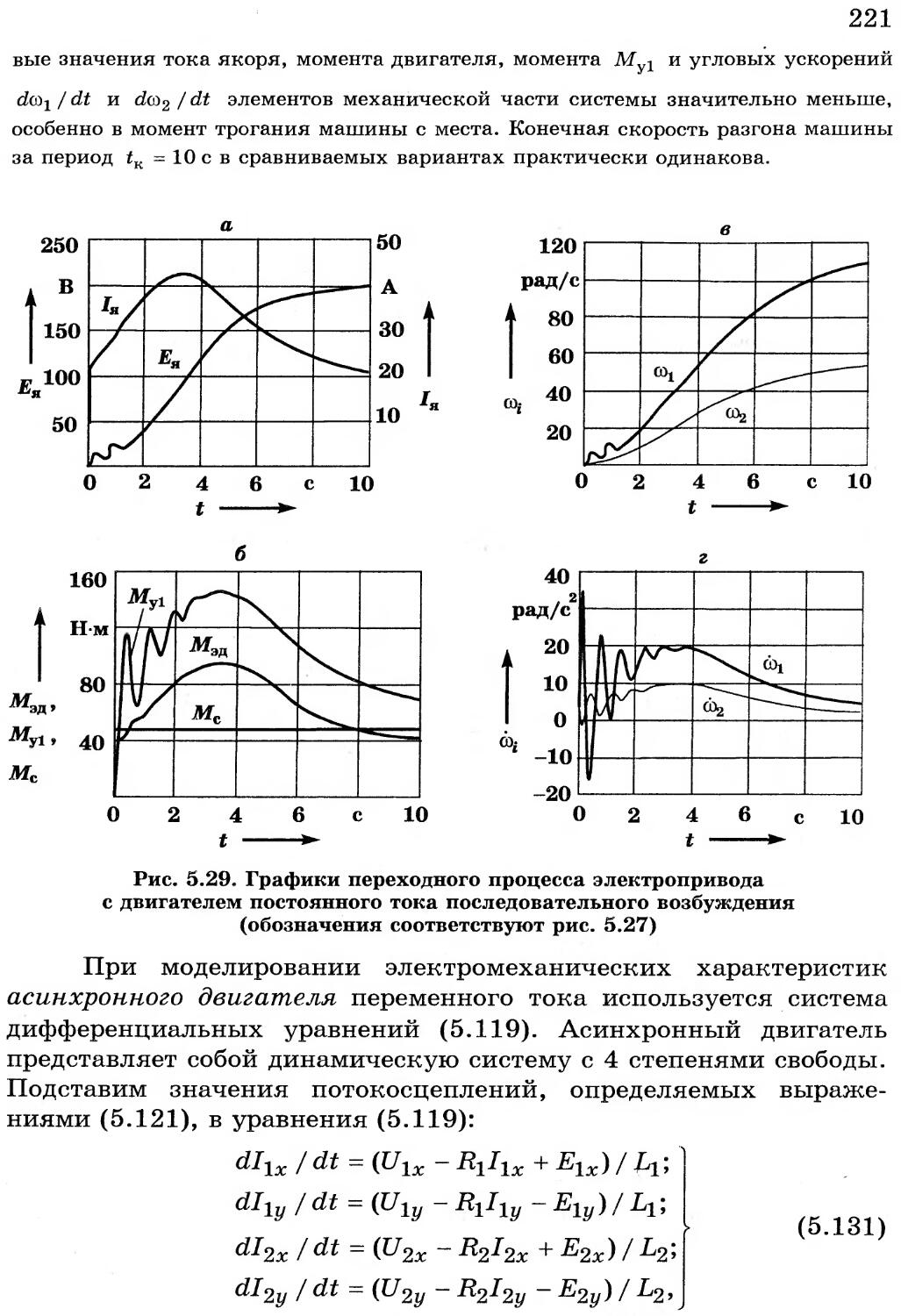
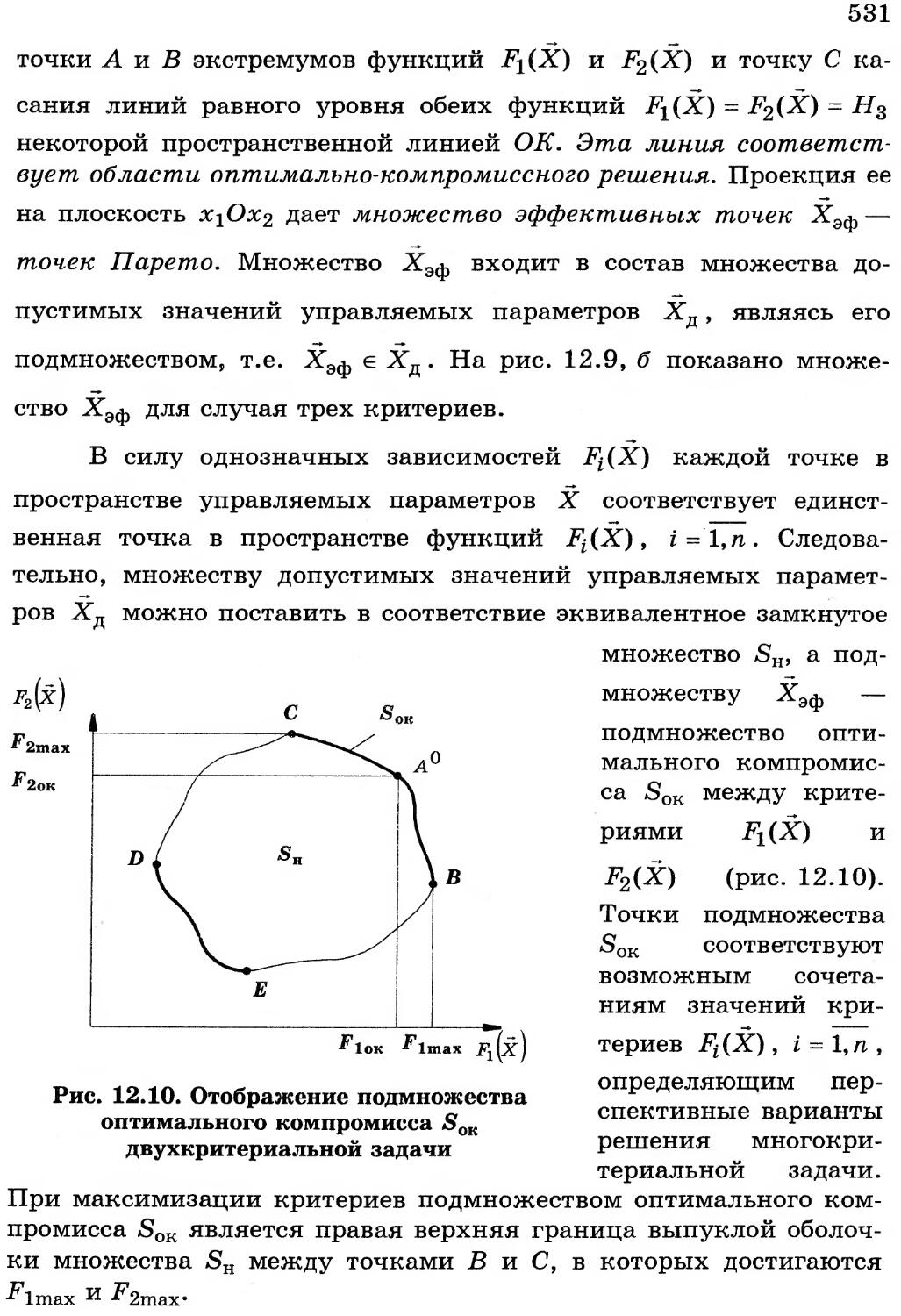
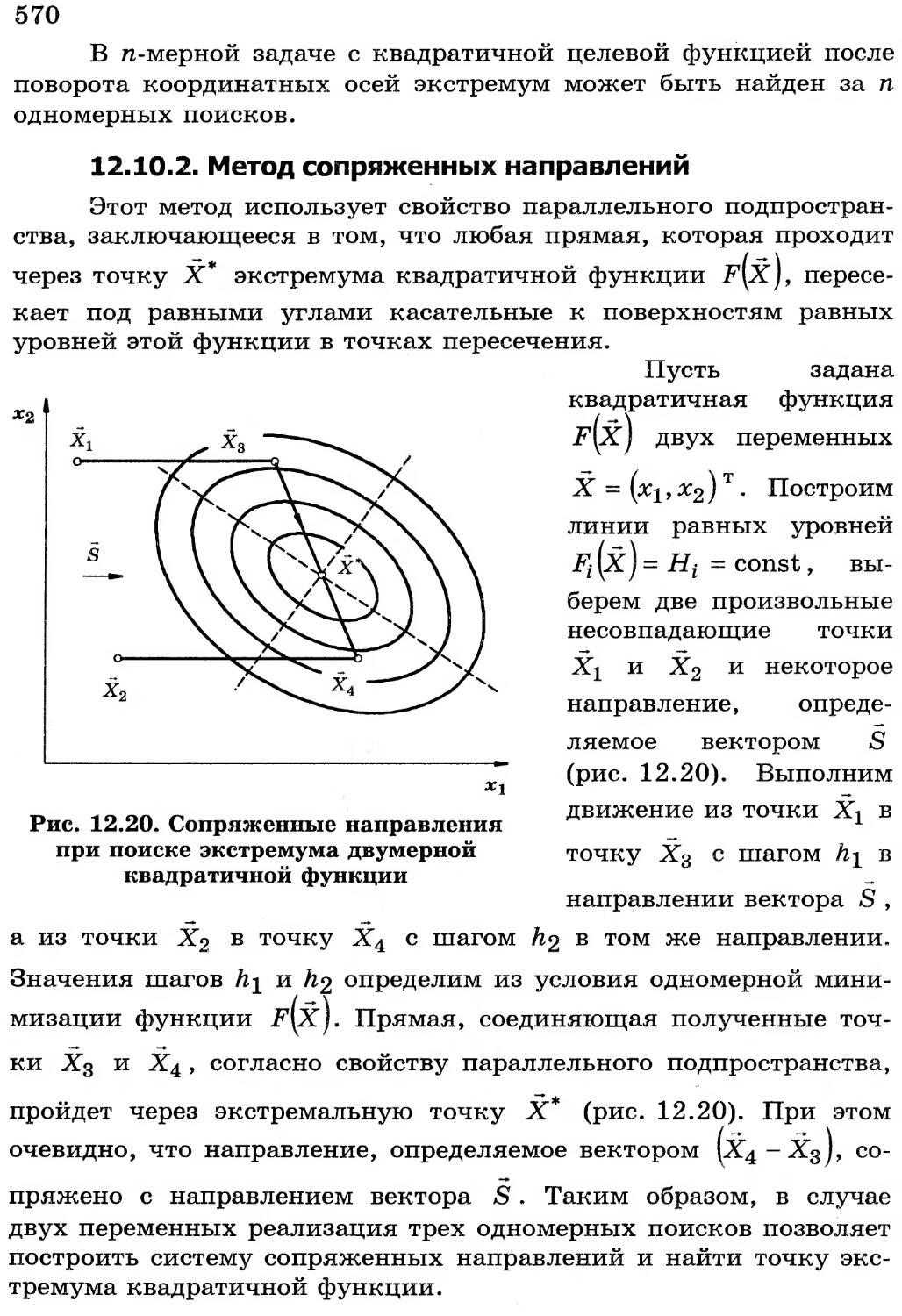
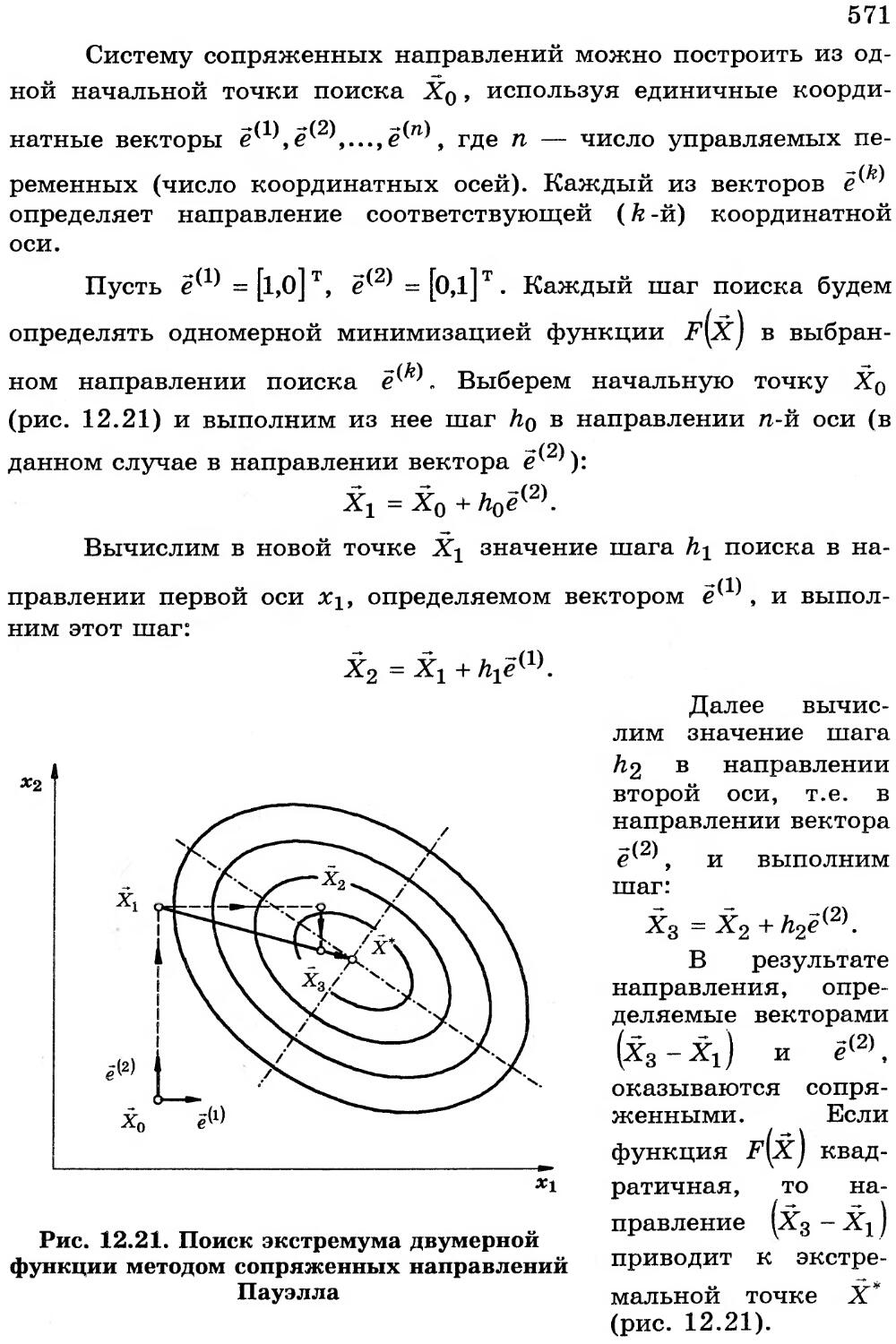
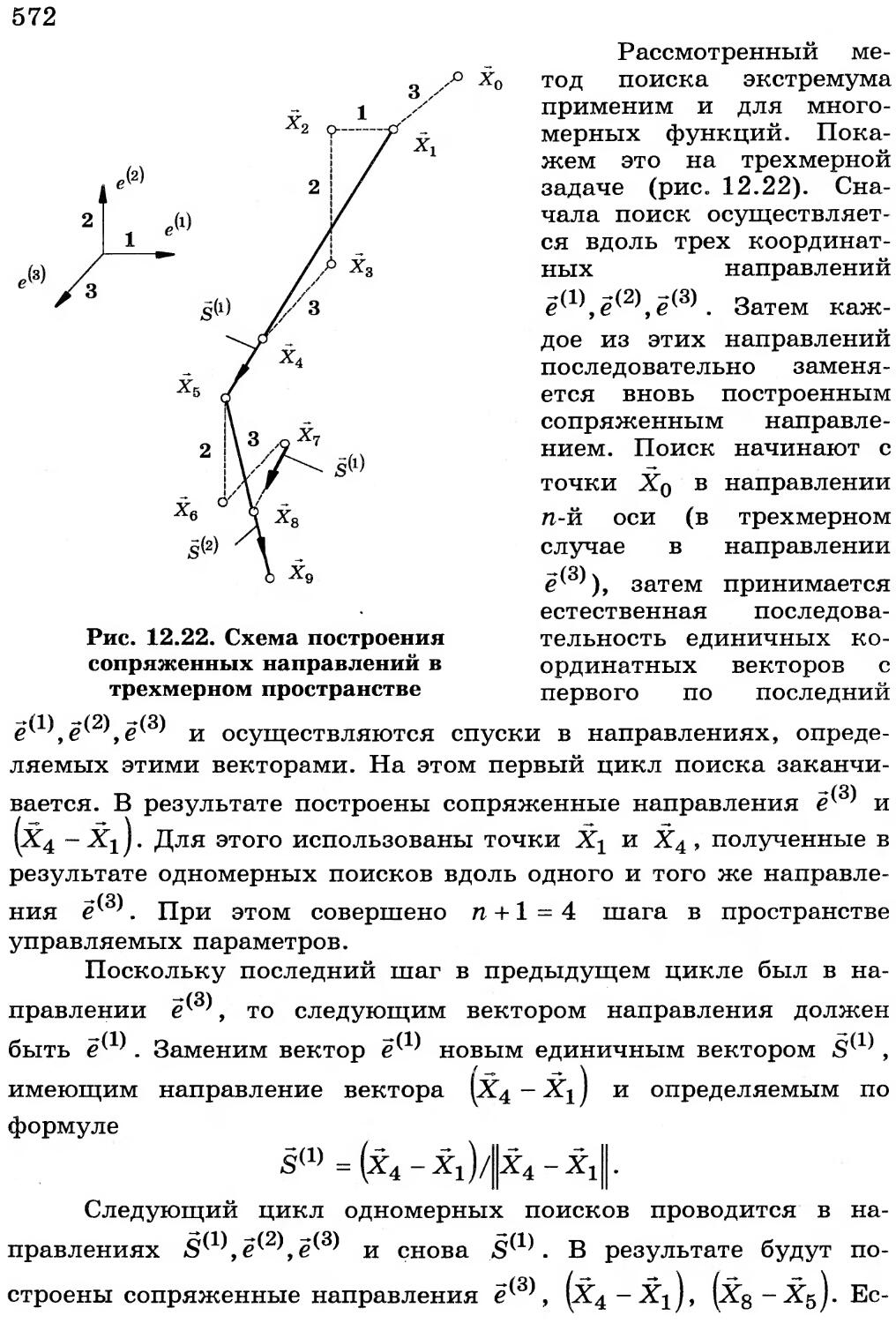
/


































































































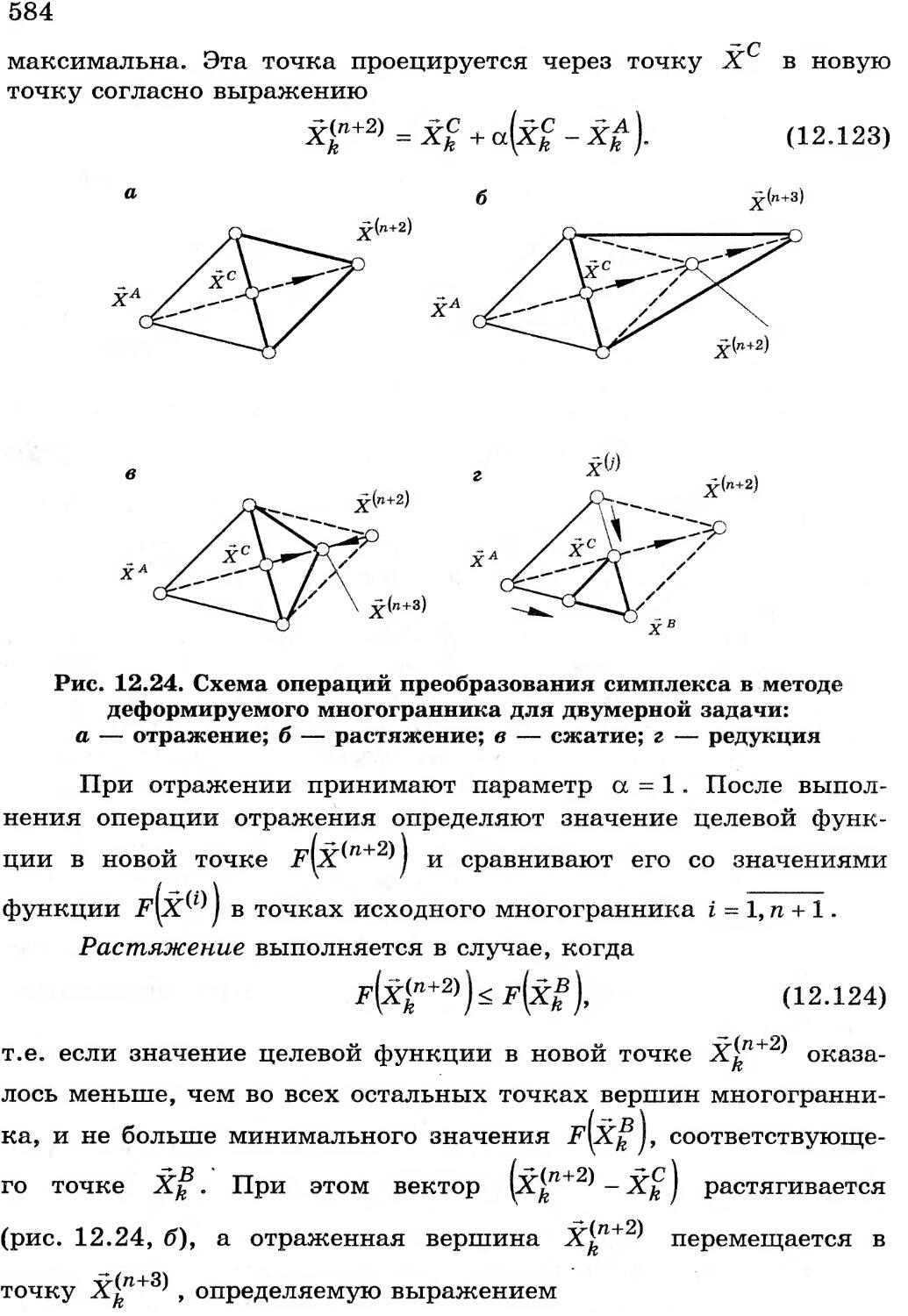








Автор: Тарасик В.П.
Теги: математика общее машиностроение технология машиностроения автодорожный транспорт моделирование
ISBN: 985-452-080-3
Год: 2004




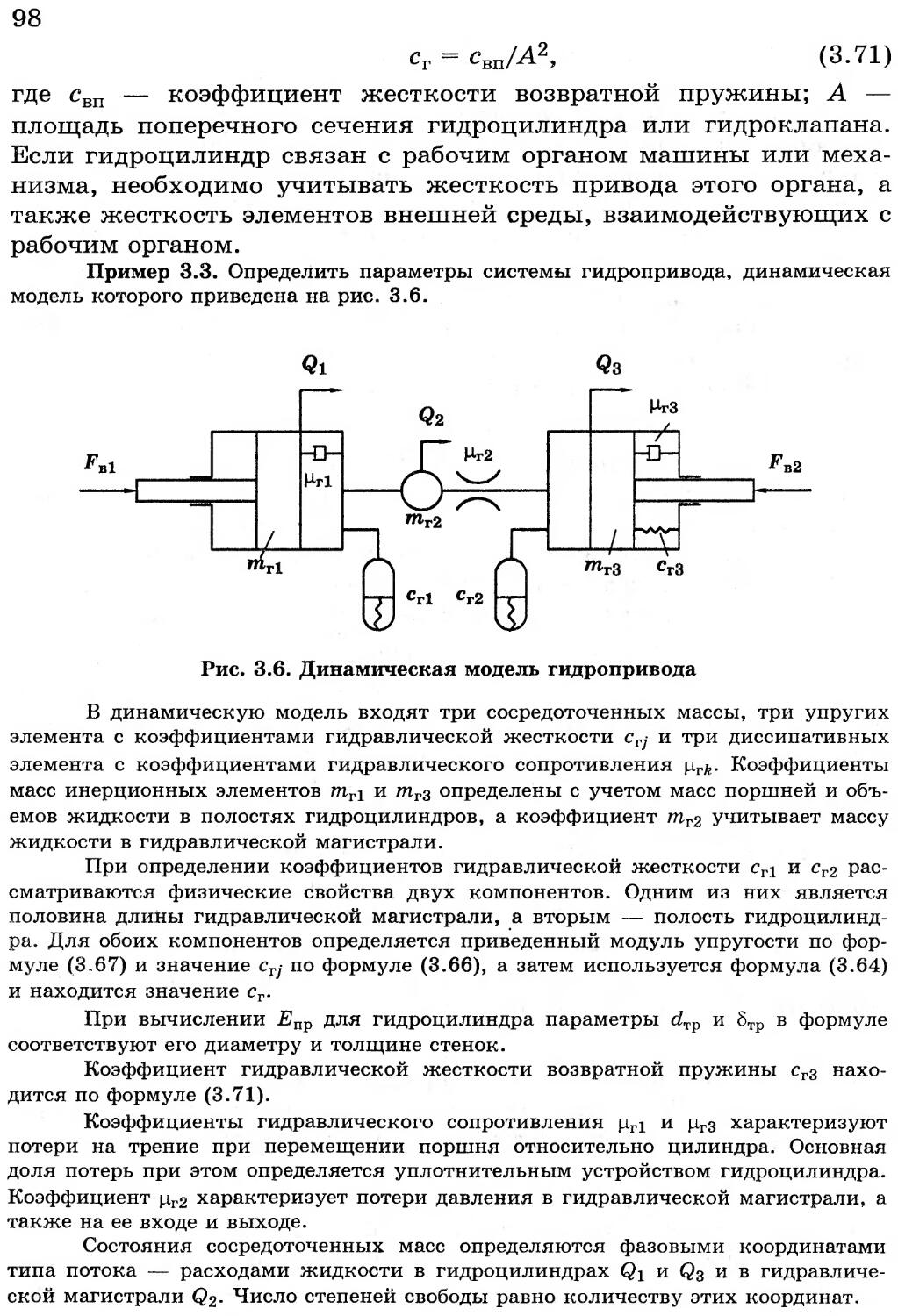
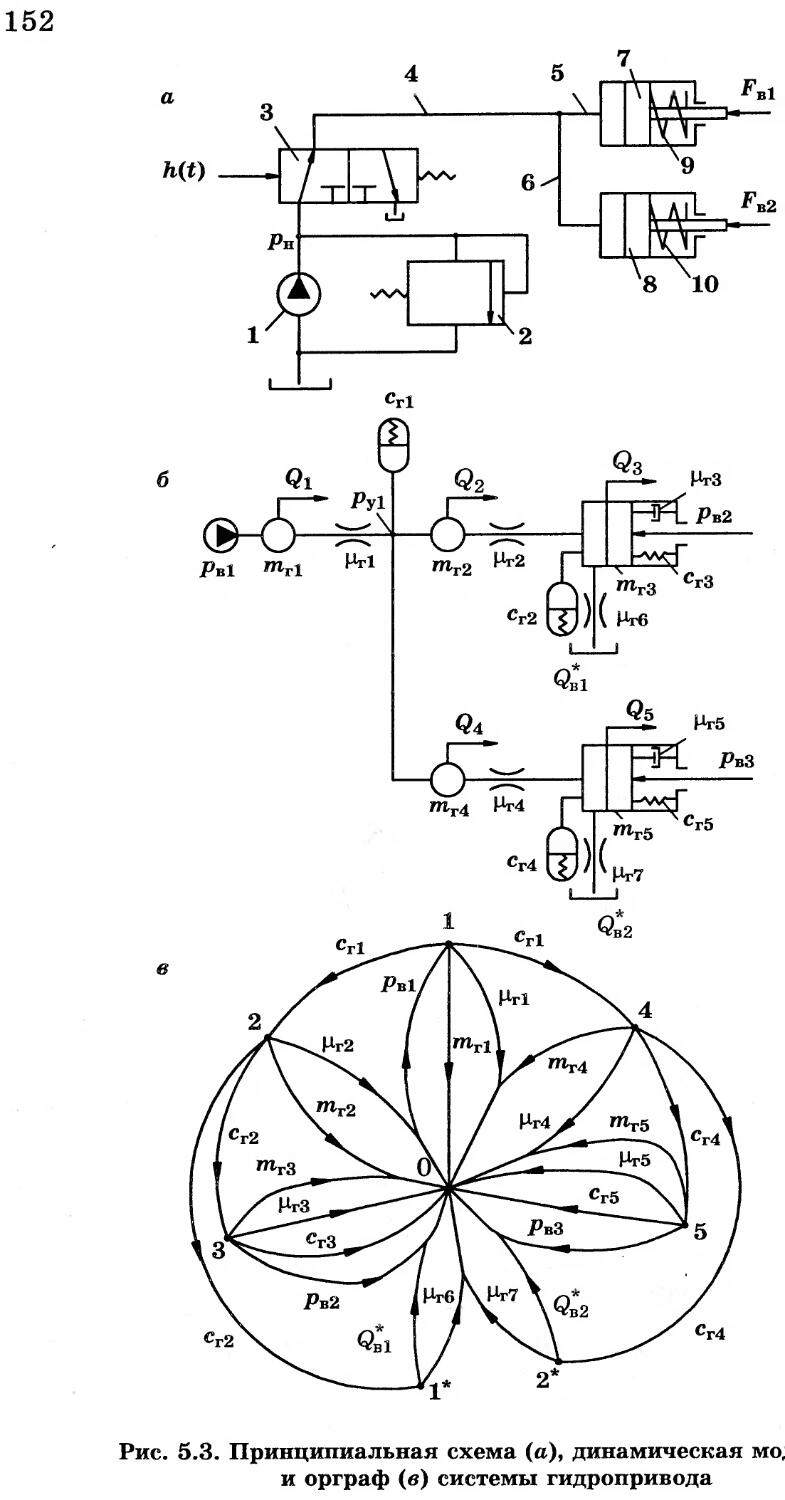
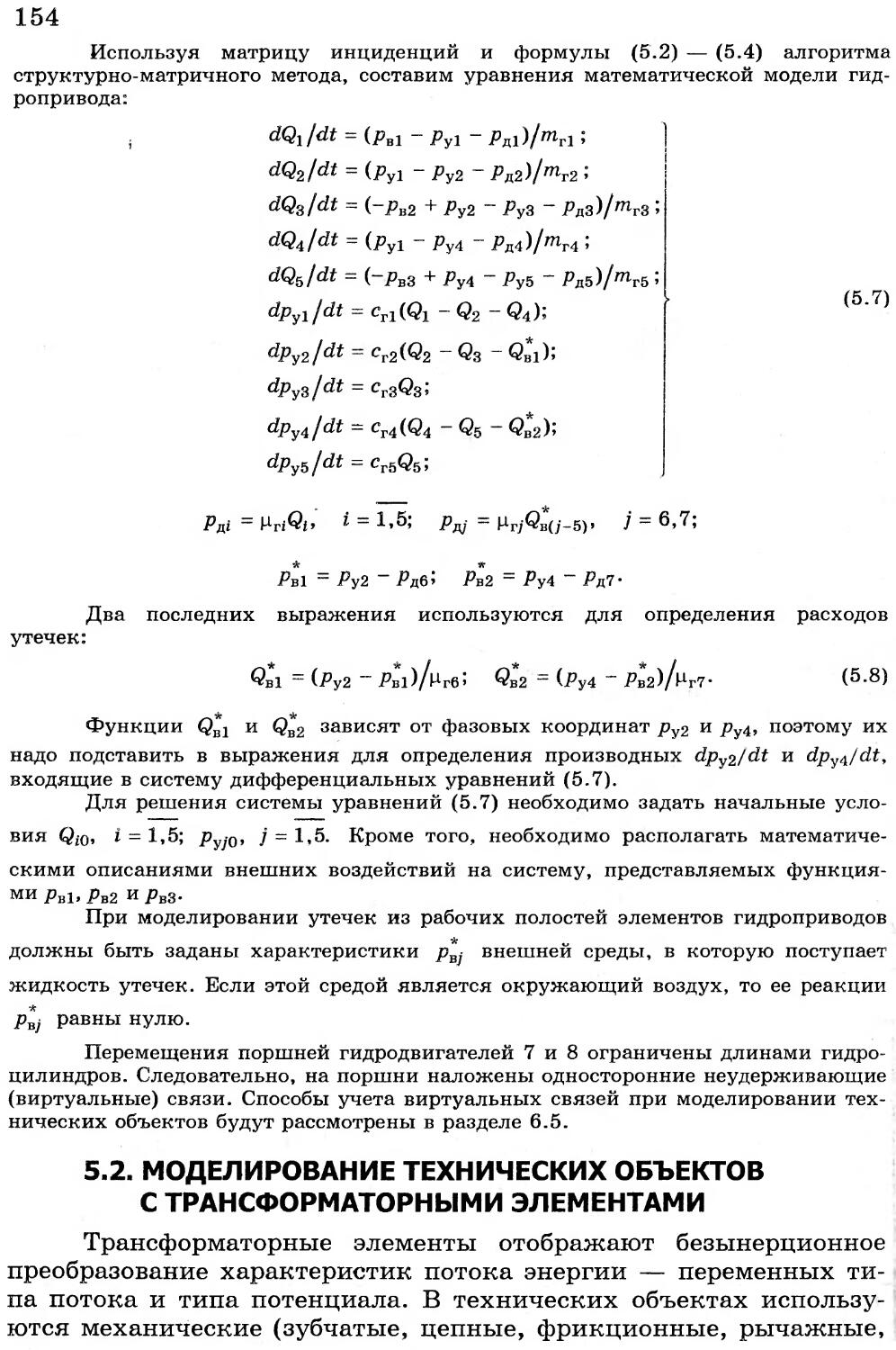
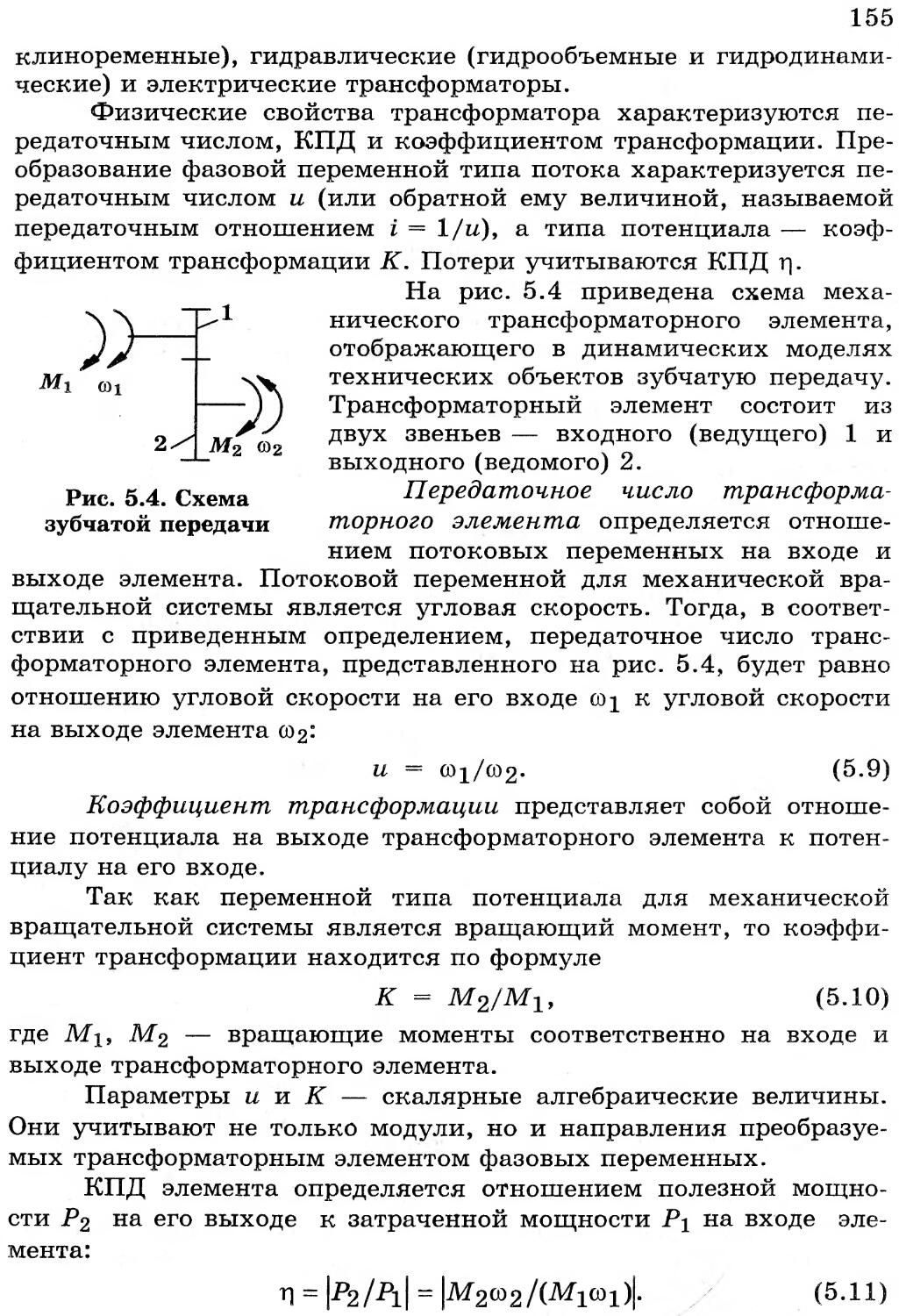
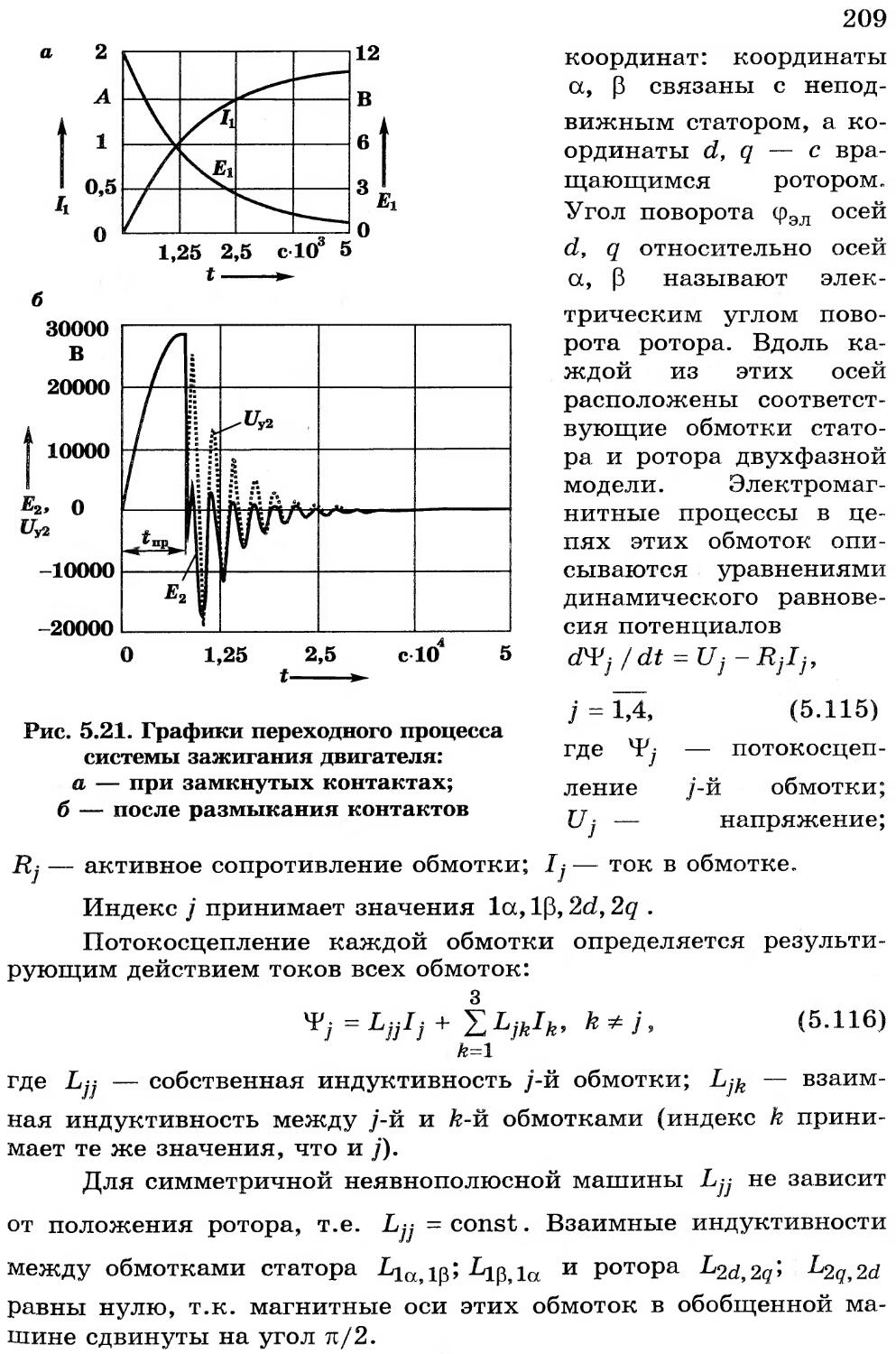
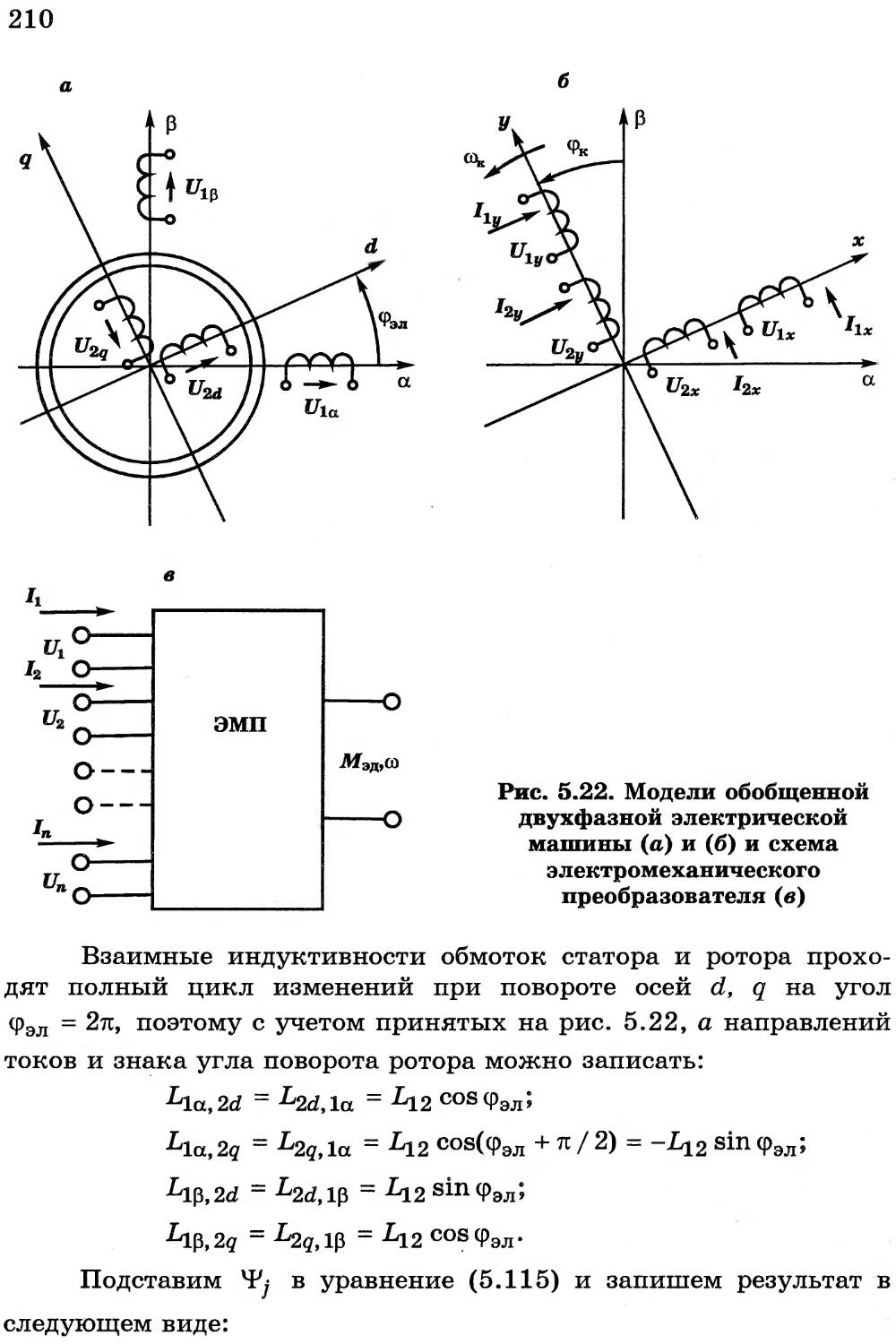
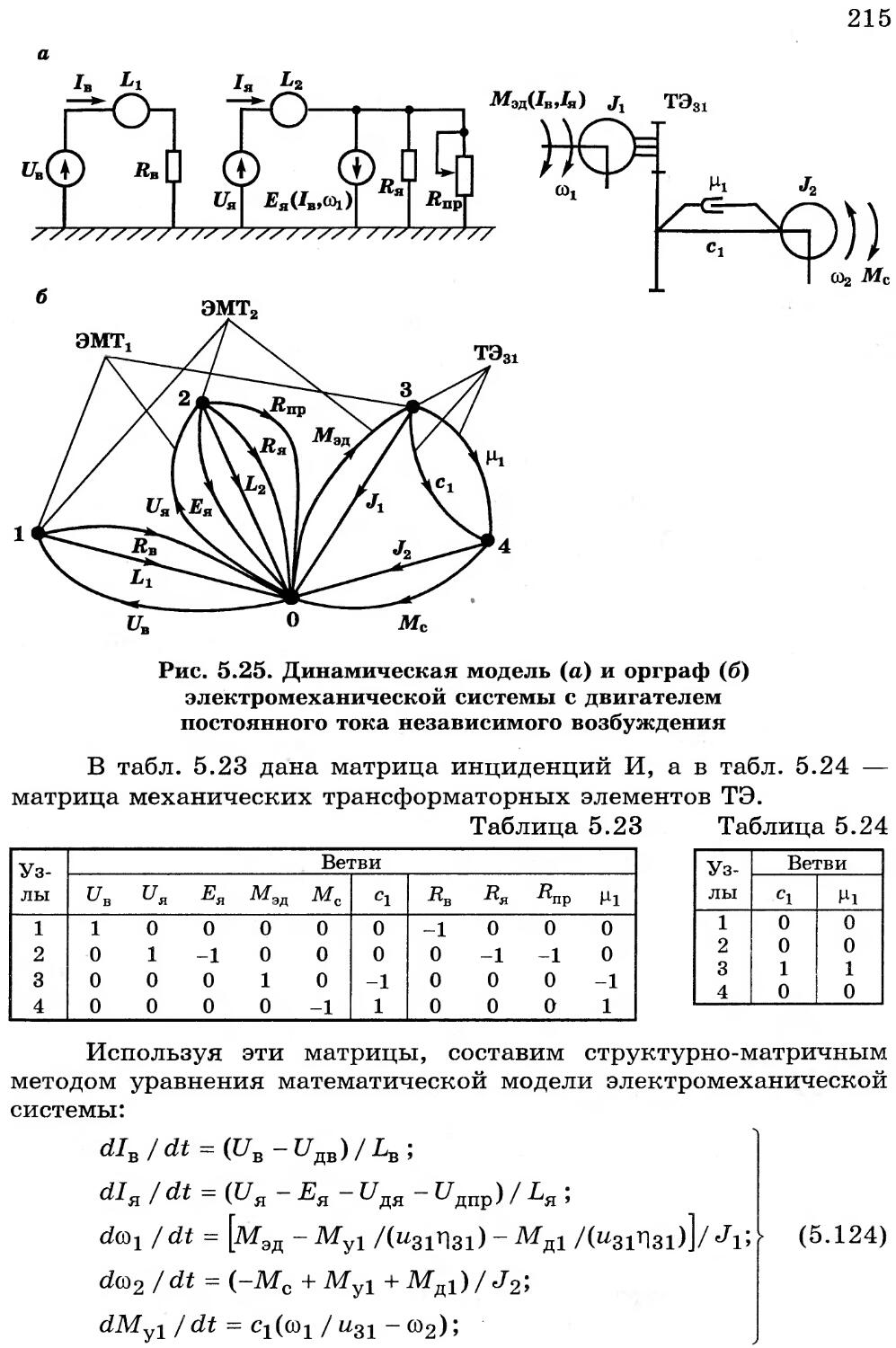
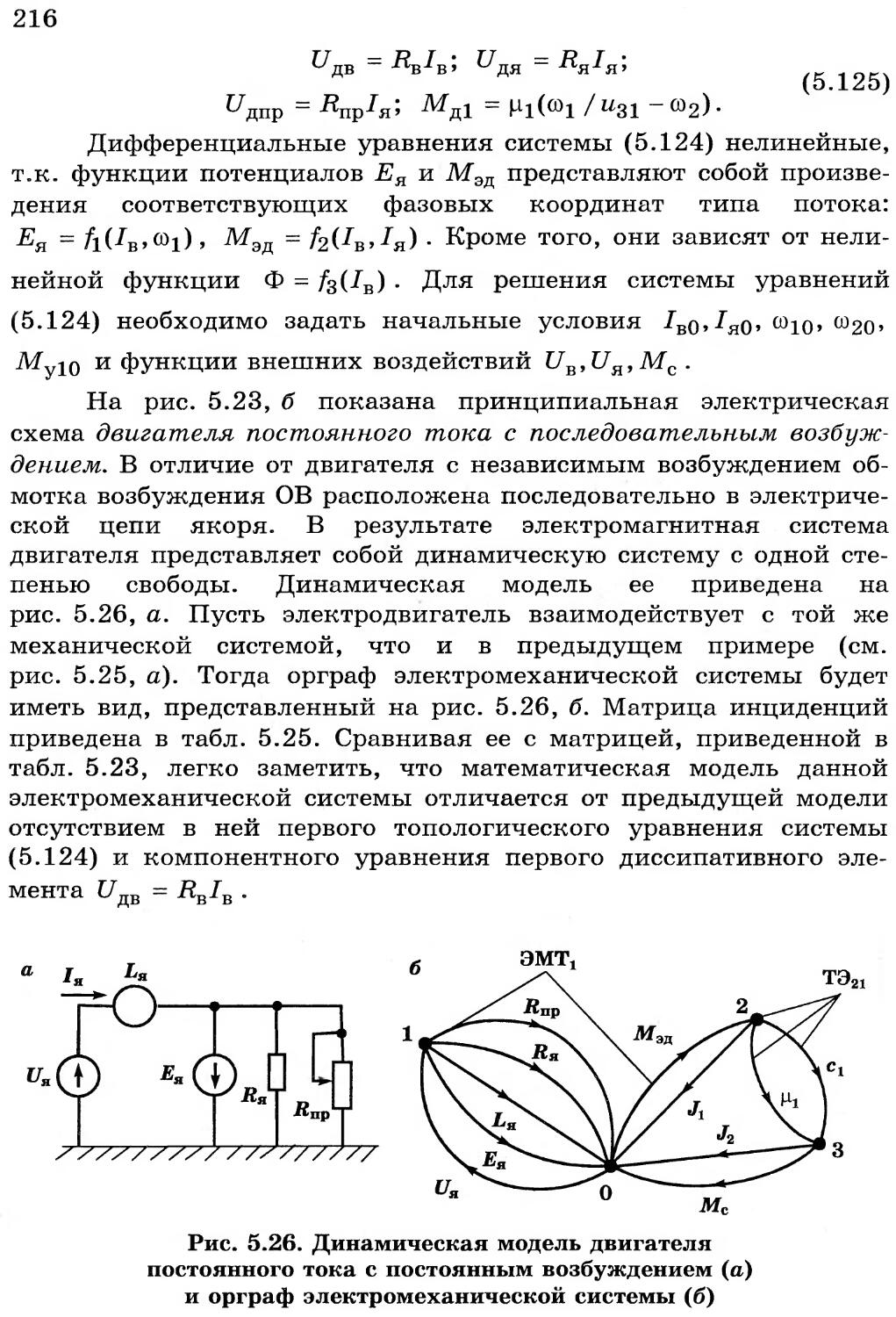
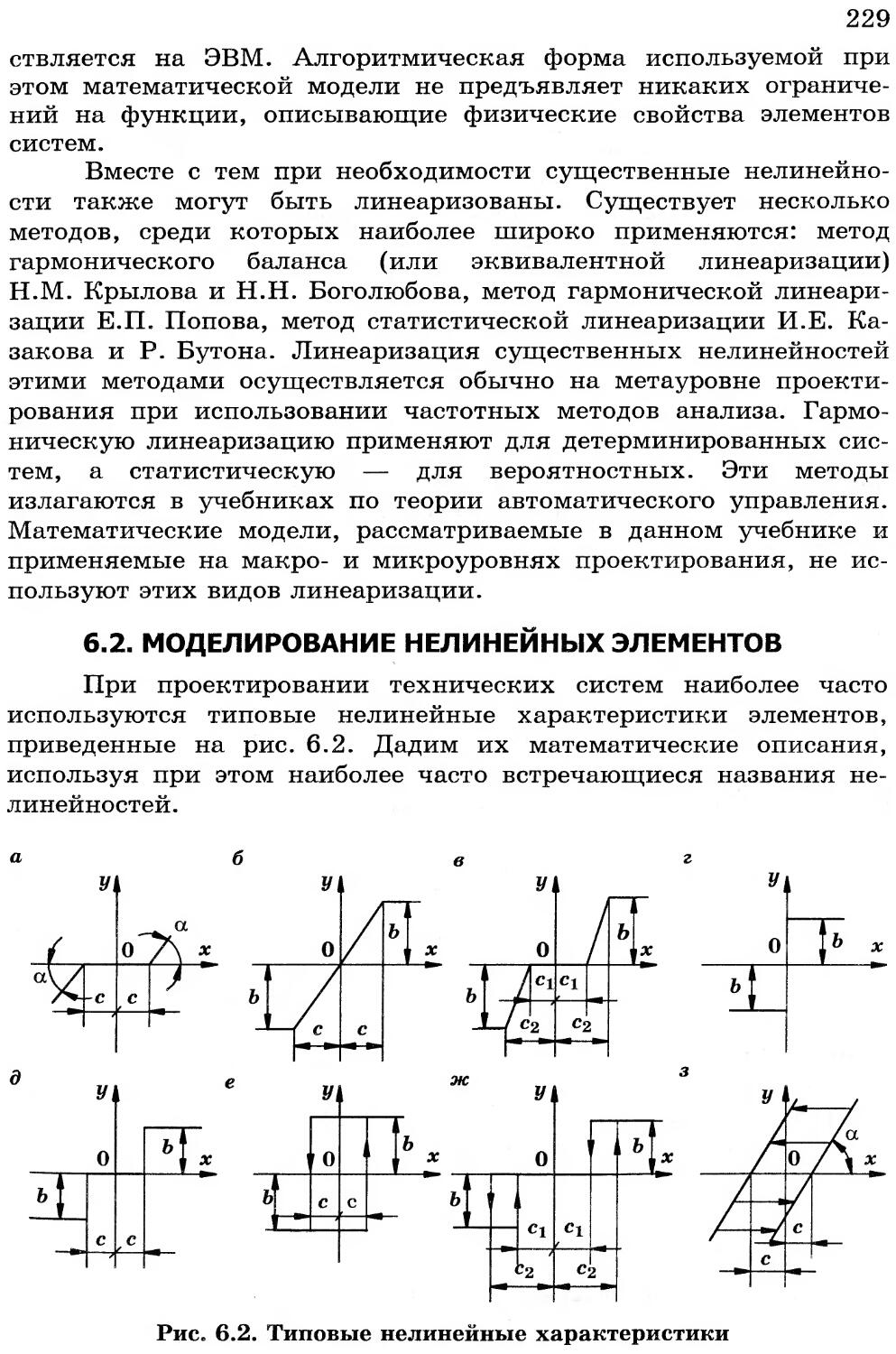
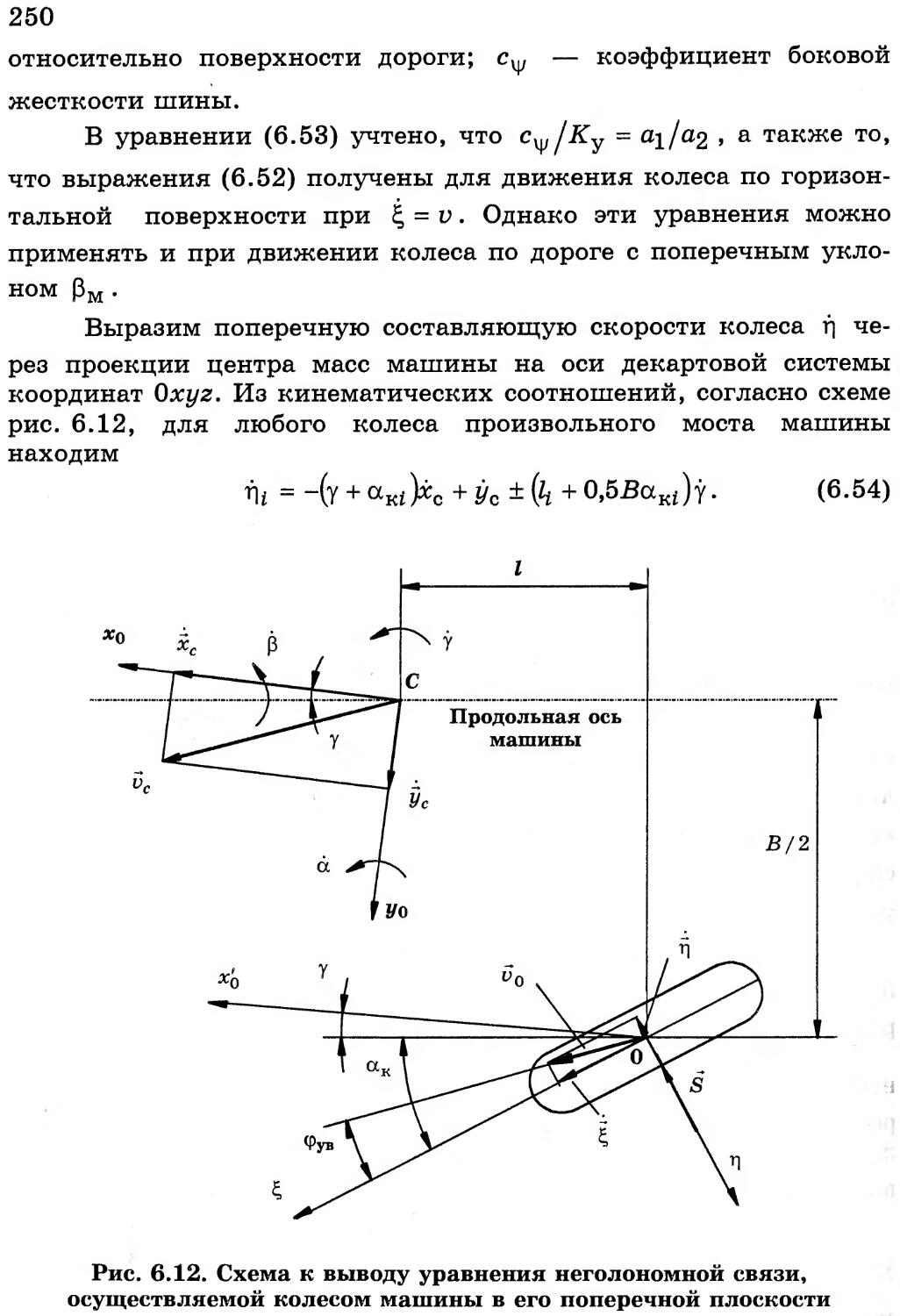
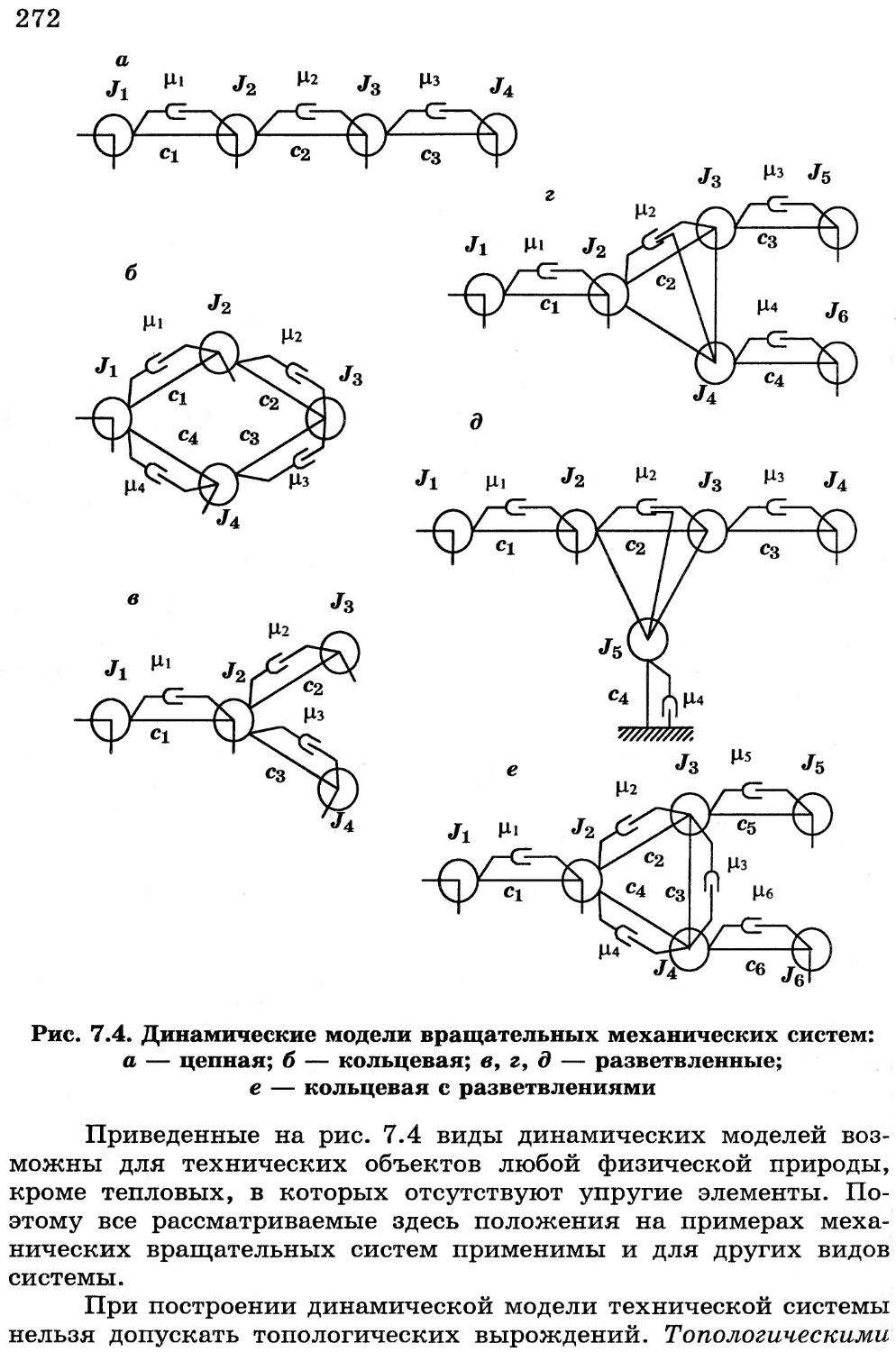
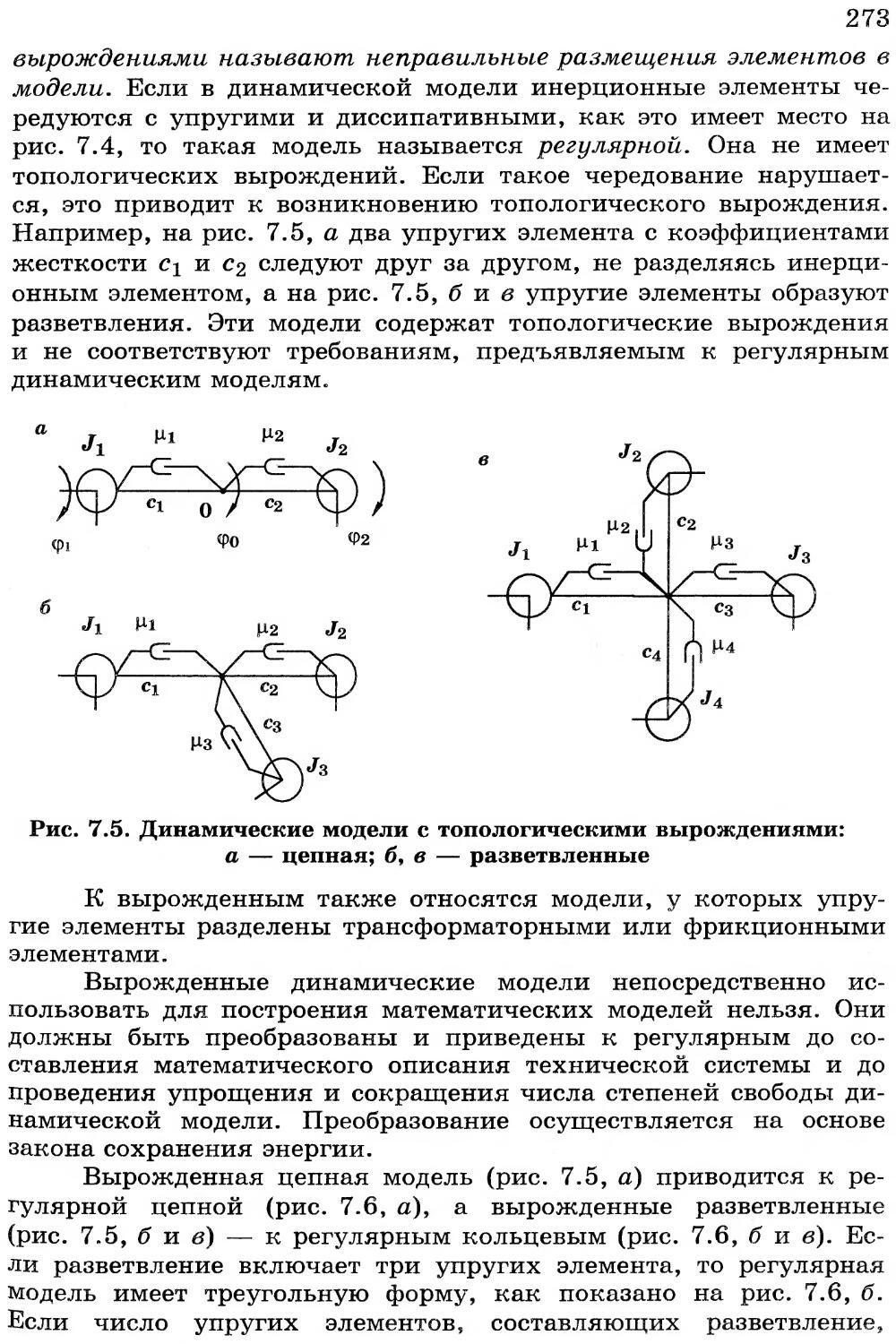
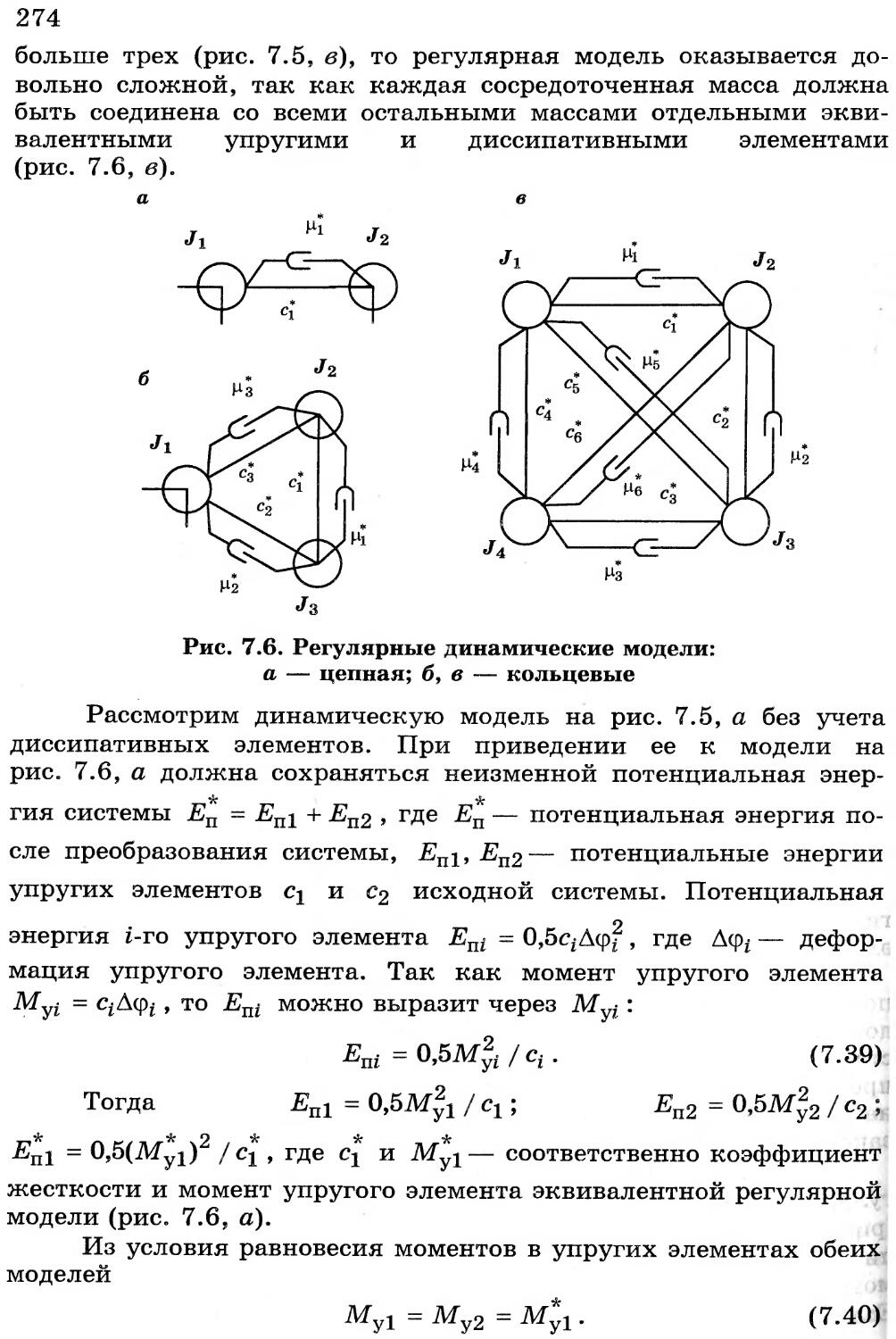
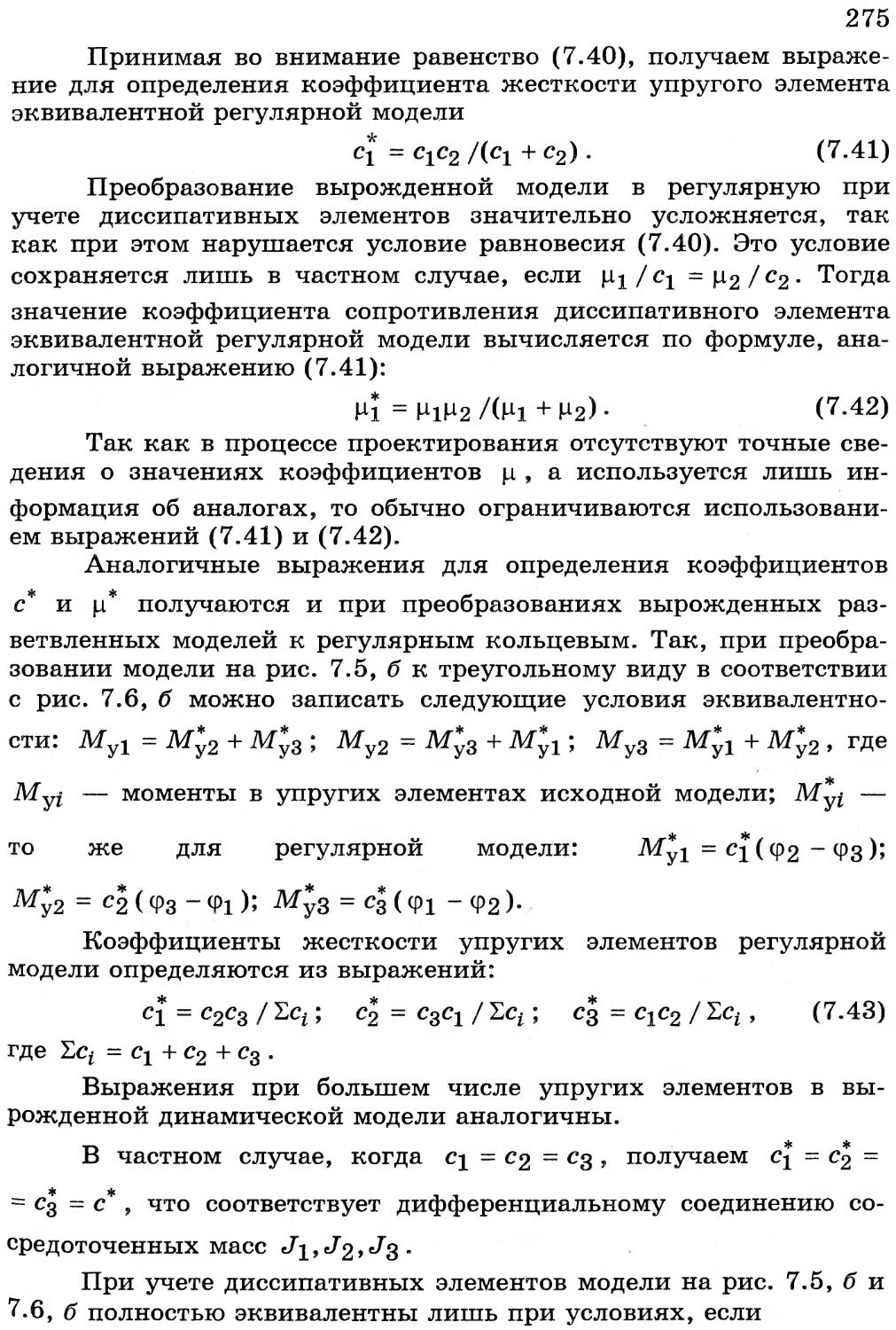
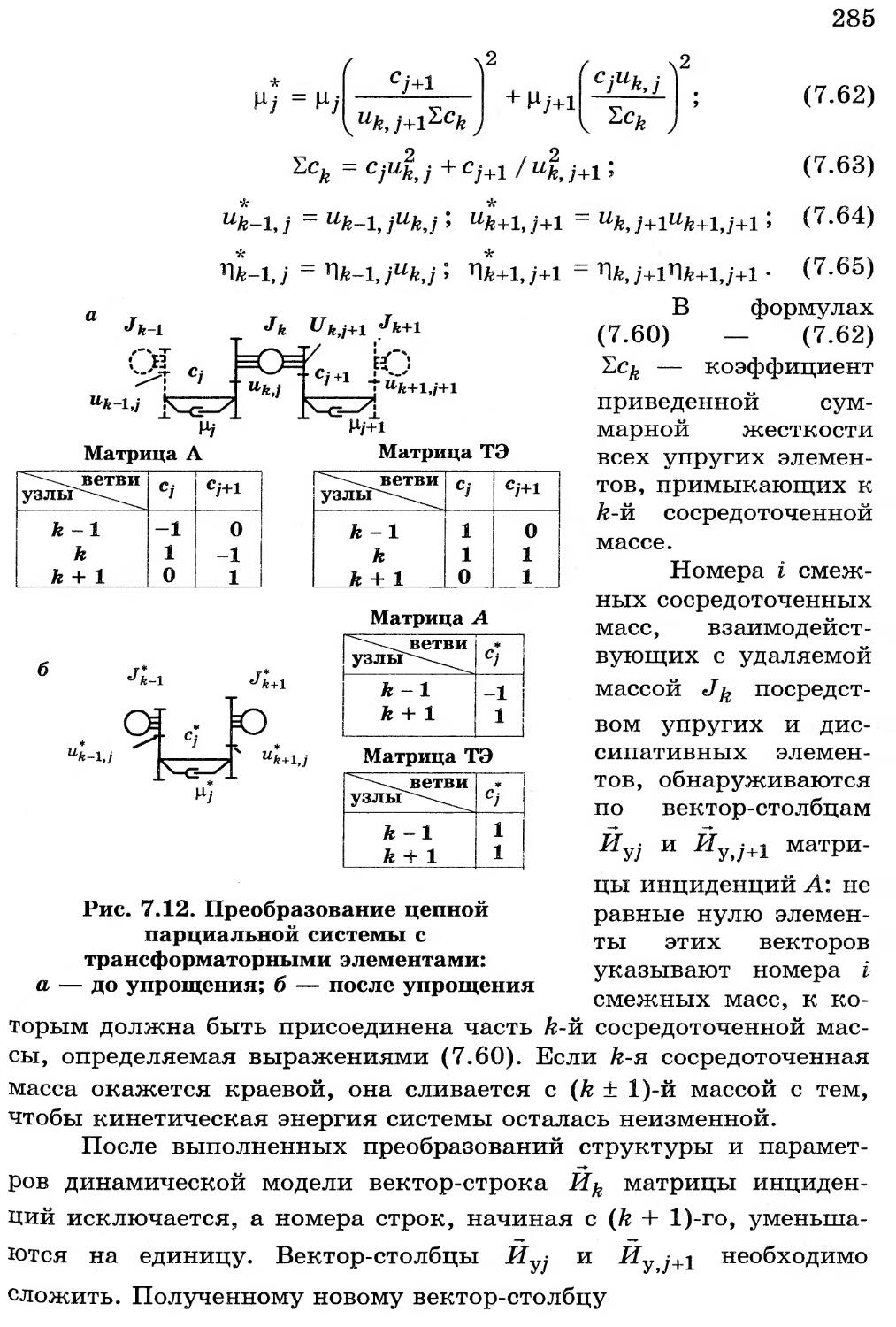
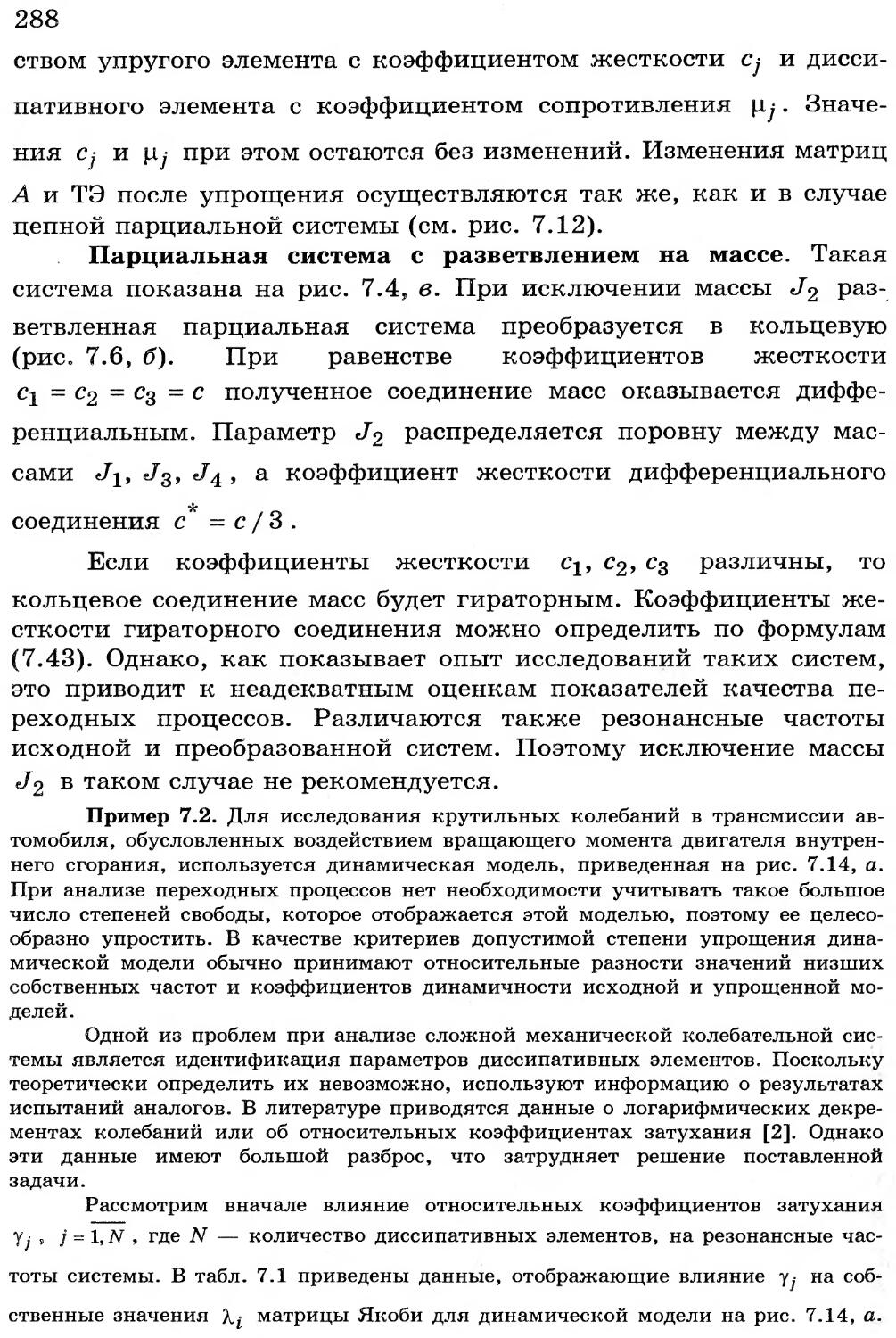
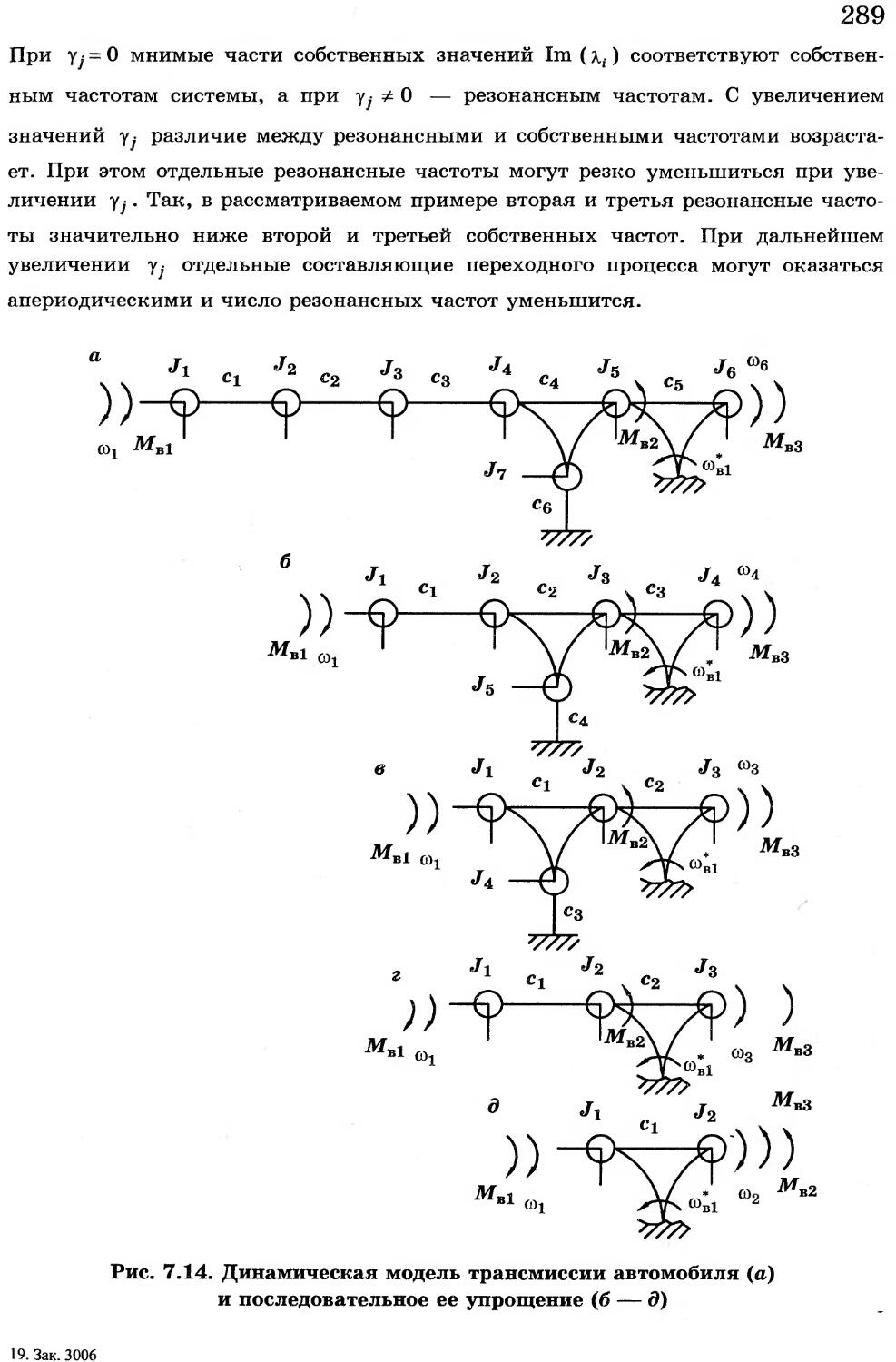
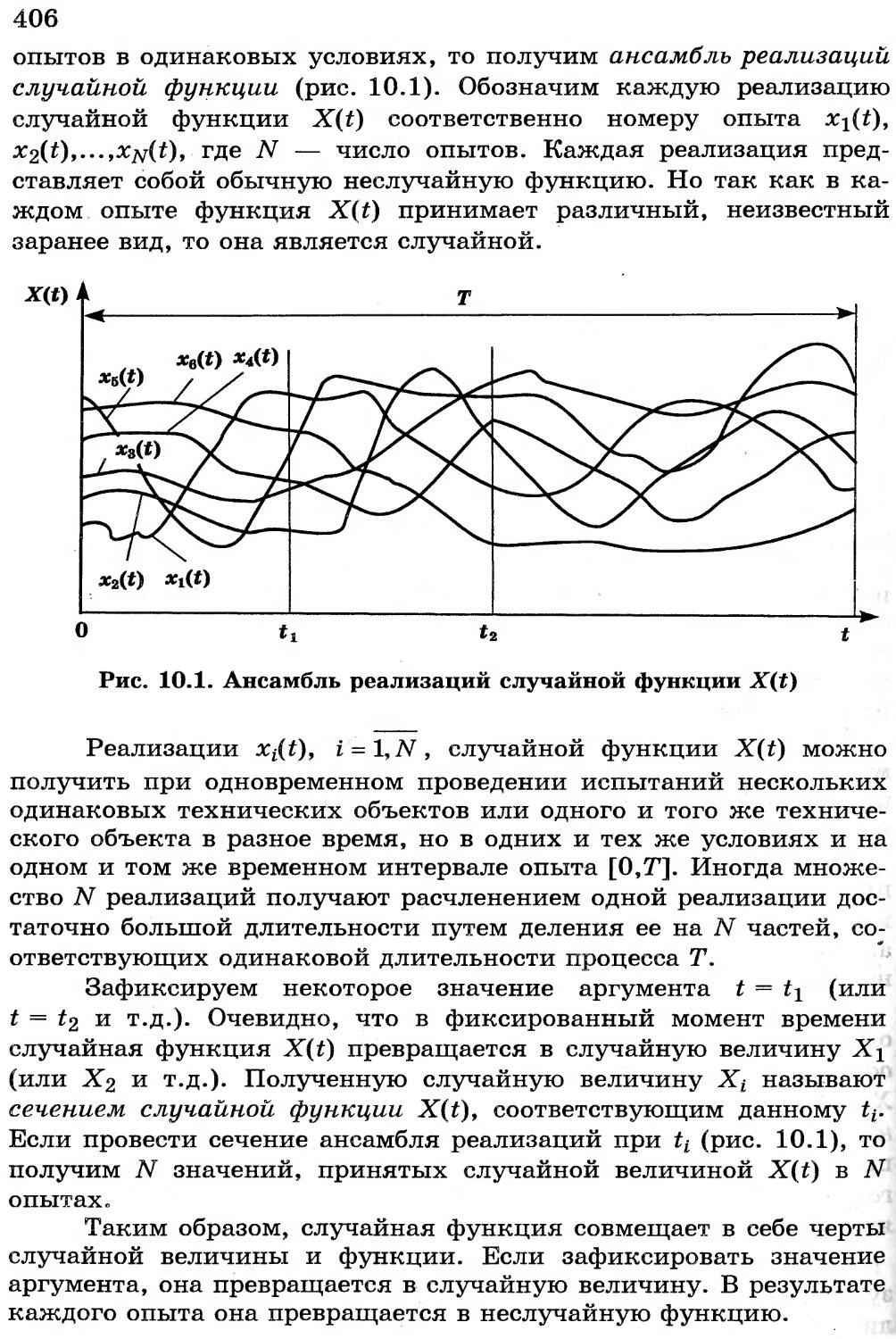
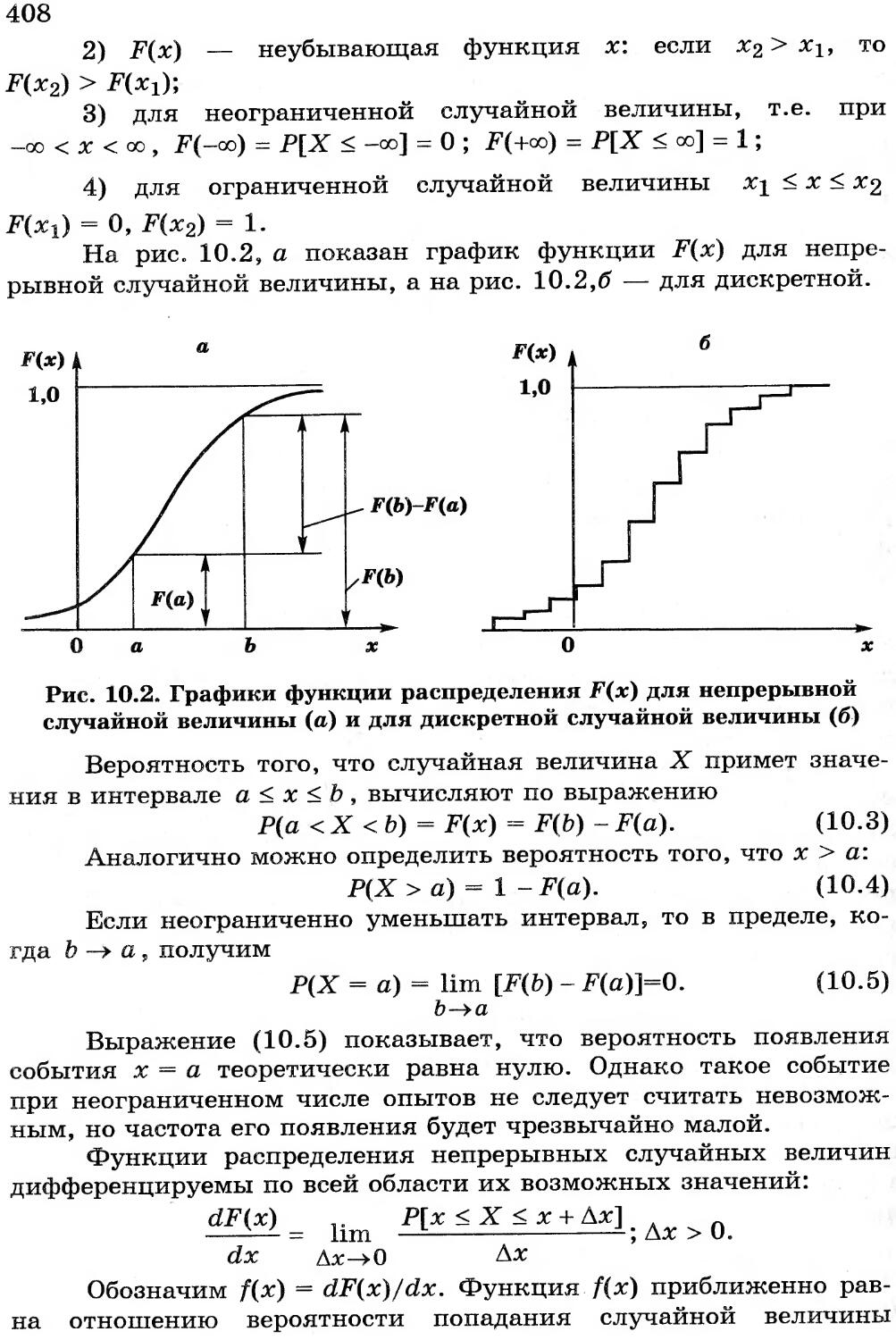
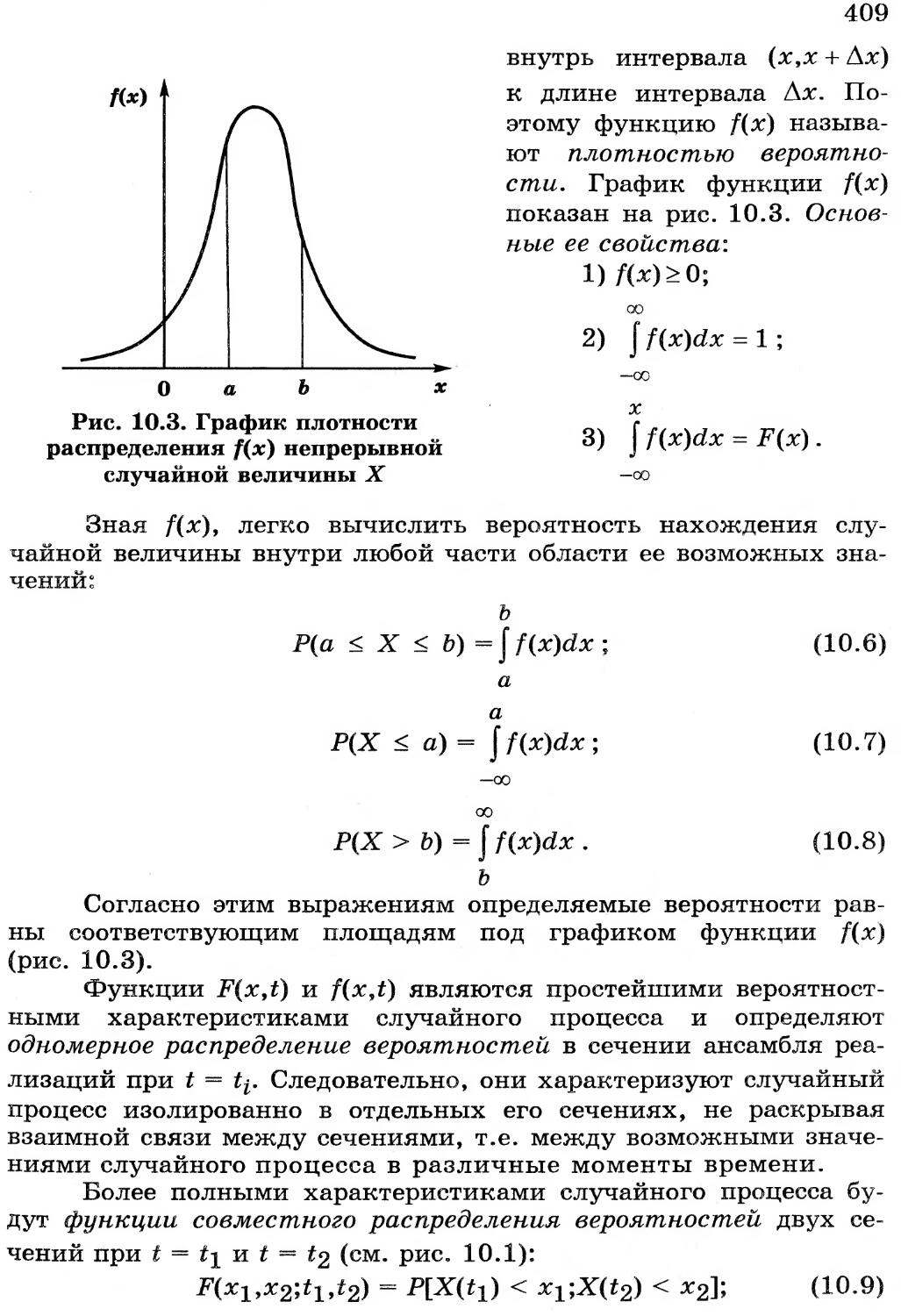
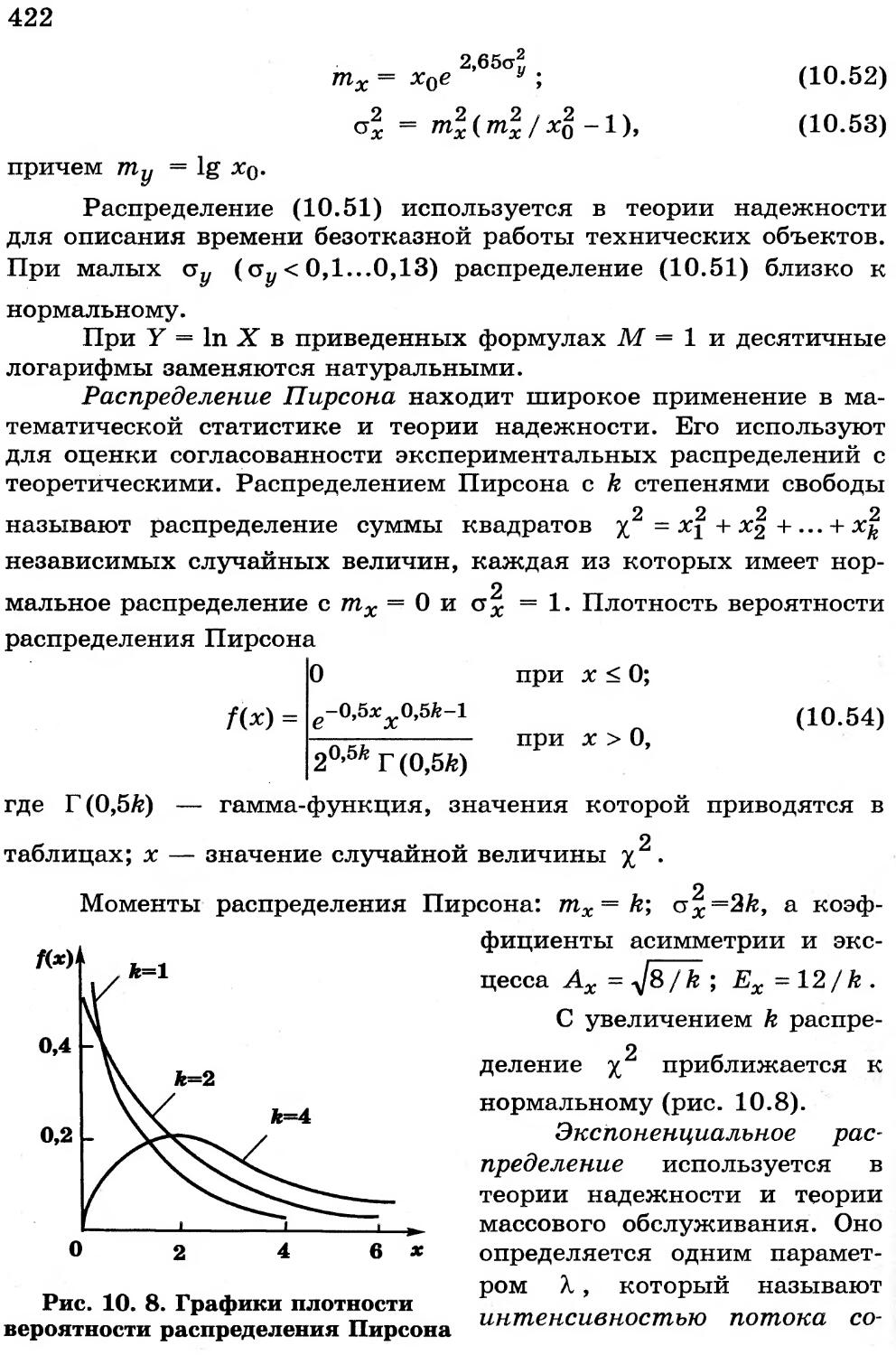
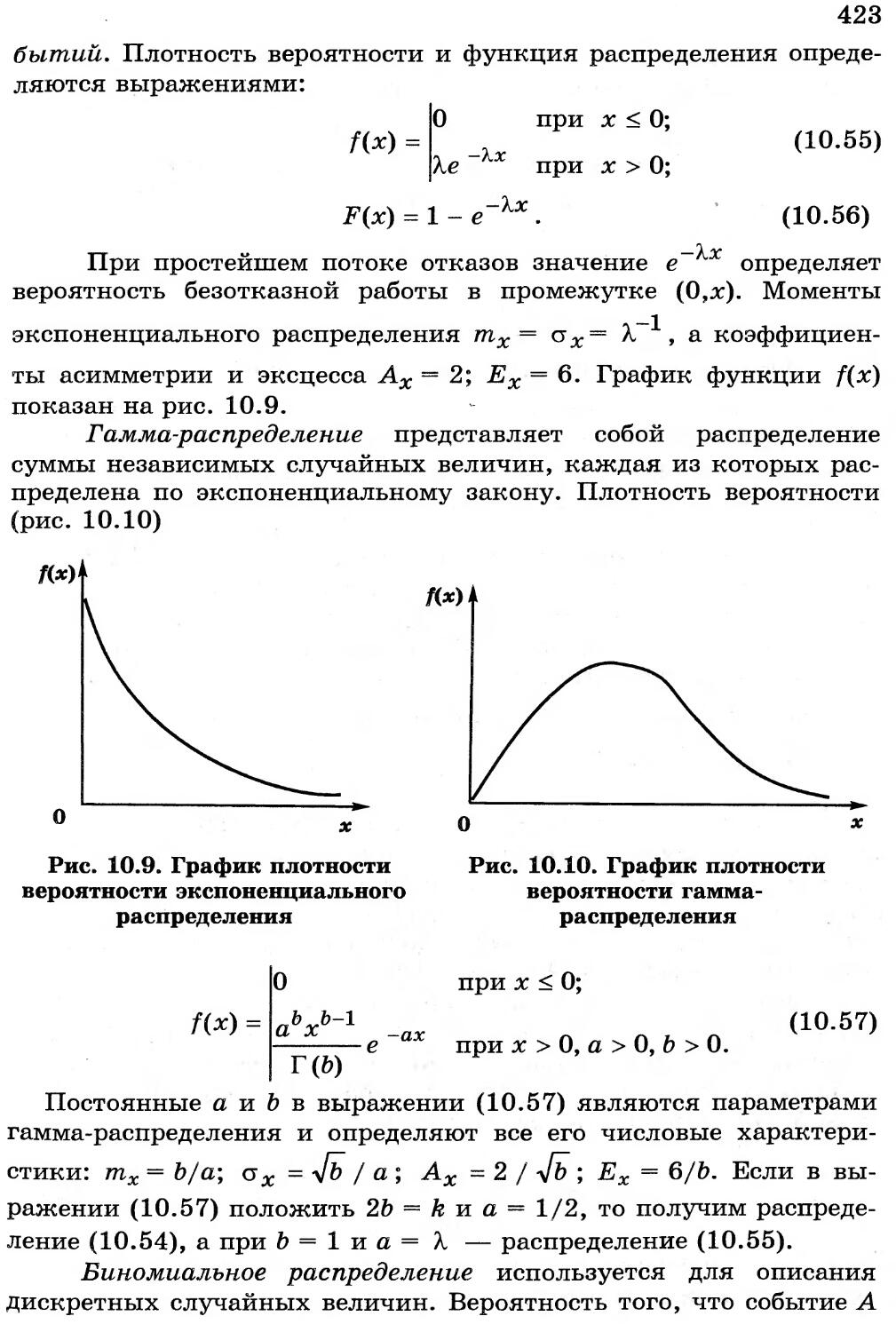
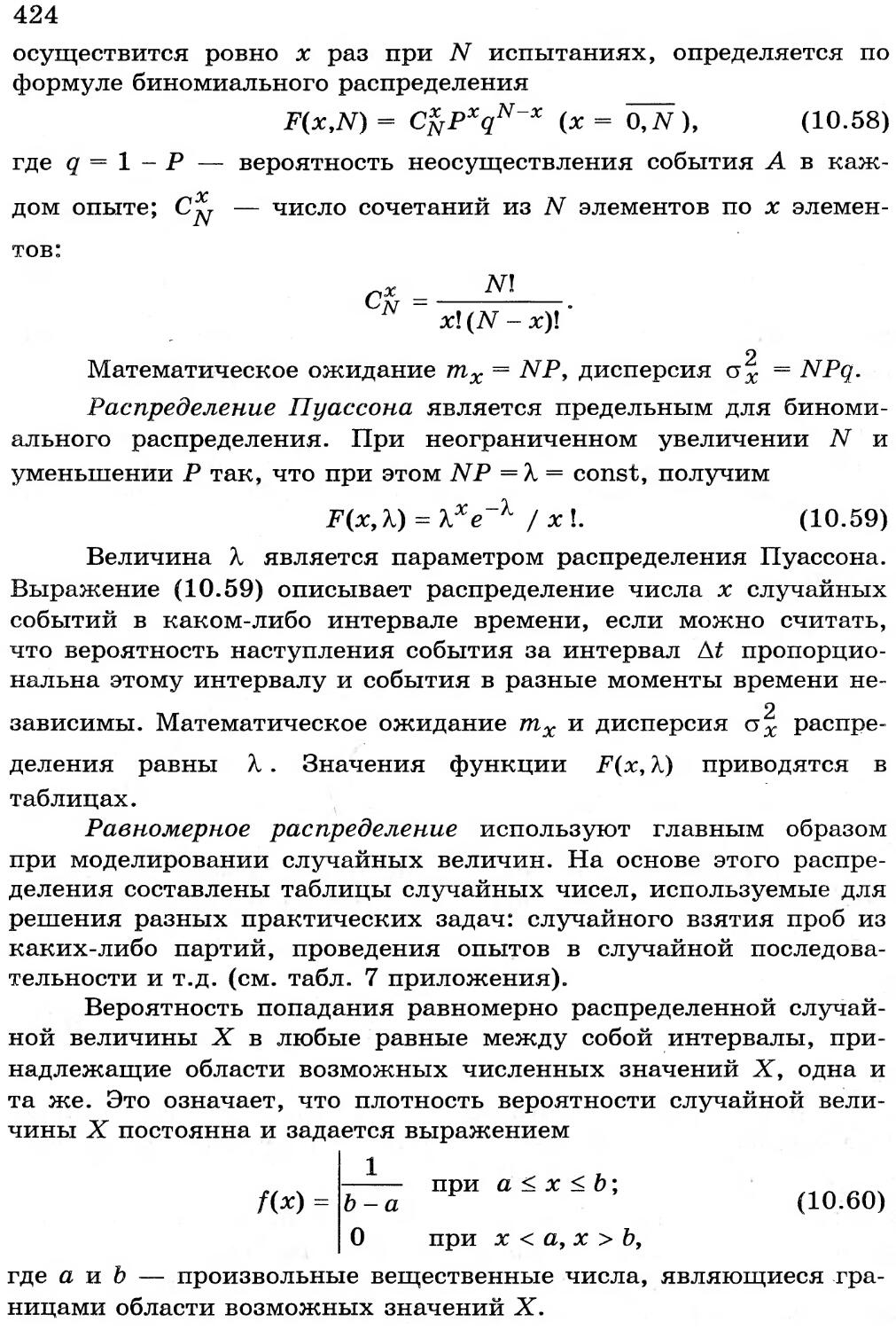
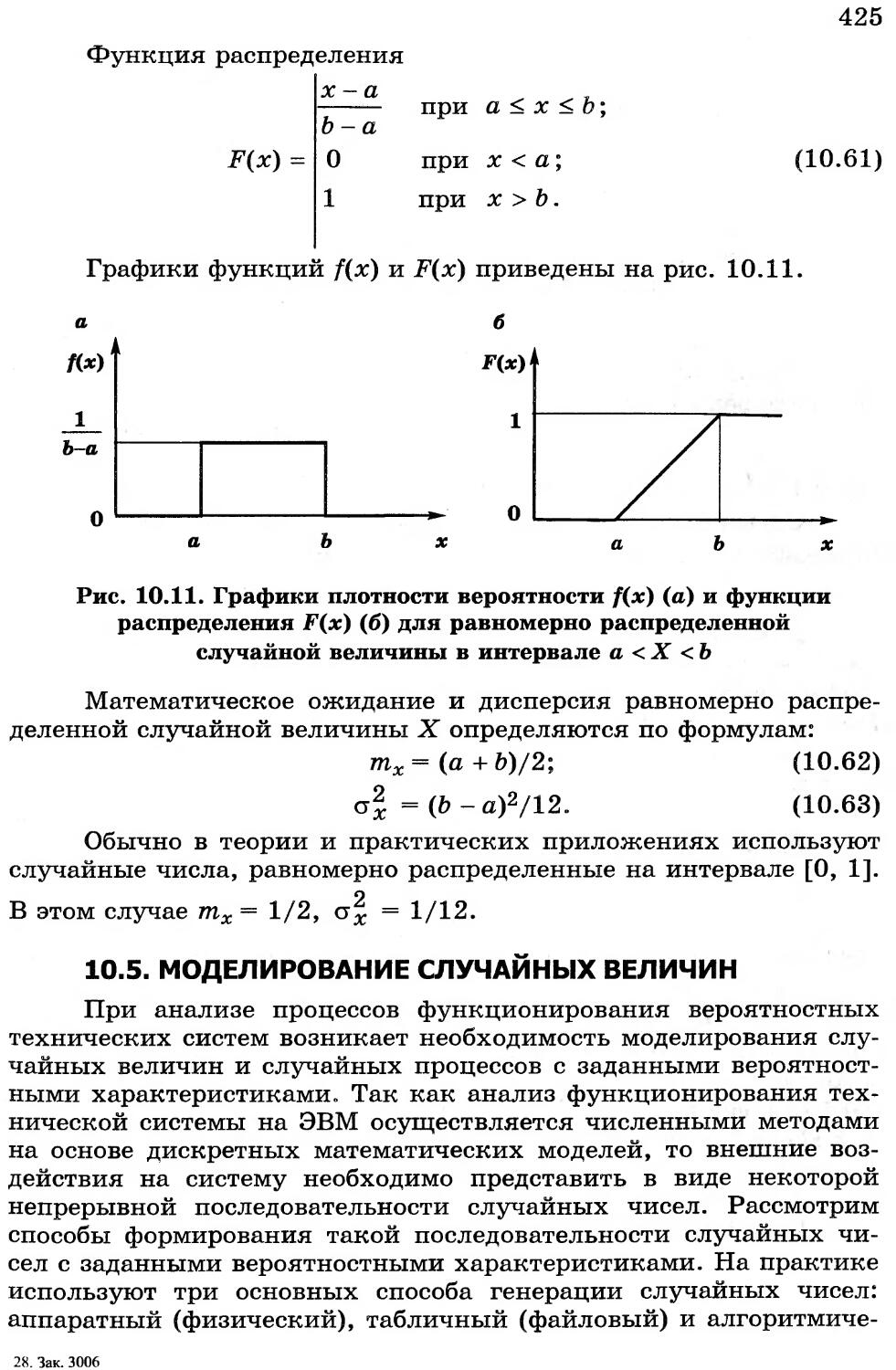
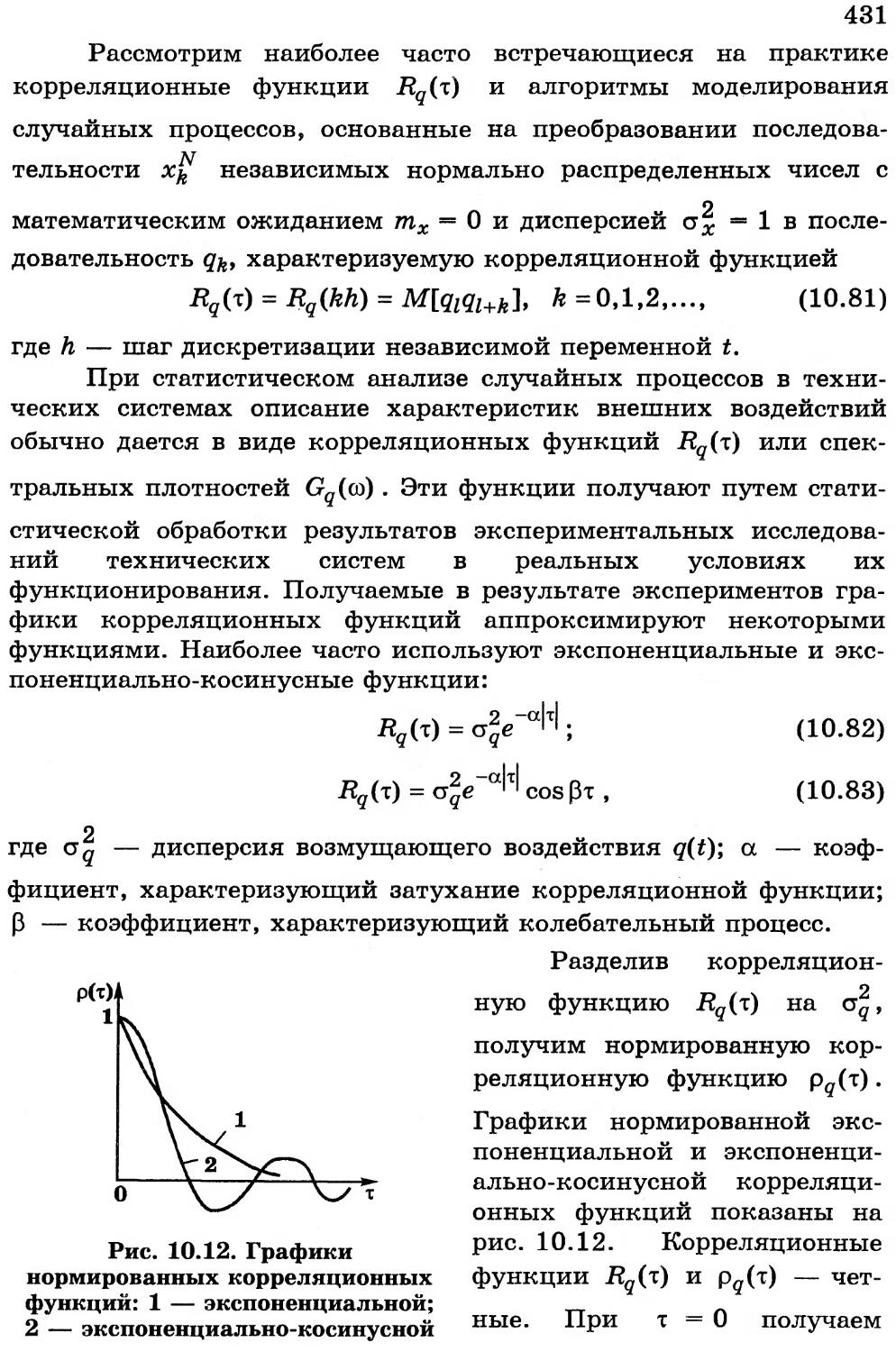
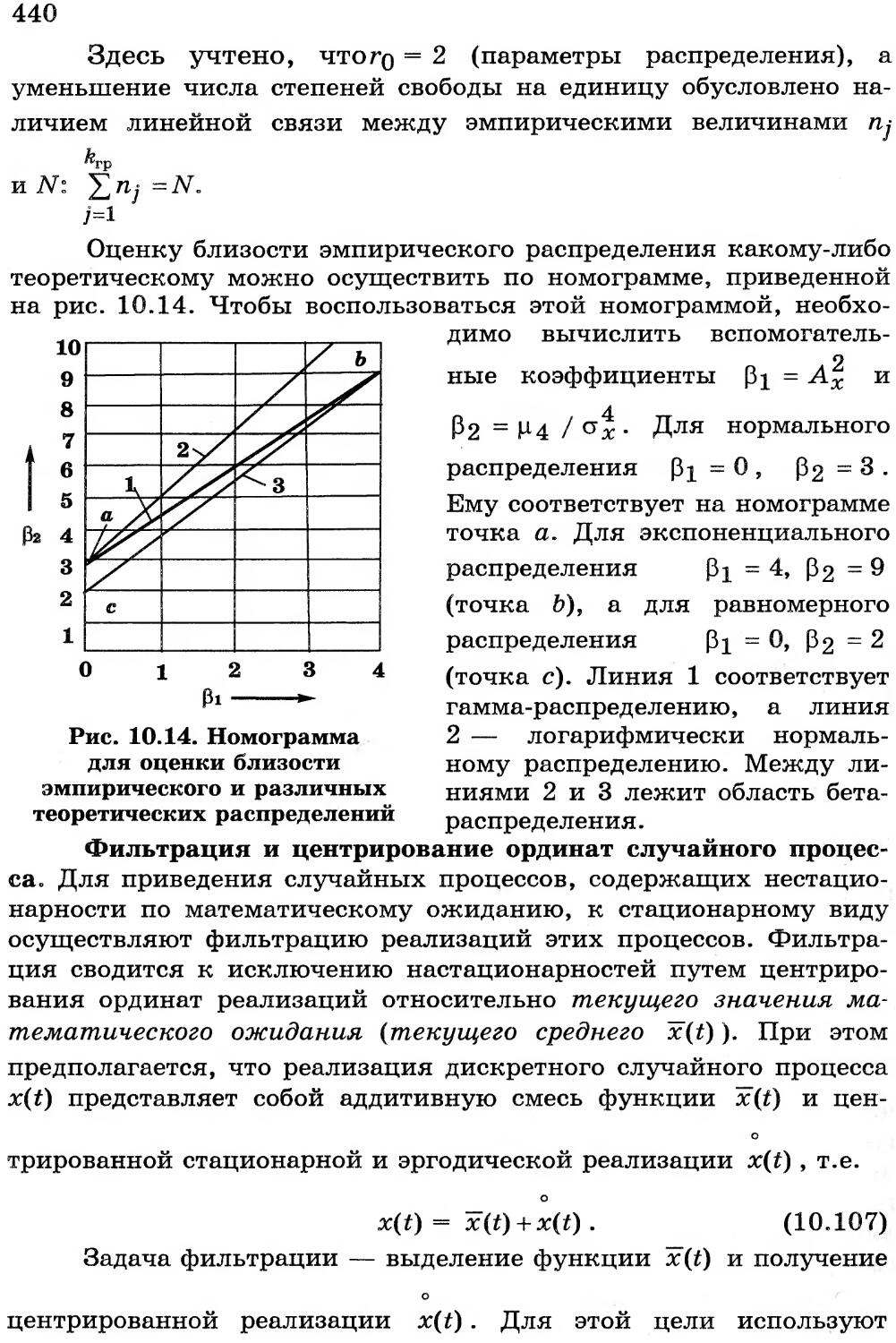
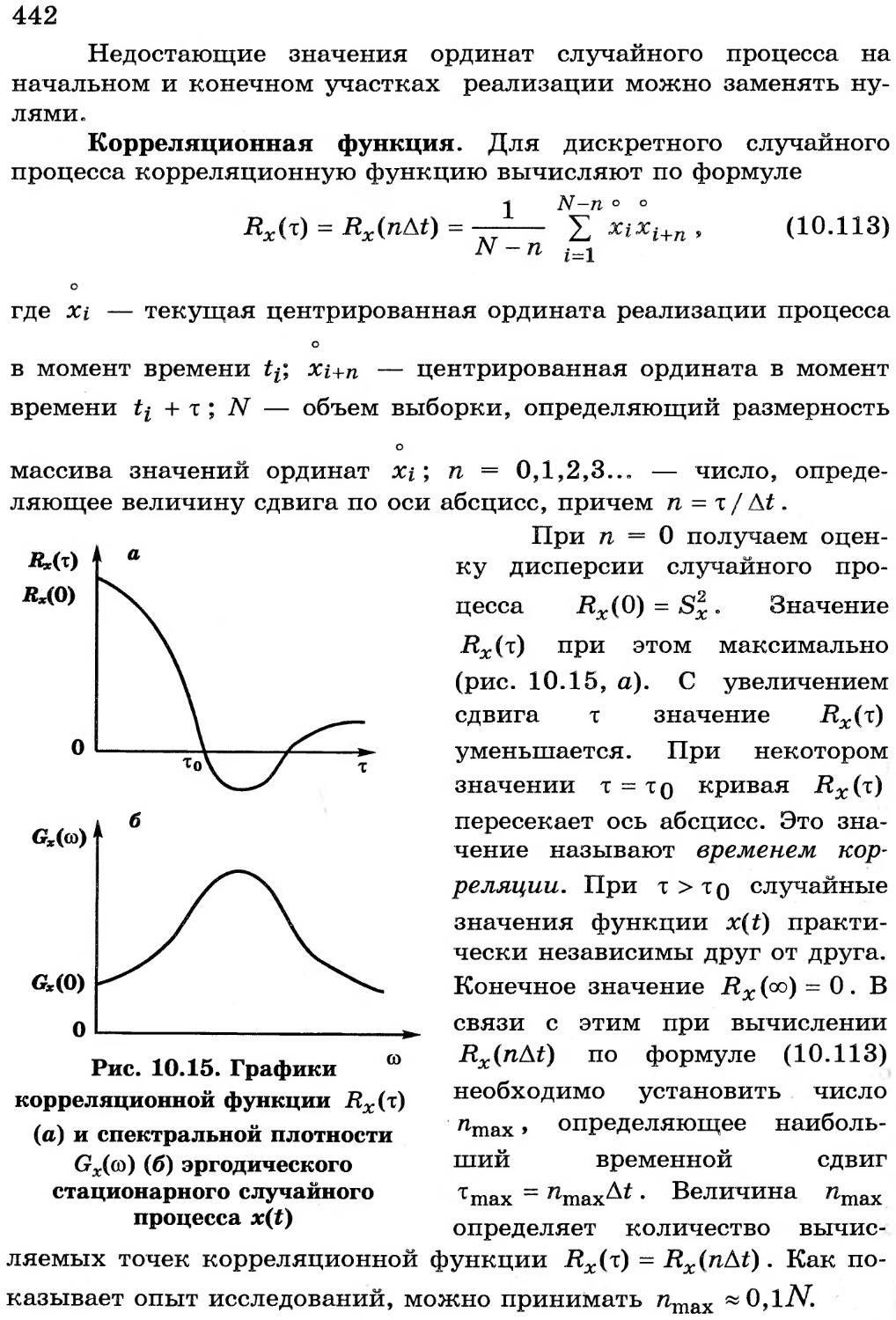
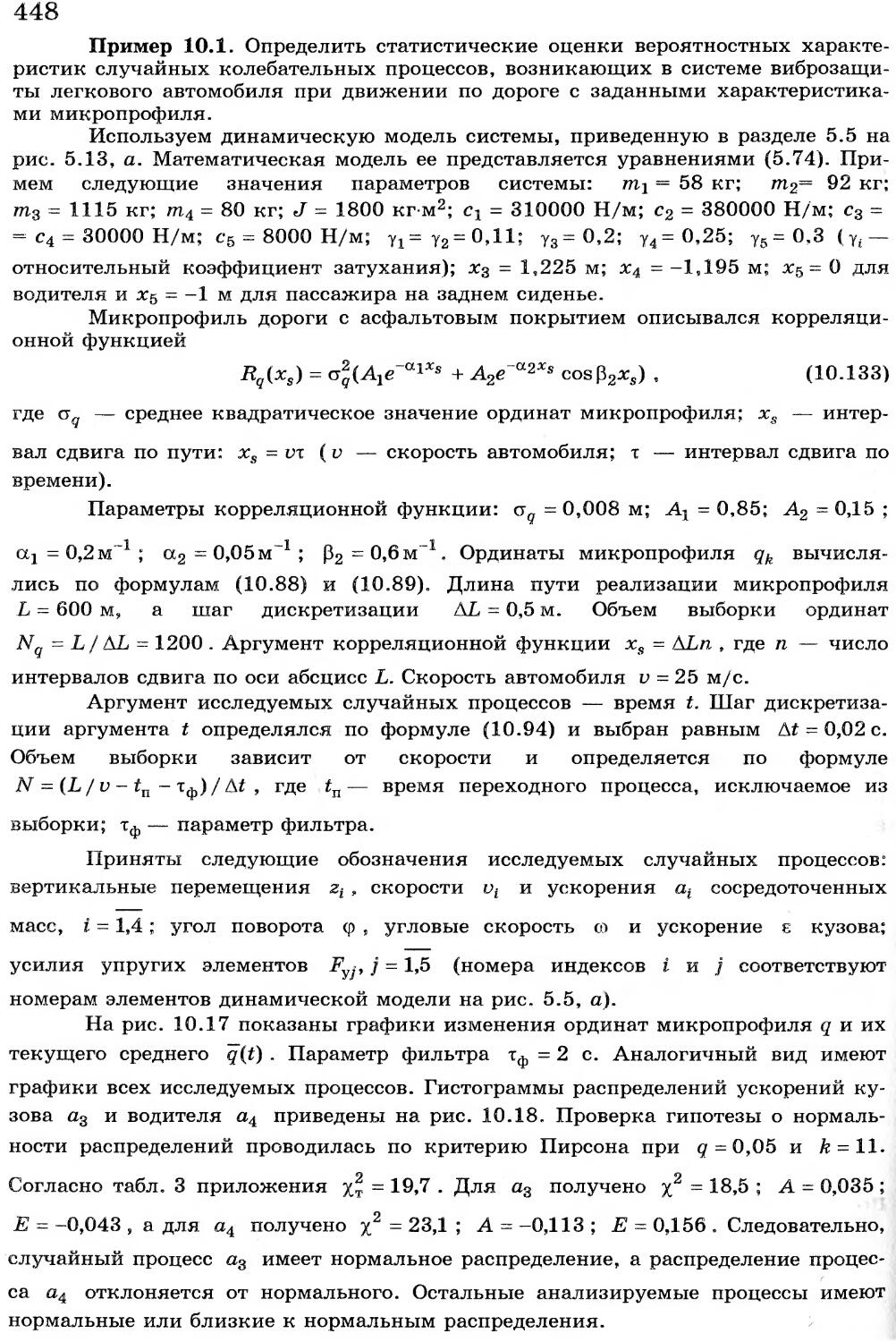
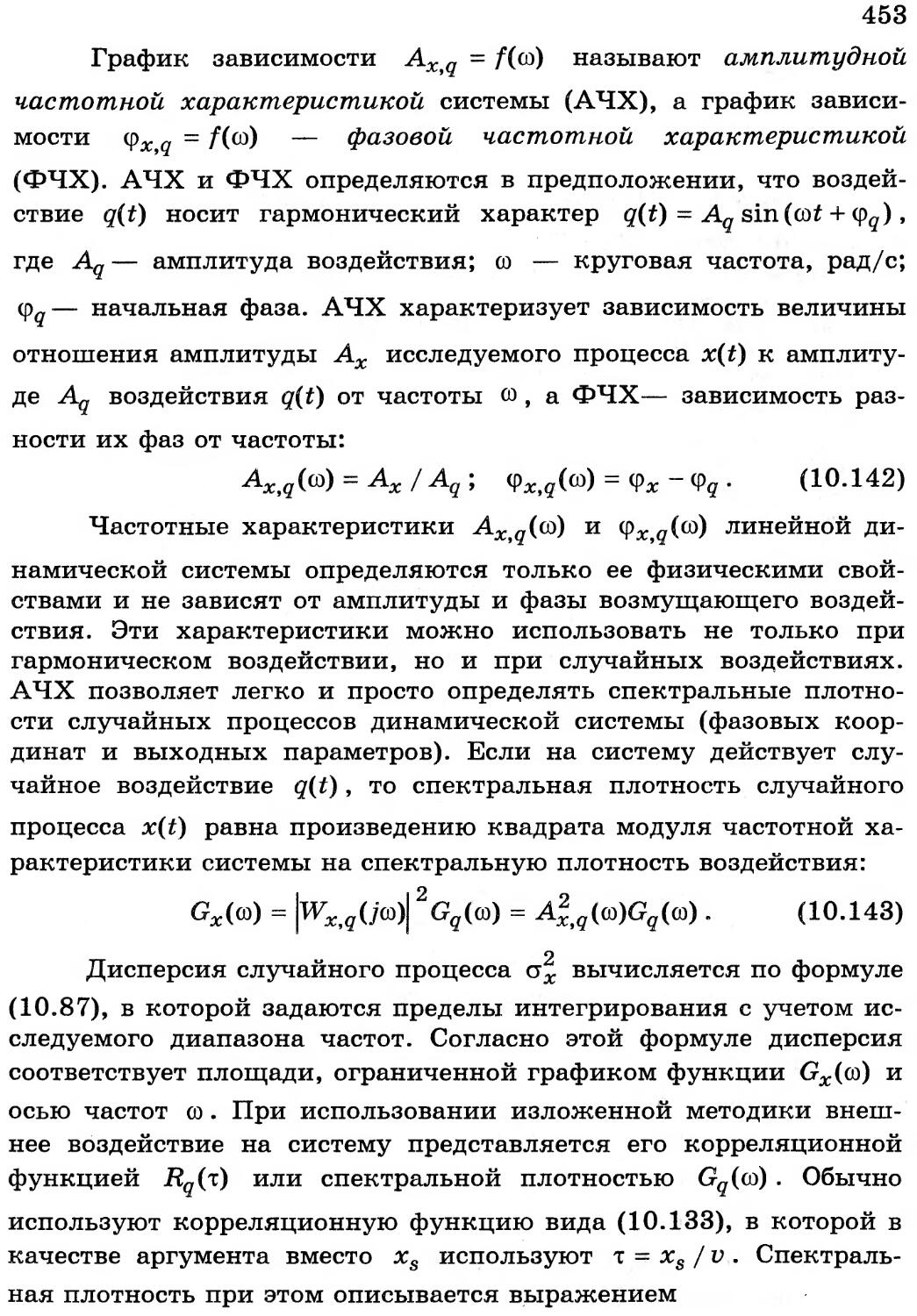
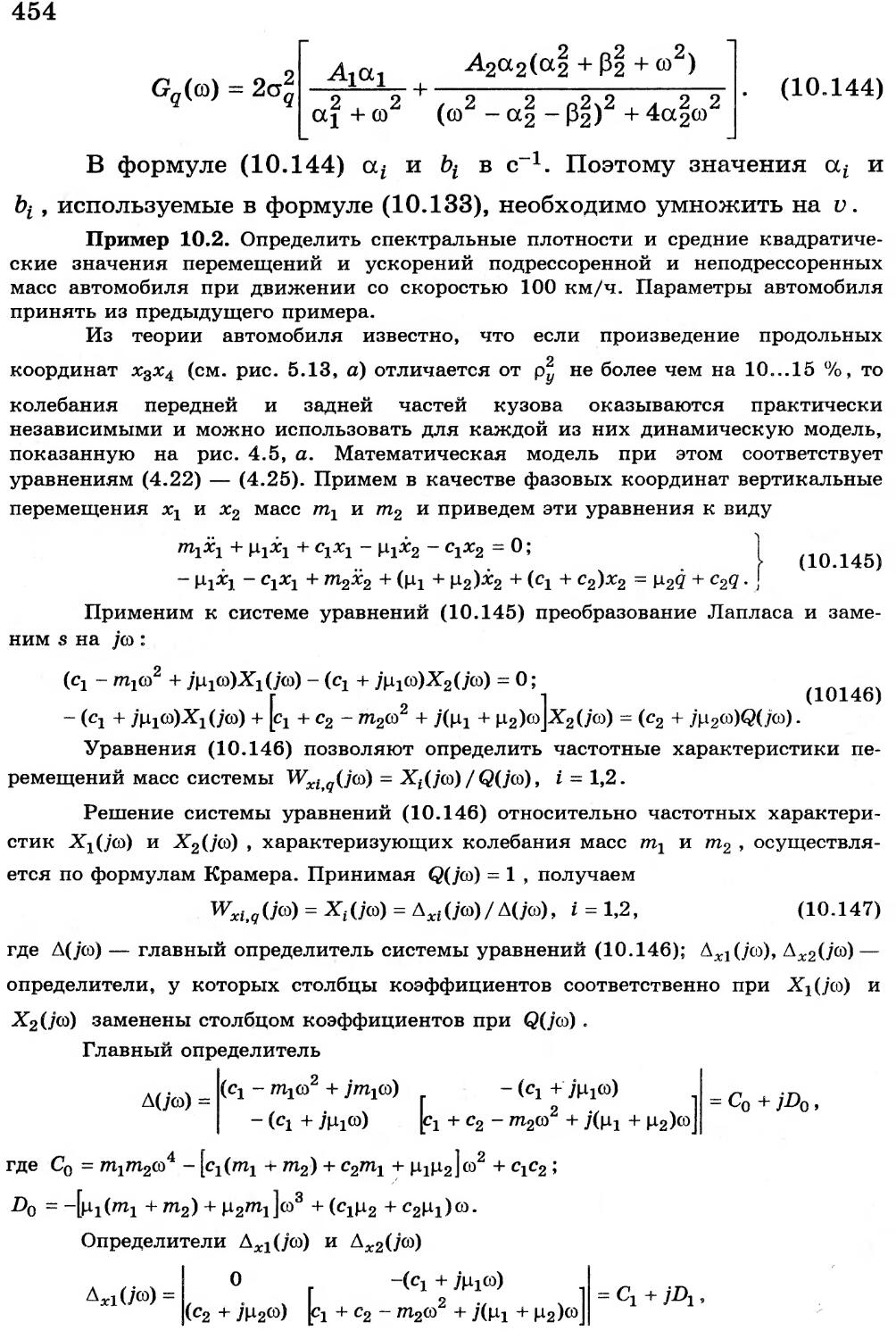
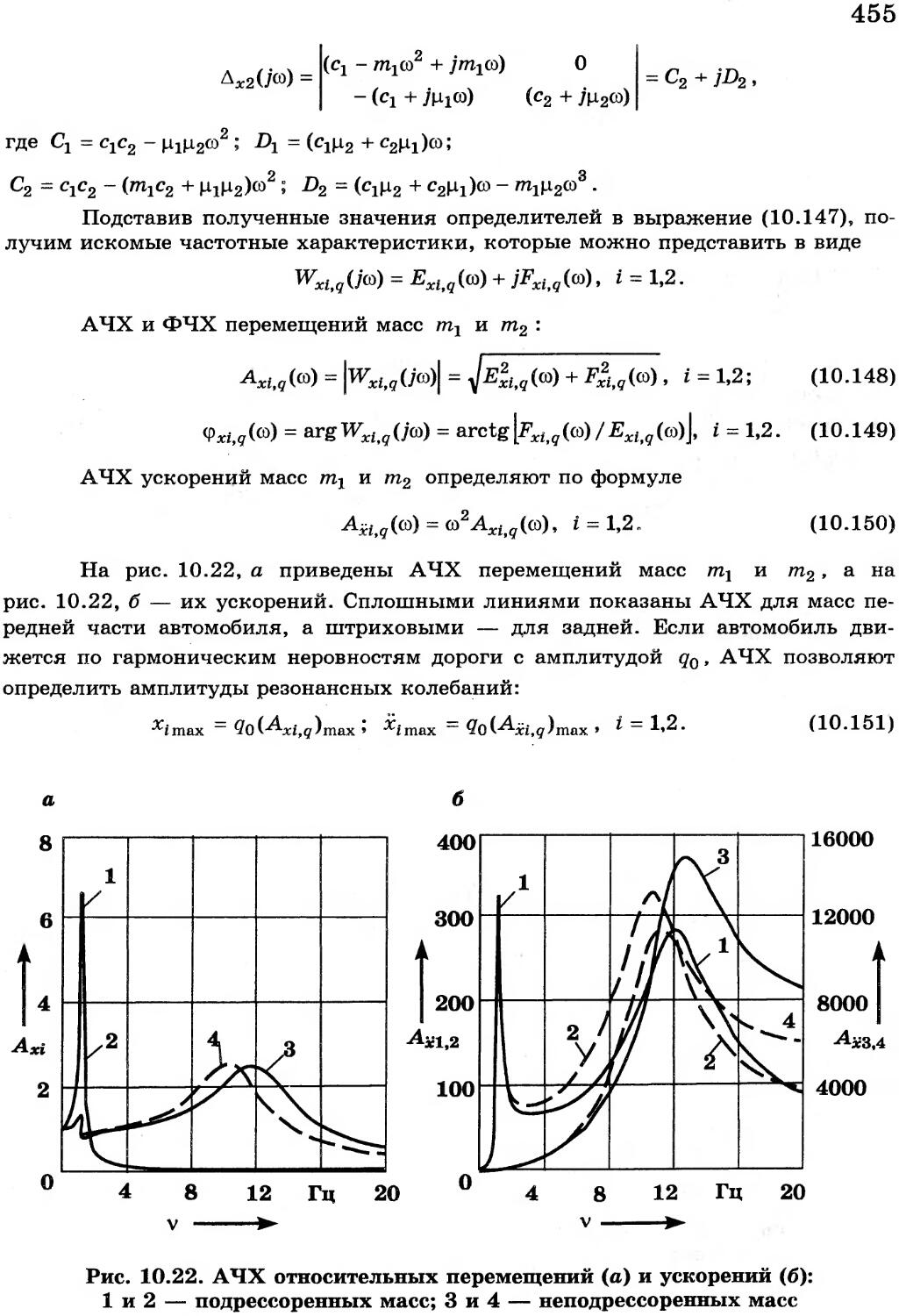
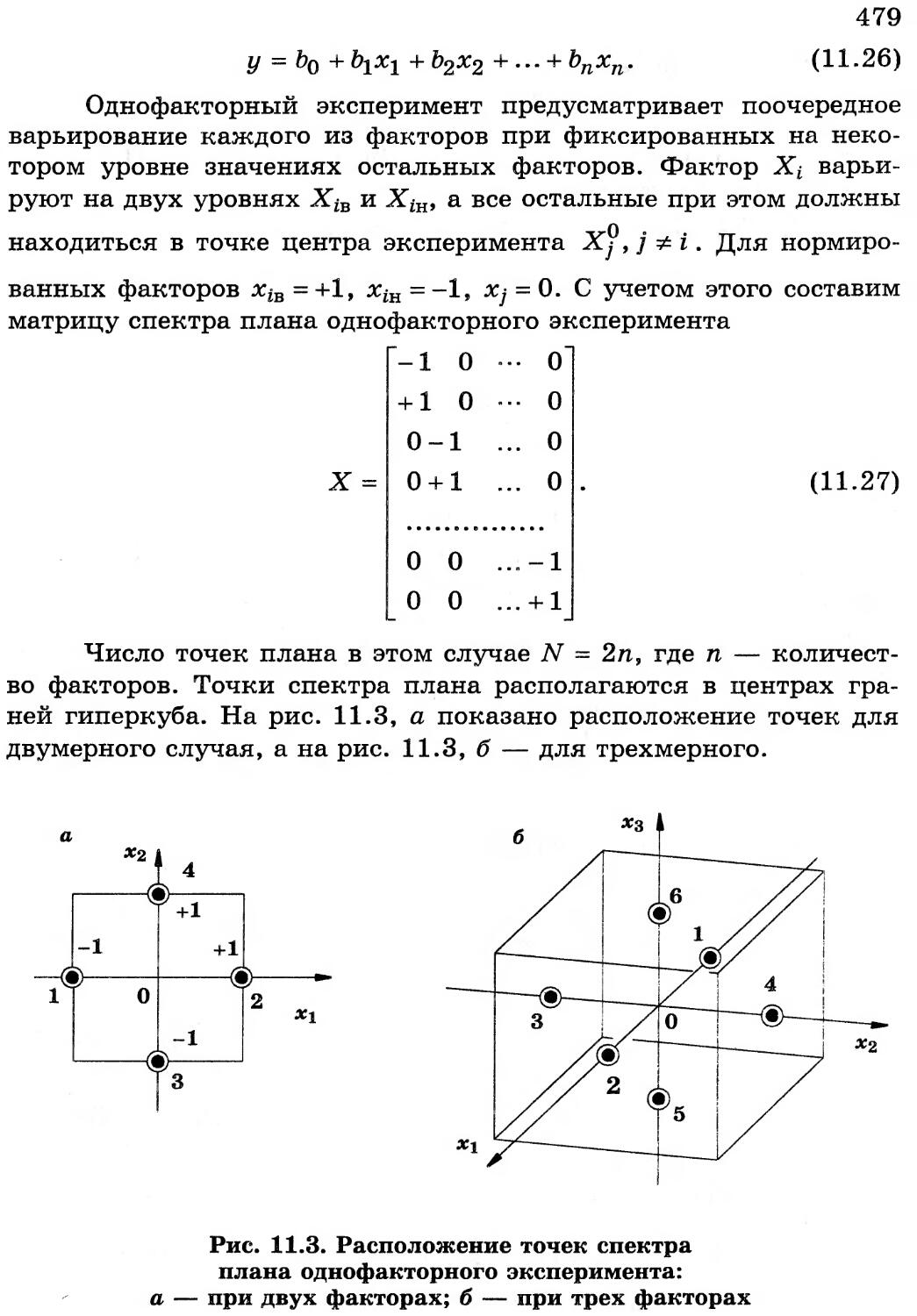
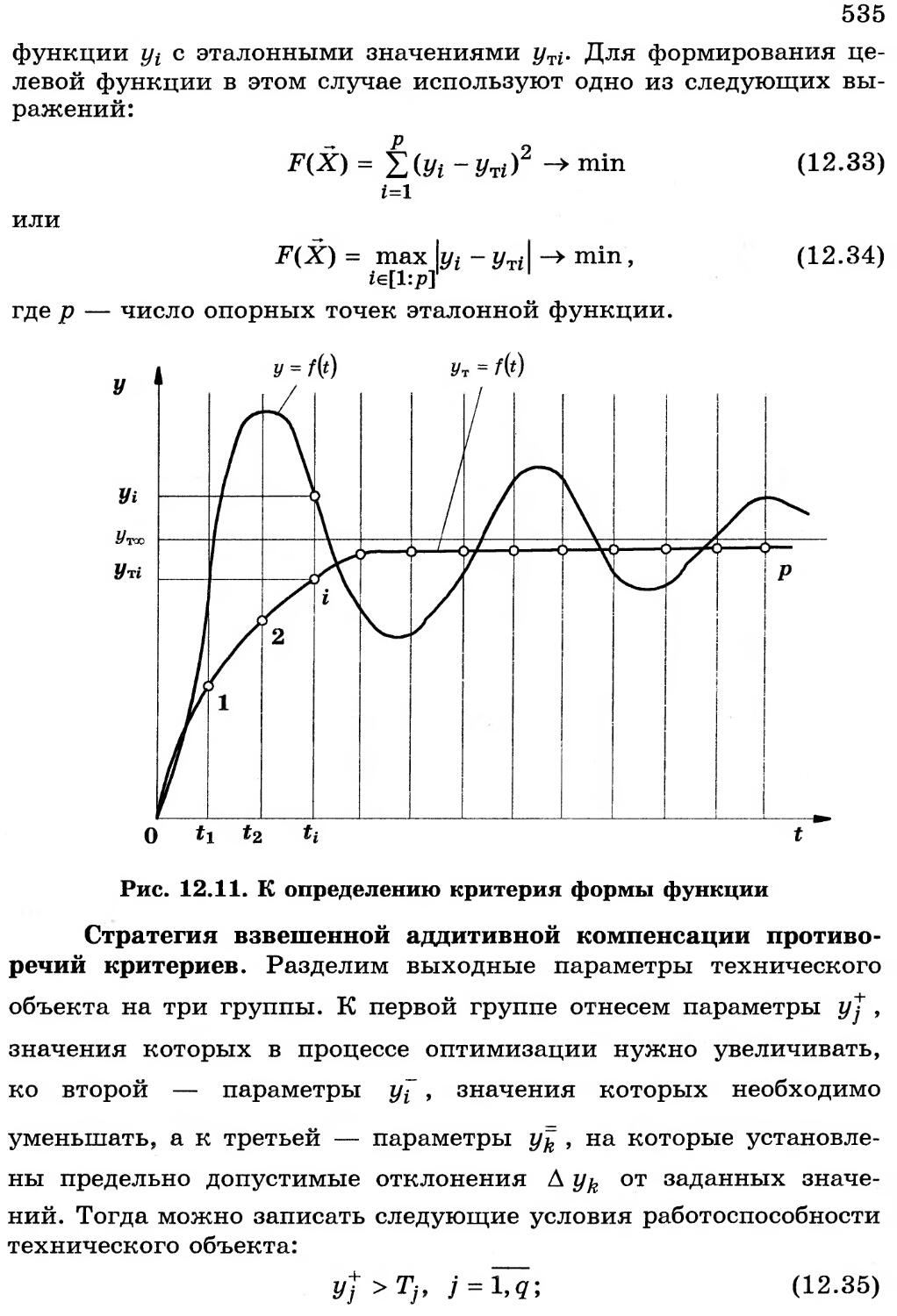
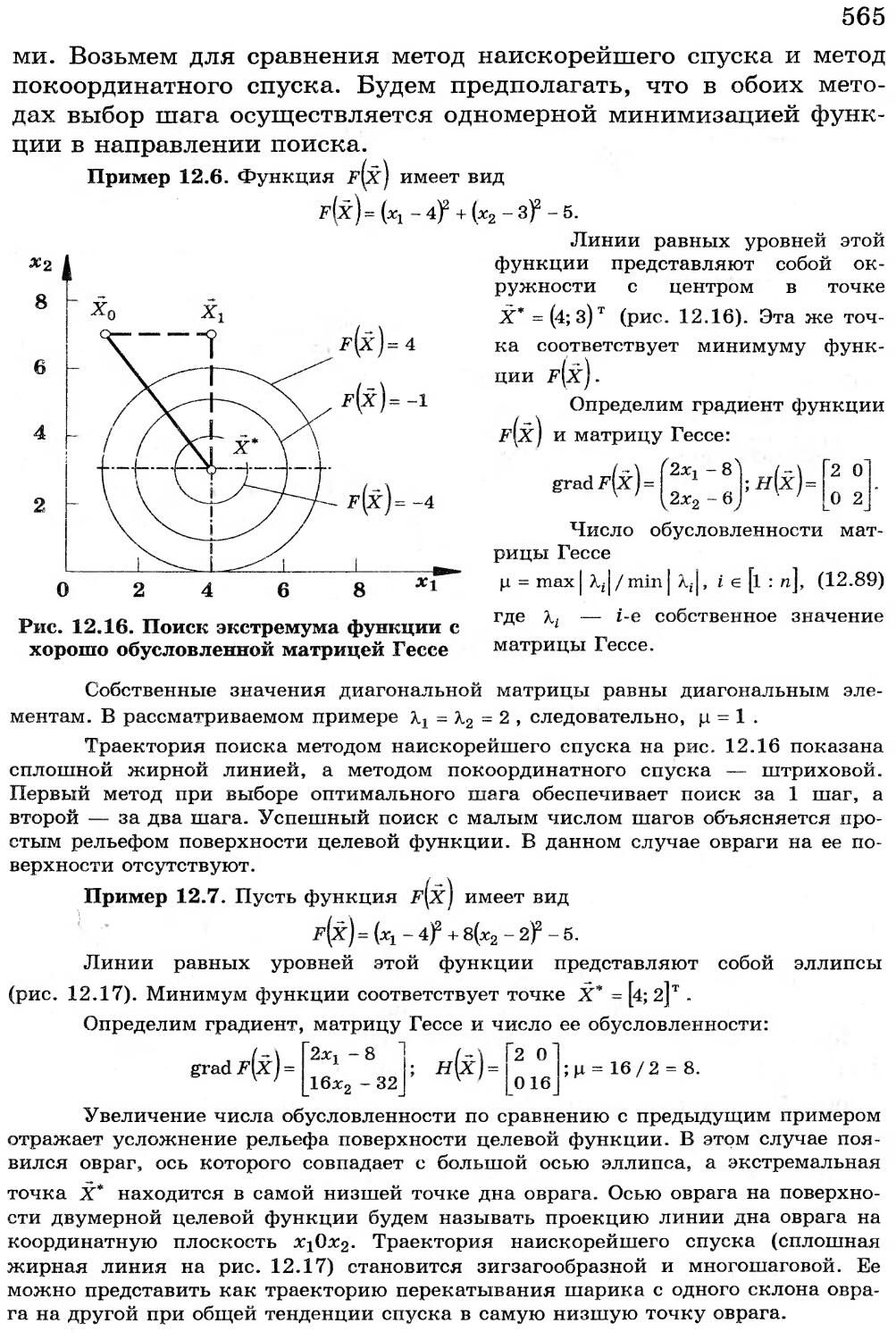
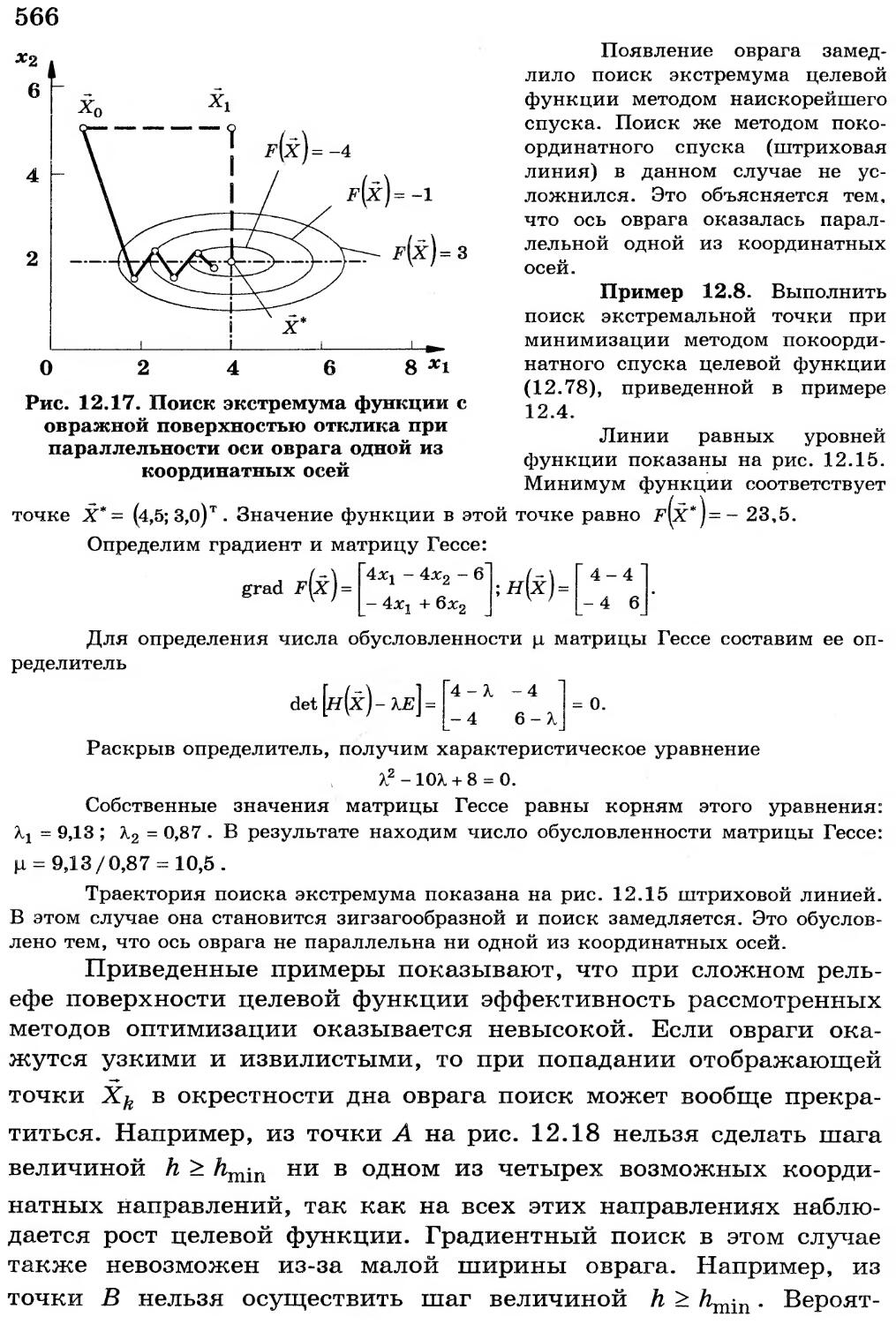
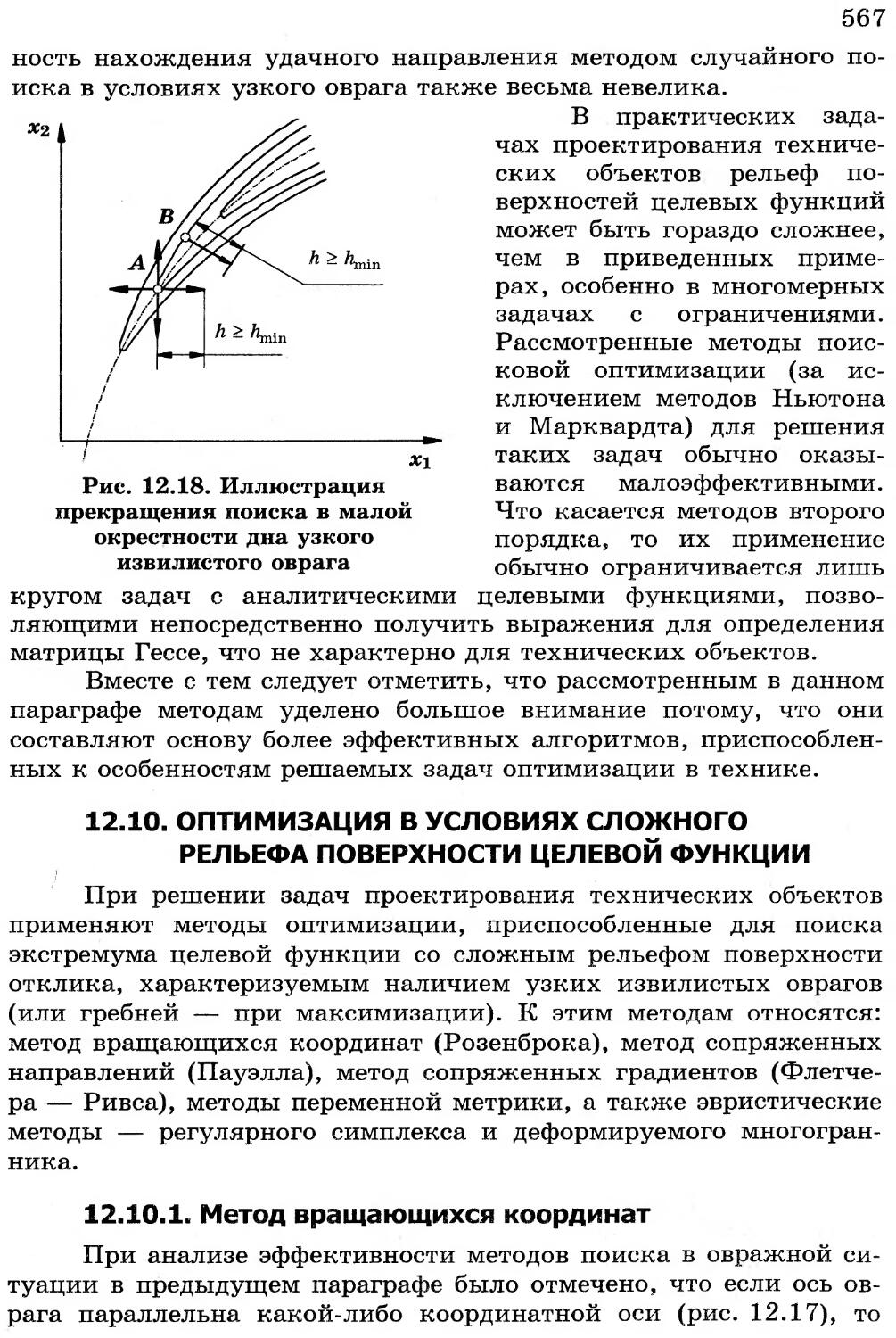
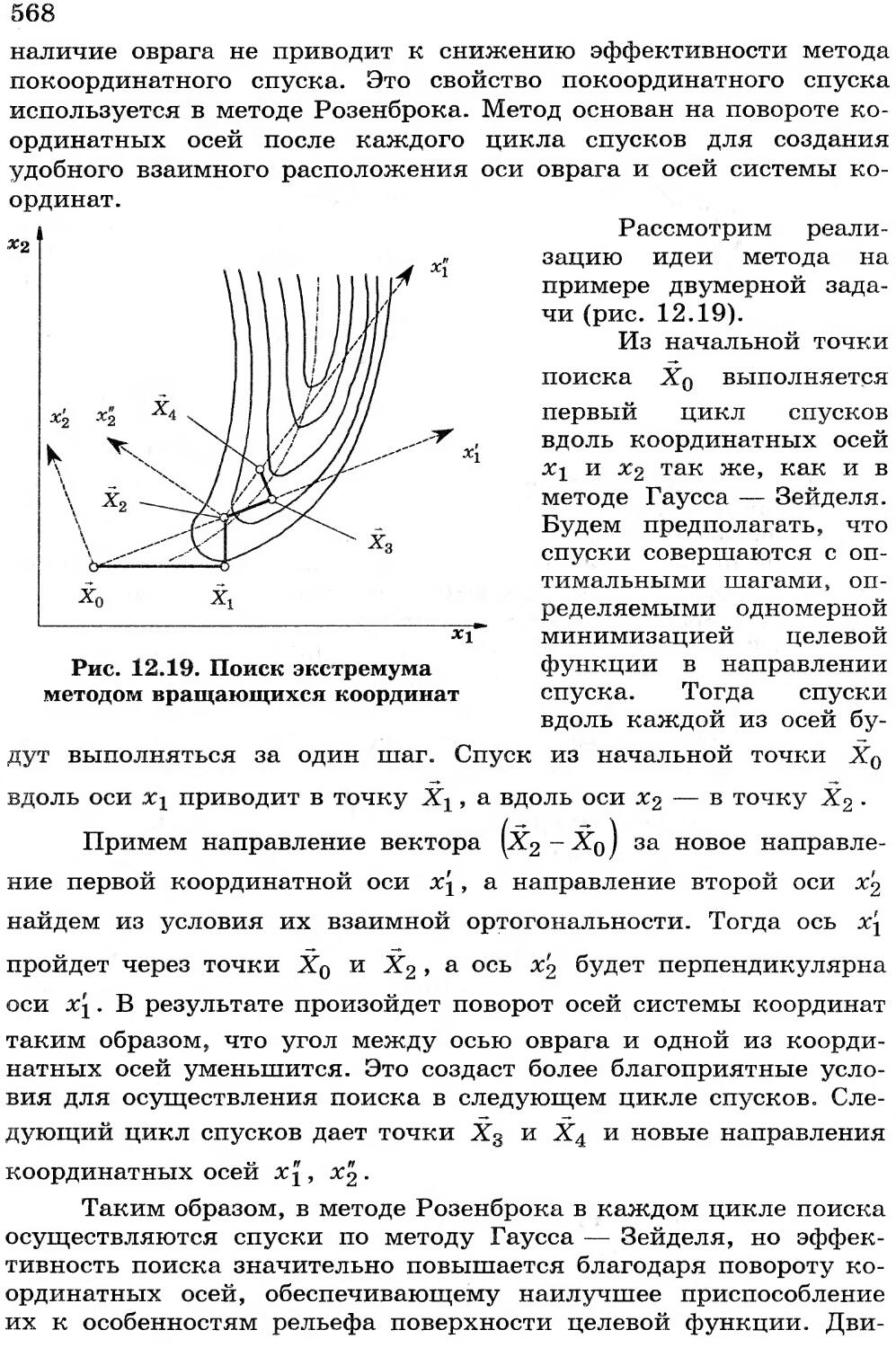
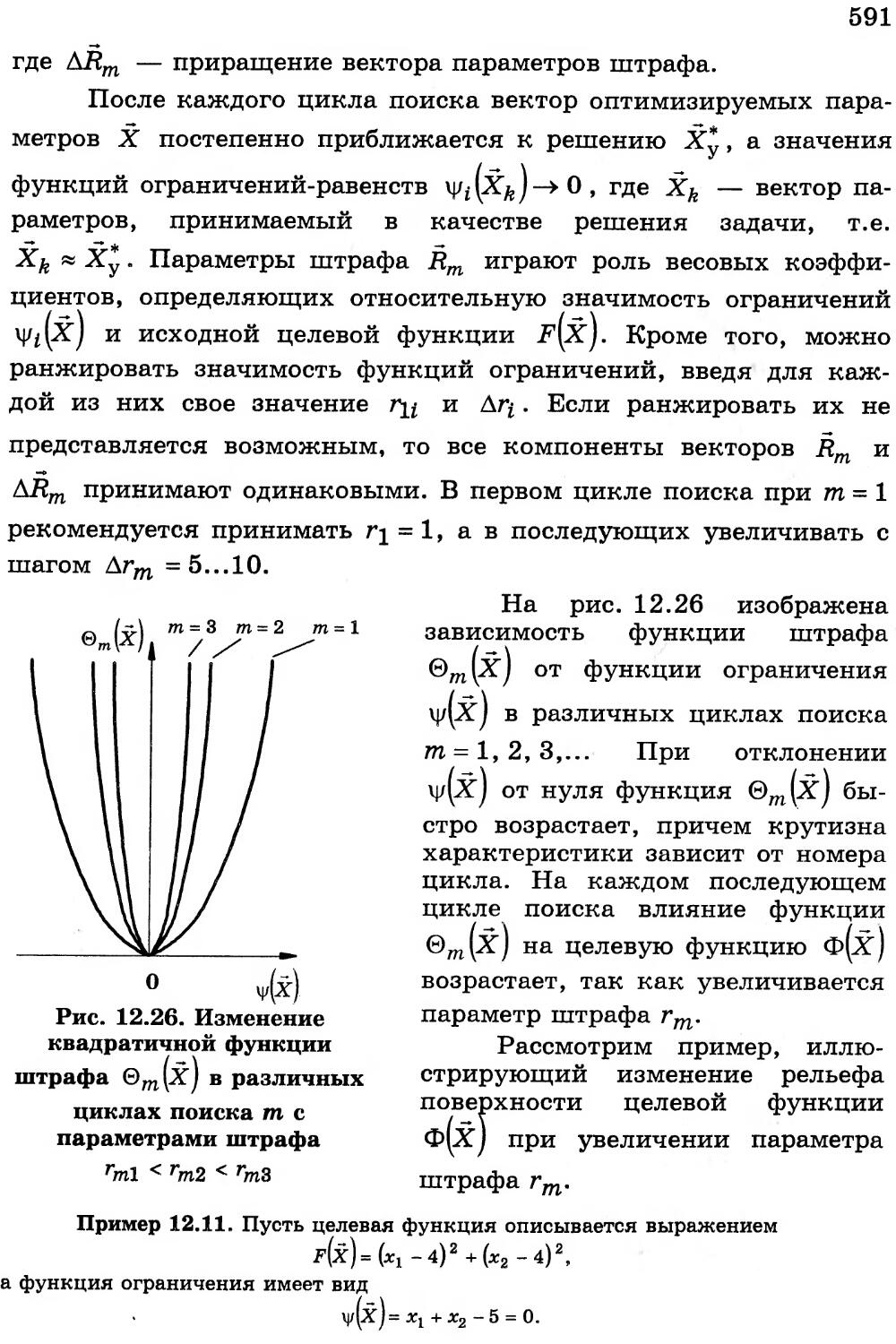
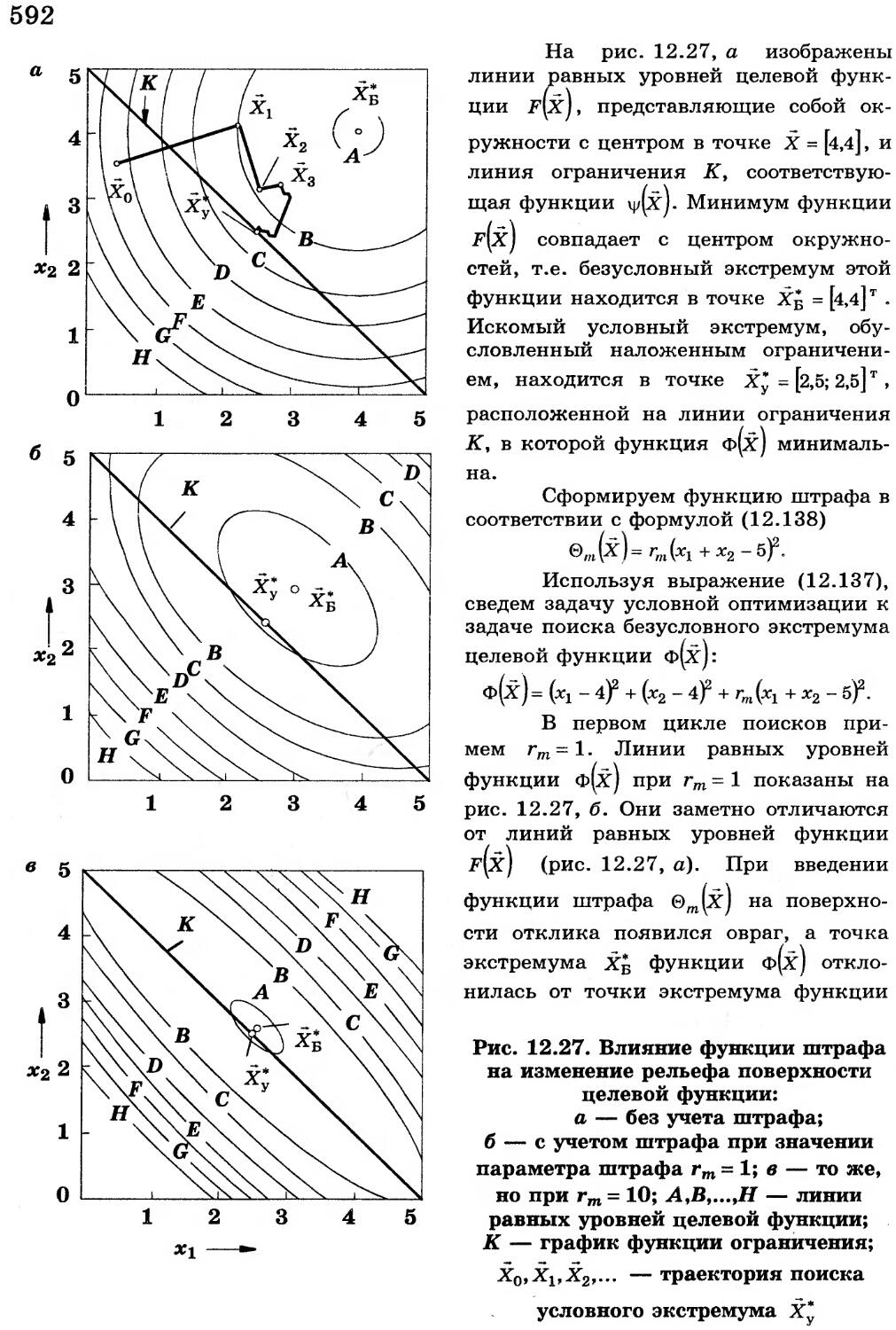
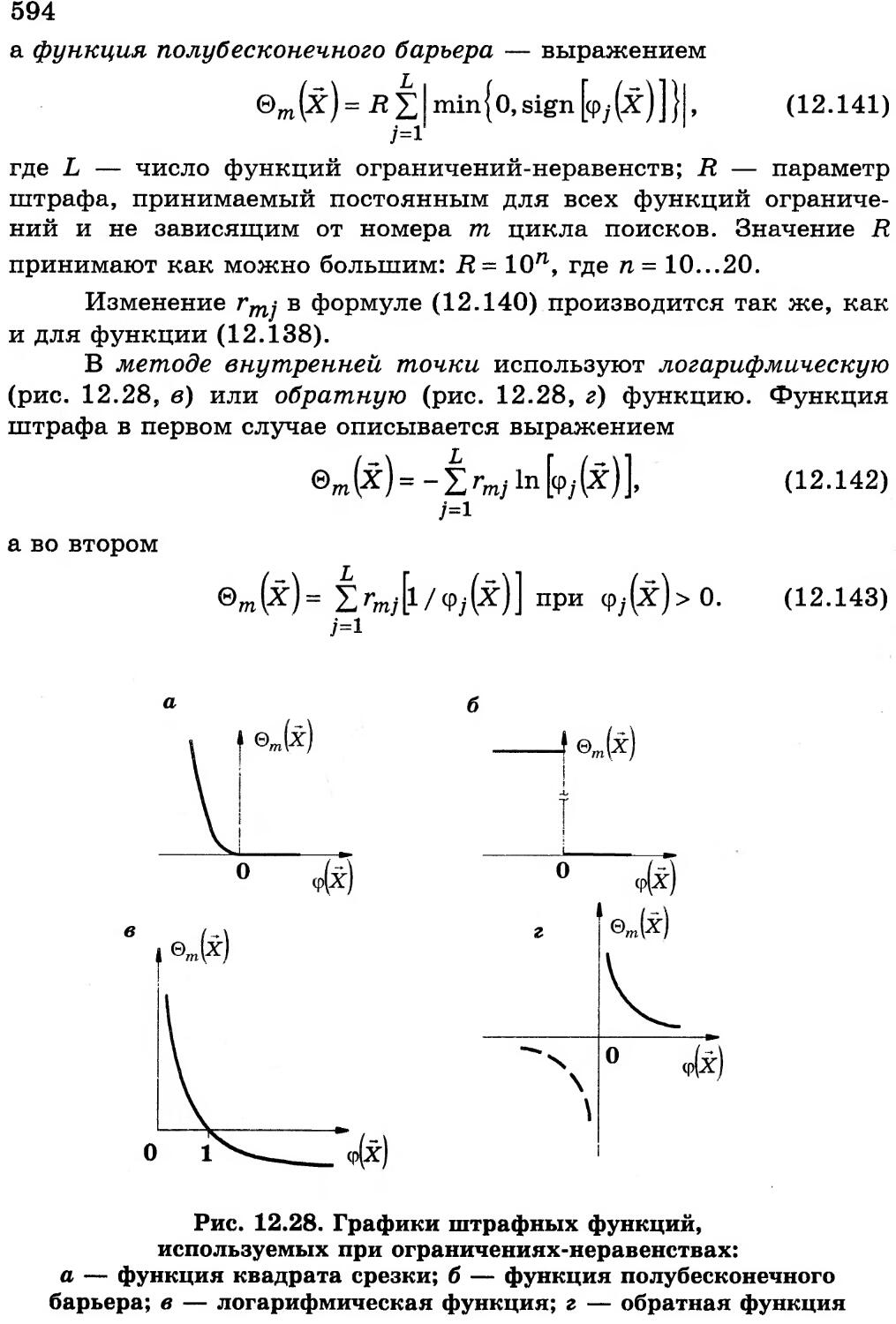
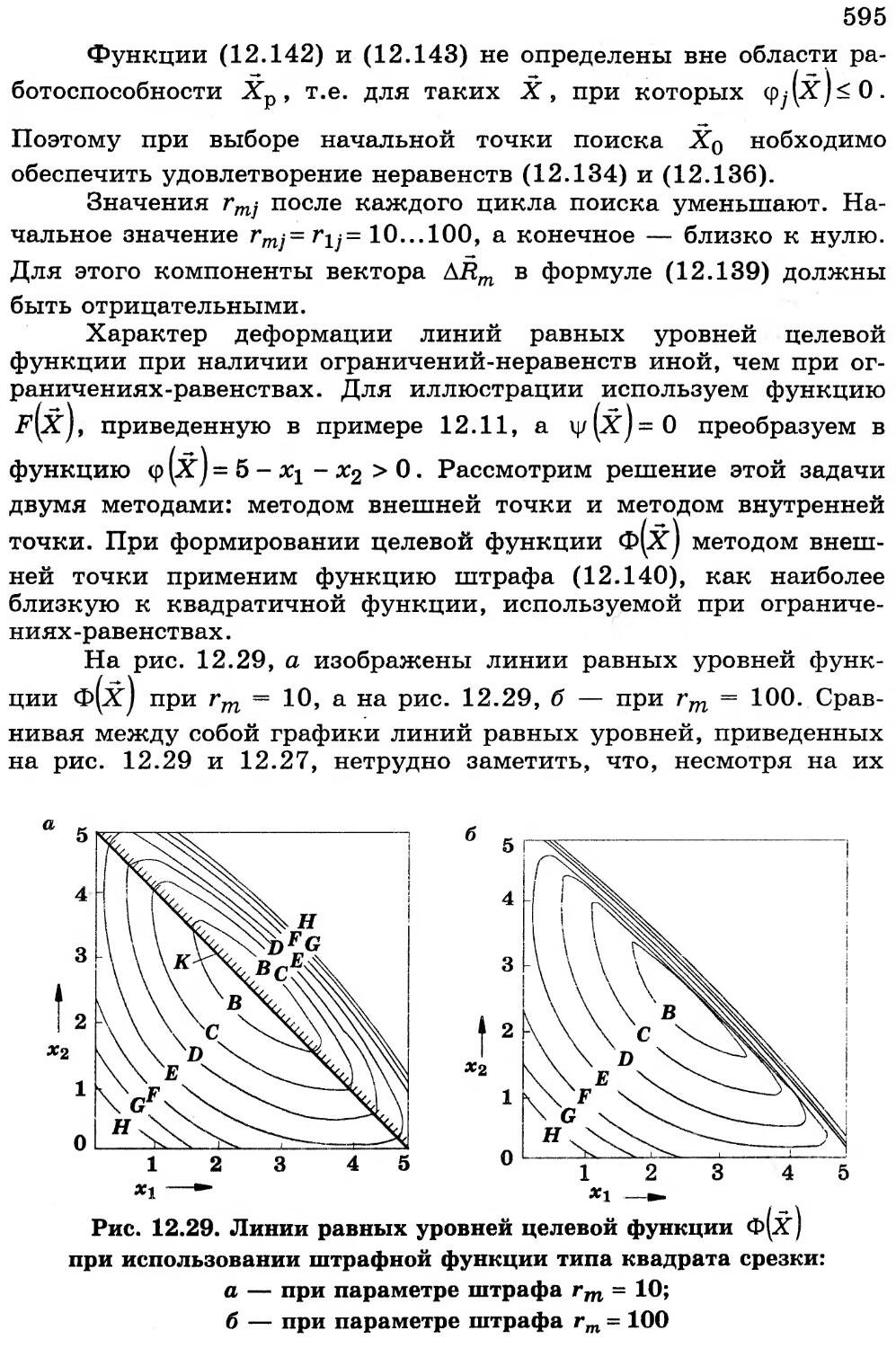
Текст
В.П. Тарасик
Математическое моделирование технических систем
Издание 2-е исправленное и дополненное
Утверждено Министерством образования Республики Беларусь в качестве учебника для студентов технических специальностей высших учебных заведений
Минск Издательство «Дизайн ПРО» 2004
УДК 51.001.57:621(075.8)
ББК 22.1:39.33-01я73
Т 19
Рецензенты: Кафедра «Автомобили» Белорусского национального технического университета; д-р техн, наук, проф. В.С. Шевченко
Тарасик В. П.
Т19 Математическое моделирование технических систем: Учебник для вузов.— Мн.: ДизайнПРО, 2004.— 640с.: ил.
ISBN 985-452-080-3
Изложены основы методологии математического моделирования и проведения вычислительных экспериментов на ЭВМ в процессе проектирования сложных технических систем. Рассмотрены принципы и современные методы построения детерминированных и вероятностных, теоретических и экспериментальных факторных моделей, численные методы решения систем алгебраических и дифференциальных уравнений и задач многокритериальной оптимизации. Построение математических моделей и применение численных методов анализа иллюстрируется примерами.
Для студентов технических ВУЗов, аспирантов, инженеров (проектировщиков и исследователей) и научных работников.
УДК 51.001.57:621(075.8
ББК 22.1:39.33-01я7<
ISBN 985-452-080-3
© Тарасик В. П., 2004
© Оформление — издательство «Дизайн ПРО», 2004
Посвящается 40-летию основания Могилевского машиностроительного института (1961) и присвоению ему статуса университета (2000)
ПРЕДИСЛОВИЕ
Современный этап развития техники характеризуется чрезвычайно быстрой сменой моделей выпускаемой продукции, возрастающим количеством разработок, выполненных на новых, неизвестных ранее принципах, обеспечивающих изделиям более высокие потребительские качества и создающих жесткую конкуренцию на рынке их сбыта. Это приводит к необходимости интенсификации процессов создания новой техники, повышения качества проектов, разработки и организации производства конкурентоспособных изделий в короткие сроки. При этом достигается снижение затрат финансовых и трудовых ресурсов, рентабельность производства и планируемая прибыль.
В этих условиях важное значение приобретают сроки и качество выполнения проектно-конструкторских работ. Их соответствие современным требованиям можно обеспечить применением новой технологии проектирования, основанной на использовании методов математического моделирования и вычислительной техники.
Новый технический объект должен, безусловно, превосходить существующие. Это достигается соответствующей стратегией проектирования, нацеленной на достижение высоких показателей технического уровня и эффективности создаваемого изделия. Решаемые задачи в соответствии с этой стратегией носят оптимизационный характер и требуют разработки и применения новой технологии проектирования. В учебнике значительное внимание
уделено вопросам методологии автоматизированного проектирования. Современная методология проектирования базируется на системном подходе, использующем принципы декомпозиции, иерархичности, итеративности, локальной оптимизации и комплексного осуществления процесса проектирования, включающего функциональный, конструкторский и технологический аспекты.
Проектирование — сложный иерархический процесс, включающий множество взаимосвязанных стадий и этапов. Декомпозиция и иерархичность приводят к необходимости применения множества разнообразных моделей. Математическое моделирование технических объектов занимает центральное место в построении эффективной технологии автоматизированного проектирования. Инженер-проектировщик должен иметь четкое представление о видах математических моделей и способах их построения, режимах функционирования технических объектов и методах их моделирования, разработке алгоритмических моделей и их эффективной реализации с использованием современных средств вычислительной техники.
В учебных планах подготовки инженеров-конструкторов различных специальностей технического профиля предусмотрен ряд дисциплин, позволяющих освоить программирование, математическое моделирование технических объектов, компьютерную графику, технологию автоматизированного проектирования, прикладное программное обеспечение, изучить современные средства вычислительной техники и научиться использовать их для выполнения проектно-конструкторских работ.
Учебник предназначен для использования при освоении дисциплины «Математическое моделирование технических систем», входящей в учебные планы всех специальностей технического профиля (название дисциплины в учебных планах некоторых специальностей отличается от упомянутого только конкретизацией объектной области).
Цель дисциплины — изучение методов построения и анализа математических моделей, постановки и решения задач синтеза и оптимизации при автоматизированном проектировании машин, технических устройств, механизмов, систем и т.п.
Содержание книги построено на материалах различных литературных источников, оригинальных авторских разработках по математическому моделированию и на базе созданного и прочитанного курса лекций в Могилевском государственном техническом университете в период 1985 ... 2000 гг.
Для освоения материала данного учебника достаточно знаний, полученных студентами при изучении курсов высшей математики, физики, теоретической механики.
Второе издание учебника дополнено материалами по моделированию электромеханических систем. Отдельные разделы подвергнуты доработке с учетом опыта использования в учебном процессе.
Автор считает приятным долгом выразить глубокую благодарность рецензентам: профессору Л.А. Молибошко и д-ру техн, наук, профессору В.С. Шевченко, критические замечания которых способствовали улучшению содержания книги.
Замечания и пожелания просьба направлять по адресу: 212005, г. Могилев, пр. Мира, 43, Могилевский государственный технический университет, кафедра «Автомобили».
ВВЕДЕНИЕ
При создании машин, технических комплексов и других объектов широко используется моделирование. Как средство познания и преобразования материального мира моделирование применяется в экспериментальных и теоретических научных исследованиях.
Моделирование представляет собой процесс замещения объекта исследования некоторой его моделью и проведение исследований на модели с целью получения необходимой информации об объекте. Модель — это физический или абстрактный образ моделируемого объекта, удобный для проведения исследований и позволяющий адекватно отображать интересующие исследователя физические свойства и характеристики объекта. Удобство проведения исследований может определяться различными факторами: легкостью и доступностью получения информации, сокращением сроков и уменьшением материальных затрат на исследование и др.
Различают моделирование предметное и абстрактное. При предметном моделировании строят физическую модель, которая соответствующим образом отображает основные физические свойства и характеристики моделируемого объекта. При этом модель может иметь иную физическую природу в сравнении с моделируемым объектом (например, электронная модель гидравлической или механической системы). Если модель и объект одной и той же физической природы, то моделирование называют физическим.
Физическое моделирование широко применялось до недавнего времени при создании сложных технических объектов. Обычно изготавливался макетный или опытный образец технического объекта, проводились испытания, в процессе которых определялись его выходные параметры и характеристики, оценивались надежность функционирования и степень выполнения технических требований, предъявляемых к объекту. Если вариант технической разработки оказывался неудачным, все повторялось сначала, т.е. осуществлялось повторное проектирование, изготовление опытного образца, испытания и т.д.
Физическое моделирование сложных технических систем сопряжено с большими временными и материальными затратами.
Абстрактное моделирование связано с построением абстрактной модели. Такая модель представляет собой математические соотношения, графы, схемы, диаграммы и т.п. Наиболее мощным и универсальным методом абстрактного моделирования является математическое моделирование. Оно широко используется как в научных исследованиях, так и при проектировании.
Математическое моделирование позволяет посредством математических символов и зависимостей составить описание функционирования технического объекта в окружающей внешней среде, определить выходные параметры и характеристики, получить оценку показателей эффективности и качества, осуществить поиск оптимальной структуры и параметров объекта. Применение математического моделирования при проектировании в большинстве случаев позволяет отказаться от физического моделирования, значительно сократить объемы испытаний и доводочных работ, обеспечить создание технических объектов с высокими показателями эффективности и качества. Одним из основных компонентов системы проектирования в этом случае становится математическая модель.
Математическая модель — это совокупность математических объектов и отношений между ними, адекватно отображающая физические свойства создаваемого технического объекта. В качестве математических объектов выступают числа, переменные, множества, векторы, матрицы и т.п. Процесс формирования математической модели и использования ее для анализа и синтеза называется математическим моделированием. В конструкторской практике под математическим моделированием обычно понимается процесс построения математической модели, а проведение исследований на модели в процессе проектирования называют вычислительным экспериментом. Такое деление удобно для проектировщиков и функционально вполне обосновано, поэтому в дальнейшем будем придерживаться этой терминологии.
Для осуществления вычислительного эксперимента на ЭВМ необходимо разработать алгоритм реализации математической модели.
Алгоритм — это предписание, определяющее последовательность выполнения операций вычислительного процесса. Алгоритм автоматизированного проектирования представляет собой совокупность предписаний, обеспечивающих выполнение операций и процедур проектирования, необходимых для получения проектного решения. Для наглядности алгоритмы чаще всего представляют в виде схем или графов, иногда дают их вербальное (словесное) описание. Алгоритм, записанный в форме, воспринимаемой вычислительной машиной, представляет собой программную модель. Процесс программирования называют программным моделированием.
Формализация процесса проектирования на основе математического моделирования позволяет его автоматизировать. Одним из основных компонентов системы автоматизированного проектирования (САПР) является математическое обеспечение, включающее математические модели объектов проектирования и их элементов, методы и алгоритмы выполнения проектных операций и процедур.
Развитие автоматизированного проектирования прошло несколько стадий. Вначале ЭВМ применялась лишь для выполнения вычислений по методикам, ориентированным на ручное решение. Это не вносило ничего нового в процесс проектирования, а лишь ускоряло выполнение отдельных его этапов. Затем начали использовать математические модели, позволяющие имитировать функционирование объектов проектирования, что позволило обеспечить повышение точности получаемой информации, организовать поиск оптимальных проектных решений и достичь универсальности описания отдельных проектных операций и процедур. Были разработаны единые подходы к получению математических моделей для целых классов технических объектов и эти подходы удалось формализовать. В результате процесс формирования математической модели оказалось возможным возложить непосредственно на ЭВМ. В дальнейшем основные усилия были направлены на разработку стратегии и методологии автоматизированного проектирования.
Полностью формализовать и автоматизировать процесс проектирования практически невозможно и нецелесообразно. На этапах разработки концепции технической системы, формирования технического задания, выбора технического решения, синтеза структуры, принятия решений и др. действия конструктора, основанные на его опыте и интуиции, как правило, непредсказуемы и не поддаются формализации. САПР предусматривает тесное 2. Зак. 3006
10
взаимодействие человека и ЭВМ. Это один из основополагающих принципов построения САПР. Вместе с тем все виды проектных работ, которые можно формализовать, должны быть автоматизированы. В этой связи важнейшая роль принадлежит математическому моделированию. При создании САПР необходима не только математическая модель создаваемого технического объекта, но и модели реализации все#' проектных операций и процедур.
Для разработки эффективной технологии автоматизированного проектирования необходимо детальное представление обо всех этапах и стадиях создания объекта с тем, чтобы осуществить их формализацию и математическое описание.
Наибольший эффект может дать автоматизация самых ранних этапов проектирования, когда осуществляется выбор технического решения. САПР позволяет просмотреть множество вариантов и отобрать несколько наилучших для дальнейшей детальной проработки и окончательного выбора. Как отмечал авиаконструктор П.О. Сухой, ошибку, допущенную при «завязке» проекта, уже не исправить совершенством инженерных расчетов и чертежными автоматами. Однако алгоритмы выполнения проектных работ на этих этапах и способы принятия решений еще недостаточно отработаны.
Высокий технический уровень изделия достигается в значительной мере на этапе функционального проектирования, на котором определяются основные параметры объекта. Проектные решения при этом в значительной мере определяют его качество. При недостаточной проработке проекта затраты на обеспечение качества, обусловленные необходимостью последующей доводки конструкции, достигают 10...20% от полной стоимости продукции. При этом 50...70% общих причин дефектов продукции связано с ошибками в проектно-конструкторских решениях, 20...30% — с недостатками технологических процессов, 5... 15% возникают по вине рабочих. Поэтому главная задача конструктора состоит в том, чтобы выявить и устранить потенциальные источники дефектов еще на стадии проектирования.
Операции и процедуры функционального проектирования, как правило, почти полностью поддаются формализации, что в конечном итоге создает необходимые условия для определения и выбора оптимальных параметров и структуры технического объекта. При этом используются математические модели создаваемых объектов, модели оценки и принятия решений, которые в виде соответствующих алгоритмов реализуются при проектировании.
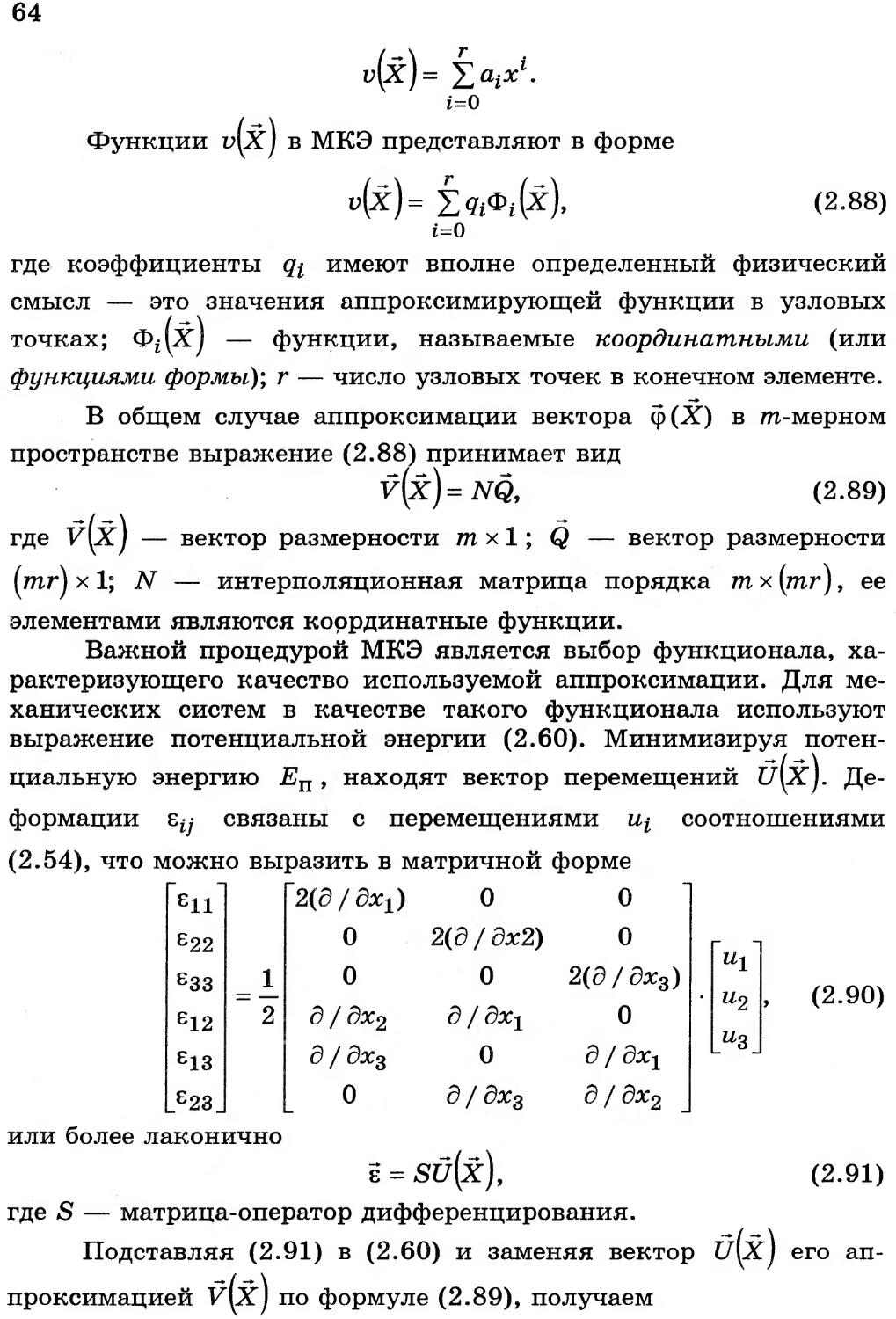
При решении задач синтеза структуры, моделировании процессов функционирования объектов с переменной структурой возникает необходимость постоянного изменения математической
модели. Поэтому большое внимание уделяется методам автоматизированного формирования математических моделей.
На различных этапах и стадиях проектирования сложной технической системы используются различные математические модели. На ранних стадиях обычно модели простые, но чем подробнее проработка проекта, тем сложнее нужна модель. Математические модели могут представлять собой системы дифференциальных уравнений (обыкновенных или в частных производных), системы алгебраических уравнений, простые алгебраические выражения, бинарные отношения, матрицы и др. Сложные модели требуют больших затрат времени на проведение вычислительных экспериментов. Системы уравнений таких моделей обычно отличаются плохой обусловленностью, что создает проблемы обеспечения устойчивости вычислительного процесса, достижения необходимой точности при приемлемых затратах времени.
Поскольку все проектные работы носят оптимизационный характер, то решать системы уравнений для получения искомого результата приходится многократно. Ситуация усугубляется также многомерностью и многокритериальностью задач. На заключительных этапах проектирования часто приходится использовать вероятностные модели, с тем чтобы исследовать процессы функционирования технической системы в условиях, максимально приближенных к реальным.
Если САПР потребует слишком больших затрат времени на разработку проекта • изделия, то она вряд ли получит широкое практическое применение.
Отмеченные факторы указывают на необходимость поиска способов ускорения обработки информации и применения эффективных технологических маршрутов выполнения проектных работ. Глубокое знание этих вопросов и умение выбрать правильное решение при создании САПР может принести значительный эффект в сокращении материальных и временных затрат на проектирование.
Приведены основные сведения о моделировании технических объектов применительно к современной методологии автоматизированного проектирования, дана классификация математических моделей.
При автоматизированном проектировании используются теоретические и экспериментальные, детерминированные и вероятностные, статические и динамические, структурные и функциональные модели и др. Рассмотрены методы получения этих моделей, в том числе методы планирования эксперимента, регрессионного и корреляционного анализа. Значительное место отведено изложению методов оптимизации.
Особое внимание уделено разработке алгоритмов формирования математических моделей сложных технических систем из
12
моделей элементов, что позволяет автоматизировать процесс формирования и осуществлять его непосредственно на ЭВМ.
Рассмотрены вопросы дискретизации непрерывных систем, элементного структурирования и построения динамических моделей. Показаны аналогии динамических систем различной физической природы и математических моделей их элементов.
Изложены методы анализа статических состояний и переходных процессов технических объектов на основе использования численных методов решения систем алгебраических и дифференциальных уравнений. Показаны способы улучшения обусловленности систем уравнений.
Рассмотрены проблемы постановки и решения задач оптимизации.
В учебнике дано целостное представление о проблемах математического моделирования технических объектов.
1. ОБЩИЕ СВЕДЕНИЯ О МОДЕЛИРОВАНИИ ТЕХНИЧЕСКИХ СИСТЕМ
1.1. МЕТОДОЛОГИЯ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
Создание нового технического объекта — сложный и длительный процесс, в котором стадия проектирования имеет решающее значение в осуществлении замысла и достижении высокого технического уровня. Под техническим объектом в дальнейшем понимается техническая система — машина, механизм, технический комплекс, технологический процесс, а также любой их компонент, выделяемый в процессе проектирования путем декомпозиции (деления) структуры целостного объекта на отдельные блоки, части, элементы и т.п.
Современная методология проектирования базируется на системном подходе. Технический объект при системном подходе рассматривается как сложная система, состоящая из взаимосвязанных, целенаправленно функционирующих элементов и находящаяся во взаимодействии с окружающей внешней средой. Это позволяет учесть все факторы, влияющие на его функционирование, и обеспечить создание технического объекта с высокими показателями эффективности и качества.
Одно из важнейших требований системного подхода заключается в необходимости рассматривать существование и функционирование технического объекта во времени и в пространстве.
Описание существования объекта во времени приводит к понятию жизненного цикла, а в пространстве — к понятию внешней среды, с которой взаимодействует объект в процессе функционирования.
Жизненный цикл технического объекта представляет собой совокупность взаимосвязанных процессов создания и последовательного изменения его состояния от формирования исходных требований к объекту до окончания его эксплуатации. Жизненный цикл состоит из следующих стадий: создание, производство, обращение и эксплуатация. Каждая из стадий содержит целый ряд этапов, операций и процедур. Важно отметить, что все стадии жизненного цикла имеют прямые и обратные связи. Прямые связи очевидны. Так, качество проекта определяет надежность и эффективность технического объекта. Надежность сказывается на производственных и эксплуатационных издержках, а эффективность характеризует основные эксплуатационные свойства объекта (производительность, экономичность и др.). Но высокая эффективность новых разработок, в свою очередь, достижима лишь при учете результатов эксплуатации существующего технического объекта (или его аналога) и анализа технологических аспектов их производства. В этом случае имеют место обратные связи.
Сложность и взаимосвязанность процессов жизненного цикла требует глубокого и целенаправленного их изучения. Для этого широко используется математическое моделирование. Моделирование применяется на всех стадиях жизненного цикла. Посредством моделирования осуществляется решение исследовательских, поисковых, проектно-конструкторских и эксплуатационных задач. На этапе доводки конструкции приходится моделировать процессы функционирования технического объекта для выявления причин неудовлетворительных показателей надежности (поломки, преждевременный износ и др.) или эффективности (не достигается расчетная производительность, повышенный удельный расход энергии, низкие показатели качества переходных процессов и др.). В период эксплуатации технического объекта моделирование осуществляется с целью определения наиболее эффективных режимов функционирования, целесообразных областей и условий использования и т.п.
Процесс создания разделяется на стадии: предпроектные исследования, техническое задание, техническое предложение, эскизный проект, технический проект, рабочий проект, изготовление опытных образцов, испытания и доводка, приемочные испытания. Первые две стадии и частично третья составляют этап внешнего проектирования, на котором осуществляется научно-технический поиск и прогнозирование, формирование описания среды функционирования технического объекта, моделирова
ние и исследование, направленные на разработку концепции и технического решения. Этап внешнего проектирования, называемый также этапом научно-исследовательских работ (НИР), завершается разработкой технического задания.
Остальные стадии относятся к внутреннему проектированию и составляют этап опытно-конструкторских работ (ОКР), в процессе которого определяются и конкретизируются основные функциональные и конструктивные параметры, определяющие технико-экономические показатели и облик создаваемого технического объекта.
Решение проблемы создания нового технического объекта базируется на всесторонне обоснованной концепции и вытекает из безусловных потребностей общества, необходимости практической реализации достигнутого научного потенциала и повышения показателей эффективности.
Концепция определяется как комплекс требований к техническому объекту для выполнения его назначения и содержит описание основы функционирования объекта.
Кроме выделения стадий осуществляется декомпозиция процесса проектирования в зависимости от степени абстрагирования, характера отображаемых свойств объекта, его структуры, принятой схемы распределения работ между подразделениями проектно-конструкторской организации и др.
Декомпозиция приводит к выделению составных частей объекта (блоков), иерархических уровней, аспектов. Это позволяет сложную задачу проектирования свести к решению более простых задач с учетом взаимодействия между ними. Каждая задача решается на основе локальной оптимизации, но декомпозиция критериев при этом осуществляется таким образом, чтобы локальные цели были подчинены конечной цели проектирования. Следовательно, концепция системности выражается не только в выделении взаимозависимых и взаимодействующих элементов технического объекта как системы, но и в единстве целей их функционирования. Кроме того, технический объект, в свою очередь, рассматривается как элемент более сложной системы (надсистемы), в состав которой входит ряд объектов внешней среды, взаимодействующих с данным техническим объектом.
Таким образом, методология автоматизированного проектирования базируется на системном подходе, использующем принципы декомпозиции, иерархичности, итеративности, локальной оптимизации и комплексного осуществления процесса проектирования, включающего функциональный, конструкторский и технологический аспекты.
Аспекты различаются характером решаемых задач и используют различные описания.
16
Функциональный аспект включает отображение основных принципов функционирования, характера физических и информационных процессов в объекте. При функциональном проектировании осуществляется синтез структуры и определяются основные параметры объекта и его составных частей (элементов), оцениваются показатели эффективности и качества процессов функционирования. Результат проектирования — принципиальные, функциональные, кинематические, алгоритмические схемы и сопровождающие их документы.
Функциональное проектирование осуществляется практически на всех стадиях и этапах создания технического объекта и при этом многократно повторяется по мере раскрытия неопределенностей, характерных для начальных этапов.
Конструкторский аспект — это реализация результатов функционального проектирования. При конструкторском проектировании разрабатываются компоновки и рабочие чертежи деталей, осуществляется выбор стандартных и унифицированных элементов, материалов деталей, оформляется конструкторская и эксплуатационная документация.
При этом определяются оптимальные конструктивные параметры — размеры и форма деталей, сборочных единиц и т.п., обеспечивающие минимальные массу и габариты, равнопрочность элементов конструкции при заданном ресурсе.
Технологический аспект включает реализацию результатов конструкторского проектирования, т.е. их материализацию в виде физического изделия (машины, технической системы и т.п.). Технологическое проектирование решает задачи технологической подготовки производства. Разрабатываются технологические маршруты изготовления деталей, сборки, наладки и технологических испытаний изготавливаемых изделий, осуществляется выбор оборудования, оснастки, инструмента и т.д.
Кроме рассмотренной иерархии этапов, стадий и аспектов проектирования иерархические уровни выделяют на основе блочного структурирования технического объекта по функциональным признакам, а также в связи с различной степенью абстрагирования при описании физических свойств технического объекта на разных этапах и стадиях проектирования.
При блочном структурировании вначале выделяют крупные блоки, составляющие верхний иерархический уровень, затем каждый блок расчленяют на более мелкие блоки, входящие в следующий уровень, и т.д. вплоть до неделимых элементов (деталей), составляющих нижний уровень иерархии. Например, блоки верхнего иерархического уровня автомобиля: двигатель, трансмиссия, ходовая часть и др. В трансмиссию входят блоки: сцепление, коробка передач, карданная передача, главная передача, дифференциал. Каждый из них может быть, в свою очередь, расчленен на более мелкие блоки.
17
С другой стороны, технический объект и выделяемые по функциональным признакам блоки могут быть структурированы по степени абстрагирования (детальности описания физических свойств). В этом случае возникают три иерархических уровня'. верхний называют метауровнем, средний — макроуровнем и нижний — макроуровнем. Характерные особенности этих уровней будут рассмотрены в разделе 1.5. *
1.2. СТРУКТУРА И ПАРАМЕТРЫ
ОБЪЕКТОВ ПРОЕКТИРОВАНИЯ
Структура — это упорядоченное множество элементов и их отношений.
Технический объект при системном подходе рассматривается как система, состоящая из взаимодействующих элементов, составляющих упорядоченное множество.
Структура технического объекта характеризуется качественным и количественным составом элементов и их взаиморасположением или взаимосвязями. Качественное различие элементов определяется их физическими свойствами. Количественно физические свойства элементов выражаются некоторыми скалярными величинами, называемыми параметрами элементов.
Характеристики функционирования технического объекта зависят от его физических свойств и внешних воздействий окружающей среды.
Физические свойства объекта определяются его структурой и параметрами элементов, из которых он состоит. Внешние воздействия зависят от физических свойств внешней среды и характера ее взаимодействия с техническим объектом. Физические свойства внешней среды также определяются ее параметрами.
Параметр — это величина, характеризующая свойство или режим работы объекта. Под объектом здесь понимается как отдельный элемент технической системы, так и вся система в целом. Следует отметить, что параметрами технической системы являются показатели качества и эффективности', производительность, рабочая скорость, грузоподъемность, удельная материалоемкость, удельная энергоемкость, габариты, масса, показатели надежности, показатели качества переходных процессов и др. Эти параметры называют выходными параметрами технического объекта.
Если структура технического объекта определена, то его выходные параметры зависят только от параметров элементов и параметров внешней среды. Различают внутренние и внешние параметры.
Внутренние параметры — это параметры элементов, из которых состоит технический объект. Например, двигатель и
18
трансмиссия являются элементами автомобиля. Выходные параметры их — мощность двигателя, передаточные числа трансмиссии и одновременно это внутренние параметры автомобиля.
Выходные параметры характеризуют свойства технического объекта, а внутренние параметры — свойства его элементов.
При переходе к новому иерархическому уровню проектирования внутренние параметры могут стать выходными и наоборот.
Внешние параметры — это параметры внешней среды, оказывающей влияние на функционирование технического объекта. Например, для автомобиля внешняя среда — дорога и воздушная среда. Параметры дороги включают в себя углы продольного и поперечного уклонов, коэффициенты сопротивления качению и сцепления колес с дорогой. Параметры воздушной среды — плотность и относительная влажность воздуха, скорость и направление ветра.
1.3. ОСОБЕННОСТИ ТЕХНОЛОГИИ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
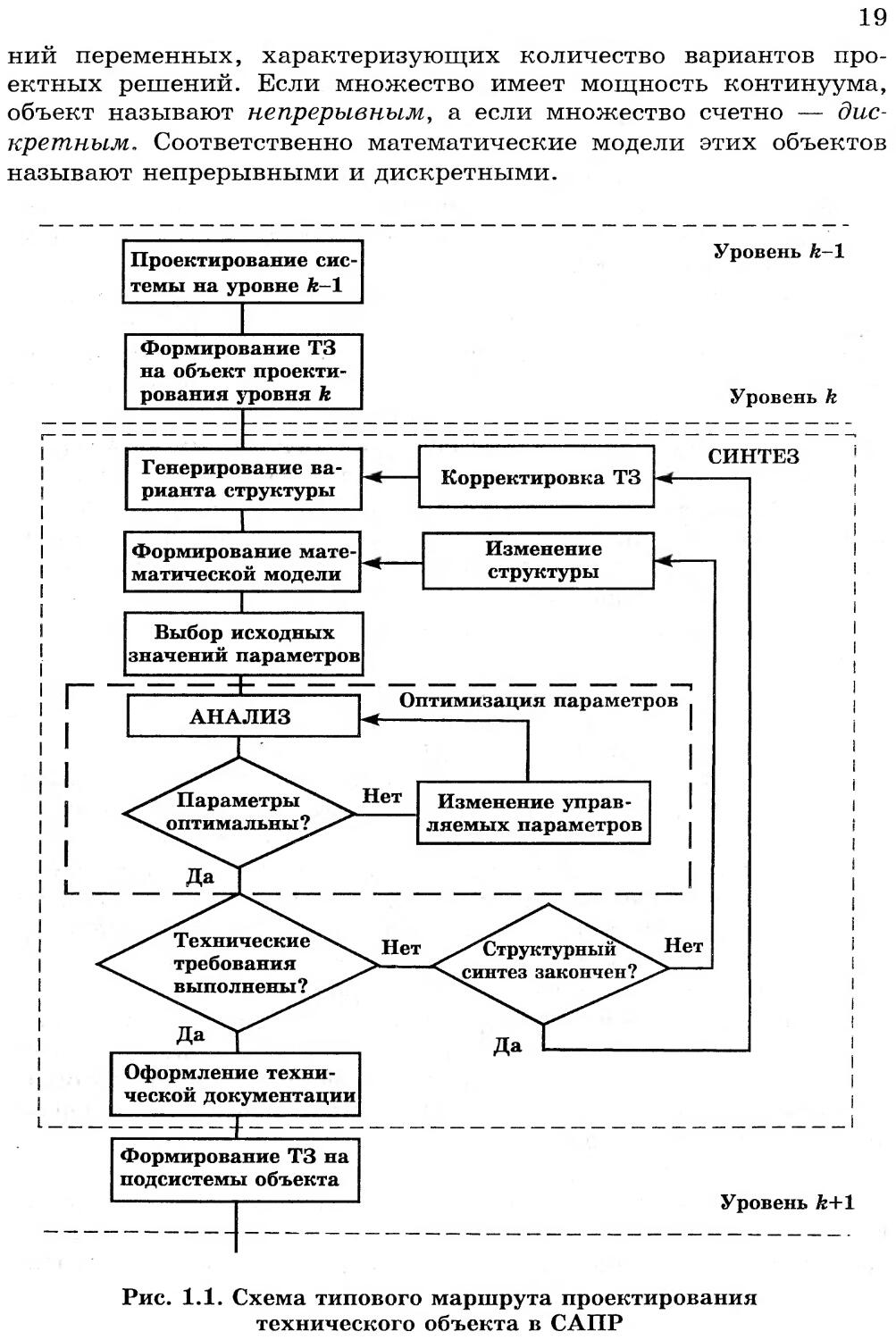
Технология автоматизированного проектирования технических объектов базируется на изложенной в разделе 1.1 методологии. Схема типового маршрута проектирования технического объекта в среде САПР представлена на рис. 1.1. Основные компоненты маршрута предусматривают выполнение процедур анализа и синтеза, выступающих в диалектическом единстве.
Анализ технического объекта — это изучение его физических свойств, характеризуемых выходными параметрами. При анализе не создаются новые объекты, а исследуются заданные на основе изучения процессов их функционирования. Для этого проводятся вычислительные эксперименты с использованием математических моделей объектов.
Синтез технического объекта — это создание новых вариантов, обеспечивающих заданный алгоритм функционирования и выполнение технических требований к объекту.
Если определяют наилучшие в некотором смысле структуру и параметры, то синтез называют оптимизацией. При определении оптимальных значений параметров говорят о параметрической оптимизации. Задачу выбора оптимальной структуры называют структурной оптимизацией.
Декомпозиция и иерархичность процесса проектирования технического объекта обусловливают многообразие решаемых задач, их целей и используемых математических моделей на различных стадиях и этапах. Разнообразие учитываемых при этом физических свойств разделяет объекты на дискретные и непрерывные. Это различие определяется мощностью множества значе
19
ний переменных, характеризующих количество вариантов проектных решений. Если множество имеет мощность континуума, объект называют непрерывным, а если множество счетно — дискретным. Соответственно математические модели этих объектов называют непрерывными и дискретными.
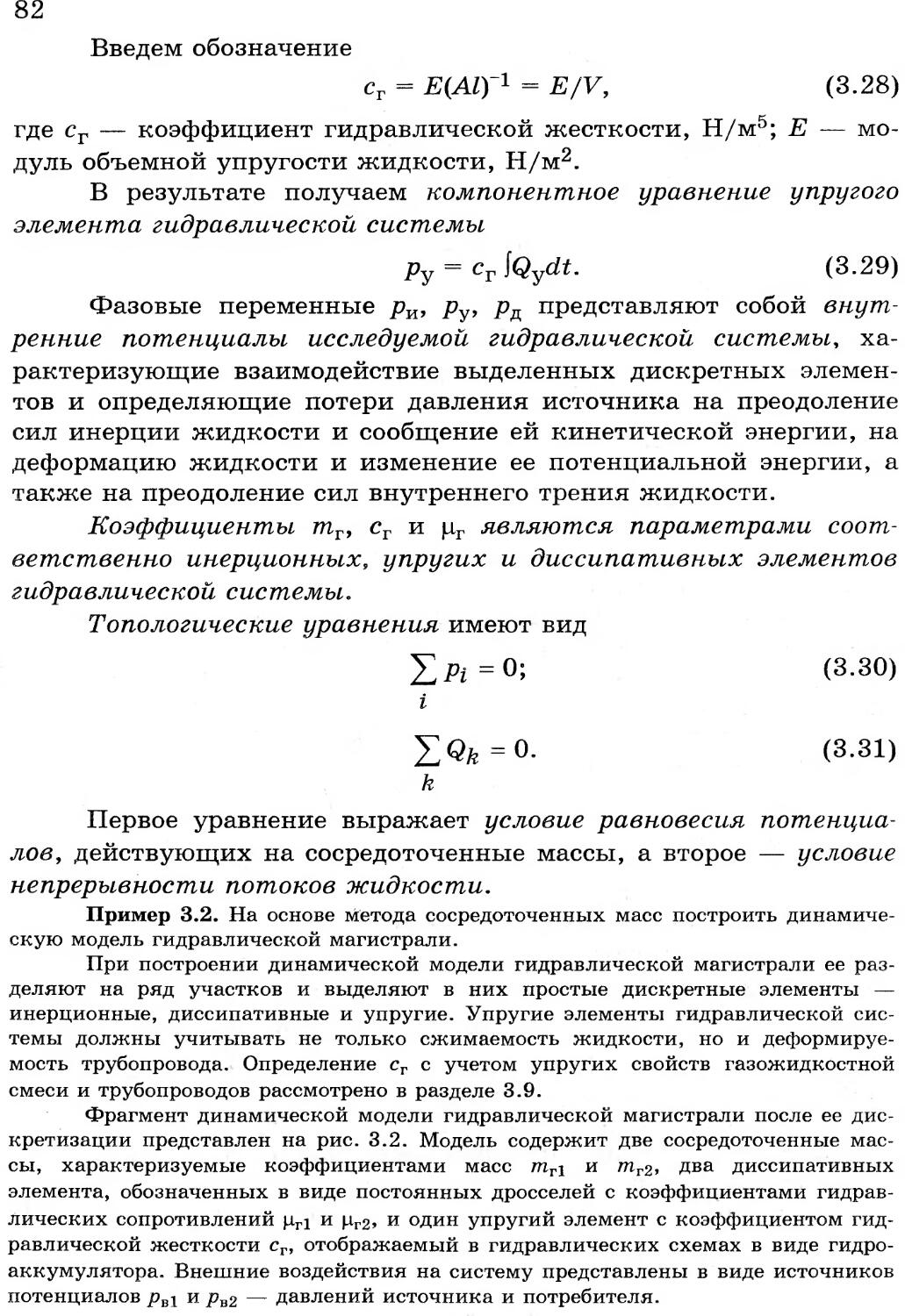
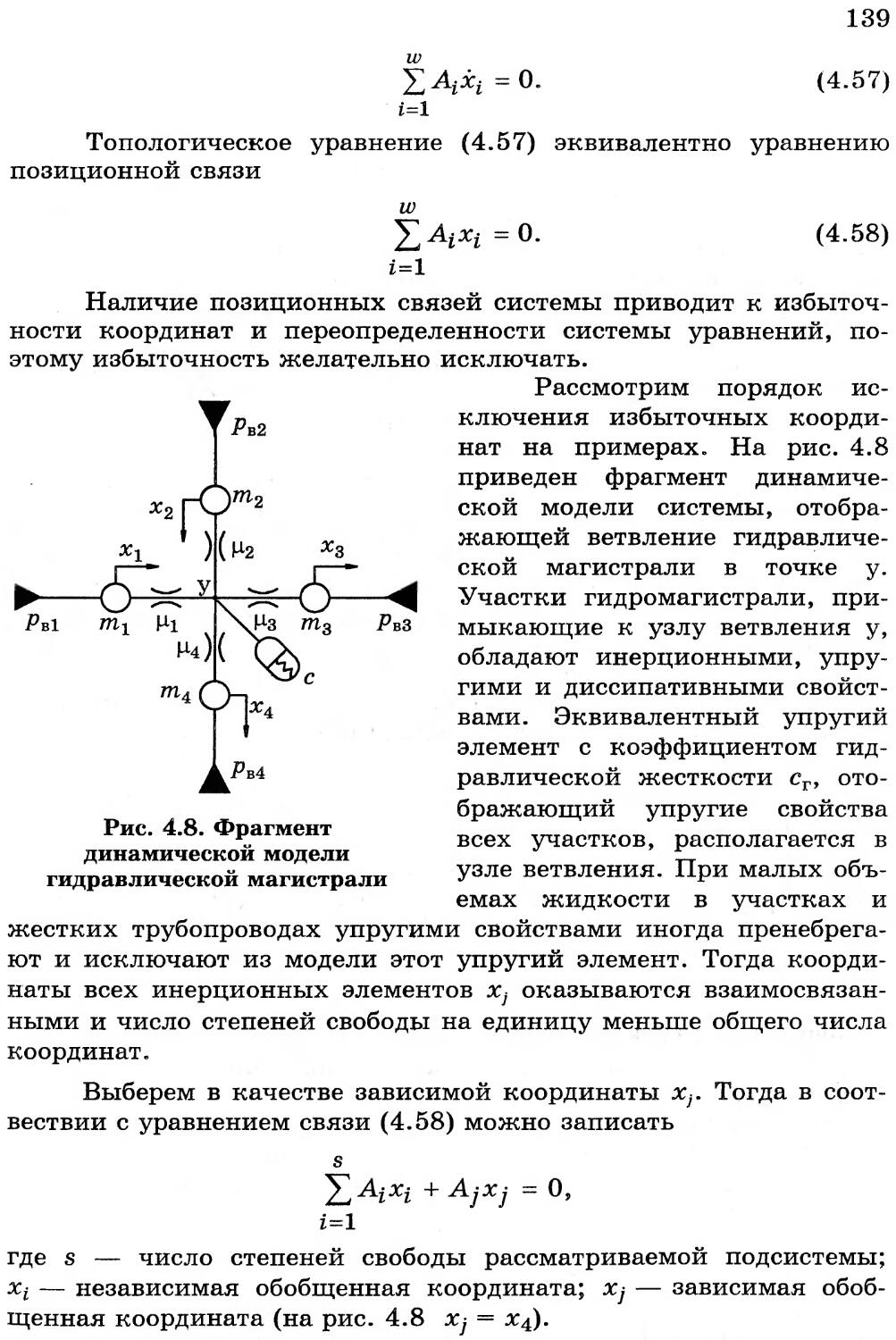
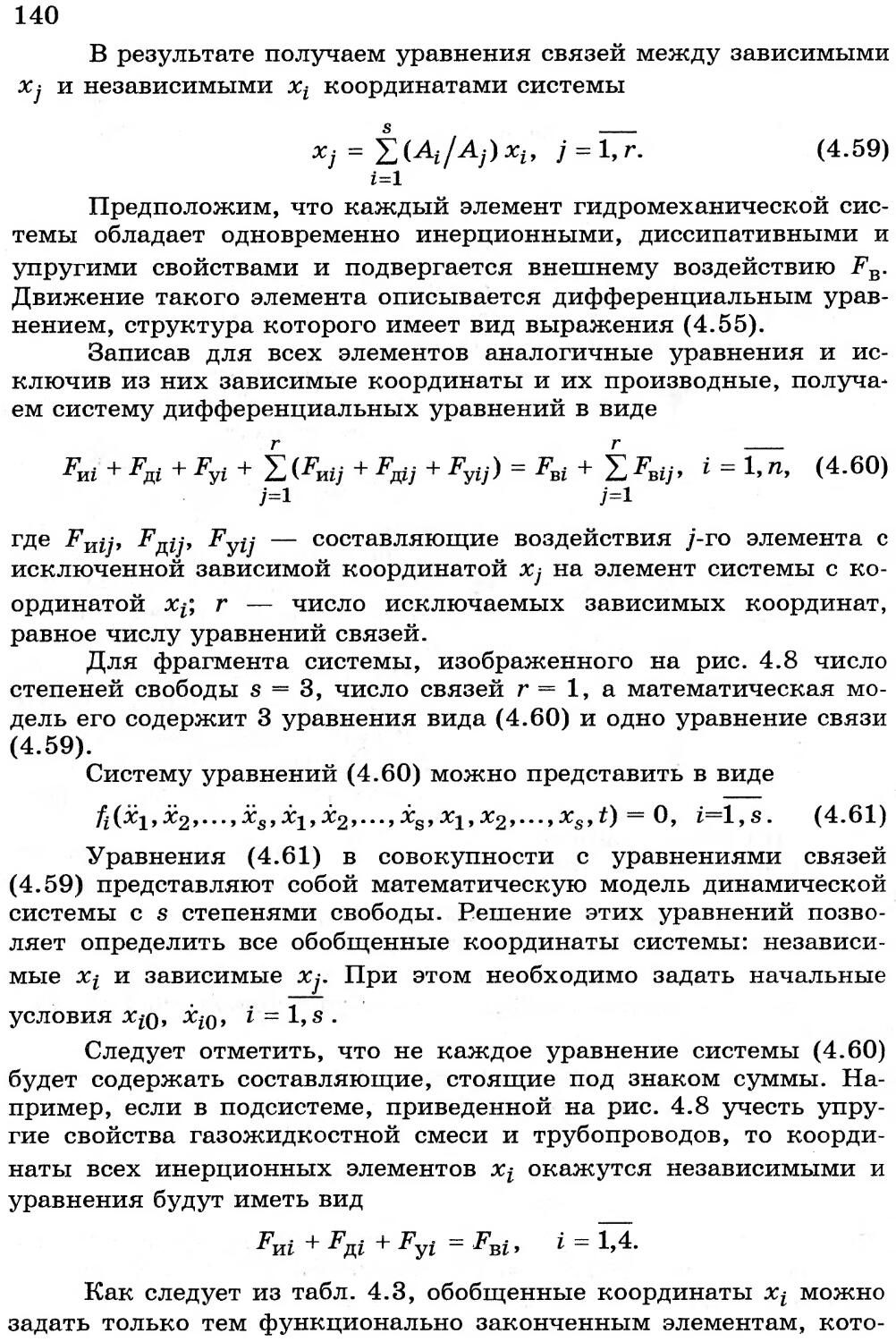
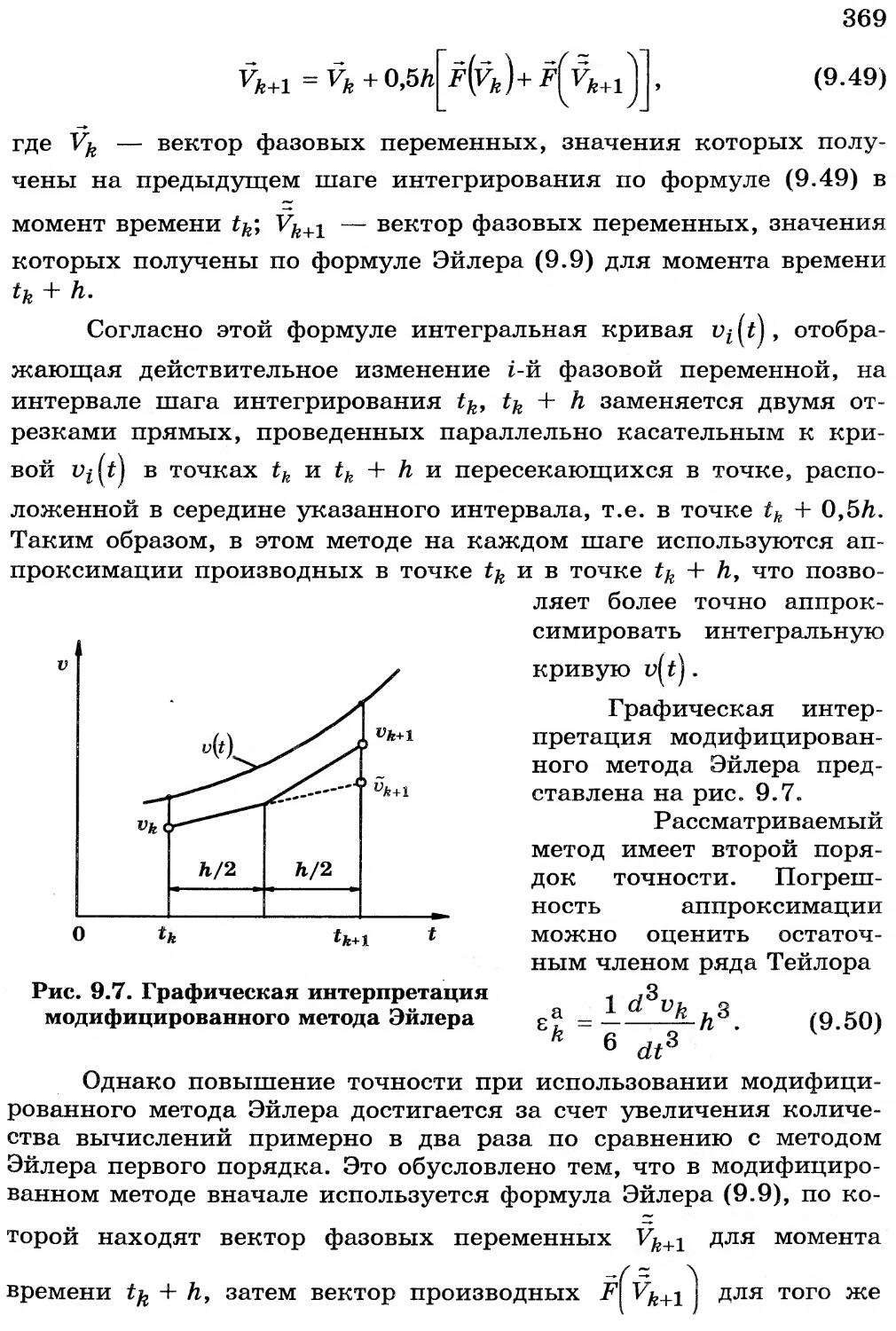
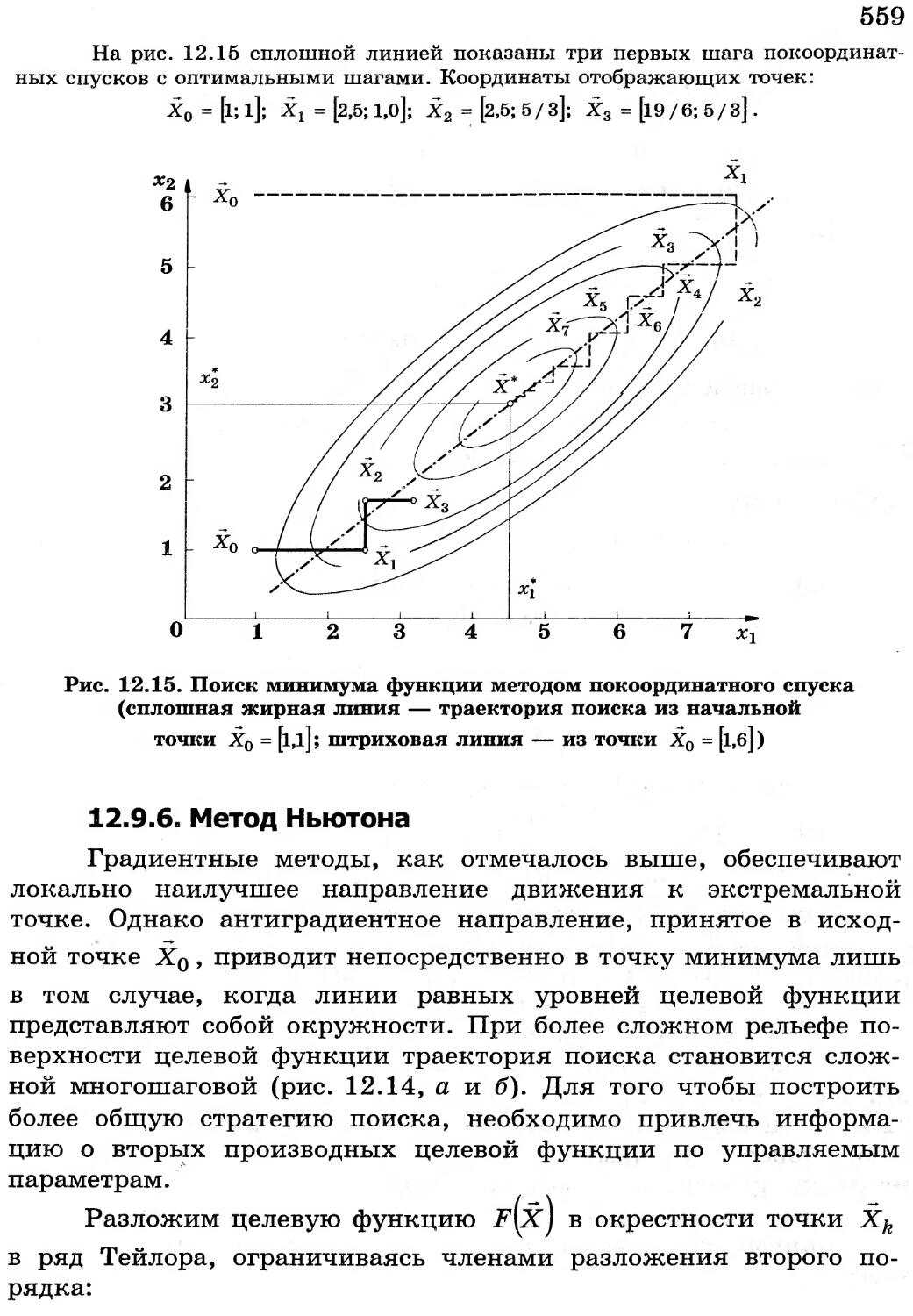
Рис. 1.1. Схема типового маршрута проектирования технического объекта в САПР
20
В общем случае задачей синтеза является определение структуры и параметров технического объекта. В связи с различием математических моделей непрерывных и дискретных объектов методы решения задач их синтеза различны.
Рассмотрим подробнее проектирование непрерывного объекта на основе маршрута, приведенного на рис. 1.1. Объектом проектирования может быть любой элемент технического объекта, выделенный в результате декомпозиции.
Формализовать и автоматизировать процедуру синтеза структуры в большинстве случаев весьма сложно, поэтому синтез структуры объекта обычно осуществляется путем перебора возможных вариантов, генерируемых эвристическими методами. Для каждого варианта структуры формируется своя математическая модель и выбираются исходные значения внутренних параметров. Сравнивать альтернативные варианты структур можно лишь после определения оптимальных параметров элементов объекта. При этом для каждого варианта осуществляется имитация процесса функционирования объекта и определяются его выходные параметры — показатели качества и эффективности, которые используются для оценки оптимальности анализируемого варианта.
Математические описания элементов структуры проектируемого объекта известны и хранятся в базе данных. В результате формирование математической модели представляет собой по существу синтез абстрактной модели объекта. Процедура синтеза при этом легко формализуется и может быть автоматизирована.
Оптимизации подлежат обычно не все параметры объекта, а только некоторая их часть. Это обусловлено тем, что при проектировании технических объектов широко используются стандартные и унифицированные элементы, параметры которых не могут быть изменены. Параметры элементов объекта, подлежащие оптимизации, называют управляемыми параметрами.
При проектировании часто ограничиваются сравнением нескольких альтернативных вариантов структур, а иногда поиск решения заканчивают, если найден вариант, удовлетворяющий заданным техническим требованиям. Такое проектное решение называют допустимым.
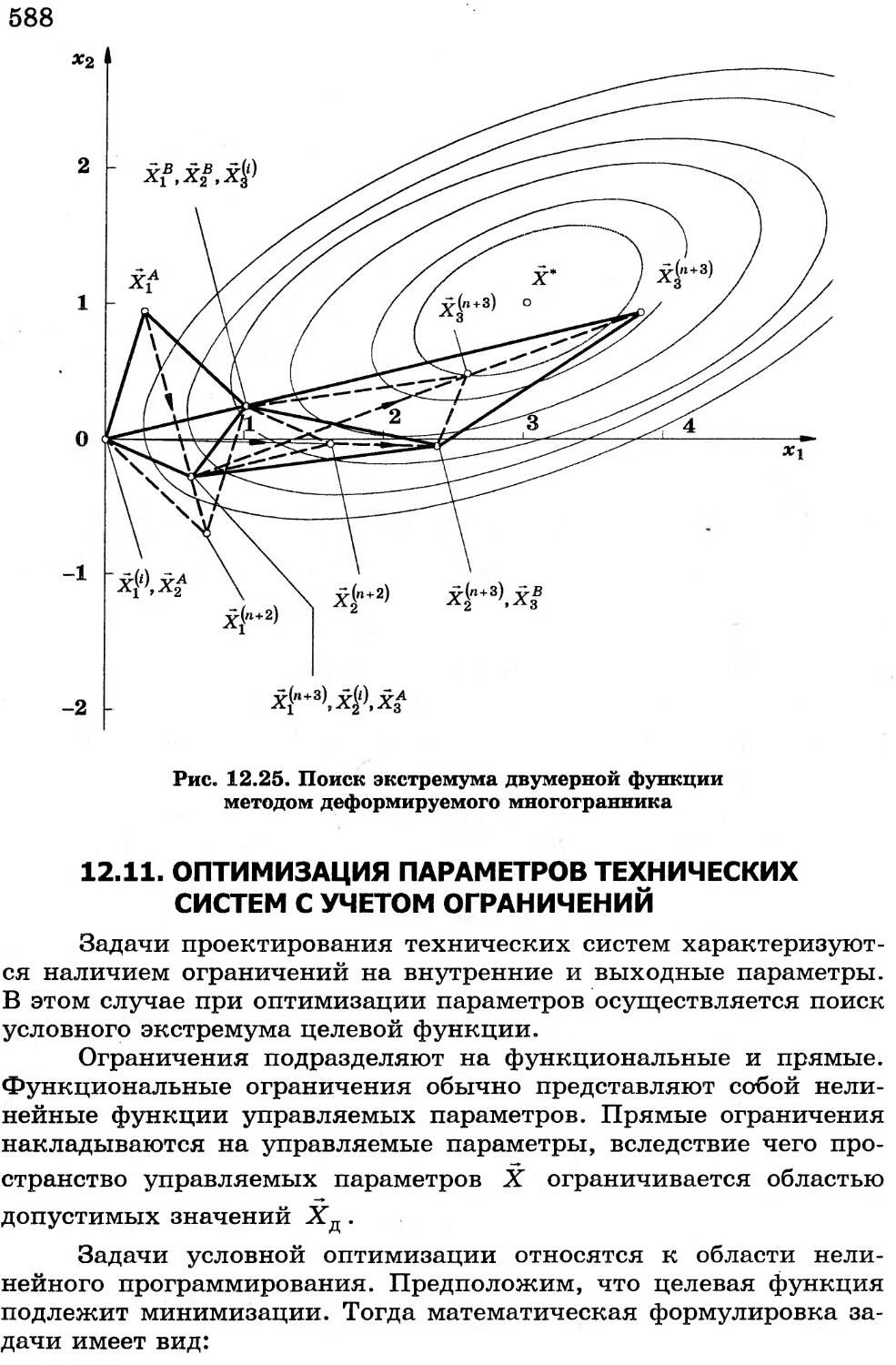
Если сравнивается ограниченное число вариантов структур, то основными компонентами технологического маршрута проектирования являются: синтез структуры, анализ и оптимизация параметров вариантов структур, процедура оценки и принятия решения.
21
1.4. ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ
Рассмотрим общие вопросы постановки задач проектирования, полагая, что проектирование технического объекта осуществляется в среде САПР в соответствии со схемой типового маршрута, приведенной на рис. 1.1.
Техническое задание на проектирование обычно представляет собой вербальное (словесное) описание целей и задач проектирования данного объекта. Эти задачи, как отмечалось ранее, носят оптимизационный характер. Для осуществления проектирования конкретного технического объекта необходима его математическая модель и формализация понятия «оптимальный». В этом и заключается существо постановки задачи.
Результатом выполнения маршрута проектирования являются проектное решение и проектные документы, содержащие информацию о структуре и выходных параметрах технического объекта и о параметрах его элементов (внутренних параметрах объекта) при заданных внешних параметрах.
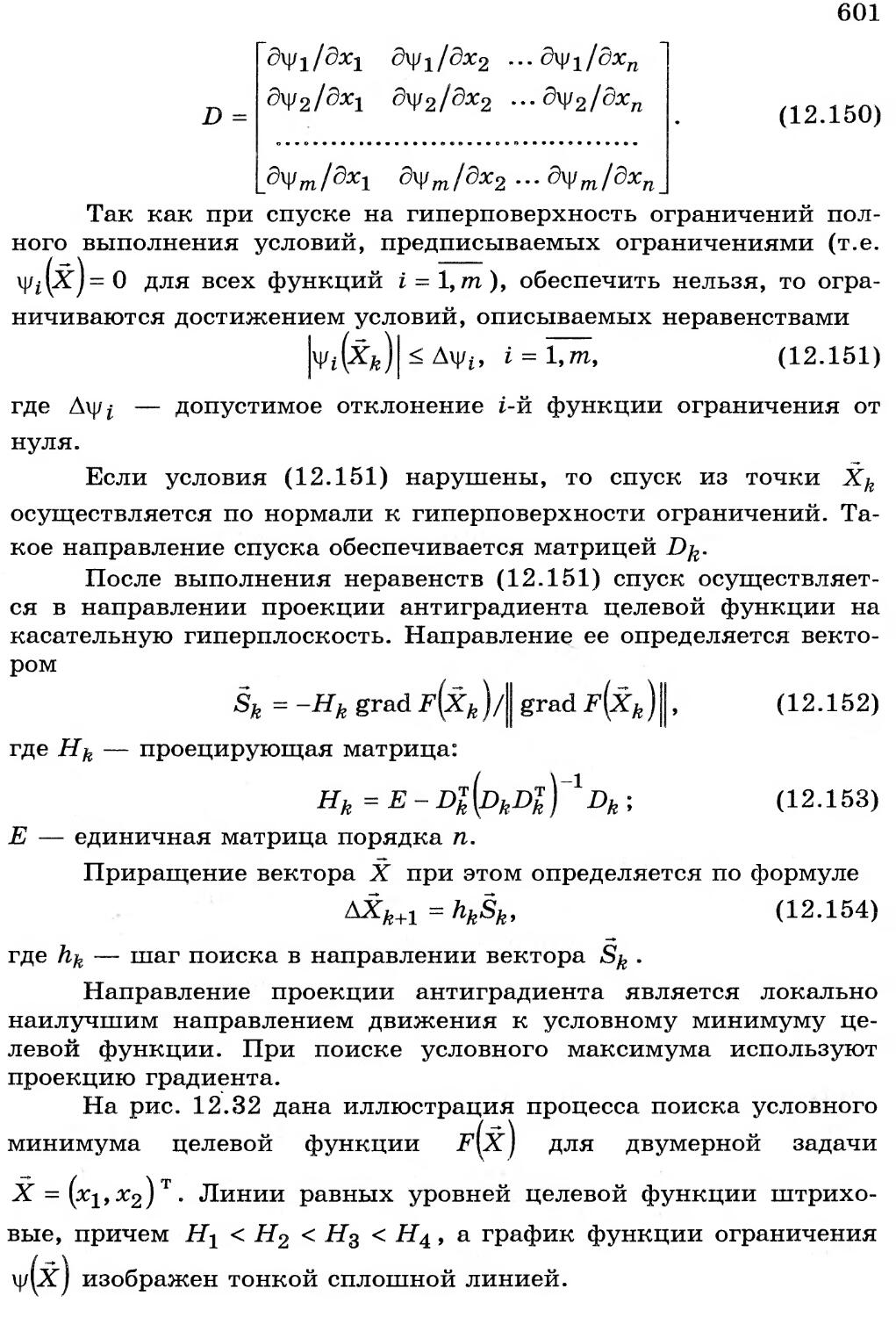
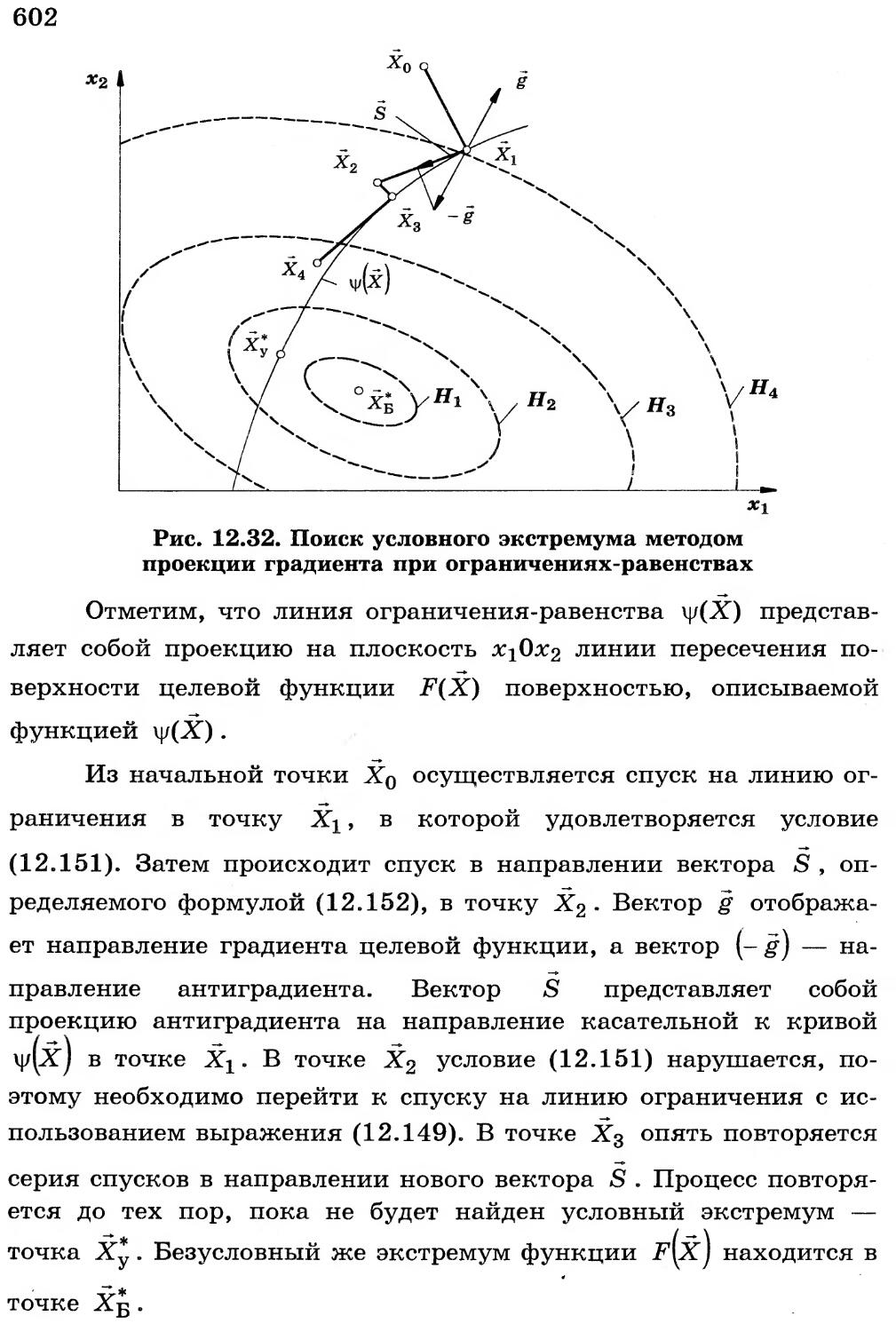
В общем случае задача проектирования имеет следующую математическую формулировку: определить структуру и внутренние параметры технического объекта, доставляющие экстремум некоторой скалярной функции при заданных ограничениях ф (X) > О, ф(Х) = О, где X — вектор оптимизируемых параметров.
Функцию f(x) называют целевой функцией или функцией качества. Она количественно выражает качество технического объекта. Эффективность и качество функционирования объекта характеризуются его выходными параметрами, поэтому они выступают в роли критериев оптимальности. Так как физические свойства объекта характеризуются множеством выходных параметров, то задача оказывается многокритериальной.
Процедура постановки задачи проектирования носит неформальный характер и включает следующие этапы: выбор критериев оптимальности, формирование целевой функции, выбор управляемых (оптимизируемых) параметров, назначение ограничений, нормирование управляемых и выходных параметров. Содержание этих этапов будет раскрыто позже при изучении методов оптимизации.
Многокритериальность задачи создает сложности формирования целевой функции и приводит к множеству возможных решений. Выделение некоторого подмножества решений задачи относится к проблеме выбора и принятия решения. Задачей принятия решения называют кортеж а =< W, 0 >, где W — мно
22
жество вариантов решений задачи; 0 — принцип оптимальности, дающий представление о качестве вариантов, в простейшем случае правило предпочтения вариантов. Решением задачи сс называют множество WOK cz W , полученное на основе принципа оптимальности.
Задачи принятия решений классифицируют по наличию информации о множестве W и принципе оптимальности 0 .
Если W и 0 неизвестны, возникает общая задача принятия решения. Это наиболее сложная задача, так как данные для получения WOK определяют в процессе ее решения. Задачу с известным 0 называют задачей выбора, а задачу с известными W и 0 — задачей оптимизации.
Построение W в общем случае является задачей выбора. Следовательно, общую задачу принятия решений можно свести к решению последовательных задач выбора. Информацию о физических свойствах вариантов W при этом доставляет ЭВМ, а выбор осуществляет лицо, принимающее решение (ЛПР), т.е. проектировщик.
Сложность задачи принятия решения обусловлена условиями неопределенности, характерными для начальных стадий проектирования технического объекта. Это приводит к необходимости многократного повторения процедур проектирования по мере раскрытия неопределенностей.
Раздел математической теории принятия решений в условиях неполной определенности называют теорией статистических решений.
1.5. КЛАССИФИКАЦИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
При проектировании технических объектов используют множество видов математических моделей, в зависимости от уровня иерархии, степени декомпозиции системы, аспекта, стадии и этапа проектирования.
На любом уровне иерархии объект проектирования представляют в виде некоторой системы, состоящей из элементов. В этой связи различают математические модели элементов и систем.
При переходе к более высокому иерархическому уровню блочного структурирования система низшего уровня становится элементом системы нового уровня, и наоборот, при переходе к низшему уровню элемент становится системой. В этом случае часто оказывается нецелесообразным использование одних и тех же видов математических моделей на разных уровнях. Обычно чем ниже уровень иерархии блочного структурирования технического объекта, тем более детальное описание его физических свойств.
Следовательно, на низших уровнях используют наиболее сложные математические модели. На высших уровнях могут быть с успехом применены более простые модели. Их можно получить путем аппроксимации моделей низших иерархических уровней.
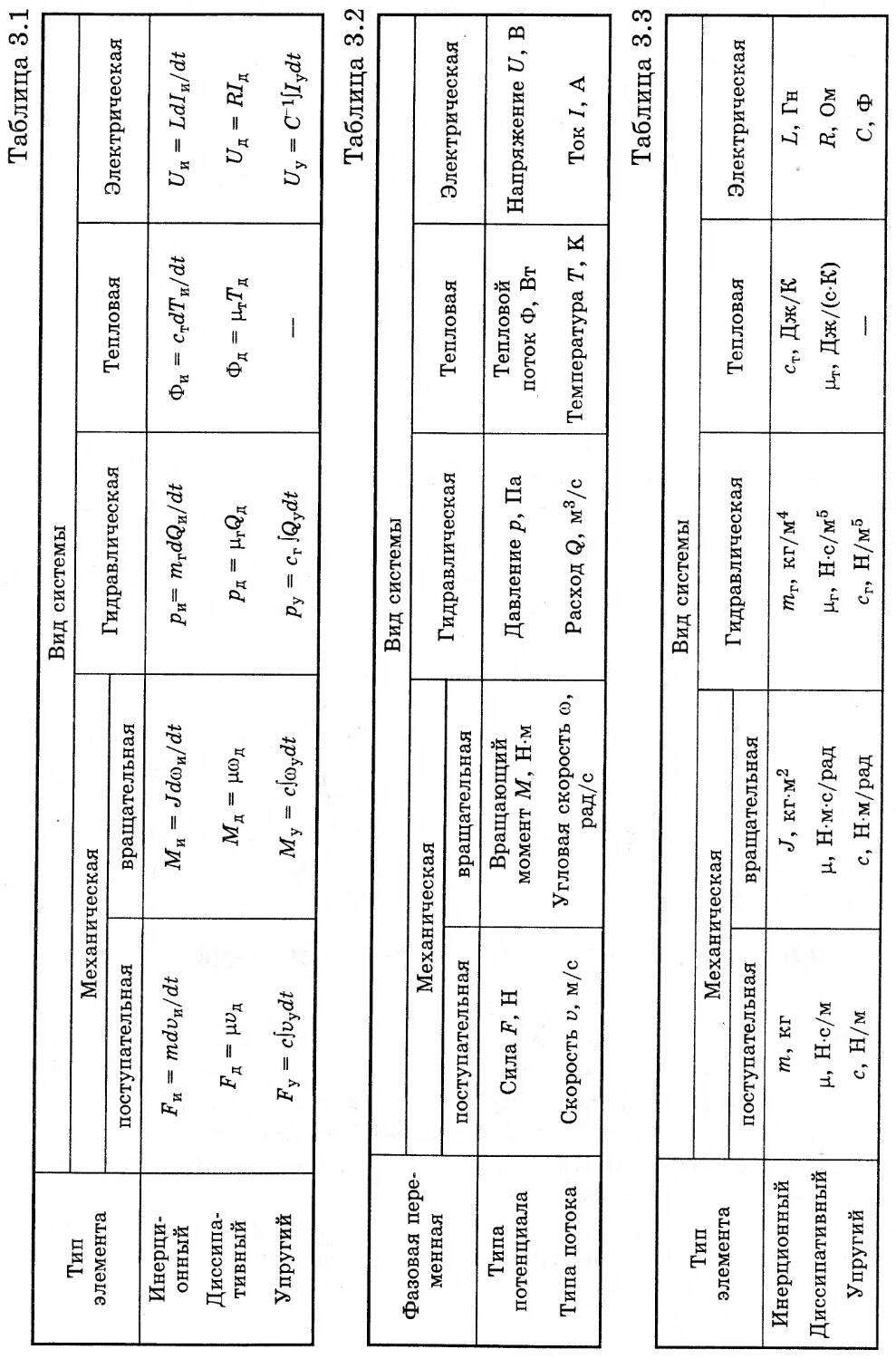
В общем случае уравнения математической модели связывают физические величины, которые характеризуют состояние объекта и не относятся к перечисленным выше выходным, внутренним и внешним параметрам. Такими величинами являются: скорости и силы — в механических системах; расходы и давления — в гидравлических и пневматических системах; температуры и тепловые потоки — в тепловых системах; токи и напряжения — в электрических системах.
Величины, характеризующие состояние технического объекта в процессе его функционирования, называют фазовыми переменными (фазовыми координатами). Вектор фазовых переменных задает точку в пространстве, называемом фазовым пространством. Фазовое пространство, в отличие от геометрического, многомерное. Его размерность определяется количеством используемых фазовых координат.
Обычно в уравнениях математической модели фигурируют не все фазовые переменные, а только часть из них, достаточная для однозначной идентификации состояния объекта. Такие* фазовые переменные называют базисными координатами. Через базисные координаты могут быть вычислены значения и всех остальных фазовых переменных.
К математическим моделям предъявляются требования адекватности, экономичности, универсальности. Эти требования противоречивы, поэтому обычно для проектирования каждого объекта используют свою оригинальную модель.
Модель считается адекватной, если отражает исследуемые свойства с приемлемой точностью. Точность оценивается степенью совпадения предсказанных в процессе вычислительного эксперимента на модели значений выходных параметров с истинными их значениями. Погрешность модели 8 по всей совокупности т учитываемых выходных параметров оценивается одной из норм век-тора eM=(6i, е2,..., ет):
j е [1 : т
= max 8;
ИЛИ
8 — 8М
(1.1)
(1.2)
где 8у — относительная погрешность модели по /-му выходному
параметру:
24
е/ ={yj- У] )/У];
уj — значение j-ro выходного параметра, полученное в результате вычислительного эксперимента на принятой для проектирования математической модели; г/у — значение того же параметра, полученное при испытаниях технического объекта в контролируемых тестовых условиях или в вычислительном эксперименте на более сложной математической модели, точность которой проверена и отвечает принятой норме.
Математические модели технических объектов, используемые при проектировании, предназначены для анализа процессов функционирования объектов и оценки их выходных параметров. Они должны отображать физические свойства объектов, существенные для решения конкретных задач проектирования. При этом математическая модель должна быть как можно проще, но в то же время обеспечивать адекватное описание анализируемого процесса.
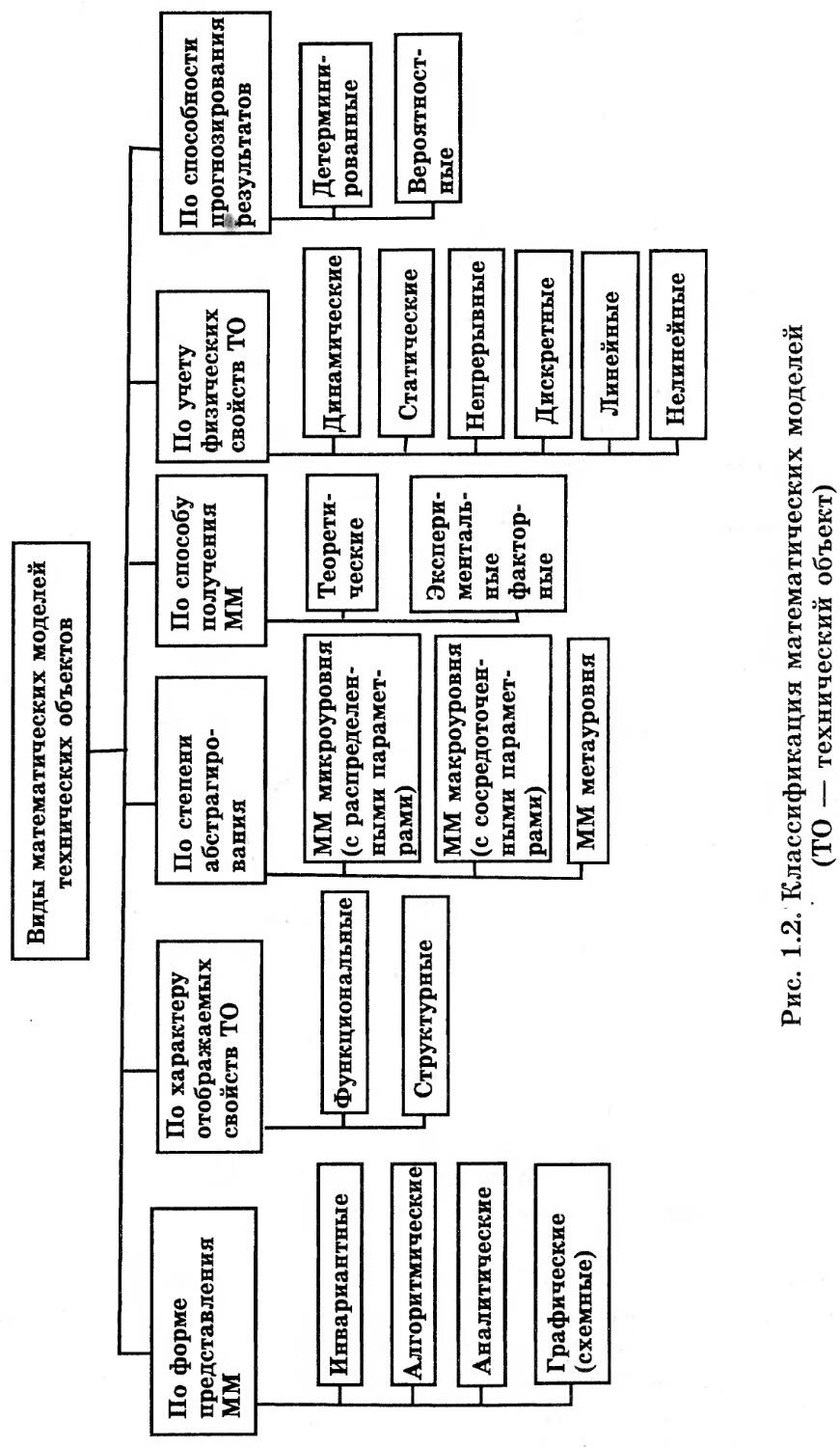
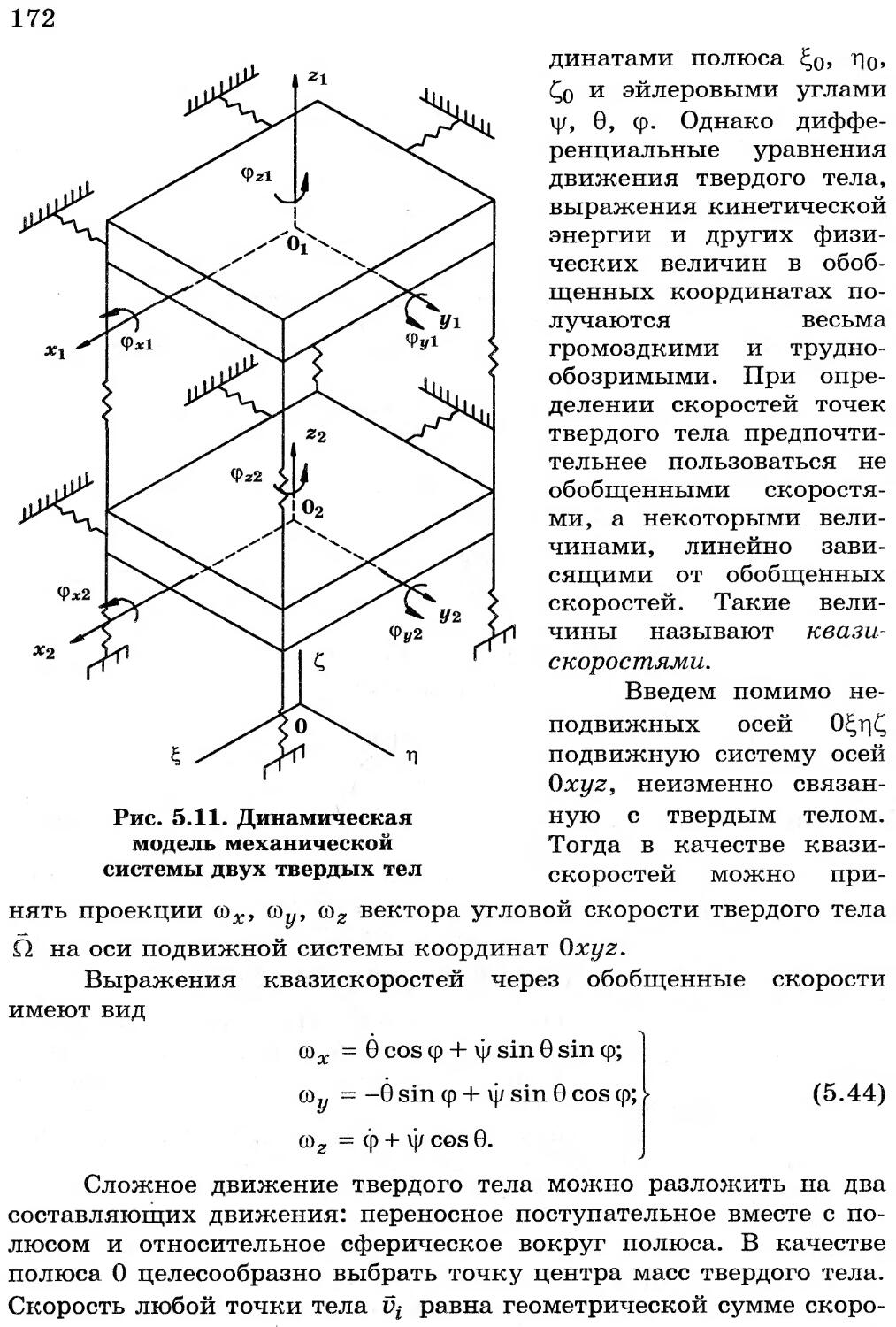
Классификация математических моделей, используемых при проектировании технических систем, приведена на рис. 1.2.
В зависимости от степени абстрагирования при описании физических свойств технической системы различают три основных иерархических уровня: верхний, или метауровень; средний, или макроуровень; нижний, или микроуровень.
Метауровень соответствует начальным стадиям проектирования, на которых осуществляется научно-технический поиск и прогнозирование, разработка концепции и технического решения, разработка технического предложения. Для построения математических моделей метауровня используют методы морфологического синтеза, теории графов, математической логики, теории автоматического управления, теории массового обслуживания, теории конечных автоматов.
На макроуровне объект проектирования рассматривают как динамическую систему с сосредоточенными параметрами. Математические модели макроуровня представляют собой системы обыкновенных дифференциальных уравнений. Эти модели используют при определении параметров технического объекта и его функциональных элементов.
На макроуровне объект представляется как сплошная среда с распределенными параметрами. Для описания процессов функционирования таких объектов используют дифференциальные уравнения в частных производных. На микроуровне проектируют неделимые по функциональному признаку элементы технической системы, называемые базовыми элементами. Примерами таких элементов являются рамы, панели, корпусные детали, валы, дис
25
ки фрикционных механизмов и др. Проектирование их основано на анализе сложнонапряженного состояния. При этом, естественно, базовый элемент рассматривается как система, состоящая из множества однотипных функциональных элементов одной и той же физической природы, взаимодействующих между собой и находящихся под воздействием внешней среды и других элементов технического объекта, также являющихся внешней средой по отношению к базовому элементу.
На всех рассмотренных иерархических уровнях используют следующие виды математических моделей: детерминированные и вероятностные, теоретические и экспериментальные факторные, линейные и нелинейные, динамические и статические, непрерывные и дискретные, функциональные и структурные.
По форме представления математических моделей различают инвариантную, алгоритмическую, аналитическую и графическую модели объекта проектирования.
В инвариантной форме математическая модель представляется системой уравнений (дифференциальных, алгебраических) вне связи с методом решения этих уравнений.
В алгоритмической форме соотношения модели связаны с выбранным численным методом решения и записаны в виде алгоритма — последовательности вычислений.
Аналитическая модель представляет собой явные зависимости искомых переменных от заданных величин (обычно зависимости выходных параметров объекта от внутренних и внешних параметров). Такие модели получают на основе физических законов либо в результате прямого интегрирования исходных дифференциальных уравнений, используя табличные интегралы. К ним относятся также регрессионные модели, получаемые на основе результатов эксперимента.
Графическая (схемная) модель представляется в виде графов, эквивалентных схем, динамических моделей, функциональных, кинематических и алгоритмических схем, диаграмм, циклограмм и т.п. Для использования графических моделей должно существовать правило однозначного соответствия условных изображений элементов графической и компонентов инвариантной математических моделей.
Среди алгоритмических моделей выделяют имитационные модели, предназначенные для имитации физических и информационных процессов, протекающих в объекте при функционировании его под воздействием различных факторов внешней среды.
Математические модели могут представлять собой функциональные зависимости между выходными, внутренними и внешними параметрами:
Виды математических моделей технических объектов
Рис. 1.2. Классификация математических моделей (ТО — технический объект)
Y = F(X,Q),
(1.3)
гдеУ,Х, Q —векторы выходных, внутренних и внешних параметров соответственно: У = (z/y), j = 1,тп; X - (xt), i = 1,п ;
Q = (qk), k=l,l; m, n, I — число выходных, внутренних и внешних параметров соответственно; F(«) — вектор-функция.
Математическая модель вида (1.3) относится к аналитической. Она позволяет легко и просто решать задачи определения оптимальных параметров. Поэтому, если представляется возможность получения модели в таком виде, ее всегда целесообразно реализовать, даже если при этом придется выполнить ряд вспомогательных процедур. Такие модели обычно получают методом планирования эксперимента (вычислительного или физического).
Деление математических моделей на функциональные и структурные определяется характером отображаемых свойств технического объекта.
Структурные модели отображают только структуру объектов и используются при решении задач структурного синтеза. Параметрами структурных моделей являются признаки функциональных или конструктивных элементов, из которых состоит технический объект и по которым один вариант структуры объекта отличается от другого. Эти параметры называют морфологическими переменными. Структурные модели имеют форму таблиц, матриц и графов. Наиболее перспективно применение древовидных графов типа И-ИЛИ-дерева. Они позволяют аккумулировать накопленный опыт, используя описания всех существующих аналогов, известных из патентной литературы и гипотетических объектов. Такие модели наиболее широко используют на метауровне при выборе технического решения.
Функциональные модели описывают процессы функционирования технических объектов и имеют форму систем уравнений. Они учитывают структурные и функциональные свойства объекта и позволяют решать задачи как параметрического, так и структурного синтеза. Их широко используют на всех иерархических уровнях, стадиях и этапах, при функциональном, конструкторском и технологическом проектировании. На метауровне функциональные модели позволяют решать задачи прогнозирования, на макроуровне — выбора структуры и оптимизации внутренних параметров технического объекта, на микроуровне — оптимизации параметров базовых элементов и несущих конструкций.
По способам получения функциональные математические модели делятся на теоретические и экспериментальные.
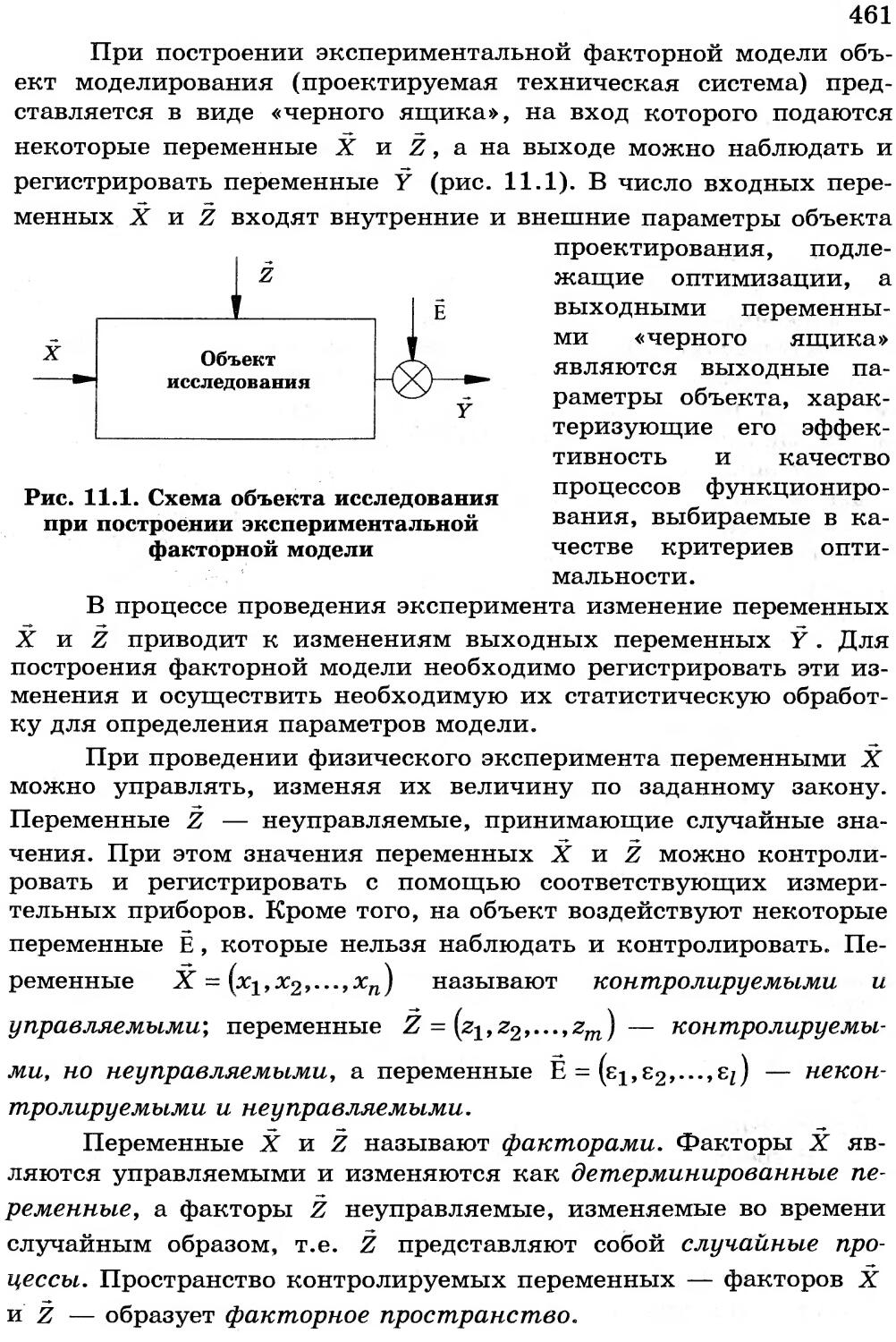
Теоретические модели получают на основе описания физических процессов функционирования объекта, а экспериментальные — на основе изучения поведения объекта во внешней среде, рассматривая его как кибернетический «черный ящик». Эксперименты при этом могут быть физические (на техническом объекте или его физической модели) или вычислительные (на теоретической математической модели).
При построении теоретических моделей используют физический и формальный подходы.
Физический подход сводится к непосредственному применению физических законов для описания объектов, например законов Ньютона, Гука, Кирхгофа, Фурье и др.
Формальный подход использует общие математические принципы и применяется при построении как теоретических, так и экспериментальных моделей.
Построение теоретических формальных моделей основано на вариационном принципе Гамильтона—Остроградского. Для динамических систем с сосредоточенными параметрами вариационный принцип приводит к уравнениям Лагранжа второго рода.
Экспериментальные модели — формальные. Они не учитывают всего комплекса физических свойств элементов исследуемой технической системы, а лишь устанавливают обнаруживаемую в процессе эксперимента связь между отдельными параметрами системы, которые удается варьировать и (или) осуществлять их измерение. Варьируемые параметры при этом называют факторами. Такие модели дают адекватное описание исследуемых процессов лишь в ограниченной области факторного пространства, в которой осуществлялось варьирование факторов в эксперименте. Поэтому экспериментальные математические модели носят частный характер, в то время как физические законы отражают общие закономерности явлений и процессов, протекающих как во всей технической системе, так и в каждом ее элементе в отдельности. Следовательно, экспериментальные факторные модели не могут быть приняты в качестве физических законов. Вместе с тем методы, применяемые для построения этих моделей (метод статистических испытаний, регрессионный анализ, корреляционный анализ, планирование эксперимента и др.), широко используются при проверке научных гипотез.
Функциональные математические модели могут быть линейные и нелинейные.
Линейные модели содержат только линейные функции фазовых переменных и их производных. Характеристики многих элементов реальных технических объектов нелинейные. Математические модели таких объектов включают нелинейные функции фазовых переменных и (или) их производных и относятся к нелинейным.
29
С целью упрощения задач проектирования на высших иерархических уровнях используют простые линейные модели. Если описание технического объекта представлено системой линейных обыкновенных дифференциальных уравнений, то, применяя преобразование Лапласа, ее можно привести к системе алгебраических уравнений с комплексными переменными, решение которой значительно проще, чем исходной системы дифференциальных уравнений. Такой подход используется для построения математических моделей на метауровне. В моделях макроуровня следует учитывать нелинейные свойства технического объекта.
Если при моделировании учитываются инерционные свойства технического объекта и (или) изменение во времени параметров объекта или внешней среды, то модель называют динамической, В противном случае модель статическая. Выбор динамической или статической модели определяется режимом работы технического объекта, положенным в основу проводимой процедуры анализа в маршруте проектирования. Большинство задач функционального проектирования требует использования динамических моделей. При конструкторском проектировании часто применяют статические модели, а динамические эффекты процесса функционирования объекта учитывают при формировании нагрузочных характеристик посредством коэффициентов динамичности, определяемых в процессе функционального проектирования.
Математическое представление динамической модели в общем случае может быть выражено системой дифференциальных уравнений, а статической — системой алгебраических уравнений. Динамическая модель может также представлять собой интегральные уравнения, передаточные функции, а в аналитической форме — явные зависимости фазовых координат или выходных параметров технического объекта от времени.
Воздействия внешней среды на технический объект носят случайный характер и описываются случайными функциями. При проектировании также учитывается случайный разброс параметров элементов объекта, обусловленный технологическим процессом изготовления. Все процессы, происходящие в объекте, также случайны и могут быть оценены вероятностными и статистическими характеристиками: вероятностью выполнения тех или иных требований, корреляционной функцией, спектральной плотностью, математическим ожиданием, дисперсией и др. Анализ функционирования объекта в этом случае требует построения вероятностной математической модели. Однако такая модель весьма сложная и ее использование при проектировании требует больших затрат машинного времени. Поэтому ее применяют чаще на заключительном этапе проектирования.
30
Большинство проектных процедур выполняется на детерминированных моделях. Детерминированная математическая модель характеризуется взаимно однозначным соответствием между внешним воздействием на динамическую систему и ее реакцией на это воздействие. В вычислительном эксперименте при проектировании обычно задают некоторые стандартные типовые воздействия на объект: ступенчатые, импульсные, гармонические, кусочно-линейные, экспоненциальные и др. Их называют тестовыми воздействиями.
1.6. РЕЖИМЫ ФУНКЦИОНИРОВАНИЯ ТЕХНИЧЕСКИХ ОБЪЕКТОВ
В зависимости от характера внешних возмущающих и управляющих воздействий технический объект может находиться в установившемся или неустановившемся состоянии. Изменение его состояния выявляется анализом поведения фазовых координат.
Установившееся состояние технической системы достигается при неизменных характеристиках внешних воздействий. Если воздействия непрерывно меняются, то состояние системы будет неустановившимся. Режим работы системы при этом называют динамическим. Он сопровождается непрерывным изменением фазовых координат, определяющих характер движения системы в динамическом неустановившемся режиме.
Характерные примеры установившегося режима — состояние покоя и состояние равномерного движения всех элементов технической системы. Такие состояния также называют статическими или равновесными. Статичность состояния определяется неизменностью реакций взаимодействия всех элементов технической системы при постоянных внешних воздействиях.
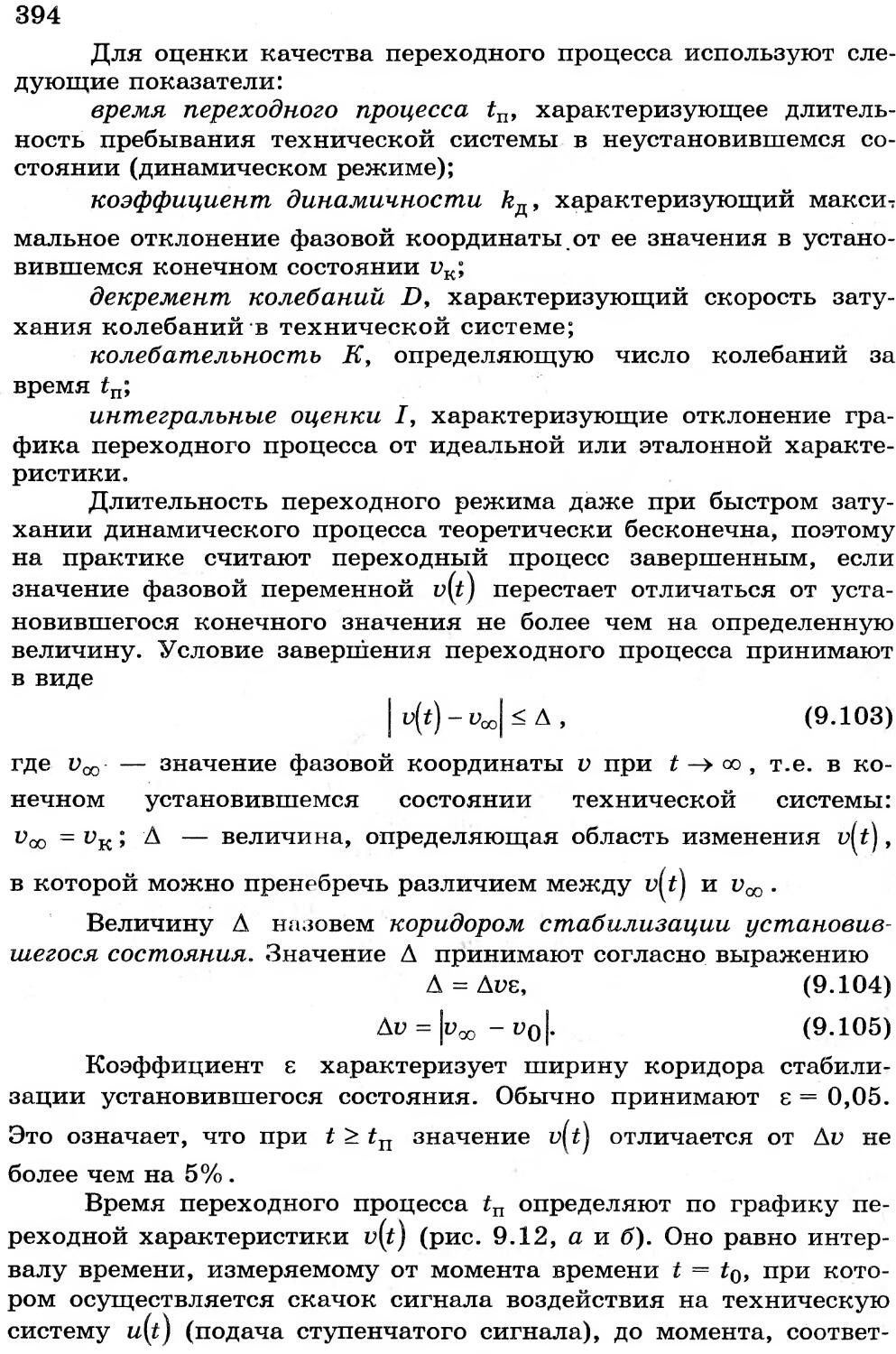
Предположим, что на техническую систему, находящуюся в установившемся состоянии равновесия, в некоторый момент времени tQ приложено ступенчатое воздействие вида
F(t) =
Eq, £ > £q, О, t < tQ,
(1.4)
где Fq = const — модуль ступенчатого воздействия.
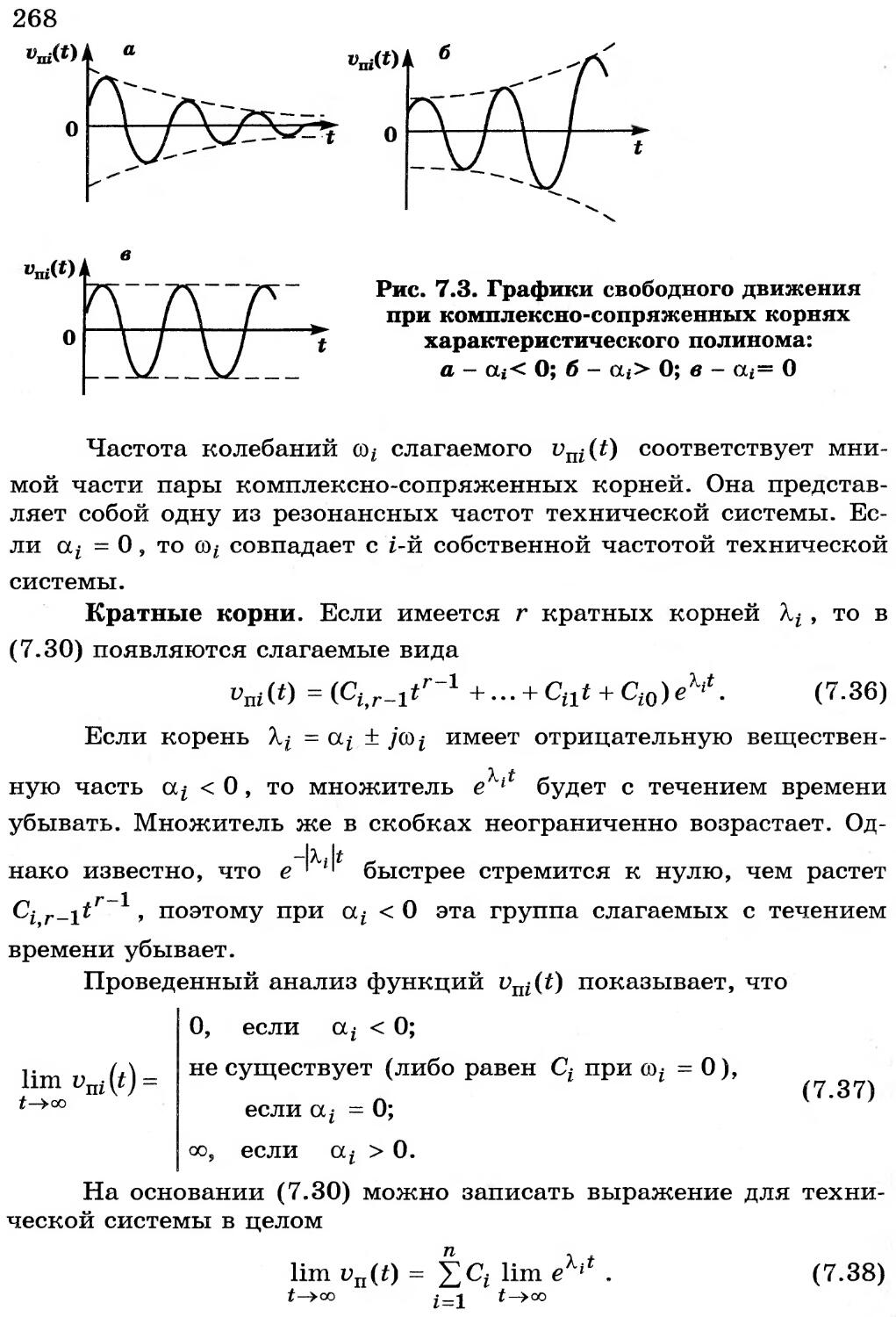
Движение системы будет определяться ее внутренними физическими свойствами и внешним воздействием. Пусть состояние технической системы характеризуется фазовой координатой x(t). Изменение ее после приложения ступенчатого воздействия можно представить в виде суммы двух составляющих: переходной хп(£) и вынужденной xB(t). Переходная составляющая устойчивой тех
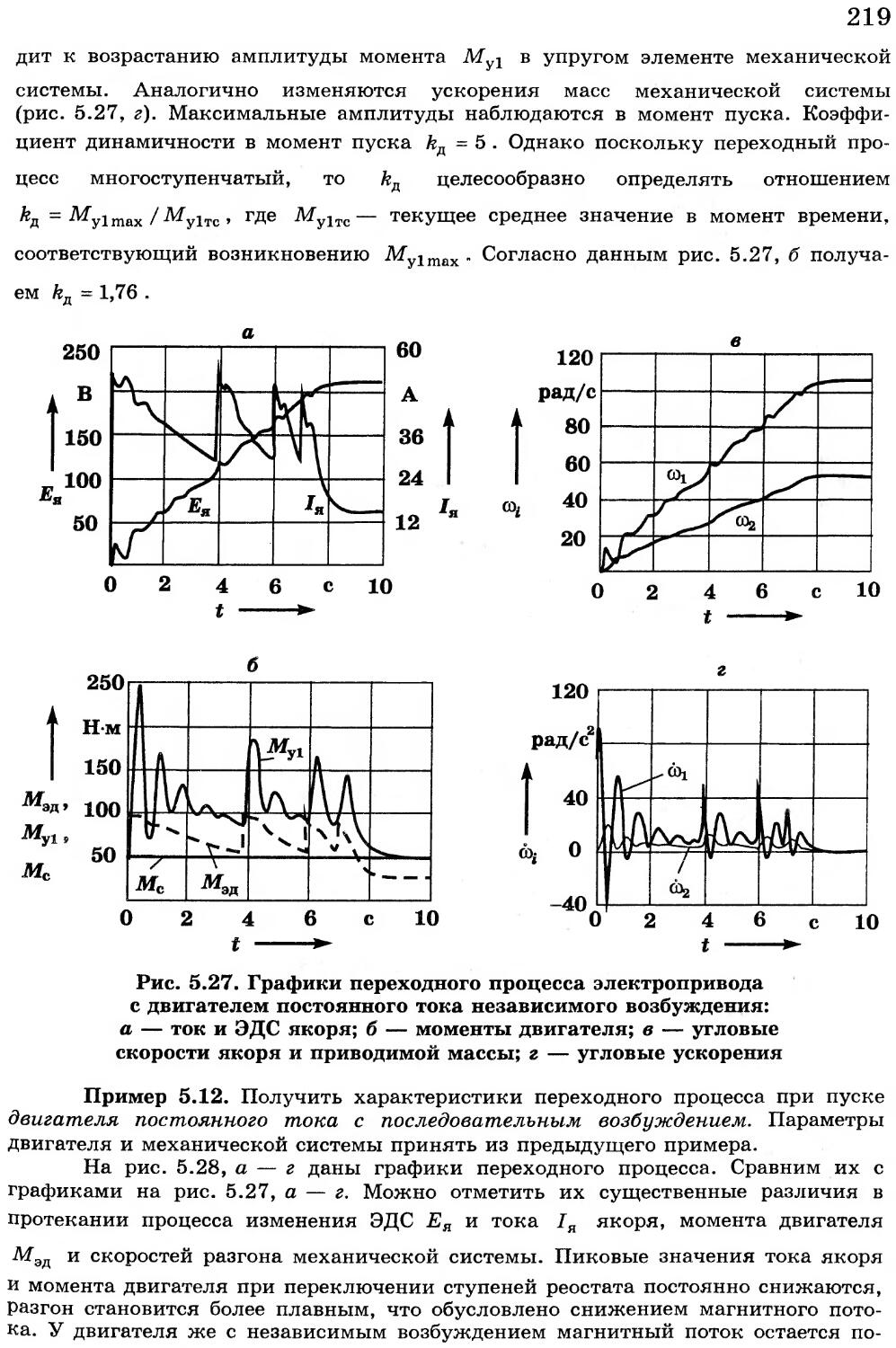
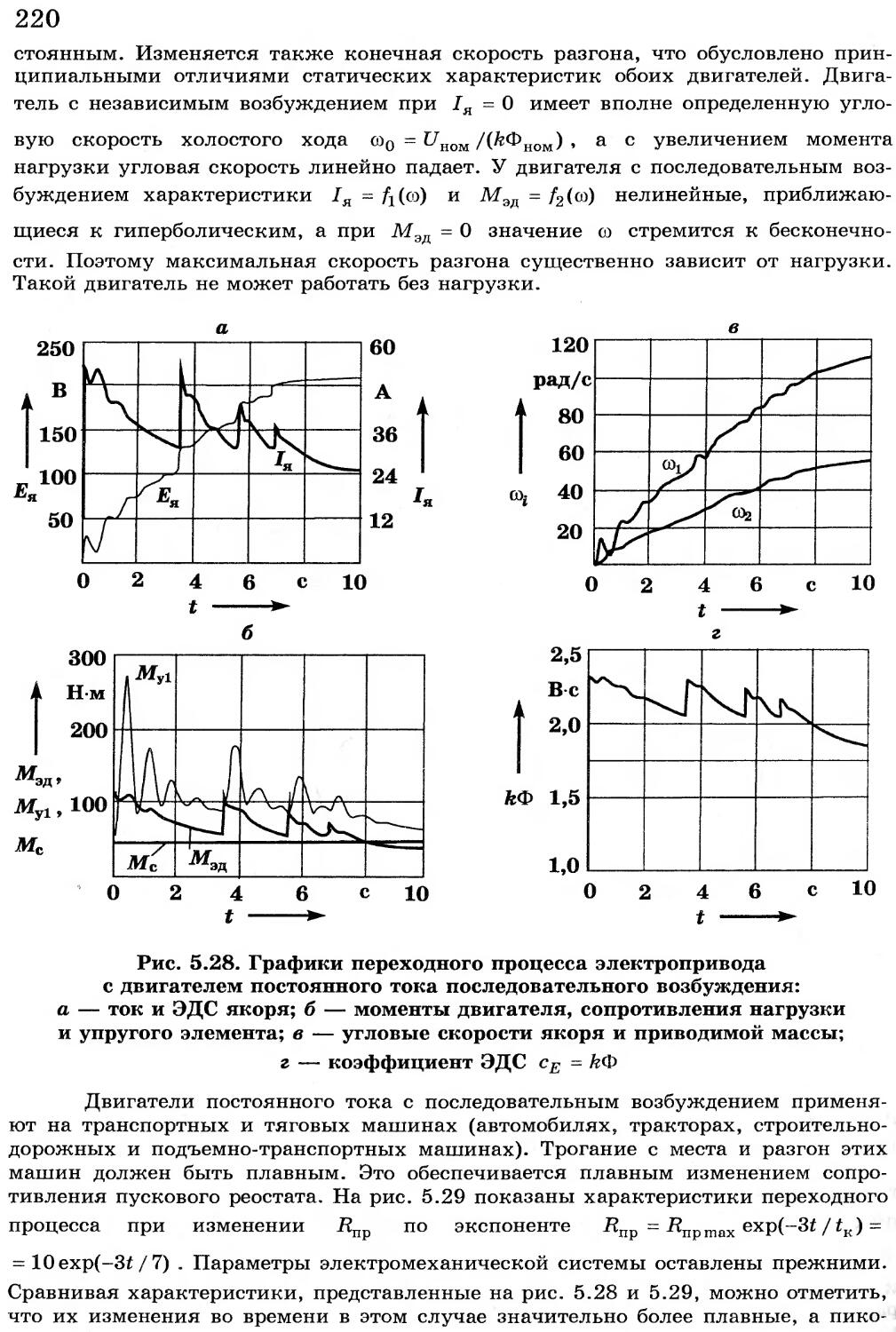
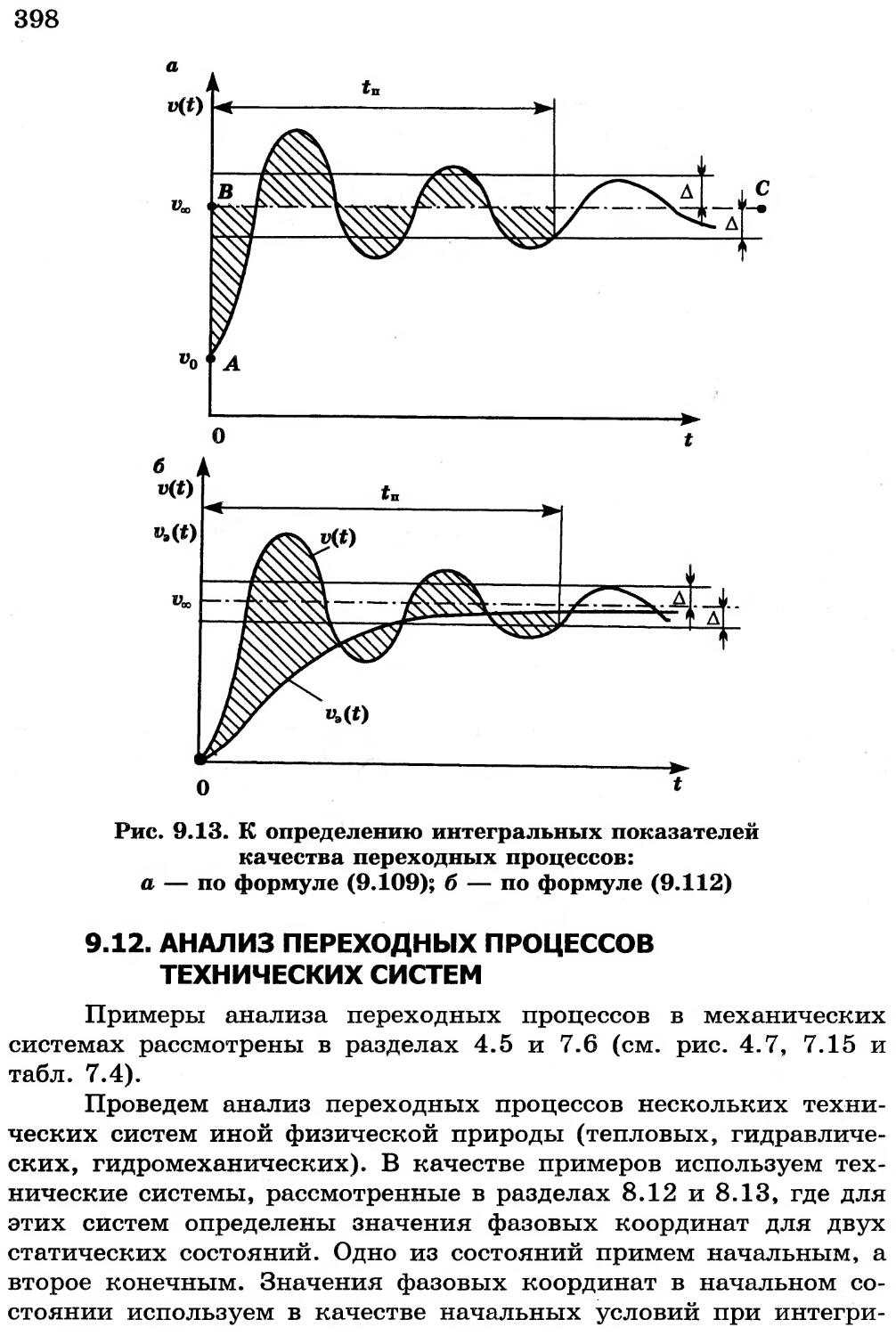
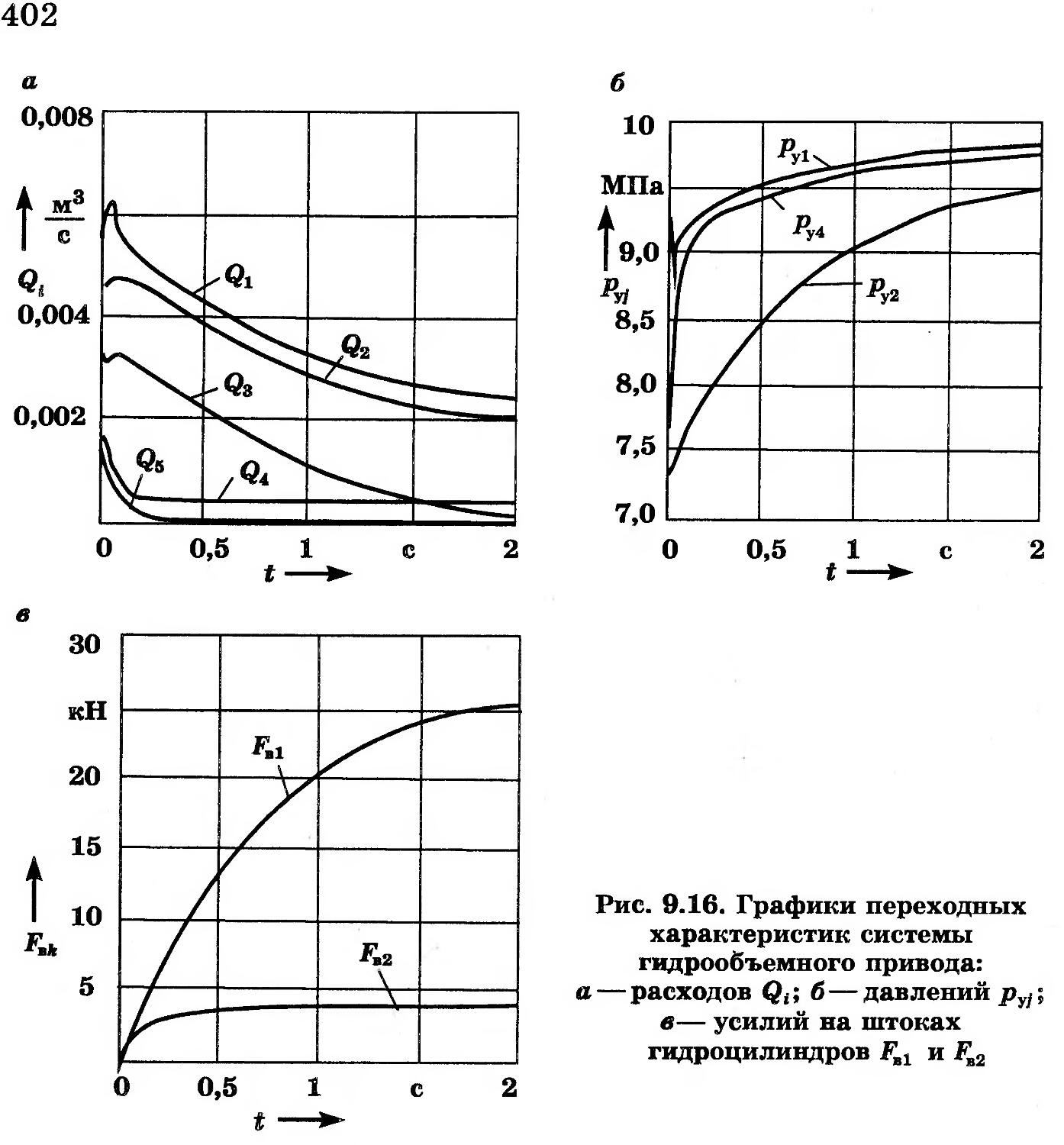
нической системы с течением времени затухает (стремится к нулю) и система приходит в новое установившееся состояние равновесия, характеризуемое вынужденной составляющей хв(0 = хк = const. Следовательно, при приложении ступенчатого воздействия система осуществляет переход из одного установившегося состояния в другое, находясь при этом в течение некоторого времени в динамическом режиме. Такой динамический режим называют переходным процессом, а графики изменения фазовых координат системы — переходными характеристиками.
Если внешние воздействия на систему переменны во времени, то они вызывают в ней непрерывный ряд переходных процессов и состояние системы в течение всего времени наблюдения будет неустановившимся.
Переходные процессы возникают также при изменении структуры или параметров технической системы в процессе ее функционирования.
Если внешнее воздействие F(t) периодическая функция, для которой 2*0 “ Asin(coB^ + ф) (см. формулу (1.4)), то после затухания свободных колебаний (переходной составляющей) в устойчивой системе установятся вынужденные колебания с частотой со в и некоторыми постоянными амплитудами ABi = k^A, где k} — постоянный коэффициент, i — номер фазовой координаты системы. Такое состояние системы также относится к установившемуся, а режим называют стационарным режимом колебаний.
Рассмотренные динамические режимы технических объектов являются модельными. Они предназначены для проведения сравнительного анализа множества альтернативных вариантов в процессе синтеза. На самом деле в техническом объекте такие режимы в чистом виде практически не встречаются. Однако модельные режимы позволяют значительно облегчить и ускорить решение проектных задач, так как детерминированные модели гораздо проще вероятностных. Получаемая при этом информация об объекте хотя и не претендует на полноту, но оказывается практически полезной. Детерминированное моделирование широко используется на начальных стадиях проектирования. Заключительные стадии проектирования выполняют на вероятностных моделях.
Внешние воздействия реальной среды обитания технической системы описываются случайными функциями, а изменения фазовых координат системы представляют собой случайные процессы. Техническая система в этом случае все время находится в динамическом режиме.
32
При постоянных характеристиках случайных процессов их называют стационарными, а при переменных — нестационарными. Способы анализа и оценки выходных параметров системы при стационарных и нестационарных случайных процессах различны. В последнем случае они значительно сложнее, чем в первом, поэтому необходимость учета нестационарности при моделировании должна быть обоснованной.
Рассмотрим основные задачи анализа, решаемые при проектировании технических систем. В зависимости от модельного режима, положенного в основу решения конкретной проектной задачи, различают следующие виды анализа: статических состояний; переходных процессов; устойчивости; стационарных режимов колебаний; частотных характеристик; чувствительности; статистический.
Анализ статических состояний относится к задачам статики, а остальные виды анализа — к задачам динамики.
На макроуровне проектирования исходная математическая модель технического объекта представляет собой систему нелинейных обыкновенных дифференциальных уравнений, которая в нормальной форме Коши имеет вид
dV/dt = F(V, U, t),
(1-5)
где V — вектор фазовых координат; U — вектор внешних воздействий; t — независимая переменная — время.
Параметры элементов технического объекта X тоже входят в математическую модель (1-5), но только в качестве коэффициентов при переменных V .
Выходные параметры объекта Y непосредственно не фигурируют в системе (1.5). Они определяются по результатам решения V(t) системы уравнений. Большинство выходных параметров имеют смысл функционалов зависимостей фазовых координат
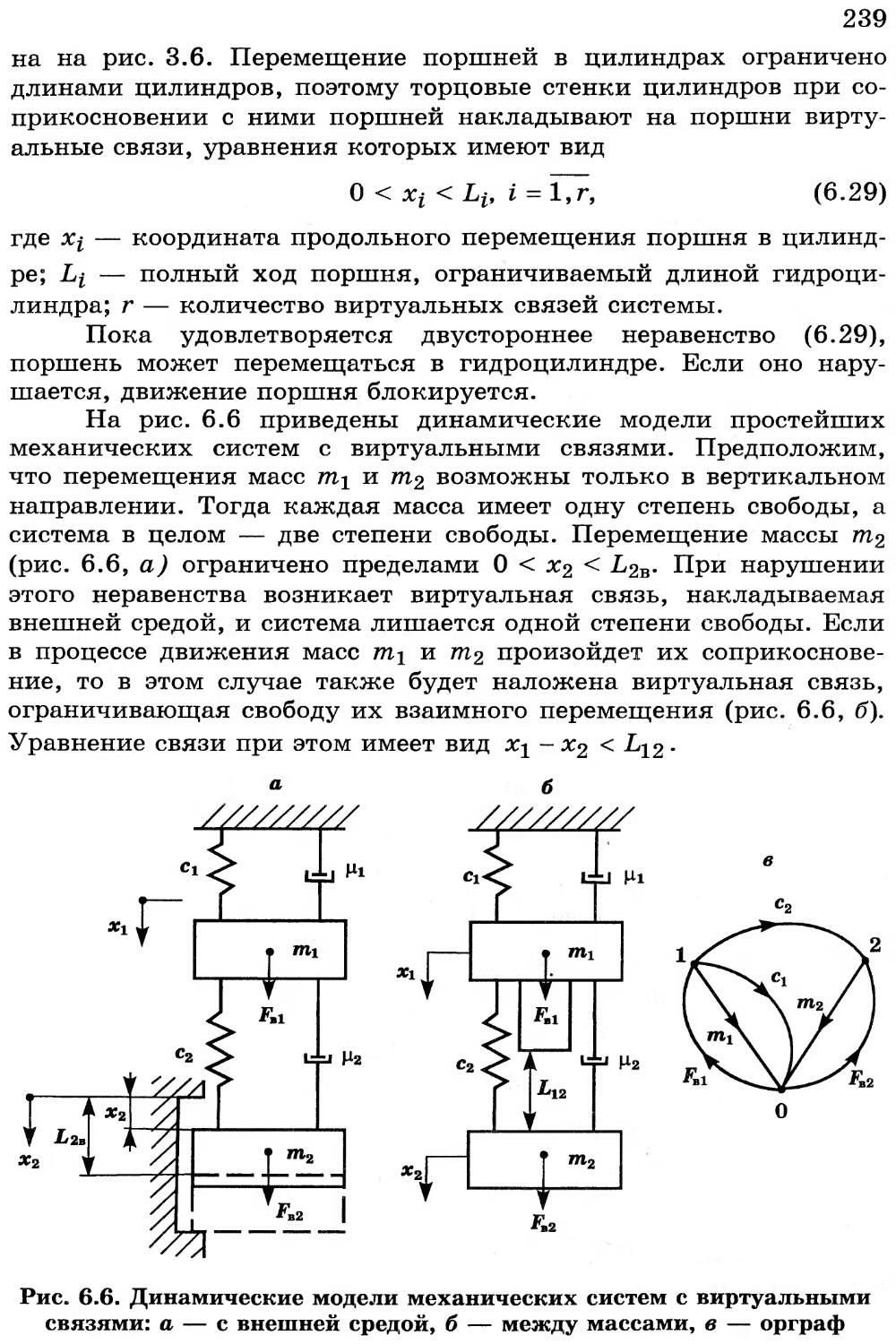
Y - Ф V(t)
Функционал представляет собой отображение класса функций в класс чисел. Примеры функционалов: определенные интегралы, экстремальные значения функций, значения функций при заданных значениях аргументов и т.п.
Система уравнений (1.5) описывает динамические режимы функционирования технического объекта. Анализ этих режимов заключается в решении системы уравнений (1.5) и последующем определении выходных параметров объекта. Задавая начальные условия V(0) = v0, находят решения V(t), а затем вычисляют
значения выходных параметров У , используемых в качестве
критериев при оптимизации внутренних параметров объекта X .
Критерии — это показатели качества и эффективности технического объекта. Их подразделяют на следующие группы: назначения; надежности; экономного использования сырья, материалов, топлива, энергии и трудовых ресурсов (экономические); ограничения вредных воздействий продукции (экологические); безопасности; стандартизации и унификации.
Математическая модель в виде (1.5) непосредственно используется при анализе переходных процессов, устойчивости, стационарных режимов колебаний. Эта же модель позволяет решать и задачи анализа статических состояний. Численное решение системы уравнений (1.5) при неизменных внешних воздействиях через конечный отрезок времени приводит к стационарной точке V* , в которой dv/dt = 0 . Это и будет точкой реше
ния задачи статики.
Математической моделью статических состояний является система алгебраических уравнений. Очевидно, что при dv/dt = О система дифференциальных уравнений (1.5) оказывается системой алгебраических уравнений
F(V, U) = 0. (1.6)
Решение уравнений (1.6), безусловно, проще, однако не всегда процедура перехода от уравнений (1.5) к уравнениям (1.6) тривиальна. Например, для получения математической модели, описывающей состояние покоя технической системы, требуются соответствующие преобразования уравнений, обусловленные необходимостью перехода к геометрическим координатам, определяющим пространственное положение элементов системы. Этим и объясняется широкое применение в САПР уравнений (1.5), когда анализ статических состояний лежит в основе технологического маршрута проектирования технического объекта (см. рис. 1.1).
Частотный анализ проводится для определения резонансных режимов, для исследования передачи или преобразования информационных сигналов, представленных в частотной области. Если математическая модель линейная, используют преобразование Фурье и система уравнений (1.5) преобразуется в систему линейных алгебраических уравнений с комплексными переменными, которая затем используется для определения частотных характеристик объекта. Процедура преобразования дифференциальных уравнений в алгебраические называется алгебраизацией исходной дифференциальной задачи. Но полученная при этом модель тем
3. Зак. 3006
не менее описывает динамические свойства объекта. При алгеб-раизации нелинейной системы применяют метод гармонической линеаризации.
Частотными методами можно также решать задачи анализа устойчивости и стационарных режимов колебаний. Они часто используются на верхнем иерархическом уровне проектирования.
Анализ чувствительности выполняется для оценки влияния вариации параметров объекта на изменение целевой функции. Сложный технический объект обычно имеет множество внутренних параметров. Решение задачи оптимизации в этом случае вызывает значительные трудности. Вместе с тем не все параметры эффективно изменяют целевую функцию. Поэтому целесообразно их классифицировать и отобрать для оптимизации лишь те параметры, которые оказывают наибольшее влияние на целевую функцию. Такие параметры называют управляемыми. Выбор управляемых параметров осуществляют до решения проектных задач синтеза.
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ТЕХНИЧЕСКИХ ОБЪЕКТОВ НА МИКРОУРОВНЕ
2.1. ОБЪЕКТЫ ПРОЕКТИРОВАНИЯ НА МИКРОУРОВНЕ
Макроуровень — это нижний иерархический уровень декомпозиции объектов проектирования по степени абстрагирования при составлении математического описания. На этом уровне осуществляется детальное описание физических свойств технического объекта. Объекты рассматриваются как сплошные среды, имеющие конечные области определения, выделяемые в трехмерном геометрическом пространстве. Такие объекты представляют собой динамические системы с распределенными параметрами. Их также называют непрерывными системами. Функционирование этих систем описывается дифференциальными уравнениями в частных производных.
Общий вид уравнений математической модели описания физических свойств технического объекта с распределенными пара-
метрами
(2.1)
или в компактной форме
(2.2)
36
где L — дифференциальный оператор; ср — искомая функция (фазовая координата); — пространственные координаты; п —количество пространственных координат; t — время; Z — вектор независимых переменных; 0(Z) — известная функция независи
мых координат.
Независимыми переменными в этих моделях являются про-
странственные координаты Xj,i = 1,п , и время t. Фазовая координата — функция независимых переменных.
Размерность задачи определяется числом пространственных координат п: при п == 1 — объект одномерный; при п = 2 — двумерный; при п = 3 — трехмерный.
Если уравнение содержит одну фазовую переменную, система описывается одним уравнением вида (2.1), если несколько фазовых переменных, т.е. вектор Ф = ((р1,(р2>--*»Фт)> то системой уравнений.
Если фазовые переменные не являются явными функциями времени, задачу анализа объекта называют стационарной, в противном случае — нестационарной. Стационарная задача характеризует статическое состояние технического объекта. Динамические режимы функционирования объекта относятся к нестационарным задачам и для их оценки требуются исследования переходных процессов.
Уравнение (2.1) имеет множество решений. Для получения единственного решения необходимо задать краевые условия. Краевые условия включают граничные и начальные условия. Граничные условия — это сведения об искомых непрерывных функциях (р и (или) их производных на границе S области определения объекта Q, характеризующие условия взаимодействия с окружающей внешней средой. Начальные условия — это значения этих же функций во всей области определения в начальный момент времени. Начальные условия задаются только при решении нестационарных задач (при исследовании переходных процессов).
Исходное дифференциальное уравнение в частных производных (2.1) вместе с краевыми условиями носит название дифференциальной краевой задачи и представляет собой математическую модель технического объекта с распределенными параметрами.
Существует несколько стандартных способов задания граничных условий. Для теплового объекта, представляющего собой твердое гомогенное (однородное) тело, используют граничные условия первого, второго и третьего родов.
Граничные условия первого рода означают задание на границе S области определения объекта Q значений (ps искомой функции фазовой переменной ср.
При граничных условиях второго рода задают на границе значения частных производных искомой функции по пространственным координатам.
Граничные условия третьего рода представляют собой уравнения баланса потоков, характеризующих обмен энергией объекта с окружающей внешней средой.
В некоторых случаях, например для гетерогенных (неоднородных по составу материала) тепловых объектов, могут быть и иные граничные условия.
Состояние объекта характеризуется изменением во времени фазовых координат, определяемых в различных его точках. Задача анализа процесса функционирования технического объекта на микроуровне заключается в определении функций фазовых координат для множества точек, выделенных в области определения объекта.
Объекты с распределенными параметрами могут быть различной физической природы: механические, гидравлические, тепловые, электрические, магнитные и др.
Механические объекты представляют собой элементы и базовые детали машин и механизмов: корпуса, рамы, панели, валы, крылья самолетов, лопасти турбин и др. При анализе механических объектов находят деформации и напряжения. Они определяют несущую способность конструктивных элементов, надежность и нормальные условия функционирования базирующихся на них других элементов объекта.
При проектировании многих технических объектов возникает необходимость анализа теплонапряженности деталей, выбора оптимальных размеров и конфигурации теплообменников и решения многих других задач теплопередачи. В тепловых объектах определению подлежат температурные поля и термические напряжения.
При анализе гидравлических и пневматических систем определяют режимы течения сплошных потоков жидкостей и газов, характеризуемые скоростями и давлениями.
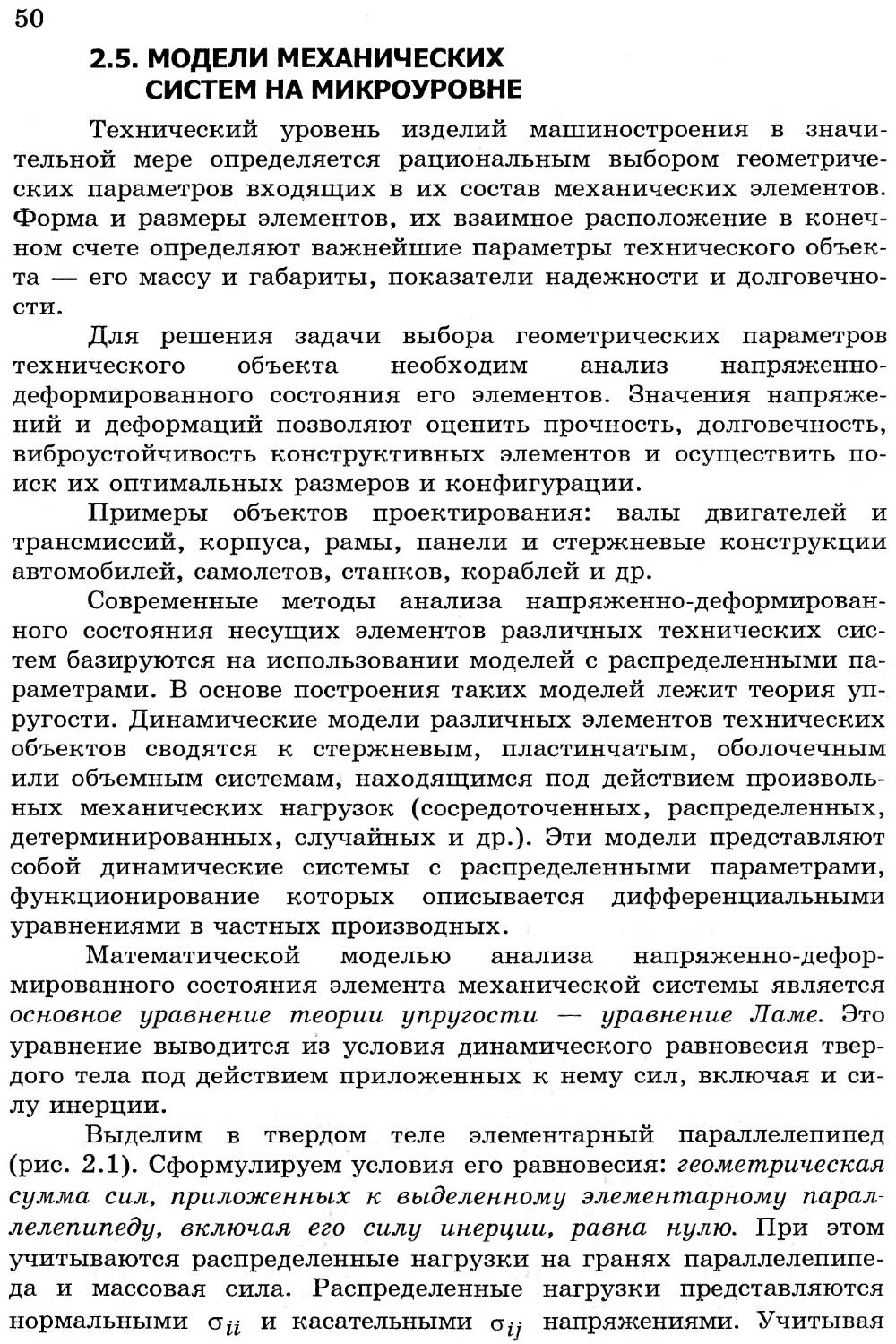
Обычно в исходные уравнения (2.1) входят не все фазовые координаты, характеризующие процессы функционирования технического объекта, а только базисные, например деформации — в модели механической системы, температуры — в тепловой системе и т.д. Остальные фазовые координаты (например, напряжения в упомянутых системах) определяют через базисные координаты на основе уравнений, устанавливающих между ними соответствующие соотношения.
38
2.2. ОСНОВЫ ПОСТРОЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ НА МИКРОУРОВНЕ
Для построения математических моделей технических объектов с распределенными параметрами используют фундаментальные физические законы. К ним относятся, прежде всего, законы сохранения (массы, энергии, количества движения).
Общая формулировка закона сохранения: изменение во времени некоторой субстанции в элементарном объеме равно сумме притока-стока этой субстанции через его поверхность с учетом скорости генерации или уничтожения субстанции в этом объеме.
Уравнение, соответствующее данной формулировке, имеет вид
dq>/dt = -divJ + G, (2.3)
где (р — фазовая переменная (координата), выражающая субстанцию; J — вектор плотности потока фазовой переменной; div J — дивергенция вектора J ; G — скорость генерации или уничтожения субстанции.
У трехмерного технического объекта вектор J состоит из трех составляющих, направленных параллельно осям декартовой системы координат х, у, 2, т.е. J = (JX9 JU9J2). Дивергенция век-тора J — скалярная величина, определяемая выражением
div J = dJx/dx + dJy /ду + dJz/dz. (2.4)
Дивергенция вектора плотности потока характеризует сумму притока-стока субстанции через поверхность элементарного объема. В качестве субстанции в различных физических законах выступают: масса, энергия, количество движения и др.
Уравнение закона сохранения массы
=-div Jp, (2.5)
где р — плотность массы, кг/м3; Jp — вектор плотности потока массы:
Jp = ри; (2.6)
v — вектор скорости переноса массы.
Уравнение (2.5) в гидроаэродинамике называют уравнением неразрывности.
В одномерном случае, когда скорость направлена лишь вдоль оси х, уравнение (2.5) имеет вид
dp/dt = -д(ро)/дх. (2.7)
39
Плотность потока массы Jp = pv измеряется в кг/(м2-с). Уравнение закона сохранения энергии
d(pE)/dt = - div Je+Ge, (2.8)
где Е = е + р2/2 — полная энергия единицы массы; е — внутрен-няя энергия единицы массы; рГ — энергия единицы объема, Дж/м3; Jp — вектор плотности потока энергии; Gp — скорость генерации или поглощения энергии в единице объема, Дж/(м3-с).
В одномерном случае поток энергии направлен только вдоль оси х, тогда Jp = Jex » а уравнение (2.8) принимает вид d(pE)/dt = -dJEx/dx +
&Ех- (2.9)
Плотность потока энергии измеряется в Дж/(м2-с).
Уравнение закона сохранения количества движения используют при моделировании движения потока жидкости. Для потока идеальной жидкости (без учета сил трения, обусловленных вязкостью) уравнение имеет вид
d(pv)/dt = -v div (ри) - grad р, (2.10)
где ри — вектор количества движения единицы объема жидкости; р — давление жидкости; grad р — градиент давления.
Градиентом называют векторную функцию скалярного аргумента. Компонентами вектора градиента являются частные производные аргумента по пространственным координатам. Градиент давления grad р - (dp/dx^dp/dy^dp/dz).
одномерного потока жидкости получаем
d(pv)/dt = -vd(pv)/dx - др/дх. (2.11)
При учете массовых сил и сил трения уравнение закона сохранения количества движения имеет вид
до/dt = GM - (grad р - r)V2u - т] grad div и/3)/р, (2.12)
где Сод — напряженность поля массовых сил; rj — динамическая
вязкость; V2 —оператор Лапласа: V2u •= (d2u/dx2) i +
+(d2v/dy2)j +(d2u/dz2)k .
Выражение (2.12) называют уравнением Навъе—Стокса.
Уравнения математических моделей микроуровня объектов другой физической природы можно найти в литературных источниках, например в [7,19].
2.3. МОДЕЛИ ТЕПЛОВЫХ СИСТЕМ НА МИКРОУРОВНЕ
Процесс переноса тепловой энергии (теплоты) в пространстве с неоднородным полем температуры называется теплообменом. Теплообмен может осуществляться теплопроводностью, конвекцией и тепловым излучением.
Температурным полем называется совокупность значений температуры для всех точек пространства в данный момент времени. Температурное поле скалярное, так как температура — скалярная величина. Если температура Т является функцией только пространственных координат T(x,y,z), то процесс теплообмена стационарный и температурное поле стационарное. Если температура изменяется во времени, то процесс теплообмена и температурное поле нестационарные.
Соединив точки теплотехнического объекта, имеющие одинаковую температуру, получим поверхность равных температур, называемую изотермической.
При проектировании теплотехнических объектов на микроуровне используют уравнение теплопроводности, связывающее изменение температуры во времени и пространстве со свойствами среды. Это уравнение позволяет выполнять анализ температурных полей в твердых телах — деталях машин.
Уравнение теплопроводности может быть получено на основе закона сохранения энергии. Применительно к тепловой системе закон сохранения энергии можно сформулировать так: изменение во времени количества тепловой энергии в элементарном объеме равно сумме притока-стока энергии через его поверхность с учетом выделения энергии в том же объеме в единицу времени внутренними источниками (или поглощения энергии стоками).
По аналогии с уравнением (2.8) можно записать
dQ/dt = -div q + Gq , (2.13)
где Q — количество тепловой энергии в единице объема, Дж/м3; q — вектор плотности теплового потока, Дж/(м2 с); Gq — количество тепловой энергии, выделяемое в единицу времени в рассматриваемом элементарном объеме, Дж/(м3-с).
Выделение (или поглощение) тепловой энергии внутри тела может происходить из-за объемных химических реакций, прохождения электрического тока, фазовых превращений материала при изменении температуры и т.п. Величина Gq характеризует мощность внутренних источников теплоты (или стоков).
Изменение количества тепловой энергии в единице объема dQ пропорционально изменению температуры dT :
dQ = CpdT, (2.14)
где С — удельная теплоемкость материала теплотехнического объекта, Дж/(кг-К); р — плотность материала.
Плотность теплового потока q в соответствии с законом Фурье пропорциональна градиенту температуры:
g=-XgradT, (2.15)
где X — коэффициент теплопроводности материала теплотехнического объекта, Дж/(с-м-К); grad Т = (дТ/дх, дТ/ду, дТ/дг) — градиент температуры.
С учетом выражений (2.14) и (2.15) уравнение (2.13) приводится к виду
ar/Si = (Ср)-1 [ div(X grad т) + Gq ]. (2.16)
Для однородного изотропного тела X = const . Тогда
8T/8t = ат div grad Т + Gq /(Ср), (2.17)
где ат = Х/(Ср) — коэффициент температуропроводности, м2/с.
Выражение дивергенции градиента температуры можно записать в виде
div grad Т= V2T = д2т/дх2 + д2т/ду2 + д2т/дг2 , (2.18) 2
где V — оператор Лапласа.
Для одномерного случая, когда теплопередача осуществляется только вдоль оси х, получаем
dT/dt = ат д2т/дх2 + Gq/ Ср. (2.19)
Для решения уравнений (2.16), (2.17), (2.19) должна быть задана функция Gq = GQ(x,y,z,t) и краевые условия — начальные и граничные. Кроме того, необходимо описание геометрии теплотехнического объекта (его формы и размеров), а также физических свойств объекта и среды (значений параметров р,X,С).
Для многих теплотехнических объектов можно принимать Cq=O.K ним, в частности, относятся объекты, представляющие собой твердые тела: стенки теплообменников и корпусных деталей машин, диски и барабаны фрикционных муфт и тормозов и др. В этом случае уравнение теплопередачи для объекта, выполненного из материала, обладающего изотропными теплофизическими свойствами,
dT/dt = aTV2T. (2.20)
Для одномерного случая
dT/dt = ат д2т/дх2 . (2.21)
4. Зак. 3006
42
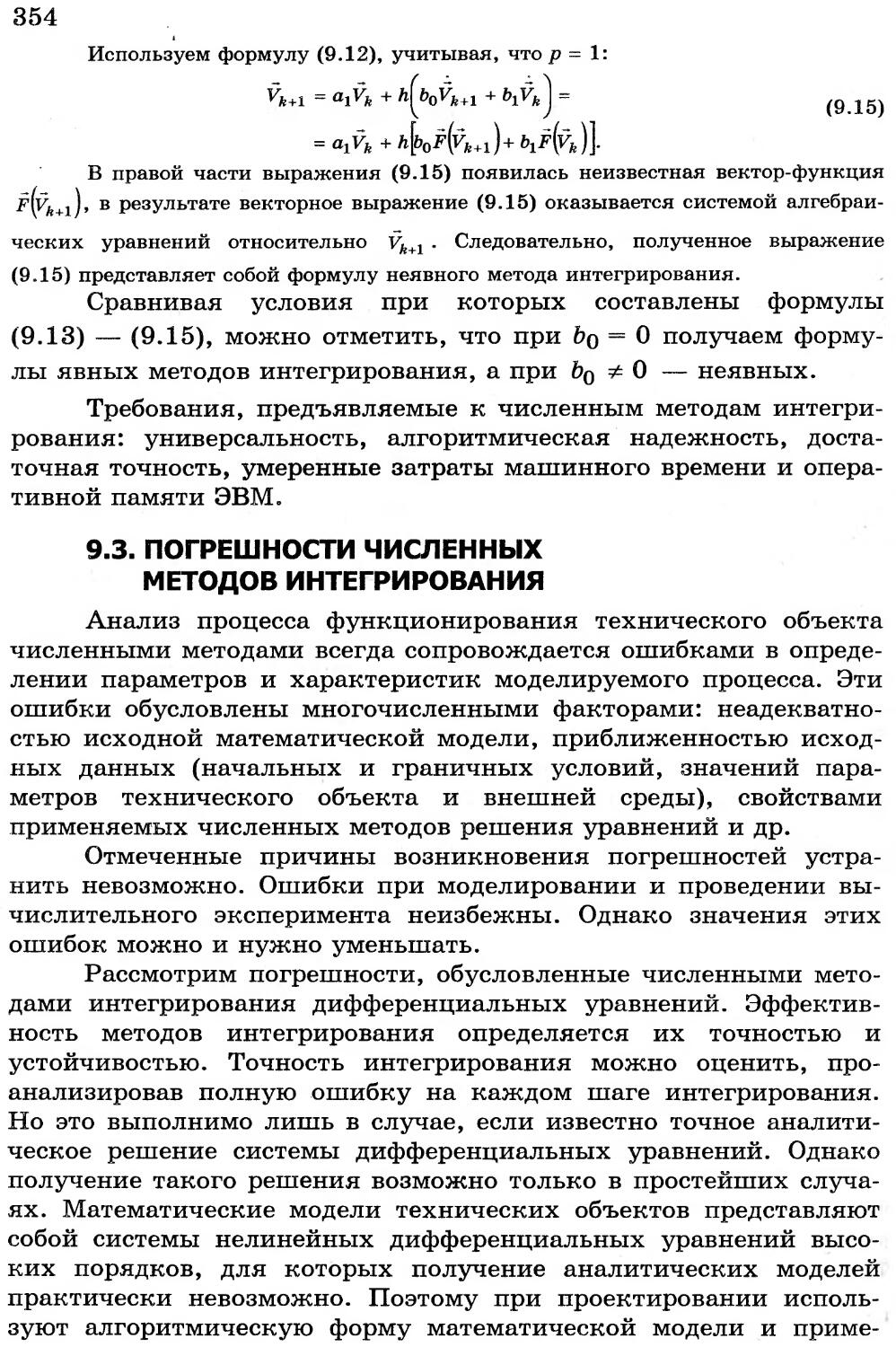
При описании граничных условий в зависимости от наличия информации о теплообмене на граничной поверхности принимают различные допущения. В простейшем случае задают граничные условия первого рода. При этом задается распределение температуры на граничной поверхности объекта S как функция координат и времени
Tg = q(x,y,z,t), x,y,z&S. (2.22)
Граничные условия второго рода описывают распределение производных температуры по пространственным координатам на поверхности S
(dT/dn)s = \y(x,y,z,t), xfy,zeSf (2.23)
где дТ/дп — модуль вектора градиента температуры.
Учитывая формулу (2.15), можно отметить, что граничные условия второго рода характеризуют распределение плотности теплового потока на граничной поверхности S.
При отсутствии теплового потока на поверхности объекта теплообмен с внешней средой не осуществляется. В этом случае говорят, что граничная поверхность объекта теплоизолирована. Граничные условия теплоизолированного объекта
(dT/dn)s = 0. (2.24)
При проектировании технических объектов часто встречается случай, когда часть граничной поверхности теплоизолирована, а на остальной части осуществляется теплообмен с внешней средой.
Граничные условия третьего рода позволяют конкретизировать характеристики теплообмена с внешней средой. При этом задается распределение плотности теплового потока на граничной поверхности. Функция плотности теплового потока зависит от способа теплообмена. Для технических объектов наиболее характерны три способа: конвективный теплообмен твердого тела с окружающей газовой или жидкостной средой, генерирование на граничных поверхностях тепловых потоков в процессе трения контактирующих поверхностей и тепловое излучение.
При конвективном теплообмене плотность теплового потока на граничной поверхности пропорциональна разности температуры окружающей среды Тс и температуры граничной поверхности Tg
qs=a(Tc-Ts), (2.25)
где а — коэффициент теплообмена (теплопередачи) через конвекцию, Дж/(с-м2-К).
Уравнение (2.25) выражает закон Ньютона. Принимая во внимание, что, согласно выражению (2.15), модуль вектора плотности теплового потока qg^-'kdT/dn, можно записать следующее уравнение баланса тепловых потоков:
XдТ/дп + ос(Тс -Ts) = 0. (2.26)
Выражение (2.26) представляет собой уравнение граничного условия третьего рода при конвективном теплообмене.
Отметим, что выражения граничных условий первого и второго рода являются частными случаями уравнения (2.26). Так, при а -> оо и Л = const или при Z, —> оо и ot = const получаем
lim —(дТ/ дп) о сс/Х-»оо Сх/Л,
в результате Tg = Тс и приходим к граничным условиям первого
рода.
Если положить ot —> 0 , получим частный случай граничных условий второго рода — при теплоизолированной граничной поверхности.
При генерировании теплового потока на граничной поверхности, что характерно для фрикционных механизмов, подшипников скольжения и т.п., уравнение граничного условия третьего рода имеет вид
^dT/dn + qg = 0. (2.27)
При лучистом теплообмене между твердым телом и внешней средой плотность теплового потока определяется по закону Стефана—Больцмана
qs = еа(Т4 - Т4), (2.28)
где 8 — степень черноты поверхности, характеризующая ее излучательную (или поглощающую) способность; ст — постоянная Стефана—Больцмана.
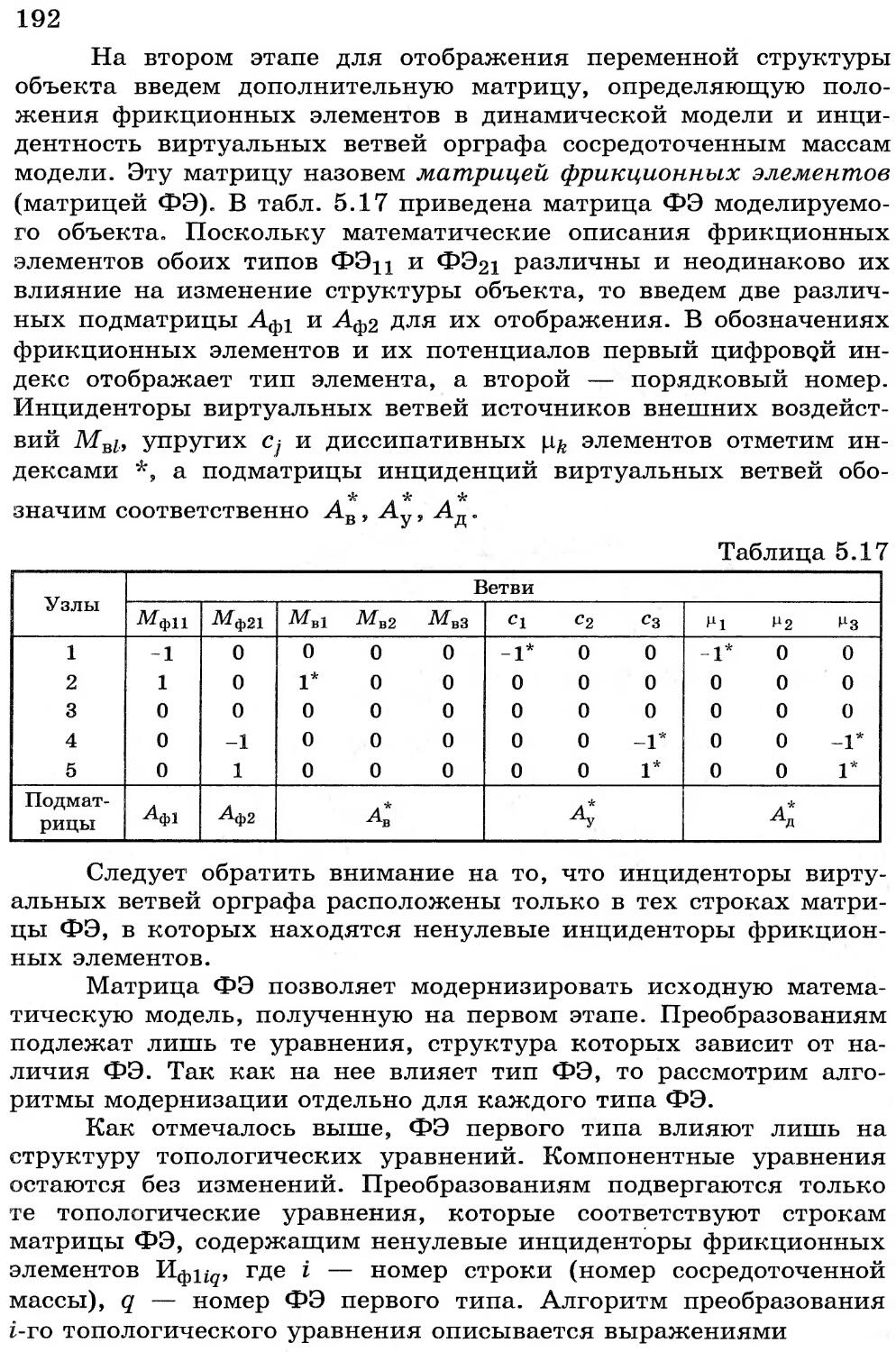
На основе выражений (2.22) — (2.28) можно получить уравнения граничных условий для одномерного теплотехнического объекта.
Уравнения граничных условий первого рода Ts0 = <pi(0 при х = °;
TS, = <Р2(0 при X = L,
(2.29)
где Тд0 — температура на левой границе; TgL — температура на правой границе; L — клина объекта вдоль оси х.
Уравнения граничных условий второго рода (дТ / dx)s^ = v|/j(O при х = 0;
(dT/dx)s =у2(£) при х = L.f
Если какая-либо из границ (правая или левая) теплоизолирована, то дТ / дх - 0 для этой границы.
Граничные условия третьего рода при конвективном теплообмене
(2.30)
. дТ дх , дТ Л,--
дх
+ «оС^со - Ts0) = ° при х = °;
+ “L^cr, -TSr) = 0 ПРИ X = L; ь L
(2.31)
при генерировании теплового потока на граничных поверхностях
X----f qg =0 при х = 0;
дх 0 I
дТ
X----f qg =0 при х - L;
дх L
при теплообмене излучением
X + 8лС>( Г4 - Г4 1=0 при х = 0;
дх ' со 7
Л,—+ 8го(т4 -74 1=0 при x = L, дх ' CL bL 1
(2.32)
(2.33)
где ТСо и ТС£ — температура окружающей среды соответственно на левой и правой границах; 8g и 8£ — степень черноты левой и правой граничных поверхностей.
Отметим, что на левой и правой граничных поверхностях могут быть различные виды теплообмена.
Многие теплотехнические объекты выполняют многослойными. Обычно один из слоев обеспечивает несущую способность, а другие выполняют роль теплоизолирующих или фрикционных элементов. В многослойном объекте наряду с теплопроводностью имеет место теплообмен соприкасающихся твердых тел. Математическая модель объекта должна включать описание условий этого теплообмена. При анализе температурных полей все части объекта необходимо рассматривать совместно. Для каждой части (слоя) записывают свое уравнение теплопроводности, а краевыми условиями будут условия сопряжения, выражающие равенство температур и равенство плотностей тепловых потоков на поверхностях соприкасающихся частей:
T1S =T2S-, (2.34)
45
Х1 (ату / a^)s = х2 (ат2 /dn)s. (2.35)
Уравнения (2.34) и ^2.35) описывают граничные условия четвертого рода.
Кроме ^рассмотренных встречаются и другие виды граничных условий. Например, ня поверхностях соприкосновения возможны фазовые превращении вещества, требующие учета затрат тепловой энергии.
Если внешние возде^ствия на объект, характеризуемые функциями краевых условие, непостоянны, процесс теплопередачи будет нестационарным.~ для получения однозначного решения уравнений математической модели в этом случае надо кроме краевых условий задать и Начальные условия. При этом задается распределение температуры по Всей области определения объекта Q в начальный момент вреК[ени ПрИ _ g .
= У> г)> х, I/, z g Q . (2.36)
Совокупность уравнеътеплопроводности и граничных условий составляет матем^тичесКуЮ модель теплового объекта на макроуровне. Результатам решения этих уравнений является температурное поле объек^а> на основании которого можно судить о его работоспособности Ограничение работоспособности на-
ступает при достижении пр^дельных значений температуры и напряжений, допускаемых для материала, из которого изготовлен объект. Напряжения в тепловом объекте определяются суммой напряжений от механическое нагрузки и термических напряжений, обусловленных градие^том температуры. Температурное поле позволяет определить тер^ические напряжения.
2.4. МОДЕЛИ ГИДРАВЛИЧЕСКИХ СИСТЕМ НА МИКРоуроВНЕ
В технических системах широкое применение находят гидравлические и пневматические приводы. При большой длине гидравлических или пневматических магистралей в них возникают волновые процессы, исслед<^вание которых возможно на основе непрерывных моделей, исп^ЛЬЗуЮщИХ дифференциальные уравнения в частных производнь$Хе
Основные физические свойства жидкостей и газов — текучесть, сжимаемость и непре^ывность потока. Текучесть оценивается вязкостью, сжимаемости — модулем объемной упругости.
Все применяемые на Практике жидкости и газы представляют собой обычные ньютпо^овС7Ше вязкие среды. В такой среде при взаимных перемещенцях
ее элементов возникают силы внутреннего трения. Напряя^ения Трения в ньютоновской жидкости пропорциональны относ^-тельным скоростям, или скоростям сдвига.
46
Жидкости обычно имеют сравнительно большую вязкость и слабую сжимаемость. Газы, наоборот, отличаются малой вязкостью и высокой сжимаемостью. Тем не менее математическое описание физических свойств жидкостей и газов на микроуровне можно выполнить на основе одних и тех же законов. Поэтому в дальнейшем будем говорить о жидкостной сплошной среде.
Движение жидкости в трубопроводе обычно рассматривают как одномерный сплошной поток. При этом положение поперечного сечения потока относительно начала отсчета геометрической координаты, выбираемого на левой граничной поверхности трубопровода, определяется одной координатой х. Значение х не зависит от кривизны осевой линии трубопровода, а равно ее длине от начала отсчета до рассматриваемого сечения.
Для описания движения жидкости используют закон сохранения массы и закон сохранения количества движения.
Закон сохранения массы выражает свойство непрерывности потока жидкости в трубопроводе и записывается в виде
д р / dt - -д(ри) / дх, (2.37)
Уравнение Навье—Стокса в одномерном случае, выражающее закон сохранения количества движения элементарной массы, согласно (2.12), имеет вид
д2о
дх2
(2.38)
При анализе движения жидкости массовыми силами пренебрегают. Тогда
в трубопроводе обычно
dv 1 др 4 д2о
— =----—+ —ц—
dt р дх 3 дх2
(2.39)
Находит применение также приближенная форма уравнения Навье—Стокса
до dt
(2.40)
где — коэффициент линеаризованного вязкого трения в трубо
проводе.
Иногда при исследованиях пренебрегают вязкостью жидкости. Принимая г) = 0 в выражении (2.39), получаем уравнение Эйлера для одномерного потока в трубопроводе постоянного сечения
до _ 1 др dt р дх
(2.41)
Уравнение Эйлера учитывает лишь инерционные свойства потока, а уравнение Навье—Стокса — инерционные и диссипативные (рассеивание энергии) свойства.
Уравнения (2.37) и (2.39) сведем в единую систему
др до
dt дх
до _ 1 др 4 д2о dt р дх 3 П дх2
(2.42)
Уравнения (2.42) представляют собой систему нелинейных дифференциальных уравнений в частных производных с тремя неизвестными функциями: скорости о, давления р и плотности р . Чтобы сделать систему определенной, необходимо в нее добавить уравнение связи между р и р.
Будем предполагать, что поток жидкости изолирован от притока тепла извне. Такой процесс движения жидкости называют адиабатическим. Характерная его особенность — постоянство энтропии [15]. Следовательно, адиабатический процесс является изоэнтропическим.
Для газа в рассматриваемом случае плотность можно выразить через давление на основании уравнения состояния
— = 1 Л, (2.43)
р k
где R — газовая постоянная; Т — температура; k — показатель адиабаты: k = Ср / Су ; Ср и Су — удельная теплоемкость газа при постоянном давлении и постоянном объеме соответственно; h - СрТ — энтальпия.
В пневматических приводах большинства технических объектов в качестве рабочего тела используют воздух. Параметры воздуха при Т = 273,15 К и Ро = 1 Па: Р = 1,293 кг/м3; Ср =1,006 103 Дж/(кг-К); Су=0,718103 Дж/(кг-К); показатель
адиабаты k = 1,405.
Следует также учитывать зависимость динамической вязкости от температуры. Обычно используют степенную зависимость вида
ц = По(7Ь / Т)п . (2.44)
Показатель степени п для воздуха при температуре
90...300 К равен (-0,889), а при температуре 300...400 К п = -0,75.
48
Эта же формула годится и для рабочих жидкостей, используемых в гидроприводах. В температурном интервале 303 < Т < 423 К принимают п < 2,77.
Зависимость плотности от давления для жидкостей представляется следующим обобщенным уравнением изоэнтропы:
(р + В) / рп = const.
(2.45)
При проектировании машиностроительных гидроприводов часто принимают линейную аппроксимацию зависимости изменения давления от относительного изменения объема жидкости при ее сжатии. Эта зависимость устанавливается законом Гука и в од-
номерном случае имеет вид
(2.46)
где Е — модуль объемной упругости жидкости, который при адиабатическом процессе определяется выражением Еа = Vdp / dV ; V — объем жидкости.
Учитывая слабую сжимаемость рабочих жидкостей гидроприводов, полагают р = const и для анализа полей скоростей и
давлений в трубопроводе используют систему дифференциальных уравнений
dv _ 1 др 4 д2о . dt р дх 3 дх2 ’
^Р- = -Е — .
dt дх
(2.47)
Значение модуля объемной упругости зависит от типа жидкости, давления, температуры, скорости деформации и характера термодинамического процесса. Наибольшее влияние на него оказывает давление, поэтому для минеральных масел обычно используют линеаризованную зависимость
Еа =Еао + Аар. (2.48)
Коэффициент пропорциональности Аа зависит от типа жидкости и ее температуры. Так, для жидкости АМГ-10 при Т = 293 К Еао = 1,68-Ю3 МПа; Аа = 12,75.
Реальная жидкость в гидроприводах обычно представляет собой двухфазную газожидкостную смесь. Воздух в этой смеси может находиться в растворенном и нерастворенном состоянии. Растворенный воздух практически не влияет на свойства рабочих жидкостей. Нерастворенный воздух содержится в жидкости в
виде пузырьков. Вследствие значительно большей сжимаемости воздуха по сравнению со сжимаемостью жидкости модуль объемной упругости газожидкостной двухфазной смеси уменьшается, причем это уменьшение является существенным при малых давлениях.
Для определения модуля объемной упругости газожидкостной смеси Ес используется приближенное выражение
Po
Еа
LXq IX a \J
Е„ + Аар
LXq LX jl
z \l/k
Ев I PO
(2.49)
1 - Еи 1J
\ p J
p
E(1q + AaP
где 8B — относительный объем газовой фазы в смеси; k — показатель адиабаты сжатия воздуха; р$ — давление, при котором определен модуль объемной упругости Еа() (обычно принимают избыточное давление р$ =0).
Для минеральных масел, используемых в машиностроительных гидроприводах, параметры находятся в следующих пре
делах: EaQ = (1,35...1,92) 103 МПа; Аа=12...13; 8В == 0,005...0,06; k = 1,4.
Распределенные модели используются при анализе высокочастотных колебаний в системах гидравлических и пневматических приводов. Для решения систем уравнений (2.42) и (2.47) необходимо задать краевые условия. Обычно принимают граничные условия первого рода и задают функции давлений и скоростей на левой и правой границах участка трубопровода:
р =
v = <Р2(*);
(2.50)
где L — длина участка трубопровода.
Начальными условиями являются значения этих же функций в начальный момент времени tQ = 0 во всех контролируемых точках трубопровода. Если функции (2.50) не зависят от времени, процесс движения жидкости в трубопроводе будет стационарным. Его характеристики зависят только от граничных условий. Начальные условия задаются для исследования нестационарных (переходных) процессов, обусловленных переменными внешними воздействиями, определяемыми функциями (2.50).
50
2.5. МОДЕЛИ МЕХАНИЧЕСКИХ СИСТЕМ НА МИКРОУРОВНЕ
Технический уровень изделий машиностроения в значительной мере определяется рациональным выбором геометрических параметров входящих в их состав механических элементов. Форма и размеры элементов, их взаимное расположение в конечном счете определяют важнейшие параметры технического объекта — его массу и габариты, показатели надежности и долговечности.
Для решения задачи выбора геометрических параметров технического объекта необходим анализ напряженно-деформированного состояния его элементов. Значения напряжений и деформаций позволяют оценить прочность, долговечность, виброустойчивость конструктивных элементов и осуществить поиск их оптимальных размеров и конфигурации.
Примеры объектов проектирования: валы двигателей и трансмиссий, корпуса, рамы, панели и стержневые конструкции автомобилей, самолетов, станков, кораблей и др.
Современные методы анализа напряженно-деформированного состояния несущих элементов различных технических систем базируются на использовании моделей с распределенными параметрами. В основе построения таких моделей лежит теория упругости. Динамические модели различных элементов технических объектов сводятся к стержневым, пластинчатым, оболочечным или объемным системам, находящимся под действием произвольных механических нагрузок (сосредоточенных, распределенных, детерминированных, случайных и др.). Эти модели представляют собой динамические системы с распределенными параметрами, функционирование которых описывается дифференциальными уравнениями в частных производных.
Математической моделью анализа напряженно-деформированного состояния элемента механической системы является основное уравнение теории упругости — уравнение Ламе. Это уравнение выводится из условия динамического равновесия твердого тела под действием приложенных к нему сил, включая и силу инерции.
Выделим в твердом теле элементарный параллелепипед (рис. 2.1). Сформулируем условия его равновесия: геометрическая сумма сил, приложенных к выделенному элементарному параллелепипеду, включая его силу инерции, равна нулю. При этом учитываются распределенные нагрузки на гранях параллелепипеда и массовая сила. Распределенные нагрузки представляются нормальными и касательными напряжениями. Учитывая
закон о парности касательных напряжений, согласно которому
°31“°13> получаем уравнения равновесия в
g12 - с21>
с23 ~ с32>
проекциях на оси Xj, Х2,
Рис. 2.1. Компоненты напряжений на гранях элементарного параллелепипеда
+ pgt, i = 1,2,3, (2.51)
где р — плотность материала твердого тела; щ — перемещение элемента вдоль оси Xf, (Jij — напряжение, действующее в направлении оси xt в грани элемента, перпендикулярной оси Xj. pg} — проекция вектора массовых сил pg на ось xit g — вектор ускорения свободного падения.
Напряжения связаны с деформациями , а
последние — с перемещениями щ. В случае линейной зависимости между ними,
устанавливаемой законом Гука, для анизотропного тела имеем
3
си = + 2Цеп; (2.52)
7=1
ну = 2ц£у при i ф i,
где Eij — деформация, вычисляемая по формуле
(2.54)
Хи ц — постоянные Ламе, характеризующие упругие свойства
среды:
« _ Ev
(1 + v)(l - 2v) ’
(2.55)
(2.56)
Е — модуль упругости; v — коэффициент Пуассона.
52
Заменяя напряжения на деформации в уравнениях равновесия (2.51), получаем основное уравнение теории упругости, называемое уравнением Ламе
р - (X + ц) grad div L7 4- pV2(7 4- pg, (2.57)
dt2
- 2
где U — вектор перемещений; V — оператор Лапласа.
Модели для анализа напряжений и деформаций часто оказываются более удобными, если представлены в интегральной форме, вытекающей из вариационных принципов механики. Вариационный принцип Лагранжа (принцип потенциальной энергии) гласит, что потенциальная энергия системы получает стационарные значения на тех кинематически возможных перемещениях, отвечающих заданным граничным условиям, которые удовлетворяют условиям равновесия. Поэтому модель представляют в виде выражения потенциальной энергии Еп системы как разность энергии деформации Е& и работы W массовых и приложенных поверхностных сил:
En=ER-W,
где Ед = 0,5/етос/Л; ет = (ец,£22>Е33>Е12>Е13>Е2з)— вектор-стро-R
ка деформаций; 5 = (а11,а22,а33» а12,п13,а2з)Т — вектор-столбец
напряжений; R — область определения искомой функции.
Введем матрицу
X 4- 2ц X X 0 0
X X 4- 2ц X 0 0
D = X X X 4- 2ц 0 0
0 0 0 2ц 0
0 0 0 0 2ц
0 0 0 0 0
0 0 о о о 2ц
(2.58)
Используя матрицу (2.58), уравнения (2.52) и (2.53) можно записать в лаконичной форме
При использовании принципа Лагранжа вместо решения уравнения (2.57) требуется минимизировать функционал
(2.60)
п
53
2.6. ПРИБЛИЖЕННЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ ТЕХНИЧЕСКИХ ОБЪЕКТОВ НА МИКРОУРОВНЕ
Точные решения дифференциальных краевых задач удается получить лишь для немногих частных случаев. Проектирование технических объектов на микроуровне осуществляют на основе приближенных математических моделей, получаемых путем аппроксимации исходных моделей. Так же поступают и при решении большинства исследовательских задач. Аппроксимация осуществляется посредством дискретизации и алгебраизации дифференциальной краевой задачи.
Дискретизация представляет собой замену областей непрерывного изменения пространственных координат xt, i - 1, п , и времени t дискретным множеством точек. Эти точки называют узлами сетки и в них определяют искомые значения фазовой переменной <р . В этом случае непрерывная функция <р (х, заменяется множеством ее значений в узлах сетки. В результате функция и все ее аргументы оказываются дискретизированными.
Используя значения функции в узлах сетки, можно через них приближенно выразить частные производные дифференциальных уравнений* описывающих исследуемый процесс технического объекта и краевые условия. Тогда дифференциальные уравнения в частных производных преобразуются в алгебраические уравнения. В этом заключается суть алгебраизации дифференциальной краевой задачи.
Приближенные математические модели технических объектов на микроуровне получают на основе методов сеток.
В зависимости от способов осуществления дискретизации и алгебраизации краевых задач различают два метода сеток: метод конечных разностей (МКР) и метод конечных элементов (МКЭ). Рассмотрим основные особенности этих методов.
Напомним, что технический объект на микроуровне представляет собой сплошную среду, локализуемую в некоторой ограниченной области R геометрического пространства, определяемой вектором координат X , т.е. X е R . Координаты геометрического пространства в дальнейшем будем обозначать х, у, z9 тогда X (х9 у9 z) .
В МКР дискретизация задачи заключается в покрытии области R сеткой и замене непрерывного множества независимых переменных X в области R конечным множеством точек Xk, являющихся узлами сетки. Сетка может быть прямоугольной, косоугольной, с постоянными или переменными расстояниями
54
Рис. 2.2. Дискретизация области определения объекта моделирования с помощью сетки (а) и аппроксимация границы области (б)
между узлами (шагами сетки). Наиболее часто используют сетку с постоянными величинами шагов. Такую сетку называют регулярной. На рис. 2.2, а показан пример построения сетки для двумерного объекта. Шаги сетки вдоль координатных соей х и у обозначены соот-
ветственно hx и hy . Узлы сетки, попавшие внутрь области R , называются внутренними. Точки пересечения прямых, образую
щих сетку, с границей S области R называются граничными узлами.
Алгебраизация задачи в МКР выполняется путем замены дифференциального оператора Lcp уравнения (2.2) разностным. При этом частные производные dtp / дх, Зср / ду, dtp / дх аппроксимируют отношениями конечных разностей, выражаемых через конечное множество значений функции (р (xk, yk, zk) в узлах сетки. В нестационарной задаче, когда ср зависит не только от геометрических координат, но и от времени t, т.е. ср = (р (х, у, х, t), дискретизации подлежит также независимая переменная t.
Дискретизация задачи в МКЭ осуществляется иначе, чем в
МКР. Область геометрического пространства R разделяется на непересекающиеся подобласти — конечные элементы (КЭ). В одномерных задачах КЭ представляют собой отрезки линий, в двумерных имеют форму треугольников или прямоугольников, в трехмерных — тетраэдров или параллелепипедов. Непрерывная фазовая переменная ср здесь также заменяется конечным числом
значений в точках с координатами х^, у^, х^, определяющими положения узловых точек упомянутых геометрических фигур в об
ласти R геометрического пространству.
Различаются также способы алге^раизации дифференциальных уравнений в МКЭ и МКР. В МКР аппроксимируются производные, а в МКЭ аппроксимируется искомое решение (р[х) некоторой функцией Xi с неопределенными коэффициентами.
55
Качество аппроксимации обеспечивается путем составления и последующей минимизации соответствующего функционала. В результате обеспечивается минимизация ошибки аппроксимации. При этом задача сводится к решению системы алгебраических уравнений.
Таким образом, общим в обоих сеточных методах является то, что они сводят исходную краевую задачу к системе алгебраических уравнений.
При использовании МКР возникают сложности в обеспечении точности математического описания граничных условий. В общем случае геометрическая область определения объекта R может иметь сложную форму границы S. Тогда граничные узлы отстоят от ближайших к ним внутренних узлов на расстояния, меньше шага сетки (рис. 2.2, б). Это приводит к необходимости либо отказа от регулярной сетки, либо замены действительной линии образующей граничной поверхности S ломаной линией S'. В любом варианте значительно осложняется моделирование технического объекта.
Поскольку КЭ могут иметь различные формы и размеры, такой проблемы в МКЭ не существует. Это одно из основных преимуществ МКЭ перед МКР, что позволяет применять его при проектировании деталей машин сложной конфигурации. В этой связи он нашел самое широкое применение в САПР.
МКР также широко применяется при решении инженерных и исследовательских задач.
Метод конечных разностей. Представим дифференциальное уравнение (2.2) в следующем виде:
5<р / 5t + L<p(xj = e(±,z), (2.61)
где X — вектор геометрических координат: X = (x,y,z)T.
Дифференциальный оператор L(p(x) может включать первые, вторые, третьи и т.д. производные функции ср по независимым переменным х, у, г. Эти производные при алгебраизации задачи заменяются отношениями конечных разностей.
Выполним алгебраизацию уравнения (2.61), полагая, что технический объект одномерный и моделируемый процесс стационарный, т.е. X = х; dq/dt = O. Предположим, что дифференциальный оператор L(p (х) = 6(р / дх . Тогда исходное дифференциальное уравнение имеет вид дер / дх = б(х).
Осуществим дискретизацию независимой переменной х, введя сетку с постоянным шагом h, и заменим частную производную дер / дх следующим отношением конечной разности:
56
дер/дх = [ф(х + h)~ ф(х)]/h. (2.62)
Подставляя выражение (2.62) в исходное дифференциальное уравнение, получаем разностное уравнение
ф(х + h)- ср (х)- 7Ю (х) = 0. (2.63)
Пронумеруем узлы сетки от 0 до n-Ы. Узлы с номерами 0 и
п+1 будут граничными, а узлы 1, п — внутренними. В результате дискретизации независимой переменной х она получает следующие значения в узлах сетки: х = 0, Л, (п + l)h . Подставляя
последовательно эти значения в уравнение (2.63), получаем сис
тему алгебраических уравнений:
ф(л)-ф(о)-йе(о)= 0;
ф(2й)-ф(й)-ле(л) = 0;
(2.64)
Ф [(п +1) й] - ф(пй)- ЙО (пй) = 0.
В системе уравнений (2.64) б(г) при х=0, h, 2h, ... — задан-ная функция, определяемая в узлах сетки, а ср (б) и cp[(n + 1)/г] — значения фазовой переменной ср в граничных узлах, определяемые из уравнений, описывающих граничные условия. Если граничные условия описываются дифференциальными уравнениями в частных производных, то для определения ф(о) и ср[(п + 1)/г] они также должны быть подвергнуты конечно-разностной аппроксимации .
Решив систему алгебраических уравнений совместно с разностными уравнениями граничных условий, найдем дискретный ряд значений функции ср во всех внутренних узлах сетки, т.е. значения ф (ft), ф (2й),..., (р (пй). Чем меньше шаг сетки h9 тем точнее результаты определения функции ср по приближенной математической модели (2.64). Однако при этом увеличивается размерность системы уравнений и возрастают затраты времени на получение решения.
Аппроксимация частной производной дер / дх выражением (2.62) не единственная. Существуют и другие конечно-разностные выражения. При аппроксимации производных удобно пользоваться шаблонами, приведенными на рис. 2.3. Шаблоны на рис. 2.3, а — г используются для одномерных задач, а на рис. 2.3, д — ж — для двумерных. Шаблон представляет собой
часть сетки, включающую множество узлов Xk , значения пере
менных в которых используются при аппроксимации производ
57
ных в заданном узле X . Узлы Xk на рис. 2.3 показаны кружками, а узел X* обведен дополнительной окружностью. Слева от шаблонов указан аппроксимируемый дифференциальный оператор, а рядом с узлами сетки записаны значения коэффициентов, с которыми соответствующие величины (р^ входят в конечноразностные выражения.
Направления осей координат на рис. 2.3 выбраны таким образом, чтобы полученные результаты вычислений функции ср^ в таблице, напечатанной на принтере, располагались в порядке следования узлов сетки.
Шаблоны, показанные на рис. 2.3, а, б, в, позволяют составить выражения соответственно правой, левой и центральной конечно-разностных аппроксимаций производной дер / дх :
Рис. 2.3. Шаблоны для разностной аппроксимации дифференциальных операторов
us
— Ф/+1 Ф/>
= ф£ -Фг-i;
2h
— Фг+1 Фг-1-
(2.65)
(2.66)
(2.67)
Для второй производной, согласно рис. 2.3, г, получаем
h2—= cpj+i -2<pz +<рг_1. (2.68)
дхл *
х
В выражениях (2.65) — (2.68) индекс i при искомой переменной ср соответствует номеру узла сетки.
Шаблоны, показанные на рис. 2.3, д — ж, используются при решении двумерных задач. Сетка в этом случае разделяет объект на вертикальные слои вдоль координаты х и на горизонтальные слои вдоль координаты у, отделяя слои друг от друга соответствующими плоскостями (вертикальными и горизонтальными). Координаты этих плоскостей обозначены соответственно xi-l^ xi> xi+l и У]-1* У]> У]+1 > где i и j — номера плоскостей. Узлы
сетки находятся на пересечениях вертикальных и горизонтальных плоскостей, а их расположение на координатной плоскости xOz/ определяется двумя координатами: по оси х и по оси у.
В результате искомая переменная (р должна иметь двойной индекс. Например, значение ср , соответствующее узлу сетки с ко-
ординатами и У]-\, обозначается . Принимая сетку с
шагами hx ~ hy = h , составим конечно-разностные аппроксима-
ции дифференциальных операторов, шаблоны для которых приведены на рис. 2.3, д — ж:
где
9 9 9
оператор Лапласа (в двумерной задаче V = д ср / дх +
+ д\/ду2).
59
Подстановка выбранных аппроксимаций производных в исходное уравнение (2.61) и в уравнения граничных условий преобразует их для стационарной задачи в систему разностных уравнений
г(й)=О, (2.72)
а для нестационарной — в систему обыкновенных дифференциальных уравнений
dV / dt = F (v), (2.73)
где V — вектор, элементами которого являются значения фазовой переменной ср во внутренних узлах сетки.
Традиционно МКР применяют при моделировании движения жидкостей и газов в трубопроводах и теплообменных процессов. Рассмотрим примеры применения МКР для моделирования теплопередачи в одномерных и двумерных теплотехнических объектах.
Пример 2.1. Аппроксимировать исходную математическую модель одномерного теплового объекта при стационарной теплопередаче, полагая отсутствие в нем внутренних источников.
Согласно выражению (2.19), дифференциальное уравнение теплопроводности в этом случае ат(д2Т /дх2) = 0 .
Если объектом является изотропное тело, то ат = const для всей области R . Применяя регулярную сетку hx = h = const и используя выражение (2.68), получаем систему разностных уравнений
(7J-1 -2Tt +Тг+1)= О, 1 = (2.74)
Если объект представляет собой стержень постоянного сечения и состоит из участков, изготовленных из материалов, различающихся физическими свойствами, то для аппроксимации частной производной д%Т / 5х2 необходимо использовать следующее конечно-разностное отношение:
е2т = 2 (тм - т, _ Tt - Tt!'
hi + hi+i hi+y hi )
Математическая модель теплопередачи в этом случае должна также учитывать различие коэффициента температуропроводности ат для участков стержня. В результате получаем
fy+i hi
Введем обозначение у; = /(«Ti^i+1) и выполним приведение подоб-
ных:
Ti-i ~ Gi + l)^i + 7iTi+i = °, i = 1, n. (2.75)
Очевидно, что уравнение (2.74) является частным случаем уравнения (2.75) при у. = 1 . Используя (2.75), составим разностные уравнения для всех внутренних узлов i = 1, п , перенеся в правые их части значения функции Т в граничных узлах:
60
(2.76)
~(yi + 1)^ +Y1T2 = -To; ^1 “ (y2 + 1)^2 + 72^3 = ^2 ~ (y3 + 1)^3 + Y3^4 = 0;
?n-l “ (Yzi + l)^n = ~lnTn+l-Уравнения (2.76) можно записать в матричной форме
АТ = В,
(2.77)
где А — матрица коэффициентов системы алгебраических уравнений (2.76), называемая матрицей Якоби; Т— вектор искомых значений функции; В — вектор внешних воздействий, определяемый заданными краевыми условиями.
Выпишем матрицу А системы уравнений (2.76): 0 0 0 0 (2.78)
А = -(yi +1) Y1 0 Y2 -(y3+1) ... 1 0 0 0 0
1 0 0 - (y2 + 1) 1 0
о 0 0 0 -(y/i-i + i) Yn-i
0 0 0 1 - (y« +1).
Матрица А оказалась ленточной трехдиагональной. Это объясняется тем, что в данном случае при аппроксимации частной производной использовался трехточечный шаблон согласно рис. 2.3, г. В результате в каждом уравнении системы (2.76) фигурируют не более трех неизвестных.
Для определения значений функции Т в граничных точках, т.е. TQ и тп+1 , необходимо использовать уравнения граничных условий. Рассмотрим решение задачи для двух вариантов граничных условий: первого рода и третьего рода при конвективном теплообмене с ркружающей средой.
Граничные условия первого рода описываются выражением (2.22). В одномерном случае при стационарной теплопередаче задаются значения TQ = const и
Tn+1 = const , которые непосредственно подставляются в уравнения (2.76).
Граничные условия третьего рода при конвективном теплообмене описываются выражением (2.26). В одномерном случае для левой и правой граничных поверхностей получаем следующие выражения:
(2.79)
где А-! и Хл+1 — коэффициенты теплопроводности левого и правого граничных
слоев; q и а2 — коэффициенты теплообмена через конвекцию на левой и правой граничных поверхностях; Тс1 и Тс2 — температуры окружающих сред на левой и правой границах; b — размер объекта по оси х (длина стержня).
Предположим, что Тс1 > Тс2 . Тогда градиент температуры в левом граничном слое будет отрицательным, а в правом — положительным. Учитывая это и используя выражение конечно-разностной аппроксимации (2.65), получаем
61
Из этих выражений находим
Т0 = (7,1+Р17’с1)/(1 + Р1);
Tn+i = (Тп + р2Тс2)/(1 + р2),
(2.80)
(2.81)
где Pi = 04 /(hfa) ; Р2 = ос2 /(hn+1Xn+1) .
Значения функции Т в граничных узлах, определяемые выражениями (2.80) и (2.81), необходимо подставить в систему уравнений (2.76). Решение этой системы позволяет получить искомые значения температуры во всех внутренних узлах объекта.
Для решения системы алгебраических уравнений с трехдиагональной матрицей коэффициентов разработан и широко применяется весьма эффективный метод, называемый методом прогонки. Этот метод рассматривается в разделе 8.11.
В одномерной нестационарной задаче уравнение теплопро-(2 21
д Т / дх I. МКР преобразует это уравнение в систему обыкновенных дифференциальных уравнений.
В заключение отметим, что математические модели одномерных объектов микроуровня посредством конечно-разностной аппроксимации частных производных искомых функций по гео-
метрическим координатам можно легко привести к моделям макроуровня, что будет показано в главе 3 для объектов различной физической природы, а также в разделе 5.7 при моделировании
теплопередачи в твердых телах.
Пример 2.2. Аппроксимировать исходную мерного теплового объекта.
математическую модель дву-
Рис. 2.4. Схема к примеру 2.2
Пусть объект представляет собой изотропное тело
= Ху = Л.) прямоугольной формы (рис. 2.4), в котором отсутствуют внутренние источники (<?q = 0), а внешние воздействия стационарны. Тогда дТ / dt - 0 и в соответствии с (2.17) и (2.18) уравнение теплопроводности имеет вид
д2Т д2Т
+ = 0. (2.82)
дх2 ду2
При дискретизации объекта используем прямоугольную
сетку с шагами hx и hy вдрлъ осей координат х и у. Если hx hy , тогда ап
проксимацию производных уравнения (2.82) по шаблону на рис. 2.3, г необходи-
XJZi
мо выполнять раздельно вдоль каждой из координатных осей. Для конечноразностного выражения, аппроксимирующего д2Т / дх2 , используем узлы, расположенные в вертикальной плоскости при , а для д2Т / ду2 — в горизонтальной
плоскости при xt :
д2т/дх2 = (т^ - 2TtJ + Ti+lij)/h2-, д2т/ду2 - (т;>Л1 -2Ти +TlJ+1)/h2.
Подставим эти выражения в уравнение (2.82):
Тм_1 - 2(г + 1)тг>/ + TlJ+1 + + TMJ) = 0; (2.83)
i = 1, n; j = 1, m,
где у = (hy / hx) 2 — для изотропного тела или у = aTXh2 /(aTyh2) — для анизотропного тела при Хх Ф Ху ; пит — количества рядов внутренних узлов сетки соответственно вдоль осей х и у (на рис. 2.4 п=4, т=7).
Порядок полученной системы алгебраических уравнений (2.83) равен п х т . Очевидно, что он значительно выше, чем для одномерной задачи. Еще более высокий порядок системы получается для трехмерных объектов, что требует огромных вычислительных затрат при решении подобных задач.
Используя выражения (2.83), составим уравнения для всех узлов с номерами j = 1, т при i = 1 , перенося при этом в правые части уравнений значения функции У, соответствующие граничным узлам:
где 7*01,...,ТОт — значения функции Т в граничных узлах, соответствующих х=0; 7*10 — значение функции Т в граничном узле с координатами х - hx‘f у - 0; 7*1 >гп+1 — то же в узле с координатами х = hx;y = (m + l)hy .
Для узлов с номерами j = 1,т при i = 2 получаем
-2(у + 1)Т*21 + ^22 + Y^ii + У^31 ~ ~^20»
^21 “ 2(у + 1)7*22 + 7*23 + уТ*12 + У?32 = Ф
^22 “ 2(у + 1)^23 + ^24 + У^13 + У ^33 = Ф ”
(2.85)
^2,т-1 ~ 2(у + 1)Т2пг + y7isZn + у ?з>т - ~Т2гп+1,
где Т2о — значение 7* в узле с координатами х = 2hx; у = 0; Т*2 щ+1 — то же в узле с координатами х = 2hx; у = (т + l)hy .
Остальные уравнения составляются аналогично. Количество таких систем уравнений равно п.
Для решения системы алгебраических уравнений (2.83) уравнения (2.84), (2.85) и др. необходимо привести к виду (2.77), т.е. заменить матрицу искомых
функций Titj, i - 1, n, j = 1, m (двумерный массив), вектором Tk, k = 1, (пт) . Это
преобразование выполняется на основе выражения k - j + (i - l)n.
Матрица коэффициентов системы уравнений
(2.86)
(2.77) для двумерной задачи
имеет вид
а 1 0 0 .
1 а 1 0 .
О 1 а 1 .
0 0 1а.
0 у 0 0 0 .
0 0 у 0 0 .
О 0 0 у 0 .
О 0 0 0 у .
OOOO.alOOO. yOOO.lalOO. OyOO.OlalO. OOyO.OOlal. OOOy. 0001a.
О О О о о о о о
о о у О О у о о о о
о о о о о о о о
о о о о о о у О О у
(2.87)
OOOO.yOOOO.alOO OOOO.OyOOO.lalO 0000.00y00.01al 0000. ОООуО. 001a
В матрице А использовано обозначение а = -2(у + 1) .
Матрица А в данном случае оказалась пятидиагональной. Это обусловлено тем, что аппроксимация производных выполнялась по пятиточечному шаблону. Причем, диагонали с элементами у отстоят от главной диагонали на ±т столбцов. Кроме того, через каждые т элементов, отсчитываемых по главной диагонали, элементы двух смежных диагоналей оказываются равными нулю, в то время как остальные элементы этих диагоналей равны единице.
Вектор В правых частей системы уравнений (2.77) имеет такую же раз-
мерность, как и вектор искомых функций Т . Формирование вектора В нетрудно проследить на основе уравнений (2.84) и (2.85).
Для решения системы алгебраических уравнений (2.77) с пятидиагональной матрицей коэффициентов А используется метод матричной прогонки [19].
Метод конечных элементов. При решении задач, связанных с определением напряжений и деформаций в элементах конструкций технических объектов, наиболее часто используют МКЭ. Дискретизация такого объекта осуществляется с использованием конечных элементов, а алгебраизация задачи заключается в выборе аппроксимирующих функций для каждого КЭ. Малые размеры КЭ позволяют использовать простые аппроксимирующие функции причем одного и того же типа для всех КЭ опреде-
ленной формы. Обычно в качестве для отдельного КЭ применяют полиномы не выше третьей степени, например в одномерном случае:
64
u(x) =
i=0
Функции ЦХI в МКЭ представляют в форме
(2.88)
i=0
где коэффициенты qi имеют вполне определенный физический смысл — это значения аппроксимирующей функции в узловых точках; фДх) — функции, называемые координатными (или функциями формы); г — число узловых точек в конечном элементе.
В общем случае аппроксимации вектора ёр(Х) в тп-мерном пространстве выражение (2.88) принимает вид
(2.89)
где I — вектор размерности т х 1; Q — вектор размерности (тиг) х 1; N — интерполяционная матрица порядка т х (тпг), ее элементами являются координатные функции.
Важной процедурой МКЭ является выбор функционала, характеризующего качество используемой аппроксимации. Для механических систем в качестве такого функционала используют выражение потенциальной энергии (2.60). Минимизируя потенциальную энергию Еп , находят вектор перемещений u{x}. Деформации е^- связаны с перемещениями щ соотношениями (2.54), что можно выразить в матричной форме
811
822
833
812
813
823
2(д/дх1) о
о
д / дх2
д / дх%
0
о
2(6 / 6x2)
0
6 / 6Xj
0
6/ 6х3
0
о
2(6 / 6х3)
0
6 / дх±
д / 6х2
и±
и9
из
(2.90)
1
2
или более лаконично
(2.91)
где S — матрица-оператор дифференцирования.
Подставляя (2.91) в (2.60) и заменяя вектор его аппроксимацией VjXI по формуле (2.89), получаем
65
Еп = 0,5 $QTBTDBQdR - W, R где B=SN, Обозначим
К = $BTDBdR, (2.92)
R
Матрицу К называют матрицей жесткости. Тогда Еп = 0,5QTKQ - W . В соответствии с принципом Лагранжа дифференцируем Еп по вектору Q и приравниваем нулю. В результате получаем систему алгебраических уравнений
KQ = Р, (2.93)
где Р = dW / dQ — вектор правых частей, называемый вектором нагрузок.
Матрица жесткости К всей исследуемой детали составляется из матриц жесткости Ку отдельных КЭ. Матрицы Ку несут информацию о конфигурации и упругих свойствах материала конечных элементов и подсчитываются по формуле (2.92), в которой при этом под R понимается подобласть, относящаяся к рассматриваемому КЭ.
Более подробное и систематизированное изложение МКЭ можно найти в многочисленной литературе, например в [6,25,28].
5. Зак. 3006
3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ПРОСТЫХ ДИСКРЕТНЫХ ЭЛЕМЕНТОВ
ТЕХНИЧЕСКИХ ОБЪЕКТОВ
3.1. ОБЪЕКТЫ ПРОЕКТИРОВАНИЯ НА МАКРОУРОВНЕ
На макроуровне осуществляют проектирование различных машин и механизмов. Объекты проектирования рассматриваются как сложные технические системы, состоящие из совокупности взаимодействующих элементов. Таким образом, в отличие от микроуровня, где объектами проектирования были детали машин (валы, корпуса, панели и т.п.), на макроуровне объект имеет сложную неоднородную структуру, состоящую из элементов — объектов проектирования микроуровня.
На микроуровне использовались математические модели, представляемые дифференциальными уравнениями в частных производных. Эти модели универсальны, дают наиболее полное описание физических свойств и позволяют решать любые задачи анализа технического объекта. Однако они чрезвычайно сложны даже для отдельного элемента машины или механизма и требуют значительных затрат времени на проведение анализа. Если рассматривать каждый элемент объекта макроуровня как сплошную среду, т.е. как динамическую систему с распределенными параметрами, то это сделает практически нереальным решение задач оптимизации структуры и параметров объекта.
67
Вместе с тем многие задачи проектирования успешно решаются с использованием более простых математических моделей. Эти модели можно получить путем аппроксимации распределенных моделей микроуровня на основе соответствующих допущений относительно представления структуры и физических свойств объекта. При этом динамическая система с распределенными параметрами путем дискретизации в пространственных координатах представляется совокупностью материальных объектов, выделенных из сплошной среды, — дискретных элементов с постоянными усредненными параметрами. Такую систему называют динамической системой с сосредоточенными параметрами.
Дискретный элемент в общем случае обладает инерционными, упругими и диссипативными свойствами (внутренние свойства системы). Различают простые и сложные элементы. Простой элемент наделен только одним из упомянутых физических свойств, а сложный — более чем одним.
Основанием для дискретизации является наличие выраженного дискретного спектра собственных частот колебаний системы в ограниченном диапазоне (например, для механических систем — до 300 Гц). Дискретные системы оказываются вполне пригодными для анализа колебательных процессов в этом диапазоне частот.
Математическая модель динамической системы с сосредоточенными параметрами — система обыкновенных дифференциальных уравнений вида (1.5).
Таким образом, объекты проектирования на макроуровне рассматриваются как системы, состоящие из совокупности взаимодействующих дискретных элементов. Задача проектирования таких объектов состоит в определении оптимальных параметров и структуры исходя из заданного описания внешней среды и технических требований к объекту.
3.2. ДИНАМИЧЕСКАЯ МОДЕЛЬ ТЕХНИЧЕСКОГО ОБЪЕКТА НА МАКРОУРОВНЕ
Построение математической модели технического объекта осуществляется на основе его динамической модели. Динамическая модель — это абстрактное графическое отображение основных физических свойств технического объекта и характеристик взаимодействия с внешней средой.
При построении динамической модели следует принимать во внимание лишь те физические свойства объекта и воздействия внешней среды, которые могут оказать существенное влияние на точность результатов исследования моделируемого процесса
68
функционирования объекта. Такой подход позволит избежать необоснованной избыточности в его математическом описании. Но при этом должна быть обеспечена адекватность математической модели (см. раздел 1.5).
На этапе построения математической модели микроуровня в инвариантной форме динамическая модель объекта проста. Она представляет собой графическое изображение области определения объекта Q соответствующей конфигурации, определяемой граничной поверхностью S, посредством которой осуществляется взаимодействие объекта с внешней средой. Во многих случаях достаточно вербального описания динамической модели. Необходимость построения динамической модели микроуровня возникает лишь при разработке алгоритмической модели (см. раздел 2.6).
При построении математической модели макроуровня в инвариантной форме почти всегда необходима разработка динамической модели. Это объясняется тем, что структура динамической модели макроуровня гораздо сложнее. Она представляется в виде совокупности взаимодействующих дискретных элементов и ее сложность зависит от степени абстрагирования при отображении физических свойств объекта.
На макроуровне для выделения дискретных элементов из сплошной среды используют различные методы: сеток, функционально законченных элементов и сосредоточенных масс.
Методы сеток подразделяют на метод конечных разностей и метод конечных элементов. Они обычно используются при построении алгоритмической модели на микроуровне в процессе ал-гебраизации дифференциальных уравнений в частных производных, но могут применяться и для построения математической
модели макроуровня путем аппроксимации модели микроуровня.
Метод функционально законченных элементов основан на выделении типовых элементов технического объекта, завершенных в конструктивном отношении и предназначенных для выполнения определенных функций (например, в гидромеханической системе — участок гидромагистрали, золотниковый клапан, дроссель, обратный клапан, насос, гидромотор и др.). Имея библиотеку математических моделей функционально законченных элементов и зная структуру технического объекта, можно составить полную математическую модель.
Наиболее часто при построении динамической модели используют метод сосредоточенных масс. Этот метод применим, если система имеет явно выраженный дискретный спектр собственных частот. Это характерно для технических объектов, у которых масса распределена в пространстве неравномерно. Напри
69
мер, в механической системе автомобиля масса вращающихся деталей в основном сосредоточена в маховике двигателя, крупных шестернях трансмиссии, барабане стояночного тормоза, колесах, имеющих большие радиальные размеры и обладающих большими моментами инерции, а соединяющие их детали (валы, муфты, карданные передачи и др.) имеют малые радиальные размеры и массу, но обладают существенными упругими свойствами. Из названия метода следует, что он предназначен для моделирования технических объектов, мерой инертности элементов которых служит масса.
При построении динамической модели методом сосредоточенных масс выделяют некоторые абстрактные материальные субстанции, наделяя их определенными физическими свойствами. Такими субстанциями являются: сосредоточенные массы, эквивалентные массам соответствующих частей технического объекта, и элементы, лишенные массы (невесомые), отображающие характер взаимодействия сосредоточенных масс.
Сосредоточенные массы обладают инерционными свойствами и способностью накапливать кинетическую энергию. Их называют инерционными элементами. Количество выделяемых сосредоточенных масс в динамической модели равно числу ее степеней свободы.
Взаимодействие сосредоточенных масс осуществляется посредством упругих, диссипативных, фрикционных и трансформаторных элементов.
Упругие элементы отображают упругие свойства динамической системы. Они обладают способностью накапливать потенциальную энергию.
Диссипативные элементы отображают свойства диссипации (рассеивания) энергии конструктивными элементами технического объекта, обусловленные силами внутреннего трения, пропорциональными относительной скорости перемещения взаимодействующих сосредоточенных масс (или сосредоточенных масс относительно внешней среды, например, при движении жидкости в трубопроводе).
Фрикционные элементы отображают физические свойства фрикционных механизмов технического объекта.
Трансформаторные элементы отображают безынерционные преобразования параметров потока энергии, осуществляемые техническими устройствами, называемыми трансформаторами.
Следует отметить, что рабочие процессы трансформаторов в общем случае могут быть весьма сложными, в особенности если происходит преобразование одного вида энергии в другой. В та
70
ком случае необходима более детальная математическая модель трансформатора. Здесь же речь идет о тех случаях, когда внутренними процессами трансформатора можно пренебречь и учитывать лишь пропорциональные изменения величин выходных фазовых переменных по отношению к величинам переменных на его входе без преобразования вида энергии. Более подробно этот вопрос будет изложен в разделе 5.2.
Состояние сосредоточенных масс характеризуется фазовыми координатами типа потока. Это геометрические координаты и их первые производные по времени, позволяющие определять положение сосредоточенных масс в многомерном фазовом пространстве и скорости их движения.
Взаимодействие различных элементов динамической модели отображается переменными типа потенциала.
Фазовые координаты типа потока выбирают в качестве обобщенных координат. Количество независимых обобщенных координат системы равно числу ее степеней свободы. В общем случае не все введенные фазовые переменные типа потока будут независимыми. Переменные же типа потенциала всегда принадлежат к зависимым координатам и выражаются через переменные типа потока.
Направления фазовых координат типа потока выбирают таким образом, чтобы они отражали положительное направление потока передаваемой через техническую систему энергии внешних источников. При этом также учитываются ограничения, наложенные объектами внешней среды на свободу перемещения сосредоточенных масс. Направления фазовых координат типа потока должны быть отображены в динамической модели системы.
Ограничения на изменения геометрических координат и скоростей движения сосредоточенных масс динамической системы называют связями. Различают связи: геометрические (позиционные) и кинематические; удерживающие и неудерживающие (виртуальные); стационарные и нестационарные; голономные и неголономные. Математическое описание ограничений дается уравнениями связей. Каждое уравнение связи отображает тот факт, что данная связь лишает материальную систему одной степени свободы. При этом соответственно уменьшается количество независимых координат системы.
Если в динамической модели выбрать только такие независимые фазовые координаты, которые отображают лишь перемещения сосредоточенных масс, допускаемые позиционными удерживающими связями, то необходимость составления и использования уравнений этих связей исключается. Сложное дви-
71 жение твердого тела при этом раскладывается на простейшие составляющие — поступательное и вращательное.
При моделировании технического объекта с виртуальными и неголономными связями уравнения этих связей включаются в состав математической модели.
Для обозначения элементов в динамических моделях применяют графические изображения, используемые в кинематических и принципиальных схемах.
Пример 3.1. Используя метод сосредоточенных масс, построить динамическую модель для анализа плавности хода автомобиля.
В связи с неровностями дороги движение автомобиля сопровождается колебаниями кузова и вибрацией его механизмов и деталей. Для того чтобы создать нормальные условия работы водителю, комфортные условия пассажирам, обеспечить сохранность перевозимого груза и нормальное функционирование механизмов и систем автомобиля, применяют систему виброзащиты (подвеску автомобиля). Эта система содержит упругие элементы и амортизаторы. Энергия толчков и ударов, возникающих на неровностях дороги, преобразуется в потенциальную энергию деформации упругих элементов подвески, вследствие чего обеспечиваются плавные колебательные движения кузова. Амортизаторы поглощают и рассеивают энергию колебаний, значительно уменьшая амплитуды резонансных колебаний. Упругими и диссипативными свойствами обладают и пневматические шины колес автомобиля. В результате подрессоренная масса кузова и неподрессо-ренные массы колес и мостов представляют собой многомассовую колебательную систему.
Адекватное описание физических свойств системы виброзащиты автомобиля позволяет провести анализ колебаний и выбрать оптимальные параметры упругих и диссипативных элементов подвески.
При движении автомобиля кузов можно рассматривать как твердое тело с шестью степенями свободы, совершающее линейные колебательные движения относительно трех ортогональных осей, проведенных через его центр масс, и вращательные движения относительно этих же осей (рис. З.Ц а). Перемещения колес при колебаниях зависят от кинематической схемы направляющих устройств подвески. Различают зависимую и независимую подвески колес. Если колеса непосредственно закреплены на несущей балке моста, движения их оказываются взаимосвязанными и подвеску называют зависимой. В этом случае мост вместе с колесами может перемещаться вертикально и вращаться относительно продольной оси автомобиля. Могут быть и другие направления движения, определяемые кинематикой подвески, однако перемещения в этих направлениях обычно незначительны и ими во многих случаях пренебрегают. При зависимой подвеске мост вместе с колесами можно рассматривать как твердое тело с двумя степенями свободы. При независимой подвеске колес обычно учитывают только их вертикальные перемещения.
Во многих случаях при моделировании зависимой подвески вместо одного твердого тела, совершающего вращательное и поступательное движения, принимают модель с двумя независимыми твердыми телами, совершающими только вертикальные перемещения, аналогично схеме с независимой подвеской колес.
Динамическая модель колебательной системы автомобиля с учетом изложенных представлений о физических свойствах системы виброзащиты приведена на рис. 3.1, а. Она имеет 10 степеней свободы. В практических задачах часто ограничиваются моделированием только трех движений кузова: поступательного вдоль оси 2 и вращательных относительно осей х и у, т.е. учитывают три степени свободы кузова. Тогда динамическая модель автомобиля представляет собой колебательную систему с семью степенями свободы.
72
Рис. 3.1. Динамические модели для анализа плавности хода автомобиля
73
Внешние воздействия на эту систему создаются неровностями микро- и макропрофиля дороги. Эти воздействия носят случайный характер и описываются случайными функциями q(t).
Рассмотренная динамическая модель приводит к довольно сложной математической модели и ее использование при проектировании требует больших затрат времени. Поэтому на ранних этапах проектирования применяют более простые динамические модели.
Для предварительного выбора параметров подвески используют одномассовую динамическую модель, пренебрегая массой колес и мостов (рис. 3.1, б). При этом принимают во внимание, что у существующих автомобилей параметры колебаний передней и задней частей кузова слабо связаны между собой. В этой связи постулируют допущение о несвязанности этих колебаний. Масса т представляет собой часть массы кузова, нагружающей колеса данного моста. Таким образом, динамическая модель в данном случае представляет совокупность инерционного, упругого и диссипативного элементов, находящихся под воздействием неровностей микропрофиля дороги q(t). Параметром упругого элемента является коэффициент жесткости с, учитывающий упругие свойства подвески и пневматической шины, а параметром диссипативного элемента — коэффициент сопротивления ц, учитывающий потери энергии в гидравлическом амортизаторе и шине при ее деформировании.
Одномассовая динамическая модель не учитывает колебаний колес. Парциальная частота колебаний колес обычно в 6... 10 раз выше парциальной частоты колебаний кузова (определение парциальных частот см. в разделе 7.6). Вследствие этого колебания колес могут вызывать вибрации элементов конструкции кузова и расположенных в нем приборов и механизмов. Кроме того, при проектировании должны быть найдены рациональные соотношения между параметрами упругих и диссипативных элементов подвески и шин. В этой связи возникает необходимость использования двухмассовой динамической модели (рис. 3.1, в). В этой модели учитывается масса части кузова тпг, приходящаяся на колеса данного моста, масса колес и моста пц, коэффициенты жесткости упругих элементов подвески с2 и шины Ci, коэффициенты сопротивления диссипативных элементов подвески Ц2 и шины щ. С учетом наложенных позиционных связей на сосредоточенные массы mi и ТП2 они могут перемещаться только вертикально вдоль осей соответственно и z2. Следовательно, система имеет две степени свободы.
Однако для более детального анализа влияния параметров подвески на колебания кузова необходимо учитывать связанность колебаний. Кроме того, возникает необходимость оценки колебаний механизмов и приборов, расположенных в различных местах кузова. В этом случае приходим к динамической модели плоских колебаний (рис. 3.1, г), в которой учитываются не только вертикальные колебания кузова относительно оси z0, но и угловые продольные колебания р относительно оси у. Колебательная система имеет четыре степени свободы и ее состояние определяется фазовыми координатами Р, 21, г2- Аналогичная модель используется при исследовании поперечных колебаний кузова.
Таким образом, в зависимости от степени абстрагирования при описании физических свойств технического объекта получают различные динамические модели.
В заключение еще раз подчеркнем необходимость обоснованного подхода к выбору моделей на различных этапах проектирования, постепенного их усложнения при приближении к заключительному этапу. Необходимость использования большого количества разнообразных моделей в процессе проектирования одного и того же технического объекта обусловливает актуальность автоматизации их формирования.
6. Зак. 3006
74
3.3. КОМПОНЕНТНЫЕ И ТОПОЛОГИЧЕСКИЕ УРАВНЕНИЯ
Физические свойства технического объекта в динамической модели макроуровня отображаются совокупностью взаимодействующих дискретных элементов. В зависимости от способа построения динамической модели каждый элемент может наделяться одним или несколькими физическими свойствами. При дискретизации методом функционально законченных элементов или сеточными методами элементы обычно обладают несколькими физическими свойствами и являются сложными. В методе сосредоточенных масс все элементы простые, так как, каждый из них наделен только одним физическим свойством.
В данной главе рассматриваются только простые дискретные
элементы.
Состояние простого элемента характеризуется одной фазовой переменной типа потока и одной переменной типа потенциала. Физическое свойство элемента описывается математической моделью, выражающей зависимость между этими фазовыми переменными. Это выражение называют компонентным
уравнением.
Основные физические свойства технических объектов любой физической природы — инерционные, упругие и диссипативные. Они отображаются в динамических моделях соответственно инерционными, упругими и диссипативными элементами. Фрикционные и трансформаторные элементы отображают специфические свойства, характерные не для всех технических объектов. Математическое описание этих свойств может быть различным, в зависимости от физической природы технического объекта. В этой связи фрикционные и трансформаторные элементы будут рассмотрены отдельно (в главе 5).
Компонентные уравнения дискретных элементов могут быть получены аппроксимацией моделей микроуровня или непосредственным использованием физических законов.
Аппроксимация моделей микроуровня осуществляется путем замены всех частных производных фазовых переменных по пространственным координатам отношениями конечных разностей. Например, производную дср/дх заменяют выражением
5<р/5х = (ср}-ф2)//х,
где (pi, (р2 — значения фазовой переменной ср на границах дискретного элемента (в узлах 1 и 2 дискретизации сплошной среды);
1Х — длина дискретного элемента вдоль оси х.
Значения параметров элементов, выделяемых из сплошной среды с распределенными параметрами, усредняют.
75
Для математического описания физических свойств элементов могут быть также использованы физические законы. Компонентные уравнения, полученные на основе физических законов, имеют следующий вид:
для инерционного элемента
ии = HdlJdt; (3.1)
для диссипативного элемента
^д=Д1д; (3.2)
для упругого элемента
U„=V[lvdt. (3.3)
В уравнениях (3.1) — (3.3) приняты следующие обозначения: И, Д, У — параметры инерционного, диссипативного и упругого элементов соответственно; I — фазовая переменная типа потока; U — фазовая переменная типа потенциала. Индексы при фазовых переменных I и U указывают на принадлежность их соответствующим элементам.
Для получения полной математической модели технической системы необходимо объединить все компонентные уравнения элементов в общую систему уравнений. Объединение осуществляется на основе физических законов, выражающих условия равновесия и непрерывности фазовых переменных. Уравнения этих законов называют топологическими уравнениями. Они описывают характер взаимодействия между простыми элементами, устанавливая соотношения между однотипными фазовыми переменными.
Условия равновесия записываются для фазовых переменных типа потенциала
^1 = °’ (3.4)
I а условия непрерывности — для фазовых переменных типа потока
(3.5) k
Форма компонентных и топологических уравнений одинакова для систем различной физической природы.
Если фазовые переменные — векторные величины, то направления векторов учитываются только топологическими уравнениями, а в компонентных уравнениях их направления не учитываются. Компонентные уравнения (3.1) — (3.3) в этом случае устанавливают соотношения лишь между модулями фазовых пе-
ременных. Это позволяет обеспечить корректное описание взаимодействия элементов системы в полной математической модели.
Топологическое уравнение для векторных переменных формируются как равенство нулю геометрической суммы соответствующих фазовых координат, а для скалярных — равенство нулю алгебраической суммы этих координат.
Полная математическая модель технического объекта на макроуровне, составленная на основе компонентных уравнений, представляет собой систему обыкновенных дифференциальных уравнений. Искомыми функциями в этих уравнениях являются базисные фазовые координаты I и 17, а независимой переменной— время t. Размерность математической модели определяется общим порядком системы дифференциальных уравнений (или числом базисных координат). Эту модель обычно представляют в нормальной форме Коши, в которой все уравнения разрешены относительно первых производных фазовых координат dl/dt и dU/dt. Координатный базис в этом случае составляют фазовые переменные типа потока I и типа потенциала U.
Состояние сосредоточенных масс определяется фазовыми координатами типа потока. Количество таких координат соответствует числу степеней свободы динамической модели объекта.
3.4. КОМПОНЕНТНЫЕ И ТОПОЛОГИЧЕСКИЕ УРАВНЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Фазовые координаты. Сосредоточенные массы, отображаемые на динамических моделях механических систем, в силу учитываемых позиционных связей, могут совершать только простейшие виды движений — поступательное и вращательное. Сложное движение твердого тела представляется сочетанием этих простейших видов движения и соответствующим количеством сосредоточенных масс (инерционных элементов).
Поступательное движение твердого тела характеризуется линейной скоростью v и силой F, а вращательное — угловой скоростью со и вращающим моментом М. Они и принимаются в качестве фазовых переменных механической системы:
фазовые переменные типа потока — скорости и, м/с, рад/с;
фазовые переменные типа потенциала — силы F, Н, вращающие моменты М, Н м.
Параметры элементов. Параметром инерционного элемента при поступательном движении является масса т, кг, а при вращательном движении — момент инерции J, кг м2.
Параметр диссипативного элемента — коэффициент сопротивления ц, называемый также коэффициентом неупругого
77
сопротивления, коэффициентом вязкого трения, коэффициентом демпфирования. При поступательном движении он измеряется в Н-с/м, а при вращательном — в Н-м-с/рад.
Параметр упругого элемента — коэффициент жесткости с. При поступательном движении в качестве единицы измерения с используется Н/м, а при вращательном — Н-м/рад.
Компонентные уравнения. Компонентное уравнение инерционного элемента получают на основе второго закона Ньютона. Для поступательного движения твердого тела уравнение имеет вид
F^=mdv^/dt, (3.6)
а для вращательного
Ми = J d®yjdt,
(3.7)
где F^, — соответственно сила инерции и момент сил инерции
(или инерционный момент) элементов; ии, сои — скорости инерционных элементов.
Скорости ии и сои представляют собой абсолютные скорости сосредоточенных масс соответственно при поступательном и вращательном движениях. Если твердое тело совершает сложное движение, то его раскладывают на простейшие составляющие, выделяют соответствующие им сосредоточенные массы и для каждой из них составляют свое компонентное уравнение инерционного элемента.
Математическое описание диссипативного элемента основано на использовании закона Ньютона для вязкого трения: сила вязкого трения пропорциональна относительной скорости перемещения элементов трения. При поступательном движении компонентное уравнение имеет вид
Fn = Vvp.’ (3.8)
а при вращательном
Мд - цсод , (3.9)
где Ед, Мд — соответственно сила и момент диссипативных элементов; Пд, (Од — скорости диссипативных элементов.
Согласно закону Гука сила упругости деформируемого механического элемента при поступательном движении Fy или момент упругости Му — при вращательном пропорциональны деформации:
Fy = сху, Му = серу, где ху, (ру — соответственно линейная и угловая деформации: ху = Xi -х2; (ру = (pi ~ Ф2» х1> х2 — линейные перемещения узлов
78 дискретизации 1 и 2 (или выделенных сосредоточенных масс); (pl, (р2— угловые перемещения.
Выразив перемещения х и (р через фазовые переменные v и со , компонентные уравнения упругих элементов можно записать в интегральной или дифференциальной формах: при поступательном движении
Fv=cfvvdt; dFv /dt = cv* (3.10)
при вращательном движении
Mv - с Г со vdt, dMv / dt - ccov , (3.11)
где Fn, Mv — соответственно сила и момент упругих элементов; иу, соу — скорости деформации упругих элементов.
Упругие и диссипативные элементы в динамической модели соединяют между собой сосредоточенные массы (рис. 3.1). В этой связи скорости этих элементов иу, соу, ид, сод представляют собой относительные скорости соединяемых ими сосредоточенных масс:
vyj = vi ~ v Z+l>
vp,k = vi ~ ^i+1’
где Vyj — скорость деформации j-ro упругого элемента; ид£ — скорость й-го диссипативного элемента; vi9 vi+^ — скорости f-й и (£+1)-й сосредоточенных масс, соединяемых j-м упругим и /?-м диссипативным элементами.
Скорости упругих и диссипативных элементов при вращательном движении твердых тел определяются аналогичными выражениями.
Силы F^, Fy, и моменты 7Ии, Му, Мд инерционных, упругих и диссипативных элементов характеризуют их взаимодействия в динамической модели. Они представляют собой внутренние потенциалы системы.
При движении системы под действием приложенных к ней внешних сил и моментов происходит изменение ее кинетической и потенциальной энергий, а часть энергии затрачивается на преодоление сил трения. Инерционные элементы динамической модели отображают свойство системы накапливать кинетическую энергию, упругие элементы — свойство накапливать потенциальную энергию, а диссипативные — рассеивать энергию потерь на трение путем превращения механической энергии в тепловую.
Топологические уравнения. Первое топологическое уравнение является уравнением равновесия. Оно выражает принцип Да-
79 ламбера: геометрическая сумма всех сил, приложенных к твердому телу, включая силу инерции, равна нулю'.
2^=0. (3.12)
i
Уравнение (3.12) соответствует поступательному движению твердого тела. При вращательном движении используется уравнение
ЕД=о. (3.13)
I
Второе топологическое уравнение определяет условие непрерывности фазовых координат типа потока. Оно выражает принцип сложения скоростей при сложном движении твердого тела: геометрическая сумма абсолютной, относительной и переносной скоростей равна нулю:
Z^ = o; (3-14)
k
-0. (3.15)
k
Количество составляемых топологических уравнений вида (3.12) и (3.13) равно числу степеней свободы моделируемой системы.
Если компонентные уравнения (3.6) — (3.11) записать в векторной форме, то в правых частях необходимо поставить знак минус. Это обусловлено тем, что сила инерции Еи и инерционный момент 7Ии направлены противоположно соответствующим ускорениям dVyJdt и dcbyjdt, сила и момент трения Рд и 7ИД противоположны относительным скоростям сосредоточенных масс бл и йл, а сила и момент упругих элементов Fv и противополож-ны векторам деформаций ху и сру. Однако, как отмечалось в разделе 3.3, компонентные уравнения при использовании метода сосредоточенных масс следует записывать без учета знаков фазовых координат, а их знаки необходимо учитывать лишь в топологических уравнениях.
3.5. КОМПОНЕНТНЫЕ И ТОПОЛОГИЧЕСКИЕ УРАВНЕНИЯ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ
В гидравлической системе фазовыми переменными типа потока являются расходы Q, м3/с, а типа потенциала — давления р, Н/м2 (Па).
80
При выводе компонентных уравнений используем уравнения Эйлера, Навье—Стокса и Гука, полученные для одномерной системы с распределенными параметрами (см. раздел 2.4).
Для перехода к модели с сосредоточенными параметрами осуществим аппроксимацию моделей микроуровня путем замены частных производных фазовых переменных по пространственным координатам отношениями конечных разностей.
Уравнение Эйлера для трубопровода постоянного сечения dv)dt = - р^др/дх , (3.16)
где v — скорость потока жидкости в трубопроводе; р — плотность жидкости; х — геометрическая координата.
Разделим трубопровод на ряд участков длиной I и заменим частную производную др/дх отношением конечной разности
др/дх = -(pj - Р2)/1 = -р/1,
(3-17)
где pi, р2 — давления в узлах дискретизации 1 и 2, т.е. на границах выделенных участков трубопровода.
Здесь учтено, что градиент давления вдоль трубопровода grad р =др/дх отрицателен (давление падает по мере удаления от источника).
Расход жидкости в трубопроводе Q выразим через скорость потока v:
Q=Av, (3.18)
где А — площадь поперечного сечения трубопровода.
Подставим значения др/дх из (3.17) и v из (3.18) в уравнение (3.16) и найдем выражение для определения р:
р = (pl/A)dQ/dt.
Введем обозначение
тг = pv/A2 = тж/А2,
(3.19)
где тг — коэффициент массы, кг/м4; V — объем жидкости в вы
деленном участке трубопровода длиной I: V=Al; тж — масса жидкости в этом участке.
С учетом (3.19) уравнение Эйлера (3.16) после дискретизации приводится к виду
Ри = тг dQ^/dt. (3.20)
Сопоставляя (3.20) с выражением (3.1), приходим к выводу, что уравнение Эйлера отображает только инерционные свойства жидкости.
О1
Рассмотрим линеаризованное уравнение Навье—Стокса dv/dt - -р-1 др/дх -(2^/р)и, (3.21)
где — коэффициент линеаризованного вязкого трения жидкости.
Учитывая выражения (3.17) и (3.18), получаем
р = (pZ/A) dQ/dt + (2^/A)Q.
Введем обозначение
цг =2^/a = 2^v/a2, (3.22)
где jLi г — коэффициент гидравлического сопротивления, Н с/м5.
С учетом выражений (3.19) и (3.22) уравнение Навье—Стокса после дискретизации приводится к виду
р - т г dQ/dt + prQ. (3.23)
Из выражения (3.23) следует, что уравнение Навье—Стокса отображает инерционные и диссипативные свойства жидкости, В этом случае р = рИ+рД, где рД — величина потерь давления на преодоление трения при движении потока жидкости в трубопроводе, а ри — затраты давления на разгон жидкости. Полагая ри и рД аддитивными величинами, выделим инерционный и диссипативный элементы участка трубопровода. Компонентное уравнение инерционного элемента соответствует выражению (3.20), а диссипативного элемента имеет вид
Рд=Цг£д. (3.24)
Уравнение Гука
dp/dt = -Едо/дх (3.25)
позволяет учесть упругие свойства жидкости. Выразим скорость потока о через расход Q по формуле (3.18). Тогда до/дх = А~гх xdQ/dx. Заменим dQ/dx отношением конечной разности
dQ/dx = - (Qi - Q2)/l = - Qy/l, (3.26)
где Qi, Q2 — расходы в узлах дискретизации трубопровода 1 и 2; Qy — изменение расхода, обусловленное сжимаемостью жидкости.
В выражении (3.26) учтено, что при возрастании давления происходит увеличение объемной деформации жидкости и величина расхода жидкости при удалении от источника уменьшается.
На основе уравнения (3.25) с учетом выражения (3.26) найдем выражение для определения давления упругого элемента, полагая Е не зависящим от р:
ру = E(Al)-1 fQydt. (3.27)
Введем обозначение
сг = EiAiy1 = E/V, (3.28)
где сг — коэффициент гидравлической жесткости, Н/м5; Е — модуль объемной упругости жидкости, Н/м2.
В результате получаем компонентное уравнение упругого элемента гидравлической системы
Py = cr\Qydt. (3.29)
Фазовые переменные ри, ру, рд представляют собой внутренние потенциалы исследуемой гидравлической системы, характеризующие взаимодействие выделенных дискретных элементов и определяющие потери давления источника на преодоление сил инерции жидкости и сообщение ей кинетической энергии, на деформацию жидкости и изменение ее потенциальной энергии, а также на преодоление сил внутреннего трения жидкости.
Коэффициенты тГ, сГ и цг являются параметрами соответственно инерционных, упругих и диссипативных элементов гидравлической системы.
Топологические уравнения имеют вид
2>=0; (3.30)
I
= (3-31)
k
Первое уравнение выражает условие равновесия потенциалов, действующих на сосредоточенные массы, а второе — условие непрерывности потоков жидкости.
Пример 3.2. На основе метода сосредоточенных масс построить динамическую модель гидравлической магистрали.
При построении динамической модели гидравлической магистрали ее разделяют на ряд участков и выделяют в них простые дискретные элементы — инерционные, диссипативные и упругие. Упругие элементы гидравлической системы должны учитывать не только сжимаемость жидкости, но и деформируемость трубопровода. Определение сг с учетом упругих свойств газожидкостной смеси и трубопроводов рассмотрено в разделе 3.9.
Фрагмент динамической модели гидравлической магистрали после ее дискретизации представлен на рис. 3.2. Модель содержит две сосредоточенные массы, характеризуемые коэффициентами масс mrj и 7nr2, два диссипативных элемента, обозначенных в виде постоянных дросселей с коэффициентами гидравлических сопротивлений цг1 и цг2, и один упругий элемент с коэффициентом гидравлической жесткости сг, отображаемый в гидравлических схемах в виде гидроаккумулятора. Внешние воздействия на систему представлены в виде источников потенциалов рв1 и рв2 — давлений источника и потребителя.
83
Рис. 3.2. Динамическая модель гидравлической магистрали
Из рис. 3.2 следует, что фазовые переменные типа потока QV[i и QRi, характеризующие состояния инерционных и диссипативных элементов, равны абсолютным расходам жидкости в выделенных участках гидромагистрали Qi и Q2, т.е. фазовым координатам сосредоточенных масс. Отсюда следует, что потери давления рд на преодоление сил внутреннего трения жидкости, определяемые уравнением (3.24), зависят от абсолютной скорости жидкости в трубопроводе. Фазовая переменная типа потока Qy упругого элемента равна разности расходов жидкости в смежных участках трубопровода, т.е. Qy == Qj - Q2.
3.6. КОМПОНЕНТНЫЕ И ТОПОЛОГИЧЕСКИЕ УРАВНЕНИЯ ТЕПЛОВОЙ СИСТЕМЫ
Б тепловой системе фазовыми переменными типа потока являются температуры Т, К, а типа потенциала — тепловые потоки Ф, Вт (или Дж/с).
Рассмотрим одномерный процесс теплопередачи в твердом теле, полагая, что передача тепловой энергии осуществляется только вдоль оси х. Разделим твердое тело вдоль этой оси на слои толщиной I, осуществив тем самым дискретизацию сплошной среды. Каждый из полученных при этом дискретных элементов можно характеризовать средними значениями параметров: плотности р, теплоемкости ст и коэффициента теплопроводности X. Очевидно, что эти реальные физические элементы, имеющие определенные геометрические формы и объемы, являются сложными, так как обладают одновременно инерционными и диссипативными свойствами, что характерно для сеточных методов дискретизации. Однако и в этом случае физические свойства дискретных элементов, так же как и в механической или гидравлической системе, можно отобразить простыми абстрактными элементами: инерционным и диссипативным.
Изменение тепловой энергии dQ в каждом дискретном элементе пропорционально приращению его температуры dT. В
результате можно записать следующее дифференциальное уравнение:
dQ/dt = ст dT/dt, (3.32)
где ст — теплоемкость дискретного элемента, Дж/К:
ст=СрУ; (3.33)
С — удельная теплоемкость материала, Дж/(кг-К); V — объем дискретного элемента, м3.
Изменение тепловой энергии в единицу времени представляет собой тепловой поток Ф = dQ/dt , поэтому уравнение (3.32) запишем в виде
Фи = ст dTyJdt. (3.34)
Сопоставляя уравнение (3.34) с выражением (3.1), приходим к выводу, что оно является компонентным уравнением инерционного элемента тепловой системы.
Диссипативные свойства тепловой системы описываются уравнением Фурье q = -X grad Т. В одномерном случае уравнение Фурье имеет вид
q = - кдТ/дх, (3.35)
где q — плотность теплового потока, Дж/(м2-с):
q = Ф/А; (3.36)
А — площадь поверхности контакта дискретного элемента с источником тепловой энергии или со смежным дискретным элементом; X — коэффициент теплопроводности, Дж/(с м-К).
Заменим частную производную дТ/дх отношением конечной разности
дТ/дх = - (Л - Т2)/1 = - Т/I, (3.37)
где Т2 — температуры в узлах дискретизации 1 и 2, т.е. на границах выделенных элементов твердого тела; I - длина дискретного элемента.
В выражении (3.37) учтено, что градиент температуры вдоль оси х отрицателен (температура падает по мере удаления от источника тепла).
Подставим значения q и дТ/дх в уравнение (3.35):
Ф = (ХА/1)Т. (3.38)
Формула (3.38) позволяет определить величину потерь теплового потока в дискретном элементе в процессе теплопередачи.
Следовательно, она дает математическое описание диссипативного элемента.
Введем обозначение
щ. = X А/l = XF/Z2,
(3.39)
где цт — коэффициент теплового сопротивления дискретного элемента, Дж/(с-К); V — объем дискретного элемента, м3.
С учетом (3.39) получаем компонентное уравнение диссипативного элемента тепловой системы
Фд = ЦтГд. (3.40)
По формуле (3.39) определяют цт при передаче тепла в твердом теле теплопроводностью, т.е. при индуктивном теплообмене. На поверхностях контакта твердого тела с жидкостной или газовой средой осуществляется конвективный теплообмен. Тепловой поток при конвективном теплообмене, в соответствии с законом Ньютона, пропорционален разности температур среды Тс и поверхностного слоя твердого тела Ts:
Фд = аАТд, (3.41)
где Тд = Тс - Ts.
В этом случае коэффициент теплового сопротивления опре-деляется по формуле
цт = Аа, (3.42)
где а — коэффициент теплообмена (теплоотдачи) через конвекцию, Дж/(с-м2-К).
Упругими свойствами тепловая система не обладает. Это следует из того, что тепловая энергия может передаваться только от более нагретых дискретных элементов к менее нагретым. Иными словами, тепловой поток при теплопередаче в твердом теле направлен противоположно градиенту температуры.
Значение фазовой переменной типа потенциала Фи характеризует величину теплового потока, затрачиваемую на изменение кинетической энергии дискретного элемента твердого тела в процессе теплопередачи, а значение Фд — величину потерь, обусловленную преодолением теплового сопротивления. Переменные Фи и Фд представляют собой внутренние потенциалы элементов тепловой системы. Параметрами инерционных и диссипативных элементов являются соответственно теплоемкость сТ и коэффициент теплового сопротивления цт.
86
Фазовая переменная типа потока Ти характеризует температуру дискретного элемента, а Тд представляет собой разность температур смежных дискретных элементов.
Топологические уравнения имеют вид
£Фг=О; (3.43)
i
Z^=0- (3.44)
k
Первое уравнение выражает условие равновесия потенциалов на поверхностях контакта дискретных элементов, а второе — условие непрерывности функции температуры.
3.7. КОМПОНЕНТНЫЕ И ТОПОЛОГИЧЕСКИЕ УРАВНЕНИЯ ЭЛЕКТРИЧЕСКОЙ СИСТЕМЫ
В электрической системе фазовыми переменными типа потока являются силы тока I, А, а типа потенциала — напряжения или потенциалы U, В.
Инерционными свойствами обладают катушки индуктивности. Компонентное уравнение инерционного элемента
=LdlJdt, (3.45)
где L — индуктивность, Гн.
Диссипативный элемент — резистор. Его компонентное уравнение получают на основе закона Ома
ид = ШД, (3.46)
где R — сопротивление, Ом.
Упругими свойствами характеризуется конденсатор. Компонентное уравнение упругого элемента
Uy = С -1 \lydt, (3.47)
где С — емкость, Ф.
Следует отметить, что реальные конструктивные элементы электрических систем — катушка индуктивности, резистор, конденсатор — обладают одновременно всем комплексом физических свойств. Однако при моделировании учитывают только одно, основное свойство элемента, так как параметры, отражающие другие свойства, незначительны и практически слабо проявляются в процессе функционирования технического объекта.
Особенностью электрической системы, отличающей ее от рассмотренных ранее видов систем, является то, что соединение
элементов в электрических схемах образует структуру, в которой легко различаются ветви и узлы. Причем ветви представляют собой двухполюсные элементы — резисторы, конденсаторы, катушки индуктивности, источники энергии и др. В этой связи оказывается более целесообразным использовать иные формы компонентных уравнений, чем приведенные выше, а именно: I = C(dU/dt)\ I = R ~^U; I = LT1 ftJdt . В этом случае топологиче
ские уравнения получают на основе законов Кирхгофа:
Z4 = °; k
(3.48)
Z^=o.
i
(3.49)
Уравнение (3.48) выражает первый закон Кирхгофа. Оно записывается для узлов электрической схемы и формулируется так: алгебраическая сумма токов для любого узла электрической схемы равна нулю. Так как сила тока — это переменная типа потока, то первый закон Кирхгофа описывает баланс потоков в узле.
Уравнение (3.49) выражает второй закон Кирхгофа. Оно составляется для замкнутых контуров электрической схемы.
Аналогично можно преобразовать уравнения математических моделей элементов и других видов систем. При этом компонентное уравнение инерционного элемента необходимо проинтегрировать, а упругого элемента — продифференцировать по времени. Такая смена формы уравнений компонентных элементов отражает свойство дуализма физических систем.
3.8. АНАЛОГИИ В ДИНАМИЧЕСКИХ СИСТЕМАХ
Сведем все полученные компонентные уравнения элементов динамических систем различной физической природы в табл. 3.1.
Сравнивая компонентные уравнения, легко обнаружить динамические аналогии всех рассмотренных видов систем. Топологические уравнения этих систем также абсолютно аналогичны. В этом проявляется единство физических законов, несмотря на многообразие форм существования материи.
В табл. 3.2 приведены фазовые переменные и их единицы для систем различной физической природы, а в табл. 3.3 — параметры элементов и их единицы.
Тип элемента Вид системы
Механическая Гидравлическая Тепловая Электрическая
поступательная вращательная
Инерционный Ги = mdvn/dt Ми = Jdo^/dt ри= mrdQ4/dt Фи = crdTK/dt (7И = LdIJdt
Диссипативный Fa = Нид Мд = ц®д Pr — p-rQfl Фд = Мт^д ия = шя
Упругий Fy = cfrjydt Му = doydt Ру = Сг \Qydt -— Uy = C^\lydt
Таблица 3.2
Фазовая переменная Вид системы
Механическая Гидравлическая Тепловая Электрическая
поступательная вращательная
Типа потенциала Типа потока Сила F, Н Скорость и, м/с Вращающий момент М, Нм Угловая скорость со, рад/с Давление р, Па Расход Q, м3/с Тепловой поток Ф, Вт Температура Т, К Напряжение U, В Ток Z, А
Таблица 3.3
Тип элемента Вид системы
Механическая Гидравлическая Тепловая Электрическая
поступательная вращательная
Инерционный т, кг 7, кг-м2 тг, кг/м4 ст, Дж/К L, Гн
Диссипативный ц, Н с/м ц, Н-м-с/рад цг, Н-с/м5 Рт, Дж/(с-К) R, Ом
Упругий с, Н/м с, Н м/рад сг, Н/м5 — С, Ф
3.9. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ЭЛЕМЕНТОВ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ТЕХНИЧЕСКИХ ОБЪЕКТОВ
Механическая система. Параметры инерционных элементов — массы т и моменты инерции J и упругих элементов — коэффициенты жесткости с определяют по известным формулам теоретической механики.
Параметры диссипативных элементов — коэффициенты сопротивлений ц можно найти, используя априорную информацию об относительных коэффициентах затухания колебаний у (коэффициентах апериодичности). Значения у обусловлены трением в конструктивных элементах технической системы, возникающим в результате их деформации и взаимных микроперемещений сочлененных деталей. Влияние трения в материале для металлических конструкций обычно во много раз меньше, чем трения в сочленениях деталей. В деталях, изготовленных из полимеров (резина, пластмасса и др.), трение значительно больше, чем в аналогичных металлических деталях (значение у примерно в 100 раз выше). В зависимости от конструктивного исполнения технической системы упругие элементы ее динамической модели могут отображать как отдельные сплошные (неделимые) детали, обладающие сравнительно небольшой жесткостью (например, пружины, длинные валы), так и целый ряд сочлененных деталей. В этой связи величина у колеблется в значительных пределах: у = 0,03...1,0. Для гашения колебаний применяют специальные демпфирующие элементы (резиновые муфты, гидравлические амортизаторы и др.), позволяющие значительно увеличить у и снизить амплитуды колебаний.
Коэффициент сопротивления Цу /-го диссипативного элемента механической системы зависит не только от у у , но и от параметров элементов динамической модели, непосредственно примыкающих к данному диссипативному элементу. При определении значений Цу используют парциальные системы.
Парциальной системой называется частичная одночастотная подсистема, выделяемая из динамической модели технического объекта. Она имеет только одну частоту собственных колебаний, называемую собственной парциальной частотой. На рис. 3.3 показаны динамические модели парциальных систем объектов механической природы с вращательным движением сосредоточенных масс. Особенность структуры парциальной системы состоит в том, что она содержит один базовый элемент и не
90
которое множество взаимодействующих с ним элементов с иными физическими свойствами по сравнению с базовым элементом. На рис. 3.3, а, в, д базовым является инерционный элемент с параметром Jj, а на рис. 3.3, б, г, е — упругий элемент с параметром Cj . Парциальные системы, показанные на рис. 3.3, а, б называют простыми, а на рис. 3.3, в — е — сложными.
Рис. 3.3. Динамические модели парциальных систем: а, в, д — с инерционным базовым элементом;
б, г, е — с упругим базовым элементом
Собственная парциальная частота определяется без учета диссипативных элементов. Это частота свободных незатухающих колебаний парциальной системы. Для системы с инерционным базовым элементом она вычисляется по формуле
(3.50)
У;=1
а для системы с упругим базовым элементом
1 - -ОС; / Jj , (3.51)
•» V * *
* ~ • Г-
где Cj — приведенный к i-му инерционному базовому элементу коэффициент жесткости j-го упругого элемента; К — количество упругих элементов, входящих в парциальную систему; Jj — параметр эквивалентного приведенного инерционного элемента, кинетическая энергия которого равна сумме кинетических энергий всех инерционных элементов парциальной системы.
91
Рассмотрим вначале парциальные системы с инерционным базовым элементом (рис. 3.3, а, в, д). Необходимость определения параметра Су возникает при наличии в парциальной системе трансформаторных элементов, что характерно для системы на рис. 3.3, д. Значение параметра Су определяется из условия равенства потенциальных энергий исходного упругого элемента с параметром Cj и приведенного упругого элемента с параметром Су. Если упругий элемент расположен на входе инерционного элемента, как Cj_^ на рис. 3.3, д, то приведенный коэффициент к
жесткости этого элемента Cy_j получают умножением Су_]_ на
квадрат передаточного числа t^y-i трансформаторного элемента
-л- 2
, а если на выходе, то делением: Cj_± = Cj^Ujj^’
к 9 -r-ч
С; - Cj / Ujj. Вход и выход базового элемента определяются по на
правлению передаваемого через динамическую систему потока энергии. Передаточное число трансформаторного элемента равно отношению скорости на его входе к скорости на выходе.
При отсутствии трансформаторных элементов (рис. 3.3, а, в)
“i = (3.50а)
Рассмотрим определение параметра Jj для парциальных
систем с упругим базовым элементом. При отсутствии трансформаторных элементов (рис. 3.3, б, г)
. N
(3.52)
i=l
где N — количество инерционных элементов, входящих в парциальную систему.
Если же парциальная система содержит трансформаторные элементы (рис. 3.3, е), то в формулу (3.52) вместо Jj необходимо
подставлять приведенные к упругому базовому элементу моменты инерции Jj . Значение Jj определяется из условия равенства ки
нетических энергий исходного инерционного элемента с парамет
к
ром Jj и приведенного с параметром Jj . Если инерционный эле
мент расположен на входе базового упругого элемента, то Jj
92
умножают на квадрат передаточного числа трансформаторного элемента, а если на выходе, тогда делят. Для парциальной системы на рис. 3.3, е
т* _ т 2, т* _ т / 2 J i — ^iuij9 i+1 ~ ^i+1 / ui+l,j*
Пусть энергия в системе на рис. 3.4, а передается от массы mi к массе m2, а на рис. 3.4, б от массы Ji к массе J2- Обе системы имеют по два трансформаторных элемента ТЭ^ и ТЭ2.
Рис. 3.4. Парциальные системы с трансформаторными элементами и ТЭ2: а — поступательная, б — вращательная
В поступательной системе на рис. 3.4, а трансформаторные элементы отображают рычажные передачи. Передаточное число T3i найдем через отношение скоростей точек А и В, а передаточное число ТЭ2 — скоростей точек D и Е:
и1 = vpJvB = ~hl/h2 5 и2 = vd!vE = 121/122 •
93
Так как ТЭ1 расположен на входе в упругий элемент, а ТЭ2 — на его выходе, то значение т* вычислим по формуле тп* = m1ufm2(iz2)-1/(m1jz]2 +^2/1/3).
Аналогично определяется J* rjlsl парциальной системы на рис. 3.5, б:
J =J1ufj2(u2) 1/(е^г1и1 + ^2/^2)»
где ui и и2 — передаточные числа ТЭ^ и ТЭ2, отображающие зубчатые передачи: иг = ©i/©i2 = -212/211; и2 = ©12/0)2 = -222/221; Zij — числа зубьев передач.
При определении параметров диссипативных элементов ц7-используются парциальные системы с упругим базовым элементом. Значение Цу определяется по формуле
|Лу = 2у;е77*®у. (3.53)
При поступательном движении твердых тел в формулы (3.50) — (3.53) вместо моментов инерции и Jj подставляют значения масс и т*; . На рис. 3.5 показан пример выделения парциальной системы с упругим базовым элементом Cj из динамической модели механической поступательной системы.
Рис. 3.5. Динамическая модель механической поступательной системы (а) и выделенная из нее парциальная система (б)
б
Парциальные системы с инерционным базовым элементом используют при упрощении динамических моделей технических объектов (см. разделы 7.6 и 7.7).
Гидравлическая система. Если при дискретизации гидравлической магистрали выделенные участки трубопровода имеют постоянное сечение, то параметры инерционных элементов тТ определяют по формуле (3.19).
Если же какой-либо участок трубопровода имеет сложную конфигурацию и состоит из нескольких частей различного поперечного сечения, тогда используется формула
тпг =pS(Fi/A/2), (3.54)
L = 1
где Vt — объем i-й части участка трубопровода; — площадь поперечного сечения этой части; п — число частей.
Компонентное уравнение диссипативного элемента гидравлической системы в разделе 3.5 получено на основе линеаризованного уравнения Навье—Стокса и имеет вид
Рд=ЦгСг=Цг^и> (3.55)
где v — скорость потока жидкости в трубопроводе.
В реальной гидравлической системе трение носит более сложный, нелинейный характер. Значение цг зависит от режима движения жидкости в трубопроводе. Различают два режима: ламинарный и турбулентный. Переход от ламинарного к турбулентному наступает при определенных условиях, характеризуемых числом Рейнольдса*.
Re=vd/v, (3.56)
где d — диаметр трубопровода, м; v — коэффициент кинематической вязкости жидкости, м2/с. При температуре Т = 323 К для моторного масла v = 62-10-4, а для масла АУП v = 15-1 О'"6.
При Re < 2300 режим движения жидкости ламинарный. Потери давления по длине трубопровода определяются по формуле Пуазейля
рДл==8лру/и/А. (3.57)
Принимая рдл = рд и используя формулы (3.55) и (3.57), находим значение коэффициента гидравлического сопротивления участка трубопровода длиной I при ламинарном режиме
цгл = 25,2pvZ/A2. (3.58)
При Re > 2300 режим движения жидкости турбулентный. Потери давления по длине трубопровода определяются по формуле
рдт = 0,443XTpZu2/, (3.59)
где Хт — коэффициент потерь на трение при турбулентном потоке. Его значение зависит от шероховатости стенок трубопровода и находится в пределах Хт = 0,025...0,030.
у о
Для определения Хт может быть использована формула Блазиуса".
Хт = О,3164Яе~0’25.
На основании формул (3.55) и (3.59), принимая рдт=рд, получаем выражение для определения коэффициента гидравлического сопротивления участка трубопровода при турбулентном режиме
цгт = 0,443XTpZ|Q|/(A2 4а ).
(3.60)
Так как цгт — величина положительная, а фазовая переменная Q — расход жидкости — может иметь любой знак, то в формуле (3.60) принимают абсолютную величину Q.
Кроме потерь по длине трубопровода существуют местные потери давления, обусловленные резким изменением величины и (или) направления скорости потока жидкости (сужение, расширение, поворот трубопровода и т.п.). Местные потери давления определяют по формуле
Рдм = 0,5СР1>2, (3.61)
где Q — коэффициент местного сопротивления (безразмерная величина).
Значения С, приводятся в справочниках по гидравлике. Если местное сопротивление обусловлено дросселем, ограничивающим расход жидкости в магистрали, то определяется по формуле
С = (Ai / Адр)2 / С,
где Af — площадь поперечного сечения f-ro трубопровода; Адр — площадь отверстия дросселя; С — коэффициент расхода дросселя (С = 0,63...0,65).
Принимая рдм = рд и используя формулы (3.55) и (3.61), находим выражение для определения коэффициента гидравлического сопротивления, учитывающего местные потери,
цгм =0,5ф|е|/А2.
(3.62)
В динамических процессах режим движения жидкости в трубопроводе может изменяться в широких пределах. Поэтому при анализе переходных процессов для оценки потерь давления в трубопроводе используют сумму коэффициентов цгл, цгт, цгм, а коэффициент гидравлического сопротивления участка трубопровода определяют по формуле
25,2pvZ Г0,4432iTpZ gp '
А2 Ч А24а + 2А2 у
(3.63)
96
Коэффициент жесткости сТ дискретного объема жидкости V определяется по формуле сг = E/V. Сжимаемость жидкости незначительна, но в процессе работы гидроприводов рабочая жидкость вспенивается и насыщается нерастворенным воздухом. Модуль объемной упругости газожидкостной смеси Ес оказывается гораздо меньше модуля упругости жидкости, особенно при небольших давлениях — до 6... 10 МПа (подробнее см. раздел 2.4). Кроме того, при определении коэффициента сг необходимо учитывать упругие свойства трубопровода. Во многих случаях деформация стенок трубопровода значительно снижает жесткость гидропривода.
Коэффициент жесткости упругого элемента зависит также от вида соединения выделенных дискретных элементов. — участков трубопровода и их параметров. В общем случае они могут иметь различные геометрические размеры — диаметры, толщины и длины, а также изготавливаться из различных материалов (сталь, латунь, эластичные шланги из резины или пластмассы и др.).
При последовательном соединении двух участков трубопровода коэффициент жесткости сг определяется по формуле
2
(3.64)
а при разветвлении трубопровода (три и более участков, объединяемых в одном узле)
/ N
сг =1/ £(1/сгД (3.65)
/ У=1
где crj — коэффициент жесткости /-го участка трубопровода; N — число ветвей трубопровода, примыкающих к данному узлу.
Коэффициент жесткости /-го участка трубопровода определяют с использованием формул
Enpj/(Vj vj/y);
(3.66)
(3.67)
где crj — приведенный модуль упругости газожидкостной смеси /го участка трубопровода; Vj — объем /-го участка трубопровода;
— доля объема жидкости /-го участка трубопровода, отнесенная к данному упругому элементу; Ес — модуль объемной упругости газожидкостной смеси; jEt₽ j— модуль упругости материала /го участка трубопровода (для стали Етр = 2,1-Ю11 Па; для латуни
Етр = 91O10 Па); dTp j, 6тру — диаметр и толщина стенки у-го участка трубопровода.
Гидромеханическая система. К ней относятся различные гидроприводы, содержащие совокупность взаимодействующих механических и гидравлических элементов. В гидромеханической системе используются такие же фазовые переменные, как и в гидравлической, т.е. переменные типа потока — расходы Q и переменные типа потенциала — давления р. Так как в механической системе фазовые переменные иные, то параметры элементов динамической модели гидромеханической системы необходимо определять как для комплексных разнородных систем.
Коэффициент массы вычисляется по формуле
/пг = тгм+тТЖ = (mM+pV)/A2, (3.68)
где тм — масса механических частей технической системы, отнесенная к данному инерционному элементу (например, масса поршня с присоединенными к нему деталями рабочих органов машины или механизма); V — объем жидкости гидромеханической системы, отнесенный к данному инерционному элементу.
В общем случае объем V переменный. В частности, объем полости гидроцилиндра зависит от перемещения поршня х
У = Уд ± Ах, (3.69)
где Уо — начальный объем гидроцилиндра (в исходном положении поршня); А — площадь поперечного сечения гидроцилиндра; знак « + » принимается, если при увеличении координаты х объем цилиндра возрастает, а знак «-» — в противном случае.
Коэффициент гидравлического сопротивления цг для дискретных элементов, выделяемых в гидромагистрали, определяют по формуле (3.63), а для гидроцилиндров — по формулам (3.50), (3.51), (3.53), в которые вместо пц и Cj подставляют mTi и сгу.
Коэффициенты жесткости упругих элементов гидромеханической системы определяют по формуле
cr = cTj + cKj/Aj2, (3.70)
где cYj — коэффициент гидравлической жесткости упругого компонента гидравлической природы, подсоединенного к гидроцилиндру (или к иному гидромеханическому объекту); сму — коэффициент жесткости механического упругого компонента.
Типичный механический компонент гидромеханической системы — возвратная пружина поршня или золотника. При наличии возвратной пружины часто упругими свойствами гидравлического компонента пренебрегают и коэффициент гидравлической жесткости определяют по формуле
7. Зак. 3006
98
Cr = СвпМ2, (3.71)
где свп — коэффициент жесткости возвратной пружины; А — площадь поперечного сечения гидроцилиндра или гидроклапана. Если гидроцилиндр связан с рабочим органом машины или механизма, необходимо учитывать жесткость привода этого органа, а также жесткость элементов внешней среды, взаимодействующих с рабочим органом.
Пример 3.3. Определить параметры системы гидропривода, динамическая модель которого приведена на рис. 3.6.
Рис. 3.6. Динамическая модель гидропривода
В динамическую модель входят три сосредоточенных массы, три упругих элемента с коэффициентами гидравлической жесткости сг;- и три диссипативных элемента с коэффициентами гидравлического сопротивления Коэффициенты масс инерционных элементов тпг1 и тпгз определены с учетом масс поршней и объемов жидкости в полостях гидроцилиндров, а коэффициент тГ2 учитывает массу жидкости в гидравлической магистрали.
При определении коэффициентов гидравлической жесткости и сГ2 рассматриваются физические свойства двух компонентов. Одним из них является половина длины гидравлической магистрали, а вторым — полость гидроцилиндра. Для обоих компонентов определяется приведенный модуль упругости по формуле (3.67) и значение сГ]- по формуле (3.66), а затем используется формула (3.64) и находится значение сг.
При вычислении Епр для гидроцилиндра параметры dTp и 6тр в формуле соответствуют его диаметру и толщине стенок.
Коэффициент гидравлической жесткости возвратной пружины сг3 находится по формуле (3.71).
Коэффициенты гидравлического сопротивления цг1 и цгз характеризуют потери на трение при перемещении поршня относительно цилиндра. Основная доля потерь при этом определяется уплотнительным устройством гидроцилиндра. Коэффициент цг2 характеризует потери давления в гидравлической магистрали, а также на ее входе и выходе.
Состояния сосредоточенных масс определяются фазовыми координатами типа потока — расходами жидкости в гидроцилиндрах и Q3 и в гидравлической магистрали Число степеней свободы равно количеству этих координат.
99
Так как фазовыми переменными типа потенциала в гидромеханической системе принимают давления, то силы внешних воздействий FBi и FB2 на поршни гидроцилиндров при построении математической модели необходимо преобразовать в давления
Рв1 = -FbiMi; Рв2 ^в2Мз,
где Ai и A3 — площади поперечных сечений соответствующих гидроцилиндров.
Потенциалы упругих руу, диссипативных рд^ и инерционных элементов, характеризующих их состояния, являются внутренними распределенными силами системы.
Определение параметров тепловой системы достаточно полно изложено в разделе 3.6.
4. ОСНОВЫ ПОСТРОЕНИЯ ТЕОРЕТИЧЕСКИХ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ НА МАКРОУРОВНЕ
4.1. СПОСОБЫ ПОСТРОЕНИЯ ТЕОРЕТИЧЕСКИХ МОДЕЛЕЙ
При моделировании технических объектов на макроуровне они рассматриваются как динамические системы с сосредоточенными параметрами. Описание процессов их функционирования дается системами обыкновенных дифференциальных уравнений. При построении теоретических моделей используется два подхода: физический и формальный. Физический подход основан на непосредственном применении физических законов, а формальный использует общие математические принципы при описании физических свойств объектов. Общим в использовании обоих подходов является необходимость построения динамической модели объекта.
Структура динамической модели представляется в виде совокупности взаимодействующих дискретных элементов, каждый из которых наделен соответствующими физическими свойствами. Набор элементов и их свойства определяются способом структурирования.
В динамической модели, построенной на основе метода сосредоточенных масс, все элементы простые. Простой элемент наделен только одним физическим свойством и описывается компонентным уравнением, составленным с использованием соответствующего физического закона. Взаимодействия между элементами динамической модели описываются топологическими
101
уравнениями, выражающими условия равновесия и непрерывности фазовых координат. Топологические уравнения позволяют объединить все компонентные уравнения в общую систему уравнений и получить полную математическую модель технического объекта.
В главе 3 на основе физического подхода получены компонентные и топологические уравнения для технических объектов различной физической природы и установлены между элементами этих объектов динамические аналогии. Структурирование технических систем при этом выполнялось методом сосредоточенных масс и методом сеток (метод конечных разностей).
При формировании математической модели технического объекта на основе компонентных и топологических уравнений используют следующие способы: узловой, контурный, метод переменных состояния, табличный метод.
Наибольшую известность и широкое применение получил узловой метод. Он основан на использовании топологических уравнений, выражающих условия равновесия потенциалов в узлах дискретизации динамической системы. Математическая модель объекта получается в виде системы интегро-дифференциальных уравнений, искомыми неизвестными в которых являются фазовые переменные типа потока, характеризующие состояние сосредоточенных масс.
Узловой метод имеет ряд недостатков, осложняющих его использование для автоматизации формирования математической модели непосредственно на ЭВМ. Одним из недостатков метода является неудобная форма системы уравнений математической модели. Для использования численных методов интегрирования дифференциальных уравнений наиболее предпочтительно представление уравнений в нормальной форме Коши. Узловой метод не позволяет формировать математическую модель объекта с трансформаторными и фрикционными элементами, имеет ограничения на вид компонентных уравнений, требует значительной затраты времени на матричные вычисления в процессе формирования модели. Основные положения узлового метода будут рассмотрены в разделе 4.4.
Метод переменных состояния ориентирован на получение математической модели в виде системы обыкновенных дифференциальных уравнений в нормальной форме Коши. Однако представление структуры динамической модели в этом методе гораздо сложнее, чем в узловом, и требует выполнения большого объема подготовительной работы, которая не поддается автоматизации.
Табличный метод использует исходные компонентные и топологические уравнения непосредственно, без каких-либо преобразований, поэтому автоматизировать его легко и просто. Одна
102
ко математическая модель при этом получается высокого порядка и имеет избыточное число фазовых координат. Система уравнений оказывается переопределенной. Количество уравнений значительно превышает число степеней свободы системы. Это приводит к неустойчивости вычислительных алгоритмов при решении полученной системы уравнений (см. главы 8 и 9).
Контурный метод применяется в электротехнике и строительной механике, где схемы взаимодействия конструктивных элементов образуют замкнутые контуры прохождения сигналов. Применение его для других технических объектов требует построения схемы замещения (эквивалентной схемы) и сопряжено со значительными сложностями формализации процесса составления математической модели.
При структурировании динамической модели методом функционально законченных элементов выделяемые дискретные элементы не обладают такой общностью, как в методе сосредоточенных масс или в сеточных методах. Количество выделяемых функционально законченных элементов и их свойства в конкретной предметной области определяются ее особенностями. Для описания элементов различных технических объектов используется множество разнообразных математических моделей. Это создает определенные преимущества при моделировании, так как исключаются любые ограничения на способы описания физических свойств элементов. Однако при этом теряется межпредметная унификация математических описаний, что требует создания и хранения в памяти ЭВМ библиотеки математических моделей элементов всех возможных технических объектов. Тем не менее, при создании специализированных САПР в конкретных технических областях часто отдается предпочтение методу функционально законченных элементов.
Широкое применение для построения математических моделей технических объектов находит формальный подход. Он основан на использовании интегральных вариационных принципов аналитической механики. Одним из наиболее мощных теоретических методов формального моделирования является вариационный принцип Гамильтона—Остроградского. Он применим к техническим объектам различной физической природы (механическим, гидравлическим, электрическим и др.). Для систем с сосредоточенными параметрами вариационный принцип приводит к уравнениям Лагранжа второго рода.
Все упомянутые выше способы предназначены для получения математических моделей технических объектов в инвариантной форме. Эти модели представляют собой либо систему компонентных и топологических уравнений, либо систему обыкновенных дифференциальных уравнений. В частном случае при описа
103
нии статических состояний технического объекта математической моделью в инвариантной форме является система алгебраических уравнений, получаемая путем соответствующих преобразований исходной системы дифференциальных уравнений.
4.2. ГРАФИЧЕСКИЕ ФОРМЫ ПРЕДСТАВЛЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
В инженерной практике часто используют графические формы представления математических моделей. Для использования графических форм должно существовать правило однозначного соответствия условных изображений элементов графической модели и компонентов инвариантной математической модели.
Одной из форм отображения физических свойств технического объекта является динамическая модель. Графические изображения элементов динамической модели отождествляются с их компонентными уравнениями, а соединения элементов соответствуют топологическим уравнениям. Следовательно, динамическую модель можно рассматривать в качестве математической модели технического объекта в графической форме.
Структурирование динамической модели и идентификация ее элементов позволяют формализовать процесс составления математической модели технического объекта в инвариантной форме. Для этого удобно использовать графические формы моделей в виде графов и эквивалентных схем.
Граф представляет структурную математическую модель системы и отображает ее топологию, а эквивалентная схема — функциональную модель и отображает топологию и компонентный состав, так же как и динамическая модель. Если ввести обозначения ветвей графа, то он будет содержать ту же информацию, что и эквивалентная схема.
Компонентные уравнения элементов динамической модели представляют собой компоненты полной математической модели объекта. Уравнения инерционных, упругих и диссипативных элементов технических объектов различной физической природы приведены в табл. 3.1. Трансформаторные и фрикционные элементы отображают специфические особенности внутренних свойств системы и ее взаимодействия с внешней средой. Их математическое описание будет рассмотрено в главе 5.
Характеристики процессов функционирования объекта определяются не только его внутренними физическими свойствами, но и внешними воздействиями. Математические описания этих воздействий также являются компонентами математической модели. Воздействия представляют собой источники потенциалов Пв = fl(I, t) и источники потоков 7В = f2(U, t). При построении полной математической модели в инвариантной форме все компо
104
нентные уравнения посредством топологических уравнений сводят в единую систему. Это наиболее удобно осуществлять с помощью графов.
Граф представляет собой совокупность узлов (вершин) и соединяющих их ветвей (ребер). Такое же определение имеет и эквивалентная схема. Определение графа может быть записано в следующем виде: Г = (У, В, И), где У — множество узлов; В — множество ветвей; И — инцидентор — указатель способа соединения ветвей.
Ветви графа и эквивалентной схемы соответствуют компонентам математической модели. Они отображают матема
тические описания инерционых, упругих и диссипативных элементов динамической модели и источников внешних воздействий.
Узлы графа и эквивалентной схемы соответствуют узлам дискретизации непрерывных объектов в геометрическом пространстве, вводимым при переходе от моделей микроуровня к моделям макроуровня. При дискретизации системы методом
сосредоточенных масс узлы дискретизации совпадают с сосредоточенными массами, представляемыми в динамической модели материальными точками или твердыми телами. Состояние технической системы и характер протекающих в ней процессов определяются фазовыми координатами узлов дискретизации. Эти координаты представляют собой потоковые переменные (например, в механической системе — скорости или геометрические координаты).
Сосредоточенные массы динамической модели обладают дуальными свойствами: они отображают инерционные свойства технической системы и одновременно являются носителями информации о ее состоянии. Последнее выражается в том, что систему фазовых координат динамической модели связывают непосредст-
венно с сосредоточенными
Рис. 4.1. Пример графа механической системы
массами.
Граф и эквивалентная схема позволяют эти свойства сосредоточенных масс дифференцировать более четко: инерционные свойства отображаются ветвями, а носители информации о состоянии технической системы — узлами. В результате каждая сосредоточенная масса отображается узлом графа или эквивалентной схемы, а ее физические свойства — ветвью инерционного элемента.
Узлы графа обозначают точками, а ветви линиями (рис. 4.1). Узлам присваивают номера сосредоточенных
105
масс, а ветвям дают обозначения параметров отождествляемых ими элементов динамической модели или обозначения источников внешних воздействий (источник потенциалов UB или источник потоков 1в). Один из узлов графа и эквивалентной схемы отображает инерциальную систему отсчета фазовых координат типа потока. Его называют базовым узлом (или базой) и ему присваивается нулевой номер.
Для обозначения различных ветвей эквивалентной схемы рекомендуется применять графические изображения, показанные на рис. 4.2. Ветви эквивалентной схемы и графа, отображающие внутренние свойства технического объекта, можно именовать так же, как и соответствующие им элементы динамической модели, т.е. инерционные, упругие и диссипативные. Поскольку эти ветви суть компоненты математической модели в графической форме,
то и компоненты имеют те же
Рис. 4.2. Обозначение ветвей эквивалентной схемы: а — инерционной;
б — диссипативной; в — упругой;
г — источника потенциала; д — источника потока
гие и диссипативные элементы
наименования, что и ветви.
На эквивалентных схемах и графах применяют обозначения параметров элементов и источников внешних воздействий соответственно виду моделируемой технической системы (см. табл. 3.2 и 3.3). На рис. 4.2 использованы обозначения для механической поступательной сис-
Рассмотрим особенности
темы.
построения эквивалентной схемы и графа на примере механической вращательной системы, динамическая модель которой приведена на рис. 4.3, а. Модель отображает инерционные, упру-системы и внешние воздействия
на нее. Элементы динамической модели обозначаются на схеме их параметрами с цифровыми индексами, соответствующими порядковым номерам элементов: — моменты инерции вращающихся твердых тел (сосредоточенных масс); Су, Цу — коэффициенты жесткостей и сопротивлений соответственно упругих и диссипативных элементов. На динамической модели необходимо также отобразить внешние воздействия на технический объект. Источники потенциалов Мв^ воздействуют непосредственно на сосредоточен
ные массы, а источники потоков сов^ — на упругие и диссипативные элементы. Рассматриваемый объект подвержен воздействиям только источников потенциалов Мв£,/г = 1,3 .
8. Зак. 3006
106
a
М2
о
Рис. 4.3. Динамическая модель (а), эквивалентная схема (б) и орграф (в) механической вращательной системы
Источники воздействий могут сообщать энергию объекту или отводить ее от объекта. Для отображения этого на динамической модели должны быть указаны положительные направления фазовых координат типа потока (или ф.), характеризующих состояния сосредоточенных масс, а также направления потоков энергии, сообщаемой объекту источниками внешних воздействий
107 а)в£ и Мв^. Если энергия источника потенциала подводится к объекту, то направления Мв^ и (О/ совпадают, а если отводится (т.е. вместо источника имеет место сток), то их направления противоположны. В рассматриваемом примере вращающий момент MBi является движущим, увеличивающим энергию объекта (к объекту подводится энергия двигателя), поэтому направления Мв1 и (01 совпадают. Вращающие моменты МВ2 и Мвз характеризуют сопротивления внешней среды движению объекта, на преодоление которых затрачивается его энергия. В этой связи направления МВ2 и со4, а также Мвз и (05 не совпадают.
Потенциалы упругих Myj и диссипативных Мд} элементов, характеризующие их взаимодействие с другими элементами системы, являются внутренними воздействиями и на динамической модели не изображаются.
Следует обратить внимание на то, что функции источников внешних воздействий типа потока сов£ и типа потенциала Мв^ обозначаются такими же символами, как и фазовые координаты типа потока и типа потенциала Му], моделируемого технического объекта. Чтобы их различать в динамических моделях, в обозначениях внешних воздействий вводится индекс «в».
Если один и тот же упругий элемент соединяет между собой более двух сосредоточенных масс, т.е. образует кольцевое соединение (например, элемент С2 на рис. 4.3, а), то такое соединение называется дифференциальным, а если кольцевое соединение сосредоточенных масс осуществляется различными упругими элементами, то его называют гираторным. Это же относится и к диссипативным элементам.
В случае дифференциального соединения следует иметь в виду, что все сосредоточенные массы, входящие в соединение, взаимодействуют с одним и тем же упругим и диссипативным элементами, что и отражено на схеме рис. 4.3, а.
При моделировании сложных технических объектов графические изображения диссипативных элементов на динамических моделях могут значительно усложнить чертеж (схему). Но если диссипативные элементы расположены в модели параллельно упругим элементам (что характерно для большинства механических систем), тогда их графические изображения можно исключить, а вместо них наличие диссипативных элементов отметить записью параметров Цу рядом с параметрами Су упругих элементов (при этом обозначения С] и цу должны разделяться между собой запятой). Это допущение будет использоваться в дальнейшем в динамических моделях вращательных механических систем (например, на рис. 4.6).
108
Построение эквивалентной схемы (рис. 4.3, б) начинают с инерционных ветвей, которые располагают вертикально. Эти ветви соединяют узлы, отождествляющие сосредоточенные массы системы, с базовым узлом, соответствующим инерциальной системе отсчета фазовых координат типа потока. Ветви упругих и диссипативных компонентов соединяют между собой взаимодействующие узлы, в соответствии с динамической моделью. Ветви источников потенциалов связывают узлы, к которым они приложены, с базой.
Граф является аналогом эквивалентной схемы и структура его аналогична (рис. 4.3, в). Если обозначить направления сигналов в ветвях графа, то получим ориентированный граф (орграф). Направления сигналов в ветвях графа изображают стрелками.
В ветвях источников внешних воздействий сигналы направляют от базы к узлу, если энергия подводится к узлу и источник обеспечивает возрастание потоковой переменной узла. В случае источника потенциала подвод энергии осуществляется при условии совпадения направлений Мв^ и При отводе энергии на преодоление сопротивлений направления Мв^ и <dz противоположны, поэтому направление сигнала в ветви источника — от узла к базе. Направление сигнала в ветви источника потока определяется аналогично, в зависимости от того, подводится энергия к техническому объекту от внешней среды или отводится.
Во всех ветвях инерционных компонентов направления сигналов от узлов к базе. Такое направление характеризует затраты энергии источников на увеличение кинетической энергии инерционных элементов. В любых других ветвях, соединяющих узлы с базой, кроме ветвей источников, сигналы всегда направлены к базе.
В ветвях упругих компонентов стрелки указывают направление передачи энергии от источников к потребителям. Если ветви диссипативных компонентов параллельны ветвям упругих компонентов, то направления сигналов в них одинаковые.
Однако встречаются случаи, когда нельзя однозначно указать направление передачи энергии в некоторых ветвях графа. Это характерно для систем с дифференциальным соединением сосредоточенных масс. В рассматриваемом примере сосредоточенные массы с моментами инерции J2, ^3 и ^4 соединены упругим элементом с коэффициентом жесткости С2 и диссипативным элементом с коэффициентом сопротивления В результате на эквивалентной схеме узлы 2, 3 и 4 связаны между собой одними и теми же упругими и диссипативными ветвями с2 и ц2. Энергия передается от узла 2 к узлам 3 и 4, но направление передачи энергии между узлами 3 и 4 априори установить нельзя.
109
Орграфа в отличие от эквивалентной схемы, содержит только ориентированные ветви. В этой связи упругая и диссипативная ветви с2 и Ц2 эквивалентной схемы, соединяющие узлы 3 и 4, на орграфе отсутствуют. Вместе с тем следует отметить, что отображать соединение этих узлов на орграфе нет необходимости. Орграф вполне определенно иллюстрирует взаимодействие всех трех узлов и отражает распределение энергии между узлами 3 и 4, передаваемой к ним через упругий и диссипативный элементы с2 и Ц2 от узла 2.
При гираторном соединении (рис. 4.4, а) каждая пара сосредоточенных масс соединена своими упругими и диссипативными элементами, поэтому все они должны быть отображены на орграфе соответствующими ветвями с указанием направлений в них сигналов (рис. 4.4, в). Здесь также определить направление сигнала в одной из ветвей может оказаться затруднительным. В этом случае принимают произвольное направление.
Рис. 4.4. Динамическая модель (а), эквивалентная схема (б) и орграф (в) технического объекта с гираторным соединением сосредоточенных масс
110
Пример 4.1. Составить графические формы математических моделей для анализа колебаний кузова автомобиля, обусловленных неровностями дороги.
На рис. 4.5, а приведена одна из возможных динамических моделей (см. также рис. 3.1, в). Твердые тела массами znj и Шъ (кузов и колеса автомобиля) совершают поступательные движения. Фазовые переменные типа потока в механической поступательной системе — скорости и, а типа потенциала — силы F. На систему наряду с источниками потенциалов FBi и FB2 действует источник потока, описываемый функцией ь>в1(£) . Источник потока отображает кинематическое воздействие внешней среды — неровностей дороги. Характеристикой этого источника является функция изменения скорости вертикального перемещения опорной точки D, определяемая выражением L>B1(f) = vy(t)[dh(y)/dy], где vy(t) — скорость движения автомобиля вдоль оси у; h(y) — функция микропрофиля поверхности дороги. Потенциалы внешних воздействий FBi и FB2 представляют собой силы тяжести соответственно кузова и колес автомобиля. Эти силы постоянны и их обычно не включают в модель при анализе малых колебаний. Однако при определении усилий в упругих элементах их необходимо учитывать. Кроме того, взаимные перемещения кузова и колес автомобиля ограничены направляющими устройствами подвески, а величины допускаемых перемещений зависят от значений усилий FB1 и Fb2.
При наличии источников потоков взаимодействие технического объекта с внешней средой осуществляется посредством упругих и (или) диссипативных элементов. В эквивалентной схеме и орграфе это приводит к возникновению дополнительных узлов, определяющих соединения ветвей упругих и диссипативных компонентов с ветвями источников потоков.
На рис. 4.5, б построена эквивалентная схема, а на рис. 4.5, в орграф рассматриваемой системы. Узлы 1 и 2 отображают сосредоточенные массы, а узел 1*— внешнюю среду, генерирующую воздействие типа потока i?B1(f) , передаваемое на упругий и диссипативный элементы С2 и Ц2 колес автомобиля. Узлы источников потоков имеют свою нумерацию и обозначаются звездочкой.
Рис. 4.6. Динамическая модель (а), эквивалентная схема (б) и орграф (а) механической поступательной системы с источником внешнего воздействия типа потока
Ill
Таким образом, орграф позволяет идентифицировать структуру и физические свойства моделируемой технической системы и представляет собой ее математическую модель в графической форме. Использование орграфа дает возможность формализовать процесс составления полной математической модели объекта в инвариантной форме, т.е. получить систему обыкновенных дифференциальных уравнений, описывающих процесс функционирования технического объекта.
Эквивалентную схему применяют обычно лишь при предметном моделировании, когда необходимо иметь схему замещения для построения эквивалентной динамической модели на элементах иной физической природы. При математическом моделировании технических систем ограничиваются использованием' орграфов.
4.3. МАТРИЧНАЯ ФОРМА ПРЕДСТАВЛЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Информация о математической модели технического объекта, которую содержит орграф, может быть представлена в виде матрицы.
Сформируем матрицу размерности ос х р, где а — число строк, Р — число столбцов. В этой матрице каждому узлу орграфа, за исключением базового, соответствует строка, а каждой ветви — столбец. Единицами в матрице отметим наличие соединений между узлами и ветвями орграфа, а нулями — их отсутствие. Направления сигналов в ветвях орграфа отобразим знаками единиц. Если сигнал направлен от узла, примем знак минус, а если к узлу — знак плюс.
Матрицу, построенную по изложенным правилам для данного орграфа, называют матрицей инциденций.
В табл. 4.1 приведена матрица инциденций для технического объекта, динамическая модель которого и орграф представлены на рис. 4.3, а в табл. 4.2 — для объекта, модели которого представлены на рис. 4.5.
Обозначим матрицу инциденций А - (а/p, i = 1,а ; j = 1, Р , где а — число узлов графа, за исключением базового; р — суммарное число ветвей орграфа — инерционных, диссипативных, упругих и источников внешних воздействий.
Таблица 4.1
Ветви
Узлы Инерционные Диссипативные Упругие Источники потенциалов
«Л е7 2 J4 J5 Ц2 Цз Р4 (?1 <?2 сз с4 МВ1 мв2 Мв3
1 -1 0 0 0 0 -1 0 0 0 -1 0 0 0 1 0 0
2 0 -1 0 0 0 1 -1 0 0 1 -1 0 0 0 0 0
3 0 0 -1 0 0 0 1 -1 0 0 1 -1 0 0 0 0
4 0 0 0 -1 0 0 1 0 -1 0 1 0 -1 0 -1 0
5 0 0 0 0 -1 0 0 0 1 0 0 0 1 0 0 -1
Подматрицы Аи Ад Ау 4,
Таблица 4.2
Узлы Ветви
Инерционные Диссипативные Упругие Источники потенциалов
Д711 т2 * Ц1 Ц2 ci ?2 FBJ &
1 -1 0 0 1 0 1 0 -1 0 0
2 0 -1 0 -1 1 -1 1 0 -1 0
1* 0 0 -1 0 -1 0 -1 0 0 1
Подматрицы Аи Ад Ау А3
113
При составлении матрицы инциденций для объекта с источниками внешних воздействий типа потока v*j(£) в нее включаются не только узлы, отображающие сосредоточенные массы, но и узлы источников потоков, отмечаемые на орграфе и в матрице звездочкой и имеющие свою нумерацию. Кроме того, необходимо иметь в виду следующее. Каждый узел орграфа должен находиться в равновесии, что соответствует топологическому уравнению ^,Fi =0, где Fi — потенциалы ветвей, инцидентных данному i
узлу. Выполнение этого условия для узла источника потока обеспечивается, если учесть реакцию внешней среды F*j . Эта реакция представляет собой потенциал ветви орграфа, отображающей источник потока. Поэтому источники потоков в матрице инциденций формально замещаются источниками реактивных потенциалов F*j (см. табл. 4.2).
Матрицу инциденций А можно представить состоящей из подматриц инерционных Аи, диссипативных Ад, упругих Ау ветвей и подматрицы ветвей источников потенциалов Ав:
А [Аи, Аду Ау, Ав].
Из табл. 4.1 и 4.2 следует, что подматрица Аи во всех случаях единичная диагональная. В этой связи при составлении матрицы инциденций А с целью упрощения обычно подматрицу Аи опускают.
Рассмотрим подматрицу ветвей упругих компонентов Ау для примера технического объекта на рис. 4.3 (табл. 4.1) и установим связь между нею и компонентными уравнениями упругих элементов.
Компонентное уравнение упругого элемента механической вращательной системы имеет вид (см. табл. 3.1)
Mv = с (4.1)
•7 J t7
Для первого упругого элемента, согласно динамической модели на рис. 4.3, a, coyi = coj- 02» следовательно, компонентное уравнение этого элемента
Му1 = ci J (®1 _ юг)dt- (4.2)
Рассмотрим возможность получения этого же уравнения на основе матрицы инциденций. Примем во внимание, что состояние сосредоточенных масс, а следовательно, и отображающих их узлов графа, характеризуется фазовыми координатами типа потока
Учитывая это и используя столбец подматрицы Ау, соответст
114
вующий данному упругому элементу, можно составить следующее выражение:
п
Myj =-cJ(EHy//coi)dt, (4.3)
1=1
где C0j — фазовая координата типа потока (угловая скорость) 1-й сосредоточенной массы (г-го узла орграфа); Иуу — инцидентор — элемент матрицы инциденций А, характеризующий наличие или отсутствие соединения j-й ветви орграфа с f-м узлом и направление сигнала в данной ветви; п — число узлов орграфа.
Используя выражение (4.3), на основе матрицы инциденций, приведенной в табл. 4.1, получаем компонентное уравнение для первого упругого элемента, полностью совпадающее с уравнением (4.2).
Для второго упругого элемента получаем
Му2 = с2 /(“2 ~“3 (4.4)
а для третьего
= с3 Jcosdf. (4.5)
Сравнивая выражения (4.2), (4.4) и (4.5) и анализируя соответствующие им столбцы подматрицы инциденций Ау ветвей упругих элементов, легко обнаружить следующие закономерности. Если в столбце содержатся два ненулевых инцидентора, то упругий элемент соединяет между собой две сосредоточенные массы, т.е. осуществляет простое соединение. При наличии трех и более инциденторов (например, второй столбец подматрицы Ау в табл. 4.1) соединение сосредоточенных масс дифференциальное. Если инцидентор только один, то упругий элемент соединяет сосредоточенную массу с инерциальной системой отсчета. Такое соединение называют реактивным, а упругий элемент, осуществляющий это соединение, — реактивным упругим элементом.
Для получения компонентных уравнений инерционных элементов по матрице инциденций используют выражение, которое составляется аналогично выражению (4.3):
ми/=-^А(ииМ(0/), (4.6)
at
где ИИц — диагональный элемент подматрицы инциденций АИ ветвей инерционных компонентов: ИИц = -1 для всех инерционных компонентов, поэтому Ми/ = J^du^/dt),
Компонентное уравнение диссипативного элемента
115
n
Mpji =
1=1
(4.7)
где Ид^ — элемент подматрицы инциденций Ад ветвей диссипативных компонентов.
Таким образом, на основе матрицы инциденций можно получить все компонентные уравнения элементов технической системы и построить ее математическую модель в инвариантной форме. Следовательно, матрица инциденций несет ту же информацию о системе, что и орграф или динамическая модель. Поэтому ее можно рассматривать как функциональную математическую модель технического объекта в матричной форме.
4.4. УЗЛОВОЙ МЕТОД ФОРМИРОВАНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Для формирования полной математической модели технического объекта на основе компонентных и топологических уравнений наиболее широкое применение получил узловой метод.
Напомним, что компонентные уравнения описывают физические свойства простых элементов, устанавливая соотношения между фазовыми переменными типа потока и типа потенциала, характеризующими состояния элементов. Топологические уравнения описывают условия равновесия и непрерывности фазовых переменных.
Используем обозначения фазовых переменных и параметров, применяемые для механической поступательной системы, и выпишем компонентные и топологические уравнения в этих обозначениях.
Принимая во внимание, что фазовые переменные системы 0^ и Fj составляют некоторые множества, запишем компонентные уравнения элементов системы в матричной форме:
уравнения инерционных элементов
Ги = mldv^/dty, (4.8)
уравнения диссипативных элементов
Гд = цид; (4.9)
уравнения упругих элементов
Fy=cjuydf, (4.10)
где Ги, Гд, Fy — векторы потенциалов соответственно инерционных, диссипативных и упругих элементов; т, ц, с — диаго
116
нальные матрицы параметров этих же элементов; ии, ид, иу — векторы фазовых переменных типа потока соответствующих элементов.
Топологические уравнения механической поступательной системы:
уравнение равновесия потенциалов ветвей орграфа, инцидентных f-му узлу,
=0, i = l,n;
U Ji
уравнение непрерывности фазовых переменных типа потока l-й ветви орграфа
-0, Z = 1,L, J i
где n — число узлов орграфа, за исключением базового; L — число ветвей.
Используя матрицу инциденций, топологические уравнения можно записать в матричной форме
AF = 0; (4.11)
uB+ATv = 0, в = и,д,у, (4.12)
где А — матрица инциденций; Ат — транспонированная матрица A; F — вектор потенциалов ветвей; ив, v — векторы потоковых переменных соответственно ветвей и узлов графа.
Элемент ubZ вектора ив определяется по формуле:
п
»в1 = £ИвПРг, (4.13)
1=1
где Ив^ — элемент матрицы инциденций, характеризующий инцидентность l-й ветви орграфа i-му узлу.
Основные положения узлового метода:
1) в качестве базисных координат используются узловые потоковые переменные и, характеризующие состояния узлов графа;
2) исходным топологическим уравнением системы является уравнение равновесия потенциалов ветвей в узлах графа (4.11), выражающее принцип Даламбера.
117
Вектор потенциалов системы F представим состоящим из подвекторов потенциалов компонентов — инерционных Ри, диссипативных Fn , упругих Fv и источников внешних воздействий
в
можно представить матрицу инциденций, состоящей из соответствующих подматриц:
А = [Аи, Ад, Ау, Ав]. (4.15)
Используя разложения (4.14) и (4.15), приведем уравнение равновесия (4.11) к виду
АИГИ + + AyFy + ABFB = 0. (4.16)
Подставим значения потенциалов ветвей из уравнений (4.8) — (4.10) в равенство (4.16):
AKm(dvii/dt) + АдЦРд + Ayc$vydt + ABFB = 0.
Учитывая топологическое уравнение (4.12), фазовые переменные ри,рд,ру можно выразить через узловые потоковые переменные v . В результате получаем матричное уравнение, описывающее алгоритм формирования математической модели узловым методом,
АитА? (dv/dt) + АдЦАдб + АусАу Jvdt = ABFB. (4.17)
Изложенный классический вариант узлового метода приводит к системе интегродифференциалъных уравнений (4.17). Такой вид уравнений неудобен для анализа процесса функционирования объекта. Как уже упоминалось, наиболее предпочтительной формой математической модели при использовании численных методов является система дифференциальных уравнений в нормальной форме Коши. Однако отмеченный недостаток узлового метода можно легко устранить.
Преобразование интегродифференциальных уравнений (4.17) к нормальной форме можно осуществить путем расширения координатного базиса. Введем функции потенциалов упругих компонентов в состав базисных координат. Эти функции представляются выражением
Fy=-cAy\vdt. (4.18)
Подставим значение FN в уравнение (4.17) и разрешим его •7
относительно производной dv/dt. Определим производную по
118
времени от вектор-функции Fy. Полученные выражения сведем в единую систему уравнений. В результате получим систему обыкновенных дифференциальных уравнений в нормальной форме Коши
dv/dt = (АитпАи) 1(ABFB + AyFy - Ад|хАдй); dFy /dt = -cAyV.
(4.19)
В уравнениях (4.19) базисными координатами являются фазовые переменные v и Fy. Базисными координатами называют совокупность неизвестных переменных в уравнениях, описывающих функционирование динамической системы.
Для системы с источниками внешних воздействий типа потенциала потоковые фазовые переменные v характеризуют состояние сосредоточенных масс и являются независимыми координатами, а их количество равно числу степеней свободы системы. При этом число узлов орграфа п (за вычетом базового) равно числу сосредоточенных масс.
Орграф объекта с источниками внешних воздействий типа потока включает дополнительные узлы, отображающие внешнюю среду, генерирующую эти воздействия. Их называют узлами источников потоков. Такие узлы имеют свою отдельную нумерацию и отмечаются на орграфе звездочками (рис. 4.5, в). Узлы источников потоков характеризуются двойственными (дуальными) свойствами, отображаемыми двумя различными функциями v^(t) и vBcZ(f). Функция u*z(f) характеризует внешнее воздействие типа потока, возникающее в результате взаимодействия объекта с внешней средой. Функция 1>всД0 характеризует состояние i-й сосредоточенной массы, отображаемое потоковой переменной ивсг*. В этой связи переменная vBC t входит в координатный базис системы уравнений (4.19), а функция vBi(t) — в число внешних воздействий. Но поскольку сосредоточенные массы, отображаемые узлами источников потоков, принадлежат внешней среде, с которой связана инерциальная система отсчета фазовых координат типа потока, то vBCi = 0 и dvBCi/dt = 0. В результате дифференциальные уравнения относительно производных фазовых координат ивс/ превращаются в алгебраические выражения, используемые для вычисления реактивных потенциалов FB* внешней среды. Независимыми координатами системы являются только фазовые пе
119
ременные типа потока v, характеризующие состояния сосредоточенных масс технической системы. Эти массы отображаются на орграфе узлами с порядковыми номерами без индексов. Их количество равно числу степеней свободы системы.
Подматрица инерционных ветвей орграфа Аи, как отмечалось, является единичной матрицей. Порядок этой матрицы для объекта с источниками потенциалов равен числу степеней свободы системы п, а для объектов с источниками потоков ее порядок п+пи.п, где пи.п — количество источников потоков. Однако во всех случаях эта матрица квадратная. Такой же порядок имеет и диагональная матрица параметров инерционных элементов т. Для объектов с источниками потоков в состав матрицы т входят так
же элементы , являющиеся параметрами инерционности внешней среды. При моделировании технических объектов инерционность внешней среды полагают бесконечно большой, поэтому включение параметров т* в состав матрицы т необходимо рассматривать как формальный прием обеспечения необходимой ее размерности.
Так как матрицы Аи и т одного и того же порядка п, то матричное произведение в первом уравнении системы (4.19) (АитпАти)~1 «« zn’1. С учетом этого уравнения (4.19) можно записать в виде
dv/dt - т 1(ABFB + AyFy + АДРД); dFy/dt = -cAyV,
где Fr — вектор потенциалов диссипативных компонентов:
F& = -цАдй.
(4.20)
(4.21)
Для решения системы обыкновенных дифференциальных уравнений (4.20) необходимо задать начальные условия и Fy0 при t = 0.
Проанализируем структуру системы уравнений (4.20). Первое матричное уравнение системы (4.20) выражает принцип Да-ламбера, а второе является компонентным уравнением упругих элементов. Уравнение (4.21) также матричное и представляет собой компонентное уравнение диссипативных элементов.
В системе уравнений (4.20) число неизвестных функций v и Fy равно числу дифференциальных уравнений. Следовательно, узловой метод позволяет избежать избыточности фазовых координат и переопределенности системы уравнений, что способствует
120
повышению устойчивости вычислительных алгоритмов при их решении численными методами. Процедура формирования математической модели полностью формализована и можно построить алгоритм ее реализации на ЭВМ.
Изложенная модификация узлового метода позволяет получить модель в виде системы обыкновенных дифференциальных уравнений в нормальной форме Коши, наиболее удобной при использовании численных методов интегрирования. Таким образом, эта модификация устраняет один из недостатков классического
узлового метода.
Узловой метод хорошо приспособлен для моделирования электрических цепей, гидравлических и тепловых систем (движение жидкости в гидравлических магистралях, теплопередача в твердом теле при одномерном тепловом потоке). Для механических систем он применим лишь в случае представления объектов в виде системы материальных точек или твердых тел, совершающих простые движения — поступательные или вращательные.
Но узловой метод не может применяться для динамических систем, содержащих трансформаторные и фрикционные элементы. Это обусловлено невозможностью отображения этих элементов матрицей инциденций. Узловым методом нельзя построить математическую модель системы твердых тел при сложном их движении — плоском, сферическом. Кроме того, в некоторых случаях для описания физических свойств технических объектов и взаимодействия с внешней средой недостаточно использования рассмотренных выше простых элементов. В частности, это относится к объектам с неголономными связями, с виртуальными связями и с переменной структурой. Такими свойствами обладают многие
механические и гидромеханические системы.
Пример 4.2. Применим модифицированный узловой метод для формирования математической модели анализа колебаний кузова автомобиля. Предположим, что исследование колебаний осуществляется на основе динамической модели, приведенной на рис. 4.5, а. Матрица инциденций для этого случая приведена в табл. 4.2. Используя ее, выпишем подматрицы ветвей источников Ав, упругих Ау и диссипативных АД ветвей:
0 0
1 о
-1 1
0 -1
Диагональные матрицы параметров элементов системы:
т = । । о о *S о g ° Soo । । ; с = । । ° о о 1 1 ; м = । । о т т- О । ।
Векторы потенциалов источников FB , упругих Fy
и диссипативных Рд
компонентов:
121
И, наконец, необходимо составить вектор фазовых переменных типа потока, необходимый для вычислений, предусмотренных вторым уравнением системы (4.20) и уравнением (4.21). Если объект подвержен внешним воздействиям только типа потенциала, то элементами этого вектора будут только независимые фазовые координаты v . Если на объект действуют источники потока, то в элементный состав вектора также включаются функции внешних воздействий v* . В этой связи вектор v в рассматриваемом примере имеет вид
где и и2 — независимые фазовые координаты, определяющие состояния сосредоточенных масс и m2; пв1 — функция, характеризующая источник потока, воздействие которого на систему обусловлено неровностями опорной поверхности дороги.
Вычислим матричные произведения слагаемых правой части первого
уравнения системы (4.20), принимая во внимание, что
। о о 1
т 1 = о 1 CSJ £ О •
0 0 Wj 1
После перемножения матриц получаем
Fyi/m1
(.Fy2 ~ ’
- Fy21mi
д д
Fnllml
(FB2-FR1)/m2
77 / *
~FB2lml
Сложим полученные векторы, в соответствии с исходным уравнением:
dvx /dt (-^B1 + ^yl + ^д1)/от1
dv2 /dt dv^/dt —- (-Fb2 - -fyi + Fy2 ~ Fal + Fa2)/m2 . (F/j - fy2 - ^2)/m*
Принимая во внимание, что dv3cl/dt = 0, а -> со , получаем два дифференциальных уравнения первого порядка и одно алгебраическое выражение,
позволяющее определить реакцию внешней среды F*r :
dv-^/dt = (-FB1 + Fyl + Рд1)/т1 ;
122
dv2/dt = (-Гв2 - Fyi + Гу2 - Fal + FR2)/m2 ;
Ki = Fy2 + Fr2.
Уравнения, необходимые для определения Fy и , получим, вычислив матричные произведения в соответствии с выражениями (4.20) и (4.21):
d^yi/dtl Гс^-и,+i>2)
= -сА,> = . ;
dFy2/dt c2(—v2 + i>Bi)
*
д1 /д2
В результате математическая модель рассматриваемого объекта представляется системой обыкновенных дифференциальных уравнений, общий порядок которой равен четырем, и тремя алгебраическими выражениями
dv^/dt = (ГЕ] + Fyl + ;
dv2/dt = (~Fb2 - Fyl + Fy2 - ГД1 + Рд2)/т2 ;
dFyl/dt = Cj(- + p2);
dFy2/dt = c2(- v2 + i>B1);
(4.22)
>
j
д2 ~ R2(_l,2 + ^Bl) ’
(4.24)
(4.25)
7 b1 ~ -ry2 ^д2 •
Для решения системы уравнений (4.22) необходимо задать начальные условия и10, п20, Fyio, Fy20. Значения _Fyl0 и ^20 обычно принимают исходя из условий статического равновесия: Fyl0 = FB1; Fy20 = + Fb2- Начальные скорости
сосредоточенных масс и f2o можно принять нулевыми. Задавая функцию uB1(t) и решая уравнения (4.22) — (4.25), получают искомые значения фазовых переменных L>i(i), v2 (t), Fyi(t), Fy2 (f), а также реакцию опорной поверхности
Если параметры элементов т, с, ц рассматриваемой системы постоянны, то полученная математическая модель будет линейной. Однако в реальных системах значения параметров элементов зависят от фазовых координат и модель оказывается нелинейной. Так, в системах виброзащиты автомобилей коэффициенты жесткости с± и С2 могут быть функциями деформаций упругих элементов. Кроме того, необходимо учитывать силы кулоновского трения, являющиеся нелинейными функциями. Отметим, что силы кулоновского трения при составлении математической модели условно относят к внешним воздействиям.
В гидравлической системе используются нелинейные функции для определения параметров диссипативных и упругих элементов цг и сг (см. раздел 3.9).
Однако нелинейные функции не препятствуют построению математической модели узловым методом, так как они включаются в нее после формирования системы уравнений.
4.5. УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
При моделировании сложных технических систем применяют уравнения Лагранжа второго рода. Их можно использовать при построении математических моделей объектов любой физической природы, если они рассматриваются как системы с сосредоточенными параметрами. При этом никаких ограничений на структуру и физические свойства объекта не накладывается.
Уравнения Лагранжа второго рода для системы с голоном-ными связями имеют вид
dt{dqt ) 5<Ii
i = 1,п,
(4.26)
где Ек — кинетическая энергия системы; Qi — обобщенная координата; qt — обобщенная скорость; Qi — обобщенная сила; п — число степеней свободы системы.
В качестве обобщенных координат выбирают независимые между собой переменные, которые позволяют полностью определить состояние исследуемой системы. Обычно в качестве обобщенных координат принимают величины, производные по времени от которых представляют собой фазовые координаты типа потока, приведенные в табл. 3.2. Например, для механических систем обобщенными координатами выбирают линейные и угловые перемещения, а обобщенными скоростями — линейные и угловые скорости. В этом случае обобщенные силы сохраняют свой физический смысл и представляют собой силы и вращающие моменты.
Каждой обобщенной координате qi соответствует своя обобщенная сила Qi. Работу всех обобщенных сил на возможных перемещениях системы (виртуальную работу) можно вычислить по формуле
5W =
i-1 Z=1
(4.27)
где 6qi — вариация д-й обобщенной координаты; bWt — работа д-й обобщенной силы на возможном перемещении.
124
Из формулы (4.27) следует, что обобщенные силы представляют собой коэффициенты при вариациях обобщенных координат в выражении для виртуальной работы.
Так как вариации обобщенных координат &Qi независимы, то, вычисляя работу всех приложенных к системе сил на одном из возможных перемещений 6gz, а все остальные вариации в формуле (4.27) полагая равными нулю, легко определить каждую обобщенную силу Qi в отдельности.
Кинетическая энергия системы Ек в общем случае является функцией обобщенных координат, обобщенных скоростей и времени и представляет собой сумму
Ек ~~ ^кО ^к1 ^к2>
где Ек0 = а0; £к1 = Ек2 = i X YaijQiQj-
i=l z i=l/=l
Если формулы связей декартовых и обобщенных координат не содержат явно времени t, то Ekq = EKi = 0, а Ек = ЕК2- Следовательно, при стационарной структуре системы кинетическая энергия представляется однородной квадратичной формой
1 п п
(4-28) 2 i=l/=l
где rriij — элемент матрицы параметров инерционных элементов системы.
Обобщенные силы можно разделить на потенциальные Qn, диссипативные <2Д и произвольные Q*.
Силы называются потенциальными, если существует положительно определенная функция обобщенных координат, удовлетворяющая равенствам
Qm = -dEnldqi, i = l,n,
где Еп = En(qi,q2,...9qn) — потенциальная энергия системы.
В стационарном равновесном состоянии системы Еп = min, следовательно, &Еп = 0 и 52ЕП > О- В окрестности точки, соответствующей этому состоянию в фазовом пространстве, потенциальная энергия может быть представлена квадратичной формой
п п
~ 22 22 > (4.29)
2 i=17=l
где Cij — элемент матрицы параметров упругих элементов сис
темы.
125
Обобщенные силы называют диссипативными, если существует положительно определенная функция обобщенных скоростей, удовлетворяющая равенствам
= - дФ/dqi , i = l,n,
где Ф — диссипативная функция Рэлея:
1 п п
Ф =~Z (4.30)
1 i=\j=X
щу — элемент матрицы параметров диссипативных элементов системы.
Обобщенная сила Qz, соответствующая i-й обобщенной координате, равна алгебраической сумме произвольной Q , потенциальной Qnf и диссипативной составляющих:
Qi =Q- -(8En/dqi)-(^/dqi), i =Щ. (4.31)
Подставим значение Q} в уравнение (4.26), опуская индекс (*) при составляющей Q* :
Обобщенная сила фигурирующая в этом уравнении, определяется с учетом работы источников всех внешних воздействий, а также некоторых внутренних источников, которые не могут быть отнесены к упругим и диссипативным элементам (например, силы кулоновского трения в механических системах).
Математическая модель, получаемая на основе уравнений Лагранжа второго рода, представляет собой систему обыкновенных дифференциальных уравнений вида
F(q,q,q,t) = 0. (4.33)
В эту систему входит п дифференциальных уравнений второго порядка, где п — число степеней свободы системы.
Процедура получения математической модели на основе уравнений Лагранжа второго рода включает следующие операции:
1) составление динамической модели технического объекта (при этом выделяются инерционные, упругие, диссипативные, трансформаторные и фрикционные элементы, определяются источники внешних воздействий);
2) определение возможных перемещений элементов системы с учетом наложенных позиционных голономных связей и введение обобщенных координат qif количество которых должно соответствовать числу степеней свободы системы п;
3) составление выражений для вычисления кинетической Ек и потенциальной Еп энергий и диссипативной функции Рэлея Ф ;
4) составление выражения для вычисления виртуальной работы 8W источников внешних воздействий, определение обобщенных сил Qf,
5) выполнение операций дифференцирования, предусмотренных уравнением (4.32), и формирование системы обыкновенных дифференциальных уравнений.
Отметим важное свойство функций Ек, Еи и Ф — их аддитивность. Напомним, что способностью накапливать кинетическую энергию обладают инерционные элементы, а потенциальную энергию — упругие элементы. Диссипативные элементы рассеивают энергию системы, затрачивая ее на преодоление внутренних сопротивлений. В связи со свойством аддитивности кинетическая энергия системы равна сумме кинетических энергий всех инерционных элементов. Потенциальная энергия системы равна сумме потенциальных энергий всех упругих элементов, а диссипативная функция — сумме энергий потерь всех диссипативных элементов.
В общем случае, когда состояния дискретных элементов системы, обладающих инерционными свойствами и взаимодействующих между собой посредством безынерционных упругих и диссипативных элементов, описываются несколькими обобщенными координатами, функции Ек, Еи и Ф для каждого элемента определяются по формулам (4.28) — (4.30). Примером такого объекта является твердое тело с шестью степенями свободы. Однако при моделировании часто встречаются более простые динамические модели, в которых состояние каждого дискретного элемента характеризуется одной или двумя обобщенными координатами. Тогда функции Ек, Еп и Ф значительно упрощаются.
Например, при плоском движении твердого тела кинетическая энергия равна сумме кинетических энергий в переносном (поступательном) и относительном (вращательном) движениях:
Ек = 0,5mv2 + O,5Jco2, (4.34)
где гп — масса твердого тела; v — скорость центра масс тела; J — момент инерции твердого тела относительно оси, проходящей че
рез центр масс; со — угловая скорость вращения тела относительно этой оси.
Кинетическая энергия сосредоточенной массы жидкости в дискретном элементе — участке трубопровода
Ек = 0,5mrQ2, (4.35)
где тг — коэффициент массы, кг/м4; Q — расход, м3/с.
Кинетическая энергия дискретного инерционного элемента твердого тела при одномерной теплопередаче
127
Ек = 0,5стТ2, (4.36)
где ст — теплоемкость инерционного элемента, Дж/К; Т — температура элемента, К.
Следует отметить, что Ек в тепловой системе характеризует приращение кинетической энергии при нагреве на 1 К.
Кинетическая энергия инерционного элемента электрической системы
Ек = 0,5Ы2, (4.37)
где L — индуктивность инерционного элемента, Гн; I — сила тока, А.
Потенциальная энергия упругого элемента
Еп = 0,5сА2, (4.38)
где с — параметр упругого элемента (характеризует его способность накапливать потенциальную энергию — см. табл. 3.3); А = q^- qi9 q2 — обобщенные координаты инерционных элементов, соединяемых данным упругим элементом.
Для механической системы А представляет собой величину деформации упругого элемента (линейную или угловую), для гидравлической — изменение объема жидкости упругого элемента, для электрической — изменение заряда конденсатора. Тепловая система упругими свойствами не обладает.
Диссипативная функция определяется по формуле
Ф = 0,5цД2, (4.39)
где ц — параметр диссипативного элемента; А = Qi Ql •> $2— обобщенные скорости (фазовые переменные типа потока), характеризующие состояния инерционных элементов, соединяемых данным диссипативным элементом.
Для механической системы А представляет собой относительную скорость движения взаимодействующих сосредоточенных масс, для гидравлической — скорость движения сосредоточенной массы жидкости в дискретном участке трубопровода, в тепловой системе — разность температур в узлах дискретизации, трической — ток резистора.
Для неголономной системы уравнения Лагранжа рода имеют вид
в элек-
второго
(4.40)
>
'£Aviqi+Av = О, v = 1,N, 1=1
128
где К — неопределенный множитель Лагранжа; Avy, Av — коэффициенты уравнений неголономных связей; п — число обобщенных координат; N — число неголономных связей.
Рассмотрим пример построения математической модели объекта на основе уравнений Лагранжа второго рода.
Пример 4.3. Построить математическую модель анализа динамических нагрузок в трансмиссии автомобиля при включении сцепления. Динамическая модель автомобиля приведена на рис. 4.6.
Параметры инерционных элементов — моменты инерции вращающихся твердых тел, параметры упругих элементов — коэффициенты жесткости Су, а параметры диссипативных элементов — коэффициенты сопротивления цу. Для отображения физических свойств сцепления трансмиссии и сцепления ведущих колес автомобиля с дорогой в модели предусмотрены фрикционные элементы ФЭ1 и ФЭ2. Преобразующие свойства трансмиссии отражаются трансформаторным элементом ТЭ. Внешние воздействия на систему представлены вращающими моментами MBi, Мв2, Мвз, причем MBi отображает воздействие двигателя, а Мв2 и Мв3 — сопротивления движению автомобиля (приведенные моменты сопротивлений качению, подъему и воздуха). Следует также учесть моменты трения зубчатых зацеплений трансмиссий Мтр и сцеплений Мф1т Мф2 в периоды, когда фрикционные элементы ФЭ^ и ФЭ2 буксуют, т.к. эти моменты представляют собой реакции неидеальных связей. Следовательно, моделируемая система неконсервативная. Поэтому при определении виртуальной работы 6W необходимо учитывать не тлько источники внешних воздействий Мв1, Мв2 и Мв3, но и моменты трения Мтр, Мф1, Мф2, несмотря на то, что это внутренние потенциалы системы.
с3,Рз
V/Z/Z/Z/z
Рис. 4.6. Динамическая модель для анализа нагрузок в трансмиссии автомобиля при включении сцепления
Получим вначале уравнения в предположении, что оба фрикционных элемента замкнуты, т.е. сцепление трансмиссии включено, а ведущие колеса не проскальзывают относительно поверхности дороги (качение без скольжения). В качестве независимых обобщенных координат выберем углы поворота сосредоточенных масс (р2, (р3, (р4 и (р5. При замкнутом сцеплении угловые координаты (pj и (р2 одинаковы. Сосредоточенная масса с моментом инерции J6 соединена с массой
129
J2 безынерционным трансформаторным элементом ТЭ, отображающим зубчатые передачи трансмиссии. Угловая координата массы J6 является зависимой от угловой координаты массы J2. Эта зависимость устанавливается выражением Фе = Фг/и, гДе и — передаточное число трансформаторного элемента. Аналогичная зависимость между угловыми скоростями этих масс: ф6 = ф2/и .
Составим выражения для определения кинетической и потенциальной энергий системы и диссипативной функции.
Кинетическая энергия
6 6
Ек = 1=1 1=1
где — угловые скорости сосредоточенных масс.
Выражая угловые скорости масс через независимые обобщенные скорости, получаем
Ек =0,5 [(Ji
+ J2 + Jq/u2)(£)2 + «^З®! + ^4о:>4 + ^б®!
(4.41)
Потенциальная энергия
з
з
Еп = ХЕШ = °’5ХС/Лг 7=1 7=1
Составим формулы для определения деформаций упругих элементов, выражая их через независимые обобщенные координаты: Aj = ф2/п - Фз ~ Фб5 А2 = Фз - Ф4; A3 = (р5. С учетом этих выражений потенциальная энергия
Еп=0,5 [с1((р2/и - ф3 - (р5)2 + с2((р3 - (р4)2 + с3 (psj. (4.42)
Так как диссипативные элементы в динамической модели расположены параллельно упругим, то выражение диссипативной функции Ф имеет такую же структуру, как и формула (4.42):
Ф = 0,5 [pi(co2/u-co3 -со5)2 +|л2(со3 — со4)2 + р3®5]- (4.43)
Виртуальная работа источников внешних воздействий и реакций неидеальных связей при замкнутых фрикционных элементах Ф0! и ФЭ2, выраженная через вариации обобщенных координат,
8W — 7Ив18ф2 - Мв2бфз - Мвз8ф4 - Мтр8ф2 . (4.44)
Момент трения Мтр, приведенный к массе с моментом инерции J2, можно определить по формуле
Мтр = (1 ~ П) С^у1 + ЛГц1)/(14Т|) , где г) — КПД трансмиссии; Му1, Мд1 — моменты соответственно упругого и диссипативного элементов:
МУ1 = С1(ф2/п - фз - Фб); МД1 = /и - со3 - ю5).
Используя выражения (4.41) — (4.44), на основе уравнений Лагранжа
(4.32) и выражения (4.27) получаем следующую систему дифференциальных уравнений:
®2 = “ С^у! + МД1) /(un)]/(JJ + J2 + J q I u2)'t
®3 = (_^b2 + ^yl + ^Д1 “ ^y2 “ ^4д2)/ ^3 ’ ®4 = (-Мвз + My2 + Мд2) / J4 ;
®б ~ (MyX + Мд1 - My3 - Мд3)/ J5 ,
9. Зак. 3006
130
где Му2 = с2(ср3 - <р4); Му3 = с3ср5; Мд2 = ц2(со3 - со4); Мд3 = ц3со5 .
При буксовании сцепления ФЭ} число степеней свободы системы возрастает на единицу и возникает необходимость введения еще одной независимой обобщенной координаты фр На движение элементов системы при этом оказывает влияние момент трения сцепления Мфр что учитывается при определении виртуальной работы. Этот внутренний момент также формально относят к числу внешних воздействий. В математической модели при этом изменяется только первое уравнение системы и вводится одно дополнительное уравнение:
В1 - Мф1 sign(a>j - со2)]/ Jj;
Ф1 signCcoj - <о2) - (Му1 + Msi)/(ur|)]/(J2 + J6 /и2),
“1 = [мв1 - Мф1 sign(a>j - со2)] го2 = [мф1 signal - <о2) - (Му1
где signCcoj - со2)— дискретная функция, зависящая от знака аргумента (coj - со2) : при положительном аргументе она равна 1, а при отрицательном -1 (ее также называют функцией знака).
Необходимость введения функции sign обусловлена тем, что момент трения сцепления направлен противоположно относительной угловой скорости скольжения фрикционных элементов. При переключениях передач в трансмиссии угловые скорости coj и го2 изменяются в широких пределах, а их разность может быть как положительной, так и отрицательной.
Использование разных моделей для замкнутого и разомкнутого состояний сцепления создает неудобства при моделировании. Однако этого можно избежать и получить единую систему дифференциальных уравнений, учитывающую максимально возможное число степеней свободы моделируемого объекта. Введем дискретную функцию состояний сцепления ФЭ!
1 при [coj — со21 < Acoj; 0 при Icoj - со2 > Acoj,
(4.45)
где Acoj — допустимая разность между coj и со2 , определяющая условие блокирования фрикционного элемента (принимают в пределах 1...3 % от coj).
При Ly = 1 сцепление замкнуто, а при Li = 0 — разомкнуто (буксует). После замыкания сцепления может оказаться, что вследствие больших ускорений сосредоточенных масс момент упругого элемента, накапливающего потенциальную энергию в переходном процессе, совместно с инерционным моментом ведомой части превысит момент трения сцепления Мф^. Тогда сцепление разомкнется и начнется его буксование. Такой переход сцепления из одного состояния в другое можно учесть функцией переключения
Рх =0,5 1 + sign(M^n - (Му1 + Мд1)/(пг|) + (J2 + J6 /u2)cb2 )
(4.46)
При Pi — 0 сцепление размыкается и начинается его пробуксовка.
При включении сцепления ФЭ! нагрузки в упругих элементах трансмис-
сии значительно возрастают, что может привести к проскальзыванию ведущих колес относительно дороги (буксованию). Для отображения этого процесса в динамическую модель вводится фрикционный элемент ФЭ2. Расположение фрикционных элементов ФЭ! и ФЭ2 в динамической модели различно: ФЭ! разделяет две сосредоточенные массы, а ФЭ2 — упругий элемент и сосредоточенную массу. Наличие упругого элемента с2 между сосредоточенными массами J3 и J4 позволяет им поворачиваться относительно друг друга, поэтому использовать функцию вида (4.45) для определения состояния ФЭ2 нельзя. В этом случае применяется лишь функция переключения
131
Р2 = 0,б[1 + 8^п(Мф2 - |му2 + Мд2|) .
(4.47)
Использование функций Iq, Р19 Р2 позволяет сформировать единую систему дифференциальных уравнений, описывающих функционирование моделируемого объекта при любых изменениях состояний фрикционных элементов ФЭ1 и ФЭ2:
(bi = [мв1 - Мф1 sign (toj - со2)(1 - Iq) - (Му1 + Мд1)Ь1Р1 /(пц)]/
/[^1 + (^2 + ^6 / 1/2)^1 J
«2 = [МвЛА + Мф1 sign («1 “ «2XI - А) ~ (му1 + Мд1)/(иг|)]/
/№ 1^1 + ^2 + ^3 / и2}'
(Ь3 = [- мв2 + му1 + мД1 - (му2 + мд2)р2 - ^2sign (®з - “4X1 - ^2)]/ J3;
1 - > (4.48)
со4 = [- Мв3 + (Му2 + Мд2)-Р2 + Assign (со3 - со4)(1 - Р2)]/^4 5
со5 = (МУ1 + МД1 - Му3 - Мдз) / J5 ;
МУ1 =cj (со2 /п — (о3 -со5);
Му2 = с2 (со3 - (04 )Р2 + -Л4ф2 (1 ~ ^2 ) ;
Муз = с3 (05 ;
При буксовании сцепления ФЭ1 два первых уравнения различны и ©1 * со2 . После замыкания сцепления эти уравнения оказываются одинаковыми
и ©1 = (Ь2 . При этом необходимо принять со2 = ®i . Если колеса пробуксовывают.
Р2 = 0. Тогда при Мф2 = const Му2 = 0 , а при Мф2 = var Му2 = Мф2 . Эти осо
бенности учтены в выражении для Му2. После размыкания ФЭ2 вначале разность скоростей (coi - со2) возрастает, что увеличивает Мд2. Затем она уменьшается и при снижении Мд2 до его значения, достигнутого в момент размыкания, произойдет замыкание ФЭ2. Следует, однако, отметить, что в состоянии скольжения принятая модель ФЭ2 не отражает истинных значений Му2 и Мд2, т.к. при этом не вычисляется действительная скорость деформации упругого элемента. Например, при Мф2 = const деформация упругого элемента с2 в связи с его безынерци-онностью мгновенно принимает значение Дср2 = (Му2 + Мд2) / с2 = const , а
Лф2 = 0 , где Му2 и Мд2 — значения Му2 и Мд2 в момент размыкания ФЭ2. В
результате Му2 = Му2 + М*2; ТИд2 = 0 . Несмотря на это, функция Р2 обеспечивает адекватное описание условий переключения ФЭ2.
Для интегрирования системы уравнений (4.48) задаются начальные условия cozo, i = l,n, и Myj0, j = где п — число степеней свободы (в данном
случае п = 5); т — количество упругих элементов. Необходимо также задать функции источников внешних воздействий MBi, Мв2, Мвз и моментов трения сцеплений Мф1, Мф2.
Момент двигателя внутреннего сгорания при наличии регулятора или ограничителя угловой скорости определяют по формулам л ж L . л , /_ \2
при
МдО -^о(Юд ~йдо) ПРИ СО
МДТ
(Од _ С0до »
М„1 > Мдт;
< ЛГдТ,
(4.49)
д > ^до И
при (0д > (0ДО и
132
где Мр, Мдо — моменты двигателя соответственно при максимальной мощности и при включении ограничителя; со^, содо — соответствующие этим моментам угловые скорости двигателя; сод — текущее значение угловой скорости двигателя; ko — коэффициент наклона регуляторной ветви характеристики двигателя; Мдт — тормозной момент двигателя при полном выключении подачи топлива.
Моменты сопротивления движению автомобиля
Мв2 = ^ав^кО Sign МвЗ = + тан/ГкО sign C04)g, (4.50)
где тпя — масса автомобиля; тпяя, тпян — части массы автомобиля, отнесенные ’ СЛ ' cljo * cLXl *
соответственно к ведущим и ведомым колесам; g — ускорение свободного падения; / — коэффициент сопротивления качению; гк0 — радиус качения колес автомобиля; h — уклон продольного профиля дороги (положительный на подъеме, отрицательный на спуске).
Функция sign учитывает необходимость изменения знака момента сопротивления качению, если при трогании автомобиля с места на уклоне происходит откат автомобиля назад.
Изменение момента трения при включении сцепления в первом приближении можно определять по формуле
^Ф1 -
^ф1 тах^ / ^ф1 ^ф! max
при
при
о<* <гф1;
t > ^ф1>
(4.51)
где Мф1тах — максимальное значение момента трения при полном включении
сцепления; t, £ф1 — текущее и полное время процесса буксования сцепления ФЭр Момент трения сцепления ведущих колес автомобиля с дорогой
^Гф2 = Фг^ав^кО » (4.52)
где — коэффициент сцепления.
Мощность Рф1 и работа трения ТУф/ фрикционного элемента ФЭ^ определяются по формулам
^ф£ = |^фгСОфг |» (4.53)
= \p^dt9 (4.54)
о
где соф/ — угловая скорость относительного скольжения поверхностей трения для ФЭх соф1 = coj — со2, а для ФЭ2 соф2 = (со3 - ю4)(1 - Р2).
На рис. 4.7 приведены графики, полученные при моделировании процесса трогания с места автомобиля массой та = 14950 кг на дороге, характеризуемой параметрами: f - 0,02; h = 0,05; срх = 0,5. Параметры автомобиля: J1 = 3,8; J2 = 0,1; J3 = 2,103; J4 = 76,916; J5 = 2,213 (Jt в кг • м2); q = 7470; c216000; c3 = 11340 (c;- в Н м/рад); и = 5,25; ц = 0,9; Мр =600 Нм; <ьр = 220 рад/с; содо = 167 рад/с; а = 0,44; Ъ = 1,87; с = -1,31; ko = 38,22 Н м с/рад;
^Ф1тах = 1410 Н м; #Ф1 = 0,75 с; Мф2 = 3390 Н м; гк0 = 0,5 м.
133
а
б
200
рад/с
50
100
0
Рис. 4.7. Графики переходного процесса при трогании автомобиля с места: а — угловые скорости сосредоточенных масс; б — угловые ускорения; в — моменты двигателя, сцепления и упругих элементов; г — мощности и работы буксования сцеплений
4.6. МЕТОД ФУНКЦИОНАЛЬНО ЗАКОНЧЕННЫХ ЭЛЕМЕНТОВ
Во многих отраслях техники объекты состоят из некоторого конечного набора типовых конструктивных элементов. Каждый такой элемент имеет определенное функциональное назначение и выполняется в виде автономного объекта, завершенного в конструктивном отношении. При этом предусмотрена возможность его присоединения к другим типовым конструктивным элементам и создания на основе упорядоченной их совокупности некоторой интегрированной технической системы, обеспечивающей задан
134
ный процесс функционирования, отвечающий определенным требованиям.
При наличии таких элементов они могут быть положены в основу структурирования объектов при их математическом описании. Это создает определенные преимущества при проектировании. Структуру объекта составляют типовые элементы, имеющие соответствующие математические описания, которые используются для получения полной математической модели технического объекта. Изменяя в процессе проектирования количественный и качественный состав элементов и варьируя их параметрами, можно получить в результате технический объект с высокими показателями качества и эффективности.
Метод структурирования технического объекта и построения его математической модели в рассматриваемом случае называют методом функционально законченных элементов. Этот метод широко применяется при проектировании гидроприводов. Однако его можно использовать и в других областях техники.
Рассмотрим особенности этого метода на примере гидромеханических систем. Воспользуемся разработками, выполненными кандидатами технических наук Т.В. Пузановой и В.А. Широченно. В табл. 4.3 приведен предложенный ими набор структурных элементов. Он обладает высокой гибкостью и позволяет составить динамическую модель любого гидропривода.
Математические модели функционально законченных элементов можно получить различными методами, однако наиболее удобно воспользоваться уравнениями Лагранжа второго рода. В этом случае нет необходимости рассматривать взаимодействие элемента с другими элементами системы. Достаточно лишь составить выражения для определения кинетической Ек и потенциальной Еп энергий и диссипативной функции Ф . Так как Ек, Еп и Ф представляют собой квадратичные функции обобщенных координат и обобщенных скоростей, то не возникает необходимости выбора направления координат или учета предполагаемого расположения элемента в динамической модели. Воздействия на элемент, как внутренние, так и внешние, также не принимаются во внимание при построении его математической модели. Дело в том, что взаимодействия элементов будут учтены топологическими уравнениями при формировании математической модели системы, а для внешних воздействий составляются отдельные математические описания, входящие в библиотеку моделей воздействий, которая, так же как и библиотека моделей элементов, используется на стадии формирования полной модели системы.
Определив функции Ек, Еи и Ф и используя уравнения Лагранжа второго рода, получают математическую модель элемента, которая в общем случае представляется выражением вида
Таблица 4.3
№ п/п Элементы гидропривода Обозначения элементов Физические свойства элементов и их математические описания
инерционные диссипативные упругие
1 2 3 4 5 6
1 Участок гидромагистрали с 1 5? 2 т тх (Игл * + Нгн Я2Sign*)А
2 Безынерционный участок гидромагистрали • т=) to • (Игл * + Нгн л2 sign х) А
3 Безынерционный упругий элемент 1 сг сг (±АуХу) /=1
4 Механический подвижный элемент X —* ц тх
-аЧ
1 Г 2
т
5 Возвратная пружина <-вп “ xi+l)
Продолжение табл. 4.3
1 2 3 4 5 6
6 Постоянный дроссель 1 •>— р = со —«2 nst Ар ( л. \ Ах Is Адр > 2 signr
7 Переменный дроссель 1 • р.п = —«2 гаг Ар Ах с л ° Лдр.п \2 signx /
8 Обратный клапан 1 *2 0,5gpAx2 sign х
9 Насос Фн 1 2 Л, ^нФн аиФн
10 Гидромотор •—— 1 Фгм 2 ^гм 'Л'мФгм ^соФгм
137
Fn + Fr + Fy = FB, (4.55)
где FK — сила инерции элемента; F^ — диссипативная сила элемента; Fy — сила упругости элемента; FB — сила взаимодействия данного элемента с другими элементами системы.
Для элементов вращательного движения вместо сил в уравнение (4.55) будут входить соответствующие моменты
Ми + Мд + Му = мв.
В табл. 4.3 указаны физические свойства, которыми наделены функционально законченные элементы, и даны математические описания этих свойств. В формулах приняты следующие обозначения параметров и фазовых переменных: т, Jn, JrM — масса и моменты инерции соответствующих дискретных инерционных элементов; А — площадь поперечного сечения гидромагистрали; цгл, цгн — коэффициенты соответственно линейных и нелинейных потерь; ц — коэффициент вязкого трения; р — плотность жидкости; 8 — коэффициент расхода дросселя; Адр, Адр.п — площади сечений соответственно постоянного и переменного дросселей; — коэффициент местного сопротивления; ат, ва — коэффициенты гидромеханических потерь; сг — коэффициент жесткости упругого элемента, определяемый по формуле (3.66); свп — коэффициент жесткости возвратной пружины; х — координата сосредоточенной массы, взаимодействующей с упругим элементом; w — количество масс, взаимодействующих с данным упругим элементом; х, х — скорость и ускорение сосредоточенной массы.
Значения цгл и цгн определяются по формулам:
цгл = 25,2pvZ/A; цгн = 0,443XTpz/VA 4- O,5gp.
Обозначения параметров, входящих в эти формулы, даны в разделе 3.9.
Площадь сечения переменного дросселя зависит от факторов управления Адр п = /(х^, р^, t), где х^ — координата регулирующего органа дросселя; р% — управляющее давление; t — время.
Обратный клапан рассматривается как безынерционный элемент переключения. В зависимости от направления скорости потока жидкости и разности давлений на его входе рвх и выходе рвых он может находиться в открытом или закрытом состоянии. Условие открытия при х = О
sign (рвх — рвых) = 1,
а условие закрытия при х Ф О
П sign х = -1 ,
Ю. Зак. 3006
138
где х — скорость потока жидкости в магистрали, в которой расположен обратный клапан; П — дискретная функция, характеризующая условия работы клапана: П = 1, если клапан расположен в магистрали так, что пропускает жидкость только в положительном направлении скорости потока; П = -1 — в противном случае.
Если обратный клапан снабжен возвратной пружиной, то к Рвых добавляется слагаемое РПр.о.кМо.к, где РПр.о.к — усилие пру-жины обратного клапана; А0>к — площадь перекрываемого клапаном отверстия — для шарикового или грибкового клапана, или площадь поверхности управляющего элемента — для золотникового клапана.
Для построения математической модели системы необходимо использовать компонентные уравнения функционально законченных элементов из табл. 4.3 и топологические уравнения, выражающие условия равновесия потенциалов и непрерывности фазовых переменных типа потока. Топологические уравнения составляются для узлов взаимодействия элементов. Как следует из табл. 4.3, каждый элемент представляет собой двухполюсник и содержит два узла, отмеченные цифрами 1 и 2. Исключение составляет лишь безынерционный упругий элемент, отображающий упругие свойства газожидкостной смеси и трубопроводов, который содержит только один узел.
В гидромеханической системе взаимодействие функционально законченных элементов осуществляется посредством рабочей жидкости, поэтому в качестве топологического уравнения используется уравнение баланса расходов жидкости в узлах взаимодействия элементов, выражающее условие непрерывности фазовых координат:
f w Л
XQi -0, j = l,u, (4.56)
где Qi — расход жидкости i-ro элемента, взаимодействующего с j-m узлом; w — количество элементов, взаимодействующих с этим узлом.
Давление жидкости в каждом узле взаимодействия одинаково для всех функционально законченных элементов, примыкающих к данному узлу.
Расход Qf можно выразить через скорость потока жидкости и площадь его поперечного сечения А/: Qi = Ai xt. Тогда уравнение непрерывности потока для j-го узла принимает вид
139
W
ЦА^Ъ. (4.57)
i=l Топологическое уравнение (4.57) эквивалентно уравнению позиционной связи
w
Хх А}Х} = 0.
i=l
(4.58)
Наличие позиционных связей системы приводит к избыточности координат и переопределенности системы уравнений, по
этому избыточность желательно
Рис. 4.8. Фрагмент динамической модели гидравлической магистрали
исключать.
Рассмотрим порядок исключения избыточных координат на примерах. На рис. 4.8 приведен фрагмент динамической модели системы, отображающей ветвление гидравлической магистрали в точке у. Участки гидромагистрали, примыкающие к узлу ветвления у, обладают инерционными, упругими и диссипативными свойствами. Эквивалентный упругий элемент с коэффициентом гидравлической жесткости сг, отображающий упругие свойства всех участков, располагается в узле ветвления. При малых объемах жидкости в участках и
жестких трубопроводах упругими свойствами иногда пренебрега
ют и исключают из модели этот упругий элемент. Тогда коорди
наты всех инерционных элементов Xj оказываются взаимосвязанными и число степеней свободы на единицу меньше общего числа координат.
Выберем в качестве зависимой координаты х^ Тогда в соот-вествии с уравнением связи (4.58) можно записать
s
Ai Xi + Aj Xj = 0, i=l
где s — число степеней свободы рассматриваемой подсистемы; Xi — независимая обобщенная координата; Xj — зависимая обобщенная координата (на рис. 4.8 Xj = х4).
140
В результате получаем уравнения связей между зависимыми
Ху и независимыми xt координатами системы
s ___
Xj = Y(AilAj)xi’ i = ^r- (4.59)
i=l
Предположим, что каждый элемент гидромеханической системы обладает одновременно инерционными, диссипативными и упругими свойствами и подвергается внешнему воздействию FB. Движение такого элемента описывается дифференциальным уравнением, структура которого имеет вид выражения (4.55).
Записав для всех элементов аналогичные уравнения и исключив из них зависимые координаты и их производные, получаем систему дифференциальных уравнений в виде
i = 1, п, (4.60)
где FHy, Fpjj, Fyij
составляющие воздействия j-ro элемента с
исключенной зависимой координатой Xj на элемент системы с ко
ординатой xf, г — число исключаемых зависимых координат, равное числу уравнений связей.
Для фрагмента системы, изображенного на рис. 4.8 число степеней свободы s = 3, число связей г = 1, а математическая модель его содержит 3 уравнения вида (4.60) и одно уравнение связи (4.59).
Систему уравнений (4.60) можно представить в виде
Хд ’ *^1 ’ *^2 > • • • > Q 1,8. (4.61)
Уравнения (4.61) в совокупности с уравнениями связей (4.59) представляют собой математическую модель динамической системы с s степенями свободы. Решение этих уравнений позволяет определить все обобщенные координаты системы: независимые Xj и зависимые Ху. При этом необходимо задать начальные условия Х/о, Xj0, i = 1, s .
Следует отметить, что не каждое уравнение системы (4.60) будет содержать составляющие, стоящие под знаком суммы. Например, если в подсистеме, приведенной на рис. 4.8 учесть упругие свойства газожидкостной смеси и трубопроводов, то координаты всех инерционных элементов Xj окажутся независимыми и уравнения будут иметь вид
i = 1,4.
Как следует из табл. 4.3, обобщенные координаты Xj можно задать только тем функционально законченным элементам, кото-
141 рые обладают инерционными свойствами. Математическое описание остальных элементов должно осуществляться с использованием обобщенных координат инерционных элементов.
Динамические модели гидроприводов представляют собой разветвленные разомкнутые цепи, а в системах автоматического управления — замкнутые одноконтурные или многоконтурные цепи. Точки ветвления цепей делят их на отдельные ветви, состоящие из некоторого набора последовательно соединенных функционально законченных элементов. Если в такую ветвь наряду с инерционными элементами входят также безынерционные, то описание последних дается с использованием обобщенных координат примыкающих инерционных элементов.
Рис. 4.9. Динамические модели ветвей гидроприводов, состоящих из взаимодействующих функционально законченных элементов
На рис. 4.9 даны динамические модели фрагментов ветвей. Узлы взаимодействия входящих в них элементов обозначены
У/. Фрагмент ветви на рис. 4.9, а включает три функционально законченных элемента: участок гидромагистрали 1, постоянный дроссель 6 и безынерционный упругий элемент 3 (обозначения элементов соответствуют их порядковым номерам, принятым в табл. 4.3).
Поскольку согласно принятым условиям при структурировании элементов постоянный дроссель считается установленным в данный участок гидромагистрали, а безынерционный упругий элемент примыкает к этому участку, то состояние всех элементов ветви определяется координатой сосредоточенной массы жидкости в участке трубопровода х1. Используем координату х± и площадь поперечного сечения участка трубопрово-
142
да Ai в моделях всех элементов ветви. Решая совместно уравнения этих элементов, получаем дифференциальное уравнение рассматриваемой ветви
А1 1т1Х1 + Црл!*! +
Ргн1^1
sign Xj + = р.
Фрагмент схемы на рис. 4.9, б также содержит один элемент, обладающий инерционными свойствами (механический подвижный элемент 4). Остальные элементы безынерционные, поэтому математическое описание ветви можно составить, используя только одну независимую обобщенную координату Х4.
Выпишем уравнения всех компонентов ветви, обозначив их координаты номерами элементов:
(Мгл2*2 + HrH2*2sign*2)A2 = А2<Р ~ Pyl)!
^4^4 + Р4%4 ~ ^4Ру1 ~~ ^вп» свп^4 = -^вп’
где Pyi — давление жидкости в узле взаимодействия у^; FBn — усилие возвратной пружины.
Используя топологическое уравнение х2 ~ (Al /А)*4 и Ре" шая совместно компонентные уравнения, получаем дифференциальное уравнение ветви
1 А А2
——(т45с4 + р4х4 + свпх4) + цгл —А х4 + цгн2 —$ х4 sign х4 = р.
А4 а2 А$
Для фрагмента схемы на рис. 4.9, в аналогичные выкладки
приводят к уравнению ветви
Х4 + Ц4Х4 + Свп#4
^-4 . А4 . 2 •
+ Ргл1 л *^4 + Мтн1 о”^4 sign %4 ~ Р • А1 А(
Таким образом, несмотря на то, что в рассматриваемой ветви два инерционных элемента, получено одно дифференциальное уравнение с одной неизвестной х4, принятой в качестве независимой обобщенной координаты. Значение координаты определяется из уравнения связи: хг = (А4/А1)х4.
143
Если функционально законченные элементы, обладающие инерционными свойствами, разделены между собой упругим элементом, их координаты оказываются независимыми. Так, динамическая модель ветви гидромеханической системы, представленная на рис. 4.9, г, имеет две степени свободы и для ее математического описания необходимо использовать две независимые координаты Xi и х4. В результате получаем систему дифференциальных уравнений
Ai + цгл1х1 + si£n xi + сгЗх1 - сгЗ (А4/А1)х4 = р;
А41(т4х4 + цх4 + свпх4) + сг3 (А4/А4) ((А4/А1)х4 - х4) = 0.
При формировании математической модели объекта методом функционально законченных элементов система дифференциальных уравнений (4.61) имеет не совсем обычный вид. В отдельные уравнения системы могут входить вторые производные одновременно нескольких обобщенных координат. В этой связи при необходимости приведения их к нормальной форме Коши можно поступить следующим образом. Предполагаем искомыми неизвестными в системе уравнений (4.61) вторые производные независимых обобщенных координат xt и для их определения составляем систему неоднородных алгебраических уравнений вида
+ #12^2 + ••• + als%s ~ а21Х1 + «22^2 + ••• + a2s*s ~ f2’
(4.62)
asl*l + ^s2*^2 + — + ass^s ~~ ft
где aki — коэффициенты при искомых переменных xt; fk — функции возмущений, определяемые независимыми координатами xt и их первыми производными xt = а также внешними воздействиями на инерционные элементы системы FBi, т.е.
fk(vi9 xi> ~^), 1,8.
Решив в общем виде систему уравнений (4.62) и введя обозначение Xi =dvi/dt9 получим следующую систему дифференциальных уравнений в нормальной форме Коши:
dvi/dt = ft(vk,FBk, pi, k = l,s,
Z 1, Q)> i 1, s,
dpj /dt = fj(vh, fe = l,s),
j = 1,Q>
) (4-63)
144
где pj — давление, определяемое деформацией упругого элемента, расположенного в j-м узле взаимодействия элементов системы; q — число узлов, в которых учитываются упругие свойства системы.
Если упругим элементом является возвратная пружина, то ее усилие выражается через давление посредством соотношения FBn = рА, где А — площадь рабочей поверхности механического подвижного элемента, с которым взаимодействует возвратная пружина.
Переменные и Pj являются фазовыми координатами системы гидропривода. При этом количество переменных типа потока равно числу степеней свободы системы.
Задавая начальные условия и р7о и интегрируя систему уравнений (4.63), получают искомые функции скоростей движения потоков жидкости и механических элементов гидропривода Vi(t) и давлений жидкости Pj(t) в узлах, в которых расположены упругие элементы.
5- СТРУКТУРНО-МАТРИЧНЫМ МЕТОД ФОРМИРОВАНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
5-1- ОСНОВЫ СТРУКТУРНО-МАТРИЧНОГО МЕТОДА
Динамическая модель технического объекта, построенная методом сосредоточенных масс, представляется совокупностью взаимодействующих элементов — инерционных, упругих, диссипативных, трансформаторных и фрикционных. Техническую систему, динамическая модель которой может быть представлена совокупностью только инерционных, упругих и диссипативных элементов, назовем простой. Динамическая модель сложной технической системы кроме этих элементов содержит трансформаторные и (или) фрикционные элементы. К сложным также относятся механические системы при сложном движении твердых тел.
Математическую модель простой технической системы можно сформировать узловым методом, используя информацию, содержащуюся в матрице инциденций. Алгоритм формирования математической модели модифицированным узловым методом описывается системой уравнений (4.20) и (4.21).
Первое матричное уравнение системы (4.20) получено на основе условия равновесия потенциалов ветвей орграфа, инцидентных соответствующим его узлам, и выражает принцип Даламбера. Это топологическое уравнение. Второе уравнение системы (4.20) и уравнение (4.21) представляют собой матричные компонентные уравнения соответственно упругих и диссипативных элементов системы.
146
Принцип формирования компонентных уравнений рассматривался в разделе 4.3, где отмечалось, что эти уравнения могут быть составлены с использованием столбцов матрицы инциденций.
Топологические уравнения также можно непосредственно получить с помощью матрицы инциденций. Выясним принцип их формирования, используя результаты построения математической модели для примера технического объекта, рассмотренного в разделе 4.4. Динамическая модель объекта приведена на рис. 4.5, а, орграф построен на рис. 4.5, в, а матрица инциденций дана в табл. 4.2. Математическую модель объекта составляют уравнения (4.22) —(4.25).
Выпишем матрицу инциденций анализируемого объекта, исключив из нее подматрицу инциденций инерционных элементов Аи, так как она в системе уравнений (4.20) не используется. Кроме того, осуществим перестановку подматриц Ад, Ау и Ав, поменяв их столбцы местами. Матрица инциденций с учетом этих изменений приведена в табл. 5.1.
Таблица 5.1
Узлы Ветви
Источники потенциалов Упругие Диссипативные
Л,1 Рь2 С2 И2
1 -1 0 0 1 0 1 0
2 0 -1 0 -1 1 -1 1
Г 0 0 1 0 -1 0 -1
Подматрицы -Ав Ац
Сопоставляя два первых уравнения системы (4.22) с элементами строк табл. 5.1, соответствующими узлам орграфа 1 и 2, легко заметить, что эти уравнения можно получить путем суммирования потенциалов компонентов, инцидентных данным узлам,
dvi/dt -
N
7=1
/ ПЦ,
i = l,n, (5.1)
где L — количество источников внешних воздействий типа потенциала (источников потенциалов); N — количество упругих элементов системы; К — количество диссипативных элементов;
п — количество сосредоточенных масс системы, равное числу ее степеней свободы.
Наличие или отсутствие источников потенциалов, упругих и диссипативных элементов, а также направления сигналов в ветвях орграфа определяются соответствующими инциденторами И, значения которых содержатся в матрице инциденций. Поэтому
147
выражение (5.1) можно записать в таком же виде, как и выражения для компонентных уравнений в разделе 4.3. В результате вместо сложных уравнений узлового метода (4.20) и (4.21) получаем простые выражения для формирования топологических уравнений равновесия сосредоточенных масс и компонентных уравнений упругих и диссипативных элементов непосредственно по матрице инциденций:
п ___
~ j ^УИ^ 9 J ~ ^9^9 i=l
п ____
— ~№k ~ ^9^9
1=1
(5.3)
В 771
т = 1,М,
(5.4)
где М — количество источников внешних воздействий типа потока; FBm — реакция внешней среды, генерирующей тп-й источник потока.
Уравнения (5.2) — (5.4) описывают алгоритм структурноматричного метода формирования математических моделей простых технических объектов.
При использовании этого метода топологические уравнения равновесия потенциалов dv / dt = f(FB,Fy,F^) и выражения для определения реакций внешней среды F* = f(Fy9FA) получают, алгебраически суммируя потенциалы ветвей орграфа по строкам матрицы инциденций, а компонентные уравнения упругих и диссипативных элементов — суммируя потоковые переменные узлов орграфа по соответствующим столбцам матрицы инциденций. При этом, как следует из уравнений (5.2) — (5.4), слагаемые компонентных уравнений и выражений для определения F* необходи
мо умножить на минус единицу.
Основу структурно-матричного метода формирования математических моделей, так же как и узлового, составляет матрица инциденций, которая, как отмечалось в разделе 4.3, представляет собой матричную форму математической модели. Однако этот ме
148
тод несравненно проще узлового, так как исключает необходимость выполнения сложной вычислительной процедуры перемножения матриц. Алгоритм структурно-матричного метода легко реализовать на ЭВМ и, следовательно, обеспечить автоматизацию процесса построения моделей. Метод отличается очевидной наглядностью в отображении структуры технической системы и ее взаимодействия с внешней средой. Он превосходно иллюстрирует полное соответствие между математическими моделями в матричной форме и инвариантной, т.е. в форме систем дифференциальных и алгебраических уравнений.
В последующем будет показано, что структурно-матричный метод, в отличие от узлового, позволяет формировать математические модели сложных технических объектов с трансформаторными и фрикционными элементами. Он обладает теми же возможностями, что и уравнения Лагранжа второго рода, но алгоритм формирования модели гораздо проще и хорошо приспособлен к автоматизации.
Приведем примеры формирования моделей с применением изложенного метода.
Пример 5.1. Моделирование механической системы. На рис. 5.1, а приведена простейшая динамическая модель, которую используют при анализе нагру-женности трансмиссии транспортного средства, обусловленной неровностями
Рис. 5.1. Динамическая модель (а) и орграф (б) трансмиссии транспортного средства
опорной поверхности дороги. Орграф, соответствующий этой модели, построен на рис. 5.1, б.
Сосредоточенные массы с моментами инерции Jlf J2, J3 отображают инерционные свойства объекта. Движение масс определяется внешними воздействиями типа потенциала, характеризуемыми вращающими моментами двигателя Мв}, сопротивления качению МВ2, сопротивления воздуха и преодолеваемого подъема Мв^. Кроме того, на характер движения оказывают воздействие неровности дороги, создающие источник потока, описываемый функцией (ОдДО . Упругий элемент с коэффициентом жесткости С2 отображает дифференциальное соединение сосредоточенных масс J2 и с источником потока. Все эти особенности учтены при построении орграфа. Неровности дороги создают дополнительное сопротивление движению транспортного средства и на его преодоление затрачивается энергия двигателя. Поэтому направление сигнала в ветви источника потока со*! принимается от узла 1* к ба
149
зе, а реакция внешней среды М*^ , обусловленная этим источником, также считается отрицательной.
В табл. 5.2 приведена матрица инциденций модели объекта, представленной на рис. 5.1.
Таблица 5.2
Узлы Ветви
ЛГВ1 МЪ2 м*л Ci <?2 Mi М2
1 1 0 0 0 -1 0 -1 0
2 0 -1 0 0 1 -1 1 -1
3 0 0 -1 0 0 1 0 1
1* 0 0 0 -1 0 1 0 1
Подматрицы ч j
При моделировании обычно используют обозначения фазовых переменных и параметров элементов, принятые для математического описания объектов конкретной физической природы (см. табл. 3.2 и 3.3). Рассматриваемый объект представляет собой вращательную механическую систему, поэтому фазовыми переменными типа потока являются угловые скорости со , а типа потенциала — вращающие моменты М.
Используя формулы (5.2) — (5.4) алгоритма структурно-матричного метода и матрицу инциденций, составим уравнения математической модели технического объекта:
dvyjdt — (AfBj — Afyj — M^/JA;
dcs^/dt = (-Мв2 + Afyl - Му2 + -Л4Д1 - ^д2)/с^2 ’
da^/dt = (-ЛГв3 + Му2 + >
dMyl/dt - qfcoj -со2);
dMy2/dt = с2(ю2 - w3 - сов1); j
(5.5)
МД1 - Ml(со1 ~ t02)’ ^д2 - М2(С02 ~ 033 - сов1)» ^в1 - Му2 + Мд2.
Задавая начальные условия ш10, со2о> юзо> ^yio> Afy20 и интегрируя систему дифференциальных уравнений (5.5), можно проанализировать нагруженность трансмиссии транспортного средства, обусловленную источниками внешних воздействий Мв1, Мв2, Мв3 и гов1 .
Пример 5.2. Моделирование гидравлической системы. На рис. 5.2, а приведена принципиальная схема гидравлической системы, состоящей из насоса 1, переливного клапана 2, трех гидромагистралей потребителей 3, 4 и 5 и соединительной магистрали 6. При построении динамической модели необходимо учесть основные свойства гидравлической системы. Предположим, что магистрали потребителей сравнительно короткие и волновыми процессами в них можно пренебречь. Тогда их можно рассматривать как дискретные элементы, наделенные инерционными и диссипативными свойствами. Массу жидкости в дискретном элементе рассматривают как сосредоточенную. Если объем жидкости в соединительной магистрали 6 значительно меньше объемов жидкости в магистралях 3, 4 и 5, в первом приближении его массой можно пренебречь или учесть эту массу путем перераспределения ее между массами магистралей 3, 4 и 5. Но пренебре-
150
гать потерями в соединительной магистрали без достаточных оснований нельзя, поэтому будем учитывать характеристики ее гидравлического сопротивления.
Внешние воздействия на гидравлическую систему создаются потребителями и насосом, причем воздействия потребителей представляют собой источники потенциалов, а воздействие насоса — источник потока. Источники потенциалов описываются функциями давлений = f(t), характеризующими потери напора в гидроаппаратах потребителей, а источник потока — функцией расхода (подачи насоса) QH = f(t).
Если подача насоса QH превышает пропускную способность гидравлических магистралей, открывается переливной клапан 2 и пропускает часть жидкости на слив. При этом клапан обеспечивает поддержание практически постоянного давления насоса рп = const. Такую гидросистему называют системой с источником неограниченной энергии. В этом случае в динамической модели насос изображается как источник постоянного давления рн, а функция подачи QH(t) не указывается. Однако во многих случаях пропускная способность гидравлических магистралей при заданном уровне максимального давления, ограничиваемого переливным клапаном, оказывается выше подачи насоса. Тогда суммарный расход
151
жидкости в магистралях определяется подачей насоса и можно в первом приближении считать QH = const (или в общем случае QH = а давление насоса рн будет определяться давлениями потребителей и потерями в гидромагистралях. Такую гидросистему называют системой с источником ограниченной энергии, и
насос в динамической модели изображают как источник потока QB1 (рис. 5.2, б).
Упругий элемент, учитывающий сжимаемость газожидкостной смеси и деформируемость стенок трубопровода, подключают в точке ветвления гидравлической магистрали. Он осуществляет дифференциальное соединение всех инерционных элементов и источника потока.
Фазовыми переменными типа потока в гидравлической системе принимают расходы Qi, а типа потенциала — давления pj.
На рис. 5.2, в построен орграф гидросистемы, а в табл. 5.3 приведена матрица инциденций.
Таблица 5.3
Узлы Ветви
Рв1 Рв2 РвЗ * Рв1 СГ1 Мт1 Нг2 МтЗ Мт4
1 -1 0 0 0 1 -1 0 0 0
2 0 -1 0 0 1 0 ~1 0 0
3 0 0 -1 0 1 0 0 -1 0
1* 0 0 0 1 -1 0 0 0 -1
Подматрицы Ав Ау Ад
Составим уравнения математической модели, пользуясь структурноматричным методом:
dQ1/dt = (~рв1 + ру1 - рл1)/тг1;
dQ2/dt = (-рв2 + ру1 - рд2)/тг2 ;
dQ^/dt = {-рв3 + ру1 - р^)/тТ^ dpyi/dt ~ сг1(~Ф1 ~ Ф2 ~ Фз + Фв1)»
(5.6)
Рд1 ~ М-ггФг» i ~ 1,2,3, Рд4 Мт4Фв1» .PbI Ру1 + Рд4»
где рв1 = Рн — давление, развиваемое насосом.
Для решения системы уравнений (5.6) задаются начальные условия Фю, Ф20, Фзо, РуЮ-
Пример 5.3. Моделирование гидромеханической системы. В заключение рассмотрим более сложный технический объект, принципиальная схема которого дана на рис. 5.3, а. Это схема гидропривода, который включает насос 1, переливной клапан 2, гидрораспределитель 3, гидравлическую магистраль, состоящую из трех участков 4, 5 и 6, и два гидродвигателя 7 и 8, выполненных в виде гидравлических цилиндров с возвратными пружинами 9 и 10. Гидродвигатели приводят в действие рабочие органы некоторой машины или механизма. Взаимодействие гидродвигателей с рабочими органами характеризуется функциями внешних воздействий на систему гидропривода FBi и FB2 . Функция h(t) характеризует состояние и процесс включения или выключения гидрораспределителя. Обычно время включения гидрораспределителя существенно меньше времени переходного процесса гидропривода, поэтому при моделировании полагают мгновенное включение гидрораспределителя.
152
Рис. 5.3. Принципиальная схема (а), динамическая мо, и орграф (в) системы гидропривода
153
Способ моделирования насоса определяется соотношением его подачи и пропускной способности гидропривода при заданном уровне давления рн, поддерживаемом переливным клапаном. В предыдущем примере предполагали, что гидросистема имеет источник ограниченной энергии. В данном примере предположим, что в процессе включения гидропривода давление насоса падает незначительно, и примем условие рп = const.
Система гидропривода содержит гидравлические и механические взаимодействующие элементы. Фазовыми координатами гидромеханической системы принимают расходы (переменные типа потока) и давления Pj (переменные типа потенциала).
При моделировании гидропривода примем во внимание инерционные свойства жидкости в дискретных участках трубопроводов, поршней гидродвигателей с учетом присоединенных к ним масс рабочих органов и массы жидкости в гидроцилиндрах. Упругие свойства гидропривода учтем введением моделей гидроаккумуляторов в точках ветвления гидромагистрали и взаимодействия гидравлических и механических элементов. Кроме того, необходимо учесть упругие свойства возвратных пружин, оказывающие на физические свойства гидропривода, как правило, гораздо большее влияние, чем сжимаемость газожидкостной смеси и деформируемость трубопроводов.
На процесс функционирования гидропривода значительно влияют утечки жидкости из рабочих полостей гидродвигателей и аппаратуры управления. Режим движения жидкости в щелях между поверхностями, осуществляющими герметизацию рабочих полостей, ламинарный, поэтому значение коэффициента гидравлического сопротивления щелей цг определяют с использованием только первого слагаемого формулы (3.63), т.е. по формуле Пуазейля. При определении значений коэффициентов pri для участков гидромагистрали учитываются все виды потерь — по длине и местные. Кроме того, при моделировании необходимо учитывать потери на трение при взаимном перемещении механизмов гидродвигателей (механические потери).
Динамическая модель гидропривода, построенная с учетом изложенных предположений о его свойствах, приведена на рис. 5.3, б, а орграф — на рис. 5.3, в. Функции источников потенциалов рв2 и рв3 определяются соотношениями рв2 = FBi/A3, рв3 = FB2/A5, где А3 и А5 — площади сечений цилиндров гидродвигателей. Источник потенциала рв1 отображает воздействие насоса на систему гидропривода. Моделирование утечек из полостей гидродвигателей осуществлено в виде источников потоков QBl и Q*2 .
В табл. 5.4 составлена матрица инциденций моделируемого гидропривода. Столбцы источников потенциалов рв1 и р*2 введены для учета реакций внешней
среды, обусловленных источниками потоков QBl и Qb2 .
Таблица 5.4
Узлы Ветви
Рв1 Рв2 РвЗ Рв1 Рв2 ^-г! ^г2 ^гЗ ^г4 ^г5 Цг1 Рт2 М-гЗ М-г4 Иг 5 М-гб М-г7
1 2 3 4 5 1* 2* 1 0 0 0 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 0 00-100 0 0 0 -1 0 0 0 0 0 -1 -1 0 0 0 0 1-1000 0 1-10 0 100-10 0 0 0 1 -1 0 10 0 0 0 0 0 1 0 -1 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 -1
Подматрицы Ав Ау
154
Используя матрицу инциденций и формулы (5.2) — (5.4) алгоритма структурно-матричного метода, составим уравнения математической модели гидропривода:
. dQjdt = (рв1 - ру1 - Рд|)/тг!!
dQ2/dt = (ру1 - ру2 - £д2)/тпг2 ;
dQs/dt = (~рп2 + ру2 - ру3 - рд3)/тга;
dQjdt = (ру1 - ру4 - рд4)/тпг4 ;
dQcJdt = (-рв3 + ру4 - ру5 - рл5)/т,.5;
dpyl/dt = eri(Q1-Q2-Q4); Г (5'7)
^Ру2/^ “ сг2^2 ~ “ Ов1)’
dPys/dt = cr3Q3;
dpyi/dt - сг4^4 ~ Фб “ ^в2)»
dPyb/dt = cr5Q5;
Рд1 ~ Рг&1> “ 1»5, Pjaj “ Мт;^в(;-5)» / ~ 6,7,
* *
Рв1 — Ру2 ~ Рдб* Рв2 ~ Ру4 ~ Рд7’
Два последних выражения используются для определения расходов утечек:
0з1 (.Ру2 />в1)/Мт6’
^в2 (.Ру4 Рв2^/Рг7'
(5.8)
Функции QBl и Qb2 зависят от фазовых координат ру2 и рУ4, поэтому их надо подставить в выражения для определения производных dpy2/dt и dpy^/dt, входящие в систему дифференциальных уравнений (5.7).
Для решения системы уравнений (5.7) необходимо задать начальные условия Q/о» i - 1,5; Ру/о» J ~ 1,5. Кроме того, необходимо располагать математическими описаниями внешних воздействий на систему, представляемых функциями рв1, рв2 и рв3.
При моделировании утечек из рабочих полостей элементов гидроприводов должны быть заданы характеристики р^ внешней среды, в которую поступает жидкость утечек. Если этой средой является окружающий воздух, то ее реакции рв; равны нулю.
Перемещения поршней гидродвигателей 7 и 8 ограничены длинами гидроцилиндров. Следовательно, на поршни наложены односторонние неудерживающие (виртуальные) связи. Способы учета виртуальных связей при моделировании технических объектов будут рассмотрены в разделе 6.5.
5.2. МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ С ТРАНСФОРМАТОРНЫМИ ЭЛЕМЕНТАМИ
Трансформаторные элементы отображают безынерционное преобразование характеристик потока энергии — переменных типа потока и типа потенциала. В технических объектах используются механические (зубчатые, цепные, фрикционные, рычажные,
155 клиноременные), гидравлические (гидрообъемные и гидродинамические) и электрические трансформаторы.
Физические свойства трансформатора характеризуются передаточным числом, КПД и коэффициентом трансформации. Преобразование фазовой переменной типа потока характеризуется передаточным числом и (или обратной ему величиной, называемой передаточным отношением i = 1/и), а типа потенциала — коэффициентом трансформации К. Потери учитываются КПД ц.
На рис. 5.4 приведена схема механического трансформаторного элемента, отображающего в динамических моделях технических объектов зубчатую передачу. Трансформаторный элемент состоит из двух звеньев — входного (ведущего) 1 и выходного (ведомого) 2.
Передаточное число трансформаторного элемента определяется отношением потоковых переменных на входе и
выходе элемента. Потоковой переменной для механической вращательной системы является угловая скорость. Тогда, в соответствии с приведенным определением, передаточное число трансформаторного элемента, представленного на рис. 5.4, будет равно отношению угловой скорости на его входе со^ к угловой скорости на выходе элемента (»2.в
и = C01/CD2. (5.9)
Коэффициент трансформации представляет собой отношение потенциала на выходе трансформаторного элемента к потенциалу на его входе.
Так как переменной типа потенциала для механической вращательной системы является вращающий момент, то коэффициент трансформации находится по формуле
Рис. 5.4. Схема зубчатой передачи
К = М2/Мъ (5.10)
где TVfj, М2 — вращающие моменты соответственно на входе и выходе трансформаторного элемента.
Параметры и и К — скалярные алгебраические величины. Они учитывают не только модули, но и направления преобразуемых трансформаторным элементом фазовых переменных.
КПД элемента определяется отношением полезной мощности Р2 на его выходе к затраченной мощности Р\ на входе элемента:
И = |^2 ЛР1| = \М2и2/(М1Ю1)\.
(5.11)
156
. В формуле (5.11) учтено, что КПД — скалярная положительная величина, а мощность — скалярная алгебраическая величина, поэтому отношение мощностей необходимо взять по абсолютной величине.
КПД трансформаторного элемента можно выразить через его передаточное число и коэффициент трансформации:
г) = \К/и\. (5.12)
Формулы для определения параметров трансформаторных элементов других видов и другой физической природы аналогичны, только в них используются свои обозначения фазовых переменных в соответствии с табл. 3.2.
Узловой метод, как отмечалось в разделе 4.4, не позволяет формировать математические модели объектов с трансформаторными элементами. Рассмотрим возможность использования для этой цели структурно-матричного метода.
Предположим, что динамическая модель технического объекта имеет вид, представленный на рис. 5.5, а. Эта модель отображает физические свойства механической вращательной системы с двумя зубчатыми передачами, моделируемыми в виде трансформаторных элементов ТЭц и ТЭ21.
Рис. 5.5. Динамическая модель механической вращательной системы с двумя зубчатыми передачами (а) и ее орграф (б)
Индексы i и j трансформаторных элементов ТЭ^ и их параметров Щр Кц, Y]ij условимся задавать следующим образом: i соответствует номеру индекса параметра инерционного элемента, а у — номеру индекса параметра упругого элемента, между которыми расположен трансформаторный элемент.
Пусть сосредоточенная масса с моментом инерции Jj связана с двигателем, а масса — с рабочим органом машины или механизма. Для любого технического объекта характерны два режима функционирования — тяговый и тормозной. В тяговом режиме энергия двигателя передается посредством механизмов системы привода рабочим органам. В тор
157
мозном режиме, наоборот, двигатель начинает поглощать энергию, накопленную рабочим органом, и становится на какое-то время тормозом. Переход с одного режима на другой осуществляется автоматически, в зависимости от воздействий внешней среды на объект, а также от управляющих воздействий оператора.
Если технический объект не содержит трансформаторных элементов, математическая модель его не меняется при переходе с одного режима на другой. В объектах с трансформаторными элементами возникает необходимость учета потерь в этих элементах. Величина этих потерь пропорциональна потенциалам в примыкающих к трансформаторному элементу упругом и диссипативном элементах. Но так как знаки этих потенциалов изменяются в зависимости от режима работы объекта, а энергия потерь всегда отрицательна, то эта особенность должна быть учтена в математической модели.
Рассмотрим установившееся движение механической системы при С0| = const и со2 = const. Расчленим эту систему на четыре подсистемы, как показано на рис. 5.6, а — г. Отброшенные части в каждой из подсистем заменим соответствующими реакциями таким образом, чтобы они оставались в состояниях равновесия и имели постоянные скорости вращения. В этом случае сосредоточенная масса с моментом инерции будет находиться в равновесии под действием внешнего момента Мв1 и момента реакции отброшенной части системы 7Иэ11 (рис. 5.6, п), звенья трансформаторного элемента будут уравновешиваться моментами реакций МэП, Му1 и 7Ид1 (рис. 5.6, б) и т.д. Отметим, что моменты Му1 и Мд1 — это внутренние потенциалы соответственно упругого и диссипативного элементов системы, представленной на рис. 5.5, а.
а б —г-
Мэ11 м
®э21
ТЭП
®Э11 Мд1 Му1 МД1
ТЭ21
ж
^э21 ©2 ^э21
Мв2
Рис. 5.6. Схема для анализа условий равновесия элементов при равномерном движении механической системы
158
Из условий равновесия сосредоточенных масс и J2 получаем: Мэц = MBj; МЭ21 = МВ2, где Мэ11 и Жэ21 — эквивалентные моменты, оказывающие на сосредоточенные массы и J2 такие же воздействия, как и моменты упругого и диссипативного элементов через соответствующие трансформаторные элементы ТЭП и ТЭ21. В свою очередь, трансформаторное преобразование приводит к необходимости учета изменения потоковых переменных сосредоточенных масс при определении потенциалов упругих и диссипативных элементов. Следовательно, при моделировании объекта с трансформаторными элементами возникает задача определения эквивалентных потенциалов ветвей, взаимодействующих с сосредоточенными массами посредством трансформаторных элементов, и эквивалентных потоковых переменных узлов орграфа.
Определим эквивалентные потенциалы упругих и диссипативных ветвей и эквивалентные потоковые переменные узлов для исследуемого объекта на тяговом и тормозном режимах. Для этого необходимо рассмотреть подсистемы, представленные на рис. 5.6, б и в, отображающие преобразование характеристик энергии трансформаторными элементами.
Тяговый режим. КПД трансформаторного элемента ТЭП (рис. 5.6, б)
П11 ^вых11/^вх11 (^yl -^д1) С0э11/(МэПС01) , (5.13)
где Рвх11 — мощность на входе ТЭц, подводимая к нему от двигателя; РВых11 — мощность на выходе ТЭц, отводимая от него и передаваемая через упругий и диссипативный элементы к ТЭ21; сс>1 и сОэц — угловые скорости на входе и выходе ТЭц.
Принимая во внимание, что передаточное число ТЭП иц = ю1/^э1Ь находим искомый эквивалентный момент 7ИЭ11 и искомую эквивалентную угловую скорость соэц
МЭЦ = (Му1 +
юэ11 ~
КПД трансформаторного элемента T32i (рис. 5.6, в)
(5.14)
(5.15)
Л21 “ |^вых21/^вх21 ~ ^э21ю2/.(^у1 + ^д1)соэ21] (5.16)
где PBX2i> -РВых21 — мощности соответственно на входе и выходе трансформаторного элемента ТЭ21; соЭ21, ю2 — угловые скорости на входе и выходе ТЭ21.
Учитывая, что передаточное число ТЭ21 1^21 = ®э21/®2> получаем
159
Мэ21 = (^yl + !
(5-17)
®э21 = ®2“21- (5.18)
Тормозной режим. На этом режиме направления всех моментов будут противоположными показанным на схемах рис. 5.6, а входы и выходы трансформаторных элементов поменяются местами. В этой связи их КПД необходимо определять обратными отношениями мощностей в сравнении с отношениями, принятыми в формулах (5.13) и (5.16). В результате получаем
следующие значения эквивалентных моментов: для ТЭП
для ТЭ21
^э11 - (^yl + ^дОЛп/^!!
9
Л^э21 - (Му1 + Л^д1)и21/Т121 •
(5.19)
(5.20)
Таблица 5.5
Узлы Ветви
мв1 •Мв2 С1
1 1 0 -1 -1
2 0 -1 1 1
Подматрицы Ау Ац
Построим орграф и составим матрицу инциденций для рассматриваемого объекта, не принимая пока во внимание наличие в динамической модели (рис. 5.5, а) трансформаторных элементов. Орграф приведен на рис. 5.5, б, а матрица инциденций в табл. 5.5.
Сравнивая выражения (5.14) И (5.17), можно отметить, что если ТЭ расположен на входе упругого и диссипативного элементов, то при определении эквивалентного по
тенциала Мэ потенциалы этих элементов Му и Мд необходимо делить на передаточное число и и КПД г), а если на выходе, то, наоборот, умножать. Для достижения этого достаточно и и ц возвести в степень инцидентора И, так как в первом случае инцидентор равен -1, а во втором +1 (см. табл. 5.5).
Сравнивая выражения (5.14) и (5.19) и соответственно (5.17) и (5.20), можно заключить, что зависимость Мэ от ц определяется также знаком потенциала Му упругого элемента. При этом полагаем для всех упругих элементов на тяговом режиме Му положительным, а на тормозном — отрицательным.
Из сравнения выражений (5.15) и (5.18) следует, что при определении эквивалентных потоковых переменных шэ^ необходимо значения узловых потоковых переменных coz умножить на
160
передаточные числа трансформаторных элементов, возведенные в степени инциденторов И/у.
При выводе уравнений (5.14), (5.17), (5.19), (5.20) предполагалось, что в динамической модели содержатся два параллельных элемента — упругий и диссипативный. Такие модели характерны для механических систем. Однако в некоторых видах систем (например, в гидромеханических) эти элементы могут иметь иное взаимное расположение. Учитывая это, составим отдельные выражения для определения эквивалентных потенциалов упругих Mdyij и диссипативных 7ИЭД^ элементов:
М •• - М ^уУ
1V1 эуI] - 1V1 У] \Ul] ^ij )
M^ik = Мд*(и^п2дЪИд^ ,
где Ryj = sign Myf, RRk = Ryj при k = j.
Эквивалентные потоковые переменные узлов для ветвей упругих элементов определяются по формуле
Иуи «эу = ®tuij > а для ветвей диссипативных элементов
^ik = ^iUik ’
В динамических моделях трансформаторные элементы изображаются так же, как и на принципиальных и кинематических схемах. В цепи передачи энергии они расположены последовательно между сосредоточенными массами и упругими элементами. На орграфе узлы отображают сосредоточенные массы. Между узлами могут быть только параллельные ветви орграфа, т.к. они отображают потенциалы, воздействующие на узлы. Поэтому трансформаторные элементы на орграфе отобразить в виде ветвей невозможно. В этой связи расположение трансформаторных элементов на орграфе отмечают выносными линиями, проведенными от узлов i и ветвей у, взаимодействие которых осуществляется посредством данного ТЭу (рис. 5.5, б).
Для формирования математической модели технического объекта с трансформаторами в дополнение к матрице инциденций составляется матрица трансформаторных элементов (матрица ТЭ). Она аналогична матрице инциденций, но составляется лишь для упругих и диссипативных элементов. Наличие трансформаторных элементов между узлами и ветвями орграфа отмечают в матрице ТЭ единицами, а их отсутствие — нулями.
В табл. 5.6 приведена матрица ТЭ для технического объекта, динамическая модель которого дана на рис. 5.5, а.
Таким образом, информация о физических свойствах и структуре объекта с механическими трансформаторными элементами дается двумя матрицами: матрицей инциденций А и матрицей трансформа-
Таблица 5.6
Узлы Ветви
ci
1 1 1
2 1 1
торных элементов ТЭ.
Обозначим элементы матрицы ТЭ, соответствующие упругим ветвям орграфа, T9ij, а диссипативным ветвям — Для учета наличия и расположения в схеме динамической модели трансформаторных элементов введем следующие функции:
при Тэу=1;
1 при Тэц = 0;
(^п2*)Ид“
1
при
при
T9ik = Ф
при Tdik =1; при Tdik = 0.
(5.21)
(5.22)
(5.23)
(5.24)
Введем эти функции в уравнения (5.2) — (5.4):
dv;
If dt
пц l'
n ____
dFyj/dt = -Cj YHyijVtSyij, j = 1, N;
5»
(5.26)
n _____
i=l
m = (5.27)
где n — число степеней свободы системы; N — количество упругих элементов; К — количество диссипативных элементов; L —
Н. Зак. 3006
162
количество источников типа потенциала; М — количество источников типа потока; щ — переменные типа потока; Fyj, F^k, FBi — потенциалы соответственно упругих и диссипативных элементов и источников потенциалов; F*m — реакции внешней среды, обу
словленные источниками потоков.
При принятых обозначениях фазовых переменных в этих уравнениях функции Ryj и Вд&, используемые в выражениях (5.21), (5.22), имеют вид
Ryj = sign Fyf, RRk = Ryj при k = j. (5.28)
Уравнения (5.25) — (5.27) описывают алгоритм формирования математической модели технического объекта с трансформаторными элементами структурно-матричным методом.
Пример 5.4. Построить математическую модель технического объекта с механическими трансформаторами. Динамическая модель объекта представлена на рис. 5.5, а.
Используя матрицы А и ТЭ, приведенные в табл. 5.5 и 5.6, и обозначения фазовых переменных со, М и параметров элементов J, с, р, применяемые в механических вращательных системах, на основе выражений (5.21) — (5.28) получаем
«У1 ИцПц
Ryl ИцПцУ
dto-Jdt^ МВ1
1 ’
dco2/df- - Мв2 + Mylu21r]21yl + Affllu21r]21yl ^/j2 ; dMyl/dt = сДс^/пц -со2п21),
> (5.29)
где Мд1 = pj (coj/izn - co2i/21) ; Лу1 = sign Myl.
На рис. 3.4, а приведена динамическая модель технического объекта с поступательными движениями сосредоточенных масс и тп2. Очевидно, что его модель абсолютно аналогична модели объекта на рис. 5.5, а и описывается уравнениями, аналогичными уравнениям (5.29), в которых необходимо лишь заменить обозначения фазовых переменных со и М на v и Ff а также параметров инерционных элементов J на т. Значения передаточных чисел рычажных трансформаторных элементов для схемы рис. 3.4, а найдем из соотношений: U11 = va/vB = -^11/^12,° W21 = Ud/vE = ^21/^22-
При формировании математической модели объекта с использованием уравнений (5.25) — (5.27) следует иметь в виду, что поскольку направления движений сосредоточенных масс учтены при выборе направлений отсчета фазовых координат сосредоточенных масс v (или со), то в формулы (5.21) — (5.24) значения передаточных чисел трансформаторных элементов и подставляют по абсолютной величине.
Необходимо также отметить, что КПД механического трансформатора зависит от передаваемой нагрузки и скоростного
163
режима, т.е. ц = /(М,со). Однако теоретическое определение этой зависимости весьма сложно и приближенно. Ее обычно определяют экспериментально после создания технического объекта. В процессе проектирования механических объектов значение ц принимается постоянным, соответствующим номинальному режиму работы, на основе информации о выбранном аналоге.
Гидродинамический трансформатор (ГДТ) представляет собой гидравлическую лопастную машину, основными элементами которой являются (рис. 5.7, а): насосное 1 и турбинное 2 колеса, колесо направляющего аппарата (реактор) 3 и система питания, обеспечивающая поддержание необходимого давления и температуры рабочей жидкости. Насосное колесо выполняет функцию генератора, преобразуя подводимую к нему механическую энергию двигателя в энергию рабочей жидкости. Турбинное колесо представляет собой гидравлический двигатель, который энергию рабочей жидкости преобразует в механическую энергию. Двойное преобразование энергии в ГДТ сопровождается значительными потерями и представляет собой довольно сложный для математического описания процесс. Однако, как показывает опыт исследований, при сравнительно небольших ускорениях колес ГДТ в переходных режимах, характерных для реальных технических объектов, во многих случаях при моделировании можно использовать статические характеристики, полученные на установившихся режимах. При этом ГДТ рассматривается как элемент безынерционного преобразования параметров потока энергии, определяемого коэффициентом трансформации К, передаточным отношением i и КПД т|, а инерционные свойства его колес и рабочей жидкости учитываются в динамической модели в виде сосредоточенных масс.
Рис. 5.7. Схема гидродинамического трансформатора (а) и его характеристики (б)
164
Типичные характеристики простейшего ГДТ показаны на рис. 5.7, б. Особенность физических свойств гидродинамического трансформатора заключается в том, что все его параметры, характеризующие преобразование энергии, переменны и зависят от скоростного и нагрузочного режимов. Его преобразующие свойства выражаются функциями К = f(i), ц = f(i) и Хн = f(i). Вместо передаточного числа и используется передаточное отношение i. Это объясняется тем, что на тяговом режиме i изменяется в пределах 0 < i <1. При i = 0 и = оо, что создает затруднения при моделировании. Кроме того, значение i непосредственно характеризует величину скольжения s = 1 - i и поэтому удобно для оценки режима работы ГДТ.
Характеристики преобразующих свойств гидродинамического трансформатора определяются выражениями
К = Мт/Мн; (5.30)
i = сот/сон; (5.31)
г) = Ki, (5.32)
где 7ИН, сон — вращающий момент и угловая скорость насосного колеса; 7ИТ, сот — то же турбинного колеса.
Вращающий момент насосного колеса определяется по формуле
Мн = ХнроМ , (5.33)
где Хн — коэффициент момента насосного колеса, характеризующий нагрузочную способность гидродинамического трансформатора; р — плотность рабочей жидкости; Da — активный диаметр гдт.
Таким образом, параметры К, i, г| и потенциалы 7ИН и Мт зависят от фазовых координат типа потока сон и сот, определяющих состояния входного и выходного элементов ГДТ (насосного и турбинного колес). В этом состоит существенное отличие гидродинамического трансформатора от рассмотренного выше механического трансформатора с постоянными параметрами К, и, ц.
На рис. 5.8, а приведена динамическая модель трансмиссии автомобиля с гидродинамическим трансформатором ГДТ!2 и двумя механическими трансформаторами ТЭ21 и ТЭ31. Для ГДТ^ применено специфическое графическое изображение, а в его обозначении используется двойной индекс, составленный из номеров взаимодействующих с ним сосредоточенных масс: первая цифра принадлежит массе насосного колеса, а вторая — турбинного. Потенциалы Мн и Мт оказывают непосредственные воздействия на колеса ГДТ и приложены к сосредоточенным массам с параметра-
165
ми Ji и J2- По существу ГДТ делит динамическую модель на две подсистемы — дотрансформаторную и затрансформаторную, а потенциалы Мн и Мт отображают их взаимодействие. Первая подсистема находится под воздействием источников потенциалов Мв1 и Мп, а вторая — под воздействием Мт и Мв2- Однако следует иметь в виду, что в отличие от МВ1 и -^в2» являющихся потенциалами внешних воздействий, 7ИН и Мт представляют собой внутренние потенциалы системы. Учитывая отмеченные особенности системы с ГДТ и существенные различия гидродинамических и механических трансформаторов, информация о расположении ГДТ приводится в матрице инциденций и включается в подматрицу воздействий Ав.
1 ГДТ12 j2
ЛГв1 а>! М
ю3
Рис. 5.8. Динамическая модель (а) и орграф (б) системы гидромеханического привода с гидродинамическим трансформатором
Орграф моделируемого объекта показан на рис. 5.8, б. В табл. 5.7, а дана матрица инциденций А, а в табл. 5.7, б — матрица механических трансформаторных элементов ТЭ.
Таблица 5.7, а Таблица 5.7, б
Узлы Ветви
мв1 Мв2 Мн мт
1 1 0 -1 0 0 0
2 0 0 0 1 -1 -1
3 0 -1 0 0 1 1
Подматрицы Ау Ад
Узлы Веч РВИ
С1 И1
1 2 3 0 1 1 0 1 1
Так как потенциалы Мп и Мт являются источниками воздействий на сосредоточенные массы динамической модели, то на орграфе они отображаются ветвями, соединяющими узлы 1 и 2 с базовым узлом 0 орграфа. При этом учитывается направление передачи энергии — от насосного колеса к турбинному. В результате обеспечивается выполнение условий динамического равновесия сосредоточенных масс согласно принципу Даламбера. Для того чтобы подчеркнуть единство моделируемой технической системы, содержащей гидродинамический трансформатор, его расположение на орграфе отображается посредством выносных линий от
166
ветвей потенциалов Мн и Мт и узлов, соответствующих массам насосного и турбинного колес (аналогично обозначениям расположения механических ТЭ).
Пример 5.5. Построить математическую модель технического объекта с гидродинамическим трансформатором, динамическая модель которого представлена на рис. 5.8, а.
Используя матрицы А и ТЭ, приведенные в табл. 5.7, а и табл. 5.7, б, на основе выражений (5.21) — (5.28) получаем:
do^/dt = (Мв1 - ;
dto2/dt = I Мт - (Му1 + МД1) /(ад21у1)j/J2;
da3/dt = - Мв2 + (Му1 + Мд1)(и31Г1з1у1 )1/J3;
dMyl/dt = cj (со2 / u21 - co3u31 );
Мд1 = I U21 ~ ®3^31)»
MH = XHpcofDl; MT = KM*.
(5.34)
(5.35)
(5.36)
yi = sign Му р
Для решения системы дифференциальных уравнений (5.34) необходимо задать начальные условия сою, ©20, ®зо, Afylo и время интегрирования Тк. Но в данном случае принимать произвольные значения начальных условий нельзя, т.к. гидротрансформатор устанавливает строго определенные соотношения между всеми фазовыми координатами системы со^ и Mj. Их значения, естественно, также зависят от внешнего воздействия на входе системы, т.е. от момента двигателя
Мв1. Этот момент представляет собой нелинейную функцию Мв1(со1), определяе
мую выражением (4.49). Параметры гидротрансформатора Хн и К — также нели
нейные функции, аргументом которых является передаточное отношение i.
Функции Хн = tpj(i) и К = <p2(i) обычно представляются в виде полиномов
ФО) = £«*** = 1‘Мат/авА (5.37)
Aj=O k=0
где ak — коэффициенты полиномов. Степень полинома m принимают в пределах 5...10.
Начальные условия обычно соответствуют состоянию статического равновесия системы. Так как при этом все производные фазовых координат по времени равны нулю, то М* = Мв1, Мд1 = 0. Режим работы двигателя задается значением угловой скорости со10. Введя обозначение Хн =<Pi(i) и используя выражение (5.33), можно записать следующую систему нелинейных алгебраических уравнений:
= MBi(co!);| (5 38)
*-н-ф1(0 = °- J
В этой системе искомыми переменными являются Хн и i. Вычислив их значения при заданном coj = со1О , затем определяют остальные координаты начальных условий:
ю20 = <W;
ю30 = ю20/(u21u31)’*
> (5.39)
Мую = ЛГти21г)21;
Мт = MB1(cD10)/f(i).
167
Наряду с механическими и гидродинамическими трансформаторами в приводах рабочих органов машин и механизмов находят применение гидродинамические муфты и гидрообъемные трансформаторы.
Гидродинамическая муфта отличается от трансформатора тем, что у нее на всех режимах работы К « 1, а изменяется лишь
Рис. 5.9. Принципиальная схема (а), динамическая модель (б) и орграф (в) гидрообъемного трансформатора
168
КПД: т] = f(i). На тяговом режиме, при 0 < i <1, в первом приближении можно принимать r| = i, а на тормозном, при i > 1, т] = 1/j. Для определения значения i используются уравнения (5.38).
В системах гидравлических приводов различных машин находят применение гидрообъемные трансформаторы. На рис. 5.9, а приведен фрагмент принципиальной схемы гидропривода с гидрообъемным трансформатором. Он представляет собой гидроцилиндр со ступенчатым поршнем и тремя полостями 1, 2 и 3. Полости 1 и 3 называют рабочими, так как они находятся под давлением рабочей жидкости, а полость 2 соединена со сливом и в ней расположена возвратная пружина 6. Гидрообъемный трансформатор в данной схеме предназначен для повышения давления рабочей жидкости в гидравлической магистрали 5 по сравнению с давлением в магистрали 4, развиваемым насосом. Такой механизм называют также гидравлическим мультипликатором. Магистраль 5 связана с гидродвигателем привода рабочего органа машины. Повышение давления в ней позволяет увеличить усилие на рабочем органе (например, в гидравлическом прессе).
Возможна и иная схема мультипликатора — со ступенчатым гидроцилиндром, в котором расположены два автономных поршня, взаимодействующих посредством рабочей жидкости, как показано на рис. 5.10, а.
При моделировании примем во внимание упругие свойства жидкости и трубопроводов, а также возможные утечки жидкости из рабочих полостей гидроцилиндров.
На рис. 5.9, б и 5.10, б даны динамические модели рассматриваемых гидросистем, а на рис. 5.9, в и 5.10, в — их орграфы.
Пример 5.6. Сформировать математическую модель гидромеханической системы, приведенной на рис. 5.9. Матрица инциденций А для этой системы приведена в табл. 5.7, а матрица трансформаторных элементов — в табл. 5.8.
Таблица 5.7
Узлы Ветви
Рв1 Рв2 * ^В1 * Р в2 СГ1 ^г2 ^гЗ Рт1 Нг2 ЦгЗ Мт4 Мт5
1 1 0 0 0 -1 0 0 -1 0 0 0 0
2 0 0 0 0 1 -1 -1 0 -1 0 0 0
3 0 -1 0 0 0 0 1 0 0 -1 0 0
1* 0 0 -1 0 1 0 0 0 0 0 -1 0
2* 0 0 0 -1 0 0 1 0 0 0 0 -1
Подмат-[ рицы Ад
16
Рис. 5.10. Принципиальная схема гидрообъемного трансформатора с двумя поршнями 2 и 3 (а), его динамическая модель (б) и орграф (в)
12. Зак. 3006
170
Таблица 5.8
Узлы Ветви
^Г1 ^г2 ^гЗ ^Г1 Нг2 НгЗ Мт4 Мт5
1 0 0 0 0 0 0 0 0
2 0 0 1 0 0 0 0 0
3 0 0 0 0 0 0 0 0
1* 0 0 0 0 0 0 0 0
2* 0 0 0 0 0 0 0 0
Используя матрицы А и ТЭ, получаем следующие уравнения математической модели:
dQ2/dt = ру1 - ру2 - ру3/(и23т)2
dQ3/dt = (-рв2 + ру3 - р^1тг3 ;
dpyl/dt = crl(Ql ~ Q2 ~ Qb1)» dp у2/dt = cr2Q2;
Фуз/^ = сгЗ (^г/М23 ~ Q3 “ Фв2);
Рд1 ~ = 1»®» Pffj ~ Mtj^b(j-3)’ 7 =: 4,5,
^г2»‘
(5.40)
Рв1 = Ру1 - Рд4»' Рв2 = РуЗ - Рдб5 ^уЗ = Signpy3.
Два последних выражения используются для определения расходов утечек
QbI — (Ру1 ~ -Рв1)/мт4 ’ ^в2 ~ (РуЗ ~ Рв2)/мт5 •
Если утечки жидкости происходят в воздушную среду, то рв1 = рв2 = 0.
Передаточное число гидрообъемного трансформатора п23 определим из соотношения расходов жидкости в его рабочих полостях 1 и 3: u23 = Q2/Q2. Выразим расходы Q2 и Q2 через скорость поршня v2: Q3 = А2и2; Q2 = A2v2. В результате получаем
и23=А2/А”2, (5.41)
где А2, А2 — площади поверхностей поршня в полостях 1 и 3 ступенчатого гидроцилиндра (рис. 5.9, а и б).
Пример 5.7. Составить уравнения математической модели гидромеханической системы, динамическая модель которой дана на рис. 5.10, б, используя матрицы А и ТЭ, приведенные в табл. 5.9 и 5.10.
Таблица 5.9
Ветви
Узлы Рв1 Рв2 * Рв1 СГ1 сг2 сгЗ Мт1 Мт2 НгЗ Мт4
1 1 0 0 -1 0 0 -1 0 0 0
2 0 0 0 1 -1 0 0 -1 0 0
3 0 -1 0 0 1 -1 0 0 -1 0
1* 0 0 -1 0 1 0 0 0 0 -1
Подматрицы ^в Ау Ад
171
Таблица 5.10
Узлы Ветви
СГ1 сг2 сгЗ
1 0 0 0
2 0 0 0
3 0 1 0
1* 0 0 0
Так как диссипативные ветви орграфа не связаны с трансформаторными элементами, то в табл. 5.10 приведена сокращенная матрица ТЭ, учитывающая лишь инцидентность упругих ветвей с трансформаторными элементами.
Математическую модель рассматриваемой гидромеханической системы составляют следующие уравнения:
dQjdt = (p„i - pyi - рй1)/тт1;
dQ2/dt = (pyi - ру2 - рд2)/тг21
dQ3/dt = (~рв2 + РУ2“з2’Ъ2У2 “ РуЗ ~ Рцз>1тгЗ;
dp^i/dt — «Г1(О1 ~ Фг)*
dPyi/dt = сг2(®2 — ®3и32 — ®в1)’
dpy3/dt = cr3Q3,
(5.42)
Pp,l ~ — Рд4 Нг4^в1»
Рв1 = Ру2 - Рд45 Ry2 = Slgnpy2.
Расход утечек QB1 определяется по формуле:
0в1 ~ (Ру2 ~ .Рв1)/Мт4 •
Передаточное число гидрообъемного трансформатора и32 определяется отношением скоростей движения поршней 2 и 3 (рис. 5.10, а):
и32 5=5 v2/v3 = А3/А2, (5.43)
где А2, Аз — площади рабочих поверхностей поршней 2 и 3.
Значение давления /?в2 можно найти из соотношения: рв2 = F/A%.
5.3. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
В предыдущих параграфах рассматривались простейшие движения твердого тела — поступательное и вращательное. Однако во многих случаях возникает необходимость моделирования сложного движения твердого тела в трехмерном, пространстве с учетом его взаимодействия с другими твердыми телами механической системы. На схеме, приведенной на рис. 5.11, два твердых тела соединены между собой и с внешней средой упругими элементами, которые позволяют им совершать поступательные и вращательные движения относительно трех ортогональных осей инерциальной системы координат 0£т)£.
Положение твердого тела в инерциальной системе осей полностью определяется шестью обобщенными координатами: коор-
172
Рис. 5.11. Динамическая модель механической системы двух твердых тел
динатами полюса ^о, По, и эйлеровыми углами ф, 0, ср. Однако дифференциальные уравнения движения твердого тела, выражения кинетической энергии и других физических величин в обобщенных координатах получаются весьма
громоздкими и труднообозримыми. При определении скоростей точек твердого тела предпочтительнее пользоваться не обобщенными скоростями, а некоторыми величинами, линейно зависящими от обобщенных скоростей. Такие величины называют квази скоростями.
Введем помимо неподвижных осей подвижную систему осей Qxyz, неизменно связанную с твердым телом. Тогда в качестве квазискоростей можно при-
нять проекции сох, еду, со2 вектора угловой скорости твердого тела Q на оси подвижной системы координат Qxyz.
Выражения квазискоростей через обобщенные скорости имеют вид
0)х = 0 cos ф + ф sin 0 sin ф;
©у = -0 sin ф + ф sin 0 cos ф; >
(5.44)
со2 = ф + ф cos 0.
Сложное движение твердого тела можно разложить на два составляющих движения: переносное поступательное вместе с полюсом и относительное сферическое вокруг полюса. В качестве полюса 0 целесообразно выбрать точку центра масс твердого тела. Скорость любой точки тела равна геометрической сумме скоро
173
сти полюса и скорости этой точки в ее сферическом движении относительно полюса:
»i =v0+ vOi
(5.45)
где Vq — вектор скорости полюса; Vqi — вектор скорости относительного сферического движения.
Скорость Vqi определяется векторным произведением вектора угловой скорости сферического движения Q и радиуса-вектора точки roz в подвижной системе координат:
vOi=Clx rOi =
СО-/О
(5.46)
lx(® u?i + Ч/(®z%i xlJi
где ix,iv,iz — единичные векторы (орты), определяющие направ-ления осей подвижной системы координат Oxc/z; со^-, со17, сог — проекции вектора угловой скорости сферического движения Q на эти оси; xif, у[, — координаты i-й точки в системе осей Оху г.
Векторным произведением (5.46) пользоваться при осуществлении вычислительных экспериментов неудобно. Наиболее целесообразно использовать для этой цели матричные операции. В этой связи для определения положения i-й точки твердого тела в подвижной системе координат введем вектор rzT = (xif yf, , а для определения скорости сферического движения точки — вектор »i = (vxi> vyi’ vzi) > гДе vxi’vyi>vzi — проекции вектора скорости сферического движения на оси подвижной системы координат.
Используя векторы q и , составим матричное уравнение для определения скорости сферического движения
Vi =
(5.47)
со — кососимметрическая матрица:
О — со-
со =
<в- 0 -со-
«А-
сот/ со^ О
(5.48)
со^ сох
Элементы сох , L''-y > соz матрицы со представляют собой ква-
зискорости твердого тела.
174
Выражение (5.47) позволяет определить проекции вектора скорости i-й точки на оси системы координат Oxyz в сферическом движении тела
vxi ~ ®yzi 03хУъ*
vyi = ю zxi ~ ю xzi> *
(5.49)
vzt = ®хУ1 ~®yxi-
Сравнивая выражения (5.49) с векторным произведением (5.46), можно убедиться, что в обоих случаях получены одинаковые значения искомых проекций скоростей на оси Oxyz. Выражения (5.49) получены в 1765 г. Эйлером и носят его имя.
Определим кинетическую энергию твердого тела. Согласно теореме Кенига, кинетическая энергии твердого тела в общем случае движения равна сумме кинетической энергии в переносном поступательном движении вместе с центром масс и кинетической энергии в сферическом движении относительно центра масс:
Е — Е +Е
-‘-'к ^к.пер ‘ ^к.отн*
При определении 2?КЛ1ер спроецируем вектор скорости полюса (скорости центра масс ) на оси подвижной системы координат Oxyz. Эти проекции также представляют собой квазискорости px(h vy0> vzq. Используем вектор квазискоростей и составим матричное выражение для определения 2£к#пер. Так как инерционные свойства твердого тела при поступательном движении одинаковы относительно любой из осей системы координат Oxyz и характеризуются скалярной величиной т — массой твердого тела, то выражение кинетической энергии в переносном поступательном движении имеет вид
к.пер — 0,&!TLVqEVq,
(5.50)
где т — скалярный множитель — масса твердого тела; Vq = (vxq,
vy0> vz0) — вектор квазискоростей центра масс твердого тела; Е — единичная матрица порядка п == 3.
Вычисление матричного произведения, согласно формуле (5.50), приводит к выражению
-^к.пер, = 0,5ah(uxq + ^0 + (5.51)
Кинетическая энергия твердого тела в сферическом движении относительно центра масс определяется с использованием матричного выражения
к.отн
= O,5coTJoco,
(5.52)
175
где сот = ((ох,со„,сог) — вектор квазискоростей сферического дви-жения тела; Jq — матрица параметров инерционных свойств твердого тела в сферическом движении (матрица инерции):
J0 = Jxx Jxy Jxz -Jyx Jyy - Jyz —Jzx ~ Jzy Jzz •
(5.53)
Jxx, Jyy, Jzz — моменты инерции твердого тела относительно осей подвижной системы координат соответственно Ox, Оу, Oz; Jxy, Jyz, Jzx — центробежные моменты инерции твердого тела соответственно относительно осей хиг/, z/из, зих; при этом Jxy = Jyx, JyZ в Jzy* Jzx ~ Jxz*
Моменты инерции относительно осей определяются по формулам
Jxx ~ + zt );
i
Т V- / 2 2ч
Jyy — X mi(zi + xi ); г i
T XT / 2 2ч
Jzz ~ ^1Щ(Х1 + yt), i
(5.54)
где mi — масса f-го элементарного объема твердого тела; Xf, у}, Zf — координаты центра масс этого объема.
Центробежные моменты инерции вычисляются по формулам
Jxy ~ i
Jyz = *
i
Jzx = t
(5.55)
Моменты инерции твердого тела относительно осей — скалярные положительные величины, а центробежные моменты инерции могут быть положительными, отрицательными и равными нулю.
Из формул (5.54) и (5.55) следует, что значения моментов инерции зависят от выбора начала подвижной системы координат Oxyz и направления ее осей. Начало координат рекомендуется принимать в центре масс твердого тела. Если однородное твердое тело имеет ось симметрии, то эта ось является его главной цен
176
тральной осью инерции. Одну из осей системы координат целесообразно совместить с этой осью, тогда центробежные моменты инерции, выражения которых включают координаты этой оси, окажутся равными нулю. Если однородное тело имеет плоскость симметрии, то во всех точках этой плоскости одна из главных осей инерции направлена по перпендикуляру к этой плоскости. Одну из осей системы координат необходимо направить перпендикулярно к плоскости симметрии, тогда центробежные моменты инерции, зависящие от координат этой оси, будут равны нулю.
Если однородное твердое тело имеет две взаимно перпендикулярных оси симметрии, то при выборе их в качестве координатных осей все центробежные моменты будут равны нулю. Эти оси будут его главными центральными осями инерции, а матрица инерции в этом случае диагональная:
О
о
О
Jyy
о
о
о
Jzz
(5.56)
Вычислив матричное произведение согласно формуле (5.52), получим выражение для определения кинетической энергии сферического движения твердого тела относительно его центра масс
^К.ОТН ~ ^г^(^ХХ®Х + ^УУ^У + ^22®2 ~ Ху® X® у ~ к КГ7\
ии у у и (5.57)
- 2 J7/un7/a), - 2J~vco~co~).
Кинетическая энергия твердого тела в квазикоординатах с учетом выражений (5.51) и (5.57) определяется по формуле:
АЛ.
0,5i71(l?xQ + VyQ + Vg()) + JXX®X + Jyy® у + J 22® 2
2(JXy®X®y + Jy2®y®2 Jzx®2®x\ '
(5.58)
Если тело имеет главные центральные оси инерции и оси системы координат Oxyz совмещены с этими осями, выражение для определения Ек упрощается:
ДЛ,
0,5
m<vx0
„2 7>2 А Т ,Л2 _L Т _L Т ,Л2
+ vy0 + vz0' + JxX® X + Jyy® у + JZZ®ZZ
(5.59)
Вычислим частные производные функции кинетической энергии по всем квазискоростям, а полученные выражения продифференцируем по времени. В результате получим компонентные уравнения инерционных элементов, отображающих физические свойства твердого тела:
177
^их iridvx^ldt, Fny mdVy^ jdt, F^z — mdv^o/dt
^HX ~ ^XX d^xJ dt ~ dxy d‘tty I dt — Jzx d(ft2/dt ;
TV^hz/ “• dyy d&y Idt — dyZ d&zldt — dXy d<ttx /dt,
-^И2 — dzz d($z /dt — dzx d(£)x !dt — dyz d(by Idt,
(5.60)
где Fm, F^y, F^z — проекции на оси подвижной системы координат силы инерции, возникающей при переносном поступательном движении твердого тела; Мих, Миу, МИ2 — проекции на эти же оси момента сил инерции в относительном сферическом движении вокруг центра масс»
Направления векторов сил инерции Ги и момента сил инерции Ми противоположны направлениям соответствующих векторов ускорений dv^/dt и d(b/dt , однако в компонентных уравнениях это не учитывается, так как знаки потенциалов инерционных, упругих и диссипативных элементов учитываются автоматически при формировании математической модели структурно-матричным методом. Эти знаки определяются направлениями сигналов в ветвях орграфа. Для всех ветвей инерционных компонентов сигналы направлены от узлов к базе. Это означает, что энергия механической системы затрачивается на преодоление сил инерции, поэтому силы инерции в уравнения равновесия узлов входят с отрицательными знаками.
5.4. МОДЕЛИРОВАНИЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ ПРИ ПРОСТРАНСТВЕННОМ ДВИЖЕНИИ ТВЕРДЫХ ТЕЛ
Физические свойства твердого тела, учитываемые при моделировании его движения, характеризуются параметрами его инерционности — массой и моментами инерции. Динамическая модель сложного пространственного движения твердого тела может быть представлена шестью инерционными элементами, компонентные уравнения которых соответствуют выражениям (5.60).
Рассмотрим движение какого-либо твердого тела, входящего в состав механической системы (рис. 5.11). Взаимные перемещения твердых тел системы ограничены. Их колебания относительно положений равновесия будем считать малыми. Тогда для математического описания их относительных движений вполне достаточно использования динамических (5.60) и кинематических (5.49) уравнений движения в подвижной системе координат Oxyz. Погрешности в определении их относительных перемещений при этом невелики и ими можно пренебречь.
Представление динамической модели твердого тела в виде шести взаимодействующих инерционных элементов предполагает, что три из них совершают поступательные движения вдоль соответствующих осей системы координат Oxyz, а остальные совер
178
шают вращательные движения относительно этих же осей. Твердые тела в механической системе (рис. 5.11) соединены между собой упругими и диссипативными элементами (последние на рис. 5.11 не показаны, с целью упрощения изображения модели объекта). Поэтому любое перемещение твердого тела, как поступательное, так и вращательное, приводит к изменению состояния упругих и диссипативных элементов, связанных с данным телом, а эти элементы, в свою очередь, оказывают влияние не только на другие твердые тела системы, но и на характер другого составляющего вида движения данного твердого тела. Иными словами, принудительное перемещение твердого тела в каком-либо одном направлении непременно вызовет другие возможные его движения. Следовательно, выделенные инерционные элементы поступательного и вращательного движений взаимодействуют между собой посредством упругих и диссипативных элементов, что должно быть отображено на орграфе.
Рассмотрим движение твердого тела, представленного на рис. 5.12, а. Оно связано с неподвижной внешней средой упругими и диссипативными элементами 5 — 8, а через упругие и диссипативные элементы 1 — 4 на тело передаются кинематические воздействия ^1(0, ув2(0» увз(О > рв4(^) • Состояния элементов 5 — 8 определяются скоростями точек А, В, С, D, в которых они соединены с твердым телом, а состояния элементов 1 — 4, кроме того, функциями i>*i(f), рв2(^)» рвз(О > ув4(0 9 характеризующими источники внешних воздействий.
Так как твердое тело совершает сложное движение, то скорости точек А, В, С, D можно определить по теореме о сложении скоростей в переносном и относительном движениях. Используя формулы (5.49) для проекций скоростей i-й точки в относительном сферическом движении, можно записать следующие выражения для определения проекций ее абсолютной скорости •к it к vxi 9 v * * * *yi > vzi •
vxi ~ vx0 + vxi ~ vx0 + ® zUi*
vyi ~ vy0 + vyi ~ vy0 + ®zxt ® xzi’
(5.61)
»zi = vz0 + »zi = vz0 +®хУ1 ~®yxi,
где uX09 vy0> vz0 — проекции вектора скорости центра масс твердо-
го тела на оси системы координат Oxi/z; vxh vyi, vzi — проекции
вектора относительной скорости i-й точки в сферическом движении вокруг центра масс; сох, со^, — проекции вектора угловой скорости сферического движения на те же оси; xi9 yL, — координаты i-й точки.
1
Рис. 5.12. Динамическая модель (а) и орграф (б) твердого тела с шестью степенями свободы
180
± ± ±
Скорости uXi,Vyi,vZi непосредственно характеризуют состояния упругих и диссипативных элементов 5 — 8, а для определения состояния упругих элементов 1 — 4 необходимо дополнительно учесть кинематические воздействия внешней среды:
vxi ~ vx0 + ®yzt ~ ®zVi ~ vBXi> vyi ~ vy0 + ®zxi ~ 03 xzi ~ иву1’ vzi = vz0 + ®хУ1 ~ ®yxi ~ vBZi>
(5.62)
*
где vBXi, vByi, vB2i — проекции вектора vBi на оси системы коор
динат»
Используя формулы (5.61) и (5.62), составим компонентные уравнения упругих элементов механической системы, изображенной на рис. 5.12, а. Рассматривая проекции виртуальных перемещений точек А, В, С, D на оси системы координат Оху? и пренебрегая величинами второго порядка малости, для упругих элементов 1 — 4 получаем следующие выражения:
dFyl/dt = cx(vzq + - tOyXi - ив1);
dFy2/dt = с2(рг0 + mxy2 - ®yx2 - i>b2); dFyz/dt = с3(рг0 + &xy3 - со^хз - t>*3); dFy4Jdt = c4(vz0 + сохг/4 - ®ух4 - kb4).
(5.63)
В этих уравнениях и далее индексы при координатах точек крепления упругих элементов соответствуют номерам упругих элементов.
Для упругих элементов 5 и 6
d^y^/dt ®yz5 ®z£/s)’
dFyQ / dt — — co^z/g),
а для упругих элементов 7 и 8
dFyi/dt = c7(vy0 + югх7 - coxz7);
dFys/dt = c8(vy0 + <вгх8 -wxz8).
(5.64)
(5.65)
Формулы (5.63) — (5.65) отображают взаимодействия инерционных и упругих элементов механической системы. Они подтверждают отмеченную выше особенность модели сложного движения твердого тела, заключающуюся в том, что все инерци
181
онные элементы этой модели взаимосвязаны между собой упругими и диссипативными элементами. Структура компонентных уравнений диссипативных элементов аналогична, поскольку в динамической модели они параллельны упругим элементам.
Состояния инерционных элементов динамической модели твердого тела характеризуются квазискоростями vxq9 vyo, vzq9 (Dx, (tty, oZ9 причем, vxq9 VyQ, vzq относятся к инерционным элементам поступательных движений, параметрами которых является масса твердого тела т, а сох, со^, со2 — к элементам вращательных движений, параметры которых — моменты инерции относительно осей JXX9 Jyy9 JZZ9 а также центробежные моменты инерции Jху, Jyz* ^ZX‘
Напомним, что система координат Oxyz связана с твердым телом, начало ее находится в центре масс, а направления осей совпадают с главными осями инерции тела.
С учетом особенностей динамической модели твердого тела на рис. 5.12, б построен орграф, на основании которого составлена матрица инциденций, представленная в табл. 5.11. Для упрощения изображения орграфа на нем не показаны ветви диссипативных элементов. В табл. 5.11 с этой же целью не приведены элементы подматрицы инциденций диссипативных элементов АД9 поскольку она полностью совпадает с приведенной подматрицей ^у.
Таблица 5.11
Ветви
лы F ?в2 РвЗ Fb4 <?1 Сз с4 С5 Св С7 <?8
1 0 0 0 0 0 0 0 0 0 -1 -1 0 0
2 0 0 0 0 0 0 0 0 0 0 0 -1 -1
3 -1 0 0 0 0 1 1 1 1 0 0 0 0
4 0 0 0 0 0 1 1 1 1 0 0 -1 -1
5 0 0 0 0 1 1 1 1 1 -1 -1 0 0
6 0 0 0 0 0 0 0 0 0 -1 -1 -1 ~1
1* 0 1 0 0 0 -1 0 0 0 0 0 0 0
2* 0 0 1 0 0 0 -1 0 0 0 0 0 0
3* 0 0 0 1 0 0 0 -1 0 0 0 0 0
4* 0 0 0 0 1 0 0 0 -1 0 0 0 0
As Ay 1
В приведенной матрице, так же как и на орграфе, узлы 1,2, 3 отображают поступательно движущиеся массы вдоль осей соответственно х, у, г9 узлы 4, 5, 6 — массы с вращательным движением относительно этих же осей, а узлы 1*...4* принадлежат
182
внешней среде, генерирующей внешние воздействия vb1,...,vb4. Потенциалы F^9...9F^ представляют собой реакции внешней среды.
Из формул (5.63) — (5.65) видно, что фазовые переменные типа потока со^, coz, характеризующие состояния инерционных элементов вращательного движения, подвергаются некоторым безынерционным преобразованиям, определяемым координатами точек твердого тела, в которых к нему присоединены упругие элементы. Эти преобразования подобны рассмотренным в разделе 5.2 преобразованиям, осуществляемым безынерционными трансформаторными элементами, отличаясь от них лишь тем, что здесь не происходит потери энергии. Эти преобразования обусловлены относительным сферическим движением твердого тела и описываются уравнениями Эйлера (5.49). Скорости точек тела в относительном движении vxi, Vyi, vzi можно рассматривать как результат безынерционных преобразований фазовых переменных cox, со^, осуществляемых трансформаторными элементами, расположенными между упругими и диссипативными элементами и инерционным элементом, моделирующим вращательную составляющую относительного движения твердого тела.
На орграфе трансформаторные элементы расположены у ветвей, связанных с узлами 4, 5, 6, отображающими сосредоточенные массы, совершающие вращательные движения. Трансформаторные элементы обозначены символами ТЭу, где i — номер инцидентного трансформаторному элементу узла, a j —номер инцидентного упругого элемента.
В табл. 5.12 приведена матрица ТЭ.
Таблица 5.12,
Узлы Ветви
ci ^2 ^3 с4 С5 С6 с7
1 0 0 0 0 0 0 0 0
2 0 0 0 0 0 0 0 0
3 0 0 0 0 0 0 0 0
4 1 1 1 1 0 0 1 1
5 1 1 1 1 1 1 0 0
6 0 0 0 0 1 1 1 1
1* 0 0 0 0 0 0 0- 0
2* 0 0 0 0 0 0 0 0
3* 0 0 0 0 0 0 0 0
4* 0 0 0 0 0 0 0 0
183
Матрицу ТЭ легко составить непосредственно по матрице инциденций А. Если в столбцах матрицы А ненулевые элементы принадлежат как узлам, отображающим поступательно движущиеся массы, так и узлам, отображающим массы с вращательным движением, то в этих столбцах необходимо отметить наличие трансформаторных элементов в строках, соответствующих узлам с вращательным движением масс.
Передаточные числа трансформаторных элементов определяются на основе уравнений Эйлера (5.49), из которых получаем
u(vn,Gyk) = vn/tok , (5.66)
где и(и^,(Оь) — передаточное число трансформаторного элемента, осуществляющего преобразование угловой скорости со^ в линейную относительную скорость Vjt i-й точки твердого тела в сферическом движении; j = х, у, z; k = х, у, z\ j /?.
Согласно уравнениям (5.49) и (5.66) формулы для определения передаточных чисел ТЭ имеют вид
2^(2^xi»® i/) ^xt/^y ~
2^(2^f, СО^,) Vyt/®z ~
Vzi/<&x ~ £/i>
^(^xi’^2) vxi/^z ~ ~У1,’ u(Vyt9®x) ~~ vyi/®x ~ u(yzi9d}y) — ^zij^y = ~xi-
(5.67)
Приведем значения передаточных чисел трансформаторных элементов для рассматриваемого примера, вычисленные по формулам^.67): и41 = уг; и±2 = i/2; ^43 = 2/3; 2Z44 = z/4; u47 = -z7;
2^48 ^8> 2Z51 *^'1> 2Z52 2Z53 ^З» 2Z54 •^4> 2/55 И5,
u56 = 2б; и65 = ~У5> ^66 = -2/6; иб7 = х7> иб8 = Не-
очевидно, что передаточные числа трансформаторных элементов в механических системах со сложным движением твердых тел имеют размерность длины и могут быть как положительные, так и отрицательные. Их значения определяются координатами точек крепления упругих и диссипативных элементов к твердому телу. КПД трансформаторных элементов в данном случае обычно принимают равными 1.
Формирование математической модели исследуемой системы осуществляется структурно-матричным методом на основе информации, содержащейся в матрицах А и ТЭ. Используется алгоритм формирования, описываемый уравнениями (5.25) — (5.27).
Пример 5.8. Составить уравнения математической модели механической системы, динамическая модель которой дана на рис. 5.12, а.
Используя матрицы А и ТЭ (табл. 5.11 и 5.12), на основе структурноматричного метода получаем
таг
dvjdt = (-Fy5 - Fy6 - Fa5 - F^/m:, dvy /dt = ( -^*y7 — -^y8 ~ -^д7 — -^дв)/^ ’ dvjdt = (-FB1 + Fyl + Fy2 + Fy3 + Fy4 + Гд1 + Fr2 + Fa3 + F^/m’ d&x/dt = [(Fyl +7^)1/! + (Fy2 + ^2)1/2 + Uy3 + ^дз)£/з + + (^y4 + ^4)^4 + Uy7 + ^д7)27 + (^y8 + ^дв^вР^х»
d&y/dt = [- (Fyl ^д1)х-, - (Fy2 + Fa2)x2 - (Fy3 + Рд3)х3 -— (-^y4 ^д4)^'4 ~ (^уб ^д5)^5 ~ (^уб + ^д6^б\/^у^
dvtjdt - [(Fy5 -kFb5)i/5 4- (Fy6 + Ffl6)i/6 - (Fy7 + ^д7)х7 - (Fy8 + ^д8)х8ре/г;
dFyl/dt = q(i?B1 - vz - йхух + (o^xj;
dFy2/dt = c2(vj — vz — &xy2 + (0^X2);
dFy3/dt = c3(r*3 - vz - coxi/3 + 0^X3);
dFyJdt = c4(v*4 -vz- axy4 + MyX*)',
dFyJdt — C5(vx "I" — (^гУб)*
dFyJdt = c6(vx + coyz6 - a>zy6);
dFy7 jdt ~ c7(vy - cdx27 + югх7);
dFy3/dt = cjvy - cox28 + шгх8).
(5.68)
Уравнения (5.68) составлены в предположении, что твердое тело однородно и симметрично относительно осей системы координат Oxi/2. В противном случае в уравнения относительно djdt необходимо дополнительно включать члены, учитывающие центробежные моменты инерции тела, согласно формулам (5.60).
Формулы для определения потенциалов (усилий) в диссипативных элементах FRk такие же, как и для dFyJdt , только вместо Cj в них необходимо подста
вить щ. Реакции внешней среды найдем по формуле
F . = F 4- F • i = 14
J Bl yl ГД1» -
(5.69)
5.5. МОДЕЛИРОВАНИЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ ПРИ ПЛОСКОМ ДВИЖЕНИИ ТВЕРДЫХ ТЕЛ
При моделировании многих технических объектов приходится учитывать плоское движение твердых тел. Это тоже сложное движение, которое можно разложить на два составляющих: переносное поступательное движение вместе с центром масс и относительное вращательное вокруг оси, проходящей через центр масс перпендикулярно плоскости движения.. В этом случае динамическая модель твердого тела представляет собой три инерционных элемента, взаимодействующих между собой, а также с другими сосредоточенными массами системы и с внешней средой посредством упругих и диссипативных элементов. Число степеней свободы твердого тела при плоском движении равно трем. Фазовыми координатами типа потока при описании его движения принимают проекции скорости переносного поступательного дви
жения центра масс на координатные оси и угловую скорость относительного вращательного движения.
Плоское движение совершает, например, твердое тело массой то в динамической модели колебаний автомобиля, приведенной на рис. 3.1, г.
При решении практических задач нередко оказывается, что центр масс твердого тела движется в координатной плоскости прямолинейно, или движение его вдоль одной из координатных осей равномерное. В таком случае при построении математической модели принимают во внимание только две степени свободы твердого тела и составляют уравнения движения только в переносном поступательном движении вдоль одной из осей координат и в относительном вращательном движении. Такое упрощение принято для модели на рис. 3.1, г исходя из предположения, что скорость движения автомобиля vx = const.
На рис. 5.13, а приведена динамическая модель, используемая при анализе вертикальных и продольных угловых колебаний кузова автомобиля и их воздействий на водителя. Эта модель отличается от схемы на рис. 3.1, г лишь тем, что в ней моделируется система виброзащиты сиденья водителя. С этой целью в модель введено твердое тело массой т^, равной суммарной массе водителя и сиденья. В результате колебательная система включает 4 твердых тела, взаимодействующих между собой и с внешней средой посредством упругих и диссипативных элементов. Наложенные на систему твердых тел голономные связи, обусловленные направляющим аппаратом подвески, позволяют массам m2 и т^ совершать только поступательные движения относительно центра масс кузова (точка О) вдоль оси Оз, поэтому их состояния характеризуются фазовыми переменными Uj, и 2 и и4 — линейными скоростями. Тело массой т% совершает плоское движение. Для его описания необходимо ввести три фазовые координаты: vx, vz и а)у, где vx, vz — линейные скорости центра масс тела в переносном поступательном движении относительно координатных осей х и
а)у — угловая скорость относительного вращения вокруг оси z/, проходящей через центр масс кузова. Инерционные свойства тела в плоском движении отображаются тремя инерционными элементами. Параметры двух из них одинаковы и равны массе т^, а параметром третьего элемента является момент инерции тела Jy относительно оси у:
Jy=mspy, (5.70)
где Ру — радиус инерции тела относительно оси у.
186
Рис. 5.13. Динамическая модель (а) и орграф (б) для анализа колебаний кузова автомобиля и водителя на подрессоренном сиденье
187
Упругие и диссипативные элементы с коэффициентами жесткости ci, с 2 и коэффициентами сопротивления (иц, Ц2 отображают физические свойства шин автомобиля, элементы с параметрами <?з, с4, цз, — свойства системы виброзащиты кузова автомобиля, а элементы с параметрами с$, Ц5 — свойства системы виброзащиты сиденья водителя. Силы тяжести твердых тел Fbi,...,Fb4, причем, Fb4 — сила тяжести водителя и сиденья. Воздействия внешней среды описываются функциями (t) , v^2 (О, характеризующими микропрофиль поверхности дороги.
Таким образом, приведенная на рис. 5.13, а динамическая модель автомобиля отображает поступательные движения твердых тел массами mj, m2 и каждое из которых имеет по одной степени свободы, и плоское движение тела массой m3 с тремя степенями свободы. Общее число степеней свободы колебательной системы в итоге равно шести.
Плоское движение твердого тела является частным случаем пространственного движения. Уравнения кинематики и динамики его могут быть легко получены из общих уравнений, приведенных в разделе 5.3, принимая во внимание, что сох = со2 = 0; и vy = 0. Уравнения Эйлера (5.49) в этом случае
^xi Vzi — СйуХ}, (5. (1)
а компонентные уравнения инерционных элементов, согласно выражениям (5.60),
FHX = rn3dvx/dt;
Fuz=m3dvz/dt'-> (5.72)
^ку Jyd^y / dt'
Уравнения (5.71) используются для определения передаточных чисел трансформаторных элементов, осуществляющих безынерционные преобразования поступательных движений элементов системы во вращательные и наоборот (см. раздел 5.4). Трансформаторные элементы при плоском движении твердого тела — рычажного типа. Длины рычагов равны модулям координат точек 3, 4, 5 присоединения упругих и диссипативных элементов к твердому телу.
При vx = const одну степень свободы твердого тела массой m3 (рис. 5.13, а) можно не учитывать и использовать только две фазовые координаты vz = и со^. В этом случае для определения передаточных чисел трансформаторных элементов Щ] достаточно второй формулы (5.71). Присвоим инерционному элементу,
188
совершающему вращательное движение, номер 5 и определим передаточные числа U53, U54, U55 трансформаторных элементов ТЭ53, ТЭ54, ТЭ55, расположенных между упругими элементами с параметрами С3, С4, с5 и данным инерционным элементом. Энергию колебательная система получает из внешней среды в результате воздействия на нее неровностей дороги, поэтому на входах ТЭ53 и ТЭ54 будут линейные скорости vz% и vz4 точек 3 и 4, а на выходе — угловая скорость со,,. На входе же ТЭ55 будет cov, а на вы
ходе . Согласно определению, равно отношению потоковых переменных на входе и на выходе ТЭ^, следовательно,
^53 — uz3 / ~ ^3’ ^54 — уз4 / ®у ~ ^4»
^55 “ ~^у / уз5 “ —1
(5.73)
Значения координат и при вычислениях иц принимаются с учетом их знаков, поэтому передаточные числа рычажных ТЭ могут быть как положительные, так и отрицательные.
Пример 5.9. Сформировать структурно-матричным методом математическую модель технического объекта, динамическая модель которого дана на рис. 5.13, а.
Построим орграф рассматриваемой системы (рис. 5.13, б). На орграфе отображены трансформаторные элементы ТЭ53, ТЭ54, ТЭ55.
В табл. 5.13 приведена матрица инциденций, а в табл. 5.14 матрица ТЭ. Так как диссипативные элементы параллельны соответствующим упругим элементам, то подматрицы инциденций этих ветвей Ад и Ау одинаковы. Поэтому в матрицах А и ТЭ, так же как и на графе, диссипативные ветви не отображены.
Таблица 5.13
Узлы Ветви
^В1 Fb2 FB3 -^в4 ^2 Cl с2 сз с4
1 -1 0 0 0 0 0 1 0 -1 0 0
2 0 -1 0 0 0 0 0 1 0 -1 0
3 0 0 -1 0 0 0 0 0 1 1 -1
4 0 0 0 -1 0 0 0 0 0 0 1
5 0 0 0 0 0 0 0 0 1 1 -1
1* 0 0 0 0 1 0 -1 0 0 0 0
2* 0 0 0 0 0 1 0 -1 0 0 0
Подматрицы Ав Ay
Используя структурноматричный метод, на основании матриц А и ТЭ составим уравнения математической модели технического объекта:
Таблица 5.14
Узлы Ветви
С1 с2 сз с4 сь
1 0 0 0 0 0
2 0 0 0 0 0
3 0 0 0 0 0
4 0 0 0 0 0
5 0 0 1 1 1
1* 0 0 0 0 0
2* 0 0 0 0 0
189
dv1/dt - (-FB1 + ,Fyl - Fy3 + Рд1 - F]l3)jmy;
dv2/dt = (~Fb2 + Fy2 - Fy4 + Fr2 - ;
dv3/dt = (-Fb3 + Fy3 + jFy4 - Fy5 + Рд3 + Fn4 - Рд5)/т3 ;
dv4/dt ( Fb4 + -^y5 + ^д5)/rm4 »
dm у /dt — {Fy3 + jF^3)x3 — (-fy4 + -^4)^4 (-^уб
dFyl/dt = q(uB1 - uj;
dFy2/dt = c2{vb2 - v2Y
dFy3/dt = CgC^ - v3 + myx3);
dFy4/dt = c4(y2 - v3 + coyx4);
dFyb/dt = c5(v3 - v4 - myx5).
(5.74)
В уравнениях (5.74) учтены значения передаточных чисел ТЭ.
Уравнения для определения усилий в диссипативных элементах Рдк и ре-
акций опорной поверхности дороги FB1 , FB*2 читатель может легко составить самостоятельно .
5.6. МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ С ФРИКЦИОННЫМИ ЭЛЕМЕНТАМИ
В системах приводов рабочих органов машин широкое применение находят фрикционные механизмы — муфты и тормоза. Они предназначены для включения и выключения приводов и предохранения их механизмов от перегрузок.
Фрикционные механизмы содержат функциональные поверхности трения и подразделяются на управляемые и неуправляемые. Функционирование первых характеризуется тремя возможными состояниями: скольжением, замкнутым и разомкнутым состояниями. Включение управляемого фрикционного механизма осуществляется путем прижатия поверхностей трения друг к другу по сигналу внешнего управляющего воздействия. Процесс включения сопровождается относительным скольжением функциональных поверхностей трения механизма и завершается их замыканием (соединением). В неуправляемых механизмах трения третье состояние отсутствует. Они постоянно включены, но при достижении некоторой предельной нагрузки начинают проскальзывать, предотвращая перегрузку механизмов привода рабочих органов машины и ее двигателя. Состояние скольжения характеризуется диссипацией энергии, обусловленной внешним трением рабочих поверхностей механизма.
Фрикционные свойства механизмов трения в динамических моделях отображаются безынерционными фрикционными элементами (ФЭ). Применяются две модели ФЭ. В первой модели ФЭ располагается между двумя сосредоточенными массами механической системы, а во второй — между массой и упругим и диссипативным элементами (на рис. 4.6 соответственно ФЭг и ФЭ2). Пер
190
вая модель используется при моделировании фрикционных муфт механизмов трансмиссии, а вторая — сцепления колес мобильных машин с опорной поверхностью дороги. Математические описания обеих моделей ФЭ приведены в разделе 4.5 (см. пример 4.3). Они существенно различны.
Наличие фрикционных элементов приводит к переменной структуре динамической модели и необходимости изменения математического описания процесса функционирования технического объекта в зависимости от состояний ФЭ/. Характер изменения модели зависит от типа ФЭ. При использовании первого типа ФЭ переменность структуры объекта отражается лишь на топологических уравнениях, описывающих условия динамического равновесия сосредоточенных масс, а компонентные уравнения остаются неизменными при любом состоянии ФЭ. Применение второго типа ФЭ приводит к необходимости изменения как топологических, так и компонентных уравнений.
Алгоритм формирования структурно-матричным методом математической модели технического объекта с фрикционными элементами рассмотрим на примере динамической модели, представленной на рис. 5.14, а. Эту модель используют для исследования динамических нагрузок в трансмиссии автомобиля при переключении передач.
При изменениях состояний ФЭ изменяется количественный и качественный состав элементов динамической модели, воздействующих на сосредоточенные массы, примыкающие к фрикционным элементам. Это необходимо отобразить в орграфе. На режиме скольжения ФЭг1 на массу J\ воздействуют потенциалы (моменты) внешнего источника 7Ив1 (двигателя) и фрикционного элемента Мфц (сцепления), а после замыкания ФЭП — потенциалы источника 7Ив1, упругого Му1 и диссипативного 7Ид1 элементов. На массу J2 при скольжении ФЭП воздействуют моменты ТИфц, 7Иу1 и а после замыкания — Мв1, и Мд1. Изменяются также параметры инерционных элементов: на режиме скольжения это Ji и J2, а после замыкания ФЭц = J2 - + J2 • При сколь-
жении ФЭ21 суммарный момент упругого с$ и диссипативного элементов ограничивается моментом фрикционного элемента, т.е. |му3 + 7Идз| = ТИф21. В результате на массу J4 воздействуют моменты Му2, МД2 и ^ф21, а на массу J5 — моменты Мф21 и Мв%. После замыкания ФЭ21 масса J4 находится под воздействием Му2, МД2> АГуз, АГдз, а масса — под воздействием 7Иу3, 7Идз, Мвз« Следовательно, в орграфе будет ряд переменных ветвей. Назовем их виртуальными ветвями и в их обозначения введем верхний индекс *. Орграф моделируемого объекта показан на рис. 5.14, б. Ветви диссипативных элементов в орграфе не показаны, т.к. они параллельны ветвям упругих элементов.
191
a
Ji ФЭц J2
co. т Л ФЭ21 Js <os Ma
ЮГЖ)))
C2^2 ЛГв2 ЛГф21 »
^В1 -МвЗ
Рис. 5.14. Динамическая модель трансмиссии автомобиля (а) и орграф (б)
Процесс формирования математической модели технического объекта с фрикционными элементами состоит из двух этапов. На первом этапе наличие ФЭ не принимается во внимание и составляются матрицы инциденций и трансформаторных элементов ТЭ. Матрица инциденций приведена в табл. 5.15, а матрица ТЭ — в табл. 5.16. Используя эти матрицы и формулы алгоритма структурно-матричного метода (5.25) — (5.27), получают топологические и компонентные уравнения математической модели объекта без учета ФЭ.
Таблица 5.15
Уз-лы Ветви
МВ1 ^в2 Мв3 ?2 ?з Р2 Рз
1 1 0 0 0 0 0 0 0 0
2 0 0 0 -1 0 0 -1 0 0
3 0 0 0 1 -1 0 1 -1 0
4 0 -1 0 0 1 -1 0 1 -1
5 0 0 -1 0 0 1 0 0 1
Подматрицы ^в
Таблица 5.16
Уз-лы Ветви
С1 с2 сз Р2 Из
1 0 0 0 0 0 0
2 0 0 0 0 0 0
3 1 0 0 1 0 0
4 0 1 0 0 1 0
5 0 0 0 0 0 0
192
На втором этапе для отображения переменной структуры объекта введем дополнительную матрицу, определяющую положения фрикционных элементов в динамической модели и инцидентность виртуальных ветвей орграфа сосредоточенным массам модели. Эту матрицу назовем матрицей фрикционных элементов (матрицей ФЭ). В табл. 5.17 приведена матрица ФЭ моделируемого объекта. Поскольку математические описания фрикционных элементов обоих типов ФЭП и ФЭ21 различны и неодинаково их влияние на изменение структуры объекта, то введем две различных подматрицы Аф1 и Аф2 для их отображения. В обозначениях фрикционных элементов и их потенциалов первый цифровдй индекс отображает тип элемента, а второй — порядковый номер. Инциденторы виртуальных ветвей источников внешних воздействий 7ИВ/., упругих Cj и диссипативных элементов отметим индексами *, а подматрицы инциденций виртуальных ветвей обозначим соответственно А*9 А* А* а У 7 А
Таблица 5.17
| Узлы Ветви
Жр21 МВ1 ^в2 Мв3 С2 сз М2 Мз
1 -1 0 0 0 0 -1* 0 0 -1* 0 0
2 1 0 1* 0 0 0 0 0 0 0 0
3 0 0 0 0 0 0 0 0 0 0 0
4 0 -1 0 0 0 0 0 -Г 0 0 -1*
5 0 1 0 0 0 0 0 1* 0 0 1*
Подматрицы ^ф! Аф2 * Ав * * Ад
Следует обратить внимание на то, что инциденторы виртуальных ветвей орграфа расположены только в тех строках матрицы ФЭ, в которых находятся ненулевые инциденторы фрикционных элементов.
Матрица ФЭ позволяет модернизировать исходную математическую модель, полученную на первом этапе. Преобразованиям подлежат лишь те уравнения, структура которых зависит от наличия ФЭ. Так как на нее влияет тип ФЭ, то рассмотрим алгоритмы модернизации отдельно для каждого типа ФЭ.
Как отмечалось выше, ФЭ первого типа влияют лишь на структуру топологических уравнений. Компонентные уравнения остаются без изменений. Преобразованиям подвергаются только те топологические уравнения, которые соответствуют строкам матрицы ФЭ, содержащим ненулевые инциденторы фрикционных элементов Иф^д, где i — номер строки (номер сосредоточенной массы), q — номер ФЭ первого типа. Алгоритм преобразования г-го топологического уравнения описывается выражениями
193
do у l'
dt
Mi + ИфИдМф1д(1 - Lg) sign (X ИфИд£0/) +
i
+ (ZH*iZMBZ +хи;умуУтуУ +X^ikMKkTKik)LqP1q i i k
при ИфПд * 0; q = 1,Q; i = 1,2Q ;
~ Д/) + 22 JiLq Иф1г<7 ,
i
(5.75)
(5.76)
где Mi — суммарный потенциал (момент), действующий на i-ю сосредоточенную массу при отсутствии фрикционного элемента (соответствует числителю первого уравнения системы (5.25), в которой обозначение потенциалов F принято для поступательной механической системы); M^lq — потенциал (момент трения) д-го ФЭ первого типа; Lq — функция состояния q-го ФЭ; P-^q — функция переключения; И*и , — инциденторы виртуаль
ных ветвей соответственно источников внешних воздействий, упругих и диссипативных элементов; Tyij9T^— функции трансформаторных элементов, определяемые выражениями (5.21) и (5.22); Ji— параметр i-ro инерционного элемента; Q — количество ФЭ первого типа.
Обобщенные выражения для определения функций Lq и Plq, характеризующих состояние фрикционного элемента ФЭ19, составляются также на основе матрицы ФЭ (см. выражения (4.45) и (4.46)):
1 при £ифПд<Вг < Асод;
Lq = * (5.77)
о при 22иф119ю1 > Дю9;
i
р1д
= 0,б[1 + sign (Мф1;(?
при
(5.78)
где Дсо^— допустимая относительная скорость скольжения Q-ro ФЭ, при которой можно считать его замкнутым.
Фрикционные элементы второго типа влияют на структуру как топологических, так и компонентных уравнений. Топологические уравнения, подлежащие преобразованиям, обнаруживаются по тому же признаку, что и в предыдущем случае, а именно по 13. Зак. 3006
194
условию Иф2/Г 0, где г — номер ФЭ второго типа. Алгоритм преобразования отличается от предыдущего и описывается выражением
do у
l'
dt
Mt 4- Иф2/ГА/^ф2г (1 -^2r) sign Иф2уг0)у) + i
(5.79)
при И‘ф2Ут' — Иууу “ ^9, г — 1,7?, i 1,27?,
где 7? — количество ФЭ второго типа; Р2Г — функция переключения r-го ФЭ:
при Иф2£г — -И-дМг
Преобразуемые компонентные уравнения упругих элементов обнаруживаются по аналогичному условию, а выражение алгоритма их формирования имеет вид
dIV[fac>r
- 4 — (1 ~ Т^г)
При Иф2 jr — Иууу — 1.
Компонентные уравнения диссипативных элементов остаются без изменений.
Пример 5.10. Построить математическую модель технического объекта, динамическая модель которого приведена на рис. 5.14, а.
Используя алгоритм структурно-матричного метода, описываемый выражениями (5.21) — (5.26) и (5.75) — (5.81), а также матрицы инциденций, ТЭ и ФЭ, представленные в табл. 5.15 — 5.17, получаем:
duyjdt = Л7в1 — Л7фл sign(co1 — со2)(1 ~ — (Afyj + i]/(<71 -+- e/2Lj);
dc^/dt = - (Л7у1 + Л7Д1) 4- Л/фц sign(co1 — со2)(1 — L^) + Л7в17/1Р11]/(е717/1 + J2);
du^/dt = (Му1 + Л7д1)и31т)31 - (Му2 + Мд2)]/ J3;
dajdt = [- Мв2 + (Му2 + Мд2)и42т|42 - A^21sign(co4 - со5)(1 - Р21) -
- (Л7у3 + Мд3)Р21 / J4;
du^/dt = [- Мв3 + A^21sign(co4 - со5)(1 - Р21) + (Му3 + -Л7д3)Р21]/ J5;
dMyl/dt = ^(сог - co3u31);
dMy2/dt = c2(co3 - co4u42);
dMy3/dt = c3(co4 - co5)P21 + (бШф2 /df)(l ~ ^21)»
^7Д1 = Mi(co2 ~ «3^31): МД2 = Н2(юз ~ ю4п42); Мд3 = ц3(со4 - а>5).
>(5.82)
(5.83)
195
В процессе формирования математической модели в данном случае выражения (5.74) — (5.80) алгоритма преобразований использовались для получения 1, 2, 4 и 5 топологических уравнений и компонентного уравнения третьего упругого элемента.
Для интегрирования системы уравнений (5.82) необходимо задать начальные условия сою, i = 1, п; Му;0, j = 1,N, функции внешних воздействий Мв1, Мв2, Мв3 и фрикционных элементов Мф11, Мф21.
В математической модели (5.82) использован неоднородный базис. Базисными координатами в ней приняты переменные типа потока — угловые скорости сосредоточенных масс и переменные типа потенциала — моменты упругих элементов Myj.
Уравнения с неоднородным базисом удобно использовать при получении линейных математических моделей. В этом случае обычно сокращается порядок системы дифференциальных уравнений. Но реальные технические объекты во многих случаях содержат упругие и диссипативные элементы с нелинейными характеристиками. В частности, упругие элементы могут иметь переменные коэффициенты жесткости, зависящие от деформации, зазоры в сопряжениях деталей, ограничения перемещений сосредоточенных масс и деформаций упругих элементов, накладываемые связями, и др. При моделировании таких систем, как будет показано в главе 6, используется однородный базис, а потенциалы упругих элементов выражаются через геометрические координаты (или xt) соединяемых ими сосредоточенных масс, а не через их производные cof (или vt), как в модели (5.82). В этом случае моделирование процесса функционирования фрикционного элемента второго типа значительно усложняется, т.к. возникает необходимость точного определения относительного углового (или линейного) перемещения поверхностей трения и последующего учета его в замкнутом состоянии. Поэтому для нелинейных систем рекомендуется использовать модели ФЭ первого типа не только для управляемых фрикционных механизмов, но и при моделировании неуправляемых фрикционных механизмов, предназначенных для ограничения нагрузок в различных приводах. Эта же рекомендация относится и к моделированию сцепления колеса с опорной поверхностью дороги, особенно для тяжелых тягово-транспортных машин с большими диаметрами шин. На рис. 5.15 приведена такая динамическая модель, в которой сосредоточенная масса с моментом инерции J5 отображает инерционные свойства ведущих колес, a J6 — поступательно движущейся массы машины.
Читателю рекомендуется в качестве упражнения составить математическую модель, используя рис. 5.15.
ЛГвз
сов
Рис. 5.15. Динамическая модель трансмиссии с управляемым ФЭц и неуправляемым ФЭ12 фрикционными элементами
5.7. МОДЕЛИРОВАНИЕ ТЕПЛОПЕРЕДАЧИ В ТВЕРДЫХ ТЕЛАХ
При построении математических моделей тепловых систем на микроуровне дискретизацию объектов осуществляют посредством методов сеток. На рис. 2.4 показан пример дискретиза
196
ции двумерного теплового объекта — твердого тела, температура которого зависит от времени t и геометрических координат х и у (предполагается, что температура не зависит от координаты г). Сетка, наложенная на твердое тело, выделяет дискретные элементы в виде прямоугольных пластин. Характерная особенность этих элементов заключается в том, что каждый из них обладает одновременно инерционными и диссипативными свойствами. Следовательно, выделенные дискретные элементы тепловой системы являются сложными. Напомним, что упругими свойствами тепловая система не обладает.
Задача анализа теплопередачи в твердом теле на микроуровне моделирования заключается в определении температуры в узлах сетки. На ранних стадиях проектирования часто рассматривают одномерный процесс теплопередачи. Так, при анализе теплонапряженности дисковых фрикционных муфт и тормозов автомобилей, тракторов, станков и других машин пренебрегают теплопередачей в радиальном и окружном направлениях, анализируя лишь изменение температуры по толщине дисков.
Одномерными можно также считать задачи анализа теплопередачи через стенки теплообменников, корпусных деталей машин, стены зданий и сооружений и других деталей технических объектов. Математические модели таких объектов можно привес
ти к моделям макроуровня.
Исходная математическая модель микроуровня представляет
собой дифференциальные уравнения в частных производных, опи
сывающие процессы, происходящие в моделируемом объекте, и граничные условия. Рассмотрим процесс преобразования этой
дифференциальной краевой задачи
Рис. 5.16. Дискретизация одномерного теплового объекта
к задаче макроуровня, математической моделью которой является система обыкновенных дифференциальных уравнений.
На рис. 5.16 представлена динамическая модель одномерной тепловой системы, используемая для анализа изменения температуры вдоль координаты х. Дискретные элементы представляют собой пластины (слои). Узлы сетки, в которых определяется температура, расположены на поверхностях этих пластин. Узлы отображены на оси х и обозначены цифрами. Пронумеруем узлы
197
от 0 до п+1. Узлы с номерами 0 и п+1 называются граничными 9 а
узлы 1,п — внутренними. Количество слоев N = п+1.
Дифференциальное уравнение теплопроводности Фурье для одномерной сплошной среды (см. раздел 2.3)
dT/dt = (Xd2r/dx2 + Gq)/(Cp),
(5.84)
где Т — температура; X — коэффициент теплопроводности; С — удельная теплоемкость материала; р — плотность; Gq — количество тепловой энергии, генерируемой или поглощаемой в единицу времени в единице объема. При анализе теплопередачи в твердых телах без фазовых превращений можно принимать Gq = °’
Уравнение (5.84) описывает физические свойства системы с распределенными параметрами. Для перехода к системе с сосредоточенными параметрами, получаемой путем дискретизации сплошной среды, используем конечно-разностную аппроксимацию второй частной производной
d2T/dx2 =
[7(х +1, t) - 2Т(х, t) + Т(х -1, t)]/12 ,
(5.85)
где I — шаг дискретизации по оси х.
Введем обозначения: T(x+l9t) = T(x9t) = Тр,
Т(х - l9t) = 9 где i — номер узла сетки. Тогда выражение
(5.85) можно записать в виде
d2T/dx2 = (7}_i - Ti)/l2 - (Ti - Ti+1)/l2+1. (5.86)
Подставив выражение (5.86) в уравнение (5.84), получим систему обыкновенных дифференциальных уравнений
dTl/dt = (7}-i — Ti)pTi/cTf — (Tf — ^4-1)Цт1+1/ст1+1 ~ (5.87)
где сТр pTj — соответственно теплоемкость и коэффициент теплового сопротивления z-го дискретного элемента:
= CtPtVf, (5.88)
(5.89)
I7/, Ч — соответственно объем и длина i-ro дискретного элемента.
Система уравнений (5.87) описывает физические свойства твердого тела при одномерной теплопередаче. Решение этих уравнений позволяет определить изменение температуры Ti(t) во всех
внутренних узлах твердого тела i - 1, п в переходном процессе не-Установившейся телопередачи, обусловленном изменением воздействий на твердое тело окружающей его внешней среды.
198
Проанализируем структуру дифференциального уравнения, записанного относительно производной температуры f-ro внутреннего узла системы, кроме узлов с номерами i = 1 и i = п. Уравнение (5.87) для i-ro узла можно записать в виде
dTi/dt = Ф д//cTi — Фд/+1/^тг+1» (5.90)
где
Фд/ -
Фд/+1 = Нт/+1 (Ti “ ^f+1)*
(5.91)
(5.92)
Выражения (5.91) и (5.92) представляют собой компонентные уравнения диссипативных элементов i-ro и (i 4- 1)-го слоев твердого тела (дискретных элементов).
Граничные узлы с номерами i = 0 и i = п+1 принадлежат одновременно твердому телу и внешней среде. Эти узлы находятся на граничной поверхности твердого тела, посредством которой осуществляется его взаимодействие с внешней средой. По аналогии с другими системами, рассмотренными в предыдущих параграфах данной главы, отнесем эти узлы к внешней среде, генерирующей на граничных поверхностях внешние воздействия на объект.
С учетом изложенного на рис. 5.17, а построен орграф тепловой системы. При этом сделано предположение, что направление теплового потока в твердом теле совпадает с положительным направлением оси х. Узлы орграфа 1...4 отображают соответствующие внутренние узлы твердого тела 1...4 (см. рис. 5.16), а узлы, отмеченные звездочкой, т.е. узлы 1* и 2*, отображают граничные узлы i = 0 и z = 5 соответственно. Все узлы орграфа соединены между собой ветвями диссипативных элементов с обозначениями параметров этих элементов цт^. Ветви, соединяющие узлы орграфа 1...4 с базовым узлом 0, не принадлежат инерционным элементам, как это было в механических, гидравличеких и других системах. Это обусловлено тем, что дискретные элементы тепловой системы сложные, обладающие одновременно инерционными и диссипативными свойствами, отобразить которые отдельными элементами невозможно. Это следует из уравнений (5.87) и (5.90). Формальное изображение этих ветвей на орграфе, с одной стороны, подчеркивает наличие инерционных свойств у тепловых объектов, а с другой — отображает связь фазовых координат типа потока Г/, характеризующих состояние узлов орграфа, с системой отсчета этих координат, начало которой отображает базовый узел.
Рассмотрим условия равновесного состояния граничных узлов 1* и 2*. Для узла 1* условие равновесия потенциалов имеет вид
199
Фв1 ~ Фд1 а для узла 2*
Фв2 = Фд5
Рис. 5.17. Орграфы тепловой системы:
а — при источниках внешних воздействий типа потока;
б — при теплоизолированной правой границе и источнике типа потока на левой границе; в — при источниках внешних воздействий типа потенциала
= Цт1(Гв*1-71), (5.93)
= HT5(?4 ~Тв2)9 (5.94)
где ФВ1, Фв2 — тепловые потоки, генерируемые соответственно
на левой и правой граничных поверхностях; TBi , Тв2 — температуры граничных узлов 1* и 2* (т.е. узлов 0 и 5 на рис. 5.16).
Поскольку выражения (5.93) и (5.94) аналогичны выражениям (5.91) и (5.92), то система уравнений (5.87) с учетом уравнения (5.90) может быть записана в виде
dTi/dt = Ф1сТ1 — Фд/4-i/^Ti+l ’ i = 19п. (5.95)
Составим матрицу инциденций, соответствующую орграфу на рис. 5.17, а. Матрица А приведена в табл. 5.18.
Таблица 5.18
Узлы Ветви
ФВ1 Фв2 М"Г1 Цт2 МтЗ |Д,Т4 Мт5
1 0 0 1 -1 0 0 0
2 0 0 0 1 -1 0 0
3 0 0 0 0 1 -1 0
4 0 0 0 0 0 1 -1
1* 1 0 -1 0 0 0 0
2* 0 -1 0 0 0 0 1
Подматрицы -Ав
200
Принимая во внимание, что кроме внешних воздействий типа потока (температуры граничных узлов или окружающей среды) к твердому телу могут быть приложены воздействия типа потенциала (генерируемые на граничной поверхности тепловые потоки, например, в результате трения соприкасающихся тел), и используя матрицу инциденций, уравнениям (5.91) — (5.95) можно придать следующий вид:
dTi/dt — /ctZ + X Ид^Фд/г/ст#; (5.96)
z k
Фд/? = ~ » (5.97)
i
Фвтп ~ “22» (5.98)
k
i = l,n; 1 = 1, L; k = l,K; m = l,M,
где ИВ£/, Ид^, Идт^ — инциденторы (элементы матрицы А) , отображающие инцидентность ветвей источников потенциалов и ветвей диссипативных элементов соответствующим узлам орграфа; L — количество источников потенциалов Фв/; К — количество диссипативных элементов тепловой системы; М — количество ис
точников внешних воздействий типа потока Твт .
Уравнения (5.96) — (5.98) описывают алгоритм структурно-матричного метода формирования математической модели тепловой системы. При этом необходимо учитывать граничные условия.
Граничные условия I рода. Задаются значения температур граничных узлов TBi и Тв2 • В этом случае на основе уравнений
(5.96) непосредственно получаем математическую модель теплового объекта в виде системы уравнений (5.95). При этом потенциа
лы диссипативных элементов Фд^> определяются по компонентным уравнениям (5.97), а уравнение (5.98) позволяет определить зна
чения тепловых потоков Фв1 и Фв2 на левой и правой граничных поверхностях, необходимые для поддержания заданных значений температур граничных узлов Тв1 и Т*2 . Тепловые потоки Фв1 и
Ф*2 генерируются источниками тепловой энергии внешней среды (или представляют собой стоки — в случае отвода тепла от твердого тела). Но при граничных условиях I рода потенциалы источников внешних воздействий неизвестны, поэтому в уравнении (5.96) принимается Фв/ = 0«
Использование уравнения (5.97) приводит к выражениям вида (5.91) и (5.92), а уравнения (5.98) — к выражениям вида (5.93) и (5.94).
Для решения полученной системы дифференциальных уравнений (5.95) необходимо задать начальные условия Т^,
Таким образом, при формировании математической модели тепловой системы с граничными условиями I рода используется динамическая модель с источниками внешних воздействий типа потока, характеризуемыми температурами граничных поверхно-стей и Т*2 •
Граничные условия II рода. Задается градиент температуры на граничных поверхностях. В одномерном случае необходимо задать значения дТ/дх при х = 0 и при х = Ъ , где Ъ — размер твердого тела вдоль оси х. Как показано в разделе 2.3, их можно легко свести к граничным условиям III рода. Однако при равенстве нулю градиента температуры на граничных поверхностях целесообразно непосредственно использовать граничные условия II рода. Этот случай соответствует теплоизолированной граничной поверхности.
Предположим, что пятый слой теплового объекта на рис. 5.16 выполнен из теплоизоляционного материала, характеризуемого малым значением коэффициента теплопроводности Х5. При этом цт5->0, а « Т4. Следовательно, теплообмен с окружающей средой через правую граничную поверхность будет незначительным и им можно пренебречь. В орграфе при этом граничный узел 2* может быть исключен (рис. 5.17, б). Составим матрицу инциденций для твердого тела с теплоизолированной правой границей и с заданными граничными условиями I рода на левой границе. Матрица А приведена в табл. 5.19.
Таблица 5.19
Узлы Ветви
* Фв1 Ит1 Рт2 ИтЗ Рт4
1 0 1 -1 0 0
2 0 0 1 -1 0
3 0 0 0 1 -1
4 0 0 0 0 1
1* 1 -1 0 0 0
Подматрицы Ав Ад
Математическая модель объекта в этом случае будет такой Же, как и в предыдущем, но только в ней ФД5 = 0.
14. Зак. 3006
202
Граничные условия III рода. На граничной поверхности задаются условия теплообмена с внешней средой. Возможны три вида теплообмена: генерирование на граничных поверхностях тепловых потоков в процессе трения контактирующих поверхностей (например, во фрикционных механизмах), конвективный теплообмен твердого тела с окружающей газовой или жидкостной средой и теплообмен излучением.
Граничные условия в первом случае имеют вид
X сТ/5х + Фвх/Ав = 0, (5.99)
где Ф вх — проекция теплового потока на ось х; Ав — площадь поверхности граничного теплообмена.
Составим граничные условия для х = 0 и х = b (рис. 5.16), заменив при этом частные производные дТ/дх отношениями конечных разностей,
дТ _ ~ ^в! _ _ Фв1х . дТ _ ^в2 ~ Тп _ _ Фв2х
дх х=0 Ь. ^1^в1 дх х=ь ^п+1 ^п+1^в2
гдеТв1, 7^2 — температуры граничных узлов, обусловленные тепловыми потоками Фв1 и Фв2 на граничных поверхностях.
Если тепловые потоки Фв1 и Фв2 на левой и правой граничных поверхностях твердого тела направлены от внешней среды к телу, т.е. тепловая энергия подводится к нему с двух сторон, то проекции тепловых потоков на ось х будут равны: Фв1х = Фвр ФВ2Х = ~ Фв2- В этом случае с учетом выражения (5.89) получаем'
Фв1 = Нт 1(^1 “ ^1)> Фв2 ~ Нтп+1С^в2 — Тц). (5.100)
Сравнивая выражения (5.100) с выражениями (5.93) и (5.94) и принимая во внимание, что для рассматриваемого примера Тп = Цтп+1 = ЦТ5? легко заметить, что в этом случае в системе уравнений (5.95) потенциалы диссипативных элементов первого и последнего слоев твердого тела Ф Д1 и Ф д5 должны быть заменены на потенциалы источников внешних воздействий Фв1 и Фв2 . Эта замена на орграфе отражается исключением граничных узлов (рис. 5.17, в). Матрица инциденций, соответствующая данному орграфу, приведена в табл. 5.20.
Выражения (5.100) используются для определения температуры граничных узлов
^в! =^1 + <^в1/Цт1> ^в2 ~ ?п + Фв2/Цтп+1 •
203
Таблица 5.20
Узлы Ветви
Фв1 Фв2 Рт2 ЦтЗ Цт4
1 1 0 -1 0 0
2 0 0 1 -1 0
3 0 0 0 1 -1
4 0 1 0 0 1
Подматрицы А-В Ад
При конвективном теплообмене задается температура окружающей среды (на левой границе Тс^ и на правой Тс2) и коэффициенты теплообмена через конвекцию и 0С2- В этом случае воздействия внешней среды являются источниками потоков и орграф тепловой системы имеет вид, приведенный на рис. 5.17, а, а матрица инциденций соответствует приведенной в табл. 5.18 матрице А.
Математическая модель тепловой системы при конвективном теплообмене включает систему обыкновенных дифференциальных уравнений (5.95) и компонентные уравнения (5.91) — (5.94). Но коэффициенты тепловых сопротивлений цт| и pTg в уравнениях (5.93) и (5.94) должны учитывать одновременно свойства теплопроводности граничных слоев, определяемые коэффициентами теплопроводности Xj и Х5, и свойства теплообмена между ними и окружающей средой, характеризуемые коэффициентами теплообмена через конвекцию и СС2’ Следовательно, в этом случае необходимо в качестве и цт5 использовать эквивалентные коэффициенты теплового сопротивления граничных слоев. Для определения температуры граничных узлов и Тв2 и эквивалентных коэффициентов теплового сопротивления цт1 и цтп+1 = цт5 используем граничные условия
X (8Т/8х) + а(Тс - Т*) = 0 . (5.101)
Составим граничные условия для х = 0 и х = Ъ, предпола-
гая, что температура окружающей среды Т и Тс2 выше температуры тела. Тогда градиент температуры в левом граничном слое будет отрицательным, а в правом — положительным:
dT/dx\x_Q = (Ti — = — ОС|(ТС1 — 7|В1)/Х|;
дТ/дх^_^ = (Тв2 ~ ^п)Ап+1 = а2(^с2 — ^в2)/^п+1 -
204
На основании этих выражений получаем
^В1 = (Р"ГИ1^1 "* М'ТК1^с1)/(Р'ТИ1 +Мтк1)> (5.102)
^в2 ~ (НтИ 71 + 1^71 + Нтк2-^с2 )/(НтИ 71 + 1 +М”гк2) > (5.103)
где цти1, Цтитг+1 — коэффициенты теплового сопротивления граничных слоев при индуктивном теплообмене, определяемые по формуле (5.89); цтк1, цтк2 — коэффициенты теплового сопротивления при конвективном теплообмене между окружающей средой и граничными слоями твердого тела.
Значения коэффициентов цткх и цтк2 определяются по формулам
Цтк1 ^1^в1» Цтк2 ^2^-в2 9 (5.104)
где ABi, Ав2 — площади граничных поверхностей, через которые осуществляется теплообмен твердого тела с окружающей средой. Для определения эквивалентных коэффициентов теплового сопротивления pTi и pTn+i подставим значения и Тв2 в выражения (5.93) и (5.94). В результате получим
Фв1=фд1=Нт1(^с1-71); (5.Ю5)
®в2 = Фдтг+1 = М-т/г+1 (^тг ~ ^с2)» (5.106)
где
ЦТ1 — Нти1^тк1 /(М"ги1 “*"Мтк1)’ (5.107)
M'ttt + I — М"гитг + 1Мтк2/(Нти 71 + 1 ’^М^тк2)’ (5.108)
Для решения системы дифференциальных уравнений (5.95) необходимо задать начальные условия Т^, i = 1,п .
5.8. МОДЕЛИРОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
Широкое применение в промышленности и в быту имеют технические объекты, представляющие собой электромеханические системы. Это обусловлено тем, что электрическая энергия — самый удобный и легкодоступный вид энергии.
Характерная особенность процесса функционирования электромеханической системы — взаимное преобразование электрической, магнитной и механической энергий, что создает известные сложности при математическом моделировании. В этой связи разработаны идеализированные модели макроуровня с дискретизацией параметров электротехнических объектов на основе метода сосредоточенных масс. В этом случае также применим структурноматричный метод моделирования. Отметим, что в электрических системах понятие «сосредоточенная масса» относится к катушке индуктивности. Рассмотрим несколько характерных примеров.
205
На рис. 5.18, а показана принципиальная электрическая схема системы зажигания бензинового двигателя внутреннего сгорания. Основные элементы системы зажигания: источник электрической энергии (аккумуляторная батарея и генератор), катушка зажигания, конденсатор, прерыватель-распределитель, свечи зажигания. На схеме отображены: источник потенциала С7в1 (внешнее воздействие); катушка индуктивности с первичной и вторичной обмотками, индуктивности которых обозначены соответственно Li и L2, сопротивления — Я; и R2; конденсатор емкостью Ci, установленный параллельно контактам прерывателя КП; конденсатор емкостью С2, соответствующей емкости проводов высокого напряжения; искровой промежуток И свечи зажигания и его сопротивление R&
Рис. 5.18. Принципиальная электрическая схема системы зажигания бензинового двигателя внутреннего сгорания
Процесс функционирования системы зажигания состоит из трех фаз:
накопление энергии в индуктивном элементе первичной обмотки катушки зажигания при замкнутых контактах прерывателя;
возникновение импульса высокого напряжения во вторичной обмотке катушки зажигания после размыкания контактов прерывателя;
пробой искрового промежутка свечи под воздействием высоковольтного импульса и выделение накопленной энергии в форме искрового разряда.
Максимальная энергия ^Kimax, запасенная в индуктивном элементе первичной обмотки,
^к1шах ~ (5.109)
Индуктивный элемент отображает инерционные свойства объекта, поэтому Ек1 — кинетическая энергия. Процесс накопле
206
ния энергии EKi начинается с момента замыкания контактов прерывателя КП и возрастания тока Ii в первичной обмотке. Ток создает магнитное поле, магнитный поток которого Ф =LL Однако увеличению тока, согласно законам электромагнитной индукции, противодействует возникающая при этом ЭДС самоиндукции в этой обмотке = -дФ / dt = -L^dl^ / dt. Поэтому значение /imax
зависит от времени t3K замкнутого состояния контактов прерывателя
t3K = 60s/(nnNi), (5.110)
где s — скважность — отношение t3K к периоду следования искр; пд — частота вращения коленчатого вала двигателя, об/мин; Nt — число искр за один оборот вала двигателя (для двухтактного двигателя Nt = пц, для четырехтактного — = пи / 2 , где пц —
количество цилиндров двигателя).
После размыкания контактов прерывателя исчезновение тока Ii приводит к возникновению ЭДС взаимоиндукции Е2 в° вторичной обмотке катушки зажигания. Поскольку последняя представляет собой электромагнитный трансформатор (ЭМТ), то между Е2 и Е^ имеет место следующее соотношение:
Е2 = КЕТ = -KL^Iidt, (5.111)
где К — коэффициент трансформации катушки зажигания: К = w2 /1^1 ; Wi, w2 — количество витков соответственно первичной и вторичной обмоток.
Из выражения (5.111) следует, что Е2 зависит от скорости снижения тока т.е. от модуля производной dl± / dt . Увеличению dli I препятствует магнитное поле, но способствует ему наличие в цепи конденсатора Ci, способного накапливать потенциальную энергию, поглощая при этом кинетическую энергию индуктивного элемента. После достижения разности потенциалов на электродах свечи зажигания значения напряжения пробоя L7np происходит искровой разряд, и запасенная энергия индуктивного и емкостного элементов вторичной цепи превращается в тепло в сопротивлении R3 искрового промежутка свечи.
В первой фазе, т.е. при замкнутых контактах КП, процессами во вторичной цепи можно пренебречь и рассматривать лишь процесс накопления энергии в индуктивном элементе первичной обмотки катушки зажигания. Динамическая модель и орграф процесса этой фазы представлены на рис. 5.19, а матрица инциденций — в табл. 5.21. Математическая модель процесса:
dI1/dt = (UB1-UA1)/L1;
(5.112)
207
Таблица 5.21
Рис. 5.19. Динамическая модель (а) и орграф (б) системы зажигания при замкнутых контактах
мы является электромагнитное преобразование
Узлы Ветви
tf.l
1 1 -1
Динамическая модель и орграф для второй фазы показаны на рис. 5.20. Характерной особенностью моделируемой систе-энергии, осущест-
вляемое катушкой зажигания, что отображено в динамической
модели и на орграфе посредством электромагнитного трансформатора ЭМТ. Свойства ЭМТ, выражаемые зависимостью (5.111), существенно отличаются от свойств механических трансформаторов,
поэтому информация о его расположении дается в матрице инциденций (аналогично тому, как это сделано по отношению к гидродинамическому трансформатору в разделе 5.2). Диссипативный
элемент R% подключается после достижения условия С7у2 > J7np ,
т.е. после накопления упругим элементом С2 достаточного потенциала С7у2.
Рис. 5.20. Динамическая модель (а) орграф (б) системы зажигания при разомкнутых контактах
Используя матрицу инциденций, приведенную в табл. 5.22, на основе структурно-матричного метода получаем математическую модель второй и третьей фаз рабочего процесса системы зажигания:
208
/ dt = (UB1 - C7yl -Пд1)/ A;
cZI2 / dt - (E2 - Uy2 - Цд2 - Ццз) / ^2»
dUyl /dt = Ci11}, dUy2 / dt - C2^Z2;
(5.113)
^д1 = Rlh> ид2 = ^2^25
(5.114)
^дЗ ^3 ^2 >
^2 ~ / ^0-
Таблица 5.22
Узлы Ветви 1
^В1 е2 С1 С2 Л1 Т?2 Из
1 1 0 -1 0 -1 0 0
1 2 0 1 0 -1 0 -1 -1
Пример 5.10. Получить характеристики переходного процесса системы зажигания двигателя автомобиля ВАЗ—2106. Параметры системы: L1 = 10,5 10-3 Гн ; L2 = 46 Гн ; Су = 0,25 10”® Ф ; С2 = 45,5 10-12 Ф ; R, = 6,30м; R2 = 7,75 103 Ом; Я3=1106Ом; C7b1=12B; К = 78,5 .
Для решения поставленной задачи необходимо проинтегрировать уравнения (5.112) и (5.113). На рис. 5.21, а приведены графики изменения тока и ЭД С самоиндукции E~f в первичной обмотке катушки зажигания в первой фазе рабочего процесса, соответствующей замкнутому состоянию контактов прерывателя. После замыкания контактов нарастание тока происходит по экспоненте, а его максимальное значение зависит от времени замкнутого состояния t3K, определяемого выражением (5.110). При моделировании принята частота вращения коленчатого вала двигателя ид =4200 об/мин, скважность s = 0,7, тогда t3K = 0,005 с. Графики изменения индуктируемой ЭДС во вторичной обмотке Е2 после размыкания контактов и накапливаемого потенциала емкостным элементом вторичной электроцепи Uy2 показаны на рис. 5.21, б. В момент времени tnp напряжение иу2 превышает напряжение пробоя искрового промежутка Unp, происходит искровой разряд и выделение накопленной энергии, в результате ЭДС Е2 резко падает.
При моделировании электрических машин (двигателей, генераторов) используют идеализированную модель, называемую обобщенной электрической машиной. В теории электрических машин доказано, что любая многофазная машина с n-фазной обмоткой статора и m-фазной обмоткой ротора при условии равенства полных сопротивлений фаз статора (ротора) в динамике может быть представлена двухфазной моделью [35, 36]. На рис. 5.22, а показана схема обобщенной электрической машины, а на рис. 5.22, в — соответствующая ей схема электромеханического преобразователя (ЭМП). Вводятся две системы ортогональных
209
координат: координаты а, р связаны с непод-
вижным статором, а координаты d, q — с вращающимся ротором. Угол поворота фэл осей d, q относительно осей а, Р называют элек-
Рис. 5.21. Графики переходного процесса системы зажигания двигателя: а — при замкнутых контактах;
б — после размыкания контактов
трическим углом поворота ротора. Вдоль каждой из этих осей расположены соответствующие обмотки статора и ротора двухфазной модели. Электромагнитные процессы в цепях этих обмоток описываются уравнениями динамического равновесия потенциалов d^; /dt = Uj-Rjl;,
1 ' J j г
j = 1,4, (5.115)
где ЧЛ — потокосцеп-ление у-й обмотки; Uj — напряжение;
R; — активное сопротивление обмотки;
I] — ток в обмотке.
Индекс j принимает значения let, 1р, 2d, 2q .
Потокосцепление каждой обмотки определяется результирующим действием токов всех обмоток:
^у =^у/у + ££уЛ> k*j9 (5.116)
k=l
где Ljj — собственная индуктивность у-й обмотки; Ljk — взаим-J J 11
ная индуктивность между у-й и &-й обмотками (индекс k принимает те же значения, что и у).
Для симметричной неявнополюсной машины Ljj не зависит от положения ротора, т.е. Ьц = const. Взаимные индуктивности 9 9
между обмотками статора LloCjip; Lipla и ротора L2d2q\ L2q^2d равны нулю, т.к. магнитные оси этих обмоток в обобщенной машине сдвинуты на угол л/2.
210
Рис. 5.22. Модели обобщенной двухфазной электрической машины (а) и (б) и схема электромеханического преобразователя (в)
Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений при повороте осей d, q на угол <рэл = 2п, поэтому с учетом принятых на рис. 5.22, а направлений токов и знака угла поворота ротора можно записать:
Ala, 2d ~ Azd, la = ^12 со®Фэл’
Ala, 2q ~~ Azg, la “ ^12 ®°®(фэл + 71 / 2) — — ^12 Фэл’
Aip,2d = -^2d, ip = -Чг^Фэл?
-Чр, 2 g = ^2д,1р = L12 с°8фЭл-
Подставим Ч7; в уравнение (5.115) и запишем результат в
следующем виде:
211
4 dlu 4 dLik — uj = ^i1! + 2L Ljk , + ®эл 2L "3 dk > 1 = 1>4 > k=i dt Л=1й(Рэл
(5.117)
где соэл = с/(рэл / dt — угловая скорость вращения осей d, q.
Первый член правой части уравнения (5.117) представляет собой падение напряжения на активном сопротивлении цепи у-й обмотки, второй — результирующую ЭДС самоиндукции и взаимной индукции, вызванную изменениями токов в обмотках, а третий член — результирующую ЭДС, наведенную в обмотке вследствие вращения ротора.
Электромагнитный момент неявнополюсной машины вычисляется по формуле
^эд = Рп^12 — cos Фэл — Ц8)
” (Лр^2д + Ла^2й) sin <Рэл ]>
где рп — число пар полюсов машины.
Выражения (5.117) и (5.118) представляют собой достаточно сложную систему нелинейных дифференциальных уравнений. В теории электропривода разработан способ, позволяющий значительно упростить модель обобщенной машины [35, 36]. Суть его заключается во введении новой системы координат х, г/, вращающихся с произвольной угловой скоростью сок относительно неподвижных осей а, Р. Модель обобщенной двухфазной машины при этом принимает вид, показанный на рис. 5.22, б. В этой модели на каждой вращающейся оси х и у расположена пара обмоток — одна обмотка статора и одна — ротора. В системе координат х, у уравнения (5.117) и (5.118) принимают вид:
^1х / dt = Ulx — + ’
/dt = Uly — R]I\y ~ ’
> (5.119)
~ ^2х ~ ^,2^2х + (®к — ^эл)^2б/ ’
(^2у / dt = &2у ~ ^2^2у ~ (юк — С0эл)'^2х >
^эд = PrMhyhx - hxhyY (5.120)
Потокосцепления вычисляются по формулам:
*1х = ^1Ах + Al2^2x5 'Pty ~ Wly +
► (5.121)
^2х = -^12-^lx +^‘2I2x’ ^2y ~ ^12^1y + ^2^2yj
Таким образом, потокосцепление каждой обмотки в системе координат х, у определяется собственной индуктивностью или Ь2 и взаимной индуктивностью 1^2 с другой обмоткой, располо
212
женной на той же оси. Взаимодействие с токами других обмоток отсутствует, т.к. их оси сдвинуты на угол л/2. Зависимости (5.121) позволяют в уравнениях (5.119) перейти от потокосцепле-ний к токам.
В модели электрической машины постоянного тока с независимым возбуждением магнитодвижущая сила (МДС) статора создается постоянным током возбуждения 1в = , поэтому она
ориентирована по неподвижной оси р . Соответственно и МДС ротора при вращении его со скоростью сок должна быть неподвижна относительно статора, а это возможно при условии, что МДС ротора вращается относительно ротора в противоположном направлении со скоростью -сок. Следовательно, в уравнениях (5.119) необходимо принять сок = 0, а оси х, у считать неподвижными. При этом обмотка якоря (вместе с обмотками дополнительных полюсов и компенсационной обмоткой КО) расположена на оси х, а обмотка возбуждения ОВ — на оси у. Поэтому в уравнениях (5.119) и (5.121) следует принять:
~ Ф ^1г/ “ ^2х ~ ^2у — 0; 1\х = 0;
^1у ~ -^в’ ^2х ~ Ап ^2у ~ -^1 — ^в’ -^2 ~
где UB, 17я — напряжения соответственно обмоток возбуждения и якоря; 1в, 1я— токи в этих же обмотках; RB— сопротивление обмотки возбуждения; Вя — суммарное сопротивление обмоток якорной цепи, включающее сопротивления обмоток якоря Вя, дополнительных полюсов 7?дп и компенсационной обмотки 7?ко.
В результате 1-е и 4-е уравнения системы (5.119) исключаются, а динамическая система процесса электромагнитного преобразования энергии оказывается системой с двумя степенями свободы.
Принципиальная электрическая схема двигателя постоянного тока с независимым возбуждением показана на рис. 5.23, а. Предположим, что этот двигатель используется для привода некоторой механической системы, обладающей инерционными, упругими и диссипативными свойствами, взаимодействующей с электродвигателем посредством механического трансформаторного элемента (зубчатой передачи). Электромеханический преобразователь двигателя, как следует из системы уравнений (5.119), обладает инерционными, диссипативными и трансформаторными свойствами. Трансформаторные свойства обусловлены преобразованиями энергии при передаче ее между тремя взаимодействующими разнородными физическими средами: электрической, маг
213
нитной и механической. Эти преобразования можно отобразить двумя электромеханическими трансформаторами ЭМТ: один из них устанавливает соотношение между ЭДС якоря двигателя Ея, током обмотки возбуждения 1в и угловой скоростью двигателя со, а второй — между моментом двигателя 7ИЭД, током обмотки возбуждения 1в и током якоря 1я:
-^я “ ^371^12^8 — “ ^Ф(£) , (5.122)
Мэд = рпЬ121в1я =/^Ф/я ; (5.123)
где Ф — магнитный поток двигателя; k — конструктивный коэффициент [35].
Рис. 5.23. Принципиальные электрические схемы двигателей с независимым (а) и последовательным (б) возбуждением
Угловые скорости со и сок связаны соотношением
® ^эл / Рп ’
Общий вид зависимости магнитного потока Ф от тока I по-
Рис. 5.24. Характеристика намагничивания
казан на рис. 5.24. Эту зависимость называют характеристикой намагничивания. Нелинейный вид этой характеристики обусловлен свойством насыщения магнитной цепи двигателя с увеличением тока. Значения тока 1ном и магнитного потока Фном, соответствующие номинальной нагрузке двигателя, выбирают близкими к пределу насыщения магнитной цепи.
214
На рис. 5.25, а приведена динамическая модель рассматриваемой электромеханической системы. Модель состоит из трех взаимодействующих подсистем:
подсистемы обмотки возбуждения, в которую входят: инерционный элемент с параметром диссипативный элемент с параметром RB и источник потенциала UB;
подсистемы якоря, в которую входят: инерционный элемент с параметром £2» диссипативный элемент с параметром Rr , источник потенциала 17я . Кроме того, в эту подсистему включается источник ЭДС якоря Ея и диссипативный элемент с переменным параметром Лпр , отображающий физические свойства пускового реостата двигателя;
механической подсистемы, в которую входят: инерционный элемент с параметром (где — момент инерции якоря и части механической системы привода, непосредственно связанной с валом двигателя); инерционный элемент с параметром J2 » ото-бражающий инерционные свойства основной части механической системы (рабочей машины или механизма); упругий и диссипативный элементы с параметрами соответственно и ; механический трансформаторный элемент ТЭ с параметрами и31 и г|31; источник потенциала Мс — момент сопротивления рабочей машины; источник потенциала Мэд — вращающий момент электродвигателя.
Следует отметить, что Ея и Мэд являются внутренними потенциалами системы, возникающими в результате взаимодействия всех трех динамических подсистем. Потенциалы же UB, 11я и Мс принадлежат источникам внешних воздействий на систему. Взаимосвязь подсистем динамической модели отображается указанием аргументов функций внутренних потенциалов и
МЭД(1В,1Я).
На рис. 5.25, б показан орграф моделируемой электромеханической системы. Так как потенциалы Ея и 7ИЭД являются результатом электромеханических трансформаторных преобразований, то их ветви на орграфе отмечены дополнительными символами 9MTi и ЭМТ2 и отображена их зависимость от соответствующих переменных типа потока 1в,1я и coj , характеризующих состояния сосредоточенных масс (узлов 1, 2, 3
орграфа).
215
a
CO2 Mс
и„ О мс
Рис. 5.25. Динамическая модель (а) и орграф (б) электромеханической системы с двигателем постоянного тока независимого возбуждения
В табл. 5.23 дана матрица инциденций И, а в табл. 5.24 — матрица механических трансформаторных элементов ТЭ.
Таблица 5.23 Таблица 5.24
Уз-лы Ветви
ив Ua ^Я Мэд мс С1 -^в ^пр Ml
1 1 0 0 0 0 0 -1 0 0 0
2 0 1 -1 0 0 0 0 -1 -1 0
3 0 0 0 1 0 -1 0 0 0 -1
4 0 0 0 0 -1 1 0 0 0 1
Уз-лы Ветви
С1 Hi
1 0 0
2 0 0
3 1 1
4 0 0
Используя эти матрицы, составим структурно-матричным методом уравнения математической модели электромеханической системы:
/ dt ~ (^в дв ) / ^В ’
^я / dt = (^Я — ^я — ДЯ “ ^дпр) / ^Я ’
dcOi /dt - [мэд - Му1 /(U31TI31) - Мд1 /(и31Пз1)]/^Г, >
day2 / dt - (-Мс + ^у1 + ^д1) / ^2>
dMyl /dt = ^(cd! /и31 -со2);
(5.124)
216
^дв ^в4^ ^дя ^я/я; 125)
^дпр — ^пр-^я’ ^д1 “ Н1(^1 /^31 “ ю2)*
Дифференциальные уравнения системы (5.124) нелинейные, т.к. функции потенциалов Ея и Мэд представляют собой произведения соответствующих фазовых координат типа потока: Яя = /i(IB,a>i) ’ ^эд ~ /г^в^я) • Кр°ме того, они зависят от нелинейной функции Ф = /3(1В) • Для решения системы уравнений (5.124) необходимо задать начальные условия /воДяО’ w10’ w20’ 7Иу10 и функции внешних воздействий 17В,(7Я,7ИС .
На рис. 5.23, б показана принципиальная электрическая схема двигателя постоянного тока с последовательным возбуждением. В отличие от двигателя с независимым возбуждением обмотка возбуждения ОВ расположена последовательно в электрической цепи якоря. В результате электромагнитная система двигателя представляет собой динамическую систему с одной степенью свободы. Динамическая модель ее приведена на рис. 5.26, а. Пусть электродвигатель взаимодействует с той же механической системой, что и в предыдущем примере (см. рис. 5.25, а). Тогда орграф электромеханической системы будет иметь вид, представленный на рис. 5.26, б. Матрица инциденций приведена в табл. 5.25. Сравнивая ее с матрицей, приведенной в табл. 5.23, легко заметить, что математическая модель данной электромеханической системы отличается от предыдущей модели отсутствием в ней первого топологического уравнения системы (5.124) и компонентного уравнения первого диссипативного элемента Un„ = .
.о £>
Рис. 5.26. Динамическая модель двигателя постоянного тока с постоянным возбуждением (а) и орграф электромеханической системы (б)
217
Таблица 5.25
Уз-лы Ветви
ия л л Мэд мс С1 R я -^пр
1 1 -1 0 0 0 -1 -1 0
2 0 0 1 0 -1 0 0 -1
3 0 0 0 -1 1 0 0 1
Номинальные параметры двигателя: Рном
Принтер 5.11. Получить характеристики переходного процесса при пуске двигателя постоянного тока с независимым возбуждением типа 2ПБ180ЬУХЛ4 и разгоне механической системы рабочей машины.
- 5,6 кВт; 17ном = 220 В;
пном = ЮОО об/мин; г| = 0,84 ; Вв = 40,2 Ом; Ря = 0,26 + 0,183 = 0,443 Ом (суммарное активное сопротивление обмоток якоря и дополнительных полюсов); LB = 10,2 • 10 3 Гн; момент инерции якоря = 0,23 кг • м2 . Параметры элементов
о 9
механической системы: J1 = 1кг • м ; J2 = 10 кг • м ; сг = 200 Н • м/рад; и31 = 2;
Лз1 ~ 0,95; коэффициент относительного затухания у = 0,1; Мс = 50 Н • м.
Так как сопротивления обмоток двигателя даны при температуре Тхол = 15 °C, то следует их определить для рабочей температуры 7^6:
-Краб = «Хол!1 + “<Граб - Гхол)], (5.126)
где а — температурный коэффициент сопротивления меди: а = 0,004 1/°С.
Приняв Траб = 90 °C, находим RB = 52,26 Ом; Ra - 0,576 Ом.
Вычислим номинальные параметры двигателя, отсутствующие в каталоге, полагая UB - 17я = Пном .
Номинальный момент двигателя Мном = Рном /соном = 30Рном /(™ном) = = 53,5Н»м.
Номинальный суммарный ток питания двигателя 1ном = Рном /(Пномг|) -= 30,3 А.
Номинальный ток обмотки возбуждения найдем из первого уравнения сис-темы (5.124) при dIB / dt = 0 : 1вном = UBOM / RB = 4,21 А .
Номинальный ток якоря /яном = 1тм - 1вти = 26,09 А .
Индуктивность якорной цепи двигателя определяется по приближенной формуле
Т'я = У^ном /(Рпюном-^ном) ’ (9.127)
где у — коэффициент, принимаемый равным 0,25 для компенсированных двигателей и 0,6 — для некомпенсированных; рп = 2 .
Так как в принятом двигателе компенсационная обмотка отсутствует, то у = 0,6 и £я = 0,0242 Гн.
Найдем коэффициент ЭДС двигателя сном при номинальном магнитном потоке Фном , используя уравнение (5.122) и второе уравнение системы (5.124) при д!я / dt = 0 , ^НОМ — ^Фном — (^НОМ — -^я-^яном) /®ном ~ 2В • С .
Используя универсальные характеристики намагничивания, приводимые в литературе по электрическим машинам, и полученное значение сном (или ФНОм)
218
можно построить характеристику намагничивания Ф = f(IB) данного двигателя. В первом приближении ее можно аппроксимировать экспонентой
Ф ~ Фщах[1 — еХР(—/^вном)]’
где а — коэффициент, определяемый из выражения а = -1п(1 - Фном /Фщах) •
Отношение Фном /Фтах можно принять в пределах 0,8...0,9.
Для пуска двигателя используют пусковой реостат в цепи якоря, который позволяет предотвратить чрезмерное возрастание тока 1Я в начальный период пуска, а также снизить динамические нагрузки в механической системе. Максимально допустимое значение тока якоря /ятах = ^г7яном • Пусковой реостат должен обеспечить в процессе пуска и разгона электромеханической системы изменение тока в пределах /Hmin < 1Я < /ятах • Момент двигателя при этом будет изменяться в пределах < Мяпгпях . Значение выбирают из
условия преодоления момента сопротивления нагрузки Мс с запасом в 10...20 %, а Мадтах определяют по формуле (5.123): Мэдтах = M>HorA-max •
Пусковой реостат должен иметь несколько ступеней. Сопротивления этих ступеней обычно выбираются из условия, чтобы суммарные сопротивления якорной цепи Rr + Рпр составляли ряд геометрической прогрессии. Количество ступеней определяется по формуле
П ~ 1п(^эдт1п / ^эдтах) /[^я /С^я ^npl)]» (5.128)
где Рпр1 — сопротивление реостата на первой ступени.
Полученное значение п округляется до ближайшего целого числа. После этого уточняется значение Мэдпйп :
^эдтш “ ^эдтах /(2?я + /?пр1) . (5.129)
Значение Мэдт1п должно удовлетворять отмеченному выше условию. В противном случае необходимо принять п на единицу больше. Для определения -Rnpi необходимо найти полное сопротивление якорной цепи max “ ^я + ^пр1 ’ обеспечивающее значение тока /ятах . Так как при этом coj - 0, Ея = 0, то ^ятах = ^ном/^ятах • Значения Z?npf на i-й ступени реостата вычисляются по формуле
^npi ~ № + ^npl)(^ЭДmin /^эдтах) ~^я‘ (9.130)
Полагая т = 2 , находим п - 2,87 . Принимаем и = 3 . В результате получаем следующие значения сопротивлений ступеней реостата (Ом): 3,64; 1,597; 0,544. При выведенном реостате 7?пп = 0 . и р
На рис. 5.27, а — г приведены графики исследуемого переходного процесса. Процесс разгона практически закончился за 9 с (при Му1 - Мс на рис. 5.27, б). Ток якоря 1Я изменяется в пределах 27...52 А (рис. 5.27, а), а момент двигателя Мэд — в пределах 55... 105 Н м (рис. 5.27, б), скачкообразно возрастая в моменты переключения ступеней реостата, т.е. при изменении 7?пп . Это приво-
219
дит к возрастанию амплитуды момента Му1 в упругом элементе механической системы. Аналогично изменяются ускорения масс механической системы (рис. 5.27, г). Максимальные амплитуды наблюдаются в момент пуска. Коэффициент динамичности в момент пуска kR - 5 . Однако поскольку переходный процесс многоступенчатый, то kR целесообразно определять отношением /гд = Му1тах /Му1тс , где Му1тс— текущее среднее значение в момент времени, соответствующий возникновению Му1тах . Согласно данным рис. 5.27, б получаем кд = 1,76 .
Рис. 5.27. Графики переходного процесса электропривода с двигателем постоянного тока независимого возбуждения: а — ток и ЭДС якоря; б — моменты двигателя; в — угловые скорости якоря и приводимой массы; г — угловые ускорения
Пример 5.12. Получить характеристики переходного процесса при пуске двигателя постоянного тока с последовательным возбуждением. Параметры двигателя и механической системы принять из предыдущего примера.
На рис. 5.28, а — г даны графики переходного процесса. Сравним их с графиками на рис. 5.27, а — г. Можно отметить их существенные различия в протекании процесса изменения ЭДС Ея и тока 1Я якоря, момента двигателя Мэд и скоростей разгона механической системы. Пиковые значения тока якоря и момента двигателя при переключении ступеней реостата постоянно снижаются, разгон становится более плавным, что обусловлено снижением магнитного потока. У двигателя же с независимым возбуждением магнитный поток остается по-
220
стоянным. Изменяется также конечная скорость разгона, что обусловлено принципиальными отличиями статических характеристик обоих двигателей. Двигатель с независимым возбуждением при 1Я = 0 имеет вполне определенную угловую скорость холостого хода соо = UHOM /(кФном) , а с увеличением момента нагрузки угловая скорость линейно падает. У двигателя с последовательным возбуждением характеристики 1Я - 4(G)) и Мэд = /2(со) нелинейные, приближающиеся к гиперболическим, а при Мэд = 0 значение со стремится к бесконечности. Поэтому максимальная скорость разгона существенно зависит от нагрузки. Такой двигатель не может работать без нагрузки.
Рис. 5.28. Графики переходного процесса электропривода с двигателем постоянного тока последовательного возбуждения: а — ток и ЭДС якоря; б — моменты двигателя, сопротивления нагрузки и упругого элемента; в — угловые скорости якоря и приводимой массы;
г — коэффициент ЭДС сЕ = кФ
Двигатели постоянного тока с последовательным возбуждением применяют на транспортных и тяговых машинах (автомобилях, тракторах, строительнодорожных и подъемно-транспортных машинах). Трогание с места и разгон этих машин должен быть плавным. Это обеспечивается плавным изменением сопротивления пускового реостата. На рис. 5.29 показаны характеристики переходного процесса при изменении 7?пр по экспоненте J?np = J?nprnax ехр(-3£ / £к) = = 10ехр(-3£ /7) . Параметры электромеханической системы оставлены прежними. Сравнивая характеристики, представленные на рис. 5.28 и 5.29, можно отметить, что их изменения во времени в этом случае значительно более плавные, а пико-
221
вые значения тока якоря, момента двигателя, момента Му1 и угловых ускорений dcoj / dt и dco2 I dt элементов механической части системы значительно меньше, особенно в момент трогания машины с места. Конечная скорость разгона машины за период £к = 10 с в сравниваемых вариантах практически одинакова.
Рис. 5.29. Графики переходного процесса электропривода с двигателем постоянного тока последовательного возбуждения (обозначения соответствуют рис. 5.27)
При моделировании электромеханических характеристик асинхронного двигателя переменного тока используется система дифференциальных уравнений (5.119). Асинхронный двигатель представляет собой динамическую систему с 4 степенями свободы. Подставим значения потокосцеплений, определяемых выражениями (5.121), в уравнения (5.119):
/ dt (Jd^x
dl±y I dt №1у Ely) /
dl2x I dt - (172x - B,2^2x + ^2x) / ^2»
(5.131)
^2y / dt — (^2y ^2^2y ^2y) / -^2’
где Е^х, Е^у, Е2х, Е2у — суммарные ЭДС самоиндукции и взаимной индукции:
Е1х = + L12I2y) ~ d<L12l2x) I dt»
Ely ~ юк(ЗДх + ^12^2х) + ^(^12^2i/) / dt ’
E2x ~ (юк ~ ^^W2y + Li2hy) ~ d^L^Ilx) / dt\
(5.132)
E2y = (юк “ ^qji^L2I2x + ^12Лх) “ rf(^12^1i/) I dt •
Члены выражений (5.132), включающие собственные индуктивности обмоток статора и ротора и L2 , описывают ЭДС
самоиндукции, а содержащие взаимную индуктивность L42 ото
бражают ЭДС взаимной индукции. Угловые скорости сок и соэл вычисляются по формулам
271 fi, ^эл > (5.133)
где fi — частота тока статора; со — угловая скорость ротора.
В математическую модель электропривода также входят дифференциальные уравнения механической системы (три последних уравнения системы (5.124)) и уравнение момента двигателя (5.120). Математическая модель асинхронного двигателя значительно сложнее, чем двигателей постоянного тока. Поскольку функции (5.132) нелинейные, то дифференциальные уравнения (5.131) также нелинейные. Взаимная индуктивность обмоток статора и ротора L12 тоже нелинейная функция L12 ~ /(^ц) » где \
I.. — ток намагничивания: г1
I» = V<71x+J2x)2+(^+^)2- (5-134)
Функция L12 = f(Iy) определяется аналогично функции магнитного потока Ф (рис. 5.24).
При моделировании переходного процесса асинхронной машины с фазным ротором в режиме двигателя 172х = С72^ =0 и и1х = 0 , а и1у = л/3171ф , где — номинальное фазное напря
жение.
Динамическая модель электромагнитной системы асинхронного двигателя приведена на рис. 5.30, а. На рис. 5.30, б представлен орграф, отображающий физические свойства электромагнитной системы двигателя и механической системы привода, а в табл. 5.26 дана матрица инциденций.
223
Рис. 5.30. Динамическая модель асинхронного электродвигателя (а) и орграф электромеханической системы (б)
Таблица 5.26
Уз-лы Ветви
Uly Е1х ^11/ ^2х ^2у ^эд мс С1 Ъх ^у ^2х ^2у Ml
1 0 1 0 0 0 0 0 0 -1 0 0 0 0
2 1 0 -1 0 0 0 0 0 0 -1 0 0 0
3 0 0 0 1 0 0 0 0 0 0 -1 0 0
4 0 0 0 0 -1 0 0 0 0 0 0 -1 0
5 0 0 0 0 0 1 0 -1 0 0 0 0 -1
6 0 0 0 0 0 0 -1 1 0 0 0 0 1
Легко убедиться, что уравнения математической модели асинхронного двигателя (5.131) можно получить непосредственно по матрице инциденций. Для получения полной математической модели рассматриваемого электропривода необходимо использовать матрицу инциденций (табл. 5.26) и матрицу трансформаторных элементов механической части системы. Читателю рекомендуется выполнить это самостоятельно.
224
Пример 5.13. Получить характеристики переходного процесса при пуске асинхронного двигателя 4А112М4 и разгоне той же механической системы, что и в примере 5.11, Параметры двигателя [36]: рп = 4; fT = 50 Гц; Рпом = 5,5 кВт;
Рис. 5.31. Графики переходного процесса электропривода с асинхронным двигателем: а — токи статора и ротора; б — моменты двигателя, сопротивления нагрузки и упругого элемента; в — угловые скорости ротора и приводимой массы; г — угловые ускорения; д — ток намагничивания; е — динамическая характеристика двигателя
225
AfHOM — 70 Н • м; ^1ф - 220 В ;
Ьг = 0,169 Гн; L2= 0,172 Гн;
./^ф — 11,1 А ; — 1,32 Ом;
R2 - 0,922 Ом;
Zq9ним = 0,164 Гн; номинальное скольжение А riUlVl ' '
shom - 0,035 ; момент инерции ротора Jp - 0,0206 кг • м2 ; cos ср = 0,882 ; ток холостого хода 10 = 3,86 А.
Принято 5 ступеней пускового реостата. Значения сопротивлений ступеней реостата (Ом) составляют следующий ряд: 16,0; 8,570; 4,318; 2,037; 0,730.
Взаимная индуктивность вычислялась по формуле
£12 = А2 ном [1 - ехр(-а/ц /10)].
При моделировании принято а = 1,897 .
На рис 5.31 приведены графики исследуемого переходного процесса.
15. Зак. 3006
6. МОДЕЛИРОВАНИЕ НЕЛИНЕЙНЫХ СИСТЕМ И СИСТЕМ С ВИРТУАЛЬНЫМИ И НЕГОЛОНОМНЫМИ СВЯЗЯМИ
6.1. ВИДЫ НЕЛИНЕЙНЫХ ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ ТЕХНИЧЕСКИХ СИСТЕМ
Нелинейной технической системой называется такая система, процессы функционирования которой описываются нелинейными дифференциальными уравнениями. Дифференциальное уравнение относится к классу нелинейных, если оно содержит нелинейные функции фазовых координат и (или) их производных.
Нелинейные свойства наиболее характерны для упругих и диссипативных элементов технической системы. Многие трансформаторные элементы обладают нелинейными характеристиками. На рис. 5.7, б показаны характеристики гидродинамического трансформатора, для которого зависимости коэффициента трансформации К и КПД Г] от передаточного отношения представляют собой нелинейные функции. Аналогичные зависимости характерны для параметров электрических трансформаторов. Фрикционные элементы также имеют нелинейные характеристики, обусловленные зависимостью коэффициента трения от относительной скорости скольжения и давления на поверхностях трения. Ярким примером нелинейной зависимости является характеристика кулоновского трения. Характеристика потерь при движении жидкости в трубопроводе также нелинейная.
227
Физические свойства элементов технической системы описываются компонентными уравнениями. Если в компонентном уравнении переменные типа потенциала и типа потока связаны нелинейной зависимостью, то элемент относится к нелинейным.
Нелинейные элементы технической системы можно разделить на следующие группы: статические и динамические, стационарные и нестационарные, однозначные и неоднозначные, одномерные и многомерные, симметричные и несимметричные относительно начала координат, непрерывные и с разрывами первого рода. Симметричные характеристики нелинейных элементов бывают нечетно-симметричные и четно-симметричные. Непрерывные бывают гладкие и с изломами.
На рис. 6.1 даны графики основных типов нелинейностей.
Рис. 6.1. Виды нелинейных характеристик: непрерывные (а, б — гладкие; в, г, д, з, и — с изломами); с разрывами первого рода (е, ж, к, л); симметричные (а, г, е — л); несимметричные (б, в, д); однозначные (а — ж); неоднозначные (з — л)
Нелинейный элемент называется статическим, если его уравнение не содержит производных от фазовых координат
y[!/(0, *i(0> xN(t), i] = 0, (6.1)
228
где Х]Х£), Х2(0, •••» — фазовые переменные на входе нели-
нейного элемента (обычно фазовые координаты типа потока); y(t) — фазовая переменная на его выходе (обычно фазовая переменная типа потенциала); t — независимая переменная — время.
Если же в уравнение (6.1) одновременно входят не только фазовые переменные, но и их производные, то элемент называется динамическим. Если функция у не зависит от времени, нелинейный элемент является стационарным, в противном случае — нестационарным. У однозначного нелинейного элемента выходная координата y(t) зависит только от значений входной координаты x(t), а у неоднозначного — не только от x(t) в данный момент времени, но и от предшествующего этому моменту времени характера ее изменения. Нелинейный элемент с неоднозначной характеристикой является динамическим, так как его характеристика описывается нелинейной зависимостью от функции x(t) и ее первой производной x(t) . Примерами таких элементов являются нелинейные элементы с характеристиками гистерезиса, зазора и др. (рис. 6.1, з — л).
Если на нелинейный элемент подается один входной сигнал x(t), элемент называется одномерным, а если несколько — многомерным (или сложным).
Большинство реальных элементов технической системы нелинейны. В зависимости от степени влияния на качественные и количественные результаты моделирования все нелинейности разделяют на две группы: несущественные и существенные. К первой группе относятся такие нелинейности, характеристики которых можно заменить линейными зависимостями без заметного искажения при этом моделируемого процесса функционирования объекта. Математические модели таких нелинейностей представляют собой непрерывные гладкие функции. Линеаризацию их осуществляют разложением в ряд Тейлора, сохраняя при этом только линейные члены ряда. Примеры использования ряда Тейлора для линеаризации приведены в разделах 8.7, 9.2, 9.6, 12.3.
Существенные нелинейности обычно описываются разрывными или неоднозначными функциями или функциями, имеющими изломы. К существенным могут быть отнесены также непрерывные функции с большой кривизной в исследуемой области изменения аргумента (например, характеристики диссипативных элементов гидравлической системы — см. раздел 3.9). Существенные нелинейности при имитационном моделировании не подлежат линеаризации, так как это может привести к недопустимому искажению результатов исследований. В этом и нет никакой необходимости, так как при имитационном моделировании анализ процессов функционирования технических систем осуще
229
ствляется на ЭВМ. Алгоритмическая форма используемой при этом математической модели не предъявляет никаких ограничений на функции, описывающие физические свойства элементов систем.
Вместе с тем при необходимости существенные нелинейности также могут быть линеаризованы. Существует несколько методов, среди которых наиболее широко применяются: метод гармонического баланса (или эквивалентной линеаризации) Н.М. Крылова и Н.Н. Боголюбова, метод гармонической линеаризации Е.П. Попова, метод статистической линеаризации И.Е. Казакова и Р. Бутона. Линеаризация существенных нелинейностей этими методами осуществляется обычно на метауровне проектирования при использовании частотных методов анализа. Гармоническую линеаризацию применяют для детерминированных систем, а статистическую — для вероятностных. Эти методы излагаются в учебниках по теории автоматического управления. Математические модели, рассматриваемые в данном учебнике и
применяемые на макро- и микроуровнях проектирования, не используют этих видов линеаризации.
6.2. МОДЕЛИРОВАНИЕ НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ
При проектировании технических систем наиболее часто используются типовые нелинейные характеристики элементов, приведенные на рис. 6.2. Дадим их математические описания, используя при этом наиболее часто встречающиеся названия нелинейностей.
Рис. 6.2. Типовые нелинейные характеристики
230
Нелинейные элементы с однозначными характеристиками.
Эти элементы относятся к статическим. Различают следующие элементы.
1. Зона нечувствительности (рис. 6.2, а) — характерна для механических трансформаторных элементов (зубчатых передач и др. механизмов). Статическая характеристика описывается следующими алгебраическими выражениями:
при х < с;
У =
k(x - с) при х > с;
k(x + с) при х < - с
(6.2)
где k === tga.
2. Зона насыщения — (ограничение выходной координаты у (рис. 6.2, б) — характерна для электрических трансформаторов (усилителей). Статическая характеристика описывается выражениями
kx
при х < с;
У =
ь
-ъ
при х > с;
при х < - с
(6.3)
где k = Ъ/с.
3. Зона нечувствительности и зона насыщения (рис. 6.2, в) — характерна для гидрообъемных и пневматических трансформаторных элементов (усилителей)
-Ъ
k(x + Ci)
0
k(x - Cj) b
У =
при х < -с2 ;
при - с2 < х < ;
при х < ;
(6.4)
при Ci < х < с2 ; при х > с2 ,
где k = b/(c2 - cj).
^. Идеальный релейный (рис. 6.2, г) — соответствует идеализированной характеристике двухпозиционных электрических приборов и описывается выражениями вида
У =
Ь
-Ь
при х > 0;
при х < 0,
(6.5)
5. Идеальный релейный с зоной нечувствительности (рис. 6.2, д) — соответствует идеализированной характеристике трехпозиционных электромагнитных приборов
231
при х < -с; при х < с;
(6.6)
при
х > с.
Нелинейные элементы с неоднозначными характеристика-
ми. Эти элементы относятся к динамическим. Различают сле-
дующие элементы.
1. Релейный с гистерезисом (рис. 6.2, е) — соответствует характеристике двухпозиционных переключающих элементов
при при при при
(6.7)
и зоной нечувствительности соответствует характеристике трехпозиционных
2. Релейный с гистерезисом (рис. 6.2, ж) переключающих элементов
при
при
при
(6.8)
при
при при
У =
У =
О
О
3. Люфт, зазор или сухое ны для механических передач k(x - с) k(x + с)
трение (рис. 6.2, з) — характер-
но)
У =
при х > 0;
при х < 0,
где k = tga.
Кроме рассмотренных типовых нелинейных характеристик
часто встречаются непрерывные неоднозначные характеристики произвольного вида (рис. 6.1, з). Для таких характеристик можно использовать кусочно-линейную аппроксимацию. Кусочнолинейная характеристика с петлей гистерезиса постоянной ширины (рис. 6.3, а) описывается следующими выражениями:
для 1-го кусочно-линейного участка
у = у± + С}(х - X}) + Az/sign х; (6.10)
для всех остальных участков
У = Уй-1 + cdx ~ xi-l) + Ay si£n x >
(6.П)
232
где xi9 уi— координаты i-й точки излома характеристики; — коэффициент, равный тангенсу угла наклона z-ro участка к оси х; Аг/ — половина ширины петли гистерезиса.
Рис. 6.3. Кусочно-линейная аппроксимация нелинейных характеристик: а — с петлей гистерезиса постоянной ширины;
б — с петлей гистерезиса, зависящей от координаты у
Если ширина петли гистерезиса зависит от выходной координаты у (рис. 6.3, б), используются следующие выражения:
для 1-го кусочно-линейного участка
У = [yi + Ci(x - Л71)](1 + /zsign х sign х); (6.12)
для всех остальных участков
У = [vt-l + ci(x -*i-l)](l + *sign х sign х), (6.13) где k — коэффициент, определяющий зависимость ширины петли гистерезиса от у.
При отсутствии гистерезиса Аг/ и k равны нулю.
6.3. МОДЕЛИРОВАНИЕ НЕЛИНЕЙНЫХ СИСТЕМ
Нелинейными свойствами обычно обладают упругие, диссипативные, трансформаторные и фрикционные элементы. Нелинейность элемента может обусловливаться некоторой зависимостью его параметра от фазовых переменных типа потока или типа потенциала или же нелинейной зависимостью между фазовыми переменными, характеризующими состояние элемента.
Первый вид нелинейности характерен для диссипативных элементов гидравлических и тепловых систем, для упругих эле
zoo
ментов гидравлических систем. В разделе 3.9 показано, что коэффициент гидравлического сопротивления участка трубопровода является функцией фазовой переменной типа потока: цг = f(Q), где Q — расход жидкости в трубопроводе. В результате диссипативный элемент гидросистемы оказывается нелинейным. Коэффициенты жесткости упругих элементов гидравлических систем зависят от давлений, т.е. от фазовых переменных типа потенциала. Теплофизические коэффициенты тепловых систем являются функциями температуры. Часто этими зависимостями пренебрегают, если диапазон изменения давлений или температур сравнительно небольшой. Тогда эти элементы рассматривают как линейные. Однако при учете упомянутых зависимостей компонентные уравнения элементов оказываются нелинейными.
Если нелинейность элемента обусловлена зависимостью его параметра от фазовых переменных, алгоритм формирования математической модели ничем не отличается от рассмотренных в главе 5 алгоритмов структурно-матричного метода. При использовании математической модели для анализа процесса функционирования системы в этом случае лишь необходимо на каждом шаге интегрирования системы дифференциальных уравнений изменять значения параметров элементов.
Параметры многих элементов механических и гидромеханических систем зависят не от принятых фазовых переменных типа потока (скоростей и расходов), а от геометрических координат, характеризующих положение сосредоточенных масс этих систем в пространстве. Например, коэффициент массы гидродвигателя тт зависит от положения поршня в гидроцилиндре тг = f(x), где х — перемещение поршня; коэффициент жесткости шины автомобиля зависит от величины ее деформации. В различных технических системах нередко используются элементы, характеризуемые сложными нелинейными зависимостями между фазовыми переменными. Иногда эти зависимости содержат производные фазовых переменных.
Если нелинейные характеристики элементов зависят от геометрических координат, то при построении математической модели технической системы приходится их включать в число базисных координат системы дифференциальных уравнений. Для механической поступательной системы в этом случае базисными координатами являются перемещения xt и скорости vt сосредоточенных масс. Следует отметить, что перемещения, так же как и скорости сосредоточенных масс, относятся к фазовым переменным типа потока.
Предположим, что компонентные уравнения упругих элементов технической системы, динамическая модель которой приведена на рис. 4.5, а, описываются некоторыми нелинейными
16. Зак. 3006
234
функциями вида Fv; = f(x), j = 1,2; где x — вектор перемеще-ний сосредоточенных масс. Математическая модель системы приведена в разделе 4.4. Она включает систему дифференциальных уравнений (4.22), компонентные уравнения диссипативных элементов (4.23), (4.24) и уравнение для определения реакции внешней среды (4.25).
Заменим два последних уравнения системы (4.22) уравнениями вида dxi/dt = vif i = 1,2. Тогда система дифференциальных уравнений примет вид
dv-yjdt ( + ^д1)/^1>
dv2/dt = (-Гв2 - Fyl - Гд1 + fy2 + -Рд2)/т2;
dx-^/dt = Uj;
dx2/dt = v2,
k (6.14)
где J’yi = Л(Х1, x2), Fy2 = f2(x2, хв1) — нелинейные функции, описывающие физические свойства упругих элементов; хв1 — функция микропрофиля опорной поверхности внешней среды (воздействие типа потока).
Для решения системы уравнений (6.14) необходимо задать начальные условия и i = 1,2 , и на каждом шаге интегрирования вычислять значения нелинейных функций Fyl и Fy%.
Формирование топологических уравнений системы (6.14), отображающих принцип Даламбера, и компонентных уравнений диссипативных элементов может осуществляться структурноматричным методом на основе использования матрицы инциденций. Алгоритм формирования двух последних уравнений системы (6.14) предельно простой. Для автоматизации формирования математической нелинейной системы необходимо иметь библиотеку стандартных функций = f (X) и Fyk = f(X, X), описывающих
характеристики типовых статических и динамических нелинейных элементов.
Характеристики наиболее часто используемых нелинейностей приведены в предыдущем параграфе. В технических системах встречаются и более сложные нелинейности, требующие составления математического описания. Рассмотрим пример одной из таких нелинейностей.
Пример 6.1. Построить математическую модель гасителя крутильных колебаний в трансмиссии автомобиля.
Гаситель предназначен для уменьшения амплитуд резонансных колебаний или устранения резонансных режимов. Вращающий момент двигателя внутреннего сгорания, применяемого на автомобиле, представляет собой периодическую
235
функцию. Разложением ее в ряд Фурье выделяют гармонические составляющие с соответствующими частотами. Резонансные режимы колебаний возникают при совпадении частот этих составляющих с собственными частотами колебательной системы двигатель — трансмиссия — ведущие колеса — кузов автомобиля.
Динамическая модель трансмиссии автомобиля с гасителем крутильных колебаний показана на рис. 6.4. Гаситель имеет ведущую и ведомую части и устанавливается на входном валу трансмиссии. Ведущая и ведомая его части соединены между собой упругим и фрикционным элементами. Упругий элемент гасителя характеризуется коэффициентом жесткости сг, углом замыкания фг и моментом предварительной затяжки пружин Мпр0, а фрикционный элемент — моментом трения Мф. В динамической модели (рис. 6.4) упругий элемент гасителя обозначен своим параметром сг, а фрикционный элемент — моментом трения Мф.
Рис. 6.4. Динамическая модель трансмиссии автомобиля с гасителем крутильных колебаний
Так как упругий элемент гасителя имеет предварительную затяжку, то при отсутствии резонансных режимов деформируется только упругий элемент с коэффициентом жесткости св (вал трансмиссии). При возникновении резонансных колебаний амплитудные значения момента Myi в упругом элементе начинают превышать момент предварительной затяжки пружин Мпр0 и момент трения фрикционного элемента гасителя Мф. В результате происходит деформация упругого элемента гасителя сг и относительное скольжение поверхностей трения его фрикционного элемента. Включение в работу упругого элемента значительно уменьшает общую жесткость упругих элементов, соединяющих сосредоточенные массы J\ и J2, снижая тем самым низшую собственную частоту колебательной системы трансмиссии и изменяя ее резонансные режимы. Выполняемая работа трения фрикционного элемента гасителя соответствует поглощаемой им энергии колебаний. Поглощение энергии колебаний гасителем приводит к значительному снижению амплитуды резонансных колебаний.
Однако угловая деформация упругого элемента гасителя не может превышать угол замыкания фг. Следовательно, деформирование его происходит в ограниченном интервале изменения вращающего момента. В результате характеристика эквивалентного упругофрикционного элемента, соединяющего в динамической модели сосредоточенные массы <J\ и J2, оказывается нелинейной: Afyi = /(Дф), где Дф =ф! — ф2; Ф1 и Ф2 углы поворота сосредоточенных масс и «^2* Характеристика эквивалентного нелинейного элемента гасителя крутильных колебаний Му1 = /(Дф) представлена на рис. 6.5, а.
При моделировании характеристики гасителя необходимо установить условия включения и блокировки его упругого элемента сг и определить коэффициент жесткости эквивалентного упругого элемента ci при различных условиях взаимодействия упругих элементов сг и св (рис. 6.4).
Рассмотрим процесс функционирования гасителя при угловой деформации нелинейного элемента Дер > 0 (рис. 6.5, а). Он включает три фазы.
Первая фаза соответствует угловой деформации только вала трансмиссии, т.е. упругого элемента с коэффициентом жесткости св. Величина угловой деформации находится в пределах
236
Дф < Дфн + (Мф sign Дф)/св, (6.15)
где Дсрн — деформация упругого элемента, соответствующая началу включения гасителя (без учета влияния фрикционного элемента); Дф — скорость изменения деформации.
Направление момента фрикционного элемента Мф всегда противоположно относительной скорости скольжения поверхностей трения (рис. 6.5, б), что учитывается функцией sign Дф в выражении (6.15).
Рис. 6.5. Характеристики эквивалентного нелинейного элемента гасителя крутильных колебаний (а) и фрикционного элемента (б)
Коэффициент жесткости эквивалентного нелинейного элемента в первой фазе ci = св, а его момент Му1 = свДф.
Во второй фазе включается гаситель и угловая деформация определяется двумя последовательно расположенными упругими элементами: гасителя сг и вала трансмиссии св. Величина угловой деформации в этой фазе находится в пределах
Дфн + (Мф sign Дф)/св <Дф < Дфк + (Мф sign Дф)/св, (6.16) где Дфк — деформация упругого элемента, соответствующая замыканию гасителя (без учета влияния фрикционного элемента).
При включенном гасителе коэффициент жесткости эквивалентного упругого элемента
с?1 свсг/(св"4_сг), (6.17)
а его момент
МУ1 = Мпр0 + Мф sign Дф + сг [Дф - Дфн - (Мф sign Дф)/ св J. (6.18)
Третья фаза соответствует замкнутому состоянию гасителя. Условие его замыкания имеет вид
Дф > Дфк + (Мф sign Дф)/св . (6.19)
Коэффициент жесткости упругого элемента после замыкания гасителя Cj = св, а момент определяется выражением
Му1 = МпрО + МФ sign Дф + Мт + сх[Дф - Дфк - (Мф sign Дф)/св], (6.20)
где Мг — момент замыкания пружин гасителя:
Л^г ^прк — -^прО Сгфг« (6.21)
Рассмотрим выражение (6.18). Подставим в него значение cj из формулы (6.17), а также значение момента предварительной затяжки пружин гасителя
237
Мпро = свА<Рв- После соответствующих преобразований получаем следующее выражение для определения момента нелинейного элемента во второй фазе процесса функционирования гасителя:
Му1 = СвСг ' А(Р + (Мф signДф+ М 0 sign Дф)———. (6.22)
св + сг св -+- сг
В этой формуле Мпр0 умножено на функцию sign Дер для возможности ее использования как при положительной, так и отрицательной угловой деформации упругого элемента.
Аналогичным преобразованиям подвергнем выражение (6.20). Учитывая выражение (6.21) и принимая во внимание, что Дфк=Дфн + Дфг> получаем
Му1 = свДф+(Мг - свфг) sign Дф. (6.23)
Здесь введена функция sign Дф с той же целью, что и в формуле (6.22).
Энергия колебаний, поглощаемая гасителем в течение конечного интервала времени £к, равна работе момента трения фрикционного элемента гасителя за это же время:
Wr = |мф|йфГ|^, (6.24)
О
где ®фГ — относительная скорость поверхностей трения фрикционного элемента гасителя:
СОфг [^в/(^'в ^вг)](®1 ®з)’ (6.25)
(91 и со2 — угловые скорости сосредоточенных масс и «72-
Значение сОфГ определяют только в периоды скольжения фрикционного элемента гасителя, соответствующие выполнению условия (6.16). Для замкнутого гасителя, т.е. в первой и третьей фазах процесса, принимают софг = 0.
6.4. СВЯЗИ ЭЛЕМЕНТОВ ТЕХНИЧЕСКОЙ СИСТЕМЫ
Движение элементов технической системы не может быть произвольным. Их взаимные перемещения в пространстве ограничены. Ограничения на изменения геометрических координат и скоростей движения элементов системы называют связями. Различают связи: геометрические (позиционные) и кинематические', удерживающие (двусторонние) и неудерживающие (односторонние); стационарные и нестационарные; голономные и не-голономные.
Движение элементов технической системы определяется не только приложенными к ним внешними воздействиями, но и наложенными на них связями, описываемыми в общем случае уравнениями вида
f(X,X,f)<0, (6.26)
где X — вектор геометрических координат, определяющих положение всех элементов технической системы в пространстве;
X — вектор скоростей этих элементов; t — время.
238
Связь на конкретную сосредоточенную массу системы может накладывать внешняя среда, либо другие сосредоточенные массы, взаимодействующие с данной массой.
В случае знака равенства в выражении (6.26) связь называется удерживающей, а если стоит знак неравенства, то связь называется неудерживающей.
Связь называют нестационарной, если уравнение связи содержит явно время t. В противном случае связь стационарная.
Связь, накладывающая ограничения только на геометрические координаты сосредоточенной массы технической системы, называется позиционной или голономной. Уравнение удерживающей голономной связи имеет вид
f(X,Z) = O. (6.27)
Если в уравнение связи наряду с геометрическими координатами входит скорость сосредоточенной массы, связь называется кинематической и описывается уравнением вида
/(х,х,О = о.
(6.28)
Если уравнение кинематической связи путем интегрирования нельзя привести к виду (6.27), то эта связь называется него-лономной или неинтегрируемой. Если же после интегрирования уравнение связи (6.28) приводится к уравнению вида (6.27), то связь, по существу, будет голономной.
Как отмечалось в разделе 3.2, при построении математической модели технической системы рекомендуется выбрать только независимые фазовые координаты типа потока. Если при выборе этих координат учесть наложенные на систему удерживающие го-лономные связи, то необходимость составления уравнений этих связей и их использования при моделировании исключается. Математические модели всех рассмотренных в предыдущих параграфах объектов построены с учетом этих рекомендаций.
6.5. МОДЕЛИРОВАНИЕ ТЕХНИЧЕСКИХ ОБЪЕКТОВ С НЕУДЕРЖИВАЮЩИМИ СВЯЗЯМИ
Неудерживающие связи в процессе функционирования технического объекта могут многократно возникать и исчезать. Поэтому такие связи называют также виртуальными. Эти связи могут накладываться как отдельными элементами самой системы друг на друга, так и внешней средой на некоторые элементы системы.
Примером технического объекта с виртуальными связями может быть гидропривод, динамическая модель которого показа
239
на на рис. 3.6. Перемещение поршней в цилиндрах ограничено длинами цилиндров, поэтому торцовые стенки цилиндров при соприкосновении с ними поршней накладывают на поршни вирту
альные связи, уравнения которых имеют вид
i = l,r,
О < Xi < Zjj,
(6.29)
где Xi — координата продольного перемещения поршня в цилиндре; Li — полный ход поршня, ограничиваемый длиной гидроцилиндра; г — количество виртуальных связей системы.
Пока удовлетворяется двустороннее неравенство (6.29), поршень может перемещаться в гидроцилиндре. Если оно нарушается, движение поршня блокируется.
На рис. 6.6 приведены динамические модели простейших механических систем с виртуальными связями. Предположим, что перемещения масс mi и m2 возможны только в вертикальном направлении. Тогда каждая масса имеет одну степень свободы, а система в целом — две степени свободы. Перемещение массы m2 (рис. 6.6, а) ограничено пределами 0 < Х2 < Z/2b- При нарушении этого неравенства возникает виртуальная связь, накладываемая внешней средой, и система лишается одной степени свободы. Если в процессе движения масс mi и m2 произойдет их соприкосновение, то в этом случае также будет наложена виртуальная связь, ограничивающая свободу их взаимного перемещения (рис. 6.6, б). Уравнение связи при этом имеет вид хг - х2 < L12 •
Рис. 6.6. Динамические модели механических систем с виртуальными связями: а — с внешней средой, б — между массами, в — орграф
240
Виртуальная связь не только изменяет число степеней свободы, но и превращает исходную линейную систему в нелинейную. Поэтому при моделировании таких объектов необходимо использовать однородный базис, принимая в качестве фазовых координат и , i = 1,п.
При возникновении виртуальной связи изменяется структура математической модели, что создает неудобства при моделировании. Однако этого можно избежать, применив прием обобщенного описания объекта переменной структуры, изложенный в разделе 4.5 при построении модели объекта с фрикционными элементами (см. пример 4.6).
Введем дискретные функции состояния виртуальной связи Hij . Индекс i соответствует номеру массы, на которую накладывается связь, а индекс j — отображает объект, ограничивающий перемещение данной массы. Определение этих функций зависит от способа наложения связи. Составим выражения для определения Hij на примерах объектов, представленных на рис. 6.6.
Виртуальная связь на рис. 6.6, а возникает либо при х2 < 0 , либо при х2 > Ь2в. В первом случае связь сохраняется,
если dv2 / dt <0 , а во втором — при dv2 / dt >0 . Функция Н2в определяется из условий
при х2 < 0 и dv2 / dt < 0;
при х2 > L2b и dv2 / dt > 0; в иных случаях.
(6.30)
Связь сохраняется, если Н2в = 1. При Н2в = 0 связь прекращается. Используя функцию Н2в , составим уравнения математической модели для объекта на рис. 6.6, а:
dv-Jdt = (FB1 - Fyl - Гд1 - Гу2 - F^/nty
dv2/dt = (Fb2 + Fy2 + ^Д2)(1 _-^2в)/т2 ; (6 31)
dx± I dt =
dx2 /dt -v2\
-^yl — > -^y2 ^2(^1 — ^2) ’ (6.32)
^д1 = Н1УЪ ^д2 = H2(yl -u2)- (6.33)
В момент возникновения виртуальной связи масса т2 становится неподвижной, поэтому необходимо принять v2 = 0, а х2 = 0 или х2 = L2b . Условие сохранения виртуальной связи про
241
веряется по знаку производной dv2 / dt, вычисляемой без учета
функции Н2в , полагая, что связь отсутствует.
Для объекта, представленного на рис. 6.6, б, виртуальная связь возникает при условии х± - х2 > Ь±2, когда массы и т2 приходят в соприкосновение. Связь удерживается до тех пор, пока dv2 / dt < di\ / dt. Значения производных dv± / dt и dv2 / dt
при этом вычисляются исходя из предположения отсутствия связи, т.е. при Н±2 = 0 . Выражение для определения функции со-
стояния виртуальной связи имеет вид
при Xi - х2 > 1^2 в иных случаях.
dv± / dt > dv2 / dt;
(6.34)
и
Математическая модель объекта в этом случае отличается от предыдущей модели только двумя первыми уравнениями системы (6.31):
dvr /dt = [fb1 + Fb2H12 - Fyl - - (Fy2 + F^2) x
dv2/dt = [FB1H12+FB2-(Fyl+Fnl)H12+
+ (-fy2 + Гд2)(1 _ H12)]/(m1H12 +m2).
В момент соприкосновения масс и т2 скорости их различны, поэтому необходимо определить начальную скорость их совместного движения по формуле
п0 = + 7п2р2) /(^ + т2) ’ (6.36)
а х1 скорректировать из условия х^ - х2 = Ь^2.
При Н}2 = 1 оба выражения (6.35) одинаковы, следовательно, dv± / dt - dv2 / dt.
Формирование топологических и компонентных уравнений можно легко осуществить структурно-матричным методом, аналогично тому, как это выполнено для объектов с фрикционными элементами (см. раздел 5.6).
Пример 6.2. Исследовать движение механической системы, динамическая модель которой представлена на рис. 6.6, б, при приложении к твердым телам гармонических воздействий FB1 = AF1 sin(coB1i + рг) и Fb2 = AF2 sin(coB2i + P2) c одинаковыми частотами сов1 = сов2 , но с противоположными фазами и Р2 •
Пусть тг = 0,2 кг; т2 = 1 кг; сг = 8,8л2 Н/м; с2 = 4л2Н/м; ц* = ц2 = = 0,5 Н с/м; £12= 0,01м. Зададим следующие значения параметров функций внешних воздействий FB1 и Fb2 : AF1 = AF2 = 0,15л2; сов1 = сов2 = Зл; = л; Р2 =0.
242
Математическая модель рассматриваемой системы соответствует уравнениям (6.32) — (6.36). Интегрирование системы дифференциальных уравнений осуществлялось методом Рунге-Кутта 4-го порядка (см. раздел 9.6) при начальных условиях xi0 = 0 ; vi0 = 0 .
На рис. 6.7, а показаны графики изменения координат хг и х2 твердых тел, а на рис. 6.7, б — их скоростей и и2. При достижении условия хт - х2 > L12 возникает виртуальная связь и удерживается в течение времени £в1 и iB2 (Рис- 6*7, «)• Массы mi и т2 при этом движутся совместно с одинаковыми скоростями (рис. 6.7, б). На рис. 6.7, в представлены графики усилий упругих элементов.
Рис. 6.7. Графики изменения координат (а), скоростей твердых тел (б) и усилий упругих элементов (в) механической системы
6.6. МОДЕЛИРОВАНИЕ НЕГОЛОНОМНЫХ СИСТЕМ
Система, на элементы которой наложены неголономные связи, называется неголономной. Неголономной связью называется кинематическая связь, выражаемая неинтегрируемой зависимостью между скоростями элементов системы,
Неголономные связи могут быть линейными и нелинейными. Линейные неголономные связи описываются линейными зависимостями между скоростями твердых тел системы, а уравне
ния нелинейных неголономных связей представляют собой нелинейные функции этих скоростей.
При проектировании технических систем часто ограничиваются линейными уравнениями неголономных связей.
Предположим, что движение технической системы описывается независимыми обобщенными координатами Q/, i = 1, п , где п — число этих координат, и на систему наложено N линейных связей вида п ___
^Aviqi+Av =0, v = l,N, (6.37)
i=l
где qi — обобщенная скорость; Avi , Av — коэффициенты уравнений неголономных связей.
Число степеней свободы системы в этом случае будет равно
s = п - N. (6.38)
Отметим одну особенность неголономных связей. Как известно, всякая голономная связь является также и кинематической, т.е. ограничения на геометрические координаты элементов системы накладывают одновременно ограничения и на их скорости. Наличие же неголономных связей может не влиять на независимость геометрических координат системы.
Неголономные системы широко распространены среди технических объектов. В качестве примеров неголономных систем можно назвать качение шара по плоской поверхности без скольжения, движение плоского конька относительно опорной поверхности без скольжения в боковом направлении и др. [4].
Наиболее ярким примером неголономной системы является автомобильное или тракторное колесо с эластичной шиной при его качении относительно опорной поверхности дороги. При проектировании любых колесных самоходных машин учитывают него лономную связь колес с дорогой. Неголономная связь имеет место как в продольной плоскости колеса, так и в поперечной.
Рассмотрим вначале связь ведущего колеса с дорогой в его продольной плоскости, используя схему плоской модели колеса, приведенную на рис. 6.8. Предположим, что внешнее скольжение (скольжение шины относительно поверхности дороги) отсутствует. Тогда скорость центра колеса (оси вращения обода колеса О) равна
(6.39) где гк — радиус качения колеса — расстояние от центра колеса до мгновенного центра скоростей при отсутствии внешнего скольжения; сок — угловая скорость вращения обода колеса.
244
Рис. 6.8. Схема плоской модели ведущего колеса
Экспериментально установлено, что радиус качения зависит от приложенного к колесу вращающего момента Мк:
гк = Гко - Мк/сш, (6.40)
где гко — радиус качения колеса при Мк = 0; сш — коэффициент окружной жесткости шины, зависящий от типа и конструкции шины.
Значение гко определяют экспериментально при качении колеса в ведомом режиме, т.е. при Мк = 0. При этом измеряют путь s, пройденный колесом за N его оборотов, а гко вычисляют по формуле
гк0 = s/(2nN).
(6.41)
Под действием момента Мк происходит окружная деформация элементов шины, в результате чего центр колеса смещается назад относительно центра опорной площадки А на величину %,
245
представляющую собой продольную деформацию шины. Относительное сжатие беговой дорожки шины в точке Е, входящей в контакт с дорогой, обозначим 8#. Определим скорость точки Е относительно точки О исходя из условия непрерывности кольцевого элемента беговой дорожки
Ve.oth Гс(1 ~ 8jp) С0к, (6.42)
где гс — свободный радиус колеса (наружный радиус колеса в не-нагруженном состоянии).
При установившемся равномерном качении без внешнего скольжения vxq - и# отн = 0. Относительное сжатие сечения беговой дорожки определяется суммой коэффициентов относительного сжатия, обусловленного нормальной нагрузкой на колесо Fz и вращающим моментом Мк, т.е. sE = 82 + 8Х. Значения 8г и 8Х определяются выражениями: 8г = brz/rz\ 8Х = Агх/гс, где brz = гс~ гк0; Дгх = гк0 - гк = Мк/сш, При определении ее исходят из условия независимости относительных сжатий беговой дорожки, обусловленных Fz и Мк (принцип суперпозиции).
Подставим значение гЕ в формулу (6.42):
~ ^с«>к[1 — (1 “ ^кО /гс)“ '^к/(7ссш)]* (6-43)
Введем обозначения
v0 = гс®к; Лиг = и0 С1 - гк0 Ас) = v0sz> Avx = и0Мк /(Wc) = v0Ex ’ где vq — скорость идеального колеса с несжимаемой эластичной беговой дорожкой (для такого колеса гк = гс ); — потеря ско-
рости, обусловленная нормальной нагрузкой F2 и определяемая коэффициентом 82 ; — потеря скорости, обусловленная вра-
щающим моментом Мк и определяемая коэффициентом 8Х.
С учетом этих обозначений получаем
vx0 = у0 - А»г - Avx. (6.44)
Иллюстрация зависимости, устанавливаемой выражением (6.44), дана на рис. 6.9.
При больших значениях Мк наступает внешнее скольжение колеса относительно дороги. Его можно отождествить с некоторым дополнительным сжатием сечения, учитываемым коэффициентом 8§ ,
Aus = v0Es = rc®Kes-
246
Рис. 6.9. Зависимости поступательной скорости центра колеса от вращающего момента 7ИК
Параметр es называют коэффициентом внешнего скольжения колеса.
Скорость центра колеса при возникновении внешнего скольжения
- Аи~ - Аи~ - Al>q, или после подстановки значений слагаемых и упрощения
~ ®к0кО ~ к / ~rc8s)- (6.45)
Зависимость VX ~ f(^K) также представлена на рис. 6.9.
Скорость центра колеса в общем случае движения может * *
vY = п. От, , где г„ — кинематиче-Л, Jly Jl\ ' r 1 JlV
* значение можно
быть выражена зависимостью
ский радиус колеса. Согласно формуле (6.45)
вычислить по формуле
гк = гк0 - Мк / сш - rces = гк - rcEs • (6-46)
Если + ех + es = 1, получаем гк = 0 , что соответствует полному буксованию колеса, так как vx = 0, а со к Ф 0 . При этом
значения коэффициентов ех и е2 характеризуют внутреннее скольжение шины, обусловленное ее деформацией, а значение коэффициента es — внешнее скольжение шины относительно до
роги.
Формула (6.45) удовлетворительно описывает связь колеса с дорогой в продольной плоскости при установившемся движении с постоянными значениями их,сок и Мк, или при незначительных плавных их изменениях. На самом же деле эти характеристики переменные и в результате различных воздействий на систему могут изменяться в широких пределах с достаточно большой скоростью. В результате в переходных процессах может возникнуть кинематическое несоответствие за счет изменения 8S и 7ИК. Момент 7ИК связан с продольной деформацией беговой дорожки % следующей зависимостью:
МК = С-/К гк0 > (6.47)
где — коэффициент продольной жесткости шины.
Но значение % изменяется не мгновенно, а с конечной скоростью %. Следовательно, в формуле (6.47) необходимо учесть за
паздывание продольной деформации шины для компенсации указанного несоответствия. Введя в ней скорость продольной деформации шины %, получим уравнение неголономной связи колеса в продольной плоскости
и + Х~(гкО -Мк/сш -rces)<BK =0. (6.48)
При движении колеса по неровностям дороги необходимо учитывать сглаживающую способность шины. В результате деформации шины и поверхности дороги площадка контакта представляет собой сложную поверхность, которую в первом приближении можно аппроксимировать плоскостью, наклоненной под углом осСр в продольном направлении и под углом Рср в поперечном. Тогда воздействие микропрофиля дороги , как видно из рис. 6.10, будет определяться углом наклона усредненной площадки контакта оссп(х) и средней высоты ординаты этой площад-ки Qcp(x). Скорость центра колеса в продольной плоскости в этом
Рис. 6.10. Схема плоской модели колеса при движении по дороге, характеризуемой функцией микропрофиля q(x)
Для малых углов otcp модуль скорости
V » £ + £аср . (6.49)
Предположим, что колеса повернуты относительно продольной плоскости симметрии машины на углы . Это необходимо
248
для того, чтобы обеспечивалось прямолинейное в среднем движение машины на дороге с поперечными уклонами или при действии на нее разворачивающего момента от агрегатируемой машины. Так как углы оску невелики, будем считать, что углы поворота обоих колес одного и того же моста одинаковы, т.е. ак/1 ~ aKi2 ~ aKi • Согласно схеме, приведенной на рис. 6.11, находим
iij =хс- Hta + (o,5By)j + (у + aKi^fc ± ^aKiy, (6.50) где В — колея машины (расстояние между колесами моста).
Точка С на рис. 6.11 соответствует центру масс машины. Остальные величины, входящие в выражение (6.50), также показаны на рис. 6.11.
В уравнении (6.50) и в последующем при наличии двух знаков перед слагаемым верхний относится к левому колесу или переднему мосту, т.е. соответствует переменным с индексами j = 1 или i = 1 , а нижний — к правому колесу или заднему мосту
Рис. 6.11. Схема к выводу уравнения неголономной связи, осуществляемой колесом машины в его продольной плоскости
249 (j = 2 или f = 2). Угол ockZ как передних, так и задних колес принимается положительным при повороте их влево.
Подставив значение v из формулы (6.49) в выражение (6.48) и учитывая (6.50), получаем уравнение неголономной связи любого ведущего колеса машины, осуществляемой в продольной его плоскости в общем случае движения,
Xii + хс+(у + aKi)yc - Hid. + (0,5Ву)у ± ltaKiy +
. / \ (6.51)
+ °^ср ~ \KOij ~ MKtj / Сш[ — rci^sij )®Kij = 0*
Если при движении машины на нее действует боковая сила (например, при поперечном уклоне дороги), то благодаря боковой эластичности шины движение ее может отклоняться от заданного направления. Это явление называют боковым уводом колеса. Оно описывается уравнением неголономной связи в поперечной плоскости колеса.
Для общего случая качения неприводного колеса (т.е. при Мк = 0) без учета внешнего скольжения шины академик М.В. Келдыш предложил следующие уравнения неголономных связей:
т] += 0; Q + y-vko~O, (6.52)
где р — поперечная составляющая скорости центра обода колеса; \р — скорость изменения поперечной деформации шины; v — скорость центра колеса; у — угол между линией пересечения диаметральной плоскости обода колеса с опорной плоскостью и касательной к отрезку оси поверхности контакта; 4 — угловая скорость обода вокруг вертикальной оси; у — скорость изменения угла у ; kQ — кривизна оси поверхности контакта: k$ = «jvpj -~а2Т-азФ» а1> а2> а3 — эмпирические коэффициенты; \р — поперечная деформация шины; ср — угловая деформация шины в результате бокового наклона колеса.
Принимая во внимание боковое скольжение шины, но пренебрегая углами наклона колеса ср и площадки контакта в поперечной плоскости, а также запаздыванием угловой деформации шины у по отношению к линейной поперечной деформации у , получим
<й + (йг///Су)(1 + /гпрИ + г]=0, (6.53)
где Ry — боковая реакция дороги: Ry = ; Ку — коэффици-
ент сопротивления уводу; /пр— функция проскальзывания шины
250 относительно поверхности дороги; — коэффициент боковой жесткости шины.
В уравнении (6.53) учтено, что /Ку = ai/#2 > а также то, что выражения (6.52) получены для движения колеса по горизонтальной поверхности при = v. Однако эти уравнения можно применять и при движении колеса по дороге с поперечным укло-ном рм .
Выразим поперечную составляющую скорости колеса f] через проекции центра масс машины на оси декартовой системы координат Оху г. Из кинематических соотношений, согласно схеме рис. 6.12, для любого колеса произвольного моста машины находим
Иг = -(г + ак/К +Ус ±(k +0,5BaKi)y. (6.54)
Рис. 6.12. Схема к выводу уравнения неголономной связи, осуществляемой колесом машины в его поперечной плоскости
251
При прямолинейном (в среднем) движении машины можно в уравнении (6.53) принять = хс . С учетом этого, а также по-
еле подстановки значения f] в выражение (6.53) получаем урав-
нение неголономной связи в поперечной плоскости колеса
0.
(6.55)
Приведенный пример показывает, что получение уравнений неголономных связей не может быть формализовано, так как приходится учитывать сложные факторы взаимодействия объекта с внешней средой и увязывать их с описанием конфигурации объекта. Поэтому необходимо создавать и использовать при моделировании технических объектов библиотеки уравнений неголономных связей.
7. КАЧЕСТВЕННЫЙ анализ и упрощение МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
7.1, ЗАДАЧИ КАЧЕСТВЕННОГО АНАЛИЗА МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
В предыдущих главах рассмотрены методы построения теоретических математических моделей, применяемых на микро- и макроуровнях проектирования технических объектов. При решении задач выбора структуры объекта и его основных параметров часто используются макромодели, представляемые системами обыкновенных дифференциальных уравнений или системами алгебраических уравнений.
На основе этих моделей проводят вычислительные эксперименты, имитируя режимы функционирования технических объектов. При этом задают некоторые стандартные (типовые) детерминированные или вероятностные воздействия на объект, что обеспечивает возможность сравнения вариантов технических решений в одинаковых условиях. Анализируя получаемые результаты, находят варианты, обеспечивающие высокие показатели качества и эффективности создаваемых объектов.
Наиболее часто при проектировании приходится решать задачи анализа статических состояний, переходных процессов и устойчивости объектов. В процессе анализа исследуются физические свойства технического объекта и оценивается степень
253
удовлетворения предъявляемых к нему требований. Анализ заключается в решении системы уравнений, составляющих математическую модель технического объекта, и определении по результатам решения показателей качества и эффективности. Однако методы анализа непосредственно не содержат рецептов по улучшению характеристик объекта. Несмотря на такой пассивный характер анализа, роль его в процессе проектирования очень велика. Как видно из рис. 1.1, процедура анализа является составной частью процессов оптимизации параметров объектов и синтеза их структуры.
Основными целями анализа каждого варианта технического решения являются: выявление функциональной работоспособности объекта и оценка выполнения технических требований к объекту.
Функциональная работоспособность технической системы определяется ее устойчивостью. Устойчивость — это способность системы возвращаться в исходное состояние равновесия после исчезновения внешних воздействий, которые вывели ее из этого состояния.
Оценка степени выполнения технических требований к технической системе осуществляется на основе системы показателей качества процесса функционирования. Они характеризуют свойство системы удерживать выходные параметры в заданных пределах на всех режимах ее работы, что позволяет осуществлять рабочий процесс с высокой эффективностью.
Показатели качества переходных процессов и методика их определения рассмотрены в разделе 9.11.
Системы уравнений математических моделей при проектировании технических объектов решают на ЭВМ численными методами. При построении модели проектировщики нередко учитывают излишние подробности в описании физических свойств объекта, не оказывающих существенного влияния на точность получаемых результатов моделируемых процессов. Модель в этом случае оказывается необоснованно сложной, что может явиться причиной неустойчивости вычислительного процесса, повышенных погрешностей или, в лучшем случае, излишних затрат машинного времени.
Неустойчивость вычислительного процесса выражается в неограниченном возрастании фазовых координат модели. Для устойчивой технической системы это противоестественно, так как она после прекращения внешнего воздействия всегда стремится к состоянию устойчивого равновесия. Неустойчивость вычислительного процесса для такой системы обусловлена расходящимся ите
254
рационным процессом численного метода решения системы уравнений. Но если техническая система обладает физической неустойчивостью, то при соответствующих воздействиях на нее фазовые координаты системы могут неограниченно возрастать. Таким образом, в обоих случаях вычислительные процессы будут расходящимися. В первом случае причина неустойчивости кроется в некорректности математической модели (плохой ее приспособленности к решению данным численным методом), а во втором — в физических свойствах технической системы.
В связи с изложенным возникает необходимость предварительного качественного анализа математической модели и обоснованного ее упрощения. Методы качественного анализа позволяют без решения системы уравнений математической модели оценить физические свойства технической системы: ее устойчивость и характер переходных процессов. Кроме того, качественный анализ математической модели необходим при выборе методов численного решения уравнений модели.
7.2. ОЦЕНКА СВОЙСТВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Пусть математической моделью технического объекта является система обыкновенных дифференциальных уравнений в нормальной форме Коши
dV------
— = F(V,t), (7.1)
dt
где V — вектор фазовых координат технического объекта: V = (vx, vn); п — порядок системы уравнений.
Если система уравнений (7.1) линейная, ее можно записать в виде
dV
— = AV + U, (7.2)
dt
где А — матрица постоянных коэффициентов — параметров математической модели, определяемых параметрами технического объекта; U — вектор функций внешних воздействий.
Матрицу А коэффициентов перед вектором фазовых координат в линейной системе обыкновенных дифференциальных уравнений в нормальной форме Коши называют матрицей Якоби и обозначают J. Матрица J квадратная, порядок ее и.
Матрицу Якоби нелинейной системы дифференциальных уравнений (7.1) определяют после ее линеаризации. Разложим нелинейную функцию F(V) в ряд Тейлора в окрестности некото
255
рой точки Vq и полученное разложение подставим в уравнение (7-1)
= F(V0) + ^(V - Vo) + |(V - V0)T --F(^o) (V - Vo) + -. (7.3) dt dV 2 dVz
где (V~Vq) — вектор отклонений фазовых координат искомой точки фазового пространства от точки с координатами Vq .
Матрица коэффициентов перед вектором V в линейной части ряда Тейлора (7.3) и есть матрица Якоби системы нелинейных дифференциальных уравнений (7.1)
J = 8F(V0)/dV. (7.4)
Элементами матрицы Якоби в этом случае являются частные производные от нелинейной вектор-функции F(V) = по фазовым координатам системы:
df2 dv1
_ dfi
Sv2 8vn df2 ^2 dv? dv„
(7.5)
б/n 8fn dfn
dvr dv2 dvn
Очевидно, что в нелинейной системе матрица J непостоянна и меняется при переходе от одной точки фазового пространства к другой» В линейной же системе матрица J = А постоянна, независимо от положения технической системы.
Аналогично определяется матрица Якоби для системы алгебраических уравнений F(V) = 0 .
Матрица Якоби характеризует важнейшие свойства физической системы, а также свойства уравнений математической модели. Она позволяет оценивать устойчивость технической системы без решения системы дифференциальных уравнений, определять качественный характер переходных процессов, частоты резонансных колебаний системы и формы колебаний. Кроме того, матрица Якоби используется для оценки так называемой жесткости системы уравнений математической модели.
Жесткой системой обыкновенных дифференциальных уравнений называют такую систему, у которой матрица Якоби
256
имеет различающиеся на несколько порядков максимальное и минимальное по модулю собственные значения.
Собственными значениями матрицы J порядка п называ-
ют корни k = 1, п , ее характеристического уравнения
det (J - КЕ) -О, (7.6)
где det — символ определителя матрицы; Е — единичная матрица того же порядка, что и матрица J.
В общем случае собственные значения матрицы J представляют собой комплексные числа
Ч = Re ()+/Im (), (7.7)
где Re (Х^) — вещественная часть собственного значения Х^
матрицы J; Im (Х^)— мнимая его часть; j = у-1 — мнимая еди
ница.
Множество собственных значений k = l,n называется
спектром матрицы Якоби.
Спектр матрицы J не только отражает физические свойства технической системы, но и оказывает влияние на характер вычислительного процесса при интегрировании системы обыкновенных дифференциальных уравнений. Жесткие системы дифференциальных уравнений требуют осторожного подхода к выбору метода интегрирования, контроля и анализа результатов решения, с тем чтобы избежать катастрофического увеличения ошибки накопления, которая может привести к неустойчивости вычислительного процесса.
Оценкой жесткости системы дифференциальных уравнений является число обусловленности матрицы Якоби
(7.8)
где
— норма матрицы J.
Иногда под числом обусловленности матрицы Якоби р. по-
нимают отношение максимального и минимального по модулю ее собственных значений:
ц = max jX^, / min |Х^> |; (7.9)
К жестким относят системы дифференциальных уравнений,
5
у которых ц > 10 . Эти системы также называют плохо обуслов
ленными.
Математические модели технических объектов довольно часто оказываются плохо обусловленными. Одна из причин этого заключается в стремлении многих проектировщиков учитывать как можно большее количество элементов технического объекта.
257
Это приводит к необоснованно широкому спектру резонансных частот динамической модели объекта, причем высшие резонансные частоты при этом могут значительно превышать частоты внешних возмущающих воздействий и практически не влиять на характеристики исследуемых процессов функционирования объекта. Такую модель следует признать чрезмерно подробной и необоснованно сложной. Численное решение уравнений в этом случае значительно затрудняется: возрастают погрешности, существенно увеличиваются затраты машинного времени, а в некоторых случаях вычислительный процесс может оказаться неустойчивым. Результаты решения при больших погрешностях бесполезны.
При построении математической модели проектируемого объекта часто бывает трудно избежать избыточности в отображении его физических свойств из-за отсутствия априорной информации об объекте. Поэтому после построения математической модели необходимо провести анализ спектра матрицы Якоби, сравнить получаемые резонансные частоты с частотами внешних воздействий и в случае значительного превышения первых над вторыми осуществить упрощение динамической модели объекта. Способы упрощения моделей будут рассмотрены в разделах 7.6 и 7.7.
В некоторых технических системах используются разнородные физические элементы, значительно различающиеся скоростями протекающих в них процессов. Пренебречь этими элементами нельзя из-за опасности потери адекватности математической модели. Тогда целесообразно разделить техническую систему на блоки с существенно различными физическими свойствами и раздельно интегрировать системы уравнений, описывающие процессы в этих блоках, с различными шагами и периодическим согласованием результатов, получаемых для каждого блока. Такой алгоритм анализа технической системы называют диакоптиче-ским»
7.3. СОБСТВЕННЫЕ ЗНАЧЕНИЯ МАТРИЦЫ ЯКОБИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Методы вычисления собственных значений и собственных векторов матрицы делятся на две группы: прямые и итерационные.
В прямых методах обычно строится правило вычисления коэффициентов характеристического полинома матрицы, после чего собственные значения находятся как корни этого полинома по какому-либо численному методу. Затем вычисляются собственные векторы.
17. Зак. 3006
258
В итерационных методах коэффициенты характеристического полинома непосредственно не вычисляются, а строятся некоторые итерационные последовательности, позволяющие найти одно или несколько, а иногда и все собственные значения матрицы. Итерационные методы более трудоемкие, чем прямые, однако они менее чувствительны к ошибкам округлений и поэтому надежнее прямых методов.
Пусть А = (a,ij), г = 1,п; / = 1,п, — некоторая квадратная
матрица. Введем вектор х = (х1?х2,...,хп)Т и составим выражение у = Ах. Если окажется, что элементы вектора у пропорциональны элементам вектора х с коэффициентом пропорциональности X , то это выражение можно записать в виде
Ах - X х = 0 , или
(А - X Е)х = 0 , (7.10)
где Е — единичная матрица того же порядка, что и матрица А.
Составим определитель матрицы (А - X Е):
«И-X «12 ... а1п
det (А - ХЕ) =
а21 а22~^ ••• а2п
(7.11)
ап1
ап2
••• апп
Раскрыв этот определитель, получим полином степени п от
7?
X со старшим коэффициентом (-1)
п det(A-XE) = (-1)П?Л + =0, (7.12)
1=1
где bf — коэффициенты полинома.
Обозначим
рп(к) = (-i)"x” + п~1
i-1
(7.13)
Полином Рп(Х ) называется характеристическим (собственным ) полиномом матрицы А, Обозначим корни этого полинома через Xi,Х2,...,Хп . Корни характеристического полинома матрицы А называются ее собственными значениями. Собственные значения характеризуются тем, что однородная система алгебраических уравнений (7.10) имеет ненулевое решение в том ------------------------ п случае, когда X = Х}9 i = l,n. Ненулевое решение системы (7.10),
259
взятое при к = 7^, называется собственным вектором матрицы
А, соответствующим собственному значению Xf.
Существует множество методов вычисления собственных значений и собственных векторов матрицы. Один из них предложил академик А.Н. Крылов. Для иллюстрации идеи метода он использовал систему однородных обыкновенных дифференциальных уравнений с постоянными коэффициентами
dyi dt <±У2 dt
^Уп dt
= «11J/1 + а12У2+---+а1пУп’
= а21У1 + а22У2+---+а2пУп>
(7.14)
~ ап1У1 + ап2У2+---+аппУп-
Матрицей Якоби этой системы является матрица А постоян-
ных коэффициентов ау при искомых переменных z/y . Если систему уравнений первого порядка (7.14) удается свести к одному дифференциальному уравнению порядка п с постоянными коэффициентами
dny dtn
d^y dt11-1
dtn~2
+• • -+ЬпУ,
то по виду уравнения легко записать его характеристическое уравнение, корни которого будут совпадать с корнями уравнения (7.13). Полученное дифференциальное уравнение целесообразно записать в операторной форме
(.Рп - biP11-1 - b2pn~2-...-bn)y(t) = О,
где р = d / dt — оператор дифференцирования.
Заменяя оператор р на X , получаем искомое характеристическое уравнение
X" -b2Xn-2 =0.
Одним из первых прямых методов решения рассматриваемой задачи был метод Леверье. Идея метода состоит в использовании известных из алгебры формул Ньютона
kbk = Sk - biS^-1 - b2Sk-2~- -bk-lsl =
k-1 --- (7.15)
= Sk - ^btSk_f, k = l,n.
i=l
260
Формула Ньютона связывает коэффициенты fy характеристического полинома (7.13) матрицы А с симметрическими функциями его корней X , вычисляемыми по формуле
Sk = k = l,n.
1=1
(7.16)
Функции представляют собой следы степеней k матрицы А.
Следом матрицы называется сумма ее диагональных элементов и обозначается SpA. Следы степеней k = l,n вычисляют по формулам
Si = Sp А =
i=l
S2 = Sp А2 =
i=l
(7.17)
S„=SpAn = £a<«>. i-1
Если значения известны, то формулы Ньютона (7.15) позволяют последовательно вычислять коэффициенты характеристического полинома матрицы:
= si;
ъ2 = 7^S2 ~ blslY>
b3 = |(«3 - М2 - Ml); (7.18)
О
bn = ~(Sn - blSn-l - Ь2«п-2---Ьп-1«1). n
Следует отметить, что при вычислении коэффициентов по формуле Ньютона они получаются со своими знаками. Если характеристический полином РП(Х ) формировать согласно выражению (7.13), в котором коэффициенты принимаются по модулю, вычисление их можно осуществлять с использованием рекуррентного выражения
261
i, k = 1, n
(7.19)
в котором bQ = 1.
Таким образом, для нахождения характеристического полинома РП(Х) матрицы А нужно по этой матрице составить матрицы
А^, А3,..., Ап , причем, А^ = А А, А^ = А^ А и т.д., подсчитать следы =SpA^ , k = l,n, этих матриц, по формуле (7.19) получить коэффициенты и на основании выражения
(7.13) сформировать искомый полином РП(Х ).
Рассмотрим пример на определение собственных значений
матриц методом Леверье.
Пример 7.1. Найти собственные значения матрицы
1 4
3 2
2 1
Вычислим А2 и А3 :
32
26
12
16
16
9
26
20
9
234 .
. 114 .
. 75
2
3 _ л2
По формулам (7.17) вычислим функции SltS2,S3 — следы матриц
А,А2,А3 : Sj = 5 + 3 + 1 = 9; S2 = 32 + 16 + 9 = 57; S3 = 234 + 114 + 75 = 423.
Используя выражение (7.19), вычислим коэффициенты характеристического полинома bt : bQ = 1; b± = = 9; b2 = 0,5^ S-l - b0S2) = 12; b3 = (1 / 3)(b2Si ~
-&1S2 -b0S3) = 6.
Подставим полученные значения в (7.13) при п - 3:
-X3 + 9Х2 -12Х + 6 = 0.
Применяя метод Ньютона для решения этого уравнения, вычислим значение Хх = 7,505. Тогда его можно представить в виде
(X2 - 1,495Х + 0,78)(Х - 7,505) = 0.
В результате получаем собственные значения матрицы А:
Xi = 7,505; Х2>3 = 0,7475 ± j 0,438.
Алгоритмы определения собственных значений и собственных векторов матриц, предназначенные для реализации на ЭВМ, в основном используют итерационные методы. Один из наиболее изящных итерационных методов решения полной проблемы собственных значений предложил Якоби в 1846 г. Метод Якоби можно использовать для нахождения всех собственных значений и соответствующих им собственных векторов. Суть метода состоит в том, что исходную симметрическую матрицу в процессе итерационной процедуры приводят к диагональному виду с помощью
262 последовательных элементарных ортогональных преобразований. Элементы полученной диагональной матрицы и есть собственные значения исходной матрицы А. Преобразования называют вращениями Якоби или плоскими вращениями.
Процедура вращения построена таким образом, что на (&+1)-м шаге осуществляется преобразование вида
Ak^Ak+1^UlAkUk, (7.20)
где Uk q, ср) — ортогональная матрица, отличающаяся от
единичной только элементами Upp = Uqq = cos ф ; Upq = -Uqp = = sin ф .
Угол ср называется углом вращения. Он выбирается таким образом, чтобы аннулировать максимальный по модулю элемент dpq в матрице А в процессе ее последовательных преобразований согласно процедуре (7.20). Элемент apq ищут среди наддиагональных элементов матрицы А^ .
Матрица имеет вид
"1 О'
« о !
1 cos ср ... . - sin ср . 1
1 sin (р cos ф
1
0 1
Метод Якоби позволяет выполнить с определенной точно-
стью преобразование исходной матрицы А к виду
Ak+1 = U%AUkD, (7.22)
где D — диагональная матрица.
Матрица D является пределом, к которому стремится последовательность матриц Afc при & —> оо , а — произведение всех
263
промежуточных матриц плоских вращений, используемых для диагонализации исходной матрицы, т.е.
Uk=U0U1U2.... (7.23)
Близость матрицы к матрице D характеризуется
числом
*2(а>= £
Z,7=l,i=7
Для этой цели может быть использована также любая норма матрицы - D .
Подробное изложение проблемы собственных значений не является целью данной книги. Для углубленного ознакомления с этой проблемой можно воспользоваться многочисленной литературой по численным методам, например [3, 8, 10].
7.4. ОЦЕНКА ФИЗИЧЕСКИХ СВОЙСТВ ТЕХНИЧЕСКОЙ СИСТЕМЫ ПО СПЕКТРУ МАТРИЦЫ ЯКОБИ
По спектру матрицы Якоби можно оценить устойчивость линейной динамической системы и характер переходных процессов. Понятие устойчивости системы связано со способностью ее возвращаться с определенной точностью в состояние равновесия после исчезновения внешних воздействий, которые вывели ее из этого состояния. Если система неустойчива, то она не возвращается в состояние равновесия, а либо удаляется от него, либо совершает вокруг него колебания с недопустимо большими амплитудами.
Следует отметить, что большинство реальных физических систем нелинейные. Но на ранних стадиях проектирования часто применяют для их описания системы линейных дифференциальных уравнений, т.е. по существу осуществляют линеаризацию математической модели технической системы. Для нелинейных систем существует понятие устойчивости в малом и устойчивости в большом. При малых отклонениях от положения равновесия нелинейная система может быть устойчивой, а при больших — неустойчивой. Поэтому нельзя ограничиться анализом устойчивости линеаризованной системы. Устойчивость в большом может быть определена лишь на основе решения уравнений нелинейной математической модели. Обычно такой анализ выполняется на заключительной стадии проектирования, а на начальных стадиях ограничиваются анализом устойчивости линеаризованной системы по спектру матрицы Якоби.
Оценка устойчивости является одной из первостепенных задач проектирования. Если рассматриваемый вариант структуры
технической системы не обладает устойчивостью, он не может быть использован для дальнейшей разработки конструкции.
Равновесный режим устойчивой технической системы, при
котором все ее фазовые координаты , i = 1, п , остаются посто
янными, устанавливается по истечении некоторого интервала времени после приложения внешних воздействий. При этом внешние воздействия должны быть постоянными и в дальнейшем не изменяться. Классификация и характеристики режимов функционирования технических объектов рассмотрены в разделе 1.6. Установившийся равновесный режим может быть нарушен вследствие изменения внешних управляющих или возмущающих воздействий, структуры технической системы (в системе с переменной структурой) или начальных условий (в процессе вычислительного эксперимента). В этом случае возникнет режим неуста-новившегося состояния системы, характеризуемый изменением ее фазовых координат во времени (£) . Неустановившееся состояние
физической системы характеризуется избытком или недостатком энергии ее источника, необходимой для привода рабочих органов или передаваемой внешним потребителям, что приводит к изменению режима ее работы.
Определим условия, которым должна удовлетворять линеаризованная математическая модель, чтобы техническая система была устойчивой и имела затухающие переходные процессы. Систему из п уравнений первого порядка (7.2) приведем к одному дифференциальному уравнению n-го порядка относительно некоторой фазовой переменной и:
+ Й„Р =
dmq ат~\
со + С1 т-1
dtm dt 1
dq dt
(7.24)
+... + Сот_]_
+ >
где q — одно из внешних воздействий на систему (функция времени).
Так как для линейной системы применим принцип суперпозиции, то можно получить решения v;(q;9t) для всех внешних
воздействий q^j = 1,L , где L — количество внешних воздействий. Результирующее решение будет равно сумме всех составляющих решений. Поэтому будем рассматривать лишь одно внешнее воздействие qj - q .
Запишем дифференциальное уравнение (7.24) в операторной форме:
265
(bopn + 1 +... + Ъп_гр + bn)v(t) = (7
= (copm +c1pm~1 +... + cm^p + cm)q(t), где p = d/dt — оператор дифференцирования.
Решение этого неоднородного дифференциального уравнения представляет собой сумму двух решений — частного решения неоднородного уравнения и общего решения однородного уравнения (однородное уравнение получают из неоднородного, приравнивая нулю его правую часть). Первое слагаемое определяет вынужденную установившуюся составляющую ив(£), второе — переходную составляющую i?n(f), характеризующую свободный переходный процесс исследуемой системы:
= ив(*) + рп(^) • (7.26)
Техническая система будет устойчивой, если переходная составляющая с течением времени затухает, т.е. выполняется условие
lim vn(t) = 0 . (7.27)
t—>00
Если с увеличением времени t переходный процесс расходится, т.е.
lim vn(f) = 00 , (7.28)
t—>оо
то техническая система будет неустойчивой.
Системы, в которых переходный процесс с течением времени не расходится и не затухает, называются находящимися на границе устойчивости.
Характер изменения переходной составляющей линейной технической системы зависит только от ее физических свойств, описываемых левой частью уравнения (7.25), т.е. однородным дифференциальным уравнением
(bopn + bxpn^ + ... + bn_xp + bn) v(t) = О . (7.29)
Поэтому свойства линейной системы изучают на основании анализа функции ип(£), представляющей собой общее решение уравнения (7.29). Это решение ищут в виде
”n(O=£Cz e^ = 2>ni(*b (7.30)
i=l i=l
где Ci — постоянные интегрирования, определяемые из начальных условий; Xi — корни характеристического уравнения; иш(0 — слагаемое свободного переходного процесса, соответствующее корню .
18. Зак. 3006
266
Характеристическое уравнение составляется непосредственно по виду однородного дифференциального уравнения (7.29)
Ь07п + /;1//г4+...+д,г1Л + Ъп = О . (7.31)
Характеристическое уравнение (7.31) является одновременно характеристическим полиномом матрицы Якоби системы линейных обыкновенных дифференциальных уравнений (7.2), а множество его корней X [, i = 1, п, составляет спектр матрицы Якоби. Количество корней п равно общему порядку системы уравнений (7.2).
Среди множества корней характеристического полинома могут быть вещественные корни Xj = сц, комплексные попарносопряженные Xj = ctj ± /coj, мнимые Xj = ±jC0j, нулевые Xj= 0.
Рис. 7.1. Изображение корней характеристического полинома на комплексной плоскости
Корни Xj представляют собой векторы, которые можно изобразить на комплексной плоскости (рис. 7.1). Модуль и аргумент вектора Xj находят по формулам:
|Хх| = y/af+(of ; (7.32)
<рг = argXf = arctg (сог / af), (7.33)
где otj — вещественная часть i-ro собственного значения матрицы Якоби; соj — мнимая его часть.
Если все корни разные, их называют простыми. Если среди корней есть одинаковые, то их называют кратными.
Собственные значения матрицы Якоби определяются только
коэффициентами дифференциальных уравнений А = (ау ), т.е. элементами матрицы Якоби. Но эти коэффициенты зависят толь
ко от параметров инерционных, упругих, диссипативных и трансформаторных элементов динамической модели технической системы и не зависят от параметров внешних воздействий. Следовательно, матрица Якоби и ее спектр характеризуют внутренние физические свойства технической системы и определяют характер переходных процессов в системе.
Постоянные интегрирования Cj, в отличие от собственных значений матрицы Якоби, зависят не только от параметров элементов динамической модели, но и от внешних воздействий на систему, т.е. зависят от матрицы А и вектора U в уравнении (7.2).
267
Поэтому вид характеристики переходного процесса ип(£) определяется как левыми, так и правыми частями дифференциального уравнения (7.24).
Рассмотрим i-e слагаемое свободного переходного процесса, определяемое i-м собственным значением матрицы Якоби для
различных случаев.
Вещественный корень. Предположим, что Xj = ctj. Тогда
слагаемое vni(t) представляет собой экспоненту
Рис. 7.2. Графики свободного движения при вещественных корнях характеристического полинома:
1 — а^<0;2 — ai > 0 ;
3 — a, = О S'
(7.34)
В зависимости от значения ос; графики свободного движения могут иметь различный вид, изображенный на рис. 7.2. Кривая 1 соответствует а/ < 0, кривая 2 — ctj > 0, кривая 3 — а$ = 0 . Следовательно, при ctj < О переходный процесс затухает, а при ctj > О он не затухает, а расходится и значение функции vnt (t) по истечении определенного интервала времени возрастает до бесконечности.
При ctj = О любое достигнутое положение системы после снятия внешнего воздействия сохраняется неизменным и система
не возвращается в исходное положение.
Комплексно-сопряженные корни. Комплексные корни все-
гда попарно-сопряженные, т.е. корень Xj = ос j + jcoj сопутствует
корню Xi+1 = at - jot.
Согласно формуле Эйлера е±] = cos со^ ± j sin ®jt. Под-
ставляя в уравнение (7.30), находим слагаемое, соответствующее паре комплексно-сопряженных корней:
Упг(0 = Cie^+^ + сме^-^ = A^sin^t + cpj, (7.35) где At и ср j — новые постоянные интегрирования.
Это слагаемое имеет колебательный характер (рис. 7.3). Однако и в этом случае при ос j < 0 колебания затухают, а при di > 0 — расходятся. При ос j = 0 колебания гармонические незатухающие.
268
Рис. 7.3. Графики свободного движения при комплексно-сопряженных корнях характеристического полинома: а - а$< О; б - а/> О; в - а/= О
Частота колебаний СО/ слагаемого vni(t) соответствует мнимой части пары комплексно-сопряженных корней. Она представляет собой одну из резонансных частот технической системы. Если ocz = 0, то (В/ совпадает с i-й собственной частотой технической системы.
Кратные корни. Если имеется г кратных корней 7-t , то в (7.30) появляются слагаемые вида
vni(0 =(Cz,r-i#r-1 + ... + С(1( + С;0)еЧ (7.36)
Если корень Xj = GCf ± jcOj имеет отрицательную веществен-
X t
ную часть а/ < 0, то множитель е 1 будет с течением времени убывать. Множитель же в скобках неограниченно возрастает. Од-нако известно, что е 1 1 быстрее стремится к нулю, чем растет г—1
Q,r-1^ ’ поэтому при ocz < 0 эта группа слагаемых с течением
времени убывает.
Проведенный анализ функций vni(t) показывает, что
0, если ос,- <0;
не существует (либо равен Q при coz = 0), если а/ = 0;
оо, если ос,- >0. у t-
На основании (7.30) можно записать выражение для ческой системы в целом
lim ип(£) = 22 Q lim e^lt •
lim uni(t) =
t—>OO
(7.37)
техни-
(7.38)
269
Из выражения (7.38) следует, что для устойчивости технической системы необходимо, чтобы все составляющие свободного переходного процесса были затухающими. Это дает возможность сформулировать условие устойчивости линейной системы: для устойчивости линейной системы необходимо и достаточно, чтобы вещественные части всех собственных значений матрицы Якоби системы уравнений математической модели были отрицательны. В этом случае на комплексной плоскости все корни располагаются в ее левой полуплоскости.
Если в спектре матрицы Якоби имеется хотя бы одно собственное значение с положительной вещественной частью, система будет неустойчивой.
Если хотя бы одно собственное значение матрицы Якоби нулевое или имеется пара мнимых собственных значений, а вещественные части всех остальных собственных значений отрицательны, то линейная система находится на границе устойчивости. Такой вариант технической системы называют критическим.
Различают апериодическую и колебательную границы устойчивости. Система находится на апериодической границе устойчивости, если имеется хотя бы одно нулевое собственное значение матрицы Якоби, и на колебательной, если имеется хотя бы одна пара мнимых собственных значений. В последнем случае в системе устанавливаются незатухающие гармонические колебания.
Устойчивость технической системы по спектру матрицы Якоби можно оценивать лишь в том случае, если она описывается линейной системой дифференциальных уравнений. Нелинейная система уравнений должна быть линеаризована путем разложения нелинейных функций в ряд Тейлора. Если при анализе устойчивости такой системы окажется, что она находится на границе устойчивости, дать оценку ее устойчивости по спектру матрицы Якоби невозможно. В этом случае задачу оценки устойчивости можно решить лишь на основе интегрирования исходной нелинейной системы дифференциальных уравнений.
Рассмотренные условия оценки устойчивости впервые изложены в известных теоремах А.М. Ляпунова.
По спектру матрицы Якоби линейной системы обыкновенных дифференциальных уравнений можно также сделать суждение о следующих физических свойствах технической системы.
1. При наличии ненулевых мнимых частей у одной или нескольких пар собственных значений переходные процессы в технической системе будут колебательными.
270
Однако такой характер переходных процессов в указанном случае наблюдается не всегда. Характеристика для любой
фазовой координаты технической системы, согласно выражению (7.30), состоит из суммы составляющих, каждая из которых определяется собственным значением X/ и постоянной интегрирования Ср Вместе с тем у разных фазовых координат эти составляющие для одного и того же собственного значения различны. В этой связи если у данной системы имеются как комплексносопряженные, так и вещественные собственные значения, то характеристики переходных процессов по всем или по части фазовых координат могут оказаться апериодическими. Особенно это характерно для случаев, когда резонансные частоты со/ принадлежат высокочастотной области, так как колебания в ней очень быстро затухают.
2. Множество значений мнимых частей со/ представляет собой дискретный спектр резонансных частот технической системы.
При совпадении частоты внешнего гармонического воздействия с одной из резонансных частот системы в ней могут возникнуть вынужденные колебания с большими амплитудами. Такие режимы работы технической системы называют резонансными,
3» Среди колебательных систем выделяют такие, у которых |coz | » |az для некоторых собственных значений. Такие системы называют многопериодными. Они имеют медленное затухание переходного процесса. Время затухания включает в себя большое количество периодов колебаний.
4. Если все собственные значения матрицы Якоби числа вещественные, то характер переходных процессов в системе апериодический.
В заключение отметим, что оценку устойчивости можно осуществлять не только по спектру матрицы Якоби. В теории автоматического управления разработаны и широко применяются алгебраические критерии устойчивости Гурвица, Рауса, Льенара и Шипара. Особенно удобен алгоритм, предложенный в 1877 г. английским математиком Э. Раусом. Алгебраические критерии не требуют выполнения весьма трудоемкой процедуры определения корней характеристического полинома, однако составление этого полинома и определение его коэффициентов необходимо, а это наиболее сложная часть задачи, особенно для системы дифференциальных уравнений высокого порядка. В связи с этим более целесообразно для оценки устойчивости использовать спектр матрицы Якоби, тем более, что он дает значительное количество полезной информации о физических свойствах системы.
271
7-5. ТОПОЛОГИЯ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ТЕХНИЧЕСКИХ СИСТЕМ
Динамические модели технических объектов классифицируют в зависимости от их конфигурации. Различают цепные, разветвленные и кольцевые модели. В цепной модели (рис. 7.4, а) инерционные элементы последовательно чередуются с упругими и диссипативными элементами и образуют разомкнутую цепь. Между инерционными и упругими элементами цепной динамической модели могут располагаться трансформаторные и фрикционные элементы (см. рис. 5.5, а, 5.8, а, 5.14, а).
На рис. 7.4, б показана кольцевая динамическая модель: последовательное чередование инерционных элементов с упругими и диссипативными образует кольцевое соединение.
Разветвленные модели приведены на рис. 7.4, в, г, д. Разветвление можно осуществлять на инерционном элементе (рис. 7.4, в) или на упругом (рис. 7.4, г и д}. Упругий элемент в последнем случае осуществляет дифференциальное соединение ветвей динамической модели. Такое соединение характерно для механических приводов рабочих органов машины при использовании дифференциальных механизмов (например, межколесных и межосевых дифференциалов автомобилей) и для гидроприводов при ветвлении гидравлических магистралей (например, приводов колесных тормозных механизмов автомобилей и других транспортных средств).
Если учесть упругие свойства подвески при установке различных взаимодействующих механизмов на рамах машин, то в динамических моделях такие механизмы также получают дифференциальное соединение между собой и внешней средой. При этом в соединении с внешней средой появляются реактивные элементы — инерционные, упругие и диссипативные. На рис. 7.4, д дана иллюстрация такой модели. В этой модели к реактивным относятся элементы с параметрами J5, с4 и ц4. Момент инерции J5 соответствует моменту инерции механизма как интегральной сборочной единицы, входящей в состав технического объекта и имеющей автономную систему упругой подвески. Значение момента инерции механизма определяется относительно оси его поворота, допускаемого системой подвески. Упругие и диссипативные свойства подвески механизма учитываются параметрами с4 и ц4.
Динамические модели могут одновременно иметь кольцевые (гираторные) соединения инерционных элементов и разветвления, как показано на рис. 7.4, е.
В любом месте каждой из приведенных на рис. 7.4 моделей могут быть установлены трансформаторные и фрикционные элементы в соединении инерционных и упругих элементов.
272
Рис. 7.4. Динамические модели вращательных механических систем: а — цепная; б — кольцевая; в, г, д — разветвленные;
е — кольцевая с разветвлениями
Приведенные на рис. 7.4 виды динамических моделей возможны для технических объектов любой физической природы, кроме тепловых, в которых отсутствуют упругие элементы. Поэтому все рассматриваемые здесь положения на примерах механических вращательных систем применимы и для других видов системы.
При построении динамической модели технической системы нельзя допускать топологических вырождений. Топологическими
273
вырождениями называют неправильные размещения элементов в модели. Если в динамической модели инерционные элементы чередуются с упругими и диссипативными, как это имеет место на рис. 7.4, то такая модель называется регулярной. Она не имеет топологических вырождений. Если такое чередование нарушается, это приводит к возникновению топологического вырождения. Например, на рис. 7.5, а два упругих элемента с коэффициентами жесткости сг и с 2 следуют друг за другом, не разделяясь инерционным элементом, а на рис. 7.5, б и в упругие элементы образуют разветвления. Эти модели содержат топологические вырождения и не соответствуют требованиям, предъявляемым к регулярным динамическим моделям.
Рис. 7.5. Динамические модели с топологическими вырождениями: а — цепная; б, в — разветвленные
К вырожденным также относятся модели, у которых упругие элементы разделены трансформаторными или фрикционными элементами.
Вырожденные динамические модели непосредственно использовать для построения математических моделей нельзя. Они должны быть преобразованы и приведены к регулярным до составления математического описания технической системы и до проведения упрощения и сокращения числа степеней свободы динамической модели. Преобразование осуществляется на основе закона сохранения энергии.
Вырожденная цепная модель (рис. 7.5, а) приводится к регулярной цепной (рис. 7.6, а), а вырожденные разветвленные (рис. 7.5, бив) — к регулярным кольцевым (рис. 7.6, б и в). Если разветвление включает три упругих элемента, то регулярная модель имеет треугольную форму, как показано на рис. 7.6, б. Если число упругих элементов, составляющих разветвление,
274
больше трех (рис. 7.5, в), то регулярная модель оказывается довольно сложной, так как каждая сосредоточенная масса должна быть соединена со всеми остальными массами отдельными эквивалентными упругими и диссипативными элементами (рис. 7.6, в).
а в
Рис. 7.6. Регулярные динамические модели: а — цепная; б, в — кольцевые
Рассмотрим динамическую модель на рис. 7.5, а без учета диссипативных элементов. При приведении ее к модели на рис. 7.6, а должна сохраняться неизменной потенциальная энер
гия системы
^П1 + ^п2 »
где Еп — потенциальная энергия по
сле преобразования системы, £ni, Еп2— потенциальные энергии
упругих элементов и с2 исходной системы. Потенциальная энергия д-го упругого элемента Eni - 0,5q Acpf, где Acpf — деформация упругого элемента. Так как момент упругого элемента Myi = Ci^i, то Eni можно выразит через Myi:
Eni = 0.5М2 / ct. (7.39)
Тогда ЕП1 = 0,5Myj / q ; Еп2 = 0,5М22 / с2 *>
ЕП1 = 0,5(Afyj)2 / Ci , где Cj и Myi— соответственно коэффициент жесткости и момент упругого элемента эквивалентной регулярной модели (рис. 7.6, а).
Из условия равновесия моментов в упругих элементах обеих моделей
Му1 = Му2 = Му1. (7.40)
275
Принимая во внимание равенство (7.40), получаем выражение для определения коэффициента жесткости упругого элемента эквивалентной регулярной модели
СГ = С1С2 /<с1 + с2> • (7.41)
Преобразование вырожденной модели в регулярную при учете диссипативных элементов значительно усложняется, так как при этом нарушается условие равновесия (7.40). Это условие сохраняется лишь в частном случае, если щ =Р2/С2- Тогда
значение коэффициента сопротивления диссипативного элемента эквивалентной регулярной модели вычисляется по формуле, аналогичной выражению (7.41):
Ml = М1М2 /(Ml + М2) • (7.42)
Так как в процессе проектирования отсутствуют точные сведения о значениях коэффициентов ц , а используется лишь ин
формация об аналогах, то обычно ограничиваются использованием выражений (7.41) и (7.42).
Аналогичные выражения для определения коэффициентов с* и ц* получаются и при преобразованиях вырожденных разветвленных моделей к регулярным кольцевым. Так, при преобразовании модели на рис. 7.5, б к треугольному виду в соответствии с рис. 7.6, б можно записать следующие условия эквивалентно
сти: Му1 = м;2 + м;з ; Му2 = м;з + М*у1 ; Му3 = М*у1 + м;2 , где
jit
— моменты в упругих элементах исходной модели; Myj —
то же для регулярной модели: Му1 = cj ((р2 ~ ФЗ)»
Му2 = с2 ( Фз - <Р1 ); МуЗ = с3 ( Ф1 " Ф2 )•
Коэффициенты жесткости упругих элементов регулярной модели определяются из выражений:
С1 = С2С3 / ^ci; С2 = С3С1 / 2сг; c^c^/Sq, (7.43) где Xq = + с2 + с3 .
Выражения при большем числе упругих элементов в вырожденной динамической модели аналогичны.
В частном случае, когда q = с2 = с3 , получаем = с2 =
что соответствует дифференциальному соединению со
средоточенных масс Ji, J2, J3 -
При учете диссипативных элементов модели на рис. 7.5, б и 7.6, б полностью эквивалентны лишь при условиях, если
276
Hl I (H2 + мз) = C1 /(c2 + сз); М2 /(Нз + Hl) = c2 /(C3 + Ci);
М3 I (Hl + H2) = c3 /(cl + c2)
В вырожденных моделях с трансформаторными и фрикционными элементами (рис. 7.7, а и 7.8, а) вначале необходимо перенести эти элементы к соответствующим сосредоточенным массам, обеспечив при этом сохранение неизменной потенциальной энергии при изменении положений трансформаторных элементов. Для этого необходимо вычислить значение эквивалентного коэффициента жесткости упругого элемента, соединение которого с другими элементами модели нарушается. На рис. 7.7 иллюстрируется последовательность преобразований вырожденной модели (а) к регулярной (в). Вначале осуществляется перенос трансформаторного ТЭ1 и фрикционного ФЭ| элементов к одной из сосредоточенных масс (рис. 7.7, б) и определение эквивалентного коэффициента жесткости С|э упругого элемента, а затем объединение упругих элементов с1э и с2 в один элемент с коэффициентом жесткости С}.
Рис. 7.7. Последовательность преобразований вырожденной цепной динамической модели с трансформаторным и фрикционным элементами (а) к регулярной модели (в)
При переносе ТЭг (рис. 7.7, б) изменяется момент упругого элемента сэ1: Му1э = My^ui, где — передаточное число T9p Из условия сохранения потенциальной энергии
_ЕП1 = / сг = 0,5Му1э / с1э следует, что сэ1 = . В резуль-
тате cj = с1эс2 /(с1э + с2) = crulc2 /(с^ + с2).
При переносе фрикционного элемента ФЭ! следует учесть возможное изменение его момента Мф± , обусловленное измене
нием взаимного расположения в модели трансформаторного и
277
фрикционного элементов. Согласно выполненным преобразованиям на рис. 7.7 такое изменение произошло и момент фрикциона должен быть скорректирован: 2Иф1 =
На рис. 7.8 отображена последовательность преобразования вырожденной разветвленной схемы с трансформаторными элементами. Коэффициенты жесткости упругих элементов С2э и с$э после переноса трансформаторных элементов (рис. 7.8, б) равны: с2э - с2 / и1 ’ с3э - с3 / и2 , а коэффициенты жесткости после пре-
образований: = с2эс2э / ;
ZCj = (?i + (?2Э + Сдэ о
* с2
с3 ^1^23 / ’ Где
^Т^Зэ / ’
Рис. 7.8. Последовательность преобразований вырожденной разветвленной динамической модели с трансформаторными элементами (а) к регулярной кольцевой модели (в)
278
В динамической модели на рис. 7.9, а сосредоточенные массы J2 и J3 разделены трансформаторным элементом, но между ними нет упругого элемента. Следовательно, модель вырожденная. Для исключения вырождения следует объединить массы J2 и J3 , обеспечив сохранение кинетической энергии системы: Е* = Ек2 + ДкЗ > где Ек — кинетическая энергия объединенной массы J* (рис. 7.9, б, в); Ек2 = O,5J2co2; Екз = 0,5Jgcol. Если приведение осуществить к модели на рис. 7.9, б, то Ек = 0,5J со2 , а если к модели на рис. 7.9, в, то Е* = О,5е7*соз • Учитывая передаточное число ТЭ и = со2 / СО3 , в первом случае получаем , о т* -г 2 т
J = J 2 + 3 / U ?аво втором J = J 2й + 3 '
б
ТЭ
Рис. 7.9. Преобразования при исключении вырождения
7.6. УПРОЩЕНИЕ ДИНАМИЧЕСКИХ МОДЕЛЕЙ МЕХАНИЧЕСКИХ СИСТЕМ
Построение динамической модели технической системы обычно осуществляется на основе интуитивных представлений об объекте в условиях отсутствия информации о ее динамических свойствах, поэтому математическая модель системы часто оказывается чрезмерно подробной и необоснованно сложной. Матрица Якоби системы дифференциальных уравнений в таком случае имеет широкий спектр собственных значений и соответственно большое значение числа обусловленности ц. Система дифференциальных уравнений оказывается плохо обусловленной, что затрудняет численное решение, приводит к росту погрешностей, неоправданно увеличиваются затраты машинного времени.
279
Учет большого числа степеней свободы, конечно, позволяет расширить представление о спектре собственных частот технической системы. Однако характеристики внешних возмущающих воздействий обычно таковы, что не могут вызвать резонансных колебаний на высших собственных частотах технической системы. Поэтому ее динамическую модель целесообразно упростить, исключив некоторое число степеней свободы. В этом случае определяется ограниченный спектр собственных частот, включающий лишь те частоты, на которых возможно возникновение резонансных колебаний. Математическая модель системы при этом упрощается, а главное — улучшается обусловленность системы дифференциальных уравнений, уменьшаются погрешности вычислений, сокращаются затраты ресурсов на проектирование технической системы.
Спектром собственных частот технической системы называют множество их значений. Из-за неравномерности распределения массы в пространстве технические объекты имеют дискретные спектры собственных частот. При моделировании технических объектов число определяемых собственных частот зависит от принятой динамической модели. Для обоснования выбора динамической модели необходимо вначале выполнить гармонический анализ функций внешних воздействий на объект. Эти функции часто оказываются периодическими и могут быть разложены в ряд Фурье, представляемый в виде бесконечной сходящейся суммы гармонических составляющих
00
М = Мср + sin + <pf), (7.44)
1=1
где Mi и ф£ — соответственно амплитуда и начальная фаза гармонического воздействия i-го порядка; Мср — среднее значение периодического внешнего воздействия; сов — круговая частота, определяемая периодом Т функции внешнего воздействия: сов = 2л / Т. Jo f
Обычно с увеличением порядка гармоники i амплитуда ее Mi уменьшается. При больших значениях i амплитуды Mi становятся незначительными, поэтому гармониками высоких порядков пренебрегают, ограничиваясь некоторым значением i = k , где k — порядок наивысшей гармоники, принимаемой во внимание при анализе технической системы. Частота этой гармоники
СО в тах-2л k / Т . (7.45)
Затем на основе исходной динамической модели объекта находят собственные частоты системы и сравнивают их с величиной
280
co B max . Если несколько собственных частот превосходят значение со в max > модель может быть упрощена. Обычно принимают некоторое значение соцт верхней границы исследуемого частотного диапазона, определяемое соотношением со цт = а со в тах , с которым сравнивается высшая собственная частота системы сотах - Значение а принимают больше единицы.
Необходимость упрощения динамической модели возникает при условии со тах > со цт.
Спектр собственных частот системы может быть определен по спектру матрицы Якоби системы дифференциальных уравнений. При этом необходимо использовать матрицу Якоби консервативной системы. Консервативной называют систему, динамическая и математическая модели которой не содержат диссипативных элементов. Характерной особенностью такой системы является то, что при возбуждении в ней свободных колебаний они будут незатухающими. Вещественные части всех собственных значений матрицы Якоби консервативной системы равны нулю, а мнимые представляют собой собственные частоты. Если при моделировании учтена диссипация энергии (неконсервативная система), то вещественные части собственных значений матрицы Якоби будут ненулевыми, а мнимые части соответствуют резонансным частотам. Резонансные частоты несколько меньше собственных частот. Разница в их значениях зависит от параметров диссипативных элементов ? возрастая при увеличении коэффициентов сопротивлений . При больших значениях ц/ количество резонансных частот может оказаться меньше числа собственных частот, так как отдельные переходные составляющие станут апериодическими.
По спектру матрицы, однако, нельзя установить, какие элементы динамической модели технического объекта обусловливают наличие высоких значений собственных и резонансных частот. Поэтому при упрощении динамической модели используется метод парциальных частот. Этот метод позволяет выявить элементы модели, создающие высокие собственные частоты системы. Эти элементы можно исключить из модели и произвести перераспределение значений их параметров между другими элементами модели таким образом, чтобы кинетическая и потенциальная энергии системы не изменились. При этом допускается некоторая величина изменения низшей собственной частоты системы, характеризующая погрешность ее определения.
Метод парциальных частот предусматривает декомпозицию (деление) динамической модели технического объекта на парци
281
альные системы и определение их собственных парциальных частот. Существует несколько типов парциальных систем. Их классификация и особенности структуры рассмотрены в разделе 3.9. Различают парциальные системы с инерционным и с упругим базовым элементом, простые и сложные. При декомпозиции цепной динамической модели (рис. 7.4, а) получим простые парциальные системы. При этом парциальная система с инерционным базовым элементом, естественно, будет одномассовой с двумя смежными примыкающими упругими элементами, а парциальная система с упругим базовым элементом оказывается двухмассовой (рис. 7.10, а, б). Инерционные элементы J1 и J2 , отображенные на рис. 7.10, а штриховыми линиями, в парциальную систему не входят. Взаимная замена этих парциальных систем позволяет осуществлять упрощение динамической модели объекта. Замена основана на следующих соотношениях между параметрами парциальных систем:
Рис. 7.10. Простейшие парциальные системы: а — одиомассовая; б — двухмассовая
Собственные парциальные частоты простейших парциальных систем (рис. 7.10, а, б) определяются по формулам (3.50) — (3.52), согласно которым
® а = V(cl +C2)/J12 ; (7-49)
= Vc12('7i +• (7.50)
Собственные парциальные частоты существенно отличаются от собственных частот динамической системы и поэтому не могут использоваться вместо них.
Соотношения (7.46) — (7.48), вытекающие из равенства частот парциальных систем, являются взаимно однозначными для параметров этих систем. При преобразовании параметров диссипативных элементов однозначен лишь переход от системы на рис. 7.10, а к системе на рис. 7.10, б:
282
Н12-Н1
+ Н2
(7.51)
Обратный переход для параметров ц, если исходить только из соотношения (7.51), неоднозначен. С учетом этого обстоятельства, а также с целью унификации вычислительных процедур при преобразованиях более сложных парциальных систем с разветвлениями можно ограничиваться лишь преобразованиями, выполняемыми над одномассовыми парциальными системами. В этом случае определяются частоты всех одномассовых парциальных систем, входящих в состав динамической модели, и осуществляется удаление сосредоточенной массы, входящей в парциальную систему с наивысшей частотой. Значение ее инерционного параметра перераспределяется и добавляется к инерционным параметрам примыкающих сосредоточенных масс.
Как следует из рис. 7.4, на котором показаны различные виды динамических моделей, число одномассовых парциальных систем равно числу сосредоточенных масс. В общем случае каждая сосредоточенная масса, кроме концевой, взаимодействует не менее чем с двумя упругими элементами.
Парциальная частота /г-й парциальной системы определяется по формуле
(7.52)
>1
где Cj — приведенный к /?-й массе коэффициент жесткости у-го упругого элемента парциальной системы (методика приведения изложена в разделе 3.9); N — число упругих элементов, соединяющих k-ю сосредоточенную массу с другими массами динамической модели.
При выполнении условия
ю k > ю lim
(7.53)
k-я сосредоточенная масса подлежит удалению. При этом общее количество масс системы и число ее степеней свободы уменьшаются на единицу.
Рассмотрим алгоритмы выполняемых преобразований в динамической модели при удалении одной из ее масс. Они зависят от количества примыкающих к массе упругих элементов, наличия разветвления и его вида.
Цепная парциальная система. Рассмотрим общий случай цепной парциальной системы с трансформаторными элементами. Парциальная система до упрощения приведена на рис. 7.11, а, после упрощения — на рис. 7.11, б. Преобразования при упрощении вначале выполним без учета влияния диссипативных элементов.
283
Из условия сохранения потенциальной энергии Eni = Eui , Е*2 = ^п2 • Используя выражение (7.39) и принимая во внимание, что и-1 = tz1u2 ; W4 = U3U4 ; Му1 = Му1и2 ; Му2 = Му2 / и3 , находим С1 = с1и2 » с2 ~ с2 / и3 • После объединения элементов и с2 в один упругий элемент с*, согласно (7.41), получаем
с* = С1С2 /(С1 + с2) = схи2с2 /(u3Sc), (7.54)
где Sc = с1и2 + с2/и3.
Рис. 7.11. Преобразование цепной парциальной системы с трансформаторными элементами: а — до упрощения; б — после упрощения
число . В результате получаем
Аналогично находим значение т* т кт/ *\2 ^3 - ^3 + ^з(и4)
Перераспределение параметра инерционности J2 удаляемой сосредоточенной массы между смежными массами и J3 выполняется согласно выражениям (7.46). Величину AJj массы J2 , отнесенную к массе , определим из соотношения
= J2ci /(сГ + с2).
Присоединяя AJj к е71? необходимо учесть передаточное
= J1 + J2C1/(ufLc). (7.55)
т*
= J3 4- ^2c2u4 I • (7.56)
Коэффициент сопротивления ц определим из условия равенства диссипативных функций Рэлея исходной парциальной и
284
преобразованной систем: Ф = Ф . При определении функции Рэлея для i-ro диссипативного элемента можно использовать выражение, аналогичное функции потенциальной энергии (7.39):
Фг =0,5м£/цг, (7.57)
где — момент i-ro диссипативного элемента.
Для исходной и преобразованной парциальных систем Ф = 0,5(71^ / И + М^2 / ц2); Ф* = 0,5(М*)2 / ц*.
Составим выражения для М^, :
Мд1 = Ц1(“1 / “j -<о2и2);
МЛ2 = И2(®2 / и3 - ®3Ы4) ;
.* * z * *
д = ц /их - со3и4).
Так как масса J2 исключается из динамической модели, то из этих выражений необходимо исключить со2. Составим уравне
ние динамического равновесия массы eJ2 ПОД воздействием только
моментов упругих элементов
TVfyj и Му2 •
^2(^2 / ^0 ~ ^ylu2 ~ ^у2 / и3 >
где Му1 = сг(ф! / иг - ф2^2) ; Му2 = с2(ф2 / и3 - Фз^4) •
После преобразования парциальной системы - 0» Тогда из этих выражений находим
<Р2 = [(С1М2 / М1)Ф1 + (с2и4 / и3 )ф3 ] / 2с •
Производная по времени от этого выражения дает со2. Ис-
пользуя со 2 и подставляя значения Мд/ и Мд в выражения для
Ф и Ф , находим
*
Ц = Hi
с1^2
(7.58)
Для построения алгоритма преобразований структуры динамической модели в процессе упрощения введем индексы ее параметров, как показано на рис. 7.12. Тогда полученные выражения приобретают следующий вид:
J* = Jz+AJf, i = k-l,k + l; (7.59)
^^k-l j— kcj+luk+l, j+11 ’ (7*60)
Cy (CjUk, jCj+1 I Ufa, J+1) / ^ck >
(7.61)
285
^Ck CjUk, j + c7+l / uk, 7+1 »
*
uk-i,j ~ uk-~i,iuk,j >
к
Uk + l,j+l ~ Uk, j+lUk+l,j+l ’
(7.62)
(7.63)
(7.64)
Л^+1,7+1 — Л&, 7+lrl^+l,7+l •
(7.65)
Л^-1,7 Л^-1,7^,7 ’
а
Jk-1
Jk Uk,j+1 Jk+1
Матрица A
Матрица ТЭ
Рис. 7.12. Преобразование цепной парциальной системы с трансформаторными элементами: а — до упрощения; б — после упрощения
Матрица А
Матрица ТЭ
В формулах (7.60) — (7.62)
— коэффициент приведенной суммарной жесткости всех упругих элементов, примыкающих к k-й сосредоточенной массе.
Номера i смежных сосредоточенных масс, взаимодействующих с удаляемой массой J посредством упругих и диссипативных элементов, обнаруживаются по вектор-столбцам Hyj и Hyj+i матрицы инциденций А: не равные нулю элементы этих векторов указывают номера i смежных масс, к ко-
торым должна быть присоединена часть /г-й
сосредоточенной мас-
сы, определяемая выражениями (7.60). Если k-я сосредоточенная
масса окажется краевой, она сливается с (k ± 1)-й массой с тем, чтобы кинетическая энергия системы осталась неизменной.
После выполненных преобразований структуры и парамет-
ров динамической модели вектор-строка матрицы инциденций исключается, а номера строк, начиная с (k + 1)-го, уменьшаются на единицу. Вектор-столбцы И„; и И„ 7+1 необходимо V J V , J
сложить. Полученному новому вектор-столбцу
286
^у/=^у/+^у,Я1 (7.66)
присвоить номер /, а номера всех последующих столбцов уменьшить на единицу. Такие же преобразования выполняются с век-
тор-столбцами и диссипативных элементов.
Аналогичные изменения осуществляются в матрице трансформаторных элементов ТЭ: вектор-строка Тэ^ исключается, а вектор-столбцы ТЭ7- и Тэ ;+1 складываются и получается новый
J rf
вектор T*j .
Парциальная система с разветвлением на упругом элементе. К этому типу относятся парциальные системы, содержащие упругий элемент, осуществляющий дифференциальное соединение удаляемой сосредоточенной массы с другими
массами динамической модели. Рассмотрим фрагмент динамической модели, приведенный на рис. 7.13, а. Предположим, что наивысшей парциальной частотой обладает сосредоточенная масса с моментом инерции J . Тогда эту массу необходимо удалить,
перераспределив значение ее параметра между массами ^k-\^k-2^k+l » а упругие элементы Cj и Cj+1 необходимо объединить, как показано на рис. 7.13, б. В этом случае после преобразования парциальной системы дифференциальное соединение масс сохраняется, а изменяется лишь количество сосредоточенных масс системы и уменьшается на единицу число ее степеней свободы.
Все зависимости, полученные для цепной парциальной системы, справедливы и для данной системы. В этой связи приведем лишь выражения для определения A J}, i = k - 2, k - 1, k + 1,
необходимые для вычисления моментов инерции Jf преобразованной системы по формуле (7.61):
A = /(^-1,;^^)»
A Jk_2 = 0,5JkCjul_2J / £ck ; (7.67)
A ^k+l = ^kcJ+lw&+l,j+l / ^ck'
Если сосредоточенная масса оказывается краевой, то преобразование данной парциальной системы не производится, а упрощение динамической модели осуществляется посредством
287
5555Я?
Матрица А
узлы ветви ci Cj+1
1 1 0
k-1 -1 0
k 1 -1
jfe+1 0 1
Матрица А
Матрица ТЭ
узлы ветви ci
to 1 0
k-1 1 0
k 1 1
jfe+1 0 1
Матрица ТЭ
Рис. 7.13. Преобразование парциальной системы с разветвлением на упругом элементе: а — до упрощения; б — после упрощения
преобразований других парциальных систем, имеющих наивысшие частоты.
Если окажется, что удалению подлежит масса J^-2* входящая в реактивный контур, то в этом случае удаляют все элементы, составляющие реактивный контур, т.е. массу с моментом инерции J&-2 , упругий элемент с коэффициентом жесткости С; и диссипативный элемент, расположенный параллельно упругому. Дифференциальное соединение инерционных элементов исчезает. Массы с моментами инерции J^-l и взаимодействуют посред-
ством упругого элемента с коэффициентом жесткости Cj и диссипативного элемента с коэффициентом сопротивления цу . Значения Cj и Цу при этом остаются без изменений. Изменения матриц А и ТЭ после упрощения осуществляются так же, как и в случае цепной парциальной системы (см. рис. 7.12).
Парциальная система с разветвлением на массе. Такая система показана на рис. 7.4, в. При исключении массы J2 разветвленная парциальная система преобразуется в кольцевую (рис. 7.6, б). При равенстве коэффициентов жесткости q = с2 = = с полученное соединение масс оказывается диффе-
ренциальным. Параметр J2 распределяется поровну между массами J\, J3, J4 , а коэффициент жесткости дифференциального соединения с* - с / 3 .
Если коэффициенты жесткости с^, с2, с3 различны, то кольцевое соединение масс будет гираторным. Коэффициенты жесткости гираторного соединения можно определить по формулам (7.43). Однако, как показывает опыт исследований таких систем, это приводит к неадекватным оценкам показателей качества переходных процессов. Различаются также резонансные частоты исходной и преобразованной систем. Поэтому исключение массы J2 в таком случае не рекомендуется.
Пример 7.2. Для исследования крутильных колебаний в трансмиссии автомобиля, обусловленных воздействием вращающего момента двигателя внутреннего сгорания, используется динамическая модель, приведенная на рис. 7.14, а. При анализе переходных процессов нет необходимости учитывать такое большое число степеней свободы, которое отображается этой моделью, поэтому ее целесообразно упростить. В качестве критериев допустимой степени упрощения динамической модели обычно принимают относительные разности значений низших собственных частот и коэффициентов динамичности исходной и упрощенной моделей.
Одной из проблем при анализе сложной механической колебательной системы является идентификация параметров диссипативных элементов. Поскольку теоретически определить их невозможно, используют информацию о результатах испытаний аналогов. В литературе приводятся данные о логарифмических декрементах колебаний или об относительных коэффициентах затухания [2]. Однако эти данные имеют большой разброс, что затрудняет решение поставленной задачи.
Рассмотрим вначале влияние относительных коэффициентов затухания уj , j = 1, N , где N — количество диссипативных элементов, на резонансные частоты системы. В табл. 7.1 приведены данные, отображающие влияние на собственные значения X/ матрицы Якоби для динамической модели на рис. 7.14, а.
289
При уу = 0 мнимые части собственных значений Im () соответствуют собственным частотам системы, а при у у Ф 0 — резонансным частотам. С увеличением значений у;- различие между резонансными и собственными частотами возрастает. При этом отдельные резонансные частоты могут резко уменьшиться при увеличении уу . Так, в рассматриваемом примере вторая и третья резонансные частоты значительно ниже второй и третьей собственных частот. При дальнейшем увеличении у у отдельные составляющие переходного процесса могут оказаться апериодическими и число резонансных частот уменьшится.
Рис. 7.14. Динамическая модель трансмиссии автомобиля (а) и последовательное ее упрощение (б — б)
19. Зак. 3006
290
Рассматриваемая механическая колебательная система, как следует из табл. 7.1, имеет шесть ненулевых собственных частот и одну нулевую. Наличие нулевой собственной частоты свидетельствует о том, что одно из решений системы дифференциальных уравнений, описывающих процесс функционирования технического объекта, является тривиальным. Это решение соответствует отсутствию колебаний и вращению всех сосредоточенных масс с одинаковыми угловыми скоростями или, в частном случае, состоянию покоя. Система алгебраических уравнений, описывающих в этом случае статическое состояние технического объекта, будет иметь неоднозначное решение, так как состояние равновесия может достигаться при любой скорости вращения сосредоточенных масс, а состояние покоя может быть при любых значениях углов их поворота. Такое состояние равновесия объекта называют безразличным. Это соответствует апериодической границе устойчивости. Переходные же процессы в технической системе оказываются вполне определенными и однозначными, а их характеристики зависят от начальных условий и изменения внешних воздействий. В связи с отмеченным свойством такие системы называют полу определенными. Способы анализа статических состояний полуопределенных динамических систем будут рассмотрены в главе 8.
На рис. 7.14, а — д иллюстрируется последовательность процесса упрощения динамической модели. Значения у;- приняты- на основе усреднения опытных данных по различным автомобилям. В табл. 7.2 отражены изменения параметров динамической модели, а в табл. 7.3 — изменения собственных значений и числа обусловленности ц матрицы Якоби на каждом этапе процесса упрощения.
Из табл. 7.3 следует, что при уменьшении числа сосредоточенных масс до трех низшая резонансная частота системы практически не изменилась, а при двух массах отличается лишь на 2,5% от частоты исходной системы. При этом значительно улучшается обусловленность системы дифференциальных уравнений (уменьшается число обусловленности ц) и увеличивается критический шаг интегрирования Лкр , что позволяет сократить затраты времени на проведение анализа переходных процессов.
В табл. 7.4 приведены значения показателей качества переходных процессов: tn — время переходного процесса, с; kR — коэффициент динамичности; D — декремент колебаний; К — колебательность (число полупериодов колебаний за время £п ); I — интегральный критерий (определения показателей качества переходных процессов даны в разделе 9.11).
При определении показателей качества внешнее воздействие Мь1 изменялось скачкообразно со 140 Н • м, до 280 Н м. Значения воздействий Мв2 и Мв3 оставались неизменными: Мв2=95Н-м; Мв3=185Н-м. Значения показателей качества переходных процессов, приведенные в табл. 7.4, относятся к одному и тому же упругому элементу (правому крайнему на рис. 7.14, а — д). Анализ этих данных показывает, что упрощение динамической модели допустимо до трехчетырех сосредоточенных масс, так как дальнейшее их сокращение приводит к заметным ошибкам в оценке показателей качества переходных процессов.
На рис. 7.15 приведены графики изменения моментов Му1 и Му5 в упругих элементах с коэффициентами жесткости q и с5 (согласно схеме рис. 7.14,а). Момент Му5 имеет небольшой сдвиг по фазе относительно момента Му1 .
Таблица 7,1
Номер собственного значения Значения у;-
Уу= 0; 7 = l,iV Y1 = Y2 = 0,05 у 3 = 0,02; y6 = 0,9
y4 = 0,l; у 5 = 0,235 y4 = 0,5; У 5 = 3,0
Вещественные Re и мнимые Im части собственных значений
Re Im Re Im Re Im
1 0 10,1 -0,155 10,1 -0,55 10,2
2 0 -10,1 -0,155 -10,1 -0,55 -10,2
3 0 104,4 -118,8 76,2 -126,6 66,3
4 0 -104,4 -118,8 -76,2 -126,6 -66,3
5 0 143,7 -24,9 103,3 -588,5 0
6 0 -143,7 -24,9 -103,3 -18,5 0
7 0 402,8 -16,5 402,2 -34,6 401,7
8 0 -402,8 -16,5 -402,2 -34,6 -401,7
9 0 693,4 -31,4 692,6 -70,3 684,8
10 0 -693,4 -31,4 -692,6 -70,3 -684,8
11 0 1032,1 -55,6 1030,4 -62,8 1029,2
12 0 -1032,1 -55,6 -1030,4 -62,8 1029,2
13 0 0 0 0 0 0
Таблица 7.2
Номер пара- Значения параметров
Модель на рис. 7.14, а Модель на рис. 7.14, б Модель на рис. 7.14, г Модель на рис. 7.14, д
метра Ji 0>i ci Н/ 7/ Ji СО/ ci Н/ Ji ®i 9 Н/ Ji ci И/
1 1,020 91,3 8500 1,548 0,05 1,053 33,3 1165 0,095 1,082 9,30 93 0,572 1,093 8,72 83,1 0,99
2 0,029 714,4 6300 0,709 0,05 0,012 334,1 120 0,644 0,099 93,8 780 46,86 3,548 4,84 — —
3 0,011 853,9 1720 0,090 0,02 0,080 106,1 780 46,86 3,460 15,0 — — 1
4 0,004 678,2 120 0,640 0,50 3,460 15,0 640 8,759 ,— — — — — — —
5 0,080 106,1 780 46,86 3,00 0,037 143,3 —, -_ — -— .— — —- —
6 3,460 15,0 640 8,759 0,90 — —„ — — — — 1,1 —.
7 0,037 143,3 — —. 111 — —— -—. —. — —
Обозначения параметров в табл. 7.2: — моменты инерции, кгм2 ; cdz — парциальные частоты, рад/с; Cj — коэф-
фициенты жесткости, Н м/рад; ц7- — коэффициенты сопротивления, Н м с/рад; — относительные коэффициенты затухания колебаний (безразмерные).
Таблица 7.3
Вещественные Re и мнимые Im части собственных значений
№ пп Модель на рис. 7.14, а Модель на рис. 7.14, б Модель на рис. 7.14, г Модель на рис. 7.14, д
Re Im Re Im Re Im Re Im
1 -0,55 10,2 -0,55 10,2 -0,55 10,1 -0,5917 9,956
2 -0,55 -10,2 -0,55 -10,2 -0,55 -10,1 -0,5917 -9,956
3 -126,6 66,3 -126,7 66,4 -472,6 0 0 —
4 -126,6 -66,3 -126,7 -66,4 -18,6 0 —
5 -588,5 0 -588,2 0 0 0 — —
6 -18,5 0 -18,5 0 — —
7 -34,6 401,7 -32,3 332,0 ’ —
8 -34,6 -401,7 -32,3 -332,0 —. — —
9 -70,3 684,8 0 0 • •- —— —
10 -70,3 -684,8 — — — 11 —
11 -62,8 1029,2 1 ' — -— —
12 -62,8 -1029,2 — “—
13 0 0 —’ I- — — —
И 100,9 57,6 46,7 1 ,0
^кр 0,104 IO'3 0,579 10~3 0,422 • 10 -2 0,119 10 й
h Кр — критический шаг интегрирования
294
Таблица 7.4
Номер модели Значения показателей качества
на рис. 7.14 ТУ тт I
а 3,850 1,385 1,195 12 0,129
б 3,850 1,385 1,195 12 0,129
в 3,850 1,383 1,192 12 0,129
г 3,875 1,385 1,182 12 0,130
д 3,875 1,435 1,206 12 0,129
Моменты Му2 > Af у3 и Му4 практически совпадают с моментом Му1. Отличие моментов в упрощенных моделях отражено данными табл. 7.4.
Рис, 7,15, Графики переходных
характеристик =
7.7. УПРОЩЕНИЕ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ГИДРАВЛИЧЕСКИХ И ГИДРОМЕХАНИЧЕСКИХ СИСТЕМ
В связи со слабой сжимаемостью жидкости и высокой жесткостью трубопроводов, стенок гидроцилиндра и аппаратуры управления гидравлические системы имеют высокие значения собственных частот. Наличие гидравлических элементов в составе технической системы с механическими элементами приводит к значительному расширению спектра ее собственных частот, причем в сторону увеличения их значений. Поэтому динамические модели гидромеханических систем почти всегда нуждаются в упрощении.
Другая важная особенность гидравлических систем заключается в том, что диссипация энергии в их элементах определяется абсолютными значениями скоростей потоков жидкости, в то время как в механических — относительными скоростями. Это приводит к необходимости сохранения всех диссипативных гидравлических элементов при преобразованиях динамической модели в процессе ее упрощения.
295
Упрощение динамических моделей гидравлических и гидромеханических систем также осуществляется на основе метода парциальных частот. Определение парциальных частот и преобразование подматрицы инциденций упругих элементов Ау матрицы А выполняется так же, как и для механических систем. Изменяется лишь порядок преобразования подматрицы инциденций диссипативных элементов Ад .
Рассмотрим процесс упрощения, используя фрагмент динамической модели гидравлической системы, представленный на рис. 7.16, а. Выделим одномассовые парциальные системы и по формуле (7.52) определим их парциальные частоты. В эту формулу вместо Jнеобходимо подставить значение коэффициента массы тг^ парциальной системы, а вместо Cj — значения коэф-фициентов гидравлических жесткостей crj, примыкающих к со-сред оточенной массе упругих элементов.
Ветви
Узлы Ветви
cvj Mr,Z-2 Цг,/-1 MtZ Цг,/+1
k - 2 1 0 -1 0 0 0
k -1 -1 0 0 -1 0 0
k 1 -1 0 0 -1 0
k + 1 0 1 0 0 0 -1
Мт/ Мт,/+1
О О
О о
-1 -1
Рг,/-2 Цг,/-1
Рис. 7.16. Преобразование динамической модели гидравлической системы: а — до упрощения; б — после упрощения
Предположим, что максимальную парциальную частоту имеет &-я сосредоточенная масса с параметром mrk. Тогда эту массу удаляют и k-я строка матрицы инциденций подлежит ис
296
ключению. Упругие элементы с параметрами сгу и crj+l» имею-
щие ненулевые инциденторы и в /?-й строке матри
цы, объединяются в один упругий элемент с параметром сг;-, оп-
ределяемым по формуле
crj “ сг/сг,;’+1 /(сг,7 +сг,/+
(7.68)
Перераспределение параметра mrk удаляемой сосредоточенной массы между смежными массами модели осуществляется на основе сохранения кинетической энергии системы. Значение коэффициента массы тг^ зависит не только от массы жидкости в k-й гидравлической магистрали, но и от квадрата площади ее сечения А% (см. формулу (3.54)). Но площадь оказывает влия
ние на скорость жидкости, а следовательно, и на ее кинетическую энергию. С учетом этого, а также принимая во внимание формулы (7.67) для парциальной системы с разветвлением на упругом элементе, получаем следующие выражения для определения коэффициентов масс упрощенной системы (рис. 7.16, б):
mri - mri + &mri > i = k - 2, k-1, k + 1, где Aznrj — величина коэффициента массы удаляемого онного элемента, присоединяемая к коэффициенту массы ствующего смежного инерционного элемента:
инерци-
соответ-
Am —
^mr,k-2 ------
W; -
™rk
Wi -
(7.70)
An? — mrk ^mr,k+l ~------
9
crj и cr,7+i — коэффициенты жесткости упругих элементов, примыкающих к удаляемой сосредоточенной массе; =
= cry+cr>y+i; Wj и Wj+i — количества примыкающих соответственно к /-му и к ментам.
Рассмотрим теперь преобразования, рицей инциденций.
сосредоточенных масс, (у + 1)-му упругим эле-
выполняемые над мат-
297
Элементы вектора-столбца нового упругого элемента cj определяются по формуле (7.66). Объединению подлежат упругие элементы, имеющие ненулевые значения инциденторов в й-й строке матрицы А, соответствующей удаляемой сосредоточенной массе.
Поскольку все диссипативные элементы динамической модели гидравлической системы должны быть сохранены, а k-я строка матрицы А подлежит удалению, то необходимо выполнить соответствующие преобразования векторов-столбцов подматрицы Ад, имеющих ненулевые элементы в k-й строке. На рис. 7.16, а
это касается диссипативного элемента с параметром цг/. Вычисление элементов нового вектора-столбца этого элемента производится по одной из следующих формул:
Йд1=Йа+иу^Йу) (7.71)
ИЛИ
Й*л1=Йд1+Иу^+1Й^+1. (7.72)
Эти формулы практически равнозначны, поэтому, выбирая между векторами И- и Ит •,, целесообразно остановиться на том из них, который содержит наименьшее количество ненулевых элементов, что позволит получить более простые выражения математической модели технического объекта. Следует, однако, иметь в виду, что если упругий элемент соединяет удаляемую со
средоточенную массу с внешней средой, то вектор И . имеет
V J
только один ненулевой элемент ., расположенный в /?-й стро
ке матрицы А. Поэтому использование вектора И • такого эле-
мента для определения вектора И&1 недопустимо, так как это приведет к исключению из динамической модели диссипативного элемента с параметром цг/ и, как следствие, к ошибке в оценке потерь энергии в гидросистеме.
На рис. 7.16, а приведена матрица А для исходной динамической модели гидросистемы, а на рис. 7.16, б — после ее упрощения. При преобразовании подматрицы Ад использовано выражение (7.72).
В процессе упрощения динамической модели может оказаться, что максимальную парциальную частоту имеет краевая
20. Зак. 3006
298
сосредоточенная масса. Предположим, что это масса тпг^ на рис. 7.17, а. Тогда динамическая модель магистрали, в которой была расположена эта масса, теряет инерционный элемент и в ней остается только диссипативный элемент. Такую ветвь динамической модели называют безынерционной. Она представляет собой модель источника потока. Следовательно, в этом случае, кроме удаления сосредоточенной массы из ветви динамической модели, необходимо преобразовать источник внешнего воздействия типа потенциала рв^ в источник типа потока Q^m . Рассмотрим выполняемые при этом преобразования.
Узлы Ветви
Pvk Цг,/-2 Hr,Z-l MtZ
k - 2 0 1 -1 0 0
k-1 0 -1 0 -1 0
k -1 1 0 0 -1
Узлы Ветви
* Рвт Мг,/-2 Мт,/-1 Мг/
k - 2 0 1 -1 0 0
k-1 0 -1 0 -1 0
* 1 m -1 1 0 0 -1
Рис. 7.17. Преобразование динамической модели гидравлической системы при удалении краевой сосредоточенной массы: а — до упрощения; б — после упрощения
Коэффициент массы тпг^ перераспределяется между массами mrtk-i и тг^_2 на основе формул (7.69) и (7.70). Поскольку в данном случае к удаляемой массе примыкает только один упругий элемент crj , то Zcrk = сгу и выражения (7.70) упрощаются. В результате получаем: &тТ k_r = 0,5mrk(Ak / А^_х)2;
’ *;.а .
^mrtk-2 = ®&mrk(Ak / Ak-2)2 ° По этой же причине нет необходимости преобразовывать подматрицы Ау и Ад . Но в связи с изме-
299 нением характера источника внешнего воздействия k-я строка матрицы в этом случае не удаляется, а превращается в строку источника потока.
После выполненного упрощения динамическая модель принимает вид, показанный на рис. 7.17, б. Строка тп* матрицы этой модели полностью повторяет строку k матрицы исходной модели, а источник потенциала заменен в ней на реакцию внешней
среды Рвтп ’ воздействие которой в данном случае рассматривается как источник потока Q^m . При этом, естественно, Рвт = Рвк> а Q-вт неизвестно. Но Q^m будет входить в математическую модель системы, сформированную на основе полученной матрицы А. Поэтому QBzn необходимо выразить через рв^. Строка т* мат-рицы позволяет это сделать: р*т = pyj - pRl = pyj - рг^вт , откуда
Овтп = (Pyj ~ Рвк) / MtZ ’
Приведенные положения и формулы применимы также для упрощения динамических моделей гидромеханических систем. Покажем это на примере.
Пример 7.3. Необходимо упростить динамическую модель гидропривода, приведенную на рис. 5.3, б.
В зависимости от физических свойств системы гидропривода при оценке парциальных частот возможны следующие варианты: максимальные парциальные частоты имеют либо массы тг2 и тг4 , либо массы тпг3 и тг5 , либо масса тг1 . Поскольку масса тг1 краевая, то последний вариант соответствует рассмотренному случаю на рис. 7.17. Поэтому остановимся только на двух первых вариантах.
Пусть максимальные парциальные частоты получены для масс тпг2 и тпг4 , причем со2 > со4 . Тогда вначале необходимо удалить массу тпг2 , а затем массу тпг4 . Матрица инциденций исходной динамической модели рассматриваемой системы приведена в табл. 5.4. Из нее следует, что при удалении узла 2, соответствующего сосредоточенной массе с параметром тг2 , необходимо объединить упругие элементы сг1 и сг2, а значение тт2 перераспределить между массами с параметрами тт1, тпг3 и тпг4 . На основе формул (7.69) и (7.70) получаем:
тг1 = тг1 + 0,5тпг2(А2 / А)Ч1 /2сг;
^2 = тгЗ + "ЫЛ? М3)2сг2 /Есг; (7.73)
тгЗ = тг4 + 0,5тпг2(А2 / А4)2сг1 /Есг;
У сг = Сг1 + Сг2 •
Масса тпг5 остается без изменения, только изменяется ее индекс т’4 = тг5 (все изменения в процессе преобразований, включая переиндексацию параметров элементов, отметим звездочкой).
300
Параметры упругих элементов:
Сг1 = сг1сг2 / сг2 = сгЗ» сгЗ = сг4» сг4 = сг5*
Количество диссипативных элементов, их параметры и индексы остаются без изменений.
Определим изменения, которые необходимо произвести над матрицей инциденций А.
Элементы вектора-столбца Й*-^ упругого элемента с параметром определим по формуле (7.66) (см. табл. 5.4)
Йу1 = Йу1 + Йу2 = [- 1,0,1,1,0,1, о]т,
а вектора-столбца Я*2 диссипативного элемента с параметром цг2 , имеющего ненулевой элемент в удаляемой строке матрицы А, найдем по формуле (7.72)
•^д2 = ^Д2 + Яу2,2Йу2 = [О-1,0,0,0,0,0] Т + (-1)[0,-1,1,0,0,1,0]Т =
= [о,о,-1,о,о,-1,о]т.
После определения векторов и Й*а2 в них необходимо исключить элементы удаляемой строки и составить новую матрицу инциденций. Полученная матрица приведена в табл. 7.5. В матрице произведена перенумерация строк и индексов параметров динамической модели с учетом проведенного упрощения.
Таблица 7.5
Узлы Ветви
Рв1 Рв2 РвЗ * Рв1 * Рв2 Сг1 сг2 сгЗ СГ4 Мг1 Мг2 МгЗ Мг4 Мгб Мгб Мг7
1 1 0 0 0 0 -1 0 0 0 -1 0 0 0 0 0 0
2 0 -1 0 0 0 1 -1 0 0 0 -1 -1 0 0 0 0
3 0 0 0 0 0 1 • 0 — 1 0 0 0 0 -1 0 0 0
4 0 0 -1 0 0 0 0 1 -1 0 0 0 0 — 1 0 0
1 0 0 0 -1 0 1 0 0 0 0 -1 0 0 0 -1 0
2* 0 0 0 0 -1 0 0 1 0 0 0 0 0 0 0 — 1
Аналогичные действия производятся при последующем удалении сосредоточенной массы с параметром тпг4 . В результате получаем матрицу инциденций упрощенной динамической модели, приведенную в табл. 7.6.
Таблица 7.6
Узлы Ветви
Рв1 Рв2 РвЗ * Рв1 * Рв2 сг2 СгЗ Мг1 Мг2 МгЗ Мг4 Мтб Мгб Мг7
1 1 0 0 0 0 -1 0 0 — 1 0 0 0 0 0 0
2 0 -1 0 0 0 1 -1 0 0 -1 -1 0 0 0 0
3 0 0 -1 0 0 1 0 -1 0 0 0 -1 -1 0 0
1^ 0 0 0 -1 0 1 0 0 0 -1 0 0 0 — 1 0
2 0 0 0 0 -1 1 0 0 0 0 0 -1 0 0 -1
На основе этой матрицы можно легко воссоздать графическое изображение упрощенной динамической модели исследуемой технической системы. Полученная модель приведена на рис. 7.18, а. Орграф системы показан на рис. 7.18, б.
301
Рис. 7.18. Динамическая модель (а) и орграф (б) после упрощения модели системы гидропривода, приведенной на рис. 5.3, б
Верхние индексы * при преобразованных параметрах на рис. 7.18 опущены.
302
Математическая модель системы гидропривода после проведенного упрощения представляется следующими уравнениями:
—ГТ = (Рв1 - Ру1 - Рд1)Мг1» at
—тг = (-Рв2 + Ру1 - Ру2 - Рд2 - РДз)/"»г2 !
at
& ~ (“РвЗ "* Ру1 ~ РуЗ ~ Рд4 — Рдб) /^гЗ » р 74)
у1 = cri(Qi ~ Qa ~ Qs ~ Qbi ~ Фвг);
at
^=cr2Q2;
at
dp^ -c Q
dt ’ r3Qa ’ J
Рд1 ~ Рд2 = Мг2<^2 +®В1); РдЗ = МгЗ®2 !
Рд4 = Мг4(®3 + ®вг)> Рдб = Нг5®з! Рдв = Мгв®в1 ! ’ (7.75)
Рд7 = Мг7^в2°»
Рв1 Ру1 Рд2 Рдб» Рв2 — Ру1 Рд4 Рд7* (7.76)
Подставляя значения рд/ из выражений (7.75) в выражения (7.76), получим формулы для вычисления расходов утечек из гидроцилиндров:
q* _ Ру1 ~ Рт2^2 ~ Рв1 q* _ Ру1 — Рт4^3 ~ Рв2 (у 77)
Мг2 + Ртб Мт4 "* Рт7
Для решения системы дифференциальных уравнений (7.74) необходимо задать начальные условия Q/o, i = 1,3; ру/0, j = 1,3 , а также функции внешних воздействий на систему рв1 , рв2 , рв3 и реакции внешней среды рв1 , рв2. Если утечки из гидроцилиндров происходят в атмосферу, то рв1 = рв2 - 0 . При необходимости определения собственных значений матрицы Якоби и оценки спектра резонансных частот значения QB1 и Q*2 необходимо подставить в систему уравнений (7.74), используя для этого выражения (7.77).
Давления жидкости на поршни гидроцилиндров рп1 и рп2 определяются по формулам, которые легко составить, используя рис. 7.18, а: рп1 = ру1 - рд2 ;
Рп2 Ру1 Рд4 •
Если максимальные значения парциальных частот имеют краевые сосредоточенные массы с параметрами тг3 и тг5 , то эти массы объединяются соответственно с массами тг2 и тг4 , в результате чего получаем динамическую модель, приведенную на рис. 7.19. Матрица инциденций для этого случая дана в табл. 7.7.
В рассматриваемом случае, в отличие от предыдущего, динамическая модель существенно отличается от исходной модели, приведенной на рис. 5.3, б: упругий элемент, отображающий физические свойства возвратной пружины поршня, приходится представлять в виде гидравлического аккумулятора, а диссипативный элемент, моделирующий трение в гидроцилиндре, располагать в магистрали гидроаккумулятора, а также изменять расположение диссипативного элемента, моделирующего сопротивление щелей в уплотнительных устройствах гидроцилиндра. Это обусловлено тем. что фазовая переменная типа потока Qni,
8. МОДЕЛИРОВАНИЕ И АНАЛИЗ СТАТИЧЕСКИХ СОСТОЯНИЙ
8.1. ЗАДАЧИ АНАЛИЗА СТАТИЧЕСКИХ СОСТОЯНИЙ ТЕХНИЧЕСКИХ СИСТЕМ
Режим функционирования технической системы определяется характером внешних возмущающих и управляющих воздействий. Различают статические и динамические режимы. Динамическим называется режим, в котором состояние системы неустановившееся. Он обусловлен изменением во времени внешних воздействий, вызывающих возникновение переходных процессов системы, при которых изменяются ее фазовые координаты.
При постоянных воздействиях система находится в установившемся равновесном состоянии. Ее фазовые координаты при этом постоянны. Такой режим функционирования системы называется статическим.
Если техническая система представляет собой совокупность взаимодействующих сосредоточенных масс (например, механическая или гидромеханическая система), то в статическом режиме они совершают равномерные установившиеся движения, либо находятся в покое (в неподвижном состоянии). Для статического режима характерна неизменность реакций взаимодействия всех элементов технической системы и реакций внешней среды. В тепловых, гидравлических, электрических и др. видах систем стати-
305 ческий режим также характеризуется постоянством фазовых переменных типа потока и типа потенциала. Так, в тепловой системе при этом сохраняется постоянство распределения температуры, в гидравлической — расходов и давлений жидкости во всех участках трубопроводов, в электрической — токов и напряжений во всех элементах электрической цепи. Следовательно, определяющим признаком статического режима для технической системы любой физической природы является постоянство во времени всех фазовых переменных типа потока и типа потенциала, характеризующих состояние всех ее элементов.
Для технических систем, инерционные элементы которых представляют собой сосредоточенные массы, выделяют две разновидности статических состояний: состояние покоя и состояние равномерного движения. Анализ этих состояний различается использованием разных фазовых переменных типа потока. При анализе равномерного движения используются базисные фазовые переменные, приведенные в табл. 3.2. Они представляют собой линейные или угловые скорости твердых тел или расходы жидкости. При анализе состояния покоя фазовыми переменными типа потока являются геометрические координаты, определяющие положение инерционных элементов в пространстве.
Задачи, решаемые при анализе статических состояний, обусловлены целями и задачами проектирования технической системы. В процессе проектирования наиболее часто приходится решать следующие задачи статики: определение положений устойчивого равновесия системы; анализ распределения фазовых переменных типа потенциала и типа потока на установившихся равновесных режимах функционирования; определение начальных условий, необходимых для интегрирования системы дифференциальных уравнений при анализе стационарных режимов колебаний или стационарных случайных процессов (с целью исключения переходного процесса); определение начальных и конечных условий при оценке качества переходных процессов по переходным характеристикам и др.
8.2. ПОСТАНОВКА ЗАДАЧ АНАЛИЗА СТАТИЧЕСКИХ СОСТОЯНИЙ
Существует несколько подходов к постановке и решению задач анализа статических состояний технических систем. Они различаются используемыми математическими моделями и методами решения систем уравнений.
Математическая модель статического состояния технического объекта представляет собой систему линейных или нелинейных алгебраических уравнений вида
F(V) = 0, (8.1)
306
где V — вектор фазовых координат технической системы.
Но статическое состояние системы можно определить и на основе исходной математической модели технической системы, представляющей собой на макроуровне проектирования систему обыкновенных дифференциальных уравнений
dV / dt = F(V).
(8.2)
Численное решение этих уравнений при неизменных внешних воздействиях через конечный отрезок времени tK приводит к стационарной точке V*, в которой dV/dt = 0 . Координаты этой точки и будут соответствовать искомому решению.
Если технический объект имеет несколько равновесных состояний, то для нахождения координат других стационарных точек необходимо осуществлять решение уравнений (8.2) с различными начальными условиями Vo.
Использование системы дифференциальных уравнений для анализа статических состояний получило довольно широкое распространение в существующих САПР благодаря достигаемому при этом упрощению программного обеспечения. Однако при таком подходе, как правило, получаются завышенные затраты машинного времени на проектирование.
Более экономичным является подход, основанный на применении системы алгебраических уравнений (8.1). Эти уравнения могут быть получены из исходной системы обыкновенных дифференциальных уравнений (8.2), полагая в ней dV/dt = 0 . Существует множество эффективных численных методов решения систем алгебраических уравнений. Некоторые из них будут рассмотрены в данной главе.
Возможен и третий подход к решению задач анализа статики. Он заключается в том, чтобы представить задачу анализа как экстремальную. Для этого необходимо сформировать целевую функцию, имеющую минимум в точке решения задачи V*. В качестве целевой функции может быть принята, например, скалярная функция Ф(У), равная сумме квадратов невязок Fi(V) системы уравнений (8.1):
(8.3)
i=l
где п — порядок системы уравнений; < F(V),F(V) >— скалярное произведение векторов F(V) и F(V) .
Определение фазовых координат стационарной точки производится с применением методов поисковой оптимизации, которые
307 позволяют минимизировать целевую функцию Ф(У). При этом находится приближенное решение поставленной задачи.
Невязка Fi(V) возникает, если в i-e уравнение системы (8.1) подставить произвольный вектор фазовых координат V, отличающийся от вектора V*. В этом случае уравнения (8.1) не удовлетворяются и возникает вектор невязок, компоненты которого Fi(V) входят в выражение целевой функции (8.3).
8.3. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СИСТЕМ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
Различают прямые и итерационные методы решения систем алгебраических уравнений. Рассмотрим вначале итерационные методы.
Предположим, что для анализа статических состояний технической системы используется математическая модель, представляющая собой систему алгебраических уравнений (8.1).
Анализ статических состояний системы сводится к решению уравнений (8.1), т.е. к нахождению координат стационарной точки, удовлетворяющих этой системе уравнений. Обозначим точное решение этих уравнений V*.
Итерационные численные методы решения системы уравнений (8.1) сводятся к нахождению последовательности векторов Уо, Т^,..., Vk , которая сходится к точному решению V*. При этом осуществляется переход из k-Й точки фазового пространства переменных V в (k + 1) -ю точку. Вектор Vq называют начальным приближением. Переход от очередного вектора Vk к вектору называют итерацией. Способ перехода определяется алгоритмом итерационного метода решения системы алгебраических уравнений.
В общем случае алгоритм итерационного метода может быть представлен выражением вида
^+1=с(иАЛ-1......VA_p+1), (8.4)
где G — вектор-функция, определяемая способом построения итерационного процесса; р — количество предыдущих значений V, используемых в данном методе; k — номер итерации.
В алгоритмах итерационных методов решения систем алгебраических уравнений обычно ограничиваются значением р = 1. Тогда выражение (8.4) приводится к виду
308
n+i = m). (8.5)
Основные характеристики итерационных методов — сходимость итераций и скорость сходимости к точному решению. Они определяют алгоритмическую надежность, точность и экономичность методов.
Сходимость итераций. Итерации называют сходящимися, если
r'Z*
(8.6)
Предположим, что функция G(V) определена и непрерывна вместе со своей производной Gy = dG / dV . Определим собственные значения 'Kq t, i
матрицы Gy. Наибольшее по модулю
у собственное значение этой матрицы называют спек-I * max
тральным радиусом матрицы Gy и обозначают буквой р :
(8-7)
Если спектральный радиус р матрицы Gy меньше единицы, а не выходит из области определения вектор-функций F и G, то процесс итераций сходится и предельный вектор (8.6) определяет единственную точку решения, к которой сходятся все итерации из любой начальной точки. Следовательно, условие сходимости итераций имеет вид
(8.8)
ie[l:n]
Приведенное определение условия сходимости итераций выражает теорему, относящуюся к глобальным теоремам сходимости, справедливым для любой начальной точки Vo. Доказать эту теорему для всех случаев невозможно. Поэтому применяют теоремы о локальной сходимости, которые предполагают, что решение V* существует, a VQ взято достаточно близким к V*.
Скорость сходимости итераций. Обозначим через Ek вектор погрешностей определения фазовой переменной V на k-Й итерации:
г7*
г7*
При сходимости итераций норма вектора погрешностей
уменьшается» Скорость, с которой уменьшается
в ближай-
309
шей окрестности точного решения V*, называется скоростью сходимости итераций. Ее оценивают по формуле
т
Е/г+1
(8.10)
где т — целое число; с — константа, причем с
Если т = 1, итерационный метод имеет линейную скорость сходимости, если т = 2 — квадратичную.
Стационарные итерационные методы. Итерационные методы решения систем уравнений основаны на применении итерационной формулы
Ъ?+1 = + HkF(Vk), (8.11)
где Hfr — итерационная матрица, представляющая собой квад
ратную матрицу размерности п х п .
Второе слагаемое правой части формулы (8.11) называют поправкой вектора V на (k + 1) -й итерации:
bVk+1=HkF(Vk). (8.12)
Все рассмотренные в разделе 8.2 подходы к анализу статических состояний и реализующие их алгоритмы относятся к итерационным и отличаются между собой лишь способом вычисления поправки АУ^+1, который определяется итерационной
матрицей .
Критерием выбора метода решения алгебраических уравнений, описывающих статику конкретного технического объекта, является сходимость итераций, что определяется функцией
G(V) = V + HF(V).
Различают стационарные и нестационарные итерационные методы. Если итерационная матрица Н постоянна, метод стационарный, в противном случае метод нестационарный.
Итерационный процесс поиска решения может быть прекращен и решение можно считать полученным, если текущая точка Vk окажется в заданной 8 -окрестности стационарной точки
V , т.е. норма вектора погрешностей Ek не превышает положи-
тельную скалярную величину £:
(8.13)
Однако поскольку решение задачи V* заранее неизвестно, воспользоваться выражением (8.13) для остановки итерационного процесса не представляется возможным. В этой связи в качестве
310
критериев или условий окончания итераций используют следую
щие выражения:
< ;
(8.14)
^2 ’
(8.15)
где Rk = F(Vk) — вектор невязок системы алгебраических уравне
ний (8.1) на /г-й итерации; 8j и 82 — малые положительные чис
ла, косвенно характеризующие точность полученного решения.
Условие (8.14) можно применять лишь при высокой скорости сходимости итераций. В любом случае предпочтительнее использовать условие окончания итерационного процесса (8.15), ограничивающее норму вектора невязок, так как оно в известной мере определяет точность полученного решения. Норму вектора невязок вычисляют по формуле
(8.16)
где п — порядок системы алгебраических уравнений; Ft(Vk) — компонент вектора невязок — невязка i-ro уравнения системы на k-й итерации.
При плохой обусловленности системы алгебраических уравнений целесообразно потребовать одновременного выполнения обоих условий (8.14) и (8.15).
В случае несходимости итерационного процесса его следует прекратить, если число итераций И превысит заданное предельное их количество И3 . Обычно принимают И3 = 100...200. Число итераций также ограничивают при сравнительной оценке эффективности методов и выборе метода решения заданной системы уравнений, при подборе параметров алгоритма итерационного процесса.
Экономичность метода оценивается объемом вычислений и необходимым объемом оперативной памяти ЭВМ.
8.4. МЕТОД ПРОСТОЙ ИТЕРАЦИИ
В качестве итерационной матрицы в методе простой итерации принимается
Н = hE , (8.17)
где h — скалярная величина; Е — единичная матрица того же порядка, что и матрица Н.
Порядки матриц Н и Е равны порядку п системы алгебраических уравнений.
311
Итерационная формула метода простой итерации
Vk+l^k + hF(Vk). (8.18)
Эта формула совпадает с формулой Эйлера для явного метода интегрирования системы обыкновенных дифференциальных уравнений (см. раздел 9.6).
Найдем условие сходимости итераций рассматриваемого метода. Для этого определим спектр матрицы Gy = dG(V) / dV . Запишем выражение вектор-функции G(V), принимая во внимание итерационную формулу (8.18):
G(V) = V + hF(V).
Определив частные производные dG(V) / dV, получим матрицу
Gy = (Е + hJ).
Здесь учтено, что dV / eV = Е , a dF(V) / eV = J , где J — матрица Якоби системы алгебраических уравнений F(V) = 0.
Определив собственные значения Xq , i = 1, п , матрицы Gy , найдем ее спектральный радиус р. Он равен наибольшему по модулю собственному значению этой матрицы |XG f . Для сходимости итераций необходимо выполнение условия (8.8), т.е. р < 1.
Собственные значения матрицы Gy связаны с собственными значениями матриц Е и J таким же соотношением, что и сами матрицы, поэтому условие (8.8) сводится к условию
|l + ftXf|<l, i = l, п, (8.19)
где X/ — i-e собственное значение матрицы Якоби J.
Неравенство (8.19) выражает условие сходимости итераций при решении заданной системы алгебраических уравнений.
Для системы линейных алгебраических уравнений
F(V)=AV + U= 0 (8.20)
матрица Якоби постоянна и равна матрице коэффициентов А при векторе фазовых координат V (U — вектор внешних воздействий на систему).
Для нелинейных алгебраических уравнений условие (8.19) можно использовать как приближенное, так как матрица Якоби в этом случае непостоянная: J = dF(V) / dV .
Условие (8.19) должно выполняться для всех X/. В результате параметр h оказывается довольно малым, что приводит к
|XZ|, i e[l:n]. (8.21)
312
большому числу итераций И. Величина И оказывается соизмеримой с числом обусловленности ц матрицы Якоби, оцениваемым по формуле
ц = max | / min
При плохой обусловленности системы уравнений ц достигает значений 102...109, поэтому метод простой итерации во многих случаях оказывается малоэффективным.
Как отмечалось в разделе 8.2, для анализа статических состояний может использоваться не только система алгебраических уравнений, но и система обыкновенных дифференциальных уравнений, описывающая динамические свойства технического объекта. Итерационная же формула в обоих случаях может быть одной и той же, например, для метода простой итерации и явного метода интегрирования Эйлера она соответствует выражению (8.18). Тогда и условия устойчивости обоих итерационных алгоритмов, используемых для решения как алгебраических, так и дифференциальных уравнений, будут одинаковыми, соответствующими выражению (8.19).
Собственные значения матрицы Якоби системы обыкновенных дифференциальных уравнений представляют собой в общем случае комплексные числа
=Re(Xz) + jIm(Xz), (8.22)
где Re ( Xj) — вещественная часть i-ro собственного значения матрицы Якоби; Im (X/) — мнимая часть того же собственного значения.
В этом случае условие устойчивости (8.19) будет иметь вид [1+й Re (Xj )]2 + й2[ Im (Xz )]2 < 1.
Из этого неравенства получаем
Л <------. (8.23)
[Re (Хг)]2 +[Im (Xi)]2
Параметр h представляет собой шаг итераций. Для устойчивых динамических систем вещественные части всех собственных значений матрицы Якоби отрицательные, т.е. Re(Xj)<0, i = 1, п. Тогда шаг итераций будет положительным. Если окажется Re(Xj)>0 хотя бы для одного Xj, то при положительном h процесс итераций будет всегда расходиться. Но такая динамическая система обладает физической неустойчивостью и ее переходные процессы расходящиеся. Следовательно, расходимость итерационного процесса в данном случае отражает физические свойства технической системы.
313
Коэффициенты системы алгебраических уравнений F(V) =0, описывающей статическое состояние технической системы, определяются ее параметрами и представляют собой вещественные числа. Собственные значения матрицы Якоби системы алгебраических уравнений в этом случае также вещественные числа. Если окажется, что для данной системы алгебраических уравнений есть одновременно Re(Xj) < 0 и Re (А^)> 0, то метод простой итерации будет неприменим, поскольку получится расходящийся итерационный процесс при любых значениях параметра h.
Возможен случай, когда для некоторой системы алгебраических уравнений все Re () > 0 . Тогда, согласно выражению (8.23), параметр h будет отрицательным.
Оценим скорость сходимости метода простой итерации для системы линейных алгебраических уравнений (8.20). Используя итерационную формулу (8.18), соответствующую (/Н-1)-му шагу
итерационного процесса, и вычитая из нее функции ив точке точного решения, которое представить в виде
И*
значение вектор-можно формально
= F* +hF(y*),
получим
г"7*
= -Й*+йр(УА) - F(V*)
h
>
где &F(Vk) = F(Vk) - F(V*); = Vk - V*.
Принимая во внимание, что
lim аЩ)
ДУ»->0 \Vk dVk
а также Vk+1 - V* = Ek+1; Vk - V* = Ek , где ЁА+1 и Ё/г — векторы погрешностей определения фазовой переменной V, получаем Ek+1 = (Е + hJ)Ek .
Предположим, что выполняется условие сходимости итераций и спектральный радиус р = | 1 + hkA < 1 . Тогда скорость схо
димости метода простой итерации можно оценить по формуле
Из этой формулы следует, что метод простой итерации обладает линейной сходимостью со скоростью геометрической прогрессии, знаменатель которой р < 1. Чем меньше р , тем быстрее будет сходимость итераций.
314
Метод простой итерации обладает наибольшей экономичностью по затратам машинного времени на одну итерацию и оперативной памяти ЭВМ в сравнении с другими методами. Он удовлетворяет условиям глобальной теоремы сходимости итераций, поэтому сходится от любых начальных приближений Vo . Однако эффективность его зависит от обусловленности системы алгебраических уравнений. При плохой обусловленности необходимо применять различные способы ускорения сходимости итераций.
8.5. МЕТОД ЗЕИДЕЛЯ
Рассмотрим итерационный алгоритм решения системы линейных алгебраических уравнений (8.20).
В методе простой итерации элементы вектора V^+1 на (&+1)-й итерации вычисляются по формуле
vi(k+l) vi(k) + + ui
U=i
, i = 1,72 .
(8.24)
В этой формуле индексы (£+1) и k, соответствующие номерам итераций, заключены в скобки.
Сущность метода Зейделя состоит в том, что для поэлементного нахождения значений щ на (&+1)-й итерации (т.е. гг-(/г+1)) определение функции невязки /^(V) осуществляется с учетом уже вычисленных значений vp^+^ элементов вектора V при р < i.
Предположим, что все диагональные элементы матрицы А не равны нулю и известен вектор после &-й итерации.
Запишем первое уравнение системы (8.20) в виде
«11^1 + = 0.
J=2
Так как = 2,п , известны, то из этого уравнения находим uj на (&4-1)-й итерации, т.е. . Подставим полученное
значение во второе уравнение системы (8.20):
а21и1(^+1) + а22и2 + Ya2jvj(k) + и2 - 0 •
>3
В этом уравнении неизвестным является г2 • Вычислив его значение, обозначим г2 = ^2(&+1) •
315
Для вычисления i-й переменной можно составить
следующее выражение:
Zaijvj(k+1) +aii»i + X aijvj(k)+ui = °- (8-25)
Уравнение (8.25) решается относительно переменной Vi , а
вычисленное значение элемента вектора V обозначается vi = vi(k+l) •
На основании выражения (8.25) можно записать итерационную формулу метода Зейделя в матричной форме
= vk - D^F(V^ ),
(8.26)
где Dk — диагональная матрица, элементы которой совпадают с диагональными элементами матрицы Якоби J = A; V'h — вектор, первоначально (т.е. при i= 1) равный Vk с последующей заменой значений элементов vp^) при р < i новыми значениями элементов рХ&+1) вектоРа Vk+l по меРе их вычисления при изменении
i - 2, п .
Метод Зейделя требует, чтобы диагональные элементы матрицы Якоби были отличны от нуля и как можно большими по абсолютной величине в сравнении с другими элементами строки матрицы, с целью улучшения сходимости вычислительного процесса. В этой связи исходная система алгебраических уравнений нуждается в предварительном упорядочении.
Условие глобальной сходимости метода Зейделя определяется неравенством (8.8). Достаточные условия сходимости итераций метода Зейделя имеют вид
(8.27)
Однако следует отметить, что условия (8.27) не являются необходимыми.
Сходимость итераций при решении конкретной системы алгебраических уравнений можно улучшить путем соответствующих перестановок уравнений системы, с тем чтобы получить доминирующую диагональ матрицы А.
Метод Зейделя, как и метод простой итерации, имеет линейную скорость сходимости.
316
8.6. МЕТОДЫ РЕЛАКСАЦИИ
Методы релаксации являются развитием метода Зейделя. Если в методе Зейделя uz(£+i) = vi > то в этих методах vi(k+l) = vi(k) + ® (ui - vi(k)) » где со — релаксационный параметр, выбираемый в пределах 0 < со < 2 . При со = 1 эти методы эквивалентны методу Зейделя.
Итерационная формула для определения вектора искомых фазовых переменных V при решении системы алгебраических уравнений имеет вид
Vh+1 = ®^+1 + (1 - . (8-28)
где Vk+1 — вектор, определяемый методом Зейделя по формуле (8.26).
При со > 1 метод называют методом последовательной верхней релаксации (ПВР), а при со < 1 — методом последовательной нижней релаксации (ПНР). Метод ПВР часто используют для решения систем алгебраических уравнений большой размерности, возникающих при моделировании на микроуровне. Соответствующий выбор параметра со позволяет получить более высокую скорость сходимости, чем в методе Зейделя.
8.7. МЕТОД НЬЮТОНА
Метод Ньютона обладает наибольшей скоростью сходимости среди практически применяемых методов. Особенность его состоит в выборе итерационной матрицы, которая обеспечивает равенство нулю спектрального радиуса р при V = V*. Скорость сходимости итераций тем больше, чем ближе к нулю значение р. В окрестности точки точного решения V* метод Ньютона имеет квадратичную скорость сходимости.
В методе Ньютона система алгебраических уравнений F(V) = 0 линеаризуется. Разложим нелинейную вектор-функцию F(V) в ряд Тейлора в окрестности некоторой точки V , близкой к точке V* о Ограничиваясь линейными членами ряда, запишем выражение для вектор-функции Е(У) в точке V*. Так как F(V*) = О, то получаем следующее выражение:
F(V*) « F(V) + (V* - V) = 0 . (8.29)
317
Принимая во внимание, что cF(V) / eV = J — матрица Якоби системы нелинейных алгебраических уравнений F(V) = 0 , на основе (8.29) получаем
V* « V - . (8.30)
Из-за линеаризации вектор-функции F(V) получается не точное решение V*, а некоторое приближение. На основе выражения (8.30) можно построить итерационный алгоритм решения системы алгебраических уравнений. После первой итерации получаем приближенное решение
(8.31) где Vq — вектор начального приближения; Jq — матрица Якоби, элементы которой вычислены в точке Vq .
Для (&+1)-й итерации получаем
(8.32)
Выражение (8.32) представляет собой итерационную формулу Ньютона. Очевидно, что итерационной матрицей в методе Ньютона является обращенная матрица Якоби
Hk = -Jk1, (8.33)
а поправка вектора V на (&+1)-й итерации находится по формуле
Д^+1 = . (8.34)
Обращение матрицы представляет собой сложную вычислительную процедуру. Однако ее можно избежать. Запишем итерационную формулу (8.32) в виде
^+1 = + • (8.35)
С учетом этой формулы преобразуем итерационную формулу (8.32), приведя ее к виду
= -Ж) • (8-36)
Правая часть матричного уравнения (8.36) представляет собой вектор невязки исходной нелинейной системы алгебраических уравнений, взятый с противоположным знаком. Полученное уравнение позволяет вычислить поправку вектора V на (й+1)-й итерации. Затем по формуле (8.35) находят вектор фазовых переменных Матричное уравнение (8.36) на каждой итерации представляет собой систему линейных алгебраических уравнений относительно вектора поправок ДЙ^+1, но матрица коэффициентов
318
этого уравнения Jk изменяется на каждой последующей итерации, что обусловлено нелинейностью решаемой системы алгебраических уравнений. Изменяется также вектор невязок F(V^) системы алгебраических уравнений в связи с перемещением точки
Vk в фазовом пространстве. Поэтому систему линейных алгебраических уравнений (8.36) приходится решать на каждой итерации. Для ее решения обычно используют метод Гаусса.
Алгоритм метода Ньютона включает следующие этапы:
1) выбор начального приближения V = Vo ;
2) вычисление матрицы Якоби Jk в точке Vk (k = 0,1,2,...);
3) вычисление вектора невязок F(Vk) исходной системы алгебраических уравнений;
4) решение системы линейных алгебраических уравнений (8.36) и определение вектора поправок д^+1;
5) определение нового приближения вектора искомых фазовых переменных У^+1 по формуле (8.35);
6) вычисление нормы вектора невязок
^+1
и нормы век-
тора поправок
7) проверка условий окончания итерационного процесса. Эти условия имеют вид
|а^+1|| < Б1; (8.37)
Д?+1 | = р(П+1)|| < е2 • (8-38)
Если оба условия (8.37) и (8.38) выполнены, процесс итераций можно остановить, приняв полученную точку в качестве точки решения, т.е. V* « Vk+1 •
Если одно из условий (8.37) или (8.38) или оба не выполнены, осуществляется переход ко второму этапу и итерации продолжаются.
В методе Ньютона по сравнению с методом простой итерации значительно больше объем вычислений на одной итерации и больше необходимый объем оперативной памяти ЭВМ, что обусловлено необходимостью вычисления и хранения матрицы Якоби и решения системы линейных алгебраических уравнений (8.36) на каждой итерации, но число итераций обычно много меньше. Главный же недостаток метода Ньютона состоит в том, что уело-
319
вия глобальной теоремы сходимости редко выполняются и сходимость при произвольном выборе начального приближения Уо обеспечивается не всегда. Для метода Ньютона необходимо обеспечить выполнение условий локальной теоремы сходимости. Если начальное приближение Vo выбрано достаточно близким к V*, то метод Ньютона всегда сходится к точному решению V*. В этой связи возникает необходимость поиска области в фазовом пространстве, в которой выполняются условия сходимости итераций, т.е. спектральный радиус р < 1 .
Все изложенные замечания о сходимости итераций относятся к решению систем нелинейных алгебраических уравнений. Для системы линейных алгебраических уравнений метод Ньютона обеспечивает сходимость к точному решению V* за одну итерацию при выборе любого начального приближения Vo.
Стремление повысить надежность метода Ньютона привело к появлению ряда его модификаций. Рассмотрим некоторые из них.
1. Многократный случайный выбор начальной точки Vo внутри некоторой области, в которой, по предположению, находится точка V* . Если при осуществлении итераций из некоторой точки величина нормы вектора поправок
возрастает и
решение не удается найти за 6...7 итераций, необходимо выбрать новое приближение Vq.
2. Введение в итерационную формулу (8.32) множителя h <1:
Vk+1 = Vk - Wa).
(8.39)
Алгоритм в этом случае отличается более осторожной стратегией поиска решения V* , так как шаг итераций уменьшается, что обеспечивает увеличение вероятности сходимости. Параметр
hfa выбирают из условия минимизации нормы вектора невязок
или уменьшения этой нормы на каждой итерации. Расходи
мость при этом исключается, однако сходимость может быть очень медленной при неудачном выборе и тогда теряется основное преимущество метода Ньютона.
3. Постепенное увеличение уровней внешних воздействий. Этот подход является более надежным и эффективным, чем предыдущий. Суть его состоит в следующем. При отсутствии внеш
320
них воздействий для большинства технических систем выполняется условие V* - 0 . Поэтому если выбрать в качестве начального приближения нулевой вектор фазовых переменных Vo = 0 , то вероятность сходимости будет тем выше, чем меньше уровень внешних воздействий.
Алгоритм включает несколько циклов итераций. В каждом цикле внешние воздействия сохраняются постоянными, а при переходе к новому циклу изменяются ступенчато (скачкообразно) на сравнительно небольшую величину. После изменения уровня внешних воздействий выполняются ньютоновские итерации и получается некоторое промежуточное решение V, принимаемое за начальную точку для следующего цикла итераций. Количество выбранных ступеней изменения внешних воздействий определяет число циклов итераций.
4. Использование комбинированного алгоритма, включающего метод простой итерации и метод Ньютона. Метод простой итерации предназначен в этом алгоритме для нахождения начального приближения для метода Ньютона, который наиболее эффективен вблизи точки V* , но может оказаться расходящимся при произвольном выборе Vq . Вначале осуществляется некоторое запланированное число простых итераций и полученная точка принимается в качестве точки Vq , из которой делается попытка
достичь точки У* методом Ньютона. Если эта попытка неудачна, продолжаются простые итерации. Таким образом, вдали от точки V используется метод простой итерации, а вблизи от нее — метод Ньютона.
Метод Ньютона и его модификации находят самое широкое применение в САПР благодаря высокой эффективности и надежности.
8.8. МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
Необходимость решения систем линейных алгебраических уравнений часто возникает при проектировании технических объектов. Такие уравнения могут представлять собой математическую модель технической системы или же входить составной частью в алгоритм решения более сложных задач.
Приведем несколько примеров. Статическое состояние механической колебательной системы с голономными связями при линейных характеристиках упругих и диссипативных элементов описывается системой линейных алгебраических уравнений. В методе Ньютона на каждой итерации решается система линейных
алгебраических уравнений относительно вектора поправок Д^+1 • Такие же задачи возникают при интегрировании системы обыкновенных дифференциальных уравнений неявными методами. Аппроксимация частных производных отношениями конечных разностей при алгебраизации математических моделей микроуровня приводит к системам линейных алгебраических уравнений. Это же характерно и для метода конечных элементов. Задачи частотного анализа линейных систем также сводятся к решению линейных алгебраических уравнений.
Поскольку в итерационных алгоритмах приходится решать системы линейных алгебраических уравнений многократно, то эффективность методов их решения приобретает исключительно важное значение.
В общем случае система линейных алгебраических уравнений в матричной форме имеет вид
АХ = В 9 (8.40)
где А — квадратная матрица порядка n; X — n-мерный вектор искомых неизвестных; В — n-мерный вектор свободных членов.
В математической модели статических состояний технического объекта элементы матрицы А и вектора В постоянны, причем, элементами матрицы А являются параметры объекта или некоторые комбинации этих параметров, а элементы вектора В представляют собой внешние воздействия на объект.
В алгоритме метода Ньютона, согласно итерационной формуле (8.36), матрица А представляет собой матрицу Якоби решаемой системы алгебраических уравнений F(X) = 0, а вектор В — вектор невязок уравнений этой системы. Так как уравнения F(X) = 0 нелинейные, то элементы матрицы А зависят от искомых фазовых координат X и поэтому они изменяются при переходе от одной итерации к другой. Изменяются при этом также и функции невязок. Но на каждой итерации имеет место система линейных алгебраических уравнений вида (8.40), характеризуемая постоянством коэффициентов и свободных членов, решение которой позволяет определить вектор поправок ДХ^+1.
Для решения системы уравнений (8.40) можно использовать рассмотренные в предыдущих параграфах итерационные методы: простой итерации, Зейде ля, релаксационный. Однако при плохой обусловленности системы уравнений, характерной для математических моделей технических объектов, скорость сходимости итераций и точность получаемых результатов обычно низкие. В большинстве случаев уравнение (8.40) решают с использованием прямых методов, из которых наибольшее распространение получили метод Гаусса и метод L {/-разложения.
21. Зак. 3006
322
8.9. МЕТОД ГАУССА
Метод Гаусса основан на последовательном исключении неизвестных из системы алгебраических уравнений. Он содержит два этапа: исключение неизвестных (прямой ход алгоритма) и пос ледова тельное вычисление значений неизвестных (обратный ход). В результате первого этапа исходная система линейных алгебраических уравнений приводится к треугольной форме. Последнее уравнение преобразованной системы содержит лишь одну неизвестную, предпоследнее — две и т.д., что позволяет осуществить их непосредственное прямое вычисление.
Рассмотрим процесс преобразований и решения системы линейных алгебраических уравнений (8.40).
При прямом ходе выполняется п - 1 стадий преобразований, где п — порядок системы уравнений (8.40). На каждой /г-й стадии производится исключение очередной неизвестной х^ из уравнений, начиная с (/Н-1)-го и кончая n-м уравнением. Первые k уравнений остаются при этом неизменными.
В процессе преобразований элементы матрицы А и вектора
В изменяются, а после (п -1) -й стадии матрица А принимает
верхнюю треугольную форму. При пересчете элементов матрицы А и вектора В используются следующие формулы:
У
(Л-1) ij
KJ
h(k) ^h(k-l) (k-l)h(k-l),
°i “ °k 9
(8.41)
(8.42)
(8.43)
i = k + 1, n; j = k, n; k = 1, n - 1,
где k — номер стадии преобразования.
После преобразования получаем систему уравнений в сле-
дующем виде:
а11х1 + «12х2+-”+а1пхп =&i;
а(1)хо+ +а(1)х
“22 2+ф"+ 2п 2 ’
(8.44)
a(n-l)x =6(n-D ипп лп ип -J
В последнем уравнении системы (8.44), полученной после выполненных преобразований, отличен от нуля только коэффициент апп перед единственной переменной хп, в предпоследнем —
323
два коэффициента an-i>n-i; an-i,n перед неизвестными и
хп и т.д. Это позволяет перейти к этапу обратного хода, при котором последовательно вычисляются значения искомых переменных Xn,Xn-i,Xn_2 И Т.Д. ДО X} .
Запишем систему уравнений (8.44) в матричной форме
UX = В* , (8.45)
где U — верхняя треугольная матрица, все элементы которой ниже главной диагонали равны нулю; В* — скорректированный вектор свободных членов.
Элементы матрицы U обозначим иу , а вектора В* - Ь* . Тогда, используя последнее уравнение системы (8.44), найдем значение переменной хп :
т* /
°п / ипп>
п
(8.46)
где ипп = апп ; ип = ип
Остальные переменные находятся последовательно с использованием формулы п
Xt = (bl - £ Ui}Xj)/uu, i = n-l...1. (8.47)
J=i+1
Отметим основные особенности метода Гаусса. Как следует из формулы (8.43), все диагональные элементы a^kматрицы А должны быть отличны от нуля. Если модуль какого-либо диагонального элемента имеет очень малое значение, то при вычислении могут возникнуть большие ошибки округления, распространяемые на весь дальнейший процесс исключения переменных. Это может привести к значительной ошибке в результирующем решении, что характерно для плохо обусловленных систем уравнений (8.40). С целью повышения точности на каждой стадии исключения переменных необходимо выбирать в (Л-1)
качестве диагонального элемента a^k f максимальный по модулю элемент среди оставшихся элементов /?-й строки. Алгоритм, реализующий эту идею, называют алгоритмом выбора главного элемента.
Рассмотрим пример на применение метода Гаусса.
324
Пример 8.1. Пусть необходимо решить следующую систему линейных алгебраических уравнений:
аЦх1 + “12*2 + “13*3 = ^1*
«21*1 + а22х2 + а2з*з = Ъ2,> (8.48)
“31*1 + “32*2 + “зз*з = ^з
при заданных значениях коэффициентов и свободных членов
На этапе прямого хода необходимо выполнить п - 1 = 2 стадии преобразований.
Первая стадия прямого хода (k = 1) — исключение х1 из всех уравнений, кроме первого. При этом i - k + l,n = 2,п; j - k,n = 1,2,3.
Преобразование второго уравнения системы (8.48): _ m(0) _ (0) , (0) _ ,
mi — т2 ~ “21 ' “11 “ “21 / “11’ ^21 = “2Р ~ ^2 ^“11^ = “21 — “21 “11 /“11 = 0» а22 = а22 ~ ^2 )“12^ = “22 — “21 “12 /“11 » а23 = “23) ~ т2 )“13^ ~ “23 — “21“13 /“11 »
b™ = b™-
Преобразование третьего уравнения системы (8.48): го(*-1)=т(0>=а(0)/а(0) = Оз1/а11.
а*1* “31 - а(0) -- а31 о ±± = 0;
«(О “32 - а(0) -~ “32 = “32 - «31^12 / “115
а(1) “зз - а(0) -- “зз = “зз - а31а1д / аи;
= fc30) - m3°'fci0) = -“зА / «li-
После первой стадии преобразований система уравнений (8.48) приводится к виду:
“11*1 + “12*2 + “13*3 “ &1>
„(1)г .JiL -М1). “22 х2 “23 х3 “ и2 ’
n(Dr +a(1)v -Ъ(1)
“32 х2 + “33 *3 _ “3 '
ce. 49)
Вторая стадия прямого хода (k = 2) — исключение х2 из всех уравнений,
кроме первого и второго. При этом i = k + l,n = 3; j = k,n = 2, 3.
Преобразование третьего уравнения системы (8.49):
= mJ1) = а$/<$;
а32 = а32 " ^з)а22 = 0 ;
a(2) _ (1) _ ^(1)^(1) _ „О) _ а(1)а(1) /а(1).
“зз “ “зз т3 “23 “ “зз “32 “23 / “22 >
6<2) = б»1» - = &<« - а^б'1’ /41’
О О О £t О Л *
В результате преобразований прямого хода алгоритма Гаусса исходная система уравнений (8.48) приводится к виду:
“11*1 + “12*2 + “13*3 ~ ^1»
z/1)- . Л(1)у -ь(1).
“22 х2 + “23 х3 “ °2 »
а{2) _ъ(2)
“зз х3 - “з
(8.50)
325
На этапе обратного хода определим искомые переменные: г -М2)/л(2)-х3 — °3 ' азз ’
X
2 ~ (^2^ а23^Хз)/а22^>
Х1 “ (&1 “ а12Х2 “ а13Хз) / а11-
8.10. МЕТОД /.{/-РАЗЛОЖЕНИЯ
В методе LCZ-разложения матрица А коэффициентов системы линейных алгебраических уравнений (8.40) представляется в виде произведения матриц L и U :
A=LU, (8.51)
где L — нижняя треугольная матрица; U — верхняя треугольная матрица, все диагональные элементы которой равны единице.
Подставим (8.51) в уравнение (8.40):
LUX = В . (8.52)
Обозначим
UX = Y (8.53)
и подставим в уравнение (8.52):
LY = В . (8.54)
Алгоритм метода L 17-разложения, так же как и алгоритм метода Гаусса, содержит два этапа. На первом этапе осуществляется разложение матрицы А, а на втором — определение вектора искомых переменных X .
Согласно определению произведения матриц значение элемента ау матрицы А равно скалярному произведению г-й вектор-строки L} матрицы L и j-ro вектор-столбца U i матрицы U:
ai} =< Lt,Uj >= "Llikukj > (8.55)
k=l
где 1^ — элементы матрицы L; u^j — элементы матрицы U; п — порядок системы уравнений; < Li9U; > — скалярное произведе-ние векторов Lj и Uj .
При осуществлении разложения матрицы А примем во внимание, что диагональные элементы матрицы U должны быть равными единице. Тогда с учетом того, что L и U — треугольные матрицы, причем L — нижняя треугольная матрица, a U — верхняя треугольная, выражение (8.55) для определения «у можно переписать в виде:
j-1
^tj = Kkukj hj при k=l
i
aij = Ylikukj ПРИ k=l
(8.56)
Разложение матрицы А выполняется за n стадий. На r-й стадии осуществляется преобразование элементов r-го столбца и r-й строки. На первой стадии первый столбец матрицы А остается
без изменений, т.е. 1ц = ац для всех i = l,n, а первая строка пере
считывается по формуле uij = aij /1ц при j = 2,п . Диагональный элемент иц верхней треугольной матрицы иц = Лц /1ц = 1 , так как /ц == ац о
Используя выражения (8.56), получаем рекуррентные формулы для вычисления элементов треугольных матриц L и U на r-й стадии разложения: г-1 ___
kr = air - ИЧкикг при i = r,n; (8.57)
k=i
r—1 ______
Upi ~ (art ~ ^rkukO I Irr при i — Г 4-1, n . (8.58) k=l
Формулы (8.57) и (8.58) лежат в основе алгоритма Краута, используемого для //[/-разложения матрицы А коэффициентов системы линейных алгебраических уравнений.
Вычисленные элементы 1~г размещаются на месте элементов atr (I = > а элементы иГ} — на месте элементов arj
(i = r + l,n). В результате матрица А приводится к виду
Zll “13 ••• и1п
Z21 122 “23 ••• и2п zo rm
^п1 ^п2 ^пЗ ••• Ъгп
При этом матрицы L и U имеют треугольный вид: Zn О О ... О
Т 121 122 0 •••°
(8.60)
^п1 ^п2 ^пЗ ••• ^пп
327
1 w12 «13 ••• uln
О 1 «23 ••• u2n
(8.61)
ООО ... 1
Все диагональные элементы матрицы U равны единице.
Для иллюстрации изменения элементов матрицы А приведем ее вид при п = 5 после выполнения r-й стадии разложения (примем г = 2):
Zll и12 «13 «14 «15 г21 122 «23 «24 «25 Z31 Z32 а33 «34 «35 • г41 Z42 «43 «44 «45 Z51 Z52 «53 «54 «55
Одновременно с выполнением последовательных стадий раз
, ис-получаемые значения элементов нижней тре-L. Для их вычисления применяется формула
ложения осуществляется вычисление элементов вектора У пользуя при этом угольной матрицы
Уг ~ ЧкУк / hi
при i = 2, п .
(8.62)
Значение у± находится из соотношения
z/i = &1 / • (8.63)
Второй этап рассматриваемого метода соответствует этапу обратного хода алгоритма Гаусса, на котором решается система уравнений (8.53) с верхней треугольной матрицей U. Вычисление элементов вектора искомых переменных X осуществляется по формуле
п
xi=yt~ H,uikxk при i = п - 1,...,1. (8.64)
k=i+l
Формула (8.64) аналогична формуле (8.47), используемой в методе Гаусса, но в ней учтено, что все диагональные элементы иц верхней треугольной матрицы U равны единице. Значение элемента хп = уп.
Изложенную схему алгоритма решения системы линейных алгебраических уравнений называют схемой Халецкого.
Диагональные элементы нижней треугольной матрицы L должны быть отличными от нуля. Если матрица А плохо обуслов
328
лена, необходимо при осуществлении ее разложения использовать алгоритм выбора главного элемента.
Отметим важную особенность метода L 17-разложения. В ходе
разложения вектор В не изменяется, что дает возможность использования полученных матриц L и U для решения систем уравнений с одинаковой матрицей А и разными векторами В внешних воздействий. При этом значительно сокращаются затраты ма
шинного времени о
Рассмотрим пример с применением метода LU-разложения.
Пример 8.2. Требуется найти решение системы линейных алгебраических уравнений
321
230
103
10
8
10
(8.65)
На первой стадии разложения матрицы А при г = 1 необходимо лишь пересчитать элементы ее первой строки и получить элементы верхней треуголь-
ной матрицы и при j = 2,п : u12 = а12 /hi = 2/3; = а13 /hi = 1/3, где /п = ап . В
результате получаем матрицу ALU в виде
alu
3 2/3 1/3
2 3 0
10 3
Выполним вторую стадию разложения при г = 2. По формуле (8.57) вы-
числяем значения элементов второго столбца нижней треугольной матрицы L при
i = 2, 3:
^22 “ а22 ~ hlu12 - 5 / 3 J Z32 — &32 ~ ^31м12 _ “2 / 3, а по формуле (8.58) — значения элементов второй строки верхней треугольной матрицы U при i = 3: u2S = (а23 - Z2iU13)//22 = -2/5.
Матрица ALU после второй стадии разложения:
^lu =
3 2/3 1/3
2 5/3 -2/5
1-2/3 3
Выполним третью стадию разложения при г = 3:
^33 - а33 ~ ^31м13 ~ ^32м23 - 12/5.
Можно убедиться, что диагональный элемент и33 верхней треугольной
матрицы U равен единице. Действительно, по формуле (8.58) находим м33 ~ (а33 ~ lsiu13 ~ ^32М23)/ ^33 “ 1 •
Принимая во внимание полученное значение Z33, приведем матрицы L
и U:
3 0 0
2 5/з о ;
1 - 2/3 12/5
1 2/3 1/3
0 1-2/5
0 0 1
329
Используя матрицу L, по формулам (8.62) и (8.63) находим значения элементов вектора у : У1 = / Zn = 10 / 3; у2 = (Ь2 - 121У1) /122 =4/5; у3 = (&з ~ ^31 */1 ~
~^32?/2) / ^33 “ 3-
Затем по формуле (8.64) вычисляем элементы вектора искомых переменных X I Х2 = У% = 3; Х2 = У2 — ^23*^3 = 2; = У1 ^12-^2 ^13-^3 !•
8.11. РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ С ЛЕНТОЧНЫМИ МАТРИЦАМИ
Матрицы А коэффициентов в системах алгебраических
уравнений, описывающих статические состояния технических систем, обычно содержат большое число нулевых элементов. Такие матрицы называют разреженными. Разреженность матриц А
объясняется тем, что каждый элемент технической системы взаи
модействует с ограниченным числом смежных элементов.
Сильная разреженность матриц особенно характерна для
математических моделей микроуровня при дискретизации крае
вой дифференциальной задачи на основе методов сеток. Замена
Рис. 8.1. Ленточнодиагональная матрица
Специфические
частных производных системы дифференциальных уравнений отношениями конечных разностей на основе использования регулярной сетки приводит к ленточным матрицам, у которых ненулевые элементы располагаются только на k главных диагоналях (рис. 8.1). Такой вид имеют, например, матрицы (2.78) и (2.87), полученные в примерах 2.1 и 2.2 при моделировании теплопередачи.
особенности структуры ленточных матриц
можно использовать для упрощения вычислительных алгоритмов. Для решения систем линейных алгебраических уравнений с трех-диагональными матрицами коэффициентов вида (2.78) используют разновидность метода Гаусса, называемую методом прогонки. Уравнения системы в этом случае имеют вид
ai,i-lxi—1 + ai,ixi + ai,i+lxi+l — — 1»^ •> (8.66)
При этом ait0 = 0 и aifn+1 = 0 .
Метод прогонки включает два этапа: прямую прогонку и обратную прогонку.
Прямая прогонка заключается в вычислении прогоночных коэффициентов на основе рекуррентных выражений:
h+1 — ai,i+l / (ai,i +
Pi+X — (Pi ~ ai9i-XPi) I (ai,i + ai,i~x4^ >
(8.67)
i = 1, n.
22. Зак. 3006
330
Значения коэффициентов и pi принимают равными нулю.
При обратной прогонке последовательно вычисляют значения элементов вектора искомых переменных X, начиная с хп = Рп+1> ио формуле
xi = k+lxi+l + Pi+1 ПРИ * = я - 1,тг - 2,...,1. (8.68)
Если число диагоналей больше трех, применяют метод матричной прогонки [19].
8.12. АНАЛИЗ СТАТИЧЕСКИХ СОСТОЯНИЙ ЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ
При соответствующих допущениях о постоянстве параметров элементов технических систем линейные уравнения характерны для некоторых механических, электрических и тепловых систем.
Анализ статического состояния проектируемой механической системы обычно сводится к определению геометрических координат и усилий или моментов в упругих элементах в состоянии покоя.
При построении математической модели механической системы координатный базис дифференциальных уравнений (8.2) могут составлять либо переменные типа потока v = (и^) , i = 1,п , и типа потенциала F„ = (Fvj), j = l,N , где v — вектор скоростей •У J J
сосредоточенных масс; F„ — вектор потенциалов (усилий или •7
моментов) упругих элементов; п — число степеней свободы; N — число упругих элементов; либо только переменные типа потока v = (vi) и х = (Х}) , i = 1,п , где X} — геометрические координаты сосредоточенных масс. В последнем случае для определения усилий в упругих элементах используют дополнительно компонентные уравнения, представляемые функциями вида Fv(x).
Координатный базис, включающий фазовые координаты V и х , необходимо использовать при наличии виртуальных связей, обусловленных ограничениями на перемещения сосредоточенных масс. При отсутствии ограничений удобнее применять фазовые координаты v и Fv. Во многих случаях нет необходимости в оп-ределении геометрических координат сосредоточенных масс системы в переходных процессах. Например, в механической вращательной системе угловые координаты не представляют интереса для проектировщика и, кроме того, их значения неограниченно
331
возрастают с течением времени. Вместе с тем применение координатного базиса v и F„ позволяет упростить математическую мо-•7
дель описания динамических процессов и сократить затраты машинного времени на их анализ. Но при моделировании состояния покоя системы возникает необходимость введения координатного базиса х , т.е. геометрических координат.
Математическая модель анализа статических состояний — система алгебраических уравнений. До решения уравнений необходимо оценить устойчивость и однозначность статического состояния объекта. Для этого используется спектр матрицы Якоби. Если вещественные части всех собственных значений отрицательны, объект обладает физической устойчивостью. Но при этом могут быть нулевые собственные значения. Это означает, что состояние покоя механической системы безразлично и достигается при любом произвольном положении объекта в фазовом пространстве. Система алгебраических уравнений в таком случае имеет неоднозначное решение. Такие системы называют полуопределен-ными. Однозначное положение объекта в пространстве фазовых координат можно получить путем исключения избыточных степеней свободы, число которых равно количеству нулевых собственных значений. С этой целью накладывают ограничения на геометрические координаты для такого же количества сосредоточенных масс, зафиксировав их на постоянном уровне. Фиксировать следует координаты только концевых масс. В состоянии покоя принимают нулевые значения их координат, а при равномерном движении — постоянные значения скоростей этих масс.
Нулевые собственные значения характерны для механических систем с дифференциальным соединением сосредоточенных масс и систем без реактивных элементов.
Рассмотрим методику решения систем алгебраических уравнений полуопределейных объектов. В матричной форме математическая модель объекта имеет вид
а11 а12 «13 ••• а1п Х1 Л’
а21 а22 а23 ••• а2п х2 Ь2
а31 а32 а33 ••• а3п • х3 — &3 , (8.69)
ап1 ап2 апЗ ••• апп_ _хп
где — элементы матрицы Якоби системы алгебраических уравнений; х^ — фазовые координаты; fy — элементы вектора внешних воздействий.
332
Предположим, что из общего количества п собственных значений матрицы Якоби т собственных значений оказались равными нулю. Зафиксируем т концевых масс с номерами индексов kq, q = 1, т. Математическая модель при этом преобразуется путем обнуления всех элементов столбцов и строк матрицы Якоби, содержащих диагональные элементы а^. Диагональные элементы при этом сохраняются. При анализе состояния покоя полагают х& = 0 и обнуляют элементы вектора внешних воздействий этих строк: = 0. Если рассматривается равномерное движение, то принимают х^ = const, а вычисляют из соотношения Ьь = аъъХъ . ЛС'ЛС' Sv
Пусть т - 1, а одна из концевых масс имеет номер индекса 2. Примем х2 = const; ai2 = 0; a2j = 0; i, j = 1, п; а22 ф 0; Ъ2 = 0 (состояние покоя). Уравнения (8.69) после этих преобразований принимают вид
а11 0 °13 ••• а1п ч
0 6^22 9 ••• 0 х2 0
а31 0 а33 ••• а3п • Хз — ьз (8.70)
ап1 0 апЗ • • • апп хп Ь5
Рассмотрим типовые примеры анализа статических состояний линейных технических систем.
Пример 8.3. Определить начальные и конечные значения фазовых координат механической вращательной системы, необходимые для моделирования переходных характеристик и определения показателей качества переходных процессов. Динамическая модель системы приведена на рис. 8.2.
Рис. 8.2. Динамическая модель механической системы
333
Переходные характеристики отображают изменения фазовых координат системы при переходе ее из одного состояния равновесия в другое равновесное состояние в результате скачкообразного ступенчатого изменения одного из внешних воздействий.
Предположим, что заданы начальное Мв10 и конечное ЛГв1к значения
воздействия Мв1, а также Мв2 = const. Остальные внешние воздействия Мв3 и Мв4 неизвестны. При их определении следует иметь в виду, что для достижения равновесных условий в исходном и конечном состояниях системы начальные МВ10 и конечные Мв/к значения всех внешних воздействий должны быть согла
сованы.
Динамические процессы системы описываются следующими уравнениями:
d&Y / dt = (Myi + Мд1)/(г/11Т|11)]/е71;
do2 / dt = + Myi + MRi - (My2 + Mд2) /(u22ri22 )] / J2;
dos / dt = + С^у2 + -^д2 )lZ32r132]/^3’ (8.71) *
d&4 / dt = — Mb4 + (Afy2 + Mff2)u42ri42]/ J4;
dMyl /dt = ^(coj /izn - w2);
d7Vfy2 / dt - c2(co2 / iz22 - (£>31/32 - (£>41/42);
Л^Д1 =М1(®1/Ыц -(02);
= ^2(&2 I U22 ~ ю3и32 ~ ®4и42) •
(8.72)
Для решения системы уравнений (8.71) с целью получения переходных характеристик необходимо задать начальные значения угловых скоростей (oiO, i = 1,4 , начальные и конечные значения моментов в упругих элементах Му;0 и Му/К , j = 1,2 .
При определении сою рассматривают либо состояние покоя системы, либо
равномерное движение. В первом случае принимают со/о =0, i = 1, п , где п — число степеней свободы системы. Во втором — используется система уравнений (8.72). В статическом состоянии механической системы моменты диссипативных элементов = 0 , т.к. отсутствуют относительные скорости перемещений сосре-доточенных масс. Тогда уравнения (8.72) получают вид
/и-и - (о? =0;
17 11 2 V (8.73)
®2 / и22 ~ ®3и32 ~ C04W42 = 0
В системе уравнений (8.73) 4 неизвестных со,- . Для их решения необходимо задать значения двух неизвестных. Задавать угловые скорости можно только концевым массам.
При определении моментов упругих элементов и угловых координат сосредоточенных масс (р^ необходимо, используя уравнения (8.71), получить математическую модель статического состояния системы. Для механических систем обычно рассматривается состояние покоя.
Решение задачи статики возможно двумя способами.
Первый способ заключается в составлении двух систем алгебраических уравнений. Одна из них — для определения М f, а вторая — для . Первая по-пУ J
334
лучается на основе топологических уравнений, входящих в систему (8.71), полагая в них doji /dt = 0, i = 1, п, и учитывая, что в статическом состоянии
Mw-=0, j = l,N:
Мв1 - Му1 /(Ui 1 т| 11) = 0;
~ ^в2 + ^yl “ ^у2 /(u22rl22) = О»
“ Мвз + Afy2U32r|32 - 0 »*
- Мв4 + Му2п42г|42 = О.
(8.74)
Так как Мв1 и Мв2 заданы, то неизвестными в уравнениях (8.74) являются Му1, Му2, Мв3, Мв4 .
Для получения второй системы уравнений используются компонентные уравнения, входящие в систему (8.71), но только в интегральной форме. Интегрируя эти уравнения и учитывая, что Му1 и Му2 определены при решении уравнений (8.74), получаем
(Cl / UiJcpj - C1q>2 = МУ1 ; 1
(С2 /^2г)ф2 ~с2и32(Рз — С2М42<Р4 = ^у2 •
Решение этой системы уравнений осуществляется так же, как и системы (8.73). Необходимо задать значения cpf двух концевых масс. В данном случае це
лесообразно принять ср3 = ср4 = О и определить и ср2 .
Второй способ заключается в подстановке из уравнений (8.75) в то-
•У J
пологические уравнения системы (8.71). В статическом состоянии системы топо-
логические уравнения принимают вид (8.74). В результате получаем следующую систему уравнений:
- [С1 /(«11П11). Ф1 + pl /(“11П11) Фг = -МВ1!
(cj /WjjJtpj — Cj +с2 /(w22r|22) <р2 + с2и32 /(“гг^гг^Фз +
+ |?2М42 /(м22Т122)]ф4 = Мв2'>
(C2U32^22 / и22^2 ~ c2U32rl32 Фз ~ C2U32U42rl32(P4 = -^в3>
(С2и42^42 /и22)ф2 “ C2U32U42r\42 Фз ~ с2й42^142^4 =
Для проведения анализа состояния покоя объекта используем уравнения
(8.76). Примем следующие значения его параметров: = 300 Н • м/рад;
(8.76)
с2 = 400Н м/рад; = 2; и22 = 1,5; и32 = 2,5; п42 = 3; щ = 0,95, i = 1,4 . Внешние воздействия: Мв10 = 50 Н • м; Мв1к = 100 Нм; Мв2 = 60 Н • м.
При этих данных собственные значения матрицы Я^коби: Xj — —5992,1; Х2 = -368,95; А,3 = Х4 = 0 . Очевидно, что система полуопределейная. Зафиксируем положения сосредоточенных масс J3 и J4 . Выполнив преобразования уравнений (8.76), предусмотренные изложенной выше методикой, получаем
335
- h /(“или) <Pi + h /(^цП11)]ф2 = -^вп (С1 / иц)ф1 ~ f 1 + с2 /(и22П22)]ф2 “ ^в2’°
2
~ с2и22*\32 ФЗ = О »
“ c2U42rl42(P4 = О*
(8.77)
Очевидно, что ср3 = ср4 = 0 . Собственные значения матрицы Якоби этой системы уравнений: = -3420; Х2 = -2375; А,3 = -538,65; Х4 = -27,428.
После определения cpf вычисляются значения Myj, используя уравнения (8.75), а также неизвестные внешние воздействия Мв3 = My2u32r|32; AfB4 - ^y2U42r\42 •
Получены следующие значения искомых фазовых координат и неизвестных внешних воздействий:
в исходном состоянии равновесия = 1,0074 рад; ф2 = 0,18703 рад; Му1=95Н-м; Му2 = 49,875Нм; Мв3 = 118,45Н • м; Мв4 = 142Д4Н • м;
в конечном состоянии равновесия срх = 2,656 рад; (р2 = 0,69468 рад;
Му1=190Нм; Му2 = 185,25Нм; Мв3 = 439,96 Н • м; Мв4 = 527,96 И • м;
Пример 8.4. Определить значения фазовых координат в состоянии покоя технической системы, динамическая модель которой дана на рис. 6.6, а, принимая два различных уровня внешнего воздействия на сосредоточенную массу т2 ( ^в20 И ^в2к )•
Отличительной особенностью этой системы является возможность возникновения виртуальной связи на массу т2 •
Математическая модель технической системы приведена в разделе 6.5. Она описывается уравнениями (6.30) — (6.33). Полагая dvt/dt = O, dxi/dt = O и Н2в = 0 и подставляя значения Fy. из выражений (6.32) в уравнения (6.31), получаем следующую систему линейных алгебраических уравнений относительно неизвестных геометрических координат xt :
-(ci + c2)xx + с2х2 + Ев1 = 0; с2хх - с2х2 + Гв2 = 0.
(8.78)
Если при решении системы уравнений (8.78) при заданных значениях Гв1 и Fb2 удовлетворяется условие отсутствия виртуальной связи, т.е. О < х2 < L2b , то полученные результаты принимаются в качестве решения. Найденные значения хю» х2о и х1к > х2к затем подставляются в выражения (6.32) и определяются ^уЮ » ^у20 И ^у1к ’ ^у2к *
Если же при решении уравнений (8.78) условие (6.29) окажется нарушенным, то это означает, что на массу т2 наложена виртуальная связь. Тогда при условии х2 < 0 принимают х2 = 0 , а при х2 > L2b х2 = Ь2в , исключают из системы (8.78) второе уравнение, описывающее равновесное состояние массы т2 , на которую наложена виртуальная связь, и решают оставшиеся уравнения с принятым ограничением на координату х2. Затем вычисляют значения Fy; по формулам (6.32).
336
Примем Ху = х2 = 0 при Гв1 = Гв2 = О . Параметры системы: су = 200 Н/м: с2 = 100 Н/м; L2b = 0,055 м.
Используя уравнения (8.78), определим координаты масс х10, х20, ^iK, х2к при FB10 =2Н, Гв1к = 6Н и Гв2=2Н. В результате получаем: х10 = 0,02 м;
х20 = 0,04 м; х1к = 0,04 м; х2к = 0,06 м. Так как х2к > L2b, то следует принять значение х2к = L2b и по первому уравнению системы найти значение х1к. В данном случае х1к = 0,0383 м. Тогда получаем следующие значения усилий в упругих элементах: Fyl0 = 4H; Fy20 = 2H; FylK=7,67H; Fy2K=l,67H.
Пример 8.5. Определить распределение температуры по толщине стенки некоторого технического объекта, левая граничная поверхность которого имеет
постоянную температуру Тв1 (граничное условие I рода), а правая охлаждается водой, имеющей постоянную температуру Тс2 = 20 °C (граничное условие III рода). Стенка двухслойная: материал первого слоя — металлокерамика типа МК-5, а второго — сталь. Толщина первого слоя 4 мм, а второго 6 мм.
Используя равномерную сетку, выделим 5 дискретных элементов. Динамическая модель теплового объекта в этом случае будет соответствовать рис. 5.16. Параметры дискретных элементов приведены в табл. 8.1.
Таблица 8.1
№ слоя Геометрические размеры слоев Теплофизические коэффициенты слоев Плотность материала
Толщина /, м Площадь А, м2 С Дж/(кг-К) Дж/(см-К) Р кг/м3
1 210 3 0,04 670 15,5 5700
2 99 99 670 15,5 5700
3 99 460 45,5 7900
4 99 460 45,5 7900
5 99 99 460 45,5 7900
Математическая модель динамических процессов в тепловой системе имеет
вид
<tTl dt = —(Гв’1 - 21) - —(Г1 - Т2у, Ст1 ст2
dTj dt = bL(Tj t _ 7}) - Hs±i.(T( _ т.+1), i = 2,3; СТ1 + 1 ► (8.79)
dT4 dt = —(Т3 - т4) - - Тс2), Ст4 Ст5
где Tit i = 1,4 — температура внутренних узлов; Тв1 = То — температура левого граничного узла; Тс2 — температура внешней среды, соприкасающейся с правой граничной поверхностью стенки; cTi, pTi, i = 1,4 , — соответственно теплоемкость и коэффициент теплового сопротивления i-ro дискретного элемента; ст5 — теплоемкость правого граничного дискретного элемента; рт5 — эквивалентный коэффициент теплового сопротивления правого граничного элемента, определяемый по формуле
и _ М"ги5 Ртк2 Нт5
Мти5 Ртк2
(8.80)
337
РТН5 — коэффициент теплового сопротивления правого граничного дискретного элемента при индуктивном теплообмене: цтиб “ ^5^5 /^5 > — коэффициент тепло
проводности материала элемента; — объем дискретного элемента; — толщина элемента; цтк2 — коэффициент теплового сопротивления при конвективном теплообмене между граничным дискретным элементом и окружающей средой: Цтк2 - а2 Ав2 » а2 — коэффициент теплообмена через конвекцию; д2 — площадь правой граничной поверхности, через которую осуществляется конвективный теплообмен.
Используя систему уравнений (8.79), построим математическую модель анализа статических состояний теплового объекта. Полагая dTt / dt = О, i = 1,4 , по-
лучаем:
Z
— Мт1 | Рт2 гр . Нт2 гр _ Нт1 гр* . Л + 7 2 “ 7в1>
< ^т! ст2 J ст2 *-т1
- Мт2 । МтЗ Т2 +^-Т3 =0;
ст2 < ^т2 стЗ > £*тЗ 1 (8.81)
ЦтЗ гр 72 МтЗ Мт4 Т3 +^-Т4 =0;
’3 < стЗ ^т4 > <?т4
/
М^т4 гр 13 Рт4 ! Нт5 т4 = -^-тс2.
'4 < ст4 ст5 > ^т5
Рис. 8.3. Графики распределения температуры Ti по толщине стенки: 1 — при Т*! = 100 °C;
2 — при Т*! = 120 °C; п — номера узлов
Решение этой системы уравнений осуществлялось методом Гаусса. На рис. 8.3 приведены графики, иллюстрирующие распределение температуры по толщине стенки при двух постоянных значениях температуры Тв1 на левой граничной поверхности: 100 и 120 °C. Собственные значения матрицы Якоби системы уравне-
ний (8.81): -9,630; -4,020; -1,860; -0,189. Число обусловленности матрицы Якоби ц= 50,952. Отрицательные вещественные части всех собственных значений свидетельствуют об устойчивости статического состояния системы.
8.13. АНАЛИЗ СТАТИЧЕСКИХ СОСТОЯНИЙ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ
Процессы функционирования нелинейных технических систем описываются нелинейными уравнениями. В системе уравнений (8.2) F(V) представляет собой нелинейную вектор-функцию фазовых координат.
В главе 6 отмечалось, что нелинейные свойства наиболее характерны для упругих, диссипативных и фрикционных элементов технических систем. Многие трансформаторные элементы также обладают нелинейными характеристиками.
Физические свойства элементов технической системы описываются компонентными уравнениями. Параметры компонентов реальной физической системы обычно непостоянны и представляют собой некоторые функции фазовых координат и их произ-
338 водных. Если эти зависимости можно линеаризовать без существенного ущерба для точности определения выходных параметров технической системы, то при проектировании целесообразно использовать линейные модели. Однако во многих случаях линеаризация недопустима из-за больших погрешностей и искажения физической сущности моделируемых процессов.
При проектировании гидравлических, гидромеханических и многих механических систем используют нелинейные математические модели. Особенностью этих моделей является непостоянство матрицы Якоби.
При проектировании гидравлической системы необходимо определить ее параметры, обеспечивающие заданные значения расходов и давлений жидкости в различных точках гидравлических магистралей. Параметрами гидравлической системы являются диаметры трубопроводов, диаметры дросселей, площади проходных сечений регулирующей и распределительной аппаратуры, подачи насосов и др. Через эти параметры выражаются параметры элементов динамической модели гидравлической системы.
Гидромеханические системы многообразны и задачи проектирования определяются их назначением. Характерным примером гидромеханической системы является гидрообъемный привод. При его проектировании ставятся задачи обеспечения необходимых усилий и перемещений рабочих органов машины или механизма. Необходимо определить диаметры гидравлических двигателей (гидроцилиндров), подачу насоса, диаметры трубопроводов, площади проходных сечений регулирующей и распределительной аппаратуры и др.
Решение систем нелинейных алгебраических уравнений, описывающих статические состояния технических объектов, осуществляется итерационными методами. Одним из условий завершения итерационного процесса является достижение значения нормы вектора невязок уравнений заданной величины 8 . Для надежной работы алгоритма итерационного метода необходимо, чтобы компоненты вектора невязок R измерялись величинами с возможно меньшей разницей их порядков (желательно обеспечить различие не более чем на один порядок). То же требование относится к фазовым переменным. Однако во многих случаях эти условия не выполняются, что значительно усложняет решение уравнений, а иногда делает невозможным получение результата с необходимой точностью.
К числу технических систем, для которых характерно значительное различие численных значений фазовых координат, относятся, в частности, гидравлические и гидромеханические сис-
339
темы. Рассмотрим это на примере гидравлической системы, схема которой приведена на рис. 5.2, а. Математическая модель динамических процессов этой системы приведена в разделе 5.1. Она представляет собой систему обыкновенных дифференциальных уравнений (5.6). Статическое состояние системы достигается при постоянных внешних воздействиях (подаче насоса Qgj и давлениях потребителей рвЬ Рв2> РвЗ )• При этом устанавливаются постоянные значения фазовых координат системы: расходов жидкости в гидравлических магистралях Qi,Q2»Q3 и давления в упругом элементе Ру± (в точке ветвления гидравлической магист
рали — рис. 5.2, б). Полагая dQt / dt - 0, i = 1,3 , и dpy^ / dt - 0 , получаем следующую систему нелинейных алгебраических уравнений:
Рв1 + Ру1 Дц1 ~ О» “Рв2 + Ру1 - Рд2 = °;
-Рвз + рУ1 - Рдз = °;
-Qi - Q2 - + Qb1 =
(8.82)
Очевидно, что невязки первых трех уравнений представляют собой давления, а последнего — расход. Давления измеряются в Па и для технических систем их значения обычно имеют порядок 106...108. Расходы измеряются в м8/с и могут иметь порядок НГ^.ЛО1. На транспортных средствах применяют насосы с подачей до (2...3,5) 10м3/с, развивающие давления (1...40) 106 Па. Следовательно, значения фазовых координат Qi и Pyj различаются не менее чем в 109 раз. В этом случае невязка последнего уравнения даже при значительной неточности определения расходов Qi будет на несколько порядков меньше невязок остальных уравнений.
Значительное различие величин фазовых переменных приводит к плохой обусловленности системы алгебраических уравнений и существенно затрудняет получение их решения с необходимой точностью. С целью улучшения обусловленности уравнений и повышения сходимости итерационного процесса необходимо вводить нормирование вектора фазовых переменных. Для этого вводятся нормирующие множители фазовых координат Kxi,
i = 1, n .
Рассмотрим особенности моделирования статических состояний гидравлических и гидромеханических систем на примерах»
Таблица 8.2
Наименование параметра Номер гидравлической магистрали
1 2 3 4
Диаметр, м 0,014 0,013 0,012 0,020
Длина, м 1,5 2,0 2,5 0,2
Толщина стенки трубопровода, м ЗЮ'4. ЗЮ'4 ЗЮ*4 ЗЮ*4
Коэффициент местных сопротивлений 4,0 4,5 5,0 1,5
Диаметр дросселя регулятора расхода потребителя, м 610'3 6-Ю"3 610'3 —
j Давление потребителя, Па 0,15 10е 0,1410е 0,1310е —
Пример 8.6. Необходимо определить давления и расходы жидкости в установившемся режиме гидравлической системы, схема которой представлена на рис. 5.2, а, а динамическая модель на рис. 5.2, б. Рабочая жидкость — масло веретенное АУ, плотность р = 860 кг/м3, кинематическая вязкость v = 0.1510 4 м2/с, модуль объемной упругости газожидкостной смеси Ес =1,7108 Па. Материал трубопроводов — латунь, модуль упругости Етр = 91O10 Па. Коэффициент потерь на трение при турбулентном потоке
Хт = 0,028. Остальные параметры гидравлических магистралей приведены в табл. 8.2. Номера магистралей соответствуют номерам индексов параметров в динамической модели согласно рис. 5.2, б.
Статическое состояние гидравлической системы описывается уравнениями (8.82). Искомыми переменными в этих уравнениях являются расходы Q1,Q2,Q3 и
давление ру1.
Запишем компонентные уравнения диссипативных элементов, выделяя линейные и нелинейные потери давления в гидравлических магистралях:
Рд1 = PrniQi + PtHiQ? sign Qi , (8.83)
где цгл. — коэффициент гидравлического сопротивления, характеризующий ли
нейные потери при ламинарном режиме движения жидкости; цгш- — коэффициент гидравлического сопротивления, характеризующий нелинейные потери при турбулентном режиме (по длине и местные).
Подставим значения pRi в уравнения (8.82):
Pyi “ Игл1Ф1 “ Игн1Ф1 sign Qi = рв1; Pyl ~ Мгл2^2 ~ Мгн2^2 SignQ2 ~ Рв2» Pyi ~ И гл з^з ~ Мгиз^з sign Q3 = рв3; - Qi - Q2 - Q3 = - QB1.
(8.84)
Так как функции = /(Qf) нелинейные, то элементы матрицы Якоби со-
ответствуют частным производным этих функций по фазовым координатам :
341
Фд/ /dQi = ^глг + ZVruiQi sign Qi = Ргл1 + 2Цгш|QiI • (8.85)
В выражении (8.85) учтено, что знаки фазовой координаты Qt и функции
sign Qi совпадают.
Матрица Якоби системы нелинейных алгебраических уравнений имеет вид
“ (^гл1 + 2цГн1|^1|) ° 0 1
J_ 0 “ (цгл2 + 2цГн2|^2|) 0 1
о о -(цгл3 +2цгн3|(?3|) 1
-1 -1 -1 о
(8.84)
(8.86)
Параметры элементов динамической модели гидравлической системы имеют следующие значения: тпг1 = 1,788 107; тг2 =2,574 107; тг3 = 3,661 107; сг1 = 1,861 1011; цгл1 = 2,058 107; цгн1 =1,4401012; цгл2 = 3,690 107; цгн2 = 1,528 1012; ЦглЗ = 6,354 107; цгн8 =1,667 1012; цгл4 = 6,587 105; цгн4 = 7,775 109.
Так как собственная парциальная частота сосредоточенной массы жидкости в магистрали 6 (рис. 5,2, а) оказалась максимальной, то с целью упрощения
динамической модели параметр инерционного элемента этой магистрали тг4 перераспределен между сосредоточенными массами остальных магистралей на основе формул (7.69) и (7.70).
Решение системы уравнений (8.84) осуществлялось методом Ньютона. Результаты решения после выполнения 20 итераций приведены в табл. 8.3 и 8.4. Анализ статических состояний гидравлической системы проведен при двух значениях подачи насоса: = 1,5 • 10~3 м3/с и Q*! = 2,0 -10 3 м3/с. В табл. 8.3
соответствует давлению, развиваемому насосом, а в табл. 8.4 рдл/ обозначает ли
нейные потери давления при ламинарном режиме, pjwi — нелинейные потери по
и в местных сопротивлениях.
Таблица 8.3
Фазовая координата Q*! = 1,5 • 10-3 м3/с Q*2 = 2,0 • 10“3 м3/с
Q1, м3/с 5,2024 • 10“4 6,9155 10“4
Q2s м3/с 5,0097 • 10“4 6,6906 10“4
Q3, м3/с 4,7879 10-4 6,3940 10 4
ру1, Па 5,4577 • 105 8,4569 10®
Рв1’ Па 5,6420 105 8,7803 • 10®
Таблица 8.4
№ магистрали QB‘l = 1,5 • 10-3 м3/с Q*2 = 2,0 10~3 м3/с
РдЛ1» Па Рдш» Па Рдл1> Па Р дш’’ Па
1 10702 389380 14200 685580
2 18450 382000 24723 685920
3 30499 386380 40666 686900
4 988 17449 1317 31020
342
Собственные значения матрицы Якоби в начальной точке поиска решения при Q = 0: Х4 =—2,058 • 107; Х2 =—3,690 • 107; Х3 =—6,354 107; Х4 =—9,143 • 10—8, а
в стационарной точке Q*4 = 1,5 10 3 м3/с: Х4 = -1,518 10е; Х2 = -1,565 109;
Х3 = -1,674 • 10е; Х4 = -1,895 • 10“®.
Норма вектора невязки R
оказалась равной
2477,7.
Повышения точности решения можно достичь путем нормирования фазовых координат системы. Введем вектор нормирующих коэффициентов Кх и примем следующие значения его элементов: Кх1 = Кх2 = Кх3 = 103; Кх4 - 10~5. Нормированные значения расходов жидкости в магистралях и давления в упругом элементе определяются по формулам
Qi = KxiQif i = (8.87)
jPyl ^x4-Pyl *
(8.88)
Матрица Якоби нормированной системы
алгебраических уравнений полу-
чает следующий вид:
0 0
/ \
+ 2-^-Iq, 0
кг2 к2,1
к Jkx2 у
( , Л
1
кх4
1
кх4
1
^х4 о
(8.89)
В результате нормирования фазовых координат при
Q = 0 получено:
= -2,058 • 104; Х2 = -3,690 104; Х3 = -6,354 • 104; Х4 = -9,143 10“3. В связи с улучшением обусловленности системы уравнений норма вектора невязки после 20 итераций оказалась равной 5,485. Значения фазовых координат в стационарной точке при Q*! = 1,5 • 10“3 : = 5,1720 • 10~4; Q2 = 5,0343 • 10"4; Q3 = 4,7938 • 10"4;
ру1 = 5,4584 • 105.
Пример 8.7. Необходимо определить значения фазовых координат — расходов и давлений жидкости в системе гидрообъемного привода в двух ее статических состояниях — исходном (начальном) и конечном. Принципиальная схема гидрообъемного привода дана на рис. 5.3, а, динамическая модель — на рис. 5.3, б. Параметры дискретных элементов системы гидропривода указаны в табл. 8.5. Номера элементов в этой таблице соответствуют номерам фазовых переменных типа потока на рис. 5.3, б. Материал трубопроводов — сталь, модуль упругости Е =2,1-1011 Па. Параметры жидкости приняты из примера 8.6. Упругие свойства стенок гидроцилиндров не учитывались.
343
Таблица 8.5
Наименование параметра Номер элемента
1 2 3 4 5
1. Диаметр, м 0,020 0,015 0,120 0,010 0,045
2. Длина, м 1,5 0,45 0,5 0,75 0,2
3. Толщина стенки трубопровода, м 0,001 0,001 — 0,001 —__
4. Коэффициент местных сопротивлений 4,0 4,5 — 4,2 ——
5. Начальный объем гидроцилиндра, м3 — — 0,0025 — 0,0001
Математическая модель системы гидропривода приведена в разделе 5.1 и представляет собой систему обыкновенных дифференциальных уравнений (5.7). Полагая в этих уравнениях dQt / dt = О и / dt = О , получим уравнения для
анализа статических состояний гидропривода:
Рв1 - РУ1 ~ РД1 =°;
Ру1 ~ Ру2 ~ Рд2 ~ О ’
“ Рв2 + Ру2 ~ РуЗ = °;
Ру1 “ Ру4 ~ Рд4 = °;
- РвЗ + Ру4 ~ Ру5 = О;
Qi ~ Q2 ~ Q4 ~ О»
Q2 ~ Ру2 / Мгб = 5
Q4 ~ Ру4 / НГ7 = О •
(8.90)
При получении этих уравнений учтено, что в статических состояниях Q3 - Фб - 0 и рд3 = рд5 = О, а также приняты во внимание выражения (5.8) из раздела 5.1 при условии р*! = р*2 = О, так как утечки жидкости из гидроцилиндров происходят в атмосферу.
Предположим, что внешние воздействия на штоки гидроцилиндров (рис. 5.3, а) пропорциональны перемещениям поршней х3 и х5:
^в1 ~ спрЗхЗ » ^в2 “ спр5х5 »
(8.91)
где спр3 и спр5 — приведенные коэффициенты жесткости, учитывающие упругие свойства объектов взаимодействия гидропривода с внешней средой, а также возвратных пружин поршней гидроцилиндров.
В рассматриваемом примере приняты спр3 = 0,105 106 Н/м, спр5 =0,380-105 Н/м.
С учетом (8.91) фазовые переменные ру3 и ру5 в уравнениях (8.90) можно представить в виде:
РуЗ = СпрЗ ХзМз, Ру5 = Спр5 Х5/А5,
где А3 и А5 — площади поршней гидроцилиндров.
Принимая во внимание компонентные уравнения диссипативных элементов (8.83) и подставляя значения ру3 и ру5 в уравнения (8.90), а также выражая
344
Q2 и Q4 через py2 и py4 , получаем следующую систему нелинейных алгебраических уравнений, описывающих статические состояния гидрообъемного привода:
Ру1 Ргл!^! MralQl Sign Рв1»
Ру! — Ру 2 — (М-гл2 / Нгб)Ру2 ~ (Мгн2 / Нгб)-Ру2 — ® ’
“ Рв2 + Ру2 = (СпрЗ / Аз)хз5
Ру1 “ Ру4 ~ (Нгл4 / Нг?)Ру4 ~ (Нгн4 / Мг7)Ру4 —
— РвЗ Ру4 ~ (^пр5 / ^б)х5’
Q1 " Ру2 / Мгб " Ру4 I Нг7 = °-
(8.92)
В этой системе уравнений искомыми переменными являются ру1, ру2 , РУ4 » Ръ2-> РвЗ, Qi, гДе РУ1 — давление в точке ветвления гидравлической магистрали; ру2 й ру4 — давления в полостях гидроцилиндров; рв2 и рв3 — давления, эквивалентные начальным значениям усилий FB1 и Fb2 и возвратных пружин поршней; Qi — расход жидкости в магистрали питания гидропривода. Так как уравнения (8.92) нелинейные, то матрица Якоби переменная, ее элементы зависят ОТ Q1, Ру2 Ру 4 ’
Параметры элементов динамической модели системы гидропривода (рис. 5.3, б) имеют следующие значения: тг1 = 0,411107; тг2 = 0,219 107; тг3 = 0,115105; тг4 = 0,821 107; път5 = 0,121 105; сг1 = 0Д291012; сг2 = 0,175-Ю13; сг3 = 0,821 109; сг4 = 0,237 1013; сг5 =0,150 1011; цгл1 = 0,494 107; цгл2 = 0,468 107; Цглз = 0.348 104; цгл4 = 0,395 108; = 0.214104; цгв = 0,505 1О10; = 0.2511011;
цгн1 =0,26610п; цгн2 = 0,735 10п; цгн4 = 0,439-Ю12.
Начальное состояние статического равновесия системы определялось при давлении источника питания гидропривода рв10= 0,75 107 Па и положении поршней гидроцилиндров, соответствующем их координатам х30 - х50 =0, а конечное состояние — при рв1к = 0,1108 Па; х3к = 0,25 м; х5к = 0,1 м.
В связи с существенной разницей значений фазовых координат типа потока Qi и типа потенциала pj осуществлялось их нормирование. Коэффициенты нормирования приняты такими же, как и в предыдущем примере.
В табл. 8.6 приведены значения фазовых координат в начальном и конечном положениях системы. Следует отметить, что значения рв2 и рн3 в начальном н конечном положениях должны быть одинаковыми. Разница в их значениях обусловлена погрешностями решения системы уравнений (8.92) численным методом Ньютона. Переменные Q2 и Q4 характеризуют расходы в гидросистеме, непосредственно не используемые для гидроцилиндров. Они включают расходы дренажа в системе управления и утечки из гидравлических цилиндров. Эти расходы отображены в динамической модели в виде источников потоков Qb1 и Q*2 . В статическом состоянии системы Qb1~^25 Qb2=^4-
345
Таблица 8.6
Фазовая координата Давление источника питания, Па
7 РвЮ = 0,75 • 10' Па Рв1к = 1 • 1°7 Па
Ру1 0,74119-Ю7 0,98498-Ю7
Ру2 0,72535 107 0,95766-Ю7
Руз 0 0,23213 Ю7
РУ4 0,73625107 0,97679 Ю7
Ру5 0 0,23856 Ю7
Рв2 0,72535107 0,72553-Ю7
1 РвЗ 0,73625-Ю7 0,73823-Ю7
Qi 0,17297-Ю"2 0,22855-Ю"2
Q2 0,14363 Ю"2 0,18964 Ю"2
Q3 0 0
Q4 0,29333-Ю'3 0,38916-Ю"3
Qs 0 °
9. МОДЕЛИРОВАНИЕ И АНАЛИЗ ПЕРЕХОДНЫХ ПРОЦЕССОВ
9.1. ЗАДАЧИ АНАЛИЗА ПЕРЕХОДНЫХ ПРОЦЕССОВ ТЕХНИЧЕСКИХ СИСТЕМ
Характеристики функционирования технической системы определяются ее внутренними физическими свойствами и внешними воздействиями. Внешние воздействия подразделяются на возмущающие и управляющие. Возмущающие воздействия на техническую систему оказывает внешняя среда, в которой функционирует данная система. Сложные технические объекты обычно снабжаются системами управления — автоматическими, автоматизированными или ручными (неавтоматизированными). Система управления предназначена для обеспечения заданных характеристик функционирования технического объекта посредством соответствующих управляющих воздействий. Эти воздействия формируются только тогда, когда характеристики объекта отклоняются от желаемых. Следовательно, они носят ярко выраженный переменный характер.
Воздействия внешней среды также переменны, а их математическое описание для большинства реальных технических объектов представляется случайными функциями.
Таким образом, для технической системы наиболее характерно функционирование в условиях непрерывно изменяющихся внешних воздействий. Состояние системы при этом оказывается неустановившимся. Это состояние характеризуется изменением во
времени фазовых координат системы. Такой режим работы системы называют динамическим. Он описывается дифференциальными уравнениями.
Математическая модель системы с сосредоточенными пара-
метрами, используемая на макроуровне проектирования, представляет собой систему обыкновенных дифференциальных уравнений
v = С7(г)],
(9.1)
где v(t) — вектор фазовых координат системы размерностью и;
V = dV / dt — вектор производных фазовых координат по време
ни; — вектор внешних воздействий размерностью тп; t — независимая переменная — время.
В зависимости от характера изменения воздействий u(t) и описания внутренних физических свойств технической системы ее математическая модель (9.1) может быть детерминированной или вероятностной.
Функциональное проектирование технических систем выполняют на основе модельных режимов (см. раздел 1.6), в число которых входят переходные процессы. Переходным процессом системы называется переход ее из одного установившегося состояния в другое. Моделирование переходного процесса позволяет исследовать быстродействие, точность, динамичность, колебательность и другие важнейшие свойства технической системы, регламентируемые техническими требованиями. Для численной оценки этих свойств вводится система показателей качества переходного процесса, которые наряду с показателями эффективности, характеризующими производительность, экономичность и др., являются важнейшими выходными параметрами, определяющими технический уровень и потребительские качества создаваемого технического объекта.
Решение задачи анализа переходного процесса включает три этапа: интегрирование системы дифференциальных уравнений, определение показателей качества, оценка степени выполнения технических требований к проектируемой технической системе.
Результатом интегрирования дифференциальных уравнений математической модели (9.1) являются функции фазовых координат технической системы v(t). Для осуществления интегрирования необходимо задать начальные условия Й(о) (значения фазо
348
вых координат Vq в начальный момент времени tQ) и функции внешних воздействий на техническую систему u(t).
Полученные в результате интегрирования функции v(t} используются для определения показателей качества переходного процесса Y , представляющих собой функционалы фазовых координат технической системы Y = Ф V(t) .
Заключительным этапом анализа является оценка степени выполнения технических требований на показатели качества переходного процесса. По результатам анализа принимается решение о дальнейших действиях проектировщика: либо принять исследованный вариант в качестве технического решения, либо продолжить поиск более эффективных вариантов структуры и параметров технической системы (см. рис. 1.1).
Рассмотрим некоторые особенности моделирования переходных процессов, обусловленные выбранным модельным режимом.
В детерминированной модели переходного процесса задают одну или несколько переменных функций внешних воздействий iZj(z) , а остальные воздействия принимают постоянными. Причем заданная переменная функция характеризуется следующими особенностями: u(t) = uG = const при t < = 0 и u(t) =
= ик = const при t > tB, где uq и uk — начальное и конечное значения функции воздействия u(t); tB — время изменения функции от начального и$ до конечного значения izK. В этом случае переходный процесс в устойчивой технической системе практиче
ски заканчивается по истечении некоторого времени tu, назы
ваемого временем переходного процесса, и система приходит в новое установившееся статическое состояние, в котором ее фазовые переменные перестают изменяться. Состояние системы при t > tn характеризуется вектором фазовых координат Кс ~ ^V)|t->oo= Ко = const .
Исходное состояние системы в начальный момент времени to - 0 также должно быть установившимся и удовлетворять условию Vq = 0. Исходя из этого требования определяют начальные
условия Ио, используя методы статического анализа, изложенные в главе 8.
349
Если компоненты вектор-функции u(t) непрерывно изменяются во времени, то техническая система будет находиться в непрекращающемся переходном процессе, т.е. будет работать постоянно в динамическом режиме. Это характерно для реальных объектов. Такая модель используется при анализе статистических характеристик, когда внешние воздействия представляются случайными функциями.
9.2. ЧИСЛЕННЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
При проектировании технической системы на макроуровне исходная математическая модель представляет собой систему обыкновенных дифференциальных уравнений, которая в нормальной форме Коши имеет вид
V = p(y,t). (9.2)
Для технических систем характерна высокая размерность вектора фазовых координат V и нелинейность системы уравнений (9.2), поэтому основным способом получения приближенного решения является применение численных методов интегрирования. Численные методы позволяют перейти от инвариантной формы математической модели (9.2) к алгоритмической. Системе дифференциальных уравнений при этом ставится в соответствие система конечно-разностных уравнений. Это соответствие может быть установлено множеством способов. Выбор того или иного способа влияет на точность получаемых результатов, устойчивость алгоритма вычислительного процесса, затраты машинного времени на решение задачи.
Метод конечных разностей является универсальным численным методом решения дифференциальных уравнений.
Для перехода от дифференциального уравнения к конечноразностному необходимо:
заменить область непрерывного изменения аргумента t дискретным множеством точек — сеткой;
заменить путем аппроксимации на сетке дифференциальное уравнение конечно-разностным уравнением.
Таким образом, при численных методах интегрирования осуществляется дискретизация независимой переменной t и ал-гебраизация системы уравнений. Алгебраизация обеспечивается заменой производных фазовых координат в системе (9.2) отношениями конечных разностей. В результате дифференциальные Уравнения (9.2) преобразуются в алгебраические. При дискрети
350
зации t интервал интегрирования [0,TKj содержит совокупность значений t^ в узловых точках сетки с некоторым шагом hk =
= tk- , где — шаг сетки в дискретном временном пространстве (шаг интегрирования). Решение, получаемое численным методом, представляется совокупностью значений фазовых координат в дискретные моменты времени tk : v(tk) - Vk , k = 1,N , где N — количество шагов интегрирования на заданном интервале [0,Тк1- Значение Тк при анализе переходных процессов выби
рают таким образом, чтобы обеспечивалось условие Тк > tn , где
tn — время переходного процесса.
Конечно-разностная аппроксимация первой производной фазовой координаты по времени dv/dt осуществляется путем ис-
пользования одного из следующих выражений: dv v(t + h) - v(t) dt h
dv v(t) ~ v(t - Л) ~dt ~ h 9 dv v(t + ft) - v(t - hj dt 2h
(9.3)
(9.4)
(9.5)
где v(t)
— значение фазовой координаты v в момент времени t;
v(t ± h) — значение v в момент времени ± ft); h — шаг сетки во
временном пространстве.
Аппроксимацию производной выражением (9.3) называют правой конечно-разностной аппроксимацией, выражением (9.4) — левой, а выражением (9.5) — центральной. При использовании выражений (9.3) — (9.5) для получения конечноразностных уравнений значения независимой переменной t при
нимаются в узловых точках t^ , k = l,N. Тогда выражение (9.3)
можно записать в виде
. / \ v(tk + h)- v(tk)
v[tk 1 ~ (9.6)
h
или
»k а (Vk+1 ~vk)/h> (9-7)
где v^ и Vfr+i — значения фазовой переменной в ft-й и (&+1)-й точках дискретного временного пространства.
351
Аналогично можно записать выражения (9.4) и (9.5).
Для системы уравнений (9.2) при использовании правой конечно-разностной аппроксимации получим
(9.8)
Подставим Vh из выражения (9.8) в систему уравнений (9.2):
П+1 = Vk+hF[Vk,tk\ (9.9)
Полученное выражение (9.9) соответствует итерационной формуле метода простой итерации, используемой для решения системы алгебраических уравнений (см. формулу (8.18)). Однако в отличие от нее формула (9.9) учитывает значение аргумента , поэтому получаемые значения V^+1 соответствуют моментам вре
мени tk+i и, следовательно, отображают изменения фазовых пе
ременных во времени, характеризуя протекание переходного процесса в моделируемой системе.
Выражение (9.9) представляет собой простейшую формулу численного интегрирования. Эта формула предложена Эйлером и
носит его имя.
Выполненные преобразования при получении формулы Эйлера иллюстрируют переход от исходной системы дифференциальных уравнений (9.2) к алгебраическим уравнениям (9.9). Но в связи с аппроксимацией производных результаты вычислений по формуле (9.9) будут приближенными значениями искомых фазовых переменных. Для оценки получаемой погрешности вычислений разложим вектор-функцию v(t) в ряд Тейлора в окрестности точки v(tk)9 принимая постоянный шаг h дискретизации незави
симой переменной t:
7 dt 2! dt2
1 d3v(tk)
3! dt3
(9.10)
3
Разложение в ряд Тейлора также можно использовать для решения дифференциальных уравнений. Погрешность при использовании формулы Тейлора определяется величиной остаточного члена ряда. Сравнивая выражения (9.9) и (9.10), легко заметить, что формула Эйлера (9.9) содержит лишь два первых члена ряда Тейлора. Следовательно, формула Эйлера осуществляет линейную аппроксимацию вектор-функции v(t) на интервале изме
352
нения аргумента tk + h . Поэтому формула численного интегрирования (9.9) имеет первый порядок точности.
Порядок точности конечно-разностной аппроксимации определяется порядком старшей производной, сохраняемой в ряде Тейлора. Поэтому при необходимости повышения порядка точности формулы численного интегрирования при ее получении на основе ряда Тейлора в нем необходимо сохранить члены с более высокими порядками производных, т.е. члены более высоких порядков.
Построение формул численного интегрирования в основном определяется выбранной конечно-разностной аппроксимацией производных. В зависимости от этого вводится следующая классификация численных методов интегрирования:
1) одношаговые и многошаговые0,
2) явные и неявные;
3) различных порядков точности (первого, второго, третьего и т.д.).
Большинство численных методов интегрирования сводится к нахождению вектора фазовых координат в (ZH-1 )-й точке дискретного временного пространства t е [0,7^] согласно формуле
Vfc+1 — & Vk> Vk-p+l> , (9.11)
где G — некоторая вектор-функция, определяемая способом построения метода; р — количество предыдущих точек, которые используются в формуле интегрирования.
Применяют в основном линейные многошаговые методы интегрирования, алгоритмы которых строят в соответствии с формулой
^/?+l ~ XajVk-j+l + X (9.12)
7=1 >0
где ОфЪ] —коэффициенты; ~ ^(^-/+1» ^-у+1)-
В одношаговых методах р = 1, а для определения используется значение Vk лишь в одной предыдущей точке, соответствующей моменту времени tk. В многошаговых методах р > 2. Происхождение названия «многошаговый» обусловлено использованием в формуле (9.12) результатов нескольких предыдущих шагов, число которых равно р. Параметр р при этом
называют порядком многошагового метода. Он определяет порядок точности линейного многошагового метода интегрирования. Повышение порядка позволяет увеличить точность метода. Однако многошаговые методы не могут стартовать из исходной точки Vq и требуют для своего запуска применения какого-либо одношагового метода для получения первых р значений элементов вектора V.
Одношаговые методы также могут быть различных порядков точности. Порядок в этом случае определяется порядком членов ряда Тейлора, сохраняемых в аппроксимирующем выражении искомого решения.
Если Ьо = 0, то в правой части выражения (9.12) будут только известные величины, вычисленные для моментов времени ^-1»“ • ° ? ^-р+1 > поэтому можно найти непосредственно из (9.12) в явном виде. Такие методы интегрирования обыкновенных дифференциальных уравнений называют явными.
Если Ф 0, то в правой части выражения (9.12), согласно
(9.2), появится неизвестная величина , а выражение (9.12) окажется системой алгебраических уравнений относительно . Методы интегрирования, которые исходную дифференциальную задачу приводят к системам алгебраических уравнений, называют неявными.
Рассмотрим примеры построения формул численного интегрирования.
Пример 9.1. Необходимо построить формулу численного интегрирования первого порядка точности при &о - 0.
Так как р = 1, то на основе формулы (9.12) получаем vM = «Л + Л&Л = «Л + <9ЛЗ>
При ai-bi ~ 1 выражение (9.13) соответствует формуле Эйлера (9.9).
Пример 9.2. Необходимо построить формулу численного интегрирования второго порядка точности при Ъ$ = 0.
При р = 2 на основе формулы (9.12) получаем
Vk+l = al^k + а2^Л-1 + b}Vk + ^2^1 = k 7 (У.14)
= alVk + a2^fc-l + + ^2^(^1)]-
В правые части выражений (9.13) и (9.14) входят только известные величины, вычисленные для моментов времени tk и tk_r , поэтому Vk+1 можно найти непосредственно из этих выражений в явном виде. Следовательно, полученные формулы относятся к явным методам интегрирования.
Пример 9.3. Необходимо получить формулу численного интегрирования первого порядка точности при Ьо * 0. 23. Зак. 3006
354
Используем формулу (9.12), учитывая, что р = 1:
Vk+i = ai^k + h^b0Vk+i + brVk = (9 15)
= ai^k + ^[&оХ^+1)+ &1Х^)]-
В правой части выражения (9.15) появилась неизвестная вектор-функция f(1^+i), в результате векторное выражение (9.15) оказывается системой алгебраических уравнений относительно Vk+1 . Следовательно, полученное выражение (9.15) представляет собой формулу неявного метода интегрирования.
Сравнивая условия при которых составлены формулы (9.13) — (9.15), можно отметить, что при Ъ$ = 0 получаем формулы явных методов интегрирования, а при Ф 0 — неявных.
Требования, предъявляемые к численным методам интегрирования: универсальность, алгоритмическая надежность, достаточная точность, умеренные затраты машинного времени и оперативной памяти ЭВМ.
9.3. ПОГРЕШНОСТИ ЧИСЛЕННЫХ
МЕТОДОВ ИНТЕГРИРОВАНИЯ
Анализ процесса функционирования технического объекта численными методами всегда сопровождается ошибками в определении параметров и характеристик моделируемого процесса. Эти ошибки обусловлены многочисленными факторами: неадекватностью исходной математической модели, приближенностью исходных данных (начальных и граничных условий, значений параметров технического объекта и внешней среды), свойствами применяемых численных методов решения уравнений и др.
Отмеченные причины возникновения погрешностей устранить невозможно. Ошибки при моделировании и проведении вычислительного эксперимента неизбежны. Однако значения этих ошибок можно и нужно уменьшать.
Рассмотрим погрешности, обусловленные численными методами интегрирования дифференциальных уравнений. Эффектив
ность методов интегрирования определяется их точностью и устойчивостью. Точность интегрирования можно оценить, проанализировав полную ошибку на каждом шаге интегрирования. Но это выполнимо лишь в случае, если известно точное аналитическое решение системы дифференциальных уравнений. Однако получение такого решения возможно только в простейших случаях. Математические модели технических объектов представляют собой системы нелинейных дифференциальных уравнений высоких порядков, для которых получение аналитических моделей практически невозможно. Поэтому при проектировании используют алгоритмическую форму математической модели и приме
355
няют численные методы анализа. Для выбора численного метода интегрирования необходимо иметь возможность оценки погрешности, возникающей в вычислительном эксперименте на математической модели.
Полная погрешность интегрирования 8^ на /г-м шаге включает следующие составляющие:
1) погрешность аппроксимации , обусловленную заменой производных отношениями конечных разностей;
2) погрешность вычисления , связанную с ошибками округления чисел в ЭВМ;
3) погрешность накопления возникающую вследствие погрешностей на предыдущих шагах интегрирования, которые наследуются и распространяются на последующие этапы вычислений.
Значение е? относительно невелико и им можно пренеб-
речь. Накопленная погрешность 8^ на /?-м шаге равна полной погрешности на предыдущем шаге (рис. 9.1). Но поскольку точное решение неизвестно, то оценить значение 8^ невозможно. Поэтому можно говорить
Рис. 9.1. К анализу погрешностей численного метода интегрирования: 1 — точное решение (интегральная кривая и(£)); 2 — аппроксимация решения численным методом;
3 — точное решение при начальных условиях в точке tk _1?
лишь о характере поведения этой погрешности. Оценка ее связана с исследованием устойчивости численных методов интегрирования. Если метод
« н
устойчив, то 8^ существенно не возрастает, поэтому погрешность интегрирования можно с достаточным основанием оценивать, определяя погрешность аппроксимации а °
Значение s| на /?-м шаге равно разности между точным решением
356 v(tk), полученным из точки с координатами (штриховая
линия 3 на рис. 9.1), и числовым решением vk, полученным по формуле численного интегрирования из той же точки (светлые точки на рис. 9.1, соединенные отрезками прямых 2). При малом шаге интегрирования h решение можно найти с достаточной точностью, разлагая функцию v(t) в ряд Тейлора в точке tk-l>vk-l °
Линия 1 соответствует точному решению при заданных начальных условиях в точке to = 0. Погрешность аппроксимации соответствует первому шагу интегрирования.
В процессе численного интегрирования контролировать и вычислять можно лишь погрешность аппроксимации 8^ . Она зависит от применяемого метода, величины шага интегрирования h и обусловленности системы дифференциальных уравнений, составляющих математическую модель технической системы.
Качественный характер изменения погрешности численного метода интегрирования в зависимости от шага h отображен на рис. 9.2. В некотором интервале изменения шага интегрирования ^min < ^ < ^тах погрешность монотонно возрастает с увеличением h. При достижении условия h > /гкр погрешность начинает сильно возрастать. Явление катастрофического роста погрешности называют неустойчивостью вычислительного процесса, а значение Акр — критической величиной шага интегрирования. Зависимость 8 от h, показанная на рис. 9.2, характерна для явных методов интегрирования, отличающихся ограниченной устойчивостью.
значительно возрасти и при слишком
малом шаге интегрирования (при h < Ат^п — рис. 9.2) из-за ошибок округления чисел в ЭВМ.
Максимальное значение шага интегрирования Лтах принимают из условия допустимой величины погрешности 8Л.
Рис. 9.2. Зависимость погрешности численного интегрирования от величины h
Погрешность может
357
Рис. 9.3. Зависимость погрешности аппроксимации 8а от величины шага h и порядка р численного метода интегрирования
8а = /(/г)» Вид приведенных на рис.
Погрешность аппроксимации 8а зависит от порядка точности численного метода интегрирования (рис. 9.3). Увеличением порядка метода р можно обеспечить выполнение условия 8а < 8д при большем шаге интегрирования h, что позволяет сократить затраты времени, несмотря на усложнение при этом алгоритма вычислений. Однако при большой величине 8Д может оказаться более эффективным метод первого порядка в сравнении с методами высших порядков, так как с увеличением р возрастает крутизна характеристики 9.3 зависимостей 8а - /*(/г) ха
рактерен для неявных методов интегрирования.
Для оценки ошибки аппроксимации на k-м шаге численного интегрирования при определении значений фазовой координаты используют:
1) остаточный член ряда Тейлора, называемый также
главным членом погрешности на шаге интегрирования:
(9.16)
где v
(Р+1) k
— значение [р + 1)-й производной фазовой координаты
по времени на /?-м шаге h — шаг интегрирования;
2) правило Рунге*.
интегрирования; р — порядок метода;
= с
vk(h / 2) - vk(h) 2Р -1
(9-17)
где с — некоторая константа; / 2] — значение фазовой координаты v9 полученное в точке тем же методом, что и vjdh), но
только за два шага интегрирования от точки каждый из которых в два раза меньше обычного шага Л;
358
3) сопоставление результатов прогноза йд, и коррекции и*:
еА = |р* “ I’ (9-18)
где — значение фазовой координаты, полученное точным методом; — значение этой же координаты, полученное приближенным методом (методом прогноза).
9.4. УСТОЙЧИВОСТЬ ЧИСЛЕННЫХ МЕТОДОВ ИНТЕГРИРОВАНИЯ
Устойчивость численного метода интегрирования связана с характером изменения погрешности накопления е^ . Если е^ с увеличением количества шагов в ходе интегрирования не возрастает, то метод интегрирования устойчивый. Если даже при небольших погрешностях аппроксимации или вычислений при выбранном шаге интегрирования h накопленная погрешность е^ растет от шага к шагу, то такой метод будет неустойчивым, а получаемые результаты вычислений бесполезны.
Устойчивость численного интегрирования связана не только с выбранным методом, но и с характером решаемой задачи, определяемым обусловленностью системы дифференциальных уравнений математической модели технической системы. Один и тот же метод интегрирования может быть эффективным при решении одной задачи и неприемлемым для решения другой.
Определим общие условия устойчивости численных методов интегрирования. В теоретическом плане устойчивость исследуется на системе линейных дифференциальных уравнений вида
U = AU. (9.19)
Воспользуемся известным в теории матриц преобразованием подобия
А = Tdiag (Xj)t-1, (9.20)
где Т — некоторая преобразующая матрица; diag (Х;) — диаго-нальная матрица, элементами которой являются собственные значения Xi матрицы А.
Произведя замену переменных U = TV , систему уравнений (9.19) можно преобразовать в систему несвязанных линейных уравнений вида
, i 1, и, (9.21)
где п — порядок системы дифференциальных уравнений (9.19).
359
Анализ устойчивости методов интегрирования проведем на этом уравнении, опуская индекс i, поскольку структура всех уравнений системы (9.21) одинакова.
Применим для решения уравнения (9.21) формулу интегрирования (9.12). Для фазовой координаты v она имеет вид
vk+l = Zajvk-j+l + й S bjbk-j+i- (9.22)
7=1 7=0
Подставляя значение ^-;+1 из уравнения (9.21), получаем однородное конечно-разностное уравнение
о*+1 - - Ybjth^k-j+i = °- (9.23)
7=1 7=0
Известно, что общее решение однородного разностного уравнения вида
аоУп+к + а1Уп+к-1 + + акУп = 0 (9.24)
представляет собой линейную комбинацию корней г его характеристического уравнения
Фй(г)= aor* +a1rh~1 + ... + ak = 0.
Решение уравнения (9.24) имеет вид
k
Уп = (9.25)
i=l
где Cf — произвольные постоянные.
Решение (9.25) разностного уравнения (9.24) асимптотически устойчиво, если все корни т\ характеристического уравнения по модулю меньше единицы, и неустойчиво, если хотя бы один корень по модулю больше единицы.
Сопоставляя уравнения (9.23) и (9.24), нетрудно заметить, что степень полинома характеристического уравнения (или характеристического полинома), составленного для разностного уравнения (9.23), равна
р = & + 1, (9.26)
а степень корней полинома п - р - j . В соответствии с этим составим характеристический полином разностного уравнения (9.23)
ср(г, ЙА.) = rp - f a}rp~j - f й/(йХ)гр“/ = 0. (9.27)
7=1 7=0
Уравнение (9.27) называют полиномом устойчивости формул интегрирования (9.22). Из уравнения (9.27) следует, что кор
360
ни характеристического полинома Г1,Г2,...,Гр зависят от выбора формулы интегрирования, определяющей значения коэффициентов aj и bj, шага интегрирования h и собственных значений X матрицы Якоби системы дифференциальных уравнений, характеризующих ее обусловленность.,
Формула интегрирования называется абсолютно устойчивой для заданного hX, если все корни полинома устойчивости по модулю меньше единицы:
|rz| <1, i = 1J. (9.28)
Обычно один из корней, например г1? дает достаточно хорошую аппроксимацию точного решения дифференциального уравнения (9.21), т.е. т\ « при h —> 0, поэтому называется
главным корнем.
Так как собственные значения Xj матрицы Якоби системы
дифференциальных уравнений — комплексные числа, то также комплексные числа. Любое комплексное число /гХ можно изобразить на комплексной плоскости в виде вектора. Начало этого вектора находится в начале координат, а конец — в точке с координатами Re(/zX) по оси абсцисс и Im (лх) по оси ординат. Отметим, что шаг интегрирования h является скалярным множителем, изменяющим лишь модуль вектора.
Для устойчивости вычислительного процесса при интегрировании системы дифференциальных уравнений необходимо, чтобы векторы ЛХ находились в определенной области комплексной плоскости.
Областью абсолютной устойчивости формулы интегрирования называется область R комплексной плоскости, в которой формула абсолютно устойчива для всех hX eR.
Техническая система обладает физической устойчивостью, если вещественные числа всех собственных значений матрицы Якоби системы дифференциальных уравнений отрицательны, т.е. Re(Xj) < 0, i = 1, п. Большинство реальных технических объектов отвечает этому условию. При анализе переходных процессов таких объектов идеальным будет метод интегрирования, у которого область абсолютной устойчивости включает всю левую полуплоскость при Re(/iX)< 0 (рис. 9.4, а).
Для нелинейных технических систем возможны случаи, когда в некоторой области фазового пространства появляются зна-
361
Рис. 9.4. Области устойчивости численных методов интегрирования на комплексной плоскости
чения , для которых Re(ftXj)>0. В таких областях система обладает локальной неустойчивостью. В этом случае метод интегрирования должен быть также неустойчивым, т.е. должно выполняться условие |г£ | > 1, где т\ — главный корень характеристического полинома (9.27). Однако при этом недопустимо, чтобы погрешность интегрирования росла с большей скоростью, чем скорость изменения результата решения. В связи с этим возникает требование относительной устойчивости метода интегрирования. Метод называют относительно устойчивым для данного hk
при условии
1 = 1, р-
>
(9.29)
На рис. 9.4, б область относительной устойчивости обозначена R$. Области R± и R2 соответствуют абсолютной устойчивости метода интегрирования. Выделение области R2 в левой полуплоскости обусловлено необходимостью обеспечения точности результатов интегрирования, так как при малых значениях |Re(ftX)| она может снижаться в связи со слабым демпфированием колебаний.
9.5. ВЫБОР ШАГА ИНТЕГРИРОВАНИЯ
Затраты времени на решение задачи анализа переходного процесса технической системы зависят от алгоритма численного метода интегрирования, допустимой погрешности , величины шага h и интервала интегрирования Тк. Интервал интегрирования Тк выбирают из условия завершения переходного процесса: Тк > tn > где — время переходного процесса, определяемое физическими свойствами технической системы и внешними воздействиями. Значение tn не зависит от метода интегрирования (если
24. Зак. 3006
362
не учитывать погрешности методов) и может быть приближенно оценено по спектру матрицы Якоби системы дифференциальных уравнений. Следовательно, затраты времени на решение конкретной задачи при заданной величине допустимой погрешности 8Д зависят от выбранного численного метода и шага интегрирования.
При выборе величины шага интегрирования должна быть прежде всего обеспечена устойчивость вычислительного процесса, а величина погрешности аппроксимации 8^ на каждом шаге не должна превышать 8д. Значение 8^ зависит от шага интегрирования h (рис. 9.2 и 9.3). Чем меньше Л, тем меньше 8^ , но при этом возрастает время вычислительного эксперимента, так как увеличивается необходимое число шагов интегрирования N. Поэтому для обеспечения высокой эффективности использования выбранного метода целесообразно поддерживать значение 8^
близким к 8д, выполняя при этом условие 8? < 8Д. Но значение
8^ при постоянном шаге h, как видно из формулы (9.16), зависит от характера протекания переходного процесса. Поэтому в каждой узловой точке интегрирования при погрешность аппрокси
мации 8^ может быть различной.
Следовательно, с целью повышения эффективности вычислений целесообразно автоматически изменять величину шага интегрирования, контролируя при этом погрешности аппроксимации всех вычисляемых фазовых координат 8^ на каждом шаге и
сопоставляя их с допускаемой погрешностью е1л по каждой фазо-вой координате.
Значение допускаемой погрешности ед принимается как некоторая часть величины определяемой фазовой координаты vl. Обычно полагают, что она составляет 1% от текущего значения переменной или от ее максимального определяемого значения if vmax •
8Д 0,011?£ ;
(9.30)
363
ед ~
(9.31)
Неявные методы интегрирования отличаются высокой устойчивостью. Многие из них обладают абсолютной устойчивостью и могут обеспечить сходимость вычислительного процесса при любом шаге интегрирования. Поэтому величину шага интегрирования для этих методов выбирают из условия обеспечения точности решения, оцениваемой погрешностью аппроксимации.
Для неявных методов интегрирования рекомендуются следующие алгоритмы автоматического изменения шага:
1) алгоритм трех зон
•ч £ если >Е* • ЬД ’
^k+1 ~ h-k> если 8д ! 2 ai i — 8Д ’
hlkm, если ai i , 2 < ед / т ,
(9.32)
где т — коэффициент изменения шага (принимают т = 2);
2) алгоритм плавного изменения шага
hk+l = hk Р д/8Д / Ek ’ (9.33)
После вычисления i = 1, п, для всех п фазовых координат окончательно шаг выбирается минимальным среди всех значений
ч+1 =minftLi-i
Погрешность аппроксимации при переменном шаге можно определить по формуле hk
(9.34)
а
(9.35)
Для явных методов интегрирования величина шага ограничивается их устойчивостью. Зададимся допустимой погрешностью на один шаг интегрирования, определяя ее по формуле (9.31). Тогда условие соблюдения точности определения фазовой координа
ты vl можно принять в виде
ДиА+1
< £д , где Ли|+1
— приращение
переменной v* на (/е + 1)-м шаге интегрирования. Согласно формуле интегрирования (9.9)
~vk = F
364
Тогда шаг интегрирования явным методом
^Ан-1 — ед I
Но при шаг интегрирования согласно этой
формуле Л^+1 00 , поэтому на величину шага необходимо ввести
ограничение сверху. Для этого можно использовать максимально допустимое значение шага интегрирования Лтах по условиям устойчивости и точности (рис. 9.2). Выражение для определения величины шага интегрирования с учетом Лтах можно записать в виде
^+1 — ед /
i
Йтг
max
После вычисления значений hl^+-^ для всех фазовых координат шаг интегрирования принимают согласно выражению (9.34).
9.6. ОДНОШАГОВЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ
Рассмотрим явные одношаговые методы интегрирования векторных уравнений, представленных в нормальной форме Коши (9.2). Построение алгоритмов линейных одношаговых методов может быть осуществлено на основе ряда Тейлора либо путем использования формулы (9.12).
В практике проектирования технических объектов широко применяют метод Эйлера и методы Рунге — Кутта.
Метод Эйлера. Простейшим методом решения задачи Коши является метод Эйлера. Формулу численного интегрирования методом Эйлера (9.9) можно получить как из общей формулы линейных методов интегрирования (9.12), так и на основе разложения искомой функции в ряд Тейлора (9.10), ограничиваясь линейными членами ряда. Для одного дифференциального уравнения вида v = F(y, она имеет вид
vk+l =vk +hF(vk>tk)’ (9-37)
где — значение производной фазовой координаты v в
момент времени
Графическая интерпретация метода Эйлера представлена на рис. 9.5. В этом методе производная фазовой координаты v на интервале времени (/Н-1)-го шага интегрирования заменяется производной Vj? = в точке с координатами t^, и ап-
проксимируется конечно-разностным отношением
i>k=(vk+l-vk)/h- (9.38)
365
Рис. 9.5. Графическая интерпретация явного метода Эйлера: а — на одном шаге интегрирования;
б — на конечном интервале времени моделируемого процесса
В результате интегральная кривая v(tj на каждом шаге интегрирования заменяется отрезком касательной к ней, проведенной в начальной точке интервала (рис. 9.5, а). В точке + h получают значение фазовой координаты и^+1, которое отличается от точного значения на величину , представляющую собой погрешность аппроксимации. Точное решение аппроксимируется так называемой ломаной Эйлера (рис. 9.5, б). Поскольку погрешность интегрирования, полученная на предыдущем шаге, наследуется последующим шагом, то с каждым шагом ломаная Эйлера может удаляться от интегральной кривой , т.е. от точного решения. Ошибка интегрирования будет увеличиваться и может наступить неустойчивость вычислительного процесса.
Так как в формуле Эйлера (9.37) используется только член ряда Тейлора первого порядка, то численный метод интегрирования имеет первый порядок точности: р = 1. Погрешность аппроксимации определим по формуле (9.16), согласно которой
4=^¥-h2. (9.39)
2 dt2
Оценим устойчивость метода Эйлера. Для этого подставим значение производной фазовой координаты на k-м. шаге vk в формулу (9.37), используя выражение (9.21). В результате получим разностное уравнение
vk+l ~vk- (h^)vk = °- (9.40)
366
Составим характеристический полином этого разностного уравнения. Так как порядок метода р = 1, то согласно формуле (9.26) k = 0. Тогда для уравнения (9.40) получаем
г-1-ЛХ = 0. (9.41)
Этот полином имеет единственный корень
r^l + ЛХ. (9.42)
Согласно выражению (9.28) условие абсолютной устойчивости метода Эйлера имеет вид
|1 + йХ|<1. (9.43)
Так как корень характеристического полинома X исходного дифференциального уравнения в общем случае является комплексным числом, то выражение (9.43) можно записать в виде
[1 + Re (йА.)] 2 + [hn (йх)]2 < 1.
(9.44)
Отметим, что условия устойчивости метода Эйлера (9.43) и (9.44) совпадают с условиями сходимости метода простой итерации (формулы (8.19) и (8.23)).
Заменив знак неравенства на
Рис. 9.6. Область абсолютной устойчивости явного метода Эйлера (заштрихована)
знак равенства в выражении (9.44), получим уравнение окружности единичного радиуса, координаты центра которой равны Re(/zX)— -1; 1ш(ЛХ) = 0. Эта окружность изображена на комплексной плоскости на рис. 9.6.
Областью абсолютной устойчивости метода Эйлера будет
внутренняя поверхность круга, ограниченного данной окружностью (на рис. 9.6 заштрихована).
При решении системы обыкновенных дифференциальных
уравнений условия (9.43) и (9.44) должны удовлетворяться для
всех собственных значений Xifi = 1,п, матрицы Якоби. В связи с этим шаг интегрирования системы уравнений, обеспечивающий устойчивость вычислительного процесса, определяется максимальным по абсолютной величине собственным значением I X I
I Imax
В результате величина шага оказывается небольшой.
Для устойчивой физической системы вещественные части собственных значений матрицы Якоби Re(x^) отрицательны. Предположим, что Xj вещественные и отрицательные. Тогда условие (9.43) можно записать в виде h\ -1 < 1, откуда
h < 2 /1 X . (9.45)
' I max
367
В общем случае максимально допустимое значение шага интегрирования системы обыкновенных дифференциальных уравнений явным Методом Эйлера можно определить по формуле (8.23).
Ограничение шага интегрирования, обусловленное устойчивостью, характерно для любых явных методов интегрирования (Рунге — Кутта, Адамса и др.) и является их серьезным недостатком. Практически явные методы интегрирования оказываются неприемлемыми для плохо обусловленных систем обыкновенных дифференциальных уравнений из-за большого числа шагов интегрирования. Проиллюстрируем это примером. Предположим, что число обусловленности системы дифференциальных уравнений составляет ц= 105. Время переходного процесса моделируемой физической системы до установившегося состояния примерно равно/ tn « 3 / I X I . . (9.46)
11 I 1mm
Число шагов интегрирования найдем из соотношения q I X I q
N = tn/h = = 1ц. (9.47)
п 2 Ш . 2й
I 1mm
Подставив значение ц , получаем N = 1,5105 шагов. Выполнение такого числа шагов требует очень больших затрат машинного времени.
Алгоритм явного метода Эйлера при постоянном шаге интегрирования включает следующие этапы:
1. Задание параметров алгоритма интегрирования h, Тк.
2. Задание начальных значений переменных Vq , fg = 0.
3. Вычисление + h.
4. Вычисление вектора правых частей системы
обыкновенных дифференциальных уравнений (9.2) для момента времени
5. Выполнение шага по формуле (9.9).
6. Сравнение и Тк. Если < Тк, то переход к этапу 3. При ^+1 - Тк окончание вычислений и печать результатов.
При переменном шаге интегрирования в число параметров алгоритма дополнительно входят nmax и Ед, i = 1,п, а шаг интег-рирования вычисляется по формуле (9.36). В связи с этим алгоритм содержит еще один этап — вычисление hk+i, который предшествует третьему этапу алгоритма.
Приведенное описание алгоритма показывает, что метод Эйлера очень прост в реализации и имеет минимальные вычисли
368
тельные затраты на один шаг интегрирования. Однако эффективность его обычно невысокая, так как шаг интегрирования при приемлемой погрешности, как правило, очень небольшой. Кроме того, он пригоден только для хорошо обусловленных систем обыкновенных дифференциальных уравнений. Для задач, у которых |lm(7zX^)| » Re(Mf) , он неприменим. Такие задачи харак
терны наличием слабозатухающей осциллирующей компоненты, а метод Эйлера неустойчив в области мнимой оси (рис. 9.6).
Модифицированный метод Эйлера. Метод Эйлера имеет первый порядок точности и может приводить к большим погрешностям при интегрировании, что обусловлено заменой интегральной кривой отрезками касательных на каждом шаге интегрирования. Точность интегрирования можно повысить, если скорректировать направление ломаной Эйлера на каждом шаге посредством более точной аппроксимации производной, учитывая ее изменение на интервале t^, t^+i. Это можно осуществить, если использовать члены ряда Тейлора более высоких порядков.
Используем три первых члена ряда Тейлора (9.10), т.е. включая член второго порядка:
v(tk + Л) = v(tk) + h + h2. (9.48)
dt 2 dtz
Аппроксимируем производные, входящие в выражение (9.48). Для первой производной вектор-функции используем
правую конечно-разностную аппроксимацию согласно формуле (9.6), которая приводит к формуле Эйлера (9.9):
dt h
Вторая производная может быть вычислена по формуле аналогичной структуры через первые производные в двух точках — в
точке t^ и в точке tk + h
Подставим значения производных в формулу Тейлора (9.48): v(fA + h) = ftr[v(iA)]+1 A{p[v(tA + ft)]- f[f(**)]}-&
Отсюда получаем формулу модифицированного метода Эйлера
+ Л) = y(tj + Q,5h{F |y(f*)]+ + Л)]}.
Эту формулу можно записать в следующем виде:
369
vk+l
(9.49)
где — вектор фазовых переменных, значения которых получены на предыдущем шаге интегрирования по формуле (9.49) в
проксимации производных в точке
момент времени — вектор фазовых переменных, значения
которых получены по формуле Эйлера (9.9) для момента времени tk +
Согласно этой формуле интегральная кривая отобра-
жающая действительное изменение Z-й фазовой переменной, на интервале шага интегрирования tk, + h заменяется двумя отрезками прямых, проведенных параллельно касательным к кривой в точках tk и tk + h и пересекающихся в точке, расположенной в середине указанного интервала, т.е. в точке tk + 0,5Л. Таким образом, в этом методе на каждом шаге используются ап-и в точке tk + Л, что позволяет более точно аппроксимировать интегральную кривую .
Графическая интерпретация модифицированного метода Эйлера представлена на рис. 9.7.
Рассматриваемый метод имеет второй порядок точности. Погрешность аппроксимации можно оценить остаточным членом ряда Тейлора
<9-50> 6 dt3
Однако повышение точности при использовании модифицированного метода Эйлера достигается за счет увеличения количества вычислений примерно в два раза по сравнению с методом Эйлера первого порядка. Это обусловлено тем, что в модифицированном методе вначале используется формула Эйлера (9.9), по ко-торой находят вектор фазовых переменных Vk+1 для момента
времени + h, затем вектор производных Для того же
Рис. 9.7. Графическая интерпретация модифицированного метода Эйлера
370 момента времени и, наконец, по формуле (9.49) находят вектор искомых значений фазовых переменных V^+l.
Исследуем устойчивость формулы (9.49) модифицированного метода Эйлера. Предположим, что дифференциальное уравнение относительно производной фазовой координаты по времени v приведено к виду (9.21), т.е. v = Xv . Тогда
F(vk+1) = , а вместо формулы (9.49) получаем конечно-
разностное уравнение
»k+l ~»k~ 0,5(йХ)(ий + vft+1) = 0.
Составим характеристический полином этого уравнения. Принимая во внимание, что модифицированный метод Эйлера имеет второй порядок точности, и используя формулу (9.26), согласно которой р = k 4- 1 = 2, получаем k - 1. В результате характеристический полином имеет вид
г2 - г - 0,5hX (г + г2) = 0
или
(1 - 0,5йХ)г2 - (1 + 0,5йХ)г = 0.
Корни этого полинома
Л 1 + О,5Л2с п ~ 9; го =----------.
1 Z 1 - 0,5ЛХ
Условие устойчивости формулы модифицированного метода Эйлера
1 + 0,5ЛХ
1 - О,5Л2с
(9.51)
Для устойчивой физической системы Re(X^) < 0, i - 1,п . Условие устойчивости (9.51) для нее можно записать в виде
[1 - 0,5Л Re (х)]2 + [0,5й Im (х)]2 < j
[1 + 0,5й Re (х)]2 + [0,5й Im (х)]2
Из выражения (9.52) следует, что рассматриваемый численный метод интегрирования устойчив при любых X , если Re (х) < 0 . Шаг интегрирования при этом ограничивается таким же условием, что и для метода Эйлера первого порядка, и определяется выражением (9.45).
Методы Рунге — Кутта. Дальнейшее повышение точности одношаговых методов возможно за счет сохранения в ряде Тейлора членов более высокого порядка. Но это требует аппроксимации
371
производных высших порядков. Существует несколько способов построения алгоритмов численных одношаговых методов интегрирования. Наиболее широко применяется способ, предложенный Рунге и усовершенствованный Кутта. Суть его заключается в том, что вектор-функцию правых частей f[v, tj системы обыкновенных дифференциальных уравнений (9.2) определяют не только в узлах сетки, но и в промежуточных точках интервала + h\ на каждом шаге интегрирования. Это позволяет учесть изменение производной на интервале шага, что приводит к повышению порядка точности алгоритма метода интегрирования.
Наибольшее применение в практике вычислений получил метод Рунге — Кутта четвертого порядка. Формулы этого метода имеют вид
Vk+1 = Vk + + 2К2 + 2К3 + К4 )/ 6, (9.53)
где
Кг =hF(vk,tk\,
К2 = hF[Vk + 0,5^х; tk + 0,57г);
К3 = hF^k + 0,5^2; tk + 0,57г);
= hF^y^ + К3; + 7г).
Для получения решения на каждом шаге производится четырехкратное вычисление функции tj правых частей системы обыкновенных дифференциальных уравнений. Однако высокая точность метода позволяет увеличить шаг интегрирования по сравнению с методом Эйлера в 10... 15 раз и обеспечить высокую его эффективность.
Все методы Рунге — Кутта являются явными, так как при определении вектора фазовых переменных на (k + 1)-м шаге вычисления производятся по явным формулам, и одношаговыми, поскольку для определения выполняется один шаг на сетке от к + А. Отметим, что модифицированный метод Эй-
лера является по существу методом Рунге — Кутта второго порядка, так как вычисление функции производится в двух точках интервала ^k+X ] •
Для оценки погрешности аппроксимации одношаговых методов наиболее часто используют правило Рунге, отображаемое формулой (9.17). В соответствии с этой формулой для метода Эйлера получаем
372
et ~ | ^(л/2)-у*(л)|>
а для метода Рунге — Кутта четвертого порядка
4 № | Vk(h/2)-vk(h)\/15.
Очевидно, что последний имеет гораздо более высокую точность, чем метод Эйлера.
Для эффективного использования алгоритма метода Рунге — Кутта четвертого порядка целесообразно в процессе вычислений поддерживать оптимальный шаг интегрирования, исходя из условия 8^ < 8д. Учитывая высокую точность рассматриваемого метода интегрирования, для автоматического выбора шага обычно используют алгоритм трех зон (9.32). Допустимую погрешность 8д можно определить по формуле (9.31).
Условие устойчивости вычислительного алгоритма метода Рунге — Кутта четвертого порядка можно получить аналогично тому, как это сделано для метода Эйлера.
Приведем результирующее выражение. При т\ < 1 оказывается h\ Xj| < 2,78 , откуда шаг интегрирования
h <2,78/1x1 . (9.54)
' I imax
Следовательно, условие устойчивости вычислительного алгоритма Рунге — Кутта четвертого порядка немного слабее условия устойчивости алгоритмов Эйлера первого и второго порядков (см. выражение (9.45)).
9.7. МНОГОШАГОВЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ
Формулы интегрирования линейных многошаговых методов строят на основе общей формулы (9.12), отображающей конечноразностную схему аппроксимации производных системы обыкновенных дифференциальных уравнений.
Многошаговые методы, так же как и одношаговые, могут быть явные и неявные. Алгоритмы явных многошаговых методов основаны на явных зависимостях искомого вектора фазовых координат на (к + 1)-м шаге через значения фазовых координат Vk9 V^_i9...fVk_p+i , полученные на предыдущих шагах интегрирования.
Для получения формулы явного метода интегрирования в формуле (9.12) принимают bQ = 0. Коэффициенты «у и bj подбирают исходя из требований точности аппроксимации и устойчивости вычислительного алгоритма. Установлено, что эти коэффициенты должны отвечать условиям:
373
fa,=l; (9.55)
J
/=1
(9.56)
/=0
Предположим, что необходимо получить формулу второго порядка точности, т.е. р = 2. Такая формула получена в разделе 9.2 (см. пример 9.2). Она имеет вид
У/г+1 = al^k +a2^k-l + •
Для метода второго порядка из условия минизациии погрешности аппроксимации: = 1; «2 = 0; = 1,5; &2 ~ “ 0,5. В результате получаем следующее выражение:
n+i = vk+H1’5^)- °>5Ж-1 )!• <9-57)
Это выражение представляет собой явную формулу метода Адамса второго порядка. Для вычисления значений компонентов вектора фазовых координат V на (k + 1)-м шаге интегрирования используются значения координат, полученные в двух предыдущих точках Vk и .
Аналогично можно получить формулы более высоких порядков точности.
Для запуска алгоритма многошагового метода необходимо использовать какой-либо одношаговый метод (Эйлера, Рунге — Кутта) и определить значения компонентов вектора V в первых р точках.
Чем выше порядок точности, тем меньше погрешность аппроксимации 8^ при одном и том же шаге интегрирования. Поэтому многошаговые методы применяют либо с целью снижения погрешности вычислений, либо для увеличения шага интегрирования при заданном значении допустимой погрешности 8Д .
Исследуем устойчивость явной двухшаговой формулы Адамса. Для этого запишем разностную формулу (9.57) для одной фазовой переменной vi9 полагая f(v) = kv , и составим для нее характеристический полином. Разностная формула имеет вид
vk+l ~vk~ - 0,5Хи/г_1) = 0
или
vk+l ~ (1 + + O’Sh/kVk-i = 0. (9.58)
Принимая во внимание, что р = 2, на основании (9.26) получаем k = 1. Тогда характеристический полином разностного уравнения (9.58) представляет собой квадратное уравнение
374
г2 - (1 + 1,5йЛ.)г + 0,5йХ = 0.
(9.59)
Воспользуемся для анализа устойчивости вычислительного алгоритма следующим свойством квадратного уравнения, которое
проверяется непосредственно: корни квадратного уравнения
9
ах +Ъх + с = 0 не превосходят по модулю единицу, т.е.
И,2 — 1 >
если
| Ъ | < а + с; (9.60)
с<а. (9.61)
Используя выражения (9.60) и (9.61), найдем приближенную оценку значения максимально допустимой величины шага интегрирования. Примем так же, как и при анализе устойчивости метода Эйлера, что моделируемая физическая система устойчива, т.е. Re < 0, i = l,n , а собственные значения Xj вещественные отрицательные. Тогда согласно (9.59) — (9.61) получаем
11,5ЛХ-1 | <1-0,5ЛХ; -0,5ЛХ<1.
Отсюда следует, что условие устойчивости явной двухшаговой схемы Адамса можно записать в виде
h<l/\X max. (9.62)
Сопоставляя выражения (9.62) и (9.45), можно отметить, что для устойчивости метода Адамса второго порядка требуется шаг в два раза меньший, чем для метода Эйлера. Поэтому на практике применяют формулы интегрирования Адамса более высоких порядков точности, чаще всего формулу четвертого порядка. Обычно эту формулу используют в следующем виде:
Vfe+1 = Vk + hF(vk)+ - Л2дА + — Л3А2Д + -Л4А3А , (9.63) nil л/ \ гс/ 2 12 8 х
где
дД = F^k)~
А24 =f(va)-2f(^_1)+f(^_2);
А3 Д = F& ) - З^Д-! ) + Зг(Д _2 ) - F(vk_3 ).
Значения в первых трех точках находят каким-
либо одношаговым алгоритмом, чаще всего методом Рунге — Кутта. Используя начальные условия Vo, дальнейшие вычисления, начиная с точки k = 4, производят по алгоритму Адамса. Шаг интегрирования в этом методе выбирается постоянным. Существуют также алгоритмы метода Адамса с переменным шагом.
375
9.8. МЕТОДЫ ПРОГНОЗА И КОРРЕКЦИИ
Повысить точность определения фазовых координат технического объекта при интегрировании системы обыкновенных дифференциальных уравнений можно не только путем увеличения порядка точности аппроксимации производных, но и посредством последовательного уточнения получаемого результата на данном шаге интегрирования. Это достигается применением методов прогноза и коррекции.
Методы прогноза и коррекции представляют собой двухфазные вычислительные алгоритмы. На первой фазе алгоритма вычисляются предсказанные (приближенные) значения искомых ft*
компонентов вектора фазовых координат Vk+1 на (k + 1)-м шаге. При этом используется какая-либо простая формула интегрирования, обычно явная одношаговая формула. На второй фазе осуществляется коррекция результатов вычисления переменных Vk+i на том же (k + 1)-м шаге интегрирования по более точной формуле — явной или неявной.
Алгоритм простейшего метода прогноза и коррекции построен на использовании явных формул Эйлера. На первой фазе алгоритма используется формула метода Эйлера первого порядка
Л»»
точности (9.9), по которой определяется , а коррекция осуществляется по формуле модифицированного метода Эйлера (9.49), т.е. по формуле второго порядка точности. Погрешность интегрирования методами прогноза и коррекции оценивается по формуле (9.18). Автоматическое изменение шага осуществляется на основе алгоритма трех зон (9.32) либо алгоритма плавного изменения шага (9.33).
Наиболее часто в методах прогноза и коррекции алгоритм прогноза построен по явной формуле численного интегрирования, а алгоритм коррекции — по неявной. Поскольку любой численный метод интегрирования может иметь явную и неявную схему, то их и используют для построения алгоритма метода прогноза и коррекции. Применяют схемы методов Эйлера, Адамса и др.
9.9. НЕЯВНЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ
Неявные методы интегрирования, так же как и явные, могут быть одношаговые и многошаговые, т.е. первого и более высоких порядков точности.
Применяемые в неявных методах интегрирования формулы конечно-разностной аппроксимации производных осуществляют преобразование исходной системы обыкновенных дифференци
376
альных уравнений в систему взаимосвязанных алгебраических уравнений. Поэтому, в отличие от явных методов, в которых фазовые переменные V^+l на + 1)-м шаге интегрирования выражаются явными зависимостями от фазовых переменных на предыдущих шагах интегрирования Vk, ,..., Vk_p+^ , при использовании неявных методов приходится на каждом шаге интегрирования решать систему алгебраических уравнений. Это приводит к увеличению затрат машинного времени при осуществлении вычислений на одном шаге интегрирования. Увеличивается также объем необходимой оперативной памяти ЭВМ.
Но неявные методы обладают более высокой устойчивостью, чем явные, что позволяет применять их для решения плохо обусловленных систем обыкновенных дифференциальных уравнений, характерных для большинства технических объектов. Явные методы интегрирования в таких случаях часто оказываются неприемлемыми либо из-за неустойчивости вычислительного процесса, либо из-за слишком малых шагов интегрирования.
В связи с более высокой устойчивостью неявные методы позволяют значительно увеличивать шаг интегрирования по сравнению с явными методами. Для минимизации затрат машинного времени осуществляют автоматический выбор шага исходя из заданной величины допустимой погрешности 8Д, используя формулы (9.32) — (9.34).
Рассмотрим наиболее часто используемые неявные методы интегрирования. Для построения алгоритмов большинства неявных линейных многошаговых методов используется общая формула (9.12)
Vk+1 = £ ajVk_j+1 + Л £ bjVk_j+l . (9.64)
7=1 7=0
Коэффициенты aj и bj этой формулы выбираются исходя из требований точности аппроксимации и устойчивости вычислительного процесса и должны отвечать условиям (9.55) и (9.56). Кроме того, в формулах неявных методов 0 .
Методы Гира. Примем bG = 1; bj - 0, j = 1, р . Тогда формулу (9.64) можно записать в виде
Здесь принято во внимание, что в слагаемом Vk+1 формулы (9.64) индекс j равен нулю, а коэффициент при этом слагаемом
377
«о - -1- С учетом этого можно составить условие, которому должны отвечать коэффициенты формулы (9.65). Используя выражение (9.55), получаем
Р ^aj=O. (9.66)
7 = 0
Формулу (9.65) аппроксимации производных фазовых переменных системы дифференциальных уравнений предложил К. Гир. Согласно этой формуле аппроксимация производных в точке ^+1 производится с использованием значений фазовых переменных, относящихся к данному и предыдущим моментам времени. Поэтому формулу (9.65) называют формулой дифференцирования назад. Эта формула используется для построения алгоритмов неявных методов Гира различных порядков точности. Методы Гира обеспечивают высокую устойчивость вычислительного процесса и позволяют значительно увеличить шаг интегрирования. При р < 2 алгоритмы неявных методов Гира обладают абсолютной устойчивостью, а шаг интегрирования выбирают исходя из обеспечения требуемой точности вычислений.
Составим формулу Гира первого порядка. Полагая р - 1, на основе (9.65) получим
Vk+1 =(Vk+l-Vk)/h. (9.67)
Принимая во внимание, что = ^(^+1), получаем следующую конечно-разностную формулу:
Vk+1 =^k+ ^(Ъг+1)- (9.68)
Сравним формулы (9.67) и (9.68) с формулами явного метода Эйлера первого порядка (9.8) и (9.9).
По формуле Эйлера (9.8) осуществляется правая конечноразностная аппроксимация производных фазовых координат, а по формуле Гира (9.67) — левая. В результате формула численного интегрирования Эйлера (9.9) представляет собой конечноразностное выражение, устанавливающее явную зависимость искомых значений компонентов вектора фазовых координат Г^+1 на (k + 1)-м шаге от их значений, вычисленных на предыдущем шаге. Следовательно, каждую координату , i = 1,п , можно непосредственно вычислить по одному и тому же выражению вида
vk+l + hF(vk). (9.69)
В формуле же Гира (9.68) вектор-функция правых частей FIVь. I) системы обыкновенных дифференциальных уравнений
378
(9.2) зависит от искомого вектора фазовых координат . Поэтому векторное уравнение (9.68) целесообразно записать в неявном виде
Vk+l-Vk-hF(vk+1)=O. (9.70)
Уравнение (9.70) эквивалентно системе алгебраических уравнений
4+l-vk-hFl(vk+1)=0, 1 = Щ. (9.71)
В уравнениях (9.71) верхний индекс I при фазовой переменной v соответствует порядковому номеру этой переменной, а нижний индекс k — номеру итерации (номеру шага интегрирования).
Из выражений (9.71) следует, что функция зависит
от всех фазовых координат системы , i = 1, п , определяемых для момента времени + h. Следовательно, эти выражения
представляют собой систему взаимосвязанных алгебраических уравнений с неизвестными функциями i4+1. Алгоритм численного интегрирования дифференциальных уравнений в этом случае предусматривает на каждом шаге решение системы алгебраических уравнений (9.71).
Таким образом, неявные формулы численного интегрирования сводят исходную систему обыкновенных дифференциальных уравнений к системе алгебраических уравнений.
Формулу (9.70) метода Гира первого порядка также называют формулой неявного метода Эйлера.
Исследуем устойчивость неявного метода Эйлера. Для этого составим характеристический полином конечно-разностного уравнения (9.71), полагая v = f(u) = Хи. Так как метод имеет первый порядок точности, то согласно (9.26) k = 0, а характеристический полином имеет вид
г - 1 - h'kr - 0.
Этот полином имеет единственный корень г = 1 /(1 - Й1).
В результате находим условие абсолютной устойчивости |1-ЛХ|>1. (9.72)
Выделяя вещественные и мнимые части выражения (9.72), запишем его в виде
[Re (йХ)-1]2 + [im (йХ)]2 > 1. (9.73)
379
Условие (9.73) выполняется во всех точках комплексной плоскости, за исключением круга единичного радиуса, центр ко-
1 Im (/а)
Re (hX)
Рис. 9.8. Область абсолютной устойчивости неявного метода Эйлера (заштрихована)
торого находится в точке с координатами Re (ах) = 1; Im (АХ) = О (рис. 9.8).
Составим сейчас формулу Гира второго порядка. На основе формулы (9.65) при р - 2 получаем
^+1 ~ (а0^/г+1 + alYk + а2Ъ?-1 )•
Из условия минимизации ошибки аппроксимации получено: - - 1,5; = 2; а2 = - 0,5.
Тогда формула аппроксимации
производных принимает вид
^+1 = (1,5vk+1 - 2Vk + 0,51^ )/h. (9.74)
В результате получаем конечно-разностное уравнение неявного численного метода интегрирования, представляющее собой формулу Гира второго порядка
1,5Йа+1 - 2Vk + 0,5У*_1 - hF(vk+l) = 0. (9.75)
Проведем исследование устойчивости метода Гира второго порядка. Характеристический полином для модельного уравнения при v = Хи в этом случае
(1,5-ЙХ)г2-2г+ 0,5 = О. (9.76)
Так как характеристический полином (9.76) представляет собой квадратное уравнение относительно г, то для оценки устойчивости метода интегрирования воспользуемся условиями (9.60) и (9.61), в соответствии с которыми получаем неравенства:
2 < 2 - АХ; 0,5 < 1,5 - АХ.
Предположим, что математическая модель относится к устойчивой физической системе. Полагая все собственные значения Xj вещественными отрицательными, можно заключить, что полу
ченные неравенства выполняются при любых значениях АХ . Следовательно, в рассматриваемом случае метод Гира второго порядка обладает абсолютной устойчивостью.
Методы Адамса. Формулы неявных методов Адамса различных порядков точности также можно получить на основе общей формулы (9.64). Неявная формула первого порядка совпадает с формулой Эйлера (9.70). При получении формул более высоких
380
порядков точности, в отличие от методов Гира, в формуле (9.64) все коэффициенты ау при j > 2 и коэффициент bj при j = р принимают равными нулю, а остальные определяют из условия минимизации ошибки аппроксимации. В результате аппроксимация производных фазовых координат на (k + 1)-м шаге интегрирования осуществляется по формуле
Необходимость выполнения условия (9.66) приводит к тому, что в неявных формулах Адамса принимают ао = -а1 = -1, что учтено в формуле (9.77). Коэффициенты bj должны отвечать условию (9.56).
Используем формулу (9.77) для получения конечноразностного уравнения неявного численного метода интегрирования второго порядка точности, т.е. неявной формулы Адамса второго порядка. В этой формуле Ь$ = by = 0,5. В результате получаем
векторное уравнение
Vk+1 - Vk - О,5й|г(^+1)+ )J = 0 • (9- 78)
Явную (9.57) и неявную (9.78) формулы Адамса второго порядка называют также формулами трапеций.
Исследуем устойчивость неявной формулы (9.78), используя модельное уравнение вида v = Xv . Характеристический полином разностного уравнения (9.78) имеет вид
г2 - г - 0,5ЛХ(г2 + г) = 0 или
г[(1 - 0,5йЛ)г - (1 + 0,5йй)] = 0.
Корни этого полинома равны:
Л 1 + 0,5йй п = 0; го =--------,
1 z 1 - 0,5йй а условие устойчивости вычислительного процесса
1 + 0,5йХ 1-0.5ЛЛ. <
Выделим вещественные и мнимые части числителя и знаменателя этого неравенства, полагая, что моделируемая техническая система устойчива, т.е. Re (Xz) < 0, i = 1,п :
(9.79)
(9.80)
[1 - 0,5 Re (йХ)]2 + [0,5 Im (йй)12 .
[1 + 0,5 Re (йй)]2 + [0,5 Im (йй)]2
(9.81)
381
Условие (9.81) выполняется при любых значениях h'k в левой полуплоскости. Следовательно, неявная формула Адамса второго порядка (9.78) при принятых условиях обладает абсолютной устойчивостью.
В заключение рассмотрим пример интегрирования системы дифференциальных уравнений различными численными методами, оценим их свойства и сравним получаемые погрешности результатов решения.
Пример 9.4. Функционирование некоторого технического объекта описывается системой обыкновенных дифференциальных уравнений:
Х1 = апхг + а12х2, (9 g2^
*2 = а21х1 + а22х2>
где ац, «12, «21» а22 — постоянные коэффициенты: «п - 500; «i2 - 1000; а21 = - 400; «22 = ~ 795.
Необходимо определить изменение во времени фазовых координат Xi и х2 при начальных условиях х10 = х20 = 1.
Найдем вначале аналитическое решение этой системы уравнений. Так как уравнения однородные, то их решения можно представить в виде
xi = ^ сче J n’ (9.83)
где Cij — постоянные интегрирования; — собственные значения матрицы Якоби (в данном случае матрицы постоянных коэффициентов а^); п — суммарный порядок системы уравнений.
Запишем выражение для первой фазовой координаты хг:
Х1 =СпЛ*+С12<Л2‘. (9.84)
Продифференцируем это выражение по независимой переменной t
xi = Qi V1* + С12А.2*Л2*. (9.85)
Подставим в первое уравнение системы (9.82) начальные условия х10 и х20 и определим начальную скорость изменения фазовой координаты хр
*10 - а11*10 + а12х20*
Подставим теперь значения х10 и х10 в начальный момент времени t0 = 0 в выражения (9.84) и (9.85):
Си + С12 - х10; 1 (9.86)
^1Сц + ^-2^12 = а11*10 + a12x20-J
Решив эту систему алгебраических уравнений, определим постоянные интегрирования, входящие в выражение (9.84):
_ Х2Х10 - «ц*ю - «12*20 _ Х1х1о - «цХ10 - «12*20
'“z11 ~' ""C-zi 5? •
Х2-*1 *1-*2
Аналогично определяются постоянные интегрирования второго уравнения:
_ Л,2Х20 - а21Хю - «22*20 „ ^“1*20 _ а21*10 ~ а22Х20
21 = =С22 = 5^; •
Собственные значения Х;- матрицы Якоби найдем, составив определитель
«11 ~ а12
а21 а22 “
382
Раскрыв этот определитель, получим Оц + а22 ± ~ 4(а11а22 _ а12а21)
Ч2 - ~2 •
Подставляя значения коэффициентов и начальных условий х10 и х20 , находим: = -8,7331; Л2 = -286,2669; Сп = 6,4362; С12 = -5,4362; С21 = -3,2743;
С22 = 4,2743.
В результате решениями системы дифференциальных уравнений (9.82) при заданных начальных условиях будут следующие функции:
х1 = 6,4362е"8’73зи - 5,4362е~286’2669*; (9.87)
х2 = -3,2743е"8’73зп + 4,2743e~286’2669*. (9.88)
Рис. 9.9. Графики функций xx(f) и x2(f) и их производных х} и х2 для устойчивой технической системы, описываемой уравнениями (9.82)
Графики этих функций представлены на рис. 9.9. Там же приведены графики скоростей их изменения во времени хх и х2 .
Рассмотрим теперь результаты решения системы дифференциальных уравнений (9.82) различными численными методами. Прежде всего отметим, что моделируемая физическая система устойчива, так как вещественные части собственных значений матрицы Якоби отрицательные, а переходные процессы в ней апериодические, так как отсутствуют мнимые части собственных значений. Используя выражение (9.45), определим максимально допустимое значение шага интегрирования методом Эйлера:
Лтах < 2/Ш =0,006986.
шах I Imax
Сделаем вначале попытки решения уравнений (9.82) с шагом h = 0,01. В таблице 9.1 приведены значения функции xx(i), вычисленные по аналитическому решению (9.87), а также значения погрешностей s при вычислении этой функции различными численными методами с шагом интегрирования h = 0,01 с. Погрешности вычислялись по формуле
Е = Xj — Xj, где Xj — значение функции хДг), вычисленное по аналитической формуле (9.87);
Xj — значение этой же функции, вычисленное с использованием соответствующего численного метода интегрирования.
В таблице приняты следующие обозначения погрешностей: еяэ и енэ — погрешности соответственно явного и неявного методов Эйлера; еяа и sHa — погрешности соответственно явного и неявного методов Адамса второго порядка; spK — погрешность метода Рунге — Кутта четвертого порядка; sHr — погрешность метода Гира второго порядка.
383
Из табл. 9.1 следует, что вычислительные процессы всех явных методов интегрирования при h > hmax оказались неустойчивыми, а полученные при этом результаты решения задачи непригодными для использования. Погрешности вычислений при этом распределились в соответствии с отношениями максимальных шагов интегрирования, определяемых выражениями (9.45), (9.62) и (9.54) для методов Эйлера, Адамса и Рунге — Кутта, к принятому при интегрировании шагу h - 0,01. Погрешности двух первых методов носят осциллирующий расходящийся характер, точно так же как и значения вычисляемых этими методами функций xx(i) и x2(i), в то время как графики этих функций плавные и процессы затухающие (см. рис. 9.9). Метод Рунге — Кутта дает гораздо меньшую погрешность, что объясняется более высоким порядком его точности. При этом погрешность накопления постепенно и плавно нарастает, поэтому при отсутствии контроля за ее величиной может сложиться обманчивое впечатление о нормальном протекании вычислительного процесса, что обязательно следует учитывать при выборе параметров алгоритма численного метода интегрирования.
Таблица 9.1
t Xi еяэ енэ Еяа Ена Ерк Енг
0,01 5,5875 11,4125 -1,0756 11,4125 1,2746 -5,7947 -1,374
0,02 5,3870 -18,8870 -0,3075 -41,1370 -0,1539 -6,8388 0,0151
0,03 4,9517 35,0733 -0,0394 149,9796 0,0306 -7,6993 0,3407
0,04 4,5385 -65,5123 0,0416 -552,9749 -0,0063 -8,6479 0,2955
0,05 4,1590 121,8086 0,0694 2036,1386 -0,0002 -9,7122 0,2253
0,06 3,8112 -227,1358 0,0817 -7498,565 -0,0014 -10,9074 0,1874
0,07 3,4925 422,8107 0,0888 27614,674 -0,0013 -12,2498 0,1678
0,08 3,2004 -787,8402 0,0936 -101695,8 -0,0014 -13,7572 0,1537
0,09 2,9328 1477,1904 0,0967 374512,1 -0,0015 -15,4503 0,1408
0,10 2,6875 -2733,1922 0,0987 -1379205 -0,0014 -17,3516 0,1287
Неявные методы интегрирования в тех же условиях (т.е. при h > Лтах) оказываются устойчивыми и позволяют значительно снизить погрешность вычислений. Наименьшая погрешность при этом получена при использовании метода Адамса, что характерно для плавно изменяемых функций.
В табл. 9.2 приведены погрешности вычислений функции Xi(f) теми же численными методами, но с шагом h = 0,001 с, т.е. при выполнении условий Л < /imax для всех методов. В этом случае обеспечивается устойчивость вычислительных процессов численного интегрирования, а погрешность даже самого грубого метода интегрирования — явного метода Эйлера становится вполне приемлемой. Методы Адамса и Рунге — Кутта дают заметную погрешность только на нескольких начальных шагах интегрирования, когда наблюдается значительное изменение функции В дальнейшем при плавном ее изменении погрешность практически равна нулю.
Следует отметить особенность методов Эйлера. Как следует из табл. 9.2, погрешности явного и неявного методов имеют противоположные знаки. Это можно использовать для уменьшения погрешности. Для этого вычисляют значение функции явным и неявным методом Эйлера и полученный результат усредняют.
384
Таблица 9.2
1 f Xi Еяэ Енэ Еяа Ена Ерк Енг
0,01 5,5875 0,2217 -0,1258 -0,0188 0,0061 -0,0001 -0,0151
0,02 5,3870 0,0072 -0,0135 -0,0033 0,0007 0,0000 0,0236
0,03 4,9517 -0,0048 0,0039 -0,0004 0,0001 0,0001 0,0220
0,04 4,5385 -0,0069 0,0067 -0,0001 0,0000 0,0000 0,0201
0,05 4,1590 -0,0079 0,0079 -0,0001 0,0000 0,0000 0,0184
0,06 3,8112 -0,0087 0,0087 0,0000 0,0000 0,0000 0,0168
0,07 3,4925 -0,0093 0,0093 0,0000 0,0000 0,0000 0,0154
0,08 3,2004 -0,0098 0,0098 0,0000 0,0000 0,0001 0,0142
0,09 2,9328 -0,0101 0,0100 0,0000 0,0000 0,0000 0,0129
0,10 2,6875 -0,0102 0,0103 0,0000 0,0000 0,0000 0,0119
Пример 9.5. Необходимо проанализировать функционирование той же технической системы, что и в примере 9.4, но при ином значении только одного коэффициента системы уравнений (9.82), а именно коэффициента п22. Пусть значение п22 = - 805.
Рис. 9,10. Графики функций xx(i) и x2(f) для неустойчивой технической системы
Принимая начальные условия х10 = х20 = 1 » получаем: 7,9875;
Х2 = - 312,9875; Сц =5,6484; С12 = = -4,6484; С21 = -2,7791; С22 =
= 3,7791.
Так как Re(x1)>0, то физическая система неустойчива и ее переходные процессы будут расходящимися при любых начальных условиях и внешних воздействиях. Графики этих процессов xx(i) и x2(t) на ограниченном интервале интегрирования показаны на рис. 9.10.
В табл. 9.3 приведены значения функции xx(i) и значения по-
грешностей численного интегрирования различными методами. Характер зависимостей погрешностей от шага
интегрирования в этом случае аналогичен
предыдущему примеру, однако абсо-
лютные значения погрешностей оказываются большими, что обусловлено более высокой скоростью изменения функций xx(i) и x2(t).
Таблица 9.3
1 1 Xi Еяэ Енэ Еяа Ена Ерк Енг
1 2 3 4 5 6 7 8
0,01 5,9148 0,0924 -0,1001 -0,0173 0,0052 -0,0001 -0,0509
0,02 6,6179 0,0021 -0,0069 -0,0024 0,0004 0,0000 -0,0259
0,03 7,1774 -0,0065 0,0060 -0,0004 0,0001 0,0000 -0,0282
0,04 7,7747 -0,0099 0,0099 -0,0004 0,0000 -0,0001 -0,0307
1 0,05 8,4212 -0,0134 0,0134 -0,0004 0,0000 -0,0001 -0,0332
385
Продолжение табл. 9.3
1 2 3 4 5 6 7 8
0,06 9,1214 -0,0174 0,0175 -0,0004 0,0000 0,0000 -0,0359
0,07 9,8798 -0,0219 0,0222 -0,0004 0,0001 0,0000 -0,0388
0,08 10,7014 -0,0272 0,0275 -0,0006 0,0000 0,0000 -0,0421
0,09 11,5912 -0,0331 0,0335 -0,0006 0,0000 0,0000 -0,0456
0,10 12,5550 -0,0391 0,0404 -0,0006 0,0001 0,0000 -0,0493
Пример 9.6. Исследовать затухающие колебания материальной точки массой тп, описываемые дифференциальным уравнением
х = —(сх + цх)/ т, (9.89)
где с — коэффициент жесткости упругого элемента; ц — коэффициент сопротивления диссипативного элемента.
Значения параметров системы: т = 1 кг; с - 900 Н/м; р, = 10 Н с/м. Начальные условия: х0 = 0; х0 - 3,5 м/с.
Проведем исследование колебаний различными численными методами и оценим погрешности интегрирования.
Для нахождения аналитического решения уравнения (9.89) приведем его к виду
х + 2пх + ю2х = 0, (9.90)
где со — собственная частота колебаний: со = <Jc /т ; п — коэффициент затухания колебаний: п = ц/(2m).
Параметры со и п измеряются в рад/с.
Составим характеристическое уравнение дифференциального уравнения (9.90) и определим его корни:
Л. + + со — 0;
= —п + -Jn2 - со2; Л2 = -п - V^2 - со2.
Характер свободных колебаний определяется значениями корней характеристического уравнения Xj и Х2. Затухающие колебания будут при условии 0 < п <со. Тогда корни Xj и Х2 оказываются комплексными сопряженными
Х1>2 = -п± ;<о3, где со3 — частота затухающих колебаний: /2 2
С0„ = VCO - п . чЛ ”
Как известно из курса теоретической механики, общее решение уравнения затухающих колебаний (9.90) имеет вид
х = e~ntipi cosco3f + C2sinco3f).
Вместо постоянных интегрирования Сх и С2 можно ввести две новых постоянных Аир, полагая С5 = Asinp, С2 = Acosp , тогда
х = Ae~nt sin(co3 • t + р). (9.91)
Постоянные интегрирования Аир определяются по начальным условиям х0 и х0 . Чтобы найти значения Аир, необходимо кроме уравнения (9.91) иметь выражение для определения скорости колебаний, которое можно получить, продифференцировав по времени уравнение (9.91):
х = -пх + Aa>3e~nt cos(co3£ + р). (9.92)
25. Зак. 3006
Подставив для начального момента времени при t - 0 начальные значения х0 и х0 в уравнения (9.91) и (9.92) и решив их совместно, получим выражения для определения постоянных интегрирования:
А= Ь+^О±^оЕ; p = arctg^3.
У СОз *о + nxQ
При заданных параметрах системы со = 30 рад/с; п = 5 рад/с; со3 ~ = 29,5804 рад/с; Т3 = 2л/ы3 = 0,2124 с.
Постоянные интегрирования: А - 0,1183 м; £ - 0 рад.
Оценим максимальный шаг интегрирования по формуле (8.23): hmax =0,0118 с. Выберем три различных значения шага 0,02; 0,01 и 0,001 и оценим погрешности, полученные при интегрировании различными численными методами.
В табл. 9.4, 9.5 и 9.6 приведены значения функции x(f), вычисленные по аналитическому решению (9.91), а также значения погрешностей интегрирования. Из табл. 9.4 следует, что при использовании явного метода Эйлера имеет место неустойчивый вычислительный процесс и погрешность неуклонно возрастает по мере роста количества шагов, т.к. принятое значение шага интегрирования больше максимально допустимого. Все остальные методы обеспечивают устойчивость вычислительного процесса, однако неявные методы Гира и методы Адамса при h = 0,02 имеют значительные погрешности.
Таблица 9.4
t X еяэ е ьнэ Е ьяа ена ^нг
0,02 0,0597 0,0103 -0,0148 0,0103 -0,0009 -0,0236
0,04 0,0897 0,0363 -0,0264 0,0293 0,0003 -0,0223
0,06 0,0858 0,0598 -0,0253 0,0178 0,0028 -0,0072
0,08 0,0555 0,0604 -0,0108 -0,0164 0,0053 0,0127
0,10 0,0131 0,0267 0,0112 -0,0466 0,0061 0,0287
0,12 -0,0258 -0,0371 0,0314 -0,0515 0,0045 0,0347
0,14 -0,0494 -0,1099 0,0417 -0,0268 0,0010 0,0288
0,16 -0,0531 -0,1607 0,0387 0,0143 -0,0032 0,0135
0,18 -0,0394 -0,1607 0,0240 0,0497 -0,0066 -0,0057
0,20 -0,0156 -0,0965 0,0031 0,0615 -0,0078 -0,0221
0,30 0,0138 0,2188 -0,0100 -0,0494 0,0071 0,0120
0,40 -0,0107 -0,4096 0,0101 0,0309 -0,0055 -0,0034
0,50 0,0077 0,6888 -0,0078 -0,0156 0,0037 -0,0020
0,60 -0,0053 -1,0758 0,0054 0,0060 -0,0022 0,0044
0,70 0,0034 1,5818 -0,0035 -0,0012 0,0012 -0,0047
Таблица 9.5
t X £яэ ^нэ ^яа ена енг
1 2 3 4 5 6 7
0,02 0,0597 0,0068 -0,0078 0,0051 -0,0002 -0,0142
0,04 0,0897 0,0187 -0,0153 0,0051 0,0001 -0,0092
0,06 0,0858 0,0257 -0,0158 0,0009 0,0008 0,0005
0,08 0,0555 0,0200 -0,0077 -0,0048 0,0014 0,0098
0,10 0,0131 0,0007 0,0060 -0,0086 0,0015 0,0152
Продолжение табл. 9.5
1 1 2 3 4 5 6 7
0,12 -0,0258 -0,0257 0,0194 -0,0085 0,0011 0,0150
0,14 -0,0494 -0,0481 0,0268 -0,0044 0,0002 0.0096
0,16 -0,0531 -0,0553 0,0252 0,0018 -0,0009 0,0013
0,18 -0,0394 -0,0418 0,0153 0,0075 -0,0017 -0,0069
0,20 -0,0156 -0,0104 0,0008 0,0103 -0,0019 -0,0120
0,30 0,0138 0,0229 -0,0057 -0,0091 0,0018 0,0084
0,40 -0,0107 -0,0350 0,0071 0,0071 -0,0014 -0,0052
0,50 0,0077 0,0454 -0,0063 -0,0051 0,0010 0,0028
0,60 -0,0053 -0,0536 0,0048 0,0034 -0,0006 -0,0012
0,70 0,0034 0,0597 -0,0033 -0,0022 0,0004 0,0003
Таблица 9.6
t X Еяэ е ьнэ Еяа Енг
0,02 0,0597 0,0008 -0,0008 0,0001 -0,0012
0,04 0,0897 0,0018 -0,0017 0,0001 -0,0004
0,06 0,0858 0,0021 -0,0020 0,0000 0,0005
0,08 0,0555 0,0013 -0,0011 -0,0000 0,0010
0,10 0,0131 -0,0005 0,0005 -0,0001 0,0011
0,12 -0,0258 -0,0024 0,0023 -0,0001 0,0009
0,14 -0,0494 -0,0037 0,0035 -0,0000 0,0004
0,16 -0,0531 -0,0037 0,0034 0,0000 -0,0002
0,18 -0,0394 -0,0024 0,0022 0,0001 -0,0006
0,20 -0,0156 -0,0002 0,0001 0,0001 -0,0007
0,30 0,0138 0,0008 -0,0007 -0,0001 0,0004
0,40 -0,0107 -0,0012 0,0011 0,0001 -0,0003
0,50 0,0077 0,0013 -0,0011 -0,0000 0,0001
0,60 -0,0053 -0,0012 0,0010 0,0000 -0,0001
При этом увеличение порядка метода Гира не дает желаемого результата. Погрешность вычислений методом Рунге — Кутта находится в пределах 0,0001...0,0003, а при шаге h < 0,01 она практически равна нулю. Следует, однако, отметить, что метод Рунге — Кутта прекрасно работает лишь при хорошей обусловленности системы дифференциальных уравнений.
При выборе шага h = 0,01 (табл. 9.5) погрешности интегрирования также значительны, но при использовании методов Адамса они значительно ниже, чем для явного метода Эйлера и методов Гира. Только уменьшение шага до h = 0,001 (табл. 9.6) позволяет снизить погрешности до приемлемых значений.
На рис. 9.11 приведены графики исследуемого процесса x(f), полученные путем вычислений по аналитической формуле (9.91) и численными методами при h = 0,01: явным методом Эйлера хяэ , неявным методом Эйлера хнэ и методом Гира второго порядка хнг . Значения хнг показаны кружочками.
Рис. 9.11. Графики затухающих колебаний механической системы с одной степенью свободы
При использовании явного метода Эйлера график хяэ процесса существенно отличается от действительного процесса х. Этот метод характерен возникновением осцилляций с повышенными амплитудами, сильно искажающими характер исследуемого процесса. Неявный метод Эйлера, наоборот, подавляет колебания и дает более сильное затухание по сравнению с реальным процессом, а также значительное отставание по фазе. Эти же особенности характерны и для метода Гира второго порядка, однако погрешность аппроксимации достигает значительно меньшей величины, чем у неявного метода Эйлера.
9,10. АЛГОРИТМЫ НЕЯВНЫХ МЕТОДОВ ИНТЕГРИРОВАНИЯ
Построим алгоритмы вычислений при использовании неявных формул численного интегрирования, приведенных в предыдущем параграфе.
Неявный метод Эйлера. Формула численного интегрирования системы обыкновенных дифференциальных уравнений неявным методом Эйлера имеет вид
Vk+l-Vk-hF(vk+1)=0. (9.93)
Выпишем одно из уравнений системы V = например
первое, разрешенное относительно Vj :
v1=a11v1+a12v2+... + alnvn+b1, (9.94)
где ац9 i = l,n; j = 1,п — коэффициенты при фазовых координатах системы дифференциальных уравнений; — элемент вектора внешних воздействий на систему: п — порядок системы дифференциальных уравнений.
Дифференциальному уравнению (9.94) соответствует формула численного интегрирования неявного метода Эйлера
< - - hf{1)(vk+i) = 0, (9.95)
где Vk+1 — вектор фазовых координат на (k + 1)-м шаге интегрирования.
В формуле (9.95) и в последующих формулах верхний индекс отображает номер фазовой переменной или номер уравнения, входящего в систему дифференциальных уравнений, а нижний индекс — номер шага интегрирования.
389
Принимая во внимание, что f''^+1 / = ^k+19 и ввеДя обозначения нижних индексов для переменных уравнения (9.94), соответствующих моментам времени и tk+i> формулу (9.95) приведем к виду
г/1) _ р(1) _ р(1) 4- /т.. р(п) । А ]_ Л
Vk+1 Vk nV^Vk+l + a12ufc+l + ”• + alnvk+l + ^1/- u-
Выполним приведение подобных, а известные величины перенесем в правую часть уравнения:
(1 - Лап)^! - ^12*4+1 + - + °1пи1+1)= vk* + kbl
Разделим левую и правую части этого уравнения на (-/г): («11 -1/л)^ + (чИ+)1 +- + ainul+i)=-U1)/ft + bl) На основании этой формулы, переходя к обобщению, можно записать
(au -1 /h)v^\ + £aZ;4+i = “ + vk} /h)’ i = bn.
/=1
Введем обозначения:
Au =au-l/h; Ay = ay при i Ф p Bt = /h\ (9.96)
В результате получаем систему линейных алгебраических уравнений относительно искомых значений фазовых координат системы i = 1, п , на (k + 1)-м шаге интегрирования
=Bf, i = l^. (9.97)
1=1
Для решения этой системы уравнений применяют метод Гаусса (см. раздел 8.9).
Алгоритм неявного метода Эйлера при интегрировании системы обыкновенных дифференциальных уравнений с постоянным шагом h содержит следующие этапы:
1. Задание параметров алгоритма интегрирования h, Тк.
2. Задание начальных значений переменных Vo, tQ =0.
3. Вычисление tk+^ = + h.
4. Вычисление элементов Ау матрицы А и В, вектора В.
5. Решение методом Гаусса системы алгебраических уравнений (9.97).
6. Сравнение tk+1 и Тк. Если tk+1 < Тк, то переход к этапу 3. При tk+^ > Тк окончание вычислений и печать результатов.
Наиболее рационально использовать алгоритм неявного метода Эйлера с переменным шагом. В этом случае в число парамет
390
ров алгоритма дополнительно входят Лтах, 8д, i = l,n, и коэффи
циент изменения шага т, а шаг интегрирования вычисляется по формуле (9.32) или (9.33) и выбирается в соответствии с выражением (9.34).
Если математическая модель технической системы линейная, то коэффициенты при фазовых переменных (элементы матрицы Якоби) постоянны. Поэтому они могут быть вычислены один раз после второго этапа алгоритма. Аналогично можно поступить с элементами Ау при I Ф j матрицы А. Для нелинейной системы дифференциальных уравнений все нелинейные функции должны быть линеаризованы путем разложения их в ряд Тейлора. Коэффициенты в этом случае равны частным производным нелинейных функций по фазовым переменным и зависят от значений фазовых переменных и времени. В этой связи они должны
вычисляться на каждом шаге интегрирования.
Неявный метод Гира второго порядка. Численное интегрирование системы дифференциальных уравнений этим методом также сводится к решению системы линейных алгебраических уравнений (9.97). Значения коэффициентов этой системы уравнений Atj и Bi можно легко найти путем сравнения формулы интегрирования Гира второго порядка (9.75) с неявной формулой Эйле-ра (9.93):
Ан = ац -1,5 / h\ Ац = ац при I /;
1'1' L'L' ' * * I'J L-J #
Bi = - bi + 2гИ° - 0,5iHz) 1 L 1 \ R ’ R—
(9.98)
k-1
Так как метод Гира второго порядка двухшаговый, то для запуска алгоритма необходимо вначале использовать какой-либо одношаговый метод, например метод лить значения компонентов и ных на двух предыдущих шагах.
Неявный метод Адамса второго
мулу Адамса (9.78), составим конечно-разностное уравнение для первой фазовой координаты ^21 на + 1)’м шаге интегрирова
Рунге — Кутта, и опреде-вектора фазовых перемен-
порядка. Используя фор-
ния
- vk} - °^h(allvk+l + а12и1+1 + - + + Ь1 +
+ + °12^2) + ••• + а1п^П) + &1)= °-
Выполним приведение подобных, известные величины перенесем в правую часть уравнения и разделим все члены уравнения на (-0,5/г):
391
(«11 -2МН+1 + (*12ий+1 + - + а1тХ+1)= -2^1 + vjV /h)- Xaijvk}-i=i
Для i-й фазовой координаты
(аи -2//01^21 + ^aijvk+i = ~^i +ua2 м)“ ^aijvk^ i=L i=1
В результате получаем следующие значения коэффициентов
Ау и Bf системы алгебраических уравнений (9.97):
Аи = au-2/h; Atj = atj при i ф j;
- 2(bi+v^/h)
>1
(9.99)
9.11. ОЦЕНКА ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ
При проектировании технической системы в качестве критериев ее оптимальности принимают показатели эффективности и качества процессов функционирования. Функционирование технической системы происходит в условиях внешней среды. Любое изменение внешних возмущающих или управляющих воздействий приводит к возникновению переходного процесса. В переходном процессе могут возникать большие амплитуды отклонений фазовых координат, сопровождающиеся значительным повышением деформаций и напряжений в конструктивных элементах технической системы. Отклонения фазовых координат от оптимальных значений отрицательно влияют на выполнение технологического процесса, снижая качество продукции. Периодические внешние воздействия возбуждают вибрации, оказывающие вредное воздействие на организм человека и сокращающие срок службы механизмов технической системы.
При изменении внешнего воздействия любая фазовая координата технической системы u(f) может быть представлена состоящей из двух составляющих
u(f) = + ип(^), (9.100)
где vB(t) — вынужденная установившаяся составляющая, определяемая частным решением неоднородного дифференциального уравнения, описывающего функционирование технической системы; L>n(f) — переходная составляющая, характеризующая свободный переходный процесс и определяемая общим решением однородного дифференциального уравнения (без правой части).
392
Если техническая система устойчива, переходная составляющая с течением времени затухает и остается лишь вынужденная составляющая. О качестве переходных процессов имеет смысл говорить лишь для устойчивой системы. Абсолютное большинство создаваемых технических объектов должно обладать устойчивостью режимов их функционирования, что вытекает из требований, обусловленных их назначением. Если в процессе проектирования такого объекта какой-либо вариант его структуры или совокупность параметров не обеспечивает устойчивости, он должен быть исключен из дальнейшего рассмотрения по причине принципиальной непригодности. Однако встречаются объекты, в которых неустойчивость в некоторой области фазового пространства оказывается весьма полезной и используется в практических целях (например, в механизмах опрокидывания кузовов транспортных средств, кантователях, механизмах для забивки свай и ДР-)-
Устойчивая техническая система может работать в установившемся или неустановившемся режиме. Поэтому возникает необходимость оценки качества процессов, описываемых обеими составляющими vn(t) и uB(f). Различают две группы показателей: первую составляют показатели качества переходного процесса, а вторую — показатели, характеризующие вынужденную составляющую, по которой определяется точность выполнения алгоритма функционирования в установившемся режиме.
Сравнительная оценка динамических свойств различных технических систем возможна лишь при одинаковых условиях их функционирования. Поэтому при моделировании используют различные тестовые воздействия на систему. При анализе переходных процессов применяют следующие виды воздействий: ступенчатое, импульсное, кусочно-линейное, экспоненциальное, гармоническое. Установившиеся процессы изучают при гармонических внешних воздействиях или случайных воздействиях, описываемых стационарными случайными функциями с заданными статистическими характеристиками.
Поскольку данная глава посвящена анализу переходных процессов, перейдем непосредственно к изложению вопросов оценки показателей качества этих процессов. Наиболее часто при моделировании технических систем качество переходных процессов оценивают по графику переходной характеристики.
Переходной характеристикой называют реакцию технической системы на ступенчатое воздействие. Переходную характеристику в теории автоматического управления рекомендуют получать при нулевых начальных условиях uz0 = 0, i>z0 = О, i = 1, п , и единичном ступенчатом воздействии:
393
u(t) = l(t) =
О при t < 0, 1 при t > 0.
(9.101)
Однако эти рекомендации могут оказаться неприемлемыми для сложных технических систем. Это прежде всего обусловлено нелинейностью их характеристик, а также сложной (разветвленной, кольцевой и т.д.) структурой и многомерностью. Возникает необходимость приближения уровней изменения внешних воздействий и их характеристик к реальным, обусловленным характерными условиями эксплуатации. Поэтому переходные процессы таких систем исследуют при ступенчатых воздействиях вида
u(t) =
Uq при t < 0, i/K при t > 0,
(9.102)
где Uq и ик — начальное и конечное значения функции воздействия ufy , причем Uq = const И UK = const, ик Ф Uq -
Переходную характеристику vn{t) определяют посредством численного интегрирования системы дифференциальных уравнений, описывающих функционирование технического объекта. Переходная характеристика un(f) представляет собой график, отображающий процесс изменения во времени некоторой фазовой координаты Vi технической системы при переходе ее из одного установившегося статического состояния в другое. Поэтому для получения переходной характеристики в процессе вычислительного эксперимента и последующей оценки показателей качества переходного процесса необходимо предварительно определить начальные и конечные значения всех фазовых координат технической системы в начальном и конечном равновесных статических состояниях. Эти состояния могут быть двух видов: состояние покоя или состояние равномерного движения элементов технической системы. Так, например, для механических систем обычно рассматривают состояние покоя, для гидравлических — состояние равномерного движения жидкости в магистрали, для тепловых — состояние установившейся теплопередачи.
В случае состояния покоя определяют значения фазовых координат системы vz0 и и/к, i = 1, п , при vtQ = viK = 0 . Если равновесным состоянием принимают равномерное движение, то определяют значения viG и viK , i = 1, п , при условии Viq = const; UjK = const . Начальные и конечные значения фазовых переменных определяют на основе использования численных методов анализа статических состояний, изложенных в главе 8.
26. Зак. 3006
394
Для оценки качества переходного процесса используют следующие показатели:
время переходного процесса tn, характеризующее длительность пребывания технической системы в неустановившемся состоянии (динамическом режиме);
коэффициент динамичности kR9 характеризующий макси7 мальное отклонение фазовой координаты от ее значения в установившемся конечном состоянии vK;
декремент колебаний D, характеризующий скорость затухания колебаний в технической системе;
колебательность К9 определяющую число колебаний за время £п;
интегральные оценки I, характеризующие отклонение графика переходного процесса от идеальной или эталонной характеристики.
Длительность переходного режима даже при быстром затухании динамического процесса теоретически бесконечна, поэтому на практике считают переходный процесс завершенным, если значение фазовой переменной v(t) перестает отличаться от установившегося конечного значения не более чем на определенную величину. Условие завершения переходного процесса принимают в виде
| p(t) - i?oo| < Д , (9.103)
где Uqq — значение фазовой координаты v при t со , т.е. в конечном установившемся состоянии технической системы: ^00 ~ ’ & — величина, определяющая область изменения v(t),
в которой можно пренебречь различием между v(t) и .
Величину А назовем коридором стабилизации установившегося состояния. Значение Д принимают согласно выражению
Д = Ди8, (9.104)
Ди = |. (9.105)
Коэффициент 8 характеризует ширину коридора стабилизации установившегося состояния. Обычно принимают 8 = 0,05. Это означает, что при t > tn значение отличается от Ди не более чем на 5%.
Время переходного процесса tn определяют по графику переходной характеристики v(f) (рис. 9.12, а и б). Оно равно интервалу времени, измеряемому от момента времени t = tg9 при котором осуществляется скачок сигнала воздействия на техническую систему u(t) (подача ступенчатого сигнала), до момента, соответ-
395 ствующего последнему пересечению переходной характеристикой линий коридора стабилизации установившегося состояния.
Время переходного процесса характеризует быстродействие технической системы. Чем меньше значение tn, тем быстрее наступает стабилизация характеристик работы системы при изменении ее режима, обусловленного управляющими или возмущающими воздействиями. Особенно важно высокое быстродействие для систем автоматического управления.
Рис. 9.12. К определению показателей качества переходных процессов: а — при колебательных процессах; б — при апериодических процессах
396
Коэффициент динамичности определяют по формуле йд = 1 + Атах / До, (9.106)
где Атах — максимальная амплитуда отклонения фазовой координаты v от конечного установившегося ее значения :
- 1^00 ; (9.107)
max = max
v,3l — экстремальное значение фазовой координаты, определяемое из условия dv/dt = 0.
Если значение Ди значительно меньше исл , то вместо Ди в
формулах (9.104) и (9.106) рекомендуется принять .
Значение kn показывает, во сколько раз максимальное ди-намическое отклонение фазовой координаты в переходном процессе превышает статическое отклонение Av при переходе технической системы из одного стационарного состояния в другое. Чем выше значение kn, тем больше отклонение характеристик ri
работы технической системы от оптимальных и тем хуже ее динамические свойства. При высоких требованиях к характеристикам функционирования технической системы значение kjr не должно превышать 1,2... 1,24. Такие значения характерны для некоторых систем автоматического управления. В большинстве же случаев при проектировании технических объектов принимают допустимые значения в пределах 1,25...1,45.
Декремент колебаний определяют по формуле
= А1 / А2 = ^э1 ^оо , (9.108)
^э2 ~ уоо
где Ai и А2 — амплитуды двух смежных отклонений фазовой координаты от значения и иэ2 — смежные экстремальные
значения переходной характеристики.
Чем выше значение Л, тем быстрее затухают колебания.
Колебательность К определяется числом амплитудных значений иЭ1 за время tn (или числом полупериодов колебаний). При высоких требованиях к переходным процессам значение К не должно превышать 1...2, а при умеренных 3...5.
В технических системах с апериодическими переходными процессами (рис. 9.12, б) фазовые координаты не достигают экстремальных значений, поэтому kK = 1, а в связи с отсутствием Гт!
колебаний D и К не оцениваются. Динамичность апериодических
397
переходных процессов минимальная» Однако для многих физических систем такие процессы практически недостижимы. Кроме того, часто длительность апериодических процессов оказывается недопустимо большой.
Интегральные оценки позволяют обобщенно оценить быстродействие технической системы и отклонение ее фазовых координат от установившихся значений в переходных процессах. При этом используют интегралы вида:
Л = J| V[t)~ Uoope; (9.109)
о
tn
12 = М)-Уо0]2^. (9.110)
о
Интеграл численно равен площади, ограниченной осью ординат, графиком v(t) и линией (заштрихованная площадь на рис. 9.13, а). Иногда вместо (9.109) используют выражение, определяющее относительную площадь:
/3 = |------j— /| p(z)-uJd/. (9.111)
I ^со ^Орп о
Интеграл Ig определяет степень отклонения переходной характеристики v(t) от идеальной переходной характеристики АВС при ступенчатом внешнем воздействии (рис. 9.13, а).
Интегральные оценки также используют для определения степени соответствия получаемой переходной характеристики v(t) заданной эталонной характеристике иэ(*):
I4 = J v\t)~vd\tjdt; (9.112)
о
tn
ь = dt- (9-113) о
В этом случае интеграл I4 равен площади, ограниченной графиками v(t) и v3(t) (заштрихованная площадь на рис. 9.13, б). Интегралы I2 и /5 используют для оценки колебательных переходных процессов.
При проектировании технических систем интегральные оценки подлежат минимизации.
398
Рис. 9.13. К определению интегральных показателей качества переходных процессов:
а — по формуле (9.109); б — по формуле (9.112)
9.12. АНАЛИЗ ПЕРЕХОДНЫХ ПРОЦЕССОВ ТЕХНИЧЕСКИХ СИСТЕМ
Примеры анализа переходных процессов в механических системах рассмотрены в разделах 4.5 и 7.6 (см. рис. 4.7, 7.15 и табл. 7.4).
Проведем анализ переходных процессов нескольких технических систем иной физической природы (тепловых, гидравлических, гидромеханических). В качестве примеров используем технические системы, рассмотренные в разделах 8.12 и 8.13, где для этих систем определены значения фазовых координат для двух статических состояний. Одно из состояний примем начальным, а второе конечным. Значения фазовых координат в начальном состоянии используем в качестве начальных условий при интегри
399
ровании дифференциальных уравнений математической модели технической системы.
Пример 9.7. Определить показатели качества переходных процессов в тепловой системе, рассмотренной в примере 8.5.
Динамическая модель тепловой системы приведена на рис. 5.16. Математическая модель ее представляет собой систему дифференциальных уравнений (8.79) (см. раздел 8.12). Параметры дискретных элементов тепловой системы даны в табл. 8.1.
Коэффициенты математической модели (8.79) имеют следующие значения: Рт1 /СТ1 = Рт2 /СТ2 = 1>015; ЦтЗ /СтЗ = Рт4/Ст4 = 3Л3: Мт5 / ст5 = °»132 * ПОСКОЛЬКУ КОЭф-фициенты постоянные, то и матрица Якоби системы уравнений (8.79) также по
стоянная, а ее собственные значения равны: Xj = -9,467; Х2 = -3,650;
Л3 =-1,674; Х4 =-0,326. Так как все собственные значения вещественные и отрицательные, то переходные процессы будут апериодические сходящиеся, а физическая система устойчивая. Число обусловленности матрицы Якоби ц= 29,014. Максимальный шаг интегрирования оценим по формуле (9.45): /гтах = 0,21126.
Фазовыми координатами тепловой системы, определяющими ее состояние, являются температуры в узлах сетки. Температура внутренних узлов 7}, i = 1,4 , определяется в процессе интегрирования системы уравнений (8.74). Температура граничных узлов Т*г и Тв*2 определяется в зависимости от граничных условий. Так как в рассматриваемом примере принято, что левая граничная поверхность имеет граничное условие I рода, то Т*} = const. На правой граничной поверхности осуществляется конвективный теплообмен с внешней средой (граничное условие Ш рода), поэтому значение Тв*2 определяется по формуле (5.103) (см. раздел 5.7).
t ---►
Рис. 9.14. Графики переходных характеристик тепловой системы: Т1,...,Т4 — температура внутренних узлов;
Т^2 — температура правого поверхностного узла
Для решения системы дифференциальных уравнений (8.79) необходимо задать начальные условия Т/о, i = 1,4 , где i — номера внутренних узлов. Значения Ti0 отображены в виде графика 1 на рис. 8.3. Там же дан график 2, соответствующий конечным значениям фазовых координат TtK. Переходные характеристики, отображающие изменение температур внутренних узлов Th i = 1,4 , и правого граничного узла Тв2 , приведены на рис. 9.14. Интегрирование системы дифференциальных уравнений осуществлялось методом Гира второго порядка с шагом h = 0,1 с. Время интегрирования Тк выбирают из условия завершения переход-
400
него процесса, удовлетворяющего выражению (9.103). При апериодических переходных процессах значение Тк можно приближенно найти из соотношения Тк = (5...7)/Н| , где Ь| — минимальное собственное значение матрицы
Якоби (по модулю).
Качество апериодических переходных процессов можно оценить временем переходного процесса tn и интегральной оценкой I. В рассматриваемом примере получены следующие значения: для узла 1 tn = 11,6 с; 1 = 0,211; для узла 2 tn = 15,0; I = 0,319; для узла 3 tn = 15,6; I = 0,342; для узлов 4 и 5 tn = 16,0; I = 0,351. Интегральная оценка определялась по формуле (9.111).
Пример 9.8. Определить показатели качества переходных процессов в гидравлической системе, рассмотренной в примере 8.6.
Принципиальная схема гидравлической системы приведена на рис. 5.2, а, а ее динамическая модель на рис. 5.2, б. Математическая модель системы получена в разделе 5.1 и представляет собой систему обыкновенных дифференциальных уравнений (5.6). Фазовыми координатами системы являются расходы жидкости в гидравлических магистралях Qf,i = l,3, и давление в узле ветвления магистралей ру1. Параметры дискретных элементов гидравлической системы даны в табл. 8.2. В табл. 8.3 приведены значения фазовых координат при двух различных значениях подачи насоса .
При анализе переходных процессов предположим, что внешнее воздействие типа потока Q*t изменяется скачкообразно, а воздействия типа потенциала Рвь Рв2 и РвЗ остаются постоянными. Начальные условия при интегрировании дифференциальных уравнений примем соответствующими расходу Q*1=l,5*10-3 м3/с, а конечные условия — при = 2,010-3 м3/с (табл. 8.3).
Составим матрицу Якоби системы уравнений (5.6):
Мтл1 *" 2Мгн1 |^11 0 0 1
mri 7Пг1
0 - — + 2Мгн2 |#21 - 0 1
еГ — УПг2 тг2
0 0 - — + 2НгнЗ |^31 1
тг3 ™гЗ
— СГ1 ~ СГ1 — Сг| 0
Матрица Якоби в данном случае переменная, ее элементы зависят от фазовых координат системы — расходов жидкости Значения параметров элементов динамической модели mrf, цгл/-, цгн/-, сг1 приведены в примере 8.6 (см. раздел 8.13).
Интегрирование системы дифференциальных уравнений осуществлялось методом Гира второго порядка с шагом h = 0,0025 с. Графики переходных характеристик приведены на рис. 9.15, а и б. Оценка показателей качества переходных процессов осуществлялась по переходной характеристике фазовой координаты типа потенциала, т.е. по графику pyl(f). Получены следующие значения показателей качества: tn = 0,265 с; /?д = 2,258; D = 2,563; К = 4; I = 0,336. Переходный процесс в рассматриваемой гидравлической системе отличается высокой динамичностью, что обусловлено высокой жесткостью элементов системы (жидкости и
401 трубопроводов). Большие значения коэффициента динамичности характерны для всех реальных гидравлических систем.
Пример 9.9. Определить показатели качества переходных процессов в системе гидрообъемного привода, рассмотренной в примере 8.7.
Принципиальная схема системы приведена на рис. 5.3, а, ее динамическая модель на рис. 5.3, б, а математическая модель в раздел 5.1 (уравнения (5.7)).
В исходном статическом состоянии поршни обоих гидроцилиндров находятся в крайнем левом положении, т.е. х30 = х50 = 0, а давление в системе питания составляет величину /?в10 = 0,75 • 107 Па. Переходный процесс в системе обусловлен скачкообразным изменением давления до величины рв1к = 1 107 Па. В результате поршень верхнего гидроцилиндра перемещается на величину Хзк = 0,25 м, а поршень нижнего гидроцилиндра на величину х5к = 0,1 м.
Рис. 9.15. Графики переходных характеристик гидравлической системы: а — расходов жидкости в магистралях
б — давления в узле ветвления магистрали ру1
В связи с плохой обусловленностью математической модели, что характерно для всех гидроприводов, интегрирование дифференциальных уравнений осуществлялось методом Гира второго порядка с шагом h = 0,01 с. Плохая обусловленность объясняется различием на несколько порядков фазовых координат и параметров всех элементов динамической модели гидропривода.
На рис. 9.16 приведены переходные характеристики исследуемого гидропривода. Оценка показателей качества переходных процессов осуществлялась по переходным характеристикам давлений в узле ветвления гидромагистралей ру1 и в полостях гидроцилиндров ру2 и ру4. Получены следующие значения оценок этих характеристик: для tn соответственно 1,12; 1,76; 1,14 с; для I — 0,148; 0,354; 0,177.
a
Рис. 9.16. Графики переходных характеристик системы гидрообъемного привода: а — расходов б—давлений
в— усилий на штоках гидроцилиндров F*! И F*2
t----►
10. МОДЕЛИРОВАНИЕ И АНАЛИЗ ВЕРОЯТНОСТНЫХ СИСТЕМ
ЮЛ. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ВЕРОЯТНОСТЕЙ
Воздействия внешней среды на технический объект носят случайный характер и описываются случайными функциями. Вследствие этого все процессы, происходящие в нем, также случайны, а его фазовые координаты и выходные параметры представляют собой случайные функции. Анализ функционирования объекта в этом случае требует построения вероятностной математической модели.
Построение вероятностных математических моделей основано на использовании методов теории вероятностей. Предмет изучения этой теории — объективные закономерности массовых случайных явлений. Случайные явления характерны для экспериментальных исследований, выполняемых на реальных технических системах, а также на их физических и математических моделях. Случайное явление протекает каждый раз несколько по-иному при однократном воспроизведении физического или вычислительного эксперимента.
Массовые случайные явления обладают свойством статистической устойчивости. Например, частота появления герба при многократном подбрасывании монеты постепенно стабилизируется и приближается к вполне определенному числу — именно к 1/2. Такое же свойство устойчивости обнаруживается и при повторениях любого другого опыта, исход которого представляется зара-
404
нее неопределенным, случайным. Методы теории вероятностей применимы только к таким экспериментам, которые обладают свойством статистической устойчивости.
Каждый опыт осуществляемого физического эксперимента проводят при одинаковых условиях. Но некоторые факторы при этом не могут быть учтены по объективным причинам. Например, при обработке детали на станке можно поддерживать постоянными скорость и глубину резания, подачу, марку материала и т.д. Однако однородность материала, первоначальные размеры заготовки, вибрации станка и т.д. изменяются в определенных не всегда известных пределах. Поэтому при подобном опыте возможны различные конечные результаты, которые нельзя предсказать до его проведения. Но благодаря постоянным условиям опыта и многократным его повторениям обеспечивается статистическая устойчивость и в результате можно определить в среднем, какая часть продукции будет годной, а какая нет.
Любой факт (исход, результат), который может появиться или не появиться при проведении опыта, называется в теории вероятностей случайным событием. Событие, которое при заданных условиях проведения опытов обязательно произойдет, называется достоверным. Если оно не может произойти, его называют невозможным.
Количественную меру объективной возможности осуществления некоторого события при фиксированных условиях эксперимента называют вероятностью этого события. Если при N-кратном повторении опыта рассматриваемое событие А произошло в ~Пд случаях, то вероятность наступления этого события Р(А) определяется выражением
Р(А) =
Если событие А достоверное, то Р(А) = 1. Для невозможного события Р(А) = 0. Однако обратные утверждения несостоятельны, так как при Р(А) = 1 не исключено, что в каком-то из опытов событие не произойдет, а равенство Р(А) = 0 вовсе не исключает возможность единичных появлений события А.
События А и В называются статистически независимыми, если вероятность их совместного наступления равна произведению вероятностей этих событий: Р(АВ) = Р(А)Р(В). В противном случае события А и В статистически зависимы.
Вероятность события А, найденная при условии, что осуществилось событие В, называется условной вероятностью события А и обозначается Р(А|В). Аналогично для события В: Р(В А) . Для статистически независимых событий Р(АВ)=Р(А)и Р(ВА)=^Р(В).
405
Результаты опытов количественно представляются некоторой случайной величиной. Случайной называют физическую величину, принимающую в результате эксперимента то или иное числовое значение, которое в принципе нельзя предсказать исходя из условий проведения опытов. Случайные величины обозначают большими буквами (например, X,Y,Z), а их конкретные численные значения (теоретические или наблюдаемые) — соответствующими малыми буквами (x,z/,z). Конкретные реализации случайной величины X представляют собой случайные числа Xi,X29-.^Xn- Обозначим через Rx множество всех значений, которые может принимать случайная величина X. Множество Rx называют областью значений X. В зависимости от того, как определена область возможных значений, случайные величины подразделяются на ограниченные и неограниченные, дискретные и непрерывные.
Случайная величина называется ограниченной сверху (снизу) или с обеих сторон, если существует предельное максимальное (минимальное) ее значение или же одновременно и максимальное и минимальное. На практике большинство случайных величин являются ограниченными. Если подобное ограничение не носит принципиального характера или же границы неизвестны, то можно считать такую случайную величину неограниченной, что иногда удобнее с математической точки зрения.
Случайная величина называется дискретной, если ее возможные значения представляют собой дискретный ряд чисел (например, количество выпавших очков при бросании игральной кости; число дефектных изделий в партии и т.п.).
Если область возможных значений случайной величины непрерывна, то ее называют непрерывной (например, размер детали, измеренный для партии изготовленных деталей; средняя скорость автомобиля при многократном повторении испытательных заездов на мерном участке пути и т.п.).
Если случайная величина X изменяется в зависимости от одного (у) или нескольких параметров, то получим
одномерную случайную функцию Х{у) или случайное поле Х(У1,У2’---*Ут)- При y = t случайную функцию называют случайным процессом X(t). В теории случайных функций случайный процесс X(t) определяется как случайная функция от неслучайного аргумента —- времени t, значения которой при каждом t еТ являются случайными величинами.
Конкретный вид, принимаемый случайной функцией в результате опыта, называется реализацией случайной функции. Если над технической системой произвести некоторое количество
406
опытов в одинаковых условиях, то получим ансамбль реализаций случайной функции (рис. 10.1). Обозначим каждую реализацию случайной функции X(t) соответственно номеру опыта
где N — число опытов. Каждая реализация представляет собой обычную неслучайную функцию. Но так как в каждом опыте функция Х(£) принимает различный, неизвестный заранее вид, то она является случайной.
Рис. 10.1. Ансамбль реализаций случайной функции X(t)
Реализации x^t), i = l,N, случайной функции X(t) можно получить при одновременном проведении испытаний нескольких одинаковых технических объектов или одного и того же технического объекта в разное время, но в одних и тех же условиях и на одном и том же временном интервале опыта [0,Т]. Иногда множество N реализаций получают расчленением одной реализации достаточно большой длительности путем деления ее на N частей, соответствующих одинаковой длительности процесса Т.
Зафиксируем некоторое значение аргумента t = (или t = t2 и т.д.). Очевидно, что в фиксированный момент времени случайная функция X(t) превращается в случайную величину Х\ (или Х2 и т.д.). Полученную случайную величину Xt называют сечением случайной функции X(t), соответствующим данному Если провести сечение ансамбля реализаций при (рис. 10.1), то получим N значений, принятых случайной величиной X(t) в N опытах»
Таким образом, случайная функция совмещает в себе черты случайной величины и функции. Если зафиксировать значение аргумента, она превращается в случайную величину. В результате каждого опыта она превращается в неслучайную функцию.
407
Воздействия внешней среды на технические системы описываются случайными функциями, а изменения фазовых координат этих систем представляют собой случайные процессы. Поэтому при проектировании таких систем возникает необходимость статистической оценки их характеристик. Кроме того, необходимо моделировать случайные воздействия с заданными характеристиками. При построении экспериментальных факторных моделей также используются методы теории вероятностей и математической статистики. Перейдем к рассмотрению основных характеристик случайных процессов и случайных величин.
10.2. РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ
В теории вероятностей случайные события А рассматривают как точки множества Q, т.е. A gQ, где Q = (со^, С02>---, ®т)> т — число элементов множества. Случайные события А полностью характеризуются вероятностной мерой Р(А), т.е. каждому событию А, как точке некоторого множества Q, сопоставляется его вероятность Р(А).
Для случайных величин и случайных процессов основными вероятностными характеристиками являются распределения вероятностей. Они устанавливают связи между реализациями случайной величины X или случайного процесса X(t) и вероятностями их появления.
Наиболее общей формой задания распределения для случайного процесса X{t) является функция распределения F(x,t) в фиксированный момент времени t = Аргументом этой функции служит реализация x(t) случайного процесса в момент Функция F(x,t) определяет вероятность того, что случайный процесс в указанный момент времени примет значение меньше некоторого уровня х, который может варьировать, т.е.
F(x,ti) = Р[Х(^) < х]. (10.1)
Для случайной величины X получим
F(x) = Р(Х < х). (10.2)
Функции распределения (10.1) и (10.2) одномерные. Функция (10.1) характеризует распределение ординат случайного процесса X(t) в отдельные фиксированные моменты времени ti9 а функция (10.2) — распределение реализаций случайной величины Хо
Основные свойства функции распределенияа.
1) функция безразмерная и изменяется в пределах 0 < F(x) < 1 для всех х;
408
2) F(x) — неубывающая функция х: если х2 > х^, то F(x2) > F(x^
3) для неограниченной случайной величины, т.е. при -оо < х < оо , F(-co) = Р[Х < -со] = 0 ; F(+oo) = Р[Х < оо] = 1;
4) для ограниченной случайной величины х^ < х < х2 F(xj) = 0, F(x2) = 1.
На рис. 10.2, а показан график функции F(x) для непрерывной случайной величины, а на рис. 10.2,6 — для дискретной.
Рис. 10.2. Графики функции распределения Г(х) для непрерывной случайной величины (а) и для дискретной случайной величины (б)
Вероятность того, что случайная величина X примет значения в интервале а < х < Ъ , вычисляют по выражению
Р(а < X < b) = F(x) = F(b) - F(a). (10.3)
Аналогично можно определить вероятность того, что х > а:
Р(Х> а) = 1 ~F(a). (10.4)
Если неограниченно уменьшать интервал, то в пределе, когда b а, получим
Р(Х = п) = lim [F(b) - F(n)]=0. (10.5)
b-+a
Выражение (10.5) показывает, что вероятность появления события х = а теоретически равна нулю. Однако такое событие при неограниченном числе опытов не следует считать невозможным, но частота его появления будет чрезвычайно малой.
Функции распределения непрерывных случайных величин дифференцируемы по всей области их возможных значений:
dF(x) _ Р[х < X < х + Дх] _
----— = lim —---------------Дх > 0.
dx Ах—>0 Дх
Обозначим /(х) == dF(x)/dx. Функция /(х) приближенно равна отношению вероятности попадания случайной величины
409
Рис. 10.3. График плотности распределения f(x) непрерывной случайной величины X
внутрь интервала (х9х + Ах) к длине интервала Ах. Поэтому функцию Дх) называют плотностью вероятности. График функции Дх) показан на рис. 10.3. Основные ее свойства:
1) Дх)>0;
00
3)
х
J f(x)dx = F(x).
Зная Дх), легко вычислить вероятность нахождения случайной величины внутри любой части области ее возможных значений:
Ъ
Р(а < X < Ъ) = J f(x)dx ;
а
а Р(Х < а) = J f(x)dx;
(10.6)
(Ю.7)
Р(Х > b) = j f(x)dx . (10.8)
Ь
Согласно этим выражениям определяемые вероятности равны соответствующим площадям под графиком функции Дх) (рис. 10.3).
Функции F(x9t) и f(x9t) являются простейшими вероятностными характеристиками случайного процесса и определяют одномерное распределение вероятностей в сечении ансамбля реализаций при t = Следовательно, они характеризуют случайный процесс изолированно в отдельных его сечениях, не раскрывая взаимной связи между сечениями, т.е. между возможными значениями случайного процесса в различные моменты времени.
Более полными характеристиками случайного процесса будут функции совместного распределения вероятностей двух сечений при t = и t = t2 (см. рис. 10.1):
F(x1,x2;ti,t2) “ ЛЛ(*1) < xr,X(t2) < х2]; (Ю.9)
410
/(x1,x2;^1^2) = S2 F(x1,x2;t1,t2)/dx1dx2 . (10.10)
Значения случайного процесса в моменты времени t1 и t2 рассматриваются как система двух случайных величин и соотношения (10.9) и (10.10) определяют двумерное распределение вероятности. При проведении экспериментов на технических объектах часто их результаты представляются не одной, а двумя и более случайными величинами, образующими систему. Распределение системы двух случайных величин и Х2 описывается функциями:
F(x19x2) = Р(Хг < х1; Х2 < х2); (10.11)
/(х1,х2) = д2 F(xlfx2)/dxidx2 . (10.12)
Геометрически функцию /(х^,^) можно изобразить некоторой поверхностью (рис. 10.4), называемой поверхностью распределения. Она характеризует плотность вероятности системы двух случайных величин. Функцию f(xi9x2) называют двумерной плотностью вероятности.
Рис. 10.4. Графическое отображение двумерной плотности вероятности f(x1,x2)
Для системы, состоящей из т случайных величин или т сечений ансамбля случайных функций в моменты времени получим т-мерное распределение вероятности. Многомерное распределение позволяет дать более полное описание случайного процесса, однако получить его сложно, поэтому при
411
исследованиях ограничиваются, как правило, одномерным и двумерным распределениями.
Двумерная плотность вероятности обладает следующими свойствами:
1) f(x1,x2)>0;
оо оо
2) j jf(x1,X2)rfx1cZx2 = 1 ;
—ОО —ОО
3) F(xltx2) =
Х1 х2
f J f(xl ,X2)dxidx2 •
—00 —оо
По заданным двумерным функциям F(xi,x2) или f(xi,x2) легко найти функции распределения каждой из случайных величин Xi и Х2:
= F(*!,+<»); F(x2) = F(+oo,x2) ;
00 оо
Л^1)= f/(xi,x2)dx2 ; f(x2) = Jf(xltx2)dx1.
_r^ — OO
Две случайные величины и Х2 называются независимыми, если их совместная функция распределения является произведением функций распределения этих величин:
F(x1,x2) = FfxJ F(x2); Кх1гх2) = /(x^ /(x2).
Если случайная величина X2 приняла некоторое конкретное значение а2, то полученное при этом распределение случайней величины Х]_ называют условным распределением:
F(X| а2) = F(x|
1 X1
Х2 =а2) = ——- J f(x1,a2)dx1 ; f(a2) J
X2=a2) = f(x1,a2)/f(a2).
Аналогично можно определить условные распределения ве-роятностей Х2 при Х^ = а±.
Условная плотность вероятности Дх^ а2) геометрически
представляет собой кривую, получающуюся при сечении поверхности Дх^,х2) плоскостью, проходящей через точку а2 параллельно соответствующей координатной плоскости (см. рис. 10.4), с последующим умножением каждой из координат на нормирующий множитель 1//(а2). Необходимость введения нормирующего множителя обусловлена тем, что образующаяся в сечении кривая
412
/(х1»а2) не удовлетворяет одному из требований, предъявляемых к функции плотности вероятности, что видно из выражения
00
j f(x!, а2 )dxr = f(a2) * 1.
—00
Для независимых случайных величин Xi и Х2'
F(xi|a2) = F(x!); F(x2|ai) = F(x2);
ft*l|a2) = ft*i); f(x2|«l) = f(x2).
10.3. ЧИСЛОВЫЕ ВЕРОЯТНОСТНЫЕ ХАРАКТЕРИСТИКИ
При изучении случайных процессов X(t) часто ограничиваются числовыми вероятностными характеристиками — моментными функциями. Для случайных величин моментные функции превращаются в обычные числовые характеристики — моменты распределения вероятностей.
Моментные функции и моменты бывают начальные и центральные и могут иметь различный порядок. Начальная моментная функция k-го порядка определяет математическое ожидание функции [x(fj)]^ в моменты времени tf.
mk(x,tt) - (10.13)
где М — символ математического ожидания.
Математическое ожидание M[X(tj)] есть результат вероятностного усреднения функции т.е. усреднения ее с весом, равным плотности вероятности Начальная моментная
функция &-го порядка вычисляется по формуле
00
^(Х,<£)= [lx(tty\k f(.x,tt)dx. (10.14)
—00
Начальный момент &-го порядка случайной величины X обозначается пц,(х) = M[Xk]. Для непрерывных случайных величин он определяется по формуле
т^(х) = fxkf(x)dx, (10.15)
’ —00
а для дискретных
п ь
mk(x) - ^xipi > (Ю-16)
i=l
413
где п — число возможных значений случайной величины X; xt — i-e значение X; Pt — вероятность, с которой X принимает численное значение
Начальная моментная функция первого порядка (k = 1) определяет математическое ожидание случайного процесса X(t) в момент времени ti9 т.е. my{x9t^ = М[Х(1[)]. Ее значение для сечения ансамбля реализаций случайного процесса при tt вычисляют с использованием выражения
00
= jx(tt)f(x,ti)dx , (10.17)
—00
где f(x9t^ — плотность вероятности случайного процесса в сечении
Очевидно, что значения (%,£/) в общем случае различны для разных сечений ансамбля реализаций случайного процесса X(t) (штриховая линия на рис. 10.5). Функцию mi(x,t) обычно обозначают mx(t) и называют математическим ожиданием случайного процесса. Можно дать следующую формулировку математического ожидания случайного процесса: математическим ожиданием случайного процесса 7И[Х(£)] называется функция времени mx(t), равная для каждого значения аргумента t = tf математическому ожиданию случайной величины X(tj) в сечении ансамбля ее реализаций.
Рис. 10.5. Ансамбль реализаций x^t) случайного процесса X(t) и его математическое ожидание mx(t)
Математическим ожиданием случайной величины X является момент первого порядка т^(х)9 обозначаемый обычно тх и вычисляемый по формуле (10.15) при k = 1:
ml(x) = тх = f xf(x)dx . (10.18)
—00
414
Начальная моментная функция второго порядка соответствует математическому ожиданию квадрата ординат случайного процесса X(t):
00
m2(x,tt)= \[x(tty\2 f(x,tt)dx. (10.19)
—00
Аналогично для случайной величины X начальный момент второго порядка
00
т2(х) = Jx^f(x)dx. (10.20)
У случайных процессов X(t) начальной моментной функцией второго порядка кроме ?П2(х,^) будет и смешанная функция т11(х1?х2^1,^2)> определяющая математическое ожидание произведения значений случайного процесса в моменты времени и
^11(*1>*2>W2) s М^(*1Н(*2)]- (10.21)
Функцию (10.21) называют ковариационной функцией случайного процесса. Для системы случайных величин Х^ и Х2 смешанный начальный момент второго порядка называют ковариационным моментом и определяют по формуле
оо оо
т11(х1,х2) = M[XiX2] = j j x1x2/’(x1,x2)dx1dx2 . (10.22)
—00 —00
Отклонение случайного процесса X(t) от его математического
о ожидания называют центрированным случайным процессом X (t)
X (0 = X(i) - mx(t), (10.23)
а отклонение случайной величины X от ее математического ожи-
о
Дания тх называют центрированной случайной величиной X:
Х=Х-тх. (10.24)
о
Для центрированных случайных процессов X (t) и случай-
о
ных величин X моментные функции ц^(х,^) и моменты ц^(х) /его порядка определяют по выражениям:
ОО о
Ц/г(*Л) = f(x,ti)dx ; (10.25)
—00
415
= jxkf(x)dx. (10.26)
—CO
Практическое значение при статистическом анализе технических систем имеют центральные моментные функции второго порядка:
для квадрата центрированного процесса
О СО о
H2(x>zi) = ; (10.27)
—со
смешанная центральная моментная функция (математическое ожидание произведения центрированных значений случайного процесса)
(10.28)
= f |x(i1)x(t2)/(x1,x2,i1,f2)dx1dx2.
—00 —co
Функцию Ц2(х>^) называют дисперсией случайного процесса Х(£). Дисперсия характеризует разброс возможных реализаций случайного процесса относительно функции математического ожидания mx(t).
о
Дисперсию случайного процесса обозначают Dx(t) или ox(t),
где <5x(t) — среднее квадратическое отклонение случайного процесса:
<зх (t) = y)Dx (t) . (10.29)
Дисперсия Dx(t) случайного процесса представляет собой функцию времени, значение которой в момент времени t = равно дисперсии случайной величины X(t^ в сечении ансамбля реализаций.
Смешанную центральную моментную функцию
Д11 (xi, Х2, ti , t2) называют корреляционной функцией случайного процесса и обозначают Она характеризует степень ли-
нейной связи (корреляцию) между значениями случайного процесса в различные моменты времени. Следует иметь в виду, что в выражении (10.28) для оба момента времени и f2 Рас-
сматриваются в любом сочетании всех возможных текущих значений аргумента t случайного процесса.
Во многих случаях удобнее пользоваться нормированной корреляционной функцией
416
Px(fl>*2) = -Rx(*1^2)/[ax(*l) cx(*2)]- (10.30)
Соотношение (10.30) представляет собой коэффициент корреляции между случайными величинами в сечениях t1 и f2. При fl = f2 = получаем px(t,t) = 1, так как значение корреляционной о функции в этом случае равно дисперсии: = Dx(t) = ox(i).
Для случайной величины X центральный момент первого
о о
порядка Pi(x) = 0, а центральный момент второго порядка ц2(х)
представляет собой дисперсию Dx, характеризующую разброс (рассеивание) реализаций xt случайной величины X относительно ее математического ожидания тх. Дисперсия случайной величины X вычисляется по формуле
Dx = \x2f(x)dx .
—00
(10.31)
Среднее квадратическое отклонение случайной величины называют также стандартом случайной величины. В качестве относительной меры рассеивания используют коэффициент вариации VX9 измеряемый в процентах:
Vx= 100 /тх, %. (10.32)
Смешанный центральный момент второго порядка системы двух случайных величин Xj и Х2 называют корреляционным моментом этих величин и обозначают Кх^х<^ :
о о о о
А11(Х1,Х2) = &Х]Х2 = ^[^1 Х2 ] =
00 00 о о
= J Jx1x2f(x1, x2)dx1dx2 .
—со —оо
(10.33)
В качестве меры взаимозависимости случайных величин Х^ и Х2 используют безразмерную величину, называемую коэффициентом корреляции".
Pxjx2
^XjX2
Q Xl G x2
(10.34)
Коэффициент корреляции может принимать значения в
диапазоне -1 < рх х < 1
1 2
Он определяет степень линейной связи
между Xj и Х2. Знак рХ1Х2 зависит от вида линейной связи. При
положительном р%1х2 Увеличение одной из случайных величин
417 приводит к возрастанию другой, а при отрицательном, наоборот, к уменьшению. При рХ1х9 = 0 случайные величины не коррели-
рованы. Для независимых случайных величин рХ1х2 = О и» следо
вательно, они относятся к некоррелированным величинам. Обратное утверждение в общем случае неверно: Х± и Х2 могут быть связаны даже не статистически, а чисто функционально и все же иметь нулевой коэффициент корреляции. При этом, конечно, указанная функциональная связь должна быть нелинейной. Если
рХ1х2 = 1, то Хг и Х2 линейно связаны, т.е. Х2 = aXi+b.
Для оценки вида графиков характеристик распределения вероятностей случайной величины используют третий и четвертый центральные моменты, вычисляемые по формулам:
Нз(*) =
ОО о
§x3f(x)dx;
—00
(10.35)
ц4(х) = $x4f(x)dx . (10.36)
—00
Третий центральный момент ц3(х) определяет асимметрию графика характеристики распределения, показателем которой служит коэффициент асимметрии
Ах = ц3(х)/суЗ » (10.37)
а четвертый центральный момент Ц4(х) характеризует степень заостренности (крутости) графика характеристики распределения, показатель которой называют коэффициентом эксцесса:
Ех= Ц4(х) / Qx “ 3 • (10.38)
Статистической характеристикой связи двух случайных процессов X(t) и Y(t) является взаимная корреляционная функция RXy (^1, ^2) • Она представляет собой математическое ожидание
о о
произведения центрированных случайных процессов X{t) и У(£) в моменты времени и £2:
о о
Rxy(*1 ,t2) =M[X(t)Y (t)]- (10.39)
Эта функция характеризует степень связи между сечением процесса X(t) при t = ty и сечением процесса У(£) при £ = £2. В отличие от корреляционной функции ^х(^1»^2) она несет в себе не-
27. Зак. 3006
418
которую информацию о среднем фазовом сдвиге случайных про-о о
цессов X(t) и Y(t).
Нормированная взаимная корреляционная функция находится из соотношения
Рху(*Ь*2> = Rxy(h> *2) • (10.40)
В заключение отметим, что все вероятностные характеристики являются неслучайными числовыми характеристиками случайных процессов и случайных величин.
10.4. ТЕОРЕТИЧЕСКИЕ РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ
При статистическом анализе технических систем используют различные теоретические распределения вероятностей случайных процессов (законы распределения). Для непрерывных случайных процессов наиболее часто употребляют нормальное распределение, распределение Пирсона, гамма-распределение, экспоненциальное распределение. Для дискретных случайных величин используют биномиальное распределение и распределение Пуассона.
Нормальное распределение (закон Гаусса) находит самое широкое практическое применение. Главная особенность, выделяющая нормальное распределение среди других законов, состоит в том, что оно является предельной формой многих распределений.
Одномерная плотность вероятности нормального распределения случайной величины X определяется выражением
=
(10.41)
Из выражения (10.41) следует, что нормальное распределе-
ние полностью определяется двумя числовыми характеристиками:
математическим ожиданием тх и дисперсией Dx = ог^ .
Функция распределения
F(x) =
(10.42)
или
1 и
F(x) = [exp (-0,5 и2) du ,
л/2л -оо
(10.43)
где и — нормированное значение центрированной случайной ве
личины, выраженное в долях ах :
419
и = (х - тх)/ сух. (10.44)
Функцию ср(и) = —(10.45)
у/2т1
называют плотностью вероятности нормированного нормального распределения. На рис. 10.6, а показан график функции /(х), а на рис. 10.6, б — график функции ср(и). Влияние математического ожидания тх и среднего квадратического отклонения огх нормально распределенной случайной величины X на вид графика Дх) отображено на рис. 10.7. Изменение mXi при = const приводит к перемещению графика /(х) вдоль оси х, не изменяя его формы (кривые 1,2,3). Изменение сух при тх = const (кривые 2,4,5) приводит к изменению масштабов графика по обеим координатным осям, и форма его изменяется. Однако во всех случаях
00 j f(x)dx = 1.
Рис. 10.6. Графики плотности вероятности нормального распределения случайной величины X (а) и нормированного нормального распределения (б)
Интегралы, вводящие в формулы (10.42) и (10.43), не выражаются через элементарные функции. Поэтому для вычисления -F(x) пользуются таблицами функции
1 и
Ф(и) = Jexp(-0,5u2)du , у2л о
(10.46)
420
которая называется функцией Лапласа (интегралом вероятностей). Значения функции Лапласа Ф(^) приведены в табл. 1 приложения.
Рис. 10.7. Влияние параметров тх и на график плотности вероятности нормального распределения )
х5
Определим вероятность попадания случайной величины X в интервал а <Х < Ъ. В соответствии с (10.6) находим
ъ
Р(а < X <b) = §f(x)dx -а
(х тх)
Если ввести нормированную переменную и согласно выра-
жению (10.44), то
Р(а<Х<Ь)=Ф(и2)~Ф(и1).
(10.47)
где и1 = (а - тх)/®х; и2 = (Ь-тх)/ах.
Отметим, что функция Ф(^) нечетная, т.е. Ф(-^г) = -Ф(и), и, кроме того, Ф(0) - 0; Ф(-оо) = -0,5; Ф(оо) = 0,5 .
Выражение (10.47) позволяет найти вероятность отклонения нормально распределенной случайной величины X от ее среднего значения тх на заданную величину. Найдем вероятность отклонения X от тх на величину ±3огх . Согласно выражению (10.47)
Р[(тпх -Зстх) <Х<(тх + 3стх)] = Ф(и2) - Ф(«1) .
Так как в данном случае, согласно (10.44), u± = -3; и2 = 3, то Ф(^2) “ Ф(и1) ~ 2Ф(3) . По табл. 1 приложения находим 2Ф(3) = 20,4987 « 0,997. Полученный результат отражает известное правило «трех сигм», которое гласит, что для нормально рас
пределенной случайной величины отклонения ее от математического ожидания практически не превосходят Зах.
В силу симметричности графика плотности вероятностей нормального распределения (рис. 10.6, а и б) все нечетные центральные моменты равны нулю, а щ(х) = . В результате ко
эффициент асимметрии Ах и коэффициент эксцесса Ех в соответствии с выражениями (10.37) и (10.38) равны нулю.
Двумерная плотность вероятности f(x,y) нормального распределения системы двух случайных величин X и У в общем слу-
чае имеет вид
у) = (2nCTxCTyJl -рхг/) 1 ехр <
2(1-Рху)
(10.48)
(Х-7Пх)2
2рХ1/(х - ^x)(v - ту) (у - ту)
1
У
Для некоррелированных величин = 0 и двумерная
плотность нормального распределения
или
f (%, у) =
1 (х-тх)2 (у-ту)2
-------ехр —----------------—
2лстхоу 2о2 2 ст2
f(.X, у) = f(x)f(y),
(10.49)
(10.50)
где f(x) и f(y) — одномерные плотности вероятностей случайных величин X и Уо
Логарифмически нормальное распределение описывает такие случайные величины, для которых нормально распределена не сама величина X, а ее логарифмы (десятичный или натуральный), т.е. У = 1g X (или У = In X), причем 0 < X < оо. Плотность вероят-
ности десятичного логарифма случайной
величины определяется
выражением
0
при х < 0;
(ТИс^хл/Зл) 0,52
при х > 0,
(10.51)
где z - (1g х - 1g х0) / <зу ; М = (1g е) 1 = 2,303 ; е — основание натуральных логарифмов.
Среднее значение случайной величины и ее дисперсия вычисляются по формулам:
422
2,65ст? тх = хое у ;
(10.52)
(10.53)
2 / 2 / 2 1 \
( тх / *0 ~ 1)’
причем Шу = 1g Xq.
Распределение (10.51) используется в теории надежности для описания времени безотказной работы технических объектов. При малых Gy (Gy < 0,1...0,13) распределение (10.51) близко к
нормальному.
При У = In X в приведенных формулах М = 1 и десятичные логарифмы заменяются натуральными.
Распределение Пирсона находит широкое применение в математической статистике и теории надежности. Его используют для оценки согласованности экспериментальных распределений с теоретическими. Распределением Пирсона с k степенями свободы 2 2 2 2
называют распределение суммы квадратов % = х± + х2 + ... + xk
независимых случайных величин, каждая из которых имеет нор-о
мальное распределение с тх = 0 и gx =1. Плотность вероятности
распределения Пирсона
0
-0,5х 0,5/г-1 е * х *
при х < 0;
при х > 0,
(10.54)
2°,5* г (0 5й)
где Г (0,5/?) — гамма-функция, значения которой приводятся в
2 таблицах; х — значение случайной величины % .
Моменты распределения Пирсона: тх = /?;
Рис. 10. 8. Графики плотности вероятности распределения Пирсона
2
Gx=2k, 8l коэффициенты асимметрии и эксцесса Ах = y[s / k ; Ех = 12 / k ,
С увеличением k распределение приближается к нормальному (рис. 10.8).
Экспоненциальное распределение используется в теории надежности и теории массового обслуживания. Оно определяется одним параметром X, который называют интенсивностью потока со-
423
бытии. Плотность вероятности и функция распределения опреде-
ляются выражениями:
/(*) =
при х < 0;
при х > 0;
(10.55)
О
F(x) = 1 - е-Хх . ’ (10.56)
При простейшем потоке отказов значение е~^х определяет вероятность безотказной работы в промежутке (0,х). Моменты экспоненциального распределения тх = сх = , а коэффициен
ты асимметрии и эксцесса Ах = 2; Ех = 6. График функции f(x) показан на рис. 10.9.
Гамма-распределение представляет собой распределение суммы независимых случайных величин, каждая из которых распределена по экспоненциальному закону. Плотность вероятности (рис. 10.10)
Рис. 10.9. График плотности вероятности экспоненциального распределения
Рис. 10.10. График плотности вероятности гамма-распределения
0
при х < 0;
/(х) =
-ах
Г (Ь)
при х > 0, а > 0, Ъ > 0.
(10.57)
Постоянные а и Ъ в выражении (10.57) являются параметрами гамма-распределения и определяют все его числовые характеристики: тх = Ъ/а; сгх = 4b / а; Ах =2 / 4b ; Ех = 6/Ь. Если в выражении (10.57) положить 2b == k и а = 1/2, то получим распределение (10.54), а при Ъ = 1 и а = X — распределение (10.55).
Биномиальное распределение используется для описания дискретных случайных величин. Вероятность того, что событие А
424
осуществится ровно х раз при N испытаниях, определяется по формуле биномиального распределения
F(x,N) = C%PxqN~x (х = OJV), (10.58)
где q = 1 - Р — вероятность неосуществления события А в каждом опыте; — число сочетаний из N элементов по х элементов:
2 Математическое ожидание тх = NP, дисперсия <зх = NPq. Распределение Пуассона является предельным для биномиального распределения. При неограниченном увеличении N и уменьшении Р так, что при этом NP =Х= const, получим
F(x, X) = Ххе~Х / х !. (10.59)
Величина X является параметром распределения Пуассона. Выражение (10.59) описывает распределение числа х случайных событий в каком-либо интервале времени, если можно считать, что вероятность наступления события за интервал At пропорциональна этому интервалу и события в разные моменты времени не-2 зависимы. Математическое ожидание тх и дисперсия ах распределения равны X . Значения функции F(x, X) приводятся в таблицах.
Равномерное распределение используют главным образом при моделировании случайных величин. На основе этого распределения составлены таблицы случайных чисел, используемые для решения разных практических задач: случайного взятия проб из каких-либо партий, проведения опытов в случайной последовательности и т.д. (см. табл. 7 приложения).
Вероятность попадания равномерно распределенной случайной величины X в любые равные между собой интервалы, принадлежащие области возможных численных значений X, одна и та же. Это означает, что плотность вероятности случайной величины X постоянна и задается выражением
/.z ч ---- при а < х < Ь; Л
/(х) = Ъ-а (10.60)
0 при х < а, х > Ъ, где а и Ъ — произвольные вещественные числа, являющиеся границами области возможных значений X.
425
Функция распределения
х - а Ъ - а при а < х < Ъ;
ВД = 0 при х < а;
1 при х > Ь.
Графики функций f(x)
(10.61)
и F(x) приведены на рис. 10.11.
Рис. 10.11. Графики плотности вероятности f(x) (а) и функции распределения F(x) (б) для равномерно распределенной
случайной величины в интервале а < X < Ь
Математическое ожидание и дисперсия равномерно распределенной случайной величины X определяются по формулам:
тх= (а + Ь)/2; (10.62)
Ох = (Ь -а)2/12. (10.63)
Обычно в теории и практических приложениях используют случайные числа, равномерно распределенные на интервале [0, 1]. о
В этом случае тх = 1/2, ах = 1/12.
10.5. МОДЕЛИРОВАНИЕ СЛУЧАЙНЫХ ВЕЛИЧИН
При анализе процессов функционирования вероятностных технических систем возникает необходимость моделирования случайных величин и случайных процессов с заданными вероятностными характеристиками. Так как анализ функционирования технической системы на ЭВМ осуществляется численными методами на основе дискретных математических моделей, то внешние воздействия на систему необходимо представить в виде некоторой непрерывной последовательности случайных чисел. Рассмотрим способы формирования такой последовательности случайных чисел с заданными вероятностными характеристиками. На практике используют три основных способа генерации случайных чисел: аппаратный (физический), табличный (файловый) и алгоритмиче-
28. Зак. 3006
426
ский (программный). Наибольшее применение при моделировании технических систем находит алгоритмический способ.
Числа, полученные алгоритмическим способом, реализующим определенные формулы, являются псевдослучайными. Однако это не означает, что они некачественные, т.е. неслучайные или случайные зависимые. Качество случайных чисел проверяют соответствующими критериями случайности, независимости и др.
Рассмотрим коротко способ получения псевдослучайных чисел с различными распределениями вероятностей. Как уже отмечалось, исходной базой при этом служат равномерно распределенные в интервале [0,1] случайные числа xR, Для получения таких чисел существует несколько алгоритмов. Один из них описывается в виде рекуррентного соотношения
(10.64)
(10.65)
где X, ц, М — неотрицательные целые числа.
Случайную величину х(а, Ъ), равномерно распределенную на интервале [а,д], получают на основе выражения
х(а, Ъ) = (Ь - а)х
Для преобразования равномерно распределенных случайных чисел в случайные числа с заданным распределением вероятностей существует общее правило. Значение функции распределения F(x) для равномерно распределенных случайных чисел в интервале [0, 1] можно рассматривать как значение случайной величины
(10.66)
Решение этого уравнения
Л. V.-'V J , где F “1(хл) — функция, обратная функции Р(х), являющаяся случайным числом из совокупности случайных чисел с плотностью вероятности Дх).
Пусть необходимо сформировать случайные числа хЕ с экспоненциальным распределением, параметр которого X . Плотность вероятности этого распределения соответствует выражению (10.55), а функция распределения — выражению (10.56). Подставим F(x) из (10.56) в уравнение (10.66)
1 г*
1 — е — х ,
Решение этого уравнения имеет вид * *
(10.67)
Так как величина (1 - xR) также равномерно распределена на интервале [0,1], то ее можно заменить на xR и использовать выражение
хЕ = -In xR Iк . (10.68)
Аналогично получают формулу для генерирования случай-Г ных чисел х , соответствующих гамма-распределению:
хг = - - £ In (1 - х/*). (10.69)
ai=l
При моделировании нормально распределенной случайной величины используют центральную предельную теорему, согласно которой распределение суммы п одинаково распределенных независимых случайных величин Xi,X2,...,Xn при неограниченном возрастании п неограниченно стремится к нормальному распределению. При п > 8 распределение этой суммы может считаться нормальным с вероятностью Р > 0,95. Используя реализации случайной равномерно распределенной величины XR, можно составить выражение для определения случайной величины , имеющей нормальное распределение с параметрами тх = 0 и ах== 1:
АГ 12 1
N° =
(10.70)
На основе формулы (10.70) из двенадцати случайных равномерно распределенных чисел х^ получается одно случайное число х^ новой совокупности, представляющей собой случайные числа с нормальным распределением.
Часто для получения случайных чисел х^° применяют формулу
= 0,774596 У xf - 10 .
(10.71)
Случайные нормально распределенные числа с заданными параметрами тх и их получают из чисел xN° по формуле m -i-гт ..
(10.72)
Случайные числа xLN, имеющие логарифмически нормальное распределение с параметрами тх и сгх, получают по формуле
428
сона,
XLN = exN (10.73)
Случайные числа хр, соответствующие распределению Пуас-получают на основе алгоритма
где k
•Л' IV,
— такое наименьшее целое число, что k+\Г 1 „
(10.74)
Z -71n(l-x?)
г—1 А
(10.75)
10.6. ОСНОВНЫЕ СВОЙСТВА СЛУЧАЙНЫХ ПРОЦЕССОВ
Различают непрерывнозначный и дискретный случайные процессы, а также случайную и дискретную случайную последовательности.
У непрерывнозначных случайных процессов область значений и область определения (во времени) — непрерывные множества.
У дискретных случайных процессов область значенй — дискретное множество, а область определения — непрерывное множество.
Случайная последовательность представляет собой процесс с дискретным временем и непрерывным множеством области значений, а дискретная случайная последовательность — процесс, у которого область значений и область определения — дискретные множества.
Случайные процессы, характеристики которых (моментные функции, функции распределения и т.д.) не зависят от начала отсчета времени, называют стационарными. Если же вероятностные характеристики зависят от начала отсчета времени, то процессы относятся к нестационарным.
Различают стационарные процессы в узком и широком смысле. Стационарными в узком смысле называют такие процессы, у которых все конечномерные функции распределения вероятностей любого порядка не изменяются при сдвиге процесса во времени. Такие процессы протекают однородно во времени, и их распределения меняются лишь в зависимости от величины интервала т = t2 - между сечениями процесса.
Стационарными в широком смысле называют случайные процессы, у которых математическое ожидание и дисперсия постоянны, а корреляционная функция зависит только от разности т = t2 - ti, т.е. mx(t) = тх= const; Dx(t) = Dx = const; =
^x(^2 ~ ^1) = )•
429
Вероятностные характеристики можно получить усреднением по времени или по ансамблю реализаций. В зависимости от соотношений между этими характеристиками различают эргодические и неэргодические случайные процессы. У эргодических процессов вероятностные характеристики, полученные из ансамбля реализаций, совпадают с характеристиками, полученными усреднением по аргументу t. Это означает, что любая из реализаций, составляющих ансамбль, должна сохранять все основные особенности процесса, т.е. быть достаточно представительной. Таким образом, у эргодических процессов можно вероятностные характеристики определять усреднением по времени одной реализации достаточной длительности.
В практике моделирования вероятностных технических систем в большинстве случаев полагают, что случайные процессы стационарные и эргодические. Для таких процессов математическое ожидание, корреляционную функцию и взаимную корреляционную функцию вычисляют по одной реализации процесса X(t)
усреднением по времени:
1 Т mx = lim — (x(t)dt;
| Т о о
Вх(т) = lim — f x(t) x(t + т:) dt;
j Т о о Rxy(^ = Iim [x(t)y(t + t)dt. Т—>СО 1 Q
(10.76)
(10.77)
(10.78)
Практически используют реализации конечной длительности Т.
Особое значение при моделировании технических систем имеют нормальные случайные процессы. Это обусловлено тем, что благодаря инерционным свойствам технических систем они обладают способностью нормализовать распределения фазовых переменных. При функционировании таких систем в условиях стационарных внешних воздействий практически все фазовые переменные имеют нормальные распределения, даже если распределения воздействий будут отличаться от нормальных.
Нормальный случайный процесс полностью определяется изменением во времени математического ожидания и корреляционной функции. Поэтому стационарный в широком смысле нормальный случайный процесс стационарен и в узком смысле. Кроме того, сумма двух нормальных процессов дает нормальный процесс, а распределение вероятностей производной стационарного процесса также нормально.
430
10.7. МОДЕЛИРОВАНИЕ РЕАЛИЗАЦИЙ СЛУЧАЙНЫХ ПРОЦЕССОВ
Для выполнения анализа процесса функционирования технической системы при случайных внешних воздействиях возникает необходимость моделирования этих воздействий. Реализации функций внешних воздействий на ЭВМ представляются в виде случайных последовательностей (значений воздействий в дискретные моменты времени), отображающих дискретные случайные процессы с заданными вероятностными характеристиками.
При моделировании стационарного случайного воздействия с нормальным распределением достаточно сформировать случайную последовательность с заданной корреляционной функцией. В основу алгоритмов формирования таких процессов положено линейное преобразование стационарной последовательности х^ независимых случайных чисел, имеющих нормальное распределение, в последовательность qk. При этом случайная последовательность х£ подается на вход дискретного линейного фильтра, формирующего на выходе дискретный случайный процесс с заданной корреляционной функцией.
Алгоритмы формирования дискретных реализаций случайных процессов задаются рекуррентными соотношениями:
97г = * =°,1>2,...; (10.79)
i=0
L т
<lk = Xalxk-l - XbjQk-j’ k =0,1,2,..., (10.80)
1=0 j=l
где a/, bj9 Ci — параметры алгоритмов, определяемые по корреляционной функции -Кд(т) формируемого дискретного случайного процесса qk.
Начальные значения q^ при k в 0 в этих алгоритмах для простоты можно выбирать нулевыми. При этом начальный участок моделируемого процесса будет несколько искажен переходным процессом, по окончании которого последовательность q^, k = 0,1,2... после некоторого значения k становится стационарной.
Для получения коэффициентов ah bj, ch входящих в выражения скользящего суммирования (10.79) и (10.80), применяются: разложение в ряд Фурье функции спектральной плотности; решение системы нелинейных алгебраических уравнений, правая часть которой определяется исходной корреляционной функцией; метод факторизации и др.
431
Рассмотрим наиболее часто встречающиеся на практике корреляционные функции 7?^(т) и алгоритмы моделирования случайных процессов, основанные на преобразовании последова-N тельности независимых нормально распределенных чисел с
о
математическим ожиданием тх = 0 и дисперсией о J = 1 в последовательность q^9 характеризуемую корреляционной функцией
Rq(x) = Rq(kh) = M[qiqi+k], k =0,1,2,..., (10.81)
где h — шаг дискретизации независимой переменной t.
При статистическом анализе случайных процессов в технических системах описание характеристик внешних воздействий обычно дается в виде корреляционных функций 7?д(т) или спек-
тральных плотностей
Gg((o) . Эти функции получают путем стати
стической обработки результатов экспериментальных исследований технических систем в реальных условиях их функционирования. Получаемые в результате экспериментов графики корреляционных функций аппроксимируют некоторыми функциями. Наиболее часто используют экспоненциальные и экспоненциально-косинусные функции:
Яд(т) = ; (10.82)
7?д(т) = а'т' cosPt ,
(10.83)
о
где од — дисперсия возмущающего воздействия q(t); а — коэффициент, характеризующий затухание корреляционной функции; Р — коэффициент, характеризующий колебательный процесс.
Рис. 10.12. Графики нормированных корреляционных функций: 1 — экспоненциальной; 2 — экспоненциально-косинусной
Разделив корреляционную функцию 7?д(т) на о^, получим нормированную корреляционную функцию Рд(т). Графики нормированной экспоненциальной и экспоненциально-косинусной корреляционных функций показаны на рис. 10.12. Корреляционные функции 7?д(т) и Рд(т) — четные. При т = 0 получаем
432
7?g(0) = Qg и Pg (О) = 1. При т > О любое значение 7?д(т) меньше дисперсии случайного процесса Од, а Рд(т) меньше единицы.
Корреляционная функция, определяемая выражением (10.83), относится к случайному процессу, содержащему периодическую составляющую.
Спектральная плотность стационарного случайного процесса Gg(tt)) представляет собой функцию круговой частоты со , которая равна преобразованию Фурье ковариационной функции К(т) этого процесса:
00
Gg(<o) - J К(т) e~J(axdx . (10.84)
—00
После преобразования выражения (10.84) для центрированного случайного процесса получим известное соотношение для области положительных частот
<?д(®) = - J/?g(T)cOS£OTdT . (10.85)
71 о
Для корреляционной функции 7?д(т) справедливо выражение
/?п(т) = cos сот с/со » (10.86)
л 3 4х ' ' '
0
2
Поскольку при т = 0 Rq(0) , то на основании выраже-
ния (10.86) получаем
о 00
ст„ = fG„(co)da> . (10 87)
□f *4.
о
Следовательно, площадь, ограниченная графиком функции Gg(co) и осью частот со , представляет собой дисперсию стационарного случайного процесса.
Перейдем к описанию алгоритмов формирования реализаций дискретного случайного процесса с корреляционными функциями (10.82) и (10.83).
Последовательность ординат случайного процесса с корреляционной функцией (10.82) получают по формуле
4k = aoxk +bl<lk-l’ k =0,1,2,..., (10,88)
433
где «о = °g 1/1 - ^1 ’ ~ е ah ’ h — шаг дискретизации независимой
« , N переменной t; xh — значения нормально распределенной слу-г?
чайной величины XN с параметрами тх = 0 и сг х = 1.
Последовательность ординат случайного процесса с корреляционной функцией (10.83) получают по формуле
= a0xk + alxk-l + b19k-l + b2<lk-2’ k = О-1’2. (10.89)
где a0 = aqb0; аг = aqa0/b0; b0 = J(ci+-Jc^ -4cq)/2;
bj = 2e~ah cos рй; b2 = ~e~2ah ;
с0 = e~ah(e~2ah -1) cos Рй ; = 1 - e~4ah .
Если корреляционная функция случайного процесса представляет собой сумму выражений (10.82) и (10.83), то значение qk равно сумме ординат, вычисленных по формулам (10.88) и (10.89). При этом в этих формулах должны быть независимыми последовательностями нормально распределенных величин с параметрами тх = 0 и сгх =1.
10.8. ОЦЕНКИ ВЕРОЯТНОСТНЫХ ХАРАКТЕРИСТИК РЕАЛИЗАЦИЙ СЛУЧАЙНЫХ ПРОЦЕССОВ
При математическом моделировании процессов функционирования технической системы для определения вероятностных характеристик используют реализации дискретных случайных процессов, получаемых в результате вычислительного эксперимента на ЭВМ. Дискретные случайные процессы характеризуют изменение во времени фазовых координат и выходных параметров технической системы в условиях случайных воздействий внешней среды. Значения фазовых координат получают в процессе интегрирования системы дифференциальных уравнений математической модели, а значения выходных параметров вычисляют на основе функциональных зависимостей между ними и фазовыми координатами. Задачей анализа процесса функционирования технической системы в этом случае является получение статистических оценок вероятностных характеристик фазовых координат и выходных параметров, характеризующих качество и эффективность системы, и оценка степени выполнения технических требований на эти параметры.
434
Фундаментальными понятиями статистической теории являются понятия генеральной совокупности и выборки.
Генеральная совокупность есть совокупность всех мыслимых значений реализации случайной величины, которые могут быть в принципе получены при экспериментах в заданных условиях.
Выборка — это конечный набор значений реализации случайной величины, полученный в ходе эксперимента. Число элементов выборки называется ее объемом. Пусть — по-
лученные реализации случайной величины X, Тогда объем данной выборки равен ЛГ.
Выборка называется репрезентативной (представительной), если она достаточно полно характеризует генеральную совокупность. Для обеспечения репрезентативности выборки используют рандомизированный (случайный) выбор ее элементов.
Назначение статистических методов заключается в том, чтобы по выборке ограниченного объема ЛГ, т.е. по некоторой части генеральной совокупности, высказать обоснованное суждение о ее свойствах в целом. Теоретически вероятностные характеристики случайных процессов могут быть найдены только по ансамблю, состоящему из бесконечного числа реализаций, или по одной из них, но бесконечной длительности, если случайный процесс стационарный и эргодический. Практически число реализаций случайного процесса и длительность каждой реализации всегда ограничены. Поэтому при вычислении характеристик получают не их истинные значения, а оценки, которые сами по себе являются случайными величинами или функциями. В этом их принципиальное отличие от оцениваемых вероятностных характеристик (моментов, моментных функций и др.), являющихся неслучайными. В связи с этим возникает задача обеспечения таких условий проведения экспериментов (вычислительных или физических) и такой обработки их результатов, при которых отклонения этих оценок от истинных значений были бы наименьшими. Следует отметить, что речь идет здесь не о приближенном вычислении истинных вероятностных характеристик. Так как оценки случайны, то можно лишь говорить о том, что погрешности оценок не выходят за доверительные интервалы, т.е. о вероятности этих погрешностей.
Важно также по ограниченной информации о случайных процессах установить точность и надежность оценок их вероятностных характеристик. Эти оценки должны быть состоятельными, несмещенными и эффективными.
Оценка A(k) вероятностной характеристики A(k) называется состоятельной, если при неограниченном увеличении объема вы
435
борки (числа реализаций N или времени реализации Т) она сходится по вероятности с искомой характеристикой A(k):
Р[ A(k) - A(k) < е] -> 1 при ЛГ-> оо , (10.90)
где 8 — малое положительное число.
Функция A(k) определяет любую вероятностную характеристику (математическое ожидание, дисперсию, корреляционную функцию, спектральную плотность и др.), а параметр k может быть временем t, временным сдвигом т , частотой со и др.
Оценка A(k) называется несмещенной, если для любого объема выборки N математическое ожидание оценки A(k) равно оцениваемой характеристике
M[A(k)]=A(k). (10.91)
Для несмещенной оценки характерно отсутствие систематической погрешности.
Несмещенная оценка A(k) называется эффективной, если среди всех оценок характеристики A(k) она обладает наименьшей дисперсией:
£>[ A(k) ] = М{[ A(k) - A(fe)]2} = min. (10.92)
О точности и надежности полученной оценки судят по вероятности того, что искомая вероятностная характеристика A(k)
располагается в интервале A(k) - а < A(k) < A(k) + а , т.е.
Ра = Р[ A(k) - A(k) < а],
(10.93)
где а — некоторая заданная величина, характеризующая точность оценки.
Вероятность Ра называют доверительной вероятностью,
интервал A(k) -а < A(k) < A(k) + а — доверительным интервалом, а его границы — доверителъными границами. построе-
ния доверительного интервала используют величину q = 1 - Ра , называемую уровнем значимости.
10.9. ОПРЕДЕЛЕНИЕ СТАТИСТИЧЕСКИХ ОЦЕНОК ВЕРОЯТНОСТНЫХ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ
При выполнении статистического анализа процессов функционирования технической системы обычно определяют для каждого исследуемого случайного процесса оценки математического ожидания, дисперсии, корреляционной функции и спектральной плотности, а также оценки характеристик распределения вероят
436
ностей. Кроме того, определяют оценки взаимных вероятностных характеристик случайных процессов X±(t) и Xz(t)' взаимную корреляционную функцию и взаимную спектральную плотность.
Для вычисления статистических оценок характеристик случайных процессов необходимо определить шаг дискретизации независимой переменной (времени t) и объем выборки N. Шаг дискретизации Af выбирают с учетом внутренней структуры случайного процесса, а объем выборки зависит от характера процесса и определяет необходимую точность статистических оценок.
Для определения At используется известная теорема Котельникова—Шеннона о квантовании непрерывных сигналов: если непрерывный сигнал x(f) обладает спектром, ограниченным частотой со х, то его квантование по времени с частотой со д > 2со х не приводит к потере информации, т.е. сигнал однозначно и полностью представляется своими дискретными значениями, взятыми через интервал квантования At < л / со х .
На основе этой теоремы можно записать выражение для определения шага дискретизации случайного процесса при статистической оценке его вероятностных характеристик
Af = л/(гсохв ), (10.94)
где сохв — верхняя круговая частота спектра процесса; г — коэффициент, выбираемый в зависимости от особенностей внутренней структуры случайного процесса.
Поскольку при моделировании технической системы характер исследуемых случайных процессов заранее неизвестен, то обычно принимают г= 1,5...3. Выбор значения сохв зависит как от степени подробности описания физических свойств моделируемой технической системы, так и от характеристик внешних возмущающих воздействий. Математическая модель технической системы при этом характеризуется спектром собственных или резонансных частот и спектром частот внешних воздействий. Последний определяет возможность возникновения резонансов, сопровождаемых увеличением амплитуд колебаний случайных процессов на соответствующих высших частотах. Для уменьшения ширины спектра резонансных частот необходимо обоснованное упрощение математической модели в соответствии с рекомендациями, изложенными в разделе 7.6. В этом случае значение со хв можно приравнять к значению со цт .
При моделировании механических систем обычно ограничиваются соцт= 63...126 рад/с (или 10...20 Гц).
437
Следует обратить внимание на согласование шага интегрирования h и шага дискретизации Af реализаций случайных процессов, используемых для статистических оценок: AZ = ah, где а — целое положительное число.
Длительность реализации случайных процессов Т при проведении вычислительных экспериментов на ЭВМ определяется необходимым объемом выборки АГ и шагом дискретизации:
Т = N At. (10.95)
Объем выборки при моделировании стационарных эргодических случайных процессов, согласно накопленному опыту статистического анализа технических систем, можно принимать в пределах N = 200...500. Увеличение N позволяет повысить точность статистических оценок. Однако следует иметь в виду, что реализации случайных процессов могут содержать низкочастотные составляющие с периодом, соизмеримым с длительностью реализации, или отдельные короткие участки с выраженной нестационарностью. В этом случае увеличение объема выборки может привести к обратным результатам. Для уменьшения влияния возможных нестационарностей реализации случайных процессов при моделировании необходимо подвергать фильтрации.
Рассмотрим алгоритмы определения основных статистических оценок вероятностных характеристик случайных процессов.
Плотность вероятности. Для оценки плотности вероятности случайного процесса X(t) используется массив чисел, составляющих его реализацию. Вначале необходимо произвести группирование данных массива. Для этого вся область изменения выборки от xmin до хтах разбивается на /?гр интервалов одинаковой длины Ах и подсчитывается число элементов выборки, попавших в каждый из указанных интервалов n-, j = 1,/? . Значениям х, находя-J А Jr
щимся в одном и том же интервале j, приписывается значение
xj , которое соответствует середине данного интервала.
Для определения числа интервалов группирования &гр используют различные полу эмпирические соотношения. Одно из них имеет вид
/ггп = 1 + 3,2 1g N. (10.96)
Полученное значение /ггр округляют в сторону ближайшего целого числа. При N = 200...500 получаем /?гр = 9...12.
После выбора /?гр определяют длину интервала:
(^тах
^min)/ ^тр ’
(10.97)
438
Сгруппированные данные используются для определения эмпирической функции fN(JAx), являющейся оценкой f^(x) плотности вероятности f(x) случайного процесса X(t) в точках 7 = 1,АГр, соответствующих срединам интервалов Дх:
где
п(уДх) =
Tij, если
0, если
/Лг(;Ах) =
п(/'Ах) _ V/
(10.98)
ЛГДх Дх
xt < Xj - Дх / 2;
xt > Xj + Ах / 2, i = 1, N.
(10.99)
Графическое изображение функции /д/(х) называют гистограммой, Для построения гистограммы (рис. 10.13) на оси абсцисс
откладывают границы интервалов и для каждого интервала стро
ят прямоугольник с высотой, равной nj/(NAx), Сумма площадей
Рис. 10.13. Гистограмма распределения случайной величины X
всех прямоугольников равна 1. Отношение nj/N называют относительной частотой (или частостью) и обозначают V ; . ЧаСТОСТЬ V ;
является несмещенной состоятельной оценкой Pj для
вероятности Pj попадания реализаций случайного процесса X/, i - 1, N , в /-Й интервал группирования.
Статистические оценки моментов распределения ординат реализации случайного процесса находят по формулам:
^гр
х = £x)vy ;
/=1
(10.100)
«х = f (xy-x)2V;; (10.101)
М о
ЙЗ = £(*)-*) V; ; (10.102)
М
*гр
Й4 = Г(*/ -X) V; . (10.103)
J J
439
В формулах приняты следующие обозначения оценок моментов распределения, используемые в математической статистике: х — оценка математического ожидания (или выборочное 9
среднее); Sx — оценка дисперсии (или выборочная дисперсия); Дз и Д4 — оценки третьего и четвертого центральных моментов, используемые для оценок коэффициентов асимметрии Ах и эксцесса Ё~ : •А*
Ax = g3/S8; (10.104)
4=R/«x-3. (10.105)
Для выяснения близости эмпирического распределения какому-либо теоретическому распределению вычисляют оценку х^ критерия Пирсона:
X2 =ЛГ S(v7-Py)2/Pp (10.106)
J=1
где Pj — вероятность попадания случайной величины X в у-й интервал, определяемая по выбранному теоретическому распределению.
9
Полученное значение % сравнивается со стандартным (таб-9
личным Хт) с учетом числа степеней свободы k и уровня значи-
2 2
мости q. При х - Хт гипотеза о соответствии эмпирического
распределения выбранному теоретическому принимается.
Значения %2 = %?
л.
в зависимости от числа степеней свобо-
2 2
ды k и уровня значимости q = Р[х > Хь „1 приведены в табл. 3 ”, ч
приложения.
Число степеней свободы статистической величины z равно числу опытных данных, по которым она вычислена, минус число вычисленных по этим же данным независимо друг от друга величин, участвующих в вычислении z. Если в качестве теоретического принять нормальное распределение, параметрами которого являются математическое ожидание и дисперсия, то число степеней свободы будет
/? = &гр “ г0 -1= ^Гр ~ 3.
440
Здесь учтено, чтогд = 2 (параметры распределения), а уменьшение числа степеней свободы на единицу обусловлено наличием линейной связи между эмпирическими величинами rtj ^гр
И Я: Пу = N.
>1
Оценку близости эмпирического распределения какому-либо теоретическому можно осуществить по номограмме, приведенной на рис. 10.14. Чтобы воспользоваться этой номограммой, необхо-
Рис. 10.14. Номограмма для оценки близости эмпирического и различных теоретических распределений
димо вычислить вспомогатель-ные коэффициенты Pi = Ах и Р2 = Н4 / • Для нормального
распределения Pi=0, Р2 = 3 . Ему соответствует на номограмме точка а. Для экспоненциального распределения Pi = 4, Р2 = 9 (точка Ь), а для равномерного распределения Pi = 0, Р2 = 2 (точка с). Линия 1 соответствует гамма-распределению, а линия 2 — логарифмически нормальному распределению. Между линиями 2 и 3 лежит область бета-распределения .
Фильтрация и центрирование ординат случайного процес-
са. Для приведения случайных процессов, содержащих нестацио-
нарности по математическому ожиданию, к стационарному виду осуществляют фильтрацию реализаций этих процессов. Фильтрация сводится к исключению настационарностей путем центрирования ординат реализаций относительно текущего значения математического ожидания (текущего среднего x(t)). При этом предполагается, что реализация дискретного случайного процесса x(t) представляет собой аддитивную смесь функции x(t) и цен-
о
трированной стационарной и эргодической реализации x(t) , т.е.
x(t) = x(t) + x(t) . (10.107)
Задача фильтрации — выделение функции x(t) и получение
о
центрированной реализации x(t). Для этой цели используют
441
фильтр низких частот. Простейший фильтр, предложенный В.С. Пугачевым, имеет прямоугольную временную характеристику, описываемую выражением
й(т) =
1 при т < 1;
О при Iт >1.
(10.108)
Для вычисления оценки математического ожидания случайного процесса, соответствующего i-му дискретному значению его реализации в момент времени необходимо осуществить усреднение значений некоторого количества ординат Пф , соответствующих памяти фильтра Тф . Память фильтра соответствует некоторой части времени реализации Т, т.е. Тф= Т/а, где а — некоторый коэффициент, отождествляемый с числом периодов составляющих случайного процесса, которые необходимо отфильтровать. Для механических систем обычно рекомендуют принимать а = 10, тогда Тф= 0,1Т.
Значение Пф связано с Тф соотношением
~ тф /
(10.109)
При вычислении текущего среднего x(t) в выражении (10.108) необходимо перейти от аргумента т к тц, где тц — порядковые номера текущих ординат в интервале от -0,5 Пф до + 0,5пф, покрываемых фильтром. Тогда характеристика фильтра приводится к виду:
h(nt) =
1 при щ
0 при щ
| < 0,5пф;
> 0,5пф.
(10.110)
Оценка текущего значения математического ожидания Xj (t) определяется по формуле
0,5пф
Z^(ti^) Xj+i 9 / — 1, N . 1=-0,5л1ф
Центрирование ординат реализации случайного процесса x(t) осуществляют согласно выражению
Xj = Xj ~ Xj , j = 1,N
(10.112)
442
Недостающие значения ординат случайного процесса на начальном и конечном участках реализации можно заменять нулями.
Корреляционная функция. Для дискретного случайного процесса корреляционную функцию вычисляют по формуле
2?х(т) = 7?x(nAt) = —— X xtxl+n , (10.113)
N~n i=l
о
где xt — текущая центрированная ордината реализации процесса о
в момент времени tf, xt+n — центрированная ордината в момент времени Ц + т ; N — объем выборки, определяющий размерность
массива значений ординат Xi; п = 0,1,2,3... — число, ляющее величину сдвига по оси абсцисс, причем п = т / /\t
Рис. 10.15. Графики корреляционной функции Вх(т) (а) и спектральной плотности Gx(a)) (б) эргодического стационарного случайного процесса x(t)
опреде-
При п = 0 получаем оценку дисперсии случайного процесса 7?х(0) ~ ° Значение
Rx(t) при этом максимально (рис. 10.15, а). С увеличением сдвига т значение 1?х(т) уменьшается. При некотором значении т = тд кривая 7?х(т) пересекает ось абсцисс. Это значение называют временем корреляции. При т>тд случайные значения функции x(t) практически независимы друг от друга. Конечное значение Rx (оо) = 0 . В связи с этим при вычислении Rx(nAf) по формуле (10.113) необходимо установить число nmax > определяющее наибольший временной сдвиг ттах ^тах^ * -Величина ^тах
определяет количество вычисляемых точек корреляционной функции Rx(t) = jRx(nA£). Как показывает опыт исследований, можно принимать nmax ~ 0,12V.
443
Нормированную корреляционную функцию получают по формуле
рх(г) = 7?х(т)/52. (10.114)
Спектральная плотность. Спектральная плотность Gx(co) (рис. 10.15, б) характеризует распределение дисперсии случайного процесса по частоте со. Поскольку дисперсия величина положительная, то и Gx(co) положительна во всем диапазоне частот. Это
следует иметь в виду при оценке результатов определения спектральной плотности.
Функцию Gx(co) можно определить посредством преобразования Фурье либо непосредственно полученной реализации случайного процесса x(t)9 либо корреляционной функции Rx(i). Последний способ применяют чаще. Он основан на использовании выражения (10.85). Однако непосредственное его применение дает оценку спектральной плотности с существенными погрешностями, так как к погрешностям вычисления корреляционной функции Вх(т) по выражению (10.113) добавляются ошибки интегрального
преобразования по выражению (10.85). Для получения оценки спектральной плотности применяют сглаживание корреляционной функции посредством корреляционного окна. Сглаживание представляет собой такую же фильтрацию ординат функции Rx (т),
как и фильтрация ординат реализации x(t) низкочастотным фильтром й(т).
Наиболее часто пользуются функциями сглаживания Барт-лета, Хеннинга и Хэмминга. Функция Бартлета имеет вид
й(т) =
max
при | т | < ттах;
при | т | > ттах;
(10.115)
а функции Хеннинга и Хэмминга
й(т) =
а+ 6 cos (лт/ттах)
0
при
при
max’
(10.116)
max
В функции Хеннинга а = Ъ = 0,5, а в функции Хэмминга а = 0,54, Ъ = 0,46.
В общем случае выражение для определения спектральной
плотности с учетом функции й(т) имеет вид
00
Gx(co) = - /й(т)Я*(т)созсотб/т. (10.117)
444
Применив к этому выражению теорему о свертке двух функций, получим
1 00
Gx(o)=- \W(aa)Gx(a-aa)dua. (10.118)
71 -ОО
В этом выражении со — значение круговой частоты, для которой вычисляется интеграл свертки, а соа — аргумент, по которому производится интегрирование. Подынтегральные функции представляют собой преобразования Фурье от функций Л(т) и G*(co) , Верхний индекс * означает, что используются теоретические значения функций. Но корреляционная функция определяется на конечном интервале своего аргумента 0 < т < ттах и подвергается сглаживанию, поэтому вычисляемая спектральная плотность является результатом усреднения теоретического значения G^(co) посредством некоторой весовой функции ТИ(со), называемой функцией спектрального окна.
Так как функции /г(т) и Вх(т) четные, то преобразования Фурье от этих функций представляют собой вещественные функции
ТИ(со) = — [Л(т) cos огис/т, (10.119)
71 о
G*(co) = ~ f^x(T)cos , (10.120)
я о
Вид корреляционного окна оказывает существенное влияние на погрешность определения спектральной плотности. На рис. 10.16, а — г показаны графики функций различных корреляционных окон h(x) и соответствующих им функций спектральных окон ТИ(со). Прямоугольное корреляционное окно описывается функцией Пугачева (10.108). Преобразование Фурье этой функции на интервале определения корреляционной функции о < т < ттах равно
WYco) = max sin max _ 2 sin СОТmax (ю 121)
71 СОТ max 71C0
Графики функций h(x) и VT(co) для данного случая показаны на рис. 10.16, а. На графике VT(co) видно, что кроме главного лепестка спектрального окна, определяющего эффективную полосу частот, пропускаемых фильтром, на более высоких частотах возникают дополнительные положительные и отрицательные
всплески. Вследствие этого график спектральной плотности Gx(co) будет содержать не имеющие физического смысла отрицательные выбросы и ложные пики. Очевидно, что анализирующий фильтр с подобной характеристикой неприемлем.
Функция Бартлета в частотной области не имеет отрицательных выбросов (рис. 10.16, б)9 но боковые всплески присутствуют, хотя они гораздо меньше, чем в предыдущем случае. Значительно меньшими амплитудами боковых всплесков характеризуется функция Хеннинга (рис. 10.16, в), а функция Хэмминга (рис. 10.16, г) обеспечивает наименьшие амплитуды. Хотя эти функции имеют знакопеременные всплески, но поскольку их амплитуды незначительны, то, как показывает опыт, флуктуации спектральной плотности (7х(со) при этом не превышают
погрешности анализа.
Для определения эффективной полосы пропускаемых фильтром частот Дсоэ используют следующие выражения:
функция Бартлета Асоэ = 1,5/(2лттах);
функция Хеннинга Дсоэ = 1,33/(2лттах);
функция Хэмминга Дсоэ = 1,25/(2лттах).
Значение ттах определяет разрешающую способность сглаживающего фильтра при спектральном анализе. Чем шире полоса анализирумых частот, тем меньше должно быть тгпах. Поэтому для выбора ттах необходима информация о собственных частотах системы и ее преобразующих свойствах. Предварительно можно принять т тах ? соответствующее одному периоду колебаний корреляционной функции после первого пересечения ею оси абсцисс, а затем в процессе исследований уточнить его значение.
При выборе ттах следует иметь в виду, что в колебательных
динамических системах низкочастотным процессам соответствуют более узкие полосы пиковых значений спектральной плотности,
чем высокочастотным.
Для дискретных случайных процессов спектральная плотность вычисляется по формуле
Gx(/Aco) =
— .Rx(0) + 2 £ Ях(1Дт)й(1Дт) cos/AcoiAT , 71 _
(10.122)
где Дсо — шаг дискретизации аргумента со спектральной плотности Gx(co); j — номер точки дискретного аргумента соу: (Оу = /Дсо;
j = 0,1,2,3,...,/г; Дт = Д£;
^шах тшах / •
446
Рис. 10.16. Графики функций корреляционных Л(т) и спектральных ТУ(со) окон: а — Пугачева; б — Бартлета; в — Хеннинга; г — Хэмминга
447
Нормированная спектральная плотность определяется из соотношения
gx(^ = Gx(^)/Rx(O). (10.123)
Взаимная корреляционная функция. Взаимную корреляционную функцию реализаций x(t) и y(t) двух случайных процессов вычисляют по формуле
1 N-п ° °
l?xy(nAt) = —- z xtJ/i+n » (10.124)
у N-n i=1
а нормированная корреляционная функция находится из соотношения
рху(пМ) = Rxy(nM) / (SxSy), (10.125)
где Sx и Sy — оценки средних квадратических отклонений случайных процессов x(t) и y(t).
Поскольку RXy (т) не является четной функцией, то ее вы-
числяют как для положительных, так и для отрицательных значений т . Четную и нечетную части функции находят по формулам:
RyinAt) = 0,б1йХ1,(-пА£) + jRXI/(nAf)l; (10.126) L. iz J
7?2(nAZ) = 0,5lRXI/(-nAO - Rxv(nM) I. (10.127)
Взаимная спектральная плотность. Так как взаимная корреляционная функция представляет собой нечетную функцию, то взаимная спектральная плотность будет комплексной функцией, аргументом которой является круговая частота со :
Gxy(a) = G’^co) + ,
(10.128)
где Gxzy(co) и (7^ (со) — вещественная и мнимая части спектральной плотности, вычисляемые по формулам:
Дт ___
Gxj/(ro/)=— RXy(°) + Z-RiGA-OcostflyiAT ; п ,-_i
взаимной
^тах
(10.129)
При нормировании пользуются соотношения
Д-т ^тах
-- X ^2(^Т) S*n 03 7^Т •
П J
(10.130)
взаимной спектральной плотности ис-
(10.131)
~ Qxy^S&j} /(SxSy),
(10.132)
448
Пример 10.1. Определить статистические оценки вероятностных характеристик случайных колебательных процессов, возникающих в системе виброзащиты легкового автомобиля при движении по дороге с заданными характеристиками микропрофиля.
Используем динамическую модель системы, приведенную в разделе 5.5 на рис. 5.13, а. Математическая модель ее представляется уравнениями (5.74). Примем следующие значения параметров системы: = 58 кг; тп2= 92 кг;
/Из = 1115 кг; т4 = 80 кг; J = 1800 кг м2; сг = 310000 Н/м; с2 = 380000 Н/м; с3 = = с4 = 30000 Н/м; с5 = 8000 Н/м; у1=у2 = 0,11; у3=0,2; у4= 0,25; у5 = 0,3 (уг.— относительный коэффициент затухания); х% = 1,225 м; х4 = -1,195 м; х5 = 0 для водителя и х5 = -1 м для пассажира на заднем сиденье.
Микропрофиль дороги с асфальтовым покрытием описывался корреляционной функцией
Rq(xs) = c>q(A.1e~a'lXs + A2e~a2Xs cos₽2xs) , (10.133)
где — среднее квадратическое значение ординат микропрофиля; xs — интервал сдвига по пути: xs = vx (v — скорость автомобиля; т — интервал сдвига по времени).
Параметры корреляционной функции: <зд = 0,008 м; = 0,85; А2 = 0,15 ; 0^ =0.2м Л ; а2 = 0,05 м"4 ; р2 = 0,6м-1. Ординаты микропрофиля qk вычислялись по формулам (10.88) и (10.89). Длина пути реализации микропрофиля L - 600 м, а шаг дискретизации AL = 0,5 м. Объем выборки ординат Nq = L/AL - 1200 . Аргумент корреляционной функции xs ~ ALn , где п — число интервалов сдвига по оси абсцисс L. Скорость автомобиля v = 25 м/с.
Аргумент исследуемых случайных процессов — время t. Шаг дискретизации аргумента t определялся по формуле (10.94) и выбран равным At = 0,02 с. Объем выборки зависит от скорости и определяется по формуле N = (L / v - tn - Тф) / At , где tn— время переходного процесса, исключаемое из выборки; Тф — параметр фильтра.
Приняты следующие обозначения исследуемых случайных процессов: вертикальные перемещения „ скорости vl и ускорения at сосредоточенных масс, i -1,4; угол поворота (р , угловые скорость со и ускорение е кузова; усилия упругих элементов Fvh j = 1,5 (номера индексов i и j соответствуют У J
номерам элементов динамической модели на рис. 5.5, а).
На рис. 10.17 показаны графики изменения ординат микропрофиля q и их текущего среднего q(t) . Параметр фильтра тф = 2 с. Аналогичный вид имеют графики всех исследуемых процессов. Гистограммы распределений ускорений кузова а3 и водителя а4 приведены на рис. 10.18. Проверка гипотезы о нормальности распределений проводилась по критерию Пирсона при д=0,05 и /г = 11. Согласно табл. 3 приложения %% = 19,7 . Для а3 получено %2 = 18,5 ; А = 0,035 ; Е - -0,043 , а для а4 получено /2 = 23,1 ; А = -0,113 ; Е = 0,156 . Следовательно, случайный процесс as имеет нормальное распределение, а распределение процесса а4 отклоняется от нормального. Остальные анализируемые процессы имеют нормальные или близкие к нормальным распределения.
449
Рис. 10.17. Реализация микропрофиля дороги (1) и текущее среднее (2)
Рис. 10.18. Гистограмма распределения ускорений кузова (а) и водителя (б)
На рис. 10.19, а приведены нормированные корреляционные функции случайных процессов а3, а4, е и Fyl , а на рис. 10.19, б их нормированные спектральные плотности. Средние квадратические значения этих процессов Sx соответственно равны: 0,843 м/с2; 1,188 м/с2; 0,383 рад/с2; 967,8 Н. При определении спектральных плотностей использован фильтр Бартлета с параметром тмах = 1 с . Пики на графиках спектральных плотностей соответствуют резонансным частотам системы vpi, значения которых определены по спектру матрицы Якоби системы ОДУ и равны (в Гц): 1,067; 1,073; 3,728; 10,440; 11,998.
Стохастическая взаимозависимость процессов оценивалась коэффициентами корреляции рху . Наибольшая корреляция ускорения кузова а3 существует с Fy3 и Fy4 (рху = 0,512), а наименьшая с q (рху =- 0,085). Наи-
29. Зак. 3006
450
большая корреляция ускорения водителя с ag (рх„ = 0,431), (Рху =- 0,576) и Fy4 ( рху = 0,634), а наименьшая с а2 ( рху = - 0,018). Наибольшая корреляция перемещения водителя 24 с а3 (рху =- 0,661), Fy3 (рху =- 0,592) и Fy4 (рху =-0,642), а наименьшая с q ( рху = 0,016) и а3 (рху = 0,027).
Рис. 10.19. Нормированные корреляционные функции (а) и спектральные плотности (б) случайных процессов: 1 — вертикальных ускорений кузова; 2 — ускорений водителя;
3 — угловых ускорений; 4 — усилий деформации шин
Рис. 10.20. Нормированная взаимная корреляционная функция ординат микропрофиля дороги q и усилия рессоры Fy3
На рис. 10.20 приведена нормированная взаимная корреляционная функция ординат микропрофиля q и усилия рессоры переднего моста Fy3. Коэффициент корреляции этих процессов рх1. - 0,440. Корреляция же между q и усилием деформации шин Fyl значительно меньше: рг,, =0,164.
Основными оценками вибронагруженности водителя и пассажиров являются средние квадратические значения ускорений (СКЗУ) в первых пяти октавных полосах частот. СКЗУ процесса х в i-й октаве определяется по формуле
vKi IvkI
<*х1 = J fGx(v)dv =SX jgx(v)dv,
I vni | vHi
(10.134)
451
где vHi, vKl — начальная и конечная частоты i-й октавной полосы, Гц.
На рис. 10.21 приведены графики СКЗУ вертикальных ускорений кузова оа3 и водителя оа4. Сравнивая оа4 с допускаемыми значениями виброускоре
ний од, регламентируемыми стандартами ISO 2631 и ГОСТ 12.1.012-90 для 8-часовой продолжительности рабочей смены, можно отметить, что исследуемый автомобиль практически удовлетворяет требованиям виброзащиты. Только в 4-й октаве, т.е. в полосе частот 5,6 — 11,2 Гц, оа4 немного превышает од.
Рис. 10.21. Средние квадратические значения ускорений в октавных полосах частот:
1 — водителя; 2 — кузова; 3 — нормативное;
i — номер октавной полосы
венных дифференциальных уравнений.
При моделировании линейных динамических систем, в которых протекают стационарные случайные процессы, часто используют частотные методы анализа. Они основаны на применении передаточных функций для описания физических свойств моделируемых объектов. Математической моделью линейной динамической системы является система линейных обыкно-Систему уравнений и-го
порядка можно свести к одному уравнению и записать его в операторной форме
(Ьорп + ьгрп 1 + ... + bn_rp + bn)x(t) =
= (с0Рт + С1Рт 1 + — + cm-iP +
(10.135)
где bi9 Cj — постоянные коэффициенты; x(t) — исследуемый случайный процесс; q(t) — внешнее воздействие (случайная функция); t — независимая переменная — аргумент случайного процесса (время); р - d / dt — оператор дифференцирования; и, т —
порядки производных.
К линейным дифференциальным уравнениям применимо преобразование Лапласа. Для преобразования достаточно заменить оператор дифференцирования р в уравнении (10.135) комплексной переменной s = ос + /со и перейти к новому аргументу s.
В результате получаем
452
Ms)X(s) = M(s)Q(s), (10.136)
где N(s) = bQsn + ^s71-1 +... + + bn ;
M(s) = cQsm Aqs771"1 +...+ +c7n_1s + cm.
Функции x(t) и q(t) называют оригиналами, a X(s) и Q(s) — их изображениями по Лапласу.
Передаточной функцией Wx q(s) называется отношение лапласова изображения исследуемого процесса X(s) к лапласову изображению воздействия на систему Q(s) при нулевых начальных условиях
Wx>q(s) = X(s)/Q(s) = M(s)/N(s). (10.137)
Преобразование Лапласа превращает исходную систему дифференциальных уравнений в систему алгебраических уравнений с комплексными переменными. Передаточная функция представляет собой дробно-рациональную функцию комплексной переменной s с постоянными коэффициентами. При частотном анализе динамической системы принимают s = /со :
WXiq(jd) = Х(/ю)/в(/ю) = М(/ю)/Х(/ю). (10.138)
Комплексные функции Х(/со) и Q(/co) называют частотными характеристиками соответственно исследуемого процесса и внешнего воздействия, a Wx — комплексной частотной харак-теристикой системы, или сокращенно — частотной характеристикой. Частотную характеристику системы Wxq(jw) можно представить в виде
Wx,qU^ = Ux,q(cd) +, (10.139)
где Uxq(w) = ReWxq(jw)— вещественная частотная характеристика, соответствующая проекции вектора И^- ^/со) на вещественную ось Re комплексной плоскости; ^^(со) = ImWx^(/co) — мнимая частотная характеристика, соответствующая проекции вектора на мнимую ось Im.
Модуль и аргумент частотной характеристики определяются по формулам
Ах>д(ю) = + (10.140)
«Рх.дСаО = arctg[vx>g(a>)/E7x>g((0)]. (10.141)
График зависимости Ах о = /(со) называют амплитудной частотной характеристикой системы (АЧХ), а график зависимости срх q = /(со) — фазовой частотной характеристикой
(ФЧХ). АЧХ и ФЧХ определяются в предположении, что воздействие q(t) носит гармонический характер q(t) = Aq sin(co£ + ср^), где Aq— амплитуда воздействия; со — круговая частота, рад/с; срд— начальная фаза. АЧХ характеризует зависимость величины отношения амплитуды Ах исследуемого процесса x(t) к амплитуде Aq воздействия q(t) от частоты со , а ФЧХ— зависимость разности их фаз от частоты:
^х,#Ссо) ~~ А-х / Aq , Фх,</(со) ~ Фх ~ Ф</ • (10.142)
Частотные характеристики Ах>д(со) и фх>д(со) линейной динамической системы определяются только ее физическими свойствами и не зависят от амплитуды и фазы возмущающего воздействия. Эти характеристики можно использовать не только при гармоническом воздействии, но и при случайных воздействиях. АЧХ позволяет легко и просто определять спектральные плотности случайных процессов динамической системы (фазовых координат и выходных параметров). Если на систему действует случайное воздействие q(t), то спектральная плотность случайного
процесса x(t) равна произведению квадрата модуля частотной ха
рактеристики системы на спектральную плотность воздействия:
Gx(co) = \wx ,g(/<o)| 2Gq(a) = Axq((o)Gq((o)
(10.143)
o
Дисперсия случайного процесса их вычисляется по формуле
(10.87), в которой задаются пределы интегрирования с учетом исследуемого диапазона частот. Согласно этой формуле дисперсия соответствует площади, ограниченной графиком функции Gx(co) и
осью частот со . При использовании изложенной методики внешнее воздействие на систему представляется его корреляционной функцией Вд(т) или спектральной плотностью G^(co) . Обычно
используют корреляционную функцию вида (10.133), в которой в
качестве аргумента вместо xs используют т = xs / v . Спектраль
ная плотность при этом описывается выражением
454
Gg(ro)= 2q2
_А1О£_
2 2
(Xi + CO
^2a2(a2 + ₽2 + c°2) (CO2 -0C2 - Pl)2 + 4«2C02
(10.144)
В формуле (10.144) az и bt в с к Поэтому значения и , используемые в формуле (10.133), необходимо умножить на v.
Пример 10.2. Определить спектральные плотности и средние квадратические значения перемещений и ускорений подрессоренной и неподрессоренных масс автомобиля при движении со скоростью 100 км/ч. Параметры автомобиля принять из предыдущего примера.
теории автомобиля известно, что если произведение продольных х3х4 (см. рис. 5.13, а) отличается от р2 не более чем на 10...15 %, то передней и задней частей кузова оказываются практически
Из
координат колебания независимыми и можно использовать для каждой из них динамическую модель, показанную на рис. 4.5, а. Математическая модель при этом соответствует уравнениям (4.22) — (4.25). Примем в качестве фазовых координат вертикальные перемещения х* и х2 масс т1 и т2 и приведем эти уравнения к виду
ТЛуХ-^ -I- p.jXj 4“ CjXj — M'l^'2 — ^'1*^'2 ~ ® »
- gjXi - qx2 + m2x2 + (pi + p2)x2 + (q + c2)x2 - p2q + c2q.
Применим к системе уравнений (10.145) преобразование Лапласа и заменим s на /со:
(q - т1с2 + /щсоП^/со) - (q + /|л1ш)Х2(» = 0;
~ (С1 + 7PiC0)Xi (/со) + [q + с2 - т2со2 + /(щ + р2)со Х2(/со) = (с2 + /p2co)Q(/co).
Уравнения (10.146) позволяют определить частотные характеристики перемещений масс системы Wxi q{](a) = Xf(/co)/Q(/co), i = 1,2.
Решение системы уравнений (10.146) относительно частотных характеристик Х1(/со) и Х2(/со) , характеризующих колебания масс т1 и т2 , осуществляется по формулам Крамера. Принимая Q(/co) = 1 , получаем
Wxl,g (fa) = Xi О) = Axi (» / Д(/ш), i = 1,2,
где А(/со) — главный определитель системы уравнений (10.146); Ах1(/со), Ах2(/со)— определители, у которых столбцы коэффициентов соответственно при Хг(/со) и Х2(/со) заменены столбцом коэффициентов при Q(/co) .
Главный определитель
(q - zqco2 + j/njco)
(10.145)
(10146)
(10.147)
Д(» =
где Co = mim2ro4 - [1
-(q+Jpico) fl + с2 - ти2ю2 + j(|q + ц2)со
+ т2) + с2т-у + |qp2]co2 + С1С2 ;
Определители Ах1(/со) и Ах2(/со)
0 _ -(с
Axi(» =
9
455
Ax2(J«) =
(q - + 777^ co)
- (q + 7Ri<°)
0
(c2 + щ2со)
- C2 + jD2 ,
где Сг = qc2 - PiP2co2 ; Вг = (qp2 + c2m)co;
C2 = clc2 - <mlC2 + H1H2)C°2 ; D2 = (C1H2 + с2кЧ)Ш “ ”hV2®3 •
Подставив полученные значения определителей в выражение (10.147), получим искомые частотные характеристики, которые можно представить в виде
Wxttq(ja>) = Extg(a>) + jFxi.g(co), i = 1,2.
АЧХ и ФЧХ перемещений масс т1 и тп2 :
Ad,g(“) = |Wxi,g(/®)| = ^Exig(a) + Exi,g((o), i = 1,2;
(Pxi,g(®) = argWxi>g(» = arctg[Fxjg(a>)/.Ex(g (<»)], i = 1,2.
АЧХ ускорений масс и m2 определяют по формуле
~ ® ~ 1,2.
(10.148)
(10.149)
(10.150)
На рис. 10.22, а приведены АЧХ перемещений масс и т2, а на рис. 10.22, б — их ускорений. Сплошными линиями показаны АЧХ для масс передней части автомобиля, а штриховыми — для задней. Если автомобиль движется по гармоническим неровностям дороги с амплитудой qQ, АЧХ позволяют определить амплитуды резонансных колебаний:
•Чгпах — ^o(-^xi,g)max » -Чтпах — ^o(^xi,g)max » — ^’2- (10.151)
Рис. 10.22. АЧХ относительных перемещений (а) и ускорений (6): 1 и 2 — подрессоренных масс; 3 и 4 — неподрессоренных масс
456
На рис. 10.23, а показан график спектральной плотности ординат микропрофиля дороги Gg(y), а на рис. 10.24, б — графики спектральных плотностей вертикальных ускорений подрессоренных G^12(v) и неподрессоренных G^34(v) масс.
Рис. 10.23. Спектральные плотности ординат микропрофиля (а) и ускорений масс автомобиля (б) (обозначения соответствуют рис. 10.22)
На рис. 10.24 приведены графики СКЗУ в первых пяти октавных полосах частот. Аргументом графиков на рис. 10.22 — 10.24 принята частота v, Гц. Соотношение между v и круговой частотой со, рад/с, используемой в формулах (10.138) —(10.150), устанавливается выражением со = 2tcv .
п-------►
Рис. 10.24. СКЗУ масс автомобиля: п — номер октавной полосы частот (обозначения соответствуют рис. 10.22)
457
10.10. ОПРЕДЕЛЕНИЕ СТАТИСТИЧЕСКИХ ОЦЕНОК ЧИСЛОВЫХ ВЕРОЯТНОСТНЫХ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ВЕЛИЧИН
Оценки числовых вероятностных характеристик случайных величин должны быть состоятельными, несмещенными и эффек
тивными.
Оценка математического ожидания. В качестве оценки х
математического ожидания тх случайной величины X используется выборочное среднее*.
(10.152)
Выборочное среднее х
— состоятельная несмещенная оцен
ка тх. выборки из нормальной генеральной совокупности эта оценка также и эффективная.
Оценка дисперсии. Если математическое ожидание тх случайной величины X известно, то оценка дисперсии может быть вычислена по формуле
(10.153)
О
Оценка Sx состоятельная, несмещенная и для нормальной
совокупности эффективная оценка дисперсии <ух.
„ 2
Если тх неизвестно, дисперсию ах оценивают на основе выражения
«X =тДтЕ(^-^)2- (10.154)
~ 1 i=l
о
Оценка Sx, вычисляемая по этому выражению, состоятель-
ная, несмещенная и для нормальной совокупности асимптотиче-о
ски эффективная при N оо . Оценку Sx называют выборочной
дисперсией,
о
Вычисление оценки Sx удобнее осуществлять по формуле
(10.155)
458
Оценка коэффициента корреляции. Оценку коэффициента корреляции называют выборочным коэффициентом корреляции. Выборочный коэффициент корреляции гХу представляет собой
отношение оценки корреляционного момента КХу случайных величин X и У к произведению оценок их средних квадратических отклонений:
Кху
Гху ~ SxSy ’
(10.156)
Оценка корреляционного момента вычисляется на основе выборок из генеральных совокупностей случайных величин X и У по формуле, аналогичной выражению (10.154):
KxV=^r-^X(Xi-x)(yt-y). (10.157)
Л “ 1 i=l
Для вычисления выборочного коэффициента обычно используют формулу
корреляции
(10.158)
Оценка rxlt состоятельная и асимптотически несмещенная.
11. ЭКСПЕРИМЕНТАЛЬНЫЕ ФАКТОРНЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ
11.1. ОСОБЕННОСТИ ЭКСПЕРИМЕНТАЛЬНЫХ ФАКТОРНЫХ МОДЕЛЕЙ
Наряду с теоретическими математическими моделями при функциональном проектировании технических систем широко применяются экспериментальные факторные математические модели.
Теоретические модели имеют то преимущество, что они непосредственно описывают физические свойства технической системы. Коэффициенты уравнений теоретических моделей представляют собой параметры элементов технической системы (внутренние параметры системы) или некоторые комбинации этих параметров, а зависимые переменные — фазовые координаты системы. Они позволяют осуществлять имитационное моделирование процессов функционирования технической системы во времени, детально изучать изменение фазовых координат в зависимости от внешних воздействий (возмущающих и управляющих), анализировать устойчивость системы, качество переходных процессов, эффективность функционирования в условиях случайных внешних воздействий, близких к реальным, т.е. оценивать ее функциональную работоспособность и выполнение технических требований к системе.
Но функциональные теоретические модели сложных технических объектов представляют собой системы нелинейных диффе-
460
ренциальных уравнений высокого порядка (обычно не ниже 30-го порядка). Однократное решение такой системы уравнений на самых современных ЭВМ требует значительной затраты машинного времени (десятки и даже сотни минут). Следует при этом учитывать, что задачи проектирования носят ярко выраженный оптимизационный характер. Целью функционального проектирования является выбор структуры на основе некоторого множества вариантов и определение оптимальных параметров технического объекта. Процедуры выбора структуры и оптимизационные алгоритмы требуют выполнения множества итераций, количество которых может достигать чисел второго и третьего порядков, причем, на каждой итерации решается исходная система дифференциальных уравнений. Поэтому решение одной проектной задачи характеризуется огромными затратами машинного времени. Этим объясняется медленное внедрение методов функционального проектирования в конструкторских организациях. Вместе с тем без выполнения работ по функциональному проектированию невозможно обеспечить высокий технический уровень и конкурентоспособность создаваемых сложных технических объектов.
Затраты машинного времени можно значительно сократить, если на этапе оптимизации параметров использовать экспериментальную факторную математическую модель. Экспериментальные факторные модели, в отличие от теоретических, не используют физических законов, описывающих происходящие в объектах процессы, а представляют собой некоторые формальные зависимости выходных параметров от внутренних и внешних параметров объектов проектирования.
Экспериментальная факторная модель может быть построена на основе проведения экспериментов непосредственно на самом техническом объекте (физические эксперименты), либо вычислительных экспериментов на ЭВМ с теоретической моделью. При создании новых технических объектов физический эксперимент
проводится на прототипах или аналогах, а иногда на макетных образцах. Однако физические эксперименты требуют огромных затрат материальных и временных ресурсов, поэтому их выполняют обычно в тех случаях, когда возникает необходимость поиска путей совершенствования существующих технических систем, когда сложность этих систем и условий их функционирования не позволяет надеяться на требуемую точность их математического описания теоретическими методами.
При функциональном проектировании факторные модели наиболее часто получают на основе вычислительных экспериментов на ЭВМ с теоретической моделью.
461
При построении экспериментальной факторной модели объект моделирования (проектируемая техническая система) пред
ставляется в виде «черного ящика», на вход которого подаются некоторые переменные X и Z, а на выходе можно наблюдать и регистрировать переменные У (рис. 11.1). В число входных переменных X и Z входят внутренние и внешние параметры объекта
Рис. 11.1. Схема объекта исследования при построении экспериментальной факторной модели
проектирования, подлежащие оптимизации, а выходными переменными «черного ящика» являются выходные параметры объекта, характеризующие его эффективность и качество процессов функционирования, выбираемые в качестве критериев оптимальности.
В процессе проведения эксперимента изменение переменных X и Z приводит к изменениям выходных переменных У . Для построения факторной модели необходимо регистрировать эти изменения и осуществить необходимую их статистическую обработку для определения параметров модели.
При проведении физического эксперимента переменными X
можно управлять, изменяя их величину по заданному закону. Переменные Z — неуправляемые, принимающие случайные значения. При этом значения переменных X и Z можно контролировать и регистрировать с помощью соответствующих измерительных приборов. Кроме того, на объект воздействуют некоторые переменные Ё, которые нельзя наблюдать и контролировать. Переменные X = (xi,X29-.-,xn) называют контролируемыми и
управляемыми*, переменные
Z - (^1,^2,...,2тп) — контролируемы
ми, но неуправляемыми, а переменные Ё = (ei,£2>— некон
тролируемыми и неуправляемыми.
Переменные X и Z называют факторами. Факторы X являются управляемыми и изменяются как детерминированные переменные, а факторы Z неуправляемые, изменяемые во времени случайным образом, т.е. Z представляют собой случайные процессы. Пространство контролируемых переменных — факторов X и Z — образует факторное пространство.
462
Выходная переменная У представляет собой вектор зависимых переменных моделируемого объекта. Ее называют откликом, а зависимость У от факторов X и Z — функцией отклика. Геометрическое представление функции отклика называют поверхностью отклика.
Переменная Е действует в процессе эксперимента бесконтрольно. Если предположить, что факторы X и Z стабилизированы во времени и сохраняют постоянные значения, то под влиянием переменных Е функция отклика У может меняться как систематическим, так и случайным образом. В первом случае говорят о систематической помехе, а во втором — о случайной помехе. При этом полагают, что случайная помеха обладает вероятностными свойствами, не изменяемыми во времени.
Возникновение помех обусловлено ошибками методик проведения физических экспериментов, ошибками измерительных приборов, неконтролируемыми изменениями параметров и характеристик объекта и внешней среды, включая воздействия тех переменных, которые в принципе могли бы контролироваться экспериментатором, но не включены им в число исследуемых факторов (вследствие трудностей их измерения, по ошибке или незнанию). Помехи могут быть также обусловлены неточностью физического или математического моделирования объектов.
В вычислительных экспериментах объектом исследования является теоретическая математическая модель, на основе которой необходимо получить экспериментальную факторную модель. Для ее получения необходимо определить структуру и численные значения параметров модели.
Под структурой модели понимается вид математических соотношений между факторами X , Z и откликом У . Параметры представляют собой коэффициенты уравнений факторной модели. Структуру модели обычно выбирают на основе апрцорной информации об объекте с учетом назначения и последующего использования модели. Задача определения параметров модели полностью формализована. Она решается методами регрессионного анализа. Экспериментальные факторные модели называют также регрессионными моделями.
Регрессионную модель можно представить выражением
Y = <p(x,Z,6),
где Ъ — вектор параметров факторной модели.
Вид вектор-функции ф определяется выбранной структурой
модели и при выполнении регрессионного анализа считается за
463
данным, а параметры Ъ подлежат определению на основе результатов эксперимента, проводимого в условиях действия помехи Е , представляемой в виде аддитивной составляющей функции отклика Y (рис. 11.1).
Эксперимент — это система операций, воздействий и (или) наблюдений, направленных на получение информации об объекте при исследовательских испытаниях.
Опыт — воспроизведение исследуемого явления в определенных условиях проведения эксперимента при возможности регистрации его результатов. Опыт — отдельная элементарная часть эксперимента.
Различают эксперименты пассивные и активные.
Пассивным называется такой эксперимент, когда значениями факторов управлять нельзя, и они принимают случайные значения. Это характерно для многих технических объектов при проведении на них физических экспериментов. В таком эксперименте существуют только факторы Z. В процессе эксперимента в определенные моменты времени измеряются значения факторов Z и функций откликов У . После проведения N опытов полученная информация обрабатывается статистическими методами, позволяющими определить параметры факторной модели. Такой подход к построению математической модели лежит в основе метода статистических испытаний (Монте-Карло).
Активным называется такой эксперимент, когда значениями факторов задаются и поддерживают их неизменными на заданных уровнях в каждом опыте в соответствии с планом эксперимента. Следовательно, в этом случае существуют только управляемые факторы X . Однако в связи с тем, что в активном эксперименте также действует аддитивная помеха Е, реализации функций отклика У представляют собой случайные величины, несмотря на то, что варьируемые факторы X детерминированы. Поэтому здесь так же, как и в пассивном эксперименте, построение экспериментальной факторной модели требует статистической обработки получаемых результатов опытов.
Основные особенности экспериментальных факторных моделей следующие: они статистические; представляют собой сравнительно простые функциональные зависимости между оценками математических ожиданий выходных параметров объекта от его внутренних и внешних параметров; дают адекватное описание установленных зависимостей лишь в области факторного пространства, в которой реализован эксперимент. Статистическая регрес
464
сионная модель описывает поведение объекта в среднем, характеризуя его неслучайные свойства, которые в полной мере проявляются лишь при многократном повторении опытов в неизменных условиях.
11.2. ОСНОВНЫЕ ПРИНЦИПЫ ПЛАНИРОВАНИЯ ЭКСПЕРИМЕНТА
Для получения адекватной математической модели необходимо обеспечить выполнение определенных условий проведения эксперимента. Модель называют адекватной, если в оговоренной области варьирования факторов X полученные с помощью модели значения функций отклика Y отличаются от истинных не более чем на заданную величину.
Методы построения экспериментальных факторных моделей рассматриваются в теории планирования эксперимента.
Цель планирования эксперимента — получение максимума информации о свойствах исследуемого объекта при минимуме опытов. Такой подход обусловлен высокой стоимостью экспериментов, как физических, так и вычислительных, и вместе с тем необходимостью построения адекватной модели.
Планирование осуществляют как активного, так и пассивного эксперимента. Планируемый активный эксперимент при прочих равных условиях точнее и информативнее, а иногда и дешевле пассивного. Это следует учитывать при выборе вида эксперимента. В вычислительном эксперименте, в отличие от физического, нет никаких ограничений на выбор управляемых факторов и характер их изменения. Поэтому вычислительные эксперименты обычно всегда реализуются как активные. В дальнейшем будут рассматриваться в основном вопросы, связанные с планированием активных экспериментов.
При планировании активных экспериментов используются следующие принципы:
отказ от полного перебора всех возможных состояний объ-
екта;
постепенное усложнение структуры математической модели;
сопоставление результатов эксперимента с величиной случайных помех;
рандомизация опытов;
оптимальное планирование эксперимента.
Детальное представление о свойствах поверхности отклика может быть получено лишь при условии использования густой дискретной сетки значений факторов, покрывающей все фактор- *
465 ное пространство. В узлах этой многомерной сетки находятся точки плана, в которых проводятся опыты. В этом случае в принципе можно получить факторную модель, которая будет практически почти полностью соответствовать исходной теоретической модели. Однако в большинстве случаев при решении практических задач, для которых используется факторная модель, такого детального описания не требуется. Выбор структуры факторной модели основан на постулировании определенной степени гладкости поверхности отклика. Поэтому с целью уменьшения количества опытов принимают небольшое число точек плана, для которых осуществляется реализация эксперимента.
В отсутствие априорной информации о свойствах функции отклика нет смысла сразу строить сложную математическую модель объекта. Если проверка этой модели на адекватность не дает удовлетворительного результата, ее постепенно усложняют путем изменения структуры (например, повышая степень полинома, принятого в качестве факторной модели, или вводя в модель дополнительные факторы и т.п.). При этом используются результаты опытов, выполненных при построении простой модели, и проводится некоторое количество дополнительных опытов.
При большом уровне случайной помехи получается большой разброс значений функции отклика У в опытах, проведенных в одной и той же точке плана. В этом случае оказывается, что чем выше уровень помехи, тем с большей вероятностью простая модель окажется работоспособной. Чем меньше уровень помехи, тем точнее должна быть факторная модель.
Кроме случайной помехи при проведении эксперимента может иметь место систематическая помеха. Наличие этой помехи практически никак не обнаруживается и результат ее воздействия на функцию не поддается контролю. Однако если путем соответствующей организации проведения опытов искусственно создать случайную ситуацию, то систематическую помеху можно перевести в разряд случайных. Такой принцип организации эксперимента называют рандомизацией систематически действующих помех.
Наличие помех приводит к ошибкам эксперимента. Ошибки подразделяют на систематические и случайные, соответственно наименованиям вызывающих их факторов — помех.
В вычислительных активных экспериментах ошибки характерны только для определяемых значений функций отклика. Если исходить из целей построения факторных моделей на основе теоретических моделей, полагая, что теоретические модели дают точное описание физических свойств технического объекта, а регрессионная модель является ее аппроксимацией, то значения
466
функций отклика будут содержать только случайную ошибку. В этом случае необходимости в рандомизации опытов не возникает.
Рандомизацию опытов осуществляют только в физических экспериментах. Следует отметить, что в этих экспериментах систематическую ошибку может порождать наряду с отмеченными в предыдущем параграфе факторами также неточное задание значений управляемых факторов, обусловленное некачественной калибровкой приборов для их измерения (инструментальная ошибка), конструктивными или технологическими факторами.
К факторам в активном эксперименте предъявляются определенные требования. Они должны быть:
1) управляемыми (установка заданных значений и поддержание постоянными в процессе опыта);
2) совместными (их взаимное влияние не должно нарушать процесс функционирования объекта);
3) независимыми (уровень любого фактора должен устанавливаться независимо от уровней остальных);
4) однозначными (одни факторы не должны быть функцией других);
5) непосредственно влияющими на выходные параметры.
В вычислительном эксперименте реализация трех первых требований не создает никаких затруднений, d в физическом эксперименте могут возникнуть сложности и даже невозможность их осуществления, что приведет к необходимости замены активного эксперимента пассивным.
Функции отклика должны быть:
1) численно измеряемыми;
2) иметь четкий физический смысл;
3) однозначными (характеризовать только одно свойство объекта);
4) информативными (полностью характеризовать определенное свойство объекта);
5) статистически эффективными (измеряться с достаточной точностью с целью сокращения дублирования опытов).
11.3. ПЛАН ЭКСПЕРИМЕНТА
При проведении активного эксперимента задается определенный план варьирования факторов, т.е. эксперимент заранее планируется
План эксперимента — совокупность данных, определяющих число, условия и порядок реализации опытов.
Планирование эксперимента — выбор плана эксперимента, удовлетворяющего заданным требованиям.
467
Точка плана — упорядоченная совокупность численных значений факторов, соответствующая условиям проведения опыта, т.е. точка факторного пространства, в которой проводится эксперимент. Точке плана с номером i соответствует вектор-строка
X- = (Хл Хо X- )
Общая совокупность таких векторов Xt, i - 1, L , образует план эксперимента, а совокупность различающихся векторов, число которых обозначим N, — спектр плана,
В активном эксперименте факторы могут принимать только фиксированные значения. Фиксированное значение фактора называют уровнем фактора. Количество принимаемых уровней факторов зависит от выбранной структуры факторной модели и принятого плана эксперимента. Минимальный Хутщ и максимальный Хутах, j = 1,п (п — число факторов), уровни всех факторов выделяют в факторном пространстве некоторый гиперпараллелепипед, представляющий собой область планирования, В области планирования находятся все возможные значения факторов, используемые в эксперименте.
Вектор Х° = ^Xj ,ХзХд) задает точку центра области планирования. Координаты этой точки X® обычно выбирают из
соотношения
Xj ~ (^jrnax + ^jmin)/(И-1)
Точку Х° называют центром эксперимента. Она определяет основной уровень факторов Xp7 = l,n. Центр эксперимента стремятся выбрать как можно ближе к точке, которая соответствует искомым оптимальным значениям факторов. Для этого используется априорная информация об объекте.
Интервалом (или шагом) варьирования фактора Xj называют величину, вычисляемую по формуле
ДХу = (Хутах “-Хуmin)/2, J = 1,м. (11.2)
Факторы нормируют, а их уровни кодируют. В кодированном виде верхний уровень обозначают +1, нижний -1, а основной 0. Нормирование факторов осуществляют на основе соотношения
468
венно Xjmin и X2min, а нормированные
•^2min = ~1 -
Рис. 11.2. Геометрическое представление области планирования при двух факторах: Хт и Х2
Для переменных Xj начало координат совмещено с центром эксперимента, а в качестве единиц измерения используются интервалы варьирования факторов. Геометрическое представление области планирования при двух факторах показано на рис. 11.2. Центр эксперимента находится в точке 0 с координатами xf, Х^?. Точки 1, 2, 3, 4 являются точками плана эксперимента. Например, значения факторов Xj и Х% в точке 1 равны соответст-их значения xlmilI = -1,
В дальнейшем будем предполагать, что в планах активных экспериментов факторы нормированы.
План эксперимента удобно представлять в матричной форме. План эксперимента задается либо матрицей плана, либо матрицей спектра плана в совокупности с матрицей дублирования.
Матрица плана представляет собой прямоугольную таблицу, содержащую информа-
цию о количестве и условиях проведения опытов. Строки матрицы плана соответствуют опытам, а столбцы — факторам. Размерность матрицы плана L х п , где L — число опытов, п — число факторов. При проведении повторных (дублирующих) опытов в одних и тех же точках плана матрица плана содержит ряд совпадающих строк.
Матрица спектра плана — это матрица, в которую входят только различающиеся между собой строки матрицы плана. Размерность матрицы спектра плана N х п, где N — число точек плана, различающихся между собой хотя бы одной координатой Ху, i = 1,Х, j = 1,п.
Матрица спектра плана имеет вид
469
(И.4)
где Xt — вектор, определяющий нормированные значения координат точки плана в i-м опыте; — нормированное значение /-го фактора в i-м опыте.
Матрица дублирования — квадратная диагональная матрица тп, диагональные элементы которой равны числам параллель-
ных опытов в соответствующих точках спектра плана: mi 0 ... О
О 0 ... mN
Опыты при выполнении эксперимента проводятся в последовательности, предусмотренной матрицей плана. Эта матрица составляется лишь при необходимости рандомизации опытов, когда в результатах эксперимента можно ожидать наличие систематических ошибок. Для выбора случайной последовательности опытов используется таблица равномерно распределенных случайных чисел. Первое число таблицы выбирают произвольно, желательно случайным образом, а затем, начиная с этого числа, выписывают L чисел таблицы, где L — число опытов (с учетом их дублирования). При этом числа, большие L, а также уже выписанные, отбрасываются.
Равномерно распределенные псевдослучайные числа приведены в табл. 7 приложения.
В вычислительных экспериментах опыты проводят в соответствии с матрицей спектра плана, так как предполагается отсутствие систематических ошибок и поэтому нет необходимости в рандомизации опытов.
11.4. РЕГРЕССИОННЫЙ АНАЛИЗ
Регрессионный анализ проводится с целью получения по экспериментальным данным регрессионных моделей, представляющих собой экспериментальные факторные модели. Задачей
470
регрессионного анализа является определение параметров экспериментальных факторных моделей объектов проектирования или исследования, т.е. определение коэффициентов уравнений моделей при выбранной их структуре.
Регрессионный анализ включает три основных этапа:
1) статистический анализ результатов эксперимента;
2) получение коэффициентов регрессионной модели;
3) оценку адекватности и работоспособности полученной экспериментальной факторной модели технической системы.
Поскольку параметры фактических моделей Ъ определяют по результатам ограниченного количества опытов, то получаемые их значения являются оценками истинных коэффициентов регрессии (3 .
Под структурой экспериментальной факторной математической модели понимается вид математических соотношений между факторами X, Z и откликом Y . В качестве факторов принимают внутренние и внешние параметры технической системы, подлежащие оптимизации в процессе ее проектирования. Внутренние параметры системы — это параметры ее элементов, внешние — это параметры внешней среды, в условиях воздействий которой осуществляется функционирование системы. Функциями отклика Y являются выходные параметры технической системы, характеризующие ее эффективность и качество процессов функционирования. Выходные параметры системы принимаются в качестве критериев оптимальности.
Как уже отмечалось, структура факторной модели выбирается на основе априорной информации, используя принцип постепенного ее усложнения. Параметры факторной математической модели определяются методами регрессионного анализа. При определении параметров этими методами нет необходимости различать виды факторов, т.е. подразделять факторы на управляемые X и неуправляемые Z. Поэтому в дальнейшем все они будут обозначаться буквой X . Тогда факторную модель можно представить векторным уравнением регрессии вида
У = ф(Х,Ь). (11.6)
Определение параметров Ъ этой модели будем рассматривать на примере одного уравнения У = ср(Х, Ь). Для определения параметров используются результаты эксперимента. Результаты эксперимента можно представить функцией вида
У = ф(Х) + Е, (11.7)
где е — аддитивная помеха случайного характера с нормальным
законом распределения.
Так как каждый опыт проводится при определенном сочетании уровней факторов X , то функцию (р (X) представим выражением:
ф(Х)=
>0
(11.8)
где Ру — у-й элемент вектора искомых коэффициентов уравнения регрессии: Р = (Ро,Pi,...,Pd)T; fj(X) — j-я базисная функция — элемент вектора базисных функций f(X) =
В качестве базисных функций используют переменные простейших полиномов, системы ортогональных полиномов (Эрмита, Лежандра, Лаггера и др.), тригонометрические функции. Наиболее часто пользуются простейшими полиномами первой и второй степеней. Например, полином первой степени, описывающий функцию отклика у при двух факторах Xi и х2, может иметь вид
У = bQ + b1x1 + Ь2х2, (11.9)
или
у = bQ + + Ь2Х2 + &зХ!Х2, (11.10)
а полином второй степени
у - + &1^1 + Ь2х2 + &3Л4Х2 + ^4Х1 + Ь^х2. (11.11)
Базисные функции в случае использования последнего выражения имеют вид: fo(X) = 1; Д(Х) = х^, /2(Х) = х2> /з(^) = х1х25 /4(Х) = xf ; /5(Х) = х%.
Если уравнение регрессии имеет вид выражений (11.9), (11.10), его называют уравнением линейной регрессии (линейной регрессией или регрессией первого порядка), а если содержит факторы во второй и более высокой степени — нелинейной рег рессией (регрессией соответствующего порядка).
Линейная регрессия может представлять как линейную математическую модель, так и нелинейную, в зависимости от того, содержит ли она линейные эффекты (как в выражении (11.9)), или наряду с ними также эффекты взаимодействия (как в выражении (11.10)). Линейным называют эффект, характеризующий линейную зависимость выходного параметра у от соответствующего фактора Xj. Эффектом взаимодействия называют эффект, характеризующий совместное влияние нескольких факторов на у
472
(например, в выражении (11.10) Эффекты взаимодействия
двух факторов называют парным взаимодействием, трех факторов — тройным взаимодействием и т.д.
Как всякий статистический метод, регрессионный анализ применим при определенных предпосылках (постулатах).
1. Аддитивная помеха е — случайная нормально распределенная величина с параметрами тп8 = 0 и сг8 = const . В этом случае функция отклика Y также случайная величина с нормальным законом распределения. Гипотезу о нормальном распределении У можно проверить по критерию Пирсона.
2. Постоянство дисперсии помехи означает, что интенсивность ошибки определения У не меняется при изменении уровня факторов в процессе эксперимента. Выполнение этого постулата проверяется по критерию однородности дисперсии в разных точках спектра плана.
3. Значения факторов в активном эксперименте — неслучайные величины. Это означает, что установление каждого фактора на заданном уровне и удерживание его на этом уровне во время опыта точнее, чем ошибка воспроизводимости. В вычислительном эксперименте это выполняется однозначно, а в физическом вклад, вносимый ошибками измерения факторов X , должен быть пренебрежимо малым в сравнении с действием других неконтролируемых факторов, образующих ошибку е определения функции У.
4. Значения помехи е в различных точках опыта некорре-лированы. Для обеспечения этого требования используется рандомизация опытов.
В пассивном эксперименте условие некоррелированности помехи обеспечивают путем соответствующего выбора временного интервала съема информации об условиях и результатах опытов.
5. Векторы-столбцы базисных функций должны быть линейно независимыми. Выполнение этого требования необходимо для получения раздельных оценок Ъ всех коэффициентов регрессии Р. В активном эксперименте оно обеспечивается соответствующим выбором спектра плана эксперимента. При этом число опытов N (без учета дублирования) должно быть не меньше, чем число оцениваемых коэффициентов NB, т.е. N > NB.
В пассивном эксперименте линейная зависимость между столбцами практически исключается, так как факторы неуправляемы и принимают случайные значения в разных опытах, но может наблюдаться сильная коррелированность столбцов, что повлечет за собой большие ошибки вычисления коэффициентов регрессии. Для выявления коррелированности столбцов проводят корреляционный анализ результатов пассивного эксперимента.
473
11.5. ОЦЕНКА ПАРАМЕТРОВ РЕГРЕССИОННОЙ МОДЕЛИ
Исходными данными для получения оценок параметров регрессионной модели технической системы (т.е. оценок Ъ искомых коэффициентов регрессии fj) является информация о значениях
управляемых факторов X (или неуправляемых — при проведении пассивного эксперимента) и функции отклика У. Эту информацию можно представить в виде матрицы X значений факторов во всех N опытах, предусмотренных спектром плана эксперимен-
та, и вектора-столбца функции отклика У:
У полученных в этих опытах
значений
Х11 х12 ••• xlj ••• хт ^21 Х22 ••• X2j ••• Х2п
(11.12)
XN1 XN2 XNj ••• XNn
X У2>’"9 У1’"'9 УХ^ > (11.13)
где Xi ~ (Хц, Xi2,...,Xin} — вектор-строка значений факторов в i-м опыте; Xtj — значение j-ro фактора в г-м опыте; п — количество факторов; N — количество опытов; yt — значение функции отклика У в i-м опыте (если проводились параллельные опыты, т.е. осуществлялось дублирование опытов, то вместо используются оценки их математических ожиданий, т.е. выборочные средние yt).
Значения базисных функций во всех опытах представляют
собой матрицу F, называемую матрицей базисных функций
/10 /11 /12 ••• hk "-fid /20 /21 /22 ••• f2k "'f2d
fiO fil fi2 ••• fik "'fid
(11.14)
fxO fxi fx2 "• fxk"'fxd
где fik — значение /г-й базисной функции в i-м опыте; =
474
= — вектор-строка значений базисных
функций в f-м опыте»
Используя информацию об X, У и F, необходимо найти оценки коэффициентов регрессии, представляемые вектором-столбцом
(11.15)
где — значение оценки коэффициента регрессии при базисной функции fk[X).
Так как функция отклика У — случайная величина, поскольку на ее значения в различных опытах оказывает влияние случайная помеха е , то оценки коэффициентов регрессии будут случайными величинами.
Уравнение регрессии устанавливает зависимость между оценкой математического ожидания функции отклика у и факторами X = (х1,х2,..»,хп). Общий вид этой зависимости
(11.16)
k=o
В связи с наличием помехи значение функции отклика в i-м опыте yi будет отличаться от у}. Для определения z/j можно составить выражение:
Vi =t>ofio+bifii+-- + bkfik+... + bdftd+Ei,i = l,N, (11.17)
где — невязка уравнения регрессии в z-м опыте.
Невязка характеризует отклонение значений функции отклика в опытах от получаемых с помощью регрессионной модели (11.16). Она возникает по двум причинам: из-за ошибки эксперимента и из-за непригодности (приближенности) выбранной структуры факторной математической модели. Причем эти причины смешаны и нельзя сказать, какая из них преобладает.
Если постулировать, что модель пригодна, то невязка будет порождаться только ошибкой опыта. Тогда для определения коэффициентов уравнения (11.16) невязку надо минимизировать. Для этого в регрессионном анализе используется метод наименьших квадратов (МНК). Составляется функция, представляющая собой сумму квадратов невязок, и осуществляется ее минимизация:
Е = 2 8i -> min.
(11.18)
475
Подставим значение 8/ из выражения (11.17):
Е - X [z/f - (fy)4o + blfil + • • • + bkfik + • • • + bdfid )] 2 ~> m^n • (11-19) i=l
В выражении (11.19) коэффициенты bk рассматриваются как неизвестные переменные, которые наилучшим образом соответствуют полученным результатам эксперимента. Значения этих коэффициентов, при которых достигается минимум функции Е, принимаются в качестве оценок коэффициентов регрессии. Минимум функции Е имеет место при равенстве нулю частных производных этой функции по переменным Ьд, , • • •, bd '
Е N г /
~ = “2 X [Уг ~ (WiO + blfil + ••• + bdfid)]fiO = ° 5
*0 1=1
~ = “2 X [Уь ~ (&о4о + bifn +... + = 0;
’1 i=l
- “2£ [yt - (&o4o + blfil + -•- + bdfid)]fid ~ ® • dbd i=l
После преобразований получим систему линейных неоднородных алгебраических уравнений относительно искомых оценок коэффициентов регрессии bG, ,..., bd :
N _ N N N
b0 X fiO + bl Z filfiO + ••• + bd S fidfiO = S ^i/iO >
1=1 1=1 1=1 1=1
N N N N
Ь0 Ё ftofil + ^1 X Л1 + • • • + X fidfn ~ X Vifil ’
i=l i=l i=l i=l
N N N N
b0 L fiofid + bl Z filfid +-- + bdtjid = Ё У if id
i=l i=l 1=1 i=l
Очевидно, что коэффициенты при неизвестных переменных b этой системы уравнений являются элементами матрицы Ф , определяемой из выражения
<& = FTF, (11.21)
в котором F представляет собой матрицу базисных функций (11.14). Значения элементов матрицы F известны из проведенного эксперимента. Следовательно, элементы матрицы Ф оказываются известными коэффициентами системы уравнений (11.20). Выпишем матрицу Ф
476
N „ N N
YfiO YfilfiO •” XfidfiO
i=l Z=1 i=l
N
•••
i=l
(11.22)
N N 9
S fiofil S fil
i=l i=l
Матрицу Ф называют информационной матрицей Фишера. Она содержит (d + 1) строк и (d 4- 1) столбцов, причем элемент у-й N
строки k-ro столбца представляет собой сумму 'EJuftk . Матрица 1=1
Ф симметрична относительно главной диагонали, что упрощает составление системы алгебраических уравнений (11.20) для регрессионной модели.
Систему уравнений (11.20) можно также записать в матричной форме
ФЬ = FTY. (11.23)
Система уравнений (11.20) имеет единственное решение, если определитель матрицы Ф не равен нулю. В этом случае матрица Ф будет не вырожденной. Выполнение пятой предпосылки регрессионного анализа, изложенной в предыдущем параграфе,
исключает возникновение вырожденности.
Решение системы уравнений (11.20) обычно осуществляют методом Гаусса. При небольшом числе определяемых коэффициентов bfr можно использовать правило Крамера.
Полученные методом наименьших квадратов оценки fy),&i,...,bd действительных значений коэффициентов регрессии
₽0>Р1 >...>₽</ обладают следующими свойствами:
1) математические ожидания оценок
м[^]= ру, / = °’rf ’ т-е’
оценки bj несмещенные;
2) дисперсии оценок коэффициентов регрессии минимальны и равны
= М< [bi
2 хч
= мць
а корреляционный момент
477
Ш1(ь7-,ьй) = M{(bj - лф>7])(&й - M[bk])} = = — Ру)(&£ — Pft)' =
(11.25)
где Суу, Cjk — элементы матрицы Ф 1, обратной к информацион-9
ной; сге — дисперсия случайной помехи;
3) оценки &q,b(i подчиняются совместному (d + 1)-мерному нормальному распределению.
11.6. ПЛАНЫ ЭКСПЕРИМЕНТОВ И ИХ СВОЙСТВА
Для проведения активных экспериментов разработано множество различных планов. Планы учитывают как особенности структуры регрессионных моделей, так и требования их эффективности с позиций повышения точности получаемых моделей и снижения затрат на проведение эксперимента.
При построении линейных моделей или нелинейных, содержащих только взаимодействия факторов, но без квадратов этих факторов (регрессий первого порядка), каждый фактор можно варьировать только на двух уровнях. Для получения таких моделей используют планы первого порядка.
Известно несколько разновидностей планов первого порядка. Эти планы различаются в зависимости от структуры регрессионной модели. Они предназначены для планирования следующих видов экспериментов:
однофакторного (классического) эксперимента;
полного факторного эксперимента;
дробного факторного эксперимента.
Если в регрессионную модель входят факторы в квадрате или с более высокими степенями, то необходимо не менее трех уровней варьирования факторов. При построении квадратичных моделей применяют планы второго порядка. Эти планы часто используют в качестве своего ядра какой-либо план первого порядка, который дополняется так называемыми звездными точками.
Планы различают по степени насыщенности и композиционности. План называют насыщенным, если общее число точек плана равно числу неизвестных параметров регрессионной модели. Такой план позволяет получить экспериментальную факторную модель при минимальных затратах, так как обеспечивает минимум числа опытов.
План называется композиционным, если в его спектр в качестве составной части входят точки спектра плана, который был
478
реализован при построении более простой модели. Композиционность плана позволяет реализовать принцип постепенного усложнения модели при минимальных затратах, так как при этом используются результаты опытов, выполненных для получения простой модели. Многие планы второго порядка являются композиционными.
Важным свойством плана является его ортогональность, У ортогональных планов информационная матрица Фишера Ф диагональная, а столбцы матрицы базисных функций F попарно ортогональны. Для ортогонального плана при заданных значениях о диагональных элементов матрицы Ф дисперсии сг, оценок ко-Dk
эффициентов регрессии минимальны. Причем, эти оценки получаются независимыми, что существенно облегчает их вычисление и анализ.
При изменении вида плана изменяется матрица Ф, что влияет на дисперсии оценок коэффициентов регрессии. Различают D-, А- и Е-оптимальные планы. Они обеспечивают различные формы эллипсоидов рассеивания оценок. D-оптимальный план минимизирует обобщенную дисперсию оценок коэффициентов регрессии и обеспечивает минимальный объем эллипсоида их рассеивания. А-оптимальный план минимизирует среднюю дисперсию всех оценок, а эллипсоид имеет наименьшую сумму квадратов длин осей. Эллипсоид рассеивания у D-оптимального плана имеет минимальную длину своей наибольшей оси.
В зависимости от возможностей предсказания отклика по уравнению регрессии различают планы ротатабелъные и униформные, План называется ротатабельным, если дисперсия предсказания отклика постоянна на фиксированном расстоянии от центра эксперимента. Униформный план обеспечивает практически постоянное ее значение в некоторой области факторного пространства. Свойства ротатабельности или униформности обеспечиваются соответствующим выбором точек матрицы спектра плана. Задача выбора оптимального плана довольно сложная и в большинстве случаев не имеет аналитического решения. Поэтому поиск оптимальных планов обычно осуществляется численными методами на ЭВМ.
Рассмотрим основы построения и основные свойства планов первого порядка.
11.7. ПЛАН ОДНОФАКТОРНОГО ЭКСПЕРИМЕНТА
Однофакторный (классический) эксперимент предназначен для получения линейной экспериментальной факторной модели вида
479
У = b0 + + b2x2 +... + bnxn.
(11.26)
Однофакторный эксперимент предусматривает поочередное варьирование каждого из факторов при фиксированных на некотором уровне значениях остальных факторов. Фактор XL варьируют на двух уровнях XiB и XiB9 а все остальные при этом должны находиться в точке центра эксперимента X®, j i, Для нормиро
ванных факторов xiB = +1, xiH = -1, Xj = 0. С учетом этого составим матрицу спектра плана однофакторного эксперимента
"-1 0
+ 1 0 0-1
(11.27)
0 0 ...-1
0 0 ... + 1
Число точек плана в этом случае N = 2п, где п — количество факторов. Точки спектра плана располагаются в центрах граней гиперкуба. На рис. 11.3, а показано расположение точек для двумерного случая, а на рис. 11.3, б — для трехмерного.
Рис. 11.3. Расположение точек спектра плана однофакторного эксперимента: а — при двух факторах; б — при трех факторах
480
Вектор базисных функций имеет вид f(x)= (l,xltx2,...,xn), (11.28)
а матрица F численных значений базисных функций отличается от матрицы спектра плана X только одним дополнительным столбцом, соответствующим базисной функции fG = LXJ = 1,
’+] +1 + 1 F= +1 L-l 0 О' L+l 0 ••• 0 L 0-1 ... 0 0 + 1 .., 0 .
+ 1 + 1 . 0 0 ...-1 . 0 0 ...+1
(11.29)
Матрица базисных функций F обладает очевидными свойст-
вами:
(11.30)
(11.31)
(11-32)
(11.33)
3) 0. J * k; j,k = 0,n, (11.34)
i=l
где N — число точек спектра плана; f&fe) — значение k-й базисной функции в f-м опыте.
Согласно выражению (11.34) векторы-столбцы всех базисных функций попарно ортогональны.
Используя свойства (11.32) — (11.34) и выражение (11.22), легко составить информационную матрицу Фишера Ф = FTF:
481
2п О О
(11.35)
О
О
О
ООО ... 2
Так как матрица Ф диагональная, то план однофакторного эксперимента ортогональный и коэффициенты регрессии некорре-лированы друг с другом. Для определения дисперсии оценок коэффициентов регрессии (11.26) вычислим обращенную матрицу Фишера
О о о
1/2п
О
1/2
О
О О 1/2
(11.36)
ООО ... 1/2
Искомые дисперсии оценок коэффициентов регрессии опре-
2 деляются произведениями дисперсии помехи на соответст-
.-1 вующие диагональные элементы матрицы Ф :
= CTg /(2n); /2,k = 1^п. (11.37)
0 k
Очевидно, что точность получаемой модели в этом случае невысокая, так как коэффициенты регрессии b^9k = l9n (кроме коэффициента &о), имеют высокое значение дисперсии. Поэтому однофакторный эксперимент следует признать явно неудовлетворительным для построения модели технической системы. В связи с этим в настоящее время он практически не применяется. Следует отметить, что рассмотренный план обладает свойством ротата-бельности.
11.8. ПЛАН ПОЛНОГО ФАКТОРНОГО ЭКСПЕРИМЕНТА
Спектр плана полного факторного эксперимента (ПФЭ) содержит все возможные комбинации значений факторов на всех уровнях их изменения. Число точек N спектра плана определяется по формуле
N = Un, (11.38)
где U — число уровней варьирования факторов; п — количество факторов.
Рассмотрим особенности и свойства ПФЭ, применяемых при построении линейных регрессий вида
31. Зак. 3006
482
У = b0 + + S Z bjtkxjxk +
j=l j=l k=j+l
n n n
+ 22 22 22 ^j,k,ixjxkxi+ •••+ ^,ii2i...inxix2*"xn'
j=i k=j+i i=k+i
(11.39)
Для получения линейной регрессии достаточно варьировать факторы на двух уровнях, т.е. U = 2. Тогда число точек спектра
плана
N = 2п п (11.40)
Такой план принято обозначать ПФЭ2П.
Рассмотрим порядок составления матрицы спектра плана, полагая, что факторы нормированы и, следовательно, могут принимать значения только либо + 1, либо - 1. Напомним, что столб-
цы матрицы X соответствуют значениям факторов , х%,..., хп .
Для составления матрицы спектра плана используется следующее простое правило: в первой строке матрицы все факторы равны - 1, в первом столбце знаки единиц меняются поочередно; во втором столбце они чередуются через два; в третьем — через 4; в четвертом — через 8 и т.д. по степеням двойки. Следовательно, для каждого последующего столбца частота изменения знака в 2 раза меньше, чем для предыдущего.
Используя изложенное правило чередования знаков, составим матрицы спектров планов для случаев п = 2ип = 3, т.е. для двух и трех факторов.
При п = 2 число точек плана N = 2% = 4, а матрица спектра плана имеет вид
5>
при п = 3 АГ = 2^ = 8, а матрица X
(11.42)
483
Спектры планов можно изобразить в привычной для экспериментатора табличной форме. В табл. 11.1 приведен спектр плана ПФЭ2^, а в табл. 11.2 — спектр плана ПФЭ2^.
мер точки спектра плана.
Точки плана ПФЭ2П располагаются в вершинах п-мерного гиперкуба. На рис. 11.4, а показано расположение точек для двумерного случая, а на рис. 11.4, б — для трехмерного.
Рис. 11.4. Расположение точек спектра плана ПФЭ2Я: а — при п — 2; б — при п — 3
Посредством ПФЭ можно построить как простейшую линейную модель технической системы вида
У = ьо + + b2x2+...+bnxn, (11.43)
так и нелинейную.
Для модели вида (11.43) система базисных функций очевидна: /0(х)= 1; д(х)= х1; f2(x) = х2;fn(x}= хп . Число базисных функций в этом случае равно п + 1.
Выясним, какие базисные функции могут входить в регрессионную модель, получаемую посредством ПФЭ2П, чтобы выпол
484
нялось требование о линейной независимости векторов-столбцов этих функций, изложенное в разделе 11.4. При выполнении этого требования получают раздельные оценки всех коэффициентов регрессии. Линейная независимость столбцов матрицы F достигается, если в ней отсутствуют полностью совпадающие или полностью противоположные (по знакам) столбцы.
В общем случае в полиномиальную модель могут входить факторы в любой степени и различные комбинации из их произведений. Так как при нормированных факторах их значения равны + 1 или - 1, а в качестве показателей степеней факторов принимаются целые числа, то при четных показателях степеней вектор-столбец базисной функции состоит только из + 1 и совпадает с вектором-столбцом функции /о(х), а векторы-столбцы всех базисных функций, соответствующих одним и тем же факторам Xj, возведенным в любые нечетные степени, будут совпадающими. Вместе с тем легко убедиться, что любые комбинации произведений факторов х1,х2,...,хп могут быть в числе базисных функций.
Выпишем выражения линейных регрессий при п = 2 с учетом всех возможных сочетаний взаимодействия факторов
у =b0 + bjX! + Ъ2х2 + fe3x1x2. (11.44)
При п = 3 получаем
у = Ъ0 + Ъгхг + Ь2х2 + Ь3х3 + &4Ххх2 + 45)
+ &5Х1Х3 + &6Х2Х3 + &7Я1Х2Х3.
В табл. 11.3 приведены базисные функции плана ПФЭ2^, используемого для построения регрессионной модели (11.44), а в табл. 11.4 — плана ПФЭ2^, используемого для модели (11.45). Прямоугольниками в этих таблицах обведены спектры планов.
Таблица 11.3
i /о=1 fl = *1 /2 = *2 fa = *1*2
1 +1 -1 -1 +1 '
2 +1 +1 -1 -1
3 +1 -1 +1 -1
1 4 +1 +1 +1 +1
Уравнение линейной регрессии, как это видно из (11.39) и (11.45), может содержать следующее предельное количество коэффициентов при различных видах базисных функций:
один коэффициент &о — свободный член уравнения регрессии;
п коэффициентов bj — линейных членов уравнения регрессии;
485
9
Сд коэффициентов bj при парных взаимодействиях факторов; о
Сд коэффициентов при тройных взаимодействиях факторов и т.д.;
один коэффициент .......п ПРИ взаимодействии факторов
максимального, n-го порядка.
Таблица 11.4
1 fo= 1 Л= *1 fz = *2 /а = хз Л = *1*2 /б = *1*3 /б = *2*3 Л = *1*2*3
1 +1 -1 -1 -1 4-1 4-1 4-1 -1
2 +1 +1 -1 -1 -1 -1 4-1 4-1
3 +1 -1 +1 -1 -1 4-1 -1 4-1
4 +1 +1 +1 -1 +1 -1 -1 -1
5 + 1 -1 -1 4-1 4-1 -1 -1 4-1
6 + 1 + 1 -1 4-1 -1 + 1 -1 -1
7 + 1 -1 4-1 4-1 -1 -1 4-1 -1
8 +1 .. 4:1...... .1 .... +1 4-1 . 4-1 +1 4-1 +1
Выражение для определения общего числа коэффициентов регрессии имеет вид
NB = 1 + п + С% +С%+...+С% = 2п. (11.46)
Так как при использовании всех возможных сочетаний факторов в уравнении регрессии число определяемых коэффициентов NB равно числу точек N спектра плана ПФЭ2П, то такой план является насыщенным.
Численные значения приведенные в таблице базис-
ных функций, являются элементами матрицы F. Матрица F плана ПФЭ2П обладает следующими свойствами:
1. Свойством симметричности относительно центра эксперимента — алгебраическая сумма элементов каждого столбца матрицы базисных функций, кроме столбца /о(х), равна нулю:
Xf;(xi)=Of j = ^d, d = NB-l, (11.47)
i=l
где fjxXi] — значение j-й базисной функции, соответствующее i-й строке матрицы F; i — номер точки спектра плана; N — число точек спектра плана; NB — количество базисных функций.
2. Свойством ортогональности столбцов — сумма построчных произведений элементов любых двух столбцов равна нулю:
486
(11.48)
3. Свойством нормировки — сумма квадратов элементов каждого столбца матрицы базисных функций равна числу точек N спектра плана:
N /- \19 i=l
= N,j = O,d.
4. Для столбца базисной функции /о(х) также равна N:
(11.49)
сумма элементов
(11.50)
i-1
Выражения (11.47) — (11.50) записаны в предположении, что дублирование опытов не производится.
Составим информационную матрицу Фишера Ф, определяемую выражением (11.22). Выражения (11.48) и (11.49) позволяют определить элементы матрицы Ф . Очевидно, что для ПФЭ2П матрица Ф диагональная с постоянными диагональными элементами:
NO ...0
0 7V...0
(11.51)
0 0...N
Следовательно, ПФЭ2П относится к классу ортогональных планов.
Так как матрица Ф диагональная, то корреляционные моменты оценок коэффициентов регрессии = 0 и оценки
всех коэффициентов регрессии bj, j = 1, NB , некоррелированы друг с другом. Кроме того, все коэффициенты регрессии оцениваются с одинаковой точностью, так как диагональные элементы матрицы Ф одинаковы. Дисперсия оценок коэффициентов
ст 2 = a%/N. (11.52)
Для линейной модели вида (11.43) план ПФЭ2П является А- и D-оптимальным и ротатабельным, а для модели (11.39) — D-оптимальным.
487
11 .9. ПЛАН ДРОБНОГО ФАКТОРНОГО ЭКСПЕРИМЕНТА
Наряду с отмеченными положительными качествами полного факторного эксперимента он имеет существенный недостаток: увеличение количества факторов приводит к быстрому росту числа опытов, что обусловлено степенной зависимостью (11.38). Например, при п = 10 спектр плана содержит N = 2^ = 1024 опыта. Кроме того, необходимо дублирование опытов.
ПФЭ позволяет построить регрессионную модель, которая учитывает влияние на функцию отклика выбранных факторов и всех возможных сочетаний взаимодействий этих факторов. Но поскольку структура модели выбирается на основе априорной информации о физических свойствах исследуемого объекта, то весьма сложно представить себе влияние на характеристики его функционирования эффектов взаимодействий выше второго или третьего порядка. Обычно при построении многофакторной регрессионной модели ограничиваются парными или, в крайнем случае, отдельными тройными взаимодействиями факторов. В этом случае ПФЭ оказывается избыточным, так как число точек спектра плана N значительно больше количества коэффициентов регрессии NB. В результате возникает возможность сокращения числа опытов. Но при этом, естественно, должно соблюдаться условие возможности оценки коэффициентов регрессии по результатам опытов, которое выражается соотношением N > jVb .
Во многих случаях на начальной стадии моделирования технической системы в связи с отсутствием необходимой информации о влиянии на ее выходные параметры различных факторов (внутренних или внешних параметров) строят линейную модель вида (11.43). Например, при трех факторах выбирают модель в виде
Z/ = &0 + Ъ-^Х^ + &2х2 + ^зхз- (11.53)
В этом уравнении четыре коэффициента регрессии, а при п = 3 спектр плана ПФЭ, согласно выражению (11.40), содержит 8 точек, т.е. предусматривает 8 опытов в различных точках факторного пространства. Следовательно, четыре опыта оказываются избыточными и их можно было бы исключить, естественно, при условии выполнения принятых предпосылок регрессионного анализа, прежде всего ортогональности столбцов матрицы базисных функций К
При построении математических моделей, использующих упрощенные уравнения регрессий, когда N >7VB, применяют дробные факторные эксперименты (ДФЭ). Наибольшее
488
распространение имеют регулярные планы ДФЭ типа 2п~Р, т.е. ДФЭ2П"^, где п — число факторов, р — степень дробности ДФЭ. Планы ДФЭ принято называть репликами с указанием их степени дробности. Так, план ДФЭ2П“1 называют полурепликой ПФЭ2П (1/2-реплика); ДФЭ2П”2 — 1/4-реплика ПФЭ2П; ДФЭ2П“3 — 1/8-реплика ПФЭ2П и т.д. Полуреплика сокращает число опытов в два раза по сравнению с ПФЭ, 1/4-реплика — в четыре раза и т.д.
При построении матрицы спектра плана ДФЭ2П~^ необходимо обеспечить выполнение условий, описываемых выражениями (11.47) — (11.50), принимая во внимание, что число точек спектра этого плана определяется по формуле
N = 2п~Р. (11.54)
Условия (11.47) — (11.50) удовлетворяются, если в матрице базисных функций F отсутствуют полностью совпадающие или полностью противоположные столбцы, что позволяет получить раздельное оценивание всех коэффициентов регрессии.
При выборе степени дробности ДФЭ должно выполняться условие
N>NB. (11.55)
Выбранные базисные функции для ДФЭ составляют лишь некоторую часть базисных функций соответствующего ПФЭ. Назовем эти функции существенными переменными, характеризующими в наибольшей мере физические свойства технического объекта.
Процедура построения спектра плана ДФЭ2Л“^ содержит четыре этапа.
Этап 1. Выбор структуры уравнения регрессии и определение степени дробности ДФЭ. При этом исходят из условия выполнения соотношения (11.55).
Этап 2. Выбор ведущих факторов и построение для них матрицы спектра плана, определяющего программу их изменения в ходе эксперимента.
Число k ведущих факторов принимают равным разности между количеством факторов п и степенью дробности ДФЭ:
k = n-p. (11.56)
Для выбранных ведущих факторов х^, Х2,..., х& строят план ПФЭ2/е, используя изложенное в предыдущем параграфе правило чередования знаков.
Этап 3. Построение матрицы X спектра плана ДФЭ2П~Л Часть этой матрицы составляет матрица спектра плана ПФЭ2/г, а
489
во вторую часть должны войти столбцы матрицы для остальных факторов х^,+1,хп » количество которых равно
p—n—k. (11.57)
Столбцы матрицы X, соответствующие этим факторам, определяют путем перемножения соответствующих столбцов ведущих факторов. Для этого используют генерирующие соотношения. Генерирующим соотношением называется алгебраическое выражение, устанавливающее связь между одним из факторов х^+1,х^+2,...,хп и произведением какой-либо комбинации веду
щих факторов х1, х2,..., xk .
Чтобы получаемые столбцы были ортогональными, для каждого из них задается отдельное генерирующее соотношение (количество этих соотношений равно р). Выбор генерирующих соотношений, вообще говоря, произволен. Однако в качестве генерирующих нельзя использовать те произведения ведущих факторов, которые входят в состав существенных переменных, так как в этом случае в матрице базисных функций F окажутся совпадающие столбцы: для одного из факторов х^+1, х^+2,...,хп и одного из взаимодействий факторов из числа существенных переменных.
Генерирующее соотношение имеет вид
xk+i ~ хjxlxm* •• ~ Р> (11.58)
где Xfc+i — фактор, не включенный в число ведущих (для него определяется столбец матрицы X спектра плана ДФЭ2/г^); Xj, Xi, хт,... — ведущие факторы.
Количество ведущих факторов, входящих в генерирующее соотношение (11.58), может быть произвольным, но соотношения (11.58) для всех x^+i должны быть разными.
Этап 4. Проверка пригодности полученного спектра плана.
Для этого необходимо построить матрицу базисных функций F и проверить, нет ли в ней совпадающих или полностью противоположных столбцов, т.е. выяснить, обладает ли матрица F свойством ортогональности столбцов, определяемым выражением (11.48). Если в матрице F нет совпадающих или противоположных столбцов, полученный спектр плана ДФЭ2П-^ пригоден для решения поставленной задачи. В противном случае выполняются последовательно следующие процедуры до тех пор, пока не будет обеспечена ортогональность:
выбираются иные генерирующие соотношения;
изменяется набор ведущих факторов;
уменьшается степень дробности плана р.
32. Зак. 3006
490
При ограниченных возможностях проведения опытов степень дробности плана сохраняют, а изменяют структуру уравнения регрессии (например, используют иные взаимодействия факторов или исключают какую-либо базисную функцию, соответствующую одному из взаимодействий высшего порядка).
Таким образом, регулярные планы ДФЭ2П-^ обладают теми же свойствами, что и планы ПФЭ2П. Матрица F удовлетворяет выражениям (11.47) — (11.50). Информационная матрица Фишера Ф диагональная и имеет вид (11.51). Дисперсию оценок коэффициентов регрессии определяют по формуле (11.52). Планы ДФЭ2П-Р ортогональны. Для линейных моделей они ротатабельны, А- и 2?-оптимальны, а насыщенные планы D-оптимальны. Поскольку планы ДФЭ значительно экономичнее планов ПФЭ, они получили широкое практическое применение. В частности, их используют для анализа чувствительности целевой функции к вариации параметров технических объектов в процессе их отсеивания и отбора для осуществления оптимизации.
Рассмотрим примеры построения планов ДФЭ.
Пример 11.1. Получить спектр плана ДФЭ, предназначенного для оценки коэффициентов уравнения регрессии вида (11.53).
Так как число факторов в этом уравнении п = 3, то при проведении ПФЭ количество точек спектра плана было бы равно N = 23 = 8. В уравнении же (11.53) всего четыре коэффициента, поэтому можно использовать полуреплику, т.е. ДФЭ23-1, спектр плана которой содержит четыре точки: N = 23-1 = 4, и следовательно, условие (11.55) выполняется.
Число ведущих факторов /г-п-р = 3-1 = 2. Выберем в качестве ведущих факторов X} и х2- Значения элементов векторов-столбцов этих факторов получим на основе плана ПФЭ22, используя метод чередования знаков. Для определения вектора-столбца фактора х$ примем генерирующее соотношение в виде хз = xjx2. Полученный спектр плана ДФЭ23-1 выделен прямоугольником в табл. 11.5, в которой приведена матрица базисных функций F.
Таблица 11.5
В матрице F нет совпадающих столбцов, следовательно, полученный спектр плана пригоден для решения поставленной задачи.
Пример 11.2. Задан список существенных переменных: Xi, х2, х3, х4, XjX2, х2х3, Х3Х4. Получить спектр плана ДФЭ.
Уравнение регрессии в этом случае будет включать 4 фактора и 8 коэффициентов, а число точек спектра плана ПФЭ равно N = 24 = 16. Следовательно, можно попытаться использовать ДФЭ24-1, спектр плана которого содержит необходимое число точек N = 8 и обеспечивает выполнение условия (11.55).
491
Число ведущих факторов k = п - р = 3. Выберем в качестве ведущих факторы xj, х2, Х3. Для фактора х^ необходимо указать генерирующее соотношение. Возможно несколько вариантов: #1X2, х1хз, х2хз, х1х2хз- Соотношения х^Х2 и х2хз принимать нельзя, так как эти взаимодействия факторов входят в список существенных переменных, в результате их вектор-стол бцы будут совпадать с вектором-столбцом фактора х4. Выберем для начала генерирующее соотношение х4 =х1х2х3. Вычислив значения элементов столбцов базисных функций /4 = х4, f5 = Х1Х2, fe = я2хз, /7 = х3х4, получим матрицу F, которая приведена в табл. 11.6. Спектр плана ДФЭ24-1 обведен прямоугольником.
Таблица 11.6
i /о=1 fl = *1 fz = *2 fa = *з /4 — *^4 /б - X}X2 — X2X3 /7 x3x4
1 + 1 -1 -1 -1 -1 + 1 + 1 +1
2 + 1 + 1 -1 -1 + 1 -1 +1 -1
3 +1 -1 + 1 -1 + 1 -1 -1 -1
4 +1 + 1 +1 -1 -1 + 1 -1 4-1
5 + 1 -1 -1 + 1 +1 + 1 -1 41
6 +1 +1 -1 + 1 -1 -1 -1 -1
7 +1 -1 + 1 +1 -1 -1 +1 -1
8 + 1 +1 + 1 +1 +1 1 +1 +1 + 1
Векторы-столбцы х^х2 и х3х4 оказались одинаковыми, следовательно, полученный план непригоден. Последовательно перебирая все возможные варианты решения проблемы, можно убедиться, что ни один из них не дает положительного результата. Это означает, что при заданном списке существенных переменных план ДФЭ24-1 не может быть применен для получения искомого уравнения регрессии. Следовательно, необходимо использовать план ПФЭ24.
Пример 11.3. Введем небольшое изменение в список существенных переменных примера 11.2: вместо х3х4 примем х2х4.
Те же действия, что и в предыдущем примере, дают значения элементов матрицы F, приведенные в табл. 11.7.
Таблица 11.7
i /0 = 1 fl = X! Л? = x2 fa = x3 /4 — x4 /5 - X1X2 /б - -r2-r3 /V = x2x4
1 +1 -1 -1 -1 -1 1 1 +1
2 +1 + 1 -1 -1 -bl -1 4-1 -1
3 + 1 -1 +1 -1 4-1 -1 -1 +1
4 +1 + 1 + 1 -1 ~1 4-1 -1 -1
5 +1 -1 -1 4-1 +1 +1 -1 -1
6 + 1 -1 + 1 -1 -1 -1 +1
1 7 4-1 -1 +1 + 1 -1 -1 + 1 -1
1 8 + 1 +1 +1 . +1 ±L_ + 1 + 1 1
В матрице F все столбцы различны и она пригодна для получения уравнения регрессии выбранной структуры.
Следует отметить, что генерирующие соотношения можно принимать также с обратным знаком, например х4 = - x1x2xs. В этом случае лишь поменяются
492
знаки в векторах-столбцах базисных функций f4 = х4 и /?• = х2х4 на противоположные, но это не приведет к изменению свойств матрицы F, оцениваемых выражениями (11.47) — (11.50).
Если принять генерирующее соотношение х4 = х^х2, то спектр плана ДФЭ24-1 также окажется пригодным, что легко проверить (рекомендуется для самостоятельной работы читателей).
11 .10. ГЕНЕРИРУЮЩИЕ СООТНОШЕНИЯ И ОПРЕДЕЛЯЮЩИЕ КОНТРАСТЫ
Если матрица базисных функций F плана ДФЭ содержит полностью совпадающие или противоположные столбцы, то это исключает возможность раздельного оценивания коэффициентов регрессии, соответствующих этим столбцам. В этом случае говорят, что имеет место смешанная оценка. Коэффициенты регрессии при этом оказываются коррелированными.
Для выяснения системы смешивания используют определяющие контрасты. Определяющие контрасты матрицы F представляют собой произведения левых и правых частей генерирующих соотношений.
Генерирующее соотношение, устанавливающее связь между фактором и ведущими факторами Ху, xz, хт, имеет вид
Умножим левую и правую части этого выражения на х^+^. Учитывая, что элементы столбца матрицы F при нормированных факторах равны + 1 или - 1, получим xk+ixk+i = 1 . В результате определяющий контраст будет представлен выражением
1 = Ху Х^Х^Х^_|_ j . (11.60)
Число определяющих контрастов, так же как и число генерирующих соотношений ДФЭ, равно р. Составив выражения определяющих контрастов для всех генерирующих соотношений и перемножив их левые и правые части, получим обобщенный определяющий контраст (ООК). При этом в правой части полученного произведения может оказаться некоторое количество одинаковых сомножителей, например т сомножителей фактора Ху. В этом случае следует иметь в виду, ч что при четном числе сомножителей результат их перемножения равен единице, а при нечетном равен х^, т.е.
493
т
ПРИ = 2,4,6,...,
1
т
fj Xj = Xj при т = 3,5,7,...
1
Для определения системы смешивания влияния переменных в ДФЭ обобщенный определяющий контраст умножают на каждую переменную, т.е. на каждую базисную функцию. Если при этом получают одинаковые результаты для какой-либо пары базисных функций, то соответствующие столбцы матрицы F окажутся совпадающими и оценки коэффициентов регрессии при этих базисных функциях будут коррелированными (смешанными). Такой план ДФЭ непригоден для получения регрессии заданной структуры. В общем случае может оказаться несколько пар совпадающих столбцов матрицы F.
В табл. 11.8 приведены результаты определения системы смешивания влияния переменных в ДФЭ24-1 для примера 11.2. В этом примере использовано одно генерирующее соотношение: #4 =Х1Х2Хз- В результате выражение ООК имеет вид: 1 = Х1Х2Х3Х4 .
Таблица 11.8
Переменные уравнения регрессии ООК Система смешивания
х0 — Л/* Л/ ““ eJC 2
Х± Xi = x2x3x4
х2 X2 = XjX3X4
х3 1 = х1х2х3х4 Az О «Л/ 1 aAs 2 “А* 4
х4 Xл — X-i ХпХг» aAs /1 1 "<
XjX2 XjX2 = ^3^4
х2х3 X2X3 = XjX4
Х3Х4 X3X4 = X1X2
Одинаковые результаты оценок системы смешивания подчеркнуты. Из таблицы видна смешанность оценок влияния переменных Х]Х2 и Х3Х4 на функцию отклика, что не дает возможности осуществить раздельную оценку коэффициентов регрессии при этих переменных.
494
11-11- СТАТИСТИЧЕСКИЙ АНАЛИЗ РЕЗУЛЬТАТОВ АКТИВНОГО ЭКСПЕРИМЕНТА
Прежде чем определять коэффициенты регрессии, необходимо выполнить статистический анализ результатов эксперимента с целью оценки их качества и пригодности для построения регрессионной модели. Статистический анализ включает оценку ошибок параллельных опытов, отсеивание грубых ошибок, проверку однородности дисперсий опытов и определение дисперсии воспроизводимости эксперимента.
Ошибки параллельных опытов. В условиях наличия случайных помех с целью уменьшения случайных погрешностей эксперимента и повышения точности получаемой регрессионной модели осуществляется дублирование опытов, т.е. проведение параллельных опытов. Каждый опыт, предусмотренный матрицей спектра плана, повторяется т = 2...5 раз. Рекомендуется число т принимать одинаковым для всех N точек плана. В результате проводится L = Nm опытов в соответствии с матрицей плана, предусматривающей при этом рандомизацию опытов.
Повторные опыты в одной и той же точке плана при наличии помехи дают различные результаты при определении функции отклика. Разброс результатов относительно оценки математического ожидания функции отклика называют ошибкой воспроизводимости опыта. Эту ошибку надо оценить.
Для каждой точки плана по результатам параллельных опытов находят выборочное среднее у[, равное среднему арифметическому полученных опытных значений функции отклика
1 т ___
Уг=—ХУш^ = ^^, (11.61)
mu=l
где и — номер параллельного опыта; yiu — значение функции отклика в и-м параллельном опыте i-й точки спектра плана.
Для оценки отклонения функции отклика от ее среднего значения у} вычисляется дисперсия воспроизводимости опыта по данным т параллельных опытов в каждой i-й точке спектра плана
о
При вычислении S- принимают число степеней свободы k
на единицу меньше, чем число параллельных опытов, т.е.
k = т -1, так как одна степень свободы уже использована для
495
вычисления yt . Это обеспечивает несмещенность оценки дисперсии воспроизводимости опыта S?.
Отсеивание грубых ошибок. Формула (11.61) справедлива лишь при нормальном распределении случайной величины у. При наличии грубых ошибок опыта распределение у отклоняется от нормального, что противоречит предпосылкам 1 и 2 (см. раздел 11.4), положенным в основу регрессионного анализа. Поэтому грубые ошибки надо вначале исключить, а затем определять yi и . Грубые ошибки — это брак повторных опытов. Для обнаружения брака используют t-критерий Стьюдента
tiu =(У1и~У*)/81, (11.63)
О*
где Si — среднее квадратическое отклонение.
Значения у* и определяются по формулам (11.61) и (11.62), но без учета оцениваемого результата опыта yiu.
Полученное значение f-критерия сравнивается с табличным tT при выбранном уровне значимости q = p\t > tk.qj и числе степеней свободы k. Уровень значимости q характеризует вероятность ошибки. Если t > tT, то это соответствует браку данного опыта и результат его не может быть использован. В этом случае опыт подлежит повторному проведению.
Значения f-критерия Стьюдента в зависимости от числа степеней свободы k и уровня значимости q приведены в табл. 4 приложения.
Проверка однородности дисперсий. Принимается нулевая гипотеза об однородности дисперсий воспроизводимости опытов.
о Однородность дисперсий означает, что среди всех дисперсий S. “ “ “ €* нет таких, которые бы значительно превышали все остальные. Для проверки однородности дисперсий во всех точках спектра плана используется либо критерий Кохрена G, либо критерий Фишера F (табл. 6 и 5 приложения).
Критерий Кохрена основан на распределении отношения
2 максимальной дисперсии S- _Y к сумме всех дисперсий: в/ XI Id Л.
G = S.max / X <11М>
1=1
496
Критерий Кохрена применяется, если количество сравниваемых дисперсий больше двух, а число повторных опытов во всех точках плана одинаково» Определив число степеней свободы ki = т - 1 и = N (N — число точек спектра плана, т — количество повторных опытов в каждой точке плана), находят табличное значение критерия Кохрена GT . Если G < GT, гипотеза об однородности дисперсий и воспроизводимости результатов принимается. Это означает, что предпосылки 1 и 2, положенные в основу регрессионного анализа, выполняются. В этом случае каждая 2 2
из дисперсий S. оценивает одну и ту же дисперсию помехи .
Следовательно, полученные результаты эксперимента качественные и могут быть использованы для построения регрессионной модели. В противном случае следует увеличить число параллельных опытов или повторить эксперимент при строгом соблюдении методики и схемы проведения опытов, предприняв необходимые меры для исключения грубых ошибок, о Если выяснится, что непостоянство дисперсии помехи обусловлено внутренними свойствами объекта, то необходимы более сложные способы обработки результатов эксперимента. Можно, например, вводить некоторую функцию от у: inz/, у[у и др.
Критерий Фишера позволяет сравнивать две дисперсии и определяется из соотношения
F = sLx /S*in- (П-65)
Дисперсии однородны, если F < FT, где FT — табличное значение критерия Фишера, определяемое при числах степеней свободы ki и /?2 и принятом уровне значимости q.
Следует отметить, что уровень значимости q по всем критериям, применяемым в процессе статистического анализа и обработки результатов эксперимента (Кохрена, Стьюдента, Фишера), должен быть одинаков. Для технических систем рекомендуется принимать q = 0,05.
Дисперсия воспроизводимости эксперимента. Если диспер-сии S. однородны, то их усредняют и находят дисперсию воспро-изводимости эксперимента
1 N
(И-66)
1=1
497
9
Дисперсия Sy представляет собой оценку дисперсии помехи 2
. Так как число степеней свободы при определении дисперсии
о. равно k = т - 1, то число степеней свободы, связанное с оцен-о
кой Sy , вычисляется по формуле
k = N(m-l). (11.67)
Формула (11.66) годится, если число повторных опытов во всех точках спектра плана одинаково. Если число опытов различно, используют формулу
где ki — число степеней свободы в i-й точке спектра плана; kt = mi ~ 1; mi — число параллельных опытов в этой точке.
11.12. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ РЕГРЕССИОННОЙ МОДЕЛИ И ПРОВЕРКА ИХ ЗНАЧИМОСТИ
Параметрами регрессионной модели являются коэффициенты регрессии bj, j = О, 2VB - 1, где NB — количество базисных функций. Значения коэффициентов регрессии можно получить, решив систему алгебраических уравнений (11.20). В этих уравнениях величина индекса d в обозначении базисных функций fici и коэффициента регрессии Ь^ равна d = NB -1. Так как информационная матрица Фишера Ф для ПФЭ и ДФЭ диагональная (11.51) и все диагональные элементы ее одинаковы и равны N, то выражение для определения всех коэффициентов уравнения регрессии одинаково и имеет простой вид:
bj (11.69)
где N — число точек спектра плана; fj(Xt) — значение у-й базис
ной функции в i-й точке спектра плана; щ — выборочное среднее функции отклика в той же точке, определяемое по формуле (11.61).
Значения базисных функций А \Х I для отдельных факторов
равны Ху, а для взаимодействия факторов — Хц^ХцХ^... С
учетом этого на основе выражения (11.69) можно записать еле-
498
дующие формулы для вычисления значений коэффициентов урав
нения регрессии:
для коэффициентов при факторах Xj, включая также свободный член уравнения,
bj = ± Х ХцУ1, j = о^; (11-70)
для коэффициентов при взаимодействиях факторов bg =^Xxikxiixim---yi’ g = n + l,d;
™ i=l
(11.71)
k9 Z, m = 1, n; k Ф l Ф m, где n — количество факторов.
Формулы (11.70) и (11.71) применяются для планов первого порядка. Для плана ПФЭ N = 2п , а для ДФЭ N = 2п Р. При определении коэффициента (свободного члена уравнения регрес
сии) XtQ = 1, i = 1, N .
Поскольку полученные значения коэффициентов регрессии bj9 j = 0, NB -1, — случайные числа, в связи с действием случайной помехи в процессе эксперимента, то они являются оценками истинных значений коэффициентов регрессии Ру . Погрешность
определения bj оценивают дисперсией
2
о
Дисперсии S оценок всех коэффициентов регрессии, как °]
показано в разделах 11.8 и 11.9, одинаковы. Величина дисперсии
S. зависит только от ошибки воспроизводимости эксперимента bj
Sy и числа опытов:
S? = Sy / (Nm), (11.72)
где m — число повторных опытов (значение т должно быть одинаковым для всех точек N спектра плана).
После определения коэффициентов регрессии bj проверяют их значимость. Принимается нулевая гипотеза о незначимости полученных коэффициентов и отсутствии влияния соответствующих им базисных функций на функцию отклика у. Проверка гипотезы осуществляется с использованием t-критерия Стьюдента, значение которого находят из соотношения
499
tj = bj /SbjJ = O,7VB-1, (11.73)
где Sb. — среднее квадратическое отклонение погрешности оценки bj ; NB — общее число коэффициентов уравнения регрессии,
равное количеству используемых базисных функций для построения регрессии.
Полученное значение tj для каждого коэффициента регрессии bj сравнивают с табличным tT, определяемым при принятом уровне значимости q и числе степеней свободы k = N(m -1), с ко-торым определялась дисперсия воспроизводимости Sy. Если
tj < tT , нулевая гипотеза о незначимости коэффициента bj прини
мается и член уравнения регрессии, включающий этот коэффициент, исключается из математической модели. Если же tj > tT , по
лагают, что данный коэффициент значимо (неслучайно) отличается от нуля и его следует сохранить в регрессионной модели. В этом случае значение коэффициента bj больше ошибки опыта, которую можно оценить величиной доверительного интер
вала гь. . Доверительный интервал находят по формуле
= ±.tTSb.. (11.74)
J ]
Следует, однако, отметить, что дисперсия воспроизводимо-2
сти эксперимента Sy зависит от очень многих факторов: выбора
центра эксперимента, интервалов варьирования факторов, наличия экстремумов функции отклика в области планирования, соотношения величины отклика и помехи (так называемое отношение сигнал — шум) и др. В этой связи при небольшом различии между tj и tT следует весьма осторожно относиться к оценке значимости коэффициентов регрессии. Лучше такие коэффициенты сохранить в модели, а влияние соответствующего фактора (или взаимодействия факторов) проверить в дальнейшем на более сложной модели или в иных условиях планирования эксперимента.
После исключения незначимых коэффициентов уравнение регрессии приобретает вид
- ^*-1
У= z (11.75)
/=о
где NB — количество значимых коэффициентов регрессии.
500
Так как часть коэффициентов регрессии исключена из модели, то N* < NB < N .
Если все коэффициенты оказались значимыми, суммирование в формуле (11.75) осуществляется до NB -1 .
11.13. ПРОВЕРКА АДЕКВАТНОСТИ И РАБОТОСПОСОБНОСТИ РЕГРЕССИОННОЙ МОДЕЛИ
По уравнению регрессии (11.75) можно вычислить предсказанные значения функции отклика у во всех точках спектра плана: , Х2 > • • • > -Х'дг * В результате будет получено N значений у: y^y2^-’^yN -Если регрессионная модель получена на основе ПФЭ и все коэффициенты регрессии признаны значимыми, то в формуле (11.75) NB = NB = N. Тогда значения yt должны совпадать со средними выборочными значениями , полученными в результате эксперимента для каждой точки спектра плана. Следовательно, поверхность отклика Y = <р(х) проходит через все точки У1, i = 1, N, и полученная модель адекватна. Значения yt в этом случае используют для проверки правильности вычислений коэффициентов регрессии.
Если же незначимые коэффициенты bj исключены из регрессионной модели, то N* < N. Тогда yt Ф yt. Это же характерно для моделей, полученных на основе ДФЭ. Разности -~yt) несут информацию об ошибках предсказания по уравнению регрессии и их можно использовать для последующего анализа свойств полученной модели — ее адекватности и работоспособности.
Для оценки рассеяния эмпирических значений щ относительно расчетных щ , полученных по уравнению регрессии,. используют дисперсию адекватности
«ад=—(И-76) N -NB i=i
где т — число параллельных опытов; N — число точек спектра плана; NB — количество значимых коэффициентов регрессии.
Если число параллельных опытов в различных точках спек-п
тра плана неодинаково, то для вычисления используют формулу
501
«ад=----Г—^^Уг~Уг)2, (И-77)
N-N* i=i
где пц — число параллельных опытов в i-й точке спектра плана.
При оценке регрессионной модели принимается нулевая гипотеза о том, что полученная модель обеспечивает адекватное описание результатов эксперимента. Проверка адекватности осуществляется путем сопоставления дисперсии адекватности и дис-
2
Персии воспроизводимости эксперимента Sy . У адекватной модели значение 8ДД обусловлено в основном действием случайной о 2
помехи, поэтому различие между 8ДД и 8 у должно быть неболь-
2 шим, так как они оценивают одну и ту же дисперсию помехи сг£ .
Проверку гипотезы об адекватности модели (гипотезы о ра-венстве дисперсий и Sy) выполняют по критерию Фишера
F = S^/S^. (11.78)
В формулах (11.76) и (11.77) учтено, что чем больше число т параллельных опытов, тем с большей достоверностью оцениваются средние значения функции отклика у. Поэтому требования к различиям между экспериментальными щ и расчетными yt значениями становятся более жесткими, что отражается в увеличении F-критерия.
Полученные значения статистики F сравнивают с табличным значением критерия Фишера FT, определяемым в зависимости от уровня значимости q и чисел степеней свободы и с которыми определялись дисперсии и Sy :
A1=N-N*; (11.79)
k2 = N(m - 1). (11.80)
Если F < FT , регрессионная модель считается адекватной.
Различие между дисперсиями и Sy обусловлено систематической ошибкой при определении функции отклика по уравнению регрессии из-за его приближенности. Если модель описывает физические свойства исследуемого объекта неудовлетворительно, систематическая ошибка приводит к значительному воз-
502
растанию дисперсии адекватности и, следовательно, к увеличению статистики F.
При F > FT гипотеза адекватности модели отвергается. В таком случае нужно либо изменить структуру математической модели, либо уменьшить интервалы варьирования факторов и провести повторно эксперимент с моделью прежней структуры.
В первом варианте реализуется принцип постепенного усложнения структуры математической модели. Если использовалось упрощенное уравнение регрессии первого порядка, учитывающее влияние на функцию отклика только факторов, или факторов и некоторого количества эффектов их взаимодействий низших порядков, что характерно для ДФЭ, то в модель можно дополнительно ввести новые члены, содержащие другие эффекты взаимодействия тех же порядков или более высоких порядков. Однако во многих случаях такой путь оказывается неэффективным, так как, согласно выражению (11.76), при увеличении количества членов уравнения регрессии и неизменном числе точек спектра плана N дисперсия адекватности может возрасти, несмотря на снижение разности поскольку при этом увеличива
ется N* и, следовательно, уменьшается знаменатель выражения (11.76). Кроме того, следует иметь в виду, что с увеличением порядка эффекта взаимодействия возрастает вероятность незначимо-сти коэффициента регрессии bj при этом эффекте. В этой связи наиболее целесообразно перейти к планированию второго поряд
ка, используя регрессионное уравнение в виде полного квадратного полинома (см. раздел 11.14).
После обеспечения адекватности регрессионной модели осуществляют проверку ее работоспособности.
Адекватность регрессионной модели еще не гарантирует ее
пригодность к практическому использованию в задачах прогнозирования и поиска оптимальных решений. Модель может оказаться неработоспособной из-за низкой ее точности. Для проверки работоспособности модели используют коэффициент детерминации, представляющий собой числовую интегральную характеристику точности уравнения регрессии. Его значение вычисляют по фор
муле
(11.81)
™ X - у)2 + N(m - 1)^ i=l
где у — среднее значение отклика:
(11.82)
503
9
Модель считается работоспособной при R > 0,75. В этом случае обеспечивается уменьшение ошибки предсказания, полученного по уравнению регрессии, по крайней мере, в 2 раза в сравнении с предсказанием по среднему значению отклика у без учета влияния факторов X на функцию отклика у.
11.14. ПЛАНЫ ВТОРОГО ПОРЯДКА
Планы второго порядка предназначены для получения регрессионной модели в виде полного квадратного полинома — полинома второй степени. Такой полином содержит основные эффекты, все парные взаимодействия и квадратичные эффекты
п
k=j+1
(11.83)
2L ^jjxi •
>1
Число коэффициентов уравнения регрессии в этом случае
AL = 1 + 2п + С„ О IL
(п + 1)(п + 2) /2,
(11.84)
что в (п + 2)/2 раз больше, чем в линейной модели вида (11.43). Соответственно возрастает и минимально необходимое число точек в спектре плана. Для получения квадратичной модели варьирование факторов в эксперименте должно осуществляться, по крайней мере, на трех уровнях.
Существует большое множество различных планов второго порядка. Систематизированное их изложение дается в специальной литературе [9]. Рассмотрим кратко лишь композиционные планы типа Вп, получившие широкое применение благодаря их экономичности и простой структуре. Эти планы содержат ядро ПФЭ2П или ДФЭ2П~^ и включают 2п звездных точек, которые расположены на координатных осях на расстоянии ±а от центра эксперимента. Величина ос выбирается из условия минимизации обобщенной дисперсии оценок коэффициентов регрессии, что обеспечивает минимум объема эллипсоида рассеяния этих оценок. Следовательно, планы Вп построены с учетом критерия D-оптимальности. Величина ос для этих планов оказывается равной 1 для всех п факторов, а область планирования представляет собой гиперкуб. Центральной точки планы Вп не содержат.
Если ядром плана является ПФЭ2П, то число точек спектра плана типа Вп определяют по формуле
N = 2n+2n, (11.85)
а если ядро составляет план ДФЭ2П “ Р, то
504
N = 2n~p + 2п. (11.86)
В качестве примера в табл. 11.9 приведена матрица спектра плана типа Вп при п = 3, ядром которого является план ПФЭ2^.
Таблица 11.9
i Xj х2 х3 i хг *2 х3
1 -1 -1 -1 9 -1 0 0
2 +1 -1 -1 10 +1 0 0
3 -1 + 1 -1 11 0 -1 0
4 + 1 + 1 -1 12 0 + 1 0
5 -1 -1 +1 13 0 0 -1
6 + 1 -1 +1 14 0 0 +1
7 -1 +1 +1
8 + 1 +1
Из приведенной таблицы легко видеть процедуру построения плана. Первые восемь точек составляют ядро плана Вп и соответствуют спектру плана ПФЭ23, а остальные шесть — звездные точки. В этих точках варьируется только один какой-либо фактор Ху на нижнем или верхнем уровне, а остальные находятся в центре эксперимента и их нормированные значения равны нулю.
Оценки коэффициентов регрессии вычисляют по формулам:
ХУ1 ’
&0 =
-
2
]]
2
bi =
bjk ~
J 2п~Р
^XljXikyi •
(11.90)
В формулах (11.87) и (11.88) N\ — число точек ядра спек-
тра плана: = 2п рв
Если отдельные коэффициенты bj и bj^ окажутся незначимыми, то их можно исключить из уравнения регрессии без пересчета остальных коэффициентов.
505
Дисперсии оценок коэффициентов регрессии различны, так как план Вп не обладает свойством ортогональности, а коэффициенты Ь$ и bjj коррелированы, поэтому в случае незначимости некоторых коэффициентов bjj при исключении их из модели требуется уточнение оставшихся коэффициентов до и bjj»
11.15. РЕГРЕССИОННЫЙ АНАЛИЗ РЕЗУЛЬТАТОВ ВЫЧИСЛИТЕЛЬНОГО ЭКСПЕРИМЕНТА НА ДЕТЕРМИНИРОВАННОЙ ТЕОРЕТИЧЕСКОЙ МОДЕЛИ
Детерминированная математическая модель характеризуется взаимно однозначным соответствием между внешним воздействием на моделируемую систему и ее реакцией на это воздействие. Поэтому в каждой точке спектра плана проводят только один опыт. План активного вычислительного эксперимента составляется в зависимости от вида регрессионной модели так же, как и для вероятностных математических моделей. При построении экспериментальных факторных моделей, предназначенных для решения задач оптимизации параметров технических объектов в процессе их функционального проектирования, используют планы первого и второго порядков.
Регрессионный анализ при экспериментах на детерминированных и вероятностных моделях включает одни и те же этапы: статистический анализ результатов эксперимента, получение коэффициентов регрессии bj, оценка адекватности и работоспособности экспериментальной факторной модели. Однако содержания первого и третьего этапов в обоих случаях различны.
На первом этапе осуществляется построение модели среднего и ее статистический анализ. При этом определяют среднее зна-9 чение функции отклика у и дисперсию модели среднего Sy, характеризующую рассеяние результатов эксперимента относительно у и оценивающую погрешность модели среднего:
(11.92)
2V i=l
где yi — значение функции отклика в i-й точке спектра плана;
N — количество проведенных опытов, равное числу точек спектра
плана.
506
Коэффициенты регрессии первого порядка определяются по формулам (11.70) и (11.71), а регрессии второго порядка, полученной на основе плана типа Вп, — по формулам (11.87) — (11.90).
После определения коэффициентов bj осуществляется проверка пригодности полученного уравнения регрессии. Для этого вначале необходимо вычислить по уравнению регрессии предсказываемые значения функции отклика в каждой точке спектра плана yi. В уравнение регрессии при вычислениях подставляют значения нормированных факторов Ху в соответствии с матрицей о спектра плана. Затем определяется остаточная дисперсия SOCT, оценивающая погрешность полученной модели:
«ост = Ybi - ^)2, (11-93)
в £=1
где NB — число коэффициентов в уравнении регрессии.
Качество предсказания, обеспечиваемого полученной регрессионной моделью, оценивают по критерию Фишера F и коэффи-2 циенту детерминации R .
При определении критерия Фишера принимается иная нулевая гипотеза, чем при экспериментах на вероятностных моделях (см. раздел 11.13). Здесь нулевая гипотеза гласит о том, что модель среднего у(Х) достаточно хорошо описывает исследуемый процесс. Регрессионная модель окажется адекватной, если выдвинутая гипотеза будет опровергнута.
По критерию Фишера сравнивают дисперсии оцениваемой и противопоставляемой моделей. Последняя должна быть более точной, чем оцениваемая модель. Поэтому в данном случае кри-терий Фишера равен отношению дисперсии модели среднего Sy к остаточной дисперсии S qCT :
ост
(11.94)
Уравнение регрессии адекватно описывает результаты эксперимента, если полученное по формуле (11.94) значение F больше табличного значения критерия Фишера FT, определяемого при принятом уровне значимости q и числах степеней свободы и с которыми определены дисперсии Sy и S ост. Согласно выраже-
507
ниям (11.92) и (11.93) = N - 1; = N - . Если условие
F > FT выполняется, это означает, что уравнение регрессии описывает результаты эксперимента в FT раз лучше модели среднего. Тогда нулевая гипотеза отвергается и регрессионная модель адекватна.
Критерий детерминации определяется по формуле
R2 = 1 - (11.95)
(N - 1)S*
Значение R определяет долю рассеяния экспериментальных значений функции отклика, учитываемую регрессионной зависимостью. Модель считается работоспособной, если В? > 0,75.
При получении квадратичных регрессионных моделей оценку значимости коэффициентов обычно не производят и модель не упрощают, а используют полный квадратный полином со всеми его составляющими (свободным членом, линейными эффектами, эффектами парных взаимодействий и квадратичными членами).
Упрощению подвергаются лишь линейные многофакторные регрессии, полученные на основе ПФЭ. Принимается нулевая гипотеза о том, что Ь; — 0, j = 1,7VB , и осуществляется проверка, от-личаются ли статистически значимо оценки коэффициентов bj от нуля. Значимость bj проверяют по критерию Стьюдента, исполь-2
зуя формулу (11.73). При вычислении дисперсии S , оцениваю-bi
щей погрешности определения коэффициентов используется остаточная дисперсия SqCT (а не дисперсия воспроизводимости
о
эксперимента Sy , как это было для вероятностной модели (см. раздел 11.12)):
<=«ост/^. (11.96)
uj
При уменьшении числа коэффициентов регрессии NB, как видно из формулы (11.93), остаточная дисперсия возрастает, что приводит к снижению критерия Фишера. Поэтому члены уравнения регрессии с незначимыми коэффициентами bj можно исключать лишь в том случае, если проверка полученной упрощенной модели на адекватность по критерию Фишера дает положительный результат.
508
11.16. ПОЛУЧЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ НА ОСНОВЕ ПАССИВНОГО ЭКСПЕРИМЕНТА
При проведении экспериментов на реальных технических объектах независимое варьирование факторов в большинстве случаев оказывается невозможным, поэтому для получения их математических моделей обычно проводятся пассивные эксперименты. Объекты при этом находятся в нормальных условиях функционирования, а изменение их фазовых координат и выходных параметров обусловлено влиянием внешних возмущающих воздействий, носящих случайный характер. В этой связи фазовые координаты и выходные параметры представляют собой случайные процессы. На них могут влиять изменения внутренних параметров объектов (например, параметров системы управления). Отнесем к факторам пассивного эксперимента xz, i = 1,п внешние воздействия, наблюдаемые фазовые координаты и изменяемые внутренние параметры, а к функциям отклика z/y, j = 1, т — выходные параметры объекта (показатели качества и эффективности).
Для получения информации о физических свойствах объекта, необходимой при построении математической модели, выбирают некоторый интервал дискретизации независимой переменной (времени t) и фиксируют в дискретные моменты времени значения факторов и функций отклика. Эти значения представляют собой случайные последовательности чисел, составляющие непрерывные множества. Необходимо, чтобы эти случайные числа для каждого фактора и каждой функции отклика в отдельности были некоррелированными. Это достигается соответствующим выбором интервала дискретизации времени (см. раздел 10.9). Эксперимент должен проводиться таким образом, чтобы исследуемые случайные процессы были стационарными и эргодическими. Допускается лишь нестационарность по математическому ожиданию, которую можно легко отфильтровать и использовать центрированные значения случайных процессов.
Изложенный подход к проведению пассивного эксперимента составляет основу метода статистических испытаний (Монте-Карло).
Используя полученные выборки факторов и функций отклика, находят их статистические оценки (см. раздел 10.9) и осуществляют построение регрессионной модели технического объекта z/y = ср(Х, b), j = 1,т . При этом необходимо проверить выполнение 1-го и 5-го постулатов регрессионного анализа. Со
509
гласно 1-му постулату все выборки должны иметь нормальные распределения (проверяется по критерию Пирсона). Затем проверяется выполнение 5-го постулата о некоррелированности столбцов матрицы факторов. Для этого осуществляется корреляционный анализ результатов статистических испытаний.
В процессе корреляционного анализа определяют оценки коэффициентов парной корреляции ry Xi между выбранными для построения математической модели выходными параметрами и факторами xif а также между парами факторов и х^, т.е. оценки коррелированности этих факторов гх.х, .
Оценка коэффициента корреляции между yj и Xi вычисляется по формуле
У ixi
IU
, i = 1,п ; j = 1,т, (11.97)
где N — число проведенных опытов; yju, xiu— значения переменных yj и xt в zz-м опыте; yj,xt— оценки математических ожиданий (выборочные средние) соответственно функции отклика z/y и фактора xt; , Sx. — средние квадратические отклонения.
Коэффициенты Гу^ являются элементами корреляционной i = 1, п; j = 1, т , в которой = гу х. :
матрицы Ryx =
jn
_Гт1 гтп2 гтп_
_ТП_
— вектор-строка оценок коэффициентов
парной корреляции между выходным параметром yj и всеми факторами Xf, i = 1, п .
Аналогично вычисляются оценки коэффициентов парной корреляции rXiXk между факторами xt и х^.
510
k
i,k = l,n.
(11.99)
Обозначим rx x = ptk . Тогда связь между факторами можно i k
представить корреляционной матрицей
Р11 Р12 ••• Pin
„ Р21 Р22 ••• Р2п
(11.100)
Рп1 Рп2 ••• Рпп
В матрице (11.100) pti = 1, i = 1, п, а остальные коэффици-
енты корреляции могут принимать значения в пределах
0 < pzJ < 1. Если |р^ близко к 1, это свидетельствует о сильной
коррелированности факторов xt и , а при \pik = 1 эти факторы
функционально (не вероятностно) связаны между собой. Оценка влияния каждого из них на функцию отклика по уравнению регрессии окажется невозможной. В случае сильной корреляции
факторов xt и xk один из них следует исключить. Для построе
ния уравнения регрессии г/у = (р(Х, Ъ) оставляют тот фактор, у
которого коэффициент корреляции х больше.
Регрессионный анализ результатов пассивного эксперимента выполняется по той же методике, что и активного. Факторы нормируют с использованием формул (11.1) — (11.3). Но в пассивном эксперименте значения факторов — случайные числа, поэтому после нормирования каждый из них во всей серии опытов распределяется в диапазоне -1 < xt < +1. В результате матрица Фишера
не диагональная, как в активном эксперименте, а может иметь все ненулевые элементы. Поэтому определение коэффициентов регрессии bj требует формирования и решения системы алгебраи
ческих уравнений (11.20).
Оценка качества предсказания, обеспечиваемого полученной моделью, осуществляется по критерию Фишера F и по коэффици-енту детерминации R , вычисляемых соответственно по формулам (11.94) и (11.95).
Если необходимо получить линейное уравнение регрессии в виде (11.26), можно использовать корреляционные матрицы (11.98) и (11.100).
511
Используя вектор-строку Rj матрицы (11.98) для j-го выходного параметра yj и корреляционную матрицу (11.100), составим матричное уравнение
R^Hj = Rj , / = ijn. (11.101)
Решив систему линейных алгебраических уравнений (11.101) относительно неизвестного вектора Н.- = (Л«), f = 1,п , J J
вычислим искомые коэффициенты уравнения регрессии (11.26) по формуле
Ьц ^jiS" /Sx,. (11.102)
J* J1, У j
Если факторы X/ — независимые случайные величины, то матрица R^ единичная, т.е. = 1, р^ = 0, i Ф k . Тогда hjt = Гц .
Изложенную методику можно также использовать при решении задач прогнозирования параметров технических объектов. На основе ретроспективного анализа составляют матрицы важнейших внутренних и выходных параметров объектов данного типа. Такой анализ аналогичен проведению пассивного эксперимента. Сущность эксперимента в данном случае состоит в создании множества конструкций одного и того же целевого назначения. Собранная информация об объекте представляет собой статистические выборки — конечные наборы значений реализаций случайных величин (факторов и функций отклика). Регрессионная модель, полученная в результате такого эксперимента, позволяет осуществлять поиск оптимальных решений и прогнозирование. При этом допускается экстраполяция параметров с выходом за пределы факторного пространства.
12. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ
ТЕХНИЧЕСКИХ СИСТЕМ
12.1. ПРИНЦИП ЛОКАЛЬНОЙ ОПТИМИЗАЦИИ В МЕТОДОЛОГИИ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
Математические модели технических объектов позволяют осуществлять анализ процессов их функционирования, получать оценки выходных параметров различных предлагаемых вариантов технических решений и сравнивать их между собой. Но конечной целью проектирования является получение наилучшего технического решения из числа возможных альтернатив, обеспечивающего высокие показатели эффективности и качества создаваемого объекта. Это достигается в процессе решения задачи синтеза, которая направлена на определение структуры и оптимальных параметров объекта.
Общие вопросы постановки задач проектирования изложены в главе 1, где дана их математическая формулировка, основные понятия и определения, приведен типовой маршрут автоматизированного проектирования и рассмотрены составляющие его проектные процедуры.
Методология автоматизированного проектирования основана на системном подходе. Основные принципы этой методологии — декомпозиция, иерархичность, итеративность, локальная оптимизация и комплексное осуществление процесса проектирования.
513
При декомпозиции сложной технической системы выделяется несколько иерархических уровней, обусловленных различной степенью абстрагирования при описании ее физических свойств. Система расчленяется на отдельные части — блоки, процесс проектирования подразделяется на стадии и этапы. Различают уров-невую, блочную и этапную декомпозиции, сочетание которых приводит к иерархической структуре системы автоматизированного проектирования. Каждый компонент этой структуры воплощается в соответствующем маршруте проектирования, в котором реализуется принцип локальной оптимизации.
Сущность локальной оптимизации заключается в том, что на каждом уровне декомпозиции применяются свои критерии оптимальности и осуществляется оптимизация лишь некоторой части параметров технического объекта, относящихся к внутренним параметрам проектируемого блока. Критериями при этом являются выходные параметры блока, представляющие собой параметры элементов объекта. В свою очередь, внутренние параметры проектируемого блока — это выходные параметры его элементов, получаемых при дальнейшей декомпозиции блока. В результате оказывается, что при проектировании любого элемента объекта используемые критерии получены как результат оптимизации параметров более крупного блока. По существу декомпозиция объекта приводит к декомпозиции критериев. Следовательно, критерии на всех уровнях декомпозиции объекта взаимосвязаны и подчинены конечной цели — достижению высоких показателей эффективности и качества функционирования технического объекта.
Проектирование элементов, выделяемых при декомпозиции объекта, основано на моделировании некоторого характерного режима их функционирования. Это может быть переходный процесс, статическое состояние (состояние покоя или равномерного движения), режим установившихся колебаний, стационарный случайный процесс и др. Система автоматизированного проектирования такого объекта содержит множество маршрутов, отличающихся между собой используемыми математическими моделями. Методы решения систем уравнений этих моделей и способы оценки выходных параметров объектов проектирования существенно различны. Проектные задачи различаются также видами зависимостей критериев от оптимизируемых параметров, количеством используемых критериев и способом формирования целевой функции.
Многообразие исследовательских и проектных задач привело к разработке множества методов оптимизации, обладающих различными свойствами и возможностями поиска экстремума це-
33. Зак. 3006
514
левой функции с учетом особенностей математических моделей объектов. Проектировщик должен хорошо знать особенности решаемой задачи и свойства существующих методов оптимизации, предвидеть характер изменения целевой функции, что позволит осуществить обоснованный выбор метода и повысить вероятность решения задачи с минимальными затратами.
В данной главе будут рассмотрены методы оптимизации, широко применяемые в системах автоматизированного проектирования.
12.2. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРИЧЕСКОЙ ОПТИМИЗАЦИИ
Под оптимизацией понимается процесс поиска наилучшего варианта решения некоторой задачи в условиях множества альтернатив. При проектировании технических объектов необходимо найти их структуру и параметры, обеспечивающие наилучшее сочетание показателей качества и эффективности. При этом возникает проблема формализации понятия «наилучший». Для выбора наилучшего варианта среди определенного множества необходимо сформулировать некоторое правило предпочтения. Основой такого правила может быть однозначная численная характеристика объекта, представляющая собой скалярную функцию. Эта характеристика содержательно отображает цель поиска, в связи с чем ее называют целевой функцией. Она позволяет количественно выразить качество объекта и поэтому называется также функцией качества. Таким образом, в основе построения правила предпочтения лежит целевая функция.
Задача параметрической оптимизации технического объекта заключается в поиске параметров, при которых целевая функция достигает экстремального значения. Параметры объекта, доставляющие экстремум целевой функции, называются оптимальными.
Если с повышением качества объекта целевая функция возрастает, оптимальные значения параметров соответствуют ее максимуму, в противном случае — минимуму.
Аргументами целевой функции являются управляемые параметры. В качестве управляемых параметров выступают внутренние параметры технического объекта, подлежащие оптимизации. Изменяя соответствующим образом эти параметры в процессе оптимизации, осуществляют поиск экстремума целевой функции. Следует отметить, что часть внутренних параметров объекта задается, и они не подлежат оптимизации (например, параметры стандартизованных или унифицированных элементов,
515 параметры, регламентированные техническим заданием на проектирование, и др.).
Обозначим вектор управляемых параметров X = (х1? х2,..., хп)т , а целевую функцию F(X). Поиск решения задачи осуществляется в n-мерном евклидовом пространстве Rn. Обозначим область определения целевой функции в этом пространстве . Вектор X задает координаты точки в области определения . Если элементы вектора X принимают только дискретные значения, то является дискретным множеством точек и задача оптимизации относится к области дискретного (в частном случае целочисленного) программирования.
Большинство задач параметрической оптимизации технических объектов связано с непрерывным изменением параметров.
Целевая функция F(X) может быть представлена геометрически в виде поверхности отклика (или гиперповерхности при п >2). Для выявления свойств целевой функции рассмотрим функцию F(x) одной переменной х. При непрерывном изменении независимой переменной х функция F(x) может быть непрерывной (рис. 12.1, а) или разрывной (рис. 12.1, б). Выделим в области определения х е х° целевой функции F(x) некоторую допустимую область изменения независимой переменной х е хл. Эта область при одной переменной х соответствует отрезку ab на оси абсцисс. Если для двух произвольных точек х^ и х2, таких, что xi < х2 , на всем отрезке выполняется условие F(x^) < F(x2), то функция F(x) на этом отрезке будет монотонно возрастающей (рис. 12.2, а), а если выполняется условие ^Xj) > F(x2), то функция Е(х) монотонно убывающая (рис. 12.2, б).
Рис. 12.1. Графики непрерывной (а) и разрывной (б) функций
516
Рис. 12.2. Графики монотонно возрастающей (а) и монотонно убывающей (б) функций
На рис. 12.3 изображен график функции F(x) - х2 , которая с увеличением х монотонно убывает при х < О и монотонно возрастает при х > О. В точке х = 0 функция F(x) достигает своего минимума. Такие функции называются унимодальными или од-
ноэкстремальными .
Рис. 12.3. График унимодальной функции
Рис. 12.4. График многоэкстремальной функции
Непрерывная функция может иметь несколько экстремумов, т.е. быть многоэкстремальной (рис. 12.4). В этом случае различают точки глобального экстремума и локальных экстремумов. Так, на рис. 12.4 при значениях Х2,..., х5 независимой переменной х возникают экстремумы целевой функции F(x), при этом точкам Xi и Х4 соответствуют глобальные экстремумы (в точке х^ максимум функции F(x), а в точке х± минимум), а точкам л?2, х$ и х5 — локальные экстремумы. Возможен случай, когда локальный (или глобальный) экстремум соответствует некоторой области из
517
менения независимой переменной. Например, на рис. 12.4 F(x) остается постоянной при изменении х в пределах х5 < х < xk .
Если независимая переменная х представляет собой множество дискретных значений Xf, i = 1, п , то целевая функция также окажется дискретной величиной. Тогда ее изображение на координатной плоскости х, F(x) представляется множеством точек с координатами х^,2^, i = 1,п, где п — число точек. Дискретные значения управляемых параметров характерны для многих технических объектов. Например, диаметры валов трансмиссии выбирают из ряда предпочтительных чисел, номиналы сопротивлений резисторов составляют некоторый дискретный ряд и т.д. В таких случаях при решении задач оптимизации предполагают, что эти параметры могут изменяться непрерывно, а после нахождения оптимальных значений осуществляют выбор из дискретного ряда. В дальнейшем будут рассматриваться объекты с непрерывными значениями управляемых параметров.
Для оценки точности попадания в заданную точку Xk пространства Rn введем понятие 8 -окрестности точки Xk .
8 -Окрестностью точки Xk называется множество SE(x) точек (векторов), которые находятся от точки Xk на расстоянии, не превышающем заданное число 8 > 0 :
т.е. множество >SE(X) есть множество таких объектов X, для ко
торых выполняется условие
Функция F(x), определенная в допустимой области изменения независимой переменной х е хк , достигает своего глобального минимума в точке х** е хл , если
F(x**) < F(x) для всех хехд. (12.2)
Функция F(x), определенная на множестве х ехд, имеет локальный минимум в точке х* е хл, если в 8 -окрестности точки * х выполняется условие
F(x*) < F(x), (12.3)
где х — значение независимой переменной, удовлетворяющее ус-
518
*
X - X
ловию
< 8; 8 — малая положительная величина, характе
ризующая точность попадания в экстремальную точку.
Аналогичны определения глобального максимума и локального максимума, только в выражениях (12.2) и (12.3) следует поменять знаки неравенств на противоположные.
Глобальный экстремум можно определить путем нахождения всех локальных экстремумов и их сравнения между собой. Если функция унимодальна, то локальный экстремум автоматически становится глобальным.
Если в задаче оптимизации один управляемый параметр х (задача одномерная), то геометрическим отображением целевой функции является кривая на координатной плоскости х, F(x) (рис. 12.1...12.4). При двух управляемых параметрах xj и х2 функция F(X) представляется в виде поверхности в трехмерном пространстве Xi,x2,F(X) (рис. 12.5, а), которую называют поверхностью отклика. Построение поверхности отклика в двумерном случае вызывает определенные трудности, поэтому ее обычно изображают на плоскости в виде линий равных уровней. Такой метод изображения геометрических поверхностей используется в топографии. Каждая линия уровня соответствует некоторому постоянному значению целевой функции F(X) = Hi9 i = 1, т , где т — число изображаемых на плоскости в координатах х^,Х2 линий равных уровней = const. Значение Hf определяет высоту f-ro сечения поверхности отклика F(X) горизонтальной секущей плоскостью П^ (рис. 12.5, а). Получаемые при этом линии равных уровней изображены на рис. 12.5,6, причем < Н2 < ... < Н5 .
Рис. 12.5. Поверхность отклика двумерной функции (а) и ее отображение на координатной плоскости х10х2 в виде линий равных уровней (б)
519
Топографический метод позволяет достаточно наглядно отображать особенности рельефа поверхностей целевых функций. На рис. 12.6 показаны линии равных уровней для многоэкстремальной целевой функции. Глобальный экстремум находится в точке А, ему соответствуют значения управляемых параметров х1А и Х2А- Точки В, С и D принадлежат локальным экстремумам.
К сожале-
Х1А *1
Рис. 12.6. Линии равных уровней поверхности отклика многоэкстремальной функции
нию, геометрическое отображение целевой функции возможно только в одномерном и двумерном случаях.
Если экстремум целевой функции отыскивается в неограниченной области
X , то его называют безусловным экстремумом, а методы его поиска — методами безусловной оптимизации.
Однако в задачах проектирования технических объектов, как правило, присутствуют те или иные ограничения. Различают прямые и функциональные ограничения.
Прямые ограничения накладываются на управляемые пара-
метры:
(12.4)
где хн^,хв/ — нижнее и верхнее граничные значения управляе
мого параметра xz; п — размерность пространства управляемых параметров.
Область в пространстве управляемых параметров, заданную прямыми ограничениями, называют допустимой областью или областью допустимых значений управляемых парамет
ров X:
Хд = е Х°| xt > xHi, xt < xBi, i g [1 : n]}. (12.5)
В качестве примера прямых ограничений можно назвать ограничения на диаметры валов. Диаметр вала не может быть
520
меньше нуля. Кроме того, обычно ограничивается и его максимальное значение по условиям компоновки технического объекта.
Кроме прямых ограничений в задачах оптимизации могут быть функциональные ограничения. Эти ограничения подразделяются на два вида: ограничения-неравенства и ограничения-равенства.
Ограничения-неравенства описываются функциями вида
<р(Х)>0, (12.6)
а ограничения-равенства функциями
ф(Х) = 0, (12.7)
где ф(Х) и ф(Х) — вектор-функции.
Прямые ограничения (12.4) можно рассматривать как частный случай функциональных ограничений (12.6).
Функциональные ограничения устанавливают некоторые зависимости между управляемыми параметрами, нарушение которых недопустимо по условиям обеспечения работоспособности или регламентируемой эффективности функционирования технического объекта.
Наличие ограничений приводит к задаче условной оптимизации, при которой находится условный экстремум целевой функции.
Наложенные ограничения приводят к тому, что поиск оптимального решения ограничивается некоторой областью Хр в пространстве управляемых параметров. При этом область Хр составляет некоторую часть области определения целевой функции, т.е. являются ее подобластью:
Область Хр пространства управляемых параметров называют областью работоспособности технического объекта.
12.3. ОПРЕДЕЛЕНИЕ ЭКСТРЕМУМА
АНАЛИТИЧЕСКОЙ ЦЕЛЕВОЙ ФУНКЦИИ
Рассмотрим задачу поиска экстремума целевой функции в одномерном случае. Предположим, что функция F(x) определена на интервале а < х < Ъ и n-кратно дифференцируема на этом интервале. Если внутри этого интервала есть точка х* , доставляю-
521 щая локальный экстремум целевой функции, то теорема Тейлора позволяет записать изменение функции F при переходе от точки х* к точке (х* + е) в виде
dF(x*) е2 d2F(x*)
Е dx 2! dx2 еп dnF(x*) „ ,
(12.9)
9
п! dxn
ряда, в которых степень 8 равна п+1
где On+i(c) — сумма членов и выше.
Если х* соответствует локальному минимуму функции F(x), то по определению должна существовать 8 -окрестность точки х* , в которой выполняется неравенство
F(x)>F(x*). (12.10)
Из неравенства (12.10) следует, что
с dF(x*} । е2 d2F(x*) dx + 2! dx2
^d^F(x )+о (е)>0. (12.11)
а п IL J JL V Z v z
п\ dxn
При достаточно малом 8 первое слагаемое доминирует над остальными, а так как 8 можно выбрать и положительным, и отрицательным, то неравенство (12.11) будет выполняться только при условии
dF(x*) dF(x)
dx dx
= 0.
(12.12)
* x=x
Рассуждая аналогичным образом, нетрудно установить, что неравенство (12.11) будет справедливым, если
d2F(x)
(12.13)
Если определяется локальный максимум, то в выражениях (12.11) И (12.13) знаки неравенств изменяются на противоположные. Тогда выражение (12.13) можно записать в виде
d2F(x)
(12.14)
х=х
522
Полученные результаты позволяют сформулировать необходимые условия локального экстремума. Локальный экстремум дважды дифференцируемой целевой функции находится в точке
Рис. 12.7. График о функции Г(х) = х
х* , если в этой точке выполняются условия (12.12) и (12.13) или (12.12) и (12.14). Если эти условия не выполняются, то в рассматриваемой точке х целевая функция не может иметь экстремума. Однако выполнение условий (12.12) — (12.14) еще не гарантирует наличие экстремума. Например, в точке х = О функции F(x) = х3 , график которой представлен на рис. 12.7, одновременно удовлетворяются условия локального минимума и локального максимума. Однако функция F(x) в этой точке не имеет экстремума.
Точки пространства управляемых параметров, в которых выполняется условие (12.12), называются стационарными. Если
стационарная точка не соответствует локальному экстремуму, то она является точкой перегиба (или седловой точкой — в многомерном пространстве управляемых параметров).
Для того чтобы стационарная точка была точкой экстремума, необходимо выполнение достаточных условий локального экстремума.
Пусть в точке х* первые (т -1) производные целевой функции F(x) обращаются в нуль, а производная порядка т отлична от нуля. Тогда, используя разложение функции F(x) в 8 -
окрестности стационарной точки х* , нетрудно доказать теорему, согласно которой:
1) если т — нечетное число, то х* — точка перегиба;
2) если m — четное, то x* — точка локального экстремума.
Если эта производная положительна, то х* — точка локального минимума, а если отрицательна, то точка локального максимума.
Пример 12.1. Определить, имеет ли функция F(x) = xs в точке х* = 0 экстремум, или эта точка перегиба функции. График функции показан на рис. 12.7.
Вычислим производные функции F(x):
= 0; d2F(X)
х=0 ^Х
dF(x) dx
d3F(x) dxs
= 0;
х=0
= б.
x=0
Так как порядок первой отличной от нуля производной соответствует нечетному числу (т = 3), то стационарная точка х* = О является точкой перегиба.
523
Пример 12.2. Провести исследование функции F(x) = х2 на наличие экс-
тремума в точке х* = 0.
Производные функции F(x):
dF(x)
dx
d2F(x) dx2
Порядок первой отличной от нуля производной соответствует четному числу (т = 2) . Следовательно, в стационарной точке х" = 0 функция F(x) имеет
локальный экстремум. Поскольку эта производная положительна, то точка х* = О соответствует локальному минимуму. График функции F(x) = х2 показан на рис. 12.3. Так как эта функция унимодальна, то найденный локальный экстремум является и глобальным экстремумом.
Все рассмотренные выше положения относятся к непрерывным целевым функциям F(x), для которых первая производная существует и непрерывна во всей области определения. Но непрерывная целевая функция может иметь изломы в некоторых точках. В этих точках она недифференцируема. Разрывная функция F(x) (рис. 12.1, б) в точках разрывов также недифференцируема. Если экстремум функции окажется в точке излома или разрыва, то даже необходимое условие наличия экстремума, позволяющее идентифицировать ее как стационарную точку, не будет выполнено.
Пример 12.3. Определить экстремум кусочно-линейной функции
Г(х) =
при х < 2, при х > 2.
При А = 4 эта функция непрерывна во всей области изменения (рис. 12.8, а), но имеет излом при х = 2, а при А Ф 4 она в этой же точке имеет разрыв (рис. 12.8, б; график построен при А = 3). В обоих случаях экстремум функции F(x) достигается в точке х = 2, т.е. либо в точке излома, либо в точке разрыва. Но поскольку функция в этих точках недифференцируема, то они, со
Рис. 12.8. Графики кусочно-линейной функции с изломом (а) и с разрывом (б)
524
гласно определению, не являются стационарными, и необходимое условие экстремума (12.12) не выполняется.
Рассмотрим необходимые и достаточные условия локального экстремума многомерной непрерывной целевой функции F(X), X = (xpхп)т, имеющей все первые и вторые частные производные по всем управляемым параметрам. Разложим функцию F(X) в окрестности экстремальной точки X* в ряд Тейлора,
ограничиваясь квадратичными членами:
F(X) « F(X*)+ < > + ±- < ДХ,Н(Х)ДХ >, (12.15)
оХ 2!
где \ у — скалярное произведение соответствующих векторов; dF(X) / дХ = grad F(X) — вектор-градиент целевой функции:
grad F(X) =
'dF dF dx± 9 дх2
(12.16)
XX — вектор, X*:
определяющий расстояние между точками X и
ДХ = Х-Х*; (12.17)
Н(Х) — матрица Гессе; ее элементы — вторые частные производные целевой функции по управляемым параметрам:
ЩХ) =
82F д2Г д2Р
dx% дХ]дх2 дх]дхп
д2Р д2Р д2Р
дХ2&Х1 дх% дх2дхп
д2Р д2Р 82F
dxndx± дхпдх2 дхп
(12.18)
При п = 2 вектор grad F(X) расположен в плоскости (или в
гиперплоскости, если п > 3), касательной к поверхности отклика F(X) в точке X , и направлен по наиболее крутому подъему по
поверхности отклика.
Необходимым условием экстремума целевой функции в некоторой точке X* пространства управляемых параметров является равенство нулю градиента целевой функции в этой точке
525
gradF(X)±=±* -0. (12.19)
Очевидно, что для выполнения этого условия необходимо, чтобы все первые частные производные целевой функции по управляемым параметрам были равны нулю:
№(Х) _ л ; - Г7 л 9 олч
— О, I — 1,72, (12.20)
дх< ♦ & s^* —— >v*
-Vj —Xj
где п — количество управляемых параметров х^.
Условие (12.20) для многомерной целевой функции аналогично условию (12.12) для одномерной функции. При выполнении условия (12.20) точка X* будет стационарной, а для того, чтобы она не оказалась седловой, а была точкой локального экстремума, необходимо выполнение еще и достаточных условий.
Для максимума достаточные условия заключаются в том, чтобы матрица Гессе в стационарной точке X* при любом векторе XX была отрицательно определенной, т.е.
{< ДХ, Н(Х)ХХ > }< 0, (12.21)
а для минимума — положительно определенной, т.е.
{< ХХ,Н(Х)ХХ > }> 0. (12.22)
Проверка условий (12.20) — (12.22) позволяет выявить экстремумы целевой функции. Однако различить локальные и глобальные экстремумы таким образом, не исследуя функцию Г(Х) во всей области определения, нельзя. Унимодальная функция имеет только один экстремум.
12.4. ПОИСКОВАЯ ОПТИМИЗАЦИЯ
Задачи проектирования технических объектов характеризуются большим количеством оптимизируемых параметров и наличием ограничений, накладываемых на параметры. Они формулируются как задачи многопараметрической условной оптимизации.
Математическая формулировка такой задачи имеет вид extrF(X), (12.23)
ХеХр
где X — вектор управляемых (оптимизируемых) параметров технического объекта; Хр — вектор, определяющий область работоспособности, задаваемую ограничениями:
526
ф(Х)>0;
Ф(Х) = О;
• ****r "V* • >у* •
^В1 9
i = l,N;
(12.24)
(12.25)
(12.26)
ф(Х) = [ф7(Х)],/ = 1,£,
— вектор-функция ограничений-неравенств;
^(X) = [^k(X)\,k = l,M,
— вектор-функция ограничений-равенств;
N — количество прямых ограничений на параметры X; L и М — количество функций ограничений-неравенств и ограничений-
равенств соответственно.
Вопросы теории и методы решения задач условной оптимизации рассматриваются в области математики, называемой математическим программированием. Если функции F(X), ф(Х),
ф(Х) нелинейные, рассматриваемая задача условной оптимиза
ции относится к задачам нелинейного программирования, если же они линейны, то эта задача линейного программирования.
При проектировании технических объектов используются алгоритмические математические модели. Если оптимизация параметров осуществляется при непосредственном использовании этих моделей в процедурах анализа, то определение значений целевой функции, функций-ограничений и их градиентов осуществляется на основе результатов численного решения системы уравнений модели и вычисления значений выходных параметров объекта, которые являются функционалами фазовых координат объекта. Следовательно, в этом случае отсутствуют аналитические выражения, которые устанавливали бы прямую связь между управляемыми параметрами и функциями (12.23) — (12.25), что исключает непосредственное использование приведенных в предыдущем параграфе выражений для определения экстремума.
Для решения задачи в такой ситуации используют поисковую оптимизацию. Сущность ее заключается в том, что поиск экстремальной точки X* в пространстве управляемых параметров осуществляется последовательными шагами, ведущими от исходной точки Хо через некоторые промежуточные отображающие
точки Х^ в заданную е -окрестность точки экстремума X*. Последовательность отображающих точек Xk, соединенных отрезками прямых, называется траекторией поиска. Переход из точки Xk в точку Х&+1 представляет собой одну итерацию (или шаг) поиска, обеспечиваемую соответствующим алгоритмом оптимиза
527
ции. На каждом шаге поиска решается система уравнений, составляющих математическую модель технического объекта, и вычисляются значения выходных параметров, на основе использования которых формируется целевая функция. Нетрудно понять, что поиск оптимального решения таким путем требует огромных затрат машинного времени.
Применение экспериментальных факторных моделей на этапе оптимизации параметров объекта позволяет сократить эти затраты. Факторные модели представляют собой простые полиномиальные зависимости выходных параметров объекта от его внутренних параметров, подлежащих оптимизации, поэтому решение задачи можно в принципе получить классическими методами, используя необходимые и достаточные условия экстремума. Однако в процессе проектирования регрессионную модель объекта приходится постоянно уточнять, что приводит к изменениям выражений целевой функции, функций ограничений и их производных. В результате оказывается целесообразным использовать поисковые методы оптимизации и в этом случае.
Алгоритм поисковой оптимизации включает следующие этапы:
1. Задание параметров алгоритма.
2. Выбор исходной точки поиска Хо и вычисление значения целевой функции в этой точке F(X0).
3. Определение направления движения в пространстве управляемых параметров.
4. Осуществление шага поиска: переход из точки Xk в точку *k+l»
5. Вычисление целевой функции F(X^+1) в новой точке X-k+i •
6. Оценку успеха поиска: сравнение значений F(Xk) и F(Xk+1).
7. Изменение параметров алгоритма поиска.
8. Проверку условий окончания поиска. Если условия окончания поиска не удовлетворяются, то осуществляется переход к этапу 3.
Таким образом, процесс оптимизации представляет собой целенаправленное движение в пространстве управляемых параметров к точке, в которой достигается экстремум целевой функции.
528
Затраты машинного времени при поисковой оптимизации можно оценить по формуле
Тм =Тм1(п1 +п2)п3, где TMi — время, затрачиваемое на один вариант анализа функционирования объекта при фиксированном значении управляемых параметров (при этом решается система уравнений математической модели, определяются выходные параметры объекта, вычисляются значения целевой функции и функций ограничений); П\ и П2 — число вариантов анализа объекта соответственно
на этапе определения направления поиска и на этапе вычисления целевой функции после осуществления шага поиска; п% — число шагов поиска.
Значения и П2 определяют потери на поиск и характеризуют эффективность алгоритма оптимизации. К показателям эффективности также относят точность определения экстремальной точки и надежность алгоритма. Под надежностью подразумевается вероятность получения решения задачи с заданной точностью.
12.5. ПОСТАНОВКА ЗАДАЧ ОПТИМИЗАЦИИ
Для выполнения функционального проектирования конкретного технического объекта необходимо получить его математическую модель и осуществить постановку задачи оптимизации. Кроме того, необходимо располагать программным обеспечением, реализующим маршрут проектирования, основными процедурами которого являются анализ вариантов и оптимизация параметров.
В иерархической системе автоматизированного проектирования каждый этап должен завершаться формированием технического задания на проектирование подсистем, из которых состоит данный объект (см. рис. 1.1). Формирование технического задания осуществляется на основе принципа локальной оптимизации с учетом назначения подсистем объекта и общих целей его создания и использования. В результате задачи проектирования подсистем формируются на основе декомпозиции критериев качества объекта.
Исходная формулировка задач оптимизации носит обычно словесный характер. Постановка задачи оптимизации заключается в формализации понятия «оптимальный». Для этого проектировщик должен быть высококвалифицированным специалистом в данной предметной области и вместе с тем владеть современными методами математического программирования.
Процедура постановки задачи оптимизации носит неформальный характер и включает следующие этапы: выбор крите
529
риев оптимальности, формирование целевой функции, выбор управляемых параметров, назначение ограничений, нормирование управляемых и выходных параметров.
В дальнейшем, как и прежде, под объектом проектирования будем подразумевать любой компонент декомпозиции проектируемой технической системы, по отношению к которому осуществляется локальная оптимизация. Это может быть отдельный блок, элемент блока, техническая система в целом и др.
В качестве критериев оптимальности принимаются выходные параметры объекта проектирования. При этом часто выбирают не все выходные параметры объекта, а только те, которые оказывают наибольшее влияние на достижение конечной цели проектирования всей технической системы. Остальные выходные параметры используются при формировании функций ограничений.
На основе выбранных критериев осуществляется формирование целевой функции.
Основная проблема постановки задачи оптимизации заключается в выборе критериев и формировании целевой функции. Выбор критериев оптимальности требует глубокого понимания сущности решаемой задачи. Всесторонняя оценка эффективности и качества объекта возможна при использовании множества критериев. Задача оптимизации в этом случае становится многокритериальной.
Векторный характер критериев оптимальности создает проблему формирования целевой функции. Сложность ее обусловлена не только большим количеством используемых критериев, но и их характером. Обычно улучшение одного из критериев приводит к ухудшению других критериев. Такие критерии называются конфликтными. Если определить оптимальные параметры объекта по каждому из критериев в отдельности, то они окажутся различными. Поэтому при наличии векторного критерия возможно лишь некоторое компромиссное решение, которое в наибольшей мере отвечает задачам проектирования.
Рассмотрим подробнее проблему формирования целевой функции. Предположим, что выбрано два критерия:, которые представляют собой некоторые функции jFj(X) и F2(X) управ
ляемых параметров X, а пространство управляемых параметров двумерное, т.е. Х = (х1,х2)т. Построим на плоскости х±0х2 линии равных уровней = const функций Е[(Х) и ^(Х) (рис. 12.9, а).
530
Рис. 12.9. К выбору оптимально-компромиссного решения в двухкритериальной (а) и трехкритериальной (б) задачах
Пусть Hi > Н2 > Н2 > . Тогда экстремумы функций
и F2(X) будут представлять собой максимумы этих функций T^imax и ^2тах- Точка А с координатами и х^1) соответствует ^imax, а точка В с координатами xj2) и х^2) — экстремуму второго критерия -F2max. Следует подчеркнуть, что точки А и В находятся в трехмерном пространстве х1, х2, F(X). Третьей координатой точки А является Fimax, а точки В — ^2 max- Соединим
531
точки А и В экстремумов функций ^(Х) и В2(Х) и точку С касания линий равного уровня обеих функций Fx(X) = В2(Х) = ^3 некоторой пространственной линией ОК. Эта линия соответствует области оптимально-компромиссного решения. Проекция ее на плоскость х±Ох2 дает множество эффективных точек ХЭф — точек Парето. Множество ХЭф входит в состав множества допустимых значений управляемых параметров Х„, являясь его подмножеством, т.е. ХЭф е Хд. На рис. 12.9, б показано множество ХЭф для случая трех критериев.
В силу однозначных зависимостей F^X) каждой точке в
пространстве управляемых параметров X соответствует единст
венная точка в пространстве функций J}(X), i = l,n. Следова
тельно, множеству допустимых значений управляемых параметров Хд можно поставить в соответствие эквивалентное замкнутое
Рис. 12.10. Отображение подмножества оптимального компромисса SOK двухкритериальной задачи
множество SH, а подмножеству ХЭф — подмножество оптимального компромисса SOK между критериями ^i(X) и F2(X) (рис. 12.10). Точки подмножества SOK соответствуют возможным сочетаниям значений критериев Ft(X), i = l,n,
определяющим перспективные варианты решения многокритериальной задачи.
При максимизации критериев подмножеством оптимального ком
промисса SOK является правая верхняя граница выпуклой оболоч
ки множества SH между точками В и С, в которых достигаются ^Irnax и ^2тах*
532
Таким образом, точками Парето являются точки простран-
ства управляемых параметров ХЭф е Хд , для которых выполняет
ся условие
т _ _
^(Хэф) - (12.27)
7=1
где Cj — коэффициент веса, характеризующий значимость у-го критерия; Ф(Х) — предельно достижимое значение целевой
функции Е(ХЭф) в области оптимального компромисса S0K; т —
количество критериев оптимальности.
Коэффициенты веса выбирают из условия
Ycj=l, Cj>0. (12.28)
7=1
Метод Парето позволяет сбалансировать противоречия меж-
ду критериями FAX) и получить однозначное оптимально-компромиссное решение задачи выбора параметров проектируемого объекта.
Приняв определенные значения коэффициентов веса и с2 в рассматриваемой задаче и сформировав аддитивную целевую функцию согласно выражению (12.27), в процессе поисковой оптимизации найдем некоторые значения управляемых параметров
х1ок и х2ок, доставляющие экстремум целевой функции F(X). При этом каждый из критериев F^(X) и F2(X) не будет достигать экстремального значения. На подмножестве оптимального компромисса SOK (см. рис. 12.10) полученному решению соответствует некоторая точка А0, в которой FloK < ^imax и F2ok < T^2niax.
При минимизации критериев ^(Х) и F2(X) подмножеству оптимального компромисса S0K соответствует линия DE.
В зависимости от вида математической модели технического объекта критерии могут быть детерминированные или статистические.
Если оптимизация параметров технического объекта осуществляется на основе детерминированной математической модели, то используемые критерии оптимальности (выходные параметры объекта) будут также детерминированными. Если же для оптимизации параметров используется вероятностная математическая модель объекта, которая учитывает случайные воздействия внешней среды и (или) случайный разброс параметров, то значе
533
ния критериев представляют собой статистические оценки выходных параметров объекта, т.е. критерии оказываются статистическими. Значения критериев на каждом шаге поиска при этом представляют собой случайные числа, так как они обусловлены не только изменением управляемых параметров, но и случайными факторами. Поиск решения в этом случае обеспечивается вероятностными итеративными алгоритмами. Эти алгоритмы можно разделить на три группы: использующие детерминированный поиск; использующие случайный поиск; комбинированного типа, использующие детерминированный и случайный поиск.
12.6. ФОРМИРОВАНИЕ ЦЕЛЕВОЙ ФУНКЦИИ В МНОГОКРИТЕРИАЛЬНОЙ ЗАДАЧЕ ОПТИМИЗАЦИИ
Для осуществления поисковой оптимизации необходимо сравнивать между собой результаты каждого шага перемещения в пространстве управляемых параметров и оценивать успешность поиска. Это возможно посредством использования однозначной численной характеристики — скалярной целевой функции. На основе анализа ее изменения алгоритм оптимизации организует целенаправленное движение в пространстве управляемых параметров к точке, в которой достигается экстремум целевой функции.
В однокритериальных задачах критерий оптимальности скалярный. Он и выполняет роль целевой функции. В многокритериальных задачах критерий векторный. Оценка результатов поиска по изменению множества критериев неоднозначная и противоречивая в связи с конфликтностью критериев. Поэтому непосредственное использование их значений в алгоритме оптимизации невозможно. Для решения многокритериальной задачи необходимо построить целевую функцию, которая обеспечивала бы обобщенную оценку качества объекта, отображаемую векторным критерием. В этом случае исходная задача сводится к однокритериальной. Процесс построения скалярной функции качества при многокритериальной оптимизации называется сверткой векторного критерия.
Принципы, положенные в основу формирования целевой функции в многокритериальной задаче оптимизации, определяют стратегию ее решения. Стратегию характеризует способ объединения вектора критериев оптимальности в скалярную целевую функцию. Различают следующие виды стратегий решения многокритериальных задач оптимизации:
стратегия частного критерия}
стратегия взвешенной аддитивной компенсации противоречий критериев}
534
стратегия мультипликативной компенсации противоречий критериев',
максиминная стратегия.
Стратегия частного критерия. В качестве целевой функции принимают один из критериев оптимальности — выходной параметр технического объекта, характеризующий важнейшее его качество и поэтому наиболее значимый для достижения поставленной цели проектирования. Все остальные критерии оптимальности используются для назначения ограничений. В этом случае оптимизация параметров технического объекта выполняется по частному критерию. Математическая формулировка задачи имеет вид:
extr yk(X);
ХбХр
ф(Х)>О;у(Х) = О;
(12.29)
(12.30)
(12.31)
Ун] < yj < Ув] > j = 1»т -1; / * где уь — &-й критерий оптимальности, экстремальное значение которого соответствует искомым оптимальным параметрам технического объекта; z/y — критерии оптимальности, учитываемые в качестве ограничений; п — количество управляемых параметров; т — количество критериев.
Если выходные параметры технического объекта yj, j = 1, т - 1, удается выразить через управляемые параметры X, то полученные функции можно ввести в число функциональных ограничений (12.30).
Преимущество стратегии частного критерия — простота постановки задачи оптимизации. Однако при этом получается высокая эффективность или высокое качество объекта только по одному показателю, а остальные показатели могут оказаться на минимально допустимом уровне, что снижает эффективность полученного решения.
Одним из примеров частного критерия является критерий формы функции. Его применяют, если задан эталонный график функции уТ = f(t), которую должен реализовать технический объект. Независимой переменной t в этой функции обычно является время, но может быть и какая-либо фазовая координата или внутренний параметр объекта. На графике уТ = f(t) (рис. 12.11) выделяют некоторое количество опорных точек и сравнивают в этих точках вычисляемые по математической модели значения
535
функции yt с эталонными значениями yTi. Для формирования целевой функции в этом случае используют одно из следующих выражений:
F(X) =X(yt- yTi)2 -+ min (12.33)
1=1
или
F(X) = max Iz/Z - yTJ -» min, (12.34)
ie[l:p]
где p — число опорных точек эталонной функции.
Рис. 12.11. К определению критерия формы функции
Стратегия взвешенной аддитивной компенсации противоречий критериев. Разделим выходные параметры технического объекта на три группы. К первой группе отнесем параметры yj , значения которых в процессе оптимизации нужно увеличивать, ко второй — параметры z/f, значения которых необходимо уменьшать, а к третьей — параметры у^ , на которые установлены предельно допустимые отклонения Д у^ от заданных значений. Тогда можно записать следующие условия работоспособности технического объекта:
у/ > Tj, i = l,q-,
(12.35)
536
yr <Tt, i = q + l,l; (12.36)
yf =Tk+kyk, k = l + l,m, (12.37)
где Tj9 Tit Tk — параметры технических требований (граничные значения выходных параметров по условиям работоспособности технического объекта, регламентируемые техническим заданием на его проектирование).
Выражение (12.37) можно преобразовать и привести к двум замещающим его выражениям:
УЙ <Tk+byk =Tkl; (12.38)
y~h2 <-(Th-byk)=Tk2. (12.39)
Введем вектор весовых коэффициентов С = (с*, с2,..., см)т , характеризующих значимость выходных параметров технического объекта, и вектор нормирующих коэффициентов Y0 = (У]°,Ур,...,У°)т и сформируем аддитивную целевую функцию в виде выражения
Q М
F(X) = - X cyz/t(X) / Y? + £ Ciyi(X) / Y® , (12.40)
;=1 i=q+l
где M — количество критериев оптимальности: M = 2т - Z; здесь учтено, что выходные параметры третьей группы переведены во вторую группу посредством преобразований по формулам (12.38) и (12.39). Выражение (12.40) можно упростить, если значения у^ (X) умножить на -1:
ад= £егг/Г(Х)/уД (12.41)
i=l
Целевая функция (12.41) подлежит минимизации. Она построена на основе принципа компенсации противоречий нормиро-0 — о
ванных критериев оптимальности yt (X) = z/^ (X) /У^ .
Выбранные весовые коэффициенты С} должны отвечать условиям (12.28). При выборе нормирующих множителей У0 можно воспользоваться либо техническими требованиями к объекту проектирования, либо технической характеристикой выбранного аналога. В первом случае в качестве нормирующих множителей принимают параметры технических требований 7}, i = 1, т , а во втором — выходные параметры аналога.
537
Стратегия решения многокритериальной задачи оптимизации при использовании аддитивной целевой функции имеет серьезный недостаток, который обусловлен конфликтностью критериев. Он заключается в том, что улучшение целевой функции (12.41) возможно при уменьшении одного из конфликтных критериев yi (X) и одновременном увеличении других критериев
уj (X) , т.е. при их ухудшении. Причем, алгоритм оптимизации
не реагирует на ухудшение отдельных критериев, так как оно не нарушает процесс поиска минимума целевой функции F(X). Улучшение целевой функции в процессе поиска в этом случае обеспечивается в основном за счет критерия, который имеет наибольшую чувствительность к вариации управляемых параметров X. В результате может оказаться, что технические требования Tj на отдельные выходные параметры yj не будут выполнены. Следовательно, не будут удовлетворяться условия работоспособности технического объекта (12.35) — (12.37) и цель проектирования окажется не достигнутой.
Стратегия мультипликативной компенсации противоречий.
В аддитивной целевой функции осуществляется компенсация абсолютных значений нормированных критериев. При построении целевой функции можно также применить принцип компенсации относительных значений критериев. Он формулируется следующим образом: суммарный уровень относительного снижения значений одних критериев не должен превышать суммарного уровня относительного увеличения других:
т _ _
^Ayz(X)/yz(X) = O. 1=1
Этот принцип приводит к мультипликативной компенсации противоречий критериев. Мультипликативная целевая функция может применяться в тех случаях, когда в техническом задании отсутствуют условия работоспособности типа равенства (12.37) и выходные параметры не могут принимать нулевые значения. Целевая функция при этом имеет вид
F(X)= Пу^(Х)/ Пу-(Х).
7=1 /=д+1
(12.42)
Целевая функция (12.42) подлежит максимизации. Для ее формирования не требуется нормирования критериев.
538
Мультипликативная целевая функция имеет тот же недостаток, что и аддитивная, т.е. улучшение одних критериев достигается за счет бесконтрольного ухудшения других.
Максиминная стратегия. Максиминная стратегия решения многокритериальных задач оптимизации нацелена на максимальное удовлетворение технических требований, предъявляемых к объекту проектирования. В ее основе лежит идея равномерности, суть которой заключается в выравнивании всех нормированных критериев оптимальности:
btyt(X)/Y,° В, i = l,m,
где В — некоторое вещественное число; bt — коэффициенты.
Условия выполнения технических требований к объекту при максиминной постановке задачи оптимизации должны быть приведены к виду (12.36). Для этого выражения (12.35) необходимо умножить на -1, а выражения (12.37) привести к виду (12.38) и (12.39). В результате все условия работоспособности объекта будут иметь вид неравенств
yj <Tj, j = (12.43)
Введем количественные оценки степени выполнения технических требований:
или
Sj(X) = |т} - у,(Х)\/ , (12.45)
где Tj — значение параметра технического требования, предъявляемого к выходному параметру z/y; z/y(X) — значение j-ro критерия оптимальности, вычисляемое на каждом шаге процесса поиска оптимальных параметров X; 8 у — интервал допустимого изменения у-го критерия.
Значения Sj(X), j = 1, М , подлежат максимизации, причем в первую очередь те из них, которые оказываются наименьшими. Отсюда приходим к целевой функции
F(X)= min S7(X). (12.46)
Функцию (12.46) называют функцией минимума, а поскольку требуется ее максимизация, то стратегию оптимизации называют максиминной. Задача поиска в этом случае формулиру
ется так:
max min S;(X) ХеХд]е[1:М]
539
(12.47)
где Хл — допустимая область в пространстве управляемых пара-метров X, определяемая прямыми ограничениями на эти параметры (12.31).
Для учета значимости выходных параметров могут вводиться коэффициенты штрафа bj > 1 . Тогда вычисление целевой функции осуществляется по формуле
F(X)= min bjSAX)
(12.48)
Максиминная стратегия решения многокритериальных задач лишена недостатков, присущих рассмотренным выше стратегиям. При ее использовании влияние на целевую функцию оказывает лишь тот критерий, который в данной точке X пространства управляемых параметров является наихудшим с позиции выполнения технических требований к объекту. В результате происходит выравнивание оценок степени выполнения технических требований Sj(X) . В этом существенное преимущество максиминной стратегии.
В связи с конфликтностью критериев z/у целевая функция (12.48) негладкая и, следовательно, недифференцируема в точках пространства управляемых параметров, в которых b;Sj(X) = bkSk(X). В этих точках происходит смена критерия, и
S;(X) в целевой функции заменяется на S^(X) 9 в результате чего V
на поверхности отклика образуется гребень. Такой характер изменения целевой функции требует применения особых алгоритмов оптимизации.
Выходные параметры z/у при максиминных критериях нормировать не нужно, так как целевая функция (12.48), согласно (12.44) и (12.45), безразмерная и нормированная.
Если условия выполнения технических требований записать в виде неравенств (12.35), то вместо функции (12.46) получим функцию максимума, которую необходимо минимизировать.
При решении задач оптимизации наиболее часто используют выражение (12.45).Оно более полно и объективно отражает цели проектирования, чем выражение (12.44). Это обусловлено тем, что численные значения параметров технических требований Tj на различные выходные параметры z/у технических объектов могут
540
ной параметр уj (X)
изменяться в очень широких пределах, поэтому оценки Sj(X), вычисляемые по формуле (12.44) для z/у, имеющих меньшие значения Tj, будут более чувствительны к изменению yj(X) . Это способствует улучшению в первую очередь выходных параметров объектов с большими численными значениями Tj. Кроме того, выражение (12.44) неприемлемо при Tj = 0.
Значение SAX) , получаемое по формуле (12.45), характери-зует не только выполнение технического требования Tj на выход-, но и степень приближения yj(X) к опти
мальному значению, находящемуся в интервале 8у . Если у-е
техническое требование выполняется и yj(X) находится в интер-
вале 8 у , то 0 < Sj(X) < 1, причем Sy(X) = 0
при У](Х) = Tj, а
Sj(X) = 1 при yj(X) = Tj - 8у . При невыполнении технического требования Sj(X) < 0 .
Если известны интервалы 8,- допустимых изменений крите-
О' риев z/y и заданы предельные желаемые значения технических
требований Ту на эти критерии, обоснованные проведенным комплексом поисковых исследований или подтвержденные опытом создания аналогичных технических объектов, то целевую функцию можно сформировать на основе выражения
т (уАХУ-Т; F(X) = Ytj —s----
>1 I 8/
(12.49)
Целевая функция (12.49) подлежит минимизации. Посколь-
ку значение F(X) в этом случае определяется в основном теми критериями, отклонения которых от Т; максимальны, то в про
цессе поиска в первую очередт происходит их улучшение, что приводит к выравниванию и минимизации взвешенных и нормированных отклонений всех критерий с учетом их значимости, оцениваемой коэффициентами веса С;. В результате реализуется
минимаксная стратегия.
При наличии регрессионной математической модели технического объекта целевая функция формируется в виде
_ пг
F(X) = £ q
i=l
Z \2
Hi (-^0 — Ui extr
У1 max “ У1 min
(12.50)
где z/imin, *Л тяу— минимальное и максимальное значения i -го •SI 111111 7 с/ Г 111С1Л.
критерия, достигаемые в области варьирования факторов X в процессе эксперимента (определяются по графикам, построенным на основе уравнений регрессии z/f(X)); z/^extr— экстремальное
значение i -го критерия (при максимизации критерия у^Х) при-нимается yiextr = yt max, а при минимизации — ytextr = J/imin)-
Целевая функция (12.50) подлежит минимизации. Она позволяет обеспечить максимальное приближение всех критериев к их экстремальным значениям и реализует стратегию минимакса.
Рассмотренные способы формирования целевой функции могут применяться как при детерминированных, так и при статистических критериях.
При решении вероятностных задач оптимизации может ставиться цель достижения максимальной вероятности Р выполнения условий работоспособности технического объекта. Тогда в качестве целевой функции принимают эту вероятность. Математическая формулировка задачи проектирования в этом случае имеет вид
max Р(Х). (12.51)
Преимущество статистических критериев заключается в повышении надежности объекта, так как при этом в большей мере учитывается изменчивость различных факторов.
12.7. ВЫБОР УПРАВЛЯЕМЫХ ПАРАМЕТРОВ
Управляемыми параметрами при оптимизации являются внутренние параметры технической системы, т.е. параметры ее элементов. Любая техническая система имеет множество внутренних и выходных параметров, поэтому задача оптимизации многопараметрическая и многокритериальная. Решение такой задачи связано с большими затратами вычислительных ресурсов, что заставляет проектировщиков искать и находить целесообразные и обоснованные способы ее упрощения. Это достигается путем уменьшения размерности вектора управляемых параметров.
Как отмечалось в разделе 12.2, часть внутренних параметров объекта регламентируется техническим заданием, и они не подлежат оптимизации. Выбор управляемых параметров из оставшегося подмножества осуществляют на основе анализа чувствительности целевой функции к варьированию значений внутренних параметров объекта. Целесообразно осуществлять оптимизацию лишь тех параметров, которые оказывают значительное влияние на целевую функцию. Значения остальных параметров можно принять по аналогам или по конструктивным соображениям, принимая во внимание прямые ограничения на них, а также нормативные документы и стандарты.
Анализ чувствительности целевой функции заключается в определении вектора чувствительности А, элементами которого являются абсолютные коэффициенты влияния
Ai = 8F(X°)/dxi, i = 1Л, (12.52)
или вектора чувствительности В с относительными коэффициен-тами влияния
Bf = AiX?/F(X°), (12.53)
где X} , F(X°) — значения i-ro внутреннего параметра объекта и целевой функции в точке X пространства внутренних параметров, в которой осуществляется анализ чувствительности.
Чем больше значения коэффициентов At и Bj, тем сильнее влияние параметра технического объекта на целевую функцию ад.
Так как для технических объектов аналитического выражения целевой функции Е(Х) обычно получить нельзя, то определение вектора чувствительности А осуществляют численным дифференцированием. Такой метод анализа чувствительности называют методом приращений.
-л
Разложим целевую функцию F(X) в окрестности точки X в ряд Тейлора, ограничиваясь линейными членами:
dF(X°) . dF(X°) А 8F(X°) . ,.п
F(X) ~ В(Хи) +—-----Axi +-------Дх2 + ... +---- Дхп , (12.54)
дх± дх2 дхп
где AXj = Xi - xf .
Если в выражении (12.54) принять равными нулю приращения всех элементов вектора управляемых параметров X , кроме AXj, то приращение целевой функции будет равно
543
AF(X) = F(X) - F(X°) »
dF(X°)
------Ax
Значение абсолютного коэффициента влияния параметра xz-на целевую функцию можно вычислить из соотношения
. cF(X°) XF(X) . ;---------
At =—-----i = l9n. (12.55)
dxt \xi
Преимущество метода приращений — универсальность и простота алгоритма. Но при сложном рельефе поверхности отклика возникает необходимость определения коэффициентов чувствительности А во всей допустимой области Хл управляемых па-раметров X, так как в отдельных ее точках Xk некоторые
управляемые параметры могут оказывать незначительное влияние на целевую функцию, а в других точках, наоборот, весьма существенное влияние. Выполнение анализа чувствительности в области Хл требует больших затрат машинного времени и не гаранти-рует высокой точности оценки влияния управляемых параметров на целевую функцию, так как количество точек, учитываемых в вычислительном эксперименте, ограничено и выбор их в известной мере случаен.
При использовании максиминной стратегии решения многокритериальной задачи оптимизации затраты времени на анализ чувствительности еще более возрастают, так как в этом случае целевой функцией на различных шагах поиска может оказаться функция любого из критериев. В связи с этим необходимо определять матрицы чувствительности А и В:
i = 1, п; j = 1, m,
(12.57)
О л 0/0
Bji ~ ^jixi / Уj >
где yj — j-й критерий оптимальности; п — количество управляемых параметров: т — количество критериев оптимальности.
Каждая строка матрицы А является вектором-градиентом одного из критериев в пространстве управляемых параметров
а каждый столбец матрицы А характеризует влияние одного из управляемых параметров на все критерии
Анализ чувствительности можно также выполнить на основе регрессионного метода. Для этого необходимо построить линейную регрессионную модель технического объекта, проведя планирование эксперимента в допустимой области управляемых параметров. Регрессионная модель в этом случае имеет вид
yj(X) = bOj +b1jX1 + b2jx2 + ... + bnjxn, j = l,m, (12.58) где by — коэффициенты регрессии.
Функция yj(X) представляет собой один из критериев оптимальности.
Сравнивая выражения (12.58) и (12.54), легко видеть, что коэффициенты регрессии by имеют смысл абсолютных коэффициентов влияния Xf на yj(X).
Регрессионный метод анализа чувствительности позволяет получить интегральную оценку влияния управляемых параметров на целевую функцию или критерии оптимальности во всей допустимой области их изменения Х„ . Этого в большинстве практиче-ских случаев бывает вполне достаточно, чтобы решить вопрос выбора управляемых параметров. Вместе с тем следует иметь в виду, что регрессионная модель не отражает истинный характер изменения поверхности отклика в каждой точке пространства и поэтому не может использоваться для выявления локальных экстремумов.
Параметры технического объекта, подлежащие оптимизации, характеризуют его разнообразные свойства и поэтому могут значительно различаться между собой численными значениями, что осложняет выбор величины шагов в пространстве управляемых параметров и снижает эффективность алгоритма поиска экстремума целевой функции. В этой связи управляемые параметры целесообразно нормировать. При нормированных параметрах в процессе поиска происходит их относительное приращение, что упрощает организацию процесса оптимизации.
Нормирование управляемых параметров можно осуществить по формуле
Xi = щ /, i = 1,п, (12.59)
где Xj, щ — значения нормированного и ненормированного г-го параметра соответственно; и® — значение этого же параметра в некоторой точке пространства ненормированных управляемых параметров.
545
Обычно значения и® принимают по аналогам, либо произвольно в области допустимых значений щ. Часто U® соответствует начальной точке поиска Uq .
В регрессионных моделях (12.58), используемых для оптимизации параметров технических объектов, управляемые параметры Xi нормированы.
12.8. МЕТОДЫ ПОИСКА ЭКСТРЕМУМА ЦЕЛЕВОЙ ФУНКЦИИ
В зависимости от особенностей поверхности отклика и наличия ограничений в процессе поиска экстремума целевой функции применяют различные методы: безусловной и условной; локальной и глобальной оптимизации.
Большинство методов оптимизации разработано для поиска безусловного экстремума. Но есть и методы, предназначенные для решения задач с ограничениями (метод проекции вектора-градиента, допустимых направлений и др.). Обычно задачи условной оптимизации сводят к задачам безусловной оптимизации с помощью штрафных функций или множителей Лагранжа.
Глобальную оптимизацию может обеспечить только метод сканирования. Однако он очень трудоемок и для многопараметрических задач неприемлем. Обычно осуществляется поиск локальных экстремумов. Поэтому важно уметь правильно оценить расположение области притяжения экстремума и назначить vO начальную точку поиска X .
При поиске экстремума движение в пространстве управляемых параметров осуществляется шагами. От величины шага зависят многие параметры поиска: потери на поиск, точность нахождения точки экстремума, надежность поиска. Разработаны методы выбора оптимального шага поиска.
В зависимости от количества управляемых параметров различают методы одномерного и многомерного поиска. Если аргументом целевой функции является один управляемый параметр, поиск будет одномерным. Одномерный поиск используют также в задачах многопараметрической оптимизации для определения оптимального шага в выбранном напряжении.
Сущность метода оптимизации в первую очередь определяется способом выбора направления движения к экстремуму. В зависимости от порядка используемых при этом производных целевой функции по управляемым параметрам методы безусловной оптимизации делят на методы нулевого, первого и второго порядков.
35. Зак. 3006
546
В методах нулевого порядка информация о производных не используется. Поиск экстремума осуществляется только на основе вычисления значений целевой функции. Такие методы называют методами прямого поиска.
Методы первого порядка являются градиентными методами. В градиентных методах используются значения целевой функции и ее первых частных производных по управляемым параметрам.
В методах второго порядка для поиска экстремума используются значения целевой функции, ее первых и вторых частных производных.
На рис. 12.12 приведены наиболее часто используемые методы безусловной оптимизации.
Рис. 12.12. Методы безусловной оптимизации
547
Поскольку задачи оптимизации технических систем, как правило, многопараметрические, будем рассматривать только методы многомерного поиска. С методами одномерного поиска можно ознакомиться в специальной литературе [26].
При изложении методов оптимизации будем предполагать, что управляемые параметры X и критерии оптимальности У(Х) пронормированы и безразмерны.
12.9. МЕТОДЫ БЕЗУСЛОВНОЙ ОПТИМИЗАЦИИ
Рассмотрим основные особенности многомерного поиска экстремума целевой функции на примерах типичных представителей методов прямого поиска, градиентных методов и методов второго порядка. Оценим возможности решения задач оптимизации параметров технических объектов этими методами.
Как уже отмечалось, абсолютное большинство методов оптимизации разработано для поиска безусловного экстремума. Однако эти методы можно с успехом использовать для решения задач с ограничениями, если путем соответствующих преобразований привести их к задачам без ограничений. Способы таких преобразований будут рассмотрены позже. Здесь же будем предполагать, что поиск экстремума целевой функции осуществляется в пространстве управляемых параметров без ограничений.
12.9.1. Метод покоординатного спуска (метод Гаусса — Зейделя)
Этот метод относится к методам нулевого порядка и обеспечивает прямой поиск экстремума без вычисления производных целевой функции, т.е. без использования необходимых и достаточных условий экстремума. Следовательно, он может быть применен к негладким и разрывным целевым функциям.
В методе покоординатного спуска направление движения к экстремуму выбирается поочередно вдоль каждой из координатных осей управляемых параметров X .
Рассмотрим процесс поиска экстремума целевой функции F(X) для n-мерной задачи оптимизации при X = (х1? х2,..., хп) т . Предположим, что осуществляется поиск минимума функции F(X). Тогда улучшению ее на (k +1) -м шаге поиска будет соот-
ветствовать условие
(12.60)
548
Задачу максимизации функции F(X) можно свести к задаче минимизации путем умножения F(X) на - 1.
Из выбранной начальной точки поиска Хо выполняется пробный шаг ho в положительном направлении одной из координатных осей (обычно вдоль оси первого управляемого параметра Л4). В новой точке с координатами х1т = + hQ; х2д = х2>о;...;
х„ 1 = х„ л вычисляется значение целевой функции FlXi) и срав-нивается с ее значением в начальной точке F^Xq ). Если
) < f{Xq ), это направление принимается для осуществления дальнейшего пошагового движения к экстремуму в соответствии с выражением
xl,k+l ~ xl,k + ^0 •
В противном случае производится возврат в исходную точку Xq и движение осуществляется в отрицательном направлении оси хг:
xl,k+l = xl,k ~ ^0 •
Движение в выбранном направлении оси х1 выполняется до тех пор, пока целевая функция улучшается, т.е. выполняется условие (12.60). При его нарушении на (k +1) -м шаге производится возврат в предыдущую точку, определяется направление движения вдоль следующей координатной оси х2 и совершаются спуски в направлении, обеспечивающем улучшение целевой функции:
х2,й+1 = x2,k ± Л0-
После осуществления спусков вдоль всех п осей первый цикл спусков N = 1 завершается и начинается новый цикл N = 2. Если на очередном цикле поиска движение оказалось невозможным ни по одной из осей, тогда уменьшается шаг поиска
(12.61) где у — коэффициент уменьшения шага: 0 < у < 1.
Далее поиск экстремума продолжается с уменьшенным шагом.
Условие окончания поиска
fyy<fcmin« (12.62)
При достижении условия (12.62) поиск прекращается и полученная точка Xk принимается в качестве искомой экстремальной точки X* . Точка Xk при этом находится в некоторой малой
549
окрестности точки X* , ограничиваемой задаваемым минимальным значением шага поиска
Параметрами алгоритма покоординатного спуска являются Ло, /*min и Y • Алгоритм обеспечивает сходимость к решению X* за конечное число итераций, если функция f{x) квадратична в окрестности экстремума.
Пример поиска экстремума методом покоординатного спуска для двумерной задачи при X = (xi,x2) показан на рис. 12.13. Линии равных уровней целевой функции е(х) обозначены Н1,...,Н4, причем Hi < Н2 < Н% < Н^, а минимум ее соответствует точке X*. Траектория поиска изображена жирной линией. Движение начато из исходной точки Хо в отрицательном направ
Рис. 12.13. Поиск экстремума функции методом покоординатного спуска
На рис. 12.13 показаны только
лении оси Xi, так как при этом целевая функция уменьшалась. После достижения точки Xi значение е(х) начинает возрастать, поэтому произошла смена направления движения. На новом направлении вдоль оси Х2 движение осуществляется к точке Х2 , и первый цикл
спусков на этом завершается. Затем циклы повторяются, пока не будет выполнено условие прекращения поиска.
два цикла спусков вдоль
осей Xi и х2. При этом в каждом цикле и вдоль каждой из осей
может быть выполнено некоторое количество шагов. Если определить оптимальный шаг поиска вдоль каждого из направлений, составляющих данный цикл, то перемещение из начальной точки в конечную вдоль каждой из осей можно совершить за один шаг (например, первый шаг соответствовал бы расстоянию (х^ -Xoj). Одномерную минимизацию FIX) на выбранном направлении
можно осуществить, например, методом квадратичной интерпо
ляции.
550
Таким образом, метод покоординатного спуска, по существу, представляет собой последовательное чередование одномерных поисков вдоль всех координатных осей, но в результате осуществляется многомерный поиск.
12.9.2. Методы случайного поиска
Поиск экстремума целевой функции при использовании этих методов осуществляется перебором совокупностей случайных значений управляемых параметров.
Существует много разновидностей случайного поиска. В простейшем из них выбирается случайное направление движения в пространстве управляемых параметров, проверяется его перспективность и при благоприятном результате проверки осуществляется движение в этом направлении. При отрицательном результате выбирается новое случайное направление и процесс повторяется. Проверка перспективности направления основана на вычислениях целевой функции е(х^+1 ) в новой (k +1) -й точке и сравнении ее значения со значением f(x^ в предыдущей k-й точке.
Координаты (k + 1) -й точки определяются выражением
+ (12.63)
где h — шаг поиска; — случайный вектор, определяющий направление поиска.
Размерность вектора й равна размерности п вектора X. Для получения вектора й^ используются п значений равномерно распределенной в интервале [—1»1] случайной величины й - («j,а?г)- Алгоритмы получения псевдослучайных величин с различными распределениями описаны в разделе 10.5.
Рассмотрим кратко работу алгоритма случайного поиска при минимизации целевой функции. После определения вектора случайного направления й^ выполняется шаг в точку ХЛ+1 согласно выражению (12.63). Если в точке условие (12.60) выполняется, шаги в этом направлении продолжаются. В противном случае осуществляется возврат в точку Xk и делается попытка достичь успеха в противоположном направлении согласно выражению X/j,+1 = Xk - hak . Если и эта попытка не имеет успеха, то определяется новый вектор случайного направления . Поиск прекращается, если было выполнено подряд заданное число не
551
удачных попыток L, Можно также предусмотреть возможность уменьшения величины шага после L неудачных попыток, тогда условием окончания поиска будет достижение минимального значения шага /zmin, согласно выражению (12.62).
Рассмотренный метод оптимизации отличается простым алгоритмом и относится к группе методов прямого многомерного поиска. Параметрами алгоритма являются h и L, а при изменении шага к ним добавляются /imin и у .
При определенных усложнениях алгоритма случайного поиска можно определить статистический градиент целевой функции, ввести элементы самообучения и адаптации метода к условиям поиска и другие усовершенствования, позволяющие повысить эффективность алгоритма [24,31].
12.9.3. Метод градиента
Градиент целевой функции — векторная величина, компонентами которой являются частные производные целевой функции по управляемым параметрам:
grad F\X I =
dF dF
dx} ’ dx2 ’ 9 dxn
(12.64)
Направление вектора градиента в каждой точке поверхности отклика F(X) совпадает с направлением наибыстрейшего возрастания целевой функции, т.е. с наиболее крутым восхождением к наивысшей точке этой поверхности в некоторой локальной области управляемых параметров. Градиентное направление является локально наилучшим направлением поиска при максимизации целевой функции, а антиградиентное — при ее минимизации. Это свойство вектора gradl?(X) и используется в методе градиента.
Движение в пространстве управляемых параметров осуществляется в соответствии с выражением
Xk+\ ~ Xk + hkSk,
(12.65)
где — шаг поиска; Sk — единичный вектор направления поиска на (k 4-1) -м шаге, характеризующий направление градиента в точке Xk.
При минимизации целевой функции вектор Sk должен иметь направление, противоположное направлению вектора градиента, поэтому для его определения используется выражение
552
-grad F(Xk) / grad F(Xk) ,
(12.66)
где
grad F(Xk)
— норма вектора градиента, вычисленная для
точки :
grad F(Xft)|| =
У i=l|_ dxi
(12.67)
При поиске максимума целевой функции в выражении (12.66) следует вместо знака минус принять плюс.
Дадим краткое изложение алгоритма поиска минимума целевой функции F^x}. В каждой точке траектории поиска Xk , в том числе в исходной точке Хо , определяется градиент целевой функции grad F\X^) и единичный вектор направления , вы
полняется шаг в пространстве управляемых параметров к точке
^k+1 согласно выражению (12.65) и оценивается успешность по-
иска на основе неравенства (12.60). При этом вычисляется значение целевой функции в точке Xk+± и сравнивается с ее
значением F{xk^ в предыдущей точке Xk . Если условие (12.60) выполнено, то шаг поиска успешный, поэтому определяется новое направление движения из точки Х^+1 и выполняется следующий
шаг в точку Xk+2 .
При большой кривизне линий равных уровней (т.е. при сложном рельефе поверхности целевой функции), а также вблизи экстремальной точки принятый в начале поиска шаг h может оказаться слишком большим и условие (12.60) на очередном шаге не будет выполнено. В этом случае необходимо возвратиться в предыдущую точку Xk , уменьшить шаг по формуле
hk ~
(12.68)
и повторить движение в том же направлении, но с меньшим шагом.
Условия окончания поиска методом градиента имеют вид:
< ^min’ (12.69)
gradE(X^+1) <£,
(12.70)
где £ — малая положительная величина.
553
При выполнении одного из условий (12.69) или (12.70) поиск прекращается, а полученная точка Xk принимается в качестве искомой точки экстремума X* . Если поиск прекращен по условию (12.69), то считается, что точка Xk находится в некоторой
малой окрестности точки X* , ограничиваемой величиной
Малое значение нормы градиента целевой функции означает, что целевая функция в некоторой области вблизи стационарной точки X* изменяется незначительно и поэтому любая точка в этой области может быть принята в качестве допустимого решения задачи оптимизации. При прекращении поиска по условию (12.70) следует иметь в виду, что координаты полученной точки Xk могут значительно отличаться от координат экстремальной точки X* . Поэтому целесообразно потребовать выполнения обоих условий (12.69) и (12.70).
На рис. 12.14, а показан пример поиска минимума целевой функции для двумерной задачи методом градиента. Линии равных уровней целевой функции обозначены причем
< Н2 9 а траектория поиска проходит через точки
Xq,При построении траектории поиска следует иметь в виду, что градиентное направление нормально к линиям равных
Рис. 12.14. Поиск экстремума функции методом градиента (а) и методом наискорейшего спуска (б)
554
уровней. Вектор-градиент в точке Xk пространства управляемых параметров расположен в гиперплоскости, касательной к гиперповерхности целевой функции .f(x) в точке, соответствующей Xk , и направлен в сторону наибыстрейшего возрастания целевой функции. Это свойство градиента и определяет вид траектории поиска.
12.9.4. Метод наискорейшего спуска
Этот метод, так же как и предыдущий, относится к градиентным, т.е. к методам первого порядка. Существует несколько вариантов метода наискорейшего спуска. Рассмотрим два варианта, наиболее часто используемые при решении задач оптимизации.
Первый из них отличается от метода градиента тем, что величина шага поиска h не задается, как параметр алгоритма, а определяется путем одномерной минимизации целевой функции вдоль градиентного направления. В результате вычисление градиента осуществляется реже, чем в предыдущем методе, и эффективность поиска повышается, особенно вдали от экстремальной
точки.
На рис. 12.14, б показана траектория поиска методом наискорейшего спуска. При выборе оптимального шага поиска посредством одномерной минимизации f{x^ градиент снова определяется только в точках Х^Х^Х^,..., дальнейшее движение из
которых в прежних направлениях приводит к ухудшению целевой функции.
Во втором варианте шаг поиска h изменяется таким же образом, как и в градиентном методе, но направления движения в этих методах определяются по-разному. Первый шаг в обоих методах одинаков. Но в дальнейшем, если на очередном шаге происходит улучшение целевой функции, т.е. выполняется условие (12.60), то в методе наискорейшего спуска движение продолжается в прежнем направлении. Например, при движении из точки Хо в точку Xi (рис. 12.14, б) осуществляются шаги величиной ho
по формуле (12.65) в направлении единичного вектора Sq с последовательным перемещением в точки xj1^, xj2^, Х^, в которых вычисляются только значения целевой функции и оценивается успех поиска, а градиент целевой функции не определяется. В
555 точке условие (12.60) нарушается, поэтому определяется новое направление движения S* и поиск продолжается. Если новое на
правление в очередной точке не обеспечивает улучшения це
левой функции, необходимо уменьшить шаг поиска по формуле (12.68).
Рассмотренный вариант метода наискорейшего спуска приводит к большему числу шагов, чем метод градиента, но требует меньшего объема вычислений, так как градиент определяется реже.
Условия окончания поиска в обоих вариантах метода наискорейшего спуска такие же, как и в методе градиента, т.е. соответствуют выражениям (12.69), (12.70).
12.9.5. Определение оптимального шага при многомерном поиске
Для повышения эффективности алгоритмов покоординатного спуска, наискорейшего спуска и др. шаг поиска определяют одномерной минимизацией целевой функции в направлении по-
иска
min F\Xb + hS
= min F(h) h>0
(12.71)
где Xk — текущая отображающая точка; — единичный век
тор направления поиска.
В методе наискорейшего спуска вектор определяет анти-
градиентное направление, а в методе покоординатного спуска совпадает с направлением поиска вдоль соответствующей оси xt.
Наиболее часто для решения поставленной задачи используется метод квадратичной интерполяции с построением интерполяционного полинома в форме Ньютона.
Выберем три точки в пространстве управляемых парамет-
ров, расположенные на направлении вектора на расстояниях
Л1, h2 и /zg от точки Xk , и вычислим значения целевой функции
в этих точках:
+ = F(xk + h2Sk); F3 = F(xk + h3Sk).
Интерполяционный полином представляет собой квадратичную функцию
г(л) = а0 + a^h - hr) + a2[h - h^h - h2). (12.72)
556
Значения функции F(hj в точках с координатами hi, h2, h% на оси , определяющей направление поиска, равны соответственно Fi, F2, F3. Используя эти данные, можно найти значения коэффициентов а$, ai, а2 интерполяционного полинома (12.72). При h ~ hi получаем пр - F± ; при h = h2 — F2 - Fi + ai(h2 - h^,
откуда
ai =(Г2-Л)/(Л2 -Л1). (12-73)
Для определения коэффициента а% подставим в выражение (12.72) h = h3:
F3 =F1 + (f2 ~ Fl)(h3 ~ ftl) / (Л2 - Л1) + a2(h3 - hl)(h3 ~ h2)-
Из этого равенства находим
(12.74)
Вычислив производную функции F^hj по переменной h и приравняв ее нулю, найдем значение h^, удовлетворяющее условию (12.71), т.е. величину оптимального шага в направлении
hk = т(Л1 + h2 “«I /«2)-
(12.75)
Функция Flh) на рассматриваемом интервале изменения h
должна быть унимодальной. В этом случае может быть обеспечена приемлемая оценка значения оптимального шага поиска h^.
Для определения h^ можно использовать алгоритм, предложенный Пауэллом. Алгоритм включает следующие этапы:
Этап 1. Задание параметров hi = О и > 0 .
Этап 2. Вычисление Л 2 = ^1 + ^0 и координат точки Xt при
hi - h2 по формуле (12.65).
Этап 3. Вычисление F(hi) и Г(Л2).
Этап 4. Если F\li2 ) < , принять hg =/ц + 2/iq . Если
F^Ffa), принять = hi - и вычислить координаты точки Xt при hi = hg.
Этап 5. Вычисление F\hs).
Этап 6. Определение точки, в которой обеспечивается минимум целевой функции:
557
-^min “ min , F(h2) > F(h%) ], Hm^n hj,
где hj — координата точки на оси ,
которой соответствует
х mm-
Этап 7. Определение hk по формуле координат точки Xk при h^.
Этап 8. Вычисление F(hk).
Этап 9. Проверка условий окончания
(12.75) и вычисление
поиска:
~ F(hk)] / F(hk) <Е1;
(^min — nk) / ^0 < e2’
mm
(12.76)
(12.77)
где и 82 — малые положительные числа (можно принимать
8Х = 0,003; 82 = 0,03 [26]).
Если оба условия выполнены, поиск заканчивается. В противном случае переходят к этапу 10.
Этап 10. Выбор наилучшей точки (при Нт^п или h^) путем сравнения Fmin и F(hfaj и двух точек на равных расстояниях h по
обе стороны от нее: h = -Нтщ - . Выбранным точкам присваи-
вают новые порядковые номера 1,2,3, соответственно возрастанию значений hj.
Этап 11. Определение Xt и F^hj) в новой точке и присвоение порядковых номеров функциям Ft в соответствии с новыми номерами параметров h[. Переход к этапу 6.
При использовании в поисковом алгоритме оптимального шага затраты времени на вычисления обычно заметно сокращаются. В методе покоординатного спуска при этом можно исключить пробные шаги для выбора направлений движения вдоль осей X/.
Пример 12.4. Осуществить поиск экстремума функции
f(x)= 2xf - 4х3х2 + Зх2 - 6хх - 10 (12.78)
методом покоординатного спуска с выбором шага на основе минимизации функции f(x) в направлении поиска методом квадратичной интерполяции.
Определим вначале координаты экстремальной точки X*. Для этого найдем частные производные функции по управляемым параметрам: dF/dx1 = 4xt -4х2 -6; SF / 6х2 =-4хг + 6х2 . В точке X* производные равны нулю. Решив полученную систему алгебраических уравнений, находим X* = [4,5; 3,о].
Примем начальную точку поиска Хо = [1,1] и зададим параметры алгоритма квадратичной интерполяции = 0 и h$ --= 2„
558
Поиск шага hk в направлении вектора Sr [1,о]:
1) определение значения целевой функции Flfa) в точке = Хо , соответствующей hi = 0:
Х]1* = X*1» + ^Si = [1,1] + о[1,о] = [1,1]; х(х<1’)= F(hi)= -15;
2) определение Fffa)'
h2 = Л, + h0 = 2; X<‘> = X’1» + h2Sx = [1,1]+ 2[l,0] = [3,1]; f(x<1)) = Г(Л2)= -19;
3) определение f(/i3) :
так как f(/i2) < F{hr), то принимаем h3 = hx + 2/i0 = 4 ;
X*1» = X»1» + ftgSj = [1,1]+ 4[l,o] = [5,1]; x(x<1))= F(h3) = -7;
4) определение коэффициентов ai и a2 по формулам (12.73) и (12.74):
/ _ л „ 1 (-7 + 15 -19 + 15^ o
аг = (- 19 + 15)/(2 - O) = -2; a2 ------------------= 2;
V 7 V 7 4-2< 4-0 2-0 J
5) определение оптимального шага поиска в направлении вектора по формуле (12.75):
hk=±[o + 2-(-2/2)]=3/2;
6) определение xjM и F(hk):
хр = Х<*> + = [1,1]+ 3/2[1,о]= [2,5;1,о]; J’(x'1)) = F(hk) = -19,5;
7) проверка условий окончания поиска:
|(-19 + 19,б)/(-19,б)| = 1/39 > Ej = 0,003.
Следовательно, необходима еще одна итерация для определения hk . На следующей итерации значение hk остается прежним и поиск прекращается. Для квадратичной функции f(x) значение hk соответствует точному попаданию в точку минимума функции в направлении поиска, что обусловлено квадратичной интерполяцией в этом направлении.
Принимаем полученную точку в качестве начальной точки Х<2) при поиске в направлении оси х2, определяемом вектором S2 = [о,1]. Поскольку значение f[x) в этой точке найдено на предыдущей итерации, то полагаем /’(л1)=г(х<1))=-19,5.
Поиск шага hk в направлении вектора S2 °
1) определение F^)'
h2 = 2;Х<2> = X™ + Л252 = [2,5; 1,о]+ 2[0; 1] = [2,5;3,о]; f(x<2))= р(Л2) = -15,5;
2) определение f(/z3):
так как Fife) > Flfa), то принимаем h3 = hr - h0 = -2 ;
X^ = X^ + hsS2 =[2,5;l,o]-2[0;l]=[2,5;-l,o]; f(x<2>)= f(a3) = 0,5;
3) определение alf a2 и hk: = 2; a2 =3;hk = 2/3;
4) определение xp и F(hk)'
X<2) =X<2> +hkS2 = [2,5;1,о]+2/з[о;1]= [2,5;5/з]; f(x<2>)= F(hk) = -20,8.
559
На рис. 12.15 сплошной линией показаны три первых шага покоординатных спусков с оптимальными шагами. Координаты отображающих точек:
Хо = [1; 1]; X] = [2,5; 1,о]; Х2 = [2,5; 5/ з]; Х3 = [19/6; 5 /з].
Рис. 12.15. Поиск минимума функции методом покоординатного спуска (сплошная жирная линия — траектория поиска из начальной точки Хо = [1,1]; штриховая линия — из точки Хо = [1.6])
12.9.6. Метод Ньютона
Градиентные методы, как отмечалось выше, обеспечивают локально наилучшее направление движения к экстремальной точке. Однако антиградиентное направление, принятое в исходной точке Хо , приводит непосредственно в точку минимума лишь
в том случае, когда линии равных уровней целевой функции представляют собой окружности. При более сложном рельефе поверхности целевой функции траектория поиска становится сложной многошаговой (рис. 12.14, а и б). Для того чтобы построить более общую стратегию поиска, необходимо привлечь информацию о вторых производных целевой функции по управляемым параметрам.
Разложим целевую функцию f{x} в окрестности точки Xk в ряд Тейлора, ограничиваясь членами разложения второго по
рядка:
560
Перепишем эту формулу, используя выражения для определения градиента целевой функции (12.16) и матрицы Гессе н[х} (12.18):
к / х «/ l- х «/j 2 к
Функция г(х) представляет собой квадратичную аппроксимацию целевой функции построенную в точке Xk . На ос-
нове этой аппроксимации построим последовательность итераций таким образом, чтобы во вновь получаемой точке аппроксимирующей функции обращался в нуль:
Xk+1 градиент
0.
Принимая во внимание, что XX = - X
мулу оптимизационного метода Ньютона Г/- \1-1 .
получаем фор-
(12.80)
Эта формула аналогична формуле Ньютона для решения системы алгебраических уравнений (см. формулу (8.32)), только
вместо обращенной матрицы Якоби J
здесь используется
об-
, а вместо вектора-функции — градиент скалярной функции gradFLX^I. Это
ращенная матрица Гессе H\Xk вязок F\X
не-
вы-
т
текает из того, что решением задачи поиска экстремума является равенство нулю градиента функции, а решением системы алгебраических уравнений — равенство нулю самой функции.
Условие окончания поиска имеет вид неравенства (12.70).
Метод Ньютона относится к методам второго порядка. В процессе поиска экстремума этим методом используется информация о целевой функции и ее первых и вторых частных производных по управляемым параметрам. Это обеспечивает более высокую скорость сходимости метода Ньютона по сравнению с методами нулевого и первого порядков.
Для того, чтобы обеспечивался спуск по поверхности отклика к минимуму целевой функции, необходимо выполнение неравенства
gradf’(x')]T)s(x’)< 0.
561
Тогда из формулы (12.80) следует, что должно выполняться
неравенство
0.
Если матрица Гессе Н[Х) положительно определенная, это
условие выполняется и направление поиска по методу Ньютона будет направлением спуска. При сложном рельефе поверхности целевой функции матрица н{х^ в различных точках может быть либо положительно определенной, либо отрицательно определенной (а иногда и неопределенной). Если в исходной точке поиска или в текущей точке Xk матрица н{х) окажется отрицательно определенной, то направление поиска, определяемое формулой Ньютона, будет направлением подъема, при котором F\Xk+i) > F\Xk), т.е. целевая функция начнет ухудшаться и про
цесс поиска окажется расходящимся.
Если целевая функция квадратичная и матрица Гессе положительно определенная, то метод Ньютона позволяет найти минимум целевой функции за один шаг, независимо от выбора начальной точки. В общем случае произвольной целевой функции сходимость повышается, если начальную точку удается выбрать в малой окрестности экстремальной точки. Поэтому метод Ньютона целесообразно применять на завершающих шагах поиска, после попадания в малую окрестность экстремума посредством других методов.
Реализация алгоритма поиска на основе формулы (12.80) требует определения обращенной матрицы Гессе, что значительно увеличивает количество вычислительных процедур. Однако этого можно избежать, преобразуя формулу (12.80) таким образом, как это выполнено в разделе 8.7. Определим поправку вектора X на (k + 1) -й итерации:
АХ/г+1 = ~[h(xJ] ^radffxj. (12.81)
Умножив слева обе части этого равенства на Н\Х^), получим систему линейных алгебраических уравнений относительно вектора ДХ^+1:
н(хА)]дХА+1 = -grad^fx). (12.82)
Решение этих уравнений осуществляется методом Гаусса и затем вычисляется вектор оптимизируемых параметров
xk+l - xk + •
562
Для наглядного подтверждения эффективности метода Ньютона рассмотрим пример поиска минимума квадратичной целевой функции.
Пример 12.5. Осуществить методом Ньютона поиск координат точки X*, доставляющих минимум функции
г(х) = 8xf + 4xjX2 + 5х2.
Очевидно, что минимум этой функции будет в точке X* = [о,о]т . Найдем эту точку методом Ньютона.
Примем начальную точку поиска Хо = [10,10] т и определим в этой точке градиент функции Fix) и матрицу Гессе:
grad FlX0
16хг + 4х2
4xy + 10х2
200
140
16 4
4 10
Используя формулу (12.82), получим систему уравнений (верхний индекс соответствует номеру итерации, а нижний — номеру оптимизируемого параметра)
16ЛХ*11 + 4Дх^ = -200;
4Дх.(1) + 10Лх<1) =-140. A Zj
Решение этой системы дает Дх^ = -10; Дх^ = -10 . В результате после
первой итерации получаем xj1^ = х{0) + Лх^ = 0; = х^ + Дх^ = 0 . Таким образом, точное решение задачи получено за один шаг поиска: = X*.
Опыт показывает, что при исследовании неквадратичных функций метод Ньютона не отличается высокой надежностью. Если точка Хо находится на значительном расстоянии от точки X* , шаг по методу Ньютона часто оказывается чрезмерно большим, что может привести к отсутствию сходимости. В этом случае целесообразно использовать формулу модифицированного метода Ньютона:
xk+l - xk ~ Y k
grad F[Xk J,
(12.83)
где yk — коэффициент шага поиска.
Можно принять у А? постоянным, причем 0 < < 1 , либо
определить его значение путем минимизации целевой функции в направлении спуска, аналогично тому, как это делается в методе наискорейшего спуска.
Поиск завершается при выполнении одного из условий: (12.70) или у ь < s , где е — малая положительная величина.
Модифицированный метод Ньютона отличается более осторожной стратегией поиска и повышает надежность решения задачи при соответствующем увеличении количества итераций.
563
12.9.7. Метод Марквардта
Этот метод представляет собой комбинацию методов наискорейшего спуска и Ньютона, в которой удачно сочетаются положительные свойства обоих методов. Как отмечалось выше, вдали от экстремальной точки наиболее эффективное направление движения определяется градиентом, а в окрестности точки X* — методом Ньютона. В этом и состоит идея метода Марквардта.
В отличие от метода Ньютона в методе Марквардта приращение вектора управляемых параметров на (k +1) -м шаге поиска АХ/2+1 = Xk+1 - Xk определяется по формуле
где Е — единичная матрица; — параметр, изменяемый на каждом шаге поиска.
Параметр позволяет регулировать стратегию поиска, изменяя ее от градиентной на начальных шагах до ньютоновской — вблизи экстремальной точки. Для этого на начальной стадии поиска принимают большое значение параметра (например, 10^...10^), так что
Очевидно, что при больших значениях направление поиска антиградиентное, а шаг зависит от величины 1 / Xq . При уменьшении влияние матрицы Гессе начинает возрастать и при > 0 направление практически определяется по методу Ньютона.
Если целевая функция на данном шаге поиска уменьшилась, значение параметра для последующего шага вычисляют по формуле
(12.85) а если увеличилась, то по формуле
X* = РХ*_1• (12-86)
Обычно принимают значение Р = 2.
12.9.8. Аппроксимация градиента целевой функции
При проектировании технических объектов чаще всего отсутствует аналитическое выражение целевой функции -Tlx). В
564
этом случае градиент целевой функции определяют посредством конечно-разностной аппроксимации.
Выражение правой конечной разности для вычисления i-ro
элемента вектора-градиента имеет вид
(12.87)
дх,- Е
где е — приращение, поочередно задаваемое каждому управляемому параметру , i = 1, п .
При выборе значения е следует иметь в виду, что при его увеличении уменьшается точность аппроксимации, а при слишком малом значении £ числитель стремится к нулю, что также не дает возможности получить достаточно точную оценку градиента.
Для повышения точности аппроксимации можно использовать центральную конечную разность
Однако при этом количество вычислений для оценки градиента практически удваивается.
12.9.9. Оценка эффективности методов поиска в условиях сложного рельефа поверхностей отклика
Целевые функции, используемые при проектировании технических объектов, характеризуются сложным рельефом поверхностей отклика. На поверхности рельефа имеют место овраги и гребни, создающие значительные сложности при поиске экстремума. Сложность рельефа обусловлена многомерностью целевой функции, наличием конфликтных критериев, учетом функциональных ограничений, введением функции штрафа при сведении задач условной оптимизации к задачам поиска безусловного экстремума и другими факторами.
Такие задачи поисковой оптимизации называются плохо обусловленными. Об обусловленности их судят по числу обусловленности матрицы Гессе (аналогично тому, как обусловленность системы уравнений математической модели объекта оценивается числом обусловленности матрицы Якоби).
Для оценки эффективности методов поиска рассмотрим несколько примеров минимизации функции в двумерном случае, т.е. при X -- (xi,x2)T. С этой целью построим линии равных уровней функции FIX) и траектории поиска различными метода
565
ми. Возьмем для сравнения метод наискорейшего спуска и метод покоординатного спуска. Будем предполагать, что в обоих методах выбор шага осуществляется одномерной минимизацией функ
ции в направлении поиска.
Пример 12.6. Функция г(х) имеет вид f(x)=(xj-4)2 + (x2-3f-5.
Рис. 12.16. Поиск экстремума функции с хорошо обусловленной матрицей Гессе
Линии равных уровней этой функции представляют собой окружности с центром в точке X* = (4;3)т (рис. 12.16). Эта же точ-
ка соответствует минимуму функции г(х) .
Определим градиент функции
Elx) и матрицу Гессе:
Число обусловленности матрицы Гессе
ц -- max | A.zj/min| i е [1 : п], (12.89)
где — i-e собственное значение матрицы Гессе.
Собственные значения диагональной матрицы равны диагональным элементам. В рассматриваемом примере = Х2 = 2 , следовательно, ц = 1 .
Траектория поиска методом наискорейшего спуска на рис. 12.16 показана сплошной жирной линией, а методом покоординатного спуска — штриховой. Первый метод при выборе оптимального шага обеспечивает поиск за 1 шаг, а второй — за два шага. Успешный поиск с малым числом шагов объясняется простым рельефом поверхности целевой функции. В данном случае овраги на ее по
верхности отсутствуют.
Пример 12.7. Пусть функция г(х) имеет вид г(х)= -4f + 8(х2 - 2f - 5.
Линии равных уровней этой функции представляют собой «рис. 12.17). Минимум функции соответствует точке X* = [4; 2]т .
эллипсы
Определим градиент, матрицу Гессе и число ее обусловленности:
grad F\X
2xj. - 8
16х2 - 32
2 О
016
;ц = 16/2 = 8.
Увеличение числа обусловленности по сравнению с предыдущим примером отражает усложнение рельефа поверхности целевой функции. В этом случае появился овраг, ось которого совпадает с большой осью эллипса, а экстремальная точка X* находится в самой низшей точке дна оврага. Осью оврага на поверхности двумерной целевой функции будем называть проекцию линии дна оврага на координатную плоскость х10х2. Траектория наискорейшего спуска (сплошная жирная линия на рис. 12.17) становится зигзагообразной и многошаговой. Ее можно представить как траекторию перекатывания шарика с одного склона оврага на другой при общей тенденции спуска в самую низшую точку оврага.
566
Рис. 12.17. Поиск экстремума функции с овражной поверхностью отклика при параллельности оси оврага одной из координатных осей
Появление оврага замедлило поиск экстремума целевой функции методом наискорейшего спуска. Поиск же методом покоординатного спуска (штриховая линия) в данном случае не усложнился. Это объясняется тем, что ось оврага оказалась параллельной одной из координатных осей.
Пример 12.8. Выполнить поиск экстремальной точки при минимизации методом покоординатного спуска целевой функции
(12.78), приведенной в примере 12.4.
Линии равных уровней функции показаны на рис. 12.15. Минимум функции соответствует
точке X* = (4,5; 3,о)т. Значение функции в этой точке равно F|X*)=- 23,5.
Определим градиент и матрицу Гессе:
grad FIX
- 4х2 - 6
- 4xj + 6х2
4-4
-4 6
Для определения числа обусловленности ц матрицы Гессе составим ее оп-
ределитель
det [н(х)- Xf] =
’4-Х
-4
-4
6-Х
= 0.
Раскрыв определитель, получим характеристическое уравнение
X2 - 10Х + 8 = 0.
Собственные значения матрицы Гессе равны корням этого уравнения:
Xj = 9,13 ; Х2 = 0,87 . В результате находим число обусловленности матрицы Гессе:
ц = 9,13/0,87 = 10,5.
Траектория поиска экстремума показана на рис. 12.15 штриховой линией. В этом случае она становится зигзагообразной и поиск замедляется. Это обусловлено тем, что ось оврага не параллельна ни одной из координатных осей.
Приведенные примеры показывают, что при сложном рельефе поверхности целевой функции эффективность рассмотренных методов оптимизации оказывается невысокой. Если овраги окажутся узкими и извилистыми, то при попадании отображающей
точки Xk в окрестности дна оврага поиск может вообще прекратиться. Например, из точки А на рис. 12.18 нельзя сделать шага величиной h > hmin ни в одном из четырех возможных коорди
натных направлений, так как на всех этих направлениях наблюдается рост целевой функции. Градиентный поиск в этом случае также невозможен из-за малой ширины оврага. Например, из точки В нельзя осуществить шаг величиной h > /zmin. Вероят
567
ность нахождения удачного направления методом случайного поиска в условиях узкого оврага также весьма невелика.
Рис. 12.18. Иллюстрация прекращения поиска в малой окрестности дна узкого извилистого оврага кругом задач с аналитическими
В практических задачах проектирования технических объектов рельеф поверхностей целевых функций может быть гораздо сложнее, чем в приведенных примерах, особенно в многомерных задачах с ограничениями. Рассмотренные методы поисковой оптимизации (за исключением методов Ньютона и Марквардта) для решения таких задач обычно оказываются малоэффективными. Что касается методов второго порядка, то их применение обычно ограничивается лишь целевыми функциями, позво
ляющими непосредственно получить выражения для определения матрицы Гессе, что не характерно для технических объектов.
Вместе с тем следует отметить, что рассмотренным в данном параграфе методам уделено большое внимание потому, что они составляют основу более эффективных алгоритмов, приспособленных к особенностям решаемых задач оптимизации в технике.
12.10. ОПТИМИЗАЦИЯ В УСЛОВИЯХ СЛОЖНОГО РЕЛЬЕФА ПОВЕРХНОСТИ ЦЕЛЕВОЙ ФУНКЦИИ
При решении задач проектирования технических объектов применяют методы оптимизации, приспособленные для поиска экстремума целевой функции со сложным рельефом поверхности отклика, характеризуемым наличием узких извилистых оврагов (или гребней — при максимизации). К этим методам относятся: метод вращающихся координат (Розенброка), метод сопряженных направлений (Пауэлла), метод сопряженных градиентов (Флетчера — Ривса), методы переменной метрики, а также эвристические методы — регулярного симплекса и деформируемого многогранника.
12.10.1. Метод вращающихся координат
При анализе эффективности методов поиска в овражной ситуации в предыдущем параграфе было отмечено, что если ось оврага параллельна какой-либо координатной оси (рис. 12.17), то
568
наличие оврага не приводит к снижению эффективности метода покоординатного спуска. Это свойство покоординатного спуска используется в методе Розенброка. Метод основан на повороте координатных осей после каждого цикла спусков для создания удобного взаимного расположения оси оврага и осей системы ко-
ординат.
х2
Рис. 12.19. Поиск экстремума методом вращающихся координат
Рассмотрим реализацию идеи метода на примере двумерной задачи (рис. 12.19).
Из начальной точки поиска Xq выполняется первый цикл спусков вдоль координатных осей Xi и х2 так же, как и в методе Гаусса — Зейде ля. Будем предполагать, что спуски совершаются с оптимальными шагами, определяемыми одномерной минимизацией целевой функции в направлении спуска. Тогда спуски вдоль каждой из осей бу-
дут выполняться за один шаг. Спуск из начальной точки Хо
вдоль оси х1 приводит в точку Xi, а вдоль оси х2 — в точку Х2 •
Примем направление вектора (х2 - Xq ) за новое направление первой координатной оси х{, а направление второй оси х2 найдем из условия их взаимной ортогональности. Тогда ось х{ пройдет через точки Хо и Х2 , а ось х2 будет перпендикулярна оси х[. В результате произойдет поворот осей системы координат таким образом, что угол между осью оврага и одной из координатных осей уменьшится. Это создаст более благоприятные условия для осуществления поиска в следующем цикле спусков. Следующий цикл спусков дает точки Х$ и Х4 и новые направления координатных осей х[ , х2 .
Таким образом, в методе Розенброка в каждом цикле поиска осуществляются спуски по методу Гаусса — Зейделя, но эффективность поиска значительно повышается благодаря повороту координатных осей, обеспечивающему наилучшее приспособление их к особенностям рельефа поверхности целевой функции. Дви-
569 жение в пространстве управляемых параметров осуществляется в соответствии с выражением
Xk+1 = Xk + hkSk, (12.90)
где — оптимальный шаг, определяемый одномерной минимизацией в направлении спуска; — вектор направления поиска: = ’ ^2k ’ • • • ’ &nk ) •
Вектор Sfc изменяется в каждом цикле и на каждом шаге поиска. В первом цикле спуски осуществляются вдоль координатных осей, поэтому соответствует единичному координатному вектору , причем k = 1, п, где k — номер шага. На первом шаге направление поиска определяется вектором = [1,0,... ,о]т , на втором — вектором = [0,1,0,... ,о]т , на k-м. шаге — вектором = [0,...,0,1,0,...,0]т и т.д. до k = п. На этом первый цикл спусков заканчивается.
Второй цикл спусков и все последующие осуществляются после поворота координатных осей. Направление первой координатной оси в jV-м цикле поиска определяется вектором
(12.91)
где XqN н Х^ — векторы, определяющие положение точки в пространстве управляемых параметров соответственно в начале и конце (ЛГ - 1) -го цикла поиска. «
Остальные оси должны быть ортогональны построенной первой координатной оси х£^. Для их построения используют процедуру Грама — Шмидта.
Поиск завершается, если значения оптимальных шагов вдоль всех п координатных осей в TV-м цикле не превышают заданное значение минимального шага ^min.
Если целевая функция квадратичная, ось оврага в двумерной задаче будет прямолинейной. В этом случае поворот координатных осей после первого цикла спусков приведет к тому, что ось оврага окажется параллельной одной из координатных осей. Тогда в экстремальную точку приведут два одномерных поиска вдоль преобразованных координатных направлений.
570
В n-мерной задаче с квадратичной целевой функцией после поворота координатных осей экстремум может быть найден за п одномерных поисков.
12.10.2. Метод сопряженных направлений
Этот метод использует свойство параллельного подпространства, заключающееся в том, что любая прямая, которая проходит через точку X* экстремума квадратичной функции f(x), пересекает под равными углами касательные к поверхностям равных уровней этой функции в точках пересечения.
Рис. 12.20. Сопряженные направления при поиске экстремума двумерной квадратичной функции
а из точки Х2 в точку Х4 с шагом
Пусть задана квадратичная функция F^x) двух переменных X = (xj, х2 ) т . Построим линии равных уровней F (X) = Hj = const, вы-берем две произвольные несовпадающие точки Xi и Х2 и некоторое направление, определяемое вектором S (рис. 12.20). Выполним движение из точки Хг в точку Х3 с шагом в направлении вектора S , h2 в том же направлении.
Значения шагов h4 и h2 определим из условия одномерной минимизации функции /ТХ). Прямая, соединяющая полученные точ
ки Х3 и Х4 , согласно свойству параллельного подпространства, пройдет через экстремальную точку X* (рис. 12.20). При этом очевидно, что направление, определяемое вектором (Х4-Х3), со
пряжено с направлением вектора S . Таким образом, в случае двух переменных реализация трех одномерных поисков позволяет построить систему сопряженных направлений и найти точку экстремума квадратичной функции.
571
Систему сопряженных направлений можно построить из од-
ной начальной точки поиска Xq , используя единичные коорди-
натные векторы где п — число управляемых пе
ременных (число координатных осей). Каждый из векторов ё^ определяет направление соответствующей (k -й) координатной оси.
Пусть = [1,0]т, ё<2> = [0,1]т. Каждый шаг поиска будем определять одномерной минимизацией функции f(x) в выбранном направлении поиска ё^. Выберем начальную точку Хо (рис. 12.21) и выполним из нее шаг ho в направлении n-й оси (в 42) ч данном случае в направлении вектора е ):
Хг=Хо+ Л0е(2).
Вычислим в новой точке Хх значение шага поиска в на-
- 41)
правлении первой оси определяемом вектором е' и выполним этот шаг:
Х2 = Хг + Л!?(1).
Рис. 12.21. Поиск экстремума двумерной функции методом сопряженных направлений Пауэлла
Далее вычислим значение шага h2 в направлении второй оси, т.е. в направлении вектора 42) е' ', и выполним шаг:
Хз = Х2 + h2e(2K
В результате направления, определяемые векторами (Хз-xj и ё(2), оказываются сопряженными. Если функция е(х) квадратичная, то направление (х3 - Х\) приводит к экстремальной точке X* (рис. 12.21).
572
Рис. 12.22. Схема построения сопряженных направлений в трехмерном пространстве
Рассмотренный ме-х0 тод поиска экстремума применим и для многомерных функций. Покажем это на трехмерной задаче (рис. 12.22). Сначала поиск осуществляется вдоль трех координатных направлений
e^\e^2\e^ . Затем каждое из этих направлений последовательно заменяется вновь построенным сопряженным направлением. Поиск начинают с точки Хо в направлении n-й оси (в трехмерном случае в направлении е(3)), затем принимается естественная последовательность единичных координатных векторов с первого по последний
ё^\ё^2\ё^ и осуществляются спуски в направлениях, определяемых этими векторами. На этом первый цикл поиска заканчивается. В результате построены сопряженные направления ё^ и (х4 - Х±). Для этого использованы точки и Х4 , полученные в результате одномерных поисков вдоль одного и того же направления е(3). При этом совершено п +1 = 4 шага в пространстве
управляемых параметров.
Поскольку последний шаг в предыдущем цикле был в направлении ё{3}, то следующим вектором направления должен быть . Заменим вектор новым единичным вектором , имеющим направление вектора (х4 - Х4) и определяемым по формуле
Следующий цикл одномерных поисков проводится в направлениях и снова s(1). в результате будут построены сопряженные направления ё, (Х4 - Х4 ), “ Х5) • Ес
573
ли теперь провести поиск из точки Х8 в направлении единичного вектора
то будет найдена точка Х9, в которой достигается экстремум квадратичной функции
Шаги траектории поиска, выполняемые в направлениях координатных осей, показаны на рис. 12.22 штриховыми линиями и обозначены цифрами, соответствующими индексам переменных Xj, а шаги в полученных сопряженных направлениях показаны сплошными линиями. Очевидно, что в трехмерной задаче с квадратичной функцией экстремум находится за 9 одномерных поисков.
В n-мерной задаче с квадратичной функцией необходимо о выполнить тг одномерных поисков. При этом в каждом цикле поиска совершается (п +1) шагов и в результате получается п взаимно сопряженных направлений. Если функция е(х) неквадратичная, количество одномерных поисков будет больше чем п^.
Условие окончания поиска методом Пауэлла такое же, как и в методе Розенброка.
Алгоритм метода сопряженных направлений Пауэлла включает следующие этапы:
Этап 1. Задание предельного значения шага 7imin, единичен) -(2) е(Д) ных координатных векторов е' 'v ’ и начальной точки поиска Xq .
Этап 2. Определение векторов направлений поиска в первом цикле:
S(1) = е(п); (12.92)
S(0 = i = 2,n + l. (12.93)
Этап 3. Определение шага поиска hY' в j-тл цикле посредст-вом одномерной минимизации функции на i-м направлении, соответствующем вектору .
Этап 4. Выполнение шага в направлении из предыдущей точки Xt-i:
574
Xi = Xt_1+hfSw.
(12.94)
Этапы 3 и 4 образуют j-й цикл спусков и выполняются последовательно (п +1) раз вдоль каждого из направлений Sw,i = 1,п + 1.
Этап 5. Проверка условий окончания поиска:
max fe[l:n+l]
(12.95)
Если условие (12.95) выполнено, поиск заканчивается. В противном случае переходят к этапу 6.
Этап 6. Определение единичного вектора нового сопряжен-
ного направления:
(12.96)
Этап 7. Определение остальных г = 2, и векторов направлений:
^(0 _ g-Ct+j—1)если i + j _ 1 < п. (12.97)
s№ _ если i + j~l>n. (12.98)
Этап 8. Замена вектора направления вектором со-
пряженного направления:
S(n+1) = S(1). (12.99)
Этап 9. Вычисление координат начальной точки поиска в j-м цикле
(12.100) и переход к этапу 3.
12.10.3. Метод сопряженных градиентов
Поиск экстремума целевой функции в этом методе также осуществляется в сопряженных направлениях. Но в отличие от метода Пауэлла, для получения сопряженных направлений спуска используются векторы-градиенты целевой функции, определяемые на каждом шаге поиска.
Понятие сопряженности векторов является обобщением понятия ортогональности. Два вектора А и В размерности п ортогональны, если их скалярное произведение равно нулю:
< А, В >= 0.
Умножим вектор В на единичную матрицу Q порядка п. Матрица Q при этом не повлияет на результат, т.е.
575
< A,QB >= 0. (12.101)
Если Q — произвольная квадратная матрица того же порядка, что и размерность векторов А и В, то при равенстве нулю скалярного произведения (12.101) векторы А п В будут сопряженными по отношению к матрице Q, или Q-сопряженными.
В методе сопряженных градиентов вектор направления поиска 8^ на k-ил шаге выбирается из условия Н-сопряженности с вектором предыдущего направления , где Н — матрица Гессе. Если матрица Гессе Hk в точке Xk положительно определенная, то минимум квадратичной целевой функции п переменных X
F(x)=a+<b,X> +0,5< Х,НХ > (12.102)
может быть найден не более чем за п одномерных шагов из любой начальной точки . Значения шагов поиска при этом определяются одномерной минимизацией целевой функции.
Одним из основных элементов алгоритма, реализующего метод сопряженных градиентов, является построение эффективных направлений поиска. В методе Флетчера — Ривса для определения направления на каждом шаге поиска осуществляется преобразование вектора-градиента целевой функции в вектор направления 8^, Н-сопряженный с вектором направления на
предыдущем шаге. Для этого используется формула
&k = ~gk + Р^-1^-1 > (12.103)
где gk — единичный вектор, определяющий направление векто-
ра-градиента на /г-м шаге:
gk = £rad F\^k
grad F\Xk
(12.104)
— коэффициент, значение которого выбирается из условия
/f-сопряженности векторов и :
<Sk,HSk_1 >=0.
Подставим значение из формулы (12.103)
< HS^_i >= 0,
(12.105)
откуда
ч ^^k-1
Sk-l^S^
(12.106)
576
Поскольку в формулу (12.106) входит матрица Гессе Н, тс ее используют при наличии аналитических выражений квадратичных целевых функций вида (12.102). Но, как уже неоднократно отмечалось, при проектировании технических объектов получить аналитическое выражение целевой функции обычно не представляется возможным. В этом случае можно использовать приближенное выражение для определения Р^_г :
< grad F(Xk), grad F(Xk) >
p Ь_1 = -------------------—-----. ( 1 Z . 1U ( )
< grad FfX^), grad >
Для неквадратичных функций Полак и Рибьер предложили следующую формулу для определения р :
AGT gradF(X^)
P*-l=----------------------=---(12.108)
< grad F(XkA), grad >
где AG* = grad F(Xk) - grad F(Xk_i). (12.109)
При использовании аппроксимирующих выражений (12.107) и (12.108) процесс поиска экстремума сопровождается увеличением числа шагов и он обычно не укладывается в п шагов даже для квадратичной целевой функции. При этом возникает опасность зацикливания алгоритма из-за появления линейнозависимых направлений. Для повышения надежности алгоритма после каждых п шагов рекомендуется обновить вектор направлений S , приняв на (п +1) -м шаге значение р = 0 . Тогда вектор S , согласно выражению (12.103), получит антиградиентное направление.,
Координаты отображающей точки в процессе поиска определяются по итерационной формуле
^k+1 = + hk&k’ (12.110)
где — шаг, определяемый одномерной минимизацией целевой функции в направлении поиска .
Условия прекращения поиска в методе сопряженных градиентов такие же, как в методе градиента, и соответствуют неравенствам (12.69) и (12.70).
Алгоритм метода сопряженных градиентов включает следующие этапы:
Этап 1. Задание параметров алгоритма Лт|П5, е и начальной
точки поиска .
577
Этап 2. Определение целевой функции Г|Х0 I и градиента целевой функции grad f(Xq) в точке Xq •
Этап 3. Задание начального значения коэффициента р = 0 .
Этап 4. Определение вектора направления поиска по формуле (12.103).
Этап 5. Одномерная минимизация функции f(x) в направлении вектора и определение шага
Этап 6. Вычисление координат новой отображающей точки по формуле (12.110).
Этап 7. Определение градиента целевой функции grad в полученной точке.
Этап 8. Проверка условий окончания поиска на основе неравенств (12.69) и (12.70). Если эти неравенства (или одно из них) удовлетворяются, поиск завершается. В противном случае переходят к этапу 9.
Этап 9. Проверка необходимости обновления вектора направлений Sk . При k = {п, 2п, Зп,...} переходят к этапу 3, а в противном случае — к этапу 10.
Этап 10. Вычисление коэффициента по одной из формул (12.106), (12.107) или (12.108).
12.10.4. Методы переменной метрики
Наибольшей эффективностью поиска характеризуются методы второго порядка. Однако они требуют вычисления матрицы Гессе, что значительно затрудняет или даже делает невозможным их использование для решения конкретных задач оптимизации. В этой связи были разработаны квазиньютоновские методы, в которых осуществляется аппроксимация матрицы Гессе. Итерационная формула квазиньютоновского алгоритма такая же, как в любом градиентном методе (см. формулу (12.110)), а направление поиска при минимизации целевой функции определяется векто
ром
(12.111)
где — квадратная матрица порядка п, аппроксимирующая обращенную матрицу Гессе в формуле Ньютона (12.80); — еди-
ничный вектор, определяющий направление вектора-градиента в
точке Xk .
578
Матрица в формуле (12.111) носит название метрики. Методы поиска вдоль направлений, определяемых этой формулой, называются методами переменной метрики, поскольку матрица изменяется на каждой итерации. Так как методы переменной метрики не используют вторых производных целевой функции, то они относятся к методам первого порядка.
На первом шаге итерационного процесса поиска в качестве Dq выбирается единичная матрица Е. На каждом следующем шаге она аппроксимируется с использованием информации, полученной на предыдущем шаге:
Dk=Dk_1+ADk, (12.112)
где — корректирующая матрица.
Задача аппроксимации обращенной матрицы Гессе заключается в том, чтобы полученная матрица была положительно определенной и, следовательно, удовлетворяла условию убывания целевой функции. Кроме того, последовательность
должна давать приближение к обращенной матрице Гессе
1. Корректирующую матрицу строят на основе выражения
ADk = Ak-Bk, (12.113)
где Afe и В^ — симметрические матрицы: матрица А^ обеспечивает приближение к обращенной матрице Гессе, а матрица В^ — положительную определенность матрицы D^.
Для определения матриц А^ и Bk Дэвид он, Флетчер и Пауэлл предложили следующие выражения:
Ak = ; (12.114)
< AXk, \Gk >
Bk = Dk-l^k(^Gk) Dk-1 , (12.115)
< AG^.-D^AG^ >
где Dk~i — матрица, полученная по формуле (12.112) на предыдущем шаге; AXfe = Xk - Xk_r; AGk = gradF(x^)~ £rad F^k-1)-
В методе переменной метрики Дэвидона — Флетчера — Пауэлла величина шага определяется одномерной минимизацией целевой функции в направлении поиска. Условия окончания поиска аналогичны методу градиента.
579
Вследствие использованной аппроксимации (12.112) и ошибок округления при вычислениях на ЭВМ матрица в некоторых случаях может оказаться вырожденной или не удовлетворяющей условию положительной определенности. Поэтому после серии п спусков целесообразно обновить матрицу Dk, приняв ее равной единичной матрице Е. При этом повышается надежность алгоритма.
Алгоритм метода переменной метрики включает следующие этапы:
Этап 1. Задание параметров алгоритма ftmin,e и начальной точки поиска Хо .
Этап 2. Определение целевой функции и ее градиента в точке XQ о
Этап 3. Задание начального значения аппроксимирующей матрицы Dq = Е .
Этап 4. Определение вектора направления поиска по формуле (12.111).
Этап 5. Определение шага поиска на основе одномерной минимизации функции в направлении вектора .
Этап 6. Вычисление координат новой отображающей точки по формуле (12.110).
Этап 7. Определение градиента целевой функции в полученной точке.
Этап 8. Проверка условий окончания поиска. Если неравенства (12.69) и (12.70) (или хотя бы одно из них) удовлетворяются, поиск завершается. В противном случае переходят к этапу 9.
Этап 9. Проверка необходимости обновления матрицы D^. При k = |п, 2п, Зп, ...| переходят к этапу 3, а в противном случае — к этапу 10.
Этап 10. Определение матрицы Dk по формулам (12.112) — (12.115).
12.10. 5. Метод регулярного симплекса
До сих пор рассматривались методы оптимизации, основанные на фундаментальных математических теоремах. Однако можно построить процедуры поиска экстремума целевой функции на геометрических представлениях поверхности отклика. Один из таких эвристических методов для оценки поведения целевой функции и целенаправленного перемещения по поверхности ее отклика использует регулярный симплекс. Регулярный симплекс
580
в n-мерном пространстве управляемых параметров представляет собой многогранник, образованный п +1 равноотстоящими друг от друга вершинами. В случае двумерного пространства Х = (х^,х2)т симплексом является равносторонний треугольник. В трехмерном пространстве он представляет собой тетраэдр.
В алгоритме поиска используется важное свойство симплексов, согласно которому новый симплекс можно построить на любой грани начального симплекса путем переноса выбранной вершины на надлежащее расстояние вдоль прямой, проведенной через центр тяжести остальных вершин начального симплекса. Полученная таким образом точка является вершиной нового симплекса, а выбранная при построении вершина начального симплекса исключается. Для перехода к новому симплексу при этом требуется одно вычисление значения целевой функции. На рис. 12.23 показан процесс построения нового симплекса для двумерной задачи.
Рис. 12.23. Схема построения симплекса для двумерной задачи: а — начальный симплекс; б — отражение; в — новый симплекс
Алгоритм поиска экстремума целевой функции с использованием симплекса содержит следующие процедуры. Вначале необходимо построить начальный симплекс, определив координаты всех его вершин . В двумерной задаче определяют координаты трех вершин равностороннего
треугольника (рис. 12.23, а). Затем вычисляют значения целевой функции для всех вершин и выбирают вершину с наибольшим значением целевой функции. Эту вершину проецируют через центр тяжести остальных вершин симплекса в новую точку, которая используется в качестве вершины нового симплекса. Предположим, что наибольшее значение целевой функции соответствует точке . Тогда через эту точку и центр тяжести вершин с координатами Х^ и (точка Xе) проводят прямую, на которой находят новую точку (рис. 12.23, б). Точку Х^8' ис-
581
ключают, а точки и образуют новый симплекс
(рис. 12.23, в).
Таким образом, рассматриваемый алгоритм предусматривает два вида вычислительных операций: первая из них связана с вычислением целевой функции в вершинах симплекса, а вторая — с построением нового симплекса.
Для построения начального симплекса необходимо задать координаты начальной точки и значение параметра Z, отождествляемого с расстояниями между его вершинами. В начальной точке располагают (n +1) -ю вершину симплекса, координаты кото-
рой обозначают х^п+1^ - х£п+1\х^п+1\...,х^+1^
Координаты
остальных вершин определяют по формуле х<"+1>+51 при j*i, Х(1) = 1
xjn+1) + 52 при j = i,
i,j = 1,п .
(12.116)
Приращения и 5 2 зависят только от размерности п пространства управляемых параметров и от выбранного значения параметра I.
При I ~ 1 ребра регулярного симплекса имеют единичную
длину. Значения 5^ и 5 2 находят по формулам:
(12.117)
(12.118)
Операцию определения координат новой вершины симплекса называют отражением относительно центра тяжести. При минимизации целевой функции отражению подлежит вершина, в которой целевая функция имеет наибольшее значение. Предпо
ложим, что эта вершина с координатами Х^. Центр тяжести ос-
тальных п вершин симплекса расположен в точке с ми, вычисляемыми по формуле
координата-
(12.119)
Координаты точек, расположенных на прямой, проходящей через точки Х^ и Xе, можно найти из выражения
X = X(i} + Х\ХС - Хи)). (12.120)
При X = 0 получаем точку , которая подлежит отражению, а X = 1 соответствует центру тяжести Xе. Для того чтобы вновь построенный симплекс оказался регулярным, отражение должно быть симметричным, а это возможно, если принять X = 2 . Тогда искомые координаты новой вершины х^п+2) найдем по формуле
Х(п+2) = 2^с _ £0) (12.121)
Для иллюстрации вычислительной схемы алгоритма рассмотрим пример.
Пример 12.9. Минимизировать функцию
xf - 2xjX2 + Зх2 - 4xj - 5. (12.122)
Для построения начального симплекса зададим начальную точку Хо = [о,о]т . Выберем параметр I = 1 и, используя выражения (12.117) и (12.118),
_ 5/3" + 2 — 1 лпгл
= 1-----7=--= 0,9659;
2у2
вычислим приращения Sj и 52 :
8, = 1 = 0,2588.
2^2
Регулярный симплекс в двумерной задаче представляет собой равносто-
ронний треугольник. Вершину треугольника с наибольшим номером, т.е. с номером 3, расположим в начальной точке х<® = Хо , а координаты остальных точек найдем по формуле (12.116):
= Ro + 82i + 81 Т = [° + 0,2588; 0 + 0,9659]т = [о,2588; 0,9659]т;
Х<* = кд + 81’ х2?о + 82]Т = [о + 0,9659; 0 + 0,2588]т = [о,9659; 0,2588]т.
Вычислим значения целевой функции в точках вершин начального симплекса: f(xJ1))= 3,6693; f(x<2))= -8,2297; f(x<3)) = -5,0 .
Переобозначим точки х& таким образом, чтобы их номера i возрастали соответственно увеличению значений целевой функции:
Xf) = х(2) = [о,9659; 0,2588]т; Х<2) = Х<3) = [о,о]т; Х<3) = X™ = [о,2588; 0,9659]т.
Верхний индекс в обозначениях векторов X соответствует номеру точки, а нижний — номеру шага преобразований симплекса. После проведенных переобозначений точка с наибольшим номером i подлежит отражению от центра тяжести двух остальных точек. Центр тяжести, согласно формуле (12.119), находится в точке
Подставим это выражение в формулу (12.121)
Х<4> = Х^ + Х^-Х<3).
Используя эту формулу, получаем следующие значения координат новой точки: х]4) = [о,7071; - 0,7071]т . В полученной точке f(x{4))= -4,8285 . Так как про
изошло уменьшение целевой функции, то точку х]3) необходимо исключить, а
вершины полученного симплекса переобозначить с учетом значений целевой
583
функции. На предыдущем шаге ЦХ} j = -8,2297; JpQ'/= -5,0, поэтому принимаем Х^ = Х,(1) = [о,9659; 0,2588]т; Х<2) = Х{2) = [о,о]т; Х<3) = х{4) = = [о,7071; - 0,7071]т.
Далее последовательно осуществляются аналогичные циклы отражения вершин с наибольшими номерами.
12.10. 6. Метод деформируемого многогранника
Из рассмотренного в предыдущем параграфе примера 12.9 очевидна простота реализации алгоритма поиска на основе регулярного симплекса. Однако этот алгоритм склонен к зацикливанию в овражных ситуациях. Это легко проиллюстрировать на том же примере 12.9. Если выполнить следующий цикл поиска, то отражаемая вершина опять возвращается в предыдущую
точку = [о,2588; 0,9659]т. Этого можно было бы избежать,
уменьшив параметр Z, однако при этом необходимо строить новый регулярный симплекс, что увеличивает количество вычислений и усложняет алгоритм.
Нелдер и Мид предложили более эффективную процедуру поиска, заключающуюся в изменении конфигурации симплекса с учетом полученных значений целевой функции в его вершинах. В этом случае многогранник деформируется и симплекс теряет свойство регулярности. Поэтому метод Нелдера и Мида называют методом деформируемого многогранника. Над многогранником в методе Нелдера и Мида выполняются следующие операции, иллюстрируемые рис. 12.24: а — отражение:, б — растяжением в — сжатием г — редукция. Исходный многогранник, полученный в (k -1) -м цикле поиска, изображен тонкими сплошными линиями, а новый многогранник — жирными сплошными линиями. Построение отражения вершины ХА показано штриховыми линиями.
Координаты вершины многогранника, в которой в (k -1) -м цикле получено максимальное значение целевой функции f(x}, обозначены вектором ХА , а вершины с минимальной функцией f(x^ — вектором ХВ. Центр тяжести всех вершин, кроме вершины ХА , находится в точке Xе .
Отражение выполняется так же, как и в случае регулярного симплекса. Отражению подлежит точка ХА , в которой Fix)
584
х-, максимальна. Эта точка проецируется через точку X в новую
точку согласно выражению
Х^п+2) = xf + a(xf - Х$\ (12.123)
Рис. 12.24. Схема операций преобразования симплекса в методе деформируемого многогранника для двумерной задачи: а — отражение; б — растяжение; в — сжатие; г — редукция
При отражении принимают параметр a = 1. После выполнения операции отражения определяют значение целевой функции в новой точке и сравнивают его со значениями
функции f{x^ ) в точках исходного многогранника i - 1, п + 1.
Растяжение выполняется в случае, когда
г(х<п+2))< р(х£), (12.124)
т.е. если значение целевой функции в новой точке Х^+2^ оказалось меньше, чем во всех остальных точках вершин многогранника, и не больше минимального значения f(x^9 соответствующего точке Xfc . При этом вектор - Х^ ) растягивается
(рис. 12.24, б), а отраженная вершина Х^п+2^ перемещается в точку Xj?n+S) , определяемую выражением
585
^(n+3) = + p(£C _ j. (12.125)
При растяжении принимают параметр р = 2,0...3,0 .
В полученной точке Х^п+3^ определяют значение функции И*?+3)) и сравнивают его со значением с тем, чтобы осуществить выбор между точками Х^п+2^ и Х^п+3^ . При этом
отражаемая точка Х£ исключается, а вместо нее вводится новая
точка вершины многогранника, координаты которой определяют-
ся из выражения
х£п+3\ если /к
Х^+2\ если
(12.126)
Сжатие выполняется, если в результате отражения значение функции в точке Х^п+2^ оказывается больше ее значений во
всех вершинах симплекса, кроме вершины , т.е. при f(x^+2))> i*A. (12.127)
Тогда вектор (х^п+2^ -Х^\ сжимается (рис. 12.24, в), а ко-ординаты точки Х<п+3) определяются по формуле
£(n+3) =^С+ _ хА ). (12.128)
При сжатии принимают параметр у = 0,4.. .0,6. После вы-
полнения сжатия определяют координаты отраженной точки
х(п+3), если /к
х(ге+2), если
К ’
(12.129)
Редукция представляет собой сжатие симплекса в два раза
путем отражения всех вершин, кроме вершины Х&, в которой
целевая функция минимальна. Редукция выполняется, если после — л -* г
отражения вершины Х^ от точки Х^ окажется, что г[х(ге+2) j > (12.130)
При выполнении условия неравенства (12.130) координаты вершин редуцированного симплекса определяют по формуле
Х%} =Х% + 0,5(х<г) - xf ), г = 1,и + 1. (12.131)
586
Из формулы (12.131) следует, что все вершины симплекса, — D кроме Xk , изменяют свои координаты и симплекс сжимается
(рис. 12.24, г).
Условие окончания поиска
< 8 ,
(12.132)
где 8 — малое положительное число.
Алгоритм метода деформируемого многогранника включает следующие этапы:
Этап 1. Построение начального симплекса и вычисление в каждой вершине значений целевой функции f(x).
Этап 2. Определение вершин ХА и ХВ соответственно с наибольшим и наименьшим значениями
Этап 3. Определение координат центра тяжести Xе всех вершин, кроме ХА , и вычисление
Этап 4. Отражение: вычисление координат отраженной точки х|Л+2) по формуле (12.123) и значения F^X^,n+2^j.
Этап 5. Сравнение f(x^+2^ с i = l,n + 1. При вы-
полнении условия (12.124) осуществляется растяжение (этап 6), при выполнении условия (12.127) — сжатие (переход к этапу 8), а при условии (12.130) выполняется редукция (переход к этапу 10).
Этап 6. Растяжение: вычисление координат точки Х^п+3^ по формуле (12.125) и значения F(xln+3H.
Этап 7. Определение координат новой точки ХА по форму-е (12.126) и переход к этапу 11.
Этап 8. Сжатие: вычисление координат точки Х^^ по формуле (12.128) и значения F^X^n+3^j.
Этап 9. Определение координат новой точки ХА по формуле (12.129) и переход к этапу 11.
Этап 10. Редукция.
587
Этап 11. Проверка условия окончания поиска (12.132). Если оно не выполняется, увеличивают индекс k на единицу и переходят к этапу 2.
Начальный симплекс можно построить либо с использованием формул (12.116) — (12.118), либо выбрав п + 1 произвольных точек в некоторой ограниченной области пространства управляемых параметров.
Пример 12.10. Минимизировать функцию (12.122) методом деформируемого многогранника.
Используем построенный в примере 12.9 начальный симплекс. Тогда Ху = [о,2588; 0,9659]т; Ху = [о,9659; 0,2588]т; = [о,о]т и соответствующие им зна-
чения целевой функции f(x1a) = -3,6693; f(xb) = -8,2297; f(x[°) = -5,0 .
В результате отражения получена точка х{п+2) = [о,7071; - 0,7071]т , в которой г(х<"+2))=-4,8285.
Соотношение полученных значений целевой функции соответствует условию (12.127), следовательно, необходимо выполнить сжатие симплекса. Определим вначале координаты центра тяжести Ху исходного симплекса по формуле (12.119):
Хр = 0,5 Xf +Х1(/)]= [0,4830; 0,1294]т.
Сжатие осуществим, используя формулу (12.128):
Х("+3> = [о,4830; 0,1294]т + О,б[о,4830 - 0,2588; 0,1294 - 0,9659]т = [о,5951; - 0,2889]т. В полученной точке г(х1(л+3))=-6,4321. Используя (12.129), изменяем координаты точки Ху = х}"+3).
Сравнивая значения целевой функции в вершинах полученного симплекса, принимаем для второго цикла поиска следующие значения координат вершин: Х$ = Xx(i) = [0,0]т; Xf = Xf = [0,9659; 0,2588]т ; Х& = X? = [о,5951; - 0,2588]т и соответствующие им значения целевой функции: г(х£1)=-5,0; г(хв)=-8,2297; f(x^)= -6,4321 .
Выполнив отражение вершины х/, получим Х<"+2) = [1,5610; - 0,0301]т; г(х*“+2’)= -8,7106 . В этом случае удовлетворяется условие (12.124), поэтому необходимо осуществить растяжение симплекса.
Используя формулу (12.125), находим Х^"+3) = [2,3415; - 0,045з]т . В этой точке f(x<"+3))=-8,6651, тогда в соответствии с формулой (12.126) получаем х£ = Х1"+3* и в следующем цикле поиска используется симплекс, координаты вершин которого: х£ = Х%> = [о,5951; - 0,2889]т; Xf = X/ = [2,3415; - 0,0453]т ; Х<° = = xf = [о,9659; 0,2588]т .
Иллюстрация выполненного поиска экстремума методом деформируемого многогранника для рассмотренного примера представлена на рис. 12.25.
588
Рис. 12.25. Поиск экстремума двумерной функции методом деформируемого многогранника
12.11. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ТЕХНИЧЕСКИХ СИСТЕМ С УЧЕТОМ ОГРАНИЧЕНИЙ
Задачи проектирования технических систем характеризуются наличием ограничений на внутренние и выходные параметры. В этом случае при оптимизации параметров осуществляется поиск условного экстремума целевой функции.
Ограничения подразделяют на функциональные и прямые. Функциональные ограничения обычно представляют собой нелинейные функции управляемых параметров. Прямые ограничения накладываются на управляемые параметры, вследствие чего пространство управляемых параметров X ограничивается областью
допустимых значений Хд.
Задачи условной оптимизации относятся к области нелинейного программирования. Предположим, что целевая функция подлежит минимизации. Тогда математическая формулировка задачи имеет вид:
min F[X XeXp
<p(xj> 0;
y(ij=0;
589
(12.133)
(12.134)
(12.135)
(12.136)
где Xp — вектор, определяющий область работоспособности технической системы, задаваемую ограничениями (12.134) — (12.136).
Прямые ограничения (12.136) при решении задач оптимизации приводятся к виду (12.134).
Исходную задачу условной оптимизации, содержащую функции ограничений, обычно сводят к задаче безусловной оптимизации, что позволяет использовать для ее решения хорошо отработанные методы поиска безусловного экстремума, рассмотренные в предыдущих параграфах. При этом целевая функция f{x} заменяется функцией ф(х), которая должна быть максимально близкой к функции FIX) в области работоспособности Хп , а при выходе из этой области становиться существенно большей, чем функция f(x). При нарушении ограничений, т.е. при выходе из области Хр, налагается штраф, что приводит к ухудшению целевой функции ф(х). Значение функции ф(х) вычисляется по формуле
ф(х)= ^(xj+OjJx), (12.137)
где ®т(х) — функция штрафа.
Поиск экстремума целевой функции ф(х) может осуществляться любым методом безусловной оптимизации. При этом безусловный экстремум функции ф(х) является искомым условным экстремумом исходной целевой функции f(x).
В связи с введением в целевую функцию ф(х) функции штрафа ®т(х) рассматриваемый метод решения задач условной оптимизации называют методом штрафных функций.
Среди методов штрафных функций различают метод внешней точки и метод внутренней точки. В первом траектория по-
590
иска может находиться вне области Хр , т.е. последовательность точек Xk, k = 1,L , может быть любой, а начальная точка Хо может выбираться как внутри области Хр , так и вне ее. В методе внутренней точки Хо и Xk находятся только внутри области Хр. При этом штраф задает как бы барьер вдоль границы допустимой области Хп вследствие неограниченного возрастания функции штрафа ©^(х). В этом случае функцию штрафа называют барьерной функцией, а метод оптимизации — методом барьерных функций.
Характерная особенность метода внутренней точки — необходимость выбора начальной точки поиска Хо внутри области Хр, что при малых ее размерах в задачах нелинейного программирования осуществить довольно сложно. При дискретных управляемых параметрах область Хр может оказаться пустой и задача станет неразрешимой. Для выбора подходящей точки Хо, обеспечивающей удовлетворение системы неравенств (12.134) и (12.136), обычно используют методы случайного поиска или сканирование в некоторой области R g X , ограниченной неравенствами (12.136).
12.11.1. Функция штрафа при ограничениях-равенствах
Для учета ограничений-равенств (12.135) используется квадратичная функция штрафа
i=l
где rmi — параметр штрафа для i-й функции ограничения Vi(x)=o в тп-м цикле поиска; М — число функций ограничений вида (12.135).
Задача поиска безусловного экстремума целевой функции (12.137) обычно решается многократно (не менее 3...5 раз) с различными значениями Rm = i = 1,М, пока результаты поиска на смежных циклах (т -1) и т не окажутся достаточно близкими. В каждом цикле поиска минимума Rm = const, а новый цикл совершается при новом значении Rm :
Rr^Rn-i+bRm, (12.139)
591
где ARm — приращение вектора параметров штрафа.
После каждого цикла поиска вектор оптимизируемых параметров X постепенно приближается к решению X* , а значения функций ограничений-равенств 0 , где Xk — вектор па-
раметров, принимаемый в качестве решения задачи, т.е. Xk « Ху. Параметры штрафа Rm играют роль весовых коэффициентов, определяющих относительную значимость ограничений и исходной целевой функции f(x). Кроме того, можно ранжировать значимость функций ограничений, введя для каждой из них свое значение Гц и Art. Если ранжировать их не представляется возможным, то все компоненты векторов Rm и ARm принимают одинаковыми. В первом цикле поиска при т = 1 рекомендуется принимать rj = 1, а в последующих увеличивать с шагом Дгт =5...10.
Рис. 12.26. Изменение квадратичной функции штрафа в различных
циклах поиска т с параметрами штрафа Гт1 < гт2 < гтЗ
На рис. 12.26 изображена зависимость функции штрафа от функции ограничения
в различных циклах поиска т = 1, 2, 3,... При отклонении от нуля функция ®т(х) быстро возрастает, причем крутизна характеристики зависит от номера цикла. На каждом последующем цикле поиска влияние функции ®т(х) на целевую функцию ф(х) возрастает, так как увеличивается параметр штрафа гт.
Рассмотрим пример, иллюстрирующий изменение рельефа поверхности целевой функции ф(х) при увеличении параметра штрафа rm.
Пример 12.11. Пусть целевая функция описывается выражением Их)=(х1-4)2+(х2-4)2, функция ограничения имеет вид
I = хг + х2 - 5 = 0.
592
б
d
Х2
На рис. 12.27, а изображены линии равных уровней целевой функции F(X), представляющие собой окружности с центром в точке X = [4,4], и линия ограничения К, соответствующая функции у(х). Минимум функции f(x) совпадает с центром окружностей, т.е. безусловный экстремум этой функции находится в точке Х^ = [4,4]т . Искомый условный экстремум, обусловленный наложенным ограничением, находится в точке X* = [2,5; 2,б]т , расположенной на линии ограничения К, в которой функция ф(х) минимальна.
Сформируем функцию штрафа в соответствии с формулой (12.138)
= + х2 ~ >
Используя выражение (12.137), сведем задачу условной оптимизации к задаче поиска безусловного экстремума целевой функции ф(х):
ф(х)= (хг - + (х2 - + х2 - б)2.
В первом цикле поисков примем rm = 1. Линии равных уровней функции ф(х) при rm = 1 показаны на рис. 12.27, б. Они заметно отличаются от линий равных уровней функции f(x) (рис. 12.27, а). При введении функции штрафа От(х) на поверхности отклика появился овраг, а точка экстремума Xj функции ф(х) отклонилась от точки экстремума функции
Рис. 12.27. Влияние функции штрафа на изменение рельефа поверхности целевой функции: а — без учета штрафа;
б — с учетом штрафа при значении параметра штрафа rm = 1; в — то же, но при гт = 10; Л,В,...,Н — линии равных уровней целевой функции; К — график функции ограничения;
Х0,Х1гХ2,... — траектория поиска условного экстремума X*
593
F(Xj в сторону сближения с точкой искомого условного экстремума X* . При малой величине параметра штрафа гт ухудшение рельефа поверхности отклика несущественное и поэтому не приводит к заметным осложнениям работы алгоритма поиска.
Во втором цикле поисков примем гт - 10. Линии равных уровней функции ф(х) для этого цикла показаны на рис. 12.27, в. Очевидно, что с увеличением гт рельеф поверхности отклика начинает сильно усложняться, и поиск экстремума затрудняется. Но поскольку в каждом новом цикле итераций находится более точное приближение вектора Х^ к решению X* , то, несмотря на необходимость повторения циклов с новыми значениями гт, рассмотренная многоэтапная стратегия оказывается целесообразной и эффективной, снижающей затраты машинного времени и повышающей вероятность получения решения.
В табл. 12.1 приведены значения целевых функций Fix) и ф(х), соответствующие линиям разных уровней А, В, ..., Н на рис. 12.27.
Таблица 12.1.
Обозначения линий равных уровней Целевая функция и ее значения
f(x), рис. 12.27, а ф(х) при гт= 1, рис. 12.27, б ф(х) при гт= 10, рис. 12.27, в
«д. 0,1 5 5
в 3 10 20
с 6 15 35
D 9 20 50
Е 12 25 65
F 15 30 80
G 18 35 95
Н 21 40 110
Из рис. 12.27, б и в видно, что после каждого цикла изменения гт безусловный экстремум Xg функции ф(х) приближается к точке X* искомого условного экстремума целевой функции f(x) .
На рис. 12.27, а изображена траектория поиска Xq,^,^,... При этом использовался метод наискорейшего спуска. Точка условного экстремума X* была найдена за 17 циклов спусков при П = 1 и т\ 7=161.
12.11.2. Функции штрафа при ограничениях-неравенствах
Для учета ограничений-неравенств (12.134) используются функции штрафа, графики которых представлены на рис. 12.28.
В методе внешней точки применяют функцию квадрата срезки (рис. 12.28, а) и функцию полубесконечного барьера (рис. 12.28, б). Функция квадрата срезки описывается выражением
т
= Xwmin
(12.140)
594
а функция полу бесконечного барьера — выражением
min|0,sign[фДХ^]] ,
(12.141)
где L — число функций ограничений-неравенств; R — параметр штрафа, принимаемый постоянным для всех функций ограничений и не зависящим от номера т цикла поисков. Значение R принимают как можно большим: R~ 10п, где п = 10...20.
Изменение rmj в формуле (12.140) производится так же, как и для функции (12.138).
В методе внутренней точки используют логарифмическую (рис. 12.28, в) или обратную (рис. 12.28, г) функцию. Функция
штрафа в первом случае описывается выражением
(12.142)
а во втором
S rmj 1 при <рДх)>0. (12.143)
>1
Рис. 12.28. Графики штрафных функций, используемых при ограничениях-неравенствах: а — функция квадрата срезки; б — функция полубесконечного барьера; в — логарифмическая функция; г — обратная функция
595
Функции (12.142) и (12.143) не определены вне области работоспособности Хр , т.е. для таких X, при которых ср7 (х)< 0.
Поэтому при выборе начальной точки поиска Хо нобходимо обеспечить удовлетворение неравенств (12.134) и (12.136).
Значения rmj после каждого цикла поиска уменьшают. Начальное значение rmj=rij= 10... 100, а конечное — близко к нулю. Для этого компоненты вектора kRm в формуле (12.139) должны быть отрицательными.
Характер деформации линий равных уровней целевой функции при наличии ограничений-неравенств иной, чем при ограничениях-равенствах. Для иллюстрации используем функцию приведенную в примере 12.11, а ф(х)=0 преобразуем в функцию <р(х)= 5 - Xi - х2 > 0. Рассмотрим решение этой задачи двумя методами: методом внешней точки и методом внутренней точки. При формировании целевой функции ф(х) методом внешней точки применим функцию штрафа (12.140), как наиболее близкую к квадратичной функции, используемой при ограничениях-равенствах .
На рис. 12.29, а изображены линии равных уровней функции ф(х) при гт = 10, а на рис. 12.29, б — при гт = 100. Сравнивая между собой графики линий равных уровней, приведенных на рис. 12.29 и 12.27, нетрудно заметить, что, несмотря на их
при использовании штрафной функции типа квадрата срезки:
а — при параметре штрафа гт = 10;
б — при параметре штрафа гт - 100
596
различный характер изменения при возрастании параметра штрафа rm, траектория движения точки безусловного экстремума Xg функции ф(х) к точке условного экстремума X* функции f(x) остается прежней.
При решении той же задачи методом внутренней точки используем логарифмическую функцию штрафа (12.142). На рис. 12.30, а изображены линии равных уровней целевой функций ф(х) при гт = 10, а на рис. 12.30, б при rm = 1. Рельеф поверхности этой функции, отображенный на рис. 12.30, б, характерен для заключительных циклов поиска. В методе внутренней точки при любых значениях гт все линии равных уровней располагаются только в области работоспособности Хр , ограничиваемой функциями ф(х). Вне этой области значений функции ф(х) не существует, поэтому начальная точка поиска должна обязательно принадлежать области XD, что осложняет применение этого метода для решения практических задач оптимизации, особенно при отсутствии аналитического выражения функции f(x).
В табл. 12.2 приведены значения целевой функции ф(х), соответствующие линиям равных уровней А, изображен-
ным на рис. 12.29 и 12.30 (рис. 12.27 — 12.30 заимствованы из [26]).
при использовании логарифмической функции штрафа: а — при гт = 10; б — при rm = 1
597
Таблица 12.2
Обозначения линий равных уровней Значения целевой функции ф(х)
при rm = 10, рис. 12.29, а при гт = 100, рис. 12.29, б при гт= 10, рис. 12.30, а при гт = 1, рис. 12.30, б
«д. 3,5 3,5 9 9
в 6,5 6,5 10 10
с 9,5 9,5 11 11
D 12,5 12,5 12 12
Е 15,5 15,5 13 13
F 18,5 18,5 14 14
G 21,5 21,5 15 15
Н 24,5 24,5 16 16
Целевая функция Ф1Х') может содержать одновременно функции штрафа для учета ограничений-равенств и ограничений-неравенств, т.е. функцию (12.138) и одну из функций (12.140), (12.141), (12.142) или (12.143), в зависимости от используемого метода.
На рис. 12.31 приведена иллюстрация поиска условного (-* \ О о
XI = Xi - 2х-|Х2 + 3^2 - 4xj - 5
12 3 4
X! -
Рис. 12.31. Поиск условного экстремума методом штрафных функций
598
при ограничениях, описываемых функциями:
\|/(х) = 6,5-xf -2х2 = 0; ф^х)^ 4хг - х2 -1 > 0; ф2(х) = х1 +
+4х2 - 4 > 0. Поиск минимума функции ф(х) осуществлен методом наискорейшего спуска. Траектория поиска Xo,Xj,...,Xn -Точка условного экстремума X* была найдена за 3 цикла спусков при г± = 1 и rg = 21. Ее координаты: X* = [2,2624; 0,6919б]т . Значение целевой функции в этой точке Ф1Х* 1= -10,626 . \ V /
12.11.3. Метод множителей Лагранжа
Недостатком рассмотренных штрафных функций является усложнение рельефа поверхности целевой функции ф(х) (см. рис. 12.27), затрудняющее поиск ее экстремума. В этой связи предложены непараметрические схемы метода штрафных функций, основанные на использовании модифицированной функции Лагранжа (метод множителей Лагранжа). Этот метод позволяет избежать нежелательной деформации поверхности отклика (или линий равных уровней целевой функции).
Целевая функция в методе множителей Лагранжа имеет вид
(12.144)
где Гр Г} — постоянные весовые коэффициенты, не зависящие от номера т цикла поиска; Oj,^i — элементы векторов параметров метода множителей: о = (ст1?о2,...,)т; т = (т^,т2,...,т .
Компоненты векторов Др = (гу) и Ди=(^) выбирают так, чтобы абсолютные значения переменных и функций, входящих в функции штрафа, различались между собой как можно меньше, т.е. Гу и Г[ выполняют функции масштабирования (нормирования). Более подробно о выборе Гу и rz см. [26].
Параметры с у и т/ постоянны для данного цикла, но изменяются при переходе к каждому новому циклу поиска по формулам:
= min 0, ф/(х(т-1))+ , j = 1, L; (12.145)
J J \ / J J
599
т^т) = 4/t(x'(”t-1))+Ti(m"1), i = l,M, (12.146) где m — номер цикла поиска.
В формуле (12.144) верхний индекс (т) для параметров Оу
и Tj опущен с целью упрощения.
Так как выражение (12.145) представляет собой функцию срезки, то вектор 6^ не имеет положительных компонент, тогда как компоненты вектора могут иметь любой знак. Каждый из этих векторов определяет сдвиг аргумента соответствующей функции штрафа. В результате изменения сдвига аргумента при переходе к новой серии спусков штраф за нарушение ограничений возрастает, вследствие чего стационарная точка постоянно приближается к области работоспособности и решение уточняется. Начальная точка поиска Хо может быть как внутри области работоспособности Хр , так и вне ее. Начальные значения множите-- (1) (1) леи f и ’ рекомендуется принимать нулевыми.
12.11.4. Алгоритм метода штрафных функций
Алгоритм содержит следующие этапы:
Этап 1. Задание начальных значений и параметров алгоритма: начальной точки поиска Хо; начального вектора параметров штрафа ; вектора приращений параметров штрафа ДВ ; параметров окончания процедуры безусловной оптимизации в каждом цикле поиска ej и £2 (зависят от выбранного метода безусловной оптимизации); параметра окончания работы алгоритма £3 .
Этап 2. Определение значения целевой функции ф(х).
Этап 3. Поиск управляемых параметров Х^, доставляющих минимум целевой функции при фиксированном векторе параметров штрафа Rm (или и — в методе множителей Лагранжа).
Этап 4. Проверка условия окончания поиска:
ф(х("1))-Ф^С(т-1)) <е3. (12.147)
В случае выполнения неравенства (12.147) принимают полученную точку в качестве точки искомого условного экстремума X* и заканчивают процесс решения задачи оптимизации. В противном случае необходимо перейти к следующему этапу.
600
Этап 5. Определение Rm по формуле (12.139) (или и
по формулам (12.145) и (12.146)) и переход к этапу 2.
На этапе 3 в процессе поиска безусловного минимума используется любой из известных методов безусловной оптимизации. Наиболее часто применяют метод наискорейшего спуска, а также методы, описанные в разделе 12.10.
Для контроля за сходимостью метода множителей Лагранжа используют последовательности = X#; F^X^); фДх^);
= 1x^1; ; j = 1, L; i = 1, М , получаемые по окончании
каждого цикла поиска. Поиск можно прекратить, когда члены по крайней мере одной из перечисленных последовательностей перестают изменяться при переходе от одного цикла поиска ко второму.
12.11.5. Метод проекции градиента
Этот метод предназначен для решения задач условной оптимизации при наличии ограничений, описываемых функциями вида (12.135), т.е. при ограничениях-равенствах.
Поиск точки условного минимума X* целевой функции f(x) осуществляется двумя чередующимися сериями шагов. Первая серия шагов обеспечивает перемещение отображающей точки Xk на гиперповерхность ограничений, а вторая — перемещение в гиперплоскости, касательной к гиперповерхности ограничений, в направлении проекции антиградиента целевой функции на эту плоскость. Координаты отображающей точки в обеих сериях определяются на основе выражения
Xk+i = %k + АХ&+1, (12.148)
где AXfe+1 — приращение вектора X на (k +1) -м шаге поиска.
При спуске на гиперповерхность ограничений (т.е. в первой серии шагов спуска) АХ^,+1 определяется по формуле
(12.149) где ф [xk) — вектор-функция ограничений в точке Xk; —
матрица размерности т х п , строками которой являются градиенты функций-ограничений фДх), вычисленные в точке Xk :
601
д\уj/dxi дхц^/дхя ...d\\)]Jdxn 8^21дх1 5у2/3х2 ...5у2/Эхл
(12.150)
_д\\1т/дХ1 д\цт/дх2 ...дут/дхп_
Так как при спуске на гиперповерхность ограничений полного выполнения условий, предписываемых ограничениями (т.е.
0 для всех функций f = 1, m ), обеспечить нельзя, то ограничиваются достижением условий, описываемых неравенствами u/Jx*) < f = 1,тп, (12.151)
где — допустимое отклонение i-й функции ограничения от
нуля.
Если условия (12.151) нарушены, то спуск из точки Xk
осуществляется по нормали к гиперповерхности ограничений. Такое направление спуска обеспечивается матрицей D^.
После выполнения неравенств (12.151) спуск осуществляется в направлении проекции антиградиента целевой функции на касательную гиперплоскость. Направление ее определяется векто
ром
(12.152)
где Нк — проецирующая матрица:
Hk = Е - Dl(pkDi]~rDk ; (12.153)
Е — единичная матрица порядка п.
Приращение вектора X при этом определяется по формуле
^+1=лЛ. (12.154)
где — шаг поиска в направлении вектора •
Направление проекции антиградиента является локально наилучшим направлением движения к условному минимуму целевой функции. При поиске условного максимума используют проекцию градиента.
На рис. 12.32 дана иллюстрация процесса поиска условного минимума целевой функции FIX) для двумерной задачи
(\ т
Xi,X2j . Линии равных уровней целевой функции штрихо-
вые, причем Нл < Н2 < Н3 < Н±, а график функции ограничения I изображен тонкой сплошной линией.
602
Рис. 12.32. Поиск условного экстремума методом проекции градиента при ограничениях-равенствах
Отметим, что линия ограничения-равенства i|/(X) представляет собой проекцию на плоскость Л4ОХ2 линии пересечения поверхности целевой функции F(X) поверхностью, описываемой функцией i|/(X) .
Из начальной точки Хо осуществляется спуск на линию ограничения в точку Хг, в которой удовлетворяется условие (12.151). Затем происходит спуск в направлении вектора S , определяемого формулой (12.152), в точку Х2 • Вектор g отображает направление градиента целевой функции, а вектор {- — на-
правление антиградиента. Вектор S представляет собой проекцию антиградиента на направление касательной к кривой у(х) в точке Хг. В точке Х2 условие (12.151) нарушается, поэтому необходимо перейти к спуску на линию ограничения с использованием выражения (12.149). В точке Х2 опять повторяется серия спусков в направлении нового вектора S . Процесс повторяется до тех пор, пока не будет найден условный экстремум — точка X* . Безусловный же экстремум функции FIX) находится в
точке ХБ .
603
Метод проекции градиента применим и к решению задач оптимизации с ограничениями, описываемыми функциями вида (12.134), т.е. при ограничениях-неравенствах ср(Х) > 0. Применение его для таких задач иллюстрируется рис. 12.33. Линии равных уровней Hi = const целевой функции F(X) штриховые, причем Hi < Н2 < Н$ < Н^ . Функцию ограничения ф(Х) > 0 также представим в виде линий равных уровней при ср(Х) = Bt = const. Эти линии изображены на рис. 12.33 тонкими сплошными линиями, причем Bi < В2 < В3 < В4 . Линия, построенная при В3 = 0 , выделяет область работоспособности Х„ технического объекта. Область изменения управляемых параметров, в которой нарушено ограничение ф(Х) > 0 , заштрихована.
Х1
Рис. 12.33. Поиск условного экстремума методом проекции градиента при ограничениях-неравенствах
Траектория поиска условного экстремума изображена жирной сплошной линией. Из исходной точки Xq осуществляется движение в направлении антиградиента целевой функции до тех пор, пока не произойдет нарушение ограничения. Поскольку точка Xi не принадлежит области работоспособности Хр , то движение в выбранном направлении прекращается и дальнейший поиск осуществляется по методу проекции градиента.
604
12.12. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ НА ОСНОВЕ МАКСИМИННОЙ СТРАТЕГИИ
Максиминная стратегия постановки и решения оптимизационных задач — одна из наиболее перспективных при проектировании технических систем. Сложность ее реализации заключается в том, что целевая функция при этом негладкая, поэтому большинство методов безусловной оптимизации первого и второго порядков неприменимы.
Вопросы формирования целевой функции при максиминной
стратегии поиска оптимально-компромиссного решения многокритериальных задач оптимизации рассмотрены в разделе 12.6.
Целевая функция минимума, подлежащая максимизации,
имеет вид
(12.155)
где bj — коэффициент штрафа, характеризующий значимость у’-го критерия оптимальности z/Дх); $Дх) — оценка степени выпол
нения /-го технического требования к проектируемой системе, определяемая по формуле (12.44) или (12.45).
Рассмотрим особенности поверхности рельефа целевой функции на примере двумерной задачи (и = 2) при двух критериях оптимальности (т = 2), т.е. при X = (х1э х2 )т; у(х) =
= (*/1, #2)Т • Вектор оценок степени выполнения технических требований в этом случае $(х) = (Sp S2) т . Выберем вектор коэффициентов штрафа b = [1,1]т . Тогда
Нх) = min [iS;(х) 1, / = 1,2. (12.156)
Построим на координатной плоскости х40х2 линии равных уровней оценок фДх) и S2(x). На рис. 12.34, а линии равных уровней функции S-Дх) штриховые, а функции S2(x) — сплошные. Высоты уровней обеих функций обозначены Hj,...,, причем < Н2 < . Через точки пересечений линий равных
уровней, в которых $Дх)=$2(х), проведем пространственную линию АВ (жирная сплошная линия). Эта линия представляет собой гребень целевой функции f(x). По обе стороны от гребня целевая функция (12.156) уменьшается.
На рис. 12.34, б дано пространственное изображение поверхностей функций &1(х) и S2(x) и показана линия их Пересе-
605
чения АВ — гребень целевой функции f(x). Рассмотрим сечение этих поверхностей плоскостью П, параллельной координатной плоскости при
х2 - х2 ~ const. Проекция этого сечения на плоскость x^OS^xj показана на рис. 12.34,, в. Она отображает зависимость целевой функции от изменения
управляемого параметра Х| при постоянном значении С1 х2. В точке G при хг = х^ характеристики Sj (х^) и *$2(х1) пересекаются, по-этому при xi < xi целевой функцией является Sj (х ), а при Xj > xi целевой функцией становится S2(x). Экстремум целевой функции (12.156) соответствует точке X* пространства управляемых параметров X, находящейся на линии гребня АВ.
Рис. 12.34. Рельеф поверхности целевой функции при максиминной стратегии поиска: а — линии равных уровней функций £>1(х) и S^fx); б — пространственное изображение поверхностей тех же функций; в — сечение поверхностей плоскостью П
606
Отмеченные особенности целевой функции значительно затрудняют решение задачи оптимизации и требуют применения соответствующих алгоритмов поиска. Один из наиболее эффективных алгоритмов основан на применении идей метода проекции градиента. Суть его состоит в следующем.
В каждой точке траектории поиска определяются выходные параметры yj(x] и вычисляются оценки $Дх). В исходной точке Хо выделяют минимальную оценку Sp(x) и осуществляют поиск по методу наискорейшего спуска с целевой функцией FlXI = SD(x). В результате происходит улучшение оценки SD(х),
но одновременно из-за наличия конфликтных выходных параметров объекта ухудшаются другие оценки. Поэтому через некоторое число шагов поиска минимальной становится другая оценка зДх). При этом возможны различные варианты смены минимальных оценок, отображенные на рис. 12.35.
Назовем функции Sp(XJ и S^|Xj конкурирующими оценками. Эти оценки минимальны среди множества оценок S7(x) вы-ходных параметров z/Дх), j = 1, т, и поэтому подлежат улучше-
нию в первую очередь.
Рис. 12.35. Характер изменения целевой функции при максиминной стратегии поиска: а — при одновременном улучшении конкурирующих оценок степени выполнения технических требований; б — при конфликтных выходных параметрах; в — при смене конкурирующих оценок
На рис. 12.35, а смена минимальной оценки на (k +1) -м шаге поиска происходит в условиях, когда точка А не является точкой гребня (г — номер шага поиска). Это характерно для неконфликтных критериев, когда конкурирующие оценки обоих критериев одновременно улучшаются. В этом случае производится замена целевой функции FIX I = SD(x), использованной на преды-дущем шаге, на функцию f(x) = и продолжается поиск безусловного экстремума этой функции методом наискорейшего спуска.
Если конкурирующие оценки SD(x) и So IX) конфликтны, т.е. улучшение одной из них приводит к ухудшению другой (рис. 12.35, б), то при переходе к точке Х/г+1 на (й + 1)-м шаге безусловный поиск необходимо заменить на условный. При этом целевая функция остается прежней: FlX)=SDIX), но вводится ограничение типа равенства SDIX)=SnIX). Условная оптимиза-Jr \ / У \ /
ция осуществляется в соответствии с методом проекции градиента целевой функции SDIX) на гиперповерхность ограничения k|/(x) = Sp(x)~ $Дх) = 0 . Движение в двумерном пространстве
управляемых параметров при этом осуществляется вдоль линии гребня.
Возможен также случай, изображенный на рис. 12.35, в, в котором гребень минимальных оценок образуется не пересечением поверхностей SDIX) и SLlX), а пересечением поверхностей неко-торых других оценок ^(х) и $Дх), значения которых до шага k включительно не фигурировали в качестве минимальных. Это приводит к смене целевой функции f(x)=S^(x) и введению функции ограничения у(х)= $Дх)- Su(x) = 0 .
Таким образом, алгоритм максиминной стратегии поиска экстремума целевой функции включает две фазы. На первой фазе осуществляется поиск безусловного экстремума методом наискорейшего спуска, а на второй — поиск условного экстремума методом проекции градиента.
Значения всех коэффициентов штрафа bhj = l, т, вначале целесообразно принять равными единице, провести оптимизацию
608
параметров и выявить наихудшие оценки 8; 1X1 степени выпол-нения технических требований Tj. При этом все оценки должны быть положительными, т.е. S.-Lxi> 0, j = 1, тп . Если же окажется, что для некоторого количества I выходных параметров
0, j = 1,1, это означает, что технические требования Tj на них не выполняются. Поэтому необходимо предпринять соответствующие меры к их выполнению.
Возможно несколько вариантов решения этой проблемы. Прежде всего следует иметь в виду, что в допустимой области Хд управляемых параметров X возможно несколько экстремумов целевой функции. Поэтому одним из вариантов может быть поиск других экстремальных точек и определение в этих точках значений S7LXJ. Если число п управляемых параметров невелико (не более 3 — 4), для поиска используют метод сканирования, а при большей размерности вектора X выбирают случайным образом несколько начальных точек поиска и используют изложенный выше алгоритм оптимизации. Если точку, в которой Sy(x)>0 для всех выходных параметров, не удается найти, необходимо либо генерировать новую структуру технического объекта (см. рис. 1.1), либо снизить технические требования к объекту.
При максиминной стратегии поиска обычно два выходных параметра из общего их количества m имеют минимальные оценки s(x). Причем эти параметры конфликтны, поэтому имеется возможность улучшения одного из них за счет другого.
Предположим, что получены минимальные оценки выходных параметров z/i(x) и z/2(x), но первый из них более значим для достижения высоких показателей эффективности или качества проектируемого объекта. При этом Sj(x}> 0, j = 1,2 . Тогда менее значимому параметру у 2^} необходимо увеличить коэффициент штрафа &2> что позволит улучшить оценку выходного
параметра z/Дх). Действительно, если, сохраняя значение - 1, принять &2 > 1 » то значения функции S2(xj = b2S2(x) увеличиваются, график ее характеристики повернется относительно точки rj пересечения ее с осью абсцисс г (рис. 12.36), а гребень целевой
609
соответ-
данного объекта значи-
Рис. 12.36. Изменения оценок степени выполнения технических требований Si(x) и 82(х) при вариации коэффициента штрафа Ъ2 менее значимого выходного параметра У2\Х)
а его
функции переместится из точки А в точку В. Это приведет к увеличению оценки степени выполнения технического требования зДх) выходного параметра z/Дх). Значение $1(х) будет ствовать ординате точки В, а значение ^(х)/^ • Если для технического наибольшую
мость имеет выходной параметр (х оценка 8^(х) не фигурировала в качестве целевой функции в процессе оптимизации, это означает, что на данный параметр занижено техническое требование 7\. Изменяя значение Т^, можно обеспечить поиск с целевой функцией F\X) = LX) и достичь
эффективного улучшения параметра i/JXl.
Таким образом, максиминная стратегия дает проектиров-
щику широкие возможности активного управления процессом поиска оптимально-компромиссного решения, что делает ее наиболее привлекательной и перспективной для использования при разработке САПР.
Целевые функции (12.49) и (12.50), в отличие от функции (12.155), позволяют отыскивать оптимально-компромиссное решение по всем критериям одновременно и реализуют стратегию минимакса. Но для использования функций (12.49) необходимо глубокое научно-техническое обоснование комплекса требований на выходные параметры объекта проектирования и наличие соответствующей математической модели, устанавливающей зависимости между критериями и оптимизируемыми параметрами, а для функции (12.50) — проведение многофакторного эксперимента и получение регрессионной модели объекта. Поиск же экстремума целевой функции (12.49) и (12.50) существенно проще, чем функции (12.155). При наличии ограничений используется метод штрафных функций или множителей Лагранжа, а при их отсутствии — любой метод безусловной оптимизации.
ПРИЛОЖЕНИЯ
1. Функция Лапласа (интеграл вероятностей)
Ф(и)
1 и
= fexp(-0,5u2)du
2л о
и 0,00 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09
1 2 3 4 5 6 7 8 9 10 11
0,0 0,0 0,0040 0,0080 0,0120 0,0160 0,0199 0,0279 0,0279 0,0319 0,0359
0,1 0,0398 0,0438 0,0478 0,0517 0,0557 0,0596 0,0636 0,0675 0,0714 0,0754
0,2 0,0793 0,0832 0,0871 0,0910 0,0948 0,0987 0,1026 0,1064 0,1103 0,1141
0,3 0,1179 0,1217 0,1255 0,1293 0,1331 0,1368 0,1406 0,1443 0,1480 0,1517
0,4 0,1554 0,1591 0,1628 0,1664 0.1700 0,1736 0,1772 0,1808 0,1844 0.1879
0,5 0,1915 0,1950 0,1985 0,2019 0,2054 0,2088 0,2123 0,2157 0,2190 0,2224
0,6 0,2258 0,2291 0,2324 0,2357 0,2389 0,2422 0,2454 0.2486 0,2518 0,2549
0,7 0,2580 0,2612 0,2642 0,2673 0,2704 0,2734 0,2764 0,2794 0,2823 0,2852
0,8 0,2881 0,2910 0,2939 0,2967 0,2996 0,3023 0,3051 0,3079 0,3106 0,3133
0,9 0,3159 0,3186 0,3212 0,3238 0,3264 0,3289 0,3315 0,3340 0,3365 0,3389
1,0 0,3413 0,3438 0,3461 0,3485 0,3508 0,3531 0,3554 0,3577 0,3599 0,3621
1Д 0,3643 0,3665 0,3686 0,3708 0,3729 0,3749 0,3770 0,3790 0,3810 0,3830
Продолжение прил. 1
1 2 3 4 5 6 7 8 9 10 11
1,2 0,3849 0,3869 0,3888 0,3907 0,3925 0,3944 0,3962 0,3980 0,3997 0.4015
1,3 0,4032 0,4049 0,4066 0,4082 0,4099 0,4115 0,4131 0,4147 0,4162 0,4177
1,4 0,4192 0,4207 0,4222 0,4236 0,4251 0,4265 0,4279 0,4292 0,4306 0,4319
1,5 0,4332 0,4345 0,4357 0,4370 0,4382 0,4394 0,4406 0,4418 0,4430 0,4441
1,6 0,4452 0,4463 0,4474 0,4485 0,4495 0,4505 0,4515 0,4525 0,4535 0,4545
1,7 0,4554 0,4564 0,4573 0,4582 0,4591 0,4599 0,4608 0,4616 0.4625 0,4633
1,8 0,4641 0,4649 0,4656 0,4664 0,4671 0,4678 0,4686 0,4693 0,4700 0,4706
1,9 0,4713 0,4719 0,4726 0,4732 0,4738 0,4744 0,4750 0,4756 0,4762 0,4767
2,0 0,4773 0,4778 0,4783 0,4788 0,4793 0,4798 0,4803 0,4808 0,4812 0,4817
2,1 0,4821 0,4826 0,4830 0,4834 0,4838 0,4842 0,4846 0,4850 0,4854 0,4857
2,2 0,4861 0,4865 0,4868 0,4871 0,4875 0,4878 0,4881 0,4884 0,4887 0,4890
2,3 0,4893 0,4896 0,4898 0,4901 0,4904 0,4906 0,4909 0,4911 0,4913 0,4916
2,4 0,4918 0,4920 0,4922 0,4925 0,4927 0,4929 0,4931 0,4932 0,4934 0,4936
2,5 0,4938 0,4940 0,4941 0,4943 0,4945 0,4946 0,4948 0,4949 0,4951 0,4952
2,6 0,4953 0,4955 0,4956 0,4957 0,4959 0,4960 0,4961 0,4962 0,4963 0,4964
2,7 0,4965 0,4966 0,4967 0,4968 0,4969 0,4970 0,4971 0,4972 0,4973 0,4974
2,8 0,4974 0,4975 0,4976 0,4977 0,4977 0,4978 0,4979 0,4980 0,4980 0,4981
2,9 0,4981 0,4982 0,4983 0,4983 0,4984 0,4984 0,4985 0,4985 0,4986 0,4986
2. Плотность вероятности нормированного нормального распределения
ср(и) = (л/2л) 1ехр(-0,5и2)
t 0,00 0,02 0,04 0,06 0,08 t 0,00 0,02 0,04 0,06 0,08
0,0 0,3989 0,3989 0,3986 0,3982 0,3977 1,5 0,1295 0,1257 0,1219 0,1182 0,1145
0,1 0,3970 0,3961 0,3951 0,3939 0,3925 1,6 0,1109 0,1074 0,1040 0,1006 0,0973
0,2 0,3910 0,3894 0,3876 0,3857 0,3836 1,7 0,0940 0,0909 0,0878 0,0848 0,0818
0,3 0,3814 0,3790 0,3765 0,3739 0,3712 1,8 0,0790 0,0761 0,0734 0,0707 0,0681
0,4 0,3683 0,3653 0,3621 0,3589 0,3555 1,9 0,0656 0,0632 0,0608 0,0584 0,0562
0,5 0,3521 0,3485 0,3448 0,3410 0,3372 2,0 0,0540 0,0519 0,0498 0,0478 0,0459
0,6 0,3332 0,3292 0,3251 0,3209 0,3166 2,1 0,0440 0,0422 0,0404 0,0387 0,0371
0,7 0,3123 0,3079 0,3034 0,2989 0,2943 2,2 0,0355 0,0339 0,0325 0,0310 0,0297
0,8 0,2897 0,2850 0,2803 0,2756 0,2709 2,3 0,0283 0,0270 0,0258 0,0246 0,0235
0,9 0,2661 0,2613 0,2565 0,2516 0,2468 2,4 0,0224 0,0213 0,0203 0,0194 0,0184
1,0 0,2420 0,2371 0,2323 0,2275 0,2227 2,5 0,0175 0,0167 0,0158 0,0151 0,0143
1,1 0,2179 0,2131 0,2083 0,2036 0,1989 2,6 0,0136 0,0129 0,0122 0,0116 0,0110
1,2 0,1942 0,1895 0,1849 0,1804 0,1758 2,7 0,0104 0,0099 0,0093 0,0088 0,0084
1,3 0,1714 0,1669 0,1626 0,1582 0,1539 2,8 0,0079 0,0075 0,0071 0,0067 0,0063
1,4 0,1497 0,1456 0,1415 0,1374 0,1334 2,9 0,0060 0,0056 0,0053 0,0050 0,0047
613
3. Распределение х2. Значения -/J,9 в зависимости от числа степеней свободы k и уровня значимости
9 = Р[Х2 >Х2,д]
Число степеней свободы k Уровень значимости q
0,99 0,975 0,95 0,90 0,10 0,05 0,025 0,01
1 2 3 4 5 6 7 8 9
1 0,00016 0,00098 0,0039 0,016 2,7 3,8 5,0 6,6
2 0,020 0,051 0,1030 0,211 4,6 6,0 7,4 9,2
3 0,115 0,216 0,3520 0,584 6,3 7,8 9,3 11,3
4 0,297 0,480 0,711 1,06 7,8 9,5 11,1 13,3
5 0,554 0,830 1,145 1,61 9,2 ИД 12,8 15,1
6 0,872 1,24 1,63 2,20 10,6 12,6 14,4 16,8
7 1,24 1,69 2,17 2,83 12,0 14,1 16,0 18,5
8 1,65 2,18 2,73 3,49 13,4 15,5 17,5 20,1
9 2,09 2,7 3,32 4,17 14,7 16,9 19,0 21,7
10 2,56 3,25 3,94 4,86 16,0 18,3 20,5 23,2
11 3,1 3,8 4,6 5,6 17,3 19,7 21,9 24,7
12 3,6 4,4 5,2 6,3 18,5 21,0 23,3 26,2
13 4,1 5,0 5,9 7,0 19,8 22,4 24,7 27,7
14 4.7 5,6 6,6 7,8 21,1 23,7 26,1 29,1
15 5,2 6,3 7,3 8,5 22,3 25,0 27,5 30,6
16 5,8 6,9 8,0 9,3 23,5 26,3 28,8 32,0
17 6,4 7,6 8,7 10,1 24,8 27,6 30,2 33,4
18 7,0 8,2 9,4 10,9 26,0 28,9 31,5 34,8
19 7,6 8,9 10,1 11,7 27,2 30,1 32,9 36,2
20 8,3 9,6 10,9 12,4 28,4 31,4 34,2 37,6
21 8,9 10,3 11,6 13,2 29,6 32,7 35,5 38,9
22 9,5 11,0 12,3 14,0 30,8 33,9 36,8 40,3
23 10,2 11,7 13,1 14,8 32,0 35,2 38,1 41,6
24 10,9 12,4 13,8 15,7 33,2 36,4 39,4 43,0
25 11,5 13,1 14,6 16,5 34,4 37,7 40,6 44,3
Продолжение при л. 3
614
1 2 3 4 5 6 7 8 9
26 12,2 13,8 15,4 17,3 35,6 38,9 41,9 45,6
27 12,9 14,6 16,2 18,1 36,7 40,1 43,2 47,0
28 13,6 15,3 16,9 18,9 37,9 41,3 44,5 48,3
29 14,3 16,0 17,7 19,8 39,1 42,6 45,7 49,6
30 15,0 16,8 18,5 20,6 40,3 43,8 47,0 50,9
4. (-распределение Стьюдента. Значения tkq в зависимости от числа степеней свободы k и уровня значимости q = P[t > tkg]
Число степеней свободы k
уровень значимости q
0,4 0,2 0,1 0,05 0,02 0,01 0,005 0,001
1 2 3 4 5 6 7 8 9
1 1,38 3,08 6,31 12,71 31,82 63,66 318,31 636,62
2 1,06 1,89 2,92 4,30 6,97 9,93 22,33 31,60
3 0,98 1,64 2,35 3,18 4,54 5,84 10,21 12,94
4 0,94 1,53 2,13 2,78 3,75 4,60 7,17 8,61
5 0,92 1,48 2,02 2,57 3,37 4,03 5,89 6,86
6 0,91 1,44 1,94 2,45 3,14 3,71 5,21 5,96
7 0,90 1,42 1,90 2,37 3,00 3,50 4,78 5,41
8 0,89 1,40 1,86 2,31 2,90 3,36 4,50 5,04
9 0,88 1,38 1,83 2,26 2,82 3,25 4,30 4,78
10 0,88 1,37 1,81 2,23 2,76 3,17 4,14 4,59
11 0,88 1,36 1,80 2,20 2,72 8,11 4,02 4,44
12 0,87 1,36 1,78 2,18 2,68 3,06 3,93 4,32
13 0,87 1,35 1,77 2,16 2,65 3,01 3,85 4,22
615
Продолжение при л. 4
1 2 3 4 5 6 7 8 9
14 0,87 1,34 1,76 2,15 2,62 2,98 3,79 4,14
15 0,87 1,34 1,75 2,13 2,60 2,95 3,73 4,07
16 0,86 1,34 1,75 2,12 2,58 2,92 3,69 4,02
17 0,86 1,33 1,74 2,11 2,57 2,90 3,65 3,97
18 0,86 1.33 1,73 2,10 2,55 2,88 3,61 3,92
19 0,86 1,33 1,73 2,09 2,54 2,86 3,58 3,88
20 0,86 1,33 1,73 2,09 2,53 2,85 3,55 3,85
21 0,86 1,32 1,72 2,08 2,52 2,83 3,53 3,82
22 0,86 1,32 1,72 2,07 2,51 2,82 3,50 3,79
23 0,86 1,32 1,71 2,07 2,50 2,81 3,48 3,77
24 0,86 1,32 1,71 2,06 2,49 2,80 3,47 3,75
25 0,86 1,32 1,71 2,06 2,48 2,79 3,45 3,73
30 0,85 1,31 1,70 2,04 2,46 2,75 3,39 3,65
40 0,85 1,30 1,68 2,02 2,42 2,70 3,31 3,55
60 0,85 1,30 1,67 2,00 2,39 2,66 3,23 3,46
120 0,84 1,29 1,66 1,98 2,36 2,62 3,16 3,37
00 0,84 1,28 1,64 1,96 2,33 2,58 3,09 3,29
5 . F -распределение Фише-
ра. Значения Fkl,k2>q в К
зависимости от числа
степеней свободы kA,k2 и уровня значимости q = P[F > Fkl>k2,q ] = 0,05 - 0 F
1 2 3 4 5 6 7 8 9
1 2 3 4 5 6 7 8 9 10
1 161 200 216 225 230 234 237 239 241
2 18,5 19,0 19,2 19,2 19,3 19,3 19,4 19,4 19,4
3 10,1 9,55 9,28 9,12 9,01 8,94 8,89 8,85 8,81
4 7,71 6,94 6,59 6,39 6,26 6,16 6,09 6,04 6,00
616
Продолжение прил. 5
1 2 3 4 5 6 7 8 9 10
5 6,61 5,79 5,41 5,19 5,05 4,95 4,88 4,82 4,77
6 5,99 5,14 4,76 4,53 4,39 4,28 4,21 4,15 4,10
7 5,59 4,74 4,35 4,12 3,97 3,87 3,79 3,73 3,68
8 5,32 4,46 4,07 3,84 3,69 3,58 3,50 3,44 3,39
9 5,12 4,26 3,86 3,63 3,48 3,37 3,29 3,23 3,18
10 4,96 4,10 3,71 3,48 3,33 3,22 3,14 3,07 3,02
11 4,84 3,98 3,59 3,36 3,20 3,09 3,01 2,95 2,90
12 4,75 3,88 3,49 3,26 3,11 3,00 2,91 2,85 2,80
13 4,67 3,80 3,41 3,18 3,03 2,92 2,83 2,77 2,71
14 4,60 3,74 3,34 3,11 2,96 2,85 2,76 2,70 2,65
15 4,54 3,68 3,29 3,06 2,90 2,79 2,71 2,64 2,59
16 4,49 3,63 3,24 3,01 2,85 2,74 2,66 2,59 2,54
17 4,45 3,59 3,20 2,96 2,81 2,70 2,61 2,55 2,49
18 4,41 3,55 3,16 2,93 2,77 2,66 2,58 2,51 2,46
19 4,38 3,52 3,13 2,90 2,74 2,63 2,54 2,48 2,42
20 4,35 3,49 3,10 2,87 2,71 2,60 2,51 2,45 2,39
21 4,32 8,47 3,07 2,84 2,68 2,57 2,49 2,42 2,37
22 4,30 3,44 3,05 2,82 2,66 2,55 2,46 2,40 2,34
23 4,28 3,42 3,03 2,80 2,64 2,53 2,44 2,37 2,32
24 4,26 3,40 3,01 2,78 2,62 2,51 2,42 2,36 2,30
25 4,24 3,38 2,99 2,76 2,60 2,49 2,40 2,34 2,28
26 4,23 3,37 2,98 2,74 2,59 2,47 2,39 2,32 2,27
27 4,21 3,35 2,96 2,73 2,57 2,46 2,37 2,31 2,25
28 4,20 3,34 2,95 2,71 2,56 2,45 2,36 2,29 2,24
29 4,18 3,33 2,93 2,70 2,55 2,43 2,35 2,28 2,22
30 4,17 3,32 2,92 2,69 2,53 2,42 2,33 2,27 2,21
40 4,08 3,23 2,84 2,61 2,45 2,34 2,25 2,18 2,12
60 4,00 3,15 2,76 2,53 2,37 2,25 2,17 2,10 2,04
120 3,92 3,07 2,68 2,45 2,29 2,17 2,09 2,02 1,96
00 3,84 3,00 2,60 2,37 2,21 2,10 2,01 1,94 1,88
617
Окончание при л. 5
10 12 15 20 24 30 40 60 120 00
1 242 244 246 248 249 250 251 252 253 254
2 19,4 19,4 19,4 19,4 19,5 19,5 19,5 19,5 19,5 19,5
3 8,79 8,74 8,70 8,66 8,64 8,62 8,69 8,57 8,55 8,53
4 5,96 5,91 5,86 5,80 5,77 5,75 5,72 5,69 5,66 5,63
5 4,74 4,68 4,62 4,56 4,53 4,50 4,46 4,43 4,40 4,36
6 4,06 4,00 3,94 3,87 3,84 3,81 3,77 3,74 3,70 3,67
7 3,64 3,57 3,51 3,44 3,41 3,38 3,34 3,30 3,27 3,23
8 3,35 3,28 3,22 3,15 3,12 3,08 3,04 3,01 2,97 2,93
9 3,14 3,07 3,01 2,94 2,90 2,86 2,83 2,79 2,75 2,71
10 2,98 2,91 2,85 2,77 2,74 2,70 2,66 2,62 2,58 2,54
11 2,85 2,79 2,72 2,65 2,61 2,57 2,53 2,49 2,45 2,40
12 2,75 2,69 2,62 2,54 2,51 2,47 2,43 2,38 2,34 2,30
13 2,67 2,60 2,53 2,46 2,42 2,38 2,34 2,30 2,25 2,21
14 2,60 2,53 2,46 2,39 2,35 2,31 2,27 2,22 2,18 2,13
15 2,54 2,48 2,40 2,33 2,29 2,25 2,20 2,16 2,11 2,07
16 2,49 2,42 2,35 2,28 2,24 2,19 2,15 2,11 2,06 2,01
17 2,45 2,38 2,31 2,23 2,19 2,15 2,10 2,06 2,01 1,96
18 2,41 2,34 2,27 2,19 2,15 2,11 2,06 2,02 1.97 1,92
19 2,38 2,31 2,23 2,16 2,11 2,07 2,03 1,98 1,93 1,88
20 2,35 2,28 2,20 2,12 2,08 2,04 1,99 1,95/ 1,90 1,84
21 2,32 2,25 2,18 2,10 2,05 2,01 1,96 1,92 1,87 1,81
22 2,30 2,23 2,15 2,07 2,03 1,98 1,94 1,89 1,84 1,78
23 2,27 2,20 2,13 2,05 2,01 1,96 1,91 1,86 1,81 1,76
24 2,25 2,18 2,11 2,03 1,98 1,94 1,89 1,84 1,79 1,73
25 2,24 2,16 2,09 2,01 1,96 1,92 1,87 1,82 1,77 1,71
26 2,22 2,15 2,07 1,99 1,95 1,90 1,85 1,80 1,75 1,69
27 2,20 2,13 2,06 1,97 1,93 1,88 1,84 1,79 1,73 1,67
28 2,19 2,12 2,04 1,96 1,91 1,87 1,82 1,77 1,71 1,65
29 2,18 2,10 2,03 1,94 1,90 1,85 1,81 1,75 1,70 1,64
30 2,16 2,09 2,01 1,93 1,89 1,84 1,79 1,74 1,68 1,62
40 2,08 2,00 1,92 1,84 1,79 1,74 1,69 1,64 1,58 1,51
60 1,99 1,92 1,84 1,75 1,70 1,65 1,59 1,53 1,47 1,39
120 1,91 1,83 1,75 1,66 1,61 1,55 1,50 1,43 1,35 1,25
00 1,83 1,75 j 1,67 1,57 1,52 1,46 1,39 1,32 1,22 1,00
40. Зак. 3006
6. G -распределение Кохрена. Значения в зависимости от числа степеней свободы kA,k2 при уровне значимости q = P[G > Gklk2,q] = 0,05
1 2 3 4 5 6 7 8 % 9 10 16 36 144 00
2 0,9985 0,9750 0,9392 0,9057 0,8772 0,8534 0,8332 0,8159 0,8010 0,7880 0,7341 0,6602 0,5813 0.500C
3 0,9669 0,8709 0,7977 0,7457 0,7071 0,6771 0,6530 0,6333 0,6167 0,6025 0,5466 0,4748 0,4031 0,3333
4 0,9065 0,7679 0,6841 0,6287 0,5895 0,5598 0,5365 0,5175 0,5017 0,4884 0,4366 0,3720 0,3093 0,2500
5 0,8412 0,6838 0,5981 0,5440 0,5063 0,4783 0,4564 0,4387 0,4241 0,4118 0,3645 0,3066 0,2513 0,2000
6 0,7808 0,6161 0,5321 0,4803 0,4447 0,4184 0,3980 0,3817 0,3682 0,3568 0,3135 0,2612 0,2119 0,1667
7 0,7271 0,5612 0,4800 0,4307 0,3974 0,3726 0,3535 0,3384 0,3259 0,3154 0,2756 0,2278 0,1833 0,1429
8 0,6798 0,5157 0,4377 0,3910 0,3595 0,3362 0,3185 0,3043 0,2926 0,2829 0,2462 0,2022 0,1616 0,1250
9 0,6385 0,4775 0,4027 0,3584 0,3286 0,3067 0,2901 0,2768 0,2659 0,2568 0,2226 0,1820 0,1446 0,1111
10 0,6020 0,4450 0,3733 0,3311 0,3029 0,2823 0,2666 0,2541 0,2439 0,2353 0,2032 0,1655 0,1308 0,1000
12 0,5410 0,3924 0,3264 0,2880 0,2624 0,2439 0,2299 0,2187 0,2098 0,2020 0,1737 0,1403 0,1100 0,0833
15 0,4709 0,3346 0,2758 0,2419 0,2195 0,2034 0,1911 0,1815 0,1736 0,1671 0,1429 0,1144 0,0889 0,0667
20 0,3894 0,2705 0,2205 0,1921 0,1735 0,1602 0,1501 0,1422 0,1357 0,1303 0,1108 0,0879 0,0675 0,0500
24 0,3434 0,2354 0,1907 0,1656 0,1493 0,1374 0,1286 0,1216 0,1160 0,1113 0,0942 0,0743 0,0567 0,0417
30 0,2929 0,1980 0,1593 0,1377 0,1237 0,1137 0,1061 0,1002 0,0958 0,0921 0,0771 0,0604 0,0457 0,0333
40 0,2370 0,1576 0,1259 0,1082 0.0968 0,0887 0,0827 0,0780 0,0745 0,0713 0,0595 0,0462 0,0347 0,0250
60 0,1737 0,1131 0,0895 0,0766 0,0682 0,0623 0,0583 0,0552 0,0520 0,0497 0,0411 0,0316 0,0234 0,0167
120 0,0998 0,0632 0,0495 0,419 0,0371 0,0337 0,0312 0,0292 0,0279 0,0266 0,0218 0,0165 0,0120 0,0083
61S
7. Равномерно распределенные псевдослучайные числа
3393 6270 4228 6069 9407 1865 8549 3217 2351 8410
9108 2330 2157 7416 0398 6173 1703 8132 9065 6717
7891 8590 2502 5945 3402 0491 4328 2365 6175 7695
9085 6307 6910 9174 1735 1797 9229 3422 9861 8357
2638 2908 6368 0398 5495 3283 0031 5955 6544 3883
1313 8338 0623 8600 4950 5414 7131 0134 7241 0651
3897 4202 3814 3505 1599 1649 2784 1999 5775 1406
4380 9543 1646 2850 8415 9120 8062 2421 6161 4634
1618 6309 7909 0874 0401 4301 4517 9197 3350 0434
4858 4676 7363 9141 6133 0549 1972 3461 7116 1496
5354 9142 0847 5193 5416 6505 7156 5634 9703 6221
0905 6986 9396 3975 9255 0537 2479 4589 0562 5345
1420 0470 8649 2328 3939 1292 0406 5428 3789 2882
3218 9080 6604 1813 8209 7039 2086 3369 4437 3798
9697 8431 4387 0622 6893 8788 2320 9358 5904 9539
0912 4964 0502 9683 4636 2861 2876 1273 7870 2030
4636 7072 4868 0601 3894 7182 8417 2367 7032 1003
2515 4734 9878 6761 5636 2949 3979 8650 3430 0635
5964 0412 5012 2369 6461 0678 3693 2928 3740 8047
7848 1523 7904 1521 1455 7089 8094 9872 0898 7174
5192 * 2571 3643 0707 3434 6818 5729 8614 4298 4129
8438 8325 9886 1805 0226 2310 3675 5058 2515 2388
8166 6349 0319 5436 6838 2460 6433 0644 7428 8556
9158 8263 6504 2562 1160 1526 1816 9690 1215 9590
6061 3525 4048 0382 4224 7148 8259 6526 5340 4064
СПИСОК ЛИТЕРАТУРЫ
1. Автоматизированное проектирование машиностроительного гидропривода/ И. И. Бажин, Ю. Г. Беренгард, М. М. Гайцго-ри и др.: Под общ. ред. С. А. Ермакова. — М.: Машиностроение, 1988. — 312 с.
2. Альгин В. Б., Павловский В. Я., Поддубко С. ЕЕ Динамика трансмиссии автомобиля и трактора. - Мн.: Наука и техника, 1986. — 214 с.
3. Бахвалов Н. С., Жидков Н. П., Кобельков Г. М. Численные методы. — М.: Наука, 1987. — 600 с.
4. Бутенин Н. В. Введение в аналитическую механику. — М.: Наука, 1971. — 264 с.
5. Вентцелъ Е. С. Теория вероятностей. — М.: Наука, 1969. — 576 с.
6. Зенкевич О., Морган К. Конечные элементы и аппроксимация. — М.: Мир, 1986. — 318 с.
7. Корячко В. П., Курейчик В, М., Норенков И, П, Теоретические основы САПР. — М.: Энергоатомиздат, 1987. — 400 с.
8. Краскевич В, Е., Зеленский К. X., Гречко В. И. Численные методы в инженерных исследованиях. — Киев: Вища шк., 1986. — 263 с.
9. Красовский Г. И., Филаретов Г. Ф. Планирование эксперимента. — Мн.: Изд-во БГУ, 1982. — 302 с.
621
10. Крылов В. И., Бобков В. В., Монастырный П. И. Начала теории вычислительных методов. Линейная алгебра и нелинейные уравнения. — Мн.: Наука и техника, 1985. — 280 с.
11. Ксеневич И.П., Тарасик В.П. Теория и проектирование автоматических систем. — М.: Машиностроение, 1996. — 480 с.
12. Кузьмик П. К,, Маничев В. Б. Автоматизация функционального проектирования. САПР: В 9 т. Т. 5. — М.: Высш, шк., 1986. — 214 с.
13. Лурье А. Б. Статистическая динамика сельскохозяйственных агрегатов. — М.: Колос, 1981. — 382 с.
14. Лурье А. И. Аналитическая механика. — М.: Изд-во физико-математической литературы, 1961. — 824 с.
15. Метлюк Н. Ф., Автушко В, П. Динамика пневматических и гидравлических приводов автомобилей. — М.: Машиностроение, 1980. — 231 с.
16. Митков А. Л., Кардашевский С. В. Статистические методы в сельхозмашиностроении. — М.: Машиностроение, 1978. — 360 с.
17. Моисеев Н. Н. Математические задачи системного анализа. — М.: Наука, 1981. — 488 с.
18. Моисеев Н. Н\ Иванилов Ю. П., Столярова Е. М. Методы оптимизации. — М.: Наука, 1978. — 352 с.
19. Норенков И. П. Введение в автоматизированное проектирование технических устройств и систем. — М.: Высш, шк., 1986. — 304 L
20. Половинкин А. И. Основы инженерного творчества. — М.: Машиностроение, 1988. — 368 с.
21. Прйменение математических методов и ЭВМ. Вычислительные методы проектирования оптимальных конструкций/ А. Н. Останин, В. А. Гугля, Н. Н. Гурский и др.; Под общ. ред. А. Н. Останина. — Мн.: Вышэйш. шк., 1989. — 279 с.
22. Применение математических методов и ЭВМ. Планирование и обработка результатов эксперимента/ А. Н. Останин, В. П. Тюленев, А. В. Романов, А. А. Петровский; Под общ. ред. А. Н. Останина. — Мн.: Вышэйш. шк., 1989. — 218 с.
23. Проектирование трансмиссий автомобилей/ А. И. Гришкевич, Б. У. Бусел, Г. Ф. Бутусов и др.: Под общ. ред. А. И. Гришкевича. — М.: Машиностроение, 1984. — 272 с.
24. Растрыгин Л, А. Системы экстремального управления. — М.: Машиностроение, 1972. — 392 с.
622
25. Расчеты машиностроительных конструкций методом конечных элементов/ В. И. Мяченков, В. П. Мальцев, В. П. Майбо-рода и др.: Под общ. ред. В. И. Мяченкова. — М.; Машиностроение, 1989. — 520 с.
26. Реклейтис Г., Рейвиндран А, Рэгсдел К. Оптимизация в технике: в 2 т. — М.: Мир, 1986. — Т. 1. — 349 с.; Т. 2. — 320 с.
27. Самарский А. А. Введение в численные методы. — М.: Наука, 1987. — 288 с.
28. Сегерлинд Л. Применение методов конечных элементов. — М.: Мир, 1979. — 392 с.
29. Системы автоматизированного проектирования. Типовые элементы, методы и процессы/ Д. А. Аветисян, И. А. Башмаков, В. И. Геминтерн и др.: / Под ред. Д. А. Аветисяна. — М.: Изд-во стандартов, 1985. — 180 с.
30. Смирнов Н. В., Дунин-Барковский И. В. Курс теории вероятностей и математической статистики для технических приложений. — М.: Наука, 1969. — 511 с.
31. Тарасик В, П. Проектирование колесных тяговотранспортных машин. — Мн.: Вышэйш. шк., 1984. — 163 с.
32. Трудоношин В. А., Пивоварова Н. В. Математические модели технических объектов. САПР: В 9 т. Т. 4. — М.: Высш, шк., 1986. — 160 с.
33. Фурунжиев Р. И. Вычислительная техника и ее применение. — Мн.: Вышэйш. шк., 1984. — 462 с.
34о Фурунжиев Р. И., Рурский Н. Н. Применение математических методов и ЭВМ. Программное моделирование систем. — Мн.: Вышэйш. шк., 1991. — 249 с.
35. Ключев В. И. Теория электропривода. — М.: Энергоатомиздат, 1998. — 704 с.
36. Копылов И. П. Математическое моделирование электрических машин. — М.: Высш, шк., 1994. — 318 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Алгебраизация 33, 53, 349
Алгоритм 9
Анализ корреляционный 509
— переходных процессов 347, 394
— регрессионный 469
— статических состояний 305
— технического объекта 18
— чувствительности целевой функции 542
Ансамбль реализаций 406
Аппроксимация конечно-разностная 54, 350
В
Время корреляции 442
— переходного процесса 348, 394
Выборка 434
624
Выборочная дисперсия 439
Выборочное среднее 439, 494
Г
Генеральная совокупность 434
Генерирующее соотношение 489
Градиент 39
— целевой функции 524
Граничное условие 36, 194 — 202
Граф 103
— ориентированный 108
д
Декомпозиция 15
Декремент колебаний 394, 396
Дивергенция вектора 38
Дискретизация 53, 349
Дисперсия 415, 457
— адекватности 500
— воспроизводимости опыта 494
— эксперимента 496
— выборочная 457
— модели среднего 505
— остаточная 506
Доверительная вероятность 435
Доверительный интервал 435, 499
И
Иерархический уровень модели 17
— макроуровень 24
— метауровень 24
— микроуровень 24
Интеграл вероятностей 420
Интервал варьирования фактора 46'
— интегрирования 350
Итерационная формула 309
Итерационный метод 307
Итерация 307
Квазискорость 172
Колебательность 394, 396
Концепция 15
Координата базисная 23, 118
— геометрическая 70
— фазовая 23, 70
типа потенциала 70
типа потока 70
Коэффициент асимметрии 417, 439
— веса 532
— детерминации 502
— динамичности 394, 396
— жесткости 77
----гидравлической 82, 96
— корреляции 416, 458
— регрессии 474, 497
— сопротивления 76, 89
— — гидравлического 81, 94, 95
— температуропроводности 41
— теплопроводности 41
— трансформации 155
— штрафа 539, 590, 604
— эксцесса 417, 439
Критерий Кохрена 495
— оптимальности 21, 529
— Пирсона 439
— Стьюдента 495
— Фишера 496
л
Линеаризация нелинейностей 229, 316
Линии равных уровней 518
М
Математическое ожидание 412, 413, 439, 41
Матрица базисных функций 473
626
— Гессе 524
— дублирования 469
— информационная Фишера 476
— инциденций 111
— итерационная 309
— корреляционная 509, 510
— ленточная 60, 329
— плана 468
— спектра плана 468
— трансформаторных элементов 160
— фрикционных элементов 192
— Якоби 254
Метод конечных разностей 53
----элементов 53
— итерационный 307
— прогонки 329
— сосредоточенных масс 68
— статистических испытаний 463, 508
— структурно-матричный 147
— узловой 115
— функционально законченных элементов L
— штрафных функций 589
Моделирование математическое 8
— физическое 7
Модель 7
— динамическая 67
----кольцевая 271
----разветвленная 271
----регулярная 273
----цепная 271
— математическая 8
----алгоритмическая 25
----аналитическая 25
----вероятностная 29
----графическая (схемная) 25
----детерминированная 30
----динамическая 29
----имитационная 25
----инвариантная 25
----линейная 28
627
----нелинейная 28
----регрессионная 462
----статическая 29
----структурная 27
----теоретическая 28
----функциональная 27
----экспериментальная факторная 460
Н
Невязка алгебраических уравнений 306, 310
Нормирование критериев (выходных параметров) 536
— управляемых параметров 544
— целевой функции 536
О
Объем выборки 434, 437
Определяющий контраст 492
Оптимизация 514
Ортогональность 478, 485
Оценка случайного процесса несмещенная 435
— состоятельная 434
— эффективная 435
П
Параметр объекта (системы) 17
----внешний 18
----внутренний 17
----выходной 17
— оптимальный 514
— управляемый 514
— штрафа 590
Передаточное отношение 155
— число 155
Переходный процесс 31, 347
План второго порядка 477, 503
— композиционный 477
— насыщенный 477
628
— первого порядка 477
— ротатабельный 478
Планирование эксперимента 466
Плотность вероятности 409, 419
— теплового потока 41, 84
Поверхность отклика 462
Показатель качества 17
----переходного процесса 347, 392, 394
— эффективности 17
Полином характеристический 258
— устойчивости формул интегрирования 3;
Принцип Даламбера 78, 116
Пространство фазовое 23
— факторное 461
Р
Рандомизация 464
Распределение биномиальное 423
— гамма 423
— логарифмически нормальное 421
— нормальное 418
— Пирсона 422
— Пуассона 424
— равномерное 424
— экспоненциальное 422
Режим работы системы динамический 30
-------модельный 31, 347
-------переходный 31, 347
-------резонансный 270
-------статический 30, 304
— стационарных колебаний 31
С
Связи 70, 237, 238
Синтез технического объекта 18
Система парциальная 89
— с распределенными параметрами 35
— с сосредоточенными параметрами 67
629
Скорость сходимости итераций 308
Случайная величина 405
— функция 405
Случайный процесс 405
----нестационарный 428
----стационарный 428
----центрированный 414
----эргодический 429
Собственные значения матрицы Якоби 256
Соединение гираторное 107
— дифференциальное 107
Состояние системы неустановившееся 30
----установившееся 30
Спектр матрицы Якоби 256
— резонансных частот 270
— собственных частот 279
Спектральная плотность 432, 443
Спектральный радиус матрицы 308
Среднее квадратическое отклонение 415
Стратегия оптимизации 533
Структура 17
— динамической модели 68, 100
— регрессионной модели 470
— технического объекта (системы) 17
Т
Теплообмен индуктивный 85
— конвективный 42, 85
— лучистый 43
Топологическое вырождение 272
Топология 103, 271
Точка Парето 531
— плана 467
— седловая 522, 525
— стационарная 522, 525
— экстремума 514, 522, 525
Траектория поиска 526
630
Узел графа 104
----базовый 105
----источника потока 113
— сетки внутренний 54, 196, 197
----граничный 54, 196, 197
Уравнение компонентное 44
— конечно-разностное 349
— Коши 349
— Лагранжа второго рода 123, 127
— Ламе 50
— Навье—Стокса 39, 46
— регрессии 462
— связи виртуальной 239
----неголономной 238, 243
— теплопроводности Фурье 41, 84
— топологическое 75
— характеристическое 266
— Эйлера 46
Уровень значимости 495
Устойчивость вычислительного проце< — физическая (системы) 253, 269
Фактор 461
Фильтр низких частот 441
Формула интегрирования Адамса 373
----Гира 376
----Рунге—Кутта 371
----Тейлора 351
----Эйлера 351, 364
Функция ковариационная 414
— корреляционная 415, 442
----взаимная 417, 447
— Лапласа 419
— моментная 412
— ограничения 520, 589
— отклика 462
631
— распределения 407
— целевая 21, 514, 529, 534 — 540
— штрафа 589
X
Характеристика переходная 31, 392
— частотная 452
----амплитудная 453
----фазовая 453
Ч
Частота внешнего воздействия 279
— относительная (частость) 438
— парциальная 89, 280
— резонансная 268, 280
— собственная 268, 280
Число обусловленности матрицы 256
Ш
Шаг интегрирования 350
— итерации 312
— сетки 54
Э
Эксперимент 463
— активный 463
— вычислительный 460
— дробный факторный 487
— пассивный 463
— полный факторный 481
— физический 460
Экстремум безусловный 519
— глобальный 516, 518
— локальный 516
— условный 520
Элемент динамической модели 68, 74, 89
632
------простой 74
------сложный 74
— диссипативный 69
— инерционный 69
— нелинейный 227
— трансформаторный 69
— фрикционный 69
— упругий 69
----реактивный 114
Эффект взаимодействия 471
— линейный 471
— парный 472
СОДЕРЖАНИЕ
ПРЕДИСЛОВИЕ......................................4
ВВЕДЕНИЕ.........................................7
1. ОБЩИЕ СВЕДЕНИЯ О МОДЕЛИРОВАНИИ ТЕХНИЧЕСКИХ СИСТЕМ..............................13
1.1. Методология автоматизированного проектирования.13
1.2. Структура и параметры объектов проектирования..17
1.3. Особенности технологии автоматизированного проектирования.................................18
1.4. Постановка задач проектирования...........21
1.5. Классификация математических моделей......22
1.6. Режимы функционирования технических объектов...30
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ТЕХНИЧЕСКИХ ОБЪЕКТОВ НА МИКРОУРОВНЕ.........................35
2ЛГ. Объекты проектирования на микроуровне....35
2.2. Основы построения математических моделей на микроуровне........................38
2.3. Модели тепловых систем на микроуровне......40
2.4. Модели гидравлических систем на микроуровне.45
2.5. Модели механических систем на микроуровне...50
2.6. Приближенные математические модели технических объектов на микроуровне............53
3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ПРОСТЫХ
ДИСКРЕТНЫХ ЭЛЕМЕНТОВ ТЕХНИЧЕСКИХ ОБЪЕКТОВ............................66
3.1. Объекты проектирования на макроуровне........66
3.2. Динамическая модель технического объекта на макроуровне..................................67
3.3. Компонентные и топологические уравнения ....74
3.4. Компонентные и топологические уравнения механической системы..................76
3.5. Компонентные и топологические уравнения гидравлической системы................79
3.6. Компонентные и топологические уравнения тепловой системы.......................83
3.7. Компонентные и топологические уравнения электрической системы.................86
3.8. Аналогии в динамических системах............87
3.9. Определение параметров элементов динамических моделей технических объектов..... 89
4. ОСНОВЫ ПОСТРОЕНИЯ ТЕОРЕТИЧЕСКИХ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ НА МАКРОУРОВНЕ.... 100
4.1. Способы построения теоретических моделей...100
4.2. Графические формы представления математических моделей .........................103
4.3. Матричная форма представления математической модели.........................111
4.4. Узловой метод формирование математической модели.........................115
4.5. Уравнения Лагранжа второго рода...........123
4.6. Метод функционально законченных элементов...133
5. СТРУКТУРНО-МАТРИЧНЫЙ МЕТОД
ФОРМИРОВАНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ..............145
5.1. Основы структурно-матричного метода........145
5.2. Моделирование технических объектов с трансформаторными элементами...................154
635
5.3. Сложное движение твердого тела..............171
5.4. Моделирование механической системы при пространственном движении твердых тел..........177
5.5. Моделирование механической системы при плоском движении твердых тел...............184
5.6. Моделирование технических объектов с фрикционными элементами......................189
5.7. Моделирование теплопередачи в твердых телах.195
5.8. Моделирование электромеханических систем....204
6. МОДЕЛИРОВАНИЕ НЕЛИНЕЙНЫХ СИСТЕМ И
СИСТЕМ С ВИРТУАЛЬНЫМИ И НЕГОЛОНОМНЫМИ СВЯЗЯМИ ...?:.....................226
6.1. Виды нелинейных характеристик элементов технических систем...................226
6.2. Моделирование нелинейных элементов .........229
6.3. Моделирование нелинейных систем.............232
6.4. Связи элементов технической системы.........237
6.5. Моделирование технических объектов с неудерживающими связями........................238
6.6. Моделирование неголономных систем...........242
7. КАЧЕСТВЕННЫЙ АНАЛИЗ И УПРОЩЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ............................252
7.1. Задачи качественного анализа математических моделей.........................252
7.2. Оценка свойств математической модели........254
7.3. Собственные значения матрицы Якоби математической модели.......... ........257
7.4. Оценка физических свойств технической системы по спектру матрицы Якоби................263
7.5. Топология динамических моделей технических систем..............................271
7.6. Упрощение динамических моделей механических систем.....................278
7.7. Упрощение динамических моделей гидравлических и гидромеханических систем......294
8. МОДЕЛИРОВАНИЕ И АНАЛИЗ СТАТИЧЕСКИХ СОСТОЯНИЙ............................304
8.1. Задачи анализа статических состояний технических систем....................304
636
8.2. Постановка задач анализа статических состояний.305
8.3. Численные методы решения систем алгебраических уравнений...................307
8.4. Метод простой итерации........................310
8.5. Метод Зейделя.................................314
8.6. Методы релаксации.............................316
8.7. Метод Ньютона.................................316
8.8. Методы решения систем линейных алгебраических уравнений..........................320
8.9. Метод Гаусса..................................322
8.10. Метод L 17-разложения........................325
8.11. Решение систем линейных алгебраических уравнений с ленточными матрицами..................329
8.12. Анализ статических состояний линейных технических систем.......................330
8.13. Анализ статических состояний нелинейных технических систем.....................337
9. МОДЕЛИРОВАНИЕ И АНАЛИЗ ПЕРЕХОДНЫХ ПРОЦЕССОВ.................................346
9.1. Задачи анализа переходных процессов технических систем......................346
9.2. Численные методы интегрирования обыкновенных дифференциальных уравнений..........349
9.3. Погрешности численных методов интегрирования..354
9.4. Устойчивость численных методов интегрирования.358
9.5. Выбор шага интегрирования......................361
9.6. Одношаговые методы интегрирования.............364
9.7. Многошаговые методы интегрирования............372
9.8. Методы прогноза и коррекции...................375
9.9. Неявные методы интегрирования.................375
9.10. Алгоритмы неявных методов интегрирования.....388
9.11. Оценка показателей качества переходных процессов.............................391
9.12. Анализ переходных процессов технических систем...............................398
10. МОДЕЛИРОВАНИЕ И АНАЛИЗ ВЕРОЯТНОСТНЫХ СИСТЕМ................................403
10.1. Основные понятия теории вероятностей.........403
637
10.2. Распределения вероятностей..................407
10.3. Числовые вероятностные характеристики.......412
10.4. Теоретические распределения вероятностей....418
10.5. Моделирование случайных величин.............425
10.6. Основные свойства случайных процессов.......428
10.7. Моделирование реализаций случайных процессов.430
10.8. Оценки вероятностных характеристик реализаций случайных процессов....................433
10.9. Определение статистических оценок вероятностных характеристик случайных процессов...............................435
10.10. Определение статистических оценок числовых вероятностных характеристик случайных величин.................................457
11. ЭКСПЕРИМЕНТАЛЬНЫЕ ФАКТОРНЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ...............................459
11.1. Особенности экспериментальных факторных моделей.................................459
11.2. Основные принципы планирования эксперимента..464
11.3. План эксперимента...........................466
11.4. Регрессионный анализ........................469
11.5. Оценка параметров регрессионной модели......473
11.6. Планы экспериментов и их свойства...........477
11.7. План однофакторного эксперимента............478
11.8. План полного факторного эксперимента........481
11.9. План дробного факторного эксперимента.......487
11.10. Генерирующие соотношения и определяющие контрасты.......................... 492
11.11. Статистический анализ результатов активного эксперимента............................494
11.12. Определение коэффициентов регрессионной модели и проверка их значимости ..................497
11.13. Проверка адекватности и работоспособности регрессионной модели..............................500
11.14. Планы второго порядка......................503
11.15. регрессионный анализ результатов вычислительного эксперимента на детерминированной теоретической модели............505
638
11.16. Получение математической модели на основе пассивного эксперимента....................508
12. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ТЕХНИЧЕСКИХ СИСТЕМ.................................512
12.1. Принцип локальной оптимизации в методологии автоматизированного проектирования ....512
12.2. Основные понятия и определения параметрической оптимизации......................514
12.3. Определение экстремума аналитической целевой функции....................520
12.4. Поисковая оптимизация.......................525
12.5. Постановка задач оптимизации................528
12.6. Формирование целевой функции в многокритериальной задаче оптимизации............533
12.7. Выбор управляемых параметров................541
12.8. Методы поиска экстремума целевой функции....545
12.9. Методы безусловной оптимизации..............547
12.9.1. Метод покоординатного спуска (метод Гаусса — Зейделя)........................547
12.9.2. Методы случайного поиска.................550
12.9.3. Метод градиента..........................551
12.9.4. Метод наискорейшего спуска...............554
12.9.5. Определение оптимального шага при многомерном поиске........................ 555
12.9.6. Метод Ньютона............................559
12.9.7. Метод Марквардта............................
12.9.8. Аппроксимация градиента целевой функции..563
12.9.9. Оценка эффективности методов
поиска в условиях сложного рельефа поверхностей отклика................564
12.10. Оптимизация в условиях сложного рельефа поверхности целевой функции.......................567
12.10.1. Метод вращающихся координат.............567
12.10.2. Метод сопряженных направлений...........570
12.10.3. Метод сопряженных градиентов............574
12.10.4. Методы переменной метрики...............577
12.10.5. Метод регулярного симплекса.............579
12.10.6. Метод деформируемого многогранника......583
639
12.11. Оптимизация параметра технических систем с учетом ограничений....................588
12.11.1. Функция штрафа при ограничениях-равенствах.......................590
12.11.2. Функции штрафа при ограничениях-неравенствах....................593
12.11.3. Метод множителей Лагранжа............598
12.11.4. Алгоритм метода штрафных функций.....599
12.11.5. Метод проекции градиента.............600
12.12. Оптимизация параметров на основе максиминной стратегии..........................604
ПРИЛОЖЕНИЯ.....................................610
СПИСОК ЛИТЕРАТУРЫ..............................620
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ...........................623