/

















































































































































































































































































































Автор: Наровлянский В.Г.
Теги: электротехника электроэнергетика энергетика
ISBN: 5-283-02597-7
Год: 2004




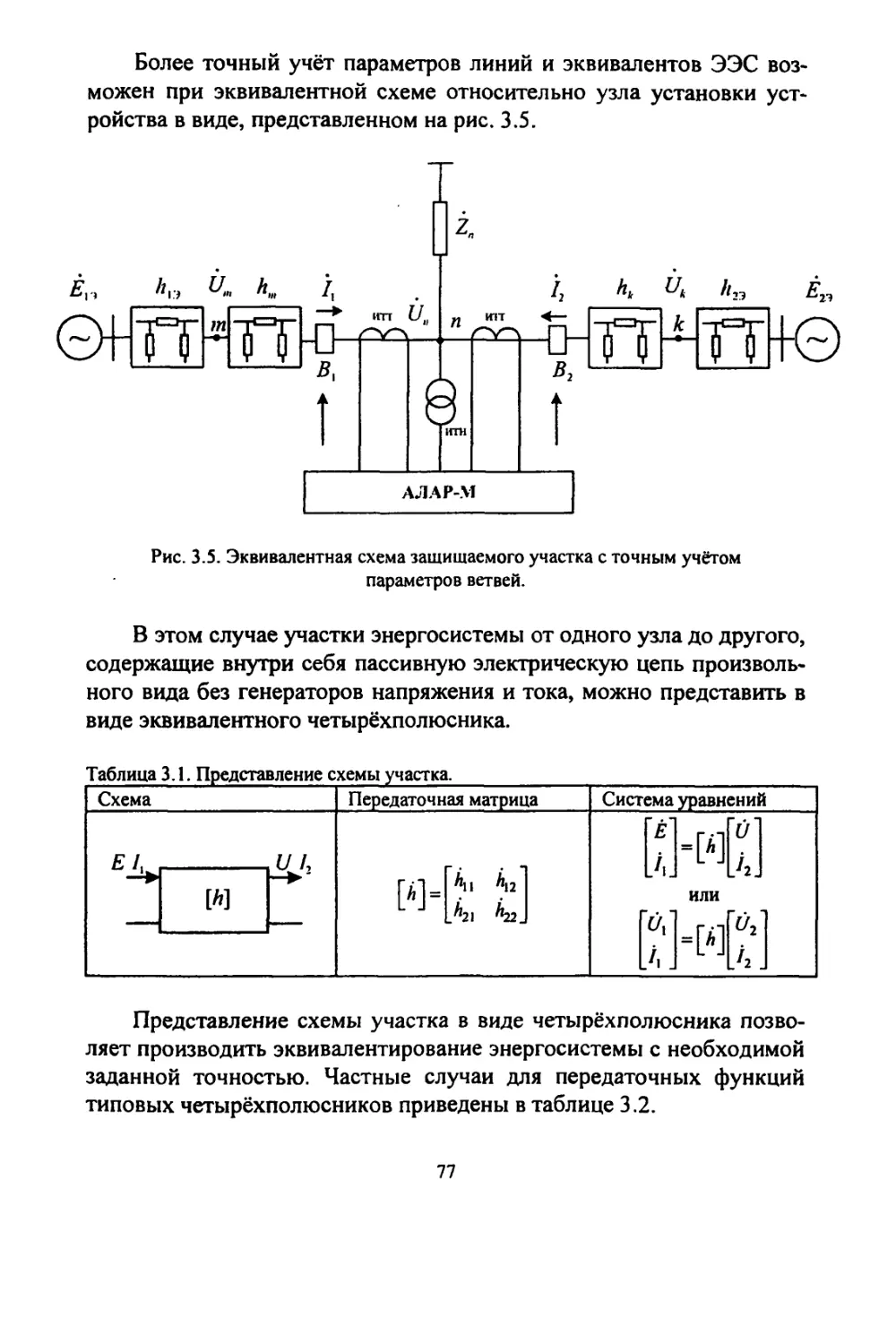
Текст
УДК 621.311-52.:621.316.93
ББК 31.27
Н28
Рецензенты:
^ doxmqp w6xw. ^аук, А!ро^&. ^.у4. Семемю ^СО-^7У ЕЭС Россмм^;
Н28 В.Г. Наровлянский. Современные методы и средства
предотвращения асинхронного режима электроэнергетической системы -
М.: Энергоатомиздат. 2004. 360 с.
ISBN 5-283-02597-7
Рассмотрены особенности работы автоматики выявления
асинхронного режима энергосистемы. Предложены адаптивные методы
выявления и контроля асинхронного режима, основанные на
идентификации параметров эквивалентных схем электроэнергетической
системы, и намечены пути реализации этих методов в устройствах
локальной противоаварийнои автоматики. Рассмотрены перспективы
применения новых технических решений, основанных на
использовании сверхпроводниковых материалов, и предложены способы и
средства для повышения пропускной способности линий передач и
устойчивости электроэнергетической системы.
Для инженеров-электроэнергетиков и студентов
электроэнергетических специальностей вузов.
ББК 31.27
ISBN 5-283-02597-7 О В.Г. Наровлянский, 2004
Оглавление
Введение 10
Глава 1. Асинхронный режим энергосистемы 17
1.1. Устойчивость энергосистемы 17
1.2. Моделирование и эквивалентирование энергосистемы 22
L3. Базовая модель асинхронного режима энергосистемы 29
1.4. Выводы 38
Глава 2. Методы и средства контроля асинхронного режима 39
2.1. Автоматика ликвидации асинхронного режима 39
2.1.1. Требования кустройствам АЛАР 41
2.1.2. Требования к размещению и настройке устройств АЛАР... 44
2.2. Косвенные признаки асинхронного режима и устройства
на их основе 55
2.2.1. Общие положения 55
2.2.2. Релейные устройства типа ЭПО 57
2.3. Прямые признаки асинхронного режима и устройства
на их основе 59
2.3.1. Общие положения 59
2.3.2. Электронное устройство САПАХ 6!
2.3.3. Микропроцессорное устройство АЛАР-М 61
2.3.4. Микропроцессорное устройство АЛАР-Ц 62
2.4. Сводная таблица технологических алгоритмов 63
2.5. Выводы. 65
Глава 3. Устройство выявления и ликвидации асинхронного
режима «АЛАР-М» 67
3.1. Краткое описание устройства 67
3.2. Принцип работы устройства 69
3.3. Методика выбора уставок устройства 72
3.3.1. Выбор уставок без учёта эквивалентов примыкающих
энергосистем 72
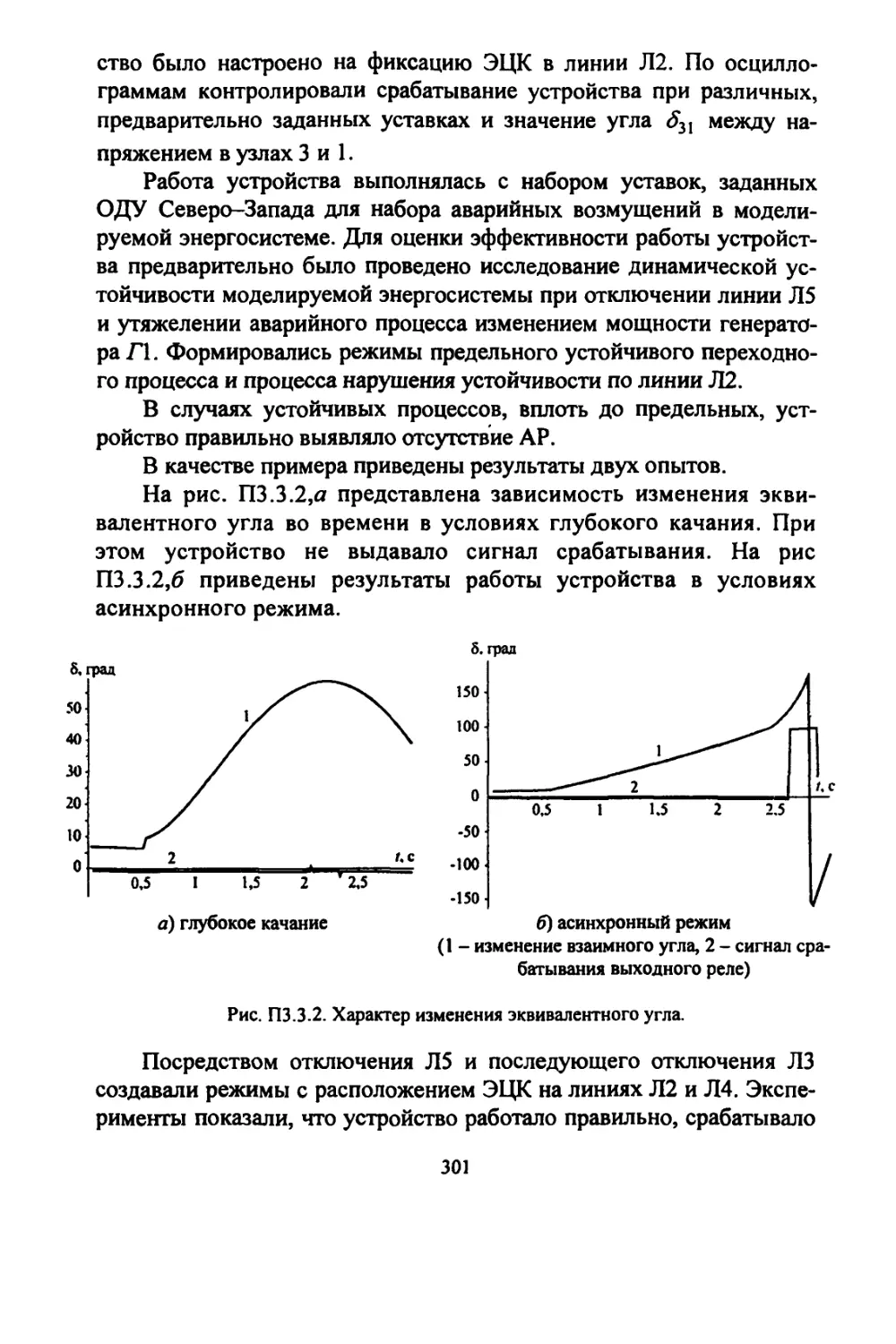
3.3.2. Выбор уставок по табличным зависимостям угла между
напряжением на концах контролируемой линии 75
3.3.3. Выбор уставок по эквивалентной схеме контролируемого
участка 76
3.4. Селективный режим работы устройства 80
3
3.5. Учёт изменения схемы и режима работы энергосистемы 80
3.6. Частные случаи использования устройства 83
3.6.1. Работа устройства при попадании ЭЦК в точку установки
устройства 83
3.6.2. Работа устройства с одной контролируемой линией 84
3.6.3. Работа устройства в узле с переменной нагрузкой 85
3.7. Модификация и дополнительные блоки технологического
алгоритма 85
3.7.1. Модификация алгоритма 86
3.7.2. Ограничение диапазона задания уставок углов 87
3.7.3. Дополнительный блок контроля изменения
эквивалентного угла 88
3.7.4. Дополнительный блок контроля по признаку качания
тока 90
3.8. Выводы 9!
Глава 4. Особенности моделирования элементов энергосистемы
при двухчастотном асинхронном режиме 93
4]. Моделирование синхронных генераторов 94
4.2. Моделирование асинхронной нагрузки 109
4.3. Моделирование энергосистемы 1 14
4.4. Выводы 120
Глава 5. Наблюдаемость и идентификация параметров
энергосистемы 12!
5.1. Исходная информация, доступная локальным устройствам
противоаварийной автоматики 121
5.2. Эквивалентирование энергосистемы для анализа
асинхронного режима 124
5.3. Измерения и задача идентификации параметров
энергосистемы 129
5.4. Отображение исходного сигнала в комплексную плоскость .131
5.5. Траектории векторов наблюдаемых величин 133
5.5.1. Векторы напряжения и тока 134
5.5.2. Вектор сопротивления 136
5.5.3. Вектор мощности !37
5.4. Оценка достижимой точности определения параметров
эквивалентной схемы 140
5.4.1. Относительная погрешность вектора 140
4
5.4.2. Погрешность определения эквивалентного
сопротивления 143
5.4.3. Погрешность определения эквивалентной ЭДС 151
5.5. Выводы 158
Глава 6. Контроль электрического центра качаний 159
6.1. Математическая модель контролируемого участка 160
6.2. Способ выявления наличия ЭЦК на контролируемом
участке 165
6.3. Выводы 168
Глава 7. Идентификация параметров эквивалентной схемы по
траекториям векторов наблюдаемых величин 169
7.1. Эквивалентная схема «генератор - шины бесконечной
мощности» 170
7.1.1. Определение угла ЭДС 170
7.1.2. Идентификация параметров 177
7.2. Двухмашинная эквивалентная схема 179
7.2.1. Вектор мощности в узле эквивалентной схемы 179
7.2.2. Определение характеристик траектории вектора
мощности 181
7.2.3. Идентификация параметров 184
7.3. Выводы 186
Глава 8. Идентификация параметров эквивалентной схемы по
уравнениям электрической цепи 187
8.1. Использование дифференциальных соотношений 188
8.1.1. Метод расчёта 189
8.1.2. Результаты расчета на математической модели 196
8.2. Использование комплексно-сопряженных уравнений 202
8.2.1. Метод расчёта 202
8.2.2. Результаты испытаний метода расчета 206
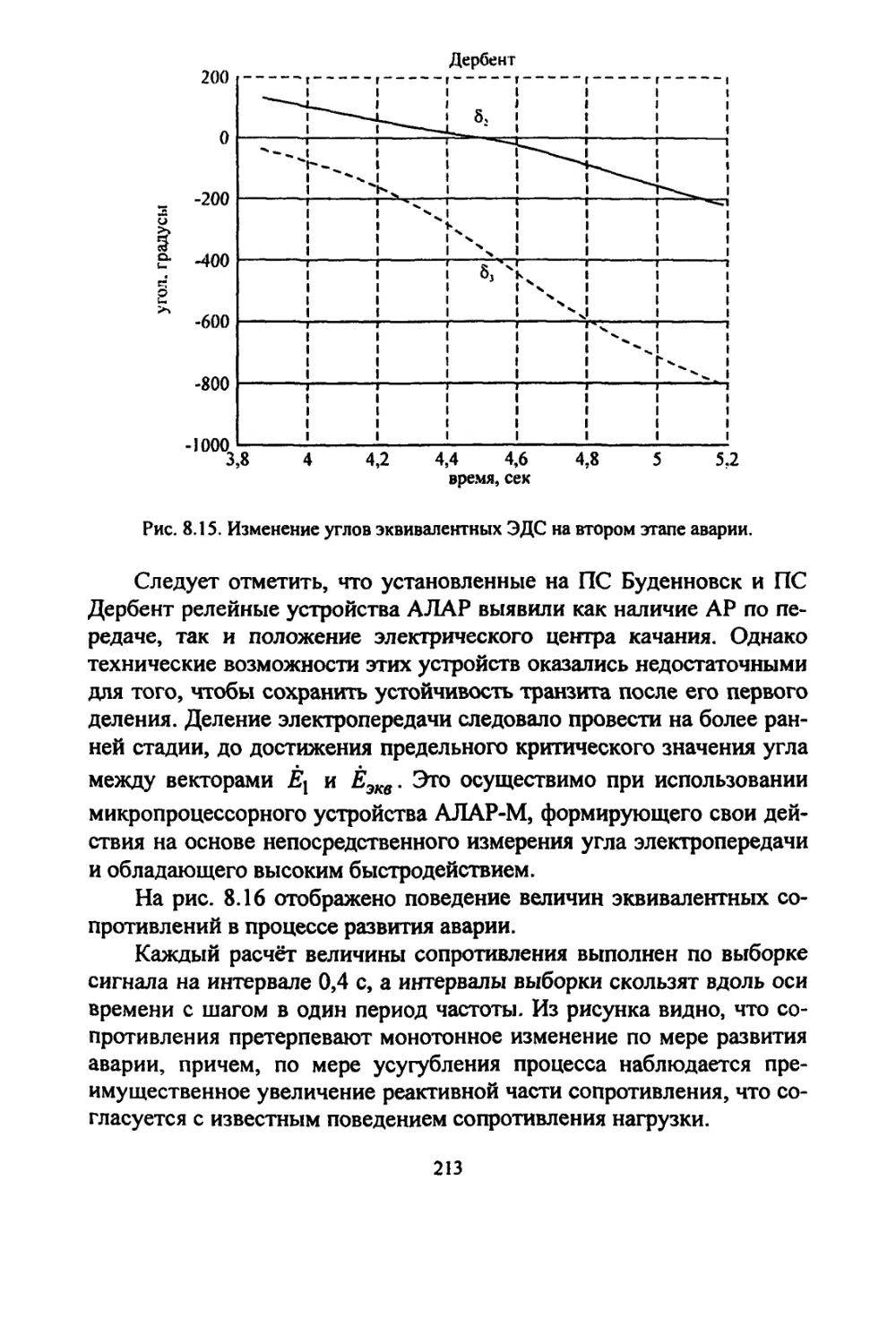
8.3. Повышение точности и скорости определения параметров ....215
8.4. Выводы 221
Глава 9. Перспективные технические средства повышения
устойчивости энергосистемы на базе сверхпроводниковых
технологий 223
9.1. Современное состояние вопроса 224
5
9.1.1. Актуальные проблемы устойчивости транспорта
электроэнергии 224
91.2. Критерии оценки целесообразности использования
устройств на базе сверхпроводниковых технологий 227
9.1.3. Сверхпроводниковые материалы 232
9.2. Токоограничивающие устройства с коммутацией
магнитного потока 234
9.2.1. Управление магнитным потоком с использованием
сверхпроводниковых экранов 238
9.2.2. Принцип работы токоограничивающего устройства 245
9.2.3. Динамические характеристики устройства 249
9.3. Сверхпроводниковые индуктивные накопители для
электроэнергетических систем 255
9.3.1. Энергетические характеристики накопителей 260
9.3.2. Использование накопителей для повышения
устойчивости электроэнергетических систем 275
9.4. Выводы 290
Приложения
К главе 3. Устройство выявления и ликвидации асинхронного
режима «АЛАР-М» 292
П.3.1. Основные технические характеристики устройства 292
П.3.2. Системы координат в комплексной плоскости 295
П.3.3. Основные результаты испытания технологических
алгоритмов 299
П.3.4. Работа устройства АЛАР-М в сети 330 кВ 302
К главе 5. Наблюдаемость и идентификация параметров
энергосистемы 307
П.5.1. Характеристическая функция 307
П.5.2. Флуктуации напряжения и относительная погрешность
модуля и угла сопротивления 310
П.5.3. Флуктуации тока и относительная погрешность модуля
иуглаЭДС 31!
К плаве 7. Идентификация параметров эквивалентной схемы
по траекториям векторов наблюдаемых величин 312
П.7.1. Расчет эквивалента для схемы электропередачи с узлом
отбора мощности 312
6
П.7.2. Результаты проверки метода идентификации
параметров эквивалента «генератор-шины» 315
П.7.3. Результаты проверки метода идентификации
параметров двухмашинного эквивалента..... 3!9
К главе 9. Перспективные технические средства повышения
устойчивости энергосистемы на базе сверхпроводниковых
технологий 322
П.9.1. Характеристики экранов для токоограничивающих
устройств 322
П.9.2. Макетный образец токоограничивающего устройства 325
П.9.3. Эскизный проект токоограничивающего устройства
450МВ-А 328
П.9.4. Расчет СПИН с цилиндрической обмоткой 332
П.9.5. Расчет СПИН с тороидальной обмоткой 337
Список литературы 345
7
Список сокращений
АВР Автоматическое включение резерва
АЛАР Автоматика ликвидации асинхронного режима
АОСН Автоматика ограничения снижения напряжения
АОСЧ Автоматика ограничения снижения частоты
АПВ Автоматическое повторное включение
АПВУС Автоматическое повторное включение с улавливанием
синхронизма
АПНУ Автоматика предотвращения нарушения устойчивости
работы энергосистемы
АР Асинхронный режим
АРВ Автоматическое регулирование возбуждения
АРО Автоматика разгрузки оборудования
АРС Автоматическое регулирование скорости
АСУ ТП Автоматическая система управления технологическим
процессом
АЧР Автоматическая частотная разгрузка
БАЛВ Быстродействующее автоматическое повторное
включение
ВПТ Вставка постоянного тока
ЕЭС Единая энергосистема
КЗ Короткое замыкание
МНК Метод наименьших квадратов
НАПВ Несинхронное автоматическое повторное включение
ОАПВ Однофазное автоматическое повторное включение
ОРПМ Объединенный регулятор потока мощности
ПА Противоаварийная автоматика
ПАР Послеаварийный режим
ПКДУ Программный комплекс дистанционного управления
СК Синхронный компенсатор
CMC Сверхпроводниковая магнитная система
СПИН Сверхпроводниковый индуктивный накопитель
энергии
СТАТКОМ Статический компенсатор
СТАТКОН Статический конденсаторный накопитель энергии
СТК Статический тиристорный компенсатор
8
ТАПВ Трехфазное автоматическое повторное включение
ТОУ Токоограничивающее устройство
ТОУТ Токоограничивающее устройство трансформаторного
типа
ТУПК Тиристорно-управляемыи последовательный
компенсатор
ШР Шунтовый реактор
ЭДС Электродвижущая сила
ЭЦВМ Электронная цифровая вычислительная машина
ЭЦК Электрический центр качаний
ЭЭС Электроэнергетическая система
FACTS Гибкие линии электропередачи (Ftexibte AC
transmission systems)
9
Введение
Повышение эффективности эксплуатации, надежности
функционирования и дальнейшее развитие национальной
электроэнергетической системы тесно связано с необходимостью решения
комплекса задач, управления системой в предаварийных и
аварийных режимах.
Одной из таких проблем является выявление состояния, при
котором возникает опасность перехода электроэнергетической системы
(ЭЭС) в асинхронный режим (АР), принятие мер к предотвращению
перехода к АР, выявление наличия асинхронного режима в случае,
когда меры его предотвращения оказались неэффективными, и,
наконец, ликвидация АР посредством технических мероприятий,
вплоть до деления ЭЭС.
Для решения этих задач в настоящее время используется ряд
локальных устройств, объединенных под общим названием
«автоматика ликвидации асинхронного режима» (АЛАР). Автоматика
ликвидации асинхронного режима является частью противоаварийной
автоматики и предназначена для устранения опасных явлений,
возникающих в таких системах при нарушении синхронной работы частей
объединенных энергосистем. Такая автоматика представляет собой
устройства, расположенные вблизи потенциально опасных сечений
ЭЭС и настроенные на те или иные измеряемые параметры режима
ЭЭС, изменение которых позволяет выявить наличие перехода ЭЭС
в асинхронный режим.
Принципы действия АЛАР основываются на выявлении
отличительных признаков АР при изменении состояния энергосистемы. В
настоящее время устройства АЛАР настраивают на основе
предварительного анализа совокупности характерных режимов работы ЭЭС.
В результате анализа определяют области изменения рабочих
параметров, характерные для устойчивого режима ЭЭС. Выход за
пределы этой области служит признаком перехода ЭЭС в неустойчивый
(асинхронный) режим и является основанием для выработки
управляющих воздействий.
Известным недостатком такого подхода является довольно
высокая вероятность возникновения ошибок первого (несрабатывание
устройства) и второго рода (ложное срабатывание устройства) в
процессе работы автоматики.
!0
Ошибки могут быть обусловлены ситуацией, в которой схема
и режим ЭЭС в данный момент времени не соответствует
предварительно рассчитанному набору характерных режимов, и,
следовательно, уставки устройства оказываются неприменимыми к
данному текущему процессу. Указанная проблема является
непреодолимой для устройств АЛ АР старого образца (релейные и
электронные устройства).
Современные микропроцессорные устройства АЛАР могут
снабжаться сменными наборами уставок. Поэтому при наличии
сигнала от системы управления верхнего уровня или от смежного
устройства автоматики локального уровня они могут изменить
заданную область режимных параметров, чтобы подстроиться к
фактическому изменению стационарного режима ЭЭС. При этом
необходимо, чтобы такой сигнал поступил в устройство заведомо раньше
начала аварийного процесса. Это возможно только при штатном
изменении режима ЭЭС, например, при плановом изменении графика
передачи мощности, при переходе к ремонтной схеме и т.п.
Определенный прогресс в этой области могут привнести
развивающиеся в настоящее время системы управления высокого уровня,
которые в режиме реального времени собирают и обрабатывают
информацию в некоторой совокупности узлов региона, имеют
быстродействующие каналы передачи информации к локальным
устройствам, и, тем самым, могут в определенной степени подстраивать
характеристики работы локальных устройств в соответствии с
режимом региона. Однако такие системы пока не имеют достаточного
развития, и, кроме того, для локального устройства необходимо
обеспечить возможность надежного функционирования и в случае
разрыва канала связи с системой управления высокого уровня.
В связи с этим важной проблемой является исследование и
разработка адаптивных методов выявления асинхронного режима,
базирующихся исключительно на величинах сигналов, доступных для
наблюдения в месте установки локального устройства и не
требующих предварительного анализа изменений схемы и режимов региона
энергосистемы в целом.
Как правило, в качестве уставки срабатывания современных
устройств АЛАР задается угол между эквивалентными ЭДС,
превышение которого соответствует моменту нарушения устойчивости ЭЭС
[Ы]. Угол уставки обычно выбирается в диапазоне от 90° до
критического угла в соответствии с фазовой характеристикой «угол -
И
скольжение». При этом величина критического угла зависит от
режима работы и структуры ЭЭС и относится к разряду информации,
которая не может быть однозначно представлена постоянной
уставкой, поскольку неизвестен режим работы ЭЭС в момент
возникновения асинхронного режима.
Адаптивные способы выявления асинхронного режима
электропередачи позволяют динамически определять величину критического
угла и, тем самым, использовать его точное значение для выявления
наступления асинхронного режима. Производя на основе
периодического получения информации о текущем значении угла оценку знака
производной скольжения можно по изменению знака производной
скольжения во времени с учетом постоянства знака самой величины
скольжения фиксировать наличие асинхронного режима в
энергосистеме, что позволяет выявить наличие АР в момент его наступления с
учетом характера текущего процесса динамического перехода.
В данной книге описывается ряд адаптивных методов
идентификации режимных параметров энергосистемы на основе измерения
напряжения и тока в одном узле. Рассмотренные методы могут быть
использованы для эффективного анализа процессов аварий,
связанных с существенным изменением положения углов генераторов. Они
могут быть также положены в основу технологических алгоритмов
работы локальных устройств автоматики предотвращения и
ликвидации асинхронного режима.
Устойчивость работы электроэнергетической системы
обеспечивается комплексом технических и организационных мероприятий, и
динамический переход к асинхронному режиму возникает тогда,
когда совокупность примененных средств оказывается неспособной
предотвратить развитие аварии. При этом вынужденной мерой
является разделение энергосистемы на две или более независимых
подсистем, каждая со своей рабочей частотой. Разумеется, такая
ситуация является нежелательной, а задача повышения устойчивости
энергосистемы и сохранение синхронности работы частей
энергосистемы постоянно является актуальной.
В настоящее время решение этой задачи базируется на
использовании новейших достижений мировой науки, техники и
технологии процессов генерации, транспорта и потребления электрической
энергии, что позволяет разрабатывать новые технические решения
и схемы использования разработанных образцов новой техники для
повышения устойчивости ЭЭС. При этом используются как тради-
12
ционные для электроэнергетических систем, так и новые
технические средства.
К традиционным техническим средствам относится
регулирование напряжения в сетях, в том числе с помощью синхронных
компенсаторов, шунтовых реакторов и статических тиристорных
компенсаторов.
К новым техническим средствам можно отнести гибкие линии
электропередачи, включая: статические конденсаторные накопители
энергии, статический компенсатор, тиристорно-управляемый
последовательный компенсатор, объединенный регулятор потока
мощности, сверхпроводниковые индуктивные накопители энергии, вставки
постоянного тока, а также адаптивные устройства управления
потоками электромагнитной энергии, включая устройства защиты и про-
тивоаварийной автоматики.
В связи с развитием технологии сверхпроводниковых
материалов значительное внимание в настоящее время уделяется также
применению в электроэнергетических системах устройств и
оборудования, связанного с использованием особых, присущих таким
материалам свойств и возможностей.
В первой части книги (главы 1-3) рассмотрены общие
представления об асинхронном режиме в энергосистеме, рассмотрены
используемые средства выявления и контроля асинхронного режима.
В главе 1 изложены основные представления об асинхронном
режиме в целом, методах моделирования и эквивалентирования ЭЭС
применительно к асинхронному режиму, приведены основные
сведения по современной автоматике ликвидации асинхронного режима,
требования к устройствам АЛАР, их установке и настройке.
В главе 2 выполнен обзор используемых в настоящее время
методов и средств контроля асинхронного режима и устройств на их
основе. Предложена сводная аналитическая таблица связи косвенных
и прямых методов выявления АР вместе с их функциональными
возможностями и объемом предварительной информации, необходимой
для реализации каждого метода.
В главе 3 подробно описано разработанное в ОАО «Институт
«Энергосетьпроект» под руководством и при непосредственном
участии автора современное устройство автоматики ликвидации
асинхронного режима «АЛАР-Ми. Изложены основные принципы,
особенности выполнения и работы устройства, рассмотрена методика
выбора уставок. Автор надеется, что материал данного раздела будет
!3
полезен как при проектировании и эксплуатации устройств АЛАР-
М, так и для облегчения понимания излагаемых в последующих
разделах вопросов, связанных с разработкой и внедрением адаптивных
алгоритмов контроля асинхронного режима.
Во второй части книги (главы 4-8) рассмотрены некоторые
новые способы контроля асинхронного режима, которые могут
быть реализованы в качестве методов и алгоритмов работы
локальных микропроцессорных устройств автоматики ликвидации
асинхронного режима.
В главе 4 рассмотрены особенности моделирования элементов
энергосистемы при АР, предложена методика эквивалентирования
генераторов, нагрузки и участков энергосистемы в случае двухчас-
тотного асинхронного режима
Глава 5 посвящена общим вопросам наблюдаемости,
идентификации режимных параметров и особенностям эквивалентирования
электроэнергетической системы, применительно к задаче выявления
асинхронного режима. Рассмотрены вопросы, связанные с
получением достоверных результатов в условиях случайных флуктуации
входных сигналов. Выполнен обобщенный анализ предельно
достижимой точности результатов идентификации параметров
асинхронного режима в условиях, когда входной сигнал искажен случайными
флуктуациями (шумами). Результаты анализа применимы к методам,
изложенным в последующих разделах, и дают предельную оценку
погрешности получаемых результатов. Изложены также некоторые
частные вопросы, результаты рассмотрения которых полезны для
общего понимания процессов при АР и использованы в
последующих разделах данной работы.
В главе 6 представлен адаптивный метод выявления
электрического центра качаний на контролируемом участке энергосистемы.
Изложенный метод использован в последней модификации
устройства АЛАР-М.
В главе 7 рассмотрены методы идентификации параметров
эквивалентной схемы асинхронного режима посредством анализа
траекторий векторов напряжения, тока и производных от них величин в
комплексной плоскости.
В главе 8 рассмотрены методы идентификации, основанные на
расчете коэффициентов уравнений ветвей эквивалентной схемы. Эти
методы используют решение переопределенной системы уравнений
ветвей эквивалентной схемы в условиях нерегулярных флуктуации
14
входных сигналов. В первом методе используются
дифференциальные соотношения между наблюдаемыми сигналами напряжения и
тока, во втором методе используются комплексно-сопряженные
уравнения для перехода в область вещественных чисел. Для
улучшения вычислительных свойств алгоритмов предложен метод
«прореживания» выборки входных сигналов.
В третьей части книги (глава 9) рассмотрены перспективные
технические средства повышения устойчивости энергосистемы на
базе использования сверхпроводниковой технологии. Изложено
современное состояние вопроса, подробно рассмотрены два
перспективных устройства - токоограничитель с коммутацией магнитного
потока и сверхпроводниковый накопитель электрической энергии.
В целях придания основному содержимому работы
компактности и последовательности часть материала справочного характера, а
также материала, связанного с выводом некоторых используемых
соотношений, вынесена в приложения.
В настоящую монографию включены как ранее опубликованные
материалы исследований, так и новые результаты, полученные
автором в последнее время и требующие обобщения. Таким обобщением
и является настоящая монография.
Автор глубоко признателен д.т.н., проф. М.Ш. Мисриханову,
непосредственно повлиявшему на решение взяться за написание
этой книги, всемерно способствовавшему тому, чтобы книга была
написана и взявшего на себя большой труд по её научному
редактированию, в процессе которого полезные обсуждения,
рекомендации и критика существенно способствовали улучшению
содержания этой работы.
Автор благодарен д.т.н., проф. [И.В. Якимцу] за постоянное
внимание и поддержку в разработке вопросов, которые нашли
отражение в этой книге.
Большое спасибо сотрудникам ОАО «Институт «Энергосетьпро-
екты А.Б. Ваганову за помощь в разработке и апробировании устройства
АЛАР-М и адаптивных вычислительных алгоритмов, А.А. Налевину,
принимавшему участие в разработке методов идентификации
параметров траекторий наблюдаемых сигналов, Г.А. Дмитриевой, внесшей
большой вклад в анализ вопросов использования СПИН для повышения
устойчивости ЭЭС, Д.Р. Любарскому и И.А. Иванову, без которых было
бы невозможным создание устройства АЛАР-М, сотрудникам ОДУ
Северо-Запада П.Я. Кацу и А.А Лисицину за полезные обсуждения
!5
практических аспектов использования автоматики ликвидации
асинхронного режима, сотрудникам НИИПТ М.А. Эдяину и его группе за
большую работу по испытаниям и апробации устройства АЛАР-М на
электродинамической модели НИИПТ.
16
Глава L Асинхронный режим энергосистемы
1.1. Устойчивость энергосистемы
Как известно, в нормальном режиме работы устойчивость
совместной работы частей электроэнергетической системы
поддерживается за счет естественных синхронизирующих сил взаимного
влияния генераторов [1.1]. Для этих же целей используются
устройства противоаварийной автоматики, действующие в начальный
момент аварии посредством принудительного изменения баланса
мощностей в сторону, препятствующую дальнейшему развитию
асинхронного хода частей энергосистемы.
В случае, когда для предотвращения перехода в асинхронный
режим указанных факторов оказывается недостаточно, необходимо
иметь возможность использовать дополнительные средства,
назначение которых состоит в выявлении факта перехода в асинхронный
режим и принятия мер к его ликвидации, обычно посредством
деления энергосистемы.
Такую возможность и предоставляет автоматика ликвидации
асинхронного режима. В ряде случаев при этом выявляют ускоряющуюся и
тормозящуюся части энергосистемы, что необходимо для
обоснованного выбора точки деления с учётом расположения нагрузки.
Решение задачи обеспечения надёжной работы ЭЭС в
стационарных и переходных режимах, сохранения и восстановления
устойчивости послеаварийных процессов основывается на
совокупности большого комплекса работ советских и российских ученых
и исследователей.
В классических работах А.А. Горева, П.С. Жданова, С.А.
Лебедева сформированы основополагающие представления о переходных
процессах в ЭЭС, создана общая теория, предложены основные
методы расчёта асинхронных режимов и управления системой в
процессе динамического перехода.
Фундаментальные исследования В.А. Баринова, ВВ. Бушуева,
В.А. Веникова, Н.И. Воропая, A3. Гамма, Ю.Е. Гуревича, Ф.Г.
Гусейнова, Л.А. Жукова, АС. Зеккеля, Б.И. Иофьева, В.Д. Ковалева,
Ф.Л. Когана, Л.А. Кощеева, Д.П. Ледянкина, И.В. Литкенс, Л.Г. Ма-
миконянца, И.М. Марковича, М.Ш. Мисриханова, А.А. Окина, М.Г.
Портного, Д.С. Савваитова, В.А. Семенова, С.А. Совалова, В.А.
17
Строева, Ю.А. Тихонова, С.А. Ульянова, A.M. Федосеева, А.А. Хача-
турова, ЮГ. Шакаряна, Н.Н. Щедрина и других советских и
российских ученых и инженеров привели к получению детализированного
представления о характере процессов в ЭЭС, разработке методов
моделирования, аналитических и численных способов расчёта
электромеханического движения ЭЭС, разработке методов анализа
устойчивости. Исследованы и решены задач развития больших ЭЭС,
обеспечения устойчивости и надёжности их функционирования,
сформированы теория и методы оптимального иерархического управления
режимами ЭЭС. Исследования асинхронных режимов продолжаются в
настоящее время в ряде научно-исследовательских институтов,
высших учебных заведениях и других организациях.
Важно отметить, что в рассматриваемой области сформирована
устойчивая парадигма, осознание и практическое освоение которой
является необходимым условием успешной деятельности в рамках
данной предметной области, и использование которой является
основой любых дальнейших исследований и разработок.
На основе разработанных методов появилась возможность
реализации комплексного подхода к проектированию развития
объединенных энергосистем с разработкой средств диспетчерского
управления, автоматического управления стационарными режимами и
противоаварийной автоматики.
Широко используются устройства автоматики и
регулирования, дающие значительное повышение устойчивости
энергосистем. К ним относятся: автоматические регуляторы возбуждения
(АРВ), автоматическое повторное включение (АПВ) всех типов
(однофазное - ОАПВ, быстродействующее - БАПВ, трёхфазное -
ТАПВ, несинхронное - НАПВ, с улавливанием синхронизма -
АПВУС), автоматическая частотная разгрузка (АЧР) и
автоматическое включение резерва (АВР).
Однако применение перечисленных устройств не всегда
обеспечивает необходимый уровень устойчивости. Для достижения
поставленной задачи требуется применение и других мероприятий, таких
как регулирование возбуждения сильного действия, отключение час-
ПАРАДИГМА (от греч. paradeigma - пример, образец) - исходная
концептуальная схема, модель постановки проблем и их решения, методов
исследования, господствующая в течение определенного исторического периода
в научном сообществе.
18
ти генераторов, отключение синхронных компенсаторов, отключение
слабых связей, деление электростанций, отключение части нагрузки
потребителей, управление средствами компенсации
(конденсаторами, реакторами), управление первичными двигателями,
электрическое торможение генераторов, регулирование мощности
примыкающих линий постоянного тока, управление мощностью нагрузки и т.п.
Нестационарные процессы, возникающие при развитии АР в
энергосистеме, представляют собой сложное явление, и при
исследовании асинхронных режимов приходится, как правило, оперировать с
относительно приближённой информацией о системе [11].
В качестве причин нарушения устойчивости ЭЭС можно отметить:
нарушение статической устойчивости вследствие неблагоприятного
распределения нагрузок между синхронно работающими генераторами
(или станциями), длительное понижение напряжения [1.3], резонансные
явления, возникающие при возмущениях [1.4], [1.5].
Нередко нарушения устойчивости возникают в результате
аварийного процесса в смежной энергосистеме [1.6] - [1.10]. Так
при параллельной работе мощной станции с двумя приёмными
энергосистемами возможно нарушение синхронизма на
неповрежденной передаче вследствие асинхронного хода по другой
передаче. При работе мощной станции на приёмную систему по двум
линиям, работающим по блочной схеме, в случае, когда приёмная
система испытывает дефицит мощности при асинхронном ходе по
одной из передач и в ней происходит снижение частоты, то по
другой передаче также может начаться асинхронный ход
вследствие разности частот передающего и приёмного конца.
Асинхронный ход по межсистемной связи может быть опасен
для энергосистемы, подсоединенной в промежуточной точке
межсистемной связи. Причём, чем меньше по мощности промежуточная
система по отношению к энергосистемам, соединенным
межсистемной связью, тем больше опасность потери устойчивости
промежуточной системы. Восстановление синхронной работы и ликвидация
аварии требуют значительного времени.
Аналитические методы определения режимных параметров при
асинхронном ходе в системе можно разделить условно на две группы
в зависимости от принятого подхода.
1. При асинхронном ходе в системе предполагается появление
дополнительных токов (или ЭДС) в контурах роторов генераторов,
а параметры всех элементов схемы предполагаются постоянными
19
[!.!!]- [!.!6]. При этом задачей создания математических моделей
синхронно и асинхронно работающих генераторов является в
данном случае определение ЭДС генераторов для расчётной схемы
замещения,
2. При асинхронном ходе в системе предполагается, что
наведение дополнительных токов в контурах ротора генератора отражается
в расчётной схеме замещения системы [1.17] введением
сопротивлений генераторов, изменяющихся от частоты. В этом случае задачей
создания математических моделей синхронно и асинхронно
работающих генераторов в системе является определение зависимости
этих сопротивлений от частоты.
Анализ возможных причин нарушения устойчивости был
выполнен на основе большого практического опыта и
экспериментального материала [1.5], [1.6], [118] - [1.20]. Обобщение практического
опыта применения асинхронных режимов в энергосистемах дает
возможность оценить опасность и определить возможные случаи
нарушения устойчивости. Полученный при этом экспериментальный
материал был использован для проведения приближённого
качественного анализа влияния различных факторов (постоянных инерции,
параметров доаварнйного режима, скольжения асинхронного хода)
на запасы результирующей устойчивости в системе.
Ряд аналитических и численных методов изучения устойчивости
при асинхронном ходе в системе основывается на применении
различных методов решения нелинейных дифференциальных уравнений
и принятии в связи с этим упрощений. В качестве основных
направлений можно выделить: направление, основанное на линейной
теории колебаний и способах решения линейных дифференциальных
уравнений; направление, основанное на методах численного
интегрирования системы нелинейных дифференциальных уравнений;
направление, основанное на применении метода гармонической
линеаризации.
В работе [1.21] при составлении исходной системы уравнений
использованы схемы замещения, в которых электромагнитные
переходные процессы, происходящие при асинхронном ходе в системе,
отражаются введением изменяющихся в функции частоты
сопротивлений генераторов системы. Полученные уравнения гармонических
составляющих электромагнитных моментов генераторов системы
предполагают возможность определения параметров вынужденных
колебаний синхрюи:ых машин.
20
В работе [1.22] предложена аналитическая методика
исследования параметров вынужденных колебаний и определения их
критических уровней, приводящих к нарушению устойчивости. При этом
рассматривается синхронная машина, работающая через внешнее
сопротивление на шины и находящаяся под воздействием
гармонической внешней силы. Идеализация периодических возмущений в
системе принята и в [1.23], где для определения параметров
вынужденных колебаний генератора применен энергетический метод.
В практике эксплуатации энергосистем имеются случаи
асинхронных режимов, при которых наблюдались асинхронное движение
более чем двух групп генераторов. Многомашинный асинхронный
режим особенно опасен по своим последствиям, поскольку
ресинхронизация при нем маловероятна, а типовые устройства АЛАР этом
случае малоэффективны. Использование типовых устройств для
выявления многомашинного АР возможно лишь при сочетании
различных обстоятельств, в частности, когда связь между двумя группами
асинхронно работающих частей энергосистемы и третьей группой
слабая. Если трёхмашинный АР развивается из двухмашинного, то
необходимо быстро ликвидировать двухмашинный АР. Если
многомашинный АР предупредить невозможно, то обычно производят
деление энергосистемы таким образом, чтобы в его оставшихся
электрически связанных частях было бы не более двух различных частот.
При этом делительная автоматика должна действовать таким
образом, чтобы разделить энергообъединение сложной структуры на
потенциально устойчивые части, которые обладали бы максимальной
способностью к ресинхронизации.
Важной задачей является как выбор места установки АЛАР, так
и организация его работы с учетом чувствительности к
асинхронному режиму определенных эквивалентных генераторов и
нечувствительности к АР при другом сочетании генераторов. Угловой принцип
выявления АР (см. главу 3) открывает определенные перспективы
для реализации указанных требований.
Определение места установки и направленность воздействия
автоматики производится на основе результатов экспериментов и
расчётов сечений АР при широком наборе возможных возмущений. Тем
не менее, практика эксплуатации устройств в ряде случаев не
соответствует расчётным условиям. Следствием этого может явиться
деление ЭЭС на потенциально неустойчивые части, не обладающие
способностью к ресинхронизации из-за значительных небалансов
21
мощности и требующие дальнейшего деления. Задача осложняется
еще и тем, что при АР в многомашинной схеме положение точки
ЭЦК не является фиксированным. В разные моменты времени она
находится в различных точках эквивалентной схемы в соответствии с
текущими значениями векторов ЭДС эквивалентных генераторов.
Кроме того, необходимо учитывать, что, во избежание
выделения энергорайона со значительным дефицитом мощности, деление
ЭЭС по одному из асинхронных сечений должно быть отстроено от
одновременного деления по другому асинхронному сечению.
Формирование системы выявления и ликвидации
многомашинного АР может быть осуществлено на основе использования
микропроцессорной техники путем определения угла между векторами
ЭДС эквивалентных генераторов и прогнозированием возможности
сохранения устойчивости в возможном наборе разделяемых частей
ЭЭС. При этом, поскольку действие делительной автоматики в
многомашинной структуре энергосистемы только способствует, но не
гарантирует обязательной ресинхронизации разделившихся частей
ЭЭС, её функционирование должно быть связано с дальнейшим
действием устройств автоматической ликвидации АР.
1.2. Моделирование и эквивалентирование энергосистемы
Вследствие высокого уровня сложности электроэнергетической
системы как объекта управления, одним из неотъемлемых аспектов
успешной деятельности в данной предметной области является
использование моделирования.
Общее присущее модели свойство заключается в наличии
структуры (статической или динамической, материальной или
мысленной), которая действительно подобна, или рассматривается в
качестве подобной, структуре реальной системы [1.24].
Модель, таким образом, это естественный или искусственный
объект, находящийся в соответствии с изучаемым объектом или,
точнее, в соответствии с какой-либо из его сторон. В процессе изучения
модель служит относительно самостоятельным «квазиобъектом»,
позволяющим получить при исследовании некоторые знания о нем
самом. При этом объект-модель способен в том или ином отношении
замещать оригинал на некоторых стадиях познавательного процесса.
Модели позволяют изучать сложные (большие) системы, прямые
эксперименты на которых затруднительны или даже невозможны.
22
Методы подобия и моделирование по своей природе нацелены
на выделение из сложной системы того, что является самым важным
при изучении её свойств в данной конкретной постановке задачи.
Моделирование, таким образом, требует объективного
соответствия с изучаемым объектом и возможности замещения его не всегда и
не во всем, а только на определённых этапах исследования. Модель,
какой бы она ни была, должна обладать способностью в ходе
исследования давать некоторую, допускающую поверку информацию.
Задачи, решаемые с помощью моделей, можно подразделить на
прямые и обратные задачи анализа.
При решении прямых задач исследуемая система задается
параметрами своих элементов и параметрами исходного режима,
структурой или уравнениями. При этом требуется определить реакцию
системы на действующие силы.
Обратные задачи анализа известной реакции системы
определяют силы (возмущения), заставившие рассматриваемую систему
прийти к данному состоянию и вызвавшие данную реакцию.
Полная математическая модель процессов в электроэнергетической
системе базируется на трудах А.А. Горева, С.А. Лебедева,
П.С. Жданова. При этом сразу было установлено, что практическое
использование полной математической модели связано с проблемами при
получении точных параметров уравнений, и определенными
математическими трудностями решения такой системы уравнений. Вследствие
этого, в фундаментальных работах [1.1], [1.25] - [1.28], были
предложены, обоснованы и используются ряд упрощенных моделей,
построенных применительно к решению различных задач при пренебрежении
(по сравнению с полной моделью) теми или иными факторами,
оказывающими несущественное влияние на исследуемые процессы.
В частности, для оценки синхронной устойчивости генератора
при периодических возмущениях от асинхронного хода
использовался метод анализа амплитудно-частотных характеристик колебания
угла положения ротора синхронно работающей машины [1.29]. Для
анализа влияния на устойчивость асинхронно работающих машин
выполнялось моделирование возмущения в виде периодической
составляющей момента на валу ротора исследуемой машины [1.30],
[1.31]. В некоторых работах исследование влияния асинхронного
хода на устойчивость генераторов в сложной электрической системе
сводилось к анализу трёхмашинной системы [1.32], [1.33].
Исследования влияния асинхронного хода в сложных электрических систе-
23
мах на устойчивость синхронно работающих машин дополнялись
экспериментами в действующих системах [! .34] - [! .36].
Применение той или иной модели зависят как от типа
рассматриваемого процесса, так и от структуры электроэнергетической системы.
Современные ЭЭС имеют, как правило, достаточно сложную
структуру, которую лишь весьма приближённо можно
охарактеризовать и классифицировать. Тем не менее, такая классификация
электрических систем полезна, поскольку существуют особенности
обеспечения устойчивости систем, присущие той или иной
структуре. Эти общие для каждой структуры особенности касаются
причин нарушения устойчивости и их последствий, целесообразного
уровня устойчивости, методов анализа, задач и принципов
управления. Классификация энергосистем по их структуре при решении
задач устойчивости производилась в [128], [1.37], [L38].
Подробный анализ набора классов математических моделей для
исследования установившихся и переходных процессов в ЭЭС выполнен в
[L20].
С точки зрения системного анализа электроэнергетическую
систему можно рассматривать как «большую систему», поскольку она
содержит значительное количество генераторных блоков, линий
электропередачи, узлов нагрузки, элементов автоматики и
управления, и при этом все элементы системы, взаимодействуя друг с
другом, образуют сложную разветвленную структуру с множеством
связей между собой. Это множество может рассматриваться в виде
топологической структуры - графа сети. В работе [1.39] предложена
типовая классификация структур энергосистемы.
Прежде всего, энергосистемы могут быть подразделены на
энергосистемы простой и сложной структуры.
К энергосистемам простой структуры могут быть отнесены
такие системы, которые при анализе электромеханических
переходных процессов можно свести к эквивалентной двухмашинной
системе.
В свою очередь, энергосистемы простой структуры подразделу
ют на следующие типы:
I. Энергосистема с избытком мощности, связанная с
энергосистемой большой мощности.
Н. Дефицитная энергосистема, получающая мощность из
энергообъединения большой мощности.
24
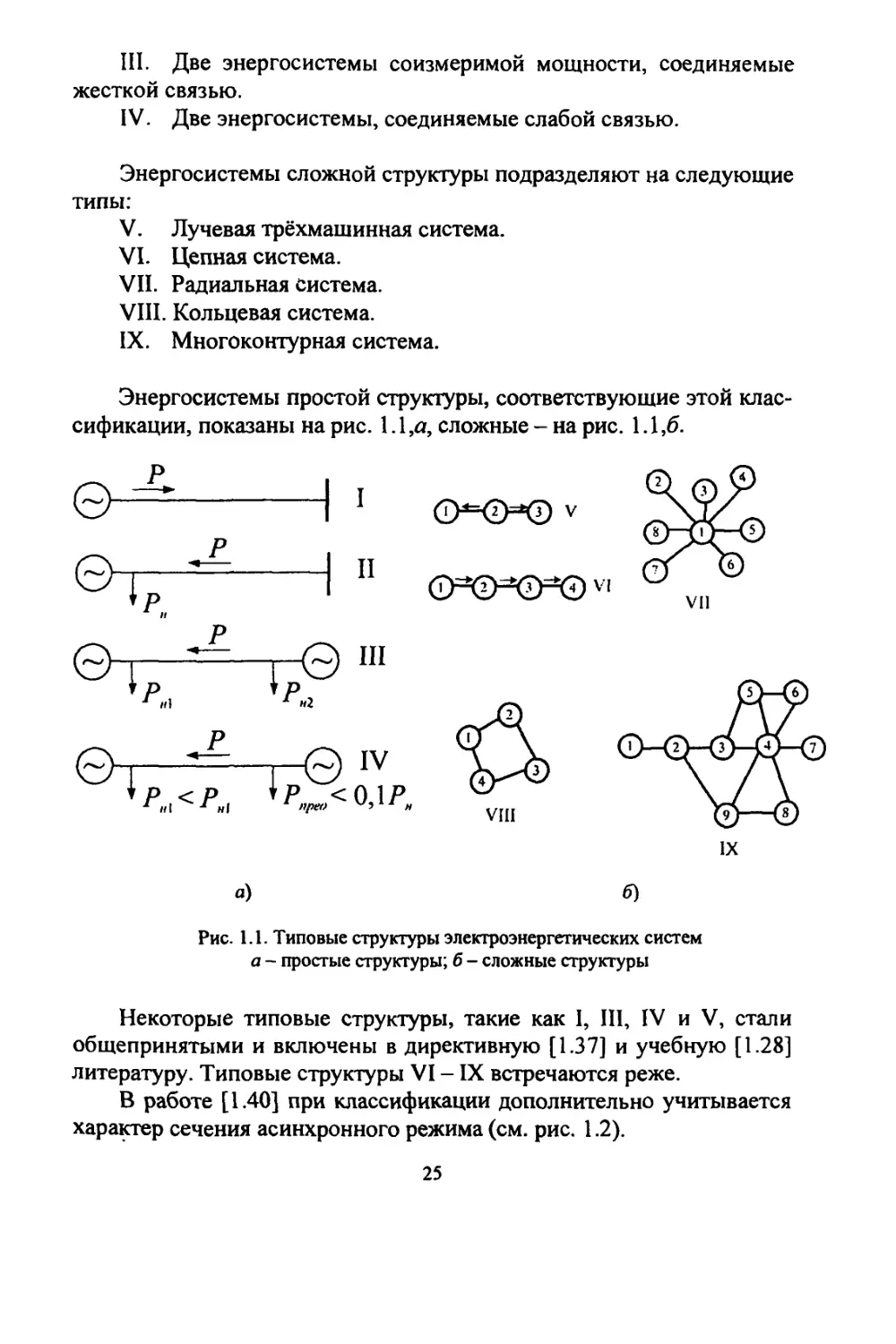
HI. Две энергосистемы соизмеримой мощности, соединяемые
жесткой связью.
IV. Две энергосистемы, соединяемые слабой связью.
Энергосистемы сложной структуры подразделяют на следующие
типы:
V. Лучевая трёхмашинная система.
VI. Цепная система.
VII. Радиальная система.
VIII. Кольцевая система.
IX. Многоконтурная система.
Энергосистемы простой структуры, соответствующие этой
классификации, показаны на рис. 1.1 ,я, сложные - на рис. 1.1 ,б.
я) 6)
Рис. 1.1. Типовые структуры электроэнергетических систем
а - простые структуры; б - сложные структуры
Некоторые типовые структуры, такие как I, III, IV и V, стали
общепринятыми и включены в директивную [137] и учебную [1.28]
литературу. Типовые структуры VI - IX встречаются реже.
В работе [1.40] при классификации дополнительно учитывается
характер сечения асинхронного режима (см. рис. 1.2).
25
Рис. ! .2. Сечение с двумя связями, расположенными на удалении друг от друга.
В [1.41] дополнительно вводятся типы структур: иерархическая
(рис. ! .3,я) и ячеистая (рис. 1.3,6).
я) б)
Рис. U. Виды структур: я - иерархическая; б- ячеистая.
При определении того, к какому типу отнести некоторую
конкретную систему, важную роль играют режим энергосистемы, а
также соотношения между мощностями генерации и потребления в её
частях и пропускной способностью электропередачи. Предложенные
типовые структуры не единственно возможные, могут быть и другие
варианты.
Структура энергосистемы существенно влияет на её
устойчивость. От структуры во многом зависит изменчивость схем и
режимов, причины и последствия нарушения устойчивости,
эффективность применения тех или иных методов выявления АР.
Такой подход позволяет проводить анализ новых свойств:
структурные характеристики, многомерность, связность и неодно-
26
родность, - которые могут выявиться в системе по мере ее
усложнения [L42].
Графическое изображение схемы замещения электрической сети
позволяет более наглядно проследить возможные характерные
особенности структуры, обусловленные, например, неравномерной
плотностью связей в разных частях графа, а также сопоставить локальную
структуру отдельных частей ОЭС с простейшими типовыми схемами.
Так, например, цепочечная структура характерна для схемы сетей
ОЭС Сибири и схемы электрификации Транссибирской магистрали;
радиальная соответствует схеме питания потребителей от одного
источника; ячеистая - схеме основных сетей европейской части ЕЭС
России; неоднородная многосвязная - схеме ОЭС Средней Волги, где
роль центрального узла играет Волжская ГЭС им. В. И. Ленина. Схема
ЕЭС России в целом является иерархической структурой.
Как отмечено в [1.39], во многих случаях достаточно сложные
системы могут рассматриваться в первом приближении как простые,
а в иных могут выделяться участки, которые целесообразно
рассматривать как простые схемы.
В работе [1.43] проведен подробный анализ методов упрощения
моделей в зависимости от особенностей структуры ЭЭС.
Необходимость упрощений моделей тесно связана с задачами
обеспечения оперативного управления ЭЭС в условиях дефицита
времени для принятия решений. В связи с тем, что современные ЭЭС
усложняются, а требования к эффективности алгоритмов анализа
электромеханических переходных процессов остаются достаточно
жесткими, вопросы рационального упрощения математических
моделей динамики ЭЭС приобретают все большую актуальность.
Проблема упрощения математических моделей наиболее успешно
решается при учёте специфики постановок задач и методов их
решения для конкретных сложных систем. При этом использование тех или
иных подходов к упрощению математической модели системы во
многом определяется также тем, для каких целей будут использованы
результаты, полученные с помощью упрощенной модели.
Собственно проблема упрощения математических моделей
динамики ЭЭС возникла практически одновременно с теорией
устойчивости ЭЭС [1.1]. С тех пор методы эквивалентирования получили
существенное развитие и в настоящее время отличаются большим
разнообразием. Вопросу систематизации эквивалентирования
посвящены работы [144], [1.45].
27
При использовании математических методов упрощения
необходимо иметь в виду, по крайней мере, два важных обстоятельства.
Во-первых, нет универсальных математических методов, одинаково
эффективных на всех этапах упрощения математических моделей
динамики ЭЭС. Во-вторых, для эффективного использования
математических методов важны правильная постановка задачи и учёт
специфических свойств системы.
Наиболее эффективными оказываются, как правило, подходы к
эквивалентированию, используемые при решении вполне конкретной
и достаточно узкой задачи исследования электромеханических
переходных процессов ЭЭС, поскольку при этом удается в большей мере
использовать специфику этой задачи.
В работе [143] предлагается достаточно общий подход к вопросу
упрощения математической модели, состоящий из ряда
последовательных этапов. Используется специфическое свойство ЭЭС -
уменьшение влияния аварийного возмущения по мере удаления от него.
Главная идея предлагаемой методики упрощения состоит в быстрой
оценке возможностей упрощения математической модели с
последующей более точной проверкой допустимости упрощения модели в
ограниченном числе характерных точек области исходных условий.
На первом этапе упрощается математическое описание элементов
ЭЭС в зависимости от места приложения и характера возмущения с
использованием показателей влияния возмущения на поведение
отдельных элементов системы, в результате чего определяются
подсистемы с идентичным математическим описанием элементов. При этом
подсистемы, расположенные вблизи места возмущения, имеют
наиболее полное математическое описание, а по мере удаления от
возмущения математические модели элементов все более упрощаются.
Второй этап упрощения математической модели ЭЭС -
собственно эквивалентирование, которое использует еще одно
специфическое свойство системы: синфазность движения генераторов в
переходном процессе.
На первом и втором этапах используются приближённые методы
оценки возможности упрощения, что позволяет построить на основе
этих методов быстродействующие алгоритмы упрощения.
Третьим этапом является проверка допустимости упрощения
путем'сопоставления результатов расчётов электромеханических
переходных процессов по исходной и упрощенной моделям системы. Эту
проверку проводят для характерных точек области исходных условий
28
с тем, чтобы можно было подтвердить правильность оценочных
методов, использованных на предыдущих этапах операции упрощения.
В качестве определенного обобщения можно утверждать, что
работа каждого устройства противоаварийной автоматики базируется на
той или иной упрощенной модели, наилучшим возможным образом
отражающей контролируемый данной автоматикой процесс в ЭЭС.
1.3. Базовая модель асинхронного режима энергосистемы
Для рассмотрения основных принципиальных моментов
перехода энергосистемы в асинхронный режим работы, особенно в тех
случаях, когда для анализа некоторой рассматриваемой проблемы в
рабочей модели достаточно учесть только основные
электромеханические процессы, используется базовая модель энергосистемы,
называемая обычно моделью «генератор - шины бесконечной
мощности». Такая модель и процессы в ней подробно описаны в учебно-
методической литературе (см., например, [1.46], [1.47]).
Тем не менее, для полноты картины и иллюстрации того, каким
образом строится упрощенная модель сложного процесса потери
устойчивости и перехода ЭЭС в асинхронный режим, целесообразно кратко
рассмотреть основные представления такой модели. Это полезно еще и
потому, что некоторые последующие разделы настоящей работы
используют основные элементы такой модели.
Следуя материалам [1.47], рассмотрим кратко основные
представления о простейшей модели ЭЭС в асинхронном режиме.
Функционирование энергосистемы сопровождается случайными
колебаниями (возмущениями) ее параметров, изменяющими режим
(отключение и включение потребителей, аварийное отключение
элементов энергосистемы, короткие замыкания в сети и т.п).
Способность энергосистемы противостоять этим возмущениям
называют устойчивостью энергосистемы, причем в зависимости от
величины возмущения различают два вида устойчивости -
статическую и динамическую.
Установившийся режим энергосистемы называется статически
устойчивым, если малые возмущающие воздействия приводят лишь
к малым изменениям режима. Это свойство энергосистемы дает
возможность вести нормальный режим, который из-за непрерывных
колебаний нагрузки не является строго установившимся, и был бы
неосуществим при отсутствии статической устойчивости.
29
Резкие большие изменения параметров энергосистемы
вследствие коротких замыканий, аварийных отключений поврежденных
элементов и так далее принято называть большими возмущениями
или динамическими переходами.
В тех случаях, когда переходный процесс после прекращения
возмущения заканчивается установившимся режимом,
соответствующим новому (послеаварийному) значению параметров, переход
является динамически устойчивым. Если при этом в переходном
процессе углы между взаимными осями роторов генераторов не
достигли значения 360°, то считается, что генераторы остались в
синхронизме и система обладает синхронной динамической
устойчивостью. Если же хотя бы один из взаимных углов превысил 360°, это
означает, что в системе имел место асинхронный режим.
Обратный переход от асинхронного режима к синхронизму
называется ресинхронизацией. Если ресинхронизация произошла
достаточно быстро и при сохранении основной нагрузки, то говорят, что
система обладает результирующей динамической устойчивостью.
При исследовании устойчивости различают энергосистемы
простой и сложной структуры. Простейшая энергосистема представляет
собой эквивалентный генератор, работающий через линию передачи
на приемную систему несоизмеримо большой мощности,
представляемую «шинами бесконечной мощности» (ШБМ), см. рис. 1.4.
1
O-oo-J
t
х„
х„
изоч
ч:
Рис. )4. Принципиальная схема простой энергосистемы.
Электромеханические переходные процессы в такой системе
описываются уравнениями:
Г—= Р-Р
^
Л
= s,
(И)
зо
где: J - угол между поперечной осью ротора генератора и синхронной
осью (рад); s - скольжение генератора относительно синхронной оси,
(рад/с); ^ ,^э - мощность турбины и электрическая мощность
генератора (отн. ед.); Г - постоянная инерции генератора, (с^/рад).
Строго говоря, в уравнении (1.1) вместо мощностей должны
быть записаны соответствующие моменты, но при малых значениях
скольжения эти величины в относительных единицах близки, и их
можно приравнять друг другу.
При упрощенных расчетах не учитывают электромагнитные
переходные процесса в роторах синхронных машин и в сети, а также
пренебрегает зависимостью сопротивлений сети от частоты приложенных
напряжений. Тогда для определения электрической мощности
генератора в переходном процессе может быть использован метод наложения
и применены соотношения, справедливые для установившегося режима.
При этом генератор представляется в схеме замещения
некоторой постоянной по амплитуде ЭДС Д,. за реактивностью А',., выбор
которых определяется характером задачи и свойствами системы
регулирования возбуждения. Это может быть синхронная ЭДС или
переходная ЭДС или ее проекция на ось % .
Электрическая мощность генератора равна:
Р, = ДД = ^sin(F) = ^sin(J), (1.2)
где: А^ = А^ + А",., + А'д /2 + А^ - суммарная реактивность передачи;
^, = E,.t//A^ - максимальное значение электрической мощности.
Мощность турбины принимается постоянной на каждом
небольшом интервале рассмотрения процесса. При рассмотрении
процесса на большом интервале необходимо учитывать действие
регуляторов скорости, изменяющих мощности турбин.
С учетом сказанного уравнение движения (1.1) генератора
записывается в виде:
Г, —= R.-^sin(F);
(1.3)
31
В случае нерегулируемой машины ЭДС генератора Е^
принимается равной Еу, пропорциональной току; возбуждения, а
сопротивление ^ равным индуктивному сопротивлению машины по
продольной оси А",,.
На самом деле имеющиеся регуляторы возбуждения в
нормальных режимах поддерживают напряжение на шинах генератора или на
шинах высшего напряжения станции с точностью, определяемой
коэффициентом усиления АРВ по отклонению напряжения. Для АРВ
пропорционального действия, регулирующего по отклонению
режимных параметров, считается допустимым производить анализ,
устойчивости, исходя из постоянства переходной ЭДС Е' за
переходной реактивностью ^. Для АРВ сильного действия, где
дополнительно используются стабилизирующие сигналы по производным
режимных параметров, можно принимать неизменным напряжение
на шинах станции [1.28].
Установившемуся режиму системы соответствует равенство
нулю производных по времени от координат л, J, т.е.
R.-R=0;1
j = 0. J
Первое из этих условий означает, что мощность турбины
уравновешивается электрической мощностью, а второе - что генератор
вращается с синхронной скоростью.
С учетом (1.3) первое условие (! .4) можно представить как
^-^sin(F) = 0. (1.5)
Из этого уравнения находится угол F, соответствующий
установившемуся режиму.
Решение уравнения (1.5) иллюстрируется диаграммой
«мощность-угол» (рис. 1.5), на которой представлена зависимость (1.2)
электрической мощности от угла и горизонтальная прямая
постоянной мощности турбины.
32
Рис. ^.5. Угловая диаграмма активной мощности.
Установившийся режим возможен, если графики ^и /^
пересекаются, для чего должно выполняться условие:
4<^
(L6)
Граничному случаю соответствует 7^ = J^,. Величину /^
называют амплитудой взаимной мощности или пределом передаваемой
мощности по линии. Если выполнено (1.6), то установившемуся
режиму на диаграмме рис. 1.5 соответствуют две точки равновесия О и
& Значения углов в этих точках равны:
<5^ = arcsin
—I.
7U
<^ ="-<?,-
(1.7)
При этом точка О является точкой устойчивого равновесия, а
точка j^f- точкой неустойчивого равновесия.
Качественный анализ, который подтверждает этот вывод,
заключается в следующем. Если в точке О угол вследствие какого-
либо возмущения получит некоторое положительное приращение, то
возникнет отрицательное ускорение, в результате чего ротор начнет
тормозиться и угол уменьшится. Аналогично, при отрицательном
приращении ротор начнет разгоняться и угол возрастет.
33
Для точки Д изменение баланса мощностей, приводящее к
ускорению или замедлению ротора, создает условия для роста угла и
нарушения синхронизма.
Приведенные рассуждения показывают наличие в точке О
восстанавливающего момента, однако для рассматриваемой модели
при этом возникнут незатухающие колебания угла вокруг
положения равновесия.
В действительности, электрическая мощность содержит
составляющую, появляющуюся при отличии скольжения от нуля и
обусловленную переходными процессами в роторе, благодаря которой
после нескольких колебаний состояние практически возвращается к
установившемуся и соответствующему точке О. Эта составляющая
мощности называется демпфирующей и приближенно учитывается
дополнительным слагаемым, зависящим от скольжения.
Строгий метод анализа статической устойчивости состоит в
рассмотрении свойств решения уравнения (1.3), линеаризованного в
окрестности положения равновесия. Это же уравнение используется
при исследовании процессов для малых отклонений режима от
установившегося. Для рассматриваемой модели при учете
демпфирующей составляющей линеаризованное уравнение, записанное в виде
уравнения 2-го порядка, имеет вид:
T^ + D^^ + ^cos(&)AJ==0, (1.8)
где A J = J - & - отклонение угла от установившегося значения &,
D - коэффициент демпфирования.
Общее решение (1.8) имеет вид:
А^Д^'+у^', (1.9)
-D±JD'-47^ cos(F,)
где у, J = ^
2Г,
Для выполнения условия устойчивости необходимо и
достаточно, чтобы действительные части корней были отрицательны.
34
Рассмотрим теперь синхронную динамическую устойчивость
системы, связанную с процессом больших колебаний угла ротора.
В приближенном анализе синхронной динамической
устойчивости генератор обычно замещают переходной ЭДС за переходной
реактивностью. При рассмотрении небольших отрезков времени
демпфирующая составляющая мощности не учитывается.
Количественное исследование условий устойчивости для
рассматриваемой системы можно провести с помощью критерия
площадей (см. диаграммы рис. L6).
Ар
О
Я'
/ ^*—^ \
P.f
Р,
^^
я 8 0 5,';=5" 5J я 8
О 8^=8" 8J я 8 О 8J 8" 8^ я 8
с) ;)
Рис. 1.6. Угловые диаграммы метода площадей.
На диаграмме рис. 1.6 на отрезке Г<5^f;<^ 1 рассматривается
площадка, заключенная между значениями 7$. и Л,, называемая
площадкой ускорения, а часть, соответствующая ^ < ^э - площадкой
возможного торможения.
Если площадка возможного торможения больше площадки
ускорения, то переход устойчив (рис. 1.6,2), в противном случае - неус-
35
тойчив (рис, 1.6,я и 1.6,6). Граничному случаю соответствует
равенство площадок.
Другой метод оценки устойчивости при больших колебаниях
системы основан на рассмотрении траекторий на фазовой плоскости
(см. рис 1.7). По оси абсцисс отложены значения угла J, а по оси
ординат - значения скольжения л.
Совокупность всех траекторий на такой плоскости составляет
фазовый портрет системы уравнений (1.3).
Рис. 1.7. Характеристики простейшей энергосистемы
я) фазовый портрет; б) энергетическая диаграмма.
Траектории разделяются на три типа: ограниченные траектории
(1), соответствующие синхронным колебаниям, неограниченные
траектории (2), соответствующие нарушению синхронизма, и граничные
траектории (3) - сепаратрисы, разделяющие траектории первого и
второго типа. Траектории первого типа замкнуты и охватывают
положение равновесия, точку О. Траектории второго типа
представляют процесс нарушения устойчивости.
* Метод граничных фазовых траекторий применим только в
случаях неизменности параметров системы уравнений (1.3) на
исследуемом интервале. Критерий площадей справедлив и при
изменяемости указанных параметров (если известен закон изменения), однако
36
этот критерий может применяться только в пределах одного
полуколебания угла, и расчет должен начинаться от значения угла,
соответствующему нулевому скольжению.
Уравнение (1.3), описывающее большие колебания, является
нелинейным, и его решение не выражается через элементарные функции.
Однако можно в явном виде получить выражение для энергии системы.
Поделив первое из уравнений (1.3) на второе, и разделив
переменные, получим:
7] л ^ = (^-^sinF).&?.
Интегрируя правую и левую части уравнения, и вынося
постоянную интегрирования в левую часть, получим:
Я = Т) (Л<У + Л,юз<?). (МО)
Постоянная интегрирования имеет смысл полной энергии
системы, и может быть выражена через кинетическую Ед. = Г -лУ2 и
потенциальную F,y =-(^J + 7^cosJ) составляющие:
Равенство (НО) называется интегралом энергии и выражает
закон сохранения энергии при движении системы.
На рис. 1.7,6 показана зависимость потенциальной энергии от
угла. Точка равновесия соответствует локальному минимуму
потенциальной энергии.
Поскольку суммарная энергия неизменна, то траектории
движения на этой диаграмме представляются горизонтальными прямыми,
причем разность между ординатой траектории и линией
потенциальной энергии соответствует величине кинетической энергии в данной
точке. Кроме того, так как кинетическая энергия не может быть
отрицательной, то реальные траектории могут располагаться лишь
выше прохождения кривой потенциальной энергии.
Для полноты картины полезно отметить, что при учете
демпфирования положение равновесия сохраняется, однако уравнение уже
не интегрируется в явном виде, и энергия системы не сохраняется, а
рассеивается, кроме того, фазовый портрет системы деформируется -
37
все ограниченные траектории закручиваются в спирали (см.
подробнее в [1.47]).
1.4. Выводы
Исследование асинхронного режима энергосистемы
основывается на использовании тех или иных модельных представлений о
процессах, возникающих в ЭЭС при потере устойчивости. При этом
модель понимается как физический или математический объект,
процессы в котором соответствуют изучаемому процессу в энергосистеме,
что позволяет исследовать сложный процесс возникновения и
развития АР в электроэнергетической системе, прямые эксперименты на
которой затруднительны или даже невозможны. Полная
математическая модель процессов в электроэнергетической системе базируется на
трудах А.А. Горева, С.А. Лебедева, ПС. Жданова.
Модель асинхронного режима энергосистемы учитывает
особенности протекания аварии при нарушении синхронизма
генераторов, и нацелена на выявление влияния такого процесса на
устойчивость энергосистемы. Детали реального процесса аварии, не
относящиеся к указанной задаче, выносятся за рамки модели.
В качестве определенного обобщения можно утверждать, что
работа каждого устройства противоаварийной автоматики
базируется на той или иной упрощенной модели, наилучшим возможным
образом отражающей контролируемый данной автоматикой
процесс в ЭЭС.
Структура энергосистемы существенно влияет на её
устойчивость. От структуры во многом зависит изменчивость схем и
режимов, причины и последствия нарушения устойчивости,
эффективность применения тех или иных методов выявления АР. Такой
подход позволяет учитывать новые качественные свойства, которые
могут проявляться в системе по мере ее усложнения.
38
Глава 2. Методы и средства контроля
асинхронного режима
2.1. Автоматика ликвидации асинхронного режима
Основной технической базой противоаварийной автоматики
(ПА) на сегодня являются общепромышленная и
специализированная аппаратура, имеющаяся в релейном, полупроводниковом и
микропроцессорном исполнении [21]. В последние десятилетия
преимущественным для локальных устройств ПА является развитие
микропроцессорной аппаратуры.
Микропроцессорное исполнение локальных устройств ПА
обеспечивает унификацию технических средств, полноценный контроль
со стороны персонала за процессами, происходящими в ЭЭС, за
состоянием устройств ПА и собственными действиями, позволяет
организовать их взаимодействие между собой и с устройствами
регистрации аварийных событий, с другими элементами АСУ ТП,
обеспечить контроль со стороны вышестоящих уровней иерархии ПА и
АСУ, и, наконец, реализовать новые более эффективные
технологические алгоритмы предотвращения аварийных процессов в ЭЭС.
Важнейшей задачей ПА является предотвращение
общесистемных аварий, нарушающих энергоснабжение на значительной
территории [1.39], [2.1].
Важным свойством ПА является её эшелонированность -
различные подсистемы ПА и входящие в них устройства призваны
остановить аварийный процесс на разных стадиях и путях его развития,
резервируя друг друга по мере усугубления развития и
распространения процесса аварии.
Противоаварийная автоматика предотвращает возникновение и
развитие аварий в энергосистемах, обеспечивает их локализацию и
ликвидацию путем выявления опасных аварийных возмущений или
недопустимых отклонений параметров электрического режима [1.40].
Система ПА включает в себя ряд подсистем (в соответствии с
классификацией [140]), обеспечивающих:
* предотвращения нарушения устойчивости параллельной
работы (подсистема АПНУ),
+ ограничение снижения частоты (подсистема АОСЧ),
+ ограничение повышения частоты (подсистема АОПЧ),
39
* ограничение снижения напряжения (подсистема АОСН),
* разгрузку (предотвращение недопустимой перегрузки)
оборудования (подсистема АРО),
* ликвидацию асинхронного режима (подсистема АЛАР).
Комплекс ПА образует эшелонированную систему противоава-
рийной автоматики, обеспечивающую требуемый уровень живучести
энергосистемы.
Подсистема АЛАР вводится в действие тогда, когда другие
подсистемы не смогли обеспечить прекращение развития процесса
нарушения устойчивости. При этом подсистема АЛАР должна
обеспечить прекращение асинхронного режима путем деления
энергосистемы.
Следуя работе [1.40], будем рассматривать типовой набор
операций подсистемы АЛАР:
* фиксация аварийного возмущения или нарушения
контролируемыми параметрами заданных ограничений,
+ запоминание предаварийного состояния, параметров
схемы, режима в момент фиксации возмущения,
* оценка степени тяжести аварийного возмущения и
необходимости осуществления управляющих воздействий,
+ выбор вида, объема и места реализации управляющих
воздействий,
* реализация управляющих воздействий.
Для функциональных блоков устройств АЛАР набор операций
каждого блока может варьироваться в соответствии с задачами,
выполняемыми данным блоком.
Действие АЛАР основывается на выявлении отличительных
признаков асинхронного движения генераторов при изменении
режимных параметров энергосистемы, причем, в предположении
двухмашинного АР в качестве базового параметра, рассматривается
взаимный угол между эквивалентными ЭДС двух групп генераторов.
Для анализа АР обычно используют одно или двухмашинный
эквивалент энергосистемы, построенный в предположении постоян-
ства.ЭДС[2.3].
При относительно простой схеме ЭЭС имеется возможность
попытаться оставить в работе несинхронные части в расчёте на
достаточно высокую вероятность быстрой ресинхронизации. Такая методи-
40
ка подробно изучалась [1.8], [1.32], [2.4] и использовалась [2.5] в
период 50-60 годов. Разумеется, при выполнении условий
самосинхронизации такой метод может быть использован и в настоящее время.
Однако, поскольку современные ЭЭС стали существенно более
сложными и объединены в ЕЭС России, длительный АР в
большинстве случаев стал недопустим. В настоящее время принят подход,
согласно которому АР должен ликвидироваться, в основном, на
первом полупериоде путем размыкания электропередачи с выбором
оптимальной точки деления.
Основными требованиями к таким устройствам являются
селективность работы, блокирование в режиме КЗ, при обрывах в цепях
напряжения и исчезновении тока.
Обзор способов ликвидации АР и алгоритмы общего подхода к
ликвидации АР изложены в работах [1.40], [2.6].
Известно, что непосредственное измерение угла между
эквивалентными генераторами встречает целый ряд трудностей
методического и технического характера. Поэтому типовые устройства АЛАР
использовали косвенные режимные параметры: ток, напряжение,
сопротивление на зажимах реле, угол между током и напряжением и т.п.
Общим для типовых устройств АЛАР является переход выбранного
режимного параметра (выявительный орган) из одной полуплоскости
значений в другую при переходе угла J между эквивалентными ЭДС
через 0° и 180°.
2.1.1. Требования к устройствам АЛАР
Оснащение энергосистем устройствами АПНУ существенно
повышает уровень их устойчивости, однако полностью не исключает
возможности её нарушения.
Причинами этого могут быть возникновение более тяжелых
возмущений в энергосистеме, чем возмущения, положенные в
основу при проектировании и выполнении АПНУ, выход исходного
режима энергосистемы за границу расчётной области, при
котором выполненная противоаварийная автоматика становится
полностью или частично неэффективной, отказ какого либо из
устройств АПНУ, другое сочетание факторов снижающих уровень
устойчивости ЭЭС.
Поэтому к надёжности и эффективности АЛАР предъявляются
высокие требования, и наличие развитых систем ПА не снижает
уровня этих требований.
41
Использование автоматики прекращения асинхронного режима
является сложной инженерной задачей. При установке устройств
АЛАР в энергосистемах необходимо определить целесообразные
места установки устройств, принцип действия и настройку.
Как правило, для выбора настройки АЛАР и проверки её
эффективности необходимо выполнить большое число расчётов.
Принимаемые решения зависят от ряда режимных условий: от степени
ответственности электропередачи, её конфигурации, влияния её
режима на устойчивость электростанций, её влияния на крупные узлы
нагрузки и на режимы энергосистемы в целом. Выбор целесообразного
способа ликвидации асинхронного режима должен производиться на
основе расчётов с учётом вероятных последствий деления и
нарушения устойчивости.
Подробный анализ этой проблемы изложен в работе [1.40].
В связи с принципиальной важностью этого вопроса для
решения рассматриваемых в настоящей работе задач, приведём здесь
основные рекомендации из указанной работы.
Кратковременный асинхронный режим, как правило, не
представляет какой либо опасности непосредственно для генераторов, но
может привести к тяжелым последствиям в энергосистеме. Чем
тяжелее и опаснее асинхронный режим, тем быстрее он должен быть
локализован или прекращен.
Глубокие снижения напряжения в электрической сети при
асинхронном режиме представляют наибольшую опасность для
потребителей, так как могут приводить к их массовому отключению,
нарушению технологических процессов и браку продукции на производстве.
В качестве первого приближения можно принимать, что
асинхронный режим при наличии ответственных потребителей допустим,
если напряжение на шинах подстанций питающей
распределительной сети не опускается ниже 0,8 исходного уровня, а в прилегающих
узлах высшего напряжения энергосистемы - ниже 0,6-0,7. Эти
значения в каждом конкретном случае должны уточняться с учётом
эксплуатационных данных о работе потребителя при возмущениях в
основной электрической сети.
Глубокие снижения напряжения при двухчастотном асинхронном
режиме могут привести к его переходу в трёхчастотный или
многочастотный асинхронный режим. Особенно вероятно такое развитие в тех
случаях, когда электрический центр качаний (ЭЦК) на
электропередаче находится вблизи узлов примыкания мощных электростанций.
42
При многочастотном асинхронном режиме, даже с постоянными
разностями частот, условия для срабатывания устройства АЛАР,
установленного в любом месте и имеющего любой принцип действия,
могут создаться только после большого числа проворотов (циклов
асинхронного режима), либо не создаться вообще. Выбор уставок
устройств АЛАР, реагирующих на изменение электрических
параметров, и прогнозирование моментов их срабатывания для трёхчас-
тотного (тем более для многочастотного) асинхронного режима в
настоящее время практически невозможен.
Поэтому существующие устройства АЛАР предназначены
только для двухчастотных АР.
Многочастотный асинхронный режим чрезвычайно опасен
своими последствиями. Увеличивается вероятность одновременного
или каскадного деления в нескольких сечениях. Естественная
ресинхронизация при многочастотном асинхронном режиме маловероятна,
а принятие мер по облегчению ресинхронизации путем разгрузки
соответствующих связей становится затруднительным.
Асинхронный режим (даже кратковременный) недопустим в
следующих основных случаях: если в узлах энергосистемы
примыкают крупные и ответственные потребители или мощные
электростанции, если имеет место значительное снижение напряжения; если
за нарушением устойчивости по связи между двумя узлами следует
нарушение устойчивости промежуточных электростанций или
нарушение устойчивости по другим связям и возникновение
многочастотного асинхронного режима; если изменение электрических
параметров на смежных или удаленных связях столь значительно, что
может привести к неселективному срабатыванию установленных на
них устройств АЛАР или АПНУ.
Во всех этих случаях в начальной фазе нарушения устойчивости
при угле между векторами эквивалентных ЭДС от 90° до 180°
должно производиться деление, или выполняться неселективное
опережающее деление при углах менее 90° в случае, когда деление при
больших значениях угла не способно предотвратить переход к
многочастотному АР.
В остальных случаях, когда приведенные выше условия не
являются определяющими, кратковременный асинхронный режим по
электропередаче может быть допущен. При этом его ликвидация
возможна следующими способами: делением энергосистемы;
ресинхронизацией частей энергосистемы, вышедших из синхронизма;
43
комбинированным способом - предварительным делением
энергосистемы по какому-либо сечению и последующей ресинхронизацией
частей энергосистемы, идущих асинхронно.
При ликвидации асинхронного режима делением время
срабатывания устройств должно быть таким, чтобы обеспечить их надёжную
отстройку от синхронных качаний и изменений параметров
электрического режима при КЗ с успешным или неуспешным АПВ. При этом, если
ресинхронизация не предусмотрена, недопустимыми являются и
излишние провороты. Желательно прекращать АР на первом цикле.
Во избежание выделения районов со значительными избытками
генерирующей мощности прекращение асинхронного режима может
быть организовано следующими способами:
делением энергосистемы, но с предварительным отключением
от противоаварийной автоматики части энергоблоков по факту
увеличения угла скольжения или частоты; установкой на части
энергоблоков устройств АЛАР, имеющих опережающую настройку по
отношению к устройствам, производящим деление энергосистемы;
отказом от деления энергосистемы в зоне выдачи мощности ТЭС
и АЭС и установкой только генераторных комплексов АЛАР с
рассогласованием их по времени или числу циклов асинхронного режима.
В ряде случаев предварительное деление позволяет уменьшить
аварийный дефицит мощности в приемной энергосистеме и
одновременно является мероприятием, способствующим ресинхронизации.
2.1.2. Требования к размещению и настройке устройств АЛАР
Уставки быстродействующих неселективных делительных
устройств, предположительно настраиваемых на угол расхождения
векторов ЭДС 90° - 180°, должны быть надёжно отстроены от рабочих
нагрузочных режимов связей, на которых они установлены. Это требование в
полной мере касается наиболее простых устройств, не имеющих
специального контроля расхождения векторов на угол более 90° (т. е. часто
используемых устройств, контролирующих увеличение тока,
моделируемого угла или снижение измеряемого сопротивления).
При определении максимально возможной нагрузки
электропередачи необходимо учитывать её работу с пониженными запасами
устойчивости в нормальных (если это предполагается) и послеава-
рийных режимах. Отстройка должна быть обеспечена также и в
ремонтных схемах. Как отмечалось выше, эти же устройства
необходимо по возможности отстраивать от синхронных качаний.
44
Требование отстройки от нагрузочных режимов относится и к
устройствам, которые принципиально не могут действовать в
установившихся режимах (например, к устройствам, контролирующим
изменение направления активной мощности, скорость снижения
сопротивления, к устройствам со счетчиком циклов и т. д.). Не
останавливаясь здесь в отдельности на особенностях каждого вида
устройств, отметим, что срабатывание пусковых или чувствительных
реле в рабочих режимах хотя и не приводит к выходному действию,
но все же нежелательно, поскольку схема устройств при этом
находится в подготовленном состоянии, а, значит, более вероятно их
неправильное действие при коммутациях в электрической сети и
синхронных качаниях. Для таких устройств, если невозможно
отстроиться от наиболее тяжелых (аварийных) режимов, необходимо, по
крайней мере, обеспечить отстройку от наиболее вероятных
длительных режимов работы электропередачи.
Требованием, противоположным отстройке от нагрузочных
режимов и синхронных качаний, является обеспечение
чувствительности устройств АЛАР к асинхронному режиму. Чувствительность
устройств любого типа должна обеспечиваться и в ослабленных
режимах, т. е. в режимах с неполным составом включенных
генераторов на электростанциях или при таких ремонтных ослабленных
схемах смежных участков сети, при которых действие АЛАР на данной
электропередаче при асинхронном режиме является обязательным.
Уставки быстродействующих устройств АЛАР, установленных в
одном сечении, должны выбираться из условия их правильного
взаимодействия при делении.
Не допускается настройка устройств, приводящая к каскадному
разделению «снизу вверх», т. е. такая настройка, при которой за
срабатыванием АЛАР на одной из слабых связей более низкого
напряжения (при перегрузке или качаниях) следует увеличение
нагрузки и срабатывание АЛАР на какой-либо из шунтирующих
связей, перегрузка следующей более сильной связи и так далее
последовательно до полного разделения энергосистемы. Такое каскадное
разделение, начавшееся с отключения слабой связи, может иметь
весьма тяжелые последствия для энергосистемы. Следует иметь в
виду, что режим (токи, мощность, напряжение) участков сети более
низкого напряжения сильно зависит от балансов мощности
ближайших узлов и слабо характеризует суммарную загрузку и запасы
устойчивости по сечению в целом. Перегрузка какого либо участка
45
распределительной сети отнюдь не говорит о малом запасе или
нарушении устойчивости. Исходя из этого, было бы желательно
обеспечивать одновременность действия устройств АЛАР в сечении.
Однако для сложных связей, тем более включающих линии
различного номинального напряжения, этого добиться практически
невозможно. Поэтому устройства могут настраиваться с некоторой
каскадностью действия «сверху вниз», что является вполне
допустимым. При этом разрешается такой выбор уставок, при котором
чувствительность устройств АЛАР на ступенях более низкого
напряжения обеспечивается только после отключения линий
электропередачи на ступенях более высокого напряжения.
Такая настройка часто позволяет выполнить трудно
совместимые требования обеспечения целесообразной последовательности
отключения линий в сечении, наилучшей отстройки от нагрузочных
режимов и синхронных качаний и обеспечения требуемой
чувствительности. Каскадность деления «сверху вниз» может быть также
обеспечена установкой на ступенях высшего напряжения
быстродействующих устройств, а на ступенях более низкого напряжения -
устройств АЛАР со счетчиками циклов. При установке во всем сечении
устройств со счетчиками циклов задаваемое количество циклов
может увеличиваться «сверху вниз».
На практике достаточно часто встречаются случаи, когда через
один и тот же элемент электрической сети проходит несколько
сечений деления. При этом желательна установка на данном элементе
только одного устройства, предназначенного для любого возможного
характера нарушения устойчивости и имеющего во всех случаях
достаточную чувствительность. Установка на одном и том же элементе
нескольких устройств, каждое из которых предназначено для своего
характера нарушения устойчивости, целесообразна только тогда,
когда характер асинхронных режимов настолько различен, что
совмещение функций на одном устройстве ведет к снижению
эффективности или невозможности его настройки.
К устройствам АЛАР, так же как и к устройствам релейной
защиты, предъявляется требование селективности и избирательности.
Устройства, установленные в данном сечении, не должны действовать при
асинхронном режиме в каком либо другом сечении, если в последнем
установлены свои устройства, предназначенные для ликвидации
такого асинхронного режима. Одновременное разделение энергосистемы в
46
нескольких сечениях и выделение несбалансированных по активной
мощности районов может привести к тяжелой аварии.
Должна обеспечиваться избирательность действия АЛАР, если в
зависимости от характера асинхронного режима (характера
изменения угла, знака скольжения, размещения ЭЦК) необходимо деление в
различных сечениях или необходимы различные воздействия с
целью ресинхронизации частей энергосистемы.
Для обеспечения высокой надёжности ликвидации асинхронных
режимов устройства АЛАР должны резервироваться. При этом понятие
«резервирование» следует рассматривать более широко, чем чисто
аппаратное резервирование на случай отказа устройства или отключаемых
выключателей. Желательно, чтобы обеспечивалось резервирование по
принципу действия и по настройке устройств. Резервные устройства
могут не только действовать с большей выдержкой времени, чем
основные, или действовать после отсчёта большего числа циклов
асинхронного режима, но и иметь различную чувствительность или быть
чувствительными в более различных областях схем и режимов.
В соответствии с [1.37] устройства АЛАР должны
устанавливаться на всех связях, по которым может возникать асинхронный
режим. После расчёта различных случаев нарушения устойчивости и
определения возможных сечений асинхронного режима должны
быть определены конкретные места установки устройств АЛАР. При
этом необходимо исходить из следующих основных условий:
* места установки устройств должны быть такими, чтобы
обеспечивалась их наилучшая настройка (чувствительность, селективность);
* сечение деления должно быть выбрано таким образом, чтобы
возникающий при делении небаланс мощности был наименьшим;
* сечение деления в целом должно быть наиболее простым
(наименьшее число отключаемых линий электропередачи,
трансформаторов, выключателей);
+ деление должно в возможно меньшей степени ухудшать
надёжность связи ответственных энергоузлов и электростанций с
энергосистемой.
Во многих случаях эти условия могут оказаться
несовместимыми и противоречащими друг другу. Например, может оказаться, что
при установке устройств АЛАР в наиболее простом сечении деления
не обеспечивается их удовлетворительная настройка. При поиске
приемлемых решений приоритетным является условие обеспечения
удовлетворительной настройки. Хорошие результаты иногда могут
47
быть получены при измерении тока (мощности, сопротивления) в
одном из присоединений и действии на отключение выключателей
другого присоединения шин того же объекта (подстанции,
электростанции). Выполнение основного действия АЛАР на отключение
присоединений на другой подстанции с использованием
высокочастотных каналов допускается лишь в исключительных случаях и
только при условии обеспечения высокой надёжности передачи
команды на деление и принятия мер, снижающих вероятность
прохождения ложных команд при неисправности канала.
При изменяющемся направлении перетоков по линиям
электропередачи (что особенно характерно для межсистемных транзитов)
сечение, по которому небаланс мощности при делении минимален,
может смещаться в широкой зоне. Для снижения небаланса
мощности при делении могут быть установлены отдельные устройства
АЛАР в двух сечениях или общие устройства, но с избирательным
действием по двум сечениям (в зависимости от величины и
направления перетоков мощности в предшествующем режиме или от
характера асинхронного режима).
Для межсистемной электропередачи с реверсивными потоками
мощности, содержащей промежуточную электростанцию,
желательно установить два комплекта АЛАР в этом узле. Каждый комплект
контролирует значение измеряемого сопротивления или угла по
своей линии и действует на отключение противоположной. Уставки
обоих комплектов должны быть выбраны так, чтобы после деления
электростанция удерживалась в синхронизме с дефицитной
энергосистемой. Для исключения возможного одновременного
срабатывания обоих комплектов следует предусмотреть взаимные блокировки
устройств. На противоположных концах линий или на генераторах
электростанции должны быть установлены резервные комплекты
АЛАР со счетчиками циклов на случай, если электростанция все же
выйдет из синхронизма по отношению к дефицитной энергосистеме.
На межсистемных электропередачах, имеющих большие
промежуточные отборы мощности, можно устанавливать по два комплекта
АЛАР по углу. Второй комплект действует при опережающем
векторе ЭДС первой станции. Аналогично, первый комплект действует
прц опережающем векторе ЭДС второй станции. Таким образом,
деление производится так, чтобы при любых условиях нагрузки
промежуточных подстанций оставались подключенными к избыточной
части энергообъединения.
48
Целесообразные сечения деления в ремонтных схемах могут
отличаться от сечений, принятых для нормальной схемы. Кроме того,
устройства АЛАР, уставки которых выбраны для условий
нормального режима, могут оказаться нечувствительными в ряде ремонтных
схем. И в том, и другом случае может потребоваться установка
устройств АЛАР (или замена уставок), специально предназначенных
для этих ремонтных схем. Эти устройства должны быть
чувствительны и селективны в таких схемах и должны быть
нечувствительны в нормальной схеме или отстроены по времени или числу циклов
от устройств, действующих в основном сечении в нормальной схеме.
Допускается автоматическая перестройка уставок и воздействий
АЛАР или автоматический ввод - вывод этих устройств при
переходе на другую первичную схему (включении - отключении линий и
др.) при условии, что схема автоматической перестройки
существенно не снижает надёжности устройств.
Оперативная перестройка персоналом уставок и воздействий
АЛАР или оперативный ввод - вывод устройств в зависимости от
первичной схемы крайне нежелательны, так как ошибки персонала
могут иметь тяжелые последствия для энергосистемы в случае
возникновения асинхронного режима.
На генераторах большой мощности и блоках генератор -
трансформатор можно устанавливать генераторные (блочные) комплекты
АЛАР. Это особенно необходимо в тех случаях, когда при установке
АЛАР на линиях, связывающих электростанцию с энергосистемой,
не обеспечивается их чувствительность (например, ЭЦК при таком
асинхронном режиме размещается глубоко в цепи генераторов) или
когда не удается разместить АЛАР в прилежащей к электростанции
сети таким образом, чтобы станция выделялась сбалансированно с
приблизительно равной по мощности нагрузкой. Блочные комплекты
АЛАР могут рассматриваться также в качестве резервных по
отношению к комплектам, установленным во внешней сети.
Для обеспечения надёжного деления при асинхронном режиме
кроме основных следует устанавливать и резервные комплекты АЛАР.
Резервные устройства не должны действовать на отключение тех же
выключателей, на отключение которых действуют основные
устройства. Как правило, основное и резервное устройства следует
устанавливать на противоположных концах одной и той же линии
электропередачи. Если между местом установки основного и резервного
устройства АЛАР имеются промежуточные узлы нагрузки, должна быть ис-
49
ключена возможность одновременного срабатывания обоих устройств
и погашения потребителей. Это достигается, например, путем задания
различного количества циклов асинхронного режима.
В соответствии с Ц.37] на наиболее ответственных
межсистемных линиях и электропередачах 330 кВ и выше должны
устанавливаться дополнительные устройства АЛАР, действующие в неполно-
фазном асинхронном режиме.
В соответствии с допустимостью кратковременного
асинхронного режима или необходимостью его предотвращения устройства
АЛАР можно разделить на три группы [1.40].
К первой группе относят неселективные быстродействующие
устройства, производящие деление в начальной фазе нарушения
устойчивости. Такие устройства применяют в тех случаях, когда
расхождение векторов ЭДС эквивалентных генераторов на
значительный угол приводит к недопустимым последствиям.
Ко второй группе относят устройства, производящие деление на
первом цикле асинхронного режима. Такие устройства применяют
тогда, когда расхождение векторов ЭДС на значительный угол может
быть допущено, однако при затягивании ликвидации асинхронного
режима (например, на втором-третьем цикле) вероятен переход двухчас-
тотного асинхронного режима в трёхчастотный или многочастотный.
Третью группу составляют устройства, действующие после
отсчёта нескольких циклов асинхронного режима.
Настройка каждой группы устройств имеет свои особенности.
В качестве устройства первой группы используют устройство,
реагирующее на увеличение тока по линии электропередачи. Такое
устройство необходимо защитить от срабатывания при
несимметричных КЗ, от трёхфазных КЗ, отключаемых основными
быстродействующими релейными защитами, при этом гарантированная
отстройка от трёхфазных затяжных КЗ невозможна. Устройство
работает по превышению уставки тока в асинхронном режиме. Уставка
срабатывания принимается по результатам расчётов асинхронных
режимов такой, чтобы с учётом принятой выдержки времени
произвести деление при расхождении векторов эквивалентных ЭДС на
угол, не больший заданного. При этом должна обеспечиваться
отстройка от максимальных нагрузочных токов в рабочих режимах
электропередачи. Значение определяется расчётным путем или по
результатам анализа фактических режимов работы электропередачи.
Учитывают возможное увеличение максимальных нагрузочных то-
50
ков при ремонте линий электропередачи, шунтирующих данную
линию. При определении максимального значения тока асинхронного
режима учитывают его возможное уменьшение в ремонтных схемах.
Должна быть рассмотрена возможность улучшения отстройки
устройства от синхронных качаний.
Другое устройство этой группы основано на принципе
моделирования угла между векторами эквивалентных ЭДС и действует на
деление при достижении моделируемым углом заданной уставки.
Наибольшее применение нашли схемы моделирования с помощью
трансреакторов [2.7]. Такие устройства не должны устанавливаться в
области возможного размещения ЭЦК или в непосредственной
близости к ней из-за увеличения в этом случае погрешностей или
возможного вывода устройства из работы при глубоком снижении
напряжения. При задании настройки устройства определяют
эквивалентные моделируемые сопротивления в обе стороны от места
установки. Настройка устройства может базироваться и на
моделировании векторов напряжения в промежуточных точках электропередачи.
Задание настройки по углу состоит в подборе таких уставок, которые
удовлетворяли бы как режимам работы в нормальной схеме, так и
всей совокупности режимов ремонтных схем. Для этого производят
расчёты на ЭВМ асинхронных режимов в нормальной схеме и
определяют диапазон значений уставок срабатывания. Аналогичные
расчёты выполняются для ремонтных схем. Пересечение множеств
значений уставок в различных схемах образует диапазон, в пределах
которого может быть выбрана уставка срабатывания, Если из-за
существенного изменения суммарного сопротивления электропередачи
и смещения ЭЦК в отдельных режимах не удается обеспечить
настройку АЛАР в какой либо из ремонтных схем, рекомендуется
попробовать изменить место установки АЛАР или значения
моделируемых сопротивлений. Промежуточные отборы мощности на
электропередаче и синхронные качания ближайших электростанций
могут сильно влиять на значение и характер изменения моделируемого
угла. Поэтому выбор уставок АЛАР по углу целесообразно, как
правило, производить по программам расчёта электромеханических
переходных процессов в достаточно подробных схемах. Тем не менее,
в тех случаях, когда схема электропередачи хотя бы приближённо
может быть сведена к двухмашинному эквиваленту, рекомендуется в
первом приближении выбрать настройку в такой упрощенной схеме
(с последующей проверкой и в полной схеме).
51
Устройство второй группы действует на первом цикле
асинхронного режима. По мере расхождения векторов ЭДС при нарушении
устойчивости напряжение в месте подключения устройства снижается, а
ток по линии электропередачи увеличивается; тем самым уменьшается
сопротивление, измеряемое содержащимися в устройстве реле
сопротивления. При определенных условиях происходит их срабатывание.
Анализ условий срабатывания реле сопротивления производят на
комплексной плоскости с координатами R и X, на которой исследуется
поведение годографа вектора комплексного сопротивления.
Годографы сопротивлений для набора режимов работы представляются
семейством окружностей, радиус и удаленность от начала координат
центра каждой из которых зависят от соотношения модулей ЭДС. В
сложных схемах даже при двухчастотном асинхронном режиме из-за
влияния нагрузки и качаний роторов ближайших электростанций
характер годографа сопротивления может сильно зависеть от вида
возмущения и послеаварийной схемы. Поэтому расчёты годографов
следует производить на ЭВМ в достаточно полных схемах с учётом всех
существенно влияющих факторов. Схемное выполнение устройства и
его настройка должны исключать срабатывание устройства при КЗ,
обеспечивать отстройку от нагрузочных режимов и синхронных
качаний, а также от асинхронных режимов на смежных связях), при
которых должны действовать другие устройства АЛАР.
Устройства третьей группы действуют после нескольких циклов
асинхронного режима. Устройство содержит реле сопротивления и
реле мощности, управляющие счетчиком циклов, состоящим из
промежуточных реле. За половину цикла асинхронного режима
принимается переориентация (срабатывание или возврат) реле мощности в
зоне срабатывания реле сопротивления, а за другую половину-его
обратная переориентация в зоне возврата реле сопротивления.,
Используемый принцип отсчёта циклов асинхронного режима
исключает срабатывание устройства при КЗ. Это позволяет отказаться от
установки второго реле сопротивления для контроля скорости
снижения измеряемого сопротивления. Благодаря этому устройства со
счетчиком циклов работоспособны при асинхронных режимах с
большими скольженьями, тогда как устройства с действием на
первом цикле отказывают по принципу своего действия Характеристика
срабатывания реле сопротивления должна надёжно охватывать все
рабочие годографы сопротивления для асинхронных режимов, при
которых данное устройство должно срабатывать.
52
Если некоторые из рабочих годографов сопротивления проходят
близко к началу координат или в третьем квадранте, то могут быть
использованы два реле сопротивления, характеристика одного из
которых ориентирована в первый квадрант, а другого - в третий.
В других исполнениях устройств со счетчиками циклов в качестве
пускового органа вместо реле сопротивления используют реле тока.
Уставки его срабатывания должны обеспечить как отстройку от
наиболее тяжелых нагрузочных режимов, так и необходимую
чувствительность по отношению к максимальному значению тока при
асинхронном режиме в ослабленной схеме. Характеристика реле мощности
выбирается таким образом, чтобы переориентация реле мощности
происходила при углах между векторами ЭДС, близких к ! 80°.
Для обеспечения «возврата» предусмотрен контроль
длительности цикла асинхронного режима. Если длительность какого-либо из
циклов превысит критический период асинхронного режима,
соответствующий скольжению втягивания в синхронизм, то действие
устройства блокируется.
Используемые в настоящее время в практике проектирования
устройства АЛАР, в основном, базируются на принципах,
использующих особенности изменения режимных параметров в условиях
развития АР [2.8].
В работе [2.6] изложены основные способы построения таких
устройств. Каждый из способов характеризуется определенной
закономерностью - переходом режимного параметра из одной
полуплоскости значений в другую полуплоскость. При этом необходим
контроль некоторого дополнительного параметра, обеспечивающий
выявление нахождения угла 5 в районе 180°. Для настройки таких
устройств необходима предварительная информация о параметрах
схемы. Работоспособность ряда способов существенно зависит от
положения места установки относительно ЭЦК.
Наряду с этим, имеются устройства, основанные на принципе
контроля расчётного угла между эквивалентными генераторами с
использованием эквивалентной модели энергосистемы. Такие
устройства используют в качестве параметров предварительно
рассчитанные относительно точки установки эквиваленты ЭЭС или
заданные уставки углов между напряжениями известных заданных узлов
участка энергосистемы. Уставки моделируют в аналоговой схеме
электронного устройства [2.9] или используют в расчётной схеме
микропроцессорного устройства [2.10] - [2.12], что позволяет кон-
53
тролировать достижение уставки угла и в соответствии с этим
вырабатывать управляющее воздействие.
В последнее время начали разрабатываться методы, не
использующие предварительную информацию о параметрах схемы
защищаемой энергосистемы.
Один из таких методов [2.13] и устройство на его основе,
базируется на использовании, характерных точек фазовых траекторий в
координатах J,dF/d? [2.14], а именно, на известном сочетании
величины относительного скольжения векторов напряжения между
заданными узлами с изменением знаков производных этого
скольжения, характерными для критического угла. Необходимо отметить,
что такой способ пригоден только в условиях, когда линию передачи
можно считать однородной.
В настоящее время разработаны и проходят апробацию новые
адаптивные методы определения эквивалентных параметров
энергосистемы в процессе развития АР, основанные на использовании
анализа дискретных выборок наблюдаемых величин. Такие методы
могут применяться для динамического определения параметров
эквивалентной схемы в темпе процесса, [2.15] и для анализа эквивалентной
схемы энергосистемы на момент аварии по данным, полученным от
цифровых регистраторов.
К устройствам АЛАР предъявляют, в основном, те же требования,
что и к устройствам релейной защиты: чувствительность,
селективность, быстродействие и надёжность. С усложнением структуры и
режимов сетей все более актуальными становится требование
срабатывания уже на первом цикле АР до достижения критического угла.
Наиболее полно этим требованиям отвечают алгоритмы
функционирования устройств, сформированных на базе
микропроцессорной техники.
Кроме того, автоматика выявления и ликвидации асинхронного
режима должна обеспечивать надёжную отстройку от глубоких
синхронных качаний, в процессе которых взаимный угол
электропередачи может вплотную приближаться к критическому значению.
В точках, где предполагается опасное понижение напряжения,
которое может возникнуть вследствие асинхронного режима,
уставку срабатывания АЛАР можно сформировать из условий
устойчивости генераторов и нагрузки, пределы которых связаны с
величиной напряжения.
54
Весьма желательным для устройства АЛАР является не только
выявление АР, но и опережающее прогнозирование выхода процесса
за границы устойчивости.
Технические характеристики устройств АЛАР релейного типа не
в полной мере удовлетворяют указанным требованиям, поскольку
базируются на косвенных признаках выявления АР, а не на прямом
расчёте угла.
Для эффективной и надёжной работы ЭЭС сложной структуры
необходимо своевременно выявлять и селективно ликвидировать
как двухмашинный, так и многомашинный АР, прогнозировать
развитие АР на его первом цикле и учитывать реальное изменение
параметров энергосистемы вследствие действия АПНУ в процессе
длительного АР.
Решение некоторых из перечисленных задач выполнено под
руководством и при непосредственном участии автора в виде
программно-аппаратных комплексов на основе разработанных методов
определения углов между векторами напряжения узлов ЭЭС и
параметров энергосистемы в АР при использовании микропроцессорной
техники для преобразования измеряемых электрических величин.
2.2. Косвенные признаки асинхронного режима и
устройства на их основе
2.2.1. Общие положения
При переходе энергосистемы к асинхронному режиму и в самом
асинхронном режиме величина и поведение тока и напряжения в
узле измерения претерпевают явно выраженные изменения.
Соответствующая интерпретация этих изменений позволяют выявить
признаки, характерные для развития асинхронного режима, в отличие от
аналогичных изменений наблюдаемых величин, обусловленных
другими причинами нарушения нормальной работы энергосистемы.
В качестве контролируемых режимных параметров используют
напряжение в точке установки устройства, ток линии электропередачи,
сопротивление на зажимах реле сопротивления (иными словами,
величину отношения напряжения к току в точке установки), активную и
реактивную мощности, скольжение вектора напряжения на одном конце
линии электропередачи относительно вектора напряжения на ее другом
конце. Устройства такого рода базируются на представлении
аварийного процесса в виде двухмашинного асинхронного режима, и, поскольку
55
угол Jp между ЭДС эквивалентных генераторов недоступен для
непосредственного измерения, используют косвенные признаки наличия АР
для формирования сигнала срабатывания.
В работе [2.6] изложены основные способы построения таких
устройств. Каждый из способов характеризуется определенной
закономерностью - переходом режимного параметра, представляющего
собой комплексную величину, из одной полуплоскости значений в
другую полуплоскость, при этом необходим контроль некоторого
дополнительного параметра, обеспечивающий выявление
нахождения угла Д, между ЭДС эквивалентных генераторов в районе 180°.
Для контроля процесса необходимы два рабочих релейных
органа - выявительный и пусковой. Для настройки таких устройств
необходима предварительная информация о параметрах схемы.
Работоспособность ряда устройств существенно зависит от положения
места установки относительно ЭЦК.
Рабочие органы на базе реле тока и реле сопротивления
принципиально работоспособны в любой точке передачи, при этом
чувствительность на базе реле тока не зависит от размещения
контролируемой точки на электропередаче, а чувствительность на базе реле
сопротивления - зависит.
Чувствительность реле напряжения зависит от места
размещения контролируемой точки на электропередаче (увеличивается при
приближении к ЭЦК), имеет более острую настройку на зону 180°,
чем реле по току, но ограничено по области применения, и может
использоваться только вне точек приложения ЭДС, поскольку в них
напряжение остается неизменным в цикле асинхронного хода.
В условиях работы с промежуточным отбором мощности в
соответствии с [2.6] рекомендуется учитывать следующие особенности
использования реле разного типа в качестве пускового органа (ПО):
* несовпадение максимума тока с моментом F= 180°
ограничивает применение реле тока как ПО в устройстве, использующем
выявительный орган с зонами работы Д, =0 + 180° "
Яэ=180±360°;
? в точке с пониженной разницей между максимальным и
минимальным значениями тока в цикле асинхронного хода
ограничивается возможность применение реле тока из-за
трудности получения достаточной чувствительности в минимальном
режиме;
56
* возможность достижения в цикле асинхронного хода более
высокого уровня напряжения в зависимости от характера
нагрузки в точке отбора мощности по сравнению со случаем
отсутствия отбора мощности ограничивает применение реле
минимального напряжения в качестве ПО, а возможность
достижения в цикле асинхронного хода более низкого
уровня напряжения в точке мощности расширяет возможности
применение реле минимального напряжения в качестве ПО;
+ достижение напряжением в точке измерения своего минимума в
момент J, =0 + 180° расширяет возможность использования
реле минимального напряжения в качестве пускового органа
вместо реле тока;
+ несовпадение минимума сопротивления на зажимах реле с
моментом <&, =0 + 180°, хотя и в меньшей степени, чем для тока,
ограничивает применение реле сопротивления;
+ использование в качестве выявительного органа реле
направления активной мощности может привести к излишнему
срабатыванию при фиксации неправильного знака
скольжения или отказу устройства; существенное улучшение
характеристик указанного устройства может быть достигнуто
использованием реле максимальной мощности с широко
регулируемой характеристикой срабатывания в плоскости Р, %2.
Указанные особенности работы реле напряжения, тока и
мощности не зависят от вида исполнения и свойственны как
электромеханическим, так и электронным реле.
2.2.2. Релейные устройства типа ЭПО
С учетом выявленных закономерностей в ОАО «Институт Энер-
госетьпроект» были разработаны и используются на практике
типовые устройства АЛАР, выпускаемые в виде основного и резервного
устройств типа ЭПО.
Основное устройство [2.16] предназначено для выявления двух-
частотного АР в энергосистеме, в том числе в первом цикле с
выявлением знака скольжения.
Принцип действия основан на фиксировании изменения состояния
(срабатывания или возврата) реле мощности в зоне срабатывания реле
сопротивления, означающей переход угла между ЭДС двух эквивалент-
57
ных генераторов через значение, близкое к максимальному
критическому (180^
Устройство позволяет определить знак скольжения вектора ЭДС,
выдать с учетом знака скольжения команду для выполнения противо-
аварийных мероприятий, способствующих ресинхронизации, в конце
второго, третьего или четвертого циклов асинхронного хода, запомнить
этот факт и после дополнительной (регулируемой) выдержки времени
проверить синхронность поведения ЭДС с выдачей команды на деление
ЭЭС, если АР не прекратился, или возвратом схемы устройства, если
АР прекратился. При длительности цикла асинхронного хода более
расчетной устройство возвращается в исходное состояние.
Резервное устройство [2.17] также предназначено для выявления
двухчастотного АР в энергосистеме. Принцип его действия основан на
фиксации колебаний тока с периодом не более расчетного в течение
заданного времени. Резервное устройство, как и основное, не
действует, если период асинхронного хода превышает расчетное время.
Схемное выполнение устройства и его настройка исключают
срабатывание устройства при КЗ, обеспечивают отстройку от
нагрузочных режимов и синхронных качаний, а также от асинхронных
режимов на смежных связях.
При КЗ уменьшение измеряемого сопротивления происходит
практически скачком, в то время как при нарушении устойчивости
вследствие инерции роторов генераторов уменьшение сопротивления
происходит плавно по мере увеличения угла между ними. Это
качественное отличие в характере процессов и используется в
устройстве. Для контроля скорости изменения сопротивления
устанавливаются два реле сопротивления, которым задаются разные
характеристики срабатывания - чувствительное реле и грубое реле.
При нарушении устойчивости сначала срабатывает
чувствительное, а затем - грубое реле.
Для настройки устройства намечаются расчетные схемы
энергосистемы с наибольшим и наименьшим удалением ЭЦК от места
установки АЛАР. Результатами расчетов являются годографы
измеряемого сопротивления и годографы полной мощности, построенные
соответственно на комплексной плоскости с координатами Д, JT и f, g.
Уставка срабатывания грубого реле должна быть выбрана такой,
чтобы характеристика реле надежно охватывала весь пучок рабочих
годографов сопротивлений асинхронных режимов, при которых
устройство должна действовать.
58
В случае, когда не удается обеспечить достаточно надежное
срабатывание устройства, рекомендуется перенести устройство в
сторону, противоположную ЭЦК, например, на другую подстанцию,
электрически удаленную от первой на некоторое расстояние.
Характеристика грубого реле сопротивления должна быть
отстроена от внешних асинхронных режимов. На практике
согласование зон действия этих устройств часто производится путем задания
уставок срабатывания грубых реле строго в пределах защищаемых
участков сети. Неизбежно возникающие при этом «мертвые зоны» -
участки сети, не защищаемые устройствами с действием на первом
цикле,- перекрываются устройствами, действующими после
нескольких циклов асинхронного режима. Допустимость такого
подхода обязательно проверяется расчетами для конкретных возмущений,
приводящих к нарушению устойчивости.
Характеристика чувствительного реле сопротивления должна
быть отстроена от измеряемого сопротивления нагрузки в наиболее
тяжелом режиме работы электропередачи.
Выбранная точка на годографе сопротивлений переносится на
годограф мощности. Последний в простейшей двухмашинной схеме
представляет собой замкнутую кривую - эллипс, степень сжатия
которого тем больше, чем ближе место установки АЛАР к ЭЦК. В
точках приложения ЭДС годограф представляет собой окружность; в
точке ЭЦК при равенстве модулей ЭДС эллипс вырождается в
отрезок прямой. Характеристика срабатывания реле мощности может
быть задана прямой, перпендикулярной большой оси эллипса.
Окончательный выбор уставок реле мощности производится
путем усреднения расчетных уставок, полученных для всех рабочих
годографов мощности.
2.3. Прямые признаки асинхронного режима и устройства
на их основе
2.3.1. Общие положения
Развитие электронной и микроконтроллерной техники предоставило
возможность перейти от косвенных признаков выявления АР к работе с
прямым признаком АР - изменению угла между ЭДС эквивалентов ЭЭС.
Метод выявления АР на основании наблюдения углов
базируется на допущении, что части ЭЭС по разные стороны от сечения
59
асинхронного хода остаются в процессе АР внутренне синхронными
и для этих частей могут быть составлены схемы замещения с
эквивалентными генераторами.
Адекватность действия АЛАР процессам, происходящим в ЭЭС,
зависит от корректности эквивалентирования, причем параметры
эквивалентных цепей, включающих синхронно движущиеся
генераторы, должны соответствовать критериям эквивалентирования,
требующих инвариантности параметров асинхронного режима в узлах
примыкания отдельных частей ЭЭС.
Для современных энергосистем эффективными являются
принципы работы устройств АЛАР, позволяющие в реальном масштабе
времени АР прогнозировать его развитие на основе граничных характеристик
устойчивости ЭЭС при динамических переходах. В двухмашинных
схемах замещения энергосистем это может быть реализовано при
непосредственном определении углов между векторами эквивалентных ЭДС
и наблюдении измеряемого угла ^. При этом, условием срабатывания
устройства является превышение углом своего допустимого значения.
Динамически неустойчивый, приводящий к асинхронному
движению частей ЭЭС, режим можно также выявить, сопоставив
текущее значение J^ и взаимного скольжения *S = J^/& с граничной
фазовой траекторией, соответствующей этому режиму.
Характерным признаком асинхронного режима в
контролируемом сечении является попадание электрического центра качаний в
зону электропередачи, охватывающую это сечение. Соответственно,
работа устройств селективной автоматики выявления и прекращения
АР на основе измерения углов характеризуется одновременным
выполнением двух условий: переходом взаимного угла через
допустимое значение и фиксацией попадания ЭЦК в контролируемую зону.
Для фиксации попадания ЭЦК в зону, контролируемую
устройством АЛАР, используются дополнительные соотношения между
аргументами или характером изменения напряжения в узлах
электропередачи, ограничивающих эти зоны. При выходе точки ЭЦК за пределы
контролируемых зон эти соотношения не выполняются, и выявление АР
может быть возложено на смежные устройства аналогичного типа.
Рассмотренные признаки наличия АР в той или иной степени
используются в традиционном устройстве САПАХ [2.18], [2.20] а
также в новых устройствах АЛАР-М [2.19], разработанном в ОАО
«Институт Энергосетьпроект» под руководством и при непосредст-
60
венном участии автора, и в устройстве АЛАР-Ц [2Л4],
разработанном в НИИПТ с участием ОДУ Северо-Запада.
2.3.2. Электронное устройство САПАХ
Устройство [2.20], предназначено для работы на межсистемных
транзитах с промежуточными подстанциями и выполняет
избирательное деление так, чтобы нагрузка промежуточных подстанций осталась
подключенной к энергосистеме, имеющей избыток мощности.
Для фиксации возникновения и определения характера
асинхронного режима применены два пусковых органа: реле угла между
напряжениями на шинах подстанций (уставка угла до 100° - 120°) и реле
направления активной мощности. Для нормальной работы устройства
необходимо устойчивое положение ЭЦК в пределах защищаемого
участка. Устройство снабжено блокировками нарушения цепей
напряжения, несимметричных КЗ, неполнофазных режимов. В расчетной
схеме используется фантомная схема получения напряжения дальнего
конца посредством модели-эквивалента защищаемого участка.
Устройство может работать в режиме двух ступеней - первая
ступень настраивается на выработку сигнала дозированного
воздействия в целях предотвращения развития асинхронного движения,
вторая ступень выдает сигнал на делительную автоматику.
2.3.3. Микропроцессорное устройство АЛАР-М
Алгоритм выявления АР базируется на измерении напряжений и
токов в месте установки и расчете с использованием параметров
эквивалентной схемы векторов ЭДС эквивалентных генераторов [2.19].
Разработка проводилась исходя из следующих требований -
выявление АР должно происходить в начальной фазе асинхронного прово-
рота, до достижения относительным углом между эквивалентными ЭДС
генераторов двух частей распадающейся энергосистемы значения 180°;
способ выявления АР должен удовлетворять требованию
селективности, т.е. устройство должно срабатывать только при наличии ЭЦК в
контролируемом сечении, не срабатывать при синхронных качаниях и
асинхронном режиме на смежных связях, не срабатывать при
различного рода коммутациях в сети, вызванных короткими замыканиями,
работой релейных защит, автоматики и штатными переключениями.
В переходном процессе в качестве предельной фазы АР может
быть принят момент времени, когда относительный угол превысит свое
критическое значение. Если до этого момента времени какие-либо про-
6!
тивоаварийные мероприятия смогли предотвратить возникновение АР,
то после достижения критического угла практически ни одно реальное
противоаварийное мероприятие не позволит избежать асинхронного
проворота и именно здесь необходимо срабатывание АЛАР.
Устройство обеспечивает ввод контролируемых токов и
напряжений, и формирование требуемого набора технологических
параметров.
Программное обеспечение устройства осуществляет выполнение
технологических алгоритмов, диагностирование и локализацию
неисправностей, восстановление функционирования устройства при
сбоях, ведение протокола событий с привязкой к астрономическому
времени, интерфейс управления, интерфейс связи с верхним уровнем
при функционировании в составе АСУ ТП энергообъекта по
последовательному каналу RS-232 (485).
Принцип действия устройства базируется на использовании
алгоритма распознавания двухмашинного асинхронного режима и
выявления наличия электрического центра качаний на контролируемом
участке электроэнергетической системы. Алгоритм построен на
расчетном определении векторов напряжений и углов между ними в
четырех узлах ЭЭС, два из которых связаны с точками приложения
ЭДС эквивалентных генераторов, а два других - с узлами,
ограничивающими контролируемую зону.
Функциональными особенностями работы устройства являются
непосредственное определение углов между векторами ЭДС
эквивалентных генераторов двухмашинной энергосистемы, использование
для выявления АР угла электропередачи, и селективность действия,
основанная на выявлении попадания ЭЦК в контролируемую
устройством зону при фиксации наличия АР в ЭЭС.
Подробно работа устройства изложена в главе 3.
2.3.4. Микропроцессорное устройство АЛАР-Ц
Алгоритм выявления АР базируется на использовании, характерных
точек фазовых траекторий в координатах {<?,<? J/J;} [2.14], а именно, на
известном сочетании величины относительного скольжения векторов
напряжения между заданными узлами с изменением знаков его
производных этого скольжения, характерными для критического угла. [2.! 3].
Для двухмашинного эквивалента с наличием ЭЦК на
защищаемом участке разработчиками устройства АЛАР-Ц предложен крите-
62
рий достижения критической величины угла, который базируется на
определении величины угла между напряжения на концах
защищаемой линии (<$л), с последующим контролем поведения этого угла и
его производных во времени, и дополнительным критерием,
связанными со скоростью изменения мощности.
Условия срабатывания устройства АЛАР-Ц имеют следующий
вид: наличие характерного для области критического значения
движения угла <$д:
sign(dJjdf) = sign(<?J; 1
и выполнение одного из дополнительный условий, характеризующих
положение угла на комплексной плоскости: sign(dP/d?) = -sign(Jj,)
или ]<5д]>я*/2.
Функция sign() является функцией выявления знака аргумента.
Необходимо отметить, что способ, реализованный в
рассмотренном устройстве, строго обоснован только в условиях,
однородной линии передачи. В работе [2.13] изложен подробный анализ
проблем, которые могут возникнуть при использовании этого
способа в линиях электропередачи с существенным отбором мощности
в промежуточных узлах.
2.4. Сводная таблица технологических алгоритмов
Поскольку технологические алгоритмы устройств АЛАР
используют различные признаки выявления асинхронного режима,
требуют разного объема исходной информации (совокупность
расчетных режимов, параметров контролируемого участка, уставок
срабатывания), и разнообразные выявительные и пусковые органы, то
представляет определенный интерес попытаться свести все
многообразие существующих традиционных и новых устройств АЛАР, а
также перспективных технологических алгоритмов в некоторый
удобно обозримый вид, позволяющий выполнить качественное
сравнение возможностей таких устройств.
С определенной долей условности все множество
технологических алгоритмов можно представить в виде таблицы 2.1.
63
Таблица 2.1. Сравнение функциональных возможностей технологических алгоритмов устройств АЛАР
Методы
1 Контроль
годографов
напряжения тока,
мощности
1 Контроль угла
между эквива-
1 лентнымиЭДС
1 Выявление
критической
точки устойчи-
[ вости режима
[
Идентификация параметров
эквивалентной
1 схемы АР
Признаки
асинхронного
режима
Косвенные
Прямые
Прямые
Прямые
Наличие дополнительных
возможностей
Превентивное
управляющее
воздействие
Нет
Да
Нет
Да
Прогноз
развития
асинхронного
режима
Нет
Нет'1
Да'>
Нет
Да
Для использования требуется
Подробный
предварительный
расчет схемы
и режимов
Да
Да
Нет
Нет
Расчет
параметров
тролируемого участка
Да
Да
Нет
Да
Расчет
условий
блокировки
Да
Да
Да
Да
Примеры
реализации
Релейные ]
устройства,
например,
ЭПО
САПАХ
АЛАР-М
АЛАР-Ц
Адаптивные
методы
выявления АР ^
Примечания: !) - для электронных устройств;
2) - для микропроцессорных устройств;
3) - рассмотрены в разделе 6 настоящей работы.
Из приведенной таблицы видно, что современные устройства
контроля угла между эквивалентами ЭДС полностью перекрывают
область функциональных возможностей традиционных релейных
устройств и предоставляют новые, более развитые возможности
контроля АР.
Разрабатываемые в настоящее время технопогические
алгоритмы идентификации параметров эквивалента в процессе
динамического перехода к АР создают предпосылки к разработке устройств
АЛАР следующего поколения, главным отличием которых должна
быть их адаптивность к измерению параметров и структуры ЭЭС,
что позволит увеличить точность и эффективность противоаварий-
ного управления.
2.5. Выводы
Важным свойством системы противоаварийной автоматики
является её эшелонированность. При этом, различные подсистемы
противоаварийной автоматики и входящие в них устройства призваны
остановить аварийный процесс на разных стадиях и путях его
развития, резервируя друг друга по мере усугубления развития и
распространения процесса аварии.
Подсистема автоматической ликвидации асинхронного режима
вводится в действие тогда, когда ранее работавшие подсистемы не
смогли обеспечить прекращение развития процесса нарушения
устойчивости и должна обеспечить прекращение асинхронного режима
путем ресинхронизации или деления энергосистемы.
Действие АЛАР основывается на выявлении отличительных
признаков асинхронного движения генераторов при изменении
режимных параметров энергосистемы, причем в предположении
двухмашинного АР в качестве базового параметра рассматривается
взаимный угол между эквивалентными ЭДС двух групп генераторов.
Для обеспечения высокой надёжности ликвидации асинхронных
режимов устройства АЛАР должны резервироваться. При этом,
понятие «резервирование» следует рассматривать более широко, чем
чисто аппаратное резервирование на случай отказа устройства или
отключаемых выключателей.
Желательно, чтобы обеспечивалось резервирование по
принципу действия и по настройке устройств. Резервные устройства могут
не только действовать с большей выдержкой времени, чем основные,
65
или действовать после отсчёта большего числа циклов асинхронного
режима, но и иметь иную по отношению к основным
чувствительность или быть чувствительными в иной области схем и режимов.
Для использовании при резервировании устройства АЛАР (а
точнее, алгоритмы функционирования таких устройств)
целесообразно классифицировать:
1) по моменту срабатывания:
* быстродействующие неселективные, производящие деление
в начальной фазе нарушения устойчивости,
* селективные, действующие на первом цикле асинхронного
режима с учетом наличия ЭЦК,
* действующие после отсчёта нескольких циклов
асинхронного режима (селективные или неселективные).
2) по характеру используемых признаков наличия асинхронного
режима:
+ использующие косвенные признаки,
* использующие прямые признаки,
и для смежных устройств выбирать алгоритмы функционирования из
разных групп.
Разумеется, в микропроцессорных устройствах АЛАР
возможна реализация сразу нескольких алгоритмов функционирования,
поэтому такие устройства (например, АЛАР-М) могут быть
использованы и в качестве основного, и в качестве резервного, с выбором для
пары таких устройств разных и наиболее эффективных для
конкретной точки установки алгоритмов работы или уставок по ступеням.
66
Глава 3. Устройство выявления и ликвидации
асинхронного режима «АЛАР-М»
В данной главе описано микроконтроллерное устройство
АЛАР-М, предназначенное для выявления и ликвидации
асинхронного режима в ЭЭС. Изложен принцип работы устройства, основной
и дополнительные технологические алгоритмы, представлена
методика выбора уставок, рассмотрены особенности использования
устройства в различных вариантах эксплуатации.
Устройство АЛАР-М в настоящее время успешно используется
в качестве элемента противоаварийной автоматики в ЭЭС России.
В приложение к данному разделу вынесены некоторые частные
вопросы, рассмотрение которых не является обязательным для
понимания принципа и особенностей работы устройства, но которые,
по мнению автора, являются полезными для облегчения его
практического использования. К таким вопросам относятся методика
расчёта векторов входных величин и привязка тока и напряжения к
системе координат. Кроме того, в приложении приведены технические
характеристики устройства, результаты оценки погрешностей
входных сигналов в условиях изменения частоты ЭЭС, и основные
результаты испытаний устройства на электродинамической модели и в
условиях реальной аварии.
3.1. Краткое описание устройства
Устройство выполнено на основе разработанного ОАО
«Институт Энергосетьпроект» совместно с научно-производственным
предприятием «Энергоизмеритель» специализированного контроллера
противоаварийной автоматики локального уровня [2. !2], [3.2].
Внешний вид устройства представлен на рис. 3.1.
Устройство обеспечивает ввод контролируемых токов и
напряжений, формирование требуемого набора технологических
параметров, ввод-вывод дискретных сигналов, интерфейс
управления в виде клавиатуры и дисплея, интерфейс связи с верхним
уровнем управления.
Ввод токов и напряжений осуществляется через согласующие
трансформаторы, обеспечивающие гальваническую развязку
аппаратуры устройства.
67
Рис. 3.1. Внешний вид устройства АЛАР-М.
Интерфейс управления обеспечивает настройку уставок и
других параметров устройства, отображение контролируемых
аналоговых величин, ввод в действие функций технологического алгоритма,
вывод кода неисправности, выявленной средствами внутренней
диагностики, отображение текущего времени. Интерфейс обеспечен
защитой от несанкционированного доступа.
Программное обеспечение устройства осуществляет
технологические алгоритмы, выполняет диагностирование и локализацию
неисправностей, восстановление функционирования устройства при
сбоях, интерфейс управления, интерфейс связи с верхним уровнем
при функционировании в составе АСУ ТП энергообъекта по
последовательному каналу RS-232 (485).
К устройству прилагается программный комплекс
дистанционного управления (ПКДУ). Он обеспечивает удаленный доступ к
устройству, ввод и редактирование блоков уставок, запрос на получение
текущей рабочей информации от устройства, ведение базы данных и
архива рабочей информации.
Предусмотрено хранение трех комплектов рабочих уставок. Эти
комплекты могут переключаться вручную или автоматически при
смене схемы защищаемого участка энергосистемы. Введенные
уставки сохраняются в энергонезависимой памяти устройства.
Использование ПКДУ предпочтительно для начальной
настройки устройства, поскольку представляет более удобный интерфейс
68
для изменения большого количества данных. Ввод с панели
управления целесообразен для текущего редактирования значений
небольшого количества изменяемых величин.
Система отображения, реализованная в устройстве, включает в
себя набор переключаемых окон отображения текущей
информации и набор окон меню. Окна изображения текущей информации
предназначены для контроля состояния процессов ЭЭС, работы
устройства и алгоритма. В основном рабочем окне отображается
текущее состояние работы, в том числе номер ступени, величина
контролируемого угла, блокировка работы, режим паузы после
срабатывания устройства. Предусмотрены окна отображения
величин и углов напряжений основного направления; величин и углов
токов в фазах основного направления; величины и угла тока фазы
«А» дополнительного направления. В отдельном окне
представлены симметричные составляющие напряжений и токов основного
направления. Имеются окна величины активной и реактивной
мощности основного направления и дополнительного направления;
служебное окно отображения регистратора процесса и окно
идентификации устройства.
В устройстве предусмотрено формирование обобщенных
сигналов «Срабатывание» и «Неисправность» для центральной
сигнализации на щите управления энергообъекта. Сигналы подаются на
выходные реле, обеспечивающие исполнительные воздействия проти-
воаварийного управления в соответствии с назначением устройства.
Подробная информация о неисправности устройства с точностью до
сменного блока и о выполнении функций в соответствии с задачами
устройства также отражается на дисплее устройства.
3.2. Принцип работы
Принцип действия устройства базируется на использовании
алгоритма распознавания двухмашинного асинхронного режима [2.Н],
[3.1] по характеру движения векторов эквивалентных ЭДС с
выявлением наличия электрического центра качаний на контролируемом
участке электроэнергетической системы.
Алгоритм построен на расчётном определении векторов
напряжений и углов между ними в четырёх узлах ЭЭС. Два из них связаны
с точками приложения ЭДС эквивалентных генераторов, а два
других - с узлами, ограничивающими контролируемую зону.
69
Выявление ЭЦК на контролируемом участке выполняется по
технологическому алгоритму, основанному на расчёте минимума
напряжения на контролируемом участке (см. главу 6 настоящей работы).
Расчёты осуществляются в реальном времени. Для них используют
вектор прямой последовательности напряжений в месте установки
устройства, вектор прямой последовательности токов основной ветви,
вектор тока фазы «А» смежной ветви, и набор эквивалентных
сопротивлений электропередачи. Одновременно с расчётом углов устройство
определяет знак скольжения асинхронно движущихся частей энергосистемы.
Функциональными особенностями работы устройства являются
непосредственное определение углов между векторами ЭДС
эквивалентных генераторов двухмашинной энергосистемы и реализация
селективности действия. Селективность основана на выявлении
попадания ЭЦК в контролируемую устройством зону.
Устройство может работать в трёхступенчатом режиме,
обеспечивая на каждой ступени формирование выходных сигналов,
соответствующих избыточной и дефицитной частей ЭЭС (с учётом знака
скольжения). Первая ступень является быстродействующей и
работает на интервале перехода ЭЭС от нормального режима к
асинхронному. Работа последующих ступеней занимает интервалы
времени, соответствующие нескольким проворотам асинхронного хода.
Ступени используются последовательно. В каждый момент времени
работает только одна ступень.
Первая ступень обеспечивает выявление АР на его первом
цикле. При этом рассчитывают векторы эквивалентных ЭДС и
векторы напряжений в точках вдоль контролируемой зоны для
определения наличия ЭЦК на защищаемом участке. Если угол между
векторами эквивалентных ЭДС превышает критическое значение,
задаваемое уставкой, то устройство фиксирует наличие АР в ЭЭС.
Дальнейшее действие первой ступени осуществляется на основе
анализа условий нахождения ЭЦК в контролируемой зоне. При
одновременной фиксации АР в ЭЭС и попадании ЭЦК в
контролируемую зону устройство выдает сигнал о срабатывании ступени в
соответствии со знаком скольжения.
Вторая ступень обеспечивает контроль суммарного угла проворо-
та эквивалентных ЭДС за установленное время. Если время
прохождения установленного числа проворотов не превышает время, заданное
уставкой, то происходит срабатывание устройства, иначе выполняется
70
возврат в исходное состояние. Возврат в исходное состояние
происходит также, если ЭЦК выходит за пределы контролируемой зоны.
Третья ступень работает аналогично второй ступени, со своими
уставками количества и времени проворотов.
Ввод в действие каждой следующей ступени осуществляется
после предустановленной паузы.
Устройство можно устанавливать для защиты одной линии
(основная ветвь), или двух смежных линий (основная и дополнительная
ветви). Для этого устройство контролирует три напряжения и три
тока основной ветви и один ток дополнительной ветви.
Для формирования сигналов управления предусмотрены
выходные реле.
Реле ступеней срабатывания (по два для каждой из ступеней для
разных знаков скольжения) обеспечивают требуемые управляющие
воздействия. Реле обобщенных сигналов передают во внешние цепи
сигналы «прибор введен» и «срабатывание». Реле «срабатывание»
используют в том числе и для блокирования аналогичных устройств
на смежных линиях.
Для исключения ложного срабатывания при явлениях, которые
сопровождаются изменением фазных соотношений между
контролируемыми величинами, но не являются асинхронным режимом,
предусмотрены блокировки. Они осуществляются по допустимой
скорости изменения угла, по максимально допустимому отношению
напряжения обратной последовательности к напряжению прямой
последовательности, по максимально допустимому отношению тока
обратной последовательности к току прямой последовательности.
Условие блокирования по допустимой скорости изменения угла
между векторами ЭДС эквивалентных генераторов позволяет
отличить сравнительно медленное монотонное изменение угла в
условиях АР от его скачкообразных изменений при возникновении КЗ или
неисправностях в цепях напряжения.
Условия блокирования по максимально допустимому
отношению напряжения обратной последовательности к напряжению
прямой последовательности позволяет зафиксировать несимметричные
режимы при возникновении КЗ, а также при неисправностях в цепях
напряжения устройства.
Условия блокирования по максимально допустимому
отношению тока обратной последовательности к току прямой последова-
71
тельности позволяет зафиксировать несимметричные режимы при
возникновении КЗ, а также при неисправностях в цепях тока.
Условия блокирования по максимально допустимому
отношению тока прямой последовательности к номинальному току фазы
позволяет отличить АР от случая близкого трёхфазного КЗ.
3.3. Методика выбора уставок
Исходные данные для настройки устройства, в общем случае,
получают на основе предварительного моделирования
эквивалентной схемы и динамических режимов защищаемой ЭЭС. В случаях,
когда моделирование невозможно или нецелесообразно, используют
упрощенные методы настройки параметров работы устройства,
основывающиеся на определении области опасных углов разворота
векторов напряжений на границах участка. Наконец, можно вообще
обойтись без расчёта критических параметров и контролировать
только достижение углом между векторами напряжения на границах
защищаемого участка величины, близкой к ! 80°.
Целесообразность использования той или иной методики
определения уставок зависит от требований к функционированию
устройства и требований к точности определения момента
срабатывания. На диаграмме рис. 3.2 представлена в качественном
виде взаимосвязь между этими факторами, что должно помочь в
определении вида методики расчёта уставок и оптимизировать
время и ресурсы, необходимые для настройки устройства.
Из диаграммы видно, что устройство может быть настроено как
для работы в «точном» режиме (при этом необходимо выполнение
определённого объема предварительных расчётов для определения
уставок), так и для работы в «грубом» режиме (при этом не нужны
никакие предварительные расчёты). Выбор подходящего метода
зависит как от требований к устройству, так и от наличного
математического обеспечения и доступной информации.
3.3.i. Выбор уставок без учёта эквивалентов примыкающих
энергосистем
. Наиболее простым вариантом настройки рабочих уставок
устройства является использование только величины сопротивления
контролируемой линии без определения параметров примыкающих
энергосистем.
72
Задать уставку у!ла как
предельный угол между
эквивалентными
генераторами
Задать уставку угла как
предельный угол между
напряжениями на
границах участков
Г—-
Задать уставку у та
вблизи ! 80 градусов
I
Задать уставки Z L Z2
как сопротивления
эквивалентов
Задать уставки Z!, Z2
как сопротивления
ветвей защищаемых
участков
.—3
/ Выбор уставок \
у^ завершен J
Рис. 3.2. Выбор способа настройки уставок технологического алгоритма.
При этом достаточно в качестве расчётной схемы задать известные
сопротивления ветвей до узлов примыкания, т.е. Z, = Z^„; Z2 = Z ^ в
соответствии со схемой, представленной на рис. 3.3.
73
(7 Z,
^ ИТТ (/ ИТТ <^J-
Z. t/,
Рис. 3.3. Схема защищаемого участка.
На рисунке приняты следующие обозначения: и - узел
установки устройства; /и, А - граничные узлы контролируемой устройством
зоны линии; Д;, Z?2 - выключатели линий; t/^,, ^ - вектора ЭДС
эквивалентных генераторов, ^,/2 * вектора контролируемых токов,
Z^ Z2- комплексные эквивалентные сопротивления ветвей.
Устройство контролирует угол между напряжением в месте
установки (7„ и напряжениями на концах защищаемых участков
f/„,,L^ в соответствии с выражениями:
(3.1)
Поскольку угол между напряжениями в начале и в конце линии
в процессе перехода в асинхронный режим неизбежно пройдет
значение 180°, то достаточно задать уставку угла вблизи этого значения
для обеспечения срабатывания устройства.
Настраиваемое таким образом устройство может быть
использовано для замены установленных в настоящее время релейных
устройств автоматики ликвидации асинхронного режима без
необходимости выполнения дополнительных расчётов уставок.
74
По существу, при такой настройке устройство работает по
косвенному признаку выявления АР - углу между векторами
напряжений на концах защищаемого участка.
3.3.2. Выбор уставок по табличным зависимостям угла между
напряжением на концах контролируемой линии
При необходимости получения более точных уставок угла
можно использовать результаты расчёта схемы ЭЭС, аналогичные
расчётам, выполняемым для установки АЛАР традиционного
исполнения. Для этого следует построить область изменения
векторов напряжения на концах контролируемого участка посредством
«прокрутки» групп генераторов расчётной схемы для наиболее
тяжелых вариантов аварий и в качестве уставки по углу выбрать
минимальные значения из полученного набора предельно
допустимых углов.
Для решения рассматриваемой задачи предлагается следующая
последовательность действий:
* Определить расчётные сечения АР в энергосистеме по одной
из известных методик расчёта устойчивости. При этом
предполагается, что части энергосистемы по разные стороны от
сечения АР остаются внутренне синхронными.
* Смоделировать на ЭВМ поведение системы при АР как набор
квазистационарных состояний. Их рассчитывают с заданным
шагом изменения угла между векторами ЭДС эквивалентных
генераторов частей энергосистемы, расположенных по разные
стороны от сечения АР.
* Построить зависимость угла между векторами напряжения на
концах ветвей примыкания <У^ =^„„ -%,* от угла разворота
векторов групп ЭДС, <?э> в виде табличной функции
<Lt = Т(<?э) Для набора наиболее тяжелых или наиболее
опасных режимов работы энергосистемы.
* Из полученной таблицы определить предельное значение угла
на защищаемом участке F,^ * соответствующее либо
полуциклу АР, либо достижению предела устойчивости по основному
уравнению фазовой траектории "угол-скольжение".
73
* Использовать в качестве уставок <5^,,ьм = <3м*,<)<м ^ ^! = ^л ^
При такой методике настройки устройство использует
выявленную для некоторой конкретной схемы ЭЭС функциональную связь
между прямым признаком АР (углом между группами ЭДС) и
косвенным признаком - разностью угла между напряжениями на концах
контролируемого участка.
3.3.3. Выбор уставок по эквивалентной схеме контролируемого
участка
Для использования «прямых» признаков выявления АР уставки
устройства следует определять на основании эквивалентной схемы ЭЭС.
На рис. 3.4 представлена эквивалентная схема замещения для
общего случая работы на две смежные линии.
Рис. 3.4. Эквивалентная схема защищаемого участка.
На рисунке приняты следующие обозначения: и - узел
установки устройства; /и, А - граничные узлы контролируемой устройством
зоны линии; #ь Д2 - выключатели линий; ^Э'^?2Э - вектора ЭДС
эквивалентных генераторов, /j, ^ - вектора контролируемых токов,
Z,,Z2,Z„ - комплексные эквивалентные сопротивления ветвей,
^^^ * комплексные сопротивления контролируемых участков
электропередачи.
76
Более точный учёт параметров линий и эквивалентов ЭЭС
возможен при эквивалентной схеме относительно узла установки
устройства в виде, представленном на рис. 3.5.
I
F,, Л,, ^, А„ 7,
t
** ^ А;э
rv^
F,
!
^инл'Ю
АЛАР-М
Рис. 3.5. Эквивалентная схема защищаемого участка с точным учётом
параметров ветвей.
В этом случае участки энергосистемы от одного узла до другого,
содержащие внутри себя пассивную электрическую цепь
произвольного вида без генераторов напряжения и тока, можно представить в
виде эквивалентного четырёхполюсника.
Таблица 3.1. Представление схемы участка
1 Схема
EjU
м
А*''
L
Передаточная матрица
м-
Ли ^2
Al ^22.
Система уравнений
или
1/1
/2.
Представление схемы участка в виде четырёхполюсника
позволяет производить эквивалентирование энергосистемы с необходимой
заданной точностью. Частные случаи для передаточных функций
типовых четырёхполюсников приведены в таблице 3.2.
77
Использование четырёхполюсника с одним сопротивлением
является наиболее простым приближенным способом расчёта. Оно
применимо в том случае, когда ветвь не содержит внутренних узлов
нагрузки или их влиянием можно пренебрегать. В этом случае схема
по рис. 3.5 совпадает со схемой по рис. 3.4.
Таблица 3.2. Передаточные функции типовых четы
!
2
3
Четырёхполюсник с одним
сопротивлением
Т-образная схема
замещения
четырёхполюсника
П-образная схема
замещения
четырёхполюсника
Изображение
^
Я/,
№
^''*
Z,
^
Ф;,° ^
&'А
^А ]
(У/;
рёхполюсников.
Передаточная матрица ]
А =
1 Z,
0 1
А =
^ =
[^2 2; ]
1+& Z,
2з
f 1 ! Z. ) , Z.
^2 Ид
^!^3
/ ^1
Представление ветви Т-образной или П-образной схемой
замещения позволяет учитывать наличие внутренних узлов ветви. При
этом П-образная схема требует меньшего объема вычислений.
Устройство периодически измеряет мгновенные значения
напряжений фаз в узле установки, трёх фазных токов одной ветви и ток
одной фазы (фазы «А») другой ветви.
По полученной выборке производится расчёт векторов основной
гармоники напряжений и токов фаз (в приложении к главе
приведены оценки погрешностей расчёта векторов в условиях непостоянства
частоты ЭЭС)
Отметим, что поскольку устройство является «векторным»,
при вводе его в эксплуатацию необходимо учитывать наличие
нескольких используемых на практике различных систем координат
токов и напряжений В приложении к главе приведены
относящиеся к этому справочные материалы и изложены рекомендации
по «привязке» цепей входных сигналов при вводе устройства в
эксплуатацию на подстанции.
78
Алгоритм выявления асинхронного режима основан на расчёте
величин эквивалентных ЭДС:
^э=^э^*=^, + ^;
(3.2)
Множители при напряжении и токе A^,Z,,A^,Z2 получают как
коэффициенты матриц каскадного соединения четырёхполюсников
ветвей
где
5 ^
.^2 2*2 J
%1=43'^M =
Й2=Й2эА =
^(11) ^1(12)
^2(П) ^2(U)J
(33)
^Э,!2
^Э,1
^!Э,2! ^1Э,22
^2Э,И ^2Э,!2
^2Э,21 ^2Э,22
^w2! ^22 J
^1!
^2
^2! ^22
В случае представления ветвей простыми последовательными
сопротивлениями (см. табл. 3.2, п.!) основные уравнения
упрощаются и принимают вид:
(3.4)
Для выявления асинхронного режима в качестве определяющей
величины используют угол <&э - Он определяется как разность между
углами эквивалентных генераторов <&? = <*i " ^2 и характеризует
граничные траектории на фазовой плоскости «угол - скольжение» (см. раздел
1.3).
Предельно допустимый по условиям устойчивой работы ЭЭС
угол <?э обозначается как ^ <х?я Отметим, что граничный по
условиям устойчивости процесс в двухмашинной схеме ЭЭС при
критическом скольжении 5др = 0 характеризуется углом <?э,<?<?я = 180°.
79
Выполнение условия <^ ^ ^э,<)оп служит признаком наличия
асинхронного режима в энергосистеме. В зависимости от того,
опережающим или отстающим является вектор Е^ по отношению к
вектору ^2э' считают, что скольжение положительно или,
соответственно, отрицательно. Это позволяет определить, с какой стороны
от места установки устройства расположены дефицитная и
избыточная части ЭЭС.
3.4. Селективный режим работы устройства
Программное обеспечение устройства предусматривает работу,
как в селективном, так и неселективном режимах.
Селективную работу устройства обеспечивают контролем
наличия ЭЦК на одной из контролируемых ветвей.
Условие наличия ЭЦК на контролируемой ветви (см. подробнее
главу 6) имеет следующий вид:
O<-^2-cos(;r + 0 + p)<l, (3.5)
где !У,,,/д - модули напряжения и тока в узле измерения, %? - угол
тока относительно напряжения, Z, 0 - модуль и угол сопротивления
Z = Z е^ контролируемой ветви.
При наличии АР, но отсутствии ЭЦК в контролируемой зоне,
выходные реле устройства не срабатывают.
При выявлении ЭЦК в контролируемой зоне срабатывают
выходные реле соответствующих ступеней устройства. С их помощью
осуществляют заранее определённые управляющие воздействия для
ликвидации АР (отключение нагрузок и генераторов,
ресинхронизация, деление системы и т.п.) с учётом дефицитности или
избыточности частей энергосистемы.
3.5. Учёт изменения схемы и режима работы энергосистемы
* Расчёт уставок для настройки АЛАР производят для каждого
конкретного режима работы энергосистемы, характеризующегося
определённой электрической схемой и распределением нагрузок.
80
В общем случае для надёжной работы АЛАР необходимо
снабжать его дополнительной информацией о действительном текущем
состоянии энергосистемы для того, чтобы основной логический блок
устройства мог выбрать для работы соответствующую таблицу
уставок из заранее введенного набора.
В действительности такая информация может быть доступна
только в некоторых специальных случаях, например, при плановом
отключении линии, при плановом изменении структуры и режима
работы энергосистемы и т.п.
В большинстве практических случаев, при аварийном
изменении характера работы энергосистемы такая информация не может
быть введена в устройство и, соответственно, не может быть
осуществлено адекватное переключение между рабочими уставками.
Поэтому устройство должно быть настроено на некоторые предельные
характеристики, пригодные для всех или большинства возможных в
энергосистеме режимов работы.
Отметим, что эта проблема является общей и характерна для
работы любого неадаптивного устройства АЛАР.
Отличие предлагаемой методики заключается в возможности
достоверной оценки величины погрешности контролируемых
устройством характеристик. Оценка производится на основе анализа
полного набора табличных функций, соответствующих
рассматриваемым режимам энергосистемы.
Поясним исходные соображения на примере набора функций.
Пусть для некоторой ЭЭС получены расчётным путем функции
некоторой репрезентативной зависимости угла эквивалента от
изменения состояния энергосистемы.
На рис. 3.6 приведены условные зависимости функций угла
между эквивалентными ЭДС от разности угла между напряжениями по
концам участка <Sj = Y(<5m*) в области около 180° для трёх режимов
ЭЭС, которые, например, по экспертной оценке, типичны или
наиболее опасны в некотором конкретном случае.
Пример иллюстрирует случай, когда линии зависимости
<?э = Y(<$^t) расположены достаточно близко (компактно) для всех
расчётных режимов.
Проводя вертикальную линию при некотором значении угла
<?,пд, получим интервал, в который попадают величины соответст-
81
вующего расчётного угла <^ . Величина интервала дает оценку
диапазона изменения величины расчётного ^ при работе устройства.
150 !60 170 180 190 200 210 220
Рис. 3.6. Компактное расположение семейства функций.
На рис. 3.7 проиллюстрирован случай, когда зависимости
<?э = Y(J^) можно разделить на несколько групп (кластеров), в
каждой из которых функции достаточно близки другу.
В этом случае, например, при плановом изменении схемы
энергосистемы, можно производить дополнительно выбор между
группами, например, по указанию оператора.
220
210
200
ИМ
!30
170
160
130 __
150 160 170 180 190 200 210 220
Рис. 3.7. Кластерное расположение семейства функций.
8,
^ 1
^2
^3
у- погрешность 1
^^г^^- 3
^""^^^* 6
^^^**1
^^^ 1
\- погрешность 2
82
На рис. 3.8 приведен вариант, при котором зависимости
<^э ^ Y(<^wA) имеют настолько большой разброс, что определение
рабочей таблицы при разумной величине разброса угла
срабатывания оказывается невозможным.
5,
220
2!()
200
!90
ISO
170
!60
150
!50 160 170 !80 190 200 2!0 220
Рис. 3.8. Нерегулярное расположение семейства функций.
В последнем случае необходимо сделать вывод о том, что
установка устройства АЛАР в выбранной точке нецелесообразна из-за
большой вариабельности определения критического угла в условиях
изменения режима работы ЭЭС. Решением задачи может стать
выбор иной точки установки устройства.
3.6. Частные случаи использования устройства
3.6.1. Работа устройства при попадании ЭЦК в точку установки
устройства
Особым случаем является попадание ЭЦК в узел установки
устройства. При этом в некоторый момент времени измеряемое
напряжение может снизиться настолько, что вычисление вектора
напряжения на ограниченной сетке аналого-цифрового преобразователя
будет иметь слишком большую погрешность. Поскольку при
получении векторов тока в качестве базы системы координат
комплексной плоскости используется вектор напряжения, то становится
невозможным правильное определение углов векторов тока, а,
следовательно, и определение эквивалентного угла.
Для учёта этого обстоятельства в устройстве предусмотрена
возможность задания дополнительной уставки по напряжению для
83
выявления снижения напряжения в узле установки устройства ниже
заданного значения. При задании такой уставки выявленное
снижения напряжения приведет к выработке сигнала наличия АР.
Однако задание указанной уставки не является обязательным,
поскольку в самом технологическом алгоритме устройства уже
предусмотрен контроль напряжения в узле установки, и устройство
блокируется при снижении напряжения до уровня 2% от номинала
(или переходит на альтернативный алгоритм работы по контролю
качания тока, если таковой включен). При восстановлении
напряжения до уровня, приемлемого для выполнения расчётов,
устройство разблокируется и продолжит работу в основном режиме.
Таким образом, даже если напряжение в узле установки устройства в
какой-то момент времени снижается до нуля, и еще не произошло
выявление АР, то при дальнейшем развитии процесса напряжение
вновь поднимется и срабатывание устройства произойдет в
интервале от 180° до 190°. При задании уставки по углу, меньшей 180°,
срабатывание устройства произойдет до наступления момента
наличия нулевого напряжения в узле установки устройства.
Таким образом, уставка по напряжению в узле установки
устройства является необязательной, и вопрос необходимости ее
использования для дополнительного контроля наличия ЭЦК
оставляется на усмотрение проектировщика.
3.6.2. Работа устройства с одной контролируемой линией
В ряде случаев необходимо контролировать участок сети только с
одной стороны от места установки устройства. При этом используют
«одноплечевую» схему включения, в которой измеряют напряжение в
месте установки устройства и ток контролируемого участка сети. В
этом случае сравнивают уставку критического угла с углом между
вектором напряжения в месте установки устройства и вектором
моделируемой ЭДС конца контролируемого участка сети. При этом уставки
сопротивления для отсутствующего плеча выставляют равными нулю,
ток дополнительной ветви к устройству не подключают.
Такой способ использования характерен при установке
устройства вблизи узла, подключенного к ЭЭС большой мощности.
Если переход к работе с одной линией выполняют в процессе
предусмотренного изменения структуры сети, например, в случаях
ремонтных работ, то ток, поступающий от ранее контролируемой
84
второй ветви, можно не отключать. Достаточно перейти на
соответствующий комплект уставок с обнуленными коэффициентами
сопротивления неконтролируемой ветви.
3.6.3. Работа в узле с переменной нагрузкой
Расположение устройства АЛАР в узле нагрузки делает его
работу независимой от изменения нагрузки узла.
При наличии на контролируемом участке нескольких
промежуточных подстанций, устройство целесообразно разместить на той из
них, которая имеет большую нагрузку с широким диапазоном
изменения в процессе эксплуатации.
3.7. Модификация и дополнительные блоки
технологического алгоритма
Программно-аппаратная архитектура устройства позволяет
добавлять (исключать) отдельные блоки технологического алгоритма, а
при необходимости и заменять его целиком.
В частности, по согласованию с ОДУ Северо-Запада для
удовлетворения специальных требований к работе устройства на линии
Кингисепп - Псков была выполнена модификация алгоритма
работы устройства.
Специальный технологический алгоритм учитывает
необходимость корреляции с возможностями и действующими методами
настройки устройств АЛАР, принятыми в регионе. Необходимость
изменения технологического алгоритма, в основном, была связана с
тем, что рассматриваемый регион характеризуется большим
количеством межсистемных транзитов с промежуточными подстанциями и
устройство должно реализовать избирательное деление ЭЭС
исключительно на первом цикле АР, причём уставка угла должна быть
разная для проворота «вперед» и « назад».
Для этого в устройстве реализован одноступенчатый алгоритм
контроля угла с возможностью независимого задания уставок
критических углов для работы в основном и резервном режимах.
Модифицированное устройство получило наименование АЛАР-
М(СЗ) и установлено на ПС-330, г. Псков осенью 2000 г.
83
3.7.1. Модификация алгоритма
В соответствии с методикой, принятой в ОДУ Северо - Запада,
для выявления асинхронного режима моделируют эквивалентные ЭДС
на основе вектора фазного напряжения в месте установки устройства
(вектор опорного напряжения) и соответствующих векторов фазных
токов линий с учётом заданных величин полных сопротивлений
моделирования. Затем рассчитывают величину <5^, представляющую собой
угол вектора ЭДС основного направления (направление «в линию»)
относительно угла вектора ЭДС дополнительного направления
(направление «к шинам»). Полученный угол сравнивают с заданными
уставками - предельно допустимой величиной угла в основном
(положительном) направлении (<5) и предельно допустимой величиной угла в
дополнительном (отрицательном) направлении (<3ь).
При наличии поворота вектора Ё^ в положительном
направлении устройство контролирует величину угла <5^ в диапазоне от 0 до
360 градусов и при пересечении границы критического сектора,
заданного уставкой <5, вырабатывает сигнал наличия АР
положительного направления (рис. 3.9,я).
При повороте вектора Д^ в отрицательном направлении
устройство контролирует величину угла <5$ в диапазоне от 0 до -360
градусов, и при пересечении границы критического сектора, заданного
уставкой <52, вырабатывает сигнал наличия АР отрицательного
направления (рис. 3.9,6).
Положительное направление перемещения Отрицательное направление перемещения
^ б)
Рис. 3.9. Диаграммы работы при провороте «вперед» и «назад».
86
Выходной сигнал положительного направления приводит к
срабатыванию реле положительного направления. Выходной сигнал
отрицательного направления приводит к срабатыванию реле
отрицательного направления.
Для исключения повторного срабатывания устройства после
выдачи сигнала устройство переводится в режим паузы на время,
задаваемое уставкой в диапазоне от 1 до 100 с с шагом 1 с.
Величина уставки выбирается таким образом, чтобы время
паузы заведомо превышало время, необходимое для проведения
мероприятий ликвидации АР и возврата энергосистемы в синхронный
режим работы.
Для исключения ложного срабатывания в условиях резкого
изменения угла, связанного с возможными коммутациями схемы, в
технологический алгоритм введено условие индифферентности к
скачкам угла, превышающим 3-Ю* град./с.
В качестве дублирующего алгоритма добавлен блок выявления
АР на основе контроля циклических колебаний тока.
3.7.2. Ограничение диапазона задания уставок углов
В базовом алгоритме диапазон уставок в положительном
направлении составлял [0; 180], а в отрицательном [0; -180].
В связи с требованием расширения диапазонов до [-360; 360]
оказалось необходимым ввести дополнительное условие по
сочетаемости уставок.
На рис. 3.10 приведена ситуация, когда уставка в отрицательном
направлении <$^,„ попадает в сектор «нормальной» работы уставки
<?м.„ положительного направления.
Рис. 3.10. Попадание уставки отрицательного направления в сектор срабатывания
положительного направления.
87
При глубоком качании может сложиться ситуация, когда
эквивалентный угол, изменяясь в положительном направлении, пересечет
уставку отрицательного направления в положительном направлении
(это не приводит к срабатыванию), но затем, возвращаясь, снова
пересечет уставку отрицательного направления, но теперь уже в
отрицательном направлении, что приведет к ложному срабатыванию.
Для исключения подобной ситуации было введено ограничение
на величины уставок, так, чтобы уставки «не пересекались». Для
этого уставку положительного направления <^ задают в диапазоне
[0;360] градусов, уставку отрицательного направления ^ - в
диапазоне [0; - 360], но сумма абсолютных величин уставок не может
превышать 360 градусов, т.е. ]^^1 + 1^^]<360^.
3.7.3. Дополнительный блок контроля изменения
эквивалентного угла
В случае длительной послеаварийной несимметрии может иметь
место ситуация, когда эквивалентный угол достиг или превысил
величину уставки в основном (дополнительном) направлении в период
блокировки устройства. При этом основной блок выявления АР
может не сработать на первом провороте АР.
Для повышения надёжности выявления АР на первом провороте
технологический алгоритм снабжён дополнительным блоком
контроля угла, который выявляет наличие и направление изменения угла
в условиях, когда величина угла больше, чем заданная уставка, но
пересечение границы не было зафиксировано.
Дополнительный блок вводится в работу при выявлении
величины угла, превышающего уставку в соответствующем направлении,
и производит контроль направления последующего изменения угла.
В этом случае устройство контролирует смещение угла J? среднее за
4 отсчёта. При выявлении устойчивого изменения угла выдается
сигнал на срабатывание реле соответствующего направления. При этом,
как и в основном алгоритме, при наличии положительного
направления поворота вектора Е^ устройство вырабатывает сигнал АР
положительного (основного) направления. При наличии
отрицательного направления поворота вектора Д^ устройство вырабатывает
сигнал АР отрицательного (дополнительного) направления.
88
Вместе с тем, при работе такого блока возможны определённые
проблемы. Например, пусть из положения ! угла J (см. рис. З.П,я)
начинается проворот в дополнительном направлении и пересечение
уставки <5„;„ замаскировано блокировкой по несимметрии.
я) 6)
Рис. З.Н. Возможные проблемы при блокировке
Пусть по окончании блокировки мы оказываемся в точке 2.
Очевидно, что при выявлении движения угла в дополнительном
направлении необходимо срабатывать.
Пусть по окончании блокировки мы оказываемся в точке 3, а
именно при угле, меньшем уставки в основном направлении <5,cw.
Очевидно, что при выявлении движения угла в дополнительном
направлении срабатывать нельзя, поскольку эту ситуацию невозможно
отличить от глубокого качания в устойчивом режиме.
Таким образом, для предотвращения ложного срабатывания
необходимо ограничить сектор работы дополнительного блока в
дополнительном направлении (см. рис. 3.9,6) интервалом величин
от <$)„,, через 180° до Д^.
Рассмотрим ситуацию при движении в основном направлении.
Например, пусть из положения 1 угла J (см. рис. З.Н,б)
начинается проворот в основном направлении и пересечение уставки <5,<ж
замаскировано блокировкой по несимметрии.
Пусть по окончании блокировки мы оказываемся в точке 2.
Очевидно, что при выявлении движения угла в основном направлении
необходимо срабатывать.
Пусть по окончании блокировки мы оказываемся в точке 3, а
именно при угле большем уставки в дополнительном направлении Д^.
89
Если устройство установлено на линии с возможным реверсом
мощности, то создается ситуация, аналогичная изложенной выше для
движения в дополнительном направлении.
Таким образом, для предотвращения ложного срабатывания также
необходимо ограничить сектор работы дополнительного блока и в
основном направлении интервалом величин от <5хн через 180° до ^.
3.7.4. Дополнительный блок контроля по признаку качания тока
Для выявления асинхронного режима в условиях потери цепей
напряжения реализован контроль поведения величины тока основной
последовательности относительно некоторой заданной уставки.
На рис. 3.12 в качестве примера изображена осциллограмма
изменения тока АР, полученная при опытах на электродинамической
модели НИИПТ.
Для обеспечения работы блока вводятся две уставки:
Тел - величина тока основной последовательности, превышение
которой является признаком возможного возникновения АР;
%? - время максимального периода проворота.
Дополнительный блок вводится в работу при выявлении
уменьшения величины напряжения основной последовательности (/; ниже
величины уставки С/;м.
Условием фиксации цикла проворота является наличие
последовательности трёх событий:
* ток превышает величину уставки (Д > Т^ь см. рис. 3.12 точка 7),
* ток становится меньше величины уставки (^ < Дд, см. рис.
3.12 точка 2),
* ток повторно превышает величину уставки (Д > 7сь см. рис.
3.12 точка 3),
причём, все три события происходят за время, не превышающее
величину уставки 7с&
В случае, если произойдет увеличение тока выше уставки, но за
установленное время Тел не будет дальнейшего развития АР, то
контрольная последовательность событий 7-2-3 не выполняется. В этом
случае производят сброс накопленной информации, и устройство
переходит к ожиданию нового превышения уставки по току.
Если уставку 7^д задать на уровне 12А, а уставку 7сд задать на
уровне 3 с, то наличие качания тока будет выявлено за время около
90
2,5 с от начала процесса и не будет срабатывания в случае качания,
которое не перешло в АР.
Рис. 312. К алгоритму контроля качания тока.
3.8. Выводы
Микроконтроллерное устройство АЛАР-М, предназначено для
выявления и ликвидации асинхронного режима в ЭЭС. Программное
обеспечение устройства предусматривает работу, как в селективном
(с контролем положения ЭЦК), так и неселективном (без контроля
ЭЦК) режимах.
Устройство может работать в трёхступенчатом режиме,
обеспечивая на каждой ступени формирование выходных сигналов,
соответствующих избыточной и дефицитной частей ЭЭС. Первая ступень
является быстродействующей и работает на интервале перехода ЭЭС
от нормального режима к асинхронному. Работа последующих
ступеней занимает интервалы времени, соответствующие
установленному количеству проворотов асинхронного хода.
9!
Наиболее простым вариантом настройки рабочих уставок
устройства является использование только величины сопротивления
контролируемой линии без определения параметров примыкающих
энергосистем. Настраиваемое таким образом устройство может быть
использовано для замены установленных в настоящее время
релейных устройств автоматики ликвидации асинхронного режима без
необходимости выполнения дополнительных расчётов уставок.
Для использования «прямого» признака выявления АР по углу
между эквивалентными генераторами уставки устройства следует
определять на основании эквивалентной схемы ЭЭС.
Поскольку в устройстве возможна реализация сразу нескольких
технологических алгоритмов, то оно может быть использовано и в
качестве основного, и в качестве резервного, с выбором для пары
таких устройств разных и наиболее эффективных алгоритмов работы
или уставок по ступеням для конкретной точки установки.
Программно-аппаратная архитектура устройства позволяет
добавлять (исключать) отдельные блоки технологического алгоритма, а
при необходимости и заменять его целиком.
92
Глава 4. Особенности моделирования элементов
энергосистемы при двухчастотном асинхронном
режиме
Повышение надежности основного электротехнического
оборудования, разработка и применение эффективных систем
автоматического регулирования и противоаварийной автоматики
позволили в определенных условиях допускать в энергосистемах
кратковременные асинхронные режимы отдельных генераторов
или частей системы с последующей ресинхронизацией выпавших
из синхронизма машин.
Для оценки допустимости асинхронных режимов в конкретных
электрических системах, выбора необходимых управляющих
воздействий, направленных на скорейшее их прекращение и
обеспечение успешной ресинхронизации, необходимо определять
параметры таких режимов.
В настоящее время для расчетов асинхронных режимов в
сложных электрических системах применяются специализированные
программные комплексы, включающие в свой состав, в том числе, и
функции анализа электромеханических переходных процессов. Эти
программы используют достаточно точные методы численного
интегрирования дифференциальных уравнений и позволяют
достаточно подробно учитывать в расчетах синхронные генераторы и их
системы регулирования, противоаварийную автоматику, а также
различные виды моделей нагрузки. Однако время счета длительных
переходных процессов в сложных ЭЭС с помощью этих программ
достаточно велико, что затрудняет их использование для решения задач
оперативного управления энергосистемой при возникновении
асинхронных режимов.
При расчете асинхронного режима важное значение имеет
адекватное представление генераторных и нагрузочных узлов ЭЭС с
учетом их основных динамических характеристик и систем
автоматического регулирования. Поскольку подробный учет всех свойств
данных элементов в сложной ЭЭС приводит к существенному
увеличению времени расчета, то при разработке методики анализа
асинхронных режимов в сложной ЭЭС существенное значение имеет ис-
93
пользование упрощенных математических моделей синхронных и
асинхронных машин, с достаточной полнотой учитывающих их
статические и динамические характеристики совместно с
характеристиками системы автоматического регулирования.
В настоящей главе' рассмотрены основные элементы методики
построения моделей элементов ЭЭС для расчета двухчастотных
асинхронных режимов в сложных ЭЭС, основанной на
декомпозиционном эквивалентировании и применении простейших схем
"исследуемый генератор - шины".
С помощью предлагаемой методики могут быть получены
параметры, необходимые для анализа асинхронных режимов.
4.1. Моделирование синхронных генераторов
Регулируемые синхронные генераторы оказывают
определяющее воздействие на протекание переходных процессов и
устойчивость всей ЭЭС. Поэтому при расчетах и исследовании асинхронных
режимов большое значение имеет правильное моделирование этих
элементов системы. Наиболее полно переходные процессы в
синхронном генераторе отражаются уравнениями Парка-Горева.
Для практических расчетов результирующей устойчивости
обычно используется представление генераторов в виде постоянной
переходной ЭДС или ЭДС, величина которой определяется с учетом
дополнительных токов в роторе от асинхронного режима. Однако,
данная модель не учитывает ряда существенных факторов,
влияющих на параметры режима синхронного генератора при асинхронном
ходе в электрической системе, в частности, влияние демпферной
системы генератора и нелинейные ограничения параметров в
системах регулирования возбуждения и скорости.
Для исследования асинхронного режима в ЭЭС предлагается
использовать математическую модель синхронной машины,
учитывающую электромагнитные и электромеханические переходные
процессы и отражающую основные процессы в системах
автоматического регулирования возбуждения (АРВ) и автоматического
регулирования скорости (АРС). Для уравнений переходных процессов в
Глава написана на основе материалов, предоставленных В.П. Гречиным,
В.А. Серовым, М.Ш. Мисрихановым.
94
контурах ротора генератора используются операторные
сопротивления и проводимости машины, которые могут быть определены по
экспериментальным или типовым частотным характеристикам.
При сформировавшемся асинхронном режиме в электрической
системе наблюдаются колебания всех режимных параметров
синхронных генераторов, вызванные влиянием асинхронно работающих
машин друг на друга. В этом случае в состав токов и напряжений
генераторов будут входить составляющие, соответствующие
основным частотам асинхронного хода, которые являются
определяющими для рассматриваемого процесса.
При построении математической модели синхронного
генератора принято допущение о том, что токи и напряжения складываются
из двух частотных составляющих, соответствующих средним
скоростям вращения роторов асинхронно идущих машин.
При возникновении двухчастотного асинхронного режима
синхронные машины системы разделяются на две асинхронно
работающие группы (рис. 4.1), а электрическая система - на две подсистемы.
Подсистема 7 имеет частоту <ui, соответствующую средней скорости
вращения генераторов одной группы, а подсистема 2 - частоту <иь,
соответствующую средней скорости вращения генераторов другой
асинхронно работающей группы.
НО <
НО '
б ^
Рис. 4.1. Электрическая система при двухчастотном асинхронном режиме.
Каждая подсистема имеет свои синхронно вращающиеся оси.
Положение синхронно вращающихся осей определяется по средней
скорости вращения генераторов в соответствующей подсистеме по
выражению:
'СН-
з<0-+
/7о<)смся:ел*я 2
зО-+
77<?<)с:куиамя 7 1
95
<?„ = J<u„6f;, (<x = l,2). (4.1)
о
Оценивая скольжение группы машин второй подсистемы
относительно первой подсистемы, получим:
j = ^-^. (4.2)
Учитывая колебания скорости вращения ротора и напряжения
возбуждения генератора в асинхронном режиме и принимая во
внимание только основную гармонику колебаний, угол положения
ротора и напряжение на обмотке возбуждения в относительных единицах
определится следующим образом:
F = ^+Fo + ^sin(p(;) + %); (4.3)
и, =M,o + ^,cos(%(;) + p,), (4.4)
где <5ь - среднее значение угла между продольной осью ротора и
синхронно вращающейся осью с частотой %ь (рис. 4.2); -<4j, % - амплитуда
и начальная фаза колебаний угла положения ротора генератора; ^4,, % -
то же для напряжения обмотки возбуждения; а угол имеет вид:
;
0
Переходный процесс в синхронном генераторе в системе
обобщенных координат [4.1], при условии, что для предшествующего
асинхронному режима скорость вращения была равна а^. = /?<У,
определится в относительных единицах системой уравнений:
^='<A + ^
^(^)Л^+^2^)^^
= -^С(,)ы,; ^^
96
7) p^ + D(pF-M) = Mr-M3,
(4.6)
где tVg,/,,^ - обобщенные векторы напряжения, тока и потокос-
цепления статора генератора; г„ - активное сопротивление статора;
7), D - постоянная инерции и коэффициент механического
демпфирования генератора; М? - вращающий момент турбины; А/э -
электромагнитный момент генератора; Xi(jp),X2(/?)'G(j9) -операторные
сопротивления и проводимость генератора, причем:
^(^) = -[^(Р) + ^(/^)];
^(^)=ir[^(p)-\(^)].
^;
Ьь
4и
^ '
^\1 ^1И*
. ^,
— ",
Ось ^^ы /4
Рис. 4.2. Векторная диаграмма синхронного генератора при двухчастотном
асинхронном режиме в ЭЭС:
JV, - синхронно вращающаяся ось с частотой я^; % - с частотой (^
Обобщенные векторы режимных параметров, при учете
основных определяющих частотных составляющих асинхронного режима,
запишутся в виде:
Уд=Уд,+(Уд2;
^R - ^R! + ^R2'
где(/^=^^, (я = 1,2);
(4.7)
(4.8)
97
4. = 4^', ("=1,2).
Для ограниченных по величине колебаний при разложении в ряд
по функциям Бесселя можно принять, что
±./4ysin(p(;)+p,y) _
= Jo(^)±J,(^)^
+ ^(^)[^ ^^^^ ^^-7 2 ^(^)+^)1 (4.9)
Тогда, с учетом (4.7) - (4.9), уравнение (4.5) по основным
частотным составляющим асинхронного хода эквивалентно паре
уравнений:
+ Z.
-2(П
/?е
(4.10)
^2'
(4Н)
где z,(y)(/?),Z2(%) (/?),(/, у = 1,2) - операторные сопротивления
генератора при двухчастотном асинхронном режиме в системе, а
составляющие ЭДС имеют вид:
98
+y.(z^G(^-^)z^-^-<'^]; (4J2)
+y,(z^G(^-y^)z^-^-^)]. (413)
В уравнениях (4.10), (4.И) значениями /^ и /?д^ определяются
фазовые углы ЭДС генератора по основным частотным
составляющим относительно их полярных осей (рис. 4.2):
Лн=Ло-§-%?; А,2=<?о-§- (4-М)
Уравнение (4.10) определяет электромагнитные переходные
процессы в синхронном генераторе для составляющих с частотой ад,
а уравнение - для составляющих с частотой я^. Операторные
сопротивления в уравнениях (4.10), (4.И) зависят от параметров
генератора *,(/?), Х2(р), параметров колебания ротора и скольжения
асинхронного режима. Сопротивления дг;(р) и Л2(р) для любой частоты
могут быть рассчитаны по соответствующим операторным
выражениям или на основе интерполяции частотных характеристик.
Через операторные сопротивления z<y(i2)(jP)'Z<x(2i)(j9) в
уравнениях (4.10), (4.11) отражается взаимное влияние переходных
процессов по различным частотным составляющим. При ограниченных по
амплитуде и частоте колебаниях ротора в установившемся
асинхронном режиме эти сопротивления достаточно малы и при
проведении практических расчетов могут не учитываться.
Электромагнитный момент генератора для уравнения (4.6) в
записи через потокосцепление определяется выражением:
99
Обобщенный вектор потокосцепления статора генератора
выражается в виде двух составляющих:
где
+ [^2(2Н^^+^22)(^2]^^^'^
На основании этого электромагнитный момент может быть
представлен в виде суммы двух составляющих: апериодической
(А^эо) и периодической (Af^), - изменяющихся с частотой
скольжения асинхронного режима, то есть:
С учетом (4.16) и (4.8), получим:
M^o = Re(Ti/,*<?^' + Тз^е^) =
= Re{y7^' [-(z,(i,) W, ++^2)(^)А)^^ +
+ (^2(ll)(^Vf + ^2)(^)^' -7^] +
+ 7^^ [-(z^l)(Р)А +^(22)(^)А)^" +
+ (^2(21)(^)Л' + ^2(22)(^^2 )^'^' - 7^2]} ^ (4. ] 7)
Мзл =Re(T/^^^ +Т2^^
= AfjCos(^) + ^)-M2sin(^(f) + ^), (4.!8)
где М, + yAf 2 = (т^^^^+ ^2/^' )^^ .
При рассмотрении двухчастотного асинхронного режима
структурную схему системы АРВ (рис. 4.3) примем в соответствии с из-
!00
вестными математическими моделями [4.2]. На рис. 4.3 система
возбуждения представлена звеном 4 с передаточной функцией %(р), а
звено J отражает нелинейное ограничение в силовом блоке, которое
можно представить [4.3] кусочно-линейной функцией (рис. 4.4).
Звеньями 7, 2, 3 с передаточными функциями №,{р) учитываются
динамические свойства системы АРВ по каналам регулирования с
отклонением параметров Ал, = л, - л^ от их значений в
установившемся режиме.
Выходной величиной системы АРВ является вынужденная ЭДС
машины Др., значение которой до ограничения соответствует ЭДС Е' .
Рис. 4.3. Структурная схема системы АРВ генератора.
ь<ус2
ь<у*1
-я;<
Рис. 4.4. Моделирование нелинейного ограничения в системе АРВ.
Обобщенный вектор л^,,, по модулю и (или) частоте которого
выбирается параметр регулирования 77/, для двухчастотного
асинхронного режима определится в виде:
101
"я(,)=",^+",2<^' (4.19)
где я,,, = я,^**"*, (а = 1,2), а модуль и частота его, согласно [4.4],
найдутся по выражениям:
и, = J%i + я,^ + 2и,,н,2 cos(^) + %>,2 -р„) ; (4.20)
С^"П + ^2"А + (<И + С^)"/!",2 COS(^) + ^,2 -%?,,)
",1 + ",2 + 2^!^2 COS(%?(;) + ^2 - ^!)
Отклонение параметра регулирования Ал,, как видно из (2.12),
(2.2!), является нелинейной функцией величин и^, %, и в оценке по
основной гармонике запишется в виде:
Ал, = Аид, + z, cos(%?(?) + р,), (4.22)
где коэффициенты гармонической линеаризации определятся как
А";о = - }(", - "«иМрС) + ^);
^ о
z, = - J(n,. - ^)cos(^(/) + %>,)<?(%>(;) + ^,.)
С учетом (4.20), для двухчастотного асинхронного режима
средняя составляющая и амплитуда колебания параметра регулирования
в записи через эллиптические интегралы определятся в виде:
А",о =-(и,, +я,2)я(АГ,7,%)-л,.,; (4.23)
Ая,„ =
ЗтгА^(и,,+я,2)
*[(я„ -^)^(^,^)-(я,^ +я^)Е(^,^/)], (4-24)
102
где F(Яд, ^), F(Я^, ^Л) - эллиптические интегралы
соответственно первого и второго рода от аргумента:
2<Jn,,n,2
*я = '—
Согласно структурной схеме рис. 4.3, без учета влияния
изменения параметров колебания, на входе звена 3 получим ЭДС
Я^ = я;,о + 2д cos(p(;) + р,), (4.25)
где средняя составляющая ЭДС
^+^(^)Х^(л)^,о, (4.26)
определяется значением вынужденной ЭДС в исходном синхронном
режиме (Е ) и средними составляющими отклонения параметров
регулирования системы АРВ, а амплитуда колебания определяется
значениями амплитуд колебания параметров регулирования.
Тогда с учетом нелинейного ограничения в системе АРВ
(рис. 2.4), ЭДС на выходе звена 3 будет определяться выражением:
+ H^cos(p(;) + P<), (4.27)
где
Я1<о=Я^о + й^о4;' (4.28)
^млО' ^<я1 " коэффициенты гармонической линеаризации [4.4],
зависящие от величин Д'о, ^я ' & также от потолочных значений
вынужденной ЭДС: максимального Е i и минимального Д^' которые
находятся по соотношениям:
Я^о = -[(<?i arccos(<?,) - JT^) -((J; arccos(^) - J^F)1; (4.29)
103
%я1 -
arcsm
(^) + ^2^"^ +arcsin(^2) + ^2V^^:
(4.30)
^<7<?t"^e0
, %2 — *
^ ^
(4.31)
Согласно выражению (4.27), средняя составляющая и амплитуда
колебания напряжения возбуждения в определении (4.4) запишется с
учетом АРВ в виде:
_Jj7f0_
'" G(0)' "*
6(0)
(4.32)
где G(0) - передаточная функция генератора при/? = 0.
Таким образом, в уравнениях переходного процесса
синхронного генератора при двухчастотном асинхронном режиме в ЭЭС (4.! 0),
(4.10) влияние системы АРВ отражается в значениях частотных
составляющих ЭДС (4.12), (4.12) за счет изменения средней
составляющей и амплитуды колебания напряжения возбуждения.
Регулирование скорости вращения синхронного генератора
оказывает существенное влияние на протекание асинхронного режима.
Дня отражения этого влияния математическая модель турбины и
системы АРС представлена структурной схемой рис. 4.5, в которой
звеном 3 учитываются ограничения мощности турбины, проявляющиеся
при больших значениях параметра регулирования в ограничении
открытия сервомотора (рис. 4.6).
Р<5-<Ыс
АГ
7
^
2
W *
*Г^ '"г-
Ч
1
J
^
^ „
Рис. 4.5. Структурная схема АРС и турбины.
104
Рис. 4.6. Отражение нелинейного ограничения мощности турбины.
Звено 7 с передаточной функцией й^ отражает влияние зоны
нечувствительности в системе регулирования, которая при
значительных изменениях скорости вращения в асинхронном режиме обычно
равна W; = 1. Передаточной функцией %(р) звена 2 отражаются
исполнительный орган системы АРС и турбина. Функция %(р) будет
определяться конкретным выполнением системы регулирования
гидравлической или паровой турбины или по общим для них
упрощенным выражениям. Величиной АЛ" на рис. 4.5 моделируется
воздействие механизма управления турбиной за счет АРЧМ, а с - ста-
тизм регулятора скорости.
Для рассматриваемого синхронного генератора входной сигнал
системы АРС при двухчастотном асинхронном режиме (при неучете
для колебательной составляющей влияния изменения ее
параметров), согласно (4.3), (4.14), представится в виде:
^-^=/7^2+(^2^^) + ^cos(^(/) + ^).
(4.33)
Тогда на входе звена 3, согласно схеме рис. 4.5, получим:
^=^ + ^г(^)
р<?-<ы.
+ AJT
(4.34)
105
где ^ - значение мощности турбины в исходном установившемся
режиме;
С учетом (4.33), выражение (4.34) можно записать в виде двух
составляющих: постоянной и периодически изменяющейся:
7% =/%о + 4и cos(%?(/) + % +^-),
(4.33)
где
^о=^ + ^(^)
АГ р^2 (^-о,)
1
Pr=arg(%^.(/y)).
Тогда вращающий момент турбины, определяемый как
^г =^г/^с' "в выходе модели системы АРС с учетом влияния
ограничений открытия сервомотора определится выражением:
Мг=Мг„+—ИКр)АУ !-йИр)[;?А?2+('И2-",)] +
<ц.
а^^
+ *И„,о4м + ^t^M cos(^) + ^ + ^), (4.36)
где И^пО'йня) - коэффициента гармонической линеаризации,
определяемые соотношениями (4.29), (4.29) при
а,-—- , <?2- : ^
^Г! ^2 "** соответственно максимальное и минимальное ограничения
мощности турбины (рис. 4:6).
Если не учитывать влияние на рассматриваемый режим
системы АРЧМ, то в выражении (4.36) следует считать АА' = 0. В соот-
Ю6
ветствии с этим, для принятой модели системы АРС уравнение
движения ротора синхронного генератора (4.6) при двухчастотном
асинхронном режиме, согласно (4.6), (4.33), (4.36), представится
двумя уравнениями:
* уравнением усредненного движения ротора генератора с
собственной частотой &2:
<"<<7р
-Af
ЭО'
(4-37)
где
7)(р) = Г,рЗ +
D+-
<Ыс<?р
-HW
^ уравнением колебания ротора:
7)^[^sm(p(f) + ^)] + Z^[^sm(p(/) + ^)] =
которое, с учетом (4.18), можно представить в виде двух уравнений:
7)[^%-^(^ + р^)'] +
7)[2^(^ + ^^) + ^(j + /7^)] + D^(^ + /?^)-
(4.38)
Таким образом, переходный процесс в регулируемом
синхронном генераторе при двухчастотном асинхронном режиме в ЭЭС
определится уравнениями (4.10), (4.10), (4.37), (4.38).
Для оценки допустимости принятых при построении
математической модели синхронного генератора упрощений произведено
сравнение результатов расчета длительного двухчастотного асин-
107
хронного режима, выполненного на основе предлагаемой модели и
на основе полных уравнений Парка-Горева.
Результаты расчета длительного установившегося асинхронного
режима с различным скольжением на основе уравнений Парка-
Горева показывают, что в состав режимных параметров генератора
входят, кроме основных частотных составляющих, соответствующих
средним скоростям вращения асинхронно работающих машин,
составляющие ряда других частот, среди которых наибольшее
значение имеют составляющие, изменяющиеся с двойной частотой
скольжения асинхронного хода.
В табл. 41 приведены значения составляющих обобщенных
векторов тока и напряжения генератора СВ-!500/200-88,
полученные на основе обработки изменения во времени соответствующих
кривых при исследовании асинхронного режима в схеме "генератор
- шины" при моделировании генератора полными уравнениями
Парка-Горева. Здесь же приведены результаты расчета
соответствующих параметров на основе рассмотренной в настоящей работе
модели синхронного генератора. В табл. 4.2 приведены
аналогичные результаты расчета режимных параметров того же генератора,
но при асинхронном ходе в трехмашинной системе и при
различном выполнении системы АРВ.
Как видно из таблиц 4.1 и 4.2, большее совпадение результатов
расчета имеет место для простейшей схемы "генератор - шины". При
отсутствии источника постоянного напряжения результаты
отличаются в большей степени (особенно при регулировании возбуждения
системой АРВ сильного действия), что может быть связано с
увеличением нелинейности параметров колебаний.
Таблица 41. Знач
при асинхронном
Модель
Парка-Горева
Упрощенная
ения составляющих тока и напряжения генератора СВ-!30(
режиме относительно шин бесконечной мощности (в отн. ед.
у
0,02
0,03
0,05
0,08
0,02
0,03
0,05
0,08
(/,
0,337
0,316
0,295
0,248
0,352
0,341
0,314
0,27!
(А
0,824
0,822
0,819
0,815
0,836
0,835
0,828
0,8212
^
0,041
0,04
0,036
0,032
-
-
-
-
/,
0,126
0,125
0,П8
0,108
0,151
0,146
0,134
0,120
/з
1,04
1,041
1,052
1,065
1,048
1,05!
1,066
1,08!
У200-88
Л I
0,028
0,027
0,024
0,019
-
- 1
1
- ]
108
Таблица 4.2. Значения составляющих тока и напряжения генератора СВ-1500/200-88
при асинхронном режиме в трехмашинной системе (параметры (У и / в отн. ед.).
Модель
Парка-Горева
Упрощенная
ТипАРВ
(7,=const
АРВ-СД
АРВ-ПД
t7.=const
АРВ-СД
АРВ-ПД
^
0,250
0,114
0,206
0,253
0,148
0,215
^2
0,942
1,017
0,980
0,962
1,031
0,994
(/,
0,025
0,04
0,036
-
-
-^ _
Л
0,364
0,552
0,507
0,398
0,461
0,520
Л
1,386
1,455
1,423
1,325
1,589
1,413
Л 1
0,061
0,124
0,093
-
-
г .
Для рассмотренных режимов и схем ЭЭС расхождение
результатов расчетов, полученных по различным моделям синхронного
генератора (в оценке по основным частотных составляющим), менее 10 %,
что можно считать вполне удовлетворительным. При увеличении
нелинейности колебаний, например, в период ресинхронизации
синхронной машины, значения режимных параметров, очевидно,
определятся по предлагаемой математической модели с меньшей точностью.
4.2. Моделирование асинхронной нагрузки
Как известно, существенную долю нагрузки в большинстве
узлов ЭЭС составляют асинхронные двигатели, которые могут
оказывать значительное влияние на режим работы и протекание
различных переходных процессов в электрической системе. В режиме
асинхронного хода возможно нарушение устойчивости
асинхронной нагрузки, что приводит в этом случае к недопустимости
данного режима в системе [4.6]. Поэтому при исследовании и расчетах
различных асинхронных режимов необходимо достаточно точное
моделирование асинхронных двигателей с учетом их динамических
характеристик.
В работах, посвященных представлению асинхронной нагрузки
в режиме асинхронного хода и исследованию ее поведения в данном
режиме, нашли отражение различные модели. Достаточно полно
математическая модель асинхронного двигателя может быть
представлена с помощью уравнений Парка-Горева. Такое представление
обычно используется при исследовании поведения одиночного
двигателя при асинхронном режиме в электрической системе [4.7], [4.8].
Для этой же цели применяются и упрощенные уравнения без учета
переходных процессов в контурах ротора [4.9].
!09
Для выявления качественных особенностей работы
асинхронного двигателя при двухчастотном асинхронном режиме в системе в
работе [4.М] используется упрощенное его представление в виде
статических характеристик активной мощности Р(^). При
проведении аналитических исследований устойчивости асинхронной
нагрузки в режиме асинхронного хода между двумя системами в [4.И]
двигатель представляется нелинейным уравнением движения ротора,
решение которого определяется в одночастотном приближении.
Моделирование асинхронных двигателей операторными
функциями, полученными на основе определяемых при малых
отклонениях параметров режима частотных характеристик, используется в
[4.12]. По данным зависимостям асинхронные двигатели могут
представляться в расчетах установившегося асинхронного режима при
удаленном от места подключения нагрузки центре качаний.
Для исследования двухчастотного асинхронного режима
возможно функциональное представление асинхронной нагрузки в виде
подсистемы с двумя входами и выходами, соответствующими связям
двигателя с системой на основных частотах асинхронного хода
[4.13]. В данном случае функциональные зависимости определяются
по частотным характеристикам проводимости двигателя,
полученным при больших колебаниях режимных параметров.
Ниже рассматривается построение математической модели
асинхронного двигателя (АД) при двухчастотном асинхронном
режиме в электрической системе, исходя из предположения, что
напряжение на шинах примыкания двигателя к системе имеет две
составляющие, соответствующие основным частотам асинхронного
хода. При этом внутренние режимные параметры двигателя (ток,
ЭДС) также представляются двумя частотными составляющими.
При представлении асинхронного двигателя
сверхпереходными параметрами (ЭДС и сопротивлением) его схема
замещения, без учета влияния потерь в стали машины, будет иметь вид,
показанный на рис. 4.7. В этом случае уравнения переходного
процесса в обобщенной системе координат в относительных
единицах можно записать в виде:
^ = '/я + Р (л^д + Яд ); (4.39)
0 = 4-Уо[1 + ^(Р-^)]^; (4.40)
по
7)^ = -М,+^(уД;7;), (4.41)
где (7#,/g,Fg - обобщенные векторы напряжения, тока и
сверхпереходной ЭДС соответственно; ^,х,,х* - активное и реактивное
сопротивления статорной обмотки, сверхпереходное сопротивление;
<ы, 71, - скорость вращения и постоянная времени ротора; М„ - мо-
1
мент сопротивления на валу двигателя; %
Xi -х
е -^
^
'я
Рис. 4.7. Схема замещения АД при его моделировании
сверхпереходными параметрами.
Постоянная времени ротора 7^ и параметр ур в общем случае
зависят от скорости вращения ротора (или скольжения АД). При
асинхронном режиме в ЭЭС скольжение двигателя может
изменяться в ту или иную сторону, поэтому величины 7), и ус в общем
смысле, не являются постоянными. Однако при определенных
условиях их можно считать неизменными [4.14].
При учете только основных частотных составляющих,
соответствующих средним скоростям вращения роторов асинхронно
работающих групп генераторов электрической системы, режимные
параметры асинхронного двигателя можно представить в виде:
Уд=Уд+Уя2, Ся.=^"' (я = 1,2);
4=Лн+'я2. 4<,=4<^"' (a = 1,2);
(4.42)
где <?,,<?2 - углы положения осей, вращающихся со скоростью <И; и
<Ы2 (рис. 4.2).
11!
При асинхронном режиме в ЭЭС будут наблюдаться
вынужденные колебания скорости вращения асинхронных двигателей, а при
зависимости момента сопротивления на валу двигателя от скорости и
колебания момента сопротивления. В оценке по первому
приближению эти колебания определяются выражениями:
6i = 61)+^cos(p(;) + pJ;
М* = Af„o + A; cos (%?(?) + р„ ),
(4.43)
(4.44)
где tug' ^<v ^ средняя составляющая и амплитуда первой гармоники
колебания скорости вращения двигателя; Af„Q,^ - то же для
момента сопротивления на валу двигателя; %, - начальная фаза
колебания скорости вращения.
Согласно определению (4.42), уравнение переходного процесса
в статоре асинхронного двигателя (4.39) для рассматриваемого
режима представится двумя уравнениями, соответствующими
основным частотам асинхронного хода:
^=A;7,+(^ + 7^)(x%+Ef);
^2 = ЧЛ + (Р + У^2)(^2 + ^)'
(4.45)
а уравнение (4.40) для цепи ротора, с учетом (4.40), (4.43),
эквивалентно паре уравнений:
л^,
7Р„,
(4.46)
В уравнениях (4.46) через вторые составляющие отражается
взаимное влияние переходных процессов по частотам а^ и й^ . Если это
не учитывать, то уравнения примут вид:
4=Уо{1 + 7^ + У(<и<*-<Ч))]}. (1 = 1.2).
(4.47)
42
Такое допущение будет справедливо для ограниченных по
амплитуде и частоте колебаний скорости вращения асинхронного двигателя.
Электромагнитный момент асинхронной машины в записи через
сверхпереходную ЭДС, согласно (4.4!), определяется выражением:
Мэ=Ж(уЯ^),
и при асинхронном режиме будет иметь две составляющие:
апериодическую - Мэо и периодическую - Af ^ :
Мэ=Мэо+^эя- (4.48)
Апериодическая составляющая электромагнитного момента, с
учетом (4.42), имеет вид:
Мэо=ф(%*+%/;)], (4.49)
а периодическая составляющая
= ^cos(^(/) + ^)-M2sin(^) + ^), (4.50)
где М, +./Af2 =у(Ё^-^)^^ .
Уравнение движения ротора асинхронного двигателя (4.41), с
учетом (4.43), (4.44) и (4.48), можно представить:
уравнением усредненного движения
7)ря;о=-М,о+А/эо; (4'31)
и уравнением колебания скорости вращения
Г,Р[А,cos(p(;) + pj] = -4и cos(p(?) + ^) + Мэя . (4.52)
Последнее уравнение, с учетом (4.50), можно записать двумя
уравнениями:
ИЗ
При учете зависимости момента на валу двигателя от скорости
вращения в виде полинома второй степени Af„ =mQ + M^6; + m2%^' в
выражении (4.44) через параметры колебания скорости вращения
асинхронной машины можно записать:
Л^„о =Мо +"*i<4) +"*2<Ц? +^у^^ L ^ ^)
Таким образом, системой уравнений (4.45), (4.46), (4.5!), (4.53)
определяется переходный процесс в асинхронной нагрузке при двух-
частотном асинхронном режиме в ЭЭС. При этом отражаются как
электромагнитные, так и электромеханические процессы, а также
учитывается нелинейная зависимость момента сопротивления от
скорости вращения двигателя.
4.3. Моделирование энергосистемы
Возможность появления и использование при эксплуатации
ЭЭС кратковременных асинхронных режимов вызывает
необходимость создания математической модели электрической системы и
на. ее основе метода расчета асинхронного режима. При
моделировании сложной системы, в первую очередь, необходимо обеспечить
подобие тех явлений, которые наиболее существенны в
рассматриваемом режиме.
Определение режимных параметров при двухчастотном
асинхронном ходе в ЭЭС может быть выполнено на основе полной
математической модели переходного движения электрической системы
[4.15], включающей в себя уравнения переходных процессов в
синхронных и асинхронных машинах, системах их регулирования, а
также уравнения электрической сети. Очевидно, что использование
такой модели для сложных ЭЭС вызывает значительные трудности,
(4.53)
П4
поэтому для конкретных расчетов применяются различные
упрощенные модели.
Так, известен ряд упрощенных моделей электрической системы,
используемых для расчетов асинхронных режимов, например,
представление электрической системы в виде эквивалентного генератора,
работающего на шины бесконечной мощности, двухмашинной и
трехмашинной схемы замещения [416, 417]. Причем, отдельные
элементы в таких моделях могут описываться достаточно полными
системами уравнений. Расчет асинхронного хода в сложной системе
с большим числом генераторных узлов может выполняться
чиненным интегрированием уравнений движения роторов при замещении
генераторов постоянными сопротивлениями и ЭДС [4.6].
В настоящем разделе для определения режимных параметров
при двухчастотном асинхронном режиме в сложной ЭЭС
предлагается использовать расчетную математическую модель в виде
простейшей схемы: "исследуемый генератор - шины эквивалентного
напряжения", как это принято при анализе синхронной
динамической устойчивости. В качестве исследуемого генератора может быть
принят любой активный узел электрической системы: отдельная
синхронная или асинхронная машина, эквивалентный генератор,
замещающий группу машин или электрическую станцию в целом, узел
комплексной нагрузки и т.п.
При построении математической модели ЭЭС будем считать,
что режимные параметры системы (токи, напряжения, мощности и
т.д.) имеют две составляющие, соответствующие основным частотам
а)ь и <М2 асинхронного режима, как это принято выше для
математических моделей синхронной и асинхронной машин. В этом случае
электрическая система рис. 4! с л генераторными и нагрузочными
узлами по какой-либо линии л разделяется на две группы в
соответствии с основными частотами асинхронного хода ^ и б^.
Следовательно, всю электрическую систему при двухчастотном асинхронном
режиме можно представить двумя схемами замещения:
а) схемой замещения по составляющим токов и напряжений
частоты %)t, в которой ж-ный генератор моделируется обобщенным
вектором ЭДС Д^ и сопротивлением z,^;
б) схемой замещения по составляющим токов и напряжений
частоты <ыь, в которой м-ный генератор моделируется обобщенным
вектором ЭДС ^,2 и сопротивлением j^ (рис. 4.8).
115
"и
'"O-t-
Д:0—^
-О-Ь^
^:0-+
И—О
^:.
ь-о^
,/1
t^-O^'
^ ! 04=
Рис. 4.8. Схема замещения ЭЭС по основным частотам асинхронного режима.
Тогда для принятой схемы замещения электрической системы
составляющие обобщенных векторов тока и напряжения на шинах
генератора /и можно записать в виде соотношений:
Яма ^ma^ -'wwa
/ = /7 е
X^'°y„*„. (or = 1,2);
(4.55)
^.=я..^-" ^ " + Е ^^*"^.^^,
^тя/паг "^ тис ^=1
(^ = 1,2),
(4,56)
ГД^ ^/яша^^а " соответственно собственные и взаимные
проводимости исследуемого генератора и всех других машин системы на
частотах а?; и щ; z^,^ =1/Умтя *^а " собственные сопротивления
относительно шин генератора /я, которые в реально возможном
диапазоне скольжений асинхронного хода можно считать одинаковыми,
Как видно из выражений (4.55), (4.56), первые слагаемые в
частотных составляющих токов и напряжений зависят от режима
работы исследуемого генератора /я, а вторые - от режима работы всех
П6
остальных генераторов системы. Используя соотношения (4.55),
(4.56), определим значение напряжения в точке, электрически
удаленной от зажимов генератора /и на сопротивление z^^ (шины).
Очевидно, что это напряжение будет иметь две составляющие:
^ этот ** ^ Дямх ^ Яма ^ями ^а *
= (^ + ^)Ё^^"^^, (^ = 1,2). (4.57)
Из соотношений (4.57) следует, что частотные составляющие
напряжения на эквивалентных шинах зависят от режима работы всех
генераторов системы, кроме исследуемого генератора w. Таким
образом, при дьухчастотном &:инкро том ходе в электрической
системе режим любого генератора можно отразить двумя эквивалентными
схемами (рис. 4.9), когда его зависимость от всех остальных
генераторов выражается соотношениями (4.57).
Рис. 4.9. Эквивалентные схемы замещения ЭЭС при
двухчастотном асинхронном режиме:
а - по частоте б),, б - по частоте а)ь.
Для правильного отражения влияния на режим работы
исследуемого генератора /я других машин сложной системы в
эквивалентных схемах рис. 4.9 должно соблюдаться общее правило о
неизменности токов, напряжений и потоков мощности в части схемы,
представляющей исследуемый генератор.
П7
По схемам замещения рис. 4.9 для составляющих частот <щ и йь
можно записать:
откуда, с учетом соотношений (4.57), получим:
^ = ^^-Х^^"^, (^ = 1,2). (4.58)
Выражения для токов по соотношениям (4.58), полученные из
анализа эквивалентных схем рис. 4.9, совпадают с определениями
(4.55) для системы рис. 4.8. Таким образом, соблюдается условие
неизменности тока исследуемого генератора /я при переходе от
схемы рис. 4.8 к эквивалентным схемам рис. 4.9.
Аналогично можно установить по схемам рис. 4.9 выражения
для частотных составляющих напряжения на шинах генератора /и:
^war^ ^Zj ^^ У^сг^й^к^ (4.59)
где и = 1,2.
Из сравнения соотношений (4.59) с выражениями (4.56),
полученными для исходной и эквивалентной систем, видно, что условие
неизменности частотных составляющих напряжения на шинах
генератора /я также выполняется. Следовательно, согласно (4.58) и (4.59)
будет выполняться условие о неизменности значений полной
мощности генератора w для схем рис. 4.8 и рис. 4.9.
Таким образом, схемы математического моделирования рис. 4.9
эквивалентны схеме исходной ЭЭС с точки зрения ее влияния при
двухчастотном асинхронном ходе на режим работы исследуемого
генератора w. Однако, следует учитывать, что частотные состав-
118
ляющие напряжения на эквивалентных шинах Ц,м<у будут
непрерывно изменяться в течение времени из-за изменения углов положения
роторов генераторов системы и их ЭДС. Поэтому в процессе расчета
двухчастотного асинхронного режима необходимо уточнять
значения составляющих напряжения на эквивалентных шинах для
каждого интервала изменения режимных параметров.
Полученная схема математического моделирования исходной
ЭЭС при возникновении двухчастотных асинхронных режимов
позволяет использовать для определения режимных параметров тот же
метод, что и для расчета синхронной динамической устойчивости -
метод последовательных приближений.
На первом приближении для всех активных узлов электрической
системы последовательно составляются эквивалентные схемы,
соответствующие основным частотам асинхронного режима, для
которых рассчитываются изменения режимных параметров на заданном
интервале времени. Частотные составляющие напряжения на
эквивалентных шинах для текущего узла подсчитывается с
использованием параметров режима, полученных при исследовании других
генераторов. Порядок обхода активных узлов может определяться
естественным возрастанием номеров узлов или критерием,
обеспечивающим меньшую погрешность получения решения.
По найденным на первой итерации значениям режимных
параметров для всех узлов электрической системы уточняются значения
напряжения на эквивалентных шинах, после чего выполняется
следующая итерация расчета асинхронного режима. Зависимости
изменения режимных параметров ЭЭС, определенные на Л-м
приближении, можно считать близкими к действительным в том
случае, когда значения напряжения на эквивалентных шинах для всех
исследуемых генераторов мало отличаются от полученных на
предыдущем приближении.
Предлагаемая методика расчета двухчастотных асинхронных
режимов в сложной ЭЭС позволяет использовать различные
математические модели синхронных генераторов и узлов нагрузки, как
простейшие, так и достаточно полные модели, учитывающие
переходные электромагнитные процессы, АРВ и АРС, процессы в турбинах
и котлах электрических станций [4.18]. По этой методике был создан
«рабочий» программный комплекс для расчетов на персональном
компьютере асинхронных режимов ЭЭС и проверки различных ал-
119
горитмов АЛАР и других средств ПАА, изложенные в следующих
главах настоящей книги. Для более детальных исследований
использовался ПВК «ДАКАР».
4.4. Выводы
Для расчетов и анализа двухчастотных асинхронных режимов в
сложной ЭЭС предложены математические модели регулируемого
синхронного генератора и АД, основанные на представлении
режимных параметров двумя составляющими, соответствующими основным
частотам рассматриваемого режима. Эти модели позволяют учитывать
электромеханические и электромагнитные переходные процессы, а
также вынужденные колебания, параметры которых определяются
одночастотным приближением при их гармоническом разложении.
Показано, что у синхронных и асинхронных машин при
ограниченных по амплитуде и частоте колебаниях ротора допустимо не
учитывать взаимное влияние переходных процессов по основным
частотам длительного асинхронного режима с установившимся
значением скольжения.
Проверка математической модели регулируемого синхронного
генератора при двухчастотном асинхронном режиме проводилась
посредством вычислительного эксперимента. Для рассмотренных
схем и режимов результаты, полученные по предлагаемой модели,
отличаются от результатов расчетов при моделировании генераторов
по полным уравнениям Парка-Горева менее чем на 10%.
Предложено сложную электрическую систему при расчетах и
анализе двухчастотных асинхронных режимов моделировать в виде
ряда простейших эквивалентных схем «генератор - шины».
Напряжение на эквивалентных шинах учитывает составляющие,
соответствующие как основной частоте исследуемого генератора, так и
составляющие, соответствующие частоте асинхронно работающих
генераторов. Показано, что напряжение на эквивалентных шинах практически
не зависит от режима работы исследуемого генератора при
ограниченных по амплитуде и частоте качаниях ротора этого генератора.
На основе разработанной наиболее полной модели создан
«рабочий» комплекс для расчетов асинхронных режимов и ресинхронизации
сложной ЭЭС при различных алгоритмах АЛАР.
120
Глава 5. Наблюдаемость и идентификация
параметров энергосистемы
5.1. Исходная информация, доступная локальным
устройствам противоаварийной автоматики
Действие устройств автоматики выявления и ликвидации
асинхронного режима электроэнергетической системы базируется йа
использовании измеренных в узле установки устройства токов и
напряжений, которые в этом режиме проходят свои экстремальные
значения [51].
Особенностью алгоритма работы АЛАР является то, что он
должен обладать высокой чувствительностью к возможному нарушению
устойчивости энергосистемы вследствие развития асинхронного
режима, но при этом не реагировать на динамические процессы, не
связанные с переходом к асинхронному режиму, и, кроме того,
селективно реагировать на движение электрического центра качаний
вдоль линии электропередачи.
Выполнение указанных требований должно обеспечиваться
соответствующим выбором режимных параметров энергосистемы,
выход которых за пределы заданных уставок приводит к
срабатыванию устройства.
Формирование режимных параметров и их уставок проводят,
как правило, на основе заранее определяемой информации об
эквивалентных характеристиках ЭЭС, представленной в виде
двухмашинной схемы замещения. Однако, возможно возникновение
несоответствия задаваемых параметров схемы замещения их текущим
значениям вследствие изменения структуры и режима эксплуатации
электропередачи, в том числе, при действии устройств противоава-
рийного управления. Это приводит к необходимости вынужденного
расширения диапазона уставок устройств АЛАР и возможным
неправильным действиям в ряде режимов ЭЭС, в том числе, к
несрабатыванию или ложному срабатыванию.
Достаточно точной информацией о параметрах
контролируемой конкретным устройством АЛАР зоны электропередачи
располагают службы эксплуатации ЭЭС. Использование этой
информации позволяет достаточно точно моделировать угол между
векторами напряжения на границах контролируемой зоны, взаимного
12!
скольжения этих напряжений или производной по времени этого
скольжения, но не всегда позволяет просто и однозначно
формировать критерии срабатывания АЛАР вследствие нелинейной
зависимости угла между эквивалентными ЭДС от изменения угла
электропередачи [5.!].
Кроме того, точное построение такой зависимости требует
наличия достоверной информации об эквивалентных параметрах ЭЭС в
процессе динамического перехода, которая, как правило, отсутствует.
В связи с этим является актуальной задача разработки
методики выявления и ликвидации АР, для реализации которой
необходимой и достаточной является информация о величинах,
непосредственно доступных для измерения (таких, как токи и напряжения в
узле установки устройства), и о параметрах электропередачи,
доступных для непосредственной и достоверной оценки
(сопротивления электропередачи, входящие в зону, контролируемую данным
устройством АЛАР). В качестве результатов расчёта должны быть
получены эквивалентные сопротивления от узла включения
устройства до узлов приложения ЭДС эквивалентных генераторов и
величины векторов этих ЭДС.
Решение такой задачи позволит реализовать адаптивные
алгоритмы выявления АР в ЭЭС, для функционирования которых не
требуется задавать внешние уставки, не относящиеся непосредственно к
параметрам контролируемого участка электропередачи. Естественно,
что реализация алгоритма предполагает использование
микропроцессорной техники, что в настоящее время рассматривается как
базовое направление формирования системной автоматики.
Отметим, что указанная проблема относится по своему
характеру к так называемым обратным задачам, в которых по информации о
протекании процесса необходимо определять параметры модели.
Проблема получения величин параметров эквивалентной схемы
асинхронного режима энергосистемы относительно узла локального
измерения тока и напряжения непосредственно связана с проблемой
наблюдаемости, или, идентифицируемости, что в данном случае то
же самое. Следуя [5.2], под наблюдаемостью будем понимать
совокупность условий, обеспечивающих получение информации о
значениях текущих параметров режима ЭЭС.
В данном разделе проблема наблюдаемости рассматривается с
точки зрения контроля динамики изменения локально измеряемых
параметров напряжения и тока.
!22
Некоторые характерные режимные параметры могут быть
получены по единичной выборке наблюдений входных сигналов. В
частности, в главе 6 изложен метод адаптивного выявления наличия
электрического центра качания в пределах контролируемого участка
энергосистемы.
Для получения других характерных параметров одной выборки
наблюдаемых величин оказывается недостаточно.
Поскольку каждое единичное измерение локально наблюдаемых
величин (напряжения и тока в узле сети) можно использовать только
в одном уравнении пространственно-физической взаимосвязи
режимных параметров (в уравнениях Ома или Кирхгофа), то, очевидно,
что на основе этого одного измерения невозможно определить
искомый эквивалент ЭЭС, т.к. количество подлежащих оценке
Параметров превышает количество уравнений связи. Не изменяет ситуации и
наличие нескольких последовательных измерений в условиях
неизменности режима ЭЭС, поскольку получаемые при этом уравнения
связи являются зависимыми.
Принципиальное решение задачи даёт дополнение уравнений
пространственно-физической взаимосвязи искомых переменных
динамическими соотношениями между параметрами в различные
моменты времени нестационарного режима ЭЭС.
В рассматриваемой задаче выборка, построенная на базе
измерений при различной величине угла между эквивалентными
генераторами (базисная выборка), даёт совокупность независимых
уравнений связи, совместное решение которых позволяет определить
искомые эквивалентные параметры.
В процессе получения базисной выборки необходимо учитывать
погрешности исходных данных, в том числе и возможность
получения данных с грубыми ошибками. Объем измерений, точность, темп
сбора данных и динамика ЭЭС накладывают ограничения на
точность получаемых результатов и даже на саму возможность
получения каких-либо оценок.
В данной главе рассмотрены вопросы, связанные с эквиваленти-
рованием ЭЭС в условиях асинхронного режима, с наблюдением
векторов напряжения и тока в узле измерения, с оценкой
погрешности расчётных величин сопротивлений и ЭДС эквивалентной схемы
ЭЭС в условиях случайных флуктуации (шума) входного сигнала.
Автор надеется, что материал данного раздела будет полезен
как при проектировании и эксплуатации устройств АЛАР, так и
123
для облегчения понимания излагаемых в последующих разделах
вопросов, связанных с разработкой и внедрением адаптивных
алгоритмов контроля АР.
5.2. Эквивалентирование энергосистемы для анализа
асинхронного режима
Современная электроэнергетическая система является сложной
системой, характеризующейся взаимодействием большого
количества факторов, влияние которых необходимо анализировать во всей
совокупности. В главе 1 было показано, что изучение процессов в
электроэнергетической системе возможно только в некотором
адекватном изучаемому процессу модельном представлении. При этом
для различных процессов необходимо использовать различные
модели, в каждой из которых принимаются во внимание существенные
особенности и исключаются из рассмотрения особенности, которые
не влияют или слабо влияют на изучаемый процесс.
Изучение системы с помощью математической модели
позволяет отразить и проследить влияние возмущений для установления
причин нарушения устойчивости, предельных значений возмущений,
приводящих к выходу из синхронизма, мероприятий по повышению
устойчивости и т.д. Для возможности исследования поставленных
задач на математической модели необходимо, чтобы она с
удовлетворительной точностью отражала процессы в электрической
системе и могла быть реализована с помощью существующих
вычислительных средств [5.3], [5.4].
Моделирование системы предполагает построение объекта (в
данном случае, математического), обладающего характерными
свойствами, подобными свойствам рассматриваемой электрической
системы, при этом речь идёт не о получении универсальной модели
сложной электрической системы, а о математической модели,
служащей для изучения интересующих исследователя вопросов [5.5], в
данном случае процессов динамического перехода к асинхронному
режиму ЭЭС.
Исследование динамических режимов в электрической системе
с большим количеством синхронных машин затруднено вследствие
высокого порядка системы нелинейных дифференциальных
уравнений, описывающих изучаемые процессы. Кроме того, прибли-
124
жённый характер информации о параметрах системы и режима,
стохастический вид возмущения, воздействующего на синхронно
работающие генераторы, вызывает необходимость использования
модели, упрощённо отображающей процессы в реальной
электрической системе [5.6].
В соответствии с установившимися представлениями [1.26] для
выявления наличия асинхронного режима необходимо и достаточно
базироваться на одной из простейших эквивалентных моделей ЭЭС.
В случае, когда ожидается развитие АР некоторой «легкой»
части ЭЭС относительно другой существенно более «тяжелой» части
ЭЭС, целесообразно использовать модель «генератор - шины
бесконечной мощности» (см. рис. 5.1).
В случае, когда ожидается развитие АР между сравнимыми
частями ЭЭС, целесообразно использовать модель двухмашинной
системы (см. рис. 5.2).
Точка с напряжением С/ соответствует месту установки
локального устройства противоаварийной автоматики, а сопротивления
Z,, Z2 - эквивалентные сопротивления ветвей модели ЭЭС.
Первый случай соответствует структурам I и Н, а второй
структурам Ш и IV согласно с классификации [L39] (см. главу 1).
П Е, Z, t/ Z: ^
(^}-)ч—н^-ч t—]
7
Рис. 5.1. Модель «генератор - шиныи.
Л Е, Z, j Z; Е; Л2
7
Рис. 5.2. Модель двухмашинной системы.
125
Более сложные структуры ЭЭС подлежат предварительному
упрощению и эквивалентированию, в процессе которого они могут
быть сведены к указанным простейшим схемам.
При этом обычно сначала производится эквивалентирование
электрической сети, а затем выполняется эквивалентирование групп
синхронных генераторов.
В работе [5.7] изложена совокупность методов эквиваленти-
рования участков ЭЭС для построения рабочей модели
исследуемого процесса.
Процесс эквивалентирования обычно состоит из двух этапов:
определение или выбор структуры искомой (эквивалентной)
математической модели и собственно преобразование исходной
математической модели к виду, определённому на первом этапе. Под
структурой математической модели здесь понимается вид и количество
уравнений, которые могут связывать как часть параметров и
переменных исходной математической модели, так и обобщённые
параметры и переменные. Эквивалентирование можно осуществлять
итеративно, когда на каждом шаге реализуются оба этапа. Выполнению
первого этапа может во многих случаях способствовать разделение
системы, описываемой исходной математической моделью, на
подсистемы с помощью различных методов декомпозиции.
Эквивалентирование групп синхронных генераторов
(электростанций) при решении задач устойчивости обычно осуществляется
после того, как выполнено эквивалентирование электрической сети.
Исходную математическую модель записывают в виде автономной
системы линейных или нелинейных обыкновенных
дифференциальных уравнений с постоянными коэффициентами. Линейное и
нелинейное описания используют, когда эквивалентная математическая
модель предназначена соответственно для исследований статической
устойчивости или электромеханических переходных процессов.
Систему линейных дифференциальных уравнений получают в
результате линеаризации нелинейных дифференциальных уравнений в
окрестности установившегося режима, для которого анализируется
статическая устойчивость системы [5.8].
Строгое упрощение исходной математической модели может
быть достигнуто применением теории дифференциальных уравнений
с малыми параметрами при высших производных и, основанного на
ней, метода разделения движений динамической системы по
относительной скорости изменения переменных. Упрощение достигается
126
как за счёт того, что не учитываются малые параметры и тем самым
понижается порядок системы дифференциальных уравнений, так и за
счёт того, что система уравнений разбивается на более простые
независимые подсистемы, по решению которых можно судить о
характере движения всей системы.
Системы уравнений, на которые расчленяется исходная система,
или системы, которые получаются, если не учитывать быстрых
движений, как правило, имеют иной физический смысл, нежели
исходная система уравнений. Поэтому изменение исходной
математической модели с помощью метода разделения движений относят к^ме-
тодам физически неподобного эквивалентирования [5.8], [5.9]. Экви-
валентирование может быть физически неподобным, когда
физическая сущность отдельных явлений, формирующих полученную
эквивалентную математическую модель, не имеет значения. Процесс
эквивалентирования при этом сводится к тем или иным способам
упрощения решения уравнений, описывающих исходную
математическую модель. В отличие от этого физически подобным считается эк-
вивалентирование, обеспечивающее получение эквивалентной
математической модели, отдельные уравнения которой или их группы
описывают элементы, подобные существующим элементам системы,
но количество элементов эквивалентной математической модели по
сравнению с исходной уменьшено [5.8].
Существуют и другие методы физически неподобного
эквивалентирования, в основе которых лежат строгие преобразования
исходной математической модели. Примерами могут служить замена
исходной системы обыкновенных дифференциальных уравнений
системой интегро-дифференциальных уравнений в частных
производных существенно меньшего порядка (так называемой
континуальной системой) [5.9], [5.10], разложение в ряды дифференциальных
уравнений исходной системы [5.9]. линеаризация нелинейных
дифференциальных уравнений с последующим их преобразованием к
канонической форме, понижающим порядок системы уравнений
[5.9], или линеаризация другими методами. Линеаризация возможна,
когда возмущения электрически удалены от эквивалентируемой час-
fH системы или незначительны, что приводит к малому изменению
значений переменных системы в окрестности её положения
равновесия. При использовании этих методов, так же как и в случае
применения метода разделения движений, возможна оценка точности
эквивалентирования.
127
Использование того или иного метода даёт возможность
привести исследуемую систему к одному из простейших видов
эквивалентной схемы, пригодной для изучения асинхронного режима.
Выбору места установки АЛАР должны предшествовать
расчёты устойчивости рассматриваемой энергосистемы с выявлением
возможных сечений асинхронного хода, относительно которых
энергосистема распадается на две части, причём каждая из них
характеризует определённую группу генераторов, нагрузок и
связей между ними.
Величина и характер изменения углов роторов генераторов в
режимах больших качаний зависят не только от постоянной инерции
агрегата, но также и от его расположения по отношению к месту
возмущения. Поэтому при проведении расчётов по определению
сечений можно воспользоваться тем, что влияние аварийного
возмущения уменьшается по мере удаления от места его возникновения, и
применить упрощённое математическое описание элементов
системы с последующей более точной проверкой в ограниченном числе
точек исходных данных.
Для определения места установки и настройки режима работы
АЛАР, выделенные в процессе расчёта сечений части энергосистемы
должны эквивалентироваться по принципу синфазности движения
генераторов в переходном процессе АР. При этом под синфазностью
движения генераторов в каждой из движущихся групп понимается
малая величина изменения разности углов между генераторами
группы в случае возмущения в энергосистеме.
Для выбора уставок рабочих углов АЛАР возможно также
использование набора расчётов квазистационарных режимов ЭЭС (см.
раздел 3.3.2). При этом должны быть удовлетворены критерии
эквивалентности, заключающиеся в тождественности характеристик
режима ветвей и узлов примыкания в исходной и эквивалентной
схемах замещения частей энергосистемы в рассматриваемом
установившемся режиме.
Такой способ позволяет находить эквивалентные параметры
энергосистемы по данным исходного установившегося режима и, в
общем случае, не может рассматриваться как строгая операция при
расчёта^ переходных процессов:
Область существования режимных параметров энергосистемы
при возникновении АР может быть рассчитана и по граничным
фазовым характеристикам в координатах угол - скольжение.
128
Рассмотрим далее некоторые важные частные вопросы,
связанные с наблюдаемостью и идентификацией параметров ЭЭС.
5.3. Измерения и задача идентификации параметров
энергосистемы
Согласно общепринятой терминологии прямыми задачами
называют такие задачи, в которых определяют следствия по известным
причинам. Обратными задачами называют такие задачи, в которых
восстанавливают причины по наблюдаемым следствиям, когда Тпо
данным наблюдений или опытов ищут значения параметров,
входящих в принятые закономерности, или даже сами закономерности.
Прямыми измерениями являются такие, когда результат
измерений у, отличается от точного, но неизвестного нам значения
измеряемой величины у„ лишь случайной погрешностью я,, т.е.
Д=Х,+*,.
Если дополнительно известна функция распределения
случайных погрешностей наблюдения я,, можно применить известные
способы для оценки величины ^.
Косвенными или непрямыми измерениями называют такие
измерения, когда несколько искомых параметров л.связаны с
результатами наблюдений ^ системой уравнений:
X=X"i,*/+*,' rw :' = 1..я. (5.1)
Задача косвенных наблюдений эквивалентна проблеме
идентификации параметров некоторой заданной модели процесса по
совокупности наблюдений или состояний процесса.
Как правило, число наблюдений превосходит число неизвестных
параметров N > я. В этом случае можно использовать известные
способы для оценки искомых параметров. Необходимо только проверять
качество получаемых оценок: состоятельность, несмещённость и
эффективность.
Когда случайные погрешности имеют нормальное (или близкое
к нормальному) распределение, задача сводится к применению
метода наименьших квадратов.
129
В работе [5.!1] показано, что задачу косвенных наблюдений
можно рассматривать в представлении интегральных уравнений 1-го
рода, в котором неизвестная функция стоит под знаком интеграла,
причём в интересующих нас случаях ядро уравнения Л^ не зависит от
неизвестной функции^:
у(/)= j^(/,jy)jr(^y. (5.2)
Поскольку для рассматриваемых нами случаев интеграл имеет
фиксированные значения пределов, то это уравнение будет
интегральным уравнением Фредг&льма.
Известная принципиальная сложность, связанная с решением
интегральных уравнений Фредгольма 1-го рода, заключается в том,
что решения этих уравнений неустойчивы к малым изменениям
входных данных, и, таким образом, оказывается нарушенным одно
из необходимых условий корректности по Адамару - единственность
решения и непрерывная зависимость от начальных данных.
Дополнительные осложнения при обработке экспериментальных
данных возникают из-за того, что наблюдения известны только в
конечном числе точек и, кроме того, имеют погрешности, связанные
с наличием шумов.
Фундаментальные идеи относительно методов устойчивых
решений интегральных уравнений первого рода связаны с работами
А.Н. Тихонова и др. (см. обзор [5 J 2]).
Подробное рассмотрение этой области выходит за рамки
настоящей работы, поэтому отметим только одно прагматическое
следствие, применимое к рассматриваемой задаче.
В соответствии с методами А.Н. Тихонова успешное решение
проблемы связано с определением некоторого множества в
пространстве возможных решений (так называемые «множества
корректности»), такого, что решение на этом множестве единственно и
устойчиво. При этом поиск множества корректности следует производить на
основании любой доступной информации о решении, а не на
основании самого уравнения обратной задачи. Например, из физических
соображений о природе решения, или доступной априорной информации
о характеристиках решения (таких, как, например, гладкость,
неотрицательность или монотонность, интервал существования и т.д.).
130
Рассмотрим теперь более подробно характер исходной
информации, которую можно использовать для решения
рассматриваемой задачи.
5.4. Отображение исходного сигнала в комплексную
плоскость
Выборка наблюдаемых мгновенных значений напряжения и тока
даёт возможности получить соответствующие величины векторов в
комплексной плоскости. Определение векторов выполняют
известным образом, посредством вычисления действительной и мнимой
компонент в соответствии с косинус- и синус- интегралом Фурье на
интервале, соответствующем периоду сигнала.
Вместе с тем, в практике расчётов нередко встает вопрос о
«неправильности» получаемого при этом знака величины мнимой
компоненты. Автор был свидетелем того, что указанный вопрос вызывал
затруднения, в частности, применительно к разработкам численных
алгоритмов получения векторов.
Действительно, выполняя интегрирование вещественного
входного сигнала, в результате получаем пару величин, одна из которых
сопоставляется с вещественной компонентой, а другая с мнимой.
При этом знак величины мнимой компоненты не соответствует
физической сущности процесса и должен быть изменён на
противоположный. Таким образом, при этом как будто бы возникает
противоречие между известной физической сущностью процесса и
известным математическим методом.
Несмотря на то, что на самом деле никакого противоречия здесь
нет и вопрос исчерпывающе изложен в соответствующей литературе,
автор посчитал полезным привести краткое пояснение.
Пусть в электрической цепи имеется некоторая доступная для
измерения гармонически изменяющаяся величина (напряжение
или ток).
Вводя, как это принято в электротехнике, оператор вращения
плоскости комплексных чисел в виде е^*, можно представить
рассматриваемую величину в виде вектора в плоскости
комплексных чисел.
Будем полагать, что исходный вектор определён следующим
образом:
13!
Й' = И-^"', (5.3)
где
^ = ^+7'-r;„. (34)
Будем рассматривать входной сигнал в виде разложения в ряд
Фурье с периодом основной гармоники, равным У = 2я/а?.
Если воспользоваться представлением ряда Фурье для
вещественной функции, то для основной гармоники получим следующие
коэффициенты:
2^
^=-J/(^)cos(^)^ = ^;
2
г
Го
(5.5)
4=-j/(^)-sm(^)^ = -^
^ о
Тогда сигнал на входе измерительного устройства представляет
собой проекцию такого вектора на вещественную ось:
/(/) = Ж(№1 = ^ - соз(<ы;) - Ц.„ sinM. (5.6)
Если теперь использовать эти коэффициенты для
восстановления величины вектора И, т.е. попытаться представить этот вектор
как К,д,„ =а, +у-А,, то оказывается, что расчётный вектор является
сопряженным по отношению к исходному значению
^=^-7-^Г*. (37)
т.е. величина мнимой составляющей имеет обратный знак.
При этом, разумеется, и знак реактивной мощности получается
обратным по отношению к её исходной величине, что оказывается
весьма существенным при фазировке устанавливаемых локальных
устройств.
Причиной такого «парадокса» является то, что в
вышеизложенном выводе не учитывалось обстоятельство, что для такого рода
задач функция входного сигнала является проекцией (следом в
вещественной плоскости) вращающегося вектора в комплексной плоскости.
132
При этом попытка восстановления исходного вектора на основе
коэффициентов, полученных в результате вещественного
преобразования Фурье, является некорректной.
Как отмечено в литературе (см., например, [5.13], стр. 11 - 15),
вещественное и комплексное преобразование Фурье дают одинаковые
результаты только в случае вещественной функции, но для
комплексной функции (а у нас именно она, или, точнее, её след в вещественной
плоскости) следует использовать комплексное преобразование.
В этом случае:
^,=^ ^, (3.8)
где
1 '
^=^^(/)^^. (5.9)
Известно (см., например, [5.14] стр. 146 - 147), что в силу
свойств комплексного преобразования полученный коэффициент
связан с коэффициентами вещественного преобразования Фурье
следующим образом:
^=^("1-./'4)- (з.ч))
В результате получается правильный знак при мнимой
компоненте вектора (и, соответственно, при компоненте реактивной
мощности).
5.5. Траектории векторов наблюдаемых величин
Микроконтроллерные устройства ПА работают с векторами
режимных параметров ЭЭС, такими, как напряжение, ток, мощность.
При развитии аварийного процесса концы указанных векторов
описывают некоторые траектории (годографы) в расчётной
комплексной плоскости.
Ниже рассмотрены особенности поведения и параметры
траекторий векторов, присущие процессу развития АР.
133
Эквивалентная схема АР рассматривается в виде,
представленном на рис. 5.2.
Пусть вектора эквивалентных ЭДС имеют вид:
,.! (5.11)
Будем полагать, что в процессе развития АР величины
сопротивлений ветвей и величины модулей векторов ЭДС остаются
постоянными на каждом интервале расчета.
5.5.1. Векторы напряжения и тока
Выражение для вектора напряжения в узле имеет вид:
(/=М-рА, где Z,=Z,+Z;.
Вводя нормировку сопротивлений ветвей
(5.12)
(5.13)
получим:
{7 = ^2^^^^^+^^^^^^ - (5-14)
Траектория конца вектора напряжения в комплексной плоскости
(годограф напряжения) представляет собой сложную кривую. Её
можно рассматривать как суперпозицию двух кривых, каждая из
которых представляет собой окружность. При этом суммарная
траектория представляет собой окружность, центр которой также
перемещается по окружности.
Пример такой траектории представлен на рис. 5.3.
134
-10
-5
0
10
Рис. 5.3. Годографы ЭДС, напряжения и тока
для двухмашинной эквивалентной схемы
(начало траектории отмечено кружком).
Выражение для вектора тока имеет вид:
/ = AZJ^2.
(5.!5)
Переходя к экспоненциальному представлению, получим:
j=^27("i(')+9,) +^_^<"2(')+3,)
(5,16)
Траектория конца вектора тока в комплексной плоскости
(годограф тока) представляет собой сложную кривую, которую можно
рассматривать как суперпозицию годографов токов, порождаемых
каждой из ЭДС. При этом каждый годограф каждого тока
представляет собой окружность, а суммарный годограф представляет собой
окружность, центр которой также перемещается по окружности.
Пример такой траектории тока также представлен на рис. 5.3.
В частном случае, когда одна из ЭДС (пусть для П)
неподвижна, выражения для годографов напряжения и тока принимают вид
окружностей с фиксированным центром.
133
5.5.2. Вектор сопротивления
Будем рассматривать отношение напряжения узла к току цепи
рассматриваемой схемы как некоторое сопротивление,
характерное для ветви, присоединенной к узлу измерения:
Z = ^ = M±ML. (5.17)
После преобразования Z = Z, :— Z,, и введения обозначе-
1-^
Я.
ния для отношения векторов ЭДС:
где <%) = #2(')"<Xi(*) " разностный угол векторов ЭДС. получим
выражение для годА^рафа сопротивления в виде:
Поскольку ^ является окружностью по определению (5.18), то в
силу свойств конформного преобразования и комплексная функция
А(') = —^— (3.20)
также является окружностью (см. [5.15]), и её можно представить в
виде:
^ = с, + ^^\ (5.21)
где с = г- - центр окружности, /?,, = ^ - радиус окружно-
- !-/?/ 1-^
сти, й,(?) -угол поворота.
Теперь выражение для сопротивления можно преобразовать к виду:
!36
Z = Z,.(c,+/>,^'<'b-.Z,, (5.22)
и далее выразить его в явном виде окружности
Z = c,+/7,2^<'\ (5.23)
где C;=Z;*(Cy-<^) - центр окружности, /?,=Z,-/7,, - радиус,
#;(;) = #у (Г) + ^ - угол поворота.
Полезно отметить, что в случае, когда модули ЭДС равны друг
другу (/?g = 1), комплексная функция /^ (?) принимает следующий вид:
^^ = 11^=1+^)=^-^^)' (3-2">
и годограф сопротивления вырождается в прямую линию.
Z, =1(Z2 -Z,)-yi(Z, +Z2) fgy. (5.25)
5.5.3. Вектор мощности
Будем рассматривать вектор полной мощности в виде:
*y = f/./*. (5.26)
Подставляя выражения для напряжения и тока, получим:
с_ ^2^1 +<2^2 ^ "^2
^ z;
и далее:
J = ^LZ^+^&(z,^-Z^-^). (5.27)
Вводя обозначения
!37
^' * zf ^"
/^2
Z2E, -Z^
(5М)
получим выражение для вектора мощности в виде:
(5.29)
Функция <S(J) является эллипсом с центром, расположенным в
точке <^, а собственно уравнение эллипса имеет вид:
7?(Л) = /1.^-^.<Г^. (5.30)
Изображение функции 7? (J) представлено на рис. 5.4.
:<ь^.: __;
: ! i 4
.l.i...i...i....
^4! ! !
/!\! : +i
: ! ^^
Рис. 5.4 Эллипс в комплексной плоскости.
Точки пересечения большой оси эллипса с самой кривой можно
определить как максимальные величины вектора F(<?), а соответст-
!38
вующие точки малой оси - как минимальные величины вектора
F(J). Определим эти точки.
Для этого представим слагаемые в экспоненциальном виде:
F(^) = ^, .^^-/^2-^^. (5.31)
где #i, #2' ^" аргументы параметров /f,, /^ *
Квадрат модуля функции будет иметь вид:
F^(F) = ^+^-2 ^ //2 cos(^-^+2-J). (532)
Функция достигает максимума при cos(%-#2+2 <?) = -1, т.е.
при &г =-! - + —- Д, где Д = 1,2... и её значение в точке макси-
мума равно (//, + //2)
Функция достигает минимума при cos(^ - 02 + 2 F) = 1, т.е. при
J^ . = — 2- + я* -й, где Д = 0,1,2... и её значение в точке минимума
равно (^-^Л
Следовательно, длина большой полуоси эллипса определяется
через его параметры как
3 = ^1+/^ Чл+/'2] = Д+/'2' (3-33)
а длина малой полуоси как
Рассмотрим теперь величину наклона эллипса.
Поскольку полученные точки F(J^- ) являются концами
больших полуосей эллипса, то выражение для векторов больших
полуосей имеет вид:
139
й.,2=(^.+^)-^ ' ' ^ (5-35)
Поскольку угол наклона малой полуоси ортогонален углу
соответствующей большой полуоси эллипса, то угол наклона малой
полуоси эллипса соответствует величине среднего значения углов
параметров/;,, /^2 *
Р = ^- (536)
5.4. Оценка достижимой точности определения параметров
эквивалентной схемы
Проблема создания адаптивных устройств противоаварийной
автоматики тесно связана с задачей нахождения эквивалента
двухмашинной схемы ЭЭС на основе измерений напряжения и тока в
узле этой схемы. При этом надо быть уверенным, что во всём
диапазоне допустимых значений сопротивлений возможные погрешности
измерений дадут приемлемую погрешность результатов расчётов.
В предположении идеальных измерительных приборов
погрешность измерения напряжения и тока определяется только шумом
входного сигнала.
Эта задача является типичной для теории погрешностей [5.!6],
[5 J 7].
В данном разделе рассматривается как погрешность
определения параметров двухмашинной схемы зависит от шума векторов
напряжения и тока.
5.4.1. Относительная погрешность вектора
Пусть задан некоторый отличный от нуля вектор Г:
И = Г.^Л (5.37)
Для малого приращения А И получим:
АМ = АМ ^ + М ^-у-А/0. (5.38)
Тогда относительная погрешность имеет вид:
МО
^
^
+ 3 -^*
^
у^ + у АД. (5.39)
Таким образом, относительная погрешность модуля вектора
равна действительной части относительной погрешности вектора, а
погрешность угла вектора равна мнимой части относительной
погрешности вектора.
Рассмотрим условия определения сопротивлений эквивалентной
схемы энергосистемы в виде, представленной на рис. 5.!. При этом
будем полагать, что векторы ЭДС заданы, а векторы напряжения !7
и тока / получены посредством обработки исходных измерений
напряжения м(?) и тока ;(;). При наличии погрешностей измерения
напряжения и тока, соответствующие погрешности проявятся и в
величинах векторов, причём для векторов погрешности следует
рассматривать в виде комплексного числа.
Предварительные исследования показали, что в
рассматриваемом случае погрешности напряжения и тока представляют собой
случайные величины, распределённые по закону, близкому к
нормальному. Численную оценку соответствующих величин можно
получить, исследуя сигнал, поступающий на вход устройства.
Простейшую оценку шума исходного сигнала получают по его
отличию от синусоиды в течение периода. Среднеквадратическое
отклонение распределения этих отличий принимается за меру шума
исходного сигнала. Используемые в задаче векторы тока и
напряжения находят как соответствующее преобразование Фурье на
выборке измерений. Погрешности векторов оказываются в этом
случае мультипликативными. Вследствие фильтрующих свойств
интеграла Фурье стандартные отклонения погрешности векторов при
интегрировании по !0 - 20 точкам в 2 - 3 раза меньше величин
стандартного отклонения распределения погрешностей исходного
сигнала.
Эти величины дают оценку погрешности абсолютного значения
векторов, т.е. радиус той окружности, в которой с известной
вероятностью лежит вершина вектора.
Очевидно, что погрешности действительной и мнимой
компонент вектора определяются погрешностью положения точки конца
вектора. Наиболее естественно полагать, что эти погрешности по
осям координат комплексной плоскости распределяются одинаково и
14!
их величины B1/V2 раз меньше величины погрешности модуля
вектора. Если вектор ^ имеет уровень шума ^, то его соответствующая
относительная погрешность определится выражением:
А^И = ^(1 + у')Л/2 (3.40).
Пусть, например, известны векторы фазных напряжений (/„,
(/д ^ и ассоциированные с ними уровни шума ^,,^,,^,. Распределяя
погрешность однородно по вещественной и мнимой составляющим
вектора, получим относительную ошибку вектора в виде:
^.-f.iiZ Г54П
где к = а, Ь, с.
В микропроцессорных устройствах противоаварийной
автоматики в расчётах используют, как правило, напряжения и токи
прямой последовательности. Поэтому представляет интерес
оценить шум прямой последовательности на основании оценок шума
фазных сигналов.
По определению вектор прямой последовательности это:
(/,=((/,+3-t/b + a2.f7,)/3, (5.42)
.2яг
где д = е -* .
Из соотношения (5.42) получаем:
А^=(А^+^-А^+^-А^)/з. (5.43)
Подставляя (5.41), получим:
)42
И в относительном виде:
At/, ^1 + у ^-4+^^*^+^*^^
(544)
В качестве примера оценки уровня шума в реальной
энергосистеме были использованы записи регистраторов в системе Дагэнерго
при аварии 2 марта 2002 года. Исходный сигнал в этом случае
оцифровывался по 10 точкам за период. На рис. 5.5 показаны результаты
расчёта шума, ассоциированного с векторами прямых
последовательностей напряжения и тока. *"
--A--f-p^^*
v!,$
.= 0,5
!00
80
3? 2
h7
f
V
""Т ! !
: ! :
L ' ' ' J
k*j- ^- ^ ^
_< t _ t
..№^jj..
! h-
жремя, сек
время, сек
Рис. 5.5. Примеры относительных величин шума исходных сигналов напряжения и
тока, полученные по осциллограммам реальной аварии.
5.4.2. Погрешность определения эквивалентного сопротивления
Рассмотрим основное уравнение для левого плеча
двухмашинной схемы рис. 5.1:
E = Lf + Z;-7
(5.45)
При этом величина сопротивления ветви определяется как:
E-t/
2i =
143
(5.46)
Следуя [517], получим величину погрешности сопротивления в
виде:
AZ =
/-A(E-f/) + (F-&)-A/
(5.47)
Поскольку в данном случае исследуется величина погрешности
сопротивления в зависимости от погрешности напряжения и тока, то
полагаем АЕ = 0. Тогда выражение для абсолютной погрешности
имеет вид:
АС/ (Ё-&г)-А/ А(/
7 /
+ Z,^
(5.48)
Разделив обе части выражения (5.48) на величину
сопротивления, получим выражение для относительной погрешности:
AZ_J_ (/ М/ А/
Z, " Z, / У * 7
(5.49)
Вводя в рассмотрение сопротивление узла измерения Zg = (///,
которое равно:
. Z,+Z,(^/^)
!-(EjE.) '
Z.=
(5.50)
и величины относительных погрешностей напряжения, тока и
сопротивления ^„ = А(/Д7, ^ = А/// , ^, = AZ/Z,, получим:
(5.5!)
Величины модулей ЭДС в первом приближении можно полагать
одинаковыми. Тогда сопротивление узла измерения выражается в
виде;
1
Zn=--
(Z2-Z,)-y.(Z;+Z,).c;J^)
(552)
!44
Подставляя (5.52) в (5.51), получим:
SZ, "1
^--1
cfg(F/2)
А^/ А/
^7 ^ 7
(5.53)
Введём в рассмотрение величину отношения сопротивления
ветвей в виде:
Ty^/Z,,
(5.54)
и выразим множитель при погрешности напряжения как функцию
отношения сопротивлений 7/ и угла F:
Щ^^) = (^-1)-у ^ + 1)-^(^/2).
(5.55)
Поведение и особенности характеристической функции АГ(?/,<?)
рассмотрены в приложении.
Сравнивая (5.51), (5.53) и (5.55), отметим, что:
Теперь (5.51) записывается в следующем виде:
(5.56)
^' 2 t/ /
(5.57)
Используя уравнение правого плеча схемы для определения
погрешности сопротивления правой ветви, AZ/Z2 , аналогично
получим:
^2
(5.58)
Из этих выражений видно, что вклад шума тока в погрешность
расчёта сопротивления аддитивен:
145
4,=у- (5 39)
а вклад шума напряжения, кроме того, зависит от величины функции
Я(?7,<У):
4t/=y^(?7.F)-^. (5.60)
Каждое из эквивалентных сопротивления ветвей ЭЭС можно
рассматривать как цепочку, состоящую из последовательно
соединенных активного и индуктивного сопротивлений. В этом случае
угрл каждого сопротивления (Z,,^) принадлежит замкнутому
интервалу [0;я/2], а разность углов сопротивлений не выходит из
области [-я/2;я/2]. Следовательно, имеет смысл рассматривать лишь
правую полуплоскость комплексной плоскости ^.
В реальной ЭЭС активная компонента эквивалентного
сопротивления меньше реактивной. В этом случае угол каждого из
сопротивлений принадлежит интервалу [я/4;я/2]. Следовательно,
разность этих углов ограничена областью [-я/4;я/4].
Кроме того, не имеет практического смысла рассмотрение
ситуации, когда одно из сопротивлений много больше другого,
поскольку в этом случае узел измерения практически совпадает с
одним из ЭДС. Целесообразно изучить поведение функции в условиях,
когда модули сопротивлений отличаются не более чем в Ю раз.
Тогда область существования практически значимых величин ту
является сектором кольца в правой полуплоскости:
77€[0,1;Ю]; 1 (5.6!)
<?е[-я/4;я/4].[
На рис. 5.6 представлен вид этой области в плоскости
комплексных величин.
!4б
+j
п/4
Рис. 5.6. Область практически значимых величин 7у.
Для полноты картины отметим также, что если речь идёт об
устройствах АЛАР, то представляют интерес не слишком малые значения
J, т.к. в устойчивых режимах ЭЭС угол J уже достигает, как
правило, значений 40 - 60 градусов. Далее будем считать, что по
абсолютной величине угол <У меняется в пределах от 45 до ] 80 градусов.
Определим теперь величину относительной погрешности
сопротивления, вызванную погрешностью тока.
Будем рассматривать сопротивление в экспоненциальном виде
Z == Z e^z. Тогда вклад погрешности тока при некотором уровне
шума ^ в величину погрешности сопротивления (5.59) можно
выразить в виде:
<*, =^, +уА^ =у = (^,/V2).(! + y), (3.62)
т.е. погрешность модуля сопротивления:
а погрешность угла сопротивления:
(5.63)
(5.64)
!47
Это означает, что во всей области значимых величин ту, Л
вызванная шумом тока погрешность модуля сопротивления
оказывается равна погрешности угла сопротивления. В соответствующих
единицах это означает, что, например, погрешность тока в !% приводит
к погрешности модуля сопротивления 0,7% и к погрешности угла
сопротивления 0,4 градуса.
Оценим погрешность сопротивления, вызванную шумом
напряжения:
4zu=<^zt/+./'-A02t,, (5.65)
где ^д/ = — и А0ду являются действительной и мнимой
частями соотношения (5.60).
Перепишем (5.60) с использованием уровня шума напряжения ^ :
^=^(^)-^ ^ = А^^^)(1 + 7% (3.66)
ИЛИ
'ZU
-А
= ^[^(^)-ЗМ) + 7^(^) + 3(я))]. (5.67)
Выражения для действительной ж(я^) и мнимой S(Af)
компонент функции Я(7у,<У) приведены в приложении. Воспользовавшись
ими, получаем:
+ y7*(cos^ + sin^) ^g(J/2) + cfg(F/2)-l]; (5.68)
А0^ =-^[77-(cos0 + sind)-
-77 (cos^-sin^) ^g(J/2)-c/g(J/2)-l]. (5.69)
Естественно, что эти погрешности пропорциональны уровню
шума напряжения.
148
Можно показать (см. приложение), что всей области практически
значимых величин ту при всех <? относительная погрешность модуля
линейно связана с относительной погрешностью угла сопротивления:
<fz</=^ АЗну+Л. (5.70)
Максимально возможные в значимой области ту погрешности
расчёта сопротивления, обусловленные шумом напряжения, как
следует из (5.68) - (5.69), достигаются при F = 45° и # = 45° для
модуля сопротивления и 0 = - 45" для его угла. Они составляют:
=^-(t?-(^+i)+i); (5.7i)
= ^(^2+1)^ + 1) (5.72)
При уровне шума напряжения !% максимальная во всей
значимой области ту относительная погрешность модуля сопротивления
при ту = Ю составляет около 13%, а максимальная погрешность угла
сопротивления 7,5°.
Рассмотрим, какова погрешность сопротивления, вызванная
шумом напряжения, при приближении угла между ЭДС к ! 80°. При <У =
!80° в соответствии с (5.68) - (5.69)погрешности для модуля и угла
сопротивления равны, соответственно:
^(^ = ^) = ^[^'(cos0-sin^)-l]; (5.73)
A^(F = ^) = -^=r[Ty(cos0 + sin0)-l]. (5.74)
149
Минимальное значение погрешности равно нулю. При J = 180°
оно будет достигнуто для модуля сопротивления в тех точках
значимой области ту, для которых выполняется условие:
Ty.(cos0-sm#)-l = O. (5.75)
Это условие выполняется, если ту > 1/т/2 и
^=arccos[ ^j
-%
(5.76)
Нулевая погрешность для угла сопротивления при J = 180°
будет достигнута в тех точках значимой области ту, для которых
выполняется условие:
7y-(cos0 + sin#)-l = O, (5.77)
т.е. в точках, для которых ту > l/V2 и
^=arccosf / J + ^. (5.78)
В качестве примера на рис. 5.7 показаны значения
относительных погрешностей модуля и угла сопротивления при 0=0 градусов
для трёх разных значений ту, рассчитанные по выражениям (5.68),
(5.69) при изменении угла 3 между ЭДС и при уровне шума
напряжения 1%.
Интересно отметить, что, поскольку из (5.78) следует, что
^ > я/4' то во всей значимой области ту шум напряжения
препятствует* возможности достичь нулевой погрешности расчёта
сопротивления угла при <У = !80°, однако нулевая погрешность расчёта
угла при F, отличных от 180°, может быть достигнута.
!50
0J4
0,!2
оа
0,08
0,06
0,04
0,02
Г1 \ ^
! \
!
!
!
кд=0,^^. j
^
^х
50
!00 !50
5, градусы
ЮО !50
8.градусы
Рис. 5.7. Значения абсолютных величин относительных погрешностей модуля и угла
сопротивления, вызванные шумом напряжения !% для случая 0= 0.
5.4.3. Погрешность определения эквивалентной ЭДС
Рассмотрим теперь смежную задачу. Пусть сопротивления
эквивалентной схемы определены с известной погрешностью, оценим
погрешность расчёта ЭДС по известным сопротивлениям и
измеренным току и напряжению.
Из (5.45) для погрешности ЭДС имеем:
АЯ = АУ + 2 А/ + / AZ.
Перейдём к относительной погрешности:
АЕ ALT+Z.A/ + 7 AZ
(5.79)
(5.80)
Преобразуем это выражение, поделив числитель и знаменатель
на ток:
13!
At/t/ ^ A7 .^ At/ . -A/ ^
дЁ- —^- —+ Z—- + AZ -i-Z„+Z—-+AZ
A^_ t/ 7 7 _ t/ ° 7
Ё (t//7+Z) (Z.+Z)
и на сопротивление:
At/ Z. A7 AZ
АЙ t/ Z ^ 7 "^ Z
(5.8!)
Y^
(5.82)
и, подставляя (5.58), получим:
1 ^At/ A7 AZ
AE_2 t/^7 Z_4 AZ
2 Z
fi.H+ll ^^
(5.83)
Отметим, что выражение (5.83) не имеет особых точек в области
значимых величин ту, поскольку (7/ + 2) равно нулю только в случае
0 = 180° при любых значениях J (см. приложение).
Выделяя компоненты, связанные с вкладом напряжения и тока,
получим:
^* Я(ту) + 2 ^" Я(т)) + 2 ^' ^ ^
Таким образом, относительная погрешность расчёта ЭДС
содержит вклад от погрешности тока и вклад от погрешности
напряжения, которые следует суммировать по абсолютной величине.
Изучим погрешность расчёта ЭДС, вызванную шумом тока:
&=-—* А (5.85)
После преобразований, аналогичных выполненным выше,
получим:
152
<^; =
Ж
1
-3
1
^(т;) + 2; ^Я(77) + 2
А^=±^.к
!
Я(^) + 2^
+ 3
!
,Я(77) + 2
(3.86)
(3.87)
Воспользовавшись результатами приложения, выпишем явные
выражения для <^д, и Айд,:
^,=
2-V2 ^sin^(J/2)
(77 +cos 0) +sin^0
x(77-(cosd + sind)-77 (cos^-sind) ^g(J/2)-cfg(F/2) + l); (5 88)
. /^ ^ sin^(^/2)
(77 +cos 0) +sin 0
x(7;-(cosd-sin0) + 77-(cos0 + sm0)-cfg(F/2) + cfg(J/2) + l). (5.89)
Функциональная зависимость связи между погрешностями
модуля и угла ЭДС, вызванными флуктуациями тока, приведена в
приложении.
Изучение (5.88), (5.89) показало, что при шуме тока 1% во
всей значимой области ту при любых значениях J погрешность
модуля ЭДС не превосходит 3%, а погрешность угла ЭДС не
превосходит !.9°.
На рис. 5.8 приведены типичные численные значения ^^ и Аид,.
Рассмотрим погрешность расчёта ЭДС, вызванную шумом
напряжения, которая в соответствии с (5.83) выражается как:
, _ 2-Яй) , _,
^"'3^)72'^^
1—
"M + 2J
^
(5.90)
Аналогично предыдущему получаем вклад напряжения в
погрешности расчёта модуля и угла ЭДС:
153
^=^2-
.с
l-2hRW
1
-3br
1
Я(?7) + 2; ^Я(?7) + 2^
\\
77
(59!)
Aar^=V2-^
1-2
Ж -r
+ 3
^ ^(^) + 2j W?y) + 2JJ
(592)
Воспользуемся (5.85) - (5.86) и, в предположении отличного от
нуля шума тока, получим:
9!
1
Я(77) + 2
-3
1
."(i7) + 2jj
-с/
2^2.^ '
(593)
ИИ
1
"M) + 2J
+ 3
1
\\
V(?7) + 2J
Ао;
д/
2^2 ^
(5.94)
Подставим (5.93), (5.94) в (5.9!), (5.92):
4м/=^/2-5/'
1-2-
&;
2^2 ^ J
= 6,.р2-^-1; (5.95)
А^^=^2-^-
1-2-
2^,
= 4а
V2-
Лот
^/
6 J
(5.96)
Из этих соотношений видно, что во всей области значимых
величин 7у при всех значениях J вклад напряжения в погрешность
расчёта обеих компонент ЭДС пропорционален шуму напряжения и
зависит от погрешности вклада тока в расчёт компонентов ЭДС.
На рис. 5.8 приведены типичные численные значения ^ ду и Асгду .
Отметим, что если напряжение и ток характеризуются одним и
тем же уровнем шума & то:
154
^=^2-^-^; (5.97)
Аа^=^2-^-Ая;у. (5.98)
В этом случае полная погрешность каждой компоненты ЭДС
выражается как
^ =<^к/ +^/ =1^2-^-^1+1^1 (399)
И
A^=A^+A^=IV2 ^-A^J + [A^y[. (5.100)
Если ^^ > 0 и/или > Адгд, > 0 в некотором
диапазоне изменения Л, то из (5.99), (5.МО) видно, что <^д и/или АбГд
будут при этом константами, равными V2 ^.
Изучение (5.95), (5.96) показало, что при шуме напряжения 1%
во всей значимой области 7у при любых значениях J погрешность
модуля ЭДС не превосходит 2.5%, а погрешность угла ЭДС не
превосходит 1°.
На рис. 5.8 приведены графики суммарных абсолютных
значений <^ и Айд в зависимости от угла <2.
Приведённые графики дают представление о поведении
погрешностей ЭДС во всей области значимых величин ту.
Перейдем, наконец, к определению погрешности разностного
угла между эквивалентами ЭДС, который является основным
рабочим параметром устройства АЛАР.
Для величины погрешности угла между ЭДС имеем:
АД = ]Ай,) + 1Аи2}, (5.10!)
где Адг, и Ай2 - погрешности угла каждой из ЭДС. Для данной
двухмашинной схемы эти погрешности рассчитывают для
значения ту, для одного плеча и для значения ^2 *^^7i Для другого
плеча схемы.
155
3
2
!
О
-*40
2
1
О
-!
'40
4
1
[... —j
г
j
!
.4
!
-
j^-l
i ^
60 SO 100 i20 И0 160 ISO
^3r^**^
[ - j- - -1
60 SO
100 !20 !40 !60 130
40 60 80 100 120 140 160 180
5,градусы
НЮ !20 МО 160 )M
3
40 60
80 100 120 140 160 !K(
6, градусы
Рис. 5.8. Погрешности расчёта модуля (а - я) и угла (2 - е) ЭДС: ту = О.! (сплошная);
ту = 1 (штрихпунктир); ту = 10 (пунктир). Верхняя строка- вклад шума тока; средняя
строка - вклад шума напряжения; нижняя строка суммарная погрешность. Уровень
шума и напряжения и тока 1%; й = — 45 градусов.
На рис. 5.9 приведены типичные зависимости погрешности
угла между ЭДС при уровне шума и тока и напряжения 1%.
Погрешности рассчитаны для трёх углов 0 при отношении модулей
сопротивлений !0.
При уровне шума напряжения и тока !% во всей практически
значимой области у) погрешность угла между ЭДС не превосходит 4°.
На рис. 5J 0 показан пример поведения погрешности угла между
ЭДС при различном уровне шума для напряжения и тока. Уровень
шума напряжения 4%, тока 2%. Причем, используется величина
шума существенно большая, чем обычно наблюдаемая в реальных ЭЭС.
156
!,5
40
Рис.5
14
I ^ j_ i^^L^jrrr^i.- i--^ J
y^r ^ ^^ 2 1
I ! '_/^L' ^ ' __^^ '
.... ^ ^
! A^ ! ! ! ) '
! '___4%_'_ ' ' ' _ _' '
г ' **t ^ t " т " T **^ ^ T* ^
Г Д^ t 1" t 1* t '
//! ! ! ! ! ! !
60
80
!40
160
180
iOO !20
8, градусы
9. Погрешность расчета угла между ЭДС при n.t = Ю и т^ = 0,1.
?,=-45°,#2 = 45°; 2-^,=^=0; 3-^ = 45°,^ = -45°.
Уровень шума напряжения и тока 1%,
6,5
6
- 5,5
о.
4,5
4
3,5
t л
40
60
80
140
t60
!00 !20
5, градусы
Рис. 510. Погрешность расчета угла между ЭДС
при^=1 ^^И7)2=1-^^^.
!80
157
5.5. Выводы
Рассмотренные в данном разделе выражения для погрешности
определения параметров эквивалентной схемы позволяют заключить,
что полученные относительные погрешности для расчёта
сопротивлений, ЭДС и угла между ЭДС являются верхними оценками для всех
практически возможных значений сопротивлений двухмашинной
схемы. Эти погрешности пропорциональны уровню шума используемых
в расчётах сигналов и функции, отражающей системные связи в схеме.
Погрешности тем больше, чем больше отношение рассчитываемого
сопротивления к сопротивлению противоположного плеча.
Оценка шума напряжения и тока по осциллограммам реальных
процессов в мощных ЭЭС показала, что уровень шума векторов
редко превышает 2 %. Поэтому вполне можно рассчитывать на
достижение удовлетворительной погрешности расчёта угла между ЭДС в
устройствах АЛАР на основе измеренных напряжения и тока в узле
любой двухмашинной схемы.
Проблема создания адаптивного устройства АЛАР зависит от
того, насколько точно удастся рассчитать эквивалентную ЭДС по
измеренным току и напряжению в узле. В этих устройствах могут
использоваться уравнения, отличные от уравнений вида (5.45). Как
правило (см. главу 8), они представляют собой квадратичные формы
уравнения (5.45). Из теории (см. [5.16], [5.17]) следует, что в этом
случае погрешности будут вдвое больше, чем найденные в данной
работе. Это вполне приемлемо для удовлетворительной оценки угла
между ЭДС в устройствах АЛАР.
158
Глава 6. Контроль электрического центра качаний
Выявление наличия электрического центра качаний (ЭЦК) на
защищаемой линии электропередачи является одной из важных задач
для локальных устройств противоаварийной автоматики
энергосистем, в частности, для устройств ликвидации асинхронного режима.
Точка ЭЦК на участке электропередачи обычно понимается как
точка, в которой напряжение достигает минимального значения во
время качаний генераторов или при асинхронном ходе.
При асинхронном режиме векторы напряжения в любых двух
точках электропередачи совершают относительно друг друга полные
провороты, если они находятся по разные стороны от ЭЦК. Если же
эти точки находятся по одну сторону от ЭЦК, то векторы
напряжения в них совершают взаимные качания.
Вблизи точки ЭЦК существует наибольшая опасность
нарушения устойчивости нагрузки, а положение этой точки служит одним
из существенных факторов при выдаче управляющего воздействия
на деление энергосистемы в асинхронном режиме. Как правило,
участки энергосистемы, на которых возможно наличие ЭЦК,
рассчитывают заранее и результаты предварительных расчётов используют в
процессе проектирования и установки устройств АЛАР. Эти расчёты
позволяют выявить возможные сечения асинхронного режима и его
влияние на элементы системы [6.1]. При этом учитывают
разнообразные возможные режимы работы энергосистемы, и, тем самым,
определяют некоторую характерную (для совокупности режимов)
область возможного положения ЭЦК [140].
Тем не менее, в каждый конкретный момент времени каждое
установленное устройство АЛАР не имеет информации о текущем
режиме энергосистемы и, соответственно, о наличии или отсутствии
ЭЦК на своем участке. Кроме того, в период развития аварии точка
ЭЦК может перемещаться как в пределах контролируемого участка,
так и переходить на смежные участки энергосистемы.
Выявление ЭЦК позволяет обеспечить селективную работу
устройств АЛАР, при которой управляющее воздействие выдаётся
только при совместном выполнении двух условий - наличии в
энергосистеме асинхронного режима и наличии ЭЦК на защищаемом участке
энергосистемы [1.57].
159
В данной главе рассмотрен способ определения положения ЭЦК
в период развития аварии на основании доступной для локального
устройства информации о контролируемом процессе [6.2].
6.L Математическая модель контролируемого участка
Рассмотрим распределение напряжения вдоль неоднородной
линии электропередачи в условиях поворота ЭДС.
Пусть имеется эквивалентная схема (рис. 6.!) с четырьмя
разными участками Zj,Z2,Z^,Z^, причём, участки Z2,Z^
контролируются устройством АЛАР, а участки Zi, Z^ представляют собой
эквиваленты примыкающих энергосистем.
Напряжения в узлах ^^з^4 схемы рассчитывают, исходя из
заданных сопротивлений и величин ЭДС, а напряжения вдоль
сопротивлений участков будем определять, исходя из напряжений узлов:
^*) = (l-*)'t/,+*'t/y,
(61)
где L/,,L/. - напряжения на границах участка, а А €[0,1] -
относительное расстояние от начала участка.
Для изучения распределения напряжения была сформирована
математическая модель с вариацией параметров схемы в широком
диапазоне величин.
Эквивалентная схема энергосистемы относительно узла установки АЛАР
оч
Е,
U:Z;
UiZ,
! (?) (
нэ
E
ё
[первый эквивалент
О
[АЛАР
Q
! о
ggg второй эквивалент j
Рис. 6. t. Эквивалентная схема.
160
На диаграмме (рис, 6.2) представлено распределение
напряжения вдоль сопротивлений участков при повороте ЭДС дальнего
конца на угол от 0° до 360° с такими параметрами схемы, которые
позволяют наглядно проследить Характерные особенности процесса.
Изменение модуля напряжения по участкам схемы
0 50 100 150 200 250 300 350 400
Рис. 6.2. Распределение напряжения вдоль линии передачи,
проход от 0 до 180 градусов.
На рис. 6.3 представлены диаграммы распределения напряжения
при «обратном» проходе от 180° до 360°.
Из диаграммы видно, что напряжение на участках без ЭЦК
изменяется линейно, а на участке с ЭЦК имеет характерный минимум.
Этот минимум проявляется уже при относительно небольших углах
разворота и задолго до достижения напряжением абсолютного
минимума в точке ЭЦК. Это вполне понятно, поскольку наличие (или
отсутствие) ЭЦК на участке предопределяется параметрами схемы.
По мере разворота ЭДС величина напряжения в точке ЭЦК
уменьшается, но, вследствие неоднородности линии, не обязательно
становится равной нулю при развороте до 180°. Точка ЭЦК
смещается при повороте ЭДС, поскольку в примере расчета величины ЭДС
по концам линии заданы не равными друг другу.
161
Изменение модуля напряжения по участкам схемы
Рис. 6.3. Распределение напряжения вдоль линии передачи,
проход от ! 80 до 360 градусов.
Интересно отметить, что диаграмма обратного прохода
отличается от прямого прохода вследствие неоднородности линии.
На основании опытов с расчётной моделью можно заключить,
что участок с ЭЦК обладает характерной особенностью - наличием
минимума квадрата напряжения, а именно, в некоторой точке
участка выполняется условие:
^-к'(А) = 0. (6.2)
Это признак может быть положен в основу способа выявления
ЭЦК на контролируемом участке.
В случае наличия промежуточного отбора мощности
распределение напряжения искажается за счёт его снижения в узлах схемы.
Рассмотрим, как это влияет на поведение точки ЭЦК.
На рис. 6.4 представлена схема передачи с промежуточным
отбором мощности.
Напряжения в узлах схемы по-прежнему рассчитывают, исходя
из заданных сопротивлений участков, сопротивлений нагрузок в уз-
162
лах и величин ЭДС, а напряжения между узлами по-прежнему
определяют, исходя из напряжений и расстояния до узлов.
Эквивалентная схема энергосистемы относительно узла установки А Л АР
z и,
! <Э
[первый эквивалент
'^
Ф
-^'gy^aa
[АЛАР[
!
ЙЖЖЖ
Ф [ 6> !
ЯЙЯ№№ВЙ1 второй эквивалент ]
Рис. 6.4. Схема передачи с промежуточным отбором мощности.
Кроме того, определяем напряжение между узлами С^,<Уз
С/,, !Уз, t/з, t/?, iVp как напряжение вдоль эквивалентного однородного
последовательного сопротивления между парами указанных узлов:
t/(*) = (!-*).t/„+*.t/„,
(6.3)
где (/,д, f7„- пары напряжений указанных узлов, а А € [0,1] -
относительное расстояние от начального узла.
Расчёт такого распределения напряжения имеет своей целью
сравнить действительную точку ЭЦК с точкой, полученной без учёта
внутренней структуры участков цепи на эквивалентной схеме с
последовательными сопротивлениями аналогичной схеме рис. 6.!.
На рис. 6.5 представлена диаграмма исходного распределения
напряжения при нулевом угле между генераторами.
Пока ни на одном из участков не выполняется условие (6,2).
На рис. 6.6,я представлена диаграмма при угле между
генераторами 90°, на рис. 6.6,й контролируемый участок выделен в большем
масштабе.
Из диаграммы видно, что расчёт по сопротивлениям участков
пока не выявляет точки минимума, в то время как расчёт по
эквиваленту уже выявляет точку минимума напряжения на
контролируемом участке.
163
0.9
0,8
0.7
0.6
0,5
0.4
0,3
0.2
0.!
0
\:
—Л(
ПС
Z,
^
\
^
Z;
Z,
^_
Z,
--
t
:;::::г*
Z.
Z. ]
Z
/у :
;
:
z, :
0 !М) 2(Ю .^00 400 500 600 700 8(М
Рис. 6.5. Распределение напряжения при нулевом угле между генераторами.
угол ^ О
г*
h^ir
!
Г
!
t
--*--
'"Г**
! ) t
Г (
)
)
)
"*}"
(
^1^
)
t
)
)
)
<
)
)
"1*
по эквивалентам
-ч-{--^
)
!
)
!
<
)
)
*"Ч—
<
JltJL
!
!
)
)
*"*Г"
)
-4^
!
420 440 460 480 500 520 540 560 530
3) 6)
Рис. 6.6. Распределение напряжения при угле между генераторами 90°.
На рис. 6.7,я представлена диаграмма при угле между
генераторами ! 20°, а на рис. 6.7,6 контролируемый участок выделен в
большем масштабе.
Из диаграммы видно, что расчёт по сопротивлениям участков
по-прежнему не выявляет точки минимума, в то время как расчёт по
эквиваленту выявляет точку минимума напряжения на
контролируемом участке.
На рис. 6.8 представлены диаграммы при угле между
генераторами 180°. При этом в обоих случаях выявлен минимум на
контролируемом участке.
164
0,8
0.7
о.ь
0.4
0.3
0,2
01
0
—-^
П0УЧ1СТ.Ь
rTl
^--
—
—
—Д--)%
—
/
/
/^
л
/ -
L=
—j
too 20V 300 400 500 WO 700 Ю0
")
0.!5^
0,05
Г Г
Г"
!
!
)
!
!
г
^J !
_ J j
no участкам „
L-
<
^1
)
)
)
)
)
)
t
!
i
no' ви ' ' -
;
--,--
!
)
!
{
j
—J
'\
к=Т^ГТ
i
"Г*
j
-^
ь
OJL—--^J- —L —^Jir
420 440 460 480 500 520 540 560 580 600
6)
Рис. 6.7. Распределение напряжения при угле между генераторами, равном 120°.
угол* !80
0.9
0.8
0.7
0.6
0,5J
0.41
0.3
0.2]
О J
—
Ж"
1 __.L -_
Ь^
—
—
маа^
-J!
V Ч
—j
!00 200 300 400 500 600 700 800
Рис. 6.8. Распределение напряжения при угле между генераторами, равном 180°
Интересно отметить, что выявление по эквивалентным
сопротивлениям позволило правильно определить наличие ЭЦК на
контролируемом участке, причём, точка была выявлена раньше, чем при
работе с истинными сопротивлениями участков.
6.2. Способ выявления наличия ЭЦК на контролируемом
участке
Рассмотренные особенности распределения напряжения вдоль
линии передачи позволяют предложить способ выявления наличия
163
ЭЦК на участке, защищаемом локальным устройством противоава-
рийной автоматики.
Пусть контролируемая ветвь присоединена к узлу с
напряжением t/, и сопротивление контролируемой ветви имеет вид:
Z = Z„<^. (6.4)
Пусть при этом ток ветви имеет вид:
7 = 7^, (6.5)
где %? - угол тока относительно напряжения узла.
Тогда напряжение в точке, отстоящей от узла на относительное
расстояние л, имеет вид:
t/,=(/,+x ZJ. (6.6)
Определим величину квадрата модуля напряжения как:
м' (х) = f/, - У; = У^ + 2лУ„И,А cos«7 + у) + x'Z^. (6.7)
Производная этой величины имеет вид:
*" иЗ(х) = 2У^/,,со5(0 + р) + 2лИ^, (6.8)
а вторая производная
Ял
jL-Mi(*) = 2Z^. (6.9)
Поскольку величина второй производной (6.9) неотрицательна,
то результатом решения уравнения
^"i(*)=0 (610)
<?л
!66
является точка минимума квадрата напряжения, относительное
расстояние которой от узла выражается следующим образом:
^_t/„cos«? + p)
2*A
При этом точка минимума модуля напряжения совпадает с
точкой минимума квадрата напряжения.
Таким образом, условие наличия ЭЦК на контролируемой ветви
имеет следующий вид:
Изложенный способ был апробирован (см. [3.4]) при разработке
модифицированного алгоритма микропроцессорного устройства
АЛАР-М.
Испытания предложенного способа выполнялись с применением
комплекта реальных осциллограмм аварий в энергосистеме с
использованием аппаратуры РЕТ0М-41М [6.3] и показали правильность
работы предложенного метода.
Во всех случаях асинхронного режима с наличием ЭЦК на
контролируемой ветви устройство выдавало сигнал на
управляющее воздействие, и наоборот, когда ЭЦК не находилось на
контролируемой ветви, устройство не выдавало сигнал на
управляющее воздействие.
Некоторая нестабильность работы алгоритма наблюдалась
только в случае «практически точного» попадания ЭЦК в узлы начала
или конца защищаемого участка.
При этом сопоставление вычисленного по (6.12) критерия
выявления ЭЦК с точными значениями 0 и 1 могло приводить к ошибке
сравнения в силу погрешностей вычисления, связанных с
погрешностью входных сигналов тока и напряжения.
По результатам испытаний выработана рекомендация:
использовать для практического применения в устройстве интервал
с измененными границами, причём для характерных в
энергосистеме уровнях шума входных сигналов изменение интервала
составляло 0,05.
167
Изменение границ интервала должно координироваться с
требованиями, предъявляемыми к допустимой вероятности ошибок
срабатывания первого рода (ошибочное несрабатывание устройства) и
второго рода (ложное срабатывание).
В случае, когда ошибка первого рода является более значимой,
рекомендуется задавать критерий выявления в виде:
^^^^ + ^е[-0,05;1,05]. (6.13)
В противоположном случае, когда более значимой является
ошибка второго рода, рекомендуется задавать критерий выявления в
виде:
t/„ cos(?r + # + %?)
Z,.7,
€[0,03; 0,93]. (6.! 4)
т'ж
6.3. Выводы
В соответствии с изложенным, для определения наличия точки
электрического центра качания на контролируемой линии
необходимо и достаточно измерять векторы напряжения и тока в начале
контролируемой линии, а затем по заданному сопротивлению линии
определить, имеется ли на линии точка минимума абсолютного
значение напряжения.
168
Глава 7. Идентификация параметров
эквивалентной схемы по траекториям векторов
наблюдаемых величин
В данном разделе рассматривается методика выявления и
ликвидации АР, для реализации которой необходимой и достаточной
является информация о величинах, непосредственно доступных для
измерения (таких, как токи и напряжения в узле установки
устройства) и о параметрах электропередачи, доступных для
непосредственной и достоверной оценки (сопротивления электропередачи,
входящие в зону, контролируемую данным устройством АЛАР). В
качестве результатов расчёта должны быть получены
эквивалентные сопротивления передачи от узла включения устройства до
узлов приложения ЭДС эквивалентного генератора и величина
вектора ЭДС.
Методы идентификации параметров эквивалента ЭЭС
асинхронного режима основываются на анализе рассмотренных выше
траекторий движения векторов наблюдаемых режимных параметров,
а именно, годографов тока, напряжения, а также производных от них
величин - годографов полной мощности и сопротивления.
До тех пор, пока ЭЭС находится в стационарном режиме или
испытывает небольшие колебания около стационарного режима,
вектора напряжения и тока изменяются незначительно. Такое состояние
не позволяет сформировать совокупность данных, на основании
которых можно было бы предпринять попытку какой либо оценки
параметров ЭЭС. При этом, локальное устройство ПА находится в
«пассивном» состоянии ожидания.
Как только возникает процесс динамического перехода к
асинхронному режиму (или к режиму глубоких качаний) векторы
напряжения и тока претерпевают существенные изменения.
Локальное устройство ПА имеет возможности выявить начало процесса и
перейти в режим накопления выборки отсчётов векторов
напряжения и тока.
Как было рассмотрено выше, при наличии изменения взаимного
угла между векторами эквивалентных ЭДС векторы напряжения и
тока описывают характерные траектории, и при наличии
достаточной информации в выборке эти траектории могут быть
идентифицированы как аналитические кривые второго порядка.
169
После идентификации аналитической кривой её параметры
позволяют рассчитать параметры соответствующей эквивалентной
схемы ЭЭС асинхронного режима [7.!].
В разделе 7.1 изложены методы определения параметров
эквивалентной схемы «генератор-шины бесконечной мощности» при
асинхронном режиме энергосистемы. Эти методы применимы для
эквивалентных схем энергосистемы вида I и II (см. классификацию
энергосистем в главе 1) и приведенным к этому виду эквивалентным
схемам более сложных энергосистем, что позволяет выполнить
анализ процесса развития аварии с переходом в АР в условиях, когда
мощность одного из эквивалентных генераторов значительно больше
мощности другого.
В разделе 7.2 изложены методы определения параметров
двухмашинной эквивалентной схемы энергосистемы при переходе к
асинхронному режиму.
Методы применимы для эквивалентных схем энергосистемы
вида Ш и IV (см. классификацию энергосистем в главе I) и
приведенным к этому виду эквивалентным схемам более сложных
энергосистем.
Предложенные методы позволяют выполнить анализ процесса
развития аварии с переходом в АР, используя данные, полученные из
осциллограмм системных регистраторов, и разработать алгоритмы
выявления и предотвращения АР для устройств локальной
автоматики ликвидации АР.
Кроме того, подобный анализ может предоставить
дополнительную информацию для решения задачи корректного выбора уставок
срабатывания, а также правильности согласования работы различных
комплектов устройств АЛАР, установленных на одной
электропередаче и т.п.
7.1. Эквивалентная схема «генератор - шины бесконечной
мощности»
7.1.1. Определение угла ЭДС
Эквивалентная схема «генератор - шины бесконечной
мощности» представлена на рис. 7.1.
170
(У, Z, У Z: F,
]-ч—н^-ч==з—Q
Рис. 7.!. Эквивалентная схема «генератор - шины бесконечной мощности)).
Здесь !7,7 - напряжение и ток в месте установки устройства,
!7, - напряжение на шинах Zj,^ -сопротивления ветвей
эквивалентной схемы, ^2 - эквивалентная ЭДС примыкающей
энергосистемы.
Для рассматриваемой схемы напряжение в узле наблюдения
имеет вид:
(/ = ^+^2 (7.1)
Введем нормированные относительные величины:
и = — ; 6 = -2- ; ^ = -i—Ц_ , (7,2)
Тогда выражение для напряжения приобретает вид:
ti = l-<* + ^. (7.3)
Переходя к экспоненциальной форме векторов, получим:
M = l-^^+^F ^^), (7.4)
где <? - угол эквивалентного генератора относительно напряжения
шин, а 0 - угол, связанный с соотношением полных сопротивлений
ветвей эквивалентной схемы.
Определяя в соответствии с (7.4) наблюдаемый вектор
напряжения в экспоненциальной форме и выражая модуль и аргумент в
явном виде, получим
171
^ = м ^, (7.5)
где
м = ^[1 + ^ ^ cos(F + ^)-^ cos^+[^-Fsin(F + ^)-^ sin^;
y? = arctan
^1 + ^ [^ - cos(F + 0) - cos 0]
Рассмотрим частный случай однородной линии.
Под однородной линией будем понимать такую линию, для
которой выполняется условие Z,/Z2 = m, где m - вещественная величина,
тогда и величина ^ вещественна и имеет нулевой фазовый угол.
При этом выражение (7.4) получит следующий вид:
Дополнительно будем полагать, что падение напряжения вдоль
линии мало и модули напряжений и ЭДС приблизительно одинаковы
(; = 1).
При выполнении указанных условий выражение (7.4) получит вид:
м^м.е^=1-^ + ^еЛ (7.6)
Это выражение имеет простое геометрическое представление.
Конец вектора напряжения перемещается по окружности в
комплексной плоскости. Окружность имеет радиус ^, а её центр
расположен в точке (1 -!;; 0).
Характер изменения вектора м зависит от величины ^. При
условии' 2 <^<1 угол вектора zi изменяется от У при <У = 0° до
некоторого максимума, а затем снова стремится к У и достигает его при
<У = 180°, этот случай представлен на рис. 7.2,я.
172
я) б) с)
Рис. 7.2. Варианты расположения траектории вектора напряжения относительно
начала координат.
На рис. 7.2,6 представлен случай, когда 2 - ^ > 1. При этом угол
вектора м изменяется от 0" при <? = 0° до 180° при <? = !80°.
Если величина ^ имеет граничное значение 2 ^ = 1, то угол м
изменяется от 0" при J = 0° до 90" при достижении углом <У
величины 180°, и скачком переходит на 270° при переходе J через
величину 180°, а дальше уменьшается до 0° при движении угла <? к
360°. Эта ситуация показана на рис. 7.2,з.
Рассмотрим теперь общий случай неоднородной линии.
Подставляя в (4.6) выражение для параметра
^ = ^ - е^ - cos# + у - ^ - sin 0 получим:
M(J) = (l-^cos0)-y ^sin0 + ^^ ^^. (7.7)
В плоскости комплексных чисел траектория м является
окружностью, центр которой расположен в точке,
*°=*^"**} (7.8)
а радиус равен
Р = #*. (79)
Начало траектории расположено в точке окружности под углом
смещения 0.
Построение траектории представлено на рис. 7.3.
173
+У
Рис. 7.3. Траектория вектора.
Пусть устройство непрерывно отслеживает траекторию движения
вектора м, так, что положение окружности становится известным.
При этом по известной точке центра окружности можно определить
элементы вектора ^.
Разделив второе уравнение (7.8) на первое, получим:
tg<7 = ^
*о-1
тогда
0 = arctg
# = ;г-arctg
Уо
, при%о>!;
^о""^
, при ^ - ^
(710)
Возведя каждое из уравнений (7.8) в квадрат и сложив, получим:
т.е.
!74
^ = J(l-Xo)'+yo
(7.4)
Теперь, зная радиус окружности /?, можно получить величину
модуля вектора F как
(7.12)
; = ^.
Наконец, взяв один из полученных векторов м,, можно
определить угол эквивалентной ЭДС как
где
<?,=У-Р,
/ = arctg
.^-хоу
, прии,-*о>1;
/ = /г - arctg
, при м^-^<1.
(7.13)
(714)
Отметим, что для получения численного значения величины
угла J эквивалентной ЭДС в соответствии с (7.! 4) необходимо
предварительно определять угол векторов сопротивлений 0.
В общем случае неоднородной линии идентификация
параметров траектории вектора напряжения не даёт достаточной
информации для получения угла сопротивлений.
Таким образом, если этот угол неизвестен априори, то
рассмотренная методика пригодна для определения величины угла
эквивалентной ЭДС в случае однородной линии, для которой 0 = 0, и,
соответственно, <У; = у , или для определения относительного движения
(т.е. его нарастания или убывания во времени) угла эквивалентной
ЭДС без привязки к абсолютному значению его начальной величины.
Выражение для тока в цепи рис. 7.1 имеет вид:
7 =
^-^2
(7.15)
!73
где Др-/?^^-^^*^^^' и Я2=/?р-А:+т - угол
суммы сопротивлений цепи.
Подставляя выражения для напряжения и ЭДС, получим:
^ = -^—^+-^L-E^=^+p^. (7,16)
Преобразуя, получим:
/ = ^е-7й; +&.</<"2-3,±*)
(7.17)
Z. Z.
Рассматривая проворот вектора ЭДС относительно вектора
напряжения шин, получим, что конец вектора тока описывает
окружность радиусом:
с центром
c = ^ig-^'. (7.19)
.-^-Д
Наблюдая траекторию движения вектора тока и идентифицируя
параметры окружности, получим наблюдаемые вектора центра и
радиуса окружности р, = д - е ^ , с, = с,е^'.
Затем, сравнивая аргументы векторов с аргументами выражений
(7.18) и (7.19) /L -Ду =<Х2 -^ ±^+^у =И2 ±^^ получаем угол
эквивалентной ЭДС с точностью до половины окружности:
"2=/7,-Д,+т- (720)
Таким образом, по годографу тока также не удаётся однозначно
определить величину угла ЭДС, можно судить только о его
относительном движении во времени.
176
7.1.2. Идентификация параметров
Рассмотрим теперь способ полного определения параметров
эквивалентной схемы асинхронного режима.
Выражения для напряжения (7.1) и тока (715) в точке измерения
представим как окружности в комплексной плоскости:
^у^.+у^^^+А^; (7.2!)
/ = —-—^ !—Я,^" = с, + Де"*. (7.22)
Z,+Z2 ' Z,+Z^ ^ ' ^'
Наблюдая траектории движения векторов тока и напряжения и
идентифицируя параметры окружностей, получим параметры
окружностей {С.,<$ы}, {<?;,<$(} .
Тогда величину эквивалентного сопротивления Z2 определим как
Zi=^, (7.23)
и, взяв вектора напряжения и тока в одной из точек выборки (пусть
я), получим систему уравнений:
/V^=^(")-<U
.,, . " (7.24)
решение которой дает величину эквивалентного сопротивления Z;:
Z,=^=^k (7.25)
Теперь из уравнений ветвей эквивалентной схемы можно
определить векторы напряжения и ЭДС для каждой точки выборки:
(7, (и) = t/(n) + Z,/(n), (7.26)
Ё(и) = Щи)^2/(я), (7.27)
!77
и, наконец, определить угол ЭДС относительно шин, как разность
аргументов векторов:
F(n) = arg(^ (л)) - arg(t/, (л)) (7.28)
В приложении приведен более сложный пример расчета при
наличии отбора мощности в узле установки устройства АЛАР.
Таким образом, можно выявить асинхронный режим ЭЭС в
условиях неполной информации о её эквивалентных параметрах,
например, при изменении структуры и режима энергосистемы в
процессе эксплуатации. Для этого достаточно последовательно измерять
напряжение и токи в узле включения АЛАР, рассчитывать
траектории движения векторов напряжений в узле измерения и на границах
контролируемой зоны, и определять координаты центров и радиусы
окружностей траекторий. По полученной информации можно
рассчитать неизвестные эквивалентные параметры передачи, в том
числе и её текущий угол J.
Поскольку к устройству локальной противоаварийной автоматики
предъявляются достаточно жесткие требования по времени
срабатывания, то, как правило, идентификацию параметров траектории
наблюдаемых векторов следует производить не по всей окружности, а по её
некоторой части - дуге относительно небольшой длины. Это
обстоятельство существенно усложняет проблему идентификации при
наличии случайных флуктуации (шума) наблюдаемых входных величин.
В идеальном случае для идентификации окружности, дуга которой
построена по точкам базовой выборки, можно было бы воспользоваться
методом определения кривой по нескольким точкам, число которых
соответствует количеству неизвестных коэффициентов. Однако
подобный метод неработоспособен в реальных условиях при наличии
погрешностей измерений. Вследствие этого, для определения параметров
эллипса используется метод наименьших квадратов (МНК) на выборке,
длина которой существенно больше количества искомых параметров.
Для решения задачи идентификации параметров траектории в
таких условиях [7.2] был использован метод, предложенный в работе
[7.3]. Он отличается от обычного метода наименьших квадратов
выполнением предварительного преобразования координат с целью
привести наблюдаемую дугу к симметричному относительно оси
ординат положению. Это существенно повышает точность расчётов в
!78
условиях короткой выборки данных. Результаты апробации этого
метода идентификации параметров приведены в приложении.
7.2. Двухмашинная эквивалентная схема
7.2.1. Вектор мощности в узле эквивалентной схемы
Рассмотрим эквивалентную двухмашинную схему
электропередачи представленную на рис. 7.4.
Г] F, Z, f/ Z; А 712
7
Рис. 7.4. Двухмашинная схема замещения ЭЭС.
На этом рисунке: 71 и 712 - эквивалентные генераторы с ЭДС 7^ и
7?2, сопротивления Z, и Z2 являются эквивалентными
сопротивлениями от узла с напряжением (/ до векторов ЭДС эквивалентных
генераторов.
Пусть векторы эквивалентных ЭДС имеют вид:
Д, = Я, - е^'О, Я; = Я2' <^ "'^. (7.29)
Выражения для наблюдаемых величин напряжения и тока имеют
вид:
^Z2 Fi+Z,.7?2 (7 30)
7=4^-, (7.31)
где Zx = Z; + Z2.
179
Выражение для вектора полной мощности будем рассматривать
в виде:
.S = (/-/*. (7.32)
Подставляя выражения (7.30), (7.3!) в (7.32) получим:
У = ^-L^. [F, - F;. (z, - е-Л"'-"1) - Z; - e^''"^) +
+ F,^Z2-^-Z,]. (733)
Вводя определения <? = a, - a^ и ^i = JZ] + Z^ , получим:
z,'
-F, .^. A..^ +^L-ElJ^-A. (7.34)
^X ^X
В большинстве практических случаев можно полагать, что
эквивалентные ЭДС равны друг другу (или отличаются на небольшую
величину), поэтому рассмотрим полученные выражения в частном
случае когда )^[ =)J?2] = ^*
Тогда:
^=^-.(z,-^-^ ^)+^(z,-Z,). (7.35)
^х ^х
Представляя комплексные величины сопротивлений в
экспоненциальном виде:
Z, =Z,.e^,Z2=Z2V^,
и вводя обозначения:
/i, =^-.Z, Vl, /^ =-^L.Z; V\ (7.36)
^x ^x
!80
получим
J = /l* <f^ - ^ * ^ ^ + ^ -Л* (7.37)
Это соотношение является основным уравнением
рассматриваемого метода.
Правую часть (7.37) можно рассматривать как суперпозицию
двух векторов:
,S = c +/>(<?), (7.38)
где вектор /?(<У) = /Vj - е^ - /^ - ^ представляет собой эллипс в
комплексной плоскости (свойства такого эллипса подробно рассмотрены в
плаве 4), а вектор <г = /^ - /^ соответствует сдвигу указанного эллипса
относительно начала координат комплексной плоскости.
7.2.2. Определение характеристик траектории вектора мощности
В идеальном случае для идентификации эллипса, дуга которого
построена по точкам базовой выборки, можно было бы
воспользоваться методом определения кривой по нескольким точкам, число
которых соответствует количеству неизвестных коэффициентов.
Однако подобный метод неработоспособен в реальных условиях при
наличии погрешностей измерений.
Вследствие этого, для определения параметров эллипса
используется метод наименьших квадратов (МНК) на выборке, длина
которой существенно больше количества искомых параметров.
Поскольку в процессе перехода к АР параметры эквивалента
энергосистемы могут изменяться во времени, следует
ограничиваться наименьшей возможной из удовлетворяющих условиям
применения МНК длиной выборки. При этом на интервале выборки будем
полагать неизменными величины эквивалентных сопротивлений и
абсолютные значения ЭДС. Таким образом, возможное изменение
параметров на всем интервале переходного процесса будем
представлять как ступенчатое изменение по интервалам базовых выборок.
Введём в рассмотрение параметры эллипса: с, d - координаты
центра, я, й - большая и малая полуоси, д - угол между
положительным направлением оси ОХ и большой полуосью эллипса.
Тогда уравнение эллипса в координатах х, у примет вид:
181
[(х - с) cos(ar) + (у - (/) - sin (a)]
^
2
+
Г(у -^) cos(6r) + (с - х) sin(ar)l
Параметры эллипса определяются посредством МНК, т.е. путем
минимизации невязки:
где
[(у, - ^). cos(g)+(с - х,) sin (a)]
^ = - ^ '
х^, у, - координаты точек годографа вектора полной мощности, TV -
общее количество точек выборки данных.
Используя выражение для угла наклона малой полуоси эллипса
(см. раздел 4.5.3):
P=^L (7.39)
применим к уравнению (7.39) операцию поворота, располагая
направления осей эллипса параллельно осям координат комплексной
плоскости. Обозначив
3,=^-, (740)
получцм
^ = ^ - (л,. 2-Л'-<Ы - л; - 6^)) - <^ - (л - ^ - Лз - е'^ ) -
182
Правую часть полученного выражения можно рассматривать как
суперпозицию векторов центра и траектории эллипса, оси которого
теперь расположены параллельно осям координат, т.е.
.5 = <: + /7(<? + 0о), (7.41)
где
с = -е^ . (^ - ^ 3> - ^ - е^ 3>); 1
Полагаем, что исходная траектория вектора мощности известна
(наблюдаема), и, следовательно, известны векторы /?, наклон
эллипса %?, и величины полуосей.
Необходимо отметить, что совокупность уравнений для
определения параметров эллипса даёт многозначное решение, и необходима
некоторая дополнительная информация, которая позволит выбрать то
решение, которое отвечает исследуемому процессу.
Для угла наклона дополнительным соображением является
следующее. Поскольку аргументы элементов двухмашинной схемы
замещения имеют возможный диапазон изменения, равный 0 ^ 90°, то
и значение угла %? может изменяться только в пределах 0-Н80", что
позволяет выбрать единственное значимое решение:
р = я-у, (7.43)
где от - угол между положительным направлением оси
действительных чисел и большой оси эллипса.
Для численного определения величин //, и /^ по выражениям
(7.37) необходимо знать соотношение между значениями этих
параметров, т.е. /^ > /*2 * или наоборот. Для этого рассмотрим выражение
для вектора /? из уравнений (7.42).
Отметим, что если вектор /? вращается в ту же сторону, что и
вектор 2'^, то /^ > /^ * иначе /^ < /^. При этом, направление вра-
183
щения вектора е*^ можно оценить по величине угла между
векторами напряжений (/, и L^.
Теперь, зная //,, /^'Р и взяв некоторую произвольную точку /?
выборки, можно из (7.43) определить разность величин <У - %. Затем,
определив % из (7.42), получить величину J.
Таким образом, на данном этапе получена величина угла <У
между векторами эквивалентных ЭДС и значения коэффициентов
//,, /^ основного уравнения (7.38).
Теперь величины аргументов сопротивлений ветвей можно
определить как
3=Р + %н 02 =Р-%) (7.44)
и перейти к расчёту параметров эквивалентной схемы.
7.2.3. Идентификация параметров
Из полученных величин /^, /^ можно определить значения
аргументов сопротивлений эквивалентной схемы, однако величины
модулей сопротивлений, равно как и величины модулей ЭДС пока
не определены, и имеющейся информации пока недостаточно для
их определения.
Возможность определения указанных величин предоставляет
«двухточечное» измерение вектора полной мощности, выполненное по
концам некоторой линии передачи с заранее известными параметрами.
Рассмотрим двухмашинную эквивалентную схему,
представленную на рис. 7.5.
Л F, Z, (/, Z (/; Z, Д; Л
/ 2
Рис. 7.5. Линия передачи с присоединенными эквивалентами энергосистемы.
184
Будем полагать, что сопротивление линии Z известно с
достаточной степенью точности.
Пусть имеются осциллограммы напряжения и тока, полученные
на обоих концах линии, или только на одном из концов, тогда
напряжение на другом конце вычисляется по току и известным
параметрам линии.
Выражения для наблюдаемых величин напряжения и тока имеют
вид:
^ (Z + Z^.^+Z,.^ ^ Z2-Ri+(Z + Zi)-E2
где
. Я,-Яз
, (7.43)
(7.46)
(7.47)
Теперь имеется возможность проанализировать два эллипса
мощности по концам линии.
В соответствии с (7.38) получаем систему уравнений:
где
-^2 = А2 ' <?^ * - ^22 ' ^ ^ + А<22 * Л2 J
?2 _^_
Z,'
Л Г2 ^+Z
-2 Z,+Z
^2=^ - 2 '
^22=^^.
(7.48)
(7.49)
!83
Определив параметры для каждого из эллипсов в соответствии с
вышеизложенной методикой, получим из (7.49) эквивалентные
сопротивления:
Z=Z
/<ч
Z;=Z
^12-^П
/^22
/<2!-/<22 J
(750)
Наконец, по известному теперь значению Z^ =IZ + Z, +^1
получим величину модуля эквивалентной ЭДС:
(7.5!)
Таким образом, теперь рассчитаны все элементы эквивалентной
схемы.
7.3. Выводы
Разработанные методы позволяют определить эквивалентные
параметры схемы асинхронного режима ЭЭС, с использованием
наблюдаемых величин тока и напряжения в узле измерения в условиях
асинхронного режима электроэнергетической системы.
Точность определения эквивалентных параметров зависит от
уровня шума входных сигналов напряжения и тока, а также от
величины дуги расхождения углов генераторов.
Метод может быть использован для анализа осциллограмм и
выявления причин аварий, связанных с переходом в АР, а также может
быть использован в качестве технологического алгоритма работы
устройств локальной противоаварийной автоматики.
Применимость метода для определения рабочих уставок
локальных устройств противоаварийной автоматики определяется
наблюдаемостью процесса в конкретной точке установки такого устройства
и вычислительными ресурсами контроллера.
186
Глава 8. Идентификация параметров
эквивалентной схемы по уравнениям
электрической цепи
В данной главе рассмотрены способы получения параметров
эквивалентной схемы ЭЭС в асинхронном режиме на основе
анализа совокупности отсчётов наблюдаемых величин и
идентификации соответствующих параметров уравнений электрической цепи.
Каждый из рассмотренных методов использует средства
определения параметров соответствующих уравнений на фоне шума
входных сигналов.
Определение эквивалентных параметров электроэнергетической
системы в асинхронном режиме представляет собой важную
проблему. Её решение позволяет обоснованно подходить к задачам
настройки противоаварийной автоматики и оценке эффективности
мероприятий, направленных на сохранение устойчивости системы.
Эквивалентные параметры энергосистемы, как правило, определяют
посредством анализа схемы ЭЭС в наиболее характерных узлах и
режимах её работы.
При этом устройства ПА, работающие с уставками, которые
были определены на основе совокупности набора предварительно
рассчитанных ситуаций, неизбежно реагируют на каждую конкретную
аварию некоторым «усредненным» образом и в некоторых случаях
не срабатывают или срабатывают неправильно. Эквивалентные
параметры, рассчитанные устройством ПА непосредственно во время
асинхронного режима, позволят повысить точность их срабатывания.
В данной главе рассмотрена возможность определения
параметров эквивалентной электрической схемы замещения ЭЭС в
асинхронном режиме посредством анализа реального процесса аварии на
основании данных, полученных для узла системы.
Предполагается, что относительно узла, в котором
регистрируются ток и напряжение, энергосистема может быть представлена
двухмашинной схемой замещения.
Рассмотренные методы применимы для разработки и реализации
технологических алгоритмов АЛАР. Кроме того, методы можно
использовать для анализа процесса развития аварии по данным
осциллограмм регистраторов.
187
В разделе 8! изложен метод анализа дифференциальных
соотношений процесса динамического перехода к асинхронному режиму.
Особенностью метода является возможность реализации
вычислительного алгоритма за определённое, наперёд известное количество
операций, при весьма скромных требованиях к объему вычислений.
Однако, при этом метод имеет определенные ограничения, связанные
с допустимым характером наблюдаемого процесса.
В разделе 8.2 изложен метод анализа пары комплексно-
сопряженных уравнений ветвей эквивалентной схемы. Метод не
имеет ограничений, связанных с характером наблюдаемого процесса,
но требует большего объема вычислений. При практической
реализации метода имеются варианты выбора способа построения
алгоритма - либо выполнение расчётов за определенное, наперёд
заданное количество операций, при использовании относительно
большого объема оперативной памяти контроллера, либо выполнение
расчётов итеративным образом, с существенной экономией ресурсов, но с
неопределенным количеством выполняемых операций. Отметим, что
указанная альтернатива между ресурсоёмкостью и временем
выполнения расчёта характерна для всех способов решения нелинейных
систем уравнений. Впрочем, в настоящее время в связи с наличием
достаточно мощных вычислительных средств, в том числе и
микроконтроллерных, проблема выбора между этими двумя
возможностями в значительной степени смягчена.
Раздел 8.3 посвящен рассмотрению способа оптимизации
формирования рабочей выборки сигнала с использованием особенностей
развития динамического перехода к асинхронному режиму.
Предложенная оптимизация применима к любому из рассмотренных
численных методов анализа переходного процесса. Она позволяет
существенно уменьшить погрешность расчётов в условиях шума входного
сигнала, и приблизиться к предельно возможным (см. раздел 5.4)
результатам решения задачи идентификации параметров эквивалента
асинхронного режима ЭЭС.
8.1. Использование дифференциальных соотношений
В данном разделе рассмотрен способ нахождения эквивалентов
электроэнергетической системы с помощью квадратичного
уравнения, связывающего вектора напряжения и тока и их первые и вторые
производные со значениями сопротивления эквивалента.
188
8.1.1. Метод расчёта
Пусть для двухмашинной схемы известны напряжение и ток в
узле линии для некоторого интервала времени, и справедлива
математическая модель вида:
.' . .' ! ^ (8.1)
y-E2=Z2/.J
Пусть на рассматриваемом интервале времени ЭДС неизмецны
по абсолютной величине и зависят только от угла поворота:
(8.2)
Измерение в промежуточной точке линии можно рассматривать
как относительно левой ветви, так и относительно правой ветви.
Поэтому, обобщая уравнения (81) для обоих направлений, будем далее
рассматривать одно уравнение вида:
F = F^^=(/±Z7, (8.3)
где положительный знак соответствует ^,Z^, а отрицательный
соответствует E2,Z2.
Полагаем, что функциональные зависимости токов, напряжений
и ЭДС непрерывны на интервале измерения, а величина
сопротивления неизменна. Тогда, дифференцируя обе части уравнения во
времени, получим:
У ^-E^^^^iZf; (8.4)
у - я". Я^ "О + О* - <if Д^ "О = f/" ± Z < 7". (8.5)
Подставляя выражение (8.3) в (8.4), и (8.3), (8.4) в (8.5),
получим:
189
В условиях АР или глубоких качаний угол ЭДС меняется во
времени.
Будем рассматривать процессы, для которых выполняется
условие:
я" «я'. (8.7)
Это ограничение будет подробно исследовано ниже.
Тогда получим:
y-<x'-(Lr'±Z /') = (/' + Z-7*.J
Исключая из (8.8) производную угла, получаем уравнение
относительно эквивалентного сопротивления:
^^'=^^'\ (8.9)
Уравнение (8.9) справедливо для точек измерения, в которых
выполняется ограничивающее условие:
t/'iZ-f #0:1
. . I (8.10)
C'iZ.r^O.J
Отметим, что условие (8.10) не выполняется только в точках, в
которых нет одновременного изменения напряжения и тока и,
следовательно, нет движения роторов эквивалентных генераторов. Во всех
остальных точках, а значит всегда при наличии АР или глубоких
качаний, решение уравнения (8.9) имеет смысл.
Уравнение (8.9) представляет собой квадратное уравнение
относительно сопротивления ветви:
190
(^±ZJ)(^±zr) = (^±Z ^ (8.П)
и всегда имеет пару решений.
Одно из решений относится к искомой ветви, а другое - к
противоположной ветви, причем во втором решении получается
значение сопротивления с противоположным знаком. Таким образом, для
нахождения эквивалентных сопротивлений достаточно решить
уравнение с некоторым одним выбранным знаком. Например, для знака
«плюс», уравнение будет относиться к левой ветви:
(7Г-Г ^) Z^ + (^r + ^J-2 ^r)Z +
+ (t/-U'-t/'-(/') = 0, (8.12)
и решение уравнения определяет величину сопротивления левой
ветви, одновременно получим и величину сопротивление правой ветви с
обратным знаком, т.е. JZ] ;-2^ j.
Предполагается, что значения функций и производных
аппроксимируют по выборке на некотором интервале наблюдения. При
этом из теории обработки сигналов известно, что погрешность
определения значений аппроксимирующих функций наименьшая для
середины интервала и наибольшая для его краёв. Если использовать
данные для середины интервала, то погрешность минимальна, но
полученные значения сопротивлений, а значит и рассчитанные по ним
значения углов ЭДС следует относить ко времени середины
интервала. При использовании предлагаемого варианта расчёта в устройстве
АЛАР это может привести к запаздыванию его реакции на
достижение критического угла между ЭДС. Если же использовать данные
для конца интервала, такого запаздывания не будет, но погрешность
может оказаться велика. Выбор между этими случаями зависит от
условий применения метода.
Получив величины эквивалентных сопротивлений ветвей,
можно определить эквивалентные ЭДС на основе уравнений (8.!):
19!
где ?Q - момент времени, соответствующий значению наблюдаемого
интервала, для которого рассчитано сопротивление.
Угол между эквивалентными генераторами можно получить в
виде разности углов ЭДС ветвей или, минуя этап определения
величин ЭДС, непосредственно из соотношения:
<? = arg
Щ^)-^7(/о)
y(;o) + Zi/(;o)
(8.14)
Для применения обсуждаемого метода необходимо находить
первые и вторые производные по времени напряжения и тока. Для
этого описывают («сглаживают») соответствующий сигнал,
например, методом наименьших квадратов посредством полинома. При
этом число точек выборки, степень полинома и другие параметры
расчёта выбирают в зависимости от условий задачи [8.1].
Векторы ЭДС в комплексной плоскости, вращающейся с
угловой частотой О р = 2яг 50 рад/сек, будем рассматривать в виде:
F(f) = ^ ^^) =^.^(^^2^з^)^ (8.15)
где угол ЭДС представлен в виде полиномиального разложения,
коэффициенты которого имеют следующий физический смысл: Я] -
начальный угол положения ЭДС, Я2 " величина отличия от
номинальной частоты, ят * производная частоты по времени.
Введём в рассмотрение характерное время первого проворота
асинхронного хода г<,. Для описания проворота за счёт отличия
частоты от номинальной введём вспомогательный коэффициент
// = 2яг/гр , такой, что один проворот за счёт разности частот
произойдет ровно за время г^,. Для описания проворота за счёт
ускорения частоты введём вспомогательный коэффициент А = 2яуг0 ,
такой, что один проворот за счёт ускорения частоты произойдет ровно
за время г^ при начальной частоте, совпадающей с номинальной.
Тогда движение углов эквивалентных генераторов можно
представить в виде:
192
I"l(')
[" 2 О
где g,A - доли вклада в изменение угла за счёт равномерного и
равноускоренного ухода частоты от номинальной, соответственно.
Если величины А равны нулю, условия применимости данного
метода выполняются точно. В противном случае условия
применимости данного метода выполняются приближенно. Необходимо
оценить, до каких значений А рассматриваемый метод все еще даёт
приемлемую погрешность результата.
Поскольку рассматриваемый метод предназначен для
определения превышения углом между эквивалентными ЭДС значения,
меньшего или равного 180 градусов, то достаточно рассмотреть
изменение параметров в диапазоне g е [0; 1], А е [0; 1]. Для выполнения
такой оценки удобно использовать математическую модель сигнала с
мультипликативным или аддитивным шумом, формирующую
сигнал, поступающий на вход расчётного алгоритма.
Известно, что расчёт производных для зашумленного сигнала,
представленного как дискретная совокупность выборок во времени,
требует использования некоторой подходящей функциональной
аппроксимации.
Получим такую аппроксимацию в виде полиномов второго
порядка (параболическая аппроксимация) несколькими разными
вариантами и сравним эти варианты по достигаемым результатам. В
схематическом виде варианты показаны на рисунке 8.].
Для всех вариантов будем аппроксимировать входной сигнал
полиномом второго порядка^, = ях^ + их + с по интервалам,
содержащим по N точек измерения каждый, и получим коэффициенты
полинома для репрезентативной точки (средней или последней)
каждого интервала.
В первом способе по коэффициентам полученной параболы
рассчитываем первую и вторую производные /^ =2ях + й; /^ =2я .
Отметим, что при этом для получения всех производных необходимо 7V
измерений исходного сигнала.
"01 ?Г^
Я()2 #2' ^2
А,.А,
%2'^2
(8 J 6)
193
^ ]^] Исходный сигнал
^#########^ооффо#о#ооооооо#оооо
t. Аппроксимация /;=^jt"+Ay+c ФОООООООООООООООООООО
по А'точкам М,
! ! Первая производная
2. Расчеч поД ^=2лг+^ ^#######^000000000000
3. Аппроксимация по Af, точкам f/^=^+j?^C #000000000000
! = ) Вторая производная
4. Расчет по/. Л=2я ^#####^00000000000000
yV.
! ' !
5. Расчет по <% /;=2/4.у+д ^#######^0000
6. Аппроксимация по /V. точкам расчета по/! #00000000000000
7. Аппроксимация но Л'; точкам расчета по <% # О О О О
Рис. 8.1. Варианты получения значений сигналов и их первых и
вторых производных.
Во втором способе первую производную аппроксимируем
полиномом второго порядка /1 = ,4л^ + Rx + С по ^ её значениям и
рассчитаем её для соответствующей точки интервала. По
коэффициентам её аппроксимации рассчитаем вторую производную
(/^ = т4х + Д). В этом способе для получения всех производных
необходимо (JV + Л^) измерений исходного сигнала.
Третий способ состоит в аппроксимации второй производной
полиномом второго порядка по % значениям, и расчёта значения
второй производной для выбранной точки интервала. В этом способе
для получения всех производных всего необходимо (JV + %)
измерений исходного сигнала.
В четвёртом способе аппроксимируем параболой второго
порядка первую производную (/^ = ^4х^ + Вх + С ) по JVi её значениям и
рассчитаем её для соответствующей точки интервала. По
коэффициентам её аппроксимации рассчитаем вторую производную
(/^ = 2!<4х + R). Ее также аппроксимируем полиномом второго
порядка по Л^з её значений. Затем рассчитаем её для нужной точки
интервала. В этом способе для получения всех производных всего
необходимо (JV + N] + %) измерений исходного сигнала.
194
Получив тем или иным образом значения напряжения и тока и
их первых и вторых производных, с помощью уравнения (8.! 2)
можно найти значения эквивалентных сопротивлений. Уравнение (8.! 2)
- это квадратное уравнение с комплексными коэффициентами:
,4-Z^+F Z + C = 0,
(817)
где
,4 = /-/*-/'./';
F = f7 7* + i7*./-2 У' /';
C = t7-6r*-Lr'-t/'.
При нахождении значений сопротивлений из уравнения (812)
получаем два корня:
2*,=
22; =
-Д + ^-4-
-В
2v4
-V^-4
,4-
J[
С
С
2-^
(8Д8)
В силу симметрии решений уравнения относительно правой и
левой ветвей, для определения принадлежности корней используется
следующее условие:
^! ^ ^ts ; Z2 = -Z2g
при
(9!(Z^) >0)& (3(Z^)>0)&(Ж(^)<0)& (3(Zxs) <0)
или ^ (819)
Zj = -Z2^; Z2 = Z^
при
(W(Z^) < 0)& (3(Z^) < 0) & (М(^) ^ 0)& (3(^) ^ 0).J
где Ж, 3 - действительная и мнимая части.
При других соотношениях между действительными и мнимыми
частями величин векторов сопротивлений результат расчёта
признается невалидным для рассматриваемой выборки значений входных
величин.
195
По полученным расчётным значениям эквивалентных
сопротивлений, векторам напряжения и тока определяем величины
эквивалентных ЭДС по уравнению (8.!3) и рассчитываем углы между ЭДС.
8.1.2. Результаты расчета на математической модели
Рассмотрим результаты, полученные с помощью описанной
модели двухмашинной схемы и иллюстрирующие предлагаемый метод
определения эквивалентов.
Шаг по времени между последовательно получаемыми
векторами выбирался из следующих соображений. При зашумлённом
входном сигнале имеет смысл использовать лишь векторы, значимым
образом отличающиеся друг от друга. Для получения векторов
напряжения и тока необходим исходный синусоидальный сигнал,
известный, по крайней мере, за один период промышленной частоты. В
модели предполагается, что один проворот происходит за I с, т.е.
изменение угла за время одного периода составляет около 7 градусов.
Резонно предположить, что два вектора значимо отличаются, если их
разность превышает удвоенное значение шума. Это означает, что при
шуме 3,5% векторы, полученные через период, значимо отличимы
друг от друга. Такой шум соответствует шуму исходного сигнала на
входе в АЛАР около 10%, что заведомо достаточно для проведения
оценок возможностей метода. Поэтому в модели шаг векторов по
времени составляет один период номинальной частоты (0,02 с). Это
означает, что на интервале в ! с можно получить не более 50
измерений сигнала. При применении рассматриваемого метода в реальном
устройстве АЛАР необходимо реагировать на изменение угла не
менее, чем 0,! проворота, т.е. на 36 градусов. Это означает, что с
помощью модели следует оценить шум, при котором интервала в 5
периодов хватает для надёжного определения производных.
Рассмотрим возможности метода в отсутствие шумов.
На рис. 8.2. показаны действительные и мнимые составляющие
векторов напряжения и тока и их производных в отсутствие шума
при расчёте по первому варианту при JV = 5. При этом g] = 0,3;
g2 = 0,7; А, = %2 = 0, т.е. выполнены предположения, при которых
получено основное уравнение метода.
При этом надёжно определяются аппроксимированные значения
сигналов и производных. Некоторые отличия от точных (сплошные
линии) значений наблюдаются только для вторых производных.
196
time, sec time, sec
Рис. 8.2. Действительные и мнимые составляющие векторов напряжения и тока и их
производных в отсутствие шума при расчете по первому варианту.
Сопротивления, полученные из уравнения (8.12), показаны на
рисунке 8.3.
На рис. 8.3,я показаны значения компонент сопротивлений
слева. Там, где они положительны, они представляют собой модельное
сопротивление Zi. Там, где они отрицательны, они представляют
собой сопротивление Z2 с обратным знаком.
На 8.3,6 представлены значения компонент сопротивлений
справа. Там, где они отрицательны, они представляют собой
сопротивление - Z2. Там, где они положительны, они представляют
сопротивление^.
Если скорректировать знаки компонент в соответствии с
условиями (8.19), то результаты расчёта полностью совпадут с
параметрами исходной модели. Результаты коррекции показаны на рис. 8.4.
В этом случае углы между ЭДС определяются с погрешностью
менее 1 градуса, если для расчётов используются значения в
серединах интервалов, и с погрешностью менее 10 градусов, если для
расчётов используются значения в концах интервалов.
197
)50
НЮ
50
_ 0
-30
-!00
-!30
-200
nnag ! ! ! }
L }. j-
) ! t real
г !— !
h h
h
f ! imag )
1—
200
!30
!00
30
^ 0
-30
-100
-!50
-200
i real
} imag
<mag ]
0
0.2
0,4
0.6 O.S
0,2 0,4
0.6 0,8
Рис. 8.3. Сопротивления при расчёте по первому варианту в отсутствие шума,
полученные непосредственно из уравнения. Сплошные линии - значения
сопротивлений модели.
!20
!<)0
S0
60
40
20
0
! ! 'mas ! ! !
! ! real ! ! !
0.2
0,4
0.6 0.S
i60
!40
!20
!00
' SO
60
40
20
0
muhip!. noisc=0%. Л?=3
Д ЖЛ<Ч<^<<^ЖЧЧ^Ч.<<№<<. ^КЧ.И.Ц. f<4<
1 ! ! '"'°^ ! !
1 ! "*' ! !
я)
0,2 0.4 0,6 0,8
6)
120
!00
80
' 60
40
20
0
Рис. 8.4. Сопротивления после коррекции при расчёте по первому варианту в
отсутствие шума. Сплошные линии - значения сопротивлений модели.
! ! i"Mg ! ! !
t ) г$а! ' ' '
*! ! ! ! . !
200
!30
!00
30
к-"*"*'
..*ггм*
гса,
^.М ^
^Я...
imag
*** ^.^
*^Л^ *
.^,
0.2
0,4 0,6 0,8 ! 0 0,2 0,4 0,6 0,8
Я) б)
Рис. 8.5. Сопротивления при расчёте по первому варианту в отсутствие шума после
коррекции. Сплошные линии - значения сопротивлений модели.
198
В случае наличия ускорения угла (й ^ 0) действительный
процесс не вполне соответствует расчётным уравнениям метода.
На рис. 8.5 - 8.6 представлены результаты расчёта для исходных
параметров gi = 0; At = 0; g2 = - 0,8; ^ = - 0,!5 с ускорением в правом
плече схемы.
Из рис. 8.5,я видно, что для ветви, в которой угол ЭДС не имеет
ускорения, сопротивления эквивалента определяются точно. Из
рис. 8.5,6 видно, что для ветви, в которой угол ЭДС имеет ускорение,
сопротивления эквивалента определяются с некоторой
погрешностью. При этом, погрешность угла ЭДС остается достаточно малой
(см. рис. 8.6), поскольку, как показано в главе 4, чувствительность
угла ЭДС к погрешностям сигнала меньше чем чувствительность
эквивалентных сопротивлений.
200
!50
100
g 30
If 0
^-30
-too
изо
-200
Й^
^
т
0,2
0,4 0,6
time, sec
0,8
Рис. 8.6. Угол между ЭДС при расчете по первому варианту в отсутствие шума.
Рассмотрим теперь, как сказывается на результатах уровень
шума векторов.
Рассмотрим два варианта наборов g, А. Первый: gi = 0,3,
%! = 0, g2 = - 0,7, Л2 = 0, при котором выполнены условия (8.7), и
второй: gt = 0, Ai = 0, g2 = - 0,85, А2 = - 0,15, когда эти условия не
выполняются.
Достаточно очевидно, что при увеличении используемых для
аппроксимации количества точек точность определения
сопротивлений должна увеличиваться за счёт улучшения фильтрации шума.
Однако при использовании слишком большого количества точек шири-
199
на интервала чрезмерно возрастает, и поведение искомой величины
не может быть удовлетворительно описано параболой на таком
широком интервале. Таким образом, должно существовать некоторое
оптимальное количество точек выборки, которое позволяет получать
наилучший возможный в данных условиях результат расчёта.
Для оценки возможностей каждого из вариантов расчёта
предпринимался поиск такого оптимума при максимально допустимом
уровне шума, все еще позволяющем получать приемлемый
результат расчёта.
Для первого варианта расчётов изменяли количество точек JV в
пределах от 5 до ! 7. Увеличение количества точек с 5 до 9 позволило
повышать уровень допустимого шума. Проверка для нескольких
групп реализаций шума показала, что М = 7 всегда
предпочтительней, чем JV=5, ноМ=9в некоторых случаях даёт худшие
результаты, чем JV = 7. Поэтому при проверке других трёх вариантов расчёта
производных всегда JV= 7.
Для второго варианта расчётов Л^ изменяли в пределах от 5 до
! 7. Проверка для нескольких реализаций шума показала, что Л^ не
имеет смысла делать больше 9. Использование второго варианта
позволяет почти в два раза повысить допустимый уровень шума по
сравнению с первым вариантом.
Для третьего варианта расчёта Л^ изменяли в пределах от 5 до
!7. Установлено, что оптимальной величиной является 15 точек, и
допустимый уровень шума больше, чем для второго варианта.
Дня четвертого варианта расчёта % изменяли в пределах от 9 до
25, Проверка для нескольких реализаций шума показала, что для %
оптимально значение !9.
В таблице 8.1 приведены сводные результаты выполненных
экспериментов.
Таблица 8.1. Сводные результаты
Вариант
расчета
производных
t
2*
3
4
Лг
7
7
7
7
Л^
-
9
-
9
JVz
-
-
t$
-
^
-
-
-
19
Предельно допустимый
шум (%) для двух наборов
первый
0,3
1
h5
2
второй
0,!
0,5
1
!
200
Таблица 8.2. Погрешность расчета углов
№
Уровень шума
векторов, %%
Вариант и условия
расчета
Угол между ЭДС
0,3
1-й вариант расчёта,
первый набор g и Л,
ускорение угла
отсутствует.
0.5
время, сек
0,3
2-й варианта расчёта,
второй набор g и А,
имеется ускорение
угла ЭДС.
1,5
3-го вариант расчёта,
первый набор g и Л
ускорение угла
отсутствует.
100
0
-100
-200
О
0,5
время, сек
2,5
4-й варианта расчёта,
первый набор g и Л
ускорение угла
отсутствует.
0,5
время, сек
201
О^оячйммс /иябя. &2
5
2,5
4-Й вариант расчёта,
второй набор g и А
имеется ускорение
угла ЭДС.
-20
-40
-60
5 -КО
^-100
1JH20
-НО
-!60
И 80
- —
^г
—-i —!—^
! !
-j
1-
-!-
0.3 0,4 0.S 0.6 0.7
В таблице 8.2 показаны основные результаты расчёта углов
между ЭДС, полученные для различных вариантов расчёта
производных по серединам интервалов при предельных возможностях
каждого из вариантов.
Отметим, что результаты, полученные при использовании
краёв интервалов, также вполне удовлетворительны для первого и
второго вариантов, но для третьего и четвертого имеют существенно
большие погрешности, чем результаты, полученные по серединам
интервалов.
Результаты исследования возможностей метода показывают, что
с его помощью можно находить эквивалентные сопротивления
двухмашинной схемы по напряжению и току её узла.
В условиях, когда изменение угла между ЭДС содержит
существенную нелинейную часть при быстром темпе процесса,
использование метода требует от М до 30 точек выборки. Погрешности метода
возрастают. Кроме того, при достаточно высоком уровне шума
может наблюдаться систематическая погрешность угла, связанная с
некоторой неадекватностью метода расчёта параметрам модели (см.
табл. 8.2, четвёртая строка).
8.2. Использование комплексно-сопряженных уравнений
8.2.1. Метод расчёта
В'данном разделе рассмотрен метод идентификации параметров
на основе анализа уравнений ветвей эквивалентной схемы по
выборке векторов исходных сигналов, преобразованных специальным
образом с исключением переменной величины угла ЭДС.
202
Такое преобразование позволяет перейти к рассмотрению
динамического процесса вне синхронной системы координат и
использовать для расчётов выборку векторов, произвольно
распределённых во времени.
На рис. 8.7 представлена двухмашинная схема энергосистемы,
содержащая эквивалентные генераторы с ЭДС F,, ^ и
эквивалентные сопротивления Z^ Z2 относительно узла, в котором
регистрирующее устройство измеряет напряжение и ток Lf, /.
Предполагается, что группы реальных генераторов, формирующие эквивалентные
ЭДС Д], ^2, работают достаточно синхронно, т.е. взаимные углы
этих генераторов при возмущениях в системе не превышают
критических значений.
Г1 F, Z, J Z; Е; Г2
/
Рис. 8.7. Эквивалентная схема «генератор - генератор)).
Для левой части анализируемой схемы справедливо уравнение:
Ei(;)-U(;) = Zi'7(;), (8.20)
гдеЕД^ = Ег^^.
Преобразуем уравнение (8.20) с целью перехода к форме, не
зависимой от угла вектора ЭДС.
Сначала получим уравнение, равносильное уравнению (8.20),
выполнив над обеими частями уравнения (8.20) операцию
сопряжения в пространстве комплексных чисел:
E*-Lr*=zf-7*. (8.2!)
Перемножая уравнения (8.20) и (8.21), получим:
203
F?=((/ + Z, 7 )((/' + Zr/*), (8.22)
Для правой части схемы аналогичное уравнение имеет вид:
F,2=((/-Z, 7 ) (^*-Zf /*). (8.23)
Каждое из уравнений (8.22) и (8.23) имеет по два решения.
Корнями уравнения (8.22) являются наборы {Е]; Z,} и {Д^; "^}' а
корнями уравнения (8.23)-наборы {^;-Zj и {Е2; Z2}.
Отметим, что при работе с реальными зашумлёнными
сигналами это свойство помогает убедиться в устойчивости полученных
результатов.
При рассмотрении (8.22) относительно непосредственно
наблюдаемых величин (тока и напряжения) получим:
Я? = У 2 + Zf - /2 + 2Z,L7 cos(%> - 0), (8.24)
где 0 - угол сопротивления, а %? - разность углов между
напряжением и током.
Уравнение (8.22) можно также рассматривать и относительно
переменных, производных от непосредственно наблюдаемых
величин.
Вводя определение комплексного сопротивления в точке
наблюдения как суммы вещественной и мнимой частей
Z = ^//==^((///) + y3(C7/7) = ^ + y!y, и представляя эквивалентное
сопротивление в алгебраической форме Z] = Д] + /А^, из (8.22)
получим:
Ef =((/? + ^f+(^ + ^)^7^. (8.25)
Можно получить и другие формы представления уравнения
(8.22), отличающиеся набором переменных.
Как показали исследования, каждая из форм обладает
различными свойствами относительно математических методов оценки
параметров в условиях зашумлённости входных сигналов. В этом разделе
рассматривается уравнение вида (8.25), которое оказалось наиболее
удобным для идентификации параметров эквивалента энергосистемы.
204
По мере развития процесса АР величины эквивалентных ЭДС
и сопротивлений могут изменяться, например, вследствие
изменения сопротивления нагрузки и характеристик реальных
генераторов, входящих в состав эквивалентов. Поэтому, параметры на
интервале каждой выборки будем понимать как усредненные по
данному интервалу.
Наличие шума в измеряемых сигналах тока и напряжения не
позволяет использовать для однозначного определения
эквивалентных параметров энергосистемы прямое решение системы
уравнений, построенной по (8.25) для необходимого количества
точек выборки. Поэтому поиск параметров выполняется методом
наименьших квадратов по переопределенной системе уравнений,
построенной по (8.25).
Для каждого интервала, содержащего 7V измерений векторов f/ и
/, анализируется переопределенная система уравнений следующего
вида:
я? =
я,' =
я/ =
(^2)+Л^+(^(2)+^)'}
'(2)
'(">'
(8.26)
Для выполнения расчётов был использован пакет оптимизации
системы MATLAB [8.2], стандартная функция teastsq которого
определяет наилучшие коэффициенты системы уравнений (8.26),
минимизируя невязку в смысле метода наименьших квадратов.
Для ускорения сходимости процесса полезно нормировать
исходные данные в виде:
Я;„, = Я,/тах(Я,), ^ =^/тах(^), /,,„ =/,/тах(/,).
Решение системы уравнений (8.26) позволяет определить
компоненты комплексного сопротивления ветви и величину амплитуды
ЭДС для каждой выборки векторов входного сигнала. После этого
можно получить величину вектора ЭДС и его угол, используя
уравнение (8.20) для любой из имеющихся в выборке пары входных ве-
205
личин тока и напряжения, соответствующих некоторому моменту
времени внутри интервала выборки:
Я,^"' (?) = (7(;) + Z,. /(;). (8.27)
8.2.2.Результаты испытаний метода расчета
Предлагаемый способ нахождения эквивалентов был опробован
на математической модели двухмашинной схемы. Для получения
выборок значений напряжения и тока задавали значения Z], Z2,
амплитуды ЭДС F], J?2 * начальный угол их разворота и относительные
скорости вращения. Полученные значения векторов напряжения и
тока зашумляли нормальным мультипликативным шумом с
заданным уровнем.
Для проверки влияния уровня шума проводили поиск
эквивалентов, задавая в качестве начальных значений параметров
величины, близкие к истинным параметрам. В качестве примера
использована двухмашинная схема, в которой происходит разворот
эквивалентных ЭДС на 360 градусов.
На рис. 8.8 - 8.9 приведены типичные зависимости случайной и
систематической погрешностей для реальных и мнимых компонент
сопротивлений схемы, при этом случайные погрешности для
модулей ЭДС не превышают 2%, а их систематические погрешности -
менее 5%. Суммарная погрешность зависит как от уровня шума, так
и от величины сопротивления.
При использовании метода наименьших квадратов необходимо
задавать начальные значения параметров. Важно бьпъ уверенным, что с
их помощью будет определён истинный минимум целевой функции, а,
значит, набор истинных параметров. При неудачном выборе можно,
вообще говоря, найти ложный минимум целевой функции, т.е. набор
параметров, не имеющий ничего общего с истинными решениями.
Поэтому специально была проверена устойчивость МНК для
(8.26) к выбору начальных значений. В реальном случае значения
активных и реактивных компонент сопротивлений неизвестны, но
разумно предполагать, что они лежат в пределах от 0 до 1000 Ом, что
определяет диапазон начальных значений параметров. Кроме того,
всегда известен класс напряжения линии, поэтому начальное
значение для модуля ЭДС целесообразно полагать равным классу
напряжения линии.
206
уровень шума векторов, %
Рис. 8.8. Случайная относительная погрешность для разньм значений параметров.
О 0,5 1 1,5 2
уровень шума векторов, %
Рис. 8.9. Относительная систематическая погрешность для разных
значений параметров.
Выполнялся поиск параметров на сетке их начальных значений
при разном уровне шума. В соответствии со свойствами корней
уравнений (8.22), (8.23) целевая функция в пределах исследованной
сетки начальных значений имеет два минимума. Они соответствуют
для уравнения (8.22) наборам {^,zj и {^2**^2} * а Д"я уравнения
(8.23) - наборам {^2,2^} ** {^и"*^M - Если отбирать лишь положи-
207
тельные значения компонент сопротивлений, то получим
единственное решение, соответственно, JE^ZJn j^,^} (см. пример
полученных результатов на рис. 8.10).
400
300
200
)00
Z, = 3+10i; Z;=!0+35nF,= tOO; 6, = 99
0
200
!50
!00
50
О
200
150
!00
50
0
/
]
]
1
400
300
200
!00
0
3.5
4
reZ,
4.3
8.5
9
im Z,
9,5
! U
200
!50
too
50
0
Ж
ь
Ч !
250
200
150
!00
50
0
94
96 98
350
7,3
reZ,
34,7
34J2
im Z;
34,74 92
92.3
93
Рис. 8.10. Параметры, найденные на сетке начальных значений.
Отобраны положительные значения:
верхний ряд - для уравнения (8.22), нижний - для уравнения (8.23).
Изучение на математической модели предлагаемого метода
показало, что при уровне шума векторов напряжения и тока до 3%,
правильном выборе исходных значений параметров и отсутствии в
сигнале ярко выраженных выбросов он позволяет надёжно
определить значения эквивалентов при условии допустимости
представления ЭЭС двухмашинной схемой замещения.
В случае, когда выборка данных не соответствует принятой
модели процесса, получаемые значения параметров содержат явные
признаки невалидности: неустойчивость к выбору начальных
значений, отрицательное значение параметров, получение значений
параметров в неприемлемом диапазоне величин.
Для проверки возможности применения изложенного метода
при анализе аварийных режимов реальной энергосистемы использо-
208
ван комплект осциллограмм одной из аварий на межгосударственном
транзите 330 кВ ЕЭС России - Азербайджан. Упрощенная схема
передачи приведена на рис. 8.И.
Л (f,)
е^-н
Буденновск Чирюрт
Махачкала Дербент Яшма
/1(EJ
Чиркейская
ГЭС
ЛЗ(Е,)
Ирганайская
ГЭС
е е е
Л^(^)
Рис. 8.11. Упрощенная схема энергосистемы.
Вследствие возмущения, место которого неизвестно, на
передаче возник асинхронный режим (АР). В результате его фиксации была
отключена ВЛ 330 кВ Буденновск - Чирюрт на подстанции (ПС)
Буденновск. Деление транзита не прекратило развитие АР, который
продолжался между генераторами ГЭС и Азэнерго. Ликвидация АР
осуществлена отключением ВЛ 330 кВ на ПС Дербент, вследствие
чего был нарушен межгосударственный транзит электроэнергии.
Выявление и ликвидация асинхронных режимов осуществлялись
устройствами АЛАР релейного типа, установленными на
подстанциях Буденновск и Дербент.
Стоящие на электропередаче регистраторы записали
развитие асинхронного режима в разных узлах транзита: на ПС
Буденновск, ПС Чирюрт, ПС Махачкала и ПС Дербент. Синхронизация
сигналов регистраторов проведена по событиям аварии.
Известно, что выключатель в Буденновске сработал через - 3,7 с от
момента начала фиксации аварийного режима, а выключатель в
Дербенте - через - 5,3 с. Совмещением моментов падения тока в
Чирюрте с уменьшением тока в Буденновске и минимума тока в
Дербенте с минимумом тока в Махачкале результаты осцилло-
графирования напряжения и тока приведены к единому времени
(рис. 812-8.13).
209
время, сек
Рис. 8.12. Осциллограммы токов.
время, сек
Рис. 8.13. Осциллограммы напряжений.
Проанализированы две двухмашинных схемы замещения
передачи: одна до срабатывания выключателя на ПС Буденновск, а
вторая после этого срабатывания. Первая характеризует движение ге-
210
нератора Г! с ЭДС F] относительно генератора Л,м? с ЭДС F^g,
эквивалентирующего работу генераторов Л2 и Л. Вторая схема
передачи характеризует относительное движение генераторов Л2 и Л.
Цель анализа состояла в определении эквивалентных параметров
схем замещения, расчёта по найденным эквивалентным параметрам
текущего значения угла электропередачи J в режиме
динамического перехода энергосистемы и формировании на основе полученной
информации условий работы противоаварийной автоматики,
обеспечивающих бесперебойный транзит электроэнергии в систему Аз-
энерго.
Для оценки уровня шума векторов напряжения и тока,
полученных по осциллограммам, изучен шум исходных сигналов.
Предполагалось, что зарегистрированные сигналы - синусоиды одной
частоты. Параметры синусоиды находили методом наименьших квадратов
по 11 измерениям, производимых регистраторами через 0,02 с.
Распределение полученных при этом невязок амплитуды исследовали на
нормальность с помощью функции normplot системы MATLAB.
Результаты позволяют считать, что полученные невязки распределены
по нормальному закону. За уровень шума исходного сигнала принято
среднеквадратическое отклонение распределения невязок, деленное
на среднее значение сигнала на выбранном интервале. На основании
полученных оценок можно считать, что уровень шума векторов
напряжения и тока составляет около 0,5 %. Поэтому применение
предлагаемого метода вполне оправдано.
Определение эквивалентных сопротивлений, ЭДС и углов
электропередачи проводилось в условиях практического отсутствия
информации об эквивалентных параметрах энергосистемы. Известно
только ориентировочное значение эквивалентного сопротивления
слева от ПС Буденновск: Z - 4,6+j26,4 Ом. В результате
проведенных расчётов для интервала времени 0-3,7 с получены следующие
значения эквивалентных сопротивлений и ЭДС при АР в полной
схеме транзита:
- слева от ПС Буденновск: Z^g = S + у26 Ом, ^ = 278 кВ,
- справа от ПС Буденновск: Z^ = 55 + yi73 Ом, R^ = 338 кВ.
Поведение модулей эквивалентных ЭДС и их углов,
рассчитанное по известным напряжению и току и найденным значениям
сопротивлений на рассматриваемом интервале, показано на рис. 814.
21!
Буденновск
360
f-
330
320
3!0
300
290
270
г —
Г *" ^
L —j
!
)-
L
1—
i
^
^.—
ч
r—!
!
j
j
-—^ !
4У)
! 2 3
время, сек
-50
-!00
ё. -!50
§ -200
-250
-300
-350
)g,
--J-
\ !
\!
H
! 2 3
время, сек
Рис. 8.14. Изменение модулей и углов эквивалентных ЭДС.
На рис. 8.14,я указаны найденные значения Д] и E^g.
Изменение углов векторов ЭДС (рис. 8.14,6) показывает, что деление
транзита произошло при угле электропередачи <У ^ 280^ (; = 3,7 с).
Практическое постоянство аргумента ^ вектора Е, и существенное
изменение аргумента <$эм? вектора Е^ отчетливо указывают, что
аварию вызвали события справа от ПС Буденновск.
После срабатывания выключателя на ПС Буденновск
эквивалентная схема изменилась. Кроме того, под действием противоава-
рийной автоматики при ; = 3,83 с на Чиркейской ГЭС отключился
один генератор мощностью 250 МВт. Поэтому оценка параметров
новой схемы замещений транзита проведена по измерениям сигнала
на ПС Дербент на интервале 3,85 - 5,2 с. Найденные эквивалентные
сопротивления процесса составили:
- слева от ПС Дербент: Z^ = 53 + у 86 Ом, Д3 = 287 кВ,
- справа от ПС Дербент: Z^ = 29 + у 135 Ом, ^ = 224 кВ.
Рассчитанное по известным напряжению и току и найденным
значениям сопротивлений на рассматриваемом интервале поведение
углов эквивалентных ЭДС показано на рис. 8.15.
212
Дербент
200
0
._ -200
& -400
2
-600
-800
""%8 4 4,2 4,4 4,6 4,8 3 5,2
время, сек
Рис. 8.15. Изменение углов эквивалентных ЭДС на втором этапе аварии.
Следует отметить, что установленные на ПС Буденновск и ПС
Дербент релейные устройства АЛАР выявили как наличие АР по
передаче, так и положение электрического центра качания. Однако
технические возможности этих устройств оказались недостаточными
для того, чтобы сохранить устойчивость транзита после его первого
деления. Деление электропередачи следовало провести на более
ранней стадии, до достижения предельного критического значения угла
между векторами ^ и Ё^. Это осуществимо при использовании
микропроцессорного устройства АЛАР-М, формирующего свои
действия на основе непосредственного измерения угла электропередачи
и обладающего высоким быстродействием.
На рис. 8.16 отображено поведение величин эквивалентных
сопротивлений в процессе развития аварии.
Каждый расчёт величины сопротивления выполнен по выборке
сигнала на интервале 0,4 с, а интервалы выборки скользят вдоль оси
времени с шагом в один период частоты. Из рисунка видно, что
сопротивления претерпевают монотонное изменение по мере развития
аварии, причем, по мере усугубления процесса наблюдается
преимущественное увеличение реактивной части сопротивления, что
согласуется с известным поведением сопротивления нагрузки.
213
30
20
!0
А1^и
^-
— 1
"X
^
3.3
3.4
3,5
3,6
3,7 3.8
время, сек
3,9
4.1
4.2
200
t50
100
^30
-30
У
Г /^
^^
Я:
^ \
П
\
3,3
3,4 3.5
3.6
3.7 3,8
время, сек
3.9
4,! 4,2
Рис. 8.16. Эквивалентные сопротивления ветвей в процессе развития аварии.
На интервале до 4,05 с получена, достаточна гладкая
зависимость изменения сопротивлений, что позволяет заключить, что
рассмотренный метод достаточно устойчив к нерегулярным флуктуаци-
ям входною сигнала и дает достоверные результаты. Резкое
изменение поведения ррлученных кривых в районе 4,05 с обусловлено тем,
что в этот момент срабатывает выключатель, происходит
отсоединение несинхронной части энергосистемы, вследствие чего резко
изменяется эквивалент.
По предложенной методике можно исследовать сигналы,
характеризующиеся нормальным распределением шума с уровнем до 3%, что
является достаточно характерным для осциллограмм регистраторов.
При работе с реальными зашумлёнными сигналами
результаты решения двух уравнений совпадают (с точностью до
погрешности) в условиях приемлемого (для данной конкретной выборки)
уровня шума, и наоборот, дают различные результаты в условиях,
когда конкретная выборка не обеспечивает получения валидного
результата. Таким образом, совместное использование двух
указанных уравнений даёт дополнительный критерий фильтрации
результатов расчёта.
214
Правильность расчёта параметров можно оценить посредством
сравнения параметров, полученных на основе подмножеств наборов
измерений токов и напряжений из существующего их множества.
Наиболее просто это можно осуществить, используя данные разных
интервалов временцрсциллограммы.
При это^ в случае, когда используемые данные не относятся к
одной генеральной совокупности, получаемые значения параметров
выбраковываются, поскольку оказываются неустойчивыми к выбору
начальных значений, дают отрицательные значения параметров или
значения неприемлемого диапазона величины.
При получении параметров с использованием только части
исследуемого интервала результаты также хорошо согласуются с
результатами, полученными посредством другой выборки. Результаты
устойчивы по отношению к выбору начальных значений в широком
диапазоне. Когда возможно сравнение с известными параметрами,
расхождение между ними незначительно. Всё это позволяет
утверждать, что полученные предлагаемым методом оценки являются
устойчивыми и их можно использовать для изучения поведения ЭЭС.
8.3. Повышение точности и скорости определения
параметров
В данном разделе рассмотрены особенности обработки
исходных сигналов и предлагается способ повышения скорости и
точности определения параметров эквивалентной схемы
асинхронного режима ЭЭС.
Идентификация параметров рассматриваемых объектов при
наличии случайных флуктуации (шума) исходных наблюдаемых
сигналов связана с тем или иным способом анализа переопределенной
системы уравнений электрической цепи, например, по методу
наименьших квадратов. При этом, качество решения и сама
возможность получения результатов тесно связана с качеством исходной
выборки сигналов.
Рассмотрим предельный случай использования выборки
напряжения и тока для стационарного состояния ЭЭС. При этом, элементы
выборки не будут отличаться друг от друга, или будут отличаться
только на величину сцуЗайных флуктуации сигнала, а исходная
система уравнений МНК, разумеется, будет плохо обусловленной. По-
213
лученное в этих условиях решение не будет иметь ничего общего с
действительными величинами искомых параметров. Это вполне
очевидно и совершенно правильно, поскольку при неподвижности углов
эквивалентных генераторов невозможно судить о параметрах
эквивалентной схемы асинхронного режима.
В период динамического перехода к АР элементы выборки
исходных сигналов содержат информацию о развивающемся процессе
и будут отличаться друг от друга на некоторую величину, зависящую
как от процесса, так и от уровня шума. При этом уровень
обусловленности исходной системы уравнений МНК и качество полученного
решения зависят от конкретного состава выборки.
Таким образом, важным вопросом является отбор значимых
точек, параметры которых используются в процессе решения [8.3].
Не вдаваясь в детали реализации расчетного алгоритма, общую
идею метода прореживания можно проиллюстрировать следующим
образом.
Пусть для каждого отсчета выборки сигнала известно его точное
значение и величина среднеквадратичной погрешности. Тогда такой
вектор можно отобразить на комплексной плоскости в виде рис. 817.
I+J
/ точное значение
область погрешности Зо
+1
Рис. 8.! 7. Погрешность вектора в комплексной плоскости.
Рассмотрим изменения одного из входных сигналов, например,
тока, на начальном этапе переходного процесса асинхронного
режима. Сигнал при этом имеет существенно нелинейный характер
изменения, а скорость изменения определяется параметрами энергосис-
216
темы, и, в частности, средневзвешенными величинами постоянных
инерции генераторов.
Пусть при измерении получена выборка, точки которой
расположены с существенным взаимным перекрытием областей
погрешностей 3<? (рис. 8.!8,я).
я) б)
Рис. 8.18. Выборки данных для расчета параметров.
Если выполнить расчет над этой выборкой, а затем в качестве
исходных данных взять, например, каждую вторую точку основной
выборки (см. рис. 8.18,6), и снова выполнить расчет, то результат
второго расчета будет мало отличаться от результата первого
расчета, но займет меньшее время.
В случае, когда основная выборка имеет шаг между отсчетами
существенно меньший, чем размер области погрешности, и
количество точек мало, результат расчета имеет большую ошибку вследствие
плохой обусловленности системы уравнений. Если же в основной
выборке точек много, то результат расчета может оказаться ошибочным
вследствие накопления вычислительной ошибки на компьютере [8.4].
В последнем случае прореживание выборки может существенно
улучшить результат расчета.
Использование такого способа для технологического алгори-
ма АЛАР, работающего в режиме реального времени, связано с
необходимостью дополнительного обоснования возможности
получения необходимого количества точек выборки для
произвольного (в том числе и высокого) темпа процесса перехода к
асинхронному режиму.
217
Каждый отсчет выборки получают с некоторым заданным
интервалом времени, и этот интервал не может быть меньше периода (в
крайнем случае полупериода) частоты сети. Таким образом, на
интервале в 1 с, характерном для первого этапа развития процесса
перехода в АР, можно получать не более 50 точек выборки. Вместе с
тем, желательно получить решения задолго до достижения
критического угла, т.е. на 1/5-ь 1/3 проворота до 180°. Таким образом,
остается около !0 точек выборки на интервале 1 с. Возникает вопрос,
применим ли метод для более быстрых процессов?
Для пояснения ситуации рассмотрим рис. 8.19, на котором
представлены варианты наблюдаемого сигнала в виде условных кривых
переходных процессов для трех случаев, отличающихся темпом
процесса (случай б? - темп наиболее медленный, случай А - средний темп
процесса, случай с - наиболее быстрый темп). По оси времени
расположены пронумерованные дискретные отсчеты векторов
измеряемого сигнала.
Рис. 8.19. Время выборки отсчетов при различном
темпе процесса.
Рассмотрим выборку для процесса я на интервале от начала
развития процесса до точки 22. Как изображено на рисунке, все точки
этой выборки лежат в интервале изменений А = 3<г по оси ординат.
218
Величина этого интервала отображает необходимое «расстояние»
между парой отсчетов выборки, на котором эти величины становятся
различимыми друг от друга в условиях «зашумления» входного
сигнала.
Если под началом оси абсцисс понимать момент начала
переходного процесса, то вплоть до момента получения точки 22
алгоритм не в состоянии выявить наличие переходного процесса.
Начиная с момента 22, алгоритм решения сохраняет в некотором буфере
существенно отличающиеся друг от друга точки выборки (значимые
точки), и прореживает незначимые точки выборки. При накоплении
достаточного количества значимых точек выполняется расчет с
окончательным определением искомых параметров
Из рисунка видно, что для медленного процесса я момент
готовности к расчету соответствует точке 32 (условно полагаем, что
четырех точек достаточно).
Процессы А и с развиваются быстрее, следовательно, для них
момент готовности наступает раньше и при меньшем количестве
точек выборки (26 точек для А, и 16 точек для с).
Рассмотрение условного примера показывает, что чем выше
темп процесса, тем быстрее комплектуется набор значимых точек. В
пределе (если при относительно малом уровне шума можно
ограничиться четырьмя точками), то решение может быть получено на
интервале г,ц;п = 0,020 х 4 = 0,080 с, что наверняка достаточно для
любого темпа реального перехода в АР.
Для надёжного решения уравнений необходимо, чтобы наборы
данных для каждого уравнения значимо отличались друг от друга.
Эта значимость определяется сравнением их разности с шумовой
составляющей сигнала. Поэтому выбор отсчётов для решения
уравнений производился с учётом реального шума в исходном
синусоидальном сигнале. Оценка уровня шума определялась как
среднеквадратичное отклонение мгновенных значений сигнала от величины
гармонического сигнала, соответствующего полученному вектору.
Критерием для выбора является превышение величины абсолютного
значения разности пары векторов над значением шума не менее, чем
на три среднеквадратичных отклонения.
Проверка рассмотренного способа прореживания выборки
сигнала выполнялась для метода, изложенного в разделе 8.2 для
наиболее тяжелого случая с уровнем шума векторов 5%, ускоренного
движения углов эквивалентных генераторов в противоположные сторо-
219
ны, причем рассматривались как одинаковые величины
сопротивления ветвей, так и отличающиеся друг от друга на два порядка.
На рис. 8.20 приведены совокупные результаты погрешности
расчета угла для различного уровня критерия отбора значимых точек
выборки.
Для наглядного выявления влияния отбора значимых точек
расчет выполнялся при явно завышенной величине шума по величинам
векторов 15%, что соответствует более чем 30 %-ному уровню шума
по мгновенным значениям входного сигнала (отметим, что как было
показано в предыдущих разделах, реальный уровень шума в
энергосистеме обычно не превышает 3 - 5%)
При критерии отбора, равного единице (7, размах разброса
результатов расчета составил около 40 градусов. По мере повышения
критерия размах уменьшается, и при практически пригодных
величинах в от 3 до 5 (7 составляет от 10 до 15 градусов.
Для уровня шума 3 - 5%, характерного для энергосистемы,
соответствующие величины уменьшаются, и при величине критерия
отбора от 3 до 5 <у погрешность угла не превышает 5-7 градусов.
30 г
20
g 10
э
&-!0
о
е
-20
-30
Ф &
.L-
2
А-. ф
4 5 6 7
критерий отбора
Рис. 8.20. Средняя погрешность и разброс величины
погрешности расчета угла.
220
8.4. Выводы
При строгом выполнении условий применимости метода
дифференциальных соотношений, а именно, при линейном
изменении величины угла ЭДС во времени, или при относительно
медленном процессе динамического перехода, когда на интервале
измерения можно использовать линейную аппроксимацию,
приемлемые результаты получаются при мультипликативном шуме
векторов до 2%. Это соответствует уровню шума в исходном
мгновенном сигнале до 6%.
Поскольку осциллограммы реальных процессов в
энергосистемах показывают, что шум по мгновенным сигналам не превосходит,
как правило, 3 - 5%, предложенный метод применим для анализа
процессов в реальных энергосистемах.
Рассмотренный метод можно использовать для анализа
осциллограмм аварий наряду с другими методами анализа как
альтернативный поверочный расчёт процессов в энергосистеме.
Использование рассмотренного метода в технологическом
алгоритме устройств АЛАР или других локальных устройств ПА должно
предваряться оценкой ожидаемого темпа аварийного процесса.
Метод можно использовать только для относительно медленных
процессов, иначе устройство начнёт запаздывать с реакцией на
достижение предельно допустимого угла.
С помощью метода комплексно-сопряженных уравнений
возможно изучение динамического поведения энергосистем. Каждый
случай нарушения устойчивости сложной ЭЭС в виде глубокого
качания или асинхронного хода является естественным уникальным
экспериментом, данные которого практически невозможно точно
моделировать. Поэтому целесообразно извлекать из единичного
зарегистрированного процесса максимум возможной информации.
Данные, получаемые при срабатывании цифровых регистраторов,
установленных в ЭЭС, можно использовать для оценки эквивалентных
параметров ЭЭС. Разумеется, эти оценки следует, и полезно,
сопоставлять с результатами расчётов данной ЭЭС с помощью
компьютера и, тем самым, убедиться в адекватности представлений о ЭЭС.
Достоинством предложенного подхода является возможность
расчёта конкретного эквивалента для конкретной
зарегистрированной аварии, без необходимости выяснения как изменилась в
результате аварии структура энергосистемы.
22!
Предложенное решение может оказаться полезным для
настройки работы системы противоаварийной автоматики.
Повышение точности и скорости определения параметров может
быть достигнуто применением изложенного способа прореживания
выборки, что позволяет существенно улучшить результаты расчета
даже в случае весьма высокого уровня шума входного сигнала.
Изложенный способ целесообразно использовать для всех
рассмотренных методов идентификации параметров эквивалентной схемы
асинхронного режима ЭЭС.
222
Глава 9. Перспективные технические средства
повышения устойчивости энергосистемы на базе
сверхпроводниковых технологий
В настоящей главе рассматривается использование
перспективных технических средств, основанных на сверхпроводниковых
технологиях, для повышения устойчивости и управляемости ЭЭС.
В разделе 9.! настоящей главы изложено современное состояние
вопроса.
В разделе 9.2 настоящей главы рассмотрен принцип работы и
основные особенности токоограничивающего устройства с
коммутацией магнитного потока, разработанного при участии автора и
реализованного в виде макетных образцов. В приложении к разделу
приведены примеры расчета характеристик экранов для токоограни-
чивающих устройств с коммутацией магнитного потока,
конструктивная реализация и характеристики макетного образца устройства
10 кВ А, а также основные характеристики эскизного проекта
устройства 450 MB А.
В разделе 9.3 настоящей главы изложены допросы
использования сверхпроводниковых индуктивных накопителей для целей
повышения динамической устойчивости ЭЭС, рассмотрены основные
понятия, необходимые для использования СПИН в качестве
источника активной и реактивной мощности в энергосистеме,
демпфирования электромеханических колебаний.
В разделе 9.3.1 рассмотрены энергетические характеристики
накопителя и геометрические характеристики обмоток. Приведены
методики расчета процесса выдачи - потребления мощности СПИН,
рассмотрены основные факторы, которые необходимо учитывать при
проектировании таких устройств. Обмотки обычно имеют
цилиндрическую или тороидальную форму. Цилиндрическая форма обмотки
требует меньших материаловложений по сравнению с тороидальной,
однако имеет большое внешнее поле рассеяния. Поэтому СПИН с
такой обмоткой требует наличия диэлектрического криостата для
исключения потерь на вихревые токи. Кроме того, использование
такого СПИН требует охранной зоны для удовлетворения
требованиям экологической безопасности и электромагнитной совместимости с
оборудованием подстанции. Поэтому конструктивно такие обмотки
обычно выполняются из нескольких катушек, расположенных рядом
223
и встречно друг другу, что существенно уменьшает поле рассеяния.
Тороидальная обмотка, имея весьма малое внешнее поле и в
наибольшей степени удовлетворяя требованиям к экологической
безопасности и электромагнитной совместимости, уступает
конструкциям с цилиндрическими обмотками в массо-габаритном отношении.
Более детальный анализ, а также конструктивно-технологические
аспекты этого вопроса рассмотрены в работах [9.10], [9.51] - [9.53].
В разделе 9.3.2 рассмотрены вопросы использования
накопителей для повышения статической и динамической устойчивости
электроэнергетических систем. Приведены результаты подробного
расчета работы СПИН на примере анализа Архангельской
энергосистемы. Показано, что использование СПИН может привести к
увеличению пропускной способности линий передачи, увеличению
статической и динамической устойчивости, и снижению требуемого
уровня дозированных воздействий автоматики противоаварийного
управления.
9.1. Современное состояние вопроса
9.1.1. Актуальные проблемы устойчивости транспорта
электроэнергии
В настоящее время основой электроэнергетики страны является
Единая электроэнергетическая система (ЕЭЭС). Структура
генерирующих мощностей ЕЭЭС формируется за счет сооружения в
оптимальных пропорциях атомных, компенсационных, тепловых,
гидравлических и маневренных электростанций различных типов при
комплексной замене устаревших агрегатов действующих
электростанций. Реализация основных стратегических направлений развития
электроэнергетики предполагает существенное расширение
эксплуатационных возможностей известных технических средств и
разработку принципиально новых устройств с повышенными
техническими характеристиками. Основной целью развития схем транспорта
электроэнергии является расширение рынка сбыта электрической
энергии и получение максимальной прибыли от реализации в
области ее потребления.
Современное состояние электроэнергетики, помимо
организационных проблем либерализации рынка сбыта электрической энергии,
характеризуется наличием актуальных технических проблем транс-
224
порта электроэнергии в энергосистеме России. Среди них можно
назвать; недостаточную пропускную способность межсистемных
связей и системообразующих линий электропередачи, ограничивающую
возможность удовлетворения требованиям рынка; слабую
управляемость сети, недостаточный объем устройств регулирования
напряжения, и, как следствие, недостаточную пропускную способность
линии в период максимума нагрузки и повышенные до опасных
значений напряжения в период суточного и сезонного снижения
нагрузки; недостаточную степень устойчивости энергосистем; ограничения
по выдачи мощности ряда электростанций; неоптимальность
распределения потоков мощности по параллельным линиям различного
класса напряжения, и, как следствие, недоиспользование сетей и рост
потерь энергии.
Основные пути решения актуальных проблем транспорта
электроэнергии лежат как в области традиционных решений
(строительство новых линий и повышение управляемости сети путем
применения различных устройств регулирования, таких как синхронные
компенсаторы (СК), статические тиристорные компенсаторы (СТК),
шунтовые реакторы (ШР), управляемые шунтовые реакторы (УШР)),
так и в области новых технических решений с использованием
устройств векторного регулирования на базе современной силовой
электроники и новых материалов, включая сверхпроводники.
Устройства векторного регулирования амплитуды и фазы
напряжения включают в себя устройства прямого преобразования
мощности - тиристорно- управляемый последовательный
компенсатор (ТУПК), статический компенсатор на полностью управляемых
вентилях (СТАТКОМ), объединенный регулятор потоков мощности
(ОРПМ), вставки постоянного тока (ВПТ).
Кроме того, разрабатываются и устройства, использующие
накопление свободной энергии в накопителях различного типа -
накопители механической энергии (маховики и гидроаккумулирующие
станции), накопители химической энергии (аккумуляторы),
накопители электрической энергии в конденсаторах для преобразователей
напряжения (СТАТКОН) и накопители энергии магнитного поля на
основе сверхпроводников (СПИН).
Особое внимание уделяется так называемым «гибким линиям
электропередачи» (FACTS)', которые можно рассматривать как
от англ. Flexible AC transmission systems
225
обобщающее понятие комплекса линий электропередач, снабженных
электроэнергетическими устройствами, применение которых
позволяет управлять потоками энергии в линиях посредством
преобразования рода тока, использования источников активной и реактивной
мощности, управления характеристиками линий и т.п. Некоторые из
таких устройств могут использоваться и уже используются в
настоящее время самостоятельно для решения ряда локальных задач.
Для реализации управления потоком мощности принципиально
необходимо применение нелинейных элементов. Основным
используемым для этих целей классом нелинейных элементов являются
полностью управляемые вентили [9.1], [9.2]. Существует большое число
различных схем для преобразования трехфазного переменного тока в
постоянный и обратно, которые различаются между собой соединением
вентилей, выполнением вторичной обмотки трансформатора,
соединением вентилей с трансформатором и другими особенностями. На основе
рассмотренной технологии в настоящее время реализованы и успешно
используются в ЭЭС России и зарубежных стран ВПТ, СТК, и другие
элементы силового электроэнергетического оборудования. Подробный
обзор возможностей использования отдельных элементов и «гибких
линий» в целом приведен в работах [9.3] - [9.5].
В настоящее время, в связи с развитием технологии
сверхпроводниковых материалов, значительное внимание уделяется
использованию в электроэнергетических системах устройств и
оборудования, связанного с использованием особых, присущих таким
материалам свойств и возможностей [9.6].
Сверхпроводниковые материалы дают возможность по-новому
подойти к вопросам создания электротехнических устройств.
Увеличение плотности тока, повышение удельной мощности, а также
наличие особых, присущих только сверхпроводникам физических
свойств, создают предпосылки для разработки высокоэффективных
видов электроэнергетического оборудования.
Особого внимания заслуживает процесс быстрого роста работ по
созданию макетных и опытно-промышленных образцов силового
оборудования для энергосистем на основе использования
высокотемпературных (азотный уровень) сверхпроводниковых материалов.
Перспективы применения в электроэнергетике
сверхпроводниковых материалов и новых устройств на их основе достаточно подробно
изложены в [9.10], поэтому в настоящем главе ограничимся только
рассмотрением принципов работы, основных особенностей и дости-
226
жимых возможностей таких устройств, которые могут быть
непосредственно использованы для повышения устойчивости работы ЭЭС, а
именно - токоограничивающих устройств для координации уровней
токов короткого замыкания и индуктивных накопителей энергии для
повышения статической и динамической устойчивости ЭЭС.
9.1.2. Критерии оценки целесообразности использования
устройств на базе сверхпроводниковых технологий
Технические характеристики низкотемпературных
сверхпроводящих материалов (проводов и лент) обеспечивают возможность их
использования в некоторых электроэнергетических устройствах.
Большое число крупных фирм осуществляет промышленный выпуск
этих материалов с ежегодным объемом производства более 500 т по
цене от 1 до 10 долларов за I кАм. На основе низкотемпературных
сверхпроводниковых материалов создано значительное число
образцов электроэнергетического оборудования.
В то же время, успехи в области создания промышленных
образцов высокотемпературных сверхпроводников в настоящее время
не вполне достаточны для широкого использования этих материалов
в сильноточной технике. Основным препятствием для
промышленного использования являются низкое значение предельных рабочих
индукций, сильная зависимость критического тока от величины
магнитного поля, высокая анизотропия зависимости критического тока
от направления внешнего магнитного поля, высокая стоимость,
обусловленная сложной технологией изготовления. Использование
высокотемпературных сверхпроводников в современных опытных
образцах токоограничивающих устройств пока ограничивается тем, что
предельное значение экранируемого поля не превышает 0,5Т.
Однако, по мнению специалистов-технологов, возможности для
совершенствования методов производства и технических характеристик
высокотемпературных сверхпроводников весьма значительны.
Из всего комплекса устройств с использованием
сверхпроводниковых материалов для электроэнергетики могут представлять
интерес электрические машины, трансформаторы, силовые кабели, то-
коограничивающие устройства и накопители электроэнергии и
некоторые другие устройства.
Каждая из указанных групп устройств включает в себя
подгруппы, отличающиеся различным видом исполнения и
функциональными возможностями.
227
Вследствие разнообразия видов и функционального назначения
анализ применения этих устройств в электроэнергетике является
комплексной и многофакторной задачей, при этом должны быть
использованы как критерии, единые для всего комплекса
рассматриваемых устройств, так и специфические критерии, применимые к
каждой отдельной группе.
Полноценное технико-экономическое обоснование
целесообразности использования сверхпроводниковых устройств в
электроэнергетике требует проведения комплексных исследований, с учетом
имеющегося опыта создания и эксплуатации образцов таких
устройств в России и за рубежом.
Рассмотрим основные критерии, применяемые для анализа
групп нового перспективного оборудования.
Целесообразность использования новых устройств в целом
можно определить следующими критериями - достигаемый
технический эффект, надежность, затраты на изготовление, затраты на
эксплуатацию.
Для вновь разрабатываемых устройств с ограниченным опытом
промышленной эксплуатации оценка целесообразности их
применения возможна лишь по ограниченному числу параметров,
сопоставимых с параметрами традиционного оборудования, и с
используемыми в настоящее время комплексными техническими решениями,
предназначенными для достижения аналогичных целей.
В качестве единых комплексных критериев, применимых ко
всем группам оборудования можно рассматривать определенные
удельные величины, такие как плотность энергии, материалоемкость,
экономичность и т.п., позволяющие сравнить новое разрабатываемое
оборудование с известным традиционным.
Наиболее информативно сравнение устройств, приведенных к
удельной мощности, либо приведенных к удельной энергии,
накапливаемой в устройстве.
Например, для широко распространенных в энергосистемах
роторов турбогенераторов традиционного исполнения накопленная в
них удельная механическая энергия составляет приблизительно
50 МДж/м^ для диапазона мощностей от 200 до 800 МВт. Если
попытаться'реализовать такую плотность энергии в магнитном поле, то
это приведет к необходимости обеспечить величину индукции в
обмотке на уровне 11 Т, что значительно превышает возможности
современных высокотемпературных сверхпроводниковых материалов.
228
Традиционные проводниковые материалы, например, медь
имеют удельное сопротивление (р = 1,72-10*^ Ом м) и реально
допустимую плотность тока от 1 до 5 А/мм^. Сверхпроводниковые
материалы имеют существенно более высокую плотность тока, и нулевое
активное сопротивление при постоянном токе. Однако, при этом
необходимо учитывать, что для обеспечения работы СП материалов
требуется наличие криостатирующих оболочек, так что сравнение
плотности тока должно проводиться не по удельным
характеристикам материалов, а по эффективному сечению кабеля (обмотки).
Традиционные проводниковые материалы слабо изменяют сдои
свойства при воздействии на них механических нагрузок в
технологическом процессе изготовления устройств и в эксплуатации, слабо
изменяют свои свойства при воздействии на них магнитного поля и
незначительно увеличивают удельное сопротивление при изменении
температуры. В отличие от традиционных материалов,
сверхпроводниковые материалы гораздо более критичны к любому из
упомянутых внешних воздействий. Они сохраняют свои номинальные
рабочие свойства в узком температурном диапазоне, в ограниченном
диапазоне внешнего магнитного поля и существенно ухудшают
токонесущую способность при любом изменении вплоть до
лавинообразного срыва основного режима работы при превышении
критических значений.
Сравнение таких характеристик с аналогичными характеристиками
традиционных материалов позволяет оценить конкурентоспособность
сверхпроводниковых материалов на рынке электроэнергетики.
Такие устройства, как СП кабели и СП трансформаторы, имеют
прямые прототипы среди традиционных электроэнергетических
устройств, вследствие чего для сравнительного анализа целесообразно
использовать присущие этим устройствам специфические параметры.
Для кабелей такими параметрами являются эффективная
плотность тока в сечении оболочки кабеля, величина потерь, удельная
стоимость транспорта энергии с учетом эксплуатационных расходов.
Ожидается, что СП кабели на базе ВТСП материалов текущего
поколения уже могут иметь преимущества перед кабелями
традиционного исполнения в специальных условиях жесткого ограничения
сечения транспортного коридора, например при туннельных вводах
большой единичной мощности в города.
Для трансформаторов необходимо принимать во внимание такие
параметры, как удельная мощность, величина потерь, величина ин-
229
дуктивного сопротивления рассеяния, перегрузочная способность,
удельная стоимость изделия с учетом эксплуатационных расходов.
Можно сделать предварительный вывод о том, что
конкурентоспособность этой группы оборудования целиком зависит от
характеристик используемых материалов, а ее оценка может быть сведена к
оценке выигрыша от снижения потерь в обмотках по сравнению с
увеличением затрат на изготовление, и в исключительных случаях к
этому может быть присоединен выигрыш от уменьшения массогаба-
ритных показателей.
В группе электрических машин необходимо отдельно
рассматривать подгруппы генераторов, двигателей, синхронных
компенсаторов, особой подгруппой являются маховичные накопители
энергии, которые по своему выполнению относятся к группе
электрических машин, а по функциональному назначению соответствуют
группе накопителей энергии.
Группу токоограничивающих устройств целесообразно
подразделить на три подгруппы, первая из которых базируется на способе
ограничения тока в цепи посредством ввода в цепь активного
сопротивления, вторая на вводе в цепь индуктивного сопротивления,
третья основывается на принципе коммутации магнитного потока.
Первая подгруппа не имеет непосредственного аналога среди
используемого электроэнергетического оборудования. Такого рода
устройства предназначены для решения задачи координации
величины токов короткого замыкания с возможностями комутационного
оборудования, и предназначены для работы совместно с
традиционными выключателями, обеспечивая ограничение тока в момент
срабатывания выключателей. При этом характеристики
сверхпроводникового оборудования должны коррелироваться с
характеристиками механических выключателей. В частности, время полного
ввода сопротивления должно быть меньше времени срабатывания
выключателя, время восстановления сверхпроводникового
состояния должно быть меньше паузы автоматического повторного
включения, количество рабочих циклов устройства должно быть не
менее предусмотренного количества рабочих циклов выключателя.
Наряду с этим, в процесс сравнительной оценки необходимо
включить альтернативный способ разгрузки выключателя,
основывающийся на традиционном техническом решении разрыва
сильноточной цепи посредством однократно используемых сменных
пиротехнических вставок. Совокупность рассмотренных характеристик не
230
позволяет пока сформировать определенное мнение о реальности
технического использования такого рода устройств, поскольку для
этого необходимо проведение дополнительной работы по анализу
поведения таких устройств в динамическом процессе снижения
токов короткого замыкания.
Вторая подгруппа может сравниваться с традиционно
используемыми для аналогичных целей техническими решениями,
основанными на устройствах реакторного типа традиционного
исполнения. Устройства этой группы могут использоваться как
самостоятельно, так и совместно с выключателями. В последнем случае
необходимо учитывать влияние такого устройства на характеристики
основного выключателя, в частности, на время гашения дуги в цепи
с дополнительно вводимым индуктивным сопротивлением. Анализ
динамики регулирования тока КЗ позволяет утверждать, что в
техническом плане такого рода устройства в принципе могут
удовлетворять требованиям электроэнергетики, и для оценки
целесообразности их использования необходимо выполнение подробного
технико-экономического обоснования в сравнении с
используемыми в настоящее время комплексными техническими решениями по
координации токов короткого замыкания, в частности, с
использованием вставок постоянного тока для ввода мощности в
энергосистему с высокой плотностью распределения мощности по площади
региона.
Третья подгруппа устройств, основанная на принципах
ограничения тока электрической цепи посредством переключения
магнитного потока в стержнях магнитопровода трансформатора (см. [9.7]),
представляет собой силовой трансформатор традиционного
исполнения, снабженный дополнительным магнитопроводом с
обмотками и СП экраном. Устройство может быть использовано в качестве
блочного генераторного трансформатора (автотрансформатора),
автоматически ограничивающего уровень тока КЗ на сборной шине,
либо в качестве автотрансформатора передачи между линиями
разного класса напряжения. Возможность технической реализации
устройства с использованием современных ВТСП материалов не
вызывает сомнений, однако, для выработки обоснованных оценок
целесообразности его использования в ЭЭС необходимо
проведение дополнительных работ с учетом традиционных
организационно-технических методов решения вопроса координации тока КЗ в
указанных областях применения.
23!
Для оценки перспектив использования ВТСП оборудования в
электроэнергетических сетях представляется необходимым
реализовать перспективные образцы оборудования в масштабе,
позволяющем осуществить их подключение к реальной электроэнергетической
сети, опробовать работу устройств в автономном режиме и при
совместной эксплуатации в составе комплекса сверхпроводниковых
устройств определить потенциально достижимые технико-
экономические показатели, оценить надежность, выявить проблемы,
связанные с эксплуатацией в номинальном, аварийных и ремонтных
режимах, и выработать на основе этого достоверное представление о
новом классе электроэнергетического оборудования.
Проведение подобного комплекса работ создаст предпосылки
для выполнения достоверной оценки целесообразности применения
этого оборудования в электроэнергетических сетях России.
9.1.3. Сверхпроводниковые материалы
Сверхпроводниковые материалы приобретают уникальные
физические свойства при работе в диапазоне температуры и индукции
магнитного поля ниже так называемых критических величин.
В работе [9.8] приведен обзор состояния разработок таких
материалов и перспектив их использования, в частности, для
электроэнергетических устройств.
Начиная с 80-х годов прошлого века у нас в стране и за рубежом
было создано промышленное производство двух типов технических
сверхпроводящих материалов.
Один из них - сплав Nb-Ti с критической температурой 9.6 К
при нулевых магнитном поле и токе. При температуре 4.2 К
(температура кипения жидкого гелия при нормальном давлении) была
достигнута величина критического магнитного поля )2 Тл при нулевом
токе. Критическая плотность тока при 4.2 К в магнитном поле 5 Тл
превышала 3*10^ А-м^.
Другой тип материала - интерметаллическое соединение NbsSn,
работоспособно в расширенном диапазоне рабочих температур и
магнитных полей. Материал на основе №з8п имеет критическую
температуру 18.3 К при нулевых магнитном поле и токе, критическое
магнитное поле около 22 Тл при 4.2 К и нулевом токе, и
критическую плотность тока более высокую, чем в материалах на основе
сплава Nb-Ti, в частности, при 4.2 К в поле !0 Тл плотность тока в
нем превышает 10^ А-м^.
232
В 1986 г., были открыты так называемые высокотемпературные
сверхпроводники (ВТСП) на основе керамической технологии с
критическими температурами перехода в сверхпроводящее состояние,
заметно превышающими температуру кипения жидкого азота при
нормальном давлении (77,3 К). Появилась возможность вместо нево-
зобновляемого и дорогого хладагента - жидкого гелия -
использовать дешевый хладоагент - жидкий азот.
К середине 90-х годов были разработаны конструкции первого
поколения ВТСП - проводов и начат их опытно-промышленный
выпуск в США, Японии, странах Европы и России. Провода
производились методом "порошок в трубе". В процессе обработки заготовки
из серебряной трубки или трубки из легированного серебра,
заполненной порошкообразным ВТСП - сверхпроводником, формируется
лента с характерным сечением 4 мм на 0.3 мм и длиной до 1000 м.
В настоящее время ленточные провода изготавливаются на
основе соединения Bt2Sr2CaCu20x, в серебряной оболочке (Bi 2212/Ag).
Несмотря на относительно низкую критическую температуру этого
соединения (около 90 К), его технологические свойства и
достижимость высоких плотностей критического тока в сильных магнитных
полях при температурах 20-30 К превышают возможности
низкотемпературных (НТСП) материалов при 4.2 К. Этот материал имеет
реальную перспективу для применения в сверхпроводниковых
устройствах с сильными магнитными полями при рабочих температурах
вблизи температуры жидких водорода или неона. В настоящее время
этот материал активно используется в разработках
электротехнического оборудования. Он имеет критическую температуру 107 К,
критическую плотность тока порядка Ю* А-м^ при температуре 77.3 К и
полях ! Тл и менее; с понижением рабочей температуры его
характеристики существенно улучшаются. Стоимость этого материала в
настоящее время около 100 долл. США за 1 кА-м. Рост масштабов его
производства, совершенствование технологии и раскрытие
потенциальных возможностей дают основание ожидать, что в ближайшие
годы его цена снизится до 10-15 долл. за 1 кА-м. Ожидается, что при
этом высокотемпературные сверхпроводниковые устройства станут
конкурентоспособными.
Начат выпуск массивных материалов на основе соединения
УВа2СизО?-х (или NdBa2Cu30?-x), которые в режиме замороженного
поля конкурируют с такими постоянными магнитами, как Nd-Fe-B.
Эти соединения особенно перспективны для создания длинномерных
233
токонесущих элементов с высокой плотностью тока (-10 А-м" ) при
77.3 К в полях до 5 Тл.
Отметим основные физические свойства сверхпроводников, на
которые могут опираться сильноточные сверхпроводниковые
технологии - сверхпроводники имеют нулевое сопротивление при
постоянном токе, т.е. способны передавать постоянный ток без потерь на
нагрев проводника, эффективное сопротивление на переменном токе
промышленной частоты из-за потерь на гистерезис и вихревые токи
отличается от нуля, но составляет менее десятитысячной доли
эффективного сопротивления обычного проводника при комнатной
температуре, при значениях магнитного поля ниже так называемого
Мейснеровского [9.9] сверхпроводники обладают идеальным
диамагнетизмом - магнитное поле не проникает в объем
сверхпроводника, поверхностное сопротивление сверхпроводника при частотах,
ниже критических, в 10 - 100 раз меньше поверхностного
сопротивления хорошо проводящих материалов (медь, алюминий) при тех же
температурах.
9.2. Токоограничивающие устройства с коммутацией
магнитного потока
Регулирование магнитного потока в электроэнергетических
устройствах основывается на трех основных принципах - использование
электромагнитного или магнитного экранирования отдельных
участков магнитной цепи, изменение характеристик магнитопровода, и,
наконец, механическое перемещением обмоток и подвижных
элементов магнитопровода друг относительно друга.
Традиционные электромагнитные экраны представляют собой
замкнутые или разомкнутые контуры из металла с хорошей
электрической проводимостью, вытесняющие магнитный поток за счет
реакции вихревых и индукционных токов. Магнитные системы с
экранами широко применяются в приборостроении при конструировании
индукционных, тепловых и электромагнитных аппаратов [9.11].
Нелинейные свойства стали, позволяющие менять
характеристики ^отдельных участков магнитопровода в зависимости от
величины переменного тока основных обмоток или тока обмотки подмаг-
ничивания широко используются при создании энергетических то-
коограничивающих устройств (см., например, [9.12], [9.13]), регули-
234
руемых трансформаторов (см., например, [9.14]). Нашли применение
в силовой энергетике и устройства с механически подвижными
элементами магнитной цепи (см. [9.15]).
Каждый из перечисленных способов регулирования магнитного
потока имеет свои особенности и ограничения.
В частности, электромагнитное и магнитное экранирование на
базе традиционных проводящих материалов связано с наличием
потерь на переменном токе. Устройства с подвижными элементами
электромагнитной системы требуют компенсации значительных
механических и электродинамических усилий, имеют повышенные
величины индуктивностей рассеяния, низкие скорости регулирования.
Устройства, использующие для регулирования выходных
характеристик нелинейные свойства стали, способны осуществлять изменение
тока и напряжения в ограниченном диапазоне мощностей; в режимах
глубокого регулирования при продольном подмагничивании требуют
специальных мероприятий для снижения уровня возбуждаемых
гармоник; при поперечном подмагничивании уровень гармоник
снижается, но требуется большая мощность управления; кольцевое под-
магничивание эффективно только при трехфазном регулировании
симметричной системы питающих напряжений. Для регулируемых
устройств характерно увеличение габаритов и ограничение значения
предельных мощностей.
Использование в качестве электромагнитного экрана
сверхпроводникового материала, сопротивление которого может мейяться в
результате управляемого разрушения сверхпроводимости тепловым
или магнитным полем или в зависимости от протекающего тока,
позволяет реализовать новый способ коммутации магнитного потока и
устройства на его основе.
Известно, что полный магнитный поток, ^пронизывающий
замкнутый безрезистивный контур, остается постоянным до ^fex
пор, пока сопротивление контура равно нулю. При изменении
приложенного магнитного поля в таком контуре индуцируется поток,
точно компенсирующий изменение потока приложенного поля.
Если в качестве материала контура используется «нормальный»
металл, то ток и связанный с ним наведенный магнитный поток
затухают во времени из-за диссипации энергии в активном
сопротивлении контура. В связи с этим такой принцип регулирования
магнитного потока не мог найти применения в традиционном силовом
электротехническом оборудовании.
235
В то же время, использование сверхпроводников в качестве
материала такого контура показало, что магнитный поток может
сохраняться неизменным в течение неопределенно долгого времени, и
лишь нарушение сверхпроводимости на каком-либо участке
приводит к изменению связанного с контуром потока.
Анализ характеристик наиболее совершенных генераторных
выключателей, выпускаемых фирмами Brown Bovery, DeM Alsthom,
Mitsubishi, проведенный с учетом перспективы роста аварийных и
номинальных токов генераторных цепей, позволяет сделать вывод о
предельных возможностях контактного принципа коммутации.
Увеличение плотности тока в контактной системе осуществляется
только за счет интенсивного охлаждения водой, воздухом или элегазом и
связано с существенными потерями энергии и значительным
усложнением конструкции. Выключатели с повышенной плотностью тока
требуют ревизии с заменой контактной системы после нескольких
отключений тока 150 - 200 кА.
Одним из способов ограничения аварийных токов является
включение в сеть специальных токоограничивающих устройств
(ТОУ), например, резонансного типа. Однако резонансные ТОУ
имеют сложную многоэлементную систему, высокую стоимость,
большие габариты, и их реализация пока целесообразна на мощности
не выше 10-15 MB А. В настоящее время в качестве
перспективного рассматривается устройство с нелинейной вольт-амперной
характеристикой - управляемый реактор [9.16], являющееся более
простым и дешевым, чем резонансное ТОУ, и позволяющее
ограничивать токи короткого замыкания без существенного изменения
нормального режима системы. Однако следует отметить, что любое
ТОУ, рассчитываемое на перетоки мощности в сотни киловольтам-
пер при напряжении не ниже 330 кВ, по своим размерам и весу не
меньше трансформаторов такой же мощности и класса напряжения.
Выбор места включения ТОУ зависит от соотношения между
токами подпитки короткого замыкания, и определяется схемой
электрической сети. Однако в большинстве случаев место включения
соответствует непосредственной связи ТОУ с трансформатором и
выключателем: цепи генераторного напряжения, последовательное включение с
трансформатором, связывающим распределительные устройства
разных напряжений, секции сборных шин и т.д. В связи с этим
представляется целесообразным создание универсального устройства,
объединяющего функции трансформатора, токоограничителя и выключателя
236
при значительном уменьшении суммарного веса и объема. Общие
требования, которым должно отвечать такое устройство, состоят в
преобразовании и регулировании напряжения в рабочем режиме,
ограничении аварийного тока, отключении отходящих линий в аварийном
режиме, защите трансформаторного устройства при коротком
замыкании на его выводах, осуществлении автоматического повторного
включения, регулировании уровня срабатывания защит и т.д.
Для решения перечисленных выше проблем наиболее удобным
было бы создание токоограничивающего выключателя -
трансформатора, способного работать с большими номинальными токами,
ограничивая при этом их ударное значение в аварийных режимах.
Использование выключателя такого типа позволило бы по-новому
сформировать и схемы высоковольтных распределительных
устройств с меньшим числом дорогостоящих ячеек. Однако
физические пределы контактной системы сильноточной коммутационной
аппаратуры [9.17] не позволяют решить такую задачу на основе
известных принципов отключения. Использование бесконтактной
полупроводниковой апаратуры для отключения токов в несколько
десятков килоампер малоперспективно, поскольку для этого
требуется существенное увеличение физических и технических
возможностей выключателей такого типа [9.18].
Потенциальные места размещения токоограничивающих
устройств в качестве самостоятельных объектов могут быть определены
только после детальной проработки технических характеристик
таких устройств и в тесной корреляции с общей структурой
координации токов короткого замыкания ЭЭС. Наряду с этим использование
ТОУ может оказаться целесообразным, а в ряде случаев и
необходимым, в составе комплексов сверртроводникового оборудования, в
частности, в качестве быстродействующей защиты
сверхпроводниковых кабельных вводов и сверхпроводниковых трансформаторов.
В работах [9.! 9] - [9.21] были сформулированы основы теории
переключателей магнитного потока на основе управляемых
сверхпроводниковых экранов. Примеры и основные аспекты реализации
токоограничивающих устройств с коммутацией магнитного потока
подробно изложены в [9.22 - 9.31].
Работа токоограничивающего устройства трансформаторного
типа (ТОУТ) основывается на коммутации магнитного потока
посредством сверхпроводникового экрана. Подробный анализ этого
процесса изложен в работах [9.7], [9.10], [9.21], [9.46]. Процессы в
237
магнитных цепях со сверхпроводниковыми экранами, а также
вопросы реализации автотрансформаторных и трехфазных схем то-
коограничивающего устройства подробно изложены в [9.47], [9.48]
Устройство такого типа может быть реализовано в адаптивном
варианте, при котором для переключения состояния не требуется
внешного управления, а переход выполняется при превышении
установленной величины тока в обмотках устройства.
Рассмотрим в настоящем разделе только основные положения,
необходимые для понимания принципиальных технических решений
и особенностей работы такого рода устройств. В приложении
приведены характеристики макетного образца устройства мощностью
К) кВ-А и эскизного проекта устройства мощностью 450 MB-А.
9.2.L Управление магнитным потоком с использованием
сверхпроводниковых экранов
Рассмотрим обобщенное представление участка магнитопровода
с экранирующей обмоткой.
Для этого представим магнитопровод в виде выделенного
участка яя', к которому присоединена оставшаяся часть электромагнитной
системы как эквивалент относительно этого участка с
соответствующими параметрами - эквивалентной намагничивающей силой /^
и эквивалентным сопротивлением 7?^^ (см. рис. 9.1,я).
Ф,и Ядя)
Ф
-с=ь
я
^П
я'
а)
-Е=3—<—
^
^
б)
я'
Ф,
Я,.
я
Я
V^7
Рис. 9.!. Экранированный участок магнитопровода и его схема замещения.
238
Представим экран на участке яя' в виде обмотки с некоторым
произвольным количеством витков м^,, связанных с потоком Ф^,
протекающим в стержне с магнитным сопротивлением Д^ и потоком
рассеяния Ф, протекающим вне стержня по пути с магнитным
сопротивлением Я,. Пусть эта обмотка нагружена внешней
индуктивностью Z,„ и активным сопротивлением ^.
Тогда система уравнения для контура обмотки совместно с
уравнениями для магнитных контуров имеет вид:
[^ +уя;(4 +4)]-^ + 7""э(Фм +<Ь,) = 0;1
^-^=(*A;o+*A,)^; (9.!)
^=Я,Ф,. J
При отсутствии экрана поток в стержне определяется как
Ф.=—3L-- (9-2)
Ямо + я*/
Подставляя (9.2) в (91), выразим поток в стержне через поток
неэкранированного стержня в виде:
где <x,=L,/Z,, <x„=Z,,,/Z,, )9 = ^/6)Z, L - полная индуктивность
экрана.
Из последнего выражения видно, что при отсутствии активного
сопротивления в цепи экрана (/? = 0) поток, пропускаемый
экраном, определяется индуктивностью рассеяния экрана,
индуктивностью нагрузки и совпадает по фазе с исходным потоком. При вве-
239
дении в цепь экрана большого активного сопротивления /? »1 или
индуктивности сг„ »1 экран полностью пропускает исходный
магнитный поток.
Рассмотрение соотношений (9.3) и (9.4) показывает, что при
малых и больших величинах /У угол сдвига фазы потока мал. В
связи с этим, когда требуется существенное изменение величины
потока через экранируемый магнитопровод, целесообразно
использовать экстремальные значения /?, осуществляя тем самым
дискретную коммутацию экрана. Для плавного регулирования потока
целесообразно использовать изменение величины яг„ при близких к
нулю значениях /?. Параметр от, является конструкционным
параметром, зависящим от конкретного выполнения экрана и связанных
с ним обмоток, и должен учитываться как ограничительное условие
при регулировании потока.
Зададим условия качества коммутации, считая, что пропускание
потока, не превосходящего по величине f Фр (где я - малая
величина) является замыканием экрана; и, наоборот, пропускание потока,
превосходящего по величине (!-^)Фо, - размыканием экрана.
Тогда, например, при f = 0,01 в сверхпроводящем режиме экрана
пропускается не более 1% исходного потока, а в резистивном режиме
пропускается свыше 99%.
Из (9.3) следует условие замыкания:
(я,+л,,)'+/?з^'(1 + а,,)'. (9.5)
Очевидно, что величины {и,,/?}, заключены внутри окружности
с радиусом /7 = f(l + <x„). Область допустимых значений {и,;/?},
удовлетворяющих условию замыкания экрана, расположена в
секторе круга в первом квадранте системы координат (см. рис. 9.2). Если
внешняя индуктивность так велика, что #„>/?, то не существует
допустимой области значений {яг,;/?}, т.е. конструкция экрана не
удовлетворяет условиям замыкания.
Для режима резистивного состояния экрана справедливо
соотношение:
240
Е<*,.
Рис. 9.2. Зависимость областей экранирования и пропускания магнитного потока от
параметров экрана.
(<*,+я,у
/?'
2F
^1.
(9.6)
Область значений {я^,^}, удовлетворяющая условию
размыкания экрана, лежит, таким образом, в первом квадранте системы
координат выше кривой эллипса с полуосями (1 + я„) "
, и ниже уровня я, = 1. Последнее условие является
(l + gJVl-2^
V27
следствием определения я, = Z,,/Z ^ 1.
Выражения (9.5). (9.6) позволяют определить предельно
допустимые величины параметров я и /?, необходимые для обеспечения
коммутации экрана с учетом реальных соотношений индуктивностей
в цепи замкнутого сверхпроводникового контура. Решая неравенства
(9.5), (9.6) относительно /9, получим:
Anin ^(1 + <*У-(<*,+я,У;
(9.7)
Дм* ^ J^{<' + "")'-<"' + "">']' С-Х>
24!
Дополнительным условием существования /?^„ является
положительность значения подкоренного выражения. Тогда допустимые
соотношения между индуктивностью рассеяния и внешней
индуктивностью сверхпроводникового контура получат вид:
Параметры f и и, по определению положительны. Тогда, если
аг„ также положительно (т.е. реактивность в цепи имеет
индуктивный характер), то для аг„ и а, можно записать:
<x,<^L; <i,<f. (9.10)
Для оценки порядка величин /?„,;„ и /У^ рассмотрим
выполнение условий коммутации при ^ = 0,01. Полагая, что
сверхпроводниковый контур не имеет внешних индуктивностей, т.е. л, =0,
ог„ =0, получим /?„,;„ =0,01, /?дщд =7 . Первая величина
определяет предельно допустимое сопротивление сверхпроводника,
вызванное потерями на переменном токе. Вторая величина
определяет необходимое сопротивление экрана в «нормальном» состоянии.
При выполнении этих условий экран можно считать идеальным
коммутатором магнитного потока для расчета стационарных
режимов работы.
Для плавного регулирования потока в экранируемом магнито-
проводе целесообразно использовать изменение индуктивности
нагрузки в цепи экрана, поскольку плавное изменение резистивности
экрана может привести к нежелательному сдвигу фазы между
исходным и пропускаемым потоками и существенным тепловыделениям в
сверхпроводниковом контуре [9.21]. Для предотвращения поворота
экранируемого потока относительно фазы основного
намагничивающего потока необходимо обеспечить малое значение величины
активной составляющей цепи экрана (/7^0).
Допустимую величину /?<,„,, можно определить, полагая, что при
регулировании потока отклонение фазы экранированного потока от
242
фазы основного потока не должно превышать некоторого малого
угла йьм .
Принимая во внимание, что при малых углах справедливо
соотношение tg(%„,,)Ay%?^,,, из (9.4) получим условие для определения
величины допустимого активного сопротивления в цепи экрана,
определяемое величиной реактивности я в цепи регулирования экрана
в виде:
^<)<ж(1-",)
1(я,+Яр)(1 + <*,)1
При выполнении этого условия из (9.3) получим поток в магни-
топроводе в виде:
1 + я,
На рис. 9.3 представлена зависимость изменения отношения
регулируемого потока к начальной величине потока без экрана.
0,00! 0.01 0,1 1 10 100
Рис. 9.3. Изменение регулируемого потока (в относительных единицах).
Переменную регулирующую индуктивность можно
охарактеризовать двумя параметрами - базовой индуктивностью ^,, и
коэффициентом изменения индуктивности А, равным отношению наимень-
243
шей величины индуктивности нагрузки экрана к ее наибольшей
величине. Для каждой конструкции переменной индуктивности
(реактора) кратность изменения А является определенной величиной,
обусловленной конфигурацией магнитной системы реактора и способом
управления индуктивностью.
Обозначив отношение потоков в виде А = Фд, /Фф, получим
выражения для максимального и минимального потоков в магнитопро-
воде:
""* ! + <*„'
^^^ — *
1 + %-<эг„
(9.12)
На рис. 9.4 приведены кривые А^ = /^ -Лы;„ =/(я )при
различном значении А, характеризующие диапазон изменения потока.
1,0
0,8
0,6
0,4
0,2
0
[АХ
//
^*
^
^——
^А=0 }
*=0,1
^==0,41
(^
^
8
10
Рис. 9.4. Зависимость величины диапазона регулирования для разных кратностей
изменения индуктивности реактора.
На каждой кривой наблюдается отчетливо выраженный
максимум, связанный с оптимальным значением ^ м/, которое
соответствует корню уравнения AA(6r„) = 0:
",,<,,; =J^
(9.13)
244
Отметим также, что использование предложенного метода экви-
валентирования магнитных цепей дополнительно создает
предпосылки для реализации управляемых трансформаторов со
сверхпроводниковым экраном [9.58], трансформаторных и
автотрансформаторных устройств со стабилизированной по напряжению третичной
обмоткой [9.10], [9.49], [9.50].
9.2.2. Принцип работы токоограничивающего устройства
Устройство может быть выполнено по трансформаторной или
автотрансформаторной схеме. Принципиальная схема однофазного
трансформаторного устройства с управляемым сверхпроводниковым
экраном приведена на рис. 9.5.
Рис. 9.5. Принципиальная схема однофазного токоограничивающего устройства.
На стержнях устройства размещены односекционная,
двухсекционная и экранирующая обмотки. Односекционная *ц и
экранирующая и^ обмотки расположены на разных стержнях. Секции
и^ и и^ объединены таким образом, что при отсутствии
экранирования (резистивное состояние экрана) суммарная ЭДС
двухсекционной обмотки равна нулю, т.е. магнитная связь между
обмотками отсутствует.
В устройстве реализуется эффект перехода экрана из
сверхпроводящего состояния в «нормальное» при превышении одного из
критических параметров сверхпроводника - температуры, магнитного
поля или плотности тока. В режиме аварийного переключения пере-
243
ход в резистивное состояние осуществляется автоматически за счет
увеличения тока в замкнутом контуре экрана.
Для построения электрической схемы замещения устройства
рассмотрим уравнения электрического равновесия в виде:
-(Л
—Z] э "Zi
-Z
2)
^2
^22
-Z
-Z3, -Z32
^зз J
Л
4
(9.14)
У,
6)
2«0
Z,
-CTJ-
и^
6)
у,
Рис. 9.6. Эквивалентная электрическая схема замещения однофазного
трансформаторного коммутатора.
246
где Иц^+уА'ц, Z22=^+7(^22+^44-2^4)^22^ ^33 = ^3+7^33
- собственные сопротивления первичной, вторичной обмоток и
экрана; Z32 = Z23 = У(^23 ^ ^347 ? ^21 = Z^ = У (^2 - Л^) ?
^з ^ ^31 * 7^13 " взаимные сопротивления обмоток.
На рис. 9.6,я представлена соответствующая эквивалентная
схема замещения.
Параметры схемы, выражаются следующим образом:
Z„=Zn^^3-*-Zl2' Z„;,=Z,2, ^=^22"^33"*^!2^ ^яс=^3'
^с = ^33 " ^13 ^ ^23 ^ ^Ьс ^ ^23
Сопротивления Z^, Z^, Z^ соответствуют индуктивностям
рассеяния и активным сопротивлениям первичной, вторичной обмоток и
экрана; сопротивления Z^,Z^,Z^ характеризуют магнитную связь.
Режим работы устройства определяется изменением сопротивления
экрана Z^.. Учитывая условие Z^ = 0, эквивалентную схему
рабочего режима можно представить в виде, показанном на рис. 9.6,6.
В режиме токоограничения, когда сопротивление Z, становится
достаточно большим, эквивалентная схема устройства распадается
на две не связанные друг с другом цепи (рис. 9.6,е). Передача
энергии во вторичную цепь прекращается, и процесс затухания тока
определяется параметрами вторичной обмотки и нагрузкой. Следует
отметить, что в отличие от традиционных способов токоограничения,
связанных с включением в цепь большого индуктивного
сопротивления, устройство с коммутатором магнитного потока дополнительно
снижает связь нагрузки с источником питания и в предельном случае
работает как выключатель.
Параметры магнитной цепи устройства можно оценить считая,
что экран полностью пропускает магнитный поток в нормальном
состоянии и полностью задерживает переменную составляющую
потока в сверхпроводящем состоянии.
В режиме выключателя обеспечивается отсутствие магнитной
связи между первичной и вторичной обмотками, т.е.
^<й = ^12 =^2! =0 -
Тогда числом витков секций вторичных обмоток определяется
следующим соотношением:
W2(Ri+R2)-"4^=0- (9.15)
247
Представляя индуктивности обмоток в виде Z, = Af + Z,,, где Af
- индуктивность, обусловленная потоками, замыкающимися по маг-
нитопроводу, /,, - индуктивность, обусловленная потоками, целиком
замыкающимися по воздуху, выразим Af через магнитные
характеристики сердечника в виде:
Af = , (9!6)
Л
ЭКС
где Д.„м "* эквивалентное магнитное сопротивление магнитопровода.
В соответствии с (9.16) индуктивность односекционной
обмотки:
А,„=ч,? ^L±&) . (9J7)
Л/?2 "^ ^N^3 ^ ^2^3
Индуктивность экранирующей обмотки:
^_^+я,)_ ^^^
А/?2 *^" ^N^3 ^* ^2^3
Индуктивность двухсекционной обмотки имеет вид
А%22 =А^2 +М4 -2А%24 - Выражая M2,Af^,Af24 через параметры
магнитной цепи и учитывая условие (9.15), получим:
..2
^(Я,+Д;)
-22-^р (9!9)
Наконец, взаимная индуктивность двухсекционной обмотки и
экрана имеет вид:
^234 =^34 -А^з = ^2^3/^! ^ (9.20)
Взаимоиндуктивность односекционной и двухсекционной
обмоток определена как А/,24 = 0 по условию работы выключателя, а
взаимоиндуктивность односекционной обмотки и экрана имеет вид:
Af ,з = w, и^Я, /(Я,Я2 + Д;Яз + Я3Я2). (9.21)
248
9.2.3. Динамические характеристики устройства
Действия переключателя магнитного потока в магнитной цепи в
какой-то мере похожи на действие полупроводникового вентиля в
электрической цепи. Рассмотрим процесс переключения экрана в
схеме (рис. 9.5), записав матричные уравнения для контуров
первичной, вторичной обмоток и экрана в операторной форме [9.2!]:
[УМ+М^л)] MP)],
(9.22)
где составляющие матрицы начального потокосцепления имеют вид:
Т.,=44-М,^.-М^. (9.23)
Используя параметры схемы замещения (рис. 9.6,я) запишем
уравнение (9.22) относительно сопротивлений контуров а, А, с:
^(Р) + Т^
-^„с -Р^Ь; 4,(р + 3.)
,(9.24)
где^=ц/^,^=?2/^, ^,=^/Z^.
В уравнении (9.24) параметры с индексами л, &, с соответствуют
полным значениям индуктивностей, взаимоиндуктивностей и
декрементам затухания цепей с учетом разделения одной из обмоток
трансформаторного выключателя на две секции,
t^a(p)' ^6 (Р)' ^с(^) " величины напряжения контуров. Начальные
значения потокосцеплений в контурах определяются как:
т./
Т..
* ОС.
=
^
-м„*
.-^.г
-м^
^
-м^
-м„"
-м^
^се .
-
"*<м1
^
.^J
Характеристическое уравнение системы (9.24) имеет вид:
рЗД, + pi д^ + ^ + ^4 = 0 ^ (9-25)
249
где
F, =o-„ =1 + 2-*„*;,,*,„ -^ -4 -4.
Яз=<5<А+<5ь<5<+Л,А.
%^ - коэффициенты магнитной связи обмоток соответствующих
контуров,
с - коэффициент рассеяния.
Исследуем корни кубического уравнения (9.25), использовав
теорему Виетта:
Яз
р,+Р2+Рз=--^-;
Яз
PtP2+P]P3+P2P3=-r;
^)^2^3
я,'
(9.26)
В рабочем режиме переключателя магнитного потока состояние
экрана сверхпроводящее, т.е. ^ мало, при этом мало и В^ и,
следовательно, один из корней (пусть /?з) - много меньше других.
Пренебрегая слагаемыми с $. и с /?$, получим:
Д+Р2
^с+^С,,.!
Л^2-
^3='^
(9.27)
Теперь корни ^,/?2 определяются как корни квадратного
уравнения.
250
В режиме размыкания экрана обеспечивается условие
<Sf »<?я * <5г » ^? - Тогда, оставляем в (9.26) только слагаемые с <$,,
получим:
Р,+я+;ь=-^;
Pl^2 + Р]Рз + ^2^3 = -^-^ "
(9.28)
Отсюда следует, что один из корней (пусть Рз) всегда
значительно больше других, поскольку соответствует большому
декременту затухания разомкнутого экранирующего контура.
Пренебрегая слагаемыми, не содержащими %, получим:
^л-
Д7?2
Pi=-
<?.
<5г<?яЬ
(9.29)
Определение корней ^,^ "^ вь:зывает затруднений, отметим
лишь, что при наложенных условиях эти корни удовлетворяют
характеристическому уравнению двухобмоточного трансформатора,
чего и следовало ожидать, поскольку при <$^ -юо, третий контур
разорван.
В случае, когда обмотки выполнены таким образом, что после
коммутации взаимная индуктивность между первичными обмотками
равняется нулю, т.е. схема распадается на два независимых контура
(см. рис. 9.5,с), решение получает следующий вид:
251
(9.30)
При переводе экрана в нормальное состояние принужденные
токи вторичной обмотки и экрана малы в соответствии с
принципами работы устройства, а принужденный ток первичной обмотки
равен намагничивающему. Пренебрегая намагничивающим током,
можно считать, что переходной режим определяется свободным
процессом, обусловленным энергией, запасенной на момент
переключения экрана:
7='
(9.3!)
где
4(')=
<r<,j^
Су =(р-,й)(р-Р2)(р-,Рз).
С,=сг
У*
Сз=^Д
^=7;
Сз=0
^7
А^ - коэффициенты магнитной связи соответствующих контуров.
Величины коэффициентов Q получают для каждого ^ путем
циклической перестановки индексов !* 7, %* в соответствующих
выражениях.
Учитывая особенности работы устройства %„ь = 0 и пренебрегая
слагаемыми, не содержащими Рз * получим:
«=i
<,".'+ f22.^
,Я<
232
**" /1*1" '
J - ^3 -Я*
4,= '
Таким образом, свободные токи в уравнениях обмоток состоят
из двух компонент: быстро затухающей составляющей е^,
связанной с резистивным состоянием экрана, и медленно затухающей 2-"''
(или е^'), связанной с параметрами соответствующей обмотки.
Большое значение величины ^, соответствующее параметрам рези-
стивного экрана, позволяет рассматривать сверхпроводниковую
экранирующую обмотку как вентильное устройство потока,
работающее в ключевом режиме.
В связи с этим коммутационные процессы в электротехнических
устройствах с переключателями магнитного потока могут
рассматриваться с точки зрения изменения параметров магнитной цепи
устройства, вызванного послекоммутациоцным распределением
потоков. При этом для расчета переходных процессов используется
принцип непрерывности суммарного потокосцепления, на основе
которого рассчитываются независимые начальные условия
переходного процесса, возникающего при переводе экрана в резистивное
состояние. Следует отметить, что скачкообразное изменение токов
обмоток и связанных с ними потоков не приводит к бесконечно
большой суммарной индуцированной ЭДС, поскольку суммарное пото-
косцепление в момент коммутации неизменно.
На рис. 9.7 приведены расчетные кривые изменения тока
вторичной обмотки модели трансформаторного коммутатора при
переводе экрана в резистивное состояние.
253
Модель выполнена однофазной на основе трехстержневого маг-
нитопровода из стали Э310. Первичная обмотка - односекционная,
вторичная - двухсекционная. Контуры устройства имеют следующие
характеристики: <?, = 4,42; <^ = 8,5 ; ^12 = 0,0001; А^ = 0,587;
%2з = 0,772. В режиме отключения в контур экрана вводилось
сопротивление, приводящее к (^ =2000, что соответствует /7 = 6,37. При
этом измерение пропускания потока дало величину 95,7% полного
потока в стержне при отсутствии экрана. В сверхпроводящем
состоянии экрана декремент составлял J^=2,5, что соответствует
/? = 0,008. При этом поток в стержне не превышал !% потока без
экрана.
L0 ^
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
^ 20 40 60 80 100 120 140 160 180 мкс
Рис. 9.7. Изменение тока вторичной обмотки модели трансформаторного токоогра-
ничивающего выключателя при коммутации сверхпроводникового экрана.
По результатам измерений можно сделать вывод, что процесс
экранирования вполне удовлетворительно описывается
изложенными соотношениями и приводит к ожидаемым характеристикам
рассматриваемого устройства.
Следует отметить, что магнитная коммутация с помощью
управляемых сверхпроводниковых экранов обеспечивает
переключение только переменной составляющей потока. В связи с этим пе-
254
h\
г \\
0,1
0,08
0,06
0,04
0,02
-'';
\б
- \\ о
. *r-— , '
0.1 0.2 0,3 0,4 с
ревод экрана в сверхпроводящее состояние не является полной
аналогией механического размыкания стержня в магнитной системе.
При механическом размыкании стержня из его объема выводится
запасенная магнитная энергия, и поток в стержне становится
равным нулю. При переводе экрана в сверхпроводящее состояние
поток, имеющийся в стержне, сохраняется («замораживается»),
вследствие чего не происходит изменения запасенной энергии и,
соответственно, не изменяется имеющееся к моменту коммутации
распределение магнитных потоков.
В приложении к главе приведены примеры расчета
характеристик экранов для токоограничивающих устройств с коммутацией
магнитного потока, показано, что теплофизические свойства экрана
позволяют реализовать работу коммутатора магнитного потока со
временем восстановления сверхпроводящего состояния,
удовлетворяющим требования АПВ в энергосистеме,
9.3. Сверхпроводниковые индуктивные накопители для
электроэнергетических систем
Начиная с 1970 года в разных странах мира постоянно
разрабатывается и совершенствуется множество различных проектов,
связанных со сверхпроводниковыми индуктивными накопителями
энергии [9.32], [9.33]. В настоящее время наибольшее практическое
применение в электроэнергетике нашли сверхпроводниковые
индуктивные накопители энергоемкостью (3-6) МДж, получившие в
технической литературе общее название микро-СПИН. В связи с небольшой
величиной запасаемой энергии основной областью их применения
является повышение качества напряжения в аварийных ситуациях
линий электропередачи [9.34], хотя в ряде случаев они используются
и как регулируемые источники активной мощности. Основным
преимуществом микро-СПИН по сравнению со статическими тиристор-
ными компенсаторами традиционного исполнения является их
высокое быстродействие, позволяющее при провалах напряжения в сети
обеспечить устойчивость синхронной и асинхронной нагрузки
потребителей.
Ведущим производителем микро-СПИН является фирма
American Superconductor (ASC), США, штат Висконсин, которая с
!990 г. разрабатывает, производит и продает сверхпроводниковые
255
индуктивные накопители указанной энергоемкости. Установки
фирмы ASC работают на ряде предприятий США, Европы и
Южной Африки. Магнитная система промышленно выпускаемых мик-
ро-СПИН выполнена на основе ниобий-титанового
сверхпроводника, работающего при температуре жидкого гелия, и размещена в
криостате с вакуумной тепловой изоляцией. Особенностью
конструктивного исполнения является использование токовводов,
выполненных из высокотемпературного сверхпроводника (провод
BSCCO-2223 в металлической матрице). Такое решение позволило
более, чем в Ю раз снизить теплоприток по токовводам и,
используя эффективные и надежные микроохладители, создать
малогабаритный индуктивный накопитель, не требующий постоянного
обслуживания. Формирование системы связи СПИН на основе
запираемых тиристоров позволяет осуществлять работу накопителей
как в режиме выдачи, так и потребления реактивной мощности.
Важной особенностью разработанного микро-СПИН является
возможность размещения его криостатированной магнитной системы
совместно с преобразователем и преобразовательным
трансформатором в мобильном контейнере. В этом случае включение
накопителя на подстанции в соответствующем узле электропередачи не
требует использования специального помещения.
Техническая возможность использования
сверхпроводниковых индуктивных накопителей в энергетических системах
подтверждается опытом энергетики США. В [9.35] рассматривается
возможность поддержания локального напряжения на
подстанциях при изменениях мощности потребления, а так же при
кратковременных аварийных перерывах электроснабжения потребителей
вследствие внезапных отключений воздушных линий и
кратковременных понижениях напряжения на 30-90% посредством
микро-СПИН (F„ =0,5-10^ Дж), распределенных по подстанциям
Северного кольца Wisconsin PubHc Service Corp. (WPS-сети) с
суммарным потреблением 200 МВт активной мощности в
максимальных режимах. Первоначальный проект предусматривал установку
шести таких устройств. Установка СПИН в узлах с нагрузками
позволяет решить проблему обеспечения стабильного напряжения
и в целом проблему устойчивости энергорайона до ввода в
эксплуатацию дополнительных воздушных линий с целью
повышения надежности энергоснабжения предприятий и населенных
пунктов Северного кольца WPS-сети.
256
Американский научно-исследовательский институт
Электроэнергетики (EPRI) опубликовал результаты наблюдений за работой
СПИН в более чем сотне узлов энергосистемы США. Результаты
наблюдений показали, что благодаря работе накопителей примерно
85% провалов напряжения имело продолжительность меньше 0,5 с, в
95% случаев работа накопителей предотвратила отключение
потребителей [9.36].
В настоящее время сверхпроводниковые индуктивные
накопители рассматриваются как одно из эффективных средств повышения
устойчивости электроэнергетических систем [9.37] - [9.39].
Отличительными свойствами накопителей являются быстродействие,
высокий кпд., возможность полной автоматизации ввода и вывода
энергии, большая удельная энергоемкость.
Связь накопителя с сетью осуществляется через
полупроводниковый преобразователь, причем по отношению к энергосистеме
сверхпроводниковый накопитель и преобразователь выступают как
единый объект с обобщенными характеристиками, а режимы
энергосистемы являются определяющими при выборе параметров
регулируемого устройства накопления энергии.
На индуктивные накопители малой и средней энергоемкости
(единицы и десятки МДж) могут быть возложены задачи увеличения
пределов передаваемой мощности линии по условиям динамической
и статистической устойчивости, демпфирования
электромеханических процессов в генераторах в послеаварийных режимах [9.40]. На
накопители большой энергоемкости (несколько сотен МДж) могут
быть возложены задачи сглаживания нерегулярных колебаний
мощности по линиям, связывающим энергосистемы, обеспечения
компенсации колебаний энергопотребления, поддержания работы
региона энергосистемы в период тяжелой аварии и т.п. [9.41] - [9.43].
При этом, по существу своих функциональных возможностей
сверхпроводниковый накопитель является противоаварийным
силовым устройством, адаптивным к меняющимся режимам
энергосистемы.
Конструктивно накопитель состоит из сверхпроводниковой
магнитной системы (CMC) в виде одной или нескольких индуктивных
катушек, выполненных из сверхпроводникового материала и
имеющих систему криообеспечения и защиты от перехода в нормальную
фазу. Связь катушек с сетью переменного тока осуществляется
обратимым полупроводниковым преобразователем и фильтрокомпенси-
257
рующим устройством подавления генерируемых преобразователем
высших гармонических составляющих.
Независимое регулирование активной и реактивной
мощностей, потребляемых СПИН от энергосистемы, возможно при двух-
параметрическом управлении преобразователем. В частности,
если преобразователь может быть выполнен по двухмостовой схеме
с последовательным соединением блоков по цепи постоянного
тока. В качестве устройства связи CMC с сетью переменного тока
помимо двухмостового преобразователя могут быть использованы
и другие схемы, в частности шестифазной преобразователь с
трехфазным уравнительным реактором и управляемыми
буферными вентилями. В общем случае выбор схемы преобразователя
обусловлен необходимостью работы с сильными токами,
характерными для сверхпроводниковых устройств, возможностью
осуществлять раздельное и независимое управление активной и
реактивной мощностью накопителя и требованиями гибкой связи
между интервалами хранения, накопления, выдачи и потребления
энергии СПИН. К настоящему времени наиболее подробно для
совместной работы со сверхпроводниковыми накопителями
рассмотрены схемы двухмостовых тиристорных преобразователей
[9.44], [9.45]. Возможность использования других схемных
решений, в том числе и на полностью управляемых
полупроводниковых приборах, в настоящее время находятся в стадии проработки.
Для повышения режимной надежности и управляемости ЕЭС
России, улучшения использования основного
электроэнергетического оборудования и снижения расхода топлива на
электростанциях ведутся работы по исследованию и созданию различных
локальных регулируемых источников активно-реактивной
мощности. Сверхпроводниковые индуктивные накопители (СПИН)
малой энергоемкости (М^ - Ю^ Дж) рассматриваются как одно из
эффективных средств управления электроэнергетической
системой (ЭЭС), на которые могут быть возложены задачи по
выполнению условий её статической и динамической устойчивости.
Возможность практически мгновенно реагировать на изменение
режима и структуры энергосистемы существенно увеличивают
технические преимущества СПИН по сравнению с традиционными
противоаварийными мероприятиями. Целесообразность
использования накопителей в ЭЭС становится понятной, если учесть, что
даже при кратковременном изменении режима противоаварииная
258
автоматика для сохранения устойчивости энергосистемы в
процессе динамического перехода действует на отключение
генераторов с последующим отключением потребителей, при этом,
актуальной задачей является оптимизация использования СПИН для
различных условий и режимов работы ЭЭС при решении задач
противоаварийного управления.
Индуктивные накопители электрической энергии на основе
низкотемпературных сверхпроводников являются в настоящее
время наиболее продвинутыми с точки зрения коммерческого
применения силового сверхпроводникового оборудования в
электроэнергетике. Поставляемые фирмой ASC накопители
энергоемкостью - 0,5-l(f Дж (микро - СПИН) для целей демпфирования
последствий аварийных ситуаций в энергосистеме успешно
эксплуатируются на ряде предприятий США, Европы и Южной
Африки. Рассматривается проект включения более 10 СПИН такой
энергоемкости в Висконсинскую энергосистему для обеспечения
условий её устойчивости. Возможность успешной конкуренции
СПИН с другими устройствами аналогичного назначения
определяется его уникальными характеристиками как практически без-
инерционного локального источника активно - реактивной
мощности, позволяющего существенно снизить последствия
аварийных ситуаций в энергосистемах, ущерб от которых по данным
ЕРШ только для США составляет более 15 млрд. долларов в год.
Обзор технических характеристик отечественных СПИН
изложен в материалах ИВТАН. В случае сохранения тенденций
развития высокотемпературных сверхпроводящих материалов
можно ожидать, что в течение ближайших 5-Ю лет станет
возможным выполнение обмоток СПИН с использованием ВТСП
второго поколения.
Комплексный анализ технических возможностей применения
микро-СПИН показал, что использование СПИН позволяет
обеспечить поддержание и регулирование напряжения в узлах ЭЭС.
Рассматривая сверхпроводниковые устройства в качестве
элементов гибких систем электропередач переменного тока (F)exi-
Ые Atternating Current Transmission System - FACTS), исходя из
выявленных проблем в узлах сети, можно определить
потенциальные места установки некоторых видов сверхпроводникового
оборудования в качестве альтернативы применению технических ре-
259
шений, основанных на использовании несверхпроводниковых
устройств FACTS. В основном это связано с регулированием
реактивной мощности для повышения пропускной способности и
поддержания устойчивости.
В настоящей главе рассматриваются основные понятия,
необходимые для использования СПИН в качестве источника активной и
реактивной мощности в энергосистеме.
В разделе 9.3.1 рассмотрены энергетические характеристики
накопителя и геометрические характеристики обмоток.
Приведены методики расчета процесса выдачи-потребления
мощности СПИН, рассмотрены основные факторы, которые
необходимо учитывать при проектировании таких устройств.
9.3.1.Энергетические характеристики накопителей
Р.3.7.7 Эмдрлмймея яри яястммн<?й.мйм(я<мгтм
При работе в энергосистеме функциональные возможности
СПИН обеспечивают выдачу и потребление активной и реактивной
мощности за счет выдачи (накопления) энергии в магнитном поле
рабочей обмотки устройства. При этом необходимо учитывать
допустимую по соображениям устойчивости материала СП обмотки
скорость изменения собственного магнитного поля, возможный
диапазоном углов регулирования вентильного преобразователя и т.п.
Наличие критической скорости изменения магнитного поля
обусловлено физическими свойствами сверхпроводникового материала (см.
[9.54]). В свою очередь, эта величина ограничивает и допустимую
скорость изменения тока, поскольку магнитное поле
пропорционально току и, кроме того, зависит только от формфактора обмотки.
Общий подход к определению параметров накопителя с учетом
перечисленных условий рассмотрим на примере компенсации
импульсного изменения активной мощности в энергосистеме.
Обычно при расчете процессов в преобразователях с
индуктивной нагрузкой ток катушки индуктивности считают неизменным, по
крайней мере, на протяжении периода частоты сети. Для анализа
энергообмена накопителя такое допущение оказывается чрезмерно
упрощенным, поскольку не обеспечивает соответствия между
конечным значением мощности, выдаваемой или потребляемой сетью, и
изменением энергии, запасенной в катушке.
260
Примем запасаемую в накопителе максимальную энергию
равной Ео, а минимальную энергию, сохраняемую при глубоком
разряде, равной ^ Ео, где ^ - коэффициент глубины разряда. Если
разряд накопителя начинается с максимальной запасенной энергии, а
заряд - с минимальной запасенной энергии, и мощность
энергообмена постоянна, то уравнение баланса имеет вид:
Рг = (1-^)Д^ (9.32)
где Р - абсолютная величина постоянной мощности; у - время
ввода или вывода постоянной мощности.
Изменение тока в обмотке накопителя при разряде имеет вид:
/(/) = /^1-(1-^)//г, (9.33)
где 7%, - ток, соответствующий энергии Д^ -
Соответственно, для режима заряда:
''('W,<o^ + (W)'/i-. (9.34)
Из уравнений (9.33) и (9.34) следует, что максимальная величина
производной тока по времени имеет вид:
7<м*'^ (9 35)
2 V3' ^ '
где 0 = —, и существует на начальном участке заряда (0 = 0) и на
у
конечном участке разряда (0 = 1).
Рассмотрим условия, которым должны удовлетворять параметры
преобразователя с буферными вентилями для обеспечения обмена
энергией с сетью.
Мощность преобразователя:
p(,) = ^^(cos<i, +cos<i2), (9.36)
я*
26!
где L/д, - амплитуда фазного напряжения вентильной обмотки
преобразовательного трансформатора; /(?) - ток через преобразователь;
<1и<22 - углы регулирования.
Принимая <х, = <22 = я и подставляя в (9.36) выражения для тока
из (9.33) и (9.34), получим для режима разряда:
^ =^^^_^_^ рс(м,х, (9.37)
и, соответственно, для режима заряда:
^ = ^"^'^ + (1-^) gcosH . (9.38)
Условия для определения диапазона изменения угла
регулирования при обмене энергией с постоянным значением мощности
можно оценить на основе соотношений:
comJl-(W) <?=т^Ь (9.39)
cos<x^ + (l-^) ^ = ^-^-. (9.40)
Л<^^0
Поскольку правые части выражений (9.39) и (9.40) являются
постоянными, то для постоянства левых частей необходима
компенсация угла регулирования в диапазонах 0 < 0 < 1, ищи, ^ # ^ й^ах -
Обозначив —^gL = K, определим из (9.39) и (9.40) диапазон
углов регулирования при постоянной мощности разряда в виде:
K<[cos6r[<x/\/y, (9.4!)
262
и для заряда в вцде
K/^*<)cos3fj<77, (9.42)
где 7у определяется предельным углом открывания вентилей.
Граничный угол регулирования для обоих режимов может быть
определен из уравнения:
Полученные соотношения определяют ограничения на величины
параметров преобразователя и катушки индуктивности для режима
обмена энергией между сетью и накопителем при постоянном
значении мощности.
Аналогичным образом рассмотрим ограничения, возникающие при
демпфировании гармонических изменений активной мощности сети.
Полагаем, что энергия накопителя может изменяться в
диапазоне от Ео до ^Ео и определяется выражением:
F(^) = Fof^ + ^smn/Y (9.44)
где Q = 2яг/Г; Г - период колебаний мощности в сети.
При этом зависимость мощности от времени имеет вид:
Р(;)=1^яд^ cosQ;, (9.45)
а величина
^=LJLoE<, (9.46)
является амплитудой максимально возможной гармонической
мощности.
В соответствии с (9.46) уравнение баланса энергии имеет вид:
263
^^(W)^, (9.47)
а для изменения тока в обмотке накопителя справедливо
соотношение:
Определяя
уравнение:
'(') = Ab^-^sinO;. (9.48)
производную тока, получаем, аналогично (9.35),
^4^=';,. (9.49)
Наконец, условие реализации обмена максимальной мощностью
^c.sn. = ^^^.^-l^sm^. (9.50)
Очевидно, что при выдаче максимальной мощности <х = а' и
cos(n-/) = l.
Для этого момента времени получаем условие, аналогичное
(9.43):
2у„/„.t )_ frry
„ ,cos^l = ^^. (9.51)
Ниже приведена сводка уравнений безразмерного вида,
определяющих требования к параметрам накопителя для рассмотренных
режимов обмена энергией.
Для удобства обозначим: режим I - постоянная мощность
энергообмена 7^, в течение времени г; режим II - переменная
мощность энергообмена ^cos
У')'
t. Баланс энергии:
^ssii=1 - ^ (режим!); (9.52)
Яо
264
^ = тг(! - ^) (режим II). (9.53)
2. Обеспечение передачи мощности через преобразователь:
^<мм;Т
2^/^cos^ ^
= -^25iL = ^ (режим I); (9.54)
5^ =j5s5!L = jl±^ (режим II). (9.55)
w^g=-^^cosaf
3. Ограничение по скорости изменения тока:
^ = ^§ (режим I); (9.56)
^ = -^г (режим II). (9.57)
На рис. 9.8 представлена диаграмма изменения величин
безразмерных комплексов в зависимости от ^.
Сводка уравнений и диаграмма обеспечивают возможность
проведения расчетов требуемых характеристик накопителя.
Полная совокупность принимаемых во внимание параметров
включает в себя: До, Р, г, t/„, 7^, л,/' ^ т. е. восемь
параметров, связанных тремя уравнениями.
При проведении расчетов необходимо задавать пять параметров
и получать остальные три по диаграмме. Непосредственный выбор
задаваемых и определяемых параметров зависит от конкретной
задачи расчета.
Например, при требовании выдачи накопителем постоянной
мощности 150 МВт в течение 1 с для поддержания динамической
устойчивости синхронной нагрузки в интервале паузы АПВ
целесообразно задать /^ = 15 кА, ^ =20^2 кВ, 7' =13 кА/с. В соответст-
265
вии с диаграммой энергоемкость индуктивной катушки Fo =2,5-10^
Дж, ^ = 0,42 . Граничное значение угла регулирования аг^ =152 .
Соответствующие указанной энергоемкости параметры устройства для
регулирования активно-реактивной мощности: индуктивность
катушки Z, = 2,1 Гн, изоляционное напряжение токовводов - 20 кВ, обратное
напряжение цепи буферных вентилей - 28,2 кВ, максимальное
значение фазного тока эффективное - 4 кА, среднее - 2,5 кА, максимальный
ток в цепи буферных вентилей - 5 кА.
от и. ед.
4,0
3,6
3,2
2,8
2,4
2,0
1,6
1,2
0,8
0,4
^
-
- ^
\/
згзу
t J- Л .... 1
^^
/^
0 0J 0,2 0,3 0,4 0,3 0,6 0,7 0,8 о
Рис. 9.8. Диаграмма изменения безразмерных комплексов:
'«о .
Л.г
ср
;8-
2Л
<м
г/^(1 + ^/^)
При этом в базовом режиме потребления реактивной мощности
типовая мощность преобразовательного трансформатора - 360 МВ-А,
типовая мощность уравнительного реактора - 70 МВ-А, фазное
напряжение реактора - 20 кВ, ток - 5 кА, схема соединения обмоток - зигзаг.
Напряжение преобразователя в режиме заряда накопителя
максимальным током - 16,3 кВ, в режиме инвертирования максимального тока -
] 7 кВ, максимальная потребляемая реактивная мощность - 273 Мвар.
266
Амплитуда компенсируемой накопителем гармонически изменяющейся
мощности при / = 0,35 Гц и ^ = 0,7 составит ^ =80 МВт.
P.J.7.2 Эм^рлмуймем ту^ лмм^йяо^ маммеиим лмщммуии
При необходимости обеспечить сложную форму зависимости
мощности обмена во времени, можно выполнить кусочно - линейную
аппроксимацию по интервалам времени, после чего задачу можно
рассматривать по интервалам с линейным изменением мощности
энергообмена.
Рассмотрим один из интервалов линейного изменения
мощности.
Пусть мощность на интервале имеет вид:
Р(;) = 7!+(Р2-Р1)-. (9.58)
г
При этом изменение энергии имеет вид;
F(?) = ^ + jP(x) ^ = Д,+7>; + 1^__Р1 ^ ^^
1Р2-Р1 .
r^AJ МЛ = Д] 1- rj* -!-
0
Энергия в конце интервала выражается следующим образом:
^=^+АЕ = ^+^!-^г = ^+^г. (9.60)
При этом ток имеет вид:
^-^ ,2
Я,+^;+-^-^- ;
До
(9.6!)
Производная тока:
' ^ <* 2
Яо1
к^.-^''
(9.62)
267
Величина производной в начале интервала:
^^- <""
Величина производной в конце интервала:
;. &.
Лг)=^- - ^. ' ^ - (9.64)
Отношение величины производной в конце интервала к
величине в начале интервала имеет вид:
П1)^/-3-^3. I (9.65)
r(0) ^/JE[ ^ Г^7
В зависимости от того, на какой границе производная тока
больше, производится расчет для данного интервала.
По заданной диаграмме зависимости мощности по интервалам
времени (пусть и интервалов) рассчитаем величину изменения
энергии по интервалам и определим интервал, на котором будет
достигнута минимальная энергия накопителя. Пусть это будет иметь место
в конце некоторого А^-го интервала.
Тогда:
Лд =^ Л„ и Я*' =Я*2-АЯ = ,%-Д,„г. (9.66)
При *^ *' > I критично окончание интервала:
Г =-J°--3- = J2-.A
268
Таблица. Режимы энергообмена.
Режим
обмена
Разряд ^<0;
^=Е^1^1гт.е.^/^>1
Заряд ^„>0;
Характер
изменения
мощности
h
Нарастание мощности
Убывание мощности
Нарастание мощности
^
Убывание мощности
7(0)
7(?)
>1
7(0)
Критично асегда
окончание интервала
2V^o \^2
При —— < 1 критично начало интервала
7) ^2
При -=-—- > 1 критично окончание интервала
<1
^^2
''(г)
/'(0)
Критично всегда
начало интервала
Д„ =
""2^
у _ *ф
7L =
2^о ^
[у^2 ^ ^2
Тогда выражение для определения номинальной энергии имеет
вид:
До=-^-^-. (2.10)
При *^ ^^ < 1 критично начало интервала:
^И ^А2
тогда уравнение для определения номинальной энергии имеет вид:
^-Е.4,^-^ = 0 (9.67)
и следующие корни:
^,„r ±J(^^)'+2^/^^^
^0(!,2) Г^11 (У-ЬК)
Поскольку ^со и Р имеют одинаковые знаки, то решение
квадратного уравнения дает только один положительный корень,
который и соответствует Дот -
Определившись в критическом по энергии интервале % перейдем
в левый смежный интервал %-1 и, повторив процедуру, получим
^0(*-t) -
Из полученной пары величин выберем максимальную и
продолжим переход влево вплоть до достижения начального интервала.
То же самое произведем двигаясь вправо от % до и.
Итогом расчета будет минимальная величина номинальной
емкости, еще достаточная для выполнения заданной диаграммы обмена
мощности.
Отметим, что максимальное значение производной тока в
сверхпроводниковой катушке зависит от соотношения линейно
изменяющейся мощности в начале и в конце интервала энергообмена:
270
для режима разряда:
&=^
для режима заряда:
';
&—А
(969)
где 7^, /^ - производные тока в начале и конце интервала энергооб-
меня
мена
[а.
С учетом (9.69), (9.70), условия ограничения по максимальной
скорости на концах интервала изменения тока:
для режима разряда - наибольшая возможная левая часть из:
для режима заряда - наибольшая возможная левая часть из:
1 + ^/7^ 1 ^
(9.7!)
(9.72)
где J' - максимальная допустимая производная тока по времени.
Условие обеспечения выдачи мощности преобразователем
выполняется при следующем соотношении (без учета падения
напряжения на вентилях):
P(;)^y,„cos<X;,/,,(;),
(9.73)
27!
где (/^ - выпрямленное напряжение холостого хода
преобразователя; аг^р - граничный угол управления вентилями преобразователя
(различный для режимов разряда и заряда); 7^ - ток накопителя.
При линейном изменении мощности ток в накопителе имеет
граничные значения в начале и в конце интервала энергообмена,
различные для режимов разряда и заряда. Тогда условия выдачи
мощности преобразователем имеют вид:
для режима разряда
^<y,,cos^,/<*,;
^<y&,cos^,/<bVy,
(9.74)
для режима заряда
T^C/^coso^,^;]
^^.COSOf;p7<b,
(9.75)
где /^ - ток, соответствующий максимальной энергии накопителя
на интервале энергообмена; 7%,^/У - ток, соответствующий
минимальной энергии накопителя на интервале энергообмена.
Ограничение по максимальному напряжению на токовводах
сверхпроводниковой катушки учитывается следующим
соотношением:
2F
7,
0
где Lf^max -допустимое напряжение на токовводах.
При расчетах энергетических параметров СПИН с
использованием кусочно-линейной аппроксимации режима комплекс
уравнений (483) - (4.92) справедлив для каждого линейного участка с
учетом непрерывности изменения во времени энергии в катушке:
Яо,6=Яо,;±и (9.77)
272
где ; - номер интервала (/+! - для режима разряда, ;-1 - для режима
заряда).
Исходя из (9.77), уравнение общего баланса энергии для JV
интервалов определяется следующим образом.
Баланс энергии на интервале:
ЯоД1-5)=^,г,,
(9.78)
где До, * максимальная энергия на ;-м интервале; ^, - коэффициент
глубины разряда F-го интервала; ^,, =(^,+7^,)/2 - средняя
мощность на t-м интервале времени f;.
Тогда общее изменение энергии за JV интервалов:
х
TV
I
E^^=X(^(i-^)).
(9.79)
Подставив (9.77) в (9.79), получим:
для режима разряда:
>0)
^ /=1 у ^=1
(9.80)
для режима заряда:
Г " ^
^o^v
лг
(9.8!)
где ^Q,, йод, - максимальная энергия накопителя в начале (в конце)
режима энергообмена.
Из (9.80) и (9.81) получим уравнение общего баланса энергии:
/=1 ;=1
(9.82)
273
где Ер - максимальная энергия накопителя; ^ - коэффициент
глубины разряда накопителя; TV - количество интервалов
аппроксимации.
С учетом потерь энергии (к.п.д. 93-:-95%), возникающих в
процессе работы накопителя, минимальное значение коэффициента
глубины разряда <^х должно быть выше ^^ ^0,05-ь0,1. Это условие
определяет минимальное значение Eg *
Е^<г<
Доломи, =угу-- (933)
Исходя из заданного минимального значения Z?Q, значение
коэффициента глубины разряда на каждом интервале аппроксимации
определяется выражением:
для режима разряда
6=^1 ^ ; (9.84)
о; /? _Vp 1-
для режима заряда
6=^1 ^ . (9.85)
На основе приведенного комплекса уравнений разработаны
алгоритм и программа расчета энергетических характеристик
СПИН для режимов разряда и заряда при кусочно-линейной
аппроксимации объема управляющих воздействий активной
мощностью накопителя [9.55].
В качестве исходных данных задаются: максимальная скорость
изменения тока накопителя 7^, максимальное напряжение на то-
ковводах катушки (У^ ^м, выпрямленное напряжение
преобразователя Lf? < Lf, mm , граничный угол управления преобразователем
274
<2;р, минимальный коэффициент глубины разряда накопителя <^„ *
количество интервалов аппроксимации TV, мощность в начале и в
конце z-ro интервала ^;,^, значение времени /-го интервала г,.
Результатами расчета являются: максимальная и минимальная
энергии накопителя Д^, F^, соответствующие им токи С^, /^ ^^,
коэффициент глубины разряда накопителя <^- и индуктивность
катушки А.
Основные соотношения для расчета обмоток СПИН приведены в
приложении.
9.3.2. Использование накопителей для повышения устойчивости
электроэнергетических систем
Вопросы оценки технических характеристик
сверхпроводникового накопителя для противоаврийного управления
электроэнергетической системой рассмотрены в [9.59]. В работе [9.60] выполнен
анализ организации управления перетоками активной мощности по
межсистемным связям с помощью СПИН-систем.
В настоящем разделе изложен материал практического примера
применения сверхпроводящих индуктивных накопителей малой и
средней энергоемкостей в Архангельской ЭС для повышения
устойчивости, пропускной способности линий передачи и демпфирования
электромеханических колебаний.
Особенностью существующей схемы Архангельской
энергосистемы является ее удаленность от энергоисточников ОЭС
Центра и наличие узлов с нагрузками вдоль линий электропередачи,
образующей межсистемную связь между Вологодской и
Архангельской энергосистемами. Электрическая связь между
Архангельской и Вологодской ЭС ОЭС Центра осуществляется по
воздушным линиям ПО кВ и 220 кВ между подстанциями Коноша,
Няндома, Плесецк, Савино. Ближайшая к Архангельской ЭС
крупная электростанция - Череповецкая ГРЭС - находится на
расстоянии 350 км от транзита Вологда-Архангельск, рис. 9.9. Как
показали расчетные исследования, сечением, ограничивающим
передачу активной мощности от Вологодской ЭС, является
сечение "!" между подстанциями Коноша и Няндома с предельно
допустимой мощностью по условиям статической устойчивости
Р,.„. = 165МВт.
275
Морпопоры
СДаинТЭЦ
Архангельская 1
Архам. ЦБК ГГ*Н
^
Черепомикм ГРЭС Волнда
В 1—
по
по
f
ЛС
^
по
Г
220
Хоровск1
) J Хоровск
\-Lg гг^-с
Сечение "У
Сечение "4"
Д№
Сечение "У
220
Сечение Т
220
Сечение "1"
Коноша
TZ-4
Вельск Шангаям Ккзема
^
ILL
ГРЭС
Рис. 9.9. Архангельская энергосистема.
276
Для решения поставленной задачи в качестве расчетного был
принят допустимый по условиям статической устойчивости режим
передачи мощности из Вологодской ЭС ОЭС Центра в
Архангельскую ЭС с перетоком активной мощности в сечении "1" между
подстанциями Коноша и Няндома Р^,, =165 МВт.
На рис. 9.10 показано распределение напряжения по
подстанциям энергосистемы в зависимости от их удаленности относительно
Череповецкой ГРЭС для одного из допустимых расчетных режимов.
При передаче мощности в направлении Архангельской ЭС самое
низкое напряжение имеется в районе ПС Коноша, и это напряжение в
допустимом режиме ниже номинального значения на 6%.
(/, кВ
245
240
235
230
225
220
215
2!0
205
0 100 200 300 400 500 600
расстояние, км
Рис. 910. Распределение напряжения по подстанциям энергосистемы.
277
1 ! Череповецкая ГРЭС
[ * '
}L- -JL- -Л
\ *
1 \ !
1 f
\ '
L- — Д 4- —
<
!
Г ^ 2t Пошехйнье
\ ' '
\ ' '
Li! *
Г 1\
L - -' д.
Г * 1
Сокол *
!
)
!
L t
^ Вологда
<4j
---^-5.
Хобовск^
и
t
!
!
!
t
.--JL-
!
T*
!
!
!
. — — 4- -
!
T*
! !
! )
t !
^ ^
Об^зерная ПО
- — -4 — — ^ .Т.
! ! /
! * /
' [7
СаЬино 9 М
Плесецк 8 J!
V !
*7 / ' *
6 ^f^ Няндома ]
-*Г t ! !
Коношна * [
В процессе анализа были рассмотрены послеаварийные режимы
(ПАР), полученные в результате аварийных отключений воздушных
линий 220 кВ в сечении "1" - ВЛ Коноша-Няндома, в сечении "2" -
ВЛ Няндома-Плесецк, в сечении "3" - ВЛ Плесецк-Савино.
Аварийные отключения сопровождаются локальным снижением напряжения
на подстанциях передачи ниже допустимого значения, нарушением
статической устойчивости ослабленного сечения.
При этом установлено, что для сохранения режима передачи
мощности в Архангельскую ЭС и для обеспечения запаса по условию
сохранения статической устойчивости послеаварийного режима по
передаче (Д^ "°""*) =1.08) потребуется отключение нагрузки в
объеме 66 МВт при ослаблении сечения "I". При ослаблении сечения
"2" суммарный объем отключаемой нагрузки может составить
62 МВт. В случае ослабления сечения "3" из-за недопустимо низкого
напряжения на подстанциях передачи может потребоваться
отключение потребителей в объеме 21 МВт.
Для усиления электрической связи между Вологодской и
Архангельской энергосистемами, обеспечения надежности
электроснабжения потребителей вдоль электропередачи, уменьшения ущерба от
отключения потребителей устройствами ПА в ПАР оценивалась
возможность размещения на подстанциях передачи с наиболее низкими
напряжениями индуктивных накопителей энергоемкостью 5 МДж и
«среднего» СПИН энергоемкостью ! 80 МДж в режиме выдачи и
потребления реактивной мощности.
9.3.2.2. С7иа#имч^с#(ляус#и0йчмё?0С7Мь
Число микро-СПИН, устанавливаемых на подстанциях
передачи, варьировалось от одного до трех. При этом в случае подключения
двух или трех микро-СПИН один из накопителей устанавливался на
подстанции с наиболее низким напряжением - ПС 220 кВ Коноша.
Рассматриваемые варианты отличались местом подключения вдоль
электропередачи 2-го накопителя - в случаях подключения двух
микро-СПИН или 2-го и 3-го из устройств микро-СПИН - в
случаях подключения трех накопителей вдоль передачи.
Для решения поставленных задач накопитель «среднего» класса
с максимальной энергоемкостью 180 МДж может быть подключен
как на ПС 220 кВ Коноша, так и на ПС 220 кВ Няндома. Основные
исследования проводились в расчетной схеме с подключением нако-
278
пителя на ПС 220 кВ Коноша. В отдельных случаях рассматривалось
подключение СПИН на ПС 220 кВ Няндома.
Полученные для расчетного режима в схеме с микро-СПИН
уровни напряжений вдоль транзита Вологда - Архангельск показаны
в виде зависимостей распределения напряжения на рис. 9.!! для
случаев подключения одного двух и трех накопителей малой емкости.
Здесь для сравнения приведено также распределение напряжения в
расчетной схеме без накопителей.
Из анализа режимов с установкой микро-СПИН на подстанциях
передачи следует, что минимальное напряжение по передаче в
результате установки одного накопителя может увеличиться на 4,5%, а
при установке двух или трех накопителей - на 5,8%.
Из проведенного анализа допустимых режимов с накопителями
вдоль передачи следует, что в случае размещения микро-СПИН на
двух или трех подстанциях предпочтительнее установка накопителей
на смежных подстанциях с наиболее низкими напряжениями. Для
расчетных схемы и режима это вариант подключения двух микро-
СПИН на смежных подстанциях Коноша и Няндома (2-В1), а также
вариант подключения трех накопителей к смежным подстанциям
Явенга, Коноша и Няндома (3-В1).
В расчетном режиме с перетоком активной мощности в сечении
"Г' - Р<)<„, =165 МВт подключение накопителя «среднего» класса с
максимальной энергоемкостью 180 МДж на ПС 220 кВ Коноша
приведет к повышению среднего уровня напряжения по передаче на
2,9% при (/усм.= 220 кВ и на 5,3% при ^ = 23! кВ.
На рис. 912 приводится зависимость t/ = /(Z,), из которой
следует, что при задании L^ = 220 кВ минимум напряжения по
передаче переместится в район подстанции Харовск Вологодской ЭС, а
при Lf т. = 23! кВ - минимум напряжения в допустимом расчетном
режиме переместится к ПС Вологда.
Анализ режимов передачи мощности в Архангельскую
энергосистему показал, что при установке устройств микро-СПИН,
работающих в режиме регулирования реактивной мощности на
подстанциях 220кВ, возможно увеличение пропускной способности сечения
"I" в следующих пределах:
+ на 6.5% при установке одного накопителя на ПС 220 кВ
Коноша, (Р^=! 76 МВт);
279
00
243
240
233
230
225
220
213
2Ю
203
^1ЖЖ1
Г \ Н Н П Н ' н/:
1 !^ )!!']) г^И/^'
rr№rrhrbHin*'!
L ! ] ] !7б ] ] ] ] ) '
!^о
100 200 300 400 500 600
л* LL LLL L L-L-L-L-L-L-!
S.i.L....iL
Г1Г Г Г Г Г Г Г p"Ff*^f Jy'
L й L [ L L [ L [^И^
Г ГА Г Г Г Г Г Г-5^и-т ^9
) ) Г1 J Г) ' Г) hi Г '
L L t\^ v ^LLLL^LL
LLLLiLLLLL^l
tilt! П"к! I 1 Н :
!00 200 300 400 500 600
а) один накопитель
б) два накопителя
в) три накопителя
Рис. 9.1!. Изменение распределения напряжения при подключении накопителей.
t/
L
^.
-j$^2i
^?
/
/
^
у
^
245
240
233
230 ]—
223
220
213
2)0
203
0 100 200 300 400 300
Рис. 9.12. Распределение напряжения при подключении накопителя
«среднего» класса.
+ на 15,5% при установке двух накопителей на двух смежных
подстанциях Коноша и Няндома, вариант 2-В!
(^<*?я ^ I В? МВт), либо на ПС Коноша, Явенга, вариант 2-В4
(Р<,.„ = 185МВт);
* на 21% при установке накопителей на трех смежных
подстанциях 220 кВ Явенга, Коноша, Няндома, вариант 3-В!
(Р„,,. = 197МВт).
* на 68% при подключении накопителя среднего класса с
начальной энергоемкостью 90 МДж (Р^д = 273 МВт).
При увеличении начального значения выпрямленного тока /%,
установленный на ПС 220 кВ Коноша сверхпроводниковый
индуктивный накопитель с максимальной энергоемкостью й„ =180МДж,
работающий в режиме управляемого реактора, позволит увеличить
пропускную способность передачи до ^&,я. =ЗМ МВт. При этом
мощность по линии 220 кВ в сечении "Г' по данным расчета режима
составит 265 МВт, что ниже мощности, допустимой по термической
28!
устойчивости. По данным [9.56] для марки провода АС-300 ее
величина составляет 276 МВт.
Установленный на ПС 220 кВ Коноша накопитель с
максимальной энергией Е„ =180МДж может быть использован не только как
управляемый реактор, на него могут быть возложены и другие
задачи. В частности, для накопителей такого класса возможны режимы
компенсации нерегулярных колебаний активной мощности по
передаче, что в значительной степени повысит надежность
энергоснабжения потребителей и обеспечит повышение пропускной
способности электропередачи. С этой целью, используя возможность
выдавать и потреблять активную мощность, СПИН может осуществлять
направленное регулирование активной мощности по передаче [9.57].
Работа СПИН «среднего» класса в режиме выдачи и
потребления активной мощности показана на примере демпфирования
колебаний активной мощности частотой / = 0,35 Гц по линии 220 кВ
Коноша-Няндома. При этом выбор исходных параметров для работы
накопителя в режиме компенсации нерегулярных колебаний
активной мощности по передаче должен быть согласован с другими
возложенными на него функциями. Поэтому начальное значение
энергоемкости накопителя принималось равным F„=0,9 Ю^Дж,
выпрямленный ток накопителя соответственно /^ = 7,75 кА, как было
установлено при работе СПИН в режиме СТК. Уставка регулятора
накопителя по активной мощности была принята равной мощности
по линии 220 кВ в сечении "1" в исходном режиме. Процесс
ограничения накопителем амплитуды колебаний показан на рис. 9.13.
Накопитель включался автоматически по факту превышения
активной мощности по линии. Процесс ограничения накопителем
амплитуды колебаний показан на рис. 9.13,6. При увеличении активной
мощности по линии накопитель работает в режиме потребления
активной мощности. Соответственно при уменьшении ^д/у накопитель
генерирует активную мощность в сеть.
В послеаварийных режимах оценивалась эффективность
подключения СПИН для обеспечения статической устойчивости ПАР и
предотвращения отключения потребителей устройствами противо-
аварииного управления (САОН). При оценке объема нагрузки,
отключаемой средствами САОН, контролировались следующие
параметры послеаварийного режима:
282
О 2 4 6 8 to 12 !4 16 18 20
я)! ' ^дя " /(^) " ^ накопителя,
2 - Рду = /(/) ^средний" СПИН на ПС Коноша
б) Работа СПИН в режимах вьщачи и потребления активной мощности
Рис. 9.13. Регулирование активной мощности на В Л 220 кВ Коноша-Няндома.
283
* напряжения на подстанциях передачи, которые не должны
быть ниже допустимого значения;
* мощности по расчетным сечениям передачи, которые не
должны быть выше допустимой по статической устойчивости
послеаварийного режима;
* мощность по отдельным линиям в расчетных сечениях,
которая не должна превышать мощность, допустимую по нагреву.
Из анализа послеаварийного режима с отключенной ВЛ 220 кВ
Коноша-Няндома в сечении" 1" следует, что при работе
накопителей в режиме регулирования напряжения пропускная способность
оставшейся в работе линии П 0 кВ может быть увеличена на 9% -
при установке микро-СПИН на ПС Коноша, на 16% - при двух
накопителях на подстанциях передачи Коноша и Няндома, на 24% -
при трех микро-СПИН на подстанциях передачи Явенга, Коноша,
Няндома.
Увеличение пропускной способности ослабленного сечения "Г'
в схеме с одним микро-СПИН, регулирующим напряжение на ПС
Коноша, позволит предотвратить отключение 9 МВт нагрузки.
Однако, при установке двух или трех накопителей ограничивающим
фактором, определяющим мощность отключаемой нагрузки, в основном
является допустимая мощность по нагреву воздушной линии ПО кВ,
которая в расчетах была принята равной !22 МВт для марки провода
АС-240 [9.56]. Эта величина меньше допустимой по статической
устойчивости послеаварийного режима, что снижает эффективность
работы накопителей. Аналогичная ситуация ожидается и при
подключении накопителя «среднего» класса на ПС Коноша, когда
эффект, полученный за счет регулирования напряжения на ПС Коноша,
снижается из-за перегрева проводов ПО кВ. В результате при
подключении двух или трех микро-СПИН по передаче или одного
СПИН «средней» энергоемкости на ПС Коноша окончательный
объем отключаемой нагрузки определяется допустимой мощностью по
нагреву проводов ПО кВ и составляет 52 МВт, что на 14 МВт
меньше суммарной мощности, отключаемой устройствами САОН в схеме
без накопителей.
При аварийном отключении ВЛ 220 кВ Няндома-Плесецк в
сечении "2" объем отключаемой нагрузки определяется только
допустимой по статической устойчивости для оставшейся в работе линии
НО кВ сечения "2". При подключении одного микро-СПИН на ПС
284
Коноша объем отключаемой нагрузки может быть уменьшен на 7
МВт. При подключении двух накопителей - на 15 МВт (микро-
СПИН на ПС 220 кВ Коноша, Няндома). Установка трех микро-
СПИН дает возможность уменьшить эту величину еще на 5 МВт
(накопители на ПС 220 кВ Коноша, Няндома, Явенга). В схеме с
индуктивным накопителем «среднего» класса на ПС 220 кВ Коноша объем
отключаемой нагрузки ограничивается пропускной способностью
оставшейся в работе двухцепной линии 40 кВ и составляет
ХРоя =38 МВт, что на 24 МВт меньше, чем в схеме без накопителя
и на 4 МВт меньше, чем в схеме с тремя микро-СПИН.
При аварийном отключении ВЛ 220 кВ Плесецк-Савино
мощность, передаваемая по оставшейся в работе линии 1Ю кВ в сечении
"3", ниже допустимой, но напряжение на подстанциях передачи
Няндома, Плесецк, Савино на 18 - 24% ниже номинального. В этой
связи необходимо отключение части потребителей для коррекции
напряжения в узлах с нагрузкой. Как отмечалось выше, в схеме без
накопителей потребовалось отключение 2! МВт нагрузки. При
одном накопителе на ПС Коноша объем отключаемой нагрузки
уменьшится на 13 МВт и составит 8 МВт нагрузки, отключаемой
устройствами ПА, а при установке двух или трех накопителей на передаче,
равно как и при подключении «среднего» накопителя в режиме
регулирования напряжения в узлах их подключения, необходимость в
отключении потребителей отпадает.
Подводя итоги проведенного анализа повышения статической
устойчивости электропередачи между Вологодской ЭС ОЭС Центра
и Архангельской ЭС можно утверждать, что:
В случае размещения микро-СПИН на двух или трех
подстанциях, предпочтительнее установка накопителей на смежных
подстанциях с наиболее низкими напряжениями. Для расчетных схемы и
режима это вариант подключения двух микро-СПИН на смежных
подстанциях Коноша и Няндома, а также вариант подключения трех
накопителей к смежным подстанциям Явенга, Коноша и Няндома.
При работе микро-СПИН в режиме компенсации реактивной
мощности на подстанциях передачи ожидается увеличение
пропускной способности сечения "Г' от 162 МВт в схеме без накопителей до
176 МВт - при установке одного микро-СПИН на ПС 220 кВ
Коноша, до ! 87 МВт - при подключении двух накопителей на смежных
подстанциях Коноша и Няндома, до 197 МВт - при размещении
микро-СПИН на трех смежных ПС 220 кВ Явенга, Коноша, Няндома.
285
Установленный на ПС 220 кВ Коноша сверхпроводниковый
индуктивный накопитель с максимальной энергоемкостью
F„ = 180 МДж, работающий в режиме управляемого реактора,
позволит увеличить пропускную способность передачи до ^^ = (273 +
3! 0) МВт в зависимости от начальной энергоемкости накопителя.
Подключение одного микро-СПИН на ПС Коноша позволит
предотвратить отключение до 10 МВт нагрузки. При установке двух
накопителей на ПС 220 кВ Коноша и ПС 220 кВ Няндома суммарная
мощность отключаемой нагрузки может снизиться на !5 МВт, при
трех микро-СПИН - на 20 МВт.
Подключение на ПС 220 кВ Коноша сверхпроводникового
индуктивного накопителя «среднего» класса с максимальной
энергоемкостью Е„ = 1.8 - М^Дж позволит предотвратить отключение до
25 МВт потребителей
P.^.ZJ. ^мнямичесжяиусмййчмяйсям
Рассмотрим теперь оценку влияния индуктивных накопителей
малой и средней энергоемкости на динамическую устойчивость
Архангельской ЭС.
С этой целью рассматривались аварийные отключения
ВЛ 220 кВ и двухфазные короткие замыкания на землю у шин
подстанций 220 кВ передачи с последующим отключением
соответствующего участка воздушной линии 220 кВ электропередачи между
Вологодской и Архангельской энергосистемами. В случае
нарушения динамической устойчивости в переходных режимах выбирались
управляющие воздействия ПА для сохранения параллельной работы
генераторов Архангельской ЭС с генераторами ОЭС Центра.
Как показали расчетные исследования, переходные процессы,
вызванные аварийным отключением участка ВЛ 220 кВ передачи,
сопровождаются опасным снижением напряжения на подстанциях
!! 0 кВ с нагрузкой, торможением асинхронных двигателей в составе
потребителей, их опрокидыванием со сбросом активной мощности и
увеличением потребления реактивной, нарушением синхронной
работы генераторов передающей энергосистемы Центра с
генераторами Архангельской ЭС.
Так при двухфазном на землю коротким замыканием вблизи
шин 220 кВ ПС Коноша с последующим отключением ВЛ 220 кВ
Коноша-Няндома переходный процесс характеризуется низкими на-
286
пряжениями на ПС НО кВ Коноша, Няндома. При качаниях
напряжение на шинах с нагрузками может снизиться на 50 -ь 70%. В
результате ожидается опрокидывание асинхронных двигателей на
подстанциях Коноша, Няндома. Синхронная работа между генераторами
Вологодской и Архангельской ЭС нарушается.
При коротких замыканиях, сопровождающихся отключением
ВЛ 220 кВ в сечении "2" между подстанциями Няндома и Плесецк,
также нарушается синхронная работа генераторов Архангельской ЭС
с генераторами передающей энергосистемы. При этом наибольшее
снижение напряжения ожидается на ПС Няндома и, как следствие,
опрокидывание асинхронных двигателей в составе нагрузки на
подстанции.
В целом анализ результатов расчетов переходных процессов на
передаче между Архангельской и Вологодской энергосистемами при
аварийных отключениях линий 220 кВ показали, что основной
причиной неустойчивости переходных режимов являются перегрузка
оставшихся в работе воздушных линий ПО кВ и, как следствие,
глубокая посадка напряжений на подстанциях передачи. Отключение
части потребителей средствами ПА в объеме, необходимом для
сохранения устойчивости послеаварийного режима, несколько снижает
перегрузку связей и приводит к некоторому повышению напряжения
в узлах с нагрузкой. Но этого отключения недостаточно, чтобы
предотвратить торможение асинхронных двигателей,
сопровождающееся ростом потребляемой ими реактивной мощности и дальнейшим
снижением напряжения. Из сказанного следует, что для сохранения
параллельной работы генераторов отправной и приемной
энергосистем в процессе перехода к послеаварийному режиму потребуется
дополнительная разгрузка расчетных сечений.
Для оценки требуемой разгрузки передачи с целью получения
устойчивого динамического перехода была проведена серия расчетов
по выбору дополнительного объема отключаемой нагрузки на
подстанциях. Для случая ослабления сечения "Г' при аварийном
отключении ВЛ 220 кВ после короткого замыкания может потребоваться
отключение потребителей в объеме 113 МВт, что на 48 МВт больше
суммарной мощности потребителей, отключаемых для сохранения
статической устойчивости послеаварийного режима. А при
ослаблении сечения "2" при отключении ВЛ 220 кВ после короткого
замыкания для обеспечения динамической устойчивости потребуется
дополнительное отключения потребителей в объеме 20 МВт.
287
Очевидно, что отключение потребителей для обеспечения
устойчивого перехода к послеаварийному режиму является ущербным
мероприятием. Поэтому дальнейшие исследования были направлены
на исключение дополнительного отключения нагрузки для
сохранения динамической устойчивости, или, по крайней мере, на его
уменьшение.
С этой целью были рассмотрены варианты установки микро-
СПИН энергоемкостью 5 МДж: одного микро-СПИН - на ПС 220 кВ
Коноша, двух микро-СПИН - на ПС 220 кВ Коноша, Няндома, трех
микро-СПИН - на ПС 220 кВ Коноша, Няндома, Явенга, а также
вариант подключения СПИН «средней» энергоемкости на ПС Коноша
для поддержания напряжения в переходных режимах.
Из анализа полученных результатов следует, что в случае
аварийного ослабления сечения "1" и отключения нагрузки в объеме,
необходимом для сохранения статической устойчивости послеава-
рийного режима в схеме без накопителей (^„^^ ^**** =66МВт),
устойчивость переходного процесса обеспечивается при работе двух
или трех накопителей в режиме быстродействующего СТК. В случае
подключения одного микро-СПИН устойчивость перехода
обеспечивается лишь при простом аварийном отключении ВЛ 220 кВ
Коноша-Няндома. При аварийном отключении линии 220 кВ в сечении
"2" и отключении потребителей в объеме /^ ^ с""" = g2 МВт
средствами противоаварийного управления устойчивость
переходного процесса обеспечивается уже при работе одного накопителя на ПС
Коноша в режиме СТК
На рис. 9.14 показана суммарная мощность отключаемой
нагрузки ITPp/f , которая потребуется для разгрузки передачи в
переходных и послеаварийных режимах, в зависимости от количества
микро-СПИН, установленных на передаче.
При установке уже одного микро-СПИН на ПС 220 кВ Коноша
объем отключения нагрузки уменьшиться на 40% при авариях в
сечении "1" и на 25% - при авариях в сечении "2".
Для сохранения параллельной работы генераторов приемной и
передающей энергосистем при отключении ВЛ 220 кВ Коноша-
Няндома в схеме с накопителем максимальной энергоемкости
Е„ = 180 МДж на ПС Коноша достаточно отключение потребителей
суммарной мощностью, равной мощности отключения нагрузки, не-
288
обходимой для сохранения статической устойчивости послеаварий-
ного режима, т.е. ^]Р<„, = 52 МВт.
ж
<2
1 2
количество микро-СПИН
Я Рон-сечение"1"
П Рон-сечение"2"
Рис. 914. Суммарная мощность отключаемой нагрузки.
Чтобы сохранить устойчивость переходного процесса при
аварийном отключении ВЛ 220 кВ Няндома-Плесецк в результате
двухфазного КЗ на землю также достаточно отключить нагрузку в
объеме, не превышающем объема сохранения статической устойчивости
послеаварийного режима с отключенной ВЛ 220 кВ в сечении "2".
Для расчетной схемы с индуктивным накопителем «среднего» класса
эта величина составила У*^аУ =38 МВт.
Таким образом, из анализа результатов расчетов управляющих
воздействий ПА для сохранения динамической устойчивости
переходных режимов и статической устойчивости ПАР следует, что в
схеме с индуктивным накопителем с максимальной энергоемкостью
Я„ = 180 МДж на ПС 220 кВ Коноша, работающего в режиме СТК,
для сохранения параллельной работы Архангельской ЭС с ЕЭС
России в переходных режимах потребуется отключение нагрузки проти-
воаварийным управлением в объеме, который необходим для
сохранения устойчивости послеаварийных режимов.
289
9.4. Выводы
Реализация основных стратегических направлений развития
электроэнергетики предполагает существенное расширение
эксплуатационных возможностей известных технических средств и
разработку принципиально новых устройств с повышенными
техническими характеристиками.
В настоящее время, в связи с развитием технологии
сверхпроводниковых материалов, значительное внимание уделяется
использованию в электроэнергетических системах устройств и
оборудования, связанного с использованием особых, присущих таким
материалам свойств и возможностей
Вследствие разнообразия видов и функционального назначения
устройств анализ применения этих устройств в электроэнергетике
является комплексной и многофакторной задачей, при этом должны
быть использованы как критерии, единые для всего комплекса
рассматриваемых устройств, так и специфические критерии,
применимые к каждой отдельной группе.
Для решения проблемы координации уровней токов короткого
замыкания с техническими возможностями выключателей
целесообразным является использование адаптивных токоограничивающих
устройств с использованием сверхпроводниковых материалов, в
частности, рассмотренного в настоящей главе токоограничивающего
выключателя - трансформатора с коммутацией магнитного потока,
способного работать с большими номинальными токами,
ограничивая при этом их ударное значение в аварийных режимах.
Общие требования, которым должно отвечать такое устройство,
состоят в преобразовании и регулировании напряжения в рабочем
режиме, ограничении аварийного тока, отключении отходящих линий в
аварийном режиме, защите трансформаторного устройства при
короткого замыкания на его выводах, осуществлении автоматического
повторного включения, регулировании уровня срабатывания защит и т.д.
Использование сверхпроводниковых индуктивных накопителей
малой (до 5 МДж) и средней (до 200 МДж) мощности позволяет
решать вопросы повышения статической и динамической устойчивости
ЭЭС, в. том числе, с компенсацией провалов напряжения на слабых
связях, демпфированием колебаний активной мощности, увеличнием
пропускной способности передачи. Кроме того, использование СПИН
позволяет существенно снизить объем отключения нагрузок устройст-
290
вами ПА для предотвращения асинхронного хода на передаче и
обеспечения ее статической устойчивости в послеаварийных режимах.
Чтобы предотвратить отключение потребителей
автоматическими устройствами отключения нагрузки по частоте, установленный на
передаче сверхпроводниковый индуктивный накопитель «среднего»
класса может быть использован также для поддержания частоты
выше уставки срабатывания первой очереди АЧР.
При необходимости деления энергосистемы актуально
сохранение устойчивости потребителей на подстанциях передачи. На
подстанциях, наиболее удаленных от генерирующих источников
мощности, напряжение может снизиться на 60 - 70 %. В такой ситуации
наименьший ущерб от отключения потребителей из-за провалов
напряжения может быть получен при условии подключения на ПС
передачи микро-СПИН, работающих в режиме быстродействующих
регуляторов реактивной мощности.
291
Приложения
К главе 3. Устройство выявления и ликвидации
асинхронного режима «АЛАР-М»
П.3.1. Основные технические характеристики устройства
Устройство предусматривает возможность эксплуатации в цепях
переменного тока с номинальными токами 1 или 5 А (имеются
соответствующие клеммы для подключения каждого из этих номиналов),
в цепях переменного напряжения 100/V3 В, при номинальной
частоте 50 Гц, с питанием от источника переменного, постоянного или
выпрямленного напряжения от 85 до 242 В;
Номинальные значения климатических факторов внешней среды
по ГОСТ 15! 50 и ГОСТ 15543 соответствуют зонам УХЛ4.
Аппаратные средства устройства обеспечивают:
* ввод токов и напряжений энергообъекта;
+ ввод дискретных сигналов;
* вывод дискретных сигналов в виде «сухого» контакта;
* интерфейс связи с верхним уровнем по протоколу ГОСТ Р
МЭК 870.
* интерфейс управления с удаленного терминала;
Устройство подключается к трём фазным напряжениям в месте
установки, к трём фазным токам контролируемой линии и к току
фазы «А» смежной линии.
Ввод токов и напряжений энергообъекта осуществляется через
согласующие трансформаторы тока и напряжения, обеспечивающие
гальваническую развязку аппаратуры устройства от первичных
трансформаторов тока и напряжения.
В устройстве предусмотрено формирование:
* сигналов «срабатывание» и «прибор введен» для центральной
сигнализации на щите управления энергообъекта;
* информации на дисплее о неисправности и выполнении
функций в соответствии с задачами устройства;
* диагностической информации о состоянии устройства.
292
Обеспечивается фиксация срабатывания устройства, фиксация
неисправности устройства с запоминанием до его квитирования и
возможность передачи этой информации через интерфейс на
устройства высшего уровня.
Для формирования сигналов управления предусмотрены
выходные реле:
* по два для каждой из ступеней, обеспечивающие требуемые
управляющие воздействия для разных знаков скольжения;
* для передачи во внешние цепи обобщенных сигналов
«прибор введен», «срабатывание»;
* для блокирования аналогичных устройств на смежных
линиях.
Технические средства устройства выполнены в виде набора
функциональных модулей.
Внешние связи устройства осуществляются через зажимы
(клеммник), обеспечивающие подсоединение к ним проводников
сечением до 2,5 мм^.
В устройстве предусмотрена защита от несанкционированного
доступа.
По прочности электрической изоляции устройство
удовлетворяет требованиям ГОСТ 30328-95 (МЭК 255-5-77).
Цепи переменного тока устройства выдерживают ток !,1-7ном
длительно, и без повреждения ток до 40-/„ом в течение 1 с (/„ом = 1 А
или 5 А - номинальный фазный ток трансформаторов тока, к
которым подсоединяется устройство).
Цепи переменного напряжения длительно выдерживают
1,!5-%ом и кратковременно (в течение 1 с) 1,8-Цном (где %<,„ =
100/V3B - номинальное фазное напряжение трансформаторов
напряжения, к которым подсоединяется устройство).
Устройство сохраняет заданные функции без изменения
параметров и характеристик срабатывания при перерывах питания
длительностью до 0,5 с.
Потребляемая мощность по цепям питающей сети:
в рабочем режиме - не более 20 Вт;
в режиме срабатывания - не более 35 Вт.
Устройство не дает сбоя, не выходит из строя и ложно не
срабатывает при подключении и (или) отключении источника питания.
293
Устройство по устойчивости к помехам соответствует
требованиям ГОСТ 29280-92 и ОТТ РД.34.35.3 М-97.
Предусматривается наличие трех комплектов рабочих уставок
устройства.
Предусмотрена возможность дистанционного изменения номера
комплекта уставок по дискретному входному сигналу и по команде
от ЭВМ.
Предусмотрено редактирование уставок посредством ввода с
клавиатуры устройства и с верхнего уровня управления.
Для исключения неправильных действий устройства
предусмотрены блокировки:
* при коротких замыканиях и при неисправностях в цепях
напряжения;
* по сигналам от внешних устройств.
Блокировка приводит к немедленной остановке работы
алгоритма АЛАР. При этом реле сигнализации о неготовности
устройства выключается с паузой 7 с, если условия блокировки сохраняются
все это время.
В устройстве предусмотрен прием пяти независимых
дискретных сигналов напряжения 220 В с током потребления не более 5 мА
и гальванической развязкой 2500 В, которые обеспечивают:
* блокировку устройства от аналогичных устройств смежных
линий;
+ блокировку устройства по требованию оперативного
персонала или от органа управления верхнего уровня;
* выбор массива уставок в соответствии с выполняемой
задачей;
* разрешение тестирования реле через меню устройства.
В устройстве предусмотрены выходные реле:
* для сигнализации о срабатывании алгоритма для каждого из
скольжений;
* для передачи во внешние цепи обобщенных сигналов
«Прибор введен» и «Срабатывание»;
В.устройстве предусмотрены аппаратурно-программный
контроль и диагностика с возможностью передачи информации о
неисправности по каналу связи.
Средняя наработка на отказ - не менее 25000 ч.
294
Среднее время восстановления работоспособного состояния
устройства при наличии полного комплекта запасных блоков не
более двух часов без учёта времени ожидания ремонта.
Периодичность технического обслуживания - 20000 ч и его
длительность не более 8 ч.
Срок службы устройства не менее 12 лет при условии
проведения требуемых технических мероприятий.
П.3.2. Системы координат в комплексной плоскости
В практике электротехники и электроэнергетики существует
несколько общеупотребительных систем координат в комплексной
плоскости. В случае, когда локальное устройство разработано в
какой-либо одной из систем координат, а должно быть установлено и
эксплуатироваться в условиях, когда принято использование
некоторой другой системы координат, возникают определенные трудности
в понимании связанных с этим частных деталей работы
технологического алгоритма устройства. Кроме того, возникают определенные
трудности при фазировке вводимого в работу устройства.
Вследствие этого целесообразно упорядочить несколько
разрозненную информацию по этому вопросу.
Большое количество авторов учебных и научных работ (см.,
например, [П.!]) использует систему координат, в которой опорной
величиной является ток и вещественная ось расположена
горизонтально (рис. П3.2.1,я).
я)
б)
Рис. П3.2.!.
295
При этом
„ , , .f (ПЗ.2.1)
т.е. напряжение опережает ток при индуктивной нагрузке
. ,„ ^и^ = ^-^,. (ПЗ.2.2)
Некоторые авторы использует систему координат, в которой
опорной величиной является напряжение (см., например, [П.2]), а
вещественная ось также расположена горизонтально (см. рис. П3.2.!,б).
При этом
M=t/„sin(a);) 1
; = /„sin(o;-p)J
Ток отстает от напряжения при индуктивной нагрузке.
(ПЗ.2.3)
. " кгде^ = ^-^,. (ПЗ.2.4)
В обоих случаях мощность определяется как
.S = Mf*, (ПЗ.2.5)
или, подставляя выражения для напряжения и тока, как:
-y = y„/„^ ^^(cosp+ysin^P+ye. (ПЗ ^)
Активная мощность соответствует Р, реактивная мощность
соответствует коэффициенту g при (+/).
Кроме того, иногда используется (см. например [П.З])
определение величины комплексной мощности в виде *У = ЛУ , т.е.
.S = U„7„e-*' =^^(cos^-7sin^) = P-ye. (ПЗ.2.7)
296
В этом случае активная мощность соответствует 7*, а реактивная
мощность соответствует коэффициенту g при (-у).
В практике работы с вторичными цепями станций и подстанций
принята система координат в соответствии со справочником [П.4]. В
ней вещественная ось расположена вертикально и номера квадрантов
сдвинуты против часовой стрелки на 90 градусов (см. рис. ПЗ.2.2).
Именно такая система координат обычно используется в
контрольно-измерительной аппаратуре подстанций, и это необходимо
учитывать в практической работе.
Для исключения возможных ошибок при фазировке входных
цепей в процессе подключения ко вторичным цепям измерительных
трансформаторов подстанций, подключение локального устройства
рекомендуется выполнять в следующей последовательности.
Подключение устройства к измерительным трансформаторам
напряжения (ИТН) и тока (ИТТ) должно быть выполнено согласно в
соответствии с разметкой фаз и согласованными направлениями
напряжений и токов.
При этом в качестве положительного направления тока, а также
активной и реактивной мощности принято, в соответствии с [П.4],
направление от точки присоединения устройства в контролируемую
линию (см. рис. ПЗ.2.2).
Рекомендуется придерживаться следующей методики
присоединения (в частности, для устройства АЛАР-М):
1. В наборе параметров установить номинальную величину
напряжения первичной обмотки измерительного трансформатора
напряжения и номинальную величину тока первичной обмотки
измерительного трансформатора тока.
2. Установить величины эквивалентных сопротивлений
основного и дополнительного направлений работы устройства.
3. Подключить напряжения вторичных обмоток
измерительного трансформатора напряжения к соответствующим клеммам
устройства.
Перейти в окно фазных напряжений устройства и убедиться в
том, что величины напряжений фаз соответствуют величине
напряжения первичной обмотки измерительного трансформатора
напряжения и углы напряжений соответствуют порядку следования фаз:
297
Фаза
А
В
С
Угол,град
0
-120
+120
+Р (от шин)
cos(p>0: P>0
sinqxO; р<0
(к шинам) 270
Ш (И)
cos(p<0; P<0
sin(p<0: g<0
cos(p>0; Р>0
!(tV)
V +0
(or шин)
!V (1П)
cos(p<0; P<0
sin(p>0; p>0
-Р (к шинам)
Рис. ПЗ.2.2.
4. Подключить токи вторичных обмоток измерительного
трансформатора тока основного направления к соответствующим клеммам
устройства.
Перейти в окно фазных токов устройства и убедиться в том, что
величины токов фаз соответствуют величине тока первичной
обмотки измерительного трансформатора тока и углы токов соответствуют
порядку следования фаз:
298
Фаза
А
в
С
Измеренный
угол
РА
РЬ
Рс __
Порядок токов
правильный, если ]
РЬ-<РА=-120
й^р?А=+120
5. Рассчитать текущий угол между напряжением и током в
месте установки устройства в соответствии с текущими
значениями активной и реактивной мощностей в момент измерения и с
учётом указанного выше положительного направления
мощностей. Рассчитанный угол %? должен совпадать с измеренным углом
%?л по величине и знаку.
6. Перейти в окно отображения активной и реактивной
мощностей и убедиться, что величины измеренных мощностей
соответствуют истинным величинам мощностей в месте установки устройства
(с учетом положительного направления тока - к узлу или от узла,
принятому в конкретной реализации локального устройства).
7. Выполнить п.п. 4-6 для тока фазы «А» дополнительного
направления.
П.3.3. Основные результаты испытания технологических
алгоритмов
В процессе разработки и модификации алгоритма работа
устройства проверялась на аналоговых и цифровых моделях
энергосистемы. В качестве аналоговых моделей использовался специальный
стенд с фазовращателем, а на заключительном этапе производились
испытания на электродинамической модели НИИПТ. В качестве
цифровой модели использовалось устройство РЕТОМ 41М с
набором осциллограмм реальных аварий.
Кроме того, на установке РЕТОМ оценивались технические
возможности АЛАР-М как измерительного прибора, точность
расчёта углов между ЭДС эквивалентных генераторов, реакция устройства
в режимах блокировок.
Испытания проводились посредством специально
организованных тестовых наборов осциллограмм и файлов, полученных в про-
299
цессе испытании устройства на электродинамической модели
энергосистемы НИИПТ, а для проверки поведения блока контроля
качания тока и на Comtrade-файлах реальных аварий.
Целью испытаний на электродинамической модели НИИПТ
была оценка качества выполнения функций выявления и ликвидации
АР в условиях, максимально приближенных к реальным, и
получение тестовых осциллограмм для обеспечения проверки
последующих, серийных образцов устройства.
Испытательная схема представляла собой физическую
модель трёхмашинной энергосистемы для анализа аварийных
процессов на связях со странами Балтии при аварийных отключениях
ВЛ 750 кВ Северо-Запад - Центр (см. рис. ПЗ.З.!). Исходные
параметры схемы и режимов энергосистемы были представлены
службой оптимизации электрических режимов ОДУ Северо-
Запада. При проведении испытаний АЛАР-М подключали в узле
4, причем на устройство подавалась одна фаза «А» тока линии Л!
и три фазы тока линии Л2.
^ «- з
Я2
Л
1!
(^) Л
Рис. ПЗ.З.!. Укрупненная схема региона Северо-Запад - Центр.
Проверка срабатывания устройства при различных значениях
уставок по углу осуществлялась моделированием АР на линии Л2
путём отключения в схеме модели ОЭС линии Л5. При этом устрой-
300
ство было настроено на фиксацию ЭЦК в линии Л2. По
осциллограммам контролировали срабатывание устройства при различных,
предварительно заданных уставках и значение угла <$^, между
напряжением в узлах 3 и 1.
Работа устройства выполнялась с набором уставок, заданных
ОДУ Северо-Запада для набора аварийных возмущений в
моделируемой энергосистеме. Для оценки эффективности работы
устройства предварительно было проведено исследование динамической
устойчивости моделируемой энергосистемы при отключении линии Л5
и утяжелении аварийного процесса изменением мощности
генератора П. Формировались режимы предельного устойчивого
переходного процесса и процесса нарушения устойчивости по линии Л2.
В случаях устойчивых процессов, вплоть до предельных,
устройство правильно выявляло отсутствие АР.
В качестве примера приведены результаты двух опытов.
На рис. П3.3.2,я представлена зависимость изменения
эквивалентного угла во времени в условиях глубокого качания. При
этом устройство не выдавало сигнал срабатывания. На рис
ПЗ .3.2,6 приведены результаты работы устройства в условиях
асинхронного режима.
5. град
6. град
50
40
Л)
20
to
0
2
0,5 :
!/
hs
2
"ЧГ
У. с
я) глубокое качание
б) асинхронный режим
(! - изменение взаимного угла, 2 - сигнал
срабатывания выходного реле)
Рис. ПЗ.3.2. Характер изменения эквивалентного угла.
Посредством отключения Л5 и последующего отключения ЛЗ
создавали режимы с расположением ЭЦК на линиях Л2 и Л4.
Эксперименты показали, что устройство работало правильно, срабатывало
30]
только в тех случаях, когда нарушение устойчивости происходило в
контролируемом сечении, проходящем через линию Л2, ложных
срабатываний не наблюдалось.
В процессе испытаний исследован набор специальных режимов
работы устройства, позволяющих проверить его функционирование
в разнообразных сочетаниях режимных параметров (режимы
качаний генераторов с последующим переходом в АР, реагирование на
КЗ в линии при выведенной блокировке и т.п.). Испытания
полностью подтвердили соответствие технических характеристик
устройства паспортным данным.
П.3.4. Работа устройства АЛАР-М в сети 330 кВ
Для проверки работы алгоритма устройства АЛАР-М с
реальными процессами, происходящими в сети 330 кВ, использованы
осциллограммы аварии в Дагэнерго 6 марта 2002 г, снятые
регистратором 505 на подстанции Будённовск-500 и регистратором 522 на
подстанции Дербент-ЗЗО (см. рис. 8.Н).
Осциллограммы с помощью программы «Аура» были
переведены в файлы формата Comtrade для работы с программной оболочкой
прибора RETOM-41R. Это позволило организовать на входах
АЛАР-М сигналы, аналогичные имевшимся на входах
регистраторов при аварии.
По известным моментам отключения осциллограммы приведены
к единому времени. Это время совпадает со временем,
зафиксированным регистратором 522 на подстанции Дербент-ЗЗО, оно на 0,3 с
меньше времени, зафиксированного регистратором 505 на
подстанции Будённовск-550. В дальнейшем всюду использованы значения
единого времени.
Алгоритм АЛАР-М работает в двухмашинной модели ЭС. На
основании эквивалентных параметров этой схемы выбираются
уставки прибора. Оценка эквивалентных параметров двухмашинной
схемы по имеющимся сигналам регистраторов была проведена
методом наименьших квадратов (см. раздел 8.2)
Предполагалось, что АЛАР-М установлен в точках
подключения регистраторов 505 и 522 и контролирует зону с правой стороны
от себя. Поэтому в качестве сопротивления Z^ взяты сопротивления
соответствующих участков линий. Использованные значения оценок
эквивалентных параметров приведены в таблице ПЗ.4.1.
302
Таблица П.3.4.1. Сопротивления линий электропередачи
Место
Будённовск-500
, Дербент-ЗЗО
Z,
9 +у 26
40 +у 70
22
58+Л 40
25+j НО
Z,
19.6+Л 33,8
H.3+J67J
На рис. П3.4] показан пример срабатывания АЛАР-М в
неселективном режиме при уставке по углу 90° на ПС Будённовск.
Использованы сигналы, полученные на основании осциллограммы
регистратора 505. Характерные особенности работы устройства
помечены на рисунке стрелками с цифрами.
Пояснения к рисунку:
1 - сигнал на входе АЛАР-М отсутствует. На дисплее прибора
при этом присутствует надпись: «Неготовность входных сигналов»,
устройство выведено из работы;
Л А
!02,4
76.8
5!,2
25.6
0,0 Й
-25,6
-5!,2
-76,8
-!
f/ = -90,3 В
/ = -9,03 А
Г= 1,2483 с
ЙНИМЖШШЖПННПШЗЖ^^
ё^
Рис. ПЗ.4.1. ПС Буденновск Осциллограмма неселективного режима, Д, = 90.
303
2 - устройство отреагировало на наличие сигнала на входах и
введено в работу;
3 - устройство сработало по достижении угла между ЭДС
эквивалентных генераторов угла 90 градусов;
4 - подан сигнал на управляющее воздействие.
По мере развития асинхронного режима угол между ЭДС
эквивалентных генераторов растет. При увеличении значения уставки
угла устройство должно отслеживать достижение значения угла
передачи и подавать сигнал на управляющее воздействие. Была
выполнена проверка работы устройства с различными значениями уставок
по углу. На рис. ПЗ.4.2 - ПЗ.4.4 показаны сводные результаты
расчета изменения угла передачи.
з
ь-
и
з
ж
:
3
ж
и
в
м
вал
ж
со
^
&
g
и
г?
Р
>.
180
160
140
120
100
80
60
40
время, сек
Рис. ПЗ.4.2. ПС Буденновск. Показатели неселективного режима.
Пояснения к рисунку:
Сплошная линия - расчётные значения угла между ЭДС
эквивалентных генераторов при заданных значениях сопротивлений
эквивалентов.
о - значения угла, рассчитанные по осциллограмме процесса.
Аналогичные результаты, полученные на ПС Дербент,
приведены на рис. ПЗ.4.3,
304
1"
г
;,=9+2б/
г
^4^-
140/
Г^
о
-,
Г
^^^ о
—-ф—
о ^
50
g. 0
^ -50
з
100
g
?-150
-200
^^-—
\o
о
\0
!
^. О '
\Joo '
^\. о '
3
3,2
3.4 3.6
время,сек
3,8
(У, В
Л А
102,4
76,8
51,2
25,6
0,0
-25,6
-51.2
-76,8
-102,4
Рис. ПЗ.4.3. ПС Дербент. Показатели неселективного режима.
(7=108.5 В /=10,85 А Г= 3.5269 с
] : : : : ^ i :
0,240 - jU
!!^{i1!i.!!!^i:HS!J^1H')!ii!\n^J!^d
АШИ№№№ !й Й ]! ^!! ^) i^ '^! i! ')
Ют^^ЛИ:
И!^'Й!№1!Ш^^№Ж:^ЖЖ^^^№^^^^^^^^
й!!!тМй№Я!!!№^№!^п^МШ!}^!:!^!!^
ЖИЖ
Ж ЙжУшШю
Ю<ШЮЖ<МЖЖИЙЯ
l^'i,
^',![M,4.n;n
[',''.1 №!'?M;:''.,^' '.
^Л!^^к, il.,ki!,;.!!!-!t:J^,)s !^!.:);.:l:i:. J л t, i!
!^iV!!^'i':[s:^i'.;;iM!':!;!r!;n!ijj)H
:iit!^!^l^!;.^.H^!^^№..i^
М!*ЖЦ,,-)!№йы<
^Mi^ki^i !!!йЯ
Н[^Ш№Ж?^^^:" аЧУ*
LLi.^i : i -
rr ; ; ; ! ! ^Fr=
^'r 1
Ж;.:
K!
f&.
Ш
K4
g№№^
Kf
K^)
67
КЗ
-0,10 1,30 2,70 4,10 5,50 У. с
Рис. ПЗ.4.4. ПС Будённовск. Осциллограмма работа 1-й ступени, селективный режим.
305
Из результатов видно, что АЛАР-М правильно оценивает углы
между эквивалентными генераторами. Отличие между
предварительно рассчитанными и углами, полученными АЛАР, вызваны
изменениями эквивалентных сопротивлений участка в процессе
динамического перехода к АР.
На рис. ПЗ.4.4. приведена осциллограмма работы устройства в
селективном режиме с уставкой по углу 150° и с определением
наличия ЭЦК на контролируемом участке.
Данные регистратора 522 на подстанции Дербент позволяют
проиллюстрировать работу устройства в условиях контроля циклов АР.
На первом цикле сработало реле первой ступени при
достижении углом критического значения, затем во втором цикле сработало
реле второй ступени.
(/=-90.3 В / = -9,03 А Г= 4,8396 с
-О.! 0 1.30 2,70 4,М 5.50 Г, с
Рис. ПЗ.4.5. ПС Дербент. Осциллограмма селективного режима, контроль циклов.
Значения полного комплекта осциллограмм аварии показал, что
во всех случаях АЛАР-М правильно реагирует на происходящие
реальные процессы, правильно определяет избыточную и дефицитную
части энергосистемы, в селективном режиме срабатывает только при
выполнении условия попадания ЭЦК в защищаемую зону, вторая
ступень АЛАР-М правильно отрабатывает заданное уставкой
количество проворотов.
306
К главе 5. Наблюдаемость и идентификация параметров
энергосистемы
П.5.1. Характеристическая функция
Рассмотрим свойства функции отношения сопротивлений
Я(?^):
^,F) = (?7-l)-y.(77 + l)-ctg(<5/2). (П5.!.])
Представляя сопротивления ветвей в экспоненциальном виде
Z = Z е^ ^, получаем:
^ = ^.,Я^)=^^, (П5.!.2)
где 0 - разность аргументов сопротивлений ветвей, тогда:
Я(77^^) = (^^1)-У'(^^+l)-ctg(J/2). (П3.!.3)
Выпишем действительную и мнимую части функции Я (ту, 0, <У).
Введём обозначение C = ctg(J/2). Выражение (П5.1.3) приобретает
вид:
Я(77,0^) = т; ^-1-ут7 .^С-УС (П5.1.4)
или
^(77,#,J)-77-cos# + ./-77-sin#-l
-y-77-cos^-C + 77-sm0*C-y-C. (П5.1.5)
Тогда действительная часть ТУ (77, F):
^(//(77^,J)) = 77sind-C + 77.cos0-l, (П5.!.6)
мнимая:
307
3(Я(?7,#,<У)) = 77 sin#-9 cos# C-C. (П5.1.7)
Оценим максимально возможные значения модуля 7У(?у,<У) в
практически значимой области ?у. Умножая (I15.L4) на комплексно
сопряженное выражение, получим квадрат модуля функции:
ЯЗ(Т7,0,<У) =
(7?2+l) + 2-?7-cos(# + <?)
sin^/2)
(П51.8)
В практически значимой области ту и при изменении F от 45 до
!80 градусов максимально возможные значения #(т7,0,#)
достигаются при # = -45. Они показаны на рис. П5.1.1. Так как (П5.1.8) -
нечётная функция относительно (# + <?), то при изменении F от - 45
до - 180 градусов максимальные значения достигаются при 0 = 45
градусов.
35
30
25
Е
20
!5
m
! !
\! !.
! ^ )
t ] ^^
! ! Ч
Гч=о^*
t
4
t t t '
) ! t '
) ] ! '
[ ) t t ^
! t ) '
t ! < '
) ) ! '
! ! ! ) '
! ) ) '
) ) ) '
! ) ! '
) ) ) '
! ) t '
! t ) '
t^ t ) ! '
KJ i ! i
г ) t ч** *- — i
) t ) ) '
t ! ) < '
! t t t '
г - -. Li=^ ! ! ! ! -
t. J i2 t"'-Г ! * '
5P-^j
40
60
80
100 !20
8, градусы
140
160
180
Рис. П51.1. Значения Я^^, при разных ?7 и # = -45".
308
Выпишем явно реальную и мнимую составляющие выражения:
!
Я(??,<?) + 2
1
(П5.!9)
(?/ cos# + ?7 sin#-C + l) + y(?7-sin#-?7-cos# C-C)
После стандартных преобразований получим, соответственно:
йС—L-1 = sin'(^2)^cos^ + ?7.sm^^g(J/2) + l) ^ ^
(я + 27 (?7 + cos^+sm^
Г 1 ") sin^(F/2).(^.cos^.c^(J/2)-^sma+c/g(F/2))
Найдём их разность и сумму:
*(пЬН?№"'^*
(77-(cos#+sin#)-?7 (cos#-sin#)-ctg(<y/2) + !-ctg(<y/2))
(?7 + cos0) +sin^^
(77*(cos^-sm^) + y7*(cos0 + sm0)-ctg(J/2) + l + ctg(F/2))
(77 +cos 0) +sin^#
Найдём формально условие, при котором Я + 2 = 0. Для этого
должны одновременно выполниться два равенства:
!R(7/(77,^J)) = 77 sin^C + ^ cos^-] = -2 (П5.!.14)
и
3(^(77,^J)) = ^.$m^-^-cos^C-.C = 0. (П5.!.!5)
309
Введя новые переменные M = 77-sin# и v = 77-cos#, получаем
систему:
ы-С + у = -1;
(П5.1Л6)
м-v С = С. '
Ее решение:
^ = 0, v = -l, (П5.!.!7)
т.е.
0 = 180°. (П5.!.!8)
Это означает, что в области значимых значений 0 условие
Я + 2 = 0 не выполняется ни при каких <? и 7у.
П.5.2. Флуктуации напряжения и относительная погрешность
модуля и угла сопротивления
Покажем, что во всей области практически значимых значений
?7 при всех <У относительная погрешность модуля линейно связана с
относительной погрешностью угла сопротивления:
^„=,4.А0д,+Д, (П5.2.1)
где (см. главу 5)
^=-
J f AZ) <? f A2) /_^_
<?(А#)^ Z
<?<?^ Z J/ JF
)/^(Л^). (П5.2.2)
После вычисления получим, что
yy-sm^-T/cos^-l
и не зависит от угла J.
Поотоянная компонента в (П5.2.1) имеет вид:
2 _^
В = -2 2—- . (П5.2.4)
77'Sin0-77-cos#-l
3!0
При # =0А = -1,В = 0, т.е. при всех значениях 77
относительная погрешность модуля равно относительной погрешности угла
сопротивления.
При других значениях 0 коэффициенты линейной зависимости
А и В зависят от ту. Например, при 0 = 45°:
— —
. = -2. /-', =2.(^-,).
Для ту = 10 ^ = -15.414; Л = 198.
П.5.3. Флуктуации тока и относительная погрешность модуля и
угла ЭДС
Выразим множители, общие для (4.84) и (4.85),
$(/ (77 + cos0) +sm^0 (^'^2 + ^!
чим:
Подставив (П5.3.1) в (4.84) и воспользовавшись (П2.22), полу-
^ = Ал,, A^.V2 + 6, ^2)
Соотношение (П5.3.2) во всей области значимых значений ту
при всех значениях <5 показывает, что вклад шума тока в
погрешность расчёта модуля ЭДС пропорционален вкладу тока в
погрешность угла ЭДС с коэффициентом, зависящим от вклада напряжения
в погрешность расчёта сопротивления.
ЗМ
К главе 7. Идентификация параметров эквивалентной
схемы по траекториям векторов наблюдаемых величин
П.7.1. Расчет эквивалента для схемы электропередачи с узлом
отбора мощности
На рис. П.7.1 приведен пример схемы электропередачи с узлом
отбора мощности, в который включено устройство АЛАР.
Считаем, что рассматриваемая линия в общем случае
неоднородна, т.е. аргументы сопротивлений различных участков передачи
неодинаковы. В качестве доступной информации, используемой при
работе устройства, рассматриваются комплексы измеряемых токов
/,, ^2 * ^з " напряжение t/о, а также сопротивления участков
передачи Z^, ^, формирующих контролируемую устройством зону.
Результатом измерений является сопротивление в узле отбора
мощности:
Из=-^-,где/э=Л+А'
и вектора напряжений ^, ^ "R границах контролируемой зоны,
определяемые соотношением:
(/ = t/(,+7-Z,.
Неизвестными параметрами являются сопротивления Z^ Z2 и
ЭДС эквивалентных генераторов Ё,, ^.
А*,
г^ №=tJ
^/^
Z,
Л
Л
?и -*—: А*:
Z,
^^"
Z;
Рис. П.7.1. Схема электропередачи с узлом отбора мощности.
312
Будем полагать, что мощность одного из генераторов (пусть
этот генератор Л2) значительно больше мощности другого
эквивалентного генератора. Это позволяет рассматривать систему как
эквивалент «генератор - шины бесконечной мощности». Сформируем в
узле измерения систему координат, вращающуюся синхронно с
частотой номинального режима передачи, совместив при этом
амплитуду номинального напряжения в узле измерения с осью вещественных
чисел комплексной плоскости указанной системы координат.
При возникновении возмущения в энергосистеме положения
роторов эквивалентных генераторов в процессе динамического
перехода будут изменяться, что приведет к изменению векторов
напряжений t/o, f/,, (/2 - Для определения вида траекторий векторов
напряжения представим изменяющиеся векторы относительных значений
напряжений в форме сумм пар векторов:
^(^) = ^2 +^2
где
Яп =
° и,,-Иэ-(1 + М)
Яз-'",
*о =
at =
Zx-R
Z,-Zi
E,-e"V
;л
^ ^!L
и„.Иэ (l + M)
^2-<?".
4 =
^2+ZlL+ZlL .
^3
".2э-(1+Аг)
Z.+Z2L +
^2L ^t
а, =-
-т 7
м^ Иэ (1 + М)
F,-^,
3!3
^Э * ^1 *** ^2 ^
M-^LJ^
^э ^з
здесь м^ - амплитуда напряжения нормального режима в узле
измерения, Лг - отношение модулей векторов ЭДС эквивалентных
генераторов, у - аргумент вектора Дд в системе координат комплексной
плоскости, сформированной в узле измерения. При выводе
соотношений принималось, что ^ = А - ^ * ^ ^ -
Формы траекторий изменения напряжений в контролируемых
узлах электропередачи, построенных в функции угла J,
представляют собой дуги окружностей. Положение их центров определяют
векторы <?Q, ^, ^' а радиусы окружностей соответствуют модулям
векторов %?о, &1, %2.
При известных значениях указанных векторов неизвестные
параметры электропередачи Z^ Z2 и её текущий угол Л определяются
соотношениями:
^ ^Z^-ao
<*o'Z
2А'^3
Яд — й] d^ ' ^3 * ^0 ' ^3 ^ ^0 *^
z,=
^0'^z'^:
2А
Z?/ An
_^2Z '^0
4 '^З^^О ^3"*^0 ^!А ^0"^2
^ = arg
Соответственно, эквивалентные ЭДС Д,, Ез и отношение их
модулей определяются по любой тройке векторов тока и напряжения
!{У/л,^/д,/2/л} в некоторый дискретный момент времени (:'):
314
П.7.2. Результаты проверки метода идентификации параметров
эквивалента «генератор - шины»
Численная реализация разработанного алгоритма проведена с
использованием программно-вычислительного комплекса «СПРУТ».
С его помощью была создана двухмашинная схема электропередачи,
представленная генераторами Л, Л2 и однородной линией с узлом
отбора мощности в месте включения устройства АЛАР. Параметры
генераторов: ^яом=19()0 МВт, cos%=0,85, 7)i=8 с,
^2/ЮА? =10000 МВт, cos%?2=0,85, Г,2=М с. Номинальное
напряжение линии в узлах включения генераторов С^дсм =^2/юм =525
кВ. Генераторы снабжены автоматическими регуляторами
возбуждения пропорционального действия и регуляторами скорости с зоной
нечувствительности Af = 0,015 Гц.
Параметры линии электропередачи были приняты
индуктивными и составили: ^=у-115,71 Ом, Z^=y-68 Ом, ^=51,71 Ом,
^2t =7'34 Ом, причем участок Z^ сформирован в виде двухцепной
линии с сопротивлением каждой цепи, равным у-136 Ом. Отбор
мощности в месте установки АЛАР моделировали неизменным
сопротивлением Z3 =1014,57 +у-594,08 Ом.
Возмущающее воздействие, приводящее к асинхронному
режиму электропередачи, смоделировано в виде трехфазного короткого
замыкания в начале одной цепи двухцепной линии с последующим
отключением этой цепи через время fp^ =0,14 с. Параметры
передачи в послеаварийном режиме Z, =j-183,71 Ом, Z^=y-136 Ом.
Предполагалось, что устройство АЛАР начинает функционировать
сразу после отключения поврежденной цепи электропередачи.
На рис. П.7.2 приведены относительные значения векторов
напряжений tig и ы^ в сформированной независимой системе
координат, определяющие траектории изменения этих напряжений на
первом цикле АР, а также показаны вектора напряжений при <У = 180° .
315
-t,2
<
-0,8
*
*
!*2
. 0.4
-0,4
0,4
* 0.8
*
# # #
/^
^ ..
^-K.
#
^ ^
#
0.8 * 1
+
*
* *
!,2
Рис. П.7.2. Выборка данных.
В результате обработки порученных траекторий по методу
наименьших квадратов рассчитаны значения центров дуг траекторий tig
и ti,:
^0=*0+7'.У0' <*1=*1+7'.У1' <?2=*2+./*.У2;
<:o=0.791-j'-0.188, ^=0,205-7^0.049, ^=0-953-у-206,
а также величины векторов радиусов траекторий, соответствующих
набору значений углов (5^.
4=^0-^0' 4 =^"^Н ^2 =^2-^2.
В частности, для первых пяти значений угла получено:
316
<5мсм =
f 55.71^
60.55
65.42
70.3
^75.16j
(град),
комплексные значения векторов радиусов траекторий
f0.178+y-0.163)
0.164+у-0.177
0.148 +у-0.19
0.132 +у-0.202
^0.114+y-0.213j
.4 =
^0.642+у-0.617)
0.588 +у 0.669
0.529+j-0.717
0.466+у 0.759
0.4+у 0.796
А =
^0.061 + у0.056^
0.056 +у 0.061
0.051 +у 0.065
0.045 +у 0.069
0.039 +у 0.073J
Рассчитанные по полученным данным в соответствии с
алгоритмом работы АЛАР эквивалентные сопротивления и текущий угол
передачи имеют следующие значения:
^t - * г* -
ip - ^2t * ^з
2 Z3 - dp - Z3 — йф - ^2/,
= 0.018 + у 183.71;
Zz=. .^.'^'^. . =^^ = -0.019 + у.51.71;
Spaces
f55.712)
60.549
65.419
70.299
75.159У
(град).
3t7
Сравнение углов <$^ и F^^v * ^ также исходных и расчётных
значений траекторий сопротивлений Z, и Z2, показывает хорошее
соответствие расчётных и исходных величин.
На рис. П.7.3 представлены кривые изменения скольжения
Л = d<5/d; векторов ЭДС эквивалентных генераторов П, Л и
производной этого скольжения яй/яй в функции угла J для
рассматриваемого АР электропередачи. По изложенному способу эти
зависимости можно определить на основе информации об изменении
текущего угла J за фиксируемое время. Равенство производной
скольжения нулю соответствует рабочему <$Q и критическому J^ углам
передачи. Программой «СПРУТ» определено значение критического
угла 5ду,=102°.
4<
*.
) "Й
+*
Г" i:
*
/
/
Ю !(
/
^
/
^
Ю 2(
.^
^
'0 2
-^
Ю 2
У
^
;о 3i
Рис. П.7.3. Зависимость скольжения и се производной от величины угла проворота.
Анализ кривых, полученных в соответствии с описанным
алгоритмом, показывает, что скольжение имеет постоянный знак в связи
с непрерывным увеличением угла <5 в асинхронном режиме ЭЭС, а
производная скольжения равна нулю при углах <$о и <?др, соответст-
318
вующих значениям, рассчитанным программой «СПРУТ». При
прохождении указанных углов изменяется знак производной
скольжения, что и используется в качестве признаков наличия АР передачи.
Изложенный принцип позволяет фиксировать наличие АР в ЭЭС по
информации об угле <5др в условиях действия противоаварийного
управления, изменяющего мощность по передаче, т.е. вырабатывать
управляющее воздействие раньше момента <5>180°, который
соответствует предельному значению критического угла при полном
сбросе мощности турбины эквивалентного генератора.
Изложенный принцип адаптивного функционирования АЛАР
представляется как перспективная возможность разработки
локальных устройств противоаварийного управления энергосистемой в
условиях неполной информации о её режиме и структуре в предава-
рийных и аварийных ситуациях.
П.7.3. Результаты проверки метода идентификации параметров
двухмашинного эквивалента
Для апробации метода и оценки погрешностей результатов,
которые могут быть связаны как с погрешностями наблюдаемой
выборки, так и с принятым допущением о равенстве величин
эквивалентных ЭДС Ё,, ^2 проведён ряд численных экспериментов.
Моделью в экспериментах являлась схема со следующими
параметрами: Zt=5 + y-60, Z = 10 + y.40, Z2=10 + y-80.
Векторы ЭДС эквивалентных генераторов в процессе
асинхронного режима моделировались как:
^=^^^^,^2=^2 ^'^^
То есть предполагалось, что векторы ЭДС эквивалентных
генераторов вращаются в противоположные стороны с различными
скоростями. На рис. П.7.4 показаны зависимости изменения углов
векторов Ё,, &2 и угла между ними J.
Для изучения влияния на результаты предложенного метода
неодинаковости величин ЭДС было реализовано изменение величины
отношений модулей A = )Ej/E2L в пределах 0,8-^-1,22, характерных
для реальных энергосистем [1.53].
319
поо
!000,
900{
800
- 700
Ц 600
<3 500
*1 400
^ 300
^ 200
100
ю"И
^
Г бр и
Г
зт
41?
5-С
ПО
..*
^
7"МГ 0(У tb -tj-1 -4{2-4
^
3^J
&-!
^
т }
j —
[ \J
.*
^-'
HL
n
^J
^ '
7 1
y'
8 !
[^
^-^-]
9 j
^J
-)00
-200'
Время, с
Рис. П.7.4. Углы векторов эквивалентных ЭДС (1,2) и угол между ними (3) при АР.
В результате «прокрутки» модели были получены наборы
«наблюдений» годографов векторов полной мощности ^ и Д^' в
которые была введена дополнительная погрешность, описываемая
нормальным законом распределения.
Пример годографов векторов полной мощности для одного из
экспериментов изображен на рис. П.7.5.
Тонкой линией показаны идеальные годографы векторов
мощности, а точками - выборки с внесенными моделируемыми
погрешностями величиной 3% на уровне одного стандартного
среднеквадратичного отклонения для нормального распределения.
Полученные траектории обрабатывали методом наименьших
квадратов с целью нахождения параметров эллипсов мощности. Их в свою
очередь использовали для нахождения эквивалентных сопротивлений
Z,, Z2 и угла <У в соответствии с изучаемым методом.
Результаты серии математических экспериментов показали, что
в диапазоне величин % = 0,81-И, 25 при моделируемой погрешности
1% погрешность определения угла находится в диапазоне от ! до 4
градусов! При моделируемой погрешности данных 3% погрешность
определения угла составляет от 3 до 6 градусов, а при увеличении
величины моделируемой погрешности до 5% погрешность
определения угла не превышает 9 градусов.
320
(?, MBap
-2ф00 -!3-
!(Ю0 !500 2600
Рис. П.7.5. Годографы векторов полной мощности.
Необходимо отметить, что существенное влияние на точность
результатов, получаемых рассматриваемым методом, оказывает
величина наблюдаемой дуги разворота углов между эквивалентными
генераторами. Так, выборка, полученная при величине дуги менее
90°, как правило, не позволяет идентифицировать параметры эллипса
при величине зашумления выборки выше 1%.
32!
К главе 9. Перспективные технические средства
повышения устойчивости энергосистемы на базе
сверхпроводниковых технологий
П.9.1. Характеристики экранов для токоограничивающих
устройств
В устройствах трансформаторного типа с коммутатором
магнитного потока величина суммарного напряжения обмоток и
внутреннего сопротивления устройства в режиме резистивного состояния
экрана, а в конечном счете - уровень токоограничения, являются
функцией конструктивных параметров /?, w, Я^,. Ориентировочные
значения указанных параметров могут быть оценены на основе
технических характеристик выпускаемых в настоящее время
сверхпроводниковых материалов и стандартных соотношений геометрических
размеров элементов магнитной системы силового
трансформаторного оборудования на примере расчетной схемы устройства (рис. 9.3).
В частности, для экранов, работающих в силовых
трансформаторных устройствах, условие эффективного экранирования можно
записать в виде:
Ус - ^2 ' ^запася "— )
где ^ - линейная токовая нагрузка обмоток трансформаторов (А/м),
^запася = (2-^-4) - коэффициент запаса по сверхпроводнику,
характеризующий уровень ограничиваемого тока, Ад - эффективная
толщина экрана, равная произведению числа витков м^ на толщину
одного витка А, ^ = и^ / и^ - коэффициент схемы.
В современных мощных силовых трансформаторных
устройствах при частоте 50 Гц и индукции в стержне а; 1,6 Т линейная
номинальная нагрузка составляет 80 кА/м [П.5]. Зависимость ^ =/(А^)
при И = 80 кА/М, %з = 3, й, =Н приведена на рис. П.9.1.
Основываясь на аналогичном подходе к оценке параметров
силового трансформаторного оборудования, можно записать
выражение для удельного сопротивления материала экрана в резистивном
состоянии, при котором обеспечивается пропускание переменного
магнитного потока в экранируемый стержень:
322
Р А
](Г*Омм tOA/м'
10 20 30 40
60 70 А; ВА мин
Рис. П.9.1. Зависимость удельного сопротивления и критической плотности тока от
суммарной толщины экрана.
/^
где /7 - коэффициент, характеризующий качество работы экрана,
D^ - средний диаметр экрана, учитывающий также наличие стенок
диэлектрического криостата, выбранных с учетом требований
механической и диэлектрической прочности, А - высота экрана, равная
высоте экранируемой обмотки, Д^, - магнитное сопротивление
одного витка, практически неизменное для ряда геометрически подобных
трансформаторных устройств разной мощности [П.6]. В
соответствии с этим для обмоток трансформаторов получим
;rD,,/A = (3,3-4).
С помощью указанных зависимостей можно оценить
максимальные значения ^^ и ^^^ для различных характеристик
материала экрана. Так, например, для ниобий-титановой фольги
толщиной 15 MKMJ, = 10'" А/М^ И /7 = 10"* ОМ-М, %c,max=0,45,
Апах=3,3; при той же толщине иу^ = 5-10^ А/м и /? = 4-10^
323
Омм, %c,max =0,22, Дта^=1,33. В общем случае увеличение
эффективной толщины экрана приводит к снижению требуемой у, и
увеличению /э.
В качестве примера оценим величину тепловыделений в
силовом четырехстержневом индукционном устройстве с параметрами
магнитной системы. Мощность одной фазы устройства - 450 МВ-А,
номинальное напряжение - (750/7з )/24 кВ, ток двухсекционной
обмотки - 9,3 кА, индукция в стали - !,7 Тл. Конструкция магнито-
провода - четырехстержневая, длина магнитной системы - 11,13 м,
высота - 4,67 м, диаметр стержня - ! ,77 м, высота окна магнитопро-
вода - 2,67 м, высота обмоток - 2,27 м. Расчетное число витков
Wj = 608, й^ = й^ = 32, ^ = 1, напряжение короткого замыкания
^=^2+^34 =14%+ 4,5% = 18,5%.
Обмотки низшего напряжения включены в треугольник,
высшего - в звезду с заземленной нейтралью. Осевая составляющая
напряженности магнитного поля на поверхности сверхпроводникового
экрана (амплитудное значение) - 183 кА/м. Принята суммарная
толщина экрана: 37-10^ м, критическая плотность тока сверхпроводника:
У, = 10***А/м^ Ограничение аварийных токов происходит при
возникновении на поверхности экрана поля с напряженностью выше 366
кА/м, т.е. при достижении током в обмотках двукратного
номинального значения. Время отключения аварии ?<„юм=0,02 с. Расчетное
значение объема сверхпроводника У = 1,7-10*^ м\ площадь сечения
экрана 5 = 8,4-10'^ м^. Индуктивность к.з. Z%=3,7'l(f Гн.
Нагрев сверхпроводникового экрана в режиме токоограничения
оценим по кривой (рис. П.9.2), рассчитанной из условия
адиабатического приближения:
Г,
й"= {Су(Г)ИЙ,
Го
где С,, - удельная теплоемкость сверхпроводника, 7^ - начальная
температура экрана, 7^ - температура, до которой разогревается
экран в процессе коммутационных выделений.
324
X
300
260
220
180
140
100
60
20
0,02 0,2 2 20 200 2000 20000 мДж
м'
Рис. П.9.2. Энергия разогрева экрана.
Проведенные оценки позволяют сделать вывод о том, что теп-
лофизические свойства экрана позволяют реализовать работу
коммутатора магнитного потока со временем восстановления
сверхпроводящего состояния, удовлетворяющим требования АПВ
в энергосистеме.
П.9.2. Макетный образец токоограничнвающего устройства
Для экспериментальной проверки полученных соотношений был
изготовлен макетный образец токоограничителя с магнитной
системой, согласно рис. П.9.3.
Полная мощность индукционного устройства в однофазном
исполнении - 12,7 кВ-А, напряжение первичное ^ =127 В,
напряжение вторичное L^ =127 В, токи в обмотках 7; =/з =100 А,
количество витков в обмотках: первичной й^ = 52, первой секции
вторичной % = 51, второй секции вторичной й^ = 68,и экране й^ = 1; м&*
териал магнитопровода - сталь Э310, материал обмоток й^, й^, й^
- алюминиевый провод сечением 13,5x3,5 мм^.
323
/
/
/
<f
/
/
"9-
00
L !
'4-
f !'
L
*1
J, ^ ^
V
) '76
A
dJ 1
V Y
J<M J
663
1^
4-4
Рис. П.9.3 Магнитная система макетного образца трансформаторного токоограни-
чивающего коммутатора мощностью 10 кВ*А.
Первичная обмотка располагается на стержне Л; в три слоя по 17
витков. Над ней, также в три слоя по 17 витков, расположена первая
секция вторичной обмотки. Вторая секция вторичной обмотки
включена встречно с первой секцией и расположена на стержне ^ в
четыре слоя по 17 витков. Поверх второй секции на том же стержне
располагается стеклопластиковый криостат с обмоткой й^ экрана.
Экран представляет собой замкнутый виток сверхпроводниковой
фольги из материала Mb7Y, высотой 2x6-10^ м, забандажированный
в стеклопластиковом корпусе. Размещение обмотки й^ и экрана й^
в криостате на магнитопроводе индукционного устройства показано
на рис. П.9.4.
На основе характеристик холостого хода в режиме
сверхпроводящего состояния экрана и при отсутствии экрана в соответствии с
геометрией магнитной системы определены сопротивления стержней
устройства:
326
077J
0/А?
0/J3
Рис. П.9.4. Взаимное расположение дополнительной обмотки % и экрана % в
макетном образце трансформаторного токоограничивающего коммутатора.
д, =Дз =17700 Гн"', #2 =5900 ПГ'.
Сопротивления определены в рабочей области изменения
потоков, благодаря чему, в некоторой степени, учитывается влияние
стыков и насыщение стали сердечника.
327
Исследование послеаварийного режима проведено для
сверхпроводниковых экранов с /?i=l,2 и /Уз^З'-П* Соответствующие
указанным параметрам напряжения XX и токи КЗ равны:
Для Д = 1,2 при t/, = 127 В, t/„24 = 60 В,
Лг.з.24 = 0,67 А, /„з t = 3,3 А,
при t/;,4=127B, t/„,=41B,
4,j =0,67 А, /^24=^3 А.
Для /?з = 3,37 при ^ = 127 В, У„ 24 = 25 В,
4.3.24 =0,22 А, /,,,=1,6 А,
при С/24 =127 В, С/,„, =15В,
7^,=0,22А, /^24=1^5 А.
П.9.3. Эскизный проект токоограничивающего устройства
450 MB A
На рис. П.9.5 приведена схема магнитной системы с обмотками
однофазного четырехстержневого трансформаторного выключателя
мощностью 450 MB-А. Трехфазная группа устройств такого типа
позволит осуществить коммутацию криотурбогенератора 1200 МВт в
нормальных и аварийных режимах. В качестве первого приближения
для выбора параметров индукционного устройства использован
принцип минимума потерь. При оптимизации параметров
учитывались потери в экранах, приведенные к «теплой)) зоне, потери в
обмотках и стали. Транспортные ограничения, коэффициенты
заполнения, магнитная индукция в каналах рассеяния, плотность тока в
основных обмотках, изоляционные промежутки и другие условия
исполнения приняты такими же, как и в трансформаторе
ОРЦ 41700/750.
Параметры трансформаторного выключателя 450 MB-А:
напряжение f 750/V3)/24 кВ, ток двухсекционной обмотки - 9,3 кА, индукция
в стали - 1,7 Т. Расчетное число витков обмоток й^ =608, /7 = 10'^,
й^ =60,, ^ =18,5%, обмотки низшего напряжения включены в
треугольник, высшего - в звезду с заземленной нейтралью, осевая
составляющая напряженности магнитного поля на поверхности
сверхпроводникового экрана (амплитудное значение) - 343,1 кА/м.
328
Рис. П.9.5. Магнитная система однофазного четырехстсржневого трансформаторного коммутатора
мощностью 430 MB А.
Принято: число слоев экрана С^, толщина сверхпроводниковой
ленты <?д = 5 мкм, материал сверхпроводника - нестабилизирован-
ная фольга с параметрами: у, =2-10*" А/м^, /? = (3-^5)-10^ Омм.
Рассчитанные потери криогенной части выключателя учитывают
теплопритоки в «холодную» зону А^ и гистерезисные потери в
сверхпроводнике Af^„.
Удельная величина теплопритоков принята, равной 0,3 Вт/м^,
коэффициент А^ = 250 Вт/Вт. Полученные в результате расчета
АЛ, =0,04 кВт, УВязСмзО?-^ кВт.
Суммарные потери трансформаторного выключателя
АР = 2000 кВт, в том числе потери в стали у, кВт, потери в меди
АТ^э =10!9 кВт, потери в криогенной части Af^ =386 кВт.
Коэффициент полезного действия 99,56 %.
С целью уменьшения тепловыделений при переводе экрана в
нормальное состояние эксплуатация трансформаторного
выключателя предполагается совместно с разъединителями, установленными со
стороны высшего и низшего напряжений. Эти разъединители
должны отключать намагничивающий ток трансформатора,
составляющий около 0,3% номинального. Отключение аварийных токов
происходит при возникновении на поверхности экрана поля с
напряженностью выше 700 кА/м, т.е. при достижении током в обмотках
двукратного номинального значения.
Для сравнения - параметры базового трансформатора типа ОРЦ
4! 7000/750: суммарные потери - И 70 кВт, длина магнитопровода -
7,! 75 м, высота магнитопровода - 4,7 м, к.п.д. - 99,72%. К.п.д.
трансформаторного выключателя ниже к.п.д. трансформатора
аналогичной мощности в основном за счет потерь в экране,
дополнительной обмотке, а также за счет увеличения размеров магнитной
системы. Однако функциональные возможности индукционного
коммутатора значительно шире, чем у обычного трансформатора. Кроме
того, если учесть потери в сильноточной коммутационной аппаратуре,
применяемой за рубежом [П.7], со стороны генератора (300-400 кВт
на фазу при мощности 400 МВт), то разница в к.п.д. становится
незначительной.
Сооружения станций большой мощности с крупными
энергоблоками требует для выдачи мощности этих станций применения
330
высоких напряжений с дорогостоящей коммутационной
аппаратурой, устанавливаемой в распределительных устройствах (РУ). При
проектировании РУ очень важно правильно выбрать схему
электрических соединений, поскольку аварии в РУ могут привести к
отключению больших генераторных мощностей и линий, что,
естественно, отражается на надежности работы энергосистемы.
Требования надежной работы РУ мощных электростанций
обусловили переход в 70-х годах от широко используемых схем с двумя
основными и третьей обходной системой шин и одним
выключателем на цепь к схемам с полутора выключателями на цепь и их разног
видностям. Анализ применяемых в настоящее время схем РУ
позволяет выделить одну особенность. В связи с укрупнением
генераторных мощностей пропускная способность отдельной линии
становится соизмеримой с мощностью отдельного генератора, и один или
несколько генераторов работают на одну линию.
Известно [П.8], что блочные схемы обеспечивают наименьшую
взаимосвязь между блоками на распределительном устройстве
электростанции, в связи с чем аварии, возникающие на каждом из блоков,
практически не сказываются на работе соседних присоединений.
Трансформаторный выключатель, коммутационные
возможности которого реализуются в самом трансформаторе, более всего
приспособлен для работы в блочной схеме. При этом
дублирование работы трансформаторного коммутатора традиционными
выключателями может оказаться не обязательным, поскольку они
работают в режиме токовой отсечки без выдержки времени, а
значение тока срабатывания выключателя трансформаторного типа
определяется параметрами сверхпроводникового экрана и
тепловым режимом его работы.
Сравнение весовых показателей трансформаторного
выключателя 450 МВ-А и базового трансформатора ОРЦ 417000/750
показывает увеличение веса магнитопровода и обмоточного провода
примерно в 1,8 раза. При этом стоимости основных материалов
трансформаторного устройства распределяются следующим
образом: электротехническая сталь - 29,3%, обмоточный провод -
15,8% , трансформаторное масло - 2,6%, сверхпроводник - 0,5%,
холодильная установка - 22,5%, диэлектрический криостат -
13,6%, прочие материалы - 15,7%. Расчетная оптовая цена
трансформаторного выключателя с учетом стоимости сверхпроводника,
холодильной установки и диэлектрических криостатов больше
33!
стоимости трансформатора аналогичной мощности примерно в два
раза. Тем не менее, оценка наиболее простого случая замены
трансформаторным выключателем традиционного трансформатора
с соответствующим комплексом коммутационной аппаратуры
показывает возможность уменьшения расчетной стоимости
оборудования более чем на 15%. Соответствующее приведенной оценке
соотношение стоимостей: трансформаторный выключатель - 1,
трансформатор базовый типа ОРЦ 417000/750 - 0,45, выключатель
750 кВ - 0,53, генераторный выключатель нагрузки - 0,18.
П.9.4. Расчет СПИН с цилиндрической обмоткой
Рассмотрим достаточно простую методику оценочного расчета
габаритов и параметров обмотки СПИН, удовлетворяющей
заданными требованиям.
В качестве исходных параметров заданы - энергоемкость F„,
рабочая плотность тока материала провода ^ конструктивная
плотность намотки А с учетом необходимых теплообменных каналов,
максимально допустимая величина индукции магнитного поля в
обмотке Лтах, максимально допустимая величина механических
напряжений <Удцм * связанных с магнитомеханическими силами.
В качестве выходных параметров необходимо получить
геометрические размеры обмотки.
Рассматриваемая обмотка представляется в виде простой
цилиндрической обмотки с прямоугольным сечением, эскиз которой
изображен на рис. П.9.6. Предполагается, что рабочий ток однородно
заполняет все сечение обмотки.
Рис. П.9.6. Геометрия цилиндрической обмотки.
332
Для описания геометрии обмотки будем использовать две
известных системы координат:
средний диаметр D, толщина намотки г, длина обмотки я в
соответствии с [П.9].
внутренний радиус я!, внешний радиус я2, полудлина обмотки А
в соответствии с [П. 10].
Переход из системы координат [П.9] в систему координат [П. 10]
описывается следующими выражениями:
D = #j + %2,г = Я2 -Я], я ^2^'
^_Я2_-Я^
D Я2 + Я,
я 26
D Яд + я.
Переход из системы координат [П. 10] в систему координат [П.9]
описывается следующими выражениями:
^ Я2 1 + р^
^ 1-Дь
В соответствии с [П.М] выражение ддя индуктивности
цилиндрической обмотки прямоугольного сечения имеет вид:
где я - количество витков обмотки, D - средний диаметр, Ф -
функция формы.
Функция формы выражается через функции Бесселя и может
быть определена по таблицам и номограммам [П.М].
Следуя работе [П.11] для обмотки, длина которой не меньше ее
диаметра, можно получить в качестве аппроксимации функции Ф
функцию вида:
333
ф,(",/?)=-
80(л + 1)
!3^ + 18Д-7
Тогда выражение индуктивности получит следующий вид:
Энергоемкость обмотки
^о *-"^о
Определяя количество ампервитков обмотки ^=^75*,
площадь сечения Л = 2& (#2 - я,), и диаметр D = Й2 + я,.
Подставляя, получим:
2я*
С учетом полученного ранее выражения для фактора формы
окончательно получим:
Д<,=16.!0-"(АУ)1я? ^("'"^
13а+ 18)?-7
Согласно [П. 10], величина индукции на оси в центре обмотки
W
Л(,=4я--1(Г'(А./)я,^1п
( 1 + ^1+У J
Вводим поправочный коэффициент А^, учитывающий
повышение поля на внутреннем радиусе обмотки в соответствии с номо-
334
граммой [П. 10], стр. 30, рис 3.3, и получаем величину поля на
внутренней поверхности обмотки:
В соответствии с [П.9], стр. 54-55, для соленоидальной обмотки
тангенциальное напряжение выражается зависимостью:
Л^ 2(я-*)
2^ (я-lf '
где с = r/aj - величина относительного радиуса.
Поскольку рассматриваемая обмотка имеет ограниченную
длину, то во избежание сложного расчета распределения механического
напряжения по сечению обмотки производится только оценка
величины напряжения, исходя из величины магнитного давления на
внутренней поверхности в среднем сечении обмотки:
Такая оценка является достаточной для суждения о возможности
изготовления обмотки заданной формы и габаритов.
Детальные расчеты напряжений как магнитомеханических,
термомеханических и напряжений намотки целесообразно относить на
этап технического проектирования конструкции СПИН.
Расчет размеров обмотки производится в следующим образом.
Задаем исходные параметры - энергоемкость Д„, рабочую
плотность тока материала провода У, конструктивную плотность
намотки А.
Задаем требования к допустимым диапазонам величины
индукции магнитного поля в обмотке от Д^т ДО Rmax, и механического
напряжения ОТ <Г^„ ДО Спиц.
Определяем величину внутреннего радиуса обмотки:
335
13<х + 18;Й-7
Получаем величину магнитной индукции в центре обмотки:
Я(,=4^ 10^(АУ)Д!п
Л
l + Jl+Д
2
^И
и на внутренней поверхности обмотки
Я,)
^Дополучаем величину механического напряжения:
Если значения полученных величин укладываются в заданные
диапазоны, то можно окончательно определить размер обмотки -
внешний диаметр из выражения 2яз = 2и - at и длину обмотки из
выражения я = 2& = 2/7 я,, в противном случае необходимо
соответствующим образом изменять коэффициенты формы и повторять циклы
расчета до получения подходящих значений параметров обмотки.
Например, для СПИН с исходными параметрами:
Д*о=2,5 10*Дж, Лм=*3 "А* ^ = 1,1-10? А/м^, - получены
следующие результаты: 2я2=2,7 м, 2^=1,9 м, я = 6,6 м, #„,=5,4 T,
<7p=l,05!(f НАЛ
Полученные значения индукции и механического напряжения
отвечают техническим характеристикам промышленно выпускаемых
сверхпроводников, а размеры магнитной системы не выходят за
рамки транспортных ограничений.
336
Вопросы оптимизации геометрии обмотки с заданной
энергоемкости и величиной максимально допустимого магнитного поля с
целью получения минимальной длины обмоточного провода подробно
изложены в [П.9]
П.9.5. Расчет СПИН с тороидальной обмоткой
Рассмотрим тороидальную обмотку прямоугольного сечения.
Рис. П.9.7. Геометрия тороидальной обмотки.
Индуктивность обмотки
z=
Запасенная энергия
/4)"
2 D + Vf>^
д = ^ = ^> ^
2 4 D + VD^
Величина пиковой индукции
337
(^.Г
в„ =
- ^
лл.
2^гЛ,
Из условия выполнимости укладки ампервитков в сечение
обмотки 5 = я*Я, (Д, + 2&) и выражения для количества ампервитков в
сечении л/„ = Л^Ус^ получим л/„ = А^А^у^^ (Д, + 26).
Расчетная система уравнений для определения геометрических
параметров обмотки имеет вид:
Я _Д, <?'
я/. 2яЛ, '
я/.
4&7<
г=^,(Д, + 2б),
где в правых частях уравнений оставлены только геометрические
параметры.
Приведем геометрические параметры к совокупности - диаметр
обмотки, толщина, апертура:
л-д-^-ь,
<? = я + й,
Д,=^-я-26,
тогда система расчетных выражений получит следующий вид:
W
2 4
('+АГ
я/. 2^(D^-a-26)'
я7-
^у^сА
= ^(D^-a-26)(D.-a).
338
В этой системе уравнений имеется четыре неизвестных H,Dp,a,& .
Будем задавать величину внешнего диаметра обмотки D^,
исходя из соображений, например, транспортных габаритов устройства.
Тогда остается три неизвестных: JV, я, 6, т.е. система уравнений,
становится разрешимой.
Подставляя второе уравнение системы в первое уравнение,
получим величину энергоемкости в виде:
я=^-
(я+аГ(р,-я-2бг
^ D,-^-b+J(D,-^-*)i-(3 + by
^.
Обозначим параметры обмотки: у; - внутренний радиус тора
(м), ^ - внешний радиус тора (м), А - высота тора (м), и - количество
витков.
Зададим характеристики обмотки: Д - величина запасенной
энергии (Дж), Я - предельно допустимая величина магнитной
индукции / - ток обмотки (А), уж- количество витков обмотки.
Величина магнитной индукции в апертуре обмотки имеет вид:
При этом максимальная (пиковая) индукция имеет место на
уровне внутреннего радиуса обмотки:
^ 2тг д
Определим среднее значение индукции:
Л =
(*-!).,'+. Л,Ж* + Ч
4яЛ,(*-1);;
339
Ч + ^ у И?
2 у.
Можно получить соотношение между средней и пиковой
величиной индукции в виде:
^="^7^-'"М=^271ГГ^) = ^
2ят;
у*
ЯЧ2
У- + У*
2 1п(А)
1 + А:
Выразим энергоемкость через среднюю величину индукции и
объем обмотки:
2^
Расчет размеров обмотки может выполняться различными
методами в зависимости от поставленной конечной цели.
Рассмотрим основные расчетные соотношения для получения
двух целевых функций - минимизации расхода провода и получения
заданных габаритов обмотки.
Для расчет геометрии с минимизацией расхода обмоточного
провода, следуя [П. 12], оптимизируем размеры обмотки.
Длина обмоточного провода составляет:
Л =
(*-U-?f +
2, Л.Л(* + 1)
4;rR,(*-l);;
Из уравнения
<5А
= 0 и определим оптимальную величину
внутреннего радиуса:
Из = з
^ (* + 1)
4ягЛ^(А-1)3
Из уравнения &V/JA =0 определим оптимальную величину
отношения радиусов:
340
Подставляя выражения для энергии, индукции, и объема,
окончательно можно получить соотношение геометрических размеров
обмотки в виде т;:^:А = 1:3:4, которое представляет собой аналог
"катушки Брукса" для тороидальной обмотки, т.е. задает наиболее
экономичное исполнение обмотки с точки зрения длины
обмоточного провода.
Иными словами, коэффициенты формы должны иметь
следующие значения:
*о=^Л;=з;
*ь,=АЛ;=4.
В случае необходимости получить минимальные габариты
обмотки методика расчета выглядит несколько иначе.
Подставляя в выражение для энергии величину объема и
среднюю величину индукции магнитного поля, получим:
2т(ц + ',У
После преобразований выражение для энергии имеет
следующий вид:
E=^.A.(N-/)^-F(A),
где F(A) формфактор обмотки:
F(*)=Azl.h^.
А + 1
Таким образом, для заданных исходных условий величина
номинальной энергии зависит от количества ампервитков обмотки, ее
высоты и соотношения радиусов
341
На рис. П.9.8 изображена зависимость формфактора от
соотношения радиусов.
0,08
0,07
0,06
Р* 0,05
-е- 0,04
&0.03
0,02
0,0!
0
i Z j 4
Рис. П.9.8. Формфактор тороидальной обмотки.
Для рассмотренного случая оптимальная величина отношения
радиусов %<, = 4, при этом F(A„) = 0,0721.
Порядок расчета обмотки зависит от совокупности заданных
исходных параметров.
Пусть необходимо получить габариты обмотки по следующим
заданным параметрам:
Номинальная накопленная энергия Е„
Паспортная критическая плотность тока материала
проводника А
j t ) ! t ! Г ! !
! t ! t ! ! t t
t ^rrt=-?**J-- ..'... ) -J......L--
' ^ t ' ^%t^ ! ! )
) / ! t ! ) ^^^ ! )
t/ t t ) ! t 1 r^^,
/t t ! 1 t t t )
/ ! ! ! ) ! ! ! ^
/ ) ) ! ^ ! ! ! *
[/ t t ! 1 t ! t t
! 23 456789 !0
Коэффициент заполнения сечения обмотки активным
материалом
Паспортная максимальная индукция материала проводника ...
Величина внешнего радиуса обмотки
Д.
Определим среднюю эффективную плотность тока в сечении
обмотки как У<у = ^ - Ус - Тогда количество ампервитков обмотки
выражается через сечение обмотки и плотность тока:
342
^^=A(^-^№=A^-i№-^=У^ ^^-^
Используя величину ампервитков, получим набор уравнений для
расчета параметров тороидальной обмотки в следующем виде:
Пиковое значение индукции ^ = —^-УдА - (А -1).
/%2 _ ^
Объем поля обмотки Р" = ;г -—--^ А - rf.
/^
Номинальная энергоемкость ^ = ^ ^* ^'
^ (1 + ^Г
Из выражения для пикового значения индукции получим высоту
обмотки, затем получим объем поля, и, наконец, из последнего
уравнения - величину энергоемкости.
Пример расчета.
Пусть заданы плотность тока в сечении обмотки у<, = 3 - l(f А/м^,
величина пиковой индукции ^ = 5 Т, внешний диаметр обмотки 3 м
(т.е. внешний радиус ^ =1,5 м), величина отношения радиусов
Д = 4.
Тогда в результате расчета получим: высота обмотки А = 0.2778,
объем обмотки И= 1,8408, энергоемкость Д= 5,6303-10^.
Подставляя значения можно получить выражение для
энергоемкости в виде зависимости от исходных параметров:
J. ' (1 + 4).*' '
Если подставить величину отношения радиусов % = 4, то
Я,=0.6!0"-^.
343
Расчет витков и индуктивности обмотки выполняется исходя из
полученного количества ампервитков:
JV 7 = 7.*^
(*-1)
Если ток обмотки задан как ток /^ на входе преобразователя, то
количество витков определяется как:
ЛГ = Л-?^
7.(*-1)
Величину индуктивности можно получить из выражения для
энергоемкости:
В таблице приведены некоторые варианты расчета геометрии и
параметров обмотки для величины Дг = 4.
Таблица расчета тороидальной обмотки.
энергоемкость
рабочая плотность тока
по сечению обмотки
1 пиковая индукция
1 внешний радиус
[ ток обмотки
1 высота обмотки
1 количество витков
1 индуктивность
5,63 10'
з-ю'
5
1,3
110'
0,2778
9375
11,26
5,63-10*
310'
5
1,5
1,510'
0,2778
6250
5,00
5.6310'
310'
5
1,5
1,75-10'
0,2778
5357
3,67
5,63-10*
3-10'
5
1,5
2,0-10'
0,2778
4687
2,81
344
Список литературы
К главе 1
1.1. Лебедев С.А., Жданов П.С. Устойчивость параллельной
работы электрических систем, - М.: Госэнергоиздат, !934, 234 с.
1.2. Анисимова Н.Д., Веников В.А. и др. Методика расчётов
устойчивости автоматизированных электрических систем, 1966.
!.3. Зеккель А.С. Влияние самосинхронизации и АПВС
крупных гидрогенераторов с электромашинной системой возбуждения на
динамическую устойчивость системы. Труды ЛПИ, вып.242, 1965.
1 4 Мамиконянц Л.Г., Портной М.Г., Хачатуров А.А. О
нарушении устойчивости в энергетической системе вследствие
асинхронного хода по одной из передач. Электричество, № 6, ! 966.
1.5. Совалов С.А. Режимы электропередач 400-500 кВ ЕЭС. -
М.: Энергия, 1967.
1 6 Портной М.Г., Хачатуров А.А. Экспериментальное
определение устойчивости электрических систем, - М.: Энергия, 1968.
1.7. Совалов С.А., Соколов НИ. Влияние нарушений режима
приемном энергосистемы на устойчивость дальних передач. Труды
ВНИИЭ, вып. 9,1959.
1.8. Мамиконянц Л.Г., Портной М.Г., Хачатуров А.А.
Обобщение опыта применения в энергосистемах асинхронных режимов.
Электричество, № 6, 1965.
1.9. Портной М.Г. Ресинхронизация в энергосистемах после
несинхронного АПВ. Информационные материалы ВНИИЭ № 66,
ГЭИ, 1966.
1.10. Хачатуров А.А. Исследование предельных режимов и
ресинхронизация з сложных энергосистемах. Труды ВНИИЭ, вып. 23,
1966.
1. И. Жданов П.С. Асинхронный режим в электрических
системах, Электричество, № 21,1936.
1.12. Веников В.А., Жуков Л.А. Переходные процессы в
электрических системах. - М.-Л.: Госэнергоиздат, 1953.
1.13. Жуков Л.А., Федоров Д.А. О представлении
асинхронного работающих генераторов в схемах замещения электрических
систем и приближенном определении параметров асинхронных
режимов. Электричество, № 7, 1964.
345
1.14. Жуков Л.А., Федоров Д.А., Лаутербах Э., Марютин В.А.
Исследование влияния автоматического регулирования возбуждения
на ЭДС генераторов, работающих в режиме установившегося
асинхронного хода в простейшем электрической системе. Электричество.
№ 10, 1964.
1.15. Жуков Л.А., Федоров Д.А. Опыт исследования на
математической модели асинхронного хода синхронных генераторов.
Труды МЭИ, вып. 54, 1964.
1.16. Федоров Д.А. Определение мощности и токов асинхронно
работающих синхронных генераторов в сложной электрической
системе. Труды МЭИ, вып. 54,1964.
1.17. Ледянкин Д.П. Оценка для асинхронного режима
параметров представления части электрической системы эквивалентным
генератором. Тематический сборник МЭИ "Повышение
экономичности и надежности энергосистем" Ярославль, 1965.
118 Мамиконянц Л.Г., Портной М.Г., Хачатуров А.А. О
нарушении устойчивости в энергетической системе вследствие
асинхронного хода по одной из передач. Электричество, № 6, 1966.
1.19. Хачатуров А.А. Исследование предельных режимов и
ресинхронизация в сложных энергосистемах. Труды ВНИИЭ,
вып. 23, 1966.
1.20. Баранов В.А., Совалов С.А. Режимы энергосистем:
Методы анализа и управления. - М.: Энергоатомиздат, 1990. - 440 с.
1 21. Ледянкин Д.П. Качание роторов генераторов
электрической системы при асинхронном режиме. Труды МЭИ, вып. 54, - М:
Изд. МЭИ, 1964.
1.22. Хачатуров А.А. Электромеханический резонанс в
сложных системах. Труды ВНИИЭ, вып. 37,1971.
1.23. Портной М.Г. Устойчивость синхронной машины при
гармоническом возмущении. Труды ВНИИЭ, вып. 24, 1966.
1.24. Веников В.А. Теория подобия и моделирования
(применительно к задачам электроэнергетики). Учеб. Пособие для вузов. Изд.
2-е доп. и перераб. - М.: «Высшая школа», 1976.
1.25. Горев А.А. Избранные труды по вопросам устойчивости
электрических систем. - М.-Л.: Госэнергоиздат, 1960.
1.26! Жданов П.С. Вопросы устойчивости электрических
систем. - М: Энергия, 1979.
1.27. Ульянов С.А. Электромагнитные переходные процессы. -
М: Энергия, 1970.
346
1.28. Веников В.А. Переходные электромеханические процессы
в электрических системах. - М.: Высшая школа, 1985.
1.29. Портной М.Г. Устойчивость синхронной машины при
гармонических возмущениях, Труды ВНИИЭ, вып. XXIV, - М: изд.
Энергия, 1966.
1.30. Литкенс И.В. Определение запаса статической
устойчивости послеаварииного режима и пути его увеличения, Электричество,
№4, 1969.
131 Ледянкин Д.П., Прахин Б.Я., Помазкин В.П. Частотные
характеристики качаний ротора синхронного генератора при
асинхронном режиме в системе, Изв. ВУЗов «Энергетикам, №12, 1968.'
1.32. Хачатуров А.А. Исследование предельных режимов и
ресинхронизации в, сложных энергосистемах. Труды ВНИИЭ, вып.
ХХН1,-М: Энергия, 1966.
1.33. Шахназарян Ю.М. Нестационарные колебания роторов
генераторов в сложных электрических системах при
ресинхронизации отдельных генераторов и станций, Изв. АН Армянской ССР,
серия тех. наук, XVIII, №4,1965.
1.34. Мамиконянц Л.Г. Электромагнитные моменты вращения
синхронных машин при включении их в сеть способом
самосинхронизации. Электричество № 8,1954.
1.35. Мамиконянц Л.Г. Токи и моменты вращения,
возникающие в синхронной машине при включении ее способом
самосинхронизации. Труды ЦНИЭЛ, вып. IV, - М: Госэнергоиздат, 1958.
1.36. Городским Д.А. Асинхронный ход синхронной машины в
системе, Электричество, № 3, 1945.
1.37. Руководящие указания по противоаварийной автоматике
энергосистем. Основные положения, Москва, 1983 г.
1.38. Совалов С.А. Режимы электропередачи 400-500 кВ. - М.
«Энергия», 1967,44 с.
1.39. Портной М.Г., Рабинович Р.С. Управление
энергосистемами для обеспечения устойчивости. - М.: Энергия, 1978.
1 40 Гуревич Ю.Е., Либова Л.Е., Окин А.А. Расчеты
устойчивости и противоаварийной автоматики в энергосистемах. - М.:
Энергоатомиздат, 1990,392 с.
1.41. Бушуев В.В. Динамические свойства
электроэнергетических систем. - М.: Энергоатомиздат, 1987.
1 42 Бушуев В.В., Лизал ек Н.Е., Новиков НЛ. Динамические
свойства энергообъединений. -М.: Энергоатомиздат, 1995.
347
1.43. Воропай Н.Н. Упрощение математических моделей
динамики электроэнергетических систем. Новосибирск, изд. «Наука»
1981.
1 .44. Гусейнов Ф.Г. Упрощение расчетных схем электрических
систем. - М.: Энергия 1978, 184 с.
1.45. Щедрин Н.Н. Упрощение электрических систем при
моделировании. - М.-Л.: Энергия, 1966, 159 с.
1.46. Жданов П.С. Вопросы устойчивости электрических
систем. - М.: Энергия, 1979.
1.47. Тихонов Ю.А., Хачатуров А.А. Устойчивость
электрических систем. Часть 1. Лекция. М.: изд. ВЗПИ, 1976.
К главе 2
2.1. Иофьев Б.И., Семенов В.А. Развитие противоаварийной
автоматики энергоснабжения на базе цифровой вычислительной
техники, Итоги науки техники. Энергетические системы и их
автоматизация. Т.5, - М.:ВИНИТИ, 1990 г.
2.2. Совалов С.А. Режимы Единой энергосистемы, - М.: Энер-
гоатомиздат, 1983.
2.3. Хачатуров А.А. Несинхронные включения и
ресинхронизация в энергосистемах. - М.: Энергия, 1977.
2.4. Гуревнч Ю.Е., Хачатуров А.А. Устойчивость работы
синхронных двигателей при несинхронном АПВ и асинхронном режиме
в системе. Труды ВНИИЭ, выл. 24,1966.
2.5. Портной М.Г., Степунин СЕ. Современные требования к
защитам от несинхронного режима, Труды ВНИИЭ, вып. XXIX, 1967.
2.6. Гоник Я.Е., Иглицкий Е.С. Автоматика ликвидации
асинхронного режима. - М.: Энергоатомиздат, 1988, 112 с.
2.7. Розенблюм Ф.М. Измерительные органы
противоаварийной автоматики энергосистем. - М.: Энергоатомиздат, 1981.
2.8. Гоник Я.Е. Обобщенные способы выявления асинхронного
хода. В сб. Труды института "Энергосетьпроект" вып.4. - М.:
Энергия. 1974 г. стр. 87-105.
2.9. Семенов В.А., Бринкис К.А. Селективная защита при
асинхронном ходе, Электрические станции, 1975. с.66-68.
348
2 10 Бринкис К.А., Бочкарева Г.И. Саухатас АС.
Микропроцессорное устройство предотвращения асинхронного хода. -
Электротехника, 1990. - № 2. с.36 - 38.
2 11 Глускин И.З., Наровлянский В.Г., Якимец ИВ. Выяв
ление асинхронного режима энергосистемы на основе измерения
угла между ЭДС эквивалентных генераторов. - Электричество, 1996,
№9.
2 12 Якимец И.В., Наровлянский В.Г., Ваганов А.Б., Иванов
И.А., Любарский Д.Р., Кац П.Я., Лисицин А.А., Ткаченко АС.
Алгоритмы работы и опыт эксплуатации устройства ликвидации
асинхронного режима АЛАР-М на ПС-330 кВ г. Псков. // Релейная
защита и автоматика энергосистем 2002. Сборник докладов XV
научно-технической конференции. ВВЦ. - Москва 2002.
2.13. Гоник Я.Е. Влияние промежуточного отбора мощности на
изменение электрических величин в цикле асинхронного хода и на
работу некоторых устройств выявления асинхронного хода./ сб. Труды
института "Энергосетьпроект" вып.4. - М.: Энергия. 1974г. с. 105-124.
2.14 Кац П.Я., Струков А.В., Эдлин М.А. Разработка и
оценка эффективности цифрового адаптивного устройства
автоматики ликвидации асинхронного режима, /в сб. Конференция
молодых специалистов электроэнергетики-2000, сборник
докладов. - М. "Изд. НЦ ЭНАС", 2000г.
2 15 Якимец ИВ., Наровлянский В.Г., Ососков Г.А., Нале-
вин А.А. «Выявление асинхронного режима в условиях неполной
информации об эквивалентных параметрах энергосистемы» //
Электроэнергетика России: современное состояние, проблемы и
перспективы: Сб. науч. трудов. М.: Энергоатомиздат, 2002.
2.16. Гоник Я.Е., Иофьев Б.И. Основное устройство
автоматического прекращения асинхронного хода и некоторые особенности
расчета его параметров срабатывания // Вопросы прогивоаварийной
автоматики электроэнергетических систем. - М.: Энергоатомиздат, 1982.
2.17. Гоник Я.Е., Иофьев Б.И., Медведева Л.Н. Резервное
устройство автоматического прекращения асинхронного хода в
энергосистеме. Электрические станции. 1979, № 4.
2.18. Бринкис К.А., Семенов В.А. Делительная автоматика от
асинхронного хода. Электрические станции. 1969, № 3 с. 84-85.
2 19 Якимец И.В., Наровлянский В.Г., Ваганов А.Б., Иванов
И.А., Любарский ДР., Кац П.Я., Лисицын А.А., Эдлин М.А. Мик
ропроцессорное устройство автоматической ликвидации асинхрон-
349
ного режима «АЛАР-М». В сб. Электроэнергетика России:
современное состояние, проблемы и перспективы: Сб. научн. тр. / Под ред.
И.В. Якимца, М.Ш. Мисриханова, В.А. И!уина. - М.: Энергоатомиз-
дат, 2002 г.-с 350-365.
2.20. Бринкис К.А., Семенов В.А. Селективная делительная
защита при асинхронном ходе. Электрические станции. 1975, № 2 с. 66-
68.
К главе 3
3 1 Якимец И.В., Глускин ИЗ., Наровлянский В.Г. Обоб
щенные способы выявления асинхронного режима энергосистемы.
Электричество 11, 1997.
3 2 Якимец И.В., Наровлянский В.Г., Ваганов А.Б. Комплекс
программного обеспечения «АЛАР» (КПО «АЛАР») Свидетельство
06 официальной регистрации программы для ЭВМ, № 990878 от
07 Л .99.
3 3 Якимец И.В., Наровлянский В.Г., Налевин А.А., Ваганов
А.Б. Способ выявления и ликвидации асинхронного режима в
электроэнергетической системе устройством автоматики Патент РФ, RU
2204877,2003.
К главе 4
41. Безумов СТ., Ледянкин Д.П. Алгоритм и программа
расчета частотных характеристик проводимостей асинхронной нагрузки
при больших колебаниях. - В сб.: Повышение надежности
энергосистем, вып.2, Иваново; ИЭИ, 1975, с.59-63.
4.2. MaHk O.P., Cory B.J. Stuby of asenchzonous operation and re-
synchronisation of synchronous machynes by mathematicat modets/ -
Proc. IEE, Power Record, 1966, № 12, p. 1977 -1990.
4.3 Ледянкин Д.П.) Серов В.А., Орлов А.В. Математическая
модель комплексной нагрузки узла энергосистемы. М.; ВИНИТИ
(Информэнерго), 1978, деп. №548. - И с.
4.4. Электрические системы. Управление переходными
режимами электроэнергетических системУПод ред. В.А. Веникова. - М.:
Высшая школа, 1982. - 247 с.
4.5. Гантмахер Ф.Р. Теория матриц. * М.; Наука, 1967. - 576 с.
350
4.6. Федоров Д.А. Определение мощности и токов асинхронно
работающих синхронных генераторов в сложной электрической
системе. В сб.: Труды МЭИ, вып. 54, - М.: МЭИ, !964, с.36!-376.
4.7. Мамиконянц Л.Г., Портной М.Г., Хачатуров А.А. О
нарушении устойчивости в электрической системе вследствие
асинхронного хода по одной из передач. Электричество, 1966, с. 8 - П.
4.8. Mo-shing Chen, DiMon WE. Power system modeling. Proc.
IEEE, 1974, V.62, №7, p.916-929.
4 9 Братолюбов А.А., Ледянкин Д.П., Ратманов СМ.
Показатели статической устойчивости сложной регулируемой
электроэнергетической системы с учетом изменения частоты. // В сб.:
Повышение эффективности функционирования электрических систем и
их элементов. Иваново. ИЭИ - 1983, с.33-39.
410. Применение аналоговых вычислительных машин в
энергетических системах. Методы исследования переходных
процессов. / Под ред. Н.И.Соколова. - М: Энергия, 1970. 400с
4.11. Моделирование переходных процессов на АВМ. Учебное
пособие. / Под ред. И.В. Литкенс. - М: МЭИ, 1977. - 80 с.
4.12. Ледянкин Д.П., Ратманов СМ. Уточнение методики
построения показателя апериодической устойчивости электрической
системы. Изв. ВУЗов «Энергетика»,1981,№11, с.6-11.
4 13. Ледянкин Д.П., Братолюбов А.А., Ратманов СМ.
Интерпретация частотно-фазового критерия статической устойчивости
электроэнергетической системы. Изв. ВУЗов «Энергетика», 1992, №11, с.
16-20.
4.14. Расстригнн А.К. Разработка методики обеспечения
устойчивости промежуточных узлов нагрузки при асинхронных
режимах по межсистемной связи. Автореферат диссертации на соискание
ученой степени канд. техн. наук. М.: МЭИ, 1984. - 19 с.
4 15 Ледянкин Д.П., Помазкин В.П., Безумов СТ.
Электромагнитный момент генератора при установившемся асинхронном
режиме двух частей сложной энергосистемы. Изв. ВУЗов
«Энергетика», 1975,№6,с.Н-17.
4.16. Безумов СТ., Серов В.А. Анализ статической устойчивости в
асинхронно работающих частях сложного энергообъединения. //В сб.
Вопросы устойчивости и надежности энергосистем СССР. Тезисы докладов
V Всесоюзного научно-технического совещания, Ташкент; 1984,. с. 15-! 6..
4.17 Математическое моделирование сложной
электроэнергетической системы с узлами конечной мощности для исследования
35]
статической устойчивостиУА.А. Братолюбов, Д.П. Ледянкин, Б.Я.
Прахин, О.И.Рыжов - В сб.: Повышение надежности энергосистем.
Иваново; ИГУ, 1979, с.50-54.
418 Гречин В.П., Серов В.А., Мисриханов М.Ш.
Особенности моделирования CHHxpoHHbfx машин при двухчастютном
асинхронном режиме //В кн.: Повышение эффективности работы
энергосистем. Труды ИГЭУ. Вып. 5. М.: Энергоатомиздат, 2002 г., с. 3!! -3! 7
К главе 5
5.1. Иофьев Б.И. Принципы построения устройств
автоматического прекращения асинхронного режима в энергосистемах.
Электричество, 1976, № 9.
5 2. Наблюдаемость электроэнергетических систем / Гамм
A3., Голуб ИИ. - М:. Наука, 1990. - 200 с.
5.3. Левин Л. Методы решения технических задач с
использованием аналоговых вычислительных машин, изд. Мир, 1966.
5.4. Дейч A.M. Методы идентификации динамических
объектов. - М.: Энергия, 1979.
5.5. Хорафас Д.Н. Системы и моделирование. - М.: Мир, 1967.
5.6. Гусейнов Ф.Г., Рахманов Н.Р. Оценка параметров и
характеристик энергосистем. - М.: Энергоатомиздат, 1988.- 152 с.
5 7. Автоматизация управления энергообъединениями./ под
ред. С.А. Совалова. - М.: Энергия, 1979.-434 с.
5.8. Щедрин Н.Н. Упрощение электрических схем при
моделировании. - М.- Л.: Энергия 1966.
5.9. Картвелишвили Н.А. Континуальная идеализация
динамических систем. // в сб. Труды ВНИИЭ. - М.: Энергия, 1972, вып.
40, с. 252-268.
5.10. Воропай Н.И. Эквивалентирование
электроэнергетических систем при больших возмущениях. - Электричество, 1975, с.
23-25.
5.11. Косарев ЕЛ. Методы обработки экспериментальных
данных. - М.: изд. МФТИ, 2003.
5.12. Тихонов АН., Арсении В.Я. Методы решения
некорректных задач. - 3-е изд. М.: Наука, ФМ,1986. - 304 с.
5.13. Деч Г. Руководство к практическому применению
преобразования Лапаса и Z-преобразования. - М.: Наука 1971.
5.14. Корн Г. и Корн Т. Справочник по математике для
научных работникой и инженеров. - М.: Наука, 1978.
332
5.15. Фейст П.К. Исследование работы дистанционных реле
методом круговых диаграмм в комплексной плоскости полных
сопротивлений. - «Труды ЦНИЭЛ», 1953, вып. 1, с. 41-88.
5.16. Бахвалов НС. Численные методы. - М., «Наука», 1973.
5.17. Березин И.С., Жидков Н.П. Методы вычислений, т.1, -
М., «Наука», 1966.
К главе 6
6.1. Совалов С.А., Семенов В.А. Противоаварийное
управление в электроэнергетических системах. - М.: Энергоатомиздат, 1988.
6 2 Наровлянский В.Г., Мисриханов М.Ш. Способ выявления
наличия электрического центра качаний в зоне ответственности
локального устройства противоаварийной автоматики. Иваново:
Вестник ИГЭУ, 2004, вып. 2.
6.3. Испытательная система для релейной защиты «РЕЛЕ-
ТОМОГРАФ-41М». Руководство по эксплуатации НПП
«Динамика». 13092133.00! РЭ. г. Чебоксары. 2000.
К главе 7
7 1 Якимец И.В., Наровлянский В.Г., Ососков Г.А., Нале-
вин А.А. Выявление асинхронного режима в условиях неполной
информации об эквивалентных параметрах энергосистемы. В сб.
Электроэнергетика России: современное состояние, проблемы и
перспективы: Сб. научн. тр. / Под ред. И.В. Якимца, М.Ш. Мисри-
ханова, В.А. Шуина. - М.: Энергоатомиздат, 2002 г.- с 366-376.
7 2 Якимец И.В., Ваганов А.Б., Наровлянский В.Г., Глускин
И.З. Определение эквивалентных параметров энергосистемы в
процессе динамического перехода по напряжению и току одного узла. -
Электрические станции 2003 № 5.
7.3. Chernov N.L, Ososkov G.A. Effective atgorithms for cirde Rt-
ting. Труды конференции Computer Physics Communications 33. Nord-
HoHand, Amsterdam, !984.
К главе 8
81 Обработка экспериментальных данных с использованием
компьютера.// под редакцией С. Минами. - М. «Радио и связь», 1999.
353
8.2. Optimization Toolbox. User's Guide. Version 2. Mathworks,
200).
8.3. ХеммингР.В. Численные методы. - M.: Наука, 1972.
8 4 Форсайт Дж., Малькольм М., Моулер К. Машинные
методы математических вычислений. - М.: Мир, 1980.
К главе 9
9.1 Кощеев Л.А., Поссе А.В., Шершнев Ю.А. Перспективы
применения запираемых вентилей в электроэнергетике. - Изв. РАН.
Энергетика. 1994, №1.
9.2. Ивакин В.Н., Ковалев В.Д. Перспективы применения
силовой преобразовательной техники в электроэнергетике -
Электричество, 2001, №9.
9 3 Ивакин В.Н., Ковалев В.Д., Худяков ВВ. Гибкие
электропередачи переменного тока. - Электротехника. 1996, №8.
9 4 Кочкин В.И., Шакарян ЮГ. Режимы работы
управляемых линий электропередачи. - Электричество. 1997, №9.
9 5 Иващенко Т.Е., Сазонов В.К., Тузлукова Е.В., Хвощин-
ская З.Г. Применение управляемых связей переменного тока при
формировании ЕЭС России./ В сб. Электроэнергетика России:
Современное состояние, проблемы и перспективы. Сб. научн. трудов.
М.: Энергоатомиздат, 2002.
9.6. Буккель В. Сверхпроводимость. Пер. с англ. - М.: Мир, 1975.
9 7 Лутндзе Ш.И., Якимец И.В., Наровлянский В.Г. Работа
переключателя магнитного потока в токоограничивающем
устройстве - Изв. АН СССР Энергетика и транспорт, 1980, №6.
9.8. Черноплеков Н.А. Сверхпроводниковые технологии:
Современное состояние и перспективы практического применения. -
Вестник Российской Академии наук том 71, 2001, №4, с. 303-319.
9.9. Роунз-Инс А., Родерик Е. Введение в физику
сверхпроводимости. - М.: Мир, 1972..
9 10 Глускин И.З., Дмитриева Г.А., Мисриханов М.Ш.,
Наровлянский В.Г., Якимец И.В. Сверхпроводниковые токоограничи-
вающие устройства и индуктивные накопители энергии для
электроэнергетических систем. - М.: Энергоатомиздат. 2002, 373 с.
9.11. Буль Б.К. Основы теории и расчета магнитных цепей. -
М.-Л.: 1964.
334
9Л 2. Либкинд М.С., Черновец А.К. Управляемый реактор с
вращающимся магнитным полем. - М.: Энергия, 1971.
9.13. Дорожко Л.И., Либкинд М.С. Реакторы с поперечным
подмагничиванием. - М.: Энергия, 1971.
9.14. Троицкий В.А. Об одном способе плавного амплитудного
регулирования. - Электричество, 1980, № 3.
9 15. Троицкий В.А., Белый Н.Г. Симметричный
трехфазный трансформатор с магнитной коммутацией. - Электротехника,
1971, 11.
9 16 Неклепаев Б.Н., Мисриханов М.Ш., Шунтов А.В. Уров
ни токов короткого замыкания и проблемы их ограничения в
современных электроэнергетических системах. - В сб. "Управление
режимами электрических станций, сетей и систем". - Ташкент: Изд-во
ФАН, УзНИИЭиА, 1991.
9.17. Брон О.Б. Контактные и бесконтактные электрические
аппараты. - Электричество, № 7,1973.
9 18 Балаков Ю.Н., Мисриханов М.Ш., Шунтов А.В. Схемы
выдачи мощности электростанций. - М.: Энергоатомиздат, 2002.
9 19 Лутидзе Ш.И., Якимец И.В., Наровлянский В.Г. Схемы
замещения магнитных цепей в электромагнитных устройствах - Изв.
АН СССР Энергетика и транспорт 1979, №5.
9 20 Лутидзе Ш.И., Якимец И.В., Наровлянский В.Г. Работа
переключателя магнитного потока в токоограничивающем
устройстве - Изв. АН СССР Энергетика и транспорт, 1980, №6.
9.21. Наровлянский В.Г. Разработка и исследование
сверхпроводниковых регуляторов магнитного потока для
электроэнергетических устройств.// Автореферат на соискание уч. степени канд. техн.
наук. - М.: ЭНИН им. Г.М. Кржижановского, 1980.
9.22. Наровлянский В.Г. Расчет соленоида со
сверхпроводящим экраном// В сб. научн. трудов «Криоэлектротехника и
энергетика», ИЭД АН УССР, Киев, 1977.
9 23 Лутидзе Ш.И., Якимец И.В., Наровлянский В.Г. Рас
пределение токов в осесимметричном сверхпроводящем экране -
Электричество, 1978, №8/.
9 24 Дронов А.С., Игнатов В.Е, Куйбышев А.Б., Лутидзе
Ш.И., Наровлянский В.Г. Управляемый реактор, авт. свид. СССР
№782579.
353
9 25 Лаптев А.Г., Наровлянский В.Г., Якимец ИВ. Сверх
проводящий коммутатор магнитного потока, авт. свид. СССР №
1090198, 1982/.
9.26 Лутидзе Ш.И., Якимец И.В., Наровлянский В.Г. Токоо-
граничивающее устройство, авт. свид. СССР № 608205.
9.27 Лутидзе Ш.И., Якимец И.В., Наровлянский В.Г. Токоо-
граничивающее устройство авт. свид. СССР № 824802.
9.28. Якимец И.В., Наровлянский В.Г., Захарова О.В.
Переходные процессы при коммутации магнитных цепей. - Изв. ВУЗов
"Электромеханика" 1987, №1.
9 29 Якимец И.В., Наровлянский В.Г., Флейшман Л.С. Ин
дукционные токоограничители с коммутацией магнитного потока. -
Электричество №4, 1992.
930 Лаптев А.Г., Наровлянский В.Г., Якимец ИВ. Расчет
магнитного поля в прямоугольной области с ферро и диамагнитными
границами.// В сб. «Исследование электромагнитных процессов в
устройствах со сплошными проводящими средами», АН СССР,
Уральский научный центр, Свердловск, 1983.
9 31 Ковалькова ТТ., Наровлянский В.Г., Якимец ИВ.
Коммутационные перенапряжения в СП экранах // в сб. тезисов докладов
Всесоюзного научно-технич. совещания "Научно технические
вопросы создания сверхпроводникового электроэнергетического
оборудования" Минэнерго СССР ЭНИН им. Г.М. Кржижановского, 1984.
9.32. S.F. Krat, X. Huang, M. Xu. Utility app!ications of a
superconducting magnetic energy storage system./ Presented at Power Gen-
Asia, Hong Kong, August 23,1994.
9.33. X. Huang. New conductor designs for superconductive
magnetic energy storage systems applications./ IEEE transactions on applied
superconductivity. -1993. - Vol. 3. № 1.
9.34. Schotder R., Coney R.G. Betriebserfahrungen mit micro-
SMES im kommerziellen industrieeinsatz. - VDI Berichte, 1998.
9.35. Borgard L. Grid Voltage Supportat Your Fingertips.-
Transmission & Distribution World. October 1999.
9 36. S. Peete, J. Lamoree, D. MueMer, С DeWinke! - Harmonic
Concerns at an Industrial Facility Utilizing a Large Scale Power
Conditioner./ Proceedings of Fourth International Conference on Power Quality,
PQA'95,NY, 1995.
356
9 37 Астахов Ю.Н., Веников В.А., Тер-Газарян А.Г.
Накопители энергии в электроэнергетических системах. - М.: Высшая школа,
1989.
9 38 Роджерс Дж.Д., Шермер Р.И., Миллер Б.Л., Хауэр
Дж.Ф. Применение сверхпроводящего магнитного накопителя на 30
МДж для стабилизации линии электропередачи. ТИИЭР, № 9, 1983.
9.39. Соколов Н.И. Влияние статических источников
реактивной мощности и сверхпроводящих индуктивных накопителей на
устойчивость параллельной работы генераторов в простой системе -
Электричество, 1990, № 10.
9 40 Роджерс Дж.Д., Шермер Р.И., Миллер Б.Л., Хауэр
Дж.Ф. Применение сверхпроводящего магнитного накопителя на 30
МДж для стабилизации линии электропередачи. ТИИЭР, №9, 1983.
9.4 L Астахов ЮН., Веников В.А., Тер-Газарян А.Г. Накопите
ли энергии в электроэнергетических системах. - М.: Высшая школа,
1989.
9 42. Перспективы применения сверхпроводимости в крупном
электрооборудовании (Франция). - Энергетика и электрификация.
Электрические сета и системы за рубежом. Вып. 12,1988.
943 БушуевВВ.,ЛизалекН.Н.,НовиковН.Л.Динамические
свойства энергообъединений. - М.: Энергоатомиздат, 1995.
9.44. Перспективы применения сверхпроводимости в крупном
электрооборудовании (Франция). - Энергетика и электрификация.
Электрические сета и системы за рубежом. Вып. 12, 1988.
9.45. Hauer J.F., Boening H.J. Control aspect of the Tacoma
superconducting magnetic energy storage project. IEEE Trans, on Power
Systems, vo!. PWRS-2,1987.
9 46 Якимец И.В., Наровлянский В.Г., Захарова О.В.
Переходные процессы при коммутации магнитных цепей. - Изв. ВУЗов
"Электромеханика" 1987, №!.
9 47 Лутидзе Ш.И., Наровлянский В.Г., Якимец ИВ. Схемы
замещения магнитных, цепей в электромагнитных устройствах. -
Изв. АН СССР, Энергетика и транспорт, 1979, №3.
9 48 Лутидзе Ш.И., Наровлянский В.Г., Якимец ИВ. Работа
переключателя магнитного потока в токоограничивающем
устройстве. - Изв. АН СССР, Энергетика и транспорт, 1980, №6.
9.49. Якимец И.В., Наровлянский В.Г. Автотрансформаторы
со стабилизированной по напряжению третичной обмоткой -
Электричество, 1995, №1.
357
9 50 Якимец И.В., Наровлянский В.Г. Коммутационные
перенапряжения в многообмоточных трансформаторных устройствах -
Изв. РАН Энергетика, 1995, №1.
9 51 Якимец И.В., Наровлянский В.Г., Матвейкин В.М. Вы
бор параметров индукционного накопителя для энергетической
системы Электричество №6,1992.
9 52. Bashkirov J.A., F!eishman L.S., NarovHansky V.G., Jaki-
metz LV. Application of Superconducting Shields in Current-Limiting
and Special-Purpose Transformers, IEEE Transactions on Applied
Superconductive vot. 5 №2,1995, pp. 1075-1078.
9 53 Якимец И.В., Наровлянский В.Г., Масалев Д.Ю. Оценка
технических характеристик сверхпроводникового индуктивного
накопителя при проектировании противоаварийного управления
энергосистемой - Электротехника, 2000, №6.
9.54. Уилсон М. Сверхпроводящие магниты. - М.: Мир, 1985.
9 55 Якимец И.В., Наровлянский В.Г., Масалев Д.Ю. Про
граммно-вычислительный комплекс «СПИН» (ПВК «СПИН») -
Свидетельство об официальной регистрации программы для ЭВМ, №
990813 от 15.11.99.
9.56. Справочник по проектированию электроэнергетических
систем. Под ред. С.С. Рокотяна и И.М. Шапиро. М., Энергия, 1977.
9.57. Якимец И.В., Дмитриева Г.А. Направленное
регулирование активной мощности сверхпроводникового индуктивного
накопителя- Электричество, 2001, N8.
9 58 Глускин И.З., Наровлянский В.Г., Мисриханов М.Ш.,
Якимец И.В. Управляемые трансформаторы со
сверхпроводниковым экраном для электроэнергетических систем. Иваново, Вестник
ИГЭУ, 2002, вып. 3.
9 59. Глускин И.З., Наровлянский В.Г., Масалев Д.Ю.,
Мисриханов М.Ш., Якимец И.В. Расчет технических характеристик
сверхпроводникового накопителя для противоаврийного управления
электроэнергетической системой. Иваново, Вестник ИГЭУ , 2002,
вып. 3.
9 60 Глускин И.З., Наровлянский В.Г., Дмитриева Г.А.,
Мисриханов М.Ш., Якимец И.В. Управление перетоками активной
мощности по межсистемным связям с помощью СПИН-систем.
Иваново, Вестник ИГЭУ, 2002, вып. 3.
358
К приложению
П.!. Бессонов Л.А. Теоретические основы электротехники. -
М.: Высшая школа, 1967.
П.2. Нейман Л.Р., Демирчян К.С. Теоретические основы
электротехники, т.! М-Л. Энергия 1986.
П 3 Нейман Л.Р., Калантаров П.Л. Теоретические основы
электротехники, 4.2, М.-Л.: ГЭИ, 1954.
П.4. Справочник по наладке вторичных цепей электростанций
и подстанций. / Под ред. Э.С. Мусаэляна. - М.: Энергия, 1979.
П.5. Петров Г.Н. и др. Теоретические основы проектирования
трансформаторов с плавным регулированием. - Сб. научн. тр. Моск.
Энергетич. ин-та. - М.: МЭИ, 1963, вып. 39.
П.6. Тихомиров П.М. Расчет трансформаторов. - М.: Энергия, 1976.
П.7. Бронштейн А.М. Коммутационные аппараты для главных
цепей генераторов. - М.: Энергия, 1976.
П.8. Мисриханов М.Ш., Седуно^ВН., Шунтов А.В. Основы
резервирования в системах генерации и транспорта электроэнергии. -
М.: Энергоатомиздат, 2002.
П.9. Брехна Г. Сверхпроводящие магнитные системы. - М.:
Мир. 1976.
П. 10. Уилсон М. Сверхпроводящие магниты. - М.: Мир, 1985.
П.11. Малогабаритная радиоаппаратура. / Справочник. Киев,
"Наукова Думка" 1972. Стр. 71.
П. 12. Dennis W. Lieurance Global Cost Optimization 1-10 MWh
Toroidal SMES. IEEE Trensaction on applied superconductivity. vo!.7,
No.l, 1997.
339
Научно-практическое издание
Наровлянский Владимир Григорьевич
Современные методы и средства
предотвращения асинхронного режима
электроэнергетической системы
Под редакцией профессора М.Ш. Мисриханова
Редактор А%Ж Айкумхякоз
Редактор издательства ^4.Д. Ж^л^мбмм
Компьютерная верстка ДАР. Т&муикжми
Набор выполнен в издательстве
Подписано в печать с оригинал-макета 15.12.04. Формат 60x90 1/16
Бумага офсетная № 1. Печать офсетная. Усл. печ. л. 22.5. Уч. изд. л. 25.48.
Тираж 500 экз. Заказ № 88т
Энергоатомиздат. 114115, Москва, Шлюзовая наб.10
Отпечатано в типографии НИИ "Геодезия*' г. Красноармейск Пушкинского
р-на Московской обл.