/

















































































































































































































































































































































































































































































































































































































































































































Автор: Голубев Ю.Ф.
Теги: кинематика математическо-механическая геометрия движения механика физика теоретическая механика
ISBN: 5-211-04244-1
Год: 2000




Текст
Ю.Ф. Голубев
Основы
теоретической
механики
2-е издание, переработанное и дополненное
Рекомендовано Министерством образования
Российской Федерации в качестве учебника
для студентов высших учебных заведений, об-
обучающихся по направлениям "Механика" и
аМа темати ка ".
ИЗДАТЕЛЬСТВО
МОСКОВСКОГО УНИВЕРСИТЕТА
2000
УДК 531.1
ББК 22.21
Г62
Рецензент: кафедра теоретической механики
Московского энергетического института
(технического университета)
Федеральная программа книгоиздания России
Издание осуществлено при финансовой поддержке Российского
фонда фундаментальных исследований по проекту № 00-01-14049
Голубев Ю.Ф.
Г62 Основы теоретической механики: Учебник. 2-е изд., перераб. и
дополн.— М.: Изд-во МГУ, 2000. — 719 с.
ISBN 5-211-04244-1
Учебник написан на основе лекций, читаемых на механико-
математическом факультете МГУ. Он поможет самостоятельно-
самостоятельному изучению предмета и активному усвоению методов теоретиче-
теоретической механики, наиболее часто используемых в практических при-
приложениях и фундаментальных исследованиях. Изложение опира-
опирается на методы дифференциальной геометрии и геометрической
теории дифференциальных уравнений. Основные теоретические
положения иллюстрируются примерами.
Для студентов и аспирантов высших учебных заведений, об-
обучающихся по направлениям "Механика" и "Математика".
УДК 531.1
ББК 22.21
ISBN 5-211-04244-1 © Издательство Московского университета, 2000
© Ю.Ф.Голубев, 2000
Оглавление
Предисловие ко второму изданию 7
Предисловие к первому изданию 9
1. Векторные свойства евклидова пространства 14
1.1. Точки и векторы 14
1.2. Свободные и скользящие векторы 25
1.3. Системы скользящих векторов 29
1.4. Пара скользящих векторов 31
1.5. Упрощение системы скользящих векторов 37
1.6. Параллельные скользящие векторы 40
1.7. Центр масс множества точек 42
1.8. Геометрия масс 45
1.9. Главные оси инерции 49
1.10. Преобразование эллипсоида инерции 50
1.11. Тензорное умножение векторов 57
1.12. Критерий тензора инерции 59
1.13. Свойства моментов инерции 61
1.14. Примеры вычисления тензора инерции 64
Контрольные вопросы к главе 1 73
2. Кинематика 76
2.1. Скорость точки 76
2.2. Ускорение точки 78
2.3. Закон движения твердого тела 81
2.4. Движение вокруг неподвижной точки 84
2.5. Угловые координаты твердого тела 88
2.6. Параметры Эйлера 96
2.7. Параметры Кэли-Клёйна 102
2.8. Кватернионы 110
2.9. Произвольное движение твердого тела ИЗ
2.10. Дифференциал вращения 115
2.11. Сложное движение точки 118
2.12. Поле скоростей твердого тела 120
2.13. Система угловых скоростей 125
2.14. Поле скоростей плоскопараллельного движения .... 131
2.15. Поле скоростей тела с одной неподвижной точкой . . . 133
2.16. Ускорение точки в сложном движении 139
4 Оглавление
2.17. Поле ускорений в твердом теле 145
Контрольные вопросы к главе 2 150
3. Динамика поступательного движения 154
3.1. Пространственно-временная структура 154
3.2. Первый закон Ньютона. Принцип относительности . . 156
3.3. Принцип детерминированности 159
3.4. Работа силы на перемещении 162
3.5. Основные задачи динамики 169
3.6. Скалярные формы уравнений движения 176
3.7. Основные теоремы динамики материальной точки ... 190
3.8. Влияние связей на движение материальной точки . . . 197
3.9. Одномерные осцилляторы 211
3.10. Резонансные явления 232
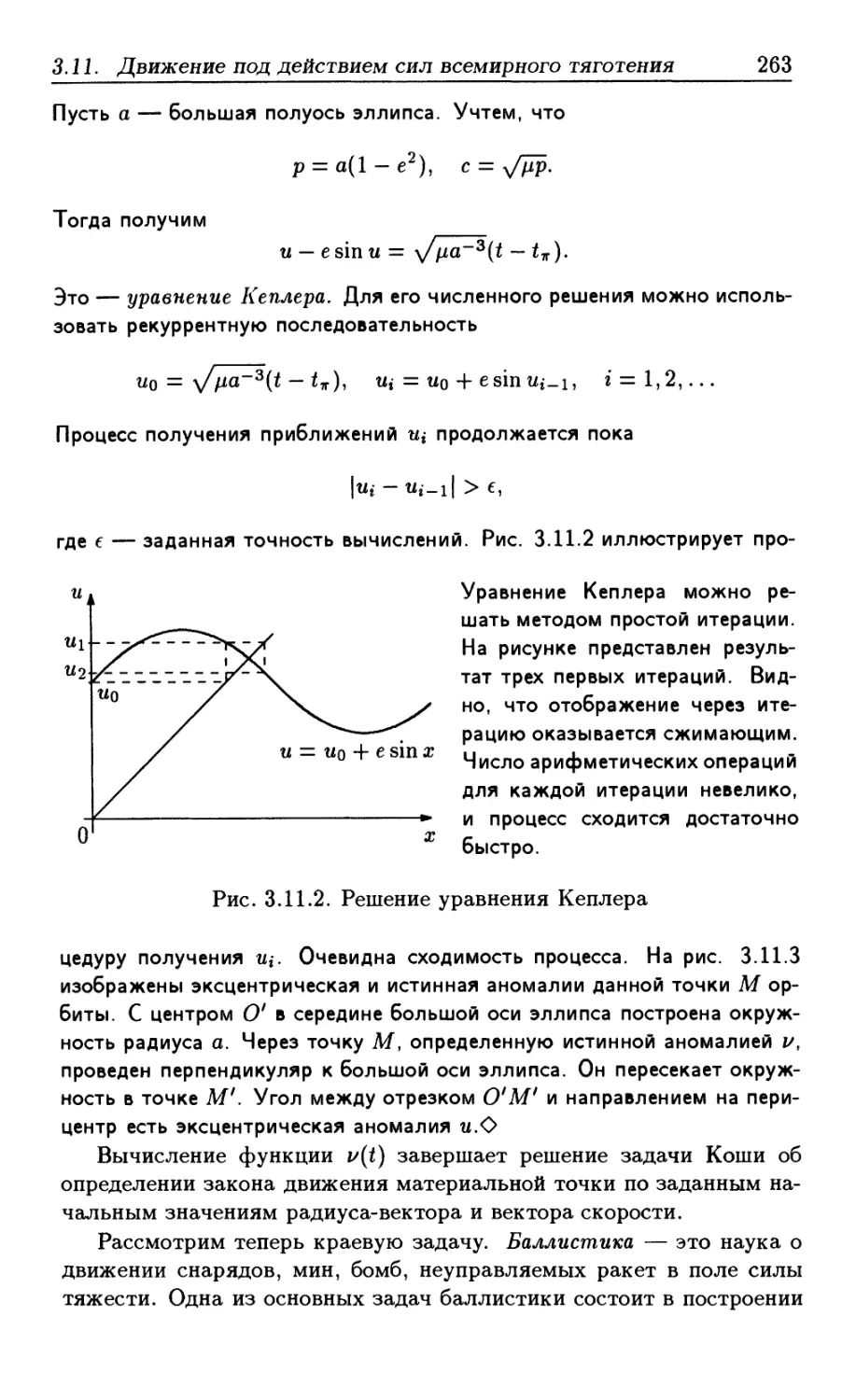
3.11. Движение под действием сил всемирного тяготения . . 254
3.12. Сферический маятник 269
3.13. Относительное движение 274
3.14. Силы инерции из-за вращения Земли 281
3.15. Элементы теории удара 289
Контрольные вопросы к главе 3 297
4. Аналитическая статика системы материальных точек 304
4.1. Равновесие системы 304
4.2. Классификация связей 305
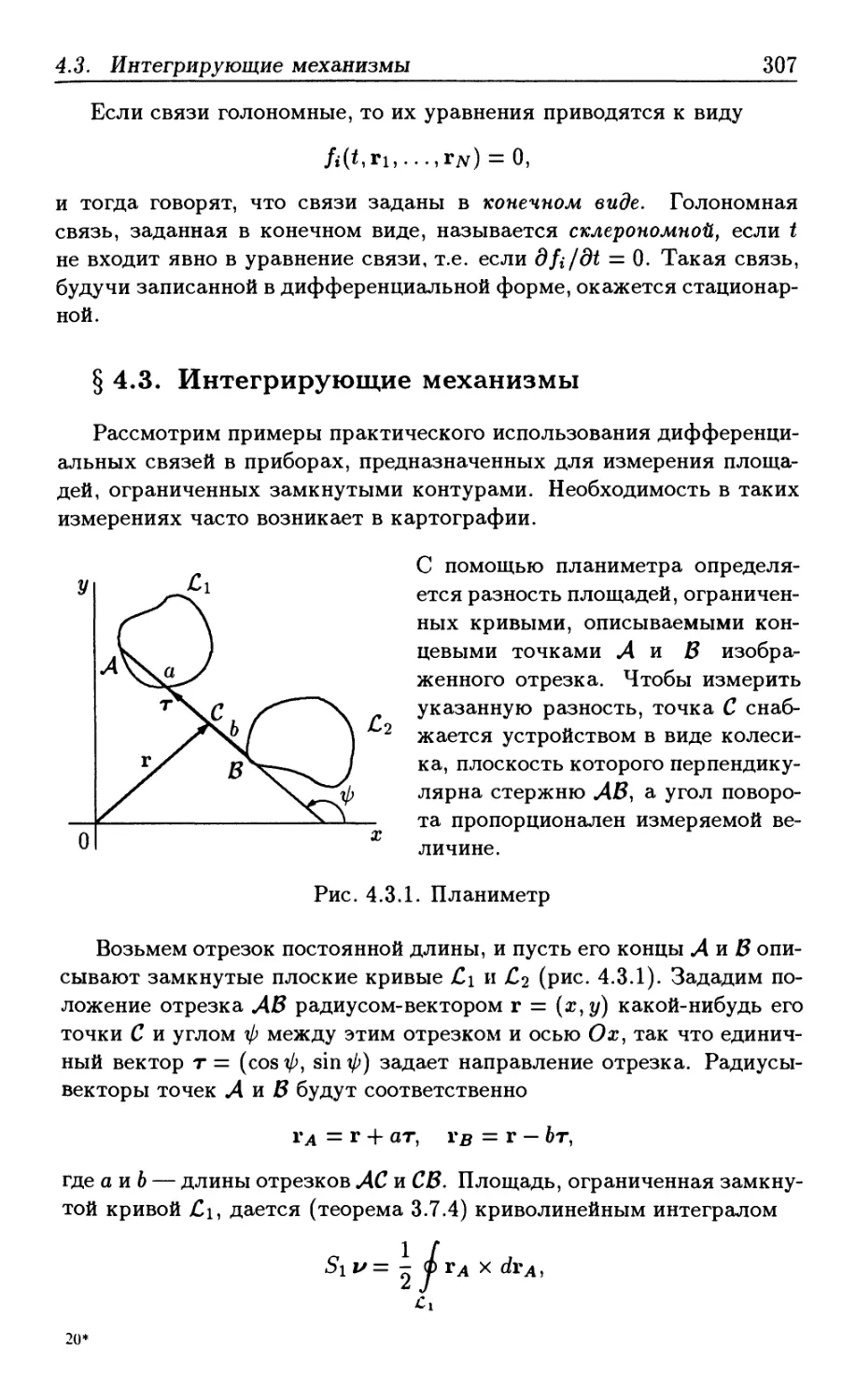
4.3. Интегрирующие механизмы 307
4.4. Критерии голономности системы связей 311
4.5. Выявление голономных связей 324
4.6. Идеальные связи. Виртуальные перемещения 332
4.7. Принцип виртуальных перемещений 343
4.8. Уравнения равновесия абсолютно твердого тела. Гео-
Геометрическая статика 352
4.9. Статически неопределимые системы 357
4.10. Равновесие систем с трением 360
4.11. Уравнение равновесия нити 364
Контрольные вопросы к главе 4 373
5. Динамика системы материальных точек 376
5.1. Общее уравнение динамики системы материальных то-
точек. Основные теоремы 378
5.2. Теоремы Кёнига 397
5.3. Движение систем переменного состава 404
5.4. Принцип Гаусса наименьшего принуждения 417
5.5. Квазикоординаты 421
Оглавление 5
5.6. Уравнения Аппёля 426
5.7. Общее уравнение теории удара 432
Контрольные вопросы к главе 5 438
6. Динамика твердого тела 443
6.1. Динамические характеристики твердого тела 443
6.2. Уравнения движения твердого тела 448
6.3. Движение твердого тела вокруг неподвижной оси . . . 453
6.4. Физический маятник 457
6.5. Задача о центре удара 462
6.Q. Движение твердого тела около неподвижной точки . . 464
6.7. Случай Эйлера 466
6.8. Случай Лагранжа-Пуассона 478
6.9. Случай Ковалевской 489
6.10. Частные первые интегралы 491
6.11. Симметричный гироскоп 494
6.12. Волчок на гладкой горизонтальной плоскости 501
6.13. Относительное равновесие спутника 504
6.14. Качение диска по горизонтальной плоскости 508
6.15. Качение шара по горизонтальной плоскости 514
Контрольные вопросы к главе 6 520
7. Уравнения движения в лагранжевых координатах 523
7.1. Координатная форма принципа Даламбера-Лагранжа 523
7.2. Уравнения движения 526
7.3. Системы Чаплыгина 531
Контрольные вопросы к главе 7 537
8. Динамика голономных систем 539
8.1. Уравнения Л агранжа второго рода 539
8.2. Энергетические соотношения 544
8.3. Обобщенная силовая функция 549
8.4. Функция Лагранжа. Циклические координаты 555
8.5. Метод Рауса исключения циклических координат . . . 564
8.6. Устойчивость движения 567
8.7. Движение вблизи равновесия 569
8.8. Главные координаты 573
8.9. Экстремальные свойства собственных значений .... 583
8.10. Влияние дополнительных сил 590
8.11. Экстремумы функционалов 598
8.12. Интегральные вариационные принципы 612
Контрольные вопросы к главе 8 622
Оглавление
9. Метод Гамильтона-Якоби 626
9.1. Преобразование Лежандра 626
9.2. Канонические уравнения Гамильтона 630
9.3. Скобка Пуассона 636
9.4. Метод Гамильтона-Якоби 641
9.5. Интегральные инварианты 658
9.6. Множители Якоби 672
9.7. Канонические преобразования 680
9.8. Элементы теории возмущений 695
Контрольные вопросы к главе 9 700
Именной указатель 704
Предметный указатель 706
Литература 714
Предисловие ко второму изданию
В настоящее время изданный в 1992 г. учебник "Основы теорети-
теоретической механики" является библиографической редкостью [25]. При
подготовке к его повторному изданию автор доработал представлен-
представленный в учебнике материал на основе опыта преподавания общего кур-
курса теоретической механики с учетом новых программ по механике
[19, 20, 42, 43, 47, 57]. В предлагаемой редакции учебника исправлены
имевшиеся опечатки и более глубоко представлены фундаменталь-
фундаментальные теоретические разделы такие, как кинематика движения твердо-
твердого тела [32], связи и виртуальные перемещения системы материаль-
материальных точек [69], необходимые условия экстремумов функционалов и
элементы теории управления [48, 54, 2], резонансные явления линей-
линейных систем [71], устойчивость консервативных систем в окрестности
положения равновесия [26, 69]. Расширены разделы по геометрии
масс, статике и аналитической динамике [10, 18, 33]. Добавлено ре-
решение новых задач, демонстрирующих влияние сил инерции, влия-
влияние сухого и вязкого трения на движение тел [34], явление удара при
наличии освобождающей связи [11, 30]. Подчеркнута связь современ-
современных методов вариационного исчисления и оптимального управления с
интегральными вариационными принципами механики. Соответству-
Соответствующий материал иллюстрируется задачей о брахистохроне и задачей о
быстродействии в начало координат фазовой плоскости [54]. В конце
каждой главы предложены контрольные вопросы для самопроверки
усвоения материала.
Указанные дополнения не изменили структуры учебника. Автор
старался найти экономные и простые пути изложения материала,
представляющие самостоятельную методическую ценность и могу-
могущие оказаться полезными для преподавателей. Автор надеется, что
материал, содержащийся в учебнике, даст хорошее представление о
теоретической механике как о науке, лежащей в основе современно-
современного естествознания, и, благодаря доступности изложения и богатству
представленного теоретического и практического материала, будет
способствовать привлечению молодежи к естественно-научным дис-
дисциплинам.
Автор благодарен сотрудникам кафедры теоретической механи-
механики механико-математического факультета МГУ Д.Е.Охоцимскому,
В.В. Румянцеву, В.В. Белецкому, И.Л. Антонову, А.В. Карапетяну,
Предисловие к 2 изданию
С.В.Болотину, Я.В.Татаринову и другим сотрудникам за полезные
обсуждения и рекомендации по улучшению содержания книги. Осо-
Особую признательность автор выражает Е.В.Мелкумовой, внесшей зна-
значительный вклад в подготовку контрольных вопросов и именного
указателя.
Предисловие к первому изданию
Теоретическая механика как наука начала развиваться в глубо-
глубокой древности [45, 65]. Изучая такие фундаментальные свойства, как
законы движения и равновесия материальных тел, она имеет огром-
огромное практическое значение и лежит в основе современного естество-
естествознания. Отвечая потребностям научно-технического прогресса, она
постоянно развивается, совершенствуя существующие и разрабаты-
разрабатывая новые методы исследований. Будучи тесно связанной со многими
естественными науками (математика, теория относительности, кван-
квантовая механика, механика сплошной среды, электротехника, теория
машин и механизмов и др.), теоретическая механика не только при-
привносит в них свои результаты, но и заимствует от них новые знания,
постановки задач, подходы к решению проблем.
Изложение основ теоретической механики возможно как с точки
зрения пользователя, которому достаточно узнать некоторый фикси-
фиксированный набор сведений (возможно, без обоснований) для практиче-
практического их применения, так и с точки зрения исследователя, которому
важен не только (и не столько) набор знаний, но и методы и техника
получения результатов для дальнейшего развития теории и с целью
проникновения в еще не изученные сферы ее приложения. Тот и дру-
другой подходы имеют право на существование. Первый часто использу-
используется в технических вузах, где курс теоретической механики служит
лишь основой для специальности. Второй подход больше практи-
практикуется для подготовки специалистов широкого профиля в области
физики, математики, механики.
Настоящая книга ориентирована на подготовку специалистов ши-
широкого профиля. Она основана на лекциях автора для студентов-
механиков механико-математического факультета МГУ. Тем самым
излагаемый материал адресован в первую очередь читателю, решив-
решившему профессионально заняться механикой и, следовательно, решив-
решившему глубоко разобраться в понятиях, идеях и методах этой науки.
Теоретическая механика, развиваясь, достигла большой глубины
и мастерства в исследовании многих весьма сложных проблем. Суще-
Существует также значительное число математических дисциплин (теория
оптимальных процессов, симплектическая геометрия, теория потен-
потенциала, теория линейчатых поверхностей, теория возмущений, теория
устойчивости, теория дифференциальных уравнений и др.), проис-
10 Предисловие к 1 изданию
хождение или развитие которых обязано теоретической механике и
результаты которых вносят существенный вклад, в частности, в по-
понимание ее задач. Ограниченные рамки университетского курса A54
часа) не позволяют включить весь этот материал и заставляют огра-
ограничивать содержание курса наиболее фундаментальными знаниями
с учетом, конечно, передовых направлений научных исследований.
При этом полезно использовать факт взаимопроникновения методов
и понятий теоретической механики и смежных наук, что будет способ-
способствовать не только пониманию их единства, но и позволит включить
новые результаты. В частности, в книге с целью экономии места
опущена теория устойчивости движения, традиционно включаемая
в курсы теоретической механики [69]. В настоящее время эта тео-
теория переросла в самостоятельную математическую дисциплину [26],
основы которой читаются в курсе дифференциальных уравнений [53].
Компактности изложения может способствовать выделение матема-
математически родственных понятий механики. Например, алгебраическая
теория скользящих векторов полностью обслуживает как раздел ки-
кинематики, изучающий свойства угловых скоростей, так и все разделы
геометрической статики. Сравнительный анализ свойств углов Эйле-
Эйлера, параметров Кэли-Клейна и кватернионов позволяет существен-
существенно дополнить кинематику твердого тела, экономно распорядившись
объемом соответствующего раздела [23]. Лаконичности способству-
способствует также сочетание алгебраического и геометрического стиля [31, 63]
аналогично тому, как это применяется в дифференциальной геоме-
геометрии [28].
Принятая в книге логическая схема изложения материала доста-
достаточно традиционна [4, 12, 15, 16, 29, 39, 40, 52, 68] и соответствует
установившейся за много лет последовательности проведения прак-
практических занятий.
Курс начинается с раскрытия понятия аффинного точечно-век-
точечно-векторного пространства как формальной аксиоматической основы по-
построений теоретической механики. Строится теория преобразований
системы скользящих векторов к простейшему виду. Вводится поня-
понятие центра масс и тензора инерции и развивается геометрия масс.
Весь этот аппарат, помимо теоретической механики, может быть эф-
эффективно применен и в некоторых разделах математики [7, 50]. Что-
Чтобы подчеркнуть это, ему придана векторно-алгебраическая форма.
Кинематика традиционно включает вопросы, связанные с изуче-
изучением геометрических аспектов движения в трехмерном аффинном
пространстве. Структура поля скоростей и поля ускорений твердых
тел анализируется с помощью аппарата дифференциальной геоме-
геометрии и теории ортогональных операторов. Создается теоретическая
основа для введения и расчета основных динамических характери-
Предисловие к 1 изданию 11
стик (кинетической энергии, кинетического момента, энергии уско-
ускорений), а также анализа структуры виртуальных перемещений. С
целью облегчения практических приложений особое внимание уде-
уделено сопоставлению различных типов координат углового положения
твердого тела [23, 28].
Для изучения поступательного движения твердого тела вводится
понятие материальной точки [1]. Это позволяет сделать динамику
материальной точки физически ощутимой, облегчает анализ упраж-
упражнений и сопоставление с опытными данными аксиоматически вводи-
вводимых принципа относительности Галилея, принципа детерминирован-
детерминированности и законов Ньютона. Анализируются ограничения на форму
законов механики и физики, следующие из принципов относительно-
относительности и детерминированности [5, 67]. Ставятся основные задачи меха-
механики. Выявляются преимущества различных систем криволинейных
координат для описания движения точки. Доказываются основные
теоремы механики и сообщаются основные приемы, применяемые для
исследования движения. Как основа качественного анализа поведе-
поведения механических объектов подробно изучаются фазовые портреты
осцилляторов. На их примере демонстрируется влияние потенциаль-
потенциальных и диссипативных сил, а также резонансные явления различных
типов [37]. Изучается динамика материальной точки, стесненной свя-
связями [61].
Столь подробное изучение движения материальной точки вызва-
вызвано двумя обстоятельствами. Во-первых, построенная теория имеет
большое самостоятельное значение, как теория широко распростра-
распространенного на практике поступательного движения реальных тел. Во-
вторых, методически она создает достаточно удобный каркас для по-
построения статики и динамики системы материальных точек, а также
доставляет ряд стандартов исследования задач механики.
Аналитическая статика и динамика опираются на учение о свя-
связях. Вопрос о голономности связей имеет принципиальное значение
для выбора того или иного математического аппарата исследования
свойств движения и равновесия системы материальных точек. В кни-
книгу включены элементы теории пфаффовых форм в объеме, достаточ-
достаточном для получения критериев голономности системы связей [44, 59].
Для большей доступности это дополнение осуществлено обычными
средствами математического анализа. В итоге сформулирован про-
простой конечный алгоритм, позволяющий выделить максимальное чи-
число голономных из заданной совокупности дифференциальных свя-
связей.
За основу учения о равновесии принят, как наиболее общий, ме-
метод аналитической статики [68]. С его помощью выводятся другие
известные методы. В частности, как следствие получена и сведена
12 Предисловие к 1 изданию
к теории скользящих векторов геометрическая статика. Показана
возможность ее применения для получения условий равновесия про-
произвольных механических систем [61].
Динамика системы материальных точек сначала излагается для
случая, когда движение стеснено произвольными дифференциальны-
дифференциальными связями. Из принципа Даламбера-Лагранжа (общее уравнение
динамики) с использованием свойств структуры виртуальных пере-
перемещений [68] выводятся общие теоремы динамики об изменении ки-
кинетической энергии (живой силы), кинетического момента (момента
количеств движения), количества движения. Изучается динамика
системы переменного состава [1]. На основе принципа Гаусса наи-
наименьшего принуждения выводятся уравнения Аппеля в квазикоор-
квазикоординатах. Получены также уравнения Воронца и, как их следствие,
уравнения Чаплыгина. Установлено, что воздействие неголономных
связей включает реакции, имеющие гироскопическую природу [44].
Динамика твердого тела изучается на основе общих теорем об из-
изменении кинетической энергии, кинетического момента и количества
движения, а также с помощью основных понятий геометрии масс.
Показывается, что аппарат динамики системы материальных точек
применим для описания движения твердого тела и систем твердых
тел. Проясняется вычислительная экономность использования урав-
уравнений Эйлера. Традиционно анализируются случаи Эйлера-Пуансо,
Лагранжа-Пуассона, Ковалевской [24]. В качестве примера методи-
методики получения частных случаев интегрируемости приводятся случаи
Гесса и Бобылева-Стек лова [6]. С целью демонстрации приложения
развитых методов к практике даются основы элементарной теории
гироскопов [14, 41], достаточные для качественного анализа действия
гироскопических приборов.
Как инструмент для изучения произвольных голономных систем
материальных точек получены уравнения Лагранжа второго рода и
канонические уравнения Гамильтона [66]. Дается понятие о лагран-
жевом формализме [1, 36]. Изучается поведение полной энергии си-
системы в зависимости от структуры обобщенных сил и кинетической
энергии. Дается метод циклических координат [5, 58]. Устанавли-
Устанавливается, что для голономных систем интегралы количества движе-
движения, кинетического момента и обобщенный интеграл энергии Яко-
би [70] всегда могут быть представлены как следствие существова-
существования соответствующих циклических координат. Указывается на воз-
возможность использования аппарата теории групп для поиска инте-
интегралов движения [5]. Изложение вариационных принципов Гамиль-
Гамильтона и Мопертюи-Лагранжа-Якоби [17, 38, 70] выполнено в соот-
соответствии с современной теорией оптимальных процессов [2, 5, 13].
Геометрически наглядная трактовка придана теории малых колеба-
Предисловие к 1 изданию 13
ний [3, 5, 21, 22].
Содержащиеся в книге методы анализа систем канонических урав-
уравнений Гамильтона включают метод Якоби-Гамильтона, теорию по-
последнего множителя Якоби [70], интегральные инварианты, перемен-
переменные действие-угол [21, 49, 55]. Для иллюстрации эффективности при-
приложений всего этого арсенала методов в книге даются элементы те-
теории возмущений.
Дополнительные подробности о содержании книги читатель смо-
сможет узнать из оглавления, где перечислены все важнейшие ее разде-
разделы. Теоретический материал поясняется решением большого числа
задач и примеров различного уровня сложности [8, 35, 43, 57].
Существующая библиография по теоретической механике огром-
огромна. Приведенный в книге список литературы не претендует на пол-
полноту. В нем содержатся только работы на русском языке, близкие
к настоящему изданию по назначению. К ним при необходимости
читатель сможет обратиться за дополнениями. В этом случае преди-
предисловие сыграет роль предметного указателя.
Большое значение имеет возможность самостоятельной оценки
читателем качества усвоения материала. С этой целью на базе IBM
PC разработано приложение к книге в виде компьютерного учебно-
учебного пособия, содержащее справочный теоретический материал, образ-
образцы решения задач различного уровня сложности, контрольные во-
вопросы и задачи, элементы практикума по теоретической механике.
Балльная система оценки знаний, элементы анимации изображения
на экране дисплея, дружественный интерфейс делают компьютер-
компьютерное пособие привлекательным средством интенсификации процесса
обучения как для преподавателя, так и для человека, решившего са-
самостоятельно закрепить свои знания.
По вопросам, связанным с приобретением компьютерного учебно-
учебного пособия, следует обращаться на кафедру теоретической механи-
механики МГУ (тел. 9393681) или в ИПМ им. М.В. Келдыша РАН, тел.
2507877 (Голубев Ю.Ф.), 2507925 (Павловский В.Е.).
В работе над книгой автор мог неограниченно пользоваться по-
помощью и советами своих коллег по кафедре теоретической механики
МГУ, за что приносит им глубокую благодарность. Автор признате-
признателен Н. Н. Колесникову, В. В. Козлову, А. П. Маркееву, Д. В. Зенкову,
И. А. Серегину, Р. Г. Мухарлямову, А. С. Галиуллину, прочитавшим
рукопись и сделавшим ряд существенных замечаний по уточнению
отдельных разделов книги.
Глава 1
Векторные свойства евклидова
пространства
§ 1.1. Точки и векторы
Предмет теоретической механики состоит в изучении и предсказа-
предсказании движений материальных систем. С этой целью формулируются
законы механики, создаются и анализируются соответствующие ма-
математические модели. Понятие аффинного точечно-векторного про-
пространства представляет собой математическую модель простейших
геометрических объектов и их отношений, на которых базируется те-
теория движения.
Аффинное точечно-векторное п-мерное пространство Ап есть
множество, состоящее из элементов двух типов: точек и векторов
пространства. При этом предполагаются выполненными следующие
четыре аксиомы:
I. Множество всех векторов пространства Ап образует п-мерное
линейное пространство Rn.
И. Каждые две точки А и В, взятые в определенном порядке,
задают единственный вектор г = АВ.
III. Если даны произвольный вектор г и произвольная точка А, то
существует единственная точка В такая, что г = АВ. Пара "точка
А и вектор г" называется "вектором г, приложенным к точке А".
При этом точка А называется начальной точкой приложенного к ней
вектора г, а точка В — концом вектора г (приложенного к точке А).
IV. Если ri = АВ и г2 = ВС, то ri + г2 = АС.
Вещественное п-мерное линейное пространство Rn есть множество
элементов (векторов), обладающих следующими свойствами:
I. Для любых двух элементов ri,i*2 Е Rn однозначно определен
элемент а Е Яп, называемый их суммой и обозначаемый ri 4 г2,
причем должно быть выполнено:
1. ri -f гг = гг 4- ri (коммутативность);
2. ri 4 (гг 4 гз) = (ri 4 г2) 4 гз (ассоциативность);
3. Существует элемент О Е Rn: r40 = r для любого гЕйп;
4. Для любого г Е Rn существует элемент — г Е Rn : г 4 (—г) = 0.
1.1. Точки и векторы 15
II. Для любого числа а и любого элемента г G Rn определен эле-
элемент от G Rn (произведение элемента г на число а), причем должно
быть выполнено:
1. а(/?г) = (а/?)г;
2. 1г = г;
3. (а + /?)г
4. a(ri + г2) =
Пусть каждой точке аффинного пространства по какому-нибудь
правилу поставлен в соответствие единственный вектор из Rn . Такое
множество пар точек и векторов называется векторным полем.
Суммой векторных полей называется векторное поле, каждой точ-
точке которого поставлен в соответствие вектор, равный сумме векторов,
приложенных к этой точке от составляющих полей.
Евклидова структура в линейном пространстве Rn задается ска-
скалярным произведением двух векторов. Конкретно скалярное произ-
произведение можно задать с помощью какой-нибудь положительно опре-
определенной билинейной симметрической формы, устанавливающей со-
соответствие между парой векторов и некоторым числом. Другими сло-
словами, скалярное произведение ri • r2; ri,r2 G Д" — это операция,
имеющая свойства:
1. г • г > 0 для любого г G Rn , причем г • г = 0, только если г = 0;
2. ri г2 = г2 -п;
3. (<*ri) -r2 = <*(Г1 -г2);
4. (п 4- г2) • г3 = ri • г3 4- г2 • г3.
Скалярное произведение позволяет определить расстояние (ев-
клидову метрику)
р(А, В) = |АВ| = \/АВ АВ
между точками А и В соответствующего аффинного пространства Ап.
Аффинное пространство с введенной в нем евклидовой метрикой
называется евклидовым пространством Еп.
В силу сформулированных выше свойств операция скалярного
умножения вполне определена, если указано, во что эта операция
переводит пары базисных векторов ei,... ,еп пространства Rn. Обо-
Обозначим
gij = et- -ej, gij = gji.
Пусть разложения x E Rn и у G Rn по базисным векторам имеют вид
ж»е,-, у =
16 Глава 1. Векторные свойства евклидова пространства
Следовательно
Естественно потребовать, чтобы скалярное произведение не менялось
при переходе к другим базисным векторам. Тогда коэффициенты
скалярного произведения должны подчиняться специальному закону
преобразования. Укажем этот закон. Пусть базис е^,... ,е^ связан с
базисом ei,..., еп посредством формул
В базисе е^,... ,е'п коэффициенты скалярного произведения примут
вид
k,P=i
Совокупность G коэффициентов д^ скалярного произведения, подчи-
подчиняющаяся указанному закону при преобразованиях координат, обра-
образует тензор второго ранга, который называется метрическим.
Покажем, что если G — тензор, то скалярное произведение в са-
самом деле инвариантно относительно линейных преобразований коор-
координат. Пусть в базисе е^,..., е^ векторы х, у выражаются формула-
формулами
При этом справедливы формулы преобразования координат
Имеем
n n n n
x У = Yl gijx'iyj = Л Л gkpanapjx'iy'j = ]Г gkpXkVp-П
i,j = l tJ = lJb,p=l k,p=l
Векторы x,y G Дп, для которых х • у — 0, называются ортого-
ортогональными, а векторы х G йп, для которых х • х = 1, называются
нормированными (единичными).
В линейной алгебре доказывается, что всякую положительно
определенную квадратичную форму можно привести к диагонально-
диагональному виду. Простейший способ задать скалярное произведение — это
1.1. Точки и векторы 17
указать, какие п векторов пространства Rn должны быть единичны-
единичными и взаимно ортогональными.
Линейным оператором А : Rn —> Rn называется правило, ставя-
ставящее в соответствие вектору хЕйп вектор Ах Е Rn и удовлетворяю-
удовлетворяющее условиям:
1. А(Лх) = ААх, XeR;
2. А(х + у) = Ах + Ay, yeRn.
Пусть ei,..., еп — базисные векторы и
i = l
Используя свойства линейного оператора, найдем
п
i = l
Следовательно, линейный оператор вполне определен указанием об-
образов базисных векторов. Результаты действия оператора над базис-
базисными векторами разложим по самим этим векторам:
п
Матрица А = (аг^), г, j = 1,..., п, называется матрицей линейного
оператора в базисе еь ... ,еп. Коэффициенты разложений векторов
у = Ах и х по базису запишем в виде матриц-столбцов размерностью
(п х 1). Тогда действие линейного оператора можно представить в
матричном виде
У\ \ / «и . •• «in
Уп } \ «ril • • • Clnn
и интерпретировать как линейное преобразование координат. Если
det А ф 0, то существует обратное преобразование
XI = Si(y),...,Sn = Sn(y),
вычисляемое по правилу
)-i /
/ У\
\ Уп
2 - 150"
18 Глава 1. Векторные свойства евклидова пространства
которому отвечает обратный линейный оператор х = А"}', так что
х = А^Ах.
Линейное преобразование координат называется движением ме-
метрики, если оно невырождено (det А ф 0) и преобразование метриче-
метрического тензора выражается равенствами
9ij(Vi, • • •» Уп) ~ 9ij(*i(y), • • •, »n(y)).
Другими словами, движение метрики точно сохраняет вид скалярно-
скалярного произведения.
При движении метрики компоненты метрического тензора удовле-
удовлетворяют равенствам
Представим это в матричной форме
ATGA = G,
АТ — матрица, транспонированная по отношению к A, G = (9ij) —
матрица метрического тензора. В частности, для евклидова про-
пространства Еп существует базис, в котором G превращается в еди-
единичную матрицу Еу и потому АТА = Е.
Матрица А называется ортогональной, если АТ = А. По-
Поскольку det Ат = det Л, то для ортогональной матрицы А получим
deti4 = ±l.
Линейный оператор, обладающий ортогональной матрицей в ка-
каком-либо ортонормированном базисе пространства Еп, называется
ортогональным линейным оператором.
Теорема 1.1.1. Матрица ортогонального линейного оператора
будет ортогональной в любом ортонормированном базисе простран-
пространства Еп.
Доказательство. Пусть задан ортогональный линейный опе-
оператор А. Это значит, что существует ортонормированный базис
ei,..., еп пространства Еп, для которого матрица
ain
A- '
1.1. Точки и векторы 19
ортогональна: АтА = Е. Зададим базис е^,...,^ с помощью ра-
равенств
t =
Потребуем, чтобы этот базис был ортонормированным. Тогда матри-
матрица
;
••• Сп
ортогональна (почему?). Применяя оператор А к векторам е(«, най-
найдем
п п п п п п
Следовательно, матрица Л оператора А в базисе е^,...,^ может
быть найдена по формуле А = СтАС. Проверим ее ортогональность:
АТА = СТАТССТАС = СТАТАС = СТС = Е.
Это и требовалось доказать.О
Теорема 1.1.2. Для ортогональности линейного оператора не-
необходимо и достаточно, чтобы он переводил ортонормированный
базис в ортонормированную совокупность векторов, число которых
равно числу векторов базиса.
Доказательство. Необходимость. Пусть А — ортогональный
оператор. Тогда в ортонормированном базисе ei,..., еп его матрица
А ортогональна: АТА = Е. Применяя оператор к базисным векто-
векторам, получим
apjep = J>2 akiaPJek ' eP =
Следовательно, в результате получаем п ортонормированных векто-
векторов.
Достаточность. Пусть базисные векторы ei,...,еп переходят в
попарно ортонормированные. Тогда, очевидно,
j ^ j, i, j = 1,..., n.
а значит, AT A = E.O
20 Глава 1. Векторные свойства евклидова пространства
Следствие 1.1.1. Ортогональный линейный оператор сохраня-
сохраняет расстояния между соответствующими точками евклидова про-
пространства.
Доказательство. Поскольку указанный линейный оператор пе-
переводит ортонормированный базис в ортонормированный, то длина
вектора в полученном базисе будет такой же, как и длина соответ-
соответствующего вектора в исходном:
Пусть заданы два линейных оператора А и В. Композицией ли-
линейных операторов называется линейный оператор С = А о В, дей-
действие которого равно результату применения оператора А к вектору,
полученному вследствие применения оператора В. Другими слова-
словами, пусть хЕйп — произвольный вектор. Тогда
Сх = (АоВ)х = А(Вх).
Назначим базис ei,..., еп. Зададим матрицы операторов А и В:
Аег- = ^Г ajiBj, Вег- =
Применим последовательно линейные операторы:
j=i Jb=ii=i
Видим, что матрица С оператора А о В получается с помощью умно-
умножения матриц: С = АВ. Произведение матриц некоммутативно. Не-
Некоммутативна и композиция линейных операторов.
Совокупность Г некоторых элементов называется группой, если
каждой паре а и Ь элементов из Г ставится в соответствие их произ-
произведение а о b G Г, обладающее следующими свойствами:
1. (а о 6) о с = а о F о с) — ассоциативность;
2. Существует элемент 1 Е Г такой, что loa = aol = а;
3. Для любого а Е Г существует элемент а" Е Г такой, что
а о а = 1.
Пример 1.1.1. Множество квадратных невырожденных матриц
образует группу относительно операции умножения. Роль единичного
элемента здесь играет единичная матрица, роль обратного — обратная
1.1. Точки и векторы 21
матрица. В соответствии с этим совокупность линейных операторов с
невырожденными матрицами образует группу относительно их компо-
композиции.
Теорема 1.1.3. Множество ортогональных операторов (орто-
(ортогональных матриц) образует группу относительно композиции опе-
операторов (операции умножения матриц).
Доказательство. Рассмотрим множество ортогональных ма-
матриц. Роль единичного элемента для него играет единичная матрица
ЕЛ роль обратного — транспонированная матрица. Докажем, что
произведение ортогональных матриц дает ортогональную матрицу.
Пусть А и В ортогональны: АТА — Е, ВТВ = Е. Для их произве-
произведения С = АВ найдем
СТС = (АВ)Т(АВ) = ВТАТАВ = Вт В = Е.
Таким образом, ортогональные матрицы образуют группу относи-
относительно их умножения, а ортогональные операторы — группу отно-
относительно их композиции.D
Группа ортогональных операторов над пространством Еп называ-
называется группой О(п). Подгруппа с det А > 0 называется SO(n).
Рассмотрим реальное физическое пространство. Геометрически
оно представляет собой трехмерное аффинное пространство А3 . На-
Направленные отрезки прямых назначим ортогональными, если они
перпендикулярны. Выберем произвольно некоторую опорную точку
О Е А3 и приложим к ней три взаимно перпендикулярных вектора,
которые будем считать единичными. Тем самым определены соотно-
соотношения
О, если г ф j\ ij = 1,2,3,
которые позволяют ввести скалярное произведение и превратить ис-
исследуемое пространство А3 в евклидово пространство Е3. Названная
система векторов образует базис линейного пространства Е3. Взятая
вместе с точкой О, она называется декартовым репером пространства
Е3. Коэффициенты разложения векторов с началом в точке О по
указанному базису называются декартовыми координатами элемен-
элементов пространства. Прямые, проходящие через точку О параллель-
параллельно базисным векторам, называются декартовыми осями координат
с началом в точке О. Базисные векторы будем обозначать ех,е2,ез.
Разложения векторов х, у Е Е3 примут вид
X = Х\Ъ\ + Х2&2 + #3^3, У — 2/1^1 + 2/2^2 +
22 Глава 1. Векторные свойства евклидова пространства
Скалярное произведение определено формулой
х у = xiyi + Х2У2 +
Модуль (длина) вектора есть
X = |х| = \/Х • X = Vr = \/xf + х\ + X3,
что служит выражением теоремы Пифагора.
Из курса аналитической геометрии известно, что:
1. х-у = |х|- |y|cos(x7y) = xycos(x7y).
Можно также сказать, что скалярное произведение есть произведение
модуля одного из векторов и проекции другого вектора на направле-
направление первого. Если один из перемножаемых векторов, например вто-
второй, оказался единичным, то скалярное произведение даст проекцию
первого вектора на направление второго: х • у = ху, если |у| = 1.
2. Выражение для косинуса угла между векторами принимает вид
(Э)
ху
3. В случае перпендикулярности векторов х и у имеем
Рассмотрим теперь в евклидовом пространстве Ег билинейную ко-
сосимметричную операцию, ставящую в соответствие паре векторов
х, у 6 Е3 третий вектор z = xxyE.El3H обладающую свойствами:
1. х х у = -(у х х) (кососимметричность);
2. Fх) х у = 8(х х у) (умножение на число 8);
3. (xi + х2) х у = xi х у + х2 х у (дистрибутивность).
В соответствии с принятыми свойствами будем иметь
ззз
х х У = ]С х*е* х Yl mei = Yl Xiyi е* х еУ
t=l ; = 1 t,; = l
Следовательно, как и в случае скалярного произведения, для полного
определения операции достаточно указать, во что она переводит пары
базисных векторов.
Пусть базисные векторы ориентированы так, что из конца третье-
третьего вектора е3 кратчайший поворот от первого ei ко второму е2 виден
происходящим против хода часовой стрелки. Система координат с
таким базисом называется правоориентированной (правой).
1.1. Точки и векторы
23
Потребуем, чтобы для правоориентированной ортонормированной
системы координат были выполнены равенства1
ех х ei = ег х ег = е3 х е3 = 0, е2 х е3 = -е3 х е2 = ei,
е3 х ei = —ei х е3 = е2, ei х ег = —е2 х ei = е3.
Тогда, очевидно,
х х у = (х2у3 -
или символически с помощью определителя
si, е2, е3
- x2yi)e3
х х у =
Уь 2/2, УЗ
Построенная таким образом операция носит название векторного
произведения (векторного умножения).
Для векторного произведения z = х х у справедливо следующее:
z х х = 0, z х у = 0, |z| = |х| • |у| sin(xTy),
вектор z перпендикулярен плоскости, натянутой на векторы х и у,
причем из конца вектора z поворот от х к у в кратчайшую сторону
виден происходящим против хода часовой стрелки.
Перейдем к произведениям трех векторов x,y,zG^3 . Их суще-
существует два типа. Смешанное произведение дается формулой
х • (у х z) =
31, #2, #3
Уь У2, Уз
Для него справедлива циклическая перестановка
х • (у х z) = у • (z х х) = z • (х х у).
Если в смешанном произведении какие-либо два сомножителя кол-
линеарны, то произведение равно нулю.
Двойное векторное произведение представляется формулой
х х (у х z) = y(x • z) - z(x • у).
Пусть в некотором репере Oeie2e3 вектор а
а =
+ а2е2 + а3е3
1 Для левоориентированного репера результаты должны иметь противополож-
противоположные знаки, что связано с требованием инвариантности операции при преобразо-
преобразованиях координат
24 Глава 1. Векторные свойства евклидова пространства
имеет координаты, представляющие собой функции скалярного ар-
аргумента t (например, времени):
a2 = a2(t), a3 =
В этом случае вектор а называется вектор-функцией аргумента t в
репере Ое^ез.
Выберем два значения аргумента: t и t + At. Значения вектор-
функции для них обозначим а и a -f Aa соответственно. Вектор Аа
назовем приращением вектор-функции вследствие приращения аргу-
аргумента. Рассмотрим отношение Аа/Д<. Предел этого отношения, если
он существует при At —* 0, есть вектор
da Aa
— = hm -—.
dt Д*-+о А*
Он называется производной вектора а по аргументу t, взятой от-
относительно репера Ое^ез. Таким образом,
da da\ da 2 da^
= е + е+е
Пусть компоненты метрического тензора (gij) не зависят от t (см.
определение метрического тензора). Тогда справедливы формулы
d , _ ч da _ db d . _ ч da db
_(a.b)=-.b + a.-, _(axb) = -xb + aX-,
где b — другая вектор-функция аргумента t. Продифференцируем
равенство а • а = а2:
da da ,
а« —= а—, или а • da = a da,
at at
Другими словами, скалярное произведение вектора на его дифферен-
дифференциал равно произведению модуля вектора на дифференциал модуля.
Если модуль вектора постоянен, то вектор и его дифференциал вза-
взаимно перпендикулярны: а • da = 0. В частности, если |ае| = 1, то
ае • (dsie/dt) = 0.
Вектор-функция а = а(^) может изменяться и по модулю, и по
направлению. Вектор а представим как произведение модуля на еди-
единичный вектор: а = аае. Взяв производную от обеих частей равен-
равенства, найдем
da da dae
а + а
1.2. Свободные и скользящие векторы 25
Первое слагаемое правой части, очевидно, коллинеарно вектору а
и носит название продольной составляющей. Оно характеризует бы-
быстроту изменения модуля вектора. Второе слагаемое направлено пер-
перпендикулярно вектору а и называется поперечной, или трансверсаль-
иой, составляющей. Оно характеризует быстроту поворота вектора.
Отметим, что, вообще говоря,
da
§ 1.2. Свободные и скользящие векторы
Согласно аксиомам аффинного пространства каждой точке из Е3
соответствует линейное пространство векторов, имеющих начало в
этой точке. Вместе с тем часто возникает необходимость по той или
иной причине считать одинаковыми некоторые векторы с различны-
различными начальными точками. Будем говорить, что множество эквива-
эквивалентных (тождественных) в каком-нибудь смысле векторов образует
конкретный класс эквивалентности. Векторные операции над пред-
представителями одного и того же класса эквивалентности будем счи-
считать лишенными смысла. Векторные операции над классами экви-
эквивалентности будем понимать как операции, одинаково выполненные
над отдельными любыми представителями классов, участвующих в
операции.
Сначала введем понятие свободного вектора. Напомним, что аф-
аффинное пространство А3 объединяет множество точек и пространство
векторов R3. Выберем вектор el ? R3 и будем откладывать его от про-
произвольной точки А € А3. Часто принимают, что все векторы, постро-
построенные таким образом, эквивалентны. Этот класс эквивалентности
называется свободным вектором а.
Особую роль в теоретической механике играет понятие скользя-
скользящего вектора. В пространстве А3 выберем опорную точку О, некото-
некоторую точку А и вектор и с началом в точке А. Зададим действитель-
действительное число (параметр) А и сопоставим ему точки Лд, В\, определенные
векторами (рис. 1.2.1)
ОАА = ОА + Аи, ОВА = ОА + (А + 1)и.
Когда А принимает произвольные действительные значения, полу-
получим множество векторов АдВа, каждый из которых имеет начало
в точке А\ и конец в точке В\. Все векторы, принадлежащие это-
этому множеству, отнесем к одному и тому же классу эквивалентности,
который назовем скользящим вектором и обозначим (ОА, и).
26
Глава 1. Векторные свойства евклидова пространства
Прямая, определенная параметрически уравнением
ОАЛ = ОА + Аи,
называется основанием скользящего вектора.
Из сказанного следует, что в пространстве Е13, снабженном декар-
декартовыми осями координат с началом в точке О, скользящий вектор
можно однозначно задать шестью параметрами (числами): тремя ко-
координатами точки А и тремя проекциями вектора и на координатные
оси. Пусть г = О А есть радиус-вектор точки А. Два вектора г и и
называются векторными координатами скользящего вектора, кото-
который в связи с этим будем обозначать (г, и). Два скользящих вектора
(г,и) и (г,—и) называются противоположными.
Суммарное число координат векторов г и и на единицу превышает
число независимых параметров скользящего вектора, равное пяти. В
самом деле, пусть в Е3 заданы две точки А\ и Ач и пусть точке А\
соответствует радиус-вектор ri, а точке А 2 — радиус-вектор Г2. Вы-
Выражения (ri,u) и (r2,u) определяют один и тот же скользящий век-
вектор тогда и только тогда, когда вектор А1А2 коллинеарен вектору
и. Другими словами, для задания скользящего вектора можно вос-
воспользоваться координатами любой точки его основания (параметр,
задающий смещение и вдоль основания, несуществен).
Моментом М° скользящего вектора (г, и) относительно опорной
точки или (что одно и то же) полюса О называется векторное произ-
произведение
М° = г х и.
Начало вектора М° совпадает с точкой О. Модуль момента М° чи-
численно равен площади параллелограмма, построенного на векторах г
и и. Можно также сказать, что модуль момента равен произведению
|и| на плечо ft. Плечом скользящего вектора относительно полюса
называется длина ft перпендикуляра, опущенного из полюса на осно-
основание скользящего вектора (рис. 1.2.1). Очевидно, что М° не зависит
О
Геометрически понятие скользящего
вектора означает следующее. Через
заданную точку А проведена прямая
/ с направляющим вектором и. Все
векторы и, отложенные от произволь-
произвольных точек прямой /, считаются экви-
эквивалентными.
Рис. 1.2.1. Скользящий вектор
1.2. Свободные и скользящие векторы
27
от того, какая точка на основании взята для задания скользящего
вектора. Действительно, пусть точки А\,Аъ принадлежат основа-
основанию и ri,r2 — соответственно радиусы-векторы этих точек. Тогда
г2 — ri = Аи. Обозначим
= ri х и,
= г2 х и.
Вычитая из второго равенства первое, найдем
Mi — М2 = (ri — Г2) х u = Аи х и = 0.
Пусть нам известен момент М° относительно полюса О, а мы хо-
хотим найти момент Мс того же скользящего вектора относительно
точки С. Обозначим гс — радиус-вектор точки А относительно по-
полюса С, а ОС — радиус-вектор точки С относительно О (рис. 1.2.2):
г = гс — ОС. Имеем
Mc=rcxu = (r- ОС) х и = М° - ОС х и.
Тем самым найдена формула пересчета момента при переходе к но-
новому полюсу.
и
При изменении полюса момент сколь-
скользящего вектора изменяется. Доба-
Добавляется момент, учитывающий поло-
положение нового полюса относительно
исходного. Однако, проекция момен-
момента на основание скользящего вектора
остается постоянной.
Рис. 1.2.2. Изменение полюса
Теорема 1.2.1. Скользящий вектор (г, и) можно однозначно оп-
определить, задав векторы Ы° и и, удовлетворяющие условию
что геометрически означает перпендикулярность вектора и момен-
моменту М°.
Доказательство. Пусть заданы векторы М° и и. Найдем
радиус-вектор г, начало которого совпадает с точкой О, а конец
принадлежит искомому основанию скользящего вектора. Потребу-
Потребуем, чтобы вектор г был перпендикулярен вектору и:
и х М° = и х (г х и) = ги2.
28
Глава 1. Векторные свойства евклидова пространства
Следовательно,
r = (uxM°)u"\
Тем самым скользящий вектор однозначно определен.?
Координаты векторов и и М° составляют шесть параметров, за-
задающих единственный скользящий вектор. Они не являются неза-
независимыми, так как связаны условием перпендикулярности векторов
М° и и, и называются плюккеровыми координатами. Удобство их
в том, что они одинаковы для любой точки основания скользящего
вектора.
Пусть е — единичный вектор оси /, проходящей через полюс О.
Рассмотрим скалярное произведение
е • М° = е • (г х и).
Представим (рис. 1.2.3) векторы г и и в виде
таким образом, чтобы векторы г*- и и* были перпендикулярны век-
вектору е, а ге и ие — параллельны ему:
r^-e = 0, u^-e = 0, re||e, ue||e.
Тогда
е-М° = e-[(r7r-fre)x(u7r-fue)] = e-(r^ xu^-f re xii^-fr* xue+rexue).
С учетом способа представления векторов г и и будем иметь
Полученное равенство означает, что проекция момента М° на ось /
есть момент проекции скользящего вектора на плоскость, перпенди-
перпендикулярную е.
и
Момент скользящего вектора относи-
относительно оси вычисляется как момент
его проекции на плоскость перпенди-
перпендикулярную оси, взятый относительно
точки пересечения оси с плоскостью.
Указанный момент не меняется при
смещении плоскости вдоль оси.
Рис. 1.2.3. Момент скользящего вектора относительно оси
1.3. Системы скользящих векторов 29
Одновременно доказано, что если на оси / взять другой полюс,
например С, и рассмотреть момент Мс, то е • М° = е • Мс.
Сказанное дает возможность корректно ввести следующее опре-
определение. Моментом скользящего вектора относительно некоторой
оси называется проекция на эту ось момента скользящего вектора,
вычисленного относительно любой точки оси.
§ 1.3. Системы скользящих векторов
Множество скользящих векторов, для которого заданы операции
преобразования к другому множеству, назовем системой скользящих
векторов. Прежде чем указать набор таких операций, введем следу-
следующие понятия.
Множество скользящих векторов называется сходящимся в точ-
точке, если основания всех векторов множества пересекаются в этой точ-
точке.
Пусть имеется множество из п скользящих векторов, сходящееся
в некоторой точке D с радиусом-вектором rp. Очевидно, что эти
векторы можно задать в виде
(yd, ui), (гд, u2),..., (r#, un),
причем вектор yd будет одинаковым для всех скользящих векторов
множества. Результирующим вектором этого множества называет-
называется скользящий вектор
\ 1=1 /
Теорема 1.3.1. (Вариньон). Пусть задано сходящееся в точ-
точке D множество скользящих векторов. Момент результирующе-
результирующего вектора относительно полюса О равен сумме моментов относи-
относительно того же полюса скользящих векторов, составляющих данное
множество.
Доказательство. Пусть основания всех п скользящих векторов
множества пересекаются в точке D. Представим скользящие векторы
в виде
где yd — радиус-вектор точки D относительно полюса О. Момент
М° результирующего вектора выражается формулой
30 Глава J. Векторные свойства евклидова пространства
С учетом свойств векторного произведения найдем
1=1
Но каждое слагаемое в правой части последнего равенства есть мо-
момент соответствующего скользящего вектора относительно полюса
O.D
Перечислим теперь операции над элементами системы скользя-
скользящих векторов, которые будем считать допустимыми.
1. Замена множества сходящихся скользящих векторов соответ-
соответствующим результирующим скользящим вектором.
2. Присоединение или исключение множества из двух скользящих
векторов с общим основанием и результирующим нулевым скользя-
скользящим вектором.
Системы скользящих векторов, которые можно преобразовать
друг в друга с помощью указанных элементарных операций, назы-
называются эквивалентными.
Теорема 1.3.2. Пусть задана система двух скользящих векто-
векторов с параллельными основаниями:
(rbiiie), (r2,u2e),
причем и\ Ч- у>2 Ф 0. Тогда эта система эквивалентна одному сколь-
скользящему вектору (гс, [щ + г/2]е), где
__
Доказательство. Добавим к заданной в условии теоремы систе-
системе два эквивалентных нулю скользящих вектора
(pi , A[pi - r2]), (r2, A[r2 - ri]).
Эти два вектора имеют общее основание и их результирующий вектор
равен нулю. Вся полученная система эквивалентна двум скользящим
векторам
(pi , ще + A[pi - r2]), (r2, u2e + A[r2 - rj),
основания которых не параллельны. Они имеют общую точку, ради-
радиус-вектор которой обозначим Г?>. Согласно операции 1 заменим эту
сходящуюся систему одним результирующим вектором
1.4. Пара скользящих векторов
31
По теореме 1.3.1 найдем
yd х е(щ -f u2) = ri x eu\ + Г2 x
+ Y2U2) x e,
или
[r/?(iii + 112) -
x e = 0.
Но векторное произведение равно нулю тогда и только тогда, когда
либо хотя бы один из сомножителей равен нулю, либо векторы, уча-
участвующие в произведении, коллинеарны. Вектор е ф 0. Тогда либо
rD = rc, либо г/)-гс = ае, где a — скалярный множитель. В том и
другом случаях конец вектора гс принадлежит основанию результи-
результирующего вектора. П
§ 1.4. Пара скользящих векторов
Обозначим is G R3 — направляющий единичный вектор, и — ска-
скаляр, гх,Г2 — радиусы-век торы, имеющие начало в некотором полюсе
О.
Парой (рис. 1.4.1) называется система двух параллельных сколь-
скользящих векторов (гх,ш/), (гг,—ш'), основания которых не совпада-
совпадают. Плоскость, определяемая основаниями пары, называется плос-
плоскостью пары. Расстояние h между основаниями называется плечом
пары. Расстоянию h отвечает вектор h.
Пара образована двумя параллель-
параллельными скользящими векторами, рав-
равными по модулю и противополож-
противоположно направленными. Основания этих
скользящих векторов параллельны.
Расстояние между основаниями есть
плечо пары. Плечо пары отлично от
нуля.
Рис. 1.4.1. Пара скользящих векторов
Момент пары есть сумма моментов векторов пары относительно
произвольной точки О. Момент пары перпендикулярен плоскости
пары и направлен так, что из его конца "вращение" плеча, создава-
создаваемое парой, видно происходящим против хода часовой стрелки.
Теорема 1.4.1. Момент пары М = — u(h x и) не зависит от вы-
выбора полюса О. Модуль момента равен произведению |г/|/г, в котором
h —
плечо пары.
32 Глава 1. Векторные свойства евклидова пространства
Доказательство. Рассмотрим пару скользящих векторов
(п,ш/),(г2,-ш/).
Найдем вектор
h = (г2 - ri) - i/[(r2 - ri) • i/].
Очевидно, что h • u = 0, и поскольку i/ — единичный вектор, то h —
|h| есть плечо пары. Конец вектора ri + h принадлежит основанию
скользящего вектора (r2, —uv). Следовательно, момент пары равен
М = ri х uv+ г2 х (—uv) = ri x ш/ + (ri -f h) x (—ш/) =
= ri xuiy-ri x uv — h x uv = — u(h x i/).
Отсюда видно, что изменение положения точки О в пространстве Е3
не влияет на результат вычисления вектора М. Меняется лишь на-
начало этого вектора. Из-за перпендикулярности векторов h и v имеем
|h х v\ = h. Поэтому |М| = \u\h.U
Заметим, что если задан момент пары, то скользящие векторы, ее
образующие, определяются неоднозначно. В самом деле, тогда для
определения указанных скользящих векторов будем иметь уравнение
в котором неизвестными служат и, и, h. В соответствии с определени-
определением векторного произведения заключаем, что и и М перпендикуляр-
перпендикулярны: и- М = 0. Зададим какой-нибудь вектор и, перпендикулярный к
М, и найдем уравнение, связывающее вектор h и скаляр и:
и х М = ии х (у х h) = и\и(у • h) - hi/2].
Но i/ • h = 0 и поэтому uh — М х и. Если теперь произвольным
образом задать и, то вектор h может быть найден однозначно.
Теперь ясно, как получить конкретную пару с заданным момен-
моментом М ф 0. Выберем произвольно радиус-вектор ri и скаляр и ф 0,
назначим i/, чтобы было М • i/ = 0, и определим
М х и
r2 = ri + .
и
Пара скользящих векторов (г1,ш/),(г2,—ш/) будет обладать задан-
заданным моментом М. Действительно, в соответствии с теоремой 1.4.1
получим
—u(h х i/) = i/ х (М х 1/) = М.
Таким образом, все пары скользящих векторов с одинаковым момен-
моментом образуют пятипараметрическое семейство. Докажем, что все эти
пары эквивалентны.
1.4. Пара скользящих векторов
33
Теорема 1.4.2. При помощи элементарных операций пару мож-
можно, не изменяя ее момента,
а) повернуть в ее плоскости,
б) перенести параллельно самой себе в любую точку простран-
пространства, при желании изменив плечо.
Доказательство. Пусть задана исходная пара скользящих век-
векторов
(г i,iii/), (г2,-ш/).
Добавим к ней эквивалентную нулю систему
(r'2,-tiV), (r'2,tiV).
Потребуем, чтобы i/ был единичным вектором, sign г*' = sign u и
ti'(r'2 — г^) х i/ = ti(r2 —
х i/.
Из последнего равенства, в частности, следует, что разность (г'2 —г[)
и вектор \J параллельны плоскости исходной пары. Для доказатель-
uuiv
^uiS
yt—uu
В плоскости исходной пары произ-
произвольно выбираются две параллель-
параллельные прямые, составляющие некото-
некоторый угол с ее основаниями и отстоя-
отстоящие друг от друга на расстояние, рав-
равное плечу исходной пары. После эле-
элементарных преобразований эти пря-
прямые станут основаниями новой пары,
эквивалентной исходной.
Рис. 1.4.2. Поворот пары в ее плоскости
ства пункта а) (рис. 1.4.2) выберем вектор г^ так, чтобы его конец
лежал в плоскости пары, зададим iS ф и и и' = и. Тогда конец век-
вектора г2 тоже принадлежит плоскости пары. Основания скользящих
векторов
(pbtii/), (ri,-tiV)
непараллельны, принадлежат одной плоскости и, следовательно, пе-
пересекаются в точке, радиус-вектор которой обозначим г^. Его можно
найти из условия
гА =ri + Ai/=r/1+AV,
3 - 1503
34 Глава 1. Векторные свойства евклидова пространства
где А и А' — скалярные параметры. Чтобы определить А, умножим
это равенство векторно на гУ. Тогда получим
A(i/xi/) = (ri -rx) xi/.
Скользящие векторы (ri,ui/), (г^, — ш/) заменим одним скользя-
скользящим вектором
{vA,u[u-v>\).
Аналогично система скользящих векторов
эквивалентна скользящему вектору
в котором радиус-вектор гв определяется из условия
ГВ = Г2 + flU = Г2 + /iV.
После умножения этого равенства векторно на i/ будем иметь
fi(u х i/) = (r'2 — r2) x i/.
Вычислим векторное произведение
(гв ~ гд) х (i/- i/) = [(г2 - п) + (/I - A)i/] х (i/- i/) =
= (г2 — ri) х v — (гг — ri) х i/ + A(i/ xi/)- /i(i/ x гУ) =
= (^2 - Pi) X I/ - (P2 - Pi) X |У + (p2 - Pi) X l/ - (P;2 - ri) X l/ = 0
в связи с выбором параметров дополнительной системы скользящих
векторов.
Вектор и — гУфО. Следовательно, либо вектор г в — Гд = 0, либо
этот вектор параллелен v — i/. Ив том, и в другом случаях система
скользящих векторов
(гЛ,и[|/-|/]) (ГВ,-«[!/-I/])
эквивалентна нулю и ее можно исключить. Осталась система
представляющая собой пару скользящих векторов, смещенную и по-
повернутую относительно исходной, но обладающую тем же моментом,
что и исходная.
1.4. Пара скользящих векторов
35
— UU
В плоскости, параллельной плоско-
плоскости исходной пары, добавляются че-
четыре одинаковых по величине сколь-
скользящих вектора, попарно взаимно уни-
уничтожающихся и расположенных на
двух основаниях, параллельных век-
векторам исходной пары. После пре-
преобразований остается пара с тем же
моментом, что исходная, но располо-
расположенная в выбранной плоскости.
Рис. 1.4.3. Смещение плоскости пары
Перейдем к доказательству пункта б) теоремы (рис. 1.4.3). В до-
дополнительной системе скользящих векторов положим i/ = i/, а вектор
г[ выберем произвольно. Рассмотрим скользящие векторы
Они эквивалентны одному скользящему вектору
где ,
Аналогично скользящие векторы
можно заменить одним
где
ГВ=
В соответствии с правилом выбора параметров дополнительной си-
системы скользящих векторов найдем
Отсюда либо г в = гд, либо (г в—гд) параллельно и. В обоих случаях
система
(рЛ, [и + ti», (гв, -[и + и']и)
36 Глава I. Векторные свойства евклидова пространства
эквивалентна нулю и ее можно исключить. Осталась система
представляющая собой пару с основаниями, параллельными основа-
основаниям исходной пары, с тем же моментом, но произвольно смещенную
в пространстве. Плечо hf полученной пары выбирается в соответ-
соответствии с равенством
и'Л' = иЛ,
где h — плечо исходной пары.П
Следствие 1.4.1. Любые две пары эквивалентны, если их мо-
моменты равны. Безразлично также, к какой точке пространства
приложен момент пары.
Теорема 1.4.3. (О сложении пар). Система, состоящая из
двух произвольно заданных пар скользящих векторов, эквивалент-
эквивалентна одной паре, момент которой равен векторной сумме моментов
заданных пар.
Доказательство. Пусть заданные пары имеют моменты Mi и
М2- Выберем в пространстве Е3 произвольную точку А с радиусом-
вектором ri и точку В с радиусом-вектором Г2 так, чтобы вектор АВ
был перпендикулярен как вектору Mi, так и вектору Мг- Согласно
теореме 1.4.2 найдем такие единичные векторы ki и кг и скаляры щ
и 1/2, чтобы было выполнено
Mi = АВ х ki^i, M2 = АВ х
Эти векторы и скаляры порождают две пары скользящих векторов
(n,ti2k2), (r2,
Но скользящие векторы (ri, uiki), (n, u2\i2) эквивалентны резуль-
результирующему вектору
а скользящие векторы (г2, —uiki), (Г2, — ъ^кг) эквивалентны
(p2,-[«iki + ti2k2]).
В итоге получаем пару скользящих векторов
(pi, wiki + w2k2), (p2,
1.5. Упрощение системы скользящих векторов 37
с моментом
М = АВ х (tiiki + u2k2) = ABx kitii + ABx k2u2 = Mi + M2.D
Доказанные выше свойства пары скользящих векторов кратко
формулируются в виде утверждения: момент пары есть свободный
вектор (см. стр. 25).
§ 1.5. Упрощение системы скользящих векторов
Пусть задана система скользящих векторов (r»,ut-), г = 1,...,п,
причем все векторы г,- имеют начало в полюсе О. Назовем суммар-
суммарным (главным) вектором величину
а суммарным (главным) моментом вектор
М° = ^гг- х иг.
1=1
Ответ на вопрос о том, к какому наиболее простому виду, исполь-
используя элементарные операции, можно привести произвольную систему
скользящих векторов, дают следующие теоремы.
Теорема 1.5.1. Всякая система скользящих векторов эквива-
эквивалентна системе, состоящей из одного скользящего суммарного век-
вектора и одного суммарного момента (суммарной пары).
Доказательство. Назначим полюс О. Рассмотрим произволь-
произвольную систему скользящих векторов (г,-, и,-), г = 1,..., п. Зафиксируем
некоторый номер г. В точке О приложим эквивалентную нулю си-
систему скользящих векторов (рис. 1.5.1)
(О, u*), @,-Ue).
Система @, —и,), (г,-, и,-) образует пару с моментом Мг- = гг- х щ. Вы-
Выполнив такие же преобразования для каждого скользящего вектора
системы, получим эквивалентную исходной систему сходящихся в
точке О скользящих векторов @,ui),..., @,un) и пар с моментами
Mi,..., Мп. Систему сходящихся скользящих векторов заменим од-
одним результирующим скользящим вектором (О, R), а систему пар —
одной парой с моментом М, причем
38 Глава 1. Векторные свойства евклидова пространства
Таким образом, две системы скользящих векторов эквивалентны
тогда и только тогда, когда равны их суммарные скользящие векторы
и суммарные моменты.
Найдем инварианты системы скользящих векторов по отноше-
отношению к выбору полюса О.
Лемма 1.5.1. При изменении полюса суммарный вектор не из-
изменяется. Остается также постоянной проекция суммарного мо-
момента на направление суммарного вектора.
Доказательство. Пусть система скользящих векторов приве-
приведена к одному скользящему вектору @,R) с основанием, проходя-
проходящим через точку О, и одному моменту М. Возьмем точку О\ и
добавим к системе два скользящих вектора (OOi, — R),(OOi,R).
Скользящие векторы (OOi, —R),@,R) образуют пару с моментом
Мд = — OOi х R. Новая система скользящих векторов эквивалентна
исходной и состоит из скользящего вектора (OOi,R) с основанием,
проходящим через точку Oi, и суммарным моментом
Мх = М + MR = М - OOi х R.
Видим, что при изменении полюса суммарный вектор не меняется.
Для расчета проекции суммарного момента на направление вектора
R вычислим скалярное произведение
Mi • R = (М - OOi х R) R = М R.D
Лемму 1.5.1 можно переформулировать следующим образом.
Следствие 1.5.1. Суммарный вектор, а также проекция сум-
суммарного момента на направление суммарного вектора инвариантны
по отношению к изменению положения полюса.
Основание скользящего вектора мож-
можно сместить так, чтобы оно проходи-
проходило через произвольно выбранную точ-
точку О. Такое преобразование будет
эквивалентным, если добавить пару с
q \ л моментом, равным моменту исходно-
исходного скользящего вектора относительно
и\ точки О.
Рис. 1.5.1. Сдвиг основания скользящего вектора
1.5. Упрощение системы скользящих векторов 39
Винтом называется такая система скользящих векторов, для ко-
которой суммарный вектор и суммарный момент коллинеарны. Соот-
Соответствующее основание с направлением суммарного вектора называ-
называется осью винта.
Теорема 1.5.2. Всякая система скользящих векторов с отлич-
отличным от нуля суммарным вектором эквивалентна винту.
Доказательство. Найдем полюс 0\, для которого Mi||R. Ради-
Радиус-вектор OOi удовлетворяет уравнению
R х Mi = 0 или R х М - R х (OOi x R) = 0.
Потребуем, чтобы вектор OOi был перпендикулярен к R. Тогда
оо, = *?*.
Найденная точка О\ и определяет искомое основание винта.О
Уравнение оси винта можно записать в параметрическом виде:
RxM
На оси винта главный вектор перпендикулярен плоскости пары. Ис-
Исключив А, найдем векторное уравнение оси винта
Rxr= —— R-M,
эквивалентное двум линейно независимым скалярным уравнениям
пересекающихся плоскостей.
При упрощении системы скользящих векторов могут представить-
представиться следующие случаи.
I.R^O, R • М = 0. Для точек винтовой оси суммарный мо-
момент будет равен нулю. Система приведется к одному скользящему
вектору. Его называют результирующим вектором системы.
II. R = 0, М^О. Система приводится к паре скользящих век-
векторов, которая называется результирующей парой.
III. R ф 0, R • М ф 0. Система приводится к винту. При при-
приведении к винтовой оси модуль суммарного момента принимает наи-
наименьшее значение.
IV. R = 0, М = 0. Система эквивалентна нулю.
Теорема 1.5.3. Система скользящих векторов, принадлежащих
одной плоскости, приводится либо к случаю I, либо к случаю II, либо
к случаю IV.
40 Глава 1. Векторные свойства евклидова пространства
Доказательство. Пусть П — плоскость, содержащая все сколь-
скользящие векторы системы, и точка О — полюс. В плоскости П выберем
произвольную точку А с радиусом-вектором гд. Радиусы-векторы rt
можно представить в виде г* = гд + г(-, где г'; принадлежат плоскости
П. Пусть R — суммарный вектор системы. Вычислим момент
п
М = ]П г, х и, = ]Г)(гЛ + г•) х иг = гд х R + 53г• х и*.
1=1 «=1 1=1
Вектор R параллелен плоскости П. Поэтому R • М = 0. Следова-
Следовательно, случай III представиться не может. ?
Таким образом, всякая плоская система скользящих векторов,
для которой R ф 0, эквивалентна одному результирующему вектору.
§ 1.6. Параллельные скользящие векторы
Система скользящих векторов, все основания которых взаимно
параллельны, называется системой параллельных скользящих век-
векторов. Обозначим эту систему S. Пусть число скользящих векторов
системы равно n, a e — направляющий единичный вектор оснований.
Тогда
S = {(r,-,eti.-), г = 1,...,п},
где гi — радиусы-векторы с началом в полюсе О. Обозначим
считая R ф 0. Вектор гс определяет в пространстве Е3 точку, назы-
называемую центром системы S.
Теорема 1.6.1. Система S параллельных скользящих векторов,
для которой ЯфО, эквивалентна скользящему вектору (rc, Re).
Доказательство. Для рассматриваемой системы
п
R = Re ф 0, М = J2 ГШ х е> М • R = 0.
t=i
Следовательно, эта система эквивалентна результирующему вектору
(ООьДе), где
ДехМ
1.6. Параллельные скользящие векторы 41
Второе слагаемое последнего выражения направлено вдоль основа-
основания результирующего вектора. Значит, конец вектора гс принадле-
принадлежит этому основанию.О
Следует отметить, что если менять направление вектора е, оста-
оставляя неизменными концы векторов г», i = l,...,n, то вектор гс не
изменится. Другими словами, центр системы параллельных сколь-
скользящих векторов инвариантен относительно ориентации их оснований.
Рассмотрим примеры.
Пример 1.6.1. Даны два скользящих вектора (ri,tiie), (г2,^2е),
и «1 • г*2 > 0. Концы векторов ri и Г2 обозначим С\ и Сч соответственно.
Определить, в каком отношении отрезок C\C<i будет разделен центром
такой системы.
Решение. По определению центра системы найдем
_ tiiri + Ц2Г2
С ~~ U\+U2
Следовательно, конец С вектора гс, как линейной комбинации двух век-
векторов ri и Г2, принадлежит отрезку С\Съ- Далее
1 с 2) Гс - Г2 =
U\ + ti2 ° Щ + U2
Отсюда получаем правило рычага первого рода:
СгС _ «2
С2С ~ их'
Другими словами, центр С системы двух скользящих одинаково напра-
направленных векторов (точка приложения результирующего вектора систе-
системы) делит отрезок, соединяющий точки С\ и С*2 приложения этих век-
векторов, на части, обратно пропорциональные модулям |wi| и |«2| соста-
составляющих векторов.О
Пример 1.6.2. Решить задачу примера 1.6.1 при условии, что
U\ • U2 < 0, Ui + U2 ф 0.
Решение. Пусть, например, и\ < 0, и% > 0, u\+U2 > 0. Формулы,
примененные для решения примера 1.6.1, остаются справедливыми, но
теперь
Г2 _ Гс - Ы
Следовательно, точка С принадлежит продолжению отрезка С1С2 со
стороны наибольшего по модулю вектора. Имеем правило рычага вто-
второго рода.О
Для подъема различных грузов часто используются приспособле-
приспособления, называемые рычагами. Они имеют вид стержня, одна точка
42 Глава 1. Векторные свойства евклидова пространства
которого служит опорной, а к другой приложен поднимаемый груз.
Примеры 1.6.1 и 1.6.2 показывают (см. § 4.8), как выполнить соответ-
соответствующие расчеты.
§ 1.7. Центр Масс множества точек
Центр масс — одно из важнейших понятий, которое часто будет
встречаться в дальнейшем. Применение этого понятия оказывается
эффективным не только в механике, но и в других разделах физи-
физики, а также для решения многих геометрических задач и получения
алгебраических неравенств.
Пусть в Е3 задано множество Q, состоящее из п точек. Положение
точек в пространстве зададим радиусами-векторами г,- и каждой точ-
точке сопоставим массу шг > 0, г = 1,..., п. Такие точки в дальнейшем
будем называть точечными массами. Физическая целесообразность
понятия массы будет обсуждена в § 3.3. Здесь используется лишь
свойство массы быть строго положительной скалярной величиной.
Обозначим
1=1
суммарную массу всех точек множества.
Определение 1.7.1. Точка с радиусом-вектором
1
называется центром масс множества Q.
Пример 1.7.1. Предположим, что к точкам приложены парал-
параллельные скользящие векторы силы тяжести u, = m,^kt где g — ускоре-
ускорение свободного падения, к — единичный вектор вертикали. Тогда центр
масс дает точку приложения результирующего вектора таких сил. Вслед-
Вследствие того, что центр масс не зависит от ориентации вектора к, суще-
существует простой способ экспериментального определения расположения
центра масс в твердом теле, рассматриваемом как множество точечных
масс. Подвесим такое тело на нити, закрепив ее в какой-либо точке те-
тела. После того как тело перестанет качаться, отметим в нем прямую,
служащую продолжением нити. Центр сил тяжести (см. § 1.6) совпадает
с центром масс, и поэтому центр масс обязан принадлежать полученной
прямой. Закрепим теперь нить в другой точке тела и повторим опера-
операцию. Тогда центр масс будет точкой пересечения этих прямых.<>
Теорема 1.7.1. Центр масс принадлежит минимальной выпу-
выпуклой области, содержащей ограниченное в пространстве множе-
множество точечных масс.
1.7. Центр масс множества точек 43
Доказательство. В самом деле, пусть число точечных масс ко-
конечно. Выберем плоскость П, разделяющую пространство Е3 на два
полупространства так, чтобы одно из полупространств, обозначим
его ft, содержало все рассматриваемое множество точек. Для ко-
конечного множества это всегда можно сделать. Выберем полюс О в
плоскости П. Тогда все векторы г,, а вместе с ними и вектор
будут ориентированы в сторону полупространства п. Ориентацию
плоскости П можно выбирать произвольно, а саму плоскость распо-
располагать сколь угодно близко к множеству точек. Аналогичное постро-
построение можно применить и к бесконечному ограниченному в простран-
пространстве множеству точечных масс.П
Лемма 1.7.1. Пусть система S = {(rt-,u;e), i = l,...,n} па-
параллельных скользящих векторов разделена на две непересекающиеся
подсистемы
51 - {(г,-,т1,-е), j = t'i,...,ij,
52 - {(rp,upe), p= /Ь...Л},
причем
j v
Тогда радиус-вектор rc центра системы S можно вычислить по
правилу
Гс" Ъ+Ъ '
где rci и гсо — радиусы-векторы центров систем S\ и S2 соответ-
соответственно.
Доказательство. Радиусы-векторы rci и гс2 имеют вид
1
Гс1 = д^ Щ
Теперь достаточно подставить указанные выражения в доказывае-
доказываемую формулу. D
Следствие 1.7.1. Центр масс некоторого множества точеч-
точечных масс можно определить путем замены отдельных непересека-
непересекающихся его подмножеств точками с массами, равными суммарным
массам подмножеств, расположенными в центрах масс этих под-
подмножеств.
44 Глава 1. Векторные свойства евклидова пространства
Поиск центра масс облегчается, если множество Q точечных масс
обладает симметрией. Пусть Q, например, симметрично относитель-
относительно плоскости П так, что симметричным точкам соответствуют оди-
одинаковые массы. Разбив Q на два подмножества, симметричных отно-
относительно плоскости П, найдем их центры масс. Центры масс подмно-
подмножеств расположатся симметрично относительно плоскости П. Зна-
Значит, центр масс всей системы принадлежит плоскости П. В том слу-
случае, когда множество Q обладает осевой симметрией, можно, группи-
группируя попарно симметричные точки, убедиться в том, что центр масс
должен принадлежать оси симметрии. Подчеркнем, что сказанное
справедливо лишь тогда, когда симметрично не только геометриче-
геометрическое расположение точек, но и распределение масс.
Рассмотрим примеры решения задач с помощью доказанных выше
свойств центра масс.
Пример 1.7.2. Доказать, что средние линии любого выпуклого
четырехугольника и отрезок, соединяющий середины его диагоналей,
проходят через общую точку и делятся ею пополам.
Решение. Поместим в вершинах четырехугольника одинаковые
массы. Центр масс такой системы должен быть в пересечении средних
линий четырехугольника. Этот же центр масс должен делить пополам
отрезок, соединяющий середины диагоналей.О
Пример 1.7.3. Рассмотрим фигуру Г, ограниченную графиком
функции у = \пх, х > 0 и лучом оси абсцисс х > 1. Эта фигура выпу-
выпуклая. Выберем на оси абсцисс точки
1 < х\ < ... < хп
и найдем соответствующие им точки на графике функции у = 1пх:
Поместим в эти точки положительные массы mi,...,mn соответствен-
соответственно. Вычислим координаты центра масс полученной системы точек, обо-
обозначив М = mi + • —h mn:
1 ' 1
хс = -rj{™>\X\ + • • • + mn#n), ус = тт(ш1 lno?i + • • • + тпп In xn).
М М
В связи с тем, что фигура Г — выпуклая, центр масс должен быть
расположен строго внутри фигуры и, в частности,
(mi InX\ + • ¦ • + win 1п#п) f тп\Х1-\г • *'-\г тпхпУ
М \ М
Отсюда, когда mi = m^ — • • • = mnt получаем, например, неравенство
Коти:
^ si + + ж„ Л
Хп < .О
1.8. Геометрия масс 45
§ 1.8. Геометрия масс
В предшествующем параграфе было изучено понятие центра масс,
дающее представление "в целом" о заданном множестве точечных
масс. Здесь рассмотрим другие подобные характеристики. Пусть
точки, принадлежащие некоторому множеству Q С Е3, заданы ради-
радиусами-векторами г*, г — 1,...,п, с началом в полюсе О. Каждой
точке припишем массу mt- > 0. В пространстве Я3, соответствующем
полюсу О, образуем положительно определенную билинейную сим-
симметрическую форму, которая любой паре векторов х,у Ей3 ставит
в соответствие скаляр
п
Т(х,у) = ]Tmt(ri х х) • (г,- х у).
»=i
Векторы х и у не обязательно должны быть разными. В частности,
если х = е и у = е, где е — единичный вектор, то получим скалярную
величину
п
Л = Т(е,е) =
которая называется моментом инерции относительно оси (осевым
моментом инерции), коллинеарной вектору е и проходящей через точ-
точку О. Момент инерции Je равен сумме произведений масс на квадра-
квадраты их расстояний до указанной оси. Выберем в точке О ортонор-
мированный базис е^ег^ез. Чтобы определить результат действия
формы Т(х,у) в Я3, достаточно указать значение формы на парах
базисных векторов. Обозначим
Jpg=T(ep,eg), p, я =1,2,3.
Тогда
Из определения формы Т(х, у) следует, что ее значение не меняется
при преобразованиях базисных векторов. В этом смысле набор J ее
коэффициентов Jpq, p,q = 1,2,3, представляет собой тензор второ-
второго ранга. Он называется связанным с точкой О тензором инерции
множества Q точечных масс. Найдем компоненты тензора J:
Т(ер,ед) = ]Tmt(rt- х ер) • (г,- х eq) = ^тгед • [г* х (ер х г,-)]
46 Глава 1. Векторные свойства евклидова пространства
или
п
T(ep,eq) =
Пусть р = q. Тогда
Jpp = Т(ер,ер) =
*=1
Величина Jpp представляет собой момент инерции относительно оси,
направляющий орт которой имеет номер р. Как уже отмечалось вы-
выше, осевой момент инерции Jpp равен сумме произведений масс точек
на квадраты их расстояний до соответствующей оси.
Предположим, что р ф q. Величина
1 = 1
называется центробежным моментом инерции относительно плос-
плоскости Оер, eq. Вернемся к определению формы Т(х, у) и преобразуем
смешанное произведение:
п
Т(х, У) = У • X md*i х (х х г*)]«
*=i
Изменяя порядок суммирования в выражении той же формы через
тензор инерции, можно получить
з з
q=l p=l
Определим вектор z = z\e\ + ^2e2 + ^зез с помощью соотношения
п
z = ^mi[ri x (x x г,-)].
i=i
Сопоставив два выражения для Т(х, у), получим
з з
zq = ^2 Jpixp = S ^рхр> 9 = 1> 2,3.
p=i p=i
Таким образом, тензор инерции порождает в пространстве Я3 линей-
линейный оператор инерции J, переводящий вектор х в вектор z. Форма
Т(х,у) может быть представлена в виде
Т(х,у) = у -z = y -Jx.
1.8. Геометрия масс 47
Пусть теперь е — произвольный единичный вектор. Напишем
момент инерции Je, соответствующий направлению е:
Выберем вектор х = е/у/7^. Для него
Т(х,х) = 1.
Другими словами, конец вектора х принадлежит поверхности второго
порядка. Если для любого направления е справедливо Je ф О, то эта
поверхность ограничена в пространстве. В этом случае она предста-
представляет собой эллипсоид, который называется эллипсоидом инерции.
Теорема 1.8.1. Je = 0 тогда и только тогда, когда все точечные
массы рассматриваемого множества принадлежат оси с направля-
направляющим вектором е.
Доказательство. Если все точки принадлежат оси с направля-
направляющим вектором е, то их расстояния до этой оси равны нулю. Значит,
Je = 0. Обратно, пусть Je = 0. Но Je по определению есть сумма
произведений положительных масс точек на квадраты их расстоя-
расстояний до рассматриваемой оси. Равенство нулю такой суммы может
быть только тогда, когда каждое слагаемое равно нулю.П
Теорема 1.8.2. Если все точечные массы принадлежат оси с
единичным направляющим вектором к : г,- = г,-к и не все г,- рае-
ны нулю, то поверхность, определенная уравнением
Т(х,х) = 1,
представляет собой круговой цилиндр с осью к.
Доказательство. С учетом равенства г» = rt-k получим
п
Т(х,х) = ?т<(г»к х хJ = (к х х
1=1 *=i
По условию теоремы имеем
t=i
Но |к х х| есть расстояние от конца вектора х до оси с направляющим
вектором к. Следовательно, это расстояние постоянно для любого
вектора х, принадлежащего поверхности Т(х,х) = 1.D
48 Глава 1. Векторные свойства евклидова пространства
В дальнейшем будем предполагать, что заданные точечные массы
не принадлежат одной прямой, так что уравнение Т(х, х) = 1 опре-
определяет в пространстве Е3 эллипсоид инерции.
Теорема 1.8.3. Если не все точечные массы принадлежат одной
прямой, то матрица
J = (JPq), Р,«= 1,2,3,
соответствующая тензору инерции, невырождена.
Доказательство. Рассмотрим систему линейных уравнений
Пусть матрица J вырождена. Тогда существует ненулевое решение
х этой системы и для него
х z = x2Jx = О,
где Jx — момент инерции множества точечных масс относительно
оси, параллельной х. Но х2 ф 0. Значит, Зх = 0. Следовательно, все
точечные массы принадлежат оси х, что противоречит условию. ?
Теорема 1.8.4. Пусть множеству точечных масс соответст-
соответствует эллипсоид инерции и пусть х определяет фиксированную точку
эллипсоида. Тогда вектор z = Jx есть нормаль к плоскости, касаю-
касающейся эллипсоида в точке х.
Доказательство. Уравнение эллипсоида инерции представим в
виде х • Jx = 1. Зададим плоскость П уравнением у • Jx = 1, где
х — постоянный вектор, а конец вектора у выделяет точку плоско-
плоскости. Допустим, что плоскость П сечет эллипсоид. Тогда существует
вектор у, конец которого одновременно принадлежит плоскости П
и эллипсоиду, причем у ф х. Для такого вектора у должны быть
выполнены равенства
у • Jx = х-Jy = 1, y.Jy = l, x-Jx = l.
Поэтому
(у - х) • Jx = 0, (у - х) . Jy = 0
или (у — х) • J(y — х) = 0. Отсюда получаем, что все точечные массы
принадлежат оси, параллельной ненулевому вектору (у — х). То-
Тогда уравнение Т(х, х) = 1 определяет цилиндр, что противоречит
1.9. Главные оси инерции 49
условию. Таким образом, плоскость П, кроме точки, определяемой
вектором х, не имеет общих точек с эллипсоидом и, значит, касает-
касается эллипсоида в точке х. Вектор (у — х) принадлежит плоскости П.
Равенство
(у - х) • Jx = О
свидетельствует, что вектор Jx перпендикулярен плоскости П. ?
§ 1.9. Главные оси инерции
Пусть для полюса О построен эллипсоид инерции. Главной осью
инерции для него называется ось, которая проходит через точку О и
коллинеарна нормали к эллипсоиду, взятой в точке пересечения оси
с ним.
Обозначим х радиус-вектор точки пересечения главной оси с эл-
эллипсоидом инерции. Тогда, согласно определению главной оси и в
соответствии с теоремой 1.8.4, будем иметь
z = Jx = Ах
или
(J - АЕ)х = О,
где J — оператор инерции, Е — тождественный оператор. Получен-
Полученная однородная линейная система должна иметь ненулевое решение.
Поэтому ее определитель обязан обращаться в нуль:
| J - АЕ| =
«7ц — A J12 J13
«721 «722 - A J23
— А
= 0.
Это уравнение называется характеристическим уравнением элли-
эллипсоида инерции. Левой частью этого уравнения служит характери-
характеристический многочлен третьей степени.
Из теории поверхностей второго порядка известны следующие
свойства решений характеристического уравнения и главных осей.
1. Все решения характеристического уравнения действительны.
2. Простому корню характеристического уравнения соответствует
единственная главная ось.
3. Главные оси, соответствующие двум различным корням харак-
характеристического уравнения, взаимно перпендикулярны.
4. Если все три корня характеристического уравнения различны
между собой, то имеется три и только три главные оси и они взаимно
перпендикулярны.
4- 1503
50 Глава 1. Векторные свойства евклидова пространства
5. Если из трех корней Ai, A2, A3 два равны между собой и отлич-
отличны от третьего, например
Ai = A2 Ф Аз,
то все оси, перпендикулярные к единственной оси, соответствующей
корню Аз, суть главные оси, отвечающие кратному корню Ai = A2.
Таким образом, имеется бесконечно много троек взаимно перпенди-
перпендикулярных главных осей. Каждая из них содержит единственную
главную ось с единичным вектором е3, соответствующую простому
корню Аз, тогда как две другие определены произвольными единич-
единичными векторами ei и в2, перпендикулярными между собой и вектору
ез-
6. Если все три корня характеристического уравнения равны ме-
между собой, то каждая ось — главная.
Таким образом, три взаимно перпендикулярные главные оси су-
существуют всегда. Выберем единичные векторы ei, ег, ез, им соответ-
соответствующие, в качестве базисных. Ясно, что тогда
J\2 = J21 = «Лз = J31 = Лз = «^32 = 0,
и уравнение эллипсоида инерции принимает канонический вид
J\\x\ + J22X2 +
Матрица J оператора инерции оказывается диагональной. Компо-
Компоненты Jn, J22, </зз> отнесенные к главным осям, называются главны-
главными моментами инерции.
Отметим, что равенства Ji2 = J13 = 0 служат необходимыми и
достаточными условиями того, чтобы ось с направлением ei была
главной. Аналогичное утверждение справедливо и для других осей.
§ 1.10. Преобразование эллипсоида инерции
Пусть в Е3 задано множество точечных масс Q. Значение введен-
введенной в § 1.8 билинейной формы Т(х,у), взятое для одной и той же
пары векторов х, у, зависит от того, какая точка пространства при-
принята за начало векторов г,. Выясним эту зависимость. Центр масс
множества Q обозначим С. Радиусы-векторы точек из Q, имеющие
начало в С, обозначим rj, i = 1,..., п, так что
t=i
1.10. Преобразование эллипсоида инерции 51
С помощью радиуса-вектора г, имеющего начало в точке С, зада-
зададим произвольную точку О. Радиусы-векторы точек из Q, имеющие
начало в точке О, обозначим г*. Тогда будем иметь г,- = г( — г.
Для точки С значение билинейной формы дается выражением
,-(г{ х х) • (р{ х у),
а для точки О по-прежнему будем иметь
п
Т(х,у) = ^m»(r» х х) • (г,- х у).
i=i
Зададим
7д#(х, у) = М(г х х) • (г х у)
билинейную форму в точке О, возникающую, если в центре масс рас-
рассматриваемого множества Q поместить его суммарную массу
п
*=1
Лемма 1.10.1. Действие формы Т(х,у) выражается суммой
Доказательство. Подставив в правую часть формулы, опреде-
определяющей Т(х,у), выражение г, = г(- — г, получим
Т(х, у) = Е mf[(r< - г) х х] • [(г< - г) х у] =
= ? m,(r< х х) • (г< х у) - (г х х) • f f ? пцгЛ х у] -
i=1 Г/- А 1
" I ( Е "»<г< ) х х| • (г х у) + М(г х х) • (г х у).
Учитывая, что
убеждаемся в справедливости леммы.П
Форма Тс(х,у) порождает в точке С тензор инерции Jc, называе-
называемый центральным тензором инерции, а форма Тд/(х,у) — в точке
О тензор инерции 3м. Лемму 1.10.1 можно переформулировать сле-
следующим образом.
52 Глава 1. Векторные свойства евклидова пространства
Теорема 1.10.1. Тензор инерции 3 множества Q, взятый в
точке О, равен покомпонентной сумме центрального тензора инер-
инерции 3е того же множества Q и тензора 3м точки С, когда в ней
помещена суммарная масса М. Подробнее, если заданы ортонорми-
рованные базисные векторы ei, в2, ез, то
4* = •% + •#' Р,*= 1,2,3.
Доказательство. По определению тензора инерции найдем
Jpq = T(ep,ef) = Тс(ер,е?) + Тм(ер,е,) = Jcpq + jfi.n
Форма Тм(х,у) и, следовательно, тензор 3м не зависят от распо-
расположения точек множества Q относительно центра масс. Они харак-
характеризуют расположение множества Q "в целом" относительно точки
О. Формулы для расчета 3м достаточно просты:
3™ = М(г х ерJ = М[г2 - (г • ерJ], р = 1,2,3,
J™ = М(г х ер) • (г х ер), p^q, р, q = 1, 2, 3.
В частности, J^ есть произведение суммарной массы на квадрат рас-
расстояния от центра масс до оси с направлением ер, проходящей через
точку О. Особенности "внутренней" структуры множества Q отра-
отражаются формой Тс(х,у) и связанным с ней тензором Jc. Теорема
1.10.1 дает возможность, определив однажды этот тензор, эффектив-
эффективно пересчитать его для любой интересующей нас точки пространства.
Перейдем к характеристикам эллипсоида инерции. Взятый от-
относительно центра масс множества Q он называется центральным
эллипсоидом инерции, его главные оси — главными центральными
осями инерции, а моменты инерции относительно этих осей — глав-
главными центральными моментами инерции.
Согласно определению, эллипсоид инерции с центром в точке О
есть геометрическое место таких точек Р, расстояние от которых до
точки О обратно пропорционально квадратному корню из момента
инерции относительно оси, проходящей через точки О и Р. Рассмо-
Рассмотрим, как преобразуются осевые моменты инерции при переходе от
полюса к полюсу.
Теорема 1.10.2. (Гюйгенса-Штёйнера). Момент инерции
Je относительно оси с произвольным направлением е, проходящей
через точку О, равен сумме момента инерции J\ относительно па-
параллельной оси, проходящей через центр масс, и произведения сум-
суммарной массы на квадрат расстояния d между осями:
Je = Jce + Md2 = Jce + M(r x eJ = Jce + M[r2 - (r • eJ].
1.10. Преобразование эллипсоида инерции 53
Доказательство. Пусть направление оси задано единичным век-
вектором е. Применяя лемму 1.10.1, найдем
Но |г х е| есть произведение модуля г радиуса-вектора на синус угла
между г и е, что представляет собой расстояние d между осями.?
Как следствие отметим, что момент инерции относительно оси,
проходящей через центр масс, меньше момента инерции относительно
любой другой параллельной оси.
Пример 1.10.1. Из теоремы Гюйгенса-Штейнера следует нера-
неравенство
Je > Md2.
Выберем произвольно на числовой оси п точек с координатами х\,
а?2,---,#п и сопоставим им массы mi, Ш2,...,тп. Взяв момент инер-
инерции относительно перпендикуляра к числовой оси, проходящего через
нулевую точку, получим
I>*,2> n 7 .
i=i
причем равенство достигается тогда и только тогда, когда х\ — ... = хп
Выберем какие-нибудь не равные нулю числа 6i, 62,.. .,6П и положим
_ 2 _ °* • _
Подставив эти выражения в полученное неравенство, найдем
Это неравенство называется неравенством Коши-Буняковского. Лег-
Легко показать, что оно справедливо также, когда некоторые из чисел
&i,..., bn обращаются в нуль.О
Пример 1.10.2. Найти геометрическое место точек плоскости,
для которых сумма квадратов расстояний от п заданных точек той же
плоскости постоянна и равна а2.
Решение. Поместим в каждую из заданных точек массу, равную
единице. Обозначим С центр масс образовавшегося множества точечных
54 Глава 1. Векторные свойства евклидова пространства
масс. Пусть О — произвольная точка плоскости. По теореме Гюйгенса-
Штейнера имеем
Л = Зсе + пОС2,
где Je — момент инерции относительно оси, перпендикулярной плоско-
плоскости и проходящей через точку О, Jce — момент инерции относительно
параллельной оси, проходящей через центр масс. По условию Je = a2.
Следовательно,
и длина отрезка ОС, равная расстоянию от центра масс С до точки О,
принадлежащей искомому геометрическому месту, должна принимать
постоянное значение. Если a > «7^, то получаем окружность с центром
в С и радиусом
0C= W~fa2~
Если а2 = Jg, то искомое геометрическое место есть центр масс С Если
а2 < Jg, то решение отсутствует.О
Исследуем теперь деформацию эллипсоида инерции в точке О по
сравнению с центральным эллипсоидом при удалении точки О от
центра масс С. Зафиксируем единичное направление ег смещения
точки О, так что г = гег, и будем изменять только модуль г. Пусть
zc(x) — оператор нормали к центральному эллипсоиду, a z(x) —
оператор нормали к эллипсоиду в точке О (см. теорему 1.8.4).
Теорема 1.10.3. Нормаль z(x) к эллипсоиду инерции с центром
в точке О может быть найдена по формуле
z(x) = zc(x) + М[г х (х х г)] = zc(x) + Мг2[х - ег(х • ег)].
Доказательство. В соответствии с определением нормали z(x)
имеем
Т(х,у) = у -z(x).
С другой стороны, согласно лемме 1.10.1
причем
Ъ(х, у) = у • zc(x), Тм(х, у) = у • M[v х (х х г)].
Следовательно,
у • z(x) = у . [zc(x) + М[г х (х х г)].
Доказываемое тождество справедливо, так как вектор у может быть
выбран произвольно.D
1.10. Преобразование эллипсоида, инерции 55
Теорема 1.10.4. Если направление ег — главное для централь-
центрального эллипсоида инерции, то оно будет главным и для любой точки
О1 определенной радиусом-вектором г = гег при произвольном зна-
значении г. И наоборот, если направление ег не было главным для цен-
центрального эллипсоида инерции, то оно не моэюет стать главным
ни при каком значении г.
Доказательство. Пусть х = хег. Тогда
z(x) = zc(x) + Mr2x[er x (er x er)] = zc(x).D
Теорема 1.10.5. Пусть направление ег произвольно. Тогда при
увеличении г диаметр эллипсоида инерции в точке О, соответству-
соответствующий направлению ег, не изменяется. Остальные диаметры умень-
уменьшаются, так что весь эллипсоид сжимается к отрезку, направлен-
направленному вдоль оси, проходящей через точки О и С. Две из трех главных
осей инерции стремятся к плоскости, перпендикулярной ег, третья
ось стремится стать коллинеарной вектору ег.
Доказательство. По определению, диаметры эллипсоида инер-
инерции обратно пропорциональны квадратным корням из соответствую-
соответствующих осевых моментов инерции. Согласно теореме 1.10.2 момент инер-
инерции относительно оси, проходящей через точку О параллельно век-
вектору ег, остается равным соответствующему центральному моменту
инерции при любом значении г. Следовательно, диаметр, параллель-
параллельный ег при любом г, будет таким же, каким он был в центральном
эллипсоиде. Моменты инерции относительно осей, не кол линеарных
ег, растут, а соответствующие диаметры уменьшаются, стремясь к
нулю при увеличении г. Весь эллипсоид стремится к отрезку, рав-
равному диаметру центрального эллипсоида инерции в направлении ег.
Середина отрезка совпадает с точкой О, а сам отрезок расположен
на оси, проходящей через точки О и С. Если х перпендикулярен ег,
то вектор нормали к эллипсоиду в точке О можно представить (см.
теорему 1.10.3) в виде
где вектор х принадлежит поверхности эллипсоида. Первое слагае-
слагаемое в квадратной скобке стремится к нулю быстрее, чем х, и напра-
направление вектораz(x) приближается к направлению векторах. Отсюда
в силу непрерывности функции z(x) следует, что любое направление
в плоскости, перпендикулярной вектору ег, тем меньше отличается
от главного, чем больше г. Тем самым одна из плоскостей, опреде-
определенная некоторыми двумя главными осями, приближается к плос-
56 Глава 1. Векторные свойства евклидова пространства
кости, перпендикулярной ег. Третья главная ось стремится стать
параллельной вектору er.D
Теорема 1.10.6. Если некоторая ось оказалась главной для двух
своих точек, то она проходит через центр масс и будет главной для
любой своей точки.
Доказательство. Пусть рассматриваемая ось проходит через
точки О\ и Ог, заданные соответственно радиусами-векторами ri и
г2, имеющими начало в центре масс С. Эллипсоид инерции для точ-
точки О\ обозначим Э\. Эллипсоид инерции для точки О2 обозначим
Э2. Сравним векторы zi(x) и z2(x) для эллипсоидов Э\ и Э2. По
теореме 1.10.3 будем иметь
zi(x) = zc(x) + Af [n x (x x ri)],
z2(x) = zc(x) + M[r2 x (x x r2)].
По условию теоремы разность векторов ri — г2 = ре определяет на-
направление главной оси как для Э\, так и для Э2. Это значит, что
zi(e) = Aie и z2(e) = Л2е. Кроме того,
z2(e) = zc(e) + M{(ri + ре) х [е х (п + ре)]} =
= гс(е) + My\ х (е х ri) + Mpe x (e x ri) =
= zi(e) + Mpe х (ex ri).
Учитывая результат действия операторов z\ и z2 и раскрывая
двойное векторное произведение, найдем
Mpri = [Мр(е • Pi) + Ai - A2]e.
Отсюда следует, что векторы ri и е коллинеарны, а значит, ось O\Oi
проходит через центр масс С. Следовательно, zi(e) = zc(e) и ось
0102, будучи главной для эллипсоида Э\, будет главной и для цен-
центрального эллипсоида инерции, а по теореме 1.10.4 она будет главной
для любой своей точки.?
Нахождение главных центральных осей инерции упрощается, ес-
если множество точечных масс обладает той или иной симметрией. На-
Например, если точки с одинаковой массой расположены симметрично
относительно некоторой плоскости, то центр масс должен принадле-
принадлежать этой плоскости. Ей же принадлежат две главные оси инерции, а
третья перпендикулярна плоскости симметрии. Если множество то-
точечных масс обладает осью симметрии, то центр масс принадлежит
этой оси. С ней же совпадает одна из главных осей инерции, а две
другие перпендикулярны к ней. Если симметрия круговая, то любое
1.11. Тензорное умножение векторов 57
направление в плоскости, перпендикулярной к оси симметрии, будет
главным. Если ось симметрии получается как пересечение двух вза-
взаимно перпендикулярных плоскостей симметрии, то две другие глав-
главные оси должны соответственно принадлежать этим плоскостям.
§ 1.11. Тензорное умножение векторов
Рассмотрим билинейную форму относительно векторов х и у, зна-
значение которой инвариантно при преобразованиях координат
$(*>У) = jK* * а) • (у х Ь) + (х х Ь) • (у х а)],
где а и b — фиксированные векторы, порождающие форму. Коэф-
Коэффициенты формы образуют тензор второго ранга и получаются (см.
§ 1.8) как значения формы на всевозможных парах базисных век-
векторов выбранного ортонормированного репера. Возьмем пару ер, eq
базисных векторов. Положим х = ер, у = eq. Тогда коэффициенты
формы примут вид
Spq = S(ep,eq) = -[(ер х а) • (в, х Ь) + (ер х Ь) • (е, х а)] =
Если р = </, то получим диагональные компоненты тензора:
Spp = (a-b)-(a-ep)(b-ep).
При р ф q найдем его внедиагональные компоненты:
Определение 1.11.1. Для произвольной пары векторов a, b
определим бинарную операцию тензорного умножения векторов "®"
по правилу
Эта операция билинейна, коммутативна, дистрибутивна и ассоциа-
ассоциативна. В результате ее применения каждой паре векторов ставится в
соответствие тензор S. Перечисленные свойства операции непосред-
непосредственно следуют из вида коэффициентов Spq.
В декартовом репере Ое^ез тензор S = а ® b принимает вид
b=( -(ai62 + a26i)/2 ai6i + a363
-(а263 + а362)/2
58 Глава 1. Векторные свойства евклидова пространства
Теорема 1.11.1. Тензорное умножение векторов равно нулево-
нулевому тензору тогда и только тогда, когда хотя бы один из сомножи-
сомножителей равен нулю.
Доказательство. Необходимость. Непосредственно из выра-
выражений для компонент тензора а®Ь следует, что если хотя бы один
из векторов равен нулю, то и все компоненты тензора окажутся рав-
равными нулю.
Достаточность. Пусть все компоненты тензора a0b оказались
равными нулю. Его диагональные компоненты дают следующие со-
соотношения
a2b2 + а3Ь3 = 0, ai6i + a363 = 0, ai&i + a2b2 = 0.
Поэтому
ai6i = a2b2 = (Х363 — 0.
Пусть, например, 6i ^ 0. Тогда а\ = 0. Далее имеем S21 =
-(a\b2 + a2bi)/2 = S31 = —(a\bs + a3bi)/2 = 0. Отсюда а2 = а3 = 0.
Аналогично разбираются остальные случаи. ?
Из доказанной теоремы, в частности, следует, что если заданы
тензор S и вектор b и существует такой вектор а, что а ® b = S, то
вектор а единственный.
Замечание 1.11.1. Тензор инерции множества точечных масс
относительно полюса О можно выразить формулой:
J =
Таким образом операция "®" удобна при вычислении тензоров инер-
инерции множества точечных масс, если радиусы-векторы точек выража-
выражаются как линейные комбинации других каких-нибудь векторов.
Пример 1.11.1. Пусть радиусы-векторы точечных масс пред-
представлены в виде г,- = rc -f р,-, где гс — центр масс системы, так что
Г Pi = °- ТогДа найдем
п
4- ^2 miPi ® Pi =
Элементарными алгебраическими преобразованиями мы еще раз полу-
получили теорему 1.10.1. О
1.12. Критерий тензора инерции 59
§ 1.12. Критерий тензора инерции
Как мы видели выше, всякому множеству точечных масс мож-
можно сопоставить тензор инерции J. Компоненты этого тензора в
каждом конкретном ортонормированном базисе образуют неотрица-
неотрицательно определенную симметричную матрицу. Однако если взять
произвольную такую матрицу, то ее не всегда можно считать матри-
матрицей тензора инерции в каком-либо базисе, т.е. не для всякой сим-
симметричной неотрицательно определенной матрицы существует мно-
множество точечных масс, порождающее тензор инерции с соответству-
соответствующими компонентами. Укажем критерий того, что заданная нео-
неотрицательно определенная симметричная матрица может считаться
составленной из компонент тензора инерции.
Лемма 1.12.1. Для любого симметричного неотрицательно оп-
определенного тензора I второго ранга существует множество то-
точечных масс, для которого выполнено равенство
где 1х — линейный оператор, соответствующий тензору I.
Доказательство. Коль скоро тензор симметричный и неотрица-
неотрицательно определенный, он имеет три ортонормированных собственных
вектора ei, ег, ез с неотрицательными собственными значениями Ai,
А2, A3. Произвольно зададим три массы:
mi > 0, т2 > 0, т3 > О
и разместим их соответственно в точках с радиусами-векторами
г,- = W —e,-, i= 1,2,3,
что, очевидно, всегда можно сделать из-за неотрицательности значе-
значений Ai, A2, А3.
Рассмотрим линейный оператор
t=l t=l
Этот оператор имеет те же собственные векторы и собственные зна-
значения, что и оператор 1х. Следовательно,
з
Ix = ^m,(r,-x)r,-.D
»=i
60 Глава 1. Векторные свойства евклидова пространства
Теорема 1.12.1. (Критерий тензора инерции.) Симметрич-
Симметричная матрица
(J\\ J\2 J\3 \
Ji\ «^22 «^23 I , Jij = Jji,
J31 «/32 J33 /
может быть матрицей тензора инерции в каком-нибудь ортонор-
мированном базисе тогда и только тогда, когда матрица
( + Лз — ЛО -Л2 —Ji3
— J21 г(^33 + ^п "" ^22) —«^23
~«/з1 —«/32 |(Jll + J22 —
определена неотрицательно.
Доказательство. Необходимость. Пусть задано некоторое
множество точечных масс. Соответствующую ему билинейную фор-
форму Т(х, у) преобразуем с использованием свойств векторного умно-
умножения:
п п п
Т(х, У) = У • J2 т'(р* х (х х Р|')) = у 'х S т*г* " Yl m^r» ' х)(р|' 'у)
1=1 *=1 *=1
или
Т(х, у) = -(Jn + J22 + 7зз)(у • х) - ^(х, у),
где
i=i
инвариантная при преобразованиях координат симметричная били-
билинейная форма, причем Р(х,у) > 0. Форме Т(х>у) соответствует ли-
линейный оператор
• x)r,- = -Jx 4- r(«/n + J22 + </зз)х.
i=i 2
Поскольку ^(х, у) > 0, матрица / оператора 1х неотрицательно опре-
определена и, как нетрудно видеть, совпадает с матрицей, указанной в
утверждении теоремы.
Достаточность. Пусть матрица / неотрицательно определена.
Тогда с ее помощью можно образовать линейный оператор 1х. Со-
Согласно лемме 1.12.1 для оператора I существует множество точечных
масс такое, что
п
Ix = 5>,.(r,-x)r,.
1.13. Свойства моментов инерции 61
Но операторы Jx и 1х связаны простым соотношением
Jx= -Ix + xSp/,
где Sp / — след матрицы 7, инвариантный относительно ортогональ-
ортогональных преобразований координат. Значит, когда множество точечных
масс реализует оператор 1х, то это же множество реализует и опера-
оператор Jx с матрицей J, заданной в условии теоремы. ?
Следствие 1.12.1. В главных осях критерий тензора инерции
состоит в выполнении неравенств треугольника для главных мо-
моментов инерции,
§ 1.13. Свойства моментов инерции
Дополнительно к понятиям осевых и центробежных моментов
инерции (см. § 1.8) введем понятия моментов инерции относитель-
относительно плоскости и полюса.
Пусть плоскость Ve имеет нормаль е и проходит через полюс О.
Моментом инерции относительно плоскости Ve множества точеч-
точечных масс mi с радиусами-векторами г, называется величина
представляющая собой сумму произведений масс точек на квадраты
их расстояний до плоскости Vt- ^(x,y) — форма, введенная при
доказательстве теоремы 1.12.1.
Выберем в точке О ортонормированный базис ei, е2, ез. Для мо-
моментов инерции относительно координатных плоскостей будем иметь
п п п
Щ = ?т,(г,- eiJ, П2 = ?т,-(г,- е2J, П3 = ?т»(г« е3J.
i=i i=i *=1
Моментом инерции относительно полюса называется величина
В соответствии с определением, осевые моменты инерции и мо-
момент инерции относительно полюса выражаются формулами (§ 1.8)
Jn = /| - Щ = П2 + П3,
62 Глава 1. Векторные свойства евклидова пространства
J22 = /i-n2 = n3-f Пь
[л = Щ + П2 + П3.
Теорема 1.13.1. Осевые моменты инерции удовлетворяют не-
неравенствам треугольника:
J\l + J22 > J33, J22 + «/ЗЗ > Ль ^33 + Jll > ^22-
Доказательство. Учитывая выражение осевых моментов инер-
инерции через моменты инерции относительно плоскости, найдем
Ju + J22 = Щ + П2 + 2П3 = J33 + 2П3,
^22 + </зз = П2 + П3 + 2Щ = Jn + 2ПЬ
^зз + Ju = П3 + Щ + 2П2 = J22 4- 2П2.
Так как Щ, П2, П3 положительны, очевидна справедливость утвер-
утверждения теоремы. D
Из доказательства теоремы следует, что сразу во всех соотноше-
соотношениях треугольника знак равенства достигается только тогда, когда
Их = П2 = П3 = 0, т.е. когда все точечные массы помещены в одну и
ту же геометрическую точку О.
Далее, пусть Up = Uq = О, Щ ф 0, р ф q. Тогда все точечные
массы расположены на координатной оси с направляющим вектором
е^. Следовательно,
ц = Щ, Jpp = Jqq, Jkk = 0.
Наконец, пусть Лр = 0, Uq ф 0, Па? ф 0, р ф g, g 7^ fe, k ф р. То-
Тогда множество точечных масс принадлежит плоскости, натянутой на
векторы eq, е*. Поэтому
Если, кроме того, окажется, что П? = Щ, для чего достаточно, на-
например, чтобы точки с равными массами располагались симметрич-
симметрично относительно биссектрис соответствующих координатных углов,
то будем иметь
Jqq = JjfcJfc = yJpp-
Теорема 1.13.2. Момент инерции относительно плоскости не
зависит от расположения полюса О в плоскости.
1.13. Свойства, моментов инерции 63
Доказательство. Пусть точка О принадлежит некоторой плос-
плоскости Ре и е — нормаль к этой плоскости. Выберем точку О за
полюс. Тогда
Пе =
Возьмем на плоскости Ve другую точку О\ с радиусом-вектором г
относительно первой: г • е = 0. Сделаем замену г, = г + х\. Тогда
получим
Но последнее выражение есть момент инерции относительно плоско-
плоскости Ve, взятый в предположении, что полюс совпадает с Oi.O
Теорема 1.13.3. Момент инерции относительно плоскости Ve
с нормалью е равен моменту инерции относительно плоскости с
той же нормалью, проходящей через центр масс рассматриваемого
множества точечных масс, сложенному с произведением суммар-
суммарной массы на квадрат расстояния между плоскостями:
где П'е — момент инерции относительно плоскости, проходящей че-
через центр масс, гс — радиус-вектор центра масс с началом в точке
на плоскости Ve-
Доказательство. Сделаем замену переменных: гг = гс + г(. По
смыслу замены
1=1
Выражение для Пе принимает вид
Пе = Е пц[(гс + г{) • е]2 = ? Ыгс • еJ+
i=l t=l
Напомним, что
1=1
Теорема 1.13.4. Момент инерции относительно произвольной
точки О равен моменту инерции относительно центра масс, сло-
сложенному с произведением суммарной массы на квадрат расстояния
от центра масс до точки О.
64 Глава 1. Векторные свойства евклидова пространства
Доказательство.
/л = Щ + П2 + П3, Пр = П; + М(гс • ерJ, р = 1,2,3.
Поэтому
1
§ 1.14. Примеры вычисления тензора инерции
Найдем главные оси и вычислим главные центральные моменты
инерции для некоторых типичных множеств точечных масс.
Пример 1.14.1. Определить центральный тензор инерции для
множества из п точек одинаковой массы ш, расположенных на одной
прямой так, что каждая точка отстоит от соседних на одинаковое рас-
расстояние Д.
Решение. Обозначим ei —направляющий единичный вектор пря-
прямой. Выберем на прямой полюс О так, чтобы радиусы-векторы точеч-
точечных масс можно было задать в виде
г,- = гехД, г = 1,..., гг.
По причине симметрии одна из главных осей инерции проходит через
точку О в направлении е\, а две другие ей перпендикулярны, причем
Jn = J\2 = «/21 = J\3 — J31 = J23 = J32 = О,
nn(n+l)Bn + l)
J22 = J33 =
6
Центр масс рассматриваемого множества точек дается формулой
1 А Л. л
mn *?
mn *r? 2
Переходя к определению главных центральных моментов инерции, за-
заметим, что
гс 1С тс jc 7е 7е 7е П
^11 "~ J\2 — J2\ ~ ^13 -~ ^31 "- ^23 ~~ ^32 -~ V-
Для расчета J^2 и «^зз воспользуемся теоремой Гюйгенса-Штейнера:
тс тс т 2 л 2 П(П + 1)(п "" 1) уч
«^22 = ^зз = ^22 - nmrc2 = шД2 -* ^ '-.О
Пример 1.14.2. Определить центральный тензор инерции для
прямолинейного однородного отрезка длины / и массы М.
1.14. Примеры вычисления тензора инерции 65
Решение. Обозначим ei — направляющий единичный вектор от-
отрезка. Полюс О назначим так, чтобы начало вектора ei совпало с одним
из концов отрезка, тогда как другой конец отрезка имел радиус-вектор
г = 1е\.
Разделим отрезок на п равных частей длины Д = 1/п и каждой ча-
части сопоставим массу m = М/п, сосредоточенную в узловой точке с
радиусом-вектором
rt- = feiA, г = 1,...,п, гп = г.
Теперь для расчета главных центральных моментов инерции можем вос-
воспользоваться результатом примера 1.14.1, который перепишем в виде
Гп = О, Г22 = Jc33 11 + j |l
22 J33 = 1^1 + j |l
Положение центра масс дискретного множества задается радиусом-
вектором
Переходя к пределу при п -+ оо, получаем решение примера 1.14.2:
Моменты инерции рассчитаны относительно главных центральных осей
с началом в центре масс гс = 1е\/2. Первая из этих осей направлена
вдоль отрезка, а две другие взаимно ортогональны и лежат в плоскости,
перпендикулярной первой оси.
Заметим, что главные центральные моменты инерции отрезка мож-
можно найти и более экономным способом с помощью интегрирования. По-
Положение центра масс, совпадающее с серединой отрезка, и указанные
выше направления главных центральных осей инерции легко установить
с помощью соображений симметрии. Обозначим dM = ydx — элемент
массы, где у — плотность, dx — элемент длины. Тогда, составляя
в соответствии с определением момента инерции интегральную сумму,
обозначая a = 1/2 и переходя к пределу, найдем
= Jss = J
2/3 Ml2
Пример 1.14.3. Определить центральный тензор инерции для
массы М, равномерно распределенной по периметру прямоугольника со
сторонами а и Ь.
5-1503
66 Глава 1. Векторные свойства евклидова пространства
Решение. Центр масс прямоугольника совпадает с точкой пересе-
пересечения его диагоналей. Две взаимно перпендикулярные оси симметрии
проходят через центр масс параллельно сторонам. Две главные цен-
центральные оси инерции с ортонормированными направляющими векто-
векторами ei и в2 соответственно совпадают с указанными осями симметрии.
Третья ось с единичным направляющим вектором ез проходит через
центр масс перпендикулярно плоскости прямоугольника. Оси прону-
пронумеруем так, чтобы сторона длины а была параллельной вектору ei, a
сторона длины 6 — параллельной вектору ег. Обозначим Мп — массу
каждого отрезка длины а, а Мъ — массу каждого отрезка длины 6. В
соответствии с условием имеем
м Ма м МЬ
Найдем момент инерции фигуры относительно оси, коллинеарной е\.
Он состоит из суммы моментов инерции двух отрезков длины а, парал-
параллельных ei и удаленных от рассматриваемой оси на расстояние 6/2, и
моментов инерции двух отрезков длины 6, перпендикулярных оси. Ис-
Используем решение примера 1.14.2:
б2 _ б2 Мб2 Г 6
Аналогично
а2 а2 Ма2
Jnn = 2Мь Ь 2Ма — = —;—
4 12 4(а
Поскольку прямоугольник — фигура плоская, получим
Га I
ьIз+Т
М(а + ЬJ
'11 Т J22 — То"
Тс. А. Т?- —
+ Л.= "^ ¦ "' .О
Пример 1.14.4. Определить центральный тензор инерции для
однородного плоского прямоугольника с массой М и сторонами а и 6.
Решение. Из симметрии прямоугольника ясно, что главные цен-
центральные оси инерции для него будут такими же, как в примере 1.14.3.
С целью вычисления, например, момента инерции Jfi разобьем прямо-
прямоугольник на п равных полос, параллельных первой оси с направляющим
вектором ех. Момент инерции каждой полосы будет такой же, какой
имеет отрезок, полученный проектированием полосы на вторую глав-
главную ось, и имеющий массу, равную массе полосы. Переходя к пределу
при п —> со, заключаем, что момент инерции Jfx равен главному цен-
центральному моменту инерции отрезка массы М и длины 6, ориентирован-
ориентированного вдоль главной оси. Проводя подобные построения для вычисления
1.14. Примеры вычисления тензора инерции 67
момента инерции J%2< убеждаемся, что он равен моменту инерции отно-
относительно второй оси отрезка массой М и длиной а, ориентированного
вдоль первой главной оси. Используя решение задачи 1.14.2, найдем
12' 22~ 12'
Кроме того,
Пример 1.14.5. Определить центральный тензор инерции одно-
однородного прямоугольного параллелепипеда с массой М и размерами а,
6, с.
Решение. Прямоугольный параллелепипед имеет три плоскости
симметрии, взаимно перпендикулярные и проходящие через середины
ребер. Центр масс С совпадает с точкой пересечения этих плоскостей.
Главные центральные оси инерции начинаются в точке С и направлены
параллельно соответствующим ребрам параллелепипеда. Пронумеруем
оси так, чтобы направляющие векторы ei — первой оси, ег — вто-
второй оси, ез — третьей оси были параллельны ребрам с длинами а, 6,
с соответственно. Найдем моменты инерции Щ, Пг, Щ относительно
координатных плоскостей, перпендикулярных векторам ei, ег, ез. Для
того чтобы найти Щ, рассечем параллелепипед на п одинаковых слоев
плоскостями, перпендикулярными вектору еь Момент инерции каждого
такого слоя будет совпадать с моментом инерции пересечения этого слоя
с первой главной осью, когда этому пересечению сопоставлена масса все-
всего слоя. Переходя к пределу при п —> со, видим, что момент П\ будет
совпадать с моментом инерции относительно С отрезка, равного пере-
пересечению параллелепипеда с первой главной осью, имеющего длину а и
массу, равную массе всего параллелепипеда. Аналогичные рассуждения
можно провести с целью расчета моментов Щ и Щ Воспользовавшись
затем решением задачи 1.14.2, получим
Ma2 _ Mb2 Me2
Щ = _' П2 = —, Пз=-1Г.
Главные центральные моменты инерции после этого вычисляются по
формулам
jc _п , п _МF2 + с2) _M(a2 + c2) _M(a2 + 62)
«/ц-Пг + Пз- ^2 ' J22 = J2 ' 33 12
Пример 1.14.6. Определить центральный тензор инерции для
массы М, равномерно распределенной по окружности радиуса R.
5*
68 Глава 1. Векторные свойства евклидова пространства
Решение. Центр масс совпадает с центром окружности. Любые две
взаимно перпендикулярные оси с началом в центре окружности и напра-
направляющими векторами ei и в2 будут главными центральными. Третья
главная ось проходит через центр и перпендикулярна плоскости окруж-
окружности. Легко видеть, что J33 = MR2. Окружность — фигура плоская и
симметричная. Поэтому имеем
jc _jc _ MB? .
Пример 1.14.7. Определить центральный тензор инерции для
однородного круга массы М и радиуса R.
Решение. Главные центральные оси инерции здесь будут такими
же, как в примере 1.14.6. Найдем момент инерции J?3. С этой це-
целью разделим радиус окружности на п равных частей и найдем момент
инерции J33 Для множества концентрических окружностей с радиусами
Pi = iR/n и массами
М , о 9\ М ,_ . <ч
(Pi - *W-i) = ^2B* - 1), 1 = 1,..., п,
равными массам слоев, заключенных между концентрическими окруж-
окружностями с номерами гиг— 1. Используя решение примера 1.14.6, полу-
получим
МВ?_ Г na(n+lJ n(n
4 [ 4
Отсюда
Из симметрии круга относительно любого диаметра заключаем, что
70 _ jc _ 1 jc _
«Ml — J22 — о 33 "" I '
Момент инерции J33 можно найти также и более экономным способом
с помощью интегрирования. В самом деле, используя указанное выше
разбиение круга, будем иметь
M
= /
о
1.14. Примеры вычисления тензора инерции 69
где р и р + dp — радиусы двух соседних концентрических окружностей,
а выражение MBirpdp)/GrR2) есть с точностью до членов второго по-
порядка малости масса слоя, заключенного между ними.
Формула, найденная для J$3, может иметь и самостоятельное значе-
значение, например когда задано множество равноудаленных друг от друга то-
точек отрезка, массы которых составляют арифметическую прогрессию.О
Пример 1.14.8. Определить центральный тензор инерции для
однородного сплошного эллипса массы М, с границей, заданной в де-
декартовых осях (xi,X2) посредством уравнения
т2 т2
XJm | 2 — 1
a2 + Ь2 ~ L
Решение. Уравнение эллипса задано в каноническом виде. Следо-
Следовательно, оси координат служат осями симметрии эллипса. Центр масс
С совпадает с началом координат. Поэтому оси координат будут глав-
главными центральными осями инерции. Третья главная центральная ось
перпендикулярна плоскости эллипса. Сделаем замену переменных
xi = ayu x2 = Ьу2.
В результате эллипс превратится в круг единичного радиуса. Разобьем
эллипс на элементы малой площади. Пусть каждый элемент имеет мас-
массу 6М{ и координаты (x^Xj). Тогда
i = a2
Примем, что масса элемента при преобразованиях координат не изменя-
изменяется. Уменьшая максимальную площадь элементов, в пределе получаем
точные соотношения
С ,2 т/ _МЬ _ 2 _
где J'n — момент инерции единичного круга массы М относительно его
диаметра (см. пример 1.14.7). Третий главный момент инерции эллипса
дается формулой
J| Jc + Jc B + 62)O
Пример 1.14.9. Определить центральный тензор инерции одно-
однородной сферы массы М и радиуса R.
70 Глава 1. Векторные свойства евклидова пространства
Решение. Центр масс совпадает с центром С сферы. Любая ось,
проходящая через точку С, есть главная центральная. Назначим про-
произвольно три взаимно перпендикулярные координатные оси с напра-
направляющими единичными векторами еь е2, е3, проходящие через точ-
точку С Момент инерции сферы относительно точки С, очевидно, будет
/ic = MR2. В силу симметрии сферы моменты инерции Щ, Щ, Щ от-
относительно координатных плоскостей будут одинаковыми. Но так как
/ic = Щ + П2 + П3, то
Следовательно,
jc _ гс _ гс _ 2МЯ2
Пример 1.14.10. Определить центральный тензор инерции одно-
однородного шара массы М и радиуса R.
Решение. Центр масс шара совпадает с его центром С. Как и в
примере 1.14.9, назначим произвольно три взаимно перпендикулярные
координатные оси с началом в точке С и направляющими единичными
векторами ei, ео, ез. Найдем момент инерции шара относительно точ-
точки С. С этой целью разобьем радиус шара на п одинаковых частей и
рассмотрим совокупность концентрических сфер с радиусами />, = iR/n.
Вычислим массу шарового слоя между соседними сферами с радиусами
Pi и pi-i:
Если по каждой сфере радиуса рг равномерно распределить массу Мг,
найти ее момент инерции относительно центра и просуммировать значе-
значения, полученные для всех сфер, то
4 + 6
Момент инерции цс шара относительно центра выражается формулой
/ic = lim fic =
1.14. Примеры вычисления тензора инерции 71
Моменты инерции шара относительно координатных плоскостей будут
одинаковыми. Учитывая, что /ic = П1 4- П2 -h П3, получим
Поэтому
тс _ тс _ jc _ 2МД2
Значение \хс можно получить с помощью интегрирования. Сложим все
массы, лежащие в тонком сферическом слое, радиус которого равен р,
а толщина dp. Получим
... ЗМ
Ш =
Следовательно,
ЗМ / 4 _ ЗМЯ2
~ j *d
Пример 1.14.11. Определить центральный тензор инерции од-
однородного сплошного эллипсоида массы М, граница которого задана в
декартовых осях B1,22,23) посРеДством уравнения
т2 т2 т2
а2 + б2 + с2 "
Решение. Уравнение эллипсоида задано в каноническом виде.
Следовательно, оси координат служат осями симметрии эллипсоида.
Центр масс совпадает с началом координат. Поэтому оси координат
будут главными центральными осями инерции. Сделаем замену
2i=at/i, 22 = 6y2, 23 = Су3,
оставив неизменным направление осей координат. В результате элли-
эллипсоид превращается в шар единичного радиуса. Разобьем эллипсоид на
элементы малого объема. Пусть каждый элемент имеет массу ?М,- и
координаты B1,2*2,23). Тогда
П2 «
72 Глава 1. Векторные свойства евклидова пространства
Пз « Е(хзJ«М,- = с2 ?(Й2«М(.
* г
Потребуем, чтобы масса каждого элемента при преобразованиях коорди-
координат не менялась. Уменьшая максимальный объем элементов, в пределе
получим точные соотношения
щ = а2п;, п2 = б2п;, п3 = с2п;,
где IIi — момент инерции единичного шара массы М относительно
плоскости большого круга. Воспользовавшись результатом примера
1.14.10, найдем
Ma2 Mb2 Me2
П П П
Главные центральные моменты инерции выражаются формулами
М(Ъ2+с2) М(а2+с2) М(а2
Jn - 112 4- Из ~ g , «/22 ~ g 1 J3Z = к
Центральный эллипсоид инерции задается уравнением
^[F2 + с2)х2 + (а2 + с2)х2 + (а2 + 62)х2] = 1.
Полуоси его равны
у М(Ь2 + с2)' у М(а2 + с2У у М(а2 + б2) *
Примем, что для осей заданного в условии эллипсоида выполнено со-
соотношение
а > 6 > с.
Тогда
Ь2 + с2<а2 + с2<а2 + Ь2.
Поэтому
^
У М(Ь2 + с2) у М(а2 + с2) у М(а2 + б2) *
Следовательно, центральный эллипсоид инерции "отслеживает" форму
эллипсоида, заданного в условии. Большой полуоси заданного элли-
эллипсоида соответствует большая полуось эллипсоида инерции, средней —
средняя, меньшей — меньшая.
Контрольные вопросы к главе 1 73
Контрольные вопросы к главе 1
1.1. Можно ли утверждать, что любой направленный отрезок есть
вектор? Если нет, то приведите пример, подтверждающий Ваше
мнение.
1.2. Доказать, что расстояние, введенное с помощью скалярного
произведения векторов, удовлетворяет неравенству треугольни-
треугольника.
1.3. Посредством какой из перечисленных форм можно определить
скалярное произведение векторов?
*=1
i=l г=1
1.4. Пусть задан базис ei,... ,е„, в нем вектор х = ]СГ=1 ж*е« и ме"
трический тензор G = (gij)- Показать, что существуют ровно
п — 1 линейно независимых векторов у = Ya=i ^»e»> ортогональ-
ортогональных вектору х.
1.5. Показать, что с помощью выбора подходящего базиса всякий
метрический тензор можно привести к диагональному виду.
Единственным ли способом это можно сделать?
1.6. Пусть G = (gij) — метрический тензор. Показать, что det G ф 0.
1.7. Показать, что если ортонормированный базис в результате ли-
линейного преобразования перешел в новый ортонормированный
базис, то матрица преобразования является ортогональной.
1.8. На плоскости с декартовой прямоугольной системой координат
заданы векторы, образующие между собой угол тг/4. Найти ме-
метрический тензор, для которого они ортонормированы.
1.9. Указать геометрический смысл модуля результата векторного
умножения двух векторов.
1.10. Указать геометрический смысл смешанного произведения трех
векторов.
1.11. Каким условием связаны Плюккеровы координаты скользяще-
скользящего вектора?
74 Глава 1. Векторные свойства евклидова пространства
1.12. Почему момент пары скользящих векторов есть свободный век-
вектор?
1.13. Как меняется при изменении полюса проекция суммарного мо-
момента на направление, перпендикулярное суммарному вектору?
1.14. Пусть R х М = О, R • М = 0. К какому простейшему виду
можно привести такую систему скользящих векторов?
1.15. Как зависит центр системы параллельных скользящих векторов
от направления этих векторов?
1.16. Обобщить понятие центра масс для бесконечного ограниченного
множества точечных масс. Доказать теорему 1.7.1 для такого
множества.
1.17. Используя свойства функции у = у/х и свойства центра масс,
доказать неравенство
2
1 \ 1
¦;Р siE* «
1=1 / 1=1
1.18. Показать, что матрица тензора инерции симметрична в любой
системе координат.
1.19. При каком условии существуют две неколлинеарные оси, отно-
относительно которых моменты инерции множества точечных масс
равны нулю?
1.20. Показать, что если множеству точечных масс соответствует эл-
эллипсоид инерции, то матрица тензора инерции невырождена в
любой системе координат.
1.21. Пусть поверхность ^(х,х) = 1 (см. § 1.8) есть цилиндр с осью к.
Найти нормаль к этой поверхности. Показать, что этот цилиндр
прямой круговой.
1.22. Доказать, что Ju = «Аз = 0, где Ji2, Лз — центробежные мо-
моменты инерции, есть необходимое и достаточное условие того,
чтобы ось ei была главной осью инерции.
1.23. Пусть г — радиус-вектор, имеющий начало в точке О и конец
в центре масс множества Q точечных масс, А) В, С — главные
центральные моменты инерции множества Q. Найти момент
инерции множества Q относительно оси с направляющим век-
вектором е, проходящей через точку О.
Контрольные вопросы к главе 1 75
1.24. Доказать, что если точечные массы множества Q расположены
симметрично относительно плоскости V, причем симметричным
точкам отвечают одинаковые массы, то
a) центр масс системы принадлежит плоскости V\
b) одна из главных осей инерции множества Q перпендику-
перпендикулярна плоскости V.
1.25. Доказать, что если точечные массы множества Q симметрич-
симметричны относительно оси, причем симметричным точкам отвечают
равные массы, то
a) центр масс множества Q принадлежит этой оси;
b) одна из главных осей инерции множества Q совпадает с
этой осью.
1.26. Доказать теорему Гюйгенса-Штейнера без привлечения леммы
1.10.1, воспользовавшись непосредственно определением осевого
момента инерции.
1.27. Применив теорему Гюйгенса-Штейнера, доказать, что осевой
момент инерции не зависит от расположения точки О на соот-
соответствующей оси.
1.28. Методом геометрии масс доказать, что сумма квадратов рас-
расстояний от вершин правильного n-уголышка до любой точки,
взятой на описанной около него или вписанной в него окруж-
окружности, есть величина постоянная, не зависящая от положения
точки на окружности.
1.29. Пусть точечные массы mi, Ш2, тз расположены на концах ко-
координатных ортов. Найти тензор инерции. Показать, что этот
тензор удовлетворяет теореме 1.12.1.
1.30. Каков критерий тензора инерции в главных осях инерции?
1.31. В примерах 1.14.1 и 1.14.2 указать вид поверхности Т(х,х) = 1
(см. § 1.8).
1.32. Определить центральный тензор инерции для гантели, состоя-
состоящей из однородного стержня массы m и длины / и прикреплен-
прикрепленных к концам стержня одинаковых однородных шаров массы М
и радиуса г каждый.
Глава 2
Кинематика
Кинематика — это раздел механики, в котором с геометрической
точки зрения изучаются пространственно-временные свойства дви-
движения различных объектов. С целью практических приложений зна-
значительное внимание уделяется рациональным методам расчета ско-
скоростей и ускорений отдельных точек, как изолированных, так и вхо-
входящих в состав абсолютно твердых тел. Владение такими методами
полезно при разработке реальных механических систем, выявлении
структуры их виртуальных перемещений, составлении уравнений ди-
динамики.
Движение происходит во времени t ? I С Л, где / — заданный
интервал множества R действительных чисел. Выберем множество
X С Е3. Задать движение X — значит указать, какое положение в
пространстве Е3 займет любая точка из X в произвольный момент
времени t Е I. Множество одновременных положений точек из X для
фиксированного времени t обозначим X(t). Движение будем рассма-
рассматривать как взаимно однозначное преобразование
X —> X(t), t 6 /.
В зависимости от особенностей движения к этому преобразованию
предъявляются специальные требования. В частности, примем, что
оно по крайней мере дважды дифференцируемо по времени и что
существует значение to ? /, для которого X = X(to).
§ 2.1. Скорость точки
Пусть множество X содержит лишь одну точку. Положение точки
X в пространстве Е3 будем задавать ее радиусом-вектором г с нача-
началом в фиксированном полюсе О. При движении точки ее радиус-
вектор меняется в зависимости от времени:
r = r(t).
Вектор-функция г(<) задает закон движения точки. Кривая в Е3У
состоящая из последовательных положений точки X(i) при ее дви-
движении, называется траекторией точки.
2.1. Скорость точки 77
Рассмотрим два положения точки X(t) и X(t + (г), соответствую-
соответствующие моментам времени t и t + а. Точке X(t) отвечает радиус-вектор
г(<), точке X(t -f с) — радиус-вектор r(t) -f Дг = r(t + <т). Величина
Дг есть вектор перемещения точки за время а. Отношение вектора
Дг ко времени перемещения называется средней скоростью за время
а:
Уср = Дг/G.
Предел этого отношения при а —> О называется скоростью точки:
г г Дг dv .
v = hm vcp = am — = -7- = г.
Выражение г есть общеупотребительное обозначение производной от
вектора г по времени.
По отношению к траектории точки вектор Дг задает секущую.
При G —> 0 вектор \ср займет предельное положение, совпадающее с
положением касательной к траектории в точке X(t).
В пространстве Е3 введем декартову систему координат с началом
в точке О и условно неподвижным ортонормированным базисом ei,
е2, е3. Тогда
г = nei + г2е2 -f г3е3,
где числа г\, г2, г3 суть координаты вектора г в указанном базисе.
При движении точки X(t) координаты вектора г представляют собой
функции времени и потому в репере Oeie2e3
drx dr2 dr3
v = viei + v2e2 + v3e3 = — ex + -jr^i + "ЗГез^
так что компоненты вектора v получаются дифференцированием по
времени координат движущейся точки.
Модуль скорости точки можно выразить следующим образом:
v = |v
где ds — дифференциал длины дуги траектории точки. Направление
отсчета дуги совпадает с направлением движения точки вдоль траек-
траектории: ds/dt > 0. Сместим вектор v(<) параллельно самому себе так,
чтобы его начало совпало с полюсом О. Получим вектор V(<). При
изменении t конец вектора V(t) опишет в пространстве кривую, на-
называемую годографом скорости. В дальнейшем векторы v и V будем
отождествлять.
Пусть скорость точки известна в каждый момент времени. Тогда
с точностью до векторной константы закон движения может быть
78 Глава 2. Кинематика
восстановлен посредством квадратур. В самом деле,
t
r(t) = /
to
izzl
Lo
Постоянная с = C\e\ + с^^2 + сзез определяется по положению точки
в некоторый начальный момент времени *0- Вектор с можно сделать
равным нулю, специально выбрав полюс О.
Простейшим можно считать движение, при котором v — посто-
постоянный вектор. Такое движение называется равномерным. Его закон
имеет вид
r(t) = (t - <0)v + с.
Траектория любого равномерного движения есть прямая линия.
Пример 2.1.1. Пусть хь я2, жз — декартовы координаты точки
X(t), и закон движения имеет вид
х\ = a + Rcosut, хч = Ь + flsinotf, #3 = с,
где а, 6, с, w, R — постоянные. Траектория получается после исключе-
исключения t:
и представляет собой окружность с центром в точке (а, 6, с), располо-
расположенную в плоскости, перпендикулярной к третьей оси. Компоненты
скорости найдем, дифференцируя закон движения:
dx\ . dx2
v\ = —77- = — Rujsmutt, V2 = —г— = Rijcosujt, V3 = 0.
at at
Следовательно, годограф скорости — это окружность радиуса Да; с цен-
центром в начале координат, лежащая в плоскости первой и второй коор-
координатных осей.О
§ 2.2. Ускорение точки
Вектор ускорения определяется как скорость движения конца
вектора \(t) по годографу. Другими словами, ускорение
есть вторая производная от радиуса-вектора по времени. Символ г
часто используется для обозначения ускорения.
2.2. Ускорение точки 79
Если ускорение точки задано как функция времени, то скорость
точки может быть восстановлена с точностью до векторной постоян-
постоянной:
t з Г *
= I w(t)dt + b = Y^ei fwi
t1 Ь
to t~1 Ьо
Вектор b = &iei + &2e2 + &зез есть скорость точки в момент <о- По-
Поэтому закон движения по заданному ускорению восстанавливается с
точностью до равномерного движения.
Простейшим ускоренным движением можно считать движение с
постоянным вектором ускорения w. Оно называется равноускорен-
равноускоренным движением. Его закон имеет вид
г(<)=
Тем самым равноускоренное движение происходит в плоскости век-
векторов w и vo, проходящей через точку с радиусом-вектором го. Если
w и vo коллинеарны (одинаково или противоположно направлены),
то движение происходит по прямой линии. В общем случае равно-
равноускоренного движения траектория представляет собой параболу.
Запишем скорость точки X(t) в виде v = vt, где т— единичный
вектор касательной к траектории. Пусть s — длина дуги траектории.
Тогда ускорение w выражается равенством
_ d\ _ dv drds __ dv 2dr
dt dt d$ dt dt ds
так как v = ds/dt. Коль скоро т — единичный вектор, т • dr/ds — О
и, следовательно, вектор dr/ds принадлежит плоскости, перпендику-
перпендикулярной вектору т. Положим
dr и
Ts = р'
где v — единичный вектор, называемый главной нормалью к тра-
траектории. Скалярная величина р называется радиусом кривизны в
рассматриваемой точке X(t) траектории. Плоскость векторов т и i/,
проходящая через точку Х(?), называется соприкасающейся плоско-
плоскостью. В соприкасающейся плоскости возьмем окружность радиуса
р. Центр ее поместим на главной нормали на расстоянии р от точки
X(t) в направлении вектора и. Получим соприкасающуюся окруж-
окружность к траектории в точке X(t). Вектор т служит общей касатель-
касательной к этим двум кривым в точке X(t). Значения dr/ds, вычисленные
80 Глава 2. Кинематика
в точке X(t) для соприкасающейся окружности и для траектории,
совпадают.
Определим единичный вектор /3 бинормали к траектории по фор-
формуле
/3 = т х и.
Оси координат с началом в точке X(t) и направляющими единичными
взаимно перпендикулярными базисными векторами т, i/, /3 называ-
называются естественными осями.
Представим ускорение в виде суммы
w = wtt+
Теорема 2.2.1. Проекции ускорения на естественные оси дают-
даются формулами
dv v2
wT = v = —, wv = —, wp = 0.
Доказательство. Учитывая результат дифференцирования век-
вектора v = vt и используя понятие радиуса кривизны, найдем
dv v2
w = -ггт+ —I/.D
dt p
Следствие 2.2.1. Ускорение точки принадлежит соприкасаю-
соприкасающейся плоскости. Можно также сказать, что соприкасающаяся
плоскость натянута на векторы скорости и ускорения.
Модуль ускорения определяется равенством
w
•w+ffi-
Если векторы скорости и ускорения коллинеарны, то соприкасающа-
соприкасающаяся плоскость не определена, а р = оо. Так, например, будет, когда
траектория движения точки представляет собой прямую. То же бу-
будет и в точках перегиба траектории.
Отметим, что в общем случае проекция wu ускорения аналогична
центростремительному ускорению при движении точки по окружно-
окружности.
Пример 2.2.1. Пусть точка движется в соответствии с законом
r\ = Rcosujt, г^ = Rsinujt, гз = at.
Определить траекторию и найти ее радиус кривизны.
2.3. Закон движения твердого тела 81
Решение. Траектория представляет собой винтовую линию на по-
поверхности кругового цилиндра радиуса R. Образующая цилиндра па-
параллельна третьей оси. Найдем векторы скорости и ускорения:
v = г = (—Rlj smut, Rucoswt, a),
w = v = (—Rw2 совсЛ, — Ru2sinujt, 0).
Видим, что v • w = 0. Поэтому wv = w. Отсюда
В данной задаче, если а ф 0, радиус кривизны р оказывается больше
радиуса R цилиндра, поверхности которого принадлежит траектория.О
§ 2.3. Закон движения твердого тела
Твердым телом называется множество точек, попарные расстоя-
расстояния между которыми постоянны. Закон движения твердого тела
относительно некоторого репера есть правило, позволяющее одно-
однозначно установить в этом репере закон движения любой, произвольно
взятой точки тела.
Лемма 2.3.1. Для определения закона движения твердого тела
достаточно задать законы движения трех его точек, не лежащих
на одной прямой.
Доказательство. Пусть относительно некоторого репера с нача-
началом в точке О заданы законы движения трех точек твердого тела
не лежащих на одной прямой. Обозначим
Ri = г2 — ri, R2 = Г3 — ]
По условию леммы
d|R2| d|R2-Ri|
dt dt dt
Единичный вектор ез определим равенством
. Ri х R2
вз — .
6 - 1503
= 0.
82 Глава 2. Кинематика
Этот вектор существует, так как заданные точки не принадлежат
одной прямой.
Пусть г — радиус-вектор произвольной точки тела. Тогда спра-
справедливо равенство
г - ri = R(t) = A1R1 + A2R2 + Л3е'3,
где Ai, A2, A3 не зависят от времени. В самом деле, умножив это
равенство скалярно сначала на Ri, а затем на R2, получим относи-
относительно Ai, A2 систему линейных уравнений с постоянными коэффи-
коэффициентами
R • Ri = Aii?} + A2R1 • R2)
R • R2 = AiRx • R2 ~Ь А2Д2.
Определитель этой системы
Д = R\R\[l - cos2(R"rR2)] = |RX x R2|2
отличен от нуля. Следовательно, Ai и А2 всегда существуют и по-
постоянны. Постоянным будет и скаляр Аз, задающий расстояние от
точки до плоскости векторов Ri, R2, неизменно связанных с телом.
Таким образом, имеем взаимно однозначное соответствие между точ-
точками тела и тройками постоянных коэффициентов Ai, А2, Аз- Закон
движения произвольной точки тела дается выражением
Теорема 2.3.1. Закон произвольного движения твердого тела
есть аффинное линейное преобразование вида
где х — постоянный вектор, A(t) — ортогональный линейный опе-
оператор, зависящий от времени, rf(t) — радиус-вектор полюса, фик-
фиксированного в теле.
Доказательство. В соответствии с леммой 2.3.1 закон движения
произвольной точки твердого тела можно представить в виде
r(t) = A1R1 + A2R2 + А3ез + ri,
где
Ri = r2-ri, R2 = r3-ri, e3 = . .,
|Ri x R2|
2.3. Закон движения твердого тела 83
ri, г2, гз — радиусы-векторы трех точек тела, не лежащих на одной
прямой. В точке ri возьмем три взаимно перпендикулярных единич-
единичных вектора
ei = Ri/jRi, е2 = е'3 х е'х, е'3.
В этом репере
R2 = Я2[е1 cos(R^R2) + е'2 вт(кГн.2)].
Видим, что коэффициенты разложений векторов Ri и R2 оказыва-
оказываются постоянными. Закон движения r(t) можно представить следу-
следующим образом:
r(t) = xie[ + х2е2 + х3е'3 + гь
где координаты
х\ = \\Ri + A2i22cos(Ri,R2), х2 = A2i?2sin(Ri,R2), x3 = А3
не зависят от времени.
Пусть движение тела рассматривается в ортонормированном ре-
репере ei, e2, ез с началом в точке О. Линейное преобразование Ах
определим его действием над базисными векторами по формулам
Aei = е'1} Ае2 = е2, Аез = е^.
Тогда
г - г' = xi Аех + х2Ае2 + х3Ае3 = A(xxei + х2е2 + х3е3) = Ах,
где вектор г' = riB) есть радиус-вектор точки тела с известным зако-
законом движения. Поскольку оператором А ортонормированный базис
переводится в ортонормированный, то А — ортогональный оператор
(см.теорему 1.1.2).О
Линейный оператор А зависит от времени. Линейное преобразо-
преобразование
переводит множество X постоянных векторов х в множество векто-
векторов, определяющих последовательные положения точек твердого те-
тела в пространстве. Как следует из доказательства теоремы 2.3.1,
множество X, оператор А и вектор г' будут разными в зависимости
от выбора полюса в теле и базиса е^, е'2, е3, жестко связанного с
телом. Этот произвол можно использовать для получения наиболее
удобного вида преобразования. Например, если известно, что одна
точка твердого тела неподвижно закреплена, то полезно за полюс в
84
Глава 2. Кинематика
теле принять именно ее. Тогда вектор г' будет постоянным. Его мож-
можно сделать равным нулю, если неподвижный полюс О совместить с
этой точкой.
Если какая-либо ось тела сохраняет постоянную ориентацию от-
относительно базиса ei, е2, ез, то матрицу оператора А можно упро-
упростить. С этой целью полюс надо взять на указанной оси, а ее еди-
единичный вектор принять в качестве одного из базисных направлений,
связанных с телом.
Смысл коэффициентов матрицы оператора А виден из следующей
таблицы.
ei
е2
ез
ei
an
«21
«31
е'2
«12
«22
«32
е3
«13
«23
«33
По столбцам матрицы А стоят координаты связанных с телом векто-
векторов e'l5 е2, е3, взятые в базисе ei, е2, е3, а по строкам — координаты
векторов ei, е2, ез, взятые в базисе е'х, е2, е3.
Пусть, например, вектор e'k сохраняет постоянную ориентацию в
пространстве. Тогда fc-й столбец матрицы будет состоять из посто-
постоянных элементов. Если дополнительно потребовать, чтобы ер =¦ ejj.,
то на пересечении k-го столбца и р-й строки должна стоять единица,
а остальные элементы k-го столбца и р-й строки будут нулями. В
результате матрица А будет содержать только четыре зависящих от
времени элемента.
§ 2.4. Движение вокруг неподвижной точки
Выше было показано, что закон движения конкретной точки твер-
твердого тела можно представить в виде
г@ = А(*)х + r'(i),
где г — радиус-вектор точки, имеющий начало в полюсе О, r'(t) —
вектор с началом в том же полюсе, один и тот же для всех точек тела,
A(t) — зависящий от времени ортогональный линейный оператор,
х — постоянный вектор с началом в полюсе О, конкретизирующий
точку тела. Конец вектора х принадлежит постоянному множеству
Л\ с которым изучаемое твердое тело можно совместить, не изменяя
расстояний между его точками.
В практических задачах множество X — так или иначе геометри-
геометрически организованное ограниченное в пространстве Е3 множество то-
точек. Вместе с тем преобразование, определенное оператором АB) и
2.4. Движение вокруг неподвижной точки 85
вектором г', формально можно применить к любой точке простран-
пространства Е3 . В этом смысле условимся считать, что твердое тело совпа-
совпадает со всем пространством Е3 , и будем говорить о движении трех-
трехмерного пространства. Таким образом, каждому движению твердо-
твердого тела можно сопоставить движение связанного с ним трехмерного
пространства и, наоборот, каждому произвольному движению про-
пространства можно сопоставить движение включенного в него твердого
тела.
Движение пространства Е3 есть композиция двух преобразова-
преобразований. Первое из них обусловлено оператором А. Второе задает оди-
одинаковое смещение всех точек пространства на вектор г'. Рассмотрим
свойства первого преобразования:
Оно состоит в применении ортогонального оператора А к векторному
пространству R3. Множество таких операторов образует относитель-
относительно их композиции группу, называемую группой 0C).
Теорема 2.4.1. Существует инвариантная прямая, точки ко-
которой при действии оператора А либо остаются на месте, либо
зеркально отражаются.
Доказательство. Если е — направляющий вектор такой пря-
прямой, то мы должны иметь
Ае = Ае,
где А — действительное число. Другими словами, е — собственный
вектор оператора А с собственным значением А. Для определения А
служит характеристическое (вековое) уравнение
det(A - \Е) = О,
где А — матрица оператора А, Е — единичная матрица. Относитель-
Относительно А это уравнение — кубическое с вещественными коэффициентами.
Оно имеет по крайней мере один вещественный корень Ао. Корню Ао
отвечает хотя бы один собственный вектор е0. Для этого вектора,
учитывая ортогональность оператора А, получим
©о • ео = Аео • Аео = Аоео • ео.
Значит, Ао = ±1.О
Следствие 2.4.1. Плоскость, проходящая через начало коорди-
координат О перпендикулярно вектору ео, инвариантна относительно дей-
действия оператора А.
86 Глава 2. Кинематика
Выберем в пространстве R3 ортонормированный правоориентиро-
правоориентированный базис ei, в2, ез так, чтобы ез = во- В этом базисе матрица А
примет вид
(аи an О
а21 а22 О
О 0 ±1
так как Ае3 = Аое3, Aei А. ез, Аег -L ез. Очевидно, что матрица
А'=(ап
\
ортогональна. Условие ортогональности этой матрицы приводит к
системе трех уравнений
аП + а21 = !> 011^12 + 021^22 = 0, п\2 + п\2 = 1.
Поскольку а\х + а\х = 1, то существует такой угол ф> что
Тогда
а\2 = — sin ф, ail = cos ф или ai2 = sin ф, а22 = — cos ф.
Следовательно,
л, ( сояф —втф \ it ( cos<6 %\хаф \
А = . , . ] или А = [ . , 1 \ -
\ втф cos0 ) \ sm0 — cos0 у
Проанализируем действие оператора А для всех возможных сочета-
сочетаний знаков величин det А и Ао-
Вариант 1. det А = 1, Ао = 1. Матрица А однозначно принима-
принимает вид
(cos ф — sin ф О
sin ф cos ф О
О 0 1
При ф > 0 соответствующий ей оператор выполняет поворот вокруг
вектора ез на угол ф против хода часовой стрелки, если смотреть с
конца вектора ез.
Вариант 2. det Л = 1, Ло = — 1. Тогда имеем
cos ф sin ф О
sin ф — cos ф О
0 0-1
2.4. Движение вокруг неподвижной точки 87
Напишем характеристическое уравнение
A + A)[-(cos2 ф - А2) - sin2 ф) = 0.
Очевидны его решения: Ai = 1, А2 = — 1, A3 = Ао = — 1. Матрица
А симметрична. Значит, ее собственные векторы взаимно перпенди-
перпендикулярны. В базисе собственных векторов матрица А оператора А
примет вид
/10 0
i= I 0 -1 0
\ 0 0-1
Тем самым оператор А задает вращение на угол тг вокруг первого
собственного вектора.
Вариант 3. detA = — 1, Ао = 1. Для матрицы А получаем
выражение
(cos ф sin ф 0
sin ф — cos ф 0
0 0 1
Такая матрица получается вследствие композиции зеркального от-
отражения относительно плоскости, натянутой на векторы ei, ез, и по-
последующего поворота на угол ф вокруг вектора ез (исходная правая
система координат меняется на левую).
Вариант 4. det А = — 1, Ао = —1. В этом случае
cos ф — sin ф 0
А — | sin ф cos ф 0
0 0-1
Эта матрица означает композицию поворота вокруг вектора ез и зер-
зеркального отражения относительно плоскости, перпендикулярной век-
вектору ез. Так же, как и в варианте 3, правая система координат ме-
меняется на левую.
Теорема 2.4.2. Ортогональные операторы, имеющие определи-
определитель, равный единице, образуют в 0C) подгруппу.
Доказательство. Пусть Ai, A2 — ортогональные операторы,
причем det A\ = det Ai = 1. Матрица композиции операторов полу-
получается как произведение матриц составляющих операторов. Имеем
det А{ = det А% = 1 и det(Ax А2) = det Ax det A2 = 1.Q
Подгруппа ортогональных операторов в 0C) с определителем,
равным единице, называется группой 50C).
Глава 2. Кинематика
Следствие 2.4.2. (Эйлер). Всякий оператор из 50C) имеет
хотя бы одно собственное значение А = 1. В связи с этим группа
5ОC) состоит из вращений вокруг всевозможных прямых, проходя-
проходящих через полюс О. Эти вращения сохраняют ориентированность
троек базисных векторов.
Следствие 2.4.3. Если действие ортогонального оператора в Е3
сохраняет ориентированность троек базисных векторов (отсут-
(отсутствуют зеркальные отражения), то этот оператор принадлежит
группе 50C).
Доказательство. Действие операторов с определителем, равным
— 1, проанализировано в вариантах 3 и 4. Оказалось, что такие опе-
операторы всегда содержат зеркальные отражения. ?
Определитель ортогонального оператора А непрерывно зависит от
времени и, следовательно, при движении остается постоянным. Это
означает, что репер, связанный с твердым телом, сохраняет свою ори-
ориентированность. В начальный момент его всегда можно выбрать той
же ориентированности, что и неподвижный репер. При этих услови-
условиях определитель оператора А всегда будет равен +1. В дальнейшем
ограничимся изучением действия операторов из группы 50C).
§ 2.5. Угловые координаты твердого тела
Пусть в пространстве Е3 выбран ортонормированный правоори-
правоориентированный базис ei, e2, ез. Рассмотрим движение твердого тела,
определенное действием оператора А ? 50C):
3 3
Ах = 2^#,-Ае; = 22xiei ' ei ~ ^е«-
»=1 1=1
Видим, что оператор А преобразует вектор х таким образом, что этот
вектор в ортонормированном правоориентированном базисе е[ \ е^ ,
ез имеет те же координаты, что и в исходном. Тем самым оператор
А осуществляет преобразование от базиса пространства к базису,
связанному с твердым телом.
Предположим, что А представляет собой композицию операторов
А*1) и А<2): А = А*1) о А<2), причем
Юе,, .'=1,2,3.
Обозначим
j^W i= 1,2,3.
2.5. Угловые координаты твердого тела
Теорема 2.5.1. Оператор А 2 в композиции А = А^1) о А^2) пре-
преобразует векторы е\ * в точности по тем же формулам, по каким
он преобразует векторы е\, в2, ез пространства Е3.
Доказательство. Применяя оператор А, найдем
Ае, = <*> ^ ^J2 $4
Следствие 2.5.1. Столбцы матрицы оператора А^ суть ком-
компоненты векторов е- конечного базиса, взятые относительно про-
промежуточного базиса ер, е^ , е^ \ полученного в результате дей-
действия оператора ^\
Пусть
Во =(ei,e2,e3)
исходный базис,
в1 = (в11),41),41
промежуточный базис и
конечный базис. Действие композиции А = А^1) о А^2^ можно пред-
представить как следующую последовательность преобразований базисов:
Bi = АA)В0, Bfc = A^Bi.
Другими словами, сначала с помощью оператора А^1) осуществля-
осуществляется переход от базиса Во к промежуточному базису Bi, а затем с
помощью оператора А^2) выполняется переход от промежуточного ба-
базиса Bi к конечному базису Вь Напомним, что матрица композиции
линейных операторов равна произведению их матриц, взятых в том
же порядке, в котором операторы участвуют в композиции.
Пусть теперь указана последовательность ортонормированных ба-
базисов
B< = (e(i0,e<°.4°). *" = 0,1Д...Л
и линейные операторы А^ перехода от одного базиса к другому:
В^А^В^ь 1 = 1,...,*.
Тогда оператор А, переводящий исходный базис Во в конечный базис
Bfc, можно найти как композицию
90 Глава 2. Кинематика
а матрицу оператора А — как произведение матриц составляющих
операторов.
Выясним теперь, какое минимальное число параметров требуется,
чтобы однозначно определить положение твердого тела в простран-
пространстве. Всякому оператору А Е 50C), взятому в конкретном ортонор-
мированном базисе, отвечает ортогональная матрица
«и
«31
Условие ортогональности Ат А = Е приводит к шести уравнениям на
коэффициенты сц,-:
з
если г ф j, ij = 1,2,3.
Е Г 1, если t =j,
apiapj = dij = < Q
«—1 > '
Всего коэффициентов девять. Следовательно, имеется три свобод-
свободных параметра, полностью определяющих действие ортогонального
оператора в Еъ. Так как А ? 50C), то дополнительно должно быть
выполнено условие detA = 1. Поскольку определитель ортогональ-
ортогонального оператора равен 1 или — 1, последнее условие, не уменьшая чи-
числа свободных параметров, сужает множество, которому они могут
принадлежать.
Три параметра, однозначно определяющие оператор А Е 50C),
могут быть выбраны различными способами. Укажем один из наибо-
наиболее распространенных. Пусть требуется найти параметры оператора
А, действие которого состоит в том, что
(к) (к) А (к) А
ey = Ae2 eK3 > = Ае3,
где е\\ &2 , eg — заданный произвольный ортонормированный
правоориентированный базис. Пусть сначала е^ ф ез. Построим
промежуточные базисы
Оба базиса, как нетрудно видеть, — правоориентированные. Переход
от базиса ei, ег, ез к базису е\*, е^ , е^ можно представить в виде
последовательности
2.5. Угловые координаты твердого тела 91
Преобразование от базиса В2 к базису В* оставляет неподвижным
вектор eg . Матрица А^ описывает поворот вокруг вектора вд .
Угол этого поворота обозначим <р и назовем углом собственного вра-
вращения. Матрица оператора А^3) имеет вид
(cos у? — sin у? О
sin <p cos у? О
О 0 1
Переход от базиса Bi к базису Вг оставляет неподвижным вектор
е\\ Матрица А^ описывает поворот вокруг вектора е^ . Угол этого
поворота обозначим # и назовем углом нутации. Матрица оператора
А^2) имеет вид
A О О
О cost? -sin г?
О sin 1? cos t?
Переход от базиса Во к базису Bi оставляет неподвижным вектор
ез- Матрица А^ описывает поворот вокруг вектора ез. Угол этого
поворота обозначим ф и назовем углом прецессии. Матрица операто-
оператора А^1) имеет вид
cos ф — sin ф О
= | sin^ cos^ О
О 0 1
Оператор А есть композиция операторов: А = А^1^ о
а его матрица вычисляется как произведение матриц:
А=
Углы ф, г?, <р носят название углов Эйлера.
Теорема 2.5.2. Существуют углы Эйлера, задающие произволь-
произвольное положение твердого тела относительно базиса Во.
Доказательство. Если е^ ф ез, то справедливость теоремы
следует из определения углов Эйлера. Если е^ = ез, то базис Вг
не определен. Его можно тогда принять совпадающим с базисом Bi.
Будем иметь д = 0. Получим композицию А = А^1) о А^3), которую
можно заменить одним поворотом на угол <р + ф вокруг вектора ез.П
Рис. 2.5.1 иллюстрирует последовательность поворотов при ис-
использовании углов Эйлера. Сначала происходит поворот на угол
прецессии ф вокруг вектора е3, и базис Во переходит в базис
(е(Д 4°, ез).
92
Глава 2. Кинематика
Затем выполняется поворот на угол нутации г? вокруг вектора е^ и
базис
переходит в
& е
„(*)
)¦
Наконец, поворот на угол собственного вращения <р переводит базис
(е(Д е<2\ ef)
в базис Bfc, жестко связанный с телом. Прямая с направляющим
A) ^Л
вектором е\ , проходящая через точку С/, называется линией узлов.
Углы Эйлера задают последо-
последовательность вращений: снача-
сначала на угол прецессии ф вокруг
оси ез, затем на угол нута-
ции д вокруг повернутого на
угол ф положения первой оси
и, наконец, на угол собствен-
собственного вращения <р вокруг нового
положения третьей координат-
координатной оси, получившегося после
первых двух поворотов.
Рис. 2.5.1. Углы Эйлера
Представляет интерес аналогия углов Эйлера ф и г? полярным
координатам точки на плоскости. Концы единичных векторов при-
принадлежат сфере единичного радиуса с центром в точке О . На рис.
2.5.2 условно изображена такая единичная сфера. Положение кон-
конца вектора е^ ^ на ней фиксируется следующим образом. Углом ф
задается положение дуги большого круга, плоскость которого про-
проходит через вектор ез и содержит вектор е^ . Положение вектора
eg в этой плоскости задается углом нутации г?. Угол ф аналогичен
полярному углу, а угол $ — полярному радиусу.
Углы Эйлера доставляют минимальный набор координат, опреде-
определяющих положение твердого тела. Когда они заданы, матрица опе-
оператора А вычисляется однозначно. Обратное неверно. Одному и
тому же оператору А отвечает множество наборов углов Эйлера, так
как каждый из углов может быть найден с точностью до слагаемого,
кратного 2тг. Чтобы избавиться от этого неудобства, следует учесть,
2.5. Угловые координаты твердого тела
93
Дуга большого круга между точка-
точками пересечения осей ез и 4 со сфе-
сферой отвечает углу нутации и ана-
аналогична полярному радиусу. Угол
прецессии задает вращение этой ду-
дуги вокруг вектора е3 и аналогичен
полярному углу. Угол собственно-
собственного вращения осуществляется вокруг
оси 4 , и к отмеченной аналогии от-
отношения не имеет.
Рис. 2.5.2. Аналогия углов Эйлера полярным координатам
по возможности, дополнительную информацию о том, как тело по-
попало в заданное положение. В частности, если известно, например,
что углы ф, *?, <р не превосходят 2тг и д ф О, то соответствие между
оператором А и углами Эйлера будет взаимно однозначным. Вместе
с тем если д = 0, то по матрице А можно восстановить только сумму
ф + (р и мы имеем случай существенного вырождения.
Приведем еще один способ введения угловых координат, иногда бо-
более удобный, чем способ Эйлера, поскольку он позволяет исключить
вырождение при 4 = ез- Пусть, как и прежде, действие оператора
А состоит в том, что
Выберем следующую последовательность промежуточных базисов:
B) _ Dfc)
ei =
eQ x 4fc)
Л*)
i4fc)
i4fc)xei|
Ч' =
e2 ~" e2 '
Переход от базиса В2 к базису В* оставляет неподвижным вектор
4 • Соответствующий оператор А^3^ задает поворот вокруг векто-
вектора 4 • Угол этого поворота обозначим у. Матрица оператора
имеет вид
(cos 7 — sin 7 О
sin 7 cos 7 О
О 0 1
Переход от базиса Bi к базису Вг оставляет неподвижным вектор
4 • Оператор А^2) задает поворот вокруг вектора 4 . Угол этого
Глава 2. Кинематика
поворота обозначим /3. Матрица оператора A.W имеет вид
(cos/? О sin/?
О 1 О
-sin/? О cos/?
Переход от базиса Во к базису Bi оставляет неподвижным вектор ei.
Оператор А^1^ задает поворот вокруг вектора ei. Угол этого поворота
обозначим а. Матрица оператора А^1) имеет вид
A О О
О cos a — sin а
О sin а cos а
Таким образом, оператор А можно выразить с помощью композиции
операторов, отличных от операторов, получающихся при использо-
использовании углов Эйлера. Углы а, /?, у называются кардановыми углами
(иногда углами Брайнта). Они задают последовательность промежу-
промежуточных базисов путем поворотов вокруг каждой из трех координат-
координатных осей в указанном порядке. Для кардановых углов возможны
различные варианты. Примером могут служить углы Крылова, ко-
когда последовательность промежуточных базисов получается посред-
посредством поворотов сначала вокруг второй неподвижной оси (тангаж,
килевая качка), затем вокруг получившегося положения первой оси
(крен, боковая качка) и, наконец, вокруг получившегося после пер-
первых двух поворотов положения третьей оси (рыскание). Углы Кры-
Крылова (их еще иначе называют корабельными углами) или им подобные
(например, самолетные углы) часто используются при исследовании
движения кораблей, самолетов и других управляемых движущихся
объектов. При этом вектор е^ ' выбирается по направлению продоль-
продольной оси объекта, а ось ei близка к среднему направлению движения
вдоль продольной оси.
Теорема 2.5.3. Существуют кардановы углы, задающие произ-
произвольное положение твердого тела относительно базиса ei, ег, ез.
Доказательство. Если е^ Ф ei, то справедливость утвер-
утверждения теоремы следует из определения кардановых углов. Если
eij = ei, то базис Вг не определен. Вектор е\ ' можно тогда принять
произвольным в плоскости (в2,ез). В частности, его можно взять со-
совпадающим с ег. Тогда будем иметь а = 0. Оператор А окажется
композицией А = А^2) о }SZ\ которая означает сначала поворот на
2.5. Угловые координаты твердого тела
95
угол 0 = тг/2 вокруг неподвижной оси e2 и поворот на угол у вокруг
оси eg , совпадающей с осью ei.D
Рис. 2.5.3 иллюстрирует последовательность поворотов при ис-
использовании кардановых углов. Сначала происходит поворот вокруг
оси ei на угол а, и базис Во переходит в базис
Затем поворот на угол 0 вокруг вектора е^ переводит базис
в базис
Наконец, поворот на угол 7 переводит базис
в базис В*.
a
В отличие от углов Эйлера кардано-
вы углы определяют угловое поло-
положение репера, жестко связанного с
твердым телом, последовательными
поворотами сначала вокруг первой
неподвижной координатной оси, за-
затем вокруг образа второй координат-
координатной оси, получившегося после перво-
первого поворота, и затем вокруг образа
третьей координатной оси, получив-
получившегося после первых двух поворотов.
Рис. 2.5.3. Кардановы углы
Как видно из доказательства теоремы 2.5.3, введение кардановых
углов переносит особенность в те положения твердого тела, для ко-
которых вз = ei. Вообще появление особенности при использовании
минимального набора угловых координат неизбежно и связано с тем,
что при поворотах концы базисных векторов описывают дуги большо-
большого круга. На сфере же любые две окружности большого круга имеют
пересечение.
96 Глава 2. Кинематика
Использование углов Эйлера или кардановых углов не встреча-
встречает принципиальных затруднений, когда углы элементарных поворо-
поворотов задаются в зависимости от времени и требуется указать, в ка-
какое положение переходит твердое тело. Однако необходимость вы-
вычисления тригонометрических функций этих углов делает расчеты
по определению матрицы оператора поворота не всегда эффективны-
эффективными. В ряде задач предпочтительным оказывается описание углового
движения твердого тела с помощью параметров Эйлера, параметров
Кэли-Клейна или кватернионов.
§ 2.6. Параметры Эйлера
Рассмотрим переход твердого тела из одного фиксированного по-
положения в другое произвольное фиксированное положение, сохраня-
сохраняющий неподвижной некоторую точку О тела. Такое движение со-
согласно следствию 2.4.2 может быть представлено как конечный по-
поворот тела на некоторый угол а вокруг оси с единичным вектором
е собственного направления соответствующего оператора А. Пусть
из конца вектора е угол а виден происходящим против хода часовой
стрелки. Как и прежде обозначим х радиус-вектор точки твердого те-
тела в его исходном положении, а г — радиус-вектор той же точки тела,
получившийся в результате указанного перехода. Радиусы-векторы
х и г имеют начало в неподвижной точке О. Построим преобразова-
преобразование х —> г.
Теорема 2.6.1. Преобразование вращения абсолютно твердого
тела вокруг оси с направляющим вектором е на угол а выражается
формулой
r = x + 2qo(<x х х) -f 2(а х (а х х)),
где скаляр qo = cos(a/2) и вектор а = esin(a/2).
Доказательство. Пусть сначала вектор х и вектор е неколли-
неарны. Составим правоориентированный репер Ое\ 'е^ е^ следу-
следующим образом:
A) _ е х (х х е) A) __ е х х (i) __
Gi — | | , eo —— * -, Co ^— e.
1 |e x x| z |e x x|
в этом репере рассматриваемое преобразование имеет вид
г = е(е • х) + |е х x|(ej cos a + е^ sin a),
где первый член есть составляющая вектора х, направленная вдоль
вектора е и не меняющаяся при вращении вокруг этого вектора. Вто-
Второй член задает преобразование вращения на угол а в плоскости,
2.6. Параметры Эйлера 97
перпендикулярной вектору е. Учтем выражения для векторов е^ ' и
еB1}:
г = е(е • х) + (е х х) sin a + е х (х х е) cos a.
Преобразуем двойное векторное произведение
е х (е х х) = е(е • х) — х
или
е(е • х) = х 4- е х (е х х).
Теперь получим
г = х 4- 2 cos(a/2) sin(a/2)(e х х) + е х (е х х)A — cos a).
Отсюда и следует доказываемая формула. Заметим, что она спра-
справедлива и в том случае, когда векторы е и х коллинеарны.П
Разложим вектор а теоремы 2.6.1 по базисным векторам непо-
неподвижного репера
Определение 2.6.1. Скалярные величины go, 0i, 02, 0з, опреде-
определяющие преобразование вращения в соответствии с теоремой 2.6.1,
называются параметрами Эйлера.
Очевидно, что параметры Эйлера удовлетворяют условию
00 + 01+02+03 = 1-
Согласно следствию 2.4.2 параметры Эйлера существуют для лю-
любого оператора А Е 50C).
Теорема 2.6.2. Зависимость компонент a,j матрицы операто-
оператора A G 50C) от параметров Эйлера дается формулами
ап = 2(?о 4- q\) - 1, а12 =
0003), <*22 = 2(?о + 02) ~ 1> а23 = 2(?203 ~ 0O0l),
- 0002), «32 = 2(^203 + 0o0i), 033 = 2(ql + ql) - 1.
Доказательство. Чтобы убедиться в справедливости теоремы,
достаточно проверить, во что переходят базисные векторы е^ при рас-
рассматриваемом преобразовании. Применяя теорему 2.6.1, найдем
e'j = ej + 2qo(a. x ej) + 2(a x (a x ej)).
7- 1503
98
Глава 2. Кинематика
Учтем, что
(olx(olx ej)) = a(a • е,) -
и рассмотрим скалярные произведения
aij = e,-ej- = e,-ej(l - 2а2) + 2q0OL • (ej x e*) +
Но а2 = q\ + q% + 9з = 1 — tfo- Пусть теперь г = j. Очевидно, что тогда
пц = 2(g2 -f g2) ~ 1» и мы получаем все диагональные члены матрицы
А. В том случае, когда г'¦ ф j, будем иметь
«ti = ЩгЧз + 9о<* • (ej х е,)).
Перебирая последовательно индексы, найдем остальные члены иско-
искомой матрицы. В частности, пусть i = 1, j = 2. Имеем е2 х ei = —ез,
и, следовательно, a\2 =
Следствие 2.6.1. Яа основании теоремы 2.6.2 заключаем, что
матрица всякого оператора А 6 50C) может быть представлена
в виде суммы симметричной и кососимметричной матриц:
\
О -^
0 ~
\
где 9о, 9ь 92, 9з — параметры Эйлера.
Сформулируем правило вычисления параметров Эйлера 9о> 9ь 92,
qs по заданным компонентам apk матрицы А.
Теорема 2.6.3. Пусть А — (apk) — матрица оператора А из
50C). Тогда параметры Эйлера qo, q\, q^, q% можно найти с помо-
помощью одной из следующих систем уравнений
49о = 1
49o9i =
49о92 =
49о9з =
/
«32
«13
«21
рАфО
- Л23
— «31
— «12
9о
29
29
29
II
= 0
2 = 1 + а
192 = «12
19з = «13
и ф 0
= 021
= «31
90 = 0
91 = 0
292 =
29293 =
III
^ + «22
= «23 =
7*0
«32
IV
9о = 0
91 = 0
92 = 0
9з = 1
Номер применяемой системы совпадает с номером первого отлич-
отличного от нуля коэффициента в упорядоченном наборе (9о,9ь92,9з)-
Доказательство. Вычислим след матрицы Л, используя теорему
2.6.2:
" 1] = Qql ~ 3
2 ? qf =
2.6. Параметры Эйлера 99
так как q% + q\ + q\ + <?з = 1 по определению параметров Эйлера.
Отсюда
Aql = 1 + ац + а22 + азз-
Если окажется, что до ^ 0, то, учитывая данные теоремой 2.6.2 вы-
выражения для apk, р ф к, через параметры qo, <7ь <?2, <7з, получаем
систему уравнений I.
Пусть qo = 0. Тогда, применив следствие 2.6.1, заключаем, что
матрица А симметричная. Коэффициент пц выражается формулой
Отсюда можно найти q\. Если q\ ф 0, то получаем систему II. Если
qi = 0, то применим уравнение
позволяющее в этом случае найти (j2- При q2 ф 0 имеем систему III.
При #2 — 0 получим систему IV.?
Заметим, что каждая система уравнений теоремы 2.6.3 имеет ров-
ровно два решения, противоположных по знаку. Оба решения отве-
отвечают, как и следовало ожидать, вращению твердого тела на углы
a + 2тгп, п G Z. Все эти углы дают одно и то же положение твердо-
твердого тела в пространстве.
Пример 2.6.1. Пусть матрица оператора А задается углами Эй-
Эйлера Ф, $, <р, так что А — А-фА^А^. Коэффициенты ар& матрицы А
выражаются формулами
(ц 1 = cos ф cos <p — sin ф cos i? sin 9?,
a\2 = — cos ф sin 9? — sin ф cos 1? cos 9?,
013 = sin ^ sin 1^,
a2i = sin ф cos <?> + cos ^ cos 1? sin <p,
a22 = — sin ф sin <?> -f cos ф cos 1? cos 9?,
CI23 = — cos ф sin 1?,
a3i = sini?sin<?>,
032 = sini?cos<?>,
a33 = cos 1?.
Для расчета параметров go. tfi. 92. <7з воспользуемся теоремой 2.6.3. Вы-
Вычислим 4(Jo = 1 + an + «22 + азз- Подставим значения коэффициентов:
2 2^2 <?+ V>
Яо = cos 2 cos —у~'
Пусть qo ф 0. Применяя формулы случая I теоремы 2.6.3, найдем
qoqi = cos - sin ~ cos —у- cos
7*
100 Глава 2. Кинематика
i? . i? Ф + ф . Ф- ф
q0q2 = - cos - sin - cos —— sin —2—,
2 р ф f p
9093 = cos - cos —^— sin —^-.
В результате имеем два решения.
д ф + ф . д <р- ф
1) 90 = cos-cos—у—, qi= sin - cos ^ ,
= ~ Sin ~ SHI——, 93= COS - Sin
l?y? + ^ . д (р-ф
2) «о = - cos - cos 2 , 91 = - sin - cos 2 ,
, д . ш-ф д . Ф+ф
92= sin - sin —g—» 9з =-cos-sin—y—.
Параметр 9о принимает нулевое значение, когда либо cos(i?/2) = 0,
либо cos([<?> + ф]/2) = 0, либо оба эти сомножителя вместе равны нулю.
Вариант 1: cos(i?/2) = 0, cos([y? + ф]/2) ф 0. Тогда q0 = 0 и
матрица А примет вид
os(^ — ф) sin(^ - ф) 0
А = ( sin(^ — у?) — cos(^> — у?) 0
0 0 1
Вычислим 29i = 1 + аи = 1 + cos(^> — (р). Предположим, что q\ ф 0.
Имеет место случай II теоремы 2.6.3, для которого
9 5 Ф ~ <Р . Ф — Ф Ф ~ Ф
Яо = 0, q{ = cos^ , 9192 = sin cos —-—, 9193 = 0.
Отсюда получаем решения:
1) 9о = 0, 91 = - cos 2 , 92 = - sin 2 , 9з = 0,
ф — <р ф — (р
2) 9о = 0, 9i = cos 2 , 92 = sin g , 93 = 0.
Когда 9i = 0, то формулы случая III теоремы 2.6.3 дают
9о = 0, 91 = 0, 92 = !» 9з = 0.
2.6. Параметры Эйлера 101
Вариант 2: cos(i?/2) ф 0, cos([y? + ф]/2) = 0. Имеем 9о = 0,- а
коэффициенты арк матрицы А примут вид
аи = — cos2 ф — sin2 ф cosi?,
а\2 — ъ\пф cosф(со$д — 1),
ai3 = sin V> sin д,
п2\ — sin ^ cos ^(cos д — 1),
ci22 = — sin2 ^ — cos2 ф cos i?,
«23 = — cos ф sin d,
аз1 = sin ф sin i?,
a32 = — cos^sintf,
a33 = cosi^.
Здесь учтено, что cos<?> = —собФ и sin<?> = sin^. Матрица А оказыва-
оказывается симметричной (см. следствие 2.6.1). Имеем
2^1 = 1 + an = 1 - cos2 ф - sin2 ф cos д - sin2 ^A - cos д).
Пусть (ji ^ 0. Тогда в соответствии со случаем II теоремы 2.6.3 найдем
л 2 • 2 / • 2^ d д д
^fO = O ^i=sinVsin —
—, qiq2 — —sin^cos^sin —, ^i^3 = sin^sin—cos —.
z z z z
Это дает решения:
1) 9o = 0, ^i = - sin ^ sin-, q2- cos^sin-, ^3 = -cos-,
2) Qo - 0, ^i= sin^sin-, 92 = -cos^sin-, 93= cos^-
Предположим, что qo = 0 и 91 = 0. Тогда либо sin^ = 0, либо
1 — cos i? = 0, либо одновременно sin^ = 0 и 1 — cosi? = 0. Пусть
сначала sin^ = 0, а 1 — cost? ф 0. Матрица А принимает вид
-10 0
А = | 0 - cos tf - sin 1?
0 — sin 1? cos 1?
и получаются решения (случай III теоремы 2.6.3):
1) 9о = 0, 9i=0, 92= sin-, 93 =-cos-,
2) 9o = 0, 9i=0, 92 =-sin-, 93= cos-.
102 Глава 2. Кинематика
Если 1 — cosi? = 0, то при любом значении ф матрица А имеет вид
что соответствует случаю IV теоремы 2.6.3.
Вариант 3: cosi?/2 = 0, cos([<?>+ ф]/2) = 0. В этом случае
(- cos 2ф - sin 2ф 0
— sin 2ф cos 2ф 0
0 0-1
Теорема 2.6.3 дает следующие решения*
2) до = 0, (ji = sin^, q2 = — соъф, <?з = 0.
Тем самым пример 2.6.1 полностью разобран.О
Теорема 2.6.3 решает задачу о вычислении параметров Эйлера по
заданным элементам матрицы А в общем случае. При изменении
расчетных формул, связанном с переходом от варианта к варианту,
всегда может быть обеспечен непрерывный переход от одного типа
решения к другому (см. пример 2.6.1).
§ 2.7. Параметры Кэли-Клёйна
Рассмотрим движение твердого тела, имеющего в репере
одну неподвижную точку, совпадающую с точкой О:
з з
г = Ах, А е 50C), г = '
Векторам г и х поставим в соответствие комплексные матрицы
р = ( «>i r2 + ir3 \ р -
Такое соответствие взаимно однозначно.
Определение 2.7.1. Пусть D — матрица с комплексными ком-
компонентами. Сопряженной к ней называется матрица
2.7. Параметры Кэли-Клёйна 103
где черта сверху означает переход к комплексно сопряженным ком-
компонентам. Матрица D называется эрмитовой (самосопряженной),
если D* = D, и косоэрмитовой, если D* = — D.
Очевидно, что Р* = —Рг и Р* — —Рх, т.е. матрицы Рг и Рх ока-
оказываются косоэрмитовыми. Кроме того, след этих матриц (сумма их
диагональных элементов) равен нулю. Всякую косоэрмитову матри-
матрицу Р с равным нулю следом можно представить в виде суммы
где pi, р2> Рз — действительные числа,
Р\, р2, рз — спиновые матрицы Паули:
О 1 \ ( О -I \ МО
1 оj • р2 = { г о)' рз = v о -1
Матрицы <7i, <т2, 0з вместе с единичной матрицей
линейно независимы. Используя правило умножения матриц, можно
убедиться, что
Определение 2.7.2. Матрица с комплексными компонентами
а /?
7 <5
называется унитарной, если Q^Q — Е.
Свойство унитарности аналогично свойству ортогональности дей-
действительных матриц. Если матрица Q унитарна, то
Тем самым модуль определителя унитарной матрицы равен 1. При
этом на аргумент определителя не накладывается никакого ограни-
ограничения.
Рассмотрим свойства коэффициентов унитарных матриц Q, для
которых
104 Глава 2. Кинематика
По отношению к унитарным матрицам это — дополнительное требо-
требование.
Матрица Q содержит восемь действительных параметров, так как
каждый из ее четырех элементов есть комплексное число. Раскроем
условие унитарности:
а у \ / a 0 \ _ { 1 0
~0 ~6 )\у 6 ) " V 0 1
Выполнив умножение матриц, найдем уравнения
6 = 0, 0'0 + 66=1.
Видим, что третье уравнение есть следствие второго. Первое и че-
четвертое уравнения — действительные. Второе уравнение — ком-
комплексное. Из него следует: 0/6 = —у/а. С помощью этого соот-
соотношения преобразуем выражение для детерминанта:
аб — 0у = (а — 0у/6N = (а + уу/аN = (аа + ууN/а = 1.
Согласно первому уравнению величина, стоящая в скобках, равна
единице. Следовательно, 6 = а и 0 = —у. Унитарная матрица Q
принимает вид
а 0
«Ч-М
Компоненты а и 0 подчиняются условию
det Q = аа + ~00 = 1.
Из-за этого условия матрица Q содержит только три независимые
величины. Как раз ровно столько, сколько нужно для определения
ориентации твердого тела в трехмерном пространстве.
Теорема 2.7.1. Унитарные матрицы Q такие, что det Q = 1,
образуют группу относительно операции умножения.
Доказательство. Роль единицы играет матрица ?*, так как она
унитарна. Пусть матрицы Q\ и Q2 удовлетворяют условиям
Q\Qx = E, Q*2Q2 = Е, det Qi = 1, det Q2 = 1.
Покажем, что матрица Q — Q\Q2 удовлетворяет тем же условиям. В
самом деле, Q* = Q2Q\- Следовательно,
Q*Q = QIQIQ1Q2 = QIQ2 = я,
2.7. Параметры Кэли-Клёйна 105
det(QiQ2) = det Qx det Q2 = 1.П
Определение 2.7.З. Группа унитарных матриц B х 2) с опреде-
определителем, равным единице, называется группой SUB).
Рассмотрим преобразование Рх —> Р, обусловленное матрицей
Q e SUB):
P = QPXQ*.
При таком преобразовании матрица Р, как и РХ1 будет косоэрмито-
вой:
р* = (q*)*p;q* = q(-px)q* = -p
Кроме того, Q* = Q~l. Поэтому рассматриваемое преобразование
сохраняет все собственные значения, а следовательно, сохраняет и
след. Значит, Р имеет след, равный нулю. Отсюда
Далее, рассматриваемое преобразование сохраняет детерминант:
det Р = р\ + р\ + pi = det Px=
х
Тем самым длина вектора в i?3, соответствующего матрице РХу совпа-
совпадает с длиной вектора в Я3, соответствующего матрице Р. Другими
словами, каждой матрице Q ? 5GB) можно поставить в соответствие
некоторый ортогональный оператор А ? 50C), действующий в про-
пространстве Е3.
Установим закон этого соответствия. Пусть
где (Tj — базисные косоэрмитовы матрицы. Тогда
з
Матрицы <jj — косоэрмитовы со следом, равным нулю. Значит, та-
такими же будут и матрицы QotjQ*, j = 1,2, 3. Они, как и матрица Р,
представляются в виде разложения по матрицам aj с действитель-
действительными коэффициентами:
106 Глава 2. Кинематика
Коэффициенты a,kj можно вычислить, зная компоненты а, /3, у, 6
матрицы Q. Отождествим Р и Рг. Сравнивая коэффициенты в вы-
выражении
Рг = QP*Q*
при базисных косоэрмитовых матрицах, найдем
з
Тем самым коэффициенты a,kj суть компоненты искомой ортогональ-
ортогональной матрицы оператора А.
Видим, что матрицы <ту, будучи базисными для матриц Р, пре-
преобразуются так же, как векторы репера, жестко связанного с твер-
твердым телом.
Определение 2.7.4. Компоненты а, /?, у, 6 матрицы Q ? 5GB):
7 = —/?, <5 = a, aa + C/3 = 1, называются параметрами Кэли-Клейна.
Параметры Кэли-Клейна могут служить для определения ориен-
ориентации твердого тела.
Теорема 2.7.2. Пусть оператору Ai 6 50C) отвечает матри-
матрица Qi e SUB), а оператору А2 € 50C) отвечает Q2 в SUB). Тогда
композиции преобразований А\ о Аг соответствует матрица
Q = Q1Q2 e Stf B).
Доказательство. Сначала применим оператор А2: f = A2X. Это
преобразование по условию теоремы можно описать формулой
Рг = Q2P*Q*2-
Применим теперь к вектору f оператор Ai: r = Aif. Тогда
Подставляя выражение для матрицы Рг, получим
Рг = QiQ2PxQ*2Ql
Но (Q1Q2)* = Q2Q1 и произведение двух унитарных матриц есть
также унитарная матрица. Поэтому матрица преобразования, полу-
получающегося в результате композиции, имеет вид Q = Q\Q2.E
Установим соответствие между параметрами Кэли-Клейна и па-
параметрами Эйлера. Пусть
2.7. Параметры Кэли-Клёйна 107
где а, Ь, а х Ь, а х (Ь х с) — векторы трехмерного пространства,
а Ра, Рь, Р[а,ъ), ^[а,[б,с]] — их образы в пространстве комплексных
косоэрмитовых B х 2) матриц.
Теорема 2.7.3. Справедливы формулы
PaPb = Р[а%Ь\ - (а • Ъ)Е, Р[аМ = \(PaPb " ftfi»),
(а • Ь)Е = ~\{РаРь + РъРа), Р[а,[ь,с]] = П(а . с) - Рс(а . Ь).
Доказательство. Как следует из определения, базисные косоэр-
митовы матрицы <г\, <Т2, сг3, имеющие различные индексы, умножа-
умножаются по правилам векторного произведения базисных векторов про-
пространства Я3. Произведение указанных матриц с совпадающими ин-
индексами равно единичной матрице, взятой с обратным знаком (см.
стр.103). Произведение РаРь можно представить в виде
РаРь = (а\<т\ 4- «2^2 4- азGз)(Ь\(Т\ 4- 62^2 4-
После перемножения всех матриц <тг- с разными индексами объединен-
объединенные коэффициенты при матрицах <Г{ будут совпадать с компонентами
соответствующего векторного произведения. Перемножение базис-
базисных матриц с одинаковыми индексами дает —(aiti 4-(X2^2 4-азЬз)^- В
итоге получается первая формула утверждения теоремы. Очевидно,
что
РьРа = Р[М] - ?(а • Ь) = -Р[аМ - (а • Ъ)Е.
Вычитая эту формулу из первой формулы утверждения теоремы, по-
получим вторую формулу, а складывая, получим третью формулу. Че-
Четвертая формула есть очевидное следствие известной формулы для
двойного векторного произведения.?
Теорема 2.7А. Пусть Q 6 SUB). Тогда параметры Эйлера
суть коэффициенты разложения
Q - qoE + qi<r\ + №1 4- дз^з-
Доказательство. Согласно определению 2.7.4 всякую матрицу
Q G SUB) можно представить в виде
Q = q0E -h qia-i 4- ^2^2 4-
причем detQ = q% + ql + q% + q% = 1. Пусть Ра = q\<r\ 4- ^2^2 4-
Очевидно, что Q = q^E + Pa и справедливо соответствие Ра^а
так что a = gxei 4- ^2 4-
108 Глава 2. Кинематика
Рассмотрим преобразование
Pr = QPXQ* = (qoE + PQ)Px(qoE - PQ) =
В соответствии с теоремой 2.7.3 имеем
Кроме того,
Р[а,[х,а)] = PxOL2 - PQ(OL • х) -* Ра(<* • х) = РХО? - Р[ау[х,а]]-
Учитывая сказанное, окончательно получим
Рг = QPXQ* = Рх + 2дО^а,г] 4" Ща,[а,хЛ.
Эта формула означает в точности такое же преобразование, какое по-
получается с помощью параметров Эйлера в теореме 2.6.1. Чтобы убе-
убедится в этом, достаточно воспользоваться изоморфизмом простран-
пространства косоэрмитовых матриц и пространства Д3.П
Следствие 2.7.1. Параметры Кэли-Клейна выражаются через
параметры Эйлера посредством следующих формул (см. определе-
определение 2.7.4)
Следствие 2.7.2. Произвольному оператору А ? 50C) соот-
соответствует матрица Q ? SUB), описывающая то же самое дви-
движение твердого тела, что и А.
Доказательство следует из теоремы 2.6.3, которая устанавлива-
устанавливает правило вычисления параметров Эйлера для произвольной орто-
ортогональной матрицы Л.О
Теорема 2.7.5. Пусть движение твердого тела с фиксирован-
фиксированной точкой определено углами Эйлера ф, д, <р. Соответствующая
матрица Q E SUB) выражается формулой Q = QtpQ^Q^, где
ф . ф
Qxi) ~ E cos — 4* &з sin тг ?
2 2
Qtf = E cos — -f (T\ sin —,
Qto = Е cos —- ¦
2.7. Параметры Кэли-Клёйна 109
Доказательство. С помощью углов Эйлера движение предста-
представляется в виде композиции преобразований вспомогательных бази-
базисов. Сначала происходит поворот исходного репера на угол прецессии
ф вокруг третьей координатной оси. Этот поворот (см. определение
2.6.1) задается набором параметров Эйлера: go = cos(V>/2), q\ = 0,
q2 = 0, <?з = ьт(ф/2). Согласно теореме 2.7.4 получаем формулу для
матрицы Qip, описывающей поворот на угол прецессии.
Следующим происходит поворот на угол нутации д вокруг пер-
первой координатной оси. Для него параметры Эйлера имеют вид
go = cos(tf/2), Ч\ = sin(tf/2), Я2 = 0, дз = 0. Отсюда получается
формула для матрицы Q#, задающей вращение по углу нутации.
Завершает композицию вращение на угол ф вокруг третьей ко-
координатной оси. Доказываемая формула для матрицы Q^ вполне
аналогична формуле для матрицы Q^.
Согласно теореме 2.7.2 композиции преобразований соответствует
произведение матриц составляющих преобразований, взятых в поряд-
порядке преобразований вспомогательных базисов.D
Пример 2.7.1. Найдем формулы для параметров Эйлера, исполь-
используя теорему 2.7.5. Выполнив умножение биномов
/ ф ф\ ( д tf\ / ф ф\
Q- ( Еcos - -f <тзsin — 1 ( Еcos - + <т\sin - J \Ecos — + &зsin — J
с использованием правил умножения матриц <тг, г = 1,2,3 (см. стр.
103), получим
tf ф-\<р . д ф-Ф . д . ф-Ф д . ф+Ф
Q=Ecos - cos —— +сгг sin - cos — h72sin - sm — hr3 cos - sin ——.
Как и следовало ожидать, коэффициенты разложения матрицы Q по
матрицам Е, <j\, a2i сг3 совпадают с выражениями первого решения для
параметров Эйлера, найденными в примере 2.6.1 для случая до Ф 0.
Второе решение получится, если ко всем эйлеровым углам прибавить
2тг.
Следствие 2.7.3. Пусть движение твердого тела задано с по-
помощью кардановых углов а, /?, у. Тогда Q ? SUB) выражается
формулой Q = QaQpQ-y, где
ос а
Qa = ? cos--+ <ti sin-
Qp = Ecos- + G2sin-,
Q1 - E cos - -f <тз sin -.
110 Глава 2. Кинематика
Отметим, что если Q ? SUB) отвечает некоторому оператору
А Е 5ОC), то матрица — Q дает тот же оператор. Поэтому при-
присутствие половинных углов Эйлера в выражениях для параметров
Кэли-Клейна вполне естественно. Имеем взаимно однозначное соот-
соответствие между одним оператором из 50C) и парой матриц (Q, — Q)
из SUB). Можно сказать, что Q есть двузначная функция операто-
операторов из SOC).
Для того, чтобы установить соответствие между параметрами
Кэли-Клейна и элементами матрицы Л, совсем не обязательно снача-
сначала определять углы Эйлера или какие-либо другие угловые коорди-
координаты. Используя изоморфизм, отмеченный в следствии 2.7.1, можно
непосредственно применить теоремы 2.6.2 и 2.6.3.
§ 2.8. Кватернионы
Множество кватернионов — это пространство Н линейных ком-
комбинаций вида
h = а 4- Ь\ 4- cj 4- cfk,
где а, 6, с, d — действительные числа, i, j, k — некоторые линей-
линейно независимые символы. В пространстве И вводится билинейное
умножение по правилу
ioj =-joi = k, jok=-koj = i, koi = -iok=j, i2=j2=k2 = -l.
Принимается, что кватернионы, у которых 6 = с = d = 0, коммути-
коммутируют при умножении со всеми остальными кватернионами.
Сопоставим каждому кватерниону h унитарную матрицу Q(h), по-
полагая
о, 4" bi с 4* di
где г — мнимая единица. Очевидно, что если имеются два кватерни-
кватерниона hi и Ii2, то Q(hi -f Ьг) = Q(hi) + Q(li2). В связи с этим
<2(h) = аЕ -f Ьст\ 4- сст2 4-
так как (см. стр. 103)
Q(i) =
Тем самым установлен изоморфизм пространств унитарных матриц
и кватернионов.
2.8. Кватернионы 111
Лемма 2.8.1. Пусть hi u I12 — два кватерниона. Тогда спра-
справедливо равенство
h2) = Q(h1)Q(h2).
Доказательство. Легко видеть, что
Q(j)Q(k) = -Q(k)Q(j) = (т^з = <П = Q(i),
(i) = -Q(i)Q(k) = «73.7! = G2 =
Таким образом, матрицы Q(i), Q(j), Q(k) при умножении подчиняют-
подчиняются тем же правилам, что и соответствующие им кватернионы. Зависи-
Зависимость же между матрицами Q и кватернионами взаимно однозначна
и линейна. D
Пусть задан кватернион h = а + 6i + cj + dk. Сопряжённым к нему
называется кватернион
h = а — 6i — cj — dk.
Теорема 2.8.1. Справедливы равенства
(hi 4" I12) = hi 4" 1*2, hi о Ii2 = I12 о hi.
Доказательство. Первое равенство с очевидностью следует из
определения кватерниона. Для доказательства второго равенства за-
заметим, что Q(h) = Q*(h), и воспользуемся взаимно однозначным со-
соответствием элементов пространства UB) и кватернионов:
о h2) =Q*(hi оh2) =(Q(hi)Q(h2))*=Q*(h2)Q*(hi) = Q(h2)Q(hi).D
Нормой кватерниона h = a 4- M 4- cj 4* dk называется величина
|h| > 0, определенная равенством
Прямое вычисление показывает, что |h|2 = detQ(h). Поэтому норма
обладает свойством
IhiohaMhiHhal.
Для каждого отличного от нуля кватерниона h имеем |h| ф 0 и су-
существует обратный кватернион
h-1 =h/|h|2,
обладающий свойствами hoh~1 = l, h" оh = 1.
112 Глава 2. Кинематика
Множество кватернионов с нормой, равной единице, обозначим
Н\. Если h G Wi, то h" = h. Очевидно, что множество Н\ есть
группа по умножению. Эта группа изоморфна группе SUB). Изо-
Изоморфизм устанавливается с помощью равенств
a = qOj b = qu с = g2, d = q3,
где g0, <7i, <?2, <7з — параметры Эйлера.
Пусть Но — трехмерное пространство кватернионов х, удовлетво-
удовлетворяющих условию
X = —X.
Метрика в этом пространстве задается формулой
|х| =хох = — х .
Пространство Но изоморфно евклидову пространству Е3 .
Теорема 2.8.2. Если |h| = 1, mo преобразование х —> z:
z = h о х о h, x? Но
есть вращение трехмерного евклидова пространства.
Доказательство. Так как х = —х, h = h", то
z = h о х о h" = h о х о h = — h о х о h 1.
Следовательно,
z = —z.
Далее
|z|2 = zoz = (hoxoh) о (h oxoh) = hoxoxoh = |x|2.
Другими словами, рассматриваемое преобразование сохраняет норму.
Учитывая изоморфизм пространств Но и Е3, получаем, что такое
преобразование эквивалентно вращению трехмерного пространства.
D
Поскольку параметры Эйлера служат коэффициентами кватер-
кватернионов из Н\, теорема 2.6.2 и теорема 2.6.3 дают возможность найти
оператор А Е 50C) по заданному кватерниону и обратно найти ква-
кватернион, описывающий то же движение, что и заданный оператор
А ? 5(9C).
Заметим, что коэффициенты кватерниона из Н\, задающего пре-
преобразование х —> z в соответствии с теоремой 2.8.2, называются па-
параметрами Родрига-Гамильтона. Видим, что по смыслу параметры
Эйлера и параметры Родрига-Гамильтона совпадают.
2.9. Произвольное движение твердого тела 113
Пример 2.8.1 Воспользовавшись последним замечанием, легко
устанавливаем связь между углами Эйлера и соответствующим кватер-
кватернионом. Точно так же, как в теореме 2.7.5, этот кватернион можно
представить в виде h = h^ о h^ о Ъ.^, где
ф , . ф , 1?..$, V^i-V?
h^ = cos — + ksin —, htf = cos - + ism -, h^ = cos ¦- 4- ksin — .
Для кардановых углов требуемые соотношения находятся аналогично.
§ 2.9. Произвольное движение твердого тела
В соответствии с теоремой 2.3.1 любой закон движения твердого
тела можно выразить с помощью равенства
где г — радиус-вектор отдельной точки тела, имеющий начало в по-
полюсе О, rf(t) — вектор с началом в том же полюсе, одинаковый для
всех точек тела, оператор A(t) ? ?0C), х — постоянный вектор,
конкретизирующий точку тела.
Движение, при котором все точки твердого тела получают одина-
одинаковое смещение в пространстве, называется поступательным.
Теорема 2.9.1. Поступательное движение реализуется тогда и
только тогда, когда А — тождественный оператор.
Доказательство. Необходимость. Пусть все точки тела полу-
получают одинаковое смещение в пространстве. Закон движения прини-
принимает вид r(t) = x-ha(t), где вектор a.(t) один и тот же для всех точек.
Выберем произвольно точки xi и х2. Для них получим
Вычитая из второго равенства первое, найдем
х2 -xi = A(x2 -xi).
Необходимость доказана, так как вектор х2—xi может принять любое
значение.
Достаточность. Если оператор А — тождественный, то все точ-
точки тела одинаково смещаются на вектор r'(t).D
Следствие 2.9.1. Произвольное движение твердого тела есть
композиция вращения вокруг некоторой оси и поступательного дви-
движения.
Х- 1501
114 Глава 2. Кинематика
Теорема 2.9.2. Всякое перемещение твердого тела можно пред-
представить либо как результат поступательного движения, либо как
результат винтового движения, т.е. такого, при котором посту-
поступательный сдвиг осуществляется вдоль оси вращения, определенной
оператором А. Если проекция вектора г' на ось вращения отсут-
отсутствует, то найдется точка твердого тела такая, что движение
сводится к повороту вокруг оси, проходящей через эту точку.
Доказательство. В соответствии с теоремой 2.6.1 закон движе-
движения можно представить в виде
г = х + 2qo(<x х х) + 2(а х (а х х)) + v'{t).
Если вектор а = 0, то имеем поступательное движение. Пусть а ф 0.
Обозначим у точку тела, которая испытывает перемещение только
вдоль направления вектора а. Для этой точки имеем уравнение
у + Ла = у + 2qo{a. х у) + 2(а х (а х у)) + r'(t).
Примем r'(t) = /За. + vn(t), где rff(t) JL а, Аи/? — скалярные пара-
параметры. Очевидно, что тогда должно быть А = /?, так как результаты
векторных произведений в исследуемом уравнении перпендикулярны
вектору а, и
qo(<* х у) + (а х (а х у)) = -г"(*)/2.
Это уравнение имеет множество решений, получающихся друг из
друга сдвигом параллельно вектору а. Ограничимся решением, для
которого а. • у = 0. После преобразования двойного векторного про-
произведения последнее уравнение приводится к виду
90(а х у) - а2у = -г"(*)/2.
Умножим его слева векторно на а. После преобразования двойного
векторного произведения получим второе уравнение:
-ql2(ql х у) - ?0а2у = -а х r"(t)/2.
Исключив из этих двух уравнений член, содержащий (а х у), найдем
решение
y=(r
Выберем теперь новый полюс, соответствующий концу вектора у:
x = z-hy, г = г + у,
2.10. Дифференциал вращения 115
где теперь уже вектор z задает точку твердого тела. Тогда получим
г = z + 2q0(oL х z) + 2(а х (а х z)) + /?а.
Такое преобразование и есть композиция вращения и поступатель-
поступательного сдвига вдоль оси вращения, Если /3 = 0, то получаем чистое
вращение. ?
§ 2.10. Дифференциал вращения
Как уже отмечалось, композиция Ai о А2 операторов Ai ? 50C),
А2 € 50C), вообще говоря, некоммутативна: Ai о А2 ф А2 о Ai. В
выбранном ортонормированном репере Ое^ез действие оператора
выражается матрицей. Оператору Ai сопоставим матрицу А\, а опе-
оператору А2 — матрицу Л2. Композиции операторов Ai о А2 соответ-
соответствует произведение матриц А\А2. Некоммутативность композиции
операторов связана с тем, что произведение матриц некоммутативно.
Следствие 2.4.2 устанавливает, что каждый линейный оператор
A G SOC) задает конечный поворот твердого тела вокруг собственно-
собственного вектора, соответствующего собственному значению, равному еди-
единице. Композиция операторов из 5ОC) (см. раздел 2.5) эквивалент-
эквивалентна последовательному выполнению конечных поворотов вокруг отли-
отличающихся друг от друга в общем случае направлений. Некоммута-
Некоммутативность композиции операторов означает, что результат выполнения
конечных поворотов зависит от того, в каком порядке эти повороты
выполняются. Проиллюстрируем сказанное.
Пример 2.10.1. Пусть оператор Ai определяет поворот твердого
тела на угол яг/2 против хода часовой стрелки вокруг оси ез, а оператор
А2 задает поворот на угол тг/2 против хода часовой стрелки вокруг оси
е2. Матрицы этих операторов имеют вид
Ал =
При действии композиции Ai о А2 сначала (см. теорему 2.5.1) происхо-
происходит поворот вокруг оси ез и вектор е2 переходит в е2 = —ei, а затем
осуществляется поворот вокруг вектора е2 . Произведение матриц равно
0
0
-1
0
0
0
1
0
Выполним теперь композицию Ао о А\. Она означает, что сначала вы-
выполняется поворот вокруг вектора е2 и вектор ез переходит в eg = &i .
116 Глава 2. Кинематика
а затем происходит поворот вокруг вектора е^ . Произведение матриц
будет иметь вид
/001
А2АХ =10 0
\ 0 1 0
Видно, что результаты применения операторов Ai о Аг и А2 о Ai полу-
получаются разными. О
Пусть A G 5ОC) есть дифференцируемая функция некоторого
скалярного параметра ?: А = А(?), причем А@) = Е — тождествен-
тождественному оператору. Изменяя ?, получим различные повороты вокруг
различных в общем случае собственных векторов оператора А(?),
зависящих от параметра ?. Выделим линейную по ? часть матри-
матрицы оператора А:
А = Е + ? ? + • • •
Матрица dA = ?? определяет линейный оператор, который называ-
называется дифференциалом оператора А.
Теорема 2.10.1. Дифференциалу dA оператора А Е 50C) от-
отвечает кососимметричная матрица.
Доказательство. Учитывая, что ААТ = Е, получим
или
Последнее равенство должно быть выполнено при произвольном ?.
Поэтому ? = — ?т.О
Кососимметричная матрица ?? определяется тремя числами:
В базисе ei, в2, ез матрице ?? можно сопоставить вектор
з
1=1
Легко проверить справедливость равенства ??х = Фхх.
В дальнейшем там, где это удобно и отсутствуют преобразования
координат, будем отождествлять в записи оператор и его матрицу.
2.10. Дифференциал вращения 117
Теорема 2.10.2. Дифференциал композиции операторов вира-
лсается суммой дифференциалов составляющих операторов:
Доказательство. Рассмотрим композицию Ai о А2. По опреде-
определению дифференциала имеем АА\ = ?i?, ДЛ2 = ?2?,
Лх Л2 = (Е + ?i? + • • -)(Е + ?2? + •••) = Е + ?i? + ?2? + • • •
Следовательно, d(yii Л2) = ?i^ + ?2^.П
Видим, что дифференциал композиции операторов обладает свой-
свойством коммутативности. Он не будет зависеть от порядка выполне-
выполнения участвующих в ней операторов: d(A\ о А2) = d(A2 о Ai).
Когда величина ?, задающая дифференциалы
dA = d(Ai о А2) = ??, dAi = ?& dA2 = ?2^,
мала, то с точностью до членов второго порядка малости действие
операторов А = Ai о А2, Ai, A2 можно представить с помощью век-
векторных умножений
г = Ах «х + $хх, ri = Aix « x-f Ф\ хх, г2 = А2х « х + Ф2 хх.
Векторы
6г = Ф х х, Eri =$i хх, <5г2 = Ф2 х х
называются дифференциалами вращений.
Следствие 2.10.1. Справедливо равенство
Ф = Ф\ 4- Ф2.
Оио означает, что дифференциалы вращений образуют линейное
пространство относительно композиции преобразований
<5r = Sri + 6г2.
По смыслу вектора Ф ясно, что его влиянию не подвержены век-
векторы х, которые параллельны Ф. Такие векторы образуют ось диф-
дифференциала вращения. Смещение <5г = г — х происходит в плоскости,
перпендикулярной Ф, а величина смещения равна
где 9 — угол между Ф и х. Смещение <5г можно отождествить с
элементом дуги окружности, и тогда \Ф\ получает смысл угла малого
поворота.
118 Глава 2. Кинематика
Рассмотрим два соседних по времени положения некоторой точки
твердого тела, вращающегося вокруг неподвижного полюса О:
r(t) = A(t)x, r(* + At) = A(t + At)x.
Учитывая свойства оператора А, найдем
r(t + At) = A(t + At)A~l(t)r(t).
При малом Д* матрица В — A(t + At)AT(t) близка к единичной.
Поэтому движение твердого тела вокруг неподвижной точки можно
приблизить последовательно выполняемыми дифференциалами вра-
вращений вокруг осей, соответствующих соседним моментам времени.
§ 2.11. Сложное движение точки
Пусть 5 — ортонормированный репер е^, е'2, ез с началом в точ-
точке О1 , который движется как твердое тело относительно репера So
ортонормированных векторов ei, в2, ез с началом в полюсе О. Рас-
Рассмотрим движение некоторой точки М. Его можно описать как с
помощью репера 5, так и с помощью репера So. Движение точки
М по отношению к реперу So назовем абсолютным движением, а ее
траекторию в этом репере — абсолютной траекторией. Движение
точки М по отношению к реперу S назовем относительным движе-
движением, а траекторию М в репере S — относительной траекторией.
Движение репера 5 назовем переносным движением.
Скорость \а движения точки по абсолютной траектории называет-
называется абсолютной скоростью. Скорость vr движения точки по отноше-
отношению к подвижному реперу 5 называется относительной скоростью.
В каждый конкретный момент времени t точка М совпадает с
некоторой точкой М' пространства, жестко связанного с репером 5.
Скорость точки М' , возникающая из-за движения этого простран-
пространства (движения репера 5), называется переносной скоростью \е точ-
точки М.
Теорема 2.11.1. (О сложении скоростей). Абсолютная ско-
скорость точки равна векторной сумме ее переносной и относительной
скоростей:
Va = Ve +Vr,
где \а — вектор абсолютной скорости; \е — вектор переносной ско-
скорости; vr — вектор относительной скорости.
Доказательство. В соответствии с теоремой 2.3.1 сложное дви-
движение точки можно описать с помощью равенства
r(t) = Ах + г',
2.11. Сложное движение точки 119
где зависящие от времени оператор А Е 50C) и вектор г' задают
движение пространства, жестко связанного с репером 5, а вектор х
конкретизирует точку М в репере S. Если М движется относительно
репера S, то х = x(t) есть вектор-функция времени. Продифферен-
Продифференцируем по времени закон движения точки:
• dA •/ A •
Г = -ТГХ + г + Ах>
at
где символ dA/dt означает дифференцирование по времени каждой
компоненты матрицы оператора А.
Первые два слагаемых выражают скорость, которая была бы у
точки, если бы вектор х сохранял постоянное значение. Такой век-
вектор выделяет точку М' пространства, жестко связанного с репером
S. В рассматриваемый момент времени точки М и М1 совпадают.
Другими словами,
dA
Третье слагаемое представляет собой относительную скорость х, пре-
преобразованную с помощью оператора А к реперу 5О.П
Замечание. Радиус-вектор г движущейся точки М можно всегда
представить суммой векторов:
Г = Г0 + Г1,
где Го есть радиус-вектор начала О' подвижного репера 5, a ri —
радиус-вектор точки М с началом в О1. Дифференцируя это равен-
равенство по времени, найдем
Равенство верно в любой момент времени. Однако первое слагае-
слагаемое в нем — не переносная скорость, а второе — не относительная
скорость. Они станут таковыми лишь в случае поступательного дви-
движения репера S.
Теорема 2.11.2. (Случай нескольких реперов). Допустим,
что точка М совершает движение в репере S\, который движется
относительно репера 52. Репер S% движется в репере 5з и т.д. На-
Наконец, репер Sk совершает движение относительно репера So- Тогда
абсолютная скорость точки М выражается формулой
У а =
120 Глава 2. Кинематика
где vr — скорость М относительно репера S, а \{ — скорость от-
относительно репера 5;+i той точки репера Si, которая в данный мо-
момент совпадает с точкой М.
Доказательство. Воспользуемся теоремой 2.11.1 о сложении
скоростей и найдем скорость vr точки М в репере S^:
где vi — скорость относительно репера S2 той точки репера S\, ко-
которая совпадает в данный момент с точкой М. Обозначив далее V2
скорость относительно репера S3 той точки репера 52, которая совпа-
совпадает в данный момент времени с точкой М, по теореме 2.11.1 найдем
скорость Vr точки М в репере S3'
Продолжая этот процесс, получим утверждение теоремы.?
§ 2.12. Поле скоростей твердого тела
При поступательном движении (см. стр. 113) векторы скорости
всех точек тела равны между собой в любой момент времени. За ско-
скорость поступательного движения принимают скорость любой точки
тела.
Вращением твердого тела вокруг неподвижной оси называется
такое движение, при котором две точки тела неподвижно закреплены
на этой оси.
При вращении твердого тела вокруг неподвижной оси каждая его
точка описывает окружность в плоскости, перпендикулярной к оси
вращения. Радиус окружности равен расстоянию от точки до оси
вращения. Положение некоторой точки М тела в пространстве мож-
можно однозначно охарактеризовать двугранным углом а между двумя
плоскостями, проходящими через ось вращения. Одна из плоскостей
неподвижна, а вторая содержит точку М и вращается. Величина
скорости точки М при движении по окружности есть
da
я
где выражение da/dt называется угловой скоростью тела, R — рас-
расстояние от точки до оси вращения. Скорость точки М параллель-
параллельна плоскости ее движения и направлена перпендикулярно радиусу в
сторону вращения.
2.12. Поле скоростей твердого тела 121
Введем скользящий вектор и> (см. раздел 1.2), основание кото-
которого совпадает с осью вращения. Ориентируем его так, чтобы из
его конца вращение было видно происходящим против хода часовой
стрелки. Полюс О расположим на оси вращения. Пусть г — радиус-
вектор некоторой точки твердого тела. Тогда ее скорость может быть
выражена с помощью векторного произведения (формула Эйлера):
V = W X Г.
Выражение, стоящее в правой части, не зависит от расположения
полюса О на оси вращения. В самом деле, пусть г = ri -f Го, где
го || и?. Тогда
Перейдем к изучению поля скоростей (см. стр. 15) в общем случае
движения твердого тела.
Определение 2.12.1. Поле скоростей называется поступатель-
поступательным, если векторы скоростей всех точек тела совпадают. Поле скоро-
скоростей называется вращательным, если существует скользящий вектор
о? (вектор угловой скорости) такой, что скорость v любой точки тела
дается формулой
V = W X f,
где f — радиус-вектор рассматриваемой точки, имеющий начало на
основании вектора о>, одинакового для всех точек тела.
Теорема 2.12.1. (Эйлера о поле скоростей твердого тела).
В любой момент времени произвольного движения твердого тела
его поле скоростей может быть представлено как сумма поступа-
поступательного и вращательного полей скоростей:
v = v0 + w х f,
где vo — скорость, одинаковая для всех точек тела, г — радиус-
вектор точки тела, имеющий начало в полюсе О1 репера S, связан-
связанного с телом, ы — скользящий вектор с основанием, проходящим
через точку О1.
Доказательство. Закон движения любой точки твердого тела
можно в соответствии с теоремой 2.3.1 представить в виде
где х — постоянный вектор, rf(i) — абсолютный радиус-вектор по-
полюса О1 , фиксированного в теле, A(t) € 50C) — ортогональный ли-
линейный оператор с матрицей А, удовлетворяющей условию ААТ = Е.
122 Глава 2. Кинематика
Продифференцируем закон движения точки:
с/г dA d^
Величина dv' /dt есть скорость точки О'. Вместе с тем она, буду-
будучи одинаково отнесена ко всем точкам, задает поступательное поле
скоростей, упомянутое в условии теоремы. Обозначим v0 = dr*/dt.
Далее, очевидно, г = г-г'их = Атг. Подставляя последнее выра-
выражение в формулу для скорости точки тела, найдем
dA т„
v = — A'r + vo.
at
Покажем, что матрица (dA/dt)AT кососимметрична. В самом деле,
учтем, что ААТ = Е. Тогда
dAAT.dAT Л dA лТ _dAT (dA\T
Al +л 0 или TtA =-л
AT.dAT Л dA лТ _dAT (dAAT
l +л- = 0 или TtA =л = -Ыл
Следовательно, существует тройка чисел ы\, и>2, ^з такая, что
И А (
А1 = и;3 0 -
0
а умножение на эту матрицу эквивалентно операции векторного
умножения на вектор ы = (и>1,и>2,^з), ассоциированный с тройкой
чисел u>i, W2, ^з- Поэтому
—^г = ы х r.D
at
Следствие 2.12.1. Проекции скоростей концов отрезка твердо-
го тела на направление самого отрезка совпадают.
Доказательство. Достаточно умножить формулу теоремы 2.12.1
скалярно на вектор г. После умножения получим f • v = f • v0. Ho Vo
— скорость точки, совпадающей с началом вектора f, а v — скорость
конца этого вектора. D
В доказательстве теоремы 2.12.1 был использован тот факт, что
умножение на кососимметричную матрицу эквивалентно векторному
умножению на вектор, ассоциированный с его элементами. Постро-
Построить такой вектор можно лишь тогда, когда фиксирован некоторый
базис. Остался неизученным вопрос, будет ли этот вектор одним и
тем же при изменении базиса. Ответ на этот вопрос дает следующая
теорема.
2.12. Поле скоростей твердого тела
123
Теорема 2.12.2. Тройка (ы\, w2, ^з) элементов угловой скоро-
скорости образует скользящий псевдовектор и> (это значит, что ы из-
изменяет направление при изменении ориентированности базиса).
Доказательство. Пусть А — матрица оператора А ? 5ОC):
в репере ei, е2, ез с началом в полюсе О. Выберем другой ортонорми-
рованный репер ki, k2, кз с тем же началом и с постоянной матрицей
направляющих косинусов В = F,-j):
е2
ki
к2
кз
Очевидно, что в базисе ki, k2, кз матрица угловой скорости примет
вид
j (dA j,
\dt
Матрицу В символически запишем следующим образом:
В = (kbk2,k3),
где ki, k2, k3 заменяют собой столбцы, образованные координатами
этих векторов в базисе ei, e2, ез. Проводя формальные преобразова-
преобразования, получим
В = (ы х кь и х к2, ы х к3).
Правая часть, как и прежде, представляет собой матрицу, составлен-
составленную из столбцов, образованных компонентами векторных произведе-
произведений. Указанные векторные произведения имеют смысл, так как ы и
к, определены в одном и том же базисе ei, в2, ез. Далее,
Вт (МАт ] в =
ki-(uxki) ki-(wxk2) ki • (ы х k3)
k2-(«xki) к2.(ыхк2) к2.(ыхк3)
к3 • (ы х ki) к3 • (ы х к2) к3 • (ы х к3)
Произведя циклические перестановки векторов, найдем
О w.(k2xki) o;.(k3xki)
(ki x k2) 0 ш • (k3 x k2)
(kix k3) w • (k2 x k3) 0
124 Глава 2. Кинематика
Рассмотрим два возможных случая реализации матрицы В.
1) detS = 1. Тогда зеркальные отражения осей координат от-
отсутствуют и, если исходный базис ei, е2, ез был правоориентирован-
правоориентированным, то и базР!с ki, кг, кз окажется правоориентированным. Значит,
ki х k2 = кз, к2 х кз = ki, кз х ki = k2 и потому
Другими словами, в новом базисе компоненты матрицы угловой ско-
скорости получаются путем проектирования ы на новые базисные век-
векторы. Следовательно, компоненты (u>i, w2, шз) преобразуются как
координаты вектора.
2) det В = — 1. Тогда имеется зеркальное отражение одной из осей
координат. Пусть для определенности это будет ось кз. Базис ki, k2,
кз станет левоориентированным. Поэтому
ki х к2 = -к3, к2 х к3 = -ki, k3 x ki = -к2
Видим, что при переходе от правоориентированного базиса к лево-
левоориентированному помимо применения к тройке (u>i, w2, <^з) правила
преобразования векторов требуется еще поменять ее знак на проти-
противоположный. Объекты, обладающие таким свойством, называются
псевдовекторами.
Далее, и) — скользящий псевдовектор, так как в соответствии с
теоремой Эйлера основание о; проходит через точку, определенную
радиусом-вектором г', и любая точка прямой
г = г' -f Аи;,
где А — произвольный скаляр, имеет скорость v = vo и может быть
выбрана за полюс при описании поля скоростей в данный момент
времени. D
Заметим, что скалярное произведение псевдовектора на вектор на-
называется псевдоскаляром. Псевдоскаляр меняет знак при зеркальном
отражении базисных векторов.
Если при преобразованиях координат выполнять переходы только
к базисам одинаковой ориентированности (использовать либо только
правоориентированные, либо только левоориентированные базисы),
2.13. Система угловых скоростей 125
то тройку (u>i, иг, ^з) можно считать полноправным скользящим век-
вектором. В связи с этим в механике условились всегда использовать
только правоориентированные системы базисных векторов.
В дальнейшем ограничимся только такими преобразованиями ко-
координат, которые сохраняют ориентированность базиса. Это позво-
позволяет считать о> скользящим вектором.
Перейдем к анализу элементарных эквивалентных операций над
системой угловых скоростей.
§ 2.13. Система угловых скоростей
Теорема 2.13.1. Пусть вектор угловой скорости и*1 соответ-
соответствует линейному оператору A\(t) E 50C), а вектор угловой ско-
скорости и>2 — линейному оператору A2(t) E S0C). Тогда композиции
линейных операторов А\ о А2 соответствует угловая скорость
и? = w1 + и>2.
Доказательство. Воспользуемся теоремой 2.11.1 о сложении
скоростей в относительном движении. Действие композиции Ai о А2
можно интерпретировать как последовательность преобразований
r@ = Aiy(O, У(О = А2х.
Следовательно (см. доказательство теоремы 2.11.1), координаты век-
вектора y(t) задают точку М тела в подвижном репере S: Ое[е'2е'3. Дви-
Движение репера S относительно So задается оператором А\. Тем самым
точка М участвует в сложном движении. Ее переносная скорость ve
из-за движения S и относительная скорость vr в репере S даются
выражениями
С использованием матриц операторов выражение для vr можно пред-
представить в виде
= Ai-dfx = M -ЗГ1»у = л 1
где Ач — матрица оператора А2 в репере 5. Воспользуемся поня-
понятием угловой скорости и сопоставим матрице (dAi/di)A\ вектор и?1,
матрице (йЛг/Л)^ — вектор и>2. Рассмотрим матрицу
п2 =Ai(dA2/dt)AlAj.
Кососимметричной матрице (dA2/dt)A% соответствует вектор угло-
угловой скорости движения в репере 5. Матрица П2) как легко видеть,
126 Глава 2. Кинематика
также кососимметрична. Она получается вследствие перехода к ре-
реперу So преобразованием подобия с помощью матрицы А\. Матрице
Q2 сопоставим вектор угловой скорости и>2 относительного движения.
Суммируя сказанное, имеем
ve = о;1 х г, vr = u>2 x r, va = ve + vr = (a;1 -|- u>2) x r.D
С помощью этой теоремы можно интерпретировать результат сложе-
сложения нескольких вращательных полей, отвечающих угловым скоро-
скоростям, основания которых пересекаются, как вращательное поле, по-
полученное вследствие композиции угловых движений. Одновременно
найдено правило сложения угловых скоростей, которое сформулиру-
сформулируем в виде следствия.
Следствие 2.13.1. (Угловая скорость с ложного движения).
Если поле скоростей в твердом теле соответствует вращению с
угловой скоростью ц>г относительно репера S\, который сам вра-
вращается с угловой скоростью и*1 в репере 5г, репер 5г вращается с
угловой скоростью и?2 в репере 5з и т.д. и, наконец, репер Sk вра-
вращается с угловой скоростью шк в неподвижном репере So, и если
основания всех векторов и>г, и*1,..., шк пересекаются в одной точке,
то результирующее поле скоростей в репере So будет вращатель-
вращательным с угловой скоростью
= (jf -f
Теорема 2.13.2. (Сложение поступательных полей скоро-
скоростей). Пусть поле скоростей твердого тела в репере S\ — посту-
поступательное со скоростью vr, поле скоростей репера S\ в репере S2 —
поступательное со скоростью vi, поле скоростей репера S2 в репере
5з — поступательное со скоростью v2 и т.д. Наконец, поле ско-
скоростей репера Sk в неподвижном репере So — поступательное со
скоростью vr. Тогда поле скоростей тела в репере So — поступа-
поступательное со скоростью
V = Уг +
1=1
Доказательство. Каждая точка твердого тела участвует в слож-
сложном движении. Достаточно применить теорему 2.11.1.D
Рассмотрим общий случай, когда движение твердого тела есть
композиция вращательных и поступательных перемещений. Такой
случай описывается формулами
г = Аху + г\ у = А2х + у',
2.13. Система угловых скоростей 127
где операторы Ai, A2 и векторы г'1} у' зависят от времени и одина-
одинаковы для всех точек твердого тела. Вектор х не зависит от времени
и фиксирует конкретную точку твердого тела.
В рассматриваемом случае оператор Ai оставляет неподвижной
точку 0i, совпадающую с концом вектора г'1} а оператор А 2 — точку
Ог, совпадающую с концом вектора г' = Aiy' + г^. Следователь-
Следовательно, основание вектора о;1, соответствующего оператору Ai, проходит
через точку О\, а основание вектора ц>2 проходит через точку Оч-
Имеем два скользящих вектора угловых скоростей, основания кото-
которых могут, вообще говоря, не пересекаться.
Вместе с тем, очевидно, эти векторы приводятся к одному сколь-
скользящему вектору и>, так как рассматриваемое сложное движение за-
задается равенством
г = AiA2x-f г'.
Видим, что всякому множеству скользящих векторов угловых ско-
скоростей можно сопоставить композицию линейных операторов. По-
Поле скоростей, порождаемое композицией, будет равно сумме полей,
порождаемых элементами этого множества. Тем самым получают
смысл операции эквивалентного преобразования такого множества и
возникает возможность рассматривать его как систему (см. раздел
1.3).
Определение 2.13.1. Пусть поле скоростей твердого тела пред-
представляется в виде суммы вращательного поля репера S с угловой
скоростью w, основание которой проходит через полюс О, и враща-
вращательного поля в репере S с угловой скоростью — и>, имеющей основа-
основание, параллельное о;. Такая система угловых скоростей называется
парой вращений.
Теорема 2.13.3. Пара вращений равносильна поступательному
полю скоростей. Вектор v этого поля вычисляется по формуле
v = w х d,
где вектор d — плечо пары (см. стр. 31).
Доказательство. Пусть задана пара вращений
Воспользуемся теоремой о сложении скоростей. Переносная скорость
произвольной точки М твердого тела, возникающая из-за движения
репера 5, определена выражением
ve = u> х г,
128 Глава 2. Кинематика,
где г — радиус-вектор точки М. Относительная скорость точки М в
репере 5 вычисляется по формуле
vr = -u> х (г-гд).
Абсолютная скорость есть сумма этих двух скоростей:
v = ve -f vr = u> х та = u> х d.
Тем самым скорости всех точек тела в рассматриваемый момент вре-
времени оказываются равными.D
Теорема 2.13.4. (Результирующее поле скоростей). Поле
скоростей твердого тела как сумма нескольких вращательных и
нескольких поступательных полей сводится эквивалентными опе-
операциями (см. раздел 1.3) к сумме одного поступательного поля и
одного вращательного поля скоростей.
Доказательство. В соответствии с теоремой 2.13.3 основание
угловой скорости ы можно смещать, добавляя соответствующее по-
поступательное поле скоростей. В самом деле, выберем точку О, не
принадлежащую основанию угловой скорости. Приложим к ней два
вектора ы и — w угловой скорости. Они не изменяют поле скоростей
в теле. Тогда вектор и>, действующий вдоль первоначальной оси,
и вектор —и) с параллельным основанием, проходящим через точку
О, образуют пару, эквивалентную поступательному полю скоростей.
Повторяя доказательство теоремы 1.5.1, сместим так каждый из за-
заданных векторов угловых скоростей. Получим сумму поступатель-
поступательных полей и систему угловых скоростей, основания которых проходят
через одну и ту же точку О. Вследствие теорем 2.13.1 и 2.13.2 заклю-
заключаем, что такая система эквивалентна сумме одного поступательного
и одного вращательного полей скоростей.D
Определение 2.13.2. Поле скоростей называется винтовым, ес-
если оно есть сумма поступательного и вращательного полей, причем
скорость поступательного поля параллельна угловой скорости вра-
вращательного.
Теорема 2.13.5. Сумма поступательного со скоростью v и вра-
вращательного с угловой скоростью w полей скоростей эквивалентна
винтовому полю.
Доказательство повторяет доказательство теоремы 1.5.2 с заме-
заменой R — w, M -> v.D
Таким образом, поле скоростей твердого тела в любой фиксиро-
фиксированный момент времени движения всегда может быть представлено
2.13. Система угловых скоростей 129
как винтовое поле. Ось вращения (основание скользящего вектора
ц>), соответствующая винтовому полю скоростей, называется винто-
винтовой осью. Отношение скорости и поступательного поля, параллель-
параллельного винтовой оси, к угловой скорости |и>| называется параметром
винта р = и/\и>\. При р = 0 остается только вращательное поле, при
р = ос — только поступательное.
Если с течением времени положение винтовой оси, угловая и по-
поступательная скорости не меняются, то твердое тело совершает дви-
движение, которое называется винтовым. Тогда за время полного обо-
оборота г = 2тг/|и>| тело продвинется вдоль оси вращения на расстояние
/ = ти = 2тгр. Это расстояние называется шагом винта.
В общем случае движение твердого тела будет гораздо более слож-
сложным из-за того, что ориентация и положение винтовой оси, угловая
и поступательная скорости могут изменяться со временем.
Параметрическое уравнение винтовой оси (см. стр.39) имеет вид
w х v
где Л — скалярный параметр; вектор г, определяющий точку вин-
винтовой оси, имеет начало в произвольном полюсе О\, выбранном для
упрощения системы скользящих векторов угловых скоростей; v —
скорость точки О\.
Чтобы исключить А, умножим параметрическое уравнение винто-
винтовой оси векторно на и>:
ц> х (ц> х v) a; • v
ШХТ- Ц - 5~U> - V
или
Имеем векторное уравнение винтовой оси. Как и следовало ожидать,
оно не дает однозначно значение г, а определяет его лишь с точно-
точностью до произвольного смещения вдоль вектора и>. Поэтому три про-
проекции этого уравнения на оси произвольной ортогональной системы
координат будут линейно зависимыми.
При движении твердого тела его поле скоростей непрерывно ме-
меняется со временем. Изменяются и векторы vhw. В каждый сле-
следующий момент времени будет получаться, вообще говоря, другая
винтовая ось.
Уравнение винтовой оси, точки которой в неподвижном репере So
задаются радиусом-вектором г5, имеет вид
v-wxr4wxr, = —-
)- 1503
130 Глава 2. Кинематика
где г' — радиус-вектор точки О\ в репере So, а г5 = г' + г.
Множество положений, которые последовательно занимает вин-
винтовая ось в неподвижном пространстве, связанном с репером So, на-
называется неподвижным аксоидом.
Запишем уравнение винтовой оси в репере, жестко связанном с
твердым телом:
w v
где х — радиус-вектор точки твердого тела, лежащей на винтовой
оси, A ? SOC) — оператор ориентации тела в неподвижном про-
пространстве.
Множество положений, которые последовательно занимает вин-
винтовая ось в движущемся теле, называется подвижным аксоидом.
Подвижный и неподвижный аксоиды двумерны. Они имеют две
координаты: одна из них — А, отсчитываемая вдоль винтовой оси,
другая — время движения t. Задание их однозначно определяет точ-
точку на аксоиде. Тем самым подвижный и неподвижный аксоиды суть
линейчатые поверхности. Они в каждый момент времени имеют по
крайней мере одну общую прямую — винтовую ось.
Теорема 2.13.6. Подвижный и неподвижный аксоиды, если они
не вырождаются в прямую, имеют общую касательную плоскость,
проходящую через винтовую ось.
Доказательство. Пусть закон движения точки М обеспечивает
принадлежность ее в любой момент времени винтовой оси. Движение
этой точки можно рассматривать как в неподвижном репере So, так
и в репере S, связанном с телом. Всегда можно выбрать движение М
так, чтобы существовали относительная vr и абсолютная va скоро-
скорости точки М. Можно считать, что в каждый момент времени М есть
точка как неподвижного, так и подвижного аксоида. Перемещаясь
по неподвижному аксоиду, точка М имеет абсолютную скорость va,
которая лежит в плоскости, касательной к неподвижному аксоиду.
Относительная скорость v точки М в репере S направлена по каса-
касательной к относительной траектории, принадлежащей подвижному
аксоиду, и потому лежит в плоскости, касательной к подвижному
аксоиду. Переносная скорость ve есть скорость точки М' твердого
тела, совпадающей с М, и направлена вдоль винтовой оси. Она тоже
принадлежит касательной плоскости к подвижному аксоиду. Имеем
Va = Ve+Vr.
Следовательно, va принадлежит плоскости, касательной к подвиж-
подвижному аксоиду. Так как закон движения точки М вдоль винтовой оси
2.14. Поле скоростей плоскопараллельного движения 131
можно выбрать произвольно, лишь бы он был дифференцируемым
по времени, то вектор va можно считать непараллельным винтовой
оси. Поэтому плоскости, касательные к подвижному и неподвижному
аксоидам, совпадают. D
Следствие 2.13.2. Произвольное непрерывное движение твердо-
твердого тела можно представить как качение подвижного аксоида по не-
неподвижному с возможным проскальзыванием вдоль винтовой оси.
Отсюда ясна большая роль теории линейчатых поверхностей в
вопросах, связанных с организацией требуемого сложного движения
твердых тел, служащих деталями механических систем.
§ 2.14. Поле скоростей плоскопараллельного дви-
движения
Движение называется плоскопараллельным, если скорости всех
точек твердого тела в любой момент времени параллельны некото-
некоторой неподвижной плоскости. Сечение твердого тела этой плоскостью
представляет собой фигуру, дающую однозначное представление о
положении тела в пространстве при плоскопараллельном движении.
Теорема 2.14.1. Поле скоростей плоскопараллельного движения
может быть либо поступательным, либо вращательным с осью,
перпендикулярной плоскости движения.
Доказательство. С помощью эквивалентных операций приведем
поле скоростей к винтовому:
Начало вектора г расположено на оси винта, его конец фиксирует
точку плоской фигуры твердого тела. Вектор v должен быть парал-
параллелен плоскости движения V для любого радиуса-вектора г. Пока-
Покажем, что могут быть лишь два случая:
1. и = О, вектор ы перпендикулярен плоскости V',
2. w = 0, вектор и параллелен плоскости V.
Рассмотрим все логически возможные варианты.
Вариант 1. Вектор ш ф О и параллелен плоскости V. Найдем
скорости двух произвольных точек этой плоскости:
vi=u + wxri, v2 = u + u> x гг.
Разность этих скоростей выражается формулой
v2 - vi = w х (го -ri).
9*
132 Глава 2. Кинематика
В силу произвольности выбора точек разность Г2 — ri можно считать
не параллельной вектору и>. Имеем противоречие. В левой части
последнего равенства стоит вектор, параллельный плоскости V, а в
правой части — вектор, перпендикулярный этой плоскости. Значит,
вариант 1 не может иметь места.
Вариант 2. Вектор w ф О, и винтовая ось пересекает плоскость
V в точке О. Тогда скорость произвольной точки плоской фигуры
выражается формулой v = u+wxr, где г — радиус-вектор, имеющий
начало в О и принадлежащий V. Скорость самой точки О равна и.
Отсюда ясно, что и = О, так как в противоположном случае скорость
точки О должна быть направлена вдоль ы и не будет параллельна
плоскости V. Значит, v = ы х г. Но векторы v и г параллельны
плоскости V. Умножим v векторно на г:
rxv=rx(wxr) = ыг2 — г(г • ы).
Вектор г всегда можно выбрать перпендикулярным ы, и тогда ы =
(г х v)/r2. Тем самым вектор ы обязан быть перпендикулярным плос-
плоскости V.
Вариант 3. Вектор ы = 0. Тогда для любой точки плоской фигуры
должно быть v = и, и поле скоростей поступательное. Ясно, что
тогда вектор и должен быть параллелен плоскости "Р.П
Теорема 2.14.2. Плоскопараллельное поступательное поле ско-
скоростей есть предельный случай вращательного поля, когда угловая
скорость стремится к нулю, а ось вращения уходит в бесконеч-
бесконечность.
Доказательство. Рассмотрим следующую систему угловых ско-
скоростей:
(ri,uie), (r2, -u>2e), и\ - ш2 = а ф 0.
Эта система эквивалентна скользящему вектору (г, ае), где
г =
а
Пусть теперь ri и гг принадлежат плоскости движения, а е — нор-
нормаль к этой плоскости. Если ш\ —+ и>2, то вектор г, определяющий
эквивалентную ось вращения, становится бесконечно большим по мо-
модулю, а а —* 0. Вместе с тем рассматриваемая система угловых
скоростей стремится к паре, которая эквивалентна поступательно-
поступательному движению. ?
Таким образом, плоскопараллельное поле скоростей всегда мож-
можно привести к вращательному полю, основание угловой скорости ко-
которого перпендикулярно плоскости движения.
2.15. Поле скоростей тела с одной неподвижной точкой 133
Аксоиды в плоскопараллельном движении представляют собой
цилиндрические поверхности, образующие которых перпендикуляр-
перпендикулярны плоскости движения. Аксоиды пересекаются с плоскостью дви-
движения по двум кривым, называемым соответственно подвижной и
неподвижной центроидами.
Определение 2.14.1. Точка пересечения основания угловой ско-
скорости вращательного поля скоростей с плоскостью движения называ-
называется мгновенным центром скоростей (иногда мгновенным центром
вращения).
Непрерывное плоскопараллельное движение твердого тела можно
представить как качение без проскальзывания подвижной центроиды
по неподвижной. Это следует из того, что скорость точки твердого
тела, совпадающей с мгновенным центром скоростей, равна нулю.
Если положение мгновенного центра скоростей известно, то ско-
скорость произвольной точки твердого тела, лежащей в плоскости дви-
движения, перпендикулярна к прямой, соединяющей эту точку с мгно-
мгновенным центром скоростей. Вектор скорости направлен по касатель-
касательной к траектории. Зная законы движения двух точек твердого тела,
можно определить центроиды как геометрическое место пересечений
нормалей к траекториям точек, взятых в один и тот же момент вре-
времени, если только эти нормали не окажутся параллельными.
§ 2.15. Поле скоростей тела с одной неподвижной
точкой
В случае, когда твердое тело имеет одну неподвижную точку О,
основание винта поля скоростей в каждый момент времени должно
проходить через эту точку. Иначе возникает противоречие с требова-
требованием равенства нулю скорости точки О. Точки тела, расположенные
на основании винта, также будут иметь нулевую скорость, а скорость
произвольной точки тела будет выражаться формулой
v = ы х г,
где г и ы имеют начало в неподвижной точке О. Следовательно, поле
скоростей будет вращательным в любой момент времени. Угловая
скорость задает направление мгновенной оси вращения, проходящей
через точку О. Аксоиды представляют собой конические поверхности
с общей вершиной в неподвижной точке. Подвижный аксоид катится
по неподвижному без проскальзывания.
Пусть угловая скорость ы представляет собой известную вектор-
функцию времени t. В неподвижной ючке О выберем ортонорми-
рованный репер 5 векторов е[, е'2, е^, жестко связанных с твердым
134 Глава 2. Кинематика
телом, и неподвижный ортонормированный репер So векторов ei, в2,
ез. Установим правило, с помощью которого, зная функцию u>(tf),
можно вычислить матрицу оператора А € SOC), описывающего дви-
движение тела.
Как отмечено на стр. 84, столбцы матрицы оператора А суть
координаты векторов е(-, г = 1,2,3, жестко связанных с телом, взятые
в неподвижном базисе ei, ег, ез. Если известен вектор ы, то скорость
точки тела, совпадающей в каждый момент времени с концом вектора
е^-, выражается формулой
dt
=:uxe-, г -1,2,3.
Таким образом, относительно каждого вектора е(- имеем одно век-
векторное дифференциальное уравнение. В координатной форме оно
эквивалентно системе из трех скалярных дифференциальных урав-
уравнений. Для того чтобы найти все столбцы матрицы оператора А,
имеем систему из трех векторных (г = 1,2,3) или из девяти скаляр-
скалярных дифференциальных уравнений. Скалярные произведения е( • е^
остаются постоянными для решений указанной системы. В самом
деле
1(в{ • в}) = (ш х е;-) • ej + в[ ¦ (ы х е}) = -ш • (ej х е{ + в{ х в}) = 0.
Различных скалярных произведений базисных векторов — шесть:
(е'хJ = (е'2J = (е(,J = 1, е\ ¦ е'2 = е\ ¦ е'3 = е'2 е^ = 0.
Эти равенства должны быть выполнены в любой момент времени.
Их наличие облегчает процедуру поиска столбцов матрицы операто-
оператора А. Система уравнений, выражающая изменение векторов подвиж-
подвижного репера в репере So, называется системой уравнений Пуассона
для базисных векторов, связанных с твердым телом. Такая система
удобна, если вектор ы задан координатами в неподвижном репере.
В том случае, когда координаты вектора ы заданы в подвижном
репере S, удобнее определять не столбцы, а строки матрицы операто-
оператора А. Строки представляют собой координаты постоянных векторов
еь е2> ез в репере S. Чтобы получить нужные дифференциальные
уравнения, заметим, что точка Мг, определяемая концом вектора е,-,
участвует в сложном движении. Будучи неподвижной, она перемеща-
перемещается относительно репера S, который в свою очередь имеет угловую
скорость ы. Относительная скорость такого движения получается
путем дифференцирования (d/dt) координат вектора е,- в базисе е^,
е72, ез, так что vr = dei/dt. Переносная скорость — это скорость,
2.15. Поле скоростей тела с одной неподвижной точкой 135
которая была бы у точки М,-, будь она элементом твердого тела:
ve = w х ej. Абсолютная скорость точки М{ равна нулю. Следова-
Следовательно,
dei
^ = -wxei, 1 = 1,2,3.
Получили систему уравнений Пуассона для векторов неподвижного
репера. Она сохраняет скалярные произведения:
(eiJ = (е2J = (е3J = 1, ех • е2 = ех • е3 = е2 • е3 = 0.
Установим теперь соотношения между координатами вектора ы и
производными по времени от углов Эйлера. Определение углов Эй-
Эйлера дано на стр. 91, где оператор А ? 50C) представлен в виде
композиции А = А^ о А# о А^. Здесь А^ соответствует углу прецес-
прецессии ф, А^ — углу нутации д, А^ — углу собственного вращения <р.
По определению вектор угловой скорости вращения вокруг некото-
некоторой оси направлен вдоль нее так, чтобы из его конца вращение было
видно происходящим против хода часовой стрелки, а модуль векто-
вектора угловой скорости равен модулю производной по времени от угла
поворота.
Оператор А^ оставляет неподвижным вектор е3 . Угловая ско-
скорость собственного вращения равна ы^ = фе^ (рис. 2.5.1).
Оператор А# оставляет неподвижным вектор
B) (*) (*) .
е\ ' — е\ ' cos <р — er2 sin <p.
Поэтому угловая скорость нутации ы# выражается равенством
Оператор А^, оставляет неподвижным вектор е3. Значит, для
угловой скорости прецессии uty имеем
В примере 2.6.1 указаны выражения для элементов матрицы опера-
оператора А через углы Эйлера. Из этих выражений следует
(*)
е3 = е\ }
sin д sin <р + ej sin д cos <р + е^ cos д.
тт (к) , (А:) , (А:) ^
Пусть ы = uj\e\ ^-и2е2 +(^з^з • По теореме о сложении угловых
скоростей будем иметь ы = ы^ + и># + и?^. Следовательно,
= ф sin д sin <p -h fl cos <p,
= ф sin д cos <p — fl sin <p,
= ф cos д -h ф.
136 Глава 2. Кинематика
Отсюда найдем выражения для производных:
д = uji cos <p — Ш2 sin <р,
ф = (u^sin^ + u^cos^/sintf,
ф = о;3 — ф cos??.
Получили систему кинематических уравнении Эйлера. Она позво-
позволяет вычислить угловое положение твердого тела, если проекции uj\ ,
u>2, и>з угловой скорости на оси координат, жестко связанные с телом,
заданы как функции времени.
Отметим вырождение кинематических уравнений Эйлера, когда
д = 0. Оно возникает из-за совпадения действий поворотов по углу
прецессии и углу собственного вращения, когда eg = ез (см. рис.
2.5.1).
Найдем теперь соотношения между координатами вектора и> и
производными по времени от кардановых углов а, /?, у (см. рис.
2.5.3). Оператор А^ поворота на угол 7 оставляет неподвижным
вектор е^ \ Угловая скорость о>7 выражается равенством ц>7 = 7^3 •
Оператор А^2) поворота на угол /? оставляет неподвижным век-
вектор ej • Значит, wp = /?е^ . Наконец, оператор А/1) поворота на
угол а оставляет неподвижным вектор ei. Следовательно, ша = ае\.
Учитывая действие операторов, будем иметь
B) (к) . , (к)
еу2 — е\ sin 7 + е2 cos T?
ei = е[ ' cos /3 cos 7 — e cos /?sin 7 + eg sin /3.
Кроме того, должно быть u> = ша + ъ>р + u;7. Поэтому
u>i — a cos j3 cos 7 + /?sin7,
u>2 = —& cos /3 sin 7 + /3 cos 7,
o;3 = dsin/? + 7.
Разрешая эти равенства относительно производных, получим
а = (wi cos 7 — ^2 sin 7)/ cos /?,
/3 = w\ sin 7 + u>2 cos 7,
7 = u>3 — d sin C.
Имеем систему кинематических уравнений Эйлера для кардановых
углов. Она вырождается, но теперь уже при /3 = тг/2.
Кинематические уравнения для параметров Эйлера (параметров
Родрига-Гамильтона) свободны от вырождений. Вращение твердого
тела (см. стр. 105) определено формулой
Pr=QPxQ\ Pr = -P;, Рх = -Р:, QQ*=E, detQ=l,
2.15. Поле скоростей тела с одной неподвижной точкой 137
где Рх = х\(Т\ + Х2<Т2 + хз&з — косоэрмитова матрица, соответству-
соответствующая вектору х точки в твердом теле, Рг = г\(Г\ + Г2<Т2 Н- гз0*з —
косоэрмитова матрица, соответствующая вектору г положения той
же точки в неподвижном пространстве, базисные матрицы <т,- опре-
определены на стр. 103. Соответствующие векторы х и г трехмерного
пространства имеют вид
х = х\&\ + #2е2 + #зез, r = riei + г2е2 + г3е3.
Матрица Q Е 5f/B). По теореме 2.7.4 параметры Эйлера служат
коэффициентами ее разложения по базисным матрицам
Q = q0E + qiai + ?2(Г2 + дз^з-
С учетом того, что Рх — постоянная матрица, производная от
матрицы Рг по времени дается равенством
Рг = QPxQ* + QPxQ* = QQ*QP*Q* + QPXQ*QQ*
или
Обозначим Pq = 2QQ*. Очевидно, что Pq = 2QQ*. Кроме того,
qq* = E-> QQ* + QQ* = 0 - Рп = -РЙ.
Поэтому матрица Рп косоэрмитова и
Теорема 2.15.1. Справедлива формула
г5е fii, Q2j ^з суть компоненты вектора угловой скорости u> e we-
подвиэюном репере: ш =
Доказательство. Очевидно, имеем Рг = Pv, где Pv — косоэрми-
косоэрмитова матрица, соответствующая вектору скорости v точки твердого
тела с радиусом-вектором г. Сопоставим матрице Рп вектор ыЕЙ3.
Пользуясь формулами теоремы 2.7.3, получим
Рг = Pv = ^u>,r]
или v = ix г для любой точки твердого тела. Другими словами,
Со — и;. При этом координаты вектора угловой скорости и радиуса-
вектора точки тела берутся в одном и том же (неподвижном в данном
случае) репере
138 Глава 2. Кинематика
Теорема 2.15.2. Параметры Кэли-Клейна и кватернионы под-
подчиняются кинематическим уравнениям
Q = PnQ/2, h = hn о h/2
соответственно. Здесь кватернион hn = fiii-f П^ + Пзк задается
компонентами вектора угловой скорости и> в неподвижном репере
Ое^ез. Параметры Эйлера (Родрига-Гамильтона) подчиняются
следующим кинематическим уравнениям
Яо =
Я1 =
Я2 =
Яз =
2
1
2
1
1
2
Доказательство. По определению Рп = 2QQ*. Чтобы получить
кинематическое уравнение для параметров Кэли-Клейна, достаточ-
достаточно справа умножить это равенство на матрицу Q/2. Далее, матри-
матрице Q соответствует кватернион h, а матрице Рп — кватернион hn-
Матричное и кватернионное кинематические уравнения изоморфны.
Кинематические уравнения для параметров Эйлера получаются пу-
путем сравнения коэффициентов при одинаковых базисных матрицах
Е, <xi, 0> <7з в соотношении
которое получается после разложения правой и левой частей кине-
кинематических уравнений для параметров Кели-Клейна по базисным
матрицам. ?
Следствие 2.15.1. Пусть вектор ш представлен в виде разло-
разложения по базисным векторам е\ , е^ , eg репера, жестко связан-
связанного с твердым телом:
Тогда
J.
2.16. Ускорение точки в сложном движении 139
и кинематические уравнения для параметров Кэли-Клейна, кватер-
кватернионов, параметров Эйлера соответственно принимают вид
qo =
2
1
1
2
1
Доказательство. Имеем Рг - Pv = QPXQ* +QPXQ*- Перейдем
в этом равенстве к координатам точки в репере, жестко связанном с
телом. Для этого умножим его слева на Q*, а справа на Q. Тогда
Pv = Q*PVQ = Q*QP* + P*Q*Q.
Косоэрмитовой матрице Рш = 2Q*Q сопоставим вектор ы с коорди-
координатами в репере, жестко связанном с твердым телом. Тогда матрица
Pv, соответствующая компонентам вектора скорости в том же репере,
выразится формулой
Отсюда, как и в теореме 2.15.2, заключаем, что матрице Рш отвеча-
отвечает вектор угловой скорости, взятый в репере Ое\ '&2 е^ . Осталь-
Остальные рассуждения проводятся аналогично доказательству теоремы
2.15.2.D
§ 2.16. Ускорение точки в сложном движении
Теорема 2.16.1. Пусть имеется произвольный вектора, задан-
заданный координатами в подвижном ортонормированном базисе е[, е'2}
eg. Тогда абсолютная производная вектора а по времени выража-
выражается формулой
da da.
rfT= dF + u>xa'
где символ d/dt означает дифференцирование по времени координат
вектора а в подвижном базисе (относительная скорость изменения
вектора sl), о; — угловая скорость вращения базиса.
140 Глава 2. Кинематика
Доказательство. Достаточно воспользоваться теоремой 2.12.1
Эйлера о поле скоростей твердого тела и теоремой 2.11.1 о сложении
скоростей в относительном движении.?
Теорема 2.16.2. (Кориолйса о сложении ускорений). Аб-
Абсолютное ускорение точки М, участвующей в сложном движении,
равно сумме
где we — переносное ускорение, выражаемое формулой
wr — относительное ускорение точки, a wc — добавочное или ко-
риолисово ускорение:
wc = 2u> x vr,
w0 — ускорение начала О\ подвижного репера, и> — угловая скорость
подвижного репера^ ы — угловое ускорение, vr — относительная
скорость точки, г — радиус-вектор точки М, имеющий начало в
точке О\.
Доказательство. По теореме 2.12.1 Эйлера найдем абсолютную
скорость точки М
где у0 — скорость точки О\ в неподвижном репере Ое^ез. Диффе-
Дифференцируя абсолютную скорость по времени, получим
Применим правило дифференцирования вектора, заданного коорди-
координатами в подвижном базисе:
wa = w0 + wx r-f w x (a? x r + vr)+wx vr+wr.
После очевидных преобразований приходим к требуемой формуле.D
Отметим следующие свойства кориолисова ускорения:
1. Кориолисово ускорение обращается в нуль, когда поле скоро-
скоростей подвижного репера поступательно (угловая скорость равна ну-
нулю), а также когда равна нулю скорость относительного движения
точки М.
2. Кориолисово ускорение обращается в нуль, если относительная
скорость точки и угловая скорость переносного движения становятся
параллельными.
2.16. Ускорение точки в сложном движении 141
Теорема 2.16.3. (Рйвальса). Ускорение произвольной точки
абсолютно твердого тела складывается из ускорения полюса, вра-
вращательного и осестремительного ускорений:
w = wo+wB + woc.
Вращательное ускорение дается формулой
wB = wxr.
Осестремительное ускорение имеет вид
Wqc =wx(wxr) = u>(u> • г) — гиЛ
Доказательство. Теорема Рйвальса есть следствие теоремы Ко-
риолиса, когда отсутствует относительное движение точки: vr = О,
wr = 0. В этом случае получим
За полюс принимается начало О\ подвижного репера. ?
Следствие 2.16.1. Вращательное ускорение возникает при из-
менении угловой скорости. Осестремительное ускорение имеется
всегда при ненулевых неколлинеарных векторах и) и г. Оно напра-
направлено к основанию угловой скорости и перпендикулярно к нему.
Пример 2.16.1. Пусть материальная точка М находится на плос-
плоской горизонтальной платформе. Платформа вращается с угловой скоро-
скоростью fie3 вокруг вертикальной оси е3> проходящей через неподвижную
точку О. Радиус-вектор г точки М горизонтален и имеет начало в точке
О. Относительно платформы точка М описывает окружность радиуса г
с центром в О. Угловая скорость радиуса-вектора г относительно плат-
платформы равна —Пе3. Найти компоненты ускорения точки М.
Решение. Переносное ускорение возникает из-за вращения плат-
платформы:
we = woc = fie3 х (Пе3 хг) = —П2г.
Относительное ускорение возникает из-за движения точки по платфор-
платформе:
wr = -fie3 х [(-Пе3) х г) = -fi2r.
Оно совпадает и по величине, и по направлению с переносным ускоре-
ускорением. Кориолисово ускорение составляет
wc = 2?2е3 х vr = 2fie3 x (-fie3 х г) = 2fi2r.
142
Глава 2. Кинематика
Абсолютное ускорение отсутствует:
= 0.
Этого и следовало ожидать, так как точка, участвуя в описанном слож-
сложном движении, остается неподвижной в абсолютном пространстве.О
Пример 2.16.2. Найдем ускорение точки, движущейся относи-
относительно поверхности Земли. Пренебрегая сжатием Земли, примем ее за
шар, радиус которого R = 6371,1км. Так как Земля совершает обо-
оборот вокруг своей оси за одни сутки, то модуль Q угловой скорости и?
вращения Земли (|и?| — п) будем считать равным
2тг
24 •3600
и 0,00007272с"
Подвижный репер, жестко связанный с поверхностью Земли, выберем
следующим образом. Возьмем полюс О\ на земной параллели, соответ-
Начало координат О\ лежит на поверх-
поверхности Земли. Третья ось направлена
вдоль радиуса из центра Земли. Вто-
Вторая ось по меридиану к Югу. Первая
ось направлена на запад. Выбранные
оси образуют правую систему коорди-
координат. Они жестко связаны с Землей и
вращаются с угловой скоростью и?.
Рис. 2.16.1. Система координат, связанная с Землей
ствующей какой-нибудь широте д. Вектор eij направим вдоль радиуса,
проведенного из центра земной сферы в точку О\. Вектор ei> напра-
направим по меридиану к югу, вектор е\ ' направим на запад по касательной
к параллели (рис. 2.16.1). Точка О\ имеет скорость v0, равную по мо-
модулю Qp, где р есть радиус параллели на широте ??, и направленную в
сторону, противоположную вектору е\ \ Имеем
v0 = -URcosi)e[k\
В связи с тем что репер О\е[ ^ е^ вращается вместе с Землей, его
угловая скорость w совпадает с угловой скоростью Земли и направлена с
юга на север, что соответствует вращению с запада на восток. Из рисунка
видно, что вектор w образует с вектором eg угол, равный тг/2 — г?, с
2.16. Ускорение точки в сложном движении 143
вектором &2 — угол, равный 7г — г?, а с вектором е^ ' — угол, равный
7г/2. Следовательно,
<•> = -ft cos г? еBк) + п sin г? 44
Абсолютная скорость точки М, заданной в репере Oie^ 4 4 * ради-
радиусом-вектором
?>4'L*)
выразится формулой
dv
V=-7T
at
или
v= (-
^ J e^
Для вычисления абсолютного ускорения точки М воспользуемся те-
теоремой Кориолиса. Точка О\ описывает окружность с центром С (рис.
2.16.1) и имеет постоянную линейную скорость ОД cos г?. Поэтому мо-
модуль ее ускорения есть ?L2Rcosd. Перпендикуляр из точки О\ на ось
вращения образует с вектором е2 угол, равный [—Gг/2 + г?)], а с векто-
вектором eg — угол 7г — г?. Значит,
w0 = -i
Угловое ускорение отсутствует. Осестремительное ускорение woc прини-
принимает вид
wO(.=wx(wxr) = -хгп2е[к) - п2 sin t?(x3 cos г? + х2 sin д)е[к)-
—Q2 cos г?(хз cos д + х2 sin г?L \
Найдем координаты кориолисова ускорения wc = 2wxvr:
wc = 2п \- [ -4rcosi?-|- -4^ sin г? ] e(*} +-^(e^^ini?-h e^^osi?) .
Компоненты абсолютного ускорения
w = wie[k) + w2eBk)
144 Глава 2. Кинематика
выражаются следующими формулами:
It COS + "rft
w2 = -Д^ + 2ft^sintf-ftsi
at1 at
w3 = -r~ + 2ft—- cos i? - ft2 cos #(Я cos # + z3 cos д + x2 sin #).
at1 at
Видим, что члены, связанные с осестремительным ускорением, весьма
малы. Для того чтобы оценить влияние кориолисова ускорения, рассмо-
рассмотрим следующие частные случаи.
Случай 1. Пусть точка движется вдоль меридиана по траектории
х\ = О, Х2 = —/Zsina, хз = R(cosa — 1).
Тогда
dxi dx2 . dx3 D. .
—-г- = 0, —г- = — /mcosa, -r = ~icasma.
at at at
В кориолисовом ускорении только первая компонента не равна нулю:
wc = 2Qi?dsin(tf + ос)е[к\
Тем самым кориолисово ускорение зависит от широты места расположе-
расположения движущейся точки. Модуль этого ускорения равен нулю на экваторе
(а = —г?), где скорость точки параллельна оси вращения Земли, и до-
достигает максимума на полюсе (а = тг/2 — г?).
Случай 2. Предположим, что вода течет в реке в Северном полуша-
полушарии с юга на север (а > 0). При этом частицы воды должны получить
ускорение wc, направленное с востока на запад. Такое ускорение сооб-
сообщает частицам воды берег реки. Следовательно, правый берег должен
интенсивнее подмываться водой и будет более крутым, чем левый. Если
река течет с севера на юг, то а < 0, и кориолисово ускорение изменит
свое направление на противоположное. Значит, и тогда река в Север-
Северном полушарии будет больше подмывать правый берег, который окажет-
окажется круче, чем левый. Это свойство рек носит название закона Бэра. В
Южном полушарии структура берегов будет иной.
Случай 3. Представим себе, что с корабля, находящегося на Север-
Северном полюсе, производится выстрел из пушки в горизонтальном напра-
направлении. Пусть снаряд имеет скорость v. Ускорение Кориолиса будет
иметь величину 2Qt\ и линейное отклонение снаряда от его первона-
первоначального направления по истечении времени t будет приблизительно
2.17. Поле ускорений в твердом теле 145
равно ilvt2. Угловое же отклонение этого снаряда будет приблизитель-
приблизительно равно линейному отклонению, деленному на пройденный путь. Сле-
Следовательно, оно равно ф « uvt2/vt = Ш, т. е. равно углу поворота
земного шара за время t.
Случай 4. Значительное влияние кориолисова ускорения можно на-
наблюдать в метеорологических явлениях. Ветер, т. е. движение воздуш-
воздушных масс, при отсутствии кориолисова ускорения дул бы в направле-
направлении от области большего атмосферного давления к области меньшего.
Следовательно, направление ветра было бы перпендикулярно изобарам.
Однако имеет место ускорение Кориолиса, направленное в Северном по-
полушарии справа налево, если смотреть вдоль скорости потока. Поэтому
в относительном движении частицы воздуха испытают добавочное уско-
ускорение. Область низкого давления с приблизительно концентрическими
изобарами называют циклоном. Из-за кориолисова ускорения воздуш-
воздушные массы циклонов Северного полушария вращаются против хода ча-
часовой стрелки. В Южном полушарии такое движение совершается по
ходу часовой стрелки.О
§ 2.17. Поле ускорений в твердом теле
Определение 2.17.1. Точка твердого тела, ускорение которой в
рассматриваемый момент времени равно нулю, называется мгновен-
мгновенным центром ускорений.
Пример 2.17.1. Рассмотрим круговой обруч, катящийся в вер-
вертикальной плоскости по горизонтальной прямой без проскальзывания.
Если скорость центра обруча постоянна, то центр обруча и будет мгно-
мгновенным центром ускорений. Вместе с тем мгновенный центр скоростей
(см. определение 2.14.1) совпадает с точкой соприкосновения обруча и
опорной прямой.О
Теорема 2.17.1. Если угловая скорость и угловое ускорение аб-
абсолютно твердого тела одновременно не равны нулю и не коллине-
арны: w х w / 0, то существует единственный мгновенный центр
ускорений, и его радиус-вектор относительно полюса О\ репера,
жестко связанного с телом, выражается формулой
Г = |^|2^Wq ' (w х "
||
+(w0 . ш) ш - (w0 • u>)(u> х w)],
где обозначения совпадают с принятыми в разделе 2.16.
Доказательство. Воспользуемся теоремой 2.16.3 Ривальса. Так
как абсолютное ускорение искомой точки равно нулю, то имеем урав-
10- 1503
146 Глава 2. Кинематика
нение, определяющее радиус-вектор этой точки:
Wo +WXT + U?(W • Г) — Y(jJ2 = 0.
Вектор г будем искать в виде
г = au> -f /?u> -f y(u> x и;).
Подставим выражение для г в уравнение:
w0 - (a + yu2)(u> xw) + (yu>2 + /?(u> • u>))u> - G@? • w) + u2f3)u> = 0.
Умножим полученное равенство скалярно сначала на о;, затем на ы,
потом на (о> х а>). Тогда получим систему трех уравнений относи-
относительно трех неизвестных а, /?, у:
w0 • u> + у[ш2и>2 — (u> • u;J] = w0 • u> + 7|u; x а>|2 = О,
w0 • u> + j3[(w • u>J - u;2u;2] = w0 • u> - /5|w x w|2 = 0,
wO'(wxw)-(a + 7u;2)|u; x u>|2 = 0.
Отсюда легко найти а, /3 и у. После подстановки их в выражение
для г убеждаемся в справедливости теоремы.D
Если мгновенный центр ускорений принять за полюс, то для дан-
данного момента времени ускорение любой другой точки твердого тела
выражается формулой
w = u>xr*+u>x(u>x г*),
где г* — радиус-вектор точки тела, имеющий начало в мгновенном
центре ускорений. В правой части этой формулы имеются лишь две
составляющие: вращательное и осестремительное ускорения.
Обратимся теперь к случаю, когда w x w = 0. Так может быть,
например, при а> = а? = 0. Нетрудно убедиться в том, что тогда,
если w0 = 0, то мгновенным центром ускорений будет любая точка
твердого тела, а если w0 ф 0, то мгновенный центр ускорений отсут-
отсутствует. Пусть и> и и> не равны нулю одновременно. При wxw=0
они будут кол линеарными, и можно принять и> = ш е^, ы = ш ew, где
еш — единичный вектор их общего направления.
Теорема 2.17.2. Пусть угловая скорость u> u угловое ускорение
и* удовлетворяют условиям
Тогда, если ea,-w0 ф 0, то мгновенный центр ускорений не существу-
ет, а если еш • w0 = 0, то имеется множество мгновенных центров
2.17. Поле ускорений в твердом теле 147
ускорений, составляющих прямую, параметрическое уравнение ко-
которой имеет вид
г = .
[угои2 + w х w0] + Аеы,
+w4 L J
где А — произвольный скалярный параметр.
Доказательство. В условиях теоремы уравнение, служащее для
определения радиуса-вектора мгновенного центра ускорений, запи-
запишем следующим образом:
w0 + u(ew x r) + ш2еш х (еы х г) = 0.
Поскольку еы • (еы х г) = 0 и еш • [еы х (еы х г)] = 0, то решение этого
уравнения может быть тогда и только тогда, когда wo еы = 0. Пусть
это условие выполнено. Будем искать г 1_ и>. Для такого г уравнение
принимает вид
и>(еы х г) — (jj2y = —w0.
Умножим это уравнение слева векторно на еы:
—о;2(еы xr)-wr= — еш х w0.
Исключим из полученных двух уравнений член, содержащий (е^ х г):
Г = -ГТ-; -т [WOU2 +WXWe].
Поскольку множество решений допускает сдвиг вдоль направления
еы, получаем уравнение прямой, указанное в утверждении теоремы.D
Обратимся к изучению поля ускорений в плоскопараллельном
движении. Зададим точку твердого тела радиусом-вектором г, вы-
выходящим из неподвижного полюса О, а мгновенный центр скоростей
— радиусом-вектором vv с началом в том же полюсе. По теореме
2.14.1 найдем скорость точки твердого тела в плоскопараллельном
движении:
v = г = и> х (г-г„),
где u> ± v, u> ± (г — rv).
Теорема 2.17.3. Абсолютное ускорение wv точки твердого те-
тела, совпадающей с мгновенным центром скоростей, выражается
формулой
wv = -u> х rv,
где rv — абсолютная скорость движения мгновенного центра ско-
скоростей по неподвижной центроиде.
10*
148
Глава 2. Кинематика
Доказательство. Дифференцируя скорость плоскопараллель-
плоскопараллельного движения, получим
w = v = и> х (г - г„) + и> х (г - rv).
Положим г = rv. Тогда г = 0 как скорость точки тела, совпадающей
с мгновенным центром вращения. ?
Пример 2.17.2. Рассмотрим круговой обруч, катящийся в вер-
вертикальной плоскости по горизонтальной прямой без проскальзывания
(рис.2.17.1). Пусть и — скорость центра обруча. Она направлена го-
При качении обруча по горизонталь-
горизонтальной неподвижной прямой мгновенный
центр скоростей совпадает с точкой ка-
u сания прямой и обруча. Если центр об-
обруча движется равномерно, то мгновен-
мгновенный центр ускорений совпадает с цен-
центром обруча. Точка обруча, которая ка-
касается прямой, не имеет скорости, но
имеет ускорение.
Рис. 2.17.1. Качение обруча по прямой
ризонтально. Мгновенный центр вращения в каждый момент време-
времени совпадает с проекцией центра обруча на опорную прямую. Значит,
rv = u. Радиус обруча примем равным a . Тогда получим величину
угловой скорости ш = u/a . Вектор угловой скорости u> JL rv направлен
так, что из его конца вращение обруча видно происходящим против хода
часовой стрелки. Воспользовавшись теоремой 2.17.3, найдем, что мо-
модуль ускорения точки обруча, совпадающей в данный момент времени с
мгновенным центром скоростей, выражается формулой wv = и2/а. Век-
Вектор wv направлен по радиусу из мгновенного центра скоростей (точки
касания обруча с опорной прямой) к центру обруча.О
Из теоремы 2.17.3, в частности, следует, что мгновенный центр
скоростей будет одновременно и мгновенным центром ускорений то-
тогда и только тогда, когда rv = 0.
Если за полюс принять мгновенный центр ускорений плоскопа-
плоскопараллельного движения, то по теореме 2.16.3 (Ривальса) формула для
расчета ускорения произвольной точки М тела примет вид
w = и> х (г - г^) - (jj2(y - rw),
2.17. Поле ускорений в твердом теле 149
где г^ — радиус-вектор мгновенного центра ускорений. Другими
словами, поле ускорений плоскопараллельного движения таково, как
будто твердое тело вращается вокруг мгновенного центра ускорений.
Вращательное ускорение перпендикулярно вектору (г — г^). Осе-
стремительное ускорение параллельно (г —г^). Следовательно, угол
0 между направлением ускорения точки М и прямой, соединяющей
точку М с мгновенным центром ускорений, не зависит от располо-
расположения точки М в теле и может быть вычислен с помощью равенства
tg/З = ш/и2. Модуль ускорения точки вычисляется по формуле
|w| = Ir-r^lVu^ + uJ4.
В плоскопараллельном движении угловая скорость и угловое уско-
ускорение коллинеарны: u> x u> = 0. Когда эти параметры известны,
мгновенный центр ускорений можно определить с помощью теоремы
2.17.2. По смыслу введенных обозначений будем иметь
1 г 9 1
где ri — радиус-вектор точки, ускорение которой известно и равно
Wi. В частности, это может быть мгновенный центр скоростей. Тогда
П = rv, wi = ifi = — u> x rv и
rw -rv = ^2 [urv - w(w x rv)].
Мгновенный центр ускорений можно определить и тогда, когда зада-
заданы не совпадающие друг с другом ускорения двух различных точек
твердого тела. В самом деле, пусть Wi — ускорение точки тела, име-
имеющей радиус-вектор ri, а W2 — ускорение точки, имеющей радиус-
вектор Г2- По теореме 2.16.3 должно быть выполнено равенство
w2 = wx + u> х (г2 - rx) - u>2(r2 - гх),
в котором учтено, что u> Jl (r2 — Гх). Из этого равенства следует
2 (W2 ~Wx) -(r2-ri) . (r2-ri) X (w2 -Wx)
^ " (Г2~ГхJ ' W" (Г2-ГхJ
Напомним, что модуль скалярного произведения векторов равен про-
произведению модулей этих векторов на косинус угла между ними, а
модуль векторного произведения равен произведению модулей сомно-
сомножителей на синус угла между ними. Поэтому
150 Глава 2. Кинематика
Подставив найденные выражения в формулу для вычисления радиу-
радиуса-вектора мгновенного центра ускорений и выполнив очевидные пре-
преобразования, получим
i[( ) W2] - r2[(w2 -
"" wl)
+(r2-ri) x (w2 x wi)}.
Контрольные вопросы к главе 2
2.1. Радиус-вектор r(t) движущейся точки можно представить коор-
координатами в различных реперах, в том числе подвижных и не-
необязательно сохраняющих ортонормированность. Как следует
выразить скорость точки, если базисные векторы е, суть про-
произвольные заданные функции времени?
2.2. В примере 2.1.1, вычислив скалярное произведение, убедиться,
что вектор скорости точки перпендикулярен ее радиусу-вектору
с началом (а, 6, с). Какую поверхность заметает радиус-вектор
движущейся точки, исходящий из начала координат?
2.3. Показать, что если точка движется по плоскости с постоянной
по величине ненулевой скоростью и постоянным по величине не-
ненулевым нормальным ускорением, то ее траектория есть окруж-
окружность.
2.4. В каком случае закон движения абсолютно твердого тела мож-
можно однозначно определить, если заданы законы движения двух
несовпадающих точек этого тела?
2.5. Доказать следствие 2.4.1.
2.6. Выписать зависимость компонент матрицы оператора А 6 50C)
от углов Эйлера.
2.7. Выписать зависимость компонент матрицы оператора А Е 50C)
от кардановых углов.
2.8. Каким вращениям твердого тела соответствует значение пара-
параметра Эйлера до = О?
2.9. Каким вращениям твердого тела соответствуют значения пара-
параметров Эйлера (ji = q2 = <?з = О?
2.10. Доказать, что преобразование подобия Р = QPxQ~l, detQ ф О,
сохраняет все собственные значения матрицы Рх.
Контрольные вопросы к главе 2 151
2.11. Доказать формулу Р\а,[ъ,с]] = ^&(а • с) - Рс(а • Ь) (см. теорему
2.7.3).
2.12. Построить унитарную матрицу Q по углам Крылова.
2.13. Найти кватернион h E И\ по кардановым углам.
2.14. Пусть #0, Я\1 <72> Яз — параметры Эйлера для Ai Е 50C), a q$,
q", g2, <?з — параметры Эйлера для А2 Е 50C). С использова-
использованием свойств унитарных матриц найти параметры Эйлера для
композиции А = Ai о А2.
2.15. Пусть #0) Qi, ?2) <7з — параметры Эйлера для композиции
А = Ai о А2 операторов Ai € 5ОC) и А2 Е 50C), a q'o, q[,
q'2i qf3 — параметры Эйлера для оператора Ai. С использова-
использованием свойств унитарных матриц найти параметры Эйлера для
оператора А2.
2.16. С использованием понятия дифференциала вращения выразить
множество всех дифференциалов смещений точек твердого те-
тела, имеющего одну закрепленную точку.
2.17. Дать определение угловой скорости при произвольном движе-
движении твердого тела.
2.18. С помощью формулы Эйлера (см. теорему 2.12.1) выразить ско-
скорость точки твердого тела, вращающегося вокруг неподвижной
оси, если радиус-вектор г точки тела имеет начало в точке О,
а ось вращения через точку О не проходит.
2.19. Доказать, что при движении твердого тела вокруг неподвижной
точки справедлива формула
1 / •/
где и> — вектор угловой скорости, е^, е'2, е^, — базисные век-
векторы репера, жестко связанного с телом и имеющего начало в
неподвижной точке, а ё^, ё'2, eg — производные по времени от
этих векторов.
2.20. Пусть ft = ^u>,' — суммарный вектор системы угловых скоро-
скоростей, а V = 53 v,- — суммарный вектор поступательных полей
скоростей. Показать, что если
а) Л • V = О, И / 0, то поле скоростей приводится к враща-
вращательному,
152 Глава 2. Кинематика
b) ft • V ф О, то поле скоростей приводится к винтовому,
c) ft = О, V ф О, то поле скоростей приводится к поступа-
поступательному,
d) ft = О, V = О, то скорости всех точек тела равны нулю.
2.21. Показать, что если ft = Yl^i' Ф О В плоскопараллельном дви-
движении, то поле скоростей приводится к вращательному. Найти
уравнения результирующей оси угловой скорости в случае та-
такого движения.
2.22. Пусть в осях, связанных с твердым телом, вектор угловой ско-
скорости тела, движущегося вокруг неподвижной точки, выража-
выражается формулой о> = ре[ + qef2 + ге'3. Выписать в скалярном
виде систему уравнений Пуассона для координат векторов не-
неподвижного репера. Непосредственным дифференцированием
проверить сохранение скалярных произведений базисных век-
векторов.
2.23. Выразить в скалярном виде компоненты угловой скорости твер-
твердого тела, движущегося вокруг неподвижной точки, в осях,
жестко связанных с телом, и в неподвижных осях через про-
производные от параметров Эйлера.
2.24. Пусть абсолютное ускорение точки тождественно равно нулю,
ускорение полюса и угловое ускорение движущейся системы ко-
координат отсутствуют. Написать уравнение, которому подчиня-
подчиняется относительное ускорение точки. Каким общим методом
можно исследовать решения этого дифференциального уравне-
уравнения?
2.25. Найти уравнения Земной параллели в координатах
примера 2.16.2. Исследовать в этих координатах влияние кори-
олисова ускорения в случае, когда точка движется вдоль па-
параллели.
2.26. Пользуясь теоремой 2.17.1, определить положение мгновенного
центра ускорений для случая, когда w0 Л о> и w0 JL и>.
2.27. Пользуясь теоремой 2.17.2, определить положение оси мгновен-
мгновенных центров ускорений движения в случае Со = 0. Объяснить
механический смысл полученного решения.
2.28. По формуле, выражающей радиус-вектор мгновенного центра
ускорений по заданным ускорениям двух точек в плоскопарал-
плоскопараллельном движении твердого тела, найти положение мгновенно-
Контрольные вопросы к главе 2 153
го центра ускорений для случая wx || W2, где Wi — ускоре-
ускорение точки с радиусом-вектором ri и W2 — ускорение точки с
радиусом-вектором Г2- Показать, что мгновенный центр уско-
ускорений принадлежит прямой, соединяющей эти точки.
Глава 3
Динамика поступательного движения
§ 3.1. Пространственно-временная структура
Из всех событий реального мира теоретическая механика выделя-
выделяет главным образом события, связанные с геометрическим аспектом
процесса движения. Такие события состоят в том, что рассматривае-
рассматриваемая геометрическая точка в заданный момент времени занимает кон-
конкретное положение в физическом пространстве. В этом смысле пред-
представление о мире можно предельно упростить, изображая его события
точками в четырехмерном пространстве, полученном из трехмерно-
трехмерного физического пространства добавлением измерения, отражающего
ход времени. Время — особое измерение. Его отношение к геометри-
геометрическим объектам зададим с помощью галилёевой пространственно-
временной структуры, включающей следующие аксиомы:
1. Мир — четырехмерное аффинное пространство А4. Точки этого
пространства называются мировыми точками или событиями. Про-
Пространству А4 соответствует линейное пространство R4.
2. Интервал времени — линейная функция t : R4 —> Я, отобража-
отображающая линейное пространство векторов на вещественную "ось" вре-
времени. Промежутком времени от события В ? А4 до события С ? А4
называется число <(ВС). Если <(ВС) = 0, то события В и С назы-
называются одновременными. Множество всех одновременных событий
трехмерно и образует аффинное пространство А3. Ему соответству-
соответствует линейное пространство R3.
3. Расстояние между одновременными событиями задается ска-
скалярным произведением в пространстве R3:
р(Я,С) = |ВС|, Be А3, Се А3.
Пространство А3, в котором введена указанная пространственно-
временная структура, называется галилеевым пространством.
Галилеево преобразование — это аффинное преобразование А4 —->
А4, сохраняющее структуру галилеева пространства, т.е. сохраняю-
сохраняющее интервалы времени и расстояния между одновременными собы-
событиями.
3.1. Пространственно-временная структура, 155
Теорема 3.1.1. Каждое галилеево преобразование представля-
представляет собой движение трехмерного пространства одновременных со-
событий, сопровождаемое сдвигом начала отсчета времени.
Доказательство. Пусть задано событие В. Выберем опорное со-
событие О. Тогда в соответствии с галилеевой структурой будем иметь
В = (С, <(ОВ)), где С принадлежит пространству А3 всех одновре-
одновременных с В событий. В пространстве А3 выберем опорную точку
О'. Событие В можно охарактеризовать временем t и радиусом-век-
радиусом-вектором х G R3 с началом в точке О' и концом в точке С. В общем
случае аффинное преобразование А4 —> А4 записывается следующим
образом:
х' = Ах + Ы + с,
V = at x + btt + ct,
где А — линейный оператор; Ь, а(, с G Я3; &*, ct — скалярные ко-
коэффициенты. При галилеевых преобразованиях любые два одновре-
одновременных события переходят в одновременные. Пусть В и D два таких
события: В = (х,<), D — (у,<)- После галилеевого преобразования
должно быть а* • (у — х) = 0. Векторы х и у могут быть произволь-
произвольными. Поэтому а* = 0. Таким образом, t' = btt + ct. Коэффициент bt
задает изменение масштаба времени. Интервал времени сохраняется
лишь при bt — 1. Далее, в соответствии с теоремой 1.1.1 расстоя-
расстояния между одновременными событиями сохраняются тогда и только
тогда, когда матрица А линейного оператора ортогональна. Следова-
Следовательно, произвольное галилеево преобразование можно представить
в виде
х' = Ах + Ы + с, ААТ = Е,
f = t + ct.U
Все галилеевы преобразования образуют группу. Примерами та-
таких преобразований могут служить:
1. Равномерное движение со скоростью Ь:
2. Изменение опорной точки (сдвиг):
3. Вращение пространства А3:
G3(x, t) : (х, t) -> (Ах, <), A G 50C).
Следствие 3.1.1. Каждое галилеево преобразование однозначно
представляется с помощью композиции вращения, сдвига и равно-
равномерного движения: G = G\ о G*i о Gz-
156 Глава 3. Динамика поступательного движения
Для любой пары галилеевых пространств существует взаимно од-
однозначное соответствие одного пространства другому, сохраняющее
галилееву структуру. В этом смысле все галилеевы пространства
изоморфны друг другу и изоморфны координатному пространству
R3xR.
Взаимно однозначное соответствие А4 —* R3 x R называется гали-
леевой системой координат (системой отсчета).
§ 3.2. Первый закон Ньютона. Принцип относи-
относительности
При поступательном движении какого-нибудь тела скорости и
ускорения любой пары его точек одинаковы, и все точки описыва-
описывают траектории, которые можно получить друг из друга сдвигом на
вектор, постоянный вдоль траектории отдельной точки. Анализ дви-
движения такого тела сводится к изучению движения какой-либо одной
его точки.
Определение 3.2.1. Материальная точка — это точка, заме-
заменяющая реальное тело, способное в силу сложившихся конкретных
условий совершать только лишь поступательное движение. Взаимо-
Взаимодействие материальных точек означает взаимодействие соответству-
соответствующих поступательно движущихся тел. Материальной точке прида-
придаются все свойства поступательно движущегося тела, определяющие
закон его движения.
Замечание. Ответ на вопрос о том, можно ли заменить матери-
материальной точкой тот или иной объект, зависит не столько от размеров
объекта, сколько от особенностей его движения и степени идеализа-
идеализации задачи.
Определение 3.2.2. Система отсчета называется инерциалъной,
если по отношению к ней любая свободная от взаимодействий с други-
другими объектами Вселенной (изолированная) материальная точка дви-
движется равномерно и прямолинейно.
Первый закон (постулат) Ньютона состоит в утверждении,
что инерциальные системы отсчета существуют. Наделение неко-
некоторой системы отсчета свойством инерциальности является сильным
утверждением и всегда нуждается в обосновании.
Теорема 3.2.1. Все системы отсчета, получающиеся из инер-
циальной с помощью галилеевого преобразования) будут инерциаль-
ными.
Доказательство. Пусть в инерциальной системе отсчета коор-
координаты изолированной материальной точки имеют вид (х,<), а закон
3.2. Первый закон Ньютона. Принцип относительности 157
ее равномерного движения задан равенством х = хо + vtf, где хо, v
суть постоянные векторы. Применим к этой системе галилеево пре-
преобразование
у = Ах + Ы + с,
t' = t + ct.
Тогда закон движения рассматриваемой материальной точки в новой
системе отсчета (у,<') примет вид
У =yo + vy<',
где уо = А(хо — vet) — bct + с, vy = Av + b, причем векторы уо и vy
постоянны. Это — закон равномерного движения.D
Из теоремы 3.2.1 следует, что инерциальных систем отсчета суще-
существует бесконечно много.
Принцип относительности Галилея утверждает, что при из-
изучении законов движения все инерциальные системы отсчета рав-
равноправны. Экспериментатор, проводящий опыты в инерциальной си-
системе отсчета, не может обнаружить движение этой системы.
Определение 3.2.3. Механической системой называется мно-
множество материальных точек и твердых тел, которые могут взаимо-
взаимодействовать друг с другом и с любыми другими объектами. Изоли-
Изолированной механической системой называется множество материаль-
материальных точек и твердых тел, которые могут взаимодействовать друг с
другом, но лишены возможности взаимодействовать с другими объ-
объектами Вселенной.
Согласно принципу относительности все законы и уравнения ме-
механики, установленные для изолированной механической системы
в какой-либо одной инерциальной системе отсчета, сохраняют свой
смысл и форму при переходе к любой другой инерциалькой системе
отсчета (инвариантны по отношению к преобразованию координат).
Это значит, что после выполнения преобразований, связанных с пе-
переходом к новой системе отсчета, структура математических выра-
выражений законов в новых переменных имеет такой же вид, какой она
имела в исходных переменных, и законы выражаются с помощью од-
одних и тех же функциональных зависимостей.
Исследуем ограничения, которые накладывает принцип от-
относительности на структуру законов механики. Пусть Wj —
ускорения, v, — скорости, г,- — радиусы-векторы материальных то-
точек (г = 1,..., TV) изолированной механической системы, t — время
и пусть равенство
ФA?1, . . . , Wat, Vi, . . . , Vjv, П, . . ., Гдг, <) = О
выражает некоторый закон механики. Тогда:
158 Глава 3. Динамика поступательного движения
1. Изолированная механическая система всегда автономна, т. е.
функция Ф не зависит явно от времени. Действительно, пусть г,(<),
i = 1,..., N суть законы движения всех точек системы. Среди гали-
леевых преобразований имеется сдвиг по времени. В соответствии с
теоремой 3.2.1 и принципом относительности получим, что функции
Yi(t — r), i = 1,..., N при любом значении т будут законами движения
тех же точек, а значит, соответствующие им w,(tf — г), v,(tf — г) вместе
с г,(< — г) обязаны удовлетворять уравнению
Ф(*Г;(* - Т), V4(< - T),Vi(t - Г), 0 = 0.
Обозначив s = t — т, найдем
<S>(w,(s), v,(s), n(s), s + г) = 0.
Поскольку т произвольно, видим, что Ф не зависит от т.
2. Функция Ф может зависеть лишь от разностей радиусов-векто-
радиусов-векторов и разностей скоростей точек изолированной системы. В самом
деле, среди галилеевых преобразований имеются сдвиги в трехмер-
трехмерном пространстве. Пусть r,(tf), i = l,...,iV суть законы движения
всех точек системы. Тогда r,(<) -f r, i = 1,..., JV, г = const также
будут законами их движения. А это значит, что совместно должны
быть выполнены равенства
ФA?,-,У|-,Г1,...,Глг) = 0,
ФA?,-, V,-, Г1 + Г, . . ., Глг + Г) = 0,
в любой момент времени t. Зафиксируем время и выберем сначала
г = —п. Тогда получим другое, эквивалентное в данный момент
времени исходному, выражение для исследуемого закона механики:
Ф^,у,-,0,г2-Г1,...,глг -ri) = 0.
Применим к этому выражению повторный сдвиг всех векторов на век-
вектор г = ri -f г', где г' — произвольный вектор. Тогда получим
Ф(тг<, v,, ri + г;, г2 - ri,..., глг - ri) = 0.
Поскольку значение г' произвольно, видим, что Ф от г' не зависит,
а значит Ф может зависеть только от комбинаций г,- — ri. Анало-
Аналогичное рассуждение можно провести для любого другого вектора г,.
Следовательно, Ф может зависеть лишь от разностей г, — г;-. Далее,
среди галилеевых преобразований имеются переходы к равномерно
движущимся системам отсчета с сохранением направлений базисных
3.3. Принцип детерминированности 159
векторов. Такие преобразования приводят к изменению всех скоро-
скоростей V,-, i = 1,..., JV, на постоянный вектор v. При этом закон Ф = О
должен остаться справедливым:
$(wt-,V! + v,v2+v,...,vjv + v,r, -г,) = 0.
Проводя теперь рассуждения, аналогичные тем, которые применя-
применялись при доказательстве первой части свойства, убеждаемся, что Ф
может зависеть только от разностей v,- — Vj и не может зависеть не-
непосредственно от значений скоростей.
3. Функция Ф инвариантна относительно преобразования всех ар-
аргументов с помощью ортогональных линейных операторов. По теоре-
теореме 3.1.1 среди галилеевых преобразований имеются преобразования
с помощью ортогональных линейных операторов. Значит, если г,(<),
г — 1,..., JV, суть законы движения точек изолированной системы,
то rj = Аг, выражают те же законы, но в повернутой инерциальной
системе отсчета. При этом ААТ = Е и А — постоянный линейный
оператор. Значит, vj = Av,, wj = Aw,-. Согласно принципу относи-
относительности Галилея равенства
Ф(\^,у,-,г,) = 0, Ф(Ауг.-, Avt-, Аг,-) = 0
должны быть эквивалентными, что и доказывает справедливость
свойства.
4. Если изолированная механическая система состоит из одной
материальной точки, то функция Ф зависит только от ускорения w
этой точки, причем уравнение Ф^) = 0 допускает нулевое решение.
В самом деле, согласно пунктам 1 и 2 функция Ф в рассматриваемом
случае не может зависеть от радиуса-вектора г, скорости v точки, а
также от времени t. По определению инерциальной системы отсчета
изолированная материальная точка имеет в ней ускорение, равное
нулю. Следовательно, равенство w = 0 должно быть следствием
рассматриваемого закона механики, и такое w должно удовлетворять
уравнению Ф(\у) = 0.
Изолированная материальная точка может испытывать ускоре-
ускорение в какой-либо системе отсчета, только если эта система отсчета
не инерциальна. Если система отсчета инерциальна, а материаль-
материальная точка имеет ускорение, то это ускорение есть следствие влияния
других объектов и точка не изолирована.
§ 3.3. Принцип детерминированности
Состоянием механической системы (определение 3.2.3) называ-
называется набор одновременных значений радиусов-векторов и скоростей
всех ее точек.
160 Глава 3. Динамика поступательного движения
Принцип детерминированности Ньютона утверждает, что
состояние механической системы, заданное в любой момент време-
времени, однозначно определяет все ее дальнейшее движение.
Этот принцип безусловно удовлетворяется, когда между ускоре-
ускорениями точек механической системы и составляющими ее состояния
существует зависимость, не содержащая третьих и более высокого
порядка производных от радиусов-векторов точек. Существование
такой зависимости в дальнейшем принимается в качестве эквивален-
эквивалента принципу детерминированности.
Зависимость между состоянием системы и производными третьего
порядка и выше также может быть установлена, но без дополнитель-
дополнительных ограничений она приведет к дифференциальным уравнениям,
для однозначного решения которых недостаточно задать лишь состо-
состояние системы, что окажется в противоречии с принципом детермини-
детерминированности.
Рассмотрим изолированную систему из двух материальных точек
в инерциальной системе отсчета. Состояние первой точки пусть бу-
будет ri, vi, а второй — Г2, V2- Когда эти точки взаимодействуют,
то изменение скоростей этих точек не будет одинаковым. Вместе с
тем, согласно многочисленным экспериментальным данным, можно
каждой материальной точке сопоставить такую скалярную постоян-
постоянную ш,- > 0, (г = 1,2), называемую массой, что будет выполнено
равенство
Аксиома 3.3.1. Масса материальной точки сохраняет свое зна-
значение не только во времени, но и при любых взаимодействиях ма-
материальной точки с другими материальными точками независимо
от их числа и от природы взаимодействий.
Рассмотрим теперь одну материальную точку с массой т, под-
подверженную внешнему воздействию. В соответствии с принципом де-
детерминированности ускорение этой точки есть функция от радиуса-
вектора и скорости этой точки, а также, быть может, времени t. Ма-
Математическим выражением этого служит второй закон Ньютона:
-(mv)=F(r,v,*).
Вектор, стоящий в правой части последнего равенства, называется
силой. Сила есть мера воздействия, вследствие которого возникает
или способно возникнуть ускорение точки. Произведение mv назы-
называется количеством движения материальной точки.
3.3. Принцип детерминированности 161
Второй закон Ньютона утверждает, что производная по време-
времени от количества движения материальной точки равна действую-
действующей на точку силе.
В системе СИ единицей измерения силы служит 1н (ньютон), а
единицей измерения массы — 1кг. По определению [н]=[мкг/с2].
Другими словами, 1н — это сила, которая массе 1кг сообщает уско-
ускорение 1м/с2.
Понятие силы дает возможность сформулировать третий закон
Ньютона, который описывает взаимодействие двух материальных
точек (определение 3.2.1). Пусть имеются две материальные точки
Аи В. Действие точки В на точку А выразим силой F^, а действие
точки А на точку В — силой F# •
Третий закон Ньютона утверждает, что силы Fa и F# равны
по величине, действуют вдоль одной прямой, направлены в проти-
противоположные стороны, но приложены к соответствующим точкам
физически различных поступательно перемещающихся тел А и В
(закон равенства действия и противодействия).
Пусть материальная точка взаимодействует с несколькими объ-
объектами. Можно рассматривать силу, которая воздействует на точку
со стороны каждого объекта при условии, что другие объекты отсут-
отсутствуют. В этом смысле будем говорить об одновременном действии на
точку нескольких отдельных сил. Результат такого действия опре-
определяется следующими аксиомами.
Аксиома 3.3.2. Все силы, действующие одновременно на посту-
поступательно движущееся тело, имеют начало в одной геометрической
точке тела, которая и принимается в качестве материальной точ-
точки.
Аксиома 3.3.3. Действие на материальную точку двух сил эк-
эквивалентно действию одной равнодействующей силы, строящейся
по правилу сложения векторов сил. Отсюда следует, что действие
на материальную точку нескольких сил эквивалентно действию од-
одной равнодействующей.
Аксиома 3.3.4. Совокупность сил, приложенных к материаль-
материальной точке, не вызывает ускорения, или, что то же самое, эквива-
эквивалентна нулю тогда и только тогда, когда равнодействующая этой
совокупности сил равна нулю.
Аксиома 3.3.5. К силам, действующим на материальную точ-
точку, можно добавить произвольное эквивалентное нулю множество
сил. От этого ускорение точки не изменится.
II -1503
162 Глава 3. Динамика поступательного движения
§ 3.4. Работа силы на перемещении
Пусть материальная точка, к которой приложена сила F, переме-
перемещается из положения с радиусом-вектором г в положение с радиусом-
вектором г + dr. Работой силы F на элементарном перемещении dv
{элементарной работой) называется скалярное произведение векто-
вектора F на вектор dv. При этом не имеет значения, действует или нет
сила F на материальную точку на всем перемещении dv. Таким обра-
образом, элементарная работа Л вычисляется по формуле
Л = F • dr.
Единицей работы служит джоуль — работа, которую совершает сила
1н на расстоянии 1м при условии, что сила параллельна перемеще-
перемещению: 1дж = 1н • 1м. Отметим следующие свойства элементарной
работы.
1. Работа равнодействующей силы на некотором элементарном
перемещении равна сумме работ составляющих сил на том же пере-
перемещении:
Л-
2. Работа силы на суммарном перемещении равна сумме работ
этой силы на составляющих перемещениях:
*i -> Л = F ?
»=i »=i t=i
3. Работа равна нулю, когда либо F = 0 (сила отсутствует), либо
dv = 0 (точка приложения силы не перемещается), либо F J_ dv (сила
и перемещение взаимно перпендикулярны).
Определение 3.4.1. Пусть точка перемещается вдоль спрямляе-
спрямляемой кривой С в Е3 , а сила действует на точку в любом ее положении
на кривой. Тогда работой силы F на пути С называется криволи-
криволинейный интеграл второго рода
=/
'•*•
В общем случае работа зависит от формы кривой ?, по которой пе-
перемещается точка приложения силы.
3.4. Работа силы на перемещении 163
Определение 3.4.2. Сила называется потенциальной, если ее
элементарная работа на произвольном перемещении dr представля-
представляет собой полный дифференциал некоторой однозначной скалярной
функции С/(г) от векторного аргумента, то есть
„ , Jrr dU . A
Fdr = dU=--dr
Функция U(r) в этом случае называется силовой функцией.
Следствие 3.4.1. Потенциальная сила может быть выражена
частными производными от функции U(r):
„ ди А ди
Очевидно, что работа потенциальной силы на замкнутом конту-
контуре равна нулю. Работа такой силы на криволинейном участке пути
зависит лишь от начального С и конечного D положений точки:
= [
F-dr= [dU = U(rD)-U(rc)
eh с
и не зависит от формы кривой CD.
Поверхности, на которых силовая функция принимает постоянное
значение, называются поверхностями уровня. Потенциальная сила
направлена перпендикулярно к поверхности уровня в сторону возра-
возрастания силовой функции. Действительно, когда элементарное пере-
перемещение направлено вдоль поверхности уровня, то работа силы рав-
равна нулю. Но элементарная работа силы есть скалярное произведение
силы на перемещение точки ее приложения. Отсюда следует орто-
ортогональность. Вместе с тем, если перемещение направлено в сторону
увеличения силовой функции, то работа обязана быть положитель-
положительной. Значит, косинус угла между силой и указанным перемещением
положителен.
Теорема 3.4.1. Силовая функция суммы нескольких потенци-
потенциальных сил равна сумме силовых функций этих сил.
Доказательство. Пусть на точку действуют потенциальные си-
силы
F,- = -г—, г = 1,.. .,п,
с/г
и*
164 Глава 3. Динамика поступательного движения
где Ui(г) — их силовые функции, г — радиус-вектор точки приложе-
приложения всех этих сил. Рассмотрим функцию
1=1
Для нее
ди ^
Тем самым U(r) есть силовая функция для суммарной силы.П
Заметим, что теорема 3.4.1 справедлива для любых потенциаль-
потенциальных сил независимо от их природы.
Силовое поле — это область пространства, в каждой геометриче-
геометрической точке которого однозначно определена сила, действующая на
материальную точку при выполнении необходимых для этого фи-
физических условий. Например, необходимым физическим условием
действия электростатической силы будет присутствие на точке элек-
электрического заряда.
Поверхности уровня силовой функции представляют собой на-
наглядный геометрический образ, характеризующий структуру потен-
потенциального силового поля. Другой характеристикой силового (не обя-
обязательно потенциального) поля могут служить силовые линии.
Силовая линия — это кривая, касательная к которой в каждой
точке кривой совпадает с направлением силы.
Задать силовое поле — значит задать зависимость F(r) силы от
радиуса-вектора точки пространства. Пусть г = r(s) — параметри-
параметрическое уравнение силовой линии, причем s — длина ее дуги. Тогда
силовая линия есть решение дифференциального уравнения
dr _ F
Ts-Щ'
Оно теряет смысл, когда либо |F| = 0, либо |F| = оо. Во всех других
точках пространства направление касательной к силовой линии одно-
однозначно определено, и в них силовые линии одного и того же силового
поля не могут пересечься под ненулевым углом.
В случае потенциального силового поля уравнение силовой линии
принимает вид
dr dU *rr ~1
ds дг
дг
Следовательно, касательная к силовой линии перпендикулярна по-
поверхностям уровня. Учтем, что \dr\ = ds, и скалярно умножим урав-
3.4. Работа силы на перемещении
165
нение силовой линии на dr. Получим
ds =
8U_
дг
-1
ди
дг
dU.
Поэтому одинаковому приращению силовой функции отвечает сме-
смещение вдоль силовой линии, обратно пропорциональное модулю гра-
градиента силовой функции. В тех точках пространства, где сила боль-
больше, поверхности равного уровня будут ближе друг к другу, чем в
других точках.
Рассмотрим наиболее часто встречающиеся типы силовых полей.
Пример 3.4.1. Поле параллельных сил. Пусть F — модуль
силы, е — единичный вектор ее направления, произвольно ориентиро-
ориентированный в пространстве и одинаковый для всех его точек:
F = Fe.
Обозначим z = е • г проекцию радиуса-вектора точки на направление
вектора е. Предположим, что модуль силы зависит только от z : F =
F(z). Элементарная работа Л силы F на перемещении dv выражается
равенством
Л = F(z) edr = F(z) d(e • г) = F(z) dz.
Согласно определению первообразной, последнее выражение есть пол-
полный дифференциал от функции
z
J
= JF(z)dz
где с — произвольная постоянная. Такое поле потенциально.
Частным случаем поля рассматриваемого типа будет поле силы тя-
тяжести. Для него F = mg е, где m — масса, g — ускорение силы тяжести
и е — направление отвеса. Тогда
U(z) = mgz + с = mg e ¦ г + с.
Другой частный случай — это электростатическое поле между за-
заряженными пластинами конденсатора. Для него F = Eqe, где Е —
напряженность поля, q — точечный заряд, е — направление, перпенди-
перпендикулярное пластинам. Имеем
U(z) = Eqz + с = Eq e • г + с.
166 Глава 3. Динамика поступательного движения
Силовые линии поля параллельных сил даются уравнением
dv
— = е или r = se + ro,
ds
где го — произвольное начальное значение радиуса-вектора. Видим,
что силовые линии — прямые, пронизывающие пространство парал-
параллельно вектору е. Поверхности уровня силовой функции даются уравне-
уравнением e-r = zo, где zo — произвольное постоянное значение переменной
z. Это плоскости, разрезающие пространство перпендикулярно вектору
е.О
Пример 3.4.2. Поле центральных сил. В любой точке поля
сила направлена вдоль радиуса-вектора г, а ее модуль зависит только
от г = |г|. Начало радиуса-вектора называется центром поля.
F = F(r)er, er=r/r.
Работа Л силы F на элементарном перемещении dr выражается равен-
равенством
А = F(r)er • dv = F(r)^ • dv = Ij^r)^ = F(r)dr
\v\ 2 r
и представляет собой полный дифференциал от функции
г
U(r)= f F(r)dr + c,
го
где с — произвольная постоянная. Поэтому поле центральных сил по-
потенциальное.
Поверхности уровня силовой функции U(r) представляют собой кон-
концентрические сферы с различными значениями радиуса г. Силовые ли-
линии суть радиальные лучи, исходящие из центра сил.
Рассмотрим частные случаи, когда F(r) задает степенную зависи-
зависимость силы от радиуса:
F(r) = aer*.
Для силовой функции справедливо выражение
aeln(r/ro), если Ь = —1;
U(r)= /6
Учтем, что силовая функция может быть определена с точностью до
произвольной постоянной. Тогда
ЗА. Работа, силы на перемещении 167
а) Центральное поле ньютонианского тяготения:
ае = —fMm, где / — гравитационная постоянная, М — масса при-
притягивающего тела, расположенного в центре поля, га — масса притяги-
притягиваемого тела, Ь = —2. Следовательно,
б) Электростатическое поле: ае = kQq, где к — электростати-
электростатическая постоянная, Q, q — величины точечных зарядов, Ь = —2. Сле-
Следовательно,
U(r) = -А
г
Силовое поле будет притягивающим, когда Qq < О (заряды разных зна-
знаков), и отталкивающим, когда Qq > О (заряды одного знака).
в) Поле упругой силы: ээ = —с2, 6 = 1. Силовая функция имеет
вид
Пример 3.4.3. Силы трения скольжения (Кулоновское сухое
трение). Скольжению одного тела по поверхности другого всегда препят-
препятствуют силы, называемые силами трения. Это пассивные силы, мешаю-
мешающие возникновению относительного движения и стремящиеся успокоить
такое движение, если оно возникло. Величина силы сухого трения FTp
пропорциональна силе N, прижимающей друг к другу соприкасающиеся
тела и направленной перпендикулярно к поверхности соприкосновения
(N — сила нормального давления):
FTp = JfeiV, к > 0.
Коэффициент пропорциональности к зависит от того, движутся или нет
друг относительно друга соприкасающиеся поверхности. Если проскаль-
проскальзывание отсутствует, то сила трения уравновешивает касательную проек-
проекцию активной силы, стремящуюся вызвать относительное перемещение.
Следовательно, в этом случае
где F — проекция активной силы на плоскость, касательную к поверх-
поверхности контакта, F — модуль проекции активной силы.
Коэффициент к ограничен предельным значением / = max А;, на-
называемым коэффициентом сухого трения (трения скольжения). Как
только к достигает предельного значения, начинается относительное
проскальзывание трущихся поверхностей. Коэффициент / зависит от
168 Глава 3. Динамика поступательного движения
скорости v относительного смещения: / = f(v). При малых значени-
значениях v функция f(v) несколько больше, чем при больших. С ростом v
эта функция асимптотически и очень быстро стремится к постоянному
значению, являющемуся характеристикой трущихся поверхностей. На
практике приближенно принимают / = const, 0 < к < /.
Сила трения и сила, препятствующая проникновению тел сквозь по-
поверхность контакта (противоположная силе нормального давления), в
сумме образуют реакцию R опорной поверхности на действие активной
силы.
Угол ф, образованный нормалью к поверхности контакта и линией
действия реакции R, отвечающей максимальной величине силы трения,
называется углом трения. Угол трения связан с коэффициентом трения
очевидным соотношением
Построим конус с вершиной в точке контакта. Ось конуса направим
по нормали к поверхности контакта, а угол при вершине положим рав-
равным 2ф. Тогда реакция в данной точке всегда будет принадлежать этому
конусу. Построенный конус называется конусом трения. Вообще гово-
говоря, шероховатость поверхностей контакта по различным направлениям
может оказаться различной. Тогда конус трения уже не будет прямым
круговым конусом.
Сила сухого трения дает пример силы, не обладающей силовой функ-
функцией (непотенциальной). В самом деле, сила сухого трения направлена
всегда против скорости относительного перемещения. Следовательно,
Выражение для элементарной работы принимает вид
Если dr — реальное перемещение, то dr = vdt. Поэтому
А = -fN^-. • vA = -fNv dt = -fNds < 0,
M
где ds > 0 — элемент длины дуги, взятый в направлении движения
точки по траектории. Видим, что элементарная работа во всех случаях
отрицательна, и ее знак не зависит от формы траектории. Когда тра-
траектория образует замкнутый контур, работа силы трения окажется не
равной нулю, а потому сила сухого трения непотенциальна.О
Пример 3.4.4. Сила вязкого трения. Такие силы возникают
в присутствии смазки между трущимися поверхностями. Сила вязкого
3.5. Основные задачи динамики 169
трения направлена в сторону, противоположную скорости относитель-
относительного движения:
FTp = —aev, ae > 0.
В практически интересном диапазоне скорости относительного про-
проскальзывания зависимость коэффициента вязкого трения эе от вели-
величины v скорости близка к линейной:
эе = эео + aeiv, эео > 0, aei > 0,
где постоянные эео, ^l характеризуют тип смазки. Если скорость v мала,
то коэффициент вязкого трения можно приближенно принять постоян-
постоянным: эе « зео.
Вязкое трение дает еще один пример непотенциальной силы. Эле-
Элементарная работа сил вязкого трения имеет вид (см. пример 3.4.3)
А = —aev • dr = —zev2dt = —sev ds < 0.
Суммарная работа такой силы по замкнутому контуру, как и в примере
3.4.3, не может обратиться в нуль.О
§ 3.5. Основные задачи динамики
Изучение движения материальной точки может производиться
различными методами. В зависимости от цели изучения различают
следующие основные задачи динамики.
1. Прямая задача динамики состоит в том, чтобы найти закоц
движения материальной точки под действием силы, определенной в
достаточно широкой области пространства.
2. Обратная задача динамики состоит в том, чтобы по полностью
заданному закону движения определить силу или силы, способные
вызвать движение точки, соответствующее этому закону.
3. Смешанная задача динамики возникает, когда заданы некото-
некоторые характеристики сил и некоторые характеристики закона движе-
движения и требуется восстановить недостающие элементы движения.
Каждая задача имеет свои особенности и специфические трудно-
трудности решения. Рассмотрим, например, обратную задачу динамики. В
том случае, когда закон движения задан абсолютно точно с помощью
по крайней мере дважды дифференцируемых по времени функций,
проблема определения сил не вызывает принципиальных затрудне-
затруднений и сводится к вычислению второй производной по времени от за-
заданного закона. Вместе с тем в достаточно часто встречающихся
ситуациях закон движения точки нельзя задать по воле человека,
но можно оценить путем проведения необходимых измерений. Тогда
170 Глава 3. Динамика поступательного движения
из-за влияния неизбежно возникающих в процессе измерений оши-
ошибок операция получения второй производной оказывается некоррект-
некорректной, а ее результат существенно зависит от метода вычислений. Это
так называемая задача математической диагностики, и для ее реше-
решения необходимо использовать как статистические свойства ошибок
измерений, так и специальные методы анализа структуры изучаемо-
изучаемого движения. Подобная задача была решена Кеплером и Ньютоном
при открытии закона всемирного тяготения, управляющего движени-
движением небесных тел.
Обратимся к прямой задаче динамики и рассмотрим уравнение,
выражающее второй закон Ньютона:
raw = F,
где w — ускорение точки в некоторой инерциальной системе отсчета.
Единичные базисные векторы ei, е2, е3 этой системы примем вза-
взаимно перпендикулярными и начинающимися в некотором полюсе О,
служащем началом системы отсчета. Разложения радиуса-вектора г
материальной точки и силы F по базисным векторам запишем в виде
г = nei + r2e2 + r3e3, F = F\e\ + F2e2 + F3e3.
Из равенства векторов следует равенство их компонент. В результате
получаем три скалярных уравнения движения
которые называются уравнениями движения в проекциях на декар-
декартовы оси координат.
Пример 3.5.1. Относительно инерциальной системы отсчета ма-
материальная точка движется в поле параллельных сил тяжести. Помимо
силы тяжести на точку действует сила сопротивления воздуха, пропор-
пропорциональная скорости точки и направленная противоположно скорости.
Найти закон движения точки.
Решение. Выберем правоориентированный инерциальный де-
декартов репер Oeie2e3 так, чтобы вектор е3 был направлен в сторону,
противоположную силе тяжести. Тогда векторное уравнение движения
точки примет вид
г = -д е3 - к г,
где г = г\е\ + г2е2 + г3е3 — радиус-вектор точки, д — ускорение
силы тяжести, к — постоянный коэффициент силы сопротивления. В
проекциях на декартовы оси координат уравнения движения примут вид
П = -tri, r2 = -fcr2, r3 = -g - fcr3.
3.5. Основные задачи динамики 171
Здесь каждое уравнение интегрируется независимо от других. Найдем
проекции скорости точки как функции времени t:
г,- = r0,- exp[-k(t - t0)], i = 1,2; r3 = (г0з + |) exp[-*(t - to)] - |,
где rot, (i — 1J,3) — значения проекций скорости в начальный момент
времени to. Видим, что скорости гь г2 с течением времени стремятся к
нулю, тогда как скорость гз стремится к величине, равной — g/k, при ко-
которой правая часть дифференциального уравнения для гз обращается в
нуль. В пространстве скоростей точка @,0,—<7/&) служит аттрактором.
Годографы скорости — прямолинейные лучи различных направлений,
сходящиеся в этой точке. Движение по годографам происходит в напра-
направлении аттрактора. При этом время достижения аттрактора бесконечно.
Вектор @,0,— g/k) называется скоростью парашютирования.
Найдем закон движения:
v-i = го2 + ^A ~ exp[-*(t -
гз = гоз + \ (гоз + f) A - ехр[-*(* - *0)]) - §(* - *о),
где г0,- — начальные значения координат. Закон движения имеет асим-
асимптоту при t —¦ оо, определенную уравнениями
г\ = roi + -~, г2 = г02 + -jp г3 = гоз + ? (г03 + J-J ~ j-(t - *о).
Это вертикальная прямая, по которой предельная точка движется рав-
равномерно со скоростью парашютирования. О
Если действующая на точку сила задана в виде
то уравнения движения представляют собой систему трех диффе-
дифференциальных уравнений второго порядка относительно неизвестных
функций ri(t), гг(<), rz(t). Общее решение этих уравнений содержит
шесть произвольных постоянных:
Г! = ri(t,Ci,...,C6), Г2 = Г2(*,С1,...,Сб), Гз = Г3(<,С1,...,Сб).
Постоянные с,- можно найти, зная начальные условия, т.е. значения
координат roi, г02, г0з и их производных foi, го2, гоз (скоростей) в
начальный момент времени to. Тогда
г01 = П(*0»С1, . . -,Сб), Г02 =
172 Глава 3. Динамика поступательного движения
ПI = П(*(ЬС1, • • -,Сб), Г02 = *S(*(b Ci, • • -,Сб), ГОЗ = ^з(^0,С1, . . .,Сб).
Разрешая эти уравнения относительно с,, найдем
Ci = /1(^0,^01,^02,^03,^01,^02,^03), 1 = 1,.. .,6.
Уравнения движения материальной точки удовлетворяют принципу
детерминированности Ньютона, что эквивалентно выполнению усло-
условий существования и единственности решений задачи Кошй для со-
соответствующей системы дифференциальных уравнений. Поэтому ка-
каждой совокупности начальных условий отвечает одно движение.
Константы с, можно найти также с помощью краевых условий,
которые задают положение материальной точки для двух различных
моментов времени t = to, t = t\:
при t = to : ri = rOi, r2 = Г02, r3 = rO3,
при t = <i : Г1 = гц, r2 = r12, r3 = r13.
Краевая задача состоит в определении значений произвольных по-
постоянных по заданным краевым условиям. Следует отметить, что
решение краевой задачи иногда требует предварительного анализа
структуры траекторий. Могут существовать положения, через кото-
которые материальная точка не пройдет в момент t = t\ ни при каких
начальных скоростях.
Пример 3.5.2. Рассмотрим движение материальной точки мас-
массы m в поле параллельных сил F = Fe, где F — положительная по-
постоянная, е — постоянный единичный вектор, задающий направление
силы. Выберем инерциальный ортонормированный репер 0eie2e^ так,
что ez =¦ —е, а единичные векторы ei и е2 образуют плоскость, перпен-
перпендикулярную силе F (в том случае, когда F — сила тяжести, векторы ei
и е2 задают горизонтальную плоскость). Пусть г = nei + r2e2 + ze* —
радиус-вектор точки. Система дифференциальных уравнений движения
принимает вид
m'z = — F, mri = 0, mr^ = 0.
Представим вектор г следующим образом: г = zez + р; р = г\е\ +г2е2,
так что р A. ez. Интегрируя уравнения движения, получим
ат2 . . F
2 m
где т = t — tQ — время, прошедшее от начала движения, zq — проекция
начальной скорости на направление ez, zq — начальное значение коор-
координаты z, р0 — проекция начальной скорости на плоскость 0eie2, p0
3.5. Основные задачи динамики 173
— начальное значение радиуса-вектора проекции точки на ту же плос-
плоскость. Примем, что в начальный момент времени to модуль скорости
равен v, а вектор скорости образует с плоскостью угол д. Тогда
zq = v sin tf, Ро = v cos д е^,
где ех —постоянный единичный вектор направления проекции началь-
начальной скорости на плоскость Oeie2. Представим координату z и вектор р
в виде
Закон движения точки определяется зависимостями
2
у = —— 4- rvsiwd, х = tv cos д.
Таким образом, точка движется в плоскости, параллельной векторам ez
и ех и проходящей через начальное положение (zo,po). В этой плоско-
плоскости точка имеет декартовы координаты {х,у).
Исключив г, получим уравнение траектории движения:
Очевидно, это парабола, проходящая через начальную точку х = О,
у = 0. При
a \1
получим также у = 0. Величина / положительна при tgtf > 0. Так будет,
например, если 0 < д < тг/2. Тогда / представляет собой дальность
бросания до точки, не совпадающей с начальной и соответствующей
значению у = 0. Дальность / зависит от угла д. Если 0 < д < тг/2, то
максимальная дальность
v2
соответствует значению t? = тг/4.
Найдем теперь область достижимости в координатном пространстве
при фиксированном значении скорости v (все точки координатного про-
пространства, через которые можно провести траекторию из заданной на-
начальной точки с заданной начальной скоростью). С этой целью вос-
воспользуемся уравнением траектории, зафиксируем значение х и найдем
максимум функции y(tgtf). Он имеет место при
174 Глава 3. Динамика поступательного движения
и равен
Парабола, соответствующая зависимости Y(x), называется параболой
безопасности. Она имеет вершину при х = 0 и ограничивает область
достижимости на плоскости (у,х). При вращении параболы вокруг оси
с направляющим вектором е, проходящей через конец вектора р0, полу-
получим параболоид безопасности. Достижимыми при заданной скорости
будут все точки пространства, расположенные относительно параболо-
параболоида безопасности со стороны, противоположной выпуклости параболо-
параболоида. О
Возвращаясь к структуре решения системы дифференциальных
уравнений движения в общем случае, отметим, что для произвольно-
произвольного момента времени справедливы равенства
/*(<, И, г2, г3, п, г2, г3) - ci} i = 1,..., 6,
где fi — те же функции, которые определяют константы с,- по на-
начальным условиям.
Определение 3.5.1. Первым интегралом системы дифференци-
дифференциальных уравнений движения называется функция времени, коорди-
координат и скоростей, сохраняющая постоянное значение для любого кон-
конкретного решения системы. Очевидно, что при переходе от одного
решения системы к другому постоянные первых интегралов могут
изменяться.
Видим, что функции /,• суть первые интегралы соответствующих
им уравнений движения материальной точки. Из сказанного ясно,
что определение закона движения точки по заданной силе можно све-
свести к задаче поиска достаточного набора независимых первых инте-
интегралов.
Определение 3.5.2. Пусть задана произвольная функция
Тогда выражение
. ОФ Л 8Ф . 1 Л дФ
где частные производные по какой-либо переменной берутся в пред-
предположении, что все остальные переменные зафиксированы, называ-
называется производной функции Ф в силу уравнений движения.
3.5. Основные задачи динамики 175
Замечание. Приведем более общее определение. Пусть заданы
произвольная система дифференциальных уравнений
х = х(х,г), хейп, xeRn, teR,
где t — независимая переменная, и функция Ф(х,г). Производной
функции Ф в силу указанной системы уравнений называется выра-
выражение
где я,-, Х{, г = 1,..., п суть координаты векторов я, X соответственно.
При этом, конечно, предполагается, что функция Ф существует.
Теорема 3.5.1. Функция Ф(<, п, Г2, гз, гь г2,гз) есть первый ин-
интеграл уравнений движения тогда и только тогда, когда ее произ-
производная в силу этих уравнений тождественно равна нулю.
Доказательство. Необходимость. Пусть Ф есть первый инте-
интеграл, a r(t) — любой закон движения материальной точки, удовле-
удовлетворяющий уравнению
Для этого закона будем иметь
<) h(t) h(t) h(t)) = с.
где с не зависит от времени. Продифференцируем левую часть этого
выражения по времени как сложную функцию:
дФ А дФ .
dt *—* dri г „.,
После подстановки в левую часть этого выражения значений Г{, взя-
взятых из уравнений движения, получим равенство
дФ А дФ . 1 4^дФ
которое должно быть выполнено для любого набора координат и ско-
скоростей, принадлежащего области определения интеграла Ф.
Достаточность. Пусть для функции Ф имеем тождество
дФ А ЭФ . 1 А дФ „ Л
^
176 Глава 3. Динамика поступательного движения
Возьмем закон движения г(<), соответствующий силе F. Подставив
его в выражение для функции Ф, получим
Ф(<, ri(t), r2(*), ra(Oi ri(t), r2(<), гз@)-
Пользуясь правилом дифференцирования сложной функции и учи-
учитывая, что производная от Ф в силу уравнений движения равна нулю,
найдем d$/dt = 0. Значит, Ф = с есть первый интеграл.?
Для того чтобы полностью узнать закон движения материальной
точки, достаточно найти шесть независимых первых интегралов. Та-
Такой набор первых интегралов назовем полным. Найти полный набор
первых интегралов не всегда легко. Однако наличие первых интегра-
интегралов упрощает исследование. Пусть, например, найдены три первых
интеграла
Ф|(<,Г1,г2,гз,Г1,Г2,гз) = с*, i = 1,2,3.
Их можно рассматривать как новую систему трех дифференциаль-
дифференциальных уравнений, эквивалентную исходной, но уже не содержащую вто-
вторых производных. Предположим, что новую систему удалось приве-
привести к следующей равносильной системе:
—Ф,-(*, гь г2, r3, ci,c2, с3) = 0, i = 1,2,3.
Отсюда следует
Ф|(*,Г1,Г2,Гз,С1,С2,Сз) = С3+г, 1 = 1,2,3.
Полученные функции, будучи независимыми, задают искомый закон
движения.
§ 3.6. Скалярные формы уравнений движения
Положение материальной точки в пространстве не обязательно
задавать непосредственно компонентами п, г2, гз радиуса-вектора г
в системе ортонормированных базисных векторов ei, e2, е3:
г = riei + г2е2 + г3е3.
Для этой цели годятся любые независимые координаты х\, х2,
однозначно связанные с компонентами законом преобразования
Величины a?i, а:2, х$ называются криволинейными координатами
точки. Когда криволинейные координаты выбраны, закон движения
г(<) однозначно задается функциями #»(<), i = 1,2,3.
3.6. Скалярные формы уравнений движения 111
Переход к криволинейным координатам особенно эффективен, ко-
когда имеется априорная информация о траектории точки. Его полезно
применять также, когда поле действующей силы обладает той или
иной симметрией. Поясним это.
Пусть, например, из постановки задачи ясно, что точка может
двигаться только вдоль поверхности, заданной уравнением
Рассмотрим семейство поверхностей:
/(Г1,Г2,Г3) = Х3,
где #з — произвольный постоянный параметр. При выполнении усло-
условий теоремы о неявно заданной функции найдем
г3 = <Kri,r2,z3).
Полученное выражение может оказаться достаточно сложным. До-
Допустим, что оно упрощается, если ввести замену
П =ri(xi,x2,x3), г2 = r2(xi,x2,x3),
где ffi, х2 — более удобные переменные. Тогда искомое преобразова-
преобразование координат примет вид
i, х2, хз), r2 = r2(xi, х2, х3),
г3 = г3(хь х2, х3) - Ф{г1(хи х2, х3), г2(хь х2, х3), х3).
В итоге при движении точки будем иметь хз = 0. Тем самым остается
найти только две функции xi(t), x2(<).
Аналогичную процедуру можно применить, когда по условиям ре-
решаемой задачи материальная точка должна двигаться вдоль кривой,
заданной системой уравнений
/i(ri, г2, г3) = 0, /2(ri, г2, г3) = 0.
Рассмотрим два семейства поверхностей
/i(ri,r2,r3) = х2, /2(г1,г2,г3) = х3,
где х2, хз — произвольные постоянные параметры. Разрешая систе-
систему уравнений поверхностей относительно г2, г3 при любых конкрет-
конкретных значениях параметров х2, хз, получим
Г2 =
12- 1503
178 Глава 3. Динамика поступательного движения
Учитывая возможность упрощения полученных выражений, введем
дополнительную замену переменной г\ = гх(х1,х2,хз), где х\ — бо-
более удобная координата, чем г\. В итоге получается преобразование
координат
г2 =
Г3 =
По условию рассматриваемой задачи материальная точка обязана
двигаться так, чтобы было х2 = #з = 0. Остается найти только одну
функцию xi(t). Рассмотрим примеры криволинейных координат.
Пример 3.6.1. Цилиндрические координаты:
ri=pcosv?, r2 = psin<p, r3 = r3.
При фиксированном значении р точки принадлежат поверхности прямо-
прямого кругового цилиндра, заданного уравнением
Направление оси цилиндра определено базисным вектором е3. Если
зафиксировать угол (р, то точка принадлежит плоскости
—r\ sin (р + ^2 cos (р = 0,
перпендикулярной единичному вектору
е2 = —ei sin <p + е2 cos ^>
и проходящей через третью координатную ось. В этой плоскости р и гз
служат декартовыми координатами, а радиус-вектор любой точки плос-
плоскости выражается формулой
г = ре[ + г3е3,
где единичный вектор е\ имеет вид
е\ = ei cos (p + е2 sin (p.
Наконец, когда постоянной считается координата гз, то получаем плос-
плоскость, параллельную базисным векторам еь е2, и в этой плоскости р и
V? суть полярные координаты точки.О
Пример 3.6.2. Сферические координаты:
r\ —p cost? cos ф, r2 =
3.6. Скалярные формы уравнений движения
179
Координатная поверхность, соответствующая постоянному значению />,
представляет собой сферу:
При фиксированном значении г3 точки принадлежат плоскости V, па-
параллельной базисным векторам ei, е2 и находящейся на расстоянии
psiwd от соответствующей им координатной плоскости. При различных
значениях гз соответствующие плоскости V пересекаются с координат-
координатными сферами по параллелям. В каждой плоскости V величины pcostf,
ф суть полярные координаты точек.
Когда зафиксирован только угол ф, то получается координатная
плоскость V\, заданная уравнением
—г\ sin ф + r2 cos ф = 0.
Эта плоскость перпендикулярна вектору
е'2 = —ei sin ф + е2 cos ^
и проходит через третью координатную ось. Каждая точка этой плос-
плоскости задается радиусом-вектором
г = xie + х2е3,
где
е = ei cos^ + e2sin^, x\ = />costf, х^ = />sint?.
Ясно, что в плоскости V\ величины р \л д служат полярными координа-
координатами. При всевозможных значениях ф координатная сфера пересекается
плоскостями V\ по меридианам. Параллели и меридианы образуют сет-
сетку координатных кривых.О
Как уже отмечалось выше, выбранным конкретным значениям
криволинейных координат х\, #2, #з соответствует единственный
радиус-вектор евклидова пространства
г = г(хьх2,хз).
Когда меняется только одна координата х,-, а остальные остаются
постоянными, конец этого вектора описывает координатную кривую,
отвечающую координате х,-. Частная производная dr/dx{ задает ка-
касательный вектор к этой кривой. Из произвольной точки А простран-
пространства можно провести три единичных вектора
дт дг
-1
дг
дх2
дг
дх2
-1
дг
дх3
дх3
-1
12*
180
Глава 3. Динамика поступательного движения
касательные к соответствующим координатным кривым. Векторы тъ,
Т2 тз, с началом в точке А образуют локальный репер криволинейной
системы координат.
Пример 3.6.3. Локальный базис цилиндрической системы коор-
координат принимает вид
dp
dip
-i
dp
д<р
дг3
cos <p + ег sin <p,
-1
= —ei sin (p + ег cos v?,
-1
= е3.
Видим, что это — взаимно ортогональные векторы.О
Пример 3.6.4. Локальный базис сферической системы координат:
dr
dr
т* = дф
dp
dr_
dr_
дф
-1
cost?cost{> + ег costf sin^ + езsint?,
-1
= —ei sin д cos ф — ег sin i? sin ^ + ез cos t?,
-l
= —ei sin ^ -f eo cos ф.
Здесь вектор тр направлен вдоль радиуса-вектора, вектор т$ — по каса-
касательной к меридиану, вектор т^ — по касательной к параллели. Векторы
Тр, 7V?, Тф взаимно перпендикулярны.О
С целью получения уравнений движения в проекциях на оси ло-
локального репера криволинейной системы координат х\, хч, #з рас-
рассмотрим скалярные произведения ускорения материальной точки и
единичных векторов т\, тг, тз:
= w • г,- =
dr_
Очевидно имеем
V =
—
dt
дт
ax,-
[dt \ dxij dtdxi]
дт .
dr .
^ X
0x2
dv .
д X
0x3
Следовательно,
д
3.6. Скалярные формы уравнений движения
181
Кроме того,
d dr _ д2г
dt dxi
d2r . d2v
+
d2
d2r .
Сопоставив эти равенства, найдем
d dr d\
Значит,
Отсюда
^дг__ dv _ д fv2\
dt дх{ ~ V ' дх{ ~ ах^ V Yy
Определение З.6.1. Выражение
rp _^
называется кинетической энергией материальной точки. Выражение
дг
называется обобщенной силой, соответствующей координате Х{.
Теорема 3.6.1. Уравнения движения материальной точки в про-
проекциях на оси локального репера криволинейной системы координат
имеют вид
Доказательство. Умножим обе части уравнения
mw = F
скалярно на вектор г,-:
г т, дг
mwi =F ^Г
дг
-1
182
Глава 3. Динамика поступательного движения
Учитывая найденное выше выражение для wj и то, что масса мате-
материальной точки всегда постоянна, получаем утверждение теоремы.О
Система дифференциальных уравнений теоремы 3.6.1 вместе с на-
начальными условиями определяет зависимости криволинейных коор-
координат a?i, #2, #з от времени. Они задают закон движения материаль-
материальной точки.
Элементарное перемещение точки имеет вид
Рассмотрим элементарную работу силы F на перемещении dr:
А = F • dr =
Я
dxi' =
Видим, что обобщенные силы суть коэффициенты при дифференци-
дифференциалах криволинейных координат в выражении для элементарной ра-
работы.
Скорость и квадрат скорости даются равенствами
dr .
2 _
V —
Квадрат скорости не меняется при преобразованиях координат, и ко-
коэффициенты
8г I | дг
Ti • Ti
суть компоненты метрического тензора. Когда локальный базис
Т2, тз ортонормирован, имеем
Т =
2
m
• 2 9T
*« dx- =
Xi.
Таким образом, для составления уравнений движения достаточно вы-
выразить в криволинейных координатах элементарную работу силы и
кинетическую энергию точки. После этого составление уравнений
движения сводится к операциям дифференцирования.
Уравнения движения материальной точки в форме, представлен-
представленной теоремой 3.6.1, носят название уравнений Лагранжа второго ро-
рода.
3.6. Скалярные формы уравнений движения
183
Пример 3.6.5. Уравнения движения в цилиндрических
координатах. Соответствующий локальный базис ортонормирован.
Далее
Яг
= 1,
dp
d<p
= P,
dr3
Скорость в этом базисе имеет координаты
vP = f>, v^-рф, v3 = r3.
Выражение для кинетической энергии принимает вид
T=j{p2 + p2<p2 + rl).
Обобщенные силы даются формулами
Qp = F\ cos <p -f F2 sin <p = Fp,
Qv = (-Fi sin <p + F2 cos v?)p = Fvp,
Q3 = F3,
где Fp = F -тр, Ftp = F • tv. В итоге получаются следующие уравнения
движения:
^з = F3.
= Fp, m"т:{р2ф)
Они удобны, когда нет проекции силы на локальные оси т^ и т3.О
Замечание 3.6.1. В случае плоскопараллельного движения ки-
кинетическая энергия в полярных координатах р и <р имеет вид
TB+V)
Пример 3.6.6. Уравнения движения в сферических ко-
координатах. Локальный базис в таких координатах будет ортонормиро-
ванным, причем
Я- =1,
9
Скорость имеет компоненты
Vл — p. V<A — р и V\h ~ p W COS 1/ .
Поэтому кинетическая энергия выражается формулой
184 Глава 3. Динамика поступательного движения
Вычислим обобщенные силы
Qp = F\ cos i? cos ф + F2 cos tf sin ф + F3 sin tf = Fp,
Q^ = (—Fi sin i? cos V> — F2 sin 1? sin ^ + F3 cos i?)p = F$ p,
Q^ = (~Fi sin V> + F2 cos ф)р cos t? = F^ p cos 1?,
где Fp = F • tp, F^ = F • r^, F^ = F • Тф. В итоге получим следующие
уравнения движения:
ш'р - mpd2 - m/9^2 cos2 d = Fp, m-r(/92i?) -f тр2ф2 sin 1? cos 1? = F* ^?,
m~(/92V>cos2i?) = F^ pcosd.
Такие уравнения удобны, когда либо F$ — 0, либо равны тождественно
нулю обе проекции F^ и F^.O
В том случае, когда движение происходит вдоль известной кривой,
заданной параметрически:
где s — длина дуги траектории, удобными могут оказаться естествен-
естественные оси. По теореме 2.2.1 проекции ускорения на естественные оси
имеют вид
dv v2
wT = —, w» = —, wp = О,
где
dv dr _
t — единичный вектор касательной к кривой в данной точке, и —
единичный вектор главной нормали, перпендикулярный к г и обра-
образующий вместе с г соприкасающуюся плоскость, E — единичный век-
вектор бинормали, перпендикулярный к соприкасающейся плоскости, v
— модуль скорости, р — радиус кривизны.
Теорема 3.6.2. Уравнения движения в проекциях на естествен-
естественные оси имеют вид
Fr
dv
Xdt Ft
= F-t,
mv
P
t —
2
F u,
где
= F-C.
Доказательство получается посредством проектирования век-
векторного уравнения второго закона Ньютона (см. стр. 160) на есте-
естественные оси. О
3.6. Скалярные формы уравнений движения 185
Следствие 3.6.1. Полная сила F, под действием которой проис-
происходит движение материальной точки, всегда принадлежит сопри-
соприкасающейся плоскости. Соприкасающаяся плоскость есть линейная
оболочка векторов v и F.
Следствие 3.6.2. Для того, чтобы вычислить нормальную со-
составляющую суммарной силы, достаточно знать лишь скорость v
движения точки по кривой.
Если касательная составляющая силы Fr — Fr{s,v,t) известна в
каждой точке кривой, то проекция
уравнения движения на касательную определяет закон s = s(<), когда
в начальный момент времени to задано s = so, ds/dt = vo.
Положение материальной точки на известной кривой не всегда
удобно задавать длиной дуги s. Пусть q — произвольная переменная,
связанная с s посредством равенства s = s(q). Тогда
, ч ds ds . d2s d2s .2 ds ..
r=r(9), » = - = -„, w=ieq +rqq-
Будем считать, что ds/dq ф 0 для любой точки траектории. Проек-
Проекцию уравнения движения на касательную перепишем в виде
где
Имеем дифференциальное уравнение одномерного движения.
Пример 3.6.7. Пусть траектория материальной точки предста-
представляет собой винтовую линию, параметризованную углом <р:
И = Rcosip, Г2 = Rsm<p, гз = — h<p/Bir).
Эта линия принадлежит поверхности цилиндра радиуса R. Ось ци-
цилиндра совпадает с третьей координатной осью. Когда <р кратно 2тг:
<р = 2ктт, третья координата кратна шагу винта Л: гз = — kh. На точку
действует сила тяжести
Р = -mge3y
и точка не испытывает сопротивления движению вдоль винтовой линии.
Требуется составить уравнение одномерного движения точки.
186 Глава 3. Динамика поступательного движения
Решение задачи можно осуществить различными способами.
Сначала применим уравнения в проекциях на цилиндрические оси. Если
бы на точку действовала только сила тяжести, то точка, имея постоян-
постоянное ускорение, двигалась бы либо вдоль третьей координатной оси, либо
по параболе в плоскости начального вектора скорости и вектора силы
тяжести. Чтобы точка двигалась по винтовой линии, помимо силы тя-
тяжести требуется дополнительная сила N (реакция связи). Обозначим
Np = N • тр, N^ = N • т,р, АГ3 = N • ез. Уравнения движения в цилин-
цилиндрических координатах примут вид
•2 _ d , 2 -ч h
р' dt 2тг '
так как по условию задачи должно быть выполнено г = R = const,
Pr = Ру — 0. Имеем смешанную задачу динамики: задан вид траек-
траектории и частично заданы силы. Реакция N неизвестна, но в условии
сказано, что N не влияет на движение точки вдоль винтовой линии.
Значит, N перпендикулярна касательной к кривой г = r(ip). Направле-
Направление касательной дается в данном случае выражением
dv h
Х~ ~~ *^тч>"" тг ез •
dip 2тг
Учитывая, что N = Nptp + N^t^ + АГзез, запишем условие ортогональ-
ортогональptp
ности:
N
dip 2тг
Тем самым получено дополнительное уравнение, позволяющее полно-
полностью решить задачу. Из условия ортогональности найдем
Тогда второе и третье уравнения движения можно представить в виде
тЯ2ф = —АГ3, -т—ф = -mg + АГ3.
Исключив неизвестную ЛГз, получим искомое уравнение
Поставленная задача решена, но дополнительно мы можем найти
также все составляющие реакции N:
?[\ Np = -
3.6. Скалярные формы уравнений движения 187
Для сравнения решим теперь эту же задачу посредством проектиро-
проектирования уравнения движения на касательную к траектории. Имеем
г =
dr
dip
dr
dip
-l
Следовательно,
Рт=Р.т=\#+Ь?Г*гп9Н
2тг *
По условию задачи реакция N не дает проекцию на касательную к траек-
траектории. Поэтому проекция уравнений движения на направление вектора
т примет вид
По определению винтовой линии
vz = — -— v
Z7T
Отсюда
Подставляя найденное выражение в левую часть проекции уравнения
движения на касательную г, выводим искомое дифференциальное урав-
уравнение одномерного движения
'-?[*¦?]"'¦
в точности совпадающее с найденным выше.
Второй путь решения задачи оказался более экономным. Удалось
обойтись без явного использования компонент реакции N, исключив их
путем проектирования уравнений движения на перпендикулярное к N
направление.
При желании можно и с помощью второго способа найти реакцию N.
Здесь получим лишь составляющую реакции вдоль главной нормали.
Единичный вектор касательной дается формулой
Г 2 ft2 "Г* Г „ . „ h ]
т= \Н + —Н — Rsimpei + Rcosipe2 — — ез .
L 4tt2J I 2тг J
188 Глава 3. Динамика поступательного движения
По определению главной нормали получим
I/ _ rfr__ drd<p _ Г 2 h2]'* d<p
pk ds d(p ds [ 47T2J ds p
где pk — радиус кривизны траектории. Очевидно, что
dip
dip
Поэтому
т. е. главная нормаль направлена в сторону, противоположную вектору
тр, а выражение для радиуса кривизны pk имеет вид
1 Го2
Выше были найдены формулы для компонент вектора скорости. Из них
следует
Проекция уравнений движения на нормаль к траектории имеет вид
Но так как i/ = — тр, получим АГ^ = ~ЛГр. Это соответствует найденному
выше значению реакции.О
Обратимся к геометрическим методам анализа свойств движения.
Обозначим Q Э х = {ж,-} — пространство координат (криволинейных
в общем случае), задающих радиус-вектор материальной точки. Раз-
Размерность пространства координат Q не превосходит трех. Скорость
точки задается набором х = {xi} ? Qy Пространство скоростей Qt
имеет ту же размерность, что и пространство Q.
Определение 3.6.2. Фазовое пространство есть прямое произ-
произведение Q х Qt координатного множества и множества скоростей.
Тем самым фазовое пространство всегда четномерно.
В частности, три координаты радиуса-вектора и три компоненты
скорости образуют шестимерное фазовое пространство. Если поло-
положение точки в пространстве вполне определено лишь одной коорди-
координатой (точка движется по заданной кривой), то ее фазовое простран-
пространство двумерно и может интерпретироваться как фазовая плоскость.
3.6. Скалярные формы уравнений движения 189
Каждому состоянию материальной точки, представляющему со-
собой некоторый набор координат ж и их скоростей ж, соответствует
одна и только одна точка фазового пространства (фазовая точка).
Движению материальной точки в реальном пространстве соответ-
соответствует движение фазовой точки в фазовом пространстве. Траекто-
Траектория движения фазовой точки называется фазовой кривой. Фазовая
кривая может вырождаться в единственную точку. Такая точка на-
называется положением равновесия.
Если существуют какие-либо первые интегралы уравнений дви-
движения, то эти интегралы выделяют в фазовом пространстве гипер-
гиперповерхности, которым должна принадлежать фазовая точка в любой
момент времени.
Рассмотрим решение уравнений движения, начальные условия ко-
которого при t = О изображаются некоторой точкой М фазового про-
пространства. Для момента t будем иметь преобразование в силу уравне-
уравнений движения, переводящее точку М в точку M(t). Пусть уравнения
движения автономны, т. е. ускорение не зависит явно от времени, и
пусть любое их решение продолжается на всю ось времени. Преобра-
Преобразование G* , обеспечивающее переход М —> M{t)} взаимно однозначно
и дифференцируемо по фазовым координатам {диффеоморфизм). Все
такие преобразования G* образуют группу:
Gx oGs = Gt+5, G° = 1, G'x = (G*).
Эту группу называют фазовым потоком, определенным уравнения-
уравнениями движения в фазовом пространстве. Фазовая кривая может быть
представлена параметрически:
х = x(xq, i0, t)> х = *(*о, «о, 0>
где жо,жо — начальное положение фазовой точки. В общем случае
это кривая в шестимерном пространстве. Фазовый портрет движе-
движения есть полное множество возможных типов фазовых кривых.
Фазовые кривые обладают рядом специфических свойств. Проил-
Проиллюстрируем эти свойства на примере фазовой плоскости.
Теорема 3.6.3. Плоская фазовая кривая, в точках которой уско-
ускорение не обращается в нуль, может иметь касательную, парал-
параллельную оси скорости, только при х = 0.
Доказательство. Уравнение движения можно представить в ви-
виде
dx . dx
- = *, ^ = /(«,«,«).
190 Глава 3. Динамика поступательного движения
Отсюда при /(ж, i, t) ф 0 получим
dx х
dx f(x,x,t)'
Параллельность касательной и оси скорости означает равенство ну-
нулю производной dx/dx.O
Следствие 3.6.3. Фазовая кривая не может быть замкнутой
ни в полуплоскости, где х > 0, ни в полуплоскости, где х < 0. При
х > 0 фазовая тонка движется в направлении увеличения координа-
координаты х.
Аналогичные свойства можно установить в случае большего чи-
числа измерений.
§ 3.7. Основные теоремы динамики материальной
точки
Определение 3.7.1. Количеством движения материальной точ-
точки называется вектор Q = mv.
С учетом этого определения второй закон Ньютона может быть
представлен в виде
dt
Другими словами, скорость изменения количества движения матери-
материальной точки равна вектору силы, действующей на точку.
Теорема 3.7.1. (Интеграл количества движения). Пусть
проекция силы F на направление постоянного вектора е равна ну-
нулю. Тогда равенство
Q е = с
есть первый интеграл уравнений движения, выражающий сохране-
сохранение проекции количества движения на ось с направляющим векто-
вектором е.
Доказательство. Умножим обе части равенства Q = F скалярно
на е. С учетом условия теоремы получим е • Q = 0. Вектор е не
меняется. Поэтому
Следовательно, в силу уравнений движения, скалярное произведение
е • Q будет постоянным.D
3.7. Основные теоремы динамики материальной точки 191
Пример 3.7.1. Пусть материальная точка движется в поле парал-
параллельных сил F = Fk, где F — величина силы (не обязательно посто-
постоянная), а к — постоянный единичный вектор. Выберем вектор е _L k
Все такие векторы е образуют плоскость V, перпендикулярную вектору
к. По теореме 3.7.1 должно быть Q • е = с, так как F • е = 0. Учитывая,
что масса точки постоянна, получим следствие: ve = ve = const. Сле-
Следовательно, проекция вектора скорости точки на плоскость V обязана
сохраняться во все время движения.О
Определение 3.7.2. Кинетический момент материальной точ-
точки (момент количества движения) относительно точки (полюса) О
есть вектор
K = rx Q,
где г — радиус-вектор точки, имеющий начало в О.
Теорема 3.7.2. (Об изменении кинетического момента).
Производная по времени от кинетического момента, взятого отно-
относительно неподвижного полюса О, равна моменту суммы всех сил,
приложенных к материальной точке:
dK
Доказательство.
^ - А(г х Q) - — х Q rx^-rxF
так как v = dr/dt параллельно Q.O
Следуя Резалю, доказанной теореме можно дать геометрическую
формулировку: скорость конца вектора кинетического момента,
взятого относительно неподвижного полюса, равна моменту сум-
суммы всех сил, действующих на материальную точку.
Теорема 3.7.3. Если на точку действует центральная сила, то
существует векторный первый интеграл К = с и движение точки
происходит в неподвижной плоскости, перпендикулярной вектору с
и проходящей через центр силы.
Доказательство. Выберем полюс О, совпадающий с центром
силы. По теореме 3.7.2 получим
так как F = F(r)r и г х F = 0. Поэтому К = с, где с — постоянный
вектор, определяемый начальными условиями движения. Кинетиче-
Кинетический момент перпендикулярен плоскости, натянутой на векторы г и
192 Глава 3. Динамика поступательного движения
v. Значит, эта плоскость не меняет своей ориентации в пространстве.
Кроме того, эта плоскость проходит через центр неподвижной силы.П
Пусть вектор rn(t) начинается в неподвижной точке О и принад-
принадлежит при любом t некоторой плоскости V. Обозначим vn = dYu/dt,
v — нормаль к плоскости V, S(t) — площадь сектора, ограничен-
ограниченного начальным вектором гп(*о)> вектором гп(*)> соответствующим
некоторому значению времени t > to, и траекторией конца вектора
гп(*), получающейся при изменении t от начального значения to. Бу-
Будем считать приращение S(t) положительным, когда оно происходит
вследствие вращения rn(t) против хода часовой стрелки, если смо-
смотреть из конца вектора i/.
Теорема 3.7.4. Пусть гп € V. Тогда справедливо равенство
гп х vn =2v — .
Доказательство. За элемент площади сектора можно взять пло-
площадь треугольника с вершиной в полюсе О. Одна сторона треуголь-
треугольника образована вектором гп(*)> а другая сторона начинается из кон-
конца вектора rn(t) и образована вектором rds, где т — единичный век-
вектор касательной к траектории, вычерчиваемой концом вектора гп(*)>
a ds — элемент дуги траектории.
Предположим сначала, что если смотреть с конца вектора is на
плоскость V, то переход в кратчайшем направлении от вектора гп к
вектору т осуществляется против хода часовой стрелки (гп вращается
против хода часовой стрелки). Тогда
гп х rds = i/|rn х т\ ds = i/rndssm(f^pr) = 2vdS.
Если переход от вектора гп к вектору т осуществляется по ходу ча-
часовой стрелки, то
гп х rds = — i/|rn х т\ ds = —i/rndssin(fn7^) = 2i/d5,
что соответствует принятому определению знака приращения площа-
площади. Учитывая, что ds/dt = vn, получаем утверждение теоремы.О
Определение 3.7.3. Величина dS/dt называется секторной ско-
скоростью вектора rn(t).
Пример 3.7.2. Пусть в плоскости V траектория точки задана по-
полярными координатами г = г(<р). Направление отсчета <р положительно
при вращении г(<р) против хода часовой стрелки, если смотреть с конца
вектора и. Установим выражение для секторной скорости в полярных
координатах.
3.7. Основные теоремы динамики материальной точки 193
Обозначим d<p — приращение полярного угла. Тогда
г • т
г(<р + d<p) = |г 4- rds\ = y/(r + rdsJ « г Н ds.
г
Приближенное равенство выполнено с точностью до малых второго по-
порядка относительно ds. Пусть d<p положительно. По определению сек-
секторной скорости найдем
2dS = r(y?)r(y? 4- d<p) sin(r(ip), r(y? 4- dtp)) = r2d<p.
Последнее соотношение справедливо, так как речь идет о равенстве диф-
дифференциалов. Таким образом,
2^ = г*О
dt dt
Теорема 3.7.5. Проекция кинетического момента на постоян-
постоянный единичный вектор и равна произведению массы и удвоенной сек-
секторной скорости, которую имеет проекция радиуса-вектора мате-
материальной точки на плоскость V, перпендикулярную к вектору и.
Доказательство. Рассмотрим скалярное произведение
К • и = m(r х v) • и.
Векторы г и v всегда можно представить в виде
г = гп + гс и, v = vn 4- vc i/,
где гп G V, vn G V, причем vn = drn/dt. Следовательно,
(г x v) = (гп + геи)х (уи + vcv)=rnx\n + rci'XYn+vcrnx и.
Векторное произведение ортогонально сомножителям. Поэтому
(г х v) • и = (гп х vn) • и.
Теперь достаточно применить теорему 3.7.4:
где 5 — площадь, заметаемая вектором гп в плоскости V.O
Теорема 3.7.6. (Теорема площадей). Если проекция момен-
момента силы на какое-либо постоянное направление г/ равна нулю, то
проекция радиуса-вектора материальной точки на плоскость, пер-
перпендикулярную и, заметает в любые равные промежутки времени
одинаковые площади.
13-1503
194 Глава 3. Динамика поступательного движения
Доказательство. Применим теорему 3.7.2 и учтем, что проекция
момента силы на направление i/ равна нулю:
i/~ = «/.(rxF) = 0.
Единичный вектор и не изменяется. Имеем первый интеграл
К и-с
Постоянная с вычисляется по начальным условиям, заданным в мо-
момент времени to. По теореме 3.7.5 получим
о dS
где 5 — площадь, заметаемая проекцией радиуса-вектора на плос-
плоскость, перпендикулярную вектору и. После интегрирования найдем
где So — начальное значение площади.О
Теорема 3.7.7. Если материальная точка описывает плоскую
траекторию, причем ее радиус-вектор с началом в полюсе О> распо-
расположенном на плоскости, заметает за любые равные промежутки
времени одинаковые площади, то движение осуществляется под дей-
действием центральной силы, линия действия которой проходит через
точку О.
Доказательство. Пусть i/ — единичный вектор, перпендикуляр-
перпендикулярный к упомянутой в условии теоремы плоскости. Тогда кинетический
момент К точки параллелен вектору и. По условию теоремы сектор-
секторная скорость точки постоянна:
at
Следовательно,
'¦"-?¦••
Поэтому F||r.D
Доказанная теорема есть пример частичного решения обратной
задачи механики. Наличие векторного интеграла кинетического мо-
момента представляет собой необходимый и достаточный признак того,
что сила, действующая на материальную точку, будет центральной.
3.7. Основные теоремы динамики материальной точки 195
Теорема 3.7.8.(Об изменении кинетической энергии). Диф-
Дифференциал dT кинетической энергии Т = mv2/2 равен работе си-
силы на действительном элементарном перемещении материальной
точки:
dT=F- dr.
Доказательство. Умножим уравнение, выражающее второй за-
закон Ньютона, скалярно на v. Будем иметь
d(mv)
А
или
= F v
dt V 2 ) A •
Теорема 3.7.9. (Интеграл энергии). Если сила, действующая
на материальную точку, потенциальна с силовой функцией U(r), то
уравнения движения допускают первый интеграл (интеграл энер-
энергии)
где П = — U — потенциальная энергия, h — постоянная энергии,
вычисляемая по начальным условиям.
Доказательство. На элементарном перемещении, учитывая оп-
определение силовой функции, будем иметь F • dr = dU. Теорема 3.7.8
дает dT = dU> или d(T — U) = 0. Поэтому утверждение теоремы
справедливо, причем h сохраняется на конкретной траектории. От
траектории к траектории величина h может принимать разные значе-
значения, так как изменить траекторию — значит взять другие начальные
условия.П
Определение 3.7.4. Скалярная величина Е = T-f П называется
полной механической энергией материальной точки.
С помощью теоремы 3.7.9 можно сделать качественные выводы о
характере движения. Например, пусть на точку действуют потенци-
потенциальные силы с силовой функцией U(r). Тогда
Имеем v2 > 0, Следовательно, U(г) + Л > 0, что выделяет область
допустимых положений движущейся точки.
Определение 3.7.5. Скалярное произведение F • v вектора силы
F и вектора скорости v материальной точки называется мощностью
силы. Единицей мощности служит "ватт": 1вт = 1н • м/с. Мощность
имеет смысл работы, которую сила способна совершить за единицу
времени.
13*
196 Глава 3. Динамика поступательного движения
Следствие 3.7Л.Производная по времени от кинетической энер-
энергии точки равна мощности силы, действующей на эту точку:
Пример 3.7.3. Движение точки в поле параллельных
сил тяжести. Основные формулы для такого движения можно най-
найти в примере 3.5.2. Здесь проиллюстрируем действие основных теорем
динамики точки. Пусть вектор е3 задает направление вертикали, и на
материальную точку действует сила тяжести Р = — тдез. Выберем ор-
тонормированный репер Ое^ез с началом в произвольной точке О
трехмерного пространства. Векторы ei и ег образуют горизонтальную
плоскость V, проходящую через начало координат О. Количество дви-
движения материальной точки подчиняется уравнению
d(m\)
Проекция силы на горизонтальную плоскость V равна нулю. Согласно
теореме 3.7.1, проекция скорости точки на горизонтальную плоскость
(горизонтальная скорость) будет сохраняться как по величине, так и по
направлению. Поэтому проекция точки на плоскость V будет переме-
перемещаться по прямой линии /, уравнение которой зададим в параметриче-
параметрическом виде:
где е ? V — постоянный единичный вектор направления горизонталь-
горизонтальной скорости, х — координата переменного положения проекции мате-
материальной точки на плоскости V, вектор г0 ? V привязывает прямую
к началу координат, задает точку прямой при х = 0 и остается посто-
постоянным при движении материальной точки. Таким образом, гп ? V при
любом значении х. Обозначим vT модуль горизонтальной составляющей
скорости и представим радиус-вектор г точки и ее скорость v в виде
г = уе3+ гп, v =
Очевидно, что
Откуда гп = х е = vr е —> х = vr = const. Поэтому
х = хо + (t -to)vrf
где xq — значение координаты х в начальный момент движения t = to.
3.8. Влияние связей на движение материальной точки 197
Проекция уравнения количества движения на вертикальную ось дает
У=-9 —> У = -т(< - UJ + (t- to)vb + уо,
где vB — начальное значение вертикальной скорости, а уо — начальное
значение вертикальной координаты.
Максимальное значение ут координаты у можно найти с помощью
интеграла энергии (теорема 3.7.9). Имеем
У2 + *? , . vl + v2T vl
т— \-mgy = h = m— h mgy0 или ут - Уо = тг-,
2 2 2g
так как для максимальной высоты ут — уо имеем у = 0.
Отметим, что в рассматриваемой задаче вектор силы тяжести не со-
создает момента вокруг вертикальной оси. Теорема 3.7.6 утверждает, что
в этом случае горизонтальная проекция радиуса-вектора будет иметь
постоянную секторную скорость. В самом деле, площадь, заметаемую
проекцией радиуса-вектора на горизонтальную плоскость, можно найти
по формуле
25е3 = (г0 х е)(х - х0) = vr(r0 x e)(t - t0).
Видим, что S меняется равномерно по времени, и теорема площадей в
данном случае имеет очевидную интерпретацию. О
Ниже будут даны другие примеры применения доказанных тео-
теорем, иллюстрирующие их эффективность при исследовании движе-
движения.
§ 3.8. Влияние связей на движение материальной
точки
Рассмотрим задачи, в которых из-за геометрических и кинемати-
кинематических ограничений (связей) ускорение w, реально получаемое точ-
точкой, не совпадает с ускорением wf = F/m, которое возникло бы под
действием заданной силы F при отсутствии ограничений. Естествен-
Естественно разницу между w и Wf объяснить влиянием некоторой дополни-
дополнительной силы.
Определение 3.8.1. Реакция связи есть сила, которая, будучи
приложенной к материальной точке вместо связи, сохраняет неиз-
неизменным закон движения точки.
Принцип освобождения от связей утверждает, что всегда су-
существует реакция связи, действие которой эквивалентно действию
связи.
198 Глава 3. Динамика поступательного движения
Пусть N — реакция связи. При освобождении от связи второй
закон Ньютона следует записать в виде
mw = F 4- N.
Силу F в отличие от реакции связи будем называть активной силой,
вызывающей требуемое движение.
Предположим, что ограничение задано с помощью уравнения
причем дФ/dv ф 0. Такое ограничение носит название дифферен-
дифференциальной связи. Это ограничение выделяет допустимые значения
вектора скорости для любого заданного положения точки и для лю-
любого заданного фиксированного момента времени. Активная сила F
обеспечивает выбор действительных значений скорости среди всех
допустимых.
При действии активной силы F реакция связи N должна быть
такой, чтобы левая часть уравнения дифференциальной связи была
первым интегралом уравнения движения, ибо вдоль действительной
траектории эта связь должна тождественно удовлетворяться.
Воспользовавшись теоремой 3.5.1, приравняем нулю производную
в силу уравнений движения от функции Ф:
1 9Ф ,_ ^тч дФ дФ Л
Отсюда получаем необходимое и достаточное условие, которому дол-
должна удовлетворять реакция N, чтобы движение материальной точки
происходило в соответствии с заданной дифференциальной связью:
Это условие ограничивает лишь проекцию N на вектор дФ/dv. Сле-
Следовательно, вектор N целесообразно представить в виде
где скаляр А = А(г, v,<) однозначно определен:
-2
А = -
а вектор Nr ± дФ/dv, и для его определения нужна дополнительная
информация.
3.8. Влияние связей на движение материальной точки 199
В механике реакция связи всегда считается пассивной силой. Это
означает, что реакция связи не может самостоятельно вызвать дви-
движение, не приводящее к нарушению связи, а может тормозить такое
движение или препятствовать его возникновению. Вместе с тем реак-
реакция всегда препятствует нарушению связи. Чтобы однозначно найти
NT, следует указать закон торможения. Таким, в частности, может
быть закон сухого трения скольжения (см. пример 3.4.3)
дФ
Уг
кг
где / — коэффициент трения, а вектор
/ дФ\ дФ
V dvjdv
-2
VT = V-
есть составляющая скорости, перпендикулярная вектору дФ/д\ и по-
потому сохраняющая связь. Может встретиться также и закон вязкого
трения (см. пример 3.4.4):
Nr = -ae(vr)vr, ae(vr) > 0.
Особо выделим случай, когда Nr = 0. Тогда N = \дФ/д\.
Определение 3.8.2. Пусть вектор 6г задает перемещение точки,
удовлетворяющее условию
дФ
Такой вектор 6г называется виртуальным перемещением точки.
Вектор 6г определен неоднозначно. Он принадлежит плоскости, пер-
перпендикулярной вектору дФ/dv.
Определение 3.8.3. Связь, стесняющая движение материальной
точки, называется идеальной, если для любого виртуального переме-
перемещения 6т ее реакция N удовлетворяет условию
N • 6т = 0.
Очевидно, что условие ортогональности реакции N и любого вир-
виртуального перемещения есть необходимое и достаточное условие того,
что Nr = 0. Можно сказать также, что реакция идеальной связи не
препятствует движению, совместимому со связью в данный момент
времени, и однозначно определена активной силой и уравнением свя-
связи.
Особо обратим внимание на различие между действительным пе-
перемещением dr материальной точки во времени и виртуальным ее
перемещением 6г в данный фиксированный момент времени.
200 Глава 3. Динамика поступательного движения
Лемма 3.8.1. Справедлива формула
ЭФ , ЭФ .
av av
где dr — дифференциал перемещения точки в действительном дви-
движении (действительное перемещение).
Доказательство. Скорость точки и дифференциал ее радиуса-
вектора в действительном движении связаны равенством dr = vdt.
Умножив обе части этого равенства скалярно на дФ/dv, получим
утверждение леммы.D
Видим (см. определение 3.8.2), что при
дФ
*0
множество виртуальных перемещений не включает действительное
перемещение. Если же
дФ
0
то действительное перемещение точки за время dt будет принадле-
принадлежать множеству виртуальных.
Теорема 3.8.1. Связь <$(v,r,tf) = 0 допускает принадлежность
действительного перемещения множеству виртуальных тогда и
только тогда, когда при фиксированных rut она определяет в про-
пространстве скоростей коническую поверхность с вершиной в точке
v = 0.
Доказательство. Необходимость. Пусть связь допускает при-
принадлежность действительного перемещения множеству виртуальных.
Тогда одновременно должны быть выполнены уравнения
дФ
Ф@ 0 0
Зафиксируем г и t. Так как \дФ/д\\ ф 0, можем воспользоваться
теоремой о неявной функции и записать эти уравнения в виде
Ф = v3 - f{vuv2) = 0, v3 = ^— vi + ^
где vi, V2, г;з — координаты вектора v в каком-нибудь ортонормиро-
ванном базисе. На плоскости (v\, ^2) рассмотрим произвольный луч
v\ = sa, vo = s/?, где a и /3 фиксированы, а s переменный параметр,
3.8. Влияние связей на движение материальной точки 201
выделяющий точки луча. Тогда второе уравнение можно преобразо-
преобразовать к виду
s — = / или / = s — —> г>3 = «7»
as $o
где /о есть значение функции / при начальном s = sq. Следовательно
7 = /o/so фиксировано при изменении $. Тем самым показано, что
если уравнению связи удовлетворяет вектор v, то и вектор sv удовле-
удовлетворяет уравнению той же связи. Точка v = 0, будучи предельной
при s —> 0, всегда может быть доопределена, как удовлетворяющая
уравнению связи. В пространстве скоростей имеем структуру кони-
конической поверхности с вершиной в точке 0. Заметим, что плоскость
есть частный случай конической поверхности.
Достаточность. Если уравнение Ф = 0 определяет коническую
поверхность с вершиной в точке 0, то это означает, что функция Ф не
меняется вдоль направления скорости, а потому
Реакция идеальной связи выразится формулой
Для материальной точки, стесненной идеальной связью Ф(у, г, t) = О,
уравнение движения принимает вид
mw = P + А—,
dv
и оно вместе с уравнениями связи и начальными условиями однознач-
однозначно определяет закон движения. Полученное уравнение называется
уравнением Лагранжа с множителем.
Теорема 3.8.2. (Влияние идеальной связи на кинетиче-
кинетическую энергию). Допустим, что на материальную точку нало-
наложена идеальная связь Ф(у,г,2) = 0. Тогда изменение кинетической
энергии определено выражением
dT <ЭФ
dt -F'v + XQv 'V'
Доказательство. Поскольку связь идеальна, мы можем вос-
воспользоваться уравнением Лагранжа с множителем и скалярно умно-
умножить обе его части на скорость v точки. Тогда
хдФ
= P-v + A— -v.a
dt V 2 I dv
202 Глава 3. Динамика поступательного движения
Член [(ХдФ/dv) • v] выражает мощность (см. определение 3.7.5),
затрачиваемую реакцией связи при движении точки.
Теорема 3.8.3. (Интеграл энергии при наличии идеальной
связи). Пусть связь идеальна и такова, что действительное пере-
перемещение в любой момент времени принадлежит множеству вир-
виртуальных, а активная сила потенциальна с силовой функцией U(r).
Тогда имеет место интеграл энергии
T=U + h.
Доказательство. Коль скоро действительные перемещения при-
принадлежат множеству виртуальных и силы потенциальны, то
хдФ п _ 8U
д\ от
и доказываемая теорема есть следствие теоремы 3.8.2.?
Рассмотрим наиболее часто встречающиеся типы связей. Пусть
уравнение связи имеет вид
Ф(г, v, t) = А • v + В = 0, А ф 0,
где вектор А = A(r,tf) и скаляр В = B(r,t) зависят только от
радиуса-вектора г точки и времени /. Такое ограничение носит на-
название линейной дифференциальной связи. Из-за нее конец вектора
v должен принадлежать плоскости, перпендикулярной вектору А и
смещенной от материальной точки на расстояние ??/|А|. Это ограни-
ограничение выделяет допустимые значения вектора скорости для любого
заданного положения точки и для любого заданного фиксированно-
фиксированного момента времени. Для такой связи дФ/dv = А, и уравнение,
определяющее векторы виртуальных перемещений, представляется
следующим образом
А • <5г = 0.
Вектор 6г определен неоднозначно. Он принадлежит плоскости, пер-
перпендикулярной вектору А. Далее, в силу уравнения связи получим
дФ
v = A-y = -B.
д\
Таким образом при В ф 0 множество виртуальных перемещений не
включает действительное перемещение. Если же В = 0, то действи-
действительное перемещение точки за время dt будет принадлежать множе-
множеству виртуальных.
3.8. Влияние связей на движение материальной точки 203
Реакция идеальной линейной дифференциальной связи выразит-
выразится формулой
N = AA.
Для материальной точки, стесненной такой связью, уравнение Ла-
гранжа с множителем принимает вид
mw = F + АА,
и оно вместе с уравнением связи и начальными условиями однозначно
определяет закон движения.
Следствие 3.8.1. Допустим, что на материальную точку на-
наложена идеальная связь A-v+B = 0. Тогда изменение кинетической
энергии определено выражением
?¦'-»•
Доказательство. Воспользовавшись теоремой 3.8.2, найдем
^ = Fv + AAv.
at
Но уравнение связи влечет А • v = — B.U
Член (—\В) выражает мощность, затрачиваемую реакцией связи
при движении точки.
Следствие 3.8.2. Пусть линейная дифференциальная связь иде-
идеальна и такова, что действительное перемещение в любой момент
времени принадлежит множеству виртуальных (В = 0), а актив-
активная сила потенциальна с силовой функцией U(r). Тогда имеет ме-
место интеграл энергии
T=U + h.
Доказательство. Коль скоро В = 0 и F = dU/dv, то доказывае-
доказываемое утверждение вытекает из следствия 3.8.1.0
Пример 3.8.1. Точка перемещается в трехмерном пространстве
относительно ортонормированного репера Ое^ез. Ее радиус-вектор
выражается формулой
г = xiei + Ж2в2 + язез.
Пусть в каждой плоскости, перпендикулярной вектору ез, задано напра-
направление проекции скорости точки на эту плоскость, зависящее от коор-
координаты #з и времени:
204 Глава 3. Динамика поступательного движения
где f(x3,i) — заданная функция. В этом случае имеем дифференци-
дифференциальную связь А • v + В — 0, для которой
А = (/(*з,0.-1.0), 5 = 0,
и действительное перемещение принадлежит множеству виртуальных,
несмотря на зависимость вектора А от времени. Функция Ф(г, v, t) имеет
вид
Множитель Л дается выражением
А = -A + Z2)"
где F\ и Fi — компоненты активной силы F.O
Выше были рассмотрены случаи, когда связь существенно зави-
зависит от скорости. Предположим теперь, что 0Ф/д\ = 0. Такая связь
означает, что движение материальной точки ограничено поверхно-
поверхностью, заданной уравнением /(г,<) = 0 (геометрическая связь). Со-
Соответствующая дифференциальная связь имеет вид А • v -f- В = 0,
где
Примем, что df/dr ф 0. Виртуальные перемещения определены
уравнением
и принадлежат плоскости, касательной к связи при фиксированном
времени t. Действительное перемещение принадлежит множеству
виртуальных тогда и только тогда, когда В = df/dt = 0, т. е. когда
связь не зависит явно от времени. Реакция геометрической идеаль-
идеальной связи /(г,<) = 0 направлена вдоль градиента:
Мощность реакции связи выражается формулой (—A df/dt). Теорему
3.8.3 можно сформулировать следующим образом.
Следствие 3.8.3. Если геометрическая связь идеальна и не за-
зависит явно от времени, а активная сила потенциальна, то имеет
место интеграл энергии.
3.8. Влияние связей на движение материальной точки 205
Максимальное число независимых связей для материальной точ-
точки, движущейся в трехмерном пространстве, не может превышать
трех. Если имеются три такие связи, то ими скорость точки опреде-
определена однозначно как функция координат и времени. Изучение закона
движения в этом случае представляет собой задачу кинематики, а за-
задачей динамики тогда будет лишь определение усилий, реализуемых
этими связями.
Рассмотрим случай, когда имеются две независимые дифферен-
дифференциальные связи
Движение материальной точки будет происходить в соответствии с
заданными дифференциальными связями тогда и только тогда, когда
реакция N удовлетворяет следующей системе уравнений
дФ2
Решение этой системы неоднозначно. Однако можно заметить, что
при выполнении условия невырожденности она однозначно опреде-
определяет линейную комбинацию
~ дФ, дФ2
av д\
где Ai и А2 — искомые скалярные параметры. Реакцию связей тогда
можно представить в виде N = N + Nr, где составляющая Nr может
совпадать по направлению с любым ненулевым вектором ?г, перпен-
перпендикулярным одновременно и вектору дФх/dv, и вектору дФ2/д\. Из
системы уравнений для реакции невозможно определить такую со-
составляющую NT. Все указанные векторы 6г называются виртуаль-
виртуальными перемещениями в данном случае, и их множество описывается
системой однородных линейных уравнений
8Ф2
• 6г = 0, -?— • 6г = 0.
av
Условие идеальности связей (условие однозначной определимости ре-
реакции N) состоит в том, чтобы было выполнено N 6г = 0 для любого
виртуального перемещения, что означает равенство нулю составля-
составляющей NT.
206 Глава 3. Динамика поступательного движения
Теорема 3.8.4. Пусть на материальную точку действуют две
независимые идеальные дифференциальные связи
Ф1(у,р|*) = 0, Ф2(у,г,<) = 0.
Тогда изменение кинетической энергии точки выражается уравне-
уравнением
dT „ _ дФх х дФ2
_ = F.V + Al— v + A2 — .v,
где Ai и А2 — коэффициенты разложения вектора реакции связей:
Доказательство. С учетом условия идеальности связей уравне-
уравнения движения материальной точки можно представить в виде
C/V C/V
Осталось умножить это равенство на v и преобразовать стандартным
образом получившуюся левую часть. ?
Следствие 3.8.4. (Интеграл энергии). Если две независимые
идеальные связи таковы, что действительное перемещение матери-
материальной точки в любой момент времени принадлежит множеству
виртуальных, а сила, действующая на точку, потенциальна с сило-
силовой функцией U = U(г), то имеет место интеграл энергии
T=U + h.
Доказательство. Действительное перемещение принадлежит
множеству виртуальных в любой момент времени тогда и только то-
тогда, когда v • (дФх/dv) = v • (дФ2/д\) = 0. Кроме того, F = dU/дгЛ
Рассмотрим подробнее часто встречающиеся случаи.
1. Заданы две линейные по скоростям дифференциальные
связи
Фх = Ai • v + Вг = 0,
Каждое уравнение выделяет в пространстве скоростей плоскость, со-
содержащую конец вектора допустимой скорости. Обозначим эти плос-
плоскости V\ и Р2 соответственно. Множество допустимых скоростей есть
прямая, служащая пересечением плоскостей V\ иТ2-
3.8. Влияние связей на движение материальной точки 207
Виртуальное перемещение 6г точки в этом случае следует опре-
определить как решение системы уравнений
Ai • <5г = 0, А2 • 6г = 0.
Таким образом, множество виртуальных перемещений состоит из
всех векторов, перпендикулярных как вектору Ai, так и вектору А2.
Это множество можно описать формулой
6r = /?Ai х А2,
где 0 — скалярный коэффициент.
Пусть заданные дифференциальные связи идеальны (см. опре-
определение 3.8.3). Поскольку 0 — произвольный коэффициент, будем
иметь
N-(Ai х А2) = 0.
Такое равенство означает компланарность векторов N, Ai, А2. По-
Поэтому суммарную реакцию идеальных связей следует искать в виде
N = AiAi-f Л2А2.
По смыслу первое слагаемое правой части можно рассматривать как
реакцию первой связи, а второе слагаемое — второй:
Теорема 3.8.5. Пусть на материальную точку действуют две
независимые идеальные дифференциальные связи
Ai • v + Bi = 0, А2 • v + В2 = 0.
Тогда изменение кинетической энергии точки выражается уравне-
уравнением
at
где \\ и А2 — коэффициенты разложения вектора реакции связей по
векторам Ai и А2:
N = AiAi + A2A2.
Доказательство. Воспользуемся теоремой 3.8.4 и учтем, что в
соответствии с уравнениями связей Ai • v = — В\, А2 • v = —В2.П
Следствие 3.8.5. (Интеграл энергии). Если две независимые
идеальные линейные дифференциальные связи однородны: В\ — 0,
В2 = 0 (действительное перемещение материальной точки в любой
208 Глава 3. Динамика поступательного движения
момент времени принадлежит множеству виртуальных), а сила,
действующая на точку, потенциальна с силовой функцией U = U(r)f
то имеет место интеграл энергии
T=U + h.
Доказательство получается с помощью следствия 3.8.4.0
2. Заданы две геометрические связи:
Они накладывают ограничения на скорость точки:
Ai • v + Si = 0, А2 • v + В2 = 0,
где
0/2
Векторы Ai и Аг направлены по нормалям к соответствующим
поверхностям, когда время t рассматривается как фиксированный па-
параметр. Действительные перемещения принадлежат множеству вир-
виртуальных при В\ = #2 = 0- Для геометрических связей это означает,
что левая часть их уравнений не зависит явно от времени. Имеем
тогда две неподвижные поверхности в пространстве, пересечение ко-
которых дает траекторию материальной точки, и требуется определить
лишь закон ее движения вдоль траектории.
Следствие 3.8.5 об интеграле энергии для данного случая можно
переформулировать следующим образом.
Следствие 3.8.6. Пусть уравнения поверхностей, в пересечении
которых лежит траектория материальной точки, не зависят явно
от времени, а активная сила потенциальна. Тогда имеет место
интеграл энергии.
3. Геометрическая связь задана с помощью параметра:
где q — скалярный параметр, определяющий положение точки на
связи, t — время. Такая связь накладывает ограничение на скорость
точки:
дг . дг
+
3.8. Влияние связей на движение материальной точки
209
Исключив параметр q, можно получить уравнение связи в стандарт-
стандартной форме. Действительно, векторно умножив дифференциальную
связь на dv/dq, получим
Введем кососимметричную матрицу, соответствующую векторному
произведению:
?> =
0 ?i -
дг3
dq
о
\ dq dq
дг2 \
dq
р.
dq
0
Она вырожденная, в чем легко убедиться, умножив ее первую
строку на dri/dq, вторую — на dr^/dq, третью — на dr$/dq и ре-
результаты сложив. Следовательно, векторное уравнение
= 0
эквивалентно двум скалярным уравнениям, линейным относительно
компонент вектора скорости. Согласно определению (см. стр. 205)
виртуальное перемещение удовлетворяет уравнению
Dv = 6r х -^ = 0,
dq
решением которого служит вектор
дг
Здесь 6q — произвольный параметр. Как и следовало ожидать, вир-
виртуальное перемещение происходит вдоль направления касательной к
связи при фиксированном времени. Условие идеальности связи
N • <5г = 0
означает, что векторы N и dr/dq взаимно перпендикулярны:
14-1503
210 Глава 3. Динамика поступательного движения
Уравнение движения материальной точки с учетом воздействия на
нее связи следует записать в виде
mw = F 4- N.
Когда связь рассматриваемого типа идеальная, то реакция связи пол-
полностью исключается:
dv dv
С учетом того, что
d2v dv
dq dq' dt dq dq2 Ч dtdq dq'
полученное уравнение (см. доказательство теоремы 3.6.1) приводит-
приводится к виду уравнения Лагранжа
/ 01 \ 01 OY
dt\d4j~"dq=: "dq'
Таким образом, имеем одно дифференциальное уравнение второго
порядка, позволяющее установить закон движения точки по связи
под действием активной силы F. Умножив это уравнение на д, полу-
получим
d {.дТ\ dT.. dT . „ „ dv
или
Это уравнение выражает закон изменения кинетической энергии.
Член F • dr/dt учитывает мощность активной силы, возникающую
из-за того, что связь зависит не только от д, но и от <. Если сила,
действующая на точку, потенциальна с силовой функцией U(г), то
полученное уравнение принимает вид
di\q~dj~ ) + ~dtZ=Z~df~"dT'
Следствие 3.8.7. Пусть сумма Т + U не зависит явно от вре-
времени:
— (Г 4- U) = 0.
Тогда справедлив обобщенный интеграл энергии Якоби
Если связь от времени явно не зависит, то q(dT/dq) = 2Т, и этот
интеграл переходит в обычный интеграл энергии.
3.9. Одномерные осцилляторы 211
Отсутствие явной зависимости суммы Т + U от времени служит
достаточным условием существования обобщенного интеграла энер-
энергии не только для случаев, рассмотренных выше, но и в гораздо более
общем случае (см\ следствие 8.4.3).
§ 3.9. Одномерные осцилляторы
Изучим свойства решений часто встречающихся на практике ти-
типов дифференциальных уравнений движения. Они будут иметь при-
приложение как к движению одной материальной точки, так и к движе-
движению систем материальных точек, подверженных связям.
Гармоническим осциллятором называется механическая система,
движение которой полностью описывается дифференциальным урав-
уравнением вида
x+w2x = 0,
где х — координата, а а; — положительная постоянная, называемая
циклической частотой.
Пример 3.9.1. Ареометр — это цилиндрический сосуд с де-
делениями, по глубине погружения которого в жидкость можно судить о
ее плотности. Пусть zq — уровень равновесного положения, Р — вес,
S — площадь поперечного сечения ареометра, р — плотность жидко-
жидкости. В положении равновесия вес ареометра уравновешен силой Архи-
Архимеда: Р = zoSpg. Если ареометр имеет меньший уровень погружения
z = zo — х, то архимедова сила станет меньше веса. Без учета сил тре-
трения прибора о жидкость проекция уравнения второго закона Ньютона
на вертикальное направление примет вид
т'х = -Р + (zq - x)Spg)
или
m
Тем самым ареометр представляет собой гармонический осциллятор с
циклической частотой ш = y/Spg/m.O
Пример 3.9.2. Пусть однородная ровная доска находится под
действием силы тяжести и лежит горизонтально на двух роликах, бы-
быстро вращающихся так, что силы сухого трения, возникающие в точках
контакта доски с роликами, направлены навстречу друг другу. В поло-
положении, когда центр тяжести доски расположен точно посередине между
роликами, силы трения взаимно уравновешены. Половину расстояния
между роликами обозначим /. Сдвинем доску на расстояние х от пер-
первого ролика ко второму. Тогда сила давления N\ со стороны доски на
первый ролик и сила давления N2 со стороны доски на второй ролик
14*
212 Глава 3. Динамика поступательного движения
уравновешивают вес доски и связаны друг с другом правилом рычага
первого рода
Nx(l + х) = N2(l - *), N1 + N2 = Р,
или N\ — iV2 = —хР/l. По условию задачи имеем выражения для сил
трения: F\ = kN\, F2 = АгЛГ2, где к — коэффициент трения скольжения
роликов о доску. Уравнение движения доски принимает вид
ткР
Следовательно, рассматриваемая механическая система есть гармониче-
гармонический осциллятор
с циклической частотой ш = \/gk/l.O
Пример 3.9.3. Рассмотрим электрический колебательный кон-
контур, состоящий из конденсатора емкости С и катушки индуктивности L.
Пусть q — заряд на конденсаторе, / — ток в контуре. При изменении
тока в катушке возникает ЭДС самоиндукции
dl
Разность потенциалов на пластинах конденсатора есть u = q/C. Следо-
Следовательно,
Ldt ~ С
По определению тока I — dq/dt. Колебания заряда на пластинах кон-
конденсатора описываются уравнением гармонического осциллятора
с циклической частотой ш = y/{CL)~l.O
Видим, что весьма разнородные физические явления подчиняют-
подчиняются дифференциальному уравнению одного и того же типа и в этом
смысле оказываются подобными. Каждый раз, когда имеется та-
такое подобие, возникает принципиальная возможность моделировать
явления одной физической природы явлениями другой природы, по
той или иной причине более удобными для экспериментатора. Гар-
Гармонический осциллятор — это система с одной степенью свободы,
заданной координатой х. Фазовое пространство для него есть фа-
фазовая плоскость (х,х). Общее решение уравнения гармонического
осциллятора выражается равенствами
х = с\ coscj* -h
х = <jj{—с\ smut + С2 cosurt),
3.9. Одномерные осцилляторы
213
где с\ и С2 — постоянные интегрирования, определяемые по началь-
начальным условиям.
Пусть в момент времени t = О заданы х = жо, i = #о- Тогда,
очевидно,
d = а?0, с2
Уравнение гармонического осциллятора допускает интеграл энергии
W2X2
где h = (io + ^2iCo)/2 — постоянная энергии. Из интеграла энергии
следует, что фазовая кривая представляет собой эллипс, заданный
уравнением
х2 х2
— 4- — - 1
а2 + Ь2 "" '
где а = >/2ft/u;, 6 = \/2Л — полуоси. Фазовая точка движется по
эллипсу в направлении часовой стрелки (рис. 3.9.1). Пусть посто-
В зависимости от различных на-
начальных условий имеем семейство
концентрических эллипсов, отли-
отличающихся друг от друга только
одним параметром — постоянной
энергии. Начало координат (поло-
х жение равновесия гармоническо-
гармонического осциллятора) в соответствии
с общепринятой классификацией
особых точек представляет собой
центр.
Рис. 3.9.1. Фазовый портрет гармонического осциллятора
янная энергии фиксирована. Тогда увеличение частоты ш влечет
уменьшение полуоси а, из-за чего фазовый эллипс выглядит все бо-
более вытянутым вдоль оси ординат.
Фазовый поток выражается матрицей
_ (
cosurt, ш * sin art
— wsinut, cosut
Общее решение уравнения гармонического осциллятора можно пере-
переписать в виде
х = a cos(u;t + a),
214
Глава 3. Динамика поступательного движения
где
а= -
s/2h
ь0 —
U)
tga = .
UX
Осциллятор совершает гармонические колебания. Коэффициент а на-
называется амплитудой колебаний, а аргумент косинуса — фазой коле-
колебаний, а есть начальное значение фазы, зависящее от выбора начала
отсчета времени. Время г одного колебания (период колебаний) вы-
выражается формулой
г = 2тг/и; = l/i/,
где v — число колебаний за 1 с. Частота колебаний v измеряется
в "герцах": и = 1гц — это частота, при которой за одну секунду
совершается одно колебание. Энергия h = а2и2/2 гармонического
осциллятора пропорциональна квадрату амплитуды.
Зависимость от времени координаты х гармонического осцилля-
осциллятора часто бывает удобно представить в виде действительной (веще-
(вещественной) части комплексной функции
х = Re (Ате«) ,
где Ат — комплексная постоянная, называемая комплексной ам-
амплитудой. Она задается равенством Ат = aetQr, так что модуль Ат
совпадает с амплитудой а, а аргумент — с начальной фазой (рис.
3.9.2).
*(«).
Комплексный вектор z(t) имеет мо-
модуль, равный амплитуде а, и в на-
начальный момент времени z@) = Am.
Если из этого положения вектор z, со-
сохраняя его модуль, вращать против
хода часовой стрелки с угловой ско-
скоростью и;, то его проекция на действи-
действительную ось дает в любой момент вре-
времени значение действительной коор-
координаты ж, соответствующее гармони-
гармоническому колебанию.
Рис. 3.9.2. Комплексная плоскость гармонического осциллятора
Гармонический осциллятор представляет собой идеализирован-
идеализированную механическую систему, в которой не учитывается трение. Обыч-
Обычно на систему действуют диссипативные силы, рассеивающие энер-
энергию движения. Ниже иллюстрируется изменение свойств системы
из-за добавления такого рода сил.
3.9. Одномерные осцилляторы 215
Осциллятор с сухим трением описывается дифференциальным
уравнением вида
х + и2х = — /signi,
где / — постоянная, характеризующая абсолютную величину силы
трения, функция signi выделяет знак скорости х.
Пример 3.9.4. Рассмотрим движение груза, лежащего на ше-
шероховатой горизонтальной плоскости и прикрепленного к вертикальной
стене с помощью горизонтальной пружины. Если груз оттянуть от стены
на достаточно большое (см. ниже) расстояние, то под действием упруго-
упругости пружины он будет стремиться к исходному положению и возникнут
колебания груза в окрестности положения, соответствующего недефор-
мированному состоянию пружины (положение равновесия). Пусть х —
отклонение груза от положения, в котором пружина недеформирована.
На груз действуют две горизонтальные силы: сила Fu = —сх, развивае-
развиваемая пружиной, где с — жесткость пружины, и сила трения скольжения
FTp = —kN sign х. Нормальное давление N на горизонтальную плос-
плоскость равно весу груза, к — коэффициент трения. Уравнение движения
груза принимает вид
тх = — сх — ктд signi,
что совпадает с изучаемым уравнением при ш2 = с/т, f = кд.О
Перейдем к анализу общих свойств движения осциллятора с су-
сухим трением. Для этого, в зависимости от знака скорости i, выделим
два случая.
Случай 1: х > 0. Уравнение движения осциллятора запишется
следующим образом:
х+и2х = -/.
Оно имеет первый интеграл типа интеграла энергии
х2 ш2х2
где Л+ — постоянная вдоль отдельной фазовой траектории, распо-
расположенной в верхней фазовой полуплоскости (рис. 3.9.3). С помощью
тождественных преобразований приведем этот интеграл к виду
х2
2ft'
'
Полученное уравнение задает на фазовой полуплоскости х > 0 се-
семейство (по Л') половин эллипсов с центром в точке О+, имеющей
абсциссу —f/w2.
216
Глава 3. Динамика поступательного движения
Случай 2: х < 0. Уравнение движения принимает вид
Для него существует первый интеграл
О,2*2
где ft — постоянная для фазовых траекторий, расположенных в
нижней фазовой полуплоскости (х < 0). Фазовые траектории подчи-
подчиняются уравнению
i2 u2(x - //w2J
2ft"
2ft"
JL.
Они образуют семейство (по ft") половин эллипсов, расположенных
на фазовой полуплоскости х < 0, и их центр смещен в точку О"",
имеющую абсциссу f/uJ. Полная фазовая траектория получается
сопряжением половины эллипса одного семейства с половиной элли-
эллипса другого семейства в момент прохождения фазовой точки через
ось абсцисс. В такие моменты особенно наглядно видно уменьшение
размаха (амплитуды) колебаний.
Полуэллипсы, изображающие
фазовые траектории в верхней
фазовой полуплоскости осцил-
осциллятора с сухим трением, пере-
переходят в полуэллипсы, изобра-
изображающие фазовые траектории
в нижней фазовой полуплоско-
полуплоскости. Из-за смещения центров
эллипсов происходит уменьше-
уменьшение амплитуды колебаний ос-
осциллятора.
Рис. 3.9.3. Осциллятор с сухим трением
Отрезок [О+,О~] — особый. Он называется зоной застоя осцил-
осциллятора. В этот отрезок попадают фазовые точки, движущиеся как по
верхним, так и по нижним полу эллипсам. Тем самым все его точки
суть положения равновесия. Фазовая точка, попав в процессе дви-
движения в некоторую точку отрезка [О+,О~], навсегда в ней останется
(рис. 3.9.3).
3.9. Одномерные осцилляторы 217
Строго говоря, такой вывод противоречив. Непосредственно из
уравнения движения следует, что постоянное значение координаты х
может быть его решением, только если х == 0. Вместе с тем приве-
приведенные выше рассуждения показывают, что фазовая точка не может
покинуть отрезок [О", О~], так как для него сила упругости меньше
по модулю силы трения скольжения.
Указанное противоречие можно устранить, если ввести в модель
осциллятора силу трения покоя. Эта сила трения должна быть в
точности такой, чтобы для точек отрезка [О+,О~] обеспечивалось
ускорение, равное нулю.
Закон движения осциллятора с сухим трением имеет следующий
вид:
— ) cosw(t — t*) -\—— smw(t — t*) ~ при х > 0,
X = <
- -— )
LJ J
— sinu;(<-r)+ -~ ПРИ
После дифференцирования по времени получим скорость осцилля-
осциллятора, необходимую для более подробного анализа движения фазовой
точки:
— t+) + Xq cosu(t — t*) при x > 0,
X = <
/ f \
-t~) + x0 cosw(t - t") при x < 0.
Постоянные xj, xo > ^J> %o> ^+? ^~ вычисляются в соответствии с на-
начальными условиями и условиями сопряжения при прохождении фа-
фазовой кривой через ось абсцисс. Пусть, например, при t = 0 заданы
значения х@) = хо, х@) = 0, причем xq < ~f/w2. В этом случае (см.
рис. 3.9.3) фазовая точка сначала будет двигаться вдоль полуэлли-
полуэллипса, расположенного в верхней полуплоскости (при xj = хо, ij = 0,
t* = 0), вплоть до момента т = 7г/и>, когда фазовая траектория пере-
пересечется с осью Ох в точке xi = — (xo+2//u>2). От точки (xi, 0) движе-
движение будет происходить вдоль полуэллипса, расположенного в нижней
полуплоскости, для которого Xq = xi, xjj" = 0, t~ = 7г/и>. Время этого
движения до нового пересечения оси Ох в точке Х2 = Хо +4//и>2 есть
(t —1~) = г = ж/ш. От точки (х2,0) фазовая кривая составит верхний
полуэллипс с xj = Х2, xj = 0, и т. д. Абсциссы точек пересечения
фазовой кривой с осью Ох можно записать с помощью формулы
218 Глава 3. Динамика поступательного движения
В случае х0 > f/u2 с помощью аналогичных рассуждений получим
хп = (-1)п (хо - ^Pj , io = 0, х0 > ^, п = 1,2,...
Эти формулы можно объединить:
)^), *о = 0, |*о| >-4, « = 1,2,...
Число колебаний определяется как минимальное натуральное значе-
значение п, удовлетворяющее условию
2n/<r f
или
1 , |*о|«а . , 1
+^Г 2
Если заданные начальные условия отличаются от только что рассмо-
рассмотренных, то для решения задачи о числе колебаний осциллятора с су-
сухим трением достаточно выполнить один дополнительный шаг, найдя
точку первого пересечения фазовой траектории с осью абсцисс. Да-
Далее ход решения задачи можно оставить таким, какой был приведен
выше.
Осциллятор с вязким трением описывается дифференциальным
уравнением
х + jfex-f w2z = 0.
Пример 3.9.5. Рассмотрим груз, подвешенный на пружине к не-
некоторому основанию. К грузу с помощью штока прикреплен поршень,
перемещающийся в цилиндрическом сосуде, наполненном жидким ма-
маслом (демпфер) (рис. 3.9.4). В положении равновесия вес груза с порш-
поршнем за вычетом архимедовой силы равен силе, развиваемой пружиной:
Р = сA — /о), где с — жесткость, /о — длина нерастянутой пружины, /
— длина пружины в положении равновесия. Если пружину укоротить
на величину х, то сила, развиваемая пружиной, будет F = сA — х — /о).
Груз под действием силы тяжести начнет опускаться. Масло из нижней
части сосуда, просачиваясь между краями поршня и стенками цилин-
цилиндра в верхнюю часть, окажет поршню сопротивление силой FT = —ах.
Уравнение движения груза примет вид
т'х = —Р -f сA — /0 — х) — ах, а > 0.
Легко убедиться в том, что это есть уравнение рассматриваемого типа.
О
3.9. Одномерные осцилляторы
219
В масляном демпфере движение поршня
вызывает просачивание масла с одной
стороны поршня на другую. Возникаю-
Возникающая при этом сила сопротивления пря-
прямо пропорциональна скорости движения
поршня и называется силой вязкого тре-
трения. За счет вязкого трения происходит
рассеивание энергии и остановка порш-
поршня.
Рис. 3.9.4. Масляный демпфер
Уравнение осциллятора с вязким трением есть линейное диффе-
дифференциальное уравнение второго порядка. Его решение следует искать
в виде х = exp(Atf), где Л — скалярный коэффициент, t — время.
Подставляя экспоненту вместо х в уравнение осциллятора, получим
характеристическое уравнение
два корня которого даются формулами
—к + у/к2 — 4cj2
Ai = - , А2 =
-Jb - у/к2 - 4u;2
В зависимости от знака подкоренного выражения рассмотрим следу-
следующие варианты.
Вариант 1: к2 — Аи2 < 0. Обозначим О, = у/Аи2 — к2/2. Решение
уравнения осциллятора принимает вид
х = е"*</2(с! cos Ш -f с2 sin Ш).
Постоянные с\ и с2 определены начальными условиями:
io + хок/2
С\ =
С2 =
где #о, io — значения х и х соответственно при t = 0.
Чтобы получить фазовый портрет, введем переменную
Тогда
? = с\ cos fit + С2 sin fit,
220
Глава 3. Динамика поступательного движения
На плоскости
нием
f = — cifi sin Qt + С2П cos Qt.
образ фазовой точки описывает эллипс с уравне-
уравнегде а2 = (с2 + с^)^2. Движение образа фазовой точки — периодиче-
периодическое с периодом г = 2ir/Q. Через период г значения ?, ? в точности
повторяются.
Переход от переменных ?, ? к переменным х, i осуществляется по
формулам
Пусть t = <„ = nr, где га — натуральное число. Для таких < коорди-
координаты ?, ? не меняются. Но меняются я, х:
krn
ктп
С ростом п фазовая точка стремится к началу координат вдоль фик-
фиксированного луча на фазовой плоскости. Фазовые кривые — спи-
спирали, закручивающиеся вокруг точки 0. Имеем особую точку типа
"фокус" (рис. 3.9.5). Движение асимптотически успокаивается около
i X
При к2 — 4а;2 < 0 фазовая точка дви-
движется по спирали, закручивающейся
около положения равновесия по хо-
ходу часовой стрелки. Осциллятор со-
совершает колебания с уменьшающейся
х амплитудой. Однако положение рав-
равновесия не достигается ни за какое
конечное время.
Рис. 3.9.5. Затухающие колебания
положения равновесия. Это — точка 0. Точка 0 из любой не совпа-
совпадающей с ней точки фазовой плоскости не достигается ни за какой
конечный промежуток времени.
Полученный тип движения можно интерпретировать как колеба-
колебания с убывающей амплитудой. Постоянная d = exp(fc/2) называется
декрементом затухания. Она показывает, во сколько раз амплитуда
уменьшается за 1с.
3.9. Одномерные осцилляторы
221
Вариант 2: к2 = 4о>2. Это — случай кратных корней характе-
характеристического уравнения: Ai = A2 = — к/2. Общее решение уравнения
осциллятора с вязким трением имеет вид
х =
( Ы\ . к ( Ы\
c2t)exp (-у 1 , ж = --жЧ-с2ехр I -у 1 ,
где постоянные с\ и с2 выражаются через начальные условия следу-
следующим образом:
Из зависимости x(t) следует, что все фазовые кривые по касательной
приближаются при t —> +00 к прямой
X
X
к
-кх
=
_
X
к
~2
кЧ
X.
и _
ik2
4
X
X
Вычислим
т
Следовательно, все фазовые траектории пересекают ось х — О под
одинаковым углом наклона, тангенс которого равен — к.
При к2 — 4и>2 = 0 колебаний не проис-
происходит. Фазовая точка стремится по-
попасть в положение равновесия, при-
приближаясь к прямой х — —кх/2. Эта
прямая служит асимптотой для всех
х фазовых траекторий. Фазовые траек-
траектории приближаются к началу коор-
координат асимптотически, достигая его
лишь при t —> оо.
Рис. 3.9.6. Апериодическое движение: к2 = 4а;2
Найдем точки пересечения фазовых кривых с осью абсцисс (рис.
3.9.6). Сначала определим момент времени f, при котором достига-
достигается равенство х = 0:
Видим, что если xq > 0, xq -f kxo/2 > 0, то существует единствен-
единственный положительный момент I пересечения фазовой кривой с осью Ох
(прямое направление движения вдоль фазовой кривой). При xq < 0,
222 Глава 3. Динамика поступательного движения
XQ-\-kxo/2 > О получим ? < 0, что соответствует обратному движению
вдоль фазовой кривой.
Аналогично, если io < 0, io + kxo/2 < 0, то ? > 0, а если io > О,
io + kxo/2 < 0, то ? < 0. Сопоставив выражения для х и ?, убедимся,
что в момент ? справедливо равенство
2 /. . k \ ( ki
х = т
Значит, если xq -f kxo/2 > 0, то равенство х = 0 достигается при
положительном значении ж, а если io + fc#o/2 < 0 — то при отрица-
отрицательном.
Суммируя сказанное, получаем фазовый портрет системы в рас-
рассматриваемом случае (рис. 3.9.6). Начало координат представляет
собой особую точку типа "вырожденный узел".
Вариант 3: к2 > 4и2. Тогда корни характеристического уравне-
уравнения действительны и различны
-к - у/к2 - 4а;2 . . -* + у/к2 - 4ш2 п . Л
Ai = ^ <0' А2 = 2 ' Ai<A2.
Общее решение уравнения осциллятора дается формулами
х = с\ exp(Ait) + С2 ехр(А2^), х =
Используя начальные условия, получим
_ го o
А A
А2 — Ai Aj — A2
Исключив время из общего решения, найдем уравнение фазовой тра-
траектории
Al Г \2х-х ]Аг
Чтобы построить фазовый портрет, сделаем замену переменных:
Х\х — х Х2Х — х
В новых переменных фазовая траектория подчиняется степенной за-
зависимости:
Tjzr^*, эе= Ах/А2 > 1,
причем во все время движения имеем ? > 0, г) > 0. Образ фазовой
точки перемещается вдоль графика степенной зависимости к началу
координат (рис. 3.9.7, а). Поэтому (рис. 3.9.7, б) все фазовые кривые
3.9. Одномерные осцилляторы
223
А2ж - х = О
Х\х — х = О
Рис. 3.9.7. Апериодическое движение: к2 > 4и2
стремятся к положению равновесия. Они не могут пересекать ни
прямую, соответствующую ? = 0, ни прямую, соответствующую г) =
О, т.е. прямые, определенные уравнениями
Х\х — х = 0,
— х = 0.
Впадая в начало координат, фазовые кривые касаются прямой г) = 0,
т.е.
\2Х — X = 0.
Если (рис. 3.9.7, б) начальная фазовая точка принадлежит области
•4, для которой выполнены неравенства
Ai?-i<0, A2x-i<0,
то существует момент времени i пересечения фазовой кривой с осью
абсцисс. Этот момент вычисляется как решение уравнения
exp(Aif) = —
с\ < 0, с^ > 0.
Отсюда
с2А2/
Подставив t = I в функцию ж(*), найдем, что фазовая кривая пересе-
пересекает ось абсцисс в точке с координатой
х —
Л2-Лх
А2
224 Глава 3. Динамика поступательного движения
Аналогично если начальная фазовая точка принадлежит области В
(рис. 3.9.7,6), для которой выполнены неравенства
Х\Х — X > О, \2Х — X > О,
то фазовая кривая пересечет ось абсцисс в точке с координатой х < 0.
Легко установить, что если начальная фазовая точка принадле-
принадлежит области С, для которой справедливо альтернативное выполнение
двух систем неравенств
Х\х — х < 0, Агя — х > 0,
либо
Х\х — х > 0, Агх — х < 0,
то фазовая кривая не имеет точек пересечения с осью абсцисс. Сум-
Суммируя сказанное, получаем фазовый портрет, изображенный на рис.
3.9.7, б. Движение, соответствующее такому фазовому портрету,
называется апериодическим. Процесс успокоения асимптотически
устойчивый. Вместе с тем ни за какой конечный интервал времени
система не в состоянии попасть в начало координат. Имеем особую
точку типа "узел".
Все рассмотренные выше примеры механических систем объеди-
объединяет то, что активная сила стремится вернуть систему к положению
равновесия. Изучим теперь движение под действием отталкиваю-
отталкивающей силы, описываемое следующим дифференциальным уравнением:
х -и2х = 0, ш > 0.
Пример 3.9.6. Возьмем механическую систему такую же, как в
примере 3.9.2, с тем лишь отличием, что ролики, поддерживающие дос-
доску, вращаются в противоположном направлении. При этом силы трения
будут направлены от середины доски. Уравнение движения примет вид
.. kg
х- -~я = 0.
Для него, и2 = kg/LO
В рассматриваемом случае характеристическое уравнение
имеет решение А = ±и>. Закон движения выражается формулой
х = с\ exp(u;tf) + ci exp(— u;*).
3.9. Одномерные осцилляторы
225
Используя гиперболические функции
chM) = [exp(urf) -f exp(-urf)]/2, sh(u;t) =
представим закон движения в виде
х = хо ch(ujt) Н sh(ujt).
и
Интеграл энергии определяет уравнение фазовой траектории
и;2*2
= А.
Изменяя значение постоянной энергии h, получаем семейство гипер-
гипербол, асимптотически приближающихся к прямым
х =
На рис. 3.9.8 изображен фазовый портрет системы. Начало ко-
Под действием отталкивающей си-
силы фазовая точка стремится поки-
покинуть окрестность положения равно-
равновесия, если только она не принад-
принадлежит асимптоте с отрицательным
наклоном: х — —шх. Точки, при-
принадлежащие указанной асимптоте,
стремятся к положению равнове-
равновесия, однако ни за какое конечное
время его не достигают.
Рис. 3.9.8. Неустойчивое движение
ординат — особая точка типа "седло". Видим, что фазовая точка,
не совпадающая с началом координат и не лежащая на асимптоте
х = — их, покидает любую сколь угодно малую окрестность начала
координат, удаляясь в бесконечность. Реальная механическая систе-
система, описываемая дифференциальным уравнением рассматриваемого
типа, неустойчива и имеет тенденцию к разрушению.
Изученные выше характерные особенности простейших законов
движения часто встречаются как элементы фазового портрета более
сложных движений. Проиллюстрируем это, построив фазовый пор-
портрет математического маятника.
15- 1503
226
Глава 3. Динамика поступательного движения
Определение 3.9.1. Математический маятник — это матери-
материальная точка, вынужденная двигаться по дуге неподвижной окруж-
окружности в поле параллельных сил. Модуль и направление силы пред-
предполагаются постоянными. Направление сил параллельно плоскости
окружности.
Начало полярной системы координат поместим в центр упомя-
упомянутой окружности. Тогда радиус-вектор математического маятника
имеет постоянный модуль г. Пусть вектор е задает направление си-
силы: F = Fe. Положение материальной точки на окружности будем
задавать углом <р между радиусом-вектором точки и вектором е (рис.
3.9.9).
Материальная точка, вынужденная
оставаться на окружности постоянно-
постоянного радиуса, совершает в поле парал-
параллельных сил движение, аналогичное
движению груза на растянутой нити,
когда размеры груза малы по сравне-
сравнению с размерами нити.
Рис. 3.9.9. Математический маятник
Уравнение изменения кинетического момента
d
—-(mr x v) = г х F
at
имеет ненулевую проекцию только на перпендикуляр к плоскости
окружности. Радиус-вектор г и скорость v взаимно перпендикуляр-
перпендикулярны, и v = гф. После преобразований уравнение изменения кинетиче-
кинетического момента для математического маятника примет вид
и>2 sin<p = О,
где u>2 = F/mr. Это и есть уравнение движения математического
маятника.
Пример 3.9.7. Груз подвешен на невесомой нити длины / и
колеблется под действием силы тяжести около нижнего положения рав-
равновесия. Если угол (р измеряет отклонение нити от вертикали, то ко-
когда нить натянута и имеет длину, значительно превышающую размеры
груза, уравнение движения груза практически совпадает с уравнением
математического маятника, в котором о;2 = g/l (см. § 6.4).О
Для малых значений угла ^ (^> < 1) можно принять sin <p « <р.
Оказывается, что при малых углах движение математического маят-
маятника приближенно описывается уравнением гармонического осцил-
осциллятора. Если <р = тг + ж, где х <С 1, то sin <р « — х, и для переменной х
3.9. Одномерные осцилляторы
227
получаем приближенное уравнение, соответствующее движению под
действием отталкивающей силы.
Уравнение движения маятника допускает интеграл энергии
Ф2
¦—- = ur cos <р + h = Ф(<р, Л),
который при конкретном значении h следует рассматривать как урав-
уравнение фазовой кривой. Область допустимых значений угла ip выде-
выделяется неравенством
ф(<р, h) = lj2 cos ip + h > 0.
Рассмотрим эволюцию фазовых кривых при изменении постоянной
энергии h в пределах — u2 < h < -f oo. Выделим следующие случаи.
Случай 1: Л = —о/2. Допустимыми будут значения
(р = 2кж, ф = 0, Ат = 0, ±1, ±2,...
На фазовом портрете (рис. 3.9.10) им соответствуют изолированные
положения равновесия, которые в реальном физическом простран-
пространстве совпадают, так как получаются друг из друга целым числом
полных оборотов по углу (р.
Рис. 3.9.10. Фазовый портрет математического маятника
Случай 2: —u;2 < h < и;2. Допустимые значения <р выражаются
неравенством
2Аттг - arccos(-/i/u;2) < (р < arccos(-/i/u;2) + 2Лгтг, к = 0, ±1,...
Для конкретного значения к выделяется связная область положи-
положительных значений функции Ф(<р, /i). В каждой такой области имеем
семейство симметричных относительно оси абсцисс замкнутых фазо-
фазовых кривых, заданных соотношением
15*
228 Глава 3. Динамика поступательного движения
Ветвь, соответствующая знаку "+", непрерывно (с вертикальной ка-
касательной) сопрягается с ветвью, соответствующей знаку "—". Такие
фазовые траектории изображают периодическое движение системы.
В течение периода г фазовая точка пройдет всю фазовую кривую по
ходу часовой стрелки и вернется в исходное положение. Из симме-
симметрии фазовой кривой заключаем, что за четверть периода абсцисса
фазовой точки смещается от положения равновесия на величину раз-
размаха колебаний
Am = arccos(—h/uj2).
Следовательно, справедливо равенство
d<p
т Г d<p f dip If
- cosAm)
Сделав замену sin(<p/2) = usin(Am/2) и обозначив е = sin(Am/2),
выражение для периода колебаний можно привести к виду
du
Интеграл в правой части называется эллиптическим интегралом вто-
второго рода. Значение его можно получить с помощью таблиц, но мож-
можно с этой же целью применить разложение подынтегрального выра-
выражения в ряд по степеням параметра е. Тогда формула для периода
колебаний примет вид
г = го + т2е2 + г4?4 + .. .
В разложении будут присутствовать члены только с четными степе-
степенями относительно е.
Видим, что период колебаний математического маятника зависит
от начальной амплитуды (размаха колебаний Ат). Вместе с тем если
начальная амплитуда Ат мала настолько, что членами второго и
более высокого порядка по е можно пренебречь, то период
4 f du 2тг
от начальной амплитуды не зависит и совпадает, как этого и следо-
следовало ожидать, с периодом колебаний гармонического осциллятора,
для которого uj — циклическая частота.
3.9. Одномерные осцилляторы 229
Для следующего приближения по е получим
т _l j u2du = 2_ j du _ 2_ j /^ZTtfdu =
W J y/l — U2 W J y/\ — U2 W J
0 0 0
- 1 j du 2 / ц2^Ц
о о
Поэтому
7Г
2cj
а приближенная формула для периода колебаний принимает вид
Случай 3: h — uj2. Имеем особый случай:
Ф(<р, h) = lj2A + cos <p) = 2uj2 cos2(<p/2).
Фазовая кривая определена зависимостью
ф = ±2uj\cos((p/2)\.
Эта кривая подходит к оси абсцисс (рис. 3.9.10) в точках
Они — тоже положения равновесия математического маятника. Ка-
Касательная к фазовой кривой в этих точках не вертикальна, что до-
допустимо, так как в них
<р = -u;2sinGr-f 2тгАг) = 0.
Область изменения угла (р в данном случае неограничена. Выделим
в ней отрезки с помощью неравенств
2тгк - 7Г < <р < тг + 2тгк, к = 0, ±1,...
Фазовая кривая для конкретного значения к окружает соответству-
соответствующее устойчивое положение равновесия, расположенное в точках
Однако характер движения вдоль нее существенно отличается от из-
изученного в случае 2. Чтобы убедиться в этом, назначим к = 0 и в
230 Глава 3. Динамика поступательного движения
начальный момент времени поместим фазовую точку на пересечение
рассматриваемой фазовой кривой и положительной полуоси ординат:
ф = 2и>, <р = 0.
По аналогии со случаем 2 попытаемся найти время г/4, за которое
фазовая точка достигнет оси абсцисс при значениях
ф = 0, (f = ТГ.
Учитывая, что в правой части получается несобственный интеграл,
запишем расчетную формулу в виде
7г —а
dip _ 1 fl + cos(ar/2)
cos(ip/2) 2u [l-cos(s/2)
где t(x) — время, за которое фазовая точка приобретает абсциссу,
равную тг — х. При х —> 0 имеем ?(#) —> оо. Это означает, что фазовая
точка реально никогда не попадет в положение равновесия ip = тг,
ф — 0, а будет бесконечно долго к нему приближаться.
Если в начальный момент фазовая точка точно попала в поло-
положение равновесия (ф = 0, <р — 7г), то она там останется навсегда, а
если ее начальное положение было смещено вдоль фазовой кривой в
область отрицательных значений ф, то фазовая точка уйдет от точки
(<^> = 0, (р = 7г) и будет бесконечно долго приближаться к положению
равновесия (ф = 0, (р = — тг).
Случай 4: Л > и;2. Для любых значений <р имеем Ф(<р, Л) > 0.
Каждому значению /г соответствуют две фазовые кривые, не пересе-
пересекающиеся друг с другом и с осью абсцисс. Они определены функци-
функциями
, ф=-у/2Ф(<р,11)
и удаляются от оси абсцисс с ростом h. Такие фазовые кривые соот-
соответствуют движению, при котором угол <р монотонно увеличивается
при положительном значении ф и монотонно убывает при отрица-
отрицательном, угловая скорость ни в одной точке не обращается в нуль.
Случай 4 завершает построение фазового портрета математического
маятника.
Определение 3.9.2. Фазовые кривые, соответствующие случаю
3, называются сепаратрисами.
Сепаратрисы отделяют два принципиально различных типа дви-
движения системы в случаях 2 и 4. В окрестности положений равновесия
при
fc = 0,±l,±2,...
3.9. Одномерные осцилляторы 231
имеем картину фазовых кривых, характерную для особой точки типа
"седло" (неустойчивое равновесие). В окрестности положений равно-
равновесия при
ib = 0,±l,±2,...
имеем характерную картину особой точки типа "центр" (устойчивое
положение равновесия).
Фазовый портрет математического маятника повторяет все свои
особенности с периодом 2тг. В этом смысле достаточно построить
фазовый портрет в вертикальной полосе, ограниченной значениями
угла <р:
— 7Г < <f < 7Г.
Чтобы получить полную картину движения, эту полосу можно свер-
свернуть в вертикальный цилиндр, а ее края склеить. Полученную фигу-
фигуру называют фазовым цилиндром. Он нагляднее, чем фазовая плос-
плоскость, отражает периодичность закона движения системы в физиче-
физическом пространстве.
Определение 3.9.3. Циклоидальный маятник — это материаль-
материальная точка, вынужденная двигаться по дуге неподвижной циклоиды
в поле параллельных сил. Циклоидой называется плоская кривая,
вычерчиваемая фиксированной точкой окружности, катящейся без
проскальзывания по направляющей прямой. Для циклоидального
маятника направляющая прямая выбирается перпендикулярно си-
силам, а указанная окружность располагается относительно прямой
так, чтобы циклоида была выпукла в сторону действия сил.
Пусть по-прежнему постоянный вектор е задает направление си-
силы F = Fe, причем F = const > 0. Выберем единичный вектор ei
вдоль направляющей прямой циклоиды так, что ei J. е, а е2 = —е.
Радиус-вектор г маятника представим в виде г = г\ е\ + г2 в2. Урав-
Уравнение циклоиды зададим параметрически:
П = 1(<р + simp), r2 = -/A + cos<?>),
где / — постоянный радиус окружности, а <р — параметр (по геоме-
геометрическому смыслу — угол поворота окружности при ее качении по
направляющей). В диапазоне —тг < р < тг координата г2 меняется
от наименьшего г2 = —2/ при ip = 0 до наибольшего своего значения
г2 = 0 при <р = ±тг. Закон движения задается функцией <р = <p(t). Ци-
Циклоиду будем предполагать идеально гладкой. Движение одномерно
и происходит под действием потенциальной силы. Исследование за-
закона движения выполним с помощью интеграла энергии. Кинетиче-
232 Глава 3. Динамика поступательного движения
екая энергия Т и силовая функция U принимают вид
Л2
Сделаем замену переменной:
Я = sin -, <^ = 2gcos
взаимно однозначную и не имеющую особенностей при —ж<<р<ж.
С ее помощью интеграл энергии Т — U = h принимает форму
J_
16т/2 ' " 4т/'
которая совпадает с формой интеграла энергии для гармонического
осциллятора (см. § 3.9). Таким образом, переменная q позволяет
отождествить движение циклоидального маятника с движением гар-
гармонического осциллятора. Из сказанного, в частности, следует, что
в отличие от математического маятника период колебаний циклои-
циклоидального маятника около положения равновесия ^ = 0в диапазоне
—тг < <р < тг вообще не зависит от амплитуды колебаний.
§ ЗЛО. Резонансные явления
На движение реальных колебательных систем могут оказывать
существенное воздействие различные возмущающие факторы. Ис-
Исследуем сначала влияние на гармонический осциллятор силы, изме-
изменение которой во времени описывается некоторой заданной функцией
f(t). Рассмотрим следующее уравнение движения:
Закон движения, задаваемый этим дифференциальным уравнением,
называется возмущенным по сравнению с законом движения гармо-
гармонического осциллятора при тех же начальных условиях. Из теории
дифференциальных уравнений известно, что решение линейного не-
неоднородного уравнения есть сумма общего решения соответствующе-
соответствующего однородного (правая часть равна нулю) уравнения и некоторого
частного решения изучаемого уравнения:
x(t) = c\ cosujt
3.10. Резонансные явления 233
Частное решение x4(t) можно получить посредством квадратур по
методу Лагранжа вариации произвольных постоянных. Этот метод
широко используется в механике для изучения движения возмущен-
возмущенных систем. Воспользуемся им. Представим xH(t) в виде
xH(t) = yi(t)coswt -f y2(t)sinwti
где yi{t), y2(t) — искомые функции. Тем самым структура част-
частного решения совпадает со структурой общего решения однородного
уравнения, но произвольные постоянные с\ и с<ь заменены функциями
времени. Дифференцируя, получим
x4(t) = y\ cosut + t/2si
Мы вправе потребовать, чтобы искомые функции t/i, t/2 в любой мо-
момент времени удовлетворяли уравнению
у\ cosut + t/2 sinu^ = 0.
Тогда выражение для x4(t) упрощается:
xH(t) = w(-t/i sinut + У2 coswt).
Найдем вторую производную:
x4(t) = и(—у\ smut + у2 cos tot) — u2x4{t).
Подставив значения для хч в уравнение движения, получим еще одно
уравнение для определения t/i, t/25 которое вместе с указанным выше
образует систему
+ у2 cosut = f(t)/u>,
\ у\ cos Lot + у2 sin tot = 0.
Разрешая ее относительно у\ и у25 найдем
У\ = f(t)sinwt, У2 = —f(t)coawt.
Нам требуется только одно решение этих уравнений. В частности,
можно взять
t t
yi = I f(t)sinu>tdt+pi, t/2 = - / f(t)cosutdt
и J w J
to to
выбрав какие-нибудь значения постоянных р\ и р2- Полученные фор-
формулы дают возможность при конкретном задании f(t) оценить влия-
влияние возмущающей силы на движение системы.
234 Глава 3. Динамика поступательного движения
Пусть, например,
f(t) = bcos(i>t + l3), i/>0.
Тогда у\, у2 можно представить в виде
t
У1 = -— J{sin[(u; + u)t + 0\+ sin[(u; - v)t - /?]} dt + pu
to
t
y2 = — J{cos[(lj + v)t + (}) + cos[(u; - u)t - /?]} dt + p2.
to
Структура частного решения зависит от значения разности ш — v.
Случай 1: и — v ф 0. Тогда
_ 6 Г cos[(u; Н- v)t Н- /3] cos[(lo - v)t - /3] 1
_ 6 Г sin[(u; Н- v)t Н- /3] sin[(u; - v)t - /3] 1
2u;\ o;H-i/ о; — j/ J
Подставив этот результат в формулу для частного решения и выпол-
выполнив преобразования, найдем
Следовательно, частное решение имеет частоту и фазу вынуждающей
силы. Его амплитуда обратно пропорциональна разности и2 - v2.
Амплитуда неограниченно возрастает, когда v —> ш.
Пусть v мало отличается от u;: v = ш + е. Общее решение рассма-
рассматриваемого уравнения можно представить в виде
x(t) = Re{A ехр(ги;*) + В ехр[г(и; + e)t]} = Re{[A + Bexp(iet)]exp(iu;t)},
где А = аехр(т), В = 6ехр(г/?)/(и;2 — и2), постоянные а и а зависят
от начальных условий (см. стр. 214). Так как е мало, то закон
x(t) можно интерпретировать как колебания с частотой и и медленно
меняющейся амплитудой
d= \A+Bexp(iet)\.
Представив комплексные числа А и Bexp(iet) векторами на ком-
комплексной плоскости и используя теорему косинусов, найдем
d2 = a2 + -г- 5^2 + 2 п cos(et + 0 - a).
(w2 - и2J ш2 - v2
3.10. Резонансные явления
235
С течением времени амплитуда d периодически изменяется, остава-
оставаясь ограниченной:
a —
u;2-*/2
j2-z/>
Это явление носит название биений.
Случай 2. Частота возмущающей силы в точности совпадает с
собственной частотой осциллятора. Для функций у\, t/2 имеем выра-
выражения
У\
j/2
Отсюда
t
= -2^ /[sinBw< + /?) - sin/?] dt + plf
to
t
= 2^ j[cos{2ut + /3) + cos /?] Л + p2.
o
6 [cosBa;t + /?)
to
2u>
6
Следовательно,
хч =
cos(u;t + /?)
Первое слагаемое в квадратных скобках удовлетворяет однородному
уравнению гармонического осциллятора. Поэтому за частное реше-
решение можно принять
хн =
-s\n
Имеем колебание с частотой и и линейно возрастающей по време-
времени амплитудой. Это явление называется частотным резонансом.
Оно проявляется в неограниченной раскачке вынужденных колеба-
колебаний при сколь угодно малой амплитуде 6 внешней силы и может при-
привести к разрушению механической конструкции.
В реальности всегда существуют силы сопротивления. Их роль в
развитии резонанса проанализируем на примере осциллятора с вяз-
вязким трением:
х + кх + и?х = 6 cos(j4 + /?),
236 Глава 3. Динамика поступательного движения
где коэффициенты 6, и, /3 — характеристики возмущающей силы.
Частное решение будем искать в виде
xH(t) = A cos(vt + /3) + В sm(i/t + /?).
Постоянные А и В подлежат определению. Очевидно, что
хч = -Ausin(ut + /?) + Bucos(ut + /3),
хч = -Aj/2 cos(i/t + /?) - ?^2 sin(i/t 4- /?).
Подставляя эти выражения в уравнение осциллятора, собирая по-
подобные члены и приравнивая нулю коэффициенты при одинаковых
тригонометрических функциях, получим относительно коэффициен-
коэффициентов А и В систему алгебраических уравнений
(u;2 - v2)A + kvB = 6,
Эта система имеет решение
_ б(ыа-1/а) _
•** "~ /г» r>\r>.ir>r>i X? —
_ „2J
Амплитуда d частного решения представляется в виде
d = у/А2 + 52 = 6[(w2 - i/2J + * V]~1/2-
Следствие 3.10.1. Яргг действии сил вязкого трения совпадение
частоты v возмущающей силы с частотой lj собственных колебаний
осциллятора не приводит к неограниченному увеличению амплиту-
амплитуды, и не существует значения частоты v возмущающей силы, при
котором такой эффект мог бы возникнуть.
Вместе с тем, когда частота и собственных колебаний осцилля-
осциллятора приближается к частоте возмущающей силы, амплитуда част-
частного решения становится максимальной. На этом свойстве основано
действие различных акустических резонаторов, маятниковых систем,
настроечных колебательных контуров в радиотехнике.
Общее решение x(t) уравнения движения осциллятора с вязким
трением представляется в виде суммы решения однородного урав-
уравнения и частного решения неоднородного уравнения осциллятора. В
§ 3.9 установлено, что, когда к > 0, любое решение однородного урав-
уравнения асимптотически стремится к нулю. Следовательно,
x(t) —> #ч(?), t —> оо
3.10. Резонансные явления 237
независимо от значений начальных условий. Другими словами, част-
частное решение xH(t) осциллятора с вязким трением асимптотически
устойчиво, и поведение системы вполне им определяется, когда время
развития процесса достаточно велико.
Рассмотрим теперь резонансное явление другого типа. Параме-
Параметры реальной системы, описываемой уравнением осциллятора, не
всегда могут оставаться постоянными. Тогда собственная частота
uj будет изменяться во времени.
Пример 3.10.1. Пусть груз весом Р подвешен на нити, дли-
длина которой / может изменяться: / = l(t). Считая груз материальной
точкой, уравнение его движения получим с помощью теоремы 3.7.2 о
кинетическом моменте относительно неподвижной точки подвеса:
-г-(т12ф) =• —P/sin<?>,
at
где <р — угол отклонения нити от вертикали, т — масса. Считая, что / >
0, перейдем к новой независимой переменной а с помощью соотношения
dt = /2 da. Полученное уравнение приведется к виду
0, u2=gl3(a), <p" = ^.
da1
Оно по виду совпадает с уравнением гармонического осциллятора, одна-
однако коэффициент при угловой координате <р не постоянен. Задавая закон
l(a), можно в определенной мере влиять на движение груза.О
Возможность управления движением осциллятора с помощью пе-
периодического воздействия на его параметры изучим на примере ли-
линейного однородного дифференциального уравнения второго порядка
с периодическими коэффициентами
х + a(t) х + b(t) x = 0,
где а(<), b(t) — периодические функции времени с одинаковым пери-
периодом т ф 0:
a(t + r) = a(t), b(t + r)
Лемма 3.10.1. Пусть a(t) — интегрируемая периодическая фун-
функция с периодом г ф 0. Тогда справедливо равенство
t + T
I a(t)dt = I a(t)dty
t о
каково бы ни было t из области определения функции a(t).
238 Глава 3. Динамика поступательного движения
Доказательство. При произвольных пределах интегрирования
с и d будет выполнено
d+т
I a(t)dt= I a(x-r)dx.
с+т
Положив теперь с = 0, d = t и учитывая свойство периодичности
функции a(tf), получим
a(t)dt= f a(t)dt.
О г
Далее
t+т 0 г t+т т
I a(t)dt= fa(t)dt+ fa(t)dt+ f a(t)dt= f a(t)dt.D
Лемма 3.10.2. Если x(t) — произвольное решение рассматри-
рассматриваемого уравнения с периодическими коэффициентами, то функция
у = x(t + т), где т — период функций a(t), b(t), есть решение того
же уравнения.
Доказательство. Если x(t) — решение, то для него
x(t + t) + a(t + r) x(t + т)+ b(t + т) x(t + т) = 0.
Но a(t + г) = a(t) и b(t + г) = 6B). Следовательно,
Пусть xi(tf), X2(t) — два линейно независимых решения изучае-
изучаемого уравнения с периодическими коэффициентами. Любое решение
того же уравнения выражается как их линейная комбинация. В част-
частности,
XX(t + Г) = aUXi(t) + a2lZ2@, ХЖ1 + Т) = a12*l(*) + 022*2@»
где постоянные коэффициенты atJ- образуют матрицу монодромии
л /an в12\
\ «21 «22 /
задающую преобразование решений через период г.
3.10. Резонансные явления 239
Пусть z(t) — произвольное решение уравнения с периодическими
коэффициентами:
Функцию z(t + г) представим аналогично:
Найдем с\ и с2:
z(t + r) = cixi(t + r) -f с2х2(г + r) = (anci -f
a22c2)x2(t).
Следовательно, коэффициенты с\ и c2 можно вычислить по формуле
Тем самым матрица монодромии задает линейный оператор моно-
дромии в пространстве решений уравнения с периодическими коэф-
коэффициентами. Для конкретной матрицы А роль базисных векторов
играют функции xi@> хг@-
Рассмотрим задачу об отыскании собственных векторов и соб-
собственных значений оператора монодромии. Эта задача сводится к
решению системы двух линейных алгебраических уравнений
а\2с2 = fici,
а22с2 = \хс2.
Собственные значения \х для этой системы называются мульти-
мультипликаторами. Они суть решения характеристического уравнения
монодромии
det(A - цЕ) = О,
или
А*2 ~ («и + а22)ц + det А = 0.
Это уравнение инвариантно относительно выбора базисных функций
Для удобства дальнейшего изложения будем считать решения
уравнения с периодическими коэффициентами комплексными функ-
функциями времени, выделяя действительную часть этих решений в слу-
случае необходимости перехода к реальным приложениям. Заметим, что
det А ф 0, так как матрица А осуществляет переход от одних линейно
независимых функций к другим. Поэтому ц ф 0.
240 Глава 3. Динамика поступательного движения
Лемма 3.10.3. Пусть z\(t) u Z2(t) суть два решения линейного
однородного дифференциального уравнения второго порядка. Тогда
соответствующий определитель Вронского W(t) выражается сле-
следующим равенством
W(t)= ^ Z2
= z1z2(t)-z1(t)z2(t) = cexp l-Ja(t)dt\ ,
где с — постоянная, to — начальный момент времени.
Доказательство. Так как и z\, и z2 обращают рассматриваемое
уравнение в тождество, то
zx(t) + a(t) zx(t) + b(t) zi{t) = 0, z2(t) + a(t) z2(t) + b(t) z2(t) = 0.
Умножая первое тождество на z2, второе — на 2i и вычитая из вто-
второго первое, получим
*i@ h(t) - h(t) z2(t) + a{t)[Zlz2(t) - zx(t) z2(t)] = 0.
Ho
zi(t) h{t) - h(t) z2(t) = ±Ыг)г2A) - ii(*) z2(t)}.
Поэтому справедливо уравнение
Решением этого уравнения служит
W(t)=W(to)exp
-ja(i)dt\s
k to )
Теорема 3.10.1. (Флокё). Пусть ц\ и fi2 — корни характери-
характеристического уравнения монодромии и
(T \
- / a(t) dt j .
Тогда /ii/i2 = D и существуют линейно независимые решения у\, у2
такие, что:
1. Если ц\ ф /л2, то
Vi(t + r) = fiiyi(t), y2(t + r) =
3.10. Резонансные явления 241
2. Если fi\ = Ц2 = 0 — кратный корень: (З2 = D, то
yi(t + г) = /?yi(t), V2(t + r) = ayi(t) + Cy2(t),
где а — постоянный коэффициент.
Доказательство. Рассмотрим каждый из упомянутых в форму-
формулировке случаев.
I. fix Ф Ц2- Возьмем для ^i и fi2 соответствующие им собственные
функции yi(t) и y2{t). По определению ух ф 0, уч ф 0 и
yi(t + Г) = fixVlit), V2(t + Т) = /Х2У2@-
Предположим, что y\(t) и уг(О линейно зависимы. Тогда существуют
не равные нулю одновременно константы Ai и Аг, для которых
= 0.
Пусть Ai ф 0. Умножая первое уравнение на \i2 и вычитая из него
второе, найдем
что противоречит неравенству \i\ ф ^2- Далее, применив к функциям
2/1 @» 2/2@ лемму 3.10.3, получим
-Ja(t)dtY
К t0 I
-2/i(O2/2(O = сехр
где с ф 0, так как ух и у2 линейно независимы. Через период г
H\fi2cexp I — / a(t)dt I = сехр I — / a(t)dt I exp I — / a(t)dt I .
\ t0 I \ t0 / \ t I
С использованием леммы 3.10.1 будем иметь,
(t+т \
- I a(t)dt\ = D.
2. цх = fi2 = f3 (случай кратного корня). Возьмем собственную
функцию ух @ ф 0, соответствующую корню /?, за базисное реше-
решение. Пусть у2 — другое базисное решение, независимое от ух. Тогда
преобразование функций через период примет вид
>- 1503
242 Глава 3. Динамика поступательного движения
Матрица монодромии оказывается треугольной:
А =
и ей соответствует характеристическое уравнение
Поскольку /3 — кратный корень, заключаем, что 022 = /?. Обозначив
а = а\2, получим формулу для случая 2 утверждения теоремы. На
основании леммы 3.10.3 имеем
(t
t \
- / a{t)dt 1 ,
J I
/
to
Через период т получим
(t \ / * \ / t+т \
- I a(t)dt I = сехр j - j a(t)dt I exp I - / a(t)dt 1 .
to I \ t0 / \ t I
Поэтому /?2 = det A = D.D
Следствие 3.10.2. Характеристическое уравнение матрицы мо-
монодромии имеет вид
2
где В = <2ц + «22 — след матрицы монодромии, сохраняющийся при
переходе от одних базисных функций к другим,
D = expl-Ja(t)dt).
Коэффициенты В и D целиком определяются свойствами функций
a(t), b(t).
Изучим структуру базисных решений у\, уг» существование кото-
которых утверждает теорема 3.10.1. Пусть сначала //i ф ц2. Тогда
yi(t + г) = fiiyi(t), y2{t + г) = fi2y2(t).
Из этих равенств следует, что функции
3.10. Резонансные явления 243
будут периодическими с периодом г. В самом деле,
ni(< + г) = yi(t + г('+т)/т V/T
П2(< + т) = y2(t + r)/
Следовательно, t/i и t/2 представляются в виде
где IIi, Пг — периодические с периодом г функции и //1//2 = -D. Та-
Таким образом, когда выполнено либо \jj,i\ > 1, либо |^2| > 1* либо
справедливы одновременно оба этих неравенства, то хотя бы одна из
базисных функций неограниченно возрастает. Это значит, что состо-
состояние покоя будет неустойчивым. Достаточно сколь угодно малого
отклонения от этого состояния, чтобы появившееся смещение стало
возрастать со временем. Такое явление называется параметриче-
параметрическим резонансом. Оно реально возникает, например, когда стоящий
на качелях человек раскачивает их, приседая в такт качаниям.
Предположим теперь, что корни характеристического уравнения
монодромии кратные: /л\ = Ц2 = И- Согласно теореме Флоке будем
иметь
Vi(t + т) = jiyiM, Ю(* + г) = <*У1(*) + Mfe@. V? = D.
Функции t/i, 2/2 представим в виде
Рассмотрим, как эти функции изменятся через период г:
yi(t + г) = //(<+T>/T/i(< + г) = fi^'TMt + г),
D
С другой стороны, по теореме Флоке функции y\(t + r), y2(t + г)
выражаются формулами
Vi(t + г) = Wt/Tfi(t), V2(t + т) = аУ1 + ^У1+ wt/Tf2(t).
Приравнивая соответствующие правые части, получим
fl(t + T) = fx{t), f2(t + Т) = f2(t),
16*
244 Глава 3. Динамика поступательного движения
то есть функции /i(t)> /г@ — периодические с периодом т. Следо-
Следовательно, параметрический резонанс может возникнуть и в случае
кратных корней характеристического уравнения.
Для вычисления мультипликаторов ^ь ^ требуется найти след
матрицы монодромии В = оц + «22- Пусть базисные функции x\{t),
х2(t) удовлетворяют начальным условиям
*i@) = l, ii@) = 0, *2@) = 0, *2@) = 1.
Тогда
an=a?i(r), а22 = «2(г), a2i = ii(r), ai2 = s2(r).
Таким образом
B = xi(t) + x2(t).
Теорема 3.10.2. (Критерий параметрического резонанса).
Пусть движение системы описывается однородным линейным диф-
дифференциальным уравнением второго порядка с периодическими ко-
коэффициентами, имеющими одинаковый период. Параметрический
резонанс в ней возникает тогда и только тогда, когда реализуется
какой-либо из следующих случаев:
1.D>1,
2. D - 1: |В| > 2, либо \В\ - 2 и а\2 4- а221 ф О,
S. D< I: \B\> D+1,
г(?е aij суть компоненты матрицы монодромии.
Доказательство. Пусть сначала D > 1. Имеем \i\\i2 = Д. Сле-
Следовательно, модуль хотя бы одного из мультипликаторов превосхо-
превосходит единицу, и соответствующее решение неограниченно возрастает.
Предположим теперь, что D = 1. Мультипликаторы выражаются
формулами
Если В2 < 4, то корни будут комплексно сопряженными и различ-
различными, но \fi\\ = \ц2\ = 1, и резонанса не возникает. Если В2 = 4, то
корни будут кратными и // = 1. Как следует из сказанного выше,
если при этом а\2 = Я21 = 0, то резонанс отсутствует, а если матрица
монодромии треугольная, то резонанс будет иметь место. Предполо-
Предположим теперь, что В2 = 4, но a 12^21 Ф 0. Тогда собственную функцию
монодромии можно взять в виде
3.10. Резонансные явления 245
Через период получим
«12
022*2) =
Заметим, что оц + <*22 = 2/х, и учтем, что характеристическое урав-
уравнение можно представить в виде (аи — /х)(о22 — аО = «12«21- Поэтому
при ai2O2i ф 0 будет также выполнено (оц -//)^0и, следовательно,
функции у\ и #2 линейно независимы. Примем уч = #2. Через период
г получим
Ж@) +022*2 =
Таким образом, для функций j/i, 2/2 матрица монодромии принимает
треугольный вид, что влечет наличие резонанса.
Пусть, наконец, \В\ > 2. Тогда корни характеристического урав-
уравнения действительны, взаимно обратны и отличны от единицы. По-
Поэтому в системе имеет место параметрический резонанс.
Предположим теперь, что D < 1. Мультипликаторы имеют вид
В - у/В2 - AD В + у/В2 - 4D
И1 = 5 ' ^2 = 2 *
Если В2 < 4D, то они будут различными и комплексно сопряжен-
сопряженными, причем |/ii| = |/i2| = yD < 1. В этом случае резонанс будет
отсутствовать. Если В2 = 4Д то корни характеристического уравне-
уравнения монодромии будут действительными и кратными. Собственные
решения имеют структуру
2/1 = S/Tfi(t), У2 = ^
причем \ц\ = у/3 < 1. Следовательно, при t —* 00 будем иметь
at
У\ —* О, У2 —* 0, так как — Ш -+ О,
и резонанса не возникает. Пусть, наконец, В2 > AD. Тогда мульти-
мультипликаторы действительны и различны. Резонанс будет иметь место,
когда абсолютная величина хотя бы одного мультипликатора превос-
превосходит единицу. Другими словами,
>1 _ |
Пример 3.10.2. Уравнение Хйлла
2t)x = 0,
246 Глава 3. Динамика поступательного движения
где uj(t) периодическая функция времени: uj(t-\-r) = u>(<), принадлежит
к числу рассмотренных выше линейных дифференциальных уравнений
с периодическими коэффициентами. При этом a(t) = 0 и следователь-
следовательно D = 1. Чтобы проиллюстрировать применение теории Флоке, рас-
рассмотрим кусочно-постоя иные периодические функции u>(t), имеющие в
пределах одного периода следующий вид:
1, при 0 < t <*i,
2, При t\ < t < Г,
где постоянные ш\ > 0, и2 > 0, t\ < т. Обозначим t2 = T — t\. Построим
матрицу монодромии. Пусть решения уравнения Хилла x\(t) и
таковы, что
zi@) = l, xi@) = 0, ж2@) = 0, х2(О)=1.
Тогда
Х\(т) = п\\ = О
— sin(u>i<i) cos(a;2<2) H
s
Воспользуемся теоремой 3.10.2 и изучим сначала условие резонанса
+ о>22\ > 2. Обозначим т\ = w\ti, r2 = uj2t2. Рассматриваемое
условие резонанса принимает вид
2 cos т\ cos т2 — I 1 J sin т\ sin т2 > 2
или, преобразовав произведение тригонометрических функций в сумму,
|aei cos(ri + т2) — ге2 cos(ri — т2)\ > 2,
где
1 (w\ u2\
= - — + — - 1.
2 \u2 u\ J
1 /ш\ ш2\
aei = -— + — +1, ае2
2 \a;2 ^i/
Очевидно, что aei > 2, ае2 > 0 при любых положительных значениях
ш\, uj2- Равенства aei = 2, ee2 = 0 достигаются тогда и только тогда,
когда uj\ = (jj2- Условие параметрического резонанса можно представить
в виде следующей совокупности неравенств
/ \ 2 ае2 , v г. t v 2 ае2 у. ч
cos(ri-hr2)> 1 cos(ri-r2) либо cos(ri+r2)< 1 cos(ri-r2).
ae ae aei ae
3.10. Резонансные явления
247
Пусть т] = cos(ti + r2), ^ = cos(ti — т2). На плоскости введем декарто-
декартовы координаты и вдоль вертикальной оси будем откладывать значения
переменной т], а вдоль горизонтальной — значения ?. Очевидно, имеем
|?| < 1. Ы < 1. что геометрически соответствует квадрату, стороны ко-
которого параллельны осям координат и проходят через точки A,0), @,1),
( — 1,0), @,-1). Чтобы получить область резонанса, из этого квадрата
следует вырезать полосу, заключенную между прямыми
л ае2 z зе2
7] = 1 ?, 7] = 1 ?.
Отметим, что ae2/aei < 1, так что угол наклона указанных прямых не
превышает 7г/4.
На рис. 3.10.1 области, соответствующие параметрическому резонан-
резонансу, выделены штриховкой. Они существуют при любых не равных друг
Области параметрического резонанса
для уравнения Хилла центрально сим-
симметричны относительно начала коор-
координат плоскости (?, rj). Они получа-
получаются после исключения из единичного
квадрата полосы, заключенной между
наклонными прямыми. Левый верхний
и правый нижний углы квадрата при-
принадлежат резонансной области при лю-
любых отличных друг от друга положи-
положительных значениях u>i, u>2.
Рис. 3.10.1. Области резонанса для уравнения Хилла
другу и\ и и>2. Резонансные области исчезают только при ш\ = и>2.
Таким образом, если
cos(ri + г2) = 1, cos(ri - г2) = -1,
либо
cos(ri + т2) - -1, cos(rx - г2) = 1
иц ^ и>2, неизбежно возникает параметрический резонанс. Вторая
группа равенств, в частности, означает, что
П + т2 = тг + 2тгк, п - г2 = 2тг/, Jk, / = 0, ±1, ±2,...
Например, при к = 0 и / = 0, получаем резонансные соотношения пара-
параметров t\ И <2-
7Г 7Г
7Г / 1 1 \
= «(— + —.
2 \wi a;2/
248 Глава 3. Динамика поступательного движения
Если условно принять, что система имеет среднюю частоту ш — (uj\ -f
и^)/2 и соответствующий ей средний период Т — 27г/а), то можно полу-
получить физически легко ощутимое резонансное соотношение периодов
г _ 1 (u>i +и>2J _ 1
Г *" 8 ^72 ~ 4
_
~ 4951'
Откуда при lj\ —> UJ2 имеем (т/Т) —> 1/2 Другие резонансные соот-
соотношения можно проанализировать совершенно аналогично.
Рассмотрим теперь случай кратных корней уравнения монодромии.
Согласно теореме 3.10.2, резонанс в этом случае отсутствует тогда и
только тогда, когда одновременно выполнены равенства
п2\ = — u>2 cos(u>i<i)sin(u;2<2) — wi sm(tuiti) cos(u>2<2) = 0,
a\2 = —sin(a;i<i)cos(a;2<2) H cos(u>i<i)sin(u;2<2) = 0.
С учетом принятых обозначений имеем однородную систему линейных
уравнений относительно неизвестных sin(ri -f T2), sin(ri — Г2):
(uji + и2) sin(ri + r2) -f (cji - L02) sin(ri - r2) = 0,
(u>i + u/2) sin(ri + T2) — (o^i — UJ2) sin(ri — r2) = 0.
Если u>i Ф u>2> определитель системы отличен от нуля, и ее решением
служат
sin(ri + г2) = 0, sin(ri - т2) = 0,
что отвечает углам квадрата на рис. 3.10.1. Таким образом, параме-
параметрический резонанс будет иметь место также и в случае кратных корней
характеристического уравнения монодромии, а заштрихованные области
на рис. 3.10.1 включают границу, кроме точек A,1), (—1, —1).О
Пример 3.10.3. Частным случаем уравнения Хилла служит од-
однородное уравнение Матьё
x+u>2(l+ecosi>t)x = 0, uj > 0, v > 0, 0 < е < 1.
Где и, е, v — постоянные параметры. Используем результаты предыду-
предыдущего примера и проанализируем возможность появления резонанса для
уравнения Мейсснера, аналогичного уравнению Матье:
х+ uj2{t)x = 0,
где uj(t) — периодическая с периодом т = 2тг/г/ функция, в пределах
одного периода определенная выражением
(* + е) wi если ° < г < г/2'
A - c)w, если (г/2) < * < г
3.10. Резонансные явления
249
В обозначениях примера 3.10.2 будем иметь
ae2 =
2?2
uir(l-e)
1-?2' "~ 2 ' г~ 2 '
Условие параметрического резонанса принимает вид
| cos(u>r) — ?2 cos(a;r?)| > 1 — ?2.
Обозначим
1 UJ
Параметрический резонанс возникает, когда либо
cosBx) — ?2 cosBx?) > 1 - ?2,
либо
cosBx) - е2 cosBx?) < -1 + ?2.
Таким образом, после упрощений получаем два случая реализации па-
параметрического резонанса:
случай 1. ?2sin2(x?) > sin2x,
случай 2. ?2
> cos2 \.
Рис. 3.10.2. Области резонансов уравнения Мейсснера.
На рис. 3.10.2 показаны области резонансных соотношений параме-
параметров Штриховка слева-вниз-направо выделяет области, соответствую-
соответствующие случаю 1, а штриховка слева-вверх-направо — случаю 2. Величины
уг-, Zi, (i = 1,2,...) суть последовательные корни уравнений
7Гу = Ctg 7Гу, WZ = — tg 7TZ
250 Глава 3. Динамика поступательного движения
соответственно. Эти корни задают аргументы максимумов для функций
fi(e) = е2 sin2 *e, f2(e) = е2 cos2 xe
при фиксированном отношении uj/v. Например, значения аргумента е,
при которых функция f\(e) достигает максимума, выражаются форму-
формулой Si = Zii/fuj Точно так же вычисляются аргументы максимумов для
функции /2(?). Указанным аргументам максимумов на рис. 3.10.2 отве-
отвечают пунктирные линии. Аналогично пересчитываются и нули функций
/l(^) и УМ^)- Графики соответствующих обратно пропорциональных за-
зависимостей выделены на рис. 3.10.2 сплошными тонкими линиями. В
целом структура областей резонансных соотношений достаточно слож-
сложна Существуют особые отношения частот вида п/2, (п = 1,2,3,...).
для которых резонанс возникает при любых значениях параметра е. В
окрестности особых отношений с ростом п резонансные области очень
быстро сужаются для любых значений параметра е < 1. Вместе с тем
для значений е = 1 резонансные области, наоборот, расширяются, хотя
между ними всегда остаются уменьшающиеся островки нерезонансных
отношений uj/i/.
Одним из способов получения приближенных условий резонанса для
уравнения Матье
x + u2(l+ecosi>t)x = 0, о;>0, v > 0, 0 < е < 1,
служит метод малого параметра. Проиллюстрируем соответствующую
процедуру поиска решений.
Будем считать, что е <С 1. Укажем способ получения решений x\(t),
в виде рядов по степеням е\
t=0
Очевидно, что
Подставим это выражение в уравнение Матье:
Уо + Уо + ХУ [&@ +и2!/»* + (^2 cos !//)&•_i] = 0.
Приравнивая нулю коэффициенты при одинаковых степенях параметра
е, получим рекуррентную систему дифференциальных уравнений
Уо
= 0, у; +<*>2!/i = -u2yi-icosi>t, г = 1,...
3.10. Резонансные явления 251
Для удобства можно выбрать следующие начальные условия:
*@), уо = х@), ю@) = 0, у,-@) = 0, i=l,...
На основании исследования уравнения Мейсснера следует ожидать,
что зависимость параметра В от е должна начинаться с членов порядка
?2. Непосредственные вычисления подтверждают это наблюдение.
Дифференциальные уравнения для функций у* представляют собой
неоднородные уравнения гармонического осциллятора. Для каждого из
этих уравнений могут возникать явления частотного резонанса при не-
некоторых сочетаниях частоты и с частотами правой части. При переходе
частот через резонансные соотношения возможны существенные изме-
изменения закона движения. О
Пример 3.10.4. Обратимся к примеру 3.10.1 и предположим, что
длина маятника меняется периодически по закону
i(f\ = Пь если 0<t<tu
{) \/2 если *i <t <tx +*2, r = ti+t2
\/2,
в пределах одного периода г. Уравнение движения принимает вид
2/ д
Ф+ Ф+ si
тФ+ ysin<p = 0.
Имеем
a(t) = 2///, D = ехр I - j a(t) dt j = exp (-2 In |l|) = 1.
При изменении t внутри пределов постоянства функции l(t) будет спра-
справедливо уравнение колебаний математического маятника, которое для
малых амплитуд можно приближенно представить в виде уравнения гар-
гармонического осциллятора
где
если 0 < t
w\l) —
Все это напоминает постановку задачи в рассмотренном выше примере
3.10.2. Отличие состоит в том, что в моменты скачкообразного (очень
быстрого) изменения длины маятника членом, содержащим произведе-
произведение скоростей 1ф в уравнении движения маятника, нельзя пренебречь.
252 Глава 3. Динамика поступательного движения
В уравнении Хилла при скачкообразном изменении функции со коорди-
координата и скорость оставались непрерывными. В рассматриваемом примере
координата ip в момент переключения будет непрерывной, а скорость ф
изменится скачком вместе с изменением длины маятника. Чтобы опре-
определить это изменение, воспользуемся уравнением кинетического момен-
момента относительно точки подвеса маятника
--(т12ф) — —Plsm<p.
at
Интегрируя это уравнение в пределах от t\ до (t\ + At), получим
I2{t\ -j- At) ф^\ -j- At) — /2(*i) ф{Ъ\) — I — gl(t)sin (pdt.
Подынтегральные члены ограничены. Поэтому в пределе при At —> О
получим
где ф+ значение угловой скорости после, а ф~ — до скачкообразного
изменения длины маятника. При изменении длины со значения /г на
значение 1\ соответствующий коэффициент пересчета угловой скорости
поменяется на взаимно обратный.
Теперь мы можем воспользоваться критерием параметрического ре-
резонанса. Как и в примере 3.10.2, построим матрицу монодромии. Пусть
решения <p\(t) и <p2(t) таковы, что
Тогда
i /?
= an = cos(a;ifi)cos(a;2^2)
•l L '2
1 1 /?
Ш\ l l W2 /|
_ /2 Г о;2 . II
22 ^ [ Wl П 2 2 l l /2
Отметим в формулах для п2\ и аи наличие множителя \\j\\, связанного
с тем, что период функции l(t) заканчивается тогда, когда она принимает
то значение, которое было в начале периода.
3.10. Резонансные явления 253
В соответствии с теоремой 3.10.2 изучим сначала условие резонанса
|«п 4- о22| > 2. Как и в примере 3.10.2, обозначим т\ = u\t\% t<i = 0^2-
Рассматриваемое условие резонанса принимает вид
>2
или после преобразования произведения тригонометрических функций
в сумму:
|aei cos(ri 4- 72) — ззг cos(ri - т2)\ > 2,
где
2 cos n cos г2 - —jk Н ^ sin n sin г2
2 N^2*2 ^1*1/ 2
Очевидно, что при любых положительных значениях 1\, /г имеем aei > 2,
352 ^ 0. Равенства asi = 2, аег = 0 достигаются тогда и только тогда,
когда /i = /2. Условие параметрического резонанса можно представить
с помощью следующей совокупности неравенств
2 ае2 2 ае2
3Bi З61 ЗЭ1 061
Рассмотрим теперь случай кратных корней уравнения монодромии. В
этом случае согласно теореме 3.10.2 резонанс отсутствует тогда и только
тогда, когда одновременно выполнены равенства
/2 Г I2 1
021 = — ,§ u>2 cos т\ sinr2 + Ш\ 4- sin т\ cosr2 = О,
'1 о 2 J
1 . 1 Ч •
а12 = — sin т\ cos r2 Н ~2 cos т\ sin r2 = 0.
U>i W2 »2
Эта система эквивалентна следующей:
( ш\ +u>o-k I sin(ri + r2) + ( ш\ — u>2t| 1 sin(ri — r2) = 0,
i -I- w2t| I sin(ri 4- r2) - I wi - o;2~ 1 sin(ri - r2) = 0.
•i / V «i /
При /i ^ /2 определитель этой системы отличен от нуля, и ее решением
служат
sin(ri 4- т2) = 0, sin(ri - г2) = 0.
После сравнения полученных формул с аналогичными формулами при-
примера 3.10.2 видим, что заштрихованные области на рис.3.10.1 вместе с
их границей дают правильное представление об условиях резонанса и в
рассматриваемом случае.О
254 Глава 3. Динамика поступательного движения
§ 3.11. Движение под действием сил всемирного
тяготения
Уравнение движения материальной точки в поле центральных сил
допускает интеграл площадей относительно центра О поля (см. тео-
теорему 3.7.3):
г х mv = <т,
где <т — постоянный для конкретного закона движения вектор, вы-
вычисленный по начальным условиям. Движение происходит в непо-
неподвижной плоскости V, перпендикулярной вектору а и проходящей
через точку О. В плоскости V введем полярные координаты гид
с полюсом в центре О. Угол д будем отсчитывать от какого-нибудь
фиксированного в плоскости V направления.
Теорема 3.11.1. (Бинё). Предположим, что постоянная пло-
площадей с = ((г/т) ф 0. Тогда модуль скорости v и величина (со
знаком) F центральной силы, под действием которой происходит
движение, выражаются формулами
носящими название первой и второй формул Бине соответственно.
Доказательство. Теорема 3.7.8 об изменении кинетической энер-
энергии Т в случае действия центральной силы F = Fr/|r| дает
dT=Fdr,
где правая часть представляет собой произведение скалярных вели-
величин силы и дифференциала модуля радиуса-вектора точки (см. при-
пример 3.4.2). При этом если dr > 0, то для притягивающей силы при-
приращение кинетической энергии будет отрицательным, а для оттал-
отталкивающей силы — положительным. Кинетическая энергия дается
формулой (см. замечание 3.6.1)
m 2 m
\2 , 2(dd
Jt)
Интеграл площадей (см. пример 3.7.2) можно представить в виде
3.11. Движение под действием сил всемирного тяготения 255
откуда dt = r2dd/c. Подставив это выражение в правую часть фор-
формулы для кинетической энергии, получим первую формулу Бине.
Разделив уравнение для приращения кинетической энергии на cW,
найдем
dr dT 2 d /1\ Г d2 /1\ 1
Примем во внимание, что
rfr __ 2_d
dtf ~ Г d
Подставив это выражение вместо коэффициента при F, убедимся в
справедливости второй формулы Бине-D
Формулы Бине дают возможность рассчитывать скорость и дей-
действующую силу в зависимости от положения точки на заданной в
плоскости V траектории. Их можно использовать, в частности, для
вывода закона всемирного тяготения Ньютона из законов, сформули-
сформулированных И. Кеплером по наблюдениям за движением небесных тел
солнечной системы. Приведем законы Кеплера.
Закон 1. Орбиты всех планет и комет солнечной системы пред-
представляют собой конические сечения, в одном из фокусов которых
расположено Солнце.
Закон 2. Площади, заметаемые радиусами-векторами планет,
имеющими начало в Солнце, прямо пропорциональны интервалам
времени движения планет.
Закон 3. Планеты двиэюутся по эллипсам, и квадраты времен
г их обращения вокруг Солнца пропорциональны кубам больших по-
полуосей а эллипсов:
т2/а3 = const.
Коэффициент пропорциональности один и тот же для всех планет
солнечной системы.
По этим законам однозначно решается обратная задача механики.
Другими словами, по ним можно восстановить силу взаимодействия
планет с Солнцем. Этот результат был впервые опубликован Нью-
Ньютоном в 1687 г.
Теорема 3.11.2. (Ньютон). Законы Кеплера справедливы то-
тогда и только тогда, когда сила взаимодействия планеты с Солнцем
выражается формулой
Р=/г
г J гз х'
где г — радиус-вектор планеты, имеющий начало в Солнце, т —
масса планеты, М — масса Солнца, f — универсальная постоянная
тяготения (гравитационная постоянная).
256 Глава 3. Динамика поступательного движения
Доказательство. Необходимость. Первый и второй законы
Кеплера позволяют сделать вывод, что орбита каждой планеты есть
плоская кривая, и для нее имеет место интеграл площадей относи-
относительно Солнца. Из теоремы 3.7.7 следует, что тогда сила взаимодей-
взаимодействия планеты с Солнцем — центральная с центром в Солнце. Посто-
Постоянная площадей для планет не равна нулю, и мы можем воспользо-
воспользоваться формулами Бине. Выберем полярные координаты с центром
в Солнце и полярную ось направим в точку орбиты, ближайшую к
Солнцу (перицентр орбиты). Полярный угол, полученный таким спо-
способом, обозначим v. Он называется истинной аномалией. Уравнение
эллипса в полярных координатах имеет вид
1 1 + 6 cos и
г" р
где е — эксцентриситет эллипса:
а и b — большая и малая полуоси эллипса, р = Ь2 /а — фокальный
параметр. Подставив зависимость радиуса от истинной аномалии во
вторую формулу Бине, получим
__ тс2 ( — е cos v -f 1 + е cos v\ __ тс2
г2 V Р ) ~ рг2'
Таким образом, сила, действующая на планету, центральная, притя-
притягивающая, а ее величина обратно пропорциональна квадрату радиу-
радиуса. Покажем, что постоянная
с2 с2а
одинакова для всех планет. Действительно, за период г обращения
вокруг Солнца радиус-вектор заметает всю площадь эллипса. Зна-
Значит,
С-т = жаЪ.
Поэтому
4тг2а3
"=—•
Но отношение а3/т2 для всех планет совпадает. Отсюда и следует
постоянство величины //. Если принять ц = /М, где М — масса
Солнца, то сила, действующая на планету, представляется в виде,
указанном в утверждении теоремы.
3.11. Движение под действием сил всемирного тяготения 257
Достаточность. Пусть сила выражается указанной в утвержде-
утверждении теоремы формулой. Выберем произвольно полярную ось. Вос-
Воспользуемся второй формулой Вине
Выполнив очевидные преобразования и обозначив и = г, получим
уравнение траектории
Это уравнение аналогично уравнению осциллятора с постоянной воз-
возмущающей силой. Решение уравнения имеет вид
или
р Ас2
Полученная формула описывает все конические сечения и только
их. Существование интеграла площадей обеспечивает выполнение
третьего закона Кеплера. Q
Закон всемирного тяготения, сформулированный Ньютоном,
гласит, что если размерами материальных тел моэюно пренебречь по
сравнению с расстояниями между ними, то любые два таких тела
притягиваются друг к другу с силой, по модулю равной
f mi ш2
р2
где f — гравитационная постоянная, m\t т^ — массы тел, р — рас-
расстояние меэюду ними. Сила притяжения направлена вдоль прямой,
соединяющей эти тела.
В соответствии с теоремой 3.11.2 движение планет солнечной си-
системы происходит так, как будто они взаимодействуют только с
Солнцем и не взаимодействуют друг с другом. По закону всемир-
всемирного тяготения на каждую планету действует не только Солнце, но и
другие планеты. Однако сила притяжения Солнца существенно пре-
превосходит влияние других планет. Точность измерений, доступных
Кеплеру, не позволяла уловить это влияние.
Рассмотрим две изолированные материальные точки с массами
mi иш2. Пусть i*i и Г2 — радиусы-векторы этих точек. Размерами
тел, соответствующих материальным точкам, пренебрежем. Тогда
17- 1503
258 Глава 3. Динамика поступательного движения
сила Fi2 притяжения второго тела первым и сила F21 притяжения
первого тела вторым выражаются формулами
где г = гг — Г1. Уравнения движения точек принимают вид
d2ri _ m2 d2r2 _ fm\
Вычитая из второго уравнения первое, найдем
ГП\ 4" ГП2
Y- ^ Г.
Г3
В небесной механике задача о движении двух материальных то-
точек под действием сил всемирного тяготения называется задачей двух
тел. Полученный результат можно сформулировать следующим
образом. В задаче двух тел относительное движение точек описыва-
описывается уравнением движения, справедливым для одной материальной
точки в поле центральной ньютонианской силы (теорема 3.11.2), ко-
когда в неподвижном центре помещена притягивающая масса, равная
сумме масс взаимодействующих тел.
Таким образом, при изучении движения планеты относительно
Солнца следует принять массу М равной сумме масс Солнца и пла-
планеты. Однако масса планеты в данном случае пренебрежимо мала.
Пусть в задаче двух тел
m\Y\ 4- Ш2Г2 m\Y\ 4- ГП2Г2
rc = ; , vc = ¦
— соответственно радиус-вектор и скорость центра масс материаль-
материальных точек. Умножив уравнение движения первой точки на mi, урав-
уравнение движения второй точки на Ш2 и сложив их, получим
---(miri + m2r2) = 0.
at
Следовательно, vc — постоянный вектор, и
Гс = (t -tO)vc+rc(*o)i
где rc(to) — начальное значение радиуса-вектора центра масс. Зна-
Значит, центр масс точек движется в инерциальном пространстве рав-
равномерно. Если нам удалось найти r(t), то радиусы-векторы точек
можно вычислить по формулам
П = Гс ; r(t), Г2 = Гс + ; r(t).
mi +Ш2 mi 4- rri2
3.11. Движение под действием сил всемирного тяготения 259
С учетом сказанного обратимся к задаче о движении материаль-
материальной точки в поле ньютонианской силы притяжения к неподвижному
центру О (пример 3.4.2). Соответствующее уравнение движения име-
имеет вид
dv .. а
— = г = — — г,
где ц — постоянная, г — радиус-вектор, v — скорость точки относи-
относительно центра О. Оно допускает интеграл энергии
v2 a
и интеграл площадей
Г X V = С.
Постоянный вектор с перпендикулярен плоскости траектории мате-
материальной точки. Траектория точки в небесной механике называется
орбитой. Вектор с определяется начальными значениями радиуса-
вектора го и скорости v0 при t = to:
с = r(t0) x v(t0) = r0 x v0, с = |с| = rovosin(rj57vo)-
Выполним преобразование
dt dt r3 г
dt
г2 dt r dt) dt\r
Следовательно, вектор
vxc--r=?
остается постоянным для конкретного движения точки. Постоянный
вектор С называется вектором Лапласа, а полученный первый инте-
интеграл — интегралом Лапласа.
Теорема 3.11.3. (Лаплас). Вектор Лапласа направлен вдоль
большой полуоси в сторону перицентра орбиты.
17*
260
Глава 3. Динамика поступательного движения
Доказательство. Напомним, что перицентр есть ближайшая к
притягивающему центру точка орбиты. Следовательно, в перицен-
перицентре производная от модуля радиуса-вектора по времени должна быть
равна нулю: г = 0. Справедливо тождество
dv
r-v = r- — =r-r.
at
Пусть г* — радиус-вектор перицентра, v* — скорость точки в пери-
перицентре. Тогда, очевидно, г* • v* = 0, т.е. радиус-вектор и скорость
в перицентре взаимно ортогональны. Умножим интеграл Лапласа
скалярно на v:
Отсюда ясно, что в перицентре С • v,r = 0, а значит, С \\ г*. Из
интеграла энергии заключаем, что значение скорости в перицентре
должно быть максимальным. Имеем v JL с. Из интеграла Лапласа
следует
Правая часть этого выражения максимальна тогда и только тогда,
когда г совпадает по направлению с ?.О
Вектор кинетического момента
и вектор Лапласа позволяют
построить репер, в котором ор-
орбита материальной точки, дви-
движущейся в поле центральной
ньютонианской силы, предста-
представляется каноническим уравне-
уравнением в полярных координа-
координатах. При этом вектор Лапла-
Лапласа направлен из притягивающе-
притягивающего центра в перицентр орбиты,
а вектор кинетического момен-
момента перпендикулярен плоскости
орбиты.
Рис. 3.11.1. Вектор Лапласа
Выберем в точке О базисные векторы (рис. 3.11.1)
ei=?/|?|, e3 = c/|c|, e2 = e3xei.
Орбита материальной точки лежит в плоскости векторов (е1,ег).
Если в этой плоскости ввести полярные координаты, для которых
3.1 1. Движение под действием сил всемирного тяготения 261
полярный угол v отсчитывается от направления вектора ei, то орби-
орбита точки выразится уравнением
1 4- e cos v
При доказательстве теоремы 3.11.2 был вычислен фокальный пара-
параметр р — с21\i. Найдем связь между эксцентриситетом е и начальны-
начальными условиями. Используя первую формулу Бине, получим
~" Р2
Подставим это выражение в интеграл энергии:
1 + е2 4- 2е cos и 1 + е cos и _ h
2р р ~ /I'
Отсюда
е2 = 14 —•
Тем самым тип орбиты зависит только от знака h постоянной энер-
энергии. Возможны следующие случаи.
1. При h < О получаем е < 1, и орбита — эллипс.
2. При h = О получаем е = 1, и орбита — парабола.
3. При h > 0 получаем е > 1, и орбита — гипербола.
4. При h = — /i/Bp) получаем е = 0, и орбита — окружность.
Для того чтобы постоянная энергии h обратилась в нуль, началь-
начальная скорость должна быть равна
Это — вторая космическая скорость. Она минимальная среди всех
скоростей, при которых материальная точка неограниченно удаляет-
удаляется от притягивающего центра.
Для того чтобы получить круговую орбиту, надо обеспечить ра-
равенство
и направить вектор скорости перпендикулярно радиусу-вектору. Ве-
Величина Vj называется первой космической скоростью. Очевидно, что
vn = v7\/2.
Определим закон движения точки по орбите. При движении точки в
поле центральной силы секторная скорость постоянна:
с/5 _ с
It ~ 2*
262 Глава 3. Динамика поступательного движения
Пусть S заметается от луча с направлением ei (в небесной механике
прямая, проходящая через притягивающий центр параллельно век-
вектору ei, называется линией апсид). Обозначим^ время прохождения
через перицентр. Тогда
2
С другой стороны (см. пример 3.7.2),
dS = — г2 dv.
Отсюда
и
Q _ Р2 [ dv _
YJ (l + ecosi/J"^'
о
Из уравнения
найдем v(t) и тем самым установим закон движения
г\ = r{v) cos j/, Г2 = r(i/) sin j/, Г3 = 0.
Уравнение для определения v(i) оказывается трансцендентным. Оно
решается численно.
Пример 3.11.1. Определим закон движения точки по эллипти-
эллиптической орбите. Имеем е < 1. Сделаем замену переменной
Переменную г/ называют эксцентрической аномалией. Дифференци-
Дифференцируя, получим
аи — аи.
1-е cos г/
Кроме того,
1-е2
1 4- е cos v —
1-е cos и
Поэтому
/-
J A +
( ecosi/)^
о
3.11. Движение под действием сил всемирного тяготения
263
Пусть а — большая полуось эллипса. Учтем, что
р = аA-е2), c = y/jlp.
Тогда получим
u — esinu = y/fia(t — tw).
Это — уравнение Кеплера. Для его численного решения можно исполь-
использовать рекуррентную последовательность
но = y/na~3(i — *тг), ui = ио 4- esinu,-_i, г = 1,2,...
Процесс получения приближений щ продолжается пока
\щ -ti,-_i
б,
«2
где с — заданная точность вычислений. Рис. 3.11.2 иллюстрирует про-
Уравнение Кеплера можно ре-
решать методом простой итерации.
На рисунке представлен резуль-
результат трех первых итераций. Вид-
Видно, что отображение через ите-
итерацию оказывается сжимающим.
Число арифметических операций
для каждой итерации невелико,
и процесс сходится достаточно
быстро.
и = г/0 4- в sin х
Рис. 3.11.2. Решение уравнения Кеплера
цедуру получения щ. Очевидна сходимость процесса. На рис. 3.11.3
изображены эксцентрическая и истинная аномалии данной точки М ор-
орбиты. С центром О1 в середине большой оси эллипса построена окруж-
окружность радиуса а. Через точку М, определенную истинной аномалией и,
проведен перпендикуляр к большой оси эллипса. Он пересекает окруж-
окружность в точке М'. Угол между отрезком О'М1 и направлением на пери-
перицентр есть эксцентрическая аномалия и.О
Вычисление функции v(t) завершает решение задачи Коши об
определении закона движения материальной точки по заданным на-
начальным значениям радиуса-вектора и вектора скорости.
Рассмотрим теперь краевую задачу. Баллистика — это наука о
движении снарядов, мин, бомб, неуправляемых ракет в поле силы
тяжести. Одна из основных задач баллистики состоит в построении
264
Глава 3. Динамика поступательного движения
Эксцентрическая аномалия есть
центральный угол образа М1 точ-
точки М после превращения эллип-
эллипса в окружность пропорциональ-
пропорциональным его растяжением вдоль оси ор-
ординат. Эксцентрическая аномалия
так же, как и истинная аномалия,
однозначно определяет положение
точки на эллипсе. Связь между
эксцентрической аномалией и вре-
временем движения по орбите дается
уравнением Кеплера.
Рис. 3.11.3. Эксцентрическая аномалия
траектории, проходящей через две заданные точки пространства (за-
(задача о попадании).
Рассмотрим задачу о попадании в ньютонианском центральном
поле силы. Пусть О — центр силы, аМиМ' — две точки простран-
пространства, через которые необходимо провести траекторию материальной
точки. Предположим, что три точки О, М, М' не лежат на одной
прямой. Они определяют плоскость V, которая содержит искомую
траекторию.
Примем для определенности, что эта траектория — эллипс. То-
Тогда притягивающий центр О находится в одном из фокусов эллипса.
Задача будет решена, если указать второй фокус О'.
По свойству эллипса имеем
где г и р — расстояния от точки М до точек О и О1 соответственно,
а г' и р' — от точки М1 до тех же точек. Следовательно,
Но по условию задачи величины гиг' фиксированы. Поэтому все
допустимые положения второго фокуса О' стеснены условием, что
разность их расстояний р' и р до заданных точек М и М' одинако-
одинакова. Такие точки О1 образуют гиперболу, и мы имеем бесчисленное
множество решений.
Зададим модуль скорости в точке М. Тем самым задана посто-
постоянная энергии h. Справедлива формула
а =
Р
1-е2
Л"
3.11. Движение под действием сил всемирного тяготения 265
Значит, в этом случае нам известна и длина большой полуоси. По
основному свойству эллипса имеем
или
р = 2а - г, р1 = 2а - г'.
Из первого равенства следует, что точка О' лежит на окружности
радиуса 2а — г с центром в М, а из второго равенства следует, что
точка О' лежит на окружности радиуса 2а — г' с центром в М'.
Две окружности либо пересекаются в двух точках, либо касаются,
либо не пересекаются. Значит, имеются либо два решения задачи,
либо одно, либо ни одного.
Изучим случай, когда имеется лишь одно решение. Тогда точка
О' должна лежать на прямой ММ'. Поскольку искомая траектория
есть эллипс, точка О' расположена между точками М и М$. Каса-
Касание окружностей будет внешним, и мы имеем, следовательно, случай
предельно возможного удаления точки М' от М для заданного зна-
значения начальной скорости. Найдем все точки М' , удовлетворяющие
этому условию. В соответствии с принятыми обозначениями
г' 4- ММ' = г' + р' + р = 2а 4- 2а - г = 4а - г.
Ясно, что все точки М', для которых решение задачи о попадании
единственно, лежат на эллипсе с фокусами в точках О и М и с боль-
большой полуосью
,= ',«.-„ = _?_:.
Если этот эллипс вращать вокруг прямой ОМ, то получим эллипсо-
эллипсоид, который в баллистике называется эллипсоидом безопасности. В
точки, лежащие вне этого эллипсоида, невозможно попасть из задан-
заданной точки М. Краевая задача не имеет решения. Для любой точки
внутри эллипсоида безопасности имеются два решения краевой за-
задачи.
Если начальную скорость увеличивать, то h —> 0, а большая полу-
полуось эллипсоида безопасности неограниченно возрастает. Это значит,
что для попадания из точки М в любую точку пространства не тре-
требуется развивать начальную скорость более второй космической ско-
скорости. На этом закончим анализ задачи о движении в центральном
поле тяготения. В заключение сделаем следующие замечания.
Замечание 3.11.1. Задача двух тел верно отражает лишь основ-
основные закономерности взаимодействия планеты с Солнцем. Вместе с
266 Глава 3. Динамика поступательного движения
тем имеется ряд особенностей движения (например, отклонения тра-
траекторий от конических сечений и др.), которые не могут быть объяс-
объяснены без учета влияния сил притяжения от других планет солнечной
системы. Соответствующая задача называется задачей п тел.
Пусть имеется п материальных точек с массами mi,..., mn, вза-
взаимодействующих друг с другом по закону тяготения Ньютона. Си-
Система уравнений движения для задачи п тел имеет вид
™>i*i = - V> I "—^з"(г* ~r;)> *>i = Ij.-чЯ,
&i*«-*ji3
где Yi — радиусы-векторы материальных точек. Аналитическое ис-
исследование этой задачи затруднительно даже в случае п = 3 (задача
трех тел). Эффективными здесь могут быть методы математического
моделирования на ЭВМ.
Замечание 3.11.2. Применение закона всемирного тяготения в
форме, предложенной Ньютоном, ограничено условием малости раз-
размеров притягивающихся тел по сравнению с расстоянием между ни-
ними. Когда размеры тел существенны, взаимное гравитационное воз-
воздействие может быть найдено из закона Ньютона с помощью инте-
интегрирования.
Теорема 3.11.4. Пусть задана материальная точка т прене-
пренебрежимо малых размеров по сравнению с ее расстоянием г до центра
однородного шара массы М и радиуса R. Тогда силовая функция U(r)
гравитационного воздействия шара на точку выраэюается формулой
С МГП ^ D
/ , если г > Я,
и(г) =;
— г2), если г < R.
Доказательство теоремы выполним в три этапа.
Этап 1. Пусть в плоскости V лежит однородный материальный
обруч радиуса р и массы Mi, а на оси, перпендикулярной к плоскости
V и проходящей через центр обруча, расположена материальная точ-
точка массы т. Начало отсчета поместим в центр обруча. Расстояние от
точки т до плоскости V обозначим у. Чтобы найти силовую функ-
функцию U\(y) гравитационного воздействия со стороны обруча на точку
т, разобьем обруч на одинаковые малые отрезки с угловым разме-
размером d<p относительно центра обруча. Искомая силовая функция U\{y)
получается суммированием силовых функций, соответствующих ка-
3.11. Движение под действием сил всемирного тяготения 267
ждому малому отрезку:
Этап 2. Пусть в плоскости V расположен круговой однородный
диск массы Mi и радиуса /. На оси, перпендикулярной к плоскости
диска и проходящей через его центр, расположена материальная точ-
точка массы т. Начало отсчета поместим в центр диска. Расстояние от
точки m до плоскости V обозначим у. Чтобы найти силовую функ-
функцию [/2B/), разобьем диск концентрическими окружностями. Пусть
р — радиус такой окружности, & dp — ширина кольца между сосед-
соседними окружностями. С точностью до малых второго порядка масса
кольца М\ = 2wM2Pdp/(ж12). Искомая силовая функция получает-
получается суммированием силовых функций, соответствующих всем кольцам
разбиения. Воспользуемся результатом первого этапа:
Этап 3. Пусть имеются однородный шар радиуса R и массы М и
материальная точка массы га, расположенная от центра шара на рас-
расстоянии г. Разобьем шар плоскостями, перпендикулярными к пря-
прямой, соединяющей центр шара и точку т. Пусть V — одна из таких
плоскостей. Расстояние от центра О шара до этой плоскости обозна-
обозначим х. Будем считать х > 0, когда плоскость V расположена между
точками О и ш, и ж < 0 в противоположном случае. В сечении шара
плоскостью V получается круг радиуса / = л/Я2 — ж2, а расстояние
у от точки m до плоскости V дается равенством у = г — х. С точно-
точностью до малых второго порядка слой, вырезаемый из шара соседними
плоскостями указанного разбиения, имеет массу
М Ш
м
Используя результат второго этапа, получаем выражение для иско-
искомой силовой функции
U(r) = f Ц^ J (\/r2 - 2гх + В? - |г - х\) dx.
-я
В зависимости от значения г следует рассмотреть два случая:
268 Глава 3. Динамика поступательного движения
а) г > R. Тогда г — х > 0 для всего интервала интегрирования.
Поэтому знак модуля можно заменить скобками, и
б) г < R. Тогда по определению модуля будем иметь
Г я г я
j\/r2 - 2rx + R? dx - f (r -x)dx- f(x - r) dx
L-я -я
Учитывая, что силовая функция определена с точностью до произ-
произвольной постоянной, получаем формулу, содержащуюся в утвержде-
утверждении теоремы. D
Следствие 3.11.1. Когда материальное тело малых размеров
находится вне материального однородного шара (например, спутник
Земли), то независимо от расстояния между ними силу притяже-
притяжения тела шаром молено получить, сосредоточив всю массу шара в
его центре.
Следствие 3.11.2. Два материальных однородных шара незави-
независимо от расстояния между ними притягиваются друг к другу с си-
силой притяжения точечных масс, равных массам шаров и сосредото-
сосредоточенных в их центрах.
Замечание 3.11.3. Этапы, выделенные в доказательстве теоре-
теоремы 3.11.4, имеют самостоятельную ценность. Вспомним, что закон
электростатического взаимодействия точечных зарядов имеет вид
закона Ньютона, когда вместо масс используются заряды, а вме-
вместо гравитационной постоянной — диэлектрическая проницаемость.
Пусть точечный положительный заряд q находится между бесконеч-
бесконечными противоположно заряженными пластинами. Примем, что пер-
первая пластина заряжена отрицательно с плотностью заряда — а. Рас-
Расстояние от точечного заряда до первой пластины обозначим у\, а до
второй пластины — у2- Цилиндром с осью, перпендикулярной к пла-
пластинам и проходящей через точечный заряд, вырежем в этих пласти-
пластинах два круга радиуса /. В соответствии с этапом 2 доказательства
теоремы 3.11.4 силовая функция от воздействия кругов на точечный
заряд будет выражаться формулой
3.12. Сферический маятник 269
где к — диэлектрическая проницаемость среды. Чтобы найти сило-
силовую функцию U для бесконечных пластин, следует выполнить пре-
предельный переход
U(yuV2) = lim U*(yi,y2) = 2тг к a q(\y2\ - \ух\).
/—юо
Пусть расстояние между пластинами равно d. Примем 2/2=2/1— d.
Тогда
{d при 2/i < 0;
d - 2yi при 0 < ух < d\
—d при 2/i > d.
Таким образом, силовое поле отсутствует вне пластин. Между пла-
пластинами силовое поле однородно, а силы направлены перпендику-
перпендикулярно пластинам.
§ 3.12. Сферический маятник
Сферическим маятником называется материальная точка, кото-
которая принуждена под действием наложенных на нее связей двигать-
двигаться по поверхности неподвижной сферы в поле силы тяжести. Та-
Такая связь может быть реализована, например, с помощью жесткого
стержня, соединяющего подвижную точку с центром сферы. Связь
будем предполагать идеальной, так что на точку действуют сила тя-
тяжести Р и реакция связи N, направленная по радиусу к центру сфе-
сферы.
Пусть начало координатного репера Ое\е2ез совпадает с центром
сферы, плоскость векторов ei, е2 перпендикулярна силе тяжести Р,
а вектор ез параллелен Р, так что Р = —т</ез, т — масса точки,
д — ускорение силы тяжести. Воспользуемся сферической системой
координат (рис. 3.12.1), в которой угол д характеризует широту точ-
точки на поверхности сферы, а угол ф — долготу (см. примеры 3.6.2
и 3.6.6). Поскольку радиус сферы R не изменяется, кинетическая
энергия Т и силовая функция U примут вид
Т = j(Я2г?2 + R2 cos2 д ф2), U = -mgRsin t>.
Существует интеграл энергии
Д2^2 + R2 cos2 д ф2 = -2gR sinti + h,
где h — постоянная в силу уравнений движения. В нижнем положе-
положении маятника имеем д = —тг/2.
270
Глава 3. Динамика поступательного движения
Расстояние R между точкой О под-
подвеса и материальной точкой М сфе-
сферического маятника не меняется во
все время движения. Таким образом,
движение материальной точки стес-
стеснено геометрической идеальной свя-
связью. Реакция N связи направлена по
нормали к поверхности сферы. Поло-
Положение точки М в пространстве одно-
однозначно определяется заданием ее ши-
широты и долготы на сфере радиуса R с
началом в точке подвеса О маятника.
Рис. 3.12.1. Сферический маятник
Так как реакция связи N направлена по радиусу, будет справед-
справедлив интеграл площадей относительно вертикальной оси, проходящей
через центр сферы (теорема 3.7.6):
1 cos2 tf =
С учетом этого выражения интеграл энергии примет вид
R?
cos2
Сделаем замену переменной z = Я sin г?. По смыслу z — вертикаль-
вертикальная координата материальной точки. Тогда
Разделяя переменные, будем иметь
z
dz
y/(h - 2gz)(R? - г2) - с2
= ±(t -10).
Многочлен, стоящий под знаком радикала, имеет третью степень.
Поэтому левая часть содержит эллиптический интеграл. Получен-
Полученное равенство определяет закон изменения z(i), и мы можем теперь
узнать зависимость fl(t), а из интеграла площадей и ф(г).
Обратимся к задаче качественного исследования движения сфе-
сферического маятника. Рассмотрим следующие случаи.
3.12. Сфераческий маятник 271
Случай 1. Пусть вектор начальной скорости принадлежит вер-
вертикальной плоскости, содержащей центр сферы и материальную точ-
точку. Это значит, что в начальный момент времени ф = О и поэтому
с = 0. Следовательно, ф = 0, и траектория движения будет принад-
принадлежать начальной вертикальной плоскости. Имеем изученный выше
математический маятник (определение 3.9.1).
Случай 2. Пусть с ф 0. Тогда знак ф будет постоянным, и ф
будет монотонной функцией времени. Рассмотрим многочлен
/(*) = (h- 2gz)(R2 - z2) - с\
Имеем
f(±R) = -с2 < 0, Д+оо) > 0, Д-оо) < 0.
Таким образом, на интервале (Я, +оо) имеется по крайней мере один
корень 7 уравнения f(z) = 0. Действительное движение соответству-
соответствует неотрицательным значениям /(г), причем таким, для которых
-R<z<R.
Поскольку начальное значение dz/dt вещественно и отлично от
нуля, то в начальный момент времени будет f(z) > 0, а так как в
этот же момент справедливо — R < z < R, то в интервале (—R, R)
имеются действительные корни аи/? уравнения f(z) = 0.
Представим многочлен f(z) в виде
/(*) = 2д (г3 - А г2 - Д2г
Сравним коэффициенты при первой степени z:
а/? + /?7 + 7<* = -Я2.
Отсюда
2
Корни а и /? по модулю меньше R. Следовательно, должно быть
а + /3 < 0.
Поэтому один из корней а или /3 отрицателен. Пусть а < 0. Корень
/3 > а может быть как положительным, так и отрицательным.
Примем для определенности, что в начальный момент времени
движения при z = zo задано z = z$ < 0. Тогда в выражении
272
Глава 3. Динамика поступательного движения
надлежит взять знак "—", и z будет уменьшаться до тех пор, пока
оно не достигнет значения а. Производная z может изменить знак,
лишь когда f(z) = 0. Продифференцировав по времени равенство
,2 _ /(*)
найдем
IB? dz"
Если корни аи/? простые, то
dz
I
Значит, в точках аи/? знак скорости z должен изменяться на про-
противоположный.
Геометрическая иллюстрация движения сферического маятника
в случае простых корней аи/? приведена на рис. 3.12.2. Поверхность
Траектория сферического маятника
изображена толстой линией и заклю-
заключена в полосе на сфере, расположен-
расположенной между двумя параллельными го-
горизонтальными плоскостями, имею-
имеющими высоту аи/? относительно точ-
точки подвеса соответственно. В сечении
сферы указанными плоскостями по-
получаются окружности, и траектория
касается этих окружностей, так что
общая касательная горизонтальна.
Рис. 3.12.2. Движение сферического маятника: а ф /?
сферы пересечена двумя горизонтальными плоскостями, проходящи-
проходящими через точки вертикальной оси со значениями z = а и z = /?. В
сечении сферы получаются две параллели. Траектория материаль-
материальной точки на сфере расположена между этими параллелями и гладко
их касается.
В случае кратного корня zo = a = /3 две параллели сливают-
сливаются, и точка описывает окружность в плоскости, перпендикулярной к
вектору ез. Имеем конический маятник. Условие кратности корней
3.12. Сферический маятник 273
состоит в том, что совместно должны быть выполнены равенства
f(z0) = (А - 2gzo)(R2 - z2) - с2 = О,
У-
=-2g(R2-z2o)-2zo(h-2gzo) = 0.
Из интеграла энергии и интеграла площадей следует, что если i0 = О,
то должно быть выполнено соотношение
Из второго условия кратности корней найдем
Отсюда ясно, что случай кратного корня можно реализовать только
при отрицательных значениях координаты zq .
Выполним расчет силы реакции N, возникающей при произволь-
произвольном движении сферического маятника. Пусть г — радиус-вектор, Р
— вес материальной точки, N — модуль реакции. Уравнение движе-
движения маятника имеет вид
гаг = ——г — Рез-
R
Продифференцировав дважды уравнение г2 = R2, найдем г г = —v2.
Если теперь учесть уравнение движения и интеграл энергии, то
R
Тем самым модуль реакции зависит только от вертикальной коорди-
координаты маятника.
Рассмотрим движение проекции на горизонтальную плоскость ма-
материальной точки сферического маятника в случае его малых откло-
отклонений от нижнего положения равновесия. Представим радиус-вектор
г маятника в виде суммы
г = гп + ze3,
где гп — горизонтальный вектор, причем rn/R — малая величина.
Относительно величины z будем иметь
z = —
IX-1503
274 Глава 3, Динамика поступательного движения
Следовательно,
Другими словами, для малых отклонений маятника от нижнего поло-
положения равновесия модуль N реакции связи оказывается постоянным
с точностью до членов второго порядка малости по координатам:
Отметим, что если малы также и скорости, то h « — 2gR и No « Р. С
точностью до членов третьего порядка малости уравнение движения
в проекции на горизонтальную плоскость принимает вид
гп =0, uj2 = N0/(mR).
Решение такого уравнения выражается равенством
гп = acosa;^ + bsinutf,
где а и b — постоянные векторы, принадлежащие горизонтальной
плоскости и вычисляемые по начальным условиям. Если векторы а и
b неколлинеарны, то конец вектора гп описывает эллипс (замкнутую
кривую второго порядка). Если а и b коллинеарны, то конец вектора
гп движется по отрезку прямой. Начало координат для этого отрезка
служит серединой.
Выяснение остальных конкретных подробностей движения сфери-
сферического маятника предоставим читателю.
§ ЗЛЗ. Относительное движение
В соответствии с принципами относительности и детерминирован-
детерминированности (см. § 3.2, § 3.3) второй закон Ньютона, связывающий ускоре-
ускорение материальной точки с действующими на нее от других объектов
силами, справедлив и имеет одинаковое выражение для всех инер-
циальных систем отсчета. Если система отсчета неинерциальна, то
связь между относительным ускорением материальной точки и при-
приложенными к ней силами будет более сложной.
Теорема 3.13.1. Уравнение относительного движения матери-
материальной точки в неинерциальной системе отсчета имеет вид
rawr = F + (-mwe) + (-mwc),
3.13. Относительное движение 275
где we — переносное ускорение, a wc — кориолисово ускорение:
wo — ускорение начала системы отсчета, w — ее угловая скорость,
Со — угловое ускорение, г — радиус-вектор материальной точки в
подвижном репере, vr — ее относительная скорость.
Доказательство. Воспользуемся теоремой Кориолиса 2.16.2. Из
нее следует, что ускорение точки в инерциальной системе отсчета
(абсолютное ускорение) выражается следующим образом:
Wa = Wr + We + Wc.
Осталось подставить правую часть в закон Ньютона. ?
Таким образом, движение материальной точки в неинерциальной
системе отсчета можно изучать точно так же, как и в инерциальной
системе, но к силам взаимодействия между физическими объектами
(абсолютным силам), учитываемым в инерциальной системе, следует
добавить силы, связанные с движением неинерциальной системы и
называемые силами инерции:
Fe = -mwe, Fc = -rawc.
Переносная сила Fe возникает из-за переносного ускорения. Кори-
олйсова сила Fc возникает из-за ускорения Кориолиса.
Теорема 3.13.2. (О кинетической энергии относительного
движения). Дифференциал кинетической энергии относительного
движения равен работе абсолютной силы и переносной силы инер-
инерции на относительном действительном элементарном перемеще-
перемещении точки dv:
dTr = F • dr + Fe • dr, Tr =
mvr2
Доказательство. Чтобы получить закон изменения кинетиче-
кинетической энергии относительного движения, умножим уравнение относи-
относительного движения теоремы 3.13.1 на вектор vr и учтем, что
dvr dv . ч
wr = -JT' -jr = vr, wc • vr = 2(w x vr) • vr = 0,
at at
где символ "d" означает дифференцирование компонент вектора в не-
инерциальном репере. После преобразований получим утверждение
теоремы. ?
18*
276 Глава 3. Динамика поступательного движения
Теорема 3.13.3. Если компоненты ускорения wo сохраняются в
неинерциальном репере и угловая скорость w этого репера постоян-
постоянна, то переносная сила инерции Fe потенциальна с силовой функци-
функцией
Доказательство. Напомним, что сила потенциальна тогда и
только тогда, когда ее работа на элементарном перемещении точки
есть полный дифференциал. Но по условию теоремы имеем о? = 0.
Поэтому
we • dr — w0 • dr + ы x (a? x r) • dr = wo • dr + [(a? • r)u> — u;2r]dr =
= J w0 • г + -(« • rJ - -a/V .D
Теорема 3.13.4. (Интеграл энергии в относительном дви-
движении). Если связи, стесняющие относительное движение точки,
идеальны и таковы, что ее действительное элементарное переме-
перемещение принадлежит множеству виртуальных, активные силы по-
потенциальны с потенциальной энергией П и переносная сила инерции
Fe обладает силовой функцией Ue, то в относительном движении
справедлив интеграл энергии
Доказательство. Сформулированное утверждение непосредст-
непосредственно следует из теоремы 3.13.2.П
Пример 3.13.1. Пусть система отсчета движется поступательно
с постоянным ускорением а (например, вагон ускоряющегося поезда).
В ней помимо активной силы F действует сила инерции Fe = —та.
Предположим, что активная сила есть сила тяжести: F = mg, где g
— вектор ускорения свободного падения. Относительное движение и
равновесие будут иметь специфические особенности.
1. Рассмотрим движение математического маятника. Момент сил
относительно точки подвеса маятника будет равен нулю только тогда,
когда отрезок между материальной точкой и точкой подвеса окажется
параллельным вектору Ф = m(g — а). Направление этого вектора следу-
следует взять в качестве начала отсчета угла отклонения маятника. Период
малых колебаний, очевидно, будет
г = 2тг
3.13. Относительное движение 277
где / — длина маятника.
2. Известно, что свободная поверхность жидкости, покоящейся в не-
некотором силовом поле, совпадает с одной из эквипотенциальных поверх-
поверхностей этого поля. Поверхность жидкости, покоящейся под действием
силы тяжести в инерциальной системе отсчета, представляет собой гори-
горизонтальную плоскость, а эквипотенциальная поверхность силового поля
задается уравнением
UT = mg • г = с,
где г — радиус-вектор точки поверхности. В системе отсчета, движу-
движущейся поступательно с ускорением а, эквипотенциальная поверхность
удовлетворяет уравнению
U = UT + Ue = m(g - а) • г = с.
Поэтому свободная поверхность жидкости есть наклонная плоскость,
перпендикулярная вектору Ф.О
Пример 3.13.2. Пусть ось цилиндрического сосуда расположена
вертикально, и сосуд вращается вокруг нее с постоянной угловой скоро-
скоростью о>. Если в такой сосуд налить жидкость и рассмотреть условие ее
равновесия относительно сосуда под действием силы тяжести, то по те-
теореме 3.13.3 уравнение эквипотенциальной поверхности можно записать
следующим образом:
1 , .о 2 2
gr- -(w-r) + -w r = с.
Представим радиус-вектор г в виде
г = ze3 + rn,
где базисный вектор ез направлен вертикально вверх и гп • ез = 0. Так
как по условию и> — шез, то уравнение эквипотенциальной поверхности
будет
U2 о С
z = -rn + Cll с1 = --.
Свободная поверхность жидкости есть параболоид вращения вокруг вер-
вертикальной оси.О
Пример 3.13.3. Рассмотрим движение сферического маятни-
маятника (см. § 3.12) в поле параллельной силы F = Fe, F = const > 0.
Представим себе, что связь реализована посредством гладкого кольца,
имеющего возможность вращаться вокруг неподвижного диаметра, па-
параллельного единичному вектору е. Радиус кольца равен г. Положение
материальной точки М массы m на кольце зададим углом if между
вектором е и радиусом, направленным из центра кольца в точку М.
278 Глава 3. Динамика поступательного движения
Если кольцо сделать неподвижным, то получим математический маят-
маятник. Пусть кольцо вращается с постоянной угловой скоростью п вокруг
неподвижного диаметра. Во вращающейся вместе с кольцом системе
координат помимо силы F на материальную точку будут действовать
силы инерции. Исследуем их влияние. Очевидно, что кориолисова сила
инерции будет перпендикулярна плоскости кольца. Она полностью ком-
компенсируется реакцией связи. Сила F и переносная сила потенциальны.
Применив теорему 3.13.3, найдем силовые функции:
Ue = — П2г2 sin2 <p, Uf = Fr cos (p.
Рассматриваемое движение одномерно. Воспользуемся интегралом энер-
ГИИ: 2 -2
ГПГ*ф* „ ™ ^9 9 • 9
—-?- = Fr cos (p + — Or2 siir (p + Л,
z z
где Л — произвольная постоянная. В дальнейшем предполагается, что
Q ф 0. После преобразований интеграл энергии приводится к виду
где
/() (P), P^, ,
Отметим, stow — циклическая частота малых колебаний соответствую-
соответствующего математического маятника, р — параметр, определяющий свойства
движения. В зависимости от значения р рассмотрим следующие случаи.
1. р > 1. Видим, что в диапазоне —1 < и < 1 функция f(u) моно-
монотонно возрастает вместе с и. Следовательно, функция /(cosy?) имеет в
точности такие же экстремумы, что и функция cos (р. Фазовый портрет
движения изучаемой системы оказывается полностью аналогичным фа*
зовому портрету движения математического маятника (см. рис. 3.9.10).
2. р < 1. При и = р функция f(u) имеет максимум, и f(p) = 0. На
границах допустимого диапазона —1 < и < 1 имеем:
Функция /(cosy?) периодична с периодом 2тг. Рассмотрим отрезок
""^ 5: Ф 5: 7Г- В зависимости от значения Л' получаются различные обла-
области допустимых значений угла (р в выражении интеграла энергии. Оче-
Очевидно, что для h' < 0 область допустимых значений угла у? отсутствует,
a) h' = 0. На рассматриваемом отрезке допустимыми будут значения
(pi — — arccosp, у?2 = arccosp,
3.13. Относительное движение 279
которым на фазовом портрете (рис. 3.13.1) соответствуют изолирован-
изолированные положения равновесия. Очевидно, что \<рх\ = |<^2| < ^/2, так как
р>0.
б) 0 < h' < A — рJ. Допустимые значения ip определяются неравен-
неравенствами
—у/Л/ -f р < cos<р < y/h/ 4- р.
Получаются две области:
О < arccos(y/h' 4-р) < if < arccos(—уЛ* 4-р),
— arccos(—y/h/ 4- p) < <p < — axccos(y/h' H- p) < 0.
Для каждой из двух этих областей имеем непересекающиеся замкнутые
фазовые кривые, охватывающие точки (<^i,0), (<^2>0) и расположенные
симметрично строго в правой и левой полуплоскостях соответственно.
Локально в окрестности каждой из точек (^i,0), (<?>2>0) фазовый пор-
портрет отвечает особой точке типа "центр" и характеризует устойчивое
положение равновесия.
в) ti = A - рJ. Тогда f(u) 4- h1 = A - w)(l + u - 2p). Поэтому
Фазовая кривая представляет собой сепаратрису, имеющую характерный
вид "восьмерки" на рис. 3.13.1. Допустимая область изменения угла <р
имеет вид
—2 arccos у/р < ip < 2 arccos y/p.
г) A — рJ < h' < A +рJ. Тогда для допустимых значений должно
быть
—уЛ? 4- р < cos <р < y/hJ 4- р.
Правая часть этого неравенства заведомо больше единицы. Ясно также,
что в рассматриваемом случае будет выполнено Bр—1)>— y/h*+p>— 1.
Поэтому допустимая область определена неравенствами
— arccos(—yfh' 4- р) < <р < arccos(—y/h/ 4- р).
Получаются замкнутые фазовые кривые, охватывающие сепаратрису,
имеющую вид "восьмерки" (рис. 3.13.1).
д) h' = A4-рJ. Имеем f(u) + h' = A4-«)A-«4-2р). Следовательно,
280
Глава 3. Динамика поступательного движения
Видим, что подкоренное выражение существенно положительно. Полу-
Получается сепаратриса, аналогичная сепаратрисе математического маятни-
маятника, проходящей через точки (—тг,0), (тг, 0) (см. рис. 3.9.10).
е) hf > A -f pJ. Функция f(u) + h' ни при каком значении <р не
обращается в нуль Поэтому имеем две непересекающиеся ветви фазовой
кривой:
ф = ±Qv//(ti) + ft',
расположенные в верхней и нижней фазовых полуплоскостях. Верхняя
кривая соответствует вращению маятника в положительном направле-
направлении, а нижняя — в отрицательном.
Ч>
—тг
Если угловая скорость вращения
кольца превосходит циклическую
частоту маятника, то положение
равновесия в начале координат пе-
перестает быть устойчивым. Вместо
него возникают два других устой-
устойчивых положения равновесия (р\
и <f2, отделенных друг от дру-
друга сепаратрисой, проходящей че-
через начало координат. Сепаратри-
Сепаратриса, проходящая через точки тг и
-тг, сохраняется.
Рис. 3.13.1. Маятник под действием центробежной силы
Полный фазовый портрет получается периодическим продолжени-
продолжением найденных фрагментов фазовых кривых на всю ось <р. Видим, что
возможные движения рассматриваемой системы существенно зависят от
значения параметра р. Если р > 1 (угловая скорость fi вращения кольца
невелика сравнительно с циклической частотой и маятника), то фазо-
фазовый портрет системы аналогичен фазовому портрету математического
маятника. Если р < 1 (угловая скорость вращения кольца больше ци-
циклической частоты маятника), то фазовый портрет системы приобретает
существенные отличия от фазового портрета математического маятника:
прежние устойчивые положения равновесия становятся неустойчивыми,
появляются новые устойчивые положения равновесия с соответствую-
соответствующей перестройкой фазового портрета и добавлением новых сепаратрис.
Такое явление можно интерпретировать как катастрофу качественной
картины поведения системы при прохождении параметра р через значе-
значение р = 1. О
3.14. Силы инерции из-за вращения Земли 281
§ 3.14. Силы инерции из-за вращения Земли
Земля движется вокруг Солнца по орбите, близкой к круговой,
с радиусом R3 = 149,6 • 106 км. Средняя линейная скорость такого
движения составляет v3 = 29,8 км/с. С Землей жестко свяжем систе-
систему отсчета с началом в центре Земли. Вычислим модуль ускорения
начала отсчета wo. Это — центростремительное ускорение
2
w0 = ^- « 5,9 • 1(Г6км/с2 = 5,9 • 1(Г3м/с2.
К3
Оно составляет ~ 0,6 • 10~*% от ускорения силы тяжести. Ввиду
относительной малости ускорением Wo пренебрежем. Примем, что
Земля представляет собой однородный шар и вращается вокруг своей
оси с постоянной угловой скоростью ш (пример 2.16.2). Рассмотрим
следующие задачи.
Задача 3.14.1. Равновесие материальной точки на по-
поверхности Земли. Поскольку при равновесии относительные уско-
ускорение и скорость точки отсутствуют, то, учитывая закон всемирного
тяготения Ньютона, получим
N - ?y r -mwx(a;xr) = O,
где N — реакция поверхности Земли, т.е. то, что противодействует
силе веса тела. Поэтому ускорение g, создаваемое силой веса, можно
выразить формулой
к = -11г-ых(«хг)
ь г3 v ;•
Вектор g задает направление отвеса.
Угол между линией отвеса и плоскостью земного экватора назы-
называется астрономической широтой местности. Ускорение g можно
представить в виде
И / ч 9
g = -—r- (w'rjw + ai'r.
Пусть в — астрономическая широта, а г? — геоцентрическая широта.
Спроектируем вектор g на направление оси вращения Земли и на
плоскость экватора (рис. 3.14.1):
• Л I1 - п Л1/?* *Л
sin0 = —rsmv, cos^ = - (-^r — rurj cos v.
Следовательно,
282
Глава 3. Динамика поступательного движения
Сила веса отклоняется от ради-
радиуса, проведенного из центра Зе-
Земли 03 в точку О, из-за дей-
действия центробежной силы, вызван-
еУ ной вращением Земли. Это откло-
отклонение отсутствует на полюсе Зе-
Земли и на ее экваторе. На полю-
полюсе центробежная сила равна нулю,
а на экваторе ее направление со-
совпадает с направлением радиуса-
вектора. Вектор е^ ориентирован
по местной вертикали.
Рис. 3.14.1. Сила веса
Таким образом, экспериментально определив разницу между астро-
астрономической и геоцентрической широтами, можно судить об отноше-
отношении осестремительного ускорения к ускорению тяготения.
Пусть теперь материальная точка движется относительно поверх-
поверхности Земли. Тогда вектор относительной скорости будет отличен от
нуля. Помимо центробежной силы возникнет сила Кориолиса
Fc = -
x vr.
Вектор этой силы перпендикулярен к направлению скорости. Если
точка находится в Северном полушарии и движется вдоль меридиана,
то сила Кориолиса направлена вправо относительно вектора скоро-
скорости. В Южном полушарии — влево (см. пример 2.16.2).
Задача 3.14.2. Падение тяжелой материальной точки в
пустоте с нулевой начальной скоростью относительно враща-
вращающейся Земли. Чтобы изучить такое движение, представим век-
векторное уравнение относительного движения в виде
— = g-2«xvr,
где g учитывает вращение Земли. Выберем оси координат так, чтобы
ось Oz была направлена вертикально вверх противоположно векто-
вектору g. Ось Ох направим к западу по касательной к параллели, ось
Оу — в плоскости меридиана к югу перпендикулярно Oz, как по-
показано на рис. 3.14.1. Единичные векторы осей обозначим е^, еу, ez
соответственно. Ось Oz отклоняется от плоскости экватора на астро-
астрономическую широту в. Считая расстояние от материальной точки до
3.14. Силы инерции из-за вращения Земли 283
поверхности Земли достаточно малым, будем полагать вектор g по-
постоянным и равным его значению в точке О. Вектор ы в осях Oxyz
имеет следующие координаты:
и> = @, —u) cos 0, u) sin 9).
Поэтому
f dz л dy . Л dx . л dx .
w x vr = -w — cos 9 + — sin 9 ) ex -f -—- sin 9 ey + — cos 9 ez.
\at at J at at
Система скалярных уравнений, получающаяся путем проектирова-
проектирования векторного уравнения движения на выбранные оси координат,
принимает вид
d?z dx
— = -2u,-cos6-g.
Она представляет собой систему линейных дифференциальных урав-
уравнений с постоянными коэффициентами. Для нее можно указать три
очевидных первых интеграла, которые не дают полного решения за-
задачи. Однако их можно учесть с целью упрощения вычислений (см.
стр. 176). Пусть материальная точка начинает падение без относи-
относительной начальной скорости, в начальный момент времени t = 0 рас-
расположена на оси z и имеет высоту Я. Тогда, проинтегрировав один
раз уравнения движения и приняв во внимание начальные условия,
найдем
dx
-у- = 2u>(z cos 9 + у sin 9) - 2u>H cos 9,
at
dy
-p = -2u>xsin9,
dt
dz
— = — 2loxcos9 — gt.
dt
В итоге имеем систему дифференциальных уравнений первого по-
порядка. Ее можно интегрировать стандартным приемом, составив ха-
характеристическое уравнение. Заметим, однако, что и сравнительно
невелико: и> « 0,7 • Ю"^. Применим метод малого параметра, что
284 Глава 3. Динамика поступательного движения
даст нам возможность нагляднее выявить влияние вращения Земли.
Будем искать решение в виде рядов по степеням ы:
оо
Jb=O
оо
Jb=O
оо
Jb=O
Подставив эти ряды в систему скалярных уравнений движения, най-
найдем
^ 53 sin6>) - 2а;Я cos0,
ib=0 ib = l
,=0
Приравняем коэффициенты при одинаковых степенях ш:
io = 0, уо = 0, z0 == -^,
х\ = 2(zq cos 0 + t/o sin 0) — 2H cos 0, y\ = — 2xq sin 0, z\ = — 2x$ cos 0,
&2 = 2(z\ cos 0 + t/i sin 0), ^2 = —2xi sin 0, z^ = —2xi cos 0,
Потребуем, чтобы заданным начальным условиям удовлетворяло ну-
нулевое приближение. Начальные условия для остальных приближе-
приближений положим равными нулю. Будем иметь
xq = 0, t/o = 0, zq = Я — gt2 J2.
Тем самым нулевое приближение дает известный закон равноуско-
равноускоренного вертикального падения тяжелой точки.
Выпишем уравнения первого приближения:
ii = -gt2 cos 0, yi = 0, ii = 0.
3.14. Силы инерции из-за вращения Земли 285
Начальные условия для этих уравнений приняты равными нулю:
хг = -~gt3 cos0, t/i=O, zi=0.
Уравнения второго приближения принимают вид
2 2
#2 = 0, t/2 = - gt3 sin 0 cos 0, 22 = т <7*3 cos2 б.
О о
Интегрируя их с соблюдением начальных условий, получим
#2 = 0, уо = Т7Т0*4 ^П 2^, 22 = Т 0*4 COS2 б.
12 о
Ограничимся первыми тремя членами разложения закона движе-
движения по степеням малого параметра:
х « - - u>#t3 cos 0, у « —г о/2^4 sin 20, z & Н - -gt2 + - u2gtA cos2 0.
3 12 2 6
Из найденных формул следует, что, начав падение без начальной
скорости относительно вращающейся Земли, материальная точка от-
отклоняется от вертикального направления к востоку и югу. Ньютон
первым предсказал это отклонение. Оно было подтверждено экспе-
экспериментально в 1795 г.
Задача 3.14.3. Маятник Фуко — это сферический маят-
маятник, совершающий относительное движение в системе отсчета, жест-
жестко связанной с вращающейся Землей. Систему отсчета выберем та-
такой же, как при изучении свободного падения тяжелой материальной
точки (см. рис. 3.14.1). Предположим, что радиус сферического ма-
маятника равен /, а точка подвеса маятника находится на оси Oz на
расстоянии / от начала координат. Координаты материальной точки
во все время движения стеснены уравнением связи
х2 + у2 + (г - IJ - I2 = 0.
Скалярные уравнения движения имеют вид
т-— = 2mu> ( — cos в + — sin в ) + \х,
at1 \dt at )
d xi dx
m—r = -2mw—sinO + \y,
ai* at
»2 j
m-r-j = -2тш— cos0 - mg + X(z - /),
286 Глава 3. Динамика поступательного движения
где члены, содержащие множитель А, выражают реакцию связи.
Будем изучать малые колебания, возникающие при отклонении
маятника от нижнего положения равновесия, когда начальная ско-
скорость отсутствует. Термин "малые колебания" означает, что должно
быть выполнено неравенство
Из уравнения связи найдем
или с учетом того, что z < I,
z — l = — /
Так как р мало, то приближенно получим
Для рассматриваемой системы дифференциальных уравнений спра-
справедлив интеграл энергии
Учтем, что начальная скорость равна нулю:
Значит, для любого момента времени справедливо неравенство
zQ > z(t) > 0.
Другими словами, малое начальное отклонение маятника влечет его
малые колебания в последующем движении.
Из интеграла энергии заключаем также, что
jO*'+ »*)< У* «§(«3+ !*)<*[.
Следовательно, при малых колебаниях и скорости будут малыми:
х2 + У2 < gl.
3.14. Силы инерции из-за вращения Земли 287
Величины
— х - у • - х • _ У
I I y/gl y/gl
будем считать малыми первого порядка по сравнению с единицей.
Тогда величина
Z 1 . о 9 ч
** = 7* 2(Хм + 2/м)
имеет второй порядок малости. Дифференцируя приближенное вы-
выражение для г, получим
z » j(xx + yy), z » y(i2 + У2 + a?i + уу)-
Поэтому величина i, так же как и величина z, в силу уравнений
движения имеет второй порядок малости.
Сопоставим проекцию силы Кориолиса на ось Oz с ускорением
силы тяжести:
Коэффициент при хм есть отношение угловой скорости вращения Зе-
Земли к циклической частоте математического маятника той же длины,
что и радиус маятника Фуко. Чтобы это отношение было близким к
единице, радиус маятника должен составить ~ 2 • 106 км. Реальная
длина маятника может быть не более нескольких десятков метров.
Отсюда ясно, что постоянную
можно принять за малую величину, а кориолисовы силы инерции
считать малыми второго порядка. Из третьего дифференциально-
дифференциального уравнения движения будем иметь с точностью до членов второго
порядка малости
Удержим в первых двух дифференциальных уравнениях движения
только малые первого и второго порядков:
d2x dy mg
dx . л та
288 Глава 3. Динамика поступательного движения
Представим уравнения движения в другой системе координат
Ох\у\, вращающейся вокруг оси Oz по ходу часовой стрелки с угло-
угловой скоростью
и/ = и sin 0.
Имеем преобразование
х = х\ cosu/< -f Ух sinu/tf,
у = — х\ sinu/< -f y\
По теореме Кориолиса 2.16.2 об ускорении в сложном движении по-
получим
х = х'х cosw't + y\ sinu/tf + 2ш'у + (ш'Jх,
у = — х'\ sinu;'^ + у\ cosw't — 2u'x + (u/Jt/.
С помощью этих формул уравнения движения приводятся к виду
х'х = -и\хх, ух = -^ij/i,
где ijj\ = (u;'J + 51/'- Пусть в начальный момент времени t = 0 оси
Оху и ОххУх совпадают и задано
х = а, у = 0, i = 0, у = 0.
В системе координат Oxit/i при 2 = 0 будем иметь
«1 = fli У1 = 0, ii =0, yi = о;'а.
Решение уравнений движения, удовлетворяющее этим начальным
условиям, записывается в виде
ш'
хх = acosutxt, ух = а—sinw^.
Исключив время, найдем, что в осях ОххУх проекция маятника на
горизонтальную плоскость описывает кривую, близкую к эллипсу
Так как u'/ui < 1, большая ось эллипса лежит на оси Ох\, вдоль
которой маятник имел первоначальное отклонение, а малая ось —
на оси Оу\. На экваторе, где в = 0, эллипс вырождается в двой-
двойной прямолинейный отрезок между точками (—а, 0), (а, 0). В системе
3.15. Элементы теории удара 289
координат Оху, жестко связанной с Землей, полученный эллипс вра-
вращается по ходу часовой стрелки с угловой скоростью и/ вокруг оси
Оz. Это вращение отсутствует на экваторе и происходит с наиболь-
наибольшей угловой скоростью на полюсе.
Первым, кто опытным путем проверил эти результаты, был фран-
французский ученый Фуко A851 г.). Маятник Фуко имел массу 30 кг. Дли-
Длина маятника составляла 67 м. Аналогичный маятник был построен
в Петербурге в Исаакиевском соборе.
§ ЗЛ5. Элементы теории удара
Когда к материальной точке кратковременно прикладывается
значительная по величине сила, то возникает эффект, близкий к уда-
удару. При этом должно выполняться определенное соотношение между
силой и временем ее воздействия. Поясним сказанное примером.
Пример 3.15.1. Пусть на материальную точку массы m в ин-
интервале времени (^o^i) действует постоянная сила F. Движение точки
будет равноускоренным. Найдем изменение количества движения
AQ = mvi - mv0 = / F dt = (*i - to)F,
где vi = v{t\), vo = v(^o) — скорости точки в моменты t\ и to соответ-
соответственно. За тот же промежуток времени точка сместится на величину
о F / ДО
) V = v + 1
о F / ДО\
ri - го = (*i - *o)vo + (*i - <о) V" = v0 + -г-1 (ti - t0).
2m \ 2m)
Зафиксируем AQ. Тогда, уменьшая A\ — ^о). можно добиться того,
чтобы смещение точки за время воздействия силы было сколь угодно
малым. Модуль силы окажется большим, а приращение скорости —
заданным Другими словами, можно добиться скачка скорости, практи-
практически не изменив положения точки в пространстве.О
Процессы, реально происходящие при кратковременном и силь-
сильном механическом взаимодействии, могут быть достаточно сложны-
сложными, а сила взаимодействия далеко не всегда будет постоянной. Од-
Однако и в общем случае, когда нас интересует лишь закон движения
материальной точки, эффект действия такой силы можно характе-
характеризовать лишь приращением количества движения. При достаточно
малом времени взаимодействия смещение точки будет пренебрежи-
мым.
Определение 3.15.1. Ударным воздействием на материальную
точку в некоторый момент времени называется скачок количества
19 - 150"?
290 Глава, 3. Динамика поступательного движения
движения (скорости), не сопровождаемый изменением радиуса-век-
радиуса-вектора точки. Величина AQ = Р называется ударом.
Если рассматривать удар как результат действия некоторой силы
F, то эта сила должна удовлетворять равенству
P= lim / FA,
to
где to — момент нанесения удара, t > to. Для любой конечной силы
этот предел будет, очевидно, равен нулю. Ненулевое значение преде-
предела возможно, лишь когда функция F(/) в точке ^о имеет особенность.
Кроме того, по смыслу ударного воздействия при t ф t0 должно быть
F = 0. Функции F(tf), обладающие указанными свойствами, назы-
называются сингулярными. Они могут быть получены посредством пре-
предельного перехода.
Рассмотрим, например, монотонно убывающую к ^о бесконечную
последовательность моментов времени
*1 > *2 > • • • > U > ti+i > ... > *о, lim U = t0.
г—>со
Поставим ей в соответствие последовательность функций
' 0 при t < tOi
Р
при t0 <t < t{,
U -t0 - ~
КО при *>*,-.
Интеграл от функции Fi(t) вычисляется по формуле
Ii = JFi(t)dt= I U-to
при *0 <*<*;,
При t > t{.
Последовательность вектор-функций {F,-(^)} имеет единственную
предельную "точку" — вектор-функцию F(tf), которая, очевидно,
обладает требуемыми свойствами. В самом деле, F(tf) равна нулю
всюду, кроме точки tOi где она принимает бесконечно большое значе-
значение. Далее вычислим интеграл от этой функции. С этой целью за-
зафиксируем момент t > to. По определению последовательности {?,-}
найдется такой номер п, что при всех i > п будем иметь to < t( < t.
Следовательно, для всех i > n будет выполнено равенство Ij = Р.
3.15. Элементы теории удара 291
Для предельной функции естественно принять
1@ =
to
Отсюда
I = lim 1@ = Р.
t>t
t—>
Таким образом, интеграл от построенной сингулярной функции F@
равен заданному импульсу Р и отличен от нуля, хотя F@ равна ну-
нулю всюду, кроме точки *о- Построенная функция относится к классу
обобщенных функций, изучением свойств которых занимается специ-
специальная математическая дисциплина.
Конкретный выбор последовательности {Fi@} неоднозначен. Он
зависит от физической природы протекания ударного взаимодей-
взаимодействия. Примененная выше последовательность {F»@} основана на
гипотезе о постоянстве силы взаимодействия за время удара. При
фиксированном значении i вектор
U — ^о
можно рассматривать как среднюю силу, соответствующую ударному
воздействию, когда время протекания процесса равно t{ — to.
Ударное воздействие может возникать, например, когда матери-
материальная точка попадает на границу области, свободной от препят-
препятствий. Рассмотрим этот случай. Пусть область допустимых поло-
положений материальной точки в пространстве описывается с помощью
неравенства
/ОМ)<0,
причем в начальный момент времени t0 радиус-вектор г материаль-
материальной точки удовлетворяет строгому неравенству /(г, 0 < 0 (точка на-
находится внутри допустимой области). Предположим, что в каждый
фиксированный момент времени уравнение /(г,0 = 0 определяет по-
поверхность, сквозь которую материальная точка не может проникать.
Точка может либо находиться в области пространства, ограниченной
этой поверхностью, либо двигаться вдоль поверхности, сходя с нее
только внутрь допустимой области. Имеем так называемую неудер-
живающую (освобождающую) связь.
Удар точки о связь может возникать, когда точка попадает на
ограничивающую поверхность. Пусть г@ — закон движения точ-
точки внутри допустимой области. Момент t\ > t0 достижения точкой
292 Глава 3. Динамика поступательного движения
границы области должен быть наименьшим корнем уравнения
f(r(tl),tl)=O
при условии df/dt > О, так как граница достигается изнутри области.
В момент t\ H- 0 скорость v точки не может иметь произвольного
значения, а должна удовлетворять условиям
Следовательно, на материальную точку со стороны связи будет ока-
оказано ударное воздействие. Ударная реакция связи Р изменит в мо-
момент t\ скорость точки. Специально подчеркнем, что при ударе ма-
материальная точка и ограничивающая поверхность не изменят своего
положения, а импульс любой конечной силы равен нулю.
Удар не будет равен нулю, если выполнены условия
>0, j-
Абсолютно неупругим называется удар, при котором
dV =°-
Упругим называется удар, при котором
dt <=
Скоростью падения называется скорость vi, с которой материальная
точка приходит в соприкосновение со связью. Скоростью отраже-
отражения называется скорость v, с которой точка покидает связь. Углом
падения а называют угол между отрицательным направлением ско-
скорости vi и нормалью и к граничной поверхности. Нормаль напра-
направлена внутрь допустимой области (рис. 3.15.1). Углом отражения /?
называют угол между направлением скорости v и нормалью и.
Связь называют идеальной при ударе, если элементарная работа
ударной реакции Р на любом виртуальном перемещении точки вдоль
связи равна нулю. В этом случае реакция Р направлена по нормали
к поверхности и
При ударе материальной точки об идеальную связь приращение ско-
скорости направлено параллельно нормали, а скорости падения и отра-
отражения расположены в одной плоскости с нормалью и (нормальной
3.15. Элементы теории удара
293
плоскости). Кроме того,
i>i sin a — v sin /?.
Обозначим v\v = v\ cos a, vu = v cos/?. Отношение
ae =
называется коэффициентом восстановления (Ньютон). Для абсо-
абсолютно неупругого удара эе = 0. Когда эе = 1, то удар называют
абсолютно упругим. Коэффициент восстановления не может быть
больше единицы. Иначе можно было бы построить вечный двига-
двигатель. Поэтому
0< эе< 1.
В указанных пределах значение эе зависит от материала соударяю-
соударяющихся поверхностей и может быть определено экспериментально.
Знание коэффициента восстановления позволяет замкнуть задачу
о вычислении скачка скорости материальной точки при наложении
связи, идеальной при ударе. Такой будет, например, любая связь,
идеальная по отношению к конечным силам реакции. В самом де-
деле, сила, с которой такая связь действует на материальную точку,
всегда направлена по нормали к связи. Поэтому и удар из-за ее
наложения, вычисляемый с помощью соответствующего предельно-
предельного перехода, будет направлен по нормали.
Для неидеальных связей помимо нормальной составляющей ско-
скорости будет меняться при ударе также и касательная составляю-
составляющая. В простейшем случае направление касательной сохранится, а
изменится лишь ее величина. Тогда задача о расчете удара замы-
замыкается введением коэффициента мгновенного трения \- Обозначим
v\r — v\ sin a, vT = vsin/?. По определению
X=l-
При ударе о связь точка отражает-
отражается внутрь области, ограниченной по-
поверхностью f(r,t) = 0. Нормаль и
направлена в сторону, где разрешено
свободное движение точки. Касатель-
Касательная к поверхности в точке падения
изображена пунктирной линией.
Рис. 3.15.1. Характеристики удара
294 Глава 3. Динамика поступательного движения
Коэффициент \, как и ж' определяется экспериментально. Иногда
используется какая-нибудь эмпирическая зависимость х = xi^)-
Пример 3.15.2. Рассмотрим движение материальной точки в
вертикальной плоскости в поле параллельных сил тяжести. Материаль-
Материальная точка соединена нитью длины / с неподвижной точкой О. Нить
реализует одностороннюю связь вида |г| < /, где г — радиус-вектор ма-
материальной точки, имеющий начало в точке О. Когда нить натянута,
материальная точка описывает окружность радиуса /, и ее движение
подчиняется уравнению
N
тп г = —rag е г- г,
где m — масса точки, g — ускорение силы тяжести, е — единичный век-
вектор вертикали, N — величина реакции нити. Согласно условию задачи,
N не может быть отрицательным.
Найдем N при условии, что связь напряжена: г2 = /2. Тогда мы
можем воспользоваться формулой для реакции, найденной в § 3.12:
N = yBft-
где h — постоянная энергии, z — высота материальной точки над точкой
подвеса О. Из интеграла энергии
mv2
-Ь mgz = h
следует, что h > mgz. Поэтому N > (—mgz/l). Иными словами, мате-
материальная точка не может освободиться от связи, если она находится в
текущий момент ниже точки подвеса (z < 0). Пусть точка 2 = 0 дости-
достигается при движении маятника по связи. Тогда либо h — 0, либо h > 0.
Если h = 0, то при z = 0 будем иметь v = 0, высота z = 0 окажется
максимальной, и маятник начнет попятное движение при напряженной
связи. Если же h > 0, то при 2 = 0 будем иметь N > 0, так что и в точ-
точке, для которой z = 0, связь никогда не освобождается. Таким образом,
материальная точка может сойти со связи только, если при движении
по связи она оказалась выше точки подвеса (z > 0).
Представим себе теперь, что при движении материальной точки
с набором высоты при условии 0 < z < I выполнилось равенство
ЛГ = BЛ - imgz)/l = 0. Тогда mv2 = 2(h ~ mgz) = mgz > 0. Так
как скорость направлена по касательной к окружности, отсюда получа-
получаем, что при N = 0 выполнено z > 0. Следовательно в последующем
движении высота будет увеличиваться, Лг станет отрицательным, и точ-
точка сойдет со связи. В данном случае условие 2/г = Zmgz есть критерий
схода материальной точки со связи.
3.15. Элементы теории удара 295
Пусть г/ радиус-вектор точки на окружности, где выполнено условие
схода со связи 2/i = Zmgzj. Из интеграла энергии найдем скорость в
точке схода: vj = y/gTj. Эта скорость направлена вверх по касательной
к окружности (перпендикулярно радиусу-вектору). Можно проверить,
что вектор скорости в точке схода выражается формулой
Радиус-вектор г/ и вектор скорости vj служат начальными условиями
для движения свободной материальной точки в поле параллельных сил
тяжести.
Закон движения точки после схода со связи примет вид
г = -— e + vjt + г/, г = -gte + v/.
Очевидно, это парабола. Она частично расположена внутри окружности
радиуса / с центром в точке О, а частично вне ее. Точка пересечения
параболы с окружностью есть точка нового выхода на связь. Приравняв
г2 к /2, найдем момент времени пересечения параболы с окружностью:
tx = 4v/ • e/g = Avfz/g. По смыслу vjz есть проекция скорости на
вертикальное направление в момент схода точки со связи. Справедливо
равенство
Vfz =
из которого ясно, что время t\ равно нулю лишь при zj =0 и при zj =/.
Как было отмечено выше, в точке окружности, где zj = 0, не может
быть схода со связи. При zj > 0 время свободного движения сначала
растет и в точке zj = //Vo достигает максимума, а при дальнейшем
росте zj убывает до нуля в верхней точке окружности (zj = /). Поэтому
в верхней точке (zj = /) окружности, реализуемой связью, схода со связи
также быть не может.
Предположим теперь, что t = t\. В этот момент точка войдет в
контакт со связью и будет иметь следующие значения радиуса-вектора
и скорости
Svh 4vJz
ri = — е+ —^-v/ -I-r/, ri = -4vjze + v/.
У if
Найдем проекцию v~ скорости на направление радиуса-вектора в момент
выхода точки на связь (радиальную составляющую скорости).
296 Глава 3. Динамика поступательного движения
Видим, что в момент выхода точки на связь неизбежен удар, так как
нормальная к связи составляющая скорости в этот момент всегда строго
положительна, и материальная точка в момент удара стремится нару-
нарушить связь. Касательная составляющая v^ скорости в момент выхода
точки на связь может быть получена из соотношения
I
После удара найдем
+ Г1 - +
где ае — коэффициент восстановления, а \ — коэффициент мгновен-
мгновенного трения. Если ае ф О, то удар будет упругим, точка отразится от
окружности и вновь будет двигаться по параболе до новой встречи с
окружностью и т.д. Если удар абсолютно неупругий (ае = 0), то точ-
точка после удара останется на окружности, и анализ ее движения можно
выполнить так же, как это было проделано выше. Значения
~~~ ¦!¦ ' ~~ U *^ Т
служат начальными условиями для движения после удара.
В случае, когда при каждой встрече со связью материальная точ-
точка испытывает абсолютно упругий удар (ае = 1), и мгновенное трение
отсутствует (х = 0), энергия точки при многократных соударениях со
связью сохраняется. Процесс соударений, раз начавшись, не сможет
прекратиться. Вместе с тем в ходе такого движения могут встретиться
случаи плавного (по касательной) выхода на связь. Чтобы убедиться в
существовании такой возможности, достаточно обратиться к изученному
выше случаю схода точки с окружности и в момент t\ принять направле-
направление скорости противоположным, сохранив ее величину Тогда движение
материальной точки пойдет в обратную сторону с сохранением траек-
траектории и всех свойств движения в обращенном времени. Точка, гладко
выйдя на связь, будет двигаться по окружности и вновь сойдет с нее
в симметричной относительно вертикального диаметра точке окружно-
окружности. После этого движение, приведшее к гладкому выходу материальной
точки на связь, повторится в обратном порядке с симметричным отра-
отражением относительно вертикального диаметра окружности.
В случае абсолютно упругого удара материальной точки об идеаль-
идеальную (без мгновенного трения) связь интерес представляют так называе-
называемые периодические движения с соударениями. В рассматриваемой зада-
задаче простейший пример такого движения доставляет падение материаль-
материальной точки без начальной скорости на внутреннюю поверхность окруж-
окружности. Отразившись от связи, точка приобретет направленную вверх
Контрольные вопросы к главе 3 297
скорость, равную скорости падения, поднимется на исходную высоту, и
процесс повторится.
Другой пример периодического движения с соударениями можно по-
построить, воспользовавшись решением примера 3.5.2. Пусть х = /л/2
— длина горизонтальной хорды, находящейся ниже центра окружности,
ограничивающей область свободного движения. Пусть vi — скорость
материальной точки в пересечении хорды с окружностью. Обозначим
L = v\/g максимальную горизонтальную дальность бросания и д на-
начальный угол наклона скорости к горизонту. Если х < L, то в пределах
О < тЭ < (тг/2) существует два угла наклона, при которых достигается
дальность бросания х:
Л 1 . X . 1 . X 7Г
#1 = - arcsin —, #2 = -- arcsin у + -•
Направление биссектрисы угла между этими начальными векторами за-
задается углом дъ — я*/4. При выбранной длине хорды это будет как раз
направление к центру окружности. Выпустим теперь из какой-нибудь
границы хорды внутрь области свободного движения траекторию с на-
начальным углом ч9\. Траектория достигнет окружности в симметричной
относительно вертикального диаметра точке, отразится от нее под углом
г?2 к симметричному горизонтальному направлению бросания, вернется в
исходную точку, отразится от нее под углом tf i и так далее. Существуют
и другие, более сложные типы периодических траекторий с соударения-
соударениями. О
Контрольные вопросы к главе 3
3.1. Будет ли галилеевым преобразование А4 —> А4, если до пре-
преобразования время измерялось в секундах, а после преобразо-
преобразования оно измеряется в часах?
3.2. Будет ли галилеевым преобразование А4 —> А4, если до пре-
преобразования расстояние измерялось в метрах, а после преобра-
преобразования оно измеряется в сантиметрах?
3.3. Доказать, что всякое движение трехмерного пространства, со-
сопровождаемое сдвигом начала отсчета времени, есть галилеево
преобразование.
3.4. Доказать следствие 3.1.1.
3.5. Почему в качестве системы отсчета, близкой к инерциальной,
традиционно принимают систему отсчета с началом в Солнце и
с осями, направленными на удаленные звезды?
298 Глава 3. Динамика поступательного движения
3.6. Могут ли силы зависеть от ускорений? От каких переменных
величин могут зависеть силы? Постарайтесь обосновать Ваш
ответ.
3.7. Доказать, что работа потенциальной силы на любом замкнутом
контуре равна нулю.
3.8. Могут ли пересекаться различные поверхности уровня силового
поля? Обосновать ответ.
3.9. Пусть [/(г) — силовая функция некоторой силы. Показать,
что U(r) -f с, где с — произвольная постоянная, есть силовая
функция той же силы.
3.10. Могут ли пересекаться силовые линии силового поля? Дока-
Доказать ответ.
3.11. Найти условия, при которых материальная точка в поле парал-
параллельных сил тяжести совершает то же движение, что электрон
между пластинами конденсатора, заряженного до потенциала
и.
3.12. Написать уравнение поверхностей уровня для силового поля
двух центров ньютонианского тяготения с равными притяги-
притягивающими массами. Какой вид будет иметь поверхность уров-
уровня, проходящая через середину отрезка между притягивающи-
притягивающими центрами? Как пройдут остальные поверхности уровня?
3.13. Автомобиль начинает движение по горизонтальной плоскости
с коэффициентом трения скольжения / колес о дорогу. Какое
максимальное ускорение автомобиль может развить?
3.14. Материальная точка под действием силы тяжести соскальзыва-
соскальзывает с наклонной плоскости, имея в начальный момент движения
высоту h. После окончания наклонной плоскости точка еще
некоторое время движется по горизонтальной плоскости, после
чего останавливается. Проекция траектории точки на горизон-
горизонтальную плоскость равна S. Предполагая коэффициент трения
наклонного и горизонтального участков одинаковым, найти за-
зависимость 5 от угла наклона плоскости к горизонту. Найти
максимальный угол наклона плоскости к горизонту, при кото-
котором скольжение точки отсутствует.
3.15. Найти область достижимости для электрона, влетающего в се-
середину вертикальной грани между горизонтальными пластина-
пластинами конденсатора, имеющего прямоугольную форму. Ширина
Контрольные вопросы к главе 3 299
пластины конденсатора — а, длина — 6, расстояние между пла-
пластинами — d, напряжение — и. Действует сила тяжести. Вели-
Величина начальной скорости электрона — 170, заряд — е. Сколько
решений имеет задача?
3.16. Каким образом, зная полный набор первых интегралов, можно
восстановить дифференциальные уравнения движения матери-
материальной точки?
3.17. Может ли первый интеграл вообще не зависеть от скоростей
материальных точек? Как тогда найти его производную в силу
уравнений движения?
3.18. Указать сетку координатных кривых для
a) декартовой,
b) цилиндрической,
c) сферической
систем координат.
3.19. Доказать взаимную перпендикулярность векторов локального
репера цилиндрической системы координат.
3.20. Доказать взаимную перпендикулярность векторов локального
репера сферической системы координат.
3.21. Найти локальный репер и координатные кривые для криволи-
криволинейных координат х\, Х2, #з, заданных равенствами
П = Rcosxi ch^2, г2 = Я sin ж i sha?2, ^з = #з,
где ?*i, Г2, гз —декартовы координаты, R — постоянная. Прове-
Проверить взаимную перпендикулярность векторов локального репе-
репера. Выписать выражение кинетической энергии материальной
точки в координатах Х\, #2, #з-
3.22. В примере 3.6.7 по методу проектирования уравнений движения
на естественные оси найти все составляющие реакции винтовой
линии.
3.23. Какую размерность может иметь фазовое пространство матери-
материальной точки?
3.24. Найти выражение секторной скорости проекции точки на плос-
плоскость параллели сферической системы координат.
300 Глава 3. Динамика, поступательного движения
3.25. Дать геометрическую интерпретацию теоремы площадей для
движения точки в поле параллельных сил тяжести, когда по-
полюс не принадлежит плоскости движения.
3.26. С помощью теоремы об изменении кинетического момента сфор-
сформулировать и доказать необходимый и достаточный признак то-
того, что сила, действующая на материальную точку, — централь-
центральная.
3.27. Сформулировать правило вычисления реакции геометрической
связи.
3.28. Пусть уравнение идеальной связи имеет вид
где Фк — однородная по скоростям функция степени к ф 0. По-
Показать, что в этом случае мощность реакции связи имеет вид
(—ЛА?Фо), где Л — множитель Лагранжа, определяющий реак-
реакцию связи.
3.29. Уравнение связи имеет вид r\ + v\ + v\ = R2(t). Определить
мощность реакции связи.
3.30. Пусть заданы две независимые идеальные неоднородные диф-
дифференциальные связи
Ai • v + Bi = 0, А2 • v + В2 = 0.
Найти геометрические места множества действительных пере-
перемещений и множества виртуальных перемещений, соответству-
соответствующих некоторому моменту времени.
3.31. Материальная точка массы m вынуждена двигаться по кольцу,
вращающемуся вокруг вертикального диаметра длины 2R с по-
постоянной угловой скоростью w. Действует сила тяжести. Вы-
Выписать обобщенный интеграл энергии Якоби. Выписать выра-
выражение для полной механической энергии. Почему полная меха-
механическая энергия не сохраняется при движении точки?
3.32. Доказать, что общее решение уравнения гармонического осцил-
осциллятора есть линейная комбинация функций cosw/ и sinw/, где /
— время, аы — циклическая частота.
3.33. Доказать, что уравнение гармонического осциллятора допуска-
допускает интеграл энергии.
Контрольные вопросы к главе 3 301
3.34. Как меняется фазовый портрет гармонического осциллятора
при уменьшении циклической частоты и. Каким будет предель-
предельное движение при и —> 0?
3.35. Для осциллятора с сухим трением найти число колебаний, если
х0 = 3//u/2, х0 = f/u.
3.36. Пусть для осциллятора с вязким трением к2 > 4иЛ Как меня-
меняется фазовый портрет осциллятора при к —+ 2и? Какой полу-
получится фазовый портрет в предельном случае?
3.37. Написать уравнение движения и нарисовать фазовый портрет
циклоидального маятника в переменных ((р,ф) (см. определе-
определение 3.9.3).
3.38. По методу Лагранжа вариации произвольных постоянных най-
найти общее решение уравнения х + и2х = exp(vt), где и и v —
действительные постоянные, / — время.
3.39. Показать, что на рис. 3.10.1 прямая г) — 2/aei-fae2?/aei проходит
через точку A; 1), а прямая т] = —2/aei + ae2f/aei — через точку
( — 1; —1) при любых значениях и\, и^-
3.40. В примере 3.10.2 для уравнения Хилла с двухступенчатым
кусочно-постоянным коэффициентом u{t) в случае ? = — 1,
ц = 1 найти собственные векторы матрицы монодромии, резо-
резонансные соотношения интервалов /i, /2, точки на фазовой плос-
плоскости, где происходят переключения функции u(t).
3.41. Указать, как по заданному начальному радиусу-вектору го и
начальной скорости vo можно найти плоскость орбиты, линию
апсид, перицентр и тип орбиты материальной точки, движущей-
движущейся под действием центральной силы ньютонианского притяже-
притяжения.
3.42. Указать, как по заданным начальным радиусам-векторам гю,
г2о и начальным скоростям ую, v2o можно найти абсолютное
движение двух материальных точек под действием взаимного
ньютонианского притяжения.
3.43. Найти закон движения материальной точки по параболической
орбите в поле центральной силы ньютонианского притяжения.
3.44. Найти закон движения материальной точки по гиперболической
орбите в поле центральной силы ньютонианского притяжения.
302 Глава 3. Динамика поступательного движения
3.45. Найти выражение для силы, действующей на материальную
точку массы m со стороны однородного шара массы М и ра-
радиуса Я, если расстояние г от точки до центра шара меньше
радиуса шара.
3.46. Найти силу, действующую на электрический заряд, находящий-
находящийся между разноименно заряженными бесконечными пластинами
и вне пространства, заключенного между этими пластинами.
3.47. Для конического маятника (см. § 3.12) абсолютная величина
скорости вращения равна \ф\ = \/g/\zo\, где g — ускорение силы
тяжести, z0 — проекция маятника на вертикаль. Когда |zo| = R
(R — длина маятника), конический маятник висит вертикаль-
вертикально, и никакого движения не совершает. Вместе с тем в этом
положении \ф\ = y/g/R Ф 0. Объяснить парадокс.
3.48. Найти максимальное и минимальное значения реакции сфери-
сферического маятника в зависимости от начальных условий.
3.49. Материальная точка находится на дне сосуда, наполненно-
наполненного жидкостью. В некоторый момент времени точка начинает
всплывать под действием архимедовой силы. В каком напра-
направлении она будет двигаться, если сосуд
a) движется поступательно с постоянным ускорением а,
b) вращается вокруг вертикальной оси с постоянной угловой
скоростью w?
3.50. Показать, что в примере 3.13.3 все устойчивые положения рав-
равновесия при любом Q находятся ниже горизонтальной плоско-
плоскости, проходящей через точку подвеса маятника.
3.51. Вычислить разность между астрономической и геоцентрической
широтами на Земной параллели, соответствующей 60°.
3.52. Применить метод малого параметра не к системе первых инте-
интегралов, а непосредственно к уравнениям движения, описываю-
описывающим падение без начальной скорости тяжелой точки в пустоте
на Землю.
3.53. Какое движение будет совершать маятник Фуко, если ему в
нижнем положении равновесия придать скорость Vo, направлен-
направленную вдоль параллели.
3.54. Под каким углом материальная точка отскочит от стенки, если
коэффициент восстановления при ударе равен 1, коэффициент
Контрольные вопросы к главе 3 303
мгновенного трения равен 0,6, а угол падения составляет 20°.
Можно ли назвать такой удар абсолютно упругим?
3.55. В примере 3.15.2 найти выражение через vjz для касательной
составляющей скорости \~ в момент выхода точки на связь.
Глава 4
Аналитическая статика системы
материальных точек
§ 4.1. Равновесие системы
Пусть задано множество, состоящее из N взаимодействующих
друг с другом материальных точек. В этом случае скажем, что ма-
материальные точки образуют систему. Взаимодействие точек может
быть обусловлено силами, влияющими на ускорения, а также свя-
связями, стесняющими положения и скорости точек. Могут быть при-
приложены также внешние силы от воздействия объектов, не входящих
в рассматриваемую систему. Конфигурацией системы назовем мно-
множество, занимаемое в пространстве в данный момент времени всеми
материальными точками системы.
Определение 4.1.1. Пусть существует конфигурация системы
такая, что в некотором репере S при отсутствии относительных ско-
скоростей всех точек системы эта конфигурация сохраняется неограни-
неограниченно долго. Такая конфигурация называется положением равнове-
равновесия системы относительно репера S. Состояние системы, попавшей
в положение равновесия с нулевыми скоростями всех ее точек, назы-
называется равновесием (относительным равновесием).
Теорема 4.1.1. Необходимым условием равновесия служит од-
одновременное равенство нулю в изучаемом положении системы как
скоростей, так и ускорений всех ее точек. Если при этом окажет-
окажется, что в любой момент времени равенство нулю скоростей всех
точек влечет также равенство нулю их ускорений, то указанное
условие будет и достаточным условием равновесия.
Доказательство. Необходимость. Пусть система находится
в состоянии равновесия. Радиусы-векторы всех точек системы отно-
относительно репера 5 должны с течением времени оставаться постоян-
постоянными. Значит, как первая, так и вторая их производные по времени
должны быть равны нулю. Необходимость доказана.
Достаточность. Пусть в данной конфигурации равенство ну-
нулю скоростей всех точек системы влечет равенство нулю их ускоре-
ускорений. Воспользуемся принципом освобождения от связей и представим
4.2. Классификация связей 305
дифференциальные уравнения движения в виде
где mu, wv, \u, vu — соответственно масса, ускорение, скорость,
радиус-вектор v-ft точки в репере 5, F^ — суммарная сила, N —
число точек системы. Предположим, что для значений г'х,..., rfN вы-
выполнено условие теоремы. Тогда для любого t должно быть
F^r;,...,r^v,0,. ..,0,0 = 0, u=l,...,N.
Поэтому постоянные во времени функции
г„ = г'„, v - 1,...,АГ
составляют решение системы дифференциальных уравнений движе-
движения. Единственность этого решения при нулевых начальных скоро-
скоростях всех точек системы обеспечивается принципом детерминирован-
детерминированности Ньютона (стр. 160).
Основная задача статики состоит в том, чтобы сформулировать
условия, обеспечивающие равновесие системы материальных точек,
а также найти все положения равновесия системы. Аналитическая
статика предполагает такую форму условий равновесия, в которой не
используются неизвестные реакции связей. При этом существенным
оказывается понятие множества виртуальных перемещений точек си-
системы, соответствующего связям. Тем самым учение о связях играет
фундаментальную роль в теоретической механике.
§ 4.2. Классификация связей
Рассмотрим систему из N материальных точек. Выберем репер S
с полюсом в точке О и обозначим через г„, v = 1,..., N, радиусы-
векторы этих точек, начинающиеся в полюсе О. Соответственно че-
через iv —vv, v — 1,..., JV, обозначим скорости точек.
Связь, заданная с помощью неравенства
Ф(*,Г1,...,Гдг,У1,...,Улг) > 0,
называется неудерживающей, или односторонней. Если для неудер-
живающей связи достигается знак равенства, то говорят, что эта
связь напряжена.
Пусть на систему наложено т связей, и пусть их можно выразить
с помощью уравнений
<?7(<,rb...,r;v,vi,...,Viv) = 0, j = l,...,m, m<3N.
20- 15(П
306 Глава 4. Аналитическая статика системы
Это так называемые удерживающие (двусторонние) связи.
Связи, уравнения которых содержат скорости материальных то-
точек, называются дифференциальными. Если выполнено условие
dQj/dt = 0, то соответствующие связи называются стационарными.
Предположим, что левые части всех уравнений связей линейно
зависят от скоростей:
N
A*v • у и + Bi - 0, г - 1,..., т,
где А(и = Aiv(t, ri,..., гдг) — векторы, 5, = Д(*, гь ..., r#) — ска-
скаляры, явно не зависящие от скоростей. Такие связи назовем линей-
линейными по скоростям. Это наиболее распространенный в практических
приложениях тип связей.
Если какие-либо уравнения дифференциальных связей можно за-
заменить эквивалентными им, но имеющими форму полного диффе-
дифференциала
то такие уравнения называются интегрируемыми, а соответствую-
соответствующие связи — голономными.
Пример 4.2.1. Пусть задана дифференциальная связь
N
где Ь — постоянная. Эту связь можно представить в эквивалентной
дифференциальной форме
N
rv-drv + bdt = 0,
откуда ясно, что она — голономная. Чтобы убедиться в этом, достаточ-
достаточно выполнить интегрирование:
В том случае, когда никакую совокупность наложенных на систе-
систему связей нельзя заменить формами полных дифференциалов, урав-
уравнения связей называют неинтегрируемыми, а связи — неголопомны-
ми.
Критерии, позволяющие установить, содержатся ли голономные
связи в заданной системе дифференциальных связей, получим в § 4.4.
4.3. Интегрирующие механизмы
307
Если связи голономные, то их уравнения приводятся к виду
= 0,
и тогда говорят, что связи заданы в конечном виде. Голономная
связь, заданная в конечном виде, называется склерономной, если t
не входит явно в уравнение связи, т.е. если dfi/dt = 0. Такая связь,
будучи записанной в дифференциальной форме, окажется стационар-
стационарной.
§ 4.3. Интегрирующие механизмы
Рассмотрим примеры практического использования дифференци-
дифференциальных связей в приборах, предназначенных для измерения площа-
площадей, ограниченных замкнутыми контурами. Необходимость в таких
измерениях часто возникает в картографии.
У
С помощью планиметра определя-
определяется разность площадей, ограничен-
ограниченных кривыми, описываемыми кон-
концевыми точками А и В изобра-
изображенного отрезка. Чтобы измерить
указанную разность, точка С снаб-
снабжается устройством в виде колеси-
колесика, плоскость которого перпендику-
перпендикулярна стержню АВ, а угол поворо-
поворота пропорционален измеряемой ве-
величине.
Рис. 4.3.1. Планиметр
Возьмем отрезок постоянной длины, и пусть его концы Аи В опи-
описывают замкнутые плоские кривые С\ и Li (рис. 4.3.1). Зададим по-
положение отрезка АВ радиусом-вектором г = (я, у) какой-нибудь его
точки С и углом ф между этим отрезком и осью Ох, так что единич-
единичный вектор т = (cos^, sini/>) задает направление отрезка. Радиусы-
векторы точек Аи В будут соответственно
= г + ат,
= г - 6т,
где аиЬ — длины отрезков АС и СВ. Площадь, ограниченная замкну-
замкнутой кривой ?i, дается (теорема 3.7.4) криволинейным интегралом
1 /
2/ А'
20*
308 Глава 4. Аналитическая статика системы
взятым вдоль контура С\ в положительном направлении. Здесь и —
единичный вектор, перпендикулярный к плоскости Оху. Подставив
выражение для гд, найдем
S\ и = - Ф (г + ат) х (dr + a dr) = - Ф г х dr + - Ф т х dr-f
¦f- Ф г х dr -f — <р тх dr= - <bvxdr + a<brx dr-f
a / a2 /
2/ 2 /
где интегрирование ведется по контуру ?, описываемому точкой С.
Аналогично
5г I/ = - (р г х dr + и — Ф dф — Ь (р т х dr Ф d(r x т).
Учтем, что интегралы по замкнутому контуру от выражений, пред-
представляющих собой полные дифференциалы, равны нулю. Следова-
Следовательно,
Ф d(r х т) = 0.
Если к тому же отрезок ЛВ не делает в плоскости Оху полных обо-
оборотов, то
Поэтому
где I = а + b есть длина отрезка. Далее
(dr) хт— (dx sin ф — dy cos ф) v.
Коэффициент при v в правой части последнего равенства равен пер-
перпендикулярной к отрезку ЛВ составляющей смещения точки С. С
помощью кинематической связи значение этого коэффициента может
быть превращено в величину угла поворота вокруг оси, направлен-
направленной вдоль стержня. С этой целью возьмем колесико с острым краем
(режущее колесико) и заставим его катиться по плоскости Оху. Ко-
Колесико не будет проскальзывать ни в направлении касательной к сво-
своей окружности, ни в направлении, перпендикулярном к касательной
4.3. Интегрирующие механизмы 309
Перемещение точки соприкосновения
режущего колесика с опорной плоско-
плоскостью происходит в направлении, пер-
перпендикулярном стержню АВ, При
этом скорость колесика в точке его
соприкосновения с опорной плоско-
плоскостью равна нулю. В результате сум-
суммарный угол поворота колесика при
обводе точкой А контура ?ь а точкой
— В контура ?2 пропорционален разно-
разности площадей, ограничиваемых кон-
контурами ?2 и ?i соответственно.
Рис. 4.3.2. Режущее колесико
(рис. 4.3.2). Пусть ось О\Оч колесика удерживается в горизонталь-
горизонтальном положении. Положение колесика можно задать углом <р пово-
поворота его вокруг оси О\Оч, углом ф между осью О\Оч и осью Ох и
координатами #, у точки прикосновения, или, что то же, центра ко-
колесика. Дифференциал смещения точки прикосновения колесика к
плоскости выразится через дифференциал <р следующим образом:
dx=:Rsmфd<p, dy = —Rcosфd^p.
Отсюда найдем
dx sin ф — dy cos ф = R dip.
Значит, если в точку С стержня АВ, изображенного на рис. 4.3.1,
поместить колесико радиуса R так, чтобы стержень АВ проходил че-
через центр перпендикулярно плоскости диска, то разность площадей
внутри контуров С\ и ?2, описываемых концами А и В стержня, вы-
выразится формулой
где А(р — полный угол поворота колесика при однократном обводе
точками А и В контуров С\ и ?2 соответственно.
Пусть теперь один конец отрезка описывает контур, охватыва-
охватывающий область, площадь которой желательно определить, а второй
принужден оставаться все время на заданной разомкнутой кривой.
Тогда, очевидно, искомая площадь равна
5 = IRAip.
Приборы, в основу конструкции которых положен указанный
принцип, называются планиметрами. Если разомкнутая кривая есть
310 Глава 4. Аналитическая статика системы
дуга окружности, имеем полярный планиметр, а если прямая — пря-
прямолинейный планиметр.
В топориковом планиметре стержень
ЛВ параллелен плоскости колесика.
Штифтом, расположенным в точке
Л, обводят контур ?, ограничиваю-
ограничивающий измеряемую площадь. Величи-
Величина измеряемой площади практически
ччч' ti^i* пропорциональна углу отклонения д
-'' / стержня от первоначального положе-
положения.
Рис. 4.3.3. Топориковый планиметр
Планиметры суть простейшие аналого-вычислительные приборы,
широко и весьма эффективно используемые в практике вождения
морских судов. Простая и целесообразная конструкция планиметра
предложена А.Н. Крыловым. Это так называемый топориковый пла-
планиметр (рис. 4.3.3). Он состоит из стержня ЛВ длины /, на конце
В которого помещено режущее колесико с осью, перпендикулярной
стержню. Плоскость колесика содержит стержень ЛВ. Колесико
катится по плоскости Оху. На конце Л стержня имеется обводной
штифт.
Поместим штифт в какую-нибудь внутреннюю точку О (рис. 4.3.3)
области, ограниченной контуром ?, площадь 5 которой требуется из-
измерить. Из точки О штифт переведем в точку О\, расположенную на
контуре ?, обведем контур С против хода часовой стрелки, вернемся
в точку О\ и из нее — вновь в точку О.
При таком движении штифта скорость точки соприкосновения ко-
колесика с плоскостью может быть направлена только вдоль стержня
ЛВ. Поэтому в процессе обвода
(dv х г) = 0
или
dx sin ф — dy cos ф = 0.
Пусть стержень после возвращения штифта в точку О образует
угол г? относительно своей первоначальной ориентации, выделенной
пунктиром на рис. 4.3.3. Процесс измерения может быть закончен,
только когда обе точки Л и В возвращены в исходное положение.
Точка Л совпала с исходной точкой О, а точка В — нет. Чтобы
4.4. Критерии голономности системы связей 311
возвратить точку В, достаточно повернуть стержень на угол д вокруг
точки О. При этом
(rfr х т) = l2vdd.
Следовательно,
где Sb — площадь, описываемая точкой В. Практически эта площадь
оказывается небольшой, и ею пренебрегают, полагая
§ 4.4. Критерии голономности системы связей
Теорема 4.4.1. Для того, чтобы систему дифференциальных
связей можно было представить в конечном виде, необходимо, что-
чтобы она была эквивалентна системе линейных связей.
Доказательство. Предположим, что заданная система диффе-
дифференциальных связей эквивалентна системе геометрических связей
/j(Pi,...,pn,0 = 0, j = l,...,m.
Эквивалентность означает, что множество скоростей точек системы,
определенное системой геометрических связей, совпадает с множе-
множеством скоростей, определенным исходной системой дифференциаль-
дифференциальных связей. Но все множество скоростей, допускаемых системой гео-
геометрических связей, задается как множество решений системы ли-
линейных дифференциальных связей вида
Таким образом, чтобы получить достаточные условия интегриру-
интегрируемости системы связей, следует рассматривать дифференциальные
связи, линейные по скоростям:
N
»" • V, + В,- = 0, f = 1,..., т.
Предположим, что все радиусы-векторы г„ материальных точек
системы можно задать с помощью независимых скалярных координат
gi,...,gn, так что
312 Глава 4. Аналитическая статика системы
В частности, в качестве gi,..., qn можно взять коэффициенты разло-
разложений yu по базисным векторам пространства. Очевидно, что тогда
п = 3iV. Если материальные точки стеснены удерживающими геоме-
геометрическими связями
fj = fj(t,ri,..., r^) = 0, j — 1,..., га',
причем га' < 3iV, то уравнения этих связей образуют незамкнутую
систему алгебраических уравнений. По теореме о неявно заданных
функциях решение ее неоднозначно. Множество решений можно опи-
описать с помощью набора свободных параметров gi....,gn, n < 37V,
произвольное задание которых обеспечивает принадлежность мате-
материальных точек геометрическим связям.
Пример 4.4.1. В твердом теле расстояния между любыми
двумя точками сохраняются. Положение твердого тела, вращающего-
вращающегося в пространстве вокруг неподвижной точки, однозначно определяется
(см. стр. 91) тремя углами Эйлера. Их можно принять за независимые
координаты
Итак, пусть координаты q\,..., qn тем или иным способом назна-
назначены. Очевидно, что
j=i 3
Подставив эти выражения в уравнения линейных дифференциальных
связей, найдем
п
aijqj + ojo = 0, г = 1,..., га,
где коэффициенты выражаются формулами
fir.
Для симметрии записи обозначим t = qo и представим уравнения
связей в виде равенств нулю дифференциальных линейных форм
п
]П а0- с?^ = 0, г = 1,..., m < п,
j=o
4.4. Критерии голономности системы связей 313
где u)i(dq) — сокращенное обозначение левой части соответствующе-
соответствующего уравнения связи. Получили так называемую систему уравнений
Пфаффа относительно дифференциалов координат. В дальнейшем
будем предполагать, что уравнения этой системы линейно независи-
независимы.
В каждой точке q пространства Дп+1 координат go, q\,..., gn си-
система Пфаффа выделяет гиперплоскость ?(q) допустимых (удовле-
(удовлетворяющих системе) дифференциалов (dqo,dqi, ...,dqn). Эта гипер-
гиперплоскость имеет размерность п + 1 — га.
В пространстве J?n+1 рассмотрим р-мерную поверхность 5Р, т.е.
множество точек M(qo,qi,... ,qn), выделяемое уравнениями
go = qo{ui,...,up),...,qn = qn(ui . ..,up),
где iti,..., itp — независимые параметры. Матрицу частных произ-
производных для этих уравнений будем считать имеющей максимально
возможный ранг р.
Дифференциалы смещений по поверхности из данной ее точки
определяются выражениями
dqi = j^^-^i/» i = 0,1,..., п.
Тем самым векторы дифференциалов (dqo,dqi,.. .,dqn) суть линей-
линейные комбинации р линейно независимых векторов
q^ 5^ dqn\
u/du/'"}duj ' ''"'Р
с коэффициентами duv.
Другими словами, векторы дифференциалов смещений по р-мер-
ной поверхности принадлежат р-мерному линейному пространству Ср
с базисными векторами ?i,..,?p. Пространство Ср назовем каса-
касательным к поверхности Sp.
Определение 4.4.1. Поверхность Sp называется интегральной
для пфаффовой системы, если ее касательное пространство Ср в ка-
каждой точке принадлежит гиперплоскости ?(q) допустимых диффе-
дифференциалов. Одномерная интегральная поверхность называется ин-
интегральной кривой.
Ясно, что число измерений касательного пространства для инте-
интегральной поверхности не превосходит п + 1 — т (числа измерений
гиперплоскости ?(q)).
Определение 4.4.2. Пфаффова система
u>i(dq) = 0, i= l,...,m
314 Глава 4. Аналитическая статика системы
называется вполне интегрируемой, если через каждую точку про-
пространства 72n+1 проходит (п + 1 — га)-мерная интегральная поверх-
поверхность.
Теорема 4.4.2. Система связей голономна тогда и только то-
тогда, когда соответствующая система уравнений Пфаффа вполне ин-
интегрируема.
Доказательство. Необходимость. Пусть система связей голо-
голономна. Тогда уравнения связей представляются в конечном виде
/i(tfo,tfi,...,tfn) = 0, г = 1,...,т.
Каждое уравнение выделяет гиперповерхность размерности п, а ко-
когда левые части этих уравнений линейно независимы, то пересечение
всех соответствующих гиперповерхностей образует интегральную по-
поверхность размерности п + 1 — т. Необходимость доказана.
Достаточность. Не теряя общности, предположим, что пфаф-
пфаффову систему можно разрешить относительно dqo, dq\,..., dgm_r.
dqo = boimdqm +
dqm-i = bm-ifmdqm + 6m_iim+i<fym+i -f ...
Пусть (n + 1 — т)-мерная интегральная поверхность существует. То-
Тогда для нее qm,..., qn должны быть независимыми, а до, • • •, Ят-i
должны быть их функциями, так что уравнения этой поверхности
можно записать в виде
а это и означает голономность системы связей.D
Перейдем к критериям голономности. Пусть а — скалярный па-
параметр. Укажем метод построения множества всех интегральных
кривых пфаффовой системы
проходящих через заданную точку Mq.
Метод 4.4.1. Касательный вектор к интегральной кривой удо-
удовлетворяет пфаффовой системе
• „
4.4. Кр и теряя голономнос тя сие темы связей 315
Выделив в матрице коэффициентов (a,-j) неравный нулю минор и про-
произведя необходимую перенумерацию индексов, представим эту систе-
систему в эквивалентном виде
Пусть точка Mq имеет координаты 9o» 9i > • • •»9n- Функции 9m((r),...,
^n(a) можно выбрать произвольно при условии, что
Тогда относительно функций ^о(^), • • • ,qm-i(&) получаем систему
обыкновенных дифференциальных уравнений, в которой коэффици-
коэффициенты bij зависят как от произвольно выбранных, так и от искомых
функций. При начальных условиях
решение этой системы определено однозначно, чем и завершается по-
построение отдельной интегральной кривой искомого множества.
Теорема 4.4.3. Пусть пфаффова система уравнений вполне ин-
интегрируема. Тогда интегральная поверхность размерности п+1—т,
проходящая через фиксированную точку Mq пространства Дп+1,'
единственна.
Доказательство. Интегрируемость системы связей означает су-
существование интегральной поверхности 5rn+1""m, проходящей через
точку Mq. Эту поверхность (см. доказательство теоремы 4.4.2) мож-
можно задать с помощью следующей системы функций:
Проведем через Mq кривую Q Е 5п+1~т. Независимые координа-
координаты </т,..., qn можно взять произвольными функциями параметра а,
а функции qo(cr),.. .,qm-i(cr) тогда определятся из конечных урав-
уравнений связей. Вместе с тем кривая Q, принадлежащая поверхности
gn+i-m^ будет интегральной для пфаффовой системы и обязана удо-
удовлетворять связанной с ней системе обыкновенных дифференциаль-
дифференциальных уравнений (см. метод 4.4.1).
Пусть теперь через точку Mq проведена произвольная интеграль-
интегральная кривая Q* (не обязательно принадлежащая Sn+1~m). Ее ко-
координаты как функции параметра а удовлетворяют той же систе-
системе дифференциальных уравнений и тем же начальным условиям,
316 Глава 4. Аналитическая статика системы
что и координаты кривой Q. Поскольку для кривой Q функции
qm(&), • • • ,Яп(<г) выбираются произвольно, то их можно взять таки-
такими же, как и для кривой Q* . Но тогда по теореме о единственности
решения системы обыкновенных дифференциальных уравнений кри-
кривая Q совпадет с кривой Q*. Значит, всякая интегральная кривая,
проходящая через точку Мо, принадлежит интегральной поверхности
gn+1-m^ содержащей эту точку.О
Построим линейный оператор Р, который обращает в нуль все век-
векторы, лежащие в гиперплоскости ?(q) допустимых дифференциалов,
и переводит в себя все векторы, ортогональные (в смысле евклидовой
метрики) к ?(q). Компоненты Pj(dq) результата применения опера-
оператора Р к вектору дифференциала смещения dq представим в виде
где Xji — неопределенные пока множители. Векторы, ортогональные
к ?(q), и, в частности, векторы (а;0, а»ь ..., агп), i = 1,..., m, опера-
оператор Р должен переводить в себя. Следовательно, коэффициенты Aj,-
удовлетворяют системе уравнений
=asj, e=l,...,m, j = 0,1,..., п.
Квадратная матрица
есть матрица Грама строк пфаффовой матрицы. Так как указанные
строки линейно независимы, получим, что матрица Грама невыро-
жденна, а значит, коэффициенты Xji определяются однозначно. Тем
самым оператор Р определен корректно. Рассмотрим матрицу Л:
Aoi 5 • • • Aom
Ani, ... лпт
Столбцы этой матрицы можно представить как векторы (Аог-,..., Ат).
Из системы уравнений для Xji видим, что m линейно независимых
векторов
суть линейные комбинации векторов (Аог,..., Ат). Поэтому ранг ма-
матрицы Л равен га.
4.4. Критерии голономности системы связей 317
Введем независимые дифференциалы
dq= (dqo,dqu...,dqn) G ?(q), <5q = Fqo, fyi, • • -^4n) € C{q).
Они не обязательно совпадают, но удовлетворяют системе пфаффо-
пфаффовых уравнений и задают в пространстве ?(q) допустимых дифферен-
дифференциалов смещения в различных направлениях. Соответственно обо-
обозначим
_ Л ер, „ Дар,
приращения оператора Р в направлениях 6q и dq.
Лемма 4.4.1 (Критерий голономности). Система дифферен-
дифференциальных связей гояономна тогда и только тогда, когда для любой
точки q = (</о, • •, </n) w любых 6q, dq € C(q) имеет место равенство
Доказательство. Необходимость. Предположим, что система
дифференциальных связей голономна. Это значит, что соответству-
соответствующая пфаффова система вполне интегрируема, т.е. существует ин-
интегральная поверхность размерности г? -f 1 — ш, заданная векторным
равенством
где щ,..., wn+i_m — произвольные параметры. По определению опе-
оператора Р будем иметь
Р^ = 0, 1/ = l,...,n +
оии
Откуда, дифференцируя по w^, найдем, что
dupduv диц дии
Меняя местами индексы //и^, получим
г д\ | дР dg = Q
дииди^ дии диц
Вычтем теперь из первого равенства второе:
дР dq ^P ^q _Q
диа дии дии диа
318 Глава 4. Аналитическая статика системы
Дифференциалы смещений cfq, 6q G C(q) и приращения Р$, P<* зада-
задаются очевидными соотношениями
n + 1-m ^ n + 1-m о
v=l
я;
n + 1 —m л n+1 —m
i
где dup, 6uu — произвольные дифференциалы параметров. Умножив
теперь на du^6uu равенства, связывающие частные производные от
Р с касательными dq/dup, dq/duu к интегральной поверхности, и
просуммировав результаты по индексам ц и v, получим утверждение
леммы в качестве необходимого условия.
Достаточность. Пусть выполнено условие леммы. Возьмем про-
произвольную точку q = (q$}..., g*) и определим интегральную кривую
q(a) (см. метод 4.4.1), проходящую через эту точку:
d(l
o
da *—* da da *-** da
j—m j=m
= Щ
где hi, ..., iin+i-m — произвольные параметры, задающие напра-
направление касательного вектора к интегральной кривой в точке q*,
/m((j),...,/m((j) — произвольные функции, обеспечивающие суще-
существование и единственность решения системы уравнений интеграль-
интегральной кривой и удовлетворяющие условию
Пусть эти функции зафиксированы. Тогда, меняя параметры «i,...,
un+i-m, получим семейство интегральных кривых. Это семейство
образует некоторую поверхность размерности n+1-m (параметр
а всегда можно выбрать так, чтобы касательный вектор в точке q*
был единичным). Докажем, что при выполнении условия леммы по-
полученная поверхность будет интегральной. Уравнение поверхности
4.4. Критерии голономности системы связей 319
представим в виде
q = q(ub...,un+i_m,G).
При изменении параметра а точка перемещается вдоль интегральной
кривой. Поэтому dq/да ? ?(q) и
Покажем теперь, что и
дщ
в любой точке поверхности. В самом деле, выполняя дифференциро-
дифференцирование, найдем
<9а <92q дР_ 5q
" " Л " + 9G at/, '
о= э fraqU
9 д)
Ur i .
\ до-) дщдст дщ да'
Следовательно,
<9а _ ЭР Эд <9Р 9д
9G " 9G дщ ~ дщ дет'
Учитывая определение оператора Р, разложим вектор dq/дщ на две
составляющие:
дщ
так что вектор b G >C(q), вектор а ортогонален ?(q) в любой точ-
точке поверхности. С помощью этого разложения представим дР/дщ в
виде
ар зр spL n n
л" = л" а + л" b = Р« + Р&-
aw, aq aq
Подставим теперь все найденные выражения в правую часть форму-
формулы для 9а/9сг:
Так как векторы b и dq/d<r принадлежат гиперплоскости ?(q), то
согласно условию леммы
320 Глава 4. Аналитическая статика системы
Значит, относительно вектора а имеем обыкновенное дифференци-
дифференциальное уравнение
да. _ 8Р_ 3q
д<т ~ д<т* ад<т
при начальном условии а@) = 0, так как q@) = q* и от iii,...,
t/n+i-m не зависит. Это уравнение есть линейное однородное урав-
уравнение относительно компонент вектора а с единственным нулевым
решением. Поэтому а = 0 для любой точки рассматриваемой по-
поверхности, и вектор dq/дщ принадлежит гиперплоскости ?(q). Сле-
Следовательно, касательная плоскость к этой поверхности совпадает с
гиперплоскостью ?(q), и соответствующая пфаффова система впол-
вполне интегрируема. О
Определение 4.4.3. Выберем независимые дифференциалы
dq = {dqo,dqi,...,dqn), 8q = Fqo,8qu . . .,6qn).
Приращения коэффициентов на этих дифференциалах обозначим со-
соответственно
П е\
^-л OClij
Внешней производной формы
i=o
называется выражение
п
dwiFq) - 6u>i(dq) = ^(daijSqj - ba^dq^).
jzzO
Теорема АЛЛ. (Фробёниус). Система дифференциальных свя-
связей голономна тогда и только тогда, когда для любых дифференциа-
дифференциалов 6q G ?(q) и dq G ?(q) обращаются в нуль внешние производные
левых частей всех уравнений соответствующей пфаффовой систе-
системы:
п
6qj - 6aijdqj) = 0, г = 1,..., т.
Доказательство. В результате применения оператора Р к векто-
вектору dq получится новый вектор, j-ю компоненту которого обозначим
Pj(dq). Тогда
i qk' i = о»
t = l k=0
4.4. Критерии голономности системы связей 321
Из леммы 4.4.1 следует, что система связей голономна тогда и только
тогда, когда
i j = О, j = 0,1,..., n,
t = l k=0
где независимые дифференциалы (dqo, dq\,..., dqn), Fqo, 6q\,..., 6qn)
удовлетворяют системе связей. Учтем, что
aikdqk = 0,
k=0 k=0
и перепишем критерий голономности системы в виде
m n
^2 Xi{ Yl^daik8qk "" 8a^d^) = °' i = 0,1,..., п.
«=1 к=0
В связи с тем что матрица Л = (Xji) имеет ранг, равный т, получаем
утверждение теоремы.?
Пример 4.4.2. Рассмотрим дифференциальную связь
didqi + a2dq2 -f азс/дз = 0,
заданную в трехмерном пространстве R3. Условие ее голономности со-
состоит в выполнении равенства
+ da,2&q2 + da^Sq^ — 8a\dq\ — 6a,2dq2 — ba^dq^ = 0
в любой точке пространства, или
9a2 даЛ
- - — J
_
) Swb ) «ftrfft + f «» - p) 6q2dq3
dq3 dq2) \dqi dq3 J \dq2 dq3 J
={^~WJ{q2qi" qiq2) +\W~W){qsqi" qiqs
lда2 да3\
+( т -z—) Fq3dq2 - 6q2dq3) = 0.
21- 1503
322
Глава 4. Аналитическая статика системы
Введем вектор а = {а\,а2,аз) и вектор
ei e2 ез
rota =
А А А
dqi dq2 dq3
получаемый путем формального раскрытия определителя правой части,
где ei, е2, ез — базисные векторы пространства Я3. С учетом этих
обозначений критерий голономности можно представить в виде
rota • (<Sq x dq) = О,
что должно выполняться для любых двух векторов, удовлетворяющих
условиям
а • 6q = О, а • e/q = 0.
Следовательно, векторное произведение Fqxdq) параллельно а. Поэто-
Поэтому в рассматриваемом случае критерий голономности связи принимает
окончательный вид
а • rota = 0.
Пусть, в частности, а = (ai,a2,0), причем имеют место зависимости
Тогда
ГОТ Я "™" I —
V
да2
да2 даЛ
— — — I
dq\ dq2 J '
а критерий голономности выражается равенством
да2 да\
a-rota = -—-ai + ^— а2 = 0,
oq o
или
т.е. связь вида
u q2, Чз) dq2 = 0
голономна тогда и только тогда, когда отношение а\/а2 не зависит от
координаты 9з- Так будет, например, если коэффициенты а\ и а2 вообще
не зависят от #з- Видим, что связь
a2 dq2 = 0
4.4. Критерии голономности системы связей
323
голономна при любых коэффициентах а\ и а2, зависящих только от
координат #i и #2-
Этот факт может показаться удивительным. Однако в данном случае ги-
гиперплоскость ?(q) одномерна, а значит, интегральная поверхность есть
интегральная кривая, которая всегда существует. Поясним это следую-
следующим примером.О
Пример 4.4.3. Пусть число связей на единицу меньше размер-
размерности пространства Дп+1, т.е. га = п. Такая система связей голоном-
голономна. Действительно, если m = п, то гиперплоскость ?(q) допустимых
дифференциалов имеет размерность п + 1 — га = 1. Все допустимые
дифференциалы оказываются коллинеарными: 6q — Xdq. Значит,
<L>i{6q) =
t =
и внешние производные тождественно обращаются в нуль. Интеграль-
Интегральная поверхность имеет максимальную размерность, равную единице.
Она представляет собой всегда существующую интегральную кривую.О
Точка соприкосновения диска с плос-
плоскостью при движении диска может
оказаться в любой точке плоскости, а
диск может принять любую ориента-
ориентацию относительно выбранного репе-
репера. Неголономные связи, стесняющие
кинематические возможности диска,
ограничивают лишь множество кри-
кривых в конфигурационном простран-
пространстве, соединяющих произвольные на-
начальное и конечное положения диска.
Рис. 4.4.1. Качение диска по плоскости
Пример 4.4.4. Рассмотрим диск, катящийся по плоскости V
без проскальзывания (рис. 4.4.1). Положение такого диска можно за-
задать координатами х и у точки соприкосновения М диска с плоскостью,
углом ф между радиусом, проходящим через фиксированную точку обо-
обода диска, и диаметром, проходящим через М, углом <р между касатель-
касательной в точке М к диску и осью Ох, а также углом tf между плоскостью
диска и осью Oz. Качение диска по плоскости без проскальзывания
означает, что в каждый момент времени скорость точки М диска, ле-
лежащей на плоскости V, равна нулю. Произвольное малое перемещение
324 Глава 4. Аналитическая статика системы
диска характеризуется дифференциалами
dx, dy, dtp у d<p, dd.
Пусть радиус диска равен R. Тогда условие качения диска без проскаль-
проскальзывания относительно плоскости V запишется в виде двух уравнений
дифференциальных связей
w\(dq) = dx — Rcos(pdxjj = О,
u;2(dq) = dy — Rsmpdip = 0.
Составим внешние производные
= Rsin<p(d<p6il; —
= — Л cos <?> (d<^> 6^ —
Дифференциалы dtp, Sip, dtp, 6ф можно выбрать произвольно. Значит,
тождественное равенство нулю внешних производных невозможно. Для
этого потребовалось бы одновременное равенство нулю sin у? и cosy?.
Следовательно, система дифференциальных связей качения диска по
плоскости неголономна.О
§ 4.5. Выявление голономных связей
При исследовании свойств системы материальных точек, подвер-
подверженных действию связей, часто оказывается желательным умень-
уменьшить размерность ее координатного пространства. Это возможно,
когда в системе имеются голономные связи. Цель настоящего пара-
параграфа состоит в построении процедуры выделения голономных свя-
связей из заданного множества дифференциальных связей.
Пусть в координатном пространстве Rn+1 задано п + 1 линейно
независимых пфаффовых форм
определенных невырожденной квадратной матрицей коэффициентов
(a,-,,), i,ji = 0,1,..., п.
Найдем для этих форм п + 1 линейно независимых векторов
ao,ai,.. .,an
так, чтобы
\
г Г 0, если г ф v,
1, если г = v.
4.5. Выявление голономных связей 325
Другими словами, матрица (с*^), составленная из компонент векто-
векторов ос„, должна быть обратной по отношению к матрице (а«^)- По-
Подобранные таким образом п + 1 векторов и п + 1 форм называются
базисными.
Пусть ? — произвольный вектор. Тогда его разложение по базис-
базисным векторам имеет вид
Рассмотрим внешнюю производную
^ d6
u6q^ ) =
Efdaifi daiu\
~я ~ "л— dqubq^.
^=0 V dqv dq, J
Коэффициенты dqu, Sq^ разложений векторов dq, 6q по базисным
векторам вычисляются следующим образом:
dqu = u
Обозначим
Тогда получим разложение внешней производной по базисным фор-
формам
п
duiFq) - 6ui(dq) =
Введем операторы
отвечающие векторным полям схи, так что
где / — некоторая функция переменных до, • • •, Яп-
326 Глава 4. Аналитическая статика системы
Теорема 4.5.1. Если полный дифференциал функции f разло-
разложить по базисным формам и>о, • • • ,wn, то коэффициенты разложе-
разложения совпадут с результатом применения операторов Аи к этой
функции:
п
Доказательство. Используя определение операторов А„, базис-
базисных форм и векторов, найдем
Справедлива также формула
Повторно применим полученные разложения полного дифференциа-
дифференциала
п
dFf) =
t=0
Очевидно, что левая часть этого равенства не изменится при пере-
перестановке символов d и 6 между собой (изменение порядка дифферен-
дифференцирования функции). Поэтому
^,f=0 «=0
Учтем разложение внешней производной по базисным формам:
[(А„А„ - А„А„ + y?C^Ai)f]uv(dq)u)flFq) = 0.
ц,и-0 «=0
В силу произвольности векторов dq и 6q, а также функции / получим
п
t=0
4.5. Выявление голономных связей 327
Определение 4.5.1. Выражение
называется коммутатором {скобкой Пуассона) двух линейных опе-
операторов А„ и Ац.
Теорема 4.5.2. Коммутатор попарно взятых базисных опера-
операторов из множества {А„}, и = 0,1,..., п, есть линейный оператор
первого порядка. Он разлагается по базисным операторам с теми
же коэффициентами, что и внешние производные базисных форм
по самим этим формам:
п
[Ay, A^J = / ^ v^^^Aj.
i=o
Доказательство. Формула, выражающая коммутатор через опе-
операторы Ai, следует из определения этой скобки. Правая часть
есть линейная комбинация операторов Ai и не содержит вторых
производных. ?
Обратимся вновь к произвольной пфаффовой системе уравнений
= 0.
Дополним входящие в нее m линейно независимых форм еще какими-
нибудь п + 1 — т линейными дифференциальными формами
так, чтобы все п + 1 форм были линейно независимы и могли быть
приняты за базисные формы. Этим формам сопоставим п + 1 базис-
базисных векторов
ао,...,ап.
Выделим особо векторы
ат,.. .,ап.
Каждый из этих векторов согласно определению обращает в нуль все
формы
wo, • • .,wm_i.
Следовательно, векторы ат,..., ап определяют гиперплоскость ?(q)
пфаффовой системы. В данной точке пространства пфаффову систе-
систему можно задавать либо m линейными дифференциальными форма-
формами u;q, ... ,wm_i, либо п + 1 — m векторными полями ат,.. .,ап.
328 Глава 4. Аналитическая статика системы
Теорема 4.5.3. Для того чтобы система дифференциальных свя-
связей была голономной (вполне интегрируемой), необходимо и доста-
достаточно при разложении внешних производных по базисным формам
иметь выполненным условие
C%Vil = 0 при f' = 0, ...,m-l; v - т, ...,n /z = m, ...,n.
Доказательство. Возьмем дифференциалы dq, 6q G ?(q). Для
них
Ui(dq) = UiFq) = 0, i = 0,..., m - 1.
Поэтому в разложении внешней производной останутся только члены
с индексами i/, /л = ш,..., п:
п
cbiiSq) - 6u,i(dq) =
Требование полной интегрируемости эквивалентно обращению в нуль
правой части этого равенства при любых dq, <$q ? ?(q). Значения же
форм uv(dq), ШцFц) (^, /л = т,..., п) могут быть выбраны произволь-
произвольно, лишь бы они дополняли совокупность форм пфаффовой системы
до базисной.П
Следствие 4.5.1. Система дифференциальных связей голоном-
на (вполне интегрируема) тогда и только тогда, когда коммута-
коммутаторы операторов Ат,..., Ап, соответствующих линейно независи-
независимым векторам ат,.. .,ап Е ?(q), разлагаются по этим лее опера-
операторам:
п
/, A^J = у ^
Доказательство получается применением теоремы 4.5.3 к раз-
разложению коммутаторов по базисным операторам.D
Интегралом системы дифференциальных связей называется фун-
функция, сохраняющая постоянное значение на интегральных поверхно-
поверхностях системы.
Теорема 4.5.4. Отыскание интегралов произвольной системы
дифференциальных связей, содержащих т уравнений, равносильно
решению п 4- 1 — т уравнений в частных производных
А,/ = Qfo.— + . .. + Qfm^— = 0, г = т, ...,п.
oqo oqn
4.5. Выявление голономных связей 329
Доказательство. Пусть / есть интеграл соответствующей пфаф-
пфаффовой системы. Это эквивалентно тому, что полный дифференциал
df и формы пфаффовой системы
одновременно обратятся в нуль. Значит,
Но формы uji(dq) для i = га,..., п можно выбрать произвольно.?
Следствие 4.5.2. Если f есть интеграл системы дифференци-
дифференциальных связей, то f удовлетворяет уравнениям
[А^,А^]/ = 0, i/,/i = m,...,n.
Доказательство. Если / есть интеграл системы связей, то имеем
тождества
Aj/ = 0, i — га,... ,n.
Линейный же оператор, примененный к функции, тождественно рав-
равной нулю, снова дает нуль. Поэтому
А^(А^/) = 0, А,ДА„/) = 0, /i,i/= m,..., п.
В итоге
[А„, А,]/ = АЛА,/) - А„(А,/) = 0.
Следствие 4.5.3. Если к системе уравнений в частных произ-
производных
А.-/ = 0, i = m, ...,n,
присоединить уравнения того эюе вида, составленные из коммута-
коммутаторов операторов, входящих в систему, то расширенная система
имеет те же интегралы, что и исходная.
Сформулируем алгоритм выявления интегралов системы
дифференциальных связей.
1. Находится какая-нибудь совокупность линейно независимых
векторов ат,..., ап, задающих пространство ?(q) допустимых диф-
дифференциалов системы связей.
2. По векторам ат,..., ап составляются линейные операторы
Ат,..., Ап.
330 Глава 4. Аналитическая статика системы
3. Выполняется процедура расширения пространства ?(q). A
именно, вычисляется коммутатор каких-либо операторов набора п. 2.
Если этот коммутатор линейно не зависит от исходного набора опе-
операторов, то он добавляется к этому набору, и над новым набором
снова выполняется процедура расширения пространства ?(q). Если
составленный коммутатор линейно зависит от операторов набора,
получившегося на очередном шаге процедуры расширения, то этот
коммутатор не принимается во внимание и составляется коммутатор
какой-либо иной пары операторов.
4. Процедура расширения пространства ?(q) продолжается до
тех пор, пока число линейно независимых линейных операторов не
перестанет увеличиваться от присоединения их коммутаторов.
Теорема 4.5.5. Процедура расширения пространства ?(q) ко-
конечна. Если она заканчивается, когда число линейно независимых
операторов равно п+ 1, то в системе дифференциальных связей го-
лопомные связи отсутствуют. Если число линейно независимых
операторов, полученных процедурой расширения, меньше чем п + 1,
то соответствующая всем этим операторам пфаффова система
вполне интегрируема, а ее уравнения образуют голономные связи
рассматриваемой механической системы.
Доказательство. Согласно следствию 4.5.3, применение проце-
процедуры расширения пространства ?(q) приводит к тому, что расширен-
расширенная система дифференциальных уравнений в частных производных
А*/ = ... = An/ = 0, k<m,
имеет те же интегралы, что и исходная. Число же линейно независи-
независимых операторов А,- возрастает, а число уравнений соответствующей
им пфаффовой системы уменьшается. Число линейно независимых
векторов ос{ не может превосходить размерности пространства Дп+1.
Значит, процедура расширения пространства ?(q) конечна. Возник-
Возникновение ситуации, когда число линейно независимых операторов А,
не увеличивается от добавления коммутаторов, означает, что все ком-
коммутаторы линейно разлагаются по операторам системы. Согласно
следствию 4.5.1, такое множество операторов определяет некоторую
вполне интегрируемую пфаффову систему.
При расширении пространства ?(q) число уравнений Пфаффа
уменьшается, причем согласно следствию 4.5.3 ни одного интегра-
интеграла не пропадает. Пусть расширенная система дифференциальных
уравнений в частных производных имеет п + 1 — к линейно независи-
независимых уравнений, причем к < т. Тогда вновь полученная пфаффова
4.5. Выявление голономных связей 331
система состоит из к уравнений. Вполне интегрируемая система к
уравнений Пфаффа имеет ровно к интегралов
/о, • • .i/*-i-
Присоединяя к к уравнениям
#0 = ... = #*_!= О
линейно независимые уравнения исходной системы, приведем ее к
виду
Таким образом, заданная система связей оказывается эквивалентной
к голономным связям
/о = Со, . . .,/fc-l = Cfc_i
и т — к неголономным связям
Пример 4.5.1. Пусть в пространстве Я4 задана система двух
дифференциальных связей:
= qo dq0 + 91 rf^i + g2 ^2 = 0,
= 0.
Очевидно, что связь u;o — голономна, а связь u;i — неголономна. По-
лучим этот результат с помощью процедуры расширения.
1. Легко проверить, что пространство допустимых дифференциалов
?(q) рассматриваемой системы натянуто на линейно независимые век-
векторы
а2 = @,0,0,1), а3 = (929з, -92, (9i - 9о9з), 0).
2. Векторам осо, «з соответствуют линейные дифференциальные опе-
операторы
9 д д , ч д
А2 = д—, Аз = 929з^ 92^— + (91 - 9о9з)т—•
<?9з ^9о dqi dq2
3. Составим коммутатор
ГА А 1 9 9
А2, Аз = 92^ 9о^—.
oqo oq2
332 Глава 4. Аналитическая статика системы
Он линейно не зависит от операторов А2, Аз. Рассмотрим расширенный
набор линейных операторов:
Ai = [А2, А3], А2, А3.
Образуем из них всевозможные коммутаторы:
Я Я
[Аь А2] = 0, [Ai,A3] = -qi-z Ь^о^—, [А2,А3] = Ai.
oqo oqi
Видим, что существует линейная комбинация
i, Аз] = 0.
Поэтому все коммутаторы операторов Аь А2, Аз линейно выражаются
через сами эти операторы. Процесс расширения допустимого простран-
пространства закончен. Расширенное пространство натянуто на векторы
()
а2 = @,0,0,1),
, 0).
Подстановкой можно убедиться, что все эти векторы удовлетворяют
вполне интегрируемому пфаффову уравнению и;о = 0, которое тем са-
самым оказалось выявленным с помощью процедуры расширения. Исход-
Исходная система эквивалентна одной голономной связи
ql + q\ + q\ = с
и одной дифференциальной неголономной связи
dqo + qsdqx = 0,
где с — произвольная постоянная, определяемая начальными значени-
значениями координат системы.О
§ 4.6. Идеальные связи. Виртуальные перемеще-
перемещения
Предположим, что механическая система состоит из N матери-
материальных точек в пространстве ?, движения которых стеснены как
геометрическими, так и дифференциальными двусторонними связя-
связями. Всякая геометрическая связь
/(г1,...,гдг,0 = 0,
4.6. Идеальные связи. Виртуальные перемещения 333
где Г1,...,глг — радиусы-векторы точек, t — время, приводится к
дифференциальной связи вида
где обозначено iv = \v. В дальнейшем изложении будем предпола-
предполагать, что эта операция выполнена над всеми геометрическими свя-
связями, так что полная совокупность связей учитывается следующей
системой независимых уравнений:
Связи оказывают на материальные точки системы пассивное воздей-
воздействие (реакции связей — пассивные силы). Они влияют на харак-
характер движения, заставляя его параметры в каждый момент времени
удовлетворять уравнениям связей. Структура связей влияет и на
положение равновесия, запрещая точкам смещаться в одних напра-
направлениях и не препятствуя смещению в других. Воздействие со сто-
стороны связей на и-ю материальную точку системы будем выражать
реакцией связей К„ (определение 3.8.1).
Необходимым и достаточным условием того, что уравнения связей
выполняются в каждый момент времени в силу уравнений движения
отдельных материальных точек, служит существование реакций, удо-
удовлетворяющих следующей системе линейных уравнений (см. § 3.8):
N ЯФ R
У2т"*"'~ = ^' J = l,...,m, m<3N,
где
N *~ тч N
При m < iN решение этой системы неоднозначно.
В пространстве Е3 выберем декартов ортонормированный репер
Ое^ез- Чтобы в Е3 задать положения всех материальных точек си-
системы (задать ее конфигурацию), достаточно назначить 3N скаляр-
скалярных величин — координат радиусов-векторов г„ точек. Каждая из
этих координат может быть отложена на отдельной оси 3iV-MepHoro
координатного пространства. Такое пространство назовем конфигу-
конфигурационным пространством системы. Отдельная конфигурация си-
системы изображается одной точкой конфигурационного пространства.
334 Глава 4. Аналитическая статика системы
Чтобы выявить структуру множества решений системы уравне-
уравнений относительно реакций, в пространстве конфигураций определим
следующие векторы
х = («1,.. .
с компонентами
R, е* — 1 <9Ф;
я = о- = /га ог • е* а-' = •
i = fc + 3(i/- 1), fc= 1,2,3, i/
и евклидово скалярное произведение
Исследуемая система уравнений будет содержать неизвестный вектор
х и перепишется следующим образом:
В силу независимости исходной совокупности связей матрица этой
системы имеет ранг, равный ш.
Решение х можно искать в виде
;- +хт,
где вектор хт ортогонален всем векторам а;-. Постоянные А; опре-
определяются однозначно, так как матрица системы уравнений для Xj
есть матрица Грама совокупности линейно независимых векторов
ai,... ,am. Вектор хт из уравнений системы связей определить не-
невозможно. Это означает, что система связей будет удовлетворена при
любом векторе хт.
Определение 4.6.1. Нормальным пространством системы диф-
дифференциальных связей назовем множество 7?, состоящее из наборов
{П„, и = 1,..., N} векторов реакций таких, что соответствующий ка-
каждому набору 3iV мерный вектор х принадлежит линейной оболочке
lin(ai,..., aw) векторов ai,..., am.
Определение 4.6.2. Пространством Т виртуальных перемеще-
перемещений назовем множество наборов {6г^, и — 1,..., N} векторов переме-
перемещений, удовлетворяющих системе уравнений
N 9ф
У2 яГ •**!> = О, j = 1,...,т.
4.6. Идеальные связи. Виртуальные перемещения 335
Векторы набора {6г„, v = 1,..., TV}, удовлетворяющего этой системе
однородных линейных уравнений, называются виртуальными пере-
перемещениями системы материальных точек.
Пространство Т имеет размерность 3N — га. Другими словами,
ЗЛГ — га дифференциалов координат точек могут быть выбраны про-
произвольно, а остальные га будут их линейными комбинациями.
Вектор 6, соответствующий набору {6ги, и = 1,..., N} виртуаль-
виртуальных перемещений, ортогонален всем векторам ai,..., am:
N
} • отi/ — (а*, о) — 0, j — 1,..., га.
Условие того, что набор действительных перемещений {drv =
\vdt,v = 1,..., N} принадлежит пространству виртуальных пере-
перемещений Т, записывается в виде
Е—L .у„ = 0, j = 1,...,га.
Пусть связи линейно зависят от скоростей
N
где векторы Aju и скаляр Ajo зависят только от координат и време-
времени. Имеем d<&j/d\u = А;„. Отсюда получается система уравнений
(определение 4.6.2), выделяющая виртуальные перемещения матери-
материальных точек для линейных по скоростям связей:
N
Ajt, • 6yu = 0, j = 1,..., га.
Учтем, что
If'
Тогда уравнения линейных связей можно представить в дифферен-
дифференциальной форме:
N
А,„ • dvu + Ajo dt = 0, г = 1,..., га.
336 Глава 4. Аналитическая статика системы
Видим, что система уравнений для дифференциалов действительных
перемещений dvu отличается от системы уравнений для виртуаль-
виртуальных перемещений 6vu наличием в ней слагаемых вида Ajodt. Поэто-
Поэтому виртуальные перемещения <5г„ можно трактовать как дифферен-
дифференциалы радиусов-векторов точек, допускаемые связями, когда время
принято за фиксированный параметр: dt — 0. Если для всех j име-
имеем Aj о = 0, то дифференциал действительного перемещения систе-
системы принадлежит пространству Т виртуальных перемещений. При
Ajo = 0, j = 1,..., m, система уравнений, определяющая дифференци-
дифференциалы действительных перемещений, совпадает с системой уравнений,
определяющей виртуальные перемещения.
Пусть задана система геометрических связей
/j(ri,...,rjv,0 = 0, j = 1 m.
Приведем ее к дифференциальной форме
Таким образом, d$j/d\v = dfj/dYu, и система уравнений, определя-
определяющая виртуальные перемещения, примет вид:
N af
-«.«^ = 0, j=l,...,m.
Равенства dfi/dt — 0, г = 1,..., m, для голономных связей необ-
необходимы и достаточны, чтобы дифференциалы действительных пере-
перемещений принадлежали множеству виртуальных.
Если все связи, наложенные на систему материальных точек, го-
лономны, то в каждый фиксированный момент времени уравнения
связей выделяют в конфигурационном пространстве соответствую-
соответствующие им гиперповерхности. Виртуальные перемещения в этом случае
суть векторы сдвигов изображающей точки из исследуемого положе-
положения в другое, принадлежащие касательному пространству к пересе-
пересечению указанных гиперповерхностей.
Для неголономных связей подобная геометрическая интерпрета-
интерпретация виртуальных перемещений не будет справедливой. В частно-
частности, наличие неголономных линейных связей не накладывает ника-
никаких ограничений на начальное и конечное положения точки в кон-
конфигурационном пространстве, стесняя лишь множество траекторий,
которыми эти точки допускается соединять. Отметим еще, что для
4.6. Идеальные связи. Виртуальные перемещения 337
неголономных линейных по скоростям связей дифференциалы дей-
действительных перемещений принадлежат множеству виртуальных то-
тогда и только тогда, когда эти связи однородны. Они не обязаны быть
стационарными.
Теорема 4.6.1. Набор реакций {Я„, v — 1,..., N} принадлежит
нормальному пространству 1Z системы дифференциальных связей
тогда и только тогда, когда для любого набора {6ru, v — 1,..., N] Е Т
виртуальных перемещений точек системы выполнено условие
N
Доказательство. Необходимость. Пусть {К„, и = 1,..., N}?TZ.
Согласно определению 4.6.1 существуют скаляры Ai,...,Am такие,
что для соответствующего этому набору реакций ЗТУ-мерного векто-
вектора х будет выполнено х = Aiai + ... -f Amam. Возьмем виртуальное
перемещение {<5г„, v — 1,..., N} Е Т системы точек и построим соот-
соответствующий ему ЗЛ^-мерный вектор 6. По определению 4.6.2 вирту-
виртуальных перемещений имеем (aj, 6) = 0, j = 1,..., m. Следовательно,
N
(х,*) = ]? Н„ • Лг„ = 0.
Достаточность. Предположим, что выполнено
N
Тогда для соответствующих векторов х и 6 это условие можно пере-
переписать следующим образом
Представим вектор х в виде
и найдем коэффициенты Xj так, чтобы было (aj, хт) = 0, j = 1,..., m.
Соответствующая система линейных уравнений однозначно разреши-
разрешима, поскольку ее определитель есть определитель Грама для линейно
независимых векторов aj. Пусть после этого оказалось, что вектор
22-1503
338 Глава 4. Аналитическая статика, системы
хт ф 0. Тогда (х,хг) = ||хт||2 ф 0. Получили противоречие, так как
можно принять 6 = хт.О
Определение 4.6.3. Связи, наложенные на систему N матери-
материальных точек, называются идеальными, если
N
]Г R, • 6тv = 0
для произвольных виртуальных перемещений Fги, и = 1,..., N) Е Т
(ср. с определением 3.8.3).
Чтобы определить реакции идеальных связей, можно воспользо-
воспользоваться методом неопределенных множителей Лагранжа. Умножим
каждое уравнение системы, определяющей виртуальные перемеще-
перемещения 6vu, v — l,...,iV, на некоторый скалярный множитель А; и
результаты вычтем почленно из равенства, выражающего свойство
идеальности связей:
о.
Виртуальные перемещения могут быть получены путем произвольно-
произвольного задания 37V — ш независимых дифференциалов координат. Осталь-
Остальные m зависимых дифференциалов получаются из уравнений для
виртуальных перемещений.
Произвольными множителями А;-, j = l,...,m, распорядимся
так, чтобы коэффициенты при зависимых дифференциалах (их чи-
число равно ш) в последнем равенстве обратились в нули. Тогда в нем
останутся лишь члены с независимыми произвольными дифференци-
дифференциалами. Из-за того что равенство нулю элементарной работы реакций
связей на любых виртуальных перемещениях системы должно быть
тождественным, заключаем, что в нуль обязаны обратиться все ко-
коэффициенты при независимых дифференциалах координат. Таким
путем находим следующие выражения для реакций идеальных свя-
связей:
0v/
В сумме правой части каждое слагаемое, очевидно, можно интерпре-
интерпретировать как реакцию j-й связи, действующую на у-ю материальную
точку. Эта реакция, следовательно, равна
Множители Xj могут быть найдены с помощью уравнений связей.
4.6. Идеальные связи. Виртуальные перемещения 339
Теорема 4.6.2. Реакции m идеальных связей однозначно опреде-
определяются при заданных активных силах, действующих на систему N
материальных точек, если т < ЗЛГ.
Доказательство. По теореме 4.6.1 реакции идеальных связей
принадлежат нормальному пространству И (см. определение 4.6.1).
Векторы этого пространства при заданных активных силах F^ опре-
определяются уравнениями связей однозначно.D
Механика, конечно, не ограничивается изучением только систем
с идеальными связями. Однако подчеркнем, что лишь для опреде-
определения реакций идеальных связей достаточно задать уравнения этих
связей. При исследовании систем с неидеальными связями кроме
ограничений на значения координат и скоростей материальных то-
точек необходимо сформулировать некоторые дополнительные сведе-
сведения о реакциях. Примером могут служить задачи о движении или
равновесии систем с трением.
Для дифференциальных связей, линейных по скоростям (см.
§ 4.2), получим
Л1
=
= у ^ Xj Aj у,
В случае голономных связей /j(ri,... ,r^v,2) = 0 коэффициенты
d$j/d\u принимают вид
дФ1=д/1
и составляют градиенты поверхностей уровня fj = 0. Реакции иде-
идеальных голономных связей
направлены вдоль частных градиентов к указанным поверхностям.
Замечание 4.6.1. В некоторых задачах требование идеальности
связей (предположение о том, что хт = 0) может оказаться слиш-
слишком сильным. Тогда необходимо добавить соответствующие ненуле-
ненулевые составляющие реакций {Щ, v — 1,..., А7'}, для которых вектор
хт ортогонален всем векторам ai, ..., am. Чтобы этого добиться,
следует в соответствии с особенностями конкретной задачи выбрать
подходящий вектор Ъ Е lin(ai,..., am) и принять хт = /36 или
22*
340 Глава 4. Аналитическая статика системы
где {<5iv> v = 1,..., TV} ?T представляет собой подходящее виртуаль-
виртуальное перемещение системы, а 0 — размерный скалярный коэффици-
коэффициент, определяемый условиями задачи и зависящий, вообще говоря, от
параметров состояния системы и времени. В дальнейшем, говоря о
системах с идеальными связями, мы будем иметь ввиду, что указан-
указанные дополнительные силы могут быть учтены во всех последующих
соотношениях таким же способом, как и произвольные активные си-
силы.
Замечание 4.6.2. Метод неопределенных множителей Лагран-
жа есть математическая формулировка принципа освобождения от
идеальных связей (определение 3.8.1). В такой форме этот принцип
механики можно успешно использовать в произвольных задачах на
условный экстремум. В частности, пусть требуется найти экстремум
скалярной функции (функционала, см. § 8.11) F(x), x ? Rn (или
х ? (Z/2)п, если F(x) — функционал) при выполнении ограничений
фг(х) = 0, i = 1,..., m,
где ф{ — скалярные функции (функционалы). Обозначим Ф множе-
множество всех значений х, удовлетворяющих ограничениям. В искомой
точке экстремума градиент F(x) по переменным х ? Ф должен обра-
обращаться в нуль. Пусть Т — касательное пространство к множеству Ф
в произвольной точке х (множество виртуальных перемещений). Оно
определено соотношением
Т= (бх:^-6х = 0, i=l,...,ш
Пусть N — ортогональное дополнение к Т. Если вектор R ? Л/*, то
по определению Л/" должно быть
R • 6х = 0
для любого 6х ? Т. Вектор R аналогичен реакции идеальных связей
ф( = 0, i — 1,..., m. По методу множителей Лагранжа найдем
Точка экстремума определена условием, что проекция градиента
dF/dx на касательное пространство Т обращается в нуль. С помо-
помощью вектора R эту проекцию можем выразить следующим образом:
8F_
дх
-EL.. (dJL JL\ JL
дх \дх ||R||y||R|r
4.6. Идеальные связи. Виртуальные перемещения 341
Примем во внимание выражение для R через градиенты функций <?,-,
г — 1,...,га, и то, что множители Лагранжа пока не определены.
Условие экстремальности можно представить в виде
3F_
дх '
Множители \ц находятся из уравнений связей. Вектор R позволяет
учесть запрет на смещение точки х в направлении, перпендикуляр-
перпендикулярном касательному пространству Т, и тем самым дает возможность
освободиться от связей при формулировании условия экстремально-
экстремальности.
Рассмотрим некоторые примеры идеальных связей.
Пример 4.6.1. Примем, что связи, обеспечивающие постоянство
расстояний между N материальными точками, идеальны. Пусть г, и г;-
— радиусы-векторы двух произвольных точек множества. Связи имеют
вид
где Uj — постоянные. Воздействие г-й точки на j-ю из-за наличия между
ними связи обозначим R,j. Аналогичное воздействие j-й точки на г-ю
обозначим Rji Согласно методу множителей Лагранжа будем иметь
где X(j — скалярные коэффициенты.
Таким образом предположение об идеальности связей системы то-
точек, образующих твердое тело, означает, что взаимодействие между ни-
ними подчиняется третьему закону Ньютона (равенство действия и проти-
противодействия см. стр. 161).
Наоборот, если предположить, что взаимодействие между точками
твердого тела подчиняется третьему закону Ньютона, то получим
Суммарные реакции связей, приложенные к г-й и j-й материальным точ-
точкам, будут соответственно равны
N N N N
R, = ?Rjf. = J^Tijfa - rt), Rj = j
Поэтому
N IN N \ - N
342 Глава 4. Аналитическая статика системы
Это и означает идеальность рассматриваемой системы связей.О
Пример 4.6.2. Движение точки или множества N точек по иде-
идеальной геометрической связи, заданной уравнением /(г) = 0. В этом
случае имеем N уравнений связей
а виртуальные перемещения удовлетворяют условиям
— -6ri = 0,..., — .<5глг=0.
ОТ г_г ОТ г_г
Реакция идеальной геометрической связи в любой точке перпендикуляр-
перпендикулярна к поверхности связи:
Л df
i = 1Э...,ЛГ.
r=r7
Таким образом, рассматриваемая связь не оказывает влияния на дви-
движение точек вдоль ее поверхности (силы трения отсутствуют). Спра-
Справедливо и обратное утверждение если силы трения отсутствуют, то
рассматриваемая связь будет идеальной, так как отсутствие сил трения
означает перпендикулярность реакции к поверхности связи и
N
Пример 4.6.3. Качение одной поверхности по другой без взаим-
взаимного проскальзывания, когда взаимодействие между ними приводится
только к силам реакций, приложенным в точке контакта.
Пусть в точке контакта G реакция первой поверхности равна Ri, a
второй — R,2. Так как проскальзывание отсутствует, то
где <5rf — виртуальное перемещение точки контакта, принадлежащей
первой поверхности, 6г^ — виртуальное перемещение аналогичной точ-
точки второй поверхности. Условие идеальности связи
Ri • «р? + R2 • «г? = (Ri + R2) • &rG = 0,
выполняющееся при любом векторе 6г<?, означает справедливость тре-
третьего закона Ньютона: Ri = -R2. Очевидно верно и обратное: если
взаимодействующие связи в рассматриваемом примере подчиняются тре-
третьему закону Ньютона, то они идеальны.О
4.7. Принцип виртуальных перемещений 343
Пример 4.6.4. Движение твердого тела с одной неподвижной
точкой, когда существует только равнодействующая сила реакции, при-
приложенная к этой точке. Пусть система связей твердого тела (сохраня-
(сохраняются расстояния между точками) идеальна. Неподвижная точка имеет
нулевое виртуальное перемещение. Отсюда и следует идеальность всей
системы связей в целом.О
§ 4.7. Принцип виртуальных перемещений
Равновесие предполагает отсутствие ускорений всех материаль-
материальных точек системы в любой момент времени. Задачи о равновесии
могут быть изучены с помощью системы уравнений, выражающей
равенство нулю суммы всех сил, действующих на каждую точку си-
системы. Эта сумма должна включать как активные силы, так и неиз-
неизвестные силы реакций связей.
Практическое применение указанного подхода затруднено, когда
число точек в системе оказывается большим (например, все точки аб-
абсолютно твердого тела). К тому же число точек, к которым приложе-
приложены активные силы, обычно сравнительно невелико, и, как правило,
нет необходимости вычислять буквально все реакции связей.
Принцип виртуальных перемещений служит наиболее общим ме-
методом решения задач статики. Он возник в результате обобщения "зо-
"золотого правила" механики: "проигрыш в расстоянии пропорционален
выигрышу в силе". Использование принципа виртуальных перемеще-
перемещений позволяет наиболее экономно сформулировать условия равнове-
равновесия систем материальных точек на основе геометрических свойств
связей и информации об активных силах без введения неизвестных
реакций связей.
Теорема 4.7.1. (Принцип виртуальных перемещений).
(И. Бернулли, Лагранж). Конфигурация системы N материальных
точек, на которые наложены идеальные двусторонние стационар-
стационарные связи, допускающие в этой конфигурации тождественное ра-
равенство нулю скоростей всех точек системы, будет положением
равновесия (определение J^AA) тогда и только тогда, когда в любой
момент времени равна нулю сумма элементарных работ всех ак-
активных сил Fu, действующих на систему, на любом виртуальном
перемещении {6rU) v — 1,..., N} точек их приложения:
N
Fu -6vu = 0, У{6г„,1/ = l,...,iV}GT.
344 Глава 4. Аналитическая статика системы
Доказательство. Необходимость. Пусть под действием ак-
активных сил Fy система материальных точек, на которую наложены
указанные в условии теоремы связи, находится в равновесии. Тогда
для каждой точки системы в любой момент времени будет выпол-
выполняться равенство
F,, +RU = 0, v= 1,...,ЛГ.
Умножив эти равенства на соответствующие виртуальные перемеще-
перемещения и сложив результаты, получим
N N
Поскольку связи идеальны, второе слагаемое здесь равно нулю. Не-
Необходимость доказана.
Достаточность. По условию любое виртуальное перемещение
системы обеспечивает тождество
N
Представим все связи в дифференциальной форме
Они стационарны и допускают в рассматриваемом положении равен-
равенство нулю скоростей всех точек системы. Значит,
Примем противоположное: пусть скорости всех точек системы от-
отсутствуют, но положение, в котором находится система, не есть по-
положение равновесия. А именно, не все ускорения точек равны нулю.
Тогда в этом положении
N ЛА N
-?-*- • v,,, j = l,...,m
и, следовательно, ускорения обязаны удовлетворять уравнениям
N
?. . w п 1* 1 го
„=15v"
4.7. Принцип виртуальных перемещений 345
совпадающим, очевидно, с уравнениями для виртуальных перемеще-
перемещений (ср. определение 4.6.2). Таким образом, в качестве виртуальных
перемещений допустимо принять
Ьти = olvvtv, v — 1,..., N,
где ocv — отличные от нуля положительные скалярные множители.
Уравнения Ньютона для каждой точки имеют вид
mvwu = Fj, -f Ry, v = 1,..., N,
где Hu — реакция связей. Умножив каждое уравнение скалярно на
6гu и сложив результаты, получим
N N N
Откуда
N
Это противоречит предположению об идеальности связей. Видим,
что в любой момент времени равенство нулю ускорений всех точек
системы есть следствие равенства нулю их скоростей, и мы можем
воспользоваться теоремой 4.1.1.D
Следствие 4.7.1. Если силы, действующие на систему, потен-
потенциальны, то при выполнении условий теоремы 4-7.1 необходимое и
достаточное условие равновесия принимает вид
6U = 0,
где U — силовая функция, т. е. положение равновесия доставляет
для силовой функции потенциальной системы стационарное значе-
значение по отношению ко всем соседним конфигурациям, переход к ко-
которым принадлежит множеству виртуальных перемещений.
Доказательство. Поскольку силы потенциальны, то существует
силовая функция U = U(y\, .. .}г^) такая, что
Условие равновесия системы состоит в том, что
N N ди
346
Глава 4. Аналитическая статика системы
Следствие 4.7.2. (Принцип Торричёлли). Равновесие систе-
системы под действием силы тяжести достигается в тех и только в
тех конфигурациях, для которых центр масс системы занимает
наивысшее, наинизшее или какое-либо другое стационарное положе-
положение по вертикали относительно соседних положений, переход к ко-
которым реализуем в пространстве виртуальных перемещений.
Доказательство. Пусть к — единичный вектор вертикали, zu —
к • vu — вертикальные проекции радиусов-векторов точек системы,
ти — их массы, М — сумма масс всех точек системы, g — ускорение
силы тяжести. Тогда принцип виртуальных перемещений примет вид
N
N
N
ru = g
8ги) =
bzv — Mg6zc = 0,
где
N
— M l j>
mu zu
— вертикальная проекция радиуса-вектора центра масс.О
Пример 4.7.1. Рассмотрим однородный прямоугольный паралле-
параллелепипед. Очевидно, что его центр масс находится в точке пересечения
диагоналей. Когда параллелепипед под действием силы тяжести стоит
на столе на какой-нибудь своей грани, то это — положение равновесия,
так как при вращении параллелепипеда вокруг какого-либо ребра или
вершины, лежащей на столе, центр масс может только подниматься.О
Пример 4.7.2. Пусть какие-либо две точки плоской неизменной
фигуры могут перемещаться только вдоль заданных гладких неподвиж-
неподвижных кривых, лежащих в той же плоскости (рис. 4.7.1). Указать, под
действием какой силы F фигура может находиться в равновесии.
Плоская фигура, вынужденная касать-
касаться двух гладких направляющих, будет
оставаться в равновесии под действием
силы F, проходящей через мгновенный
центр вращения фигуры. Только в этом
случае виртуальное перемещение точки
А оказывается перпендикулярным на-
направлению действия силы F.
Рис. 4.7.1. Равновесие фигуры
Решение. Пусть сила F приложена к точке А фигуры. Принцип
4.7. Принцип виртуальных перемещений 347
виртуальных перемещений запишется в виде
F • <5гЛ = 0.
Значит, F -L бгд. Мгновенный центр вращения фигуры (см. опреде-
определение 2 14.1) лежит в пересечении нормалей к неподвижным кривым в
точках касания с ними фигуры. По теореме 2.14.1 виртуальное переме-
перемещение любой точки фигуры должно быть перпендикулярным радиусу,
проведенному к этой точке из мгновенного центра вращения О. Сле-
Следовательно, для равновесия фигуры необходимо и достаточно, чтобы
линия действия силы F проходила через мгновенный центр вращения.О
Принцип виртуальных перемещений можно использовать для ре-
решения геометрических задач. Проиллюстрируем это примерами.
Пример 4.7.3. Пусть в плоскости даны некоторая кривая С и точка
Р вне ее (рис. 4.7.2). Проведем через точку Р единичную нормаль v к
кривой С и обозначим через h расстояние по нормали от кривой С до
точки Р. Приложим к точке Р некоторую силу F = Fu, направленную
вдоль нормали v. Элементарная работа силы F есть
Элементарная работа силы F, перпен-
перпендикулярной к кривой, выражается как
произведение величины силы (со зна-
знаком) на дифференциал расстояния от
точки Р приложения силы до кри-
кривой. Дифференциал смещения точки
Р параллельно касательной к кривой,
взятой в основании перпендикуляра из
точки Р на кривую, не влияет на вели-
величину элементарной работы.
Рис. 4.7.2. Работа силы, перпендикулярной к кривой
где г = го+Лё/— радиус-вектор точки Р, го — радиус-вектор основания
перпендикуляра. По смыслу обозначений имеем
<5г0 1 F, 6{hv) = v6h + h6v, bv I v.
Следовательно,
A = F6h.
Предположим теперь, что на плоскости расположены тг кривых
Ci,... ,С„ и точка Р. Обозначим /ii,..., hn расстояния от точки Р до
348 Глава 4. Аналитическая статика системы
каждой из этих кривых соответственно. На той же плоскости зададим
кривую V уравнением
/(ль...,л„) = о.
Дифференциалы координат h\,...,hn при смещении точки вдоль кри-
кривой V удовлетворяют равенству
Приложим теперь к точке Р силы Fj = U{df/dhi, направленные
вдоль единичных нормалей щ к кривым Ct. Радиус-вектор г точки Р
можно представить с помощью любого из соотношений
г = пн + hit/iy i = l,...,n,
где го; — радиусы-векторы оснований перпендикуляров из точки Р на
кривые d. Вычислим элементарную работу сил F,- на виртуальном пе-
перемещении точки Р вдоль кривой V.
а =
Из принципа виртуальных перемещений следует, что точка Р, распо-
расположенная на гладкой кривой V, под действием выбранных сил F, будет
находиться в равновесии. Значит, равнодействующая сил Ft- направлена
по нормали к кривой V.
Таким образом, получен простой способ геометрического построения
нормали к кривой, заданной указанным способом. Специально отметим,
что все рассуждения этого примера справедливы, когда некоторые из
кривых d или все они представляют собой точки (докажите!). В этом
случае роль нормали щ будет играть единичный вектор направления из
точки С{ в точку Р. Рассмотрим несколько конкретных случаев.
Случай 1. Пусть кривая V есть эллипс. Фокусы эллипса обо-
обозначим С\ и (?2. расстояния от точки Р эллипса до фокусов — h\ и />2
соответственно. Тогда
где а — большая полуось эллипса. Очевидно, что
Поэтому нормаль к эллипсу есть биссектриса угла между фокальными
радиусами-векторами.
4.7. Принцип виртуальных перемещений 349
Случай 2. Пусть кривая V есть гипербола. Как и в случае 1,
обозначим C\\aCi — фокусы, h\ и /i2 — расстояния от них до точки Р
гиперболы. По определению
Откуда
Fx = 1, F2 = -1.
Поэтому касательная к гиперболе есть биссектриса угла между фокаль-
фокальными радиусами-векторами (нормаль есть биссектриса смежного угла).
Случай 3. Пусть V есть парабола, С\ — директриса (прямая),
С2 — фокус (точка). Уравнение параболы имеет вид
Откуда
Fi = l, F2 = -l.
Следовательно, касательная к параболе служит биссектрисой угла ме-
между фокальным радиусом-вектором и перпендикуляром, опущенным из
точки параболы на директрису.О
Докажем два основных необходимых признака равновесия.
Теорема 4.7.2. Пусть связи, наложенные на систему матери-
материальных точек, допускают в некоторой ее конфигурации поступа-
поступательное виртуальное перемещение всех ее точек вдоль некоторой
неподвижной оси е. Тогда для равновесия системы в этой конфи-
конфигурации необходимо, чтобы сумма проекций всех активных сил на
указанную ось равнялась нулю:
N
Доказательство. Пусть е — единичный вектор направления оси
поступательного виртуального перемещения. Для всех точек систе-
системы можно принять
6ги =ае,
где а — скалярный множитель, отличный от нуля. Применяя прин-
принцип виртуальных перемещений, получим
N N N
Y] *У • 6*v = У^ Я» • « е = а У^ F» • е = 0.
Но а ф 0.D
350 Глава 4. Аналитическая статика системы
Теорема 4.7.3. Пусть связи, наложенные на систему матери-
материальных точек, допускают в некоторой ее конфигурации виртуаль-
виртуальные перемещения, соответствующие повороту всей системы как
твердого тела вокруг неподвижной оси е. Тогда для равновесия си-
системы в этой конфигурации необходимо, чтобы сумма моментов
всех активных сил относительно этой оси равнялась нулю:
N
е ¦ ^iv х Fy = 0.
Доказательство. Применяя формулу дифференциала вращения
системы вокруг оси е на угол 8<р (§ 2.10), получим следующее выра-
выражение для виртуальных перемещений:
где iv — радиусы-векторы точек системы, имеющие начало на оси
вращения. Из принципа виртуальных перемещений следует
N N N
v • Si\ = 8<р2_] Fi/ • (е х г„) = 8<ре • 5^r" x F^ = 0.
Но 6<р произвольно.D
Перейдем к анализу условий равновесия голономных систем. До-
Допустим, что на систему N материальных точек наложены удержива-
удерживающие геометрические связи
/j(ri,...,rjv) = 0, j - l,...,m.
Функции fj будем считать независимыми, т.е. матрица Якоби
J = 1 тг^-
имеет ранг, равный т. Это значит, что из уравнений связей мы мо-
можем т координат радиусов-векторов точек выразить как функции
остальных 3./V — т координат и рассматривать эти 3./V — т координат
как совершенно независимые, полностью определяющие положение
системы.
Определение 4.7.1. Лагранжевы координаты системы матери-
материальных точек суть скалярные величины, произвольно задав конкрет-
конкретные значения которых, можно однозначно рассчитать координаты
всех точек системы, удовлетворяющие всем заданным голономным
связям. Число лагранжевых координат должно быть минимальным.
4.7. Принцип виртуальных перемещений 351
Когда заданы голономные связи, то лагранжевы координаты мо-
могут быть найдены с помощью описанной выше процедуры. Однако это
не единственно возможный способ. В частности, чтобы задать голо-
номную систему, бывает достаточно, не выписывая уравнений связей,
выбрать лагранжевы координаты q\,..., qn и указать соответствие
г* = rt-(gi,...,9n), г = 1,...,АГ.
Пример 4.7.4. Пусть система представляет собой жесткий матери-
материальный стержень, могущий вращаться в плоскости вокруг одного из сво-
своих концов. Очевидно, что задание угла поворота полностью определяет
положение такой системы, и этот угол может служить ее лагранжевой
координатой.О
Определение 4.7.2. Число лагранжевых координат называется
числом степеней свободы системы материальных точек, на которую
наложены голономные связи.
В частности, в примере 4.7.4 имеем систему с одной степенью сво-
свободы.
Пусть значения лагранжевых координат q\,..., qn определяют не-
некоторую конфигурацию голономной системы. Другую конфигура-
конфигурацию этой системы зададим с помощью координат
Ч\ + 6qi,...,qn + 6qn-
Пространство виртуальных перемещений Т совпадает с касательным
пространством поверхности, выделяемой связями. Поэтому вирту-
виртуальные перемещения материальных точек можно выразить как ли-
линейные комбинации касательных векторов:
6ги = ]Г -тр %, v = 1,..., N.
Необходимое и достаточное условие равновесия под действием актив-
активных сил F,, принимает вид
N п
Определение 4.7.3. Величины
носят название обобщенных сил.
352 Глава 4. Аналитическая статика системы
Теорема 4.7.4. Для равновесия системы материальных точек с
голономными связями необходимо и достаточно, чтобы
Qi=0,...,Qn = 0,
т.е. в положении равновесия должны быть равны нулю все обоб-
обобщенные силы системы.
Доказательство. В рассматриваемом случае принцип виртуаль-
виртуальных перемещений представляется в виде
1=1
При этом 8qi могут быть выбраны произвольно.D
§ 4.8. Уравнения равновесия абсолютно твердого
тела. Геометрическая статика
Структура множества виртуальных перемещений точек абсолют-
абсолютно твердого тела определена теоремой 2.10.1 о дифференциале вра-
вращения и теоремой 2.3.1. Из них следует, что все виртуальные пере-
перемещения точек тела даются формулой
8г'и = 6г0 + Ф х г„,
где 6г0 — произвольный вектор смещения полюса О, совпадающего с
некоторой точкой тела, г^ — радиусы-векторы точек тела, имеющие
начало в полюсе О, г^ — радиусы-векторы точек тела в неподвижном
пространстве, Ф — произвольный вектор дифференциала вращения.
Теорема 4.8.1. Абсолютно твердое тело под действием актив-
активных сил ?и, v = 1, ..., N, будет находиться в равновесии то-
тогда и только тогда, когда равны нулю главный (суммарный) век-
вектор и главный (суммарный) момент этих сил относительно какого-
нибудь полюса О:
N N
uzzl vzzl
Доказательство. Воспользуемся принципом виртуальных пере-
перемещений, согласно которому для равновесия твердого тела необходи-
необходимо и достаточно выполнение равенства
N
4.8. Уравнения равновесия абсолютно твердого тела 353
для любого виртуального перемещения точек тела. Подставив выра-
выражение для 8r'u, получим
N N
или, воспользовавшись свойствами смешанного умножения,
N N
Так как это равенство должно быть справедливым при любых век-
векторах Ьт0 и Ф, приходим к выводу, что множители при них равны
нулю-D
Следствие 4.8.1. В качестве полюса при составлении условий
равновесия можно принять произвольную точку твердого тела.
Доказательство. Сделаем переход от полюса О к произвольной
точке А:
Г„ -YA +Р„, V = 1,...,JV,
где все г^ начинаются в точке А. Составим условие равновесия, как
того требует теорема 4.8.1:
N N N N N
l/zz\ VZZ.\ U — 1 V ~ 1 V — 1
Учитывая равенство нулю главного вектора сил, видим, что при рав-
равновесии имеет место тождество
N N
г у F* — \ г у F* — П П
Следствие 4.8.2. В задачах о равновесии твердого тела допу-
допустимо заменять исходную систему активных сил другой системой,
имеющей тот же главный вектор и тот лее главный момент отно-
относительно выбранного полюса, что и исходная. В этом смысле сила,
приложенная к абсолютно твердому телу, может интерпретиро-
интерпретироваться как скользящий вектор, а статика твердого тела вполне
исчерпывается теорией скользящих векторов (см. § 1.2).
Методы решения задач о равновесии с применением теории сколь-
скользящих векторов составляют раздел механики, называемый геометри-
геометрической статикой.
23- 1503
354 Глава 4. Аналитическая статика системы
Исходным пунктом геометрической статики служат условия рав-
равновесия свободного твердого тела: главный вектор F и главный мо-
момент Lo сил этой системы должны обращаться в нуль для любого
полюса О. На основе этого условия можно ввести понятие об экви-
эквивалентных системах сил.
Определение 4.8.1. В данной совокупности сил S заменим все
силы равными им по модулю и противоположными по направле-
направлению. Полученную совокупность обозначим S. Две совокупности сил
S\ и S% называются эквивалентными, если составная совокупность
5i (J 5г или S\ (J 52, будучи приложенной к твердому телу, оставляет
его в равновесии.
Тем самым эквивалентные совокупности сил представляют собой
эквивалентные системы скользящих векторов. Любая теорема в тео-
теории скользящих векторов находит свое отражение в статике твердого
тела.
В частности, справедлива следующая теорема.
Теорема 4.8.2. При инвариантах (см. § 1.5), отличных от ну-
нуля, система сил, приложенных к твердому телу, эквивалентна од-
ной результирующей силе (главному вектору) и одной результиру-
результирующей паре (главному моменту). При специальном выборе полюса
(если он взят на оси винта) результирующая сила и плоскость ре-
результирующей пары перпендикулярны друг другу.
Лемма 4.8.1. Наложение новой связи не нарушает равновесия
системы материальных точек.
Доказательство. Наложение новой связи лишь стесняет простор
для выбора виртуальных перемещений. Множество виртуальных пе-
перемещений 7i для системы с добавочной связью принадлежит множе-
множеству Т для системы без добавочной связи. Если принцип виртуаль-
виртуальных перемещений будет выполнен для любого {8vUy v = 1,..., N} ЕТ,
то он будет выполнен и для любого {6iv, v = 1,..., N} ? Ti.Q
Теорема 4.8.3. Любая система материальных точек (деформи-
(деформирующаяся или нет) обязана в своем положении равновесия подчи-
подчиняться всем условиям, найденным для твердого тела.
Доказательство. В соответствии с леммой 4.8.1 равновесие рас-
рассматриваемой системы материальных точек не нарушается, если к
ней добавить столько и таких связей, чтобы она превратилась в аб-
абсолютно твердое тело.П
Следствие 4.8.3. Применяя условия равновесия абсолютно твер-
твердого тела сначала ко всей системе в целом, а затем к специально
4.8. Уравнения равновесия абсолютно твердого тела
355
выбранным ее частям, можно получить соотношения, полностью
определяющие равновесие системы.
Проиллюстрируем сказанное примером.
Пример 4.8.1. Два одинаковых весомых стержня АВ и АС со-
соединены идеальным одностепенным шарниром в точке А (рис. 4.8.1) и
помещены в вертикальной плоскости. Концами В и С стержни упира-
упираются в гладкую горизонтальную подставку. Чтобы удержать стержни от
падения, концы В и С привязаны одинаковыми однородными нерастя-
нерастяжимыми нитями к серединам D и Е противоположных стержней. Найти
отношение натяжения нити к весу одного стержня.
При выписывании уравнений равнове-
равновесия сначала вся система рассматри-
рассматривается как твердое тело, и соответ-
соответствующие уравнения позволяют найти
внешние силы, обеспечивающие рав-
равновесие. Изучение равновесия отдель-
отдельных фрагментов системы позволяет
определить внутренние силы в поло-
положении равновесия. Если силы зада-
заданы, то те же уравнения позволяют
найти другие неизвестные.
В М
С
Рис. 4.8.1. Равновесие стержней
Решение. Рассматриваемая система плоская. К ней приложены
силы веса Pi = Р2 = Р стержней, Ti, T2, T'lt Т2— реакции нитей, Ri,
R2 — реакции подставки, пьп2 — реакции шарнира на правый и левый
стержни. Термины, использованные в условии задачи, математически
означают следующее.
1. Нити однородные и нерастяжимые: натяжение нити постоянно
вдоль нити
Ti = -Ti, Т2 = -Т'2.
2. Подставка гладкая: реакции Ri и R2 направлены вертикально.
3. Шарнир идеальный одностепенной: он допускает относительное
движение стержней только в плоскости чертежа. При этом шарнир не
оказывает сопротивления изменению угла между стержнями (отсутству-
(отсутствует момент сил трения). По третьему закону Ньютона силы ni и п2
противоположны. По симметрии примем их горизонтальными.
Для равновесия механической системы совокупность скользящих век-
векторов сил должна быть эквивалентна нулю. При этом не важно, дефор-
деформируема система или нет. Сначала примем, что вся система стержней
23*
356 Глава 4. Аналитическая статика системы
есть твердое тело, и запишем, что главный вектор и главный момент
всех сил равен нулю:
RX+R2-2P = О, 2Я2 /сое0 - Р Q + ^ + П costf = 0,
где / — длина одного стержня. Первое соотношение означает равенство
нулю суммы проекций всех сил на вертикальную ось Оу. Второе соотно-
соотношение означает равенство нулю главного момента всех сил относительно
точки В. Исключены взаимно уничтожающиеся силы T*i, Т;х, Т2, Т2;
iii, II2 Соотношение, выражающее равенство нулю проекции главного
вектора сил на горизонтальную ось, не содержит неизвестных и потому
здесь не выписано.
Из уравнений равновесия всей системы как абсолютно твердого тела
следует
RX = R2 = P.
Рассмотрим теперь часть системы, а именно стержень АС. На него
действуют силы n2, P, R2, Т2, Т2. Система этих сил должна быть
эквивалентна нулю. За полюс выберем точку А:
п2 — Т'2 cos <р — Т2 cos (p = О,
R2 - Т2 sin (р - Р -f T2 sin <p = О,
R2l cos 0 - Р- cos0 - T^/sin@ - ф) - T2lsin(O - ф) = 0.
Первые два равенства выражают проекции главного вектора сил на оси
Ох и Оу соответственно. Третье равенство задает главный момент
всех сил относительно точки А. Из второго уравнения заключаем, что
Т'2 ¦=¦ Т2. Следовательно,
Ti = Т[ = Т2=Ц=Т.
Из уравнения моментов получим
Т _ cos в
Р "" 4 sin@-<?>)'
Из треугольника DCM найдем
DM
/ -f - 1 cos 0
4.9. Статически неопределимые системы 357
Отсюда получаем искомое отношение
Т _ >/l + 9ctg2fl
Р ~ 8 '
§ 4.9. Статически неопределимые системы
В предыдущем параграфе было установлено, что абсолютно твер-
твердое тело будет находиться в равновесии тогда и только тогда, когда
главные вектор и момент сил, приложенных к телу, равны нулю. Эти
условия в проекциях, например, на декартовы оси координат эквива-
эквивалентны шести скалярным уравнениям, из которых можно определить
не более шести неизвестных величин. Вместе с тем, так как никаких
ограничений на систему сил в общем случае не накладывается, число
сил, подлежащих определению, может оказаться значительно боль-
больше. Когда возникает такая ситуация, модель абсолютно твердого
тела недостаточна для решения задачи. Эту модель следует считать
вспомогательной в смысле теоремы 4.8.3.
Определение 4.9.1. Совокупность сил (включая реакции свя-
связей), приложенных к механической системе, называется статически
неопределимой, если число неизвестных составляющих сил превыша-
превышает предельное число уравнений, определяющих равновесие системы.
Теорема 4.9.1. Система с идеальными удерживающими связя-
связями будет статически неопределимой, если после удаления какой-
либо связи множество виртуальных перемещений содержит толь-
только нулевой вектор.
Доказательство. Если при удалении какой-либо связи множе-
множество виртуальных перемещений содержит только нулевой вектор, то
оно и подавно будет содержать только нулевой вектор, когда эта
связь восстановлена. Принцип виртуальных перемещений тожде-
тождественно удовлетворяется из-за того, что <5гг = 0 есть единственное
решение уравнений для виртуальных перемещений. Но тогда систе-
система уравнений для ускорений
тоже имеет единственное решение Wj =0. Значит, т > 3N. Для
определения неизвестных множителей Лагранжа, задающих реакции
связей (§ 4.6)
358
Глава 4. Аналитическая статика системы
имеем систему уравнений Ньютона при Wj = 0:
.=1 и^
в которой число неизвестных больше числа уравнений.?
Следствие 4.9.1. Случай статически неопределимой системы
сил будет иметь место, когда число независимых идеальных удер-
удерживающих связей превышает число координат точек системы.
Однако, как будет видно из дальнейших примеров, статическая не-
неопределимость может возникнуть и тогда, когда число связей меньше
числа координат точек системы, но неизвестна часть активных сил.
Пример 4.9.1. Пусть стол, опираясь четырьмя ножками, сто-
стоит под действием силы тяжести Р на гладком плоском горизонтальном
полу (рис. 4.9.1). Будем считать стол абсолютно твердым телом и про-
проанализируем условия его равновесия. Любое виртуальное перемещение
параллельно поверхности пола и потому горизонтально. Сила тяжести -
единственная активная сила - направлена по вертикали. Следовательно,
принцип виртуальных перемещений тождественно выполнен, и стол на-
находится в состоянии равновесия. Поставим задачу определения реакций
опоры. Тогда реакции следует считать активными силами, а связь в виде
горизонтальной поверхности исключить. Пусть и — единичный вектор
вертикали. Так как связь идеальна, то искомые реакции Щ выражаются
формулами
Стол остается в равновесии на глад-
гладком горизонтальном полу под дей-
действием силы тяжести и четырех
неизвестных вертикальных реакций
опоры. Для определения этих реак-
реакций имеется лишь три условия рав-
равновесия твердого тела, что делает
задачу нахождения реакций стати-
статически неопределимой.
Рис. 4.9.1. Стол на гладком горизонтальном полу
Ri^Riis, »= 1,2,3,4.
Выберем полюс О на опорной поверхности, а точки опоры зададим
радиусами-векторами г,-, начинающимися в точке О: г, J_ и. Уравнения
4.9. Статически неопределимые системы 359
равновесия примут вид
Ri + R2 + Rs + Ra = Л
4
У^гг х uRi = rc x i/P,
*=i
где rc — радиус-вектор проекции центра масс стола на опорную плос-
плоскость.
Второе уравнение можно переписать в виде
= 0.
Так как сомножители в векторном произведении не коллинеарны, то
должно быть выполнено уравнение
Это уравнение вместе с первым условием равновесия образует систему из
трех скалярных уравнений с четырьмя неизвестными. Рассматриваемая
механическая система оказалась статически неопределимой.
Заметим, что стол с тремя ножками, стоящий на горизонтальном
гладком полу, представляет собой статически определимую систему.О
Пример 4.9.2. Задана проволочная конструкция ABCD, образо-
образованная горизонтальной перекладиной ВС, жестко соединенной под пря-
прямым углом с двумя параллельными стержнями АВ и CD (рис. 4.9.2).
Стержни в свою очередь опираются о горизонтальную шероховатую
плоскость в точках А и D соответственно. Эту конструкцию будем счи-
считать абсолютно твердой и предположим, что единственной активной си-
силой служит сила тяжести Р. Шероховатая плоскость представляет собой
неидеальную связь. Чтобы найти неизвестные силы реакции R\ и Я2, их
следует добавить в число активных сил. Уравнения равновесия примут
вид
Ri + R2 + P = 0, rixRi+r2xR2 + rcxP = 0,
где гс — радиус-вектор центра масс конструкции. После скалярного
умножения второго уравнения на разность r2 — ri будем иметь
Ri • [(г2 - п) х n] + R2 • [(г2 - п) х г2] 4- Р • [(р2 - п) х гс] = 0.
Радиус-вектор рс представим суммой rc = r-f ri. Тогда получим равен-
равенство
(Ri + R2 + Р) • (г2 х п) + Р • [(г2 - п) х г] = 0.
360
Глава 4. Аналитическая статика системы
Реакции пола, возникающие в опо-
опорах проволочной конструкции, не
создают момента относительно пря-
прямой AD, соединяющей точки опо-
опоры. Это означает, что шесть уравне-
уравнений равновесия такой конструкции
будут линейно зависимыми. Тем са-
самым задача расчета всех шести ком-
компонент опорных реакций оказывает-
оказывается статически неопределимой.
Рис. 4.9.2. Проволочная конструкция на шероховатом полу
Учитывая первое уравнение условий равновесия, отсюда найдем
P-[(r2-ri)xr] = 0.
Так как векторы (гг — ri) и г принадлежат плоскости конструкции
ABCD и не коллинеарны, то их векторное произведение перпендику-
перпендикулярно указанной плоскости. Значит, в положении равновесия плос-
плоскость конструкции должна быть вертикальной. Отсюда ясно, что число
уравнений, из которых можно найти неизвестные компоненты реакций
связей, оказывается равным пяти, т.е. на единицу меньше числа неиз-
неизвестных Система оказалась, как и в предыдущем примере, статически
неопределимой.О
§ 4.10. Равновесие систем с трением
Сначала рассмотрим задачу о равновесии материальной точки на
шероховатой поверхности. В этом случае (рис. 4.10.1) нормальная ре-
реакция Ru поверхности уравновешивает нормальную составляющую
Fv йот равнодействующей активных сил, а сила трения FTp уравнове-
уравновешивает составляющую (FT т) активных сил в касательной плоскости.
Здесь по-прежнему и— нормаль к поверхности, т— единичный век-
вектор, направленный вдоль проекции активной силы на касательную
плоскость. При этом сила трения по модулю не может быть боль-
больше, чем k\R\, где к — коэффициент трения (пример 3.4.3). Таким
образом, в случае равновесия мы имеем
4.10. Равновесие систем с трением
361
Для равновесия точки на шерохова-
шероховатой поверхности необходимо и доста-
достаточно, чтобы активная сила, действу-
действующая на точку, принадлежала кону-
конусу трения. При этом реакция поверх-
поверхности выражается в виде суммы нор-
нормальной составляющей и силы тре-
трения, направленной по касательной к
поверхности в плоскости, образован-
образованной активной силой и нормалью i/.
Рис. 4.10.1. Точка на шероховатой поверхности
Если взять угол <р между активной силой и ее нормальной составля-
составляющей, то получим tg(p < tg/z, или
Другими словами, при равновесии материальной точки на поверхно-
поверхности с трением угол между активной силой и ее нормальной составля-
составляющей не должен превышать угла трения.
Построим конус трения, приняв материальную точку за его вер-
вершину. Угол раствора конуса равен /*, а ось конуса направлена по
нормали к поверхности. Для равновесия материальной точки необ-
необходимо и достаточно, чтобы равнодействующая F активных сил при-
принадлежала конусу трения. Если поверхность удерживающая, то без-
безразлично, внутри какой полости конуса расположена сила F. Если
же поверхность неудерживающая, то от конуса трения надо взять
лишь ту полость, которая направлена в сторону, запрещенную для
схода точки.
Пусть уравнение шероховатой поверхности есть
Тогда
/(г) = 0.
дт
df
dv
С другой стороны,
cos/x =
362 Глава 4. Аналитическая статика системы
Условие равновесия можно представить в виде
(г-Я)'
\ дг . 1
Ясно, что положений равновесия материальной точки, находящейся
под действием силы на шероховатой поверхности, может оказаться
бесконечно много. Они могут заполнять некоторую область. Если в
полученном условии сохранить только знак равенства, то это усло-
условие вместе с уравнением поверхности выделит кривую, служащую
границей положений равновесия.
Пример 4.10.1. Найти положения равновесия весомой мате-
материальной точки на шероховатом эллипсоиде, заданном каноническим
уравнением в декартовой системе координат Oxyz:
где ось Oz направлена вертикально вверх. Вес Р = —mgeZi причем ez —
единичный вектор оси Oz. Обозначим ех, еу соответственно единичные
векторы осей Ох и Оу. Тогда
и условие равновесия принимает вид
_2 J2
или
Z2 Т2 7/2
— Ь2 > —4- У
Таким образом, все положения равновесия на эллипсоиде расположены
внутри цилиндра, поверхность которого задается уравнением
х2 ( с2 \ у2 ( с2 \
{l + ) + 1 + ) h
у2 (
? V1
а ось параллельна оси Oz. Если шероховатый эллипсоид — поверх-
поверхность удерживающая, то положения равновесия заполняют две обла-
области, образованные пересечением эллипсоида с цилиндром. Если по-
поверхность эллипсоида неудерживающая, то только одну: либо верхнюю,
либо нижнюю.О
4.10. Равновесие систем с трением
363
Перейдем к проблеме равновесия динамической системы с тре-
трением. В такой системе помимо неизвестных значений абсолютных
величин сил трения возникает дополнительная неопределенность из-
за того, что во многих случаях направление сил трения неизвестно и
должно быть найдено. Здесь следует принять во внимание, что на-
направление трения скольжения вполне определено скоростями точек
системы. Следовательно, для решения статических задач полезной
будет информация о том, каким движением система дошла до поло-
положения равновесия. Чтобы исключить неопределенность, можно так-
также искать силы трения, при которых система не переходит из покоя
в определенное движение.
Пример 4.10.2. Найти условие равновесия материальной точки,
расположенной на конце невесомого абсолютно твердого горизонтально-
горизонтального стержня длины /. Другим концом стержень прикреплен к вертикаль-
вертикальной оси так, что может вращаться, оставаясь параллельным шероховатой
горизонтальной плоскости (рис. 4.10.2). При этом материальная точка
прижимается к плоскости силой Р. В соединении стержня с вертикаль-
вертикальной осью возникают силы трения.
В системе с трением может возникнуть
статическая неопределимость сил тре-
трения, и тогда важной становится инфор-
информация о том, каким движением систе-
система пришла в положение равновесия. В
частности, если известно, что стержень
остановился после вращения, то этой
информации иногда может оказаться
достаточно для однозначного опреде-
определения сил трения.
Рис. 4.10.2. Система с трением
Пусть на точку перпендикулярно стержню действует горизонтальная
активная сила F. Тогда имеем единственное скалярное уравнение рав-
равновесия
FTp
F-f
где М — момент сил трения в точке присоединения стержня к вер-
вертикальной оси, FTp — сила трения материальной точки об опорную
поверхность. Получили статически неопределимую систему, так как в
обусловленных законами трения пределах
-М <М
-kP < FTp < kP
364 Глава 4. Аналитическая статика, системы
величины М и FTp могут принять любое значение, лишь бы в сумме
они уравновешивали силу F. Пусть теперь сила F зависит от угла пово-
поворота стержня: F = F(<p), и известно, что материальная точка пришла
в положение равновесия, двигаясь по окружности против хода часовой
стрелки. Тогда угол (р, соответствующий положению равновесия, дол-
должен удовлетворять уравнению
если, конечно, его решение существует. Если же оно отсутствует из-за
того, например, что
M + kP>\F(<p)\
при любом (f, то положением равновесия будет любое положение ма-
материальной точки на описываемой ею окружности, причем для одно-
однозначного определения величин М и FTp потребуются дополнительные
данные.О
§ 4.11. Уравнение равновесия нити
Определение 4.11.1. В теоретической механике нитью называ-
называется кривая, вдоль которой по некоторому закону распределена мас-
масса. Нить не оказывает сопротивления изгибу. Любой элемент нити
имеет постоянные длину и массу.
По смыслу понятие нити наиболее близко к такому физическо-
физическому объекту, как цепочка, общая длина которой значительно больше
длины ее отдельного звена. Возьмем какой-либо отрезок нити Л1Л2
(рис. 4.11.1). Длина отрезка А1А2 равна As. Пусть к отрезку Л1Л2
приложены силы, равнодействующая которых проходит через неко-
некоторую точку Л, расположенную внутри или на границе отрезка, и
равна F. Предположим, что при уменьшении As так, что точки А\
и Л2 стягиваются к точке Л, величина |F| убывает, но существует
предел
F
Ф = lim ——.
д$—о As
Вектор Ф называется удельной силой, приложенной к точке Л. Сила,
приложенная к элементу ds, включающему Л, будет иметь значение
Ф ds.
Чтобы найти условия равновесия гибкой нерастяжимой нити, рас-
рассмотрим отрезок As и примем его за абсолютно твердое тело (см.
теорему 4.8.3). К отрезку As приложены активная сила F и две си-
силы Ri и R,2, обусловленные воздействием на элемент As соседних
участков нити. Пусть в точке А\ (рис. 4.11.1) нить имеет единичный
4.11. Уравнение равновесия нити
365
По физическому смыслу нить по-
добна длинной цепочке. Она не
оказывает сопротивления изгибу и
сжатию. Поэтому при равнове-
равновесии нити силы, к ней приложен-
приложенные, должны иметь равнодейству-
равнодействующую, равную нулю.
Рис. 4.11.1. Равновесие элемента нити
вектор касательной ri, а в точке Л 2 — единичный вектор касатель-
касательной Т2. Из-за отсутствия сопротивления изгибу система сил F, Ri,
R2 должна приводиться к равнодействующей, а силы Ri и R2 мо-
могут быть направлены только по касательной к нити. В результате
единственным уравнением равновесия будет
Ri + R2 + F = О
или
-Rin + R2r2 + Ф As = 0.
Определим вектор-функцию Дт, где R — натяжение нити , а т —
единичный вектор касательной в точке А.
Обозначим Ан — начальную точку, Ак — конечную точку нити.
Вектор т направим от точки Ан к точке Ак. Величина Rr пред-
представляет собой силу, которую надо приложить вдоль касательной в
любой точке А нити, если нить в этой точке разрезать и потребовать,
чтобы часть АНА находилась в равновесии. Устремляя As к нулю,
получим дифференциальное уравнение равновесия нити
Рассмотрим возможные варианты задания краевых (граничных)
условий.
1. Пусть к концам нити приложены силы FH, FK. Тогда, очевидно,
должно быть
FH = — Rh th, Fk = Як тк,
Ян, тн; Як, тк — соответственно натяжение нити и векторы касатель-
касательной к ней в начальной и конечной точках.
2. Предположим, что один из концов нити, например Лн, должен
принадлежать заданной гладкой поверхности. Тогда реакция NH по-
поверхности направлена по единичной нормали ин к ней: NH = NHuH.
Соответствующее краевое условие примет вид
366 Глава 4. Аналитическая статика системы
В частности, если к концу нити не приложена активная сила: FH = О,
то либо RH — NH = 0, либо вектор тн коллинеарен вектору i/H, и
3. Пусть конец нити, например Лн, обязан принадлежать данной
гладкой кривой
Г = Г(<7),
где a — длина дуги этой кривой. Тогда сумма проекций активной
силы и силы натяжения нити на касательную к кривой в точке Ан
будет равна нулю:
Если FH = 0, то тогда либо RH = 0, либо начальная касательная нити
тн перпендикулярна касательной к заданной кривой.
4. Если точка Ан неподвижно закреплена, то граничное условие в
этой точке отсутствует.
Подобно только что рассмотренным вариантам можно проанали-
проанализировать граничные условия, заданные в точке Ак или сразу в обеих
точках.
Уравнение равновесия нити представим в виде
dR R
+—1/=0,
p
ds p
где i/ — единичный вектор главной нормали кривой, по которой рас-
расположена нить, а р — ее радиус кривизны (см. § 2.2). Спроектируем
это равенство на касательную, главную нормаль и бинормаль к кри-
кривой, обозначив соответственно Фг, Ф^, Фр проекции Ф на указанные
направления. Мы получим
Фг + -г- = °> Ф* + — = 0, Фр = 0.
ds /9
Последнее из этих уравнений означает, что соприкасающаяся плос-
плоскость, найденная для любой точки кривой равновесия нити, содержит
активную удельную силу.
Обратимся к вопросу об интегрировании уравнений равновесия
нити. Пусть вектор г точки нити в некотором ортогональном репере
имеет координаты г = (г1,Г2,гз). Имеем четыре неизвестные функ-
функции
ri, г2, г3, Я.
По определению т = dr/ds. Тот факт, что s есть длина дуги, выра-
выражается условием
ds J \ ds J
4.11. Уравнение равновесия нити 367
Примем, что удельная сила Ф зависит от радиуса-вектор а точки ни-
нити:
Ф = #(г).
Тогда скалярные уравнения равновесия нити
суть уравнения второго порядка относительно г\у Г2, гз и первого
порядка относительно R. Если к этим уравнениям добавить условие
2
dsj \ds
то в общем случае число постоянных интегрирования, которое не-
необходимо задать, чтобы однозначно определить форму нити, равно
семи. В частности, решение задачи о форме равновесия нити будет
однозначным, если задать длину нити и положения двух ее концов
г _ /гн н н\ _ /к к к\
Пример 4.11.1. Определим форму равновесия нити длины /, за-
закрепленной концами неподвижно в двух точках Ан и Ак и находящейся
под действием силы тяжести. Выберем оси координат. Ось Oz проведем
через точку Ан и направим вертикально вверх (рис. 4.11.2). Перпенди-
Перпендикулярную ей ось Ох выберем так, чтобы правая полуплоскость Oxz со-
содержала точку Ак. Ось Оу перпендикулярна плоскости Oxz. Краевые
z Нить с закрепленными концами прини-
принимает под действием силы тяжести фор-
Ан
к му цепной линии. Эта линия располо-
расположена в вертикальной плоскости, содер-
содержащей концы нити. Глубина прогиба
увеличивается при увеличении длины
нити по сравнению с расстоянием ме-
0 Ь х ЖДУ точками ее закрепления.
Рис. 4.11.2. Равновесие нити с закрепленными концами
условия примут вид
гн = @,0,а), гк = F,0,с), 6>0,
где а, Ь, с — некоторые заданные постоянные. Выпишем систему урав-
уравнений равновесия тяжелой нити:
ds \ dsj ds \ dsj ds \ ds J
368 Глава 4. Аналитическая статика системы
где 7 — удельный вес нити.
Второму уравнению и краевым условиям удовлетворяет функция
y(s) = 0. Значит, нить целиком принадлежит плоскости Oxz. Далее
из первого уравнения заключаем, что
где с\ — постоянная интегрирования. Примем х за независимую пере-
переменную и учтем, что справедливо операторное равенство
ds ds dx'
Поэтому третье уравнение равновесия приводится к виду
dx d ( dx dz\
ds dx \ ds dx)
Четвертое уравнение равновесия представим следующим образом:
Следовательно, зависимость z(x) удовлетворяет уравнению
dx
в котором знак выбран положительным, так как в начальной точке
ds/dx > 0, и эта величина нигде в нуль не обращается.
Дифференциальное уравнение для функции z(x) можно представить
в виде
dz d2z
didx1 Т.*!
2 C\ dx'
'1 +
V
Следовательно,
dx J c\
4.11. Уравнение равновесия нити
369
Это равенство разрешим относительно dz/dx:
Введем переменную
Относительно нее будем иметь
Рассмотрим два случая.
1. Правая часть положительна. Тогда
Слева стоит табличное выражение производной. Значит,
In (С + VC2 - l) = -(«-«).
V / Ci
Перейдем к показательным функциям
С + v/C2 - 1 = exp [l(x - а)] .
Справедливо тождество
-l = exp Г-—(х - а)
Следовательно,
2. Правая часть отрицательна. Тогда
Легко убедиться в том, что решение этого уравнения будет таким же,
как и в первом случае.
24- 1503
370 Глава 4. Аналитическая статика системы
В итоге имеем зависимость
С = ch [?<«-«)].
Перейдем к переменной z\
= *{* [!(,-.>]-«,}.
Получили форму равновесия тяжелой нити. Такая кривая называется
цепной линией. Учтем краевые условия
и ( 1 \ Iй
ch[-L ,*-
,>]„ ,
из которых можно найти а и с2 в зависимости от единственного пара-
параметра с\. Например, вычитая из первого условия второе, получим
Lci
или
Постоянная с2 определена выражением
Оставшийся неопределенным параметр с\ вычисляется из условия,
что длина нити равна /. Имеем
*L= /ц. Г—V = —
dx у \dx) с\
Следовательно,
или
4.11. Уравнение равновесия нити 371
Когда х = Ь, то должно быть s = /, т.е.
что дает возможность однозначно найти параметр с\ и тем самым за-
закончить определение формы равновесия нити. Отметим еще формулу
для расчета натяжения R вдоль цепной линии
ds Г 7 1
R = с\— = jz + c\c2 = c\ ch —(ж - а) .О
dx [cx J
В заключение параграфа укажем на аналогию между задачей
о форме равновесия нити и задачей о движении материаль-
материальной точки.
Пусть силы, приложенные к нити, имеют силовую функцию
Тогда уравнение равновесия принимает вид
Его можно спроектировать на касательную к нити:
ds ds
Имеем первый интеграл
R = p-U,
где /3 не зависит от s.
Умножим теперь уравнение равновесия нити на натяжение R:
где
Преобразуем к такому же виду уравнение движения материальной
точки в силовом потенциальном поле:
—.
дг
24*
372 Глава 4. Аналитическая статика системы
Ускорение w точки можно вычислить по формуле (см. § 2.2)
d (ds \ ds d (ds \ d . .
w = It{dlT) = dldS{diT) =vTsivT)-
Следовательно,
d, . 1 6Ui
v—(vt) = —.
ds m dv
Полученное равенство представляет собой дифференциальное урав-
уравнение траектории точки. Имеем четыре неизвестных п, г2, гз, v. В
силу свойства \т\ — 1 должно быть справедливо тождество
Сравнение уравнений формы равновесия нити в потенциальном поле
и уравнений траектории движения материальной точки показывает,
что задача о форме равновесия нити аналогична задаче об определе-
определении траектории материальной точки. Поясним аналогию.
Система дифференциальных уравнений, описывающая форму ни-
нити в равновесии, совпадает с системой дифференциальных уравнений
для траектории точки, если формально отождествить
P=—Ui, v = R.
m
Когда начальные условия для соответствующей задачи Коши совпа-
совпадут, то совпадут и решения. Другими словами, если удельная си-
сила, действующая на элемент материальной нити, выражается как
градиент функции С/, то кривая, по которой располагается нить, то-
тождественна с траекторией движения свободной материальной точки
в поле силы, имеющей силовую функцию
где m — масса точки. При этом начальное положение точки должно
совпадать с началом Ан нити, а ее начальная скорость должна иметь
величину, численно равную Ян, т.е.
где UH есть начальное значение функции U. Начальная скорость
должна быть направлена по касательной к нити.
Контрольные вопросы к главе 4 373
С помощью отмеченной аналогии многие свойства движения ма-
материальной точки можно перенести на свойства форм равновесия ни-
нитей. Например, пусть нить находится под действием центральных
сил
U = U(r),
где г = |г| — расстояние от элемента нити до некоторого неподвиж-
неподвижного центра. Тогда задача о равновесии нити сводится к задаче о
центральной орбите под действием силы с силовой функцией
Следовательно, априори можно утверждать, что задача о равнове-
равновесии нити в центральном поле всегда решается квадратурами, форма
равновесия нити есть плоская кривая, плоскость которой проходит
через центр силы. Теорема 3.7.6 о постоянстве секторной скорости
(интеграл площадей) аналогична утверждению, что момент натяже-
натяжения нити относительно центра есть величина постоянная.
Контрольные вопросы к главе 4
4.1. Что такое равновесие системы материальных точек? Пусть в
некоторой конфигурации в некоторый момент времени ускоре-
ускорения всех точек системы обратились в нуль. Можно ли такую
конфигурацию считать положением равновесия?
4.2. Может ли стационарная линейная дифференциальная связь
быть неоднородной?
4.3. Зачем в интегрирующих кинематических механизмах берут ко-
колесико с острым краем?
4.4. Какой результат получится, если при измерении площади то-
пориковым планиметром начальную точку обвода взять не вну-
внутри, а вне обводимого контура?
4.5. Сформулируйте критерий того, что заданная дифференциаль-
дифференциальная связь нелинейна по скоростям.
4.6. Почему для пфаффовой системы нельзя построить интеграль-
интегральную поверхность размерности большей, чем п — ш, где п — раз-
размерность пространства, т — число уравнений?
4.7. Для произвольной пфаффовой системы указать метод построе-
построения двумерной интегральной поверхности.
374 Глава 4. Аналитическая статика системы
4.8. С помощью теоремы Фробениуса показать, что связь
з
+ a2dq2 + a3dq3 = О, а, = ^a.jtfj, det(atJ) ф О,
с постоянными коэффициентами aij голономна тогда и только
тогда, когда матрица (а^) симметрична. Найти соответствую-
соответствующую геометрическую связь.
4.9. С помощью теоремы Фробениуса проанализировать, голономна
или неголономна система связей, возникающая при описании
качения без проскальзывания абсолютно твердого шара по аб-
абсолютно твердой абсолютно шероховатой плоскости.
4.10. Доказать, что разложение произвольного вектора ? ? Rn по
базисным векторам а,- имеет вид ? = ^"=1 и;,(?)а,-, где u>j —
соответствующие базисные формы (см. § 4.5).
4.11. С помощью процедуры расширения пространства ?(q) найти го-
лономную связь в системе
+ q\q2dq2 = 0,
= dqo + «fadtfi = 0.
4.12. Предположим, что геометрические связи учтены с помощью вы-
выражений vu = 14,D1,. ..,?„,?), и кроме того система стеснена
неголономными связями $j(vu, v,,,t) = 0, j = 1,.. .,m < п.
Выразить множество виртуальных перемещений через вариа-
вариации 6qi,...,6qn.
4.13. Две материальные точки соединены стержнем постоянной дли-
длины и могут двигаться по плоскости так, что скорость середины
стержня направлена вдоль стержня. Как будет направлена ре-
реакция плоскости, если связь предположить идеальной?
4.14. Привести примеры, показывающие, что формулировку теоремы
4.7.1 ослабить невозможно.
4.15. Показать, что равенство уровней жидкости в сообщающихся со-
сосудах есть следствие принципа Торричелли.
4.16. Доказать, что способ построения нормали к кривой, получен-
полученный в примере 4.7.3, справедлив, когда некоторые из заданных
кривых d или все из них суть геометрические точки.
Контрольные вопросы к главе 4 375
4.17. Как будет работать способ построения нормали к кривой, полу-
полученный в примере 4.7.3, если в качестве кривых С\ и Сг взять
a) прямоугольные декартовы оси координат,
b) произвольные аффинные оси координат.
4.18. Указать механический смысл обобщенной силы, соответствую-
соответствующей координате q, в случае, когда
a) координата q означает поступательное перемещение всей
системы в направлении единичного вектора е,
b) координата q означает вращение всей системы на угол q
вокруг единичного вектора е.
4.19. Необходимо ли выполнение условий равновесия твердого тела
в положениях равновесия сосуда, наполовину наполненного во-
водой?
4.20. Пусть условия равновесия твердого тела выполнены для сосуда,
наполненного водой частично. Можно ли на этом основании
утверждать, что такая система находится в равновесии?
4.21. Что можно сказать о равновесии системы, если для нее условия
равновесия твердого тела не выполнены?
4.22. Сколько независимых скалярных уравнений равновесия можно
получить в том случае, когда все силы, приложенные к твер-
твердому телу, вместе с точками их приложения принадлежат не-
некоторой плоскости? Какие варианты составления уравнений
равновесия при этом возможны?
4.23. Найти положения равновесия весомой материальной точки на
шероховатом шаре; цилиндре с коэффициентом сухого трения
к.
4.24. Пусть нить находится в равновесии под действием удельной си-
силы Ф($). В некоторой точке нити касательная к ней задается
единичным вектором т. Найти соприкасающуюся плоскость к
нити в этой точке.
4.25. Пусть нить закреплена в точках А и В, расположенных вместе
с нитью на гладком горизонтальном столе. Стол вращается
вокруг вертикальной оси, проходящей через середину отрезка
А В. Найти натяжение в зависимости от координат точек нити.
Найти формы равновесия нити, соответствующие постоянному
натяжению. Как эти формы соотносятся с длиной отрезка АВ.
Глава 5
Динамика системы материальных точек
Сначала, следуя Даламбёру, дадим эвристические соображения,
приводящие к основному уравнению динамики системы материаль-
материальных точек (материальной системы). Пусть, например, задана ма-
материальная система, на которую наложены стационарные связи, и
пусть А — одна из ее точек. На эту точку будут действовать как ак-
активные силы, так и реакции связей. Обозначим F равнодействующую
всех активных сил, приложенных к точке А. Пусть w есть ускорение
точки. Если сравнить вектор силы mw = F' и вектор F, то, вооб-
вообще говоря, эти векторы не совпадут. Разложим активную силу на
составляющие F' и F":
F = F' + F".
Ясно, что лишь составляющая F' силы F влияет на движение точки
Л, вызывая ускорение w. Составляющая F" никакого влияния на
движение не оказывает и как бы теряется при движении точки А.
Даламбер назвал силу F' движущей силой, а силу F" — потерянной
силой. Из сказанного следует, что
F" = F - F' = F - mw.
Величину (—mw) назовем даламберовой силой инерции. Для всякой
точки материальной системы потерянная сила есть векторная сумма
активной силы и силы инерции. Так как сила F" не оказывает вли-
влияния на движение, то она должна уравновешиваться какой-то дру-
другой силой (реакцией связей), приложенной к той же точке. Поэтому
должно быть
R + F" = 0
или
R+F + (-mw) = 0.
Принцип Даламбёра состоит в следующем. Если к каждой
точке материальной системы в некотором ее положении приложить
имевшие место активные силы, реакции связей и силу инерции, то
это положение системы будет положением равновесия.
Приведенное выше обоснование принципа Даламбёра нельзя при-
признать вполне строгим. Оно правдоподобно с точки зрения физической
377
интуиции. Доказательство этого принципа будет дано в следующем
параграфе, где он будет представлен в форме принципа Даламбера-
Лагранжа, справедливого не только для систем со стационарными,
но и с произвольными дифференциальными связями.
Пример 5.0.1. Невесомый стержень ОАВ (рис. 5.0.1) может
свободно вращаться в вертикальной плоскости вокруг гладкого непо-
неподвижного шарнира О. В точках А и В помещены массы т и т' со-
соответственно, которые колеблются вместе с ним под действием силы
тяжести. Требуется составить уравнение движения.
Две материальные точки А и Б, подве-
подвешенные на невесомом стержне, враща-
вращающемся вокруг неподвижной точки О,
совершают синхронное движение по ду-
дугам окружностей разного радиуса. Ка-
Каждую позицию стержня можно рассма-
рассматривать как положение равновесия под
действием силы тяжести и даламберо-
вых сил инерции. Результирующее дви-
движение такой системы представляется
как движение математического маятни-
маятника со специально подобранной длиной
/: а < I < 6.
Рис. 5.0.1. Применение принципа Даламбера
Решение. Колебание отдельной материальной точки под действи-
действием силы тяжести (математический маятник) было изучено выше (см.
определение 3.9.1). В рассматриваемом примере имеются две матери-
материальные точки, описывающие дуги различных радиусов за одно и то же
время. Следовательно, каждая точка должна влиять на движение дру-
другой. Применив принцип Даламбера, эту динамическую задачу можно
свести к обычной задаче статики, которая, будучи решенной, дает диф-
дифференциальные уравнения движения. Пусть ОА = а, ОВ = 6 и угол,
образованный стержнем с вертикалью Oz, равен д. Точка А описывает
дугу окружности. Компоненты ее ускорения имеют вид
wT = ад, wn = ад2.
Аналогично для точки В получим
wT=be, wn-bd2.
Согласно принципу Даламбера, необходимым и в данном случае доста-
достаточным условием равновесия сил инерции и активных сил служит равен-
378 Глава 5. Динамика системы материальных точек
ство нулю моментов этих сил относительно точки О. Подсчет моментов
дает
(ma2 + m'62)t? + (ma + m'b)g sin д = 0.
Следовательно, стержень с двумя массами будет двигаться так же, как
стержень с одной массой, смещенной от точки О на расстояние
ma2 -f m'b2
ma -f m'b
Как видим, принцип Даламбера эффективен. Однако в его фор-
формулировке участвуют неизвестные реакции связей. Объединим прин-
принцип Даламбера с принципом виртуальных перемещений.
§ 5.1. Общее уравнение динамики системы мате-
материальных точек. Основные теоремы
Будем рассматривать систему материальных точек с массами mu,
i/= 1,..., JV, стесненную двусторонними линейными дифференци-
дифференциальными связями. Связи могут быть как неголономными, так и го-
лономными.
Теорема 5.1.1. (Принцип Даламбера-Лагранжа). Для то-
того чтобы ускорения iu материальных точек (ти,ти), v = l,...,iV,
удовлетворяли второму закону Ньютона в инерциальной системе
отсчета под действием активных сил F^ и идеальных двусторон-
двусторонних связей (см. § 3.8), необходимо и достаточно выполнение общего
уравнения динамики
N
для любого набора дифференциалов {bvu, v = 1,..., N}, принадлежа-
принадлежащих множеству виртуальных перемещений Т.
Доказательство. Необходимость. Действие связей на точки
системы эквивалентно действию сил реакций связей R^. Уравнение
движения отдельной материальной точки можно записать в виде
muiu = FV+R^, v = 1,..., N.
Условие идеальности связей состоит в том, что сумма работ реакций
на любом виртуальном перемещении равна нулю:
N
5.1. Общее уравнение динамики системы 379
Умножив уравнение движения каждой точки на соответствующий
дифференциал bvu и сложив результаты, найдем
N
Необходимость доказана.
Достаточность. Пусть на систему точек наложено к независи-
независимых связей
Фj(rl,...,rN,уг, ...,vN,t) = 0, j = l,...,fc.
Им соответствует следующая система уравнений для виртуальных
перемещений:
?^¦*.-¦>, ,¦=!, ..,*.
Воспользуемся методом неопределенных множителей Лагранжа. Ум-
Умножим каждое уравнение системы для виртуальных перемещений на
скалярный множитель Xj, и все результаты вычтем из общего уравне-
уравнения динамики, которое предполагаем выполненным для любого вир-
виртуального перемещения. Получим
N
Подберем Xj так, чтобы коэффициенты при зависимых дифференци-
дифференциалах обратились в нуль. Тогда в нуль должны обратиться и коэф-
коэффициенты при независимых дифференциалах. В результате находим
систему уравнений движения
muiu =
Взятые отсюда выражения для vv подставим в уравнения
которые возникают после дифференцирования по времени уравне-
уравнений связей. Получим систему из к уравнений относительно к неиз-
неизвестных множителей Xj. Эта система имеет единственное решение,
так как связи независимы. Поэтому ускорения материальных точек,
определенные принципом Даламбера-Лагранжа, единственны, что и
доказывает достаточность. О
380 Глава 5. Динамика системы материальных точек
Следствие 5.1.1. Движение системы материальных точек оп-
определяется системой дифференциальных уравнений
Ш|уГ|У =
AA u=\ N.
которые называются уравнениями Лагранжа первого рода. Их надо
решать, учитывая связи, наложенные на систему. Выражения
задают реакции связей, действующие на точки системы. Неиз-
Неизвестные множители Xj однозначно определяются с помощью те-
теоремы 5.1.1.
Определение 5.1.1. Основные динамические характерис-
характеристики.
Вектор
N N , N
называется количеством движения системы материальных точек.
Вектор
N N , N
К = 2^ тиги хг,/ = ^ muvu x -j- = ^ тиги х vu
называется кинетическим моментом (моментом количеств движе-
движения) системы материальных точек относительно начала отсчета.
Скаляр
1 N
называется кинетической энергией (живой силой) системы матери-
материальных точек.
Понятие количества движения допускает кинематическое толко-
толкование. Напомним (см. определение 1.7.1), что центр масс задается
радиусом-вектором
5.1. Общее уравнение динамики системы 381
Поэтому
= М-г- — > muYu = М — = М\с
Другими словами, количество движения есть произведение массы
всей системы и скорости ее центра масс.
Определение 5.1.2. Внутренними силами ?„ называются ак-
активные силы взаимодействия между точками системы. Внешними
силами ?и называются активные силы, вызванные действием на
точки системы объектов, не входящих в рассматриваемую систему.
Внутренние силы подчиняются закону Ньютона о действии и про-
противодействии (см. стр. 161). Следовательно,
N N
Перейдем к теоремам об изменении основных динамических ха-
характеристик.
Теорема 5.1.2. (Об изменении количества движения). Если
связи идеальны и в каждый момент времени допускают поступа-
поступательное виртуальное перемещение всей системы параллельно непо-
неподвижной оси с единичным направляющим вектором е, то производ-
производная по времени от проекции Qe количества движения на эту ось
равна сумме проекций внешних активных сил на ту же ось:
Доказательство. Пусть в соответствии с условием теоремы су-
существует виртуальное перемещение, выражаемое формулами
Ьги = ае, и = 1,..., N.
Тогда с помощью принципа Даламбера-Лагранжа получим
N
Но а ф 0. Значит,
N N d N
-е = — J^m^r^ e =
382 Глава 5. Динамика системы материальных точек
Представим активные силы, действующие на точки системы, как сум-
сумму внутренних и внешних сил:
F» = F(l) + F(e)
Тогда
Следствие 5.1.2. (Интеграл количества движения). Если
сумма проекций всех внешних активных сил на направление е в усло-
условии теоремы 5.1.2 тождественно равна нулю, то проекция скорости
центра масс системы на это направление постоянна, а проекция
центра масс на это направление либо не движется, либо смещает-
смещается равномерно.
Доказательство. Имеем
Следовательно,
—-(rc • е) = vc • е = с\ — const,
at
Отсюда
г с • е = (t — tQjci -j~ <^2,
где с\ и С2 — постоянные интегрирования. Если с\ = 0, т.е. проекция
начальной скорости центра масс на направление е отсутствует, то
проекция центра масс на это направление остается неподвижной.О
Пример 5.1.1. Пусть человек стоит на абсолютно гладком льду,
и в начальный момент скорость его центра масс отсутствует. Так как
внешними активными силами будут только силы тяжести, и они напра-
направлены вертикально, то что бы человек ни делал, он не сможет сместить
в горизонтальном направлении свой центр масс.О
Пример 5.1.2. Пусть на абсолютно гладкую горизонтальную
плоскость положены две абсолютно гладкие тяжелые призмы так, как
показано на рис. 5.1.1. Указать, насколько переместится нижняя призма
массы М, когда верхняя призма массы т под действием силы тяжести
перейдет без отделения от нижней в такое положение, что она коснется
горизонтальной плоскости. Основание нижней призмы примем равным
а, верхней — 6.
Решение. Движение призм будем считать плоскопараллельным
в вертикальной плоскости Oxz. Пусть ось Ох будет горизонтальной.
5.1. Общее уравнение динамики системы 383
Абсолютно гладкие призмы, положен-
положенные на абсолютно гладкую горизон-
горизонтальную плоскость, движутся под дей-
действием силы тяжести так, что их общий
центр масс не перемещается в горизон-
горизонтальном направлении. Используя это
свойство можно найти смещение одной
из призм, зная смещение другой.
CL X
Рис. 5.1.1. Призмы на гладкой плоскости
Обозначим хн горизонтальную координату центра масс нижней приз-
призмы в начальный момент движения, а хъ — горизонтальную координату
центра масс верхней призмы в тот же момент. Тогда горизонтальную
координату хс центра масс всей системы можно найти по формуле
_ Мхн + тхъ
Х
Хс~ М + т '
К моменту окончания движения нижняя призма сместится в горизон-
горизонтальном направлении на х, а верхняя — на х + (а — Ь). Соответственно
центры масс будут иметь горизонтальные координаты
х'н = хн + х, х'ъ = хъ + х + (а ~ Ь).
Так как проекция силы тяжести на горизонтальное направление равна
нулю, а в начальный момент времени скорость центра масс отсутству-
отсутствует, то центр масс не должен смещаться в горизонтальном направлении.
Отсюда
Мхн + тхъ _ М(хн + х) + т[хъ + х + (а - Ь)]
М + т М+т
Следовательно,
т(а — b) ^
х = —-^ ?.О
М + т
Активные силы — понятие, связанное со вторым и третьим зако-
законами Ньютона. Пользуясь принципом освобождения от связей, вме-
вместо связей можно ввести их реакции и включить реакции в число
внешних сил. Этим открывается возможность для обобщений теоре-
теоремы об изменении количества движения.
Теорема 5.1.3. Пусть после освобождения от некоторых свя-
связей оставшиеся связи идеальны и допускают поступательное вир-
виртуальное перемещение системы материальных точек вдоль любого
384 Глава 5. Динамика системы материальных точек
направления в пространстве. Тогда производная по времени от ко-
количества движения системы равна сумме всех внешних сил, вклю-
включая и реакции удаленных связей:
ЙСЛ N N
dt ~2^*" + 2^ •
Доказательство. По условию теоремы виртуальное перемеще-
перемещение можно принять одинаковым для всех точек системы, если отбро-
отбросить некоторые связи, а их реакции включить в разряд внешних сил.
Следовательно,
6г„=а, i/=l,...,JV,
а принцип Даламбера-Лагранжа примет вид
Так как вектор а произволен, то
N
{rnuru -Fu -R,) = 0.
Дальнейшие рассуждения вполне аналогичны доказательству теоре-
теоремы 5.1.2.D
Теорема 5.1.2 есть частный случай теоремы 5.1.3, когда реакции
связей не влияют на соответствующую компоненту вектора количе-
количества движения.
Скажем, что связи допускают дифференциал вращения (см. § 2.10)
вокруг оси е, если величины
6yu = 6<ре х г,/, v — 1,..., AT,
где ё<р — произвольный скалярный множитель, принадлежат множе-
множеству виртуальных перемещений Т.
Теорема 5.1.4. (Об изменении кинетического момента си-
системы). Пусть связи идеальны и допускают в каждый момент вре-
времени дифференциал вращения вокруг неподвижной оси с направляю-
направляющим единичным вектором е. Тогда производная по времени от про-
проекции Ке кинетического момента на эту ось равна моменту внеш-
внешних активных сил относительно той лее оси:
5.1. Общее уравнение динамики системы 385
Доказательство. По условию теоремы виртуальное перемеще-
перемещение можно задать с помощью формулы
6yu = 6<ре х г,,, v = 1,..., N,
где 6<р — произвольный скалярный множитель. Подставляя это вы-
выражение в уравнение принципа Даламбера-Лагранжа и пользуясь
свойствами смешанного произведения, найдем
N
е • ^(га,,г„ х г,, — г,, х F,,) 6<р = 0.
Так как 6<р произвольно и
*V ^ Tj/ — 17 (
то
Вектор е — постоянный, и его можно внести под знак дифференци-
дифференцирования по времени. Далее
Ке =е К.
Кроме того, силы действия и противодействия попарно принадле-
принадлежат одной прямой и противоположны. Поэтому их моменты взаимно
у ничтож аются. ?
Следствие 5.1.3. (Теорема площадей). Если в условиях тео-
теоремы 5.1.4 сумма моментов внешних активных сил относительно
оси е равна тождественно пулю, то проекция Ке кинетического мо-
момента системы на ось е остается постоянной в процессе движения.
Доказательство. В рассматриваемом случае Ке = 0. Поэтому
Ке = const есть первый интеграл системы уравнений движения.?
Геометрический смысл величины Ке виден из выражения
N
Ке = У^ mu{vu х V,,) • е.
Таким образом, кинетический момент Ке относительно оси е есть
сумма произведений масс точек системы на секторные скорости их
проекций на плоскость, перпендикулярную к оси е. Сказанное оправ-
оправдывает исторически сложившееся название следствия 5.1.3.
25-1503
386 Глава 5. Динамика системы материальных точек
Пример 5.1.3. Фигурист, стоя на льду и отталкиваясь от него
для вращения вокруг собственной вертикальной оси, в начальный мо-
момент широко расставляет руки. Подтягивая постепенно их к корпусу,
он увеличивает угловую скорость вращения. Следствие 5.1.3 объясняет
этот эффект.О
Теорема 5.1.5, Пусть после освобождения от некоторых связей
оставшиеся связи идеальны и допускают дифференциал вращения во-
вокруг произвольной оси. Тогда производная по времени от вектора
кинетического момента равна сумме моментов внешних активных
сил, включая моменты реакций удаленных связей:
dK_ N
dt
Доказательство. По условию теоремы, после исключения соот-
соответствующих связей и отнесения их реакций к внешним силам вир-
виртуальное перемещение можно взять в виде
<5г„ = 6<р е х г,,, v = 1,..., ЛГ,
а принцип Даламбера-Лагранжа обеспечивает выполнение равенства
(тиги - ?и - Ru) • 6ги = О
для любого виртуального перемещения, совместимого с оставшими-
оставшимися связями. Здесь R,, — реакции удаленных связей. Дальнейшее
рассуждение аналогично доказательству теоремы 5.1.4, Подставив
выражения для виртуальных перемещений в уравнение принципа и
выполнив преобразования, найдем
Но, в отличие от теоремы 5.1.4, произвольное значение здесь может
принимать не только 6<р, но и вектор е.О
Следствие 5.1.4. (Интеграл кинетического момента). Если
сумма моментов внешних сил (активных и реакций связей) относи-
относительно какой-либо точки пространства тождественно равна нулю
в некотором интервале времени, то вектор кинетического момен-
момента системы, взятый относительно этой точки, остается в этом
интервале постоянным:
К = с,
5.L Общее уравнение динамики системы 387
что в проекциях на оси координат эквивалентно трем скалярным
первым интегралам.
Когда имеет место интеграл кинетического момента, то плос-
плоскость, перпендикулярная вектору К и проходящая через неподвиж-
неподвижный центр приведения моментов, называется неизменяемой плоско-
стью Лапласа.
Построим из какого-либо полюса, например начала координат, го-
годограф переменного, вообще говоря, с течением времени вектора К.
Если главный момент внешних сил относительно оси е обращается в
нуль, то мы будем иметь интеграл площадей Ке = се, и рассматрива-
рассматриваемый годограф будет кривой в плоскости, перпендикулярной вектору
е. Когда суммарный момент внешних сил обращается в нуль отно-
относительно двух неколлинеарных осей ei и е2, то мы будем иметь два
интеграла площадей:
К\ = К • ei = с\, Ко = К • ег = С2.
Тогда вектор кинетического момента проектируется в фиксирован-
фиксированную точку плоскости, натянутой на векторы е* и в2, и годограф пред-
представляет собой прямую, перпендикулярную этой плоскости.
С помощью понятия годографа теореме 5.1.5 можно придать гео-
геометрическую формулировку.
Следствие 5.1.5. (Формулировка Резаля). Скорость конца
вектора кинетического момента равна главному (суммарному) мо-
моменту внешних сил, приложенных к системе материальных точек.
Такая формулировка указывает на возможность использования
методов кинематики для составления уравнения кинетического мо-
момента.
Пример 5.1.4. На невесомой нити подвешен контейнер массы М
с песком (рис. 5.1.2). Расстояние от центра масс контейнера до точки
подвеса О равно /, и в начальный момент он неподвижен. В контейнер
со скоростью v по прямой, перпендикулярной нити и отстоящей от точки
О на расстояние /, выстреливается пуля массы т. После попадания в
песок пуля застревает в контейнере. Найти скорость контейнера вместе
с пулей непосредственно после остановки пули в контейнере, считая пре-
пренебрежимо малым смещение контейнера за время движения пули внутри
него.
Решение. Отвлечемся от влияния силы тяжести, приложенной
к пуле. Тогда внешние силы, действующие на систему пуля-контейнер,
суть реакция нити и вес контейнера. Обе силы до попадания пули не
создают момента относительно точки О. Примем, что временем от мо-
момента попадания пули в контейнер до полной относительной остановки
25*
388 Глава 5. Динамика системы материальных точек
Пуля, попадая в контейнер баллистиче-
0 ского маятника, движется затем вместе
с контейнером как единое целое. Ко-
Количество движения и кинетический мо-
момент относительно точки подвеса маят-
маятника, которые имела пуля до попада-
попадания в контейнер, сохраняются. Им со-
соответствуют первые интегралы уравне-
ш ний движения Кинетическая энергия
системы уменьшается за счет тепловых
потерь.
Рис. 5.1.2. Баллистический маятник
пули можно пренебречь, так что за это время контейнер практически
останется в исходном положении. Тогда справедлива теорема площа-
площадей в вертикальной плоскости (следствие 5.1.3): кинетический момент
системы пуля-контейнер до попадания пули должен быть равен кинети-
кинетическому моменту этой системы непосредственно после остановки пули в
контейнере. Следовательно,
Imv = 1{M + m)V,
где V — искомая скорость. Решение задачи дается формулой
М + m
Пример 5.1.5. Рассмотрим задачу двух тел массы тп\ и т2 соот-
соответственно, притягивающихся друг к другу по закону всемирного тяго-
тяготения. В этой системе сила всемирного тяготения — внутренняя. Пусть
внешние силы отсутствуют. Тогда имеет место интеграл кинетического
момента
К — Y\ х miVi -|- r2 x m2v2 = с.
Видим, что кинетический момент (рис.5.1.3) представляется диагональю
параллелограмма, построенного на векторах
Ki = ri х mivi, K2 = г2 х m2v2.
Плоскости, проходящие через начало координат О и через скорости
vi и v2, обозначим V\ и Р2 соответственно. Очевидно, что V\ L Ki
и Vi -L К2. Следовательно, линия пересечения плоскостей V\ и Р2
перпендикулярна плоскости параллелограмма, а значит, и вектору К.
Другими словами, плоскости V\ и "Р2 пересекаются по прямой, принад-
принадлежащей плоскости Лапласа.О
51. Общее уравнение динамики системы
389
К2
Плоскость Лапласа перпендикуляр-
перпендикулярна вектору кинетического момента
системы и не меняется при движе-
движении материальных точек. Сами точ-
точки не обязаны перемещаться в плос-
плоскости Лапласа. В случае задачи
двух тел эта плоскость может быть
построена как геометрическое ме-
место линий пересечения плоскостей
V\ и ?2. образованных радиусами-
векторами и векторами скорости со-
соответственно каждого из тел.
Рис. 5.1.3. Построение плоскости Лапласа
Теорема 5.1.6. (Об изменении кинетической энергии). До-
Допустим, что связи, наложенные на систему материальных точек,
идеальны и таковы, что дифференциалы действительных перемеще-
перемещений принадлежат множеству Т виртуальных перемещений. Тогда
дифференциал кинетической энергии равен сумме работ всех актив-
активных сил на дифференциалах действительных перемещений точек си-
системы:
N
dT = YyFudrl/.
Доказательство. По условию теоремы, можно принять вирту-
виртуальное перемещение равным
6yu — dvu — \udt, v — 1,..., N,
где vu — действительная скорость v-ft материальной точки. По прин-
принципу Даламбера-Лагранжа
N
• dvu) = 0.
Но
dV V2
Теперь осталось воспользоваться определением 5.1.1. ?
Заметим, что для линейных по скоростям дифференциальных
связей вида
N
390 Глава 5. Динамика системы материальных точек
дифференциал действительного перемещения принадлежит множе-
множеству Т виртуальных в любой момент времени тогда и только тогда,
когда Bj = 0. При этом неголономные связи могут оказаться неста-
нестационарными (векторы Aju могут зависеть явно от времени). Если
связи голономны:
/>(*,Г1,...,глг) = 0,
то требование, чтобы дифференциалы действительных перемещений
принадлежали множеству Т, эквивалентно требованию dfj/dt = 0.
Другими словами, если голономные связи допускают в качестве вир-
виртуального дифференциал действительного перемещения, то такие
связи не зависят явно от времени (склерономны).
Заметим также, что в правую часть утверждения теоремы 5.1.6
входит работа всех активных сил, как внутренних, так и внешних.
Пример 5.1.6. Рассмотрим движение человека, поднимающегося
по лестнице. Внешними силами, действующими на него, будут сила
тяжести и сила реакции опоры. Пусть человек начинает движение по
лестнице вверх в момент времени t0 из состояния покоя: То = 0, а
поднявшись наверх, останавливается: Тк = 0 в момент времени tK. По
теореме 5.1.6 работа всех сил на действительных траекториях точек их
приложения будет тогда равна нулю:
N *
Но работа сил реакций отсутствует, так как точка опоры каждой ноги о
лестницу остается неподвижной. Точка опоры лишь скачком меняется
при смене опорных ног. Следовательно, работа силы тяжести компен-
компенсируется работой внутренних сил. Вместе с тем, как это следует из тео-
теоремы 5.1.2, подъем центра масс человека происходит именно благодаря
действию внешней силы реакции лестницы.О
Пример 5.1.7. В задаче примера 5.1.4 подсчитаем изменение
кинетической энергии системы до и после попадания пули в песок:
...... v , Mmv2
1к - io = о
2\M + m "" )- 2(М + т)'
Таким образом, вследствие удара кинетическая энергия уменьшилась, и
это произошло в результате работы именно внутренних сил. По разнице
значений кинетической энергии можно рассчитать выделившееся при
этом количество тепла.О
Теореме 5.1.6 можно придать несколько иную формулировку.
5.1. Общее уравнение динамики системы 391
Теорема 5.1.7. В условиях теоремы 5.1.6 производная по време-
времени от кинетической энергии системы равна суммарной мощности
всех активных сил (см. определение 3.7.5):
Доказательство получается, если дифференциал энергии и пра-
правую часть, выражающую его значение, разделить на дифференциал
времени dt.D
Заметим, что область применения теорем 5.1.6 и 5.1.7 может быть
существенно расширена также и на тот случай, когда из-за некото-
некоторых связей действительное перемещение не попадает в множество
виртуальных. Чтобы применить указанные теоремы, достаточно та-
такие связи исключить, заменив их реакциями. По изменению кине-
кинетической энергии тогда можно судить о работе реакций связей на
действительном перемещении.
Теорема 5.1.8. (Интеграл энергии). Пусть активные силы
потенциальны с силовой функцией f/(ri,... ,гдг), связи идеальны1 и
дифференциал действительного перемещения принадлежит множе-
множеству виртуальных в любой момент времени. Тогда имеет место
первый интеграл (интеграл энергии):
T-U = h,
где h — постоянная интегрирования.
Доказательство. Наличие силовой функции f/(ri,... ,г^) озна-
означает, что активные силы выражаются формулами
F - — i/-l N
Поскольку условия теоремы 5.1.6 выполнены, то
N N c,jj
dT = V F, • dvv = V — • dvv - dU.
Следовательно, при действительном движении
d(T-U) = 0.a
Введя понятие потенциальной энергии
392 Глава 5. Динамика системы материальных точек
выражение Т — U = h можно представить в виде
где То и По — начальные значения кинетической и потенциальной
энергий соответственно. Имеем закон сохранения механической энер-
энергии. Далее
Г - То = По-П.
Другими словами, приращение кинетической энергии равно разности
значений потенциальной энергии в начальной и конечной точках дви-
движения. Следовательно, разность между начальным и минимальным
значениями потенциальной энергии показывает предельно реализуе-
реализуемое положительное приращение кинетической энергии. В этом смы-
смысле указанная разность характеризует собственный энергетический
ресурс системы.
Задача 5.1.1. Подсчитать собственный энергетический ресурс
тела, состоящего из материальных точек, притягивающихся друг к другу
по закону всемирного тяготения.
Решение. Пусть точки тела попадают из бесконечности, где,
очевидно, достигается максимум потенциальной энергии всемирного тя-
тяготения (см. пример 3.4.2), на свои места последовательно одна за дру-
другой. Обозначим ть.. „tun массы всех точек, a ri2, г2з,-.. — расстояния
соответственно между точками mi и Ш2, ш2 и тз и т.д. в их заданном
положении. Предположим, что точки mi,...,mn_i уже помещены на
свои места. Работа, совершаемая при перемещении массы тп из беско-
бесконечности на свое место под действием точек ть.. .,mn_i, равна
Л. / mi m2 ^п—
_-. f YY1 I _____ -i~ ______ I I ________
п — J Inn I i Г • • • "г
где / — гравитационная постоянная. В правую часть этого выраже-
выражения масса тп входит по одному разу в произведении с каждой из масс
mi mn_i. В каждое из аналогичных выражений для работ, совер-
совершаемых при перемещениях точек mn+i, mn+2,..., масса тп входит в
произведение только с одной массой. Следовательно, в выражение пол-
полной работы
А = Ai + А2 + ... + Ап + ... + AN
масса тп будет входить по одному разу в произведении со всеми другими
массами, кроме нее самой.
С другой стороны, потенциал в точке пространства, где находится
масса 7Щ, выражается формулой
— + — + ...+ —— + —^-L 4-
\
....
)
5.1. Общее уравнение динамики системы 393
Рассмотрим сумму
N
Масса гпп входит здесь в каждое слагаемое, для которого i ф п, по
одному раэу в комбинации с другой массой. В член mnVn она входит
в комбинации с каждой массой, кроме нее самой. В целом тпп входит
в рассматриваемую сумму по два раза в комбинации с каждой массой,
кроме нее самой. Поэтому работа сил всемирного тяготения при обра-
образовании системы из бесконечно удаленных точек равна
1
В частности, для системы из двух точек mi и гпч это правило дает
1 __ f ГП1ГП2
где г — расстояние между точками. Для системы из трех точек mi, т
77*3 найдем
А = -/ mi — + — ) + т2 — + — ) + т3 — + — =
2 L \П2 Из/ \г12 г23/ \Пз г2з/\
— f fmim2 1
V r12 ^13 ^23 /
В случае сплошного тела, имеющего плотность /?, расчет ресурса А
производится по интегральной формуле
= \JvPdu,
п
где П — объем, занимаемый телом, V — потенциал точки тела.
Найдем, например, энергетический ресурс однородного шара массы
М и радиуса R. С этой целью воспользуемся теоремой 3.11.4. При
движении элемента массы dm из бесконечности до поверхности шара
силы тяготения совершают работу
При движении элемента dm внутри шара работа есть
/Mr2, (M ,
drn+dm
394 Глава 5. Динамика системы материальных точек
Суммарная работа сил тяготения при перемещении элемента dm равна
Интеграл в правой части последнего равенства есть момент инерции ша-
шара относительно его центра. Для шара (см. пример 1.14.10)
fr2pdQ =
ЗМД2
Следовательно, энергетический ресурс шара выражается формулой
. 1
Возьмем скалярную функцию
ф = V^m^v^ -г„.
Ее полная производная по времени имеет вид
dФ N N N
-^ = ]Г rnv\v -г„+^2 mu\u • \u = 2Т +
Определение 5.1.3. Пусть задана некоторая функция <p(t). Ее
средним значением на интервале (to, ^o + т) называется величина
to + r
to
Процедура вычисления среднего называется усреднением.
Усредним равенство, выражающее </Ф/Л, т.е. проинтегрируем его
правую и левую части по времени t в пределах от to до to + т и
разделим на т. Получим
__[Ф(*о + г) - Ф(*о)] = 2Г+ ^(F, + R,) • р„.
Левая часть этого равенства на конечном интервале времени может
обратиться в нуль, когда
5.1. Общее уравнение динамики системы 395
В частности, таким свойством будет обладать периодическое движе-
движение с периодом т.
Определение 5.1.4. Движение называется финитным, если
lim -[Ф(*о + г)-Ф(*о)] = 0.
г—>оо 7"
Финитным, например, будет движение, при котором г^(<), у„(<),
v = 1,..., N, ограничены. Для финитного движения будем предпо-
предполагать существование средних
to + r N to + r N
/
t0
o N
T=lim- Tdt, У*(?„ + К„) -г„ = lim -
to
Определение 5.1.5. Выражение
N
называется виршлом Клаузиуса.
Пример 5.1.8. Пусть сосуд объема п наполнен газом, молекулы
которого не взаимодействуют друг с другом. Стенки сосуда непрони-
непроницаемы для молекул. Найдем вириал этой системы. Удар молекулы о
стенку будем считать абсолютно упругим. Ударная реакция стенки будет
направлена по нормали к поверхности сосуда, и она будет единственной
силой, действующей на молекулы. Среднее по времени от ударных ре-
реакций, отнесенное к элементу площади поверхности, есть давление р
газа на стенки. Пусть v — внешняя нормаль к поверхности, da — ей
соответствующий элемент площади. Тогда средняя сила р воздействия
стенок на газ в точке поверхности, имеющей радиус-вектор г, имеет вид
р = —puda. Следовательно,
Vr = p 11vuda-p /divrdft = 3pft.
5 n
Здесь 5 — поверхность сосуда, а переход от поверхностного интеграла
к объемному осуществлен по формуле Остроградского.О
Теорема 5.1.9. (О вириале). Для финитного движения мате-
материальной системы справедлива формула
396 Глава 5. Динамика системы материальных точек
Доказательство получается переходом к пределу при г~+оов
правой и левой частях равенства
^[Ф(*о + г) - Ф(*о)] = 2? - Vr.U
Пример 5.1.9. Найти связь между средней кинетической энергией
и давлением для газа, находящегося в условиях примера 5.1.8.
Решение. Применяя теорему о вириале, получим
Напомним, что отношение кинетической энергии к числу молекул про-
пропорционально абсолютной температуре. Если кинетическая энергия по-
постоянна, то полученная формула устанавливает связь между температу-
температурой, давлением и объемом газа.О
Пример 5.1.10. Пусть реакции связей отсутствуют, но силы потен-
потенциальны, причем потенциальная энергия П(гь • • • ,r/v) есть однородная
функция степени s:
Для такой системы вириал принимает вид
Следовательно, если для нее выполнены условия теоремы о вириале, то
2Г-5Й=0.
Вместе с тем справедлив интеграл энергии
Г + П = А,
который после усреднения примет вид
Т + П = А.
Отсюда
Т=ЦА, Й = А.
Тем самым установлено, как начальная энергия системы делится между
средними значениями кинетической и потенциальной энергий на беско-
бесконечно большом интервале времени. При s = —2 полученные формулы
5.2. Теоремы Кёнига 397
не работают. Если s = —2 и h ф О, имеем противоречие, из которого
следует, что в этом случае движение не может быть финитным.
В остальных случаях найденные формулы дают возможность сделать
приближенные оценки состояния системы. Например, пусть газопыле-
газопылевое протопланетное облако в начальный момент обладало энергией ft.
Отвлечемся от всех сил взаимодействия частиц, кроме гравитации. По-
тенциальная энергия такой системы будет однородной функцией степени
s — —\. Будем считать протопланетное облако сплошным однородным
шаром массы М. Воспользовавшись решением задачи 5.1.1, получим
К~ 10 ft '
где R — средний радиус по времени эволюции системы, а в качестве П
принята работа, необходимая для переноса всех частиц системы из дан-
ной точки облака в бесконечность, где они не взаимодействуют. Форму-
ла имеет смысл, когда ft отрицательно, т.е. когда движение финитно.О
§ 5.2. Теоремы Кёнига
Расчет кинетической энергии и кинетического момента системы
материальных точек не всегда легко выполняется. Чтобы его облег-
облегчить, удобно использовать специальную систему координат, носящую
название осей Кёнига.
Определение 5.2.1. Осями Кёнига называется система коорди-
координат, движущаяся поступательно. Начало ее совпадает с центром масс
изучаемой системы материальных точек.
Если С — начало осей Кёнига, то его абсолютный радиус-вектор
гс дается формулой
. N N
Для расчета абсолютной скорости по теореме сложения скоростей
получаем выражение
V = Vc +Vr,
где vc — абсолютная скорость движения центра масс, a vr — ско-
скорость движения относительно осей Кёнига.
Теорема 5.2.1. Кинетический момент абсолютного движения
системы дается выражением
K = rcxMvc + К*,
398 Глава 5. Динамика системы материальных точек
где К* — кинетический момент движения в осях Кёнига, когда за
полюс взят центр масс С:
N
К* = ]Пг'„ х mv\ru, г'„ = iv - гс.
Доказательство. Из определения кинетического момента следу-
следует
N N TV
(N \ ЛГ iV
^m^r'^ I x vc + rc x ^m^vr^ +J^rJ, x mv\TV.
Так как v'v = r^ — rc, то
v
N N N
2 ^ mvY'u =
TV TV TV TV
^r^ - vc ^ m^ = O.D
Теорема 5.2.2. Кинетическая энергия абсолютного движения
системы материальных точек дается выражением
где Т* — кинетическая энергия движения относительно осей Кёни-
Кёнига:
1 N
Доказательство. Из определения кинетической энергии следует
vi (vc+vr^)J Мг;? l
V = l l/ = l
Но
TV
= 0.D
5.2. Теоремы Кёнига
399
Пример 5.2.1. Вычислить кинетическую энергию однородно-
однородного обруча массы М, катящегося без проскальзывания в вертикальной
плоскости по горизонтальной прямой. Скорость центра обруча равна v.
Решение. Воспользуемся теоремой 5.2.2 Кёнига. Точка касания
обруча с опорной прямой есть его мгновенный центр вращения (§ 2.14).
Пусть радиус обруча равен R. Центр обруча имеет скорость v. Эта ско-
скорость, будучи горизонтально направленной, перпендикулярна к радиусу,
проведенному в точку касания. Поэтому относительно своего центра об-
обруч вращается с угловой скоростью lj = v/R, а в таком движении все
его точки описывают окружность и имеют линейную скорость v. От-
Относительно осей Кёнига получим кинетическую энергию Т* = Mv2/2.
Значит, кинетическая энергия обруча равна
Видим, что значение кинетической энергии от радиуса не зависит и,
каким бы малым ни был радиус, катящийся обруч не может считаться
материальной точкой.О
Пример 5.2.2. Пусть велосипедное колесо массы m с невесо-
невесомыми спицами и радиусом г может вращаться вокруг своего центра О,
закрепленного на одном конце невесомого стержня длины /. Другим сво-
своим концом стержень опирается в точке А о горизонтальную плоскость.
Стержень не может скользить относительно плоскости (рис. 5.2.1). До-
Доказать, что за счет действия внутренних сил можно добиться равновесия
стержня АО.
Велосипедное колесо при опоре на на-
наклонный стержень остается в равнове-
равновесии, если специально придать колесу
постоянное угловое ускорение относи-
относительно точки О за счет действия вну-
внутреннего момента сил между колесом
и опорным стержнем. Положение рав-
равновесия, однако, не будет устойчивым,
и для его поддержания потребуется со-
соответствующее управление указанным
угловым ускорением.
Рис. 5.2.1. Динамическое равновесие
Решение. Обозначим <р угол между стержнем и горизонтальной
плоскостью. Очевидно, что /\* = mr2u, где о; — угловая скорость
вращения колеса вокруг точки О. По теореме 5.2.1 кинетический момент
400 Глава 5. Динамика системы материальных точек
колеса относительно точки А выразится формулой
К = гпг2ш + 12тф.
Внешние силы, приложенные к системе, — это вес колеса и реакция
опоры в точке А. По теореме 5.1.4 получим
АК
-— = -mgl cos (p
at
или
mr2uj + 12тф = —mgl cos ^.
Следовательно, если в данном положении стержня обеспечить ф = 0 и
принять
ma/ cos <z>
а; = =—»
то это положение окажется положением равновесия. Заметим, что ко-
когда стержень принадлежит верхней полуплоскости, это равновесие будет
неустойчивым. О
Теорема 5.2.3. (Об изменении кинетического момента в
осях Кёнига). Если связи, наложенные на систему материальных
точек, идеальны, допускают дифференциал вращения вокруг непо-
неподвижной оси L и, кроме того, допускают поступательное смещение
системы по любому направлению в плоскости, перпендикулярной L,
то в осях Кёнига производная по времени от кинетического момен-
момента относительно оси /, параллельной L и проходящей через центр
масс системы, равна сумме моментов внешних активных сил от-
относительно оси /, т.е.
где е — направляющий вектор осей L и I.
Доказательство. Представим силы, действующие на систему, и
скорость ее центра масс в виде
у„ = (у„ • е)е + \ир, уир 1 е,
разложив эти векторы на сумму составляющих, одна из которых па-
параллельна е, а другая лежит в плоскости, перпендикулярной е. Из
условия теоремы следует, что
5.2. Теоремы Кёнига 401
Применяя теорему 5.2.1, найдем
—(е К*)
Но
Отсюда
N
Следствие 5.2.1. Если связи, наложенные на систему матери-
материальных точек, допускают дифференциал вращения вокруг произволь-
произвольной оси и, кроме того, поступательное виртуальное перемещение
всей систелгы вдоль любого направления, то
ж* N
dt
//=1
Другими словами, скорость конца вектора кинетического момента в
осях Кёнига равна сумме моментов всех активных сил относительно
центра масс системы.
Замечание 5.2.1. Пусть связи, наложенные на систему матери-
материальных точек, допускают дифференциал вращения вокруг оси с по-
постоянным направляющим единичным вектором е, проходящей через
центр масс системы. Тогда
d
Доказательство. В данном случае виртуальные перемещения
будут
6ти = 6<ре х г'и.
26 - 1503
402 Глава 5. Динамика системы материальных точек
Из принципа Даламбера-Лагранжа, следуя доказательству теоремы
5.1.4, найдем
6<ре
Но 6<р произвольно и
N N \
^mvY'v х г„ - ^jTr', x F, I = °-
j/ = l v-\ /
г'„ х г„ = y'v х (rc + r'y) = т'у x rc + --(p^ x i'u).
at
Осталось учесть, что
N
и применить определение 5.1.2.D
Следствие 5.2.2. Если связи, наложенные на систему, допус-
допускают дифференциал вращения вокруг произвольной оси, проходящей
через центр масс, то
ПК* N
Рассмотрим теперь теорему об изменении кинетической энергии
Т\
Следствие 5.2.3. (Изменение кинетической энергии в осях
Кёнига). Пусть связи, наложенные на систему, идеальны и та-
таковы, что дифференциалы действительных перемещений принадле-
принадлежат множеству виртуальных и среди виртуальных содержатся
поступательные смещения системы вдоль любого направления. То-
Тогда дифференциал кинетической энергии в осях Кёнига равен работе
всех активных сил на дифференциале действительного относитель-
относительного перемещения системы:
N
Доказательство. В связи с тем что выполнено условие теоремы
5.1.6, будем иметь
N
5.2. Теоремы Кёнига 403
Кроме того, можно применить теорему 5.1.3 о движении центра масс:
N
По теореме 5.2.2 получим
Т= )-Mv2c+T\
Кроме того, учтем, что dvv = dYc + dv1». Следовательно, формулу для
дифференциала кинетической энергии можно представить в виде
N N
dT + Mvc • redt = J^ F* ' drc + ? F" # dv'»'
Поскольку drc = \cdt, то после учета теоремы о движении центра
масс найдем
N
В приложениях при расчете кинетического момента не всегда бы-
бывает удобно принимать центр масс системы за полюс. Тогда может
оказаться полезной теорема о кинетическом моменте относительно
подвижного полюса. Пусть некоторая точка А в инерциальной си-
системе отсчета имеет радиус-вектор г а и скорость v^ • Обозначим
N
КА =
где y'v = yv—гд, a \v — абсолютная скорость точки системы. Величи-
Величина Ка есть кинетический момент системы относительно подвижной
точки А.
Теорема 5.2.4. Закон изменения Кд дается уравнением
ПК N
7 + Q
где Q — количество движения системы, F^e — внешние актив-
активные силы, TVv — реакции тех связей, удаление которых обеспечи-
обеспечивает идеальность связей, существование дифференциала вращения
вокруг любой оси, проходящей через точку А, и произвольного по-
поступательного виртуального перемещения системы.
26*
404 Глава 5. Динамика системы материальных точек
Доказательство. Учтем, что vu = г(/+гл. Тогда по определению
5.1.1 будем иметь
N N
К = ]Г г, х mv\v = 5^К + рд) х m,\u = Кл + г л х Q.
Воспользуемся теоремой 5.1.5:
Но в принятых предположениях справедлива теорема 5.1.3:
Закон изменения вектора Кл, в частности, показывает, что суще-
существует множество подвижных точек, относительно которых кинети-
кинетический момент изменяется так же, как и относительно неподвижной
точки. Для этого необходимо и достаточно, чтобы было
vaXvc = 0.
Например, это условие выполняется, если точка А совпадает с цен-
центром масс.
§ 5.3. Движение систем переменного состава
Рассмотрим в инерциальном репере систему М материальных то-
точек, которые в некоторый момент времени t = to заполняют объем
V\ (рис. 5.3.1). Пусть система ограничена проницаемой оболочкой,
сквозь которую материальные точки могут проходить как внутрь,
так и наружу объема V\.
В момент t\ — to 4- At материальные точки, занимавшие в момент
to объем V\y займут некоторый другой объем V*i и образуют систему
N. Система N есть система постоянного состава. Движению подоб-
подобных систем посвящены § 5.1, 5.2. Объем системы N может изменять-
изменяться. К моменту t\ объем системы М будет частично заполнен теми
материальными точками, которые были в нем ранее, а частично —
новыми точками, проникшими сквозь ограничивающую этот объем
оболочку за время At. Тем самым система М будет системой пе-
переменного состава. К изучению законов движения таких систем мы
сейчас и переходим.
5.3. Движение систем переменного состава
405
Объем V*2 содержит те же материаль-
материальные точки, что и объем V\. Через вре-
время At часть из этих точек осталась
в объеме Vi, а другая часть покину-
покинула его. Кроме того, в объем V\ могли
проникнуть и иные частицы, ранее в
объеме V\ не содержавшиеся. Таким
образом, состав материальных точек
объема V\ оказывается переменным.
Рис. 5.3.1. Система переменного состава
В каждый момент времени можно вычислить количества движе-
движения Q и Q для систем М и N соответственно. Пусть при t — to
система N совпадает с системой АА. Тогда
Q = Q\tQ .
В момент времени t\ = to 4- At величины Q и Q уже могут разли-
различаться. Количество движения системы М. можно выразить так:
где AQn — количество движения материальных точек, поступивших
в систему М за время At, AQy — количество движения точек, уда-
удалившихся из нее за то же время. Вычислим производную
dt At—о At
Отсюда находим
= lim
At-О
Л" " "Л" + Fn " Fy'
to
At
где Fn, Fy обозначают пределы
Fn = lim ^L, Fy = lim
At0 At У Д<0
At-0
Тем самым векторы Fn, Fy имеют размерность силы. Назовем
Гд = Fn — Fy
дополнительной силой.
406 Глава 5. Динамика системы материальных точек
Теорема 5.3.1. Количество движения системы переменного со-
состава изменяется в соответствии с уравнением
N
dt ^f
где ?„ — активные внешние силы, а Щ — реакции связей, уда-
удаление которых позволяет включить в множество Т виртуальных
перемещений поступательное смещение системы в любом направле-
направлении.
Доказательство. К системе постоянного состава N применим
теорему 5.1.3 об изменении количества движения. Системы ЛЛ и N
в момент to совпадают. Следовательно, для них совпадут множества
виртуальных перемещений: Т = Т. Одинаковыми будут и связи, ко-
которые следует удалить, чтобы поступательные смещения системы по
любому направлению вошли в множество Т. Теперь для окончания
доказательства теоремы достаточно в формуле, выражающей dQ/dt,
учесть зависимость dQ/dt от сил и реакций.?
Таким образом, скорость конца вектора количества движения
равна сумме дополнительной силы и внешних сил, включая реакции
связей.
Определение 5.3.1. Поток материальных точек через объем V
называется стационарным, если количество движения точек, заклю-
заключенных в любом элементарном объеме внутри V, зависит только от
положения этого объема внутри V и не меняется со временем.
Заметим, что условие стационарности потока относится не только
к внутренним точкам объема, но и к его оболочке. Другими слова-
словами, одинаковые материальные точки, выходя из объема или входя в
него, приобретают в одних и тех же местах неподвижной оболочки
одинаковые скорости.
Рассмотрим составляющие главного вектора внешних сил. Выде-
Выделим главный вектор объемных сил FM, т.е. сил, действующих на ма-
материальные точки, находящиеся внутри объема V, и обусловленных
воздействием объектов, расположенных вне объема (гравитационные,
электрические, магнитные силы, силы инерции и т.п.). Обозначим
RO6 — главный вектор сил, обусловленных действием ограничиваю-
ограничивающей объем V оболочки на материальные точки, находящиеся внутри
объема и непосредственно примыкающие к этой оболочке, в тех слу-
случаях, когда оболочка не будет абсолютно проницаемой. Примем, что
другие силы отсутствуют. Тогда, очевидно,
N
5.3. Движение систем переменного состава 407
Обозначим также RHO суммарный вектор сил, действующих со сто-
стороны материальных точек, находящихся внутри объема V, на его
оболочку. По третьему закону Ньютона имеем RHO = — R-об-
Теорема 5.3.2. (Формула Эйлера). Пусть поток материаль-
материальных точек через объем V стационарен. Тогда суммарная сила воз-
воздействия точек, расположенных внутри объема V, на его оболочку
равна сумме главного вектора объемных сил и дополнительной силы:
R-но = FM + FA.
Доказательство. Так как поток материальных точек через объ-
объем V стационарен, то количество движения системы переменного со-
состава М сохраняется во времени: dQ/dt = 0. Воспользовавшись
теоремой 5.3.1, можно написать в соответствии со смыслом векторов
FM и Ro6:
FM + R06 + Ял = 0.D
Формула Эйлера определяет усилие, действующее на оболочку,
ограничивающую некоторый объем, через который осуществляется
стационарный поток вещества.
Предположим теперь, что объем V произвольной формы имеет
два отверстия сечений Sn и 5у. Через отверстие Sn вещество (жид-
(жидкость, рассматриваемая как совокупность материальных точек) мо-
может втекать в объем, а через отверстие Sy вытекать. При этом ско-
скорости vn втекания точек и vy вытекания будем считать одинаковыми
по всей площади соответствующих сечений. Найдем
,. AQn ,. A(Mv)n
Fn = bm —^ = hm —* —.
At—0 At At—0 At
Из-за стационарности потока скорость vn может быть вынесена за
знак предела:
Аналогично
Fy =/xyvy.
Коэффициенты /хп и /ху называются приходом и расходом массы.
Для стационарного потока суммарный расход массы (разница ме-
между поступающей в объем массой и уходящей из него) должен быть
равен нулю. В противоположном случае менялась бы масса внутри
объема. Следовательно, //п = ?*у = /Л и дополнительная сила выра-
выразится формулой
FA = /i(vn - vy).
408
Глава 5. Динамика системы материальных точек
Приход fi массы рассчитывается по формуле
/i = р 11 v \ndS,
Sn
где р — плотность вещества, а и — внутренняя нормаль элемента
сечения. Если сечение, через которое поступает вещество, плоское,
то
Пример 5.3.1. Пусть через поперечное сечение S изображенных
на рис. 5.3.2 труб протекает вода в направлении, указанном стрелка-
стрелками. Скорость потока равна v. Найти силу, действующую со стороны
жидкости на эти трубы.
Рис. 5.3.2. Воздействие вещества на оболочку
Решение. Случай а. Пусть [/-образная труба ориентирована
в вертикальном направлении по единичному вектору к (рис. 5.3.2,а).
Имеем vn = —кг;, vy = кг;, приход массы /i = Spv. Следовательно,
RHO = Р + ?д = -k(Mg + 2Spv2),
где Р — вес трубы и воды, находящейся в трубе в фиксированный мо-
момент времени. Другими словами, если такую трубу поставить на весы и
пропускать через нее воду, то их показания будут на величину добавоч-
добавочной силы больше, чем вес трубы с водой.
Случай б. Пусть одно звено L-образной трубы ориентировано в
вертикальном направлении к (рис. 5.3.2,6). Единичный вектор горизон-
горизонтального направления обозначим т. Тогда vn = —кг;, vy = ту, приход
массы fi = Spv. Поэтому
RHO = P + FA = -k(Mg + Spv2) - rSpv2.
5.3. Движение систем переменного состава 409
На такую трубу действует горизонтальная составляющая силы, проти-
противоположная направлению вытекающей струи. Вертикальная составляю-
составляющая оказывается больше веса.
Случай в. Труба ориентирована в горизонтальном направле-
направлении т (рис. 5.3.2,в). Очевидно, что vn = то, vy = то, /i = Spv, и
дополнительная сила отсутствует.О
Обратимся вновь к общему случаю движения системы переменно-
переменного состава и рассмотрим разность
= mnvn - myvy,
где mn — масса, vn — скорость центра масс прибывающих в систему
материальных точек, шу — масса, vy — скорость центра масс точек,
удаляемых из системы.
Определение 5.3.2. Пусть Дш = тп — ту ф 0. Тогда средней
скоростью переменной части системы назовем вектор и, удовлетво-
удовлетворяющий уравнению
иДш = mnvn — myvy.
Следствие 5.3.1. Если существует
dm Am
-г- = lim —- ф 0,
dt At-+o At
то дополнительная сила ?Д выражается формулой
ъ dm
где и — средняя скорость переменной части системы.
Теорема 5.3.3. (Уравнение Мещёрского). Пусть скорость
изменения массы dm/dt ф 0. Тогда изменение скорости v центра
масс системы переменного состава описывается уравнением
(е) Се)
где ?у , Щ/ — внешние активные силы и реакции связей, т — мас-
масса системы, и — абсолютная средняя скорость переменной части
системы.
Доказательство. Воспользуемся теоремой 5.3.1:
410 Глава 5. Динамика системы материальных точек
Количество движения Q представим в виде Q = mv, где v — ско-
скорость центра масс. Тогда
dQ _ dm dv
Осталось теперь учесть следствие 5.3.1.D
Определение 5.3.3. Вектор
_i , ч dm
FR = (u - v) —
называется реактивной силой. Разность u — v называется относи-
относительной средней скоростью переменной части системы.
Следствие 5.3.2. (Уравнение Лёви-Чивита). Если абсолют-
абсолютная средняя скорость переменной части системы равна нулю, то
изменение скорости v центра масс описывается уравнением
d N
Следствие 5.3.3. (Формула Циолковского). Если относи-
относительная средняя скорость переменной части системы и — v = uo
постоянна по величине и направлена в сторону, противоположную
скорости движения центра масс системы, а внешние силы отсут-
отсутствуют, то
v = йот Ь 1>о,
т
где то — начальное значение массы, vq — начальное значение моду-
модуля скорости.
Доказательство. В условиях следствия уравнение Мещерского
принимает вид
dv dm
После интегрирования получим требуемую формулу. D
Формула Циолковского показывает, что при сделанных предполо-
предположениях конечная скорость системы (ракеты) не зависит от режима
расхода массы.
Пример 5.3.2. Определить движение тяжелой гладкой цепочки
(рис. 5.3.3), свободный конец которой свешивается с горизонтального
стола, тогда как не вступившая еще в движение часть цепочки сложена
в комок у самого края стола.
5.3. Движение систем переменного состава 411
При движении системы к части цепоч-
цепочки, свешивающейся со стола, добавля-
добавляются новые фрагменты, имеющие в мо-
момент присоединения по условию задачи
нулевую скорость. Имеем систему пере-
переменного состава, к которой применимы
уравнения Леви-Чивита.
Рис. 5.3.3. Гладкая цепочка — система переменного состава
Решение. Свешивающуюся часть цепочки рассмотрим как си-
систему переменного состава. Пусть х — ее длина. Присоединяющаяся
масса есть dm = pdx, где р — плотность. До вступления в движе-
движение эта масса покоилась на столе. Следовательно, абсолютная средняя
скорость переменной части системы равна нулю, и мы можем воспользо-
воспользоваться уравнением Леви-Чивита. Из внешних сил на изучаемую систему
действует только сила тяжести, направленная вдоль оси х. Уравнение
движения принимает вид
d ( dx\
-г" \ X -г- 1 = QX.
dt\dtj У
Умножим это уравнение на (xdx/dt) и проинтегрируем. Тогда
dt) ZQX
Пусть в начальный момент времени to нить покоится, и длина ее свеши-
свешивающейся части равна xq. Тогда
2 „3
Рассмотрим предельное решение при хо —> 0. Для него примем с = 0.
Тогда
dx F
ИЛИ
т.е. длина нити будет увеличиваться с ускорением, равным д/3, втрое
меньшим ускорения свободного падения.О
Подчеркнем, что уравнение Мещерского имеет смысл, когда ш^О,
т.е. суммарная масса системы изменяется. Если суммарная масса
412 Глава 5. Динамика системы материальных точек
системы постоянна, но существует предел
,1= lim ?7= lim ^#0,
то дополнительную силу следует выражать формулой
Рд = /i(vn-vy),
где vn — предел при Д< —> 0 абсолютной скорости центра масс то-
точек, поступающих в систему, a vy — аналогичный предел для точек,
удаляемых из системы. Уравнение движения примет вид
m % =
При желании разность vn — vy можно вычислять как разность ско-
скоростей, взятых относительно репера, связанного с системой перемен-
переменного состава.
Пример 5.3.3. Пусть L-образная трубка массы тп, объема V и се-
сечения S расположена так, что одно ее звено может поступательно сколь-
скользить вдоль гладкой горизонтальной направляющей (как на рис. 5.3.2,6).
В другое звено подается воздух с постоянной скоростью и относитель-
относительно трубки перпендикулярно ее сечению. Считая, что внешние активные
силы отсутствуют, найти закон движения центра масс трубки.
Решение. Имеем систему переменного состава, масса которой
остается постоянной. Направляющий вектор вдоль звена к отверстию
трубки, куда подается воздух, обозначим к. Вдоль другого звена напра-
направим вектор т. Пусть р — плотность воздуха. Очевидно,
/1 = Spu, vn = —uk 4- vt, vy = ur+ t;r,
где v — скорость движения трубки. Следовательно,
По условию задачи движение в направлении к отсутствует. Значит, со-
составляющая силы ?д в этом направлении уравновешивается реакцией
опоры. Проекция уравнения движения на направление т имеет вид
Член Vp учитывает массу воздуха, заключенного в объеме трубки. Дви-
Движение трубки оказывается равноускоренным.О
Перейдем к закону изменения кинетического момента системы пе-
переменного состава. Кинетический момент будем вычислять относи-
относительно неподвижного полюса О.
5.3. Движение систем переменного состава 413
Теорема 5.3.4. Кинетический момент К системы переменного
состава изменяется в соответствии с уравнением
N N
где дополнительный момент Мд = Мп — Му, а
суть скорости изменения суммарных кинетических моментов то-
точек, прибывающих в систему и соответственно удаляемых из нее.
Доказательство. Повторим дословно рассуждения, которые
служили для доказательства теоремы об изменении количества дви-
движения, но для систем М и Я будем брать не векторы количества
движения, а векторы кинетического момента, подсчитанного относи-
относительно неподвижного полюса О. Тогда получим
Ж Ж ЛЖ
+ М
Теперь осталось к системе N постоянного состава с кинетическим
моментом К применить теорему 5.1.5.0
Следствие 5.3.4. В случае стационарного потока материаль-
материальных точек через систему М получим dK/dt = 0. Поэтому момент
сил, действующих на оболочку объема V, выражается формулой
мно = мм + мд.
Смысл индексов такой же, как в теореме 5.3.2.
Пример 5.3.4. Рассмотрим ротор турбины (рис. 5.3.4). При
равномерном вращении поток вещества через межлопаточные простран-
пространства будет стационарным. Изменение кинетического момента будет от-
отсутствовать, что приведет к выполнению равенства
которое определяет момент М(е) внешних сил, приложенных к ротору.
Вычислить дополнительный момент Мд, возникающий за счет про-
протока вещества через внутренний объем турбины.
Решение. Предположим, что относительные скорости vi потока
материальных точек на входе в объем между лопатками и скорости V2
414 Глава 5. Динамика системы материальных точек
УЛ При стационарном течении сквозь турбину
векторы относительной скорости поступа-
поступающего и убывающего вещества, проходя-
проходящего через межлопаточные пространства
системы, имеют постоянные, но различ-
различные величину, направление и начало. За
счет этого возникает дополнительный мо-
момент, обеспечивающий требуемый режим
вращения турбины.
Рис. 5.3.4. Течение сквозь турбину
на выходе из объема одинаковы каждая в любой точке всего входного и
выходного сечений и составляют углы а\ и а2 с радиусами-векторами,
проведенными из центра рабочего диска турбины к серединам входного
и выходного сечений.
Векторы всех моментов направлены по одной и той же прямой, пер-
перпендикулярной плоскости чертежа и проходящей через точку О. Поэто-
Поэтому будем принимать во внимание лишь скалярные величины моментов
с учетом знаков. Очевидно, в соответствии с рисунком будем иметь
Мп = ^i(-visinai +wri)ri, My = /i2(-v2sina2
где u) — угловая скорость вращения турбины, fi\ и /i2 — приход и расход
массы. Для стационарного потока ц\ = /х2 = /i. Значит, дополнитель-
дополнительный момент, действующий на одну секцию турбины, составит
Мд = [—v\ri sin cti + v2r2 sin a2 -f u(r\ — r\)).
Пусть теперь ротор с числом лопаток п заторможен. Если поток стаци-
стационарен и одинаков во всех секциях турбины, то формула
Мд = n/i(—virisinai -f v2r2sina2)
выражает суммарный момент, который задает начальное угловое уско-
ускорение ротора. Получили турбинную формулу Эйлера. Из нее видно, что
наибольшая отдача турбины достигается при углах ct\ и а2, противопо-
противоположных по знаку.
Отметим, что в условиях задачи существует значение и* угловой ско-
скорости, при котором дополнительный момент обращается в нуль:
2 9
1 ' О
5.3. Движение систем переменного состава 415
Теорема 5.3.5. (Изменение кинетической энергии систе-
системы переменного состава). Пусть связи идеальны, а дифференци-
дифференциалы действительных перемещений всех материальных точек, обра-
образующих в данный момент времени рассматриваемую систему пе-
переменного состава, принадлежат множеству виртуальных переме-
перемещений. Тогда кинетическая энергия Т системы переменного состава
удовлетворяет уравнению
dT N
—
где ?v — все силы, приложенные к системе (как внутренние, так
и внешние), \и — скорости точек их приложения, WA — дополни-
дополнительная мощность:
wn = wa - wy,
возникающая в связи с изменением кинетической энергии из-за того,
что некоторые материальные точки, суммарно имеющие кинети-
кинетическую энергию Т„, прибывают в систему:
w - dT"
Wn~ dt '
а некоторые с суммарной кинетической энергией Ту удаляются из
нее:
Wy~ df
Доказательство. Пусть ЛЛ — система переменного состава с ки-
кинетической энергией Т, а N — система постоянного состава с кинети-
кинетической энергией Т, совпадающая в рассматриваемый момент времени
t с системой АЛ, так что
т\г = f\t.
На момент t\ = t -f At величины ТиГ можно связать соотношением
T\tl = f\h + АТП - АТУ,
где ДТП — кинетическая энергия материальных точек, поступивших
в систему М за время <5<, а ДТУ — кинетическая энергия точек, уда-
удалившихся из нее за это же время. Ясно, что должно быть
где
At*O At У At-
hm r, Wy = hm .
At-*O At У At-0 At
416 Глава 5. Динамика системы материальных точек
Но система N есть система постоянного состава, и для нее выполнены
условия теоремы 5.1.7.D
Следствие 5.3.5. Если скорости всех попадающих в систему М
материальных точек одинаковы по величине и равны vn, а скорости
удаляющихся из объема точек также одинаковы по величине и рав-
равны vy, то дополнительная мощность в такой системе переменного
состава будет выражаться формулой
где fin — приход, /iy — расход массы. Если поток стационарен:
/in = fiy ?z ц, то дополнительная мощность принимает вид
Пример 5.3.5. Рассмотрим систему переменного состава, совпа-
совпадающую с изученной в примере 5.3.3. В ней, очевидно, \х — Spu, и
дополнительная мощность дается формулой
Этот же результат в данном случае можно получить и непосредственно,
умножив обе части уравнения, полученного в примере 5.3.3, на скорость
v системы. Такое совпадение подтверждает принятую при подсчете до-
дополнительной энергии гипотезу об идеальности связей.О
Пример 5.3.6. Тележка может двигаться горизонтально. На
ней укреплена труба в форме прямого усеченного конуса, ось которого
ориентирована вдоль направления движения тележки. Пусть в наиболь-
наибольшее сечение Sn трубы с постоянной горизонтальной скоростью и отно-
относительно тележки перпендикулярно сечению подается вода. Вытекает
вода через другое сечение Sy трубы. Считая воду несжимаемой жид-
жидкостью, найти уравнение движения тележки и мощность, необходимую
для реализации такого движения.
Решение. Имеем систему переменного состава, масса которой
остается постоянной. Направляющий вектор относительной скорости
воды обозначим т. Пусть р — плотность воды. Очевидно, что fin =
Snpu и fiy = SypUy. Так как вода несжимаема, то Snu = Syuy. Далее
vn = и + v, vy = иу + v,
где v — скорость движения тележки. Следовательно, уравнение движе-
движения тележки в направлении т принимает вид
5.4. Принцип Гаусса наименьшего принуждения 417
где т — масса тележки с трубой, а Vр — масса воды, заключенная в
объеме трубы. Подведем теперь энергетический баланс. Слагаемые до-
дополнительной мощности из-за поступления и расхода массы принимают
вид
ттг с* / I \2 тяг с1 / I с1 I с* \2
Wn = -bnpu(u + v) , Wy = —ibnpw(v H- bnu/by) .
Дополнительная мощность вычисляется как разность
= Wn - Wy = ±Sn
Если правую и левую части уравнения движения тележки умножить на
v, то получим
dT ... 2(Sn \
- = W» = -SnPu* {- - 1 j v.
Из дополнительной мощности вычтем слагаемое, выражающее затраты
на ускорение тележки:
Wp = Wa-WH = ~SnPu
Величина Wp определяет затраты энергии, необходимые для разгона
частиц воды до скорости, при которой они покидают систему. Следо-
Следовательно, для реализации рассматриваемого движения нужен источник
энергии, не указанный в условии задачи.О
§ 5.4. Принцип Гаусса наименьшего принуждения
Координаты и скорости точек системы в действительном движе-
движении тождественно удовлетворяют уравнениям связей
Фj(ru...,rN,yu...,vut) = 0, j = l,...,m.
Продифференцируем по времени эти уравнения:
А9Ф #Ф 9Ф
Когда в данном состоянии системы изменяются действующие на
нее силы, то меняются ускорения материальных точек, а их коорди-
координаты и скорости остаются фиксированными.
Определение 5.4.1. Допустимыми называются такие ускоре-
ускорения, которые могут быть реализованы материальными точками си-
системы в ее фиксированном состоянии при наложенных на нее связях,
27- 1503
418 Глава 5. Динамика системы материальных точек
если произвольно задавать действующие на систему активные силы.
Действительными называются такие ускорения, которые возникают
в системе при конкретных активных силах, вызывающих ее движе-
движение.
Действительное ускорение всегда будет одним из допустимых.
Определение 5.4.2. Выражение
где w* — допустимые ускорения системы, F^ — активные силы, ти
— массы материальных точек, называется принуждением по Гауссу.
Теорема 5.4.1. (Принцип Гаусса наименьшего принужде-
принуждения). Действительные ускорения wu, v — 1,..., N, системы мате-
материальных точек с идеальными связями доставляют минимум при-
принуждению по Гауссу:
2 Е ^(m"w" F") = ^ 2
Доказательство. Действительные Wj, и допустимые w* ускоре-
ускорения точек удовлетворяют одной и той же системе уравнений:
Разности (w^ — w*) удовлетворяют системе уравнений, определяющей
виртуальные перемещения:
Значит, среди виртуальных перемещений найдутся пропорциональ-
пропорциональные разностям ускорений
Применим принцип Даламбера-Лагранжа:
лг
(rrty'Wy — Fy) • (vfv — w*) = 0.
5.4. Принцип Гаусса наименьшего принуждения 419
Обозначим wf = Yvjmv ускорения, которые возникли бы у точек,
если их освободить от всех связей. Тогда получим
- w?) = о.
Выполним тождественное преобразование
(w, - wf) • (w, - w?) = -[(w, - wf J + (w, - w?J - (w*, - wf J].
N 1 N
Обозначим
1
Из принципа Даламбера-Лагранжа следует
1 N
л.д = Л Ар, Ар = — / ^ iTi>i/ [Wv w^) .
Так как Лр — положительная величина, обращающаяся в нуль, лишь
когда w* = Wy, то Дц = min A.O
Принцип наименьшего принуждения допускает простое геометри-
геометрическое истолкование. Он означает, что действительные ускорения
системы минимально отклоняются от тех, которые имели бы место
при полном отсутствии связей. Метрика, оценивающая отклонение,
определена коэффициентами квадратичной формы принуждения по
Гауссу.
Пример 5.4.1. В пространстве R3 задана неподвижная абсолютно
гладкая кривая
r = r(s),
где 5 — длина ее дуги. На эту кривую положена тяжелая нить длины /
и массы М. Направление вертикали задано единичным вектором к, так
что ускорение силы тяжести выражается равенством
g = -fl*.
Требуется найти ускорение нити при условии, что нить не отделяется от
кривой ни одной своей точкой.
Решение. Пусть 5 = 5* — значение параметра в начальной
точке нити, а 5 = 5* 4-А определяет положение некоторой ее внутренней
точки. Обозначим т касательную и г/главную нормаль к опорной кривой
27*
420 Глава 5. Динамика системы материальных точек
в точке, соответствующей значению параметра s = s* -f А. Ускорение
точки нити с тем же значением параметра имеет вид
W = WtT+ WnU.
Причем из-за нерастяжимости нити касательное ускорение всех ее точек
одинаково:
wt(s*) = wt(s* + А)
при любом 0 < А < /. Обозначим р — плотность нити. Масса элемента
нити будет
dm = pdX.
К этому элементу приложена сила тяжести
Р = kpgdX.
Запишем принуждение по Гауссу:
•и
или
Л = -u%M + wtgp / к • rdX + ...
о
Многоточием обозначены члены, не содержащие ускорений, ибо wn =
v2 jR% где R — радиус кривизны. Обозначим z — к • г вертикальную
координату точки кривой. Тогда
_ dv _ d(k ¦ г)
Следовательно,
А = -w2tM + wtgp[z{s*
Минимум Л достигается при
Это и есть искомое уравнение движения. Оно показывает, что касатель-
касательное ускорение нити пропорционально разности вертикальных координат
ее концов. Следовательно, при любой форме опорной кривой положе-
положение равновесия нити достигается тогда, когда концы нити находятся на
одном и том же вертикальном уровне. Здесь мы имеем аналогию с за-
законом одинакового уровня жидкости при равновесии в сообщающихся
сосудах. О
5.5. Квазикоординаты 421
§ 5.5. Квазикоординаты
Пусть в пространстве R3 конфигурация системы N материальных
точек однозначно определена координатами
9i,'.',9n, п < ЗАГ,
так что радиусы-векторы всех точек системы выражаются функция-
функциями
Предположим, что на систему наложены дифференциальные связи
Фj(ru...1rN,vu...1vN,t) = О, j = l,...,m<n.
Учтем, что
v" " Л, ^. * + dt '
и подставим эти выражения в уравнения связей. Тогда связи примут
вид
Ф)(Ч\*-- ->ЧиЧи-- -ЛпЛ) = 0, j = 1,...,ш.
Будем считать, что ранг матрицы Якоби
равен т. Это означает, что система связей выделяет в пространстве
скоростей <ji,..., qn поверхность размерности п — т. Представим ее
в параметрической форме:
Qi = 9t(*)9b • • • jfln,*l, • • .,7Tn-m), i = 1, . . .,П
таким образом, что при произвольном задании скалярных параме-
параметров я*1,..., 7Tn-m уравнения связей автоматически удовлетворяются.
Если параметры я> заданы, то они выделяют единственный на-
набор q = (<h ... ,<?п)> удовлетворяющий уравнениям связей. Когда
тгд. = Kk(t) заданы как функции времени, зависимость q от тг^ со-
составляет систему обыкновенных дифференциальных уравнений, ре-
решая которую, например, численным методом, можно найти функции
q\(t),.. .,qn(t) и узнать тем самым, как меняется конфигурация си-
системы в пространстве.
При желании зависимости тг^(/) можно рассматривать как произ-
производные от некоторых функций
422
Глава 5. Динамика системы материальных точек
Определение 5.5.1. Первообразные
t
to
называются квазикоординатами системы материальных точек. По-
Постоянные Ск могут быть выбраны произвольно и равны значениям
квазикоординат в начальный момент времени t0. Величины Жк назы-
называются квазискоростями, а тг* — квазиускорениями.
Приставка "квази" подчеркивает принципиальное отличие между
квазикоординатами и координатами, которое проиллюстрируем сле-
следующим примером.
Пример 5.5.1. Положение точки на плоскости можно задавать
полярными координатами г и у? (рис. 5.5.1), а траекторию точки —
функциями r(t) и <p(t). Обозначим a(t) площадь, заметаемую радиусом-
вектором при его движении по заданному закону. Между радиусом-
вектором, полярным углом и площадью а имеется следующее кинема-
кинематическое соотношение:
ф = 2&/г2.
Таким образом, площадь а есть квазикоордината, a & — квазиско-
Значение площади сг, заметаемой
радиусом-вектором, не дает одно-
однозначного представления о направле-
направлении радиуса, хотя значение сектор-
секторной скорости & и радиальная ско-
скорость г однозначно определяют век-
вектор скорости. Положение точки на
плоскости можно задавать поляр-
^ ными, декартовыми или иными ко-
координатами с добавлением при не-
необходимости кинематических урав-
уравнений.
Рис. 5.5.1. Координаты и квазикоординаты
рость. Но положение точки нельзя однозначно задать значениями по-
полярного радиуса и квазикоординаты сг. Площадь, заметаемая радиусом-
вектором, существенно зависит от движения, которым точка пришла в
то или иное положение. Между координатой <р и квазикоординатой а не
существует никакого конечного соотношения, позволяющего однозначно
вычислить одно по значению другого.О
5.5. Квазикоординаты 423
Еще один пример использования квазикоординат встречается в
кинематике абсолютно твердого тела (см. § 2.15), где компоненты
^ь ^>2> ^>з угловой скорости суть квазискорости, связанные с произ-
производными, например, угловых координат ф, ф, tf, кинематическими
уравнениями Эйлера.
Ответ на вопрос о том, в каком случае квазикоординаты могут
служить полноправными координатами системы материальных то-
точек, дается следующей теоремой.
Теорема 5.5.1. Квазикоординаты жк могут служить координа-
координатами, однозначно определяющими конфигурацию системы с учетом
дифференциальных связей, тогда и только тогда, когда зависимость
q от квазискоростей эквивалентна линейной зависимости:
q = go
и соответствующая Пфаффова система
п — т
dq = qodt + ]Г ock
k=i
вполне интегрируема (определение 4-4-%) -
Доказательство. Необходимость. Пусть квазикоординаты
7Tjb можно взять в качестве координат, значения которых однознач-
однозначно определяют конфигурацию системы с учетом связей. Это значит,
что существуют конечные соотношения
4i = ftOri, • • -,Kn-m,t), 1 = 1,.. .,П,
задающие поверхность размерности п — т в пространстве Rn. По
смыслу квазикоординат касательное пространство к этой поверхно-
поверхности совпадает с пространством ?(q) эквивалентной пфаффовой си-
системы при произвольном задании дифференциалов йтгь Наличие та-
такой поверхности означает линейную зависимость скоростей от квази-
квазискоростей и полную интегрируемость соответствующей пфаффовой
системы. Необходимость доказана.
Достаточность. Пусть указанная в условии теоремы пфаф-
пфаффова система вполне интегрируема. Дифференциалы dq\,.. .,dqn,
chri,... ,йтгп_т принадлежат пространству R2n~m. Полная интегриру-
интегрируемость означает, что существуют формы d/i,... ,d/n, которые, будучи
линейными комбинациями форм
п — т
и){ = dqi - qiodt - ^ otikdT!k, г = 1,..., n,
424 Глава 5. Динамика системы материальных точек
служат полными дифференциалами по переменным t, </i,..., qn,
7Ti,... ,тгп_т. Значит, существуют независимые функции /,- такие, что
система уравнений
где С{ — некоторые постоянные, выделяет в пространстве #2n~m ги-
гиперповерхность. При этом касательное пространство к ней совпада-
совпадает с подпространством, на котором все формы пфаффовой системы
обращаются в нуль. Поскольку дифференциалы dqi выражаются че-
через дифференциалы с/тг*, из полученных конечных уравнений можно
выразить
Щ = qi(ni, • • .,тг„_т,*), г = 1,.. .,п,
что и дает искомую однозначную замену переменных.?
Следствие 5.5.1. Квазикоординаты, введенные для системы ма-
материальных точек с дифференциальными связями, могут оказаться
координатами только в том случае, если эти связи голономны.
Однако голономность связей еще не означает, что любые квазико-
квазикоординаты можно применять в качестве координат системы (см. при-
пример 5.5.1).
Удобство использования квазикоординат обусловлено простотой
введения независимых параметров, задающих пространство допусти-
допустимых скоростей системы.
Определение 5.5.2. Частной производной от координаты qi no
квазикоординате тг& называется выражение:
Аналогично для произвольной функции f(qi,..., qn) получим
дттк fr[ dqi 0жк f^ dq{ джк '
Таким образом, операция частного дифференцирования по квазико-
квазикоординатам всегда имеет смысл и вполне аналогична операции част-
частного дифференцирования по координатам.
Определим пространство виртуальных перемещений при исполь-
использовании квазикоординат. Если подставить зависимость скоростей от
квазискоростей в уравнения связей, то по определению этих зависи-
зависимостей уравнения связей автоматически удовлетворяются. Следова-
Следовательно будут тождественно выполнены равенства
д-к ^Г[ dvv ^ dqi джк
5.5. Квазикоординаты 425
Умножим полученные тождества на произвольные параметры <5тг* и
проведем суммирование по индексу к. Тогда получим
N
где
Пространство виртуальных перемещений определено этими форму-
формулами. Любой набор векторов {6ru,v = l,...,iV}, полученный ука-
указанным способом, удовлетворяет системе уравнений, задающей вир-
виртуальные перемещения. Размерность п — rn множества таких наборов
совпадает с размерностью пространства виртуальных перемещений.
Пусть координатам <?i,...,<fa соответствуют обобщенные силы
Q\, • • 1 Qn (определение 4.7.3). Тогда выражение для элементарной
работы сил примет вид
п
Определение 5.5.3. Скалярная величина
называется обобщенной силой, работающей на изменении квазикоор-
квазикоординаты TTfc.
Видим, что закон перехода от обобщенных сил Q,- к обобщенным
силам Q*k вполне аналогичен закону, имеющему место при замене
координат.
Пример 5.5.2. Пусть положение материальной точки на плоскости
с ортами еь ео определено полярными координатами г \л <р, причем угол
<р отсчитываете* от вектора ei. К точке приложена сила
F = Fiei-f F2e2.
Тогда координатам г и <р соответствуют обобщенные силы
Qr = Fi cos <p + F2 sin <p, Qv = r(-F\ sin <p -f F2 cos <p).
Первая из них есть проекция силы на радиус-вектор точки, а вторая есть
момент силы F относительно начала координат. Если вместо коорди-
координат (г, у?) ввести квазикоординаты (г}а), где а — площадь, заметаемая
426 Глава 5. Динамика системы материальных точек
радиусом-вектором при движении точки, то (см. пример 5.5.1) будем
иметь
Следовательно, Qr не изменится, а обобщенная сила Qa примет вид
2
Qa = ~(—F\ sin (р + F2 cos (p).
Исключить угол <р с помощью a здесь принципиально нельзя, так как
между ними не существует конечного соотношения.О
§ 5.6. Уравнения Аппёля
Пусть положения материальных точек динамической системы
определены радиусами-векторами
где q = (<fi,..., qn) — набор координат, однозначно выделяющих кон-
конфигурацию системы, причем п < ZN. Дифференциальные связи
учтем с помощью соотношений (см. § 5.5):
4=
Когда квазискорости тг^ задаются как произвольные скалярные вели-
величины, то мы получим значения скоростей <ji,..., qn, совместимые со
связями. Если же квазискорости заданы как произвольные функции
времени тг* = irk(t), то для определения движения системы, соответ-
соответствующего этим функциям, следует проинтегрировать получающую-
получающуюся из приведенных соотношений систему обыкновенных дифференци-
дифференциальных уравнений.
Определение 5.6.1. Уравнения
Ч = q((fl,---i^ni*l,---,*n-m,0
называются кинематическими уравнениями системы материаль-
материальных точек.
Эти уравнения обобщают кинематические уравнения (см. § 2.15)
в теории движения абсолютно твердого тела. Функции тг*(?) опреде-
определяются приложенными к системе активными силами. Соответствую-
Соответствующие дифференциальные уравнения могут быть получены с помощью
принципа Гаусса.
5.6. Уравнения Аппёля 427
Определение 5.6.2. Пусть w,, суть ускорения точек системы.
Функция
называется энергией ускорений.
Энергия ускорений структурно аналогична кинетической энергии
системы.
Теорема 5.6.1. (Уравнения Аппеля). Квазиускорения 7г* удо-
удовлетворяют системе уравнений
•?тг- = Ql, k = 1,.. .,n — т,
где QI — обобщенная сила, работающая на изменении квазикоорди-
квазикоординаты TTfc.
Доказательство. Скорости и ускорения точек системы, удовле-
удовлетворяющие связям, выражаются равенствами
wfy =
где многоточием обозначены члены, не содержащие квазиускорений
я-*. Эти члены одинаковы для любого допустимого ускорения. Мно-
Множество допустимых ускорений получается, когда коэффициенты тг*
выбираются произвольным образом.
Принуждение по Гауссу (определение 5.4.2) есть положительно
определенный многочлен А второй степени по переменным 7г*. Его
минимум существует, единствен и может быть найден из условия
—- = 0, к = 1,...,п-пг.
Функцию А представим в виде
- N N
По-прежнему многоточием обозначены члены, не зависящие от квази-
квазиускорений и пропадающие при частном дифференцировании по ним.
428 Глава 5. Динамика системы материальных точек
Первый член принуждения по Гауссу есть энергия ускорений. Про-
Продифференцируем по я** второй член:
dN N п <\ е\ п о
h § h^
Следствие 5.6.1. Для того чтобы получить полный набор урав-
уравнений движения системы материальных точек, достаточно разре-
разрешить уравнения Аппеля относительно квазиускорений и к получен-
полученным обыкновенным дифференциальным уравнениям добавить кине-
кинематические уравнения системы. При этом число уравнений соста-
составит 2п — т и будет равно сумме числа координат и квазискоростей.
Расчет энергии ускорений не всегда просто выполняется. Часто
оказывается полезной теорема, аналогичная теореме Кёнига для рас-
расчета кинетической энергии.
Теорема 5.6.2. Энергия абсолютных ускорений системы связа-
связана с энергией ускорений относительно осей Кёнига (определение
5.2.1) посредством соотношения
где wc — ускорение центра масс системы, S* — энергия ускорений
в осях Кёнига.
Доказательство. Радиусы-векторы точек системы имеют вид
vu = гс + г'. Следовательно,
Подставив эти выражения в формулу для 5 и приняв во внимание,
что
N
т^ = О,
убеждаемся в справедливости теоремы.?
Пример 5.6.1. Составить уравнения движения точки массы т
под действием активной силы F. Движение точки стеснено дифферен-
дифференциальной связью
где г = 7*iei + r2e2-И'зез — радиус-вектор точки, а еь е2, е3 — линейно
независимые ортонормированные векторы.
5.6. Уравнения Аппёля 429
Решение. Воспользуемся уравнениями Аппеля. Энергия уско-
ускорений имеет вид
S=jr2 = j(rl + rl + rl).
Ускорения г\ и г2 удовлетворяют условию
?1 = ^3^2 И" ^3^*2 •
Следовательно,
r3r2J + rl + г§].
Ускорения го и г3 кинематически никак не связаны. Выпишем уравнения
Аппеля ds
— = m[r3(r3r2 + г3г2) + г2] = #2,
OS .. п
Работа активной силы F на произвольном виртуальном перемещении
выражается равенством
А - F • <5r = Fi6rx + F2Sr2
Виртуальные перемещения удовлетворяют уравнению
6п - г36г2.
Отсюда
Л = (Fir3 + F2) Er2 + F3<5r3.
Видим, что обобщенные силы Q2 и Q3 выражаются формулами
Полная система уравнений движения, состоящая из уравнений Аппеля
и кинематического уравнения, запишется следующим образом:
A + r|) r2 + r3r3r2 = — (Fir3 + F2), f3 = — F3, fi = r3r2.
m m
Первые два уравнения позволяют найти г2, г3. Третье уравнение опре-
определяет г\.О
Пример 5.6.2. Две материальные точки М\ и М2 (рис. 5.6.1) оди-
одинаковой массы т соединены стержнем длины / и пренебрежимо малой
массы. Система может двигаться под действием силы тяжести только в
430 Глава 5. Динамика системы материальных точек
Если начальная угловая скорость
ф ф 0, то система не падает вниз
под действием силы тяжести. Нали-
Наличие конька в середине стержня за-
заставляет ее, совершая вращательное
движение около некоторого посто-
постоянного среднего уровня высоты, го-
ризонтально дрейфовать в положи-
х тельном направлении, если ф > О, и
в отрицательном, если ф < 0.
Рис. 5.6.1. К задаче о вертикальном скольжении
вертикальной плоскости и только так, что скорость середины стержня
направлена вдоль стержня. Определить движение точек М\ и М2.
Решение. Указанную в условии систему материальных точек
опишем координатами х, z середины стержня и углом <р, образованным
отрезком М\М2 с горизонтальной осью Ох. Тогда координаты матери-
материальных точек М\ и Mi выразятся формулами
Х\ - X - - / COS V?, Х2 = X + - / COS <р}
1 , . 1
Запишем уравнение дифференциальной связи:
cos <р sin <р
По теореме 5.6.2 энергия ускорений S представляется следующим обра-
образом
с_ 2m(x2 + 'z2) 2ml2 ..2 2ml2 .4
Введем квазискорость тг, положив
х = л- cos <p, z = тг sin (p.
Тогда
..о ml2 ..n
S = Ш7Г2 + —- <р2 + . . . ,
4
где многоточием обозначены члены, не содержащие ускорений. Опре-
Определим обобщенные силы. С этой целью выпишем выражение для эле-
элементарной работы:
А = —2mg6z = —2mgsin<p6ir.
5.6. Уравнения Аппёля 431.
Поэтому Qjt = — 2mgsin(p, Q^ = 0. Уравнения Аппеля принимают вид
тг = —д sin <р, ф = 0.
Интегрируя, найдем
где а и /? — постоянные интегрирования. Следовательно,
Поэтому
dv 1 .. у
•— = — ТГ =
d<p a a
тг = — cosy? + 7.
Теперь можно найти координаты х и г:
cte 1 . 1 . Я о 7
—- = — х = —тг cos ^ = —г- cos у? И— cos у?,
dz 1 . 1 . . у . , 7 '
— = — z = —Trsinv? = —r-cos 9? sin y? H—siny>.
dip a a a1 a
Отсюда
G9
- + r—j
COSy?) COS<p + €.
Учитывая, что <р = at+/3, получаем закон движения, зависящий от пяти
произвольных постоянных а, /3, у, 6, е.
Формулы, выражающие закон x(t), z(t), справедливы, когда а ф О,
т.е. когда система имеет ненулевую начальную скорость ф. В этом слу-
случае зависимость х(<р) содержит член, линейный по (р. Из-за него центр
масс "дрейфует" вдоль оси Ох. По вертикали центр масс колеблется
около некоторого постоянного среднего значения координаты z. Вся си-
система, не теряя среднего уровня высоты, смещается в горизонтальном
направлении вправо или влево в зависимости от знака угловой скорости
а.
Если а = 0, то угол кр сохраняет постоянное значение, и система
скользит вдоль наклонной прямой с угловым коэффициентом dz/dx =
tg/З, При этом можно воспользоваться теорией движения вдоль наклон-
наклонной плоскости. Квазискорость тг имеет смысл модуля скорости центра
масс.О
432 Глава 5. Динамика системы материальных точек
§ 5.7. Общее уравнение теории удара
Рассмотрим систему материальных точек с массами mv и радиуса-
радиусами-векторами г„. Движения точек стеснены связями. По аксиоме об
освобождении от связей последние можно заменить реакциями, дей-
действующими на точки системы. Пусть R означает вектор удара, по-
получающегося как предел импульса реакции (см. § 3.15). Уравнения
удара для каждой точки можно записать в виде
где Р„ — удары активных сил. Следуя Лагранжу, введем понятие
связей, идеальных при ударе.
Определение 5.7.1. Связи называются идеальными при ударе,
если сумма работ ударов реакций связей на любом виртуальном пере-
перемещении системы, обусловленном связями, существующими во время
удара, равна нулю, то есть
N
Теорема 5.7.1. Приращения А(ти\и) количеств движения ма-
материальных точек системы, подчиненных идеальным при ударе свя-
связям, отвечают активным ударам Р„ тогда и только тогда, когда
выполнено общее уравнение теории удара
N
для любого виртуального перемещения системы, определенного свя-
связями, существующими во время удара.
Доказательство. Необходимость. Пусть приращения коли-
количеств движения точек системы вызваны активными ударами Р„. Это
значит, что для каждой точки справедливо уравнение
Выразив отсюда удары реакций связей и подставив их значения в
условие идеальности связей, получим, что для реальных приращений
количеств движения справедливо общее уравнение теории удара.
Достаточность. Пусть общее уравнение теории удара выполне-
выполнено. Тогда оно выделяет единственные значения приращений коли-
количеств движения точек системы. Это доказывается аналогично теоре-
теореме 5.1.1 по методу неопределенных множителей Лагранжа.П
5.7. Общее уравнение теории удара 433
Отметим, что при ударе связи могут как сохраняться, так и не со-
сохраняться. Связь называется сохраняющейся, если она существует
во время удара и сохраняется после удара. Связь называется несо-
храняющейся, если она существует во время удара, но исчезает сразу
после удара. Тогда множество виртуальных перемещений, имеющее
место после удара, будет отличаться от множества виртуальных пе-
перемещений, которое существовало во время удара.
Основные теоремы теории удара касаются изменения количества
движения системы, ее кинетического момента и кинетической энер-
энергии.
Теорема 5.7.2. Если среди виртуальных перемещений системы
с идеальными связями, существующими во время удара, имеется
поступательное перемещение вдоль некоторого направления е, то
приращение проекции количества движения на это направление рав-
равно сумме проекций на то же направление активных ударов, прило-
приложенных к точкам системы:
N N
е • AQ = е • ^ Р„, Q = j
и = \
Доказательство. По условию теоремы к множеству виртуаль-
виртуальных относится перемещение
Syv = ае, а ф О, и = 1,..., N.
Подставив его в общее уравнение теории удара, найдем
N
ае • ^[Д(т„у„) - Р„] = 0.
Так как а ф 0, то после очевидных преобразований получаем требу-
требуемое утверждение. ?
Следствие 5.7.1. Если связи допускают поступательное вир-
виртуальное перемещение системы вдоль любого направления, то при-
приращение из-за удара ее количества движения равно сумме ударов
активных сил:
N
Приращение количества движения можно интерпретировать как
произведение суммарной массы и приращения скорости центра масс
системы:
N
AQ = МДус, М = у] mv.
28-1503
434 Глава 5. Динамика системы материальных точек
Следствие 5.7.2. Если активные удары отсутствуют, то при-
приращение скорости центра масс системы равно нулю.
Пример 5.7.1. Пусть кусок глины массы mi, двигаясь гори-
горизонтально и поступательно со скоростью vb сталкивается и слипается
с куском глины массы гщ, движущимся вертикально и поступательно
со скоростью V2 (рис. 5.7.1). Найти скорость центра масс куска глины,
получившегося в результате слипания.
При отсутствии внешних ударов скоро-
скорости центра масс кусков глины до столк-
столкновения и после столкновения совпада-
совпадают. Скорость центра масс как до, так и
после удара, равна отношению суммы
количеств движения этих кусков к сум-
сумме их масс. В результате удара кинети-
кинетическая энергия системы уменьшится за
счет работы внутренних сил.
О х
Рис. 5.7.1. Сохранение скорости центра масс при ударе
Решение. Внешние удары отсутствуют. Скорости центра масс
системы vc до удара и после удара совпадают. Следовательно, искомая
скорость равна
m2v2
а ее модуль выражается формулой
/ 9 9
\Jmlv\
/ 9 9 • 9 9
Vc = \Jmv + mv
Получившийся после удара кусок глины не обязательно должен двигать-
двигаться поступательно.О
Теорема 5.7.3. Если среди виртуальных перемещений системы
с идеальными существующими во время удара связями имеется диф-
дифференциал вращения вокруг некоторого направления е, то прираще-
приращение кинетического момента системы относительно оси с направле-
направлением е равно сумме моментов активных ударов относительно этой
оси:
N
е • Д К = е • У*] vu хРи.
5.7. Общее уравнение теории удара 435
Доказательство. Виртуальные перемещения, соответствующие
дифференциалу вращения вокруг направления е, выражаются фор-
формулой
6rl/ = aexrl/) a ф О, i/= 1,.. .,ЛГ.
Подставляя эти значения в общее уравнение теории удара, найдем
N
^2[A(mu\u) - Р„] • (е х г„) = 0.
t/=i
Пользуясь свойствами смешанного произведения, получим
N
[г„ х Д(т„у„) — rux Р„] = 0.
Так как при ударе радиусы-векторы точек системы не изменяются,
то г у можно ввести под знак приращения Д.П
Следствие 5.7.3. Если связи допускают дифференциал враще-
вращения вокруг любого направления, то приращение вектора кинетиче-
кинетического момента из-за удара равно сумме моментов активных ударов:
N
ДК = ^г,, х Р*/
t/=i
Перейдем к теоремам об изменении кинетической энергии при уда-
ударе. Пусть помимо активных ударов Р^ к системе внезапно прило-
приложены дополнительные идеальные связи. Эти связи могут быть как
дифференциальными, так и геометрическими, приведенными к диф-
дифференциальной форме.
Обозначим С множество допустимых скоростей системы с допол-
дополнительными связями, а С — множество допустимых скоростей до
удара. Так как при ударе исходная система связей сохраняется и к
ней только добавляются новые связи, то С1 С С. Обозначим \v € С
скорость v-й точки до удара. Разложим \и на две составляющие:
v^ __ а^ +ь
потребовав, чтобы Ь^ ? С, а„ _L С. Таким образом, Ь^ — составля-
составляющая скорости, принадлежащая множеству допустимых скоростей
С системы с дополнительными связями, а„ — ортогональная соста-
составляющая к этому множеству (в евклидовой метрике). Аналогично
обозначим
28*
436 Глава 5. Динамика системы материальных точек
скорость той же точки после удара, причем Ь^ ? С, ь!и _L С.
Вновь наложенные связи могут быть как упругими, так и абсо-
абсолютно неупругими. Если они абсолютно неупругие, то а'„ = 0. Та-
Такие связи могут быть удерживающими и сохраняться после удара.
Если же они упругие, то для них будем предполагать выполненной
гипотезу Ньютона, которая в рассматриваемом случае приводит к
равенствам
где эе — коэффициент восстановления (см. § 3.15). Примем его оди-
одинаковым для всех точек системы. Другими словами, будучи идеаль-
идеальными, вновь наложенные связи не изменяют составляющую скорости,
принадлежащую множеству С. Изменяется только ортогональная к
С составляющая скорости.
В соответствии с гипотезой Ньютона будем иметь
Ч + aev, = A + ае)Ъ€С'.
Тем самым сумма скорости \'и произвольной точки системы после
удара и скорости той же точки до удара, умноженной на коэффици-
коэффициент восстановления, принадлежит множеству допустимых скоростей
с дополнительными связями.
Теорема 5.7.4 (Карно). Пусть к системе материальных то-
точек с идеальными связями внезапно приложены активные удары Р„
и идеальные при ударе упругие связи, так что вновь полученная си-
система связей сохраняется при ударе, включает действительное пе-
перемещение в множество виртуальных и обладает коэффициентом
восстановления эе. Тогда изменение кинетической энергии системы
из-за удара выражается формулой
1 N N
^ ^F Ь
где Т, V — кинетическая энергия системы соответственно до и
после удара, А\и =• \'и — \и — скорость, потерянная v-U точкой при
ударе.
Доказательство. Так как исходная система связей вместе с
добавившимися позволяет включить действительное перемещение в
множество виртуальных (определение 4.6.2), то мы можем принять
Ьхи = ос(\'и + аеуД а ф 0.
5.7. Общее уравнение теории удара 437
Из общего уравнения теории удара получим
N
u\u) - Р„] • К + *v,) = О
4- ае) Р„
или
N N
Сделаем преобразование
1 , 1 1 , /Л 1 , 1
2 v^ + 2 Vt/) Vt/ = 2 ^Vt/ " У"' + 2 Vt/ + 2
Поэтому
Отсюда
1
- у.) • v, = --
N
t/=i
Следствие 5.7.4. Пусть активные удары не действуют: Р„ =
0. Тогда разность между кинетической энергией системы до удара
и после него выражается равенством
Напомним (см. § 3.15), что коэффициент восстановления удовле-
удовлетворяет неравенству 0 < ае < 1. Поэтому при ударе, возникающем
вследствие наложения на систему новых связей, кинетическая энер-
энергия не может возрастать. Когда удар абсолютно упругий: ае = 1,
кинетическая энергия сохраняется.
Следствие 5.7.5. Пусть на систему внезапно накладываются
дополнительные связи так, что вновь полученная совокупность свя-
связей оказывается удерживающей, идеальной и в момент удара вклю-
включает действительное перемещение в множество виртуальных. То-
438 Глава 5. Динамика системы материальных точек
гда потеря кинетической энергии системы из-за удара равна кине-
кинетической энергии потерянных скоростей:
ml/(Avl/J
„=1 2 '
Доказательство. Если связи после удара удерживающие, то то-
тогда составляющая а^ скорости после удара, перпендикулярная мно-
множеству С допустимых скоростей, должна быть равна нулю. Значит,
для всех точек системы следует принять ае = 0 (удар абсолютно не-
неупругий). Теперь доказываемое утверждение есть прямое следствие
теоремы 5.7.4 при отсутствии активных ударов.?
Пример 5.7.2. При попадании пули в баллистический маятник
(см. пример 5.1.4) возникает удар из-за внезапного наложения удержи-
удерживающих связей. В результате пуля остается в маятнике, и ее скорость
вместе с маятником составляет
т
где т — масса пули, М — масса контейнера с песком, v — скорость
пули до удара. Все скорости (см. рис. 5.1.2) ориентированы горизон-
горизонтально. Потерянные скорости контейнера Аг;к и пули Avn выражаются
формулами
т А т М
Аг;к = — v, Дг;п = -=—• v - v = ~^гг- v-
М + т М + т М + т
Применим следствие 5.7.5:
С другой стороны, непосредственный подсчет значений кинетической
энергии до и после удара показывает (см. пример 5.1.4)
, mv2 I m2v2 I mMv2
~~ ~~2 2 М + т " 2 М + т'
Совпадение результатов свидетельствует, что даже в такой достаточ-
достаточно сложной динамической системе, как баллистический маятник, связи
можно считать идеальными при ударе.О
Контрольные вопросы к главе 5
5.1. Указать различие между даламберовыми силами инерции и си-
силами инерции, возникающими из-за движения системы отсчета.
Контрольные вопросы к главе 5 439
5.2. Решить пример 5.0.1 с помощью принципа Даламбера-Лагран-
жа.
5.3. Составить для системы примера 5.0.1 уравнения Ланранжа 1-го
рода. Как из них получить уравнение, найденное в решении
примера 5.0.1?
5.4. Доказать, что для внутренних сил выполнены равенства
N N
5.5. На абсолютно гладкой горизонтальной плоскости лежит тре-
треугольная призма массы М и высоты h. С верхней точки приз-
призмы по прямой длины / без скольжения по призме скатывается
круговой обруч массы m и радиуса R. На сколько сместится
призма, когда обруч достигнет горизонтальной плоскости?
5.6. Что можно сказать о движении центра масс системы в задаче
двух тел (см. § 3.11)? Тот же вопрос для задачи п тел.
5.7. Граната была брошена под углом к горизонту с некоторой на-
начальной скоростью. Во время полета она взорвалась. Как бу-
будет двигаться после этого центр масс образовавшейся системы
материальных точек?
5.8. Что можно сказать о кинетическом моменте системы в задаче
двух тел? Тот же вопрос для задачи п тел. Какие геометриче-
геометрические особенности движения следуют из свойств кинетического
момента в этих задачах?
5.9. Человек сидит на табуретке, способной вращаться без трения
вокруг вертикали, и держит в руках велосипедное колесо. В
начальный момент времени система покоится. Затем человек
раскручивает колесо и держит его так, что плоскость вращаю-
вращающегося колеса горизонтальна. Как будет двигаться система в
целом и отдельные ее составляющие, включая человека и табу-
табуретку?
5.10. Подсчитать работу внутренних сил при подъеме человека по
лестнице в условиях примера 5.1.6.
5.11. Какие силы (активные, пассивные, внутренние, внешние) спо-
способны изменить
а) количество движения,
440 Глава 5. Динамика системы материальных точек
b) кинетический момент,
c) кинетическую энергию
механической системы?
5.12. Какие силы должны иметь силовую функцию, чтобы мог суще-
существовать интеграл энергии?
5.13. Доказать, что для однородной функции степени s:
/(Агх,..., XrN) = A*f(n,..., rN)
справедлива формула
5.14. Найти вириал Клаузиуса для газа, заключенного в сфериче-
сферический сосуд. Молекулы газа взаимодействуют друг с другом по
закону всемирного тяготения и испытывают абсолютно упругие
удары при столкновении со стенками сосуда.
5.15. Обруч радиуса R скатывается без начальной скорости с наклон-
наклонной плоскости. Центр обруча в начальный момент времени име-
имеет высоту Н над горизонтальной плоскостью. Какую скорость
приобретет центр обруча при достижении обручем горизонталь-
горизонтальной плоскости?
5.16. В примере 5.2.2 исследовать возможность создания равновесия
в наклонном положении стержня ниже точки опоры. Будет ли
тогда искусственное равновесие устойчивым?
5.17. Доказать, что если действительное перемещение относительно
осей Кёнига принадлежит множеству виртуальных, то справед-
справедливо равенство
N
где Т* — кинетическая энергия относительно осей Кёнига, а
dv'v = v'vdt — действительные перемещения точек относительно
осей Кёнига.
5.18. Пусть подвижная точка А теоремы 5.2.4 совпадает с центром
масс системы. Показать, что тогда К^ = К*, так что теорема
5.2.4 по смыслу совпадает со следствием 5.2.2.
Контрольные вопросы к главе 5 441
5.19. Пусть труба имеет по всей длине круговое поперечное сечение
площади 5, а осевая линия трубы образует произвольную пло-
плоскую кривую без самопересечений. Входное и выходное отвер-
отверстия параллельны. Скорости входящего и выходящего потоков
плотности р перпендикулярны сечению трубы и по величине
равны v. Течение стационарное. Найти дополнительную силу,
действующую на трубу со стороны потока. Указать все решения
задачи.
5.20. Относительная скорость струи газов двигателя ракеты есть по-
постоянный вектор uo. Запас топлива составляет 10% первона-
первоначальной массы ракеты. Начальная скорость центра масс раке-
ракеты vo. Внешние силы отсутствуют. Как следует направить uo,
чтобы получить максимальный угол поворота вектора скорости
центра масс при выгорании топлива?
5.21. По наклонной плоскости призмы, находящейся на гладкой го-
горизонтальной опорной плоскости, соскальзывают без трения п
материальных точек массы m каждая через равные интервалы
времени At из состояния относительного покоя. Первоначально
все точки находились на призме на высоте h над опорой и вся
система имела массу М. Найти скорость призмы в тот момент,
когда последняя материальная точка покинет призму.
5.22. Для системы примера 5.3.2 вывести уравнение изменения ки-
кинетической энергии из уравнения изменения количества движе-
движения. С помощью теоремы 5.3.5 объяснить происхождение сла-
слагаемых, отличных от мощности силы тяжести.
5.23. Пусть материальная точка массы га вынуждена двигаться по
абсолютно гладкой плоскости. С помощью принципа Гаусса
найти ускорение точки под действием силы F не параллельной
плоскости. Дать геометрическую интерпретацию решения.
5.24. Получить все соотношения, связанные с процедурой введения
квазикоординат, для случая линейных дифференциальных свя-
связей.
5.25. Составить полную систему уравнений движения, включающую
уравнения Аппеля и кинематические уравнения, для матери-
материальной точки, движущейся под действием активной силы F и
дифференциальной связи
г? + г| + г1 = г;2,
где v — постоянная величина, гь г2, г3 — декартовы коорди-
координаты точки.
442 Глава 5. Динамика системы материальных точек
5.26. Получить закон движения системы примера 5.6.2 для случая,
когда начальное значение угловой скорости стержня равно ну-
нулю.
5.27. Указать, какое множество виртуальных перемещений следует
учитывать в основном уравнении теории удара:
a) множество виртуальных перемещений до удара,
b) множество виртуальных перемещений после удара,
c) множество виртуальных перемещений во время удара.
5.28. В примере 5.7.1 убедиться в сохранении кинетического момента
системы до и после удара.
5.29. В примере 5.7.1 подсчитать разность кинетических энергий си-
системы до и после удара. Сопоставить результат со следствием
5.7.4.
Глава 6
Динамика твердого тела
Абсолютно твердое тело представляет собой множество точек,
расстояния между которыми не изменяются. В силу специфики свя-
связей движение такой системы полностью описывается теоремами об
изменении количества движения, кинетического момента и кинети-
кинетической энергии. Поэтому свойства движения, выделяемые этими те-
теоремами, проявляются в динамике твердого тела особенно выпукло.
Потребность в изучении свойств движений твердых тел зароди-
зародилась в глубокой древности. Практически любая техническая кон-
конструкция включает элементы, которые в нормальных условиях их
работы близки по своим свойствам к абсолютно твердому телу. За-
Задачи баллистики пушечных ядер, снарядов, ракет, спутников планет
на определенных этапах исследования могут рассматриваться как за-
задачи о движении абсолютно твердого тела. Такие же задачи возни-
возникают при создании высокоточных измерительных приборов, механиз-
механизмов и машин. Из сказанного ясно, что теория движения абсолютно
твердого тела весьма обширна и имеет многочисленные практиче-
практические приложения. Здесь мы ограничимся лишь основами этой тео-
теории, включающими общую математическую постановку проблемы и
традиционные методы решения типичных задач.
§ 6.1. Динамические характеристики твердого те-
тела
Пусть Ое^ез — абсолютный репер, Ае^е^е^ — репер, имеющий
начало в произвольной точке А абсолютно твердого тела и жестко
с ним связанный, Ае\е2ез — репер, имеющий начало в точке А и
сохраняющий ориентацию абсолютных базисных векторов.
Аксиома 6.1.1. Количество движения, кинетический момент
и кинетическая энергия твердого тела могут быть получены ин-
интегрированием по объему твердого тела в предположении, что ка-
каждый элемент объема движется как материальная точка.
Эвристическое основание для принятия такой аксиомы образуют
следующие положения.
444 Глава 6. Динамика твердого тела
1. Поле скоростей точек твердого тела имеет винтовую структуру
(см. § 2.13).
2. Когда размеры элемента материального объема малы по срав-
сравнению с его расстоянием до оси мгновенного винта, то скорости всех
точек этого элемента мало отличаются друг от друга, и движение
этого элемента близко к поступательному (теорема 2.14.2).
3. Исключение из правила п.2 составляют лишь элементы, пере-
пересечение которых с осью винта не пусто. Но при уменьшении размеров
всех элементов сумма масс элементов, расположенных на оси винта,
стремится к нулю и в пределе не влияет на результат суммирования.
Рассмотрим некоторый элемент твердого тела, имеющий массу
mu. Обозначим его радиус-вектор в абсолютном репере г„, а в репере,
жестко связанном с телом, — г'„. Радиус-вектор начала А подвиж-
подвижного репера, проведенный из точки О, обозначим г^. Все указанные
векторы связаны равенством
По теореме 2.12.1 Эйлера о поле скоростей твердого тела заклю-
заключаем, что скорость vu любого элемента, не пересекающегося с осью
вращения, может быть найдена, если даны поступательная скорость
v^ тела вместе с точкой А и вектор угловой скорости о;:
Векторы v^ ио) можно задать по отношению как к абсолютному, так
и к подвижному реперам. Соответственно этому и основные дина-
динамические величины (количество движения Q, кинетический момент
К, кинетическая энергия Т) можно отнести и к абсолютному, и к
подвижному реперам.
Теорема 6.1.1. Количество движения Q абсолютно твердого
тела выражается формулой
Q = Mvc = М(\А + и х г'с),
где
1 Г
г'dm
~с М
v
есть радиус-вектор центра масс тела относительно точки А, М
— масса тела, V — его объем.
Доказательство. Скорость центра масс системы материальных
точек, составленной из элементов mUi выражается формулой
1 N 1 Г ^
6.1. Динамические характеристики твердого тела 445
Для завершения доказательства достаточно перейти к пределу при
max Шу —> О.П
U
Теорема 6.1.2. Кинетический момент К^ твердого тела, взя-
взятый относительно начала А подвижного репера, выражается фор-
формулой
КА = My'c х vA + 3А w,
где За — оператор инерции тела, взятый в точке А.
Доказательство. Рассмотрим систему материальных точек, со-
составленную из интегральных элементов ти. Ее кинетический момент
выразится равенством
N
КА =
Подставив сюда значение скорости \и, найдем
N N
КА=^2 V'v Х т»(УА + Ю X Г^) = My'c X \А + 53 Т'и Х тЛи Х v'uY
u=zl u-l
Но согласно определению § 1.8 последнее слагаемое есть оператор
инерции системы материальных точек из элементов mV) взятый в
точке А и примененный к вектору угловой скорости а?. Переходя к
пределу при тахт„ —> 0, получаем требуемое утверждение.?
и
Замечание 6.1.1. В случае сплошного абсолютно твердого тела
компоненты тензора инерции определяются интегральными форму-
формулами
Ju =y[(r/J-(r/-e<J]dm, Jij = -^(p'.e.-Kr'-e^dm, ij = 1,2,3, i ф j.
v v
Или более подробно
hi = J[(rtf + (r'3f) dm, J22 = J[(r[J + (rtf) dm,
V V
J33 = J[(r[J + (r'2J] dm, J12 = - J r[r'2 dm,
V V
Лз = - / r[r'3dm, J23 = - / r'2r'3dm,
446 Глава 6. Динамика твердого тела
где V — объем, занимаемый телом.
Замечание 6.1.2. Обратившись к доказательству теоремы 5.2.4,
найдем формулу, связывающую кинетический момент Ко, взятый
относительно точки О, с кинетическим моментом Кд:
Теорема 6.1.3. Кинетическая энергия Т абсолютно твердого
тела выраэюается формулой
T=-Mv2A + MvA ¦ (w х г'с) + - 1Ш J1,
где 1Ш — момент инерции относительно оси, параллельной вектору
угловой скорости и) и проходящей через точку А.
Доказательство. Для системы материальных точек, состоящей
из элементов ти, будем иметь
„ 1 N
Подставив сюда значение скорости у„, получим
1 N N . N
Согласно § 1.8 последнее слагаемое есть момент инерции рассматри-
рассматриваемой системы материальных точек относительно оси, параллель-
параллельной вектору о? и проходящей через точку Л, умноженный на квадрат
угловой скорости. Переходя к пределу при тахга„ —^ 0, получим
и
требуемое утверждение.D
Замечание 6.1.3. Если точка А совпадает с центром масс С те-
тела, то формула для расчета кинетической энергии упрощается:
Следствие 6.1.1. С использованием оператора инерции форму-
формула для расчета кинетической энергии принимает вид
\ -f MvA • (w х г'с) + i w • За w.
6.1. Динамические характеристики твердого тела 447
Доказательство. Возьмем единичный вектор е^, параллельный
вектору угловой скорости и>. По определению оператора инерции Лд
(см. § 1.8) момент инерции 1Ш относительно оси, проходящей через
точку А и имеющей направляющий вектор еы, выражается формулой
1Ш = е^ • J д еы.
Осталось подставить это выражение в формулу теоремы 6.1.3. ?
Следствие 6.1.2. Справедливы соотношения
Другими словами, градиент кинетической энергии по вектору Уд
скорости точки А равен количеству движения твердого тела, а гра-
градиент кинетической энергии по вектору ц> угловой скорости равен
кинетическому моменту тела относительно точки А.
Доказательство получается дифференцированием выражения
для кинетической энергии в следствии 6.1.1. Действительно,
= Муд 4- М(и> х r'c) = Mvc = Q,
Ob)
Следствие 6.1.3. Так как по переменным Уд и и; кинетическая
энергия представляет собой квадратичную форму, то
Компоненты угловой скорости в общем случае могут не быть про-
производными по времени от каких-либо координат, определяющих угло-
угловое положение твердого тела относительно репера Ле^ез- Тогда эти
компоненты следует рассматривать как квазискорости и указать их
связь с производными по времени от выбранных угловых координат.
Пусть, например, это будут углы Эйлера (см. § 2.15). Кинематиче-
Кинематические уравнения Эйлера можно представить в виде
и> = е<р ф + е^ ф + е# г?,
где е^,, е^, е# — единичные векторы осей, вдоль которых направлены
угловые скорости собственного вращения, прецессии и нутации.
448 Глава 6. Динамика твердого тела
Следствие 6.1.4. Частные производные от кинетической энер-
энергии по угловым скоростям собственного вращения, прецессии и ну-
нутации равны проекциям кинетического момента на соответствую-
соответствующие направления:
дт
дф
- К е -
Доказательство.
дт _
дф
дТ дш дТ _
дш дф' дф ~
дт
дш '
дш
~дф'
дт _
~дд~
дт _
дЬ ~
кА
дт
дш
•е,,.
дш
"д!
Осталось воспользоваться следствием 6.1.2 и разложением угловой
скорости по направлениям элементарных поворотов. ?
§ 6.2. Уравнения движения твердого тела
Абсолютно твердое тело, не стесненное связями, имеет шесть сте-
степеней свободы, поскольку возможны поступательные перемещения
тела вместе с точкой А по любым трем независимым направлениям в
пространстве и, кроме того, возможны произвольные вращения твер-
твердого тела вокруг точки А, принадлежащие группе SOC) (см. § 2.4).
Таким образом, имеется ровно шесть независимых параметров, опре-
определяющих пространство допустимых скоростей точек тела. Для этих
параметров (квазискоростей) можно составить шесть уравнений ди-
динамики в форме уравнений Аппеля (см. § 5.6). Вместе с тем отметим,
что и общие теоремы динамики об изменении количества движения
(теорема 5.1.3) и об изменении кинетического момента (теорема 5.1.5)
также дают шесть дифференциальных уравнений движения. Для
простоты изложения воспользуемся этими теоремами.
В системе уравнений движения выделяются две группы: три урав-
уравнения поступательного движения тела вместе с точкой А и три урав-
уравнения движения тела вокруг точки А. Если рассматривать кинетиче-
кинетический момент тела относительно неподвижной точки О, то указанные
группы уравнений движения примут вид
N N
Q = F, k
где F — сумма всех сил, действующих на тело, исключая реакции
внутренних связей самого тела.
Первое векторное уравнение выражает изменение количества дви-
движения Q тела и определяет поступательное движение тела вместе с
6.2. Уравнения движения твердого тела 449
точкой А. Оно эквивалентно трем скалярным уравнениям в проек-
проекциях на направления базисных векторов.
Часто бывает удобнее рассматривать кинетический момент отно-
относительно подвижной точки А, и тогда по теореме 5.2.4 имеем уравне-
уравнения движения
TV
Q = F, KA+vA xQ =
Если в качестве базисного принять репер Ae^e^eg, жестко связанный
с телом, то по теореме 2.16.1 об относительной производной найдем
V xF,.
^+о>х Q = F, ^
at at f
Мы можем воспользоваться также следствием 6.1.2 и представить
уравнения движения в следующем виде:
дт\ дт „ d (дт\ зт дт А
J
dt \d\AJ д\А dt \du)J ou> ovA ^
Чтобы определить закон движения, систему уравнений, составлен-
составленную с помощью теорем об изменении количества движения и кине-
кинетического момента, необходимо дополнить кинематическими уравне-
уравнениями. Например, это могут быть уравнения, связывающие радиус-
вектор точки А и ее скорость, и уравнения Эйлера:
—j- = vA, и> = е<рф + егрф + е#'д,
at
где векторы е^, е^, е# даются выражениями (см. § 2.15)
е<? = вз,
е^ = е[ sin ti sin <p -f e'2 sin ti cos <p + e'3 cos i?,
e# = e[ cos (p — e'2 sin (p.
Кинематические уравнения Эйлера следует разрешить относительно
производных от угловых координат. Выполнив это, получим
ф = -—- (ш • e'i sin (p -h w • e'o cos <p),
Sin 17
ф = w eg — ф cos v?.
29- 1503
450 Глава 6. Динамика твердого тела
Такие уравнения не всегда удобны из-за их вырождения при г? = 0.
Свободны от вырождения кинематические уравнения Пуассона, вы-
выражающие неподвижность направляющих векторов абсолютного ба-
базиса еь е2, е3 (см. § 2.15):
dei
_L = _u,xe,, i = 1,2,3.
at
Имеем девять дифференциальных уравнений в проекциях на оси ре-
репера, связанного с телом, т.е. значительно больше, чем это было не-
необходимо для получения закона движения при использовании углов
Эйлера. Уравнения Пуассона структурно просты, единообразны и
включают только операции типа умножения и сложения1.
Другая группа свободных от вырождения кинематических урав-
уравнений получается с помощью кватернионов (см. § 2.15):
Отсюда находим четыре скалярных действительных уравнения. Эти
уравнения столь же просты, как и уравнения Пуассона2.
Каждый тип системы кинематических уравнений имеет свои до-
достоинства и недостатки. Удобство использования того или иного типа
зависит от специфики конкретной задачи. Соответствующие приме-
примеры будут рассмотрены в дальнейшем.
В некоторых случаях удобно выражать кинетическую энергию не
с помощью квазикоординат, а непосредственно через производные от
координат по времени. Тогда уравнения движения можно привести
к специальной стандартной форме. Для конкретности обратимся к
угловым координатам Эйлера <р, ф, fl. В этом случае имеем шесть
координат, задающих положение тела в пространстве (лагранжевых
координат, однозначно определяющих конфигурацию системы):
где первые три координаты суть коэффициенты разложения радиу-
радиуса-вектора точки А по векторам ei, e2, ез абсолютного репера.
Сначала умножим уравнение изменения количества движения на
единичные векторы е,-:
d
1При численном интегрировании уравнений Пуассона накопление вычисли-
вычислительных погрешностей нарушает взаимную ортогональность базисных векторов,
и они перестают быть единичными.
2 В уравнениях для кватернионов из-за численных ошибок может нарушаться
лишь обязательное требование единичной нормы кватерниона.
6.2. Уравнения движения твердого тела 451
Символ d/dt означает вычисление абсолютной скорости конца век-
вектора. Так как векторы е, постоянны, то их можно внести под знак
дифференцирования:
В итоге получаем следующие уравнения:
Рассмотрим теперь скалярное произведение уравнения изменения ки-
кинетического момента на вектор е^:
1 (Ш.} (ш х ^П (v х —^ -
где для краткости обозначено
N
Вектор ev совпадает с ез. Поэтому
Учтем это и, кроме того, воспользуемся свойствами смешанного про-
произведения:
d (ВТ \ ВТ . , 8Т
Можно проверить, что в репере, связанном с телом, справедливы вы-
выражения
_ дш _ дш _ д\А
Следовательно, будет верным соотношение
dt \дш ' дф) дш ' д^р д\А ' д^ ~ 9)
или более кратко
d FТ\ 6Т _
di \дф) ~~blp~-Mip-
29*
452 Глава 6. Динамика твердого тела
Аналогично рассмотрим уравнение
d (дт\ , / дт\ , / дт\ __
где
Или
(\ дт
I
J (дт \ дт (d
ctt V^w / дш ydt
y I д\А
Справедливы формулы
дТ дТ d du) Л
+ 0
с учетом которых проекция уравнения изменения кинетического мо-
момента на направление е^ принимает вид
дт\ дт _
Спроектируем теперь уравнение изменения кинетического момен-
момента на направление е^:
d (дТ\ ( дТ\ ( дТ\ хж
dt \du)J \ ou)J \ ova)
где
N
x
Отсюда
d (дт \ дт (d \ дт ( ч _.
37Т"'е^~^~*17е^+и?хе^~ я (v^ х е*) - М^'
dt \дш J дD) \dt I ova
Можно убедиться, что
дТ дТ d • дш д\
6.3. Движение твердого тела вокруг неподвижной оси 453
Поэтому проекция уравнения изменения кинетического момента на
направление е^ представляется в виде
d (ЗТ\ дТ ,,
Таким образом, мы нашли шесть уравнений движения, которые име-
имеют совершенно одинаковую запись:
d (дТ\ дТ
17"л^""^" = (У*' i = 1,...,6.
dt \dqij dqi
Обобщенные силы Qi (определение 4.7.3) выражаются формулами
,-=1,2,3,
Or
Ai
N N N Я
v. (e^ x v'v) = J^F, • ^,
N N
N N
Полученная система уравнений движения носит название системы
уравнений Лагранжа второго рода. В дальнейшем будет показано,
что к такой форме приводятся дифференциальные уравнения для
лагранжевых координат произвольной голономной системы матери-
материальных точек. В случае движения абсолютно твердого тела первые
три обобщенные силы имеют смысл проекций суммарной силы на оси
абсолютного репера, а последние три — моментов сил относительно
осей е^,, е^, е^ соответственно.
§ 6.3. Движение твердого тела вокруг неподвиж-
неподвижной оси
Пусть две точки А и А1 твердого тела закреплены неподвижно
в абсолютном пространстве. Прямая АА\ определенная единичным
вектором eg, остается неподвижной во все время движения по отно-
отношению как к самому твердому телу, так и к абсолютному реперу.
454 Глава 6. Динамика твердого тела
Угловая скорость и> направлена вдоль оси А А' , так что u> = и>е3. В
точке А назначим два других связанных с телом единичных базисных
вектора е^, е2 так, чтобы они были перпендикулярны друг к другу,
к вектору eg и образовывали правую тройку. Оператор инерции 3Л
в репере Ае[е2е3 представим постоянной матрицей
ll Л 2 Jl3
Ja = ( hi J22 J23
J31 J32 J33
Чтобы воспользоваться уравнениями движения, полученными в
§ 6.2, освободим твердое тело от связей, введя реакции R и R/ непо-
неподвижной оси в точках А и А' соответственно, препятствующие сме-
смещению этих точек. Радиус-вектор точки А1 обозначим
r' = ae'3,
где а — расстояние между точками А и А!.
В соответствии с определением 5.1.1 количество движения тела
запишем в виде
Q = Mvc,
где vc — скорость центра масс С, выражаемая равенством
vc = wxr'c = ш(е'3 x r'c).
Центр масс совпадает с некоторой точкой, фиксированной в твердом
теле и имеющей радиус-вектор т'с с началом в точке А. Поэтому для
вычисления абсолютного ускорения центра масс можно воспользо-
воспользоваться теоремой 2.16.3 Ривальса:
jt vc = w(e>3 х г'с)+ш2[е'3 х (е'3 х r'J] = u(e'3 x r'c) + Ш2[е'3(е'3 • г'с) - г'с].
Чтобы найти кинетический момент тела, применим оператор инерции
За к вектору угловой скорости а;. Тогда получим
К а = За ь> = v(Ji3 e'x + J23 е'2 + «/зз ез)-
Векторное произведение w x Кд примет вид
x ei + J23e;3 x e'2) = u2
Рассмотрим проекции уравнений количества движения и кинетиче-
кинетического момента на базисные векторы е^, d2, e/3\
^ /), t = 1,2,3,
6.3. Движение твердого тела вокруг неподвижной осп 455
ej- I^KA+u,xKA\ =eHM + r'xR'), i= 1,2,3,
где
N
V-l
есть суммарный момент относительно точки А всех активных сил,
приложенных к телу. Воспользовавшись разложением
г'с = rci е[ + гс2 е'2 + гс3 е'3
и выполнив необходимые операции, получим шесть уравнений дви-
движения твердого тела вокруг неподвижной оси:
2r'cl)M = F1+R1 + R'u
ur'cl - u/Vc2)M = F2 + R2 + R!2,
0 = F3 + R3 + Я'з,
— u;2 J23 = M\ — a#2>
2Ji3 = M2 + a^i,
cjj33 = M3.
Чтобы определить закон движения, к этим уравнениям следует до-
добавить кинематическое уравнение (см. § 2.12)
da
выражающее связь между углом а поворота тела вокруг оси и вели-
величиной его угловой скорости.
Проанализируем полученную систему дифференциальных урав-
уравнений. В ней два уравнения
— =и;,
at
при заданных начальных условиях полностью определяют закон a(t)
движения твердого тела. Уравнение, выражающее угловое ускоре-
ускорение, есть следствие теоремы 5.1.4 и потому не содержит неизвестных
реакций в точках А и А1 закрепления оси. Остальные пять уравнений
служат для вычисления реакций R и R/. Однако видно, что полный
набор всех составляющих реакций найти невозможно. Составляю-
Составляющие Дз и R'3 вместе препятствуют поступательному перемещению
тела вдоль направления ез, и их нельзя определить по отдельности,
а можно найти лишь их сумму. Относительно поиска этих реакций
имеем статически неопределимую задачу. Остальные составляющие
iJi, R2, Ri, R2
456 Глава 6. Динамика твердого тела
вычисляются однозначно, так как левые части соответствующих
уравнений движения представляют собой известные функции време-
времени, когда найдена зависимость ш = u(t).
Теорема 6.3.1. Если ось вращения служит главной и централь-
центральной осью инерции тела, то уравнения для определения реакций R\,
R,2, R[, R'2 совпадают с уравнениями, получающимися из условий
равновесия твердого тела.
Доказательство. Поскольку ось вращения есть главная ось
инерции, то вектор ез (см. § 1.9) должен быть собственным для опе-
оператора инерции Лд, а значит, должно быть J\s = J23 = 0. Так как
ось центральная, то г'с1 = г'с2 = 0. Система, составленная из первых
двух, четвертого и пятого уравнений движения, примет вид
F1 + R1 + R[ = 0, Mi - aR'2 = 0,
F2 + Д2 + R'2 = 0, M2 + aR[ = 0.
Выпишем уравнения равновесия твердого тела (см. теорему 4.8.1):
F + R + R/ = 0, М + г7 х R7 = 0.
Осталось умножить скалярно эти уравнения на векторы е[ и e'2.D
Следствие 6.3.1. Если неподвижная ось тела служит главной
и центральной осью инерции, а внешние силы отсутствуют, то
при вращении тела реакции R и R/ в точках закрепления оси не
возникают.
Такие оси называются свободными {естественными) осями вра-
вращения. Следствие 6.3.1 дает необходимый и достаточный признак
свободной оси.
Следствие 6.3.2. Если неподвижная ось тела служит главной
осью инерции, а внешние силы отсутствуют, то при вращении те-
тела вокруг этой оси не возникает реакция R' в точке А'.
Оси, вращение вокруг которых при отсутствии внешних сил не
вызывает появления реакции одной из закрепленных точек, называ-
называются постоянными {перманентными) осями вращения. Очевидно,
что свободные оси будут также и постоянными осями.
6.4. Физический маятник
457
§ 6.4. Физический маятник
Физическим маятником называют тяжелое твердое тело, которое
может свободно вращаться вокруг неподвижной горизонтальной оси.
Действие параллельного поля тяжести приводится к равнодействую-
равнодействующей, проходящей через центр масс тела (см. § 1.7) и равной весу тела.
Положение физического маятника будем определять углом а между
вертикалью и плоскостью, проходящей через ось вращения и центр
масс. Момент инерции тела относительно оси вращения обозначим
7зЗ) массу тела — буквой М.
Определение 6.4.1. Радиусом инерции тела относительно оси,
заданной направлением е, называется неотрицательная скалярная
величина &, удовлетворяющая равенству
1е = Мк2,
где 1е — момент инерции тела относительно этой оси.
Как и в § 6.3, начало отсчета А подвижного репера расположим
на оси вращения. Базисные векторы примем следующими: е3 напра-
направим вдоль оси вращения, е^ — так, чтобы плоскость векторов е'х, e3
содержала центр масс тела, е'2 — так, чтобы она дополняла базисные
векторы до правой тройки (рис. 6.4.1).
Физический маятник со-
совершает плоскопараллель-
плоскопараллельное движение вокруг не-
неподвижной горизонтальной
оси А А''. На рисунке по-
показан срез маятника плос-
плоскостью, проходящей через
его центр масс С перпен-
перпендикулярно к оси вращения.
Движение маятника опре-
определяется углом а, образо-
образованным прямой ОС с вер-
вертикальной плоскостью.
Рис. 6.4.1. Физический маятник
Радиус-вектор центра масс будет иметь следующее разложение по
ортам подвижного репера:
где / — расстояние от центра масс до оси вращения, z — смещение
центра масс вдоль оси вращения относительно точки А.
458 Глава 6. Динамика твердого тела
Вектор силы тяжести Р, будучи направлен по вертикали, сохра-
сохраняет неизменную ориентацию в пространстве. Когда оси репера, свя-
связанного с телом, повернуты относительно вертикали на угол а, то
Р = Mg(e[ cos a — e^sina).
Следовательно, момент силы тяжести относительно оси е3 дается вы-
выражением
М3 = е3 • (г'с х Р) = Р • (е3 х г'с) = Р • (/е3 х е[) = /Р -е'2 = -Mglsin a.
Учтем, что ш = d, и выберем радиус инерции тела так, чтобы
J33 = Mk2. Изменение кинетического момента относительно оси е3
описывается соотношением
d2<* _ gl ....
Это и есть уравнение движения физического маятника.
Определение 6.4.2. Величина
/' = к2 II
называется приведенной длиной физического маятника. Точка О',
расположенная на перпендикуляре к оси вращения, проходящем че-
через центр масс, на расстоянии /' по ту же сторону от оси, что и центр
масс, называется центром качания. Точка О пересечения перпенди-
перпендикуляра с осью вращения называется точкой подвеса.
Следствие 6.4.1. Уравнение колебаний физического маятника
совпадает с уравнением колебаний математического маятника (оп-
(определение 3.9.1)} вся масса которого сосредоточена в центре кача-
качания. Теория движения математического маятника может быть
полностью применена к анализу движения физического маятника.
Следствие 6.4.2. Точка подвеса и центр качания расположены
по разные стороны от центра масс твердого тела, причем
где р есть центральный радиус инерции.
Доказательство. Пусть момент инерции тела относительно оси,
параллельной оси вращения и проходящей через центр масс, равен
Мр2. По теореме 1.10.2 Гюйгенса-Штейнера найдем
Подставив найденное значение к в формулу для /', получим
6.4. Физический маятник 459
Следствие 6.4.3. Как видно из формулы
при уменьшении I до значения р период т малых колебаний маятника
уменьшается вместе с I:
а при дальнейшем уменьшении (I < р) период начинает увеличи-
увеличиваться.
Теорема 6.4.1. (Гюйгенс). Точка подвеса физического маят-
маятника и центр качания суть точки взаимные. Если центр качания
принять за точку подвеса, то прежняя точка подвеса будет цен-
центром качания. Период колебаний маятника при этом не изменит-
изменится.
Доказательство. Если центр качания принять за новую точку
подвеса, то расстояние от этой точки до центра масс станет равным
/' — /, а приведенная длина /* тогда вычислится по формуле
Рассмотрим задачу об определении реакций в точках А и А' за-
закрепления физического маятника. Сначала вычислим составляющие
момента силы тяжести в репере Ае[е'2е'3:
Mi=e/1-(r/c х Р) = Р-(е/1 х r'c) = zP-(ei x ез) = -гР- e'2
М2 = е'2 • (г'с хР) = Р. (е'2 х г'с) = Р • (-/е{, + ze[) = zMg cos a.
Отметим, что уравнение колебаний физического маятника допускает
интеграл энергии
a2 gcosa _ a2 gl cos a
где h — постоянная, зависящая от начальных условий. Этот инте-
интеграл позволяет вычислить значение угловой скорости по известному
углу а поворота маятника.
460 Глава 6. Динамика твердого тела
Выпишем теперь уравнения движения, содержащие искомые ре-
реакции (см. § 6.3):
iJi = -/М 2А + f-4-ybcosa ,
j- -Jsina,
К = j
Д'3 + Я3 = 0.
В частности, если плоскость Ае[е2 есть плоскость симметрии маят-
маятника, то ось вращения будет главной осью инерции. Значит, тогда
Ji3 — ^23 = 0, а кроме того, z = 0. В итоге
Я'2 = R[ = 0,
и ось вращения маятника будет перманентной осью.
Приведем несколько примеров практического применения физи-
физического маятника.
Пример 6.4.1. Маятниковые часы. Как уже отмечалось выше,
период малых колебаний маятника выражается формулой
Регулировка хода часов с таким маятником посредством изменения рас-
расстояния / между центром масс и точкой подвеса имеет ограниченные
возможности, так как справедливо неравенство
Видим, что при необходимости диапазон регулировки периода колеба-
колебаний маятника (а следовательно, точности хода часов) может быть рас-
расширен посредством уменьшения центрального радиуса инерции р маят-
маятника. О
6.4. Физический маятник 461
Пример 6.4.2. Определение ускорения д свободного падения.
Ускорение свободного падения можно определить, зная период т коле-
колебаний. Мы будем предполагать, что измерение времени производится с
требуемой точностью. Для малых колебаний маятника найдем
_ 4tt2J33
9 " М1т* '
В этой формуле момент инерции J33 и расстояние от точки подвеса ма-
маятника до его центра масс с трудом поддаются непосредственному из-
измерению. Чтобы обойти эту трудность, применяют оборотный маятник.
Оборотный маятник имеет две призмы, острые ребра которых обращены
друг к другу, а прямая, их соединяющая, есть ось симметрии и, следова-
следовательно, содержит центр масс. Маятник заставляют поочередно качаться
на этих ребрах, а перемещением дополнительных грузов достигают того,
чтобы периоды малых колебаний маятника совпали. Тогда по теореме
Гюйгенса расстояние между ребрами, которое можно очень точно изме-
измерить, и будет равно длине V эквивалентного математического маятника.
Отсюда
4тг2/' Л
* = —•<>
Пример 6.4.3. Определение момента инерции тела относительно
какой-либо оси. Заставляя качаться тело вокруг горизонтальной оси и
наблюдая период его колебаний, можно найти момент инерции J33 по
формуле
Mglr2
J33 = . о )
4тН
где расстояние / известно не вполне надежно. Чтобы обойти эту труд-
трудность, возьмем какое-нибудь другое тело с массой М', которое поме-
поместим так, чтобы его центр масс находился точно на оси вращения тела
М. Пусть J33 — момент инерции тела М'. Величину J33 можно весьма
точно вычислить, если телу М' придать простую геометрическую форму.
Например, можно взять две равные цилиндрические гири, поместив их
на одинаковых расстояниях от оси вращения. Обозначим а' расстояние
от центра масс составного тела М -f M' до оси вращения. Тогда
п ~ М + АР'
Откуда (M-f M')af = ML Предположим, что, закрепив тело М' вместе
с телом М на оси вращения, мы получим период колебаний т'. Так как
момент инерции массы М + М1 относительно неподвижной оси равен
</зз + </зз» то должно быть
(М + М')а'д(т'J М1д(т'?
J33 + ^33 = ^ = -^—
462 Глава 6. Динамика твердого тела
Следовательно, справедлива пропорция
J33
или
г2
В итоге в правой части полученной формулы остались только известные
величины и величины, поддающиеся точному измерению.О
§ 6.5. Задача о центре удара
Рассмотрим твердое тело, которое может свободно вращаться во-
вокруг неподвижной оси с направляющим вектором eg, закрепленной в
точках А и А1 , расстояние между которыми равно а. Предположим,
что в начальный момент времени тело находится в покое. Пусть к
точке В тела, имеющей радиус-вектор г# по отношению к точке Л,
приложен удар Р, направленный по касательной к окружности, ко-
которую может описывать точка В при вращении тела вокруг оси, так
что Р || вз х г^. Для простоты изучим случай, когда центр масс
тела, определенный радиусом-век тором гс, принадлежит плоскости,
проходящей через точку В и ось вращения. В этой же плоскости вы-
выберем базисный вектор е^ перпендикулярно вектору е^. Вектор е!2
должен образовывать с ними правую тройку.
При ударе положение твердого тела не изменится, но тело при-
приобретет угловую скорость ы вращения вокруг оси е^. Разложим век-
векторы Р, гв, Гс по базисным векторам:
Р = Ре'2, гв = Ье[ + 2ьвз, rc = le[ -f ze'3.
Тогда разложение момента удара по тем же векторам запишется в
виде
гв х Р = -zbPe[ + ЬРе'3.
Воспользовавшись теоремами об изменении скорости центра масс
и кинетического момента при ударе, получим следующую систему
уравнений:
Rx + R[ = 0, -zbP - aR'2 =
P + R2 + R'2 = w/M, aR[ = w J23,
Первая группа из трех уравнений выражает теорему об изменении
скорости центра масс, вторая группа — теорему об изменении кине-
кинетического момента. Последнее уравнение второй группы описывает
6.5. Задача о центре удара 463
изменение кинетического момента относительно оси вращения и по-
позволяет найти угловую скорость после удара. Остальные уравнения
дают возможность определить ударные реакции R и R/ точек закре-
закрепления оси вращения.
Полученная система уравнений удара в рассматриваемой задаче
может быть выведена и непосредственно из уравнений движения тела
вокруг оси (§ б.З). Для этого достаточно каждое уравнение движения
умножить на Д* и перейти к пределу при Д* —> 0.
Определение 6.5.1. Центром удара называется точка твердого
тела, удар по которой не вызывает ударных реакций в местах закре-
закрепления неподвижной оси.
Теорема 6.5.1. Центр удара в рассматриваемой задаче имеет
радиус-вектор
гц = бце^ 4- 2це'3,
где 6ц = Jzz/{IM), а координата zn определяет на оси вращения та-
такую точку, для которой эта ось служит главной осью инерции.
Доказательство. В системе уравнений удара примем
R\ = гц — R,2 — R<2 — 0.
С учетом того, что и> = 6P/J33, из второго уравнения этой системы
получим
к = ш-
Подставим в четвертое уравнение системы значение удара Р, выра-
выраженного из второго уравнения:
{ i3 u) = 0.
Напомним (см. § 1.8), что
Ji3 = — / г\ГзAт, Ml = / r\ dm.
v v
Следовательно, должно быть
Лз + zulM = - ri(r3 - 2Ц) dm = 0,
v
так как ш ф 0. Отсюда ясно, что (Ji3 + zulM) есть компонента J{3
тензора инерции относительно точки, лежащей на оси вращения и
смещенной от точки А на расстояние 2Ц, и эта компонента должна
быть равна нулю. Кроме того, имеем J23 == ^23 = 0.0
464 Глава 6. Динамика твердого тела
§ 6.6. Движение твердого тела около неподвиж-
неподвижной точки
Пусть в абсолютном пространстве закреплена только одна точка
твердого тела. Обозначим ее О. С твердым телом жестко свяжем
правый репер Ое^е^е^. Пусть гс — радиус-вектор центра масс, и> —
угловая скорость тела, К — кинетический момент, М — суммарный
момент внешних активных сил, приложенных к телу, взятые относи-
относительно точки О и разложенные по базису e'l5 е'2, e^:
к = ад + ад + ад,
М = Afiei + М2е'2 + М3е'3.
Оператор инерции, связывающий векторы К и ы, представляется в
репере Oe^e^eg постоянной матрицей
J = (JijI ij= 1,2,3.
Чтобы воспользоваться уравнениями движения, выведенными в § 6.2,
освободим твердое тело от связи в точке О, введя реакцию R, прило-
приложенную к этой точке.
Уравнение, выражающее теорему об изменении количества дви-
движения (см. § 6.2), имеет вид
m -Xi = F + R,
at
где m — масса тела, F — суммарная активная сила. Так как ско-
скорость и ускорение точки О равны нулю, то по теореме 2.16.3 Ривальса
ускорение центра масс определено формулой
—-- = u>xrc+u>x(u>x rc).
at
Поэтому реакция, заставляющая точку О оставаться неподвижной,
дается равенством
R = m[u> xrc-fwx(wx rc)] — F.
Пусть /(г) = 0 — уравнение эллипсоида инерции твердого тела
относительно точки О (см. § 1.8):
/(р) = т(р,р)-1=
6.6. Движение твердого тела около неподвижной точки 465
Теорема 6.6.1. Вектор К кинетического момента перпендику-
перпендикулярен к плоскости, касающейся эллипсоида инерции в точке G пере-
пересечения эллипсоида с лучом, выходящим из неподвижной точки О
параллельно вектору угловой скорости и>.
Доказательство. Пусть г — радиус-вектор точки G: г = эеи?.
Нормаль к эллипсоиду параллельна градиенту от функции f(r):
Обратимся теперь к уравнению кинетического момента (теорема
5.1.5, § 6.2):
at
Предположим, что базисные векторы е^, е'2, е^ суть собственные век-
векторы тензора инерции (§ 1.9). Координатные оси, связанные с телом,
тогда будут главными, а кинетическая энергия тела запишется в виде
(§ 6.2)
Т = 1( V + Bq2 + Сг2),
где А, В, С — главные моменты инерции относительно соответству-
соответствующих координатных осей, р, q, r — проекции угловой скорости ш на
главные направления. Для расчета компонент вектора кинетическо-
кинетического момента имеем формулу К = дТ/дш или
А1 = _ = ЛР, K2 = - = Bq, A. = ^ = C7r.
Подставив эти значения в уравнение изменения кинетического мо-
момента, найдем
dt
Эти уравнения называются динамическими уравнениями Эйлера.
Замечание 6.6.1. Если оси репера Ое[е'2е'3 не будут главными
осями инерции, то динамические уравнения станут существенно бо-
более сложными:
dl<1
dt
30- 1503
466 Глава 6. Динамика твердого тела
-f U3K1 —W1K3 = М2,
dt
dl<3
dt
где компоненты
+ UJ\ K2 — Ш2К1 = М3.
t = 1,2,3,
получаются посредством частного дифференцирования по wi, u>2, ^1
выражения для кинетической энергии.
Замечание 6.6.2. Репер Ое^е^вз, вообще говоря, не обязательно
жестко связывать с твердым телом. Но тогда моменты инерции уже
могут не быть постоянными, хотя вид уравнений движения, приве-
приведенных в замечании 6.6.1, не изменится.
Для того чтобы полностью определить закон движения твердого
тела, системы динамических уравнений Эйлера недостаточно. Эту
систему следует дополнить кинематическими соотношениями (§ 6.2).
В целом получается система дифференциальных уравнений, исследо-
исследование свойств решения которой часто сопряжено со значительными
трудностями. Ниже будут рассмотрены три случая, когда для этой
системы аналитически может быть построено общее решение. Это
— случай Эйлера, когда момент внешних сил отсутствует, а также
случаи Лагранжа-Пуассона и Ковалевской, когда движение вокруг
неподвижной точки происходит под действием параллельного поля
силы тяжести.
§ 6.7. Случай Эйлера
Пусть абсолютно твердое тело закреплено в неподвижной точке
О, а момент внешних сил отсутствует: М = 0. Тогда динамические
уравнения Эйлера принимают вид
В ^ + (А - С)рг = 0,
Для этих уравнений справедлив интеграл энергии (см. теорему 5.1.8):
Ар2 + Bq2 + С г2 = h.
6.7. Случай Эйлера 467
Кроме того, имеет место интеграл кинетического момента (см. след-
следствие 5.1.4):
К = const,
означающий, что вектор кинетического момента не изменяется в аб-
абсолютном пространстве. В частности, остается постоянным его мо-
модуль:
У У 22 2
Лемма 6.7.1. В случае Эйлера постоянна проекция угловой ско-
скорости и> на неподвижное направление К кинетического момента.
Доказательство. Найдем скалярное произведение
шК/сг = (р Ар + q Bq + г Cr)/cr = h/cr.O
Следуя Пуансо, изучим движение эллипсоида инерции Э тела от-
относительно неподвижной точки О. Дело в том, что этот эллипсоид
жестко связан с самим телом. Положение эллипсоида инерции в про-
пространстве однозначно определяет положение твердого тела.
Назовем апексом точку, в которой луч, выходящий из неподвиж-
неподвижной точки О коллинеарно вектору и>, пересекает эллипсоид инерции.
Пусть г — радиус-вектор апекса.
Теорема 6.7.1. Расстояние от неподвижной точки О до плос-
плоскости, касательной к эллипсоиду инерции в апексе, не меняется при
движении твердого тела.
Доказательство. По теореме 6.6.1 вектор кинетического момен-
момента задает нормаль к эллипсоиду инерции, взятую в апексе. Расстоя-
Расстояние от точки О до касательной плоскости есть
6 = г • К/а.
Но согласно определению эллипсоида инерции (см. § 1.8)
где 1Ш — момент инерции тела относительно мгновенной оси враще-
вращения. Поэтому
г =
По лемме 6.7.1 будем иметь (см. теорему 6.1.3)
-1 _ 2Г VK
~ уДТа ~ ~'
з«*
468 Глава 6. Динамика твердого тела
Следствие 6.7.1. (Геометрическая интерпретация Пуансо).
Плоскость V, касательная к эллипсоиду инерции в апексе, непо-
неподвижна в абсолютном пространстве. Движение твердого тела в
случае Эйлера можно представить качением эллипсоида инерции по
неподвижной плоскости V без проскальзывания.
Доказательство. Плоскость V имеет фиксированное расстояние
до неподвижной точки О, а ее ориентация, определяемая вектором
кинетического момента, остается постоянной во все время движения.
Точка касания принадлежит оси угловой скорости, и, значит, ско-
скорость точки эллипсоида, совпадающей с апексом, равна нулю.П
Определение 6.7.1. Полодия — это кривая, описываемая апек-
апексом на поверхности эллипсоида инерции. Герполодия — это кривая,
вычерчиваемая апексом на неподвижной плоскости V, касающейся
эллипсоида инерции в каждый момент времени.
Подвижный аксоид (см. § 2.13) имеет вершину в точке О и в
качестве основания — полодию. Неподвижный аксоид имеет вершину
в точке О и в качестве основания — герполодию.
Радиус-вектор г = rie[ -f 1*2^2 + гзе3 точки на полодии должен
удовлетворять как уравнению эллипсоида инерции
так и уравнению, получаемому из условия сохранения модуля кине-
кинетического момента:
Лу + B2q2 + C2r2 = ^{А2г\ + В2г\ + С2г2) = а2.
Откуда
Из этого уравнения и уравнения эллипсоида инерции следует урав-
уравнение подвижного аксоида:
А(А - D)r\ + В(В - D)r\ + С (С - D)r\ = 0.
В дальнейшем будем считать, что
А > В > С.
Тогда для того чтобы этот конус был вещественным (движение было
реализуемым), необходимо и достаточно выполнение неравенства
А > D > С.
6.7. Случай Эйлера
469
Оно — очевидное условие того, что расстояние S = D/2 от каса-
касательной плоскости V до точки О будет меньше, чем наибольшая по-
полуось С/2, и больше, чем наименьшая полуось Л/2. Аксоид вы-
вырождается в прямую, параллельную вектору е[ или е^, когда D = Л
или D = С'. В этих случаях полодия будет состоять из двух точек
пересечения большой или соответственно двух точек пересечения ма-
малой оси с эллипсоидом инерции.
При D = В аксоид превращается в две вещественные плоскости,
проходящие через среднюю ось:
С(В - С)
Л(Л - В)'
Полодия в этом случае состоит из двух эллипсов, пересекающихся
по средней оси эллипсоида инерции и симметричных относительно
координатных плоскостей.
Вблизи точек пересечения большой
и малой осей инерции с эллипсо-
эллипсоидом картина полодий напомина-
напоминает окрестность особой точки ти-
типа "центр" (рис. 3.9.1). В малой
окрестности средней оси е'2 имеем
картину полодий, характерную для
седловой точки (рис. 3.9.8).
Рис. 6.7.1. Схема полодий на эллипсоиде инерции
В общем случае полодия служит пересечением эллипсоида инер-
инерции и конуса второго порядка, имеющего те же плоскости симметрии,
что и эллипсоид. Она состоит из двух различных замкнутых ветвей,
симметричных друг к другу относительно неподвижной точки и од-
одной из главных плоскостей эллипсоида, и обладает четырьмя вер-
вершинами, для которых радиус-вектор г, выходящий из неподвижной
точки, имеет максимум или минимум модуля. При движении одна из
ветвей полодии катится по неподвижной плоскости V. Вторая ветвь
катится по плоскости, симметричной V относительно неподвижной
точки. Общий вид расположения полодий на эллипсоиде инерции
представлен на рис. 6.7.1. Имеем однопараметрическое по D семей-
семейство кривых.
Пусть в начальный момент апекс находится в окрестности наи-
наименьшей оси эллипсоида инерции:
А > D > В > С.
470 Глава 6. Динамика твердого тела
Из уравнения подвижного аксоида получим
А(А - D) ,
+
C(D-B)
Так как апекс принадлежит эллипсоиду инерции, то г\ ограничено
по величине. Следовательно, когда D —* А, полодии стягиваются к
точке пересечения эллипсоида с его наименьшей главной осью.
Аналогично, пусть в начальный момент апекс находится в окрест-
окрестности наибольшей оси эллипсоида инерции:
А > В > D > С.
Тогда справедливо неравенство
r3'
B(B-D)
которое показывает, что при D —> С полодии стягиваются к точке
пересечения эллипсоида с его наибольшей главной осью.
Чтобы изучить структуру герполодий, опустим из неподвижной
точки О перпендикуляр на плоскость V. Пусть этот перпендикуляр
попал в точку Е. Его длина 8 выражается равенством
6 = 1/V15.
Из точки Е проведем радиус р в точку на герполодий. По теореме
Пифагора
где г — расстояние от точки О до апекса. При движении апекса по
полодии это расстояние изменяется в ограниченных пределах:
Гщ < Г < ГМ.
В ограниченных пределах будет изменяться и р:
рт = у/гЪ
Поэтому герполодия заключена между двумя концентрическими ок-
окружностями. В зависимости от длины дуги полодии герполодия мо-
может оказаться как замкнутой, так и незамкнутой кривой. В послед-
последнем случае она заметет всюду плотно кольцо между окружностями
максимального рм и минимального рт радиуса. В частных случа-
случаях D = А или D = С полодия и герполодия обращаются в точку.
Эллипсоид инерции будет вращаться, оставаясь в соприкосновении
6.7. Случай Эйлера 471
с плоскостью V своей вершиной, расположенной соответственно на
малой или большой полуоси. При D — В полодия обращается в два
эллипса, проходящих через среднюю ось, и тогда минимальный ра-
радиус герполодии рт = 0.
Теорема 6.7.2. В случае Эйлера ось угловой скорости неподвиж-
неподвижна в твердом теле тогда и только тогда, когда она совпадает с од-
одной из главных осей инерции.
Доказательство. Необходимость. Пусть ось b угловой скоро-
скорости неподвижна в твердом теле. Это значит, что коэффициенты &i,
62, Ьз ее разложения по базисным векторам, связанным с телом:
b = 6ie;+ 62e'2 + 63е^,
остаются постоянными во времени. Так как u> = u>b, то, очевидно,
г =
Кинетическая энергия не изменяется. Следовательно, и модуль ш
угловой скорости тоже будет постоянным. Уравнения Эйлера примут
вид
(С - B)qr = 0, {А - С)гр = 0, {В - A)pq = 0.
Если эллипсоид инерции не есть эллипсоид вращения, то по край-
крайней мере две из величин р, д, г должны быть равны нулю. Но это и
означает, что тело вращается вокруг одной из главных осей инерции.
Если эллипсоид инерции представляет собой эллипсоид вращения,
например А = В ф С, то тогда любая ось в плоскости, перпенди-
перпендикулярной оси, соответствующей моменту инерции С, будет главной.
Величины р и q могут быть тогда любыми, и если хотя бы одна из
них отлична от нуля, то тогда должно быть г = 0. Если А = В — С,
то тогда любая ось тела будет главной, ар, g, r могут при этом быть
произвольными.
Достаточность. Пусть, например, начальные условия выбраны
так, что р = q — 0, г = Го ф 0. Динамические уравнения допускают в
этом случае единственное решение: р = q = 0, г = 7*о- Это означает,
что вектор угловой скорости сохраняет свое положение относительно
твердого тела, а кроме того он совпадает по направлению с вектором
кинетического момента, который остается неподвижным в абсолют-
абсолютном пространстве. Аналогично можно рассмотреть случаи закрутки
вокруг других главных осей.П
Следствие 6.7.2. Главные оси инерции служат перманентны-
перманентными (постоянными) осями вращения твердого тела вокруг неподвиж-
неподвижной точки (см. § б.З).
472 Глава б. Динамика твердого тела
Теорема 6.7.3. Движение оси угловой скорости устойчиво в
окрестности большой или малой полуосей инерции и неустойчиво
в окрестности средней полуоси.
Доказательство. По смыслу устойчивость движения означает,
что в любой момент времени координаты объекта мало изменятся при
малом изменении начальных условий. Пусть в начальный момент
направление угловой скорости близко к направлению малой полуоси
(D мало отличается от А). Тогда координаты апекса удовлетворяют
неравенству
2 A(A-D) 2 А(А-Р)
2 + r3S C(DB)ri< C2(DB
которое означает, что если параметр D, определенный начальными
условиями, по величине близок к Л, то координаты г2 и гз будут
малыми в любой момент времени. Тем самым движение оси угло-
угловой скорости в окрестности наименьшей полуоси эллипсоида инерции
устойчиво.
Аналогично пусть в начальный момент времени направление уг-
угловой скорости близко к направлению большой полуоси (D мало от-
отличается от С). Тогда координаты апекса удовлетворяют неравен-
неравенству
r2 2 C(D-C) 2 D-C
Г1+Г2- в(в-п)Гз< b(b-dy
Следовательно, при D, по величине близком к С, малыми в любой
момент времени будут координаты г\ и г2. Это означает устойчивость
движения оси угловой скорости в окрестности большой полуоси эл-
эллипсоида инерции.
В окрестности средней полуоси все полодии разделяются на два
семейства эллипсами, служащими полодиями при D = В. Будучи
мало отклонен от точки пересечения средней полуоси с эллипсоидом,
апекс движется по полодии, близкой к соответствующему эллипсу и,
следовательно, значительно отклоняется от начального положения,
сколь бы близким оно ни оказалось к точке средней полуоси. Отсюда
— неустойчивость такого движения.О
Заметим, что в теореме 6.7.3 имеется в виду лишь устойчивость
движения оси угловой скорости. Сами вращения твердого тела при
этом неустойчивы, так как даже небольшие изменения величин угло-
угловых скоростей могут приводить к значительным изменениям угловых
координат.
Определение 6.7.2. Регулярной прецессией называется движе-
движение твердого тела около неподвижной точки, при котором тело уча-
6.7. Случай Эйлера 473
ствует в сложном вращении с постоянной переносной угловой скоро-
скоростью о>п и с постоянной по величине относительной угловой скоро-
скоростью ыг при сохранении угла между векторами ып nuir.
Теорема 6.7.4. Пусть А = В > С. Тогда в случае Эйлера возни-
возникает регулярная прецессия с переносной угловой скоростью ып, на-
направленной по вектору кинетического момента:
"П = К/Л,
и относительной угловой скоростью ыг, направленной вдоль наи-
наибольшей оси инерции:
где г — проекция угловой скорости тела на эту ось.
Доказательство. Если А = В, то третье уравнение Эйлера дает
откуда г = го и, следовательно, постоянно. Векторы кинетического
момента К и угловой скорости а> имеют следующие разложения:
К = Аре[ + Aqe'2 + Сге'3,
Поэтому
А _ К _ ,
л-с" л-с~гез'
а значит, векторы ы, К и ось тела ез принадлежат одной плоскости.
Кроме того, справедлив интеграл энергии
Л(р2 + q2) + Сг2 = А(р2 + q2 + г2) + (С - A)r2 = h.
Следовательно,
2 _ h + (А - С)г2
Ш А
сохраняет значение. Поскольку г не меняется, то угол, образованный
вектором а? и осью е^, а также угол, образованный неподвижным в
пространстве вектором К и осью е^, будут постоянными. Такое дви-
движение тела есть сложное вращение. Уравнение, связывающее векто-
векторы ы, К, eg, можно представить в виде
474 Глава 6. Динамика твердого тела
Отсюда ясно, что угловая скорость и>п прецессии вокруг вектора ки-
кинетического момента и угловая скорость а>г собственного вращения
даются формулами
К
-, шг = г
- -J e3.D
При регулярной прецессии плоскость, содержащая векторы а>, К,
ез, вращается вокруг вектора К с угловой скоростью о>п. Если ввести
углы Эйлера так, что вдоль вектора К будет направлен неподвижный
базисный вектор ез, то для регулярной прецессии угловые скорости
собственного вращения и прецессии (см. § 2.5), а также угол нутации
будут постоянными:
Полодия станет окружностью с центром на наибольшей оси инерции.
Герполодия также окажется окружностью.
Замечание 6.7.1. Если между главными моментами инерции
справедливо соотношение
А > В = С,
то тогда возникает регулярная прецессия, при которой относительная
угловая скорость направлена по наименьшей оси эллипсоида инер-
инерции.
Перейдем к задаче определения закона движения. С этой целью
исключим г из интегралов энергии и модуля кинетического момента:
Ар2(А - С) + Bq2(B -C) = a2- hC.
Аналогично после исключения р
Bq2(A - В) + Cr2(A ~C) = hA - с2.
Пусть А > В > С, тогда
a2-hC> 0, hA - a2 > 0.
С помощью полученных соотношений выразим величины риг через
где
, <T2-hC 2 hA-<T2
at = -г-— —, at =
B(B - C)' r ~ B(A - B)'
6.7. Случай Эйлера 475
Для определенности предположим, что a2 > a?.. Тогда должно быть
—ar < q < ar. При этом условии величина р никогда не обращается
в нуль и, будучи непрерывной, не меняет знака. Пусть в начальный
момент р > 0. При этом условии р будет положительным в течение
всего времени движения. Величина г обращается в нуль, когда q =
±аг. Из второго уравнения Эйлера
видим, что q меняет знак вместе с г. При г > 0 будет q < 0. При
q — —аг величина г обращается в нуль, и происходит смена знака q.
При г < 0 будет q > 0, и q возрастает до тех пор, пока не достигнет
значения q = ar. Подставив найденные значения р и г во второе
уравнение Эйлера, получим
(В-С)(А-В)
AC
где правило выбора знаков оговорено выше. Обозначим
_ 1(В-С)(А-В)
а%' РМ
Тогда
i = ±nV(l - *2)A - *2*2)-
После разделения переменных время t выразится с помощью элли-
эллиптического интеграла первого рода:
ds
Величины р, q, r будут периодическими по времени с периодом
1
ds
т
¦*/
Когда функции p(t), q(t), r(t) известны, можно определить закон дви-
движения твердого тела. Учтем, что вектор К кинетического момента
неподвижен в абсолютном пространстве, и направим вдоль него еди-
единичный базисный вектор е3. Разложим ез. по базису репера Oe[ef2ef3,
жестко связанного с телом:
3 = -~{Аре[ + Bq e'2 + Сге'3).
с
476 Глава 6. Динамика твердого тела
Коэффициенты разложения суть известные функции времени.
Пусть h = a+bi+cj+a1 k — кватернион, характеризующий угловое
положение тела. По теореме 2.6.2 найдем
Ар . Bq 9 ,9 Сг 1
bd— ac~ ——, ab + cd = —-, аг + аг = Ь -.
2(т 2G 2а 2
Отсюда
__ B^fd — Ара _ Ара1 + Bqa
Остаются неизвестными лишь две функции a(t) и d(t).
Чтобы получить кинематические уравнения для a(t) и d(t)} введем
кватернион (см. § 2.15)
Ъ.ш = pi -f qj + rk,
составленный с помощью координат вектора угловой скорости в ре-
репере, жестко связанном с телом. Тогда
Воспользуемся правилом умножения для кватернионов:
Ь
d= -(-cp-f 6cjf + ar).
Из этой группы выберем первое и последнее уравнения и подставим
в них коэффициенты с и 6, выраженные через and. Получим
где ft — постоянная энергии. Имеем систему линейных дифференци-
дифференциальных уравнений с переменными коэффициентами. В общем случае
можно определить а и d каким-либо численным методом.
6.7. Случай Эйлера 477
Отметим также, что эта система, как следовало ожидать, имеет
первый интеграл
••¦'=?4
На плоскости с декартовыми координатами a — абсцисса и d — ор-
ордината мы можем ввести полярные координаты: радиус р = y/a2 + d2
и полярный угол /?, так что
a = pcos/?, d = psin/3.
Очевидно, что в силу рассматриваемой системы дифференциальных
уравнений для а и d справедливо равенство
i> h + Cr
к 2(<т + Сг)
с известной правой частью. Поэтому зависимость /?(<) выражается
квадратурой.
Если А = В, то г и, следовательно, р будут постоянными, и урав-
уравнение для C легко интегрируется:
" v и/ ' ^и' 2(<т + Сг)
Видим, что при А — В изображающая точка на плоскости коэффи-
коэффициентов a, d описывает окружность постоянного радиуса
с центром в начале координат. Если О > 0, то вращение выполняется
против хода часовой стрелки, а если О, < 0, то — по ходу часовой
стрелки.
Примем снова А ф В и определим теперь закон движения твер-
твердого тела, применив для этого углы Эйлера у?, ф, д. По-прежнему
неподвижную ось ез выберем совпадающей по направлению с векто-
вектором кинетического момента К. Тогда
К = Аре[ -f Bq е'2 + Ое'3 = <те3.
Отсюда получаем систему тригонометрических уравнений
Ар— a sin д sin <p, Bq — a sin д cos <р, Сг — a cos fl.
Из третьего уравнения следует
COS!? = ,
а
478 Глава 6. Динамика твердого тела
а из первого —
Ар
sin <р = —г
asiwd
Первые два кинематических уравнения Эйлера имеют вид
р — ф sin d sin <p 4- I? cos <?>,
q — ф sin i? cos <p — d sin <?>.
Исключив t?, получим
p sin <?> + q cos <?>
^ = : .
sin v
Из выражений для Ар и Bq через углы Эйлера можно усмотреть, что
a sin в(р sin <p + q cos <p) = Лр2 + ??</2.
Поэтому
Следовательно, в процессе движения угол прецессии вокруг вектора
кинетического момента может только возрастать.
Тем самым и задача об определении закона движения с помощью
углов Эйлера также сведена к квадратурам.
§ 6.8. Случай Лагранжа-Пуассона
Рассмотрим движение твердого тела вокруг неподвижной точки в
поле силы тяжести. С помощью ортонормированных векторов е^, е^,
ез, жестко связанных с телом, зададим направления главных осей
инерции относительно неподвижной точки О. Соответственно Л, В,
С суть главные моменты инерции. Потребуем, чтобы тело было дина-
динамически симметричным (эллипсоид инерции был эллипсоидом вра-
вращения). Например, пусть
А = В.
Центр масс тела расположим на положительном направлении полу-
полуоси симметрии (волчок Лагранжа):
ге=Сез, С>0.
В качестве независимых лагранжевых координат примем углы Эй-
Эйлера <р, ф, i9. Ось прецессии направим вертикально вверх, а ось
6.8. Случай Лагранжа-Пуассона 479
собственного вращения зададим единичным вектором е'3 (см. § 2.5).
Кинематические уравнения Эйлера (§ 2.15) имеют вид
р = ф sin д sin <р 4 1? cos <p,
q = ф sin д cos <^> — i9 sin <p,
г = ф cos i? + ф-
Кинетическая энергия
выражается через угловые скорости следующим образом:
Т = 1 [Л(^2 sin2 а? + а?2) + С(ф cos t? + ^J].
Сила тяжести приложена к центру масс. Силовая функция опреде-
определена формулой
U = -mg? costf.
Выпишем уравнения Лагранжа для координат <р и ф (§ 6.2):
Здесь ни кинетическая энергия, ни силовая функция от <р и т/> не
зависят. Этим уравнениям соответствуют первые интегралы
ф(А sin2 д + С cos2 1?) + CV cos t? = /?Л,
С(^ cos д + ф) = Сг0,
где /?, го — постоянные интегрирования. Отсюда
ф sin2 д •=. Р — Ьго cos г?,
^cosi? 4- <? = г0,
причем 6 = С/Л. Кроме того, имеет место интеграл энергии
А(ф2 sin2 д 4- г?2) 4- О2 = -2тяС cos tf + Л,
который можно переписать более удобно:
V>2 sin2 i9 4 i?2 = a-
480 Глава 6. Динамика твердого тела
Постоянные а и а даются равенствами
1
а = -г(Л — Сгп), а = 2mg(/A.
А
Указанные первые интегралы образуют полную систему дифферен-
дифференциальных уравнений первого порядка относительно углов Эйлера:
i/>2sin2i? + tf2 = a-acosi9,
ф sin2 d = /3 — Ьго cos г?,
ф cos d + ф = го.
Подставив в первое уравнение значение ф, найденное из второго урав-
уравнения, получим
(/? - бго cos dJ + г92 sin2 г? = (a - a cos i?) sin219.
Чтобы упростить это уравнение, введем новую переменную г/ = cos i9.
Тогда
J
9 9
= (а — аг/)A — г/ ) — (/? - бгог/) = /(г/),
^^" 1-г/2 '
ф = го — г/г/> = Го — г/ •
1-г/2 "
Первое уравнение преобразованной системы полезно сопоставить с
аналогичным уравнением в теории сферического маятника (§ 3.12).
Сходство этих уравнений обусловливает сходство методов исследова-
исследования движения. Закон u(t) определяется свойствами функции /(г/).
Лемма 6.8.1. Пусть в начальный момент t0 движения задано
u(to) = г/о, причем /(г/о) > 0. Тогда многочлен /(г/) имеет три
действительных корня щ, г/2, г/', удовлетворяющих неравенствам
— 1 < г/1 < г/о < г/2 < 1 < и1 < -foe.
Доказательство. Многочлен /(г/) — третьей степени, причем
/(г/) < 0 при г/ —> —оо, /(г/) < 0 при г/ = ±1,
/(г/) > 0 при и -> +оо, /(г/0) > 0.
Кроме того, |г/о| < 1.D
6.8. Случай Лагранжа-Пуассона
481
Следствие 6.8.1. Многочлен f(u) можно представить в виде
f(u) = а{и - щ)(и2 - u)(uf - и).
Величина и вместе с щ должна во все время движения оставаться
в интервале
ui < и < и2,
так как по смыслу задачи f(u) не может стать отрицательным. Угол
нутации fl колеблется между двумя предельными углами
удовлетворяющими равенствам
COSl?2 == U2-
Чтобы узнать закон «(/), надо проинтегрировать уравнение
В нем, когда и возрастает от и\ до и2, следует брать знак "+". Когда
и убывает от и2 до wi, следует брать знак "—".
В случае Лагранжа движения твер-
твердого тела точка z пересечения оси
eg с единичной сферой принадлежит
полосе между параллелями, соответ-
соответствующими COS$i =«1Й COS $2 = ^2.
Эти параллели получаются в резуль-
результате сечения сферы заштрихованны-
заштрихованными горизонтальными плоскостями.
Рис, 6.8.1. Область допустимых положений точки z
Выполним качественное исследование движения. Возьмем еди-
единичную сферу с центром в неподвижной точке О и через О прове-
проведем вертикальную ось с направляющим вектором ез (рис. 6.8.1). На
этой оси отметим точки, соответствующие значениям щ и и2. Через
них проведем горизонтальные плоскости, которые пересекут сферу
по двум параллелям. Выделим точку z, в которой ось е^ пересекает
сферу. Параллель точки z задается величиной и. Точка z всегда
заключена между параллелями, соответствующими щ и и2, и опи-
описывает кривую, идущую от одной из них к другой. Когда эти две
параллели близки между собой, ось тела е^ приближенно описывает
31 - 1503
482
Глава 6. Динамика твердого тела
круговой конус вокруг оси ез- Параллели могут совпадать, и тогда
ось ез скользит по поверхности соответствующего кругового конуса.
Во всех вариантах кривая, описываемая точкой z на сфере, достигает
обеих параллелей.
Теорема 6.8.1. При — 1 < ui < 1*2 < 1 в случае Лагранжа-Пуас-
Лагранжа-Пуассона существуют только три типа кривых, описываемых точкой z
на единичной сфере между ограничивающими параллелями $2 и д\.
1. \/3/(Ьго)\ > 1 или |/?/(Ьго)| < 1 и а < аC/(Ьг0). Тогда угол пре-
прецессии изменяется строго монотонно. Угловая скорость прецессии
никогда не обращается в нуль. Кривая, описываемая точкой z, глад-
гладко касается обеих параллелей #2> $1 (рис. 6.8.2, а).
2. /3/(Ьго) = U2- Тогда угол прецессии изменяется монотонно.
Угловая скорость прецессии обращается в нуль на параллели $2-
Кривая, описываемая концом z вектора е'3, имеет точки возврата
на параллели $2 и гладко касается параллели i?i (рис. 6.8.2,6).
3. |/?/Fго)| < 1, а > a/3/(bro). Тогда угол прецессии меняется
не монотонно. Угловые скорости прецессии имеют разные знаки
на параллелях fli и tf2- Кривая, описываемая точкой z, имеет пе-
петлеобразный характер с точками самопересечения (рис. 6.8.2,в) и
гладко касается обеих параллелей.
Рис. 6.8.2. Возможные типы движения волчка Лагранжа
Доказательство. Воспользуемся аналогией между углами Эй-
Эйлера и полярными координатами (см. § 2.5). Определим положение
точки z на сфере с помощью угла д и полярного угла ф. Имеем
du
dip /3-ubro
1. Обозначим щ = /3/(Ьго). Если и^ не принадлежит отрезку
i, 112], то ф никогда не обращается в нуль. Так будет, если \щ\ > 1
6.8. Случай Лагранжа-Пуассона 483
или f{u^)) < 0. Из определения функции f(u) получим, что
Когда |гц| < 1, то /(ity) имеет тот же знак, что и выражение
а/?
а- г—,
ого
Если условие первого пункта теоремы выполнено, то /(tty) < 0, и щ
не попадает в интервал между корнями и\ и U2. Угловая скорость
прецессии сохраняет знак. На параллелях $i и $2 производная п
обращается в нуль. Кривая, описываемая точкой z и заданная па-
параметрически: u(t), Ф(г), гладко касается этих параллелей. Первый
пункт теоремы доказан.
2. Пусть ity совпадает с одним из корней и\ или u*i. Докажем, что
это может быть только корень u*i. В самом деле, если /(w^) = 0, то
из вида функции f(u) следует
a =
В выражении f(u) заменим а этим значением:
/(«) = (и* - «)[аA - и2) - 22
Один из корней очевиден. Другой обращает в нуль выражение в ква-
квадратных скобках. Для этого корня должно быть и^ > и. Значит,
иф есть наибольший корень, и точки, в которых угловая скорость
прецессии обращается в нуль, располагаются на верхней параллели,
а не на нижней. Чтобы определить, как приближается траектория
точки z к верхней параллели, вычислим угол 6 между траекторией
и меридианом, проведенным через вертикаль и точку z (рис. 6.8.3).
Очевидно,
А с siwd с1ф A — и2)ф 0го(иф — и)
Когда и —¦ ity, имеем 6 —> 0, а значит, точка 2 приближается к верх-
верхней параллели в направлении перпендикуляра и аналогично удаля-
удаляется. На верхней параллели имеем точку возврата. Утверждение
пункта 2 доказано.
3. Пусть и\ < и^ < U2. Тогда ф обращается в нуль только на
параллели, соответствующей значению и^ и лежащей внутри допу-
допустимой для точки z полосы. Знак ф вблизи параллели д\ будет про-
противоположен знаку ф вблизи параллели i?2- Когда и^ постепенно
31*
484
Глава 6. Динамика твердого тела
Угол 8 образован вектором касатель-
касательной к траектории точки z на единич-
единичной сфере и соответствующим мери-
меридианом. Элементарное смещение точ-
точки вдоль траектории представляется
в виде суммы смещений вдоль парал-
параллели на величину йф sin d и вдоль ме-
меридиана на величину dd. Если 6 = 0,
касательная к траектории направле-
направлена вверх по меридиану. Если 6 = тг/2,
касательная к траектории направле-
направлена по параллели.
Рис. 6.8.3. Определение угла 6
уменьшается от и2 к «ь на траектории точки z образуется петля,
существование которой и утверждает пункт 3.
4. Чем меньше щ по сравнению с г«2, тем больше размер петель.
При уменьшении и^ соседние точки, в которых траектория z касается
параллели д\, сближаются. Покажем, что не существует значения
параметра ity, при котором эти точки совпадут.
Примем противоположное. Пусть при некотором значении и^ Е
{и\, U2) соседние точки касания на параллели д\ совпали. На поверх-
поверхности единичной сферы возникает замкнутая траектория С точки z
(рис. 6.8.4). Ограниченная этой траекторией область V не содержит
внутри себя конца вектора ез, принадлежащего пересечению единич-
единичной сферы с вертикальной осью. Конец вектора е3 может принадле-
принадлежать лишь границе ?, когда д = 0. Поэтому вектор е'3, вычерчивая
траекторию ?, не может совершать вращательное движение вокруг
вертикальной оси ез-
Для удобства дальнейших преобразований введем базис, "полу-
"полусвязанный с телом". Он образован единичным вектором е^, напра-
направленным вдоль оси симметрии тела, ортогональным к нему единич-
ным вектором е^ , направленным по угловой скорости нутации (ли-
(линии узлов) и расположенным в горизонтальной плоскости, и векто-
вектором е2 \ образующим с е'3,е[ ' правую тройку (рис. 2.5.1).
Из-за того, что А = В, оси ер и е ' служат, как и оси е[ и е'2,
главными осями инерции. Следовательно,
и = 1? е(!2) + ф sin 1? еB2) + гое?°, К = Ад е(х2) + Аф sin д еB2) + Сгое?\
Возьмем плоскость V у проходящую через вертикальную ось и вектор
К. Нормаль к этой плоскости параллельна вектору ез х К, который
6.8. Случай Лагранжа-Пуассона
485
В случае Лагранжа точка z пересече-
пересечения оси симметрии волчка с единич-
единичной сферой не может описывать за-
замкнутую кривую, аналогичную изо-
изображенной на рисунке. Эта точка все
время находится вблизи вертикаль-
вертикальной плоскости V, содержащей век-
вектор кинетического момента и моно-
монотонно вращающейся вокруг вертика-
вертикали. Поэтому возможные типы движе-
движения изображающей точки z исчерпы-
исчерпываются показанными на рис. 6.8.2.
Рис. 6.8.4. Замкнутая траектория точки z
с учетом равенства е3 х е3 = е\ ' sin т9 принимает вид
е3 х К = Ад(е3 х е^) + Аф sin д(е3 х е?°
+ Cr0eB) sin tf.
По теореме 5.1.5 о кинетическом моменте скорость конца вектора К
выражается формулой
—- = -?e3 х тде3 = (тде3 х е^ =
at
sind.
Найдем угловую скорость о?п вращения плоскости V. С этой целью
вычислим смешанное произведение
(е3 х К) • е{2) = Аф sin tf[(е3 х еB2)) • е^] + Cr0sin д =
= Аф sin tf[(eB2) x e{2)) • е3] + Cr0 sin i? =
= — Аф sin i?(e3 • е3) + Cro sin fl = A sin д(—ф cos д +
Abrosind A3
sin2i? V 6^о
Мы исследуем случай, когда u\ < u^ < U2. Следовательно, \щи\ < 1,
го ф 0, и рассматриваемое смешанное произведение сохраняет знак в
процессе движения, никогда не обращаясь в нуль. Введем горизон-
горизонтальную составляющую Кг вектора К:
Тогда е3 х К = е3 х Кг.
выразится формулой
е3 х К
Угловая скорость вращения плоскости V
Ж
= Abro(mg(l —
'-2
486 Глава 6. Динамика твердого тела
B)
Заметим теперь, что вектор е^ ортогонален плоскости, содер-
содержащей векторы е'3 и ез- Значит, угол у между этой плоскостью и
плоскостью V удовлетворяет равенству
(е3хКЬ42) Abro п
COS7 = _ = ___A
Для определенности примем г о > 0. Тогда получим, что cos 7 >
0. Тем самым угол 7? изменяясь непрерывно, обязан во все время
движения быть в диапазоне
7Г 7Г
<Т<2-
Отсюда следует, что если вектор е^ вычерчивает замкнутую кривую
?, то плоскость V не может монотонно с ограниченной снизу угловой
скоростью вращаться вокруг вектора ез. Это, однако, противоречит
тому, что в данном случае шп > е > 0, где е — постоянная.
Аналогичные рассуждения приводят к противоречию и тогда, ко-
когда го < 0.
Полученный результат убеждает нас в том, что путем непрерыв-
непрерывных изменений начальных условий другие типы траекторий точки г,
кроме тех, что содержатся в утверждении теоремы, найти невозмож-
невозможно. Вместе с тем имеет место непрерывная зависимость решений по
начальным условиям.О
Теорема 6.8.2. Для возникновения в случае Лагранжа-Пуассона
регулярной прецессии вокруг вертикальной оси необходимо и доста-
достаточно выполнение в начальный момент времени движения следую-
следующих равенств:
д0 = 0, 2ф1 cos до - 2Ьгофо + а = 0.
Доказательство. Регулярная прецессия означает, что движение
происходит при сохранении значений
Так может быть только тогда, когда щ = t/2 = costfo, т.е. и\ должно
быть кратным корнем уравнения f(u) = 0. Отсюда
du
= 0.
Выполнив дифференцирование, найдем
-аA - и\) - 2ui(a - ащ) + 2bro(f3 - Ьгощ) = 0.
6.8. Случай Лагранжа-Пуассона 487
Напомним, что
а - ащ = р2 + q2 = ф2 sin2 ti + Ь2 = ф1 sin2 tf0,
/?- 6rot/i = V>osin2tfo-
Учитывая эти выражения, получим уравнение
sin2 г?оB^2 cos ^о - 26го^о + а) = 0.
Оно имеет два решения: т90 = 0, а также угол i?o, Для которого
2^g cos tf о - 26ro^o + а = 0.
Решение 1?0 = 0 следует исключить, так как в условии теоремы речь
идет о регулярной прецессии вокруг вертикальной оси. Следователь-
Следовательно, остаются условия, приведенные в утверждении теоремы. В силу
тождественности преобразований они оказываются необходимыми и
достаточными. П
Определение 6.8.1. Волчок Лагранжа, вращающийся вокруг
вертикальной оси {$ = 0), называется спящим волчком.
Уравнения движения допускают решение, для которого д = 0.
Вопрос о том, будет ли волчок, закрученный вокруг вертикальной
оси, спящим, по сути дела сводится к вопросу об устойчивости такого
решения.
Теорема 6.8.3. (Условие Маиёвского). Волчок Лаграпжа,
закрученный вокруг вертикальной оси, будет спящим тогда и толь-
только тогда, когда
Доказательство. В соответствии с условием теоремы ось волчка
eg направлена в начальный момент вертикально: sintfo = 0. Решение
0 = 0, ф = 0, ф = ф0
удовлетворяет уравнениям движения. Найдем условие, при котором
такое решение будет устойчиво по $. Как следует из теоремы 6.8.2,
корень и = 1 должен быть кратным корнем многочлена f(u). При
этом имеются две возможности:
1. Совпали корни ио и и'. В этом случае, очевидно, имеется корень
г/i ф U2 = и\ и малые возмущения начальных условий приведут к
малым возмущениям корней, что приведет к большому отклонению
г? от начального положения. Движение будет неустойчивым по tf.
488 Глава 6. Динамика твердого тела
2. Совпали корни и\ и и2. В этом случае малые возмущения при-
приведут к малым отличиям обеих корней и\ и г/2 друг от друга и от
единицы. Движение в этом случае будет устойчивым.
Условие, позволяющее отделить первый случай от второго, состо-
состоит в том, что во втором случае при и = 1 функция f(u) выпукла
вверх, т.е. d2f/du2 < О или
2а - (а - а) - Ъ2г1 < 0.
Учитывая, что для рассматриваемых начальных условий a = a,
и выполняя необходимые преобразования, получаем утверждение
теоремы. D
Определение 6.8.2. Волчок Лагранжа называется быстро за-
закрученным, если в начальный момент времени угловые скорости пре-
прецессии и нутации равны нулю, угол нутации может быть отличен от
нуля, и задана большая угловая скорость собственного вращения.
Иначе говоря,
^0 = 0, 1*0 = 0, tfo^O, brg/a>l.
Определение 6.8.3. Псевдорегулярной прецессией называется
движение быстро закрученного волчка Лагранжа, происходящее ме-
между близкими с заданной точностью различными параллелями д\ и
Теорема 6.8.4. Для любого сколь угодно малого Ад > 0 суще-
существует угловая скорость собственного вращения, при которой бы-
быстро закрученный волчок Лагранэюа осуществляет псевдорегуляр-
псевдорегулярную прецессию между параллелями д\ и д2 = $i + Д#.
Доказательство. Для быстро закрученного волчка получим с
помощью первых интегралов
а = at/0, /3 =
где щ = costV Функция f(u) принимает вид
f(u) = (а - аи)A - и2) - (/? - br0uJ.
Подставим сюда вместо а и /3 их выражения через щ:
f(u) = (t/o - ti)[a(l - и2) - b2r2(u0 - и)].
Как и следовало ожидать, один из корней f(u) равен щ. Кроме того,
щ = иф, и значит, щ = и2- На параллели щ имеем точки возврата
(случай 2 теоремы 6.8.1). Корень и\ находится из уравнения
6.9. Случай Ковалевской 489
Отсюда
q(l-tij)
uo-ui= \ 17
При увеличении го разность щ — и\ стремится к нулю.П
Движение оси симметрии быстро закрученного волчка осуществ-
осуществляется в виде мелких нутационных дрожаний и прецессионного дви-
движения, происходящего все время в одну сторону. Реальный волчок
при таком движении издает характерное гудение.
§ 6.9. Случай Ковалевской
Пусть твердое тело под действием силы тяжести движется около
неподвижной точки. Направим ортонормированные векторы е^, е'2,
eg с началом в этой точке по главным осям инерции тела. Соответ-
Соответствующие моменты инерции обозначим А, В, С. Примем, что между
моментами инерции выполнено соотношение
А = В = 2С,
т.е. эллипсоид инерции есть эллипсоид вращения вокруг оси е^.
Центр масс расположим в экваториальной плоскости этого эллипсои-
эллипсоида (плоскости векторов е[, е'2). В рассматриваемом случае любая ось
в экваториальной плоскости, проходящая через неподвижную точку,
оказывается главной, и мы можем выбрать оси е\ и е'2 так, чтобы
радиус-вектор центра масс тела представился равенством
Пусть неподвижный вектор е3, направленный вертикально вверх,
имеет разложение
Тогда сила тяжести выражается формулой Р = —тд ез, а силовая
функция принимает вид
U = -тд е3 • гс = -тд?у.
Сила тяжести потенциальна, а ее момент относительно вертикаль-
вертикальной оси равен нулю. Следовательно, имеем два первых интеграла
уравнений движения — интеграл энергии и интеграл площадей от-
относительно оси e3:
Ар2 + Aq2 + Сг2 + 2тд?у = й,
Ару + Aqi + Cry11 = j3.
490 Глава 6. Динамика твердого тела
Найдем еще один первый интеграл. Для этого рассмотрим динами-
динамические уравнения Эйлера
Cr = -mg?y'.
Примем во внимание соотношения между моментами инерции и пе-
перепишем эту систему следующим образом:
2p-qr, 2q = -pr + y3, г = -72,
где
9Z п 9i i gZ
7з = —7 , 72 = -^-7 . 7i = —7-
Величины 7i, 72, 7з удовлетворяют дифференциальным уравнениям,
аналогичным уравнениям Пуассона для вектора ез (см. § 2.15):
71 = ^72 - 97з, 72 = Р7з - Г71, 7з = ЧП\ - Р72-
Возьмем функцию
Вычислим производную от нее в силу уравнений движения твердого
тела:
— = 2рр- 2qq - 71 = rBpq - 72).
Пусть теперь
Y = 2pq-72.
Для этой функции найдем
^ = 2pq + 2pq - 72 = ~r(p2 - q2 - 7i) = -rX.
at
Следовательно, в силу уравнений движения выполняется равенство
где к — постоянная интегрирования. Это и есть искомый первый ин-
интеграл уравнений движения, называемый интегралом Ковалевской.
6.10. Частные первые интегралы 491
Четвертый "геометрический" интеграл уравнений выражает по-
постоянство модуля вектора
Как будет показано ниже (см. § 9.6), полученной совокупности пер-
первых интегралов в данном случае достаточно, чтобы найти фазовые
траектории посредством квадратур. Качественное исследование ре-
решения в случае Ковалевской выходит за рамки настоящей книги.
Здесь остановимся лишь на некоторых его свойствах.
Представим интеграл энергии в виде
В трехмерном пространстве введем прямоугольные оси и возьмем
точку Л/*(Х,У, Z). Координаты этой точки удовлетворяют равен-
равенствам
Z-X = Д Х2+У2 = ?2,
из которых ясно, что при движении тела точка Я перемещается по
эллипсу, служащему пересечением прямого кругового цилиндра ра-
радиуса к с образующей, параллельной оси Z, и плоскости, которая
проходит параллельно оси У, наклонена к оси X под углом тг/4 и
пересекает ось Z в точке с координатой D.
Спроектируем точку Я на плоскость (X, У). Получим новую точ-
точку п(Х, У, 0). Из выражений для производных X, У можно усмотреть,
что
XY -XY = -r(X2+Y2).
Пусть /? — угол между радиусом-вектором точки п и осью X. Тогда
из полученного равенства следует
Другими словами, точка п движется по окружности радиуса к так,
что угловая скорость ее радиуса-вектора равна —г.
§ 6.10. Частные первые интегралы
При изучении случаев Эйлера-Пуансо, Лагранжа-Пуассона, Ко-
Ковалевской мы имели исчерпывающий набор так называемых алге-
алгебраических первых интегралов, справедливых при любых начальных
492 Глава 6. Динамика твердого тела
условиях и позволяющих исследовать движение с помощью квадра-
квадратур. Других случаев существования полного набора подобных пер-
первых интегралов в задаче движения тяжелого твердого тела около не-
неподвижной точки не имеется. В связи с этим может быть поставлен
вопрос о существовании в указанной задаче алгебраических первых
интегралов, справедливых не во всей области начальных условий, а
в какой-нибудь ее части. Утвердительный ответ дают случаи Бо-
Бобылёва-Стек лова и Гёсса. Рассмотрим их.
Случай Бобылёва-Стеклова. Пусть между главными моментами
инерции, взятыми относительно точки опоры, справедливо соотноше-
соотношение
а центр масс принадлежит второй главной оси:
гс =
Тогда система уравнений движения примет вид
Ар - BА - C)qr = -тел"г), у = ry' - qy",
2Aq - (С - А)рг = О, у' = ру" - гТ,
С г + Apq = mgyj], у" = qy - ру',
где 7, У? У — координаты вертикального вектора ез в базисе ei, e'2,
eg главных направлений инерции:
Динамические уравнения Эйлера допускают следующее частное ре-
решение
r = 0, q = qo, p=^P-y = My.
Aq0
Три уравнения Пуассона примут вид
7 =-907", j' = Mjy", т" = 7(«о - МУ).
Кроме очевидного
для этих уравнений существует еще один первый интеграл
2qoj' + М-у2 = Г.
Отсюда
/ , а , Г М
/qo ?qo
6.10. Частные первые интегралы 493
Следовательно,
(т»J = 1-72-(/-2J.
Найденное значение у" подставим в первое из уравнений Пуассона.
Тогда интегрирование уравнений движения сводится к эллиптиче-
эллиптической квадратуре
—qQdt = ±-
Таким образом, здесь мы получаем лишь частное решение задачи о
движении тела.
Случай Гесса. Предположим, что все три момента инерции не
равны между собой:
А > В > С,
а центр масс задается радиусом-вектором
*с — Че1 Т ЧеЗ*
Тогда система уравнений движения для рассматриваемого случая
примет вид
Ар - (В - C)qr = тду'С, 7 = н' ~ Я7",
Bq — (С — А)рг = тд(у"? — у С), у1 = ру" — гу,
Cr-(A- B)pq = -г
Эти уравнения допускают интеграл энергии, интеграл площадей от-
относительно вертикальной оси ез = 7ei +7/е2 + 7//ез и геометрический
интеграл вида |ез| = 1:
Ар2 + Bq2 + Cr2 = -2тд(?у + СУ) + К
Ару + Bqy' + Cry" = <т,
Из первого и третьего динамических уравнений Эйлера получим
г - чН(в -с) + рС(а - в)] = о.
Потребуем теперь, чтобы для координат центра масс были выполне-
выполнены соотношения
(В-С) = кСB, (А-В) = Ы^2,
где к — произвольный постоянный коэффициент. Тогда предыдуще-
предыдущему дифференциальному уравнению можно придать вид
494
Глава 6. Динамика твердого тела
Отсюда мы заключаем, что при подходящем выборе начальных усло-
условий будет справедлив частный интеграл, указанный Гессом:
Начальные условия также должны удовлетворять этому равенству.
Помимо указанных в теории движения тяжелого твердого тела
около неподвижной точки существуют еще несколько случаев, когда
справедливы алгебраические частные первые интегралы. Тогда мож-
можно решить задачу, получив закон движения посредством квадратур.
§ 6.11. Симметричный гироскоп
Одним из наиболее ярких примеров применения теории движения
твердого тела около неподвижной точки служит гироскоп.
Определение 6.11.1. Симметричный гироскоп — это твердое
тело, одна из точек которого О закреплена, а эллипсоид инерции
относительно этой точки есть эллипсоид вращения. Ось симметрии
эллипсоида е^ называется осью фигуры гироскопа.
В технике для обеспечения вращения гироскопа вокруг одной из
его точек часто применяется карданов подвес. Наиболее простая кон-
конструкция карданова подвеса представляет собой два кольца (рис.
6.11.1). Гироскоп может вращаться вокруг оси фигуры е'3 относитель-
относительно внутреннего кольца. Внутреннее кольцо может вращаться вокруг
оси е^ ' относительно внешнего. Внешнее кольцо может вращаться
вокруг оси ез неподвижной подставки. Ось е\ перпендикулярна как
к вз, так и к ез. Все три оси пересекаются в одной точке О, которая
и будет здесь неподвижной точкой.
Карданов подвес образован двумя
круговыми кольцами. Внешнее коль-
кольцо вращается вокруг оси, закреплен-
закрепленной в некоторой системе отсчета.
Внутреннее кольцо вращается во-
вокруг перпендикулярной оси, закре-
закрепленной во внешнем кольце. Само
тело вращается вокруг оси е^, закре-
закрепленной во внутреннем кольце. Тело
имеет неподвижную точку О, лежа-
лежащую в пересечении указанных осей.
Рис. 6.11.1. Карданов подвес
6.11. Симметричный гироскоп 495
Из-за симметрии эллипсоида инерции гироскопа любая ось, про-
проходящая через О и перпендикулярная к е'3, будет главной осью инер-
инерции, и моменты инерции гироскопа относительно таких осей будут
одинаковыми. Обозначим эти моменты инерции А. Момент инерции
относительно оси фигуры обозначим С.
Разложим угловую скорость и> гироскопа по направлению оси фи-
фигуры и по направлению, к ней перпендикулярному. Вторую составля-
составляющую обозначим и>э, а составляющую вдоль оси фигуры обозначим
г. Составляющую и>э можно интерпретировать как угловую скорость
оси фигуры, а г — как скорость собственного вращения вокруг этой
оси.
Кинетический момент К гироскопа представим суммой
К = Кэ + Cre'g,
где Кэ = AuK. Величина Н = С г называется собственным момен-
моментом гироскопа. Ей соответствует вектор Н = Сге'3 собственного
момента.
Пусть ei, е2 — единичные направления каких-нибудь осей, пер-
перпендикулярных друг к другу и к оси вз, образующих с е'3 правый
репер и вращающихся так, что проекция угловой скорости репера
Ое^е'зе'з на плоскость, перпендикулярную е'3, равна ыэ. Имеем
и>э = ре\ + q е2, Кэ = Аре\ + Aq е2.
Очевидно, что проекции угловой скорости репера Ое^е^вз на напра-
направления e'i, е'2 также должны быть равны р и q соответственно и лишь
проекция г' угловой скорости репера на ось е^ фигуры, вообще гово-
говоря, не равна г, так как векторы е^, е'2 могут иметь вращение, неза-
независимое от гироскопа. Угловую скорость репера Oe^e^eg обозначим
J.
Воспользуемся теоремой об изменении кинетического момента:
K + w'xK = M. В проекциях на оси репера Ое^е^вз получим дина-
динамические уравнения
Вектор, равный и противоположный скорости конца К, есть мо-
момент того сопротивления, которое оказывает гироскоп внешним те-
496 Глава 6. Динамика твердого тела
лам, передающим момент М. По смыслу этот вектор представля-
представляет собой главный момент сил инерции гироскопа. Из динамических
уравнений видно, что инерционный момент образован следующими
составляющими.
1. Моменты
-л(?-,/)е'„ -*(*
не зависящие от угловой скорости г собственного вращения гироско-
гироскопа, а потому сохраняющие свою величину, если остановить собствен-
собственное вращение и превратить гироскоп в маятник. При этом ось фигуры
должна занимать то же положение, что и ось вращающегося вокруг
него гироскопа. Эти моменты обусловлены угловой скоростью а/.
2. Обращенная скорость
-ы'хН = Нхи)' = -Яде; + Нре'2
конца вектора Н. Она возникает от вращения с угловой скоростью
и/. Так как Н направлен вдоль оси фигуры, то
Г = (Н х J) = Н х ш.
Этот момент представляет собой инерционное сопротивление, раз-
развиваемое вращающимся гироскопом при изменении направления его
оси. Момент Г называется гироскопическим моментом. Как видно
из формулы, гироскопический момент перпендикулярен к плоскости,
содержащей векторы Ници направлен так, что он как бы стремит-
стремится привести вектор Н в совпадение с w.
3. Составляющая
откладываемая вдоль направления ef3, представляет собой инерцион-
инерционное сопротивление изменению скорости собственного вращения.
Пример 6.11.1. Рассмотрим действие гироскопического момента
на винтовой самолет. Пусть винт самолета вращается по часовой стрел-
стрелке, если смотреть из кабины пилота. Тогда вектор собственного момента
Н направлен по продольной оси самолета вперед. При повороте налево
(левый вираж) самолету сообщается угловая скорость и>, направленная
вверх. Гироскопический момент будет стремиться совместить вектор Н с
вектором и> так, чтобы нос самолета поднимался вверх. Аналогично при
правом вираже у самолета возникает тенденция опустить нос. Наобо-
Наоборот, когда специально поднимают нос самолета, то самолет стремится
повернуть направо, а при опускании носа — налево. Способ борьбы с
6.11. Симметричный гироскоп 497
этими явлениями состоит в уравновешивании гироскопического момента
посредством управления.О
Пусть к гироскопу не приложено никаких внешних моментов. То-
Тогда имеет место случай Эйлера движения твердого тела при А =
В ф С. Кинетический момент К будет постоянным как по величи-
величине, так и по направлению. В соответствии с теоремой 6.7.4 гироскоп
осуществляет регулярную прецессию вокруг вектора кинетического
момента. Ось фигуры вращается вокруг него с постоянной угловой
скоростью прецессии
и>п = К/Л
и образует с ним постоянный угол д. Постоянным будет также соб-
собственный момент Н = К cos д. Гироскоп вращается с постоянной
угловой скоростью вокруг оси фигуры, которая сама совершает рав-
равномерное вращение по круговому конусу вокруг постоянного напра-
направления К. При этом чем больше угловая скорость г собственного
вращения, тем меньше д.
Изучим поведение оси фигуры при действии на гироскоп отлич-
отличного от нуля внешнего момента.
Определение 6.11.2. Кинетической осью гироскопа называется
линия, направленная вдоль вектора К кинетического момента.
Теорема 6.11.1. Пусть д — угол отклонения оси фигуры от ки-
кинетической оси гироскопа, и?п = К/Л — угловая скорость прецессии,
которую имел бы гироскоп, если его освободить от внешнего момен-
момента. Тогда
иП С
lim д = О, lim — = —-.
г—оо г—оо \г\ А
Доказательство. Угол г? между кинетической осью и осью фи-
фигуры определяется формулой
Аиэ
' Сг '
Кроме того,
Когда г —> ос, например, за счет начальной закрутки или воздействия
вращающего момента вокруг оси е^, и при этом остальные компонен-
компоненты угловой скорости остаются ограниченными, то имеем tgi? —* О,
откуда и следует утверждение теоремы.?
32- 1503
498 Глава 6. Динамика твердого тела
Следствие 6.11.1. При больших значениях \г\ амплитуда коле-
колебаний оси фигуры около кинетической оси будет малой, а угловая
скорость прецессии оси фигуры достигает значительной величины
порядка \г\.
Следствие 6.11.2. В общем случае, когда внешний момент М
отличен от нуля, кинетическая ось не остается постоянной, а дви-
движется в соответствии с теоремой об изменении кинетического мо-
момента. Вместе с тем всегда существует столь большое значение
угловой скорости г собственного вращения, что угол между осью
гироскопа и кинетической осью будет сколь угодно малым.
Следствие 6.11.3. Когда собственное вращение г велико по срав-
сравнению с о;э, колебания оси фигуры составляют лишь мелкое дрожа-
ние, не имеющее существенного значения для практики.
От колебаний, указанных в следствии 6.11.3, в прикладной теории
гироскопов часто отвлекаются и в качестве основной задачи занима-
занимаются изучением движения кинетической оси, рассматривая его как
главную составляющую часть движения самой фигуры гироскопа.
Следствие 6.11.4. (Закон прецессии в прикладной теории.
Правило ЭКуковского). Внешний момент М, приложенный к ги-
гироскопу, заставляет кинетическую ось поворачиваться с мгновен-
мгновенной угловой скоростью
Msin(K7M)
"~ К
вокруг оси, перпендикулярной к плоскости векторов К иМ. Это
вращение имеет тенденцию совместить вектор К с вектором М.
Доказательство. Обозначим Мп проекцию момента М на плос-
плоскость, перпендикулярную к вектору К. Составляющая Мп не ска-
сказывается на изменении абсолютной величины |К| и вызывает лишь
поворот вектора К. Найдем угловую скорость Qe этого поворота.
Здесь е — единичный вектор ее направления, перпендикулярный к
вектору К. Искомая угловая скорость удовлетворяет уравнению
(]ехК = Мп.
Отсюда
К х (Пе х К) = К х Мп = К х М
или
6.11. Симметричный гироскоп 499
По смыслу должно быть е А. К. Поэтому
КХМ г.
Так как угловая скорость ?2 обратно пропорциональна абсолютной
величине кинетического момента
к = с
то движение оси быстро вращающегося гироскопа при прочих равных
условиях происходит тем медленнее, чем больше его собственный
момент. Этим объясняется факт чрезвычайно малой податливости
(большой жесткости) оси фигуры такого гироскопа по отношению к
приложенным к нему возмущающим силам.
Рассмотрим несколько примеров практического использования
гироскопов.
Пример 6.11.2. Гиромаятником называется гироскоп с тремя
степенями свободы, центр масс которого принадлежит оси фигуры (слу-
(случай Лагранжа-Пуассона, см. § 6.8). Такой гироскоп служит основным
чувствительным элементом гирогоризонта — прибора, предназначенно-
предназначенного для надежного определения вертикали или перпендикулярной к ней
горизонтальной плоскости. Гиромаятник движется, как быстро закру-
закрученный волчок Лагранжа. Ось фигуры подчиняется закону псевдоре-
псевдорегулярной прецессии (теорема 6.8.4). Угловая скорость прецессии ф на-
направлена вдоль вертикального вектора е3. По теореме об изменении
кинетического момента получим (рис. 6.11.2)
Вследствие быстрой закрутки волчка
Лагранжа вокруг оси его симметрии,
отклоненной от вертикали, любая точ-
точка этой оси описывает кривую, близкую
к горизонтальной окружности. Если
точку оси отметить, то плоскость гори-
горизонтальной окружности станет наблю-
J даемой и сможет служить опорой при
проведении измерений.
Рис. 6.11.2. Принцип действия гирогоризонта
sintf = P/sintf.
Отсюда
ф = Р//Я,
32*
500 Глава 6. Динамика твердого тела
где Р — вес, / — расстояние от центра масс до неподвижной точки.
Период прецессии рассчитывается по формуле
г = 2тг#/(Р/).
Конец оси фигуры будет приближенно описывать окружность, располо-
расположенную в горизонтальной плоскости.
Широта какого-либо места определяется по высоте над горизонтом
одного из небесных светил. Для измерения высоты светила нужна го-
горизонтальная плоскость, от которой производится отсчет. В условиях
хорошей видимости для этой цели может служить естественная линия
горизонта. При отсутствии видимости на суше можно пользоваться сво-
свободной поверхностью какой-нибудь жидкости или плоскостью, перпен-
перпендикулярной к отвесу. Однако эти приспособления не должны двигаться
ускоренно. В море, когда имеет место качка корабля, все эти способы
неприемлемы. Одним из первых надежно работавших в этих услови-
условиях приборов с гироскопическим маятником был искусственный горизонт
Флериэ A886 г.).О
Пример 6.11.3. Астатический гироскоп имеет центр масс, рас-
расположенный на пересечении кардановых осей (случай Эйлера-Пуансо,
§ 6.7). Если такой гироскоп установить на земной поверхности и сооб-
сообщить ему начальную угловую скорость, направленную по оси фигуры,
то при отсутствии возмущающих сил эта ось будет сохранять постоянное
направление в абсолютном репере. Астатический гироскоп применяет-
применяется, например, для управления вертикальными рулями торпеды. В этом
случае ось фигуры направлена в цель. Если торпеда сбивается с курса,
то рама поворачивается относительно вертикального диаметра внешне-
внешнего кольца подвеса. Это приведет в действие руль поворота, который
выправит курс.О
Пример 6.11.4. Чувствительным элементом указателя поворота
самолета служит астатический гироскоп с двумя степенями свободы, ось
которого вынуждена оставаться в плоскости, жестко связанной с само-
самолетом. Ось фигуры удерживается пружиной вблизи нейтрального поло-
положения. При вращении самолета вокруг направления, перпендикулярного
к оси фигуры гироскопа, развивается гироскопический момент, завися-
зависящий от угловой скорости вращения. Под действием этого момента ось
фигуры, оттягивая пружину, переходит в новое положение равновесия,
а ее отклонение передается на стрелку прибора.О
Приведенные примеры иллюстрируют лишь основные механиче-
механические принципы использования гироскопов. Современные гироскопи-
гироскопические приборы имеют значительную сферу применения. Эти прибо-
приборы устроены достаточно сложно, особенно когда они призваны дли-
длительно работать с высокой точностью в условиях действия возмуще-
возмущений.
6.12. Волчок на гладкой горизонтальной плоскости 501
§ 6.12. Волчок на гладкой горизонтальной плос-
плоскости
Пусть начало О и векторы ei, е2 абсолютного ортонормирован-
ного репера Ое^ез принадлежат гладкой горизонтальной опорной
плоскости. Направление ез вертикально. Начало ортонормированно-
го подвижного репера С^е^е^, жестко связанного с телом, примем в
центре масс тела Ст. Волчок (абсолютно твердое тело) будем считать
динамически симметричным (как в случае Лагранжа, § 6.8):
Л = В ф С.
Вектор е3 направим вдоль оси динамической симметрии. Предполо-
Предположим, что точка опоры D волчка о плоскость лежит на оси симметрии
волчка. Расстояние от точки опоры до центра масс равно /. Угол
между векторами е3 и ез по-прежнему обозначим д (угол нутации).
Радиус-вектор центра масс представим разложением по векторам аб-
абсолютного репера:
г с = nei + г2е2 + г3е3.
Уравнение связи, учитывающей действие опорной плоскости, будет
иметь вид (рис. 6.12.1)
r3-/costf = 0.
Выражение для кинетической энергии волчка получим с помощью
теоремы 5.2.2:
Т = ^mv] + ]г[А(ф2 sin2 d 4- Ь2) + С(фсмд + фJ],
где ф — угол прецессии, <р — угол собственного вращения волчка
(§ 6.8) в осях Кёнига, vc — скорость центра масс:
Сила тяжести имеет силовую функцию
U = -mgr3.
Уравнения движения волчка примут вид (§ 6.6)
mr\ — 0, тг2 = 0, тгз = —тд + Я,
502 Глава 6. Динамика твердого тела
Если в начальный момент времени
> /е' движения горизонтальная составляю-
/ щая скорости центра масс отсутству-
' ет, то волчок, опираясь о гладкую
>з горизонтальную плоскость, движется
так, что его центр масс перемещается
^ все время только вдоль вертикальной
?> /q ^ оси- Точка опоры D волчка описыва-
^ ет на горизонтальной плоскости кри-
кривые, сходные по типу с изображенны-
изображенными на рис. 6.8.2.
Рис. 6.12.1. Волчок на гладкой горизонтальной плоскости
где R — модуль реакции опорной плоскости. Направляющий вектор
реакции совпадает с ез. Уравнения допускают очевидные первые
интегралы
г\ = a\t -j- а2, г2 = аз^ ¦+¦ а4,
—— = С(ф cos d + ф) = С*го, —г = Афsin2 d ¦+¦ Cr$ cos d = Ав.
Оф дф
Здесь ai, а2, аз, а4, г0, /? — постоянные интегрирования. Кроме
того, справедлив интеграл энергии
Т = -mv2 + -[А(ф2 sin2 д + д2) + С(^ cos д Л- фJ] = -mgr3 + ft.
С учетом уравнения связи полученные интегралы позволяют закон-
закончить решение задачи с помощью квадратур. Пусть, в частности,
ai = a2 = аз = а4 = 0,
т.е. в начальный момент центр масс волчка проектируется в начало
абсолютного репера и не имеет начальной горизонтальной скорости.
Тогда, так как горизонтальные силы отсутствуют, в соответствии с
интегралом количества движения центр масс волчка будет оставать-
оставаться на вертикальной прямой, проходящей через точку О. Остальные
первые интегралы составляют систему уравнений
ф2 sin2 I? + i?2(l + ai sin2 #) = a - a cos #,
^COSl? + ф = Го,
6.12. Волчок на гладкой горизонтальной плоскости 503
где a - 2mgl/A, ax = ml2/Л, a = B/г - Crl)/A, b = С/Л. Видим,
что мы вполне можем применить технику исследования движения,
оказавшуюся полезной в случае Лагранжа-Пуассона (§ 6.8). В част-
частности, после введения переменной u = cos d получим
\2 f(u) ¦ C-broU . ;
ix2) 1-ti2
Многочлен f(u) оказывается в точности таким же, как при изучении
волчка Лагранжа. Поэтому качественный анализ поведения углов
д, гр, <р, проведенный в § 6.8, остается справедливым и в данном слу-
случае. Однако реальная картина движения будет здесь несколько иной.
Чтобы показать это, зададим следующие начальные условия
ф0 = 0, tf0 = 0, гзо = 0, #о > 0, ф0 ф 0.
Рассмотрим уравнение относительно переменной и:
- и2)] = («о - «)[аA - и2) - 62го2(«о - «)}.
Угол д не может принимать значений, для которых правая часть
отрицательна. Следовательно, д > до- Вместе с тем д не может
увеличиться до значения тг, так как при д = тг имеем и = — 1 и
Следовательно, д может достичь лишь некоторого значения д\ < тг.
Итак, значения д заключены в пределах
Обозначим р модуль радиуса-вектора точки D опоры волчка о плос-
плоскость, проведенного из начала О абсолютного репера (рис. 6.12.1).
Очевидно, что
o < р < /sin??i,
т.е. траектория точки D заключена между двумя концентрическими
окружностями радиусов
/?о = /sin^o, р\ = /sin i?i
с центром в точке О. Заметим, что когда д = t?o> угловая скорость
прецессии обращается в 0. Поэтому траектория D имеет на вну-
внутренней окружности радиуса />0 точки возврата. Очевидно, что чем
504 Глава 6. Динамика твердого тела
больше будет фо, тем меньше разница между радиусами упомянутых
окружностей.
Во всем предыдущем изложении предполагалось, что ни для зна-
значения $ — г^о, ни для значения д = д\, ни для промежуточных зна-
значений д волчок, кроме точки D, не имеет с плоскостью общих точек.
Если это не так, то задача о движении тела становится существенно
более сложной.
§ 6.13. Относительное равновесие спутника
Рассмотрим движение абсолютно твердого спутника в централь-
центральном поле тяготения сферической Земли. По теореме об изменении
количества движения центр масс спутника в центральном ньютони-
анском поле сил будет двигаться как материальная точка с массой,
равной массе m спутника (§ 3.11). Предположим, что траектория
центра масс есть окружность радиуса R с центром в центре Земли.
Из центра О Земли проведем радиус-вектор R центра масс спут-
спутника. Выберем вращающийся репер Oe'/e^'e^' так, чтобы ось е^' была
коллинеарна R, ось е'2' — параллельна скорости v центра масс, ось е"
— перпендикулярна к плоскости орбиты и составляла с указанными
двумя правую тройку. Относительно абсолютного (см. § 3.14) репера
Oeie2e3 репер Oe'/e'^eg вращается с постоянной угловой скоростью
Q = v/R вокруг вектора е" = ei. Найдем условие, при котором
спутник будет находиться в равновесии относительно вращающегося
репера Oe'/e^eg под действием сил тяготения и сил инерции: центро-
центробежных и кориолисовых.
Силовая функция, описывающая действие центрального поля на
спутник, имеет вид
где V — объем спутника, // = /М — произведение гравитационной
постоянной на массу М Земли, г — расстояние от элемента спутни-
спутника массы dm до точки О. Пусть г' — радиус-вектор элемента dm
относительно центра масс спутника. Тогда
В подынтегральном выражении силовой функции переменным инте-
интегрирования будет вектор г'. Следовательно,
б.13. Относительное равновесие спутника 505
Тем самым силовая функция зависит от радиуса орбиты и положения
спутника на орбите, характеризуемого вектором е^'. При вращениях
спутника относительно центра масс величина R не меняется. Меня-
Меняется ориентация вектора е^ относительно спутника.
Пусть ос — вектор дифференциала вращения (см. § 2.10) спутни-
спутника около центра масс. Тогда виртуальное перемещение вектора е^
относительно спутника примет вид
6е% — —а х eg.
Отсюда получим приращение силовой функции U на виртуальном
перемещении спутника, определенном дифференциалом а:
0U „ „ 3U , „ ч fdU
- OL.
Следовательно, вектор момента гравитационных сил относительно
центра масс спутника может быть найден по формуле (см. § 4.8):
Конкретный вид U зависит от формы тела и распределения массы
в его объеме. Предположим, что размеры спутника малы по срав-
сравнению с радиусом орбиты (r'/R <C 1) настолько, что функцию г"
можно разложить в ряд Тейлора, оставив в нем лишь величины до
второго порядка малости включительно. Тогда
г' 1 г'2
R
Пусть жестко связанный с телом ортонормированный репер i
задает главные центральные оси инерции спутника:
г' = pie[ + /э2е'2
f pidm-f p2dm = f p3dm = J pip2dm — f pxp3 dm = J p2p3 dm = 0.
v v v v v v
Как и прежде, главные моменты инерции обозначим
Л = J(p22 + р\) dm, В = J(p23 + р\) dm, С = I\р\ + р\) dm.
V
V
Кроме того, положим
506 Глава 6. Динамика твердого тела
Выполним теперь необходимые преобразования, опуская заведомо
равные нулю члены.
Л 2 i 2 i 2 i 2 i 2 i 2
1 + ~ ~ Щ1
v
3 М +Р1+ Р1)G2 + У2 + Т) - />?72 - рЬ'2 - рЬ}] dm.
Учитывая обозначения для моментов инерции, получим приближен-
приближенную (до членов второго порядка малости по размерам спутника от-
относительно радиуса орбиты) формулу для гравитационной силовой
функции
и = it + ??{А+в+с) ~ ш?{Лу2+Bl'2+Ст)-
Первые два члена этой формулы постоянны при фиксированном ра-
радиусе орбиты и потому не существенны. Выражение в скобках у тре-
третьего члена есть момент инерции спутника относительно оси с на-
направляющим вектором ез, т.е. относительно радиуса-вектора центра
масс.
Вычислим гравитационный момент Ыд:
= щ х е» = |?[(С - Bh'Ve; + {А- СO7"е'2 + {В - АO'7е'3].
Перейдем к учету влияния сил инерции. Силы инерции из-за вра-
вращения системы координат имеют при постоянной угловой скорости
переносного движения силовую функцию (теорема 3.13.3)
U.= ^У"[г2-(е'г'- гJ] dm=?-J{(Re'3'+r')>-[e'{. (Re'3'+ r')]2} dm =
V
?- |[r'2 - (e'/ • r'J] dm.
Пусть в репере Ос^е^е^ жестко связанном со спутником, вектор е"
имеет разложение
Тогда
[г'2 - К • г'J] dm = J [r'2(/?2 + /?? + Pi) ~ @ipi + 02P2 + РзРзJ] dm.
6.13. Относительное равновесие спутника 507
С учетом свойств осей Ос^е^е^ окончательно найдем
Заметим, что в круглых скобках стоит момент инерции спутника от-
относительно оси е'{.
Момент Мв сил инерции из-за вращения репера Ое'/е'^ е^' выража-
выражается формулой, аналогичной формуле для гравитационного момента:
Вычислим момент, создаваемый силами Кориолиса относительно
центра масс:
= 2fi f(wxr')(e'{-r')dm,
где о? — угловая скорость спутника относительно репера Oce'/e^e^,
так что относительная скорость vr точки спутника с радиусом-
вектором г; выражается формулой
vr — о? х г'.
Заметим теперь, что в осях, связанных с телом, имеем разложения
г' = рхе[ -f P2&2 + />звз, w = ре[ + qef2 + ref3 и, следовательно,
p\dm=l-{B+C-A), jp\dm=l-{C+A-B), J?dm=±
V V V
Поэтому момент сил Кориолиса принимает вид
+ B-C)- rfo(C + А- В)]е[ +
+ С - А) - р03(А + В -СМ +
+ A-B)-q0l(B + C- A)}e>3}.
При изучении стационарных положений спутника относительно ре-
репера Ое'/во'ез следует принять во внимание, что силы Кориолиса не
совершают работы на относительном действительном перемещении
спутника, а при относительном равновесии, когда ы = 0, они вообще
отсутствуют.
508 Глава 6. Динамика твердого тела
Рассмотрим потенциальную энергию гравитационных сил и сил
инерции. Для круговой орбиты Q,2 — fi/R3 (см. § 3.11). Поэтому
О2
П = у [3(Л72 + В7'2 + С7) - (А/31 + ВЩ + С/?2)].
В положении равновесия потенциальная энергия спутника должна
иметь стационарное значение.
Теорема 6.13.1. В принятых предположениях сумма потенци-
потенциальных энергий гравитационных сил и сил инерции принимает ми-
минимальное значение, когда наибольшая ось эллипсоида инерции на-
направлена вдоль радиуса-вектора центра масс, а наименьшая — по
нормали к плоскости орбиты.
Доказательство. Из выражения для потенциальной энергии
следует, что ее абсолютный минимум достигается, если минималь-
минимально выражение
Как отмечалось выше, это есть момент инерции относительно оси eJ(.
Следовательно, ось с наименьшим моментом инерции должна быть
направлена вдоль вектора ез'. Аналогично в положении абсолютного
минимума потенциальной энергии должно быть максимально выра-
выражение
л/?2 + я/?22 + с7?2,
а оно есть момент инерции относительно оси е". Следовательно, ось
с наибольшим моментом инерции должна быть направлена вдоль оси
е'/.О
Особо подчеркнем, что теорема 6.13.1 была получена в предпо-
предположении, что спутник не влияет на движение центра масс Земли и
что размеры спутника малы по сравнению с расстоянием до центра
Земли.
§ 6.14. Качение диска по горизонтальной плоско-
плоскости
В повседневной жизни часто встречается движение, при котором
одна поверхность катится по другой. Примерами могут служить ко-
колеса транспортных средств, катящиеся по опорной поверхности, ша-
шарикоподшипниковые соединения, мельничные жернова и многие дру-
другие устройства. Часто это — механические системы с неголономны-
ми связями. Здесь мы рассмотрим простейшие модели, связанные с
качением.
6.14. Качение диска по горизонтальной плоскости 509
Определение 6.14.1. Диском называется абсолютно твердое те-
тело, на поверхности которого выделена окружность. Точки сопри-
соприкосновения этого тела с опорной поверхностью могут располагать-
располагаться только на выделенной окружности. Обручем называется диск,
вся масса которого сосредоточена на окружности, по которой обруч
может соприкасаться с опорной поверхностью. Считается, что диск
упал, если в процессе движения возникают точки соприкосновения
диска с опорной поверхностью, не принадлежащие выделенной для
этого окружности.
Предположим, что диск катится по опорной абсолютно шерохова-
шероховатой (отсутствует проскальзывание точки диска, находящейся в кон-
контакте с опорой) горизонтальной плоскости под действием силы тя-
тяжести. Правоориентированный абсолютный репер Ое^ез выберем
так, чтобы его начало и ортонормированные векторы еь е2 принадле-
принадлежали опорной поверхности, единичный вектор ез направим по верти-
вертикали вверх. Пусть диск соприкасается с опорной плоскостью в точке
Оп, заданной радиусом-вектором
гп =г\е\ +г2е2.
Введем ортонормированный подвижный репер Опе^е^ез с началом в
точке Оп (рис. 6.14.1). Вектор е^ направим по касательной к опорной
окружности диска, вектор е'2 — по радиусу к центру опорной окруж-
окружности, вектор ез — перпендикулярно к плоскости опорной окруж-
окружности так, чтобы вместе с векторами е^, е2 он образовывал правую
тройку. Обозначим ф угол курса между векторами е^ и ei, d — угол
между векторами е'2 и ез (характеризует наклон опорной окружности
к опорной плоскости), (р — угол собственного вращения диска. Если
R — радиус опорной окружности, то R <р есть дуга между точкой Оп
и некоторой жестко зафиксированной точкой на окружности.
Очевидно, что пять величин
Г1, **2, 1?, ф, <р
однозначно определяют положение диска в пространстве и могут слу-
служить лагранжевыми координатами задачи.
Чтобы получить уравнения движения диска по плоскости, вос-
воспользуемся теоремой 5.2.4 об изменении кинетического момента К',
взятого относительно подвижной точки Оп-
Для простоты примем, что центр масс диска расположен в цен-
центре Ос опорной окружности, а центральный эллипсоид инерции есть
эллипсоид вращения вокруг оси, параллельной вектору е^ и прохо-
проходящей через Ос- Это означает, что моменты инерции, взятые отно-
относительно осей репера Опе[е'2е'3, не будут изменяться при движении
диска.
510
Глава 6. Динамика твердого тела
е3
О
Плоскость опорной окружности дис-
диска пересекает горизонтальную плос-
плоскость по прямой с направляющим
вектором курса е[. Плоскость окруж-
окружности наклонена и составляет с вер-
вертикалью угол д. Угол <р собствен-
собственного вращения диска отсчитывается
от проекции вертикали из точки Оп
на плоскость диска. Точка Оп сопри-
соприкосновения диска с плоскостью имеет
скорость, направленную вдоль линии
курса.
Рис. 6.14.1. Диск на горизонтальной плоскости
Закон изменения вектора К' в репере
нением
выражается урав-
урав—г—
ravn
где m — масса диска, ып — угловая скорость репера One^e^e^, vn
и vc — скорости точки Оп и центра диска Ос соответственно, М9 —
момент силы тяжести:
М^ = —mgRsinide/l.
Вектор ып можно представить с помощью разложения
ып = пхе[ + п2е'2 + fi3e3 = -1? ei + ф cos д е'2 + ф sin д е'3.
Поворот по углу д осуществляется вокруг оси е^, а по углу курса ф
— вокруг оси, параллельной вектору е3 и проходящей через Оп.
По отношению к подвижному реперу One^e^e^ поле скоростей дис-
диска вращательное с угловой скоростью ф вокруг оси е3, так как относи-
относительное поле скоростей плоскопараллельно и вследствие абсолютной
шероховатости поверхности точка Оп есть мгновенный центр относи-
относительных скоростей диска (§ 2.14). Угловая скорость диска равна
Из-за отсутствия проскальзывания диска относительно опоры в точ-
точке Оп скорость vn этой точки выражается уравнением неголономной
связи
vn = -<pRe[.
6.14. Качение диска по горизонтальной плоскости 511
Скорость центра масс 0с дается равенством
vc = ы х R е2.
Для подсчета кинетического момента диска относительно точки Оп
воспользуемся теоремой 5.2.1 Кёнига:
где Кс — кинетический момент центра масс:
Кс = тЯ2е'2х(ыхе2) =
а К* — кинетический момент диска относительно его центра масс.
По предположению, оси Oce\ef2e3 — главные центральные, несмо-
несмотря на вращение диска по углу <р, так как А = В. Поэтому
К* = Л(-1? е[ 4- ф cos d е2) + С(ф sin d + ф)е'3.
Следовательно,
К' = -(Л + raiJ2)i)ei + Аф cos d е'2 + (С + mR2)(ip sin d + ф)е'ъ =
= (А + mR2)(jJie[ + Аш2е'2 + (С + mR2)w3e'3.
Вычислим теперь векторное произведение vn x vc. Сначала заметим,
что
vc = (wn + фе'3) х Де2 = Д(ып х е2 -
Поэтому
vnxvc = —(pRpe^ x (u?n x e2 - <^ei) = —фК1^ х (о?п х е2) = 9?
Далее легко получить, что
ш„ х К; = [(С + miJ2)w3fi
- (С +
- (Л +
Сравнив коэффициенты при одинаковых базисных векторах в урав-
уравнении кинетического момента, найдем систему динамических урав-
уравнений движения
(А + mi?2)cii + (С +
Лс^2 + (А + тД2)и;1Пз - (С + mfl2)w3fii + m^tf2fii = 0,
(С + тЯ2)и>3 + Ли;2П1 - (Л + m#2)wi02 = 0.
512 Глава 6. Динамика твердого тела
Чтобы замкнуть эту систему уравнений, к ней следует добавить сле-
следующие кинематические уравнения:
шх = Qx = —19, и>2 = П2 = V> cos i?i ^з = ^з Н- <? = ^ sin ^ + <?•
Пример 6.14.1. Найдем уравнения движения обруча, катящегося
по абсолютно шероховатой плоскости. В соответствии с примером 1.14.6
будем иметь
А = В= ~шД2, C = mR2.
Поэтому система динамических уравнений примет вид
-cii -f2u;3Q2 - о^з^з = -
1 3
-ci2 + 2Wifi3 - 2u;3fii + фС1\ = О,
1 3
2u;3 + Г^2^1 - ^^1^2 = О.О
Пример 6.14.2. Напишем динамическую систему уравнений
для материального круга массы га, катящегося по абсолютно шерохова-
шероховатой горизонтальной плоскости. Воспользовавшись результатом примера
1.14.7, найдем
А = В= -mR2, C= -mR2.
Имеем следующие динамические уравнения:
-til + ^3^2 - т^2^з = -—sintf,
15 3
-ci2 + ^^1^з - ^3^1 + Ф&\ = О,
3 1 5
2 4 4
Рассмотрим так называемые циклические движения диска, т.е.
движения с постоянными значениями величин д, и>2, и>з- Если д по-
постоянно, tou>i = Qi = д = 0, и при неизменных значениях с<;2) ^з>
второе и третье динамические уравнения диска удовлетворяются то-
тождественно. Из первого динамического уравнения видим, что при
таком движении должно быть
(С + mR2)w3&2 — At>2(k>3 — ф) = —mgRsin д.
6.14. Качение диска по горизонтальной плоскости 513
Исключив ф с помощью кинематического уравнения
ф = u>3-u;2tgi9,
получим условие совместности
Аи\ tg d - (С + mR2)u3U2 = mgRsin d.
Ясно, что рассматриваемое циклическое движение диска существует
при любых значениях d = t?o и и>2 = u>20 ^ 0, так как всегда можно
найти подходящее значение из-
Из условия совместности следует, что при t? = О должно быть ли-
либо и>2 = 0, либо шз = 0, либо и>2 = и>з = 0. Когда о;г = 0, о;з ^ 0»
диск катится прямолинейно по горизонтальной плоскости с постоян-
постоянной угловой скоростью ф = из- Когда ш^ ф 0, из = 0, диск вертится
вокруг неподвижного вертикального диаметра. При Ш2 = ^з = 0 диск
неподвижно стоит на горизонтальной плоскости.
При д = $о ^ 0 найдем ^ = ^г/cosi? или
Ранее было найдено, что скорость vn точки соприкосновения диска с
плоскостью равна
vn = —фИе'х = — v?H(ei cost/?-f e2si
Поэтому координаты точки соприкосновения удовлетворяют уравне-
уравнениям
Учитывая, что ф = шз — ^2 tg tf, будем иметь
Угловая скорость ^ = u^/cost? ^ 0. Следовательно,
rx = R'ipcosip, r2 = a
где
Д' = flfsint?- —
Интегрируя, найдем
^1 — ^ю = fi'(sin ф — sin V'o)» ^2 — f*20 = — R'(cos ф — cos
33 - 1503
514 Глава 6. Динамика твердого тела
Получили, что при циклическом движении диска, когда г?0 ф 0, точка
опоры Оп описывает окружность радиуса R! с центром в точке
Гц = (По - tf'sin^ei + (^20 + R*соьфо)е2.
Отношение 1^3/^2 вычисляется из условия совместности:
w3 1 Л, Q rngR . \
uj2 C+mR2 \ w% J
§ 6.15. Качение шара по горизонтальной плоско-
плоскости
В отличие от диска любая точка шара допускается к контакту с
опорной поверхностью. Кроме того, при движении однородного шара
по горизонтальной плоскости сила тяжести всегда проходит через
точку опоры и не оказывает воздействия на движение. Радиус шара
массы m примем равным R.
Как и в § 6.14, начало О и векторы ei, ег ортонормированного пра-
правоориентированного абсолютного репера выберем принадлежащими
опорной плоскости. Вектор ез того же репера направим вертикально
вверх. Радиус-вектор центра масс шара зададим равенством
гс = nei + г2е2 4- г3е3.
Предположим, что абсолютно твердый шар однороден. Начало Ос
репера Ос^\^2^ъ осей Кёнига поместим в центре шара.
Пусть о? — угловая скорость шара, а
vc =
— скорость его центра масс. Из точки Ос выпустим радиус-вектор
гп в точку Оп контакта шара с опорной поверхностью:
гп = -Де3.
По теореме 2.12.1 Эйлера о поле скоростей твердого тела найдем аб-
абсолютную скорость уш точки шара, совпадающей с Оп:
Vu, = Vc +W X Г„.
Рассмотрим следующие случаи.
1. Шар не проскальзывает в точке контакта с опорной
плоскостью. Это означает, что скорость vm и скорость совпадаю-
совпадающей с Оп точки плоскости одинаковы и равны нулю. Следовательно,
6.15. Качение шара по горизонтальной плоскости 515
скорость vc и угловая скорость о? стеснены дифференциальным со-
соотношением
vc+u> х гп = 0.
В координатной форме это эквивалентно двум уравнениям неголо-
номных связей
г\ — Rw2 = 0, Г2 4- Ru\ = 0.
Воспользуемся уравнением кинетического момента К', взятого отно-
относительно точки Оп:
Ж'
—7- 4- mvn xvc = 0,
at
где vn — скорость смещения точки опоры по плоскости. Моменты
внешних сил отсутствуют, так как и сила тяжести, и реакция опоры
проходят через точку Оп. Кроме того, отметим, что vn = vc, так как
центр шара всегда проектируется в точку опоры. Поэтому имеем
первый интеграл
К' = <nei 4- ог2е2 4-
выражающий постоянство вектора К' в абсолютном пространстве.
Для вычисления К' воспользуемся формулой Кёнига (теорема 5.2.1):
К' = К* - тгп х vc,
где К* = Aw — кинетический момент шара относительно его центра
масс, А — осевой центральный момент инерции.
Векторный первый интеграл эквивалентен трем скалярным инте-
интегралам
Аш\ — r^mR = Gi, Аш2 4- r\mR = 0*2,
Исключив в первых двух интегралах угловые скорости wi, W2 с по-
помощью уравнений связей, найдем компоненты скорости центра масс
шара:
1 (А \"Х
(А V1 (А
Видим, что центр шара движется прямолинейно и равномерно.
Угловая скорость шара сохраняется в инерциальном простран-
пространстве:
0 ,0*2 , 0"з
ые + е + е
Значит, угловое движение шара около центра масс есть вращение
вокруг оси постоянного направления, проходящей через центр шара.
Эта ось не обязательно горизонтальна.
33*
516 Глава 6. Динамика твердого тела
2. Шар проскальзывает в точке контакта с опорной плос-
плоскостью. Это означает, что в точке контакта с поверхностью скорость
шара не равна нулю. Тогда возникает сила трения, которая будет
влиять на движение шара. Примем, что в точке контакта приложена
сила сухого кулоновского трения скольжения: FTp = — kmgуш/|уш|,
где к— коэффициент трения (см. пример 3.4.3). Относительно точки
контакта шара с плоскостью будет справедлив, как и в предыдущем
случае, векторный интеграл кинетического момента: К' = ег. Умно-
Умножив обе части этого равенства справа векторно на гп и приняв во
внимание выражение вектора К' через угловую скорость и скорость
центра масс шара, найдем
А(л) X Гп + ШГП X (Гп XVC) = (TX Гп.
Следовательно,
(тхгп mR2
U) X Гп = + —— Vc.
Л Л
Используя это выражение, получим зависимость между скоростью
шара в точке контакта и скоростью его центра масс.
В соответствии с теоремой об изменении количества движения ско-
скорость центра масс шара подчиняется уравнению
dvc . vm
m —7— = —kmg
at
Поэтому для скорости Vui будем иметь
dvm уш
Обозначим vm0 значение вектора скорости точек шара, находящих-
находящихся в контакте с опорной плоскостью, в начальный момент времени.
Тогда решение уравнения для вектора vm имеет вид
Г ае 1
vm = уш0 1 - ; г (t - t0) ,
где to — начальный момент времени движения. Другими словами,
направление скорости точек шара, находящихся в контакте с плоско-
плоскостью, с течением времени не изменяется, а величина скорости убы-
убывает линейно по времени.
6.15. Качение шара по горизонтальной плоскости 517
Теперь мы можем найти скорость центра масс:
где vco — начальное значение скорости центра масс. Таким образом
центр масс шара движется с постоянным ускорением, направленным
противоположно скорости проскальзывания шара в точке контакта.
Ускорение действует до тех пор, пока не прекратится проскальзыва-
проскальзывание. Это произойдет в момент времени
kg
¦
=?)'•
Затем шар будет двигаться в соответствии с моделью качения по аб-
абсолютно шероховатой плоскости. Скорость v* центра масс шара по
окончании проскальзывания выразится формулой
-1 • n<L -1
где и>о и vco — начальные значения угловой скорости шара относи-
относительно центра масс и скорости центра масс соответственно. Видим,
что скорость центра шара в конце проскальзывания не зависит от
коэффициента трения.
Найдем траекторию центра масс шара при проскальзывании:
Гс = -Уш01 г Г^~ + Vco(t - to) + Гс0.
IVoI 2
Отсюда видно, что если векторы ушо и vco неколлинеарны, то тра-
траектория центра масс шара представляет собой параболу, выпуклую
в направлении скорости в точке контакта шара с плоскостью. При-
Приращение радиуса-вектора г* — гсо центра шара к моменту окончания
скольжения выразится формулой:
3. Соударение биллиардных шаров. Рассмотрим соударение
двух однородных шаров, имеющих равные радиусы R и массы т.
Следуя Кориолису, примем две гипотезы.
1. Мгновенное трение отсутствует: касательные составляющие
скоростей шаров в точке контакта не изменяются. Ударный импульс
518
Глава 6. Динамика твердого тела
направлен по нормали к поверхности шаров. Он не создает момента
относительно центра шара.
2. Удар шаров абсолютно упругий: кинетическая энергия системы
при ударе не изменяется.
Учтем, что сила тяжести и сила трения шаров о плоскость суть
конечные силы. Воспользовавшись следствием 5.2.1, получаем, что
при ударе угловые скорости шаров относительно их центров не меня-
меняются. Пусть единичный вектор п задает направление линии центров
шаров при ударе, скорости центров масс шаров до удара равны vj~,
v^", а после удара — соответственно v*, vj. Обозначим u~[, u^, м*,
u^ проекции скоростей центров масс шаров на направление вектора
п до и после соударения. В согласии со сказанным выше количества
движения системы до и после соударения примут вид
Q- =
Q+ =
-f
а выражения для кинетической энергии до и после соударения запи-
запишутся следующим образом
)
-\2
,^2
где Л — момент инерции шара относительно диаметра. Воспользо-
Воспользовавшись равенствами Q~ = Q+ иГ = Т+, получим систему урав-
уравнений относительно uf, u%
ut = «i
Эта система содержит линейное и квадратное уравнения, а потому
имеет два решения. Одно из них: u* = uj~, u^ = wj следует отбро-
отбросить, а второе: и* = иJ, и^ = и~[ — оставить.
Таким образом, при ударе биллиардные шары обмениваются про-
проекциями скоростей центров на направление общего диаметра, тогда
как другие составляющие линейной и угловой скоростей сохраняют-
сохраняются.
Непосредственно после удара условия качения шаров без про-
проскальзывания могут не выполняться, и для определения радиусов-
векторов и скоростей центров шаров по окончании проскальзывания
следует воспользоваться результатами предыдущего пункта.
6.15. Качение шара по горизонтальной плоскости 519
Предположим, например, что до удара первый шар стоял на ме-
месте, а второй катился без проскальзывания и скорость его центра
была равна v. Тогда после удара скорость центра первого шара ста-
станет равной vio = n (v -п), а скорость центра второго окажется равной
v2o = v — n(v • п). Угловая скорость первого шара непосредственно
после удара равна нулю, и он начнет движение с проскальзывани-
проскальзыванием. После окончания поскальзывания скорость центра первого шара
станет равной
mR2YlmR2 5,
+—J —vlo=7(v-n)n.
Здесь учтено, что для однородного шара А = 2mR2/5 (см. пример
1.14.10). Поэтому шар, находившийся до удара в покое, после удара
будет двигаться по направлению линии центров в момент соударения,
но с несколько меньшей скоростью, чем та, которую получил его
центр при ударе.
Так как второй шар перед столкновением катился без проскаль-
проскальзывания, то непосредственно перед ударом было выполнено соотно-
соотношение и? х г„ = —V. Направление скорости центра второго шара
сразу после удара будет перпендикулярным линии центров шаров в
момент соударения. Следовательно, и второй шар непосредственно
после удара начнет двигаться с проскальзыванием. После окончания
проскальзывания скорость его центра станет равной
/ mR2Y1
, Y ( mR?
Она будет отклонена от скорости центра второго шара до удара на
угол, меньший, чем скорость V20, возникшая непосредственно после
удара. При лобовом соударении шаров после окончания проскальзы-
проскальзывания их скорости будут соответственно равны
¦ 5 . 2
vi = yv, v^ = -v.
Видим, что после лобового столкновения и первый, и второй шар
движутся в одном и том же направлении. Движение второго шара
после соударения объясняется тем, что он при ударе не меняет своей
угловой скорости.
Отметим, что в рассмотренных задачах закрутка шара вокруг вер-
вертикальной оси ез никак не влияет на движение его центра масс. Так
происходит из-за того, что контакт шара с плоскостью предполага-
предполагается происходящим лишь в одной точке. Реальные (не абсолютно
520 Глава 6. Динамика твердого тела
твердые) тела при контакте всегда деформируются. Вместо точки
возникает поверхность контакта с ненулевой площадью. Появляется
момент относительно точки Оп сил взаимодействия шара с опорной
плоскостью, и картина движения может быть значительно сложнее.
Контрольные вопросы к главе 6
6.1. Составить в терминах угловой скорости и углового ускорения
выражение для энергии ускорений свободного абсолютно твер-
твердого тела. Выписать уравнения Аппеля и получить из них ди-
динамические уравнения Эйлера.
6.2. Пусть фу #, <р — углы Эйлера, так что ф — угол прецессии, е^
— единичный вектор направления угловой скорости прецессии,
д — угол нутации, е# — единичный вектор направления угло-
угловой скорости нутации, <р — угол собственного вращения, е^ —
единичный вектор угловой скорости собственного вращения, w
— угловая скорость тела, v^ — скорость начала репера, жестко
связанного с телом. Доказать формулы
дь) дш дм
-~ = 0, -^ = ipe^ xe^ + деф х ед,
du> deft, dw de#
д\А д\А dvA
-fy=VAxev, — = уАхеф, ? = v.xe,
где d/dt — оператор дифференцирования в осях, жестко свя-
связанных с телом.
6.3. Пусть тело вращается вокруг неподвижной оси, и внешние ак-
активные силы отсутствуют. В абсолютных осях, одна из которых
направлена по оси вращения, найти выражения компонент ре-
реакций в точках опоры.
6.4. Центральный радиус инерции физического маятника составля-
составляет 0,05м. Каким должно быть расстояние между точкой подвеса
и центром масс маятника, чтобы период его малых колебаний
составил 1 с? Сколько решений имеет задача? Как практически
можно реализовать эти решения?
Контрольные вопросы к главе 6 521
6.5. Однородный стержень длины / и массы га стоит вертикально на
гладкой горизонтальной плоскости. По нижнему концу стерж-
стержня произведен удар Р. Какую скорость приобретут нижний и
верхний концы стержня?
6.6. Однородную дверь высоты 6 и ширины а необходимо открыть
посредством удара. В какую точку двери следует ударить, что-
чтобы реакции в дверных петлях не возникли?
6.7. В каком случае существует система координат, не связанная
жестко с твердым телом, относительно которой его тензор инер-
инерции имеет постоянные компоненты?
6.8. Что служит осью регулярной прецессии в случае Эйлера при
6.9. Как будет двигаться твердое тело в случае Эйлера, если
a) В = С?
b) А = С?
c) А = В = С?
6.10. В случае Эйлера движения твердого тела вокруг неподвижной
точки при А = В найти зависимость р, q, r от времени.
6.11. Как надо закрутить волчок Лагранжа, чтобы этот волчок стал
спящим?
6.12. Какие типы движений может совершать ось волчка Лагранжа?
6.13. В чем состоит различие между регулярной и псевдорегулярной
прецессиями?
6.14. Определить направление псевдорегулярной прецессии волчка
Лагранжа, если в начальный момент времени его закрутили
по ходу часовой стрелки.
6.15. Выразить величину угловой скорости псевдорегулярной прецес-
прецессии волчка Лагранжа в зависимости от угловой скорости пер-
первоначальной закрутки.
6.16. Определить направление регулярной прецессии в случае Эйле-
Эйлера при А = В.
6.17. В случае Ковалевской указать начальные условия, при которых
реализуется постоянное вращение вокруг первой координатной
оси, связанной с телом.
522 Глава 6. Динамика твердого тела
6.18. Как найти градиент к эллипсоиду инерции в апексе тела, дви-
движущегося вокруг неподвижной точки?
6.19. К некоторой точке оси вращения гироскопа приложена сила,
стремящаяся повернуть ось влево относительно смотрящего на
него наблюдателя. В какую сторону будет двигаться ось гиро-
гироскопа?
6.20. При каких начальных условиях возникает псевдорегулярная
прецессия волчка Лагранжа?
6.21. Какое движение может совершать центр масс волчка с точкой
опоры на гладкой горизонтальной плоскости?
6.22. Какие существуют положения относительного равновесия спут-
спутника на круговой орбите? Размеры спутника малы по сравне-
сравнению с расстоянием спутника до притягивающего центра.
6.23. Найти стационарные движения обруча, катящегося в поле тя-
тяжести по горизонтальной плоскости без проскальзывания.
6.24. В какую точку неподвижного биллиардного шара должен це-
целиться биллиардист, чтобы после соударения шаров и оконча-
окончания их проскальзывания относительно стола угол между ско-
скоростями центров шаров составил тг/3.
Глава 7
Уравнения движения в лагранжевых
координатах
Напомним (определение 4.7.1), что лагранжевыми координатами
системы материальных точек называется минимальный набор пере-
переменных величин, конкретное задание значений которых однозначно
определяет совместное с геометрическими (конечными) связями по-
положение всех точек системы. Число лагранжевых координат есть
число степеней свободы системы, а выбор таких координат зависит
от структуры геометрических связей. Пусть q\,..., qn — лагранже-
вы координаты, <ji,... ,<jn — обобщенные скорости. Тогда радиусы-
векторы материальных точек будут функциями лагранжевых коор-
координат и времени t:
где N — число материальных точек. По определению эти функции
тождественно удовлетворяют при произвольно заданных <?i,...,<?n
всем учтенным геометрическим связям, стесняющим систему.
Помимо учтенных геометрических на систему могут быть наложе-
наложены еще дополнительные геометрические и дифференциальные связи,
которые не учитываются указанными функциями и которые можно
выразить с помощью системы уравнений (§ 4.4)
j = 1,.. . ,m, га < п.
§ 7.1. Координатная форма принципа Даламбера-
Лагранжа
В соответствии со сказанным скорости г„ точек системы выража-
выражаются формулами
Г„ = > -?¦— Qi,+ -дт-, V = 1, . . ., N.
524 Глава 7. Уравнения движения в лагранжевых координатах
Пространство виртуальных перемещений, соответствующее уч-
учтенным геометрическим связям, задается линейными комбинациями
вида
6vu = Y^ -5-7 *fti ^ = 1, • • •, W.
Дополнительные связи сужают пространство виртуальных переме-
перемещений, добавляя уравнения
N <->^ W я*. л с» п N л- л п л ,
j = l,...,m.
Теорема 7.1.1. В лагранжевых координатах тождество прин-
принципа Даламбера-Лагранжа эквивалентно тождеству
любых значений 6qi, удовлетворяющих линейным уравнениям
•Ъ1 иЧх
Здесь Т — кинетическая энергия системы,
— обобщенные силы.
Доказательство. Согласно теореме 5.1.1 принцип Даламбера-
Лагранжа состоит в выполнении тождества
N
для любого набора 6г„, и = 1,..., JV, виртуальных перемещений тогда
и только тогда, когда iv, и = 1,..., ЛГ, суть действительные ускоре-
ускорения точек системы, возникающие под действием активных сил F^,
приложенных к ее точкам.
7.1. Координатная форма принципа Даламбера-Лагранжа 525
Выразим 6г„ через дифференциалы лагранжевых координат. То-
Тогда тождество принципа Даламбера-Лагранжа примет вид
Рассмотрим коэффициент при 6gt. В нем
по определению 4.7.3 обобщенной силы. Далее
.. drv _ dv^ drv _ d /\ 5r^ л d ar^
IV
Дифференцированием по времени получим
Едг„ .
qk + в«л " fr[ dqkdqi qk
9qi " ^ dqidqk qk + в«,-л " fr[ dqkdqi qk dtdqi " a fy,-'
При частном дифференцировании переменные сц и д,- следует считать
независимыми. Продифференцируем первое равенство по сц. Полу-
Получим тождество
Теперь можно продолжить преобразования:
i \(
Осталось подставить правую часть последнего равенства в тождество
принципа Даламбера-Лагранжа и учесть определение 5.1.1 кинетиче-
кинетической энергии системы.Q
Отметим аналогию преобразований в доказательстве этой теоре-
теоремы с преобразованиями, связанными с выводом уравнений движения
одной материальной точки в криволинейных координатах (теорема
3.6.1).
526 Глава 7. Уравнения движения в лагранжевых координатах
§ 7.2. Уравнения движения
Используя теорему 7.1.1, можно построить систему дифференци-
дифференциальных уравнений движения, в которой искомыми переменными бу-
будут лагранжевы координаты и которые будут учитывать действие
дополнительных дифференциальных связей. Эти связи мы будем
предполагать независимыми, так что после очевидных преобразова-
преобразований и соответствующей перенумерации переменных уравнения связей
можно представить в виде
qP+v — <?>Р+Д*,<?ь • • ><7п,<?ь • • ><7р), р= п — гп, I/ = 1,.. .,ш.
Согласно теореме 7.1.1 принцип Даламбера-Лагранжа состоит в вы-
выполнении тождества
для любых дифференциалов 6qj, удовлетворяющих уравнениям вир-
виртуальных перемещений
dqk
=!,..., т.
Воспользуемся методом множителей Лагранжа. Умножим ка-
каждое из этих уравнений на соответствующий множитель Aj, и при-
прибавим к тождеству Даламбера-Лагранжа. Получим выражение
О Г m 1
. .\Jt\wj-wrQk~^~^rK\6qk+
k i
Дифференциалы 6g& независимы, и их можно задать произвольно.
Дифференциалы 6qp+u зависимые. По методу Лагранжа подберем m
множителей А„ так, чтобы коэффициенты при зависимых дифферен-
дифференциалах 8qp+v обратились в нуль. Тогда коэффициенты при незави-
независимых дифференциалах Squ обязаны стать равными нулю, так как
тождество должно сохраниться при любых 6qk. В результате полу-
получаем систему дифференциальных уравнений, содержащую неопреде-
7.2. Уравнения движения 527
ленные множители А^:
6T \ &Г
)
Здесь кинетическая энергия системы зависит от лагранжевых коор-
координат, независимых скоростей fa, зависимых скоростей qp+l/ и време-
времени:
Частное дифференцирование выполняется так, как будто все вели-
величины
<7ь • • • »9п»9ь • • • »9р»9р+ь • • Лп
не зависят друг от друга.
Введем функции
Т* = T*(gi,. ..,gn,iij • • ->9pi*)» Рр+Дяь •••J9niii, • • ->9р,0-
Функция Т* получается из Т заменой скоростей <jp+j/, ь' = 1,..., ш,
их выражениями через дифференциальные связи, а функции ^р+„
совпадают по форме с соответствующими функциями ^p+j/. Одна-
Однако при частном дифференцировании Т* и <?>*+J/ будем считать спра-
справедливыми в силу уравнений дифференциальных связей следующие
соотношения (см. определение 5.5.2):
= 1 * =
Частные производные от функций Т, <^р+|/ будем по-прежнему вычи-
вычислять так, как будто все их аргументы независимы. Тогда
Далее
дт* _ дт ^ дт „гр^„ ._
Мы теперь можем воспользоваться уравнениями, содержащими
неопределенные множители, чтобы исключить отсюда выражения
d_dT_ d 8Т
dt dqi' dt dqp+i,
528 Глава 7. Уравнения движения в лагранжевых координатах
В результате будем иметь
?дТ^_дТ,о , ^
| V- дТ
d<pp+v x , ^ dT d (d<pp+v\
Видим, что все члены, содержащие неопределенные множители, вза-
взаимно уничтожаются.
Теорема 7.2.1. Лагранжевы координаты определяют движение
механической системы, стесненное идеальными дифференциальны-
дифференциальными связями, тогда и только тогда, когда они удовлетворяют следу-
следующей системе дифференциальных уравнений
d (дТ* \ дТ*
7t{-dq7)--dq7 = Q'+Qi' i = l>->P = n-m>
где
Доказательство. Очевидно, принцип Даламбера-Лагранжа вы-
выполняется тогда и только тогда, когда справедливы равенства
дт
А аг
^аг А ат дрр+и А аг
Вычитая из первого равенства второе, находим требуемую систему
уравнений. D
Замечание 7.2.1. Система уравнений теоремы 7.2.1 справедлива
при любых наложенных на систему связях. Но она не полна. Нам
7.2. Уравнения движения 529
удалось при ее выводе исключить скорости qp+l/ в явном виде, но не
удалось исключить координаты др+|/. Чтобы эту систему замкнуть,
достаточно добавить к ней уравнения дифференциальных связей (ки-
(кинематические уравнения).
Замечание 7.2.2. Слагаемые Qi обусловлены воздействием диф-
дифференциальных связей. В общем случае они могут содержать вторые
производные от обобщенных координат, и потому их не всегда можно
трактовать как обобщенные силы.
Найдем сумму
+
Лемма 7.2.1. Если дифференциальные связи допускают принад-
принадлежность действительных перемещений множеству виртуальных,
то тогда справедливо равенство
Доказательство. Принадлежность действительных перемеще-
перемещений множеству виртуальных означает справедливость равенств
E
*=i
Следствие 7.2.1. Если дифференциальные связи стационарны и
допускают принадлежность действительных перемещений множе-
множеству виртуальных, то тогда
34- 1503
530
Глава 7. Уравнения движения в лагранжевых координатах
В том случае, когда дифференциальные связи линейны по скоро-
скоростям:
t/)iqi -f
v-=. 1,.. .,
где коэффициенты bp+l/)i = 6P+i/,,(?i,.. ,?n,*)> г = 0,.. .,p, могут
зависеть только от координат и времени, слагаемые Qi принимают
вид
i=i
' +7tf
г = l,...,p= n- m,
где коэффициенты 7«j выражаются формулами
ij h
db;+Vti дь;+и<0
Система уравнений теоремы 7.2.1 превращается тогда в уравнения
Воронца:
^ /#r \ _ #r _ "
а величины Qj можно интерпретировать, как обобщенные силы.
Отметим, что матрица (jij) кососимметрична:
Ъз = -Tjn ij = l,...,n-m.
Отметим также, что когда связи голономны, то
9^j (9^,- ' dt dqi
для любых индексов j и г, и в этом случае все 7ij» 7*о окажутся
равными нулю. Когда связи стационарны: dbp+uj/dt = 0, и вместе с
тем 6p+i/,o = 0 для любых и, j, то будем иметь 7io = 0.
7.3. Системы Чаплыгина 531
Определение 7.2.1. Силы, действующие на систему материаль-
материальных точек, называются гироскопическими, если соответствующие им
обобщенные силы линейно зависят от обобщенных скоростей:
Qi =
причем матрица (jik) кососимметрична: 7*Jfe = — 7ki-
Из структуры уравнений Воронца видим, что реакции неголоном-
ных линейных по скоростям идеальных связей могут зависеть от об-
обобщенных скоростей. Эта зависимость выражается с помощью гиро-
гироскопических слагаемых в выражениях для обобщенных сил реакций.
§ 7.3. Системы Чаплыгина
В некоторых системах с линейными дифференциальными связями
вида
р = п — m, v —
переменные qp+v, v = l,...,m, можно выбрать таким образом, что
они не войдут ни в один из коэффициентов bp+v,k, ни в выражение для
кинетической энергии Т, составленное без учета дифференциальных
связей.
Определение 7.3.1. Механическая система с дифференциаль-
дифференциальными связями, разрешенными относительно qp+u, и = 1,...,т, на-
называется системой Чаплыгина, если связи стационарны, однородны:
Ьр+1/)о = 0, и если выполнены равенства
dbp+Uik dbp+Uik дТ
m =HS7 = — = 0' P=n-m, //,i/= l,...,m, fc = i
Уравнения движения для систем Чаплыгина могут быть полу-
получены как следствие уравнений Воронца. Действительно, пользуясь
обозначениями предыдущего параграфа, найдем, что для систем Ча-
Чаплыгина справедливы следующие соотношения:
дТ*
dqi
_дь
dqk " 8qh
34*
EOT fdbp+Uij dbp+Utk \
532 Глава, 7. Уравнения движения в лагранжевых координатах
Поэтому уравнения движения принимают вид
d (дт*\ ffr А ет ^(дьм дър+и
dt V dqi ) d4i + fr{ dqp+v ^ V dqi dqk
, t =
Полученные уравнения образуют систему уравнений Чаплыгина.
Когда Q*, г — 1,..., п — т, зависят только от координат q\>..., qn-m>
первая группа уравнений окажется замкнутой относительно коорди-
координат (/1,.. .,(/n_m и сможет быть решена независимо от второй груп-
группы, представляющей собой уравнения дифференциальных связей.
Для этого достаточно в выражениях dT/dqp+v исключить с помощью
уравнений связей зависимые скорости qp+i, ...,gn-
Пример 7.3.1. Обратимся к механической системе, рассмотренной
в примере 5.6.2. Заданы две материальные точки массы т, соединенные
не имеющим массы стержнем длины 2/. Под действием силы тяжести
система движется только в вертикальной плоскости и только так, что
скорость центра масс направлена вдоль стержня. Пусть у — вертикаль-
вертикальная, ах — горизонтальная координаты середины стержня, <р — угол,
который стержень образует с горизонтальным направлением. Имеем ки-
кинетическую энергию и силовую функцию системы
Т = тп(х2 + у2) Ч- m/V, U = -2гпду.
Дифференциальная связь представлена уравнением
х = yctgtp.
Пусть #1 = у, #2 = <Р, </з = #• Имеем п = 3, р = 2. Коэффициенты
кинематической связи принимают вид
&3i = ctg<p, 632 = 0.
Видим, что ни выражения кинетической и потенциальной энергий, ни
выражения коэффициентов bp+V)k не зависят от координаты х. Следо-
Следовательно, это — система Чаплыгина.
Запишем уравнения Чаплыгина:
dt\dy) Оу + дх sin2 tp " ду '
dt \ дф ) д<р дх sin2 кр
7.3. Системы Чаплыгина 533
Найдем функции Т* и дТ/дх:
* 2 ЛТ
Т* = -^| \-гп12ф2, — = 2rai = 2mt/ctg у>.
sin <?> cte
Подставим их в уравнения движения:
2my \
¦ 2 )
in <?>/
с? ( 2my \ 2my<pctg<p
-77 I ¦ 2 ) + ~
sin <?>/ sin
sin <p sin у
Выполнив очевидные преобразования, найдем
d ( у \
т = —
9? = а.
где а — постоянная интегрирования. Далее см. пример 5.6.2.0
Пример 7.3.2. Пусть двухколесная тележка с одинаковыми ко-
колесами поставлена на абсолютно шероховатую горизонтальную плос-
плоскость. Кузов тележки может перемещаться только параллельно плоско-
плоскости (рис. 7.3.1). Каждое колесо есть плоский диск, перпендикулярный к
оси длины 2а, на которую насажены колеса. На тележку действует сила
F, параллельная опорной плоскости и приложенная в точке j5, нахо-
находящейся на прямой С. Прямая С горизонтальна, задает ось симметрии
тележки и проходит перпендикулярно к оси, на которую насажены ко-
колеса, через ее середину D. Точка В расположена на расстоянии Ь от
точки D. Предположим, что центр масс С тележки также принадлежит
прямой С и отстоит от точки D на расстояние / по ту же сторону, что и
точка В. Радиус каждого колеса обозначим R.
Выберем правоориентированный абсолютный репер Ое^ез с нача-
началом О, векторами еь в2, принадлежащими опорной плоскости, и век-
вектором ез, перпендикулярным к ней. Положение тележки на плоскости
можно описать, задав радиус-вектор г точки D:
г = xei + ув2
угол д между вектором ei и единичным вектором е^ оси ?, угол у>2 по-
поворота левого колеса, угол <р\ поворота правого колеса (правое и левое,
если смотреть в сторону вектора е^). Таким образом, система содержит
пять лагранжевых координат:
х, у, д, ipu <p2.
534 Глава 7. Уравнения движения в лагранжевых координатах
Тележка Чаплыгина имеет два одина-
одинаковых колеса и гладкую подпорку, ко-
которая мешает ей опрокинуться и не
оказывает сопротивления горизонталь-
горизонтальному перемещению. Тележка может
катиться вдоль прямой при одинако-
е2
вых угловых скоростях колес относи-
относительно корпуса и поворачивать, когда
относительные угловые скорости колес
различны. Поступательно смещаться
ei x вдоль оси колес тележка не может.
Рис. 7.3.1. Тележка Чаплыгина
Найдем уравнения дифференциальных связей. Из-за абсолютного
трения колеса не могут проскальзывать относительно опорной плоско-
плоскости в точке контакта с ней. Скорость каждого колеса в точке контакта
выразим по теореме 2.12.1 Эйлера как сумму скорости точки D, соста-
составляющей скорости в точке контакта из-за поворота тележки по углу fl и
составляющей из-за поворота колеса вокруг своей оси.
Для правого колеса получим
atf + R<pi = 0.
Для левого колеса будем иметь
ysiwd — atf + Иф2 — 0.
Кроме того, колеса не должны иметь бокового проскальзывания. Сле-
Следовательно, скорость точки D должна быть направлена вдоль оси С:
xsini? — у cost? = 0.
После преобразований систему дифференциальных связей можем пред-
представить в виде
х = — (a cos i?)i? — (R cos д)ф\,
у = (asint?)i? — {Rsu\d)<f2,
Система связей имеет лишь две независимые скорости i? и ^, аее ко-
коэффициенты зависят только от координаты д.
Кинетическую энергию Т тележки найдем как сумму кинетической
энергии То кузова, кинетических энергий Т\ правого и Т% левого колеса.
7.3. Системы Чаплыгина 535
Для расчета кинетической энергии воспользуемся теоремой 5.2.2 Кёнига.
Вычислим скорость vc центра масс кузова. Относительно точки D кузов
вращается вокруг вертикальной оси с угловой скоростью д. По теореме
Эйлера
vc = \D + tfe3 x (-le\) = (z
так как ei = ei cos д + e2 sin tf. Отсюда
х sintf-y cos tf) + i?2'2.
Кузов около центра масс вращается с угловой скоростью о> = х)ез. По
теореме Кёнига
То = ^ [*2 + у2 + 2Щх sin д - у cos 0) + ifc2tf 2] ,
где то — масса кузова, к% = Ас + то/2, так что Аго — радиус инерции
кузова относительно оси, параллельной ез и проходящей через точку D,
Ас — центральный момент инерции, соответствующий направлению ез
(теорема 1.10.2 Гюйгенса-Штейнера).
Скорость vci центра масс правого колеса выражается формулой
vci = V?> + da e\ = (х + i?a cos i?) ei + (у + da sin i?) ег-
Колесо около своего центра вращается с угловой скоростью д вокруг
диаметра, параллельного ез, и с угловой скоростью ф\ вокруг своей оси
крепления. Для колеса эти направления суть главные и центральные
(пример 1.14.7). Обозначим А момент инерции относительно диаметра,
С — момент инерции относительно оси колеса. Тогда
Аналогично для левого колеса
Т2 = ^ [i2 + у2 - 2Щх cos д + у sin д) + a2t92] + i(A& + Сф\),
где mi — масса каждого колеса. Кинетическая энергия системы в целом
равна
B + у2) + ЩШ tf) + ?
Т = у(х2 + у2) + тоЩхзШ - у cos tf) + ~i?2 + ^-(ф\
536 Глава 7. Уравнения движения в лагранжевых координатах
где m = mo 4- 2??ii — масса всей системы, J = ток% + 2m\a2 + 2Л
— момент инерции всей тележки вокруг вертикальной оси, проходящей
через точку D.
Найдем выражения для обобщенных сил. Виртуальное перемеще-
перемещение точки В, к которой приложена единственная сила F, определено
формулой (§ 2.10):
6гв = 6rD + 6tie3 х (-Ье[) = Fх
Пусть F = Fxe\ + Fye2. Работа силы F на перемещении бгв дается
равенством
F • 6гв = Ji&P + Fyby + 6(Fr sin t? - Fy cos
Отсюда получаем обобщенные силы
QX = FX) Qy = Fy, Q# =b{Fxsinti-Fycosti).
Когда сила F зависит только от угла д ориентации тележки:
мы будем иметь дело с системой Чаплыгина, так как ни коэффициенты
связей, ни выражение для кинетической энергии и обобщенных сил не
будут содержать координат ж, у, (f2-
Для того чтобы получить уравнения Чаплыгина, найдем функцию
Т*. После исключения зависимых скоростей с помощью уравнений свя-
связей будем иметь
Видим, что Т* не зависит явно от координат. Поэтому уравнения Ча-
Чаплыгина запишутся в виде
Для расчета 7t?i представим дифференциальные связи следующим обра-
образом:
X = 6*01?+ 6*19*1, У= Ьубй +
где
Ьх# = —acosi?, 6дг1 = — /2 cost?, 6у# = —asini?, 6yi = —/Jsini?,
62т? = "тт, 62i = 1.
Контрольные вопросы к главе 7 537
По определению 7.2.1 коэффициентов гироскопических сил, выражаю-
выражающих влияние дифференциальных связей, получим
дт дьх1 t дт дьу1 п(дт . ат \
ах at? at/ ai? \^ *У )
поскольку &2t?. &21 — постоянные, а 6^ и Ьу# не зависят от y?i. Далее
—— = тпх + т^д sin i? = mo (/ sin д — a— cos д ) i? Rib\ cos i? ,
ox LV m0 J m0 J
—— — my — m^ldcosd = mo — ( /cosi? — a — sini?) д Яф\slum .
Oy I \ rn0 J m0 }
Поэтому 7tfi =
Вычислим теперь обобщенные силы:
QJ = Q# + Qxbx# + gy6yT? = FF* - aFy) sin i? - (aFx + bFy) cos t?,
Q* = E^6,.! + gy6yl = -R(FX cos tf + Fy sin t?).
Учитывая все полученные соотношения, выписываем уравнения Чаплы-
Чаплыгина:
(ma2 + J + 4С^
-|) tf + (тй2 + 2C)^i - m0RW2 = Q\.
Это — замкнутая система из двух обыкновенных дифференциальных
уравнений второго порядка, которая может быть исследована независи-
независимо от системы уравнений дифференциальных связей.О
Контрольные вопросы к главе 7
7.1. Пусть дифференциальные связи представлены в виде
(t,4i>- • -)9п)9ь* --»9р)» р = п — m,i/ = 1,...,т,
где <7i,...,gn — обобщенные координаты системы. Доказать,
что тогда множество виртуальных перемещений определено ра-
равенствами
538 Глава 7. Уравнения движения в лагранжевых координатах
7.2. Показать, что если величины Q, теоремы 7.2.1 не зависят от
ускорений, то система связей линейна по скоростям.
7.3. Допускают ли уравнения теоремы 7.2.1 интеграл энергии, если
действительные перемещения принадлежат множеству вирту-
виртуальных, а активные силы потенциальны.
7.4. Показать, что если дифференциальные, линейные по скоростям
связи однородны, то 5Zf=i QiQi — 0, где величины Q,- определены
теоремой 7.2.1 (см. следствие 7.2.1).
7.5. Как будут выглядеть уравнения движения тележки Чаплыгина
в примере 7.3.2, если колеса считать не имеющими массы?
7.6. В примере 7.3.2, приняв F = 0, указать стационарные движения
тележки Чаплыгина.
Глава 8
Динамика голономных систем
В этой главе будут рассмотрены системы материальных точек со
связями, имеющими геометрическую природу и выражающимися ко-
конечными зависимостями от радиусов-векторов точек системы. Такие
связи допускают введение лагранжевых координат <ji,..., qn, где п —
число степеней свободы системы (определение 4.7.1). Любое совме-
совместимое со связями положение всех точек системы однозначно опре-
определяется заданием момента времени t и значениями лагранжевых
координат:
г„ = г„@1,...,0п,<), 1/= 1,...,ЛГ.
Здесь г^ — радиусы-векторы точек системы, N — число ее точек.
На координаты q\,..., qn и их обобщенные скорости <ji,..., qn не на-
накладывается никаких кинематических условий.
Действительные элементарные перемещения точек системы зада-
задаются равенствами
или
г"=3?в5-«+-вГ' "=1--'"-
Виртуальные перемещения выражаются формулами
где bqi — дифференциалы независимых переменных qi.
§ 8Л. Уравнения Лагранжа второго рода
Получить уравнения движения голономной системы с идеальны-
идеальными связями можно, воспользовавшись теоремой 7.1.1 о форме прин-
принципа Даламбера-Лагранжа в лагранжевых координатах. Основное
540 Глава 8. Динамика голономных систем
тождество этого принципа имеет вид
Поскольку для голономной системы дифференциалы <5д, произволь-
произвольны и независимы, а основное тождество должно выполняться при лю-
любых значениях 6^, то закон qi(t), i = 1,.. . ,п, будет соответствовать
действительному движению тогда и только тогда, когда он удовле-
удовлетворяет системе обыкновенных дифференциальных уравнений
d {дТ\ дТ
)Q 1
которая называется системой уравнений Лагранжа второго рода.
Эти уравнения удобны для использования, так как экономно опи-
описывают движение, определяя зависимость лишь лагранжевых коор-
координат от времени. Они не содержат неизвестных реакций идеальных
связей, а правила составления этих уравнений стандартны и не за-
зависят от специфики изучаемой голономной системы.
Лагранжев формализм — это последовательность стандарт-
стандартных операций, которые необходимо выполнить, чтобы получить урав-
уравнения Лагранжа второго рода. Вот эти операции.
1. Выбрать минимальный набор независимых координат q\,..., qn,
с помощью которых желательно записать уравнения движения.
2. Найти обобщенные силы
Их можно получить как коэффициенты при дифференциалах обоб-
обобщенных координат в выражении для элементарной работы всех сил,
действующих на систему, на виртуальных перемещениях точек их
приложения:
N п
Если исходные силы F,, были функциями координат точек системы
или их скоростей, то при вычислении обобщенных сил следует выра-
выразить эти функции через обобщенные координаты и их производные.
3. Вычислить кинетическую энергию Т системы как функцию ла-
лагранжевых координат qi, обобщенных скоростей <j,-, времени t. Чтобы
найти Т, полезно использовать теоремы кинематики о структуре по-
поля скоростей, а также теоремы Кёнига. Удобно бывает вычислить
8.1. Уравнения Лагранжа второго рода 541
сначала кинетическую энергию в декартовых координатах, а затем
перейти от декартовых координат и скоростей к лагранжевым коор-
координатам и обобщенным скоростям.
4. Выполнить указанное в уравнениях Лагранжа частное и полное
дифференцирование. При этом дифференцирование по обобщенным
скоростям и лагранжевым координатам производится так, как будто
они независимые переменные.
Указанная последовательность операций позволяет для любой си-
системы координат, действуя стандартным образом, выписать урав-
уравнения движения. Специфика левых частей этих уравнений вполне
определяется видом кинетической энергии для той или иной механи-
механической системы.
Теорема 8.1.1. Кинетическая энергия Т системы материаль-
материальных точек есть сумма
где
— однородная квадратичная форма обобщенных скоростей,
п
*=1
— однородная линейная форма обобщенных скоростей. То от скоро-
скоростей не зависит.
Доказательство. Кинетическая энергия вычисляется по форму-
формуле (см. определение 5.1.1)
1 N
Выражая радиусы-векторы точек системы через лагранжевы коор-
координаты, получим
- V— ' — - 1 N
»=1
Подставим эти выражения в формулу для кинетической энергии:
Т = i У" mv ~~
542 Глава 8. Динамика голономных систем
Теперь примем
n / N
Следствие 8.1.1. Коэффициенты однородных форм разложения
кинетической энергии имеют вид
6s
Следствие 8.1.2. Длл склерономной механической системы свя-
связи не зависят явно от времени: dvv/dt = 0, г/= 1,..., JV, w Kwwe-
тическая энергия есть квадратичная форма обобщенных скоростей:
Т = Т2.
Теорема 8.1.2. Форма Т2 кинетической энергии положительно
определена.
Доказательство. По определению
о
Рассмотрим квадратичную дифференциальную форму
Y^bb ^ (
8.1. Уравнения Лагранжа второго рода
543
где 6q{, 6qj — дифференциалы лагранжевых координат при фикси-
фиксированном времени. Массы точек системы строго положительны. По-
Поэтому значения формы Ф неотрицательны. Докажем, что форма Ф
невырождена.
Рассмотрим матрицу
dr2
dr2
dr2
dqn
drN \
dqi
drN
dqn dqn v dqn
С ее помощью матрицу формы Ф можно представить в виде
(ay) = JJT.
Таким образом матрица (atj) есть матрица Грама для строк матрицы
J. Если связи, наложенные на систему материальных точек, незави-
независимы, то J имеет максимально возможный ранг, равный п, и, следо-
следовательно, ее строки линейно независимы. Поэтому det(a,j) ф О.П
Замечание 8.1.1. В отдельных изолированных точках простран-
пространства обобщенных координат матрица (аг;) может вырождаться. Это
— особые точки. Поведение механической системы в их окрестности
нуждается в специальном исследовании.
Следствие 8.1.3. Систему уравнений Лагранжа можно, за ис-
исключением тех случаев, когда координаты принимают значения, со-
соответствующие особым точкам, разрешить относительно вторых
производных от обобщенных координат.
Доказательство. Пользуясь равенством Т = T2+T\ +To, найдем
После выполнения в уравнениях Лагранжа операции дифференциро-
дифференцирования по времени получим
544 Глава 8. Динамика голономных систем
Относительно вторых производных qj имеем систему линейных урав-
уравнений с невырожденной матрицей (а^-).О
Замечание 8.1.2. Уравнения Лагранжа второго рода могут быть
справедливыми не только для голономных систем. Например, урав-
уравнения Чаплыгина имеют форму уравнений Лагранжа, в которых ре-
реакции, введенные в соответствии с принципом освобождения от не-
голономных связей, оказываются гироскопическими и имеют специ-
специальную форму. Однако техника получения уравнений Чаплыгина
не поддается лагранжеву формализму и оказывается более сложной
(§ 7.3).
§ 8.2. Энергетические соотношения
Теорема 5.1.8 обусловливает существование интеграла энергии си-
систем с произвольными связями, для которых действительные пере-
перемещения принадлежат множеству виртуальных. Для голономных си-
систем интеграл энергии может существовать и тогда, когда действи-
действительные перемещения не содержатся среди виртуальных. Чтобы по-
получить этот результат, докажем сначала обобщение теоремы 5.1.6 об
изменении кинетической энергии.
Теорема 8.2.1. Для действительного элементарного перемеще-
перемещения {dqi, i = 1,..., п} голономной механической системы выполнено
дифференциальное соотношение
t=i
Доказательство. Умножим каждое уравнение Лагранжа
дт\ дт
) ^ 1
на qi и результаты почленно сложим:
Это равенство можно представить в виде
8.2. Энергетические соотношения 545
По теореме Эйлера об однородных функциях
Поэтому
ИЛИ
?т-ад-?«*-?.
Осталось умножить это соотношение на dt.D
Теорема 8.2.2. (Обобщенный интеграл энергии Якоби).
Пусть голономные связи, стесняющие систему материальных то-
точек, зависят явно от времени, но кинетическая энергия Т от време-
времени явно не зависит. Пусть, кроме того, активные силы, действую-
действующие на систему, обладают силовой функцией U, зависящей только
от лагранжевых координат. Тогда уравнения Лагранэюа допускают
первый интеграл
Т2 - Tq = U + Л,
где h — произвольная постоянная (константа энергии), определяе-
определяемая начальными условиями.
Доказательство. Воспользуемся теоремой 8.2.1 и учтем, что
если кинетическая энергия не зависит явно от времени, то dT/dt = О,
а если существует силовая функция [/, то
1=1
Пример 8.2.1. Пусть невесомая горизонтальная перекладина вра-
вращается с постоянной угловой скоростью ш вокруг вертикального стержня
(рис. 8.2.1). На перекладине расположена материальная точка массы
т, прикрепленная к вертикальному стержню пружиной жесткости с и
могущая скользить по горизонтальной перекладине без трения. Найти
вид интеграла энергии.
Решение. Расстояние от материальной точки до вертикального
стержня обозначим х. Кинетическая энергия точки дается формулой
35- 1503
546 Глава 8. Динамика голономных систем
СЗ Материальная точка m вынуждена дви-
двигаться вдоль прямой, вращающейся с
постоянной угловой скоростью. Реак-
Реакция связи, перпендикулярная этой пря-
JH. мой, не равна нулю и совершает рабо-
q I J ту на абсолютном перемещении точки.
Механическая энергия системы в этом
случае не сохраняется, хотя сила пру-
пружины, действующая на точку, потенци-
потенциальна. Вместе с тем имеет место обоб-
обобщенный интеграл энергии Якоби.
Рис. 8.2.1. Связь, зависящая от времени
Сила потенциальна с силовой функцией
2
где xq — длина пружины в недеформированном состоянии. Однако
сумма кинетической и потенциальной энергий
не может служить интегралом уравнений движения, так как связи зави-
зависят явно от времени, и реакция связи совершает работу на действитель-
действительном перемещении точки. Вместе с тем кинетическая энергия от времени
явно не зависит. Поэтому справедлив обобщенный интеграл энергии
Якоби
где h — постоянная интегрирования.О
Следствие 8.2.1. (Об изменении полной энергии). Пусть
71 = Т + П — полная энергия системы, П = —U — потенциальная
энергия части сил. Тогда
Теорема 8.2.3. (Критерий гироскопических сил). Силы,
действующие на систему материальных точек, будут гироскопи-
гироскопическими тогда и только тогда, когда
8.2. Энергетические соотношения 547
для любых значений обобщенных скоростей <]ц.
Доказательство. Необходимость. В соответствии с определе-
определением 7.2.1 гироскопическими называются силы, для которых
п
Qj = $^7я&, 7л = -Ъз^ *, j = 1,...,п.
1=1
Непосредственной подстановкой легко убедиться в том, что для них
доказываемый критерий выполнен.
Достаточность. Пусть силы таковы, что справедливо указан-
указанное в условии теоремы тождество. Продифференцируем его частным
образом по сц\
Обозначив jji = dQj /дсц, убеждаемся в том, что рассматриваемые си-
силы удовлетворяют определению 7.2.1. Для них должно выполняться
тождество
«,j=i *<i=i
при любых значениях обобщенных скоростей. Отсюда 7jt = ~7tj-^
Пример 8.2.2. Пусть движение изучается в неинерциальном ре-
репере. Тогда на механическую систему помимо прочих сил инерции дей-
действуют кориолисовы силы (теорема 3.13.1). Для связей, не зависящих
явно от времени в этом репере, такие силы будут гироскопическими. В
самом деле, сила Кориолиса, действующая на v-ю точку системы, вы-
выражается формулой
F^ = — 2т„(и> х vry), v = 1,..., Ny
где и> — угловая скорость репера, \ги — относительная скорость 1/-й
точки. Следовательно,
Qi = -2
Далее
п N п д N
\"^ п * о \^ ( \ S^ ®^v - о V^ / — /\
35*
548 Глава 8. Динамика голономных систем
Определение 8.2.1. Силы называются диссипативными, если
их мощность может принимать только неположительные значения:
?.&< о.
1=1
Пример 8.2.3. Пусть к каждой точке системы приложена сила
сопротивления, пропорциональная первой степени скорости:
Соответствующие обобщенные силы примут вид
Если система склерономна, то
Следовательно, при любых склерономных связях такая система сил бу-
будет диссипативной.О
Следствие 8.2.2. Необходимое и достаточное условие гироско-
пичности сил молено представить в виде
N
= 1 Х Х
а диссипативности сил — в виде
N
Доказательство. Согласно определению обобщенных сил, най-
найдем
Определение 8.2.2. Пусть
п
8.3. Обобщенная силовая функция 549
с симметричной F,-j = bji) неотрицательно определенной матрицей.
Тогда функция
П = 2
называется диссипативной функцией Рэлёя.
Функция Рэлея неотрицательна. Следовательно, если она суще-
существует, то
1=1
и силы, приложенные к системе, будут диссипативными. Если функ-
функция Рэлея положительно определена, то диссипацию называют пол-
полной, а совокупность таких сил — определенно диссипативной.
Следствие 8.2.3. Гироскопические силы не влияют на измене-
изменение полной энергии системы. Они не нарушают интеграл энер-
энергии или обобщенный интеграл энергии Якоби. Диссипативные силы
стремятся уменьшить полную энергию.
Заметим, что для склерономных систем выполнено соотношение
Поэтому закон изменения полной энергии упрощается:
Для таких систем необходимое и достаточное условие существования
интеграла энергии состоит в том, что непотенциальные силы либо
отсутствуют, либо они должны быть гироскопическими.
§ 8.3. Обобщенная силовая функция
Пусть лагранжевы координаты задают конфигурацию механиче-
механической системы в подвижном репере. Изменения лагранжевых коорди-
координат никак не влияют на положение базисных векторов в абсолютном
пространстве и характеризуют лишь относительное движение.
Изучим структуру уравнений Лагранжа, построенных по прави-
правилам составления уравнений для относительного движения. По те-
теореме 2.11.1 сложения скоростей для каждой материальной точки
системы будем иметь
va = Vе 4- vr
550 Глава 8. Динамика голономных систем
где v? — скорость точки в абсолютном репере, v? — скорость точки
относительно подвижного репера, v? — переносная скорость. Кине-
Кинетическая энергия абсолютного движения примет вид
J/ = l J/ = l
где Т* — кинетическая энергия относительного движения. Функция
U* выражается формулой
Определение 8.3.1. Функция
называется обобщенной силовой функцией, если обобщенные силы в
уравнениях Лагранжа второго рода выражаются формулами
0U
Соответствующая система сил называется обобщенно потенциаль-
потенциальной.
Теорема 8.3.1. Функция U* служит обобщенной силовой функ-
функцией сил инерции, действующих в подвижном репере.
Доказательство. Вычислим необходимые частные производные:
аи- A dvt A dv;; A di
Обозначим: vo — скорость начала подвижного репера, о? — угловую
скорость этого репера, г„ — радиусы-векторы относительного поло-
положения точек системы. По теореме Эйлера найдем
V* = V0 + U> X IV
Следовательно,
8.3. Обобщенная силовая функция 551
С учетом этих выражений сгруппируем первый и третий члены в
правой части выражения для dU*
dU* A d А
— / v •••'I/ t" '" ' u i —' '- у— '- ~v) i —- '- • v\ Я .
Далее
dqi
По-прежнему символом d/dt будем обозначать дифференцирование
по времени координат вектора в подвижном репере (относительная
производная). Отметим, что полная производная по времени, взя-
взятая от евклидова скалярного произведения, может быть заменена на
относительную производную. Получим
Примем во внимание равенства
dru
dvv
_ r
V
dt dqi dqi dt
В соответствии с определением 8.3.1 вычислим обобщенную силу
NT" 1
El d\Q . I uYy
mu —-—|-u>xvo-fu;x(u>xiv)-fu>xr[/-f2(u>xv!,) • ——.
_ \ dt I dqi
Ho
<fv0 dv0
_ = _+u,XV0.
Поэтому первые четыре члена в квадратной скобке выражения для
Qi учитывают действие силы инерции из-за переносного ускорения.
Пятый член учитывает действие силы Кор полиса. D
Следствие 8.3.1. Кинетическая энергия относительного дви-
движения имеет вид
552 Глава 8. Динамика голономных систем
а с учетом того, что U* служит обобщенной силовой функцией для
сил инерции, уравнения Лагранжа можно представить в виде
dt \dqi) dqi " dt
где Qi — обобщенные силы, не учитывающие сил инерции. Как и
следовало ожидать, с учетом того, что Т = Т* + U*, уравнения
Лагранжа принимают стандартный вид
dt \dqi
Помимо сил инерции в природе существуют и другие силы, обла-
обладающие обобщенной силовой функцией.
Пример 8.3.1. На электрон, движущийся в электромагнитном
поле, действует сила Лоренца
F = eE+-(vxB),
с
где Е — напряженность электрического поля, v — скорость электро-
электрона, с — скорость света, В — вектор магнитной индукции, е — заряд
электрона. Покажем, что сила F имеет обобщенную силовую функцию
вида
е
с
Функция <р и вектор-функция А называются скалярным и векторным
потенциалами. При этом
г = r\ ei + г2 е2 + гз е3
радиус-вектор электрона и
Найдем силу F, воспользовавшись определением 8.3.1 и считая г\, r2t
гз обобщенными координатами электрона:
L f—\ - L (-1 Л \ - -? (V ^1 * —^
dt\d+l) "" Jt V с ) """с l^J Л7^' + "вГ
~ е
8.3. Обобщенная силовая функция 553
Отсюда следует, что
Йр еЛ fdAi дАЛ . edAi
Другими словами, должно быть
Существование потенциалов <р и А следует из свойств уравнений Макс-
Максвелла для электромагнитного поля.
В частном случае, когда векторы Б и В постоянны, указанные по-
потенциалы принимают вид
V? = -Е г, А = г х В.
Заметим, что уравнения движения электрона в постоянном электромаг-
электромагнитном поле интегрируются аналитически. Это — линейные уравнения
с постоянными коэффициентами. Здесь ограничимся лишь исследова-
исследованием траектории. Представим радиус-вектор г, скорость v электрона и
вектор Е в виде суммы двух составляющих:
где еь — единичный направляющий вектор поля В. В дальнейшем бу-
будем считать, что В ф О, так как в противоположном случае движение
будет равноускоренным, и его траектория представит собой прямую или
параболу.
Запишем уравнения движения с учетом принятых обозначений:
d „ d „ е, ^ч
m-j-vb = eEb, m — vi = с Ei + -(v± x B)-
at at с
Первое уравнение выражает равноускоренное смещение электрона вдоль
оси ед, параллельной вектору В магнитной индукции:
eEb(t-toJ ^ „ , ч _,_
П - « h Vbo(t - to) + По,
2т
где уьо, по — начальные значения проекций скорости и радиуса-вектора.
Проинтегрируем один раз второе уравнение движения:
eE1(t-to) + -[(i\L-rLo) x B] + mvi0.
с
554 Глава 8. Динамика голономных систем
Пусть В ф 0. Положим
Вх [rovio + eEx(<-to)]c c2m
В х [mvio + e Ejft - to)]c c2m
гп = rbeb + г10 Wt Wt L%
Проверкой убеждаемся в справедливости дифференциального уравнения
из которого ясно, что модуль R вектора R не изменяется в процессе
движения. Введем вектор
Тогда
и траекторию электрона можно представить как результат композиции
двух движений: движения по окружности радиуса R с центром в точке
гп, причем плоскость окружности перпендикулярна вектору В, и движе-
движения вместе с точкой гп, перемещающейся по параболе. Образно говоря,
при действии ненулевого магнитного поля электрон совершает ''спира-
''спиралевидное" движение.О
Теорема 8.3.2. Всякая обобщенная силовая функция U линейно
зависит, от обобщенных скоростей:
где Ui = f/i(gi,.. .,9п>0> г = 0,1,...,п, а силы, ею определяемые,
представляют собой сумму гироскопических сил и сил, не зависящих
от обобщенных скоростей.
Доказательство. Пусть задана обобщенная силовая функция
U = U(qiy...,qn,qi,...,qn,t).
По определению 8.3.1 найдем
ди ди у. д2и .. А д2и . д2и
Qi - A
Но в соответствии с принципом детерминированности Ньютона (§ 3.3)
обобщенные силы могут зависеть лишь от лагранжевых координат,
обобщенных скоростей и времени:
Qi = <3»(?ь..,?п,?1,...,?п,0> i= 1,...,я.
8.4. Функция Лагранжа. Циклические координаты 555
Поэтому
д2и . .
0 1
Следовательно, U линейно зависит от обобщенных скоростей:
п
где Ui(qi, ...,qn,t), i = 0,1,..., п. Таким образом,
dU ^dUi . dUo
ди( _dUj\ . du0 dUj
Вычитая, найдем
Обозначим
dUi dUj . .
Так как 7»; = —Ti*? первый член выражения для Qj дает гироскопи-
гироскопическую силу (определение 7.2.1). Второй и третий члены не зависят
от обобщенных скоростей.О
Следствие 8.3.2. Силы, определяемые обобщенной силовой фун-
функцией, не могут быть диссипативными.
§ 8.4. Функция Лагранжа. Циклические коорди-
координаты
Пусть из множества активных сил, действующих на систему ма-
материальных точек, можно выделить часть, для которой существует
силовая функция U = U(q\,..., qn, t) либо обобщенная силовая функ-
функция U = U(qi,...,qn,qi,. ..,qn,t).
Определение 8.4.1. Сумма кинетической энергии Т и функции
U
L = T+U
называется функцией Лагранжа (лагранжианом) системы матери-
материальных точек.
556 Глава 8. Динамика голономных систем
Следствие 8.4.1. С использованием функции Лагранжа уравне-
уравнения Лагранжа второго рода принимают вид
d (dL\ 8L . . 1
di \dqij dqi
где Qi — силы, не обладающие силовой функцией.
Доказательство непосредственно следует из определения 8.3.1.
Следствие 8.4.2. Для систем материальных точек функция Ла-
Лагранжа представляется в виде
L = Li -Ь L\ + Lo,
где Z/2 — квадратичная форма от обобщенных скоростей, L\ — ли-
линейная форма от обобщенных скоростей, Lo от обобщенных скоро-
скоростей не зависит.
Доказательство. Когда U есть силовая функция, т.е. она зави-
зависит только от координат, то указанное представление функции Ла-
Лагранжа следует из теоремы 8.1.1. Если U — обобщенная силовая
функция, то необходимо привлечь еще теорему 8.3.2.D
Следствие 8.4.3. Если функция Лагранжа не зависит явно от
времени, а силы, не обладающие силовой функцией, являются ги-
гироскопическими или отсутствуют, то имеет место обобщенный
интеграл энергии Якоби:
Z/2 — Lq = ft.
Доказательство дословно совпадает с доказательством теоремы
8.2.2 при замене Т на L. Однако теперь L может включать уже об-
обобщенную силовую функцию.D
Определение 8.4.2. Координата qi называется циклической, ес-
если функция Лагранжа от нее не зависит:
дЬ л
0
Соответственно <]ц называется циклической скоростью.
Теорема 8.4.1. Если qi — циклическая координата и соответ-
соответствующая ей непотенциальная сила отсутствует: Qi = 0, то си-
система уравнений Лагранжа допускает первый интеграл вида
где /?,• — постоянная интегрирования.
8.4. Функция Лагранжа. Циклические координаты 557
Доказательство. Так как qi — циклическая координата, а
Qi = 0, то соответствующее уравнение Лагранжа (см. следствие
8.4.1) принимает вид
Первый интеграл, о котором идет речь в теореме 8.4.1, называет-
называется циклическим интегралом. В отличие от циклических координат
остальные координаты называются позиционными.
Принимая во внимание следствие 8.4.2, заключаем, что цикличе-
циклические интегралы линейны относительно циклических скоростей qi и не
зависят явно от циклических координат qi. С помощью циклических
интегралов можно исключить из остальных уравнений движения ци-
циклические скорости, выразив их через скорости позиционных коор-
координат. При этом порядок системы уравнений движения снижается
на 2s единиц, где s — число циклических координат.
Рассмотрим примеры, показывающие, что при действии только
голономных связей теорема 8.4.1 о циклическом интеграле обобщает
основные теоремы динамики системы.
Пример 8.4.1. Интеграл количества движения (следствие 5.1.2)
имеет место, когда связи допускают виртуальное поступательное пере-
перемещение всей системы вдоль постоянного направления с единичным век-
вектором е. Соответствующую этому перемещению лагранжеву координату
обозначим q\. Тогда
bvv = e 6q\, v — 1,..., N,
суть виртуальные перемещения всех точек системы и dvv/dq\ = e. Об-
Обобщенная сила Q\ имеет вид
N ~ N N
и представляет собой сумму проекций активных сил на направление е.
Вычислим теперь частные производные dT/dq\% dT/dq\:
где М — масса, vc — скорость центра масс системы. Далее
9Г Л . div Л . d drv Л . de
у > >
Л . div Л . d drv Л . de Л
= у mvvv • —— = > rriyVy • —-—— = > т»ти • — = 0.
fr[ dq ^ dte9l ?f "A
558 Глава 8. Динамика голономных систем
Следовательно, если dU/dqi = О, то координата q\ будет циклической.
Соответствующее ей уравнение
N
е-М\с =e
дает теорему 5.1.2 о движении центра масс. Если же Q\ = 0, то бу-
будет справедлив циклический интеграл, выражающий закон сохранения
проекции количества движения на направление вектора е:
е • М\с = Р\ .О
Пример 8.4.2. Интеграл площадей (следствие 5.1.3) существует,
когда множество виртуальных перемещений в каждый момент времени
включает дифференциал вращения всей системы как целого вокруг не-
неподвижной оси (§ 2.10). Пусть е — единичный вектор направления этой
оси, a </i —угол поворота вокруг нее. Примем q\ за одну из лагранжевых
координат системы. Дифференциалы вида
bvv = 6qx(e хгД i/= 1,...,W,
определяют в рассматриваемом случае виртуальные перемещения точек
системы. Тогда
/ = ехг„ V- 1,...,ЛГ.
dqi
Обобщенная сила, соответствующая координате q\, вычисляется следу-
следующим образом:
N dr N N
Q\ = ?Р" ' j^ = ^F, • (e x ту) = е
Она представляет собой проекцию суммарного момента сил на напра-
направление е. Вычислим теперь частные производные дТ/dqi, dT/dq\\
л-r N я* N л N N
01 О O
=
что совпадает с проекцией суммарного вектора кинетического момента
на ось е. Далее
дТ \—* . дти \-^ . d дти \-^\ d .
ivvv • (е х vv) = 0.
8.4. Функция Лагранжа. Циклические координаты 559
Уравнение Лагранжа, соответствующее координате q\, принимает вид
А ( N \ N
— I е Гг х m v I =e V*
dt \ ^ " " 1 7^1
и выражает теорему 5.1.4 об изменении кинетического момента. Если
момент активных сил относительно оси е равен нулю, то соответствую-
соответствующий циклический интеграл будет интегралом площадей.О
Пример 8.4.3. Пусть силы, не имеющие силовой функции, от-
отсутствуют: Qi = 0. Тогда система уравнений Лагранжа имеет вид:
d (8L\ dL
Ы° 1
Если, кроме того, функция Лагранжа не зависит явно от времени, то
для этой системы справедлив обобщенный интеграл энергии (следствие
8.4.3). Покажем, что этот интеграл можно интерпретировать как цикли-
циклический.
Перейдем к другой независимой переменной г:
t = t(T).
Обозначим
Уравнения Лагранжа после перехода к новой независимой переменной
примут вид
d (dc\ дс .
dr \dq'J dq{
где
Эти уравнения имеют структуру уравнений Лагранжа, но чтобы их пол-
полностью определить, требуется задать зависимость t = t(r). Пользуясь
произволом в выборе этой функции, определим ее, добавив к исходной
системе дифференциальное уравнение
I \ _ _ п
dr V^v dt
Тем самым переменные qi,...,qn,t заданы посредством системы урав-
уравнений Лагранжа второго рода, где С служит функцией Лагранжа. По-
Поскольку С от t явно не зависит, координата t будет циклической, и ей
соответствует циклический интеграл
560 Глава 8. Динамика голономных систем
Покажем, что этот интеграл есть обобщенный интеграл энергии. В са-
самом деле,
дС , ^ dL dqi А дЬ
Поскольку L = Li -f L\ + Lo, получим
дс
W = Lo-L2.
Следовательно, изучаемый циклический интеграл есть
L2 - Lo = h.O
Рассмотренные примеры показывают, что для голономных систем
основные теоремы динамики можно рассматривать как проявление
свойств циклических координат. Ясно, что удачный выбор лагран-
жевых координат в значительной мере облегчает интегрирование и
исследование системы уравнений Лагранжа. При выборе координат
полезно стремиться к тому, чтобы из них как можно больше оказа-
оказались циклическими.
Решающую роль здесь играет структура множества виртуальных
перемещений и то, как изменяется функция Лагранжа по различным
направлениям в пространстве лагранжевых координат. Дифферен-
Дифференциалу циклической координаты отвечает направление виртуальных
перемещений системы, в котором функция Лагранжа не изменяется.
Наоборот, если в каждой точке конфигурационного пространства су-
существует направление виртуальных перемещений, оставляющее по-
постоянной функцию Лагранжа, то одну из лагранжевых координат
следует выбирать так, чтобы ее дифференциал задавал именно это
виртуальное перемещение системы.
Направление виртуального перемещения удобно задавать набором
конкретных значений дифференциалов лагранжевых координат. Эти
дифференциалы можно назначать произвольными. Например, мож-
можно задать их в виде
% = fi(qi,---,4n,tNs, i = l,...,n,
где функции /,- задают направление виртуального перемещения при
фиксированном времени, 6s — дифференциал скалярного параметра
s. Когда обобщенные координаты изменяются с течением времени:
4% = 0i(O»
8.4. Функция Лагранжа. Циклические координаты 561
то и введенные дифференциалы <5</, также будут зависеть от времени.
Считая s и t независимыми, найдем
Символы "d" и "<5" обозначают частные дифференциалы лагранже-
вых координат по независимым параметрам t и s. Следовательно,
должно быть
d(%) = 6(Ац), t= 1 n,
и, значит,
Определим функции <fr(s), <jt(s) с помощью следующей системы
дифференциальных уравнений
Если теперь параметр s принять за некоторую новую лагранжеву ко-
координату, то при различных начальных условиях эта система обык-
обыкновенных дифференциальных уравнений определит в фазовом про-
пространстве системы семейство координатных линий, соответствующих
изменению координаты s при фиксированном времени t. Условие, при
котором координате s соответствует циклический интеграл, сформу-
сформулируем в виде теоремы.
Теорема 8.4.2. (Э. Нётер). Пусть изучаемая система опреде-
определена посредством функции Лагранжа
обобщенные силы, не имеющие силовой функции, отсутствуют:
Qi = 0, а координата s вводится с помощью обыкновенных диффе-
дифференциальных уравнений
36- 1503
562 Глава 8. Динамика голономных систем
где t — постоянный параметр, не зависящий от s, в силу чего
Яг = ft(M)> 4i = &(М)» L = L(s,t).
Если при этом L не зависит явно от s: dL/ds = 0, то координата s
будет циклической, и ей соответствует циклический интеграл вида
»=1 *•
где /3 — постоянная интегрирования.
Доказательство. Поскольку Q, =0, то координаты gt и их ско-
скорости qi подчиняются уравнениям Лагранжа, которые можно запи-
записать в виде
Условие постоянства функции L при изменении параметра s можно
представить следующим образом:
дЬ \-^ 9L dqi v-^ dL dqi
- x ' ч -i- = 0.
ds r^i dqi ds ~* dqi ds
Преобразуем это условие с помощью уравнений Лагранжа и правила
введения координаты s:
_ A d fdL\ ^dLdft _d (^dL \_
Замечание 8.4.1. Относительно неизвестных функций /, усло-
условие
8L "dL^dLf^dfidfi]
t=i v^' »=i v*' \j=i v^
можно рассматривать как одно дифференциальное уравнение в част-
частных производных. Найдя его общее решение, можно получить все
циклические координаты системы. При этом необходимо учитывать,
что /,-, г = 1,..., п, зависят только от координат и времени и должны
удовлетворять уравнению при любых значениях обобщенных скоро-
скоростей.
8.4. Функция Лагранжа. Циклические координаты 563
Следствие 8.4.4. Известно, что для произвольной системы ма-
материальных точек справедливо равенство
L = Z/2 + L\ 4- Lo,
где
п
^2 = Г
*,Р=1
однородная квадратичная форма обобщенных скоростей,
p=i
— однородная линейная форма скоростей, Lq от скоростей не зави-
зависит.
Уравнение для определения функций /,- принимает вид
Так как это уравнение должно быть тождеством при любых значе-
значениях обобщенных скоростей, то соответствующие коэффициенты
должны обратиться в нуль. Отсюда получается система уравне-
уравнений в частных производных относительно функций /,:
I v^ dakp -
Матрица (atjb) невырожденная, а значит, первые две группы урав-
уравнений полученной системы можно разрешить относительно частных
производных:
' f
36*
564 Глава. 8. Динамика голономных систем
Тогда последнее уравнение исходной системы примет вид
Не останавливаясь подробно на условиях совместности полученной
системы уравнений, отметим следующие ее свойства.
1. Пусть Ь{ = О, г = 1,.. . ,n, Lq = 0. Такой случай имеет ме-
место, когда связи не зависят явно от времени, и силы потенциальны.
Получаем, что решением системы служат функции /,-, не зависящие
явно от времени: dfi/dt = 0.
2. Пусть q^ — циклическая координата. Тогда
Как и следовало ожидать, решение системы в этом случае можно
взять следующим:
Л. = 1, U = О, гф р.
Это означает, что здесь координата s совпадает с циклической коор-
координатой q^.
§ 8.5. Метод Рауса исключения циклических ко-
координат
Когда некоторые из лагранжевых координат оказались цикличе-
циклическими, можно с помощью соответствующих первых интегралов по-
понизить порядок системы дифференциальных уравнений движения.
Метод Рауса позволяет выполнить понижение порядка системы, со-
сохранив при этом форму уравнений Лагранжа.
Пусть gi,..., qs — позиционные, a qs+\,..., qn — циклические ко-
координаты. Если Qp = 0, р = s + 1,..., гс, то координатам g5+i,..., qn
отвечают циклические интегралы
7— = /^, /i=l,...,n.
С помощью этих интегралов можно циклические скорости q^ пред-
представить в виде функций (для механических систем соответствующая
матрица не вырождена)
8.5. Метод Рауса исключения циклических координат 565
Составим функцию
в которой q^ заменим их выражениями через позиционные координа-
координаты, скорости и константы циклических интегралов, так что
R =
Полученная таким образом функция R называется функцией Payca.
Для того чтобы вывести уравнения движения, не содержащие ци-
циклических скоростей, рассмотрим дифференциал dR функции Рауса
по всем аргументам:
dR JO dR ,
Принимая во внимание выражение функции Рауса через L и ее про-
производные, будем иметь
где dqi, dqi, d/Зц, dt — независимые дифференциалы соответствующих
переменных. Полученные выражения для dR тождественны. Сле-
Следовательно, должны совпадать коэффициенты при дифференциалах
аргументов. Учитывая, что
—- = /? ji = « + l,...,n,
найдем
" dt
Заметим, что в каждом из этих равенств смысл частной производ-
производной в левой и правой частях неодинаков. Частные производные от
функции Рауса по g,-, <jn вычисляются в предположении, что не из-
изменяются аргументы /?AX,^ = s+l,...,n,a частные производные от
функции Лагранжа — в предположении, что не меняются аргументы
566 Глава 8. Динамика голономных систем
Принимая во внимание систему уравнений Лагранжа, найдем
уравнения для позиционных координат:
d (ди
{
Эта система замкнута, когда Qi не зависят от циклических коорди-
координат, и в этом случае она носит название системы уравнений Рауса.
Видим, что уравнения Рауса имеют форму уравнений Лагранжа,
но роль функции Лагранжа в них играет функция Рауса. После ин-
интегрирования уравнений Рауса задача определения закона изменения
циклических координат приводится к квадратурам. В самом деле,
Отсюда
* 9R ,.
<0
где сц — постоянная интегрирования. Подынтегральное выражение
будет известной функцией времени, когда определены все позицион-
позиционные координаты.
Пример 8.5.1. В случае Лагранжа-Пуассона движения твердого
тела вокруг неподвижной точки (см. § 6.8) функция Лагранжа имеет
вия 1 . .
L = -[А(ф2 sin2t? + г?2) + С(ф cos д + фJ] - тдС, cos d.
7>[
Она не зависит явно от углов <р и ф, которые, следовательно, будут
циклическими координатами. Им соответствуют циклические интегралы
—г = ф(А sin2 д + С cos2 д) + Сф cos д = /ЗА,
дф
-т-г = С(ф cos i? + ф) = Сг0.
Вычислим функцию Рауса:
дф &<р
Разрешим циклические интегралы относительно ф, ф:
ф- г-у- , (р = го- Vcosi?.
8.6. Устойчивость движения 567
Поэтому
Я = L - А(/3 - brocos0)i>- Crl = L-A (/? ~ 6г°L°°S *>' - Сг20 =
sin v
1 Г, (ta (/?-6r0cost?J\ „ Л
1 Г,
= 2 [Л
Заметив, что функция Рауса не зависит явно от времени, выпишем об-
обобщенный интеграл энергии:
Далее исследование движения можно провести так же, как в § 6.8.O
§ 8.6. Устойчивость движения
Пусть движение некоторой механической системы описывается
системой дифференциальных уравнений
где у G йт, а вектор-функция Y удовлетворяет условиям суще-
существования и единственности решения. Предположим, что вектор-
функция z(J) — решение системы, а х = у — z — отклонение решения
у от решения z. Поскольку
то для х получаем дифференциальное уравнение
где
X(t, x) = [Y(«, x + t(t)) - Y(t, «@), X(t, 0) = 0.
Следовательно, дифференциальное уравнение для переменной х до-
допускает тривиальное решение х = 0. Исследование свойств движе-
движения в окрестности решения z = z(J) сводится к исследованию свойств
движения в окрестности тривиального решения х = 0.
Определение 8.6.1. Непрерывная скалярная функция V(*,x)
называется знакопостоянной (знакоположительной или знакоотри-
цателъной), если V(t,x) > 0 (или V(t,x) < 0) во всей своей области
определения.
568 Глава 8. Динамика голономных систем
Определение 8.6.2. Функция V(t,x) называется знакоопреде-
ленной (положительно определенной или отрицательно определен-
определенной), если в ее области определения существует непрерывная ска-
скалярная функция W(x) такая, что либо V(t,x) > W(x) > О при х ф О
(положительно определенная функция), либо V(t,x) < W(x) < О
при х ф 0 (отрицательно определенная функция), причем V(t,O) =
W@) = 0.
Определение 8.6.3. Нулевое решение системы
x = X(t,x)
называется устойчивым по Ляпунову при t —> оо, если для любого to
из области существования и единственности решений и любого е > 0
существует S > 0 такое,что
1) все решения x(t) системы, включая нулевое решение, для ко-
которых ||х(<о)|| < <$, определены в промежутке to < t < оо;
2) для всех этих решений справедливо неравенство ||х(<)|| < е при
to < t < оо.
Теорема 8.6.1. (Ляпунов). Если для системы
удовлетворяющей условиям существования и единственности ре-
решений при любом t > to, существует положительно определенная
функция V(t,x), допускающая знакоотрицательную производную по
времени V(t,x) в силу системы, то тривиальное решение х = 0 дан-
данной системы устойчиво по Ляпунову при t —> оо.
Доказательство. По условию теоремы имеется непрерывная по-
положительно определенная функция 1У(х) такая, что
V{t, х) > W(x) > 0 при х ф 0, V{t, 0) = W@) = 0.
В пространстве Rm возьмем сферу S? : ||х|| = ?:, целиком принадле-
принадлежащую области определения функции V(t,x). Сфера S? — компакт-
компактное множество. Функция РУ(х) непрерывна и положительна на Ss.
Нижняя грань этой функции достигается в некоторой точке х* 6 5е:
Зафиксируем to- Функция V(to,x) непрерывна по х, причем
V(to,0) = 0. Следовательно, существует окрестность ||х|| < 6 < е
такая, что 0 < V(<o,x) < ос при ||х|| < 6.
Рассмотрим любое нетривиальное решение х = x(t) с начальным
условием ||х|| < 6 и предположим, что существует t = t\, для кото-
которого ||х|| = е. Изучим поведение функции К(^,х(<)) вдоль решения
8.7. Движение вблизи равновесия 569
x(t). В силу условия теоремы V < 0. Поэтому функция V(t,x(t))
невозрастающая и
а > V(to,xo) > V(tux(h)) > W(x(tx)) > а,
что невозможно.?
Замечание 8.6.1. Функция V(*,x), удовлетворяющая условию
теоремы 8.6.1, называется функцией Ляпунова.
§ 8.7. Движение вблизи равновесия
Исследуем движение склерономной механической системы под
действием потенциальных сил в окрестности ее положения равнове-
равновесия в пространстве лагранжевых координат. В точке равновесия все
потенциальные силы обращаются в нуль:
?-0. (-1 п.
oqi
Если в какой-то момент времени лагранжевы координаты равны их
значениям в положении равновесия, а обобщенные скорости отсут-
отсутствуют, то и в любой другой момент времени лагранжевы координа-
координаты будут в силу уравнений движения оставаться постоянными. Не
уменьшая общности, можно принять, что в положении равновесия все
лагранжевы координаты обращаются в нуль:
4% = 0, i = 1,...,п.
Такое решение системы уравнений Лагранжа будем в дальнейшем
называть "нулевым" решением.
Введем 2п-мерный вектор:
и выберем в пространстве таких векторов какую-либо метрику ||q, q||.
Достаточным условием устойчивости нулевого решения служит
существование функции Ляпунова. Применительно к рассматривае-
рассматриваемому случаю функция Ляпунова есть дифференцируемая функция
V = V(qi,...,qn,qu...,qnI
знакоопределенная (сохраняющая знак и обращающаяся в нуль толь-
только при нулевых значениях всех аргументов) и такая, что ее производ-
производная в силу уравнений движения
A dV . A dV ..
570 Глава 8. Динамика голономных систем
знакопостоянна, причем ее знак противоположен знаку V. Знакопо-
Знакопостоянная функция может либо быть тождественно равной нулю, либо
обращаться в нуль в каких-нибудь точках фазового пространства.
Скажем, что силовая функция U{q\,..., qn) имеет в точке
qi = о,...,?„ = 0
изолированный максимум, если существует число 6 такое, что при
выполнении условий
справедливо неравенство
Теорема 8.7.1. (Лагранж). Положение равновесия склероном-
склерономной системы, находящейся под действием потенциальных сил, ус-
устойчиво, если в этом положении силовая функция достигает изо-
изолированного максимума (потенциальная энергия — изолированного
минимума).
Доказательство. Так как силовая функция
определена с точностью до произвольной постоянной, то можно счи-
считать, что в положении равновесия она достигает нулевого значения.
Тогда существует окрестность нулевого решения, в которой
причем поскольку максимум U изолирован, то эту окрестность мож-
можно выбрать такой, чтобы равенство нулю функции U было возможно
лишь в положении равновесия.
Для склерономной системы кинетическая энергия представляет
собой невырожденную положительно определенную квадратичную
форму всех скоростей. Следовательно, полная энергия
есть знакоположительная функция. Рассматриваемая система допус-
допускает интеграл энергии % — h (следствие 8.2.3), т.е. в силу уравнений
движения
Тем самым Н есть функция Ляпунова. ?
8.7. Движение вблизи равновесия 571
Следствие 8.7.1. Если положение равновесия склерономной си-
системы, находящейся под действием потенциальных сил, устойчи-
устойчиво, то оно останется устойчивым при добавлении гироскопических
и диссипативных сил.
Устойчивость движения означает, что если в начальный момент
времени отклонения фазовых переменных (координат и скоростей)
от нулевых значений были малыми, то они останутся малыми и в
любой другой момент. С целью получения более подробной инфор-
информации о структуре движения введем допустимые пределы изменения
лагранжевых координат и обобщенных скоростей
k»l<*» Ш<&, i=l,..., п.
Эти пределы приблизительно характеризуют размеры допустимой
области движения, где положение равновесия системы будет изоли-
изолированным, а также предельное значение кинетической энергии, при
котором система достаточно долго остается внутри допустимой обла-
области, если ее вывести из положения равновесия.
Величины (ji,..., qn, q\,..., qn будем считать малыми в том смы-
смысле, что
М«1, 1*1«1, , = !,...,„,
a» di
и настолько, что при разложении в окрестности положения равно-
равновесия в степенные ряды кинетической энергии и силовой функции
членами выше второго порядка малости по сравнению с другими чле-
членами будем пренебрегать.
Представим силовую функцию в виде ряда
d2U
+ ...
Принимая во внимание, что в положении равновесия
= 0, 2 = 1,.. .,п,
иЧг о
получим приближенное выражение для силовой функции
где b{j суть постоянные коэффициенты, образующие симметричную
матрицу
572 Глава 8. Динамика голономных систем
отличающуюся только знаком от матрицы вторых частных производ-
производных от силовой функции, взятых в положении равновесия.
Разложение в ряд коэффициентов a,j кинетической энергии дает-
дается формулой
Так как малыми предполагаются не только лагранжевы координаты,
но и обобщенные скорости, а кинетическая энергия в рассматривае-
рассматриваемом случае есть квадратичная форма от обобщенных скоростей, то
члены первого и более высоких порядков в разложении коэффици-
коэффициентов ciij не следует учитывать. В кинетической энергии они будут
иметь порядок не ниже третьего. Окончательно получаем, что при-
приближенно кинетическая энергия может быть представлена квадра-
квадратичной формой
* 2 • =1
где все коэффициенты a,j = %•(()) образуют симметричную постоян-
постоянную положительно определенную матрицу
Эта матрица в точности совпадает с матрицей коэффициентов кине-
кинетической энергии, взятой в положении равновесия.
Определение 8.7.1. Механическая система называется позици-
позиционной линейной системой, если ее кинетическая энергия есть поло-
положительная симметричная квадратичная форма обобщенных скоро-
скоростей:
а силовая функция есть симметричная квадратичная форма лагран-
жевых координат:
с постоянной положительно определенной симметричной матрицей А
и постоянной симметричной матрицей В.
Следствие 8.7.2. Для позиционной линейной системы нулевое
значение координат
8.8. Главные координаты 573
задает положение равновесия.
Следствие 8.7.3. На конечном достаточно малом интервале
времени позиционная линейная система приближенно описывает
движение соответствующей произвольной склерономной механиче-
механической системы в окрестности ее положения равновесия.
Следствие 8.7.4. Уравнения Лагранжа для позиционной линей-
линейной системы имеют вид
и образуют систему линейных дифференциальных уравнений второ-
второго порядка с постоянными коэффициентами.
§ 8.8. Главные координаты
Пусть Rn — линейное пространство с базисом а.\,..., ап. Набору
лагранжевых координат q\,..., qn сопоставим вектор
1=1
Тогда уравнения Лагранжа для позиционной линейной системы мож-
можно представить в виде
q=-Cq, C = А~1В.
Другими словами, вектор q есть результат действия линейного опе-
оператора С в пространстве Rn. В базисе ai,...,an матрица оператора
С есть произведение матрицы А , обратной к матрице кинетической
энергии, на матрицу В силовой функции (определение 8.7.1).
Теорема 8.8.1. (О приведении позиционной линейной си-
системы к главным координатам). В пространстве Rn существу-
существует базис ui,... ,un главных направлений:
для которого переменные & удовлетворяют системе уравнений Ла-
Лагранжа
Ь = -А;&, i = l,...,n,
с действительными коэффициентами Aj — собственными значени-
значениями оператора С.
574 Глава 8. Динамика голономных систем
Доказательство. В линейном пространстве Rn введем метриче-
метрический тензор, матрица которого в базисе ai,...,an совпадает с матри-
матрицей А кинетической энергии. Это можно сделать, так как матрица А
симметричная и положительно определенная, а кинетическая энер-
энергия не зависит от выбора базиса в пространстве Rn. С помощью этого
тензора определим скалярное произведение двух векторов х,уЕЙ":
Тем самым пространство Rn превращается в евклидово. Так как
матрица В симметричная, то С — самосопряженный оператор по ме-
метрике А. Известно, что все собственные значения А,-, i = 1,...,п,
самосопряженного оператора — действительные числа. Кроме того,
у каждого самосопряженного оператора, действующего в веществен-
вещественном евклидовом пространстве Яп, существует ортонормированный по
метрике А базис из собственных векторов. Пусть собственному значе-
значению А» соответствует собственный вектор и,- этого базиса: Си,- = A,ut-.
Среди А, могут быть и кратные корни характеристического уравне-
уравнения. Кратный корень повторяется в последовательности
л\,..., Ап
столько раз, какова его кратность.
Представим вектор q в виде разложения по базису ui,... ,un:
Тогда векторное уравнение движения позиционной линейной системы
примет вид
п п п
]Р &и, = - ]Р iiC u, = - ]Р А,-&и,-.
1=1 1=1 1=1
Векторы ui,... ,un линейно независимы. Значит, должны совпадать
коэффициенты при этих векторах в правой и левой частях.?
Определение 8.8.1. Уравнение вида
det(A^ - В) = О
называется уравнением частот позиционной линейной системы.
Теорема 8.8.2. (Сильвестр). Все корни уравнения частот ве-
вещественны и совпадают с собственными значениями оператора С.
8.8. Главные координаты 575
Доказательство. Характеристическое уравнение для собствен-
собственных значений оператора С имеет вид
det(C - AjE7) = 0,
где Е — единичная матрица. Воспользуемся свойствами определи-
определителей:
det Л det(C - ХЕ) = det[A{C - ХЕ)] = det(B - АЛ),
так как С = А В. Поскольку det Л ф О, то уравнение частот и
характеристическое уравнение оператора С эквивалентны.?
Следствие 8.8.1. Собственные векторы Uf оператора С удовле-
удовлетворяют уравнению
(В - АЛ)и = 0.
Доказательство. По определению собственного вектора
Си, = А, и,.
Но С = Л В. Поэтому Bui = АгЛиг.О
Следствие 8.8.2. В позиционной линейной системе, в отличие
от системы линейных дифференциальных уравнений общего вида,
резонансные члены не возникают даже в случае кратных собствен-
собственных чисел.
Определение 8.8.2. Координаты ?i,...,?n, описывающие дви-
движение позиционной линейной системы по главным направлениям, на-
называются главными координатами.
Следствие 8.8.3. В главных координатах кинетическая и по-
потенциальная энергии позиционной линейной системы принимают
вид
Следствие 8.8.4. Движение позиционной линейной системы, за-
заданной с помощью произвольных лагранжевых координат, есть пря-
прямое произведение движений п одномерных систем по главным напра-
направлениям.
576 Глава 8. Динамика голономных систем
Для каждой одномерной системы могут представиться три слу-
случая.
1. А = о;2 > 0. Имеем колебания гармонического осциллятора по
закону
? -f i
2. А = 0. Случай безразличного равновесия. Закон движения:
Z = сх + c2t.
3. А = —и2 < 0. Случай неустойчивого движения. Закон движе-
движения:
? = d chut -f
Пусть некоторое собственное значение А» положительно. Тогда
система при соответствующих начальных условиях может совершать
периодическое колебание вида
= (ci coswt -f
где Uj — вектор, соответствующий собственному значению А,. Такое
движение есть прямое произведение одномерного движения
?,- = с\ cosшг + С2 sinut
и тривиальных движений ^ = 0, j ф г.
Пример 8.8.1. Рассмотрим систему из двух одинаковых математи-
математических маятников длины /, массы ш, находящуюся в поле силы тяжести
с ускорением д. Пусть маятники соединены невесомой пружиной, дли-
длина которой в недеформированном состоянии равна расстоянию а между
точками подвеса (рис. 8.8.1). Исследуем движение соответствующей по-
позиционной линейной системы.
Введем декартов репер Ое^. Начало О репера поместим в точку
подвеса одного из маятников. Вектор ei направим в сторону другого
маятника, вектор ег — вертикально вверх. Радиусы-векторы точек со-
сосредоточения масс маятников представим в виде
Г1 = a?iei +я2е2, Г2 = Ух ei + 3/2 е2.
Пусть gi и ^2 — углы отклонений маятников от вертикали. Эти углы
суть лагранжевы координаты системы. Они образуют координатное про-
пространство Я2. Имеем
х\ = /singi, #2 = —/cos gi,
yi = CL + /sin 02, У2 = -/COS 02-
8.8. Главные координаты
577
о
I
m
m
Два маятника образуют колебательную
систему с двумя степенями свободы.
При одинаковых массах и длинах маят-
маятники, будучи соединены пружиной, вы-
выполняют по одной из главных коорди-
координат синхронное движение по одному и
тому же закону, а по другой — движе-
движение в противофазе. Маятники способ-
способны в процессе движения системы чере-
чередовать между собой возбуждение ма-
малых колебаний.
Рис. 8.8.1. Система маятников
Составим выражения для силовой функции и кинетической энергии си-
системы. Согласно закону Гука (см. пример 3.4.2,в) силовая функция U
пружины дается выражением
с(Ь - аJ
где 6 — длина пружины в деформированном состоянии, равная длине
отрезка между массами маятников:
Ь=
= \/[a+l(sinq2-sinqi)]2+l2(cosq2-cosqiJ.
Считая ?1 и ^2 величинами первого порядка малости, найдем 6 с точно-
точностью до третьего порядка:
Силовая функция Ut силы тяжести выражается формулой
= mgl(cos qi + cos q2).
С точностью до членов четвертого порядка малости получим
Таким образом, кинетическая энергия и силовая функция для соответ-
соответствующей позиционной линейной системы принимают вид
~ ml2 , .о .о.
= -^i (q\ + q\) - ^(q2 -
37-I5O.S
578 Глава 8. Динамика голономных систем
Для матриц А и В имеем выражения
т/2 О \ / (mgl + cP) -с/2
О т/2 У ^
Выпишем уравнение частот:
mg -f cl — Am/ —с/
—с/ m^f -f cl — Am/
или
(mg + cl - Am/J - c2/2 = 0.
Находим два собственных значения
А1=Л, А2 = Ai(l + 2/S)f /?=—.
/ (jim
Координаты собственного вектора, соответствующего Аь
Ui = tXnai + «12«2,
где ai, a2 —базисные векторы пространства Д2, равны между собой:
t*ll = Ui2.
Для координат собственного вектора, соответствующего Аг,
U2 = V>21 «I -f t«22 «2j
найдем
tX2l = ~ U22-
Чтобы решить задачу, достаточно принять (учитывается норма с коэф-
коэффициентами кинетической энергии)
UU = Ui2 = U2\ = -U22 = (lV2rn)"\
и тогда
_ «1 + OL2 _ OL\ — OL2
U U
Главные координаты ?ь ^2 суть координаты вектора q = q\ ol\ + <j2 «2
базисе Ui, 112, т.е.
q =
8.8. Главные координаты 579
Переход от главных координат к лагранжевым осуществляется по фор-
формулам
В главных координатах кинетическая энергия и силовая функция выра-
выражаются равенствами
Главные координаты имеют следующий смысл.
1. ?2 = 0. Тогда q\ = #2- Оба маятника движутся по одному и тому
же закону. Пружина не работает.
2. ?i = 0. Тогда q\ = —дг- Маятники движутся симметрично в про-
противоположных направлениях относительно вертикальной прямой, про-
проходящей через середину отрезка между точками подвеса маятников (дви-
(движутся в противофазе).
Уравнения движения в главных координатах приобретают форму
?i = —Ai?i, ?2 = —^2^2-
Это — уравнения двух гармонических осцилляторов (см. § 3.9) с часто-
частотами
Чтобы завершить исследование примера, рассмотрим конкретный слу-
случай колебаний, заданных при t = 0 начальными условиями
«i@) = дз@) = 0, 9i@) = O, ft@) = 0.
Им отвечает решение
В лагранжевых координатах оно принимает вид
/sir
qi = ill —
g2 = O
)¦
Допустим теперь, что /? <С 1. Это эквивалентно требованию, что жест-
жесткость пружины весьма мала. Тогда
37*
580 Глава 8. Динамика голономных систем
Подставив это значение в закон движения и применив тригонометриче-
тригонометрические преобразования, найдем
q2 =
где
Величина ? мала вместе с /?. Поэтому в законе движения первое сла-
слагаемое в круглых скобках можно представить как колебания частоты ш1
с медленно изменяющейся амплитудой. Второе слагаемое есть фоно-
фоновое колебание с малой амплитудой. Сначала наблюдатель увидит, что
практически колеблется только первый маятник с амплитудой
—— COS St.
Затем с течением времени начнет раскачиваться второй, а через время
г = 7Г?/2 будет колебаться практически лишь второй маятник. Через
время 2т второй маятник успокоится и будет снова колебаться лишь
первый и так далее.О
Обратимся теперь к изучению общей структуры решения позици-
позиционной линейной системы. Уравнения движения в главных координа-
координатах
разрешаются с помощью функций
& = с\ exp(iukt) + с2 exp(-iu>kt)}
где i — мнимая единица, u>k = л/^ь, Сь С2 — постоянные, опреде-
определяемые начальными условиями. Постоянные ujk могут оказаться и
мнимыми, когда А& < 0. В лагранжевых координатах решение, соот-
соответствующее собственному значению А&, запишется следующим обра-
образом:
q = [ci exp(tw*t) + с2 exp(-iu>jb*)] uk.
Следствие 8.8.5. Все решения позиционной линейной системы
представляют собой линейную комбинацию слагаемых вида
q =
8.8. Главные координаты 581
Линейно независимых решений указанного вида имеется ровно
2?г. Общее решение позиционной линейной системы можно построить,
найдя все такие линейно независимые решения. Следствие 8.8.5 мо-
может оказаться полезным для исследования систем с большим числом
степеней свободы. Чтобы проиллюстрировать сказанное, рассмотрим
следующий пример.
Пример 8.8.2. Изучим малые колебания системы, состоящей из
п материальных точек массы т, связанных друг с другом одинаковы-
одинаковыми пружинками жесткости с и могущих двигаться по прямой. Крайние
материальные точки соединены пружинками с неподвижными стенками
(рис. 8.8.2).
Материальные точки соединены между
собой и со стенками пружинками в це-
цепочку и движутся без трения по гори-
горизонтальной прямой.
Рис. 8.8.2. Система осцилляторов
Функция Лагранжа системы есть сумма кинетической энергии точек
и силовой функции пружин:
где qk — смещение fc-й материальной точки из положения равновесия.
Система уравнений Лагранжа запишется следующим образом:
mqi +cBqi - q2) = О,
mqk + cBqk - qk-X - qk+x) = 0, k = 2,..., n - 1,
mqn + cBqn - qn-i) = 0.
Если для удобства обозначить <?о = <?n+i = 0, то уравнения движения
можно представить более симметрично:
cBqk -qk-i-qk+i) = 0, к = 1,...,п.
Для этих уравнений будем искать решение вида
qk = Dexp[i(ut ± к<р)], к = 0,..., п + 1.
Подставив эти выражения в уравнения Лагранжа, получим
[-LJ2m + сB - е-'* - е'*)]9к = 0, к = 1,..., п.
582 Глава 8. Динамика голономных систем
Заметим, что е~щ +1%4> = 2 cos <р. Так как qk Ф О, то должно быть
га
Условиям на границе (go = </n+i = 0) можно удовлетворить, взяв ком-
комбинацию
qk = Dexp[i(wt + k<p)]
Условие go = 0 дает D = — F. Или
Получили стоячую волну. Условие qn+i = 0 приводит к уравнению
которое имеет п различных корней, расположенных в верхней части еди-
единичной окружности:
(fs = —, 8 = 1,...,П.
П -f 1
В результате находим п положительных частот
7TS
/Т
V m
/
=2i/—8111
V
га 2(п +
Собственный вектор u5 можно взять в виде
и5 = 2^ ак sin k<ps.
Главная координата ?5 изменяется по закону
?8 = cs cos(u)9t -f /3S) = Re[2i?M exp(iu;5t)].
Общее решение есть комбинация главных колебаний:
п
<7fc = 2^ €s (t) sin fc<p, .О
5 — 1
В соответствии с определением 8.8.1, чтобы найти собственные
значения позиционной линейной системы, достаточно решить уравне-
уравнение частот. В общем случае это — алгебраическое уравнение степени
п. Как видно из рассмотренных примеров, при малых п, а также в
некоторых других исключительных случаях его решение может быть
8.9. Экстремальные свойства собственных значений 583
получено аналитическими методами. Однако для значительного чи-
числа практически интересных задач п велико, а решение характери-
характеристического уравнения можно получить только численно. Но тогда
существенно сказываются вычислительные погрешности. Вместе с
тем для вычисления собственных значений можно использовать их
экстремальные свойства (см. следующий параграф), что позволяет
привлечь к этой задаче эффективные численные методы поиска экс-
экстремумов функций нескольких переменных.
§ 8.9. Экстремальные свойства собственных зна-
значений
Сопоставим с кинетической энергией позиционной линейной си-
системы квадратичную форму от лагранжевых координат
Квадратичную форму, соответствующую потенциальной энергии си-
системы, обозначим
Смысл коэффициентов aij, 6,j ясен из определения 8.7.1.
После перехода к главным координатам по формулам
Яг = $^Ч/»'&» г =
квадратичные формы принимают вид
5
Будем предполагать, что главные координаты пронумерованы так,
что между собственными значениями выполнено соотношение
Ai < А2 < Аз < ...< Ап.
Рассмотрим отношение квадратичных форм
Lq)_
1 = 1
584 Глава 8. Динамика голономных систем
Очевидно, что
— Лп'
Этот результат можно сформулировать еще и по-другому:
Ai = min ' ' = min ?(q, q), An = max .'[ = max ?(q,q),
я 4(q,q) ||q||=i V4'4; g A(q, q) ||q||=i V4'4;'
где норма ||q|| вектора q есть евклидова норма с матрицей А.
Рассмотрим подпространство ?т, представляющее собой линей-
линейную оболочку собственных векторов Ui,..., um:
Если qe?m, то
i=i t=i
Поэтому справедлива формула
Am = max
Аналогично, если ^т = lin{um,..., un}, to
= min
Теорема 8.9.1. Пусть Ai,..., An — собственные значения пози-
позиционной линейной системы, пронумерованные в порядке возраста-
возрастания. Тогда
Ат = min max
A(q,q)
где Ет — множество всех подпространств размерности т, ? —
одно из таких подпространств.
8.9. Экстремальные свойства собственных значений 585
Доказательство. Рассмотрим подпространство
?m = li
Его размерность равна п — m + 1. Поэтому оно пересекается с под-
подпространством ?, имеющим размерность т: ?т П ? ф 0. Значит,
существует элемент q такой, что
qe?m, qe?.
Для элемента q имеем
Первое неравенство справедливо, так как максимум ищется для всех
q G ?, a q ? ?. Второе неравенство справедливо, так как q E ?т, а
для ?т справедливо равенство
Лт = m
m — -.
:m A(q, q)
Кроме того, среди ? Е Ет имеется подпространство
?m=lin{ub...,um}.
Для него
Am = max
x трт
e*» A(q, q)
Следовательно, минимум выражения
достигается и равен Am.D
Следствие 8.9.1. Пусть Ai,..., An — собственные значения по-
позиционной линейной системы, пронумерованные в порядке возраста-
возрастания. Тогда
A = max min ^
A(q,q)
Следствие 8.9.2. Пусть координаты q\,.. .,qn удовлетворяют
линейным уравнениям
586 Глава 8. Динамика голономных систем
которые в пространстве Rn лагранжевых координат выделяют (п —
к)-мерпое подпространство. Экстремальные свойства собственных
значений позиционной линейной системы можно переписать в виде
ч • 5(q,q)
Afc+i = max mm
max
где внутренний экстремум вычисляется среди всех q, удовлетворя-
удовлетворяющих линейным уравнениям, а внешний экстремум берется по всем
независимым комбинациям коэффициентов этих уравнений.
В случае, когда все А, > 0, можно дать геометрическую интер-
интерпретацию экстремальных свойств собственных значений позиционной
линейной системы. Каждой такой системе сопоставим эллипсоид Э:
3 = {q: 5(q,q) = l}
и определим
1 = 1
Пусть Х{ — некоторое собственное значение, ах — соответствую-
соответствующий ему собственный вектор х = ?,иг, принадлежащий поверхности
эллипсоида. Тогда
Д(х,х) = ±А,-# = Л{||х||2 = 1.
Следовательно, главные оси эллипсоида Э обратно пропорциональны
собственным частотам
Отношение ??(q, q)/A(q, q) не меняется при пропорциональном изме-
изменении всех компонент вектора q. Поэтому, применяя теорему 8.9.1,
q можно считать принадлежащим эллипсоиду Э. Утверждение тео-
теоремы 8.9.1 можно тогда представить в виде
2 .
^ = mm max
8.9. Экстремальные свойства собственных значений 587
или окончательно
am = max min ||q||,
SE ?3
где am — длина полуоси эллипсоида, соответствующая собственному
вектору um. Верхняя грань в этом равенстве достигается на подпро-
подпространстве ?т, натянутом на векторы ui,..., um. При этом предпола-
предполагается, что
«1 > «2 > •.. > am.
Определение 8.9.1. Пусть задана некоторая позиционная ли-
линейная система с кинетической энергией Т и потенциальной энергией
П = —U. Другая система с кинетической энергией Т и потенциальной
энергией П называется системой, обладающей большей жесткостью
по сравнению с исходной, если
Г = Г, П > П.
Аналогично систему, обладающую свойством
f < Т, Й = П,
называют системой, имеющей меньшую инерцию при той же жестко-
жесткости.
Теорема 8.9.2. (Рэлёй). При увеличении эюесткости системы
или при уменьшении ее инерции собственные значения увеличива-
увеличиваются.
Доказательство. Как при увеличении жесткости, так и при
уменьшении инерции имеем
B(q,q) < Д(д,д)
Но тогда минимумы и максимумы этих отношений будут связаны
между собой таким же неравенством, т.е.
Xi < Аь г = 1,...,п.
При этом хотя бы в одном из этих соотношений имеет место строгое
неравенство, если только не выполнено тождество
Д(д,д) _
588 Глава 8. Динамика голономных систем
Следствие 8.9.3. (Геометрическая интерпретация теоремы
Рэлея). При увеличении жесткости системы или при уменьше-
уменьшении ее инерции новый эллипсоид Э содержится внутри исходного
эллипсоида Э. Полуоси внутреннего эллипсоида не больше, чем со-
соответствующие полуоси объемлющего.
Пусть на позиционную линейную систему, имевшую собственные
значения Аь ..., Ап, наложено дополнительно s независимых линей-
линейных связей
Ф1 = 0,...,Фв =0.
Полученная таким образом новая позиционная линейная система бу-
будет иметь п — s степеней свободы. Обозначим
собственные значения этой системы.
Теорема 8.9.3. При наложении s независимых связей каждое из
первых n — s собственных значений увеличивается, не превосходя при
этом собственное значение исходной системы, номер которого на s
единиц больше:
A
Am 5* Am <
Доказательство. Воспользуемся следствием 8.9.2:
min ,, *\, j = l,...,m-l.
Ф,=0,
Здесь связи Ф\ = 0,.. .,Ф5 = 0 фиксированы, а связи Ф^- = 0 варьи-
варьируются. Сопоставим полученное выражение с выражением для Ат:
Ат = max min ' , j = 1,..., т - 1.
Ф, Ф,=о i4(q,q)
В правой части последнего равенства минимум берется по более ши-
широкому множеству, так как связи Ф,- = 0 отсутствуют. Поэтому
С другой стороны, имеет место формула
Ат+, = max min ' , j = 1,..., т + s - 1,
Ф, Ф;=о%^)
8.9. Экстремальные свойства собственных значений 589
в которой варьируются все m -f s — 1 связей. Поэтому
А^ < Am+S.D
Следствие 8.9.4. Если наложена лишь одна линейная связь, то
Ai < А; < А2 < А; < ... < Л*_х < Ап.
Другими словами, собственные значения исходной позиционной ли-
линейной системы разделяются собственными значениями системы,
отличающейся от исходной тем, что в ней имеется дополнитель-
дополнительная линейная связь.
Замечание 8.9.1. Пусть на координаты позиционной линейной
системы дополнительно наложена нелинейная связь <?(q) = 0. Тогда
вновь полученная система уже не будет линейной. Вместе с тем если
положение равновесия </1 = g2:=.-- = <Zn = 0 удовлетворяет урав-
уравнению дополнительной связи, то разложение левой части уравнения
связи в степенной ряд будет иметь вид
" 5Ф 1
Предположим, что линейные члены действительно имеются:
" 5Фч2
Тогда можем пренебречь членами второго и более высокого порядка
и получить линейную связь, которая, будучи наложена на коорди-
координаты позиционной линейной системы, вновь образует позиционную
линейную систему.
Дадим геометрическую интерпретацию теоремы 8.9.3 для случая
Следствие 8.9.5. Пусть эллипсоид Э = {q : J5(q, q) = 1} соот-
соответствует исходной позиционной линейной системе и имеет полу-
полуоси
«1 > «2 > •• > ап.
Рассмотрим сечение этого п-мерного эллипсоида гиперплоскостью
в Rn. В сечении получится (п — \)-мерный эллипсоид Э*. Полуоси
эллипсоида Э* разделяют полуоси эллипсоида Э:
ai > ai > а2 > <*2 > ... > а*_х > ап.
590 Глава 8. Динамика голономных систем
Пример 8.9.1. Наличие трещины в стеклянном сосуде определяют,
постукивая о посуду каким-нибудь предметом. У посуды без трещины
имеются дополнительные связи между ее элементами по сравнению с
посудой, имеющей трещину. Поэтому у посуды без трещины частота
возникающих колебаний должна быть более высокой, а значит, должен
быть выше и тон звучания.О
§ 8.10. Влияние дополнительных сил
Пусть помимо потенциальных сил с потенциальной энергией П =
B(q, q) на позиционную линейную систему действуют еще и другие
силы
Qi = Qi(t), i=l п.
Перейдем к главным координатам по формулам
qi = ^Г Uji ?j, t = 1,..., n, det(iij,-) ф 0.
j=i
Силам Qi в координатах qi соответствуют силы S,- в координатах &.
Установим соотношение между Qi и St-, исходя из равенства выраже-
выражений для элементарной работы
Дифференциалы координат связаны формулами
Следовательно,
Сравнив коэффициенты при независимых дифференциалах главных
координат, найдем
Таким образом, если лагранжевы координаты выражаются через
главные при помощи матрицы
8.10. Влияние дополнительных сил 591
то обобщенные силы Ej, j = l,...,n, выражаются через Qi% i =
1,..., п, при помощи транспонированной матрицы:
В главных координатах уравнения движения принимают вид
Рассмотрим случай, когда все собственные значения положительны:
Aj; = u;?, j = 1 n, а силы <2j@ и, значит, Ej(t) суть произвольные
периодические функции с периодом т и частотой П = 2тг/г. Такие
функции можно разложить в ряд Фурье:
Подстановкой нетрудно убедиться в том, что ряды
ОО д
S
дают частное решение уравнений движения.
Если некоторое значение кО, совпадает с Uj и соответствующее
Ajk Ф 0, то для координаты ?j будет иметь место явление резонанса.
Когда резонанс отсутствует, решение можно представить в виде
где
J=l J=l
Uj — собственные векторы позиционной линейной системы. Таким
образом, q описывает свободное колебание системы, a q* — выну-
вынужденное колебание.
Теорема 8.10.1. Пусть па систему действуют периодические
обобщенные силы
Qi = /|-cos7<, i = l,...,n,
где f = (/i,..., /n) — постоянный вектор. Тогда движение по глав-
главным координатам, для которых собственный вектор \ij ортогонален
вектору f:
(Uj,f) = ]TWjt/t. = 0,
не возбуждаются при действии этой силы.
592 Глава 8. Динамика голономных систем
Доказательство. В матрице V = (tiji)T второй индекс соответ-
соответствует номеру собственного вектора, первый индекс выделяет компо-
компоненту разложения этого вектора по базису ai,...,an:
Для случая, указанного в условии теоремы, обобщенная сила, отве-
отвечающая j-му главному колебанию, принимает вид
Следствие 8.10.1. Пусть функция Лаграпжа не изменяет сво-
своего вида при преобразованиях координат
где матрица S обладает свойствами: SS = Е, S = 5Т (это, в част-
частности, могут быть преобразования симметрии относительно плос-
плоскости или повороты на угол ж). Тогда, если на систему действует
внешняя сила Q, такая, что
то главные координаты, для которых собственный вектор и удовле-
удовлетворяет условию
5и = -и,
не возбуждаются. Наоборот, для силы Q, удовлетворяющей усло-
условию
SQ = -Q,
не возбуждаются координаты, для которых
Доказательство. Если собственное значение А оказывается про-
простым (некратным), то для соответствующего ему собственного векто-
вектора и будем иметь
Su = и, либо 5и = —и.
Действительно, поскольку вид функции Лагранжа не изменяется при
преобразовании с матрицей 5, то Su — собственный вектор, соответ-
соответствующий значению А, а так как А — простой корень, то эти соб-
собственные векторы коллинеарны:
Su = аеи.
8. JO. Влияние дополнительных сил 593
Далее имеем
SSu = ae2u = и,
так как SS = Е. Следовательно, ае2 = 1 или ае = ±1.
Если Л — кратный корень, то необязательно должно быть Su =
aeu. Но тогда Ui = и + Su удовлетворяет условию S\i\ = ui.
Теперь получим
«,(& = (u, Q) = (и, SQ) = (Su, Q) = -(и, Q),
если Su = — и. Поэтому (u, Q) = 0. Аналогично выводятся осталь-
остальные утверждения. ?
Рассмотрим влияние гироскопических сил. Такие силы могут воз-
возникать, например, вследствие действия кориолисовых сил в неинер-
циальной системе отсчета. Они также могут быть следствием про-
процедуры Рауса игнорирования циклических координат. Рассмотрим
случай L = Ьъ + L$. Если лагранжевы координаты системы ортого-
ортогональны в том смысле, что форма Li есть сумма членов, содержащих
только квадраты обобщенных скоростей, то (см. § 8.5) функция Рау-
Рауса также будет представлять собой сумму положительно определен-
определенной квадратичной формы по позиционным скоростям и свободного
от скоростей члена. Однако если Li — произвольная положительно
определенная квадратичная форма, то отсутствие линейного по ско-
скоростям члена в функции Рауса гарантировать нельзя, так что функ-
функцию Рауса следует принять в виде
R = Ri + R\ ¦+• Rq ,
где #2 — квадратичная по скоростям, R\ — линейная по скоростям
формы, До от скоростей не зависит. Стационарное положение такой
системы, соответствующее решению системы уравнений dRo/dqi = 0,
г = 1,..., га означает, что в нем позиционные координаты #i,..., qm
сохраняют постоянные значения, тогда как циклические координа-
координаты могут изменяться в соответствии с циклическими интегралами.
Такой тип движения системы называют стационарным. По смыслу
исследование свойств движения в окрестности стационарной точки
уравнений Рауса совпадает с исследованием окрестности стационар-
стационарного движения в пространстве всех лагранжевых координат (как ци-
циклических, так и позиционных).
Мы можем принять для исследуемой стационарной точки <ji =
q2 = ... = qm = 0 (см. § 8.7) и оставить в функции Рауса только сла-
слагаемые до второго порядка малости включительно. Функция Рауса
ЗК - 1503
594 Глава 8. Динамика голономных систем
соответствующей линейной системы примет вид
где Л = (a,j) — положительно определенная постоянная симметрич-
симметричная матрица, В = Fjj) — постоянная симметричная матрица, /,-, /,j
постоянные коэффициенты. Составим уравнения Рауса:
= lj''''m'
Полученная линейная система отличается от позиционной линейной
системы слагаемыми вида
t =
которые имеют смысл гироскопических сил (см. определение 7.2.1),
так как матрица D = (rftJ) кососимметрична.
Линейно независимые решения этой системы будем искать в виде
где и € Дт, ^7 G й2т — постоянные векторы, х Е R2m — фазовый
вектор, соответствующий искомому решению. Подставив вместо q его
выражение в уравнения движения, получим задачу на собственные
значения:
(Л/?2 + D0 + В)и = 0.
Характеристическое уравнение имеет вид
det(AC2 + DC + B) = Q.
Его степень равна 2ш. Корни этого уравнения есть собственные
значения задачи. Каждому собственному значению /3 соответству-
соответствует по крайней мере один ненулевой собственный фазовый вектор
г} = (u,/?u), где и ненулевое решение полученной вырожденной си-
системы линейных уравнений.
Теорема 8.10.2. Различным корням характеристического урав-
уравнения соответствуют линейно независимые ненулевые собственные
фазовые векторы.
8.10. Влияние дополнительных сил 595
Доказательство. Предположим противоположное. Пусть соб-
собственные значения /?ь ...,/?* попарно различны, а соответствующие
им собственные фазовые векторы щ,...,щ линейно зависимы, т.е.
существуют не все равные нулю скаляры 7ь • • • 17* такие, что
Предположим, например, что 7* ф 0. Вектор-функция
к
1 I (/ I — 7 / * # #. С
\ / ^^^ I • »*
t=l
составляет решение изучаемой системы дифференциальных уравне-
уравнений с начальными условиями, определенными значением этой век-
вектор-функции при t = 0. Но по построению fi@) = 0. Следовательно в
силу теоремы единственности решений системы дифференциальных
уравнений имеем f (t) = 0. А потому
Мы теперь можем условие линейной зависимости векторов т;,- умно-
умножить на /?i и результат вычесть из полученного равенства:
72(/?2 ~ 0\)Щ + • • • + 7*(А - Р\)Щ = 0.
Другими словами, оказывается что линейно зависимыми будут также
векторы Щ, • ,г)к. Процесс исключения векторов мы можем анало-
аналогичным образом продолжать и в результате получим
- А) • ¦ • (А - A-i)*i* = о.
Имеем противоречие, так как по предположению 7* ф 0.D
Следствие 8.10.2. Пусть характеристическое уравнение име-
имеет 2т различных корней /?i,...,/?2m w r)\^^rhm — соответству-
соответствующие этим корням собственные векторы. Тогда общее решение ис-
исследуемой линейной системы представляется в виде
2т
где ?j, j = 1,.. .,2m, произвольные постоянные.
Следствие 8.10.3. Если все корни характеристического уравне-
уравнения различные и мнимые, то движение линейной системы с ги-
гироскопическими силами в окрестности стационарной точки будет
устойчивым.
38*
596 Глава 8. Динамика голономных систем
Теорема 8.10.3. Пусть матрица В положительно определена.
Тогда все корни характеристического уравнения системы с гироско-
гироскопическими силами суть мнимые числа.
Доказательство. Воспользуемся теоремой 8.7.1 Лагранжа. Если
матрица В положительно определена, то потенциальная энергия си-
системы
имеет в стационарной точке изолированный минимум. Система имеет
интеграл энергии, так как гироскопические силы на энергию системы
не влияют. Согласно следствию 8.7.1, такая система устойчива в
окрестности стационарной точки. Предположим теперь, что корень
характеристического уравнения 0k оказался при этом не мнимым, то
есть
Щ, Ofc — действительные числа. Это означает, что общее реше-
решение будет иметь слагаемое, содержащее в виде множителя функцию
exp(t)kt). Пусть t)k > 0, тогда найдется сколь угодно близкое к стаци-
стационарной точке в начальный момент времени решение, удаляющееся
в бесконечность при t —> ос. Предположим, что щ < 0. Сделаем
замену независимой переменной: t = —т. Обозначим </' дифферен-
дифференцирование по т. Линейная система уравнений с гироскопическими
силами примет вид
Aq" - Dq* + Bq = 0.
Она удовлетворяет теореме Лагранжа об устойчивости, а ее харак-
характеристическое уравнение совпадает с характеристическим уравнени-
уравнением исходной системы, если искать решение в виде q = uexp(—0т).
Следовательно, общее решение системы будет включать слагаемое,
содержащее в виде множителя функцию ехр{—щт). Таким образом,
и предположение об отрицательности щ противоречит устойчивости
системы. ?
Заметим, что если характеристическое уравнение линейной систе-
системы с гироскопическими силами имеет кратные корни, то даже в том
случае, когда все они мнимые, нельзя утверждать, что система будет
устойчивой. Сказанное проиллюстрируем примером.
Пример 8.10.1. Материальная точка массы m движется в плоско-
плоскости с декартовыми координатами Оху. Плоскость вращается с угловой
скоростью и? = ше. Вектор е перпендикулярен плоскости Оху и обра-
образует с осями Ох и Оу правую тройку, а ось вращения проходит через
точку О. На точку действует центральная сила F = —с(#, у), где х, у —
8.10. Влияние дополнительных сил 597
координаты точки, г = (х,у) — ее радиус-вектор. Уравнения движения
примут вид
х — 2шу — (и>2 — а)х = О,
у + 2и>х - (u>2 - а)у = О, а = —.
Здесь учтены кориолисова (гироскопические члены, содержащие х и у)
и центробежная силы инерции. Запишем характеристическое уравнение:
0* - („2 - «) -2а>/? _
2w/3 /?2 - (w2 - а) ~
или
Корнями этого уравнения служат
Р\ = -г{ш-у/а)у /?2 = -i
При а > 0 все корни мнимые и различные. Следовательно, система
будет устойчивой при любом сколь угодно малом положительном а.
Если а < 0, то у корней возникнут действительные части и система
будет неустойчивой.
В рассматриваемой системе координат характер устойчивости при ма-
малом положительном а следует считать гироскопическим, так как если
гироскопические силы убрать, то в случае ш2 > а > 0 движение будет
явно неустойчивым.
Особо рассмотрим случай а = 0. Тогда f}\ = fa и /?з = Ра- Имеем два
кратных мнимых корня характеристического уравнения. Если мысленно
убрать гироскопические силы, то рассматриваемая система превращается
в позиционную линейную систему, уравнение частот которой имело бы
один кратный корень, и вся плоскость Оху состояла бы из собственных
векторов. В ней следовало бы выбрать взаимно ортогональные, напри-
например вдоль осей Ох и Оу, и каждому из направлений соответствовало бы
по два линейно независимых решения. Действие гироскопических сил
приводит к тому, что система имеет одно собственное направление ui
для корня Рх—02 — — w*'. определяемое из условия
u\x - iuly - 0,
и одно собственное направление из для корня /?з = Ра = «*>. определя-
определяемое из условия
и>3х + гизу = 0.
Недостаток базисных решений здесь восполняется за счет так называ-
называемых "резонансных" членов вида г = tuj exp(Pjt), j = 1;3, где и, —
598 Глава 8. Динамика голономных систем
уже найденные векторы. В самом деле, возьмем, например, /3\ = — гш.
Тогда резонансные члены имеют вид
х = u\xtexp(—iwt), у — u
х = u\x exp(—iut) — iwx, у = u\y exp(-iu)t) — iuty,
x = —2гши\х exp(-iut) — u>2x, у = —2iuu\y exp(-iujt) — w2y.
Подставив эти выражения в уравнения движения, убеждаемся в том,
что уравнения удовлетворяются с учетом условия для компонент соот-
соответствующего вектора ui. To же самое касается и второго собственного
значения /?з = 0а = ^- Таким образом общее решение уравнений дви-
движения в рассматриваемом случае имеет вид
г = (?i + 6*)ui exp(-turt) + (?3 + &<)u2 exp(iwt),
где fi,.. .,^4 — произвольные постоянные. Возможность появления ре-
резонансных членов в случае кратных корней принципиально отличает
линейную систему с гироскопическими силами от позиционной линей-
линейной системы, для которой из-за кратности корней резонансные члены
никогда не вози и кают. О
§ 8.11. Экстремумы функционалов
Определение 8.11.1. Функционалом называется отображение за-
заданного множества функций в некоторое множество действительных
чисел. При этом каждой функции из заданного множества (множе-
(множества определения функционала) соответствует единственное действи-
действительное число из множества значений.
В этом определении термин "функция" может пониматься также в
смысле "вектор-функция". Будем считать, что все функции принад-
принадлежат классу С2 дважды непрерывно дифференцируемых функций.
Обозначим 7 некоторую вектор-функцию в пространстве Rn ла-
гранжевых координат, определенную на отрезке времени to <t <t\:
7 = {qeRn :q = q(t), to < * <<i}.
Пусть yf — другая вектор-функция, определенная на том же отрезке:
У = {q' e Rn : q' = q(t) + «q(t), tO<t< *i}.
Представим ее в виде у' = у + 6. На множестве вектор-функций у
зададим некоторый функционал ФG)« Изучим свойства приращения
8.11. Экстремумы функционалов 599
С этой целью в пространстве вектор-функций у зададим норму
||7||. Нормой называется функционал, удовлетворяющий следующим
условиям.
1- IItII ^ 0, причем Ц7Ц = 0 только если у = О,
||Т7||1М1 1Ы1
3. ||с*7|| = Ы ||т||) каково бы ни было число а.
Если 7 ? С2) нормой может служить, например, величина
||Т|| = maxтах[|и(*)|, |&@1], г = 1,..., п.
Определение 8.11.2. Функционал Ф называется дифференциру-
дифференцируемым на некотором множестве вектор-функций, если ДФ предста-
представляется суммой двух функционалов:
ДФ = F + Л,
где F зависит от 6 линейно:
при фиксированном у и любом действительном а, а функционал R
есть малая более высокого порядка относительно 6:
) = о(||в||),
то есть из выполнения неравенства
\№<е
следует, что \R\ < с(е)е} причем с(е) —* 0 при е —> 0. Линейная
часть приращения называется дифференциалом функционала или его
вариацией. Слагаемое 6(t) называется вариацией вектор-функции.
Дифференциал функционала Ф часто обозначается как 6Ф.
Теорема 8.11.1. Функционал
«о
где q(t) = (qi(t)>..., qn(t))f a L имеет вторые непрерывные частные
производные по всем аргументам, дифференцируемый, и его диффе-
дифференциал (вариация) дается формулой
600
Глава 8. Динамика голономных систем
Доказательство.
ФG + 6) - ФG) = j[L(q + <5q, q + Eq, <) - L(q, q, t)] dt =
to
(
Пусть \\Sq\\ < e. Тогда по определению o(||6q||) найдем
|Д|=
jo{\\H\\)
to
dt
<o
Проинтегрируем по частям выражение
to
Определение 8.11.3. Экстремалью дифференцируемого функ-
функционала называется вектор-функция у, для которой FF,y) — 0 при
любом допустимом 6.
Теорема 8.11.2. (Эйлер). Вектор-функция у служит экстре-
экстремалью функционала
Ф(у) =
to
на множестве кривых, проходящих через фиксированные точки (до-
(допустимое множество)
q(*o) = qo, q(*i) = qi,
тогда и только тогда, когда она удовлетворяет системе обыкновен-
обыкновенных дифференциальных уравнений
d (дь\ дь .
40 1
в вариационном исчислении называемой системой уравнений Эйлера.
8.11. Экстремумы функционалов 601
Доказательство. Согласно теореме 8.11.1, дифференциал функ-
функционала имеет вид
Внеинтегральный член равен нулю, так как по предположению тео-
теоремы о допустимом множестве вектор-функций имеем
Необходимость. Пусть у — экстремаль. Это значит, что
Допустим, что существует момент времени t* Е [<o,*i]> Для которого
квадратная скобка, соответствующая г-й координате в подынтеграль-
подынтегральном выражении дифференциала, не равна нулю. По непрерывности
она тогда будет сохранять знак в некоторой окрестности точки Г:
to < t* — a < t < t* + a < t\. Выберем 6qi ф 0 в этой окрестности,
причем того же знака, что и квадратная скобка. Вне окрестности по-
положим 6qi = 0. Для индексов j ф г примем 6qj = 0. Тогда, очевидно,
будет FF) > 0, что противоречит экстремальности у.
Достаточность. Если утверждение теоремы выполнено, то ква-
квадратная скобка в выражении для дифференциала, очевидно, равна
нулю.П
Замечание 8.11.1. Система уравнений Эйлера в приведенном
виде совпадает по форме с системой уравнений Лагранжа второго
рода. Однако по смыслу в уравнениях Лагранжа функция Лагранжа
должна удовлетворять обязательному условию невырожденности по
обобщенным скоростям. Вместе с тем в уравнениях Эйлера, приме-
применяемых для решения задач на экстремум функционала, аналогичное
условие невырожденности подынтегральной функции относительно
первых производных может не выполняться. Кроме того, в уравне-
уравнениях Эйлера под t следует понимать любую независимую переменную
(не только время).
Пример 8.11.1. (Задача о брахистохроне). Материальная
точка массы m соскальзывает без начальной скорости в поле парал-
параллельных сил тяжести в вертикальной плоскости по абсолютно гладкой
кривой 7. соединяющей заданные начальную точку А и конечную точку
В. Среди всех дважды непрерывно дифференцируемых кривых у, про-
проходящих через фиксированные точки А \л В, найти такую, для которой
время движения точки из А в В минимально.
602 Глава 8. Динамика голономных систем
Решение. Поместим начало координат в точку А. Ось Ау
направим вертикально вниз. Горизонтальную ось Ах выберем так, чтобы
плоскость Аху содержала точку В, Пусть точка В имеет координаты
#ьУ1 Время Т движения по кривой у можно выразить с помощью
криволинейного интеграла первого рода:
'= I —
J v '
где ds — элемент длины дуги, a v — скорость точки, которую в данном
случае можно найти из интеграла энергии:
mv2 у
-у- = mgy, v = у/2ду.
Примем у в качестве независимой переменной и обозначим х1 производ-
производную от х по у. Тогда получим
У}
г =
Имеем функционал, для которого пределы интегрирования, а также на-
начальная и конечная точки фиксированы. Необходимое и достаточное
условие экстремальности есть уравнение Эйлера относительно функции
х(у):
Следовательно
где с — константа интегрирования и С = C\flg. Из интеграла энергии
следует, что у > 0. Ясно также, что должно быть С2у < 1. Перейдем к
другой переменной: С2у = sin2 г. Возьмем только ту ветвь экстремали,
которая соответствует увеличению х. В результате будем иметь
х = — / 2 si
2 sin2 т dr.
После интегрирования получаем искомую экстремаль в параметрической
форме:
8.11. Экстремумы функционалов 603
Это циклоида. Она вычерчивается точкой обруча, совпадающей в на-
начальный момент с точкой А. Обруч имеет радиус 1/BС2), катится без
проскальзывания по оси Ах так, что его центр расположен ниже оси Ах,
а абсцисса центра равна 2т и служит параметром циклоиды. Постоянная
С подбирается так, чтобы циклоида прошла через точку В.О
При получении условий оптимальности большую роль играет мно-
множество функций, на котором происходит сравнение значений функ-
функционала. Это множество назовем областью определения функциона-
функционала. Для теоремы Эйлера это было множество дважды непрерывно
дифференцируемых функций, проходящих через фиксированные на-
начальную и конечную точки в заданные начальное и конечное значе-
значения параметра t. Могут быть и другие ограничения. Предположим,
например, что требуется найти экстремум функционала ФG) среди
всех вектор-функций, для которых значение другого функционала
такого же вида:
* 1
Щу) = J
to
равно постоянной с. Условие Ф = с ограничивает множество функ-
функций, среди которых ищется экстремум, и традиционно называется
изопериметрическим условием, а соответствующая задача оптимиза-
оптимизации изопериметрической задачей. По существу это задача на услов-
условный экстремум.
Определение 8.11.4. Градиентом функционала Ф(у) на множе-
множестве вектор-функций с фиксированными краевыми точками называ-
называется вектор-функция
?Ф _ fdL_ _ d_ \8L] д^_± \dL]\
Пусть на отрезке to < t < t\ заданы две вектор-функции
71 = {хЕЙп: х(<) = (*i(<),..., *п@). *.' е С2, i=l,..., п},
2
Определим для них скалярное произведение по формуле
to ' = 1
Очевидно, что все свойства скалярного произведения при этом выпол-
выполняются. Скалярное произведение порождает норму вектор-функции:
2 _
= G,7)
V п
= / Е«?
I.i=i
604 Глава 8. Динамика голономных систем
Теорема 8.11.3. Пусть, как и прежде, все траектории прохо-
проходят через фиксированную начальную и конечную точки для заданных
начального to и конечного t\ значений параметра t. Тогда найдется
постоянная А, для которой экстремаль функционала Ф при условии,
что функционал Ф сохраняет постоянное значение, совпадает с без-
безусловной экстремалью функционала Ф + АФ.
Доказательство. Дифференциалы функционалов можем пред-
представить в виде
Изопериметрическую задачу переформулируем так: требуется най-
найти такую кривую у* (экстремаль), что 6Ф = 0 для любой вариации
6', обращающей в нуль значение 6Ф. Пусть задана совершенно про-
произвольная вариация 6. Тогда вариация Ь1 может быть получена по
формуле
1-2
= ^ ~ "л"""* I ^—, с> I -^—.
II #7 || V #7 / ^7
Прямой проверкой легко убедиться в том, что скалярное произведе-
произведение
(?•')-
По смыслу 8' представляет собой вариацию в плоскости, перпенди-
перпендикулярной градиенту функционала Ф в пространстве функций.
Необходимое и достаточное условие экстремальности состоит в
том, что
для любого 5, причем скалярная постоянная А выражается формулой
15Ф,"-2
Следствие 8.11.1. (Свойство взаимности изопериметричес-
кой задачи). Множество экстремалей функционала Ф при фикси-
фиксированном значении функционала Ф и множество экстремалей функ-
функционала Ф при фиксированном значении функционала Ф принадле-
принадлежат однопараметрическому по параметру А семейству безусловных
экстремалей функционала Ф + АФ.
8.11. Экстремумы функционалов 605
Теорема 8.11.3 обосновывает метод множителей Лагранжа для
изопериметрических задач (сравните с замечанием 4.6.2). Рецепт ре-
решения задач по этому методу состоит в том, что ищется безусловный
экстремум функционала Ф + АФ. Его экстремаль 7* будет зависеть
от скалярного параметра А. Параметр А находится из условия, что
Ф(Т*) = с.
Пример 8.11.2. Найти функцию у(х) такую, что ее график
на плоскости с декартовой системой координат Оху представляет собой
гладкую кривую, проходит через фиксированные точку А с координа-
координатами @,0) и точку В с координатами (а,0), а площадь, ограниченная
графиком функции у(х) и осью Ох, максимальна среди всех кривых
одинаковой длины /.
Решение. По условию имеем
а а
Ф= [y(x)dx, Ф= I
Функционал Ф задает площадь под графиком функции у = у(х), а функ-
функционал Ф есть длина дуги искомой кривой. Воспользуемся теоремой
8.11.3. Составим функционал
Согласно теореме 8.11.2, экстремаль этого функционала удовлетворяет
уравнению Эйлера:
l-A-if . Г .1=0.
После однократного интегрирования получим
У' * ,
где а — постоянная интегрирования, а ? — новая независимая перемен-
переменная, так что dx/d? = A, dy/d? = Ay'. Видим, что знаки у1 и ? совпадают.
Разрешив полученное уравнение относительно г/, найдем
где г/о. ?о — значения переменных у и ? в точке А. Перейдем к неза-
независимой переменной х и определим значение постоянной а из краевых
606 Глава 8. Динамика голономных систем
условий. Имеем г/о = 0, ?о = « и у(а) = 0. Поэтому
2 (а
В итоге получаем уравнение искомой экстремали, в которое входит па-
параметр Л:
Таким образом, все экстремали оказываются дугами окружности, име-
имеющей радиус |А| и проходящей через точки А и В. Радиус окружности
найдем из условия, что длина искомой дуги равна /. Это условие при-
приводит к уравнению:
. I _ а I
МПЩ-7]А|'
которое имеет ненулевое решение, если а/1 < 1. Часть окружности,
расположенная выше оси Ох, дает максимум требуемой площади. Знак
А выбирается из условия, чтобы именно эта часть окружности имела
длину /.О
Область определения функционала может задаваться также с по-
помощью системы дифференциальных уравнений. Для удобства по-
построения метода поиска экстремумов функционала в этом случае
примем следующие обозначения:
Xi — qi, xn+i = <ji, 2=1,..., га m = 2га, х = (х\,... ,хт).
Будем искать экстремумы функционала
= jw(x,u,t)dt,
где touti — начальное и конечное значения независимой переменной
t, u = (u\,..., Uk) — вектор управления, задающий функцию x(t) как
решение системы дифференциальных уравнений
х = Х(х,и,0, Х€Ят,
при конкретном задании вектор-функции u = u(t) и начальных усло-
условий х(*о) = хо- Например, если рассматриваемый процесс есть дви-
движение системы материальных точек, то вектор-функция u(tf) задает
управляющие силы, которые могут выбираться, чтобы целенапра-
целенаправленно изменить траекторию, скорость и другие характеристики дви-
движения. В дальнейшем будем считать, что вектор и принадлежит за-
замкнутой ограниченной области С/, так как возможности управления
обычно ограничены.
8.11. Экстремумы функционалов
607
В сформулированной задаче область определения функционала
формируется свободно выбираемыми из области D функциями u(t).
Поэтому градиент функционала целесообразно построить именно в
этом пространстве. Составим вспомогательный функционал
7
J
a=l
Функционал Л совпадает с функционалом 0 для функций x(tf), слу-
служащих решениями заданной системы дифференциальных уравнений.
При этом коэффициенты ф{A), i — 1,.. .,m, можно выбирать совер-
совершенно произвольно. Воспользуемся произволом с целью преобразо-
преобразования дифференциала функционала к виду, в котором будут присут-
присутствовать только вариации 8uj, j = 1,..., к. Выполним варьирование
в предположении, что х удовлетворяет заданной системе дифферен-
дифференциальных уравнений:
Внеинтегральный член выражает приращение функционала из-за из-
изменения пределов интегрирования. Меняя местами символы варьи-
варьирования и дифференцирования по времени в последнем слагаемом
подынтегрального выражения и выполняя интегрирование по частям,
найдем
Символ " означает изохронное варьирование, то есть приращение
значения функции при фиксированном значении независимой пере-
переменной. Если независимая переменная тоже изменяется, то соот-
соответствующий дифференциал (полная вариация функции) выразится
формулой dxi — 6х( + xi dt. Учитывая это равенство, получим
6в
= j
608 Глава 8. Динамика голономных систем
Теорема 8.11.4. Дифференциал функционала 0 дается форму-
формулой
если найдется вектор-функция ф(г) = (^i@ ^т@)> удовлетво-
удовлетворяющая совместно с вектор-функцией x(t) системе дифференциаль-
дифференциальных уравнений
дн an . л
^ l
w условиям трансверсальности
т
т
>i(*i)d*,(*i) = 0,
которые подходящим выбором ф и и в моменты to и t\ должны
быть выполнены для любых допустимых условиями задачи диффе-
дифференциалов dt и dx в начальной и конечной точках интегрирова-
интегрирования. Условия трансверсальности обусловливают краевые значения
вектор-функций ф и и.
Доказательство. Достаточно воспользоваться полученной фор-
формулой для дифференциала Ю, которая справедлива независимо от
выбора вектор-функции ф. Потребуем, чтобы ф было решением си-
системы дифференциальных уравнений
&н .
* = ~ьг г = 1 т'
где х служит решением исходной системы уравнений:
Xi = Лг- = —, г - 1,...,т.
дфг
Решение x(t) зависит только от управления и и заданных начальных
или краевых условий для х. Для заданного управления решение x(t)
определяется независимо от неизвестной вектор-функции ф(г). По-
После того как решение x(tf) найдено, можно воспользоваться системой
дифференциальных уравнений для ф, задав краевые условия на на-
начальные и конечные значения V>(*o) и V>(*i) таким образом, чтобы
8.11. Экстремумы функционалов 609
уничтожить внеинтегральные члены в формуле, выражающей диф-
дифференциал функционала. После выполнения указанной процедуры в
формуле для дифференциала функционала останутся только члены,
содержащие управление.D
Переменные ^-, г = 1,..., m называются сопряженными перемен-
переменными, а определяющая их система дифференциальных уравнений —
сопряженной системой. Функция Н называется функцией Гамиль-
Гамильтона или гамильтонианом задачи управления. Сопряженная систе-
система совместно с системой дифференциальных уравнений для перемен-
переменных Х{% г = 1,...,т, образуют гамильтонову систему дифференци-
дифференциальных уравнений. Свойствам таких систем посвящена следующая
глава.
Замечание 8.11.2. В приведенных выше рассуждениях не тре-
требовалось каких-либо жестких ограничений на функции W(x,u,t) и
u(t). Достаточно лишь, чтобы выполнялись условия существования
решений сопряженной системы, а функция
была интегрируемой в смысле исходного функционала. Например,
функция W может быть кусочно-дифференцируемой по управлению,
аи — кусочно-непрерывной вектор-функцией.
Следствие 8.11.2. В условиях теоремы 8.11.4 градиент функци-
функционала 0 по управлению выражается вектор-функцией
Пример 8.11.3. Рассмотрим одномерное движение материальной
точки, описываемое дифференциальным уравнением
q = w, — 1 < и < 1,
где и — управление, выбираемое произвольно в указанном диапазоне,
но так, чтобы уравнение движения имело решение. В начальный момент
времени to = 0 точка имеет координату </@) = qo \л скорость </@) = </о-
Управление требуется выбрать так, чтобы перевести точку из начального
заданного положения в положение q(T) = 0, q(T) = 0 за кратчайшее
время Т.
Такая задача встречается в теории активной стабилизации движения
или равновесия.
39- 1503
610 Глава 8. Динамика голономных систем
Решение. Примем обозмачемия: х\ = q, х2 = q. Тогда имеем
систему дифференциальных уравнений первого порядка
Х\ = Д?2, Х2 — w> ""I < U < 1.
Функционал 0 и гамильтониан 7i теоремы 8.11.4 принимают вид
т
0
о
1
= I Idt, П =
Запишем сопряженную систему
^ 0 ^
Проанализируем условия трансверсальности. Начальная и конечная
точки движения фиксированы, фиксирован также и начальный момент
времени. Следовательно, dx\@) — dx2@) = dx\(T) = dx2(T) = 0;
сЙо = 0. Конечный момент времени не фиксирован: dt\ = dT ф 0.
Поэтому условия трансверсальности будут выполнены, если приравнять
нулю коэффициент при dt\\
1 + Фх{Т)х2{Т) + iMT)ti(T) = 1 + ЫТНТ) = 0.
Дифференциал функционала 6 в пространстве управлений принимает
вид
т
бе = Iф26и<И.
о
Найдем решение сопряженной системы: ф\ = const, ф2 = (t *~ Г)^1 +
ф2(Т). Функция ^2@ служит градиентом функционала 0 и определя-
определяет структуру оптимального управления. Из условия трансверсальности
следует, что ф2(Т) ф 0. Поэтому функция ^2@ может обратиться в
нуль всего лишь в один момент времени, и рассматриваемый функци-
функционал может иметь экстремумы только на границе области управления.
Поскольку требуется найти минимум функционала, то следует выбирать
u = —signф2. Только в этом случае любая вариация управления будет
приводить лишь к увеличению функционала. Из условия трансверсаль-
трансверсальности тогда следует, что ф2(Т) = ±\. В любом случае в зависимости
от значения ф\ управление как функция времени либо вообще не имеет
переключений и все время остается равным какому-либо ограничению
допустимой области, либо имеет только одно переключение с одного
ограничения на другое.
8.11. Экстремумы функционалов 611
Более полное представление об оптимальном управлении дает зада-
задача синтеза. Так называется задача определения оптимального управле-
управления в зависимости от фазовых координат (в рассматриваемом случае от
xi, х2). Используем результаты исследования структуры оптимального
управления. В начало координат траектория может входить либо при
и = +1, либо при и = —1. Возьмем независимую переменную г = T — t.
Определим все точки фазовой плоскости, из которых можно попасть
в начало координат по закону оптимального управления за время Т.
Уравнения движения примут вид
?=-»• ?=- <><-'<-*¦
Пусть сначала и = +1. Интегрируя, получаем уравнение траектории
г2
Х2 = -Г, Xi = у.
На плоскости (xi,X2) это полупарабола, отвечающая отрицательным
значениям хо и положительным значениям х\. Предположим теперь,
что при каком-то значении г = т\ произошло переключение управле-
управления, так что
0<г<ту,
т\<т<Т.
Тогда для момента т = Т будем иметь
Т2
х2 = -2ri + Г, xi = 2тгТ -т\ , 0 < п < Т.
При изменении т\ в указанных пределах получим все множество точек
фазовой плоскости, для которых время Т приведения в начало коорди-
координат минимально, если и(+0) = 1.
Аналогичные результаты получаются и для случая Ц+0) = — 1. По-
Полупарабола, выходящая из начала координат и служащая линией пере-
переключения, имеет вид
_^г2
Если имеется переключение, то
и множество точек, для которых время Т минимально, выражается фор-
формулами
Т2
х2 = 2ri - Т, xi = -2nT 4- г? + —, 0 < п < Т.
««>={-!:
612 Глава 8. Динамика голономных систем
Таким образом линия переключения состоит из двух непересекающихся
полупарабол. Мы можем их объединить одним уравнением:
Рецепт оптимального управления прост. Пусть фазовая точка, от-
отражающая текущее состояние системы, имеет координаты (хь^)- Из
уравнения линии переключения можно найти соответствующее значение
х\. Управление в точке (#i,X2) имеет вид
{
-signal, *\ =
Приведенная формула определяет оптимальное управление для всей фа-
фазовой плоскости. О
§ 8.12. Интегральные вариационные принципы
Теорема 8.12.1. (Принцип Гамильтона стационарного дей-
действия). Действительное движение голономной механической си-
стемы под действием потенциальных (обобщенно потенциальных)
сил, выполняемое от заданного положения q(<o) = qo до другого за-
данного положения q(*i) = qi (*i > Jo), отличается от кинемати-
кинематически возможных движений системы между этими положениями
в том же интервале времени тем, что действительное движение
служит экстремалью функционала
to
где L = T + U — функция Лагранжа системы.
Доказательство. Вектор-функция q(t) лагранжевых координат,
описывающая действительное движение, удовлетворяет уравнениям
Лагранжа второго рода (см. § 8.1), которые в свою очередь служат
необходимыми и достаточными условиями экстремальности (теорема
Определение 8.12.1. Пусть 7 — экстремаль функционала Ф в
смысле теоремы 8.12.1. Значение этого функционала на экстремали
зависит от начального и конечного положения системы, начального
и конечного моментов времени:
8.12. Интегральные вариационные принципы 613
Функция S(qo,qi,<o,*i) называется действием по Гамильтону.
Замечание 8.12.1. Использование принципа Гамильтона приво-
приводит к необходимости решать краевую задачу, то есть задачу о поиске
решения системы дифференциальных уравнений движения, удовле-
удовлетворяющего заданным краевым условиям q(tfo)> q(^i)- Эта задача
имеет ряд существенных особенностей по сравнению с задачей Коши,
когда решение системы дифференциальных уравнений определяется
по начальным условиям q(*o), q(*o)- Задача Коши в силу принципа
детерминированности Ньютона для реальных механических систем
всегда имеет единственное решение. Решение же краевой задачи при
произвольном выборе краевых условий может вообще отсутствовать
или быть неоднозначным. Сказанное проиллюстрируем примером.
Пример 8.12.1. Функция Лагранжа гармонического осциллятора
выражается формулой
где q — единственная лагранжева координата. Для определения закона
движения воспользуемся принципом Гамильтона. Зададим начальный
момент t0 = 0 \л конечный t\ моменты времени, а также желаемые на-
начальное q(to) = q0 и конечное q(t\) — q\ положения системы. Тогда ее
закон движения должен доставлять экстремум функционалу
среди всех функций q(t) таких, что q(to) = qo, q(t\) = q\.
Применив теорему 8.11.2, убеждаемся в том, что движение рассма-
рассматриваемой системы должно удовлетворять уравнению гармонического
осциллятора (см. § 3.9)
2 = 0.
Пусть to = 0. Решение этого уравнения при </@) = qo имеет вид
q — qo cos ujt + с sin u>/.
Постоянную с найдем из условия q(t\) = q\\
c=q-l-'
Видим, что когда t\ ф жк/и;, трудностей при определении постоянной
с не возникает, и решение краевой задачи существует и однозначно при
любом q\.
614 Глава 8. Динамика голономных систем
В том случае, когда t\ = тгк/u;, с не определено и его нельзя найти
из краевого условия. При этом если q\ ф qo cosu;^i , то решение краевой
задачи вообще отсутствует, а если q\ = qocosujt\, то существует бесчи-
бесчисленное множество решений краевой задачи, так как тогда параметр с
будет произвольным. О
Определение 8.12.2. Два положения qo и qi системы называ-
называются сопряженными кинетическими точками, если они могут быть
соединены между собой несколькими различными экстремалями.
В примере 8.12.1 точки qo и q\ — q0cosujti при t\ = 7rfc/u> суть
сопряженные кинетические точки.
Принцип Гамильтона можно применять не только для вывода
уравнений движения систем дискретных материальных точек, но и
для описания движения непрерывных сред.
Пример 8.12.2. Рассмотрим малые упругие плоские поперечные
колебания прямолинейного стержня длины / с жестко закрепленными
концами. Обозначим х расстояние от какого-нибудь конца недеформи-
рованного стержня до некоторой его точки G. Пусть u(t, х) — смещение
точки G перпендикулярно прямой, вдоль которой был расположен неде-
формированный стержень. В каждый фиксированный момент времени
смещение u(t,x) есть функция аргумента х, определяющая мгновенную
форму стержня. При фиксированном значении х смещение u(t,x) есть
функция времени, однозначно определяющая положение соответствую-
соответствующей точки системы. Следовательно, u(t, x) при фиксированном х можно
считать лагранжевой координатой. Лагранжевых координат получается
бесконечно много. Однако принцип Гамильтона позволяет справиться с
этой трудностью.
Пусть р — плотность стержня, а — площадь его поперечного се-
сечения. Дифференциал dx при малых u(t,x) отождествим с элементом
длины дуги деформированного стержня. Кинетическая энергия Т и по-
потенциальная энергия П упругой изгибной деформации имеют вид
где постоянная с равна произведению модуля Юнга на момент инер-
инерции сечения стержня относительно поперечной оси. Величина д2и/дх2
обратно пропорциональна радиусу кривизны мгновенной формы стерж-
стержня.
Запишем функционал принципа Гамильтона
to О
8.12. Интегральные вариационные принципы 615
Для любого 6u(t, х), при котором в начальный и конечный моменты вре-
времени положение стержня не варьируется, а концы стержня не изменяют
своего положения с течением времени:
6u(tOn х) = 6u(tux) = 6u(t, 0) = 6u(t} 1) = О,
дифференциал 6Ф этого функционала должен обратиться в нуль:
/ / д дF) V / д2и 82Fи)
t0 0 t0 О
Учитывая краевые и граничные условия, возьмем первый интеграл в
выражении для 6Ф один раз по частям по аргументу t, а второй интеграл
— дважды по частям по аргументу х. Если р, <т и с постоянны, то,
очевидно, будем иметь
//(-<
to 0
Поскольку 6и произвольно, получим дифференциальное уравнение в
частных производных
д2и _ с д4и
Принцип Гамильтона справедлив только для консервативных си-
систем, то есть для систем, находящихся под действием потенциальных
или обобщенно потенциальных сил. Неконсервативные механические
системы подчиняются принципу Остроградского.
Теорема 8.12.2. (Принцип Остроградского). Действитель-
Действительное движение голономной механической системы под действием по-
потенциальных (обобщенно потенциальных) и непотенциальных сил,
выполняемое от заданного положения q(*o) = qo до другого заданно-
заданного положения q(^i) = qi (t\ > to), отличается от кинематически
возможных движений системы между этими положениями в том
же интервале времени тем, что действительное движение удовле-
удовлетворяет равенству
где L — Т + U — функция Лагранжа системы, a Qi — обоб-
обобщенные силы, для любых функций Sqi(t), удовлетворяющих условию
616 Глава 8. Динамика голономных систем
Доказательство. Очевидно, что в условиях теоремы доказыва-
доказываемое равенство приводится к виду
Теорема 8.12.3. (Принцип Мопертюй-Лагранжа-Якоби).
Пусть лагранжиан L голономной системы не зависит явно от вре-
времени (силы потенциальны или обобщенно потенциальны). Тогда
действительная траектория изображающей точки конфигурацион-
конфигурационного пространства служит экстремалью функционала
y
Ро t = l
среди всех траекторий, обладающих одной и той же константой h
обобщенного интеграла энергии и проходящих через фиксированные
начальную Р$ и конечную Р\ точки.
Доказательство. Функция Лагранжа L(q\,..., qn, q\,..., qn) от
времени явно не зависит. Так же, как в примере 8.4.3, сделаем замену
переменной t = t(r) и введем функцию Рауса
R-C 6Ct>
R-C-—1,
где С = *'?(<7ь .. .,<7п,<7ь • •-,<7n), t* = dt/dr. Обобщенный интеграл
энергии представляется в виде
h
После исключения в функции R производной I1 при помощи интегра-
интеграла энергии получим систему уравнений Лагранжа
d fdR\ <ЭД
I IT "F = ()' t = 1,...,п,
dt \dq'J dqi
все решения которой имеют одинаковую постоянную энергии Л. Для
этой системы справедлива теорема 8.12.1, так что соответствующие
решения служат экстремалями функционала
Rdr
то
-1
8.12. Интегральные вариационные принципы 617
среди всех кривых, проходящих через фиксированные начальную Ро
и конечную Pi точки при заданных начальном и конечном значениях
параметра т. Пользуясь результатами примера 8.4.3, найдем
Замечание 8.12.2. Несмотря на то что значения го и т\ фиксиро-
фиксированы, начальный и конечный моменты реального времени движения
могут изменяться в соответствии с зависимостью
дс А дь .
Тем самым в изучаемом принципе начальный и конечный моменты
времени (в отличие от принципа Гамильтона) не фиксированы, но
связаны значением обобщенного интеграла энергии.
Определение 8.12.3. Пусть у — экстремаль функционала J в
смысле теоремы 8.12.3. Значение этого функционала на экстремали
зависит от начального и конечного положений системы:
Функция VK(qo,qi) называется действием по Мопертюи.
Следствие 8.12.1. Для системы материальных точек функция
Лагранэюа L есть сумма
L = Li + L\ + Lq
квадратичной L,2, линейной L\ no обобщенным скоростям форм и
члена Lo, не зависящего от обобщенных скоростей:
1 п п
^2 = Г
ij = l t = l
Для такой системы функционал принципа Мопертюи-Лаграпжа-
Якоби представляется в виде
Pi Pi Pi п
J= f{2L2 + Li)dt= [2L2dt+ f
Po Po Po i=1
618 Глава 8. Динамика голономных систем
Доказательство. Преобразуем подынтегральное выражение рас-
рассматриваемого принципа. Воспользуемся теоремой Эйлера об одно-
однородных функциях:
v-^ dL , ^-% дЬ .
Следствие 8.12.2. Для системы материальных точек функци-
функционал принципа Мопертюи-Лагранэюа-Якоби приводится к виду
Pi Pi „
Po Po l=1
где метрика ds задается равенством:
n
ds2 =
Доказательство. Форма L2 не меняет значений при преобра-
преобразованиях координат. Поэтому коэффициенты (at;) образуют тензор
второго ранга. Он может служить метрическим, так как форма Li
положительно определена.
Воспользуемся следствием 8.12.1. По определению метрики ds
имеем
8
Поэтому
*Q ¦* О
Учтем обобщенный интеграл энергии Якоби:
Функционал следствия 8.12.2 позволяет искать экстремум в кон-
конфигурационном пространстве геометрическими методами, не привле-
привлекая информацию о скоростях системы.
Пример 8.12.3. Пусть на систему материальных точек наложены
голономные связи, а силы обобщенно потенциальны (определение 8.3.1)
с силовой функцией
8.12. Интегральные вариационные принципы 619
причем ни силовая функция, ни связи от времени явно не зависят. Тогда
функционал принципа Мопертюи-Лагранжа-Якоби имеет вид
Pi Pi
J
= I
L
Po Po * = 1
где метрика ds определена квадратичной формой кинетической энергии.
В самом деле, здесь
1 п
Следствие 8.12.3. (Принцип Якоби). Пусть система с го-
лономными связями находится под действием потенциальных (в
обычном смысле) сил, а связи не зависят явно от времени. Тогда
функционал принципа Мопертюи-Лагранэюа-Якоби представляется
в форме
Pi
= f
J
Po
где U = U(q\,.. .,<?п) — силовая функция системы, h — постоянная
энергии:
T-U = Л,
а метрика ds определена квадратичной формой кинетической энер-
энергии:
п
ds2 =
В принципе Якоби время t и дуга s связаны дифференциальным со-
соотношением
d
у/ЩГ+h)
Доказательство. Воспользуемся следствием 8.12.2. В рассма-
рассматриваемом случае имеем
Lo = U, Li= О, L2 = Т.
Учитывая интеграл энергии и определение метрики ds, получим
T=2U' =U + h-°
620 Глава 8. Динамика голономных систем
Следствие 8.12.4. Принцип Якоби позволяет свести задачу об
определении траектории движения изображающей точки к экстре-
экстремальной задаче в пространстве конфигураций с римановой метри-
метрикой. В области U + h > 0 конфигурационного пространства зададим
риманову метрику формулой
dp = y/U + h ds.
Тогда траектории системы с заданной константой энергии будут
геодезическими линиями метрики dp.
Доказательство. Функционал принципа Якоби принимает вид
J = V2 dp.
и
Ро
По этому принципу траектории реального движения суть геодезиче-
геодезические линии метрики dp.О
Отметим, что метрика dp получается из ds растяжением или сжа-
сжатием, зависящим только от координат точки q, но не зависящим от
направления. Поэтому углы в метрике dp совпадают с углами в ме-
метрике ds. Вблизи границы области ?/+h > 0 длина дуги уменьшается.
На границе длина дуги любой кривой равна нулю.
Пример 8.12.4. Свободная материальная точка, вынужденная
перемещаться только по связи, представляющей собой гладкое риманово
многообразие, движется по геодезической линии. Действительно, для
такой точки будем иметь
2 \dt ¦ ' " =°-
Запишем действие по Якоби
Pi
= mV2h I ds.
Так как h одинаково для всех сравниваемых траекторий, то экстремали
суть геодезические рассматриваемого многообразия.О
Пример 8.12.5. Рассмотрим траектории движения материальной
точки массы m в вертикальной плоскости под действием поля парал-
параллельных сил тяжести. Пусть орт е2 направлен вертикально вверх, а орт
ei — горизонтально в плоскости движения. Радиус-вектор материаль-
материальной точки выразим формулой
8.12. Интегральные вариационные принципы 621
Кинетическая энергия и силовая функция принимают вид
m .9 .оч
т = у Wi + Я2)^ и = -™9 42-
По-прежнему д — ускорение силы тяжести.
Согласно принципу Якоби (следствие 8.12.3) действительная траек-
траектория между точкой Ро и точкой Pi доставляет экстремум функционалу
Pi Pi
/. г
y/2(h — mg q2) ds = wAB dq\,
J
Po Po
в котором А = 2(/i — mgq2), В = m[(dq2/dq\J + 1]. Согласно теореме
8.11.2 экстремаль этого функционала должна удовлетворять уравнению
дУАВ _ _rf_ (ду/АВ\
9q2 dqi I dq'2 J
где q2 — dq2/dq\. Выполнив дифференцирование, найдем
____( Г
АдЯ2 dqi\m\l В
Обратим внимание, что, согласно следствию 8.12.3,
Поэтому уравнение экстремали приводится к виду
совпадающему с общеизвестным уравнением изменения вертикальной
координаты точки под действием силы тяжести. Из него получим
.2
?2 =
Уравнение, определяющее горизонтальную координату, следует из выра-
выражения для производной dt/dqi, если учесть, что это есть форма записи
интеграла энергии:
622 Глава 8. Динамика голономных систем
Отсюда и из предыдущего равенства вытекает, что
Таким образом, как и следовало ожидать, уравнения движения прини-
принимают вид
h = -01 q\ = vT,
где vr — начальная горизонтальная скорость. Траектория движения
(геодезическая) есть парабола с вертикальной осью.О
Контрольные вопросы к главе 8
8.1. Как выглядит разложение кинетической энергии системы по од-
однородным формам от обобщенных скоростей?
8.2. Какими свойствами обладает матрица формы Т^ кинетической
энергии для механической системы?
8.3. Привести пример механической системы, для которой матрица
(a{j) формы Тч кинетической энергии вырождается для некото-
некоторых конфигураций.
8.4. Показать, что если связи склерономны, то обобщенный инте-
интеграл энергии Якоби переходит в интеграл энергии, соответству-
соответствующий теореме 5.1.8.
8.5. Показать, что гироскопические силы не нарушают обобщенный
интеграл энергии Якоби.
8.6. Показать, что движение электрона в электромагнитном поле
допускает интеграл энергии (см. пример 8.3.1).
8.7. Как будет двигаться электрон в постоянном магнитном поле
(см. пример 8.3.1)?
8.8. Показать, что из принципа детерминированности и второго за-
закона Ньютона следует, что обобщенные силы не могут зависеть
от обобщенных ускорений.
8.9. Выполнить доказательство существования обобщенного инте-
интеграла энергии Якоби в случае, когда Лагранжиан не зависит
явно от времени.
8.10. Проверить справедливость теоремы Нетер для циклических ко-
координат уравнений Лагранжа 2-го рода.
Контрольные вопросы к главе 8 623
8.11. Пусть система имеет циклические координаты, а соответствую-
соответствующая функция Рауса имеет стационарную точку в пространстве
позиционных координат. Можно ли утверждать, что эта точка
всегда отвечает положению равновесия системы?
8.12. Пусть L = Z/2 + Lq есть разложение функции Лагранжа по од-
однородным относительно скоростей формам. Какое разложение
по таким формам может иметь функция Рауса при наличии ци-
циклических координат.
8.13. Какой механический смысл имеют циклические интегралы в
случае Лагранжа-Пуассона движения твердого тела вокруг не-
неподвижной точки (см. § 6.8)?
8.14. Может ли знакопостоянная функция быть тождественно равной
нулю во всей ее области определения?
8.15. Может ли знакоопределенная функция быть не равной нулю во
всей ее области определения?
8.16. Может ли функция Ляпунова зависеть только от части обоб-
обобщенных координат или скоростей?
8.17. Проанализировать устойчивость движения спящего волчка Ла-
Лагранжа.
8.18. Будет ли устойчивым по Ляпунову движение твердого тела во-
вокруг неподвижной точки
a) в случае Эйлера в окрестности наибольшей или наимень-
наименьшей осей инерции;
b) при возникновении регулярной прецессии в случае Эйлера;
c) при возникновении регулярной прецессии в случае Лагран-
Лагранжа-Пуассона;
d) при возникновении псевдорегулярной прецессии в случае
Лагранжа-Пуассона?
8.19. Сформулировать правило нахождения собственных векторов
позиционной линейной системы.
8.20. Написать алгоритм получения закона движения позиционной
линейной системы в лагранжевых координатах, если получен
закон ее движения в главных координатах.
624 Глава 8. Динамика голономных систем
8.21. Показать, что если силовая функция позиционной линейной си-
системы удовлетворяет условию теоремы Лагранжа об устойчиво-
устойчивости равновесия, то все решения уравнения частот положитель-
положительны.
8.22. Исследовать малые колебания системы, состоящей из п мате-
материальных точек массы m каждая, связанных последовательно
друг с другом одинаковыми пружинками жесткости с и могущих
двигаться по окружности радиуса R. В начальный момент вре-
времени пружинки ненатянуты. Действуют только упругие силы
пружинок.
8.23. Пусть позиционная линейная система имела п собственных зна-
значений
Ai < А2 < ...< Ап.
Дополнительно на систему наложены две линейные по коор-
координатам однородные связи. Что можно сказать о собственных
значениях вновь полученной системы?
8.24. Исследовать структуру решений линейной системы вблизи по-
положения равновесия, когда на нее кроме потенциальных сил
действуют диссипативные силы с отрицательно определенной
по скоростям диссипативной функцией Рэлея.
8.25. Исследовать зависимость решения задачи о брахистохроне (см.
пример 8.11.1) от начальных условий.
8.26. Выписать систему дифференциальных уравнений для сопря-
сопряженных переменных в случае, когда управляемая система опи-
описывается линейными дифференциальными уравнениями.
8.27. Какие краевые условия будут следовать из условий трансвер-
трансверсальности в задаче оптимального управления, если
а) начальная и конечная точки траектории обязаны принад-
принадлежать поверхностям, заданным уравнениями
b) начальная и конечная точки траектории обязаны принад-
принадлежать поверхностям, заданным уравнениями
с) не наложено никаких ограничений на начальную и конеч-
конечную точки?
Контрольные вопросы к главе 8 625
8.28. Как будет осуществляться управление в соответствии с синте-
синтезом примера 8.11.3, если фазовые координаты ж, х определяют-
определяются с некоторой ошибкой Дж, Дж?
8.29. Указать область определения для функционала принципа Га-
Гамильтона.
8.30. Указать область определения для функционала принципа Мо-
пертюи-Лагранжа-Якоби.
8.31. Сформулировать принцип Якоби.
8.32. Свободная материальная точка движется по сфере. Сфера —
идеальная удерживающая связь. Указать возможные траекто-
траектории движения точки.
Глава 9
Метод Гамильтона-Якоби
В дальнейшем будет изучаться движение голономных механиче-
механических систем под действием потенциальных или обобщенно потенци-
потенциальных сил. Для таких систем справедливы принцип Гамильтона и
система уравнений Лагранжа второго рода. Каждое уравнение Ла-
гранжа — это дифференциальное уравнение второго порядка, опре-
определенное на координатном пространстве. Для исследования геоме-
геометрических свойств систем такого рода удобно вводить эквивалент-
эквивалентные системы первого порядка, определенные на фазовом простран-
пространстве. Система дифференциальных уравнений первого порядка задает
в фазовом пространстве векторное поле, по структуре которого мож-
можно, следуя Пуанкаре, судить о свойствах интегральных кривых и о
существовании первых интегралов.
Переход от системы уравнений второго порядка к системе урав-
уравнений первого порядка можно осуществлять разными способами, и в
результате будут получаться, вообще говоря, различные эквивалент-
эквивалентные системы. Среди них особенно простую и симметричную струк-
структуру имеет система канонических уравнений Гамильтона. Свойства
этих уравнений лежат в основе метода Гамильтона-Якоби исследо-
исследования движений механических систем, а также современной теории
возмущений. Канонические уравнения получаются с помощью пре-
преобразования Лежандра.
§ 9.1. Преобразование Лежандра
Пусть функция /(х) переменного х Е Rn: x = (a?i,...,a?n)» удо-
удовлетворяет условию невырожденности
det (•?-?- ) ф 0.
Введем другие переменные
df
9.1. Преобразование Лежандра 627
Определение 9.1.1. Преобразованием Лежандра функции /(х)
называется функция
получающаяся после замены переменных х,, i = 1,..., п, через пере-
переменные pi, г = 1,..., п, что возможно в силу условия невырожденно-
невырожденности.
Теорема 9.1.1. Преобразование Лежандра инволютивно: если
при преобразовании Лежандра f переходит в д, то д при преобразо-
преобразовании Лежандра перейдет в /.
Доказательство. Дифференциал функции д(р) имеет вид
П гч П П П л-
dg = ^2 я~ dpi = 5ZXi dpi + l>2Pi dxi " Z! ~яГ~ dxi'
t=i ^ i=i i=i i=i ax<
Согласно определению переменных pi, i = l,...,n, коэффициенты
при дифференциалах dxi обращаются в нуль. Следовательно,
при любых дифференциалах dpi. Отсюда
дд . л
х = г=1
Значит, при указанном преобразовании функция /(х) восстанавлива-
восстанавливается. ?
Теорема 9.1.2. Пусть /(х) — выпуклая функция переменной х,
такая, что квадратичная форма
положительно определена. Тогда при заданном р = (pi,... ,pn) ew-
полнено равенство
g(p) = max ^^ж< - /(х) .
40*
628 Глава 9. Метод Г&мильтона-Якоби
Доказательство. Точки экстремума функции
п
F(x,p) = ?>,*,•-/(х)
при фиксированных параметрах pi удовлетворяют уравнению
df
Но таким же соотношением связаны переменные р и х при преобра-
преобразовании Лежандра. Кроме того, в силу выпуклости /(х) этот экстре-
экстремум есть максимум.О
Теорема 9.1.3. Преобразование Леэюандра выпуклую функцию
/(х) переводит в выпуклую функцию д(р).
Доказательство. Согласно теореме 9.1.1
дд . ,
^ = ««, г=1,...,п.
Продифференцируем это равенство по pj:
Э2д = dxj
dpjdpi dpj'
Из равенства pj = df/dxj следует
t = l J rj izzl
Поэтому матрицы
(Л.
оказываются взаимно обратными, и из положительной определен-
определенности одной из них следует положительная определенность другой.
Аналогично, если одна из матриц отрицательно определена, то и дру-
другая матрица также отрицательно определена. ?
Следствие 9.1.1. Пусть /(х) — выпуклая функция, причем ма-
матрица
dxidxj
9.1. Преобразование Лежандра 629
положительно определена. Если д(р) есть преобразование Лежан-
дра функции /(х), то
,*;< <?(р) + Дх).
Доказательство непосредственно следует из теоремы 9.1.2. D
Следствие 9.1.2. Если /(х) — выпуклая функция, причем ма-
матрица
Kdx{dxj
отрицательно определена, то после преобразования Лежандра эта
функция переходит в
in I ^р,х, - /(х)
1 ,
/
а значит, для таких функций
Определение 9.1.2. Неравенство
справедливое для выпуклых вниз функций при любых значениях х
и р, и неравенство
справедливое при любых значениях х и р для функций, выпуклых
вверх, называются неравенствами Юнга.
Пример 9.1.1. Рассмотрим функцию
ха
f(x) = —, а > 1, х > 0.
Эта функция выпукла вниз. Найдем ее преобразование Лежандра:
= рсГ=гХ1 д(р)=рх =
а а
630 Глава 9. Метод Гамильтона-Якоби
Обозначим
Тогда неравенство Юнга принимает вид
и оно справедливо для всех х>0, р>0, а>1,/?>1, причем
I + i = I.O
а /?
Пример 9.1.2. Рассмотрим функцию
f(x) = arctg x, x > 0.
Эта функция выпукла вверх. Вычислим ее преобразование Лежандра:
df 1
С его помощью получаем неравенство Юнга:
ХР> Р \ arctg \ h arctg x.
Введем переменную у = у/A — р)/р. Тогда
Р=ТТ7'
а неравенство Юнга примет вид
х — у
2 > arctg х - arctg t/,
где х > 0, у > 0.О
Заметим, что оценки функций, получаемые с помощью неравенств
Юнга, оказываются точными, т. е. существуют значения аргументов,
при которых достигается точное равенство.
§ 9.2. Канонические уравнения Гамильтона
Пусть движение системы описывается уравнениями Лагранжа
второго рода
d FL\ 9L
где gi,..., qn — лагранжевы координаты системы.
9.2. Канонические уравнения Гамильтона 631
Теорема 9.2.1. Система уравнений Лагранжа второго рода эк-
эквивалентна системе 2п уравнений первого порядка
дН п . дН . л
Р» = -"л ^ р*> <H = ^—i i = l,...,n,
dqi dpi
где pi = dL/dqi, функция
H{pi,..., pn, 4\, • • •, 9n, t) =
есть преобразование Лежандра функции L по переменным </i,..., qn,
слагаемые
--,Pn,9i,...,?n,0 = QMu - - • ,ЧпЛи - - - An,t), t = l,...,n,
суть обобщенные силы, в записи которых обобщенные скорости вы-
выражены через переменные pi, % = 1,..., п.
Доказательство. Преобразование Лежандра функции
по переменным (/i,..., qn есть функция
п
Я =
в которой скорости (ji,..., qn выражены через р\,..., рп с помощью
системы уравнений
дь .
рг = _, ,= !,..„п.
Для механических систем это всегда можно сделать, так как по тео-
теореме 8.1.2 имеем
qidqjj г
Полный дифференциал функции Н
тождественно равен полному дифференциалу выражения
pi^"L
632 Глава 9. Метод Гамильтона-Якоби
при pi =
Pidqi -^щ-dqii-l^Q- dqi- -щ dt.
Коэффициенты при dqi обращаются в нуль в соответствии с опре-
определением переменных р,-, г = 1,..., п. Сравнивая полученные выра-
выражения для дифференциала dH', найдем
dpi' 5^» 9^,-' dt dt '
Примем теперь во внимание уравнения Лагранжа:
OL t .
Определение 9.2.1. Переменные
t =
называются обобщенными импульсами системы. Функция
где скорости ^i,...,qn выражены через переменные pi,...,рп, назы-
называется функцией Гамильтона, Переменные
называются каноническими переменными Гамильтона, Простран-
Пространство Д2п канонических переменных называется фазовым простран-
пространством.
Следствие 9.2.1. (Система уравнений Гамильтона). Если
Qi = 0, то Pi = 0, и соответствующая система уравнений Лагран-
эюа эквивалентна системе 2п уравнений первого порядка
дН . дН . л
1
которая называется системой канонических уравнений Гамильто-
Гамильтона.
9.2. Канонические уравнения Гамильтона 633
Следствие 9.2.2. (Свойства функции Гамильтона).
1. Из доказательства теоремы 9,2.1 находим:
этом частная производная от Н по qi берется в множестве
переменных cji,..., qn,P\, • • ,Рп, о, частная производная от функции
L no qi берется в множестве переменных q\,..., qn, gi,..., qn. Это
разные множества, и смысл частных производных для них различен.
2. Вычислим полную производную Н по времени:
dH А (дН . дН Л ЗН
Пусть переменные pi, qi удовлетворяют каноническим уравнениям
Гамильтона. Тогда
dH _ дН
Г~"аП
Другими словами, полная производная от Н по времени в силу кано-
канонических уравнений Гамильтона совпадает с частной производной
от Н по времени.
3. Для произвольных систем материальных точек функция Га-
Гамильтона представляет собой обобщенную энергию:
H = L2- Lo,
а для склерономных систем под действием потенциальных (не обоб-
обобщенно потенциальных) сил — полную энергию:
# = Г+П.
Действительно, для систем материальных точек функция L
есть сумма форм:
L = Li + L\ + Lo,
где 1,2 — однородная квадратичная форма, L\ — однородная линей-
линейная форма скоростей, Lo от скоростей не зависит. Далее
9L . ^^ ^2 . , v^ dL\ .
По теореме Эйлера об однородных функциях получим
> -^T-Qt = 2L2, > -rr~<7i = Li.
Поэтому Я = L2 — Lo- Когда система склерономна и силы потенци-
потенциальны, то L2 = T, Lo = U = —П.П
634 Глава 9. Метод Гамильтона-Якоби
Следствие 9.2.3. Система канонических уравнений Гамильто-
Гамильтона имеет первый интеграл вида Н — h, где h — постоянная инте-
интегрирования, тогда и только тогда, когда функция Гамильтона Н не
зависит явно от времени: dH/dt = 0. Для систем материальных
точек этот интеграл эквивалентен обобщенному интегралу энер-
энергии Якоби, для склерономных систем с потенциальными силами —
интегралу полной механической энергии.
Следствие 9.2.4. Обобщенный импульс pi, соответствующий
циклической координате qi, сохраняет в силу канонических уравне-
уравнений Гамильтона во все время движения постоянное значение.
Доказательство. По определению циклической координаты име-
имеем dL/dqi — 0, но
дН 8L
Значит, для циклической координаты dH/dqi = 0, и
дН dL nm
Когда в системе имеются циклические координаты, изменение по-
позиционных координат описывается функцией Гамильтона, в которой
циклические импульсы приняты за постоянные параметры.
Пример 9.2.1. Треугольная призма массы М может скользить
по гладкой горизонтальной плоскости (рис. 9.2.1). Однородный ци-
цилиндр радиуса г и массы т может катиться без проскальзывания под
действием силы тяжести по боковой грани призмы, образующей угол а
с горизонтом. Ось цилиндра в процессе движения горизонтальна. Со-
Составить канонические уравнения Гамильтона.
Призма скользит без трения по гори-
горизонтальной плоскости. Цилиндр ска-
скатывается так, что прямая его контакта с
призмой остается все время параллель-
ной плоскости. Из-за отсутствия внеш-
^Гних горизонтальных сил центр масс си-
системы не смещается в горизонтальном
направлении.
Рис. 9.2.1. Цилиндр, катящийся по призме
Решение. Пусть q\ — горизонтальное смещение призмы слева
направо, qo — смещение центра масс цилиндра относительно призмы
9.2. Канонические уравнения Гамильтона 635
вдоль боковой грани снизу вверх от ее основания (рис. 9.2.1). Абсолют-
Абсолютная скорость v центра масс цилиндра складывается из относительной
его скорости вдоль поверхности призмы и переносной скорости горизон-
горизонтального поступательного движения призмы. Следовательно,
v2 = q\ + q\ -f 2<7i<j2 cos a.
Угловая скорость вращения цилиндра вокруг оси равна ш — q2/r. По
теореме Кёнига кинетическая энергия цилиндра есть
mv2 mr2
+
n m Л о 3 .9 л. . \
ш 2 = j Ы + - q\ + 2qiq2cosa) .
Учитывая поступательный характер движения призмы, найдем выраже-
выражение для кинетической энергии всей системы
т =
.о Ш /3 .п
^ + У I 292
2
Потенциальная энергия имеет вид
П = т</92 sin а.
Найдем выражения для обобщенных импульсов:
Pi = д-т- = ^т- = (А/ + m)9i + mq2 cos a,
dL 8T /3 . \
= ^т- = ^г- = m I - 92 + qi cosa ]
^92 oq2 V2 /
Отсюда
. _ 3pi — 2p2 cos a
3(M + m)-2mcos2a'
. _ 2[(M -f m)p2 — mpi cos a]
42
42 ~ m[3(M + m)-2m cos2 a]
Чтобы найти функцию Гамильтона, достаточно учесть, что система скле-
склерономна. Поэтому Я = Т + П, где обобщенные скорости следует за-
заменить их выражениями через обобщенные импульсы (следствие 9.2.2,
свойство 3). Учтем, что по теореме Эйлера
+ Р292-
Значит,
Зшр? + 2(М -f m)p? — 4mpiP2 cos a
H = — о то/** ¦—T^ ^1
2m[3(M + m) - 2m cos2 a]
636 Глава 9. Метод Г&мильтона-Якобп
Видим, что координата q\ циклическая. Это — проявление возможности
поступательного перемещения всей системы по горизонтальному напра-
направлению. Импульс pi есть постоянный параметр, вычисляемый по на-
начальным условиям. Система канонических уравнений Гамильтона при-
принимает вид
. __ дН __ 2[(М + m)p2 — mpi cos a]
Я2"
Я2~"др2~ m[3(Af + m)-2m cos2 а]1
дН
р2 = - ^-— = -mg sin а.
Щ2
Эта система имеет интеграл энергии II = h. Окончание решения предо-
предоставим читателю.О
Следствие 9.2.5. В канонических переменных
функционал принципа Гамильтона (теорема 8.12.1) принимает вид
функционал принципа Мопертюи-Лаграпжа-Якоби (теорема 8.12.3)
выражается формулой
fn
«о ' = 1
В такой записи наглядна связь этих принципов. При существова-
существовании интеграла энергии Н = h и фиксированном /i на сравниваемых
траекториях функция Н не варьируется и потому выпадает из функ-
функционала J. Переменные pi, г = 1,...,??, на концах не закреплены.
§ 9.3. Скобка Пуассона
Определение 9.3.1. Пусть даны две функции канонических пе-
переменных и времени
Скобкой Пуассона {у?, V7} этих функций называется операция
9.3. Скобка Пуассона 637
Теорема 9.3.1. Скобка Пуассона обладает следующими свойст-
свойствами.
1. Она есть билинейная кососимметричная операция:
а) {<Р,Ф} = -{Ф,Ч>},
б) {с<р,ф}=с{<р,ф}, ев Я,
в) {<Р + Ф,х} = {<Р,Х} + {Ф,Х}, X = x(tfb--->tfn,Pi,...,Pn,*)-
2. Частное дифференцирование по времени выполняется над ней
по правилу
9 s /г
3. Справедливо тождество Якоби
, Ф},х} + {{1>,х),<р} + {{х, <р},Ф) = о.
Доказательство. Пункты 1 и 2 служат прямым следствием опре-
определения 9.3.1 и легко проверяются непосредственной подстановкой.
Обратимся к доказательству тождества Якоби.
Скобку Пуассона {^>, ф} можно интерпретировать как результат
применения линейного оператора
к функции <р, так что
Следовательно,
}, ^} = ~{{Х, Ф], <Р} = -
Откуда
> X}, ^} + {{X,
где [Ь^,Ь^] — коммутатор линейных операторов Ц и Ц. Согласно
теореме 4.5.2, такой коммутатор сам есть линейный оператор. Зна-
Значит, сумма второго и третьего слагаемого в тождестве Якоби не содер-
содержит вторых частных производных от \. Первое слагаемое левой ча-
части тождества таких производных также не содержит. Аналогичное
рассуждение показывает, что в левой части тождества Якоби отсут-
отсутствуют вторые частные производные от функций <риф. Вместе с тем
по определению скобки Пуассона каждое слагаемое содержит множи-
множителем частные производные второго порядка от какой-либо функции
<р, ф или х- Полученное противоречие показывает, что все члены
левой части тождества Якоби взаимно уничтожаются.D
638 Глава 9. Метод Гамильтона-Якоби
Следствие 9.3.1. Пусть задана функция
Производная по времени от f в силу канонических уравнений Га-
Гамильтона дается выражением
где Н — функция Гамильтона системы.
Доказательство.
dt ^ \dqi dpi dpi dqij '
В случае автономной системы канонических уравнений Гамиль-
Гамильтона (dH/dt — 0) их правые части задают в фазовом пространстве
стационарное векторное поле: в каждой точке (q, p) фазового про-
пространства приложен 2п-мерный вектор
дН
Указанное векторное поле называется гамильтоновым.
Следствие 9.3.2. Скобка Пуассона {/, Н} есть производная от
f no направлению гамильтонового поля. Оно определяет фазовый
поток — однопараметрическую группу преобразований фазового про-
пространства
где (q(tf),p(tf)) — решение автономной системы уравнений Гамиль-
Гамильтона.
Следствие 9.3.3, (Теорема Нётер). Если функция Гамильто-
Гамильтона
выдерживает однопараметрическую группу преобразований, задан-
заданную каноническими уравнениями вида
dqi _ dF dpi dF
"j — "о ' ~"i — q » * — 1,..., n,
as dpi as oqi
где F = F(q\,.. .,^n,pi,. • -,Pn), mo F есть первый интеграл систе-
системы с функцией Гамильтона Н.
9.3. Скобка Пуассона 639
Доказательство. По условию теоремы
?.,*„ = „.
Отсюда {F,H} = 0.П
Теорема 9.3.2. (Якоби-Пуассона). Пусть функции
f(qi, • • -»9п,Рь • • -»Рп»О» #(<?ь • • -,9n»Pi» • • -,Рп»0
ct/тъ первые интегралы канонических уравнений с функцией Гамиль-
Гамильтона
Н =
Тогда скобка Пуассона {/, #} есть первый интеграл этих уравнений.
Доказательство. Выполним дифференцирование
Но так как / и д — первые интегралы, то
Поэтому
d
Следствие 9.3.4. Пусть Н не содержит явно t и f = а есть
первый интеграл системы канонических уравнений с функцией Га-
Гамильтона Н. Тогда
dmf
at ~Cu at2 dt™
суть первые интегралы той же системы.
Доказательство. Когда Н не зависит явно от времени, канони-
канонические уравнения допускают интеграл энергии
Я = Л.
По теореме 9.3.2 Якоби-Пуассона выражение
{f,H} = c
640 Глава 9. Метод Гамильтона-Якоби
будет тогда тоже первым интегралом. Но
dl-U. + {fH}-0
Значит, df/dt = c\ = —с. Аналогично получим, что d2f/dt2 = C2
также есть первый интеграл, и т.д.О
Теорема 9.3.2 и ее следствие 9.3.4 дают простое правило, позво-
позволяющее из двух известных первых интегралов получить при помощи
алгебраических операций и дифференцирования третий интеграл, че-
четвертый и т.д. Однако при этом не все получающиеся интегралы бу-
будут независимыми, так как независимых функций от 2п переменных
может быть не более чем 2п. Иногда может получиться функция от
исходных первых интегралов, а иногда числовое тождество.
Пример 9.3.1. Пусть задана свободная от внешних воздействий
система N точек с массами mv и радиусами-векторами
Будем считать, что на эту систему не наложены связи, так что декартовы
координаты хи, у„, zu, v = 1,...,JV всех точек в абсолютном репере
Ое^ез суть лагранжевы координаты системы. Силы взаимодействия
точек потенциальны. Кинетическая энергия выражается формулой
N
Найдем обобщенные импульсы:
, дт у дт z дт
Ри = дт- = mvxu, vyv = —- = muyu, pzu = —- = muzu.
oxv uyv ozv
Составим выражения для количеств движения и кинетических моментов:
N N N N N
N N N N
ку = ^ ку = ^2(zuPi - xvVzv\ kz = y, к =
Как известно (см. § 5.1), функции рх, ру, pz, Кх, Ку, Kz служат пер-
первыми интегралами для такой системы.
Вычислим скобки Пуассона от функций, связанных с одной точкой:
9.4. Метод Гамильтона-Якоби 641
так как dp*/qi — dpyu/dqi = 0. Аналогично
{pxvX} = {plpi} = o.
Далее
'-
2L,\eqi dPi
d)- d
~ V dqi dpi dpi dqi J dpi
{pU<i} = o,{k*v,k»} = Kt, {K*,Ki) = -к», {к*,Щ} = к'.
Из-за независимости друг от друга координат и импульсов всех точек
скобки Пуассона исследуемого набора первых интегралов будут сумма-
суммами скобок Пуассона членов, соответствующих каждой отдельной точке.
Скобки Пуассона, взятые от первых интегралов, дадут соотношения, ана-
аналогичные полученным для отдельных точек. Следовательно, с помощью
скобок Пуассона, например, по трем первым интегралам
Рх, Ку, Kz
можно восстановить весь исследуемый набор, но других интегралов
сверх этого набора получить не удается.О
§ 9.4. Метод Гамильтона-Якоби
Обозначим для краткости
(qo,*o) = (?i(M,...,gn(*o),*o), (<ьО = (gi@»--->9n@>0
соответственно начальную и конечную точки движения системы в
расширенном координатном пространстве i?n+1 . Согласно определе-
определению 8.12.1, функция действия по Гамильтону есть интеграл
= /
взятый вдоль экстремали у, соединяющей точки (qo,*o), (<1>0-
ствие 5 будет однозначной функцией своих аргументов, если экстре-
экстремали, выходящие из точки (qo, *о)> не пересекаются друг с другом. В
дальнейшем это условие считается выполненным.
41 - 1503
642
Глава 9. Метод Гамильтона-Якоби
Теорема 9.4.1. Дифференциал функции действия выражается
формулой
i - Hdt
dS =
где подстановка вычисляется как разность между значениями фун-
функции, заключенной в скобки, взятыми в текущий t и начальный to
моменты времени, pi — обобщенные импульсы, Н — функция Га-
Гамильтона, dqi, i = l,...,n, dt — независимые дифференциалы ла-
гранжевых координат и времени.
Доказательство. Для того чтобы найти приращение интеграла
действия, когда меняются не только краевые значения координат, но
и моменты времени t0 иг, разобьем дифференциалы dqo и dq на два
слагаемых следующим образом (рис. 9.4.1):
Полная вариация есть разность
значений функций, соответствую-
соответствующих различным моментам време-
времени, тогда как изохронная вариация
означает изменение функции при
фиксированном времени. Знание
полной вариации позволяет найти
значение изохронной даже тогда,
когда моменты времени для срав-
сравниваемых точек конфигурацион-
конфигурационного пространства не совпадают.
t t + dt
Рис. 9.4.1. Полная и изохронная вариации
rfq = <5q + q A, dq0 = <5qo + qo dt0.
Величины 6q и ?qo характеризуют разницу между соседними экстре-
экстремалями, имеющую место для одного и того же момента времени. По
правилам дифференцирования интегралов найдем
*1
= d f
to
Ldt= Ldt
f
t0
6Ldt=
+
to
to
9.4. Метод Гамильтона-Якоби
643
Но последний интеграл равен нулю, так как 5 вычисляется вдоль
экстремали у. Поэтому
to
Учитывая, что
получим
b=i \ i=i / J
Следствие 9.4.1. Справедливы соотношения
dS dS
/¦) Т
(*о) = dqi(t0) - qi(to)dto, p{ = —,
.D
Подставив вместо импульсов в выражение для Н соответствую-
соответствующие частные производные dS/dqi, получим уравнение
ds
as as
которому обязана удовлетворять функция действия по Гамильтону
и которое называется уравнением Гамильтона-Якоби.
Пример 9.4.1. Составим функцию действия по Гамильтону для
движения по инерции свободной материальной точки. Пусть х, у, z —
декартовы координаты точки и tfo = 0. Тогда закон движения принимает
вид
х - а?о + яot^ У =2/0 + 2/0*, z = zo + &ot.
Согласно принципу Гамильтона, этот закон есть экстремаль функцио-
функционала действия. Поэтому функция действия по Гамильтону вычисляется
следующим образом:
S(x
t
, у, z, а?0, Уо, ^о, t) = у у (i2 4- у2 + i2) Л = ^(
+ ^о) =
m
41*
644 Глава 9. Метод Гамильтона-Якоби
Поверхности уровня этой функции суть концентрические сферы с цен-
центром в исходной точке. Воспользуемся следствием 9.4.1:
OS х — xq 8S х — xq
dS у - уо 95 2/ - 2/o
dS z-zo dS
Найдем также уравнение Гамильтона-Якоби. Имеем
Следовательно, функция 5 удовлетворяет уравнению
Знание функции 5 действия по Гамильтону дает возможность
найти закон движения системы. Функция 5 удовлетворяет уравне-
уравнению Гамильтона-Якоби. Тем самым имеется возможность с помощью
методов теории уравнений в частных производных исследовать свой-
свойства движения динамических систем.
Определение 9.4.1. Непрерывно дифференцируемое решение
уравнения в частных производных Гамильтона-Якоби, содержащее п
произвольных постоянных c*i,...,an, называется полным интегра-
интегралом этого уравнения, если выполнено условие
Теорема 9.4.2. (Якоби).Пусть S(t,q\,.. .,</n,ai,.. .,an) — пол-
полный интеграл уравнения Гамильтона-Якоби. Тогда соотношения
dS . 3S
_ = /?,, —=Pt, , = !,..Mn,
суть независимые первые интегралы соответствующей системы
канонических уравнений Гамильтона.
9.4. Метод Гамильтона-Якоби 645
Доказательство. Поскольку 5 есть полный интеграл уравнения
Гамильтона-Якоби, то для него
9 (ds i тА = *
dai \dt ^ ) dat ^
где принято обозначение
dS _
Wi ~ Pi-
Считая /?,-, i = 1,..., n, постоянными, найдем
Так как 5 непрерывно дифференцируема, то можно изменить поря-
порядок дифференцирования и вычесть из второго равенства первое:
^ d2s (. дн\
?* ад;5а,- V dpj )
В связи с тем, что
получим
. дн .
для ^j(^), удовлетворяющих группе уравнений
dS .
— = А> , = !,...,„.
Найдем полную производную по времени от р,-, i = 1,.. ,,п. В
соответствии с обозначением имеем
dPi d2S
Учтем, что 5 есть полный интеграл уравнения Гамильтона-Якоби:
а9,- V а< + у a9ia< + aft + fr[ dqidqj dPj ~u'
646 Глава 9. Метод Гамильтона-Якоби
Меняя порядок дифференцирования и вычитая из р,- левую часть
последнего равенства, получим
он ^ d2s (. дн\ _
Отсюда следует, что равенства
ds a ds
сохраняются в силу канонических уравнений Гамильтона. Значит,
они представляют собой первые интегралы этих уравнений. Незави-
Независимость интегралов следует из определения 9.4.1.П
Теорема Якоби обосновывает следующее правило построения за-
закона движения qi(i), Pi{t) по известному полному интегралу уравне-
уравнения Гамильтона-Якоби 5(t, <ji,..., qn, c*i,..., an). Сначала разреша-
разрешается система п уравнений
dS й ' 1
— = #, г = 1,...,п,
со-
соотносительно переменных ?ь • • • > 4п и находятся функции
5i = fl(*,ai,...,an,/?!,...,/?„), t = l,...,n,
зависящие от 2п произвольных постоянных. Затем эти функции под-
подставляются в выражения
dS .
р,. = _, , = !,...,„,
что дает зависимости
Pi =Pi(^Qfb-.,«n,/?i,..,/?n), г= l,...,n.
Это правило всегда можно применить в силу определения 9.4.1.
Пример 9.4.2. Кинетическая энергия и силовая функция гармо-
гармонического осциллятора имеют вид
Найдем функцию Гамильтона:
р2 ы2<72 ОТ
9.4. Метод Гамильтона-Якоби 647
Составим уравнение Гамильтона-Якоби:
6S_
dt
(dSY
= 0.
Будем искать решение этого уравнения в виде суммы
где h — произвольная постоянная. Подставим эту сумму в уравнение
Гамильтона-Якоби:
dq
Возможность знака "+" перед радикалом здесь можно не учитывать,
так как согласно теореме 9.4.2 достаточно найти любую функцию S\,
зависящую от одной произвольной постоянной, например /i, и удовле-
удовлетворяющую уравнению Гамильтона-Якоби.
Чтобы получить первый интеграл
dh ->*'
нет необходимости искать функцию Si(<?, h)t хотя в данном случае найти
ее нетрудно:
[ — — sin 2<р 1 , cos (р =
2
Достаточно определить производную dS\/dh из уравнения
Отсюда
ujq
= — arccos
Следовательно, первый интеграл /? = dS/dh выражается равенством
— arccos . — t •=. в
u /2h
или
q — cos(u;^ + /3),
как это и следовало ожидать (см. § 3.9).О
648 Глава 9. Метод Гамильтона-Якобп
Рассмотренный пример показывает, что задача о поиске полного
интеграла решается неоднозначно. Полный интеграл не дает общего
решения уравнения Гамильтона-Якоби, охватывая лишь небольшую
часть решений. Тем не менее по полному интегралу можно восста-
восстановить исходное уравнение. Действительно, дифференцируя полный
интеграл, получим
Из первой группы соотношений можно выразить каждое а*- через
частные производные dS/dqi, t, qi, i = l,...,n. Подставив найден-
найденные выражения для с*,-, i = 1,...,п, во второе равенство, получим
исходное уравнение в частных производных.
Установленная связь между траекториями механической системы
и уравнением в частных производных позволяет не только находить
траекторию по решению уравнения Гамильтона-Якоби, но и, наобо-
наоборот, свести интегрирование уравнения в частных производных ука-
указанного типа к интегрированию системы обыкновенных дифферен-
дифференциальных уравнений Гамильтона.
В самом деле, поставим для уравнения Гамильтона-Якоби задачу
Коши
Чтобы найти решение этой задачи, следует составить характеристи-
характеристические уравнения, которые в данном случае образуют систему кано-
канонических уравнений
. _ дН . _ дН
Р% ~" dqi ' Ч%~ dpi'
с начальными условиями
dS0
Qi(to) = fto, Pi(to) =
i = l,...,n.
q=q0
Отвечающее этим начальным условиям решение системы есть ха-
характеристика задачи Коши для уравнения Гамильтона-Якоби. Вы-
Выберем значение t\ настолько близким к to, чтобы характеристики,
выходящие из близких друг к другу точек qo, не пересекались при
*о < t < t\. Значения q(<i), t\ можно принять за координаты точки
5, так что
9.4. Метод Гамильтона-Якоби 649
где интегрирование выполняется вдоль характеристики, ведущей в
точку В. Построенная функция S(B) удовлетворяет уравнению
Гамильтона-Якоби. Она называется главной функцией действия по
Гамильтону.
Вернемся к задаче определения закона движения механической
системы с помощью полного интеграла уравнения Гамильтона-Яко-
Гамильтона-Якоби. Для симметрии обозначим
Уравнение Гамильтона-Якоби примет вид
as as as \ as „fas
Теорема 9.4.3. (Имшенёщсий). Пусть какая-либо координа-
координата Xk и соответствующая ей производная dS/dxk входят в левую
часть уравнения F = 0 только посредством некоторой функции
( ds
не содержащей других переменных и производных:
S dS dS dS
Тогда функция
где ak — произвольная постоянная, Sf не зависит от Xk, есть
полный интеграл уравнения F = 0 в том и только том случае,
если функция Sk удовлетворяет обыкновенному дифференциальному
уравнению
а функция S' есть полный интеграл уравнения
„(as1 as1 as1 as1 \ .
r I -q—i • • •»-x , -л , • •., -л—)^o, • • .»^fc»i,a?jb+i,.. .,хп,аи = О.
\dXo OXk-l OXk+l OXn )
Доказательство. Необходимость. Пусть
650
Глава 9. Метод Гамильтона-Якобп
где S' не зависит от хку есть полный интеграл уравнения F
Подставив S в это уравнение, получим
= 0.
(dS9
dS' 8S'
8S'
Xk+1,...,Xn,<p{xk,—))=0.
Так как 5 — решение, то последнее равенство есть тождество, спра-
справедливое при любом значении координаты ж*. Но при изменении
Хк может изменяться только функция (р. В этих условиях тождество
возможно, лишь когда <р при изменении Xk сохраняет постоянное зна-
значение. Поэтому выполнены два равенства:
dSk
JdS'
dS' dS'
\дх0'' ' dxk-i'dxt
Далее по условию
d2s
— X
d2sk d2s'
#0.
Поэтому ни один из сомножителей не обращается в нуль, и 5' есть
полный интеграл последнего уравнения.
Достаточность. Пусть Sk и 5' удовлетворяют условию теоремы.
Очевидно, что тогда S = S' + Sk есть решение исходного уравнения.
Продифференцируем по а* уравнение для Sk, обозначив для кратко-
краткости рк = dSk/dxk'-
dip d2Sk
Следовательно,
дрк дхкдак
d2sk
— i
#0.
Учтем, что S' — полный интеграл соответствующего уравнения в
частных производных:
d2sf
Значит,
82S
9.4. Метод Гамильтона-Якоби 651
и S есть полный интеграл исходного уравнения. ?
Метод получения полного интеграла уравнений в частных произ-
производных первого порядка, состоящий в последовательном применении
теоремы 9.4.3, называется методом Имшенецкого разделения пере-
переменных. Рассмотрим несколько примеров на применение этого мето-
метода.
Пример 9.4.3. Пусть функция Гамильтона не зависит явно от
времени. Уравнение Гамильтона-Якоби принимает вид
dS TTfdS dS
Заключаем, что <р — dS/dt. По теореме 9.4.3 полный интеграл этого
уравнения можно искать как сумму
где h — постоянная интегрирования, а функция S1 есть полный интеграл
уравнения в частных производных
QS' OS'
При этом для каждого фиксированного значения h функция S1 должна
зависеть от п — 1 произвольных постоя иных. О
Пример 9.4.4. Одна из координат, например q\, оказалась цикли-
циклической: dH/dqi = 0. Имеем <р — dS/dqi, и полный интеграл следует
искать в виде
S = aiqi +S'(t,q2,".,qn),
где ot\ — постоянная, a S' есть полный интеграл уравнения
dS' ТТ ( dS dS
+ ^1
Пример 9.4.5. Пусть
Н = <fn(<Pn-l(- - •<Рз{(Р2(<Р1(ЯиР1),Я2,Р2)ЛЗ,Рз), - - .)Лп,Рп)-
Функция Н не зависит явно от времени. Поэтому
Srr-At + S1,
причем S1 удовлетворяет уравнению
/ dS'\ 8S'\ dS'\ \ dS'\ ,
652 Глава 9. Метод Гамильтона-Якоби
Введем произвольные постоянные а\ лп-ь ап = А и положим по-
последовательно
dS2s
do2
dS^
Разрешив эти уравнения относительно производных, получим
dqi % " *~Ь * ' -»•••»•
Следовательно, Si находятся квадратурами:
Si= I $idqi.
Полный интеграл уравнения Гамильтона-Якоби представляется в виде
суммы
что дает решение задачи.О
Пример 9.4.6. Рассмотрим кеплерово движение, при котором ма-
материальная точка массы тп притягивается к неподвижному центру с си-
силой, обратно пропорциональной квадрату расстояния до центра. Функ-
Функция Гамильтона в сферических координатах (пример З.б.б) имеет вид
Положим
Ясно, что реализуется случай, рассмотренный в примере 9.4.5. О
Пример 9.4.7. Предположим, что
9.4. Метод Гамильтона-Якоби 653
Тогда полный интеграл уравнения Гамильтона-Якоби следует искать в
виде
причем 5' удовлетворяет уравнению
dS' dS'
Отсюда
u(dS'
Следуя методу Имшенецкого, положим
где ai,..., an — постоянные, удовлетворяющие условию
ai + ...Ч- »п = 0.
Вместе с /г имеем ровно п независимых произвольных постоянных. Раз-
Разрешив полученные уравнения относительно производных dSi/dqi, най-
найдем
Полный интеграл уравнения Гамильтона-Якоби примет вид
а задача об определении закона движения решается квадратурами.О
Пример 9.4.8. (Случай Лиувйлля). Пусть кинетическая и потен-
потенциальная энергии системы могут быть представлены в форме
» = 1 j = l j = l \г=1 /
где Л,-, J9»-, П, — функции только от одной, им соответствующей пере-
переменной ?,'. Тогда закон движения такой системы может быть найден с
помощью квадратур.
Действительно, для системы Лиувйлля функция Гамильтона Н вы-
выражается равенством
-1
п / 2 \ / п ^
654 Глава 9. Метод Гамильтона-Якоби
которое имеет вид такой же, как в примере 9.4.7.0
Рассмотренные примеры убеждают, что случаи, когда эффектив-
эффективно работает метод разделения переменных, встречаются достаточно
часто. Полезно иметь критерий, устанавливающий факт разделимо-
разделимости переменных на основе анализа структуры уравнения Гамильто-
Гамильтона-Якоби. Для систем, кинетическая энергия которых зависит толь-
только от квадратов обобщенных скоростей, такой критерий доставляет
теорема Штеккеля.
Теорема 9.4.4. (Штёккель). Пусть кинетическая энергия си-
стемы есть
l
Такая система допускает разделение переменных тогда и только
тогда, когда существует невырожденная матрица
и вектор-столбец (/t(g,)), г = 1,...,п, элементы которых <рц и /,-
зависят только от соответствующей координаты д,-, причем
«,=«« = {}; };!; j=i „,
где U — силовая функция системы.
Доказательство. Необходимость. В рассматриваемом случае
функция Гамильтона не зависит явно от времени. Значит,
причем S' удовлетворяет уравнению
Предположим, что переменные разделяются, то есть существует пол-
полный интеграл последнего уравнения, имеющий вид
9.4. Метод Гамильтона-Якоби
655
где Sj = Sj(qj,ai,..., an). Подставим выражение полного интегра-
интеграла в уравнение для функции S'. Оно должно удовлетворяться то-
тождественно для всех значений gi,..., qn, ai,..., an. Дифференцируя
частным образом по каждому ot$, получим
Si d2Sj
t=l
Коэффициент при с,- в этих равенствах зависит только от д,. Соста-
Составим определитель из коэффициентов:
Д =
dS\
dSn
dqn
da j dqi
Он отличен от нуля, так как 5' — полный интеграл. Следовательно,
полученные соотношения принимают форму, указанную в условии
теоремы. Далее
то есть
1=1
Необходимость доказана.
Достаточность. Учитывая условие теоремы, уравнение для
функции 5' можно представить в виде
где ai,..., an — произвольные постоянные. Это уравнение эквива-
эквивалентно следующему:
1 = 1
ds'
= о.
Теперь очевидно, что сумма
t=l
656
Глава 9. Метод Гамильтоиа-Якоби
где функции Si определяются из уравнений
2 п
представляет собой искомый полный интеграл, поскольку матрица
невырожденна.а
Пример 9.4.9. В случае системы Лиувилля (см. пример 9.4.8)
имеем
с,=
Тогда в качестве матрицы Ф условия теоремы 9.4.4 можно взять следу-
следующую
/ AXBX -Вг -Bi ... -Bi \
А2В2 В2 0 ... О
А3В3 О В3 ... О
\ АпВп О О
Эта матрица невырожденна:
Вп )
п п
Чтобы разделение переменных было возможно, функция U должна
иметь вид
*-Ъ,(в,±л)'\
который совпадает с указанным в примере 9.4.8. Тем самым случай
Лиувилля есть следствие теоремы Штеккеля.О
В заключение параграфа отметим, что все рассматривавшиеся
ранее возможности интегрирования уравнений движения, основан-
основанные на использовании циклических координат, охватываются мето-
методом разделения переменных. К ним добавляются еще случаи, когда
разделение переменных возможно, хотя координаты и не оказывают-
оказываются циклическими. Тем самым метод Гамилътона-Якоби представляет
собой наиболее эффективный метод аналитического интегрирования
уравнений движения.
9.4. Метод Гамильтона-Якоби 657
Особую роль в этом методе играет выбор лагранжевых координат.
Одна и та же задача для некоторого набора лагранжевых координат
может допускать разделение переменных, а для другого набора —
не допускать. Проиллюстрируем сказанное на задаче определения
закона движения одной материальной точки.
Пример 9.4.10. Пусть положение материальной точки определя-
определяется в пространстве декартовыми координатами:
г = r\ ei + r2 е2 + г3 е3
в абсолютном ортонормированном репере. Кинетическая энергия имеет
вид
Р2. Рз — обобщенные импульсы. В обозначениях теоремы Штек-
меем
где бб
келя имеем
. /2m -2т -2т
ex = с2 = с3 = г—, Ф=| 0 2т 0
2т \ 0 0 2ггг
Следовательно, в декартовых координатах переменные разделяются тс-
гда и только тогда, когда силовая функция представляется суммой
Поэтому декартовы координаты неудобны, например, для изучения дви-
движения в поле центральных сил (см. пример 3.4.2).О
Пример 9.4.11. Положение материальной точки зададим сфери-
сферическими координатами (пример 3.6.2)
г = г\ е\ -f r2 e2 -f r3 е3,
причем
П = г cos д cos ф, Г2 = r cos д sin ф, r^ = r sin "д.
Кинетическая энергия имеет вид (пример 3.6.6)
2т \ г2 г2 cos21? /
где Pt/,, p#, pr — обобщенные импульсы, соответствующие координатам
^1 = Ф* Q2 = ^. ^э = г. Применим теорему Штеккеля:
1 1 1 / ° -1 °
С1 = п . .о ...о а> С2 = 7Г—Т, СЗ = 7Г—^ Ф = 1 О COS2?? -1
2m 0 г
2mr2' 2m' \ п_ л ^_2
42 - 1503
658 Глава 9. Метод Гамильтона-Якоби
Видим, что коэффициенты с\, С2, сз этой теореме удовлетворяют, и
сферические координаты разделяются тогда и только тогда, когда
Г2 COS2
В случае поля центральных сил будем иметь f\ = /2 = О.О
Пример 9.4.12. Для описания движения материальной точки
возьмем цилиндрические координаты (пример 3.6.1)
r\ = pcosp, Г2 = psin<p, r^ — z.
Выпишем кинетическую энергию в этом случае (пример 3.6.5):
где рр, ру, pz — обобщенные импульсы для координат р, i?, z соответ-
соответственно. Обозначим <ji = z, <j2 = ft Яз = Р- Тогда
= с3 = —, с2 =
2т
Тем самым сь С2, сз удовлетворяют теореме Штеккеля. Поэтому цилин-
цилиндрические координаты разделяются тогда и только тогда, когда силовая
функция имеет вид
Аналогично можно исследовать задачу о разделимости перемен-
переменных и для других типов лагранжевых координат.
§ 9.5. Интегральные инварианты
Рассмотрим расширенное фазовое Bn -f 1)-мерное пространство
B котором координатами точки будут величины
В этом пространстве выделим произвольную замкнутую кривую Со,
заданную в параметрической форме:
Qi = Qi(a)i Р«=Р?(аM *=*о(а)> « = 1,...,п, 0 < а </.
9.5. Интегральные инварианты
659
Трубка интегральных кривых обра-
образована решениями системы уравне-
уравнений Гамильтона, проходящими через
заданный произвольный замкнутый
контур Со начальных состояний си-
системы в расширенном фазовом про-
О) V Ч/ странстве. Это — двухпараметриче-
/ ^—'Со екая поверхность. Один из ее пара-
t метров — время, а другой определяет
начальную точку на контуре Со.
Рис. 9.5.1. Трубка интегральных кривых
Будем считать, что при а = О и а = I мы имеем одну и ту же точку
кривой Со- Из каждой точки кривой Со, как из начальной, выпустим
интегральную кривую уравнений Гамильтона. Получим замкнутую
трубку интегральных кривых (рис. 9.5.1), образующие которой зада-
задаются функциями
&¦ = #(*, or), Pi=Pi(t,<x), г = 1,...,п, 0<а</,
где
На этой трубке произвольно выберем другую замкнутую кривую С\,
охватывающую трубку. Уравнения кривой С\ запишем в виде
сопоставив каждому значению параметра только одну точку кривой.
Теорема 9.5.1. Криволинейный интеграл
взятый вдоль любого замкнутого контура С в пространстве Д2п+1,
не меняет своего значения при произвольном смещении (возможно,
с деформацией) этого контура вдоль трубки интегральных кривых,
проходящих через контур С.
Доказательство. Согласно теореме 9.4.1, дифференциал функ-
функции действия по Гамильтону выражается формулой
dS=
to
42*
660 Глава 9. Метод Гамильтона-Якоби
При смещении точки вдоль контура Со смещается и соответствующая
тому же значению параметра а точка контура С\. Следовательно,
dS = S'(a)da. Проинтегрируем dS в пределах 0 < a < /:
= S(l) - 5@) =/( Y, Pi db - H dt)
to 0 4t =
<} -H'dhUii J2pU<i°-H0dto\o
Следствие 9.5.1. Рассмотрим замкнутые контуры е Д2п+1, со-
составленные из одновременных состояний, т.е. принадлежащие плос-
плоскостям t = const. Вдоль такого контура dt = 0. Поэтому
Интеграл 1П не меняет своего значения, если контур Do, образован-
образованный состояниями системы в один и тот эюе момент времени to,
смещается вдоль трубки интегральных кривых, переходя в контур
D\ других одновременных состояний.
Определение 9.5.1. Интеграл
/=
взятый вдоль замкнутого контура в пространстве Д2п+1, называется
интегральным инвариантом Пуанкаре-Картана.
Интеграл
In= f (]j?pidgt) 1
взятый вдоль замкнутого контура в пространстве R2n одновременных
состояний, называется универсальным интегральным инвариантом
Пуанкаре.
Слово "универсальный" подчеркивает, что интеграл /п будет ин-
инвариантом для любой системы уравнений Гамильтона, так как в по-
подынтегральное выражение не входит функция Гамильтона Я.
Интеграл /п удобно относить к фазовому пространству В?п пере-
переменных
9.5. Интегральные инварианты 661
Пусть в этом пространстве контуры одновременных состояний Do, D\
охватывают одну и ту же трубку фазовых траекторий гамильтоновой
системы. Тогда для них
Один из контуров, например Do, можно выбрать совершенно произ-
произвольно. Можно считать, что точки контура ?>0 характеризуют раз-
различные состояния системы в один и тот же момент времени t0. Отве-
Отвечающие им состояния системы в момент времени t\ образуют контур
Di.
Пример 9.5.1. Рассмотрим гармонический осциллятор с функцией
Гамильтона
р2 u>2q2
Напишем для него уравнения Гамильтона:
9 = Р» P=-u>2q.
Эти уравнения легко интегрируются, и решение имеет вид
q(t) = q0 cos u>t + — si
pit) . Po
—— = — qosmu>t H ,
где qo, Po — начальные (при t = 0) значения фазовых координат. Через
фиксированное время t имеем преобразование координат в силу урав-
уравнений движения. Если при t = 0 из начальных точек (<?о,Ро) фазовой
плоскости составить произвольный замкнутый контур, то к моменту вре-
времени t он перейдет в другой замкнутый контур, составленный из соот-
соответствующих точек (g(tf),p(<)). Зафиксируем время t и возьмем интеграл
Пуанкаре по замкнутому контуру, образованному фазовыми точками ос-
осциллятора в этот момент:
= uj ф \-qosinwt Н cosujt) ( dqocosutt H sinutt) =
J V L> / \ U) )
662
Глава 9. Метод Гамильтона-Якоби
Учтем, что все интегралы, взятые от полных дифференциалов вдоль
замкнутого контура, равны нулю. Тогда
/п = lp{t)dq{t) = ipodqo = /„@).О
Теорема 9.5.2. Пусть движение системы описывается кано-
каноническими уравнениями Гамильтона. Тогда алгебраическая сумма
площадей Si, ограниченных проекциями на координатные плоскости
(qi,Pi) контура D одновременных состояний:
сохраняется при преобразованиях D в силу уравнений движения.
Доказательство. Произвольный контур D, заданный в фазовом
пространстве, спроектируем на плоскость (ftjPi)- Получим контур
Д. Тогда по формуле Грина
I d .= I-
JptQt /J
D Dt
= 5,-,
D
где 5, — площадь области (со знаком), ограниченной контуром Д
в плоскости (qiiPi). Направление обхода контура D индуцирует на-
направление обхода на проекции Д (рис. 9.5.2). Площадь Si берется
со знаком "Н-", если контур Д обходится по часовой стрелке (в на-
направлении кратчайшего поворота оси р, к оси qi ), и со знаком "—" в
противоположном случае.D
Произвольный контур D в фазовом
пространстве проектируется на дву-
двумерную координатную плоскость, со-
соответствующую координате qi и им-
импульсу pi. При интегрировании на-
направление обхода проекции Д это-
этого контура определено направлением
обхода контура D. Площадь 5, счита-
rq% ется положительной, если проекция
Д обходится по часовой стрелке.
Рис. 9.5.2. Проекция контура на фазовую плоскость
Интегралы / и /п называются относительными интегральными
инвариантами первого порядка. Значения этих интегралов зависят
О
9.5. Интегральные инварианты 663
от выбора замкнутого контура, а дифференциалы, стоящие под зна-
знаком интеграла, входят линейно. Теорема 9.5.2 показывает, что ин-
интегрирование по контуру можно заменить интегрированием по по-
поверхности, ограниченной контуром. Сохранение элемента любой по-
поверхности будет иметь место при ее деформации в силу канонических
уравнений Гамильтона. Имеем абсолютный (не связанный с конкрет-
конкретным видом поверхности) интегральный инвариант второго порядка.
Существуют также интегральные инварианты более высоких поряд-
порядков вплоть до интеграла по объему фазового пространства. Факт
сохранения интегралов Пуанкаре и Пуанкаре-Картана есть отличи-
отличительный признак канонических уравнений Гамильтона.
Теорема 9.5.3. Если для некоторой системы дифференциаль-
дифференциальных уравнений вида
интеграл
Ki = l /
сохраняется вдоль любой трубки интегральных кривых, то это —
система канонических уравнений Гамильтона, т.е. существует
функция
ни л v дН v дН
Я(*,аг1,...,агп,у1,...,уп) такая, что Л; = —, У,- = - —.
Доказательство. Выберем в начальный момент времени произ-
произвольный замкнутый контур
Xi = Xi(a), y,=t/t(»), ^ = ^0, г=1,...,п, 0 < а < /,
Этот контур деформируется в силу уравнений движения, и для ка-
каждого момента времени t уравнения контура будут иметь вид
Xi = Xi(t,a), yi=yi(t,a), г = 1,...,п, 0 < а < I.
Значение /п можно вычислять как одномерный интеграл
664 Глава 9. Метод Гамильтона-Якоби
Сохранение /п вдоль трубки интегральных кривых означает, что
dln f^fdyidxi dxi\ ^ dxi
о
+
о
Здесь внеинтегральный член обращается в нуль, так как точки кон-
контура совпадают при а = 0 и а = I. Следовательно,
ib
Подставив сюда значения правых частей дифференциальных урав-
уравнений, получим
(Yidxi - Xidyi) - О
для любого замкнутого контура в пространстве R2n. Видим, что по-
подынтегральное выражение есть полный дифференциал:
Следствие 9.5.2. Сохранение интеграла Пуанкаре есть необхо-
необходимое и достаточное условие того, что заданная система диффе-
дифференциальных уравнений есть система канонических уравнений Га-
Гамильтона.
Теорема 9.5.4. Пусть для некоторой системы дифференциаль-
дифференциальных уравнений вида
yi ;(,?1,...,а?п,у1,...,уп), i=
интеграл
Пуанкаре-Картана служит интегральным инвариантом. Тогда ме-
между функцией Н и функциями Х%, У% имеют место зависимости
v _ дН v. _ дН - 1
{~ду~' Yi~~dx~' '-1 Bl
9.5. Интегральные инварианты 665
Доказательство. Введем вместо t другую независимую перемен-
переменную т так, чтобы были выполнены соотношения
dx\ _ _ rf^n _ dy± _ tfyn _ Л _
X\ Xn Y\ Yn 1
где ц = /i(?,a?i,...,#n, j/i,...,2/n) — произвольная функция от пере-
перечисленных аргументов.
Интегральная кривая этой системы задается равенствами типа
Ух =У<(г,я??,...,аг°,у?,...,у°,<о).
Пусть начальные точки (xj,...,х„, 2/?,..•., Уп>^о) принадлежат за-
замкнутой кривой Со:
Приняв во внимание эти зависимости, получим параметрические
уравнения интегральных кривых:
Xi = Xi(r,a) yi = yi(r,a) < = <(r,ar), i = l,...,n, 0 < a < /,
в которых значение параметра а выделяет интегральную кривую,
а значение параметра г задает точку на этой кривой. Полагая т
постоянным, мы на каждой образующей зафиксируем точку, а на
трубке интегральных кривых выделим замкнутую кривую. В силу
сказанного интеграл
= / (X^'dx'
-Hdt
будет представлять собой функцию параметра г, и при каждом зна-
значении т будет криволинейным интегралом по соответствующей за-
замкнутой кривой С. В силу инвариантности / будем иметь
где штрих означает дифференцирование по г. Дифференцируя под
знаком интеграла, найдем
/ I E W*i + yi(dxi)f) - H'dt - #(*)' 1=0.
666 Глава 9. Метод Гамильтона,-Якова
Здесь dx(, dt зависят от дифференциала da. Изменим порядок диф-
дифференцирования по а и по г и проинтегрируем по частям вдоль за-
замкнутого контура:
E №dxi - ж^ю] - H'di+*'dH \ = °-
В силу заданной системы дифференциальных уравнений имеем
х\ = iit' = хф = Xi ц, у[ = Yi /i.
Учитывая эти равенства в подынтегральном выражении, а также за-
зависимость
dHdt
получим
Так как замкнутый контур, по которому ведется интегрирование, мо-
может быть выбран произвольно, то равенство нулю интеграла означа-
означает, что подынтегральное выражение есть полный дифференциал. Но
множитель /i может быть выбран каким угодно. В этих условиях
выражение, стоящее в фигурных скобках, должно тождественно рав-
равняться нулю при любых дифференциалах с?ж,, cfy,, dt. Поэтому
v - дН Y - дН дН - dH п
У'~ dxi* *~ дш* ~dF~~df
Следствие 9.5.3. В условиях теоремы 9.5.4 выполнено тожде-
тождество
8Н __ dH
которое справедливо для канонических уравнений Гамильтона.
Следствие 9.5.4. Существование интегрального инварианта
Пуанкаре-Картана есть необходимое и достаточное условие того,
чтобы движение системы описывалось каноническими уравнениями
с функцией Гамильтона, входящей в выражение инварианта. Инва-
Инвариантность интеграла Пуанкаре-Картана может быть положена
в основу механики голономных систем с потенциальными силами.
9.5. Интегральные инварианты 667
Пример 9.5.2. В интеграле Пуанкаре-Картана функция Га-
Гамильтона Н входит на правах импульса. Введем новую переменную
Pn+i = —Я. Тогда можно выразить, например, р\ как функцию осталь-
остальных переменных:
а интеграл Пуанкаре-Картана можно переписать следующим образом:
л /п+1 \
/ / V^ j \
I = ф I > р^ dqi — ip dqi 1, tfn+i = t.
Здесь роль времени играет уже координата q\. Поэтому закон движения
будет определяться каноническими уравнениями
dqi dip dpi dip .
~T~ = a~~"' 3~ = "* л~» i = 2,...,n+l.
agi ар,- agi ag,-
Полученные уравнения носят название уравнений Уитпгпёкера. Они по-
позволяют сделать следующие выводы.
1. Если Я не зависит явно от времени t, то в уравнениях Уиттекера
координата qn+i будет циклической, из-за чего порядок интегрируемой
системы можно понизить на две единицы. Интеграл энергии приобрета-
приобретает смысл циклического интеграла.
2. Если функция Я не содержит явно координату q\4 то dtp/dqi = 0, и
ip = сесть первый интеграл, аналогичный интегралу энергии в исходной
системе. Если, кроме того,
представляет собой еще один первый интеграл, то (следствие 9.3.4) вы-
выражения
Ы __ д^ _ _ d"f _
также будут первыми интегралами этой системы. С другой стороны,
когда d<p/dqi =0, имеем / = F(t,qu ... ,qn,-<p,p2,... ,рп) и
8f__ 5F 5F chp__ 5F
dqi dqi dpi dqi dqi'
Обобщая, можно сказать, что если равенство
668 Глава 9. Метод Гамильтона-Якоби
служит первым интегралом системы канонических уравнений Гамиль-
Гамильтона, имеющей циклическую координату (/ь то первыми интегралами
будут также равенства
OF d2F 3nF
dqk dq2k dq%
Перейдем к изучению инвариантов систем канонических уравне-
уравнений Гамильтона, получающихся интегрированием по объему фазово-
фазового пространства. Сначала докажем теорему Лиувилля об интеграль-
интегральном инварианте произвольной системы дифференциальных уравне-
уравнений. Пусть движение точки пространства Rm переменных х\,..., хт
задано с помощью следующей системы дифференциальных уравне-
уравнений:
Выберем область D(to) С Rm начальных координат х\,..., хт, соот-
соответствующих моменту to. Уравнения движения определяют преобра-
преобразование
х(*0) - х@,
вследствие которого область D(to) перейдет в область D(t). Составим
интеграл
А(<)=
D(t)
где dut — элемент объема области D(t), F(x,t) — некоторая ска-
скалярная функция. Этот интеграл, вообще говоря, будет зависеть от
времени t.
Теорема 9.5.5. (Лиувйлль). Интеграл A(t) от заданной функ-
функции F(x,t) no произвольному объему D(t) сохраняет свое значение
при изменении t (служит интегральным инвариантом) тогда и
только тогда, когда справедливо тождество
dF A d(Ffj)
dt
dF A
dt fr[
Доказательство. Пусть в некоторый момент времени t реали-
реализовались значения координат Xi(t), г — 1,...,т. Вычислим произ-
производную dA/dt. С этой целью дадим времени малое приращение г.
Соответствующее т преобразование координат в силу уравнений дви-
движения имеет вид
Xi(t + т) = x{(t) + fi{xi{t),..., xm{t), t)r + о(т).
9.5. Интегральные инварианты 669
Составим матрицу Якоби этого преобразования:
Следовательно,
По свойству якобиана
A(t + r)= f F(x(t + T),t + T)dut+T= f F(x(< + r),t + r)detJcKJ|.
D(t+r)
В точке т = 0 получим
rfA dA
?>(t)
Из выражения для det J найдем
A(det7)
r=0
Поэтому
D(t) u "~x J
Для непрерывно дифференцируемой функции ЛB) постоянство ее
значения и условие dA/dt = 0 эквивалентны. Кроме того, область
интегрирования может быть выбрана произвольно.?
Следствие 9.5.5. При движении, описываемом системой диф-
дифференциальных уравнений
** — Ji\xli - - - > хтч l)i г —- 1, . . ., 771,
область D(t) сохраняет объем тогда и только тогда, когда
Доказательство. Чтобы получить этот результат, достаточно
применить теорему Лиувилля, приняв F = 1.D
670 Глава 9. Метод Гамильтона-Якоби
Следствие 9.5.6. Движение, определенное системой канониче-
канонических уравнений Гамильтона, сохраняет объем фазового простран-
пространства.
Доказательство. Число фазовых координат равно т = 2п:
Х\ = Qi, . . . , Хп = (Jn , Xn + i — Р\ , . . . , X2n =: Pn.
Тогда
Следствие 9.5.7. Движение, описываемое системой канониче-
канонических уравнений Гамильтона, не может быть асимптотически ус-
устойчивым.
Доказательство. Утверждение справедливо, так как при асим-
асимптотической устойчивости объем области фазового пространства в
окрестности притяжения соответствующей фазовой кривой должен
уменьшаться, что невозможно.D
Следствие 9.5.8. Если F(t,q\,.. .,<?n,pi,.. -,рп) есть первый ин-
интеграл системы канонических уравнений Гамильтона, то
= / F(*,gi,...,gn,pi,...,
Л
D(t)
где интегрирование ведется по области D(t) фазового простран-
пространства, есть интегральный инвариант.
Доказательство. Так как F — первый интеграл, то
а кроме того, в силу сохранения фазового объема
2п ъ*
h
Поэтому критерий теоремы Лиувилля выполняется.D
9.5. Интегральные инварианты 671
Следствие 9.5.9. Если dH/dt = 0 (система канонических урав-
уравнений автономна), то
= /
D(t)
есть интегральный инвариант.
Теорема 9.5.6. (Теорема Пуанкаре о возвращении). Пусть
Г — сохраняющее объем непрерывное взаимно однозначное отобра-
отображение, переводящее ограниченную область D евклидова простран-
пространства в себя: YD = D. Тогда в любой окрестности п любой точки
из D найдется точка х Е п, которая возвращается в окрестность
?2, т.е. Тпх Е Q при некотором п > 0.
Доказательство. Рассмотрим образы окрестности:
п, га,...,г*п,...
Все они имеют одинаковый положительный объем. Предположим,
что все они не пересекаются. Тогда объем их суммы равен сумме
объемов. Но все образы должны принадлежать D. Область D огра-
ограничена по условию теоремы, а вместе с тем если образы fi, ГП,...
не пересекаются ни при каком fc, то объем D должен быть бесконеч-
бесконечным. Получили противоречие. Значит, при некоторых натуральных
т>0, fc>0, m> k получим
Пусть z E М. Тогда отображение Т~к (оно существует) возвращает
точку z в окрестность П. Кроме того, имеем T~kz E Гт~*П. Обозна-
Обозначим у = r~fcz. Имеем у Е ft. С другой стороны, существует xGfi,
такое, что у = Гпх, п = m — k.D
Пример 9.5.3. Преобразование, описываемое системой канониче-
канонических уравнений Гамильтона, сохраняет объем. Если система автономна
(dH/dt = 0), то это преобразование обладает групповыми свойствами.
Пусть, кроме того, система склерономна (справедлив интеграл энергии),
и потенциал П растет на бесконечности. Тогда теорема Пуанкаре о воз-
возвращении применима для области D, выделяемой неравенством
Г + П<Л,
Т > 0 — кинетическая энергия системы.О
672 Глава 9. Метод Гамильтона-Якоби
§ 9.6. Множители Якоби
Пусть в пространстве Rm задана система обыкновенных диффе-
дифференциальных уравнений
Определение 9.6.1. Функция
М = M(sb...,zm,t)
называется множителем Якоби, если она удовлетворяет дифферен-
дифференциальному уравнению в частных производных
Пример 9.6.1. Система канонических уравнений Гамильтона
допускает множитель Якоби, равный 1, что видно из следствия 9.5.6.0
Пример 9.6.2. Пусть на систему материальных точек наложе-
наложены идеальные голономные связи и заданы силы, зависящие только от
лагранжевых координат. Движение такой системы описывается уравне-
уравнениями Лагранжа второго рода
d /дь\ дь _ ...
С помощью преобразования Лежандра (теорема 9.2.1) эти уравнения
могут быть приведены к форме
. 8Н .
Легко видеть, что в данном случае
2п л
так что эти уравнения допускают множитель, равный единице.О
Пример 9.6.3. Рассмотрим голономную систему, на которую
действуют гироскопические силы вида
п
Qi =
9.6. Множители Якоби 673
и позиционные силы
Уравнения движения этой системы (теорема 9.2.1) приводятся к виду
дн дн А
Qi = ---, Pi = -¦?—+ 2
Тогда
v fi _ ^ _ ^ %
Из равенства
найдем, что
^ a2l dqj _ _fl, ,
Следовательно, матрицы
(_дЧ_\ (дд
\dqjdqij' \dPi
взаимно обратны, и матрица
\dpi
симметрична. Поэтому
к
Рассмотренная система допускает множитель М = 1.О
Пример 9.6.4. Уравнения движения тяжелого твердого тела около
неподвижной точки имеют вид (см. § 6.6)
Ар + (С- B)qr =
Bq + (A- C)pr = mgii'f, - 7<). 7* = Y'P ~ V,
Cr+(B- A)pq =
43-1503
674
Глава 9. Метод Гамильтона-Якоби
где 7. т'« 7" — направляющие косинусы вертикали в главных осях инер-
инерции тела относительно неподвижной точки, а радиус-вектор гс цен-
центра масс тела в тех же осях не меняется и имеет разложение гс —
Оз. Здесь
=р,
= 7
Очевидно, что в данном случае dfi/dxi = 0, % = 1,...,6, и система
уравнений движения тяжелого твердого тела около неподвижной точки
имеет множитель Якоби М = 1.О
Следствие 9.6.1. Пусть М — множитель Якоби. Тогда по те-
теореме 9.5.5
А = I Mdut
D(t)
есть интегральный инвариант для любого объема D(t) С Дт.
Возьмем
У% =
*=
независимые первые интегралы рассматриваемой системы дифферен-
дифференциальных уравнений. Мы можем интерпретировать равенства
—- * _ 1 Ьъ
xk+j — Xk+j, J — 1, . . ., 771 — Л,
как невырожденное преобразование координат, так как
ду\
дх\ дхь
= det
дук дук
дх\
При вычислении инварианта Л можно перейти к переменным
Элементарный объем в пространстве этих переменных обозначим
duyx. По правилу преобразования переменных при интегрировании
будем иметь
-Л/"(Уь.--,У*,^+1,...,жт,<)йПу1Г = NJkdUt,
где N — произвольная функция, а в правой части буквой N обозна-
обозначена функция Л/", в которой вместо yi,..., у* подставлены их зависи-
зависимости от xi,..., хт.
9.6. Множители Якоби 675
Теорема 9.6.1. Пусть М\ u М2 — два множителя Якоби, при-
чем М2 Ф 0. Тогда их отношение
есть первый интеграл системы дифференциальных уравнений.
Доказательство. Выполним дифференцирование:
MiM2- МХМ2
dt \M2)
Преобразуем числитель полученного выражения.
По определению множителей Якоби, очевидно, будем иметь
^ А д/( дм2 ^ ^
Следовательно,
MiM2 - МХМ2 = У ^ M2Mi - V Ф- МХМ2 = 0.D
tdx hdx
Если известны к независимых первых интегралов yi,..., у*, то с
помощью преобразования к координатам уь ..., у*, ^jk+i,..., жт ис-
исходная система дифференциальных уравнений может быть приведе-
приведена к следующей:
yi =0, i = l,...,i,
где
Имеем систему дифференциальных уравнений порядка m — к отно-
относительно неизвестных я;ь+ь ..., хт.
Теорема 9.6.2. Пусть известны к независимых первых инте-
интегралов yi,..., yk, а также множитель Якоби М. Тогда множитель
Якоби N для системы т—к дифференциальных уравнений, к которой
приводится исходная система, имеет вид
43*
676 Глава 9. Метод Гамильтона-Якоби
Доказательство. Пусть N — множитель приведенной системы.
Соответствующий интегральный элемент объема должен быть инва-
инвариантен. Следовательно,
N duyx = N Jk dut = М dut.n
Теорема 9.6.3. (Теорема о последнем множителе). Если из-
вестпны тп—1 независимых первых интегралов системы дифференци-
дифференциальных уравнений и множитель Якоби М, то интегрирование этой
системы заканчивается квадратурой.
Доказательство. Достаточно применить теорему 9.6.2 в случае
m = п — 1. Тогда интегральный элемент
dxm = F(yi,...,ym)dym,
Jm-l
где Jm_i — соответствующий якобиан, есть полный дифференциал
при условии, что
У1>. • -,2/m-l
сохраняют постоянные значения. Решение завершается квадратурой:
М
J
Jm-l
dxm = cm.D
Теорема 9.6.4. Пусть имеется автономная система из двух
дифференциальных уравнений с двумя неизвестными
Тогда множитель Якоби служит интегрирующим множителем
уравнения
h dxi - /1 dx2 = 0.
Доказательство. Согласно определению уравнение для интегри-
интегрирующего множителя имеет вид
д(м/2)= д(м/г)
дх2 дхх
или
d{Mf2) + d{Mh) =
дх2 дх\
а это совпадает с уравнением для множителя Якоби в случае, когда
М не зависит явно от времени.D
9.6. Множители Якоби 677
Следствие 9.6.2. Пусть система дифференциальных уравнений
автономна:
Я| = /|(ЯЬ • • >#m), -JTT = О, «=1,...,Ш,
и пусть для нее известны т — 2 независимых первых интеграла
Vi = У*(?ь...,?т), г = 1,...,т-2,
о также множитель Якоби М, ме зависящий явно от времени. То-
Тогда исходная система приводится к системе уравнений второго по-
порядка
в которой функции f'm_i, f'm получаются из /m-i, /m
остальных переменных с помощью первых интегралов, а множи-
множитель Якоби принимает вид
N = M/Jm.2.
Дополнительный интеграл такой системы определяется выраже-
выражением
_1 = / N(f'm dxm-i - /^_х dxm),
где результат интегрирования зависит лишь от начальной и ко-
конечной точек.
Доказательство. Приведенная система эквивалентна пропорции
dxm-\ _ dxm
ft ~~ ft
Jm-l Jm
ИЛИ
f'mdxm-i - fln-idxm = 0.
Далее применяем теорему 9.6.4.D
Таким образом, знание множителя Якоби и т — 2 независимых
первых интегралов автономной системы дифференциальных уравне-
уравнений позволяет свести к квадратурам задачу определения ее траекто-
траекторий.
Пример 9.6.5. Рассмотрим автономную систему канонических
уравнений с двумя степенями свободы
dq\ _ dq2 _ dpi _ dp2 _ ,
dpi dp2 dqi dq2
678
Глава 9. Метод Гамильтона-Якоби
где Н = H(q\,q2,p\,P2)- Для такой системы существует интеграл энер-
энергии (следствие 9.2.3)
Н = h.
Допустим, что известен еще один независимый с Н первый интеграл
вида
Теория Якоби дает возможность полностью проинтегрировать систему в
этих условиях. Итак,
H(q\,q2,P\,P2) = Л,
Предположим для определенности, что
J =
дН дН
dpi др2
&р ар
dpi др2
Тогда можно принять
Pi =
и исключить с помощью этих соотношений обобщенные импульсы из
системы уравнений Гамильтона.
Множителем Якоби для исходной системы служит 1. Следовательно,
приведенная система допускает еще один первый интеграл
Если выражения для pi и р<х подставить в заданные первоначально пер-
первые интегралы, то они обратятся в тождества. Продифференцируем эти
тождества сначала по а:
On Upi UT1 Up2 n
dp~^!fa+dp^!fo = '
dF dpi 8F dp2 ,
dpi да др2 да
Отсюда
i
да
J др2' да ~~ J дрх'
9.6. Множители Якоби 679
Дополнительный первый интеграл принимает вид
где подынтегральное выражение служит полным дифференциалом. По-
Поэтому полным дифференциалом должно быть также выражение
Pi dq\ -\-p2dq2 = dG,
и дополнительный первый интеграл системы можно записать в виде
^ = 0, G = G(qi,q3,h,a).
Применим теперь те же рассуждения для того, чтобы найти еще один
первый интеграл. Продифференцируем по h заданные в условии первые
интегралы с подставленными в них функциями р\ и Р2'-
dpi dh + др2 dh ~ '
?.1?.1 = п
dpi dh + dp2 dh
Отсюда
dp±_l_dF_ dp2 _ 1 dF
dh " J dp2 dh " dpi'
Из уравнений движения с использованием свойств пропорций найдем
dF . dF , dF . dF J
о— Щ\ ^— "92 л— Щ\ - -т— dq2
Hi - др2 - dpi - др2 dpi
Hi
~ dF dH ~ gF ^Я "" dF dH dF dH •
dp2 dpi dpi dp2 dp2 dpi dpi dp2
Или
1 dF . 1 dF . dpi , dp2 .
J dp2 J dpi dh dh
Получаем завершающий интеграл системы Гамильтона
Таким образом, разрешая уравнения
680 Глава 9. Метод Гамильтона-Якоби
относительно р\ и р2, мы можем составить линейную форму
Pi dqi -\-p2dq2,
которая будет полным дифференциалом dG. Остальные интегралы при-
принимают вид
Отметим сходство между полученным решением и тем, которое следует
из теоремы 9.4.2 о полном интеграле уравнения Гамильтона-Якоби.О
§ 9.7. Канонические преобразования
На примере циклических координат мы видели (см. § 8.4), что
успех интегрирования систем дифференциальных уравнений, описы-
описывающих движение механических систем, в значительной мере зависит
от удачного выбора лагранжевых координат. При переходе от одних
лагранжевых координат к другим будут по определенному закону
изменяться и обобщенные импульсы, так что в новых фазовых пере-
переменных уравнения движения вновь примут вид канонических уравне-
уравнений Гамильтона. Произвольные преобразования фазовых координат
таким свойством, вообще говоря, обладать не будут. Интегральный
инвариант Пуанкаре (определение 9.5.1) позволяет, подходя с еди-
единых позиций как к преобразованию лагранжевых координат, так и
обобщенных импульсов, выделить специальный класс преобразова-
преобразований фазовых переменных, не нарушающих структуру канонических
уравнений движения.
Определение 9.7.1. Невырожденное преобразование координат
И = *?t(<Zi» • • ><7п,Ръ • • '>Pn,t)i г = 1,.. .,n,
называется каноническим^ если существует функция W такая, что
для любого фиксированного момента времени t выполнено соотно-
соотношение
t=i
где 6W означает дифференциал W при фиксированном времени t,
с — число, называемое валентностью канонического преобразова-
преобразования. Если с = 1, то каноническое преобразование называется уни-
валёнтным.
9.7. Канонические преобразования 681
Следствие 9.7.1. Канонические преобразования не нарушают ин-
интегральный инвариант Пуанкаре.
Доказательство. В пространстве одновременных состояний вы-
выражение 6W есть полный дифференциал. Значит,
Ф ^2
p« do*. D
Теорема 9.7.1. В переменных fi,.. . ,?п,»?ь • • >*fa уравнения дви-
движения механической системы суть канонические уравнения Гамиль-
Гамильтона
, дН' . дН' . .
с функцией Гамильтона
6W
—,
где б правой части переменные qi,pi выражены через переменные
Яг =
Доказательство. По теореме 9.4.1 дифференциал функции дей-
действия выражается формулой
/ » \ I'1
I / ^Pi dqi — Н dt I = dS(<ii, qo, ^1, to).
В силу каноничности преобразования будем иметь
С учетом этого для новых переменных получаем соотношение
to
Так как преобразование фазовых переменных не вырождено, мы мо-
можем в правой и левой части заменить р$, д» их выражениями через ?»,
щ. Поэтому в новых переменных справедлив интегральный инвари-
инвариант Пуанкаре-Картана. Осталось воспользоваться теоремой 9.5.4.0
682 Глава 9. Метод Гамильтона-Якоби
Следствие 9.7.2. Если функция W не зависит явно от времени
(dW/dt = 0), то
#'F,...,?п, 7]и • • •, т/п, t) = cH(qi,..., qn,pu ...,pn, t),
где вместо qi,p% подставлены их выражения через $,г,гц.
Каноническое преобразование, для которого W = 0, называется
однородным.
Рассмотрим неособое преобразование
Яг = ?»F>-->?n), г = 1,...,п,
выражающее переход от одной системы лагранжевых координат к
другой.
Теорема 9.7.2. Предположим, что преобразование координат
непрерывно дифференцируемо, и каждой системе лагранжевых ко-
координат соответствуют обобщенные импульсы
dL 8L
Тогда преобразование
(а,р)-«,ч)
будет каноническим, однородным и унивалентным.
Доказательство. Выполним замену переменных
П П лг П лг
а это и есть условие однородного унивалентного канонического пре-
преобразования. D
Переход от одних лагранжевых координат к другим называется
обобщенным точечным преобразованием.
Определение 9.7.2. Выберем из новых канонических перемен-
переменных некоторый набор, содержащий п величин:
9.7. Канонические преобразования 683
так, что к + т = га, a (ii,..., u-,ji,..., jm) — любое разбиение мно-
множества натуральных чисел A,..., п) на две непересекающиеся части.
Вместе с исходными координатами q\,..., qn мы получим 2п перемен-
переменных. Функция H^(gi,. ..,gn,$/i,.. .,уп,*), для которой
называется производящей функцией соответствующего каноническо-
канонического преобразования.
Теорема 9.7.3. Пусть W есть производящая функция в смысле
определения 9.7.2. Тогда каноническое преобразование можно задать
с помощью следующих уравнений:
dW dW dW , . л
5^ ^ %. i/=l,...JibJm + * = n.
Доказательство. По теореме о неявно заданной функции первая
группа уравнений определяет зависимости
Две другие группы уравнений определяют функции
// = l,...,m,
Кроме того, имеем
Вместе с тем
к
Поэтому
где в правой части следует выполнить требуемую определением 9.7.1
замену переменных. D
684 Глава 9. Метод Гамильтона-Якоби
Следствие 9.7.3. Каноническое преобразование полностью опре-
определяется, если задать его валентность и производящую функцию
W. Существенную роль здесь играет состав аргументов этой функ-
функции. Всего получается 2п возможных вариантов выбора аргумен-
аргументов.
Рассмотрим некоторые варианты.
Следствие 9.7.4. Пусть W(qi,... ,дп,?ь • • -,?п,*) — функция,
заданная на прямом произведении двух п-мерных координатных про-
пространств. Если
{H- •¦•'¦' "•
то W может быть взята в качестве производящей функции кано-
канонического преобразования, определенного уравнениями
dW dW . ,
1
Определение 9.7.3. Каноническое преобразование с производя-
производящей функцией вида
называется свободным.
Пример 9.7.1. Для преобразования переобозначения фазовых
координат:
&=Р», Ъ = (Ц, г = 1,...,п
должно быть выполнено
dW . л
-— = -ТЦ - -qi, г = 1,...,п.
Возьмем W = -??=1«»'&- Тогда
-^— =Cpi =-6, 1= 1,...,П.
Oqi
Требуемый результат получается при с = — 1. Следовательно, преобра-
преобразование переобозначения фазовых координат есть свободное преобра-
преобразование валентности с = —1. Заметим, что с = — 1 в данном приме-
примере независимо от вида производящей функции, т.к. при переобозначе-
переобозначении фазовых координат функция Гамильтона должна поменять знак на
противоположный.О
9.7. Канонические преобразования 685
Отметим, что существуют канонические преобразования, которые
нельзя считать свободными.
Пример 9.7.2. Тождественное и обобщенное точечное преобра-
преобразование не могут быть заданы производящей функцией вида
так как функция с таким составом аргументов должна быть в данном
случае тождественно равна постоянной. Эти преобразования не будут
свободными.О
Следствие 9.7.5. Пусть W(gi,.. .,gn,»/i,. ..,iyn,J) — функция,
заданная на прямом произведении двух п-мерных пространств пе-
переменных q{, r)i, i = 1,..., п. Если
то W есть производящая функция канонического преобразования,
определенного уравнениями
dW dW . . ,
* 1
Пример 9.7.3. Производящая функция тождественного преобра-
преобразования есть
В самом деле, применяя следствие 9.7.5, найдем
т = ср{, ?i = qi, i=l,..., п.
Дополнительно следует принять с = 1.О
Теорема 9.7.4. Унивалентные канонические преобразования об-
образуют группу.
Доказательство. В силу невырожденности каждому канони-
каноническому преобразованию соответствует обратное каноническое пре-
преобразование. Пример 9.7.3 свидетельствует, что тождественное пре-
преобразование также будет каноническим. Возьмем два унивалентных
канонических преобразования
(qi,Pi, i = l,...,n)-+ (&,ffc, i= l,...,n),
686 Глава 9. Метод Гамильтона-Якоби
Покажем, что преобразование
(&,*?«, t = 1,...,л)-» (б,г),-, i= 1,...,п)
есть каноническое и унивалентное. Согласно определению 9.7.1 име-
имеем при с — \
Вычтем первое равенство из второго:
1=1 1=1
Осталось выразить в правой части q через ^i,... ,?п-О
Производящая функция может зависеть от параметра. Каждому
значению параметра будет соответствовать отдельное каноническое
преобразование, а в целом мы получим семейство преобразований.
При непрерывном изменении параметра величины ?г, г;г, i = 1,..., п,
будут его функциями.
Теорема 9.7.5. Пусть W(q\,.. . ,</п,?ь • • ч?п,а) — непрерывно
дифференцируемая по всем аргументам функция, удовлетворяющая
условию следствия 9.7.4, а — непрерывно изменяющийся параметр.
Тогда функции
&(а), тц(а), i = l,..., л,
удовлетворяют каноническим уравнениям Гамильтона
dot drji' dot d?i'
где V = dW/dck.
Доказательство. По определению канонического преобразова-
преобразования будем иметь
п п
1=1 1=1
9.7. Канонические преобразования 687
где 6W — дифференциал при фиксированном значении а; с*о, ot\ —
два различных значения параметра. Вычитая из первого равенства
второе, получим
/ п лтт/ \ ai
= d[W4ao)-W4ai)].
Следовательно, при изменении а будет справедлив интегральный
инвариант Пуанкаре-Картана. Осталось воспользоваться теоремой
9.5.4, где роль времени играет параметр а. П
Замечание 9.7.1. Пусть заданы два значения с*о и а\ параметра
а, и
(*?»•> р,-, г = 1,..., ч) —> (^«(^о)) ^t(^o)) i = I? • • • > л),
(^») Pii i'' '=z 1» • • •» *0 —* (^*(^l)) ^«(^l)) ^ =z 1» • • •» n)i
суть два канонических преобразования одной и той же валентности
с производящими функциями
соответственно. Тогда преобразование
(^(^о),^г(«о), t = l,...,n) -*F(«l)»l?i(»l)> * = 1,...,П)
будет каноническим и унивалентным (см. теорему 9.7.4).
Следствие 9.7.6. Движение, описываемое каноническими урав-
уравнениями Гамильтона, можно интерпретировать как каноническое
преобразование, в котором роль параметра играет время t, а произ-
производящей функцией служит функция S действия по Гамильтону.
Канонические преобразования сохраняют все общие свойства си-
систем уравнений Гамильтона. Изменяется только вид самой функции
Гамильтона. Выше мы видели (теорема 9.4.3), что возможность инте-
интегрирования таких систем тесно связана именно со спецификой зави-
зависимости функции Гамильтона от фазовых переменных. Если удается
найти каноническое преобразование, переводящее функцию Гамиль-
Гамильтона к такому виду, что систему, полученную после преобразования,
можно проинтегрировать, то тем самым проинтегрируются и исход-
исходные канонические уравнения.
Теорема 9.7.6. Канонические уравнения Гамильтона для систе-
системы с п степенями свободы аналитически интегрируются, если фун-
функция Гамильтона не зависит от п каких-нибудь канонических пере-
переменных с различными индексами.
688 Глава 9. Метод Гамильтона-Якоби
Доказательство. Для системы с п степенями свободы множе-
множество канонических переменных имеет вид
Разобьем это множество произвольно на два подмножества перемен-
переменных
Установим между элементами этих подмножеств соответствие
, еслих*=р5, s=l,...,n.
Пусть функция Гамильтона не зависит от переменных
яь-. .,хп.
Очевидно, что тогда
У*=0, * = 1,...,п.
Следовательно, получаем первые интегралы
У*=/?ь t=l,...,n.
Так как функция Гамильтона зависит только от переменных
t/jb, к = 1,.. .,п,
то переменные xi,..., хп удовлетворяют уравнениям
Поэтому
t
/ (, t = 1,..., n.D
= /
to
Замечание 9.7.2. С помощью канонических преобразований об-
обобщенные импульсы можно переводить в обобщенные координаты,
и наоборот. В самом деле, пусть, например, обобщенный импульс
р8 требуется преобразовать в обобщенную координату и, наоборот,
координату qs — в импульс, а остальные канонические переменные
оставить без изменений. Для этого достаточно применить произво-
производящую функцию вида
9.7. Канонические преобразования 689
В результате будем иметь
Нужный эффект получается, например, при с = 1.
Следствие 9.7.7. Пусть выполнено условие теоремы 9.7.6. То-
Тогда в соответствии с замечанием 9.7.2 существует такое канони-
каноническое преобразование, что в новых канонических переменных
функция Гамильтона Н не будет зависеть от щ,..., г)п:
H = V(ti,...,tn,t),
а решение примет вид
/ау(АД0 Л.
to
Определение 9.7.4. Канонические переменные
?ь • • • ifn» tyi» • • •»Vni
в которых функция Гамильтона имеет вид
я =
называются переменными действие-угол.
В том случае, когда многообразие, определенное первыми инте-
интегралами & = fa, i = 1,..., п, канонических переменных, компактно,
переменные щ (см. пример 9.7.4) действительно имеют смысл угло-
угловых координат на этом многообразии. В других случаях переменные
77*, строго говоря, уже не будут угловыми, хотя мы сохраним за ними
это название.
Замечание 9.7.3. По аналогии можно принять, что для пере-
переменных действие-угол функция Н имеет вид
т.е. не зависит от переменных &.
Пример 9.7.4. Рассмотрим движение гармонического осциллятора
с единичной массой. Его функция Гамильтона имеет вид
44-1503
690 Глава 9. Метод Гамильтона-Якбби
Найдем производящую функцию W(q,?) канонического преобразования,
после применения которого будет выполнено #' = ?. Учтем, что
dW
dq
Поэтому функция W должна удовлетворять следующему уравнению:
l/cW\2 Ь2
2 V ^ / 2 ^
Это может быть, например,
Определим переменную rj:
Таким образом, переменная г; имеет смысл аргумента тригонометриче-
тригонометрической функции в законе движения гармонического осциллятора
Этим оправдывается название "угловая переменная".
В рассматриваемом случае функция Н не зависит явно от времени.
Поэтому справедлив принцип Якоби (следствие 8.12.3). Вычислим дей-
действие по Мопертюи для фазовой кривой, соответствующей постоянной
энергии ?:
Эта кривая есть эллипс с полуосями а = у/2? и 6 = у/2?/к. Если взять
начальное положение, совпадающее с конечным, то фазовая точка прой-
пройдет по полному эллипсу, а значение действия / вычислится по формуле
(следствие 9.2.5)
1= f \/2t-kq2dq = Ipdq = жаЬ =
которая оправдывает для ? название "переменная действие" .О
9.7. Канонические преобразования 691
Теорема 9.7.7. (Якоби). Пусть с ф 0. Если найдено решение
уравнения типа Гамильтона-Якоби
» • • • > "о— с » О I = •'(si» • • •»sn» ^)»
от параметров fi,...,fn w, ^ытъ может, времени t, и
такое, что
то система канонических уравнений
дН дН . Л
4i¦ = т—, Pl" = ~ йГТ' |=1>--чп>
решается явно в квадратурах. При этом функции fi,... ,fn, опреде-
определенные системой уравнений
служат независимыми первыми интегралами уравнений движения.
Доказательство. Рассмотрим каноническое преобразование с
валентностью с/Ои производящей функцией
служащей полным интегралом уравнения типа Гамильтона-Якоби.
По определению канонического преобразования переменные f i,..., f n
удовлетворяют системе уравнений
3W . Л
1
которая разрешима относительно них, так как по условию теоремы
якобиан этой системы не равен нулю. Вычислим функцию Гамиль-
Гамильтона
в новых переменных. Согласно теореме 9.7.1, будем иметь
Н' = сН hi,..., qn, — с,..., -— с, t) + -5-.
V dqi dqn J dt
44*
692 Глава 9. Метод Гамильтона-Якоби
Далее после дифференцирования вместо q\,..., qn следует подста-
подставить их выражения через &, щ. Из условия теоремы найдем
Осталось воспользоваться следствием 9.7.7.0
Таким образом, задача нахождения разнообразных типов пере-
переменных действие-угол сводится к отысканию достаточно большого
числа решений уравнения Гамильтона-Якоби в частных производ-
производных.
Замечание 9.7.4. Пусть система с п степенями свободы описы-
описывается уравнениями Гамильтона и имеет п первых интегралов. Если
можно указать такое каноническое преобразование, что эти первые
интегралы входят в набор новых канонических переменных, то по
теореме 9.7.6 рассматриваемые уравнения Гамильтона можно проин-
проинтегрировать аналитически. Это — еще один способ построения пере-
переменных действие-угол.
Определение 9.7.5. Две функции
F\ = Fi(gi,...,gn,pi,...,pn,*), F2 = F2(qu... ,gn,Pb • • • ,Pn,t)
находятся в инволюции, если их скобка Пуассона (определение 9.3.1)
равна нулю: {F\,F2} = 0. Несколько функций находятся в инволю-
инволюции, если они находятся в инволюции попарно друг с другом.
Лемма 9.7.1. Пусть уравнения
F\ = Fi(gb...,gn,pi,...,pn,*) = 0,
F2 = F2(gi ,...,$„, Pi i...,Pn, 0 = 0
служат следствием уравнений
Wt(«i,...,«n,Pi,...,Pn,0 = 0, i = l,...,m,
причем функции щ, i = 1,...,га, находятся в инволюции. Тогда в
инволюции будут и функции F\, F2: {Fi,^} = 0.
Доказательство. Зафиксируем время t и рассмотрим фазовый
поток, обусловленный функцией щ (следствие 9.3.2) по параметру s.
Так как функции щ находятся в инволюции, то применение к ним
указанного фазового потока оставляет их постоянными, и поток не
нарушает уравнений щ = 0, i = 1,..., п. Но тогда останется выпол-
выполненным и уравнение F2 = 0. Поэтому {F2,u\} = 0. Аналогично для
любого г получим {F2,Ui} = 0 или {ui,F2} = 0. Последнее означает,
что фазовый поток, обусловленный функцией F2, не меняет функций
и;, а значит, сохраняет уравнение F\ = 0. Поэтому {Fi, F2} = 0.O
9.7. Канонические преобразования 693
Теорема 9.7.8. Пусть даны п функций
таких, что
функции rji,...,r)n, для которых преобразование
(q,p)-(*,*?)
будет каноническим, существуют в том и только том случае, если
функции (fi, г = 1,..., п находятся в инволюции.
Доказательство. Необходимость. Предположим, что функ-
функции <?>;, г = 1,..., п находятся в инволюции. Поскольку соответству-
соответствующий якобиан не равен нулю, то можно разрешить систему уравне-
уравнений
относительно переменных р&, & = 1,..., п, так что
Pk =
Будем считать параметры ?i,...,?n постоянными. Вторая система
уравнений есть следствие первой, а первая находится в инволюции.
Значит, в инволюции будут и функции Pk — фк, к — 1,..., п. Возьмем
от них скобки Пуассона:
д(Рк - фк) д(Рз-ф,) д{рк-фк)
dPi dPi
sr(di>s г дфк \ дф8 дфк n
fr[ \ d4i dq{ ) dqk dqs
Видим, что существует функция W = W(qi,.. .,?п,?ь • • -,fn,0> Для
которой справедливо равенство
8W
срк = ^(€€0
где с — постоянная. Если теперь принять
dW 8W ,
694 Глава 9. Метод Гамильтона-Якоби
то получим каноническое преобразование валентности с. Невыро-
Невырожденность матрицы вторых частных производных от функции W не-
непосредственно следует из предположения о невырожденности якоби-
якобиана.
Достаточность. Пусть существуют переменные r/i,...,77n, Для
которых преобразование
оказалось каноническим. Согласно определению, это означает, что
имеется функция W = W(q\,..., qn, f i,..., fn, tf) такая, что
«=i t=i
В соответствии с принятым условием невырожденности якобиана
можно найти pi = il>i(qi, - - ^qniti, - - - ,?n,t) и воспользоваться услови-
условием того, что левая часть последнего равенства служит полным диф-
дифференциалом:
дфз дфк
0qk 0qs ~ U<
Проводя теперь преобразования формул предыдущего пункта доказа-
доказательства в обратном порядке, убеждаемся в том, что функции рк — фк,
к = 1,.. .,п находятся в инволюции, а значит в инволюции будут и
функции щ, i = 1,..., п.О
Теорема 9.7.9. (Теорема Лиувилля об интегралах в инво-
инволюции). Пусть имеется п независимых, находящихся в инволюции
первых интегралов f\,..., fn системы уравнений Гамильтона. То-
Тогда существует каноническое преобразование, приводящее уравнения
движения к форме
& = 0, fji = Yi(fu...,fn,t), i- l,...,n,
где Yi — функции первых интегралов и времени.
Доказательство. Примем в качестве новых переменных задан-
заданные первые интегралы
& = /»(?ь • • -,Qn,Pi, •• -,Рп»0» г = 1,.. .,п.
Так как функции /,-, г = 1,..., п, независимы и находятся в инволю-
инволюции, то по теореме 9.7.8 существуют такие переменные 7/,, г = 1,..., п,
что преобразование (p,q) —> (*7>?) будет каноническим:
9.8. Элементы теории возмущений 695
В новых переменных (?,7?) уравнения движения имеют форму урав-
уравнений Гамильтона и задаются функцией Н1 = сН + dW/dt. Но &,
i = 1,..., п, будучи первыми интегралами движения, не изменяются
с изменением времени: & = 0, г = 1,...,п. Отсюда dHf/дгц = 0.
Поэтому
Отметим, что пример 9.6.5 содержит систему интегралов в инво-
инволюции, удовлетворяющую теореме 9.7.9.
§ 9.8. Элементы теории возмущений
Предположим, что движение некоторой механической системы
описывается каноническими уравнениями Гамильтона с функцией
Гамильтона
Я =
Представим эту функцию в виде
где Но = H0(qi,..., qn, р\,..., рп, t) — функция Гамильтона, допуска-
допускающая аналитическое решение соответствующей системы уравнений
Гамильтона, функция Н\ ограничена, а е — безразмерный параметр,
величина которого характеризует точность приближения функции Я
с помощью функции Hq. Если для любой точки некоторой ограни-
ограниченной области D расширенного фазового пространства имеем
\\8Ho дЯо|1 \\дНг дНх
~^—) —к— ^ ? \\ ~т—) —к—
то для этой области погрешность приближения мала, и можно го-
говорить о небольших отклонениях точного закона движения, обусло-
обусловленного функцией Я, от приближенного закона движения, обусло-
обусловленного функцией Hq. Рассмотрим стандартные варианты
Вариант 1. Пусть функция Hq такова, что для соответствующего
уравнения Гамильтона-Якоби
aw/at + Но = о
можно указать полный интеграл W = W(qi,.. .,gn,ai,.. .,an,J);
Уравнения
dW _ 8W _
~д ~~ Р*' ~Б "~* ~~^*' t — 1,..., n,
oqi ooti
696 Глава 9. Метод Гамильтона-Якоби
задают преобразование координат
Это преобразование координат будет каноническим и унивалентным,
так как
A ST«A STdW A ^STm А ЯШ
Pi d(li ~ 2^ A dan = XJ-Q^dqi + }^ — da{ = SW.
Найдем функцию Гамильтона Я' в переменных а\,..., an, /3\,..., /Зп,
соответствующую функции Я(дь..., qnipu • • • ,Pn, 0:
' = Я + ^- = Яо + 5Ях + ^ -
где функция Я{ есть результат подстановки в функцию Н\ зависи-
зависимостей
q% = flfifai,. ..,Qfn,/?i,.. .,fln,t),
Pi =Pi(ofi,...,Ofn,A,...,/?n,0, i = l,...,n,
выражающих закон преобразования координат. Следовательно, в пе-
переменных c*i,..., an, /?i,..., /Зп движение изучаемой системы описы-
описывается каноническими уравнениями Гамильтона вида
ЗН[ • дН[ . 1
Ясно, что если 5 = 0, то величины а,- и /?,- в силу уравнений движе-
движения будут постоянными. Тем самым мы еще раз доказали теорему
9.4.2 Якоби. Закон движения, соответствующий функции Гамильто-
Гамильтона Яо, имеет вид преобразования координат, в котором изменяется
только t, а величины а,-, /?,-, i = 1,..., п принимаются постоянными.
Закон движения с функцией Гамильтона Я дается точно такими же
формулами, что и закон движения с функцией Гамильтона Яо, но
координаты ai,..., ап, /?ь ..., /?п заменяются решением системы ка-
канонических уравнений с функцией Гамильтона еН\.
Этот результат можно истолковать следующим образом. Мож-
Можно считать, что движение происходит в соответствии с законом, со-
соответствующим функции Яо, а параметры этого закона ai,...,an,
/?i,.. ../?п не остаются постоянными, а медленно (когда е мало) из-
изменяются с течением времени. Функция Н\ называется пертурба-
пертурбационной (возмущающей) функцией. В небесной механике описанный
9.8. Элементы теории возмущений 697
метод носит название метода оскулирующих элементов. Сами оску-
лирующие элементы суть параметры кеплеровского движения (см.
§3.11).
Метод оскулирующих элементов сродни методу Лагранжа вариа-
вариации произвольных постоянных. В самом деле, пусть изучается дви-
движение, описываемое следующей системой обыкновенных дифферен-
дифференциальных уравнений:
ii = /»(xi,.. . ,zn,t), г = 1,.. . ,n.
Предположим, что для вспомогательной системы вида
it = Fi(a?i,...,scn,t), г = l,...,n,
нам удалось найти полный набор независимых первых интегралов
У% = Уг(зь...13п,*)> г = 1,...,п,
таких, что
-* '¦> »¦
Координаты t/i,..., уп, будучи постоянными в силу вспомогательной
системы дифференциальных уравнений, окажутся изменяющимися в
силу изучаемой системы. Найдем закон этого изменения:
dyi дуг _^ду{ ^ дуг
Следовательно,
Исключив в этих уравнениях координаты #i,.. .,хп с помощью си-
системы первых интегралов, получим замкнутую систему уравнений
относительно координат у\,..., уп. Если разности
малы по сравнению с функциями fj, j = 1,..., п: \i <C 1, то перемен-
переменные t/i,..., уп будут медленно по сравнению с переменными х\,...,хп
698 Глава 9. Метод Гамильтона-Якоби
меняться во времени, и движение изучаемой системы можно интер-
интерпретировать как движение вспомогательной с медленно изменяющи-
изменяющимися параметрами. Преимущество метода оскулирующих элементов
по сравнению с методом вариации произвольных постоянных в том,
что оскулирующие элементы удовлетворяют каноническим уравне-
уравнениям Гамильтона.
Применим метод вариации произвольных постоянных к случаю,
когда вспомогательная система дифференциальных уравнений имеет
вид
Для такой системы можно указать следующий полный набор первых
интегралов:
«о
Зависимости
выражают опорный закон движения. В соответствии с методом Ла-
гранжа будем иметь
Ш = fi(yi + z\, - -. ,Уп + zn,t) - Fi(t), i = l,...,n.
Правую часть полученной системы можно представить в виде
" Oft
Ш = V тг" Vi + /«B1 @. • • •. 2„(<),<) - F{(t) + Ф<(у1,...,yn,t),
где функции Ф,- таковы, что их разложения в ряд Тейлора по пере-
переменным t/i,.. ,ууп начинаются с квадратичных членов, а матрица
рассчитывается при ^ = у2 = ... = у„ = 0 и представляет собой из-
известную функцию времени. Система дифференциальных уравнений
называется системой уравнений в вариациях для изучаемой систе-
системы в окрестности опорного закона движения. В общем случае это —
система линейных дифференциальных уравнений с переменными во
9.8. Элементы теории возмущений 699
времени коэффициентами. По ее свойствам можно судить о характер-
характерных особенностях исходной изучаемой системы. Система уравнений
в вариациях принимает простой вид, когда
т.е. опорный закон движения удовлетворяет изучаемой системе. То-
Тогда
Примером эффективного использования системы уравнений в вариа-
вариациях служит теория движения в окрестности положения равновесия
(§ 8.7). Там линейная система и есть система уравнений в вариациях
относительно нулевого решения.
Во всех случаях, когда система уравнений движения приводится
к виду
x=eX(x,t), х6йт,
где е — малый параметр, решение можно искать в виде асимптоти-
асимптотических рядов по степеням е:
tr=O
Подставив этот ряд в уравнение и приравняв коэффициенты при оди-
одинаковых степенях е в разложении правой и левой частей, получим
рекуррентные системы уравнений
х(°> = О,
х« = Х(')(х(°),... .х*'-1)), » = 1,.. .,оо.
Начальные условия можно задать так, чтобы при t = О было выпол-
выполнено
Пусть все приближения для индексов 0,... ,г — 1 найдены. То-
Тогда для индекса г в правой части соответствующей системы урав-
уравнений будут стоять известные функции времени, и г-е приближение
находится квадратурой. Видим, что основная техническая трудность
применения данного метода будет состоять в выписывании конкрет-
конкретных выражений для Х^*\ Но имеется и принципиальная трудность,
связанная с тем, что получающиеся ряды не всегда сходятся. Вопро-
Вопросам рационального применения получающихся разложений посвяще-
посвящена теория малого параметра, изложение которой выходит за рамки
данной книги.
700 Глава 9. Метод Гамильтона-Якоби
Вариант 2. Предположим, что функция #о допускает введение
переменных действие-угол. Это значит, что существует каноническое
преобразование (q, p) —> (?,?7) с производящей функцией W) удовле-
удовлетворяющей уравнению типа уравнения Гамильтона-Якоби:
Функция Гамильтона Н = #о + ?#i при таком преобразовании при-
примет вид
а уравнения движения в переменных ($,17) запишутся в форме
• дНх . _ 8V дНх .__
Поиск решения этой системы в виде рядов по степеням е приводит
так же, как и в первом варианте, к рекуррентной системе уравнений
относительно коэффициентов разложений, а высказанные выше за-
замечания относительно особенностей таких решений сохраняют спра-
справедливость.
Контрольные вопросы к главе 9
9.1. Найти преобразование Лежандра для функции f(x) = x2/2.
9.2. Составить неравенство Юнга для функции f(x) = arcsec x.
9.3. Найти функцию Гамильтона и написать уравнения Гамильтона
для случая Эйлера движения твердого тела вокруг неподвиж-
неподвижной точки (см. § 6.7). В качестве Лагранжевых координат при-
принять углы Эйлера.
9.4. В примере 9.2.1 найти зависимость координат q\, qi от времени.
9.5. Показать, что векторы гамильтонового векторного поля каса-
касаются поверхности уровня функции Гамильтона #(p,q).
9.6. Пусть функция Гамильтона #(p,q) сохраняется на гамильто-
новых фазовых потоках, определенных функциями /(p,q) и
#(р, q). Показать, что тогда скобка Пуассона {/, д} есть первый
интеграл системы уравнений Гамильтона с функцией Гамиль-
Гамильтона Я.
Контрольные вопросы к главе 9 701
9.7. Составить функцию действия по Гамильтону для гармониче-
гармонического осциллятора.
9.8. Может ли полный интеграл уравнения Гамильтона-Якоби не
зависеть от каких-либо координат?
9.9. Может ли полный интеграл уравнения Гамильтона-Якоби за-
зависеть от постоянных, число которых меньше числа степеней
свободы системы?
9.10. Может ли полный интеграл уравнения Гамильтона-Якоби не
зависеть явно от времени?
9.11. Разделить переменные по методу Имшенецкого, если функция
Гамильтона выражается зависимостью
9.12. Написать уравнение Гамильтона-Якоби для сферического ма-
маятника (см. § 3.12). Показать, что это уравнение решается
методом разделения переменных.
9.13. Получить критерий интегрируемости по методу разделения пе-
переменных для уравнений движения материальной точки в по-
полярных координатах.
9.14. Показать, что элемент площади любой двумерной поверхности
фазового пространства сохраняется в силу канонических урав-
уравнений Гамильтона.
9.15. Выписать уравнение Уиттекера для гармонического осцилля-
осциллятора, приняв в качестве независимой переменной координату.
Какие особенности имеет это уравнение?
9.16. Показать, что если
— интегральный инвариант системы дифференциальных урав-
уравнений, сохраняющей любой объем Q фазового пространства, то
F — первый интеграл этой системы.
9.17. Сосуд разделен непроницаемой перегородкой на две части. В
одной из них находится газ, движение молекул которого описы-
описывается системой уравнений Гамильтона, а в другой — вакуум.
702 Глава 9. Метод Гамильтона-Якоби
В некоторый момейт времени перегородку убрали, и газ начал
заполнять весь объем сосуда. Следует ли из теоремы Пуанка-
Пуанкаре о возвращении, что найдется такой момент времени, когда
все молекулы газа снова соберутся в той части сосуда, где они
первоначально находились?
9.18. Показать, что система уравнений движения спутника относи-
относительно центра масс на круговой орбите допускает множитель
Якоби, равный единице.
9.19. Показать, что в задаче исследования движения тяжелого твер-
твердого тела вокруг неподвижной точки достаточно найти 4 незави-
независимых первых интеграла, чтобы определить траектории движе-
движения. Перечислить эти интегралы в случаях Эйлера, Лагранжа-
Пуассона, Ковалевской. Какие первые интегралы являются об-
общими для всех этих случаев?
9.20. Показать, что система канонических уравнений Гамильтона
для сферического маятника (см. § 3.12) допускает первый ин-
интеграл, отличный от интеграла энергии. Каков физический
смысл этого интеграла?
9.21. Пусть G(qi,q2, Л, or) — функция, существование которой устано-
установлено в примере 9.6.5. Доказать, что тогда 5 = M + G есть пол-
полный интеграл соответствующего уравнения Гамильтона-Якоби.
9.22. Какую форму при каноническом преобразовании приобретает
интегральный инвариант Пуанкаре-Картана.
9.23. Показать, что каноническое преобразование будет однородным
тогда и только тогда, когда справедливы равенства
9.24. Показать, что преобразование
, Л a 2a
будет каноническим валентности с = а. Найти производящую
функцию этого преобразования.
9.25. Пусть найдено каноническое преобразование к переменным дей-
действие-угол. Как найти закон движения системы в исходных
канонических переменных?
Контрольные вопросы к главе 9 703
9.26. Найти переменные действие-угол для системы с функцией Га-
Гамильтона
2 W
где к — постоянная.
9.27. Проинтегрировать систему уравнений примера 9.6.5 с помощью
теоремы 9.7.9 Лиувилля об интегралах в инволюции.
9.28. Написать систему уравнений в вариациях для физического ма-
маятника в окрестности положения равновесия.
Именной указатель
Аппель (Appell P.E. 1855-1930),
426
Бернулли (Bernoulli J. 1667-1748),
343
Бине (Binet J.F.M. 1786-1856),
254
Бобылев Д.К. A842-1917), 492
Буняковский В.Я. A804-1889),
53
Бэр К.М. A792-1876), 144
Вариньон (de Varignon P. 1654-
1722), 29
Воронец П.В. A871-1923), 530
Галилей (Galilei G. 1564-1642),
154, 157
Гамильтон (Hamilton W.R. 1805—
1865), 112,612,632,643
Гаусс (Gauss C.F. 1777-1855),
417
Гесс (Hess W. 1858-1937), 493
Грам (Gram J.P. 1850-1916), 316,
543
Гюйгенс (Huygens Ch. 1629-
1695), 52, 459
Даламбер (d'Alembert J. 1717-
1783), 376, 378
Жуковский Н.Е. A847-1921),
498
Имшенецкий В.Г. A832-1892),
649
Кёниг (Koenig J.S. 1712-1757),
397, 428
Кардано (Cardano D. 1501-1576),
94, 494
Карно (Carnot L.N.M. 1753-1823),
436
Картан (Cartan E.J. 1869-1951),
660
Кеплер (Kepler J. 1571-1630),
255, 263
Клаузиус (Clausius R. 1822-1888),
395
Клейн (Klein F. 1849-1925), 106
Ковалевская СВ. A850-1891),
489
Кориолис (Coriolis G.G. 1792-
1843), НО, 275, 517
Коши (Cauchy Au.L. 1789-1857),
44, 53, 172
Крылов А.Н. A863-1945), 94,
310
Кулон (Coulomb Ch.O. 1736-
1806), 167
Кэли (Cayley A. 1821-1895), 106
Лагранж (Lagrange J.L. 1736-
1813), 182, 201, 233, 338,
343, 378, 453, 478, 539,
570, 616, 697
Лаплас (Laplace P.S. 1749-1827),
259, 387
Леви-Чивита(ЬеуьСНуНаТ. 1873-
1941), 410
Лежандр (Legendre A.M. 1752-
1833), 627
Лиувилль (Liouville J. 1809-1882),
653, 668, 694
Лоренц (Lorentz H.A. 1853-1928),
552
Ляпунов A.M. A857-1918), 568
Именной указатель
705
Маиевский Н.В. A823-1892),
487
Максвелл (Maxwell J.C. 1831-
1879), 553
Матье (Mathieu E.L. 1835-1890),
248
Мейсснер (Meissner V.F. 1882-
1974), 248
Мещерский И.В. A859-1935),
409
Мопертюи (de Maupertuis P.L.M.
1698-1759), 616, 617
Нётер (Noether A.E. 1882-1935),
561, 638
Ньютон (Newton I. 1643-1727),
156, 160, 167, 255, 285,
293
Остроградский М.В. A801-1862),
395, 615
Паули (Pauli V. 1900-1958), 103
Пуанкаре (Poincare H. 1854-1912),
660, 671
Пуансо (Poinsot L. 1777-1859),
467
Пуассон (Poisson S.D. 1781-1840),
134, 478, 636, 639
Пфафф (Pfaff J. 1765-1825), 313
Раус (Routh E.I. 1831-1907), 564,
593
Резаль (Resal H.A. 1828-1896),
191, 387
Ривальс (Rivals), 141
Родриг^осЬ^В.О. 1794-1851),
112
Рэлей (Rayleigh [Strutt] J. 1842-
1919), 549, 587
Сильвестр (Sylvester J.J. 1814—
1897), 574
Стеклов В.А. A864-1926), 492
Торричелли (Torricelli E. 1608-
1647), 346
Уиттекер (Whittaker E.T. 1873-
1956), 667
Флериэ (Fleuriais G.), 500
Флоке (Flocke K.A.), 240
Фробениус (Frobenius F.G. 1849-
1917), 320
Фуко (Foucault J.B.L. 1819-1868),
285
Хилл (Hill M.J.M. 1856-1929),
245
Циолковский К.Э. A857-1935),
410
Чаплыгин С.А. A869-1942),
531, 533
Штейнер (Steiner J. 1796-1863),
52
Штеккель (Stackel P. 1862-1919),
654
Эйлер (Euler L. 1707-1783), 88,
91,97,121, 136,407,414,
465, 466, 600
Эрмит (Hermite Ch. 1822-1901),
103
Юнг (Young T. 1773-1829), 629
Якоби (Jacobi K.G.J. 1804-1851),
210, 545, 616, 619, 637,
639, 643, 644, 672
45- 1503
Предметный указатель
Аксоид
-неподвижный, 130
-подвижный, 130
Аномалия
-истинная, 256
-эксцентрическая, 262
Апекс, 467
Баллистика, 263
Биения, 235
Бинормаль, 80
Вариация
-полная, 607
Вектор
-Лапласа, 259
-перемещения, 77
-результирующий, 29, 39
-свободный, 25
-скользящий, 25
-суммарный (главный), 37
-угловой скорости, 121
Векторы
-базисные, 325
-нормированные, 16
-ортогональные, 16
- скользящие
--противоположные, 26
Вид канонический, 50
Винт, 39
Вириал Клаузиуса, 395
Воздействие ударное, 289
Волчок
-Лагранжа, 478
-быстрозакрученный, 488
-спящий, 487
Вращение твердого тела, 120
Вырожденный узел, 222
Гамильтониан, 609
Герполодия,468
Гироскоп симметричный, 494
Годограф скорости, 77
Градиент функционала, 603
Группа, 20
-0C), 85
-50C), 87
-5GB), 105
-О(п), 21
-SO(n), 21
Движение
-абсолютное, 118
-апериодическое, 224
-винтовое, 129
-метрики, 18
-относительное, 118
-переносное, 118
-плоскопараллельное, 131
-поступательное, 113
-пространства, 85
-равномерное, 78
-равноускоренное, 79
-стационарное, 593
-финитное, 395
-циклическое, 512
Действие
-по Гамильтону, 613
-по Мопертюи, 617
Декремент затухания, 220
Диск, 509
Диссипация полная, 549
Диффеоморфизм, 189
Дифференциал
- (вариация) функционала, 599
-вращения, 117, 384
-оператора, 116
Предметный указатель
707
Длина приведенная, 458
Жесткость системы, 587
Задача
-двух тел, 258
-динамики
— обратная, 169
--прямая, 169
--смешанная, 169
-изопериметрическая, 603
-краевая, 172
-о попадании, 264
-синтеза, 611
Закон
-Ньютона
--второй, 160
--первый, 156
— третий, 161
-всемирного тяготения, 257
— движения
--твердого тела, 81
--точки, 76
-сохранения
— механической энергии, 392
Законы Кеплера, 255
Импульсы обобщенные, 632
Инвариант
— интегральный
--Пуанкаре, 660
— Пуанкаре-Картана, 660
— абсолютный, 663
— - относительный, 662
Инварианты
— системы
--скользящих векторов, 38
Инерция системы, 587
Интеграл
-Ковалевской, 490
-Лапласа, 259
-первый, 174
-полный, 644
45*
-системы связей, 328
-циклический, 557
-энергии, 391
--Якоби, 210,545
Интервал времени, 154
Касательная к траектории, 77
Квазикоординаты, 422
Квазискорости, 422
Квазиускорения, 422
Кватернион сопряженный, 111
Класс эквивалентности, 25
Колебания гармонические, 214
Количество движения, 160,190,
380
Коммутатор, 327
Композиция
-вращений, 88
-линейных операторов, 20
Конфигурация системы, 304
Координаты
-векторные, 26
-главные, 575
-декартовы, 21
-криволинейные, 176
-лагранжевы, 350
-плюккеровы, 28
-позиционные, 557
-полярные, 178
-сферические, 178
-циклические, 556
-цилиндрические, 178
Коэффициент
-восстановления, 293
- трения
--вязкого, 169
--мгновенного, 293
— сухого, 167
Кривая
-интегральная, 313
-фазовая, 189
Лагранжиан, 555
708
Предметный указатель
Линия
-апсид, 262
-силовая, 164
-узлов, 92
-цепная, 370
Максимум изолированный, 570
Масса, 160
-суммарная, 42
-точечная, 42
Матрица
- косоэрмитова, 103
-линейного оператора, 17
-монодромии, 238
-ортогональная, 18
-унитарная, 103
-эрмитова, 103
Матрицы Паули, 103
Маятник
-Фуко, 285
-математический, 226
-физический, 457
-циклоидальный, 231
Метод
- Имшенецкого, 651
-вариации постоянных, 233
- оскулирующих элементов, 697
Метрика
-евклидова, 15
Мир, 154
Многочлен
-характеристический,49
Множество
-скользящих векторов,
--сходящееся в точке, 29
Множитель Якоби, 672
Момент
-гироскопа собственный, 495
-гироскопический, 496
- инерции
--относительно оси, 45
--относительно плоскости, 61
- относительно полюса, 61
--центробежный, 46
-кинетический, 191, 380
-количеств движения, 380
-количества движения, 191
-пары, 31
-силы, 191
-скользящего вектора, 26
--относительно оси, 29
-суммарный(главный), 37
Моменты инерции
-главные, 50
--центральные, 52
Мощность силы, 195
Мультипликаторы, 239
Натяжение нити, 365
Неравенство
-Коши, 44
- Коши-Буняковского, 53
-Юнга, 629
Нить, 364
Норма
-кватерниона, 111
-функционала, 599
Нормаль главная, 79
Область
- определения
- функционала, 603
Обруч, 509
Окружность
-соприкасающаяся, 79
Оператор
-линейный, 17
- ортогональный, 18
-монодромии, 239
Орбита, 259
Оси
-Кёнига, 397
-естественные, 80
-инерции главные, 50
- - центральные, 52
- координат
Предметный указатель
709
- декартовы, 21
Основание вектора, 26
Осциллятор
-гармонический, 211
-с вязким трением, 218
-с сухим трением, 215
Ось
-винта, 39
-винтовая, 129
-вращения, 114
--мгновенная, 133
--постоянная, 456
- - свободная, 456
-инерции главная, 49
-кинетическая гироскопа, 497
Пара
-вращений, 127
-результирующая, 39
-скользящих векторов, 31
Парабола безопасности, 174
Параболоид безопасности, 174
Параметры
- Кэли-Клейна, 106
- Родрига- Гамильтона, 112
-Эйлера, 97
Переменные
-действие-угол, 689
-канонические, 632
-сопряженные, 609
Перемещение
-виртуальное, 199, 335
-действительное, 199
Планиметр, 309
-полярный, 310
-прямолинейный, 310
-топориковый, 310
Плечо
-пары, 31
- скользящего вектора, 26
Плоскость
-Лапласа, 387
-пары, 31
-соприкасающаяся, 79
Поверхность
-интегральная, 313
-линейчатая, 130
-уровня, 163
Поле
-векторное, 15
- - гамильтоново, 638
-параллельных сил, 165
-силовое, 164
- скоростей
--винтовое, 128
- вращательное, 121
--поступательное, 121
-тяготения центральное, 167
-упругой силы, 167
-электростатическое, 167
Полодия, 468
Положение равновесия, 189, 304
Портрет фазовый, 189
Поток
-стационарный, 406
-фазовый, 189
Правило рычага
-второго рода, 41
-первого рода, 41
Преобразование
-Лежандра, 627
-каноническое, 680
- однородное, 682
- - свободное, 684
--унивалентное, 680
-обобщенное точечное, 682
Прецессия
-псевдорегулярная, 488
-регулярная, 472
Принуждение по Гауссу, 418
Принцип
-Гамильтона, 612
-Гаусса, 418
-Даламбера, 376
-Даламбера-Лагранжа, 378
-Мопертюй-Лагранжа-Якоби, 616
710
Предметный указатель
-Остроградского, 615
-Якоби, 619
-виртуальных перемещений, 343
-детерминированности, 160
-освобождения от связей, 197
-относительности, 157
Приход массы, 407
Произведение
-векторное, 23
-векторное двойное, 23
-скалярное, 15
-смешанное, 23
Производная
-в силу уравнений, 174
- вектора
--относительная, 24
-внешняя, 320
- по квазикоординате, 424
Пространство
-аффинное, 14
-галилеево, 154
-евклидово, 15
-конфигурационное, 333
-нормальное, 334
-фазовое, 188, 632
Псевдовектор, 124
Псевдоскаляр, 124
Работа силы
-на пути, 162
-элементарная, 162
Равновесие системы, 304
Радиус инерции, 457
Радиус кривизны, 79
Расстояние, 154
Расход массы, 407
Реакция связи, 197
Резонанс
-параметрический, 243
-частотный, 235
Репер
-декартов, 21
-локальный, 180
Ресурс энергетический, 392
Связи, 197
-голономные, 306
-идеальные, 338
- - при ударе, 432
- неголономные, 306
Связь
-геометрическая, 204
-дифференциальная, 198, 306
--линейная, 202, 306
-идеальная, 199
- - при ударе, 292
-неудерживающая, 291, 305
-склерономная, 307
-стационарная, 306
-удерживающая, 306
Седло, 225
Сепаратриса, 230
Сила, 160
-активная, 198
-веса, 281
-диссипативная, 214
-дополнительная, 405
-инерции, 275
- Даламбера, 376
- кориолисова, 275
-обобщенная, 181, 351, 425
-обобщенно потенциальная, 550
-отталкивающая, 224
-пассивная, 199
-переносная, 275
-потенциальная, 163
-реактивная, 410
-средняя, 291
-удельная, 364
Силы
-внешние, 381
-внутренние, 381
-гироскопические, 531
-диссипативные, 548
Система
-Чаплыгина, 531
Предметный указатель
711
-вполне интегрируемая, 314
- координат
- галилеева, 156
- - правоориентированная,22
-линейная, 594
--позиционная, 572
-материальных точек, 304
-механическая, 157
--изолированная, 157
- определенно диссипативная, 549
-отсчета, 156
--инерциальная, 156
-скользящих векторов, 29
- - параллельных, 40
-сопряженная, 609
-статически неопределимая, 357
- уравнений
- - Гамильтона, 632
- Лагранжа второго рода, 453
--Пуассона, 134
--Пфаффа, 313
- Рауса, 566
- - Эйлера, 600
- - в вариациях, 698
Системы
-сил эквивалентные, 354
-эквивалентные, 30
Скобка Пуассона, 636
Скорость
-абсолютная, 118
-движения
--поступательного, 120
-космическая
--вторая, 261
- первая, 261
-относительная, 118
-отражения, 292
-падения, 292
-переменной части, 409
- относительная, 410
-переносная, 118
-секторная, 192
-средняя, 77
-точки, 77
-угловая, 120
-циклическая, 556
Случай
- Бобылёва-Стеклова, 492
- Гесса, 493
Событие, 154
Состояние
-механической системы, 159
Статика геометрическая, 353
Структура галилеева, 154
Тело твердое, 81
Тензор
-инерции, 45
--центральный, 51
-метрический, 16
Теорема
- Гюйгенса-Штейнера, 52
-Кориолиса, 140
-Лагранжа, 570
-Ляпунова, 568
- Ривальса, 141
-Штеккеля, 654
Точка
-кинетическая сопряженная, 614
-материальная, 156
-мировая, 154
- подвеса, 458
Траектория
-абсолютная, 118
-относительная, 118
-точки, 76
Трение
-вязкое, 168
-скольжения, 167
Углы
- Брайнта, 94
-Крылова, 94
-Эйлера, 91
-кардановы, 94
-корабельные, 94
712
Предметный указатель
-самолетные, 94
Угол
-нутации, 91
-отражения, 292
-падения, 292
-прецессии, 91
-собственного вращения, 91
-трения, 168
Удар, 290
-абсолютно неупругий, 292
-абсолютно упругий, 293
-упругий, 292
Узел, 224
Умножение
-тензорное, 57
Уравнение
- Гамильтона-Якоби, 643
-Кеплера, 263
- Лагранжа
--с множителем, 201
- Матье, 248
- Мещерского, 409
-Хилла, 245
-движения маятника
- математического, 226
- - физического, 458
-равновесия нити, 365
-характеристическое, 49
-частот, 574
Уравнения
-Воронца, 530
- Лагранжа
--второго рода, 182, 540
- первого рода, 380
-Уиттекера, 667
-Чаплыгина, 532
- Эйлера
--динамические, 465
- кинематические, 136
-движения
--в координатах, 170, 180
-кинематические, 426
Ускорение, 78
-действительное, 418
-допустимое, 417
Условие Маиевского, 487
Условия краевые, 365
Усреднение, 394
Устойчивость по Ляпунову, 568
Фокус, 220
Формализм Лагранжа, 540
Формула
-Циолковского, 410
-Эйлера, 121, 407
Формулы Вине, 254
Формы базисные, 325
Функции в инволюции, 692
Функционал, 598
-дифференцируемый, 599
Функция
-Гамильтона, 632
-Лагранжа, 555
-Ляпунова, 569
- Рауса, 565
-Рэлея диссипативная, 549
- действия
- - по Гамильтону, 649
-знакоопределенная, 568
-знакопостоянная, 567
-обобщенная, 291
-пертурбационная, 696
-производящая, 683
-силовая, 163
--обобщенная, 550
-сингулярная, 290
Центр, 213
-вращения, 133
-качания, 458
-масс, 42
-системы, 40
-скоростей, 133
-удара, 463
-ускорений, 145
Центроида
Предметный указатель
-неподвижная, 133
-подвижная, 133
Цилиндр фазовый, 231
Частота циклическая, 211
Число степеней свободы, 351
Шаг винта, 129
Широта
-астрономическая, 281
-геоцентрическая, 281
713
Экстремаль, 600
Эллипсоид
-безопасности, 265
-инерции, 47
--центральный, 52
Энергия
-кинетическая, 380
--точки, 181
-полная механическая, 195
-потенциальная, 391
-ускорений, 427
Литература
1. Лйзерман М.А. Классическая механика: Учебное пособие.—2-е
изд. перераб.—М.: Наука. Гл. ред. физ.-мат. лит., 1980.—368 с.
2. Алексеев В.М., Тихомиров В.М., Фомин СВ. Оптимальное уп-
управление.—М.: Наука. Гл. ред. физ.-мат. лит., 1979.—432 с.
3. Андронов А.А.} Витт А.А., Хайкин С.Э. Теория колебаний. 2-е
изд. перераб.—М.: Физматгиз, 1959.—915 с.
4. Аппель П. Теоретическая механика/ Пер. с франц. Т. 1, 2.—М.:
Физматгиз, I960.—515-1-487 с.
5. Арнольд В.И. Математические методы классической механики.—
М.: Наука. Гл. ред. физ.-мат. лит., 1979.—432 с.
6. Архангельский Ю.А. Аналитическая динамика твердого тела.—
М.: Наука. Гл. ред. физ.-мат. лит., 1977.—328 с.
7. Балк М.Б., Болтянский В.Г. Геометрия масс. (Библиотечка
"Квант", вып. 61).—М.: Наука. Гл. ред. физ.-мат. лит., 1987.—
158 с.
8. Балк М.Б., Демин В.Г., Куницын А.Л. Сборник задач по небес-
небесной механике и космодинамике.—М.: Наука. Гл. ред. физ.-мат.
лит., 1972.—336 с.
9. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая ме-
механика в примерах и задачах: Статика и кинематика: Учеб. по-
пособие для студентов технических вузов.—10-е изд., перераб. и
доп.—Спб.: Политехника, 1995.—670 с.
10. Белецкий В.В. Движение искусственного спутника относительно
центра масс.—М.: Наука. Гл. ред. физ.-мат. лит., 1965.—416 с.
11. Belecky V.V., Kasatkin G.V., Starostin E.I. The pendulum as a
dynamical billiard. Pergamon, Elsevier Science LTD. Printed in Great
Britain: Chaos, Solitons Ъ Fractals. V.7. No 8. 1996.—p. 1145—1178.
12. Березкин Е.Н. Курс теоретической механики.—M.: Изд-во МГУ,
1974.—646 с.
Литература 715
13. Блисс Длс, Лекции по вариационному исчислению/ Пер. с англ.—
М.: ИЛ, 1950.—348 с.
14. Булгаков Б.В. Прикладная теория гироскопов.—М.: Изд-во МГУ,
1976.—400 с.
15. Бухгольц Н.Н. Основной курс теоретической механики: В 2 ч.:
Учебник.—9-е изд. стереотипное.—М.: Наука. Гл. ред. физ.-мат.
лит., 1972.—4684-332 с.
16. Балле-Пуссен Ш.Ж. Лекции по теоретической механике/ Пер. с
франц. Т. 1.—М.: ИЛ, 1948.—339 с. Т.2.—М.: ИЛ, 1949.—327 с.
17. Вариационные принципы механики: Сб. ст./ Под ред. Л.С.Пола-
ка.—М.: Наука. Гл. ред. физ.-мат. лит., 1959.—932 с.
18. Веретенников В.Г., Синицын В.А. Теоретическая механика (до-
(дополнения к общим разделам): Учеб. пособие.—М.: Изд-во МАИ,
1996.—360 с.
19. Вильке В.Г. Теоретическая механика: Учебник.—2-е изд. пере-
раб. и доп.—М.: Изд-во МГУ, 1998.—272 с. ISBN 5-211-03785-5.
20. Галиуллин А.С. Аналитическая динамика: Учеб. пособие.—М.:
Изд-во РУДН, 1998.—441 с. ISBN-5-209-00582-8.
21. Гантмахер Ф.Р. Лекции по аналитической механике.—М.: Нау-
Наука. Гл. ред. физ.-мат. лит., 1960.—296 с.
22. Гантмахер Ф.Р., Крейн М.Г Осцилляционные матрицы и ядра
и малые колебания механических систем.—2-е изд. перераб. и
доп.—М.;Л.: Гостехиздат, 1950.—359 с.
23. Голдстейн Г Классическая механика/ Пер. с англ. —М.: Наука.
Гл. ред. физ.-мат. лит., 1975.—415 с.
24. Голубев В.В. Лекции по интегрированию уравнений движения тя-
тяжелого твердого тела около неподвижной точки.—М.;Л.: Госте-
Гостехиздат, 1953.—287 с.
25. Голубев Ю.Ф. Основы теоретической механики: Учебник.—М.:
Изд-во МГУ, 1992.—525 с. ISBN 5-211-02267-Х.
26. Демидович Б.П. Лекции по математической теории устойчивос-
устойчивости.—М.: Наука. Гл. ред. физ.-мат. лит., 1967.—472 с.
27. Добронравов В.В. Основы механики неголономных систем: Учеб.
пособие для вузов.—М.: Высшая школа, 1970.—272 с.
716 Литература
28. Дубровин Б.А., Новиков СП., Фоменко Л. Т. Современная геомет-
геометрия.—М.: Наука. Гл. ред. физ.-мат. лит., 1979.—759 с.
29. Зоммерфельд А. Механика/ Пер. с нем.—М.: Гос. изд-во иностр.
литературы, 1947.—391 с.
30. Иванов А.П. Динамика систем с механическими соударениями.—
М.: Международная программа образования, 1997.—336 с.—
ISBN 5-7781-0031-0.
31. Картпан Э. Интегральные инварианты/ Пер. с франц.—М.;Л.:
Гос. изд-во технико-теоретической лит., 1940.—216 с.
32. Каршан Э. Теория спиноров/ Пер. с франц.—М.: Гос. изд-во
иностр. литературы, 1947.—224 с.
33. Козлов В.В. Симметрии, топология и резонансы в гамильтоно-
вой механике.—Ижевск: Изд-во Удмурдского гос. университета,
1995.—432 с—ISBN 5-7029-0126-6.
34. Кориолис Г. Математическая теория явлений бильярдной игры/
Пер. с франц.—М.: Гос. изд-во технико-теоретической лит.,
1956.—235 с.
35. Котпкин Г.Л.у Сербо В.Г. Сборник задач по классической меха-
механике.—2-е изд., испр. и доп.—М. Наука. Гл. ред. физ.-мат. лит.,
1977.—320 с.
36. Лагранж Ж.Л. Аналитическая механика/ Пер. с франц., т. 1,
2.—М.;Л.: Гостехиздат, 1950.-594+440 с.
37. Ландау Л.Д., Лифшиц Е.М. Теоретическая физика. Т. 1. Меха-
Механика.—М.: Физматгиз, 1958.—206 с.
38. Ланцош К. Вариационные принципы механики/ Пер. с англ.—М.:
Мир, 1965.—408 с.
39. Лойцянский Л.Г., Лурье А.И. Курс теоретической механики.
4.1: Статика, кинематика.—Изд. 8-е перераб. 1982.—352 с. 4.2:
Динамика.—Изд. 6-е перераб. 1983.—640 с.—М.: Наука. Гл. ред.
физ.-мат. лит.
40. Лурье А.И. Аналитическая механика.—М.: Наука. Гл. ред. физ.-
мат. лит., 1961.—824 с.
41. Магнус К. Гироскоп: теория и применение/ Пер. с нем.—М.:
Мир, 1974.—526 с.
Литература 717
42. Маркеев А. П. Теоретическая механика: Учеб. пособие для уни-
университетов.—М.: Наука. Гл. ред. физ.-мат. лит., 1990.—416 с.—
ISBN 5-02-014016-3.
43. Мещерский И.В. Задачи по теоретической механике: Учеб. посо-
пособие.—37 издание, исправл./ Под ред. В.А.Пальмова, Д.Р.Мерки-
на; оформление обложки С.Л.Шапиро, А.А.Олексеенко.—Спб.:
Лань, 1998.—448 с—ISBN 5-8114-0031-4.
44. Неймарк Ю.И., Фуфаев Н.А. Динамика неголономных систем.—
М.: Наука, Гл. ред. физ.-мат. лит., 1967.—519 с.
45. Ньютон И. Математические начала натуральной философии//
Крылов А.Н. Собр. тр. Т. 7.—М.;Л.: Издательство АН СССР,
1936.—676 с.
46. Охоцимский Д.Е., Голубев Ю.Ф., Сихарулидзе Ю.Г. Алгоритмы
управления космическим аппаратом при входе в атмосферу.—М.:
Наука. Гл. ред. физ.-мат. лит., 1975.—399 с.
47. Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космиче-
космического полета.—М.: Наука. Гл. ред. физ.-мат. лит., 1990.—448 с.—
ISBN 5-02-014090-2.
48. Охоцимский Д.Е., Энеев Т.М. Некоторые вариационные задачи,
связанные с запуском искусственного спутника Земли.—М.: Гос.
изд-во технико-теор. лит-ры. (Успехи физических наук. Т. 63,
вып. 1а), 1957.—с. 5-32.
49. Парс Л.А. Аналитическая динамика/ Пер. с англ.—М.: Наука.
Гл. ред. физ.-мат. лит., 1971.—636 с.
50. Пеньков В.И., Сарычев В.А. Оптимизация параметров гравита-
гравитационной системы стабилизации спутников с одностепенным под-
подвесом на слабоэллиптической орбите.—М.: ИПМ им. М.В. Кел-
Келдыша АН СССР. Препринт №90, 1974.—49 с.
51. Поляхов Н.Н., Зегэюда С.А., Юшков М.П. Принцип Суслова-
Журдена как следствие уравнений динамики.—М.: Высшая шко-
школа. (Сборник НМС по ТМ, вып. 12), 1982.-е. 72-79.
52. Поляхов Н.Н., Зегэюда С.А., Юшков М.П. Теоретическая меха-
механика: Учеб. пособие.—Л.: Изд-во Ленинградского ун-та, 1985.—
536 с.
53. Понтпрягин Л. С. Обыкновенные дифференциальные у равнения.—
М.: Наука. Гл. ред. физ.-мат. лит., 1982.—332 с.
718 Литература
54. Понтпрягин Л.С, Болтянский В.Г., Гамкрелидзе Р.В., Мищен-
Мищенко Е.Ф. Математическая теория оптимальных процессов.—М.:
Наука. Гл. ред. физ.-мат. лит., 1961.—391 с.
55. Пуанкаре А. Избранные труды/ Пер. с франц. Т. 1, 2.—М.: Наука.
Гл. ред. физ.-мат. лит., 1971.—771 с.
56. Пуанкаре А. Лекции по небесной механике.—М.: Наука. Гл. ред.
физ.-мат. лит., 1965.—572 с.
57. Пятницкий Е.С., Трухан Н.М., Ханукаев Ю.И., Яковенко Г.Н.
Сборник задач по аналитической механике: Учеб. пособие для
вузов.—2-е изд., перераб. и доп.—М.: Наука; Физматлит, 1996.—
432 с—ISBN 5-02-014593-9.
58. Раус Э.Дж. Динамика систем твердых тел/ Пер. с англ.: В 2 т.
Под ред. Ю.А.Архангельского, В.Г.Демина.—М.: Наука. Гл. ред.
физ.-мат. лит., 1983.—464+544 с.
59. Рашевский П.К. Геометрическая теория уравнений с частными
производными.—М.;Л.: Гостехиздат, 1947.—354 с.
60. Румянцев В. В. О принципе Гамильтона для неголономных сис-
систем// ПММ. Т. 42, вып. 3.—М.:Наука. Гл. ред. физ.-мат. лит.,
1978.—с. 387-399.
61. Суслов Г.К. Теоретическая механика.—М.;Л.: ОГИЗ; Гос. изд-во
технико-теоретической лит., 1946.—665 с.
62. Тара СМ. Краткий курс теоретической механики: Учебник для
втузов.—8-е изд.—М.: Наука. Гл. ред. физ.-мат. лит., 1972.—480 с.
63. Татаринов Я.В. Лекции по классической динамике.—М.: Изд-во
МГУ, 1984.—296 с.
64. Теоретическая механика. Терминология. Буквенные обозначения
величин: Сб. рекомендуемых терминов. Вып. 102.—М.: Наука. Гл.
ред. физ.-мат. лит., 1984.—47 с.
65. Тюлина И.А. История и методология механики.—М.: Изд-во
МГУ, 1979.—282 с.
66. Уиттекер Е.Т. Аналитическая динамика/ Пер. с англ.—М.;Л.:
ОНТИ, 1937.—500 с.
67. Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по фи-
физике. Вып. 1.—М.: Мир, 1967.—267 с.
Литература 719
68. Четпаев Н.Г. Теоретическая механика.—М.: Наука. Гл. ред. физ.-
мат. лит., 1987.—368 с.
69. Четпаев Н. Г. Устойчивость движения. Работы по аналитической
механике.—М.: Издательство АН СССР, 1962.—535 с.
70. Якоби К. Лекции по динамике/ Пер. с нем.—Л.: ОНТИ. Гл. ред.
общетехнической лит., 1936.—271 с.
71. Якубович В.А., Стпаржинский В.М. Линейные дифференциаль-
дифференциальные уравнения с периодическими коэффициентами и их при-
приложения.—М. Наука. Гл. ред. физ.-мат. лит., 1972.—720 с.
Учебное издание
Голубев Юрий Филиппович
ОСНОВЫ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
2-е издание, переработанное и дополненное
Зав. редакцией
ИЖЩехура
Художественный редактор
Ю. М.Добрянская
Корректор
В.АВетров
Изд. лиц. № 040414 от 18.04.97
Подписано в печать 24.07.2000.
Формат 60x90 1/16. Бумага офсетн. № 1.
Офсетная печать. Усл. печ. л. 45,00.
Уч.-изд. л. 34,03. Тираж 5000 экз. Заказ № 1503.
Изд. № 7037.
Ордена «Знак Почета»
Издательство Московского университета.
103009, Москва, ул. Б. Никитская, 5/7.
Отпечатано в полном соответствии
с качеством предоставленных диапозитивов
в ОАО «Можайский полиграфический комбинат».
143200, г. Можайск, ул. Мира, 93.