создаваемому бегущей волной). Кроме того, к магнетрону прикла¬
дывается сильное магнитное поле постоянной величины, направ¬
ленное по оси трубки (перпендикулярно плоскости рис. 178). Ана¬
лиз уравнений (23) и (24) показывает, что в конечном счете элек¬
троны движутся по спиральным траекториям, показанным на
рис. 178. Зубцы на траектории электрона получаются вследствие
взаимодействия электрона с бегущей волной.
Рис. 178. Спиральная траектория по¬
тока электронов в магнетроне
1) траектория электронов, 2) катод,
3) анодный блок, 4) объемные резонаторы
1 Магнетрон был изобретен раньше, чем лампа бегущей волны, но с точки
зрения принципов работы вышеприведенное утверждение является пра¬
вильным. ' ' ’
426
ГЛАВА 12
Объемные резонаторы по краям анодного блока магнетрона
служат для создания медленной волны, которая необходима для
того, чтобы электроны двигались приблизительно синхронно. Дос¬
тигаемый при этом результат подобен результату, получаемому
в искусственной линии передачи или в «нагруженной» линии. При
соответствующей частоте сдвиг фаз соседних резонаторов равен
180° и, следовательно, поле вдоль кольцевого зазора меняется по
знаку, как это показано на рис. 178. При резонансной частоте
поле на любом сегменте анодного блока периодически изменяется
по знаку.
Расстояния между сегментами в лампе могут быть неболь¬
шими, с тем чтобы имели место колебания заданной частоты, но
с длиной волны в пространстве, определяемой физическими раз¬
мерами. Следовательно, расстояние, пройденное волной за один
период, может быть небольшим и волна имеет замедленный ха¬
рактер.
Магнетроны имеют довольно высокий коэффициент полезного
действия (порядка 0,5—0,7) и могут генерировать очень большие
мощности. По этим причинам магнетроны чаще всего использу¬
ются в качестве мощных генераторов СВЧ-диапазона.
12—6. НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ ВОПРОСЫ
Распространение микроволн в принципе подобно распростра¬
нению света. Направленная антенна формирует луч, распростра¬
няющийся по прямой линии. Позади зданий и возвышенностей
имеет место зона тени, и ионосфера не оказывает заметного влия¬
ния на дальность передачи.
Основное отличие распространения микроволн от световых
волн в атмосфере состоит в том, что диэлектрическая постоянная
воды для микроволн сильно отличается от диэлектрической по¬
стоянной для составляющих спектра видимого света. В диапазоне
СВЧ значение е для воды в 81 раз больше, чем для свободного
пространства, в то время как в спектре световых волн б для воды
лишь в 1,77 раза больше, чем для свободного пространства.
Вблизи поверхности Земли количество водяных паров относи¬
тельно больше, чем в более высоких слоях атмосферы, и, следо-
тельно, в нижних слоях плотность воздуха выше. Сочетание этих
двух причин вызывает то явление, что вблизи Земли микроволны
распространяются медленнее, чем на больших высотах, стремясь
частично обогнуть Землю. Это обстоятельство приводит к тому, что
эффективный радиус Земли в среднем в 4/3 раза больше, чем дей¬
ствительный. Поэтому радиогоризонт для волн СВЧ-диапазона
простирается дальше оптического горизонта.
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
427
У волн СВЧ-диапазона, так же как у световых или любых дру¬
гих электромагнитных волн, наблюдается явление дифракции у
краев твердых объектов. Рис. 179 показывает зависимость энер¬
гии волн, обогнувших край ножа. Эту зависимость можно считать
в первом приближении справедливой для любого проводящего
объекта.
Рис. 179. Дифракция радиоволн у лезвия ножа
Радиоволны, попадающие в результате дифракции в зону тени,
могут йыть использованы, например, в радиорелейных линиях
связи при ведении передач за линию радиогоризонта или через
горы.
Кроме явления дифракции существуют другие способы созда¬
ния поля в зонах затенения. Воздух в тропосфере находится в
непрерывном турбулентном движении, в результате которого со¬
здаются завихрения. Поэтому в тропосфере возникают области
426
ГЛАВА 12
Рис. 180. Затухание волн в атмосфере:
а) при дожде; б) при тумане и облаках
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
429
низкой и области высокой плотности воздуха. Такие же изменения
характерны для плотности водяных паров и температуры воздуха
тропосферы. В силу этого диэлектрическая постоянная воздушной
среды е принимает случайные значения в зависимости от положе¬
ния точки наблюдения. Разброс величины е очень невелик (по¬
рядка 10-6), однако он до некоторой степени влияет на электро¬
магнитное поле и создает поле рассеяния.
Поле рассеяния распространяется не только в направлении па¬
дающей волны, но и в других направлениях. Таким образом, рас¬
сеянная волна может попасть в теневую зону. Это явление по¬
добно сумеречному свету, наблюдаемому после захода солнца.
Хотя такое излучение не является прямым, тем не менее количе¬
ство энергии достаточно для приема. Поля рассеяния могут быть
использованы для передачи на расстояния до 500 км. В силу слу¬
чайностей в движении воздуха на больших дальностях имеют
место изменения напряженности поля (наблюдаются замирания),
однако поле никогда не исчезает полностью. Напряженность поля
всегда выше нуля и при достаточной чувствительности приемни¬
ков и очень высоком усилении антенн связь никогда не преры¬
вается. Напряженность поля в пространстве за горизонтом на 70 дб
ниже, чем в свободном пространстве на том же удалении от пе¬
редатчика. На частотах от 40 до 4000 Мгц напряженность поля
рассеяния почти не зависит от частоты.
Подобно световым волнам, радиоволны СВЧ-диапазона в атмо¬
сфере постепенно затухают. На рис. 180 показана зависимость за¬
тухания в децибелах на одну милю от длины волны и метео¬
условий.
Из рис. 180 видно, что при данной длине волны увеличение за¬
тухания прямо пропорционально росту плотности осадков. Это
увеличение происходит за счет рассеяния, а не за счет поглощения
волн. Отдельные капли дождя достаточно малы по сравнению с
длиной волны передачи и не могут эффективно рассеивать энер¬
гию падающих волн, однако миллионы капель на пути рас¬
пространения волны могут рассеять заметное количество
энергии.
Несмотря на это, рассеянные волны частично возвращаются
к месту передачи, и соответствующие им сигналы могут уверенно
индицироваться на экране радиолокатора. Метеорологические ра¬
диолокационные станции используют это явление для того, чтобы
отмечать продвижение штормов и гроз.
Характер рассеяния различных объектов в точности известен
только для простейших форм предметов и материалов. На рис. 181
показана эффективная площадь рассеяния идеально проводящего
шара. Эффективная площадь рассеяния а определяется следую¬
щим образом: считается, что отраженная волна, возвратившаяся
430
ГЛАВА 12
к передатчику, получается за счет изотропного рассеяния всей
энергии падающей волны плоским отражателем с площадью а,
ориентированным перпендикулярно падающей волне. Заметим, что
для шара с большим радиусом (см. рис. 181) а становится равной
площади проекции шара. Для отражателей другой формы это по¬
ложение не всегда справедливо.
Рис. 181. Зависимость эффективной площади рассеяния с шара с ра¬
диусом а от длины волны X
В таблице 1 приведены выражения для эффективной площади
рассеяния других объектов простейших геометрических форм в
предположении, что их размеры значительно больше длины волны.
(Это соответствует ассимитотическому значению кривой в правой
части рис. 181.) При очень малых размерах объектов, сравнимых
с длиной волны X, величина площади рассеяния приблизительно
равна значению, полученному с помощью рис. 181 (левая часть),
умноженному на коэффициент, близкий к единице.
ТЕХНИКА СВЕРХВЫСОТНЫХ ЧАСТОТ
431
Теоретические выражения для эффективной площади рассеяния
различных предметов
Примечания и графическое представление
Эффективная площадь рассеяния
4м2 Г 81п (ка вш 0 сов у)
К2 |_ ка 81п 6 сов у *
81П (кь 81П 0 Б1П <р) „П2
X \ ■ п . — С08 0
кЬ 8ш 0 ат у
Наименование
предмета
Плоская
прямоуголь¬
ная пла¬
стинка
Таблица 1
432
ГЛАВА 12
Примечания и графическое представление
А — площадь пластинки. Формула справедлива только для
случая перпендикулярного падения луча
г = радиус шара
Эффективная плошадь рассеяния
4яаг4 Г2Л (2кг 51п в) Л2
12 ЙТ ■ а СО5 О
X2 |_ 2кг 8Ш в
4кА2
X2
Т.Г2
№
Наименование
предмета
Плоская
круглая
пластинка
Плоская
пластинка
любой
формы
Шар
Сфериче¬
ский
сегмент
(выпуклый
или вогну¬
тый)
Продолжение
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
433
28-405
эинэкаехэтайи аояээьифвйл и винвьэнид^
1
| винвэээед ЧТГВТПО1ГЦ веиеихмэффе
1 <М1+1 4
= Г фг8;гш+ 1~]
г[_фг§)ш + ш
ф »ЭЭ5ОЭ = ф разоэ г;и
ехантгэби
эинеаонанивн
еоэолгоп X
цпхХнвша
ЙЕН ЦИН
-нэптоншэ
‘Ииоёафэ
иинэ'гпвдн
И'иоЕодвдви'
Продолжение
434
ГЛАВА 12
Примечания и графическое представление
г\ и г2 — основные радиусы кривизны в точке кажущегося зер¬
кального отражения
г — радиус цилиндра
1 — длина цилиндра
в — угол между направлением наблюдения и нормалью к оси
цилиндра, лежащей в плоскости, проведенной через направ¬
ление наблюдения и ось цилиндра
к = 2л/Х
Эффективная площадь рассеяния
тс (г2 + га вес ф)
8тсэг92
X
соз 6Х
Г 81п (к1 зш 0) “I2
Х к1 зш 0
Наименование
предмета
Тор
Любая
двояко¬
изогнутая
поверх¬
ность
Круговой
цилиндр
П родолжение
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
435
28*
П родолжение
эинэкеехэкэдп эомээьифвйл и винеьэнидц
иояоллбя ‘иоивбп эХноя о1ь ‘вэтэвлввоиВ'эдп :вэХноя вюэнв = у
винввонэо эХиЦвд = у
ЭТПН0
ЭГП1Ч0 'КЭ
виннэоэвЗ ч’п’е'гпоги венаихиэффе
^5
1
(и+ Л^б.
ЪХУ ъ
е
вхэнгэдп
эинваонаииец
(изо одэ
я ондввХя
-итгнэпЗап
•э и. ‘Хяодэ
иинэьХвдо
ис!п) эХноу
(инишдэн
ннодотэ оэ
иинэьХкдо
иди) эХноу
(Иэтп
-сяХевддо
я ондвкЛя
-ит/нэидэи
иинэьХвдо
ибн) эХноу
436
ГЛАВА 12
Продолжение
Примечания и графическое представление
Эффективная площадь рассеяния
■кагЬ2сг
(а2 5Ш20 СО52у+&2 5Ш205Ш2у + С2 СО52©)2
•Наименование
предмета
Эллипсоид
вращения
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
437
Примечание и графическое представление
Эффективная площадь рассеяния
х29
16 (СО82 ф — 81П2 ф 8Ш2 0)3
Наименование
предмета
Конусное
острие
Продолжение
438
ГЛАВА 12
Продолжение
При выводе всех формул предполагалось, что радиусы кривизны и размеры предметов значительно больше
длины волны X. (Эти условия не могут быть удовлетворены для конусов и конусных острий в областях, близких
к вершине). Несмотря на это, формулы дают результаты, очень хорошо совпадающие с экспериментальными дан¬
ными. Кроме того, существуют некоторые теоретические предпосылки, позволяющие распространить эти частные
формулы на другие случаи.
Примечания и графическое представление
Все вышеприведенные результаты справедливы для случая, когда передатчик и приемник расположены в од¬
ной и той же точке (моностатический случай). Случай бистатический, когда передатчик и приемник разнесены
друг от друга, представлен ниже.
Для сравнения см. выше графу „Эллипсоид вращенияа. Пере¬
датчик (или приемник) находится на оси г. Приемник (или пе-
редатчик) находится в направлении 0 при у =
4^0^
9 Хх
С2
[1 + СО5 0+ (1-СО80^
Эффективная площадь рассеяния
4дД4
ЗХ2
Наименование
предмета
Треуголь¬
ный угол¬
ковый
отража¬
тель
Эллипсоид
(бистатиче¬
ский слу¬
чай)
ТЕХНИКА СВЕРХВЫСОКИХ ЧАСТОТ
439
Сложные рассеивающие объекты можно рассматривать как со¬
четания объектов, имеющих простые формы, однако взаимодей¬
ствие этих простых форм проанализировать трудно, и никаких
строгих результатов пока не получено. Приближенный анализ на
основе статистических методов см. в главе 8. Диаграмма рассея¬
ния самолета, полученная экспериментальным путем, показана на
рис. 182.
Рис 182. Диаграмма вторичного излучения самолета (АТ-11)
при Х= 10 см
Кроме свойств одиночных отражателей очень важно учитывать
отражающие свойства земли, которая представляет непрерывную
рассеивающую поверхность. Для целей радиолокации обычно же¬
лательно знать рассеивающие свойства местности, которая рас¬
сматривается как диффузный рассеиватель. Для других целей,
как, например, для радиорелейных линий передачи, необходимо
знать свойства земли вблизи углов зеркального отражения (угол
отражения равен углу падения).
На основании скудных данных, опубликованных в печати,
можно считать, что диффузное рассеяние носит изотропический
440
ГЛАВА 12
характер. При этом эффективность рассеяния (отношение отра¬
женной энергии к энергии потерь) имеет порядок 10—50%. Счи¬
тается, что эффективность зеркального отражения под углом,
близким к углу падения, равна 100%; при больших же углах она
значительно ниже. Экспериментально установлено, что параметры,
характеризующие зеркальное отражение от поверхности земли или
моря, определяются, по существу, площадью в пределах первой
зоны Фрезнеля, т. е. площади, непосредственно окружающей
точку падения луча и имеющей радиус, равный четверти волны
минимальной длины.
12—7. ЗАКЛЮЧЕНИЕ
Если задать вопрос: что самое главное в области СВЧ? — то
ответ на него, как частично отмечено во введении к данной главе,
был бы таким: самым главным в области СВЧ является обяза¬
тельное использование при анализе уравнений Максвелла самого
общего вида, а также всех их разновидностей. Короче говоря, для
правильного описания работы аппаратуры СВЧ нужно применять
законы электромагнитного поля. Далее, аппаратура СВЧ во мно¬
гих отношениях более сходна с оптическими приборами, чем
с радиотехническими устройствами, работающими на более низ¬
ких частотах. Благодаря этим своим особенностям СВЧ занимают
особое место в радиотехнике.
Знание законов электромагнетизма дает возможность более
быстро понять принципы работы большей части аппаратуры СВЧ.
Эта аппаратура может иметь вполне приемлемые размеры. Надо
помнить также о том, что в диапазоне СВЧ электроны движутся
относительно медленно по сравнению с частотой изменения поля.
Это обстоятельство вместе со знанием законов электромагнетизма
помогут понять работу генераторов мощности, в которых исполь¬
зуются потоки электронов.
В силу того что рассматриваемый нами вопрос сам по себе
очень обширен, любое освещение его, сколь бы 'продолжительно
и обширно оно ни было, будет иметь пробелы в некоторых суще¬
ственных деталях, необходимых для практического применения.
Материал, изложенный в данной главе, имеет много таких про¬
белов. Однако он может служить в качестве первоначального пу¬
теводителя или обозрения этой области техники.
■ГЛАВА 13
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
Р. С. Юлиан 1
13—1. ВВЕДЕНИЕ
Пожалуй, нет другой такой области техники, как радиолокация,
которая была бы так тесно связана с управлением полета управ¬
ляемых снарядов. И это вполне логично. Для того чтобы иметь
возможность направлять снаряд к цели, надо иметь средства для
получения постоянной информации о его местоположении. Наи¬
лучшим из таких средств является радиолокация.
Термин радиолокация (в иностранной литературе — радар) ро¬
дился в период второй мировой войны и означает совокупность
средств и методов обнаружения и определения местоположения
различных объектов с помощью радиоволн. Это определение явля¬
лось удовлетворительным на раннем этапе развития радиолока¬
ции, но теперь оно уже недостаточно. Более точным определением
этой техники в современном ее состоянии будет следующее: ра¬
диолокация— это такая техника, с помощью которой можно полу¬
чить всевозможную информацию об удаленном объекте путем ис¬
следования отраженных от объекта радиоволн, направленных на
него специально для этой цели. Иными словами, радиолокация
есть техника исследования эхо-сигнала, полученного с помощью
радиоволн. Для получения эхо-сигнала можно использовать, и
обычно используются, различные виды энергии, и в частности —
звуковые, световые и радиоволны; хотя основной физический прин¬
цип явления во всех этих случаях одинаков, методы использова¬
ния зависят главным образом от природы самой энергии, вслед¬
ствие чего эти различные области развивались более или менее
независимо. Термин «радиолокация» относится только к использо¬
ванию радиоволн. Принцип действия радиолокатора очень прост.
Радиоволны, называемые иногда электромагнитными, зани¬
мают низкочастотный участок спектра электромагнитных колеба¬
ний. Точные границы между различными участками электромаг¬
нитного спектра, как, например, радиоволны, инфракрасное излу¬
1 Сотрудник самолетостроительной фирмы Хыоза.
442
ГЛАВА 13
чение, свет, рентгеновские лучи, являются несколько условными,
но самая верхняя граница по частоте для радиоволн находится
где-то в районе 10° Мгц (длина волны — 0,3 мм).
В качестве логического основания для деления электромагнит¬
ного спектра на различные участки взят способ генерирования
колебаний различной частоты или метод обнаружения этих коле¬
баний. Радиоволны возникают вследствие движения макроскопи¬
ческих электрических токов; обнаруживаются они благодаря не¬
посредственному действию электрических токов, наводимых ра¬
диоволнами в электрических цепях. В отличие от этого излуче¬
ния волн более коротких, чем радиоволны, производятся и обна¬
руживаются благодаря тепловым,* молекулярным или атоми¬
ческим эффектам. Наиболее низкочастотный участок электромаг¬
нитного спектра, скажем, ниже 10 кгц, обычно не считается частью
электромагнитного спектра, потому что такие длинные волны
(больше 30 000 м) в радиосвязи не используются, хотя отлича¬
ются они от других радиоволн незначительно.
Принцип радиолокации может быть применим почти ко всему
спектру радиочастот, однако высокочастотный (микроволновый)
участок этого спектра получил наиболее широкое практическое
применение. Это объясняется главным образом тем, что длины волн
этого диапазона позволяют использовать небольшую по размерам
и компактную аппаратуру. В начале второй мировой войны были
разработаны радиолокаторы, работающие в дециметровом диапа¬
зоне волн, принципы конструкции которых сохранились и в совре¬
менных радиолокаторах.
Цель этой главы — рассказать технически грамотному чита¬
телю, не являющемуся специалистом в области радиолокации, о
наиболее важных принципах последней, о ее возможностях и
ограничениях и о современном состоянии этой отрасли техники.
13—2. ПРИНЦИПЫ ИМПУЛЬСНОЙ РАДИОЛОКАЦИИ
Из всех радиолокационных систем наибольшими возможно¬
стями обладают импульсные1 системы радиолокации. Короткие
вспышки, или импульсы, радиочастотной энергии излучаются ра¬
диопередатчиком с частыми перерывами, а отраженные импульсы
(эхо) от объектов по той же самой траектории принимаются ра¬
диоприемником в перерывах между передачами импульсов.
На рис. 183 представлена импульсная радиолокационная стан¬
ция, отображающая на индикаторе отраженный от одиночной
1 Слова, имеющие в радиолокационной технике особый смысл и значение
или являющиеся терминами профессионального жаргона, при первом появлении
в тексте выделяются курсивом. Их значение будет понятно из контекста.
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
443
цели сигнал, визуально наблюдаемый оператором. Работа этой
простейшей радиолокационной установки заключается в сле¬
дующем.
Запускающие импульсы от триггерного генератора заставляют
передатчик генерировать высокочастотные импульсы длительно¬
стью т через интервалы времени Т. Эти импульсы через антенну
излучаются в пространство. Антенна сконструирована так, что
она концентрирует энергию в нужном направлении, т. е. сосре¬
доточивает большую часть энергии в основном лепестке диа¬
граммы направленности, или, иначе говоря, в луче. Благодаря та¬
кой конструкции антенны излученная энергия формируется в пу¬
чок бегущих волн, ограниченный по углу шириной луча антенны,
а в радиальном направлении (т. е. вдоль оси антенны) — расстоя¬
нием, пройденным радиоволной за время т. Объект, оказавшийся
на пути радиолокационного луча, перенаправляет, или, лучше ска¬
зать, рассеивает некоторую долю падающей на него энергии от
каждого пакета волн, образуя тем самым эхо-пакеты, распростра¬
няющиеся радиально во все стороны от рассеивающего объекта.
Рассеянный пакет волн доходит обратно до радиолокатора и
улавливается при помощи радиолокационного приемника по про¬
шествии времени запаздывания, равного
двойное расстояние до цели 2/? ..
скорость распространения радиоволн '
где с — скорость распространения электромагнитных волн (радио¬
волн); она обычно равна скорости света, т. е. 299 792 км/сек.
Принятый отраженный от цели сигнал может наблюдаться на
индикаторе типа А (рис. 183). Этот прибор, являющийся одним из
наиболее ранних устройств для визуального наблюдения, представ¬
ляет собой электронно-лучевую трубку, которая с помощью элек¬
тронного луча прочерчивает график изменения сигнала на выходе
приемника с течением времени. Тот же самый триггерный импульс,
который дал начало зондирующему импульсу, запускает электрон¬
ный луч электронно-лучевой трубки, который движется горизон¬
тально по экрану трубки с регулируемой скоростью. Это движе¬
ние называется разверткой по дальности. Сигнал, полученный с
выхода приемника, дает выброс луча вертикально вверх. По¬
скольку горизонтальное положение электронного луча показывает
время, прошедшее с момента передачи импульса, а время прихода
отраженного импульса пропорционально расстоянию до цели, то
горизонтальная координата может быть калибрована прямо в еди¬
ницах дальности.
Эта простая радиолокационная установка способна полностью
определить местонахождение цели. Направление на цель опреде¬
ляется по направлению луча антенны в ходе наблюдения, а рас¬
стояние до цели вполне определяется временем запаздывания эхо-
444
ГЛАВА 13
импульса. Все многочисленные импульсные радиолокационные
системы, находящиеся в настоящее время в эксплуатации, в сущ¬
ности, работают по этой основной схеме, правда, с различными до¬
бавлениями к ней. Разница между различными существующими
радиолокационными системами определяется главным образом со¬
ставом информации, для получения которой они предназначены,
и конечной формой представления этой информации. Например, ра¬
диолокационная установка с ручным управлением сейчас могла
Рис. 183. Простая импульсная радиолокационная установка
бы быть снабжена более совершенным индикатором, чем она имела
раньше, дающим значительно больше информации о характере
цели, а не только о расстоянии до нее. В других случаях индика¬
тор вообще можно убрать, а все данные о цели направлять прямо
в автоматические устройства.
Легкость и точность, с которой радиолокатор определяет рас¬
стояние до тех или иных предметов, являются его самыми глав¬
ными преимуществами над всеми другими методами локации.
Прежние методы определения дальности базировались главным
образом на оптической триангуляции. Метод триангуляции при
больших расстояниях неточен, а в силу необходимости иметь длин¬
ную базисную линию и неудобен. В противоположность этому не¬
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
445
которые из первых радиолокаторов, работавших на сантиметровых
волнах, определяли расстояния до целей, находившихся на рас¬
стоянии нескольких тысяч метров, с точностью до нескольких ме¬
тров и производили определение расстояния в боевой обстановке
быстрее, чем оптическими методами и средствами.
Зависимость времени запаздывания эхо-сигнала от расстояния,
что делает возможным измерение расстояний, является основой
для любой радиолокационной установки, независимо от того,
определяется ли в ней расстояние или нет. Эта эквивалентность
между временем и расстоянием, которая должна быть уяснена
для того, чтобы понять как возможности радиолокационного мето¬
да, так и его ограничения, заслуживает более подробного анализа.
Во-первых, как показывает уравнение (1), предельная разреша¬
ющая способность по дальности относительно двух целей зависит
от длины импульса т; и если две дискретные цели отличаются по
дальности меньше чем на с-с/2, то отраженные от них сигналы вза¬
имно перекроют друг друга и тем самым сделают невозможным
определение их местонахождения по отдельности. В силу этого
длина импульсов должна быть укорочена, но уменьшение длины
импульса снизит среднюю передаваемую мощность, что уменьшит
дальность действия радиолокатора. Во-вторых, отраженный сиг¬
нал от цели, находящейся к радиолокатору ближе, чем расстоя¬
ние, равное будет интерферировать с зондирующим импуль¬
сом. Это вместе с другими возможными эффектами, о которых бу¬
дет сказано ниже, определяет ближний предел дальности, за кото¬
рым никакая цель не может быть наблюдаема. И, в-третьих, по¬
скольку радиолокатор посылает импульсы друг за другом непре¬
рывно, чтобы получать данные также непрерывно, то сигнал от
одного зондирующего импульса, отразившегося от объектов, нахо¬
дящихся на расстоянии /?, может быть принят одновременно с от¬
раженным сигналом от предыдущего зондирующего импульса, ко-
сТ
торый отразился от объекта, находящегося на расстоянии /? + —,
где Т — длительность паузы между зондирующими импульсами
(рекурентный период). Такая неопределенность относительно даль¬
ности должна быть исключена. Наиболее простым методом исклю¬
чения этой неопределенности является увеличение паузы Т между
импульсами настолько, чтобы отраженные импульсы, возвращаю¬
щиеся от объектов, расположенных дальше, чем сТ/2, были на¬
столько слабыми, чтобы не смогли причинить каких-либо неприят¬
ностей. Конечно, такой метод не имеет 100-процентной эффектив¬
ности, особенно при крупных целях, как горы, острова, или при не¬
нормальных условиях распространения волн, которые приводят ко
всяким неожиданностям. Кроме того, увеличение времени Т также
снижает среднюю излучаемую мощность. И как это часто бывает
446
ГЛАВА 13
при решении технических вопросов при выборе значений т и Т, не¬
обходимо идти на компромисс.
Для исключения неопределенности по дальности иногда исполь¬
зуют метод изменения частоты повторения импульсов. В этом слу¬
чае величина Т изменяется относительно некоторого среднего зна¬
чения. Отраженные от различных целей сигналы, возвратившиеся
за период развертки по дальности, запущенной тем же зондирую¬
щим импульсом, появятся в точно определенных точках на раз¬
вертке, тогда как отраженные сигналы, получившиеся от преды¬
дущих зондирующих импульсов, будут рассеяны по всей линии
развертки. Этот метод позволяет опознать отраженные импульсы
кратких периодов без их подавления. Изменения частоты повто¬
рения импульсов имеют еще и другое преимущество, заключаю¬
щееся в уменьшении взаимных помех от других радиолокацион¬
ных передатчиков и снижении эффективности воздействия на ра¬
диолокатор искусственно создаваемых помех. Например, работа
передатчика искусственных помех, который должен посылать сиг¬
налы, подобные отраженным, но только с ложной дальностью,
будет затруднена из-за необходимости синхронизации со случайной
частотой повторения, что значительно труднее, чем синхронизация
частотой, имеющей строгую периодичность.
Большинство радиолокационных станций работает так, как
здесь только что было описано, поскольку радиолокаторы с им¬
пульсным излучением удобны тем, что хорошо отделяют отражен¬
ные сигналы, приходящие с различных расстояний. Однако они во¬
все не представляют единственную возможность определения рас¬
стояний. В действительности может быть использован любой вид
зондирующего сигнала. Например, передача может вестись сигна¬
лами с незатухающими колебаниями, частота которых периодиче¬
ски изменяется (радиолокационная станция с частотно-модулиро-
ванным непрерывным излучением). В последнем случае расстоя¬
ние до цели можно определить по величине сдвига частоты пере¬
датчика, который получился к моменту прихода отраженного сиг¬
нала. Величину же сдвига можно определить просто путем гетеро¬
динирования, т. е. путем получения биений отраженного сигнала
с определенной частью передаваемого в этот момент сигнала. Эта
система не имеет ограничений по минимальной дальности, имею¬
щихся у импульсного радиолокатора, и большинство радиовысото¬
меров работает по такому принципу.
13—3. ПРИНЦИПЫ РАБОТЫ РАДИОЛОКАЦИОННОЙ
СТАНЦИИ. ИСПОЛЬЗУЮЩЕЙ ЭФФЕКТ ДОППЛЕРА
Пожалуй, самой простой передачей, которую можно себе пред¬
ставить, была бы передача на немодулированных незатухающих
колебаниях. К сожалению, попытки использовать радиолокацион¬
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
447
ные станции по этому принципу сталкиваются с двумя трудно¬
стями. Во-первых, поскольку при таком положении переданный
сигнал не является больше функцией времени, то нет никакой воз¬
можности осуществить измерения дальности, ибо никто не может
сказать, когда данная частица отраженной энергии была излучена
передатчиком. Во-вторых, при наличии более мощного непре¬
рывно излучаемого сигнала отраженный сигнал вообще было бы
невозможно обнаружить. Несмотря на эти недостатки, такие си¬
стемы тем не менее обладают одной весьма важной особенностью,
которую предыдущие системы не имели,— способностью разли¬
чать движущиеся цели на фоне сигналов помех, т. е. сигналов,
отраженных от неподвижных предметов. Подвижные цели могут
быть обнаружены благодаря эффекту Допплера, заключающемуся
в некотором изменении частоты отраженного от движущегося
предмета сигнала, которое называется допплеровским сдвигом ча¬
стоты. Этот сдвиг частоты можно понять, если представить, что
каждый раз, когда цель удаляется от радиолокатора на '/2 длины
волны, один полный период обратного излучения выпадает из
приема из-за времени, потребного для того, чтобы сигнал прошел
эту дополнительную половину длины волны и обратно. Сдвиг, сле¬
довательно, будет определяться следующей формулой:
— 214,
= (2)
где— допплеровский сдвиг частоты отраженного сигнала (по¬
ложительный при приближении цели); —радиальная состав¬
ляющая относительной скорости; X — длина волны.
Эта зависимость между сдвигом частоты и скоростью в радио¬
локационной системе, использующей эффект Допплера, отчасти
аналогична зависимости между временем и расстоянием в им¬
пульсной системе и вызывается той же самой причиной — конеч¬
ной скоростью света. Сдвиг частоты, происходящий под действием
эффекта Допплера, можно обнаружить так же, как в радиолока¬
ционной системе непрерывного излучения с частотной модуляцией
посредством гетеродинирования с излучаемым сигналом. Результи¬
рующая модуляция, или частота биений, будет равна допплеровой
частоте и может быть выделена из других сигналов с помощью
фильтра частот. По-видимому, сигналы, отраженные от целей,
имеющих различные радиальные скорости, могут быть также отде¬
лены друг от друга с помощью фильтров. Таким образом, радио¬
локатор, использующий эффект Допплера, различает цели главным
образом по их радиальной скорости, а не по их радиальному рас¬
стоянию до передатчика.
448
ГЛАВА 13
13—4. СРАВНЕНИЕ ПРИНЦИПОВ РАБОТЫ ИМПУЛЬСНЫХ
РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
С РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ,
ИСПОЛЬЗУЮЩИМИ ЭФФЕКТ ДОППЛЕРА
В период второй мировой войны многие артиллерийские сна¬
ряды снабжались неконтактными взрывателями, представлявшими
собой небольшие радиолокаторы допплеровского типа. Однако в
других областях радиолокаторы с непрерывным излучением полу¬
чили значительно меньшее распространение, чем импульсные. Это
было обусловлено главным образом тремя обстоятельствами. Во-
первых, в начале войны имелось эффективное средство получения
импульсов большой мощности в дециметровом диапазоне волн —
магнетрон. Магнетрон не может генерировать непрерывно, но
идеален для генерации коротких импульсов. Изобретение магне¬
трона привело к созданию радиолокационных установок с большой
разрешающей способностью как по углу, так и по дальности при
достаточно большой чувствительности; и, естественно, усилия ин¬
женеров были направлены на то, чтобы еще больше улучшить
эти качества. Во-вторых, легкость, с которой импульсный радиоло¬
катор определяет расстояния, что представляет исключительную
ценность для многих случаев применения. И в-третьих, радиоло¬
каторы с непрерывным излучением требовали большей точности
исполнения, чем импульсные. Легко понять, что как в радиолока¬
ционных системах непрерывного излучения, которые были описа¬
ны, так и в особенности в радиолокационной системе с использо¬
ванием эффекта Допплера передатчик должен излучать очень ста¬
бильный сигнал для того, чтобы можно было обнаружить малей¬
ший сдвиг частоты, происходящий под действием эффекта Допп¬
лера. Кроме того, просачивание мощности прямо из передатчика в
приемник создает некоторые затруднения. Это просачивание обяза¬
тельно должно быть большим по сравнению с мощностью отра¬
женного сигнала, который надо обнаружить, и любая ложная мо¬
дуляция может легко внести искажения в модуляцию за счет бие¬
ний, создаваемую отраженным сигналом. Дополнительным услож¬
нением радиолокатора, работающего на основе эффекта Доппле¬
ра, является необходимость в многоячейковых фильтрах вместо
простой временной развертки для индикации отдельных целей.
С другой стороны, использование эффекта Допплера придает ра¬
диолокатору важнейшее качество, которым нельзя пренебрегать.
При сравнении принципов работы импульсной и допплеровской
систем радиолокации необходимо четко представлять различие
между точностью, с которой какая-то величина может быть опре¬
делена, и разрешающей способностью по этой же самой величине.
Радиальная скорость какой-нибудь отдельной цели может быть
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
449
точно определена путем дифференцирования данных о дальности,
полученных с помощью обычного импульсного радиолокатора.
Однако, как уже было показано, импульсный радиолокатор разли¬
чает цели только по дальности; цели же, находящиеся на одном
И том же расстоянии, невозможно наблюдать раздельно, несмотря
на возможную разницу в их радиальной скорости. С другой сто¬
роны, радиолокатор с использованием эффекта Допплера разли¬
чает цели по скорости изменения их дальности, но не различает их
по дальности. Однако ценность такой системы для обнаружения
движущихся целен на фоне отраженных сигналов от неподвижных
целей очевидна.
В технике связи есть два основных метода для одновременной
передачи двух различных сообщений по одному каналу — это вре¬
менное и частотное уплотнение канала. Импульсный радиолокатор
и радиолокатор с непрерывным излучением, использующий эффект
Допплера, могут служить примерами применения этих двух мето¬
дов для различения множества целей.
Несмотря на очевидную общность этих двух направлений, с
помощью известного метода математического анализа можно
определенно показать, что временные и частотные характеристики
сигнала являются теми двумя сторонами, с помощью которых наи¬
более легко провести различия на практике.
Как в дальнейшем будет показано, можно создать радиолока¬
ционные системы, которые используют оба принципа одновременно.
Однако такие системы не получили широкого применения.
До рассмотрения таких импульсно-допплеровских радиолока¬
ционных систем было бы полезно более подробно ознакомиться
с временным и частотным спектрами сигналов, используемыми в
двух описанных выше простых радиолокационных системах.
На рис. 184 графически изображены частотные и временные
функции. На рис. 184, а показан сигнал незатухающих колебаний.
Его можно рассматривать как кривую напряжения сигнала в за¬
висимости от времени. Синусоида является высокочастотной несу¬
щей, тогда как пунктирная прямая линия показывает огибающую
этого сигнала. В этом идеализированном случае с монохромати¬
ческим сигналом высокая частота пропорциональна соз2и/о(, так
что огибающая остается без изменений в течение всего времени.
Сигнал в частотном изображении может быть представлен в виде
спектральной линии на частоте /0, как это показано на рис. 184,6.
На этом же рисунке более короткой линией на частоте /0 + /п пока¬
зан спектр допплеровских частот идеализированного сигнала, от¬
раженного от приближающейся цели. В действительности отра¬
женные сигналы будут иметь некоторую конечную ширину полосы
вследствие отклонений от основной частоты при излучении сиг¬
нала, флюктуаций, появляющихся благодаря рассеивающим свой¬
ствам движущейся цели, и неустановившихся режимов наблюде-
29—405
450
ГЛАВА 13
пий. Эта ширина полосы частот отраженного сигнала определяет
нижний предел в разности скоростей целей, который характери¬
зует разрешающую способность точно так же, как длительность
импульса в импульсной радиолокации устанавливает предел раз¬
решающей способности по дальности. Из уравнения (2) видно,
что если нужно различить два объекта, радиальные скорости ко¬
торых отличаются, скажем, на 15 м)сек, с помощью радиолока¬
тора, работающего на длине волны 3 см, то используемый спектр
Рис. 184. Временной и частотный спектры
может быть не шире 1 кгц. Такая ширина является очень незначи¬
тельной частью (одной десятимиллионной) рабочей частоты /0 при
длине волны 3 см, а это означает, что излучение должно быть ко¬
герентно во всех интервалах порядка 107гц.
На рис. 184, в и г подобным же образом показаны идеализиро¬
ванные сигналы, имеющие место при работе импульсного радиоло¬
катора. В этом случае, за исключением момента излучения им¬
пульса, передатчик все время находится в выключенном состоянии.
Что касается несущей, то теперь она умножается на модулирую¬
щую функцию, которая равна нулю, за исключением момента излу¬
чения импульса, когда она почти постоянна. Огибающая, пока¬
занная на рис. 184, в пунктирной линией, является модулирующей
функцией. Поскольку теперь излучаемые сигналы состоят из корот¬
ких импульсов во временном изображении, это значительно изме¬
няет, частотный спектр излучения, показанный на рис. 184, г. Вме¬
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
451
сто юго чтобы быть сконцентрированным около частоты /о, спектр
разошелся по диапазону, определяемому формой импульса и его
длительностью. Этот спектр на рис. 184, г показан пунктирной
кривой.
Это расширение в частотном отношении может быть лучше по¬
нято, если вначале рассмотреть простой случай, когда несущая
созшо/ модулируется сигналом (а4-6 созои/), содержащим со¬
ставляющую постоянного тока и еще одну составляющую угловой
скорости о>1. В результате получим
Ц= (« + ^СОЗ СОЗ Ш(/, (3)
что идентично выражению
ц = соз (о)0 — оэ1) I + а соз ш0/ + -у соз (о>0 4- «]) /. (4)
Составляющая нулевой частоты (постоянного тока) может рас¬
сматриваться так, словно она сдвинута к несущей частоте, тогда
как составляющая угловой частоты Ш1 образует две другие состав¬
ляющие, разнесенные этой частотой по обе стороны от несущей.
Характер вышеприведенного тригонометрического выражения ясно
показывает, что если бы модулирующая функция была более слож¬
ной и содержала много членов ряда Фурье, то они дали бы две
боковые полосы составляющих спектра, расположенных симме¬
трично по обе стороны от несущей. Теперь плотность спектра
Фурье Г(ш), связанная с прямоугольным временным импульсом
I ({), и определяемая посредством
/«1 = 1 при — -^-<г<+ (5)
и.
/ (I) = 0 при всех прочих условиях,
может быть найдена из отношения интегрального косинуса Фурье
+”
/?(ш) = ^/(/) СОЗ /(/;=/(— I) (6)
— со
и будет равна
5!п Ст)
<7)
2
Таким образом, несущая, модулированная одиночным прямоуголь¬
ным импульсом с длительностью т, имеет спектр, разбросанный по
всем частотам, как это показано пунктирной кривой на рис. 184, а,
вид которой определяется уравнением (7), перенесенным на несу¬
29*
452
ГЛАВА 13
щую частоту. Хотя спектр расширяется неограниченно, ширина
центральной вершины, которая заключает в себе 90% всей энер¬
гии, равна 2/х, т. е. расширение обратно пропорционально длитель¬
ности импульса; например, для импульса в 1 мксек ширина спек¬
тра равна 2 Мгц.
Если бы модулирующий импульс повторялся регулярно через
определенный интервал Т, т. е. модуляция стремилась бы к пе¬
риодической функции времени, тогда (как мы уже знаем из извест¬
ного разложения ряда Фурье) результирующий спектр стремился
бы к ряду дискретных линий, размещенных с частотой повторе¬
ния Это может быть подтверждено рассмотрением следующей
функции:
*=л
ля= о)
Л= —п
которая представляет функцию времени <р (/), взятую М = 2п-}-1 раз
в интервалах Т от —пТ до + пТ. Результирующий спектр Фурье
из уравнения (6) будет
4-® Л=л
Е (ш) = | © (/ — /гТ) соз ш1(Н =
— ® к——п
к~п
= вещественной части от е’аТк | у (I) е1™1 сП =
к=—п —
/ЫшТ \ +°°
51П ~т~) г
= ;0,7-4 <р(/)С08ш^^; Ф(^) = ф(—/). (9‘
""Ы —
Это и есть спектр функции ср (/), умноженной на коэффициент, не
зависящий от ср, но зависящий от Ы и Т. Этот коэффициент имеет
пики высотой М и шириной -цт периодов, разнесенных через
каждый Т период, как и предполагалось раньше. На рис. 184, г эти
пики представлены сплошными вертикальными линиями.
Предшествующий анализ полностью применим на практике к
технике передачи в радиолокации, за исключением того, что кон¬
центрация спектра в линии, как она определялась уравнением (9),
теряется при переходе к радиочастоте в обычных радиолокацион¬
ных передатчиках. Это происходит потому, что наше допущение о
несущей созш0( при рассмотрении модуляции неприменимо к обыч¬
ному высокочастотному генератору, запускающемуся каждый раз
перед началом каждого импульса. При таком положении, когда
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
453
фаза высокочастотного сигнала меняется от одного импульса к
другому, спектральная плотность, как и в случае одиночного им¬
пульса, пропорциональна пунктирной кривой на рис. 184, г. Мы
так считаем потому, что в силу случайной фазы несущая сама по
себе имеет спектральную ширину больше, чему, что дает раз¬
мазывание линий, которые отчетливо определялись уравнением (9).
Обратное соотношение между длительностью функции времени
и возможной остроконечностью ее частотного спектра, как это
видно из уравнения (7), а также из уравнения (9), является основ¬
ным фактом, который проявляется различными путями. Напри¬
мер, при любом типе радиолокатора для различения сигналов по
времени (по дальности) на величину Д/, требуется* чтобы за вре¬
мя Д/ переданный сигнал заметно изменялся в каком-либо отноше¬
нии и, следовательно, имел соответствующую ширину частотного
спектра по крайней мере порядка. Подобным же образом, чтобы
различить цели по частоте (скорости) до четкости /, необходимо
расширить полосу наблюдения по времени на интервал поряд¬
ка -у. По этой причине с помощью импульсного радиолокатора
невозможно простыми методами различать цели по скорости, ибо
спектр отраженного сигнала от различных целей с допплеровским
сдвигом частоты почти полностью перекрывается. На практике
допплеровский сдвиг частоты может дойти до нескольких кило¬
герц, тогда как типичная ширина спектра импульса равна не¬
скольким мегагерцам.
13—5. ПРИНЦИП РАБОТЫ ИМПУЛЬСНО-ДОППЛЕРОВСКОЙ
РАДИОЛОКАЦИОННОЙ СИСТЕМЫ
Предшествующие рассуждения показали некоторое различие
между импульсной и допплеровской радиолокационными система¬
ми, т. е. различие между разрешающей способностью по дально¬
сти и разрешающей способностью по скорости, на основании чего
можно было бы сделать вывод о невозможности использования их
вместе, в единой системе. Но это вовсе не так, в чем мы убедимся,
более детально рассмотрев спектры.
Безусловно верно, что частотное расширение, обусловленное
импульсностью сигнала, практически будет большим по сравнению
с допплеровским сдвигом частоты. Однако если передаваемые им¬
пульсы образуются путем включения и выключения когерентного
излучения от непрерывно работающего стабилизированного гене¬
ратора, описанного в предыдущем разделе, тогда результирую¬
щий частотный спектр будет иметь четкую структуру линий, отде¬
ленных друг от друга промежутками, обусловленными частотой
454
ГЛАВА 13
повторения импульсов. Эта структура показана на рис. 184, г. От¬
раженный от какого-либо объекта сигнал теперь будет состав¬
ляться из этих линий, распространившихся на ту же самую конеч¬
ную ширину полосы, по тем же самым причинам, что и для одиноч¬
ной линии отраженного сигнала в системе с непрерывным излу¬
чением.
Системы, в которых передача осуществляется импульсами,
имеют большое практическое преимущество перед непрерывно из¬
лучающей системой, поскольку они не требуют, чтобы приемник
работал во время работы передатчика, и позволяют все же разли¬
чать цели по скорости в том случае, когда линии от цели, летя¬
щей с одной скоростью, могут быть отличены от наложенных на
них линий от целей, летящих с другими скоростями. Последнее мо¬
жет быть сделано различными способами, в частности такими, как,
например, применение частотного фильтра с полосой пропускания
в виде гребня. Такие фильтры пропускают спектр одной цели и в
то же время ослабляют спектр, который попадает между зубьев
гребня. Возможно, было бы проще сначала разделить цели по
дальности посредством синхронного электронного переключателя,
называемого стробом дальности, который не пропускает сигналы от
всех целей, находящихся на расстоянии, отличном от нужного, а
затем отобрать цель с желаемой скоростью с помощью частотного
фильтра, имеющего только один зубец. Такого рода строб скорости
пропускает только одну из многих спектральных линий цели, чем
разрушает импульсный характер сигнала, но это не имеет значе¬
ния для определения расстояния до цели, которое уже найдено.
Только что описанная система способна вести наблюдения за
целью при условии, что она свободна от наложения помех от дру¬
гих целей или местных предметов и несколько отличается по рас¬
стоянию или по скорости от создающих помехи. Подобная разре¬
шающая способность системы достигается за счет некоторых
усложнений, которых нет в более простых системах, описанных
ранее. Например, трудность отыскания неизвестной цели в огра¬
ниченный срок, очевидно, увеличится, поскольку будет необходимо
вести наблюдение не только по углу и дальности, но также и по
скорости. Иногда, может быть, нужно прибегнуть к параллельным
каналам дальности или скорости, для того чтобы решить эту за¬
дачу более или менее удовлетворительно.
В качестве второго примера рассмотрим временной и частот¬
ный графики, приведенные на рис. 184, с точки зрения их периодич¬
ности.
Согласно сказанному ранее, временная периодичность прояв¬
ляется как неопределенность по дальности для любого расстоя¬
ния, кратного величине
(Ю)
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
455
Периодический характер частотного графика».создает подобную не¬
определенность по скорости для любой скорости, кратной вели*
чине
(Н)
где X — Длина волны несущей. Это соотношение вытекает из урав¬
нения (2) и из уравнения (9), дающего четкую структуру спектра,
а также из допущения, что допплеровский сдвиг частоты опреде¬
ляется путем получения биений отраженного сигнала с сигналами
стабилизированного генератора, генерирующего несущую для зон¬
дирующих импульсов. Коэффициент 4 в знаменателе [вместо ко¬
эффициента 2 в уравнении (2)] получается вследствие того, что
конечный результат биений будет одинаковым, независимо от того,
будет ли частота /о выше или ниже частоты одной из спектраль¬
ных линий отраженного сигнала на данную .величину. Предполо¬
жим, что, для того чтобы исключить неопределенность измерений и
не допустить нежелательных наложений полезных сигналов и сиг¬
налов помех при определении как скорости, так и дальности, сле¬
дует взять /?к и Ун значительно больше практически возможных
значений. К сожалению, численный расчет по формулам (10) и
(11) для практических случаев показывает, что обычно невоз¬
можно при широкой полосе иметь обе эти величины одновременно
большими. В заключение можно сказать, что помехи от местных
предметов можно допустить, а неопределенность вполне возмож¬
но устранить с помощью некоторой вспомогательной системы или
посредством различных методов работы станции.
13—6. ЧУВСТВИТЕЛЬНОСТЬ
Дальность действия любой локационной системы или системы
обнаружения является важнейшей характеристикой. Чтобы отве¬
тить на вопрос, для каких целей и на какую дальность рассчитана
та или иная система, необходимо учитывать многие факторы, часть
которых являются основными, а остальные второстепенными дета¬
лями, характеризующими способность системы воспринимать окру¬
жающую обстановку. Самыми главными характеристиками радио¬
локационных систем, которые особо выделяют их из всех других
методов определения места целц, являются: независимость измере¬
ний от времени суток и погоды, надежность работы при любых
действиях цели и максимальная чувствительность приемной аппа¬
ратуры.
Основным показателем чувствительности является отношение
амплитуды полезного сигнала, полученного в системе, к амплитуде
456
ГЛАВА 13
ложных возмущений, ^}ли шумов. При расчете этого отношения
прежде всего необходимо знать мощность принимаемого отражен¬
ного сигнала.
Рис. 185. Геометрическое соотношение передачи и приема
Факторы, оказывающие влияние на мощность принимаемого от¬
раженного сигнала, можно установить при рассмотрении рис. 185
и уравнения (12), которое часто называют уравнением радиоло¬
кации:
$ = —Ц--Д. (12)
4т:Л2 4я/?| 4 ’
В этой формуле
5 — мощность отраженного сигнала на выходе приемной ан¬
тенны;
Р — мощность, излучаемая передающей антенной;
О — усиление по мощности передающей антенны;
о — эффективная площадь рассеяния цели;
А — эффективная площадь приемной антенны;
— расстояние от передатчика до цели;
/?2 — расстояние от цели до приемника.
Вывод из этого уравнения очевиден. Первым фактором яв¬
ляется излучаемая мощность на единицу площади цели, перпенди¬
кулярной к 7?1, при изотропном излучении всей мощности передат¬
чика. Вторым фактором является коэффициент усиления передаю¬
щей антенны, представляющий собой отношение излучаемой мощ¬
ности, сконцентрированной в направлении цели, к мощности при
изотропном излучении. Третий фактор характеризует плотность
отраженной мощности у приемной антенны на единицу плотности
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
457
облучающей цель мощности, выраженной через эффективную пло¬
щадь рассеяния а цели; и последний фактор есть площадь антенны
приемника, на которую, фактически, принимается отраженная
мощность.
В обычных радиолокационных системах приемная и передаю¬
щая антенны находятся в одном и том же месте; фактически в ка¬
честве приемной и передающей используется одна и та же антенна.
Здесь они были рассмотрены отдельно потому, что такое положе¬
ние существует в некоторых случаях, например, в управляемых
снарядах с полуактивным радиолокационным самонаведением. Та¬
кого типа управляемый снаряд имеет радиолокационный прием¬
ник, тогда как его цель облучается радиолокационным передат¬
чиком, находящимся в другом месте.
В случае общей антенны приемника и передатчика уравнение
радиолокации упрощается благодаря тому, что Р\ = Р2 = К, а также
благодаря использованию основного соотношения между усиле¬
нием антенны и ее эффективной площадью
О=~„ (13)
Все это приводит к следующему уравнению:
РА%
Чтобы показать влияние различных параметров на максималь¬
ную достижимую дальность действия системы, лучше всего исполь¬
зовать решение уравнения (14) для
я =6,—(15)
тах ( * / ’
где 5т1п — минимальная (пороговая) мощность сигнала. Интерес¬
но отметить, что /?тах изменяется пропорционально корню четвер¬
той степени от излучаемой мощности, чувствительности приемника
(или эффективной площади рассеяния цели) и пропорционально
квадратному корню от эффективной площади антенны (или прямо
пропорционально диаметру антенны). При использовании этих урав¬
нений для проектирования систем радиолокации необходимо знать,
что у правильно сконструированной сверхвысокочастотной антен¬
ны, размеры которой больше длины волны X, эффективная пло¬
щадь А равна обычно 0,64-0,7 от геометрической площади этой ан¬
тенны.
Все величины, входящие в уравнение (12), являются параме¬
трами радиолокационной установки, за исключением а, которая
представляет очень сложный параметр, характеризующий цель.
458
ГЛАВА 13
Эффективную площадь рассеяния можно представить в виде пло¬
щади, перпендикулярной к оси луча передатчика, из которого дол¬
жна быть взята часть потока энергии и однородно рассеяна во
всех направлениях, с тем чтобы создать у приемной антенны та¬
кой мощности сигнал, какой получился бы при рассеянии от дей¬
ствительной цели. Величина эффективной площади цели может
быть в несколько раз больше или меньше геометрической попереч¬
ной площади предмета, но часто совпадает с ней.
Можно легко обнаружить, что величина а зависит от многих
факторов: от размера, формы, ориентации и материала цели, от
длины волны и поляризации, к которой приемная антенна воспри¬
имчива, и от угла рассеяния в. В частности, о сильно колеблется
при небольших изменениях в ориентации геометрически сложной
формы цели, как, например, самолет, размеры которого намного
больше длины волны X. Эти колебания происходят потому, что
даже небольшое угловое вращение больших целей будет весьма
заметно изменять различные доли длины волны по отношению к
расстояниям до разных рассеивающих точек, из которых цель,
можно сказать, состоит. Такие изменения расстояний будут значи¬
тельно изменять фазы отдельных рассеянных волн, которые обра¬
зуют возвращающийся отраженный сигнал. В силу этого можно
предположить, что практически для целей, которые движутся при
таких исключительных условиях, величину а надо рассматривать
как стохастическую функцию времени. Если считать отраженный
сигнал совокупностью большого числа независимых отражений от
различных участков цели, то амплитудное распределение вероят¬
ности этой функции времени должно быть распределением по
Релею и его частотный спектр должен быть пропорционален отно¬
сительным радиальным скоростям (в длинах волн в секунду) раз¬
личных частей цели. Во многих случаях было замечено, что в дей¬
ствительности так оно и есть. Другие наблюдения показали, что
многочисленные отдельные рассеивающие точки иногда могут об¬
разовать всего несколько точек. В главе 8 эти флюктуации ра¬
диолокационных отраженных сигналов рассмотрены более по¬
дробно.
Строго говоря, уравнение (12) должно включать в себя коэф¬
фициент, учитывающий атмосферное поглощение. Но его следует
учитывать только при длинах волн менее 3 см или во время силь¬
ного выпадания осадков. Этот вопрос уже рассматривался в гла¬
ве 1 1.
Знание величины мощности принятого сигнала в том виде, в
каком она определена уравнением (12), еще мало о чем говорит.
Очень важно знать, насколько эта мощность принятого сигнала
больше пороговой мощности сигнала, которая еще достаточна для
удовлетворительной работы приемной аппаратуры. Другими сло¬
вами, надо знать, какова величина шумов. В радиолокационном
Радиолокационная техника
459
приемнике засчитывают три вида шумов, которые можно разли¬
чить по их происхождению и влиянию на работу станции:
1) шумы цели;
2) шумы окружающей среды;
3) шумы приемника.
Шумы цели возникают вследствие статистического характера са¬
мого рассеиваемого излучения (об этом шла речь при рассмотрении
эффективной площади рассеяния о). Они вызываются флюктуа¬
циями по амплитуде, поляризацией и изменением угла падения
возвратившегося отраженного сигнала, хотя эти флюктуации дол¬
жны быть точно определены при детальном анализе работы си¬
стемы, поскольку они определяют предельные характеристики не¬
которых параметров системы; они тем не менее не оказывают осо¬
бого влияния на величину полезного сигнала, но позволяют более
детально характеризовать свойства сигнала. В противоположность
этому шумы окружающей среды и шумы приемника ограничивают
предельную дальность обнаружения целей, так как создают меша¬
ющие сигналы на выходе приемника.
В шумы окружающей среды включаются все посторонние излу¬
чения, приходящие в приемник из внешнего мира: естественные и
искусственно создаваемые помехи. Они сейчас нас мало интере¬
суют, поскольку при нормальных условиях они пренебрежимо
малы по сравнению с шумами приемника. Атмосферные шумы, на¬
пример, почти не имеют практического значения, за исключением
шумов на самых нижних частотах, используемых в радиолокации
(несколько десятков мегагерц).
Шумы приемника определяют пороговую величину полезного
сигнала. Эти шумы можно рассматривать как Случайные сигналы,
появляющиеся на выходе приемника даже при отсутствии вообще
какого-либо входного сигнала. Они частично происходят от всеоб¬
щего теплового возбуждения электронов в элементах,, составляю¬
щих входное сопротивление в приемнике, но больше всего — от
электронных процессов в электровакуумных лампах и других
приборах, из которых состоят входные цепи приемника. Это так
называемый белый шум; его частотный спектр занимает всю по¬
лосу пропускания приемника. Величина этого шума в каждом от¬
дельном приемнике обычно выражается в виде коэффициента шу¬
ма характеризующего мощность шумов некоторого идеализи¬
рованного приемника с тем же самым коэффициентом усиления.
Идеальным приемником считается такой, в котором все шумы воз¬
никают на входных клеммах (в выходном сопротивлении антенны)
приемника. Этот нижний предел для шума зависит только от тер¬
модинамической температуры сопротивления антенны и ширины
полосы частот, пропускаемой приемником. Таким образом, мощ¬
ность шумов приемника, отнесенная ко входным зажимам прием¬
460
ГЛАВА 13
ника [та же исходная точка, как и при определении 5 в уравне¬
нии (12)] определяется следующим выражением:
п = ЫР-В-К-Т, (16)
где п — мощность шумов приемника, отнесенная ко входу при¬
емника;
МР—коэффициент шумов приемника (шум-фактор);
В—ширина полосы пропускания приемника;
К—постоянная Больцмана = 1,38X 10-10 эрг/°К;
Т — абсолютная температура;
причем К-Т= 1О-20'4 вт/гц, при Т = 300°К.
Минимальное отношение сигнал-шум, которое допустимо при
любых отдельных операциях, как, например, обнаружение цели,
при автоматическом слежении и т. д., зависит от характера опера¬
ции, но порог чаще всего находится в пределах от 1,0 до 0,1. Ко¬
эффициент шумов может приближаться к 1,0 для низкочастотных
радиолокационных систем, но наиболее типичные значения для
сверхвысокочастотной аппаратуры лежат в пределах от 10 до 50.
13—7. ОПИСАНИЕ ИНДИКАТОРА КРУГОВОГО ОБЗОРА
Нижеследующий краткий обзор отдельных узлов расширит рам¬
ки представления о работе радиолокатора. С наиболее общими
принципами действия можно ознакомиться путем рассмотрения
прохождения сигналов в импульсных радиолокационных станциях
двух типов, являющихся прототипами современных станций, а
именно: в панорамной станции с ручным управлением и станции
автоматического сопровождения целей.
Основная задача радиолокатора состоит в наблюдении за всеми
целями, находящимися в определенной зоне обнаружения. Наи¬
более типичным представителем таких устройств является пано¬
рамная радиолокационная станция, задача которой состоит в ото¬
бражении целей на индикаторе кругового обзора в заданных пре¬
делах дальности. Изображение, получаемое на экране индикатора,
напоминает, по существу, карту с наблюдателем, находящимся, как
правило, в центре (панорамы). На этой карте цели появляются в
виде ярких пятен на темном фоне, подобно изображению на экране
телевизионного приемника. Способ получения такой карты может
быть понят из рис. 186, где изображена корабельная панорамная
радиолокационная станция. Развертка по дальности индикатора
типа А, на которой индицировалась цель соответственно ее даль¬
ности, теперь видоизменена таким образом, чтобы она осуществля¬
лась радиально от центра к краю экрана электронно-лучевой труб¬
ки. Поскольку развертка по дальности пульсирует с частотой пов¬
торения импульсов передатчика, обычно равной нескольким сотням
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
461
герц, она для глаза кажется непрерывной и видна в виде тонкой
светящейся (из-за шумов приемника) линии, • идущей по радиусу,
на которой располагаются яркие точки, представляющие собой
цели. Антенна радиолокатора, диаграмма направленности которой
Рис. 186. Радиолокационная панорамная станция
является острой по азимуту и (обычно) широкой по углу возвы¬
шения, вращается вокруг вертикальной оси так, чтобы луч про¬
извел обзор окружающего пространства. Развертка по дальности
вращается на индикаторе синхронно с разверткой антенны, благо¬
даря чему цели видны по всем азимутам последовательно. Это
462
ГЛАВА 13
вращение развертки обеспечивается механическим вращением от¬
клоняющих катушек электронно-лучевой трубки, которые и осуще¬
ствляют развертку. Для того чтобы цели могли быть видны непре¬
рывно, экран электронно-лучевой трубки обладает длительным по¬
слесвечением (медленное затухание светового пятна после возбуж¬
дения его электронным лучом).
Благодаря этому получается действительная картина объектов,
находящихся в зоне обзора радиолокатора. Подобную же картину
местности можно получить с помощью радиолокатора, установ¬
ленного на самолете при учете соответствующего сдвига и измене¬
ния положения развертки дальности по времени.
Необходимо иметь в виду, что панорамные станции рассчитаны
для целей, находящихся на земной поверхности. Поэтому цели, на¬
ходящиеся вне этой поверхности, не будут отображаться в истин¬
ном плане, поскольку время прихода отраженного сигнала зави¬
сит от действительной (наклонной), а не от горизонтальной даль¬
ности.
13—8. ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕНН
Одновременно с основным ограничением в отношении разре¬
шающей способности по дальности, налагаемым длительностью
импульса, имеется также ограничение относительно разрешающей
способности по угловым координатам, обусловленное шириной
основного лепестка диаграммы направленности антенны. У хо¬
рошо сконструированной антенны основной лепесток не может
быть очень узким, так как он всегда ограничивается дифракцией
радиоволн, а следовательно, размерами апертуры (раскрыва)
антенны в длинах волн. Это находится в противоречии с положе¬
нием, имеющим место в световом прожекторе, где угловое рас¬
ширение луча определяется отношением размера источника света
к фокусному расстоянию и существующими аберрациями. Рас¬
пределение высокочастотной энергии радиолокационной антенной
в пространстве по направлению определяется относительными ам¬
плитудой и фазой возбужденных колебаний по всей апертуре
антенны. В направлении основного лепестка волны от всех частей
антенны приходят в фазе и, следовательно, складываются, тогда
как в других направлениях получается некоторое, большее или
меньшее, вычитание.
Детальный вид этого направленного распределения, или диа¬
граммы. направленности антенны, можно получить простым сло¬
жением волн в удаленной точке от каждого элемента апертуры
с учетом как относительной фазы и амплитуды каждого элемента,
так и относительного сдвига фазы, получающегося вследствие прохо¬
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
463
ждения волнами различных расстояний от различных элементов
антенны. При этом оказывается, что соотношение между диаграм¬
мой направленности антенны и возбуждением апертуры, по суще¬
ству, согласуется с отношением функций 2?(ш) и /(I) в уравне¬
нии (6); одна из них получается из другой простым преобразо¬
ванием Фурье. В частном случае, согласно уравнению (7), по¬
стоянная амплитуда и фаза линейной апертуры длиной Ь дает
диаграмму направленности антенны
51П в! 51П / О
если 9<:1’ (17)
(~г)5,п0 (т)
где 27(0) — относительная напряженность электрического поля;
О — угол между направлением излучения и перпендикуля¬
ром к линейному источнику.
Эта диаграмма направленности соответствует как прямоуголь¬
ной, так и линейной апертурам, она имеет форму, представленную
пунктирной кривой на рис. 184, а и показывает две общие особен¬
ности диаграммы направленности антенны. Первая — ширина
основного лепестка обратно пропорциональна размеру апертуры
(ширина основного лепестка между нулями в уравнении (17) рав¬
на 2Х/2, радиаш). Вторая — диаграмма направленности имеет бо¬
ковые лепестки, ширина которых равна половине ширины основ¬
ного лепестка. Наибольшие боковые лепестки в диаграмме, опре¬
деляемой уравнением (17), имеют максимумы напряженно¬
сти 27(0) =0,22, или на 13 дб ниже напряженности основного ле¬
пестка.
Форма диаграммы направленности антенны может быть в зна¬
чительных пределах изменена путем соответствующего управления
возбуждением в апертуре. Например, боковые лепестки могут
быть несколько уменьшены по сравнению с основным лепестком
при одновременном увеличении ширины основного лепестка и сни¬
жении усиления антенны за счет убывания амплитуды к краям
апертуры. Типичные круглые радиолокационные антенны имеют
возбуждения апертуры, дающие ширину луча на уровне ‘/а мощно¬
сти около 1,2 Х/Ь, и первые боковые лепестки по мощности на
20 дб ниже основного лепестка.
В качестве примера сложной формы луча рассмотрим луч, наи¬
более подходящий для панорамной станции, изображенной на
рис. 186. В этом случае луч должен быть узким по азимуту,
чтобы получить хорошую разрешающую способность по азимуту,
и широким по углу возвышения, если мы хотим также обеспечить
обнаружение самолетов. Такой луч получится тогда, когда апер¬
тура антенны будет длинной пр горизонтали и короткой по вер¬
464
ГЛАВА 13
тикали. Кроме того, можно получить диаграмму, при которой из¬
лучаемая мощность будет уменьшаться, как квадрат косеканса
угла возвышения для того, чтобы мощность отраженного сигнала
от целей, находящихся на данной высоте, не зависела от расстоя¬
ния от радиолокатора. Это может быть сделано, и часто делается,
в определенных пределах, посредством соответствующего форми¬
рования фазы возбуждения по высоте апертуры.
Поскольку размеры антенны по сравнению с длиной волны
обычно невелики, то в ней могут появляться небольшие лепестки
с довольно заметной напряженностью поля, расположенные под
большими углами к основному лепестку. Как мы уже видели, от¬
носительная мощность в некоторых лепестках может доходить до
величины от 0,05 до 0,01, тогда как средняя относительная мощ¬
ность всех лепестков, не считая основного, может составлять от
10“3 до 10-4. Это не столь большие уровни по сравнению с разбро¬
сом энергии отраженного сигнала, определяемым уравнением (12).
Эти боковые лепестки могут вносить помехи от местных предме¬
тов, накладывающиеся на полезные сигналы. Если не принять
специальных мер (например, изменение усиления приемника син¬
хронно с разверткой по дальности), то центральная часть индика¬
тора кругового обзора иногда может быть полностью забита
этими помехами. Эти ограничения по ширине луча и уровню боко¬
вых лепестков в зависимости от размера антенны часто являются
очень серьезными, особенно в авиации или в области управляе¬
мых снарядов, где поперечные размеры антенн строго ограничены.
13—9. ИНДИКАТОРЫ
Панорамная станция может быть использована для иллюстра¬
ции некоторых проблем, связанных с пространственным разверты¬
ванием луча, или обзором, производимым импульсными радиоло¬
каторами вообще. Здесь может быть много вариантов как в от¬
ношении типов развертки луча антенны, так и в отношении ви¬
зуального представления. Например, самолетная радиолокацион¬
ная станция перехвата одного типа развертывает двухмерную
угловую диаграмму направленности в пространстве с помощью
остронаправленного луча антенны и имеет индикатор, отобра¬
жающий цели только в этом угле. Это представляет основную
проблему. Возможное распределение целей в пространстве
является по меньшей мере трехмерным (для импульсно-доппле¬
ровской системы — четырехмерным), и радиолокатор со сканирую¬
щей антенной может измерять все координаты, определяющие
местонахождение такой цели, но данные не могут быть получены
оператором в должном виде непосредственно. Электронно-лучевая
трубка, будучи очень далека от требуемого идеала индикатора,
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
465
по существу, является двухмерной. В некоторых случаях требуется
значительная изобретательность при проектировании индикатора,
который представлял бы оператору (и без того очень занятому,
если он управляет самолетом в бою) всю нужную ему информа¬
цию в том виде, в каком он может ее быстро воспринять и оценить.
Один из лучших методов заключается в,том, чтобы показать каж¬
дую цель не просто в виде светового пятна на экране трубки,
а в виде определенной геометрической фигуры, по форме и раз¬
мерам которой можно было бы иметь приближенное суждение
о некоторых данных цели, как, например, расстояние, высота, ско¬
рость сближения, принадлежность и т. д. Для этой цели были
испытаны стереоскопические и цветные индикаторы.
13—10. ВРЕМЯ ОБЗОРА ПРОСТРАНСТВА
Другое общее ограничение для панорамной станции, как и во¬
обще для любого радиолокатора, которое является менее очевид¬
ным, но более важным, чем все предыдущие, возникает из того
факта, что вся информация, получаемая радиолокатором с обыч¬
ной приемной антенной и двумя выводными клеммами, заключена
во временном характере одиночного электрического сигнала, по¬
являющегося на этих клеммах антенны. Все данные должны быть
извлечены из этой одиночной скалярной функции времени. Это
очень важное различие между радиолокационной станцией и чело¬
веческим глазом, которому часто уподобляют радиолокатор.
Глаз — это многоканальный приемник.
Тот факт, что радиолокационная установка эквивалентна одно¬
му каналу информации, ведет ко многим следствиям, для оценки
большей части которых не требуется глубоких знаний в теории
информации. Мы уже встречали некоторые подобные следствия,
например, при рассмотрении влияния частоты повторения импуль¬
сов на измерения дальности и скорости. Дальше, коль скоро ча¬
стота повторения импульсов ограничена, то число импульсов на
одно развертывание луча антенны также будет ограничено. Это
накладывает жесткий предел на скорость вращения антенны при
сканировании. Если антенна за время, прошедшее между двумя
импульсами, повернется на угол, больший чем ширина диаграммы
направленности, то часть пространства полностью выпадет из
обзора. Обычно же требуется, чтобы в одну точку пространства
попало несколько импульсов. Из всего этого мы видим, что при
выборе оптимальной длительности импульса, оптимальной ча¬
стоты повторения, оптимальной ширины луча (усиления антенны)
и скорости развертывания луча нужно рассматривать все факторы
вместе, потому что все они тесно взаимосвязаны. Кроме факторов
внешней обстановки, на влияние которых радиолокатор доджей
30—405
466
ГЛАДА 13
быть рассчитан, оптимальный выбор будет зависеть от техниче¬
ских ограничений, накладываемых существующей аппаратурой,
как, например, ограничений по величине пиковой или средней излу¬
чаемой мощности, по достигнутой степени интегрирования от им¬
пульса к импульсу в цепях приемника или индикаторе. Если при¬
емная аппаратура дает превосходное интегрирование и является
оптимальной во всех других отношениях, тогда вероятность обна¬
ружения цели определенного размера в определенной части про¬
странства и в заданное время должна зависеть только от средней
мощности, которую может излучить в пространство передатчик, и
от чувствительности приемника (включая эффективную площадь
приемной антенны). На первый взгляд может показаться, что
усиление передающей антенны также должно быть учтено в рас¬
четах, поскольку уравнение (9) определенно указывает, что мощ¬
ность полученного обратно сигнала зависит от величины усиления
передающей антенны, однако в действительности дело обстоит
иначе, ибо когда усиление антенны растет, ширина луча умень¬
шается, и, таким образом, каждая точка пространства будет облу¬
чаться меньшее время. Другими словами, уравнения (12) и (16)
более или менее полностью охватывают проблему слежения за
уже обнаруженной целью, но это только часть всей проблемы об¬
зора пространства. Другие аспекты радиолокатора как источника
информации станут понятны после рассмотрения основных эле¬
ментов, из которых состоит радиолокационная установка.
13—11. ПЕРЕДАТЧИК
Продолжим ознакомление с работой панорамной станции, пред¬
ставленной на рис. 186. Каждый импульс передаваемого сигнала
запускается триггерным генератором, который действует подобно
часам или реле времени. Этот триггерный импульс начинает раз¬
вертку дальности и заставляет модулятор выдавать импульс
большой мощности в передатчик, который в свою очередь выдает
серию высокочастотных импульсов, излучаемых в пространство.
Типичными численными характеристиками для поисковой радио¬
локационной установки могут быть: частота повторения импульсов
от 100 до 1000 импульсов в секунду, продолжительность импульса
от 5 до 0,5 мксек и пиковая излученная мощность от нескольких
киловатт до нескольких мегаватт. Рабочая длина волны может
быть выбрана в любом месте радиочастотного спектра, но обычно
используется сверхвысокочастотный диапазон. Этот диапазон раз¬
бит на несколько поддиапазонов, которые в американской си¬
стеме стандартов обозначены буквами Ь, 5, X и К; каждый под¬
диапазон имеет среднюю длину волны, равную 30, 10, 3 и 1 см
соответственно. Более короткие длины волн дают большее усиле¬
ГЛАВА 13
4б7
ние антенны и лучшую разрешающую способность по угловым
координатам при тех же самых размерах антенны, тогда как гене¬
рирование и детектирование мощности на более коротких волнах
более затруднительно. Генераторные лампы (клистроны) диапа¬
зона 5 (10-СЛ1 Диапазон) были созданы для того, чтобы генери¬
ровать импульсы мощностью до 30 мегаватт. Для радиолокацион¬
ных станций дальнего действия, предназначенных для раннего
обнаружения приближающихся самолетов, было бы желательно
применить более длинные волны (метровые), потому что изби¬
рательное отражение объекта равно почти половине длины волны
и потому, что более длинные волны больше склонны к распро¬
странению вдоль земной поверхности, чем более короткие.
13—12. АНТЕННЫЙ ПЕРЕКЛЮЧАТЕЛЬ
Антенный переключатель, с которым высокочастотный импульс
встречается на своем пути к антенне, представляет собой элек¬
тронный переключатель, соединяющий антенну с передатчиком во
время передачи и с приемником — в остальное время. Он имеет
большое практическое значение, так как позволяет одну и ту же
антенну использовать и в качестве передающей, и в качестве при¬
емной. Переключение производится благодаря ионизации газа под
действием электрического поля, получающегося в резонансной
цепи от большой напряженности зондирующего импульса, но не
от принимаемых отраженных сигналов, которые очень слабы,
чтобы вызвать ионизацию. В настоящее время применяют более
современные высокоскоростные переключатели, которые исполь^
зуют особые свойства ферритовых материалов в сверхвысокочас¬
тотном диапазоне.
13—13. ПРИЕМНИК
Отношение переданной мощности к принимаемой для порого¬
вого радиолокационного отраженного сигнала исключительно ве¬
лико, порядка 1018, тогда как в ряде опытов по получению отра¬
женных от Луны радиолокационных сигналов это отношение было
еще выше, порядка 102'. Одна из главных задач приемника со¬
стоит в том, чтобы усилить слабый отраженный сигнал, принятый
антенной, до такого уровня, чтобы его можно было использовать
для различных нужд; типичный коэффициент усиления по ампли¬
туде равен 106 (по мощности ~1012). Для такого усиления почти
везде используются супергетеродинные радиоприемники, блок-
схема которых показана на рис. 186.
Существенной особенностью супергетеродинного метода приема
является то, что приходящий сигнал преобразуется в другой сиг-
30*
468
ГЛАВА 13
нал более низкой частоты путем смешения или биения первона¬
чального сигнала с относительно сильным постоянным сигналом
(очень близким к первоначальному по частоте), генерируемым
гетеродином, функции которого в сверхвысокочастотных приемни¬
ках обычно выполняет клистрон с выходной мощностью в не¬
сколько миливатт. Смешение происходит в нелинейном элементе,
имеющем несколько названий: смеситель, преобразователь ча¬
стоты, первый детектор (в подобных приемниках обычно исполь¬
зуется кристаллический детектор). Полученный сигнал имеет не¬
сущую частоту, равную разности частот первоначальной несущей
частоты и частоты гетеродина. Требуемое большое усиление про¬
изводится теперь на этой более низкой частоте, называемой про¬
межуточной частотой (ПЧ). Такой метод работы имеет два боль¬
ших преимущества. Во-первых, на низкой частоте значительно
легче получить требуемое усиление, и каскады работают более
стабильно; во-вторых, приемник может <5ыть настроен на требуе¬
мую частоту просто путем изменения частоты гетеродина. Соот¬
ветствующая полоса пропускания усилителя промежуточной ча¬
стоты определяется шириной спектра (рис. 184), и если ее сделать
шире, чем нужно для пропускания спектральных составляющих
сигнала, то это приведет к усилению всякого рода мешающих
шумов.
Для отображения обстановки на индикаторе достаточно иметь
только огибающую возвращенного сигнала, так что следующей по
порядку операцией будет выпрямление сигнала во втором детек¬
торе, для того чтобы получить эту огибающую или что-то близкое
к ней. Выходной сигнал второго детектора — это последователь¬
ность импульсов, соответствующих отраженным сигналам, но по¬
лученных уже без участия высокочастотной несущей. Так как
основная часть частотного спектра этого сигнала тянется от нуля
до эквивалента (обратной величины) длительности импульса, то
он обычно содержит в себе составляющие частот вплоть до не¬
скольких мегагерц, и поскольку методы усиления такого рода сиг¬
налов с полосой частот такой ширины для радиолокационных
приемников были заимствованы из телевизионных приемников, то
сигналы эти названы видеосигналами. Таким образом, мы на¬
чали с видеоимпульсов высокой мощности (выход модулятора) и
теперь закончили импульсами, которые, по существу, являются
отраженными сигналами этого первоначального видеоимпульса.
Могут спросить: зачем вообще нужно преобразовывать этот сиг¬
нал вначале в высокую частоту, а потом в промежуточную? Дело
в том, что низкие частоты, составляющие видеосигнал, с их очень
большим процентом разброса было бы очень трудно вообще
передать в пространство, не говоря уже об их направленной пере¬
даче.
Возможен и другой вопрос: почему принятый сигнал не детек¬
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
469.
тировать сразу и не получить огибающую тотчас после поступле¬
ния сигнала на вход приемника (поскольку это исключило бы
расходы на создание гетеродина и первого детектора)? Это дейст¬
вительно можно сделать, и такие приемники обычно известны как
широкополосные детекторные приемники, потому что все усиление
происходит по видеочастоте. Такие приемники менее чувстви¬
тельны, чем супергетеродинные (почти на 105 коэффициента уси¬
ления по мощности), что во многих случаях является большим не¬
достатком. Причина такой потери чувствительности заключается
в том, что при достаточно низких уровнях сигнала все выпрями¬
тели действуют по квадратическому закону, т. е. их выходное на¬
пряжение в конечном счете падает как квадрат входного напря¬
жения. (Это подчинение квадратическому закону сохраняется для
сигналов напряжением меньше 0,1 вольта для обыкновенных де¬
текторов.) Если произвести выпрямление при низких уровнях
сигнала, то в результате после детектора сигнал падает до уровня
шумов цепи, чего не произошло бы, если бы вначале за счет уси¬
ления был достигнут нужный уровень. Это объяснение может вы¬
звать следующий вопрос: если первый детектор не причиняет та¬
кого вреда, как второй, то почему не сделать так, чтобы некоторая
часть или все усиление происходило по высокой частоте? Конечно,
иногда некоторые преимущества достигаются при предваритель¬
ном усилении по высокой частоте, но поскольку это касается чув¬
ствительности, то они весьма незначительны, ибо первый детектор
вносит только небольшие потери в уровень сигнала и работает
строго линейно, не изменяя ни относительной фазы, ни амплитуды
всех спектральных составляющих во время преобразования в про¬
межуточную частоту. Такая разница в работе первого и второго
детектора получается потому, что в первом детекторе присутствует
сигнал гетеродина, уровень которого намного выше уровня при¬
нятого отраженного сигнала.
Главным фактором, обеспечивающим высокую чувствитель¬
ность радиолокатора, по-видимому, является способность радио¬
приемника линейно усиливать до высокого уровня токи, наводи¬
мые в антенне электромагнитным полем, до прихода их на второй
детектор, где уже начинает действовать квадратический закон.
В качестве зондирующих импульсов можно вместо радиоволн
использовать, например, видимые или инфракрасные лучи, но
при современном состоянии этой техники процесс детектирования
для этих длин волн протекает полностью по квадратическому
закону (выходной ток пропорционален входной мощности), и
в конечном счете получается чувствительность такая же низкая,
как у упомянутого выше широкополосного детекторного прием¬
ника. Отсюда не следует, что такие длины волн совершенно непри¬
годны для обнаружения целей там, где могут быть использованы
узкополосные электрические сигналы, однако надо иметь в виду,
470
ГЛАВА 13
что в случае оптического ули инфракрасного радиолокаторов с та¬
кой же разрешающей способностью по дальности, как и обычный
радиолокатор, придется столкнуться с большим препятствием
в отношении чувствительности приемника. Дальнейший анализ
в целях сравнения видимых или инфракрасных частот электро¬
магнитного спектра и радиочастот должен касаться значений от¬
носительных энергий, отражаемых или излучаемых теми или
иными целями в этих диапазонах частот, более мощного фона,
обусловленного влиянием солнца на более коротких волнах, и се¬
лективного по частоте поглощения атмосферой.
13—14. ПРИЕМНИК ДЛЯ АВТОМАТИЧЕСКОГО
СОПРОВОЖДЕНИЯ ЦЕЛИ
Во многих областях техники и особенно в области управляе¬
мых снарядов индикаторы нельзя использовать в качестве выход¬
ных приборов. В последнем случае это объясняется, во-первых,
отсутствием на борту человека и, во-вторых, превышающей чело¬
веческие возможности скоростью, с которой получейную информа¬
цию надо ввести в действие. Эти условия требуют автоматизации
аппаратуры. Типичным и в то же время простым примером такой
аппаратуры является следящий приемник с автоматическим со¬
провождением цели как по направлению, так и по дальности, осу¬
ществляемым после «захвата» цели.
Рис. 187. Приемник автоматического слежения за целью:
1. Сопровождение по дальности, 2. Сопровождение по направлению, 3. Регулировка
усиления, 4. Подстройка частоты
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
471
На рис. 187 обозначены четыре функции импульсного радио¬
локатора автоматического сопровождения цели, как наиболее
важные и типичные для автоматического управления. Каждая из
этих управляемых функций требует своей следящей системы. Все
эти следящие системы, пронумерованные от 1 до 4, вместе с на¬
именованием каналов, которые они контролируют, указаны
на рис. 187.
13—15. СОПРОВОЖДЕНИЕ ПО ДАЛЬНОСТИ
Сопровождение по дальности обычно производится путем авто¬
матического отбора требуемого отраженного сигнала посредством
захватывания его в «вилку» с помощью хронирующего импульса,
называемого стробимпульсом дальности, который генерируется
приемником в предполагаемый момент прибытия требуемого эхо-
сигнала. Стробимпульс дальности не пропускает в канал прием¬
ника все отраженные сигналы, прибывшие в другое время. Он
может использоваться для того, чтобы посредством системы авто¬
матического сопровождения по дальности (/) автоматически сле¬
дить за нужным отраженным сигналом. Обычный принцип рас¬
щепления стробимпульса, на основе которого эта система рабо¬
тает, заключается в том, что отраженный сигнал захватывается
двумя отдельными более короткими стробирующими импульсами
(ранним и поздним), которые, по существу, являются первой и
последней половинами стробимпульса дальности. Схема, выпол¬
няющая эту задачу, называется временным дискриминатором.
Сигналы, переданные этими двумя стробимпульсами, взаимно вы¬
читаются, а результат (ошибка сложения) подается обратно в си¬
стему слежения для внесения опережения или запаздывания в
фазу выработки стробимпульса дальности. Если стробимпульсы
пришли раньше, большая часть отраженного сигнала попадает на
второй стробимпульс, и наоборот. Точность метода, с которой
стробимпульс дальности сопровождает цель, зависит от характе¬
ристики его следящей системы. Например, следящая система мо¬
жет иметь память по скорости, которая в случае внезапного исчез¬
новения отраженного сигнала заставляет систему продолжать пе¬
редвижение строба с неизменной скоростью. Можно также спро¬
ектировать следящую систему так, чтобы даже при наличии силь¬
ных сигналов стробимпульс мог получить какую-то долю макси¬
мальной величины ускорения, т. е. чтобы система не могла вне¬
запно приобрести новую скорость. Это снижает возможность «за¬
хвата» строба каким-либо ложным сигналом. Если нужно опреде¬
лить дальность до цели, то это можно сделать посредством элек¬
тронных измерений временной задержки между зондирующим им¬
пульсом и стробимпульсом дальности (на рис. 187 не показано).
472
ГЛАВА 13
Однако даже если сведения о дальности не нужны, как, например,
для некоторых типов самонаводящихся снарядов, стробирование
по дальности может быть весьма нужным для того, чтобы не про¬
пускать нежелательные сигналы в следящие системы по направ¬
лению.
13—16. АВТОМАТИЧЕСКОЕ СЛЕЖЕНИЕ ПО НАПРАВЛЕНИЮ
Следящая система по направлению (2) должна удерживать
антенну нацеленной на объект. Ее принцип работы до некоторой
степени подобен принципу слежения по дальности с заменой пара¬
метра времени углом антенны. Цель захватывается в вилку по
направлению за счет кругового движения луча антенны в про¬
странстве (или другим способом), в процессе, называемом про¬
странственное развертывание луча антенны. Сравнение относи¬
тельной напряженности сигнала при различных положениях луча
используется следящей системой антенны для того, чтобы заста¬
вить привод антенны повернуть последнюю в нужном для сопро¬
вождения цели направлении. Наиболее часто применяется си¬
стема, называемая конической разверткой луча1, которая исполь¬
зует смещенный луч, вращающийся вокруг своей оси. Цель, нахо¬
дящаяся на этой оси, дает постоянный сигнал, но цель, сошедшая
с оси, дает отраженный сигнал, модулированный частотой враще¬
ния луча. Фаза и амплитуда этой модуляции находятся с помо¬
щью углового дискриминатора; полученные данные используются
для изменения направления оси антенны.
Вторая система, называемая системой с мгновенным переклю¬
чением лепестков антенны (также называется одноимпульсной)
имеет антенну с несколькими парами выводных клемм. Диаграмма
направленности антенны (т. е. положение луча) зависит от того,
какая пара выводов используется в данный момент, так что та¬
кая антенна эквивалентна нескольким антеннам. Сравнением
амплитуд и (или) фаз сигналов, имеющихся одновременно в этих
различных выводах антенны, определяется положение цели отно¬
сительно оси антенны, и ошибка в направлении исправляется.
Эта система требует большего количества оборудования (осо¬
бенно дублирующих приемников), чем система с конической раз¬
верткой луча, но она имеет свое преимущество, заключающееся
в том, что флюктуации амплитуды отраженного сигнала мало
влияют на точность определения направления. Теоретически она
1 Эта операция иногда также называется коническим сканированием. По¬
скольку операция разложения пространства на отдельные элементы при круго¬
вом обзоре также называется сканированием, то нежелательно вносить неясность
путем использования одного и того же слова для двух совершенно различных
операций, когда имеется другой, более правильный термин.
РАДИОЛОКАЦИОННАЯ ТЕХНИКА
473
способна определять направление по каждому отдельному им¬
пульсу, тогда как коническая развертка дает среднее направление
по многим импульсам. Более подробно вопросы сопровождения
по направлению рассматриваются в главе 15.
13—17. АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА УСИЛЕНИЯ
Поскольку вследствие изменения дальности, а также изменений
величины о эффективной площади рассеяния принимаемый отра¬
женный сигнал может очень сильно изменяться по амплитуде, то
коэффициент усиления приемника необходимо автоматически ре¬
гулировать в зависимости от уровня поступившего в приемник
сигнала так, чтобы сигнал на выходе приемника не превышал
определенной величины. Для выполнения этой задачи приме¬
няется система автоматической регулировки усиления (3).
Эта система контролирует величину отраженного сигнала
в стробимпульсе дальности и соответственно изменяет коэффи¬
циент усиления усилителя промежуточной частоты. Несмотря на
то что принцип работы этой системы очень прост, его надлежащая
работа, особенно при небольших по сравнению с шумами прием¬
ника сигналах, достигается с трудом. Малейшие изменения в по¬
ведении этой системы при наличии шумов могут сильно повлиять
на работу остальных следящих устройств.
13—18. АВТОМАТИЧЕСКАЯ ПОДСТРОЙКА ЧАСТОТЫ
Самым последним применением принципов следящих систем
к радиолокационным приемникам является автоматическая под¬
стройка частоты гетеродина относительно частоты радиолокацион¬
ного передатчика. Такая подстройка выполняется просто путем
использования биения частоты опорного сигнала (частота зонди¬
рующего импульса или отраженного сигнала) с частотой сигнала
гетеродина при их смешении, подобном процессу смешения, при¬
меняемому в основном канале приемника. Частота выходного сиг¬
нала, которая равна разности частот этих двух сигналов, подается
через частотный дискриминатор, охватывающий цепи, настроенные
на разность частот, близкую к желаемой. Так же как в других
следящих системах, этот дискриминатор выдает сигнал (постоян¬
ного тока), показывающий ошибку между действительным и нуж¬
ным значением частоты, и этот сигнал используется для подгонки
действительной частоты к требуемой.
ГЛАВА 14
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
Р. Г. Грайст 1
14—1. ВВЕДЕНИЕ
За последние годы, начиная примерно с'начала второй миро¬
вой войны, сделан крупный шаг в развитии вычислительных
устройств, применяемых в самых различных отраслях науки и тех¬
ники, и особенно в одной из наиболее бурно развивающихся
областей — в технике управляемых снарядов. Часть задач, встре¬
чающихся в последней области техники, может быть решена с по¬
мощью карандаша и бумаги, другая часть — с помощью лога¬
рифмической линейки или арифмометра, третья же, возрастающая,
часть очень важных и серьезных проблем может быть решена
с помощью указанных методов только с большим трудом. В этом
случае надо полагаться только на электронные математические
машины, причем очень часто — на моделирующие устройства, или,
иначе, на вычислительные машины непрерывного действия. За¬
дача данной главы — дать общий обзор вычислительных машин
непрерывного действия, техники и методики их применения.
14—2. СЧЕТНО-РЕШАЮЩИЕ УСТРОЙСТВА И ЦИФРОВЫЕ
ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
Термин счетно-решающее устройство относится к прибору,
предназначенному для получения числовой величины. Это опреде¬
ление применимо также к обычным арифмометрам, которые,
в принципе, просто механически подсчитывают прохождения
зубьев шестерни. Этот принцип положен в основу электрической
цифровой вычислительной машины, в которой за единицу подсчета
вместо зуба шестерни взят электрический импульс. Работа вычи¬
слителя такого типа, следовательно, зависит исключительно от
наличия или отсутствия импульсов в кодированной группе, а во¬
все не от величины импульсов. Любой импульс, который, без со¬
1 Сотрудник самолетостроительной фирмы Хьюза.
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
475
мнения, может быть опознан как таковой, будет иметь одинако¬
вое значение вне зависимости от его величины и формы. Поэтому,
как только задача полностью сформулирована, цифровая вычис¬
лительная машина может дать ее решение в численном виде
с точностью до младшего десятичного разряда. Ответ может быть
получен только после окончания вычисления, следовательно,
только через определенные дискретные периоды. Этот факт плюс
применение кодированных импульсов, которые могут быть запи¬
саны и воспроизведены в любое время, —вот те основы, на кото¬
рых базируется техника цифровых вычислительных машин. Все
цифровые вычислительные машины имеют арифметическое устрой¬
ство (АУ), которое может выполнять четыре основных арифмети¬
ческих действия: сложение, вычитание, умножение и деление —
в любой произвольной последовательности над любыми соответст¬
вующим образом закодированными числами. АУ получает управ¬
ляющие сигналы от устройства управления (УУ), которые в свою
очередь определяются программой, записанной в запоминающем
устройстве (ЗУ). Входная информация в АУ поступает или от так
называемого устройства ввода, которое преобразует входные ве¬
личины (часто заданные в непрерывной форме) в импульсные
коды, или от ЗУ, которое может воспроизвести ранее записанные
коды чисел. Первичным процессом, связанным с использованием
цифровых вычислительных машин, является программирование.
Вопрос о цифровых вычислительных машинах будет более под¬
робно рассмотрен в главе 15. Здесь же он затронут только для
предварительного ознакомления с общим понятием дискретной
вычислительной техники и для того, чтобы подчеркнуть ее отличие
от моделирующих машин, которые, как мы увидим дальше, рабо¬
тают на совершенно иной основе.
14—3. МОДЕЛИРУЮЩИЕ МАШИНЫ
В практике значение термина «вычислительное устройство»
распространилось на аппаратуру, которая оперирует с непрерыв¬
но изменяющимися величинами, характеризующими непрерывно
протекающие процессы. Эти вычислительные устройства назы¬
ваются вычислительными машинами непрерывного действия, ма¬
шинами-аналогами, и моделирующими устройствами1. Они осно¬
ваны на двух аналогиях: 1) операция аналогична вычислению, но
отличается от него в принципе; 2) величины, которыми они опери¬
руют, как, например, положение вала, величина напряжения, сила
тока,— являются аналогами величин, которые описывают состояние
1 В дальнейшем будут использованы как те, так и другие термины,—
Прим, перев.
476
ГЛАВА 14
реального объекта. Точность моделирующей машины зависит от
правильности установленных зависимостей между аналоговыми и
интересующими нас величинами, а также от приборной точности
измерения результатов. У точной лабораторной установки ошибки
могут быть снижены до нескольких сотых процента, но в обыч¬
ных устройствах ошибки могут лежать в пределах от полпроцента
до нескольких процентов. Таким образом, моделирующая машина
является в известной мере аналогом логарифмической линейки,
которая, не обладая математической точностью, во многих слу¬
чаях дает результаты, удовлетворяющие требованиям поставлен¬
ной задачи. Так как в моделирующих машинах операции выпол¬
няются над непрерывно изменяющимися величинами, а рассма¬
триваемые величины не существуют в форме, в которой их можно
было бы легко запомнить, чтобы впоследствии воспроизвести, то
возникает задача создания метода подачи их в машину, отлич¬
ного от используемого в цифровых вычислительных машинах.
Если, например, в данной задаче требуется выполнить три дей¬
ствия сложения, то требуются три суммирующих устройства,
тогда как в цифровой вычислительной машине три действия сло¬
жения были бы выполнены последовательно в одном и том же
арифметическом блоке, Это положение распространяется и на
другие математические операции. Таким образом, в модели¬
рующих машинах физические элементы машины обычно для каж¬
дой задачи связываются уникальным образом, тогда как в цифро¬
вой машине’ единственный фактор, который уникален для зада¬
чи,— это программа или последовательность выполняемых опера¬
ций, которые управляют сериями электрических импульсов.
14—4. ТИПЫ МОДЕЛИРУЮЩИХ МАШИН
Уже было сказано, что моделирующие машины выполняют
действия над физическими величинами, аналогичные математиче¬
ским операциям. Поэтому моделирующие машины удобно класси¬
фицировать по характеру величин, с которыми оперируют. В мо¬
делирующих машинах иногда применяются устройства, основан¬
ные на тепловых, гидравлических и пневматических принципах
действия, однако главным образом в них используются механиче¬
ские и электрические устройства. Механические моделирующие
машины используются главным образом для таких величин, как
время, сила, перемещение, скорость, ускорение; тогда как электри¬
ческие моделирующие машины оперируют с величинами: время,
напряжение, электрический заряд и сила тока. Эти системы могут
быть использованы отдельно, но часто они используются в модели¬
рующей машине совместно. В число моделирующих машин
обычно не включают моделирующие устройства, используемые
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
477
для испытаний, проводимых в аэродинамической трубе, хотя эти
устройства и основаны на технике моделирования; их относят
больше к области аэродинамики, чем к области вычислительной
техники.
Наши представления об этой области техники еще более рас¬
ширятся после того, как мы рассмотрим способ, каким эти различ¬
ные машины производят четыре арифметических действия, и
в том числе интегрирование дифференциальных уравнений и пре¬
образование функций.
14—5. ВЫЧИСЛИТЕЛЬНЫЕ ОПЕРАЦИИ,
ПРОИЗВОДИМЫЕ С ПОМОЩЬЮ МЕХАНИЧЕСКИХ
ВЫЧИСЛИТЕЛЬНЫХ УСТРОЙСТВ
Рис. 188. Геоме¬
трические соотно¬
шения величин в
умножителе про¬
порционального
типа
В качестве величины, используемой в работе многих механи¬
ческих вычислительных машин, берется угловое перемещение
вала. Значение этой величины выражается числом оборотов или
долями одного оборота, совершаемого валом. Движение двух ва¬
лов складывается посредством дифференциальной зубчатой пере¬
дачи, соединяющей валы между собой; смена знаков величин про¬
изводится посредством пары равно связанных шестерен, а умно¬
жение на постоянную выполняется связанными
шестернями, передаточное число которых рав¬
но требуемой постоянной. Умножение или деле¬
ние на переменную величину выполняется меха¬
низмом, построенным на принципе, иллюстри¬
руемом рис. 188. Если точка Р перемещается
только по направлению ОР, то г/ = Г81п6, где
значение 51П0 устанавливается пропорциональ¬
ным заранее заданному коэффициенту. Наибо¬
лее интересным элементом механических вычис¬
лительных машин является интегратор, впервые
изобретенный Дж. Томпсоном, братом знамени¬
того английского физика Кельвина. В 1876 году Кельвин задался
целью объединить указанные выше приборы для решений диффе¬
ренциальных уравнений почти так же, как это сейчас делается в
современном дифференциальном анализаторе, . и ему действи¬
тельно удалось на основе этих интеграторов сконструировать одну
машину — для анализа данных о морских приливах и отливах и
другую — для предсказания времени их наступления. Это, веро¬
ятно, явилось первым применением сложной моделирующей ма¬
шины для решения практически важной задачи. Предсказание
приливов и отливов до того времени было строго охраняемой мо¬
нополией отдельных лиц, которые основывали свои методы на
эмпирических правилах, тогда как благодаря применению мето-
478
ГЛАВА И
Рис. 189. Дисковый
интегратор
дов моделирования Кельвин смог установить строгий математи¬
ческий метод анализа и предсказания приливов и отл.ивов со зна¬
чительно большей точностью и значительно более просто, чем это
позволяли методы, существовавшие ранее. Его метод, по существу,
без каких-либо изменений используется и в наши дни.
Принцип действия интегратора можно хорошо понять на
основе схемы, приведенной на рис. 189. На схеме видно, что при¬
бор состоит из трех элементов: диска,
ролика, продольная ось которого парал¬
лельна плоскости диска, и шарика, ко¬
торый катится по диаметру диска и по
образующей цилиндрической поверхности
ролика. Таким образом, ролик вра¬
щается под действием сил трения, раз¬
виваемых при движении диска. Шарик
может перемещаться вдоль ролика и за¬
нять любое положение. Можно видеть,
что, по существу, это точный линейный
механизм с переменной скоростью, в котором при на-хожденим
шарика в положении у и повороте диска на угол ср ролик повер¬
нется на угол с1Ь = у(1^. Следует заметить, что никаких ограниче¬
ний относительно независимой переменной ср не существует; она не
обязательно должна быть явной функцией времени. Современные
интеграторы отличаются от своих прототипов в деталях конструк¬
ции, особенно благодаря применению двух шариков вместо одного,
но они работают по тому же самому принципу. Интеграторы —
исключительно универсальные устройства, и в зависимости от
вида величины, которая должна быть проинтегрирована, могут
быть использованы для получения простых функций, степеней пе¬
ременных и т. д. На основе принципа интегрирования по частям в
соответствии с выражением
г/л; -|- | х Лу
два интегратора и дифференциальная зубчатая передача могут
быть использованы для построения множительного устройства;
а механизируя выражение
^2 «М
с помощью двух интеграторов можно построить генератор синусои¬
дальной функции и т. д.
Функции вида 9=/(х), где у есть однозначная произвольная
функция от х, обычно получаются с помощью кулачкового эксцен¬
трика, показанного на рис. 190, или посредством штырьковой зубча-
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
479
той передачи, показанной на рис. 191. Эти принципы и их простое
логическое распространение на другие устройства нашли перед
второй мировой войной при¬
менение в приборах управле¬
ния артиллерийским огнем и
Рис. 191. Реализация функции у=Цх) с
помощью штырьково-зубчатой передачи:
1) колесо с отверстиями для сцепления со
штырьками, 2) паз для осевого перемещения
вала, 3) штырьки
Рис. 190. Функциональное устройство
кулачкового типа, реализующее функ¬
цию у=[(х)
в дифференциальных анализаторах. Несмотря на то что в управ¬
ляемых снарядах чисто механические вычислительные машины
редко используются, однако отдельные элементы этих устройств
применяются довольно часто.
14—6. ЭЛЕКТРИЧЕСКИЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
Развитие электрического эквивалента механической вычисли¬
тельной машины произошло позднее; его появлению предшество¬
вало применение в конце двадцатых годов динамических анало¬
гов комплексных акустических систем, в тридцатых годах — раз¬
работка операционного усилителя и в начале второй мировой
войны — использование про¬
филированных потенцио¬
метров в вычислительных
схемах.
Основным конструктив¬
ным блоком электрических
моделирующих машин яв¬
ляется усилитель с отрица¬
тельной обратной связью,
показанный в упрощенном
виде на рис. 192. Типовой операционный усилитель имеет несколько
входных каналов, соединенных со входом усилителя через соот¬
ветствующие сопротивления, на одно из которых с выхода этого
усилителя подается сигнал отрицательной обратной связи. На ри¬
сунке треугольником показан усилитель с коэффициентом усиле¬
Рис. 192. Схема усилителя с обратной
связью
480
ГЛАВА 14
ния О. Выходное напряжение усилителя Ео равно Об. Сопротив¬
ления 2/ и 7.x могут быть комплексными, т. е. включающими в
себя омическое сопротивление, индуктивность или емкость. Если
ток, протекающий в усилителе, сделать пренебрежимо ма¬
лым, то
= Ч
или
Е, -~а- — Р
Ех-е_^‘ О _<; .
г, 2х - г, ■
При большом значении коэффициента усиления О (порядка от
10000 до 30000) сигнал обратной связи препятствует величине .2
отклониться от нулевого потенциала больше, чем на'пренебрежимо
малую величину (например, не более чем на одну пятитысячную).
При таких условиях мы можем пренебречь величиной е = в
уравнении (1) и написать
Можно Далее изобразить простую физическую картину работы
усилителя, заметив, что его выходное напряжение Ео всегда дол¬
жно принимать значение, необходимое для того, чтобы ток, проте¬
кающий через 2/, равнялся току, приходящему через 2,. Действи-
^=4+<г+^з
Ч к *
я у' Р
1 ~е°
Рис. 193. Сумматор
тельное значение Ео будет, конечно, зависеть от характера сопро¬
тивлений 7х и X/, которые могут быть комплексными. Если к уси¬
лителю подводится несколько входных сигналов через одинако¬
вые сопротивления и 2/ — такое же сопротивление, как на
рис. 193, то блок становится сумматором, т. е.
I — -4- Е? _А3_ — _ Ед .
Я К + К К ’
Ех + Ег + Еа = — Ео.
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
481
Если 2, — емкость, а 7/ — сопротивление (рис. 194), то схема бу¬
дет дифференцировать по времени
= = (3)
или
-Е0 = /?С§-.
Для того чтобы заставить усилитель интегрировать по вре¬
мени, надо поменять местами конденсатор и сопротивление, как
это сделано на рис. 195, и
теперь имеем
; ^1 (-> а Ед .
‘ (4)
Ед = — ПСI сП.
о
Для умножения переменной
величины на постоянную
совместно с усилителем ис¬
пользуют масштабный по¬
тенциометр. Например, на
рис. 196 показана схема для
умножения на коэффи¬
циент к, меньший единицы.
Умножение на постоян¬
ную, большую единицы, мо¬
жет быть выполнено путем
включения потенциометра в цепь обратной связи, как это пока¬
зано на рис. 197. В обоих показанных случаях умножение на ка¬
кой-либо коэффициент эквивалентно делению на обратную вели¬
чину.
Рис. 194. Дифференцирующий уси¬
литель
Рис. 197. Умножение на коэффициент
Л>1
31—405
Рис. 195. Интегратор
Рис. 196. Умножение на коэффи¬
циент Л<1
482
ГЛАВА 14
Другой важной функцией усилителей с обратной связью яв¬
ляется перемена знаков, при которой напряжение одной полярно¬
сти преобразуется в равное напряжение, но противоположной по¬
лярности.
Усилитель с обратной связью может также выполнять функцию
буферного каскада для развязки между цепями, чтобы исключить
возможность влияния электрической нагрузки одной цепи на
другую.
Используемые таким образом усилители с обратной связью
называются операционными усилителями. В случаях, имеющих
практический интерес, сопротивления 2, и 2/ могут быть чисто
реактивными, а выходное напряжение соответственно будет пред¬
ставлять собой функции вре¬
мени.
В том случае, когда нуж¬
но перемножить две пере¬
менные, например х и у,
усилитель может быть ис¬
пользован для питания сер¬
вомотора, перемещающего
ползунок потенциометра, с
Рис. 198. Схема умножения с сервомеха- которого снимается напря-
низмом жение обратной связи, как
это показано на рис. 198.
Работа сервомеханизма в принципе подобна рассмотренным
схемам, а мотор включается так, чтобы сделать величину ошибки е
пренебрежимо малой. Здесь положение ручки потенциометра
пропорционально величине Е0 = х, и если напряжение у подается
на другой потенциометр, имеющий такое же распределение
напряжения, как и первый, и движения их механически связаны,
тогда на ползунке второго потенциометра установится напряжение,
пропорциональное произведению ху. Потенциометры могут быть
намотаны так, чтобы иметь самое разнообразное распределение
напряжения, и, таким образом, могут представлять большое
число различных функций.
Другие методы умножения двух переменных, требующие более
сложных электронных схем, основаны на том, чтобы сделать вы¬
соту последовательных прямоугольных импульсов пропорциональ¬
ной одной переменной, а их ширину — пропорциональной другой
переменной величине. Таким образом, после их демодуляции полу¬
чается напряжение, пропорциональное произведению двух пере¬
менных хну. Еще один способ умножения основывается на прин¬
ципе вычитания квадратов двух величин:
(х + у)2 — (х—у)2 = х2 4- 2ху + у2 — х2 + 2ху —у2 = 4ху. (5)
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
483
Кроме перечисленных выше принципов работы разработан еще
целый ряд методов, но в этом кратком обзоре на них останавли¬
ваться нецелесообразно.
Метод использования этих блоков моделирующих устройств для
решения задач можно продемонстрировать на нескольких приме¬
рах. Рассмотрим полином
V = а + Ы + сР + (№. (6)
Требуется получить функцию ц(/), заданную постоянными а, Ь,
с и <1. Это может быть выполнено с помощью схемы, показанной на
рис. 199. На первый интегратор подается постоянное единичное на¬
Рис. 199. Схема реализации полинома а + Ы+с(2+с1(3
пряжение. Тогда его выходное напряжение оказывается пропор¬
циональным времени. Это напряжение подаётся на вход второго
интегратора, выходное напряжение которого будет пропорцио¬
нально квадрату времени. Последующие, более высокие степени
времени получаются таким же образом. Отдельные члены поли¬
нома получаются умножением определенной степени времени на
соответствующие константы; там, где нужно, меняют знаки, и все
это суммируется на выходном усилителе. Для того чтобы заряд в
каждом интеграторе был равен нулю при < = 0, надо иметь ка¬
кие-то средства для закорачивания их непосредственно перед на¬
чалом вычисления.
В том случае, когда берется полином со степенями перемен¬
ной у, не зависящей от /, можно использовать схему, до некото¬
рой степени аналогичную предыдущей, но интеграторы теперь не¬
обходимо заменить потенциометрами, находящимися на общем
31*
484
ГЛАВА 14
валу. Выходное напряжение каждого потенциометра должно слу¬
жить входом для следующего потенциометра, и последующие, бо¬
лее высокие степени переменной у должны получаться таким обра¬
зом, как это показано на рис. 200. В схеме на этом рисунке пока¬
зано также применение операционного усилителя, служащего бу¬
фером между двумя потенциометрами. В этом случае операцион-
-Е
Рис. 200. Схема реализации полинома а+Ьу + су2+Лул
ный усилитель исключает ошибки, обусловленные большой пере¬
менной нагрузкой, каковой является следующий потенциометр.
Однако часто обмотка потенциометра может быть выполнена так,
чтобы компенсировать влияния известной фиксированной нагрузки,
как это сделано при умножении переменной у3 на постоянную <1.
Несмотря на то что эти примеры иллюстрируют метод установ¬
ления соответствия между схемой и математическим выражением,
они не представляют еще решение уравнения, а являются только
вычислением. При решении уравнения с помощью определенной
электрической схемы, так же как и в математическом выражении,
значение нужной переменной определяется из условия равновесия
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
485
(равенства) двух частей уравнения. В схеме это достигается за
счет введения обратной связи. Возьмем, например, уравнение
41=-У- (7)
Формальное решение для этого уравнения можно записать так:
у—Уо = — \у<и
6
или (8)
У = — IУ + Л-
о
Поскольку выражение, написанное таким образом, имеет лишь
формальное отношение к аналитическому решению у=у0 им
можно вполне руководствоваться при построении схемы для вы¬
числения с помощью моделирующих устройств.
Говоря иначе, выражение про¬
сто устанавливает, что величина
переменной в функции времени
равна выходному напряжению
интегратора, в котором задается
переменная и ее начальное зна¬
чение. Схематически это выгля¬
дит так, как показано на рис. 201,
на котором дополнительно вклю¬
чено два инвертора знаков. С
практической точки зрения отме¬
тим, что заряд на конденсаторе
представляет собой значение интеграла. Поэтому должны быть
обеспечены условия для шунтирования конденсатора сопротивле¬
нием до тех пор, пока не начнется процесс интегрирования.
Несмотря на то что этот пример сам по себе слишком прост
для применения, он в достаточно ясной и наглядной форме пока¬
зывает возможности этого метода.
В качестве примера, более соответствующего применению мо¬
делирующих устройств, мы можем взять нелинейное дифферен¬
циальное уравнение второго порядка
§ + = О)
Обычно желательно решить уравнение относительно производной
самого высшего порядка. Следовательно, необходимо составить
Рис. 201. Схема для решения урав¬
нения <1у1<1х=—у
486
ГЛАВА 14
вычислительную схему, исходя из предположения, что эта произ¬
водная уже известна. Тогда уравнение примет вид
$=-^44+(«о
г? <Ру
Если считать, что значение известно, тогда оно должно
служить входным напряжением для первого интегратора, выход¬
ное напряжение которого будетЭто выходное напряжение
Рис. 202. Схема для решения уравнения (сРу/сИ2) +ау — <1у!<И —
—(<1у1<11)+у2=Ь
после вторичного интегрирования дает значение переменной у.
Сразу видно, что здесь имеют место две операции интегрирования,
два действия умножения, несколько действий сложения и, воз¬
можно, инвертирование знаков.
Мы составили схему, начав со входного сигнала на первый ин¬
тегратор, который согласно уравнению (10) должен быть ;
принципиальная схема, представляющая указанные операции,
изображена на рис. 202. Иногда возможны несколько эквивалент¬
ных вариантов одной и той же принципиальной схемы, отличаю¬
щихся по способу получения указанных функций или же по месту
ввода величин. Например, если используются функциональные по¬
тенциометры, которые могут непосредственно выполнять преоб-
1 1
разования —или -р-, то второй множитель с сервомотором не
потребуется. Соответственно, если имеются электронные умножи-
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
487
тели, то значение у2 может быть получено непосредственно в од¬
ном умножителе, а значение у2 а -^0 + 0—в другом умно¬
жителе.
В то время как формальные решения для большинства обыкно¬
венных дифференциальных уравнений, как правило, можно напи¬
сать сравнительно легко, полные аналитические решения могут
быть найдены в относительно малом числе случаев. Кто привык
мыслить категориями аналитических операций, тот склонен рас¬
сматривать дифференциальные уравнения как исключения, решае¬
мые только с помощью специальных методов, пригодных для ре¬
шения только ограниченного класса задач. Численные решения, в
принципе, всегда возможны, и в определенных случаях они широко
использовались, как, например, в артиллерии при вычислении таб¬
лиц стрельбы. Однако большие затраты времени и труда, по всей
вероятности, явятся препятствием для применения этих методов
при решении срочных повседневных технических задач. В настоя¬
щее время моделирующая техника позволяет поставить задачу и в
течение нескольких часов получить семейство кривых, определяю¬
щих выходные данные для широкого круга исходных данных. Дей¬
ствительно, сейчас решение дифференциальных уравнений с по¬
мощью моделирующих устройств выполняется с такой легкостью,
что часто для более быстрого решения задачи выгодно предста¬
вить ее в форме дифференциальных уравнений.
Этого, вероятно, достаточно для понимания принципов, на осно¬
вании которых могут быть получены решения дифференциальных
уравнений. Хотя их математическое выражение и анализ, без¬
условно, являются основой для применения этого метода, тем не
менее картина еще не является полной. Типичным использованием
моделирующих устройств в технике управляемых снарядов яв¬
ляется их применение при анализе работы системы управляемого
снаряда в целом, включая работу системы управления, системы
наведения, поведение корпуса снаряда и анализ результирующей
траектории. Выход (траектория) будет, в свою очередь, оказывать
влияние на входные данные или сигналы ошибок в системе наве¬
дения. Поскольку этот метод используется для анализа систем,
собранных из физически реализуемых компонентов, то необходимо
иметь блоки для моделирования наблюдаемых характеристик и
недостатков компонентов. Наиболее значительные из этих недо¬
статков представляют собой нелинейности многих видов; к ним от¬
носятся: насыщение, игра (мертвый ход), непостоянство крутизны
входа-выхода, мертвое пространство, механические остановки
и т. п. Обычно в схемах, моделирующих эти эффекты, используют
настраиваемые диодные контуры, которые вступают в работу,
когда напряжение соответствующей полярности начинает превы¬
шать определенные пороговые значения. Схема составляется так,
488
ГЛАВА 14
что ее характеристика аналогична моделируемому явлению. Та¬
кие схемы позволяют решить широкий круг важных задач, воз¬
никающих при изучении действующих физических систем. Но так
как для наших целей они не являются основными, то мы ограни¬
чимся сказанным.
14—7. ПРИМЕНЕНИЕ МОДЕЛИРУЮЩИХ УСТРОЙСТВ
На рис. 203 представлена общая блок-схема системы наведения
управляемого снаряда. Наведение включает все функции и опера¬
ции, связанные с определением относительного положения и дви¬
жения управляемого снаряда относительно цели и выработкой
команд управления, необходимых для удержания снаряда на курсе
сближения с целью. Невзирая на различия характеристик систем
Рис. 203. Блок-схема системы управления снарядом
наведения отдельных управляемых снарядов, общие проблемы,
связанные с задачей наведения, одинаковы. Эти проблемы вклю¬
чают в себя измерения расстояний, угловых положений и скоро¬
стей, значения которых непрерывно изменяются; на основе этих
данных требуется получить решение уравнений, описывающих си¬
стему в целом. Ясно, что для всех этих операций могут быть вы¬
полнены вычисления при помощи моделирующих устройств вне
зависимости от того, является ли система командной, с самонаве¬
дением, с наведением по лучу и т. д.
Задача бортовой системы управления состоит в том, чтобы
должным образом реагировать на команды управления, поступаю¬
щие в нее из системы наведения. Здесь, вероятно, больше, чем
МОДЕЛИРУЮЩИЕ УСТРОЙСТВА
489
где-либо в другом месте, чувствуется зависимость от техники мо¬
делирования. Проектирование системы управления включает раз¬
работку и оптимизацию сервомеханизмов и корректирующих кон¬
туров, определение запаса устойчивости и параметров характе¬
ристик, определяющих допустимые пределы производственных до¬
пусков, реакции на шум и множество других задач, решения ко¬
торых основаны на методах моделирования как во время самого
проектирования системы управляемого снаряда, так и во время
практической реализации проекта.
При разработке таких компенсирующих устройств, какие ино¬
гда требуются для корректирования частотных характеристик си¬
стем управления, можно использовать различную моделирующую
технику.
Аэродинамические характеристики управляемого снаряда, опре¬
деляющие его реакцию на действие системы управления, менее
поддаются анализу посредством методов моделирования по срав¬
нению с другими характеристиками, о которых уже шла речь.
Инженеры-проектировщики системы часто сталкиваются с пробле¬
мой создания остальных элементов системы, так чтобы они рабо¬
тали в оптимальном режиме при заданных аэродинамических ха¬
рактеристиках, которые могут изменяться не линейно в широких
пределах с изменением скорости, угла атаки, расположения цен¬
тра тяжести, высоты снаряда и т. д. Кроме оптимизации реакции
управляемого снаряда на команды управления технику моделиро¬
вания можно применить для исследования флаттера, теплоотдачи
и других подобных проблем, представляющих интерес для кон¬
структора.
В системе наведения рассматриваются геометрические соотно¬
шения, определяющие относительное положение управляемого сна¬
ряда и цели. Входной сигнал системы наведения определяется из¬
менением их относительного положения. В правильно спроектиро¬
ванной системе наведения управляемого снаряда эти геометриче¬
ские соотношения должны быть таковы, чтобы они могли созда¬
вать замкнутую петлю регулирования и обеспечивать обнаружение
и корректирование возникающих ошибок. В этом разделе можно
также показать применение моделирующих устройств при расче¬
тах, необходимых для запуска должным образом нацеленного сна¬
ряда, с тем чтобы он достиг цели при минимальных требованиях
к системе управления и наведения (задача управления огнем).
Мы кратко показали, каким образом методы моделирования
могут быть использованы для анализа задач, связанных с проек¬
тированием систем управляемых снарядов; они также могут быть
использованы при определении характеристики работы всей си¬
стемы в целом в ходе исследований поведения снаряда на траек¬
тории. Во время таких исследований моделируется полностью вся
система. При этом возможно применение реальных узлов иссле¬
490
ГЛАВА 14
дуемого управляемого снаряда. Моделирование производится в
системе, подверженной действиям предполагаемых возмущающих
сил. В таких условиях действие шумов, ошибки запуска, реакция
на перегрузки в исключительно тяжелых условиях, влияние слу¬
чайных изменений в допусках на снаряд, влияние частичных поло¬
мок и тому подобное могут быть измерены достаточное число раз
при многократных повторениях. Это позволит сделать выводы,
основанные на приемлемых статистических данных.
Наконец, когда снаряд находится в полете, телеметрическая
информация сопоставляется с расчетными данными траектории.
Сравнение наблюдаемых и расчетных данных позволяет лучше
понять те явления, которые могут произойти во время полета. На
основании этих данных могут быть внесены изменения в теорети¬
ческие предпосылки с тем, чтобы устранить противоречия с дан¬
ными летных испытаний и обеспечить основу для внесения усовер¬
шенствований в последующие модели управляемых снарядов.
14—8. ЗАКЛЮЧЕНИЕ
В этой главе сделана попытка в общих чертах и в доступной
форме описать применение моделирующих машин в области управ¬
ляемых снарядов. Вычислительная машина — это инструмент, и,
как в отношении всякого инструмента, необходимо оценить все ее
возможности и ограничения, прежде чем ее можно будет успешно
использовать. Подобно инструменту, вычислительную машину надо
использовать в соответствии с планом, который правильно учиты¬
вает соотношение между частью и целым, а также между целым и
его назначением. Это позволит дать ответ на любой возникший во¬
прос. Чтобы довести систему до оптимума как в экономическом,
так и в техническом отношении, инженер-проектировщик должен
проявить постоянную готовность пересмотреть всю систему.
ГЛАВА 15
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
Э. С. Нельсон1
15—1. ВВЕДЕНИЕ
Использование электронных цифровых вычислительных машин
в системах управления является естественным шагом, который
должен был последовать за усиленным развитием и применением
для решения сложнейших вычислительных задач, возникающих в
науке и технике. Хотя первые электронные цифровые вычислитель¬
ные машины были очень громоздкими сооружениями, содержа¬
щими тысячи электронных ламп, однако последующие усовершен¬
ствования, внесенные в принципиальную схему и в логику построе¬
ния машин, и применение техники миниатюризации, позволили в
итоге создать вычислительные машины достаточно простые и до¬
статочно малых размеров, позволивших практически использовать
их в бортовых системах управления.
Цифровые вычислительные машины отличаются от моделирую¬
щих машин, или, иначе, вычислительных машин непрерывного дей¬
ствия, использовавшихся ранее в большинстве систем управления,
тем, что первые работают с дискретными сигналами, тогда как мо¬
делирующие машины работают с непрерывными сигналами. Ди¬
скретные сигналы цифровых вычислительных машин легко приве¬
сти в соответствие с разрядами чисел, и по этой причине первые
цифровые вычислительные машины были сконструированы для
выполнения арифметических действий над дискретными числами
почти таким же образом, как мы производим арифметические рас¬
четы карандашом на бумаге. Однако принцип использования сиг¬
налов в дискретной форме имеет более общий характер. Он нашел
свое применение и в других типах счетно-решающих устройств, на¬
пример в цифровом дифференциальном анализаторе. В будущем,
вероятно, будут созданы новые типы цифровых вычислительных
машин, специально предназначенные для использования в систе¬
мах управления.
Применение цифровых вычислительных машин в бортовой си¬
стеме управления сталкивается со множеством проблем. Исполь¬
1 Сотрудник фирмы «Рамо-Вулдридж корпорейшн».
492
ГЛАВА 15
зовать вычислительные машины на борту — это не просто скон¬
струировать небольшую цифровую вычислительную машину. Необ¬
ходимо разработать вычислительную систему, которая получает
входные данные от измерительных приборов, входящих в систему
управления, производит расчеты, соответствующие математиче¬
скому алгоритму задачи управления, в истинном масштабе вре¬
мени, и выдает сигналы управления самолетом. Входные и вы¬
ходные сигналы обычно являются непрерывными величинами. Сле¬
довательно, вычислительная система должна иметь еще и преобра¬
зователь непрерывных величин в дискретные, чтобы осуществить
преобразование непрерывных сигналов, поступающих от бортовых
измерительных приборов, в дискретные сигналы, которые могут
быть введены в цифровую вычислительную машину. Эта сложная
вычислительная система должна быть небольшой по размерам,
легкой, механически прочной и надежной.
15—2. ЛОГИЧЕСКИЕ ОСНОВЫ ЦИФРОВЫХ
ВЫЧИСЛИТЕЛЬНЫХ МАШИН
Электронные цифровые вычислительные машины имеют в своей
основе шесть принципов:
1) Числа1 могут быть представлены с помощью дискретных
электрических сигналов2. Использование дискретных сигналов ха¬
рактеризует счетно-решающее устройство, как цифровую вычис¬
лительную машину.
2) Арифметические операции над числами могут быть пред¬
ставлены в виде операций переключения над дискретными элек¬
трическими сигналами, представляющими эти числа. Логические
операции, как, например, сравнение двух чисел, могут быть также
выполнены посредством переключающих схем.
3) Действия переключающих схем, выполняющих арифметиче¬
ские операции, могут управляться с помощью дискретных таких
же электрических сигналов, какие используются для представления
чисел.
4) Дискретные сигналы управления могут быть представлены
дискретными числами; отсюда, последовательность операций циф¬
ровой вычислительной машины может быть представлена рядом
чисел.
1 Здесь используется термин «число», хотя это с одинаковым успехом мо¬
жет относиться и к буквам алфавита, знакам препинания и т. д.
2 Электрические сигналы избраны потому, что электроника дает возмож¬
ность наилучшим образом реализовать все то, что заложено в цифровых вычис¬
лительных машинах. Были созданы также автоматические механические цифро¬
вые машины, но по сравнению с электронными они работают слишком медленно
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
493
5) Информация, представленная дискретными электрическими
сигналами, может быть записана в постоянной или временной фор¬
ме, а затем воспроизведена вновь в виде таких же дискретных
электрических сигналов. Этот принцип позволяет цифровой вычис¬
лительной машине иметь «память», которая может хранить числа.
6) Ряд чисел, представляющих последовательность операций
цифровой вычислительной машины, может быть записан в блоке
памяти. И эти сигналы могут быть использованы впоследствии для
управления работой вычислительной машины. Этот принцип по¬
зволяет организовать работу вычислительной машины так, что ее
операции будут определяться рядом инструкций, записанных в
ее блоке памяти. Эти инструкции, а следовательно, операции вы¬
числительной машины, могут быть запрограммированы большим
числом различных способов без внесения изменений в физическую
структуру вычислительной машины.
15—3. СИГНАЛЫ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ
Первый принцип цифровых вычислительных машин — представ¬
ление чисел дискретными электрическими сигналами — осущест¬
вляется путем установления соответствия между числом и дискрет¬
ными электрическими сигналами. Дискретные числа могут быть
представлены составляющими их цифрами и системой счисления,
как, например, двоичной, десятичной и т. д., на которой они бази¬
руются. Электрические сигналы могут характеризоваться двумя
величинами: напряжением относительно некоторого начального по¬
тенциала и временем ', т. е. сигнал в той или иной точке вычисли¬
тельной машины расшифровывается путем проверки значения на¬
пряжения, которое имеется в этой точке в тот или иной момент
времени относительно исходного напряжения.
Дискретный характер сигналов цифровых вычислительных ма¬
шин проявляется в дискретных значениях напряжения и в дискрет¬
ных интервалах времени, которые учитываются при дешифровании
сигналов. Для того чтобы получить определенное цифровое выра¬
жение сигналов, надо сделать так, чтобы дискретные интервалы
напряжения и времени превышали помехи, имеющиеся в вычисли¬
тельной машине.
В большинстве цифровых вычислительных машин сигналы
имеют два состояния1 2, которые используются для представления
цифр 0 и 1. Время разбивается на ряд интервалов, и сигнал
интерпретируется соответственно тому состоянию напряжения, ка¬
1 Вместо напряжения и времени могут быть использованы частота и сила
тока. Согласно законам электрической цепи, эти различные представления экви¬
валентны, хотя каждое подчеркивает различные стороны явлений.
2 Некоторые цифровые вычислительные машины применяют сигналы, имею¬
щие много состояний, например 10. Считается, что сигнал с двумя состояниями
обеспечивает наиболее надежную работу вычислительной машины.
494
ГЛАВА 15
кое он имеет в данном интервале. На рис. 204 показано несколько
видов дискретных электрических сигналов. Первый вид сигнала —
синхронизирующий, или «тактирующий», сигнал — определяет вре¬
менные интервалы. Второй вид сигнала — положительные импуль¬
сы, которые имеют два состояния: «есть импульс» и «нет импуль¬
са». Эти состояния обозначаются соответственно цифрами 1 и 0.
Рис. 204. Виды сигналов вычислительной машины
Третий вид сигнала — отрицательные импульсы. Этот вид сигнала
имеет два значения амплитуды напряжения. Высокий уровень на¬
пряжения обозначает единицу, а низкий уровень — нуль. Таким
образом, логические свойства, присущие дискретным электриче¬
ским сигналам, представлены последовательностью двоичных
цифр. Чтобы представить числа в цифровой вычислительной ма¬
шине, между двоичными цифрами сигнала и разрядами чисел
устанавливается необходимое . соответствие. Если используется
двоичная система счисления, то каждая двоичная цифра сигнала
расшифровывается как двоичная цифра числа. Благодаря этому
цифровые вычислительные машины
495
свойству, упрощающему схему арифметического блока цифровой
вычислительной машины, многие ранние электронные цифровые
вычислительные машины были созданы для работы с двоичной си¬
стемой счисления. Если применяется иная, не двоичная, система
счисления, то разряды чисел размещаются в соответствии с груп¬
пой двоичных цифр сигнала. Например, для выражения десятич¬
ной цифры в двоичной форме требуется по меньшей мере четыре
двоичных разряда. Преимущество непосредственной десятичной
интерпретации определенных групп двоичных цифр, при наличии
простого десятичного устройства ввода и вывода данных, при¬
вело к увеличению применения двоично-кодированных десятичных
чисел для тех вычислительных машин, данные из которых должны
быть прочитаны непосредственно человеком. В бортовых системах
управления десятичная система счисления не представляет осо¬
бого интереса, ибо такая система нужна только для того, чтобы
показать полученные результаты летчику. Поэтому большая часть
бортовых цифровых вычислительных машин работает с двоичной
системой счисления.
Правила перевода последовательности сигналов вычислитель¬
ной машины, представляющих двоичные цифры, в число должны
быть дополнены правилами, которые вычислительные машины ис¬
пользуют для выделения группы цифр в одно число, называемое
«словом» *.
Многие вычислительные машины работают со словами фикси¬
рованной длины. Например, самолетная цифровая вычислительная
машина (1) имеет фиксированную длину слова из 19 двоичных
разрядов, из которых 16 — разряды числа, 1 разряд — знак числа и
2 разряда используются вычислительной машиной для управления
переключениями. Некоторые вычислительные машины работают с
переменной длиной слов.
Различают вычислительные машины параллельного действия, в
которых все разряды числа одновременно участвуют в операции,
и машины последовательного действия, в которых разряды числа
проходят какую-то точку машины последовательно во времени.
Вычислительная машина может быть построена и на смешанном
принципе, т. е. параллельно-последовательного действия.
15—4. ВЫПОЛНЕНИЕ АРИФМЕТИЧЕСКИХ И ЛОГИЧЕСКИХ
ОПЕРАЦИЙ С ПОМОЩЬЮ ПЕРЕКЛЮЧАЮЩИХ СХЕМ
Устройства вычислительной машины, которые фактически вы¬
полняют вычисление, работают с дискретными электрическими сиг¬
налами, которые представляют числа. Появляющиеся новые дис¬
кретные электрические сигналы представляют собой численный ре-
1 Термин «слово» используется чаще, чем «число», потому что слова в вы¬
числительной машине могут представлять собой как команды, так и числа.
496
ГЛАВА 15
зультат этих вычислений. Все эти операции выполняются так на¬
зываемыми переключающими схемами. Примеры простых пере¬
ключающих схем показаны на рис. 205. На схеме рис. 205, а бук¬
вами А и В обозначены входные сигналы, буквой С — выходной
сигнал. V] есть напряжение, большее самого высокого напряже¬
ния Е2, получаемого от Л и В. Особыми символами обозначены
диоды, обладающие высоким сопротивлением для электрического
тока, идущего в одном направлении, и почти нулевым сопротивле¬
нием для тока противоположного направления. Знаки диодов на
схеме расположены так, что направление угла, как стрелкой, по¬
казывает направление тока в сторону низкого сопротивления.
Рис. 205. Переключающие схемы на диодах
Если А и В имеют величину напряжения Е\<Е2, соответствую¬
щую двоичной цифре 0, то С будет также иметь значение напря¬
жения, близкое к и, следовательно, может быть записан в виде
двоичной цифры 0. Только если оба сигнала, А и В, будут иметь
напряжение (двоичная цифра 1), тогда на выходе С также будет
напряжение, близкое к Е2, что соответствует двоичной цифре 1.
Такая схема обычно называется схемой и (или схемой совпаде¬
ния). Ее действие определяется таблицей (1). На схеме рис. 205, б
Уо — напряжение, которое ниже, чем самое низкое напряжение Е\
СИГНаЛ0В- Таблица 1
Напряжения Двоичные цифры
АВС АВС
Ех Ех ООО
Ех Е2 Ех 0 10
Е2 Ех Ех 10 0
Е2 Е2 Е2 111
Если А или В имеют значение напряжения Е2 (двоичная циф¬
ра 1), то на выходе С также будет напряжение, близкое к Е2, что
соответствует двоичной цифре 1. Операции, выполняемые этой
схемой, обычно называемой схемой или (или собирательной схе¬
мой), определяются таблицей 2.
Таблица 2
Напряжения Двоичные цифры
АВС АВС
Ех Ех Ех 0 0 0
Ех Е2 Е2 0 11
Е2 Ех Е2 101
Ед Ед Ед 111
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
49?
Третья основная переключающая схема выполняет операцию
не (или операцию отрицания) и может быть реализована с по¬
мощью инвертирующего усилителя. Схема инвертора показана на
рис. 206. Операции этой схемы определяются таблицей 3. Штрихи
над буквой Е в колонке для сигнала В означают, что их уровень
отличается от уровня напряжения для сигнала А.
Таблица 3
Напряжения Двоичные, цифры
АВ АВ
Ех Е2 0 1
Е2 Ех 10
Более сложные переключающие схемы могут быть построены
комбинированием этих трех простых схем.
Рис. 206. Прин¬
ципиальная схе¬
ма инвертора
На рис. 207 приведена схема двоичного сумматора. На схеме 5
означает цифру суммы; С — цифра переноса, появившаяся в ре¬
зультате двоичного сложения чисел, представленных сигналами А
и В; А и В означают отрицание Л и В соответственно.
Разработана математическая теория логического построения,
основанная на булевой алгебре1. Согласно этой теории сигналы
цифровой вычислительной машины обозначаются буквами, ска¬
жем, А, В, ($, 5 и т. д., которые принимают лишь два значения,
0 и 1, и называются двоичными Переменными.
1 Булева алгебра не является единственной, которую можно использовать
при проектировании вычислительных машин. Широкое использование этой ал¬
гебры обусловлено тем, что ее элементарные операции могут быть реализованы
с помощью простых электронных схем. Другие алгебры, например алгебра, ис¬
пользованная Г. Эйкеном и другими, также хороши и подчеркивают различные
свойства вычислительных машин.
Рис. 207. Схема двоичного сумма¬
тора
32—405
498
ГЛАВА 18
Действия переключающих схем вычислительной машины опи¬
сываются алгебраическими операциями над двоичными перемен¬
ными. Например, схема и на рис. 205, а алгебраически представ¬
ляется уравнением
С = А-В. (1)
Схема или на рис. 205, б представляется выражением
С = А + В. (2)
Инвертор на рис. 206 представляется выражением
5 = А (3)
Двоичный сумматор на рис. 207 представляется двумя выраже¬
ниями:
$ = А-В+ А-В; (4)
С = А-В.
Временная зависимость сигналов вычислительной машины может
быть учтена вычислительной алгеброй путем добавления к двоич¬
ной переменной индекса, обозначающего время. Таким образом,
8п обозначает величину сигнала 5 во временном интервале п.
Работой переключающих схем можно управлять посредством
дискретных электрических сигналов такого же типа, какие были
использованы для представления чисел. Управление заключается
в разрешении начать операцию или прекратить ее. Остановка опе¬
рации заключается в принуждении результирующей двоичной пе¬
ременной принять определенное значение. Если это значение равно
нулю, управление операцией Р выполняется посредством формиро¬
вания результирующего сигнала В согласно правилу
В = О-В. (5)
Управляющая двоичная переменная О равна нулю, если операция
Р должна быть остановлена, и единице, если операция Р должна
продолжаться. Следовательно, /? = 0, когда 0 = 0 и В=Р, когда
0=1. Подобным же образом, если при прекращении операции зна¬
чение В устанавливается так, чтобы быть равным единице, то
управление достигается за счет формирования В согласно правилу
в = а+р. (6)
В этом уравнении О имеет тот же смысл, что и в уравнении (5);
следовательно, /?=!,,когда 0 = 0, и В=Р, когда 0=1. Уравнения
(5) и (6) посредством использования правил булевой алгебры
можно преобразовать к виду, удобному для механизации. Так же
как значением функции можно управлять с помощью двоичной
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
499
переменной (в предыдущем примере это была О), работой вычис¬
лительной машины можно управлять посредством дискретных
электрических сигналов.
Если вычислительная машина выполняет несколько операций,
то можно использовать ряд сигналов управления, скажем (?', О2,
О2 и т. д. Эти сигналы управления можно образовать из ряда дру¬
гих сигналов, скажем, <2', <22, <23, <24... Так, например, если должны
быть отобраны 10 операций, то из четырех сигналов может быть
образовано 10 сигналов управления следующим образом:
О'” = 01-02. О». 04 С<6> = 01.02.03.04
6(2,= 01.02.03.04 Ц(7) = О1.О2.ОЗ.О4
О(3, = 01-02.0э.04 о(8) = о1 • • <?9 • С?4
о(4) = 0*-02-О9-О4 ос9, = оГ-02'.о9.о4
0(5) = о» • 02 • о9 • О4 <7(10) ■= о1 • О2 • о9.04.
Совокупность четырех двоичных переменных О1, О2, О3, О4 мо¬
жет рассматриваться как 4-разрядное двоичное число. Таким
образом, дискретные сигналы управления могут быть представ¬
лены дискретными числами, а последовательность операций циф¬
ровой вычислительной машины может быть представлена рядом
чисел.
15—5. «ПАМЯТЬ» ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ
В предыдущем разделе вопросы временных соотношений вход¬
ных и выходных сигналов в элементах вычислительной машины
подробно не рассматривались.
Рассмотренные переключающие схемы имели в общем прене¬
брежимо малое время прохождения сигналов. Однако имеется
большой и важный класс элементов вычислительной машины, ко¬
торые обладают таким свойством, в силу которого значение выда¬
ваемых ими выходных сигналов зависит от того, какое значение
имели ранее их входные сигналы, т. е. эти элементы «помнят»
прежние значения сигналов, поэтому они называются элементами
«памяти» вычислительной машины.
Важным запоминающим элементом вычислительной машины
является триггер. Существует множество различных типов триг¬
герных устройств, применяемых в вычислительных машинах, но
мы здесь остановимся только на одном — на модификации схемы
Икклза—Джордана. Принципиальная схема этого триггера пред¬
ставлена на рис. 208. Этот прибор имеет два устойчивых состоя¬
ния. В одном из них правая лампа открыта, а левая закрыта, т. е-
<2 = 0, <2=1. В другом состоянии — наоборот: ф = 1, <2=0. Сиг¬
32»
500
ГЛАВА 15
нал Р означает отрицательные синхронизирующие импульсы. Пе¬
редние фронты этих импульсов указывают границы дискретных
интервалов времени, когда триггеры переходят из одного состоя¬
ния в другое. Отрицательный импульс в точке С ставит триггер
в состояние (2 = 0, а отрицательный импульс в точке О ставит его
в состояние С=1. / и К — сигналы, поступающие из других пере¬
ключающих схем. Синхронизирующие импульсы Р выделяют сиг¬
налы / и К, и если один из них имеет значение 1, то отрицатель¬
ный импульс передается в точку С (при /(=1) или О (при /=1).
Триггерная схема, показанная на рис. 208, работает под дей¬
ствием сигналов / и К вида, используемого в переключающих схе¬
мах, рассмотренных в предыдущем разделе, и вырабатывает вы¬
ходные сигналы 0 и (?, которые могут быть использованы непо¬
средственно переключающими схемами. Применение этого триг¬
гера в качестве элемента памяти в вычислительных машинах
иллюстрируется следующими примерами:
1) Сигнал переноса в последовательном двоичном сумматоре,
полученный при сложении предыдущего разряда, должен хра¬
ниться столько времени, чтобы его можно было использовать при
сложении следующего разряда.
2) Двоичные цифры, составляющие код команды, которую не¬
обходимо выполнить, могут быть накоплены в ряде триггерных
устройств, которые могут выдавать сигнал, необходимый для
управления операцией.
Рис. 208. Триггерная схема
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
501
Вычислительные схемы и схемы управления обычно состав¬
ляются из переключающих схем и триггеров. Триггеры пригодны
только для кратковременного запоминания данных, ибо их исполь¬
зование в качестве средств накопления информации обходится
слишком дорого. Для хранения большого количества информации
существуют более экономные накопители. Так, например, имеются
магнитные барабаны, магнитные ленты, матрицы из магнитных
сердечников, в которых информация накапливается в виде раз¬
личной степени намагниченности элементов из магнитных сплавов
с прямоугольной петлей гистерезиса; имеются запоминающие
трубки, плиты из титаната бария и конденсаторные решетки, в ко¬
торых информация запасается в виде заряженного состояния
мельчайших элементов диэлектрического материала; имеются уль-
траакустические и магнитострикционные линии задержки, в ко¬
торых информация запасается в виде последовательности цир¬
кулирующих импульсов- Создание экономичных, надежных и ком¬
пактных устройств «памяти», которые могут хранить большое ко¬
личество информации, явилось очень важным фактором в развитии
электронных цифровых вычислительных машин — самых универ¬
сальных вычислительных устройств сегодняшнего дня. «Память»
позволяет запасать числа, используемые в последующих расчетах,
записывать результаты вычислений, запоминать числа, представ¬
ляющие команды управления. Эффективность цифровых машин
в большой степени зависит от емкости их запоминающих устройств
и легкости получения содержащихся в них сведений.
В бортовых цифровых вычислительных машинах в качестве
запоминающих устройств используются магнитные барабаны,
обладающие большой надежностью и компактностью. Барабан
длиной 200 мм, диаметром 100 мм и весом 3,6 кг имеет емкость
«памяти» до 50 000 двоичных цифр. Достоинство магнитных ба¬
рабанов, которое особенно важно для бортовых систем управле¬
ния, состоит в том, что они позволяют осуществить длительное
хранение информации.
Магнитный барабан состоит из вращающегося барабана, по¬
крытого пленкой из хорошо намагничивающегося материала, как,
например, окись железа или кобальто-никелевые сплавы, Запись
и считывание информации производятся с помощью магнитных
головок, являющихся, по существу, небольшими электромагни¬
тами, которые считывают сигналы с магнитных дорожек бара¬
бана, когда он вращается. Дискретные электрические сигналы вы¬
числительной машины, проходя по записывающей головке, на¬
магничивают до состояния насыщения небольшие участки поверх¬
ности барабана. Намагничивание в одном направлении представ¬
ляет двоичную цифру 0, а намагничивание в противоположном
направлении представляет двоичную цифру 1. Когда барабан, вра¬
щаясь, проходит мимо считывающей годовки, в нем народятся
502
ГЛАВА 15
дискретные электрические сигналы, соответствующие дискретным
магнитным сигналам, записанным на барабане. Таким образом,
магнитный барабан представляет собой устройство, позволяющее
записать информацию, поступающую в виде электрических им¬
пульсов, и затем воспроизвести ее в форме таких же дискретных
электрических сигналов. Техника управления работой переклю¬
чающих схем может быть использована и для управления процес¬
сами записи и считывания.
Магнитный барабан, использованный в самолетной цифровой
вычислительной машине, показан на рис. 209.
15—6. ПРОГРАММИРОВАНИЕ ДЛЯ ЦИФРОВЫХ
ВЫЧИСЛИТЕЛЬНЫХ МАШИН
Каждая цифровая вычислительная машина может выполнять
несколько основных операций, как, например, сложение, вычита¬
ние, умножение, деление, сравнение и т- д. Управление этими опе¬
рациями может осуществляться с помощью дискретных электри¬
ческих сигналов, т. е. начало и конец каждой операции могут быть
определены дискретными электрическими сигналами. Следова¬
Рис. 209. Магнитный барабан самолетной цифровой вычислительной
машины фирмы Хьюза
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
503
тельно, последовательность операций, выполняемых машиной, мо¬
жет быть определена посредством специальной последовательно¬
сти этих сигналов.
Если последовательность сигналов управления подается в вы¬
числительную машину извне, то она превращается в машину спе¬
циального назначения, которая может выполнять вычисления
только для той задачи, которая определена этой последовательно¬
стью операции. Однако наличие устройств памяти позволяет скон¬
струировать вычислительную машину, в которой последователь¬
ность операций определяется сигналами, записанными в блоке
памяти. В этом случае последовательность операций может легко
изменяться путем смены команд, записанных в блоке памяти. Сле¬
довательно, вычислительная машина может выполнить любые рас¬
четы, соответствующие любым возможным последовательностям
операций. Если система команд машины позволяет выполнить
основные арифметические действия (сложение и умножение) и
логические операции преобразования в дополнительный код’ и
сравнение, а также несколько команд передачи управления, тогда
машина может производить расчет и находить решение почти лю¬
бой задачи. Такие вычислительные машины называются универ¬
сальными, или машинами общецелевого назначения.
Большинство цифровых вычислительных машин являются ма¬
шинами программного управления. Они имеют запоминающее
устройство, в котором записываются программы, определяющие
последовательность операций вычислительной машины. Использо¬
вание запоминающего устройства для записи программы значи¬
тельно упрощает управление вычислительной машиной, предназна¬
ченной для решения комплексных проблем в бортовых системах
управления, где она выполняет самые разнообразные функции как
наведения, так и управления огнем. Тийовая блок-схема цифро¬
вой вычислительной машины показана на рис. 210. Блок памяти
обеспечивает накопление чисел и команд. Арифметический блок
выполняет арифметические операции над числами, накопленными
в блоке памяти, и посылает результаты обратно в блок памяти.
Рис. 210. Типовая блок-схема вычислительной
машины
504
ГЛАВА 15
Блок управления воспроизводит команды, записанные в блоке
памяти, дешифрует их и направляет в арифметический блок для
выполнения операций, указанных в команде. Устройство ввода и
вывода данных принимает сигналы от измерительных приборов
самолета, преобразует их в дискретные электрические сигналы и
записывает в блок памяти, а также считывает полученные резуль¬
таты из блока памяти и выдает сигналы управления для самолета.
Программно-управляемая цифровая вычислительная машина
работает следующим образом. Блок управления считывает первую
команду из блока памяти и затем направляет ее в арифметиче¬
ский блок для исполнения операции, указанной в этой команде.
Далее, блок управления считывает вторую команду и направляет
ее в арифметический блок для выполнения. Каждая команда со¬
держит в себе код операции, которая должна быть выполнена, и
адрес числа в запоминающем устройстве, которое должно быть
направлено в арифметический блок. Адрес ячейки памяти, в ко¬
торой записан код следующей команды, также может содержаться
в этой команде. Вычислительные машины часто классифицируются
по количеству адресов в команде. Машина, имеющая команды,
содержащие один адрес, называется одноадресной вычислитель¬
ной машиной. Вычислительная машина, имеющая инструкции,
в которой указаны адреса двух чисел, участвующих в операции,
адрес результата и адрес следующей команды называется четы¬
рехадресной вычислительной машиной. Каждая вычислительная
машина имеет определенный состав команд. Последовательность
команд, предназначенных для решения определенной задачи на
вычислительной машине, называется программой этой задачи.
Сложение двух чисел программно-управляемой цифровой вы¬
числительной машиной выполняется следующим образом:
Два числа и команда сложения этих чисел должны быть за¬
писаны в запоминающем устройстве. Процесс сложения состоит из
следующих четырех этапов:
1. одно из чисел из блока памяти передается в арифметиче¬
ский блок;
2. второе число из блока памяти передается в арифметический
блок;
3. оба числа складываются;
4- сумма из арифметического блока передается в блок памяти.
Четырехадресной вычислительной машине потребовалась бы
только одна команда для выполнения этих операций, но для одно¬
адресной вычислительной машины требуются четыре команды.
Как работает программно-управляемая цифровая вычисли¬
тельная машина, можно показать на следующем примере,, пред¬
ставляющем собой одну из многих задач общей задачи управле¬
ния самолетом. Вычислительная машина должна определить, хва¬
тит ли имеющегося в баках горючего для того, чтобы самолет
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
505
долетел до места назначения. Сперва вычисляется расстояние, ко¬
торое самолет может пролететь на оставшемся топливе. Из этого
расстояния вычитается остающееся в резерве расстояние, и ре¬
зультат сравнивается с расстоянием до места назначения. В мате¬
матической форме эту задачу можно записать следующим
образом:
где Р — количество оставшегося топлива;
5 — путевая скорость;
/? — средний расход топлива в час;
Ог — остающееся в резерве расстояние;
— расстояние, которое самолет может пролететь;
О — расстояние до места назначения.
Данные об Р и /? — измеряются самолетными измерительными
приборами, которые затем преобразуются в дискретную форму и
записываются в запоминающем устройстве вычислительной ма¬
шины. Значения 5 и Д — должны быть рассчитаны заранее и за¬
писаны в блоке памяти. Процесс решения этой задачи идет сле¬
дующим образом:
1. Р передается из блока памяти в арифметический блок;
2. 5 передается из блока памяти в арифметический блок;
3. Г и 5 перемножаются;
4. /? передается из блока памяти в арифметический блок;
5. результат операции 3, который сохранялся в арифметиче¬
ском блоке, делится на /?;
6. Дг передается из блока памяти в арифметический блок;
7. значения От вычитаются из результата операции 5;
8- значения Р передаются из блока памяти в арифметический
блок;
9. результат операции 7, Р( сравнивается с Р;
10. результаты операции 9, Р]<Р или Р)>Р посылаются в ин¬
дикаторное устройство пилота.
Этот пример показывает некоторые особенности цифровых вы¬
числительных машин. Первая—один блок (арифметический) вы¬
полняет в определенной временной последовательности необходи¬
мые для решения задачи арифметические и логические операции.
Вторая — необходимые для решения задачи команды записы¬
ваются в запоминающем устройстве. Третья — чтобы получить
ответ, сможет или не сможет самолет долететь до места назна¬
чения,— должна быть составлена программа.
Возможность программирования — очень важное свойство вы¬
числительной машины для разработки и прлетных испытаний си¬
506
ГЛАВА 1Б
стемы управления, ибо, оно говорит, что для того чтобы спроекти¬
ровать вычислительную машину, вовсе нет необходимости в окон¬
чательном установлении математической формулировки задачи
управления на самой начальной стадии разработки. Большая
часть изменений,. вносимых в задачу управления, сопряжена
только с изменениями в программе, а не в конструкции вычисли¬
тельной машины. Всякого рода неполадки в работе системы управ¬
ления, не устраненные в ходе испытаний системы, часто можно
устранить просто, сделав некоторые изменения в программе, запи¬
санной в запоминающем устройстве.
15—7. ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНЫХ ДАННЫХ
В ДИСКРЕТНЫЕ
Цифровая вычислительная машина имеет устройства, которые
сопрягают ее с другими устройствами системы управления и осу¬
ществляют преобразования дискретных величин, используемых
в вычислительной машине, в непрерывные.
Входные сигналы для вычислительной машины поступают от
измерительных приборов, определяющих общее состояние и поло¬
жение самолета, например, воздушную скорость, высоту, расстоя¬
ние до цели и т. д. Сигналы, поступающие от этих измерительных
приборов, обычно представляют величины напряжений постоян¬
ного или переменного тока, или углов положения вала, или про¬
межутков времени. Поэтому возникает задача найти методы пре¬
образования их из непрерывной формы в дискретную. Проблема
точности чисел, используемых в расчетах для представления вход¬
ных величин, является главным образом проблемой точности пер¬
вичных измерений входных величин, ибо преобразование непре¬
рывных данных в дискретные может быть выполнено почти стой
же самой точностью, с какой производились измерения.
Если промежуток времени, который нужно измерить, выделить
импульсами напряжений в его начале и конце, то. он может быть
преобразован в дискретную форму путем подсчета количества
синхронизирующих импульсов, укладывающихся на протяжении
этого промежутка. Были разработаны очень точные методы изме¬
рения времени, основанные на этом принципе. Легкость, с какой
промежуток времени может быть преобразован из своей непре¬
рывной формы в дискретную, навела на мысль использовать этот
принцип для преобразования других величин. Напряжение посто¬
янного тока может быть преобразовано во временной интервал
путем сравнения его с величиной линейно изменяющегося пило¬
образного напряжения. Положение вала может быть преобразо¬
вано в промежуток времени с помощью фазовращателя в счетно¬
решающем приборе. Напряжение переменного тока может быть
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
507
преобразовано в напряжение постоянного тока с помощью выпря¬
мителя.
Существует множество других методов преобразования непре¬
рывных данных в дискретные. Например, положение вала может
быть измерено дискретно посредством считывания фотоэлектри¬
ческим способом кодированных отметок, сделанных на вале или
на диске, насаженном на него, или посредством двоичной зубча¬
той передачи, производящей ряд последовательных включений и
выключений.
Некоторые методы преобразования дискретных сигналов в не¬
прерывные могут быть использованы для обратного преобразова¬
ния непрерывных величин в дискретные. Например, дискретное
число может быть преобразовано в интервал времени путем от¬
счета числа импульсов от генератора импульсов вычислительной
машины, равных числу, которое должно быть преобразовано. Ин¬
тервал времени, полученный во время отсчета требуемого числа
импульсов, и будет нужным интервалом времени. Электрически
этот интервал времени будет представлен напряжением, имеющим
значение 1 в течение этого интервала и 0 в остальное время. Если
это значение напряжения периодически повторять и пропустить
через фильтр нижних частот, получится сигнал постоянного тока,
амплитуда которого пропорциональна отношению интервала вре¬
мени к периоду повторения. Следовательно, напряжение сигнала
будет пропорционально дискретному числу. Подобным же образом
код значения интервала времени может быть преобразован в по¬
ложение вала.
В большинстве бортовых систем управления имеется несколько
сигналов, определяющих состояние систем и являющихся вход¬
ными непрерывными сигналами для вычислительной машины;
имеется также несколько непрерывных сигналов управления, вы¬
даваемых вычислительной машиной. Каждый из них должен быть
преобразован в дискретную форму. Поэтому для каждого сигнала
необходима своя отдельная аппаратура преобразования. Необхо¬
димость достижения малых размеров и веса для бортовых систем
требует разработки систем преобразования, в которых одно пре¬
образующее устройство переключалось бы последовательно так,
чтобы каждый сигнал отбирался по очереди.
15—8. ВЫЧИСЛЕНИЕ В ИСТИННОМ МАСШТАБЕ ВРЕМЕНИ
Цифровая вычислительная машина, используемая в бортовой
системе управления, должна выполнять расчеты в истинном мас¬
штабе времени, необходимом для получения сигналов управления;
т. е. время, необходимое вычислительной машине для вычисления
и выработки сигналов управления по значениям измеряемых вели¬
508
ГЛАВА 15
чин, определяющих состояние самолета, должно быть меньше вре¬
мени, в течение которого могут произойти или происходят значи¬
тельные изменения этих величин.
В силу того что электронные схемы действуют мгновенно,
электронные вычислительные машины являются очень быстродей¬
ствующими вычислительными устройствами. Однако универсаль¬
ные цифровые вычислительные машины, разработанные для тех¬
нических расчетов, имеют только один арифметический блок, ко¬
торый выполняет операции последовательно друг за другом. Хотя
время, потребное для выполнения одной операции в электронной
цифровой вычислительной машине, равно нескольким микросекун¬
дам, тем не менее время, необходимое для решения всей задачи и
получения законченного решения уравнений системы управления,
обычно значительно больше.
Цифровые вычислительные машины, разработанные для бор¬
товых систем управления, являются достаточно быстродействую¬
щими и выполняют расчеты со скоростью, отвечающей характе¬
ристикам самолета. Наиболее скоростные цифровые вычислитель¬
ные машины работают со скоростью, равной 4 миллионам двоич¬
ных чисел в секунду (машина «Бинак»). Стремление к удовлетво¬
рению требований высокой надежности, малых размеров, веса и
небольшой потребляемой мощности приводит к тому, что машины
бортовой системы управления имеют небольшие скорости счета,
порядка 200 000 двоичных единиц в секунду. Установлено, что
такая скорость вполне достаточна для самолетных систем управ¬
ления. Проведенные испытания самолетных цифровых вычисли¬
тельных устройств в полете показали их большие возможности и
многосторонность использования.
На динамическую характеристику цифровой вычислительной
машины влияет тот факт, что входные сигналы подаются регу¬
лярно, а выходные сигналы выдаются один раз в течение каждого
цикла вычисления. Это явление, так же как и задержки, обуслов¬
ленные необходимостью соблюдения последовательности вычисле¬
ния во времени, должно быть учтено при использовании цифро¬
вой вычислительной машины в системе управления.
15—9. НАДЕЖНОСТЬ
Использование в большинстве цифровых вычислительных ма¬
шин двоично-кодированных дискретных электрических сигналов
является важным фактором надежности их работы. Разница ме¬
жду двумя уровнями сигналов выбирается такой, чтобы она была
большей по сравнению со среднеквадратическим значением напря¬
жения шумов, которые могут появиться в вычислительной машине.
Поэтому вероятность появления ошибки в данной цифре сигнала
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
509
очень мала. Однако обычная вычислительная машина имеет не¬
сколько тысяч элементарных переключающих схем, каждая из
которых может выполнять до миллиона действий в секунду. Та¬
ким образом, чтобы обеспечить работу вычислительной системы
без ошибок в течение многих часов, каждая схема в отдельности
должна быть исключительно надежна. Много технических усилий
было вложено для разработки надежных схем, и эти усилия увен¬
чались успехом. Созданы вычислительные машины, которые рабо¬
тают без ошибок в течение многих часов.
Большое число электронных ламп, имеющихся в вычислитель¬
ной машине, является одним из ее слабых мест, ибо лампа имеет
ограниченный срок службы, а следовательно, неизбежно должна
служить причиной неисправностей и аварий.
Качество ламп постоянно улучшается. Многие лампы, исполь¬
зующиеся сейчас в вычислительных машинах, имеют срок службы,
насчитывающий несколько тысяч часов. Много усилий в изыска¬
ниях и исследованиях было направлено на замену электронных
ламп в вычислительных машинах магнитными и полупроводнико¬
выми приборами. Большое число ламповых схем, применявшихся
в первых электронных цифровых вычислительных машинах, заме¬
нены в последующих вычислительных машинах схемами на кри¬
сталлических диодах. Благодаря этому надежность вычислитель¬
ных машин значительно повысилась. Транзисторы обещают за¬
менить еще большее число электронных ламп в вычислительных
машинах.
Современный уровень развития техники позволяет полностью
удовлетворить требования надежности работы цифровых вычис¬
лительных машин, используемых в системах управления. Напра¬
шивается вопрос, может ли ошибка, появившаяся в одной цифре
одного числа, привести к выработке вычислительной машиной
ошибочного сигнала управления и, следовательно, вызвать нару¬
шения в выполнении поставленной задачи? Если вычисления были
правильно запрограммированы, то одиночные ошибки окажут
лишь незначительное влияние на сигналы управления.. Устойчи¬
вость процессов численных расчетов, построенных так, чтобы быть
нечувствительными к ошибкам округления, в общем вполне доста¬
точна для подавления влияния случайных ошибок, появляющихся
в вычислительной машине. Влияние помех от ошибок не больше,
чем влияние шумов, имеющихся в моделирующих устройствах.
15—10. КОНСТРУКЦИЯ АППАРАТУРЫ
Условия, в которых должна работать бортовая система управ¬
ления, предъявляют жесткие требования к конструкции аппара¬
туры. Ограниченные габариты и вес, большие перепады темпера-
510
ГЛАВА 15
Рис. 211. Самолетная цифровая вычислительная машинВ фирмы Хьюза
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
511
туры и давления, большие ускорения — вот те условия, в которых
эти системы должны работать. Причем все эти требования дол¬
жны быть удовлетворены без ухудшения способности производить
расчеты в боевых условиях в истинном масштабе времени, без
снижения надежности.
Первые электронные цифровые вычислительные машины, по¬
строенные несколько лет назад, весили несколько тонн, занимали
объем в несколько десятков кубических метров и потребляли до
100 кет энергии, содержали несколько тысяч электронных ламп.
Однако новейшие достижения науки и техники позволили усовер¬
шенствовать и упростить цифровые вычислительные машины на¬
столько, что стало возможным построить и испытать практические
модели самолетных цифровых вычислительных машин. Некоторые
из указанных достижений имеют теоретический характер. Для ло¬
гических анализов вычислительных процессов использована мате¬
матическая логика (упомянутая в предыдущих разделах), позво¬
лившая значительно упростить цифровые вычислительные ма¬
шины без снижения качества их работы. Много улучшений в вы¬
числительную машину внесли и новые методы проектирования схем
и приборов. Сверхминиатюрные лампы, германиевые кристалличе¬
ские диоды и печатные схемы помогли создать небольшие по раз¬
меру и весу вычислительные машины. Научные исследования и
разработки в области механических характеристик электронной
аппаратуры обеспечили возможность создать компактные и легкие
в изготовлении детали. Цифровая вычислительная машина состоит
из большого числа элементарных схем, образующих сложные ло¬
гические устройства. Этот факт используется для облегчения и
упрощения их производства и эксплуатации. Вычислительная ма¬
шина разделяется на большое число почти идентичных ячеек, каж¬
дая из которых конструируется в виде отдельного элемента, ко¬
торый может быть вставлен в стойку. Так, например, большое
число идентичных триггеров может быть использовано в переклю¬
чающих схемах. арифметического блока и блока управления. На
рис. 211 показана самолетная цифровая счетно-вычислительная
машина.
15—11. ПРЕИМУЩЕСТВА ПРИМЕНЕНИЯ ЦИФРОВЫХ
ВЫЧИСЛИТЕЛЬНЫХ МАШИН В БОРТОВОЙ СИСТЕМЕ
УПРАВЛЕНИЯ
В процессе развития цифровых вычислительных машин для
бортовых систем управления были созданы новые элементы для
этих систем, позволившие в значительной степени улучшить их ра¬
боту. Новые вычислительные устройства дают возможность полу¬
чать решения сложных задач автоматических систем управле-
512
ГЛАВА 15
ния, и в то же время они достаточно малы, легки и прочны, чтобы
быть использованными на борту самолета. Цифровые вычислитель¬
ные устройства дают следующие преимущества:
1. Вычислительная способность универсальных цифровых вы¬
числительных машин такова, что проектировщик системы управле¬
ния может сформулировать алгоритм управления без каких-либо
ограничивающих приближений. Таким образом, от системы управ¬
ления можно получить наиболее полную отдачу.
2. То обстоятельство, что задача, решаемая вычислительной ма¬
шиной, может быть изменена путем простой замены программы,
записанной в запоминающем устройстве вычислительной машины,
позволяет оперативно вносить изменения в задачу управления на
любой стадии разработки системы без каких-либо изменений в
конструкции вычислительной машины. Этот процесс улучшения
системы путем изменения программы может быть проделан
также и во время полевых испытаний и во время эксплуа¬
тации.
3. Количество разрядов в слове вычислительной машины мо¬
жет быть выбрано достаточно большим, чтобы не накладывать
каких-либо ограничений на точность системы.
4. Способность универсальной вычислительной машины решать
любую задачу в пределах емкости ее «памяти» и требуемого для
решения времени позволяет использовать обычную вычислитель¬
ную машину в самых различных системах управления. Возмож¬
ность стандартизации вычислительных машин, а также их серий¬
ного производства, упрощения эксплуатации при снижении необхо¬
димого количества запасных блоков создает значительные преиму¬
щества.
5. Способность цифровой вычислительной машины вырабаты¬
вать решения позволяет значительно автоматизировать системы
управления.
Цифровая вычислительная машина фирмы Хьюза для бортовой
системы управления имеет следующие данные:
1. Общее количество команд —64. В том числе сложение, вы¬
читание, умножение, деление, извлечение квадратного корня, ана¬
лиз знака, логическое сложение, логическое умножение, сдвиг
(вправо и влево) и передача информации между отдельными уст¬
ройствами машины.
2. Частота синхронизирующих импульсов — 160 000 гц.
3. Длина слова— 19 разрядов. Из них 16 разрядов — мантиса
числа, 1 разряд — знак числа, 2 разряда свободны (вспомогатель¬
ные).
4. Емкость накопителя на магнитном барабане — 2500 слов из
19 цифр на 60 дорожках.
5. Скорость вращения барабана — 8000 об/мин.
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
513
6. Емкость оперативного запоминающего устройства — 8 слов
в регистре с циркуляцией кода.
7. Входные и выходные каналы — 64 входа для непрерывных
данных; выходные данные выдаются с темпом 65 раз в секунду.
8. Адресная система — модифицированная двухадресная с по¬
движным адресом.
9. Объем машины — 0,127 м3.
Эта самолетная цифровая вычислительная машина представле¬
на на рис. 211.
33—405
ГЛАВА 16
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ
ПОЛЕТА
Р. Р. Беннет1
16—1. ВВЕДЕНИЕ
Совершенно очевидно, что количественное описание характери¬
стик управляемого снаряда во время его полета по траектории
является весьма сложной задачей. Даже самые простые системы,
с которыми может встретиться конструктор управляемых снарядов,
являются достаточно сложными, чтобы вполне оправдать громад¬
ные затраты труда, необходимого для того, чтобы добиться нор¬
мального функционирования всей системы в целом. При этом
конструктор не может довольствоваться качественными ответами
или ответами типа «да» или «нет». Ему необходимы точные ко¬
личественные сведения о том, какие окончательные характери¬
стики должна иметь система.
Даже если имеется возможность дать полное математическое
описание работы системы и всех ее элементов, а также определить
в математической форме параметры системы и ее входные сигналы,
то и в этом случае для определения конечного поведения системы
необходимо выполнить огромную работу. В математическом отно¬
шении задача сводится к нахождению решения совместных диффе¬
ренциальных уравнений (в общем случае нелинейных с перемен¬
ными во времени коэффициентами) при произвольных вынуждаю¬
щих функциях и произвольных начальных условиях. Учитывая
сложность большинства встречающихся на практике систем, реше¬
ние указанной задачи обычными аналитическими методами может
быть получено только после многочисленных упрощений и прибли¬
жений. Для преодоления таких трудностей разработано большое
количество вычислительных машин и методов машинного решения
этих систем уравнений. В связи с развитием управляемых снаря¬
дов техника автоматического вычисления, хотя опа и является
сравнительно новой отраслью, приобрела огромное значение.
Весьма часто математическое описание поведения некоторых
звеньев системы является либо слишком сложным, либо практи¬
1 Сотрудник лаборатории космической техники фирмы «Рамо-Вулдридж
корпорейшн».
АНАЛИЗ ТРАЕКТОРИЙ И МОДЕЛИРОВАНИЕ ПОЛЕТА
515
чески невыгодным. В таких 'случаях используют вычислительные
машины для моделирования тех условий, в которых должна рабо¬
тать реальная система. Так, например, гиросцоп можно установить
на вращающийся стол, движением которого управляет автомати¬
ческое вычислительное устройство • (ниже этот процесс будет опи¬
сан более подробно). Такой вид моделирования, в котором исполь¬
зуются реальные блоки снаряда, носит название физического моде¬
лирования.
Процесс полного математического описания работы системы
с помощью математических уравнений и применение машинных
методов к решению этих уравнений носит название математиче¬
ского моделирования. В дальнейшем изложении основное внима¬
ние будет уделено последнему виду моделирования, что отчасти
объясняется тем, что техника математического моделирования ча¬
стично используется и в процессе физического моделирования.
В ходе разработки системы управляемого снаряда для анализа
ее работы используются три метода: анализ с карандашом в ру¬
ках, моделирование и летные испытания. В какой мере может
быть использован каждый из этих методов в том или ином случае,
зависит главным образом от требований к разрабатываемому сна¬
ряду. Надо заметить, что аналитический метод и метод моделиро¬
вания — процессы относительно недорогие по сравнению со стоимо¬
стью проведения летных испытаний. Надо также иметь в виду, что
степень использования того или иного метода по мере перехода от
одной стадии разработки к другой должна изменяться. Однако
не следует думать, что моделирование и летные испытания на ка¬
кой-то стадии проектирования могут заменить рациональное мыш¬
ление человека.
В настоящей главе не ставится задача сделать из читателя
специалиста в области моделирования. Здесь дается лишь общее
знакомство с данной областью, для того чтобы инженер-проекти¬
ровщик мог со знанием дела подойти к выбору метода и техники
моделирования при решении стоящих перед ним задач. Несмотря
на то что большинство лиц, связанных с программой разработки
управляемых снарядов, непосредственно не работают с моделиру¬
ющими устройствами, тем не менее вполне возможно, что они бу¬
дут в той или иной степени связаны с такого рода работой.
16—2. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Существует два типа вычисления, или математического модели¬
рования: моделирование с помощью машин-аналогов и моделиро¬
вание с помощью цифровых машин. Каждый из них имеет свои
особенности, преимущества и недостатки. Мы рассмотрим их в от¬
дельности.
33*
516
ГЛАВА 18
16—2.1. Автоматическое вычисление в дискретной форме
Рис. 212. Механиче¬
ская система для ил¬
люстрации принципов
дискретного и непре¬
рывного математиче¬
ского моделирования
Как указывает само название, моделирование в дискретной
форме производится с использованием дискретных величин, или
цифр. Все количественные выражения определяются в форме чи¬
сел. Вычисление производится главным обра¬
зом путем сложения и умножения этих
чисел.
Чтобы уяснить весь процесс расчета, рас¬
смотрим более детально дискретное, или чис¬
ленное, вычисление. Предположим, что мы
имеем дело с простой механической системой
(рис. 212), имеющей массу, пружину и демп¬
фирование с помощью вязкого трения; найдем
ее движение, когда она возбуждается прило¬
женной силой /(/). Хотя этот частный пример
не связан с расчетом траектории управляе¬
мого снаряда, однако принципы, которые он
иллюстрирует, те же самые, простота же примера дает возмож¬
ность понять эти принципы более ясно.
Если принять систему линейной, то ее
движение может быть описано следую¬
щим дифференциальным уравнением:
Мх-Е Вх-у Кх = /(Г), (1)
где х — перемещение массы. Следова¬
тельно, мы допускаем, что данную физи¬
ческую систему можно описать матема¬
тически. Теперь представим следующие друг за другом значения
времени, разнесенные на величину А/ и отмеченные точками на
прямой (рис. 213). При /п = лА( значения х и ее производных мож¬
но выбрать равными 1
х = (2)
^=Хд+127Л~1; (3)
(Хп+,-Хл) (х„-*„_!)
"А/ М _ хп+1 ~ 2хл + *я-1
Х~ М ~ ■ (М)2 ■
Таким образом, первая производная получается путем деления ко¬
нечной разности первого порядка на промежуток времени. Вторая
производная получается путем нахождения разности двух первых
производных.
Рис. 213. Деление неза¬
висимой переменной на
дискретные интервалы
1 Существует много вариантов таких частных выборов.
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ ПОЛЕТА
517
Подставив эти выражения в уравнение (1), получим
, Г2М я . Гв • м 1
_ /(4) + хп + хя_] |_2Д< (Д/)^
хл+1~ гм п / в \ • (а)
\2М)
Использование этого выражения и знания значений хп и хп_{
позволяет нам вычислить величину хп+ь Далее, мы можем вычис¬
лить величину хп+2 по значениям хп+] и хп. Повторяя этот про¬
цесс, мы пройдем по оси времени слева направо. Исходные значе¬
ния, например х, и х0, будут зависеть от начальных условий.
В качестве примера детального расчета возьмем систему на
рис. 212 и примем, что она вначале, в момент ( = 0, находилась в
покое (т. е. х=х = 0), и внезапно приложим к ней постоянную силу
вместо Для простоты примем численные значения М, В, К и
равными единице. Таким образом, уравнение (1) примет вид
х-|-х + х=1;^^0, (6)
а уравнение (6) можно записать следующим образома
_ 1 + ,7.
"+1 {
Исходя из начальных условий х=х=0, вполне достаточным при¬
ближением для небольших значений / можно считать выражение
х = | хИИ^,Р. (8)
Таким образом,
х^Д^)2. (9)
Вычисления х2, х3, можно произвести, используя уравне¬
ние (7).
Взяв величину промежутка времени Д/=’/2, т. е. приблизи¬
тельно 15 интервалов для. каждого периода колебания системы,
показанной на рис. 212 и описываемой уравнением (7), получим
1 + 7хп — Зх_ ।
^41= (Ю)
Соответствующие значения даются в таблице 1, в которой также
указаны ошибки, появившиеся в результате приближенного харак¬
тера вычисления. Рассматривая большие интервалы, можно
518
ГЛАВА 16
видеть, что численные расчеты на основании уравнения (10) дают
хорошее совпадение с точными решениями.
Вычисленные положения массы
Таблица 1
Время
Вычисленное положение
Точное значение •
Ошибка
0
х0 0,С00
0,000
0,000
0,5
Х1 0,250
0,104
—0,146
1,0
х2 0,550
0,340
—0,210
1,5
х, 0,820
0,611
—0,209
2,0
х4 1,018
0,850
—0,168
2,5
х6 1,133
1,024
-0,109
3,0
хс 1,175
1,124
—0,051
3,5
х7 1,165
1,162
—0,003
4,0
х8 1,126
1,153
0,027
4,5
х9 1,077
1,118
0,041
5,0
Хю 1,032
1,075
0,042
5,5
Хп 0,999
1,034
0,035
6,0
х12 0,979
1,002
0,023
* По данным точных расчетов.
Несмотря на то что этот процесс имеет в своей основе диффе¬
ренциальное уравнение, он складывается из умножения, сложе¬
ния, деления и накопления или запоминания последних значений.
Эти действия могут быть выполнены значительно быстрее при на¬
личии цифровой вычислительной машины. Обычным методом на¬
копления данных является запись на перфокарты, магнитную
ленту и магнитные барабаны.
Рис. 214. Типичная электронная цифровая вычислительная машина
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ ПОЛЕТА
519
В сущности, большие цифровые вычислительные лаборатории,
например такие, где используются машины фирмы ТВМ, представ¬
ляют собой не что иное, как увеличенные и расширенные варианты
настольных счетных машин. Типичная электронная вычислитель¬
ная машина, используемая при исследованиях систем управляемых
снарядов, показана на рис. 214.
16—2.2. Вычисления в непрерывной форме
В главе 14 описаны элементы, или составные части, используе¬
мые в моделирующих машинах. Вычислительные устройства и
схемы непрерывного действия, применяемые в системах наведения
и управления снарядов, во многих отношениях сходны с теми, ко¬
торые используются в обычных вычислительных лабораториях.
Элементами, или узлами, вычислительных машин непрерывного дей¬
ствия могут быть электронные схемы, которые обеспечивают вы¬
полнение следующих математических операций: сложение, вычи¬
тание, умножение, деление, инте¬
грирование, дифференцирование,
моделирование функций, логиче¬
ский выбор.
Моделирование функций вклю¬
чает разложение в тригонометри¬
ческие ряды и использование раз¬
личных сочетаний, что особенно
важно при расчетах траекторий.
Логический выбор является операцией, в которой сравнива¬
ются две величины, и на основе этого сравнения делается выбор.
Такого рода операция пригодна для моделирования специальных
функций, а также при записи траёкторных решений.
Чтобы уяснить принципы работы моделирующей машины, ис¬
пользуемой для лабораторных вычислений, возвратимся к при¬
меру, представленному на рис. 212. Изменив порядок членов в
уравнении (1), получим
х = /(1) ^-х ^т-х. (11)
Предположим, что мы имеем электронные приборы или элементы,
которые выполняют указанные на рис. 215 математические опера¬
ции. Входными и выходными сигналами этих устройств являются
непрерывно изменяющиеся электрические напряжения.
Очевидно, мы можем начать со второй производной х и полу¬
чить значения хи —Дх, как показано на рис. 216. Анало-
м м г
гичным образом можно получить все величины, необходимые для
Рис. 215. Основные функциональные
элементы математического модели¬
рования непрерывного вида
520
ГЛАВА 16
решения уравнения (11). Схема, показанная на рис. 216, и яв¬
ляется моделью, соответствующей уравнению (1). Если на эту схе¬
му подать соответствующий входной сигнал / (/), на выходе схемы,
получится величина х. Например, если приложенная сила
(рис. 212) является ступенчатой
функцией (скачком), то соответ¬
Рис. 216. Промежуточный этап
в решении уравнения (1)
Рис. 217. Блок-схема решения урав¬
нения (1) на моделирующем устрой¬
стве
ственно этому сигнал /(/) на рис. 217 представлял бы собой
также ступенчатое напряжение. Соответствующее записывающее
устройство, установленное на выходе второго интегратора, отме¬
тило бы в этом случае отклик системы,
показанный на рис. 218. (Предполагается,
что система первоначально находилась в
покое.)
Сочетание элементов моделирующих
устройств вместе с соответствующими сред¬
ствами соединения их друг с другом со¬
ставляет основное оборудование вычисли¬
тельной лаборатории, в которой приме¬
няются машины непрерывного действия.
При работе с управляемыми снарядами
наиболее часто используются вычислитель¬
ные машины с применением электронных
усилителей, охваченных обратной связью. Эти машины имеют
большую скорость и высокую точность работы. Такого рода вы¬
числительные устройства, используемые в торговых предприятиях,
носят названия «Рэак», «Тайфун», «Геда». Общий вид типичной
вычислительной лаборатории, в которой применяются машины
непрерывного действия, представлен на рис. 219.
Сейчас вполне уместно сравнить дискретные и непрерывные ме¬
тоды вычисления. Одно различие сразу же бросается в глаза. Дис¬
кретный метод, в принципе, может дать неограниченную точ¬
ность. Если брать все большее и большее число значащих цифр и
одновременно промежутки времени делать все короче и короче
(т. е. уменьшать значения Д/ в приведенном выше примере), то
Рис. 218. Переходная
характеристика системы,
показанной на рис. 212
(реакция на внезапно
приложенную постоян¬
ную силу)
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ ПОЛЕТА
521
можно получить большую точность. Конечно, здесь имеются чисто
практические ограничения, и в конце концов сама начальная ма¬
тематическая формулировка является лишь приближенной. Точ¬
ность математического моделирования непрерывного вида прямо
связана с ограниченной точностью отдельных компонентов, ис¬
пользуемых в системе. Далее, точность дискретного вычисления
можно в принципе проверить обычными методами, тогда как ре¬
альная точность вычислительного устройства непрерывного дейст¬
вия редко может быть достоверно известна и часто основывается на
Рис. 219. Типичная вычислительная лаборатория с машиной непрерывного
действия
догадках. По этой причине при математическом моделировании не¬
прерывного вида проверка решений является часто весьма жела¬
тельной, но такую проверку можно осуществить только после по¬
лучения решения численными методами.
Основными преимуществами математического моделирования
непрерывного вида являются высокая скорость решения и простота
программирования, т. е. настройки, вычислительного устройства
(включая сюда и изменения параметров). Взаимные связи различ¬
ных элементов вычислительного устройства непрерывного дейст¬
вия очень напоминают по форме блок-схему системы, которая уже
знакома инженерам.
Имеются примеры исследования, которые открывают интерес¬
ные возможности в сочетании непрерывного и дискретного мето¬
дов. Например, при расчетах траектории управляемого снаряда
дальнего действия класса «земля — земля» относительно быстрые
колебания снаряда могут быть лучше изучены с помощью матема¬
тического моделирования непрерывного вида, а расчет расстояния
может быть выполнен с помощью вычислительных устройств дис¬
кретного действия, что обеспечивает большую точность вычисле¬
ний. Такие схемы нуждаются в устройствах преобразования непре¬
рывных сигналов в дискретные и наоборот.
522
ГЛАВА 16
16—3. АНАЛИЗ ТРАЕКТОРИИ
Рис. 220. Основные элементы представле¬
ния проблемы исследования траектории
До этих пор мы рассматривали систему, которую можно ис¬
пользовать для решения проблем исследования траектории, не
касаясь сущности самих проблем. Хотя уравнения, касающиеся
проблем исследования траектории, зависят от конкретного вида
снаряда и от тактических условий его применения, тем не менее
вполне можно сделать несколько общих выводов.
На рис. 220 схематически представлена задача управления
снарядом. Блок, отмеченный надписью «Наведение и управление
снарядом», учитывает соотношения, существующие между мгно¬
венной кинематической ситуацией и командами наведения, пода¬
ваемыми на снаряд, а так¬
же реакцию снаряда на
команды наведения. Этот
блок может включать так¬
же и командную линию
связи, если рассматривае¬
мый снаряд управляется по
радио. Это устройство учи¬
тывает также аэродинамику
снаряда.
Движение снаряда и це¬
ли учитывается в блоке,
обозначенном словом «кине¬
матика». Здесь вырабатывается сигнал ошибки по дальности, т. е.
сигнал, пропорциональный расстоянию, на которое снаряд откло¬
нился от некоторой контрольной точки в районе цели.
Блок с надписью «Преобразование координат» введен допол¬
нительно, в связи с тем что система координат, являясь наиболее
удобной при описании движения снаряда (обычно с шестью сте¬
пенями свободы), может оказаться не совсем удобной для пред¬
ставления «кинематики». Поэтому возникает необходимость пре¬
образования координат. Некоторое внимание должно быть также
уделено выбору начала системы кинематических координат. Если
система земных координат обычно лучше всего подходит для
расчета траекторий снарядов класса «земля — земля», то для сна¬
рядов класса «воздух — воздух» подвижная система координат
может оказаться лучше. Для каждого блока схемы, изображенной
на рис. 220, будет иметься несколько дифференциальных уравне¬
ний, относящихся к одному времени. Их количество и сложность
определяются конкретной системой снаряда. Далее, характер ра¬
боты системы управления снаряда и соответствующая ему траек¬
тория будут определять степень приближения и возможных упро¬
щений, которые желательны с точки зрения экономии вычисли¬
тельной аппаратуры. Допустимая степень упрощения может быть
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ ПОЛЕТА
523
определена путем расчета траектории с принятыми упрощениями
и без них.
Для некоторых типов снарядов задачу траектории можно ли¬
неаризовать при сохранении значительной степени точности.
В этом случае рассматриваемые уравнения будут линейными, хотя
некоторые параметры и будут зависеть от времени. Важность при¬
ведения уравнений к линейному виду вытекает из известного свой¬
ства принципа суперпозиции, согласно которому выходной сигнал
линейной системы равен сумме составляющих, вызванных воздей¬
ствием отдельных сигналов на входе. Таким образом, ошибка по
дальности, появившаяся вследствие маневра цели, может быть
вычислена и сложена с ошибкой по дальности, обусловленной
шумом.
Несмотря на то что вполне можно произвести запись несколь¬
ких переменных величин на имитаторе во время вычислений тра¬
ектории и во многих случаях так и делается, тем не менее основ¬
ное внимание обычно обращают только на ошибку по дальности.
Эта величина в конечном счете является критерием, по которому
судят о характеристиках системы управления снарядом. Для фик¬
сирования и индикации этой величины разработано большое число
типов специальной аппаратуры.
16—4. ФИЗИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Физическое моделирование иногда называют «философией не¬
вежества», ибо к этому методу прибегают тогда, когда невоз¬
можно или неудобно описать математически поведение некоторой
части сложной системы. При физическом моделировании стре¬
мятся воспроизвести в лаборатории важные характеристики окру¬
жающей среды, в которой обычно работает рассматриваемая
часть системы. Для такого метода имеются, конечно, значитель¬
ные ограничения. Например, если в действительности акселеро¬
метр подвергается воздействию продольного ускорения в опреде¬
ленном направлении, то в лаборатории такие условия создать
трудно.
В качестве примера применения физического моделирования
рассмотрим гироскоп, предназначенный для управления креном
снаряда. Предположим, что он реагирует только на крен вокруг
заданной оси, а его выходные характеристики мало известны.
Установив его на вращающийся стол с сервоуправлением, как это
показано на рис. 221, мы можем изменять величину крена сна¬
ряда. Выход гироскопа подключается к вычислительной машине,
которая теперь имитирует всю систему (включая корпус снаряда,
аппаратуру наведения и кинематическую часть), кроме гироскопа.
Вычислительная машина управляет вращающимся сТолом с по¬
524
ГЛАВА !6
Рис. 221. Пример физического
моделирования
мощью соответствующих сигналов. Затем может быть сымитиро¬
ван весь процесс полета снаряда. При этом положение вращаю¬
щегося стола определяет величину крена гироскопа, которая
равна реальной величине крена снаряда при полете по заданной
траектории. Таким образом, гироскоп является в известном
смысле своей собственной вычислительной машиной.
Существуют более точные устройства, в которых кроме оси
крена имеется до четырех дополнительных карданных подвесов.
Такие «летноиспытательные» столы обеспечивают для гироскопов
и других компонентов системы наведения три степени свободы
вращения. Вполне возможно, что по
мере развития техники управляе¬
мых снарядов такая установка бу¬
дет находить все меньшее приме¬
нение.
Поскольку в процессе физиче¬
ского моделирования участвуют ре¬
альные узлы и блоки снаряда, ис¬
пользуемая вычислительная аппа¬
ратура (обычно аналогового типа)
должна обязательно работать в
истинном масштабе времени. Это
значит, что одна секунда времени вычислительной машины дол¬
жна соответствовать одной секунде полетного времени. При мате¬
матическом же моделировании масштаб времени выбирается про¬
извольно. Математическое моделирование траектории может про¬
исходить в течение нескольких минут, тогда как действительный
полет длится всего несколько секунд. Поэтому вычислительная
аппаратура, используемая для физического моделирования, дол¬
жна удовлетворять более жестким условиям в отношении скоро¬
сти вычисления, чем аналогичная аппаратура, применяемая толь-
ко'для математического моделирования.
Другой интересный пример физического моделирования возни¬
кает в связи с исследованием систем, в которых человек играет
активную роль в процессе наведения. Например, можно себе пред¬
ставить управляемый снаряд, который передает на наземную стан¬
цию наведения телевизионное изображение того пространства,
куда снаряд направляется. При этом оператор наземной станции
может наблюдать телевизионное изображение и с помощью со¬
ответствующих устройств передавать команды управления на
снаряд.
На рис. 222 показана моделирующая установка для исследова¬
ния работы такой системы. Оператор установки в известном
смысле равноценен гироскопу, показанному на рис. 221. Он
является звеном, работу которого трудно описать математически.
Вычислительное устройство, представленное на рис. 221, имити¬
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ ПОЛЕТА
525
Рис. 222. Физическое моделирова¬
ние с участием человека как эле¬
мента сйстемы
рует снаряд, его кинематику и все другие существенные факторы,
которые связаны с этим испытанием. Оно воспроизводит всю си¬
стему, начиная от управления, осуществляемого оператором, и
кончая индикатором.
Эффективность описанной
здесь системы, управления сна¬
рядом будет, вне всякого сомне¬
ния, в значительной степени за¬
висеть от качества работы опера¬
тора. Кроме того, при любой дан¬
ной тактической обстановке нель¬
зя ожидать, чтобы оператор мог
в точности повторять свои дей¬
ствия в последующих испытани¬
ях. Таким образом, чтобы доста¬
точно эффективно оценить работу системы, данный оператор дол¬
жен совершить большое число «полетов». Возможно, необходимо
будет проделать ту же работу, используя несколько различных
операторов. Приведенный выше пример наглядно показывает эко¬
номичность моделирования по сравнению с действительными по¬
летными испытаниями.
16—5. УЧЕТ СЛУЧАЙНЫХ ЯВЛЕНИЙ
Ранее было указано, что радиолокационные шумы являются
существенным фактором во многих системах управления снаря¬
дами. Другими случайными величинами, которые также необходимо
учитывать, являются турбулентности атмосферы, маневры, совер¬
шаемые целью, некоторые отклонения, допущенные при изготов¬
лении снаряда, а также шумы цепей. Можно создать электриче¬
ские напряжения, соответствующие большинству этих величин,
если известны их существенные статистические свойства.
Для работы совместно с имитаторами сконструированы элек¬
тронные устройства, которые вырабатывают соответствующие
напряжения шумов. Такие генераторы шумов в сочетании с дру¬
гими устройствами могут имитировать случайные маневры цели,
случайные значения параметров системы (как, например, усиле¬
ние сервопривода, используемого в системе управления) и разли¬
чия в тактической обстановке. Можно получить произвольное рас¬
пределение вероятности случайных величин. Часть величин, на¬
пример шумы радиолокатора, могут изменяться в течение времени
полета снаряда. Другие, как, например, усиление сервопривода,
могут оставаться неизменными во время полета данного экземп¬
ляра снаряда, но не быть одинаковыми для различных экзем¬
пляров.
526
ГЛАВА 16
При учете статистических величин при моделировании нужно
испытать в «полете» большое число снарядов. Для каждой такти¬
ческой обстановки и совокупности параметров снаряда нужно вы¬
полнить большое число решений, чтобы учесть изменения стати¬
стических величин от полета к полету.
Для определения степени точности, которую можно ожидать
от серии испытаний при введении случайных величин с помощью
имитатора, могут быть использованы обычные методы статистики.
Рис. 223. График для определения пределов теоретической вероятно¬
сти попадания, соответствующей наблюдаемым статистическим изме¬
рениям. Кривые даны для 95-процентного доверительного уровня при
количестве опытов, равном 100
Или, наоборот, можно определить количество решений, необходи¬
мое для получения заданной точности. Например, пусть крите¬
рием, определяющим работу системы, будет служить просто ве¬
роятность попадания или непопадания интересующего нас снаряда
в «цель» (которая может представлять собой некоторый район во¬
круг действительной цели). Вероятность попадания в цель
является, таким образом, существенным итогом исследования с по¬
мощью моделирования. Этот итог получается путем подсчета ко¬
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ ПОЛЕТА
527
личества испытаний, которые подтвердили попадания в цель. На
рис. 223 показана степень точности, которую можно ожидать при
100 независимых решениях одной и той же траекторной задачи,
полученных с помощью имитатора. Таким образом, для данной
вероятности попадания, равной 0,4 (т. е. 40 решений являются по¬
паданиями), теоретическое значение вероятности лежит в пре¬
делах от 0,3 до 0,5. Под теоретическим значением вероятности по¬
нимается вероятность, которую можно было бы ожидать при бес¬
конечно большом числе имитированных полетов. Если степень
достоверности, связанная с измерениями такого рода, недоста¬
точна, то единственной возможностью является имитация боль¬
шого числа полетов.
Рис. 224. Диаграмма, иллюстрирующая пример модели¬
рования траектории управляемого снаряда
Так как наличие статистически распределенных величин тре¬
бует получения очень большого числа решений, то скорость моде¬
лирования становится существенной величиной. Анализируя со¬
временное состояние техники математического моделирования, не¬
прерывного и дискретного, можно сделать вывод, что моделиро¬
вание непрерывного типа имеет явное преимущество для такого
рода исследований.
Чтобы лучше уяснить сделанные выводы, покажем пример ре¬
ального моделирования управляемого снаряда. На рис. 224 схема¬
тически изображен снаряд класса «воздух — земля» в реальной
среде, в которой проходит его траектория. Положим, что пуск
снаряда произведен из определенной точки пространства и далее
снаряд наводится на наземную цель с помощью пассивной ин¬
фракрасной системы самонаведения. .Для простоты будем считать,
что наведение происходит в двух измерениях (на.плоскости).
От цели к точке пуска, находящейся под углом оо над гори¬
зонтом, проведем исходную линию. Обозначим расстояния от
528
ГЛАВА 16
этой линии до снаряда буквой у, скорость снаряда — буквой V,
а угол между направлением снаряда и исходной линией — бук¬
вой у. Угол атаки обозначим через а, угол линии визирования —
через о, а расстояние, измеряемое по линии визирования, — че¬
рез Р.
Будем считать, что головка самонаведения, установленная на
снаряде, направлена по его продольной оси. При линейной работе
в головке самонаведения вырабатывается выходной сигнал, про¬
порциональный углу между осью снаряда и линией визирования
(т. е. а + у + а).
Вследствие наличия шума головка самонаведения не может
точно определить направление линии визирования. Шум учиты¬
вается эквивалентным углом т), который может изменяться с рас¬
стоянием.
Предположим, что снаряд управляется с помощью рулей, угло¬
вое отклонение которых от нейтрального положения равно 8.
Угловое положение рулей определяется системой управления.
Входным сигналом этой системы является выходной сигнал го¬
ловки самонаведения. Система управления имеет свойственное
ей запаздывание ц. Таким образом,
Х1а + 6 = кх (а + 7) + а + у), (12)
где — параметр усиления.
Пренебрегая изменениями плотности воздуха и полагая, что
скорость снаряда примерно постоянна, а угол атаки мал, аэроди¬
намическое уравнение Движения снаряда можно записать следую¬
щим образом:
“+^“+^“=''ад (1г'
где К2— масштабный коэффициент.
Используя те же самые допущения при расчете аэродинамиче¬
ской подъемной силы снаряда, получим
7 = ^’ <14)
где т2 можно рассматривать как постоянную величину.
Полагая, что углы у и 3 малы, получим
у = Ут — ^созоо, (15)
где § — ускорение силы' тяжести, а
о = (16)
Из предположения о постоянстве скорости снаряда получим
Р = -У. (17)
АНАЛИЗ ТРАЕКТОРИИ И МОДЕЛИРОВАНИЕ ПОЛЕТА
529
Блок-схема моделирующего устройства, обеспечивающего ре¬
шение уравнений (12) — (17), представлена на рис. 225.
Если управляемый снаряд запускается в направлении, отличном
от линии визирования, то говорят, что имеет место «ошибка запу¬
ска». Эта ошибка имитируется посредством установления соот¬
ветствующего начального значения величины у. Для подобной
Рис. 225, Блок-схема математического моделирования задачи самонаводлщегося
снаряда на вычислительной машине непрерывного действия
имитации подаются три входных сигнала: ошибка запуска, сила
тяжести и шум. «Ошибка по дальности» определяется путем из¬
мерения величины у в момент /? = 0.
Как уже указывалось, приведенный пример иллюстрирует пол¬
ностью линейную систему. Для исследования влияния шумов на
такую систему нет необходимости проводить серию «полетов».
Для этого достаточно провести лишь одно испытание моделиро¬
ванием, чтобы получить такую величину, как ошибка по дально¬
сти, путем применения метода сопряженных систем (ад]о1п( апа-
1уз1з). Действительно, за время одного испытания можно начер¬
тить результаты для всех значений начальной дальности запуска,
34—405
530
ГЛАВА 16
включая влияние шумов (которые могут изменяться с расстоя¬
нием), ошибки запуска, силы тяжести и т. д.
Нелинейность системы (например ограниченность движения
рулей) требует замены блока, обозначенного хК\ на рис. 225, и
мешает строгому применению линеаризованного подхода к реше¬
нию задачи. В этом случае более предпочтительно провести серию
моделированных «полетов» для каждой отдельной установки па¬
раметров (т. е. Кь К2, Т1, Т2, Р> шо и т. д.), считая, что шумы и
ошибка запуска меняются статистически от опыта к опыту.
Этот метод моделирования можно использовать для проверки
статистических изменений величин Кь К2 и т. д., появившихся, на¬
пример, вследствие случайных отклонений, допущенных при про¬
изводстве снарядов и при регулировке перед полетом.
Для таких случаев вполне может подойти интерпретация ре¬
зультатов, которая была дана в примере с рис. 223.
Описанные здесь методы анализа траектории, использующие
математическое или физическое моделирование или же сочета¬
ние обоих этих видов, играют большую роль в тех случаях, когда
возможные ограничения и приближения анализа четко уяснены
и учитываются при расшифровке полученных результатов. Чисто
математическое моделирование имеет то преимущество, что вне
зависимости от величины предполагаемых параметров они могут
быть введены в задачу при относительно высокой точности управ¬
ления. При этом имеется возможность легко и быстро варьиро¬
вать этими параметрами по желанию, с тем чтобы наблюдать за
эффектами, которые возникают при таких вариациях. Физиче¬
ское моделирование, как уже указывалось, может потребоваться
там, где часть элементов системы не может быть описана матема¬
тически точно. В любом случае анализ траектории всегда является
некоторым приближением к реальному положению вещей, по¬
скольку во многих технических проблемах наиболее вероятными
источниками основной ошибки будут скорее неожиданные явле¬
ния, которые появляются во время реального полета, чем извест¬
ные принятые приближения.
ГЛАВА 17
КОМПОНОВКА СИСТЕМЫ
УПРАВЛЯЕМОГО СНАРЯДА
Дж. С. Флетчер 1
17—1. ВВЕДЕНИЕ
В предыдущих главах были рассмотрены конкретные области
техники, с которыми приходится иметь дело на отдельных эта¬
пах разработки и проектирования управляемых снарядов. Теперь
необходимо связать все полученные сведения в одно целое, с тем
чтобы обеспечить наиболее эффективное решение всей пробле¬
мы — проблемы проектирования системы в целом.
Система в этом смысле есть совокупность компонентов, кото¬
рые должны быть спроектированы так, чтобы они могли работать
вместе как одно целое. Термин система был первоначально приме¬
нен в области связи и обозначал совокупность различных техни¬
ческих средств связи (телефон, телеграф, радио и т. д.), которые
использовались для передачи сообщений из одного места в другое.
Во время второй мировой войны этот термин широко использо¬
вался для обозначения взаимосвязи между отдельными видами
специальной боевой техники, как, например, система управления
артиллерийским огнем, радиолокационная система раннего пре¬
дупреждения, система обнаружения и слежения, система звуко¬
вой локации и т. д. Выражение система оружия используется для
обозначения взаимосвязанной совокупности отдельных боевых
средств. Этот термин применяется в отношении системы пере¬
хвата бомбардировщиков, в которую входят перехватчик, борто¬
вая система управления огнем, вооружение, силовая установка,
система навигации, а также линия связи «земля — воздух» и, воз¬
можно, автоматическая система посадки. Система перехвата сама
является лишь частью еще большей системы, называемой систе¬
мой противовоздушной обороны, которая включает систему ран¬
него предупреждения, противосамолетное вооружение, перехват¬
чики, систему наземного управления перехватом и, кроме того,
линии связи, объединяющие все перечисленные системы в одно
целое.
1 Сотрудник фирмы «Спейс электронике корпорейшн».
532
ГЛАВА 17
Важнейшим принципом, который должен соблюдаться во всех
программах разработок, является принцип комплекса, который
означает, что различные части системы не могут разрабатываться
отдельно и объединяться вместе в единую систему только после их
окончательной разработки; они должны с самого начала рассмат¬
риваться как части единой программы разработки. При раздель¬
ной разработке некоторые части системы могут оказаться совер¬
шенно непригодными для работы в общей системе. Наиболее убе¬
дительно такое несоответствие можно показать, предположив, что
система управления огнем создана настолько громоздкой, что
она не входит ни в один из существующих перехватчиков или,
наоборот, перехватчик сделан столь малых размеров, что в нем не
помещается необходимая электронная аппаратура и система
управления огнем. Наиболее типичным примером является проб¬
лема конструирования автопилота для конкретного самолета. Ка¬
залось бы, что можно приобрести готовый автопилот, пригодный
для большинства различных типов самолетов. Однако очевидно,
что отвечающая всем требованиям конструкция должна совме¬
щать в себе высокие значения параметров стабильности и управ¬
ления, свойственные данному самолету, и, кроме того, должна со¬
ответствовать тем задачам, для выполнения которых данный са¬
молет предназначен.
Управляемый снаряд фактически является системой оружия.
Он является совокупностью различных частей, которые движутся
вместе с полезным грузом по какой-то пространственной траекто¬
рии, которая, так же как и место назначения, обычно определяется
вне снаряда. Полезный груз заключен в боеголовке, а местом на¬
значения является какая-то цель, которая должна быть уничто¬
жена. Проблема разработки и проектирования управляемого сна¬
ряда затрудняется тем, что она охватывает слишком много раз¬
личных областей техники. В этом можно убедиться, обратившись
к предыдущим главам. Обычно разработка всей системы управ¬
ляемого снаряда производится большим коллективом ученых и
инженеров, большинство которых имеют соответствующую под¬
готовку в специальных областях науки и техники и знакомы с
технологией разработки всего комплекса управляемого снаряда.
Часть этого коллектива может быть выделена в особую группу,
ведущую проектирование всего комплекса; в нее входят специали¬
сты, имеющие широкую техническую подготовку (аналитики ком¬
плекса, инженеры комплекса, проектировщики комплекса, коор¬
динаторы комплекса и т. д.). Они работают в тесном сотрудни¬
честве с разработчиками отдельных узлов, имеющими более узкую
специализацию.
Важным условием разработки управляемого снаряда является
необходимость компромиссного согласования характеристик от¬
дельных узлов вследствие возможного влияния их друг на друга.
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
533
Трудность здесь состоит в том, что такая работа требует широ¬
кого технического кругозора, для того чтобы иметь возможность
принимать наиболее приемлемые компромиссные решения. Целью
данной главы является изложить некоторые соображения, связан¬
ные с разработкой комплекса управляемого снаряда. Эти сооб¬
ражения будут рассматриваться в соответствии с отдельными эта¬
пами разработки управляемого снаряда:
I этап: Определение задачи комплекса.
II этап: Выбор составных частей (компонентов).
III этап: Выбор оптимальных характеристик (оптимизация
системы).
IV этап: Оформление технической документации (чертежи и
технические условия).
V этап: Производство и испытание.
17—2. ОПРЕДЕЛЕНИЕ ЗАДАЧИ СИСТЕМЫ
Чтобы определить общую задачу системы, надо ответить на
вопрос, какую задачу должен решить снаряд. Вначале нужно
установить тип цели, которую необходимо поразить. Надо также
примерно оценить стоимость создания такой системы, а также не¬
обходимые для этого время и затраты труда. Эту стоимость
можно сравнить с точностью снаряда: чем выше точность, тем
больше стоимость управляемого снаряда. Вся изобретательность
инженера должна быть направлена на то, чтобы сделать отноше¬
ние точности к стоимости как можно большим. Существенным
фактором является характер предполагаемой цели, ибо отличи¬
тельные признаки цели, которые выделяют ее на общем фоне
окружающей среды, в которой она находится, в значительной сте¬
пени определяют те типы систем наведения, применение которых
в данном случае возможно. Например, если цель — город или
какая-то географическая местность, то она может быть указана
на карте, и, следовательно, наиболее вероятной системой наведе¬
ния явится самонаведение на заданную широту и долготу. Если
город имеет другие отличительные признаки (повышенное выде¬
ление тепла или способность отражать радиолокационные им¬
пульсы, или же, как у города Лос-Анжелоса, способность выде¬
лять много дыма), то они также могут быть использованы в само-
наводящихся системах в качестве источника информации. Если
же целью является военный корабль или самолет, то свойствами,
которые можно использовать в качестве источника информации,
будут радиолокационное или оптическое отражение (солнечных
лучей или луча прожектора), тепловое излучение или даже звуки,
которые они создают. Шум, создаваемый кораблем, особенно
часто используется для самонаведения торпед.
534
ГЛАВА 17
Другая часть задачи состоит в том, чтобы подобрать соответ¬
ствующее средство транспортирования или платформу, с которой
будет осуществляться пуск снаряда. Во многих случаях тип пус¬
ковой установки может быть определен, исходя из общей стои¬
мости перехвата рассматриваемой цели. Например, при бомбар¬
дировке Англии одну и ту же задачу немцы могли выполнить,
используя большие управляемые снаряды, запускаемые с конти¬
нента, или небольшие бомбы (управляемые или любые другие),
сбрасываемые с бомбардировщиков. В этом чисто практическом
примере политика, так же как и экономика, вероятно, играли не¬
маловажную роль при принятии решения использовать управляе¬
мые снаряды, запускаемые с земли, а не малые снаряды, сбрасы¬
ваемые с самолета (применявшиеся управляемые снаряды были
разработаны в системе сухопутных, а нс военно-воздушных сил).
Характер цели и выбор пусковой установки определят, к ка¬
кому из 4-х классов снарядов будет относиться вновь разраба¬
тываемый: 1) «земля — воздух», 2) «земля — земля», 3) «воз¬
дух — воздух», 4) «воздух — земля». Под «землей» подразуме¬
вается наземная или корабельная пусковая установка. Запуск с
воздуха обычно осуществляется с самолета. Решение относительно
цели и пусковой установки определяет требуемый полезный
груз (вес боеголовки), дальность полета и общие размеры управ¬
ляемого снаряда. Оно также накладывает ограничения на выбор
компонентов системы управляемого снаряда. Например, если
целью, как в случае Фау-2, является город, то требуется боего¬
ловка исключительно большой мощности, чтобы вообще был
смысл разрабатывать такой снаряд. Правда, в настоящее время
возможно использовать атомную или водородную боеголовку, но
это связано со стоимостью и наличием таких головок, а также
с условиями безопасности на пусковой платформе, когда на ней
находится снаряд с таким зарядом. Применение больших боеголо¬
вок с обычным взрывчатым веществом или с атомным зарядом,
безусловно, потребует управляемых снарядов больших размеров,
что в свою очередь сделает запуск возможным только с земли или,
по крайней мере, с очень тяжелых бомбардировщиков. Конечно,
когда атомная боеголовка станет меньшей по размерам и более
легкой по весу или когда управляемые снаряды станут более
эффективными в смысле большего отношения веса полезной на¬
грузки (вес боеголовки) к весу остальной части снаряда, такой
вывод потеряет свой смысл.
Большая часть вопроса об определении задачи системы будет
решена, как только будут установлены критерии для анализа
эффективности работы управляемого снаряда. Эти критерии
имеют вид рабочих характеристик, т. е. основных параметров, ко¬
торые характеризуют работу системы. Выбор этих параметров си¬
стемы и в конечном счете определение ее задачи являются частью
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
535
очень важной области исследования, называемого исследованием
операций, которая доказала свою ценность во время последней
мировой войны. Исследование операций фактически является все¬
объемлющим анализом системы. Применяемые методы исследо¬
ваний подобны между собой и дают одинаковые конечные ре¬
зультаты. Существенным отличием является то, что исследование
операций, по крайней мере на этапе определения задачи системы,
требует лишь весьма грубых приближений к значениям различных
параметров, т. е. увеличение их в 2 или 3 раза не будет иметь
существенного значения, в то время как параметры системы ору¬
жия обычно должны быть известны с точностью до 20 процентов.
Грубый анализ, применяемый на этапе определения задачи си¬
стемы, заменяется более строгим анализом на этапе выбора опти¬
мальных характеристик системы.
17—3. ВЫБОР КОМПОНЕНТОВ СИСТЕМЫ
Следующим этапом разработки является определение компо¬
нентов, или основных подсистем, которые составляют систему
оружия. Разделение на подсистемы важно потому, что часто эти
компоненты могут быть описаны вне связи с системой, частью ко¬
торой они являются. Разделение на подсистемы также существенно
и потому, что оно позволяет всю систему рассматривать как сово¬
купность относительно небольшого числа блоков, каждый из кото¬
рых в свою очередь содержит большое число меньших узлов.
Обычно системы управляемого снаряда разделяются на следую¬
щие подсистемы:
1) силовая установка (система двигателя);
2) аэродинамическая компоновка;
3) бортовая система управления;
4) система наведения (включая все вычислительные устрой¬
ства) .
Кроме того, вероятно, нужно также рассматривать как отдель¬
ную подсистему вспомогательное оборудование, которое обеспе¬
чивает правильный запуск управляемого снаряда. В его состав
надо включить пусковую установку или пусковое устройство лю¬
бого носителя управляемых снарядов и фактически все то, что от¬
носится к технике обслуживания, начиная с момента получения
снаряда с завода, а также к его проверке и запуску в полевых
условиях. Очень часто этой частью задачи пренебрегают, хотя
она может оказаться серьезным ограничивающим фактором в си¬
стеме управляемого снаряда. Здесь, однако, мы ограничимся рас¬
смотрением четырех подсистем, которые были перечислены выше.
Выбор наилучшего варианта из всевозможных сочетаний этих
четырех подсистем — очень трудная задача. Решение этой задачи
536
ГЛАВА 1?
граничит с изобретением. Обычно изобретение принято рассматри¬
вать как результат вдохновения или интуиции. Предполагается, что
идея новой системы рождается внезапно, а в законченном виде —
после сосредоточенного размышления над данным вопросом. Разу¬
меется, во многих случаях это приводит к выдающемуся успеху,
и вполне возможно, что большинство новых открытий (в науке
или в других областях) появляются именно таким образом.
Однако при разработке системы, которая должна выполнить строго
определенную задачу, такой процесс мышления был бы в лучшем
случае ненадежным. Решения в последнем случае приходят в го¬
лову медленно и обычно не во всей полноте и цельности, а в виде
отдельных смутных проблесков. Одному человеку трудно охватить
все стороны задачи и сохранить их решения в достаточной ясности,
чтобы выразить это в виде законченной конструкции системы.
Однако если к решению задачи приступает большое число людей,
обладающих творческим мышлением, то вероятность нахождения
самого удачного решения задачи будет наибольшая, поэтому та¬
кой подход к решению задачи используется чаще, чем какой-либо
Другой.
В научной работе необходима система и организованность про¬
цесса мышления, особенно когда это касается изобретательства.
Звицки предложил систему мышления, которая ставит своей
целью «образное представление и анализ всех вновь возникающих
решений без предвзятости и безотносительно к обычно принятым
взглядам по данному вопросу». Можно надеяться, что благодаря
одновременному рассмотрению многих аспектов сложной пробле¬
мы, взятой в целом (вместо рассмотрения только одной ее сто¬
роны), кому-нибудь удастся открыть новые возможности для
решения задачи, которые могли бы остаться нераскрытыми при
неорганизованном процессе мышления. Звицки называл этот
процесс «морфологическим мышлением».
Эта мысль будет понятнее, если ее выразить следующим обра¬
зом: запишем (обычно в сложных задачах краткие заметки необ¬
ходимы) все возможные решения задачи без какой-либо предвзя¬
тости относительно результата исследования и с твердой уверен¬
ностью, что все решения могут быть реализованы. Затем упрощен¬
ным путем оценим достоинства каждого решения. Звицки предло¬
жил производить этот процесс в следующей последователь¬
ности:
1. Дать точную формулировку задачи, которая должна быть
решена. Это соответствует определению задачи системы, о чем
мы говорили выше.
2. Определить характеристические параметры, от которых за¬
висит решение (это должны быть конструктивные параметры, рас¬
смотренные ниже).
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
537
3. Для каждого параметра существует определенное число не¬
зависимых неизменных значений. Запишем их в виде матрицы;
Р\ > Р21 -Р?'
Р2> Р2> Р%*
Р'п’Рю Р^«-
Эта матрица называется морфологическим блоком; в каждой
строке окружается один элемент и соединяется в цепочку, которая
представляет одно из возможных решений.
4. Определить путем упрощенного анализа качественную цен¬
ность всех полученных решений.
5. Выбрать наиболее желательные решения и создать модели
для их испытания.
При поверхностном взгляде, учитывая большое число различ¬
ных решений, которые нужно проанализировать, процесс кажется
громоздким. Однако главная идея заключается в том, чтобы
записать все решения так, чтобы их можно было просмотреть все
вместе и ни одно решение не было пропущено. Даже если будет
проанализирована только небольшая часть всех возможных ком¬
бинаций, то и тогда будет сделан крупный шаг вперед хотя бы
потому, что все они были просто записаны; по крайней мере,
можно будет сказать, что рассмотрены все возможные варианты.
Во многих случаях можно очень быстро определить относитель¬
ную ценность некоторых параметров и тем самым уменьшить об¬
щее число возможных вариантов. В некоторых случаях для реше¬
ния сформулированной задачи системы можно использовать лишь
незначительное число вариантов. На этом этапе разработки си¬
стемы должно быть выполнено категорическое требование, чтобы
ни один, даже самый маловероятный, вариант не отбрасывался
поспешно, только из-за того, что он значительно отличается от
признанных современных тенденций. Такие понятия, как радио¬
локация, ядерное и термоядерное оружие, ракеты и реактивные
двигатели, перед войной, возможно, были полностью отвергнуты
как маловероятные, однако впоследствии, по всей вероятности,
война явилась толчком для их разработки в некоторых странах.
Чтобы сократить наши рассуждения, будем считать, что запи¬
сана полная морфология и наиболее перспективные решения уже
отобраны и являются как раз теми, которые упоминались.
538
ГЛАВА 17
17—4. СИЛОВАЯ УСТАНОВКА
Чтобы проанализировать возможные варианты силовой уста¬
новки, мы можем проиллюстрировать применение морфологиче¬
ского метода, пользуясь примером Звицки. Морфологический блок
для реактивных двигателей имет следующий вид:
[Рр р2] — содержащаяся внутри снаряда или получаемая
извне химически активная масса;
[р2, р2] — внутреннее или внешнее образование тяги (исполь¬
зования внутреннего или внешнего рабочего тела);
[р1, р|, р3] — внутреннее или внешнее или же нулевое форси¬
рование тяги;
[р}, Р2А — внутреннее или внешнее регулирование тяги;
[р|, р21—положительная или отрицательная (всасывание)
тяга;
[Рб> Р& Р1 Ре] “ спос°б преобразования химической энергии в ме¬
ханическую: термохимический, электрохимиче¬
ский, лучевой или прямой (непосредственный);
р', р2, р3 р|] — вакуум, воздух, вода, земля;
Рв' Рв> Рз> Ре — прямолинейное, вращательное или колебательное
движение или же отсутствие движения;
[Рэ> Рэ> Рэ —газообразное, жидкое или твердое топливо;
Гр}0, р20| — непрерывного действия или пульсирующий;
р1!!, р2/ — самовоспламеняющееся (гиперголическое) или
несамовоспламеняющееся топливо.
Подробный анализ большей части этих решений с изготовле¬
нием работающих моделей двигателей выполнен во время второй
мировой войны в Германии и союзниками как в Европе, так и
в США. Сегодня мы имеем следующие действующие типы реак¬
тивных двигателей:
1. Типичный прямоточный воздушно-реактивный двигатель
Г 1
„О
РмРи-
или
большинство рЗ
двигателей
Прямоточные воздушно-реактивные двигатели применяются
в том случае, когда необходима простота и высокая эффектив¬
ность, а требование гибкости в изменении скоростей (особенно
сверхзвуковых) не имеет существенного значения. Как показано
в главе 2, они имеют преимущество в определенной области ско¬
ростей и радиусов действия.
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
539
2. Типичный турбореактивный двигатель
р\рЖр1р1р7р1р1р\оРп ■
Турбореактивные двигатели (хотя на дозвуковых скоростях
они менее экономичны, чем турбовинтовые и поршневые двига¬
тели) целесообразно применять в тех случаях, когда требуются
большие изменения скоростей полета —от очень малых (при
взлете и посадке) до высоких сверхзвуковых скоростей. Они яв¬
ляются самыми сложными из всех (исключая некоторые жидко¬
стные ракетные двигатели) существующих двигателей, используе¬
мых для полета на сверхзвуковых скоростях.
3. Типичный пульсирующий воздушно-реактивный двигатель
Р^Мх-
Пульсирующие воздушно-реактивные двигатели были исполь¬
зованы в самолетах-снарядах Фау-1. Они являются наиболее про¬
стыми двигателями для низких дозвуковых скоростей полета. В со¬
временных управляемых снарядах они почти не используются.
4. Типичный жидкостный ракетный двигатель
р\р№р}р№(™™
Двигатели этого типа применяются там, где нужно получить
очень большую тягу при сравнительно небольшом весе двигателя.
Они незаменимы в тех случаях, когда управляемый снаряд дол¬
жен лететь за пределами земной атмосферы, как, например, бал¬
листические ракеты дальнего действия.
5. Типичный пороховой ракетный двигатель
Р^г^Р^РгР^п •
Пороховые ракетные двигатели по конструкции намного проще
жидкостных, но обычно имеют меньший удельный импульс и не¬
сколько труднее поддаются управлению.
Все указанные двигатели постоянно совершенствуются, и их
области применения все более расширяются. Интересным членом
морфологического блока реактивных двигателей является жидко¬
стный ракетный двигатель для работы в двух средах (вода — воз¬
дух)
Р\р№рУ>№ (или Р^Р^^п.
Этот двигатель можно использовать при запуске снарядов
из-под воды, скажем, с подводной лодки. Представляет также инте¬
рес гидрореактивный, способный заменить подводный винт, и двига¬
540
ГЛАВА 1?
тель террареактивный. Последний основан на том, что он должен
выжигать землю и отбрасывать продукты сгорания назад. Хотя
такие идеи способны увлечь воображение, их практическое приме¬
нение является делом далекого будущего.
17—5. АЭРОДИНАМИКА
Аэродинамика больших или сверхзвуковых скоростей является
сравнительно новой наукой. Поэтому нет ничего удивительного
в том, что в период появления управляемых снарядов большая
часть аэродинамических форм была дозвуковой, что упрощало
проблему конструирования снаряда. Скоро стало ясно, что ско¬
рость является существенным фактором в отношении уязвимости
любого типа авиационного оружия, будь то управляемый снаряд
или любой другой аппарат. В качестве примера возьмем снаряд
Фау-1. Верхний предел его скорости равнялся 576 км/час, поэтому
хотя около 2000 этих снарядов достигли своих целей в Англии,
в два раза большее число их было сбито. Снаряд Фау-2, имевший
на конечном участке своей траектории скорость до 2400 км]час, не
был сбит ни разу.
Проблема создания сверхзвуковых летательных аппаратов
была не только проблемой двигательной установки, способной
создавать большие скорости, но и проблемой получения соответ¬
ствующей аэродинамической конфигурации, которая имела бы
минимальное лобовое сопротивление при сохранении функций
управления. Лобовое сопротивление, или сила торможения, как
только, скорость переходит звуковой барьер, резко увеличивается
и продолжает возрастать при сверхзвуковых скоростях почти про¬
порционально квадрату скорости. Чтобы уменьшить это сопротив¬
ление, инженеры-аэродинамики желали бы использовать игло¬
образное тело с крыльями почти нулевой толщины. К сожалению,
такое тело должно нести на себе двигатель, систему наведения и
управления, которые обладают весом и соответствующим объемом.
Таким образом, управляемый снаряд, который хотели бы иметь
аэродинамики, был бы подобен стреле, тогда как инженеры по
электронике желали бы получить снаряд, имеющий сходство
с шаром или кубом. Это противоречие должно было разрешиться
в компромиссной конструкции.
Одним из основных вопросов, который требовалось решить на
раннем этапе развития управляемых снарядов, который и по сей
день остается важным, является вопрос о том, какова должна
быть степень аэродинамической устойчивости управляемого сна¬
ряда и какую степень устойчивости необходимо обеспечить искус¬
ственно за счет использования электронного оборудования, вхо¬
дящего в систему автопилота. Например, при дозвуковых скоро¬
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
541
стях короткопериодические колебания, возникающие в большин¬
стве самолетов при закрепленном руле, медленно, но более или
менее хорошо гасятся. Более того, поскольку колебания затухают
медленно, пилот легко может увеличить эффективность демпфиро¬
вания колебаний путем соответствующей манипуляции ручкой
управления. Однако, когда скорость самолета увеличивается, ча¬
стота колебаний возрастает, а кроме этого увеличивается склон¬
ность к неустойчивости, при которой даже опытные пилоты не
в состоянии добиться надлежащего управления. В случае если
найти аэродинамическую форму, исключающую такие колебания
или, по крайней мере, сводящую их до минимума, не представ¬
ляется возможным, необходимо использовать электромеханиче¬
ские устройства, способные усилить или полностью заменить дей¬
ствия пилота. Для этой цели используются акселерометры (изме¬
ряющие боковые ускорения), свободные гироскопы (измеряющие
положения корпуса самолета в пространстве), прецессионные ги¬
роскопы (измеряющие угловые перемещения корпуса) и угловые
акселерометры. Эти приборы используются отдельно или в раз¬
личных комбинациях. Зачастую, если расчеты аэродинамических
характеристик были произведены недостаточно точно, они не в со¬
стоянии обеспечить полной стабилизации летательного аппарата.
Большое число проблем, которые возникали в немецких сверхзву¬
ковых летательных аппаратах, были обусловлены неустойчи¬
востью. Надо заметить, что, чем больше число используемых до
полнительных приборов, тем больше ненадежность в работе; от¬
сюда вытекает необходимость компромисса между устойчивостью
и надежностью.
В противоположность самолету управляемый снаряд обладает
некоторыми компенсирующими свойствами. Поскольку управляе¬
мый снаряд обычно не должен совершать взлет и посадку, то ему
иногда можно придать более симметричную форму, т. е. поставить
несущие поверхности как в горизонтальной, так и в вертикальной
плоскостях. Это упрощает проблему управления, так как в этом
случае имеет место полная симметрия в направлениях снизу —
вверх и справа — налево. Кроме того, не нужно будет прибегать
к крену летательного аппарата, чтобы создать боковые силы, а это
фактически сводит задачу управления от трехмерной к двум иден¬
тичным двухмерным задачам управления. Трехмерная аэродина¬
мическая форма называется однокрылой, а двухмерная = кресто¬
образной.
17—6. СИСТЕМА УПРАВЛЕНИЯ
Система управления является «мускулами» конструкции. Ее
задача-—принять сигналы (обычно электрические) от системы на-
ведения и передать их на поверхности управления (рули), которые
542
ГЛАВА 17
в свою очередь с помощью аэродинамических сил изменяют на¬
правление траектории полета (в случае газовых рулей последнее
достигается изменением направления силы тяги). Механическое
управление поверхностями управления часто выполняется посред¬
ством пневматических или гидравлических рулевых приводов. Та¬
ким образом, бортовая система управления в принципе является
простейшей следящей системой. В систему управления посылается
сигнал, и система открывает вентиль, регулирующий поток воз¬
духа или жидкости, находящихся под высоким давлением. Жид¬
кость давит на поршень, который механически связан с поверх¬
ностью управления, и перемещает ее. Величина отклонения заме¬
ряется каким-нибудь измерительным прибором (датчиком), а за¬
тем сравнивается с входным сигналом. Когда требуемое отклоне¬
ние произошло, оба сигнала выравниваются и вентиль закры¬
вается. Сигнал обратной связи можно получить и не по отклонению
поверхности управления, а, например, по боковому ускорению кор¬
пуса, по угловой скорости корпуса и т. д. В последних случаях
полученный результат (выход) измеряется соответствующим элек¬
тромеханическим прибором и снова сравнивается с входным сиг¬
налом; затем выход увеличивается до тех пор, пока оба сигнала
не станут равными. В таких следящих системах встречаются все
типичные осложнения, связанные с проблемой устойчивости, о ко¬
торых говорилось в главе 9, а также дополнительные осложнения
из-за того, что характеристики аэродинамической части контура
следящей системы обычно известны с недостаточной степенью точ¬
ности. В результате мы вынуждены пойти еще на один очень сущест¬
венный компромисс. Должны ли мы тратить много усилий на то,
чтобы улучшить аэродинамические характеристики снаряда, или,
по меньшей мере, чтобы повысить наши знания в области аэроди¬
намических характеристик, или же мы должны их затратить на
то, чтобы сконструировать следящую систему с большим коэф¬
фициентом надежности, что увеличит размеры, вес и сложность
конструкции управляемого снаряда? Конечно, имеется еще и
третья возможность, состоящая в том, чтобы, испытывая в полете
большое число управляемых снарядов, подбирать параметры сле¬
дящей системы до тех пор, пока полет не станет устойчивым.
Однако это очень дорогостоящий путь, хотя в первые дни разви¬
тия управляемых снарядов, когда еще никакой теории по аэроди¬
намике или данных испытаний в аэродинамической трубе не су¬
ществовало, так и делалось.
Часто вся бортовая система управления состоит из одного
лишь автопилота, который при отсутствии команд управления
удерживает управляемый снаряд на устойчивой траектории (по
прямой, по дуге большого круга или по траектории «свободного
падения»). В этом случае система наведения следит как за откло¬
нением снаряда от этой траектории, так и за изменением положе¬
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО - СНАРЯДА
543
ния цели и посылает в автопилот корректирующие сигналы. В та¬
кой системе управления может быть использована стабилизиро¬
ванная платформа, подобная той, которая рассматривалась
в главе 7. В такой системе направление, фиксированное в про¬
странстве, сохраняется, несмотря на то что иногда имеют место
значительные отклонения корпуса снаряда по углам тангажа и
рыскания. Корректирующие команды подаются в виде прецес¬
сионных моментов, приложенных к гироскопам, находящимся на
платформе. Усредненное движение, корпуса снаряда, связанного
с платформой посредством следящей системы, будет происходить
соответственно прецессионным сигналам. Таким образом, кор¬
рекции наведения нужны менее часто и только тогда, когда по¬
являются отклонения с большим периодом колебаний. Такая си¬
стема управления снарядом может быть использована тогда,
когда цель неподвижна или перемещается очень медленно.
17—7. СИСТЕМА НАВЕДЕНИЯ
Систему наведения вместе с вычислительной аппаратурой
можно назвать глазами (или ушами) и мозгом всей системы
управления. Она включает также и «нервную» систему, состоящую
из электрических проводов, трубопроводов гидравлического при¬
вода, механических тяг и т. д., т. е. всего того, что объединяет
различные узлы системы в единую систему управления. Очень
часто эти линии значительно влияют на надежность управляемого
снаряда.
Системы наведения разделяются на две категории: системы
самонаведения (автономные системы наведения) и системы ди¬
станционного управления. Самонаводящийся управляемый снаряд
получает перед запуском программу полета, предусматривающую
характер траектории, по которой он должен следовать до места
своего назначения, и выполняет эту программу с помощью или
гироскопов, или акселерометров, или команд от различного рода
головок самонаведения, но извне во время полета никаких допол¬
нительных команд управления не получает. Управляемый же сна¬
ряд дистанционного управления может получить некоторую про¬
грамму перед вылетом и, кроме того, получает дополнительные
команды в течение всего полета. Иногда снаряд может объеди¬
нять в себе оба вида наведения: до конечного участка своей траек¬
тории он может управляться на расстоянии командами извне,
а на конечном участке — самонаводиться.
Выбор системы наведения для снаряда часто является одной
из наиболее трудных проблем. Во время второй мировой войны
этот вопрос решался так: сначала создавалась силовая установка
и аэродинамическая схема снаряда, а затем уже решался вопрор
544
ГЛАВА 17
о системе наведения. И часто бывало так, что, когда нужно было
применить оружие, система наведения еще не была готова. Так
случилось, например, со снарядом Фау-1. Вначале предполага¬
лось использовать наведение по радио. Однако когда пришло
время запускать снаряд (это время из-за быстрого приближения
конца войны наступило несколько раньше, чем предполагалось),
то никакой системы наведения для этого снаряда еще не суще¬
ствовало. В результате пришлось использовать самые простые
приборы. Для определения азимута применялись прецессионные
гироскопы и магнитные компасы; расстояние же определялось
главным образом измерением времени полета. Однако не было
уверенности, что эта грубая система будет готова в срок, в связи
с чем немцы даже стали готовить «героев», которые, находясь на
борту снарядов, должны были вести их к цели способом визуаль¬
ного наблюдения.
К сожалению, задача этой главы не может быть полностью
выполнена, так как подробные сведения о средствах наведения
все еще охраняются как военная тайна. Однако существо идеи
может быть показано на основе опыта вождения кораблей и само¬
летов. Рассмотрим, например, задачу доставки груза из одного
пункта в другой на гражданском транспортном самолете. Пилот
имеет в своем распоряжении несколько навигационных средств.
Он может, пользуясь картой, определить широту и долготу места
своего назначения; путем наблюдения положения Солнца на небе
или звезд в моменты времени, точно определенные хронометром,
он может определить свое положение относительно места назна¬
чения. После вылета он будет вносить поправки по курсу в соот¬
ветствии со своими непрерывными измерениями широты и долготы
до тех пор, пока в конце концов не прибудет к месту своего
назначения. Подобный же метод, использованный в управляемых
снарядах, называется автоматическим астронавигационным наве¬
дением.
Вместо такого метода пилот может использовать земные ориен¬
тиры, которые будут непрерывно информировать его о положении
самолета в пространстве. В качестве таких ориентиров могут слу¬
жить рельеф земной поверхности, радиомаяки или световые маяки,
должным образом размещенные на поверхности Земли, с тем что¬
бы направлять его полет по одной из предначертанных трасс.
Вместо земных ориентиров пилот может лететь по радиолучу, ко¬
торый посылается с места назначения. Он имеет приборы, пока¬
зывающие ему отклонения от направления радиолуча вправо или
влево, и летчик удерживает самолет примерно в середине луча.
Вне зависимости от того, какие средства используются для наве¬
дения — земные ориентиры, маяки или радиолуч,— во всех случаях
самолет следует к цели почти так же, как и по лучу. В отношении
управляемых снарядов в таком случае говорят, что они наводятся
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
545
по лучу радиолокатора. Однако для управляемых снарядов луч
обычно посылается с места старта. Луч направляется на цель,
обычно корабль или самолет, и снаряд как бы входит в луч и дви¬
жется по нему от пусковой установки к цели.
Подобные методы наведения непригодны для использования,
когда самолет подошел к месту своего назначения, особенно в слу¬
чае плохой видимости. Здесь пилот должен использовать либо
систему посадки по приборам, либо систему наземного управления
посадкой.
При использовании системы посадки по приборам пилот полу¬
чает что-то вроде точечной отметки, характеризующей ошибку по¬
ложения на шкале прибора, на котором с помощью радиосредств
показывается положение аэропорта относительно положения са¬
молета. Задача в этом случае трехмерная: пилот движется вперед
не только по сигналу «вправо — влево», но и по сигналу «вверх —
вниз» и, кроме того, должен снижаться по «устойчивой траекто¬
рии», обеспечивающей приземление на умеренной скорости сни¬
жения. Таким образом, самолет «самонаводится» на аэродром.
Управляемый снаряд, использующий такой же метод, называется
самонаводящимся.
При использовании системы наземного управления посадкой
пилот получает с аэродрома указания, в каком направлении ему
нужно довернуть, чтоб идти на посадку. Руководитель посадкой
следит за положением самолета по экрану радиолокатора и ста¬
рается вывести самолёт на посадочную полосу, подавая пилоту
команды по радио. Эта система особенно хороша там, где имеется
большое движение самолетов. Недостаток системы заключается
в том, что, когда самолет находится уже на близком расстоянии
и малой высоте, что бывает как раз перед приземлением, запаз¬
дывание по времени между наблюдениями и подачей команды
может быть значительным, так что, если к тому же имеется пло¬
хая видимость на земле, управление посадкой становится затруд¬
нительным. Такое наведение, используемое в управляемых снаря¬
дах, называется командной системой наведения. Для управляемых
снарядов команды наведения редко могут поступать от цели; как
правило, они поступают из пункта запуска снаряда, где в этом
случае должно быть известно как точное положение цели, так и
положение управляемого снаряда.
Другой тип системы наведения, чаще применяемый на кораб¬
лях, чем на самолетах, представляет наведение методом счисле¬
ния пути. Хотя эта система является одной из наиболее старых,
тем не менее она все еще имеет широкое применение. Метод
счисления пути описан в главе 7. Его принципиальное отличие
от других рассмотренных методов состоит в том, что здесь курс
выдерживается без постоянного слежения за наземными или не¬
бесными ориентирами. Место нахождения цели определяется отно-
35-405
546
ГЛАВА 17
сительно точки отправления, а текущее положение определяется
(или вычисляется) по скорости и направлению полета самолета.
Скорость определяется посредством указателя скорости самолета
относительно окружающего воздуха с внесением необходимой по¬
правки на вычисленную или другим методом найденную скорость
ветра. Направление же может быть определено с помощью обыч¬
ного магнитного компаса '.
Скорость и направление полета можно также определить пу¬
тем интегрирования ускорений, измеренных в инерциальной си¬
стеме отсчета, созданной системой свободных гироскопов, и срав¬
нения результатов с координатами исходной точки. Такая инер¬
циальная система наведения является особым видом навигации
методом счисления пути.
Стоит упомянуть еще одну систему наведения (впервые пред¬
ложенную, очевидно, немцами), называемую «органическим наве¬
дением». В этой системе должно использоваться какое-либо жи¬
вотное, специально обученное для опознавания цели, которое
с помощью различных устройств должно удерживать цель в центре
оптической сетки, сообщая таким образом вычислительной си¬
стеме направление линии визирования. В одних проектах пред¬
лагалось использовать обезьян, а в других — голубей. В послед¬
нем случае голубь должен быть обучен клевать чувствительный
экран, на котором появлялось изображение цели.
Иногда системы наведения разделяют на три основные группы.
К первой группе относят системы, в которых информация из
внешнего пункта управления непрерывно передается на управляе¬
мый снаряд в течение всего времени полета управляемого сна¬
ряда. В эту группу входят командные системы наведения и си¬
стемы наведения по лучу радиолокатора. Такие системы исполь¬
зуются в том случае, когда более точная информация относи¬
тельно цели может быть получена вне системы самого управляе¬
мого снаряда.
Вторую группу составляют системы, в которых вся информа¬
ция относительно траектории полета вводится в управляемый
снаряд перед запуском снаряда. К этой группе относятся астро¬
навигационные и инерциальные системы наведения. Эти системы
могут быть использованы в тех случаях, когда положение цели
известно до запуска снаряда и не изменяется во время нахожде¬
ния управляемого снаряда в полете.
Третью группу составляют системы, в которых управляемый
снаряд сам непосредственно получает информацию о цели и ис¬
пользует полученную информацию для определения собственной
1 Такая система использовалась Линдбергом в его историческом трансатлан¬
тическом перелете Нью-Йорк — Париж. Главным преимуществом метода яв¬
ляется простота, что и послужило причиной успеха Линдберга
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
547
траектории. Сюда входят системы самонаведения и системы наве¬
дения с помощью животных. Они используются там, где цель
может изменять свое положение в течение полета снаряда, а внеш¬
няя информация относительно цели неточна. Системы самонаве¬
дения в свою очередь обычно подразделяются на пассивные,
активные и полуактивные. Пассивные системы самонаведения
принимают энергию, излучаемую целью (звуковую, инфракрасного
излучения от двигателей или радиоволн от маяков-ответчиков,
иногда используемых на самолетах-мишенях). Активные системы
самонаведения сами излучают энергию (радиоволн, инфракрас¬
ных лучей, световую или звуковую) и наводятся по отраженной от
цели энергии. Полуактивные системы самонаведения получают
отраженную от цели энергию, которую создает источник, находя¬
щийся вне цели и вне управляемого снаряда. Такой источник
может находиться на стартовой позиции или в любом другом
месте. Пассивные системы самонаведения имеют то преимуще¬
ство, что они ничем себя не обнаруживают. Активные или полу¬
активные системы используются там, где от цели нельзя получить
достаточно энергии. Наибольшую энергию могут дать полуактив¬
ные системы, ибо передатчик, если он наземный, может иметь, по
существу, неограниченные размеры.
Существенной частью системы наведения являются исполь¬
зуемые вычислительная машина или вычислительные элементы.
Конечно, уравнения, которые должны быть решены, предопределя¬
ются методом наведения и видом программ, которые могут быть
заложены в управляемый снаряд. Вычислительные устройства
могут быть дискретного и непрерывного действия. Дискретные,
или цифровые, вычислительные машины используются в тех слу¬
чаях, когда количество и сложность уравнений велики, а входные
и выходные скорости вычислителя относительно малы. Вычисли¬
тельные машины непрерывного действия применяются там, где точ¬
ность менее существенна, чем простота. Информация поступает
в вычислите’льную машину и выдается ею непрерывно; входной
информацией могут служить данные о дальности и направлении
от радиолокатора, выходные сигналы от гироскопов и акселеро¬
метров, давление воздуха, скорость относительно воздуха и угол
атаки или просто обороты какого-нибудь вала. Выходной сигнал
вычислительной машины направляется в систему управления. По¬
этому, когда уравнения движения просты, лучше всего исклю¬
чить преобразовательные устройства, преобразующие сигналы из
дискретной формы в непрерывную, и произвести все вычисления
в непрерывной форме.
Исключением может явиться командная система наведения,
при которой команды посылаются на борт снаряда на расстоянии,
часто в кодированной дискретной форме (например, в системе
с импульсно-кодовой модуляцией, рассмотренной в главе 6).
35*
548
ГЛАВА 17
В этом случае размеры и вес вычислительной аппаратуры не будут
представлять большой проблемы, так что для таких систем вполне
можно использовать большие стационарные цифровые вычисли¬
тельные машины.
17—8. СИНТЕЗ СИСТЕМЫ
Разумеется, что инженер, работающий в области систем наве¬
дения управляемых снарядов, должен в известной мере быть зна¬
ком со всеми вопросами, рассмотренными в предыдущих главах.
• Аэродинамика необходима при определении аэродинамической
формы снаряда и его летных характеристик; теория ракетного и
реактивного двигателя — при выборе силовой установки; теория
следящих систем и гироскопов — при анализе системы управле¬
ния; принципы навигации, теория распространения радиоволн и
техника СВЧ — при определении системы наведения; техника счет¬
но-вычислительных устройств дискретного и непрерывного дейст¬
вия—при выборе типа вычислительной машины. Кроме того, дол¬
жно быть ясно, каким образом применить в объединенной системе
управляемого снаряда определенные положения теории информа¬
ции, теории шумов и моделирующей техники.
Воспользовавшись выводами, сделанными в предыдущих раз¬
делах, а также используя материалы некоторых предыдущих глав,
мы можем представить в общих чертах компоненты системы
управляемого снаряда, от которых больше всего зависит выполне¬
ние возлагаемой на систему задачи.
Возможные варианты для выбора рассмотрим в следующем
порядке:
/. Силовая установка
а) Прямоточный реактивный двигатель, пульсирующий воз¬
душно-реактивный двигатель или турбореактивный двигатель.
Жидкостный ракетный двигатель или ракетный двигатель на твер¬
дом топливе. Поршневой двигатель с винтом.
б) Планирование, планирование с ускорителем, непрерывная
тяга двигателя, непрерывная тяга с ускорителем.
2. Аэродинамическая схема
а) Однокрылая или крестообразная.
б) Дозвуковая или сверхзвуковая.
в) Крыло треугольное или стреловидное.
г) Рули носовые по схеме «утка» или хвостовые, или подвиж¬
ные крылья.
3. Управление
а) Гидравлическое, пневматическое, электромеханическое или
интерцепторное.
б) Обратная связь — по отклонению поверхности управления,
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА 549
по продольному ускорению, по направлению полета, по угловой
скорости корпуса, по угловому ускорению корпуса.
4. Наведение
а) Командное, по лучу, самонаведение, инерциальное, астро¬
наведение, с помощью животного.
б) Вычислительная машина: цифровая, электрическая непре¬
рывного действия, механическая непрерывного действия.
5. Боевая головка
а) С ядерным зарядом или обычная.
б) Одиночная или спаренная.
в) Взрыватель: контактный, дистанционный, радиовзрыватель,
часовой механизм.
Предположив, что здесь представлена полная морфология
управляемых снарядов, мы можем рассмотреть все возможные
решения. Обозначив параметры М, имеем
М\~24 = р}~е, р\~4 — силовая установка
/И^-24 = — аэродинамика
/И'-20 = С}-4С^-5 — управление
7И4-18 = <7}-6(^_3 — наведение
д/1-16 = и71.2Н71.21Г'-4 — боеголовка.
Запись всех этих сочетаний даст некоторое представление
о задаче, стоящей перед инженером-проектировщиком. Хотя здесь
записана лишь небольшая часть общего числа возможностей, тем
не менее видно, что имеется 24 возможных сочетания по силовой
установке (считая, что все р\ возможны со всеми р2)> 24 аэроди¬
намические схемы, 20 систем управления, 18 систем наведения и
16 возможных . сочетаний боеголовок, а в общей сложности
3 317 760 различных возможных сочетаний! Каким образом инже¬
нер-проектировщик системы должен ориентироваться среди такого
множества возможных вариантов? Единственный способ — брать
наугад наиболее подходящее сочетание и исследовать его до
конца, пока не станет ясно, что оно не годится, после чего пе¬
рейти к исследованию другого варианта. Иногда после многих
неудачных попыток приходится переживать разочарование.
Другим, пожалуй лучшим, выходом из положения является
решение с помощью интуиции и упрощенного анализа несколь¬
ких наилучших вариантов, отобранных для дальнейшего исследо¬
вания и экспериментальной проверки. После того как будет про¬
делана большая часть экспериментальной работы, выбирается
наиболее подходящая система и инженеры-аналитики приступают
к следующему этапу разработки — к оптимизации системы1.
1 Т. е. к выбору оптимальных характеристик системы.— Прим, ред
550
ГЛАВА 17
17—9. ОПТИМИЗАЦИЯ СИСТЕМЫ
После предварительного отбора тех компонентов, которые счи¬
таются наилучшими, необходимо произвести анализ выбранного
варианта для того, чтобы определить характеристики, которыми
будет обладать в конечном итоге оптимальная система. Эта за¬
дача может быть представлена как задача по определению ряда
технических условий на входные и выходные величины различ¬
ных узлов, входящих в состав управляемого снаряда.
Рис. 226. Типичная блок-схема управляемого снаряда
Очень полезным средством для анализа системы на этой ста¬
дии разработки является блок-схема всей системы. Подсистемы
изображаются в виде блоков со связующими их линиями, показы¬
вающими направление прохождения информации в системе.
На рис. 226 показана стандартная блок-схема для типовой
системы управляемого снаряда. Информация об отклонении сна¬
ряда от заданной траектории принимается системой наведения
(«глаза») и посылается в вычислительную машину («мозг»), кото¬
рая решает, какую команду управления необходимо послать
в бортовую систему управления («мускулы»). Система управле¬
ния с помощью аэродинамических сил производит изменение
траектории полета, имеющее целью компенсировать отклонение
от заданной траектории. Сигнал о введенной поправке по цепи
обратной связи подается назад в систему наведения через прибор,
выполняющий геометрические преобразования, замыкая, таким
образом, контур системы управления. Для того чтобы система
управления точно воспроизвела команду управления, обычно
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
551
используется элемент, измеряющий выход системы управления,
т. е. движение снаряда. Сигнал от этого элемента сравнивается
с сигналом команды управления, и управление продолжает осу¬
ществляться до тех пор, пока ошибка рассогласования не исчезнет.
Силовая установка показана на блок-схеме таким образом,
будто она влияет только на аэродинамику снаряда, хотя во мно¬
гих случаях она может быть связана с системой управления и мо¬
жет получать командные сигналы от вычислительной машины.
Сплошными линиями показаны желаемые направления потока
информации. В более сложных системах неизбежно появляются
также нежелательные направления, иногда называемые перекре¬
стными помехами. Часть этих нежелательных связей показана на
схеме пунктирными линиями. К ним относятся:
1. Продольное ускорение, вызываемое тягой силовой установки,
может влиять на механические и электронные элементы в систе¬
мах наведения и управления.
2. Боковые силы, возникающие при небольшом эксцентриситете
тяги, которые могут оказывать вредное влияние на выход си¬
стемы управления или непосредственно на траекторию.
3. Поперечные ускорения, обычно создаваемые выходом си¬
стемы управления, также могут повлиять на элементы систем
наведения и управления.
4. Перекрестные помехи между каналами тангажа и рыскания,
которые почти всегда существуют (на блок-схеме не показаны).
Более подробная (по сравнению с рис. 226) блок-схема, пока¬
зывающая все эти линии связи, называется функциональной
схемой.
Уравнения траектории определяются целой системой урав¬
нений, называемых функциями передачи (см. главу 9), которые
устанавливают соотношения между выходными сигналами каж¬
дого блока на схеме и его различными входными сигналами. Эти
функции передачи не всегда являются линейными дифференциаль¬
ными операторами, как и не всегда имеют непосредственную
связь выходных сигналов только со входными сигналами, посколь¬
ку часто могут содержать возмущения, возникшие внутри си¬
стемы (см. главы 6 и 8). Часть этих источников ошибок показана
на рис. 227. Слово «уход» (на этой схеме) употребляется в общем
смысле, как сдвиг от нулевого положения выхода, после того как
управляемый снаряд был отрегулирован перед запуском.
Дальнейшая задача заключается в необходимости проанали¬
зировать работу системы при наличии известных возмущений,
выраженных в виде возможных функций передачи, которые дол¬
жны быть учтены системой управления. Эта задача на первый
взгляд также кажется очень сложной и трудной. Поскольку ком¬
поненты системы на этой стадии разработки еще не сконструиро¬
ваны, то не исключена возможность наличия многих возмущений,
552
ГЛАВА 17
присущих этим компонентам, а следовательно, может быть мно¬
жество разнообразных функций передачи, которыми можно вос¬
пользоваться при проектировании. Для решения этой проблемы
хорошо применить метод последовательных приближений. Этот
метод позволяет инженеру-аналитику системы после некоторых
совещаний и консультаций со специалистами по отдельным эле¬
ментам системы приближенно оценить некоторые вероятные зна¬
чения возмущений в каждом компоненте системы. Далее, он вы¬
бирает определенное число «ключевых» параметров системы, с по¬
мощью которых можно хотя бы приближенно проанализировать
работу системы. Тремя основными параметрами, которые почти
всегда принимаются в расчет, являются усиление, постоянная вре¬
мени и вес системы. Усиление — это число, которое характеризует
отношение выходного сигнала системы управления к отклонению
траектории, которое может отметить система наведения. Постоян¬
ная времени — это число, которое показывает запаздывание по
времени между наблюдением отклонения траектории и реакцией
на выходе системы управления. Часто запаздывание вносится
в систему намеренно, для того чтобы усреднить шумы во времени.
Вес причисляется к параметрам системы потому, что, во-первых,
он находится в зависимости от всех компонентов системы, и, во-
вторых, имеет большое значение для таких тактических характе¬
ристик летательного аппарата, как максимальная скорость и вы¬
сота полета. Отдельные элементы, совершенно одинаковые по
Рис. 227. Источники ошибок в системе
управляемого снаряда
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
553
основным характеристикам, но более легкие по весу, обычно
всегда предпочитаются, хотя часто приходится идти на компро¬
мисс, увеличивая вес и одновременно улучшая тактические харак¬
теристики системы (например, двигатель с большей тягой обеспе¬
чивает большую скорость ценой увеличения общего веса системы).
После выбора параметров проектировщик с помощью любых
имеющихся в его распоряжении средств (анализ, моделирующая
установка, цифровая вычислительная машина и т. д.) приступает
к определению значений выбранных параметров системы, которые
обеспечат создание оптимальной системы. Под оптимальной систе¬
мой в данном случае подразумевается система, способная лучшим
образом выполнить возложенную на нее задачу.
Рис. 228. Схема прохождения процесса разработки и изготовления
системы вооружения. Пунктирными линиями показаны маловероятные
обратные связи
Затем система должна быть проанализирована с точки зрения
упоминавшихся ранее параметров, к которым относятся: стои¬
мость, точность (величина промаха), вероятность поражения цели
и время разработки.
После выбора оптимальных значений параметров системы и
разработки временных технических условий конструкции и чер¬
тежей производятся новые расчеты ошибок системы. Эти новые
расчеты вместе с дополнительными параметрами используются
для последующего анализа и одновременно приступают к изго¬
товлению элементов конструкции. Данные испытаний готовых
узлов используются снова для анализа. На рис. 228 показана
схема процесса разработки и изготовления системы. Ввиду не¬
обходимости обеспечить совместимость отдельных элементов си¬
стемы создание конструкции снаряда должно вестись только по¬
этапно, хотя необходимая информация может поступать непре¬
рывно. Таким образом, сначала получают вариант А, затем Б
и т. д., постепенно приближаясь к оптимальному варианту. В этом
состоит метод последовательных приближений.
Опыт показывает, что многие из ошибок имеют относительно
малое влияние на характеристики системы и лишь одна или две
могут быть критическими. Естественно, желательно снизить вели¬
чину таких критических ошибок Перед повторным циклом опти¬
мизации. Когда их удается снизить настолько, насколько это прак¬
тически возможно, тогда останется лишь несколько «ключевых»
554
ГЛАВА 1?
параметров системы и небольшое число критических ошибок.
Оптимизацию такой системы часто можно произвести аналити¬
ческим путем, используя методы, подобные разработанным Н. Ви¬
нером.
Очень часто даже при небольшом количестве параметров и
ошибок решения должны находиться с помощью других методов.
Одним из таких методов, который часто применяется на практике,
является метод линеаризации. Дифференциальное уравнение, ха¬
рактеризующее систему, может быть записано так, чтобы все
функции передачи были выражены приближенными линейными
членами. Выражение «линейные члены» берется здесь в матема¬
тическом смысле, т. е. в уравнении зависимая переменная и ее
производные должны находиться в первой степени (например,
линейной апроксимацией для члена у соз у при достаточно малом
значении у будет у. Весьма полезно, где это возможно, исклю¬
чить из уравнения все функции независимой переменной, пред¬
ставляющие собой произведения, сомножителем которых является
зависимая переменная. Тогда уравнение будет иметь только по¬
стоянные коэффициенты и его решение не представит затруднений.
В случае необходимости отклонение от нелинейности может
быть записано в виде отдельного входного сигнала в соответст¬
вующий компонент системы и рассматриваемого после того, как
линейная задача уже однажды решена.
Приведем некоторые случаи, когда применение этого метода
целесообразно:
I. При полетах на короткие расстояния, когда поверхность
Земли принимается плоской, а не сферической.
2. При разбивке сложных траекторий на элементарные уча¬
стки, когда 81п 6 и соз 6 апроксимируются посредством первых
нескольких членов в ряде Тейлора для каждого элементарного
участка траектории. В этом случае важно сохранить достаточное
число членов, чтобы получить значащий результат.
3. При допущениях, что нет предела для максимальных зна¬
чений выходных сигналов отдельных компонентов системы, так же
как нет мертвой зоны и мертвого хода. Это эквивалентно допу¬
щению о бесконечном динамическом диапазоне.
Оценка точности принятых апроксимаций производится при
последующем введении в задачу различных значений отклонений
от линейности для повторного анализа. Для производства лучших
апроксимаций нужны интуиция и практика. Как только линейные
уравнения решены, то можно сказать, что большая часть задачи
выполнена, так как для применяемых апроксимаций выходной
сигнал имеет линейную зависимость от любых входных сигналов,
т. е. определенное изменение в величине любого входного сигнала
вносит пропорциональное изменение в выходном сигнале, неза-
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
555
висимо от любых незначительных изменений, имевших место
в любом другом входном сигнале. Кроме того, отметим, что если
ошибки были случайными, то результирующая ошибка на выходе
также случайна и подчиняется закону гауссова распределения со
среднеквадратической ошибкой, равной сумме квадратов отдель¬
ных ошибок.
Рис. 229.
Графический метод
Заслуживает также внимания графический метод (рис. 229).
Графики рабочих параметров как функций различных параметров
системы даются для одного и того же отрезка времени. Задача
заключается в том, чтобы убрать острые выбросы огибающей там,
где это возможно, и работать в наиболее подходящей полосе, как
это показано на рис. 229, а. Следует избегать работы в узких опти¬
мальных полосах, как показано на рис. 229, б, так как, хотя на
основании анализа работа в этих полосах и кажется вполне удов¬
летворительной, статистические изменения в параметрах системы
могут внести нежелательные результаты. Если острых выбросов
в огибающей нет, тогда, выбрав некоторую произвольную рабочую
точку (скажем, точку А на рис. 229, в), делают допущение о ли¬
нейности и приступают к анализу методом линеаризации.
Очень часто еще до начала какой-либо работы по проектиро¬
ванию компонентов системы инженер-проектировщик системы или
руководитель группы проектирования должен принять'некоторые
копромиссные решения только относительно рабочих параметров,
которые критически зависят от рассматриваемой частной системы.
Например, требуется привести в соответствие с точностью системы
или со временем, необходимым для разработки. Пусть произве¬
дена оценка затрат на какой-то блок Сг в функции времени 1г, ко¬
556
ГЛАВА 17
торое потребовалось бы для разработки этого узла (считая, что
во всех других отношениях его характеристики удовлетвори¬
тельны). Кривая была бы похожа на кривую, изображенную на
рис. 229, в. Затем желательно построить кривую общих затрат
в зависимости от времени, как показано на рис. 229, г. Мы полу-
/V
чим общую стоимость как С = ЕС\, где С,— стоимость 1'-го компо-
1=1
нента системы, а М — число компонентов. Общее время разработки
не равно сумме периодов времени, затраченных на разработку каж¬
дого компонента, а равно наибольшему из этих периодов. Таким
образом, чтобы получить минимальную общую стоимость при за¬
данном времени разработки, необходимо просто все периоды вре¬
мени разработки отдельных компонентов системы приравнять I,
поскольку если для некоторого компонента системы Л</, то его
можно увеличить до I и благодаря этому снизить общую стои¬
мость, сохранив при этом I (общее время разработки) неизмен¬
ным. Разумеется, это верно только для монотонно убывающих
значений С,- в зависимости от
Такой же прием можно применить для построения графика
минимальной общей стоимости в зависимости от точности. В этом
случае пусть точность будет представлена некоторой ошибкой, на
выходе системы, окажем, величиной промаха. Возьмем о2= Ео2,
1=г
где о— ореднеквадратическое отклонение результирующей вели¬
чины промаха, а <з, — среднеква’дратическое отклонение величины
промаха, внесенной 1-ым компонентом системы при допущении,
что система приведена к линейному виду. В линеаризованной си¬
стеме общая величина промаха М определяется следующим вы¬
ражением:
к
;=1
где хх — величина параметра 1-го компонента, Вх,— отклонение
величины 1-го параметра от величины, при которой промах ра¬
вен нулю (при допущении, что идеальный компонент дает нулевой
промах).
Тогда В» равна умноженному на среднеквадратическое
отклонение величины Хх-
Чтобы получить минимальную стоимость в зависимости от точ¬
ности, мы должны принять, что стоимость каждого компонента
изменяется вместе со ореднеквадратическим значением промаха,
связанным с величиной промаха компонента, следующим урав¬
нением: г _ Кх
Ь/ — Т" •
7
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА
557
Здесь а{ — число, показывающее степень зависимости стои¬
мости от точности (а, — процент изменения стоимости на 1% из¬
менения точности). Чтобы снизить общую стоимость для заданной
точности до минимума, положим
(И \ И
) = 0, сохраняя о2 = сопз(;
/=1 > /=1
лц /V
= ° при 2о/8о/ = 0или
л
< а18а1 — — о .8о2.
/=2
Следовательно,
/V
2 а/8<Т/ ЛЦ
<чК1 /=2 _ VI
а? + 1 а, - Д „«/+■ 6д'-
(=2 *
Поскольку любая о/ может изменяться независимо, коэффициенты
о/ в каждой части уравнения должны быть равны или
_^_ = ^С = С0П8(,
а’>+2 а’/ +2
или
а-^- = СОПбЕ
Такие же результаты получатся, если мы захотим уменьшить зна¬
чение <з при заданной стоимости. Таким образом, если мы зада¬
димся точностью, а следовательно, стоимостью любого отдельного
компонента системы, тогда определятся точность и стоимость каж¬
дого компонента системы управляемого снаряда, имеющего мини¬
мальную стоимость при заданной точности.
Теперь можно построить график минимальной общей стои¬
мости в зависимости от точности путем определения о, для после¬
довательно равных значений —,. Интересны некоторые выводы
С/®(
из этого уравнения:
1. Если кривые зависимости стоимости от точности для всех
компонентов системы по виду подобны (все значения а/ равны),
558
ГЛАВА 17
то допустимые стоимости отдельных компонентов находятся в та¬
ком же соотношении, как и среднеквадратические отклонения, т. е.
чем больше стоимость, тем меньшая доля суммарной ошибки до¬
пускается в этом компоненте системы.
2. Если кривые по виду не идентичны, то компонент системы,
стоимость которой с изменением ошибки изменяется быстрее,
чем других, требует самой большой ошибки или самой меньшей
стоимости.
17—10. ПЕРЕНЕСЕНИЕ ПОЛУЧЕННЫХ ВЫВОДОВ В
ЧЕРТЕЖИ И ТЕХНИЧЕСКИЕ УСЛОВИЯ
Вопросы перенесения полученных выводов в рабочие чертежи
рассматривались в предыдущем разделе.
Технические условия почти никогда не составляются непосред¬
ственно для четырех основных подсистем, а, как правило, состав¬
ляются для отдельных блоков управляемого снаряда. Это объяс¬
няется тем, что деление на подсистемы производится по функцио¬
нальным признакам, тогда как деление на блоки производится по
конструктивным соображениям, т. е. информация должна посту¬
пать в отдельный узел, который составляет блок. Таким образом,
хотя для целей оптимизаций аэродинамические характеристики
могут быть выражены в виде функции передачи для различных
скоростей и высот, их надо превратить в размеры крыльев и хво¬
стового оперения, диаметр корпуса, нагрузки конструкции, темпе¬
ратуру поверхностей, регулировку и т. д. Все электронные устрой¬
ства, будь то в системе управления, в системе наведения или
в вычислительной машине, могут разрабатываться в одной группе,
тогда как все электромеханические узлы — в другой. Здесь опять
возникает необходимость принятия компромиссных решений. На¬
пример, следует ли отнести общий допустимый снос снаряда глав¬
ным образом за счет электронного блока, или за счет гироскопи¬
ческого блока, или же за счет корпуса снаряда (при разрегули¬
ровке). Когда рассматривается вопрос об усилении или постоян¬
ной времени, необходимо решить, какие значения усиления или
постоянной времени допустимы в механических блоках и какие
в электронных. Какой вес установить тому или иному узлу? Каким
образом должны быть размещены блоки в управляемом снаряде?
Все эти вопросы должны быть разрешены с помощью здравого
рассуждения и на основе использования некоторых идей, рас¬
смотренных в предыдущем разделе.
Оптимизированная система переносится в чертежи и техниче¬
ские условия и передается в цех для изготовления. По мере изго¬
товления блоков необходимо подвергать их тщательным испы¬
таниям по каждому отдельному узлу, чтобы выявить их точные
характеристики. Полученные характеристики узлов направляются
КОМПОНОВКА СИСТЕМЫ УПРАВЛЯЕМОГО СНАРЯДА 559
обратно разработчикам системы, которые используют их для коррек¬
тировки своих первоначальных решений и предположений. Вполне
может оказаться, например, что первоначальный расчет центра
тяжести, определяющий продольную аэродинамическую устойчи¬
вость и управляемость снаряда, окажется неправильным после
того, как все узлы будут размещены внутри управляемого сна¬
ряда. Это можно исправить добавлением небольшого балласта
в_носовую или хвостовую части снаряда, с тем чтобы переместить
фактический центр тяжести в расчетное положение. Если это ведет
к большому увеличению веса снаряда, надо изменить аэродина¬
мическую форму снаряда так, чтобы добиться нужной устойчи¬
вости при фактически получившемся центре тяжести.
Более неприятным, хотя и менее вероятным, может быть слу¬
чай, когда возникнет необходимость пересмотра всей системы.
Например, предположим, что результирующие размеры и вес
управляемого снаряда после разработки всех компонентов си¬
стемы окажутся настолько большими, что потребуют замены
места старта — вместо пуска с самолета необходимо будет пе¬
рейти к пуску с наземной установки. Может возникнуть и такое
положение, когда точность будет настолько низка, что придется
заменить цель, для которой снаряд предназначался; скажем, сна¬
ряд сможет поражать не маленький самолет, а большой корабль.
В большинстве таких случаев потребуется или переоптимизация
системы на основе новых измеренных характеристик компонентов
системы, или же выбор других компонентов.
После внесения изменений на основе результатов конструиро¬
вания элементов системы может потребоваться изготовление но¬
вых элементов по новым техническим условиям. Это является про¬
должением цикла разработки. Надо полагать, что этот процесс
является сходящимся. Быстрота сходимости, естественно, будет
зависеть от точности, полученной на различных этапах процесса.
Например, если компоненты системы были первоначально подо¬
браны правильно и их характеристики точно предсказаны, то
правильно оптимизованная система не потребует внесения изме¬
нений.
17—11. ПРОИЗВОДСТВО И ИСПЫТАНИЕ
В большинстве областей техники стадия производства резко
отделена от стадии разработки. Однако в области управляемых
снарядов в силу их большой сложности и в силу иногда до¬
вольно примитивного состояния методов и техники разработки
стадия производства тесно связана со стадией разработки. По¬
казанная на рис. 227 обратная связь от стадии производства
к группе разработки системы должна быть постоянной.
ОГЛАВЛЕНИЕ
Стр.
Предисловие .... 5
Глава, 1. Общие принципы разработки управляемого снаряда и его
элементов 7
Глава 2. Аэродинамика управляемых реактивных снарядов 12
Глава 3. Стабилизация снаряда и управление им в полете 61
Глава 4. Ракетный двигатель 84
Глава 5. Прямоточные воздушно-реактивные двигатели ....... 138
Глава 6. Теория информации и наведение управляемых снарядов . . . 168
Глава 7. Решение навигационных задач при наведении управляемых
снарядов 211
Глава 8. Случайные явления и точность наведения и управления . . . 249
Глава 9. Следящие системы и обратная связь 273
Г л а в а 10. Приборная гироскопия 303
Глава 11. Распространение радиоволн 355
Г л а в а 12. Техника сверхвысоких частот 394
Гл а ва 13. Радиолокационная техника 441
Глава 14. Моделирующие устройства 474
Глава 15. Цифровые вычислительные машины 491
Глава 16. Анализ траектории и моделирование полета 514
Глава 17. Компоновка системы управляемого снаряда 531
А. Е. Пакет, С. Рамо КОНСТРУИРОВАНИЕ УПРАВЛЯЕМЫХ СНАРЯДОВ
М., Воениздат, 1963. 560 С
Редактор Кругликов Ф. Ф. Художник Грибков Л, Д.
Технический редактор Медникова А. Н. Корректор Мельник С. М.
Сдано в набор 5.11.62 г. Подписано к печати 20.2.63 г.
Формат бумаги 60 X 90*/1в — 35 печ. л. = 35 усл. печ. л. 34,668 уч.-изд. л.
Тираж 5500 ТП 63г. 251 Изд. № 10/2491 Зак. № 405
2-а типография Военного издательства Министерства обороны СССР
Ленинград Д-65, Дворцовая пл. д. 10
Цена 1 р. 93 к.