/






















































































































































































































































































Текст
?. И. ФЕДОРОВ
ГРУППА
ЛОРЕНЦА
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1979
22.31
? 33
УДК 539.1
Группа Лоренца. Федоров Ф. И.— М.: Наука. Главная редакция
физико-математической литературы, 1979.
Изложение теории группы вращений, группы Лоренца и связанных
с ними групп, а также их представлений. Впервые в научной литературе
теория группы Лоренца излагается на основе комплексной векторной
параметризации, что позволяет достигнуть значительных упрощений при
рассмотрении многих вопросов. При изложении широко используются
прямые методы векторного и тензорного исчисления.
Отдельная глава посвящена применениям группы Лоренца и
некоторым основным вопросам теории элементарных частиц. Книга не требует
от читателя специальной математической подготовки — необходимые
дополнительные сведения изложены в приложениях. Книга рассчитана на
студентов старших курсов, аспирантов и научных сотрудников
специализирующихся в области теоретической физики.
Рис. 4. Табл. 3. Библ. назв. 117.
Федор Иванович Федоров
ГРУППА ЛОРЕНЦА
М., 1979 г., 384 стр. с илл.
Редактор Б. А. Миртов
Техн. редактор С. Я. Шкляр
Корректоры О. А. Бутусова, Л. Н. Боровика, Т. А. Панькова
ИБ № 11342
Сдано в набор 17.05.79. Подписано к печати 01.11.79. Т-18631. Бумага
60x907i6, тип. JVft 1. Обыкновенная гарнитура. Высокая печать. Условн.
печ. л. 24. Уч.-изд. л. 24,57. Тираж 4950 экз. Заказ № 552. Цепа
книги 2 р. 70 к.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
4-я типография издательства «Наука». 630077, Новосибирск, 77,
Станиславского, 25
гЬ 20402—164 ,?? „? ^?,?????? (S) Наука. Главная редакция
Ц> 0/п0, -п—129-79. 1704020000 W физико-математической
\)??(№)-?\3 литературы, 1979
ОГЛАВЛЕНИЕ
Предисловие
Глава I. Трехмерная ортогональная группа 7
§ 1. Ортогональная группа в и-мерном пространстве ... 7
§ 2. Трехмерная группа вращений 12
§ 3. Композиция вектор-параметров группы вращений . . 18
§ 4. Вектор-параметр и углы Эйлера 28
§ 5. Двумерный вектор-параметр и группа SUB) . . . . 33
§ 6. Инвариантное интегрирование на группе вращений . . 40
§ 7. Инфинитезимальные вектор-операторы группы вращений 43
§ 8. Комплексная трехмерная ортогональная группа ... 50
§ 9. Подгруппы комплексной группы вращений 50C, С) 57
Глава П. Представления группы вращений 66
§ 10. Представления. Перестановочные соотношения для инфи-
нитезимальных операторов 66
§ 11. Унитарность представлений группы вращений ... 72
§ 12. Инфинитезимальные операторы неприводимых
представлений 76
§ 13. Конечные преобразования представлений группы вращений 86
§ 14. Матричные элементы неприводимых представлений . . 95
§ 15. Произведение неприводимых представлений . ... 103
§ 16. Коэффициенты Клебша-Гордана 109
Глава III. Группа Лоренца 120^
§ 17. Пространство Минковского 120
§ 18. Антисимметричные тензоры. Дуальность 126
§ 19. Преобразования Лоренца 148
§ 20. Комплексный вектор-параметр 159
§ 21. Композиция вектор-параметров группы Лоренца . . 170
§ 22. Преобразования векторов в мире Минковского . . . 193
§ 23. Малые группы и другие подгруппы группы Лоренца . 201
§ 24. Группа 0D) и комплексная группа Лоренца 50D, С) 206
Глава IV. Представления группы Лоренца 214
§ 25. Конечномерные представления собственной группы
Лоренца 214
§ 26. Инфинитезимальные операторы и конечные
преобразования группы Лоренца. Произведение представлений . . 221
1*
4
ОГЛАВЛЕНИЕ
§ 27. Конечномерные представления полной группы Лоренца.
Инвариантная билинейная форма 229
§ 28. Представления малых групп и комплексной группы
Лоренца 239
§ 29. Бесконечномерные представления группы Лоренца . . 246
Глава V. Применения группы Лоренца в теории элементарных
частиц 253
§ 30. Релятивистские волновые уравнения первого порядка . 253
§ 31. Плоские волны (свободные частицы) 269
§ 32. Описание спиновых свойств частиц 276
§ 33. Метод проективных операторов в теории частиц . . . 288
§ 34. Уравнения для частиц со спином 1/2, 0,1 . . . . 298
§ 35. Частицы во внешнем поле 312
§ 36. Матричные элементы квантовой электродинамики . . 319
Приложения 346
1. Некоторые сведения из линейной алгебры 346
2. Абстрактный вывод закона композиции вектор-параметров 357
3. Прямые суммы и произведения пространств и матриц . . 361
4. Лемма Шура 367
5. Метод проективных операторов 371
Список обозначений 379
Литература
381
ПРЕДИСЛОВИЕ
Существует много превосходных и широко известных монографий*
в которых излагается теория группы Лоренца и ее представлений (см.,
например, [1—7] и др.). При этих условиях появление новой книги,
посвященной тому же вопросу, требует некоторого обоснования.
Настоящая книга радикально отличается от всех существующих руководств ??
группе Лоренца в ряде отношений. Как известно, группу Лорепца можно
параметризовать различными способами. В качестве ее параметров
используются углы Эйлера и компоненты скорости, либо углы обычных в
гиперболических поворотов, параметры Кэли — Клейна, комплексные углы
Эйлера. В данной книге впервые в основу теории группы Лоренца
положена комплексная векторная параметризация, предложенная автором
около 20 лет назад. При такой параметризации все шесть параметров
произвольного преобразования Лоренца объединяются в один трехмерный
комплексный вектор, подчиняющийся весьма простому закону композиции.
Кроме того, матрица самого общего преобразования Лоренца также
принимает в этой параметризации предельно простой вид.
Комплексные вектор-параметры вместе с формулой композиции, как
законом группового умножения, образуют группу, изоморфную группе
Лоренца. Поэтому большинство основных свойств преобразований
Лоренца может быть получено без обращения к матрицам этих преобразований,
а непосредственно на уровне определяющих их вектор-параметров. Эта
задача чрезвычайно облегчается ввиду крайней простоты закона
композиции. Многие важные факты становятся при этом почти очевидными.
Таким образом, в принятом здесь изложении самую фундаментальную
роль играет закон композиции параметров, который для других
параметров не только не использовался, но даже никогда не был выписан в явном
виде вследствие его сложности.
Указанные обстоятельства позволяют при рассмотрении группы
Лоренца отойти от общепринятой схемы изложения, которая с некоторыми
вариациями повторяется практически во всей существующей литературе
и которая основана на использовании с самого начала инфинитезималь-
ного подхода. Благодаря простоте закона композиции и общего
выражения для матрицы Лоренца оказывается возможным изучать многие
основные свойства этой группы на уровне не инфинитезимальных, а
конечных преобразований. Вообще, векторная параметризация позволяет
по-новому взглянуть на многие свойства группы вращений и группы
Лорепца, а также связанных с ними групп 50C, С), 50D), 50D, С).
При изложении широко используются прямые методы векторного и
тензорного исчисления. Вследствие этого в книге содержится лишь
сравнительно небольшое число формул и соотношений, в которых встречаются
отдельные компоненты векторов или элементы матриц и, соответственно,
применяются индексы. Как правило, основные рассуждения и выводы
проводятся с трехмерными, четырехмерными и многомерными векторами
6
ПРЕДИСЛОВИЕ
и матрицами, как едиными объектами, причем используются их
инвариантные (ковариантные) алгебраические свойства.
В первых двух главах излагается теория трехмерной группы
вращений и ее представлений на основе векторной параметризации. Два
последних параграфа первой главы посвящены рассмотрению комплексной
группы вращений 50C, С), которая играет большую роль в теории малых
групп Лоренца (§23) ив теории спина (§ 32). Главы третья и
четвертая содержат теорию группы Лоренца и ее представлений. В частности,
довольно подробно рассмотрены алгебраические свойства
антисимметричных тензоров (бивекторов), их связь с комплексными трехмерными
векторами и соотношения дуальности (§ 18). В § 24 кратко изложена теория
четырехмерной группы вращений 50D) и комплексной группы Лоренца
50D, С) на основе векторной параметризации.
Пятая глава посвящена применениям группы Лоренца и ее
представлений в теории элементарных частиц. В этой почти необозримой
области приложений рассмотрены лишь некоторые вопросы, в основном
связанные с интересами автора. Здесь можно отметить изложение общей
теории спиновых свойств частиц (§ 32), где проявляется существенная
роль группы 50C, С). С помощью векторной параметризации получено
явное выражение для вигнеровского вращения в самом общем случае.
В § 33 изложен метод проективных операторов в теории элементарных
частиц. В § 35 излагается общий метод отыскания точных решений
волновых уравнений для спиновых частиц в поле плоской электромагнитной
волны. В § 36 рассмотрены новые эффективные методы вычисления мат.
ричных элементов и дифференциальных сечений различных процессов
квантовой электродинамики. В приложениях, имеющих справочный
характер, приведены некоторые сведения из линейной алгебры. Отметим,
что список литературы ни в малейшей степени не претендует на полноту.
При изложении мы не стремились к скрупулезной математической
строгости формулировок, выводов и доказательств. Главной целью автора
было изложить в доступной форме удобный и эффективный (с его точки
зрения) аппарат, позволяющий с существенным упрощением
рассматривать многие вопросы, связанные с применением в теоретической физике
таких фундаментальных групп, как 50C) и 50C, 1). В какой мере эта
цель достигнута — судить читателю.
Автор считает своим долгом выразить искреннюю благодарность
А. А. Богушу и М. Б. Менскому, прочитавшим рукопись и сделавшим
ряд ценных, замечаний. Автор признателен также А. В. Березину,
Ю. А. Курочкину и В. С. Отчику, просмотревшим отдельные главы и
указавшим на замеченные неточности.
Минск, сентябрь 1978 г.
Ф. И. Федоров
Глава I
ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
§ 1. Ортогональная группа в/?-мерном пространстве
По определению га-мерной ортогональной группой О(п)
называется совокупность всех линейных преобразований в гс-мер-
ном линейном пространстве, оставляющих инвариантной сумму
квадратов компонент всякого вектора х = (ха), ? = 1, 2, ..., ?
из этого пространства
X = ХаРа — ?<? — ?? ~т~ %2 ? · · · ? ^?· ?*· */
Здесь и в дальнейшем по дважды повторяющимся индексам
предполагается суммирование в пределах их возможных значений*)·
Пусть О = @??) — квадратная матрица рассматриваемого
линейного преобразования. Тогда
X* = OaflXfi A.2)
или
х'= Ох^хО. A.3)
Тильда (~) обозначает транспонированную матрицу
??? = ???. A.4)
В выражениях вида A.3) всегда будет предполагаться условие
суммирования по соседним индексам стоящих рядом векторов или
матриц (см. П. 1). Случаи, когда это условие не должно
применяться, мы будем отмечать точкой между стоящими рядом
величинами. Таким образом, если
ху = х«Уа = ух, хА = (яа4аР), A.5)
то
х · У = (ЗДр), х · А = (ХаА^). "A.6)
*) В случаях, когда это условие не применяется, над повторяющимся
индексом ставится точка.
8
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Условие ортогональности преобразования О можно теперь
написать в виде
х'2 = (ОхJ = (Ох)Ох = хООх = х2 =xlx. A.7)
Поскольку это равенство является тождеством относительно
вектора х, то отсюда следует
00=1. A.8)
Мы подразумеваем здесь под 1 единичную матрицу надлежащего
порядка. В случаях, когда необходимо указать порядок
единичной матрицы, мы будем ставить при ней соответствующий индекс.
Таким образом, 1п будет означать единичную матрицу порядка
п. Всюду в дальнейшем мы не будем делать различия в записи
между числом к и соответствующей ему скалярной матрицей
любого порядка
[fc 0 0 ... О 0\
О к 0...0 0
к =
Ип. A.9)
10 0 0 ...О V
Из A.8) следует также
0 = 0-1, 00=1. A.10)
С помощью индексов соотношение A.8) запишется в виде
0??0?? = 0??0?? = 6??. A.100
Здесь ??? — известный символ Кронекера, который можно
рассматривать как общее выражение для элементов единичной
матрицы: 1= (???). В соотношении A.10') индекс ?, по которому
производится суммирование, нумерует строки матрицы О, в то
время как номера столбцов ? и ? фиксированы. Таким образом,
согласно A.100 0??0?? = 0 при ? ? ? и ?^?^ = 0|? = 1.
Если рассматривать элементы каждой строки как компоненты
некоторого гс-мерного вектора, то A.10') означает, что строки
ортогональной матрицы образуют ортонормированную систему
векторов. Из A.10) аналогичным образом вытекает 0??0?? = ???,
следовательно, такое же утверждение справедливо и для
столбцов ортогональной матрицы.
Взяв детерминант от обеих частей A.8), получим
|0|2 = 1, |0|=±1. A.11)
Поэтому при любом числе измерений пространства
ортогональные преобразования подразделяются на два типа: собственные
0+(|0+|=1) и несобственные 0_(|0_|= — 1) ортогональные
преобразования.
§ 1. ГРУППА В п-МЕРНОМ ПРОСТРАНСТВЕ
9
Из них только собственные ортогональные преобразования 0+
образуют группу, которая обозначается SO(n) и называется
специальной ортогональной групппой в гс-мерном пространстве.
Слово «специальная» означает условие равенства единице
детерминанта матрицы преобразования. Очевидно, группа собственных
преобразований является подгруппой группы всех ортогональных
преобразований.
Всякое бесконечно малое преобразование имеет вид \-{-Аг
причем все элементы матрицы А малы, так что их
произведениями между собой можно пренебречь. Налагая условие
ортогональности A.8), получим A + А) A + А) = 1, откуда следует
А = —А, т. е. матрица А должна быть антисимметричной. Итак*
бесконечно малое ортогональное преобразование имеет вид
0=1+А, А = -А. A.12)
Таким образом, существует связь между ортогональной и
антисимметричной матрицей. Уравнение A.8), выражающее
равенство двух симметричных матриц, равносильно п(п-\-1)/2
условиям, налагаемым на элементы ???. Поэтому ортогональная
матрица зависит от п2 — п(п + 1)/2 = п(п — 1)/2 параметров. Столько
же независимых элементов имеет антисимметричная матрица А.
Легко убедиться в справедливости общей формулы, выражающей
собственную ортогональную матрицу через антисимметричную:
0=A+Л)A - Л)-1 =|±j.=2-^-^ = 2 A - А)-*- 1. A.13)
Запись в виде дроби допустима в данном случае, поскольку
1+^4 и 1 — А коммутируют между собой. Транспонируя
равенство'A.13), получит О = A + А)-*A - А) = (I - А)/A+ А) =
= О, т. е. условие A.10). Кроме того, |1 — Л| = |1+Л| =
= |1+^4|, откуда следует |0|=1, т. е. выражение A.13)»
действительно является собственной ортогональной матрицей.
Разумеется, выражение A.13) имеет смысл лишь при условии.,
что A—А)-1 существует, т. е.
\1-А\ Ф0. A.14>
Покажем, что для вещественных антисимметричных матриц А
условие A.14) всегда выполняется. Действительно,
характеристическое уравнение матрицы А имеет вид
|?-?| =0, A.15>
где ? — собственное значение матрицы А. Поэтому равенство
11 — А | =0 означало бы, что матрица А имеет собственное
значение, равное единице. Это невозможно, так как при А = А* —
10
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
= —А (звездочка означает комплексное сопряжение) матрица
А антиэрмитова: А+ = А* = —А и поэтому может иметь лишь
чисто мнимые собственные значения (см. П. 1).
Соотношение A.13) легко разрешается относительно матрицы Л
А = 1 - 2@ + I)-1 = (О - 1)/@ +1), A.150
причем условие О = 0~1 приводит к антисимметрии А.
Действительно,
2 = ^ —i^fl —1 = 1— ° = _ л
? + ? О + 1 1 + 0 ~
Эти соотношения справедливы всегда, за исключением случая,
когда @ + I) не существует, т. е. при условии
|0+1| =0. A.15")
Из A.13) имеем О + 1 = 2A — Л), следовательно, |0 + 1| =
= 2П|1—Л|~1, поэтому A.15") может иметь место лишь в
случае, когда некоторые элементы матрицы А бесконечно велики.
Для A — А)'1 мы можем написать ряд Неймана [10]
(l—A)~l = i+A+A2 + A* + ..., A.16)
предполагая сходимость этого разложения. Согласно теореме
Гамильтона— Кэли (П. 1) всякая квадратная матрица является
корнем своего характеристического полинома, степень которого
равна порядку матрицы ? (либо корнем полинома степени s < ?
(см. П. 1)). Поэтому га-я и более высокие степени матрицы О
выражаются в виде линейных комбинаций ее низших степеней.
Отсюда следует согласно A.13), что га-мерная матрица О всегда
может быть представлена в виде полинома от А не выше
(п— 1)-й степени
О = ахАп~х + а2Ап~2 + ... + ап.хА + ап. A.17)
Поскольку каждой антисимметричной матрице А согласно
A.13) соответствует собственная ортогональная матрица О, то
п(п — 1)/2 независимых элементов .4??(?<?) можно
рассматривать как параметры, определяющие собственное ортогональное
преобразование.
Заметим, что вместо выражения A.13), называемого формой
Кэли, собственную ортогональную матрицу О любого порядка
можно выразить через антисимметричную матрицу А более
общим образом:
0 = /(Л)//(-Л), A.170
где /(^4)—любая функция, ограниченная условием f(A) ?
^f(-A). Впрочем, как указывалось выше, всякая функция от
§ i. ГРУППА В n-MEPHOM ПРОСТРАНСТВЕ i±
матрицы гс-го порядка А может быть выргажена в виде полинома
от А степени не выше п — \. Разумеется, представление A.17х)
справедливо, лишь когда /(^4) является неособенной матрицей:
\f(A) | ? 0. В частности, взяв f(A) = exp {А/2}, придем к
представлению
0 = ехр^. A.17")
Важную роль играют соотношения коммутации между
бесконечно малыми преобразованиями A.12). Легко убедиться, что
коммутатор двух антисимметричных матриц А = — А и А' —
= — А' также является антисимметричной матрицей
А" = {АА*}- = АА' -А'А = - А". A.18)
Выраженное через элементы матриц, это соотношение имеет вид,
?* = АауАу$ — A'ayAyt = — Ala (?, ? = 1, 2, ..., ?). A.19)
Всякую антисимметричную матрицу А можно написать в виде
4=4" ******> /?? = - /??> D·20)
где базисные антисимметричные матрицы /?? не зависят от
элементов матрицы 4??. Элементы матриц /?? определяются
следующим образом *):
Jqo = ?????? — ?????? = 2?[??][??]. A.21 J
Здесь ?[??][??) — обобщенный символ Кронекера (П. 1),
обладающий свойствами:
?[??][??]0[??][??] = 0[??][??], A.22)
л
?[??][??]^?? = ^[??] = -у (Fafi — Fpa). A-23)
Последнее свойство позволяет рассматривать б[арнРо] как оператор
альтернирования. Непосредственной проверкой с помощью A.21),
либо используя соотношения A.18) — A.20), можно убедиться,,
что для матриц /?? при любом ? имеют место следующие
соотношения коммутативности:
¦\ГЬа'*')_ = _ б^-/»' + ??????' +???./??'- бээ·/""'. A.24)
Рассмотрим уравнение для собственных векторов ? и
собственных значений ? ортогональной га-мерной матрицы О
?? = ??, ?=(??), ?=1, 2, ..., п. A.25)
*) Верхние индексы нумеруют различные матрицы /, а нижние
индексы — элементы матрицы.
12 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Поскольку О = О, то, умножая это уравнение на О, получим
0?--|-?. A.26)
После скалярного умножения уравнений A.25), A.26) на ? имеем
??? = ??2, ??? - ~- ?2. A.27)
ЗдеСЬ ??? = ??????? = ??????? = ???, ?2 = ??-?? = ?|? = ?? +
+ ^2 + · · · + ??· Разность уравнений A.27) дает соотношение
(?--!-)?2 = 0. A.28)
Отсюда следует либо ?2 = 1, либо ?2 = 0. Таким образом,
собственные векторы ? любой ортогональной матрицы, обладают
свойством ?2 = 0, за исключением тех, которые отвечают
собственным значениям ? =. ± 1.
Рассмотрим уравнения ??? = ????, Ог|J = ?2?2· Второе из них
заменим уравнением ??2 = A/?2)?2. Умножив первое на ?^ и
второе на ??, получим после вычитания, поскольку ????* = ?2#??»
(??--^)*?*? = 0· A.29)
Таким образом, два собственных вектора ??, ?2 ортогональной
матрицы при условии ?? ? ?? ортогональны между собой в
смысле ???2 = ????2? = 0.
§ 2. Трехмерная группа вращений
Собственная ортогональная группа в трехмерном
вещественном пространстве называется группой вращений и обозначается
SOC). Согласно A.17) в этом случае
О = 0+ = ахА2 + а2А + а3. B.1)
Как показано в П. 1, характеристическое (оно же и
минимальное) уравнение антисимметричной трехмерной матрицы А
имеет вид
A*-±-(A*)tA = 0. B.2)
Для нахождения коэффициентов ??, ?2, аз используем
соотношение A.13), согласно которому
(l—AH = az+ (а2 — а3)А + (ах — а2)А2 — ахАг = 1 + А.
Используя B.2) и сравнивая коэффициенты в обеих частях этого
§ 2. ТРЕХМЕРНАЯ ГРУППА ВРАЩЕНИЙ
13
равенства при независимых степенях матрицы А, найдем ах =
= а% = 2/[1 — 7г(A2)t], ?3 = 1, следовательно,
0 = l + 2(A+A*)/[i-42(A*)t]. B.3}
Вместо матрицы А удобно ввести дуальный ей вектор*)
с = (cd) с помощью соотношений (см. П. 1) **)
А = Сх, Ааъ = Cab = badOfidi Ca = 1/2^abcAbc.
B.4)
Здесь Eadb — трехмерный символ Леви-Чивита.
Согласно (П. 1.78) сх = сс — с2, следовательно, (сХ2)е =— 2с2.
Таким образом, мы получим вместо B.3)
0 = 0(с) = Ос =^^т = 1 + 2С><+ сХ2
1 — с2 + 2с-с + 2с*
B.5)
Наряду с 0(c) мы будем пользоваться также обозначением Ос-
Явное выражение для матрицы преобразования B.5) имеет
следующий вид:
0(c)
1 + с4
l + c*-cS-c*2(V2-c3) 2(с1сз + с2)
2(Vi+c3) l+c2-ci-c232(V3-ci)
l2(Vl
С2)
= -1 +
2(V2-Ci) ! + c;
[l + e* е1ег-еге1ег+еЛ
i + c'
5? + ?. * + ?«
C«V
Cl ~ С2 С3С2 + С1 4 + С\
B.5')
Из самого вывода формулы B.5) следует, что при любом
векторе с матрица О будет ортогональной. Впрочем, нетрудно
непосредственной проверкой убедиться, что выражение B.5)
обладает свойством A.8), причем |0|= + 1. Однако еще неясно,
всякая ли собственная ортогональная матрица 0+ может быть
представлена в виде B.5), т. е. для любой ли 0+ найдется
соответствующий вектор с. Для выяснения этого вопроса рассмотрим
выражения
1 + 0<=гЬ' °-5 = г&' B·6)
1 + с 1 + с
с помощью которых находим
СА =
0-0
B.7)
*) Жирным шрифтом обозначаются трехмерные векторы.
**) Всюду в дальнейшем индексы а, Ь, с, d,... пробегают значения
от 1 до 3. Индексы i, /, Ar» I,... изменяются от 1 до 4, а греческие
индексы ?, ?, ... ?, ?, ... принимают значения от 1 до ? (? > 4).
14
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Поскольку выражение в правой части является
антисимметричной матрицей, то вектор с в общем случае определяется
однозначно (см. П. 1). Особого рассмотрения требует лишь частный
случай 1 + Ot = 0. При этом согласно B.7) длина вектора
обращается в бесконечность. Однако и в этом случае формула B.5)
сохраняет смысл. Действительно, пусть с = Ссх \с\ = 1).
Подставляя это выражение для с в B.5) и устремляя С к
бесконечности, получим
0=1 + 2схХ2 = &VC! - 1. B.8)
Видно, что это есть преобразование поворота вокруг направления
сх на 180°*). Отметим, что в этом случае 0 = 0, так что
О2 = 00 = 1. Наоборот, если положить 0 — 0 = 0, то из B.6)
следует сх/A + с2) = 0, что при с ? О приводит к с2 = оо.
Нетрудно убедиться, что условие 1 + Ot = 0 соответствует
отмеченному в предыдущем параграфе особому случаю A.15").
Действительно, согласно (П. 1.67)
\l + 0\=l + Ot + Ot+\0\ =2A + 00=0,
поскольку из^О = 0+ следует_|0| = 1 и (см. (П. 1.58)) 0 =
= |0|0-1 = О, следовательно, Ot = Ot = Ot.
Итак, мы можем сделать вывод, что при любом векторе с
формула B.5) определяет собственное ортогональное
преобразование О = 0+, и наоборот, для каждого преобразования
вращения 0+ существует единственный вектор с, через который 0+
выражается в форме B.5) (если считать вектор бесконечной
длины, параллельный заданному направлению, единственным).
При этом каждая компонента вектора с может принимать
всевозможные значения от — oq до + оо без каких-либо
ограничений. Иными словами, существует взаимнооднозначное
соответствие между всевозможными преобразованиями вращения 0+ и
совокупностью всех векторов с в трехмерном вещественном
пространстве. При этом вектору с = 0 соответствует тождественное
преобразование 0+ = 1, и наоборот, из О = 1 согласно B.5)
следует с = 0. Поэтому вектор с = (са) можно рассматривать
как совокупность параметров группы вращений — мы будем
называть его вектор-параметром группы вращений [11] **).
*) Это ясно из того, что если а = ксх, то Оа = а, а при a J_ cx (аех = 0)
имеем Оа = — а.
**) По-видимому, Дж. Гиббс первый ввел вектор-параметр группы
вращений (см. [11.1]). Поскольку никто, никогда и нигде не использовал
этот вектор в конкретных расчетах, то он остался неизвестным автору
данной книги и был заново получен в рамках поисков ковариантном
трактовки группы вращений (см. [И]). Как убедится читатель, в этой
книге вектор-параметр составляет основу всего изложения.
§ 2. ТРЕХМЕРНАЯ ГРУППА ВРАЩЕНИЙ
15
Нетрудно определить геометрический смысл вектор-параметра
с. Из B.5) следует, поскольку схс = [ее] = 0, что
О (кс) с = сО(кс) = Осс = 0~схс = с, B.9)
т, е. преобразование Ое оставляет вектор с (и любой
параллельный ему вектор) неизменным.
Но последнее означает, что преобразование О (кс) можно
рассматривать как поворот пространства вокруг направления с.
Пусть угол этого поворота равен а, тогда единичный вектор
#(#2=1), перпендикулярный к с(хс = 0), преобразуется в
вектор х1 = Ох% причем х'2 = 1 и
cos* = xx' = xOcx = l+2xcXx + xf2x = 1-2^ = ^4
1 + с2 1 + с2 1 + с2
Отсюда имеем
а 1-cosa t(?2^L
1 + cosa ё 2
или
M = tg-|-. B.10)
Итак, направление вектора с задает ось поворота, а его длина
численно равна тангенсу половинного угла поворота.
Поскольку в данном случае х' = Осх = (A — с2) ? +
+ 2[cx])/(l-\-с2), то легко убедиться, в соответствии с
определением векторного произведения, что поворот от ? к х* образует
правый винт с направлением вектор-параметра с. В соответствии
с ранее сказанным (см. B.8)) мы видим, что при ? = ? длина
вектор-параметра с обращается в бесконечность.
Отметим, что по ходу рассуждений мы фактически доказали
теорему Эйлера о том, что всякое вращение вокруг точки в
трехмерном пространстве сводится к повороту вокруг некоторой
фиксированной оси [12].
Мы уже отмечали, что
О@) =1. B.11)
Кроме того, преобразование, обратное к О (с), получается в
результате изменения направления вектор-параметра с на
противоположное. Действительно, согласно A.10) и B.5)
О'1 (с) = О (с) = 1 + 2 (- сх + с><2)/A + с2) = О (— с). B.12)
Поскольку нулевому значению вектор-параметра с соответствует
единичное преобразование B.11), то бесконечно малое
преобразование вращения О (см. § 1) мы получим при |с|->-0. Согласно
16
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
B.5) такое преобразование можно написать в виде
0=1+2сХ (|с|<1). B.13)
Пусть заданы два произвольных вектора ? и р' одинаковой
длины: р'2 = р2. Выясним, какие преобразования вращения О (с)
преобразуют ? в р':
Р' = ОсР=\±^р. B.14)
1 — с
Очевидно, задача заключается в отыскании вектор-параметра с,
удовлетворяющего последнему соотношению. Из него следует
p-p' = -lc,p + p'l B.15)
Отсюда ясно, что с(р — р') = О, поэтому можно искать с в виде
линейной комбинации двух векторов р + р' и [РР'Ь
перпендикулярных к ? — ?':
* = ?(? + ?') + ?[???.
Подставляя в B.15), получим ? = (? (? + ?'))» следовательно,
с = ? (? + ?') + [рр'Мр (? + р% B.16)
где ? — произвольное вещественное число.
Таково общее выражение для вектор-параметра
преобразования вращения, преобразующего ? в р'. Поскольку с(р — р') = О,
то направление с всегда лежит в плоскости, перпендикулярной
кр —р'. Таким образом, совокупность преобразований вращения,
переводящих вектор ? в равный ему по длине вектор р', образует
однопараметрическое семейство, являющееся подгруппой группы
вращений. Очевидно, наименьшее значение \ с | получается
для ? = 0:
С=[РР')/Р(Р + Р')· B.17)
При этом ось вращения перпендикулярна к плоскости векторов
р, р' и | с | = tg (?/2), где ? — угол между ? и р'. Такое вращение
является наименьшим в смысле величины угла поворота из в#ех
преобразующих ? в р'.
Пусть мы имеем два правых (левых) ортогональных
нормированных репера еа и еа(а= 1, 2, 3) *):
еаеъ = еаеь = ??&, [еаеь] = ± ъаЬсес, [e'ae'b] = =fc eabc^. B.18)
Выясним, какое преобразование вращения 0(c) переводит
каждое еа в еа. Как известно (см. П. 1), такое преобразование будет
*) Нижние индексы при буквах жирного шрифта обозначают
различные трехмерные векторы. Те же индексы при буквах обычного шрифта
обозначают компоненты вектора.
§ 2. ТРЕХМЕРНАЯ ГРУППА ВРАЩЕНИЙ 17
единственным. На основании (П. 1.44) и B.18) оно может быть
написано сразу:
0 = 0(с) = е'а-еа. B.19)
Легко убедиться с помощью B.18), что 00=1, и с помощью
(П. 1.67), что |0|= +1. Формула B.7) поз/воляет найти вектор-
параметр этого преобразования
сх= (е'а-ва — ea-e'a)/{i + ebe'b).
Поскольку (см. (П. 1.79)) a-b — b-a = [foa]x, то отсюда
следует
с = [еае'а}/A+еье'ь). B.20)
Ортогональная группа в трехмерном пространстве наряду с
матрицами вращений 0+ содержит также матрицы 0_,
обладающие свойствами OJ)^ = 1, |0_| = — 1. Очевидно, умножая
матрицу 0+ на — 1, мы получим матрицу типа 0_ и наоборот.
Таким образом, можно определить общее преобразование 0_
(вращение с отражением) следующим образом:
0_ = 0_(с) = -0+(с). B.21)
Ни от какой матрицы 0+ (с) нельзя перейти путем непрерывного·
изменения ее элементов к какой-либо матрице 0_, так как
детерминант \0\ должен был бы при этом скачком измениться от
+ 1 до — 1. В то же время очевидно, что внутри каждой из
совокупностей 0+ (с) и 0_ (с) можно, непрерывно изменяя сг
перейти от всякой матрицы к любой другой. Поэтому говорят,
что группа 0C) состоит из* двух компонент связности 0+ и 0_.
Согласно (П. 1.29) мы имеем для матриц трехмерной группы 0+
характеристическое уравнение
(?-1)[?2+ A-??? + ?] =0 B.22>
и для матриц 0-
(?+ 1)[?2— A + 0,)? + 1] = 0. B.23)
Таким образом, матрицы 0± всегда имеют соответственно
собственные значения ? = ± 1. Отвечающий им собственный вектор
есть не что иное, как вектор-параметр с точностью до множителя
(см. B.9), B.21)).
Рассмотрим группу Р, состоящую из двух чисел + 1 и — 1
или, что равносильно, двух матриц
/1 0 0\ /-1 О 0\
1= ???, -1= °~1 °- B-24)
\0 0 1/ V 0 0—1/
2 Ф. и. Федоров
18 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Здесь (+1) обозначает тождественное преобразование, а (— 1) —
преобразование инверсии в трехмерном пространстве (изменение
знаков у всех координат любого вектора). Группу ? называют
группой инверсии, очевидно, она является подгруппой
ортогональной группы 0C). Ортогональную группу можно тогда
представить как прямое произведение двух групп*): непрерывной
группы вращений 0+ и дискретной группы ?
0 = ???+. B.25)
При этом нужно иметь в виду, что оба элемента группы ?
коммутируют со всеми элементами группы 0+.
§ 3. Композиция вектор-параметров группы вращений
Поскольку преобразования вращения 0(c) образуют
группу, то
О (с) О {с') = О {с"), C.1)
где вектор-параметр с" результирующего преобразования
является некоторой функцией от векторов с и с'. Эту функцию мы бу
дем записывать в виде
с" = <с,с'>. C.2)
Она определяет закон композиции вектор-параметров группы
вращений. Чтобы определить вид функции C.2), подействуем
обеими частями матричного равенства C.1) на вектор с". С
учетом B.9) имеем OcOctc" = с" или после умножения на 0_с = Оё1
(Ос,-0-с)с" = 0.
Умножим это равенство на векторы с и с". Снова учитывая B.9),
получим
с (Ос, - 1) с" = 0, с' A - О.с) с" = 0. C.3)
С помощью B.5) эти соотношения приводятся к виду
с (с'х + с'Х2) с" = 0, & (сх — с*2) с" = О,
откуда следует, что вектор с" перпендикулярен к двум векторам
[ее] + [[ссг] с'] и [с'с] — [\с'с\с\, следовательно, он
пропорционален их векторному произведению
с" = С [[сс'\ - [с' [ее']], \сс'\ + [с [ее']]].
После элементарных вычислений получаем
с" = С0(с + с' + [ее']). C.4)
*) Напомним, что прямым произведением двух групп G и ?
называется совокупность всех пар элементов (g, h) (g^G, h^H),
перемножаемых по правилу (g, h)(g\ h,) = (ggry hh').
§ 3. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
19
Чтобы найти скалярный множитель С0, запишем соотношение
C.1) в виде (см. B.5))
(l-c»x)OcOc, = l + c"x
или, после умножения справа и слева на с'
1с'с"]Осс' = с'(Ос-1)с/ C.5)
Используя B.5), находим
[с'с"\ (сх + с-с)с' = — [ее']2,
откуда с учетом C.4) следует
C^l-cc')-1·
Таким образом, формула композиции C.2) имеет вид*)
с" = <с, с'> = с + с'+}сс'] . C.6)
1 — ее
Эта формула имеет фундаментальное значение для всей
теории группы вращений и ее представлений. Из C.6) следует, что,
если оба вектора сие' достаточно малы (|с|, \cr |«Cl), то,
с точностью до величин второго порядка малости, можно
написать: с"— с + с''. Таким образом, малые вращения
складываются по обычному векторному закону — факт, который в другой
трактовке требует специального доказательства. При ссг = 1 из
C.6) следует \с"\ = оо, т. е. наложение любых двух вращений,
вектор-параметры которых удовлетворяют условию ее' = 1,
всегда дает поворот на 180°. Если с\\с\ то можно написать с =
= tg(a/2)cb cr = tg (a72) clf и формула C.6) дает
<с, <р = ?±?, д * <«/2) + tg у /2) = a + al (ЗЛ)
1-сс l-tg(a/2)tg(a'/2) х б 2 ? ? /
Следовательно, как и должно быть, при последовательных
вращениях вокруг одной и той же оси углы поворота складываются.
В случае ее* = 0 имеем
<с, с">=.с + с' + \сс'\. C.8)
Формула C.6) обладает следующими очевидными свойствами:
<с, 0> = <0, с> = с, C.9)
<с, _<,> = <-с, с}=0. C.10)
*) Заметим, что если бы вместо A.18) мы взяли 0= A — A)/(i+A)r
А= сх, то получили бы Ос— 1 + 2 (сх2 _ c*)/(l -f- с ) и закон композиции
<с, с'> = (с + с' — [сс'])/A — ее').
2*
20
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Очевидно,
<С', с> = с+с+[с'с) j
1-е с
исключая единственный случай с |с'. Наконец, путем
непосредственного вычисления нетрудно проверить равенство
«а, 6>, с> = <а, <6, с» = <а, 6, с) =
_а + Ъ + с + [аЬ] + [ас] + [be] - аб с + [[аЬ] с) (о лп\
Соотношения C.9) —C.12) говорят о том, что закон композиции
C.6) имеет характер операции группового умножения.
Действительно, если рассматривать всевозможные векторы с трехмерного
пространства как элементы некоторой группы, а C.6) — как
закон умножения этих элементов, то согласно C.9) нулевой вектор
(с == 0) является единичным элементом группы, а вектор (— с)—
обратным элементом по отношению к с. Из C.11) следует, что
рассматриваемая группа некоммутативна, а C.12) выражает
свойство ассоциативности группы. Последнее вытекает также из
того, что
(ОаОь)Ое = Оа(ОьО€),
ввиду ассоциативности формулы умножения матриц.
Нетрудно видеть, что из<#, а> = <#, а> следуете = у, В этом
можно убедиться, «умножив» обе части первого равенства справа
на — а: <<#, а>, — а> = <<#, а>, —а) и используя
последовательно C.12), C.10), C.9). Впрочем, это ясно также из только
что доказанных групповых свойств операции C.6).
Отметим еще следующие соотношения:
-<а, &> = <-&, -а>, -<а, &,с> = <-с, - &, - а>, C.13)
которые могут быть получены непосредственно из C.6), но
которые можно рассматривать также как следствие равенств (см.
B.12))
О:1 «а, ft» = (О (а) О (ft)) = О'1 (Ъ) О'1 (а) =
= 0(-ftH(-a) = 0«-ft,-a».
Как известно, совокупность векторов всякого линейного
пространства по определению образует коммутативную группу
относительно векторного сложения как групповой операции.
Согласно сказанному выше в трехмерном векторном пространстве может
быть введен также закон умножения C.6), по отношению к
которому все векторы снова образуют группу, но уже
некоммутативную. Мы будем называть эту группу группой
вектор-параметров. Очевидно, она изоморфна группе вращений 0+, поскольку
§ 3. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 21
между с иО+ (с) существует взаимно однозначное соответствие,
выражаемое соотношениями B.5), B.7). Отсюда ясно, что все
свойства группы 0+ в конечном итоге должны вытекать из
соотношения C:6).
Используя соотношение (П. 1.58) и определение |0±| = ± 1,
имеем для матрицы, взаимной к 0±:
0± = |0±|??1 = ±0±. C.14)
С другой стороны, из общей формулы (П. 1.87) следует
0± [uv] = [0±и, 0±?].
Подставляя сюда C.14), находим
-t 0± [uv] = [д±и, &±v]
или также
0+ [uv] = [0+в, 0+1?], 0+их = @+и)х 0+, О+цхО;1 = @+ю)Х
C.15)
0_ [uv] = — [0_w, 0_v] = [0_г, 0_и]. C.16)
Геометрический смысл формулы C.15) заключается в том,
что результат применения преобразования вращения к
векторному произведению двух векторов и и ? равен векторному
произведению повернутых векторов 0+ю и 0+я. Согласно C.16) для
несобственных преобразований трехмерной ортогональной
группы результат отличается от предыдущего знаком.
Скалярное произведение векторов а и 6 не меняется, если оба
они подвергаются произвольному преобразованию группы SOC)
(Оа) (Об) = аООЪ = аЬ. C.17)
Это свойство справедливо для ортогональной группы в
пространстве любого числа измерений.
С помощью C.15) —C.17) и C.6) нетрудно убедиться в
справедливости равенств
0+ <а, 6> = <0+а, 0+6>, C.18)
0_ <а, 6> = <0_6, 0_а>. C.19)
Легко проверяется соотношение
<С) с,у = (в+^ + Ы]Ш = <с\ с}\ C.20)
Из него следует, что от порядка компонируемых
вектор-параметров с и с' может зависеть лишь направление, но не величина
22 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
результирующего вектор-параметра. Если написать согласно C.6)
с+ = <с,с') = ° + с'+\сс'], с_ = <с')С>=<+^[<»']
ее 1 — ее
то из сравнения этих формул можно сделать вывод, что вектор-
параметры с+ и с-, соответствующие композиции двух векторов
с и с' в разном порядке, симметрично расположены относительно
плоскости, проходящей через векторы сне'.
Отметим еще соотношения
A + а2)A + &2)
A-??J
(? + ?2)(? + <?>2) .
A-а<6,с>J
A + <?, 6>2) A + с2) A + a2) A + &2) A + c2)
A — <a, 6> cJ A — ab — ac — 6c — a [be]J '
? + <„,&>*= ?1+;?;???, C.2i)
l + <a,6,c>2- „ _t ^a
C.21')
Вектор <«,&> (см. C.6)) с помощью B.5) можно представить
в следующих двух формах:
, ,ч ?4-(? + ??N a + (i-ax)Oab
<«>*>= ??> = 1-«» =<??&,?>, C.22)
&+(l_&x)a 6 + (l + &xH.fta
<a'&> = i-«> = i-«> = <6>°-·«>· (8·23>
Здесь учтены соотношения (см. B.9))
??^? = 0±аа = а, аОаЬ = ЪО-ъа = aft.
Компонируя равенство C.22) справа с вектором —а, получаем
<a,ft,-a> = Oa&. C.24)
Смысл этого соотношения заключается в следующем. Его левая
часть есть вектор-параметр преобразования ОцОъОа1, которое
является преобразованием подобия (см. П. 1) матрицы 0(b)t
произведенным с помощью матрицы Оа- Согласно C.24) этот
вектор-параметр получается из ft путем поворота Оа- Поскольку
(ОаЬJ = ft2, то можно сделать вывод, что все матрицы 0+(с),
соответствующие повороту на один и тот же угол (определяемый
\с\, см. B.10)) вокруг осей различного направления, должны
быть подобны (эквивалентны) друг другу. При этом, если
1^1 = 1^1» то матрица преобразования подобия от 0G к 0С'
совпадает с матрицей поворота от с к с'.
Закон композиции C.6) дает возможность определить для
вектор-параметров операцию «возведения в степень». Действи-
§ 3. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 23
тельно, мы можем написать
с<2> = , ? _ 2с <3> _ 3-е2 <4> _ 4 A-е2) ,„ 25\
С <C'C>-i_c2' € ~l-3c2C' C -i-6c2 + c4C(^5)
и т. д. Аналогично можно определить также операцию
«извлечения корня из вектор-параметра». Если речь идет о квадратном
корне, то задача сводится к отысканию решения уравнения
(см. C.25))
-^ = а C.25')
1-е2
при заданном а. Возводя это уравнение в квадрат, имеем A —
—с2J + 4 A — с2) а2 — А/а2 = 0, откуда следует 1 — c2 = 2(l±
zfcT/1+?2).
При этом из C.25') находим с = ?/(? ± V 1 + а2). Если
наложить естественное условие, чтобы из # = 0следовало с = 0, то
нужно выбрать верхний знак (при знаке «—» дляа = 0 имели
бы с — 0/0). Таким образом, «квадратный корень» из вектор-
параметра ? определяется однозначно*)
с = * <с, с> = с<2> = а. C.25")
1 + V 1 + а2
С помощью формулы C.6) можно представить любой вектор
в виде композиции некоторых фиксированных по направлению
векторов. Это представление в известной мере аналогично
обычному разложению векторов по трем линейно независимым
векторам. Ввиду важности этого вопроса мы остановимся на нем
подробнее.
Пусть единичный вектор с задает некоторое фиксированное
направление. Как известно, любой вектор ? можно представить
в виде суммы векторов параллельного и перпендикулярного с.
Такое разложение имеет вид
? = Ь1 + 61с, 6^ = 0, с2 = 1, C.26)
причем
1х = пс, &! = [с[пс}}. C.27)
*) Можно определить произвольную групповую степень
вектор-параметра снисходя из следующих соображений. Направление вектора c<fe>
очевидно, параллельное; остается определить его длину. Согласно B.10),
Jc| = tg(a/2). Ясно, что /с-кратное повторение поворота0(c) равносильно
повороту на угол fca, поэтому | с<к> \ = tg (ka/2) = tg (k arctg | с |). Итак,
имеем окончательно c<k>= | c^|ci= tg(/carctg| c\) c/\ с|.Это соотношение мож-
o считать пригодным для любых к — дробных, отрицательных и т. д.
24 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Рассмотрим вместо C.26) представление
л = <6,Ес>, Ьс = 0, с2 = 1. C.28)
Согласно C.6) имеем
п = Ь + 1с+1[Ъс). C.29)
Отсюда сразу находим
1 = пс, C.30)
после чего из C.28) с помощью C.10), C.12) получаем
<и, -1с} = «ЬЛс> -ley = 6.
Следовательно (см. C.6), C.30)),
Ь=<п,_Ес) = п-пс(с + 1пс)) = (с*-»с)[»с] C31)
Таким образом, представление C.28) всегда возможно и является
однозначным. Нетрудно убедиться тем же путем, что в
представлении
? = (Ic, &'>, Vc = 0
вектор &' определяется равенством
[с[пс]]+пс-[пс]
Ь =<_?*,„> = ^^—,
при том же значении ? C.30). Как и должно быть, &'2 = б2 (см.
C.20)). Все формулы C.18) —C.33) остаются в силе и для
комплексных векторов а, с.
Изложенную выше векторную параметризацию группы
вращений можно назвать ковариантной в том смысле, что
совокупность параметров образует в пространстве параметров вектор,
который преобразуется с помощью тех же матриц О, что и
векторы основного координатного пространства х (см. A.3) и
C.24)). Разумеется, в пространстве параметров можно выбирать
базис по-разному. Если выбрать в нем ортогональный декартов
базис, определяемый правой тройкой вещественных ортонорми-
рованных векторов еа B.18),
еаеь = &аы [еаеь] = Ъаьсес, C.34)
то каждый вектор-параметр с может быть представлен в виде
разложения
с = caeai с' = *???· C.35)
Пря фиксированных еа последнее равенство позволяет с помощью
)
(пс + сх) [пс]
1 + (псJ
C.32)
C.33)
§ 3. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
25
C.34) свести закон композиции C.6) к совокупности трех
соотношении
„ / г\ Са «" Са "*" RabdCbCd /о ос\
са = с'еа = <с, с > еа = ? (б.оЬ)
или, в раскрытом виде,
• С1 + C'l + С2С3 - С3С2
1 - (Vi + с2с2 + с3с3)
- __ С3 + С3 + СА - С2С1
1 - (сЛ + V* + сЗсз)
Однако практически при рассмотрении различных вопросов,
относящихся к группе SOC), нет необходимости переходить к
покомпонентному выражению закона композиции C.36) или
C.37). Гораздо удобнее пользоваться непосредственно векторным
равенством C.6). Точно так же, вместо использования матрицы
0(c), выраженной через компоненты вектор-параметра с в
форме B.5'), значительно удобнее применять форму B.5) этой
матрицы. Такой подход составляет основу ковариантного изложения,
принятого во всей данной книге.
При решении различных вопросов приходится сталкиваться
с ситуацией, когда какое-либо направление с0 является
выделенным. В таких случаях целесообразно воспользоваться следующим
разложением вектор-параметра с:
с = а0с0 + ?0? + ??**, C.38)
где с0 — единичный вещественный вектор выделенного
направления, ае — комплексный вектор, обладающий свойствами
[с0е] = ie, |\е |а = ее* = 1, с0е = 0. C.39)
Из первой формулы следует после комплексного сопряжения
[с0е*] = — ie*. C.40)
и после возведения в квадрат
е2 = е*2 = 0. C.41)
Векторы е, е* удовлетворяющие условию C.41)*), мы будем
называть круговыми векторами (см. [12.1 — 13]). Очевидно также
с0е* = 0. C.42)
*) Часто употребляемое для векторов C.41) название «изотропные»
следует признать крайне неудачным, поскольку ни о какой изотропии
здесь не может быть и речи.
с*
С2 + С2 + Vl "~ С1С3
1 - (сгс'г + с/2 + с3с'3) '
C.37)
26
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Векторы с0, е, е* могут быть реализованы, например, в реперном
базисе C.34) следующим образом:
c0 = es, e = {e1-ie2)/y2, e* = (ег +iej/S2. C.43)
Легко проверить, что при этом имеют место все свойства
C.39)-C.42).
Очевидно, при вещественном ао и любом комплексном ??
вектор с, определенный разложением C.38), будет вещественным.
Базис с0, е, е* будем называть аксиальным. То обстоятельство,
что векторы с0, е, е* действительно образуют базис трехлгерного
пространства, проверяется путем умножения соотношения C.38)
скалярно на с0,е и е*. С помощью свойств C.39), C.41), C.42)
находим
а0 = с0с, ?0 = е*с, ?? = ее, C.44)
т. е. коэффициенты ао и ?0 всегда определяются однозначно.
При фиксированных сь и е любой вещественный вектор
согласно C.38) однозначно определяется заданием вещественного
числа ао и комплексного числа ??, так что можно писать
с « с (?0, ?0), с' = с (??, ??), с" = с(а0, ?0)· Если с есть вектор-
параметр группы вращений, для которого согласно § 2 допустимы
все значения без ограничений, то, соответственно, для него
??(??) может быть произвольным вещественным (комплексным)
числом. Таким образом, мы приходим к выводу, что группу
вращений можно также параметризовать двумя произвольными
числами — одним вещественным и одним комплексным.
Разумеется, если заданы такие «смешанные» параметры (??, ??)
для некоторых преобразований 0(c), то пара (?0, ?0)»
соответствующая произведению этих преобразований, может быть
найдена из формулы композиции C.6) путем подстановки в нее
выражений C.38). После несложных выкладок, учитывающих
соотношения C.39) — C.42) и следующее из них равенство
[ee*]=i[e[cue*]] = ic0, C.45)
находим
„»_«o+«;+2im(p0p;*) . р,+р;+'-(«Ж-р>о) Пш
1 ~ ???? - 2 Re (?0?? ) ? - ???? - 2 Re (PoPo)
Очевидно, эти формулы композиции параметров ??, ?? много
сложнее предельно простого соотношения C.6). Тем не менее
в ряде случаев использование аксиального базиса является
целесообразным.
§ 3. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
27
Заметим, что представляет интерес векторная параметризация
с вектор-параметром d, связанным с с соотношением
d = с/} А1 + с\ C.47)
откуда следует
1 + с2 = A - и2), с = й//Г=^. C.48)
При этом в C.47) и C.48) подразумеваются положительные
значения квадратных корней. Подставляя это выражение в B.5),
находим
О (с) = 0'(d) -1+2 О'Т^З* + dx) dx. C.49)
Очевидно, для того чтобы матрица C.49) была вещественной,
необходимо выполнение условия
d2<l. C.49')
Таким образом, конец вектора d может лежать в любой точке
внутри и на поверхности единичного шара. В предельном случае
d2 = 1 матрица C.49) сводится к О' = 2d-d— 1, что, как мы
знаем (см. B.8)), соответствует повороту вокруг оси d на 180°.
Закон композиции для вектор-параметра d находится
следующим образом. Согласно C.47) должно быть (см. C.21))
<л, «о. = г <с'с'у = ;+е' + [сс'] . (з.50)
Заменяя здесь с, с' согласно C.48), получаем
<d, ?'\ = d/1 - d'2 + d' yrY=J2 + [dd'\. C.51)
Выражения C.49) и C.51) для Оа и <d,d'>0 отличаются
отсутствием знаменателей, что является известным преимуществом
при использовании такой параметризации для комплексной
группы вращений (см. § 8). Однако наличие иррациональности
усложняет соотношения по сравнению с B.5), C.6). С точки
зрения геометрической интерпретации вектор-параметра d
изменение по сравнению с с сводится к тому, что длина его равна
не тангенсу половинного угла поворота (см. B.10)), а синусу
того же угла
?|= tg(a/2) _ = q.n« C.52)
У 1 + tga (?/2) г
Направление же вектора d совпадает с с и по-прежнему
определяет ось поворота.
Заметим, что согласно C.51)
1 - <rf, d'>o = (/A - d2) A - d'2) — dd'Y. C.53)
28 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Таким образом, если d2 < 1, d'2 < 1, то <d, d'}20 < 1. Вместо C.21)
получим соответственно
1 - <d, d\ d"}20 = (>^A — d2) A — rf,2)(l — d,,2> - dd' /l - d -
- dd" /1 - d'2 - d'd" V^Y^d2 + d [d'd"]J. C.54)
Видно также, что аналогично C.24)
(d,d\ — d\ = 0'dl'. C.55)
Кроме того, для закона композиции C.51) выполняются также
свойства C.9), C.10) и C.18)-C.20).
§ 4. Вектор-параметр и углы Эйлера
Группу вращений можно параметризовать различными
способами. Одной из весьма распространенных является
параметризация с помощью углов Эйлера (см., например, [3, 4]).
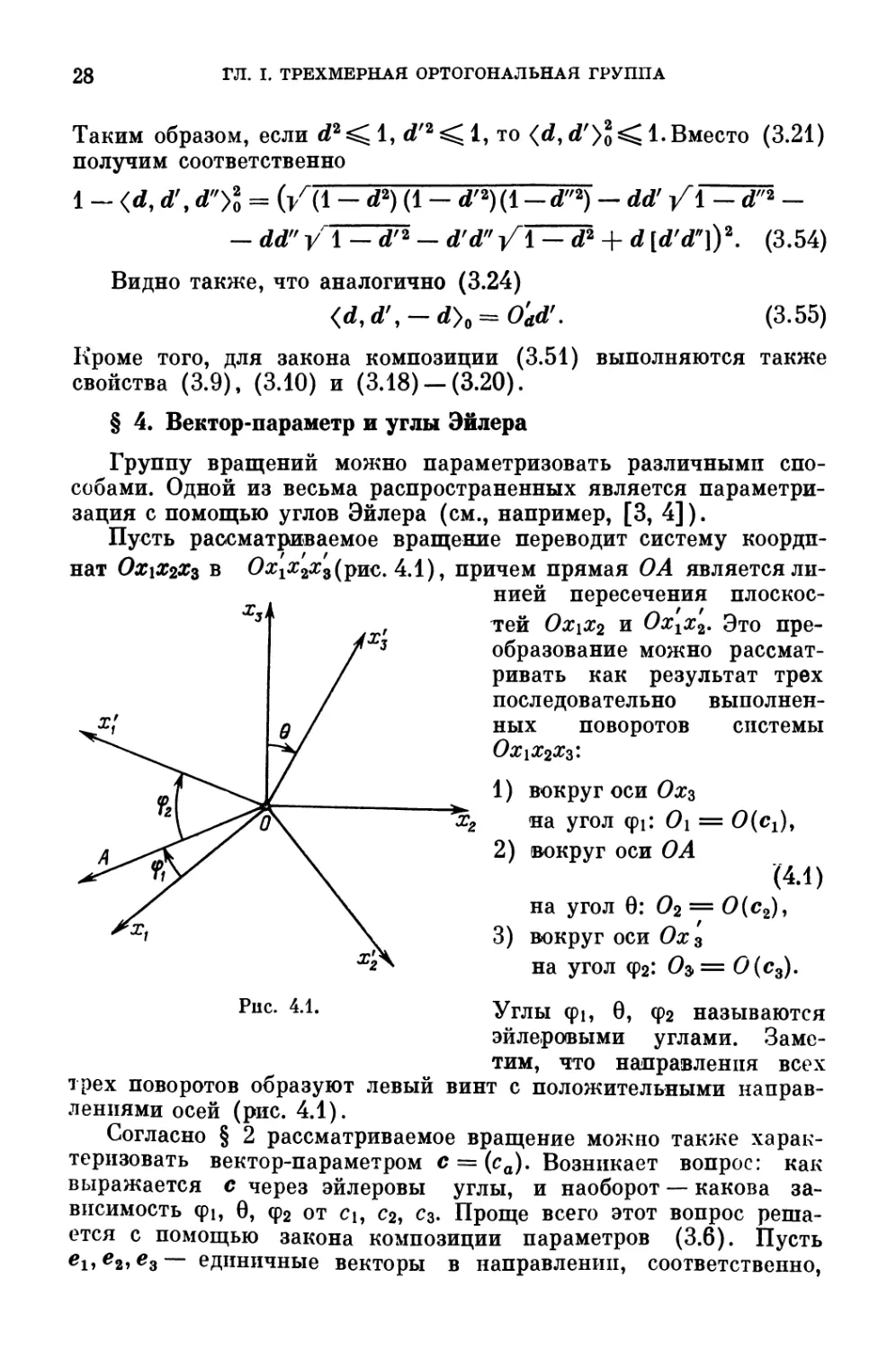
Пусть рассматриваемое вращение переводит систему
координат Ох\ХгХъ в 0#1#2#з(рис. 4.1), причем прямая О А является
линией пересечения
плоскостей Ох\Хъ и Охххг. Это
преобразование можно
рассматривать как результат трех
последовательно
выполненных поворотов системы
Ох\х2хг:
1) вокруг оси Охъ
хг на угол ??: 0\ = 0(сх),
2) ©округ оси О А
'D.1)
на угол ?: #2 = 0(с2),
3) вокруг оси Ох3
на угол <рг: #3· = 0(с3).
Углы ??, ?, ?2 называются
эйлеровыми углами.
Заметим, что направления всех
трех поворотов образуют левый винт с положительными
направлениями осей (рис. 4.1).
Согласно § 2 рассматриваемое вращение можно также
характеризовать вектор-параметром с = (са). Возникает вопрос: как
выражается с через эйлеровы углы, и наоборот — какова
зависимость ??, ?, ?2 от ci, сг, сз. Проще всего этот вопрос
решается с помощью закона композиции параметров C.6). Пусть
0?>?2>^3— единичные векторы в направлении, соответственно,
§ 4. ВЕКТОР-ПАРАМЕТР И УГЛЫ ЭЙЛЕРА
29
осей 0х\, 0x2, Охз. Тогда вектор-параметр первого поворота D.1)
выражается следующим образом (см. B.10)):
?
*i = ai*s» «1 = — Щ- D.2)
Знак «—» в ?? обусловлен тем, что поворот вокруг
еьсовершается по левому винту. В результате этого поворота ось Ох\, т. е.
вектор ег, принимает направление О А = Oxex = О {с^е^ а
вектор-параметр второго поворота D.1) будет равен согласно B.5),
D.2)
C2=_tg|0le1 = -tglii^b±^-, e, = lVll. D.3)
? ? 1 + aj
При втором повороте ось Ох3 \\ е3 переходит в Ох3 \\ 02е3 и,
соответственно, вектор-параметр третьего поворота равен
с3 = -^0(с2)е3. D.4)
Результирующий вектор-параметр полного вращения согласно
C.6) будет равен <с3, с2, сх> = с, или, если учесть C.22) и
переставить с3 с с2,
у ? ?? \
с = \ с2, — tg -f е3, — tg -± е3^. D.5)
Согласно C.7) имеем
с = <с2, ае3>, а = - tg ^Ц^2. D.6)
Здесь е3с2 = — tg (?/2) е30 (сг) ех = 0, так как с1\\е3 (см. D.2))
и е3ех = 0. Поэтому (ср. C.29))
с = с2 + ае3 + а [с2е3]. D.7)
Отсюда находим компоненты вектора с в первоначальной
системе координат Ох\Х2Хъ
/ , ? А ? ?? — Ф2 / ?? + ?2
Cl = сех = с2 (е1 + ае2) = — tg -g-cos -Ц^—?lcos —^ »
/ ч ? ? . ?? — ?2| ?? + ?2 /, оч
с2 = се2 = с2 (е2 — аех) = tg -g-sin -Ц^—i|cos -^—i, D.8)
сз = <*з = a = — tg ¦
(??+?2
Заметим, что в соотношении D.5) последние два члена в
угловых скобках можно переставить, после чего результирующий
30
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
вектор-параметр принимает вид <с2, си — tg(<p2/2)e3> или, если
использовать C.22) и D.3),
/ ? ? Фа \
с = с(ф!, ?, ?2) = ч^—tg-J-e3. — tg—«ь -tgy«s/· D-9)
В этой формуле с получается как результат композиции вектор-
параметров, направленных вдоль осей первоначальной системы
координат.
Разрешая соотношения D.8) относительно ??, q>2, ?, получим
с1сз + с2 „..„*„ ciV-"
?? = arctg у _ Д ?2 = — arctg
le, + el'
e = 2arctg|/ri^. D.10)
Отметим еще соотношение
1 + с2 = (cos2 -|- cos2 Ъ^-Щ~\ D.11)
С помощью формул D.8) для компонент вектор-параметра с мы
можем получить в явном виде выражение для матрицы B.5)
соответствующего преобразования вращения О (с) через
эйлеровы углы:
0 =
cos <px cos <р2 — cos ? sin <px sin <p2,
sin <px cos ?2 — cos ? cos <px sin <?2,
sin ?2 sin ?,
cos ?? sin <p2 + cos ? sin ?1 cos <p2, sin <?? sin ?
— sin <px sin ?2 + cos ? cos <px cos <p2, cos <?? sin ?
— cos <?2 sin ?, cos ?
D.12)
Эта матрица отличается от приведенной в других руководствах
[3, 4] изменением знаков углов ??, ?, <рг. Последнее связано с
тем, что положительным эйлеровым углам, определяемым
согласно рис. 4.1, соответствуют отрицательные углы поворотов,
в соответствии со смыслом вектор-параметра с (см. § 2)*).
Компактная формула B.5) для общего преобразования
вращения полностью равносильна громоздкой матрице D.12), но
несравненно более удобна для получения всевозможной
информации о свойствах группы вращения. В еще большей степени
эти преимущества сказываются применительно к композиции
*) Иными словами, различие вызвано тем, что у нас преобразование
B.5) определяется по его действию на компоненты вектора при
фиксированной системе координат.
§ 4. ВЕКТОР-ПАРАМЕТР И УГЛЫ ЭЙЛЕРА
31
параметров. Для углов Эйлера соответствующие формулы имеют
вид (см. [9.1])
cos ?" = cos ? cos-?' — sin ? sin ?' cos (<p2 + q>0>
ei(pi = (ei(P*/sin ?") [sin ? cos ?' + cos ? sin ?' cos (?2 + ??) +
+ i sin ?' sin (?2 + <pi)L D.13)
6 = cos(e72) Lcos^-cos-e « _slnTS1n_e I
Чтобы окончательно выразить ?", ??, <р2через ?, <pu ?2< ?'^?? r
?2, нужно еще подставить ?" из первой формулы во вторую,
и полученный результат — в третью формулу, а затем перейти
к обратным функциям arccos и In.
Формулы D.13) настолько громоздки, что никогда никем
не использовались. В то же время эквивалентное им простое
векторное соотношение C.6), как будет видно из дальнейшего,
играет самую фундаментальную роль в качестве основного
средства описания, изучения и анализа свойств группы вращений (и
других групп), а также ее представлений.
Сверх того, векторная параметризация характеризуется
свойствами C.9), C.10), в силу которых нулевое значение всех
параметров соответствует единичному преобразованию, а
изменение знака всех параметров — обратному преобразованию.
Параметризацию, обладающую этими простыми и удобными
свойствами, мы будем называть естественной. Нетрудно видеть, что
параметризация с помощью углов Эйлера не является
естественной, поскольку переход к обратному преобразованию связан
не с изменением знаков углов ??, ?, фг, а с заменой ?? -*- л—(ргг
?->?, ?2->?—??.
Выше отмечалось соотношение C.24), согласно которому
преобразование подобия произвольной матрицы группы вращений
с помощью любой другой матрицы той же группы сводится к
линейному преобразованию вектор-параметра. Параметризацию,
обладающую этим свойством, мы будем называть линейной.
Параметризация с помощью эйлеровых углов не обладает этим
свойством и, следовательно, не является линейной.
Из других преимуществ векторной параметризации следует
отметить равноправие всех параметров (компонент вектора с),
чему соответствует определенная симметрия основных
соотношений теории группы вращений в этой параметризации.
Эта симметрия проявляется и в том, что все компоненты о
изменяются в одних и тех же пределах от —оо до + °°. Все это
влечет за собой весьма существенное упрощение многих вычис-
-32
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
лений и доказательств основных соотношений для группы
вращений.
Заметим, что, как показано в П. 2, закон композиции C.6)
является простейшим (после обычного векторного сложения)
возможным групповым законом умножения для трехмерных век
торов.
Довольно часто группа вращений параметризуется с помощью
вектора ?, который, как и с, направлен по оси вращения, но
длина которого численно равна углу поворота ?. Такой вектор-
параметр связан с нашим вектором с соотношениями
? = фс/| с | = 2 (с/| с |) arctg \ с 1, D.14)
c = (l/\l\)tg(\l\/2). D.15)
Такая параметризация является естественной и линейной.
Однако закон композиции для вектор-параметров имеет вид
¦•¦^-^-wiwlL^ ¦ D·,?)
где
<? = (?/| 11) tg (| 11/2) + (I'/| V |) tg (| V |/2) +
+ tg(|i|/2)tg(|r|/2)[»,]/VrI2r2.
Таким образом, и при этой параметризации закон композиции
параметров оказывается весьма сложным по сравнению с C.6).
Мы видим, что группу вращений можно параметризовать
самым различным образом. По существу при этом дело сводится
к тому или другому выбору базиса или координатной системы
в пространстве параметров. Положенная в основу нашего
рассмотрения векторная параметризация (§ 2) соответствует выбору
декартова базиса в пространстве вектор-параметров. Выше в § 3
мы воспользовались также аксиальным базисом, когда выражали
я в виде с = а0с0 + ??0 + ???*. Если выбратьс0, е, е* согласно C.43),
то связь параметров ??, ?? с вектором с имеет вид C.44).
Считая с = саеа, получим
?? = сс0 = с3, ?0 = се* = {сх + ic2)/-/2, ?? = (ct — ica)//2.
D.17)
Через эйлеровы углы параметры ??, ?? выражаются следующим
образом (см. D.8)):
а, — *ЦА fc- -.84«р(- i^)/>/2co,*I±^.
D.18)
Заметим, что в пространстве вектор-параметров можно
выбрать также обычную сферическую систему координат. Роль дли-
§ 5. ДВУМЕРНЫЙ ВЕКТОР-ПАРАМЕТР И ГРУППА 517B) 33
ны радиуса вектора с будет тогда играть | с | = tg (?/2), где ? —
угол поворота вокруг с. При этом
*i=tg(x/2)sin00coscp0, c2=tg(x/2)sin00sin(p0,: c3=tg(%/2)cos%.
Очевидно, углы Фо и ?? определяют направление е% т. е. играют
роль полярного угла и азимута.
§ 5. Двумерный вектор-параметр и группа SU B)
Как известно, направление любого вектора х в пространстве,
или, что то же самое, положение точки на сфере единичного
радиуса с центром в начале координат может быть задано с
помощью угловых сферических координат ?* и ?. Аналогично
переходу от эйлеровых углов к трехмерному вектор-параметру с
можно перейти от сферических координат ?*, ? к компонентам
двумерного вектора v. Для этого фиксируем единичный вектор с9
Рис. 5.1.
в направлении северного полюса сферы единичного радиуса,
совпадающем с осью Охг правой декартовой системы координат
(рис. 5.1). Любая точка на сфере и соответствующее ей
направление единичного вектора х могут быть получены путем
поворота вектора с0 на угол ? вокруг оси, перпендикулярной к
плоскости (c0f x)' Такой поворот осуществляется с помощью
преобразования О (?), причем вектор ? определяется формулой B.17)'
v = to*l/(l + <VP), <?? = *1==1* vc=va? = Oi E.1)
|v| = tg@/2),: O(v)c0=x. E.2)
Эти формулы однозначно определяют вектор ? во всех случаях,
кроме ? = — с0, что соответствует южному полюсу сферы. В
последнем случае О (?) осуществляет поворот на 180°, поэтому
3 Ф. и. Федоров
34
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
| ? | = оо B.8), а направление ? может быть произвольным в
плоскости, перпендикулярной с0.
Очевидно, с помощью соотношений E.1) каждой точке А
сферы, отвечающей единичному вектору х с координатами
х\ = sin ? cos ?, #2 = sin ? sin ?, Хг = cos О*, E.3)
можно поставить в соответствие точку А1 и вектор ?, лежащие в
плоскости ? центрального сечения сферы, перпендикулярного оси
0#з, причем согласно B.10)
|v|=tg@/2), 0<0<?. E.4)
Компоненты вектора ? равны (рис. 5.1)
?? = — tg (?/2) sin ?, ?2 = tg @/2) cos ?. E.5)
Находя отсюда ? и ?, получим
0 = 2 arctg I ? |, ? = — arctg (vx/v2). E.6)
Таким образом, между @», ?) и (vi, v2) существует взаимно
однозначная связь, т. е. каждой точке на сфере будет
соответствовать определенный вектор ? в плоскости ? или, иначе говоря,
то,чка в этой плоскости, определяемая концом вектора v.
Следовательно, формулы E.5) определяют отображение сферы на
плоскость (и наоборот).
Очевидно, северному полюсу сферы N будет соответствовать
v= 0, т. е. точка О плоскости Р. Для всех точек верхней
полусферы 0· < ?/2, поэтому |?| < 1,—следовательно, эти точки
будут отображаться на крут единичного радиуса, образуемый при
сечении сферы плоскостью Р. Точки, лежащие на сфере по
окружности этого сечения, остаются на последней при
отображении, однако смещаются по дуге на 90°. Точки нижней полусферы
отображаются на всю остальную часть плоскости Р, лежащую
за пределами упомянутого круга сечения. При этом южный
полюс отображается на окружность бесконечного радиуса.
Очевидно, компоненты вектора ? могут принимать все значения от —оо
до оо.
Описанное отображение аналогично хорошо известной
стереографической проекции сферы на плоскость (см., например, [3])
и отличается от нее несущественными чертами. Напомним, что
при стереографической проекции отображение сферы на
плоскость устанавливается следующим образом (рис. 5.2). Из
южного полюса S сферы единичного диаметра через точку А на
сфере проводится прямая SA до пересечения в точке А' с
плоскостью Р, касательной к сфере в северном полюсе N. При этом
южному полюсу соответствует окружность бесконечно большого
радиуса на плоскости Р. Для нас изложенный выше способ
отображения (см. рис. 5.1) имеет то преимущество, что вектор ?,
§ 5. ДВУМЕРНЫЙ ВЕКТОР-ПАРАМЕТР И ГРУППА 517B) 35
определяющий точку на плоскости, соответствующую заданной
точке сферы х t является вектор-параметром преобразования
поворота полярной оси с0 к направлению х.
Тем самым всем точкам поверхности сферы ставится в
соответствие бесконечная непрерывная совокупность преобразований
вращения О (?) с условием vc0=0. Правда, согласно закону
композиции C.6) произведению двух таких вращений 0(?H(?')
(vc0 = v'c0= 0) будет соответствовать вращение О" = 0(<?? ?*»,;
вектор-параметр которого <v, ?'> не будет перпендикулярен к с0
и следовательно, О" не будет относиться к рассматриваемой
совокупности. С другой стороны, ясно, что при любом с
преобразование О (с) у примененное к с0, даст некоторую точку сферы,
для которой существует однозначно определенный
вектор-параметр v. Этот вектор ? при заданном с определяется формулами
C.28) —C.31), которые мы перепишем здесь в виде
Я ? , ?0, <?, ? — ! + (CC^2
E.7)
причем ?0 = cc0, v"c0 = 0. Очевидно, О (с) с0 = О (?") О (а0с0) с0 =
=0(v")co (см. B.9)), следовательно, полагая ? = <v,v'>, имеем
О «v, v'>) с0 = О (v") c0, v"c0 = 0, и этим соотношением
однозначно ставим в соответствие произведению вращений 0(?H(?')
вращение О (?"), принадлежащее той же совокупности. Из E.7),
C.6) при с = <?, ?'> находим
где ??= <vf v'> c„ = с, [w']/(l — w'). Поскольку vc„ = v'c, = 0t
3*
36 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
то [w']J|c0, и можно написать с0 = ± [vv']/| [vv'l |. С помощью
этого выражения для с0 можно убедиться, что
c0-c0[vv') = {??'], c0[vv'].[c0, v +v'] = [[vv'], v + v']
в результате E.8) принимает вид
(?-??' + [??/]?)(? + ??
(l_vv'J + [w']
? = <?, ?'>? = ?1"???7??..??/- E-9)
Здесь символ (?, ?')! обозначает композицию двумерных вектор-
параметров ? и ?' (vc0 = v'c0 = 0), результатом которой является
снова двумерный вектор-параметр v'' (v"c0 = 0) такой, что
O(v)O(V)c0 = O(vv)c0.
Нетрудно убедиться, что композиционная формула E.9)
обладает следующими свойствами, аналогичными свойствам
соотношения C.6):
<0, V>! = <V, ?? = V, <V, - ?>? = <- V, V>! = 0г
(v + v'J
<^^>i-<^.^>i=le2W + ^..
14-?,?'?2 A + V2)A+V/2)
1+<?,?>1== 1-2w4vV. .
E.10)
<?, ?'>! = <?', ?>! лишь при ? || ?',
<- ?, <?, ?')^ = «- ?, ?>1? ?'>? = ?'. E.11)
Однако легко проверить, что, например,
<?, <?', - ?')^ = ?, «?, ?')!, -?')! ? ?, E.12>
т. е. свойство ассоциативности в общем случае не имеет места.
Поэтому формула композиции двумерных вектор-параметров
E.9), в отличие от C.6), не обладает свойствами группового
закона умножения. Кроме того, исходя из E.9), видно, что
-<v, v'X^-v, -v'^^-v', -vMcp. C.13)).
Формула композиции двумерных векторов ?, ?' гораздо
сложнее, чем C.6). Однако ее можно значительно упростить, если
перейти к аксиальному базису (см. § 3). Пусть с0— ось базиса
([с0е] = ie). Тогда любые вещественные векторы ?, ?', лежащие
в плоскости, перпендикулярной к с0, могут быть написаны в виде
? = ?? + ?*?*, ?' = ?'? + ?'*?*. E.13)
Здесь ?, г/ — произвольные комплексные числа. Если выбрать
е^Охи е2\\Ох2 ? ввести ?, е* согласно формулам C.43), то
\\ = \ех = (? + ?*)// = yr2Re ?, ?2 = ve2 = i/2"lm ?,
§ 5. ДВУМЕРНЫЙ ВЕКТОР-ПАРАМЕТР И ГРУППА SUB) 37
следовательно (см. E.5)),
??^=!?^ = .!??.4 E.1У)
Подставляя выражения E.13) в E.9), получим после несложных
преобразований с учетом свойств C.39) — C.41)
?" = ?"? + ?"*?*,
где параметр ?" определяется соотношением
?" = <?, ?'> = (? + ?')/A - 2?*?'), E-14)
которое есть не что иное, как закон композиции для аксиального
базиса. Нетрудно убедиться, что
<?. 0> = <0,?> = ?, <?, - ?> = <- ?, ?> = 0
1<?,?'>124<?',?>12>
1 + 2|<?, ?'> |2 = A + 2 |? J2) A + 2|?' |2)/| 1 - 2?*?' |2,
<— ?, <?, V» = «— ?, ?>, ?'> == ?,
<?. <?', - ?'» = ? ? «?, ?'>, - ?'>,
- <?, ?'> = <- ?, - ?'> ? <- ?', - ?>·
E.15)
Равенство (?, ?') = (?', ?) возможно лишь в случае ??'* = ?*?',
т. е. когда произведение ?*?'— вещественное число. Эти
соотношения полностью соответствуют приведенным выше формулам
E.10) —E.12), но получаются гораздо более простым путем.
Большое удобство использования аксиального базиса связано
здесь с тем, что двумерный вектор-параметр ? полностью
определяется одним комплексным числом ?, для которого закон
композиции имеет весьма простой вид E.14).
Соотношения вида C.28) —C.31), E.7), E.8) при заданном
векторе с0 {с\ = l) позволяют каждому преобразованию О (с)
в трехмерном пространстве поставить в соответствие
преобразование, переводящее любой двумерный вектор ? (vc0 = 0) в
некоторый другой вектор v'(v'c0 =0). Это соответствие
устанавливается следующим образом. Как известно, 0(c) О (?) = 0«с, ?».
Представим вектор (с, ?) аналогично E.7) в форме <с, ?>—
= <?', ас0У1 где v'c0=0. В результате получим (ср. E.8) —E.13))
?' = «с, ?>, - с0 <с, ?>-с0>= i + (c0<c,v>J =
= т)'е + т)'*е*. E.16)
Используем здесь аксиальный базис, взяв для с выражение C.38)
38
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
и для ?— E.13). С помощью C.46) найдем
. . («0 + 2 im (?*0?)) cQ + (?, + ? + <?.?) е + (?; + ?* - <?.?*) е*
<c>v> = ?-2??(?;?) *
откуда следует согласно E.16)
?0+A+ .«„) ? ^
В соответствии^ E.13) можем написать ? = (vx + *v2)/y 2, ?' —
= W + iv^/vX ?0 = (d + tei)//2, в результате чего E.17) при-
нимает форму
^ = (??? + РО/С- ?^? + ocl), E.18)
где
? = ?1 + ??1? ?'^?? + ???, E.19)
?? = 1 + /с3, ?? = сх + ic2. E.20)
Таким образом, преобразованию 0(c) мы поставили в
соответствие дробно-линейное преобразование E.18) в комплексной
плоскости ?.
Рассмотрим матрицу коэффициентов преобразования E.18)
? ?? Pi) ? 1 + ic, c, + ic9)
¦H-««:rU+s«4l· E·21)
Очевидно, если осуществить еще одно преобразование ?"=(???/+
+ ??)/(~~ ?? ?' + оы )? то в результате снова получим дробно-
линейное преобразование над первоначальной переменной:
?" = (??? + ??)/(~" ??*? + ??), причем соответствующие матрицы
перемножаются по обычному правилу
«x = «?«?, j_ ?? „.J = |_ p.. ??] [?; ?;| · E.22)
Вычислим детерминант матрицы щ и произведение ее на эрми-
товски-сопряженную
\u1\ = i+c\ + cl + cl = l+c\ E.23)
«л+ - (_р; !;) (;j " Paj - (I«I' +1 ? I2) (j j) -1 + ? E.24)
§ 5. ДВУМЕРНЫЙ ВЕКТОР-ПАРАМЕТР И ГРУППА SUB) 39
Следовательно, если ввести матрицу
Vi + e2 (-P «)
1 + ic с, + ic,
?=?' + *?''=±4^=?' ? = *' + *"= * i7=b
>? 1 + с2 У 1 + с
то она будет унитарной: гш+ = иьи = 1, и детерминант ее будет
равен единице:
М = |а|2+ИН2=1, E-26)
т. е. матрица и будет унимодулярной. При этом преобразование
E.18) не изменяется, так как оно определено с точностью до
общего для всех коэффициентов множителя. Очевидно,
совокупность всех унитарных унимодулярных комплексных матриц
второго порядка образует группу. Эта группа обозначается как
группа SUB) и называется специальной унитарной группой матриц
второго порядка.
Соотношения E.25) легко разрешаются относительно вектор-
параметра с и дают
ci = P'/a', *2 = ?"/?', с8 = а"/а', a' = ±A +с*)-\ E.27)
при этом предполагается, что ?, ? удовлетворяют условию E.26).
Мы видим, что заданному с соответствуют две матрицы и
E.25), отличающиеся знаком. Таким образом, отмеченное выше
соответствие между 50C) ? SUB) является двузначным в том
смысле, что каждой матрице 0(c) из группы 50C)
соответствуют согласно E.25) две матрицы и и — и группы 5?/B)*).
Ввиду указанного соответствия комплексные числа ?, ?,
ограниченные условием |?|2 + |?|2=1, можно, наряду с
компонентами вектора с или углами Эйлера ??, ?2, ?, рассматривать как
параметры группы вращения. Такая параметризация широко
используется, причем ? и ? называются параметрами Кэли —
Клейна. С помощью E.27) находим из B.5')
( ?'2 + ?'2 py-aVpV + aW
0 = -1 + 2 ?'?'' + aV ?'2 + ? ??-?'?' ? E.28)
(?"?'-?'?" ?"?" + ?'?' |a|2 J
Заметим, что поскольку мы воспользовались схемой
соответствия между точками плоскости и сферы (см. рис. 5.1),
несколько отличной от стереографической проекции (см. рис. 5.2), то
введенные нами параметры ?, ? соответственно отличаются от
принятых в литературе (см., например, [3, 4]). В частности,
*) Группа SUB) называется универсальной накрывающей группой
по отношению к группе S0C).
40
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
приведенная в [4] матрица вращения, выраженная через
параметры ?, ?, получается из E.28) при замене ?'->·?", ?"->- — ?',
т. е. ?-»-— ?. Использованный здесь способ введения
соответствия, основанный на соотношениях E.1), E.2), E.16),
непосредственно опирается на закон композиции вектор-параметров C.6)
и позволяет наиболее естественным путем ввести унитарные
матрицы и.
Закон композиции для параметров ?, ? сводится к простому
матричному умножению
а2 Рг
_р;в;|-и«1-
? ?
?* i
а
(«? Pi
и имеет вид
а2 = аах — ???, ?2 = ??? + ??^. E.29)
Из него следует, что данная параметризация является линейной
(см. § 4), поскольку из равенства щ = ищи = ищи+ вытекает
линейная зависимость параметров аг, ?2 от ??, ??.
Однако определенным неудобством параметров ?, ? является
то, что они не являются независимыми. Поэтому при
вычислениях всегда необходимо учитывать дополнительное условие
E.26). Эти параметры также не являются естественными (см,
§ 4), так как ос = ? = 0 не соответствует единичному
преобразованию и пара (—?, —?) определяет преобразование вращения-
не обратное преобразованию (?, ?), а совпадающее с ним.
Выражение E.25) для и можно написать в виде
где
и = ± A + icaOa) ??? + clx а = 1,2, 3. E.3?;
·>-(?-5· --??). ??-9 ?·*>
— так называемые матрицы Паули, удовлетворяющие
соотношению
CaGb = ???—ISabcGc. E.32)
Эти матрицы находят широкое применение во многих вопросах
теоретической физики.
§ 6. Инвариантное интегрирование на группе вращений
Пусть каждому собственному ортогональному преобразованию
0 = 0+ поставлено в соответствие некоторое число /. В таком
случае говорят, что на группе вращений задана функция. По-
§ 6. ИНВАРИАНТНОЕ ИНТЕГРИРОВАНИЕ 41
скольку вектор-параметр с однозначно определяет
преобразование О, то / будет функцией от С
/ = /(*)=/(*«)=/(*!, *·,<*)· F.1)
Инвариантный интеграл от функции / определяется следующим
образом:
/= J J j f (с) К (с) (dc), (dc) = dCldc2dc39 F.2)
— oo —oo —oo
причем весовая функция К (с) должна быть выбрана так, чтобы
при любом с0 имело место равенство
j / «с», с» К (с) (dc) = j> (с) Я (c)(dc). F.3)
Произведем замену переменных
с' = <с°,с>, с = <-с°,с'>. F.4)
При этом бесконечные пределы интегрирования не изменятся,
и условие F.3) примет вид
j / (с') К «- с°, с'» 4§у (ЛО = ]"/(*)* (с) (de)% F.5)
где
я (c)/d {&) = | <W<fc; | = | а <- с\ с'}ь/дса | F.6)
— якобиан преобразования. Если условие F.5) будет
выполняться для любого бесконечно малого вектора с0, то оно будет
справедливо ? вообще. При малом с0 (см. C.6))
с = <- с\ с'> = (- с0 + с' - [cV]) A - с°с') =с' + бс', F.7)
причем
бс' = - с0 A + с'·с' + с'х). F.8)
Мы пренебрегли здесь членами, квадратичными по с0. Для
весовой функции К получаем
К(с) = К (<- с0, с'» = К (с' + бс') - Я (с') + ЬК. F.9)
Последний член имеет следующий вид:
?? = бс' (W? (с')/5с') = б^ {дК/дс'ь). F.10)
Вычисляем якобиан F.6) с учетом F.7), F.8):
-^ = -A-(c;-C2-eV.ffb'-[cV]b) =
= б„ь - 9 (с2с>; + c°b%c'd)/dca = баь -(<&ь + cV6ab - <&*). (б.И)
42 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
В прямой (безындексной) записи это соотношение имеет вид
(д/дс').с = 1 - ?, ? = cV + с°-с' - сох, F.12)
причем ? — бесконечно малая матрица ввиду малости | с01.
Поэтому (см. П.1.67))
D{c)ID{c') = \{д1дс')-с\ = |1-?| = 1-?,= ?-- 4cV. F.13)
Теперь формула F.5) с учетом F.9), F.13) принимает вид
J / (с') (К (с') + 6К) A - 4cV) (?/) = J / (с) К (с) (dc)
или с точностью до членов первого порядка малости
j / (с') (?? - 4с°с'К (с')) (dc') = 0. F.14)
Здесь согласно F.10), F.8)
??- 4cV /С (с') = - с0 [A + С с' + с'*) 5#/дс' + Шс'\. F.15)
Поскольку интеграл F.14) должен обращаться в нуль при
любой функции / {с') и любом малом с0, то должно быть
A + с' · с' + с'х) дК/дс' = - 4с'#. F.16)
Это дифференциальное уравнение решается весьма просто.
Умножая его слева скалярно на с\ получим
с'дК/дс' = - Ьс'*Щ\ + с'2). F.17)
Для оператора, стоящего слева, имеем общее выражение *)
c'-w- = \c'\jwj· F18)
где для вещественного вектора с'
| с'\ = /с'2 = У# = Ус[2 + <?? + с?. F.19)
F.20)
Таким образом, уравнение F.17) принимает вид
1 дК 4|с'|
К д\с'\ =1 + |с'Р':
следовательно,
X(C)=(IW·
F.21)
*) Пусть ? =в (ха), ? = 1, 2,..., п. Введем новые переменные ? = у **»
следовательно, *„_ =_?_+ _^?*?_ = р_.
§ 7. ИЫФИНИТЕЗИМАЛЬНЫЕ ВЕКТОР-ОПЕРАТОРЫ 43
Легко убедиться, что эта функция удовлетворяет исходному
уравнению F.16). Постоянная С находится из условия нормировки
J К (dc) = 1. Переходя к сферическим координатам в
пространстве векторов с% получим
(dc) = | с \Ч | с | sin ЫЫщ F.22)
следовательно,
CJ (i + l ·0" =4«cJli+^i",lC'
откуда находим С = l/?2. Окончательно инвариантный интеграл
на группе вращений имеет вид
Соответственно скалярное произведение двух функций / и ?,
заданных на группе, можно определить выражением
(/ (с), ? (с)) = 4г j /* (с) ? (с) A^СС2J. F.24)
Переход к углам Эйлера ??, ?, q>2 согласию D.8) — D.11) дает
/ = (8?2)-? j / (<plt ?, <?2) sin ? ???????%. F.25)
§ 7. Инфинитезимальные вектор-операторы группы
вращений
Согласно B.13) при бесконечно малом преобразовании
вращения О (с0) = 1 + 2сох радиус-вектор ? переходит в вектор
х1 = О (с0) ? = A + 2сох) ? = ? + 2 [Ле]. G.1)
Рассмотрим некоторую функцию от координат /(#) = / {xa) —
= /(#ь #2, #з). Если подставить в нее вместо х его выражение
черезх\ полученное из GЛ):х = О (— с°) ?',?? мы получим
новую функцию /? (#'). Таким образом, при вращении вид функции
/ (а?) изменяется, и она переходит в другую функцию
h(*) = f@-J>x). G.2)
Поскольку О (— с0) а; = л; — 2 [с°гв] = а; + ?«, то
/? (*) = / (* + Ьх) = (? + ?* ±j / (?), G.3)
44
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
причем
?*? = ?*° шга = -2 [«·*? & = - 2с° [х к} <7·4>
Здесь квадратные скобки означают векторное произведение
радиус-вектора на вектор градиента. Аналогичным образом можно
рассмотреть изменение в результате малого вращения функции,
заданной на группе (§6). Аргументом такой функции f(c)
является вектор с% который при вращении, определяемом вектор-
параметром с0, переходит вс'=<с°, с>. Аналогично G.2) f(c)
переходит в Д (с), причем
/i(<0 = /«-c°,c». G.5)
Согласно F.7), F.8) при|с°|<1
<— с", с> = с + 8с = с - с° A + ее + сх), G.6)
поэтому
f1(e) = f(c + bc) = fl + 6c^y(c), G.7)
где
6с^=-сЧЦ-^с + сх)^. G.8)
Рассмотрим, наконец, изменение функции /(?, ?) или /(?),:
ааданной на сфере (§ 5), в результате вращения, определяемого
вектор-параметром с. Согласно E.2) функцию точки х на сфере
можно рассматривать как функцию двумерного вектор-параметра
v: /(#)=/ (Ovc0) = -? (?). При вращении О (с) такая функция
переходит (см. G.2)) в
/? И = / (О-·*) = / @-*0vco) = / @<-*,v>*o) = / @*с.) = г|) (?').
Для того чтобы найти ?', нужно, аналогично E.7), представить
<— с, ?> = ? — c(l+v-v + vx) (см. G.6)) в виде <v',ac0>,
ограничиваясь членами первого порядка по с. Используя E.16),
находим
?' == ? + ?? = ? — с (l + ?· ? + ?? — (c0 + [vc0])-(c0 + [vc0])).
G.9)
Полученное выражение для ?? нужно подставить в формулу
аналогичную G.7):
/?(?) = (? + ??^)/(?). G.10)
При этом следует использовать соотношение (см. П. 1.81)
[vc0] · [vc0] = ?* A — <v c0) — ?· ?,
§ 7. ИНФИНИТЕЗИМАЛЬНЫЕ ВЕКТОР-ОПЕРАТОРЫ 45
а такаде учесть, что c^d/dv = c„v = 0. В результате получим
ev^=-c(l-v» + 2v.v + vx + c,.[c,v])?.
Но
Co-Kv]^ = ce.c0[v^]=(c0x2-M)[v^] = vX/vf G.10')
так как
Поэтому получаем окончательно
6v^ = -c(l-v* + 2v.v + 2vx)^. <7Л1>
В соотношениях G.1), G.3), G.7), G.10) изменение при малом
вращении различных величин: радиуса-вектора точки
трехмерного пространства ж, функции от а?, функции на группе / (с) и
функции на сфере / (?) — определяется операторами, которые
согласно G.1), G.4), G.8), G.11) во всех четырех случаях
могут быть представлены в форме
2? = 2c°J = 2c2/ai G.12)
где J = (/a) линейный вектор-оператор *). При этом для радиуса-
вектора х оператор J является матричным, и поскольку согласно
G.1) И B.4) C°a(Ja)bc = <?* = ЧаЛ, ТО
(/о)ьс = еЬвс = — ??6?. "G.13)'
Для функции f(x) согласно G.4) это будет векторный
дифференциальный оператор
•^—[*»]' G-14)
для функции на группе вращений f(c) (см. G.8))
Je=-4-(l + c-c + cX)| = -i±?l(l+Oe)l G.15)
н для функции на сфере / (?) (см. G.11))
.Г = —i(l-v» + 2v.v + 2vx)l = —!(l + v>Hvl. G.16)
*) Термин вектор-оператор или векторный оператор обозначает, что
оператор/состоит из трех компонент /в» /ь, /с, преобразующихся при вра*
щениях как компоненты трехмерного вектора, что следует из C.24).
46 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Здесь ? рассматривается как вектор в трехмерном пространстве,
ограниченный условием vc0 = 0.
Все операторы J, определенные соотношениями G.13) —
G.16), называются инфинитезимальными операторами группы
вращений. Мы приведем их явные выражения в компонентах.
Оператор G.13)
/0 0 0v / 0 0 1\ /0 — 1 0\
/1= 00-1 , /2= 000, /3 = И °°. G.17)
\0 1 0/ \-1 0 О/ \0 OjJ
Оператор G.14)
Jt^-гаъеХъ^. G.18)
или
G.19)
Оператор G.15)
?=~?[?+СаСьЪ+8°"С**У <7·20>
или
2Jl=-^-ct{c0±y[c3±rc1±^ G.21)
Оператор G.16) при с01кз
Л = - 4" ?1 + ?2)^ - ???^« G-22)
,? д д
Если вместо с\, Сг, сз ввести углы Эйлера ??, ?, q>2 согласно D.8),
D.10), то формулы G.21) принимают вид
д д sin ?? д
/1 = ??8?115-8???1^?^ + 1^^
г« · 9 . п 9 , cos q>j a
/2 = -зтф1^-со8ф1с18в^.+-ж^-з5-, G.23)
J*- -i-
§ 7. ИНФИНИТЕЗИМАЛЬНЫЕ ВЕКТОР-ОПЕРАТОРЫ 47
Соответственно, если перейти в формулах G.22) от vi, V2 к
сферическим координатам ?*, ? согласно E.5), E.6), то мы получим
Л = sin ? g? + cos ? ctgO щ,
Я Я
/? = — cos ? jj + sin ? ctg 0^, G.24)
_? д
К этим же формулам мы придем, если произведем в G.19)
замену декартовых координат на сферические:
хг = |#|sinOcos(p, x2 = |#|sinflsin(p, х3 = | д?| cosO- G.24')
Покажем, что соотношение G.16) является частным случаем
G.15). Из E.7), заменив ?" на ?, имеем
с = <?, осс0> = ? + ас0 + ? [vc0], G.25)
v = _ асс^ + сс^ ^ а = с^ G2g)
1 -f-a
Очевидно, с переходит в ? при а = 0, однако G.15) не
переходит в G.16) в результате простой замены с на ? из-за наличия
производной д/дс. Чтобы получить правильный результат,
вычислим д/дс, рассматривая с как функцию величин ? и а. Мы
имеем
_?_ — ^JL-L— -L
дсл ~~ дсл dv, "· дс да
или, в безындексной записи,
Я-(?'*)?+5ЁяГ- G.27)
Очевидно, да/дс = с0; для вычисления же первого члена
рассмотрим выражение
й 1 / ? х\ ? й
и продифференцируем его по вектору с
Используя G.25), G.10') и соотношенияc0v = c09/3 v = 0Ё
получим после простых преобразований согласно G.27)
q д 1 — aVv — ас* + Vх $
48 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Отсюда ясно, что
?/(c)|„=o = (l + vx)^/(v), G.29)
следовательно,
(H-c.c+cX);c|a=o = (l + v.v + vX)(l + vx)^ =
= (l-v2 + 2v.v + 2vx)^,
т. е. соотношение G.15) при a = 0 действительно переходит в
G.16).
Формулу G.16) можно получить также из G.14), если
произвести замену переменных х\, #2, хг на \x\f vi, V2. Для этого
в соотношениях E.1), E.2) отбрасываем ограничение жа=11что
сводится к умножению на | х\:
«" М + 1..» *-|*|<?(?)^. G.30)
Отсюда следует
д _д\х\ д ? д w = _?__<> c* + (x/\x\ + c0)-v д
дх ~~~ дх д\х\~^\дх *V) dv \х\д\х\ \ ? \ + cQx dv '
Подставляя в G.14), получим
| ? | + cQx dv'
Если заменить здесь ? согласно G.30) и учесть, 4Toc0v=c0d/dv=i
= 0, О (?) с0 = 2 со> то после простых
преобразований снова получим соотношения G.16).
Вычислим для всех четырех случаев сумму квадратов
компонент инфинитезимального вектор-оператора J2 = J%>
В случае G.13) имеем (см. П.1.38)
J2 = Ja= (&abcEacd) = — (Eacbsacd) = "~ 2Fbd) =—2. G.31)
В случае G.14)
(ГУ = J*aJ*a = [^iJJ^i]^ *аъс4^ W*< 5?·
Используя (П. 1.38), получаем
U*J = (вмбс* - 8bg8cd) хь ± xd ±. G.32)
$ 7. ИНФИНИТЕЗИМАЛЬЕЫЕ ВЕКТОР-ОПЕРАТОРЫ 49
Поскольку дхь1дхс = ???, дхс/дхс = 3, то
Используем обозначения
«*-·¦« д-=5=1г$+5+4 <733>
В результате получим
(/»)·=-*»?,-*?(? + *?). G.34)
На основании G.15) имеем
(JCY = Цг (??6 + <>«ь) ±- A + с*) (??(? + Oad) ^. G.35)
Ь d
Поскольку саОаЬ (с) = са0Ьо (с) = сь, ОоЬ0ос = бЬс и (см. B.5))
ТО
ОаЬ w Id + с2) Oad] = ± [A + c*)OabOad] - A + с2) ??(?^ = о.
Ь Ъ b
С помощью этих соотношений получаем после несложных
вычислений
(,Г). _i + f!(A.+ ·?(! + <>.?)) G.36)
и аналогично (см. G.16))
(JvJ = 4-A + v2)Av. G.37)
Здесь использованы обозначения
Ac~i?-^' ??~^-^ + < G·38)
Если перейти к углам Эйлера D.8) —D.10), то вместо G.36)
получим
В свою очередь при переходе к сферическим координатам G.24') ,
4 ?. и. Федоров
50 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
E.5) выражения G.34), G.37) дают совпадающий результат
Если ввести здесь переменную ? посредством соотношения
l = lntgl-1 G.41)
то sinfl-^r ="зг и соотношение G.40) принимает вид
§ 8. Комплексная трехмерная ортогональная группа
Рассмотрим трехмерное комплексное линейное пространство.
Всякий вектор ? в этом пространстве и сопряженный к нему ?*
можно написать в виде
? = ? + ?&, ?* = ? — ib, (8.1)
где ?, 6—трехмерные вещественные векторы. Если задан второй
комплексный вектор z' = a'-\-ibr, то скалярное произведение
векторов ? и ?' можно определить формулой
zz1 = (а + ib) (a1 + iV) =аа' -ЬЪ' + i (aV + Ъа')% (8.2)
где аа'и т. д.— скалярное произведение вещественных векторов
(см. § 2). Наряду с этим можно определить скалярное
произведение векторов ? и ?' с помощью соотношения
?*?' = (? — ib) (?' + iV) = ??' + ЪУ + i {aV — ba'). (8.3)
Скалярное произведение, определенное согласно (8.3), мы будем
называть эрмитовским скалярным произведением. При ?' = ? из
(8.2) получаем скалярный квадрат комплексного вектора
?2 = а2 _ 62 + 2ш&, (8.4)
который может быть любым комплексным числом. При том же
условии ? = ?' эрмитовское скалярное произведение (8.3) дает
квадрат модуля комплексного вектора
\z\2 = z*z = a2 + b2. (8.5)
Очевидно, как и в случае комплексных скалярных чисел,
квадрат модуля комплексного вектора является вещественным
положительным числом, которое может равняться нулю лишь в том
случае, когда вектор ? есть нулевой вектор:? = ? = Ъ = 0.
§ 8. КОМПЛЕКСНАЯ ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА 51
Отметим различие в определении квадрата модуля вектора *
и числа ? = а + ib. Если для чисел всегда справедливо
соотношение \z2\ = \z\2 = а2 + Ь2, то согласно (8.4)
| ?21 = + У(а2 - Ь2J + 4 (абJ = У (а2 + Ь2J - 4 [аб]2 =*
= К|*|4-4[а&12, (8.6)
следовательно, в общем случае |z2|^=|z|2. Из (8.6) следует,
что равенство \?2\ = | ? |2 может иметь место тогда и только
тогда, когда [аЪ] = 0. Согласно (8.1)
[zz*] = -2i [аб], (8.7)
следовательно, соотношение (8.6) можно написать в виде [12.1—
13]
|z2|2 = |z|4+[zz*I2. (8.8)
Видно, что из равенства [zz'] = 0 следует ?' = С ?, где С —
произвольное комплексное число.
Так же, как в § 2, можно определить комплексную трехмер·
ную ортогональную группу, обозначаемую 0C, С), как
совокупность комплексных линейных преобразований (матриц), остав·
ляющих неизменным скалярный квадрат (8.4) произвольного
комплексного вектора [?]. Повторяя рассуждения § 2 с заменой
вещественных величин на комплексные, получаем следующие
выражения для произвольного преобразования комплексной группы
«вращений» 50C, С), т. е. совокупности ортогональных
преобразований с детерминантом, равным единице (собственных
комплексных ортогональных преобразований):
О (q) = Oq = A + ?х)/A - ?х) = 2 A - «jr*) - 1 (8.9>
или (ср. B.5))
i + q i+q
Здесь q—a + ib — комплексный трехмерный вектор-параметр.
При этом очевидно
О (?*) = О* (q) = 1 + 2 (?*х + g*X2)/(l + д*2). (8.11)
Существенное отличие матриц (8.10) от матриц B.5)
заключается в том, что первые имеют смысл не при всех комплексных
векторах q. Очевидно, матрица Oq (8.10) имеет смысл в том
случае, когда все ее элементы ограничены. Между тем для
комплексных векторов возможно равенство
1+да=0, (8.12)
или
?2_62 + 1==0? аь = о4 (8.13)
4*
52
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
когда выражение (8.10) теряет смысл. В выражении B.5) всегда
1 -{- с2 ? 0 ввиду вещественности вектор-параметра с Именно
поэтому для компонент вектора с были допустимы все значения.
Условия (8.12), (8.13) могут удовлетворяться при конечных
векторах а, 6, причем очевидно, что такие векторы не задают
определенного преобразования Од (8.10) и не могут служить
вектор-параметрами. Однако матрица (8.10) может потерять смысл
и при бесконечно больших векторах q. Подчеркнем, что когда
мы говорим о конечности или бесконечности комплексного
вектора 5, то это означает соответственно |?|2 < оо или | q2\ = оо .
Для комплексных векторов возможно такое положение, когда
|д|а= оо (что означает а2 = оо, либо б2 = оо, либо, наконец,
?2 = 62=??), но в то же Время \q2\ < оо. Действительно,
например, для кругового вектора qимеем)g2| = g2=0, т. е. ?2—62 =
= аЪ = 0. Очевидно, последние равенства могут выполняться и
при бесконечно больших векторах а и Ь, если последние равны
и перпендикулярны друг другу. При этом модули комплексных
элементов матрицы (8.10) будут бесконечно велики.
Следовательно, наряду со случаем (8.12) 1 + q2 = 0 следует исключить
также случай | q \2 = оо, | q2 | < оо.
Таким образом, в определении матриц Од группы 50C, С)
должны содержаться условия, ограничивающие допустимую
область значений комплексных вектор-параметров ?, которые
можно сформулировать в виде соотношений двух видов: 1.1+?2 =7^0
и II. при \q |а = оо должно быть | q2 \ < оо. Однако можно
сформулировать условия, ограничивающие допустимую область
значений вектор-параметра q в виде одного соотношения. Для этого
аналогично C.47), C.48) введем новый комплексный
вектор-параметр ? посредством соотношения
Vl + q2 Vi-P2
Здесь подразумеваются значения квадратных корней с
положительной вещественной частью, чтобы при переходе к
вещественным вектор-параметрам получить соответствие с группой 50C).
С помощью вектор-параметра ? получим вместо (8.10)
выражение (см. C.49))
0(p)=Op = l+2(VTzr7+P*)p*. (8.15)
Очевидно, необходимое и достаточное условие для того, чтобы
это преобразование имело смысл, сводится к требованию |р| <oof
лли (см. (8.14))
§ 8. КОМПЛЕКСНАЯ ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА 53
Однако наложив это условие, мы должны еще убедиться, что
при умножении любых двух матриц (8.10) Оч и Oq^ для
комплексных вектор-параметров которых выполняется соотношение
(8.15'), результирующий вектор-параметр также будет ему
удовлетворять. Для этого необходимо использовать закон композиции
комплексных вектор-параметров, который, очевидно, будет иметь
прежний вид C.6)
ir-<f,f')~f + «/ + I«'1. (8.16)
1 — qq
Точно так же для вектор-параметров ? (8.14) аналогично
C.51) получим
<P,p'>o = pVi-p'2 + P'Vt-P2 + lPP'l (8.17)
Отсюда ясно, что если|?|2 < оо, |р'|2 < оо, то и |<р, р'>012 <оо.
Следовательно, вышеуказанное требование для
вектор-параметра ? выполняется, а значит, и условие (8.15') выполняется для
соответствующих векторов q, т. е.
lJ&&r<- (8Л8)
Заметим, что 1 - <р, р'>20 = (КA - р2) A - р'2) - рр'У *).
Произвольный комплексный вектор q может быть
представлен как в виде суммы, так и в виде композиции трех векторов,
пропорциональных ?0, е и е*, где согласно C.39) —C.42)
[с0е] = + ief [ее*] = ic0. (8.19)
Действительно, если написать
q = ас0 + ?? + ye* (q2 = ?2 + 2??), (8.20)
то коэффициенты этого разложения определяются однозначно:
а = ?со> ? = ?0*, ? = ??. (8.21)
Покажем, что всегда можно написать также
q = <1с0У це, ?**>. (8.22)
Отсюда следует <gf — ??*> = <?с0, г\е} или с учетом (8.19) — (8.21)
' ???? = lc0 + ? A + *6)e.
*) При такой параметризации совокупность точек в пространстве
параметров, в которых преобразования (8.15) теряют смысл, отодвинута на
бесконечность. Преобразование (8.14) является примером той допустимой
замены параметров, которая отмечена в П.2, причем ? (?) = ?\ + ?*.
54 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Сравнивая коэффициенты при независимых векторах с0, е, е*9
находим
t ? - i (?2 + ??) ~ _ A — *?) ? у . У /о ооч
Таким образом, представление (8.22) всегда возможно и
является однозначным.
Обратные выражения для ?, ?, ? через ?, ?, ?, разумеется»
также являются однозначными. Чтобы получить их, достаточно
раскрыть выражение (8.22) согласно C.12) и умножить скаляр-
но нас0, е, е*. Таким путем найдем
__._ ? + »·??(?+·»?) ? ? A + <S) С (? — »Б)
?~ ?-??(? + ??)« ?" 1-лСA + «)» ?- 1-??A + ??)"
(8.24)
С помощью B.5), (8.19) нетрудно убедиться, что
(8.26')
0(±1съ)е=\Щеу О(±1с0)е* = ^е*, (8.25)
причем согласно (8.24)
i-H _ A - <«)а _ A - 'У /о од\
1+??-?+?~- 1 + ?2 + 2??· ^°'
Используя эти соотношения, а также C.22), получаем
<?с0, ??> = <?? (ic0) e, ic0> = <т)'е, ?c0>,
<ic0, ?**> = <Xp (tcQ)e*x lcoy = <?'**, ?*0>,
где
? — ? 1 — ?? — 1 — ??' C-C1 + ig- 1+ei · <»·^>
Поэтому, наряду с (8.22) для 5 возможны представления
? = We, Hc0, ?**> = <?'?, ?'**, |с0>. (8.27')
Еще одно представление можно получить из (8.22), (8.20), если
на основании C.13) написать
— q = — ас0 — ?? — ??* = <— ??*, — ??, — Ес0>
или
?? = ??^? + ??* + уге* = <???*, ???, ?^?), (8.28)
где величины, снабженные индексом 1, лишь знаком отличаются
от тех же величин без индекса. С учетом этого мы можем
переписать соотношения (8.23) в виде
t _^?+??+?) „ (* + <ai)Pi г __!L·- i«2m
??" l + Mi + *«i ' % ?+^?' ?? ~ 1 + 4' (8'29)
§ 8. КОМПЛЕКСНАЯ ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА 55
Поскольку формулы (8.28), (8.29) справедливы при любых qx
и соответственно ??, ??, ??, то мы можем отбросить у этих
величин индекс 1 и в результате получим
q = ас0 + ?* + ye* = <???*, ?? ??>, (8.30)
? _ ? + t (?2 + ??) „ _ A + *«) ? ? _ ? /? ??
Мы можем здесь снова осуществить перестановку (см. (8.26,)'У
<ЯА ?ico) = <?ico> 0(— SicoLi^> и с помощью (8.25) получим
q = <??**, ??, ??*>, ?! = l^j- 4l = j-t-, (8.32)
? = <SA. &«*. ??«>. Ci = 7??7? Si = 4 ¦ i · (8·33)
Формулы (8.22), (8.24), (8.270, (8.30) —(8.33) дают
представления произвольного комплексного вектора q в виде композиции
векторов, пропорциональных с0, et e*9 для всех шести возможных
перестановок с0, е, в*. В любом случае, при заданном порядке
с01 е, в* в композиции, представление является совершенно
однозначным.
Если qc0 = ? = ?,?? из (8.27'), (8.32) получаются особенно
простые представления
« = ?? + уе * = '?., ?^ ??*) = <^>*, ^ ??). (8.34)
Аналогично, при ? = qe* = 0 имеем q*= ?2 и (см. (8.22), (8.23) J
g = ac0 + Ye*=/ac0,1-55\=/1-^) aC()\, (8.35)
а при ? = qe = О
? = ac0+pe=(aCo,Tils) = /rils, «e,>. (8.36)
Представления для вещественного вектора q = q* = с
отличаются тем, что a = ?*, ? = ?*, с2 = a2 + 21 ? |2. Поэтому,
например, согласно {8.22), (8.23)
с = ac0 + ?* + ?*?* = <|c0, ??, ??*>,: (8.37)
где
?-,(?* + |?[*) A-?«)? f_ ?*
В случае (8.34) будем иметь
С = ?? + ?*?* = <^??, 7^,^,!'» ?*?*/· (8·39)
56
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Отметим одно интересное ? важное обстоятельство.
Рассмотрим двумерное комплексное пространство, натянутое на векторы
са и е (или с0 и е*). Нетрудно убедиться, что результат
композиции двух векторов из этого пространства
9" = <«, ?'> = <ас0 + ??, а'с0 + ?'*> =
= A - аа'Г1 {(<* + а') с0 + [? + ?' + i (??' - ?'?) \e)
также принадлежит к этому пространству. Более того, если взять
? и а' вещественными, то в векторе q" = а"с0 + ?"? коэффициент
а" также будет вещественным. При этом квадрат вектора
q2 = (ас0 + ??J = а2 будет вещественным числом, которое,
однако, может равняться нулю при q ? 0 (для q = ??).
Совокупность вещественных вектор-параметров с группы
вращений образует векторное линейное пространство, которое
является группой по отношению к двум различным групповым
операциям одновременно. Оно является абелевой группой по
отношению к операции векторного сложения, как и всякое векторное
пространство. Кроме того, оно является неабелевой группой по
отношению к операции композиции параметров <с, с'> C.6). При
этом для обеих операций единичный @) и обратные (— с)
элементы совпадают.
Этими же свойствами обладает вышеупомянутое двумерное
пространство с0Уе(с01 е*), каждый вектор в котором
характеризуется одной вещественной и одной комплексной компонентой.
В дальнейшем мы увидим, что это пространство,
рассматриваемое как группа относительно закона композиции C.6), тесно
связано с группой движений евклидова двумерного
пространства ЕB).
В ряде случаев существенным является то обстоятельство*
что любой вектор-параметр, как комплексный, так и
вещественный, может быть представлен в виде композиции двух векторов
?^? + ?? и ??*. Таким образом, мы можем написать
q = ас0 + ?* + ye* = <??0 + ?*, ?**>. (8.40)
Аналогично (8.22), (8.23), (8.24) находим отсюда
t ? -1' (?2 + ??) ?A-»«) ?_ У ,я ,<ч
6— i-ia+?? ' l~"l-ia + ?v, b " 1 - ??* ?°'^1}
? + ??? о ._. ? ?(?-;?) ,я,9.
?-1—?? ?-?=??» ?--?3??' (8·42)
Таким образом, представление (8.40) всегда возможно и
является однозначным. Из сравнения с (8.24) видим, что только
выражение для ? отличается от соответствующего выражения при
представлении (8.22). Случай вещественного вектора q соответст-
§ 9. ПОДГРУППЫ КОМПЛЕКСНОЙ ГРУППЫ SOC, С) 57
вует ? = ?*, ?* = ?, при этом имеем из (8.41)
. ?-?(?2 + 1?|2) _ ? (!-»·«) : ?* (843)
Как уже отмечалось выше, совокупность векторов ссс0 + ??
образует группу по отношению к закону композиции C.6).
Векторы ?е*л разумеется, также образуют группу, а именно одно-
параметрическую, аддитивную абелеву группу:
<??*, ?V>= (?+?')**· (8.44)
Следовательно, существование представления (8.40) для вектор-
параметра означает, что любое преобразование комплексной или
вещественной трехмерной группы вращений всегда может быть
представлено в виде произведения преобразований, относящихся
к двум более простым группам.
Очевидно, представление типа (8.40) может быть реализовано
еще в трех разновидностях:
« = <?i«o + Ci**. i)i*>. (8.45)
i = <k**,Sa*. + 4,e>f (8.46)
q = <?3*, ?8*? + ?з**>. (8.47)
§ 9. Подгруппы комплексной группы вращений 50C, С)*)
Ввиду взаимно однозначного соответствия между 0(q) ъ q
каждой подгруппе группы О (q) соответствует подгруппа вектор-
параметров q ? наоборот (поскольку закон композиции C.6)
имеет групповой характер). Следовательно, важный вопрос о
типах подгрупп и их структуре для группы 50C, С) может быть
целиком рассмотрен на основе закона композиции C.6), без
обращения к самим группам. Для этого следует отыскать такие
совокупности векторов д, элементы которых в результате
композиции C.6) снова давали бы элемент той же совокупности.
Рассмотрим сначала группу 50C), являющуюся подгруппой
группы 50C, С) при условии g= g*=c. То, что это
действительно подгруппа, сразу следует из того, что композиция
вещественных векторов а согласно C.6) дает снова вещественный вектор.
В дальнейшем мщ будем обозначать через с произвольный
вещественный вектор, с0 — фиксированный вещественный
единичный вектор \Cq =я l)f e — круговой комплексный вектор,
обладающий свойствами C.39). У группы 50C) имеются подгруппы
*) См. [15].
58
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
только одного типа*), соответствующие q = Сс0, поскольку
<Cc0,C'c0>=?^<v (9.1)
Это — однопараметрическая Лодгруппа поворотов вокруг
фиксированной оси с0 на произвольные углы <p(tg((p/2) =C).
Совокупность подгрупп группы 50C, С) является
несравненно более богатой. Мы уже знаем две подгруппы q = д*=с и д=Ссв.
В комплексной области последнее соотношение дает четыре
подгруппы. Действительно, наряду с С = ? = ?* возможны
значения С = ??, ?. е. С является чисто мнимым числом, поскольку
из (9.1) ясно, что это свойство сохраняется при композиции.
Однако фактически мы получаем в последнем случае не одну,
а две группы. Чтобы показать это, используем соотношение C.21)
1+ <«-«> A_м')з ·
Из него следует, что если 1 + q2 > 0 и 1 + q'2 > 0, то и
1 + <#» ?'>2 > 0 (если qqf вещественно). При С = ia имеем
1 + ?а = 1 — а2. Таким образом, совокупность векторов q = ??
при ?2 <С 1 образует подгруппу, для всех элементов которой
1 + q2> 0. Более широкая подгруппа получается при любых
других значениях ? (?2??). Наконец, С может быть
произвольным комплексным числом: С = а + ??'·
Отметим, что преобразования O(iac0), a2 <C 1, и O(iac0),
a2 > 1, получаются одни из других путем умножения на
преобразование обычного поворота вокруг с0 на 180°, которому со-
ответствут вектор-параметр бесконечной длины q = оо с0.
Согласно B.8) имеем
О(оос0) = 1 + 2с* = 2с0-с0 - 1.
Примечательно, что тот же результат получается, если взять
q =iooc0, т. е. чисто мнимый вектор-параметр с бесконечно
большим модулем. Поэтому подгруппы q = ac0 и q=iac0(a = a*)
имеют в качестве общих элементов наряду с групповой единицей
также обычный поворот на 180°**). На основании (8.16) имеем
< оо с0, iacoy = icja, следовательно, О (оо с0) О (iac0) = О (ia'c0)s
где о! = а. Поэтому, если а2 ^ 1, то а'2^ 1, как и
утверждалось выше. Заметим, что
<оос0, ac0>=--j4 <ooc0, ??^> = -?^, <оос0, оос0> = 0.
'''' (9-2)
*) Мы не рассматриваем дискретных подгрупп, примером которых
являются кристаллографические группы.
**) Элементы О@) = 1 и О (оос0) образуют дискретную подгруппу.
S 9. ПОДГРУППЫ КОМПЛЕКСНОЙ ГРУППЫ SOC, С)
59
Вектор q = (? +ia') c0 всегда можно представить в виде
(? + ??') с0 = ф0, U'c0>, | Г | < 1, где
gaV+rt?· ?=25-(?2+?'2^1+^(?2+?'2_1J+4??)'
«'+^* ?' = ?(«2 + ?'2 + 4 -^(?2 + ?'2 + 1J - 4?'2)·
Действительно, можно проверить с помощью (8.16), что
<?с0, ??4>=<?^?» Щ'со>, ?=?1, ?'^?'". Таким образом,
комплексный вектор-параметр q = (? + ??') с0 соответствует
произведению коммутирующих между собой преобразований
обычного и гиперболического поворота вокруг с0.
Аналогичную совокупность четырех типов подгрупп мы
получим, рассматривая все вектор-параметры вида q=Cqu где
зафиксированный комплексный вектор, причем q\ = 1.И здесь мы
имеем четыре подгруппы: С = а; С = ??, ?2 <С 1; С = ??,
?2 > 1, и С = а + ??'. Заметим, что любой комплексный вектор
q с неравным нулю квадратом q2 ? О может быть представлен в
виде q = Cqu где С = У ?2, ?1 = q/Vq2 (?? = 0·
Рассмотренные выше четыре подгруппы д = Cq1 изоморфны
соответствующим подгруппам для q = Cc0. Это ясно как из
непосредственного сравнения, так и благодаря соотношениям (см*
C.24), B.16))
Ях = <Vo = <?о, «и - «„>, ?о = I (Со + ??) + ГТТ^-' <9-3>
где ? — любое комплексное число. Поэтому преобразования
0{Cqx) и О(Сс0) эквивалентны: 0(Cqx) = 0Яо О (Cc0) Ogl Тем не
менее можно рассматривать q = Сс0 и q = C^i как разные
типы рассматриваемых подгрупп (или как различные их
реализации) ввиду того, что в определение комплексного вектора ??
входят дополнительные по сравнению с с0 параметры.
Очевидно, случай q2 = 0 (q — круговой вектор) является
особым. При этом q всегда можно представить в виде
q = Ce, е2 = 0, ее* = 1. (9.4)
При фиксированном е и различных С такой вектор-параметр
порождает две подгруппы С = а и С = а + га' (а, а'
вещественны) . Значения С = ?? не дают новый тип подгруппы, так как
мнимую единицу можно включить в е, пе меняя условий (9.4),
определяющих круговой вектор. Для этого случая композиция
(8.16) сводится к простому сложению
<Се, Се) = (С + С) е. (9.5)
60
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Таким образом, используя различные виды фиксированных
векторов: вещественные (с0), круговые (е) и общие комплексные
(дг)у мы получаем 10 типов однопараметрических абелевых
подгрупп группы 50C, С).
Отметим, что подгруппа q = Се поддается простой
интерпретации. Рассмотрим 2Х2-матрицы (см. E.30), E.31))
Легко убедиться, что
V (q) V (q') = V «9, tf'»f I V (q) | = 1. (9.7)
Следовательно, матрицы V (q) образуют группу, изоморфную
50C, С). Полагая q = Се и выбирая круговой вектор е в виде
где еа — орты декартовой системы координат (еаеь = ??&),
получим для компонент вектора q = Се = (? + ??') е выражения
?? =Щ2 = С/"|/2, дз = 0. При этом матрица (9.6) принимает вид
'<*>-(· ,vfci· <м»
Такие треугольные матрицы реализуют представление группы
смещений точки евклидовой плоскости (см., например, [9.1]).
Действительно, пусть ? = х\ -\-ix2 определяет точку комплексной
плоскостп (хи #2), тогда
У {Се) (;) = (i), z'=z + iV2C.
Таким образом, подгруппа О (Се) комплексной группы
вращений изоморфна группе ? сдвигов на двумерной плоскости. При
этом С = ? = ?* соответствует сдвигам вдоль фиксированной
прямой (оси х2), а С = а + га' — произвольным сдвигам.
Для дальнейшего мы воспользуемся разложением
вектор-параметра в аксиальном базисе. Рассмотрим совокупность векторов
q, определяемую формулой
q = Сс0 + а$е + 6?*?*, а = а*, Ъ = Ь*. (9.9)
При этом вещественные числа а и Ъ мы считаем
фиксированными. Результат композиции вектора (9.9) с вектором того же типа
q' = С'с0 + а$'е + Ь$'*е* имеет вид (см. (8.16), (8.19))
<?, ?'> = С"с0 + а$"е + 6?"***, (9.10)
§ 9. ПОДГРУППЫ КОМПЛЕКСНОЙ ГРУППЫ SOC, С)
и
где
С + С' + М^р'-рр'»)
~1~??'~?&(??'* + ?'?*)' * 1;
ft" = ? + ?; + ** (fl'P —??') /? 4 9^
Мы видим, что при любых вещественных С и комплексных ?
композиция двух векторов типа (9.9) снова дает вектор того же
типа (при аЪ = О условие вещественности С отпадает). Поэтому
совокупность таких векторов определяет некоторую подгруппу
группы 50C, С) или, вернее, несколько подгрупп, отличающихся
за счет выбора чисел а и Ь.
Рассмотрим сначала случай, когда одно из чисел а, Ъ
обращается в нуль. При этом второе число можно включить в
соответствующее ? (или ?*), и мы получим q = Сс0 + ?? (b = 0)
или q = Cc0 -f ??* (? = 0). Видно, что случай а = 0 не дает
ничего нового по сравнению со случаем 6 = 0. Действительно*
различие между е и е* проявляется лишь в том, что [с0е] = iey
а [с0е*] = — ге*. Но если заменить с0 на — с'0, то [сое]= — ге и
[cje*]= fe*, т. е. по отношению к вектору с'0 противоположное
направления векторы е и е* меняются ролями. Поэтому ясно,
что, положив С = —С, с'0 = — с0, мы придадим вектору q =
= Сс0 + ?? свойства вектора q = Сс0 + ??*.
Итак, соотношение
9 = ^0 + ?? (9.13)
определяет совокупность комплексных вектор-параметров,
замкнутую по отношению к закону композиции (8.16), т. е. группу..
Мы имеем
<С* + * Се, + у * . 'C + C'>C' + (|,1+i;'(C'P-CP'))C, (9.14,
1 + q2 = 1 + С2. (9.15)
Из этих соотношений видно, что вектор-параметры вида (9.13)
определяют по существу четыре подгруппы, в зависимости от
значения С: I. С = С*. II. С = to, а2 < 1A +q2 > 0). III. С =
= ??, ?2?? A + q2 ? 0). IV. С = ? + to7.
Вектор-параметр (9.13) может быть однозначно представлен
как результат композиции (8.35), (8.36)
Сс0 + ?* = <??0, ?*> = ??0 + ? A - ??) e,
откуда следует ? = С, ? =. ?/A—?С). Таким образом,
q = Сс0 + ?* = <Сс0, ?*/A - iC)>, (9.16)
т. е. каждый элемент группы (9.13) может быть представлен в
«2
ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
виде произведения соответствующих элементов рассмотренных
ранее групп q = Cc0 hj = Се.
Заметим, что наряду с (9.13) можно было бы рассмотреть
также вектор-параметры
q = Cq0 + $e, ql = 1, [q0e] = ± ie, (9-17)
где q0 — комплексный вектор. Однако такой вектор-параметр не
дает ничего нового по сравнению с (9.13). Действительно,
аналогично (9.9) вектор q0 может быть представлен в виде q0 =
= С'с0 + ?'? (член е* отпадает, поскольку #0е = 0), и мы
возвращаемся к выражению (9.13).
При С = а = а* вектор q = ас0 определяет вращение на угол
<р = 2 arctg ? вокруг направления с0, перпендикулярного е.
Поэтому произведение <?с0, ??> есть произведение элементов двух
абелевых групп, в совокупности дающее сдвиг точки на
плоскости и поворот плоскости. Но такое преобразование характеризует
группу ?B) движений евклидовой плоскости [9.1].
Следовательно, при вещественных С группа (9.13) изоморфна группе ? B),
которая, в частности, может быть представлена с помощью тре-
угольных матриц [0 Jj (ср. (9.8), а также [9.1]).
Согласно (8.40) —(8.42) общий комплексный вектор-параметр
всегда можно представить как результат композиции двух
векторов
q = ас0 + ?? + ye* = <?<?0 + ??, ??*>. (9.18)
Это означает, что всякое преобразование группы комплексных
вращений 50C, С) может быть представлено как произведение
преобразований комплексной*) группы ? B) и группы q = ??*.
Последняя может быть представлена аналогично (9.8) треуголь-
ными матрицами, но левыми: L J,
Представление (9.18) возможно и для вещественных
векторов q, когда ?=?* и ?=?* (см. (8.43)). Следовательно, любое
преобразование вещественной группы вращений может быть
выражено через произведение преобразований двух подгрупп
комплексной группы вращений: ? B) и? = ??*. Указанная
возможность представления всех преобразований групп 50C, С) и S0C)
через произведения преобразований групп q = ?с0 + х\е и q =
— ??* широко используется в теории представлений группы
вращений и группы Лоренца. Представление (9.18) может быть
осуществлено и в другом порядке (см. (8.45) — (8.47)).
Обратимся теперь к случаям, когда в выражении (9.9) ни а,
ни Ъ не равны нулю. Из (9.10) — (9.12) следует, что при этом
*) В том смысле, что коэффициент С в (9.16) является не
вещественным, а комплексным.
§ 9. ПОДГРУППЫ КОМПЛЕКСНОЙ ГРУППЫ 50C, С) 6&
С может быть вещественным (С = а). Мы имеем
1+?2 = 1 + ?2 + 2??|?|2, (9.19)
откуда следует, что случаи аЪ > О и аЪ < О существенно
отличаются один от другого, поскольку в первом — всегда i + q*>0%
а во втором 1 + q2 может принимать как положительные, так и
отрицательные значения.
Если положить а = Ь, то согласно (9.19) q = q* = с, т. е. мы
получим вещественную группу вращений S0C). При любых
афЪ, ab>Q получается группа, изоморфная S0C). Чтобы
показать это, учтем, что с0, е, в* являются собственными векторами
преобразования О(Сс0) с любым СФ±г. Пусть С = is (? =
= ?* ? ±1), тогда
Oi*c0c0 = c0, OieCoe = ke, 0UCQe* = -±-?*, к = i±S-. (9.20>
Поэтому
<fe*0i ?> — *в*о> = °i*c0q = ?^? + ?^?? + — ?*?*· (9·21>
Очевидно, при аЪ > О всегда можно так выбрать &(?), чтобы
ак = fc/ft. А это означает, что преобразования са=ЬиафЬ
эквивалентны между собою. Тем не менее мы будем
рассматривать случай аЪ > О, а Ф Ъ как новый тип подгруппы, поскольку
в выражение (9.9), которое можно написать в виде
q = аС() + ?* + ??*?* (? = а*), (9.22).
входит дополнительный параметр ? = ?*.
При аЪ < О рассмотрим сначала случай Ь = —а. Включая ?
в ?, получим из (9.9)
g^aco + ??-?·**. (9.23)
Пусть 1 + q2 = 1 + ?2 — 21 ? |2 > 0. Тогда вектор-параметры (9.23)
определяют группу, изоморфную группе SLB) вещественных
унимодулярных матриц второго порядка. Действительно,
положим ? = ?? + ??2 и
с0 = е21 e = (e1-ie^/V2t e* = (ег +ie2)/V2.
При этом из (9.23) следует q = ????, где
gi = ?/2?2, ?2 = ?, ?3 = — ?????.
Подставляя эти выражения в формулы (9.6), найдем
V(!)-V\u, ^ii =
V« M' Kl +
?
(9.24>
64 ГЛ. I. ТРЕХМЕРНАЯ ОРТОГОНАЛЬНАЯ ГРУППА
Мы видим, что все элементы матриц V (q) (9.6) (в данном
случае мы будем обозначать эту группу матриц V0 (q))
оказываются вещественными. Следовательно, вектор-параметры (9.23)
действительно определяют группу, изоморфную SLB).
Более широкую группу мы получим, наложив более слабое
условие 1 + q2 ? 0. При этом все элементы матриц V0 (q) для
? + #а < 0 согласно (9.24) будут чисто мнимыми числами.
Отметим, что группа (9.23) содержит в качестве своих
подгрупп рассмотренные выше группы q = ас0; q = iac0; q = aqx\
Таблица 9.1
Таблица подгрупп комплексной группы вращений
?
?
2
з
4
5
1 6
7
8
9
10
И
12
13
14
15
16
17
18
19
20
Вид вектор-параметра
I. q=Cc0, с0=с0 » cl=i
С=а=а*
C=ia, ?2<1
C=ia, ?2??
C=a+ia'
П. q=Cqi, ef=l, ql*±qi
С=а=а*
C=ia, ?2<1
?=??, ?2??
C=a-\-ia'
III. q=Ce, e2=0, ??*=1
C=a=a*
IV. 2 = ??0+??, [c0e]=ie, ee*=l
C=a,=a*
C=ia, a2<l
C=fot, aV=l
?=?+??'
a=b=i
афЬ
VI. 0=aco+fl$e-&p*e*, ?=?*, 6=6*, ab>0
a=6=l, l+a2>2
a=b=l, l+aV=2
a^b, l+a2>2ab|
a=^6, l+aV=2ab|
? I2
? 2
Ч2
J|«
Изоморфные
группы
5, SO B)
6
7, 50 A,1), 5ЯB)
8
1
2
3
4
?
? B)
16, 50 C)
15, SO C)
19, 50 B,1)
20
17, SO B,1)
18 I
q = lagfi и j = ae. Таким образом, трехпараметрическая группа
(9.23) гораздо богаче подгруппами, чем ?0C).
Если аЪ < 0, но Ь =5^ —а, то мы получим группу,
изоморфную предыдущей, что доказывается с помощью того же
соотношения (9.21).
Таким образом, вектор-параметр вида (9.9) порождает все
типы подгрупп, ^рассмотренные выше, сводка которых дана в
§ 9. ПОДГРУППЫ КОМПЛЕКСНОЙ ГРУППЫ 50C, С) 65
табл. 9.1*). Действительно, при а=Ь = 0 получаем из (9.23)
подгруппы типа q = Сс0, при С = Ъ = 0 — подгруппы q = ?? и,
наконец, при а = —6 = 1 и соответствующем значении ? из
(9.9) следует q=Cq1(ql=l).
Отметим, что во всех случаях, приведенных в табл. 9.1,
кроме 4, 8 и 14, вектор-параметр является каноническим, т. е.
удовлетворяющим условию q = q*.
Из рассмотренных 20 подгрупп 7 пар групп изоморфны
между собой. Это пары групп A,5), B,6), C,7), D,8), A5,16),
A7,19), A8,20). Следовательно, неизоморфных между собой
групп насчитывается 13, а именно, 1—4, 9, 10, 11—15, 17, 18.
Хорошо видно, что все группы 1—10 являются частными
случаями по отношению к типу IV. Для типов I, III это очевидно,
а тип II получается, если положить ? = хС при фиксированном
комплексном С. При этом самой богатой подгруппами является
группа IV, насчитывающая 12 подгрупп.
Проведенный здесь анализ подгрупп группы 50C, С) и их
структуры, использующий исключительно свойства трехмерного
комплексного вектор-параметра и закона композиции (8.16),
можно рассматривать как иллюстрацию эффективности
векторной параметризации.
*) Заметим, что подгруппы 5—8 получаются из 11—14, если взять
вектор-параметр в виде q = С (с0 + ?0?) и фиксировать ?0 (так как (с0 +
+ ??*J = 1).
5 ?. и. Федоров
Глава II
ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
§ 10. Представления. Перестановочные соотношения
для инфинитезимальных операторов
Представлением группы G называется группа линейных
преобразований (в частности, квадратных матриц) в линейном
пространстве R, элементы которой Т6 находятся в определенном
соответствии с элементами g группы G. Это соответствие: g\-*~Tgt1
g2-+-Tgi и т. д. характеризуется следующими свойствами:
TgJgi = ТМш, A0.1)
Те = 1, A0.2)
где е — единица группы G, а 1 обозначает единичную матрицу
в пространстве R. При этом каждому элементу g^G поставлен
в соответствие один вполне определенный оператор Tg1 однако
обратное соответствие T-+G в общем случае не является
однозначным. Иными словами, представление группы может быть
беднее элементами, чем сама группа. Это обстоятельство
выражают словами: представление группы является ее гомоморфным *)
отображением на группу матриц.
Пространство R называется пространством представления.
Элементы этого пространства (векторы) будем обозначать ?.
В зависимости от того, конечно или бесконечно число
измерений пространства Д, различают конечномерные и
бесконечномерные представления. Число измерений конечномерного
пространства представления ? называют размерностью представления.
Под действием преобразования представления Tg вектор ?
переходит в некоторый другой вектор ?' того же пространства Д,
что мы будем записывать в виде
?' = ^?, ?,?'???. A0.3)
*) В отличие от изоморфного — взаимно однозначного отображения.
§ 10. ПЕРЕСТАНОВОЧНЫЕ СООТНОШЕНИЯ
67
Линейное преобразование ? в линейном векторном
пространстве R можно задавать по-разному. Пусть /а, а = 1, 2, ..., га,—
базисные векторы некоторого га-мерного пространства. Это
означает, что любой вектор ? данного пространства может быть
представлен в виде линейной комбинации
? = ??/?· (Ю.4)
Совокупность комплексных чисел ?? называют компонентами
(или координатами) вектора ? относительно базиса (/«). Их
задание (при фиксированном базисе) однозначно определяет
любой вектор ?. Действие линейного оператора ? на любой вектор
? полностью определяется, если указать, как он действует на
векторы базиса
?7? = 7?· A0.5)
Каждый из векторов ]а в свою очередь может быть представлен
в виде линейной комбинации базисных векторов /р
/? = ^??/?·
A0.6)
Матрица ГаР есть матрица оператора ? в базисе /V Она
полностью определяет линейный оператор Т. Чтобы убедиться в этом,
подействуем оператором ? на вектор ? A0.4). В силу
линейности ? и соотношений A0.6) мы получим
ТУ = VaTJa = ??7? = ??7\??/? = ??/? = ?'. (Ю.7)
где
?? = ??. A0.8)
Таким образом, знание матрицы оператора (Г^) позволяет
найти компоненты ?? вектора ?', являющегося результатом
действия оператора ? на любой вектор ?. Если, в соответствии с
принятыми в § 1 обозначениями, написать
* = (*«) =
?*?)
¦W
?' = Ш =
+?)
С;
(???)
11
nl
in
A0.9)
то в безындексной записи соотношение A0.8) будет иметь вид
?' = ?? = ??. A0.10)
Таким образом, если известна матрица (Г^) оператора Т*) в ба-
*) Мы обозначаем сам линейный оператор и соответствующую ему
матрицу (Гвр) в базисе (/р) одной и той же буквой Т.
5*
68 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
зисе (/р), то матрица-столбец компонент преобразованного
вектора ?' получается из матрицы-столбца компонент вектора ?
(в том же базисе (/?)) путем операции умножения на
транспонированную матрицу Т.
С другой стороны, векторы ? можно задавать не в виде
разложений A0.4) по базисным векторам, а непосредственно в
виде матриц-столбцов ? = (??) A0.9), поскольку базис (/«)
обычно является фиксированным для всего пространства.
Тогда линейный оператор Т, преобразующий ? в ?', задается
соотношением
?' = ??, ??=?????. A0.11)
Мы будем обычно пользоваться вторым способом задания
оператора ? непосредственно в виде матрицы, умножаемой справа
на матрицу-столбец преобразуемого вектора. Однако в
литературе часто используется также задание оператора посредством
его действия на базисные векторы, т. е. с помощью формул
A0.5) —A0.10). Таким образом, оба способа задания оператора
? отличаются транспозицией его матрицы.
Подпространство Rx пространства R называется
инвариантным относительно представления g-*~Tg, если из ?^/??,
следует Tgty^Ri для всех g^G и всех ?^??, ?. е. если действие
всех Tg на векторы подпространства R\ не выводит их за
пределы R\. Представление Tg в R называется неприводимым, если
в R нет инвариантных относительно Tg подпространств,
исключая тривиальные: нулевое и все пространство R.
Согласно B.5) преобразования группы вращений 0+(с)
являются непрерывными и дифференцируемыми матричными
функциями вектор-параметра с. Для краткости мы будем опускать
индекс «+». Очевидно, соответствие g-+-Tg в случае группы
вращений можно записать в виде 0(с)-*~ ? (с). Поскольку (см.
C.1) и C.6))
О (с') 0(с) = 0 «с', с» = О [С'\С^С] )¦ (Ю.12)
то условия A0.1), A0.2) принимают соответственно вид
Т (с') Т(с) = Т «с', с» = ? [ с' + с +}с'е] \ A0.13)
\ 1 — ее I
Г@)=1. A0.14)
Заметим, что соотношение A0.14) является следствием
A0.13). Действительно, при с' = 0 имеем
Т@)Т(с) = Т(с)
для любого с, что после умножения справа на Т'1 (с) приводит
§ 10. ПЕРЕСТАНОВОЧНЫЕ СООТНОШЕНИЯ
09
к A0.14). Таким образом, условие A0.13) полностью
определяет представление группы вращений.
В дальнейшем мы будем в основном иметь в виду
матричные представления, не считая особо оговоренных случаев.
Очевидно, при этом соотношение A0.13) по своему характеру будет
матричным функциональным уравнением.
Отметим еще, что из A0.13), A0.14) при сг = — с следует
Г(-с)Г(с) = Г@) = 1, т. е.
Г(с) = Г(-с). A0.15)
Из сравнения A0.12) и A0.13) ясно, что сами матрицы О (с)
реализуют одно из представлений группы вращений, так
называемое основное представление.
Пусть в пространстве представлений R осуществлено
преобразование базиса с помощью произвольной постоянной
неособенной матрицы S. Под этим подразумевается, что все векторы ?
пространства R испытывают преобразование ?-^^?. При этом
действующие в пространстве R операторы представления ? (с)
претерпевают преобразование подобия
Г(с) = 52,(сM.
Как видно, соотношение A0.13) остается в силе для матриц
Г'(с), какова бы ни была не зависящая от с матрица S.
Следовательно, матрицы Тг (с) также реализуют представление
группы вращений, которое называется эквивалентным представлению
? (с). В теории представлений групп эквивалентные
представления рассматриваются не как существенно различные, а как
разные формы одного и того же представления, отличающиеся
за счет выбора базиса.
При малом с, разлагая ? (с) в ряд Маклорена, получим с
учетом A0.14)
Т (с) = ? @) + с (^-)с=о + ... = 1 + 2cJ, A0.16)
где постоянный матричный вектор-оператор J = (/?),
определяемый соотношением
'--И^Ь <10·,7>
называется инфинитезимальным вектор-оператором
представления группы вращений. Подчеркнем, что J следует
рассматривать как трехмерный вектор, компонентами которого являются
матрицы Jа (я=1, 2, 3), определяемые по формуле
70 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
Аналогично G.12) введем обозначение
c = cJ = caJa. A0.18)
Таким образом, для бесконечно малых преобразований
представления группы вращении имеем
Г(с) = 1 + 2с. A0.19)
Величину с при любом с мы будем называть инфинитезималъ-
ным оператором представления. Покажем, что задание вектор-
оператора J однозначно определяет представление группы
вращений. Для этого положим в A0.13) \cr | бесконечно малым.
Мы получим
? (с') Т(с) = Т «с', с» = Т(с) + 8с d-^f-? A0.20)
причем (ср. F.8))
8с = с'A + с.с + с*). A0.21)
С другой стороны, согласно A0.19) Т(сг) = 1 + 2с', поэтому
A0.20) принимает вид
2с'? (c) = c'(l + c.c + cx)-j^T (с). A0.22)
Это соотношение справедливо при любом направлении
бесконечно малого вектора с'\ полагая с' = кс и учитывая, что ссх =
в» [ее] = 0, получим после сокращения на к
27т(с) = A + с*)с^Т(с).
Поскольку с(д/дс) = |с\ {did\с|) (см. F.18)) и с=\с\с1,
где с ? = 1, последнее уравнение принимает вид
?????&?- A0·23>
Это обыкновенное дифференциальное уравнение для матрицы ?
легко интегрируется, поскольку матрица сг не зависит от \с\:
Т(с) = Сехр{2сг\d\e|/A +1с|2)} = Сехр {2сгarctg\e\).
Вследствие условия A0.14) постоянная матрица С равна
единичной, и мы имеем окончательно:
? (с) = ехр [2с± arctg \e\]. A0.24)
Таким образом, достаточно найти инфинитезимальный вектор-
оператор Jx чтобы тем самым полностью определить соответст-
§ 10. ПЕРЕСТАНОВОЧНЫЕ СООТНОШЕНИЯ 71
вующее представление группы вращений ? (с). Следовательно,
решение вопроса о построении представлений группы вращений
упирается в определение вида вектор-оператора J.
Обратимся к соотношению C.24), которое перепишем в
следующем виде:
сГ = 0(с)с' = <с, с', — с>.
Отсюда следует в соответствии с A0.13)
? (с") = Т(с)Т {с') ? (— с). A0.25)
Для малого с' (а значит и с") получаем согласно A0.19)
с" = Т(с)?Т(— с) = Oific'. A0.250
Если вектор с также мал, то с учетом B.13) получаем
с' + 2 [??] = A + 2с) ? A - 2с)
или, ограничиваясь членами второго порядка малости,
[сс'\ = ее' — с'с.
Используя для коммутанта (антикоммутанта) операторов Л, В
обозначение
{АВ}Т = АВ + ВА, "A0.26J
перепишем полученное соотношение в виде
{cPU = [??]. A0.27)
Поскольку это равенство однородно по векторам с и с', то мы
можем отбросить предположение о их малости и считать здесь
сие' произвольными по направлению и величине.
Мы получили перестановочные соотношения для инфинитези-
мальных операторов. Из их вывода ясно, что они имеют один
и тот же вид для любых представлений группы вращений, хотя
матрицы /а, разумеется, различны для разных представлений.
Раскрывая A0.27) с учетом A0.18), получим
СаРъ \J а^ъ)— == &abccacbJс»
откуда следует ввиду произвольности са, сь
{/а/ь}_ = EabJc A0.28?
или
{/1/2}_ = /3, {/2/з}- = /,, {/3/?}- = /2.
Нетрудно убедиться путем непосредственной проверки, что все
операторы G.14) — G.24) удовлетворяют этим перестановочным
соотношениям.
72
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
Соотношения A0.27), A0.28) непосредственно вытекают из
A0.13), т. е. из того факта, что ? (с) является представлением
группы вращений. Следовательно, эти перестановочные
соотношения являются необходимыми условиями, которым должны
удовлетворять матрицы /в, для того чтобы они являлись инфини-
тезимальными операторами некоторого представления группы
вращений. Можно доказать, что они являются и достаточными
условиями. А именно, справедливо следующее утверждение: если
какие-либо три матрицы /в удовлетворяют условиям A0.27) или
равносильным им A0.28), то эти матрицы являются инфините-
зимальными операторами (генераторами) некоторого
представления группы вращений [5].
§ 11. Унитарность представлений группы вращений
Скалярное произведение F двух векторов ? и ? в
конечномерном комплексном пространстве R определяется следующим
образом:
F = ?*?? = ??????. A1-1)
Здесь матрица ? должна быть эрмитовой
?+ = ?* = ?, ??? = ??? A1.2)
и положительно определенной, т. е.
?*??>0 (??=0). A1.3)
Во всяком конечномерном пространстве может быть введено
скалярное произведение, например, путем выбора ? = 1.
При линейном преобразовании базиса пространства все
векторы этого пространства изменяются: ?-?-?', ?->•?', ..., причем
это изменение сводится к линейному преобразованию векторов
с помощью одной и той же неособенной матрицы S
? = 5?', ? = 5?', .... |S|#0. A1.4)
Подставляя эти выражения в A1.1), получим
F = Щ') *n\Sx') = E*?'*) ???' = ?'*5+?5?'.
Мы видим, что в новом базисе скалярное произведение
принимает вид F = ф^т/х'» причем
?' = S+r\S, ? = S+^ifS-1. A1.5)
Всякая эрмитова положительно определенная матрица может
быть представлена в виде
х\ = А+А, A1.6)
где А — некоторая неособенная матрица. Действительно, с по-
§ 11. УНИТАРНОСТЬ ПРЕДСТАВЛЕНИЙ ГРУППЫ
73
мощью некоторой унитарной матрицы U, т. е. матрицы,
обладающей свойствами
U+U = UU+ = 1, U+ = ?-\ A1.7)
можно привести ? к диагональной форме ??: ? = Ut\qU =
= U+r\U (см., например, [16]), причем элементы, стоящие по
диагонали матрицы ??, будут положительны. Поэтому
квадратный корень ??? будет диагональной матрицей с вещественными
элементами, т. е. эрмитовой матрицей, и мы можем написать
?0 = (]/?0J = (??0)+??0. Отсюда ясно, что, положив А = Ут)о#,
мы представим ? в форме A1.6). Из A1.6), (Н.7) следует, что,
выбрав S = А~\ мы получим ?' = 1. Таким образом, путем
линейного преобразования базиса пространства матрица любого
скалярного произведения всегда может быть сделана единичной,
т. е. скалярное произведение может быть представлено в
простейшей форме
F = ?*? = ?;??. A1.8)
Преобразование с помощью некоторой матрицы V,
действующее в пространстве Я, называется унитарным, если применение
V к обоим векторам скалярного произведения A1.1) не меняет
последнего, т. е. если
G?)*?G?) = ?*G+?^)? = ?*??.
Поскольку это соотношение справедливо при любых ?, ?, то
7+?7 = ?. (Ц.9)
Таково общее определение унитарного преобразования.
Очевидно, свойство A1.7) является частным случаем A1.9) при ? =,1.
При преобразовании базиса A1.4) V, как и всякий линейный
оператор, испытывает преобразование подобия
v = svs-k (и.юу
Выбирая в качестве S преобразование, обращающее ?' в
единичную матрицу, т. е. полагая ? = S+ S~l (см. A1.5)), и
подставляя последнее выражение вместе с A1.10) в A1.9), получим
V/+V = 1, т. е. свойство A1.7). Следовательно, матрица всякого
унитарного преобразования путем линейного преобразования
базиса может быть сделана унитарной в смысле определения
A1.7). Иначе это можно выразить словами: матрица унитарного
преобразования подобна унитарной.
Покажем, что преобразования представлений группы
вращений являются унитарными относительно надлежаще
определенного скалярного произведения. Пусть ? (с) — преобразование
74 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
представления и Л — произвольная постоянная неособенная
матрица. Построим матрицу
А1(с) = Т+(с)АТ(с) A1.11)
и обозначим через ? инвариантный интеграл от этой матрицы
по группе вращений (см. § 6)
Роль функции f(c) (см. § 6) играют здесь элементы матрицы
A1.11). Вследствие свойства инвариантности F.3) интеграл
A1.11) не изменяется, если в Аг(с) мы произведем правый
сдвиг аргумента с->·<<?, с°>, т. е.
ч - Ь <«> (IW = ? Al (<с'с0>) ii+V A1ЛЗ)
Но согласно A1.11) при любом сь
?? «с, с"» = Т+ «с, с"» ?? «с, с·» =
= (Г (с) Г (с°))+Л ? (с) ? (с0) = Т+ (с0) Лх (с) Г (с0).
Поэтому из A1.13) следует
? = j Г+ (с»)Л (с) Г (с») ^i^· = Т+ (с») ?? (с«), A1.14)
т. е. при любом с0 для преобразования ? (с0) удовлетворяется
условие A1.9). Таким образом, преобразования представлений
группы вращений унитарны по отношению к скалярному
произведению с матрицей A1.12). Согласно доказанному выше мы
всегда можем так выбрать базис в пространстве представлений,
чтобы матрицы ? (с) были унитарны в смысле A1.7). Как
отмечалось в предыдущем параграфе, преобразование базиса
несущественно для представления, поэтому мы всегда будем считать
базис выбранным таким образом, чтобы ? = 1 и выполнялось
условие A1.7) унитарности матриц представления
Т+ (с) = Г (с) = ? (- с). A1.15)
Применяя это условие к соотношению A0.24), получим
(exp {2ctJ arctg | с |})+ = exp {2ctJ+ arctg | с \} =
= ехр {— 2cxJ arctg | с |},
откуда следует
J+=-J, /? = -/?, с+ = -с (с = с*), A1.16)
§ li. УНИТАРНОСТЬ ПРЕДСТАВЛЕНИЙ ГРУППЫ
75
т. е. инфинитезимальные операторы представления группы
вращений являются антиэрмитовыми матрицами. Вместо /в можно
ввести эрмитовы инфинитезимальные операторы
I = iJ, Ia=iJa, /+ = /. A1.17)
Перестановочные соотношения A0.28) для операторов /в
принимают вид
{1а1ь}~ = itabJc A1.18)
Соответственно соотношение A0.24) заменяется следующим:
? (с) = ехр( —2ic1arctg[c|), c1 = c/|c|, A1.19)
где введено обозначение (см. A0.18))
?) = cl = caIa = ic, с+ =7? (с* = с). A1.20)
При этом перестановочные соотношения A1.18) принимают
форму
[с?}- = 1[ссГ]. A1.21)
Мы будем, в основном, пользоваться этими перестановочными
соотношениями вместо A0.27), ввиду эрмитовости инфинитези-
мального оператора с.
Рассмотрим сумму квадратов компонент 1а инфинитезималь-
ного вектор-оператора любого неприводимого представления
группы вращений
P = H = IaIa = Ia6abIb = IlL A1.22)
Здесь 1 обозначает единичную трехмерную матрицу. Из
перестановочных соотношений A1.18) следует*)
{1ЧЬ}_ = {/?/?, /ь}_ = Ia{IJb}- + {IJb}-Ia =
= ^abc(/a/c + /c/a)=0, A1.23)
так как Bate антисимметрично по отношению к индексам а, с,
а выражение в скобках симметрично по отношению к тем же
индексам. Таким образом, квадрат вектор-оператора /а
коммутирует со всеми тремя своими компонентами, а, следовательно,
и с любой их линейной комбинацией. Поэтому можно написать
{/?}_ = {/?}_ = 0 A1.24)
для любого вектора с, в том числе комплексного, Оператор
/2 = К, коммутирующий со всеми /«, называется оператором
Казимира.
*) Здесь используется известное общее свойство коммутанта
{АВ, С}- = А{ВС}- + {АС}-В.
76
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
§ 12. Инфинитезимальные операторы неприводимых
представлений
Нашей задачей является определить вид матрицы инфините-
зимального оператора с неприводимого представления группы
вращений для любого вектора с. Предположим, что пространство
представления R имеет конечное число измерений. Важнейшей
характеристикой любой матрицы служит набор ее собственных
значений, которые являются корнями характеристического
полинома матрицы. Согласно теореме Гамильтона — Кэли (см. П.1)
всякая матрица удовлетворяет своему характеристическому
уравнению. Пусть s — размерность пространства представлений, тогда
общее характеристическое уравнение для матрицы с можно
написать в виде
/>(c) = cs + a1cs+ ... + аа-? + а9 = 0. A2.1)
Матрица с линейно и однородно зависит от компонент вектора
поэтому, очевидно, все члены матричного уравнения A2.1)
должны быть однородными функциями от са степени s. В
противном случае уравнение A2.1) не могло бы оставаться
справедливым для любого с. Отсюда следует, что каждый коэффициент ак
должен быть однородной целой функцией степени к от са. При
этом коэффициенты характеристического полинома являются
инвариантами преобразования подобия, т. е. они одинаковы для
матрицы с и матрицы при любой S (см. П.1).
Перейдем в соотношении A0.25') к операторам с A1.20)
с" = Ос,с = ? (с') сТ~1 (с'). A2.2)
Отсюда следует, что при любом повороте вектора с матрица с
испытывает преобразование подобия. Следовательно,
характеристические полиномы для матриц с" и с должны совпадать, т. е.
их коэффициенты CLh{c") и ah(c) должны быть одинаковы. Это
значит, что ак должны быть такими целыми однородными
функциями от са1 которые не меняются при любых поворотах
вектора с, т. е. инвариантны относительно вращений. Существует
лишь один независимый инвариант вектора с по отношению
к вращениям: с2. Поэтому отличными от нуля могут быть лишь
коэффициенты ак с четным к = 2к\ и они должны иметь вид
ak = a2hf = Ък* (с2)*', где Ьь' не зависят от с. Вследствие этого
полином ? {с) может содержать либо только четные, либо
только нечетные степени с, и уравнение A2.1) принимает форму
? (с) = с3 + Ь^с-2 + Ь2с&-* + ... = 0. A2.3)
§ 12. ИНФИНИТЕЗИМАЛЬНЫЕ ОПЕРАТОРЫ
77
Пусть сг будет наинизшей степенью с, коэффициент при
которой в полиноме ? \с) отличен от нуля. Тогда s — г = 2к —
четное число, и характеристический полином можно представить
в форме
[/^2\ft, / >*42N h— 1 /J**2\
Полином в квадратных скобках по теореме Гаусса разлагается
на биномы с2/с2 — ??, ? = 1, 2, ..., ft, причем числа ?? должны
быть вещественными положительными, так как эрмитовская
матрица с имеет вещественные собственные значения. Поэтому
?? = ??, и характеристическое уравнение в общем случае
должно иметь вид
р(с ) = 7 (с2 - ?2*2) (с2 - ?2*2) ... (с2 - ???2) = 0. A2.4)
Отсюда следует важный вывод о том, что отличные от нуля
собственные значения матрицы с всегда входят парами,
отличающимися знаком, и имеют вид ± Я|с|, где ? не зависит от с.
Согласно A2.4) собственные значения матрицы с не зависят от
направления вектор-параметра с, а лишь от его длины \с\. Кроме того,
отсюда следует, что каждому собственному вектору ?*,
отвечающему собственному значению ?, в пространстве представления
должен соответствовать собственный вектор ?_?.
Отыскание матрицы инфинитезимального оператора
представления с = са1а сводится к нахождению трех матриц 1\, /г, /з.
Вместо этого можно поставить задачу несколько иначе. Всякий
вектор-параметр с можно представить в виде слегка
видоизмененного разложения по векторам аксиального базиса (см.
C.38))
с = ас0 + ??+ + ?*?_, A2.5)
причем
е+ = е* = («J + ie,)//2, е- = е = е+ = (ех — iei)/-t/lt е+е. = 1,
A2.5')
i [с9е±] = ± е±, [e+e-] = — ic0, e\= 0.
Очевидно 1 = с1 = ас01 + §е+1 + ?*«_/ или
с = ас0 + ?*+ + ?*?_. A2.6)
Подчеркнем, что матрица с0 = с0/ эрмитова; cj = с0, т*к как
вектор с0 вещественна матрицы /« (см. A1.17)) эрмитовы. Что
касается операторов е± = е±1х то
(«±)+ = 4*+ = ? = V A2.7)
78 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИИ
Таким образом, матрицы е+ и е- эрмитовски-сопряжены одна
другой: (е±)+ =^т.
Согласно A2.6), если мы найдем матрицу с0 для
фиксированного единичного вещественного вектора с0 и матрицы е±
для соответствующих нормированных круговых векторов е±, то
для любого вектор-параметра с матрица с получится с помощью
коэффициентов ?, ? разложения A2.5) в виде линейной
комбинации A2.6). Пусть
М>т = Щт, A2.8)
где т — какое-нибудь собственное значение матрицы с0, а грт —
соответствующий собственный вектор.
Перестановочные соотношения A1.21) линейны и однородны
относительно каждого из векторов сие'. Поэтому, хотя при их
выводе мы предполагали векторы сие' вещественными, эти
соотношения сохраняют силу и для комплексных векторов.
Действительно, если
с = ?? + ?&,
где ?, & — вещественные векторы, а ?, ? — любые комплексные
числа, то, по определению A1.20), с = ?? + ?&. Поэтому (см.
A1.21))
{сс7}_ = [la + ?&, Р}_ = I [a?]- + ? {6^}_ =
= il [ас'] + щ [be'] = i [cc'].
Аналогично можно показать, что соотношение A1.21)
остается справедливым, если оба вектора с, с' являются
произвольными комплексными векторами. Следовательно, мы можем
применить соотношение A1.21) к векторам с0, е± и, учитывая
A2.5х), получим
{с0е±}_ = i [<Q?±] = ± е±. A2.8')
Действуя обеими частями этого матричного равенства на
вектор г|)т с помощью A2.8), находим
(с0е± — е± с0) ?/? = ± е±г|)т, с0 (е±Цт) = (т ± 1) е±^т.
Следовательно, вектор e±tym (если он не нулевой) является
собственным вектором матрицы с0, отвечающим собственному
значению иг ± 1, т. е.
?+??» = efi"Wl. A2·9)
е-урт = o4m-i, A2.90
где <Хт — некоторые коэффициенты.
§ 12. ИНФИНИТЕЗИМАЛЬНЫЕ ОПЕРАТОРЫ
79
Коэффициенты а™ будут иметь определенные значения
лишь при условии нормировки векторов ?™. В качестве такого
УСЛОВИЯ МЫ ВОЗЬМеМ ???'??? = tym±ltym±l= 1· С ДРУГОЙ СТОрОНЫ,
поскольку с0 — эрмитова матрица, то ее собственные векторы,
отвечающие различным собственным значениям, ортогональны.
Таким образом,
???????' = Smm'. A2.10)
Очевидно, этими условиями ?™ определяется с точностью до
произвольного фазового множителя ???(??). Каковы бы ни были
комплексные коэффициенты ат'или а^ , мы всегда можем
подобрать в соотношениях A2.9), A2.9') эти фазовые множители так,
чтобы либо а(т\ либо am для всех т были вещественными
положительными числами. Предположим это условие выполненным
для a(m}.
Если подействовать оператором е± на вектор ?™ к раз, то
получим
?±?« = ^?«±?? A2.11)
где
Акт = c^aigx ... aiiVi)· A2-12)
±
Предположим, что матрица с0 имеет наибольшее собственное
значение Z, и пусть ?? будет ее собственным вектором,
относящимся к этому собственному значению. Действуя на ??
повторно оператором е_, мы получим совокупность собственных
векторов ??, ??-?, ?_2, ..., ?^ ... Эта совокупность должна
заканчиваться вектором ?-*, так как, по доказанному выше, каждому
собственному значению ? отвечает собственное значение — ?.
Таким образом, при некотором целом к мы должны получить
Отсюда следует I — к = — Z, к = 2Z, т. е. ? = ft/2. Значит,
собственное значение ? в любом случае должно быть половиной
положительного целого числа к. Если подействовать оператором 0_
на ?-?, то должен получиться нулевой вектор, иначе согласно
A2.9х) мы имели бы ?-?-? = o?~i\|>-(i+i), что невозможно, так как
для собственного значения — (Z+1) по предположению не
найдется пары Z + 1>Z. Следовательно^-^-! = 0. Таким образом,
из одного вектора ? путем применения операторов е-, к =
80
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
= 0,1,..., 2Z, мы получим 21 + 1 векторов ?, ?-?, ?-2, ..., ?-н-ь
?_?. Очевидно ?+?? = 0, поскольку не существует вектора ??+?.
С другой стороны, согласно A2.9), A2.9') *±?±? = о@\|>±A+1).
Это соотношение можно согласовать с равенствами
М>±, = 0, A2.13)
если положить
а(Й} = 0, A2.13')
где следует одновременно брать верхние или нижние знаки.
Далее, по условию A2.9х)??-? = (?/?(?})?-?? и согласно A1.21) и
A2.5')
{е+е*-}- = е+е_ — е-в+ = <?„· A2.14)
Поэтому (см. A2.13), A2.9))
?+??-? = -^ e+e.^i = —^ (е^е+ + с0) ?, = — ?,. A2.15)
Аналогично можно написать, используя A2.9), A2.14),
a(+)a(-) _i_m
?+???-l = TIT) e+e-tym = — Ve-e+ + co) ?™ = (?) ???,
am am am
A2.16)
откуда ясно, что из e+tym ~ i|)m+i следует e+i|)m-i — ^m и т. д.
Таким образом, операторы е±, действуя на любой вектор \[)т
совокупности ??, ??_?, ..., ?-*, снова дают векторы, относящиеся
к ней, с точностью до множителей<Хт, причем а±г = 0.
Итак, совокупность всех векторов, полученных из
собственного вектора ? матрицы с0, отвечающего максимальному
собственному значению ?, путем повторного применения оператора е_,
обладает тем свойством, что, применяя к любому из них
произвольное число раз любой из операторов с0, е± или любое их
произведение, мы снова будем получать векторы той же
совокупности или нулевой вектор, т. е. не выйдем за ее пределы. Но тогда,
очевидно, тем же свойством будет обладать любая степень
оператора с A2.6) для любого вектор-параметра с, а значит, и
матрица ? (с) преобразования A1.19), которая согласно § 1
представляется в виде полинома от с. Следовательно, полученная
выше совокупность 21 +1 векторов ?™, —l^m^l, образует
базис представления.
Чтобы найти коэффициенты а^} (см. A2.9), A2.9')),
рассмотрим скалярное произведение обеих частей уравнения A2.9)
§ 12. ИНФИНИТЕЗИМАЛЬНЫЕ ОПЕРАТОРЫ 81
на ???+i. Учитывая нормировку A2.10), получим
???+????« = а?}. A2.17)
С другой стороны, на основании A2.7), A2.9') имеем
* ^ Г^+. 1* /^ , \* (-)*?*
???+??+ = L e+^m+i] = {e-tym+t) = ат+1г|}т.
Поэтому из A2.17) следует
atiWrn^rn = ofcTi = <4+)· A2.18)
Поскольку выше было показано, что коэффициенты ат всегда
можно выбрать вещественными и положительными, то согласно
A2.18) такими же будут и коэффициенты а(т\ Умножая
равенство A2.14) слева на tym и справа на ?™, получим с учетом
A2.9), A2.90, A2.7), A2.18)
(?;?+) (?.*¦) - (??-) (?+*.) = (????I ~ (с4+)J = ^.
Сумма этих соотношений от m = I до /и +1 дает (поскольку
??+) = 0).
(с4+))а = i + (I- 1) + (J ~ 2) + ... + (т + 1) =
:l(J + m + l)(Z-m).
Следовательно (см. A2.18))*),
i,+) = oS+)=a5+I='|/-|-(i + m + l)(Z-m) =
= ]/?1(/(/+1)_?»(?» + 1)). A2.19)
Заметим, что отсюда следует а±* = 0, как и должно быть
согласно A2.13'). Легко убедиться, что для ??»** справедливы
также соотношения
<4±} = j/"-?- [{l -l·- уJ - (m ± Щ = }^±A???)A±?? + 1),;
A2.20)
a«$>=a^>=ai(±). A2.21)
Поскольку любая матрица в гс-мерном пространстве
однозначно определяется результатом ее действия на ? линейно незави-
*) Мы вводим в коэффициенты а}*' верхний индекс I, чтобы явно
подчеркнуть их зависимость от ?.
6 ?. и. Федоров
82
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
симых векторов этого пространства, то формулы A2.6), A2.8),
A2.9), A2.9'), A2.20) полностью задают операторы с в
пространстве, натянутом на векторы ?™, —Кт<1.
Резюмируем полученные результаты. Рассмотрим и-мерное
комплексное линейное пространство Д, в котором выбран ортонор-
мированный базис ???, ??????' = Smm'·, m, w! = —?, — ? + 1, ...
..., ? — 1, ?; ? = (? — 1)/2, ? = 2? +1, неопределим в этом
пространстве три линейных оператора с, c+tc-, действующие на
векторы базиса следующим образом:
С0Цт = ^???, ?±??? = aii±4m±l. A2.22)
При этом с0 = Со, Со = с+с- = 1, [СоС^] = =F ie±1 [с+с-] = — icr
Операторы A2.22) удовлетворяют соотношениям
с_ = с+, {соС±}_ = ± с±, {с+с_}- = с0. A2.23)
Очевидно, если с2Ф1хто умножая соотношение ^i^m = ^^^m
(cj = l) на I с I = ?/c5, получим
сг|)т = т|с|г|)т. A2.24)
Для любых векторов с, с' можно построить операторы (см.
A2.5))
с = ас0 + ??+ + ?*?_, с' = а'с0 + $'е+ + ?'*?_, A2.25)
которые, как нетрудно проверить с помощью A2.22),
удовлетворяют соотношению A1.21) и поэтому согласно § 10 реализуют
некоторое представление группы вращений.
Это представление будет неприводимым, поскольку в
пространстве Д, натянутом на векторы ?™, не может быть
подпространства, инвариантного относительно операторов с+ и с_.
Действительно, если бы в R существовало инвариантное
подпространство R' размерности к @ <&</& = 2? + 1), то в нем имелось
бы не более чем к линейно независимых векторов. Но любой
вектор ? из R' может быть представлен в виде линейной
комбинации ? = ??????. Нетрудно убедиться, что^ согласно A2.9),
A2.9'), действуя на этот вектор операторами с+ и с-, мы можем
получить из него ? = 21 + 1 линейно независимых векторов,
каковы бы ни были коэффициенты ату не равные одновременно
нулю. Таким образом, в й не может существовать
подпространства, инвариантного относительно с±, а значит, и относительно
с A2.25), что и означает неприводимость представления.
Можно доказать [3, 4], что соотношениями A2.22), A2.5)
для ? = 0, 1/2, 1, 3/2 ... определяются все неприводимые
представления трехмерной вещественной группы вращений. Таким
§ 12. ИНФИНИТЕЗИМАЛЬНЫЕ ОПЕРАТОРЫ 83
образом, любое неприводимое представление группы вращений
однозначно определяется заданием числа Z, которое называется
весом представления.
Поскольку для неприводимого представления все собственные
значения т = — Z, —?+1, ..., Z — 1, ? различны, то для
матрицы с минимальный полином совпадает с характеристическим
и имеет вид (см. A2.4)) в случае целого ?:
pi (?) = [с2 _ р<л] [? _ (Z _ 1}2С2] ...[?_ 22С2] [с2 - С2] С = О,
A2.26)
в случае полуцелого Z:
? (с) = [с2 - ZV] [с2 - (? - 1Jс2] ... \с2 -(-М = 0. A2.27)
Эти выражения можно объединить в одном полиноме:
р1 (с) = [с2 - Z2c2] [с2 - (I - 1Jс2] ...
...[>_ C+ <-!)")' c2] ~i/2(i+(-iJ<) = 0? A2?28)
Степень уравнений A2.26) —A2.28) равна 2Z + 1.
Соотношения A2.26) — A2.28) справедливы не только для
вещественных, но и для комплексных векторов с и
соответствующих операторов с. В частном случае круговых векторов е±
A2.23) они принимают вид
7?+1 = 0. A2.29)
На основании A2.22) мы можем написать ковариантные
явные выражения для операторов с0, е± через собственные
значения и собственные векторы ?™ (см. П.1)
^ ?
с0= ? ™???·?™, A2.30)
m=-l
^ I
е±= ? о4±},фт±1"фт. A2.31)
Здесь выражения вида i|)m-i|)m обозначают матрицы-диады,
которые определяются соотношением (см. П.1)
(?·?)?? = ????. A2.32)
Нетрудно убедиться, что операторы A2.30), A2.31), при
действии на все векторы ?™ дают результаты, совпадающие с A2.22).
Матрицу неприводимого представления группы вращений
веса I будем обозначать Т1 (с).
б*
84
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
Рассмотрим совокупность матриц Г* (с), комплексно
сопряженных к матрицам ? (с) произвольного представления группы
вращений. Взяв комплексное сопряжение от равенства A0.13),
получим
Г* (с) Т* (с') = Г* «с, с'». A2.33)
Следовательно, матрицы Г* (с) также образуют представление
группы вращений. Ясно, что если матрицы ? (с) = ? (с)
образуют неприводимое представление веса ?, то и совокупность
Т1* (с) будет неприводимым представлением той же
размерности и соответственно того же веса ?. Но поскольку неприводимое
представление веса I группы вращений, как вытекает из способа
его построения, единственно с точностью до эквивалентности, то
Т1* (с) должно быть эквивалентно Г1 (с), т. е.
Т1* (с) = ST1 (с) S-1 ~ Т1 (с). A2.34)
Поэтому можно утверждать, что в случае группы вращений
любое представление совпадает с комплексно сопряженным к нему
(или, что то же самое, эквивалентно ему).
В § И было показано, что оператор Казимира К = I*
коммутирует со всеми компонентами 1а инфинитезимального вектор-
оператора / (см. A1.23), A1.24)). Поскольку для
неприводимого представления три матрицы 1а образуют неприводимую
совокупность, то согласно лемме Шура (П.4) матрица К должна
быть кратна единичной: К = ?. Чтобы найти число ?, достаточно
определить результат действия К на любой из векторов ?™
(см. A2.22)), например, на ?. Используя для единичной
матрицы в пространстве вектор-параметров выражение (см. П.1)
1 = с0-с0 + e+-e~ + е--е+, получим с помощью A1.22)
? = Л/ = / (с0-с0 + е+-е- + ?_·?+) / = Со + е+е~ + е~е+.
A2.35)
Но согласно A2.14) е+е- = е~е+ + с0, поэтому
К = /2 = с§ + с0 + 2е_е+. A2.35')
Поскольку e+tyi = 0, с0г|)г = ???, то Щг = I (I + 1) ??#
Следовательно, для неприводимого представления группы вращений
веса I
K = p = l(l + l) A2.36)
и соответственно (см. {11.17))
J*=*-1A + 1). A2.36')
§ 12. ИНФИНИТЕЗИМАЛЬНЫЕ ОПЕРАТОРЫ 85
С помощью этого соотношения можно получить
дифференциальное уравнение, которому удовлетворяют все элементы
матрицы неприводимого представления ? (с). Для этого используем
соотношение A0.22), из которого вследствие произвольности
вектора с1 вытекает, поскольку с' = cr Jc,
JcTl(c)=-L(i+cc + cX)-^Tl(c). A2.37)
Таким образом, согласно A0.22) умножение ? (с) на
матричный вектор-оператор Jc равносильно применению к ? (с)
дифференциального оператора G.15). Применяя еще раз к обеим
частям операцию Jc G.15), получим с учетом G.36)
Ц^ (?<+с ? [1+с ¦?¦))г' <с>+1 <*+*)Tl ^=°· A2·38)
Таким образом, каждый элемент матрицы преобразования
неприводимого представления группы вращений веса I должен
удовлетворять уравнению
(*.+«?(*+«?))/<«>+i^/M=0· A2·38'>
До сих пор мы ограничивались неприводимыми
представлениями. Если рассматриваемое представление приводимо, то его
матрица в надлежащем базисе может быть представлена в виде
(см. П. 3)
г(с) = 11е(ц®^D A2.39)
г
где ? г (с) — неприводимые представления веса ?», на которые
распадается ? (с), г* — их кратность. Как следует из вывода,
соотношения A1.23), A1.24) имеют место и для инфинитези-
мальных операторов приводимых представлений, т. е. квадрат
инфинитезимального вектор-оператора коммутирует со всеми
своими компонентами в случае любого представления группы
вращений как неприводимого, так и приводимого. Для
инфинитезимального преобразования соотношение A2.39) примет вид
(см. A0.19))
1 + 2с = 2 ? [Ц ® (lli + 2с4)] = ? ? (??| ® ?4) +
г г
+ 2? ? (lr{ ®с'1) = 1 + 2 2 ? (lr. ? с4). A2.40)
Следовательно, в общем случае инфинитезимальный оператор
86
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
приводимого представления имеет вид
c = Se(iri®clj, ? = ??(??^). (?2.4?)
Соответствующие выражения имеют место и для операторов е±
?± = ??(??(®5). A2.42)
Поэтому на основании A2.35) можно написать (см. П.З)
/2 = 2®(iri<S>(/'J)· A2·43>
i
Поскольку [I j есть квадрат инфинитезимального
вектор-оператора, относящегося к отдельному неприводимому представлению
с весом Z»·, то для него справедливо соотношение A2.36)
(lliy = h(h + i). A2.44)
Таким образом,
? = ? ? (lri ? I4) U (h + 1) = § ? h (h + 1) lriBii+i), A2.45)
i i
т. е. каждому неприводимому представлению веса Z<
соответствует скалярный блок Z<(Z< + 1)» который для представлений,
имеющих кратность г<, входит г* раз.
§ 13. Конечные преобразования представлении
труппы вращений
В предыдущем параграфе были найдены инфинитезимальные
операторы всех неприводимых представлений группы вращений.
С их помощью, на основании формулы A0.24), мы можем
определить соответствующие конечные преобразования
? (с) — exp {2cx arctg | с \} = ехр {— 21сг arctg | с \ }, сх = -щ.
A3.1)
Очевидно, этой формулой неудобно пользоваться для
непосредственных вычислений, так как экспоненциальная функция от
матрицы выражается бесконечным степенным рядом
* = 1 + ? + ^+...+-?-?*... A3.2)
Однако поскольку матрица с удовлетворяет
характеристическому уравнению A2.28) (оно же минимальное), то с21*1 выража-
§ 13. КОНЕЧНЫЕ ПРЕОБРАЗОВАНИЯ ПРЕДСТАВЛЕНИЙ 87
ется в виде линейной комбинации низших степеней с. То же
справедливо и для всех степеней выше, чем 2Z + 1. Поэтому
бесконечный ряд A3.2) для матрицы с должен сводиться к
полиному от с степени не выше 21.
В данном параграфе нам будет удобнее пользоваться антиэр-
митовским оператором сг A0.18), для которого полином A2.28)
перепишется следующим образом:
= [3 +1*} R + (?-D2] . . . [3 + (^Ц^')*] «~ - о.
A3.3)
Очевидно, этот полином разлагается на множители вида \сг — im\
—Кт<1.
Общее выражение для разложимой в степенной ряд функции
от матрицы а, приводимой к диагональному виду, определяется
интерполяционным полиномом Лагранжа — Сильвестра (см.
[15.1])
2рь (а)
Здесь ?(?) = (? —??)??(?) = 0 — минимальное уравнение
матрицы a, Xh — собственные значения. Поскольку собственные
значения матрицы сг равны — im, то собственные значения
матрицы ? (с) A3.1) равны ехр {— 2im arctg |c|} и формула A3.4)
в нашем случае принимает вид
Tl(C) = Tl(\cl Сг)= У Pm(ci) g-aimarctg)^ A3.5)
n?ll Pm(im)
причем
Р1&1)=(сг + ЩР1тСс1)· A3.6)
Используя равенство
ехр {2imarctg | с | > = A — j | с | )m A + J | с | )"m, A3.6')
выражение A3.5) можно преобразовать к виду
Т1(с) = A + сГ1 2 4^A-^к1I+тA + ^с|)'--. A3.7)
Показатели степени I ± m будут целыми числами как при целом,
88 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
так и при полуцелом Z. Из A3.3), A3.6), A3.7) следует, что
A -f- с2I Т1 (с) является полиномом от сг степени 2Z,
коэффициенты которого, в свою очередь, будут полиномами от \с\
степени не выше 21. Введем обозначение
Т1 (с) = Т1 (|с|, с,) = A + с2)"'Qt(\е|, с,), A3.8)
причем на основании сказанного мы можем написать
Ql(e) = Qt(\e\,el)^ ? bl»h\c\*cl A3.9)
x,fe=o
Очевидно, полином Qi полностью определяется
соотношениями A3.7), A3.6), A3.3) и может быть вычислен с их помощью
для любого Z. Однако этот путь связан с утомительными
выкладками, поэтому мы используем другой способ, приводящий к
рекуррентному соотношению для коэффициентов bXft.
Подставляя A3.8) в A0.23), получим
2(cl+l\c\)Ql(\c\,c1) = (l+c*)dQl[\ee\ei\ A3.10)
Полагая в A3.8), A3.10) |с| = 0, имеем
ар.·!)-1· (лтг)и=о=^1)@'^ = 2^· <13Л1>
Взяв производную r-го порядка по |с| от обеих частей
уравнения A3.10) и полагая |с| = 0, найдем
<?(Г+1) @, сг) = 2ClQ\r) @, eL) + r B1 - г + 1) #-« @, сх). A3.12)
Если придавать здесь г значения 1, 2, 3, ..., то получим с
учетом A3.11) следующий ряд равенств:
Q\2) @, сг) = &,#> @, сг) + 21Q\0) @, с,) = BсгГ + 2Z,
$3) @, сг) = Bсх)з + 2 CZ - 1) Bсх), A3л3)
$4) @, сг) = B^)* + 4CZ- 2) BсхJ + 12Z(Z - 1),
Из A3.11) —A3.13) ясно, что в общем случае Q\r) @, сг)
является полиномом от сх, который содержит только четные
(нечетные) степени сг соответственно при г четном (нечетном). При
этом старший член в Qi @, сг) равен Bсг)г. С другой
стороны, согласно A3.9) имеем
dr)@.Si)=r! ? № A3.14)
§ 13. КОНЕЧНЫЕ ПРЕОБРАЗОВАНИЯ ПРЕДСТАВЛЕНИЙ 89
Сопоставляя A3.14) с A3.13), получаем ряд выводов.
Во-первых, коэффициенты brk должны равняться нулю при к > г, так
как Qi (О, сг) не содержит сг в степени выше г. Во-вторых,
ЬГк = 0, если г II А: являются числами неодинаковой четности.
В-третьих,
#г = 4г A3Л5>
Мы можем теперь определить коэффициенты при членах сг и
с1~1в выражении A3.9) для Qi. Для старшего члена cl имеем
^obl.2i\cr = biw\c\2l = -^\cf A3.16)
вследствие A3.15) и условия 6?,2? =0 при ? < 21. Для второго
члена имеем аналогично
JS ь1,,1-г | с Г = ftij-Ltf-x | с I2' = -^щ | с I2', A3.17)
так как b2it2i-i = 0 ввиду различной четности 21 и 21 — 1.
Перейдем к выводу рекуррентных соотношений между
конечными преобразованиями неприводимых представлений
группы вращений с весами, отличающимися на единицу. Введем
обозначение
R(c) = Tl(c)-Tl-l(c). A3.18)
Следует иметь в виду, что здесь под Т1 (с) и ? ~? (с) мы
понимаем не матрицы соответствующих преобразований*), а
алгебраические выражения для этих преобразований в виде
полиномов от операторов с19 с коэффициентами, зависящими от |с|,
в соответствии с A3.8), A3.9). Поэтому R (с) также будет
некоторым полиномом от съ коэффициенты которого, как функции
от |с|, нам нужно определить. Ясно, что степень R(c)
относительно сг будет равна степени ? (с), т. е. 21. Согласно A3.1)
для любого I
?1 (с) = exp {2cx arctg | с | }, A3.19)
причем, разумеется, для разных I матрица сг будет различной,
*) Для матриц Т1(с) и Т1~г(с) формула A3.18) не имела бы смысла,
так как эти матрицы имеют разные размерности 2l+i и 21—1 и поэтому
их нельзя складывать.
90
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
что можно учесть с помощью обозначения Ci . Однако ci и
с ?"* согласно результатам предыдущего параграфа будут иметь
21 — 1 одинаковых собственных значений im, — (? — 1) < т <
^?—1. Поскольку вид функции A3.19) от cL один и тот же
для ? и ? — 1, то при замене сг на любое из вышеупомянутых
общих собственных значений im полином R (с) = R (| с |, сг)
согласно определению A3.18) обращается в нуль. Но тем же
свойством обладает полином Р~ (сх) (см. A3.3)) степени
21 — 1. Следовательно, полином Д(|с|, с^) степени 21 может
отличаться от Р1~1(сх) лишь биноминальным множителем,
линейным относительно cv Таким образом, мы можем написать
R(c) = &i + 4)Pl-lGi), A3.20)
где коэффициенты ?, ? являются функциями от |с|. Для того
чтобы найти их, достаточно определить коэффициенты при
старших степенях cll и cj1 в Г1(|с|, сх), так как в Т1 (| с |, сг)
эти степени не входят, а в R(c) согласно A3.20) и A3.3)
соответствующие члены имеют вид (?сх + ?) с?г~\ Учитывая A3.8),
A3.9), A3.16), A3.17), получаем
ё~ Bl)\(l + c2I ' Л B1 — 1)! A + с2I - (ОЦ
Если ввести обозначение (см. A3.3))
РгЙ = |сГ1Р'(с1) =
= I? + /Vs] ... [с2 + C + (~1J')%2]с~ , A3.22)
то с помощью A3.18), A3.20) —A3.22) находим рекуррентную
формулу
Т1 (с) = Т1-1 (с) + B^(f+c^ P1-1 (с). A3.23)
Подставляя сюда выражение A3.8), получим рекуррентное
соотношение для полиномов Qi (с)
Q, (с) = A + с») &-! (с) + Jjjj. (с + ?) ?1'1 (с). A3.24)
Чтобы применять эти формулы, необходимо знать выражения
Qi (с) для начальных, наименьших значений веса I. В случае
§ 13. КОНЕЧНЫЕ ПРЕОБРАЗОВАНИЯ ПРЕДСТАВЛЕНИЙ 91
целого I таким значением будет I = 0. При этом Т1 (с)
превращается в тривиальное представление Т°(с) = 1, а полином
A3.22) принимает вид Р° (с) = с. Соответственно Q0 (с) = 1
(см. A3.8)). Таким образом, из A3.23) получаем
W Х + 2!A + с2) ^ (С,+ 4!A + с2J ^ W
и т. д. Отсюда ясно, что общее выражение для конечного
преобразования неприводимого представления группы вращений при
целочисленном весе I имеет вид
*«>-«+;? ^fc&^-'fo (i3-25)
В случае полуцелого веса I нужно положить P/f(c) = l,
так как ? (с) является полиномом степени 21 +1 с равным
единице коэффициентом при старшем члене. Поскольку при
отрицательных I представления ? (с) не существуют, то следует
положить Т~ /л(с) = 0. Тогда из A3.23) следует
тЧш (А _ 2 (с+ 1/2) ТЧЛ м _ 2 (с+ 1/2) , 23 (с + 3/2) pV, г
1 W~ II (l+ €>)'/.' ' W""l!(l + c2)V. + 3!(l + cT' W
и т. д. Общее выражение для ? (с) при полуцелом I имеет вид
?? (с) _ '? 2*+1(д+к + 1/2) pft-i/г г. ?13 26.
( } Д B* +1)! A + с2)А+1/2 (С)' ( '
Для иллюстрации выпишем окончательные выражения для
конечных преобразований неприводимых представлений с весами
? = 0, 1/2, 1, 3/2, 2, 5/2, 3, вытекающие из формул A3.25),
A3.26), A3.22):
Г(с) = 1, Тч'(с)= ! + 2с2 , A3.27)
Г(с) = 1 + 2|±^-*),; A3.28)
1 + с
*) Очевидно, ГЧС) A3.28) совпадаете О (с) (см. B.5)), причем^ = сх.
Аналогично матрица Г1'2 (с) (см. A3.27)) совпадает с и (см. E.30)),
причем 1а = ??/2.
92
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
TV. ? 1 + Зс2/2 + B + 7с2/3) с + 2с2 + 4с3/3 m oqv
Г (с) = (i + ??· ' {огЩ
г2 (с) = ? + 2 C + »^)?+(8+«^y + g»+yf A3.зо>
3 A + с )
Г5/'(с) = A+сГ5/,[1 + |-с2+-^с4 + B + ^.с2 + ^с*)с +
+ B + Ц- с2) с2 + (i- + 2с2) с* + § с< + А>], A3.31>
гз (с) + (iwtt1 + тс2+Т" с1 < +11 + ic2 + f*4? +
+4(?+2с2) сз+D+4 с*)ъ+·?>+-?-*]· <13·32>
При выводе формулы A3.23) для неприводимых
представлений мы использовали только соотношение A3.1) и
выражение для характеристического (минимального) полинома
A3.3). Рассмотрим теперь приводимое представление,
распадающееся на неприводимые представления только с целыми
(либо только с полуцелыми) весами l\, h, ..., Z8. Матрицу этого
представления ? (с), как и любого приводимого представления
группы вращений, всегда можно представить в некотором базисе
в виде прямой суммы матриц неприводимых представлений
т (с) = ти (с) © ти (с) е ... е т1* (с). Aз.зз)
Пусть I — максимальный из весов Zi, h, ..., ??. Тогда, как легко
видеть, минимальный полином матрицы с будет совпадать с
характеристическим полиномом Р1 (с) матрицы c(i). Поэтому
исходные основные соотношения A3.1) и A3.3) для матрицы
? (с) будут те же, что и для матрицы Т1 (с). Следовательно,
вытекающее из них соотношение A3.25) или A3.26) будет
справедливо также для приводимых представлений группы вращений,
распадающихся на неприводимые представления соответственно
только с целым или только с полуцелым весом, если ? равно
максимальному весу из всех Zi, Z2, ..., L·
Запишем равенство A3.1) в виде
? (с) = ехр [2с arctg/T^/i/c*}. A3.34)
При такой записи очевидно, что правая часть зависит от
вектора с, как целого, причем все его компоненты с« входят
равноправно. Соотношение A3.34) допускает обобщение на случай,
когда с является произвольным трехмерным комплексным
вектором. Очевидно, в последнем случае Т(с) будет преобразованием
§ 13. КОНЕЧНЫЕ ПРЕОБРАЗОВАНИЯ ПРЕДСТАВЛЕНИЙ 93
представления комплексной ортогональной группы (см. § 8)
в трехмерном пространстве. Ясно также, что и минимальное
уравнение Р1 (с) = 0, где Р1 (с) определяется формулой
A3.22), сохраняет свое значение для любого комплексного
вектора'с. Поэтому и формулы A3.25), A3.26) сохраняют свой
смысл и значение в случае комплексного вектора с. Все
сказанное справедливо и тогда, когда вектор с является круговым
комплексным вектором с = е, е2 = 0, хотя при этом
соотношения значительно видоизменяются по форме. _
При замене с на е выражение (arctgi/c^/j/c^ входящее
в A3.34), очевидно, будет равно единице, так как
Таким образом, при с = е формула A3.34) сильно
упрощается и принимает вид
? (е) = ехр Bе) = ехр (— lie). A3.35)
Минимальное уравнение A2.32) при с = е принимает вид
^(е)=?1+1 = 0, ^21+1 = 0. A3.36)
В том, что это действительно есть минимальное уравнение для
сдвигающего оператора е±, можно убедиться и непосредственно.
Согласно A2.9) 1>±% = e+??-? = ... = e++1\|)_I = 0. Поскольку
всякий вектор ? в пространстве неприводимого представления с
весом I может быть представлен в виде линейной комбинации
? = ??????, то оператор е++1 обращает в нуль любой вектор
в пространстве представления. Но оператор, обращающий любой
вектор пространства в нулевой вектор, равен нулю, т. е. ^++1 =
=0. В то же время никакая низшая, чем 2? + 1, степень
оператора е+ не будет обладать этим свойством, так как, например,
ЭД>-1==^г|>г=?0(см. A2.11)). Поэтому A3.36) действительно
+
является минимальным уравнением для оператора е+ и,
очевидно, также для эрмитовски-сопряженного оператора е_ = — е%.
Условие A3.36) позволяет сразу написать выражение для ? (е±)
A3.35) в виде полинома. Для этого достаточно разложить
функцию ехр Bе±)в степенной ряд, который оборвется вследствие
A3.36). Следовательно,
Т1 (е±) = ехр Bе±) = 2 "Чт"· A3-37)
fc = 0
94
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
причем это выражение будет верным и для приводимого
представления, распадающегося на неприводимые представления
только с целыми (полуцелыми) весами, максимальным из
которых является I. Заметим, что этот же результат можно получить
и на основании формул A3.25), A3.26), в чем проще всего
можно убедиться на частных примерах A3.27) — A3.32).
С помощью выражений A3.27), A3.28) и последующих
можно получить алгебраические соотношения между инфинитези-
мальными операторами представлений группы вращений. Для
неприводимого представления с весом I = 1/2 имеем*)
A +2с) A + 2?) = 1 + 2? с" = /с с'>
/A + с2)A+с'*) /l + c'
или (см. C.6), C.21))
A + 2с) A + 2?) = 1 — ее' + 2с + 2с' + 2 [сс'Ъ
откуда следует
4с? = — ее' + 2 [се'].
Учитывая A0.18), можем переписать это соотношение в виде
Сас'ь D/а/ь + баЬ — 2еаЬс/с) = 0,
откуда, вследствие произвольности са, Съ, получаем
1 1
JaJb = — -? ??6 + "J GabcJa- A3.38)
Если ввести вместо /? эрмитовы матрицы
а а = 2iJa = ??, A3.39)
?? согласно A3.38) будем иметь
OaOb = ?«6 + lEabcOc- ^13.40)
Нетрудно убедиться, что если в E.31), E.32) заменить ?? на
— ??, то получим A3.40).
Аналогичным образом для ?= 1 соотношения A3.28), A0.13)
дают
A + с2 + 2с + 2с2) A+с'*+2?+2с'2) = A + с2) A + с'2) +
+ 2 A - ее') (с + ? + [??]) + 2 (е + с' + [с?]J. A3.41)
Ввиду произвольности сие' мы можем приравнивать здесь по
*) Для I = 1/2 пространство представлений имеет 21 + 1 = 2
измерения.
§ 14. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 95
отдельности члены, содержащие одинаковое число сомножителей
с и с'.Таким путем получаем [сс'\ = сс' — с'с, т. е.
перестановочное соотношение A0.27), и далее с его помощью
с*с' 4- с'с2 + cQ + ее'с = 0. A3.42)
Справедливо также аналогичное соотношение, получающееся
при перестановке сие'. Сравнение членов четвертой степени
по с, & в A3.41) дает
с'2с2 4- с2?2 _|- 2с2?2 + ее' [ее') — [с?]2 = 0. A3.43)
Соотношение A3.42) можно переписать в виде
°aCbCd |y/a {JbJd}+ + Y{JbJd)+Ja + hdJa + у (Sai/d + <Wb)l =°·
Используя A0.28), получим hh = hh + sdbgJg, поэтому
опуская cacbcd1 имеем
JaJbJd + JdJbJa + у *>db& {J J &}- + §bdJ a + ? (8abJd + ^ad^b) =0·
Еще раз используя A0.28), а также (П.1.38), и вводя h = ?/?,
получим окончательно
IJbIc + IJbh = бвЬ/с + bbJa. A3.44)
Нетрудно убедиться, что A3.43) есть следствие A0.27) и A3.44).
Алгебра матриц /а, определяемая соотношением A3.44),
носит название алгебры Даффина — Кеммера. Аналогичным
образом можно с помощью A0.13), A0.27) и A3.29) —A3.32)
установить алгебраические соотношения для инфинитезимальных
операторов представлений с другими весами I.
§ 14. Матричные элементы неприводимых представлений
В § 13 были получены рекуррентные соотношения,
позволяющие находить выражения для конечных преобразований
неприводимых представлений группы вращений с любым весом I. При
этом преобразование ? (с) выражается в виде полинома степени
21 от оператора с = cJ, коэффициенты которого являются
полиномами от с2. Полученные в § 13 соотношения имеют ковари-
антный характер в том смысле, что они сохраняют свой вид при
любом выборе базиса как в трехмерном пространстве
вектор-параметров с, так и в B1 + 1) -мерном пространстве
представления веса I.
Для того чтобы написать матрицы ? (с) в раскрытом виде, в
форме квадратной таблицы их элементов, необходимо выбрать в
96
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
пространстве представлений какой-нибудь базис. Наиболее
распространенным является следующий выбор базиса. В
трехмерном пространстве параметров фиксируется некоторое
направление с помощью единичного вектора с0{с0 = 1). После этого в
пространстве представлений выбирают в качестве базиса систему
21+ 1 ортонормированных собственных векторов г|)т(с0)(—? ^т^
^ I) оператора с0 = с0Г-
$т(с0) ???' (С0) = (?«)?(???')? = 8ш'· A4.1)
В таком базисе матрица с0 принимает диагональную форму
?— I
-i + 1
cn =
? —1
?
A4.2)
Отсюда и из соотношений с0^т = т\^т следует, что базисные
векторы ?™ должны иметь следующий вид:
?-! =
?-?+1
1
О
О
О
??-? =
*?
О
О
О
О
A4.3)
с точностью до фазовых множителей егфт,не нарушающих
нормировку.
Указанный базис мы будем называть каноническим с0
-базисом.
Если в пространстве представлений задан произвольный
линейный оператор (матрица) В= (#??), то в каноническом с0-
базисе матричные элементы Втт> определяются, как обычно,
следующим образом:
Втт> = ?« (С0) ????' (С0) = (?«)??*? (???')?· A4.4)
С помощью этого общего соотношения мы можем найти
матричные элементы Tmmf (с) преобразования представления группы
вращений в каноническом с0-базисе.
Если векторы с и с0 линейно зависимы: с = | с | с0, то
матричные элементы Ттт> получаются сразу. Действительно, в этом
случае векторы г|эт (с0) будут собственными векторами оператора
Г'(с) = Г'(|с|с0)(см. A3.1))
Т1 (| с | с,) ?„, (с,) = ехр (- 2im arctg | ? |) ??· (со)· A4.5)
Поэтому матрица Тх (| с \ с0) в каноническом с, -базисе будет диа-
§ 14. МАТРИЧНЫЕ ЭЛЕМЕНТЫ
97
тональной, причем ее диагональные элементы равны
Tlmm = exp(— 2imarctg|c|). A4.6)
В общем случае из A3.25), A3.26) ясно, что отыскание
? mm* {с) согласно A4.4) сводится к вычислению матричных
элементов для различных степеней оператора с, т. е. выражений
{ch)mm> = ?™ (С0) сЧт' (с0). A4.7)
Вещественный вектор с можно однозначно представить в
аксиальном базисе в форме A2.5)
с = ас0 + ??+ + ?*<?_. A4.8)
Соответственно оператор с представляется в виде (см. A2.6))
с = ас0 + ?*+ + ?**- A4.9)
Действие операторов с0, е± на любой базисный вектор ?„»
определяется формулами A2.22):
С0Цт = Щт> *±??? = am ???±?·
Поэтому с учетом A4.1) мы получаем
стт' = i|?m (ac0 + ??+ + ?*?_) Цт> =
= ?™ (ат'г|)т> + ??(??)???'+1 + ?*?(^?|?-?) =
= ат'бтт' + ??^???,??'+? + ?*?(^)???^'_1, A4.10)
Поскольку
<? = ?2*2, + ?2*2+ + ?*291 + ?? (c0e+ + e+c0) +
+ ??* (c09_ + e_c0) + ? ? |2e+e_, A4.11)
?? ясно, что таким путем в принципе можно вычислить
выражение A4.7) при любом к и затем найти Т1тт'{с) (см. § 13).
Однако этот путь связан с громоздкими выкладками, объем которых
очень быстро возрастает с увеличением ?. Поэтому для решения
поставленной задачи удобнее использовать полученное в § 8
представление вектора с в виде композиции векторов,
пропорциональных с0, е = е_ и е* = е+ (см. (8.37)). При этом в
соответствии со свойствами представлений (см. A0.13)), если
с = <??, це*, ?*0>, A4.12)
то
Т1 (с) = Т1 Aе) ?1 (?**) ?1 (??0). A4.13)
« ?. и. Федоров
98 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
Аналогичное будет иметь место при выборе других
представлений для с (§ 8). Что касается матрицы Г!(?с0)г то ее действие
на вектор ^m'(c0) определяется формулой A4.5)
?1 (?^0) г|)т' = ?«·?«^ km> = exp (— 2imf arctg ?) = (^??^? ·
A4.14)
Для матриц ?1 (??), ?1 (??*) на основании A3.37) мы имеем,
поскольку e±+1 = 0,
Г'(^) = да A4.15)
ft=0
и аналогичное выражение — для оператора ?1 (г\е*). Согласно
A2.11)
*±???' (С0) = Ат'Ут'±к(с0)- A4.16)
±
Здесь, как ? в A4.14), не предполагается справа суммирование
по повторяющимся индексам ml и к. Это ясно также из того, что
слева эти индексы входят однократно. Множитель Ат» опреде-
±
ляется следующим образом (см. A2.12), A2.20)):
Ahm = a^aSii ... a^b-D = V (* * m)! {l ± т ±HL. A4.17)
При подстановке A4.13) в A4.4) следует учесть еще, что
Ьа (е.) Т1 (ge) = (??+ (?***) ?? (с,))* = (?1 (- ? V) ?? (с0))*.
A4.18)
Таким образом, при использовании представления A4.12) мы
получим
TL* (с) = Хт> (?1 (- ?***) ?? (с,))* (?1 (??·) ?™< (с,)), A4.19)
где ?, ?, ? берутся из (8.27), (8.27'). Если бы мы вместо A4.12)
использовали для с представление с = <??0, ??*, |е>, то
аналогичным образом получили бы
Tlmm- = ?™1 {?1 (- ?**) ??)· (?1 (le) ?.,.),
?« = ?-«*«"*? = (^|)m· A4.20)
Согласно A4.15), A4.16)
l+m' ^k, l+m'
Tl (le) t|w = V ?? tm- = 2 ТГ &Ъ*'+к'х A4.21)
fc'=o fe'=o +
J- mm' — Am'
§ 14. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 99
поскольку члены со значениями т' — к' <С — Z, т. е. к' > V + т',
обратятся в нуль. Аналогично имеем
1-т'
?1 (??·) ?*. = 2 ТГ A^'^+k. A4.22)
Здесь исчезают члены с т' -{- к> I, т. е. с к> I — m'.
Таким образом, мы получим согласно A4.19), A4.22)
(l-m \ /l-m' \
2 Ц^ ?* г|>;_ь 2 F! ^''Ф»'+*' · A4·23)
fe=o + / \ь'=о + /
Учитывая A4.1), мы должны сохранить лишь члены, в
которых т' + к' = т + к, т. е. к' = т — т' + к. Поскольку 0 <
< к' = т — т' + к < I — т', то m' — m^k^l — m,
следовательно,
Г*т· = ?». 2 (~fcfi^ ?*'·· A4.24)
&=? + +
Здесь с определяется согласно A4.12) и
? = max @, т' — т). A4.25)
Поскольку Ат определяется формулой A4.17), то
/\. /. . / . _/ч. \1/2
k+m-m'
АК- _ ( (l-m')\(l + m' + k')l ?'2 _ k+
+ т ~ { 2ft' 0 + т')\ {1-т'- к')\ ) - Т'
(l — т')\ (I + т + кI У/2
<2m-m'+h(l + m')\(l — m — k)\ )'
Окончательно формула A4.24) принимает вид
г» , (Л - пт-т' (i^JLY' ( (l~m)\(l-m')\ \1/2
A4.26)
? У (-&!)*(»+ " + *)! /U o7\
l+m
У
?*? 2hk'(m — m'+k)l(l — m — к)\
Аналогично с помощью формул A4.20), A4.21) получим
Г' М - ?»'-"· (i + itYl (l + m)\(l + m')\ \11г
X 'У (-»!)* «-" + *)! м, 28?
?- *V-« + *)!(»+ m-fc)|· A4·^
7*
100
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
причем
с = <?*?, ??*, ??>, ?'= max @, m - m'). A4.29)
Вообще, используя любое из представлений с, приведенных
в § 8, мы можем получить шесть различных по форме
выражении для матричного элемента Ттт>.
Матричные элементы Ттт*
(с) удовлетворяют
дифференциальным уравнениям, для получения которых мы используем
соотношение A2.37), в котором заменим / на выражение (см.
A2.35))
/ = 1/ = {с^с% + ее* + е*-е) I1 = с0-с0 + ее* + е* е. A4.30)
В результате формула A2.37) принимает вид
-Y(t + c.c + cX)^Tl(c) = lcTl(c) = (c9.20+e.^^
A4.31)
Умножим это равенство на базисные векторы канонического с9-
базиса: слева — на г|эт (с0), справа —на i|>m'(c0). Поскольку
функция ?™ (О не зависит от с, то в левой стороне A4.31) ее
можно переставить с оператором д/дс. С другой стороны,
гМ0 = (ct^m)* = (с0ЦтУ = лщС,
Урте± =: { е±$т) ={еТЦт) = ОтЧтТ1·
В результате получим из A4.31)
1С^тТ1 (С) \|W = (св-ф«Св + е-^т? + ?*·?^) ?1 (с) ?^,
или
__i_(i+c.c+cx)^.^m,(c)=
= mcjlrn- (с) + carWi-i,». (с) + aL+)e7j,+1,m. (с). A4.33)
Умножая на векторы с0, е±, найдем
cj'Tmm- (с) — ТпТтт' (с)%
с ? го , A4.34)
е±1еТ1тт- (с) = о2МТ1Ж (с),
где с0/ = 2~соA +с-с + сХ)7" и т· Д· Если зафиксировать
индекс т', то эти соотношения аналогичны уравнениям A2.8),
A2.9).
§ 14. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 101
Рассмотрим инвариантный интеграл следующего вида:
X = §Tl+(c)BTv(c)dx, dx = -^^2, A4.35)
где Т\ Т1' — матрицы неприводимых представлений группы
вращений весов Z, V и В — произвольная постоянная прямоугольная
матрица размерности BZ +1) XBZ' +1). Очевидно, X также
будет постоянной прямоугольной матрицей той же размерности.
Вследствие унитарности представлений группы вращений
Г+(с)= Г~1(с) = Т(— с) (ом. §11). Поскольку X
—инвариантный интеграл, то (см. § 6)
X = J ?1 (- с) ВТ1' (с) dx = \ Т1 (- <с, с§» ВТ1' «с, ce» dr.
A4.36)
Но согласно C.13) Т1 (— <с, св» = Г1«— с§, — с» =
= Г1(—с0) Т1 (—с), поэтому последнее равенство можно
написать в виде
X = Т1 (- с0) [J Г1 (- с) ДГ1' (с) ?] Г1' (с.) = Г1 (- с,) XT1' (с.)
A4.37)
Считая с. бесконечно малым вектором, имеем Г1 (± с0) = 1 ±
± 2с0, где с0 — инфинитезимальный оператор неприводимого
представления веса ?. Поэтому соотношение A4.37) принимает
вид
X = A - 2^) X A + ?') = X - 2 (с0*Х - XcJ')< A4.38)
откуда следует
cU = Хс?'. A4.39)
Поскольку X — фиксированная прямоугольная матрица, а с^и
с0 — неприводимые совокупности матриц, то согласно лемме
Шура \???) матрица X отлична от нулевой лишь при условии
I = ?', причем в этом случае квадратная матрица X должна быть
скалярной, т. е.
? = ????, A4.40)
где ? — число. Итак, мы имеем для произвольной постоянной
квадратной B? + 1) ? B? + 1)-матрицы В
J ?1 (- с) ВТ1 (с) dx = ??,,+?. A4.41)
Взяв след от обеих частей этого равенства, получим
{$ Tl{-c)BTl(c)dx]t = $[{Tl)-1BTl\tdx =
= §Btdx = Bt = {2l+i)n,
102
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
следовательно,
? = 5</B?+1), A4.42)
или
J Tl+ (с) ВТ1 (с) dx = Bt/{21 + 1).
Выписывая это соотношение с помощью индексов, получим
J ??????????? = ??? J ?????^? = ??????/B? + 1)
или также (поскольку 2?Vv = #?????)
2?vp (J T&Tlodx - ??????/B? + 1)) - 0. A4.43)
Это равенство справедливо для произвольной матрицы В = (???),
поэтому
jH;nadt = |^f. A4.44)
Возвращаясь к исходному выражению (см. A4.35), A4.40)),
получим
JCrUt = %^. A4.45)
Мы получили соотношения ортогональности для матричных
элементов неприводимых представлений группы вращений.
Полученные соотношения позволяют определить
коэффициенты разложения любой функции /(с) на группе*) по матричным
элементам неприводимых представлений Т1. Такое разложение
можно написать в виде
00
f(c) = ^(ClTl(c))u Z = 0,-1 !,-§-···. A4.46)
г=о
где С — \Са$) — некоторые постоянные матрицы,
Действительно, (ClTl)t = С1аРТ}>а(с) поэтому выражение (ClTl)t для любого ?
представляет собой линейную комбинацию матричных
элементов Урд(с), коэффициентами которой являются элементы СдР
матрицы С1. Таким образом, задача сводится к отысканию мат-
*) Для того чтобы/(с) была разложима в ряд, членами которого
служат матричные элементы Tlmm, (с), необходимо (и достаточно),
чтобы она была функцией с интегрируемым квадратом, т. е. чтобы было
§ 15. ПРОИЗВЕДЕНИЕ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ ЮЗ
риц С1 для любого Z. На основании A4.45) имеем
J K+ (С) f (С) dx = 2 f ^??+ (С) С10А (С) dx =
— Г1' Г Tl'*TV ?? — ?? ????1*? — gM>V
Таким образом,
Ci; = BГ + 1) J г?+ (с) / (с) dx A4.47)
или в безындексной записи
С1 = BZ + 1) J Tl+ (с) f (с) dx = B1 + 1) J Tl (— с) f (с) dx. A4.48)
Последнее соотношение однозначно определяет матричные
коэффициенты разложения A4.46).
§ 15. Произведение неприводимых представлений
Пусть заданы два произвольных представления группы
вращений: Тг (с) и Т2 (с). Рассмотрим прямое произведение матриц
этих представлений (см. П.З)
T(e)=T1(c)<S>T2(e). A5.1)
Нетрудно убедиться, что матрица ? (с) также будет реализовать
некоторое представление группы вращений. Действительно,
согласно (П.3.24) и A0.13)
? (с) ? (&) = (?, (с) ® Г2 (с)) B\ (с') ® Г2 (с')) =
= Т, (с) Т, (с')<8>Г2 (с) Т2 (с')=Т1 «с, с'»®Г2 «в, c'»=T((Cl с'».
Пусть Тг (с) и Т2 (с) являются неприводимыми
представлениями с весами V и I" соответственно: Тг (с) = Т1'(с), Т2 (с) = Т1\с).
Выясним, будет ли представление
T(c) = Tv(c)®Tl'(c) A5.2)
приводимым. Для этого перейдем к инфинитезимальным
операторам (см. A0,19), A1.20))
? (с) = 1 - 2ic, Т1' (с) = У - 2iel\ ?1" (с) = 1" - 2icl\ A5.3)
Здесь У и 1" обозначают единичные матрицы порядка 2V +1 и
2Z" + 1 соответственно и
с = с/, Зг = сГ, Зр = сГ, A5.4)
причем/' =/*'4 ?' = ??". Подставляя A5.3) в A5.2), ограничи-
104
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
ваясь членами первого порядка малости по с и учитывая, что
1' ® 1" = 1 — единичная матрица размерности B1' + 1) B?"+1),
получим
с = 1' ® ?" + с1' ®1' = сA'® Г + /' ® Г)
или
с = с/, / = 1' ® Г + J' ® Г. A5.5)
Пусть г|)т' = г|эт', г|)т* = \|w — канонические базисные векторы в
пространствах представлений Г и Т1"соответственно ис0—с/\с\г
тогда (см. ^12.8))
Со Я|)т' = ^Чт', С0Чт" = т"г|)т". A5. 6)
Прямому произведению матриц A5.2) соответствует прямое
произведение векторов г|эт' ® г|)т", причем (см. (П.3,20))
cQ fa. ® г|4") = (!' ® *Г + *о ® 1") (Н>т' ® ФтО =
= ???' ® с^фт-г + Со ???' ® ?«* = ("*' + /и") (\|w ® г|4*). A5.7)
Таким образом, вектор г|эт' ® г|)т* есть собственный вектор
матрицы с0г отвечающий собственному значению тп' + тп"\
cQ^m=-m^m, ?« = ??»'® ?**, m = m' + m". A5.8)
Векторов вида A5.8) с — 1'<т'<1\ —1"<т"<1" будет
всего B/' + 1) BZ" + 1) и все они будут линейно независимы,
поэтому они образуют полный базис в пространстве R = Д'®Л",
число измерений которого как раз равно B/'+1) B/" + 1).
Согласно П.З базис в Д, образованный векторами фт A5.8), будет
ортонормированным, если такими будут системы г|)т' и г|эт/г.
Из A5.7) и A5.8) следует, что в общем случае одному и
тому же т отвечает несколько различных пар чисел т' и т" и,
соответственно, несколько независимых собственных векторов
??? ® tym», т. е. имеет место случай кратных собственных
значений. Поскольку согласно § 12 в случае любого неприводимого
представления группы вращений собственные значения
оператора^ однократны, то представление ? (с) A5.2),
соответствующее прямому произведению двух неприводимых представлений,
приводимо. Последнее ясно также из того, что максимальное
возможное значение т равно V + I" и неприводимое
представление с таким весом имело бы размерность s = 2A' +I") + 1, в
то время как представление A5.2) имеет размерность
B?' + 1?2?" + 1) = * + 4??.
Остается выяснить, какие неприводимые представления
содержатся в произведении Г = 24'® Г1". Предположим, что V < l"t
§ 15. ПРОИЗВЕДЕНИЕ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ Ю5
Очевидно, в совокупности векторов A5.8) будет только один
вектор с т = V + Z", а именно ??'-?* = ?? ® ??* (соответственно
для т = —\V + ?),·?_?'_?/?= -?-?* ® ?-??· Значению т = ?' +
+ ?" — 1 будет соответствовать два независимых вектора A5.8)
Для ?? = V + ?" — 2 таких векторов будет три: ??'-2<8) ??*, ??-?®
0 ??^-?, ?? ® ??"-2 и т. д. Эта ситуация наглядно поясняется
^ \ \ \ \ \
\ \ \ V ч ^ч
ч Ч ч Ч \ V-
V ч ? \ Чч \ ч^ Чч Ч^ %
ч ч \ ч ч
ч \ \ Ч Ч 1
\ \ \ \ ?
\ \
ч ч
. \ ? \ ? \
*Ч Ч Ч—V—Чг
\ \ \ \ \
\ \ V Ч ^
\ Ч Ч Ч Ч '
\ \ \ ? \
\ \ \ \ N
с^ ч ? Ч, \
\ \ \ \ \
\ \ \ \ V
«Ч \ Ч Ч Ч
\ ? \ \ ?
х V
ЧI Ч N Ч Ч Ч Iя V*
Ч \ ч ч ч ч ъ
? ? ? ? \ \
\ \ \ \ \
ч ч ч \ ч
\ ? ? \ \ \
Рис. 15.1.
на рис. 15.1. Поскольку каждый вектор A5.8) определяется
парой чисел т', т", то последние можно рассматривать как
дискретные координаты точки на плоскости, Совокупность всех
этих точек образует решетчатый прямоугольник, изображенный
на рис. 15.1. При этом все точки, соответствующие одной и той
же сумме т = т! + т", лежат на наклонных прямых,
показанных на рисунке. Из рисунка видно, что с уменьшением т от
V + I" до I" — V число соответствующих векторов ?™
увеличивается от 1 до 2V +1, затем остается постоянным до ?? =,
= — (?" — V) и после этого убывает. Поскольку для
неприводимых представлений (см. § 12) максимальное собственное
значение оператора с0 равно весу представления, то можно
сделать вывод, что в Г ® Т1" входит неприводимое представление
группы вращений с весом 1 = V' + ?" и притом только одно, так
как вектор ypv+i* — единственный.
С помощью круговых векторов е± = =fc i [c0e+] (§ 12) мы
можем построить сдвигающие операторы (см. A5.5))
е± = е±1 = е± A' ® Г + Г ® 1") = 1' ®?' + ?1® 1". A5.10)
106 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
Повторно действуя оператором е_ на вектор ??'+r = г|)г ® ??"»
мы получим полный набор 2 {V + ?") + 1 собственных векторов
?т+,/Г представления Tl+l". В частности,
??'4#-? = Cel (??' ® ??") = С (??· ® ?????* + ?-?'? ? ??") =
= С (аР"\|)г ® ???-? + aj.#(~Vi'-i ® ??*)· A5.11)
Таким образом, собственный вектор оператора с0У отвечающий
т — V -{-1" — 1 для неприводимого представления ? + ",
является линейной комбинацией векторов A5.9). Построив из двух
векторов A5.9) другую линейную комбинацию, ортогональную
к A5.11), мы можем рассматривать ее как базисный вектор
неприводимого представления свесом V-\-1"—1, отвечающий
максимальному собственному значению, равному этому весу.
Последовательно действуя на этот вектор оператором в- A5.10), мы
получим все канонические базисные векторы представления
? +? ~*. После этого в подпространстве трех векторов ??'+?*_2
останется неиспользованным лишь один независимый вектор,
поскольку два войдут в уже построенные представления ? + и
?1 + "-1-Поступая с ним таким же образом, построим
представление ? + ~2 и т. д. Очевидно, этот процесс можно повторять
до m = V — ?', но не дальше, поскольку в подпространстве с
m = Z" — V — 1 уже будут использованы все независимые
векторы. Таким образом, мы построим представления ? +? , ?1 + "~\...
..., Гг~ . Сумма их размерностей, как легко проверить, равна
[2A'+1") + 1] + [2(J' + I" - 1) + 1] +... + [2(Г - V) +1] =
= BГ + 1Н2Г + 1),
т. е. совпадает с размерностью представления ? ® Гг.
Следовательно, произведение двух неприводимых представлений с
весами V и I" разлагается на неприводимые представления с весами
\V —Z"|, \V — 1"\ +1, ..., V + Z", причем каждое из этих
представлений встречается в разложении один раз.
Приводимость матрицы ? (с) = ? (с) (g) T (с) означает, что
существует базис, в котором она принимает (для всех с) блочно-
диагональную форму или, что то же самое, разлагается в прямую
сумму матриц Г"'"',. г"'-''/+\ ..., ?v+l" (см. П.З)
(??'-1"? ?
?,?'-?+? I yir-n ф г|г-{»н-1 ? ф fi'+r A512)
Упомянутый базис есть именно тот, который мы строили с по-
§ 15. ПРОИЗВЕДЕНИЕ НЕПРИВОДИМЫХ ПРЕДСТАВЛЕНИЙ Ю7
мощью процедуры, описанной выше. Матрица ? (g) T f как
следует из определения прямого произведения (см. (П.3.19)), не
имеет формы A5.12), но, согласно изложенному выше,
приводится к такому виду преобразованием базиса. Поэтому матрица
Т1 ® Т1 не равна, но подобна матрице A5.12). Используя
символ подобия со, можем написать:
Т1' ® Г1" со Г11'-1 ? ?11''*'1*1 ? ... ? ??'+?".
Это же соотношение может быть написало в виде
S (Т1' ® Т1") S'1 = ?11''1'1 ? ?11''1*1 ? ... ? ??+?\ A5.13)
где S — матрица размерности BV + 1) B1" + 1), осуществляющая
переход от базиса прямого произведения ???' ® ?™» к
каноническим базисам представлений, стоящих справа. Подчеркнем, что
матрица S, согласно смыслу понятия приводимости, должна
быть одной и той же для всех с, т. е. она не должна зависеть
от с. В применении к инфинитезимальным операторам (см.
A5.3)) соотношение A5.13) запишется следующим образом:
ScS'1 = с"'-' ? с"'"'"'+1 ? ... ? с г+,"( A5.14)
или также
SIS'1 = /"'-г| ? /"'-rl+1 ? ... ? ??'+?\ A5.15)
Квадрат этого равенства дает
sps-1 = (/"'-'"'J ? ... ? (/!'+'"J.
Если учесть соотношение A2.36), справедливое для матриц
любого неприводимого представления, то мы получим
Г|г-Г|(|Г-Г| + 1)
SPS'1 =
(|Г-Г| + 1)(|1'-Г|+2)
(V + l")(V + I" + 1) j
A5.16)
В этой матрице каждый блок 1A + 1), \V — 1"\ < I <, V + I"
является скалярной матрицей порядка 21 + 1. Поскольку подобные
матрицы имеют одинаковые минимальные полиномы, то
минимальный полином матрицы /2, как следует из A5.16), будет равен
Q (Р) = (Р - g{v-n)(P - *,i'-mi) · · ·(I2 - ??'+r) = 0, A5.17)
где
gl = 1A+1). A5.18)
Таким образом, при разложении произведения неприводимых
представлений группы вращений в прямую сумму неприводимых
108
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
представлений каждому слагаемому веса I соответствует свой
корень минимального полинома A5.17), равный gi. Все корни мини-*
мального полинома различны, т. е. каждый из них является
однократным. Собственные векторы представлений Т1 (| V — I" | <
< I <,V + ?") мы будем обозначать посредством Wm(— l^.m^.1).
Блочная форма A5.16) оператора ? соответствует разбиению
пространства R = Rv ® Ri» на сумму взаимно ортогональных
подпространств Ri(\V —1"\ <l<l' + l")y в каждом из которых
ортонормированная система 21 + 1 базисных векторов состоит из
У1т(-1<т^1).
Рассмотрим подробнее квадрат оператора A5.5),
? = 1' ® Г2 + Г2 ® 1" + 2/' (g) Г. A5.19)
Согласно A2.36)
Г2 = V (Г + 1) 1', Г2 = Z" (Z" + 1) 1". A5.2 0)
Поскольку 1' ® 1" = 1, то можно написать
? = г (Г + 1) + Z" (Г + 1) + 2М, ? = /' ® Г. A5.21)
Очевидно, матрица Л/, как и /2, распадается на блоки
соответственно представлению A5.16). Заметим, что
PWlm = l(l + l)Wlmj 30?^ = ^?^. A5.22)
Поэтому, применяя обе части равенства A5.21) к вектору ???»
получим
м^1т = 4- (*· - *' (*' + !)-«" (*" +1)) ?« = ? № *'. ? <,
A5.23)
где
V (/; ?, ?") = 4" ? * (* + 1) - ? (?' + !)-«' ('" + D1- A5· 24)
Оператор ? можно преобразовать аналогично A2.35):
м=г ® г = /; ® /; = ??6/; ® /; = к. *0+*+. е_ +
+ е_. е+)аЬ ?? ® /ь = с,/' ® свГ + е+/' ® е_Г +
+ е_Г ® е+7" = cj' ® cj"+VI ® ?? + еГ ® е+. A5.25)
В таком виде легко определяется действие ? на векторы г|эт' ®
®???.
В дальнейшем нам понадобятся два элементарных
соотношения из комбинаторики. Как известно, биноминальный коэффици-
§ i6. КОЭФФИЦИЕНТЫ КЛЕБША—ГОРДАНА Ю9
ент определяется формулой
(п\ _п(п — 1) ... (и — k + i)
\к) к\
При положительном ? он может быть написан в виде
(;)=щ^.. (i5-2S)
а при отрицательном п= — т (т > 0) — в виде
(--). <_ if (-+:-·).(- »>* <5&# <«·2')
Сравнивая коэффициенты при хр~с в обеих частях тождества
A +х)рA + #)~9 = A + я)*~9, придем к соотношению (при
?-?<0)
2(-i)k^ + «^*-M = ^-p + e-iy A5#28)
Полагая здесь /? = — (а + 1), g = 6 — с + 1, получим после
элементарных преобразований
2(q-fc)lF-fc)l_qlF--g)l(q + * + l)l (лк oq\
к(с-к)\ ~~ с!(а + 6 —с+1)! * \м.ю)
Если же положить в A5.28) ? = q — 1 = а, то получим
Предполагается, что а, Ь, с, к — неотрицательные целые числа.
Суммирование производится по тем значениям к, для которых
все факториалы имеют смысл.
§ 16. Коэффициенты Клебша — Гордана
Как было показано в предыдущем параграфе, при
перемножении двух неприводимых представлений группы вращений
Т1 и Гг, заданных соответственно в пространствах Я' и Я",
в результирующем пространстве Я = Я' ® Я" можно выбрать
базис двояким образом. С одной стороны, этот базис может быть
задан всевозможными прямыми произведениями ортонормирован-
ных собственных векторов матриц ? и ? :
\ ml rn'mj mj mffm1J
число которых равно BZ' + 1) B1" + 1) — размерности
пространства Я. С другой стороны, базис в Я можно задать с помощью
110
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
собственных векторов ?™ (— ?^??^,?) матриц ?1 (| V — I" | < I <
< V + О тех неприводимых представлений, на которые
разлагается произведение ?1 ® ? . Число векторов ?™ равно
2 B? + 1) = BГ + 1)B?" + 1), т. е. также равно размерно-
ЫГ-1»|
сти пространства, и они также ортонормированы: ????^ =
Переход от одного базиса к другому совершается с помощью
некоторого линейного преобразования S (см. A5.13)). Элементы
матрицы этого преобразования или, что то же самое,
коэффициенты линейных комбинаций, при помощи которых векторы ?™
выражаются через i|)m'® i|)m«, носят название коэффициентов
Клебша — Гордана. Мы можем утверждать (см. П.1), что
матрица S A5.13) должна быть унитарной, поскольку она
преобразует один ортонормированный базис в другой.
Коэффициенты Клебша — Гордана (ККГ) имеют
исключительно важное значение для многих разделов теоретической
физики и необозримо широкие применения. Им посвящена весьма
обширная литература. После Клебша и Гордана их вычислением
занимались такие крупнейшие ученые, как Вигнер, Фок, Ван-
дер-Варден, Рака, Швингер, Редже и многие другие. Среди
десятков руководств, где излагается теория ККГ, по-видимому, не
найдется двух книг, содержащих одинаковый вывод этих
коэффициентов. Причиной такого обилия различных способов
получения ККГ, наряду с их важностью, является значительная
громоздкость их вывода, побуждающая авторов изыскивать новые
более простые пути. Однако до сих пор этот вывод оставался
достаточно сложным*).
Ниже излагается вывод ККГ, который значительно короче и
проще всех известных до сих пор и опирается на весьма
элементарные соображения (см. [22]). Вначале мы введем некоторые
обозначения и определения. Поскольку индекс пг, входящий в
вектор ?™, согласно A5.8) равен m = m' -f- m", то можно
обозначить
^m'® ?™'" = ???'® ^m-m' = ?????', ?™??'? ' = Smmi6 /.
miWij ?? ??¦?
A6.1)
Здесь и в дальнейшем при индексации различных величин
опускаются веса V и I" перемножаемых неприводимых
представлений, поскольку в данном случае они фиксированы. Выражение
*) Так, в монографии [7], где, по заявлению ее автора, приведен
самый простой из всех выводов, последний занимает шесть страниц.
§ 16. КОЭФФИЦИЕНТЫ КЛЕБША — ГОРДАНА
111
для ?,? через ТШт' теперь можно написать в виде
* т = 2л Cmm'^mm'· (lo.z)
m'
Входящие в эту линейную комбинацию числа Cmmf и есть
коэффициенты Клебша — Гордана. Заметим, что в существующей
литературе (см., например, [17] — [21]) употребляется свыше
десятка различных обозначений для ККГ, например, С1т*т"гт
(Vl"lm\ VV'm'm") и т. п. Принятое нами обозначение обладает тем
преимуществом, что, при максимальной компактности, оно
однозначно определяет, какие векторы из числа ?™ и Tmm'
связывает данный коэффициент. Пределы суммирования по индексу тг
устанавливаются из следующих соображений. Будем считать
V < Z", тогда наибольшее значение т', с одной стороны, не
должно превосходить V (так как — Z'< m! < Z'). С другой стороны,
при фиксированном т должно быть \т — т'\ = |т"| < I".
Поскольку нас интересует верхний предел для т', то считаем
т'>т*), тогда |т — т'\ = т! — т< Z", т!<1" + т, т.е. мы
получаем еще одно ограничение сверху на т'. Следовательно, т!
не должно превышать меньшего из чисел V и V + т, т. е.
т' <: т+, т+ = min (?', I" + т). A6.3)
Допустимые значения т! в соотношении A6.2) ограничены снизу
условием — т' < Z'; кроме того, при т' <С т из \т — т'\ ·—
= т — т' < I" следует — т! <, I" — т. Таким образом,
аналогично A6.3) получаем
— т! < т_, т' > — т-, т- = min (?', V — т). A6.4)
Окончательно имеем
т+
??= ? С1тт-Чтт; ™± = Ш1П (Г, Г ± т), A6.5)
т=-т_
причем
Z_<Z<Z+, l± = \l'±l"\, — Km^l. A6.6)
Применяя сдвигающие операторы е± A5.10) к обеим частям
равенства A6.2), получаем аналогично A5.11) с учетом A6.1)
^ rrel ?? л1 ( ' х-ъ >ч1" п *^1* ' *~\ п \
е±Чт = 2л Стт' \$т' ® 0±???-??' + е±^т> ® tym-m')
т'
*) Неравенство т' ^ т невозможно лишь в том случае, если т > V.
Тогда верхней границей для т' служит /'.
112 ГЛ. П. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
или, снова пользуясь A6.2),
„?(±)\?? , — nli±)Vrl , ,? , ^ —
*?'
= 2j Cmm> \&тп-т'ХРт±1,т' + 06m' ^m±l,m'±l)· A6·7)
m'
Здесь для сокращения принято обозначение ат±} = а!?\ ат'±) =
= obm^j От^±) = ?™^. Сравнивая в A6.7) коэффициенты при
одинаковых ? mm', находим рекуррентное соотношение для ККГ,
Общ Ст±1%т' = &т-т'Стт* "Г &т' ^m,m'=Fi· (lo.o)
Теперь мы можем перейти непосредственно к вычислению
ККГ. Полагая в A6.8) т = ± I и заменяя т' на т' ± 1,
получим a$?iCl±itm' = — 4и«'±1)С±1,т'±1' откуда следует (см.
A4.17))
С±1,т> = (— 1) A,V^m' C±W ?
" * 1J ?B?)! (? + ?-)!(?" - 1 ± m')!(*' ? m')!J ?±??±? *10'У'
Согласно A6.2), A6.1), A2.11)
С mm* можно представить в виде
= (А%Г)-* ((?±)'??,?^0*?±«· A6.10)
Здесь ?^ = 2?4?,?.?±?,?? (см. A5.10))
G±)*mVmm> = (е? (g) 1" + 1' ® ?1***-' =
= ? ( 1 m) ((*±)ft<8) (?i)*m-h)wm- ® ?;_?. ) =
— ? it! (? ? m - k)\ +m'?»-»' T±I,m'±fe. 110.11)
h=0 ^ x
Подставляя A6.11) в A6.10), используя A4.17), A6.9) и
учитывая, ЧТО ?±?^?'±&?±?,?'??6/??'±?,?'? ПОЛУЧИМ ПОСЛв ПрОСТЫХ ВЫЧИС-
лений
cL·· = ck±r US)2(- D w-* (z *m\ ?
X (iiS?'-*) iCiCS-*^?'»-*. A6.12)
§ 16. КОЭФФИЦИЕНТЫ КЛЕБША — ГОРДАНА 113
Коэффициенты Cl±i±i· находим из условия нормировки (см.
A6.1), A6.9), A4.17))
TSiTii-l-Slck-'l1-
m'
i}+-l)\\Cl±i%±y\% V (V±m'W + l*m')\ ,,? ш
~~ B?')!(? + ?_)! *$ (V*m')\{l*-l±m')\- I1"·10/
Здесь при верхнем знаке I — ?" < т! < V, а при нижнем знаке
—Z' < m' < Z" — Z. Обозначая V =F ?»' = А и пользуясь A5.29),
приводим 2 при обоих знаках к виду
т'
У р +1 + *I ?*' ^ *>' (* + *-)! ? - *-)! (*+ + * +1)' „Д4/,
Надлежащим выбором фаз можно сделать все Схтт'
вещественными, а С\\' — положительными. При этом из A6.13), A6.14)
находим
?? ? BZ')lBZ + i)l ?/ш м _??? - /ift|~
t\v - [(? —?_I(?.,. + ? + 1I] · 6-i.-i' = eiCir, ?? = =fc 1. A6.15)
Подстановка этого значения C\v в A6.12) с верхним знаком
дает выражение для коэффициентов Клебша — Гордана, и тем
самым вывод завершается. Основное его отличие от других
выводов заключается в использовании соотношений A6.10), A6.11),
A2.12), весьма значительно упрощающих вычисление.
При нижних знаках из A6.12), A6.15) получается еще одно
выражение для Схтт», в котором пока не определено ?/. Полагая
в соотношении A6.12), взятом с верхним знаком, га = — ?,
т! = — V и заменяя индекс суммирования: к = к\ + I — ?-,
получим с помощью A5.30) Ег = (— 1) + . В результате A6.12)
принимает вид
~BZ+l)(Z+-Z)!(Z+m)! (l—m)\(l' + m')\(l" + m±m')\ ]Vi
.(Z-Z_)!(Z+Z_)!(Z++Z+1)! (l'±m')\ (?" ± т + m')\\ X
„ V (- lfT«'+* (V ± m' + fc)l (Z* + I qF m' - *I Mft ^
A ^ *'(« +т — Л)!(Г+ !»'-*)! (Z*-Z± то'+Л)!' Vio.ioj
U-i
C^=(±l) +
Разумеется, эти выражения с обоими знаками тождественно
равны друг другу, однако из A6.10), A6.11) очевидно, что
меньшее число членов в сумме мы получим, если при т > 0 (т <С 0)
возьмем верхний (нижний) знак.
Таким образом, мы получили сразу два выражения A6.16)
для ККГ, дополняющие друг друга в смысле удобства вычисле-
о ф. и. Федоров
114
ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
ния этих коэффициентов. Заметим, что второе выражение A6.16)
не может быть получено из первого путем преобразования
индекса суммирования, поскольку множители при сумме в обоих
выражениях различны и, кроме того, различны числа членов суммы.
Выражения A6.16) могут быть получены одно из другого с
помощью соотношения: Стт' = (— 1) + C_m,_m'.
Перейдем к выводу рекуррентных соотношений для ККГ.
Существует много рекуррентных соотношений для коэффициентов
Клебша — Гордана, они насчитываются десятками (см., например,
[19]). Большинство из них аналогично A6.8) могут быть
получены без знания явных выражений для Стт*. Однако
практическая ценность этих соотношений, за редким исключением,
весьма незначительна. Причина заключается в следующем. Как
известно, смысл всякого рекуррентного соотношения состоит в том, что
с его помощью, зная значения некоторой величины для одного
или нескольких значений какого-либо дискретного параметра, мы
можем последовательно определять искомую величину для его
последующих значений, отстоящих от первоначальных на
некоторые интервалы. Наибольший интерес представляют такие
рекуррентные соотношения, из которых путем последовательного
их применения можно определить значение искомой величины
для любых значений параметров, если известны ее значения для
одного или нескольких исходных значений параметров.
Соотношение A6.8) не предоставляет такой возможности, поскольку
значения Ст±?,т* выражаются через ^m.m'Ti» т. е. через значение
этой величины, в котором изменены два индекса (т и т').
Очевидно наиболее удобны такие рекуррентные соотношения,
которые связывают значения Стт>, отличающиеся между собой
вследствие изменения лишь какого-либо одного из трех
индексов.
Подставляя в A5.23) выражение A6.2), получим
рекуррентное соотношение для Стт* по индексу т!\
+ <&U№l'-xC\*.m-+x - 0. A6.17)
Кон дон и Шорт ли [21] в результате довольно громоздких
вычислений получили рекуррентное соотношение по индексу Z*).
Ниже излагается значительно упрощенный вывод этого
соотношения.
*) Вывод этого соотношения в [21] занимает около 10 страниц. Ввиду
громоздкости вычислений даже в фундаментальных монографиях (см.
[18, 6] и др.) указанное соотношение приводится без вывода.
§ 16. КОЭФФИЦИЕНТЫ КЛЕБШЛ — ГОРДАНА Ц5
Обозначая К— Г(§) 1",нетрудно убедиться в справедливости
соотношений (ср. A1.18), A5.21), A5.5))
{1аКь}- = izabcKc, IK = KI, A6.18)
Kl?m =4?[? + ?*-(?-?)*) ??? = ?,??,,
4 A6.19)
Всякий вектор-оператор К, удовлетворяющий A6.18), можно
представить в виде
К=В1 + К°, A6.20)
где В — некоторый скалярный оператор (матрица), причем
[IaKlU=iBabcK°e, {?/}_= К0/=/К0 = 0. A6.21)
Действительно, умножая A6.20) на / и полагая К01 = ?? —
— J5/2==0, получим согласно A6.19), A5.22)
BP4m=l{l + i)B4lm = KlYm, *<=i^fT)Y«. A6·22)
т. е. с помощью A6.20), A6.21) матрица В, а значит и К0,
определяется однозначно. Если ввести аналогично с 0, е± операторы
Н = с0Ку Я± = е±Я, Н°± = е±К°(Н1: = Н+1 Я°+ = Н%), то
A6.20) примет вид Н = В^0 + Я0, Н± = ?е± + яЦ-', а из A6.21)
получим
{с0Я°}-=0, {?0Я°±Ь = ±Я5: = -{9±Я0}., A6.23)
[Я±H°±U = 0, {?±Я?}- = ± Я0, с0Я° + Я+Н°_ + Я-Н°+ = /К°=0.
A6.24)
Из A6.23), A5.8) следует с0(Н^т) =т(Н^т),с0(Н0^1т) ==
= (т ???) (?±???), поэтому должно быть
?0??? = ?&№?? Я^ = Ц/)^Й±1| A6.25)
Zt It ±
причем из эрмитовости Н° следует 23т1 = Dm . Применяя
соотношения A6.24) к ???, получим
An±l» Dm = ± (
шЙ1 + ofetiDji1 + «Ж = 0. A6.27)
alk^M = a^^Vb Dlii = ± (???»?? - а^ВД. A6.26)
± ± ± ±
+
8*
116 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
Здесь ??^, ?{?(±) определяются согласно A2.20). Из A6.26)
находим
J™ = (I - 1г)A + 1™+ 1) ± 2т ?™> A6.28)
что дает после подстановки в A6.27) и простых преобразований:
т (I + h)(l +h + 2IA - lxf - 1] Dg' = 0. A6.28')
Отсюда ясно, что An1 ? 0 для всех т лишь при условии l\ = I ±
±1*).
Из A6.20) находим X02 = Я02 + Н°+Н1 + Н°_Н°+ = X2 - ВЧ\
Умножим это равенство, так же как {#+#_}- = Я, слева на ???
и справа на ?«. С помощью A6.19), A6.20), A6.22), A6.25),
A6.28) получим после некоторых преобразований, учитывая, что
I — т \l -f- 1) — m
г'<г' + «-7(ГТ1Г· A?·29)
т^1'*,-тг^Ь1*м1,-?«т?"«,+1>-'1·
Путем выбора фаз можно сделать все Dlml±1 вещественными
и положительными. В результате из A6.29) находим
„.,_! n,-lt, Г-^Hг-^)[(^++1J-^Г
Если теперь подставить A6.2) в первое соотношение A6.25) и
умножить на ?/???'» то получим рекуррентное соотношение для
Стт' по индексу I [21]
dW~ хсЫ· + (?^??? - т')с™· + D™ +1&™' = °- <16· 31>
Рекуррентные формулы A6.17) и A6.31) позволяют
определять изменение С1тт' в зависимости от индексов т! и I по
отдельности. Очевидно, желательно дополнить их рекуррентным
соотношением по третьему независимому индексу т. Чтобы найти
*) Случай ? = ?? = 0 реализуется только при Г = 1"\ при этом вектор
?^ = ?{| соответствует тривиальному одномерному представлению.
§ 1?. КОЭФФИЦИЕНТЫ КЛЕБША — ГОРДАНА Ц7
последнее, достаточно с помощью A6.8) исключить из A6.17)
Cm,m'^i. В результате получим [22]
+ am+1am_m'+1Cm+ifm' = 0, A6.32)
где
?? = -?[1A + ?) + 1-A+ + 1I
Совокупность формул A6.17), A6.31), A6.32) образует систему
рекуррентных соотношений для коэффициентов Клебша — Горда-
на, полную в том смысле, что она определяет их изменение в
зависимости от каждого из трех индексов т\ Z, m по отдельности.
С помощью этой системы мы можем последовательно вычислить
все члены С1тт^ зная один-единственный из них, например,
<4+<+. ±г=1-
В теории представлений группы вращений (и других групп)
фундаментальную роль играют операторы типа е± A2.7),
преобразующие ??» в ??»±?. Мы назвали их сдвигающими (§ 12) *).
В ряде случаев может оказаться полезным оператор, сдвигающий
по ? для вектора ?™, поскольку с его помощью можно
переходить от любого из неприводимых представлений, на которые
разлагается Т1' (g) T1", к соседним представлениям.
Пусть операторы Х± являются сдвигающими по ?, т. е.
обладают свойствами
?±?« = ??±)?«±1, A6.33)
где ?^±) —некоторые числа, зависящие от ? и т. Отсюда,
используя A5.22) получаем
{??±}.??? = ± 2(? + -А- ± 4")Х±У1™- A6.34)
Введем эрмитовы матрицы С±, удовлетворяющие соотношениям
{С±/}_ = 0, C±Wl = ±(l + ±±4rWm, A6.35)
откуда следует
С+ + С- = 1, С2±-С±=Р. A6.36)
С помощью матриц С± свойствам A6.34) можно придать форму
матричных соотношений
{РХ±}- = 2Х±С±. A6.37)
*) Применяется также термин лестничный (ladder) оператор.
118 ГЛ. II. ПРЕДСТАВЛЕНИЯ ГРУППЫ ВРАЩЕНИЙ
Нетрудно убедиться, что и, наоборот, из A6.37), A6.35), в
предположении, что Х± не влияют на индекс т, следует A6.33).
Таким образом, задача сводится к отысканию матриц Х±,
удовлетворяющих равенству A6.37). С помощью перестановочных
соотношений A6.23), A6.24) можно показать, что операторы Х±
имеют вид
Х+ = 2?\?- + Н° (с0 - С±) = - 2#°9+ - #° (с0 + С±). A6.38)
Действительно, согласно A2.25), A2.7), A6.23) /2 = c02-f S0 +
+ 2е_е+, причем {c0X-t-}« = 0, поэтому, учитывая A6.24),имеем
-?{??±}- = {е.9+, X±U = (?-?% + #-*+) ^0 - 2#°е_9+ -
откуда получаем после некоторых преобразований
-?{??±)- - Х±С± = Я» (С% -С±- Р) = 0.
Остается определить коэффициенты рт . Для этого используем
вытекающее из A6.38) соотношение
Х+-Х- = Н°(С--С+). A6.39)
Умножая его слева на ?™ и справа на ???, получим на
основании A6.33), A6.35)
?«±>=?B? + 1)???·?·??,.
Учитывая A6.25), A6.30), имеем ?^±} = =F B1 + 1)Dl^l±\
откуда следует
?>?+) = -¦§$-ftf*-', A8.40)
При этом операторы Х+ будут обладать необходимыми свойствами
?±?? = ?-??±? = 0. A6.42)
Нетрудно убедиться, что операторы, эрмитовски-сопряженные к
Х±, будут обладать обратным действием, т. е.
???^?^?^1. A6.43)
§ 16. КОЭФФИЦИЕНТЫ КЛЕБША — ГОРДАНА Ц9
Умножая слева на ?™ г % получаем отсюда
$» = ??'????, = (?±??^)*??? = ??1(±). A6.44)
При сложении моментов мы имеем дело с двумя
совокупностями базИСНЫХ векторов: ?????' = tym' ® tym-m' И ???. ДЛЯ ?????'
сдвигающими операторами по индексу т! будут е± ® ?^,; а по
индексу ггы 1'(8)е^Для ?™ сдвигающими операторами по индексу
т являются е± = е± ® 1" + 1' ® е±. Вместе с найденными выше
операторами Х±, сдвигающими по индексу ?, мы получаем полную
систему операторов, позволяющих по желанию изменять любой
индекс каждого из векторов ?,™' и ?™.
Глава III
ГРУППА ЛОРЕНЦА
§ 17. Пространство Минковского
Согласно частному принципу относительности линейное
преобразование координат и времени, соответствующее переходу
от одной инерциальной системы к другой, должно оставлять
инвариантной квадратичную форму
F = x\ + x\ + x\-c4\ A7.1)
где с —скорость света в вакууме. Пространственно-временной
континуум можно рассматривать как линейное пространство.
Если ввести в нем четырехмерный вектор
Ъ = (ха, хо) = (х, хо), х = (*«), хь—ct, а= 1, 2, 3, A7.2)
то форма F может быть представлена в виде
F>=:lg°%, A7.2а)
где метрическая матрица g° имеет вид
A 0 0 0)
go ??? 0 0|
0 0 10
10 0 0-1/
-(?-!)·
A7.3)
В последней матрице мы использовали блочную запись, причем
1з означает трехмерную единичную матрицу. Впрочем, индекс 3
мы будем обычно опускать.
Следуя Минковскому, можно ввести мнимую временную
переменную
Х4 = ixo = ict. A7.4)
Соответственно радиус-вектор точки (события) в четырехмерном
пространстве Минковского будет теперь определяться следующим
образом:
* = ? = (*«, ??) = (х, tee), к = 1, 2, 3, 4. A7.5)
§ 17. ПРОСТРАНСТВО МИНКОВСКОГО
121
Переход от вещественного вектора ? A7.2) к вектору ?
A7.5) осуществляется с помощью унитарной матрицы U
x = Ul, tf = (J°), 27+ = (J _^) = Z7-i, U* = g°. A7.6)
Инвариантная квадратичная форма A7.1) превращается при
этом в сумму квадратов компонент вектора ?
F = х\ + х\ + х\ + х\ = xhxh = xl = x* = x*- xl A7.7)
т. е. ее можно рассматривать как скалярный квадрат 4-вектора
х. Соответственно скалярное произведение двух 4-векторов ? и
х' определяется следующим образом:
хх' = xhx'h = хаха + х^х'ь = хх' — х0х'0. A7.8)
При хх' = 0, т. е. хх' = #0#о> 4-векторы х, х' ортогональны друг
другу. Основным преимуществом метрики Минковского, т. е.
выбора чисто мнимой четвертой (временной) компоненты каждого
вектора, является то, что при этом отпадает необходимость
введения метрического тензора g° A7.3). В соответствии с A7.5)
всякий 4-вектор в пространстве Минковского должен иметь три
первые (пространственные) компоненты вещественные, а
четвертую (временную) компоненту — чисто мнимую.
Четырехмерные векторы а = (?, ??0) в пространстве или, как
говорят иногда, в мире Минковского могут быть трех
разновидностей:
пространственноподобные при а2 > О, а2 > а\; A7.9)
времениподобные при а2 < О, а2 < я2,; A7.10)
светоподобные при а2 = 0, а2 = а%. A7.11)
Очевидно, у пространственноподобных векторов не может
равняться нулю пространственная часть а, а у времениподобных
векторов ао ? 0. Для краткости мы будем обозначать векторы
A7.9) —A7.11) как s-вектор, ?-вектор, Z-вектор (space, time,
light).
Очевидно также, что два вектора, относящихся к разным
типам A7.9) — A7.11), не могут быть линейно зависимы.
Рассмотрим приращение трехмерного радиуса-вектора Ах
движущейся частицы за время At Если 4-вектор ??= (Ax,icAt)
будет пространственноподобным, то (Ах2) = (АхJ — с2 (AtJ > 0,;
или (Ах/AtJ = ??2> с2, где ?? — вектор скорости частицы.
Поскольку движение материальных тел со скоростью, равной или
превышающей скорость света, невозможно, то перемещение частиц
может описываться только времениподобными векторами: (АхJ<.
122
ГЛ. III. ГРУППА ЛОРЕНЦА
<0. Поэтому 4-вектор импульса частицы P = (PtiPo) также
всегда должен быть времениподобным.
Если рассматривать две различных точки в пространстве
Минковского в один и тот же момент времени, то
соответствующие им мировые векторы имеют вид х = (х, ix0), х' = (х\ ix0)
и Ах = (х — х\ 0), следовательно, (?#J = (? — ?'J > 0. Таким
образом, все точки обычного трехмерного пространства, взятые в
один и тот же момент времени, связаны между собой мировыми
векторами, обладающими свойством A7.9). Отсюда и происходит
название «пространственноподобный» вектор.
Наконец, если две мировые точки (события) (х, ix0) и [х'% ix0)
относятся к движению фронта световой волны в вакууме, то
(а/ - x)/(t' - *))а = * или (х'-х)*-с* (?/_?J==(??:J==?, т. е.
связывающий эти события мировой вектор будет светоподобным.
В дальнейшем изложении мы будем пользоваться метрикой
Минковского, т. е. считать четвертую координату всякого
вектора чисто мнимой. Это обстоятельство накладывает
определенные условия на элементы матрицы каждого линейного
преобразования Л, переводящего некоторый 4-вектор ? в другой
4-вектор х': х' = Ах. Запишем матрицу А в блочной форме
=(:-;')· -
ч
1 а31 «32 «33 J
(ааь), и'
v' = {v[,v'2,v'z). A7.12)
кз;
Тогда равенство х' = Ах примет вид
( х'\ (a u'\lx\ (ax + ix0u'\
[ix'J [?' к )[i*J [*»+l*x0)'
Поскольку при любых вещественных #, х0 величины х', х0 также
должны быть вещественны, то трехмерная матрица ? и число
к должны быть вещественны, а трехмерные векторы ю' и ?/—
чисто мнимы: ю' = iu, ?/ = iv. Поэтому матрица всякого
допустимого линейного преобразования в пространстве Минковского
должна иметь вид
= [iv к у
A7.13)
Заметим, что произведение любых двух матриц вида A7.13),
так же как их линейная комбинация с вещественными
коэффициентами, снова дает матрицу того же вида.
Рассмотрим, какие векторы типов A7.9) —A7.11) могут
быть ортогональны между собой. Пусть даны два пространст-
§ 17. ПРОСТРАНСТВО МИНКОВСКОГО
123
веиноподобных вектора а = (а, га0), Ъ = F, гЬ0), т. е. а2 > я2,,
Ъ2 > Ь0. Очевидно, для таких векторов условие ортогональности
аЪ = аЪ — а0Ь0 = 0 может быть выполнено, так как трехмерное
скалярное произведение оЪ = | а | · | 61 cos ?, ?= ? (?, &) путем
выбора угла ? может быть сделано равным величине а0Ь0 < |?|·| Ь\.
Если векторы а и Ъ времениподобны, ??|?|<|?0|, |&|<|Ь0|
и равенство аЪ = а060, очевидно, не может быть достигнуто. Итак,
времениподобные векторы не могут быть взаимно ортогональны.
Для светоподобных векторов а, Ъ должно бытьа0= ±|а|, Ь0 =
= zfc|6|, и равенство ab = а0Ь0 возможно лишь, когда а||6,
причем, если ао&о>0, то ? и 6 параллельны, а при ??&?<0 — ан-
типараллельны. Во всех случаях это означает, что 6 = ?? и bo =
= ???, т. е. а и Ъ — линейно зависимые 4-векторы: Ъ = ??.
Итак, ортогональность двух светоподобных векторов
равносильна их линейной зависимости, т. е. пропорциональности всех их
компонент.
Если обратиться к парам разнотипных векторов, то легко
убедиться, что s-вектор и ?-вектор могут быть взаимно
ортогональны. В то же время Z-вектор может быть ортогонален s-век-
тору и не может быть ортогонален ?-вектору. Таким образом,
из шести различных попарных сочетаний 4-векторов A7.9) —
A7.11) свойство взаимной ортогональности возможно лишь в том
случае, если один из векторов будет пространственноподобным
(и, в виде исключения, для случая двух пропорциональных
светоподобных векторов).
Пусть заданы два произвольных фиксированных линейно
независимых 4-вектора а = (а, шд), Ъ = F, ib0). Рассмотрим
совокупность векторов, являющихся их линейными комбинациями,
x = la + r\b,: # = ?? + ?6, ?0 = ??0 + ??0 A7.14)
при произвольных вещественных |, ?. Такая совокупность
образует двухмерное линейное многообразие в пространстве Минков-
ского или гиперплоскость. Векторы а и Ъ могут относиться к
различным типам A7.9) —A7.11). Выясним, каковы могут быть
векторы ? при различных а, Ъ. Прежде всего ясно, что при
любых ао и bo надлежащим выбором ? и ? можно получить
хо = 0.
При этом #=И=0, иначе векторы а и Ъ были бы линейно
зависимы. Будем называть вектор (а, 0) пространственным
вектором, а вектор @, iao) — временным вектором. Из вышесказанного
следует, что пространственный вектор может быть получен как
линейная комбинация любых двух линейно независимых
векторов. Другими словами, всякая гиперплоскость в пространстве
Минковского обязательно содержит пространственные векторы.
124 ГЛ. III. ГРУППА ЛОРЕНЦА
В общем случае
*2 = ?2?2 + ?262 + 2???6 = ?2 (???2 + 2\.аЪ + Ь2), ?, = ?/?.
A7.15)
Квадратный трехчлен относительно ??, стоящий в скобках»
будет сохранять свой знак при любых вещественных ??, если
его дискриминант отрицателен, т. е. если
?(?, Ъ) = Саь = (аЪJ - а2Ъ2 < 0. A7.16)
Если же Оаь > 0, то х2 может иметь в зависимости от ??
любой знак или равняться нулю. Легко видеть, что при Ь = ка,
т. е. когда ? и ? линейно зависимы, ?«» = 0.
В раскрытом виде для общих 4-векторов а =(а, ia9), Ь=(Ь, ib%)
выражение для овь записывается следующим образом:
ааЬ = (аЪ - а0Ь0J - («2 - 4) (б2 - Ь2) . (а0Ъ - Ь.аJ - [аЪ\\
A7.17)
Гиперплоскость, определяемая векторами A7.14), не
изменяется, если вместо а и Ъ взять два других вектора а\ Ь',
являющихся произвольными независимыми линейными комбинациями
векторов а и Ь:
а9 = ?? + vb, 6' = ?'? + v'b. A7.18)
Действительно, любой вектор вида
|V + ц'Ь' = A'? + ?'?')? + A'? + ?'?') b
сводится к A7.14), если положить ?'? + ?'?' = |, ?'? + ?'?' = ?.
Любым ?, ? будут однозначно соответствовать ?', ?' и,
наоборот, при условии отличия от нуля детерминанта:
d =
??'
Г
W
??' — ?'?=^0,
что означает независимость линейных комбинаций A7.18).
Вычислив выражение
ом = (а'Ь'J - ?'?2 = (??' - ?'?J \{abf - a2b2] =<Poab% A7.19)
убеждаемся, что знак оа'Ъ' всегда совпадает со знаком ?«&.
Поэтому при рассмотрении гиперплоскости A7.14) можно
заменить векторы a, b их любыми независимыми линейными
комбинациями. Уже указывалось (стр. 123), что в качестве
одного из векторов всегда можно выбрать чисто
пространственный вектор а° = (а, 0). Сверх того, второй вектор b можно
заменить такой линейной комбинацией V = b + ??°, которая будет
§ 17. ПРОСТРАНСТВО МИНКОВСКОГО 125
ортогональна к а9: а%Ъ' = а°Ь + ??02 = 0. Для этого нужно
положить ? = — a°b/a02. Таким образом, любая гиперплоскость
A7.14) может быть получена как множество всех линейных
комбинаций чисто пространственного вектора а° = (а, 0) и
некоторого другого вектора Ь, ортогонального к нему: а°Ь=0. При
этом (см. A7.16)) ???5=— а02Ь2=—а2Ь2. Таким образом, знак
Сшь противоположен знаку Ъ2. Если Ъ есть s-вектор, то олЪ < 0 и
х2 = (??? -|- цЬJ = ?2?02 + Ц2Ь2 > 0 при всех значениях ? и ?,
т. е. гиперплоскость будет содержать только s-векторы. Ц
частном случае, когда Ь=(Ь, 0) = Ь° — пространственный вектор,
гиперплоскость будет чисто пространственной. Если Ъ2 = 0, то
?«* = 0. При этом ?2 = ?2?02 ^ 0, т. е. гиперплоскость будет
состоять из s-векторов, но будет включать также единственный
светоподобный «луч», который соответствует х2 = 0, т. е. |=0,
? = х\Ъ. Очевидно, этот луч представляет собой совокупность
векторов, пропорциональных Ъ. Наконец, когда Ъ есть ?-вектор:
Ъ2 < 0, имеем оаь > 0, и х2 = |2а02 + Ц2Ъ2 может иметь любой
знак или равняться нулю в зависимости от значений
коэффициентов ?, ?. Равенство я2 = 0 имеет место только при условии
? = ± V— a02/b2 ?, чему соответствует х = ? (?° =fc V— a02/b2 b),
т. е. в этом случае гиперплоскость содержит два независимых све-
топодобных луча, определяемых Z-векторами а° ± У — а02/Ь2 Ь.
Резюмируя, приведем сводку возможных свойств
гиперплоскостей в пространстве Минковского:
гиперплоскость ?: ? = |?° + ??, ?° = (?, 0), a°b = 0
I. b2 > 0. ? содержит только s-векторы: ?2 > 0;
И. Ь2 = 0. ? содержит s-векторы и один светоподобный луч:
? = т)Ь;
III. Ь2 <С 0. ? содержит s- и ?-векторы и два светоподобных
луча: х = ? (?° ± У— a02/b2 b).
Полученные три типа гиперплоскостей различаются в
зависимости от свойств вектора Ь. Наряду с этим из приведенной
сводки следует еще один признак классификации. А именно,
к типу I относятся гиперплоскости, не содержащие ни одного
светоподобного луча, к типу II — содержащие один такой луч
и к типу III — содержащие два светоподобных луча.
Инвариантным критерием для различия рассматриваемых трех типов
гиперплоскостей служит значение величины ааь A7.16). Согласно
A7.15) при Оаь < 0 и любых вещественных ? и ? имеем х2 > 0,
т. е. все векторы гиперплоскости ? являются пространственно-
подобными, что соответствует типу I. При оаь = 0 уравнение
#2=; 0 (см. A7.15)) будет давать один двухкратный корень
для 1о, т. е. один светоподобный луч (случай II). Наконец, при
Оаь > 0 будем иметь два различных корня ?0, удовлетворяющие
уравнению х2 = 0 (случай III).
126 ГЛ. III. ГРУППА ЛОРЕНЦА
§ 18. Антисимметричные тензоры. Дуальность
С помощью двух произвольных векторов в пространстве
Минковского можно построить тензор простейшего вида — диаду
(см. П.1)
<xlVl ???2 xlVs х1УЛ
??? НУ г ?2?3 ?#?
*? v« v8 *л'
ХЛ ?? V» *?
х-У = (ЧУ{) =
A8.1)
Сумма двух диад с различным порядком векторов х, у дает
симметричный тензор
(х · у) = ? · у + у · ? = (х ^jf), (? · у)м = xkyt + yhxh A8.2)
который мы будем называть симметрированной диадой (сим-
метрант). Аналогичным образом разность таких диад образует
антисимметричный тензор
[х- у]=х- у — у- х, [х- y]kl = xkyt — ykxi A8.3)
или альтернированную диаду (альтернант). В блочной записи
(см. A7.13)) эти тензоры принимают следующий вид:
(*-У) = (Х7 + У'Х 1(|Г«в + *Л\ A8.4)
fx-y + y-i
V(y0x+X,
¦**) -2Vo
, ..i-r. «fc.-V>V A8.5)
\-1(Уох~хо9) ° J
Используя соотношение (П. 1.79), можем написать [? · у] в
виде
[х.у]=( 1ух]Х ЧУох-*оЯ)\ A8.6)
Отсюда видно, что альтернант полностью определяется двумя
трехмерными векторами [ух] = — [ху\ и у0х — х0у.Хотя 4-векто-
ры ? и у вместе имеют восемь независимых компонент, однако
тензор A8.6) содержит лишь шесть компонент, входящих в
упомянутые два трехмерных вектора. Но на самом деле эти
компоненты не являются независимыми, так как 3-векторы [ху]
и Уох — #0у всегда ортогональны между собою: [ху] {уоХ— хоУ) —
= 0, каковы бы ни были 4-векторы хну. Следовательно,
альтернант A8.6) зависит лишь от пяти независимых параметров
и поэтому не может служить прототипом общего
антисимметричного тензора в пространстве Минковского, который должен
содержать шесть независимых компонент.
§ 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 127
Антисимметричные тензоры играют очень важную роль как
в геометрии мира Минковского, так и в физических теориях.
Достаточно сказать, что электромагнитное поле, одно из
фундаментальнейших физических полей, представляет собой
антисимметричный тензор. Такие тензоры получили специальное
название «шестивекторы» или «бивекторы». Оба эти названия
обусловлены тем, что их структура в общем случае полностью
определяется заданием двух 3-векторов, насчитывающих шесть
компонент. Антисимметричные тензоры играют существенную
роль в теории группы Лоренца (и вообще ортогональных групп,
см. § 1), а также во многих других вопросах. Ввиду этого мы
подробно рассмотрим их свойства.
Как показано в П.1, характеристическое уравнение анти-
симетричной 4X4 матрицы ? имеет вид
ос* - ???2 + | а | - 0, ?? = \ (а2), (а = - а). A8.7)
Следовательно, такая матрица имеет только два инварианта —
квадрат ее следа ?? и детерминант |а|. Собственные значения
матрицы являются корнями биквадратного уравнения
?4-???2+|?| =0 A8.70
и равны
?1>2 = ± ]/????+?/?|-4|?|,
?3,4 = ± ?-? Vb« ~ ??*-4|?|. A8.8)
В блочной записи (см. A7.13)) любая антисимметричная
матрица ? выражается следующим образом:
т. е. она однозначно определяется двумя 3-векторами и и 6
(бивектор!). Два вещественных вектора ? и 6 можно
объединить в один комплексный вектор
q = a + ib A8.10)
и таким образом установить взаимно однозначное соответствие
между всеми векторами комплексного трехмерного пространства
и всеми антисимметричными матрицами в пространстве
Минковского. В тех случаях, когда применяется это соответствие, мы
будем писать (см. [102], [104])
« = «(в) = ( Ref ПГ)=4- ((* + **>?*-*1· A8-И)
128 гл. ш. группа лоренца
Отсюда вытекает, что если ? = 0, то q = 0 и наоборот, а
также — что из равенства двух антисимметричных матриц следует
равенство соответствующих им по формуле A8.11) векторов q
и наоборот. Следовательно, связь ? и q имеет взаимно
однозначный характер.
Заметим, что если С — вещественное число, то справедливо
соотношение
a(Cq) = Ca(q) (С = С*), A8.12)
которое, однако, не имеет места для комплексных С.
Используя A8.9), находим (см. (П.1.78))
?.^."+»·»?«\ ???-?-(«·).-»·-? A8.13)
Чтобы вычислить |а| ковариантным путем, используем след от
матричного тождества A8.7)
4|?| = 2?|~(?% A8.14)
Заметим, что из этого соотношения вытекает равносильность
соотношений |об| =¦ 0 и (a4)f = 2?«. С помощью A8.13) получим,
возводя матрицу а2 в квадрат:
?4 /(??' + 6.6)'-[????6] ... \
V ... b'-labf)
Мы выписываем здесь лишь диагональные блоки, нужные для
вычисления следа. Учитывая (см. (П.1.78)), что аХ4 = —еРа™,
получаем после простых вычислений
(се4), = 2 (a4 + b* - 2 [a&]2). A8.15)
Подставляя это выражение вместе с A8.13) в A8.14), находим
|a| = [ab]2-a262 = -(abJ. A8.16)
Учитывая соотношения A8.13), A8.16), имеем (см. A8.8))
??-4|?| = (?2 + 62J-4[?6]2.
Но
|?|· = ?*??« + 6«, [qq*) = -2i{ab], A8.16')
следовательно, собственные значения A8.8) матрицы a A8.9)
равны
? = ± 2 *'» /&2 - а2 ± /| q |4 + [??*]2 = ± -5-(/?* ± /?*2)·
A8.16я)
§ 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 129
Здесь возможны любые сочетания знаков. Очевидно, два
собственных значения будут вещественны: ? — zfc (i/2)(j/~q*—j/g*2),
а два других чисто мнимы: ? = zfc (г/2) {Уд2 + V^g*2)· Мы
полагаем здесь и всюду в дальнейшем V~q*2 = "j/^*2* Сопоставляя
A8.13) — A8.16) с равенством q2 = а2 — Ь2 + 2iab, видим, что
основные инварианты антисимметричной матрицы ? A8.9),
A8.11) связаны с комплексным вектором q соотношениями
41 a I = - (Im q*f = - -^ (?2 - q**f = - 4 (аЬ)г, A8.17)
(a4), = 2 (Re ?2J + (Im ?2J = (Re q2J + \ q* |».
Заметим, что произведение a+a дает положительно
определенную эрмитову матрицу, след которой равен
(a+a)t = 2\q\2 = 2(a2 + b2). A8.18')
Отметим еще соотношения
а* (?) = «(?*). «(«) = «(-?). «+(«) = «(-«*), A8.18")
Характеристическое уравнение матрицы a A8.7') при учете
A8.17) может быть написано в виде
?4 + (a2 - Ь2) ?2 - (abJ = 0 A8.18'")
или
а2 4-а*2 //у2 —/?*2\2
?4 + * + g ?2 + (^ 2g ) =?. A8.18"")
Если антисимметричная матрица является альтернантом
векторов х, у A8.3), A8.6), то для инвариантов получаются
выражения (см. A7.16)):
4 ([*-y]2)t = W - «V = °*у, 11*·»] I = 0. A8.19)
Последнее равенство сразу следует из A8.9), A8.16), A8.6).
Несложный расчет показывает, что тензор [х · у] удовлетворяет
не только уравнению [х · у]2([х - у]2 — вху) = 0, которое
получается из общего характеристического уравнения A8.7) при учете
соотношений A8.19), но и более простому уравнению
[х-у]([х-у]2-°*«)=0. A8.20)
Это есть минимальное уравнение для [х · у] (см. П.1), которое
в данном случае имеет низшую степень, чем характеристическое.
9 ф. и. Федоров
130
ГЛ. III. ГРУППА ЛОРЕНЦА
Отсюда снова следует вывод, что альтернированная диада не
является общим случаем антисимметричной матрицы.
Заметим, что в этом отношении четырехмерное пространство
отличается от трехмерного. Действительно, в трехмерном
пространстве всякая антисимметричная матрица ? = —а дуальна
некоторому вектору: а =ах (см. B.4)). С другой стороны,
трехмерная альтернированная диада х-у — у-х равна [ух\х
согласно (П.1.79). Но векторное произведение [ух] может
равняться любому трехмерному вектору, а следовательно, дуальная к
нему матрица может представлять любую антисимметричную
матрицу в трехмерном пространстве.
Всякому антисимметричному тензору а= (ajk) в
пространстве Минковского можно однозначно сопоставить дуальный ему
антисимметричный тензор ах с помощью соотношения
? ?
A8.21)
где Ejhin — четырехмерный символ Леви-Чивита (см. П.1).
Выпишем общую антисимметричную матрицу а A8.9) в раскрытом
виде:
? =
г о
— «12
-«18
-«14
«12
0
-«23
-«24
«13 «Н
«23 «24
0 «34
-«34° J
< 0
яз
-в2
ГЛг
-вз
0
Я1
—Л
ibl)
— а1 ibJ
0 ?63
-ib3 о I
A8.22)
Вычисляя последовательно элементы матрицы ах с помощью
определения A8.21), например, ах2 = (г/2) (812з4аз4 + е124за4з) =
=гос34 = — Ь3 и т. д., получим
сс>
0 -63
ьп о
bt
— ьа
Ь2 —???\
? -ia2
0 — ian
/6х -ia\
[ia 0 У
A8.23)
Видно, что если ? = ?(#), то ах = — a(iq). Действительно,
согласно A8.11)
a(iq) = ( Re{iq)X ilm{i*A. A8.24)
Но если q = a + ibt то iq = — b + ia, т. е.
Re (iq) = — Im q = — 6, Im (iq) = Re q = a, A8.25)
следовательно, A8.23) можно написать в виде
aX(i) = (-Rte(lf, -"»<'«>) —«<**). A8.26)
^ ilm(iq) 0 J
§ 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 131
Итак, мы имеем важное соотношение (см. [102], [103])
М?))х = ссх (?) = -a(iq) = ?(- iq), A8.27)
с помощью которого легко получаются различные выводы
относительно свойств дуальных антисимметричных матриц.
Двукратное применение операции дуальности дает
??? (q) = (ах (q))x = (а (- iq))x = а (- q) = - а («).
Такжм образом, для любой ? = — ? имеем
??? = _ ?. A8.28)
Рассмотрим инварианты дуальной матрицы. Согласно A8.17),
A8.27)
(<хХ2 (q))t = (?* (_ iq))t = - 2 Re (-??)« = - 2 Re (- ?·) =
= 2Reg2 = -(a2(i))f,
следовательно, для любого тензора a = —a
(??2)? = -(?2),. A8.29)
Аналогично находим (см. A8.17))
!aX(i)l = |a(-ii)| = -T(Im(-iiJJ = |a(g)|. A8.30)
Из A8.7), A8.29), A8.30) следует, что характеристическое
уравнение тензора ах имеет вид
а*4 + ?«??2 + | а | = аХ4 - (а2 - ?2) ах2 - (аЬJ = 0. A8.30')
Это уравнение получается из A8.18"') путем перестановки a
и Ь, что равносильно изменению знака ??. Нетрудно видеть, что
собственные значения матрицы ax(<jf) равны (см. A8.16"))
? = ± j (V~q2 ± Yq*2)· A8.30")
Отметим еще соотношения, легко проверяемые с помощью A8.9)
и A8.23):
а* - ах2 = Ь2 - а2 = ?«, а3 = (б2-»2) а - а& а* =
= ?„? -У-|а|а*, A8.30'")
[a (q) a (q')]t = 2 (&&' - аа') = - 2 Re (от'), |
[а (в) ax (g')]( = - 2 (аЪ'+Ьа') = - 2 Im (??')f A8.30"")
[«(?) («(«') + гаХ (?'))]< = - 2?«'. j
9*
132 ГЛ. III. ГРУППА ЛОРЕНЦА
Корень из квадрата вектор-параметра q в общем случае есть
некоторое комплексное число ? = ?? + г|г. Для него имеем
уравнение
I2 = Ъ\ - 11 + Ш*= q2 = «2 - &2 + 2ш6,
следовательно,
Исключая |г или ??, получим для этих величин биквадратные
уравнения
It - (?2 - &2) ?? - (nbf = О, Ц + («2 - &2) l\ - («&J = 0.
Сравнивая с A8.18"') и A8.30'), убеждаемся, что ?? есть
собственное значение матрицы ос (q), ?2— собственное
значение матрицы а. Различия собственных значений A8.30") и
A8.16") сводятся к тому, что одни получаются из других
умножением на L Используя выражения A8.9), A8.23), получаем
??? = (??6? ~ Ьа _ °?6) = - ab - ??? = 1 (???), A8.31)
пли (см. A8.16))
? (?) ?? (?) = ?? (?) ? (?) = - \ Im ?' = - /-|?(?)|. A8.32)
Отсюда следует, что если |?| =5^0, то матрица, обратная к а,
пропорциональна ах и равна
а-' = -ах/У"Н^| (|а| =^0). A8.33)
Тензор a(q) согласно A8.17) является особенным (|а| = 0)
при условии вещественности квадрата комплексного вектора q
Img2 = 2аЬ = 0, q2 - q*2. A8.34)
Вследствие A8.32) условия |?|=0 и ??? = 0 равносильны.
Поскольку (см. П.1) а= |а|а-1, то тензор, взаимный к а=— а,
в силу A8.33) имеет вид
а = у^|^[а*. A8.35)
Отсюда следует, что при а ф 0 равенства | ? | =0 и а = 0
вытекают одно из другого.
Выше было показано (см. A8.19)), что если
антисимметричный тензор является альтернированной диадой, то его
детерминант равен нулю. Можно показать, что и наоборот — из равенства
|ос|=0 следует, что а= [а· 6]. Действительно, всякий тензор
S 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 133
может быть представлен в виде суммы не более четырех диад
а = а · а'+ Ъ · Ъ' + с · c' + d · d'. A8.36)
Если |?| # О, то все векторы а, Ь, с, d должны быть линейно
независимы и то же относится к векторам а\ Ь\ с\ d'. Если же
|а| = 0, то тензор ? представляется в виде суммы не более
трех диад
? = а · а! + Ъ · V + с · с', A8.37)
поскольку векторы а, Ь, с, d (или а', Ь\ с', d') линейно
зависимы. Если ? — антисимметричный тензор, то, как ^>ыло показано
(см.A8.35)), равенство |ot| = 0 влечет за собой ? = 0. Но
взаимный тензор ? имеет своими компонентами трехмерные
миноры детерминанта а. Поэтому равенство а= 0 означает, что и
векторы^ а, Ь, с (или а', V с') линейно зависимы и тензор
а = —ос должен представляться в виде суммы не более чем
двух диад, откуда и следует, что ? = ? · Ь — Ъ · ? = [#·?>].
Путем непосредственного вычисления нетрудно проверить, исходя
из формы A8.9), что при условии ?& = |?| = 0 тензор ?
удовлетворяет минимальному уравнению вида A8.20)
?(?2-??) =0 (? = —?). A8.38)
Таким образом, равенство |сс| = 0 есть необходимое и
достаточное условие для того, чтобы антисимметричный тензор ? был
альтернантом.
Пусть тензор ? = — ? задан в форме A8.9), причем аЬ =
= |а|=0.Тогда существуют такие два 4-вектора ? и ?/, что
а = [х · у]. Возникает вопрос, как найти ? и ?/, если задан ? =
= ?(#),?. е. известен вектору = а + ib.Прежде всего заметим,
что векторы ? и у заведомо не могут быть определены
однозначно. Действительно, поскольку справедливы соотношения
[*·*]= 0, [(* + *) · у] = [х · у] + [? · у] A8.39)
для любых 4-векторов #, ?/, ? (см. определение A8.3)), то
[х- у] = [(х + 1у)· У] = [х-(У + Цх)]
при любых скалярах ? и ?. Пользуясь этими свойствами, мы
всегда можем один из векторов ? или у привести к виду х =
= ?9 = (#, 0), т. е. сделать его чисто пространственным вектором.
Кроме того, в общем случае можно, не меняя альтернанта
[х · у], тем же путем добиться того, чтобы векторы х} у были
взаимио ортогональны: ху = 0. Действительно, пусть ху *Ф 0.
Тогда берем вместо у вектор у' = у + \х и требуем, чтобы
ху'= х(у + 1х)=ху + 1х2 = 0. Если х2ф0, т. е. х не есть
Z-вектор, то отсюда находим %=—ху/х2 и альтернант [х · у]
134 ГЛ. III. ГРУППА ЛОРЕНЦА
принимает вид [х · у'], причем хуг = 0. Если х2 = 0, но у2 ? 0,
то аналогичную операцию производим над вектором х.
Единственный случай, когда этот способ непосредственно не приводит
к ортогонализации векторов ? и у, имеет место при х2 = у2 = 0,
т. е. когда оба вектора светоподобны. И это понятно, ибо если
при х2 = у2 = 0 справедливо также ? у = 0, то согласно § 17
мы имеем линейную зависимость у = Сх и альтернант равняется
нулю. Однако при х2 = у2 = 0 мы также можем получить ? =
= #° = (#, 0) и привести альтернант к виду [х° · у], после
чего, взяв у' = у + \х° при | = —х0у/х02, получим [х° · у] =
— [з° * У'] с #V = 0. Здесь реализуется цепочка
преобразований [х · у] = [х° · у] = [х° · у'].
Итак, во всех без исключения случаях любой альтернант
? · у], не изменяя его значения, можно представить в виде
#? * ?/']» гДе х° = (?? 0) и #У = 0. Отсюда следует, что можно
рассматривать всего три возможности: у' является s-t ?- или
1-вектором.
Таким образом, нужно найти ? = (х, 0), y = {y,iy~) из
соотношений (см. A8.6), A8.9))
« = ( ? ?? = [*·*? = ? [Уа?1>< ?ne*V аЪ = ху= 0. A8.40)
V-;6 о/ \-%* ° /
Отсюда имеем [ух] = ?, ?/0# = Ь, 6у = 0 или ? = b/y„ [by] =
= —у0а.Утюжгая второе равенство векторно на Ь, получим^Ь2 =
Таким образом, значения х=Ь/у0У у = у0[аЪ]/Ъ2
удовлетворяют требуемым условиям при любом ?/?. Проще всего положить
</о = 1, после чего получаем окончательно (см. [102])
a = [x-yh * = (Ь,0), У = A/Ъ2)([аЪЪгЪ2) (аЬ = 0). A8.41)
Поскольку у2 = (а2 — Ъ2)/Ъ2, то при |?|<| &|(??>0) вектор
у будет соответственно s-, ?- или J-вектором. Иными словами,
знак у2 совпадает со знаком Re q2. Заметим, что из
соотношения A8.41)
[x-y] = a(q)
следует (см. A8.6))
q = [yx] + i(y<>x — х0У)·
Отсюда имеем для квадрата вектора q
q2 = [ух]2 - (У0х - *оУJ = *V = - <W A8·41')
Коммутант двух антисимметричных матриц в пространстве
любого числа измерений снова дает антисимметричную матрицу.
Действительно, если А = —Л, В = —2?, то
{АВ}^ = АВ-ВА = ВА-АВ = -{АВ}-. A8.42)
S 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ
135
В трехмерном пространстве этому соответствует соотношение
(см. П.1.76)
[ахЬх]. = ахЬх - Ъхах = Ъ-а-а-Ъ = [аЪ]х. A8.43)
В пространстве Минковского имеем
{a (q), а (?')}- = <*(«*). A8.44)
Чтобы найти комплексный вектор q" по заданным q = а + ib
?/ = ?/ + ?6/, используем A8.9). После простых вычислений
получаем
/ [««']*-[Ю']х i([e6']-[e'M)\
?(«) = ^?([?6/]«-[?/6]) 0 /'
откуда следует
д" = [??'] - [&&'] + ? ([aft'] - [а'Ъ]) = [gg']. A8.45)
Таким образом, справедливо соотношение
{«(?).«(?')}- = «([??'])· A8.46)
Отсюда следует, что две матрицы ? и а' коммутируют тогда и
только тогда, когда [qq'\ — 0 или q' = Cg, т. е. векторы q и д'
линейно зависимы (пропорциональны). Если коэффициент С
вещественный, то это означает (см. A8.12)), что а! = Са. Если
же С = Сх + *С2, то согласно A8.12), A8.26)
а' = ? (g') = ? (C^g + iC2g) = Сга (q) + С2а (iq) = Сга — С2осх.
Итак, мы получаем следующий результат: антисимметричная
матрица а', коммутирующая с другой антисимметричной
матрицей а, в самом общем случае должна быть линейной
комбинацией ? и ах.
Пусть а" = a(q") = {аа'}_, тогда
(сс)< = - 2 Re [gg']2, | ?" | =- - A-(Im [gg']2J, A8.47)
Простота этих выражений характерна для многих соотношений,
основанных на использовании соответствия а«т*д (см. A8.11)).
Заметим, что коммутант двух альтернантов, будучи
антисимметричным тензором, не является в общем случае альтернантом,
как следует из соотношений A8.46), A8.47). Действительно,
при |ос| = |а'| =0, что соответствует Img2 = Img'2 =0,
получим Im[gg']2 = — Im (gg'J ^ 0, следовательно, |?"| ? 0.
Рассмотрим 4-вектор следующего вида:
р= [а-Ъ]хс A8.48)
ш
ГЛ. III. ГРУППА ЛОРЕНЦА
¦или в индексной записи (см. A8.21), A8.3))
Pj = -g- Zjhin {a-b]lnck = teJhin<*ibnch = iejhinahbicn. A8,49)
Вследствие известных свойств символа Леви-Чивита (см. П.1)
отсюда следует ра = pb = рс = 0, т. е. вектор ? ортогонален к
каждому из векторов а, Ь, с. Из формулы A8.49) ясно, что все
три вектора а, Ь, с входят в ? одинаковым образом и
перестановка любых двух из них ведет к изменению знака. Вводя для
? обозначение [а, Ь, с], имеем
? ?— [а, Ь, с] = [а · Ь]хс = — [Ь · а]хс =
= -[с· Ь]ха = |>.с]ха = [с · а]хЬ = -[а · с]хЬ. A8.50)
Видно, что вектор ? отличен от нуля лишь при условии, что все
векторы а, Ь, с линейно независимы. Воспользовавшись A8.6)
я A8.23), нетрудно убедиться, что
[я, Ь, с] = [а- Ъ]хс= — {ао[Ьс] +Ь0[са] + с0\аЪ],
Вычислим квадрат вектора ?
?2 = Рз = РзРз == — ujkirfijh'i'n'akbiCnuk'bi'Cn'
Согласно П.1
&jhlrfijh'l'n' ==
hi' hn>
,6nfc'
поэтому из A8.51) следует
p2 = [a,b, с]2 = —
?,„ ?
?'
In'
шг'
? ab ас
ab b*
ас be
ia[bc\).
A8.500
A8.51)
A8.52)
A8.53)
т. е. р2 равен детерминанту Грама (см. [10]) векторов а, Ь, с с
обратным знаком. Заметим, что равенство [а, Ь, с]2 = 0
является необходимым, но недостаточным условием линейной
зависимости векторов а, Ь, с. Причина этого — индефинитность метрики
пространства Минковского. В частности, в пространстве с
дефинитной метрикой ортогональность двух ненулевых векторов
достаточна для их линейной независимости. В метрике
Минковского дело обстоит иначе, поскольку, например, два светоподоб-
ных вектора а (а2 = 0) и b = Ca, будучи линейно зависимыми,
в то же время взаимно ортогональны: ab = 0. Аналогично в
трехмерном комплексном пространстве круговые векторы е (е2 = 0) и
ег = Се ортогональны в смысле ее* = 0, несмотря на свою
линейную зависимость.
S 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 137
При рассмотрении возможных свойств вектора р=[а,'Ь]хс
мы, как отмечалось выше, можем считать в альтернанте [а · Ь]
вектор а пространственным: а = а0 = (а, 0). Записав ? в виде
(см. A8.50)) ? = [а0 · b]xc= [b · с]ха°, мы можем теперь
применить те же соображения к альтернанту [Ь · с] и заменить
вектор b на Ь° = (&, 0).Таким образом, вектор ? всегда
представляется в виде ? = [?° · b°]xc. В альтернанте [?° · Ь°] всегда
можно считать, что а°Ь° = 0. Действительно, если это условие не-
имеет места, то вводя вместо Ь° вектор Ь0' = Ь° + ??° и выбирая^
| = —а°Ь°1а02, получим требуемый результат: Ь°'а° = 0. Итакг
будем считать, что а°Ь° = 0. Заменяя вектор с на с' =
= с -j- ??° + ?&°, мы не изменим р, поскольку [а · Ь]ха =
= [а · b]xb = 0. Налагая условия а°с = Ь°с' = 0, получим ? =
= —л*с/я02, ? = —b°c/b02. Таким образом, всегда можно считать,
что
? = [а* · &о] хс, а°Ь° = а°с = Ь°с = 0. A8.54)
При этом (см. A8.53)) р2 = — аЩ^с2, следовательно, знак р*
противоположен знаку с2. Отсюда следует, что если с есть s-век-
тор (J-вектор), то ? будет соответственно J-вектором (s-векто-
ром). Если же с2 = 0, то и р2 = 0, т. е. с и ? одновременно
светоподобны. Д этом случае, поскольку р2 = с2 = рс = 0, то·
согласно § 17 ? = Яс.
Для того чтобы определить коэффициент ?, мы
предварительно выведем полезное соотношение, которое неоднократно будет
использоваться в дальнейшем. Пусть ?, ? — два произвольных
антисимметричных тензора. Вычислим произведение ????.
Согласно определению A8.21)
1 Id
(????)?' = -?-?]?????>?????'?>§?>?' = —bhnnbhyvn'ainVvn'. A8.55)
Используя A8.52), получим после несложных вычислений
(?*?*)«. = (??),,--!-(??)*??«'
или в безындексной записи
???? = ??_ -i-(c#)f. A8.56)
Возвращаясь к соотношению A8.54) для случая с2=0,
подставим в него с = ?/? и итерируем
Р-=4- la°'b°lxP =T2- [а°-Ь01Х2р. A8.57)
Согласно A8.56)
[ао.&о]хг = [«о. 6°Ja 1- ({а0 > b°]a)t. A8.58)
138 ГЛ. III. ГРУППА ЛОРЕНЦА
Поскольку (см. A8.3), A8.2))
[а0 · Ь0]2 = а°Ь° · (а0 . b°) - aQ2b° . b° - b02a° . ?° A8.580
и ?°? = b°p = 0, ?? [?° · Ь°]2/> = 0. Следовательно (см. A8.19)),
[а°.6°|Х2р = — -1_([?0.?0]2)? р = ?02?02? = ?2&2/?
й равенство A8.57) дает ?2=?262. Таким образом,
? = [а°.Ь°]х с = ± | а |.| 61 с (с2 = а°с = b°c = a°b° = 0). A8.59)
Следовательно, тензор [а0 · Ь°]х имеет собственные значения
zfc | а | · | Ь | и, соответственно, имеет Z-вектор с в качестве
собственного вектора. Фактически двум различным собственным
значениям ± \ а | · | 6 | будут соответствовать два светоподобных
собственных вектора, которые мы обозначим е±. Чтобы найти е±
в явном виде, раскроем матрицу [а0 - Ь°] с помощью A8.6),
A8.23):
к-МГ* °о)· |»0-»°'Ч-Д| "f1)· <18в0>
Теперь можно убедиться, что собственные векторы е± имеют вид
e± = ([ab], =Fi|[ab]|) (| [аЬ] \ = |а|-| Ъ\). A8.61)
Действительно,
\а«.Ъ«\*е+^[ ° i[ab])( [аЪ] \ = /tlta6]II«6]\ =
1 ± \_ f [ab] 0 )[+i\ [аЬ] |' V -«1«&]2 /
= ± |[а&]|е±.
Если нормировать векторы а, 6, т. е. заменить их единичными
векторами а1ч bLl а\ = Ьх = 1, а^ = 0, | [aj)^ | = 1, то получим
[ao.fcojx ?± = ± е±, *± = ([???, =F i),
а° = (а1, 0), b° = F1,0)f ?? = 6? = 1, «? = 0.
Векторы е± удовлетворяют соотношениям
e±aQ = e±b° = 0, 4=°» *-=*+. *+*-= 2. A8.63)
Кроме е±, тензор [a0· b°]x имеет два собственных вектора а0 и
6°, отвечающих нулевым собственным значениям
[?°.6°]??°= [а°.Ь°]хЬ° = 0.
Четыре линейно независимых вектора а0, Ь°, е± можно
рассматривать как базисные векторы пространства Минковского. В этом
случае удобно нормировать е± так, чтобы
*+*-=: 1, ?±=^([??1. =Fi). A8.64)
* 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ \$д
Напомним, что в §§ 3, 12 был введен аксиальный базис
трехмерного пространства, состоящий из единичного вещественного
вектора с0и двух круговых векторов е±. Все эти векторы
являются собственными векторами 3 X 3-тензора с0, дуального
вектору ct:
c*cQ = 0, с%е± = =f ie± A8.65)
и обладают свойствами
с0е± = е\ = 0, Со = е+е~ = 1, е_ = е+. A8.66)
Мы видим, что введенный выше базис а0, 6°, е± в пространстве
Минковского обладает большой аналогией с аксиальным
базисом трехмерного пространства. Это непосредственно следует из
сравнения A8.65), A8.66) с соотношениями
[а°.&0]х а0 = [aQ-b°]x 6° = 0, [а°.6°]х е+ = ± е±,
е\ = а°в± = Ь°е± = а°Ь° = 0, а02=602 = е+е_ = 1, е- = е+.
В аксиальном базисе особую роль играет «ооь» — единичный
вектор с0. Аналогично в случае A8.67) особую роль играют два
единичных пространственных вектора а0, 6°, определяющих
пространственную гиперплоскость. Поэтому указанный базис в
мире Минковского естественно назвать планальным.
Из формулы A8.56) можно получить ряд других
соотношений. Взяв след от обеих частей равенства, получим
(????), = --(??)«. A8.68)
Напомним, что во всех нижеследующих соотношениях ? и ? —
антисимметричные тензоры. Полагая ? = ?, имеем для любого ос
??2 = ?2 _ ??? (??2)? = _ (?2)?# A8.69)
Заменим в A8.56) ? на ??. На основании A8.28) получим
??? = -?*? + 4-(???)„ (??*), = (?*?),. A8.70)
Аналогично, заменив ? на ??, придем к соотношению
??? = - ?*>< + 4"(???)<· A8·71>
С помощью формулы A8.52) можно преобразовать любое
выражение, в которое дважды входит символ дуальности ((Х)). Таким
путем получим
?*??? = (???), + (? - yt) {j-(^)t - ??) - ? (?? + ??). A8.72)
140 ГЛ. III. ГРУППА ЛОРЕНЦА
Здесь ? — произвольная матрица. Далее легко убедиться, что
{офх}? ={???}? = {?><??}---{??}_. A8.73)
Заменив здесь ? на ??, получим
{??}* ={???}- = {???}-= {????,?. A8.74)
Тем же путем получаются соотношения
[а · ахЬ]х = - [аа · Ъ] + аЪ · а, A8.75)
где а, 6 — произвольные векторы. Заменяя ? на ах, получим
отсюда
[а · аЬ]х = -[Ь · аха] -аЬ · ах. A8.76)
Справедливы также формулы
[(??)?]2+[(???)<]2 = 4(?2?2)(-(?2)?(?2)?, A8.77)
aaxb-c$xd = fld-?$ac — ??·6??<? + bc-da$a — bd«co$a +
+ 4" (??)« (**·? — ad-bc) — afyb-cad. A8.78)
Эта формула может быть получена из A8.72), если положить
К = 6'С и умножить результат слева на ? и справа на d.
Частным случаем A8.78) является соотношение
(aa*bJ = lab . atfb — a2ba2b - b2aa2a + ????* - (aabJ. A8.79)
Приведем еще равенство
([?· 6]|>.d])t = 2(ad. Ьс-ас- bd). A8.80)
Пусть (см. (П.1.41))
\а, b,c, d| =
К К ьз К
С1 С2 С3 С4
*1 d* dS d*
= *jkin<ijbkcidn A8.81)
— детерминант, составленный из компонент четырех линейно
независимых векторов а, Ь, с, d. Этот детерминант является
чисто мнимым числом, так как а± = Шо, &4 = ibo и т. д. С
другой стороны (см. A8.48), A8.49)),
а[Ъ · c]xd = 1гШпа,Ькс4п; A8.82)
сравнивая с A8.81), находим
a[b-c]xd=i\a, 6, с, d|. A8.83)
С помощью A8.50') находим соотношение
U[b.c]xd = d[a. Ъ]хс =
= — (a0[bc]d— bo[cd]a+c0[da]b— d0[ab]c). A8.83')
§ 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 141
Совокупность приведенных выше алгебраических векторно-
тензорных соотношений позволяет решать многие задачи кова-
риаптпым путем, т. е. не обращаясь к рассмотрению отдельных
компонент векторов и тензоров. Приведем некоторые примеры.
Пусть задан вектор а и требуется найти общее выражение для
вектора х, ортогонального к а: ха = 0. Ответ будет ? = ??, где
? — произвольный антисимметричный тензор. Действительно,
ах = ana = 0. Если требуется найти вектор, ортогональный к
двум векторам а и Ьт то выражение для него может быть па-
писано сразу: ? = [а · Ь]хс, где с — произвольный вектор.
Собственные векторы антисимметричной матрицы ^обладают
специфическими свойствами. Пусть ах = ?? (? = — ?), тогда,
поскольку для всякой антисимметричной матрицы тождественно
хах = 0, имеем ??2 = 0. Следовательно, все собственные
векторы антисимметричной матрицы, отвечающие ненулевым
собственным значениям, имеют скалярный квадрат, равный нулю.
Это справедливо для пространства любого числа измерений.
В мире Минковского это свойство можно выразить так:
собственные векторы антисимметричного тензора при ? ? 0 светопо-
добны. В общем случае при |а|=т?0 все собственные значения
антисимметричного тензора отличны от нуля и, следовательно,
все четыре собственных вектора его светоподобны. При |а| =0
согласно A8.38) мы имеем, наряду с нулевым собственным
значением, два других ? = ±УДа. Очевидно, нулевое собственное
значение будет двукратным, что вытекает из условия а« = 0,
справедливого для любой антисимметричной матрицы. Таким
образом, если | ? | =0, ?? ? 0, то бивектор ? имеет два светопо-
добных собственных вектора. Возможен также случай ?? = 0,
|? (q) I? 0, что соответствует равенству а2 = б2 или Re q2 = 0.
При эгом характеристическое (оно же минимальное)
уравнение для ? принимает вид а4 = — | а |, и а имеет четыре свето-
подобиых собственных вектора. Наконец, возможен случай
|оь| =??=0 или а2 — Ь2 = аЬ = 0. При этом комплексный
вектор? является круговым (q2 = 0), а уравнение A8.38) принимает
вид а3 = 0 и является минимальным уравнением для а,
поскольку а2 ф 0 согласно A8.13). Мы встречаемся здесь со случаем,
когда все собственные значения ? равны нулю и минимальный
полином имеет трехкратный корень. Согласно П.1 структура
тензора ? в этом случае ясна — он состоит из одной жордановой
клетки третьего порядка и «диагонального» нуля. Жорданова
клетка имеет всего один собственный вектор (П.1), а второй
отвечает диагональному нулю. Разумеется, тензор ? при этом
неприводим к диагональному виду. Собственный вектор,
отвечающий жордановой клетке третьего порядка, находится без
всякого труда. Написав ??2 = 0, видим, что столбцы тензора а2
(см. A8.13)) можно рассматривать как собственные векторы
142 ГЛ. III. ГРУППА ЛОРЕНЦА
(П.5). Проще всего взять четвертый столбец а?, в результате
чего получим жорданов собственный вектор в виде
х = ([аб], — ??2), ?2 = [аЪ]2 — а4 = 0, A8.84)
таким образом, он оказывается светоподобным. Таким путем
получаем лишь один собственный вектор, так как остальные
столбцы матрицы а? A8.13) при q2 = 0 пропорциональны
найденному ? A8.84). Убедиться в этом можно, взяв, например,
в соответствии с условиями а2 — Ъ2 = аЪ = О
A)· w=(f)·
(ха + Ь-Ь = @00). A8.85)
В результате матрица а2 A8.13) принимает вид
A8.86)
и мы видим, что третий столоец отличается от четвертого
множителем i. Чтобы найти все собственные векторы, нужно
использовать минимальный полином эрмитовой матрицы ?см. П.5)
1-л*Л\{ a* ib\ (-а™ + Ь-Ъ -i[ab]\
Вычисляя А2 с учетом условий a2 — b2=ab=0 получим Al = 2a2A
или A (A — 2a2) = 0. Следовательно, столбцы матрицы A — 2a2
должны содержать все собственные векторы тензора а,
отвечающие нулевым собственным значениям. Таким образом, имеем
А-2а2 = [Ь-Ь-аа-аг -i[al]\ A8.87)
\^ i[ab] —*)
Четвертый столбец дает уже известный нам жорданов
собственный вектор A8.84). Собственный вектор, отвечающий
диагональному нулевому собственному значению, содержится в трех
первых столбцах матрицы А — 2а2. Снова используя A8.85) t
получим вместо A8.86) на основании A8.87)
— 20
0 0
?0
> 0 0
0
0
-1
i
0'
0
— i
-1<
А-2а2
откуда видим, что «диагональный» собственный вектор пропор-
§ 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ Ш
ционалеп первому столбцу и равен (см. A8.85))
Действительно, как и должно быть,
«•-(-ST D(p·)-*
Таким образом, при условии q2 = О антисимметричный тензор
a(q) имеет только нулевые собственные значения и два
собственных вектора
я° = (а, 0), ? = ([аб], — га2), A8.88)
причем первый из них — чисто пространственный, является
диагональным, а второй — светоподобный, является жордановым
собственным вектором (П.5). Построим альтернант векторов х°
? ? (см. A8.6))
??.?] = /[[^]«]? -??\ д1/»х -?«\=?2??. A8?89)
^ ?? ? ? J \ia 0 /
Как видим, этот альтернант с точностью до множителям2 равен
дуальной матрице ах.
Полученный результат не является случайным. Рассмотрим
тензор, дуальный альтернанту двух векторов а и Ь: [а - Ь]х.
Поскольку детерминант этого тензора равен нулю, то он, по
доказанному выше, должен сам равняться некоторому альтернанту
[а.Ь]х= [c-d]. A8.90)
Возникает задача — найти с и d при заданных а и Ъ.
Разумеется, все векторы предполагаются ненулевыми, и а, Ъ (так же
как с, d) линейно независимы. Поскольку [а · b]xa = [a-b]xb =
= 0, то
[с . d] a = ad · с — ас · d = 0, [с · d] Ъ = bd · с — be · d = 0.
A8.91)
Вследствие независимости end должно быть ad = ас = bd =
= Ьс = 0, т. е. векторы cud должны быть ортогональны
каждый к каждому из векторов а и Ь. Предположим вначале, что
([а · b]2)t ? 0. Тогда, как показано выше, тензор [а · Ь]х имеет
два нулевых собственных значения (которым соответствуют
собственные векторы а и Ь) и два ненулевых, которым
отвечают светоподобные векторы g+ и g-. Пусть [а · b]xg± = ?±#±,
тогда и [с · d]g± = ?±?± или
dg+ - c — cg+- d = K+g+1 dg- - c — cg- - d = ?-g-.
144
ГЛ. III. ГРУППА ЛОРЕНЦА
Разрешая эти уравнения относительно векторов end, получим,
что каждый из них есть линейная комбинация собственных
векторов g+ Eg-: с = lig+ + ?)??_, d = l2g+ + r\2g-, следовательно,
[c-d] =(???2 — ?2??)[?+ ·*-].
Таким образом,
[a.b]x = C[g+.g_], A8.92)
т. е. матрица [ab]x при ??& = 0 представляется в виде
альтернанта своих собственных векторов, отвечающих ненулевым
собственным значениям. Можно в виде иллюстрации осуществить
проверку этого результата на примере матрицы [а°-Ь°]х и
векторов е± (см. A8.60), A8.61)). Случай, когда ??&=0, требует
особого рассмотрения. Напомним, что, не меняя альтернанта
[ab] (а значит, и [а-Ых), всегда можно представить его в
виде [?°·?, где а°=(а, 0) — пространственный вектор и а°Ь = 0.
Следует особо подчеркнуть, что при любых а и Ъ переход к
этому представлению совершается по существу однозначно.
Действительно, пусть ао = 0 (или Ьо = 0), тогда нужно лишь ортого-
нализировать ? и 6. Если ао ? 0 и bo ? 0, то берем вместо ?
вектор а + |Ь, где ? = — а0/Ьо\ при этом а + \Ь =(а — a0b/b0, 0).
Если взять вместо Ъ вектор Ъ + ??, где ? = — Ьо/яо, то
получим вектор, который отличается от а-\-\Ъ множителем — ЬоМ).
Таким образом, с точностью до общего численного множителя
переход от общего альтернанта [а · Ь] к альтернанту [а0 · Ь]
совершается однозначно. После этого, если а°Ь ? 0, то берем
вместо Ъ вектор Ъ + ??° и требуем, чтобы а°Ь + ??02 = 0, ? =
= -—a°b/a02. Так как всегда а02 Ф 0, то и этот переход
осуществляется однозначно. Итак, всякий альтернант без изменения
своего значения, по существу однозначно*) приводится к виду
[а0 · 6], где а0 — (а, 0), а°Ь = 0. Следовательно, все возможные
варианты связаны с характером вектора Ь, для которого
возможны случаи: I. Ь = F, 0), И. Ь = F, Й0), Ъ2 > 0, III. Ъ2 < 0,
IV. Ь2 —0. Случай I был рассмотрен выше (см. A8.60),
A8.61)). В случае II тензор [а0· Ь]х имеет минимальный
полином (см. A8.38))
[а0 · Ь]х([а° · Ь]Х2-а02Ь2)= 0. A8.93)
Нормируем вектор а0 так, чтобы а02 = а2 = 1, включив
соответствующий множитель в Ь, тогда ненулевые собственные значения
будут равны ±УЬ2, а соответствующие собственные векторы
будут пропорциональны столбцам матриц (см. П.1) [а°-Ь]хХ
*) Т.е. с точностью до общих множителей, которые можно вводить
в любой из векторов. Единственным исключением является случай, когда
а и Ь — чисто пространственные векторы. Тогда их выбор неоднозначен.
Бели нормировать вектор а0 на единицу: а02=1, то форма [а»Ь] получается
с точностью до изменения знака обоих векторов а0 и Ъ.
S 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 145
?([?? · Ь]Х±У&2). Выписав такую матрицу в явном виде и взяв,
ее четвертый столбец, получим
[?··6]? х± = ±VFx±, x± = {bj> ± УЩаЪ], ib*)x х% = °· A8·94)
Нетрудно убедиться, что
[х+.х-]=2уЩа°.Ь]. A8.95)
В случае III минимальный полином A8.93) вследствие Ь2 <
< 0 будет иметь мнимые ненулевые корни. Соотношения A8.94),
A8.95) сохранят силу и в этот случае, однако векторы х± будут
содержать мнимости в пространственной части.
Случай IV является особым и соответствует выполнению
условия ???*)= ?. При этом соотношение A8.92) теряет силу, так
как отсутствуют ненулевые собственные значения. Однако при
этом справедливо соотношение A8.89), аналогичное A8.92).
Правда, в формуле A8.89) векторы х° и ? являются
собственными векторами матрицы а, хотя ? одновременно есть и
собственный вектор матрицы ах. Это обстоятельство вообще
характерно для данного случая — светоподобный вектор ? является
общим собственным вектором матриц ? и осх. То, что эти
матрицы должны иметь общие собственные векторы, вытекает из
коммутации ? и ах (см. A8.32)).
Рассмотрим еще один важный тип антисимметричных
матриц. Операция дуальности A8.21) линейна, т. е. (??+??)? =
= ???+???, где ?, ? — любые числа ?, ? — антисимметричные
матрицы. Введем оператор дуальности D путем определения
Da = ??. Тогда согласно A8.28)
?J? = ??? = __?. A8.96)
Поставим задачу отыскания «собственных матриц» для
операции дуальности, т. е. таких антисимметричных а, для которых
??? = ??. Тогда из A8.96) сразу следует, что ?2 = — 1, ?«=
= ± i. Нетрудно построить собственные матрицы оператора
дуальности D. Пусть а —любая антисимметричная матрица.
Тогда матрицы
?± = ?±??? A8.97)
будут искомыми, поскольку Da± = ?*. = =F ia±. Матрицы ?±
обладают рядом важных свойств. Вычислим квадраты этих матриц
а% = а2 — а><2 ± i (оса* + аха).
С помощью A8.31), A8.69) получим
4 = 4" Ка1>* ± 1 (ааХ)*Ь D)? = 2 [(а2), ± i (аа*),], A8.98)
10 ф. н. Федоров
146
ГЛ. III. ГРУППА ЛОРЕНЦА
т. е. а± является скалярной комплексной матрицей. Назовем
а+ самодуальной матрицей и ?-антидуальной матрицей.
Очевидно, всякая матрица ? однозначно представляется через эти две
матрицы:
? = 4-(?+ + ?-)< A8.99)
так же как и дуальная к ней
ах = -i- i (а+ - а-). A8.100)
Поскольку, как мы знаем (см. A8.31)), матрицы а и ах
коммутируют между собой, то это справедливо также для а+ и а-:
{аах}_ = {а+а_}- = 0. A8.101)
Более того, любая самодуальная матрица а+ коммутирует с
любой аитидуалыюй а_. Действительно,
{а+а!}_ = {(а + гах), (а' — ?а/х)}-=
= {аа'}- + {аха'х}- + i{{axa'}- - {аа'х}-).
Но согласно A8.73), A8.74) {???'?}_ = - {??'}_, {???'}- =
= {??'?}-, поэтому рассматриваемый коммутант равен нулю:
{?+?11_ = О, ?+?? = ?!?+. A8.102)
Вычислим след от произведения самодуальной и антидуальной
матриц
(?+??), = (??'), + (аХа'х), + i [{a*ar)t - (аа'*),].
С помощью A8.68), A8.70) убеждаемся, что этот след равен
нулю:
(а+о1), = 0. A8.103)
Из A8.102) следует, что произведение самодуальной и антиду-
альнои матриц в любом порядке является симметричной
матрицей. Действительно, пусть ? = ?+?_, тогда
? = ?!?+ = ?_?+ = ?+?_ = ?. A8.104)
Итак, произведение самодуальной и антидуальной матриц
является симметричной матрицей со следом, равным нулю.
Рассмотрим теперь произведение двух однотипных матриц,
т. е. двух самодуальных или двух антидуальных
?±?! = ??' - ???,? ± ? (?*?' + ??'*). A8.105)
§ 18. АНТИСИММЕТРИЧНЫЕ ТЕНЗОРЫ. ДУАЛЬНОСТЬ 147
Используя A8.56) и A8.71), можно привести правую часть к
виду
4" [(??')? ±i (acc'x)J + {??'}_ ± i {?><?'}- = \ (??4), + {?±?'}_.
Но согласно A8.99), A8.103), A8.102):
(??4), = -2" ((«+ + ?_) ?4) = -? (?±?4)„
{?±?'}_ = — {?±, (?+ + ??)}- = -y {a±a±}-.
Поэтому из A8.105) следует
?±4 = 4" D" (a±a'±)< + la±«±)-)· A8.106)
Используем теперь соответствие между ? и комплексным
вектором q = a+ib (см. A8.9), A8.11), A8.26)). Тогда
определение A8.97) можно написать в виде
*±(q) = a(q)±ia*(q) =
_1 аХ ib\ + i (bX -ia) -( (a ± ?6>? ± (? ± '"*^
— \— ib 0 / * \ia 0 / ~" \+ (a ± ib) 0 /
НЛМ
С помощью соотношений A8.98), A8.106), либо
непосредственно используя явные выражения A8.107), A8.108), получим
«+ (?) = - «*. «- (?) = - q*\ A8. 109)
a+a+ = a+ (q) a+ (?') = - qq' + [qq']+, AS.110)
a_ocl = a_ (9) a_ (?') = - (адТ + Ш'С A8.111)
a ' / 9X q)(<l'*X -q'*)_(-qq'* + q-q* :~q'*-q -lqq'*\\
A8.112)
Сразу видно, что последняя матрица симметрична, и нетрудно
проверить, что ее след равен нулю в соответствии с A8.103),
A8.104).
10·
148
ГЛ. III. ГРУППА ЛОРЕНЦА
§ 19. Преобразования Лоренца
Всякое линейное преобразование х' = Lx вектора ? A7.5) в
пространстве Минковского с матрицей L вида A7.13),
оставляющее инвариантным квадрат вектора ? A7.7), называется
общим преобразованием Лоренца.
Таким образом, в пространстве Минковского матрица
Лоренца является комплексной ортогональной матрицей (см. § 1)
специального вида A7.13). Используя общие результаты § 1,
мы сразу можем написать условия, которым должна
удовлетворять матрица Лоренца
LL = LL = l, L = L~\ A9.1)
|L|2 = 1, |L|=±1. A9.2)
Поскольку преобразования L оставляют инвариантной
квадратичную форму A7.1), в которую квадраты трех переменных
входят с плюсом и квадрат одной переменной —с минусом, то
группу Лоренца обозначают символом О C,1). Аналогично,
в пространстве любого числа измерений символом 0G71, п)
обозначают группу линейных преобразований (т+п)-мерного
пространства, оставляющих инвариантной форму вида х\ + х\ + ...
...+ Хт—xm+i—хт+ъ— · · ·—хт+п . Если детерминанты таких
преобразований равны +1, то ограниченную этим условием
подгруппу обозначают SO(m, ?).
Все преобразования L вида A7.13), удовлетворяющие
условиям A9.2), образуют общую группу Лоренца. Собственные
преобразования Лоренца L+, для которых |?+|>= + 1, также
образуют группу являющуюся подгруппой общей группы
Лоренца. Несобственные преобразования Лоренца L_, для которых
|L_| = — 1, не образуют группы.
Используя для L блочную форму A7.13), имеем [24]
???). l=^t A9·3)
Подставляя эти выражения в A9.1), получим
й-С5;«'*^)-й?)· (,9·4)
Здесь использованы правила перемножения прямоугольных
матриц (см. П.1)
И2 1 (Vl, VU V3) = ? "? ?2 Vs )=»·»,
§ 19. ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 149
?? V2,Vs) I M2 1 = *?^1 + У2^2 + V3U3 = VU'
Из A9.4) находим
PJ3 = l-fw.w, ??? = ?#= —Аю, v2 = k2 — 1. A9.5)
Если исходить из равенства LL = 1, то аналогично получим
?? = 1 + r.p, ??? = — Аг, ю2 = А2 —1. A9.6)
Отсюда для элемента L44 = А матрицы L следует соотношение
L24 = А:2 = 1 + и2 = 1 -f »2> 1. A9.7)
Таким образом, имеют место две возможности: первая из них
соответствует условию
L44 = *>1, L = U+\ A9.8)
в этом случае преобразование L называется ортохронным. Такие
преобразования образуют группу. Действительно, нетрудно
убедиться, что взяв
?' й»Л г,(+)
получим
(L(+)L/(+)L4 = (to, к) (*') = кк> - vu'. A9.9)
Согласно A9.5), A9.6) (i?w'J< v2u'2 = (к2 - 1) (к'г - l)t поэтому
A + ш'J < 1 + 2ги' + (/с2 - 1) (А;'2 — 1) =
= /^'2 _ (? - и'J < к*к'%. A9.10)
Следовательно, ftft' — vu'> I и произведение матриц L(+)Z/(+)
обладает свойством A9.8), т. е. также является ортохронной
матрицей Лоренца. Матрица, обратная к L(+), равна
транспонированной, поэтому для нее, также как и для единичной
матрицы, выполняется условие A9.8). Следовательно, совокупность
матриц L{+) содержит обратные матрицы и единичную матрицу.
Таким образом, ортохронные матрицы образуют подгруппу
общей группы Лоренца; она называется полной группой Лоренца.
Преобразуя вектор ? с помощью ортохронной матрицы L,
получим #4 = (Lx)a = to« + кхА или х'о = vx + кх0. Пусть ? — вре-
мениподобный вектор; тогда | Xq \ > I x | и, поскольку для
ортохронной матрицы А>|я| A9.5), то х0 всегда имеет
тот же з&ак, что х0. Таким образом, ортохронная
матрица преобразует каждый времениподобный вектор ? с ??>0
(хо < 0) снова во времениподобный вектор х1 с х\ > 0 (#0 < 0).
150
ГЛ. III. ГРУППА ЛОРЕНЦА
Нетрудно убедиться, что скалярное произведение двух
времениподобных положительных (отрицательных) векторов*) р, р'
всегда отрицательно. Действительно, в этом случае рр' =
=/?// — р0Р'о<0, так какр0ро> 0 и |р0|> |р|, \р'0\ >\ р'
[.Аналогично доказывается, что скалярное произведение
положительного и отрицательного времениподобных векторов всегда есть ? ?-
ложительное число. Отсюда, между прочим, снова следует,
что два времениподобных вектора не могут быть ортогональны
между собой, т. е. равенство рр' = 0 невозможно (см. § 17).
Для времениподобного вектора ? ни при каком L невозможно
также равенство pLp = 0, поскольку вектор Lp также будет
времениподобным. Заметим, что для пространственноподобных
векторов нельзя высказать аналогичных общих утверждений.
Вторая возможность, вытекающая из A9.7), соответствует
условию
L44=*<-1, L = U-K A9.11)
Преобразования (и матрицы) Лоренца, удовлетворяющие этому
условию, называются неортохроннымщ они не образуют группы.
Рассмотрим преобразование с помощью матрицы L A9.3)
времениподобного вектора х>= @, ??0):
-*-М(У-(~П)·
Поскольку х0 = кх0 = L4A» то в случае неортохронной
матрицы временная составляющая вектора ? изменяет знак на
обратный. Если рассматривать L как матрицу перехода от одной
системы координат К к другой К', то в случае L = L(~} во
второй системе К' направление течения времени изменяется на
обратное. В случае же L = L(+) меняется лишь масштаб
измерения времени, а направление временной оси остается
неизменным. С этим и связаны названия ортохронное (L = L{+}) и не-
ортохронное (L»== L(-)) преобразования Лоренца.
Очевидно, переход от одной инерциальной системы к другой
должен переводить всякий положительный времениподобный
вектор, характеризующий реальное движение, снова в такой же
вектор. Видно, что соответствующее преобразование L должна
быть ортохронным. Следовательно, только преобразования,
принадлежащие к полной группе Лоренца, могут описывать переход
от одной инерциальной системы координат к другой — они
называются преобразованиями Лоренца.
Для ортохронной матрицы |?(+)| может равняться как +1,
так и — 1. В первом случае мы имеем дело с преобразованиями
*) Мы называем времениподобным вектор положительным
(отрицательным), если ро > 0 (/>о < 0).
§ 19. ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА
151
?+" , совокупность которых образует собственную ортохроя-
ную группу Лоренца. Во втором случае \L(+U= — 1 мы имеем
несобственные ортохронные преобразования Лоренца ,
которые не образуют группы.
Различные виды преобразований Лоренца могут быть
сведены в следующую таблицу:
|L|= + 1
L<->
+
|LI=—1
L<_+>
Приведем сводку соответствующих определений и терминов:
L=[Li+\ L(-)}={L+1 L_}=(L(++), L(_+), L(+\ L(."M -общая
группа Лоренца (общее преобразование Лоренца) ;L(+)={L+"\Li+)}—
полная группа Лоренца (преобразование Лоренца); L+ = {L+ ,
L+} — собственная группа Лоренца (собственное
преобразование Лоренца); L+ —собственная ортохронная группа
Лоренца; L- — несобственное преобразование Лоренца; L(_) — неорто-
хронное преобразование Лоренца.
Можно убедиться, что при перемножении двух
преобразований Лоренца различных типов характер результирующего
преобразования определяется по простому правилу: одинаковые
знаки у сомножителей дают в результате плюс, а различные —
минус, причем это справедливо независимо для верхних и нижних
знаков. Таким образом, например,
и т. д. Проверка этого правила тривиальна, за исключением,
быть может, соотношений ?г(")?г(")»=.?г(+) и L(+)L(_) = L(_). Оба
они следуют из формул A9.10), A9.11) с учетом того, что в
первом случае ккг > 0, а во втором кк' < 0.
Преобразование Р, изменяющее знак у пространственной
части ? 4-вектора х\ Рх = ? (х, я4) = (— #, #4)> называется
пространственной инверсией. Матрица его имеет вид
i> = (-JJ), р =р* = р+ = pf p* = l. A9.12)
Так как РР»=1, \Р\ = — 1, Ра = + 1, то преобразование ?
является частным случаем несобственного ортохронного
преобразования Лоренца ?(-+). Поскольку | РЬ(±}\ = | Р\ · | Ь(^\ = =F 1,
то
PL(±+) = L(T+>. A9.13)
152
ГЛ. III. ГРУППА ЛОРЕНЦА
Таким образом, путем умножения на матрицу ? мы можем
осуществить переход от собственных к несобственным
преобразованиям Лоренца и наоборот.
Преобразование
Р* = — ? = (J _J), ?' = ?'* = ?'+ =?',
?'2=1 A9.14)
изменяет знак у временной компоненты Х\ 4-вектора: Р' (а?,
ха) == (#> —х*) и поэтому называется инверсией "{отражением)
времени. Поскольку Р'Р' = 1, |Р'| = — 1, Р44 — — 1, то это
есть неортохронное несобственное преобразование Лоренца L(S\
Наконец, произведение
//+>, A9.15)
РР' = - 1
которое можно назвать полной инверсией, является простейшим
неортохронным собственным преобразованием Лоренца.
Умножая на операторы Р, Р', РР' = — 1, мы можем переводить
любое преобразование L± в преобразование любого другого типа·
Совокупность матриц Р, Р' = —Р, ±1, образует группу с
таблицей умножения следующего вида:
1
?
—?
—1
1
1
?
-?
— 1
?
?
1
— 1
—?
-?
—?
— 1
1
?
-1
—1
—?<\
?
1
Используя блочную форму A9.3) матрицы Лоренца, можно
получить ряд дополнительных соотношений. Для вычисления
детерминанта матрицы L умножим четвертый ее столбец джадно
на iv/k и вычтем из первых трех
? ? -\-u-v/k iu\ 1л\а , uv\
0 к ~ P + ~l
\L\ =
A9.16)
Применяя здесь формулу (П.1.67), получим
|L| = fc|P| + rpa. A9.17)
С помощью той же формулы (П.1.67) находим из A9.6)
| ?? | = | ? ? = 11 + ? ? ? = 1 + ?2 = к. A9.18)
Таким образом, всегда | ? | ?0. Поэтому второе из
соотношений A9.5) можно написать в виде ?» = — ?/к. Умножая на
|?|? и учитывая, что |?|?~1 = ?, получим грю = — |?|v2/k.
§ 19. ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 153
В результате соотношение A9.17) принимает вид (см. A9.18))
\L\ = ???/?. A9.18')
Следовательно, согласно A9.2) имеем соответственно
|?|=±* (|?|=±1). A9.19)
Умножая вторые уравнения A9.5) и A9.6) на ? и и
соответственно, получим
??? = ??? = — kuv.
Дальнейшие сведения об L можно получить с помощью
характеристического полинома [24]. Согласно (П.1.30) для L, как для
всякой матрицы четвертого порядка, справедливо соотношение
L* - LtL* + 4" [(LtJ - (L2)t) L* - LtL + \ L \ = 0. A9.20)
Учтем, что для матрицы Лоренца L= \L\L~l = \L\L, и
умножим равенство A9.20) на L = L2; мы получим
L2 + |L| I2- Lt(L + \L ? ?) + 4" \{LtY - (L2)t] = 0. A9.21)
При IX/1 = 1 это матричное уравнение для элемента L\\
принимает вид
4L,L44 = (LtJ + 3(L2L4- (L*)aa.
С помощью A9.7) получаем отсюда
ALtLAA= (LtJ + 3к2- 2uv-($2)t. A9.22)
Известное неравенство Коши — Буняковского (см., например,
[10]) имеет вид
(ЗДрJ<(*рJA/оJ, A9.23)
где все хР1 уа вещественны. Если положить хр = ??&, уР = ?&?, то
(ММ2= ((?2),J< (МЧМ2= (№)tJ. A9.24)
Это общее соотношение справедливо для вещественной матрицы
любого порядка. Учитывая A9.5), получим отсюда [24]
((?2),J < (A + «· «)tJ = C + и2J = B + ?-2J.
Кроме того, очевидно,
(»»J < И2»2 = (А2 — IJ.
Из последних двух соотношений следует
| 2??? + (p2)t|<2|»r| + |(?2)< К 2 (?2- 1) + 2 + А* = Ък\
154 ГЛ. III. ГРУППА ЛОРЕНЦА
Поэтому A9.22) приводит к неравенству (при \L\ = 1)
Lt(iL44-Lt) = LtCL,4-^)>0. A9.25)
Поскольку Lt*= ?? + ft, L44 = ft, то из A9.25) следует
(* + PO C* — ?*) > 0. A9.26)
Рассмотрим теперь случай Lt = О, по-прежнему считая \L\ = 1.
При этом A9.22) сводится к
ф»), = 3/с2 - 2uv. A9.27)
Вычислим выражение
т((Р"Р)а)<=(Р2)|-(РР)*.
Вследствие A9.27), A9.5), A9.6) оно принимает вид
? ((? - ?J)* ^ 2 (и2 - иг) > 0. A9.28)
Но ? — ?, как трехмерная антисимметричная матрица, всегда
может быть представлена в виде ? — ? = ?? (см. П.1), поэтому
~2~ ((? ~~ ?J)< = — «2 ^ 0. Это равенство совместно с A9.28) лишь
при условии и2 — uv = 0, ? = ?, откуда следует ii = rnL = L,
Наоборот, если L = Z, то LL = L2 = 1 и уравнение A9.21) при
|?| = 1 дает Lt(Lt — AL) = 0, т. е. Lt = 0. Итак, при |L| = 1
условия Lt = 0 и L = L равносильны. При этом ?< = — ft.
В случае |L| = — l, взяв след от A9.21), получим
(L2)t = (L,J. A9.29)
При этом условии уравнение A9.20) принимает вид
(L2 - 1) (L2 - LtL + 1) = 0. A9.30)
Следовательно, несобственная матрица Лоренца всегда имеет
два собственных значения, равных ± 1. Два других
собственных значения зависят только от следа матрицы L и равны
l/2(Lt±y(Lt)>-4).
В § 1 было показано, что ортогональная матрица тг-го
порядка может быть представлена в виде полинома степени не выше
? — 1 от антисимметричной матрицы а. В нашем случае ? = 4,
поэтому в соотношении A.18) мы можем начинать с третьей
или второй степени*). Рассмотрим следующее выражение для?:
L = ао + а{а + а2а2 (а = -а). A9.31)
*) Можно проверить, что с помощью полинома первой степени от а
нельзя построить ортогональную матрицу порядка выше второго.
* 19. ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 155
Поскольку скалярные множители а,\ и а2 стоят при
произвольной антисимметричной матрице а, то на них можно наложить
томили иное условие. Положим а2 = а{ и потребуем, чтобы
LLf= 1. Поскольку а2 = а2, то мы получим
LL = (а. +а1а°-J - а2а2 = 1. A9.32)
Согласно (П.1.33)
?4=*?«?2- |?|, A9.33)
поэтому условие A9.32) принимает вид
aL B?0 — ????) ?2 + ?\ — ?? \ ? \ — 1 = 0.
Приравнивая нулю порознь коэффициент при ?2 и свободный
член и решая полученные уравнения, находим следующее
выражение для матрицы Лоренца:
1 - ?„ + 2 (? + ?2)
L = , * . ]=4-. 19.34)
|/ A —??)« —4|? |
Покажем, что связь между L и ?, выражаемая формулой
A9.34), взаимно однозначна, т. е. заданной L = L~l, \L\ = 1
соответствует вполне определенная антисимметричная матрица а.
Для этого выпишем выражения
L -1 = -= 4а Lt = 4 , A9.34')
/i1-^J-4!0'! ^/A-??J-4|?|
откуда следует
? = Ц^ = iV^-1 = - а. A9.34*)
Последняя формула однозначно определяет а, исключая случай
Lt = 0. Как показано ранее, при Lt = 0 должно быть L = L,
кроме того, согласно A9.34') какие-то элементы матрицы ?
должны быть бесконечно велики. Этот особый случай будет
рассмотрен в следующем параграфе.
Согласно A.13), A.15') должна существовать
антисимметричная матрица а! такая, что
* = ??. ?' = ^=-?'. A9.35)
Сравнивая эти выражения с A9.34), A9.34//), видим, что а не
совпадает с а. Однако а' и ? должны выражаться одна через
другую. В 4-мерном пространстве общая ковариантная
функциональная зависимость одной антисимметричной матрицы о! от
другой ? может иметь только следующий вид:
?' = /(?) =??+??3. A9.36)
156
ГЛ. III. ГРУППА ЛОРЕНЦА
Действительно, всякая функция от матрицы является
полиномом от нее степени не выше размерности матрицы, а
вследствие антисимметрии а/ этот полином должен содержать лишь
нечетные степени а. Подставляя A9.35) в A9.36), имеем
(?, + 1)(?? + ??3) = ?,— 1. Используя здесь A9.34) и A9.33),
получим после некоторых вычислений
, , д /A-??J-*?«|-A-??) >/A-??J-4|?|,
?-1??? 2 | ? | ' ? ~ 2 | ? |
Следовательно, выражение A9.35) для L оказывается гораздо
более сложным, чем A9.34).
Согласно A9.34) матрица Лоренца выражается через
произвольную антисимметричную матрицу а, ограниченную условием
A-??J-4|?| ?0. A9.37)
Более подробно об ограничениях, налагаемых на матрицу ?
или, точнее, на определяющий ее комплексный вектор q
(см. A8.11)), речь будет идти в § 20.
Интересно отметить, что выражение A9.34), если
рассматривать а как трехмерную антисимметричную матрицу,
полностью совпадает с формулой B.2) для преобразования О
группы вращений. Чтобы убедиться в этом, нужно только учесть,
что в трехмерном случае |а| = 0, а = сх, ?? = — с2·
Заметим, что при |<х| = 0 согласно A8.38) ?3 = ???,
а выражение A9.34) принимает вид
1 — ?„
? + ?
Если учесть, что при этом A — а) * = l + !rz~X"' т0 Для ^ П0ЛУ"
а
чаем, в соответствии с A.13), выражение L = 2A — ?) — 1 =
= A+?)/A — ?). Таким образом, при |?|=0 согласно
A9.35) ?' = ?.
Матрица ?, как всякая матрица, действующая на вектор в
пространстве Минковского, должна иметь структуру A7.13).
Антисимметрия ? приводит к уже известной нам форме A8.9)
a=(-VJ) = a(i)' q=a + ib. A9.38)
Теперь все величины, входящие в A9.34), получаются с
помощью формул A8.13), A8.16):
2__ (аа + ЪЪ — a2 i[ab]\ А ,2 2 , , , ,.*
A9.39)
* 19. ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 157
При этом условие A9.37) принимает вид
A-??J-4|?| = A+?2-62J + 4(?6J^0, A9.40)
иными словами, не должны одновременно выполняться
равенства
&2=а2+1? аб = о. A9.41)
Очевидно, шесть независимых компонент произвольного
антисимметричного тензора а, удовлетворяющего условию A9.37) г
можно рассматривать как параметры преобразования
Лоренца L, число которых, согласно § 1, должно равняться шести.
Рассматривая ? как тензор-параметр, можно написать на
основании A9.34) L = L(a), причем, как нетрудно убедиться
с помощью A9.34), A9.37), L@) = 1, L~l(a) =?(?) =
= L(a) =L(-a).
Формула A9.34") позволяет найти закон композиции для
этих тензорных параметров группы Лоренца. Пусть L(a)>
L(a') — два преобразования Лоренца, тогда L(a)L{a') =
= L(a"), причем тензор-параметр а" находится из
соотношения A9.34")
?„_ L (a) L (?')-? (?') ? (?)
lL(a)L(a')]t
Подставляя сюда выражение A9.34) для L(a), получим после
ряда преобразований
а" = <а, а'> =
__ С1 - ??) cc'+t1 ~ Ма +(«*+«)(«' 2+« ??'2- ? )(?2-?)
1-ДаДа, + (аа')* + (а2а/2)*
A9.42)
Нетрудно убедиться, что
(а, — а> = ( _ а, а> = 0, <а, 0> = <0, а> = а. A9.43)
Мы видим, что при использовании в качестве параметров
группы Лоренца компонент антисимметричного тензора ?
закон композиции параметров получается довольно сложным и
громоздким. Несравненно более удобной оказывается другая
параметризация группы Лоренца [23—25], которая будет
рассмотрена в § 20.
Из выражения A9.34) для L непосредственно следует, что
если а есть собственный вектор матрицы a
?? = ??, A9.44)
158 ГЛ. III. ГРУППА ЛОРЕНЦА
то вектор а будет также собственным вектором матрицы
Лоренца
1 —?„ + 2?A + ?)
La=K1a, ?1== ? , ¦ A9.45)
Справедливо и обратное — всякий собственный вектор
матрицы L должен быть собственным вектором матрицы а,
входящей в выражение A9.34). Действительно, из A9.34), A9.45)
следует
(? + ?2)?*=??, A9.46)
где ? — число. Умножим это соотношение на ? и а2 (см.
A8.7)):
(а2 + а3 — ??)? = О,
A9.47)
((?? + ?)?2 + ?3)? = |а|а.
Исключая из трех уравнений A9.46), A9.47) два вектора а2а
? ?3? путем умножения на соответствующие числа и сложения,
придем к соотношению ?? = ??*). Таким образом, задача
определения собственных векторов и собственных значений
произвольного собственного преобразования Лоренца сводится к
гораздо более простой задаче отыскания собственных векторов
и значений антисимметричной матрицы ? (см. § 18).
Выясним, при каких условиях матрица собственного
преобразования Лоренца может иметь собственное значение, равное
единице. Для этого заменим в уравнении A9.21) |L|, L и L
на единицу. В результате получится соотношение
B-L<J= (L2),. A9.48)
С помощью выражения A9.34), используя A8.7),
вычисляем {L2)t:
,r,v 4 (* - ??J + 8 A - ??) ?? + 8?? +4(?4), A + ??)? - 4 | ? |
(Ь)* A-??J_4|?| *A-??J_4|??
Подставляя эти выражения и Lt A9.34') в A9.48), получаем
после простых преобразований: УA — ??J — 4|?| = 1 — ??, из
этого соотношения следует |а|=0. Итак, условие |а|=0
необходимо для того, чтобы матрица L имела собственное
значение, равное единице, т. е. \L—11 = 0. Это условие
также достаточно, потому что, если |а| =0, то матрица ? име-
*) Аналогичное утверждение справедливо в любом пространстве для
любой матричной функции от матрицы: если ? = /(?), то из аа = ??
следует ?? = ??? и наоборот.
S 20. КОМПЛЕКСНЫЙ ВЕКТОР-ПАРАМЕТР
15S
ет собственное значение ? = 0 и тогда согласно A9.45) ?? = 1.
Таким образом, условия |а|=0 и |Zr—11 =0 равносильны.
Заметим, что в этом случае матрица ? имеет двукратное нулевое
собственное значение. Действительно, при | оь | = 0
минимальное уравнение A8.38) для ? имеет корни 0, ±УДа, равные
возможным собственным значениям а. Поскольку след
антисимметричной матрицы ? равен нулю, а с другой стороны, он
равен сумме всех собственных значений, то ясно, что нуль
должен быть двукратным собственным значением.
Итак, собственное преобразование Лоренца L A9.34) имеет
собственное значение, равное единице, тогда и только тогда,
когда |а| =0. Это собственное значение всегда будет
двукратным, а соответствующие собственные векторы матрицы L будут
совпадать с двумя независимыми собственными векторами а и
а' матрицы а, для которых аа = аа' = 0.
§ 20. Комплексный вектор-параметр
Воспользуемся полученным в § 18 представлением
произвольной антисимметричной матрицы ? = — ? = ? (q) с
помощью собственных матриц оператора дуальности а± = =ь ia±
(см. A8.99))
? = ^(?+ + ?_). B0.1)
Введем несколько измененные обозначения. Согласно A8.107),
A8.108)
-<«>-№)¦ «-«>=(*** "»*)¦ <20·2)
Матрица ?+ (q) целиком определяется вектором q, а матрица
а_ (q) — комплексно сопряженным вектором ?*. Удобно
использовать такие обозначения, в которых явно фигурировал бы
вектор, определяющий антисимметричную матрицу.
Обозначением такого рода мы уже пользовались в § 2 для трехмерных
антисимметричных матриц, определяя их через дуальный
вектор с: А = с . Это соотношение (см. B.4)) однозначно ставит
в соответствие каждому трехмерному вектору с
трехмерную же антисимметричную матрицу. В четырехмерном
пространстве также можно поставить в соответствие любому
трехмерному вектору q четырехмерную
антисимметричную матрицу, причем не одну, а две [23—25]:
«*-Uix±i)· B0·3>
160 ГЛ. III, ГРУППА ЛОРЕНЦА
При этом, в соответствии с B0.2), B0.1), можно написать
«+(«) = «+, «- (?)=?:. B0.4)
Выпишем здесь в новых обозначениях установленные в § 18
свойства матриц q±:
{?+?!}_= 0, (*+*!), = 0, B0.6)
q±q'± = -?? + [qq')±, {«±?±}-=2[??']±,
й--? 1мУ+—2ftf. B0·7)
Заметим, что операция перехода от вектора q к матрицам q±
B0.3) линейна, т. е.
(?? + ??')± = ??± + ??4. B0.8)
Из B0.7) следует, что минимальное уравнение для матриц q±
жмеет вид
Ч± + Чг = (q± ~ i /?) («± + t /?5) = 0. B0.9)
Следовательно, собственные значения как }+, так и ?_
равны =*= ty?2. Поскольку след антисимметричных матриц
четвертого порядка q± равен нулю, а с другой стороны, равен
сумме всех собственных значений, то каждое из собственных
значений ± i l^q2 является двукратным. Детерминант
матрицы равен произведению всех ее собственных значений, поэтому
|?±1 = ?4· B0.10)
Из B0.9) следует, что при ц2ф0
q-? = -q±lq\ B0.11)
Соответственно имеем для взаимной матрицы (см. П.1)
q± = \q±\q~±=-q2q±- B0.12)
Из B0.9) следует также, что матрицы q± приводимы к
диагональному виду всегда, кроме случая
?2=0, а2-62 = аЬ = 0 («=« + »), B0.13)
поскольку при этом минимальный полином q± = 0 имеет
кратные корни.
§ 20. КОМПЛЕКСНЫЙ ВЕКТОР-ПАРАМЕТР 161
Преобразуем выражение A9.34) для матрицы Лоренца с
учетом приведенных выше соотношений. Согласно B0.1) имеем
«=«(?) = 4 (?+ + ?-) B0-14)
и на основании B0.6), B0.7)
a?=\{-q*-q** + 2q+q-\ ?? = -\(?2 + ?*2)· B0.15)
Знаменатель формулы A9.34) равен (см. A9.40))
/A-??J-4|?| = /A-?8-?2J + 4(?6J =
= /A + ?2)A + «*2) = |1 + «?· B0.16)
Окончательно получаем, подставляя в A9.34) выражения
B0.14)-B0.16),
(i + g+)(i + gl) BQi7)
L |l + *2l ' ( ]
Следовательно, матрица Лоренца представляется в виде
произведения двух коммутирующих матриц
L = ?+ (q) ?. (?*) = ?.(?*)?+ (g), B0.18)
где
e± (?) = 4=% {?+ (?), ?. (?')}- = 0. B0.19)
? i+q
Полученные соотношения благодаря простым свойствам
матриц q± позволяют с большим удобством исследовать матрицу
Лоренца во всех деталях.
Вычислим детерминант L. Детерминант матрицы 1 + q±
равен произведению ее собственных значений, равйых 1 ± i Vq^.
Следовательно, при любых q
U + flf )
поэтому и I LI = | ?+ (q) \.\ ?_ (g*) | = 1. Элемент Lu согласно
B0.17), B0.5) определяется выражением
, l + (g+glL4 l + lg|2>1 f2021,
44 li + t1! ~\i + q2r B0·21)
Действительно,
A + I?I2J-11 + ?2|2 = A +«2 + &2J- A + ?2-62)*-4(?6)»=
= 4(&2 + [ob]2)>0.
11 Ф. И. Федоров
162 ГЛ. III. ГРУППА ЛОРЕНЦА
Свойство LL=i получается сразу с помощью B0.18), B0.19),
B0.7), так как
в± (?) ?± (?) = A + g1±j(g1rg±) = ?- B0.22)
Отметим, что хотя 4 X 4-матрицы ?± удовлетворяют свойствам
?±?± = 1, | ?± | =?. 1, однако их нельзя рассматривать как
матрицы Лоренца, поскольку они не имеют структуры A9.3).
Таким образом, формулы B0.17) —B0.19) для любого
трехмерного комплексного вектора q = а + Ь, при котором выражение для
матрицы L сохраняет смысл, определяют собственное
преобразование Лоренца ?+"* (см. § 19). Наоборот, если задано
собственное преобразование Лоренца L, то можно найти
соответствующий вектор q. Действительно, взяв след от равенства
B0.17), получим с учетом B0.6)
Lt=-4/\l + q2\. B0.23)
С другой стороны, поскольку q± антисимметричны, а ?+?- —
симметричная матрица, имеем
L - ? = 2 (q+ + ql)/\ 1 + ?21. B0.24)
Разделив B0.21) на B0.25), найдем (ср. A9.34'))
-rifc + I-V^—(Г»?) ,20.25)
Таким образом, зная L = L+, по этой формуле определяем
q = а + ib. Единственный особый случай, который мы сейчас
рассмотрим, соответствует Lt = 0. Поскольку \L\ = 1, то, как
показано в конце § 19, при этом L = L и соотношение A9.34)
дает неопределенность вида 0/0. Согласно B0.23) Lt = 0 лишь
при |?2|=оо. Используя B0.3), B0.5), выпишем
выражение B0.17) для L в развернутом виде:
L== ? /1 -1 я I2 + (д + д*)х + дд* + д*д g-g*-lgg*] \
U + flf2l\ -(*-*·)-[«·] i + \g\2 У
B0.26)
Если перейти к пределу |?2|->оо, то здесь останутся лишь
члены, квадратичные по 5, и мы получим
L= !(«·«· +«··«-! «?* -[««·1\ B0.27)
Введем множитель | дг |-1=(д25*2)~1/г внутрь матрицы и обозначим
?? = ?//??, ??* = ?*//?**, ?? = ?Г=1, B0.28)
§ 20. КОМПЛЕКСНЫЙ ВЕКТОР-ПАРАМЕТР 163
тогда B0.27) примет вид
/,??·«;+?*?·«?-??1?· -[«?*?
2
B0.29)
Мы видим, что, действительно, L = Z, причем выражения
B0.28), B0.29) полностью сохраняют смысл при | q21 ->- оо.
Таким образом, в случае Lt = 0 задача сводится к нахождению
комплексного единичного вектора ??(?? = 1) из соотношения
B0.29), где L —заданная симметричная матрица Лоренца,
? ?'^ ? = ?, B0.30)
?? ШЛ
\ш к)
со свойствами (см. A9.5))
$t + k = Lt = 0, ?2=1+«·», ?» = — ku, k2 = i+u2.
B0.31)
Из сравнения B0.29) и B0.30) получаем
[«!«?] = -'¦». I?il2 = *. B0.32)
??·?? + ??·?1 = ? + ??1|2 = ? + ?· B0·33)
Первое из равенств B0.32) дает (см. (П.1.79))
Вычитая это из B0.33), находим
??·?? = 4-(? + * + ?«?)· B0.34)
Для того чтобы это равенство было непротиворечиво,
необходимо, чтобы матрица ? = —(? + А: + шх) обладала
свойствами, которые имеет левая часть, а именно:
(??·«;)+ = ??·?;. (*?·*?)* = i*aP = *. (л·»;)· = **·«;·
Справедливость двух первых свойств: ?+ = ?, ?* = &
устанавливается сразу на основании B0.31). Для выполнения
последнего свойства
?« = -|- ?» + ?» _- иХ2 + 2к (? + шх) + i (???? + ихР) = foe,
как можно убедиться с помощью тех же соотношений B0.31),
нужно только, чтобы антисимметричная матрица ? = ??? -f- »??
равнялась нулю. Поскольку ? — вещественная матрица, для
этого достаточно, чтобы (?2)? = 0. Используя B0.31) и (П.1.90),
И*
164
ГЛ. III. ГРУППА ЛОРЕНЦА
нетрудно убедиться в справедливости последнего равенства.
Следовательно, соотношение B0.34) непротиворечиво, и мы
можем определить из него вектор q1% умножая обе стороны на
произвольный вектор с:
?? = B??<0-1 (? + k+iux) с = С (? + к + iux) с, B0.35)
при условии, что (? + к + Шх)сф0. Заметим, что последнее
неравенство исключает с = и, так как согласно B0.31) (? + & +
+ iux)u = 0. Постоянная С находится из условия нормировки
*; = !·
Таким образом, и в случае Lt = 0 связь между матрицей
Лоренца L и комплексным вектором q, определяемая
формулой B0.17), имеет взаимно однозначный характер, если не
считать того, что из B0.29), B0.34) вектор qx (q\ = 1) определяется
с точностью до знака, не играющего никакой роли. Ситуация
здесь вполне аналогична случаю B.8) для группы вращений,
когда с2-> оо, однако соответствующее преобразование задается
единичным вектором сг = cl\ с |, также определяемым из B.7)
с точностью до знака, причем последний также не имеет
значения. Заметим, что как там, так и здесь, условия L = L, L2 —
= 1@ = 0, О2 = 1) и | q21 ->¦ оо (с2 -> оо) оказываются
равносильными, т. е. вытекают одно из другого.
Итак, мы доказали, что комплексному трехмерному
вектору q однозначно соответствует по формуле B0.17) собственное
ортохронное преобразование Лоренца L^ и, наоборот,
каждому собственному преобразованию Лоренца L+ однозначно
соответствует комплексный трехмерный вектор q.
Следовательно, мы можем рассматривать q = а + ib как комплексный
вектор-параметр группы Лоренца, который объединяет в себе
шесть параметров ??, аг, Яз» ^ь &2, &з. Представление B0.17),
полученное впервые в [23—25], является весьма компактным,
простым и удобным для выяснения всех свойств матрицы
Лоренца и всевозможных вычислений с ее помощью.
В заключение выпишем развернутое выражение для
матрицы Лоренца через векторы а, 6, являющиеся вещественной и
мнимой частью комплексного вектора q. Мы можем при этом
исходить как из формы A9.34), так и из формы B0.26). После
несложных преобразований получим
L = [A + а2 - б2J + 4 (аЪ)Т1/9 X
? /? — (?2 + ?2) + 2?? + 2(?.? + ?·?) 2i(b + [ab])
\ _ 2?(? —[??]) 1 + ?2 + ?2
Рассмотрим общее выражение B0.36) для частных
значений комплексного вектор-параметра q = a -f- ib.
. B0.36)
S 20. КОМПЛЕКСНЫЙ ВЕКТОР-ПАРАМЕТР 165
1. Линейный вектор q: [??*] = — 2i [ab] = 0, q = \c, с = с*а
с3 = 1,1 = |? + i%2- При этом согласно B0.26) имеем
! /1-1?|2 + 2^х+2|?|2с.с ??,?'
IT+Fll -2iSac 1 +1112
Шь^ _,;P\ , ,," . B0.36a)
2. Канонический вектор: g2 — q*2 = Aiab = 0. При этом (см.
B0.36))
, = 1 /l — {а2 + Ъ2) + 2ах+2а.а + Ъ.Ъ 2i(b+[ab])\
q- 1 + ?2 -?2 [ _ 2i (» - [??]) 1 + a2 + ?2/
B0.366)
3. Круговой вектор q : g2 = а2 — б2 = ab = 0. При этом а-а+
+ ЪЪ + [аЪ][аЪ]/а2 = а2 (см. П.1). Из B0.36) следует
L = /? + 2??-2[??].[??]/?2 2ib+[ab]\ B0.36в)
9 у _2?(?-[?6]) 1 + 2?2 /
Обратимся теперь к выяснению физического
(геометрического, кинематического) смысла комплексного вектор-параметра
q = а + *&· Пусть преобразование Лоренца представляет собой
поворот одной системы координат относительной другой,
причем обе системы покоятся. Тогда матрица L должна иметь вид
(см. B.5))
G=1 + 2с +с2 . B0.37)
1 + с2 v '
Выясним, какой вектор-параметр q будет соответствовать
данному случаю. Используем общее соотношение B0.25)
\0 1/'
+(€¦+·:)-(_·;:)-
причем в данном случае
L — L
4* ?
0
B0.38)
Пусть Z,,=7^0, тогда из B0.38), B0.39) следует а=с,Ъ=0, т.е.
q = q* = с. Если же L( = 0, то с2 ->- оо и О — Чсх-с^—\. (см.
B.7)), т. е. согласно B0.37), B0.38)
I ° *М ЧмП ?????
B0.40
166
ГЛ. III. ГРУППА ЛОРЕНЦА
поэтому
[????] = 0» ? ?? ?2 = ???? = 1. ??·?? + Ч\ ?? = 2^·^.
Из первого уравнения следует g*= Cgx и, после умножения на
??: ? ?? I2 = С??> ?· е· С = 1, g* ==gx = сг. Итак, если
преобразование Лоренца сводится к чистому вращению, то вектор-параметр g
либо является вещественным, либо только бесконечно большим
скалярным (комплексным) множителем отличается от
единичного вещественного вектора. Иначе говоря, в последнем случае
вектор g является линейным комплексным вектором с
бесконечно большим модулем. Этот случай соответствует повороту
системы координат вокруг некоторого направления на угол ?.
Легко проверить, что и наоборот: если g = g* = с, или g = Сси
С-+оо, то преобразование Лоренца сводится к вращению (во
втором случае на угол ?).
Пусть теперь L есть матрица Лоренца, соответствующая
переходу от координатной системы К к системе К' с осями,
параллельными осям К, движущейся относительно К с
произвольной по направлению скоростью» (| ?| < 1, скорость света
с=1). Такое преобразование имеет вид (см., например, [27])
/l-MT-l,,../* iyvx ? = _1 B0.41)
В этом случае
Lt = 2(i+y), L-r = 2iV(_°p^).
Поскольку здесь невозможен случай Lt = 0, то соотношение
B0.38) дает окончательно
\-ib 0) 1 + YV-* ОГ
откуда следует
— О, »-If-T-r;^-y |»|<l. P0.42)
Таким образом, в случае «чистого движения» B0.41) вектор-
параметр должен быть чисто мнимым вектором (д = гб), по
модулю меньшим единицы.
Если ввести угол гиперболического поворота ? с помощью
формулы
the = |r|<lf B0.43)
§ 20. КОМПЛЕКСНЫЙ ВЕКТОР-ПАРАМЕТР
167
то для вектор-параметра q = ib получим согласно B0.42)
соотношение
i = iMh-f, Ъ=Щ- B0.44)
Эта формула аналогична соответствующей формуле для вектор-
параметра чистого вращения (см. B.11)): q=c1tg (?/2), cx=cl\ c\.
Мы рассмотрели два основных частных случая
преобразования Лоренца: поворот без движения и движение без поворота.
В общем случае преобразование Лоренца представляет собой?
некоторое сочетание движения и поворота системы координат.
Возникает вопрос, какое движение и какой поворот связаны с
собственным преобразованием Лоренца, заданным общим
комплексным вектор-параметром q = а + ib. Для решения его нам
понадобится закон композиции комплексных вектор-параметров
группы Лоренца, который рассматривается в § 21.
В §§ 19 и 20 мы встретились с двумя способами
параметризации группы Лоренца. В формуле A9.34) шесть параметров
группы Лоренца объединяются в один антисимметричный
тензор а, который можно назвать тензор-параметром группы
Лоренца, а саму параметризацию — тензорной. В формуле B0.17)
те же шесть параметров объединяются в один комплексный
вектор-параметр д, в результате чего появляется комплексная
векторная параметризация группы Лоренца. Разумеется, между
обеими параметризациями существует теснейшая связь,
устанавливаемая соотношением ? = — а = a (q) A8.11), однако
векторная параметризация обладает весьма существенными
преимуществами в отношении простоты и удобства. При обеих
параметризациях на тензор-параметр ? или вектор-параметр q
приходится налагать ограничения, чтобы выражение для L
A9.34) или B0.17) сохраняло смысл. В отличие от трехмерной
группы вещественных вращений, где вектор-параметр с мог
принимать любые значения, в случае группы Лоренца целые
области значений а или q приходится рассматривать как
недопустимые. С аналогичным положением мы уже сталкивались
(см. § 8) в случае комплексной группы 0C, С), которая
находится в теснейшей связи с группой Лоренца и при нашем
подходе параметризуется также комплексным вектор-параметром.
С наличием недопустимых областей значений параметров
связало то, что группа Лоренца (как и группа 0C, С)) относится к
числу так называемых некомпактных непрерывных групп
(см., например, [3, 4]).
Как и в случае группы 50C, С) (см. (8.14)), мы можем
переопределить вектор-параметр группы Лоренца q и ввести
вместо него другой комплексный вектор-параметр ?
p^q/^T+Qt, д=р//Г=^, /l^p* = 1//F+J5. B0.45)
168
ГЛ. III. ГРУППА ЛОРЕНЦА
В результате выражение B0.17) для собственной матрицы
Лоренца принимает вид
L = (VT^ + p+){VT=J** + р*_). B0.46)
Это форма обладает тем преимуществом, что условие,
ограничивающее допустимые значения вектор-параметра р, имеет
простую форму | ? | < оо. Напомним, что аналогичное условие
ограничивало значения вектор-параметра ? в группе 50C, С)
(см. § 8).
Заметим, что матрица а' (см. A9.36)) выражается через
вектор-параметр ? следующим образом:
а' = Р+ + Р- . B0.46')
/1-/>2 + >/1-/>*2 '
В то же время согласно B0.25), B0.45) имеем для матрицы а
? = 4- ( /+ - /~ \ B0.46")
Для плоских преобразований Лоренца, т. е. когда д2=д*2и, со-
ответственно, р2 = р*2 (см. B0.45)), имеем а' = а = (р+ +
+ pl)/2Vl-p2 = (q+ + q-)/2.
Последний случай играет важную роль. Как показано в § 18,
антисимметричная матрица а = а(д), входящая в выражение
A9.34) для матрицы Лоренца, имеет в этом случае
детерминант, равный нулю. Поэтому согласно A9.34) имеем
L = 1 +2(а + а2)/A - ??). B0.47)
При этом (см. § 18) матрица ? может быть представлена в
виде альтернанта двух 4-векторов ?=[?°·6], где a° = (a1,0)f
Ъ = F, гЬ0), а\ = 1, а°Ь = агЬ = 0. Такая матрица ? зависит не
более чем от пяти параметров, два из которых входят в
единичный пространственный вектор ах, а три остальных содержатся в
4-векторе Ь, ограниченном условием а°Ь = 0. Поскольку ??<>6 =
= 1/2([a0 · b]2)t = — Ъ2 A8.19), то общее выражение для
матрицы L B0.47) может быть написано в виде
L =. 1 + 2([а°.Ь] + [а°-Ь]2)/A + Ь2). B0.48)
Как уже отмечалось ранее (§ 18), альтернанты [а°-Ь],
входящие в плоское преобразование B0.48), могут
подразделяться в зависимости от свойств вектора Ъ = F, ib0) на несколько
типов: 1) &о = 0; 2) Ъ2 > 0, Ь0 ? 0; 3) 6 = 0; 4) Ь2<0,
Ьф0\ 5) Ь2 = 0. Согласно A8.6), A8.11) альтернанту [а0 · Ь]
§ 20. КОМПЛЕКСНЫЙ ВЕКТОР-ПАРАМЕТР
169
сопоставляется комплексный вектор-параметр
[?°.?] = ?(?), q = [Ъаг] + ?6?? g2 = Ь2-Ь2, = Ь2. B0.49)
Следовательно, указанные выше типы преобразований можно
классифицировать также по свойствам вектора ?. А именно,
случай 1) отвечает вещественному q = g*, т. е. чисто
пространственному повороту; случай 2) соответствует q2 = ?*2 > 0; случай
3) означает чисто мнимый вектор q = —g*, т. е. чистое движение
(или движение с поворотом на 180° при Ь%> 1, § 21). Случай 4)
означаетд2 = ?*2 <0и может быть подразделен на два: — 1<
< д2 < 0 и д2 < — 1 (так как д2^— 1, см. B0.17)). Наконец,
случай 5) отвечает круговому вектору q : q2 = 0.
Матрицу L B0.48) с учетом свойств векторов а0 и Ъ можно
преобразовать к виду
?=1 + 2 «0·(»-»'«0)-.».(?» + ») , B0.49')
1 + ?
Следует, однако, помнить, что произведение таких матриц в
общем случае не будет матрицей того же типа, т. е. эти
преобразования не образуют подгруппы. Тем не менее выражение
B0.48), ввиду его простоты и явной четырехмерной
ковариантности, является удобным для применения при решении ряда
вопросов. Заметим, что преобразования чистого вращения и
чистого движения (см. B0.37)), так же как многие другие
важные преобразования, относятся к виду B0.48).
Если Ь есть светоподобный вектор: Ъ2 = 0, то
преобразование B0.48) еще более упрощается и принимает вид
L=l + 2[a°-b]+2[a°-b]2=l + 2[a° · Ъ] -26 . Ь. B0.50)]
Поскольку при этом [?°·6]3 = 0, то минимальный полином ло-
ренцовой матрицы B0.50) принимает вид (L—IK, т. е. она не-
приводима к диагональному виду, имеет трехмерную клетку
Жордана и все ее собственные значения равны единице Два
собственных вектора этой матрицы определены в A8.88).
Отметим, что матрица L B0.48) обладает тем свойством, что
она преобразует вектор вида ??° + t\b с любыми
коэффициентами |, ? снова в вектор того же вида. Это означает, что она
оставляет инвариантной гиперплоскость, натянутую на
векторы а0, Ъ. Поэтому преобразование вида B0.48) или, что то же
самое, преобразование Lq при д2 = д*2, можно назвать плоским
преобразованием. Если q = а + ib, то, очевидно, условие для
плоского преобразования будет аЪ = 0.
Рассмотрим матрицу Лоренца, отвечающую преобразованию
чистого движения, т. е. положим q = iu (|и|<1). Согласно
170 ГЛ. III. ГРУППА ЛОРЕНЦА
B0.26) получим
Lte-1+ 2 /..» '-V B0.51)
1 — и \— т и /
Введем ?-вектор w = (и, г), w2 = и2 — 1 < 0. С его помощью Liu
может быть представлена в виде
Ьш-Т-2^, Т = A_1). B0.52)
Здесь ? — преобразование временной инверсии (Г2 = 1, 171 =
= —1). Очевидно, для любого мирового вектора а=(?, ??0)
справедливо соотношение
Та = аТ = а* = (а, — ш0). B0.53)
Поэтому можно написать
Lia =TLW=LW*T, B0.54)
где
Lw = Zw = 1 - 2ш- w/w2, Li = 1, I Lw | = - 1. B0.55)
Матрица Lw (как и Г) относится к несобственным
преобразованиям Лоренца. Таким образом, преобразование чистого
движения получает простое четырехмерное ковариантное выражение.
§ 21. Композиция вектор-параметров группы Лоренца
В § 3 и последующих параграфах глав I и II мы видели,
что основную роль в теории группы вращений и ее
представлений играет закон композиции вектор-параметров группы
вращений
<с, с<у = с + с' + [сс'] B1 Л)
1 — ее
Как мы сейчас убедимся, этот же закон справедлив и для
группы Лоренца. Рассмотрим произведение (см. B0.19), B0.7))
-? (д) - (дЧ ? + q±) A + 4) 1'"' + (q + q' + 1"'])±
= 7Т^=е±(?'г B1·2)
где
f = <q,j>='+/ + M]. B1.3)
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
171
Очевидно, что
?"* = <?*, ?'*> = <?, ?'>* = *\**?^*· <21·4>
Отсюда ясно, что перемножая две матрицы B0.17),
отвечающие вектор-параметрам q и q', получим согласно B0.18),
B0.19), B1.2)
LqLq. = ?+ (?) ?. (q*) ?+ (q') ?_ (?'*) =
= (?+ (?) ?+ (?')) (?_ (?*) ?_?'*) = ?+ (?") ?_ (?"*).
Поскольку матрица Лоренца определяется заданием
комплексного вектор-параметра q, то можно написать L = L(q) или
L — Lq. Однако наиболее полная запись должна отражать, что
на самом деле в определение матрицы Лоренца, кроме 5,
входит еще комплексно сопряженный вектор д*. В ряде случаев
это обстоятельство приходится непосредственно учитывать.
Поэтому в дальнейшем мы будем использовать различную форму
записи
L = L(q) = Lq = L(q,q*). B1.5)
В частности, полное определение закона композиции
вектор-параметров группы Лоренца имеет следующий вид:
L (?, ?*) L (?', ?'*) = L «?, ?'>, <?, ?'>*). B1.5')
Таким образом, комплексные вектор-параметры q группы
Лоренца компонируются в точности по тому же закону B1.1),что
и вещественные вектор-параметры с группы вращений.
Справедливость простой формулы B1.1) и раздельная композиция
векторов <jf, q' B1.3) и сопряженных им ?*,д'* B1.4)
чрезвычайно упрощают рассмотрение как самой группы Лоренца,
так и ее представлений.
Заметим, что матрицы ?± (q) образуют представления комп-*
лексной группы вращений 50C, С) (см. § 8). Следовательно,
матрицу Лоренца L (g, q*) можно рассматривать как
произведение матриц представлений комплексной группы вращений,
отвечающих вектор-параметрамq(v+(q)) и ?*(?-(?*))·
В общем случае из закона композиции B1.3), как и для
группы вращений (см. § 3), вытекает ряд соотношений
группового характера. Мы выпишем их здесь все вместе еще раз для
комплексного вектора q:
<?,0> = <0,?> = ?, B1.6)
<«,-«> = <-«>?> = О* B1.7)
«?, ?'>> <Г> = <«, <«' ?"» = <?г?\ q"\ B1.8)
172
ГЛ. III. ГРУППА ЛОРЕНЦА
-<«.«'> = <-«'.-«>, B1.9)
<?, ?' >= ФяЧ\ q> = <«', 0-ri>r B1.Ю)
<?, ?'>2 = <?', ?>2, 1 + <«, ?'>2 = A + q2) A + ?/2)/(l - ??'J·
B1.11)
Напомним, что в формулах B1.10) Oq означает преобразование
трехмерного поворота 0(c) B.4), в котором вещественный
вектор-параметр с заменен на комплексный q. Таким образом,
О (?) представляет собой комплексное
ортогональное преобразование в трехмерном пространстве, т. е.
преобразование группы 50C, С) (см. § 8)
0(q) = 0+(q) = 1 + 2 J?±3?l. B1.12)
1 +q
Как уже отмечалось ранее, выражения B1.12) и B0.17)
имеют смысл не при всех значениях комплексного вектора ?.
Так, например, ясно, что если 1 + q2 = 0, то выражения B1.12)
и B0.17) теряют смысл. Что касается закона композиции B1.3)
и вытекающих из него следствий B1.6) —B1.11), то здесь
тоже нужно иметь в виду, что вектор q не может быть
произвольным. Для соотношений B1.10) это следует уже из того, что
туда входит преобразование О (q) B1.12), которое не
определено при 1 + q2 = 0. При этом же условии равенство B1.7),
справедливое в общем случае, не вытекает из формулы B1.3).
Действительно, согласно последней
что при 1 + q2 = 0 дает неопределенность вида 0/0.
Ниже мы рассмотрим детально вопрос о тех ограничениях,
которые следует наложить на комплексный вектор q, чтобы он
мог рассматриваться как вектор-параметр группы Лоренца
(и группы ?0C, С)). Сейчас же мы обратимся к вопросу о
представлении произвольного собственного преобразования
Лоренца Lq B0.17) в виде произведения преобразования
движения без поворота L\u на преобразование поворота без
движения L с
Lq = LcLitt. B1.13)
Этому соответствует представление общего вектор-параметра q
в виде
q = <с, ш}. B1.14)
С помощью групповых свойств B1.6) —B1.8) поставленная за-
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 173
дача получает очень простое решение. Уравнение, комплексно
сопряженное к B1.14), имеет вид
9* = <с, —in). B1.15)
На основании B1.6) —B1.8) имеем согласно B1.14)
«с, ш>, — ш> = <с, ш, — ш> = <с, 0> = с = <д, — гю> B1.16)
и аналогично из B1.15) с* = с = <д*, zw>, следовательно,
<g,— &»> = (?*, г»). «Умножая» в смысле формулы B1.3) обе
части этого равенства слева на — q* и справа на i», получим,
используя B1.7),
<- ?*, ?> = <«», *»> = 2??/A + и2). B1.17)
Согласно B0.42) при чисто мнимом вектор-параметре q=iu
(| ю | < 1) последний связан со скоростью соотношением
и = » B1.18)
1+??-*2
Возводя это равенство в квадрат и разрешая относительно ?2,
получим
¦'=йР?· ^^^-???· B1·,8'>
после чего из B1.18) находим вектор скорости
?? = 2ю/A + и% w = <ш, ш>. B1.19)
Сравнивая с B1.17), видим, что
»--«-t*,f>-<<-t,f*>= ""/"'?'*1 ¦ B1-19')
1 + ?4?
С помощью B1.9), B1.3) находим также
-и» <21·2»>
Таким образом, скорость ? однозначно выражается через ?, д*.
Заметим, что если задана величина <—?*»?>= w, то из
уравнения B1.17) или B1.19) вектор и определяется
неоднозначно. Разумеется, направление и всегда совпадает с
направлением р, но для абсолютной величины | ю | получается квадратное
уравнение |*| A + |ю|2) = 2| и\ или |ю|2— 2|в|/|в| + 1 = 0.
Поскольку свободный член этого уравнения равен единице, то
два его решения)»!1 и | щ | обратны друг другу по величине: | щ\ =
= 1/| »? |. Следовательно, если | иг | < 1, то | щ | > 1 и наоборот.
Таким образом, представление любого комплексного вектора q
в форме B1.14) оказывается неоднозначным, поскольку для
174
ГЛ. III. ГРУППА ЛОРЕНЦА
вектора и возможны два значения и = ?/(?+??— ?2),|»|<
> 1, либо ю' = v/(l -j/1 - ?*) = ю/w2, \и'\>\.
Существенное различие между этими двумя выражениями
состоит в том, что при ?-+0 из первого следует также и-+0,
а второе выражение для и' приводит к неопределенности 0/0.
Как мы уже знаем из предыдущего параграфа, q = iu при
| и | < 1 соответствует чистому движению. Следовательно,
именно значение и соответствует искомому нами разложению
общего преобразования Лоренца на движение и вращение. Что
же касается вектора и\ то он соответствует суперпозиции
движения с той же скоростью ? и поворота на 180° вокруг
направления движения. Действительно, рассмотрим композицию (при
С->-оо)
„ ч /г* · \ Си 4-iu iu . ,
<ш, Си} = {Си, ш> = ~ -* — = ш ·
? — ibu и
Поскольку вектор Си при С->-оо задает поворот на 180°
вокруг и || г, то это доказывает высказанное утверждение.
Таким образом, чисто мнимый вектор-параметр q = iu при
| и | > 1 задает не чистое движение, но движение в сочетании
с поворотом на ? вокруг направления скорости. Существенно,
однако, то, что мы всегда можем однозначно представить любой
вектор q B1.14) как результат суперпозиции
вектор-параметров, отвечающих чистому движению и чистому вращению,
выбрав |ю|<1. Из B1.20) находим с помощью B1.3), B1.11)
1 - „« = 1 + <— g*, g>2 = 11 + g2|2/(l + |g|2J>0. B1.21)
Отсюда следует, что всегда ?2^1. Равенство |г| = 1
означает, что скорость относительного движения систем отсчета равна
скорости света. Согласно теории относительности это
невозможно. Как следует из B1.21), выражением этого обстоятельства
является неравенство
|1+?2|/A + 1?12)>0. B1.22)
Сравнивая его левую часть с общим выражением B0.26) для
матрицы Лоренца, убеждаемся, что всегда
*"-г#Я-7тЬ-* <21·23»
Таким образом, это соотношение справедливо не только в
случае чистого движения без поворота (см. B0.41)), но для
любого собственного преобразования Лоренца. Из B1.23) ясно, что
условие ?44^1 (см. A9.7)) имеет тот смысл, что скорость ?
всегда меньше скорости света. С возрастанием ? увеличивается
и \Lu\, а случай L\± = 1 соответствует нулевой скорости:v = 0.
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 175
Отсюда мы можем сделать вывод, что любое из равенств
^44 = 1. |1 + «а| = 1 + Ы2 B1-24)
является необходимым и достаточным условием того, чтобы
собственное преобразование Лоренца являлось чистым вращением.
Действительно, согласно A9.5) —A9.7) из B1.24) следует, что
матрица
при этом и = ? = 0, ?? = 1, т. е. L = I ? ), где ? —
трехмерного вращения.
С помощью B1.19), B1.21) находим
и = *<-g, g*> - = _ i q-q* + lqq*] =
1 + V1 + <- g, g*>2 1 + I 9 |2+ | 1 + q2\
- 2 (>-[«>]) B125)
1 + a2 + 62 + V(i + a2 - ?2J + 4(a6J
Теперь из B1.16) вычисляем вектор с, определяющий
вращение системы координат
Вещественность этого вектора становится очевидной, если с
учетом равенства 11 + q2 | = У1 + q2 Y\ + q2* написать его в виде
с = Vi + q2*q + Vi + q2q* = Re (К ? + ?У) f21 27)
VTT?4Kl + g2 Rel/l+g2
Пусть ? — аргумент комплексного числа 1 + <jf2, т. е.
l + q2 = \l + q2\ei(»x B1.28)
тогда выражение B1.26) для с можно написать также в виде
q + eWq* е-Щ/2д + егу/2д* Re (e-Wiq)
С~~ ? + ?*? ~~ ?-??/2 + ???'2 — cos (?/2) · \**-**)
Рассмотрим подробнее важный частный случай, когда
квадрат вектор-параметра является вещественным числом:
?2 = (?2)* = ?*2 = а2 _ 62? аЬ = 0# B1.30)
Здесь имеются две возможности:
1I + ?2>0, 1+«2 = |1 + 52|, с = -±-(в + д*). B1·31)
В частности, при q*=— g, т. е. q=ib, i+q2 = 1 — б2 > 0, 62<1
176
ГЛ. III. ГРУППА ЛОРЕНЦА
получаем с = 0, т. е. мы приходим к уже известному нам
случаю чистого движения без поворота
2) 1 + qr2 < О, 1 + q2 =, - 11 + q2\. B1.32)
При этом числитель выражения для с B1.26) становится
чисто мнимым вектором 2ib, а знаменатель обращается в нуль.
Таким образом, здесь с = СЬи где Ь\ = 1, С-> оо. Мы уже
встречались выше (§ 20) с таким случаем и знаем, что он
соответствует повороту на угол ? вокруг направления Ь. В частности,
к этой возможности относится случай
9 = _ 9*=», б2>1. B1.33)
Хотя здесь вектор-параметр является чисто мнимым, но он не
удовлетворяет условию |6| < 1, поэтому преобразование
Лоренца не должно сводиться к чистому движению без поворота.
Поскольку в данном случае появляются бесконечности, мы
рассмотрим его детальнее, исходя непосредственно из общего
выражения B0.17). Полагая в нем q = ib% 1 + q2 =* 1 — б2 < 0,
11 + q21 = 62 — 12 получим
L^wb-l{l~0izv r:*)· <2?·34)
-?2+ 266 2ib
2ib l + 6a
Если сравнить это выражение с B0.41), то нетрудно убедиться,
что они не сводятся друг к другу, например, уже потому, что
пространственные части матриц B0.41) и B1.34) равны
соответственно 1 + (V — ?)?-?/?2 и — 1 + 26·6/F2 — 1) и вследствие
различия в знаке при единице никак не могут совпасть.
Согласно общей формуле B1.25) имеем в данном случае и = 6/62, и
соответствующее преобразование Лоренца равно (см. B0.26?,
q =* ib/b2)
^ш =
?2-1
(b2-l + 2b.b/b2 lib \ 2
V -2» b2+l)· B1-d5)
Сравнение с B0.41) дает ? = 2Ь/(Ь2 + 1) в соответствии с B1.20).
Что же касается вектора с, то, как было показано в случае
B1.32), с=СЬг, С->оо, 61 = 6/|6|, а при этом соответствующее
преобразование Лоренца принимает вид B0.40)
ь-Г^-'Э· <21·36»
Перемножая B1.36) и B1.35), получаем B1.34)
LcLia = Lib. B1.37)
Таким образом, непосредственная проверка показывает, что
общие формулы B1.20), B1.25), B1.26) дают правильный ре-
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 177
зультат и в особом случае B1.32), несмотря на появление
бесконечно больших величин. Из B1.37), в соответствии с
законом композиции, должно следовать соотношение
СЪЛ+1ЫЪ2 + 1С[ЪЪ]1Ъ2
ib = <с. ш> = — —? .
Поскольку [66] = 0, 6x6=161, |6|61 = 6,то при С->оо правая
часть равна гб, как и должно быть.
То обстоятельство, что при чисто мнимом вектор-параметре
мы, вообще говоря, не имеем чистого движения, становится
особенно ясным в предельном случае | и | -> оо. Действительно,
при этом общее выражение, вытекающее из B0.26) при q = Ш:
^-|1—»|^ _2ш 1 + и2) B1·38)
принимает вид
/2.^-1 0\ .
т. е. изменить порядок пространственного поворота и движения,
правления и на 180°.
Вместо представления q в виде B1.14) можно потребовать,
чтобы
? = а + г& = <ш\ с'>, B1.39)
т. е. изменить порядок пространственного поворота и движения.
Поступая так же, как в случае B1.14), получим
»' = i<«*, -9>~ <«'-« + '«Ч = 2 Ъ + [2аЪ{2, B1.40)
* * l + lflfl 1 + ?2 + 62' ? '
ю - 1 + /ГГ7 i + kl2 + |i + *T ~с· B1·41)
Заметим, что я'2 = ?2 (см. B1.20)) и и'2 = и2 (см. B1.25)).
Таким образом, при изменении порядка операций поворота и
движения, из которых состоит заданное преобразование
Лоренца, вектор-параметр поворота с не меняется, а векторы »', ?/
сохраняют свою длину, изменяя лишь направление.
Непосредственным расчетом можно убедиться, что это изменение
направления осуществляется ортогональным преобразованием с
вектор-параметром с:
v'^OcVt и' = Оси% Og=l + 2^ + c2X>. B1.42)
l-f- с
12 ?. и. Федоров
178
ГЛ. III. ГРУППА ЛОРЕНЦА
Последний результат следует из B1.39), B1.14) и равенства
с' = с. Действительно, соотношение
q = <с, ш> = <ш', c> B1.43)
приводит вследствие C.24) к
iu! = <с, ш, — с> = гО^и, B1.43')
а поскольку vr\u\ u||w, to отсюда следует и первое
соотношение B1.42).
Наряду с B1.42) справедливы также формулы
v' = Oqv = Oq*vr и' = 0gw = Оч*и, B1.44)
которые получаются, если учесть вытекающее из B1.43)
равенство с = <д, — ??> = <— ??', 5>и комплексно сопряженное к
нему. Из них следует
<д, — ??, — з> = — ??', <?*, ??, — ?*> = ??',
что равносильно B1.44).
Полученные выше соотношения в самом общем случае дают
ответ на вопрос о том, какая скорость и вращение
соответствуют любому собственному преобразованию Лоренца, заданному
произвольным комплексным вектор-параметром q. Наоборот,
если известна относительная скорость двух систем координат ?
и вектор-параметр поворота с, то с помощью B1.18), B1.14)
либо B1.39) находим q и затем соответствующее
результирующее преобразование Лоренца Lq по формуле B0.26). При этом
мы можем по желанию либо объединять скорости и вращения,
включая их в единый комплексный вектор-параметр д, либо
рассматривать их раздельно в любом порядке.
Теперь мы можем установить ограничения, которые следует
наложить на комплексный вектор-параметр q для того, чтобы
выражение B0.17) для преобразования Лоренца имело смысл.
Как уже отмечалось, соответствующие условия вытекают из
требования, чтобы элементы матрицы B0.17) оставались
конечными. Обращение их в бесконечность возможно, как следует из
B0.17), в двух случаях
1) 1 + ?2 = 0; B1.45)
2) |l + ia|<oof Ы2=оо. B1.46)
Видно, что оба эти случая исключаются одним неравенством
B1.22). Однако необходимо еще показать, что если это условие
выполняется для двух вектор-параметров q и qr, то оно будет
выполняться и для вектор-параметра q" =<?, ?'>, являющегося
результатом их композиции. Поскольку (см. B1.21))
ггтй='^1 + <-«*'*>2· <21·47)
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
179
то вместо B1.22) мы рассмотрим неравенство
1 + <- g*, q}2 > 0. B1.48)
Если из выполнения этого неравенства для q и q' будет
следовать в общем случае его выполнение для q" = <?>?')» тогда
B1.48) будет необходимым и достаточным условием того, что
вектору q соответствует преобразование Лоренца согласно
соотношению B0.17).
Чтобы показать это, воспользуемся тождеством (см. [26])
A _ ?6)(? _ a'V) (i + <?| 6><e/f V>)wm
- A + ??')A + bV)(i + <- ?\ ?><6', - 6», B1.49)
которое без труда проверяется с помощью B1.3). Здесь а, 6, a'f
V — произвольные векторы, в том числе комплексные.
Согласно B1.47) имеем
1 + <-?"*, ?">
,
i + q
1 + 1?" I2
B1.50)
Знаменатель этого выражения равен
1 + | ?"|2 = 1 + <«, ?'><«*, ?'*>· B1.51)
Воспользуемся тождеством B1.49), положив в нем a=q, Ь= q',
?' = q*, V = q'*. В результате получим
1 + | gT = A +1?|2)A ?\9'|2) A + <- q*, q><q'*, - g'»·
11 —14. \
B1.52)
С другой стороны, для числителя B1.50) имеем (см. C.21))'
B1.53)
? + ? = ? + <?, ?'>2 = O + g'Xi + g")
* -?-??'?/ A-ад'J
Подставляя B1.52), B1.53) в B1.50), получим
!+<-«**. ?">2=
или (см. B1.47))
1 + g2
1 + lif
2 ? ? , /2
1+g
l + lflf'r
(i+<-g*, ?><?'*,-?'>)
/\\_1
0 + <-g*. g>2)(i+ <-?'*, g'>2)
1 + < ? , ? > - A + <_ ^ д><^, _ ?). · B1·54)
Отсюда ясно, что если условие B1.48) выполняется для вектор-
параметров q и q', то оно будет выполняться и для их
композиции.
12*
180
ГЛ. III. ГРУППА ЛОРЕНЦА
Заметим, что согласно B1.53) вектор-параметры группы
Лоренца обладают еще и тем свойством, что из условий 1 -f- q2 ? 0f
1 + ?'2 ? о вытекает 1 + q ? 0, где q" = <g, ?'>.
Если переопределить вектор-параметр согласно B0.45), то
для векторов ? = qlVi + q2 будет справедлив закон композиции,
установленный в § 8 для группы 50C, С) (см. (8.17))
<Р, Р'Уо = ??^?2 + ?' УТ=72 + [РР'1 B1.55)
Такое же соотношение будет справедливо для комплексно
сопряженных вектор-параметров р* = q*lV\ + g2*.
Вообще, все изложенное выше относительно представления
q= <с, ш)и условий, ограничивающих допустимые значения
вектора 9, относится и к вектор-параметру комплексной группы
вращений 50C, С). Ввиду совпадения законов композиции
параметров для группы Лоренца 50C, 1) и группы 50C, С) эти
группы, очевидно, изоморфны.
С физической точки зрения формула композиции
вектор-параметров B1.3) по существу представляет собой своеобразную
форму общего релятивистского закона сложения любых
скоростей и вращений. В частности, например, складывая два чистых
движения с вектор-параметрами
q = tu, qf = iu' (и2 < 1, и'2 < 1),
получим согласно B1.3)
q" = <;„, iu'} = «(»+ »')-[-'!. B1.56)
1 + юю
Поскольку qn не является чисто мнимым, то в общем случае
суперпозиция чистых движений сопряжена с некоторым
поворотом. Из формулы B1.20) получаем в данном случае
// о u(l-u2) + u'(l + u2) + 2u.uu
V (l + «2)(l + «'2)+4im'
Переходя здесь от и, и' к ??, ?/, с помощью B1.18) находим
,, _ уУГ^72+ у' [? + *Г1 A+ КГУ)] (9i „v
?? Г+ЫР ' К*1э<)
Это есть общая формула сложения произвольных скоростей в
теории относительности (см., например, [27]). Кроме того, в
данном случае движению со скоростью ??" будет сопутствовать
последующий поворот системы координат, определяемый
согласно B1.27), B1.29) вектор-параметром с. Поскольку здесь
(см. B1.56))
1 + (Г== (?-»2)(?-*/2)>0
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
181
то мы имеем случай B1.30), B1.31), откуда следует
с==_ 2[ии] = -2[??] >21 5gv
i + uu' (? + ?? _ ^)(? +1^1 —?'») + 00
Ось этого поворота перпендикулярна к плоскости векторов
скоростей ?? и ?/.
С помощью B1.54) можно получить довольно простое
соотношение, связывающее величины скоростей г, ? и ?" [26].
Как известно (см. B1.19х)) <—?*>?>= *0- С другой стороны,
если q' = <с', ш'>, то <д'*, — q'} = <с', — ??', — ш', — с'> =
= <с\—to', — с'>= —iOcv' (см. B1.19), C.24)). Поэтому
соотношение B1.54) может быть написано в виде
1-^= AГр2)A^2). B1.59)
Отметим, что равенство iv = <ш, ш> (см. B1.19)) можно
интерпретировать следующим образом: вектор iv есть результат
группового умножения вектора ш самого на себя, т. е. iv
является групповым «квадратом» вектора ш. В свою очередь Ш
можно трактовать как «квадратный корень» из iv. Таким
образом, вектор-параметр in преобразования движения,
отвечающего некоторому вектору ?, является групповым «квадратным
корнем» из мнимого вектора iv, пропорционального относительной
скорости систем отсчета.
Выражение B0.17) и формула композиции параметров B1.3)
позволяют установить целый ряд свойств матрицы Лоренца в
дополнение к приведенным в § 18. Запишем соотношение B1.5/)
для краткости в виде
LqLq. = L<^>, B1.60)
тогда B1.6), B1.7) равносильны свойствам
L0 = l, Lq1 = Lq=L.q. B1.61)
Кроме того, из B0.17) следует
L*q = Lq*. B1.62)
Ввиду установленного в § 20 однозначного соответствия между L
и соответствующим вектор-параметром q мы можем утверждать,
что из равенства Lq = Lq» следует q = qr (и, разумеется,
наоборот). Заметим еще, что из B1.62), B1.61) вытекает, что
матрица комплексно или эрмитовски-сопряженная к матрице Лоренца,
также является матрицей Лоренца с другим вектор-параметром
L+ (?) = L* (?) = L* (- ?) = L (- ?*). B1.63)
182
ГЛ. III. ГРУППА ЛОРЕНЦА
Выясним, например, когда матрица собственного
преобразования Лоренца симметрична. В этом случае должно быть
Lq = LqLq = L(qtq) = 1 = L0,
т. е.^согласно B1.61) <g, q> = 2q/(l — q2) = 0. Следовательно,
L = L только при q = 0, когда L = 1, либо при | q |2 = oo, когда
L имеет вид B0.29).
Условие вещественности матрицы L имеет вид Lq = Lq* = Lq
и сводится к вещественности q: q = q*. Следовательно, матрица
Лоренца вещественна только для преобразования чистого
вращения.
Для того чтобы матрица L была эрмитовой Lq = Lq (см.
B1.63)), необходимо и достаточно, чтобы# = — #*, т. е. вектор-
параметр должен быть чисто мнимым. Как мы уже знаем, в этом
случае L задает либо чистое движение (q2> — 1),либо движение
с поворотом вокруг направления скорости на 180° (q2 < — 1).
Матрица L унитарна, если Lq = L-q* = Lq1 = L-q.
Следовательно, q = #*, т. е. условие унитарности совпадает с условием
вещественности и выполняется лишь в случае преобразования
вращения без движения.
Две матрицы Лоренца коммутируют, если LqLq> = ?<?,?'> =
= L(q>qy. Для этого необходимо, чтобы <<jf, <jf'> = <#', <Jf>, что
согласно B1.3) приводит к условию [qqr] = 0.
Матрица называется нормальной, если она коммутирует со
своей эрмитовски-сопряженной матрицей. Соответствующее
условие для матрицы Лоренца имеет вид
LqLq = L(-q*tq) = L(q-q*),
т. е. <#, — <jf*> = <— #*, q} или, на основании предыдущего
результата, [qq*] =0, т. е. вектор-параметр q должен быть линейным.
Заметим, что согласно B1.19'), B1.40) <— g*, q} = iv%
<g, — g*> = iV, поэтому
LqLq = Liv, LqLq = />!©', B1.u4)
т. е. умножение матрицы Lq на эрмитовски-сопряженную к ней
слева или справа дает матрицу Лоренца, вектор-параметр
которой всегда является чисто мнимым и равен соответствующей
скорости, умноженной на L Соотношению iv = <ш, ш> (см.
B0.25)) соответствует
LiuLiu = Lia = LiV. (zl.oo)
Следовательно, матрица Lq с вектор-параметром q — iu является
«корнем квадратным» из матрицы с соответствующим вектор-
параметром IV.
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 183
До сих пор мы ограничивались собственной группой Лоренца.
Полная группа Лоренца получается в результате добавления
матрицы пространственной инверсии A9.12)
р = (~о ?)· р2 = 1' Р = р~х = р' B1·66)
с помощью которой каждой матрице L+ = Lq ставится в
соответствие матрица
L^^Lq = PLq. B1.67)
Очевидно, из Zq = Lr следует q = qr. Используя B1.66),
B0.3), легко убедиться, что
Pq± = ч+р, рч±р~х = ря±р = «т> B168)
таким образом, матрицы q+ и q- подобны (эквивалентны). На
основании этого и формулы B0.17) имеем
(i+g+)(i+g*_) (i+g-)(i+g;)
PLq=:P ПТ71 " ii+«2i
следовательно,
PLq = Lq*P, PLqP = Lq* B1.69)
или более точно
PL{q,q*) = L{q*,q)P. B1.70)
Соотношения B1.66) —B1.69) позволяют исследовать
свойства матриц Lq так же, как мы это делали для Lq. Вместо B1.60)
мы имеем теперь
LqLq> = PLqPLq> = Lq*Lq, = L<q*tq> B1.71)
Мы будем выписывать дальше без пояснений соотношения,
соответствующие формулам B1.61) и последующим:
L0 = PL, = ?, B1.72)
Lqx = tq = PLq = L_qP = PL-q* = L_^*, B1.73)
Lq = Lq*, Lq = Lq* = L-q. B1.74)
Из B1.71) следует
L\ = L<q*,q> = 1 при <?*, ?>=0,;
т. е. при ?* = — ?, или [gg*] = 0, | q \ = oo;
L* = 2<, при « = #*, B1.75)
?а = 2+ = 2_д при g = — g = 0. B1.76)
184 ГЛ. III. ГРУППА ЛОРЕНЦА
Таким образом, из несобственных преобразований Лоренца
только матрица Lq = P является эрмитовой. Условие унитарности:
Lq = L-q = Lq = ?/_^*, ? = ?*
совпадает с соответствующим условием для собственной матрицы
Лоренца. Условие нормальности матрицы Lq имеет вид
L^^r = L<q*,-q) = b^L^ = Lt-q*^),
откуда <#*, — #> = <— ?*, g>, ?. e. g = 5* или | q | = оо.
Остальные два возможных типа матриц Лоренца (см. § 17)
отличаются от рассмотренных лишь знаком: L(+} = — Lt+\ LL~) =*
= -PL^ = -L.
Рассмотрим^ вопрос об инвариантах и собственных значениях
матриц Lq и Lq. Матрица Lq имеет два независимых
инварианта, поскольку|L| = 1 и L = \L\L,
(^)' = ]??7?· № = 4
i-g2
B1.77)
У матрицы Lq вследствие A9.29) имеется лишь один
независимый инвариант
(?,), = 2 Ш!_^, BJ),-((?,),)». B1.78)
Собственные значения ? матрицы Lq = ?+ (g) ?_ (q*) B0.18)
сразу получаются как всевозможные произведения собственных
значений коммутирующих между собой матриц е+(д) и ?-E*):
k_(i±iV?Hi±tVi*)u B1.79)
В общем случае, используя все сочетания знаков, получим
четыре различных собственных значения. Однако при условии q2 = q*2
получаются кратные собственные значения:
, (i±iV?Y , i + g2 f+i °ри i + «a>o
1,2 |i + «2| ' 3,4~|? + ?2??-? °ри i-h«2<o.
B1.80)
Наконец, в наиболее частном случае, когда вектор-параметр q
является круговым вектором
q* = (? + ib)a = 0, ?2 - &2 = ab = О,, B1.81)
получим из B0.17)
L=(l + e+)(l + i-). B1·82)
Нетрудно проверить, что при этом(?, — IJ = 2q+qlt (L — I)8 = 0.
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 185
Следовательно, в данном случае минимальный полином матрицы
имеет трехкратный корень, и собственная матрица Лоренца
будет неприводимой к диагональному виду. Вместо четырех она
будет иметь только два собственных вектора, один из которых
будет соответствовать жордановой клетке третьего порядка (см.
П.1).
Собственные значения несобственной матрицы Лоренца L9
согласно A9.30), B1.78) равны
??,2 - ± 1, ?8,4 - 2 = |? + ?*| '
B1.83)
В общем случае они также все различны, а кратные значения
могут иметь место лишь при Lt = ±2, т. е. при условии
<?» ?*>2 =0· Подставляя сюда q =а + ib, получим ?2= [аЪ]2. При
этом матрица также будет неприводимой к диагональному виду.
Аналогично C.25") можно определить произвольную
групповую степень комплексного вектор-параметра q:
q<» = —?=- tg (к arctg Yq*) B1.84)
. i ? 1 — ix
или, если использовать соотношение arctg ? = -у- In , ^,
В частности, для «квадратного корня» из q получим (см. C.26))
?
<i/a> = g <?<i/2>) ?<i/2>> = ?. B1.86)
j ? 1/ >i ? ?2
?
+ Vl +
Соотношения B1.85) определяют любую степень матрицы
Лоренца L(q) или матрицы комплексной ортогональной группы
0(q)
Lh(q) = L(q<% Oh (q) = 0 (**>). B1.87)
Отметим, что для круговых вектор-параметров q приведенные
соотношения чрезвычайно упрощаются и сводятся к следующим:
q(k> = А-д, (9г = 0), B1.88)
Lh(q) = L(kq), Oh(q) = 0(kq).
186
ГЛ. III. ГРУППА ЛОРЕНЦА
Рассмотрим различные частные случаи комплексных вектор-
параметров q и соответствующих им лоренцовых матриц. Как
известно, трехмерные комплексные векторы могут быть трех
типов (см. [12.1, 12.2,13] и П.1). Линейные комплексные
векторы q удовлетворяют соотношению [qq*] = 0 или \q2\ = | q |2. Для
круговых векторов q2 = 0. Если ни то, ни другое условие не
выполняется, то мы имеем дело с общим эллиптическим
комплексным вектором q.
Пусть q — линейный комплексный вектор, тогда он может
быть представлен в виде произведения комплексного скалярного
множителя | на единичный вещественный вектора:
q=ld.Согласно B1.19/), B1.27) в этом случае получим
2Img d c= Rel*Vi + l2
1 + Ul2 ' ReKl + ?2
u = _?iILi_d, c = ™^*JLL}-d. B1.89)
Таким образом, в этом случае ось поворота с совпадает с
направлением скорости ?, ввиду чего соответствующее
преобразование Лоренца можно назвать винтовым.
Для кругового вектора q = е, е2 = 0 имеем из тех же
соотношений
? =
21m —i[««4t c = Ree. B1.90)
l + M
Заметим, что — i [ее*] = \е |2с1? где с±—единичный вещественный
вектор, ортогональный к е и е* (см. C.39)). Таким образом,
в этом случае ось поворота с лежит в плоскости кругового
вектора е, а направление движения образует с ней некоторый угол,
отличный от прямого. Преобразованиям Лоренца с круговым
вектор-параметром мы дадим условное название циклических
преобразований.
Поскольку всякое собственное преобразование Лоренца может
быть представлено в виде B1.13) Lq = LcLia, то, используя
B0.54), можем написать
Lq = LcTLw, w = (u,i). B1.91)
Но согласно B0.37)
<Ос 0
Lc=yQ J, LCT = TLC, B1.92)
поэтому для любого Lq справедливо общее выражение
Lq = TLcLw, a> = (o,i) B1.93)
или (см. B1.43))
Lq = TLW.LC, ?/ = (Оси, i) = Lcw. B1.94)
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
187
Согласно B1.64), поскольку Li = Lc, L^= TLW T = Lw*,
находим с помощью B1.93)
Lq Lq = hiv = LW*LCT LCLW = Ьи)*ьи) = i ?/гу0» (^1.У5/
где ш0 = (г, 0» ?и>о = LwTLw.
Мы упоминали в § 20 о плоских преобразованиях Лоренца,
причем был установлен ряд критериев, по которым можно было
судить о том, что заданное преобразование L является плоским.
К числу их относятся условия |<х| =0, q2=q*2, ?6==0, \L—1| =0
(§ 20), которые все эквивалентны между собою и являются
необходимыми и достаточными. Воспользовавшись представлением
B1.43) q = <с, ш> = <iV, c>, можно получить еще один
критерий. Согласно B1.11)
4 , „2_ A + с2)A-«2) A + с2) A - «/2)
^Я A —ic«J ~~ (l-ic«'J '
откуда сразу следует, что необходимым и достаточным условием
для плоского преобразования Лоренца Lq = L (<c, iu)) является
си = си' = 0, т. е. перпендикулярность оси поворота с к
направлению движения (и). При этом q2 = с2 — и2 A + с2), поэтому знак
q* =z Ь2 (см. B0.49)) совпадает со знаком разности (см. B0.43),
B0.44))
-i?-»» = sin»-f—th»4- B1.96)
Плоские преобразования Лоренца представляют собой, хотя
и не общий, но весьма широкий и важный класс преобразований,
обладающих к тому же сравнительно простыми свойствами.
Ввиду этого представляет интерес установление связи произвольных
преобразований Лоренца с плоскими. Такая связь легко
устанавливается на основании доказанного выше свойства, что
преобразование Лоренца Lq является плоским тогда и только тогда,
когда в его вектор-параметре, который всегда однозначно может
быть представлен в виде q = <c, iu}, векторы ежи взаимно
перпендикулярны: си = 0. Заметим, что отсюда следует
справедливость того же утверждения для представления q = <ш', с> (см.
B1.43')), поскольку и' = Оси и си' = сОси= си = 0. Очевидно,
всегда можно написать
?=<с, -с0, с\ *а> = <с',в°>, с' = <с, -с°>, q° = <с°, ш>.
B1.97)
Эти соотношения верны при любом с0. Если выбрать
вещественный векторе0 так, чтобы с°и = 0, то вектор-параметр q° будет
задавать плоское преобразование Лоренца, а вектор с'
вследствие своей вещественности будет соответствовать преобразованию
188
ГЛ. III. ГРУППА ЛОРЕНЦА
чистого вращения. Разумеется, из представления q= <ш', с>
вытекает аналогично q = <<??, сх>, где?? = <i»/, с°>, сх = <— с% с>в
c°w' = 0. Два этих варианта соответствуют различной
последовательности выполнения плоского преобразования и поворота.
Поскольку пространственное вращение также есть плоское
преобразование Лоренца, то справедливо также утверждение: всякое
преобразование Лоренца мооюет быть представлено в виде
произведения не более двух плоских преобразований.
Следует иметь в виду, что представление B1.97) заведомо
неоднозначно, поскольку вещественный вектор с0 ограничен
единственным условием с°и = 0, т. е. он может быть любым
вектором в плоскости, перпендикулярной к направлению движения.
В самом общем случае можно утверждать, что каков бы ни
был вектор с в представлении q = <с, ги), всегда можно так
выбрать c°(c°w=0), что вектор дополнительного поворота с!=<с,—?°>
будет иметь произвольное направление а. Действительно,
положим с' = <с, — с°> = Са, где С — параметр, подлежащий
определению. Отсюда имеем, пользуясь групповой композиционной
алгеброй B1.6) — B1.11),с0 = — <—с, Са>=<— Са, с>. Налагаем
условие
с°и = <— Са, с} и = 0 или (с — Са + С [са]) и = 0,
откуда однозначно следует
и соответственно
/ си-а
С ~~ а(и + [си]У
Q СП
со = <-с',с>=с-0-'Х)с'
1 — ее
B1.98)
При си = 0, как и должно быть, С = 0.
Таким образом, любому выбранному направлению а
соответствует однозначное представление q = <c', g0>, q\ = 5J2, с'Ца.
Следовательно, справедлива следующая теорема: любое
неплоское преобразование Лоренца может быть бесчисленным
количеством способов представлено в виде произведения
преобразования вращения Lc> на плоское преобразование Lqo,
соответствующее той же скорости v. При этом направление оси
вращения с' может быть выбрано произвольно, и этот выбор
однозначно определяет разложение Lq — Lc>Lqo.
Рассмотрим некоторые частные случаи. Пусть а = и, тогда
сп „ _ .,, „ .о _ (cgi + **iX)[CKiI
и
c' = ~u=,cai.ult с°= ^ \ ' " , ", »х = т^Т. B1-99)
в2
! + («*,)» ' 1_|вГ
Таким образом, если дополнительный поворот имеет осью на-
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ 189
правление исходного движения и, то соответствующий вектор-
параметр & равен проекции с на направление и.
Пусть с'|[си], т. е. дополнительный поворот происходит
вокруг оси, перпендикулярной к плоскости (с, и). Полагая в B1.98)
а = [си], получим
с, = си-[си] с0 (си — с2их) [си] B1.100)
[си]2 ' [си]2
Очевидно, выражения B1.98) для с' и с0 не зависят от
величины вектора а, а только от его направления.
Поставим задачу об отыскании такого с0, чтобы
дополнительный поворот был минимальным, т. е. чтобы с'2=<с, — с°>2 = min.
Поскольку с°и = 0, то общее выражение для с0 имеет вид
с° = 1[си] + ц[и[си]]. B1.101)
Вместо того, чтобы искать минимум с'2, удобнее взять (см.
C.21))
1 + в" - 1 + <с,- «·>¦ = A + Cl(l tP · B1·102>
(i + cc )
Поскольку A+с2) постоянно, то задача сводится к отысканию
минимума выражения
1 + с02 _1 + 12[си]2 + ^2и2[си]2
а+ссг о+тиси]2J
Из уравнения dF/dl == 2? [си]2 =0 следует ? = 0, значит,
с0 = T)[u[cit]]. Решение уравнения dF/дц = 0 дает ? = 1/и2. В
результате получаем, опять-таки совершенно однозначно,
«•—г*, «'-"¦.-iff'1· <2'-'»з>
Заметим, что если задан некоторый единичный вектор ии то
любой трехмерный вектор а можно однозначно представить в виде
(см. П.1)
а = и1и1а — иг2а, B1.104)
где первый член справа есть проекция вектора а на
направление иА, а второй член — проекция а на плоскость,
перпендикулярную к иг. Таким образом, согласйо B1.103) минимальный
дополнительный поворот с' соответствует такому выбору вектора
с0, когда последний равен проекции вектора с, входящего в
исходное представление q — <c, ш>, на плоскость,
перпендикулярную к и.
Все содержание этого параграфа с особой очевидностью
свидетельствует о том, каким мощным средством является векторная
190
ГЛ. III. ГРУППА ЛОРЕНЦА
параметризация при изучении свойств преобразований Лоренца..
С ее помощью оказывается возможным легко и просто решать
такие задачи, которые при другом подходе, например, при
использовании столь широко распространенной эйлеровой
параметризации, были бы практически непосильными для решения.
Основная причина этого огромного упрощения заключается в том,
что благодаря предельно простому закону композиции вектор-
параметров B1.3), как правило, нет необходимости производить
вычисления с помощью громоздких 4Х4-матриц Лоренца, и
вместо них можно иметь дело непосредственно с векторами q.
Нижеследующие расчеты могут служить дополнительной
иллюстрацией справедливости этих утверждений.
Мы познакомились с различными частными видами
преобразований Лоренца, которые характеризуются теми или иными
условиями, налагаемыми на комплексный вектор-параметр q.
Дадим здесь сводку таких преобразований.
1. Винтовые преобразования: [??*] = 0; (| q2 | = | q |2);
2. Плоские преобразования: q2 = q*2.
Частными случаями плоских являются нижеследующие
преобразования:
3. Преобразования вращения: q = q*\
4. Преобразования движения: ? = — ?*;
5. Циклические преобразования: q2 — 0.
Выше было показано, что любое преобразование Лоренца
однозначно представляется в виде суперпозиции вращения и
движения: q — <с, ш> = <ш', с> (см. B1.43)). Это представление
имеет наиболее непосредственный кинематический смысл. Кроме
того, согласно B1.97) каждое преобразование Лоренца
бесчисленным множеством способов может быть представлено как
произведение вращения и плоского преобразования (см. B1.97),
B1.98)), т. е. двух плоских преобразований. Покажем, что
возможны и различные другие представления общего
преобразования Лоренца в виде произведения двух преобразований
перечисленных выше более простых типов.
А). Преобразование Лоренца Lq при любом q можно
представить как произведение вращения на винтовое преобразование.
Действительно, любой вектор? = <с, ш> можно написать в виде
q = <с', 5°>, где с' = <с, — Си} определяет вращение, a q° = <Cw,
ш>— винтовое преобразование. Вещественный коэффициент С
при этом произволен. Если поставить условие, чтобы
дополнительное к винтовому преобразованию вращение сг было минимальным,
то задача сведется к минимизации выражения
1 + с'2 = A + с2) A + С2и2)/ A + СсиJ
по параметру С. Элементарное вычисление приводит к C—uclu2t
§ 21. КОМПОЗИЦИЯ ВЕКТОР-ПАРАМЕТРОВ
191
следовательно,
(ис — их){ис] ,2 = [ис]2
и2 + (исJ ' и2 + (ис)
<с,-сь)=*»'Г ,"» . *'2 = ,»'"L·»' B1Л05)
ис 4- in2
q° = <Си, ш> = » . w.
и A — тс)
Таким образом, ось с' минимального поворота перпендикулярна
к направлению движения и.
Б). Любое преобразование Lq можно представить как
произведение двух циклических преобразований. Задача сводится к
представлению произвольного ?в виде
? = <*,у>, *» = у» = 0. B1.106)
Отсюда имеем у = <—х, д>, и условие у2= 0 приводит к
уравнению (поскольку х2 = 0)
(q-x+iqx]J = 1 + q2- A + ?*J = 0,
откуда следует
l + gar = l/l + g2, B1.107)
у = JLzi*±iffL. B1.108)
Vi + g2
Итак, мы можем выбрать любой круговой вектор х(х2 = 0),
удовлетворяющий условию B1.107), после чего круговой вектор у
однозначно определяется формулой B1.108). Разумеется,
аналогично можно было бы выбирать вектору (у2 = 0), тогда
1 + ?У=УТ+72 и *=<?, -y> = (q-y-{qy])/Vl + q2.
Очевидно, рассматриваемое представление неоднозначно, так как
комплексный вектор зависит от шести параметров, а условия
х2 = 0 и B1.107) дают четыре уравнения. Поэтому на х можно
налагать дополнительные условия, например, потребовать, чтобы
вектор ? лежал в плоскости вектора 5, что приводит к
уравнению х [qq*] = 0.
В). Справедливо следующее утверждение: плоское
преобразование Лоренца всегда может быть представлено в виде
произведения двух преобразований с чисто мнимыми
вектор-параметрами. Задача сводится к представлению q в виде
/· · /\ i (и + и) — [ии ] ,-л ,??4
q = (и, ш'> = ? , / i- B1.109)
1+ии v '
Отсюда следует, что ?2=?*2, т. е. преобразование Lq должно быть
192 гл. ш. группа лоренца
плоским. Аналогично Б) имеем, считая q = а + гЬ, аЪ = О,
;„' — / ;„ ?\ — g "" iu + * [gKJ — a - [6g1 + *(* — » + [««?
in __<—zw,?/>_- ? + igtt - ? - bu + iau *
B1.110)
Приравнивая вещественную часть последней дроби нулю,
получим
A — Ъи) (а — [Ъи]) + аи- (Ъ — и + [аи]) = 0. B1.111)
Умножив на ю, получим aw(l — и2) = 0, т. е. аи = 0. Поэтому
B1.111) сводится к A—6w)(a—[6ю]) = 0. Но 1 — Ъи ? 0f так как
иначе знаменатель выражения B1.110) обращался бы в нуль*
Следовательно,
[Ъи] = а. B1.112)
Поскольку аи = 0, то ищем и в виде: и = ? [аб] + ?6. Подставляя
в B1.112), получим ? = — 1/62при произвольном ?. В результате
имеем
и = [аЬ)/Ь2 + г)Ъ. B1.113)
Отсюда с помощью B1.110) находим
»'^("Т-У »-*»¦)¦ B1Л14)
Согласно B1.11) 1+ q2 = A - и2)A — w'2)/(l + ии'J. Поэтому при
1 + ?2 > 0 одновременно должно быть и2 < 1, и'2 < 1 или и2 > lf
ю'2>1,т. е. оба преобразования и, и' должны быть либо чистыми
движениями, либо движениями с поворотом на ? вокруг
направления движения. Если же 1 + q2 <0, то и2<1, и'2 > 1 или
наоборот. Из B1.113), B1.114) имеем
1 — и2=1 — -|? — ?262, B1.115)
1 _ и'2 = 4 + <_ tof дуг = A — и2) A + д2)/A - ?&J. B1.116)
Еслии2 < 1, то согласно B1.115) должно бытьО<т!2< (б2—а2)/Ь\
Поскольку ? вещественно, то это возможно лишь при Ь2^а2,:
т. е. #2<0. Наоборот, и2 > 1 при ?2 > (б2 — а2)/б4; последнее
неравенство может быть удовлетворено всегда. Если мы потребуем,
чтобы 1 — w'2> 0, то при выполнении B1.115) необходимо будет,
чтобы 1 +а2— &2>0 или &2< а2+1. Таким образом, должно быть
а2<&2<«2 + 1. B1.117)
Итак, для того чтобы плоское преобразование представлялось в
виде суперпозиции двух чистых движений, необходимо, чтобы
его вектор-параметр q=a+ ib удовлетворял неравенствам B1.117)
и, конечно, условию аЬ = 0. Однако если вектор q для плоского
§ 22. ПРЕОБРАЗОВАНИЯ ВЕКТОРОВ ПО МИНКОВСКОМУ 19 3
преобразования не удовлетворяет требованиям B1.117), он тем
не менее всегда может быть представлен в форме B1.109), хотя
в, или в', либо оба эти векторы будут по длине больше единицы.
Как мы знаем, это будет означать, что одно, либо оба движения
будут сопряжены с поворотом на ?.
Если положить ? = 0, то получим
« = -^Г-> »' = -^-(F2-?2N-[?&]). B1.118)
Можно вместо этого наложить условие перпендикулярности
направлений обоих движений: ии' = 0. Оно выполняется для
значений ? = 4D ±/Vl-4a4/&8).
§ 22. Преобразования векторов в мире Минковского
Рассмотрим изменение мировых векторов под действием
различных преобразований Лоренца. Простейшим является случай,
когда вектор-параметр q веществен: q = с = с*. При этом
преобразование Лоренца есть чистое вращение
-«.
и действие его на любой вектор х = (х, ix0) сводится к повороту
пространственной части этого вектора
х1 = Lcx = (Оех, ix0). B2.1)
Обратимся теперь к случаю чистого движения B0.51)
L = Li(t = l+ 2 (в-в *»), |„|<1. B2.2)
Рассмотрим действие этого преобразования на основные типы
векторов. Пусть у = (у, iy0), причем у2 = х2. Выясним, когда
справедливо равенство L{Ux = у. Оно распадается на два уравнения
. л их — хл ? иV — их ^их — хл
х + 2-—?и=у, *о + 2 /_ю, =-*0-2т-^ = Уо.
B2.3)
Отсюда однозначно следует
Ц= ХТУ . B2.4)
*о + 2/о '
причем удовлетворяются оба уравнения B2.3). Однако при этом
должно также удовлетворяться условие в2 < 1.
Итак, если (х — уJ1(хо + У оJ < 1, то существует единственное
преобразование чистого движения такое, что у = Ь*%их. Однако,
13 Ф. и. Федоров
194
ГЛ. III. ГРУППА ЛОРЕНЦА
разумеется, это возможно не для всяких 4-векторов я, у с
равными квадратами. Действительно, не нарушая равенства у2 = я2,
можно сделать сумму хо + у0 как угодно малой и, соответственно,
| и | как угодно большим. Условие и2 — 1 < 0 можно
интерпретировать как требование, чтобы 4-вектор (х — у, i(x0-\y0))=z
= ? — Ту был времениподобным (Т = II·. __ Vj— отражение
времени) .
Последний результат сразу следует из формул B0.54),
B0.55). С их помощью получаем у = Ьщх = TLwx = ?(? —
— 2w · w/w2)x или y — Tx = — 2Tw-wx/w2. Ho w = (w, ?) в
случае и2 < 1 есть времениподобный вектор. Таким же будет и
вектор Tw, а значит, и у — Тх (скалярный коэффициент
— 2wxjw2 не играет роли). Вместо ? можно использовать
матрицу пространственной инверсии ? = — Г.
Отметим, что если векторы я, у — времениподобные: х2 =
= у2 < 0, то условие и2 < 1 согласно B2.4) заведомо будет
выполняться, если четвертые компоненты х0 и у0 имеют одинаковый
знак. Если и2 > 1, то из B0.26) следует
^ = -1--Ц(В-И *), «·>!. B2.5)
1 — и \— ш и*)
Как видим, выражение для Ьщ в этом случае отличается от
B2.2) знаком. Аналогично соотношения, соответствующие
B2.3), B2.4), будут отличаться лишь знаком при у и у0. Таким
образом, вместо B2.4) получим
" = -Г=Т-· B2·6>
о *о
Следовательно, если (х + уJ/(хи — у0J >1, то существует
преобразование Лоренца, переводящее ? в у при условии и2 — 1 > 0,
что равносильно требованию, чтобы 4-вектор (х -\- у, i(xo-yo)) =
= х + Ту был пространственноподобным. В случае B2.4)
должно выполняться условие и2 < 1 или
(х - уJ - (х0 + у0J = 2(х2-ху- х0у0) = 2(х2- хТу) < 0.
B2.7)
В случае B2.6) должно быть и2 — 1 > 02откуда следует
х2 + хТу > 0. B2.8)
Поэтому, чтобы вектор ? можно было преобразовать в вектор у
с помощью матрицы Лоренца с чисто мнимым
вектор-параметром, необходимо, чтобы выполнялось одно из соотношений:
*У + *?#? > *2 = *2 - 4 = ?/2* *0 + *оУо > - ?2· B2.9)
Таким образом, преобразование Liax = ?/ возможно не для
всяких векторов х, у с равными квадратами.
§ 22. ПРЕОБРАЗОВАНИЯ ВЕКТОРОВ ПО МИНКОВСКОМУ 195
С помощью общего плоского преобразования Лоренца
также можно осуществить переход от ? к у (у2 = х2). Удобнее
всего воспользоваться для этого выражением для L в форме A.13)
L = L(q) = \±^ E =-?). B2.10)
Как показано в § 19, для плоских преобразований такое
представление всегда возможно, причем ? = a (q) = 1/2 (g+ + ql).
Уравнение Lx = у сводится теперь к следующим:
A + ?)? = A — а) уг ах+ = х~, х± = у =ь ? =(#±, г#*).
B2.11)
Поскольку х2 = у2, то х+х~ = 0. Раскрывая B2.11), получаем
\-ibo)[ix+) U-J
или
[ах+] — х^Ь = аг-, — 6лг+ = я^. B2.12)
При этом следует иметь в виду (см. § 18), что для плоских
преобразований | а | = аЬ = 0. Умножая первое уравнение B2.12)
скалярно на х + и учитывая, что ?+?- = ?+?- — х?х0 = 0,
убеждаемся, что второе уравнение есть следствие первого. Из первого
уравнения находим
& = -L([aar+]-ar-). B2.13)
Таким образом, мы можем задать вектор а и определить 6
согласно последнему равенству. Из условия аЬ=0 следует ах~ =
— 0, т. е. выбор а ограничен лишь требованием
перпендикулярности этого вектора к х~ = у — х. Такой вектор определяется
двумя параметрами, и общее выражение для а будет иметь вид
а = ? [?- [?+?-]] + ? [дН-аг-]. B2.14)
Вещественные параметры ? и ? произвольны, за исключением
условия B1.22), которое в данном случае имеет вид
11 + а2 - 62|/A +й2 + б2) > 0. B2.15)
Заметим, что формула B2.13) теряет смысл при х0 = 0, т. е.
при уо = — xq. В этом случае первое уравнение B2.12) имеет
вид: [ах+] =х~. Нетрудно убедиться, что при этом для а, 6
получаются выражения (поскольку х+х~= 0):
а = **+ + ^г [*+*1. Ь = - -^ х+ + ?*" + j? [*+*"]
13*
196
ГЛ. III. ГРУППА ЛОРЕНЦА
с произвольными ?, ?. Таким образом, всегда существует двухпа-
раметрическая совокупность плоских преобразований Лоренца,
переводящих вектор ? в у при х2 = у2.
Обратимся теперь к вопросу о том, каково общее собственное
ортохронное преобразование Лоренца Lq, осуществляющее
переход от ? к у: Lqx — y при х2 =у2 [29]. Любое Lq можно
представить в виде (см. § 21) Lq—LcLia, «2< 1, где q =<с, ш>,
следовательно, LcL\ax = У, или L\ax = L-Cy, или также (см.
B0.51))
Отсюда следуют уравнения
их — ? их — ?
* + 2- ?и = 0-су, *„-2- / =-г/о, B2.16)
1 — и 1 — и
которые отличаются от B2.8) лишь заменой у на 0-су.
Поэтому решение для и может быть написано сразу на основании
B2.4)
и = *~1~? (И<1). B2.17)
о * уо
Аналогично B2.6) при условии Lq = L L\a, и2 > li мы получим
» = ^^ A«1>1)· B2-18)
Нетрудно убедиться, что подстановка выражения B2.17) в
уравнения B2.16) обращает их в тождества, справедливые при
любом с. Разумеется, как и в случае преобразования чистого
движения, переходы х ->· У = Lqx возможны лишь для тех х,
у(х* = у2)9 для которых выполняется условие
"Ч^)'^ B2-19)
или, что то же самое, вектор х — TL_cy — времениподобный.
Вообще, с помощью собственного ортохронного
преобразования Лоренца заведомо нельзя перевести любой вектор ? в любой
другой вектор у с тем же квадратом. Это ясно, например, из
того, что вектор ? = @, ?) может быть преобразован в
вектор ?/ = @, — ?), только с помощью неортохронного
преобразования.
При выполнении условия B2.19) существует трехпараметри-
ческое семейство преобразований Лоренца, осуществляющих
§ 22. ПРЕОБРАЗОВАНИЯ ВЕКТОРОВ ПО МИНКОВСКОМУ 197
переход ?? ? к у. Матрицы этого семейства зависят от
произвольного трехмерного вещественного вектора, с? поскольку они
содержат вектор-параметр и B2.17).
В качестве примера применения вышеприведенных формул
рассмотрим важный для теории элементарных частиц случай
преобразования 4-импульса частицы от системы покоя к
движению или наоборот. Четырехмерный вектор энергии-импульса
частицы ? = (?, ip0) удовлетворяет известному соотношению
ра = ^ __ pJ ? __ ma. B2.20)
Здесь ? — трехмерный вектор импульса, ро — энергия частицы,
m — ее масса покоя. Как следует из B2.20), вектор 4-импульса
является времениподобным. Для покоящейся частицы вектор
4-импульса равен р° = @, im). Если
Р° = W, B2.21)
то в формуле B2.4) следует положить ? = ?, х0 = p0i у = 0,
Уо = тп. Таким образом,
и = —?¦—. B2.22)
Ро + m
Легко убедиться с помощью B2.20), что при р0 > 0 всегда будет
а2 < 1. Если ввести вектор 4-скорости частицы путем
определения
v = (v,iv0)=-?-, ^ = ^-^ = -^«- = -1, B2.23)
"* ТП
то для вектор-параметра B2.21) получаем
» = TTV B2.24)
Обратный переход от покоящейся частицы к движущейся
= L-iup° осуществляется путем изменения знака ю.
Преобразование чистого движения Ьш с вектор-параметром B2.22),
B2.24), осуществляющее переход от системы, где частица
движется с импульсом ? (скоростью ??), к системе покоя частицы,
называется преобразованием «буста».
Рассмотрим в заключение вопрос об отыскании
«минимального» преобразования Лоренца L от одного вектора ? к другому у:
у = Lx, Для «минимального» преобразования можно дать
следующее общее определение. Пусть мы имеем группу SO(n, С)
комплексных ортогональных преобразований тг-мерного
пространства. Тогда согласно § 1 общее преобразование О этой группы
может быть написано в виде
O=0(a) = ii? a = -a, B2.25)
198
ГЛ. III. ГРУППА ЛОРЕНЦА
причем комплексная антисимметричная матрица ? является
матрицей-параметром группы. Поставим вопрос об отыскании
такого преобразования у = О (а) х (у2 = х2), где х, у — векторы
га-мерного пространства, для которого
(a+a)t = min. B2.26)
Такое ортогональное преобразование будем называть
минимальным преобразованием от а; к у. Условие у = Ох аналогично
B2.11) можно написать в виде ах+ = аг, х± = у ± х. Поскольку
х* заданы, то речь идет о нахождении минимума величины
(a+a)t = — (a*a)t при условии ая+ = х~. Пользуясь методом
Лагранжа, образуем величину
F = - -i- (?*?), + ? (яг - ах+) + ?* (?-* - а*я+*), B2.27)
где ? — неопределенный комплексный гс-мерный вектор,
играющий роль лагранжева множителя. Здесь ?? рассматривается как
скалярное произведение векторов ? и #. Искомой величиной
является антисимметричная комплексная матрица а = (???),
причем ? и а* рассматриваются как независимые.
Для получения условий минимума нужно приравнять нулю
производные от F по ? и а*. Расчет можно вести ковариантно,
для чего следует воспользоваться общими формулами,
справедливыми при а = —а:
ж-(«Р)« = ж-(Ра)« = Р-Р· <22·28)
dF/da = —1/2(а* —а*) — (?-?+ - ?+-?) =
= а*-[?·*+] =0*), B2.29)
dF/да* = ?- [?* · ?+*] = 0. B2.30)
Получившиеся уравнения — комплексно сопряженные. Таким
образом, имеем
а= [?* ·*+*]. B2.31)
Кроме того, х~* = а*х+*. Подставляя сюда значение ? из B2.31),
*) По определению под производной от скаляра F по матрице ? =
= (осдл) мы понимаем матрицу, элементы которой равны производным
от F по соответствующим элементам матрицы а: dF/да = (dFjda^) =
= (FV). Если F = (??) * = ??????, то dF/???? = ??? = ]W, т. е. <9(??) t/da=
= d($a)t/d<x = ?. При этом предполагается, что все элементы матрицы ?
независимы. Если ??? = —???, т. е. ? антисимметрична, то ?????? =·
= 2 ??????+ 2 ??????^ 21 ??? (? "?^??' ПОЭТОМУ <9(??????)/0??? =
?<? ^ ?>? ?<?
= (? —?)??, или <9(??)*/<9? = fT— ?. Формула B2.29) вытекает из
предыдущей, если положить ? = у-?, так как ((y-x)a)t = #?*?
§ 22. ПРЕОБРАЗОВАНИЯ ВЕКТОРОВ ПО МИНКОВСКОМУ J 99
получим аг* — ?-?+?+* + ?+-??+* = О, откуда
-*
+ Сх+ „_ ,^* ?..*" +С**+*
?= ?» , <? = ?*+·, ?* = * Т. ,; · B2-32)
х+х+ х^х*
С помощью этого значения ? находим из B2.31)
а= [?-.?+*]/?+?+*, B2.33)
откуда следует
4- («+<*)< = \*+?\*??-\*+**-1\ B2.34)
Таково общее решение рассматриваемой экстремальной задачи.
Применим его к случаю трехмерной вещественной ортогональной
группы (§ 2). Пусть х = с, у = с'', с2 = с'2, тогда
__ (с" — <?)·(<?' + с) — (с" + с)-(с' — с) с' с — с & [сс']х
а~ (с + СJ ~ с2 + сс' с(с + с'У
что совпадает с выражением B.17) для вектор-параметра
минимального поворота от вектора с к сг.
В общем случае из B2.33) следует, что |а| = 0 во всех
пространствах размерности ? > 2. Обращаясь к матрице Лоренца,
приходим к выводу, что минимальное преобразование должно
быть плоским, причем матрице а= [аг-#+*]/|#+|2 (см. B2.33))
согласно A8.6), A8.9), A8.10) соответствует вектор-параметр
_ [х+х~ ] + i (— ?+?- — х~х+)
?= *+2+*+2
или с учетом значений х±
__ ? 1*У] + i (х0* - У0У) Ixy] + i (x0x - У0У)
4 *(х + у)* + (?0 + */0J " х(х + у) + у0(*0 + у0У K"k6*]
Полученный вектор соответствует плоскому преобразованию
Лоренца, поэтому в представлении ?=<?, ш} векторы сии
взаимно перпендикулярны. При этом (см. B1.27))
«-fr'-.c+rt'.rih+.j· «22-з5'>
следовательно, при разложении минимального преобразования на
произведение вращения и движения вектор-параметр вращения
ортогонален к пространственной части векторов хну. Что же
касается вектора и, то он будет определяться формулой B2.17),
в которой с следует взять в виде B2.35/).
Согласно A8.18") 72(?+?)<= |?|2, следовательно найденное
нами минимальное преобразование от а; к у соответствует
наименьшему значению квадрата модуля комплексного вектор-пара-
200
ГЛ. III. ГРУППА ЛОРЕНЦА
метра q при заданных ? и у (х2 = у2). При этом из B2.35)
следует
кр = 41*12Ы^'4**УР B2.36)
|* + у|
Применим минимальное преобразование с вектор-параметром
B2.35) к случаю перехода от системы покоя ? = @, im) к
движению: y=*(p,ipo). Мы получим q = — ip/(p0+ т), т. е.
соотношения B2.21), B2.22). Таким образом, преобразование буста
является минимальным преобразованием Лоренца от покоя к
движению частицы (или наоборот).
Рассмотрим некоторые другие случаи минимальных
преобразований. Пусть х = (а, 0), у = F, ib0), Ь2 — Ъ\ = а2. Согласно
B2.35) при этом
[аЪ] — ЬЪ
g= L \ ° ,. B2.37)
* ?(? + ?) + &2
В случае светоподобных векторов # = (а, г | а |), ?/ = F, i \ Ь \)
имеем
п _ [аЦ + г(|а|а —|>|Ь) /99 от
? "" а(а + 6) + |6|(|а| + |6|)· ^^
Заметим, что полученным здесь минимальным
преобразованиям B2.33) можно дать специфическую интерпретацию.
Векторы ? и у задают две точки в /г-мерном пространстве, лежащие
на гиперповерхности х2 — у2 = С. Выражение 72(?+«)?,
являющееся функцией двух точек на упомянутой гиперповерхности,
можно рассматривать как меру «расстояния» между этими
двумя точками. Для бесконечно близких точек имеем у = ? + dx,
и в B2.34) можно положить х~ = у — ? = dx, ?* = 2х + dx ~
~ 2х (с точностью до dx2). При этом из х2 = С следует, что
х dx = 0. В результате получаем
4- (?+?), = ds* = 4' **''dx·'' -' x*dx |2 = dx*g dx, B2.39)
* о I a: I
где g можно рассматривать как «метрический тензор» на
гиперповерхности х2 = С, который имеет вид
? = Г71т( И2-*·**)· B2-4°)
г\х\
Тем самым мы устанавливаем эрмитову метрику на комплексной
сфере в пространстве любого числа измерений.
Рассмотрим частные примеры. В вещественном трехмерном
пространстве х = #*, х2 = | ?|2 = С2, xdx=x*dx = 0, и из B2.39)
следует ds2 = [xdx]2/2x* = dx2/2C2. Полагая ? = С (sin ? cos ?,
§ 23. МАЛЫЕ ГРУППЫ И ДРУГИЕ ПОДГРУППЫ
201
sin ? sin ?, cos ?), получим известное выражение для
дифференциала длины дуги на сфере ds2 = V2 (^?2 + sin2 Gdcp2).
В случае группы Лоренца х2 = х2 — х\ = С, | х |2 = х2 + х\ =
= 2х2 — С, #efo* = z*d# = xdx + #0d#0- Дифференцируя #2=С,
получим xdx = x0dx0. Таким образом, мы можем исключить Хо и
перейти к трем независимым координатам х = (ха) на
поверхности х2 — #о = С· В результате из B2.39) получим
B2.41)
ds2
где
g 2 B*2 _ С) V B*2 - С) (*2 - С) у { ]
В случае светового конуса С = 0 и формула B2.41) дает
ds2 = [a*te]2/4a?4. B2.43)
Формально это выражение отличается от ds2 на поверхности
сферы в трехмерном вещественном пространстве лишь
добавочной двойкой в знаменателе. Однако на самом деле в B2.43) все
три координаты х= (х*) независимы и xdx? 0.
§ 23. Малые группы и другие подгруппы группы Лоренца
Рассмотрим совокупность всех преобразований Лоренца Lqi
оставляющих неизменным некоторый фиксированный 4-вектор
х = (*, ??<>)
Lqx = x. B3.1)
Совокупность таких преобразований образует группу.
Действительно, из B3.1) следует, что x=LqXx, —следовательно,
рассматриваемая совокупность наряду с каждым Lq содержит обратное
преобразование-?^1. Преобразование Lq=i, разумеется,
обладает свойством B3.1), и произведение двух преобразований, не
меняющих ху также не изменяет х. Таким образом, совокупность
Lqy удовлетворяющих B3.1), образует подгруппу группы
Лоренца, которую Вигнер [33] назвал малой группой Лоренца. Ее
называют также стационарной подгруппой, сохраняющей вектор
х, или малой группой, принадлежащей вектору х.
Поскольку согласно B3.1) вектор ? есть собственный вектор
матрицы Lq, отвечающей собственному значению, равному
единице, то, как показано в § 19, преобразование Lq должно быть
плоским. Если взять Lq в виде A + <*)/(!—а), то A—а)# =
202
ГЛ. III. ГРУППА ЛОРЕНЦА
= (i -{-а)х, т. е. должно быть
Отсюда следует
[ах] - х0Ь = О, Ьх = 0. B3.3)
Если хо ? 0, то второе уравнение следует из первого при
скалярном умножении на х. Следовательно, в этом случае вектор
а можно выбрать произвольно и
Ь = [ах]/х0, q = a + ib^(i — ixx/x0) a. B3.4)
Таким образом, вектор-параметр q малой группы является
линейной функцией произвольного вещественного вектора а.
Компоненты последнего ??, аг, яз можно рассматривать как
параметры, и малая группа, очевидно, будет трехпараметрической. Если
Хо = 0, то из B3.3) имеем [ах] = 0, т.е. а = Сх. Вектор 6
должен быть перпендикулярен к х и, следовательно, содержит два
параметра. Значит, малая группа, принадлежащая чисто
пространственному вектору х = (#, 0), также будет
трехпараметрической. Если ? = @, ixo), то 6 = 0, вектор а произволен и q = а=
=?*, т. е. малая группа в этом случае есть подгруппа
пространственных трехмерных вращений. При светоподобном векторе
? = (ar, i\x\), выражение B3.4) для вектор-параметра q
сохраняет силу и принимает вид
? = (l — ix?)a, x1 = x/\x\1 а? = 1. B3.5)
Итак, каков бы ни был 4-вектор х = (х, ix0), принадлежащая ему
малая группа всегда будет трехпараметрической непрерывной
группой Ли.
Выражение B3.4) пригодно во всех случаях, кроме того,
когда ? есть чисто пространственный вектор, т. е. х= (х, 0). Как
показано выше, при этом вещественная часть вектор-параметра
q параллельна вектору #, а мнимая — перпендикулярна к нему.
Такой вектор может быть представлен в виде
q = 1хг + i (y\e + ?*?*), B3.6)
где е — круговой вектор (см. П.1), перпендикулярный кхг:
[хге] = ie (см. C.39)). Параметр ? — вещественный, а ?—
комплексный.
Обозначим в выражении для q B3.4)
? = х/х0 B3.7)
и рассмотрим совокупность всех комплексных векторов вида
q = qO = (l — ivX)a B3.8)
§ 23. МАЛЫЕ ГРУППЫ И ДРУГИЕ ПОДГРУППЫ 203
при фиксированном ??, получающихся, когда вещественный
вектор а принимает всевозможные значения. Видно, что эта
совокупность изоморфна трехмерному вещественному линейному
пространству. Действительно, если q' = (I — ivx)a'y то вектор
lq + щ' = A - to*) (?? + ??') = A - ?**) a\ B3.9)
где а"=\а-\-х\аг — вещественный вектор, если ? и ?
вещественны. Таким образом, любая линейная комбинация вектора B3.8)
с вещественными коэффициентами снова будет вектором того же
типа. Кроме того, скалярное произведение любых двух векторов
вида B3.8) вещественно:
qvq'v = (a + i [??]) {а' + ? [?'?]) = аа! — [??] [?'?] = а A + ???2?
как, разумеется, и скалярный квадрат:
?| = а2 _ [ш?]2 = а$а ? = ! + ??2 = 1 _ V2 + V.V. B3.10)
Наконец, векторное произведение векторов qO, ?©
[?«?;] = A - ">?)<? «" = A - ?·*) [«?'1 ?23·11)
также есть вектор вида B3.8). Таким образом, в пространстве
комплексных вектор-параметров qO B3.8) мы можем производить
все те операции, что и в обычном трехмерном вещественном
пространстве, и будем получать при этом векторы вида B3.8), либо
вещественные числа. При фиксированном ? вектор а однозначно
определяет qv, поэтому ? можно рассматривать как
вектор-параметр малой группы. Все векторы 5, в том числе B3.8), компо-
нируются согласно C.6), поэтому закон композиции для вектор-
параметров а находится из соотношения
A - ivx) а" = <A - ivx) a, (l - ivx) a'}. B3.12)
Поскольку
A-й,*)-'-'—» + "*, B3.12')
то мы получаем
а"-(а а'\ .* + *' +A-*-р) [??'] № \Ъ
а _<?,?>«- ?^??^ + [??][??? · (????)
Легко убедиться, что <?, 0>?=<0, ?}?=?, <а, —-а>©=<—а, а>«,=
= 0 и т. д. При ?=0 мы возвращаемся к закону композиции B1.3).
Заметим, что при ?2 = 1 соотношение B3.12') теряет смысл, так
как матрица 1 — ??? не имеет обратной. Тем не менее
соотношение B3.13) остается справедливым и в этом случае и сохра-
204
ГЛ. III. ГРУППА ЛОРЕНЦА
няет свои групповые свойства. Непосредственным расчетом
можно получить соотношение
<?, ?', — ?}? = ?? (а) а', B3.14)
где
^.М-И-2'-7++;1-у'.-· B3.15)
Ясно, что группа ЗХЗ-матриц ??(?) изоморфна малой группе
Lq%f —L(qv, qiy Эти формулы обобщают C.24), B.5) и
переходят в них при ?? = 0. Формулы B3.14), B3.15) можно получить
также из соотношения C.24), записанного для комплексных
векторов q B3.8)
<q,q',-q> = Oqq'. B3.16)
Подставляя сюда q = (l — ivx) ?, q! = (l — ivx) а! и умножая
обе части на (l — ipx)-1, получим
??(?) = (l - i^J-'O^.x^Cl - ???), B3.17)
что совпадает с B3.15). Нетрудно показать, что A — ?-?)? =
= (l=Fii?x)[(l =F ivx)a]x{l =f ivx), поэтому из B3.17) получаем
Av (а) = 1 + 2 (а + а2)/A + а,), а = A - ?-?) ??. B3.18)
Сравнивая с B.3), видим, что ??(?) отличается от 0(a) лишь
заменой ах на A — ??·??)??, следовательно,
л«<">=!+!!~Тх· Bз·18')
1 —A—?·??)?? ? '
Характерной чертой выражений B3.13), B3.15) является то,
что они не меняются при замене ?? на — ??. При любом
фиксированном вещественном векторе ? матрицы ??(?) B3.15)
образуют непрерывную трехпараметрическую группу вещественных
линейных преобразований в трехмерном пространстве. При этом
|i4ti(a)J = l при всех ? и а, что сразу следует из B3.17).
Из того же соотношения B3.17) вытекает, что группа матриц
??(?) при данном ? изоморфна (эквивалентна) подгруппе
(см. § 8) комплексной группы вращений 0(g), где q
определяется из B3.8).
Заметим, что
ql = A + ivx) a = i±i?j(i - tvx) a = OiOqv. B3.19)
1 — iv*
§ 23. МАЛЫЕ ГРУППЫ И ДРУГИЕ ПОДГРУППЫ
205
Поскольку для любого собственного ортогонального
преобразования О справедливо соотношение (см. C.15))
OqxO^ = (Oq)x, B3.20)
то
0 («;)=SS=о*0**0** B3·21)
т. е. группы О (д*) и О (qv) отличаются преобразованием
подобия (за исключением случая ?2 = 1, когда 0\? не существует).
Кроме малых групп различных типов, группа Лоренца
обладает рядом других подгрупп. Вопрос об их нахождении тесно
связан с соответствующим вопросом, решенным в § 8 для
группы комплексных вращений 0C, С). Группа Лоренца или, иначе,
группа 50C, 1) изоморфна группе 50C, С). При
использовании векторной параметризации этот факт не требует
доказательства. Действительно, обе группы параметризуются комплексным
вектор-параметром q = а + ib с одним и тем же законом
композиции (8.11), B1.3), следовательно, наличие взаимно
однозначного соответствия между элементами этих групп очевидно.
Следует отметить, что условие, ограничивающее допустимые
значения комплексного вектор-параметра q, также одно и то же для
обеих групп, а именно 11 + q21/A + | q \2) > 0 (см. B1.47),
B1.48)). Хотя оно выводилось для группы Лоренца, но оно
является также необходимым и достаточным для того, чтобы
элементы матрицы комплексного вращения 0(q) (8.9) имели
определенные конечные значения.
Поскольку мы использовали для определения подгруппы
группы 0C, С) не свойства ее самой, а лишь закон композиции
вектор-параметров, который справедлив и для группы Лоренца, то
все выводы, полученные в § 8 относительно подгрупп группы
50C, С), без каких-либо изменений переносятся и на случай
группы 50C, 1). В частности, приведенная в § 8 таблица
возможных видов подгрупп полностью относится к группе Лоренца.
Нам остается лишь добавить некоторые комментарии,
связанные с интерпретацией отдельных подгрупп.
Обратимся к подгруппе, связанной с вектор-параметром вида
(9.22).
q = ас0 + ?? + ??*?*, ? < ? ? 1. B3.22)
Нетрудно видеть, что этот случай соответствует малой группе
Лоренца, принадлежащей времениподобному вектору. Согласно
B3.4) вектор-параметр такой группы может быть написан в виде
q = (l — jux) а, ? = ?/?„ ?2 < 1. B3.23)
206
ГЛ. III. ГРУППА ЛОРЕНЦА
Условие ?2 < 1 соответствует х2 — xl < 0, т. е. времениподобному
вектору х. Вещественный вектор а всегда можно представить в
виде ? = ?? +$хе + ??>*, [ve] = — i \ ? \ e, a = а*. Подставляя в
B3.23), получим
? = ?? + ??A-|?|)? + ??A + |??|)?*, B3.24)
т. е. выражение вида B3.22), где ? = с0, ? = ?? A — ? ? ?), ? =s
= A+|р|)/A-|г|).
Если в общем выражении (9.9)
q = Cc0 + а$е + 6?*?*, B3.25)
где а, Ъ вещественны, положить 0 > a/Ь =И= —1, то мы получим
малую группу Лоренца, принадлежащую пространственноподоб-
ному вектору х = (#, ix0), ? = х/х01 ?2 > 1. Действительно, исходя
из прежнего выражения B3.22), тем же путем мы придем к
соотношению B3.24), в котором, однако, A — | ? |) A + | ? \) = ab=
= 1 — ?2 < 0. Если 1 + 92 > 0, то это будет группа SO B, 1)
(см. § 9). При наложении более слабого ограничения 1 + q2 ? ?
мы получим подгруппу группы Лоренца, принадлежащую
вектору х, которая преобразует его в ± х. Эту подгруппу,
отмеченную в [56], можно назвать расширенной малой группой.
Несмотря на изоморфизм со случаем Ъ = —а (что соответствует
согласно B3.24) | ? \ = оо), эти подгруппы не следует
отождествлять.
Наконец, третий тип малой группы — принадлежащей свето-
подобному вектору х = (?, ? \ х |), ? =?/ \ ? |, га=1, —также
охватывается формулой (8.61) при а = 0 F = 0). Действительно,
при | ? | = 1 из B3.23), B1.24) имеем q = ?? + A + | ? \) ?*?*,:
что соответствует (9.13).
§ 24. Группа О D) /и комплексная группа Лоренца SO D, С)
Группа 0D) есть четырехмерная вещественная
ортогональная группа. Согласно общему определению (см. § 1) линейные
преобразования, образующие эту группу, оставляют неизменной
сумму квадратов четырех вещественных координат ??, к = 1, 2,
3, 4. Таким образом, если ?' =??, ОеОD), то ?'2 = ?2.
Соотношения, характеризующие эту группу, в большинстве случаев
находятся в самой тесной аналогии с соответствующими
формулами для группы Лоренца. Поскольку группа 0D) находит ряд
применений в проблемах физики, мы остановимся кратко на
основных ее свойствах.
§ 24. ГРУППА 0D), КОМПЛЕКСНАЯ ГРУППА ЛОРЕНЦА 207
Как и для всякой ортогональной группы (§ 1),
преобразования О группы 0D) определяются соотношениями
00 = 00 = 1, B4.1)
|0|* = 1, |0±|=±1, B4.2)
где О+@-) — собственное (несобственное) преобразование
группы 0D). В отличие от группы Лоренца, ввиду полного
равноправия всех переменных %к здесь отсутствует разделение
преобразований по признаку ортохронности (§ 19).
По аналогии с B0.17) рассмотрим матрицу
О = (//+g+)j1/+'"a\ = *+ («О в- (ft) = ?. F) ?+ (?), B4.3)
V A + ?2) A + b2)
где ?, 6 — произвольные вещественные трехмерные векторы. На
основании свойств антисимметричных матриц а+, 6_ (см. § 20)
получим
00 = 1, |0|=1, B4.4)
следовательно, выражение B4.3) представляет матрицу
собственного преобразования группы 0D). Наоборот, если мы имеем
матрицу О, удовлетворяющую условиям B4.4), то, как в § 20
можем найти векторы а, Ъ из соотношения B4.3).
Действительно,
V A + а2) A + 6") L У A + ?2) (l + 6a)
поэтому
•¦+H-i-i»v)-22*r B4·6>
Отсюда определяются векторы ?, 6. Особый случай О* = 0
имеет место согласно B4.5) при |а|->-оо, либо при |6|-^оо, либо,
наконец, когда оба вектора имеют бесконечно большую длину.
Из B4.3) ясно, что этим возможностям соответствуют
преобразования
О = ?1+?_ F), О = 6?_?+ (?), ? = аг+Ъг-, B4.7)
где aL = al\a |, Ъг = Ь/\ Ь |. Таким образом, и при Ot = 0
соотношение B4.3) сохраняет смысл. Кроме того, весьма
существенно, что, в отличие от группы Лоренца, формула B4.3) дает
собственное преобразование группы 0D) для всех без исключения
значений векторов а, 6. Таким образом, в данном случае
отсутствует ограничение, подобное B1.48).
Ясно, что векторы а, 6 можно рассматривать как параметры
группы 0D). Следовательно, группа 0D) параметризуется с по-
208
ГЛ. III. ГРУППА ЛОРЕНЦА
мощью двух произвольных независимых вещественных
трехмерных векторов.
Наряду с этим очевидно, что группу 0D) можно было бы
параметризовать с помощью антисимметричной матрицы а,
причем формулы A9.34), A9.34") останутся справедливыми и в этом
случае. Отличие от группы Лоренца будет лишь в том, что
отпадает условие A9.37) и матрица ? будет вещественной
антисимметричной матрицей.
В отличие от группы Лоренца, матрицы ?+ (а) и ?_ F),
удовлетворяющие свойствам B4.4), также принадлежат к группе
0D). Однако они являются частными видами преобразований,
поскольку каждое из них является трехпараметрическим.
Действительно, ?+(?) и ?_ F) получаются из B4.3), если положить
6 = 0 или а = 0 соответственно.
Тем же путем, как в § 21, можно убедиться, что
вектор-параметры а, 6 группы 0D) компонируются независимо один от
другого по формуле B1.3)
, , а + а' + [аа] , ,, Ъ + Ъ' + [ЬЬ'] (t}, ~
<а,а} = i_aa, , <Ь,Ь}= i_w . B4.8)
Поэтому каждая из совокупностей коммутирующих между собой
матриц?+(?), ?_F) является представлением трехмерной
группы вращений, поскольку
?±(?)?±(?') = ?±«?,?'» B4.9)
и, следовательно, для них выполняются условия A0.13).
Таким образом, по существу, все свойства группы 0D), как
следует из соотношений B4.3), B4.8), B4.9), могут быть
получены как следствие свойств группы 0C) и ее представлений.
Инвариантный интеграл на группе 0D) может быть написан
сразу по аналогии с F.23)
/ = ?-* j / (?, 6) [da] [db] = ? ~4 J / «a0, a>, <60, 6» [da] [db] ==
= ? J / «a, a0>, <6, 60» [da] [db] = ? J / (- a, - 6) [da] [db)t
[da] = (da)/(l + a2J, [db] = (db)/(i + 62J, B4.10)
причем имеет место нормировка
n~4j[da][d&] = l. B4.11)
Широкое применение в аксиоматической квантовой теории
поля имеет группа 0D, С), т. е. группа ортогональных 4X4-
матриц, все элементы которых комплексны, как и компоненты
4-векторов, преобразуемых посредством этих матриц. Эта группа
содержит в качестве одной из своих подгрупп группу Лоренца
и получила название комплексной группы Лоренца. Для нее
§ 24. ГРУППА 0D), КОМПЛЕКСНАЯ ГРУППА ЛОРЕНЦА 209
справедливы условия B4.1), B4.2). Таким образом, общее
преобразование группы SO (А, С) является комплексно^ 4><^4-мат-
рицей 3?, удовлетворяющей прежним условиям SBSB = SB SB =
= \SB\ = 1. Легко убедиться, что такие матрицы, аналогично
матрице 0D) (см. B4.3)), могут быть параметризованы с
помощью двух независимых трехмерных комплексных векторов
q==a + ib и g = d + ih [36]
g = 2 (g> ?) = ?+ (q)?. (g) = A + *+)^+в-\. B4.12)
V(l + q2)(i + g2)
причем (см. B1.48))*)
1 + <- ?*> ?>2 > О, 1 + <- **, g>2 > 0. B4.13)
Действительно, из свойств матриц ?± сразу следует выполнение
условий SB SB = \SB\ =1 при любом знаке корня. С другой
стороны, имеем аналогично B4.6)
i <»++»->=-К *г; ?)-^ <2*·">
Поскольку при заданной SB правая часть является известной
антисимметричной 4 X 4-матрицей, то отсюда однозначно
находятся векторы q и g. Таким образом, согласно B4.12), B4.14)
матрица SB и пара комплексных трехмерных векторов #, g
(с условиями B4.13)) взаимно однозначно определяют друг
друга. Следовательно, пара комплексных векторов q, g задает
12 параметров комплексной группы Лоренца.
Итак, самое общее преобразование SB (q, g) согласно B4.12)
всегда может быть представлено в виде произведения двух
коммутирующих между собой матриц ?+ (q), ?. (g), каждая из
которых зависит лишь от одного комплексного вектора. Разумеется,
не нарушая этого разделения параметров, можно от компонент
каждого из вектор-параметров q, g перейти к каким-либо шести
другим параметрам, например, сопоставить каждому из q и g по
три независимых комплексных угла Эйлера. Формулы,
осуществляющие такой переход, будут совпадать с соответствующими
формулами для трехмерной вещественной группы вращений.
Это обстоятельство, наряду с чрезвычайной простотой всех
соотношений, позволяет весьма легко изучать и анализировать
многие важнейшие свойства комплексной группы Лоренца и ее
представлений. Целый ряд основных соотношений,
установленных для вещественной группы Лоренца в гл. III,
непосредственно без всяких выкладок может быть перенесен на группу
*) Отметим, что именно эти условия (как и в случае обычной группы
Лоренца) ответственны за некомпактность группы 50D, С).
14 ф. н Федоров
210
ГЛ. III. ГРУППА ЛОРЕНЦА
50D, С). По существу, при этом все будет сводиться к замене
д* на g и рассмотрению следствий, которые вытекают из этой
замены.
Аналогично обычной группе Лоренца имеем
2 (i. g) ^ («'. В') = 2 ««, ?'>, <*, ?'», B4.15)
т. е. вектор-параметры q и g компонируются независимо. В § 20
было показано, что вещественному вектор-параметру q = q*
соответствует преобразование чистого вращения
Mi,S)=(°<?) J), B4.16)
где 0(q) определяется соотношением B.5). В свою очередь
чисто мнимому вектор-параметру q = — g* отвечает
преобразование чистого движения — гиперболический поворот (см. § 20)
^•-*-?7???(,??",,·,,_?)· OiKD- (M.17)
Из сравнения B0.17) с B4.12) сразу ясно, что формулы B4.16),
B4.17) останутся справедливыми и для матриц комплексной
группы Лоренца, но соответственно при условиях g = q или
g = — q. При этом в выражении SB (g, q), в отличие от B4.16),
q будет комплексным вектором и соответственно О (q) —
трехмерным комплексным вращением. Аналогично в выражении
& (?> ~~" ?)>в отличие от B4.17), вектор q будет произвольным
комплексным вектором, а не чисто мнимым.
В § 21 было показано, что общий комплексный
вектор-параметр g всегда может быть представлен в виде q = <с, ш>, где с%
и —вещественны. Этому соответствует
L (q, q*) = L (с, с) L (ш, — ш), B4.18)
т. е. разложение произвольного преобразования Лоренца в
произведение гиперболического и обычного поворотов. При этом
векторы с, iu находятся из соотношений (см. B1.17), B1.25))
<ш, ш> = 2??/A + и2) = <- ?*, ?>,
iu = <-?*» g> = g - g* + [и*] B4.19)
1 ± /l +<-*·, *>2 1 + I 9 I2 ± 11 + qL |
и с = (g, — iu}. Выбирая здесь верхний знак, получим и\ < 1,
чему соответствует преобразование L(iuly —iu^ чистого
движения. Второе значение для и равно щ = их1и\, поэтому и\ > 1.
При этом L (ш2, — ш2) также дает преобразование движения
с той же скоростью, что и в первом случае, но в сочетании
с коммутирующим пространственным поворотом на 180° вокруг
направления и. В случае группы Лоренца естественно можно
§ 24. ГРУППА 0D), КОМПЛЕКСНАЯ ГРУППА ЛОРЕНЦА
211
ограничиться первым случаем, как более простым, тем более, что
при этом получается разложение L в произведение чистого
движения и чистого вращения. При этом следует лишь наложить
дополнительное условие и2 < 1.
Эти результаты непосредственно переносятся на комплексную
группу Лоренца & (g, g). Аналогично B4.18) всегда можно
написать
2 (?, g) = 2 (?0, q.) 2? (?1, - ?1), B4.20)
где q = <5о, дх>, g = <g0, — g1>, причем аналогично B4.19)
?1 = <-^Я> = l-t + llg\ B4.21)
1 ± У 1 + <- g,q>2 i + qg±V(i + q2)(i + g2)
?o = <?,-??>. B4.22)
Однако теперь у нас отсутствуют приведенные выше основания
для выбора знака в B4.21). Поэтому в комплексной группе
Лоренца разложение B4.20) может быть осуществлено двумя
способами B4.21).
Итак, всякое преобразование группы SO (А, С) может быть
представлено двумя способами B4.21), B4.22) в виде
произведения B4.20) преобразований более простых основных типов
B4.16) и B4.17), которые можно назвать комплексными
пространственным и гиперболическим поворотом соответственно.
Заметим, что в произведении B4.20) можно изменить порядок
сомножителей в правой части, т. е. взять S? (g, g) =
= 2? (??, — 5?) & (??» ??)· При этом оказывается, аналогично
B1.41), B1.42),
?'? = ?·, q'i = O(q0)qv B4.23)
Отметим, что как следствие формулы ^24.12) мы сразу
получаем соответствующее выражение для любого преобразования
вещественной четырехмерной группы вращений B4.3).
В векторной параметризации получает простое общее
решение задача приведения матрицы комплексного преобразования
Лоренца к так называемой регулярной форме [34], [35]
^^???' * = -#· B4·24)
Поскольку любая антисимметричная матрица в четырехмерном
пространстве может быть представлена в виде суммы матрицы
типа 5+ и матрицы типа g_t то можно искать R в виде
7? = ??+ + ??_. B4.25)
14*
212
ГЛ. III. ГРУППА ЛОРЕНЦА
Используя B4.12), соотношение B4.24) можно переписать
в форме
A + ??+ + ?*-)A + ?+)A + *-) =
= V(l + 92)A + g2) A- ??+-?*-).
Раскрывая здесь скобки и пользуясь тем, что q± = —д2B0.7),
долучим, приравнивая коэффициенты при линейно независимых
матрицах 1, 5+, g-, q+g-, четыре уравнения для ?, ?, которые
все оказываются совместными и дают
: , ~Vi+^ -vw 26)
l/i + ^ + ^i + if2 Ki + g2 + /i + i2
Таким образом, матрица R определяется однозначно.
Заметим, что и в случае группы 50D, С) можно проделать
замену параметров (см. (8.14))
4 = 4ilV^?u g=gilV"iF?u B4.27)
в результате которой матрица & B4.12) принимает вид
? = (УТ^Й + ?1+)(|/"l^if + ?_). B4.28)
При этом формулы композиции вектор-параметров qlt gi будут
лметь известный вид (8.17)
<??, Яг> = «? l/"l - Чг + Чг V^ - ч\ + [????]· B4.29)
Вопрос о подгруппах группы SO (А, С) может быть решен на
основе общей теории непрерывных групп. Однако при этом мы
получим абстрактное описание подгрупп, в то время как в
теоретической физике используется конкретная их реализация,
связанная с той или иной параметризацией. Наиболее просто и
элементарно этот вопрос может быть рассмотрен на основе
комплексной векторной параметризации группы 50C, С) (см. § 8, 9)
и 50C, 1) (см. § 23). Если для группы 50C, С) возможные
подгруппы (§ 9) определялись заданием вида вектора q, то для
группы SO (А, С) подгруппы будут определяться заданием вида
пары векторов g, g. Каждый из них мы можем взять в одной
из форм, соответствующих рассмотренным в § 9 двадцати
подгруппам группы 50C, О). Рассмотрим сначала 13 неизоморфных
между собой подгрупп 1—4, 9, 10, 11—15, 17, 18. Каждому
сочетанию двух различных векторов, например, q = ac0,
подгруппа 1) и g = io!c + ?? (погруппа 13) соответствует подгруппа
группы 50D, О). Число таких сочетаний равно 13· 12/2 = 78,
чему соответствует такое же число неизоморфных между собою
подгрупп комплексной группы Лоренца. Сюда следует еще доба-
§ 24. ГРУППА 0D), КОМПЛЕКСНАЯ ГРУППА ЛОРЕНЦА 213
вить 13 подгрупп, получающихся при q = g, которые будут
изоморфны соответствующим подгруппам 50C, С). Кроме того,
взяв, например,q = ас0, мы получим разные подгруппы 50D,С),
полагая g = ac0, g = ас, g = а'с0, либо g = а'с. Первые две,
будучи однопараметрическими, изоморфны между собой, хотя
н различаются за счет векторов с0 и с. Подобным же образом
различаются между собой две последние изоморфные подгруппы,
являющиеся двухпараметрическими.
Аналогично при других сочетаниях q и g, взятых из числа
упомянутых 13 подгрупп, мы можем выбирать параметры ?, ?
? базисные векторы с0, е в выражениях для q и g как
одинаковыми, так и различными. При этом необходимо, чтобы
предполагаемое равенство некоторых параметров в обоих векторах
сохранялось при композиции. Во всяком случае, мы можем брать
векторы q и g, относящиеся к одному и тому же типу, но со
всеми различными параметрами ?, ?. Это даст еще 13
неизоморфных с другими подгрупп. Таким образом, общее число
полученных описанным способом неизоморфных подгрупп группы
50D, С) достигает 78 + 2 · 13= 104. Если же мы будем
учитывать всевозможные сочетания векторов q и g, относящихся ко
всем 20 приведенным выше подгруппам группы 50C, С),
включая изоморфные, но отличающиеся между собой по реализации,
то общее число соответствующих подгрупп комплексной группы
Лоренца превысит 200.
Приведенное рассмотрение еще раз показывает, что простой
закон композиции B4.8) представляет собой мощное и
эффективное средство для изучения различных свойств групп 50C),
50C, С) ? связанных с ними групп 5?/B), 5LB, С), 50D),
50C, 1), 50D, С).
Глава IV
ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
§ 25. Конечномерные представления собственной
группы Лоренца
Как показано в § 20, каждое преобразование собственной
группы Лоренца ?+ = L (q, 5*) однозначно характеризуется
заданием комплексного вектор-параметра q, причем (см. B1.5))
?(«, «*) ?(?'> ?'*) = ?««> «'>. <?. «'>*)· B5.1)
Поэтому согласно § 10 представление собственной группы
Лоренца определяется соответствием L (?,?*) -* Г(д, д*), причем
аналогично A0.13)
У («. «*) Г (?'. ?'*) = Г «в, ?'>. <«. ?'>*)· B5.2)
Ввиду совпадения формул композиции параметров B1.3) и B1.1)
тесная связь представлений группы Лоренца с представлениями
группы вращений является совершенно очевидной.
Действительно, пусть ? (с) — некоторое представление группы вращений.
Подставим в матрицу ? (с) вместо ее аргумента —
вещественного вектора с — комплексный вектор q,: при этом для ? (q) по-
прежнему будет выполняться условие (если ? (с) —
аналитическая функция)
T{q)T{q')=T{(q,qry), B5.3)
так как равенство A0.13) является тождеством относительно с,
с'. Но соотношение B5.3) есть частный случай соотношения
B5.2), поскольку в ? (q, 5*) не фиксирован вид
функциональной зависимости от каждого из аргументов. Следовательно,
можно считать Г(д, q*) = ? (q). Ясно, что матрица ? (g*), где
? (с) — представление группы вращений, также будет
представлением собственной группы Лоренца.
Итак, мы видим, что всякое представление ? (с) группы
вращений при замене вещественного вектора с комплексным
вектором q превращается в представление собственной группы Ло-
§ 25. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ
215
ренца. Одновременно оно будет представлением комплексной
группы вращений SOC, С).
Если рассматриваемое представление группы вращений будет
неприводимым представлением веса ?: ? (с), то полученное из
него представление группы Лоренца ? (q) будет также
неприводимым. Действительно, если бы Т1 (q) было приводимым, то
это свойство по самому смыслу понятия приводимости имело бы
место для всех значений q, в частности, для q = с, т. е. тогда
и Т1 (с) было бы приводимым представлением группы вращений
в противоречии с условием.
До сих пор мы рассматривали соответствие L (q, g*) -> ? (q)
или L E, 5*) -> ? (g*), при котором представление зависит
лишь от части параметров группы Лоренца. Но если мы
рассмотрим соответствие
L (?,; ?*) - ? (?, ?*) = Тг (?) ® Т2 (?*), B5.4)
где Тг(с), ?2 (с) — два совершенно произвольных
представления группы вращений, то по правилу умножения прямых
произведений матриц (см. П. 3) получим
Т (?, ?*) ? (q', q'*) = Тг (?) 7\ (?') ® Тг (q*) Тг (q'*) =
= ^ «?, ?'» ® ?, «?, ?'>*) = ? «?, ?'>, <?, ?'>*). B5.5)
Таким образом, выполняется основное условие B5.2), и поэтому
соответствие B5.4) является представлением собственной
группы Лоренца. Следовательно, с помощью представлений группы
вращений мы можем получать в форме B5.4) представления
группы Лсренца, «полные» в том смысле, что они, в отличие от
B5.3), зависят ат полного набора параметров. Очевидно,
представления B5.4) содержат B5.3) как частный случай,
соответствующий тому, что одно из представлений Т\ или Гг является
тривиальным: Тг (с) = 1 или Т2 (с) = 1.
Пусть представления Т\ и Гг являются неприводимыми
представлениями группы вращений с весами I ъ V соответственно.
Покажем, что соответствующее представление
L (qt ?*) - ?11' (g, q*) = ?1 (?) <g> Tv (?*) B5.6)
будет неприводимым представлением собственной группы
Лоренца. Для доказательства мы используем следствие из леммы
Шура (см. П.4) которое утверждает, что если со всеми
преобразованиями представления коммутирует лишь матрица, кратная
единичной, то представление является неприводимым.
Рассмотрим бесконечно малое преобразование вида B5.6),
которое получается, очевидно, при условии |?|<С1. При этом
216 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
аналогично A5.3) —A5.5) имеем
Т1 (q) = I1 - 2iq\ ?1' (g*) = ?1' - 2iq*1' B5.7)
и
Tw (g, ?*) = 1 - 2i (ql ® l1' + lz ® j*1').
где
«'?^' + ?1®**1'»/11' (?,?*) B5.8)
является инфинитезимальным оператором для представления
B5.6). Пусть некоторая матрица .4 коммутирует с ? (g, g*), или,
что то же самое, с оператором / (g, д*) B5.8)
U,gl®ll# + ll®i*l#l-=0 B5.9)
при любых д. Поскольку векторы д и д* в общем случае
линейно независимы, то для выполнения B5.9) необходимо и
достаточно, чтобы
[A,ql®ivU = 0 B5.10)
и
[A, lIeg*l'}- = 0. B5.11)
Поскольку при всевозможных g как д1, так и д*1 представляют
собой неприводимые совокупности матриц, то согласно П. 3
А = ? A1 ® I1') = ?1A?+1???+1,. B5.12)
Следовательно, матрица А, коммутирующая с 7(д, д*), а значит,
и с Тп (д, д*), может быть только скалярной. Отсюда (см. П. 3)
следует неприводимость представления B5.6).
Итак, выражения вида
Т11' (д, д*) = Т1 (д) ® Т1' (д*), B5.13)
где ?, V — веса некоторых неприводимых представлений группы
вращения (т. е. целые или полуцелые числа), определяют
неприводимые конечномерные представления группы Лоренца. Можно
показать (см. § 26), что выражения вида B5.13) исчерпывают
все возможные конечномерные неприводимые представления
группы Лоренца. Последние, таким образом, характеризуются
заданием пары чисел (?, Г), каждое из которых может быть
целым либо полуцелым.
Заметим, что если мы наложим на возможные значения
вектор-параметра g условие д = д*=с,т. е. ограничимся
преобразованиями вращения в пространстве Минковского (§ 20), то
представление ??? B4.13) станет приводимым, поскольку оно
§ 25. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ
217
сведется к прямому произведению неприводимых представлений
группы вращений (см. § 15)
Т11' (с) = Т1 (с) ® Т1' (с) со Ти'п (с) ? ... ? Tw'~x (с) ? Tw (с).
B5.14)
Весьма существенно то, что пары (Z, V) и (Z', Z) при 1фУ
определяют различные неприводимые неэквивалентные друг
другу представления. Чтобы убедиться в этом, рассмотрим
соответствующие представлениям Т11' B5.13) и Tll= Tl'(q)® ?1 (q*)
инфинитезимальные операторы (см. B5.8))
Я> =,· ql (?) I1' + ?? ® ?*г, /B) = $|# 0 I1 + 1Г ® ?*1. B5.15)
Их собственные векторы будут иметь вид^т® ?™* и ? '®?»??
соответственно (ср. §§ 15, 16), причем
— Z< го, m^Z, ~ Z'<ro\ mi ^ Zr, B5.16)
^ = ^i^tL, ?*1' ?- - m' /?51^. B5.17)
Поэтому собственные значения операторов /A), /B) B5.15)
равны соответственно
Хг = ?» j/^? + щ' |^2) ?2 = m'L у-2 + щ у^*2 B5.18)
В общем случае 52=И=5*2, и поскольку при 1Ф1Г m и тх (так
же как тп' ъ тп\) изменяются в разных пределах, то всегда
найдутся такие значения непрерывно изменяющегося комплексного
вектор-параметра q и такие го, го', что равенство ?? = %2 будет
невозможно ни при каких miy mv Следовательно, при ? ? V
совокупности собственных значений операторов /A) и /B) не
совпадают, а значит, /A) и /B) или, что то же самое, Ти и ?11
при ? ? V неэквивалентны (.см. П.1).
В этом отношении представления группы Лоренца
существенно отличаются от представлений группы вращений. Как мы
видели (см. § 12), любые два неприводимых представления группы
вращений одинаковой размерности всегда эквивалентны. Здесь
же представления Тп и Т1 , имеющие одну ? ту же
размерность B? +1) B?' +1) при 1ф1\ неэквивалентны между собой.
Более того, в общем случае существует целый ряд
неэквивалентных неприводимых представлений одной и той же размерности s.
Нетрудно видеть, что их число равно числу различных способов,
какими можно представить s в виде произведения
упорядоченной пары целых чисел. Так, для s, равного простому числу,
имеем s = 1 . $ = $ . 1 и, вводя ? = У2 (s — 1), получаем два
неприводимых неэквивалентных представления: Т° (q, q*), Tlo(q, q*)
и т. д.
218
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Преобразования Лоренца L(q, g*), разумеется, сами
образуют представление группы Лоренца — основное или векторное
представление. Возникает вопрос, является ли это представление
неприводимым? Положительный ответ на него нетрудно получить
с помощью леммы Шура (см. П.4). Для этого рассмотрим
матрицу С, коммутирующую со всеми преобразованиями
собственной группы Лоренца. В число последних входят преобразования
вида B0.37), отвечающие чистым поворотам, без движения.
Матрица, коммутирующая со всеми матрицами B0.37), на основании
леммы Шура должна иметь вид
где ? — трехмерная скалярная матрица. Если наложить на С
еще условие коммутации с матрицей B0.54), отвечающей
относительному движению систем координат, то сразу получаем
? = ?, т. е. матрица С, коммутирующая с преобразованиями
Лоренца, должна быть скалярной. Итак, преобразования
Лоренца образуют неприводимое представление группы Лоренца, а
потому должны выражаться в форме B5.13). Поскольку
размерность s пространства Минковского, где действуют преобразова-.
ния Лоренца, равна четырем, то, как было установлено выше,
нужно сделать выбор между тремя возможными неприводимыми
представлениями: @, 3/2), C/2, 0) и G2, 7г). Вопрос решается
однозначно, если учесть, что при органичении условием д=д* =
— с преобразования Лоренца приводимы (см. B0.37)). Между
тем представление @, 3/г) согласно B5.13) при q = q* = с
имеет вид
Г°8/2 (с) = Т° (с) (g) Т*и (с) = fu (с)
и совпадает с ? f0 (с). Следовательно, представления @, 3/г) и
C/2, 0) будут неприводимы также при q = q* = с, что
противоречит B0.37). Таким образом, преобразования самой группы
Лоренца образуют представление Gг, 72), т. е.
L E, q*) со ?4*4' (?, ?*) = fu (q) ® ?4* (g*). B5.19)
Действительно, для ???-Cl имеем согласно B0.17)
L = l + q+ + ql. B5.20)
С другой стороны (см. § 13),
?'>{Ч) = 1±Ш, w(q) = lig* igi-gA B5.21)
§ 25. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ
21У
и для | q | < 1
TVt (?) ® f' (q*) = A, + и (?)) <g) A, + w (q*)) =
= ?4 + »(?)®1? + It® »(«*)·
Напомним, что согласно определению (см. П.З)
w(aNM -( ?9? С^-*·I»^
B5.22)
:®-« = (Г„«)
=
l'?3 ° ^l-?2 °
iq1 + q2 0 _^з 0
о iqL + q2 о -
??3 iqi — q2 ° °
о о iq3 iq1 — q2
0 0 iqx +q2 - iq3 j
~?2
Сравнивая B5.22) с B5.20), приходим к выводу, что для
эквивалентности Leo T4i(q) (x) T4i(q*) необходимо и достаточно,
чтобы существовала такая неособенная постоянная 4 X 4-матри-
ца ?, что
(w (q) ® 12) S = 5?+, A2 (х) w (?*)) S = 5?!. B5.23)
Нетрудно убедиться, путем непосредственного расчета, что такая
матрица существует и равна
ili 0 ??
o = _J_| 0 0—1 i
¦J/2 00 -1 -ll
[-li 0 0 J
B5.24)
причем #5*5+ = S+S = 1, т. е. она унитарна.
Выражение для неприводимого представления ^25.13) можно
написать в форме
Г11' (?, q*) = A(q)B (q*) = В (q*) Л (д)г B5.25)
где
^ (?) = ?7' (?) ® ?'\ ^ (?*) = ?1 ® ГГ («*). B5.26)
Таким образом, всякое неприводимое представление группы
Лоренца разлагается в обычное произведение двух коммутирующих
между собой матриц A(q) и В (q*). Это утверждение остается
в силе и для любого приводимого конечномерного представления
220
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
группы Лоренца, поскольку последнее можно написать в виде
Т (q, q*) = (T4q)<S>Th (q*)) ? [?4 (q) <g> Th (q*)) ? ...
... ? (т1к (q) ® Tlh (q*)) = A(q)B (q*) = В (q*) A (q), B5.27)
B5.28)
где
Mq) = (rh(q) ® ?'1) ? ... ? (rlk(q) ® i'*),
В (q*) = (l4 0 Th (q*)) ? ... ? (? ® г'* («*)).
Подчеркнем, что соотношение
Г (9. 9*) = А(9)В («*) = ? (?*) ? (?) B5.29)
остается справедливым в любом базисе, т. е. и тогда, когда
? (?»?*) не выражается в виде прямой суммы матриц
неприводимых представлений. Следовательно, выражение B5.29)
является совершенно общим и универсальным для всех
конечномерных представлений группы Лоренца в произвольном базисе.
Последнее ясно из того, что преобразование подобия STS~l = ?1
не может нарушить коммутативность матриц A(q) и В (q*)
? изменить их аргументы (см. П.1). Можно убедиться с
помощью B5.26), что
A (q) A {q') = А «?, ?'», В (?·) В (д>*) = В «?, ?'>·). B5.30)
Для преобразований самой группы Лоренца возможность
представления в виде B5.29) была по существу установлена
еще в § 20 (см. B0.18)), причем
A(q) = B+(q), Я («*) = ?_ fa*).
Теперь не представляет труда написать общее выражение
для неприводимого представления четырехмерной группы
вращений SO (А). Сохраняя по-прежнему букву ? для обозначения
представлений и этой группы, имеем аналогично B5.13)
О = О (а, 6) -> ??? (а, 6) = Т1 (а) ® Т1' F). B5.31)
Почти все рассуждения этого параграфа, лишь с заменой q на а
и gf* на 6, могут быть перенесены на случай группы 0D}.
Таким образом, мы можем резюмировать, что неприводимые
представления группы SO (А) выражаются через прямые
произведения двух неприводимых представлений группы 50C),
параметризованных посредством двух независимых вещественных
трехмерных вектор-параметров ? и 6. Как ? в случае конечномерных
представлений группы Лоренца, каждое неприводимое представ-
§ 26. ПРОИЗВЕДЕНИЕ ПРЕДСТАВЛЕНИЙ 221
ление группы SO D) задается парой чисел Z, Z', принимающих
значения из ряда 0, 1/2, 1, 3/2, ...
Соотношения B5.25) —B5.29), очевидно, также сохраняют
силу, так что неприводимое представление группы SO D) всегда
может быть написано в виде
?11' (?, 6) = А (а) В(Ъ) = В F) А (а), B5.32)
где операторы А (а) и В (Ь) определяются формулами,
аналогичными B5.26):
А (а) = Т1 (а) ® I1', В F) = I1 ® Г1' F). B5.33)
Соответственно будут справедливы и аналогичные выводы,
относящиеся к приводимым представлениям группы 50D), которые
также всегда могут быть написаны в виде
? (?, 6) = А (а) В(Ъ) = В (Ь) А (а), B5.34)
где А (а) и В (Ь) выражаются формулами, аналогичными
B5.28), с заменой q на а и q* на 6.
§ 26. Инфинитезимальные операторы
и конечные преобразования группы Лоренца.
Произведение представлений
Согласно B5.20) для бесконечно малого преобразования
Лоренца (| q | <С 1) имеем
L=H-q+ + q*-. B6.1)
Операторы <jf+, <jf_, линейно зависящие от векторов <jf, <jf*, можно
написать в виде
q+ = 2qI(+) = 2ga/<+), ?! = 2q*I(~) = г^/^. B6.2)
Из B0.3) получаются выражения для инфинитезимальных
операторов 7ofc> через элементы матричной алгебры в пространстве
Минковского (см. также A.20), A.21))
/<±> = _ -fCw* db (e* - еа*)) = ±(±J«- -±-eabcJbe).
B6.3)
С помощью этих выражений нетрудно убедиться, что для
операторов 1а справедливы следующие перестановочные соотношения:
[№№}- = ваЬс1?>, B6.4)
{Д+'/Н- - 0. B6.5)
222 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Эти соотношения являются следствием формул B0.6), B0.7)
li±i±)- = 2[OT']±, iff+flfi}- = 0. B6.6)
С другой стороны, на основе соотношения B5.19) мы можем
получить другие выражения для инфинитезимальных операторов
группы Лоренца. Согласно B5.23)
q+ = S+ (w (q) ® 12) 5, q_ = 5+ A2 <g> w (q)) S.
Поскольку для представлений группы соотношение
эквивалентности равносильно равенству, то, учитывая, что и>(?)= Ча°а
(9.6), можем написать
q+ = 2qJiJ~) = w (q) ® 12 = ige (?? ® 12),
g__ = 2qaI(a~) = 12 (g) w (g) = *ga A2 ® ??),
откуда следует
/<+>=-|-??®12, ?^-4-1·®^· B6·7>
Рассмотрим операторы
Я(±> = /Ш/<±> = /<±^ B6.8)
Нетрудно убедиться, что они коммутируют со всеми инфините-
зимальными операторами Д . Действительно,
{*<+)П+>}_ = /<+' {ii+)H+)U + [??+)??+)}-??+) =
= eabc(l(a+)li+) + I(c+)I(a+))=0
вследствие того, что оператор в круглых скобках симметричен
по отношению к перестановке индексов а ж с. Аналогичным
путем убеждаемся, что
[К^Щ^и = 0, B6.9)
причем это равенство справедливо для всех четырех сочетаний
знаков (±). Операторы, коммутирующие со всеми инфинитези-
мальными операторами группы, называются операторами
Казимира. Как следует из леммы Шура, они должны быть
скалярными матрицами. Действительно, согласно B6.7) в силу свойств
матриц Паули (см. § 12) имеем
¦*а == 7~^а0у12= "?" = *а »
так как ?* == о\ + ?2 + al = 3.
Одним из распространенных способов параметризации группы
Лоренца является выбор в качестве параметров компонент анти-
§ 26. ПРОИЗВЕДЕНИЕ ПРЕДСТАВЛЕНИЙ
223
симметричного тензора ? в пространстве Минковского (см. § 19),
Для бесконечно малого преобразования Лоренца, т. е. когда все
компоненты ам тензора ? настолько малы, что их квадратами
можно пренебречь, мы получим из A9.34)
L=l + 2a (?=-?). B6.10)
Используя представление A.20) для четырехмерного
антисимметричного тензора а, получим
? = -?*???/ , ocftI = — atft, / = — / , B6.11)
где Jkl — постоянные антисимметричные матрицы, элементы
которых задаются формулой A.21)
Jmn = Sftm6in — Sfcn6Im. B6.12)
Если воспользоваться элементами матричной алгебры еы в
пространстве Минковского (см. П.1), то матрицы Iм могут быть
определены следующим образом:
/" = ем — е1\ B6.13)
Матрицы Iм представляют собой инфинитезимальные операторы
группы Лоренца, если в качестве параметров группы выбрать
компоненты антисимметричного тензора а. Согласно A.22) эти
операторы удовлетворяют следующим перестановочным
соотношениям:
[jhlJmnU = - bhmJln + bhnJln + blmJhn - 6in/ftm, B6.14)
которые нетрудно проверить с помощью B6.13). Однако
необходимость в этой проверке отпадает, если учесть, что согласно
B1.3), B1.4) векторы q, qr и сопряженные к ним q*, qr* ком-
ионируются независимо друг от друга по одному и тому же
закону, совпадающему с законом композиции для группы
вращения. А соотношения коммутации, как мы видели в § 10,
вытекают из закона композиции. Поэтому формулы B6.4) совпадают
с соответствующими соотношениями A0.28) для группы
вращений, а равенство B6.5) является следствием независимой
композиции вектор-параметров g и j*.
Инфинитезимальные операторы любых представлений группы
Лоренца при комплексной векторной параметризации (которые
мы будем обозначать теми же буквами 1а ) также
удовлетворяют соотношениям B6.4), B6.5). Результаты предыдущего
параграфа позволяют сразу написать выражения для инфинитези-
мальных операторов неприводимых конечномерных
представлений группы Лоренца через соответствующие операторы группы
224 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
вращений. Вспоминая, что согласно A0.18)
ql = qj\ q*l'=q*Jl\ B6.15)
получим аналогично B5.7), B5.8), A0.16) для бесконечно
малого преобразования представления
Т11' = 1 + 2/п', Iй' = ql(+)l + q*I{~)l\ B6.16)
где
/<+>W®lr, 1{~I'= 11®JV. B6.17)
Справедливость соотношений B6.4), B6.5) для этих операторов
очевидна, если учесть правила перемножения прямых
произведений матриц (см. П.З) и перестановочные соотношения A0.28)
для группы вращений.
Мы можем теперь обосновать сделанное в предыдущем
параграфе утверждение о том, что соотношения B5.6) определяют
все неприводимые конечномерные представления группы
Лоренца. Действительно, поскольку перестановочные соотношения
B6.4) для / совпадают с соответствующими соотношениями
A0.28) для группы вращений, то из них следуют для /(-) те же
выражения, что и в случае группы вращений. Поэтому (см.
A2.39)) в наиболее общем случае вектор-оператор /(-) должен
выражаться в виде прямой суммы неприводимых операторов
группы вращений, т. е.
?^-??^®/*). B6.18)
где J h — инфинитезимальный оператор неприводимого
представления группы вращений с весом Zft, гА —кратность этого
представления в сумме B6.18). Коммутирующие с /(_) операторы
Г согласно (П.З) должны иметь вид
/(+) = 2e(iVfe(g)l'ft), B6.19)
ft x '
где ? = (??) — тройки матриц размерности rk. Но, вследствие
B6.4), для /(+), а значит и для всех ? , справедливы те же
перестановочные соотношения, т. е. N должны выражаться
через представления группы вращений формулой, аналогичной
^26.18). Нас интересуют неприводимые операторы / , а такими
могут быть лишь отдельные слагаемые прямой суммы: lrft® J »
N ® 1 и лишь в том случае, если N будет неприводимо
(см. П.4). Но в таком случае из B6.4) следует, что N долж-
§ 26. ПРОИЗВЕДЕНИЕ ПРЕДСТАВЛЕНИЙ 225
ны быть неприводимыми инфинитезимальными операторами J .
Таким образом, мы с необходимостью приходим к операторам
B6.16), B6.17), а тем самым и к соотношению B5.6).
Минимальные полиномы для операторов
g<+> = 2д/<+>, д*(-> = 2?*/(-} B6.20)
вых матриц J , а /(+) эквивалентно прямой сумме матрица
(см. П.З). Таким образом,
? (?<+>) = [(q^y - IV][(?(+)J - (I - 1) VI - - · = 0, B6.21)
?(?*ы) = [(?*(_)J - ?V2][(?*(-)J - {V -1J?*2]... = о.
B6.22)
Заметим, что в отличие от операторов с1 неприводимых
представлений группы вращений эти минимальные уравнения не
будут совпадать с характеристическими. Последние в соответствии
с B6.17) будут иметь вид
[p(g<+>)]«'+i = 0, [P(g*(->)]2,+1 = 0. B6.23)
Согласно B6.10) при бесконечно малом преобразовании
Лоренца вектор ? переходит в вектор
х' = ? + 2ая. B6.24)
Аналогично § 7 рассмотрим функцию f(x) = /(#*), которая при
преобразовании B6.10) переходит в функцию
д (?) = f (L^x) =f(x — 2??) = / (? + ??) =
= (l+ «*?)/(*), B6.25)
причем
?* ? = (- 2?*) ^- = 2*?-^ = 2xkaklVl. B6.26)
Аналогично B6.11) мы можем написать
где
1 тМ
^hl^kVl=—ahlJ 7
Jhl = XkVi — *iVk B6.27)
представляют собой дифференциальные ннфинитезимальные
операторы группы Лоренца.
15 ф. И. Федоров
226
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Как и в § 7, можно рассматривать функции, аргументами
которых являются комплексные векторы { и j*: функции на
группе Лоренца / (q, #*). При преобразованиях Лоренца,
характеризуемых вектор-параметром д°, аргументы такой функции
принимают значения q' = <<jf°, <jf>, q'* = <?0*, ?*>. Поскольку
закон композиции для q, q* и с одинаков, то, повторяя
рассуждения § 7 (см. G.5) —G.8)), мы придем к выводу, что
изменение функции / (#, #*) при бесконечно малом преобразовании
Лоренца характеризуется формулой
?/ («f, q*) = -q°{l + qq + q*) dfldq -
- q°* A + q* ¦ q* + q*x) dfldq*, B6.28)
откуда аналогично G.15) получаем для соответствующих инфи-
нитезимальных операторов
Л^_^A + ?.? + ?х)^ = «1^2A + 0(?))А
B6.29)
Разумеется, для операторов B6.27), как легко проверить,
справедливы перестановочные соотношения B6.14), а для
операторов B6.29) —соответственно соотношения B6.4), B6.5).
Соотношения B6.10) —B6.14) для тензорной параметризации
без изменений переносятся на случай группы 50D), лишь
антисимметричная матрица а должна быть вещественной. Вместо
B6.1) мы в этом случае получим
О = 1 + а+ + 6_, B6.30)
причем
а+ = 2аАу &_ = 2ЪВ, B6.31)
где Л, В будут инфинитезимальными операторами группы
SO (А) в векторной параметризации. Соотношения B6.3) —B6.5)
останутся справедливыми при замене / на Л и /(_) на В, так
же как и последующие соотношения B6.16), B6.17), B6.21) —
B6.23) для представлений группы SO D). Будут верны также
формулы B6.27), если под х = (хк) понимать радиус-вектор
в вещественном четырехмерном пространстве. Наконец,
рассматривая функцию /(а, 6) на группе 50D), получим
аналогично B6.29) следующие выражения для инфинитезимальных
§ 26. ПРОИЗВЕДЕНИЕ ПРЕДСТАВЛЕНИЙ
227
операторов:
А^-±{1+а.а + ах)±=-^{1+0(и))^ B6.32)
Вь = -±A + Ь.Ь + Ъ*)^ = -*±?A + 0(Ь))-^. B6.33)
Операторами Казимира для группы 50D) будут А2 и В2.
Соотношения B5.25), B5.29) совместно с результатами § 13
позволяют без труда получить выражения для конечных
преобразований неприводимых представлений группы Лоренца в виде
полиномов от инфинитезимальных операторов. Для этого
достаточно получить соответствующие выражения для матриц A(q)
и В (q*) по отдельности. Соотношение B5.26) для В (q*)
можно переписать следующим образом (см. П.З):
В (g*) = l1 <g) ?1' (?·) = ?1' (q*) ? ?1' (q*) ? ... ? ?1' (?*), B6.34)
причем прямая сумма содержит 21 -f-1 слагаемое.
Таким образом, с точки зрения группы вращений матрица
B(q*) представляет собой BZ +1)-членную прямую сумму
матриц неприводимых представлений ? группы 50C), в которых
аргумент с заменен на q*. Согласно рассуждениям, приведенным
в конце § 13 (см. A3.33)), для B(q*) будет справедливо
выражение A3.25) или A3.26) соответственно для целого или
полуцелого веса V, очевидно, с заменой с на q*. При этом, разумеет-
ся, оператор q имеет смысл q*I (см. B6.16), B6.17)).
Оператор A (q) = ?1 (q) (x) 1 непосредственно не выражается в
виде прямой суммы, так как матрица 1 стоит в прямом
произведении на втором месте. Однако согласно (П.З), A(q) эквивалентна
BV + 1)-членной прямой сумме матриц Т1 (q)
A (q) ^ l1' (g) ?1 (q) = Tl (q) ? ?1 (q) ? ... ? ?1 (q). B6.35)
Поскольку все соотношения § 13 имеют ковариантную форму, то
они справедливы при любом выборе базиса или, иными словами,
одинаковы для всех эквивалентных между собой матриц.
Поэтому выражения A3.25), A3.26) будут справедливы и для A(q)
соответственно при целом (полуцелом) Z, если заменить с на q
и понимать под q оператор qI(+) = qJl <g) iv (см. B6.16), B6.17)).
Таким образом, конечные преобразования неприводимых
конечномерных представлений группы Лоренца ? (q, q*)
получаются в виде произведений полиномов A3.25), A3.26) с соответ-
15*
228 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
ствующей заменой с на q или q* и учетом соотношений B6.16),
B6.17):
q = qIM = qjl ® il\ 5* = ?*/(-} = lz(g)?*Jr. B6.36)
Полученные выводы будут справедливы и для приводимых
представлений группы Лоренца
? = Thh ? Thh ® ... ? Tlklh B6.37)
при условии, что все первые веса Zi, h, ..., h являются
одновременно целыми или полуцелыми и что то же самое справедливо
для вторых весов Zi, Z2,..., Z&. В этом случае в формулах A3.25),
A3.26) под ? следует понимать максимальный вес из ряда
hy h, ..., Zft или Zi, Z2,..., I'u соответственно.
С незначительными видоизменениями эти результаты
переносятся и на случай группы SO (А) (см. B5.32) —B5.34)). Для
этого нужно лишь в приведенных выше рассуждениях заменить
q на а и q* на 6.
Перейдем к рассмотрению прямого (кронекеровского)
произведения неприводимых представлений собственной группы
Лоренца. В § 15 было показано, что прямое произведение
неприводимых представлений группы вращений с весами I л V
распадается на неприводимые представления с весами |Z—Z'|,
\l — l'\ +1, ..., l + l'. Выражение B5.13) позволяет легко
установить аналогичный результат для неприводимых
конечномерных представлений собственной группы Лоренца.
Итак, рассмотрим прямое произведение
Tw (q, q*) <8> Thh (q, q*) = Tl (q) ® ?1' (q*) ®
®Tl'(q)®Tll(q*)- B6.38)
Согласно (П.3.21)
Tl'(q*)®Tu(q)?cTl4q)®Tl'(q*),
поэтому
?11' <g> Г'1'1 со Tl (q) <g> Th (q) ® T1' (q*) (g> Th (q*).
Но, как показано в § 15,
Tl(q)®Th(q)*> 2 eZ*(i),
?=|1-!,|
/ I' + li
?1' (q*) ® Th (q*) зо ? ? ??' (q*).
?-|?'-'?|
§ 27. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ ПОЛНОЙ ГРУППЫ 229
Таким образом,
2,"'(9.9*)®?'11(?.9*)^ ? ®Tx(q))<8)
\?=|?-?,| /
?'+??
? ®Tv(q*)
Поскольку согласно B5.13)
TX(q)®TV(q*) = T™'(q,q*),
то
, ?+?? ?'+??
Tll'(q,q*)®Thh(q,q*)x> ? ? ? ? ???'(q, q*).
?'-?? ?-|?'-??|
B6.39)
t
Следовательно, прямое произведение представлений ? и ? ?
\я в виде прямой суммы неприводимых
\ ? и ?' независимо пробегают значения
? = ?-?, \i-h\ + i,...,i + h,
? /?? /? / B?.40)
v = \r-h\, |r —??? + ? r + ii-
Повторяя те же рассуждения, можно показать, что прямое
произведение двух неприводимых представлений группы SO (А)
аналогичным образом раскладывается на неприводимые
представления:
?11' (?, 6) (?) Г1 ^ (?, 6) *> ? ? ? ? ??? (?, &), B6.41)
?1!! ?'-|?'-?;|
где ?, ?' пробегают те же значения B6.40).
§ 27. Конечномерные представления полной группы Лоренца.
Инвариантная билинейная форма
Согласно § 19 полная группа Лоренца состоит из ортохрон-
ных преобразований Лоренца, как собственных (<?+), так и
несобственных (?-+))· Она может быть получена путем
добавления к собственной группе Лоренца преобразования
пространственной инверсии Р, поскольку PL+0 == L(J') (См. A9.13))·
представляется в виде прямой суммы неприводимых представле
ний ? , где ? и ?7 независимо пробегают значения
230 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Исходя из формул A9.12), B0.3)
и соотношений
р2=1 р-1=/>? B7.1)
нетрудно убедиться, что
Pq± = q^P, Pq±P - q± B7.2)
и аналогично (см. B0.19))
P*±(q)=4(q)P, Pe±(q)P = ^(q)· B7.3)
Отсюда согласно B0.18) следует
PL (q, q*) ? = Рг+ (q) ?_ (q*) ? = (??+ (g) ?) (??_ (?·) ?) =
= ?_ (9) ?+ (?·) = ?+ (?·) ?. (q) = L («*, q). B7.4)
Рассмотрим теперь представления полной группы Лоренца.
Поскольку собственная группа Лоренца является подгруппой
полной группы Лоренца, то в представлении полной группы
будет содержаться представление собственной группы (см. B5.1),
B5.2))
L(f(q,q*) = L(q,q*)-+T(q,q*).
Преобразованию пространственной инверсии ? будет
соответствовать оператор П, который согласно определению
представления должен обладать свойствами B7.1)
П2 = 1, ? = П, B7.5)
а также удовлетворять соотношению, соответствующему B7.4):
UT (g, д*) ? = ПТ (g, g*) ? = ? (g*, q). B7.6)
Мы будем называть П оператором (преобразованием)
представления пространственной инверсии. Таким образом, представление
собственной группы Лоренца ? (g, g*), порождаемое
представлением полной группы, эквивалентно представлению собственной
группы ? (g*, q) *), которое получается при перестановке
аргументов ди д*.
Конечномерное представление ? (g, q*) собственной группы,
порождаемое неприводимым представлением полной группы,
может быть неприводимым, либо приводимым. Рассмотрим первую
возможность: ? (g, g*) является неприводимым представлением
*) Очевидно, если соответствие L (g, q*)-+T (g, q*) есть представление
собственной группы Лоренца, то и соответствие L{q, g*)-> T(q*, д)также
будет представлением той же группы.
§ 27. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ ПОЛНОЙ ГРУППЫ 231
собственной группы. Тогда согласно B5.13) ? (?, ?*) должно
выражаться следующим образом:
Т (q, ?*) = Tw (q, q*) = Tl (q) <g> T1' (?*). B7.7)
Из ^27.6) следует, что это представление должно быть
эквивалентно представлению ? (?*, q)
TlV (q,q*) со Т"'(q*,q) B7.7')
или
Tl (q) <g> T1' (q*) oo Tl (q*) ® T1' (q). B7.8)
Согласно (П.3.21)
f («*) <g) f (q) oo Tv (q) ® Tl (q*) = Tvl (q, q*).
Из последних соотношений следует Тп' (q, q*)oo ?1 ? (q, q*)- Ho
в § 25 было показано, что представления собственной группы
Лоренца Tlv (q, q*) и ?1'1 (q, q*) при I ? V неэквивалентны.
Следовательно, рассматриваемый случай, когда ? (?, ?*)
является неприводимым представлением собственной группы
Лоренца, может быть реализован лишь при условии I = V. При
этом мы сразу можем определить и оператор П, соответствующий
пространственной инверсии. Действительно, из B7.6) при
Т (q, q*) = Tli (q, q*) = ?1 (?) ® ?1 (?*) B7.9)
следует
?1 (?*) ® ?1 (?) = ? (?1 (?) ® ?* (?*)) ?, B7.10)
и сравнение с (П.3.8) приводит к выводу:
? = ±5, S=~S = S~\ S2=i, B7.11)
т. е. преобразование представления, отвечающее
пространственной инверсии, в данном случае с точностью до знака равно
ортогональному симметричному преобразованию 5, переставляющему
сомножители в прямом произведении ? (?) ® ? (?*).
Обратимся ко второй возможности, когда представление
собственной группы, порождаемое неприводимым представлением
полной группы Лоренца, является приводимым. Это
приводимое представление собственной группы не может иметь в
качестве своей неприводимой компоненты преобразование ? (?, ?*),
поскольку, по доказанному выше, последнее вместе с
соответствующим ? = 5 B7.11) уже давало бы неприводимое
представление полной группы. Итак, представление собственной группы
^ (?>?*)> если оно приводимо, может содержать лишь
компоненты Т11' (?, ?*) с 1фУ\ Но согласно B7.6) в любом случае
232
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
представление полной группы наряду с ? (?, ?*) должно
содержать преобразование T(q*, q). Следовательно, приводимое
представление собственной группы вместе с преобразованием
?11 (?> ?*) = Т1 (?) ® Т1 (q*) должно содержать также
неэквивалентное ему преобразование
Т11' (?*, q) - ?1 (?*) ® ?1' (?) со ?1' (?) ® ?1 (?*) = ?1'1 (?, ?*).
Иными словами, неприводимые представления собственной
группы с ? ? V должны входить парами Т11 (?,?*) и Т1 ' (?>?*)·
Каждая такая пара
T(q, ?*) = Tlv{q, ?*) ? Tl'l(q, ?*) B7.12)
образует неприводимое представление полной группы Лоренца,
если для нее существует преобразование П, обладающее
свойствами B7.5), B7.6). Чтобы найти П, рассмотрим преобразования
T^q*)=T»'{q,q*)®Tl\q,q*)=(TlM®TV^ ° )
\ О Т1 (q)®Tl(q*)l
B7.13)
и
r(f.f) = 7-"'(ff*,ff)er«'«(f,i)-(r,(**),8,"'(«)r ° , V
V О Т1 (q*)®Tl(q)l
B7.14)
На основании (П.3.8) имеем
Tll'(q*,q) = Tl(q*)®Tl'(q) =
= S [?1' (q) <g> ?1 (?*)) S-1 = ST1'1 (q, q*)S,
Z" V. q)=T1' (?*)® Tl (q)=S-1(Tl(q) ® T1'(q*))S=ST11'(q, q*)S,
где 5 = iS_l — ортогональная матрица перестановки сомножите-
п
лей в прямом произведении Г1® Г1'. Поэтому (см. B7.14))
?(?*, ?) =
' о 2г"'(в, «*)$.'
/*°\(r,',(f.i·) о \/Зо\ B715)
V о syl V о ?·"'(«,?·)/\0*/
/0 1\/??'(?, ?*) 0 \ /0 1\
Но
lTl'l(q, q*) О N /ft < \ ITn
\ О Г»' (g, q·)
§ 27. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ ПОЛНОЙ ГРУППЫ 233
следовательно (см. B7.13), B7.6)),
[S0){ о Tl4(q,q*)l[s0)
где
B7.16)
П-±[°^, ? = ? = ??\ ?2 = 1. B7.17)
Из структуры матриц ? (q, q*) B7.13) и ? B7.17) ясно, что
они образуют неприводимую совокупность, т. е. мы
действительно получили неприводимое представление полной группы
Лоренца.
Резюмируем полученные результаты. Неприводимые
конечномерные представления полной группы Лоренца могут быть
построены двумя способами. В первом случае они состоят из
преобразований неприводимого конечномерного представления
собственной группы Лоренца с одинаковыми весами ? (q, q*)
с добавлением преобразования П, отвечающего пространственной
инверсии, которое с точностью до знака равно ортогональному
симметричному преобразованию перестановки сомножителей
в прямом произведении ? (g) Т. Во втором случае они состоят
из прямой суммы двух неприводимых представлений собственной
группы Лоренца с переставленными весами: Тп (g, g*H
? ??? (?,?*) {???') с добавлением симметричного
ортогонального преобразования ? вида B7.17).
Как видим (см. B7.11), B7.17)), в обоих случаях
представление собственной группы Лоренца Ти или
j,{W) = ???1 ? ??'?
может быть дополнено до неприводимого представления полной
группы двумя различными способами, отличающимися знаком
оператора П, отвечающего пространственной инверсии.
Общая группа Лоренца получается в результате добавления
к полной группе неортохронных преобразований L± (§ 19).
Для этого достаточно дополнить полную группу оператором
инверсии времени A9.14)
Р* = -P = (i °V ?'2 = ?2 - 1
или оператором полной инверсии РРГ = — 1, который
коммутирует со всеми операторами общей группы Лоренца. Тем же
свойством должен обладать и соответствующий ему оператор f
представления общей группы Лоренца. Поэтому для неприводи-
234
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
мого представления общей группы из леммы Шура следует, что
оператор ? должен быть кратным единичному. Но поскольку
ft _ ?? т0 ИМеются лишь две возможности: ? = 1 или ? = —1.
Если ? = 1, то дополнение представления полной группы
таким оператором ничего не меняет, поскольку единичный
оператор всегда содержится в группе. Поэтому в данном случае мы
можем рассматривать неприводимое представление полной
группы как неприводимое представление общей группы, отображая
матрицы L и — L на одно и то же преобразование представления
полной группы Т. Если же ? = — 1, то L будет отображаться
на Г, а — L на —.Т.
Что касается оператора представления П', отвечающего
инверсии времени Р' = —1Р = Р(—1), то из соответствия ?*->~??,
— I-*·/ следует, что П' = /П = П/ = ± П.
Рассмотрим совокупность матриц [Т (q, #*)]*, комплексно
сопряженных к матрицам неприводимого представления ? (q, 5*).
Согласно B5.13)
[Т11' (q, q*)]* = (Tl (q))* ® (?1 (q*))*. B7.18)
Напомним (см. A0.24)), что для любых представлений группы
вещественных вращений
? (с) = exp {2^/arctg V&). B7.19)
Поскольку с = с*, то взятие комплексного сопряжения от ? (с)
сведется к замене инфинитезимального оператора J на J*.
В формуле B5.13) Т1 (q) и Т1 (q*) — конечномерные
неприводимые представления комплексной группы вращений, которые
получаются из B7.19) путем замены вещественного
вектор-параметра с на комплексный вектор q (q*)
Tl (q) = exp {2 (qJl/v'<?) arctg /^),
Tv (q*) = exp {2 (q*Jv/v'q**) arctg /j55}. B7.20)
Введем следующие обозначения:
?* (q) = exp {2 (jfJ*//?) arctg /~tf}, B7.21)
? (q*) = exp {2 (q*JWq*~2) arctg /я**}, B7.22)
[T (q)]* = exp {2 (q*J*/Vq**) arctg /3*2}. B7.23)
Последняя из этих формул определяет «полное» комплексное
сопряжение, в то время как первая содержит комплексное
сопряжение только от инфинитезимального оператора, а вторая —
только от вектор-параметра. Подчеркнем еще раз, что в
соотношении B7.19) и в последующих формулах инфинитезимальные
операторы J\J) — odHu и те оке. Поэтому из унитарности пред-
§ 27. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ ПОЛНОЙ ГРУППЫ 235
ставлений вещественной группы вращений (§ 11) мы можем
извлечь выводы относительно соответствующих свойств
конечномерных представлений группы Лоренца. Согласно A1.15),
A1.16)
Т+ (с) = Г (с) =Т(—с) B7.24)
и
J+ = -J, /+ = -/?. B7.25)
Равенства B7.24) можно записать в виде
Т* (с) = Т'1 (с) =Т(— с). B7.26)
Очевидно, они останутся в силе при замене вещественного
вектора с на комплексный вектор q, так как звездочка при ?
означает комплексное сопряжение только инфинитезимальных
операторов. Таким образом,
T*(q)=~T-1(q)=T(-q), B7.27)
?* (q*) = f'1 (q*) = f (- q*). B7.28)
В то же время согласно B7.23)
[? (q))* = ?* (q*) = f (- q% [? (q*))* = ?* (q) = f (- q).
B7.29)
Отсюда следует (см. B7.18))
[Tlv (q, ?*)]* = (fl (q*))'1 ® {Tv (q))-1 = [?? (?*, q)]'1.
B7.30)
Условие унитарности A1.7) U+ = U~l можно написать также
в виде
U* = U~l. B7.31)
Матрица А~х называется контрагредиентной по отношению
к матрице А. Таким образом, свойство унитарности можно
определить следующим образом: матрица унитарна, если комплексно
сопряженная и контрагредиентная к ней матрицы совпадают*).
Заметим, что если мы имеем произвольную группу матриц Л, В,
С, ..., то из С = АВ следует, что С = АВ~\ т. е.
совокупность Л, В~\ С~1 также образует группу, изоморфную
исходной. Если совокупность А, В является представлением
некоторой группы, то Л, В~\ ... также образуют представление, ко-
*) Очевидно, свойство ортогональности матрицы можно определить
как равенство ее своей контрагредиентной матрице.
236
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
торое называется контрагредиентным к первому. Очевидно, если
А' = А~1, то А=А'~{, т.е. отношение контрагредиентности
двух матриц является симметричным.
Из B7.30) следует, что^ДГ (q, q*)\* не совпадает с конт-
рагредиентной матрицей [Т (q, 3*)], а отличается от нее
перестановкой g и д*. Следовательно, конечномерные
представления группы Лоренца не унитарны. Единственным
исключением является случай тривиального представления: /=/'=0,
т00 (?,«*) = 1.
Очевидно, неунитарность конечномерных представлений
группы Лоренца обусловлена комплексностью вектор-параметра q-
Обратимся теперь к вопросу о билинейной инвариантной эр-
митовской (невырожденной) форме в пространстве
конечномерного представления группы Лоренца. Такая форма имеет вид
F = ?*?? = ?*?????, ? = ?+, |?|=?0. B7.32)
Для возможности построения такой формы, очевидно, прежде
всего необходимо, чтобы, наряду с вектором ?, рассматриваемое
представление содержало и комплексно сопряженный вектор ?*.
В случае группы вращений дело обстоит просто. Если ?
преобразуется посредством Т1(с), то ?* — посредством ? * (с). Как
показано в § 12 {см. A2.33), A2.34)), Т1* (с) также будет
представлением группы вращений и притом неприводимым. Так
как для группы вращений все неприводимые представления
одной и той же размерности эквивалентны, то согласно A2.34)
Т1* (с) = ST1 (с) S~\ B7.33)
Следовательно, ? (с) и ? * (с) по существу дают одно и то же
представление, поэтому в случае группы вращений первое
основное условие для существования формы B7.32) всегда
выполняется для любого представления.
Иначе обстоит дело с группой Лоренца. И в этом случае,
очевидно, [Ти (<jf, q*)]* наряду с Ти' (q, q*) будет
представлением и притом неприводимым. Из B7.33) следует: поскольку
это равенство является тождеством относительно вектора с, то
Т1* (q) = ST1 (q) S'\ Tl* (q*) = ST1 (q*) S'\ B7.34)
В то же время [?1 (q)]* = Tl* (q*) ? ST1 (q) S"\ С помощью B7.34)
получаем
[TXV (?, ?*)? = ST1 (q*) S~x ® S'TV (q) S' =
= (S <g> S') (Tl (?*) ® T1' (q) (S <g> ST1) =
= ((S ® 50 S0) Tvl (q, q*)((S ® S') S0)~\ B7.340
§ 27. КОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ ПОЛНОЙ ГРУППЫ 237
где So — матрица, осуществляющая перестановку сомножителей
в произведении ??®?? (?.3).
Таким образом, комплексно сопряженное представление
эквивалентно ? , т. е. имеет место ситуация, аналогичная случаю
полной группы Лоренца — для построения формы B7.32)
необходимо, чтобы либо Т = Тп, лпбо ? = ?11' ® ??? = Г*"'*.
Иными словами, для конечномерных представлений полной
группы Лоренца условие, чтобы в пространстве представления
наряду с ? содержалось также ?*, всегда выполняется.
Инвариантность формы B7.32) по отношению к некоторому
преобразованию представления ? выражается условием ?'*??' =
= ?*??, если ?' = ??, ?' = ??, откуда следует ?*?+?5?? =
= ?*??, или вследствие произвольности ?, ?
2»+?? = ?. B7.35)
В частности, для неприводимого представления Т11' (q, q*)
соответственно должно быть
[T"'(q,q*)] + T\Tll'(q,q*) = n- B7.36)
Здесь подразумевается тождество относительно всевозможных
значений д. Вследствие унитарности представлений группы
вращений и, соответственно, тождественной относительно с
справедливости соотношения B7.24), можем написать
Tl+ (q) = (?1)-1 (q), Tv+(q*) = (?"') (q*). B7.37)
Здесь, аналогично B7.28), B7.29), следует различать Tl+ (q) =
= 2"* (?) и
[ Т1 (q)]+ = [Tl (q)]* = ??+ (q*) = ?1 (- «*). B7.38)
Мы имеем, таким образом (см. B7.34)),
[Т11' (q, q*)]+ = [Tl (q)]+ ® [?? (q*)]+ =
= Г,+ (?*) ® ?''+ (9) = ?1 (- з*) ® ?1' (- q) = [?"' (*·, q)]-\
B7.39)
Поэтому соотношение B7.36) можно написать в виде
ЦТ11' (q, q*) ? = Tw («*, ?). B7.40)
Но это есть условие B7.7'), которое, как мы знаем,
удовлетворяется для представлений Т" пли У = ? ' ф Г1 ' полной
группы Лоренца. Сравнивая с равенством B7.6), убеждаемся,
что всегда можно положить
? = «?, B7.41)
238 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
где число а должно быть вещественным, так как ?+ = ?. Мы
доказали, таким образом, что для любого неприводимого
конечномерного представления полной группы Лоренца матрица
билинейной инвариантной формы с точностью до вещественного
числового множителя совпадает с матрицей преобразования
представления, отвечающего пространственной инверсии. Поскольку
для матрицы ? найдены общие выражения B7.11), B7.17), то
тем самым матрица билинейной формы ? для неприводимого
представления полной группы Лоренца определяется в самом
общем случае.
Заметим, что простейший пример соотношения B7.41)
доставляет само основное представление группы Лоренца в мире
Минковского. Действительно, в этом случае ?= (#, ???), ?*=
= (#, —too), а инвариантная форма имеет вид F = ?*??|) =
= xl — ?2, причем
? = ??) = ?· B7·42)
Следует иметь в виду, что, при преобразовании базиса с
помощью матрицы А : ?' = ??, матрицы ?, ? и ? преобразуются
по-разному, а именно:
ТГ = АПА-\ Т' = АТА-\ ?' .=А+-1цА~1. B7.43)
Поэтому равенство B7.41) справедливо не в любом базисе.
Однако, если матрица А унитарна: А+.= А~1, то к\' = Ах\А~1 и
соотношение B7.41) остается в силе. Существенно то, что всегда
можно так выбрать базис представления, что B7.41) будет
верно. Для любого конечномерного приводимого представления
полной группы Лоренца, поскольку последнее распадается на
прямую сумму неприводимых представлений, ? представляется
в виде прямой суммы
? = ???? ® ?2?2 ? ... ФагПг,
?2. =1, Щ = Щ, B7.44)
где Uk относятся к отдельным неприводимым представлениям
полной группы Лоренца. Путем надлежащей нормировки
базиса каждого неприводимого представления вещественные
числа ак всегда могут быть сделаны равными ±1. Действительно,
согласно B7.43), B7.44) для этого достаточно выбрать А =
= А\ ®А2 ? ... ®АГ1 причем матрицы Ak скалярны и равны
?? ~ у\ йъ. I· При этом матрица отражения
п = п1еп2е...0П
г
V
" ?
B7.45)
§ 28. ПРЕДСТАВЛЕНИЯ МАЛЫХ ГРУПП
239
не изменится. В результате ? всегда может быть приведена
к виду
?±??
л = (± пх) ? (± ?2) ? ... е (± пг) =
±п0
±Ur)
B7.46)
когда она обладает свойствами
? = ?* =^ = ?+ = ?-1. B7.47)
Обратимся теперь к преобразованию полной инверсии,
которое изменяет знаки у всех компонент мирового вектора
хг = — хщ
xk = — xk.
B7.48)
Выше было показано, что для неприводимого
представления собственной группы Лоренца оператор
представления полной инверсии может быть равен +1 или —1. Если же
мы имеем приводимое представление ? = Т\ 0 ?2 ? ... ?.??, то
??
i±it
{
± ?.
B7.49)
где индексы при единичных матрицах относятся к
соответствующим неприводимым представлениям, входящим в Т.
§ 28. Представления малых групп и комплексной
группы Лоренца
В § 23 были рассмотрены малые группы Лоренца. Приведем
здесь краткую сводку полученных там результатов. Если для
некоторого мирового вектора х = (#, ix0)
L(q)x = x, B8.1)
то вектор-параметр q соответствующих преобразований Лоренца
Lq имеет вид
? = ?«=A — ivx) с,
V =
B8.2)
причем с — произвольный вещественный вектор. В зависимости
240
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
от свойств вектора ? возможны три существенно различных
случая:
I. Вектор ? — времениподобный:
х2 = х2 — *о<0, ??2<1. B8.3)
И. Вектор ? — светоподобный:
Х2=а.2_х2 = ()) 02 = 1 B8.4)
III. Вектор ? — пространственнолодобный:
я2 = а:2 —**>0, 1?2>1# B8.5)
Согласно § 23 в любом случае малая группа является
подгруппой 0(qv) комплексной группы вращений SO C, С),
отвечающей совокупности вектор-параметров q9 B8.2). Для
вещественных векторов с (см. B8.2)) справедлив закон
композиции [14]
<с, c)O- i_cc, + [Oc][OC,] , (Z5.D)
причем
(с, с', — c}v = ?? (с) с', B8.7)
где (см. B3.18))
?? (с) = 1 + 2 2-?^, ? = A - ?-?) cx. B8.8)
Из изоморфизма 0(qv) и Av(c) следует, что представления
подгруппы 0(qv) комплексной группы вращений будут
одновременно представлениями группы ?? (с). Согласно A1.17) и A0.16)
для бесконечно малых преобразований представлений группы
О (qv) получим
T(qv) = l-2iqvJ,
qvJ = с A + ???) J = cJv, B8.9)
r = (i + iV*)j,
т. е.
JVi = J1 + i(v2J3—v3J2),
J 2 =/2 + 4^1 — ^1^3)»
Л = /3 + ? iPJ-i — ??),
где J — инфинитезимальный вектор-оператор представления
обычной вещественной группы вращений, Jv—- такой же оператор
§ 28. ПРЕДСТАВЛЕНИЯ МАЛЫХ ГРУПП 241
для пруппы AO(c). С помощью A1.21) находим следующие
перестановочные соотношения для Jv:
[cJv, с'Г) _ = i [сс'\ A - v-v) Г. B8.10)
Эти соотношения имеют ковариантную форму относительно
преобразований вращения в пространстве параметров. Если выбрать
(а)
в этом пространстве систему ортов &
с(а)с(Ь) = боЬ, cC) = v/\v\, B8.11)
то B8.10) принимает вид
{/*/з)- = iJi, {JUiU = Ul, UVW- = i A - »2) Л B8.12)
Оператор Казимира в ковариантном виде и, соответственно, в
базисе B8.11) имеет вид
К - Jv(i - ?.?) Г = JT + JV + A - ?2) Л2· B8.13)
Заметим, что все соотношения B8.10) —B8.13) останутся в
силе и для qv — (l + ivx) с, поскольку при этом ? переходит в
— ??, что, как указывалось выше, ничего не меняет.
Формулы B8.6), B8.8) определяют существенно различные
группы матриц в зависимости от того, каковы свойства вектора
? B8.3)-B8.5).
I. Если ? — времениподобный вектор, то х2 < 0, ?2 < 1; при
этом можно изменить нормировку праметров, введя с'*1* =
= A — u2)/V1>,c,B) = A — u2)~1/2c<2>, что повлечет за собой
соответственное изменение инфинитезимальных операторов: J^2 =
= у/ 1 — ?2 /?,2. Тогда перестановочные соотношения B8.12) для
Ji°i ^2*1 J* принимают вид
W2 ^з! = iJi » W9J1 I- — ^2 » Ui » J2 I- = *«^з>
т. е. они совпадают с перестановочными соотношениями A1.12)
для группы вращений. Таким образом, в этом случае малая
группа Лоренца изоморфна группе SOC).
II. Если ? — светоподобныи вектор (х2 = 0, ?2 = 1), то
перестановочные соотношения B8.12) принимают вид
[JUIU = «/?, GУГ1- - *V?, №2!- = 0 B8.14)
и будут такими же, как у группы движений евклидовой
плоскости ?'B), которой изоморфна соответствующая малая группа (§ 9).
16 ф. И. Федоров
242 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
В базисе B8.11) согласно B8.9) получим
J ? = J\ — iJ 2» J 2 = Wii J ? — •'a» B8.15)
следовательно, здесь имеется лишь два независимых инфинитези-
мальных оператора J\ и /?> удовлетворяющих
перестановочному соотношению
{/»/»)-=/?. B8.16)
Соответственно,
cJv = ClJl + c2Jv2 + с3/з = (Ci + fca) /! + Со/зг B8.17)
т. е. в качестве параметров можно взять одно вещественное (сз)
и одно комплексное (с\ + гсг) числа. Заметим, что общее
выражение B8.13) для оператора Казимира в этом случае
обращается в нуль.
III. Наконец, для пространственноподобного вектора х(х2>0,
0а> 1), нормируя вещественные вектор-параметры с, как в
случае I, но с помощью (?2 — l) 2, получим вместо B8.12)
[JlJl\- = iJl {/?/?}_ = i-Ъ [fiA)- = - Ul B8.18)
Это — перестановочные соотношения для группы SO B,1),
оставляющей инвариантной форму х\ + х\ — х\.
Этим трем случаям соответствует различная метрика
пространства комплексных векторов qv (см. § 23). При выборе ортов
B8.11) матрица ? = 1 + яХ2B3.10) принимает вид
?=( О I-*2 01 B8.19)
\ О 0 1/
следовательно, форма ере = q% дефинитна лишь в случае I.
В случае II форма вырождена, а в случае III — индефинитна.
Ортам с(а) B8.11) соответствуют комплексные орты д(а>
B8.2), которые также ортогональны в смысле q^a)q(b) = 0 при
афЪ. Вместо того, чтобы нормировать вещественные орты с(а),
часто бывает удобно нормировать q(a). При этом согласно
B3.10), B3.11), B3.19) имеем (?A)J = (?B)J = 1 - »\ (?C)J =
= 1. Таким образом, в случае I возможна нормировка \q у =
= (*B)J= 1» т. е. мы получим q(a)q(b) = 8ab. В случае II
(q1J = (?B)J =0, и в случае III возможна нормировка (при
вещественном с) (qA)J = (?B)J = — 1.
§ 28. ПРЕДСТАВЛЕНИЯ МАЛЫХ ГРУПП
243
Таким образом, использование векторной параметризации
естественным образом приводит нас к единой трактовке трех малых
групп 50C), ? B) и 50B,1). Вое они описываются общими
формулами B8.6) —B8.13) и отличаются между собой лишь за счет
того, к какой из трех областей значений принадлежит ?2: ?2 < 1,
?2 — 1 или ?2 > 1 соответственно. Заметим, что при ?2 = 1
формулы B8.6), B3.15) упрощаются и принимают вид
<с,с'%=с+^;с[СС'\ B8.20),
^(с)=1+2гтйрХсХ· B8·21)
Очевидно, наличие указанных общих соотношений позволяет
изучать на основе единого подхода три цруппы ?0C), ? B) и
50B,1), а также связи между этими группами и комплексной
группой вращений. Разумеется, это относится в равной мере как
к самим группам, так и к их представлениям, В частности, весьма
существенным является тот факт, что все эти три группы по
существу являются подгруппами комплексной группы вращений.
Именно отсюда наиболее простым и естественным путем
получаются все приведенные выше соотношения, характеризующие
рассматриваемые группы.
Подчеркнем, что согласно B8.9) инфинитезимальные
операторы конечномерных представлений групп ?B) и 50B,1) могут
быть получены в виде простых линейных комбинаций инфините-
зимальных операторов группы 50C). Таким образом, каждому
представлению группы 50C) соответствует определенное
конечномерное представление групп ?B) и 50B,1).
Рассмотрим теперь конечномерные неприводимые
представления комплексной группы Лоренца. Согласно B5.6)
конечномерные неприводимые представления вещественной группы
Лоренца выражаются следующим образом:
Tll'(q,q*) = Tl(q)®Tl'(q% B8.22)
где ? (с) — преобразование неприводимого представления веса
I вещественной группы вращений. Отсюда по аналогии вытекает
следующее выражение для преобразований конечномерных
неприводимых представлений комплексной группы Лоренца [36]:
Т"' (<Г, g) = ?1 (q) <g> Tv (g) = A(q)B(g) = В(g) A(q), B8.22)
где
A(q) = Tl(q)®i1', B(g) = ll®Tl'(g). B8.23>
16*
244 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Таким образом, формула B8.22) определяет преобразование
конечномерного неприводимого представления комплексной группы
Лоренца, разлагающееся в произведение двух коммутирующих
матриц, каждая из которых зависит от одного вектор-параметра.
Не представляет труда распространить на случай
комплексной группы & (q, g) результаты § 26 по построению
полиномиальных выражений для конечных преобразований представления
группы L(q, q*) через инфинитезимальные операторы.
После замены д* -> g для операторов Ти (g, g) произвольного
конечномерного неприводимого представления (?, V) (Z, V =
= 0, 1/2, 1, 3/2; ...) группы S(q, g) будем иметь (см. § 13)
Tll'(q,g)=Al(q)Bl'(g),
A1 (q) = ?1 E+)/A + ?·I, ?1' (g) = ?1' (?_)/A + g*I'. B8.24)
Здесь
q+ = qJ{+\ 3- = g/-), B8.25)
причем (ом. B6.3), B6.5))
/?±> = ± {-±гаЬс/Ьс ± Г4), Ц<+)/П- = 0. B8.26)
Для полиномов ? (?+), ? \g-)останутся в силе полученные
в § 13 выражения
Р1 Ся±) = ? ? *(?(?2)(n-ft)/2?ft±. B8.27)
To же самое будет справедливо и для минимальных уравнений
21+1
? <#> (?2)v*BI+1-ft)g* = 0 B8.28)
fe=0
и для рекуррентных соотношений между коэффициентами
2#>1>я = (п + 1) #>„+1 - B? - ? + 1) Ь(Д_! (в < 21), B8.29)
Cti+i + 2&&.,, = 22l+1a(ft'VBi)!. B8.30)
Представления B8.22) были рассмотрены в [36]. В [37]
было показано, что комплексная группа Лоренца обладает
более общими конечномерными представлениями вида
TUUUU (if g) = тии (?? ?*} 0 ri.i4 (if g*}. B8.31)
Рассматриваемые представления выражаются в виде кронекеров-
ских произведений матриц неприводимых представлений
вещественной группы Лоренца 50C,1) Thh (?,?*) и Tlih(g, g*)%
соответствующих двум независимым комплексным векторам q и
§ 28. ПРЕДСТАВЛЕНИЯ МАЛЫХ ГРУПП
245
g. He представляет труда убедиться, что выражение B8.31)
является конечномерным представлением группы 50D, С).
Действительно, каждому преобразованию SB (g, g) однозначно
соответствует выражение B8.31), причем согласно закону композиции
это соответствие сохраняется при перемножении преобразований.
Представление B8.31) является неприводимым, так как
коммутирующая с ним матрица должна быть кратна единичной, что
следует из тех же соображений, с помощью которых
доказывалась неприводимость представления группы SO C,1) (см. §§ 25,
26). Разумеется, каждый из весов l\, k, h, U может принимать
значения 0, 1/2, 1, 3/2 ...
Очевидно, представление B8.22) получается как частный
случай B8.31), если положить по одному весу из каждой пары
(??, ?2) и (Z3., h) равным нулю.
Можно показать, что представления B8.31) исчерпывают все
возможные неприводимые конечномерные представления группы
50D, С). Действительно, в качестве 12 параметров этой группы
можно выбрать комплексные компоненты векторов g, g*, g, g*.
Тогда бесконечно малое преобразование представления будет
иметь вид (ор. B6.16))
? (q,g) = 1 + 2g/(+) + 2q*I(-) + 2gKi+' + 2g*tO~\ B8.32)
где /(±', /С(±) — инфинитезимальные вектор-операторы,
отвечающие вектор-параметрам g, g*, g, g*. Если положить g = 0, то
T(q) = ? (g, g*; 0, 0) будет удовлетворять соотношению A0.13),
откуда следует, что каждый из вектор-операторов / и /(-)
удовлетворяет перестановочным соотношениям, характерным для
группы 50C), а между собой /(+) и /(-) коммутируют.
Аналогичные свойства имеют операторы К(+) и К{~\ Далее, поскольку
(см. B4.12))
2 (g, g) = ?+ (д) ?_ (g) = ?_ (g) ?+ (g), B8.33)
то К(+) и К(-) коммутируют с /(+) и /<_).Таким образом, любой
из четырех вектор-операторов /(± , 1СХ удовлетворяет
перестановочным соотношениям для группы 50C), и все эти
вектор-операторы коммутируют между собой. Отсюда, повторяя те же
рассуждения (см. § 26), которые приводят к выражениям B5.6) для
неприводимых представлений группы 50C,1), придем к общему
выражению для неприводимого конечномерного представления
группы 50D, С):
y!.IAl4 (?1 g*; gi g*) = TU {q) q TU (?*} 0 TU {g) 0 Th (g*}
B8.34)
или
? (g, g*; g, **) = A(q)B (g*) С (g) D (**), B8.35)
246
ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
где
A (q) = Th (q) ® \и ® \и ® I1*, В (q*) = ll'(x) Th(q*) ® 1**® 11*,
C(g) = lZl ® I1'® Г!'(*) ® l\ #(g*) = l'1 (x)t*2 ® l'3 ® Tu(g*).
B8.36)
Существенно, что все операторы А, В, С, D коммутируют между
собой, что ясно из их структуры B8.36). Выражение B8.35)
справедливо и для приводимого конечномерного представления
группы SOD,С). В этом случае как T(q, 5*; g, ?*), так и все
операторы А, В, С, D будут прямыми суммами выражений того
же вида.
Таким образом, любое конечномерное неприводимое
представление комплексной группы Лоренца определяется заданием
четырех весов ??, ?2, h, h и выражается в виде прямого
произведения матриц соответствующих четырех представлений
комплексной группы вращений 50C, С). Повторяя рассуждения,
приведенные в §§ 13 и 26, нетрудно показать, что любое конечное
преобразование B8.34), B8.35) может быть представлено в
полиномиальной форме
Т"*1Ча а*·* с*\ Ph (^(+)) PU (?")*) Ph (^+)) PU ( *("})
I?, q , *, g ) A + gf)Il A + fW)Ii A + g2)l3 A + g*2)l4 ,
B8.37)
где
q(±) = g/(±)f J± = iK(±)f B8.38)
а полиномы ? определяются теми же формулами, что в § 13.
§ 29. Бесконечномерные представления группы Лоренца
Группа Лоренца обладает, наряду с конечномерными, также
бесконечномерными неприводимыми представлениями [3,4].
Чтобы получить выражения для инфинитезимальных операторов
бесконечномерных неприводимых представлений группы
Лоренца, нам удобнее будет воспользоваться тензорной
параметризацией (см. B6.10) — B6.14)). Введем обозначения
/вЬ = й«ьЛ· Ja*=iKa, (/с) = /. (*с)=*. B9.1)
тогда, как легко убедиться, перестановочные соотношения B6.14)
сведутся IK следующим:
</e/b}_ = iWc, B9.2)
{1аКь}. = 1гаЬсКс, B9.3)
{KaKb}_ = iEabcIc. B9.4)
§ 29. БЕСКОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ
247
Соотношения B9.2) совпадают с перестановочными
соотношениями A1.18) для группы вращений, как и должно быть, поскольку
из шести инфинитезимальных операторов Jkl (к, I = 1, 2, 3, 4)'
группы Лоренца три оператора Jab (?, b — 1, 2, 3) отвечают
чисто пространственным поворотам. На основании результатов
гл. II можно утверждать, что операторы 1а в общем случае
соответствуют некоторому приводимому представлению группы
вращений, распадающемуся на неприводимые представления с
весами U < 1\... < lk < ..., разумеется, целыми или полуцелыми.
При этом, поскольку возможные значения весов неприводимых
представлений группы вращений неотрицательны, т. е.
ограничены снизу, то в этом ряду всегда будет наименьший вес, который
мы ? обозначим Iq. Что же касается наибольшего веса, то он
может и не существовать — последний случай будет
соответствовать, очевидно, бесконечномерному представлению группы
Лоренца.
Положив в B9.3) Ъ = а, получим
?.?. =?.?., ?? = ?? = ????.
а а а а
С другой стороны, с помощью B9.2), B9.3) легко убедиться
аналогично A1.23), что
{IK, /а}_ = {KI, /а}- = 0. B9.5)
Кроме того, согласно B9.3), B9.4)
{1КХ Кь}- = {1аКаУ Кь}- = 1а {КаКь}- + {IaKb}„Ka =
= *в«ь· Vah + KcKa) = \ гаЬс ({/в/с}. + {КсКа}-) = 0. B9.6)
Поэтому оператор IK, как коммутирующий со всеми инфините-
зимальными операторами неприводимого представления группы
Лоренца, на основании леммы Шура (см. П.4) должен быть
скалярной матрицей:
1К = К1=с'. B9.7)"
Поскольку вектор-операторы / и К удовлетворяют равенствам
A1.18), A6.18), то для них справедливы соотношения A6.20),
A6.21) и последующие формулы § 16 с тем изменением, что
матрица В в формуле A6.20) определяется равенством
гДе ??» — канонические собственные векторы неприводимых
представлений / группы вращений, входящих в /:
/ = ?®? г = гв. *i,···. h- B9.9)
248 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Отличие B9.8) от A6.22) обусловлено заменой равенства A6.19)
соотношением B9.7). Однако все последующие соотношения
§ 16 вплоть до A6.28') остаются в силе и, как следствие их, мы
имеем в рассматриваемом случае
К = BI + К0 ,
\IaKbi- = 1&аЬсКс,
{?/}_ = 0, ?? = 1К° = 0,
Я0 = свК°, Я°± = е±К°,
/? ?? +
4- 2«'>(±)
?". ±??» ?"«
?? = *±1.
B9.10)
B9.11)
B9.12)
B9.13)
B9.14)
B9.15)
B9.16)
Вследствие B9.8) —B9.10) определение оператора К
сводится к нахождению К0. В свою очередь, эта задача согласно
B9.14) —B9.16) сводится к отысканию^Dl^l±1.
Из B9.11) следует {е±#±]__ = 0, (е± = е±1). Применяя это
соотношение к ?™, получим с помощью B9.14)
ах^Ж - ос^ад+1. B9.17)
± ±
Если выражение B9.15), взятое с верхним знаком, подставить в
B9.17), то после простых преобразований получим, полагая
?? = ?±1,
DV+1 ? ?. 1+1 DLl-l Dl,l-1
K(Z + lJ-m2 К(/ + 1J-(т + 1J' VT~^ ~ V l* - (m + if
Bfti8)
Таким образом, все стоящие здесь отношения не зависят от т,
поскольку они не меняются при замене /пнаш+ 1. Поэтому мы
можем написать
Dli1-1 =DMKia-i»f, Dl^l = Dl-^lVp^m\ B9.19)
где ?)'·'-1, ?)'-1·' — некоторые функции от ?. Из B9.15) находим
теперь
DX-* = ± ?I·"-1^, №·'= =F D1-1·1^!. B9-20)
± ±
где
?«±> = j/ -I- (Z =F m)(Z qp m - 1) = pi(?}. B9.21)
§ 29. БЕСКОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ 249
Полученные формулы при произвольных Z, т определяют
матрицы #°, Н°± и, тем самым, дают общее решение задачи
отыскания матричного вектор-оператора К0
К0 = 1К° = (с0.с0 + е+-е_ + «_·*+) Я0 = с0Н° +
4- е+Н°- + е-Н°+1 B9.22)
удовлетворяющего условиям B9.11), B9,12).
Заметим, что если условию B9.3) удовлетворяют какие-либо
два матричных вектора К' и К\ то матричный вектор К=
= С К' + С" К", где матрицы С", С" коммутируют с J, также
будет удовлетворять этому условию. Действительно,
{/вА'ь}_= {/„, С'К'ь + C'KlU = С [1аК'ь\- + С" {ГаК1\- =
= ieabc (СК'С + С"К"С) = ieabcKc.
Можно также взять К = К'С + К"С" или К = А'К'В' +
+А"К"В", при условии, что А', В', С; А", В", С"
коммутируют с /. На основании B9.10), B9.4), B9.13) можем написать
{е^К, е-К}- = i [е+е_] / = с0 = [В~е^ + Н°+, Be. + Н°Х
или, после (раскрытия правой части,
(В2 - 1) со + {H°+H°J. + {Ве+, Я°_|_ + {Н%, fill- = 0. B9.23)
При применении этого соотношения к ?™ следует учесть, что мы
получим векторы с тем же весом I только из двух первых
членов в выражении B9.23). Таким образом, действуя оператором
(В2— 1) с0 + [Н°+Н-} - на $1т и приравнивая в полученном
результате нулю коэффициент при векторе i|)m> получим
(см. B9.8))
B1 - 1)Д - B1 + 3)Dl+{ = 1 - c'2\l2(l + IJ, {29.24)
где (см. B9.14), B9.20))
Di = Dll-W-[ '. B9.25)
Умножая равенство B9.24) на 2?+1, можем переписать его
следующим образом:
(W-i)Dl + P + c'W =
= [4(l + lJ-i]Dl+l+(l + lJ + c'2J(l + i)\
Это соотношение имеет вид Fz = Fz+i, где
Fl = DP-l)Dl + l2 + c'2/l2;
таким образом, величина FL на самом деле не зависит от Z, т. е.
250 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Fn= с". Величину с", не зависящую от I, проще всего можно
найти, придав I частное значение, а именно, положив 1*= 10. При этом
должно быть Du = 0, поскольку Z0 по условию — минимальное
значение веса Z, а в выражение B9.25) для Д входит вес I—1.
Следовательно,
(U2 - 1) Z), + I· + с'*П2 = с" = Fh = lj + c'Vll
откуда
?? = (? - ll)(c'4lll* - l)/DZ2 - 1). B9.26)
Ввиду произвольности величины с' введем для упрощения
обозначение с' = 10с и получим из B9.8), B9.26)
»*~Ц|?тГ«Ь· Д-'''',^"'''· B9.27)
Очевидно, соотношение B9.27) определяет лишь произведения
Dll-lD1-11 коэффициентов, входящих в формулу B9.19), но не
сами коэффициенты по отдельности. Следовательно, при
известных Д, определяемых заданием Zo, с и ? = Zo + &, мы можем
произвольно выбирать любой из коэффициентов Dl>l~l либо Dl~1'1.
Однако при этом мы не получим различных неприводимых
представлений, так как нетрудно показать, что изменение, связанное
с выбором D1»1-1, сводится к некоторому линейному
преобразованию базисных .???????? ургп· Действительно, пусть
?™ = ???«, B9.28)
где ?* — некоторые числа. При этом операторы /в, не
действующие на веса I неприводимых представлений группы вращений,
останутся без изменений. Что же касается оператора К0, то
нетрудно убедиться, что выражение для K°tym будет совпадать с
K°tym, если заменить ?4 на ?^?? коэффициенты Z)'»'-1, Dl~l>1
на следующие:
?'1'1 = (??/??-?) Л1·1, Л"'1 = (??-?/??) Л1-1'1·
При этом Dll-lDl-i>1 = D'll-lD'1-11, т. е. величины Dt B9.25) не
меняются. Следовательно, сохраняя выражения B9.27) для Dh
мы можем выбрать р* так, чтобы по возможности упростить
соотношение между Dll~x и Dl~l>1. Проще всего выбрать pi так,
чтобы D'11-1 = ?)"-1·', для чего достаточно положить
Pi
? (D^/D8'8'1)] \ B9.29)
§ 29. БЕСКОНЕЧНОМЕРНЫЕ ПРЕДСТАВЛЕНИЯ 251
В результате согласно B9.27) мы получим
?)'-'-1 , ?)'-1·' = VDl=± |/ A' ~^~ *> · B9.30)
Поскольку представления, соответствующие базисам,
отличающимся за счет линейных преобразований, эквивалентны, то мы
всегда можем считать выполненным преобразование B9.28),
B9.29), т. е. полагать коэффициенты Dll~x и D1'11 совпадающими
между собой и равными выражению B9.30). Что касается знака
квадратного корня в B9.30), то он, очевидно, может быть выбран
любым при условии выполнения равенства
D11-1 = D1-11 = Аг. B9.31)
В частности, всегда можно считать вещественную часть корня
B9.30) положительной.
Итак, в общем случае неприводимое представление группы
Лоренца задается в пространстве Л, являющемся прямой суммой
подпространств R\ в которых действуют неприводимые
представления группы вращений (I — целое или полуцелое)
r = r1° е д'о+1 е д*о+2 е ..., B9.32)
базисные векторы которых обозначаются ?™ (— l^m^l).
В каждом из этих подпространств действие инфинитезимальных
операторов с = с! (см. B9.2) —B9.4)) определяется прежними
формулами § 12 (с = ?с0 4- ??+ + ?*?_)
ctm = 1Щ1т + ???+)?«+? + Л*«т~\|4-н B9.33)
a^^jZ-A-tZ + mX/i/Ti+l),
а операторы сК = Вс + сК° действуют по формулам
+ Al+1 (|/(i + lJ_w2^-i _ ?^4+? + РЙ?1+Ч»Л), B9.34)
, /02-««)(с2-«2) ,,.> ??
л'= -г I Jr.,—> ?»= V -? <? * w)(z =*= т -*>·
B9.35)
При этом все перестановочные соотношения B9.2) —B9.4)
удовлетворяются.
252 ГЛ. IV. ПРЕДСТАВЛЕНИЯ ГРУППЫ ЛОРЕНЦА
Операторы с и Вс согласно B9.33) не выводят вектор ?™
за пределы подпространства R1. В отличие от этого оператор с-К0
(см. B9.35)) переводит вектор ?™ из В1 в векторы соседних
подпространств #?+1 и Я'. Этот сдвиг в сторону уменьшения ?
ограничен минимальным значением ? = ??, так как при 1 = Iq
коэффициент АХо B9.35) обращается в нуль. В сторону же
возрастания ? процесс может оборваться согласно B9.35) лишь в том
случае, если число с одновременно с Z0 (и со всемп Z) будет
целым либо полуцелым и притом с > 10. Следовательно, если
с —10 = k>0 (к — целое), то представление будет
конечномерным. Если же с будет любым другим (в общем случае
комплексным) числом, то формулы B9.33) —B9.35) будут определять
бесконечномерное представление группы Лоренца.
Нетрудно убедиться, что в конечномерном случае формулы
B9.33) —B9.35) определяют неприводимое представление вида
B5.6) Ти\ причем I = с — Z0. V = с + Z0.
Глава V
ПРИМЕНЕНИЯ ГРУППЫ ЛОРЕНЦА В ТЕОРИИ
ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
§ 30. Релятивистские волновые уравнения
первого порядка
Применения группы Лоренца в теоретической физике
необычайно обширны, поскольку она является основной группой
симметрии пространства и времени. Наиболее фундаментальную роль
играет эта группа в вопросах теории элементарных частиц
(квантовой теории поля). Ввиду ограниченности объема настоящей
книги мы остановимся в этой главе лишь на некоторых
относящихся сюда задачах.
Первые релятивистские волновые уравнения для описания
элементарных частиц были предложены полвека тому назад.
К ним относятся: скалярное уравнение второго порядка
(?2-™2)?0 = 0, vt = vjf vh = d/dKk, ?? = ?>?(*)? C0.1)
называемое уравнением Клейна — Фока [37.1, 37.2], и
уравнение для четырехкомпонентной волновой функции ? = (??)
(?*?*+™)? = 0, ?* = ?*(?) C0.2)
— уравнение Дирака [37.3]. В последнем уравнении ?*
обозначают четверку 4 X 4-матриц, удовлетворяющих следующим
соотношениям (алгебра Дирака):
?? + ??=2?„. (зо.з)
В дальнейшем общая теория релятивистских волновых уравнений
развивалась многими авторами.
В теории элементарных частиц обычно используется
предположение, что свойства свободных, невзаимодействующих частиц
описываются линейными дифференциальными уравнениями с
постоянными коэффициентами, удовлетворяющими требованию
релятивистской ковариантности.
254 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Предположение, что волновая функция частицы может быть
получена, как решение некоторого дифференциального уравнения,
является совершенно естественным в связи с огромными
успехами, достигнутыми при описании атомных и молекулярных систем
уравнением Шредингера. Тем не менее, это предположение
нельзя считать необходимым или единственно возможным.
Существуют теории, в которых состояния частиц описываются с помощью
интегральных уравнений. Предположение о линейности
уравнений вытекает из принципа суперпозиции, являющегося одним из
фундаментальных положений квантовой механики. Однако и для
этого допущения существует альтернатива в виде нелинейных
теорий, которые получили определенное развитие и с которыми
связываются надежды на преодоление некоторых
принципиальных трудностей.
Предположение о том, что дифференциальные уравнения для
элементарных частиц должны иметь постоянные коэффициенты,
является необходимым, если речь идет об описании свободных
частиц. Действительно, если бы в уравнение входили какие-то
заданные функции координат или времени, то это означало бы,
что различные точки пространства или моменты времени
неравноправны для частицы. Это равносильно наличию некоторого
поля, действующего на частицу, т. е. последнюю нельзя было бы
считать свободной. Наконец, требование релятивистской
ковариантности есть прямое следствие принципа относительности.
В настоящей книге мы не будем заниматься нелокальными и
нелинейными теориями.
Наиболее общая система линейных однородных
дифференциальных уравнений для гс-компонентной волновой функции
•ф(х) = ($а(хк)), а = 1, 2, ..., п\ fc = l, 2, 3, 4, может быть
написана в виде (? = 1, 2, ..., ?)
У AhM3h4 f ?? Q /304)
Мы рассматриваем «квадратную» систему, т. е. предполагаем
число уравнений равным числу компонент неизвестной функции.
Если в системе C0.4) встречаются производные выше первого
порядка по каким-либо из переменных, то путем введения
новых неизвестных функций
dtyddxi = ??+?, dtyn+\/dx2 = ??+2 C0.5)
и т. д. всегда можно привести все уравнения C0.4) к такому
виду, когда в них будут входить только производные первого
порядка и сами неизвестные функции. Присоединяя к измененной та-
§ 30. РЕЛЯТИВИСТСКИЕ ВОЛНОВЫЕ УРАВНЕНИЯ 255
ким образом системе C0.4) все соотношения C0.5) *), получим
квадратную систему линейных уравнений первого порядка
y^ + y^ + yl^ + yto^ + yUo-o,
которую можно короче записать в виде
G*?*+7°)? = 0. C0.6)
Здесь ?\ ?°, (к = 1, 2, 3, 4) — постоянные матрицы. Если |?°| ?
? 0, то, умножая уравнение C0.6) слева на ?0-1, получим
(?°-??*+?)? = ?.
0-l.vh
Обычно вводят в это уравнение постоянную т. Обозначая 7^?0~??
снова через ?\ получим
(tVk + m)^ = 0. C0.7)
Еще раз подчеркнем, что уравнения C0.6) и C0.7) равносильны
только при неособенной матрице ?°. Очевидно, уравнение C0.6)
целиком определяется заданием постоянных матриц ?\ ?°, а
C0.7) — заданием ?* и т. Следовательно и все свойства
объектов, описываемых этими уравнениями, в конечном итоге зависят
от ?*, ?°, т.
В качестве примера преобразования C0.5) можно рассмотреть
уравнение Клейна —Фока C0.1)
(Vi + Vi + V· + V4 - m2) ?„ = 0. C0.8)
Введем функции ?? путем соотношений
V**o + m*k = 0. C0.9)
Тогда исходное уравнение C0.8) принимает вид
?? + ™?? = 0. C0Л0)
В итоге из одного уравнения второго порядка C0.8) получается
система пяти уравнений первого порядка C0.9), C0.10) для пя-
тикомпонентной функции**)
* = (*<>, ??, ?2, фа, ?4) = (??, ?*)· C0.11)
*) Каждое из таких соотношений вводит новую функцию, но
одновременно оно является и дополнительным уравнением первого порядка,
содержащим эту функцию, так что число уравнений останется равным
числу неизвестных функций.
**) Многокомпонентные функции ? мы будем записывать как в виде
матрицы столбца, так и матрицы строки, например, ? = I ^ I = (t|H, t|)ft).
256 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Эта система может быть записана в стандартной форме C0.7),
причем матрицы ?№ имеют следующий вид:
??^
Тз =
ГО 1 0 0 01
1 0 0 0 ?[
0 0 0 0 0
0 0 0 00
№ о о о о,
@0010
0 0 0 0 0
0 0 0 0 0
10 0 0 0
\о о о о о;
@010 0\
0 0 0 0 0
10 0 0 0
0 0 0 0 0
[о о о о о.
0 0 0 0 1\
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
^1 О О О 0J
C0.12)
Обратимся теперь к требованию релятивистской
ковариантности уравнений C0.7) и C0.6). Из него в первую очередь
следует, что функция ? должна быть задана в пространстве
некоторого представления группы Лоренца. Мы ограничимся
конечномерными представлениями, которые для общности будем считать
приводимыми. В дальнейшем мы убедимся, что при
использовании конечномерных представлений группы Лоренца уравнения
вида C0.7), C0.6) не могут быть построены с помощью одного
неприводимого представления. Пусть функция ? преобразуется
по представлению Т. Это означает, что если вектор ? в мире Мин-
ковского испытывает преобразование Лоренца
х' = Lqxy C0.13)
то функция ? одновременно испытывает преобразование
*'(*') = *V|>(*)· ?30·1*)
Опуская q, запишем C0.13) в виде Хь = Lhlxv Тогда согласно
C0,13) и свойствам матрицы Лоренца (§ 19) имеем ? =
= 1гхх' = Lx' или хх — Llkxh = Lklxk. Отсюда следует
дх
д ??? д т д , т
dxk dxk дх{
C0.15)
Осуществим над уравнением C0.7) преобразование C0.13) —
C0.15). Физически это означает переход от одной инерциальной
системы к другой. Согласно принципу относительности, при этом
закономерность, определяемая уравнением C0.7),не должна
измениться. Последнее означает, что в результате преобразования
Лоренца система C0.7) должна перейти в равносильную ей
систему уравнений. Но равносильные, эквивалентные между собой
системы линейных уравнений отличаются тем, что уравнения
одной из них являются линейными комбинациями уравнений,
входящих в другую. Иными словами, одна система получается из
§ 30. РЕЛЯТИВИСТСКИЕ ВОЛНОВЫЕ УРАВНЕНИЯ
257
другой путем умножения на некоторую неособенную матрицу S.
Следовательно, должно быть справедливо соотношение
(V*V; + т) ?' (*') - S (?*?* + т) ? (*). C0.16)
Подставляя сюда C0.14), C0.15), получим
№ ? + т)ТЦ(х) в 5(?> V*+ mI(z)9
или
?? = 5?, ?*?·«???* = <$7*?*? = 5?? ? ?*. C0.17)
Из первого тождества следует S = ?, а из второго (поскольку ?
не зависит от х)
4hTLkl = ??. C0.18)
Последнее равенство можно написать также в виде
?-?? = Lrf. C0.19)
Таким образом, уравнение C0.7) будет релятивистски ковариант-
ным, если основные матрицы ?* удовлетворяют соотношению
C0.19). Если L есть преобразование пространственной инверсии
то ? = Г = ? (см. § 27). При этом соотношение C0.19)
сводится к следующим:
?4? = ??4, ??? = — ???. C0.20)
Будем называть матрицы ?? (? = 1, 2, 3) пространственными, а
матрицу ?4 — временной. Тогда условие ковариантности
уравнения C0.7) по отношению к пространственной инверсии согласно
C0.20) можно сформулировать следующим образом: временная
матрица ?4 должна коммутировать, а пространственные матрицы
?? — антикоммутировать с П.
В теоретической физике фундаментальную роль играет
принцип наименьшего действия. Если уравнения движения
(уравнения поля) могут быть получены из принципа наименьшего
действия, то последний приводит также к законам сохранения для
основных физических величин — энергии, импульса, момента
количества движения, заряда. Принцип наименьшего действия для
поля может быть сформулирован как условие минимума
функционала действия W(cm., например, [38])
W = S2,(^^k^)dxldx2dx3dx4, C0.20')
где & — плотность функции Лагранжа. Отсюда следуют
уравнения Лагранжа для поля
v*F^F}-§f = 0· C0-21)
17 ?. и. Федоров
258 гл. v. группа лоренца в теории элементарных частиц
Для того чтобы уравнения поля были релятивистски ковариантны-
ми, необходимо, чтобы функция Лагранжа была релятивистски
инвариантной. С другой стороны, линейные уравнения поля
получаются лишь в том случае, если функция Лагранжа будет
билинейной относительно ?. Таким образом, 9? должна быть
билинейным инвариантом. В § 27 было показано, что билинейная
инвариантная форма F = ?*?'? может быть построена для
представлений полной группы Лоренца. Таким образом, для того
чтобы уравнения C0.7) могли быть получены из вариационного
принципа, необходимо, чтобы пространство, в котором задана
функция ?, было пространством представления полной группы
Лоренца. Инвариантную форму можно написать в виде
F = ?*?? =^??, "? = ?*? = ??*. C0.22)
Ясно, что мы имеем здесь дело с двойным набором независимых
полевых величин ? = (??) и ?* = (?*). Вместо последней
величины удобно рассматривать в качестве независимой величину
?*). Поэтому полная система полевых уравнений будет наряду
с C0.21) содержать также уравнения
Vft -^=--^1 = 0, C0.23)
*(Vk1>) 0? ?
поскольку инвариантная функция Лагранжа должна зависеть от
?» ?» ?&?» ?&?· Легко убедиться, что функция Лагранжа для
уравнения C0.7) с точностью до постоянного множителя может
быть взята в виде
& = - тщ - \ (??*?*? - (?*?) V4). C0.24)
Выражение ??*?&? является инвариантом, поскольку при
преобразовании (см. C0.13) — C0.15)) х' = Lx, у' = L ?, ?' = ??
имеем
$yhvW = f*nyhLkiVrt' =
= (??)*??*^,???? = VT\TT-xtTLhl4rt
и согласно B7.35), C0.18)
Т+у\Т = ?, T-yTLu = ?',
следовательно,
*) Очевидно, ?* и ? взаимно однозначно выражаются друг через
друга: ?* = ??, поскольку ?2 = 1, ? = ? (см. B7.47)).
§ 30. РЕЛЯТИВИСТСКИЕ ВОЛНОВЫЕ УРАВНЕНИЯ
259
Аналогично можно показать, что (?*?)?*? также является
инвариантом. Таким образом, функция Лагранжа C0.24), как и
должно быть, представляет собой билинейный инвариант
относительно ? и ?. Общее уравнение C0.23) для лагранжиана C0.24)
принимает вид
?*?*? + ™?> = 0, C0.25)
т. е. совпадает с C0.7). В то же время уравнение C0.21) дает
?*??* — тЩ = 0. C0.26)
Заметим, что лагранжиан C0.24) можно написать в форме
откуда видно, что в силу уравнений поля C0.25), C0.26) он
обращается в нуль. Между двумя системами уравнений C0.25) и
C0,26) должна быть связь, поскольку ? получается из ? в
результате комплексного сопряжения и умножения на матрицу
билинейной формы ? (см. C0.22)). Проделав эти операции
над уравнением C0.25), получим (vfe*Vfe^* + ^?*) ? = 0 или
Vfe^*Yfe+T] + ^? = 0. Сравнивая полученное уравнение с C0.26),
видим, что они не противоречат одно другому лишь при
условии V^W*+fl)«— Vh№k- Поскольку (v*)=(Va. *Vo). (v?) =
=(Vai — *Vo)> то отсюда следует
??«+? = — ?', ??4+? — ?4 C0.27)
или
???+ = —???, ??4+ = ?4?. C0.28>
Эти уравнения могут быть объединены в следующей форме:
??*+? = РыУ1, (Ры) = ? = (~ J J) C0.29)
и отличаются от C0.20)
??*? = РыЧ1 C0.30)
тем, что слева ? заменено на ? и ?* на ?*+. Из сравнения левых
частей C0.29) и C0.30) следует
f+ = DfD, ?) = ?? = ??. C0.31)
Здесь учтено, что согласно B7.45), B7.46) ? и ? коммутируют.
Очевидно,
D2 = ???? = ?2?2 = 1. C0.32)
17*
260 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Если матрицы ?* эрмитовы, то из C0.31) следует ?)?*=?*??
Но совокупность четырех матриц ?* для нераспадающегося
уравнения должна быть неприводимой. Поэтому на основании леммы
Шура матрица D, как коммутирующая со всеми матрицами
неприводимой совокупности, должна быть пропорциональна единичной.
А поскольку D2 = 1, то D = ± 1, т. е. ? = ± П. Наоборот, если
? = ± П, то D = ± 1 и ?*+ = ?*. Итак, матрицы ?* для
нераспадающейся системы релятивистских волновых уравнений C0.7)
могут быть эрмитовыми тогда и только тогда, когда ? = ± П.
Соотношения C0.27) можно написать в виде (поскольку ?+ —
= ? B7,47))
(???)+ = - ???, (??4)+ = ??4, C0.33)
или
(?«?) + = _ ?4 (?4?) + = ?4? C().33')
Таким образом, матрицы ??4 и ?4? всегда эрмитовы, а ??* и
??? — антиэрмитовы.
Лагранжиан C0.24) не содержит явно координат xh. Как
известно, на основании теоремы Нетер (см. [38]) отсюда следует,
что имеет место закон сохранения энергии-импульса в форме
VlEhl = 0i Ekl = Lbhl — a f . Vfe^a — Vfc% '
C0.34)
где Eki — тензор энергии-импульса поля ?. Кроме того,
лагранжиан C0.24) инвариантен по отношению к градиентному
преобразованию 1-го рода: ?-^????, ?-^?"???, откуда следует закон
сохранения заряда
V*/»-0, /^??^-^??, C0.35)
где /\ — вектор четырехмерного тока. Подставляя C0.24) в
C0.34), C0.35), получим
Ей = -f (*T!V** - (V**) ?'?). C0·36)
U = *Tf4. C0.37)
Разумеется, выражения C0.36), C0.37) определяют тензор
энергии-импульса и вектор тока с точностью до коэффициентов.
Следуя В. Паули [39], введем понятие различных классов
неприводимых конечномерных представлений группы Лоренца ? .
Последние задаются парой весов (?, ?'), которые могут принимать
целые либо полуцелые значения (§ 25). Представления (?, V)
относятся к
классу + 1, если I и V — целые;
классу — 1, если I и V — полуцелые;
§ 30. РЕЛЯТИВИСТСКИЕ ВОЛНОВЫЕ УРАВНЕНИЯ 261
классу +?» если ?— целое, V — полуцелое;
классу — ?, если ? — полуцелое, V — целое.
Как показано в § 24, при перемножении двух представлений
(?, V) и (Zlf ??) получается сумма представлений (?, ?'), в которых
|? — ??|<?<? + ??, \V— ??|<?'<?' + ??. Поскольку все ?
(и ?') отличаются между собой на целые числа, то все пары (?,
?'), получающиеся при перемножении представлений (?, V)
и (??, ?'?) будут относиться к одному и тому же классу. В
частности, если (I, V) и (Zlf h) относятся к классу + 1, то и их
произведение будет содержать только неприводимые представления
класса + 1. Если (I, V) принадлежит к классу + 1, a (Zlt 1г) —
к классу — 1, то их произведение даст представления класса — 1
и т. д. Таким образом, убеждаемся, что справедлива следующая
«таблица умножения» для представлений:
+ 1
-?
+?
— ?
+i
+1
— 1
+ ?
—?
-1
—1
+1
—?
+ ?
+e
+ ?
— ?
+ 1
— 1
-8
— ?
+?
—?
+1
В уравнении C0.7) в общем случае функция ?
преобразуется по некоторому приводимому представлению: (?, V) ? (/?, ??) 0
?(?2» 1г) ? · · ·, а вектор градиента V = (Vft), как всякий
мировой вектор, преобразуется по представлению G2, V2) (см. § 25).
Поэтому стоящая в C0.7) производная ?? преобразуется как
произведение G2, 7г) ® [(?, V) ? (Zlf h)® ...], которое
распадается на сумму [G2, 72)®(Z, 1')]Щ(Ч2, 72)®(?!, ??]? ...
В слагаемых этой суммы согласно § 26 будут содержаться
представления \1 ± 7г, V ± 7г), (?? ± 7г, li ± V2) и т. д.
Релятивистская ковариантность системы C0.7) означает, что
в каждом ее уравнении компоненты слагаемых ?*??? и ????
должны преобразовываться одинаково, т. е. относиться к одному
и тому же неприводимому представлению и, тем более, к одному
и тому же классу. Но если (?, V) относится к классу + 1, то
(? ± 7г, V ± 7г) принадлежит классу — 1 и вообще, если (?,
V) ~ ± 1, ± ?, то соответственно (? ± 7г, V ± 7г) ~ HF 1, Ч2 г.
Отсюда следует, во-первых, как указывалось выше, что
используя одно (любое) неприводимое конечномерное представление,
нельзя построить ковариантное уравнение C0.7). Во-вторых, для
его построения необходимо, чтобы в наборе представлений (?, ?')·,
262 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
??» О для функции ? наряду с каждой парой (Zs, l3) входило
хотя бы одно из представлений (Z, ± 72, h ± 1/г)· Пара (??, 13)
и любая из пар (Zs ± 72, U ± 1/2) называются зацепляющимися.
Очевидно, система C0.7) может быть построена только из
зацепляющихся между собой представлений группы Лоренца. Но
зацепляться между собой могут только представления классов
+1 и — 1 либо классов + ? и — ?. Таким образом, мы
приходим к фундаментальному выводу, что ковариантные системы
уравнений C0.7) могут существовать только в двух
разновидностях*): содержащие представления классов ±1, либо
представления классов ± ? (в том и другом случае обязательно обоих
классов).
В первом случае уравнения описывают частицы с целым
спином и во втором случае — частицы с полуцелым спином.
Обозначая через ?+ все функции, относящиеся к
представлениям класса +1(+?), и соответственно определяя ?_, можем в
любом случае написать волновую функцию уравнения C0.7) в
виде
C0.38)
-С:)·
Такому разбиению функции ? будет соответствовать разделение
матриц ?* на блоки
. _,V++vft+_
? \ZLr C0,39)
Соответственно система C0.7) разобьется на две подсистемы
к . и . ? (oU.4U)
Yi+vn>+ + yLv*h>- + ™?- = о.
Ho ???± принадлежит к классу фр, и поскольку каждое
уравнение C0.40) может содержать компоненты ? лишь одного класса,
то ?^+ = ?„ = 0. Следовательно, для функции ? C0.38)
матрицы ?* C0.39) должны иметь вид
-(
v*= : · C0·4?)
Здесь 0± обозначают нулевые квадратные матрицы размерности,
равной числу компонент функции ?± соответственно.
Очевидно, представление (?, ?) всегда относится к классам
±1 и соответствует целому спину. Если представление (?, V)
*) При наличии всех четырех классов уравнение C0.7) распадается
на две независимые, не связанные между собой системы (±1) и (±е).
§ 30. РЕЛЯТИВИСТСКИЕ ВОЛНОВЫЕ УРАВНЕНИЯ
263
относится к классу + 1(— 1)» то к тому же классу принадлежит
и представление с переставленными весами A\ I). В случав
полуцелого спина представления (Z, V) и (Z, V) принадлежат к
противоположным классам (если (Z, V) относится к +8> то A\ I) —
к — ?, и наоборот).
Как показано в § 27, если ? принадлежит к представлению
(?, ?'), то ?* относится к представлению (Г, I). Отсюда следует,
что переход к комплексно сопряженному представлению не
меняет его класса в случае целого спина
*±?°°*±?· C0·42)
Наоборот, в случае полуцелого спина
*±.°°*т.· C0-42'>
При разбиении функции ? согласно C0.38) матрица
инвариантной билинейной формы ?, аналогично ?* C0.39), может
быть записана в блочном виде
а сама форма F = ?*?? B7.32) принимает вид
F = 4>*т|-нл|>+ + г|)*т)+_г|)_ + ???-+?>+ + ?!?__?- C0.44)
В случае целого спина согласно C0.41) имеем
?*?? ~ ?+??++·?+? + ?-.??__?_?+·?+??+-·?-? + ?_??-??+?. C0.45J
Сюда входят произведения представлений ?±? во всех возможных
четырех сочетаниях. Эти произведения разлагаются на
неприводимые представления в соответствии с формулой B6.39). Но
форма F должна быть инвариантной, а это значит, что в правой части
должны получаться величины, преобразующиеся по тривиальному
представлению @, 0), которые являются числами (скалярами,
инвариантами). Согласно B6.39) Г00 может получиться лишь
при перемножении двух одинаковых представлений, а это
возможно только, если перемножаемые представления относятся к
одинаковому классу, Поэтому в C0.45) должно быть ?+- = ?_+ = 0,
и следовательно, для целого спина матрица ? должна иметь вид
»=(Х>(о\°)· <30·4?>
Если выписать формулу C0.44) для полуцелого спина, то с
учетом C0.42') получим
?*?$ ~ ·?-??++·?+? + ·?-??+-·?-? + ?+??-+?+» + ?+??—?-e.
Те же соображения приводят теперь к выводу, что справа могут
C0.43)
264 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
остаться лишь второй и третий члены, следовательно, для
полуцелого спина матрица ? должна иметь вид
И-Г»)· (зо-47>
Согласно C0.22) ? = ??*; подставляя сюда C0.38) и C0.46)
или C0.47), получим в случае целого спина (см. C0.42))
и в случае полуцелого спина (см. C0.42'))
Таким образом, в любом случае разбиению C0.38) функции ? по
классам соответствует такое же разбиение функции ?, ?. е. мы
имеем одновременно
?=(?+, ?_), ?=(?+, ?-). C0.470
Заметим, что согласно § 27 такую же структуру, как ?,
должна иметь матрица ? преобразования представления, отвечающего
пространственной инверсии, т. е. для целого спина
П = (П01П2) C0-48)
и для полуцелого спина
П = (п°2По1)· C0·49)
Если уравнение C0.7) ковариантно относительно отражений
(что мы предполагали), то (см. § 27) для полуцелого спина
каждому представлению (?, ?'), входящему в ?+?, будет
соответствовать представление (?', ?), входящее в ?-?. Представления (?, V)
и (?', I) имеют одну и ту же размерность, равную B? + 1) BГ +
+ 1). Поскольку для полуцелого спина одна из этих скобок
всегда будет четным числом, то функции ?+? и ·?_? будут в этом
случае иметь одинаковое и притом четное число компонент. Отсюда
следует, что для любой частицы полуцелого спина система C0.7)
всегда будет содержать число уравнений, кратное четырем.
Кроме того, в представлениях C0.41), C0.47), C0.49) матрицы
?*, ??, Иг и ?*, ?2, ?2 все будут квадратными матрицами
одинаковой (четной) размерности.
Согласно § 27 матрицы ? и ? обладают свойствами ? = ? =
5= ?-1 = ?+ и ?? = ??. Теми же свойствами будут обла-
§ 30. РЕЛЯТИВИСТСКИЕ ВОЛНОВЫЕ УРАВНЕНИЯ 265
дать в случае целого спина матрицы ??, ?? и ?2, Пг (см. C0.46)г
C0.48)). В случае полуцелого спина из этих же свойств ? и ?
следует согласно C0.47), C0.49)
ть = ?? = ?2, Пг = ?? = П2, ???2 = ПХП2 = 1, C0.50)
так что вместо C0.47) можно написать
-(ГоНгО)· ????№??')-<3->
Используя C0.41), C0.46), C0.48), получим из соотношений
C0.29), C0.30) в случае целого спина
???? = ? ??2?2» ?2??2 = ? ?2???, C0.52)
???^ = =F ?12?2, ?2?21 = =F ?^?^ C0.53)
Здесь знак « — » относится ? ??, а знак « + » к ?4. Из второго
равенства C0.52) следует ?^= — ?^+??· V^= ЪТЙПи
следовательно,
Ч-кЧ· 44J*)· <30·54)
Таким образом, для определения ?* достаточно знать ?*2, ??, ?2· При
этом на ?*2 налагаются еще условия, вытекающие из первых
уравнений C0.53)
????2 = - ??2?2, ???42 = ?42?2. C0.55)
Что касается первого уравнения C0.52) и второго уравнения
C0.53), то они являются следствием приведенных соотношений.
В случае полуцелого спина с помощью C0.41), C0.51)
аналогично находим из C0.29), C0.30)
причем на ?*2 налагаются условия
Уа12 = - 4iOi· ?*2 = ????+??- C0.57)
Следует помнить, что, кроме этого, матрицы ?* должны
удовлетворять условиям, вытекающим из C0.19).
Применим общее условие ковариантности C0.19) к случаю·
полной инверсии, когда L = — 1, а Т = 1 (см. B7.49)). При
этом оно принимает вид
/?* = -?*/, C0.58)
266 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
т. е. матрица представления полной инверсии должна антиком-
мутировать со всеми ?*. С помощью C0.41) нетрудно убедиться,
что (с точностью до общего знака) матрица / должна иметь вид
' = (о+-.-К-.> C0·59»
где 1± —единичные матрицы в подпространствах ?±. Очевидно,
/ будет антикоммутировать с любой матрицей
Л = (;«), C0.60)
имеющей структуру матриц ?* C0.41)
?? = -??. C0.61)
В то же время / коммутирует с любой матрицей структуры*)
*в(ор)· <3(Ш)
Отсюда следует важный вывод о том, что матрица
представления полной инверсии / для целого спина коммутирует с
матрицей билинейной инвариантной формы ? C0.46), а для
полуцелого спина — антикоммутирует с ней (см. C0.47)).
В теории элементарных частиц важную роль играют
конечные преобразования приводимых представлений группы
Лоренца в пространствах, где определены релятивистские волновые
уравнения C0.7). В §§ 26, 28 рассматривался вопрос о
нахождении конечных преобразований для случая, когда все первые
(и все вторые) веса неприводимых представлений (Zft, Z&),
входящих в приводимое, одновременно являются целыми, либо
полуцелыми. Однако приводимое представление, по которому
преобразуется волновая функция элементарной частицы, как
показано выше, должно состоять из зацепляющихся неприводимых
представлений, оба веса которых отличаются на + 7г. Пусть
l\, h, · · ·, In — совокупность первых весов неприводимых
представлений и ?— максимальное значение из этого ряда. Тогда по
условиям зацепления в этом ряду вместе с I обязательно должен
быть вес I—72· Аналогично в ряду вторых весов Zi, Z2, ..., Zn
должен присутствовать вес V — 7г· Поэтому в случае
конечномерных релятивистских уравнений минимальный полином для
оператора g(+) = qj^ (как и для g*l-) = qll^) будет равен
произведению минимального полинома для максимального
целого (полуцелого) веса на минимальный полином для ближайшего
*) Разумеется, мы предполагаем, что размерности блоков матриц А и
В такие же, как в ?*.
§ 30. РЕЛЯТИВИСТСКИЕ ВОЛНОВЫЕ УРАВНЕНИЯ 267
меньшего на 72 полуцелого (целого) веса. Таким образом, если
в § 13 при построении конечных преобразований
использовались минимальные полиномы A2.26), A2.27), в которых
собственные значения изменялись через единицу, то теперь нам
придется иметь дело с полиномом, в котором собственные значения
изменяются через 7г· Такой полином в общем случае будет
иметь вид (q2 — 1)
(?(+)г+«) (?(+)а+do- ?2)*) (?<+J+(?. - m...
...(?(+J + (V2J)i(+) = 0. C0.63)
Аналогичный вид с заменой I на V будет иметь минимальный
полином для оператора д(~\ При этом по-прежнему будут
справедливы соотношения (см. A1.19)).
T(q, ?*) = Tw{q)T^(q*)=TM{q*)Tw(q)t C0.64)
где _
Т(±) (q) = exp [2q(±) arctg Ylf/Vq21 C0.65)
Если ввести новые инфинитезимальные операторы по
формуле (см. [49])
?<±> = 2?(±), C0.66)
то нетрудно убедиться, что уравнение C0.63) для д( примет
вид минимального уравнения для целого веса Iq = 21. Замене
C0.66) должна отвечать замена вектор-параметра q -> q' в
формулах C0,65), такая, чтобы эти соотношения сохранили свок>
форму. Действительно, в результате замены C0.66) получим иэ
C0.65) _
Г<±>(?)=ехр {q(±) arctg ???1\??\. C0.67)
Положим здесь ? = /?':
Т{±) (q) = ехр{?'(±) arctg (???)?/?\
и подберем / таким образом, чтобы
arctg (/ ??) = 2 arctg /д7*· C0. 68}
Если мы найдем такое /, то выражение C0.67) будет иметь вид
Т(±) (q) = exp [2??±) arctg ??/??), C0.69)
т. е. будет полностью совпадать по форме с C0.65), причем опе~
ратордр будет удовлетворять минимальному уравнению
Ч (? + 1) (? + 4) ... (дг + АЦ) = 0. C0.70)
Поэтому в данном случае можно будет использовать результат»
§ 13.
268 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Из условия C0.68) следует после взятия тангенса
/•?·-??? /-
ИЛИ
Здесь необходимо выбрать верхний знак, иначе при q -> 0
вектор i' = g// будет неопределенным. Между тем, очевидно, q и
q' одновременно должны стремиться к нулю. Итак, мы имеем
*' = / а, «(±) - 7 2· C0.71)
1+У1 + ?2 1 +У 1 + q2
Заметим, что по закону композиции C.6) <g', g'> = g, т. е.
вектор q' есть «композиционный квадратный корень» из вектор-
параметра q (см. C.25")).
Поскольку функциональная зависимость ? (q) C0.69) и
минимальный полином C0.70) полностью совпадают с теми
соотношениями, которые применялись в § 13, то можно
непосредственно перенести на рассматриваемый случай полученные там
результаты. Таким образом, получим
Т(±)(а) Р<"«>G(±)) Р<*'«>B?*У/) Ш72>
где полином РB определяется формулами § 13, В итоге для
конечного преобразования приводимого представления,
распадающегося на прямую сумму зацепляющихся неприводимых
представлений, получим [49]
г(у,^)==^(^>)^) (?'*<;>), C0.73)
(? + ?'?·(? + ?'*2J'0
Эти выражения для конечных преобразований представлений,
соответствующих уравнениям для частиц с различным спином,
находят применение при решении различных вопросов теории,
в частности, при вычислении матричных элементов различных
взаимодействий (см. § 36). При этом матрицы PBle) {q (+)) и
коммутируют между собой.
§ 31. ПЛОСКИЕ ВОЛНЫ (СВОБОДНЫЕ ЧАСТИЦЫ) 269
§ 31. Плоские волны (свободные частицы)
В соответствии с фундаментальными идеями де-Бройля,
лежащими в основе квантовой механики, любой свободной
частице сопоставляется плоская волна. Поэтому волновую функцию,
удовлетворяющую уравнению C0.7), будем искать в виде
? = tfe*9*, ?° = ?(?), C1.1)
где рх = phxh = рх — р0х01 ? = (pk) = (?, ip0) — четырехмерный
вектор энергии-импульса частицы. При этом мы полагаем
скорость света и постоянную Планка равными единице (с = Й= 1).
Согласно теории относительности для 4-импульса справедливо
соотношение
Р* = ?-Р1 = -т*л Р20 = Р2 + т\ C1.2)
где т — масса покоя частицы, ро — ее энергия. Подставляя
C1.1) в C0.25), получим после сокращения на eipx
алгебраическое уравнение для амплитуды волновой функции
(ipkf + m)^ = 0. C1.3)
Введем матричный оператор
? = iprf. C1.4)
Отбрасывая нулевой индекс при '?0 = '?0(/>)» получим уравнение
(р + т)г|) = 0. C1.5)
Аналогичным путем из C0.26) получается уравнение
ф(р-т) =0. C1.5')
Основной задачей является отыскание ?(?). Для этого
удобно воспользоваться методом проективных операторов (см. П.5),
который предполагает знание минимального полинома матрицы
р. Общий вид последнего можно найти из соображений,
аналогичных тем, с помощью которых был найден минимальный по-
лином оператора с (см. A2.4)).
Умножим соотношение C0.18) справа на Г- и затем на
ipi—в результате получим ТрТ'1 = ??? Ьырг. ЯоЬкгрг = р'кестъ
вектор р, преобразованный с помощью матрицы Лоренца L.
Учитывая C1.4), придем к соотношению
???-? = ^, p' = Lp. C1.6)
Но это равенство полностью аналогично соотношению A2.2), из
которого следует форма A2.4) минимального полинома для с.
270 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Таким образом, по аналогии мы можем сразу написать
выражение для минимального полинома матрицы ?
Р G) = Pr (? + ???2) (? + ???*) ...(?» + ???*) = 0. C1.7)
Как и в § 12, здесь используется то свойство, что единственный
инвариант, который можно построить из 4-вектора р, есть его
квадрат (в различных степенях).
Заметим, что соотношения C0.33), C0.33') могут быть
написаны в виде
??+ = ??, (??)+ = ??, (??) + =9?. C1.7')
Рассмотрим систему покоя частицы и временно заменим
постоянную т в C1.5) на т°. В системе покоя ? = 0, р^ = im,
? = — my4, где т — масса частицы, и уравнение C1.5)
принимает вид
?*? = ??, ? = т°/т. C1.8)
Очевидно, ? есть собственное значение матрицы ?4, и если оно
известно, то масса частицы находится из равенства т = т°Д.
Следовательно, если матрица ?4 имеет различные по величине
собственные значения, то им соответствуют различные массы.
Таким образом, уравнение C1.5), вообще говоря, может
описывать частицы, которые могут находиться в состояниях с
различными массами покоя. Минимальное уравнение C1.7) в системе
покоя принимает вид
? (?4) = (?4? [(?4J - ??] [(?4J - ??]... [(?*J - ??] = ?, C1.9)
т. е. ??, Яг, ..., входящие в C1.7), являются собственными
значениями матрицы ?4. Из C1.9) ясно, что у матрицы ?4
ненулевые собственные значения всегда входят парами ±?. Из C1.8)
следует, что противоположным знакам ? отвечают
противоположные знаки т. Отрицательным значениям т соответствуют
античастицы, о которых речь будет ниже. При ? = 0 т =
= ??°/? = оо, поэтому нулевым собственным значениям матрицы
?4 не отвечают какие-либо физические состояния частицы. Из
рассмотрения исключаются матрицы ?4, имеющие комплексные
собственные значения, поскольку им соответствовали бы
комплексные массы.
Среди ненулевых корней ? минимального полинома C1.9)
в общем случае могут быть и совпадающие. Однако из
физических соображений случай кратных ненулевых корней должен
быть исключен из рассмотрения.
Чтобы показать это (см. [40]), рассмотрим выражения для
тензора энергии-импульса и вектора тока в случае плоской вол-
§ 31. ПЛОСКИЕ ВОЛНЫ (СВОБОДНЫЕ ЧАСТИЦЫ)
271
вы с фиксированным вектором р. Подставляя C1.1) в C0.36),
получим
Еы = tphYf1 = iPh]t. C1.10)
Пусть минимальное уравнение C1.7) или, что то же самое,
{31.9) имеет ненулевой кратный корень ??, т. е. скобка(р2— ?????2)
входит в некоторой степени ? > 1. Написав ? (?4) = (?4 —
— ??)?? (?4) = 0, мы определим Pi (?4) ? 0 как соответствующий
усеченный минимальный полином (см. П.5). Нетрудно видеть,
что кратность корня ??/?? повлечет за собой условие [??(?4)]2 =
= 0 *). Рассмотрим выражение Q =*Р\ (?4) ??4?. (?4)· Согласно
C0.27) ?4+? =. ??4, поэтому и ??"(?4)? = ?????4),
следовательно, Q = ??4[^?(?4)]2 = 0. Величина Q представляет собой
матрицу, элементы которой получаются путем умножения строк
матрицы Pi (у*) на ??4 и затем на столбцы матрицы ??(?4). Но
среди столбцов ??(?4), как показано в П.5, содержатся жорда-
новы собственные векторы матрицы ?4, отвечающие собственному
значению ??, а среди строк ?* (?4) содержатся те же векторы,
комплексно сопряженные. Поэтому среди элементов матрицы Q
будут содержаться (с некоторыми коэффициентами) величины
?*??4? = ??4? = /Ч. Равенство их нулю означает согласно
C0.37) отсутствие заряда, а значит, и тока. Действительно,
величины /л преобразуются как компоненты мирового вектора.
Чтобы убедиться в этом, вычислим ]\ = ??^?? где ?' = ??,
a Xk = Lklxt. Имеем
fh = (??) ?*?<? = (?<?)*??*?<? = ?*?+??*7\|).
Но согласно B7.35), C0.19)
T\yhT = (?+??) (rV?) = ? W.
следовательно,
fk = 1?*4Lhly\ = Lkl (??'?) = Lkljl. C1.11)
Поскольку движение с импульсом ? может быть получено путем
перехода от системы покоя с помощью преобразования буста
B2.22), то полный вектор тока получается путем того же
преобразования из своей четвертой компоненты в системе покоя.
В самом деле, если /=@, /4), то из C1.11) следует, что
1к — LkiJ? = LkJ*- Поэтому, если заряд (/4) равен нулю в
системе покоя, то / = (Д) будет равен нулю в любой системе. Но
тогда в силу соотношения C1.10) равен нулю также тензор
энергии-импульса 2?«.
*) Наоборот, из этого равенства следует кратность корня ??.
272 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Итак, мы доказали, что если минимальный полином матрицы
? C1.4) содержит кратные ненулевые корни, то им отвечают
такие волновые функции, которым соответствуют нулевой заряд
и энергия частицы [40]. Поскольку всякая частица должна иметь
энергию, то уравнения C1.5), обладающие таким свойством,
следует исключить из рассмотрения, и мы можем считать, что
в минимальных уравнениях C1.7), C1.9) все ненулевые корни
??, ?2, .,., ?? однократны.
Как было показано выше, различным ? соответствуют
различные массы частицы. Если ограничиться случаем, когда
частица имеет одно значение массы покоя и который представляет
наибольший физический интерес, то минимальное уравнение
C1.9) будет иметь вид (?4)?[(?4J — ?2] =0. Очевидно, в этом
случае всегда можно нормировать матрицу ?4 так, чтобы ?2 = 1.
В результате мы приходим к фундаментальному выводу о том,
что для любой одномассовой частицы минимальное уравнение
матрицы ?4 должно иметь вид
?(?4) = (?4)'[(?4J-1]=0 C1.12)
и, соответственно, минимальное уравнение матрицы ? (см.
C1.7))
pQ) = prQ* _ т2) = о. C1.13)
Поскольку последнее равенство является тождеством
относительно ? = (ph), то из него следует, что минимальное уравнение
C1.12) справедливо не только для ?4, но и для любой матрицы
?\ входящей в C1.3):
Р(?) = (Т*Г [ (?**J - 1] = 0- C1.14)
Таким образом, оказывается, что для любых одномассовых
частиц такие важные их характеристики, как минимальные
полиномы матриц ?\ могут различаться лишь кратностью г нулевого
корня полинома.
Рассмотрим простейший случай г = 0. При этом имеем
согласно C1.13), C1.4) — (pk4kJ = т2 = —- р2 = — pkpkJ или
Pk4hPi4l = SkiPkPi, что можно написать в виде PkPiVhitt1 +
+ ???*) — бы] = 0. Ввиду тождественности этого соотношения
относительно рк, можно опустить множители pkpt (именно для
этого и произведена симметризация: ?*??"->1/2(?*?? + ?'?*)), и
мы получим соотношение (см. C0.3))
?? + ?? = 2?«. C1.15)
Нетрудно убедиться, что в общем случае из C1.14) следует
соотношение
2 v*y'yw · · · Г = ? ьмУт · · · vs> C1Л6>
? ?
§ 31. ПЛОСКИЕ ВОЛНЫ (СВОБОДНЫЕ ЧАСТИЦЫ)
273
где 2 означает сумму по всем перестановкам индексов к, Z,
?
т., .s. Эти равенства определяют алгебру матриц
релятивистских волновых уравнений. Алгебра C1.15) называется алгеброй
Дирака.
Поскольку yh(tyeipx) = ipk(tyeipx), то уравнение C1.13)
остается справедливым при замене ? = ipk*{k на V ^ V*Tf*· При этом,
однако, следует также заменить т2 = — р2 на ?2 ? V2.· В Ре"
зультате согласно C0.7) и C1.13) имеем уравнения
(V + mI> = 0, vr(V2-Va) = 0. C1.17)
Согласно первому уравнению ? = — m_1v ?. Итерируя,
получаем ? = (— m~1v)ri|>=(— m~l ?)?+2?· Но согласно второму
уравнению vr+2 = V2Vr» поэтому
(V2 - т2)$ = 0, (у2 - т2)Ъ* = 0, ? = (??). C1.18)
В этом уравнении слева стоит скалярный оператор Клейна — Фока
(см. C0.1)). Таким образом, каждая компонента волновой
функции одномассовой частицы удовлетворяет уравнению Клейна —
Фока. Согласно C1.5) ?? = — mt|), т. е. ? есть собственный
вектор матрицы р, отвечающий собственному значению — т. Но из
C1.13) следует, что матрица ? имеет также собственный вектор
?', отвечающий противоположному по знаку собственному
значению:
(p-mW = 0. C1.19)
Эту ситуацию можно интерпретировать несколько по-иному.
А именно, изменение знака можно относить не к т, а к /?, и
писать (—? + ™)?' = 0. Дело в том, что решения исходного
дифференциального уравнения C0.7) в виде плоских волн C1.1)
существуют для всевозможных р, удовлетворяющих условию
р2 = — ??2 C1.2). Каждое из этих решений определяет
некоторое возможное состояние свободной частицы. Поэтому можно
сказать, что совокупность всех состояний делится на два
множества, элементы которых отличаются друг от друга заменой
р==(р, ip0) на —/? = (—р, — ip0). Изменение знака
трехмерного импульса />-> — ? означает движение частицы с той
же скоростью в противоположном направлении. Более
радикальным является изменение знака четвертой компоненты, т. е.
энергии. Поэтому разделение всей совокупности состояний на два
упомянутых множества естественно производить следующим
образом: к одному множеству относить все состояния с любыми
? и Ро = | ро | > 0 (их называют положительно-частотными
состояниями)^ к другому — состояния также со всевозможными р,
но с /?о = — |/?о| (отрицательно-частотные состояния). Ещепол-
18 ф. и. Федоров
274 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
века назад Дирак показал (для случая электрона), что
адекватная теория необходимо должна учитывать обе эти совокупности
состояний.
Решения ?' уравнения C1.19) могут быть получены очень
просто в общем виде из волновых функций ? — решений
уравнения C1.5). Умножим уравнение C1.5) слева на оператор /
представления полной инверсии C0.59). Вследствие
свойства C0.58) он антикоммутирует с р:
/р = -р/, C1.20)
поэтому 1(р-\-т)$= (— р + т)/ф = 0, откуда следует, что
?' = /? = ?(-?) (р-+-р). C1.21)
Таким образом, если ? — совокупность всех
положительно-частотных решений, то /? дает совокупность всех соответствующих
отрицательно-частотных решений основного уравнения C0.7). На
основании C0.38), C0.59) сразу получим
?= (?+, ?.), ?' = (?+> -?-)· C1.22)
Таким образом, действие оператора / сводится к изменению
знака у ?- (или у ?+).
Мы дадим теперь чрезвычайно простое доказательство одной
весьма важной общей теоремы теории элементарных частиц.
Выражение для вектора тока C0.37) имеет вид
/? = ?*??*?. C1.23)
Вычислим это выражение для состояния, описываемого функцией
?' C1.21). Напомним, что оператор / C0.59), как и ? B7.47),
обладает свойствами
/ = 7=/* = /+ = /-?. C1.24)
Поэтому ?'* = (/?)* = ?*/ и (см. C0.58))
fk = <?'*??*?|/ = ?*/??*/? == — ?* (/?/) ?*?. C1.25)
Но в случае целого спина согласно § 30 /?/ = ?, следовательно,
jk = — jk. В случае полуцелого спина /?/ = — ? и h = /V Таким
образом, для любой частицы целого спина всегда возможны такие
состояния ? и ?', в которых /к, а значит, и заряд частицы, имеют
противоположные знаки. Иными словами, заряд частицы с целым
спином индефинитен. Для частиц с полуцелым спином из
равенства jk—jk* разумеется, нельзя сделать вывода о дефинитно-
сти заряда, так как оно относится лишь к соответствующим
состояниям ? и ?', а не ко всем возможным.
Обращаясь к тензору энергии-импульса C1.10), получаем
противоположные свойства, поскольку Ем содержит множитель р,
§ 31. ПЛОСКИЕ ВОЛНЫ (СВОБОДНЫЕ ЧАСТИЦЫ)
275
изменяющий знак при переходе от ? ? ?' (см. C1.21)).
Следовательно, для частиц с полуцелым спином энергия индефинитна.
Оба этих утверждения составляют содержание теоремы
Паули [39], которая обычно доказывается путем более сложных
рассуждений (см., например, [41]).
Отрицательно-частотные решения C1.21) не могут
рассматриваться как волновые функции состояний частицы с
отрицательной энергией (и массой), поскольку последние в силу ряда
обстоятельств физически неприемлемы. Эти решения связывают с
состояниями частицы, в которых она обладает противоположным
знаком заряда при тех же массе и спине — состояниями
античастицы. Различие в знаке заряда может сказаться лишь в
результате взаимодействия с электромагнитным полем. Последнее
вводится в уравнения C0.7) путем замены Vfc Ha Vfe — ^*» гДе
е — заряд частицы, Ак — вектор-потенциал электромагнитного
поля, Таким образом, волновое уравнение для заряженной
частицы в электромагнитном поле имеет вид
(?*( Vft - ЬАк) + ???)? = 0. C1.26)
Если ?? — волновая функция соответствующей античастицы, то
уравнение для нее должно иметь вид (е->—е, ?-?-?")
bh(Vk + ieAh) + ??)? = 0. C1.27);
Уравнению C1.27) должно соответствовать уравнение,
получающееся из C1.26) путем умножения на матрицу представления
полной инверсии /:
(T*(V*- ieAk) - ™)?' = 0, ?' = /?. C1.28)
Чтобы найти связь ?? с ?', возьмем комплексное сопряжение от
C1.28) и умножим его на матрицу ?. Поскольку (см. C0.27))
???* = — ???? ??4* = ?4?? ??
? (yk* (Vfe + ieA*h) — m) ?'* = — (?* (vft + ieAk) + m) ??'* == 0.
C1.29)
Здесь ??'* = ?/?* = ± /??* = ±/? = ± ?', причем знак «+^
(«—») соответствует целому (полуцелому) спину. В результате-
уравнение C1.29) принимает вид
(?(V*+ ЬАк) + т)ф = 0. C1.30)
Предположим, что существует постоянная матрица С,
обладающая свойством
CY = V*C. C1.31)
Тогда, умножая C1.30) на эту матрицу, получим уравнение-
C1.27), где
lg„ f = CV. C1.32)
276 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
В следующем параграфе мы найдем матрицу С для частиц со
спином 0, 72, 1. Функция ?? называется зарядово-сопряженной по
отношению к ?, а С — матрицей зарядового сопряжения*).
§ 32. Описание спиновых свойств частиц
Согласно результатам предыдущего параграфа волновая
функция ? C1.1) свободной частицы при заданном импульсе ?
находится из алгебраического уравнения C1.5) как собственный
вектор (в пространстве представления группы Лоренца) линейного
оператора (матрицы) р. Поскольку ? определена в пространстве
приводимого представления группы Лоренца, содержащего
несколько неприводимых зацепляющихся представлений (см.
§ 30), то она содержит ряд компонент (ниже мы увидим, что
их число не может быть меньше четырех). Матрица ? для одно-
массовой частицы (см. C1.13)) имеет лишь два ненулевых
собственных значения ± т (второе из них связано с античастицей).
Отсюда ясно, что в общем случае уравнению C1.5) при
фиксированном ? должны удовлетворять несколько линейно
независимых функций ?. Причина этого вырождения хорошо известна —
при заданном ? состояния частицы могут различаться за счет
спиновых проекций.
Как обычно в квантовой механике, классификация различных
?, являющихся решениями уравнения C1.5), может быть
осуществлена по собственным значениям дополнительного оператора,
коммутирующего с р. Такой оператор легко находится из условия
релятивистской ковариантности C1.6). Предположим, что
преобразование Лоренца!/ = Lqтаково, что// = Lqp = p.Тогда
первое уравнение C1.6) примет вид ???~? = ? или
Tq3 = pTq. C2.1)
Но если^р = р^ то совокупность таких Lq образует малую
группу Лоренца (см. § 23), принадлежащую вектору 4-импульса р.
Итак, матрицы представления Тд, отвечающие преобразованиям
малой группы, образуют совокупность операторов,
коммутирующих с /?, которая может быть использована для общего
определения спинового оператора свободной частицы. Отсюда ясна роль
малых групп Лоренца в теории элементарных частиц.
Векторная параметризация группы Лоренца позволяет
весьма просто изложить теорию спиновых свойств элементарных
частиц [14, 48—53]. Согласно B3.7), B3.8) общее выражение для
вектор-параметра малой группы имеет вид
q = qP = (l-ivx)a, v = p/p0. C2.2)
*) Применяющийся в литературе термин «матрица зарядового
сопряжения» относится к матрице С = CL которая вместо C1.31)
обладает свойством ?'? = — чкС (см., например, [41—47]).
§ 32. ОПИСАНИЕ СПИНОВЫХ СВОЙСТВ ЧАСТИЦ
277
Мы ввели здесь вместо q9 B3.9) обозначение ?р, поскольку ? —
скорость частицы — целиком определяется заданием р.
Поскольку вектор 4-импульса частицы времениподобен (р2 = — т? < 0),
то, как показано в § 23, принадлежащая ему малая группа
изоморфна группе вращений SOC).
Вместо конечного преобразования представления Tq в
качестве оператора, коммутирующего с /?, гораздо удобнее выбрать ин-
финитезимальный оператор того же представления, полностью
определяющий ? (см. § 26), который мы здесь обозначим
? = a (qp) = - i (qpIM + gj/"). <*P = ?*. C2.3)
Поскольку он линейно зависит от qp и qp и умножение qp
на любой вещественный множитель не играет роли, то следует
нормировать вектор-параметр qp C2.2):
ql = q*p2 = ?2 - [??]2 = ?2 A - ?2) + (??J = 1. C2.4)
Заметим, что, поскольку при времениподобном ? имеем!?2 < 1, то
такая нормировка при любом ? всегда возможна.
Вектор-параметр C2.2) малой группы можно представить в
другом виде. Рассмотрим равенства C2.1), C2.2) в системе
покоя частицы (? = ?? = 0, р = р° = @, im)x qp = q° = q0*)
Tq*p» = p»Tqo. C2.5)
Перейдем теперь с помощью преобразования буста (см. § 22) к
системе отсчета, в которой частица движется с импульсом р.
Согласно B2.21), B2.22)
p = L-iap\ u = p/(p0 + m). C2.6)
Полагая в C1.6) рг = ?, ? = /?°, получим
T^ufTia = p, ?0=?????-??. C2.7)
Подставим это выражение для р° в C2.5):
TqoTiupT-iu = TiupT-iuTq*
ИЛИ
Тр = рТ, C2.8)
где (см. C.24))
? = T„iaTq.Titt = Tqx q = <- iu, tf, iu) = 0-iaq°. C2.9)
Равенство C2.8) совпадает с C2.1), следовательно, совпадают и
вектор-параметры C2.2) и C2.9). Обозначив q°= q°* = с, с2 = it
получим
qp = A — ivx) а = О-ыС C2.10)
278 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Отсюда
c = Oia(l-ivx)a. C2.11)
A priori не ясно, что это равенство должно удовлетворяться,
потому что с и а — вещественные векторы, а Ощ A — ivx) = ? —
комплексная матрица. Однако (см. [53]), если вспомнить, что
согласно B1.19) iv = <гю, ш>г 0_itf = 0<_ittf_itt> = (l — ivx)/(l +
+????)}?? можно написать
? = Oitt (l - ivx) = 0??0<-??.-«?> A + ivx) =
= 0_itt(l+^X) = ^ C2.12)
откуда следует, что на самом деле ? вещественна. Зная и C2.6) а
нетрудно вычислить матрицу ?
H = l+j^ = ;=,-j-(O«+0-«)= — fl+ /f ? C2.13)
Представляет интерес выражение для обратной матрицы
?-? = 1-^1 = -L(Oia + 0-i«) = ReOia = ^-fl ?^?—?
C2.14)
Подчеркнем, что изложенные рассуждения и, в частности,
соотношение C2.11) справедливы только для малой группы,
принадлежащей времениподобному вектору /?, так как только тогда
существует преобразование буста C2.6).
Основной вывод из вышеприведенных рассуждений
заключается в том, что для частицы, движущейся с произвольным
импульсом /?, существует оператор ?, коммутирующий с
оператором /?, имеющий вид (см. C2.3), C2.10), C2Л1))
a = -i[@_ittc)/(+)+(Oittc)/(-)]
ИЛИ (ПОСКОЛЬКУ 0±iaC = сО±%а = cO^ia)
o = cS, 5 = -г@г«/(+) + 0_^/(-}). C2.15)
Здесь с— произвольный единичный вещественный трехмерный
вектор. Оператор а имеет вид проекции вектор-оператора S на
единичный вещественный вектор с, который мы называем осыо
спиновых проекций. Оператор S и есть вектор-оператор спина
частицы, движущейся с импульсом р.
Напомним, что согласно B6.3)
#> = 4" [± Г* —? *abcJbc)f C2.16)
§ 32. ОПИСАНИЕ СПИНОВЫХ СВОЙСТВ ЧАСТИЦ 279
где Jkl—инфинитезимальные операторы представления группы
Лоренца в тензорной параметризации. В системе покоя частицы
и = 0 и оператор ? C2.15) принимает вид
o» = cS°, 5· =-<(!<+>+ !<->), 52=4в«*°/Ьв· C2Л7)
При этом компоненты 52 удовлетворяют обычным
перестановочным соотношениям для момента количества движения*)
{S°aS°bU = itabcSl C2.18)
Общий вектор-оператор S C2.15) можно представить
следующим образом (см. C2.14), C2.17)):
S = S (р) = - 4" [(°<« + 0„ia)(lM + /(->) +
+ (Oia - 0-*)(/(+) - /w) ] = х-1^ + (^)('(+) - I")
или, поскольку (см. C2.6)) 2ю/A — и2) = р/тл
S (р) = ?^ + m [?, /(+) - /("}]. C2.19)
Раскрывая это выражение с учетом C2.14), C2.16), C2.17),
получим для компонент вектор-оператора S
Sa(p) =4iEbca[{po^b--^l)jed--2ipb8adJe*j. C2.
20)
Введем антисимметричную 4Х4-матрицу
„ / (?*)* im'^cpn
? = —?= . , ?? = 0. C2.21)
\— iw [ер] 0 у
Тогда с ее помощью общий оператор ? можно написать в виде
а = — ia% ? = -|- afeI/feI. C2.22)
Матрица ? есть не что иное, как антисимметричный тензор,
который согласно A8.11) можно сопоставить вектор-параметру
малой группы C2.10) Яр ^ ^-iac:
a-a(gp) = ^_iIm@_iaC) Q J. C2.23)
В нашей трактовке особенно просто определяется изменение
оператора проекции спина ? = ? (qp) = ? (qp, qp) при произволь-
*) Или, что то же самое, для инфинитезимальных операторов группы
вращений A1.18),
280 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
ном преобразовании Лоренца Lq. Как всякий оператор, заданный
в пространстве представления, ? изменяется по формуле
?' = ТдвТд1. C2.24)
Поскольку вообще (см. C.24))
Т (q) T (qp) T(-q) = T «?, qPt - j» = ? (Oqqp) C2.25)
или, в более подробной записи,
Т (q, q*) T (qPr q*p) T(-q, -q*)=T(q·, ?'*), q' = Oqqp% C2.26)
а о = a(qpi ql) (см. C2.3)) есть инфинитезимальный оператор
представления Tqp, то
?' = а (?', q'*) = - i (?7(+) + ?/*/(")), C2.27)
т. е. изменение ? сводится к замене qp на д', причем (см. C2.10) J
q' = Oqqp = OqO-iac. C2.28)
Соотношения C2.10), C2.26), C2.28) показывают, что при
определении вектор-параметра малой группы и его изменений при
переходе к другой системе отсчета основную роль играют
преобразования комплексной группы вращений SOC, С).
На основании C2.9), C2.10), C2.17), C2.15) имеем
T-iuO«Tia = a(p) C2.29)
или
T-iaS°Titt = S(p). C2.30)
Таким образом, общий вектор-оператор спина S C2.19) частицы
с импульсом ? получается из соответствующего оператора S°
покоящейся частицы с помощью преобразования представления ?-<„,
соответствующего лоренцову преобразованию буста C2.6). При
этом вектор с оси спиновых проекций остается неизменным.
Поскольку оператор o(qp) (см. C2.3)) коммутирует с
оператором ? при любом векторе с, входящем в выражение C2.10) для
?р,то отсюда следует, что для частицы, движущейся с
произвольным импульсом р, может иметь определенное значение проекция
ее спина на любое направление с ).
Одной из основных задач релятивистской кинематики
является следующая. Пусть в некоторой системе отсчета задано состоя-
*) Как ни странно, в распространенной учебно-монографической
литературе встречаются по этому поводу неверные утверждения. Так, в
книге [54] на стр. 105 сказано, что при заданном импульсе «проекция спина
на произвольную ось ? не может иметь определенного значения».
Аналогичное утверждение содержится и в книге [41], стр. 114.
§ 32. ОПИСАНИЕ СПИНОВЫХ СВОЙСТВ ЧАСТИЦ 281
ние частицы, в котором она имеет импульс ? и определенное
значение проекции спина на некоторую ось с. Спрашивается,
каково будет состояние частицы в любой другой системе отсчета, т. е.
после применения произвольного преобразования Лоренца ЬЧх.
На основе векторной параметризации группы Лоренца эта задача
получает чрезвычайно простое общее решение (см. [50], [14],
[53]). Что касается импульса р' частицы в новой системе
отсчета, то он находится известным путем: р' — Lqtp, где ^—вектор-
параметр соответствующего преобразования Лоренца. Оператор
проекции спина ? C2.8), C2.15) полностью определяется
заданием вектора qp, а последний, в свою очередь, заданием ряс
(см. C2.6), C2.10)). Поэтому можно написать
qP=0-iac=q(p, с). C2.31)
Согласно C2.28) при преобразовании Лоренца Lqt этот вектор
переходит в следующий:
?' = « (Р\ С) = ОчА (р, с) = OqxO-iUKV)c = 0{qu-ia>ct C2.32)
где и (р) = р/(р0 + т) (см. C2.6)). Из равенства р1 = ЬЧх р,
подставляя ? = L-iuP*, ?' = L-itt'p0, получим L-iu'P°=LqiL-iuP0 или
Ь «to', qu - to» P° = p\ * = p'/(po + m). C2.33)
Поскольку p° = @, im), то отсюда следует, что
<to', glf — to> = ? = ?* C2.34)
есть вещественный вектор, определяющий некоторый
пространственный поворот. Этот поворот называется вигнеровским
вращением (см., например, [45]). Согласно C2.34) <??,— to> = <—to', n}$
следовательно (см. C2.32)),
?' = Ч (?? с') = #<-*«', пус = 0-ШОпС
Сравнивая с C2.31), можем написать
q (?', с') = 0-Ы.с\ с' = Опс. C2.35)
Таким образом, в общем случае при произвольном преобразовании
Лоренца L4x импульс ? частицы переходит в р'= Lqtp, а ось
спиновых проекций с испытывает вигнеровское вращение: с' = Опс.
Поскольку левая часть равенства C2.34) вещественна, то
можно написать
О'»'» «и — *»> = <*»', ?!, — to>* = <— to', g*, to>,;
откуда следует соотношение (см. B1.19), [53])
q* = <to', to', glf — to, — to> = <iV, qu — /i?>, C2.36)
где ? = ?/?0,?' = ??/?0.
282 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Чтобы вычислить вектор-параметр ? вигнеровского вращения
C2.34), представим ?! в форме B1.39)
?? = <*'»!, »!>. C2.37)
Тогда р' = L9lp = LiatLnip = LiUlp'i, причем
Pi = Lntp = (pi *>o), Pi = Onxp = (Po + m) Onxu. C2.38)
Используя выражение B0.54) для L\Uo получим
/ ? ' '.2 (и1'и1ШЛ(р'Л (Р'\
? = Wi=Pi + —,^ ul)[tpJ = [tp'J'
откуда следует
»'--А·- , (i"*;)i,' + 2(^-/'),4. C2.38')
Выражение C2.34) для ? можно написать в форме (см.
C2.37))
? = «га', ?»!>, <»х, — ш». C2.39)
Сначала находим согласно B1.3), C2.38')
, 4?, + ??)-?»?1 ?(?'? + (?-??)??)-[?'???]
\т j lBi/ л _j_„'„ = ; ; =
1 + и ui P0 + m — BiPi
1 - UjO^u * >"»« W>_ 1 + J«x» ·
Подставляя эти выражения в C2.29), находим, после некоторых
вычислений с помощью приемов, изложенных в П.1,
= A—,¦.)«, + »?(! + «)»
1-^A + ^)» '
Таково самое общее явное выражение для вектор-параметра
вигнеровского вращения—оно получено здесь впервые.
Использование векторной параметризации позволило получить его в простой
и компактной, легко обозримой форме.
В частном случае, когда преобразование Лоренца Lqif
сводится к чистому движению (пг = 0, q1 = iuL)^ вектор-параметр
вигнеровского вращения равен [56], [14], [53]
? = <ш', г»!, — гю> = [»?»]/A — иги). C2.41)
Заметим, что согласно C2.34)
<??. - *»> = <- &»? ">> C2.42)
§ 32. ОПИСАНИЕ СПИНОВЫХ СВОЙСТВ ЧАСТИЦ 283
т. е. — ?»' и ? появляются как результат представления вектор-
параметра <?и — гю> в соответствии с B1.39) в виде композиции
чисто мнимого и вещественного векторов. Этот результат может
быть сформулирован в виде общего утверждения (по существу
равносильного C2.36)), не связанного со спиновыми свойствами,
а являющегося лишь следствием закона композиции
вектор-параметров:
Произведение преобразования буста, отвечающего некоторому
импульсу р, на произвольное лоренцово преобразование *) равно
произведению вигнеровского вращения на преобразование буста,
отвечающее результирующему импульсу р'. Это утверждение
можно рассматривать как определение вигнеровского вращения.
Рассмотрим еще некоторые частные случаи соотношений
C2.35), C2.40). Если преобразование Лоренца является чистым
вращением/^, то в C2.37) ni = 0, пг = сг и согласно C2.40)
п=сг. Таким образом, в этом случае
р' = (У, iPo) = @CtP, iPo), С = 0Cxct C2.43)
т. е. импульс ? и ось спиновых проекций с испытывают
одинаковый пространственный поворот 0Сх.
Представляет интерес случай, когда преобразование ЬЧх
относится к малой группе, принадлежащей вектору р, т. е. (см.
C2.10))
qx = 0-iacu ?' = L4xp = p. C2.44)
При этом согласно C2.32)
Я.' = 0<Чи-Ы)с = О K0-teclf — to» с.
Но (см. C.22)) (O-iuCxi — to> = <— to, сгУл следовательно,
Y=Oqiq(p%c)=0-toOeic=q(p,cr), с' = 0Схс. C2.45)
Таким образом, с помощью преобразования малой группы,
принадлежащей 4-импульсу р, можно, не меняя импульса частицы,
повернуть ось спиновых проекций произвольным образом.
Нетрудно найти также вектор-параметр преобразования
Лоренца, не меняющего оси спиновых проекций, но преобразующего
импульс ? в любой другой заданный импульс р' (разумеется,
при р'2 = р2). Это преобразование играет роль, обратную
предыдущему преобразованию. Поскольку с остается неизменным,^)
в C2.34) должно быть ? = 0, следовательно,
?? = <—ia'i iw>,
Я! = Oqxq {?, с) = 0<_itt,,itt,_itt>c = 0-ia'C = q (р', с). C2.46)
С помощью найденных выше преобразований мы можем без
тРУДа решить теперь следующую наиболее общую задачу: пусть
*) Подразумевается собственное и ортохронное.
284 гл. v. группа лоренца в теории элементарных частиц
заданы ряс для некоторой частицы — найти такое
преобразование Лоренца Lqti чтобы эти векторы приняли некоторые
другие, произвольно заданные значения р' и с'. Иными словами,
нужно найти такой вектор-параметр ??, чтобы
g(/,c')=0flg(pfc), р'2 = р2, с'2 = с2 = 1. C2.47)
Искомое преобразование можно провести в два этапа. Сначала
согласно C2.45) ищем такое <h, при котором импульс ?
останется без изменения, а ось с принимает направление с'. Для
этого должно быть (см. C2.44), B.16))
q'i = 0-ia^, с, = I (с + с') + [сс']/A + сс% C2.48)
где ? — произвольное вещественное число. В результате мы
получим вектор q(p, с'). Применяя к нему преобразование C2.46)
с вектором ?? = <— *»', г»>, получим вектор-параметр
результирующего преобразования в виде (см. C.23))
Яг = <«ь qi> = <— iu't i»i O-iu^y = <— iu\ eu to}. C2.49)
Тот же результат можно получить, выполняя преобразования
C2.45) в обратном порядке.
Волновую функцию состояния частицы с импульсом ? и
значением s проекции спина на ось с будем записывать в виде
}Мр, c)- Она должна быть собственной функцией операторов
? и ?
(р + т) ?5 (?, с) = 0, (?-*)?.(?.*)=0. C2.50)
При любых преобразованиях Лоренца Lq% операторы ? и ?
преобразуются аналогично C2.7), C2.9)
3' = TqST-qi, o' = TqiaT-qi, p' = Lqxp C2.51)
и соответственно волновая функция
U = Tqrf§(p,c). C2.52)
При таком преобразовании значение проекции спина s, как ш
любое собственное значение, не изменится, т. е.
?'?? = *??, ?* = ?8 (?', с'), C2.53)
где р' и с' определяются согласно C2.10), C2.25), C2.51).
Таким образом, рассмотренные выше преобразования C2.31) —
C2.49) позволяют от функции ??(?, с) переходить к функциям
с любыми / и с', но с тем же самым s, т. е. без изменения
значения проекции спина.
Однако не представляет труда построить операторы, которые
будут изменять волновую функцию состояния с любыми ? ж с
§ 32. ОПИСАНИЕ СПИНОВЫХ СВОЙСТВ ЧАСТИЦ 285
таким образом, что она будет описывать состояния с теми же
? и с, но с любыми возможными значениями проекции спина
s. Для этого нужно лишь учесть, что операторы S%
удовлетворяют тем же перестановочным соотношениям C2.18), что и ин-
финитезимальные операторы представлений группы вращений (см.
A1.18)). Операторы Sa(p) отличаются от S% преобразованием
подобия, поэтому и для них будут иметь силу те же
перестановочные соотношения C2.18). Но эти соотношения полностью
определяют (при заданном представлении) и спектр собственных
значений проекций спина, и свойства волновых функций (см.
§§ 10—12). Поэтому мы можем применить к Sa(p) те же^рас-
суждения, которые в § 12 привели к операторам е = el, e* =
=е+, где е — круговой вектор: [се] = — ie (см. A2.5')).
В полной аналогии с этим мы можем построить операторы
[57], [53]
a+=eS(p), o- = e*S(p), C2.54)
которые будут действовать на волновую функцию ?, (?, с ) ??
формулам A2.9)
<*±?? (?, с) = ?^??? (?, с), C2.55)
где (см. A2.20)) ck±) = Vi/t(l*8)(l±8 + l), I — значение
спина.
Таким образом осуществляется переход к волновым
функциям, отвечающим любым значениям проекции спина. Наличие
такой возможности является существенным во многих случаях и,
в частности, при расчете вероятностей переходов между
различными состояниями (см. § 36).
Мы можем резюмировать полученные выше результаты
следующим образом. Для того чтобы прийти от состояния г|)8 (р, с)
частицы с произвольным спином к любому другому возможному
состоянию ?? (р\ с') с тем же значением проекции спина s,
достаточно применить к волновой функции г|э8 (р, с)
(преобразование представления группы Лоренца ТЯх с надлежащим
значением вектор-параметра дг C2.49). Чтобы изменить значение
проекции спина s, нужно подействовать на волновую функцию
операторами C2.54), которые, хотя сами и не являются
операторами представления, но построены из его инфинитезимальных
операторов
Указанные свойства позволяют сделать выводы относительно
зависимости вектора тока /\ = ???? и тензора энергии-импульса
(см. C1.10)) Еы = iptji от различных спиновых состояний
частицы. Как показано в § 31 (см. C1.11)), /* действительно ведет
286 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
себя при преобразованиях Лоренца как числовой вектор*).
Поскольку /л для свободной частицы зависит только от 4-вектора
(pk) (и не зависит от координат xk), то из соображений
ковариантности возможно лишь следующее выражение для /\:
7* = Cph, C2.56)
где С — скаляр_ (инвариант). Поэтому инвариантом будет и
свёртка ijhpk = ??? = iCpl= — im2C. Пусть qx есть
вектор-параметр малой группы, тогда согласно C2.45), C2.52)
преобразование Tqx будет менять лишь ось спиновых проекций
Tq$ = Trf, (р, с) = ?8 (?, с') = г|/. C2.57)
При этом ?'??' =^*Tqtr\pTqt^. Поскольку Tqx есть
преобразование представления малой группы, принадлежащей вектору р,
то pTqt = Tqxp. С другой стороны^ всегда (см. § 27) ?+??»= ?,
следовательно, ?'??' = ipkjk = ??? = iphh- Отсюда следует
jf/i = /л- Таким образом, мы доказали, что вектор тока (а значит,
и тензор энергии-импульса iprf ?) свободной частицы не зависит
от того, на какое направление спроектирован ее спин.
Рассмотрим теперь изменение значения проекции спина на
фиксированную ось с. Такое изменение осуществляется по
формуле C2.55) с помощью операторов о± B7.35). Из {33.16)
следует, что ?+? = ??, но (см. C2.15)) а = с5(р), и поскольку с
произвольный вещественный вектор, то при любом ?
5+(?)? = ?5(?). C2.58)
Отсюда вытекает, что
(?+)+? = (eS)+v\ = e*S+r\ = r\e*S = ??_ C2.59)
ж аналогично (?-)+?*=??+. Снова рассмотрим ?'??', где (см.
C2.55))
г|/ = ?±?3 = ?^}?,±1.
Имеем
?'??' = (*±?·)*??*±?« = Ь {о±)+Щ><У±Ь· C2.60)
Как показано выше, (?±)+? = ???. Далее, поскольку ?? = ??,
яли (cS) ? = ? (cS)^ при любом с (см. C2.3)), то S (?) ? = pS (?),,
значит, и с±р = ??±. В результате соотношение C2.60)
принимает вид
d»±%±3<A±)b±i = (а[±))%±гЗЪв±г = ?3??? (?±?8). C2.61)
*) Мы употребляем термин «числовой вектор», чтобы отличать
рассматриваемую величину от вектор-операторов, например S, /^и т.д.
§ 32. ОПИСАНИЕ СПИНОВЫХ СВОЙСТВ ЧАСТИЦ
287
Но ?? (?±??) = ?^±)???8±1= ?^?^??, = (ав±}L« согласно A2.25)
В результате получаем из C2.61)
?.±???.±? = ?.??. или ??±???|)?±? = ?.??>*· ^32.62)
Тем самым строго доказано, что вектор тока и тензор энергии-
импульса свободной частицы с любым спином не зависят ни от
направления оси спиновых проекций с, ни от значения проекция
спина s на это направление.
Очевидно, никакое собственное (и несобственное) ортохрон-
ное преобразование Лоренца не может изменить знак четвертой
компоненты времениподобного вектора (§ 22), в частности, /V
Сопоставляя вышесказанное с результатами § 31, относящимися
к дефинитности заряда и энергии, мы приходим к следующему
фундаментальному выводу: свободная одномаосовая частица в
случае целого спина всегда имеет дефинитную энергию и
индефинитный заряд, в случае полуцелого спина — наоборот. При этом
изменение знака заряда в первом случае и энергии — во втором
может произойти только в результате преобразования полной
инверсии (§ 31), т. е. переходя к античастице. Этот вывод
обосновывается приведенным выше рассмотрением всех
возможных состояний одномассовой частицы и соответствующих
значений вектора тока /.
Заметим, что в современной научной литературе в
подавляющем большинстве случаев ограничиваются рассмотрением
состояний частиц с определенным значением проекции спина на
импульс (а не на какое-либо другое направление). Такие состояния
получили название спиральных, а само значение проекции спина
на импульс соответственно называется спиральностью. Ясно, что
такой подход является весьма частным по отношению к развитому
в данном параграфе. Широкое использование спиральностей,.
вместо рассмотрения проекций спина на любое направление ct
обусловлено прежде всего значительным упрощением соотноше-
вий, поскольку вектор-параметр C2.10) при с||р|ю просто
сводится к с (см. B.9)) и малая группа в этом случае не только
изоморфна, но и совпадает с группой вращений. Поэтому
рассмотрение спиральностей движущихся частиц становится
аналогичным рассмотрению спина покоящихся частиц.
Однако векторная параметризация настолько упрощает всю
трактовку спиновых свойств частиц, что ограничение
рассмотрением только спиральностей становится совершенно
неоправданным. Кроме того, имеются и другие существенные обстоятельства,,
которые лишают спиральность преимущественной роли при
описании спиновых свойств частиц.
В самом деле, из C2?35), C2.38), C2.40) следует, что если
с|р1ю» то с' = One не будет параллельно и'. Проще всего можно
убедиться в этом на примере преобразования C2.45), не меняю-
288 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
щего /?, но меняющего с. Это означает, что если проекция спина
на импульс (спиральность) частицы равна s, то при переходе к
другой лоренцовой системе отсчета это же значение s будет иметь
проекция спина на другое направление с', а не на новый
импульс частицы (//). Иными словами, если в некоторой системе
отсчета ? есть оператор спиральности, то при переходе к другой
системе отсчета он преобразуется в новый оператор ?', который
не будет оператором спиральности. Следовательно, спиральность
не является характеристикой частицы, инвариантной по
отношению к преобразованию Лоренца.
Обычно при описании процессов рассеяния частиц с
использованием оператора спиральности приходится проектировать
спины падающих и рассеянных частиц каждой на свое направление
импульса. Между тем соотношение C2.2) естественным образом
приводит к возможности описывать спиновые состояния систем
из двух любых частиц с помощью проекций спина на одно общее
направление [50], [14].
Поставим задачу: найти такой вектор-параметр q? чтобы
одновременно Lqp = ? и Lqp' = ?', где ?, pf — два произвольных
4-импульса различных (или одинаковых) частиц. Согласно C2.2)
для этого должно быть A — ivx) a =(l — ш'х)а', откуда следует
а' = ?, [??] — [v'ar] = [? — ?', а] = 0, или
a = C(v-v% C2.63)
где С — произвольное вещественное число. Соответствующий
комплексный вектор-параметр C2.2) имеет вид
q = C(v — O' + i [vv']) = Cji<— iv, iV>. C2.64)
Направление а C2.63) обладает тем свойством, что проекции на
него спина обеих частиц одновременно будут иметь определенные
значения. Как следует из вывода, это будет справедливо и в том
случае, когда обе частицы имеют различные массы. Отметим, что
согласно C2.63) указанное направление а параллельно вектору
относительной скорости обеих частиц. То, что такой вектор
может играть особую роль для систем двух частиц, вполне
естественно. Однако интересно то, что это есть относительная
скорость в классическом нерелятивистском смысле, хотя вся
теория является строго релятивистской·
§ 33. Метод проективных операторов в теории частиц
Волновые функции ? C1.1) свободных частиц находятся как
решения линейных однородных алгебраических уравнений C1.5)
или, иначе говоря, как собственные функции оператора р:
?? = — тф. C3.1)
§ 33. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ
289
Хотя в уравнении C1.5) не учитываются никакие взаимодействия,
однако решения вида C1.1) играют во всей теории элементарных
частиц самую фундаментальную роль. В частности, с их
помощью строится матрица рассеяния (см., например, [43]), в
которой учитывается и взаимодействие частиц.
Поскольку общий вид минимального полинома для оператора ?
известен (см. § 31), то при отыскании функции ?, являющейся
решением уравнения C5.1), может быть использован метод
проективных операторов [58], общие математические основы
которого изложены в П.5. Ограничиваясь случаем одномассовых
частиц*), используем минимальное уравнение C1.13) для
матрицы р:
? (?) = рг (р2 _ т2) >= 0. C3.2)
Чтобы найти решение уравнения C3.1) (/> + ^)? = 0»
записываем C3.2) в виде
Р(Р) = Ср + ™)Р+(р) = 0, Р+(р) - ?(? - т)Ф0. C3.3)
Согласно (П.5.9) проективный оператор для решения ? C3.1)
равен
Р+(Р) рГ(?—т) /QQM
Аналогично для решений уравнения ?? = тф, соответствующих
античастицам, долучим Р(р) = (р — т)Р-(р) = 0, Р_ (р) =
= РГ(Р + т)> откуда следует
? -Р-(*> -РгСр + ш) П35ч
Подчеркнем, что для возможности построения операторов ?±
существенно то, что ненулевые корни минимального полддома
Р(р) C3.2) однократны. Это будет обеспечено, если мы заранее
исключим возможность наличия нефизических состояний с
нулевой энергией ([40], § 31),
Как правило, каждый из операторов ?+ и ?- выделяет
подпространство пространства представлений, имеющее несколько
измерений. Число измерений этих подпространств равно следу
проективных операторов ?± (?.5). Если след равен щ то это
означает, что уравнения (р ± т) ? = 0 имеют при заданном
импульсе ? по ? независимых решений. Можно показать, что всегда
) Общий случай частиц с несколькими массами рассмотрен в [58].
19 Ф. и. Федоров
290 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
(?+)?= (?_)<. Действительно, матрица ? согласно C1.4), C0.41)
имеет структуру I ], так же как любая ее нечетная степень.
Напротив, всякая четная степень матрицы ? имеет структуру
| ]. Поэтому отличными от нуля могут быть только следы от
\0 ?/
четных степеней ? (или ?*)? Если г —четное, то (?+)* =
= (/>r)+/2mr= (x-)t. При нечетном г также (х+)е= (Pr+l)tf
/2mr+l= (?-)*.
Различные независимые решения уравнения C3.1) (так же
как уравнения (р — 771)^ = 0) отличаются за счет проекций
спина (§ 32), т. е. они являются решениями уравнения (см. C2.50))
?? = 5? C3.6)
для различных значений проекции спина s на некоторое
направление с. Оператор проекции спина ? C2.3) коммутирует с р.
Уравнение C3.6) тоже удобно решать методом проективных
операторов (ом. П.5). Для этого необходимо знать минимальный
полином матрицы ?. Но ? лишь преобразованием подобия (см^
C2.29)) отличается от ?° C2.17), поэтому ? и ?° имеют
одинаковые минимальные полиномы. Поскольку ?° = cS° C2.17) и
вектор-оператор S° удовлетворяет тем же перестановочным
соотношениям C2.18), что и соответствующий инфинитезимальный
вектор-оператор / группы вращений (см. A1.18)), то
минимальный полином оператора ? при любом импульсе ? будет иметь
тот же вид A2.26) или A2.27), что и минимальный полином
для c=cl. Поскольку с2 — 1,то для целого спина s будем
иметь
? (?) = ?(?2 _ ?) (?2 _ 4)... (?* - s2) = 0 C3.7)
и для полуцелого спина
? (?) = (?* - 4) (*2 ~ 4") '' · ^ - <2s + W = °· <33'8>
Зная минимальный полином ?, можно построить (см. П.5)
проективный оператор
?» = ?»(?)/?*(«»), (o-8h)Ph(c)—P(o)=0, C3.9)
выделяющий из любой волновой функции ? содержащуюся в ней
часть, отвечающую проекции спина, равной sh. Согласно (П.5.29')
имеет место тождество
??*-?, (зз.10>
h
§ 33. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ 291
поэтому для любого состояния ? можно написать
? = ??*. ?* = ?*?. <*?* = ?>*· C3.11)
k
Эти соотношения определяют разложение любого состояния на
состояния, отвечающие всевозможным проекциям спина sh.
Поскольку {?/?}_ = 0, то (см. П.5) проективный оператор,
выделяющий состояние, отвечающее заданному импульсу /?, знаку
±т и проекции спина sk1 будет равен произведению операторов
C3.4) (или C3.5)) и C3.9):
4±) = *±?* = ?**±· (ззл2>
Так как соответствующее состояние единственно, то согласно
(П.5.16) должно быть
Ч±) = Ч±кф· C3.13)
Здесь предыдущий вектор диады ?& является вектором
рассматриваемого состояния. Последующий вектор ? нам пока
неизвестен, однако его нетрудно определить. Для этого достаточно
учесть, что матрица ? и матрица инвариантной билинейной формы
? удовлетворяют соотношению C1.7')
?? = ?>. C3.14)
С другой стороны, согласно B7.40) ЦТ (q, q*) = ? (q*, q)r\.
Поскольку оператор проекции сшгаа ? C2.3) есть инфинитезималь-
ная часть оператора представления Г, то для него справедливо то
же соотношение
W(q,q*)=a(q\q)r\. C3.15)
Согласно C2.3) a(q, q*) = — i (?/(+) + ?*/(_)), причем (/(±))+ =
= — /(±) (см. A1.16)). Поэтому ?+E, q*) -=o(g*, g), и вместо
C3.15) можно написать
?(???*)?=??+(???·). C3.16)
Следовательно,
??? = ??+?+ C3.17)
и такое же соотношение справедливо для любых степеней рк и о1.
Поэтому матрица ?(±) удовлетворяет тому же соотношению
C3.14), что и ? : ?^? = ? (?^*)". Подставляя сюда правую часть
равенства C3.13), получим
?·??>= ?(?·?)+ = ??*·?*. C3.18)
Умножая это соотношение слева на любой вектор ?, справа на ?
19*
292 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
и учитывая свойства B7.47), получим сри= C-?, где число С равно
???*/??. Отсюда следует для проективного оператора ? = Тд
выражение
?==G?."?. C3.19)
Так как матрица ? проективна и выделяет единственное
состояние, то (см. П.5)
Xt = СЩ = 1. C3.20)
Поскольку ? — эрмитова матрица, то ?? = ?*?? — вещественное
число, поэтому С также всегда вещественно. Заменяя t|)jia Сф,
можно нормировать С на +1 при Щ > 0 и на — 1 при ?? < 0.
Следовательно,
№ = *±?* = ± ???-?* C3.21)
или короче:
? = ±?·?] C3.21х)
причем соответственно имеет место нормировка
?? = ±1. C3.22)
Вместо этой инвариантной нормировки часто употребляется
нормировка по заряду, согласно которой
??4? = ±1. C3.23)
Переход от одной нормировки к другой осуществляется весьма
просто, если учесть, что согласно C3.1)
?^? = —rriplp. C3.24)
С другой стороны (см. C2.56)),
??*? = Cph. C3.25)
Умножая на iph и сравнивая с C3.24), получим iCp2 = — iCm2 =
= — тЩ. Следовательно, С = — (?/77?)?? и согласно C3.25)
??4? = СрА = (ро1т)"щ. C3.26)
Таким образом, при нормировке C3.22)
??4? = ±Ро/т. C3.27)
Если же взять нормировку C3.23), то
W> = ±m/p0. C3.28)
Соответственно при такой нормировке мы получим вместо C3.21)
? — ±(???)?|)(±)·?(±). C3.29)
§ 33. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ
293
Как показано в предыдущем параграфе, для частиц с целым
спином ???' = —1 лишь в том случае, если ?' отличается от
? преобразованием полной инверсии (т^ е. ?' относится к
состоянию античастицы). При этом ?'?' = ?? = m/|/?o|, так как при
нижнем знаке в C3.28) нужно также изменить знак у ро
вследствие полной инверсии. Итак, в случае целого (полуцелого) спина
возможна такая нормировка:
Частица
1 Античастица
Целый спин
?(±).?(±)=(™/,?0|)?(±)
?
Полуцелый спин 1
??4?=1, г|д|)=т/|р01
?±?(±) = ±??0|)?± J
C3.30)
Если же нормировать по формуле C3.22), то соответственно
получим
Частица
Античастица
Целый спин
??=1, ф/Чр=\Ро\!т
Полуцелый спин ?
??=1, ?^?=|?0|??
??=—1, ?'?4?'^|?0|//7?
C3.31)
Мы видим, что во всех случаях знак нормировки C3.22)
соответствует знаку анергии.
Итак, знания минимальных полиномов операторов ? я а
достаточно для того, чтобы получить в инвариантной форме решение
уравнения C3.1) для любого состояния свободного поля,
нормированное по условиям C3.22) или C3.23), знаки в которых
связаны с дефинитностью энергии или заряда соответственно.
Из формулы C3.21) следует для вектора тока выражение
/*="*?4 = ±(??*)« C3.32)
и соответственно (см. C1.10)) для тензора энергии-импульса
Ekl = ±iPh(Ttl)t. C3.33)
Знак, например, в соотношении C3.32) определяется уже
известным образом: для целого спина знак «+» отвечает частице,
а «—» —античастице; для полуцелого спина /?=.'.(??*)? во всех
случаях.
Мы видим, что хотя проективная матрица ? дает не саму
волновую функцию ?, а диаду ±?·?, тем не менее такие фундамен-
294 гл. v. группа лоренца в теории элементарных частиц
тальные величины, как заряд и энергия поля, выражаются
непосредственно через ? согласно C3.32), C3.33). Это обстоятельство
имеет общее значение, и все основные билинейные по ?
выражения, имеющие прямой физический смысл, вычисление которых
является главной задачей теории, могут быть выражены
непосредственно через ?.
Рассмотрим, в частности, вероятность перехода некоторой
частицы из состояния ?? в состояние ?2 в результате некоторого
взаимодействия. Как известно, общее выражение для этой
вероятности пропорционально квадрату модуля соответствующего
матричного элемента перехода:
w ~ | ?2<??? |2 = (bQb) * (?2<???), C3.34)
где Q — оператор, вид которого определяется характером
взаимодействия. Так как
(?2<???)* = ?2<?*??* = ??*<?+??2 = ???<?+??2,
то C3.34) можно написать в виде
W ~ ??#(?2·?2)(??? = [?(?2·?2)(?(??·??)]*,
где Q = ?(?+?. Согласно C3.21) ??·?? = ??, ?2·?2 = ?2, где ??,
Т2 — проективные операторы C3.12), C3.21), C3.21') для
состояний ?? ? ?2 соответственно. Знаки опущены для краткости.
Таким образом, вычисление вероятностей переходов или
эффективных сечений для различных процессов в общем случае
сводится к вычислению следов от произведения операторов:
и>~ (QT2QTX)t. C3.35)
Так как вычисление следов может быть осуществлено
инвариантным путем, то выражение C3.35) может быть получено без
использования явного вида матриц ?* в каком-либо частном
базисе.
Очень часто при вычислении различных эффектов
взаимодействия приходится находить соответствующие вероятности,
просуммированные по спинам конечных состояний и усредненные по
спинам начальных состояний. В выражении C3.35) суммирование
по спинам осуществляется чрезвычайно просто. Согласно C3.10)
для частицы со спином s выражение C3.35), усредненное по
спинам начального состояния и просуммированное по спинам
конечного состояния, будет иметь вид (см. C3.21))
27?? 2 w ~ 17?? (e*^*i)*· <33·36)
Si,SS
При этом предполагается, что оператор Q не зависит от спина
частицы.
§ 33. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ
295»
В качестве еще одного применения метода проективных
операторов вычислим с их помощью общие перестановочные
соотношения для вторично квантованных волновых функций частиц с
произвольным спином. Как известно (см., например, [43]^, во
вторично квантованной теории волпаовые функции ?(#) и ?(#)
рассматриваются как операторы, действующие на вектор
состояния многочастичной системы в пространстве, где переменными
являются числа частиц, находящихся во всевозможных
состояниях (числа заполнения). Такая операторная волновая функция;
представляется в виде суперпозиции
? (х) = ? ая*й (х) + ?+?; (*), C3.37)
?
где ??(?) — волновая функция отдельной частицы в п-м
состоянии, а величина ап является оператором, действующим на числа
заполнения га-го состояния. Операторы ап подчиняются
перестановочным соотношениям
[????}? = 8™> {Wmh = Kamh = °' C3.38)
где знак «—» соответствует частицам, подчиняющимся статистике
Бозе — Эйнштейна (статистике симметричных состояний), а знак
« + » — частицам, подчиняющимся статистике Ферми — Дирака
(статистике антисимметричных состояний).
В рассматриваемом нами случае системы свободных частиц
с произвольным спином, описываемых релятивистским волновым
уравнением GfeVft + ??)? = 0, волновые функции всех возможных
состояний имеют вид (см. C1.1)) ??(±/?)???(±?/?#), где индекс s
нумерует спиновые состояния при заданном импульсе.
Соответственно представление C3.37) будет иметь вид
? (?) = B?)/2 2 f (*P) к (?) V (?) eipx +
+ ?.(-?)?'(-?)?-,?*]. C3.39)
Здесь (dp) = dp\dp2dpz, a B?)"~3/2— ^бычный нормировочный
множитель. Для сопряженной функции ?(#) получим аналогично
? (?) = B?)/2 J (dp) [at (?) ? (?) е-** + at (- ?) ? (- ?) e**.]
C3.40)
Обозначим at (— ?) = bs (?), as (— ?) = bt (?) и вычислим
выражения {??(#')» Ъ*(х")}* (?> ? —индексы компонент ?), полагая,
что операторные амплитуды as(p) = ???, b8(p) = bap
подчиняются соответствующим перестановочным соотношениям C3.38)
kp, flaVb = \Ь,р, btp'h = бм'б (р - р'), C3.41)
а все остальные коммутанты (антикоммутанты) величин а и Ь
296 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
равны нулю. В результате получим, полагая х'— х" = ху
М>«(*'),Ы*")Ь =
= B?)~32 j (dp) [<(?) ^ (?) eipx =f ?*? (- ?) ?'? (- ?) e~ipx].
S
Мы можем отбросить здесь индексы компонент и написать это
соотношение с помощью диадной символики в виде [58]
(¦(«О ·*(*·)>* =
= B?)2? (dP) [?8(?)·?(?)*''?* * tf (-?)·? (-?)e~ip*l
C3.42)
Нетрудно видеть, что при условиях C3.41)
{?(?') ·?(*")}* = {¦(*') ·?(*")>* = 0. C3.420
До сих пор мы не делали различия между целым и полуцелым
спином. Теперь учтем, что при целом спине (при нормировке
C3.23)) согласно C3.29), C3.30)
?* (± р)·? (± р) = (ml\ р01) ?<±> = (m/| р01) ?± (?) ?,. C3.43)
Аналогично при полуцелом спине имеем
Г(±р)-Г(±р)=±1т/\ро\)х±Ш,. C3.44)
Здесь мы вместо ?/t (см. C3.13)) пишем ?*(±?).
Предположим вначале, что целый спин квантуется с
коммутатором, а полуцелый — с антикоммутатором. Подставляя в
C3.42) при верхнем знаке соотношения C3.43), а при нижнем
знаке — C3.44), получим в обоих случаях справа одинаковое
выражение [58]
<ф (*') · ? (?")}? = Bn)-sm j &. [?+ Q) eipx - ?. (?) e~ipx]. C3.45)
Сумма 2 исключается вследствие соотношения C3.10). Очевид-
но, справедливо равенство
?± G) e±ipx = ?± (± V) e±**f V = ?*?\
ж согласно C3.4), C3.5)
X±(P)^2(q=m)^·
Нетрудно убедиться, что ?-(—V) = x+(+V)f поэтому
?-(?)?-?>* = ?-(—V)e-'>* = ?+(+?)*-**.
? 33. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ 297
При этом соотношение C3.45) принимает вид
<+(*')·*(*")>* = rn Bn)-V(у) jШ(eip* - ?"**) =
= -2??+(?)?0(*), C3.46)
где
?. (?) = B?) j ^- ?"* sin p0*o C3.47)
— инвариантная дельта-функция. При Хо = 0 имеем ??(#, 0) = Ог
а поскольку ??(?) —инвариантная функция, то она обращается
в нуль для любого пространствевноподобного мирового вектора
(*2>0).
Если сделать обратное предположение, а именно — что целый
спин квантуется с антикоммутатором, а полуцелый—с
коммутатором, то, повторяя те же рассуждения, мы придем к
соотношению C3.45), в котором оправа вместо минуса будет стоять плюс
В результате получим [58]
{?(*') ·?(*")}* = 2mx+(V)Ai(*), C3.48)
где
?? (х) = B?)"8 j Ш е*х cos Pox0. C3.49)
Эта инвариантная функция не обращается в нуль при простран-
ственноподобном векторе ? (?2 > 0). Именно это обстоятельства
заставляет отбросить вторую возможность, приводящую к
соотношениям C3.48), C3.49).
Физические основания, приводящие к такому выводу,
заключаются в следующем. Если две мировые точки х' и х" соединены
пространственноподобным интервалом ? = ?' — х'\ ?1 > 0, то·
согласно принципу относительности любые процессы,
происходящие в таких точках, протекают независимо друг от друга.
Математически на языке квантовой теории это выражается в том, что
операторы любых физических (наблюдаемых, измеряемых)
величин, относящихся к одной и к другой точке, должны
коммутировать между собой. Возьмем для примера операторы заряда
/1 = ? (#') 74,? (?? и 7*4 = ? (^) ?4? (?,/) и рассмотрим их
коммутатор ??(*')?4?(*'), ? (*")v4 (*"))- =
= ?????'?· (?? (*') ?? (*'). ?? (*") Ъ' ИГ*
В случае целого спина для х2 > 0 при условиях C3.46), C3.42'У
все функции коммутируют между собой, поэтому [ГА]"А}_ = 0, как
и должно быть. В случае полуцелого спина при тех же условиях
298 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
все функции антикоммутируют, следовательно, их произведения
по две — коммутируют, т. е. также получается правильный
результат \]'Л)_ =0.
Если же принять перестановочные соотношения C3.48), то
коммутация операторов тока, взятых в точках, разделенных про-
странственноподобньгм интервалом, не будет иметь места, что
дротиворечит принципу причинности. То же самое будет
справедливо и в отношении других операторов физических величин,
билинейно выражающихся через ? и ?, в частности, оператора
энергии-импульса. Поэтому вторую возможность C3.48) следует
отбросить. Тем самым мы доказали в общем виде известную
теорему Паули: частицы с целым спином подчиняются статистике
Бозе — Эйнштейна, а частицы с полуцелым спином — статистике
Ферми — Дирака.
§ 34. Уравнения для частиц со спином 1/2, 0, 1
Задача нахождения релятивистских волновых уравнений,
описывающих элементарные частицы с тем или иным значением
спина, сводится к отысканию соответствующих матриц ?* (см.
C0.7)). В § 30 было установлено, что при разбиении волновой
функции по классам ±1 или ±?: ? = (?+, ?_) матрицы ?*
должны иметь следующую структуру — для целого спина (см.
C0.54), C0.53)):
^-пач«J· '-и**·;· {ил)
????2 = — ??2?2, Uxyt2 = ??2?2;
для полуцелого спина (см. C0.56), C0.57)):
a J ° У1Л а = ( 0 У\Л
у V-????? о j' v 1пл4А о у C4.2)
У и = - %Т?2+ТЬ Vi2 = ????2+%.
Дальнейшие сведения о блоках ?*2 матриц ?* можно получить
только с помощью основного условия ковариантности C0.19) при
использовании преобразований собственной группы Лоренца и ее
представлений, Введем четырехмерный матричный вектор ? =
= (?*). Тогда соотношение C0.19) можно переписать в виде
tT = T(Lt). C4.3)
Поскольку (см. B0.18)) L = e+(g)e-(g*) и
*± (?) = A +«±)//1 + Ч\ ?^ (q) = е± (- q),
§ 34. УРАВНЕНИЯ ДЛЯ ЧАСТИЦ СО СПИНОМ 1/2, 0, 1
299
то из C4.3) следует
(e+(-q)y)T(q) = T(q)(e_(q*)y).
C4.4)
Здесь нужно иметь в виду, что матрицы L, е± действуют на
верхние индексы матрицу*,,, и поэтому их можно переставлять
с матрицами Т, действующими на нижние индексы. Применим
соотношение C4.4) к случаю бесконечно малых преобразований
A?|<1). когда (см. § 26)
«+(-?) = !-?+, Mi*) = * + «!.
? (q) = 1 + 2g/(+) + 2g*/(-).
В результате получим
A-?+)?)(? + 2?/(+)+2?*/(-)) =
= (? + 2?/(+) + 2?*/<-))((? + ?!)?).
Операторы q± можно написать в виде
п _?7(±)_„ г(±)
где согласно B0.3)
{ 0 0 1 <П
о о о ± ?|
-1 0 0 0 l·
@ +10 0 j
C4.4')
C4.5)
C4.6)
/? =
(О 0 0 +i|
0 0-10
0 10 0
(+100 0 |
J2 —
/.*}
(О —1
1 О
о о
о о \
о о
О ±1
(О 0 + 1 0 |
C4.7)
Отсюда следует, что
(/Ас = - еаьс, (/А* = - (/«*% = ± Ьаъ- C4.8)
Приравняем в C4.5) отдельно члены, содержащие независимые
векторы q и q*:
2? (?/<+)) - ?+? = 2 (qI(+)) ?, 2? («·/<->) = 2(?*/(">) ? + ?-?»
или
2q (?/(+) - /(+)?) = ?+?, 2?* (?/^ - /("М = ?!?
или, наконец, учитывая C4.6),
2 {?/(±)]. - J(±)Y, 2 {у№). = ?^?, C4.9>
т. е.
г^)-^/.*)^1.
C4.10>
300 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Здесь также нужно помнить, что / действует на нижние ин
кже нужн
дексытдо» a JK:r) — на верхние. Поскольку а = 1, 2, 3, то
условия C4.9) содержат шесть матричных уравнений для четырех
матриц ? . Однако не все они независимы. Подставляя C4.8)
в C4.10), получим
2 {ть/<±>1_ = - гаьсус ± ??6?4, C4.11)
2 {?4/^}- = =f 8abyb = =f ??. C4.12)
Все матрицы /?±) удовлетворяют соотношению yJ *a J = — 1
(здесь по ? не суммируется, что обозначено точкой). Поэтому,
\ получим
V = -2{/fY,/(f}_ C4.13)
умножая C4.9) на/а**, получим
или
V»-2{/f,(/f)»,v·}.. C4.14)
Если фиксировать индекс к, то в C4.14) справа, ввиду
антисимметрии матриц Ja\ будет отсутствовать матрица ?\ Таким
образом, согласно C4.14) каждая из матриц ?* может быть шестью
способами выражена через три остальные, благодаря возможности
выбрать а = 1, 2, 3 и любой из знаков ±, Формулы C4.14) с
учетом C4.8) принимают вид
Уь=2{г.ь/*6.ьу',1<?1, C4.15)
?<= ? 2^ if}_ - ± i-WWl. C4.16)
Взяв сумму и разность уравнений C4.11), C4.12) для верхнего
ц нижнего знака, получим
-eobcYc = lYb,n+) + 4-4-, C4.17)
{^,/<+) + Д_))-=0, C4.18)
??6?4 = ??6.'?+)-^-))-> C4.19)
-Va = W4,/i+)-4_)}-. C4.20)
Разность уравнений C4.16) для обоих знаков эквивалентна
соотношению
{у* ??+ *?}_= 0- C4·20')
Их сумма совпадает с C4.19) (при а=Ъ).
§ 34, УРАВНЕНИЯ ДЛЯ ЧАСТИЦ СО СПИНОМ 1/2, 0, 1
301
Согласно C4.20) все матрицы ?? выражаются через ?4. Таким
образом, для отыскания всех ?* достаточно найти одну матрицу
?4, поскольку ffi заданы. Для отыскания ?4 могут быть
использованы соотношения C4.18). Кроме того, итерируя уравнение
C4.13), получим, поскольку м.\2 = — 1,
(¦«? - №"т. '? 1.. с}. - - Ш. пь
C4.21)
Таким образом, каждая из матриц ?* удовлетворяет каждому из
шести уравнений C4.21) второго порядка относительно инфини-
тезимальных операторов ?? . Уравнение C4.21) можно написать
в виде
(Ifyyk + yh(lfJ - 2lfyklf + V4v* = 0. C4.22)
В частности, из него следуют дополнительные к C4.18)
соотношения для ?4.
До сих пор наше рассмотрение свойств элементарных частиц
имело общий, универсальный характер и относилось к частицам
с любым спином, описываемым с помощью релятивистских
волновых уравнений первого порядка C0.7)*). В этом параграфе мы
рассмотрим простейшие из таких уравнений, которые
используются для описания частиц с наименьшими значениями спина.
Исходным пунктом для построения любого релятивистского
уравнения является определение набора неприводимых
представлений группы Лоренца. Последние, как мы знаем, задаются двумя
весами I ъ V (§ 25), принимающими целые и полуцелые
значения. Выпишем ряд простейших представлений:
(оо), (о 4-). D- °} D-4-)' <01)' A> °)'
D- *). (* 4-)· <*· 4>. (° 4} D- °) · · · <34-23>
Учитывая-результаты § 30, чтобы построить уравнение, которое
может быть получено из вариационного принципа, следует брать
либо представления типа (?, ?), либо пары представлений
(?, 1')®A\ I). Далее нужно, чтобы все взятые представления
относились к классам ±1 (или ±?), причем обязательно должны
присутствовать представления обоих классов. Наконец,
необходимо, чтобы все взятые представления могли быть соединены между
*) Вне рамок нашего рассмотрения, ввиду ограниченности объема
книги, остались, в частности, уравнения для частиц с нулевой массой
покоя и ряд других вопросов теории элементарных частиц.
302 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
собою цепочкой зацеплений (§ 30). Простейшие наборы
представлений, удовлетворяющих этим требованиям, имеют вид
(°4-)-(-г0)' C4·24)
(°°)-D-г)' <34·25)
@1)-(-г4-)-A0)' <34·26)
кн-и
I I C4.27)
и т. д. Напомним, что размерность всего представления равна
сумме чисел B1 + 1) BV + 1). Таким образом, для схемы C4.24)
размерность равна 4, для C4.25)—5, C4.26)—10, C4.27)—16.
Простейшей — во всяком случае, по размерности пространства —
является схема C4.24). Мы и рассмотрим ее в первую очередь.
Поскольку представления C4.24) относятся к классам ±?, то
искомое уравнение C0.7) будет описывать частицы полуцелого
спина. Задача заключается в отыскании вида матриц ?\ Согласно
C0.56) они должны иметь вид C4.2)
-( ° Я
т4=и...* ; . ??4 «„„« ; . C4.28)
причем (ом. C0.17))
??* = *????? ?? ??2 = - %Оь. <34·29>
0 ??
\ ?
C4.30)
где (см. C0.51))
?-(.?4 ?
\?? 0 /
— матрицы представления пространственной инверсии и
билинейной формы соответственно. В нашем случае представление C4.24)
является неприводимым представлением полной группы Лоренца.
Поэтому согласно B7.41) можно взять ? = ?, ?? = ??.
Представления ( 0 -у J и (-у 01 двумерны, следовательно, ? ???2~~~
2Х2-матрицы. Операторы представлений @-^-j и f-у 0) могут
быть написаны в виде (см. B5.13)) Т01/2 = Т° (q) ® T1/2 (q*) и
Т1 2 = ? 2 (q) (g) T° (q*) соответственно. Но Т° — тривиальное
§ 34. УРАВНЕНИЯ ДЛЯ ЧАСТИЦ СО СПИНОМ 1/2, 0, 1
303
Г01/2 _ ml/2 ,
/20
единичное представление, поэтому у01/2 = ? (q*) и Г =
= Т (q). Матрица ?? согласно § 27 должна переставлять
сомножители в прямом произведении Г0® Г1 , но переставлять
здесь нечего, так как Т° = 1, поэтому ?? = ? ? является
единичной 2Х2-матрицей
@ 0 1 0\
П-
0 0 0 1
10 0 0
0 10 0)
Следовательно (см. C4.28), C4.29)),
ЧГ9· *
Отсюда следует, что
???
-чЪ о
У\г
V4+
«12 '
v?2
.??
,?-f-
2 '
? =
C4.31)
т. е. матрицы ?* в данном случае эрмитовы, как и должно быть
при ? = ? (см. § 30).
Общая матрица преобразования представления C4.24)
принимает теперь вид (см. B5.18), B5.27), A3.41) —A3.43))
r=sf«^(f) 0 \ г1/2() = 1 + (.72Ка
V 0 T^(q)J Vl+q2 )
где ?? — инфинитезимальные операторы представления Т1/2
группы вращений (матрицы Паули). Таким образом, в данном
случае
?+'-?(?.·). ?-'-4·(?3· («.за)
Условие C4.18) для ?4 C4.31) сводится к ?*2?? = <М>?2· ?? мат"
рицы ?? образуют неприводимую совокупность, поэтому
коммутирующая с ними матрица ??2 должна быть кратна единичной.
Полагаем ??2 = 1г при этом
?4 = (^) = ? = ?. C4.34)
С помощью C4.20) находим
Т* = Л+>-Л->,Т*}--(^?а·). C4.35)
Легко убедиться, что найденные матрицы ?* удовлетворяют со-
304
ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
отношениям C0.3). Согласно C2.17) оператор проекции спина
имеет в данном случае вид (в системе покоя частицы)
?--?*(?<+) + 1<->)-4·?.(???0)· ?2-4 = °· C4·35'>
следовательно, спин частицы, описываемой уравнением C0.7)
с матрицами ?* C4.34), C4.35), равен 1/2. Полученное
уравнение есть знаменитое уравнение Дирака, описывающее электроны
и позитроны.
Выпишем полностью матрицы C4.34), C4.35) с учетом
A3.4,-<ШЗ> * = (-), ?, = (»7), ...?,·,):
10 0 О -П ? 0 0 0 —11 ?0 0 — i ??
0 0 0 i\
f =
0 0 — i
0 i 0
[i 0 0
0
0 l·
о '
?? 0 0 —11
2 ? ? ?? ? ?
?""~ ? ? ?? о l·
loo о ;
I-
V3 = .
? i 0 0 0
ю — * о 0)
(О 0 1 01
0 0 0 1
10 0 0
[О 1 О 0J
Y4 =
C4.36)
При этом матрицы ?1 и ?3 антисимметричны, а ?2 и ?4 —
симметричны:
?1 = _?1, f = -f> ?2 = ?2^ ?4 = ?4# C4.37)
В соответствии с алгеброй Дирака имеем
?? + ?? = 2?«. C4.38)
Квадрат каждой из ?* равен единице, и все они между собой ан-
тикоммутируют. Легко убедиться, что матрица
а о о о \
?? = ?1?2?3?4 = ?5+ _.
0 10 0
0 0—1 0
\0 0 0 — 1 j
C4.39)
наряду со всеми ?*(?;= 1, 2, 3, 4) удовлетворяет алгебре C4.38).
Сравнив с C0.59), убеждаемся, что ?5 является матрицей
представления полной инверсии: ?5 = /.
Матрицы ?\ обладающие свойствами C4.38), можно
построить также из матриц J a ) C4.7), алгебра которых имеет вид (см·
B0.5)-B0.7))
?±)/1±) + ?±)/.±) = -2?1
Jabi
J a Jb — Jb J a = 0.
Из C4.40) следует, что тройки матриц i/i+) и ij^
C4.40)
C4.41)
по отдельности
§ 34. УРАВНЕНИЯ ДЛЯ ЧАСТИЦ СО СПИНОМ 1/2, 0, 1 305
удовлетворяют алгебре Дирака C4.38)*). Пять матриц могут
быть построены, например, следующим образом:
Vе = /<->/<+>, y* = iJ(i\ ?5^/^. C4.42)
Здесь ?? = ??, ?4 « — ?4, ?5 = — ?5. Вообще матрицы Дирака
C4.38) могут быть выбраны бесчисленным множеством способов»
Однако любые два их набора ?* и ?'* всегда связаны
преобразованием подобия, т. е. если ?* и ?'* удовлетворяют C4.38), то
всегда существует матрица S такая, что для всех к = 1, 2, 3, 4
?'* = SfS-1. C4.43)
Мы докажем это предложение с помощью метода проективных
операторов. Перепишем равенство C4.43) в виде ?'\5 — ??* = 0
или
???^?? — ^????? = (?????? — ????? ) SvQ = 0
или, наконец
Jlf*S = 0, ??* = ?'*®1 —1®?. C4.44)
Минимальное уравнение матрицы Mh с учетом C4.38) имеет вид
Л/*(Л/*2—· 1) =0. Поскольку согласно C4.44) матрица S есть
собственный «вектор» оператора М\ отвечающий нулевому
собственному значению, то соответствующий проективный оператор
равен (см. П.5) Nk = 1 -(М*J/4 = У2A + ?'*® ?*)**). Мы
имеем четыре уравнения C4.43) для S и соответственно четыре
оператора ?1, ?2, ?/3, ?/4, которые все между собой коммутируют»
Поэтому полный проективный оператор равен их произведению
= -^ A + v,x ® ?) A + ?'2 ® ?) A + ?'3 ? ?) A + ?'4 ® ?).
C4.45)
След оператора N равен числу независимых решений системы
уравнений MkS = 0, к = 1, 2, 3, 4 (см. П. 5). След от выражения
C4.45) легко вычисляется, если учесть, что (А ® B)t = AtBt
(см. П. 3) и что следы от произведений различных матриц
Дирака равны нулю. Действительно, согласно C0.41) след от
произведения нечетного числа ?* всегда равен нулю, из C4.39)
следует ?? — 0» а взяв след от равенства C4.38), получим (?*?*) * =
= 46w. Поэтому Nt = 1, следовательно, существует
единственная (с точностью до множителя) матрица 5, удовлетворяющая
C4.43) при заданных матрицах Дирака ?* и ?'\ Чтобы найти 5,
достаточно умножить проективный оператор N на произвольную
*) Эти тройки матриц удовлетворяют также алгебре Паули A3.40):
lV(±)^±)=6ob+l-8obci/(±).
**) Здесь 1 = 14®14— единичная матрица 16-го порядка.
20 Ф. и. Федоров
306 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
матрицу A: S = NA или в развернутом виде
??? = ????'{$?? + ??????' + 2 ???'???' + ???^???' + ??????'^ ??'?',
\ h<1 )
где ??? = ?^?', ?5* = ?5?\ Окончательно имеем
S = A + y'hAyh + ? yhlAylh + ybhAyhb + уъАу\ C4.46)
k<l
Следует иметь в виду (см. П. 5), что для некоторых А правая
часть этого выражения может обращаться в нуль. Однако
всегда имеются такие А, что S ? 0,— любая из них дает решение.
Условие C1.31) для матрицы зарядового сопряжения С име-
•ет вид C4.43), поскольку транспонированные матрицы ?*
удовлетворяют алгебре Дирака. Поэтому из изложенного выше
следует, что для уравнения Дирака всегда существует матрица
зарядового сопряжения С. Легко убедиться, что при матрицах C4.36)
С = ? ?, а в случае матриц C4.42) С = ?4?5. Вообще, если две
из четырех матриц Дирака симметричны и две —
антисимметричны, то С равна произведению антисимметричных матриц. Если
же три матрицы Дирака симметричны, а одна антисимметрична,
то С равна произведению трех симметричных матриц или, что то
же самое, произведению антисимметричной матрицы на ?5. В
случае трех антисимметричных матриц и одной симметричной
последняя и будет матрицей зарядового сопряжения. Если ?* =
= _ ?* (к = 1, 2, 3, 4), то С = ?5, а при ?* = f (к = 1, 2, 3,4)
должно быть С = 1.
Рассмотрим совокупность 16-ти матриц: 1, ?\ ??*?' (&<?),
*??» ?5 (?, ? = 1, 2, 3, 4). Обозначим их следующим образом:
Гв, Я = 1, 2, ..., 16:
?? = 1, ?2 = ?5, Г3 6 = ?\ Г7 10 = ???,
C4.460
Г11 16 = ???, iff, iff, iff, iff, iff.
Нетрудно убедиться, что квадраты всех матриц Гв равны
единичной матрице: (ГвJ = 1, все они эрмитовы и следы произведений
любых двух различных матриц Гв равны нулю. Таким образом,
имеет место соотношение
(ГВГВ,)< = 4бвв<. C4.47)
Отсюда следует, что все Гв линейно независимы между собою,
так как из авТв = 0 после умножения на Гв/ и взятия следа, в
силу C4.47), получаем ав = 0, В = 1, 2, ..., 16.
С помощью Гв выражение C4.46) для S можно написать
в виде
S = Т'ВАТВ C4.48)
{суммирование по ? от 1 до 16 подразумевается, как обычно).
§ 34. УРАВНЕНИЯ ДЛЯ ЧАСТИЦ СО СПИНОМ 1/2, 0, 1 307
Из определения S C4.43) следует, что при ?'* = ?* матрица S
должна быть кратна единичной: S = а. В этом случае равенство»
C4.48) принимает вид
???? = Г^ХС C4.49)
Отсюда ясно, что число а линейно зависит от элементов
матрицы ???; в то же время оно является инвариантом. Единственный
линейный инвариант матрицы есть ее след, поэтому а = gAt =
= ?4?????, где g — некоторый числовой множитель. Подставляя
это значение в C4.49) и учитывая произвольность ???, получим
?????? = ???????. Сворачивая по ? и ?, будем иметь ?????? =
= (??)?? = 4????. Но (??)?? = 16???, поэтому g = 4.
Окончательно имеем
?????? = 4??????. C4.50)
Произвольная 4Х4-матрица ? может быть представлена в
виде линейной комбинации матриц Гв:
? = ЬвГв, C4.51)
причем Ъв находятся с помощью C4.47)
Ьв= (?*?),/4. C4.52)
Можно сказать, что матрицы Гв образуют ортогональный
нормированный базис в пространстве 4Х4-матриц, в котором
скалярное произведение матриц ? и ? равно (?+?),/4.
С помощью C4.50) преобразуем выражение
Г В у\С ^^ -рВ -рС о о
??1 ?? = 1 ??,1 ?/???/???/?,
полагая ??/???/? = A/4)??/?/???, к виду
1 ??1 ?? ? -? \1 1 1 ?????·
Матрицу TBTDTC, как всякую 4Х4-матрицу, можно представить
в виде C4.51), C4.52)
ТВГВГС = ЪЕТЕ, bE = ±(TBrDTcrE)t.
В итоге получим
Г&Гй - ^ (rBrDrcrE)trfprvDM. C4.53)
Положим здесь Г" = Гс = ?* и просуммируем по к:
уМр = -fa № DyhTE)trfA C4.54).
20*
308 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Нетрудно убедиться, что
/ГУ = 4Г\ vVvft = -4Y5, ???* = -2?',
vNVY = 4в1ж, ???'?* = - 2?5?'. C4.55)
Подставляя эти соотношения в C4.54) и учитывая C4.46'),
получим
?????? = ?????? - ?????5? - \ ?????? -± (?5??)?? (?? )??. C4.56)
Матрицы Дирака и всевозможные соотношения между ними
имеют самое широкое применение в теории элементарных
частиц. Выше мы познакомились с некоторыми из таких
соотношений. Как правило, приходится иметь дело с выражениями,
содержащими произведения различного числа матриц Дирака.
Значительное упрощение подобных вычислений может быть достигнуто
с помощью нижеследующего простого рекуррентного
соотношения для произведений дираковских матриц [60]:
??? ? = ????? - ????? + ????? - \ ??????? ???. C4.57)
Справедливость этой формулы вытекает непосредственно из
алгебры Дирака. Здесь греческие индексы ?, ?, ?, ?, ? принимают
значения 1, 2, 3, 4, 5, ?????? — пятимерный символ Леви-Чивита
(см. П. 1). С помощью этой формулы произведение любого
числа матриц Дирака сводится к произведению не более чем двух
матриц. Заметим, что аналогичной формулы не существует для
четырех матриц ?\ Если не объединять ?5 с остальными ?\ то
эта формула распадается на две:
yW1 = ewvw - bhmyl + 8lmyh + 8AlmrVY, C4.58)
V W = ????5 - \ *мтпУтуп. C4.59)
С применением формул C4.56) — C4.59) мы встретимся в § 36.
Уравнение C0.7) для частиц со спином 0 (скалярных мезо-
йов) мы фактически уже получили, когда в § 30 перешли от
уравнения Клейна —Фока C0.8) к уравнению первого порядка
с матрицами C0.12). Действительно, {0 0) есть скаляр, а
A/2 1/2) —вектор в соответствии с компонентами ?0 и ?*
функции ? C0.11). Легко проверить также, что все условия C4.9) —
C4.22) удовлетворяются для матриц C0.12), причем инфините-
зимальные операторы /1±} представления ? — ?00 0 ?12 г
имеют вид
/о о \
7« =(о /<*>)> C4'60)
§ 34. УРАВНЕНИЯ ДЛЯ ЧАСТИЦ СО СПИНОМ 1/2, 0, 1 309
так как Т2/11/2 = L — матрица Лоренца (см. § 26). В
соответствии с C0.46), C0.48), C0.59) для этого уравнения имеем
/1 0 0 0 0)
0—1 0 00
|о 0—1 о ol
О 0 0—10
10 О О О ll
tf = 4-(J °Р)
'=(? -% C4·61)
а матрица зарядового сопряжения С = 1, поскольку ?*=??
(см. C1.31)). С помощью элементов матричной аглебры еАВ (см.
П. 1) можно написать выражения для всех матриц ?* C0.12)
к компактной форме
?* = ?0* + ?*°. C4.62)
Вопрос о спине частицы, описываемой данным уравнением,
не так прост, как в случае электрона Дирака.
Оператор спина для покоящейся частицы равен согласно
C2.17), C4.6), C4.7)
/о о \ /о о \
C4.63)
[о /<+>+/<->
c± = cl{±\ с2-1
Можно убедиться (см. B0.5) — B0.71)), что
??(??2_?)=0. C9.64)
Поскольку собственные значения оператора проекции спина ?°
равны 0, ±1, .то на первый взгляд рассматриваемое уравнение
описывает частицы со спином 1 или, возможно, с двумя
значениями спина 0 и 1. Чтобы выяснить этот вопрос, следует
построить соответствующие полные проективные операторы состояний
с различными спинами. Все матрицы ?* C4.62), C0.12) имеют
минимальные уравнения вида
?*(?**_?)=0,
следовательно, проективный оператор ?+ C3.4)
ся частицы равен
C4.65)
для покоящей-
*+ = ??4(?4 + ?)==
о
о
о о
о о
0 0 0 0
0 0 0 0
0 0 0 1
C4.66)
Оператор Казимира для неприводимого представления группы
вращений с весом 1 равен К = 1A + 1) (см. A2.36)). Если
представление приводимо, то минимальное уравнение для оператора
310 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Казимира содержит произведение скобок (К — Z(Z + 1)) для всех
значений весов I входящих в него представлений. В нашем
случае, если ? = 0 и ? = 1, то минимальное уравнение для К
должно иметь вид
К(К-2) = 0. C4.67)
С помощью C4.7), C4.63) нетрудно убедиться, что
@000 0\
K==S02=\
о о
2 О
О 2
О О
C4.68)
т. е. уравнение C4.67) действительно справедливо. С его
помощью строим проективные операторы для опина 0 и 1 (см. П.5).
Согласно C4.45) они имеют вид
A 0 0 0 0\
К0 = 1 — -s- К = \
0 0 0 0 0]
0 0 0 0 0
0 0 0 0 0
,00001)
1
^? = т К
0
0
0
0
??
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
Полные проективные операторы состояний частицы со спином
О и 1 равны (см. § 33)
г<+> =
= ?+?0 = ?+,
?[+) = ?+?? = 0.
Следовательно, состояния рассматриваемой частицы, отвечающие
спину 1, отсутствуют, т. е. уравнение C0.7) с матрицами ?*
C4.62) действительно описывает частицу со спином 0.
Еще в 1936 г. Прока предложил уравнения, которые, как
впоследствии выяснилось, описывают частицу со спином 1
(векторный мезон). Они имеют вид (с несущественными
переобозначениями)
V,** + m$k = О, ?,?? _ ???, + т^ы = 0. C4.69)
Здесь ?? — 4-вектор, ??? = — %k — антисимметричный тензор,
имеющий шесть независимых компонент, поэтому полное число
компонент волновой функции
? ='(** ?*) C4.70)
равно десяти. Вектор ?? преобразуется по представлению Gг
72), а тензор ??? = — ??·—по представлению (О 1)?A ?).
Таким образом, уравнениям C4.69) соответствует набор
представлений C4.26).
Уравнения C4.69) могут быть написаны в общей форме
C0.7), причем матрицы ?? имеют вид
?* = е1Ш + eilh]l. C4.71)
§ 34. УРАВНЕНИЯ ДЛЯ ЧАСТИЦ СО СПИНОМ 1/2, 0, 1
311
Здесь подразумевается суммирование по Z, а сложный индекс
[Ы] принимает шесть значений [23] = —[32], [31] = —[13],
[121= -[21], [14] =-[41], [24]=-f42ff [34]--[43],
которые соответствуют номерам строк (столбцов) матрицы с 5-го
по 10-й. Таким образом, например, е1П21 обозначает единицу,
стоящую на пересечении первой строки и седьмого столбца.
В тех же случаях, когда встречается, например индекс 2[21] =
= —2[12] на соответствующем месте B-я строка, 7-й столбец),
следует ставить —1. Элементам с индексами вида 1[11] ничего
не соответствует, и они пропускаются. Перемножаются
элементы екШ} по правилу
eihWemlmni = eftTOeIft|Hmn5 = <Дй1]САл1
eHklVmn*m=8m[mnlek\ C4.72)
где e[W1[m«,=ekmetn —ek»etw (см. [62]). Даффин [63] установил,
что как матрицы C4.62), так и матрицы C4.71) подчиняются
одной и той же алгебре
? ??» + ???? = ?/??? + ????? C4.73)
Кеммеру [64] принадлежит общее исследование свойств матриц,
подчиняющихся этой алгебре, которая носит название алгебры
Даффина — Кеммера. Отметим, что матрицы C4.71), как и
C4.62), являются вещественными и симметричными.
Рассмотрению их свойств посвящен ряд исследований*). Ввиду эрмитово-
сти: ук = yh+— матрица билинейной формы совпадает с матрицей
пространственной инверсии и равна
? = ? = 2(?4J-1. C4.74)
Как и в случае скалярного мезона, матрица зарядового
сопряжения равна единичной.
Уравнения для частиц со спином 72, 0 и 1 являются
наиболее простыми из всех уравнений C0.7) для частиц с различными
спинами**). Соответственно эти уравнения и свойства
описываемых ими частиц наиболее изучены. Частицы со спинами,
превышающими единицу, принято называть частицами с «высшими
спинами». Очевидно, с возрастанием спина сложность уравнений
быстро увеличивается. Кроме того, имеется мало
экспериментальных данных, относящихся к частицам с высшими спинами (если
не считать атомных ядер). Поэтому уравнения для конкретных
частиц со спином, превышающим 2, практически не
рассматривались. Уравнения для частиц со спином 3/2 были получены и
исследованы многими авторами [68—71]. Уравнения первого
*) См., например, [65—67].
**) В частности, можно показать (см., например, [4]), что только в
этих уравнениях матрицы ?* могут быть эрмитовыми.
312 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
порядка для частицы со спином 2 были впервые получены в
[72], впоследствии те же уравнения были выведены Редже [73].
Свойства частиц со спином 3/2 изучались в работах [74—76].
Рассмотрению частиц со спином 2 посвящены работы [77—80].
В работах [81, 82] изложена общая теория релятивистских
волновых уравнений, построенных с использованием кратных
представлений группы Лоренца, т. е. таких приводимых
представлений, в которых некоторые неприводимые представления
содержатся более одного раза.
§ 35. Частицы во внешнем поле
Уравнение для частицы во внешнем электромагнитном поле
имеет вид C1.26)
G*(V* - ieAh) + т)^ = 0, C5.1)
где Ah — четырехмерный вектор-потенциал. Как правило, точное
решение такого уравнения не удается получить, и поэтому
задача приближенного его решения имеет важное значение. В [83]
был предложен общий универсальный метод приближенного
решения уравнений вида C5.1) для частиц с любым спином в
произвольном электромагнитном поле не слишком большой
интенсивности. Обозначим Я = V + т, V = ?*??, U = —ieArf и
предположим, что нам известно решение ?0 уравнения для свободной
частицы ???? = 0. Таким образом, нужно решить уравнение
(Я + U) ? = 0, которое формально можно написать в виде
ЯA + Я-1С/)ф = 0. C5.2)
Сравнивая с #?? = 0, видим, что {1 + Я_1?/)ф = ?0, откуда
следует
? = A + H-lU)-l$o = A - H~lU + (H-4JJ - .. .)??. C5.3)
Мы воспользовались здесь разложением оператора A+Я~]С/)
в ряд Неймана [10], предполагая условия, допускающие такое
разложение, выполненными. Эффективность разложения C5.3)
зависит от возможности выразить Я в замкнутом виде.
Согласно C1.17) оператор V для одномассовой частицы удовлетворяет
минимальному уравнению Vr(V2 — V2) = 0, где V2 — даламбер-
тиан. В этом и следующем параграфах мы будем для всех 4-век-
торов (в том числе р) применять обозначение
?=?*?* C5.4)
вместо p = iphik, которое использовалось в §§ 31—33. Если q
удовлетворяет минимальному уравнению
«г(?-«2)=о. C5·5>
§ 35. ЧАСТИЦЫ ВО ВНЕШНЕМ ПОЛЕ
313
то оператор (g+tfi) имеет вид
Это выражение получается, если написать (д + иг)-1 в виде
полинома от q степенп г +1 с неизвестными коэффициентами и
затем потребовать, чтобы произведение этого полинома на g + w
равнялось единице. Аналогично мы можем написать формальное
выражение
г—1
Я-1 = (У + т)-1=(-|)Г(пг-у)(п12-УГ1 + '»-12(-|)'1·
ft—О
C5.7)
Таким образом, определение Я сводится к определению (иг2 —
— V2). Результат его применения к функции ? можно легко
вычислить, если она имеет вид плоской волны: ? ~ ?°?,??. В
таком случае
(т._у«гЧ=-Дг-* C5·8)
т +р
В общем случае можно представить ^т2 —V2) с помощью
известной функции Грина для уравнения Клейна — Фока (см.,
например, [38]). Тем самым будет определена функция Грина (точ*
нее, матрица, Грина) оператора (V + m) для одномассовой
частицы с любым спином. Таким образом, изложенный метод
позволяет выразить матричную функцию Грина для (V + m)
через хорошо известную функцию Грина скалярного оператора
(иг2 — V2)-1. Такой подход оказался эффективным в применении
к решению различных задач теории элементарных частиц (см.,
например, [83, 84, 86]).
Если вектор-потенциал Ah определяет поле плоской
электромагнитной волны, то уравнение C5.1) для частиц с различными
спинами допускает точное решение. Впервые такое решение
было получено для дираковского электрона Волковым [85]. Пусть
к = (hi) — волновой вектор, тогда для шдюкой
монохроматической волны любой поляризации можно написать
Лл = Лл(ср), <p=fcr = Aw, к? = 0. C5.9)
Из условия Лоренца VtAi = 0 вытекает соотношение
Ы' = 0, Л, = ЗЛ/Зф, кА = const. C5.10)
Поскольку постоянная слагающая в вектор-потенциале
несущественна, то можно считать, что
кА=:0. C5.10')
314 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Решение ?? для свободной частицы имеет вид tyo(p)eipx.
Очевидно, применение к нему оператора A + Я~1С/)~1 C5.3) приведет
к тому, что экспоненциальный множитель eipx будет умножаться
на некоторую функцию от ft, ?, <р. Следовательно, можно
написать (см. [86])
? = ?(?)*??*, ?(?) = ?(*, р, <рИоЫ, (G + m)\jp0(p) = o.
C5.11)
Здесь ? (ft, ?, ?) —матрица, элементы которой зависят от ?
только через посредство ? = кх. Подставляя выражение для ?
C5.11) в уравнение C5.1), получим после простых
преобразований уравнение для вектор-функции ? (?)
h' + (m + ib)x = 0, ?' = 5?/5?, Ъ = р-еА. C5.12)
Таким образом, использование выражения C5.3) позволило
нам получить обыкновенное дифференциальное уравнение для
волновой функции частицы с произвольным спином в поле
плоской монохроматической электромагнитной волны [86]. Это
уравнение во многих случаях допускает точное решение, которое
может быть получено ковариантным путем и в ковариантной
форме (см. [86-90], [75], [80]).
Минимальное уравнение C5.5) для матрицы ft принимает вид
fcr+2 _ о (поскольку ft2 = 0). Соответственно матрица ft является
особенной: |ft| =0. Поэтому среди уравнений системы C5.12)
содержатся алгебраические условия, накладываемые на вектор-
функцию ?. Эти условия можно получить,^умножив C5.12) на
ftr+1: kr+l(m + ib)% = 0. Однако матрица ft всегда является
неприводимой к диагональному виду. Действительно, даже при г =
= 0 ее минимальное уравнение (ft2 = 0) содержит кратные
корни. Поэтому (см. П. 5) умножение на ftr+1 в общем случае
выделит не все алгебраические условия, а лишь те, которые связаны
с клетками Жордана высшего порядка.
Однако это затруднение можно обойти, если учесть, что
согласно C1.7') умножение на ? делает матрицу ? = iprf эрмитовой:
(г\р)+ = цр. В нашем случае, поскольку мы опустили множитель
г, матрица ? = цк будет антиэрмитовой: ?+ = —?. Как известно
[15.1], эрмитова (и антиэрмитова) матрица всегда приводится к
диагональному виду, поэтому ее минимальный полином не будет
иметь кратных корней. Этот полином можно написать в виде
??(?) = 0, где Р@) ? 0, так как он будет иметь один нулевой
корень, поскольку ?, как и ft,— особенная матрица. Поэтому
?(?)/?@) будет проективным оператором, выделяющим все без
исключения векторы ?, для которых ?? = 0, а значит, и к% = 0,
§ 35. ЧАСТИЦЫ ВО ВНЕШНЕМ ПОЛЕ
315
(см. П. 5). Итак, вместо C5.12) мы рассматриваем уравнение
*?'+?(™ + *6)? = 0, C5.13)
которое отличается от C5.12) умножением на ? и потому
равносильно ему (?2= 1). Умножая C5.13) наР(х), получим полную
совокупность алгебраических условий, налагаемых на вектор-
функцию ?, в виде
Р{к)ц(т + ib)x = 0. C5.14)
Следовательно, r\(ib-\- ??)? можно рассматривать как
собственный вектор матрицы ? (?) для нулевого собственного значения.
Но ?(?)? = 0, значит, матрица ? пропорциональна проективно-
ному оператору, выделяющему все собственные векторы
матрицы ? (?) с нулевыми собственными значениями. Согласно П.5
отсюда следует, что ?(т + ib)% = ??? = ?&??, где ?? = ??(?) —
произвольный вектор в пространстве представлений уравнения
|C5.12). Таким образом, для решения ? уравнения C5.12)
справедливо представление [86]
%=(т + 1Ъ)-%> C5.15)
Неопределенность в зависимости ?? от ? следует понимать таким
образом, что алгебраические условия C5.14) ничем ее не
ограничивают. Однако фактически выражение C5.15) ограничивает
возможный вид функции ? благодаря тому, что в него входит
особенная матрица к. Для отыскания ??(?) нужно использовать
полное уравнение C5.13).
Вследствие наличия в C5.15) оператора (m + ib), который
согласно C5.6) содержит в знаменателе выражение т2+Ь2,
целесообразно несколько переопределить волновую функцию
C5.11), введя в нее дополнительную скалярную функцию. Таким
образом, мы будем искать ? в виде [87]
¦ = ?(?)???{?(/??--?)}, C5.16)
где
-Jl*. *М-Ч?~Ш^, !·-¦& C5.17,
При этом основное уравнение C5.11) принимает вид
??'+(™ + ?)? = 0. C5.18)
Здесь с —4-вектор следующего вида:
c = b — gk = p — eA—gk1 cr =—eAr — g'k. C5.19)
Для него справедливы соотношения (см. C5.10))
с2 = р2 = — яг2, ее' = ке' = be' = W = 0, кс = кЬ = ? = const.
C5.20)
316 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
До сих пор все полученные выше результаты имели общий
характер и были пригодны для частиц с любым спином.
Перейдем теперь к нахождению решений уравнения C5.18) для
конкретных частиц.
1. Спин 1/2. В этом случае согласно алгебре Дирака C0.3)
и рекуррентным соотношениям C4.58) имеем после умножения
указанных равенств на akbicm
2b + Ъа = 2аЪ, C5.21)
2bc = d + ifh, C5.22)
где (см. C4.58))
d = (ab+[a-b])c, h=[a-b]xc. C5.23)
Соотношением C5.15) применительно к уравнению C5.18) мы
не можем воспользоваться, так как матрица т + ic является
особенной ввиду равенства с2 = -т2 и не имеет обратной. Умножая
C5.18) на ? и учитывая, что согласно C5.21) к2 = к2 = 0, имеем
?? = 0, где ? = k(m-\-ic). С помощью C5.21) —C5.23) находим
>«4.>^.>4 >Ч >Ч >Ч
?2 = ikck(m — ic) = 2щк(т + ic) = 2???.
Следовательно, матрица ? имеет минимальное уравнение ? (? —
— 2??) = 0, откуда ясно, что уравнение ?? = 0 имеет решение
? =, (? — 2??)??, где ?? — произвольный биспинор*). Поскольку
кск = 2?&, то ? — 2?? = (т — ic)k. Подставляя ? = (т — ic)k%o
в C5.18), получим, поскольку (т + ic)? = (т2 + с2)к%о =0t
h' =к[(т — Гс)??0]' =% — ????0 + (т- fc)hi C5.23')
Но согласно C5.22), C5.23), C5.20) кс'к = 2кс'к = 0, поэтому
к% = — ikck%0— — 2i?k?0 = 0. Следовательно, ?? — произвольный
постоянный биспинор. Окончательно имеем
X = (m — ic)kxo, ? = ???? [i(px — ?)]. C5.24)
Это решение по существу (хотя и не по форме) совпадает с
решением Волкова [85].
2. Спин 0. В этом случае согласно C0.12) матрицы к, с
имеют вид (см. C0.12))
~ /0 к\ ^ /0 с\
^ = [к о;» с = [с о)-
Волновую функцию ? будем искать в виде
?= (ишо, в), C5.25)
*) Векторы в пространстве представления @ 72HG2 0) называются
биспинор ами.
§ 35. ЧАСТИЦЫ ВО ВНЕШНЕМ ПОЛЕ 317
где щ — скаляр, и — 4-вектор. Очевидно, ?? = (ки, тщк)г
??= (си, тщс), и уравнение C5.18) распадается на два:
ки! + icu + т2и0 = 0, и0к + iu0c + и = 0.
Исключая отсюда и, получим согласно C5.20) щ = О, щ = iC
и окончательно [87]
x = C(im,c). C5.26)
3. Спин 1/2 со взаимодействием Паули [87, 88].
Взаимодействие Паули описывается дополнительным членом в операторе
уравнения C5.1), который равен inF^y1, где ? — константа
взаимодействия, FM = — Flk = Vfci4i — Vii4ft — тензор
напряженности электромагнитного поля. Для функции C5.16) вместо C5.18)
при этом получается уравнение
кх/ + (т + гВ)х = 0у В=~с + 2п1сА'. C5.27)
Аналогично случаю 1 имеем к(т + ??)? = k(m-\-ic) = 0, откуда
следует ?= (т — ic)k%\. Подстановка этого выражения в C5.27)
дает
??'? = 2ЫА/к%1. C5.28)
В отличие от C5.23'), при произвольном ? (?) это уравнение
непосредственно не интегрируется. Поэтому рассмотрим случай
линейной поляризации, когда ?(?) = /(?)?, где /(?) —скалярная
функция, а= (?,?) —постоянный 4-вектор (&а = 0). В этом
случае уравнение к%[ = 2г/а&х1имеет решение
%?? = eiCk%o = (cos ? + ?? sin ?) ?·?0, ? = 2?/, C5.29)
где ?? — произвольный постоянный биспинор. Окончательное
решение задачи имеет вид (см. C5.16))
? = (иг — ib) (cos ? + ш sin ?) &?? exp [i(px — ?)]. C5.30)
4. Спин 1. В этом случае, аналогично случаю спина 0, удобнее
пользоваться не алгеброй матриц ?* C4.73), а определением их
действия непосредственно на волновую функцию. Согласно
C4.69) имеем
Отсюда следует, если мы обозначим искомую функцию ? = (тщ
ос), где и — 4-вектор, а = —а — антисимметричный тензор, что
*? = (?*, т[и-к]). C5.31)
318 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Подчеркнем, что в функции ? мы понимаем под ? шесть
независимых компонент этого тензора, а под aft — результат умножения
4-вектора ft на полный тензор. Здесь мы также ограничимся
случаем линейной поляризации: А = /(?)?. Из C5.18), C5.31)
следуют уравнения
а= [к-и'] + i[c-u]y a'ft + iac + т2и =0. C5.32)
Подставляя ? из первого уравнения во второе и учитывая C5.31),
получим после некоторых преобразований
2??»? + (ftu" + icu') к + (ikuf — си)с + iku · с' = 0. C5.33)
Умножая на к, находим отсюда ku' = icu, ки" = i(cu' + с'ц), с
учетом чего C5.13) принимает вид
2i\m' — i(c'u + 2си")к + 2си · с — iku · с' = 0. C5.34)
Для дальнейшего будет удобнее переопределить базис, взяв в
качестве основных вместо а я с векторы (ab = ас = ?)
d = ?-?[?·^? = ? — (?/?)?, е = ?~?[?·??]? = с + (m2fo)k,
C5.35)
причем справедливо соотношение с = ?~?[? · ft] е. Кроме того,
введем вектор ? с помощью определения
*?(*?)~![*·«]?? *>2=1, kv = av = pv = 0. C5.36)
Векторы к, ?, ?, ?; или, соответственно, векторы к, d, с, ? образуют
«естественный» базис [87] четырехмерного пространства Минков-
ского, наиболее удобный для решения задачи. Векторы к, d, e, v
обладают следующими свойствами:
dk = dv = de .= dc = ev = ее = 0, d2 = 1, e2 = m2, fte = ?
d' = '(/7?) ft, e' = c' = - /'d, dd' = ее' = ec' = ce' = ke' =^ 0.
C5.37)
Соответственно вектор и в уравнении C5.34) будем искать в
виде разложения по векторам естественного базиса
и= lift + Ы + he + l*v, C5.38)
u' = (?; + /7?) ft + (Й - f%) d + l'3e + &. C5.39)
С учетом этих соотношений, умножая уравнение C5.34)
последовательно на ft, d, e, у, получим соответственно
Ь = -Ш li-Va/'S,, i; = -(/72m2)?2t i; = 0. C5.40)
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ
319
Последнее равенство не связано с остальными; из него следует
14 = С, что приводит к решению
x = C(imv, [v-с]). C5.41)
Второе и третье уравнения C5.40) дают A2Й=ш&Ь)/ =
= ± {if/2т) (|2 hF imh), откуда следует |2 + Ш\ъ = С± X
X ехр(± if/2т). Полагая здесь С_ = 0, либо С+ = 0, находим,
согласно C5.38),
A2, h)± = C±(=F iro, l)exp(± i//2m)f ?? = ifhl2m2. C5.42)
В результате получаем еще два решения
Х± = С± (и?, af) exp (± i//2ro)f
и± = * ч= imd ± (/72m) A, C5.43)
a* = i/2/' [?-?;] + ?^·(? =F ™d)].
Эти же решения могут быть получены на основе
использования алгебры Даффина— Кеммера C4.73) матриц ?* [89]. В этом
случае решения получаются сразу для скалярного и векторного
мезона, поскольку алгебры соответствующих матриц совпадают.
Методом, аналогичным изложенному выше, получены точные
решения для векторного мезона с аномальным магнитным и квад-
рупольным электрическим моментами в поле плоской
электромагнитной волны [90], а также для частиц со спином 3/2 [91] и
2 [92]. Во всех случаях число независимых решений равно
2?+1, где s — значение спина частицы. Отметим, что
некоторые из задач, относящихся к спинам 1/2, 0, 1, решались в
работах [94—97] нековариантным путем. Изложенный в настоящем
параграфе метод отличается своей универсальностью и
ковариантностью как самого расчета, так и окончательного результата.
§ 36. Матричные элементы квантовой электродинамики
Расчет вероятностей всевозможных процессов
взаимодействия между элементарными частицами — основных величин,
подлежащих экспериментальному определению, сводится к
вычислению квадратов модулей элементов матрицы рассеяния (см.,
например, [42, 43]).
Согласно C3.35) эти величины для частиц с произвольным
спином могут быть представлены в виде
w = С (?????? = С (<?**?20*?? Д, C6.1)
320 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
где С — некоторая константа,, Q — оператор, характеризующий
взаимодействие, ??,'Тг, ??, Хг, ??, ?2 — проективные операторы
начального и конечного состояний. Оператор Q обычно
представляется в виде некоторой линейной комбинации из матриц волновых
уравнений ?* и различных их произведений. Операторы ?, ?, ?
также могут быть выражены через матрицы ??, поэтому в
конечном итоге задача сводится к вычислению следов от различных
произведений матриц ?\ При этом в C6.1) остаются лишь
члены, содержащие четное число сомножителей ?\ поскольку
согласно C0.41) след от произведения нечетного числа матриц ?*
для частиц с любым спином равен нулю. Число матриц,
входящих в выражения C6.1), зависит от характера процесса и
типов взаимодействующих частиц. Оно возрастает с увеличением
спина частицы и повышением степени минимального полинома
C1.7). Для большинства процессов даже в случае частиц со
спином 1/2 это число превышает десять. Вычисление следов от
произведений матриц релятивистских волновых уравнений
представляет по существу одну из основных трудностей, с которыми
приходится сталкиваться при теоретическом расчете
вероятностей различных процессов, происходящих при участии
элементарных частиц.
Эта трудность может быть в значительной степени уменьшена
при использовании подхода, основанного на непосредственном
вычислении матричных элементов (вместо квадратов их модулей)
[98, 99]. Очевидно, матричный элемент ?? = ?2#?? несет
больше информации, чем \М\2, и если он известен: Л/= il/i + Шг,
то вычисление \М\2 = М\ + М\ сводится к нахождению суммы
двух квадратов. Однако до сих пор, как правило, вычислялся
непосредственно квадрат модуля матричного элемента. Причина
заключается в том, что по общей формуле C6.1) нахождение
w=\M\2*) сводится к выполнению ковариантной
операции — взятию следа от произведения матриц. В то же время при
вычислении самого матричного элемента приходится
использовать явный вид волновых функций и матриц, расписанных по
компонентам, что приводит к ревкому возрастанию объема
вычислительной работы. Однако вычисление самого матричного
элемента ? тоже можно производить коваряантно, если согласно
[99] использовать оператор представления, преобразующий
волновую функцию состояния ?? в функцию ?2,
?2 = ???. C6.2)
Поскольку ? — оператор представления, то (см. B7.35)) можно
написать
?а = {Wi) = (W ? = UT+r\ = гМГ = ^Г· C6.2а)
*) Мы опускаем множитель С.
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 321
откуда следует
Но согласно C3.21') ??-?? = ??, поэтому
? = bQb = (nT~lQ) t. C6.3)
Таким образом, с помощью этого соотношения можно вычислять
сам матричный элемент, используя ковариантную операцию
взятия следа. Выражение C6.3) содержит меньше матриц ?\ чем
C6.1), поэтому его вычисление значительно проще и менее
громоздко. Этот подход можно применять к частицам с любым
спином (см. [100, 101, 76]). Здесь мы рассмотрим подробно его
применение к задачам квантовой электродинамики [102—107].
В этом случае ??, -фг — волновые функции свободного электрона
(позитрона) и соответственно ?? — проективный оператор
электрона в начальном состоянии, ? — матрица преобразования бис-
пинорного представления C4.24).
Поскольку для электрона минимальное уравнение оператора
? имеет вид (i/>J — m2 = 0 {см. C1.14), C1.15)), то
проективный импульсный оператор C3.4) равен
?+= ?/2(?_???), v = p/m = (vjv0), v2=-i. C6.4)
Напомним, что здесь, как и в предыдущем параграфе, ? = ?;*?*
(а не v = ivk4h, как было в §§ 20—34). Спиновый оператор
согласно {32.21), C2.22) равен
? = _??, ^=1/2?«? C6.5)
причем антисимметричная матрица ? имеет вид
а^П^]Т])^а^.)г 4> = 0-ittC> ?, = 0, C6.6)
где с2 = 1 и (см. C2.14))
?-1 = ReCLitt = v0 - v.v/(i + ?0). C6.7)
Согласно C4.35') оператор ? имеет минимальный полином ?2 —
— 1/4 = 0, следовательно, проективный оператор состояния с
проекцией спина +1/2 на направление с имеет вид (см. C3.9))
? = ? + 1/2. Инфинитезимальные операторы /w = — Jlh очень
просто выражаются через матрицы Дирака
Jhl = ±(yky*-ylyk). C6.8)
Действительно, нетрудно убедиться с помощью C2.16), что все
соотношения C4.9) —C4.22) при этом выполняются.
Минимальное уравнение ?2 — 1/4 при этом также справедливо, в чем проще
21 Ф, И, Федоров
322 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
всего убедиться в системе покоя, когда ? = О, vq = 1 и
?? -1 0 0\
(сх0\
a = lo oJ =
1 0 0 0,
О 0 0 0
10 0 0 0)
что соответствует оси спиновых проекций с, направленной вдоль
х3. При этом согласно C6.5), C6.8) получим о = (?/2)??42, ?2 =
= 1/4. Таким образом, проективный спиновый оператор равен
? = ?2A-??), C6.9)
причем здесь и всюду в дальнейшем мы определяем матрицу ?
для электрона следующим образом:
* = ?2?????. C6.10)
Заметим, что в случае электрона нам не понадобится вводить
отдельно проективный оператор второго спинового состояния
(с проекцией нас, равной— 1/2), потому что для его получения
достаточно изменить направление с на противоположное.
Таким образом, проективный оператор состояния начального
свободного электрона с импульсом ? = mv и проекцией спина
1/2 на некоторое направление с согласно C6.4), C6.9) равен
(см. C3.21))
?? = -J- A — toi) (l - toi), <*! = (* (gx), C6.11)
где антисимметричная 4Х4-матрица ?? определяется по C6.6),
C6.7) через ?\ и сг.
Для нахождения общего вида преобразования ? в биспинор-
ном пространстве, входящего в C6.3), используем соотношения
C0.71), C0.72). Поскольку в этом случае представление имеет
вид @ lh)®D2 0), то оба максимальных веса Z0 равны 1/2,
следовательно, 2Zo = 1. Но вес 1 соответствует основному
представлению группы SO C), т. е. преобразованию 0(q) B.5).
Таким образом, имеем
?(,,,·) = (? + 2*-_-tX_)(l + 2?—jj^r-). C6-12)
Здесь в соответствии с B6.3), C6.8) следует положить
5'<±> = 9'/<±> = -*-g;(-J-e-beTV ± VY), C6.13)
где ?* — матрицы Дирака. В результате получим общее конечное
преобразование представления группы Лоренца для частицы со
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ
323
спином 1/2 в следующем, виде (см. [49, 102—105]):
T(q)--=Re9+iy4mp + a(pq), ? = A + gf )-''¦. C6-14)
Заметим, что если согласно B0.45) ввести вектор-параметр
? — чЫ 1 + ?2> то выражение C6.14) примет вид
Т(р) = Re/l^p + if lmy/T=~F+a(p). C6.140
Следует подчеркнуть, что столь простое и компактное, удобное
для вычислений выражение для самого общего преобразования
представления группы Лоренца в биошгаорном пространстве
может быть получено лишь на основе векторной параметризации.
Ранее с таким же обстоятельством мы встретились
применительно к самому преобразованию Лоренца B0.17). Поскольку
оператор Q в C6.3) обычно выражается в виде линейной комбинации
произведений матриц ?\ то, как отмечалось выше, задача
сводится к вычислению следов от произведений четного числа матриц
?**). Нетрудно показать (см., например, [42, 41]), что
(??) * = 46Ы| (???~?«) t = 4F**»» - ?*?» + дкп81гп) и т. д.,
причем число слагаемых, содержащих произведения символов
Кронекера 6W в произведении 2п матриц, равно Bи —1)!! =
= 1.3.5 ... Bп — 3) Bп — 1). При ? = 5 это число составляет 945,
а при ? = 6 достигает 10 395. Между тем во многих самых
основных процессах квантовой электродинамики квадрат модуля
матричного элемента (см. C6.1)) при учете спиновых состояний
всех частиц содержит произведения по 12 матриц ?\ Отсюда
ясно, насколько трудоемкой может быть задача вычисления | ДГ |2
при общепринятом подходе, особенно когда учитываются
поляризации взаимодействующих частиц.
Поэтому в большинстве случаев (см. [41, 42])
ограничиваются вычислением дифференциальных сечений процессов,
происходящих с неполяризованными частицами, или учитывают
поляризацию только некоторых из них. В то же время очевидно, что
опыт, учитывающий поляризацию частиц, несет гораздо больше
информации об их свойствах. Технические возможности для
постановки таких экспериментов в последние десятилетия также
значительно увеличились. Все это делает актуальной задачу
вычисления вероятностей различных процессов взаимодействия
элементарных частиц с учетом их поляризации.
*) Следует иметь в виду, что когда мы говорим о четном числе
матриц в произведении, то не включаем в это число ?5, так как эта матрица
имеет иную структуру, чем ?* (ср. C4.34), C4.35) и C4.39)). Например,
(fffYf)t = 4#0.
21*
324 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Матричный элемент C6.3) запишем в виде
М = (Q^T-1^ = 4" «??)<' C6.15)
где (см. C6.11), C6.14))
5=4?7,-, = A-?91)A-???)?(-?), C6.16)
причем v1 = (vl, ivu) и
Ч-~Ы-.р~*>-["^-%?№' + ·*> '???). C6Л7)
Что же касается вектор-параметра q преобразования ? (g),
которое осуществляет переход oti|)i=i|)(Pi, сх) к г|J=г|)(р2> са)»то
согласно C2.49), C2.48) он равен (полагаем ? = 0)
q = <— щ2, с, шх>, с = [<???,1/A + схс2). C6.18)
Поскольку —?==<— i»i, — с, гю2>, то Г (— g) = T-ittxT-cTiUt.
С другой стороны (см. C2.23), C2.25)),
*i = «@-*^) = ?-?,???!) rtel, C6.19)
поэтому
A — ???)?(— g) = r_ittl(l ~ toW) T_cTitt2. C6.19')
В последующих расчетах основную роль играют соотношения
C4.58), C4.59). Умножая первое из них на akbicm, получим,
учитывая A8.21) (см. также C5.22))
~abc ="d + ?°#, ?° = ??5,
d = (ab+[a-b])c = a(bc + [b-c]) = ((a-c) — ac)b, C6.20)
g = [а · Ь]хс = — а[Ь · с]х.
После умножения равенства C4.59) на iakbi получим
f2b = ???° - [? · Ь]х. C6.21)
Введение матрицы ?° вместо ?5 удобно потому, что при этом из
основных соотношений C6.20), C6.21) исчезает мнимая
единица i. Если умножить C4.59) на (i/2)ahh где а= — а, то
получим соотношение (см. C6.10))
?0^= ~f = _~Х# C6.22)
Отсюда следует после умножения на ?°(?02 = — 1)
?<??=?. C8.23)
S 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 325
Поэтому та C6.21) следует после умножения на ?°
lib = ab+[a-b], C6.24)
Между прочим, поскольку [а · Ь] = — [Ь · а], из последнего
равенства следует соотношение ab-\~ba = 2ab C5.21),
эквивалентное алгебре матриц Дирака C0.3).
Умножив C4.58) на Уго^а,» и Уг^а/т, получим после
простых преобразовании
_ ^ /\ _ ^ /\
аа = аа + ?°???, ?? = аа + ?°???, C6.25)
откуда следует
{??}- = 2??, {??}+ = 2?°#???. C6.26)
Если умножить равенства C6.25) на ?° и учесть C6.22), то
получим
??? = ??? — ?°??, ??? = ??? — ?°??. C6.27)
Умножим C4.59) на (УОомо&тл (а = — а, а' = — а'). После
некоторых преобразований получим [103]
ss? = 4- (aa')*+4"?0 (???,)*+{™^~ C6·28)
Отсюда следует (см. A8.28), A8.70))
???' = ??/?, {??'}. = 2{aa'}-,
C6.29)
{??,}+ = (??,)? + ?°(???,)?.
При a' = ? имеем
a2 = 4" l(a2)* + V° (aax)J. C6.30)
Используя соотношения A8.18"), A8.30""), получим из C6.28)
a (q) a (q') = S ([??']) - Re ??' - ?° Im qq'. C6.31)
Совокупность приведенных здесь соотношений C6.20) —
C6.31) образует специфическое исчисление операторов Дирака,
которое позволяет ковариантным путем с большим упрощением
производить разнообразные расчеты, встречающиеся в квантовой
электродинамике и других разделах теории частиц, где
используются матрицы Дирака. Операторами Дирака мы называем вели-
чины ?°, ?, ?. Вместе с алгеброй антисимметричных тензоров,
изложенной в § 18, это исчисление образует математический
326 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
аппарат, удобный для всевозможных квантовоэлектродинамиче-
ских расчетов.
С помощью приведенных выше соотношений не представляет
труда вычислить следы от различных произведений операторов
Дирака [103, 105]. Ниже приводится сводка наиболее часто
встречающихся выражений. Все входящие в последующие формулы
матрицы ?, ?, ??, ?2, ... антисимметричны:
(аЬ) t = 4аЬ, at = (?°?) t = {fab) t = 0, C6.32)
(^), = 2(ар)„ G°а|), = -2(ахрЬ, (?2)* = 2(?2),, C6.33)
(ab^d) t = ЦаЪ · cd - ас · bd + ad · be), C6.34)
(?6????)?=4?[6. c]xd,
(aab) t = 4???, (?°?6?) t = 4???6, C6.35)
(???2.?3) t = 4(???2?3) *, C6.36)
(???^?^ = (о^о^(аза4)* — (<*!<**)*(аза*)* + 4 ({?^}-asa4)t,
C6.37)
(аЭД, = - 4а (?? + ????N = 2аЬ(сф) t - 4?{??}+6, C6.38)
(?°??(??5)* = 4?(???-???N = 4?{???}+6-2??(???)«. C6.39)
Входящий в матричный элемент C6.3) оператор Q содержит
произведения операторов Дирака. С помощью соотношений
C6.20) — C6.30) он в самом общем случае может быть приведен
к универсальной форме [105]
Q = I + ??° + а + fb + a. C6.40)
В таком виде может быть представлена любая 4Х4-матрица.
Здесь |, ? — числа: a, b — 4-векторы, а = — а — матрица. Все
эти величины могут быть как «вещественными», так и
комплексными. Для векторов a, b и тензора a
a = (a,ia0), a = (_.f '*) C6.41)
«вещественность» означает, что a, а0, ft, ft вещественны. Если
какие-либо из этих величин комплексны, то всегда можно
написать а = а' + га", а = а' + их", где а', а", а', а" вещественны
в указанном выше смысле. Совокупность величин |, ?, ?, 6, ?
содержит 16 параметров: 1 + 1 + 4 +4 + 6 = 16. В совокупности
операторов 1, ?°,"?, ??&, ? содержатся все матрицы Гв C4.46')'
с некоторыми коэффициентами.
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 327
Пять операторов 1, ?°, ?, ?°6, ? обладают свойством
«ортогональности», которое заключается в том, что след от произведения
любых двух различных из их числа равен нулю. Поэтому, если
имеется второй оператор Q' = %' + ?'?° + а' + ?°?' + ?', то след
от произведения QQ' вычисляется просто:
(W) t = («' - ??? +?? + W + ??), =
= 4F6' - ??' + ??' + 66' + ?/2{??').) - C6.42)
Очевидно, Qt = 4|. Оператор Q C6.40) можно задавать
следующим образом: Q = Q(l, ?, a, 6, a). С помощью C6.20) — C6.30)
нетрудно убедиться, что
<?(!, ?, ?, 6, a) 0F', ?', ?', 6', a7) = <?F", ?", *", 6", ?"), C6.43)
причем
?" = II' - ??' + ??' + bb' +-L (??')„
?" = ??' + ??' - ??' + ??' + -|- (???')„
?''=(?'-?>+(? + ?)?'+(?'-?'><N-(?+?><)&',
C6.44)
Ь" = (-?' + ?'*)? + (? + «><)«'+(?'_«')& +A + ?) 6',
?" = ??' - |'? - (?«' + ?'?)? + [« · «'] + [? · *>'] +
+ [« -ЬТ -[Ь-а'] ?+{??'}-.
Поскольку матрицы Q произвольны, то при условии | Q | ? 0 они
образуют полную линейную группу в четырехмерном
пространстве GL D). Формулы C6.43) показывают, что ?, ?, ?, 6, ?
являются параметрами этой группы с законом композиции C6.44).
Положив а = 6 = 0, мы получим 8-параметрическую подгруппу
этой группы. Если обозначить ее элементы Q (|, ?, ?) = ? +
Н~ *П° + ос» то закон композиции параметров |, ?, ? имеет вид
(нужно положить в C6.44) а = а! = Ъ = 6' = 0)
Г = ??' - ??7 + 4" (??')*' *!" = W + ?Ч + 4"(aXa,)" C6 45)
?*- ??' + ?'? - (??' + ?'?)? + {??'}_.
Матрицы ? C6.14) очевидно образуют 6-параметрическую
подгруппу этой группы, которой изоморфна также группа Лоренца.
Матрица # = ? + ??° + ? совпадает с ? C6.14), если ?, ? и a
связаны соотношением
F + *ЛJ = 1 + (a(a + iax)b/4. C6.46)
328 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Действительно, если ? = Re ?, ? = Im ?, ?? ? + ?? = ?. ? ??
же время согласно A8.13), A8.32) (?2 (pq))t = — 4 Re (pg)\
(? (pq) ?? (pq))t = — 4 Im (pgJ, следовательно, соотношение C6.46)
превращается в р2 = 1 — р2#2, т. е. в тождество. Из C6.46)
следует
?2 = ? + ?))/2, ?2 = (?-?))/2,
Л = |//)г + ((аахL/4J, D = l + (<x%/4.
В выражении C6.19') согласно {36.14), C6.18)
? (- с) = A - ? (с))//ТТ?, 1 + с* = 2/A + сЛ),
поэтому A - ??(сх)) Г (- с) = /V2(l + clCi) A - ice(Cl>) A -
—? (с)). Поскольку (см. C6.31)) ? (сг) ? (с) = ? ([схс]), так как
схс = 0, то
A - te(ci)) Г(- с) = /4A+схс2) [l-«(e)-to(ci)+'a([«i«l)] =
= ^1 A + с1в1)A-р), C6.47)
где
? = -? = (??)· <36·47')
Здесь С есть комплексный 3-вектор следующего вида*):
с = ^c.i + *(;» + ^ = <iCtt tex> = <C) /Ci>. C6.48)
Для С справедливы соотношения
1 + С2 = 0, 1 + | С |2 = 4/A + сгс2). C6.49)
Таким образом, матрица В C6.16) имеет вид (см. C6.19'),
C6.47))
В = /2/A+ |С|2) A - *9Х) T.ittl A - ?) ?*,. C6.50)
Следует подчеркнуть, что спиновые векторы сг и с2 входят в
это выражение и в матричный элемент ? C6.15) не по
отдельности, а только в специфической комбинации C6.48),
образующей комплексный вектор С.
Заметим, что произвольный оператор C6.40) может быть
представлен в виде суммы Q = Qo + Qu (?o = I + ??° + ?,
0 Заметим, что матрица ?, ввиду комплексного характера с, не будет
€вещественной» в указанном выше смысле.
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 329
Qi =?+?°6, причем (?о — четный, a (?? — нечетный оператор в
смысле числа матриц ?*, входящих в члены, из которых
слагается оператор. В матричном элементе C6.3), C6.15) всегда можно
добиться того, чтобы оператор Q относился к одному из типов
Qo или Qu Действительно, из соотношений C6.20) — C6.25)
следует, что члены, содержащие произведение четного (нечетного)
числа ?\ всегда сводятся к типу Qo(Qi). В выражении (??? =
= (Б +ЛТГ+ 0 + ?°6 + ?)?? можно в любом из слагаемых
заменять ?? на — iv\tyu так как ?? есть решение уравнения Дирака для
свободной частицы (??? + 1)?? = 0. Тем самым мы можем
менять четность оператора, стоящего при ??, в любом выражении
и таким путем свести Q к Qo или Q\. Будем считать, что Q =
= Qx = а + ?°?. В этом случае в выражении C6.15) для
матричного элемента в операторе В C6.50) следует оставить только
нечетные по ?* члены, и таким образом мы получаем
м = - -?(?^?L'№-<*D - Р> г""&)" <36-51>
поскольку Tq и ?—четные операторы (см. C6.14)).
Следовательно, задача сводится к вычислению выражений
Dt = faT-iuJbfii), = (ъЪ-иьы (а + y°b))t, C6.52)
02 = faT-ia$Tia, (a + Yb))t. C6.53)
Поскольку (i»iJ, (г'»г)г, <— i«i» *»г>2 вещественны, то согласно
C6.14)
_1-аAИ1) 1 + a(to,)
l + tt«-i»lt ?»»
C6.54)
Вычисление следов в D\ дает (см. ^36.32), C6.35))
#! = 4 [A - »?)(! - »!)]~1/гA - Bi»a) ?>? (? + ал - а*Ъ),
а = а «— iult i»2». C6.55)
При вычислении Dz учтем, что согласно C1.6), B2.21)
Vj.iUl = T-iaJiuflT-i^ = T.{UlV°, V° = Zj^ = @, ?)
и (см. C6.25), C6.47')) ?/>$ = 4??° (так как ?>°? = 0), причем
330 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
согласно A8.23)
Таким образом (см. C6.54)), обозначив р\ = a^iuj), ?2 = ?(?»2)„
имеем
Dt = (Т-Ш$>ТШ, (? + fb))t = [A - »?)(l - »I)]-,/jX
X [A - ?" ?) Щ A +Ша + ?° S)]t. C6.57)
G помощью C6.35), C6.39) находим
D2 = 4 [A - «?)(l - «*5)]/* ю* (ба + ЯЬ), C6.58)
где (см. B2.24), A8.9), A8.23))
[(? - «0(? - *DY4t = V(i + »u)(i + vu) =v„
C6.59)
? = ?? — ?2 + Р*Рг — ???* =
_( ° ? (bi-»«+i vem
~ll'(B2-Bi + [?2I) oj )-
Поэтому, если а = (?, ia0), b — F, ib0), то,
и;0 (Ga + Hb) = CN,
JV«= A—ю1юа + (»?·«2))« + ? — ??)("? — w2) — b0[uxu2]. C6.60)
Поскольку
a = a(<-ia1,iu2>)^T-^-(_}i^_Ui) 0 i;), C6.61)
«*-r=k(.PA? » )· C662)
то для ?), имеем: Dj, = - iFoV2/(l + | С |а) JV0, где
?» = »? (A — MiMa)« + («о — &*)(»i — иг) —
— (Ь0 + ах)[и1и2|) — vu (A — »!»2) a0 +
+ «(»! — »2) + &[«ti«2]). C6.63)
В результате получим для матричного элемента выражение
M=-iV, V 2/A + | С |г) (ЛГ„ + #С). C6.64)
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 331
Чтобы получить явный вид ? для любого процесса, нужно
лишь знать величины а, а0, 6, Ь0, определяющие оператор Q\
(см. стр. 329).
Введем светоподобные 4-векторы ci=(clJ ?), c*=(c2, i), сг =
= с\ = 0. Легко убедиться в справедливости соотношений
clc2 = Clc\ = 1 + схс2 = 4/A + | С |»),
* -и— · „ (Зо.Ь5)
NC = CiN+cJciCi.
Здесь iV+ — антисимметричная матрица вида B0.3)
iY+ v—jv о;·
Если ?, 6 — произвольные «вещественные» 4-векторы, то при
любом комплексном 3-векторе q имеет место равенство
(aq±b)* = aq%b. C6.66)
Действительно, согласно A9.12) а* = —Ра = —аР, Ь* = — РЬ,
поэтому
(aq±b)* = а*д±Ь* = аРд±РЬ.
Но (см. B7.2)) Р?±Р = ?*, таким образом, равенство C6.66)
доказано. Нетрудно доказать также следующее соотношение,
справедливое для произвольных «вещественных» светоподобных
векторов а, Ь: а2 — а2 — а%= 0, Ь2 = Ь2 — Ь\ = Ои произвольных ?, q':
aq±b-aq^b = ab-aq±q'+b. C6.67)
Это равенство можно написать еще в виде (см. A8.80))
{[a-q±a\[b-q*b\)t = 0 (?2 = Ь2 = 0). C6.68)
Тождество C6.67) устанавливается прямым вычислением
aq± = ((«х =f ш0) ?, ± ag), q^b = ((- 6х =Fib0) д', ± bq')f
aq±b = (— [ab] zfc ? (Ь0а — а0Ъ)) д, яд^Ь =
= (- [аЪ] =F ? (Ь0а - а0Ъ)) д\ C6.68')
яд±Ь-ад^Ь = q{[ab][ab} ± г([аЬ]-(Ь0а — а0Ь) —
—(Ь0а — а0Ь) · [аЪ]) + (Ь«а — а0&) · (bj* — а0Ь)}«'·
Но согласно (П.1.79), (П.1.81)
lab}.[ab] = [аЪ]2 + (аЪ — ЬаJ =
= а*&2 _ (аьJ + аЬ(аЬ + Ьа) — ЬЧа — asi·»,
332 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
\аЬ\ · (Ь0а — а0Ъ) — (Ь0а — а0Ь) · [аЪ] =
= [V* - а0Ь, М>11х = ** (Ь0аЬ - а0Ъ2) -
— 6х (Ь0а2 — а0аЪ) = аЬ (Ь0а + а0ь)*·
Поскольку а2 = а2,, Ь2 = bj» то, как нетрудно проверить,
[аЪ] · [аЪ] + (Ь0а — а0Ъ) · (Ь0а — а0Ь) = аЬ (а · 6 + 6 ·? — aft — аьЪь).
Следовательно,
ад±Ь-ад^Ь = ab*g [а-6 + ft-а ± i{b0a +a0b)x—ab — a0b0]q'.
C6.69)
С другой стороны, согласно C6.680
aq±qTb = q [(—?? =F м0)(— ЬХ =F *&о) + <*-b] ?'· C6.70)
Квадратные скобки в C6.69) и C6.70) совпадают (см. П.1), что
доказывает равенство C6.67).
Вычислим квадрат модуля Л/, пропорциональный
дифференциальному сечению w:
w~\M\* = (vl/2(i + \c\*))\N0\*\i + nc\*, » = ??/??0.
Используя C6.65), получим
? ? ? = (FJ/8) IN% |· c*Cl A + с\п+ск1с\сх +
+ (сгП+О'/сгС! + [cln+Cj. |7Dсх)а).
Вводя c*cx под скобку и учитывая C6.66), C6.67), можем
написать
? ? |8 = (FJ/8) I iV0|» Ofo + c^+Cl + e*tH*ei + ctn+nlcj =
= (П/S) | #. |» c*8 A + «+)<1 + ml) Cl =
= W«)|^.l2|i + »2l^»^
где ?n —преобразование Лоренца B0.17), отвечающее вектор-
параметру ? = ?/?0. Окончательно находим
?? |2 = (VJ/8) I Nl + N г\ dLacv C6.71)
Мы получили общее выражение (с точностью до множителя)
для вероятности любого процесса квантовой электродинамики,
описываемого матричным элементом вида C6.3). Замечательной
чертой выражения C6.71) является то, что зависимость от
спинов начального и конечного электрона (позитрона), как
оказывается, имеет простой и универсальный характер. Эта зависи-
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 333
мость целиком определяется величиной
R=c*2Lnc1, C6.72)
где светоподобные векторы сг=(с19 i), с2=(с2, i) задают
направления проектирования спинов, а вся зависимость от характера
конкретного процесса сосредоточена в трехмерном (в общем
случае комплексном) векторе ? = N/NQ. Простота выражения для R
позволяет произвести его общий анализ и получать общие
выводы, пригодные для любого процесса типа C6.3). Здесь нам
удобно будет воспользоваться блочной формой матрицы Лоренца
(см. A9.3), B0.26),? = ?? + ??2)
Ln=(9il\ p = |l + n2r1(l-|«|2 + 2(«i+»i-«i + «2-«2)))
J C6.73)
г = 2 11 + и2 Г1 (я, + [пгп2]), $ = - 211 + л2 ?1 (я, - [пгп2))у
к = 11 + я21 A + | я |2), r2 = s2 = к2 - 1,
?? = ! + «·$, ?? = 1 + r-r, ?* = —??, pr = —?*. C6.74)
Выражение для ? теперь принимает вид
R = c2pcx + ??* — c2r + к {c\ = c22 = 1). C6.75)
Чтобы найти экстремум R в зависимости от cL и с2, образуем
функцию F = R + (?!/2)(?; - 1) + (?,/2)(*5 - 1). Уравнения
dFldcx = dF/dc2 = 0 имеют вид
?*2 + * + ?^ = 0, рсх — г + ?2?2 = 0. C6.76)
Подставляя значение сх из первого уравнения во второе и
значение с2 из второго в первое, получим, учитывая C6.74),
A — ???2) ег + (к + se1 — ?2) s = 0,
A - ???2) с2 + (?, + rc2-k)r = 0. C6'77)
Отсюда следует, что cL l| s,c2 || г, а поскольку clfCa— векторы
единичные, то сх = ± «/|«|, ea= ±r/|r|(|«| = |r|) (см. C6.74)).
Кроме того, уравнения C6.76) удовлетворяются, если 1 — ???2 =
= ?.+ scL — ?2 = ?? + rc2 — ? = 0, т. е. ?2=& + sct1 Хг = к — rc2,
<fc + *cx)(& — rc2) = 1. При этом из C6.76) имеем
Эти уравнения совместны, так как подстановка значений сг, с2
из одного уравнения в другое приводит к тождеству, что можно
показать с помощью C6.74). Подстановка с2 или сг из C6.78)
334 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
в C6.75) дает R = 0. Легко проверить также, что с\ = с\ = 1 и
Таким образом, справедливо общее утверждение: для любого
процесса, описываемого матричным элементом C6.3), при
произвольных импульсах электронов каждому направлению оси
ci (сг) одного электрона всегда соответствует направление оси
с2(сл) второго электрона — такое, что вероятность процесса равна
нулю, т. е. процесс с такими спинами запрещен. Соответствие
между сг и с2задается формулами C6.78), которые справедливы
при любых импульсах частиц. Эта общая закономерность с
особой силой подчеркивает роль спиновых соотношений в
процессах взаимодействия: при любых импульсах существуют такие
корреляции спинов, для которых процесс невозможен. Случаи
сг = ± s/\ s |, с2 = ± rl\ r | с одинаковыми знаками являются
частными по отношению к C6.78) и дают R = \М|2 = 0. Если
же сх = ± $1\ $ |, с2= =F r/| r |, то соответственно
Д = 2(*±|г|), C6.79)
? ? |2 = (FJ/8) IN0 |2(l + ? ? |2 ± 2 Уп1+[пгп2]* ). C6.80)
Очевидно, здесь верхний знак соответствует абсолютному
максимуму йи \М\2.
Таким образом, любой процесс типа C6.3) имеет
максимальную вероятность для следующих направлений осей спиновых
проекций:
сг = sl\* |, с2 = - п\ г |. C6.81)
Рассмотрим еще случай, когда сг = ± с2 = с. В первом из них
имеем
?? |2 = (FJ/8) \N.t\*c-t\* (cL = с2 = с). C6.82)
Во втором случае
?? |2 = (Vl/8) IN012 (| [nc] |2 + 2c [*?]) (с, - - c2 =c).
C6.83)
Усреднение (суммирование) по спиновым состояниям
осуществляется очень просто. Усреднить по спинам означает взять
полусумму значений \М\2 C6.71) для проекций спина +1/2 и
— 1/2, что соответствует сх и —с3. Поскольку R C6.72) линейно
зависит от cL и с2, то усреднение по спинам начальной или
конечной частицы сводится к вычеркиванию в R членов,
содержащих сг или с2 соответственно. В результате получим (см.
C6.75))
Д1 = к — гс2, R2 = к + sc^ C6.84)
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 335
где —1 (—2) означает усреднение по спинам первой (второй)
частицы. Усреднение по спинам обеих частиц дает
\ м |21·2 = {vl/8) | N1 + n> \к = (vys) I лг, |· (i +1»?·) =
= №)(|#0P + W). C6.85)
Во многих случаях величины iVo, N C6.62), C6.63)
являются вещественными. Если ?=?/?0 — вещественный вектор, то
? @П 0\
I 0 1 / и выРажение C6.71) сводится к
| ? |2 = (FJ/8) ?? + ?* ? A + с2Опсг). C6.86)
При этом для зависимости вероятности \М\2 от спинов
справедливы дополнительные простые закономерности:
1. Вероятности процессов, отличающихся одновременным
изменением знаков проекций спина обоих электронов, одинаковы.
Действительно, для с19 с2 и— сг, — с2 \М\2 C6.81) имеет
одно и то же значение.
2. Если сх = с2 =-- с, то (см. B.5))
? ? |2 = G02/4) | ?012 A + л2 cos2 ?), C6.87)
где ? — угол между л и с.
Следовательно, вероятность процесса, в котором оба электрона
имеют одинаковую проекцию спина на одно и то же направление
с, есть линейная функция от cos2 ?. Эта вероятность постоянна
для всех с, лежащих на круговом конусе с осью ? и углом
раскрытия 2<р. Она минимальна: | ? |2 = (Fq/4) | iVe |2 при
? = ?/2, т. е. когда общая ось с лежит в плоскости,
перпендикулярной к п. Ее максимум | ? |2 = (Fq/4) | N% + N2\ достигается
при с || п.
3. Если cL = — с2 = с, то (см. B.5))
|M|2 = (F2/4)|iV|2sinV C6.83)
Таким образом, вероятность процессов с переворотом спина
пропорциональна sin2 ?. Она также постоянна на поверхности
конуса (П.2) и максимальна: | ? |2 = (Fq/4) | N |2 при с J_ п.
В случае с \\ ? процессы с переворотом спина запрещены.
4. Запрещены все процессы, для которых с2 = — Опсг,
поскольку при этом \М\2 = 0 C6.86). Это частный случай по
отношению к C6.78).
5. Вероятность имеет абсолютный максимум
?? |2 = (F2/4) I Nl + iV21, C6.89)
когда c2 = 0*cv
336 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
6. Усреднение по спинам начальных состояний (т. е.
вычеркивание членов с cx), либо по спинам конечных состояний дает
один и тот же результат, совпадающий с результатом усреднения
по всем спинам; при этом
|M|2 = (F§/8)|iV§ + JV2|. C6.90)
Таким образом, вероятность, усредненная по спинам, равна
полусумме максимальной C6.89) и минимальной @) вероятности.
В качестве иллюстрации применения полученных выше
общих соотношений к конкретным расчетам рассмотрим матричный
элемент процесса, для которого оператор Q определяется
формулой
Q = TV Шг -№-тгп (? - 0 л <36·91>
где /?=?>?+??, /2=?>2—?2, ?>?.2=??,2?, ??,2=&?,2?, ??=?* =0
v\ = vl=—l; pu /?2 —импульсы электронов, к\, fe —
импульсы фотонов. Придавая различные значения 4-векторам g,
fe, можно с помощью C6.91) описать целый ряд процессов (см.,
например, [41—43]): комптон-эффект, тормозное излучение,
рождение пары фотоном в поле ядра, рождение пары двумя
фотонами, аннигиляцию пары. Приведем оператор Qj^ униве|ь
сальной форме Q = Q\ = а + ?°6 путем замены — gh и — hg
на ighvi и ihgv\. С помощью C6.20) получим
Q = i(a + fb), C6.92)
причем
a = 2(^g-^*) + ((g.*)-g*)x+, C6.93)
b = [*.g]xK.f "± = 1^*^ C6·94)
Подстановка этих выражений в соотношении C6.60), C6.63),
C6.64) сразу дает значение матричного элемента М. При этом
N0 и N вещественны, следовательно, для \М\2 имеют место
выражение C6.86) и все справедливые для него выводы.
Отметим, что полученные легко обозримые выражения
содержат в себе общую зависимость матричного элемента (а тем
самым и вероятности процесса) от произвольных поляризаций и
импульсов всех участвующих в процессе частиц. Эквивалентные
по информативности выражения, полученные методами,
изложенными в общеизвестных руководствах [41, 42], заняли бы
несколько страниц и потребовали бы значительной
вычислительной работы.
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ
337
В качестве второго примера рассмотрим применение
изложенных в данном параграфе методов к расчету процессов,
описываемых матричными элементами несколько иного типа. А именно,
речь пойдет о процессах рассеяния мюона и электрона
(позитрона) на электроне и превращении электронной пары в мюонную
[107, 109]. Соответствующие матричные элементы (за
исключением скалярных множителей) имеют вид (см. [41, 42]):
I. Рассеяние мюона на электроне
Ме11 = ?2?4? · Uy41M ? = Pi — ??· C6·95)
II. Превращение электронной пары в мюонную
М% =--?(- Рг) ?4? · йтЧ (- Р2)/?а. C6.96)
III. Рассеяние электрона на электроне
Мее = M'ee/q2 - Mee/q'2, q' =* р% - plf
— — — / — (ОО.У7)
Мее = ?2?4? · ???4?» Мее = 4>·?*4>1? ???4?·
IV. Рассеяние позитрона на электроне
MeP = M'ep/q2-MeP/ql qi = p'i + pu
MeP = ?2?4?·?>? (- pD тЧ (- рд, C6.98)
^? = ?(-??)?4?·??(-?)·
Здесь подразумевается, что ?? = ?(??), ?? = ?(??) и т. д.—
дираковские волновые функции свободных частиц,
характеризуемых 4-импульсами pi, р[ ... В C6.95) pi, p2 — импульсы
начального и конечного электронов, рг, р2 — то же для мюонов.
В C6.96) ри Р2 относятся к электрону и позитрону, Ри р'2 — к
мюону и антимюону. В C6.97) рХ1р[ —импульсы начальных
электронов, рг, Рг — конечных электронов. В C6.98) ри Pi —
начальные, а рг, Рг — конечные импульсы электрона и позитрона.
Системы отсчета и поляризации всех частиц произвольны.
В работе [110] был предложен способ описания спиновых
состояний электронов, который получил довольно широкое
распространение в научной и учебной литературе [41, 42, 45, 54].
В качестве оператора, коммутирующего с р, используется
оператор
?'=?0*, *? = 0, {?'?}- = 0, *2=1, ?,2=1. C6.99)
Четырехмерный вектор $ называется спиновым вектором.
Собственным значениям ±1 оператора а' отвечают состояния
электрона с проекцией спина ±1/2. Нетрудно установить связь опе-
И. Федоров
338 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
1-4
ратора ? с введенным выше оператором ? = — ??, ар = О (см.
<36.5), C6.6), C6.10)). Согласно C6.25) имеем ???= ?°???;.
Вектор ??? ортогонален к ? (???? = 0). Кроме того, (???J =
— — ???2?. Согласно A8.69) аХ2 = ?2— 72(?2)*. Поскольку
ш; = 0, ?? (axvJ = l/2v2(a?)t. Из C6.6) имеем V2(aa)f =
= [cv]2 - (к'1сJ = ?2 - (vcJ —(vl - (vcJ) = v2 = -l. Таким
образом, 4-вектор ??? обладает свойствами вектора s C6.99):
(axvJ = 1 и paxv = 0. Следовательно, ?' = ?? = ???; (см.
[103]), т. е. оператор ?', коммутирующий с /?, или, что то же
самое, с ?;, отличается от истинного оператора проекции спина
? = — ?? множителем iv.
Оператор ? C2.22), C2.21) непосредственно связан с малой
группой, изоморфной группе вращений, и через нее
(посредством теоремы Нетер)—с моментом количества движения. В то
же время оператор о' C6.99) вводится более формально. Если
в ? трехмерный вектор с имеет прямой смысл оси спиновых
проекций, то в ?' физический смысл 4-вектора s неясен. Кроме того,
оператор вида C6.99) удается ввести только в случае электрона,
тогда как оператор C2.22) универсален и пригоден для частиц
с любым спином.
Используя оператор ?', нельзя непосредственно получить
простые соотношения, приведенные в § 32, позволяющие
осуществлять переходы между различными состояниями свободной
частицы, а также соотношения C6.71), C6.86), приводящие к
простым общим закономерностям для зависимости вероятностей
процессов от спинов. Для этого нужно перейти от ?' к ?.
Тем не менее оператор ?' и спиновый 4-вектор s широко
применяются в силу двух обстоятельств. Во-первых, математическая
структура s проще, чем а, поскольку в s матрицы ?* входят
однократно, а в а — двукратно. Кроме того, s есть 4-вектор, а а —
тензор. Во-вторых, с помощью s осуществляется явно
четырехмерно ковариантное описание спина, в то время как в а входит
трехмерный вектор с. Поэтому, например, соотношения C6.62) —
C6.64) внешне выглядят как трехмерно ковариантные (будучи
по существу четырехмерно ковариантными).
Уже упоминалось, что вектор s не имеет непосредственного
физического смысла. Приписать ему последний можно лишь с
помощью установленного выше соотношения s = (s^ is0) = ? ?,
которое в раскрытом виде сводится к равенствам (см. C2.6),
A8.23))
s = c + vc-v!(l + v0)y sQ--=vc/(l+v0)t C6.100)
или, если ввести вектор-параметр буста B2.24) и = ?/(? -f- ?;0),
s = с + cu-v, sQ = си. C6.101)
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 339
Таким образом, зная ? (либо у, и ), всегда можно перейти от с
к 5, а также обратно:
c = s — s0v. C6.102)
Поскольку ?'2 = (?°$J = 1, то проективный спиновый
оператор имеет вид (см. П.5) l/2(lzF'fs).
Обобщая соотношение C3.35), полученное в § 33 на основе
теории проективных операторов, можем написать
bQlb'(bQ2b)* = (Tl(?2T2<?lb, C6.103)
где Q\, Q2 — произвольные матричные операторы, причем Q =
?? = ??·?? = V4(l-toi) A-?°??) = V4(l-toi-ir0*i + ? *)>
?2 = ?2 · ?2 = 1П A-?2-70*2 + Й, C6.104)
pi = [v\-si], ?2 = [v2-s2], V1S1 = v2s2 = 0,
v\, *>2 — 4-скорости частиц 1 и 2. _ ^ _ ^
Матричный элемент C6.95) запишем в видеМ =\|)a«%#^2a^i»
где а — произвольный 4-вектор. Вычислим выражение
U = ?2?%·??(?2??)*(?2??)*? C6.105)
которое сводится к |Af|2, если положить_а-а = 6-6=1.
Согласно C6.20) —C6.30) имеем (поскольку Ъ = ?4?+?4 = —Ь)
16?2???· (ЬН\)* = —16(????2?) = 5?— S2, C6.1050
где
Si = [(?1 + ?°?)?(???2 + ?°?2)?], =
= 4a((vi-v2)—viv2 + (si-s2)— sxs2 + *|>2·$?]? + *|>2·?;?]?N,
C6.106)
S2 = [A + *???) ? A + i px) a]< =
= 4a A + p2px + p2xpx + ipx - ??)?. C6.107)
Поскольку (см. A8.56)) ???? = ???2 — 1/2(?1?2)?, то C6.105')
после простых преобразований приводится к виду
4?^??· ??>??)* = — ?(?+ + фх)Ь, C6.108)
где
?± = ?± = NV±NS± + ?? - (??),/2, ? = - ? = [v--s+]f
N*±=Nv± = i±vt/2*v, Ns±=Ns± = i±Qt/2*Q, C6.109)
V=(l7ri;2), ?=E?·52), У± = У1±У2, S± = Sl±S2.
22*
340 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Отметим, что матрица ?± полностью симметрична по отношению
к ? и ?. Совершенно аналогично получаем
4???1 · (?????* = - ? (?? + ??'?) 6, C6.110)
где ?+,?' отличаются от ?+, ? штрихами при всех величинах.
Таким образом (см. C6.105)),
16i7= а (е+ + ???) Ъ-а (?+ + ??')?6 =
= ? (?+ + ???) ft.b (?+ - ??'?) ?.
Полагая здесь 6·6 = ?·? = 1, получим (см. C6.95))
16<?<|^?|2 = [(«+ + ??)(?; - ?'?)]? =
= (?+?; + ???,?), = (?+?+'-??'),. C6.111)
Подставляя значения ?+, ?+, ?, ?7, согласно C6.109) находим
окончательное явное выражение для \???\2
16g4| ?«?|* = [(?+?+ + ?? - (Ni/2)(iV+^+ + 6V -
-FV)f/2)]4-([»-.*+] [»1·4])« =
=/0>i, *i; »2. *2; »?.*?; »?,*) = /(i, 2, i', 2'), C6.И2)
где цифры 1, l7,... символизируют пары (v\, S\), (?>?, *?) и т. д.
•Это выражение, определяющее зависимость вероятности раесея-
ния мюона на электроне от импульсов и поляризаций всех
частиц, является вполне обозримым, его симметричная структура
т. зависимость от всех величин непосредственно просматриваются.
Усреднение по любым из спиновых переменных осуществляется
в C6.112) путем простого вычеркивания всех членов,
содержащих соответствующие векторы s. Так, например, результат
усреднения по $2 и s2 выглядит следующим образом:
«WpEiF = (?^<), - ([v--s1][v'_.s1])t =
= 2 B + ?&? + v[v2 + vxv[ · v2v'2 — ???2 · v2v[ +
+ v^vL-s^ — v^-visj. C6.113)
При этом вследствие законов сохранения
Pi + Pi = mvi + m'v'i = mv2 + m'v'2, vL = — гу_, г = т/т',
- ?;12/2 = - r2vi - (l + ул) = г2 A + vxv2), C6,114)
*v'i = V2V2, VXV2 = ?7??729
(«vO* + (^iJ = (*V-J + 2?????1?2 =
= A + iV>2)(l + ?[?2) + г^-^а.
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ 341
Поэтому имеем
8g*|17^P = (i;ii;i)8 + (^;J-
- A + г2) vl/2 - г (visa - v-srv-s[)t C6.115)
что совладает с известным результатом (см. [111]).
Обращаясь к процессу II C6.96), следует учесть, что (см.
C1.21), C4.39))
?(-?) = ?5?(?), *(-?) = -?0>)?5. C6.116)
Поэтому из ?(?)?(/>) = 1 вытекает ?(— /»)?(— ?) =р —1 (см.
§ 31). Из C6.116) следует тдкже
?.(-?) = ?(-?) ·*(-!») = -ЧЧ(Р) ·?(?)?5 = -?5?(?)?5 =
= -('/4)?5A - iv) (? - ?0*) ?» = -('?) (? + iv) A + ?0?).
C6.117)
Таким образом, ? (—?) отличается от ? (?) изменением знака как
?, так и s. Учитывая эти соотношения, запишем ??*? C6.96)'
аналогично ??? C6.95) в виде
?*??& = ?2?5??2··??«?2 C6.118)
d соответственно
ff« I Jl#i |· ^ [ф.У'аЧэх-(?»?*^4>?)*][*??*»4>? · (??^??)*]. C6.119)
Поскольку ?*6 = ?4(?5?)+?4 =1>?5, то согласно C6.117),
C6.103) получим
?2?5???· (^275Й>0* == (??&?5?2?5?)< =
= -Ыри *\)Ь*(-Р2, -s2)a\t. C6.120)
Мы видим, что это выражение отличается от C6.105') лишь
заменой /?2, $2 на —рг, j—*2# Аналогично второй множитель в
C6.119) отличается от ?^??'??^???)* заменой р[, s[; р2, s'2
на р2, $2*> — Pi» — $? соответственно. Следовательно, используя
функцию /, введенную в C6.112) для процесса I, можем сразу
написать для процесса II
I6g41 М%\* = f (vlt 8X; — у2, — s2; у2, s2; — vl9 — s[) =
= /A,-2,2',-1). C6.121)
Для рассеяния электрона на электроне имеем согласно
C6.97)
I Мее |2 = | М'„|2/?4 + I Ml с|2/У4 - 2 Re (лО?)/дУ«. C6.122)
342 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Из C6.97) ясно, что Мее совпадает с выражением C6.112),
а Мее отличается от последнего лишь перестановкой ?2 и ?2,
т. е.
|м;;|2=/A,2', ?',2).
Таким образом, для определения \Мее\2 необходимо
вычислить лишь выражение Re \МееМее\ Для этого воспользуемся
следующим приемом. Согласно C4.56) имеет место равенство
Мее = ^2v4i-^2v4i = ^??-???? — ?aV4riaT4i —
- 1/2(?2?4?·?2?41 + ^2V5v4i-n>2V5v40- C6.123)
Отсюда следует
Re OOO = ЛГ, - V2 (| Мее |2 + Мг), C6.124)
где
М0 = Re [?? (?,??-???? - ?2?5??·???4?)? = Re (#?#? - UJj'J,
Мг = Re (?/« Yav5v4i-*ivV*i) = Re Wi.
#o = ?2?1 · (?2«??) * = (????2) * = — (????2) ,, C6.125)
U ? =^5^г (?2???)* = — {T?a%2f)t,
U2 = ?2?56??· (????)* = — (Tiax2fb)t,
a #?» #?» ?^2 отличаются от этих выражений лишь штрихами
при ??, ?2 или соответственно при ? я s. Заметим, что здесь ана-
логично C6.105) мы рассматриваем выражения вида "фг^фц
(?^^??) с тем, чтобы положить впоследствии ?·? = 6·6 = 1.
Вычисление выражений C6.125) с помощью формул C6.20) —
C6.30) и соотношений § 18 не представляет труда и дает
W0 = (s+p* + ??+?8+)?, Шг = (?;-?* + is_Nv+)a,
AU2 = ? (? - i (? + px + psx)) 6, C6.126)
где
?* = [Vi-v*h Ps = ISi'SiU ? = v+s+ + s_ ·?;_ — i>+-s+f
? = ? = p!p2x - р^р, = PiP^ + p^P! - (p!p2x)</2 =
= ? - (iv*2p.x) - (*?·*2??). C6.127)
? = i;xpsxi;2 = ^p^^ = i \ vlt v2J s^ s21.
Здесь \v\, V2, s\, 52| —детерминант, построенный из компонент
4-векторов vu i;2, s\9 s2. Таким образом, согласно C6.125) —
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ
343
C6.127)
16М0 = М0A,2, 1',2') =
= s.NvN'vs'- + v-p*p*vL - ?+?,?'8?'+ - s+p?p'Oxs+, C6.128)
16Мг = МхA, 2, 1', 2/)=(??')< - [(?+?»?+?8?) (?'-?^ -р?% =
= [(s- · ?;. —1;+· s+) (?;1 · si — *V'*>+)]* — [(?* + Ps) (p* + Ps)]« —
- l[0v»2PsX) + (*i-*.P?)][W-^p;x)+ (*?·*??)]}|- 4? C6.129)
где
0 = _??' =
У1 2
В результате имеем (см. C6.122) —C6.124))
1Ш\Мвв\2
/A,2,1% 2^) /A, 2', Г, 2)
<"i-".L ("?-?L
/A,2,1% 2') - 2Л/0A,2, Г,2-) + ^ A, 2, 1', 2')
К-У2J(У1-У2J
Подставляя сюда выражения C6.112), C6.128), C6.129) для
/, Л/о, ??, получим искомое сечение в явном виде.
Нужно иметь в виду, что здесь (и для процесса IV)
соотношения, вытекающие из закона сохранения энергии-импульса,
вследствие равенства т=т' имеют более простой вид, чем
C6.114):
Vl + v[ = v2 +vi vl = — ?;_,
V1V2 = ^2, ^1 = ^2, ^2 = *>2yl·
Чтобы вычислить I Afер 12 согласно C6.98), учтем, что (см.
C6.116), C6.117))
МеР = ?,?*?? · ???4?. M"ev = йлЧЧг · UyV4i· C6.131)
Поэтому (ср. C6.118), C6.121))
1б|м;р|2=/A, 2, 2', 1'), 16|?/;?|2-/A, -Г, -2', 2). C6.132)
Остается вычислить Re {Ме*р, ?/Jp), для чего аналогично
C6.123), используем соотношение C4.56)
- ?2 (???4?·?>??4? + Wy4i· ??????)·
344 ГЛ. V. ГРУППА ЛОРЕНЦА В ТЕОРИИ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ
Сравнивая с C6.123), C6.124), C6.127) —C6.129), видим, что
16Ве(лг;Жр)=-ЛГ0A,2,2', Щ-ЧгЩм'^+ММ, 2, 2', 1'))
и, соответственно,
(yi-y2) K + yiL
. / A, 2, 2% П +2^,A,2,2',!') + ^ A, 2, 2/ Г)
Следовательно, сечение процесса IV может быть сразу
написано, исходя из сечения процесса III без всяких вычислений,
с помощью перестановок переменных. Таким образом, чтобы
получить выражения для сечения любого из рассматриваемых
четырех процессов, достаточно вычислить три величины: / C6.112),
Л/0 C6.128) и М\ C6.129) [109]. Следует отметить четко
выраженную симметрию этих выражений относительно ? и s.
Аналогично C6.113) результат усреднения, например,
выражения C6.130) по спинам конечных электронов получается
путем вычеркивания членов, содержащих $2 и $2. При этом согласно
C6.112), C6.128), C6.129)
16М0 = s^NlNl-M^ -V+V+, 7=(Л^+^+—I»-·«ill»-·*Л)*»
16Mi = [(st · ?;» — ?+ · st) (vL · s[ — s[ · ?+) — pOp'v]t
и выражение C6.130) принимает вид
2т*\М-\*= Ао + А + *» + *+ С» + С C6.134)
' (?-*.L ??-ЧL ft-*.I (v-*.I
где
А0 = (Nv+Nl)t = А0 (vu v2i v[, v2), B0 = A0 (иъ v2, v'lt v2),
C0 = (NlNl - p^), + 2!>+!>;f C6.135)
A = ([v-.Sl] [vL-s'^t = A(l9 2, 1', 2'), ? = Л A, 2', 1', 2),
С =ji + 25l(p?P;x- #M ,; + [(v+.Sl - *??-) (svv+-uL.8l)]t.
Выражения C6.112), C6.121), C6.130), C6.133) имеют
чрезвычайно общий характер, поскольку они справедливы при
произвольных импульсах и поляризациях всех четырех частиц и
соответственно содержат обширную информацию. Отметим, что до
работ [107, 109] в столь общем виде вычислялось лишь
дифференциальное сечение для рассеяния электрона на электроне [112].
Более простые случаи, когда все или некоторые частицы неполя-
§ 36. МАТРИЧНЫЕ ЭЛЕМЕНТЫ
345
ризованы, рассчитывались рядом авторов. Так, для неполяризо-
ванных частиц сечение реакции I (рассеяние мюона на
электроне) рассчитано в [ИЗ, 114], кроме того, в [114] получено
сечение реакции I для поляризованных начальных электрона и
мюона. Сечение реакции II (превращение электронной пары в
мюонную) было рассчитано в [115] лишь для неполяризованных
частиц. В работе [111] было вычислено сечение процесса III
(рассеяние электрона на электроне) для случая, когда частицы
в конечном состоянии неполяризованы, что соответствует
формулам C6.134), C6.135). Однако в работе [111] допущены
ошибки (выражение для С содержит неправильные члены,
хотя Л о, Во, Со, А, В вычислены правильно). Эта ошибка
воспроизведена в книге [41] и в статье [112]. В последней,
сверх того, неправильны все члены, содержащие по четыре
спиновых вектора S\, $2, $?, $2· Таким образом, по существу, весь
расчет, приведенный в [112], является ошибочным.
Эти данные отчетливо характеризуют ситуацию в области
расчетов вероятностей процессов с участием поляризованных
частиц. Из них следует, что лишь в работах [113—115] были
получены правильные результаты, но они, во-первых, относятся
к более простым реакциям (это ясно из сравнения C6Л12),
C6.121) с C6.130), C6.133)) и, во-вторых, либо совсем не
учитывают поляризацию, либо учитывают ее лишь у половины
частиц, участвующих в процессе. Разумеется, это обусловлено
сложностью и громоздкостью расчетов реакций с учетом поляризаций
частиц при использовании общепринятых методов.
Действительно, если хоть одна частица неполяризована, то расчет
упрощается в несколько раз, поскольку отпадают самые сложные и
громоздкие члены, содержащие по четыре спиновых вектора s.
Заметим еще, что в [112] окончательные формулы
занимают несколько страниц, в то время как соответствующий
пм результат C6.130) после подстановки значений входящих
туда величин /, Л/о, ? займет несколько строк. Очевидно,
вероятность совершить ошибку при вычислении в простых и
симметричных выражениях вида C6.112), C6.128), C6.129)
относительно невелика.
ПРИЛОЖЕНИЯ
1. Некоторые сведения из линейной алгебры
Прямоугольная таблица, составленная пз любых тп чисел
^ = D*) =
MlHl2
^21^22
???
^ml^m2
..it.
? = 1, 2, ...,m,
v = l, 2, ...,?,
(?.1.1)
содержащая т строк и ? столбцов, называется т X п-матрицещ
величины ??? — ее элементами. Общим свойством всякой такой таблицы
является следующее: из каких бы взятых наугад чисел ??? она ни была
составлена— всегда числа имеющихся в ней линейно независимых строк
и линейно независимых столбцов будут одинаковы. Это число г
называется рангом матрицы А. Очевидно г не может превышать меньшего из
чисел т, п. Для двух матриц, имеющих одинаковые числа строк и
столбцов, определена операция сложения, причем элементы матрицы, равной
сумме нескольких таких матриц, равны суммам соответствующих
элементов складываемых матриц. Для всякой отдельно взятой матрицы А
определены операции:
1. Умножения на число — сводящегося к умножению на это число
всех элементов:
КА — ?\???) — ^????)·
(П.1.2)
2. Комплексного сопряжения — сводящегося к взятию комплексного
сопряжения от всех элементов:
A* = (a;v). (П.1.3)
3. Транспонирования, т. е. перестановки строк и столбцов, в результате
чего получается ? X ш-матрица:
А =
АиА21
А А
?12?22
*mi
А\пАъп
~~(^??)·
(П.1.4)
4. Эрмитовского сопряжения, которое сводится к одновременному
выполнению операций комплексного сопряжения и транспонирования
А+ — А*. (П.1.5)
1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 347
Операции 2, 3, 4 обладают свойством симметричности, т. е.
?*) * = А, /= Л, (А+) + = А.
(П.1.6)
Для двух матриц А = D??), 2? = B?Vp) определена операция
умножения АВ при условии, что число столбцов первой матрицы равно числу
строк второй матрицы
АВ = С = (?7??), ?7?? = ??·?.??·&?? = ??????· A1.1.7)
Во всей книге подразумевается суммирование по дважды
повторяющимся индексам в пределах их возможных значений. Отдельные
случаи, когда это правило не следует применять, мы будем отмечать
точкой над индексом: А . . . Бели какие-либо две буквы, обозначающие
векторы или матрицы, стоят рядом, то подразумевается суммирование по
соседним индексам. Например, ??? = («4????), ?? = ????, ?4 =
= ??^?? и т. д. В случаях, когда суммирования нет, между буквами
ставится точка. Например, А · В = (ЛЙУЛР*), хотя АВ = (??????) (см. (П.1.7)).
Нетрудно убедиться в справедливости соотношений
АВ = ВА, (Л#) + =#+Л+
(П.1.8)
для любых А, В, для которых существует произведение АВ.
Частными случаями прямоугольных матриц являются матрица-столбец
Л =
*2
уУтп)
= ?
(П.1.9)
и матрица-строка
в = (фь ф2, · ·., фп) = Ф,
(П.1.10)
которые можно называть также векторами. Эти матрицы можно
перемножить в порядке ВА лишь в случае m = и; при этом получим 1 X 1-матри-
цу, т. е. число
?? = ???! + ?2?2 + ... + ?????? = ??. (?.1.11)
Перемножение же в порядке АВ возможно всегда и дает ?? ? ?-матрицу
специального вида
АВ =
Vi V2-t2^n
= ?.?, ?2?)??=????. (?.1.12)
Такая матрица, элементы которой состоят из всевозможных попарных
произведений компонент двух векторов ? и ?, называется диадой. Мы
будем использовать для диады обозначение ? · ?. Можно убедиться, что
? · ? = ? · -?, (? . ?) + = ?*· ?*.
(?.1.127)
Очевидно диада является матрицей первого ранга, так как любая пара
ее строк (и столбцов) пропорциональны между собой. Заметим, что в
большинстве случаев, когда это не вызовет недоразумений, мы, для
сокращения записи, будем изображать вектор в виде матрицы-строки
(П.1.10).
348
ПРИЛОЖЕНИЯ
Матрицы-диады являются основными элементами, из которых можно
построить любую матрицу. Действительно, справедливо утверждение:
всякая матрица ранга г может быть представлена в виде суммы г и
только г независимых диад:
А = ?<»> · ?(»)+ ?2) · ?B)+ ... + ?(?) · ?(?). (?.1.13)
Независимость диад означает, что все векторы ?<!>, ?<2>,..., ?(?\ так же
как все векторы ?*1), ?<2>,..., ?<?>, являются линейно независимыми.
Наличие какой-либо линейной зависимости между tyl\ ?<2>,..., ?<?> или
??1), ..., ?<?> привело бы к уменьшению числа диад в сумме (П.1.13).
Действительно, если, например, ?<2>= /сфО), то
?(?). ?@-|-?B). ?B)= ?<»).(?(?)+ &?<2>) = ?<»>. ?'
и, таким образом, сумма двух диад фактически сводится к одной диаде.
Прямоугольную т X ?-матрицу А = (???) можно рассматривать как
линейный оператор, преобразующий n-мерный вектор ? = (??), ? = 1,
2,..., ?, в m-мерный вектор ? = (??), ? = 1, 2,..., m,
? = Лф, ?? = 4????. (?.1.14)
Если ? = D??), ?? ? = 04??) или
??? = ???, (?.1.15)
поэтому ?? = ??-4?? или
4? = ?? (?.?.16)
С помощью векторов ?=(??)? ?=(??) и матрицы ? = D??) можно
образовать число
?«4? = ??^???? = ??-4???? = ?-4?. (?.1.17)
Очевидно, все приведенные выше утверждения остаются справедливыми
и в частном случае т = п. т. е. когда матрицы являются квадратными.
Для всякой заданной квадратной матрицы А можно поставить
вопрос об отыскании всех возможных чисел ? и векторов ?,
удовлетворяющих уравнению
Лф = ??. (?.1.18)
При этом ? называется собственным вектором матрицы А, а ? —
соответствующим собственным значением этой матрицы. Можно доказать [16],
что всякая квадратная матрица А имеет по крайней мере один
собственный вектор ?. Собственные значения ? ? ? ^-матрицы являются корнями
характеристического уравнения
| ? _ а | = ?* — ????~? + ?2??~2 -... + (-1) пап = О, (П.1.19)
коэффициенты которого аи а2,...,ап являются однородными
полилинейными функциями соответственно степени 1, 2,..., ? от элементов
матрицы А.
Если все векторы пространства испытывают некоторое линейное
преобразование: ?' = ??, то заданная в нем матрица А претерпевает
преобразование подобия
А' = SAS-K (П.1.20)
При этом характеристическое уравнение не меняется, так как
|Я-Л'| = \X-SAS~4 = |5(? —ЛM~Ч = |5| . |?-4| . |S-»| —
= ??-Л!.
1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 34$
Поэтому все коэффициенты а\ характеристического уравнения (П.1.19)
являются инвариантами преобразования подобия. Матрицы А' и Л (см.
(П.1.20)) называются подобными или эквивалентными. Коэффициент аг
выражается следующим образом:
ах = %х + ?2 +... + ?? =* Лп + An + ... + Ann — At. (?.1.21)
Здесь ??, ?2,..., ?? — корни уравнения (П.1.19), Л « — след матрицы А*
Коэффициент а п имеет вид
ап =*???2...?? =* |Л|, (ПЛ.22)
т. е. он равен детерминанту матрицы А. Коэффициент а2 можно
представить в виде
?2 = ?1?2 + ?? + ···+VA = -^-[(?l + ?2 + ··· + ?»),-
— (?? + ?1 + · ¦ + ?«I· <п.1лз>
Поскольку сумма к — ? степеней всех собственных значений матрицы А
равна следу матрицы Ак
?* + ?*+...+?* = D% (?.1.24)
то
?2=?[(^?~(?%]. (?.1.25>
Аналогично все коэффициенты ак могут быть выражены через следы от
различных степеней матрицы Л. Более точно коэффициент а* выражается
через следы от степеней А, Л2,...,Л*. Выражения для ак могут быть,
получены из рекуррентных соотношений, известных под названием
формул Ньютона [116]:
kak = (Ah)t - аг {Ah-*)t + а2 {Ah'% -...+(- l)h'4-?4· (?.1.26>
Согласно теореме Гамильтона — Кэли [16] всякая квадратная
матрица Л является корнем своего характеристического уравнения (П.1Л9).
Таким образом, имеет место матричное равенство
Ап _ ????-? + агАп-2 _ # # # +(—1) пап = (Л — ??) (Л — ?2).. .(Л — ??) = 0.
(П.1.27)
Следовательно, для квадратной матрицы размерности ? ? ? всегда
существует полином n-й степени, который аннулируется при подстановка
в него матрицы Л. Поэтому степени матрицы Л:Л° = 1, Л, Л2, ..., Лп
всегда линейно зависимы между собой, и любая степень, начиная с п-в
и выше, может быть представлена в виде линейной комбинации
степеней Л°= 1, Л, ..., Л"-1.
Из формул (ПЛ.27), (ПЛ.21), (ПЛ.26) вытекают следующие тождества:
для матриц второго порядка
Л2-Л,Л + Ц| s0; (ПЛ.28)
для матриц третьего порядка *)
A*-AtA*+1tA- |Л| ^ 0; (ПЛ.29)
*) Матрица Л, называемая взаимной к Л, может быть определена
соотношением Л = |Л|Л~! (см. (ПЛ.58)).
350
ПРИЛОЖЕНИЯ
для матриц четвертого порядка
Л4 - AtA3 +1 [(AtJ - (A2)t] А* - AtA + I A \ ~ 0. (П.1.30)
Если матрица А антисимметрична: А = —Л, то и любая ее нечетная
степень будет антисимметричной, поэтому (Л2Л+|)* = 0. Кроме того, для
антисимметричных матриц нечетного порядка \А\ =0, так как при
перестановке строк и столбцов детерминант не должен меняться, а, с другой
стороны, вследствие антисимметрии матрицы и нечетности ее порядка он
должен изменить знак. С учетом этих свойств уравнения Гамильтона —
Кэли для антисимметричных матриц упрощаются и принимают
соответственно вид (для ? = 2, 3, 4, 5, 6)
А2 + \А\ =0, (П.1.31)
x3 + ^=^3-|UV=o,
(П.1.32)
(П.1.33)
А*-1 (Л V3 + у № АJ " (А] ^ = 0, (пл.34)
Л6 - -*-(А\А* + | [((А\у - (Л4),] А*-\А\ = 0. (П.1.35)
Во многих случаях степень полинома, который обращается в нуль
при подстановке в него матрицы А, меньше степени характеристического
полинома, т. е. размерности матрицы п. Полином наименьшей степени
/(?) со старшим коэффициентом, равным единице, для которого f(A) =0,
называется минимальным полиномом матрицы Л, а уравнение /(Л) =0 —
минимальным уравнением. Минимальный полином всегда существует,
определен однозначно и имеет степень не выше п. Он является делителем
характеристического полинома, и все различные корни последнего, т. е.
все различные собственные значения, являются также корнями
минимального полинома, хотя кратность корней минимального полинома может
быть меньше кратности тех же корней характеристического полинома [16].
Таким образом, среди корней минимального полинома матрицы
содержатся все ее собственные значения. Если минимальный полином
матрицы не содержит кратных корней, то матрица приводима к
диагональному виду [16]. Если же какой-либо из корней минимального полинома
? имеет кратность к, то это означает, что при приведении матрицы к
нормальной форме Жордана [16] она будет содержать одну или несколько
жордановых клеток размерности к
[? 1 0 0.
0 ? 1 0.
? . . ..
0 . . . .
..000]
..0 0 0
.0 ? 1
.0 0 ?
(?.1.36)
или любых низших размерностей и не будет содержать жордановых кле*
ток размерности выше к (для ?).
Неприводимость матрицы к диагональному виду является выражением
того факта, что число различных линейно независимых собственных век-
1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 351
торов матрицы меньше ее размерности, т.е. из этих собственных векторов
нельзя составить базис полного пространства, в котором определена
матрица. При этом каждой жордановой клетке любого порядка отвечает
только один собственный вектор.
Бели же матрица приводима к диагональному виду, т.е. ее мини
мальный полином не имеет кратных корней, то, при выборе в качеств»,
базиса пространства совокупности всех собственных векторов матрицы,
она принимает диагональную форму, причем по диагонали будут стоять
собственные значения матрицы.
Во многих вопросах линейной алгебры находит применение так
называемый символ Леви-Чивита. В л-мерном пространстве этот символ
записывается в виде ????> ~ , причем число индексов равно размерности
пространства и каждый индекс может принимать значения от 1 до л.
Символ Леви-Чивита однозначно определяется условием полной
антисимметрии, т.е. тем, что он меняет знак при транспозиции любых двух из
его индексов
???...?&...??.··??
= — 8,
ai...aj...afc...an
и условием
8i23-n = 1.
Отсюда следует, что символ Леви-Чивита равен нулю, если среди era
индексов есть совпадающие. Когда все индексы различны, то символ Леви-
Чивита равен +1 или —1 в зависимости от того, получается
последовательность ai, ok,..., ?? из 1, 2, 3,..., ? путем четной или нечетной
перестановки.
Для произведения двух символов Леви-Чивита справедлива формула
abc^a'b'e'
ha' &ab' he'
ha' hb' he'
*W hb' he'
(П.1.37)
Здесь 6aa/, hb'~ известные символы Кронекера. Мы ограничились случаем
? = 3, но аналогичные формулы справедливы при любом п.
Действительно, при а = а' = 1, b = У = 2, с = с' = 3 слева и справа получается
единица. Любое же изменение порядка индексов а, Ь, с или a', b,
с'вызовет одинаковое изменение знака слева и справа, поскольку при этом
в детерминанте произойдет перестановка строк и столбцов. Таким
образом, равенство (П.1.37) справедливо при любых значениях индексов.
Для свёртки символов Леви-Чивита по нескольким индексам
справедливо соотношение
???...????+1...?????...????+1...?? ~ kl
aA+lPfc+l ??+???+2
?.
>afc+lPn
an$h+l ???&+2
...??
?????
(?.1.38)
Доказать эту формулу можно методом индукции. Для к = О последняя
формула верна, так как она аналогична (П.1.37). Предполагая (П.1.38)
справедливым для некоторого к < л, положим ??+? = ?&+?, тогда имеем
??...??+1??+2···?? <*f"<*k+i$k+2'-$n
= к\
со ©
a/t+la/i+l ak+l$k+2 ' ' ' afc+lPn
s ?
an«fe+l an$h+2
4???
(?.1.39)
352 приложения
Разлагая здесь детерминант по элементам первого столбца, нетрудно
убедиться, что соотношение (П.1.38) справедливо при замене к на к +1,
а значит, при любом к. В частности,
???...??_1?????...??_1?? = (л — О* ?????'
(П. 1.40)
???...?????···?? = л!
С помощью символа Леви-Чивита можно записать выражение для
детерминанта матрицы А = (Aafi) в виде
? ? = ????,...??????, · · · Апап> (П.1.41)
или
??1?,...??^?1?1^?,?, · * * Aanfin = ' А ' ????.···??· (?.1.42)
Матрица U, преобразующая совокупность ортонормированных
векторов n-мерного пространства ?(*), к = 1, 2,..., л, в совокупность ? также
ортонормированных векторов ?(*>, является унитарной, т.е. обладает
свойством U+ = ЕМ. Действительно, пусть
?<«·?<*'> = ?(*)*?(*') = 6fcfc#> *, // = 1, 2, ..., л, (?.1.43)
и
?<*> = tfq><*>. (?.1.43')
Тогда
# = ?<*'>.?<*'>% (?.1.44)
так как tfq>(fe) = \|>(fe'b<p(fe'>*(p(fe) = 6??,?(?) = ?(?). ??? этом tf+Ef = 1,
так как ??+= «р^-Ч^и согласно (?.1.43) U+U = (pW.^к')*Ц>Ю.(р(к>>* =
= *W<P(fe) Vu)* = ?(?)·?(?)*. Легко проверить, что
?(?).?(?>* = ?(*>. <?(*>* = ?. (?.1.45)
Для доказательства достаточно подействовать матрицей ?<*> · ?<*)* на
любой вектор ? = ??,?(?'*:
(?<*>·?<*>*)? = ??,?<«.?<?L("')= ??.«??№> = ?,?<* = ?.
Легко показать, что унитарная матрица U (П.1.44) при заданных ?(*>
и \|?(fe) (П.1.43) будет единственной.
Во многих случаях находит применение полная матричная алгебра,
состоящая из п*-матриц еа*. Матрицы еа^ имеют все элементы, равные
нулю, за исключением единственного элемента, стоящего на пересечении
?-й строки и Р-го столбца, равного единице. Любая ? X л-матрица А =
= D??) может быть представлена в виде суммы А = Аа$еР*. Матрицы
е** перемножаются по правилу
е**е* = ???**". (?.1.46)
Элементы матриц еа* определяются следующим образом:
(*«*)хх = ??????. (П.1.47)
Пусть некоторая квадратная матрица А размерности ? преобразует ?
заданных линейно независимых векторов ?<*), к = 1, 2,..., п, в ? других
1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 353
заданных векторов ?(*>:
?<*) = 4?<*>. (?.1.48)
Задание ?<*> и *?(*> позволяет однозначно определить матрицу а: она
имеет вид суммы ? диад
А = ?<*> · ?<*>, (?.1.49)
где векторы ?<*> определяются с помощью символов Леви-Чивита
следующим образом:
" 1?A), ?B), ...,????? ' ' " ^ ?*+1 ''' ""'
а величина ??*1), ?<2>,..., ?<?> | обозначает детерминант, составленный
из компонент линейно независимых векторов ?<*>. Действительно,
векторы ?<*> согласно (П.1.41), (П.1.50) обладают свойствами
????(? = ?(*)?(? = ?;[?? (п.1.51)
поэтому матрица ? (?.1.49) будет удовлетворять условию (П.1.48).
Рассмотрим подробнее основные свойства векторов и матриц
(тензоров) в трехмерном пространстве (см. [12.1, 12.2, 13]). Общая формула
(П.1.42) примет в этом случае вид
Ч'Ъ'С Ааа'АЪЪ'А<х* = \А\ ъаЬС (П.1.52)
Умножая (П.1.52) на 8вьс, получим еще одно соотношение,
определяющее детерминант трехмерной матрицы с помощью тензора
Леви-Чивита:
1
I А I = " WWc' Ааа'АЪЪ'Асс" (П.1.53)
Если же (П.1.52) умножить на гаьа, то согласно (П.1.39) получим
1
? гаЪага'Ъ'С Ааа'АЬЬ' А*' = ? I $С<Г (П-1.54)
Введем матрицу А с составляющими следующего вида:
_ 1
Ac'd= 2 гаЪага'Ъ'с'Ааа'АЪЪ'· (П.1.55)
Тогда соотношение (П.1.54) можно написать в виде
АаьАьс= |Л| бвс. (П.1.56)
В бескоординатной. записи это соотношение принимает следующий вид:
АА =АА = \А\. (П.1.57)
Если матрица А имеет обратную (|Л| Ф0), то, умножая слева на Л,
получим
А = \A\A-K (П.1.58)
Матрица А, определяемая соотношением (П.1.56) или (П.1.58), называется
взаимной к матрице А. Хотя (П.1.58)_имеет смысл лишь при \А\ ? 0,
тем не менее все свойства матрицы Л, вытекающие из этого
соотношения, сохраняют силу в общем случае и притом для ? ? л-матрицы a
23 ?. И. Федоров
354 приложения
любым п. Поэтому можно использовать соотношение (П.1.58) при выводе
различных свойств взаимной матрицы.
Детерминант матрицы А, умноженной на число к, равен
\кА\ = к*\А\. (П.1.59)
Поэтому, так как \А\ есть число, имеем из (П.1.58)
|J| = \А\\ (П.1.60)
поскольку \А~1\ = |Л|~!, что следует из АА~1 = 1. Матрица, взаимная
к обратной, согласно (П.1.58) имеет вид
1:гг=Л-1, (П.1.61)
т. е. операции перехода к обратной и к взаимной матрице
перестановочны. Для двукратно взаимной матрицы"? имеем
2=\А\А. (П.1.62)
Взаимная матрица от матрицы А, умноженной на число /с, равна
кТ= к*А. (П.1.63)
Легко убедиться, что ^ _
А= А. (П.1.64)
Вычислим еще взаимную матрицу от произведения двух матриц.
Согласно (П.1.58) _
АВ = ВА. (П.1,65)
Следовательно, матрица, взаимная к произведению двух матриц,
определяется по тому же правилу, что и матрица, обратная к произведению
двух матриц. С помощью (П.1.53) можно получить выражение для
детерминанта от суммы двух матриц
М + ВI = "Г Wa'b'o' (Ааа, + Ваа,) (Аьь, + Вьь,) (Асс. + Всс,). (П.1.66)
Раскрывая скобки и снова учитывая (П.1.53), получим
\А+В\ = \A\ + \B\+Ki + Kb
где
1
КХ = ~6~ еаЬсеа'Ь'С (Ааа'АЬЬ'Всс' + Ааа'ВЬЬ'АсС + Ваа'АЪЪ'Асс')>
а К2 отличается от ?? перестановкой А и В. Изменяя обозначения немы*
индексов и учитывая свойства тензора Леви-Чивита, убеждаемся, что все
три члена Кх равны между собой. Поэтому
К!= — «WVb'C Ааа'ВЬЬ'АСС> = U*)l·
Переставляя А ж В, получим Яг = (АВ) t. Окончательно
\А+В\ — \А\ + (АВ) t + (АВ) t + \В\. (П.1.67)
С помощью тензора Леви-Чивита можно представить векторное
произведение двух векторов в следующем виде:
lavh = «WVc- (?·1·68)
i. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 355
Справедливость этого представления проверяется непосредственно. Правую
часть соотношения (П.1.68) можно рассматривать как результат
умножения вектора ? на тензор второго ранга юх, компоненты которого
определяются следующим образом:
»Zb = *abc»c· (П·1·69)
Вследствие свойств гаъс тензор их является антисимметричным: их=—и
Компоненты этого тензора, как следует из определения (П.1.69), линейно
и однородно выражаются через компоненты вектора и. Тензор »
называется дуальным вектору». В раскрытом виде определение (П.1.69)
записывается следующим ооразом:
О — ип
(П.1.70)
Таким образом, тензор Леви-Чивита позволяет поставить в соответствие
каждому вектору антисимметричный тензор второго ранга. Это
соответствие оказывается обратимым, поскольку каждому антисимметричному
тензору второго ранга ? = —? в свою очередь можно поставить в
соответствие вектор и с помощью соотношения
Раскрывая это соотношение, получим щ = ?32, и2 = ??3, Щ = ?2?·
Сравнивая с (П.1.70), видим, что у = их. Таким образом,
Вектор и, определяемый согласно (П.1.71), называется дуальным
антисимметричному тензору ?. Операция дуальности, как следует из ее
определения, обладает свойством линейности. Это означает, что
(an + bv)x = аих + bvx, (П.1.73)
где а, Ь — скалярные множители.
С помощью дуального тензора их соотношение (П.1.68) можно
написать в виде
[uv]=uxv. (П.1.74)
Это равенство также можно рассматривать как определение тензора их
дуального «, если оно справедливо при любом v. Вследствие
антисимметрии их можно также написать
vux = — uxv = — [uv] = [011]. (П.1.75)
Рассмотрим произведение двух матриц юх, Vх. Пользуясь (П.1.68) и
учитывая, что (см. (П.1.39))8аЬсеа,ь,с = 6аа,дьь, - баЬ,бЬа,, получим
(*XV*)ab = vaub-ueve6ab
или в прямой записи
23» uxvx = ou-vu. (П.1.76)
356 ПРИЛОЖЕНИЯ
Умножая обе части последнего равенства справа на произвольный
вектор и?, получим, учитывая (П.1.74),
uxvxw = [и [то]] = ?-uw — vu-w. (П.1.77)
Это известная из элементарной векторной алгебры формула для
двойного векторного произведения. В частном случае v=u имеем из (П.1.76)
их2 = и>и-и\ ахз = -я2юх. (П.1.78)
Выражение для тензора, дуального векторному произведению: [ш?]х,
просто получается с помощью (П.1.74) и (П.1.77). При любом векторе А имеем
[[яр]хЛ]= (»·» — U'V) А, следовательно,
[uv]x = ? и — и ?. (?.1.79)
Полезная в ряде случаев формула получается путем преобразования
выражения для диады, образованной из двух векторных произведений.
Согласно (П.1.76) имеем [ab]>[cd] = [cd]x [ab]x + [ab] [cd]. Используя
(П.1.79), находим после простых выкладок
[ab]»[cd] = [ab] [cd] -\-ad-c*b + bc-da — acdb — bdca. (П.1.80)
В частности,
[ab] -[ab] = [ab]2 + ab(ab + ba) — a2bb — b2aa. (П.1.81)
Приведем еще формулы с векторными произведениями, известные пз
элементарной векторной алгебры,
[ab] [cd] = acbd — ad-bc, (П.1.82)
[ab]2 = аЧ2 - (abJ. (П.1.83)
В частном случае, когда а = ??? b = л2, п\ = п\ = 1, ???2 = 0, формула
(П.1.81) с учетом (П.1.83) дает ???'??? = * "" ??'?? ~?2,?2
или
пг-пг + п2п2 + п3п3 = 1, (П.1.84)
где
n3=[ntn2], nanb = 6ab. (П.1.85)
Формула (П.1.84) дает выражение для единичного тензора через тройку
взаимно ортогональных единичных векторов*).
Найдем выражение для тензора, взаимного к юх.С помощью (П.1.55)
(П.1.69), (П.1.79) получим
Ъх = ии. (П.1.86)
В выражении ? [uv] тензор ? может быть введен под знак векторного
произведения. Действительно, на основании (П.1.55), (П.1.68) можем
*) Индекс, стоящий при букве, набранной жирным шрифтом, служит
для обозначения различных векторов. Его не следует смешивать с
индексом, стоящим при той же букве обычного шрифта па, который служит для
обозначения различных компонент одного и того же вектора.
2. ВЫВОД ЗАКОНА КОМПОЗИЦИИ ВЕКТОР-ПАРАМЕТРОВ 357
написать {a [uO])a = *abc (яа)ь (va)c или
a [uo] = [яа, ??] = [ая, ??]. (?.1.87)
В случае симметричного или антисимметричного тензора ? = ±?
? [иг] = [?», ??]. (?.1.88)
Если тензор ? — неособенный (|?|#0), то (П.1.87) можно записать
в виде (см. (П.1.58))
a [uo] = | а|-1 [аи, ас]. (П.1.89)
обозначив здесь ?-1 = ?*, а= ?, | сх | ~ = |?|, получим, поскольку
а-1 = а-1,
[?[»»] = ??|[?», ?»!· (?.1.90)
Для случая ортогональной матрицы, полагая ? = ?— = О, 9 получим
(см. § 1)
0± [uo] = ± [0±и, 0±?]. (?.1.91)
Аналогично (П.1.67) можно получить выражение для тензора,
взаимного к сумме двух тензоров ?, ?. Используя (П.1.55), получим после
несложных вычислений
<?+? = ?~+ ??+ ?? + ?? — ?,? — ?*? + ?* ?, — (??),. (?.1.92)
Отсюда находим:
(???) t = *t + ft + at ?* - (??) t (?.1.93)
2. Абстрактный вывод закона композиции
вектор-параметров
Приведенный в § 3 вывод закона композиции трехмерных вектор-
параметров C.6) основан на использовании свойств группы ?0C). Этот
закон имеет фундаментальное значение для таких важнейших групп, как
группа трехмерных вещественных и комплексных вращений и группа
Лоренца. По существу, он определяет все основные свойства как самих
групп, так и их представлений. Любые ортогональные группы обладают
подгруппами, параметры которых компонируются по этому закону. В
связи с этим представляет интерес более детальное исследование закона
композиции C.6).
В настоящем параграфе мы покажем, что формула C.6) или, точнее,
некоторое ее обобщение, может быть получена только на основании
групповых свойств, которыми она должна обладать по самому своему
смыслу. Итак, мы будем искать векторную функцию от двух трехмерных
векторов
х = <а, Ь>= /(а, 6), (П.2.1)
обладающую следующими свойствами:
ассоциативность
<а, <6, с» г «а, 6>, с>; (П.2.2)
наличие единичного элемента, равного нулевому вектору,—
<0, а> = <а, 0> = а; (П.2.3)
358 приложения
наличие обратного элемента, равного противоположному вектору,—
<а, — а> = <— а, а> = 0. (П.2.4)
При этом мы будем исходить из того, что любая векторная функция
двух векторов может быть представлена в виде
<а, 6> = ? (а, 6) а + ? (а, 6) 6 + ? (а, 6) [а, 6], (П.2.5)
где функции ?, ?, ? являются числами (инвариантами). Очевидно, задача
сводится к отысканию функций ? (?, 6), ? (а, 6), ? (а, 6).Соотношение
ассоциативности (П.2.2) с учетом выражения (П.2.5) может быть написано
в виде
<#, с> = <а, у>, (П.2.6)
где л? = <а, Ъ),у=<Ъ, с>. Раскрывая (П.2.6) с помощью (П.2.5), получим
после ряда элементарных преобразований
[? (*, с) ? (?, 6) - bcl (?, с) ? (?,*)] ? +
+ [? (*, с) ? (?, 6) + ??? (?, с) ? (?, 6)] 6 + ? (л?, с) с +
+ ? (*, с) ? (?,*) [?, 6] + ? (*, с) ? (?, 6) [6с] + ? (?, с) ? (?, 6) [ас] =
з6(в, ??)? + [?(?, ??N(*,?) + ???(?, |?)?F, ?)]» +
+[? («, У) Л (^, ?) - ??? (?, у) ? F, с)] с + ? (?, у) ? F, с) [?*] +
+ ? (?, У) ? №, с) [be] + ? (a,y) ? F,с) [ас]. (П.2.7)
Вследствие тождественности этого функционального соотношения для
любых а, 6, с мы можем приравнять между собой коэффициенты,
стоящие справа и слева при векторах а, 6, с, [аб], [ас] и [ic]. В результате
получаем систему из шести функциональных уравнений от трех векторных
аргументов:
? (*, с) ? (?, 6) - 6сС (*, с) ? (?, 6) = ? (?, у),
? (?, с) ? (?, 6) + ??? (л?, с) ? (а, 6) = ? (а, у) ? F, с) + ??? (а, у) ? F, с),
? (?, с) = ? (а, у) ?F, с) - ??? (а, у) ? F, с), (П.2.8)
6(*,<0С(а, &) = ?(?, У)Ъ(Ъ, с),
? (л?, с) ? (а, 6) = ?(?, у) ? F, с),
? (л?, с) ? (?, 6) = ? (а, у) ? F, с).
В дальнейшем мы будем всюду писать вместо знака тождественного
равенства знак обычного равенства.
Полагая в (П.2.5) а= 0 или 6 = 0, получим на основании (П.2.3)
6(«,0) = ?@, 6) = 1. (?.2.9)
Если же в (П.2.5) положить b = — а или а = — 6, то с помощью (П.2.4)
получим
?( ?, — а) = ? (?, — ?) = ? (?). (?.2.10)
Бели теперь полагать в каждом из уравнений (П.2.8) последовательно
? = 0, 6 = 0 ис =0, то с учетом (П.2.9) получим ряд соотношений, из
которых половина будут очевидными тождествами, а остальные накладыва-
2. ВЫВОД ЗАКОНА КОМПОЗИЦИИ ВЕКТОР-ПАРАМЕТРОВ 359
ют определенные ограничения на функции ?, ?, ?. Выпишем последние:
а =0, | F, с) 6 @, Ь) - bcl F, с) ? @, Ь) = 6 @, у),
6 (». с) ? @, Ь) = ? @, у) 6 F, с), (П.2.11)
? F, с) 6@, 6) = ?@, У) ? F, с);
? =0, ? (?, с) ? (?, 0) + ??? (?, с) ? (?, 0) =? (?, с) ? @, с) +??? (?, с) ? @, с),
? (?, ?)?(?, 0)=?(?, ?)?@, с), ? (?, ?)?(?, 0)=? (?, с) ?@, с); (П.2.12)
с =0, ? (*, 0) = ? (?, 6) ? F, 0) - ?6? (?, 6) ? F, 0),
?(*, 0)?(?, 6) = ?(?, 6)?F, 0),
? (*, 0) 6 (?, 6) = ? (?, 6) ? F, 0). (?.2.13)
Из второго соотношения (П.1.11) следует ?@, Ь) = ?@, у),а поскольку Ь и
у независимы, то ? @, 6) не зависит от Ъ, т. е.
? @, а) = const = к. (П.2.14)
Аналогично из второго равенства (П.2.13) получим
? (?, 0) = const = к'. (П.2.15)
Выпишем соотношения (П.2.11) —(П.2.13) для векторов а, Ь с учетом
(П.2.14), (П.2.15)
? @, ?) ? (а, 6) - *??? (а, 6) = ? @, <а, 6», (П.2.16)
6@, ?) ? (?, 6) = ?? (а, 6), (П.2.17)
? (а, 0) ? (а, 6) + *'?6? (а, Ь) = 6 @, 6) ? (?, 6) + *?6? (?, ?), (?.2.18)
????, 6) = 6@, Ь) ? (а, 6), (П.2.19)
? (?, 0)? (а, 6) = кх\ (а, 6), (П.2.20)
? «а, 6> 0) = ? F, 0) ? (а, Ь) - ?'??? (а, 6), (П.2.21)
Л'Б(«, &) = ?(»,0N(?, 6). (П.2.22)
В свою очередь в этих последних соотношениях можно полагать а=0 или
6 = 0. С учетом того, что согласно (П.2.9) ?@, 0) =?@, 0)=1, при а = 0
соотношения (П.2.16) —(П.2.22) дают тождества, за исключением (П.2.19)
и (П.2.22), из которых следует
к = к', ? (?, 0) = 6 @, а) = ? (?). (?.2.23)
При этом равенства (П.2.17) и (П.2.20) совпадают, так же как (П.2.19)
и (П.2.22). В результате система (П.2.16) —(П.2.22) сводится к следующей:
? (?) 6 (?, Ъ) - kabl (?, 6) = ? «?, 6», (?.2.24)
? (?) ? (?, 6) = кх\ (?, 6), (?.2.25)
? (?) 6 (?, 6) = ? F) ? (?, 6), (?.2.26)
*6(?, 6) = ? F) ? (?, 6). (?.2.27)
Уравнение (П.2.21) оказывается следствием (П.2.16) и (П.2.18) и потому
может быть отброшено. Система (П.2.24) —(П.2.27) тождественно
удовлетворяется при а = 0 и 6 = 0. Если же положить 6 = -ои обозначить
? (?, -?) = ?(?), (?.2.28)
360
ПРИЛОЖЕНИЯ
то она сведется к следующей:
? (?) ? (?) + ka2v (?) = 1, ? (?) ? (?) = &? (?), (?.2.29)
? (?) ? (?) = ? (— ?) ? (?), /?, (?) = ? (— ?) ? (?). (?.2.30)
Первое уравнение (?.2.30) дает
? (- ?) = ? (?) = ? (?, 0) = ? (- ?, 0) = ? @, ?) = ? @, - ?). (?.2.31)
При этом вторые уравнения (П.2.29) и (П.2.30) совпадают. Из них следует
?(>)-?'(.?+^ ,w=?wtw· (?·2·32)
Заметим, что (П.2.26) есть следствие (П.2.25) и (П.2.27). Следовательно,
остаются только три независимых уравнения: (П.2.24), (П.2.25) и (П.2.27),
из которых находим
?(?, Ь) = ? (Ь) g(a, ?), ? (?, b) = ? (?) * (?, 6), ? (?, 6) = kg (?, 6), (?.2.33)
где
Если положить в (П.2.33) и (П.2.34) 6= — а, то снова придем к
соотношениям (П.2.32). Подставляя выражения (П.2.33), (П.2.34) в (П.2.5), получим
? «?, b» (? (b) a + ? (a) b + к [ab])
k(a)k(b)-k2ab
<«> b> = ' Y/A'/J 2л ' . (n·2·35)
или
<?, 6) ?/?(?) + 6/? F) + к [?/? (?), 6/? F)]
? «?, 6» - 4 _ ?2?6/? (?) ? F) · 1"^*>)
В этом соотношении ? (?)— неопределенная скалярная функция векторного
аргумента, относительно которой нам известно (см. (П.2.23), (П.2.9),
(П.2.31)), что
?@) = 1, ?(-?) = ?(?). (?.2.37)
Величина к является произвольной постоянной. Если ввести обозначение
а' = ?/? (?), b' = ?/? F), <?', 6'>? = <?, 6>/? «?, 6», (?.2.38)
то соотношение (П.2.35) примет вид
<»·¦*>,-*+, ж "·
Эта формула композиции отличается от C.6) в двух отношениях.
Во-первых, в ней предполагается, что вектор-параметр а' отличается от
первоначального ? вследствие «нормировки» (П.2.38), причем нормировочный
множитель ? (?) зависит от а. По существу, это есть замена переменных.
Во-вторых, в (П.2.39) входит постоянный параметр к, который в C.6)
равен единице. Впрочем, если к ? 0, то его тоже можно исключить из
(П.2.39). Для этого умножим уравнение (П.2.39) на к и вместо (П.2.38)
введем следующие обозначения:
«•-га· *'=ш· <«··'·>.-г&& <пл40>
3. ПРЯМЫЕ СУММЫ И ПРОИЗВЕДЕНИЯ МАТРИЦ
361
В результате мы придем к формуле C.6)
а» j_ Ъ" + \а"Ь"\
<«"> Ь">2 = 1-,| - (П·2·41)
Если же к = О, то закон композиции (П.2.39) сводится к простому
векторному сложению
<а', 6'> = а'+ 6'= <?', а'>, (?.2.42)
которое, разумеется, обладает всеми необходимыми групповыми
свойствами (П.2.2) —(П.2.4).
Мы можем резюмировать результаты нашего рассмотрения
следующим образом. В трехмерном пространстве вектор-параметров общий
закон композиции (П.2.5), обладающий групповыми свойствами (П.2.2) —
(П.2.4), должен иметь вид (П.2.36), где ? (?)—произвольная функция,
удовлетворяющая условиям (П.2.37), а к— произвольная константа. При
к ? 0 формула композиции (П.2.36) лишь преобразованием переменных
(П.2.40) отличается от C.6), (П.2.41). К соотношению C.6), (П.2.41) мы
придем также, если положим к = ? (?) = 1. При к = 0 композиция
сводится к простому векторному сложению, т. е. соответствующая непрерывная
группа будет абелевой.
Таким образом, формулы композиции (П.2.41) и (П.2.42) по существу
являются единственными возможными (с точностью до изоморфизма),
которые могут быть получены из условий (П.2.2) — (П.2.5).
3. Прямые суммы и произведения пространств и матриц
Рассмотрим два линейных пространства Д' и R" размерностей п' и
п" соответственно, не имеющие общих элементов (векторов). Пусть
*' = (*?.*;.·... </). ?=«, ?;, · · ·. о (п.з.1)
будут векторами соответственно из пространств В? и R". Рассмотрим
линейное пространство R размерности ? = ?' + и", состоящее из всех
векторов вида
? = (?- г) = (?;,..., *;.; *;,..., ?· (?·3·2>
Пространство R называется прямой суммой пространств R' и R", и этот
факт выражается соотношением R = R' ? R". Соответственно мы можем
написать для вектора ?
?=(?'; ?")=?' ? ?" (?.3.3)
и рассматривать его как прямую сумму векторов ?' и ?". По смыслу
определения ясно, что для прямой суммы пространств справедливо
соотношение R' ? R" = R" ? R'. В то же время согласно (П.3.3) имеем
*? = ?" ? ?' = (?"; ?') ? (?'; ?") = tf ? ?"·
Таким образом, для прямой суммы двух различных векторов
коммутативность не имеет места. Однако векторы ?' ? ?" и ?" ? ?'
отличаются друг от друга лишь порядком расположения компонент. Поэтому
они могут быть получены один из другого с помощью простейшего
ортогонального преобразования S в пространстве R:
¦?='*· *-(??""). ^^-(^о'). <П.3.4)
где in обозначает единичную матрицу размерности п. Очевидно, все эти
362
ПРИЛОЖЕНИЯ
определения и соотношения тривиальным образом обобщаются на число
пространств или векторов, большее двух. При этом, очевидно, будет
иметь место свойство ассоциативности
(?? ??2)??3 = ??0(?20 ?3)= ?? 0?2 ??3.
Скалярное произведение вектора (П.3.3) и соответствующего вектора
? = ? ? ?" получается с помощью формулы
?*? = (?'* ф ?"·) (?' ? ?") = ?'*?' + ?"*?". (?.3.5)
Аналогичным образом из двух квадратных матриц А' и Л",
определенных в пространствах R', ?", можно построить одну блочно-диагональ-
ную квадратную матрицу А размерности п' + п"
А = А' ®A" = L АХ (П.3.6)
Матрица А называется прямой суммой матриц А' и А". Эта операция
обладает также свойством ассоциативности
Аг е (Л2 е ах) = (лх е л2) е ?3 = ?? ? ?2 е л3 = ( о
\о о
однако коммутативность не имеет места, так как при А' Ф А"
A'®A"=(t' !»)*(?' А>) = А" ®А'-
Очевидно, 1?, ? 1пп = in,f ? ??, = inr+n». При условии, что в прямых
суммах ? = ??????^???3), A=AW®Ai2)®At*> слагаемые ?(8>, А^
относятся соответственно к одному и тому же пространству Ша\ имеет место
соотношение
Лг|? = АМуМ®АЮф*)®АЮуЮ. (П.3.7)
Легко убедиться, что различие между А = А' 0Л" и А\=А" ®А'
сводится к преобразованию подобия с помощью той же ортогональной
матрицы S (П.3.4):
Аг = SAS-1 = SAS. (П.3.8)
Из определения (П.3.6) непосредственно вытекают соотношения
(А ®А') + (В ®В') = (А + В)®(А' + В'),
(А 0 А') (В 0 В') = АВф А'В',
Л^Л/ = Л0Л/, {A 0Л')+ = 4+0Л'+, (П.3.9)
\АфА'\ = \А\-\А'\, (AeA')t=At+A'tl
{А®А')-1=А-*фА'-1,
ЛэТ= \а®а'\(а®а')-*= и/|Л0|л|л/.
Рассмотрим наряду с векторами ?' = (?^)* ?" = (??") (П.3.1) вектор
= (????, ??^. · · ·. *!*„« *«*1· · · · · *2V'> · · · '· *?'*1· · · ·» tn'tn-)·
(?.3.10)
3. ПРЯМЫЕ СУММЫ II ПРОИЗВЕДЕНИЯ МАТРИЦ
363
Линейное пространство Д размерности л'л", состоящее из всех векторов
вида (П.3.10), называется прямым (кронекеровским) произведением
пространств Д' и Д". Это обстоятельство выражается соотношением
R = Д' ® Д". (П.3.11)
Соответственно можно написать для вектора (П.3.10)
? = ?' <g> ?'" (?.3.12)
и рассматривать его как прямое произведение векторов ?', ?".
Отметим, что вместо того, чтобы компоненты прямого произведения
векторов ?|? ?"„ = As,s„ выстраивать в одну строку (П.3.10), можно
расположить их в виде прямоугольной таблицы с числом строк, равным числу
компонент первого вектора, и числом столбцов, равным числу компонент
второго вектора:
*!*!· *i*a» ••·»*?*?·
? ? ? ? " ? ' ? " ? ' ? "
^
? ? ' ? " ? ' ? " ? ' ? "
= (^s's") = Л'
Следовательно это прямое произведение можно рассматривать также
как прямоугольную матрицу-диаду А размерности ?' ? ? . Такое
представление во многих случаях является полезным, и мы в подобных
случаях будем писать вместо ? = ?'®?"
А = <?' . ?". (?.3.12')
Очевидно, что по смыслу определения (П.3.11) R'®R" = R"®R\
Однако из (П.3.10) ясно, что в общем случае
?(?) = <?' ® ?" # ?" ® г|/ = ?<2>.
Следовательно, для прямого произведения двух линейно независимых
векторов коммутативность не имеет места. Но, аналогично случаю прямой
суммы, векторы ?|/ ® ?" и ?" ® г|/ состоят из одних и тех же компонент,
расположенных в различном порядке. Поэтому они могут быть получены
один из другого с помощью ортогонального преобразования
?B) = 5?(?)? s = S-K (П.3.13)
Вид матрицы этого преобразования нетрудно установить на основании
сравнения ??)=(?|??")? ?B)= (?^,?'). Ясно, что элементы S будут
равны 0 Иц 1, причем в каждой строке и каждом столбце S будет только
по одной единице. Кроме того, очевидно, что вид S зависит только от
размерностей векторов г|/ и ?", но не от значений их компонент. Исходя
из этого, можно показать, что при одинаковых размерностях пространств
R' и R" матрица S должна быть симметричной. Действительно, в этом
случае наряду с (П.3.13) должно быть справедливо соотношение ?*1) =
=^?<2>, откуда следует ?<2> = S-???) =3<фО>, т.е. 3 = S~l = S, S2 == 1.
Запишем векторы ?*1), ?<2) в виде
?(?)=*'® г=о;« о. *;(*: о. -,*«№ ??
364 приложения
Компонента ??>??* стоит в векторах ?*1), ?<2> соответственно на местах
S(D = (/ - 1) п» + s", ,<« = (s" _ i) n' + s'. (?.3.13')
Поэтому матрица 5 (П.3.13), преобразующая ?A> в ?<2>, имеет вид
5=22 esB)s<1)= ? ? es'+n'<s"-^ s,,+n,,(s,-1'l (П.3.13")
8/=1з"=1 s'=l з"=1
где еАВ — элементы полной матричной алгебры в пространстве R =
=Д'®Д" (см. П.1).
Легко убедиться, что для прямого произведения трех и более
векторов справедлив закон ассоциативности
? ® (?' ® ?'') = (Ф ® ¦') ® ?" = ? ® ?' ® ?''· (?.3.14)
Имеют место также левый и правый законы дистрибутивности
(? + ?') ® ?" = ? ® ?" + ?' ® ?'', (?.3.15)
? ® W + ?") = ? ® ?' + ? ® ?". (?.3.16)
Если здесь обычную сумму векторов заменить на прямую (П.3.3), то левый
закон дистрибутивности (П.3.15) останется справедливым:
(? ? ?') ® ?" = ? ® ?" ? ?' ® ?", (?.3.17)
а правый —нет (см. (П.3.2), (П.3.10)).
Для скалярного произведения имеем
(? ® ?') * (? ® *') = ?*? · <p'V· (?.3.18)
Отсюда следует, что если сами векторы ?*?\...,q/n) ??A) , . , . , ?(?")
образуют ортонормированные базисы в пространствах Д' и R"
соответственно, то векторы i|)<s's"> = <P<S'> ® ?<?"> образуют ортонормированный базис
в пространстве R = R' ® R".
Прямое произведение матриц определяется аналогично (П.3.10). Пусть
в пространствах R' и R" заданы квадратные матрицы Л' = (^?/?')» ^' ==
= (^?^?") порядка (размерностей) пг и п" соответственно. Тогда матрица
А размерности п'п"
А = А'®А" = (А'^,А")
А А А А А А
А' А" А' А" А' .А"
l^n'l^ Al'2^ * * * AnrniA J
(?.3.19)
называется прямым (кронекеровским) произведением матриц Аг и А".
Заметим, что определение (П.3.19) естественно обобщается на случай,
когда Аг и А" являются произвольными прямоугольными матрицами.
Поэтому, если рассматривать вектор ? как матрицу-столбец, то
определение (П.3.10), (П.3.12) будет частным случаем (П.3.19). Используя
блочное умножение, можно убедиться, что действие матрицы А (П.3.19)
на вектор ? (П.3.10), (П.3.12) определяется формулой
Л ? = (А' ® ?") (?' ® ?") = А'У ® ?"?'. (?.3.20)
Произведение (П.3.19) некоммутативно, однако А" ® А' отличается от
А ®А" лишь перестановкой строк и столбцов, соответствующей
преобразованию (П.3.13). Поэтому
А" ® А' = S(A' ® A")S~l = S(A' ® A")S, (П.3.21)
3. ПРЯМЫЕ СУММЫ И ПРОИЗВЕДЕНИЯ МАТРИЦ
365
где S — ортогональная матрица (П.3.13). Как и ранее, в случае п' = п"
матрица S будет симметричной и S2 = 1.
Прямое произведение матриц ассоциативно и дистрибутивно:
(А ® В) ® С = А ® (В ® С) = Л ® В ® С, (П.3.22)
(А+В)®С = А®С + В®С, А®(В + С) = А®В + А®С. (П.3.23)
Если вместо обычной суммы взять прямую сумму матриц, то первое из
соотношений (П.3.23) останется в силе:
(АеВ)®С = А®СфВ®С. (П.3.23')
Но второе, как и в случае векторов, не будет справедливо. Однако, хотя
А® (В ? С) не выражается автоматически в виде прямой суммы
(А ®В)(В{А ®С), но имеет место эквивалентность
А ® (В ? С) со (А ® В) 0 (А ® С) (П.3.23")
вследствие свойства (П.3.21).
Очевидно, прямое произведение матриц линейно относительно
каждого из сомножителей, поэтому
аА+цВ)®С= \А ®С + г\В®С,
где ?, ? — произвольные комплексные числа.
Аналогично (П.3.20) имеем
(А ® В) (А' ® В') = АА' ® ВВ\ (П.3.24)
если А и А', так же как В и В\ имеют одинаковый порядок. Поскольку
К ® К' = 1Л' ® К = Кп'> (П.3.24')
то согласно (П.3.24)
{А ® #)-! = Л-» ® В-К (П.3.25)
Нетрудно убедиться, что
/®В = А® В, (А ® #) + = А+ ® В+. (П.3.26)
Из определения (П.3.19) непосредственно следует, что
(A®B)t=AtBt. (П.3.27)
Отсюда и из (П.3.24) находим, что также
[(A®BJ]t=(A2®B2)t=(A*)t(B*)tl [(A®B)k]t=(Ak)t(Bb)t.
Если ?', ?" — собственные векторы матриц А' и А" соответственно, т. е.
А'Ъ' = ?'?', Л"ф" = ?'?',
то согласно (П.3.20)
W ® 4") (*' ® ?") = ?'? ® ?"? = ?'?"(?' ® ?").
Таким образом, собственные векторы прямого произведения матриц А'®А"
равны прямым произведениям собственных векторов сомножителей ?' и
?", а собственные значения матрицы Ar ® А" равны всевозможным
попарным произведениям соответствующих собственных значений %!, ?"
матриц Аг и А"\ Отсюда следует, что
\Л' ® Л" | = \А' К | А" Г'. (П.ЗЯ8)
Для матрицы, взаимной к прямому произведению, имеем на основании
366 ПРИЛОЖЕНИЯ
(П.3.25), (П.3.28) Л'®Л"=| А'® А" | (Л'® Л")_1= I Л' |п"| А" ^'л'® Л" =
=^A'®~A''\A'\nn-i\A"\n,-i
Если обозначить
то соотношение (П.ЗЛ9) запишется в виде
??? = (л' ® Л,,)?v = ?'?,?,????? (П.3.29)
причем, как следует из (П.ЗЛЗ'),
? = л"(?' - 1) + ?", ? = я"(?' - 1) + ?". (?.3.30)
С помощью аналогичной (лексикографической) нумерации можно
каждой квадратной матрице В = (???) в и-мерном пространстве сопоставить
вектор ? = (??), в и2-мерном пространстве —
?? = #??, ? = ? (? — 1) + ?. (?.3.31)
Рассмотрим произведение трех квадратных матриц и-го порядка
А'ВА" = (-4??/5?'?'-4'?) = (^??'-^??'^?'?')'
Используя соотношения (П.3.29), (П.3.31), можно написать
А'т,А^, = (Л' ® 2")??> 2??? = ?? (?.3.32)
и, таким образом, произведение трех квадратных матриц и-го порядка
представить как линейное преобразование вектора ? с помощью
матрицы А' ® А?' порядка л2:
А'ВА" = (Л' ® Л") ?. (?.3.33)
Отметим еще следующее важное свойство прямых произведений. Пусть
Л = Л!®Л2®...® Ak® ...®Л8 (П.3.34)
и пусть какая-либо из матриц Ak подобна матрице В
А н со В, A k = 555- К (П.3.35)
В таком случае матрица Л будет подобна матрице
Л' = Л ? ® Л2 ® ... ® Я ® ... ®Л8,
отличающейся от Л заменой Ak на 5. Действительно,
А = Л, ® ... ® S&S-1 ® ... ® А8 = ?Л'?-1, (П.3.36)
где матрица ? имеет вид
? = 1<*> ® 1<2) ® ... ®1<*-0 ® S ® 1<*+»>® ... 0 ?(?). (?.3.37)
Тем же путем можно показать, что при замене любого числа любых
матриц Лл, входящих в прямое произведение (П.3.34), на какие-либо матрицы
подобные им, мы также получим в результате матрицу, эквивалентную
первоначальной. Таким образом, произвольная перестановка
сомножителей в прямом произведении любого числа матриц и также замена этих
сомножителей на произвольные эквивалентные им матрицы всегда
приводит к матрице, эквивалентной первоначальному прямому произведению.
Нетрудно убедиться, что прямое произведение любого числа
симметричных, эрмитовых, ортогональных, унитарных, нормальных (А+А =
4. ЛЕММА ШУРА
367
=ЛЛ+), проективных (идемпотентных), неотрицательно или
положительно определенных, приводимых к диагональному виду матриц
является матрицей того же типа. Прямое произведение нечетного числа
антисимметричных (антиэрмитовых) матриц снова будет матрицей того же
типа, а в случае четного числа сомножителей — симметричной
(эрмитовой) матрицей.
4. Лемма Шура
Рассмотрим две совокупности квадратных матриц, причем первая
совокупность {а} состоит из матриц порядка т, а вторая — {?} — из
матриц порядка п. Рассмотрим также всевозможные прямоугольные
матрицы А, имеющие т строк и ? столбцов (т X и-матрицы). Тогда имеет
смысл произведение матриц ? на Л справа: аА, которое будет являться
прямоугольной яг X тг-матрицей. Аналогично, произведение Л ? также
дает ?? ? и-матрицу.
Совокупности {а} и {?} могут составлять каждая независимо от
другой конечное, бесконечное счетное или континуальное множество.
Пусть совокупности {?}, {?} неприводимы, т. е. не имеют инвариантных
подпространств, отличных от нулевого или пространства размерности
т, ? соответственно. Предположим, что существует такая т X и-матри-
ца А, что равенство
аА = А$
(П.4.1)
выполняется для всех ? или ?. Последнее означает, что для каждой
матрицы ? из первой совокупности может быть найдена некоторая
матрица ? из второй совокупности такая, что аА = А$, и наоборот, для
каждой ? найдется такая а, что справедливо (П.4.1). Очевидно, что
(П.4.1) выполняется для любых ? и ? (в том числе и приводимых),
если А = 0, т. е. когда А — нулевая матрица. Утверждение леммы Шура
сводится к тому, что для неприводимых совокупностей {а} и {?} матрица
А может отличаться от нулевой только в случае, когда эти совокупности
эквивалентны: ? = А$А~Х. Это равносильно тому, что т = ? и |Л| # О,
т. е. А является квадратной неособенной матрицей.
Докажем это утверждение. Пусть матрица А имеет вид
?
А =
лиЛ12 · · · Ат
^21^22
а2П
?????2 * * * Атп
(П.4.2)
Матрицы ? (?) можно рассматривать как линейные операторы,
действующие в тп-мерном (гс-мерном) пространстве ??(??). В свою очередь
столбцы матрицы А можно рассматривать как векторы /><!>, р&\..., /><п>:
(П.4.3)
.«) =
Агг
Агг
Ami4
, /><«=
м»1
Ч·
*П2,
{А *
А2п
А
заданные в тп-мерном пространстве Ra. Тогда матрица аЛ будет иметь
в качестве своих столбцов векторы ар<1\ ар<2>,. ..,ар<п>. Напишем вы-
368
ПРИЛОЖЕНИЯ
ражение для элементов к-то столбца m X л-матрицы Л ?
?
(^P)ft'fe == 2 Ah'$W *' = 1,2,...,и.
Выписанный в явном виде этот столбец имеет вид (см. (П.4.3))
и,
?
?
1=1
^,)
*2l
\Aml)
1=1
Приравнивая соответствующие столбцы в обеих частях равенства (П.4.1),
получим
а/>(*' = 2 hkP(l)< * = 1, 2, .... it. (П.4.4)
1=1
Это равенство означает, что действие каждой из матриц ? на любой из
? 7п-мерных векторов /><*> сводится к линейной комбинации этих же
векторов, т.е. векторы р<1\ р<2\..., /><п> определяют подпространство ?',
инвариантное по отношению к совокупности всех матриц а. Но поскольку
эта совокупность по условию неприводима, то подпространство В! должно
быть либо нулевым, либо совпадать с полным тп-мерным
пространством Да. В первом случае А = 0. Если же А ? 0, то среди векторов
Р{1К Р{2\ ···» Р{п) имеется m линейно независимых векторов, следовательно,
ДОЛЖНО быТЬ 71 ^ 771.
Транспонируя обе части равенства (П.4.1), получим $А = Аа.
Теперь А будет прямоугольной ? ? ??-матрицей, а совокупности матриц
Т«Ь Ш очевидно будут нещшводимы, как и {?}, {?}. Повторяя снова
те же рассуждения и считая А ? 0 (значит и А Ф 0), придем к выводу,
что должно быть тп^п. Следовательно, если А Ф 0, то m = п, т. е. А
является квадратной матрицей и притом неособенной, поскольку все
?? ее столбцов линейно независимы. Лемма Шура доказана.
Пусть аЛ = 0 для всех тп-мерных квадратных матриц а из
некоторой неприводимой совокупности и для некоторой m X «-матрицы А.
Тогда арМ = а/><2> = ... = ар<п) = 0 и пространство, натянутое на
векторы ??1), ..., /7<?>, будет инвариантным подпространством для
совокупности матриц а. Поэтому либо А = 0, либо среди векторов pW есть m
линейно независимых. Но в последнем случае матрицы а будут
обращать в нуль любой вектор из пространства Ла, т. е. а = 0. Таким
образом, для неприводимой совокупности {а} равенство аЛ = 0 возможно
лишь, когда А = 0 или а =а 0. С помощью транспозиции нетрудно
доказать аналогичное утверждение для случая Аа = 0. Случай, когда все
? = 0, не представляет интереса, так как тогда неприводимая
совокупность матриц а фактически отсутствует. Отбрасывая его, мы можем
сформулировать утверждение: если для всех квадратных m X тп-матриц
а из некоторой неприводимой совокупности аЛ = 0 или Ва = 0, где
А (В)—фиксированная m ? ?- (? ? ??)-матрица с любым п, то Л = 0
E = 0).
Из доказанной выше общей леммы Шура вытекает важное следствие,
которое часто также называют леммой Шура. Пусть {а} — неприводимая
совокупность квадратных матриц и Л —квадратная матрица той же
размерности 771 X 771, коммутирующая со всеми а: аЛ = Аа. Но в таком
случае также аА' = 4'а, где А' =¦ А — Xim (? —любое число). В силу леммы
4. ЛЕММА ШУРА
369
Шура А' должно быть либо нулевой, либо неособенной матрицей, но
вторая возможность отпадает, если ? есть собственное значение матрицы А.
Поэтому должно быть ? — ???? = 0, т.е. А = ?. Итак, матрица,
коммутирующая с неприводимой совокупностью матриц, должна быть
скалярной матрицей.
Рассмотрим теперь некоторую вполне приводимую совокупность
квадратных матриц {а}. Последнее означает, что существует базис, в котором
все матрицы ? принимают блочно-диагональную форму
??*»
~<2>
У(Л)
v(D .
?B)
... ? ?'
.<*>¦
(?.4.5)
причем блок a<fe) является квадратной матрицей порядка и&, одного и
того же для всех а. Будем считать, что матрицы a(ft) далее неприводимы,
т. е. каждая a<ft> не может быть никаким выбором базиса приведена к
б л очно-диагональному виду для всех а. Со всеми матрицами ?
рассматриваемой совокупности будет коммутировать матрица
/V».
А =
V*
Vnft
= ??1?? ? к21щ ¦
? KKh (
(?.4.6)
где ?? — произвольные числа. Очевидно, матрица А не является
скалярной. Таким образом, если совокупность {а} вполне приводима, то
заведомо существует матрица, отличная от скалярной, коммутирующая со
всеми а.
Во многих случаях и, в частности, для представлений наиболее
важных групп имеет место такое положение, когда совокупность {а} может
быть либо неприводимой, либо вполне приводимой. В таком случае из
леммы Шура вытекает критерий для суждения о неприводимости или
полной приводимости рассматриваемой совокупности {а}. Именно, если
единственной матрицей А, коммутирующей со всеми а, является
скалярная матрица, то совокупность {а} неприводима. И наоборот, если
матрица А, коммутирующая со всеми а, может отличаться от скалярной, то
совокупность {а} вполне приводима.
В дальнейшем мы ограничимся рассмотрением представлений групп
вместо совокупности матриц вообще. Общее выражение для матрицы ?
вполне приводимого представления некоторой группы в
соответствующем базисе можно написать в виде прямой суммы
? = ?? ? ?? ? ... 0 ?2 ? ?2 ? ?2 ? ...,
в которую отдельные неприводимые представления ??, ?2,.
дить неоднократно. Очевидно,
ткеткф
Тъ = Ки®Т
тк
(П.47)
могут вхо-
(П.4.8)
24 ф. и. Федоров
370
ПРИЛОЖЕНИЯ
где гл — кратность неприводимого представления Tk, входящего в Г.
Поэтому вместо (П.4.7) можно написать
I. *
rh
Г»)>
(П.4.9)
где ? ? обозначает прямую сумму. Найдем общее выражение для
матрицы А, коммутирующей с матрицей приводимого представления ? (П.4.7),
(П.4.9). Матрицу А можно разбить на блоки, соответствующие
представлениям, входящим в (П.4.7):
UA1) ЛA2)...^
Л =
^B1) ^B2)
(П.4.10)
причем мы здесь пока будем предполагать, что индексы нумеруют все
блоки Tk подряд независимо от того, соответствуют ли они одинаковым
или различным представлениям. Условие коммутации ТА = AT
запишется в блочном виде с учетом квазидиагональной формы ? следующим
образом:
TkAW)-=AWTi. (П.4.11)
Если Tk и Tj являются различными, неэквивалентными представлениями,
то на основании леммы Шура Л<л*> = 0. Если же Tk = ??, то на
основании той же леммы Л(йг) = ^ftIln , где Хм — произвольное число и пь,
—размерность пространства неприводимого представления Tk· Для наглядности
рассмотрим случай, когда
тогда согласно доказанному выше
/ЛA1) ЛA2) 0 \
А= Л<21> ЛB2) 0 U
\о о лC3у
где ?<!> есть произвольная матрица второго порядка
К?пх
^22 ПХ
0
0
?A)®?????33??,,
?A)=?? Г
\?21 ?22
¦Очевидно, в общем случае каждому блоку 1 (?) Тк в матрицах ? будет
соответствовать в коммутирующей с ними матрице А блок Х^ (?) 1п,» где
%{k) —произвольная матрица порядка rk. Для представлений Tk,
входящих в ? однократно, матрица ?(?> будет сводиться к числу.
Следовательно, общее выражение для матрицы А имеет вид
(П.4.12)
Докажем еще одно простое утверждение, являющееся по сути дела
следствием леммы Шура. Пусть квадратичная матрица А порядка ran
5. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ
371
коммутирует с двумя совокупностями матриц: 1т®аи ? ® 1п, где а и ? —
квадратные матрицы порядка пит соответственно,, относящиеся к двум
неприводимым совокупностям {а} и {?}. Тогда матрица А должна быть
скалярной.
Для доказательства разобьем матрицу А на блоки
А =
1т\
А11 А12... А
А21 А22...А2т
Ami дгп2 лтт
где все Ahl — квадратные матрицы размерности п. Соответственно
напишем
lm®CC:
Га 0 ... О ^
О ? ... О
.. О а)
Из коммутации А с матрицей \т®а, согласно только что доказан*
ному следует, что А = ? ® 1П, где ? — произвольная квадратная матрица
размерности т. Условие коммутации А с ? ® 1П:
{(тг®1«), (?®??)}-= {??}-®??
приводит к равенству ??·= ??, что, вследствие неприводимости
совокупности матриц ?, влечет за собой скалярность матрицы ?: ? = ??™. Но в
таком случае
А = Aim Оу In === Almn»
что доказывает предложение. Заметим, что оно справедливо и тогда, когда
совокупности {а} и {?} совпадают. В этом случае А будет скалярной
матрицей размерности т2.
В заключение отметим, что если мы имеем прямое произведение
С = А ® В, где А и В — квадратные матрицы из некоторых двух
совокупностей, то можно утверждать следующее: если хотя бы одна из
совокупностей А или В приводима, то совокупность С также будет
приводима. Это ясно из того, что если каждая А может быть представлена
в виде Л = Л'0Л", то А ® В = (А' ® В)®(А" ® В). В то же время
из неприводимости А и В не следует неприводимость С, примером чего
является приводимость прямого произведения неприводимых
представлений группы вращений (§ 15).
5. Метод проективных операторов [58]
Если известно минимальное уравнение матрицы ?
? (?) = (? — ??) (?- ?2).. .(? - ??) = 0, (?.5.1)
то решение уравнения
(?-?*)?* = 0 (?.5.2)
для собственного вектора ?? может быть получено без использования
явного вида ? в каком-либо базисе, т.е. ковариаптным путем.
Минимальное уравнение (П.5.1) можно написать в виде
P(a) = (a-Kh)Ph(a) = 0,
(П.5.3)
24*
372
ПРИЛОЖЕНИЯ
где
Ph(?) = (? — ??).. .(? — ?*-?) (? — ??+!).. .(? — ??) ? 0. (?.5.4)
Мы будем называть полином Рл(а), получающийся после удаления из
? (а) бинома (а —Ял), усеченным минимальным полиномом,
соответствующим собственному значению ?&, или короче, к-м усеченным
полиномом.
Сравнивая матричное уравнение (П.5.3) с векторным уравнением
(П.5.2), видим, что каждый ненулевой столбец матрицы Ph(a) можно
рассматривать как собственный вектор ??, отвечающий собственному
значению Ял. Отсюда ясно, что матрица ??{?? доставляет столько различных
решений уравнения (П.5.2), сколько она содержит линейно независимых
столбцов. Возникает вопрос, все ли независимые решения уравнения
(П.5.2) содержатся среди столбцов матрицы ??(??? Ответ будет
утвердительным при условии, что Xh является однократным корнем
минимального полинома [58]. Чтобы убедиться в этом, рассмотрим пример матрицы,
приведенной к нормальной жордановой форме (см. § 36):
!\ 0
0 ??
0 0
0
0
?,
?2 1
0 ?»
?20
0 ??
0
0 0 ?,
2J
(П.5.5)
Минимальное уравнение этой матрицы имеет вид
?(?) = (?— ??(? — ?2)8= 0.
Построим усеченные минимальные полиномы
?(*?-?)" ° о
Рг(а) = (а-Ь)*
0
0
(К-КK о
0 (?,-?,)»
??
?1(?) = (?-?1)(?-??I
0
(?.5.6)
(?.5.7)
0 0 ?2 — ??
0 0 0
0 0 0
(?.5.8)
Однократному корню ? ? минимального полинома (П.5.6) соответствует
5. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ
373
в полиноме (П.5.7) скалярный ящик некоторого (в данном случае третьего)
порядка. Вообще если ? — однократный корень минимального полинома, то
матрица ? диагонализяруется по собственному значению ?. При этом число
собственных векторов, отвечающих ?, равно размерности
соответствующего блока в нормальной форме матрицы. Из (П.5.7) следует, что
независимые столбцы усеченного полинома
0
0
[ 0
. *;-
' 0 '
(К-КK
0
0
. ¦;=
' ° 1
0
(К-КK\
0
0 J
являются собственными векторами: ?? ? = ????, и, кроме них, не
существует других собственных векторов, отвечающих собственному
значению ??. Ясно, что так будет и в общем случае. Следовательно, если ?&
является однократным корнем минимального полинома ? (?), то все
собственные векторы, отвечающие собственному значению ?&, содержатся
среди независимых столбцов матрицы соответствующего усеченного
полинома.
Хотя мы проводили рассуждения для нормальной, а не для исходной
формы матрицы а, однако, очевидно, они имеют общее значение, так как
нормальная форма подобна матрице а, а для подобных матриц
минимальные полиномы, собственные значения и число отвечающих им
собственных векторов одинаковы.
По-иному обстоит дело, если ? является кратным корнем
минимального полинома ? (?). В этом случае в нормальной форме матрицы
обязательно содержится одна или несколько клеток Жордана, порядок которых
равен кратности корня ? в минимальном полиноме. В нашем частном
примере (П.5.4) такая клетка одна:
(К ? о\
о ?2 ? .
\0 0 ?2/
Однако, кроме того, в общем случае матрица ? при том же минимальном
полиноме может содержать любое число клеток Жордана с тем же ?,
того же или любых меньших порядков, включая первый. При этом в
усеченном минимальном полиноме, отвечающем такому ? (?.5.8),
отличными от нуля будут лишь столбцы, соответствующие клеткам Жордана
максимального порядка.
Итак, если Ял — корень минимального полинома кратности г&, то
столбцы усеченного полинома Р*(а) будут содержать лишь собственные
векторы, соответствующие жордановым клеткам порядка rk (по одному
на каждую такую клетку).
Пусть ?? — однократный корень минимального полинома ? (?).
Построим матрицу
*»(«)
ъ-уот· (?·5·9)
Здесь />л(Ял)#0 именно вследствие однократности Xh (см. (П.5.4)).
Согласно (П.5.3) aPh(a)= lkPk(a) и вообще anPk (?) = %p>h (?), поэтому
374
ПРИЛОЖЕНИЯ
ясно, что умножение Р&(а) на любой полином Q(a) равносильно
умножению на Q(kh):
(П.5.10)
(П.5.11)
Вследствие этого
Ра
2 __
Q(a)Ph(a)=Q(Kk)Pk(a).
Pk(a)Ph(a) Pk(a) _
(Pk(h)J РЛК)
Pft·
Таким образом, матрица рь (П.5.9) является идемпотентной, так как все ее
степени равны между собой. Написав (П.5.11) в виде ?*(??—1) = 0, видим,
что это есть минимальный полином матрицы р*. Поскольку он не имеет
кратных корней, то р* всегда приводится к диагональному виду, причем
по диагонали будут стоять лишь единицы и нули —корни минимального
полинома или собственные значения р*. Итак, матрица рл путем
надлежащего выбора базиса всегда может быть приведена к виду
Р* =
1
°J
-?
(П. 5.12)
Здесь индексы г и s указывают размерности квадратных матриц
единичной и нулевой соответственно. Действуя рл на произвольный вектор ?,
получим
?*1 )
l·2
l*r+.j
=
[Ц
%\
%\
о
0
Таким образом, оператор рл сохраняет в любом векторе ? лишь те
составляющие, которые соответствуют подпространству, натянутому на г
первых базисных векторов. Иными словами, рл проектирует любой вектор
на упомянутое подпространство. Вообще, всякая идемпотентная матрица
? (р2 = р) является проективной матрицей.
Заметим, что р' = 1 — ? также является проективным оператором,
поскольку р'(р' — 1) =—A — ?)? = 0. Этот оператор будет
дополнительным к оператору р, так как он проектирует на дополнительное
пространство.
Так как р* (П.5.9) лишь числовым множителем отличается от Рь(а),
то столбцы рь также являются собственными векторами матрицы а,
отвечающими собственному значению ?&. Из (П.5.12) ясно, что след
матрицы рл((рл)* = г) равен числу таких независимых собственных векторов,
причем эта характеристика является инвариантной, поскольку след
матрицы не зависит от выбора базиса.
Пусть ? — произвольный вектор. В таком случае вектор
? = ?*?
(П.5.13)
5. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ
375
согласно (П.5.3) и (П.5.9) удовлетворяет уравнению ?? = ХнУ- Поэтому
либо ?*? = О, либо рлф является собственным вектором матрицы а,
отвечающим собственному значению ?&.
Если матрица ? обладает свойствами
р2 = р, р, = 1, (П.5.14)
то это означает, что она является проективным оператором, выделяющим
единственный вектор. Наоборот, если известно, что ? есть проективная
матрица, выделяющая единственный вектор, то р* = 1. Из записи ? ? =
= 1р ясно, что этот вектор можно рассматривать как собственный вектор
У самой матрицы р, отвечающий собственному значению, равному
единице: ?? = я|). Поскольку он один, то все столбцы матрицы ? должны быть
пропорциональны ему, т. е. ? должна иметь вид
Р =
г
к
|
Ч1
%,
•4?
'¦?1
t2
*».
.•••.??
У ?)
? ?
1*??? *??3···*???.
(?.5.15)
причем некоторые из чисел у8 могут равняться нулю, но, разумеется, не
все одновременно, так как р* = 1. Соотношения (П.5.14), (П.5.15)
означают, что ? является матрицей-диадой
? = У · ?,
(П.5.16)
первый вектор которой у является собственным вектором матрицы р.
При этом из (П.5.14) следует
Pi = ?<? = 1. (П.5.17)
Легко проверить теперь, что ?2 = У · ?? · ? =^?|) · ? = p.
Если матрица р симметрична, то ?="? = ?·? = ?·?. Умножая
это равенство справа на любой вектор ?, получим у · ?? = ? · ?? или
? =(??/??)'? = Су. Следовательно, ? = C-? · ?, или ? = ? · ?', где
?' =усу. Таким образом, если матрица обладает свойствами
Р2 = ? = Р, Р* = 1.
(П.5.18)
то она всегда может быть представлена в виде
? = ? . ?, ?? = ???? = 1. (?.5.19)
Для эрмитовой матрицы р из (П.5.17) имеем аналогично
? = у . ? = р+ = ?* = ?* . ?*.
Отсюда, после умножения на произвольный вектор ? слева, получим
? = (??*/??) ?* = су*. (?.5.20)
Следовательно, в этом случае
? = су · ?*, (?.5.21)
причем из ? = р+ следует С* = С, т. е. число С вещественно. Взяв след
от (П.5.21), получим согласно (П.5.18)
?? = суу* = 1, с = ?/?*? > о.
(П.5.22)
376
ПРИЛОЖЕНИЯ
Поэтому можно ввести нормировку ?' = yCty и представить ? в виде
? = ?' · ?'*. Итак, матрица ?, обладающая свойствами
Р2 = ? = Р+, 9t = 1, (П.5.23)
всегда представляется в виде
? = ? . ?*, ?*? = 1. (?.5.24)
Заметим, что представления (П.5.19), (П.5.24) не вполне однозначны
вследствие возможности умножения ? на фазовый множитель. В случае
(П.5.19) он равен zfcl и в случае (П.5.24) е** с любым вещественным ?.
Частным случаем (П.5.2) является уравнение
?? = 0. (П.5.25)
Условие существования ненулевых решений для ? имеет вид |а| = 0.
С помощью взаимной (см. П.1) матрицы ? это соотношение можно
написать в виде ?? = 0. Следовательно, векторы ? пропорциональны
столбцами взаимной матрицы а. Аналогично (П.5.13) для вектора ?? (? —
любой вектор) справедливо утверждение: либо ?? = 0, либо ?? = ? —
собственному [вектору матрицы ? для нулевого собственного значения.
Если известно, что нулевое собственное значение является
однократным корнем характеристического полинома, то ему. будет
соответствовать единственный собственный вектор. Поэтому аналогично
(П.5.16) в этом случае можно написать ? = ?? · ?, ? еслн матрица ?
^имметрична, то ? = ?? · ?. Взяв след, получим at = ??2. Поэтому
?/?* = ? · ?/?2 = ?' · ?', где ?' = ?/??2 (?'2 = 1). Таким образом, если
? = ? и ? имеет однократное нулевое собственное значение, то
а/о! = ? · ?, ?? = 0, ?2 = 1. (?.5.26)
Эти соображения полностью распространяются ? на уравнение (П.5.2),
если ?* — однократный корень характеристического полинома для а.
В этом случае в (П.5.26) следует вместо ? подставить a — ?*:
a-h/(a-h)t = *h'*h' (?~?)% = °> *? = 1· ? = «·
(?.5.27)
Бели характеристический полином матрицы ? известен
Q (a) = (a - ?,)"'... (a - ??)"*.. .(? - ?/3 = (a - ??) Qk (a) = 0,
(?.5.28)
то
(?-??)< = <?*(?*)· (?.5.29)
В этом можно проще всего убедиться, взяв ? в нормальной жордановой
форме. Тогда матрица ? — ?* будет иметь единственный нулевой
диагональный элемент, а матрица ?—?*, наоборот, единственный
диагональный элемент, отличный от нуля, равный (П.5.29).
Если минимальное уравнение (П.5.1) не имеет кратных корней, то
между различными проективными операторами (П.5.9) имеет место
соотношение
??* = 1- (П.5.29')
Действительно, пусть }(х) —полином степени п, все корни которого хк
5. МЕТОД ПРОЕКТИВНЫХ ОПЕРАТОРОВ
377
различны. Обозначая /*(#) = /(#)/(# — #л)> построим новый полином
степени ? — 1:
?(*) = ?-?/fcw//k(**)·
Так как fh(xl) = Q при к ? I, то Ф(ял)=0 при к = 1, 2,..., л. Но
полином степени и — 1 может иметь ? различных корней лишь тогда, когда он
?
тождественно равен нулю. Следовательно, Ф(ж)«0 и^ fh (x)lfh (xh) =*
= 1. Это и дает равенство (П.5.29') в котором 1 означает единичную
матрицу.
Применение проективных операторов позволяет существенно
упростить решение ряда задач квантовой теории поля (см. [58]). Проективная
матрица р(р2 = р), действуя на любой вектор состояния, выделяет из
него составляющую, которая удовлетворяет определенным требованиям
(например, описывает заданный спин, энергию и т.п.). Если состояние
характеризуется рядом признаков, каждому из которых отвечает свой
проективный оператор, то возникает задача построения из частных
проективных операторов такого проективного оператора, который выделял
бы состояния, обладающие одновременно всеми требуемыми
характеристиками. Если проективные операторы, отвечающие отдельным признакам,
коммутируют между собой, то вопрос решается весьма просто — искомый
проективный оператор будет равен произведению проективных
операторов для отдельных характеристик состояния. Если же частные
проективные операторы не коммутируют, то задача усложняется. Рассмотрим этот
вопрос в общем случае [117].
Пусть ?, ? — две проективные матрицы, действующие в некотором
линейном n-мерном пространстве Л, и ? — вектор этого пространства. По
определению
?(?-1) = ?(? — 1) = О, (П.5.30)
и матрица ? проектирует любой вектор на некоторое подпространство
??, соответственно матрица ? — на 7??. Задача заключается в нахождении
проективной матрицы ?(?2 = ?), которая проектировала бы любой вектор
на подпространство i?Y, являющиеся пересечением подпространств Ra и
Др: Ry = Ra (] /??. Мы будем называть такую проективную матрицу ?
матрицей пересечения ? и ?. Обобщение задачи на случай, когда имеется
более чем два проективных оператора, очевидно.
Для всякого вектора ?? е Ra должно быть ??? = ??, соответственно
для % е Rfi имеем ??& = ??. Для любого вектора ?? = Ry должны
одновременно выполняться условия
(а — 1)? = (? — 1) ?? = 0. (П.5.31)
Таким образом, проективная матрица должна выделять в пространстве
R все векторы, являющиеся одновременно собственными векторами
операторов ? и ?, отвечающими собственному значению, равному единице.
Введем дополнительные проективные операторы
а' = 1 - ?, ?' = 1 — ?, ?'(?' -1) = ?'(?' -1) = 0 (П.5.32)
и прямоугольную матрицу
P = (p,j> (П.5.33)
378
ПРИЛОЖЕНИЯ
имеющую ? столбцов и 2п строк. Тогда условия (П.5.31) запишутся в виде
??? = 0. (П.5.34)
В такой постановке задача становится частным случаем проблемы
определения вектора ? из уравнения Л ? = 0, где Л — любая прямоугольная
матрица с числом столбцов, равным числу компонент ?. Для решения этой
задачи можно использовать метод проективных операторов [117]. Умножая
на эрмитовски-сопряженную матрицу Л+, получим ?? = 0, где С = Л+А
является квадратной (? ? п)-эрмитовой неотрицательно определенной
матрицей. Действительно, рассмотрим форму F>= ?*4+4?, где ? — любой
вектор нужной размерности. Эту форму можно написать в виде
скалярного произведения двух комплексно сопряженных векторов, так как
?*4+'= (А%)*, поэтому F = (-4?)* (-4?)?^0. Легко показать, что
уравнения Л ? = 0 и ?? = 0 эквивалентны. Действительно, из первого следует
второе, а из второго, умножая скалярно на ?, получаем ??+-4? =
= (Лф)*(Лф)= 0. Но скалярное произведение вектора на самого себя
равно нулю* лишь когда вектор равен нулю, т. е. Л ? = 0. Следовательно,
первое уравнение следует из второго. Таким образом, все решения
уравнения ?? = 0 с квадратной матрицей С будут решениями уравнения
Л ? = 0 с прямоугольной матрицей Л и наоборот. Поскольку С —эрмитова
матрица, то ее минимальный полином не содержит кратных корней.
Если \С\ ? 0, то нетривиальных решений нет. Если же |С|=0, то
минимальное уравнение для С имеет вид Р(С) = СР0(С)= 0, причем Ро@)ф
? 0. Поэтому проективный оператор, выделяющий все решения
уравнения Л ? = 0, равен Ро(С)/Р0@). Подчеркнем, что такой подход
целесообразно применять и в том случае, когда Л — квадратная матрица,
неприводимая к диагональному виду, поскольку при этом нельзя
непосредственно использовать метод проективных операторов, изложенный выше.
Применяя эти результаты к матрице ? (?.5.33), следует учесть, что
обычно ?', ?' являются эрмитовыми матрицами. В таком случае ? =
= р+р = ?'2 + ?'2 = ?? + ?'. Если вместо двух проективных операторов
ищется пересечение любого числа к таких операторов ссь аг, ..., ал, то
соответствующая матрица ? будет равна сумме дополнительных к ним
проективных операторов
? = а[ + а'2 + ... + a'h = к - (?? + ?2 + ... + ah). (П.5.35)
Итак, справедливо утверждение: пространство, являющееся
пересечением пространств проектирования эрмитовых проективных матриц а8 (s =
= 1, 2,...,/с), состоит из векторов ?, удовлетворяющих условию ?? = 0,
где ? — сумма дополнительных к а8 проективных матриц. Если Р(х) =
= хРо (?) = 0 — минимальное уравнение для ?, то соответствующий
проективный оператор пересечения ? равен
?==?0(?)/?0@). (?.5.36)
Для иллюстрации рассмотрим случай двух коммутирующих
проективных операторов ? и ? (?? = ??). Согласно (П.5.35) при этом ? =
=2 —(? + ?). Ищем минимальный полином ? (?):
(? — 2J = ? + ? + 2?? = 2 — ? + 2??,
?(?) = ??0(?) = ?(?— 1) (?—2) = 2??? = 2??B - ?— ?) = 0.
Таким образом, проективный оператор пересечения в этом случае равен
? = (? — 1)(? —2)/2 = ??,
как и должно быть. Отметим, что способ, примененный для решения
уравнения (П.5.34), может быть использован для любой «прямоугольной»
системы линейных однородных уравнений, т. е. такой системы, в которой
число неизвестных не равно числу уравнений.
СПИСОК ОБОЗНАЧЕНИЙ
л? = (ага) —трехмерный вектор; ха(а = 1, 2, 3)—его компоненты;
индексы а, Ь, с, d... принимают значения от 1 до 3;
е — тройка независимых векторов (репер);
? = (pfe)= (р, р4) = (Р, 1Р0)— четырехмерный вектор в мире Минков-
ского; индексы /, /с, I, m принимают значения от 1 до 4. Греческие индексы а,
?,..., ?, ?,... принимают значения от 1 до ? > 4. По дважды
повторяющимся индексам подразумевается суммирование в пределах всех
возможных их значений;
ху=хауа = х\у\ + #2*/2 + #з!/з— скалярное произведение трехмерных
векторов ? и у;
?2 = ?*-\- ?*-{- ?* = х% — скалярный квадрат трехмерного вектора;
| q |=V##* — Уя'2 + я — модуль комплексного вектора q=q'+ iq"\
рр' = pkPk = ? ?' — ?0?0 — скалярное произведение четырехмерных
векторов в мире Минковского;
\ХУ\ — векторное произведение трехмерных векторов я?, у;
ЕаЬс — трехмерный символ Леви-Чивита;
[*#]« "- *аЪсХьУс>
~ (тильда) — знак транспонирования матрицы;
??? —символ Кронекера;
Ах — умножение матрицы А = (Л«р) на вектор ? = (яр):
(Ах)а = XЛ = (^???)?
сх — антисимметричная 3 X 3-матрица, дуальная вектору с = (са):
/ о -с, с\
СаЬ = *adbCd> °Х = I С3 ° _ С1 )· С><а: = [С*Ь *С>< = t*c]i
\- °2 С1 0 /
Х'У = {*аУь) — Диада, образованная из трехмерных векторов ? = (ха),
У = (Vb);
x*y=(xhyi)—диада, образованная из четырехмерных векторов
*=,(**). У =Ы;
(х-у) =Х'У+у-х, {х-у)=х-у + у-х — симметризованные диады
(симметранты);
[х*У] = х*У — У ·#, [#·*/] = ? · у — ?/ · # — альтернированные диады
(альтернанты);
а + Ъ + [аЪ\
<а, о> = ^ __ а^— — композиция двух 3-векторов а и Ь;
At = Ааа— след квадратной матрицы А = (Лар);
\А | — детерминант квадратной матрицы Л;
Л — матрица, взаимная к матрице А (А А = \А\);
* — знак комплексного сопряжения;
А+ = А*—матрица, эрмитовски-сопряженная к А;
О (а) = Ой— ортогональная 3X3 матрица, отвечающая
вектор-параметру а;
0+ — собственная ортогональная матрица ) ?^ · .
О- — несобственная ортогональная матрица / ' *' ±1,#
д/дх = (д/дха)— операторный вектор градиента;
(dx) = dx\dx2dxz — элемент объема в пространстве векторов х;
? (с)— матрица преобразования представления группы вращений,
отвечающего вектор-параметру с;
380
СПИСОК ОБОЗНАЧЕНИЙ
?? (с)— матрица преобразования неприводимого представления группы
вращений веса I;
® — символ прямого произведения пространств (векторов) и матриц;
ф —символ прямой суммы матриц;
{АВ}-= АВ—ВА — коммутатор операторов Л, В;
{АВ}+ = АВ + В А — антикоммутатор операторов А, В;
J = ?/2 (ОТ (с)/дс)с=0— инфинитезимальный вектор-оператор
представления группы вращений;
/ = й = /+ — эрмитовский инфинитезимальный вектор-оператор
представления группы 50C);
<?= cJ = cnJn — — с +;
? ?
?= cl = cln =?+;
? ?
?«±>= j/^(* + m)(Z±m + l);
Схшш, — коэффициент Клебша — Гордана;
?± — сдвигающие операторы: е±^lm = a^^m±i»
e±=±i[c0e±], cQ = c*0, eg = 1;
s-вектор а — пространственноподобный вектор в мире Минковского
(а2>0);
?-вектор а — времениподобный вектор (а2 < 0);
Z-вектор а — светоподобный вектор (а2 = 0);
Skimn—четырехмерный символ Леви-Чивита;
ах — 4 X 4-матрица, дуальная антисимметричной матрице a = — a:
? i_
akl— 2 ehlmnamn>
?+"*— собственное ортохронное преобразованпе Лоренца ? I ?/_^|=±1,
l№~> — несобственное ортохронное преобразованпе Лоренца J ^44 ^ *»
Z/j7*—собственное неортохронное преобразование Лоренца 1|lir*|=±l;
?,(-)— несобственное неортохронное преобразование Лоренца J/,44 ^ — 1;
^± = l^ — * J — антисимметричные 4Х4-матрицы, отвечающие 3-век-
тору д;
L(q) = Lq= L(q, q*) — собственное ортохронное преобразование
Лоренца, отвечающее комплексному вектор-параметру q\
круговой комплексный вектор q: q2 = 0;
линейный комплексный вектор q: [qq*] = 0;
? (<?> Я*) — преобразование представления группы Лоренца,
отвечающее вектор-параметру q\
Tll\q, q*) = Tl(q) ® ?1' (q*) — неприводимое конечномерное
преобразование представления группы Лоренца с весами Z, /';
?* — матрицы релятивистского волнового уравнения первого порядка к\
?= iPh*ih (кроме §§ 35, 36, где ?= ??*?*);
ln — единичная матрица порядка п;
V — единичная матрица порядка 21 + 1.
ЛИТЕРАТУРА
1. Вигнер ?. Теория групп и ее приложения к квантовомеханической
теории спектров.— М.: ИЛ, 1961.
2. Верле Ю. Релятивистская теория реакций.— М.: Атомиздат, 1969.
3. Гелъфанд Я. М., Минлос Р. ?., Шапиро 3. Я. Представления группы
вращений и группы Лоренца.— М.: Физматгиз, 1958.
4. Наймарк М. А. Линейные представления группы Лоренца.— М.:
Физматгиз, 1958.
5. Мурнаеан Ф. Теория представлений групп.— М.: ИЛ, 1950.
6. Любарский Г. Я. Теория групп и ее применения в физике.— М.:
Наука, 1967.
7. Хамермеш М. Теория групп и ее применение к физическим
проблемам.— М.: Мир, 1966.
8. Хейне Б. Теория групп в квантовой механике.— М.: ИЛ, 1963.
9. Ван дер Варден В. Л. Метод теории групп в квантовой механике.—
Харьков: ОНТИ, 1938.
9.1. Виленкин Я. Я. Специальные функции и теория представлений
групп.— М.: Наука, 1965.
10. Курант Р., Гильберт Д. Методы математической физики.— М.: ГТТИ,
1933 т. 1.
11." Федоров Ф. Я.—ДАН БССР, 1958, т. 2, с. 408.
11.1. Корн Г., Корн Т. Справочник по математике.— М.: Наука, 1973.
12. Уиттекер Е. Аналитическая динамика.— М., ОНТИ, 1937.
12.1. Федоров Ф. Я. Оптика анизотропных сред.— Минск: изд. АН
БССР, 1958.
12.2. Федоров Ф. Я. Теория упругих волн в кристаллах.— М.:
Наука, 1965.
13. Федоров Ф. Я. Теория гиротропии. Наука и техника.— Минск, 1976.
14. Федоров Ф. Я.— В сб.: Гомельская школа по физике высоких
энергий.— Дубна, препринт ОИЯИ 2-63-71, 1972, с. 3—27.
15. Федоров Ф. Я— Изв. АН БССР, сер. физ.-матем. н., 1973, № 2, с. 63.
15.1. Гантмахер Ф. Р. Теория матриц.— М.: Наука, 1967.
16. Мальцев А. Я. Основы линейной алгебры.—М.: Наука, 1970.
17. Edmonds A. Angular momentum in quantum mechanics.— Princeton,
1957.
18. Юцис А. Я., Левинсон Я. В., Ванаеас В. В. Математический аппарат
теории момента количества движения.— Вильнюс, 1960.
19. Юцис А. Я., Вандзайтис А. А. Теория момента количества движения
в квантовой механике.— Вильнюс, 1965.
20. Варшалович Д. Л., Москалев А. Я., Херсонский В. К. Квантовая
теория углового момента.— М.: Наука, 1975.
21. Кондон Е., Шортли Г. Теория атомных спектров.—М.: ИЛ, 1949.
22. Федоров Ф. И., В сб.: Проблемы теоретической физики, памяти
В. А. Фока.- Л.: изд. ЛГУ, 1975, т. И, с. 43.
23. Федоров Ф. Я.—ДАН БССР, 1961, т. 5, с. 101.
24. Федоров Ф. Я— ДАН БССР, 1961, т. 5, с. 194.
382
ЛИТЕРАТУРА
25. Федоров ?. Я.— ДАН БССР, 1962, т. 143, с. 56.
26. Федоров Ф. Я.— ДАН БССР, 1973, т. 17, с. 208.
27. Фок В. А. Теория пространства, времени и тяготения.— М.: Физмат-
гиз, 1961.
28. Федоров Ф. Я., Вогуш ?. ?.— ДАН БССР, 1962, т. 6, с. 690.
29. Вогуш А. Л., Федоров Ф. Я.—ДАН БССР, 1962, т. 5, с. 241.
30. Вогуш А. Л., Мороз Л. Г., Федоров Ф. Я.— Изв. АН БССР, сер. физ.-
матем. н., 1970, № 4, с. 85.
31. Широков Ю. М.— ДАН СССР, 1954, т. 99, с. 737.
32. Hori S.— Progr. Theor. Physics, 1959, т. 21, с. 613.
33. Bargmann F., Wigner E — Proc. Nat. Acad. Sci., 1948, т. 14, с. 211.
34. Боголюбов Я. Я., Логунов А. Л., Тодоров И. Т. Основы аксиоматиче-
ческого подхода в квантовой теории поля.— М.: Наука, 1969.
35. Йост Р. Общая теория квантованных полей.— М.: Мир, 1967.
36. Вогуш А. Л., Федоров Ф. Я.—ТМФ, 1972, т. 13, с. 67.
36.1. Федоров Ф. Я.— ДАН СССР, 1973, т. 209, с. 70.
37. Верезин А. В., Федоров Ф. Я.— Изв. АН БССР, сер. физ.-матем. н.,
1975, № 1, 118.
37.1. Klein О.— Zs. Phys., 1926, т. 37, с. 895.
37.2. Fock V.— Zs. Phys., 1926, т. 38, с. 242.
37.3. Dirac P.—Proc. Roy. Soc. (Lond.), 1928, т. 117, с. 610, 118, 351.
38. Вогуш Л. Л., Мороз Л. Г.— Введение в теорию классических полей.
Наука и техника.— Минск, 1968.
39. Паули В. Релятивистская теория элементарных частиц.— М.: Гос-
техиздат, 1947.
40. Федоров Ф. Я.— ДАН СССР, 1951, т. 79, с. 787.
41. Ахиезер А. Я., Верестецкий В. В. Квантовая электродинамика.— М.:
Наука, 1969.
42. Bjorken /., Drell S. Relativistic Quantum Mechanics.—N. Y.: McGraw-
Hill, 1964.
43. Боголюбов Я. Я., Ширков Д. В. Введение в теорию квантованных
полей.— М.: Наука, 1976.
44. Швебер С. Введение в релятивистскую квантовую теорию поля.—
М.: ИЛ, 1963.
45. Газиорович С. Физика элементарных частиц.— М.: Наука, 1969.
46. Новожилов Ю. В. Введение в теорию элементарных частиц.-— М.:
Наука, 1972.
47. Нишиджима К. Фундаментальные частицы.— М.: Мир, 1965.
48. Вогуш Л. Л., Федоров Ф. Я.— Изв. АН БССР, сер. физ. матем. техн.,
1962, № 2, с. 26.
49. Тхарев Е. Е., Федоров Ф. Я.—ЯФ, 1967, т. 5, с. 1112.
50. Федоров Ф. Я.— ТМФ, 1970, т. 2, с. 343.
51. Тхарев Е. Е., Федоров Ф. Я.— ДАН БССР, 1970, т. 14, с. 212.
52. Тхарев Е. Е., Федоров Ф. Я.— ТМФ, 1971, т. 7, с. 322.
53. Федоров Ф. Я.— Изв. АН БССР, сер. физ.-матем. н., 1973, № 1, с. 86.
54. Верестецкий В. В., Лифшиц ?. ?., Питаевский Л. П. Релятивистская
квантовая теория, ч. I.— M.: Наука, 1968.
55. Мурадян Р. М. Препринт ОИЯИ, Р2-3902, 1968.
56. Федоров Ф. Я.— ТМФ, 1970, т. 2, с. 343.
57. Федоров Ф. Я., Тхарев ?. ?.— ЯФ, 1968, т. 7, с. 189.
58. Федоров Ф. Я.- ЖЭТФ, 1958, т. 35, с. 495.
59. Fieri ?.— Zs. Phys., 1937, т. 7, с. 347.
60. Федоров ?. Я.— Изв. АН БССР, сер. физ.-матем. и., 1967, № 1, с. 127.
61. Ргоса Л.— J. Phys. et. rad., 1936, т. 7, с. 347.
62. Вогуш Л. Л., Федоров Ф. Я.—ДАН БССР, 1968, т. 12, с. 21.
63. Duffin Я.— Phys. Rev., 1938, т. 54, с. 1114.
64. Kemmer Я.— Proc. Roy. Soc, 1939, т. 173, с. 91.
ЛИТЕРАТУРА 383
65. Вогуш Л. Л., Федоров Ф. Я.— ДАН БССР, 1961, т. 6, с. 81.
66. Волсун А. Я, Федоров Ф..Я.—Изв. АН БССР, сер. физ.-матем. н.,
1966, № 1, с. 99. · . . ™
67. Федоров Ф. Ж—Изв. АН БССР, сер. физ.-матем. н., 1972, № 5, 73.
68. Rarita W., Schwinger /.— Phys. Rev., 1941, т. 60, с. 61.
69. Гельфанд Я. М., Яелом А. Я— ЖЭТФ, 1947, т. 18, с. 703.
70. Петраш Я.— Чехосл. физ. ж., 1955, т. 5, с. 160.
71. Fierz ?., Pauli W.— Proc. Roy. Soc., A, 1939, т. 173, с. 211.
72. Федоров Ф. Я.—Уч. зап. БГУ, 1951, № 12, с. 156.
73. Regge Т.— Nuovo Cimento, 1957, т. 5, с. 325.
74. Тройский В. Я., Федоров Ф. Я.— ДАН БССР, 1960, т. 4, с. 278.
75. Радюк А. Ф., Федоров Ф. Я— Изв. АН БССР, сер. физ.-матем. н.,
1976, № 4, с. 64.
76. Гурин Н. Я., Федоров Ф. Я.— Изв. АН БССР, сер. физ.-матем. н.,
1976, № 4, с. 72; 1977, № 6, с. 65.
77. Крылов В. В., Федоров Ф. Я- ДАН БССР, 1967, т. И, с. 681.
78. Вогуш ?. ?., Крылов В. В., Федоров Ф. Я— Изв. АН БССР, сер. физ.-
матем. н. 1968 № 1 с. 74.
79. Крылов В. В.— Изв. АН БССР, сер. физ.-матем. н., 1972, № 6, с. 82.
80. Крылов Б. В., Федоров Ф. Я.—Изв. АН БССР, сер. физ.-матем. н.,
1976, № 2, с. 47.
81. Федоров Ф. Я., Плетюхов В. ?.— Изв. АН БССР, сер. физ.-матем. н.,
1969, № 6, с. 81; 1970, № 3, с. 78; 1974, № 6, с. 63.
82. Плетюхов В. Л., Федоров Ф. Я— Изв. АН БССР, сер. физ.-матем. н.,
1970, № 2, с. 79; № 3, с. 84; 1972, № 6, с. 59.
83. Федоров Ф. Я— ДАН СССР, 1949, т. 65, с. 813.
84. Файнберг В. Я.—В сб.: Тр. ФИАН,— М.: Наука, 1955, т. 6, с. 269.
85. Volkow D.— Zs. Phys., 1935, т. 94, с. 250; ЖЭТФ, 1937, т. 7,
с. 1286.
86. Федоров Ф. Я.— ДАН СССР, 1967, т. 174, с. 334.
87. Федоров Ф. Я— ДАН БССР, 1974, т. 18, с. 17.
88. Радюк А. Ф., Федоров Ф. Я.— ДАН СССР, 1973, т. 211, с. 1091.
89. Федоров Ф. Я, Радюк А. Ф.— ЯФ, 1974, т. 20, с. 509.
90. Радюк Л. Ф., Федоров Ф. Я— ДАН БССР, 1974, т. 18, с. 118.
91. Радюк А. Ф., Федоров Ф. Я.— Изв. АН БССР, сер. физ.-матем. н.,
1971, № 4, с. 64.
92. Крылов В. В., Федоров Ф. Я— Изв. АН БССР, сер. физ.-матем. н.,
1976, № 2, с. 47.
93. Крылов В. Я., Радюк А. Ф., Федоров Ф. Я.—Препринт № ИЗ, Ин-т
физики АН БССР, Минск, 1971.
94. Тернов Я. М., Багров В. Г., Вордовицкий К. ?.. Маркин Ю. Л.—
ЖЭТФ, 1967, х 52, с. 1584.
95. Тернов И. М., Багров В. Г., Клименко Ю. И.—Изв. вузов, физика № 2,
1968, с. 50.
96. Боргардт А. Л., Карпенко Д. Я.— ЖЭТФ, 1967, т. 50, с. 1167.
97. Becker W., Mitter Я.— J. Phys. A: Math, and Gen., 1974, т. 7, с. 1261;
Acta phys. austr., 1975, т. 43, с. 395.
98. Соколов Л. Л. Введение в квантовую электродинамику.— М.: Физ-
матгиз, 1958.
99. Вогуш Л. Л.— Изв. АН БССР, сер. физ., техн., 1964, № 2, с. 29.
100. Федоров Ф. Я, Энгельманн 3.— Изв. АН БССР, сер. физ.-матем. н.,
1974 № 1 с. 55* № 3 с. 66.
101. Вогуш А. Л., Курочкин Ю. Л., Федоров Ф. Я—ДАН СССР, 1976,
т. 231 с. 312.
102.' Федоров Ф. Я— ЯФ, 1973, т. 17, с. 883.
103. Федоров Ф. Я.— ТМФ, 1974, т. 18, с. 329.
104. Федоров Ф. Я.— Изв. АН БССР, сер. физ.-матем. н., 1974, № 2, с. 58;
1975, № 3, с. 51; 1976, № 1, с. 63; ДАН БССР, 1975, т. 19, с. 492.
384
ЛИТЕРАТУРА
105. Федоров ?. Я.— Изв. АН БССР, сер. физ.-матем. н., 1977, № 1, с. 68.
106. Федоров Ф. Я. Межд. школа (Сочи) по физ. высок,
энергий.—Дубна, Р. 1, 2-8529, 1975.
107. Федоров Ф. Я., Фонг X. Я.— Изв. АН БССР, сер. физ.-матем. н., 1975,
№ 4, с. 54; 1975, № 6, с. 47; 1976, № 1, с. 63; ДАН БССР, 1976, т. 20, с. 304.
108. Богуш Л. Л., Курочкин Ю. Л., Федоров Ф. Я.— Изв. АН БССР, сер.
физ.-матем. н., 1976, № 2, с. 55.
109. Федоров Ф. Я.— Изв. АН БССР, сер. физ.-матем. н., 1976, № 5, с. 61.
110. Michel L., Wightman Л.—Phys. Rev., 1955, т. 98, с. 1190.
111. Ford G., Mullin С— Phys. Rev., 1957, т. 108, с. 477.
112. Sarkar 5.—Nuovo Cimento, 1962, т. 24, с. 139.
113. Bhabha Я.— Ргос. Roy. Soc, 1938, т. 164, с. 257.
114. Massey Я., Corben Я.— Ргос. Cambr. Phil. Soc, 1939, т. 35, с. 461.
115. Верестецкий В. Я., Померанчук Я. Я.—ЖЭТФ, 1955, т. 29, с. 864.
116. Фаддеев Д. Я., Фаддеева В. Я.— Вычислительные методы
линейной алгебры.— М.: Физматгиз, 1963.
117. Федоров Ф. Я.—Изв. АН БССР, сер. физ.-матем. н., 1967, № 4, с. 112.