/

















































































































































































































































Текст
К. Ф. ТЕОДОРЧИК
АВТОКОЛЕБАТЕЛЬНЫЕ
СИСТЕМЫ
ИЗДАНИЕ ТРЕТЬЕ,
ИСПРАВЛЕННОЕ
И ДОПОЛНЕННОЕ
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ТЕХНИКО-ТЕОРЕТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 10 5 2 ЛЕНИНГРАД
АННОТАЦИЯ
Книга посвящена теории автоколебательных
и потенциально-автоколебательных систем, т. е.
систем динамических (электрических,
механических и электромеханических), в которых при
известных условиях может нарушаться
устойчивость положения равновесия и возникать
движение, переводящее систему в режпм ста
ционарных периодических колебаний.
В книге изложены простые методы
приближённого решения технических задач, возш>
кающих при работе таких систем.
Книга рассчитана на научных работников
и инженеров, работающих в области
электросвязи, автоматического регулирования и
физики колебаний, а также на студентов
соответствующих специальностей.
ОГЛАВЛЕНИЕ
Предисловие 6
Введение 11
часть 1 '
АВТОНОМНЫЕ СИСТЕМЫ
Глава I. Общие методы исследования свойств
колебательных и автоколебательных систем 12
§ 1. Пассивный линейный колебательный контур ... 12
§ 2. Влияние линейной лампы на пассивный
колебательный контур 14
§ 3. Решения линейного уравнения колебательной
системы на плоскости комплексного переменного . . 17
§ 4. Решения линейной системы второго порядка на
фазовой плоскости 25
§ 5. Колебательный контур, регенерированный
нелинейной лампой 35
§ 6. Фазовая плоскость нелинейных систем. Предельный
цикл 38
§ 7. Влияние гармоник на частоту автоколебаний ... 48
§ 8. Динамика автоколебаний 50
Глава II. Квазилинейные методы приближённого
рассмотрения почти гармонических автоколебаний . . 54
§ 9. Динамика вынужденных колебаний линейной
консервативной системы 54
§ 10. Энергетический метод приближённого решения
уравнения почти гармонических автоколебаний . . 59
§ 11. Мягкий режим генерации 62
§ 12. Жёсткий режим генерации 71
$13. Метод линеаризации характеристик 80
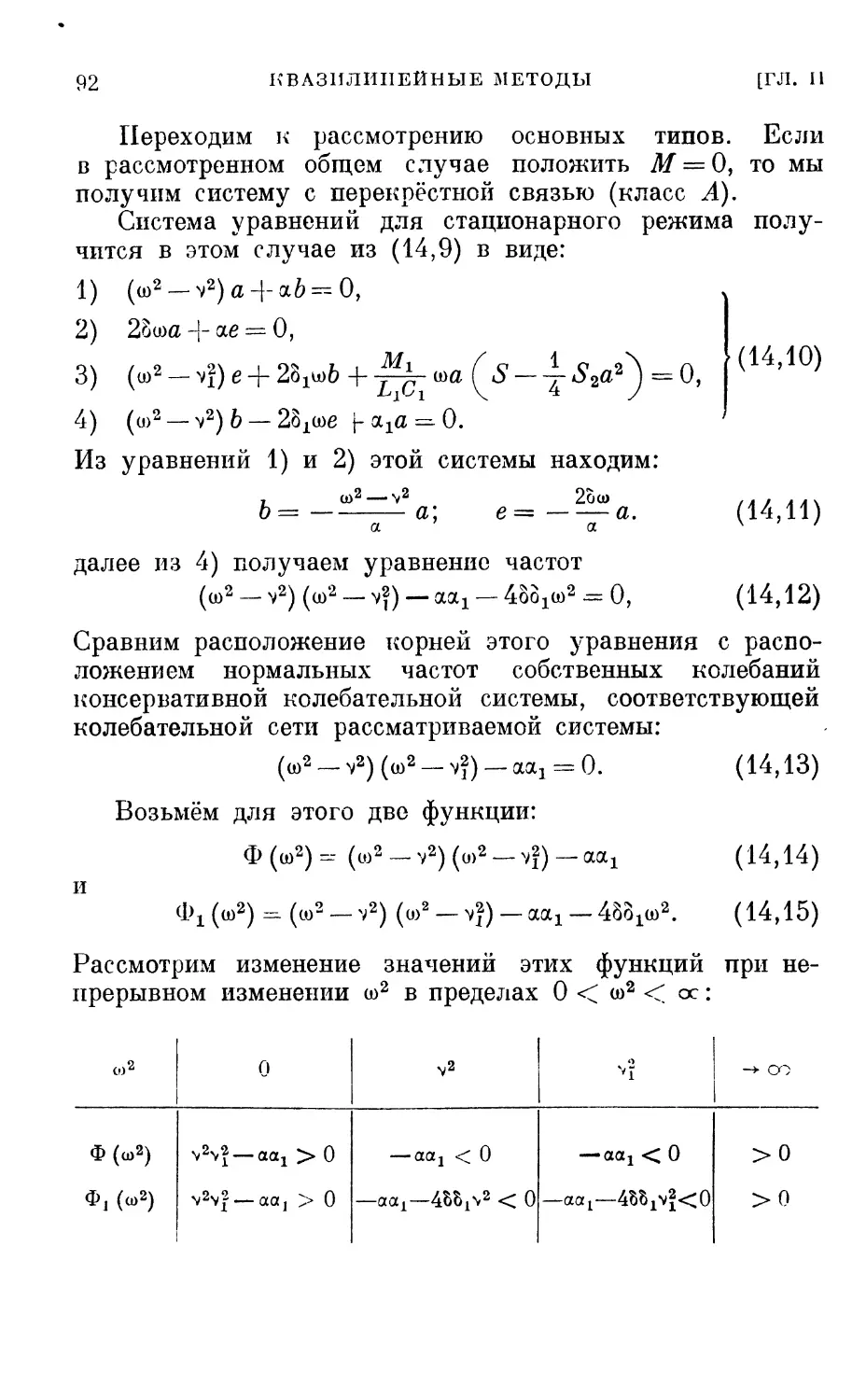
§ 14. Почти гармонические автоколебательные системы
с двумя степенями свободы • . 89
Глава III. Метод диаграмм регенерации 99
§ 15. Распространение метода амплитудно-частотных
характеристик на квазилинейные и почти
гармонические автоколебательные системы 99
4 ОГЛАВЛЕНИЕ
§ 16. Построение обобщённой диаграммы регенерации . . 104
§ 17. Примеры применения метода обобщённых диаграмм
регенерации к решению автоколебательных задач . 106
§ 18. Явление затягивания 114
§ 19. Схемы стабильной частоты 118
§ 20. Отрицательная обратная связь 122
§ 21. Автоколебательные системы с инерционной
нелинейностью 123
§ 22. Генераторы гармонических автоколебаний типа RG 127
§ 23. Стабильность гармонических автоколебательных
систем 145
§ 24. Теория генераторов с колебательным контуром в
схеме моста 147
§ 25. Генераторы с падающей характеристикой или
отрицательным сопротивлением лампы 151
§ 26. Диаграммы регенерации систем с отрицательным
сопротивлением 155
Глава IV. Автоколебания, близкие к гармоническим
(системы с запаздыванием) 162
§ 27. Автоколебательные системы с запаздывающими
силами 162
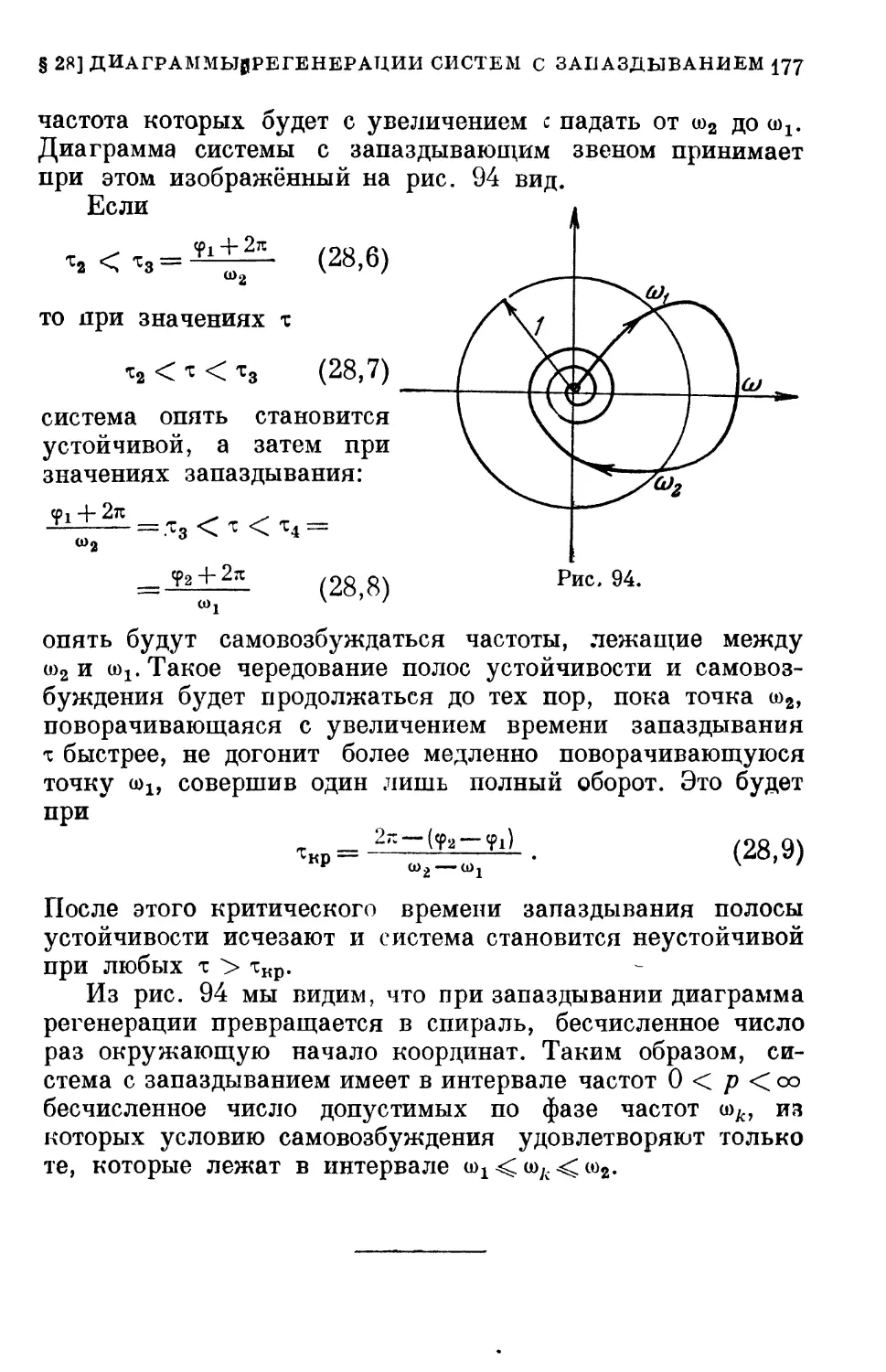
§ 28. Диаграммы регенерации систем с запаздывающими
силами 175
Глава V. Релаксационные автоколебательные системы . . 178
§ 29. Колебательные и автоколебательные системы
негармонического типа (Типы движений регуляторов,
управляемых с помощью реле) 179
§ 30. Графический метод Льенара 191
§ 31. Разрывные автоколебания 197
§ 32. Непрерывный переход от почти гармонических
автоколебаний к разрывным. Блокинг-генератор . . . 199
§ 33. Релаксационные автоколебательные системы с
запаздывающими силами 207
ЧАСТЬ 2
НЕАВТОНОМНЫЕ СИСТЕМЫ
Глава VI. Нелинейные колебательные и
автоколебательные системы под действием внешних сил ... 210
§ 34. Метод нахождения периодических почти
гармонических решений нелинейных систем при
гармоническом внешнем воздействии 212
§ 35. Признаки устойчивости периодического решения . 214
§ 36. Нелинейный колебательный контур 217
§ 37. Параметрический резонанс в нелинейном контуре . 223
§ 38. Теория регенеративного приёмника 234
§ 39. Режим биений, механизм явления захватывания . . 243
ОГЛАВЛЕНИЕ 5
§ 40. Взаимная синхронизация двух генераторов .... 247
§ 41. Резонанс второго рода 250
§ 42. Асинхронные воздействия 254
§ 43. Действие внешних сил на автоколебательные
системы с инерционной нелинейностью 259
§ 44. Действие внешней периодической силы на
релаксационную автоколебательную систему 263
Таблица формул для разложения тригонометрических
полиномов в ряд Фурье 270
Основная литература 271
ПРЕДИСЛОВИЕ
Современная наука и техника широко пользуются
незатухающими колебаниями. Более того, само развитие
радиосвязи, электроакустики, телевидения и многих
других отделов новой техники стало возможным только после
открытия и изучения систем, могущих генерировать
незатухающие колебания за счёт источников энергии,
колебательными свойствами не обладающих. Такого рода
системы получили название автоколебательных. Пожалуй,
наиболее широко распространёнными системами такого
рода являются электромагнитные прерыватели. Наиболее
же важным их представителем является ламповый
генератор. Однако явления автоколебаний встречаются не
только среди электрических систем, но широко
распространены в динамических системах любого вида. К этому
классу принадлежат, например, часы, все тепловые
машины поршневого типа, все смычковые и духовые
инструменты и т. д. Кроме перечисленных систем, в которых
автоколебания являются основным рабочим процессом
и которые поэтому естественно назвать генераторами
колебаний, в технике широко распространены системы,
работа которых может происходить без автоколебаний,
но в которых автоколебания при известных условиях
могут возникать. Таковы все ламповые усилители,
приёмники, всевозможные регуляторы, следящие системы и т. п.
В этих системах, носящих название
потенциально-автоколебательных, возникновение автоколебаний в одних
случаях может оказаться полезным для их работы,
в других—вредным.
Рациональный подход ко всем указанным
автоколебательным явлениям возможен только на базе создания
ПРЕДИСЛОВИЕ
7
теории, достаточно точно отображающей их специфику.
Хорошо известная теория линейных колебаний этому
требованию, очевидно, не удовлетворяет, так как в
линейных системах незатухающие колебания при наличии дис-
сипативных сил и в отсутствии периодического или
квазипериодического внешнего воздействия невозможны.
Таким образом, все автоколебательные системы являются
принципиально нелинейными, и для их адэкватного
рассмотрения необходимо было развитие теории нелинейных
колебаний. Начало развития теории автоколебаний было
положено работами зарубежных учёных—Мейснера,
Баркгаузона, Мельера (Германия). Однако,вскоре после
Великой Октябрьской революции, в связи с бурным
развитием радиотехники в Советском Союзе, ведущая роль
в этом вопросе перешла к советским учёным академикам
Л. И. Мандельштаму, Н. Д. Папалекси, А. А.
Андронову, А. Н. Крылову, чл.-корр. АН Н. Н. Боголюбову,
акад. М. В. Шулейкину, профессорам М. А. Бонч-Бруе-
вичу, 10. П. Кобзареву, Б. П. Асееву и многим
другим. Разработанные ими методы распадаются на две
группы.
Первую группу образуют методы, применимые к
произвольным нелинейным системам как при малой, так и при
большой нелинейности; такими общими методами
являются, во-первых, впервые применённый А. А.
Андроповым ц получивший широкое применение метод
качественного интегрирования уравнений автоколебательных
систем путём построения семейства интегральных кривых
на фазовой плоскости и, во-вторых, метод кусочной
линеаризации; нелинейной характеристики с последующим
сшиванием решений.' на. границах линейных областей,
впервые применённый Н. Д. Папалекси.
'Вторую группу образуют методы с ограниченной
применимостью, "приложимые лишь, к случаям большой
нелинейности (релаксационные автоколебания) или малой
нелинейности (почти гармонические автоколебания).
К первой подгруппе относится метод разрывной
трактовки (Мандельштам), а ко второй—метод малого
параметра (Андропов, Витт)., опирающийся на
математические работы Пуанкаре и Ляпунова, и ряд квазилинейных
8
ПРЕДИСЛОВИЕ
методов, широко применяемых вследствие своей
простоты*).
Предлагаемое вниманию читателей третье издание
«Автоколебательных систем», как и предыдущие издания,
не ставит своей целью систематическое изложение всех
методов анализа нелинейных систем**).
В книге развиты энергетический и
амплитудно-фазовый методы, которые допускают прозрачную физическую
интерпретацию и углубление понимания механизма
автоколебательных процессов. На базе этих методов даны
простые и надёжные способы приближённого решения
многочисленных технических вопросов, возникающих при
практическом применении нелинейных динамических
систем—как электрических, так и механических.
В третье издание дополнительно включены:
качественный метод интегрирования нелинейных уравнений при
помощи построения на фазовой плоскости семейства
интегральных кривых, дополненный энергетическим
рассмотрением свойств такого фазового портрета, и
изложение квазилинейного метода линеаризации
характеристики. Сравнение этих методов позволило показать,
что в гармоническом приближении все эти методы
равноценны и сводятся к переходу к квазилинейным
уравнениям, точно описывающим свойства
инерционно-нелинейных систем.
Этот результат позволил выяснить границы
приложимости гармонического приближения квазилинейных
методов. Граница эта определяется тем, что ряд важных и ярко
выраженных свойств автоколебательных систем
(возможность периодических движений, синхронизация на
основной частоте и т. д.) совершенно не зависит от характера
нелинейности, в частности, её инерционности или без-
инерционности и поэтому правильно описывается
квазилинейными уравнениями. Свойства эти сами могут быть
названы квазилинейными, в противоположность суще-
*) Один из этих методов—метод медленно изменяющихся
амплитуд—обоснован академиками Л. И. Мандельштамом и
Н. Д. Папалекси, ЖЭТФ, т. 4 (1934), стр. 117.
**) Изложение всех методов читатель может найти в ряде
монографий и трудов, список которых прилагается.
ПРЕДИСЛОВИЕ
9
ственно нелинейным свойствам, целиком определяемым
отступлениями формы автоколебаний от гармоничности, т. е.
наличием обертонов (например, синхронизация на
гармониках). Эти последние свойства не могут быть
охвачены гармоническим приближением и квазилинейными
методами.
Весь материал книги заново просмотрен, переработан
и дополнен. Автор заранее благодарен всем, кто пожелал
бы сообщить ему свои критические замечания.
К. Теодорчик
Москва, 28/XI 1951 г.
ВВЕДЕНИЕ
Автоколебательными называют такие колебательные
динамические (электрические, механические или
смешанные электромеханические) системы, в которых при
известных условиях положение равновесия теряет устойчивость
и возникает движение, переводящее систему в режим
стационарного периодического колебания; чтобы обладать
такими свойствами, любая автоколебательная система
должна состоять из трёх обособленных или
переплетённых между собой частей: во-первых, из колебательной ->
системы, во-вторых, из управляемого этой системой уси- 1
лителя, обратное воздействие которого, перекрывая
неизбежные потери колебательной энергии, делает
положение равновесия системы неустойчивым, а колебания из ,
затухающих—нарастающими, и, в-третьих, из
ограничителя нарастания колебаний, переводящего их в
стационарное периодическое движение конечной величины.
Колебательная система и усилитель могут быть
линейны, ограничитель же колебаний неизбежно должен
быть нелинейным элементом. Поэтому и любая
автоколебательная система всегда принципиально нелинейна.
Рассмотрение автоколебательных систем рационально
разделить на две части: автоколебания, совершающиеся
свободно, без воздействия внешних сил (автономные
системы), математически характеризуемые тем, что
описывающие их уравнения не содержат времени явно, и
автоколебания, происходящие при наличии внешних, явно
зависящих от времени сил (неавтономные системы).
ЧАСТЬ 1
АВТОНОМНЫЕ СИСТЕМЫ
ГЛАВА I
ОБЩИЕ МЕТОДЫ ИССЛЕДОВАНИЯ СВОЙСТВ
КОЛЕБАТЕЛЬНЫХ И АВТОКОЛЕБАТЕЛЬНЫХ
СИСТЕМ
§ 1. Пассивный линейный колебательный^контур
Рассмотрим электрический контур, состоящий из
постоянных по величине ёмкости С и катушки
самоиндукции L, омическое сопротивление которой R (рис. 1).
Если в начальный момент равновесие зарядов в
контуре нарушено и далее контур от внешних воздействий
свободен, то в нём возникают сво-
R бодные движения, описываемые
"ЛЛЛЛЛ*—| уравнением
:с LQ + RQ + ±Q = 0, (1,1)
которое выражает отсутствие в
контуре электродвижущих сил. В
этом уравнении Q обозначает
мгновенное значение заряда
конденсатора.
ч.
Рис. 1.
Если принять во внимание, что
С
= V
(1.2)
есть мгновенное значение разности потенциалов на
обкладках конденсатора, а
dQ
dt '
Q-=I
(1,3)
§ 1] ПАССИВНЫЙ ЛИНЕЙНЫЙ КОЛЕБАТЕЛЬНЫЙ КОНТУР 13
мгновенное значение тока контура, то мы видим, что
делением уравнения (1,1) на С мы получим уравнение для
потенциала ёмкости
LV + RV + ±-V = 0, (1,4)
а дифференцированием — уравнение для тока
U + RI + ±I = 0. (1,5)
Таким образом, заряд, потенциал и ток конденсатора
изменяются при свободном движении по одинаковому
закону*). Это позволяет при рассмотрении свойств решения
уравнения свободных колебаний не интересоваться
физической природой независимой переменной, обозначив её
просто буквой х.
Введя обозначения:
2j = 8 — коэффициент затухания,
— = о)2 — собственная циклическая частота,
мы можем поэтому записать уравнение свободных
колебаний в виде:
'х + 2Ъх + ы1х = 0. (1,6)
Все члены этого уравнения должны, конечно, иметь
одинаковую размерность. Так как дифференцирование
по времени привносит в формулу размерности
множитель Т"1, то, очевидно,
[Ч = Ы = У-1. (1.7)
Если контур образован обычными физическими элемен- .
тами В, L, С, то все его параметры, а следовательно и
коэффициенты уравнения (1,6), положительны. Вследствие
рассеяния энергии в положительном омическом
сопротивлении все свободные движения рассматриваемой системы
затухают со временем, и система из любого начального
состояния приходит к устойчивому положению
равновесия. Тем же свойством обладает и любой сложности сеть,
*) Этим свойством обладают лишь линейные системы.
14 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
Г состоящая из положительных L, R и С и не содержа-
/щая сторонних электродвижущих сил. Вследствие этого
) все такие системы получили название пассивных. Так как
) в пассивной системе все свободные движения
сопровождаются рассеянием энергии, а притока энергии извне нет,"то
все свободные движения пассивной системы затухают и
система приводится в состояние устойчивого равновесия.
§ 2. Влияние линейной лампы на пассивный
колебательный контур
Положим теперь, что с колебательным контуром
(рис. 1) связана линейная усилительная лампа, анодная
/а характеристика которой выражается
I * 1 формулой
/^Ь\ # l I Ia = h + Sx, (2,1)
V^^aTi g M g где Ia — мгновенное значение анод-
Т| "Т//4 ( г ного тока> соответствующее мгновен-
' ному значению потенциала сетки х,
Рис. 2. а £ —постоянная крутизна
характеристики *). Схема присоединения
лампы к контуру изображена на рис. 2. Колебательный
контур включён в цепь сетки так, что разность
потенциалов обкладок конденсатора подаётся на сетку
* = ■§-. (2,2)
Изменения анодного тока благодаря обратной связи анодной
катушки с сеточной индуцируют в контуре
электродвижущую силу
*=-мЦ*. (2,3)
Благодаря этому колебания заряда в контуре описываются
*) Современные усилительные лампы имеют довольно
большой практически линейный участок характеристики и поэтому
при работе в пределах этого участка могут быть рассматриваемы
как линейные элементы.
s 1\ ВЛШНШН ЛАМШ.1 НА КОЛЕБАТЕЛЬНЫЙ КОНТУР 15
уравнением
LQ + RQ + ±Q = e. (2,4)
Воспользовавшись уравнениями (2,1) —(2,3), мы получим
из (2,4) уравнение свободных колебаний контура,
регенерированного лампой: *~~'
ж + т^д + _^ + _ж = 0. (2,5)
Сравнив это уравнение с уравнением свободных колебаний
контура (1,6), мы видим, что линейная усилительная лампа,
присоединённая к контуру в схеме обратной связи,
оставляет вид уравнения без изменения, привнося лишь
к омическому сопротивлению контура добавочное
сопротивление
#л = ^-. (2,6)
В отличие от обычного сопротивления проводников
контура, это привносимое усилителем добавочное
сопротивление может быть как положительным (при
положительном М), так и отрицательным (при отрицательном М).
В первом случае усилитель в схеме обратной
связи увеличивает затухание контура, поэтому такую
обратную связь, подавляющую колебания, называют
отрицательной; во втором случае затухание уменьшается,
колебания регенерируются обратной связью, — это
положительная обратная связь.
Если связь между анодной и сеточной катушкой
схемы рис. 2 осуществлена в виде вариометра, допускающего
непрерывное изменение коэффициента взаимоиндукции,
то, как видно из уравнения (2,5), действующее
сопротивление колебательного контура может быть непрерывно
изменяемо. Это действующее сопротивление обращается
г» пуль при
д/=. _^ИЛ11 j,,^^.. (2,7)
1ft МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
При этом контур становится, с математической точки
зрения, консервативным и описывается уравнением
Конечно, физически такая совершенно точная компенсация
сопротивления неосуществима, и случай (2,8) является
лишь границей между затухающими свободными
движениями (устойчивым положением равновесия), имеющими
место при
М>-^, (2,9)
и нарастающими свободными движениями (неустойчивым
положением равновесия), наступающими при
М<-™. (2,10)
Таким образом, линейная усилительная лампа в схеме
обратной связи позволяет непрерывно менять затухание
колебательного контура, переводя его из устойчивых
режимов затухающих в неустойчивые режимы
нарастающих свободных движений.
Введя обычные обозначения для коэффициента
затухания и частоты собственных колебаний:
280 = 1(Я + ^) иш"»^, (2,11)
мы можем записать уравнение (2,5) в виде обычного
уравнения колебательной системы:
х + 2Ь0х + ^х = 0. (2,12)
В этом уравнении, однако, коэффициент затухания может
принимать как положительные, так и отрицательные
значения. В последнем случае мы будем называть его
коэффициентом нарастания колебаний.
Кроме рассмотренного выше случая воздействия
линейной лампы на диссипативный параметр (сопротивление)
колебательного контура, обратная связь может изменять
и консервативные его параметры. Действительно, рас-
РЕШЕНИЯ УРАВНЕНИЯ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ 17
Рис. 3.
смотрим схему рис. 3, в которой обратная связь на лампу
подана не с ёмкости, а с сопротивления колебательного
контура. В этой схеме потенциал сетки и анодный ток
выражаются формулами:
x=-RQ; Ia^Sx; (2,13)
электродвижущая сила, поступающая из анодной цепи
в контур, равна (см. (2,3))
е = - MSx = MSRQ. (2,14) ,
Подставив это выражение в (2,4), /^
получим: ь—
LQ + RQ + ^Q- MSRQ X
или
(L-MSR)Q + RQ + ^Q = 0.(2,15)
Из этого выражения мы видим, что в этой схеме
обратной связи линейная лампа изменяет не сопротивление, а
индуктивность колебательного контура, а именно:
уменьшает её при М > 0 и увеличивает при М < 0.
Аналогично уравнению (2,5) это уравнение может быть
приведено к виду (2,12), однако при (L — MSR)<0
в этом уравнении коэффициенты Ь0 и о)^ будут
отрицательны. Это показывает, что линейный усилитель в схеме
обратной связи может существенно изменять
динамические свойства линейной цепи вплоть до перевода её из
колебательной в апериодическую и наоборот. Ярким
примером этого являются генераторы типа RC (см. § 22).
§ 3. Решения линейного уравнения колебательной -
системы на плоскости комплексного переменного
Чтобы исследовать закономерности в изменении
характера решений уравнения линейной колебательной системы
второго порядка
х + 2Ъ0х + о>20х = 0 (3,1)
- К. Ф. Теодорчик
18 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
при непрерывном изменении коэффициента затухания
в пределах
»>&о>-оо, (3,2)
приведём его сначала к простейшему виду.
Воспользуемся тем, что любой колебательной системе присуща своя
единица времени — период её собственных колебаний,—
и введём в уравнение (3,1) безразмерное время
т = а)0г = 2тг — . (3,3)
Исходное уравнение при этом примет вид:
Разделив, далее, все члены на wg и введя безразмерный
параметр
• = ^*). (3,4)
мы получим искомый простейший вид уравнения
£ + 2,* + *-0, (3,5)
зависящий только от одного параметра. Значения этого
параметра могут согласно (3,2) изменяться в пределах
оо > s > — оо. (3,6)
Для упрощения записи мы ниже будем обозначать
дифференцирование по собственному времени попрежнему
точкой и писать уравнение (3,5) в виде:
х + 2&х + х = 0. (3,7)
Как известно, все частные решения линейных
дифференциальных уравнений с постоянными коэффициентами
*) Параметр е связан с добротностью регенерированной
системы Q соотношением
§ 3] РЕШЕНИЯ УРАВНЕНИЯ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ 1Q
имеют вид показательных функций времени*):
х = Ае*. (3,8)
Подставив (3,8) в уравнение (3,7), мы получим:
(s2 + 2zs + l)x = 0. (3,9)
Так как мы ищем решение, не равное тождественно нулю,
то записанное в таком виде**)уравнение может
удовлетворяться только при обращении в нуль алгебраического
уравнения
s2 + 2ss + l = 0, (ЗДО)
называемого характеристическим уравнением
дифференциального уравнения (3,7). Решение этого уравнения даёт
два значения
*i.2= -t±/?=l (3,11)
и два частных решения (3,7). Общее решение, как
известно из теории, равно
x = A1e^ + A2es^f (3,12)
где Ах и А2 — две произвольные постоянные, однозначно
определяемые заданием двух начальных условий
движения:
для т = 0 х = х0 и x—Xq. (3,13)
Характер определяемого общим решением (3,12)
движения зависит от значений корней характеристического
*) См., например, акад. А. Н. Крылов, О некоторых
дифференциальных уравнениях математической физики. Изд.
АН СССР, 1932.
**) При такой записи s имеет, очевидно, смысл оператора
дифференцирования, а величина оператора интегрирования.
Действительно, из общего вида частного решения линейных
уравнений (3,8) следует:
С 1
x = sx и \ xdz= — х. (3,14)
о*
2р МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
уравнения. Корни эти могут быть действительными или
комплексно сопряжёнными, поэтому их удобно изображать
точками на плоскости комплексного переменного (х, iy)
(рис. 4).
Если е уменьшается в пределах
оо>е>1, (3,15)
то корни s, оставаясь действительными отрицательными
числами, движутся от — оо и — 0 навстречу друг другу
до слияния в двойной корень в точке — 1 (рис. 4). Общее
решение (3,12)
представляется при этом суммой двух
показательных затухающих
функций. В зависимости от
начальных условий движение
имеет характер
апериодического приближения к
положению устойчивого
равновесия без перемен знака или
с одной переменой знака
(рис. 5, а и б). При
дальнейшем уменьшении е в
пределах
1>е>0 (3,16)
корни характеристического уравнения становятся
комплексно сопряжёнными
*i,2= -e±;j/T=^ (3,17)
Рис. 4.
и перемещаются по комплексной плоскости по дуге
окружности радиуса единицы (так как |s| = l) от точки А до
тсУчек В и С (рис. 4). Общее решение принимает в этой
области вид затухающего по показательному закону
колебания
x^Ae-^sindfl^? . т + ср), (3,18)
т. е. колебательного приближения к устойчивому
равновесию (рис. 5, в).
При s = 0 корни становятся чисто мнимыми $1,2= ± &
(точки В и С на рис. 4) и общее решение получает вид
§ 3] РЕШЕНИЯ УРАВНЕНИЯ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ 21
незатухающего колеоания
x-.4sin(x + cp). (3,19)
С изменением знака s на отрицательный положение
равновесия системы теряет устойчивость, так как пара
комплексно сопряжённых корней выходит в правую полу-
плоскость. Корни характеристического уравнения
принимают вид
«l^^leliil/l^i* (3,20)
и с уменьшением г в пределах
0 > е > - 1
(3,21)
двигаются по правой половине окружности к точке D.
Общее решение принимает при этом характер показательно
нарастающего от неустойчивого положения равновесия
колебания (рис. 5, г)
(3,22)
х =- А& 61"- sin (j/ 1 — s2 • т + ср).
В точке D два комплексно сопряжённых корня s опять
сливаются в двойной действительный положительный
корень
М.2=+1 (3,23)
22 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
и при дальнейшем уменьшении е в пределах
-1>е>-оо, (3,24)
оставаясь действительными и положительными, расходятся
к пределам
$!-» f 0 и <?2->+°о. (3,25)
Это —область апериодической неустойчивости, в которой
общее решение
* = V'-^"5"7^ Ve,+/7-Th (3,26)
принимает вид суммы двух показательно нарастающих
функций. Таким образом, мы видим, что траектории
корней характеристического уравнения линейной системы
второго порядка на плоскости комплексного переменного
наглядно показывают границы устойчивости и смену
характера свободных движений системы.
В применении к линейным системам более высоких
порядков метод этот позволяет сформулировать необхо-
•г димое и достаточное условие устойчивости, состоящее
в требовании, чтобы все корни характеристического урав-
; нения лежали в левой полуплоскости комплексного пере-
/ менного 5, а также важное для автоколебательных систем
/ условие самовозбуждения колебаний, состоящее в юм,
1 что при изменении параметров устойчивой системы
самовозбуждение колебаний (колебательная потеря
устойчивости) *) наступает тогда, когда одна из пар комплексно
сопряжённых корней выходит через мнимую ось в правую
. полуплоскость комплексного переменного s.
Для линейных систем второго порядка, как мы видели,
необходимым и достаточным признаком устойчивости
положения равновесия является положительность всех
коэффициентов уравнения. Для систем более высокого порядка
признак этот необходим, но недостаточен. Раусом-Гурви-
цем указан общий метод нахождения по коэффициентам
характеристического уравнения системы необходимых и
*) При выходе через мнимую ось в правую полуплоскость
действительного корня имеет место, очевидно, апериодическая
потеря устойчивости.
I ц РЕШЕНИЯ УРАВНЕНИЯ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ 23
достаточных признаков устойчивости положения
равновесия системы п-то порядка*). Метод этот состоит в еле*
дующем: если нам дано характеристическое уравнение
системы
ao^ + ei^-^e^^+.-.+fln-is-hfln^O, (3,27)
то надо составить из его коэффициентов квадратную
матрицу, написав по её диагонали в порядке возрастания
индекса все коэффициенты, начиная от аг. Все
горизонтальные строки заполняются затем коэффициентами, —
справа от диагонали с индексами убывающими, а слева —
с возрастающими на единицу. Оставшиеся свободными
места замещаются нулями. Составив эту матрицу,
выделяем из неё п детерминантов указанным ниже образом.
Для устойчивости положения равновесия системы
необходимо и достаточно, чтобы все п детерминантов были
положительными. Иллюстрируем сказанное на примере
системы четвёртого порядка:
А}..
К
<*1
а3
"6
О
О
а*
.......
О
О
«4
(3,28)
(3,29)
Вычислив детерминанты, получим условия
устойчивости положения равновесия системы четвёртого порядка:
Д£ == а3 (а1а2 — а0а3) — а\а± > О,
Д* = а4>0.
Условия устойчивости системы третьего порядка получим
отсюда, положив а4 = 0:
Д? = ах>0,
Д| == агаъ — а0а3 > 0, (3,30)
>0.
Ч е т а е в, Устойчивость движения*
ь1
*) См., например, Н. Г.
ОГИЗ, Гостехиздат, 1946.
24 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ {ГЛ I
Заметим, что, как легко убедиться, из выписанных условий
следует необходимость положительности всех
коэффициентов. Нарушение последнего из этих условий указывает
на выход в правую полуплоскость комплексного
переменного действительного корня. Действительно, свободный
член, как произведение всех корней, взятое с
соответствующим порядку уравнения знаком, меняет знак лишь
при переходе в правую полуплоскость комплексного
переменного действительного корня уравнения. Таким
образом, нарушение последнего условия устойчивости
указывает на появление в решении уравнения показательно
нарастающего члена, т. е. на возникновение
апериодической неустойчивости.
Наоборот, нарушение предпоследнего условия
устойчивости указывает на выход в правую полуплоскость
пары комплексно сопряжённых корней *), т. е. на
появление в решении показательно нарастающего
гармонического колебания (колебательной неустойчивости). Поясним
сказанное примером. Если для системы третьего порядка,
в характеристическом уравнении которого все
коэффициенты положительны
a0s3 + axs2 + a2s + а3 = О,
выполнено условие
А| = аха<ь — а0а3 = 0 или -^-^-^_, (3,32)
то мы можем представить исходное уравнение в виде:
<*+-$) О2+-S>0' <3'33>
т. е. оно имеет один действительный отрицательный корень
*!=-£- (3,34)
*) Для системы от третьего до шестого порядка
включительно указанный признак является единственным возможным путём
получения колебательной неустойчивости. Для систем более
высоких' порядков возможны и другие пути, однако вопрос этот
пока ещё полностью не исследован.
(3,31)
§ 41 РЕШЕНИЯ ЛИНЕЙНОЙ СИСТЕМЫ НА ФАЗОВОЙ ПЛОСКОСТИ 25
и пару чисто мнимых корней
«2,з = ±;"[А^ (3,35)
и находится на границе колебательной неустойчивости.
§ 4. Решения линейной системы второго порядка
на фазовой плоскости
Ещё более наглядную картину свойств линейной
колебательной системы второго порядка даёт
представление этих решений в виде семейства интегральных кривых
на фазовой плоскости начальных условий х иж = у*).
Состояние системы, описываемой уравнением
s + 2ei + s = 0, (4Д)
изображается в любой момент времени положением
представляющей точки (х0, г/0) на фазовой плоскости. При
движении системы эта точка движется по фазовой
плоскости, описывая на ней непрерывную кривую,
называемую интегральной кривой системы. Через любую точку
фазовой плоскости, если точка эта не соответствует
положению равновесия системы, проходит одна и только одна
интегральная кривая. Действительно, координаты любой
точки фазовой плоскости, за исключением точек,
соответствующих положениям равновесия, мы можем принять
за начальные условия однозначно определяемого ими
свободного движения системы. С другой стороны, если бы
две интегральные кривые имели где-либо на фазовой
плоскости (не в точке равновесия) общую точку, то,
приняв координаты этой точки за начальные условия
движения, мы пришли бы к противоречию, так как этим
начальным условиям соответствовало бы не одно, а два
различных свободных движения. Таким образом, вся
фазовая плоскость (за исключением положения равновесия)
*) А. Пуанкаре, О кривых, определяемых
дифференциальными уравнениями. ОГИЗ, Гостехиздат, 1947. Акад. А. А. А н-
д р о н о в п С. Э. X а й к и н, Теория колебаний, ч. 1. ОНТИ, 1937.
26 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
покрыта семейством непересекающихся интегральных
кривых. Поведение интегральных кривых в точках
равновесия, называемых особыми точками системы, мы
рассмотрим ниже.
Из уравнения движения системы (4,1) легко получить
уравнение семейства интегральных кривых. Для этого
достаточно, представив уравнение движения в виде системы
двух дифференциальных уравнений первого порядка
du 0 dx / / <*v
-£--.-х-2еу и -^=у, (4,2)
исключить из них время, разделив почленно первое на
второе:
dy __ — ж — 2гу
dx ~~ у ' \*>6'
Уравнения (4,2) дают, очевидно, проекции скорости
перемещения представляющей точки на координатные оси
фазовой плоскости. Отсюда легко может быть вычислена
и сама скорость движения представляющей точки вдоль
интегральной кривой
( Скорость v не следует смешивать со скоростью изменения
dx \
независимого переменного -у- — у Л
Геометрически уравнение (4,3) даёт угловой
коэффициент касательной к интегральной кривой в точке (#, у)
фазовой плоскости
*~Ч,.-* = ^. (4,5)
Полученное соотношение однозначно определяет угловой
коэффициент для всех точек фазовой плоскости за
исключением положения равновесия системы, для которого оно
принимает вид
4-J • (^
# § 4] РЕШЕНИЯ ЛИНЕЙНОЙ СИСТЕМЫ НА ФАЗОВОЙ ПЛОСКОСТИ 27
указывающий на неопределённость направления
касательных в особых точках. Построение вида семейства
интегральных кривых, так называемого фазового портрета
системы, для различных типов свободных движений
возможно либо непосредственным интегрированием уравнения
(4,3) *), либо графически методом изоклин. Сущность
этого последнего метода,
применимого и для
нелинейных систем второго
порядка, когда
интегрирование уравнения семейства
интегральных кривых
невозможно, состоит в
следующем: уравнение (4,5)
непосредственно даёт
уравнение семейства изоклин,
т. е. геометрического
места точек фазовой
плоскости, в которых семейство
интегральных кривых
имеет касательные с данным
угловым коэффициентом к.
Для рассматриваемой линейной системы все линии
семейства изоклин прямые, проходящие через начало
координат:
у -1
Рис. 6.
к+2г '
(4,7)
На рис. 6 дан пример построения методом изоклин
фазового портрета консервативной линейной системы (е^О).
Особое значение для любой системы имеют следующие
изоклины:
А) Изоклина горизонтальных касательных. Для этого
геометрического места -г-~- 0, т. е. А«=0, что для
линейной системы даёт уравнение прямой, проходящей через
*) См. А. А. Андронов и С. Э. Хайкин, Теория
колебаний. ОНТИ, 1937.
28 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I {
начало координат:
Заметим, что уравнение изоклины горизонтальных
касательных в общем случае может быть получено
непосредственно из дифференциального уравнении зястемы, положив
в нём х = 0 и х = у.
В) Изоклина вертикальных касательных, для которой
— = л:=оо. В рассматриваемом случае ее уравнение
(см. (4,7)) принимает также вид прямой
У = 0. (В)
Таким образом, все интегральные кривые уравнения
типа (4,1) пересекают ось абсцисс под прямым углом.
Обратимся теперь к подробному рассмотрению
изменения фазового портрета системы (4,1) при непрерывном
изменении параметра е в пределах
оо > е > — оо.
I. Область апериодически затухающих движений
co>s>l. (4,8)
В этой области решения уравнения (4,1) дают:
У Ах e<-s+V^> - + А2*—V*=i) -
(4,9)
Отсюда видно, что существуют две и только две системы
начальных условий, при которых это отношение принимает
постоянное значение. Это будет: во-первых, если
начальные условия таковы, что
Аг Ф 0, а А2 - 0;
тогда
£=_е + |/е-ПГТ; .(С)
§ 4] РЕШЕНИЯ ЛИНЕЙНОЙ СИСТЕМЫ НА ФАЗОВОЙ ПЛОСКОСТИ 20
и, во-вторых, если начальные условия заданы так, что
Аг = 0, а А2 Ф 0;
тогда
|=_e_^iTZl. (D)
На фазовой плоскости эти два случая отображаются двумя
интегральными прямыми, проходящими через начало
координат и расположенными во втором и четвёртом
квадрантах фазовой плоскости. Ниже эти две интегральные
прямые мы будем обозначать буквами С и D. Вместе
с прямыми горизонтальных А и вертикальных В
касательных эти, характерные для апериодических режимов
линейного осциллятора, прямые дают на фазовой плоскости
костяк всего фазового портрета. Сравнив уравнения
прямых А, С та D, легко убедиться, что прямая горизонтальных
касательных всегда проходит ближе к оси абсцисс, чем
интегральные прямые С и D. Обратимся теперь к
рассмотрению расположения на фазовой плоскости указанных
четырёх прямых'в рассматриваемом случае.
Прие=+о° линии горизонтальных касательных А,
вертикальных касательных В и интегральная прямая С
сливаются с осью абсцисс, а интегральная прямая D—с осью
ординат. Фазовый портрет системы для этого случая
вырождается в семейство вертикальных прямых, по
которым движение представляющей точки происходит по
направлению к оси абсцисс (рис. 7).
Если s уменьшается до конечных, но больших по
сравнению с единицей значений, то интегральные прямые С
и D, оставаясь близкими соответственно к осям абсцисс
и ординат, начинают вращаться около начала координат
навстречу друг другу, углубляясь во второй и четвёртый
квадранты. Линия вертикальных касательных В остаётся
неподвижной и всегда совпадает с осью абсцисс. Линия
же горизонтальных касательных вращается по часовой
стрелке около начала координат, оставаясь между
интегральной прямой С и осью абсцисс. При больших
значениях скорости у~х все интегральные кривые практически
параллельны интегральной прямой D. В полосе малых
30 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
значении скоростей г/ = # интегральные кривые
искривляются и, пересекая или не пересекая линии
вертикальных В и горизонтальных А касательных, направляются
к началу координат, неограниченно приближаясь к
интегральной прямой С (рис. 8). При дальнейшем уменьшении
1
1
t '
1 1
t 1
i I
t \
i i
У
0
''
\ i
''
»>
! '
i i
i i
'
<2?
-0 &
Рис. 7.
*-x
s до единицы интегральные прямые С и D всё больше
сближаются и при е = 1 сливаются в одну прямую,
делящую пополам второй и четвёртый квадранты фазовой
плоскости. Прямая горизонтальных касательных
поворачивается при этом вокруг начала координат против часовой
стрелки до положения АО А (рис. 9), определяемого
уравнением
J/=jzi
х 2 *
Таким образом, с уменьшением е от оо до 1 интегральные
кривые сходятся к положению равновесия по всё более
изогнутым траекториям, совершая в пределе при е = 1
полный полуоборот вокруг начала координат. При этом
все интегральные кривые всегда достигают особой точки
по направлению полупрямых СО. Очевидно, что в этом
случае начало координат соответствует устойчивому поло.
и колебательно.
4] РЕШЕНИЯ ЛИНЕЙНОЙ СИСТЕМЫ НА ФАЗОВОЙ ПЛОСКОСТИ 31
жепию равновесия. Особая точка рассмотренного типа
получила название устойчивого узла.
II. Область колебательно затухающих движений.
Значение е = 1 является границей между областями
движений, затухающих апериодически
Последняя область
простирается для значений е, из-^
меняющихся в пределах
1 >е>0. (4,10)
В этой области
интегральные прямые С и D
исчезают, и в качестве каркаса
фазового портрета остаются
лишь прямые изоклин
вертикальных касательных В
(линия абсцисс) и
горизонтальных касательных А.
Последняя прямая с
уменьшением s продолжает
далее вращаться около
начала координат по часовой
с осью
Рис. 0.
стрелке от положения АО А (рис. 9) до совпадения
ординат.
Решение уравнения (4,1) принимает в рассматриваемой
области вид
х = Ае**1*sin (\/ 1 — е2
х = Ae~'z cos([/1 — е2 •
■ * + ?),
(4,11)
где
tgx
Таким образом, как координата х, так и скорость её
изменения х = у, совершают сдвинутые по фазе колебания,
амплитуда которых затухает по показательному закону.
Отсюда видно, что на фазовой плоскости все
интегральные кривые спирально скручиваются к положению
равновесия, являющемуся особой точкой типа устойчивого
32 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ CHCTJEM [ГЛ. 1
фокуса (рис. 10, а). В противоположность узлу, к которому,
как мы видели, все интегральные кривые приходят по
направлению интегральной прямой С, к устойчивому
фокусу интегральные кривые приходят со всех сторон.
С уменьшением е «шаг спирали» непрерывно
уменьшается, а прямая горизонтальных касательных всё ближе
придвигается к оси ординат. В пределе при е = 0
семейство спиралей переходит в семейство концентрических
Рис. 10.
окружностей с центром в начале координат. Для этого
случая особая точка получила название центра. Её не
достигает ни одна из замкнутых интегральных кривых,
вернее, сам центр является выродившейся в точку
замкнутой интегральной кривой (рис. 6). Это фазовый портрет
консервативной колебательной системы
х + х = 0, (4,12)
решение которой имеет вид незатухающего гармонического
движения
z = ylsin(T + cp). (4,13)
Первый интеграл уравнения (4,12) (интеграл энергии)
имеет вид
x2 + y2 = p2 = 2Wy (4,14)
§ 4] РЕШЕНИЯ ЛИНЕЙНОЙ СИСТЕМЫ НА ФАЗОВОЙ ПЛОСК >СТИ 33
где W есть постоянная энергия незатухающих колебаний
системы.
Каждому значению постоянной энергии W соответствует
на фазовой плоскости замкнутая интегральная кривая—
окружность радиуса р = \/r2W. Поэтому интегральные
кривые консервативной колебательной системы являются
траекториями равной энергии системы. Отсюда следует,
что любая интегральная кривая затухающего движения
пересекает траектории равной энергии, переходя снаружи
окружности внутрь, так как движение по ней
представляющей точки сопровождается рассеянием энергии
системы. Интегральные же кривые нарастающих движений
(см. III и IV) (движение по которым сопровождается
приростом энергии системы) пересекают траектории
равной энергии изнутри наружу.
III. Область колебательно нарастающих движений.
Пройдя через режим консервативных движений,
наступающий при е = О, система при дальнейшем уменьшении s
в пределах
0>е> -1 (4,15)
вступает в область нарастающих по показательному
закону колебательных движений.
Решение уравнения (4,1) имеет в этой области вид,
совпадающий с решением (4,11) для II области, но прямая
горизонтальных касательных А, продолжая с
уменьшением s вращаться по часовой стрелке, выходит в первый
и третий квадранты фазовой плоскости. Благодаря этому
интегральные кривые получают вид раскручивающихся
от неустойчивого положения равновесия спиралей
(рис. 10, б), а особая точка получает вид неустойчивого
фокуса.
При е = — 1 изоклина горизонтальных касательных
согласно (А) достигает прямой
и возникают две совпадающие действительные интеграль
ные прямые С и D, делящие пополам первый и трети и
квадранты фазовой плоскости. Фазовый портрет системм
3 К Ф. Теодорчик
34 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. 1
принимает при этом вид рис. 12, при котором особую точку
называют неустойчивым узлом (ср. с рис. 7—9 I области).
Фазовая плоскость сохраняет этот тип при всём
дальнейшем уменьшении г в пределах
_1>е> -оо. (4,17)
При этом интегральные прямые С и D расходятся,
вращаясь в противоположных направлениях: линия С,
Рис. И. Рис. 12.
вращаясь против часовой стрелки, стремится в пределе
к совпадению с осью ординат, а линия D и идущая
впереди неё изоклина горизонтальных касательных Ау
вращаясь по часовой стрелке, стремятся к оси абсцисс.
Характер изменения при этом фазового портрета
системы дан на рис. 11, 12 и рис. 7 с изменённым
направлением стрелок.
Из вышеизложенного ясно, насколько наглядным
является метод рассмотрения свойств свободных движений
линейной колебательной системы на фазовой плоскости.
Метод этот, как показал акад. А. А. Андронов, сохраняет
все свои достоинства и в применешш к нелинейным
автоколебательным системам второго порядка. В работах
акад. А. А. Андронова и других авторов метод этот
успешно применён и для изучения некоторых нелинейных
систем более высокого порядка, решения которых изобра-
§ 5} КОЛЕБАТЬ 1Ы1. КОН'ПР, i'El E1IEP11 J»() BAJIIJblU ЛАШЮ11 35
жаются, конечно, уже не на плоскости, а в фазовом
пространстве.
Рассмотрим в заключение фазовый портрет
неустойчивой линейной системы второго порядка с отрицательной
упругостью. Ограничившись случаем отсутствия трения,
имеем уравнение
х- u>2r = 0. (4,18)
Формальным (так как система (4,18) не колебательная)
введением собственного времени
и это уравнение может быть
приведено к простейшему виду:
'х-х^О, (iJ9)
первый интеграл которого даёт
?/2 — х2 =. const. (4,20)
11а фазовой плоскости это
уравнение даёт семейство гипербол
с асимптотами
У=±х (4,21)
(рис, 13). Как видно из рисунка, па фазовой плоскости
уравнение (4,19) даёт всегда неустойчивую особую точку,
получившую название седла. Учёт затухания даёт
аналогичную фазовую картину, лишь сжатую или растянутую
вдоль осей координат. Убедиться в этом предоставляем
читателю.
§ 5. Колебательный контур, регенерированный
нелинейной лампой
В предыдущих параграфах мы детально рассмотрели
шпы движений, возможных в линейной колебательной
системе второго порядка при регенерации линейной
лампой, и убедились, что среди возможных в такой схеме дви
жений нет автоколебаний. Периодические движения
вокруг особой точки типа центра автоколебаниями считать
нельзя, так как амплитуда их произвольна и определяется
:№ .МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. i
начальными условиями движения. Кроме того, как
указано выше, такой режим системы физически не осуществим,
так как мы но можем реализовать и поддерживать
абсолютно точно необходимое для него соотношение
параметров. Математически это выражается в том, что все
периодические решения соответствующего уравнения
исчезают и становятся затухающими или нарастающими при
сколь угодно малом изменении параметров равенства
(2,7), выражающего компенсацию потерь лампой. По
введённой акад. А. А. Андроновым номенклатуре такие
системы получили название особенных или негрубых
динамических систем, в отличие от допускающих физическую
реализацию грубых систем, тип движений которых в
конечном интервале значений параметров качественно
сохраняется, изменяясь лишь сколь угодно мало количественно
при достаточно малом изменении определяющих их
параметров.
Таким образом, среди линейных нет
автоколебательных систем, и, как мы указывали уже во введении, для
построения автоколебательной системы к неустойчивой
колебательной системе необходимо присоединение ещё
нелинейного ограничителя нарастания колебаний. В
ламповых схемах роль такого элемента выполняет сама
генерирующая лампа, усилительные свойства которой
вследствие нелинейности характеристики уменьшаются при
возрастании колебаний. При генерации наряду с
изменением потенциала сетки изменяется вследствие реакции
схемы и потенциал анода лампы. Поэтому анодный ток
определяется не статической, а динамической
характеристикой лампы, работающей в данной схеме. Если анодная
нагрузка активна, то динамическая характерястикаг может
быть построена по заданному семейству статических
характеристик лампы в виде кривой, однозначно
определяющей анодный ток как нелинейную функцию сеточного
напряжения:
/. = /(?«)■ (5Д)
Отсюда крутизна характеристики (также нелинейная)
$5] КОЛЕБАТЕЛЬН. КОНТУР, РЕГЕНЕРИРОВАННЫЙ ЛАМПОЙ 37
Полагая, как и выше, потенциал сетки равным разности
потенциалов на пластинах конденсатора контура
Ve = % = x, (5,3)
мы получим для регенерированного нелинейной лампой
контура уравнение (см. (2,5)),
'i + i[R + ^^]x + ±x^0. (5,4)
Выделив из выражения нелинейной крутизны
•постоянную составляющую, мы можем записать (5,2) в виде:
S^S.-S^x). (5,5)
Введя это выражение в уравнение (5,4), получим:
*+ 280 [I-^lH] *4 »,»* = (), (5,6)
где
есть линейный коэффициент затухания регенерированной
схемы. Введя далее собственную единицу времени, параметр
г = — (см. § 3) и обозначив нелинейный множитель,
СТОЯЛО
щий в (5,6) в квадратных скобках, через ф (х) *), получим
удобный для общего рассмотрения вид уравнения контура,
регенерированного нелинейной лампой:
х + Щ(х)х + х = 0. • (5,8)
Существенно важно, однако, заметить, что в полученных
выше уравнениях нелинейный член получился зависящим
исключительно от независимой переменной только потому,
что при выводе мы пренебрегли малыми параметрами
схемы. Действительно, мы, например, считали, что
потенциал конденсатора контура равен потенциалу сетки. Если
учесть ещё хотя бы омическое сопрэтивление проводов
*) Так как Sx (0) = 0, то Ь (0)=1.
1
i
38 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
(см. рис. 2) конденсатора р, то, очевидно, потенциал сетки
будет равен
Vc = ^ + 9Q = x + 9Cx. (5,9)
В связи с этим мы придём к более общему виду
уравнения
х + 2еф (я, х) х + х = 0, (5,10)
в котором нелинейный член является функцией как
независимого, переменного, так и скорости его изменения*).
Общие свойства этого уравнения мы и будем
рассматривать ниже.
§ 6. Фазовая плоскость нелинейных систем.
«Предельный цикл
Ввиду отсутствия регулярного метода интегрирования
нелинейных уравнений второго порядка огромное
значение для изучения их свойств приобретает метод
качественного интегрирования путём построения фазового
портрета изучаемой системы**). Так же как для линейной
системы, представляем уравнение (5,10) в виде системы
двух уравнений первого порядка
и, исключая время, получаем уравнение интегральных .
кривых
dy — 2вф(ж, у)у — х /ft 9N
Тх = у ' 1М)
Точки с неопределённым значением углового
коэффициента касательных
2-т <•■»>
*) К тому же результату приводит учёт анодной реакции,
©ели нагрузка лампы не чисто активна.
**) См. цитированную выше книгу А. А. Андронова
и С. Э. X айкин а.
§ 6J ФАЗОВАЯ ПЛОСКОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ ЗУ
дают особые точки (положения равновесия) системы.
Из (6,2) видно, что рассматриваемая система имеет
единственную особую точку х — у = 0. Так как
непосредственное интегрирование уравнения интегральных кривых
нелинейной системы вообще невозможно, то построение
фазового портрета удобнее всего выполнять методом изоклин.
Для изоклины с угловым коэффициентом касательных
к интегральныхМ кривым, равным к, из (6,2)
непосредственно получаем уравнение
A = ZI2sj,(r. ч)у-х 6/
У V }
Отсюда мы видим, что в нелинейных системах
рассматриваемого типа изоклиной вертикальных касательных
иопрежнему остаётся ось абсцисс. Все же остальные
изоклины становятся, вообще говоря, кривыми линиями. Так,
изоклина горизонтальных касательных имеет вид кривой
Щ{х, у)у + х = 0. (6,5)
Нанеся на фазовой плоскости достаточно густую сеть
изоклин изучаемой системы, мы можем выявить вид её фазового
портрета с желаемой точностью.
Второй метод построения фазового портрета,
позволяющий сделать ряд существенных заключений о свойствах
нелинейных . систем, основывается на следующем: для
достаточно малой области фазовой плоскости, окружающей
произвольно выбранную на ней точку (х0, у0), мы можем
приближённо и тем точнее, чем меньше взятая область*),
заменить нелинейное уравнение (5,10) линейным:
x + 2z0x±x = 0, (6,6)
где
£о = £ф(Яо, У о)- (6>7)
Пользуясь изложенным в § 4, мы можем далее на
основании уравнения (6,6) начертить в выбранной области вид
интегральных кривых. Перейдя затем в соседнюю область,
*) Под малостью здесь надо понимать малость расстояний
от выбранной точки до любой точки периферии окружающей её
области.
40 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
где нелинейное уравнение будет апроксимироваться другим
линейным уравнением
х + 2е'0х + х = 0, (6,8)
где
£о = £'М-го> у о),
мы можем продолжить любую интегральную кривую
внутри новой области, воспользовавшись в качестве
начальных условий значениями переменных на границе обеих
областей. Построенный таким образом приближённый
фазовый портрет нелинейной системы стремится при
уменьшении областей к точному портрету как к пределу.
Практически выполнить такой предельный переход, конечно,
невозможно, но из теоретической его возможности следует
ряд выводов, весьма существенных для изучения
нелинейных систем. Важнейшие из них следующие:
1) Если переменный коэффициент затухания апрокси-
мирующих линейных уравнений
s0 = s'M*. У) (6'9)
на всей фазовой плоскости сохраняет знак, то движение
представляющей нелинейную систему точки по всем
интегральным кривым сопровождается при е0 > 0 рассеянием
энергии системы (декрементно), если же s0 < 0, то —
поступлением энергии в систему (инкрсментно). В первом
случае нелинейная система имеет устойчивое положение
равновесия и все её свободные движения затухают, во
втором—положение равновесия неустойчиво и свободные
движения нарастают неограниченно (точнее, уводят систе-
(му за пределы применимости апроксимации, лежащих
в основе вывода уравнения движения). В обоих случаях
} среди интегральных кривых нет замкнутых траекторий,
' соответствующих стационарным периодическим
движениям, и такие системы автоколебательными быть не могут.
2) Если коэффициент затухания (6,9) изменяет знак
на фазовой плоскости, то уравнение*)
Ф(*,У) = 0 (6,10)
*)К. Теодорчик, ЖТФ, т. XVII, в. 5 (1947), стр. 571.
Л. Айзенштадт, Вестник Московского университета, Л» 5
(1951), стр. 53.
§ 6] ФАЗОВАЯ ПЛОСКОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ 41
Р&е. 14. Заштрихованная
часть чертежа—инкремент-
ная область.
даёт одну или несколько линий, разделяющих всю
фазовую плоскость на замкнутые или уходящие в
бесконечность области. Все движения в пределах каждой из таких
областей будут, в зависимости от знака г0 = гф (х, у),
затухающими (декрементными)
или нарастающими (инкремент-
ными). При этом, очевидно,
каждая декрементная (инкрементная)
область может ограничиваться
на фазовой плоскости лишь
разделяющими кривыми,
отделяющими её от соседней ин-
крементной (декрементной)
области.
Если начало координат
лежит в инкрементной области,
то положение равновесия
системы неустойчиво и она
самовозбуждается. Пусть, далее,
единственная инкрементная
область фазовой плоскости, окружающая единственную
неустойчивую особую точку, отделена от остальной
декрементной части фазовой плоскости замкнутой
разделяющей кривой (6,10). Покажем, что в этом случае система
после некоторого процесса установления приходит к
стационарному периодическому движению, т. е. является
автоколебательной. Изобразим для этого на чертеже
(рис. 14) разделяющую кривую и две окружности равных
энергий консервативной части рассматриваемого
нелинейного уравнения. Первая из этих окружностей целиком
лежит внутри разделяющей кривой, почти касаясь её
в единственной точке W\\ вторая расположена целиком
вне разделяющей кривой, почти касаясь её в точке W*.
Вследствие вышеуказанных энергетических свойств
интегральных кривых все они пересекают первую
окружность изнутри наружу, а вторую окружность—снаружи
внутрь.
Таким образом, все интегральные кривые фазового
портрета рассматриваемой системы входят внутрь кольцевой
области, лежащей между начерченными двумя окружно-
42 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. 1
стями. Так как внутри этого кольца положения
равновесия системы (особой точки) нет, то все интегральные
кривые, вошедшие внутрь кольца, должны вливаться по
крайней мере в одну замкнутую траекторию,
отображающую на фазовой плоскости изолированное периодическое
движение системы. По введённой Пуанкаре
терминологии, такая изолированная, замкнутая интегральная
кривая получила название
предельного цикла. Если все соседние
интегральные кривые как извне,
так и изнутри накручиваются на
предельный цикл, то движение по
нему, очевидно, устойчиво (рис. 15).
если же скручиваются,—то
неустойчиво.
Кроме устойчивых и
неустойчивых, возможны ещё
полуустойчивые предельные циклы, на
которые соседние интегральные
кривые с одной стороны
накручиваются, а с
другой—скручиваются; однако случай этот является особенностью не
хрубых (особенных) систем и поэтому в реальных
физических системах неосуществим.
Из рассмотрения характера входящих в кольцевую
область интегральных кривых ясно, что если в
рассматриваемой системе положение равновесия неустойчиво и внутри
кольца расположен только один предельный цикл, то он
устойчив. Если же внутри кольца расположено несколько
предельных циклов, то их может быть только нечётное
число, причём ближайший к началу будет устойчив, а далее
устойчивые и неустойчивые будут чередоваться. Если
положение равновесия системы устойчиво и единственная
замкнутая разделяющая кривая окружает декрементную
область фазовой плоскости и начало координат, то
рассуждения, аналогичные приведённым в пункте 2)
настоящего параграфа, приводят к выводу, отличающемуся от
вышеполученного лишь тем, что ближайший к началу
координат предельный цикл неустойчив. Предоставляем
убедиться в этом самому читателю. Заметим, что из всего
§ 6] ФАЗОВАЯ ПЛОСКОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ ^
вышеизложенного следует, что устойчивость положения
равновесия и окружающих его предельных циклов всегда
чередуется.
Примером автоколебательной системы рассмотренного
типа может служить система, подчиняющаяся уравнению
*-2|е| (V-J-^)i + a = 0. (6,11)
Согласно (6,10) разделяющая кривая является эллипсом
•5 + ^-1- (6,12)
в центре которого расположена особая точка типа
неустойчивого фокуса, если | s | < 1, и неустойчивого узла при | s | > 1.
Внутри этого эллипса фазовая плоскость пнкрементна,
а вне его—декрементна. Устойчивый предельный цикл
системы (ниже мы покажем, что данная система имеет
только один предельный цикл) расположен внутри
кольцевой области, ограниченной на фазовой плоскости двумя
окружностями, описанными из начала координат
радиусами, равными А и В. Таким образом, положение
предельного цикла определяется тем точнее, чем ближе но форме
разделяющая кривая к одной из траекторий, равных
энергии коцсервативной части уравнения системы. В
пределе, когда разделяющая кривая совпадает с одной из
этих траекторий, предельный цикл также с ней
совпадает и его положение и форма определяются совершенно
точно. Примером может служить уравнение
х - 2 | е | (1 - х2 - х2) х + х = 0, (6,13)
получающееся из (6,11) при равенстве полуосей эллипса.
Читатель легко убедится, что это уравнение при
любом | г J имеет чисто гармоническое решение:
х~■■ sinx, (6,14)
и предельный цикл, совпадающий с разделяющей
окружностью. Сказанное справедливо и относительно
автоколебательных систем с нелинейной консервативной частью
(контур с нелинейной самоиндукцией или ёмкостью).
44 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
Заметим ещё, что в выражении нелинейного члена систем
типа (5,10) весьма часто сильно преобладает зависимость
от х или х. Вследствие этого разделяющая кривая резко
вытягивается по направлению одной из координатных
осей фазовой плоскости. В результате этого
местоположение предельного цикла определяется в этих случаях
слабо.
Более точные данные о форме и месте расположения
предельного цикла могут быть получены лишь для двух
предельных случаев:
1. Пусть нелинейная функция уравнения (5,10)
в рассматриваемой области фазовой плоскости з
ограничена
— ЛГ<ф(:г, у) < У (6,15)
и параметр г настолько мал, что внутри области а
8т = ЛГ|е|< 1. (6,16)
В этом случае коэффициенты затухания £0 всех
линейных уравнений, которые апроксимируют нелинейную
систему в отдельных областях фазовой плоскости, будут
лежать в пределах
-г«, <eo<Sm, (6,17)
и нелинейная система во всей области, где выполнены
условия (6,15)—(6,17), близка к консервативной
линейной системе, т. е. её колебания почти гармоничны.
Предельный цикл такой системы близок к окружности, а все
остальные интегральные кривые в инкрементных
областях близки к спиралям слабо нарастающих, а в декремент-
ных—к спиралям слабо затухающих линейных систем.
Степень отступления этих кривых от окружностей можно
оценить исходя из того, что для них относительное
изменение радиуса будет, очевидно, меньше, чем для
линейной системы с максимальным коэффициентом затухания,
для которой отношение это равно
^=2*ет. (6,18)
Близость всех интегральных кривых к окружностям кои-
* 6] ФАЗОВАЯ ПЛОСКОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ 45
сервативной системы видна также из формы кривой гори*
зонтальных касательных
2\е\$(х,у)у = х, (6,19)
которая при выполнении условия (6,16) v ется вблизи
оси ординат, пересекая её в начале
координат и точках пересечения её
разделяющей кривой рис. 16.
В рассмотренном случае особая
точка была неустойчивым фокусом.
Возможны, однако, случаи, когда
условия (6,15)—(6,17) выполняются
только для кольцевой зоны, заключающей
внутри себя предельный цикл. В таких
системах всё вышесказанное приложи-
мо лишь к части фазовой плоскости,
лежащей внутри этой кольцевой зоны.
В такой системе предельный цикл
будет почти окружностью, а особая точка
может быть неустойчивым узлом.
Стационарные её автоколебания будут
почти синусоидальны, но в течение
времени установления форма
колебаний будет далека от синусоиды.
Пример такой системы даёт уравнение (6,13)
при |е| > 1.
Рассмотрим теперь второй крайний
в уравнении (5,10) выполнено условие
Рис. 16.
Заштрихованная часть
чертежа — инкре-
ментная область.
случаи, когда
1*|»1.
(6,20)
В этом случае, за исключением узкой области,
заключающей внутри себя разделяющую кривую, вся фазовая
плоскость в областях рассеяния энергии резко декре-
ментна, а в областях поступления энергии так же резко
инкрементна.
Как мы видели в § 4 (см. рис. 7), все интегральные
кривые в таких областях почти вертикальны и направлены
при рассеянии энергии к оси абсцисс, а при поступлении
энергии—от неё. Чтобы составить себе представление
о том, как изгибаются эти интегральные кривые при
46 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
приближении к вышеуказанной области, заключающей
разделяющую кривую, необходимо предварительно
рассмотреть ещё вопрос о положении в этом случае изоклины
горизонтальных касательных и ещё некоторые свойства
разделяющей кривой. Представив уравнение изоклины
горизонтальных касательных в виде:
'М*. У) У
1
21
(6,21)
мы видим*), что, проходя через начало координат и точки
пересечение разделяющей кривой с осью ординат, она
при больших значениях | s ]
не стелется вдоль оси
ординат, как в первом случае,
а прижимается к
разделяющей кривой и оси абсцисс.
Приняв во внимание
знаки функции ф (х, у) по обе
стороны разделяющей
кривой, мы видим, что, выйдя
из начала координат в
правую полуплоскость,
изоклина быстро приближается
к внутренней части
разделяющей кривой и
подымается вдоль неё к верхней точке
пересечения с осью ординат.
Выйдя в этой точке наружу,
изоклина вновь опускается
вниз вдоль разделяющей
кривой, оставаясь снаружи её.
Приблизившись к оси
абсцисс, изоклина отходит от разделяющей кривой и
направляется вдоль оси абсцисс, не пересекая её (рис. 17).
Рис. 17. Заштрихованная часть
чертежа — инкрементная
попасть.
*) Это видно из того, что при | г | — оо уравнение (6,21)
принимает вид:
<Н*, ?/)у = о,
показывающий, что изоклина горизонтальных касательных
распадается на прямую у = О и разделяющую кривую <1>(х, г/) = 0.
§ 6] ФАЗОВАЯ ПЛОСКОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ 47
Вторая половина изоклины располагается в нижней
полуплоскости симметрично верхней относительно начала
координат. Таким образом, при больших | е 1 изоклина
горизонтальных касательных почти полностью (а при
j г | —> оо полностью) охватывает разделяющую кривую.
Перейдём теперь к рассмотрению нужных нам свойств
разделяющей кривой. В любой
точке разделяющей кривой
затухание системы равно нулю,
поэтому интегральная кривая,
проходящая через такую точку,
имеет общую касательную с
проходящей через ту же точку
окружностью равных энергий *).
Направления движения
представляющей точки по интегральной
кривой рассматриваемой системы
и по окружности равных энергий
совпадают. Отсюда следует, что Рис 18 Заштриховаи-
интегральные кривые системы пая часть чертежа—ин-
пересекают разделяющую кривую крементная область,
так же, как окружности
равных энергий, т.е. они могут входить внутрь
разделяющей кривой (но не могут выходить наружу) в точках,
расположенных на дугах АВ и АгВх (рис. 18), и могут
выходить наружу (но не входить внутрь) в точках дуг
BAi и ВгА. Приняв во внимание эти свойства
разделяющей кривой и вид изоклины горизонтальных касательных,
легко заключить, что все интегральные кривые,
подходящие как изнутри, так и снаружи, будут вливаться
в одну кривую, которая стелется вдоль внутренних частей
дуг АВ и АХВЪ выходит наружу в точках В и Ви
опускается к оси абсцисс вдоль наружной стороны
разделяющей кривой (линии ВСг и ВгС) или срывается
*) Таким образом, разделяющая кривая является крияой
контактов Пуанкаре по отношению к семейству окружностей
равных энергий консервативной линейной системы.
4g МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
почти вертикально, если разделяющая кривая наклонена
(рис. 18) и входит внутрь её в точках Сх и С. Эта
замкнутая кривая и является искомым предельным циклом
системы при | е j —>оо. Полученный предельный цикл
характерен своей резко отличной от окружности формой (не
гармонические автоколебания), наличием участков,
проходимых представляющей точкой с весьма малой
скоростью (ползучее движение вблизи оси абсцисс), и
участков, проходимых с весьма большим ускорением (почти
вертикальные участки). Всё это—характерные
признаки так называемых релаксационных автоколебательных
систем.
На этом мы закончим общее качественное знакомство
со свойствами фазового портрета типичной нелинейной
автоколебательной системы и перейдём к аналитическому
их рассмотрению.
§ 7. Влияние гармоник на частоту автоколебаний
При рассмотрении формы предельных циклов на
фазовой плоскости мы убедились, что автоколебания могут
быть чисто гармоническими члишь в исключительных
случаях. Легко видеть, что всякое отступление от
гармоничности вызывает деформацию предельного цикла,
состоящую в отступлении его от круга (для
приведённого к собственному времени уравнения) или эллипса
(для неприведённого уравнения). С другой стороны, такая
деформация означает отход представляющей точки,
обегающей предельный цикл, от кривой равных энергий
и заход в декрементные или инкрементные области
фазовой плоскости, для которых угловая частота колебаний
меньше собственной частоты. Отсюда следует, что
обогащение гармониками неизбежно приводит к понижению
угловой частоты автоколебаний. Убедиться в этом легко
и аналитически *).
*) Б. К. Ш а мб ель, ИЭСТ, № 2 и 3 (1937); ЖТФ, т. IX,
вып. 7 (1939), стр. 514 и 566. Б. В а н-д е р-П о л ь, Щелиней-
ная теория электрических колебаний. Связьтехиздат, М., 1935.
§ 7] ВЛИЯНИЕ ГАРМОНИК НА ЧАСТОТУ АВТОКОЛЕБАНИЙ 49
Действительно, уравнение генератора (5,10) всегда
может быть написано в виде:
LQ-2\b0\y{Q,Q)Q + ±Q = 0, (7,1)
где Q — заряд конденсатора. Умножив это уравнение на
Qdt, мы получим:
d(lL^)+d(^e*)=2|80|<Ke, Q)Q*dt. (7,2)
Если наша система автоколебательная, то в стационарном
режиме движения её периодичны. Поэтому, проинтегрировав
за период (7,2), мы получим:
т
2|8о|$<К0. Q)Q2dt = 0, (7,3)
"о
т. е. среднее за период значение диссипации энергии
в системе равно нулю. Таким образом, в среднем за период
генератор в стационарном режиме ведёт себя как
консервативная система. В следующем параграфе мы покажем,
что это верно не только по отношению ко всему колебанию
в целом, но и для каждой гармоники в отдельности
(см. 8,3 — 8,5). Отсюда следует, что средние за период
значения кинетической (магнитной) и потенциальной
(электростатической) энергии колебаний равны друг другу:
LQ* = ±-Q*. (7,4)
Точное периодическое решение (7,1) мы можем написать
в виде ряда Фурье:
Q — ах sin ы + я2 sin (2utf + <р2) + .. . (7,5)
Q = ада) cos Ы + 2a2w cos (2ы -f cp2) + • • • (7,6)
Подставив эти выражения в (7,4) и приняв во внимание
4 К Ф Теолорчик
50 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. I
ортогональность гармоник *), получим:
ОО 00
Lco^n'a^-l^a*. (7,7)
Введя сюда частоту собственных колебаний контура
2 1
находим окончательно:
«2 = <-^ , (7,9)
1
что подтверждает вышесказанное.
§ 8. Динамика автоколебаний**)
Уравнение автоколебательной системы второго порядка
с линейным контуром, как мы видели, может быть написано
в виде:
я + 280ф(а:, ж)ж + и>§ж==0, (8,1)
в котором при наличии самовозбуждения 80 < 0 и
нелинейная функция ф (х, х) равна в начале координат единице.
Для каждого устойчивого автоколебательного режима
решение уравнения (8,1) является во время установления
непериодической функцией bj смени, которая при
приближении к стационарному режиму стремится, как к пределу,
к некоторому периодическому движению, спектр которого
*) Ортогональность гармоник выражается условием
— \ sin nt • sin mt dt •
f_ J 0' еслп m *& n>
I 1, если т = п.
0
**) К. Теодорчик, ЖТФ, т. Х (1940) стр. 627.
§ 8]
ДИНАМИКА \ВТОКОЛЕБАНИЙ
51
с любой точностью может быть представлен конечным
рядом Фурье:
п п
х=2 (а*sin *о)* ~~ ^cos ^o)^== 2 Жа# (8»2)
*=i i
В этом выражении мы всегда можем положить Ьх = О, так
как для установившихся свободных автоколебаний выбор
начала отсчёта времени произволен.
Таким образом, для решения (8,1) необходимо знать
частоту со и (2п—1) амплитуд стационарного движения.
Чтобы получить необходимую для этого систему 2п
уравнений, подставим в исходное уравненпе (8,1) решение
(8,2) и запишем результат в виде
л
п п п п
-_ 2 (А V - «>5) хк - 2ЭД. ( ^ хк, 2 **) S **• (8>3)
1 ill
Правую часть, как периодическую функцию времени, мы
можем разложить в ряд Фурье. Очевидно, что коэффициенты
этого ряда будут функциями частоты и вследствие
нелинейности функции ф (х, х) х, вообще говоря, функцией
амплитуд всех гармоник стационарного движения. Трактуя
правую часть (8,3) как сумму внутренних сил системы
2 ^, порождаемых расстройками, затуханием и лампой,
мы получим:
п
2^ = 2 [/*К flm, bm)sink(ut + Fk(u>, am, fem)cosb)/].
(8,4)
(Гармониками более высокого, чем п, порядка пренебрегаем).
Как известно, в консервативных колебательных системах,
уравнения которых стоят в левой части (8,3), могут
существовать чисто гармонические колебательные движения
резонансной частоты лишь в отсутствии внешних
действу ю]цих на них сил. Отсюда мы заключаем, что при
4*
52 МЕТОДЫ ИССЛЕДОВАНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ [ГЛ. II
стационарном автоколебательном движении сумма сил, стоя
щих в правой части (8,3), обращается тождественно в нуль.
Из (8,4) следует, что это возможно лишь при условии
обращения в нуль всех коэффициентов ряда Фурье (8,4).
Это даёт для определения (2п) неизвестных (частоты и
2п—1 амплитуд) систему 2?г нелинейных алгебраических
уравнений:
fk К ат> bm) = О и Fk (со, ат, Ьт) (8,5)
А = 1, 2, . . . , п.
Но физическим соображениям, решением нашей задачи
будет только то решение системы (8,5), которое даёт
положительную частоту и действительные значения всех
амплитуд*).
Таким образом, решение автоколебательной задачи
для стационарного режима может быть сведено к
решению системы нелинейных алгебраических уравнений (8,5).
Однако такое сведение, в общем случае, даёт для
действительного решения нелинейной задачи весьма мало, так
как общих методов точного решения систем нелинейных
алгебраических уравнений не существует. Тем не менее
такая возможность существенна, так как она показывает
на взаимосвязь частоты и стационарных амплитуд между
собой. Эта взаргмосвязь отражает нарушение в нелинейной
системе принципа суперпозиции и указывает, в
частности, на невозможность изменения одной из гармоник
(например, действием внешней гармонической силы
частоты данной гармоники) без одновременного изменения
частоты, амплитуд и фаз остальных гармоник. Как мы
увидим ниже, это свойство автоколебательных систем
существенно для понимания поведения
автоколебательных систем, находящихся под внешним воздействием.
Для случая почти гармонического режима, когда
амплитуды гармоник малы по сравнению с амплитудой
основного члена и быстро убывают с увеличением номера гар-
*) Из (8, 3) п (8, 5) следует, что в стационарном режиме
компенсация потерь в среднем за период имеет место не только для всего
автоколебательного движения в целом, но и для каждой его гар-
ионики в отдельности.
§ 8] ДИНАМИКА АВТОКОЛЕБАНИЙ 53
моники, в решении (8,2) можно ограничиться малым
числом членов. В этом случае система уравнений может быть
приближённо решена. Таким образом, вышеприведённое
рассмотрение указывает естественный путь приближённого
решения нелинейных уравнений автоколебательных
систем. В случае почти гармонического режима
автоколебаний удовлетворительный результат получается уже при
учёте одного основного члена решения. При этом может
быть приближённо найден не только стационарный режим,
по и процесс установления автоколебаний. Для этого нам
понадобится только рассмотреть предварительно динамику
и особенно энергетические процессы, имеющие место при
действии внешней силы на линейную консервативную
систему второго порядка.
ГЛАВА 11
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ ПРИБЛИЖЁННОГО
РАССМОТРЕНИЯ ПОЧТИ ГАРМОНИЧЕСКИХ
АВТОКОЛЕБАНИЙ
§ 9. Динамика вынужденных колебаний линейной
консервативной системы
Незатухающие колебания в линейных системах могут
иметь место в случае их консервативности. В этом
отношении нелинейные автоколебательные системы
напоминают консервативные линейные системы. Если иметь
в виду только свободные колебания таких линейных
консервативных систем, то аналогия эта будет существовать
лишь для стационарной амплитуды автоколебаний; если
же сравнивать поведение автоколебательной системы
с поведением линейной консервативной системы,
находящейся под воздействием внешней гармонической силы
резонансной частоты, то, как мы сейчас покажем, ука-
заннную аналогию можно проследить весьма далеко.
С целью выяснения этой аналогии рассмотрим линейную
консервативную систему с одной колебааельной степенью
свободы:
х + <*>2# = F0 cos pt. (9,1)
Если внешняя сила отсутствует (F0 = 0), то в системе
могут существовать свободные гармонические колебания
с частотой а) и произвольными (определяемыми начальными
условиями движения) амплитудой и фазой:
х = a sin Ы — b cos Ы = A sin (u>£ — <р), (9»2)
9J ДИНАМИКА ВЫНУЖДЕННЫХ КОЛЕБАНИИ 55
где А =-- Y а2 + б2 и tg ср = — . Если же внешняя сила
действует, то полное решение (9,1) будет:
х = a sin Ы — Ь cos а>/ + 2_° 2 cos /tf. (9,3)
Если для начального момента t = О, ж = # = 0, то реше-
ние это принимает вид:
F0 , . F0 . соч pt— cos <ot /(l /ч
X = a ° a {COS />/ — COS 0>f} = —-5- £ ~- . (9,4)
o>2—p2 K r } o> + p (w — p) t \ » /
Из этого выражения видно, что при приближении частоты
внешней силы к частоте свободных колебаний, т. е. при
приближении к резонансу, решение (9,4) стремится к
пределу, равному
lim х = ~ t sin Ы. (9,5)
Таким образом, внешняя гармоническая сила резонансной
частоты вызывает в линейной консервативной
колебательной системе неограниченно нарастающие гармонические
колебания, сдвинутые по фазе на четверть периода
относительно внешней силы. Для краткости можно сказать, что
косинусоидальная внешняя сила вызывает синусоидальные
нарастающие движения в системе. Аналогично легко
убедиться, что синусоидальная внешняя сила резонансной
частоты вызывает линейно нарастающие со временем коси-
нусоидальные колебания. Таким образом, при указанных
начальных условиях, если
х-\-ю2х ~/0sinotf,
то полное решение
х= -—-tcosmt.
Если же
х + Л = F0 cos ы, (9,6)
то решение
х ~-Fr-t sinatf.
5fi КВАЗИЛИНЕЙНЫЕ МЕТОДЫ [ГЛ II
Результат этот легко понять с энергетической точки зрения.
В самом деле, если точка, на которую действует косинусо-
идальная внешняя сила, совершает гармоническое
движение х = a sin Ы — b cos u>t, то работа внешней силы за период
будет:
т
W = \ F dx = \ FQ cos wt • a) (a cos Ы + b sin ut)dt = ~aF0.
о
(9,7)
т. е. отличная от нуля работа совершается только над
синусоидальной компонентой движения. Графически этот
результат можно получить, откладывая внешнюю силу
по ординате прямоугольной де-
lf картовой системы координат, по
абсциссам которой
откладывается смещением. Площадь,
описания представляющей точкой за
цикл на этой плоскости, равна
работе силы за цикл над
системой. Площадь эта
положительна, если представляющая
точка обегает цикл по часовой
стрелке, и отрицательна, если
движение происходит против
часовой стрелки (рис. 19).
При гармонических силе и движении мы получаем
циклы в форме эллипсов, обегаемых в направлении часовой
стрелки, если
F — F0 cos otf и х — a sin Ы
или
F — /о sin wt и х = — 6 cos wt.
Таким образом, косинусоидальная внешняя сила
раскачивает только синусоидальную компоненту движения, и
наоборот. Если на консервативную линейную колебательную
систему действует гармоническая внешняя сила
резонансной частоты и произвольной фазы
х-\ u>2x = F0cofii»t -;-/0 sin со/, (9,8)
da
~dt^
db
di~
F0
2(o
/o
" 2a>
§ 9] ДИНАМИКА ВЫНУЖДЕННЫХ КОЛЕБАНИЙ 57
то согласно вышесказанному движение будет:
х = |^-1 sin Ы — -^- * cos о)*, (9,9)
т. е. будет иметь вид:
х = a (t) sin ш^ — 6 (?) cos Ы. (9,10)
Амплитуды гармонических компонент этого решения
непрерывно нарастают со временем так, что скорость
нарастания синусоидальной компоненты равна
(9,11)
косинусоидальной
(9,12)
Ниже мы увидим, что уравнения установления почти
гармонических автоколебаний имеют вид, совпадающий
с (9,11) и (9,12). Если на рассматриваемую линейную
консервативную колебательную систему действует
произвольная внешняя сила
x + vfix= g(0, (9,13)
то полное решение при начальных условиях для / — О,
х = х = 0 имеет вид*):
t t
х = -i sin ы^ % (E) cos шЕ fc — ~ cos ы{% (?) sin cog d£. (9,14)
о о
Легко убедиться, что для чисто гармонической силы
резонансной частоты решение это даёт результат,
совпадающий с (9,9). Пусть теперь %(t) = F (t) cosЫ, где F(t) —
*) Акад. А. Н. Крылов, О некоторых дифференциальных
уравнениях математической физики. Изд. АН СССР, 1932.
58 КВАЗИЛИНЕЙНЫЕ МЕТОДЫ [ГЛ. U
функция времени. Тогда (9,14) даёт:
t t
# = —sinoj/ \ F (Z,)cos2Mcdi-~ — coso)* \ /^(^siniofccoswSdf^
о о
t t
= ^-sin со* i F($)cK +^- {since* ^ F(S)cos2<o&cK —
0 0
— cos a>* ^ F(5)sin2a>Sds} . (9,15)
о
Если F (t) = F0 = const, то первый член (9,15) даёт
полученное выше выражение (9,5), а второй член обращается
тождественно в нуль. При непостоянном F (t) этот
второй член тождественно в нуль не обращается, но будет
тем меньше по сравнению с первым членом, чем
медленнее изменяется F (t) по сравнению с cos со*. Таким
образом, для этого случая приближённое решение уравнения
x + u2x = F(t)cosi»t + f(t)siru»t (9,16)
будет:
t t
х = -^ътЫ^ F^dS-Jj-cosco* ^/(6)dS. (9,17)
о 6
Следовательно, для рассматриваемого более общего
случая медленно изменяющихся по амплитуде сил мы имеем
опять:
х = a (*) sin a>* — ft (*) cos со*,
где приближённо
t t
a(l)=i\F^d' и 6«)=^ $/(*)« (9,18)
§ 10] ЭНЕРГЕТИЧЕСКИЙ МЕТОД РЕШЕНИЯ 59
Рассмотрим следующий пример. Пусть на нашу
консервативную колебательную систему в момент t =*0
начинает действовать затухающая внешняя сила резонансной
частоты
х + rfx = F0 e-*1 cos a) t\ (9,20)
при этом коэффициент зааухания а < w (это и есть условие
медленности изменения F(t)). Тогда согласно (9,18)
t
«(o=e5ie"ft'irf?="&(1~e"*,): 6(г)=0- (9,21)
о
В этом случае амплитуда синусоидального колебания
в нашей системе не будет неограниченно нарастать, а
стремится при t —> оо к стационарному значению
Шпа(0==ао = £. (9,22)
из (9,18) видно, что в общем случае такой предел будет
t
существовать всегда, если lim \ F (I) d\ конечен.
О
§ 10. Энергетический метод приближённого решения
уравнения почти гармонических автоколебаний*)
Мы видели, что уравнение автоколебательной системы
второго порядка может быть записано в виде:
ж + 2о0ф(а;, i)* + w§;r = 0. (10,1)
В § 6 мы убедились, что решение этого уравнения
как в стационарном режиме, так и в течение процесса
установления будет почти гармоничным, если выполнены
условия:
N = '-^«1 (10,2)
*) К. Теодорчик, ЖТФ, т. IX (1939), стр. 1481,
(U) КВАЗИЛИНЕЙНЫЕ МЕТОДЫ [ГЛ. II
и нелинейная функция в рассматриваемой области
ограничена
— ЛГ<|ф(я, з)|<ЛГ*), так что 7V | е | < 1. (10,3)
При выполнении этих условий все интегральные кривые
состоят из элементарных дуг, соответствующих слабо
затухающим или слабо нарастающим линейным колебаниям.
Так как угловая скорость * движения представляющей
точки по таким дугам тем меньше угловой скорости со0
собственной частоты контура, чем больше затухание
(нарастание), то мы видим, что каждый цикл обращения
представляющей точки по интегральным кривым
рассматриваемой нелинейной системы происходит с1 переменной, но
несколько меньшей, чем а)0 угловой скоростью. Размахи
колебаний при этом внутри предельного цикла нарастают
весьма медленно, а вне его так же медленно уменьшаются.
Всё вышесказанное позволяет в первом приближении
положить, что в почти гармоническом режиме во время
установления мы можем искать решение уравнения (10,1)
в виде гармонического колебания, происходящего с
некоторой постоянной частотой to и медленно изменяющейся
амплитудой:
л = a (t) sivnot. (10,4)
Это означает, что время установления стационарного
автоколебания 0 велико по сравнению с периодом
е»7„^- (10,5)
и в течение любого промежутка времени, малого по
сравнению с временем установления, но большого по
сравнению с периодом:
О » Д* > Г, (10,6)
мы можем при вычислениях пренебречь изменением
амплитуды. Поэтому для такого интервала времени,
обнимающего много циклов обращения представляющей точки
*) Это последнее условие, как мы видели, выполняется
всегда, если нелинейным элементом является лампа.
§ 10] ЭНЕРГЕТИЧЕСКИЙ МЕТОД РЕШЕНИЯ 61
вокруг положения равновесия, мы можем искать решение
в виде
# = asinu)£, (10,7)
где а и о) постоянны.
Для того чтобы найти значение постоянной частоты
и закон установления стационарной амплитуды, представим
исходное уравнение в виде:
x-\-u>*x = (v>2 — is>l)x-2b0ty(jr, х)х, (10,8)
и будем рассматривать правую часть как сумму
внутренних сил системы, действующих на консервативную
колебательную систему, уравнение которой написано слева.
Зная форму движения, мы можем вычислить эту сумму
сил:
2 g — (a)2 — a)2) a sin Ы —
— 2&0ф (a sin Ыу аоа cos Ы) • аа> cos Ы. (Ю,9)
'Так как написанное выражение для суммы сил в течение
рассматриваемого отрезка времени At является
периодической функцией, то мы можем разложить его в ряд
Фурье, коэффициенты которого будут, очевидно,
функциями амплитуды и частоты:
SS = /(a» w)sina>* +
+ F(a, a)) cos Ы-\- const -f гармоники. (10,10)
Константа в этом разложении (если она отлична от нуля)
указывает на смещение рабочей точки вследствие
самодетектирования. Отбрасывая как малые и слабо влияющие
на добротный контур все гармоники не резонансной
частоты, мы приходим к уравнению
£ + uAc = /(a, to) sin Ы + F (a, (o)cos(d^. (10,11)
Так как по исходному допущению частота постоянна
и решение *(10,4) при надлежащем выборе начала отсчёта
времени не содержит косинусоидальной части, то из (10,11)
мы получаем (см. (9,15) —(9,18)):
f(a, u>) = 0 (10,12)
62
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
и
S= ±F(a, «>)*)• (10,13)
Последнее уравнение даёт приближённый закон
установления почти гармонических автоколебаний. Для вычисления
стационарной амплитуды и частоты мы получаем из (10,12)
и (10,13) систему двух нелинейных алгебраических
уравнений с двумя неизвестными:
/(а, ю) = 0,
F{a, а>) = 0. (10,14)
§ 11. Мягкий режим генерации
Рассмотрим систему, работающую на симметричном
участке характеристики, который может быть апроксими-
Рис. 20. Рис. 21
рован полиномом третьей степени (рис. 20):
1а = Я0Х-±Я2Х*. (11,1)
Отсюда для крутизны получаем выражение (рис. 21)
S(x) = S0-S2x*. (11,2)
Если апроксимируемый рабочий участок характеристики
слабо нелинеен, то
S^S, (11,3)
*) Это уравнение установления получено впервые Ван-дер-
Полем
§ 11] МЯГКИЙ РЕЖИМ ГЕНЕРАЦИИ 63
Подставив (11,2) в уравнение (5,4), получим:
Система регенерирована, если М < 0 и неустойчива
(самовозбуждающаяся), если
r__\m\s0 <а (11 5)
Таким образом, для самовозбуждения крутизна в рабочей
точке должна превосходить некоторое критическое
значение
Введя сокращённые обозначения:
28 — | ЛГ | 5ош; = 2S0 ^ 0 (11,7)
и
|Л/|52ш; = 232>0>
• мы можем записать исходное уравнение (11,4) в виде:
х + 2(Ь0+Ь2х2)х f- o)02^ = 0. (11,8)
Это уравнение описывает самовозбуждающуюся
автоколебательную систему, если
80<0, (11,9)
и невозбуждённую, потенциально автоколебательную, если
Ь0>0. (11,10)
Если 80 < 0 и на рабочем участке характеристики
| й (#) | = 11 801 — Ь2х21 < о)0, то рассматриваемая система
автоколебательная и в пределах, в которых выполняется
вышенаписанное условие, почти гармоническая.
Найдём вышеизложенными методами приближённый
закон установления и стационарное решение
уравнения (11,8). Первое гармоническое приближение ищем
согласно § 10 в виде:
х = а$тЫ, (11,11)
»)4 КВАЗИЛИНЕЙНЫЕ МЕТОДЫ [ГЛ. II
где а считаем постоянным в интервалах времени At
(см. § 10). Представив далее исходное уравнение (11,8)
в виде:
'х + ^х = (^-и1)х + 2(\Ъ0\-Ь2х*)'х=%%, (11,12)
вычисляем при помощи (11,11) сумму сил:
2 $ = (w2 — о)^) a sin Ы -f
+ 2ао) М 80| —._ 82а2 j cosЫ -f — o2u)a3cos3atf. (11,13)
Отбрасывая третью гармонику, мы отсюда согласно (10,13)
получаем уравнение установления колебаний
da = a(\b0\-U2a*) (11,14)
dt ~^ «' 4
и согласно (10,14*)—уравнения стационарного движения
а (а)2 - а>*) = 0 и a (j 50 | -1 82аЛ - 0; (11,15)
это даёт либо а = 0 (равновесие), что при о0 < 0, как мы
видели, неустойчиво, либо
a = 2]/Lk>. (11д6)
Последнее соответствует стационарному автоколебательному
режиму.
Чтобы окончательно быть уверенным в правильности
полученного результата, необходимо ещё убедиться в
устойчивости полученного движения. Гармоническое
колебательное движение может быть неустойчивым по амплитуде
и по частоте, или, что то же, по фазе. Условие
устойчивости частоты мы рассмотрим ниже (см. § 35), где будет
показано, что в устойчивых по амплитуде автономных
автоколебательных системах второго порядка частота всегда
устойчива. Поэтому здесь достаточно убедиться в
устойчивости амплитуды. Воспользовавшись общим видом
уравнения установления
| = Ф(а), (11,17)
ill
МЯГКИЙ РЕЖИМ ГЕНЕРАЦИИ
65
легко указать критерий амплитудной устойчивости
автоколебаний. Для этого строим уравнение (11,17) на осях ( а, -£ j
(рис. 22). Стационарные амплитуды, очевидно, определяются
точками А, В> С, .. . пересечения кривой ^-=Ф (а) с осью
Рис. 22.
абсцисс. Легко убедиться, что точки Л, С, . . ., в которых
кривая пересекает ось а сверху вниз, соответствуют
устойчивым амплитудам автоколебаний. Точки же В, D, в
которых пересечение происходит снизу вверх, дают
неустойчивые амплитуды. Действительно, в первых точках нарушение
стационарной амплитуды вызывает всегда такое
последующее её изменение, которое возвращает амплитуду к её
стационарному значению, а в точках второй группы —
наоборот. Из этих соображений следует, что в случае
неустойчивого положения равновесия ближайшая к нему
стационарная амплитуда будет всегда устойчива. Наоборот,
в случае устойчивого положения равновесия устойчивой
будет только вторая стационарная амплитуда. Математически
полученный выше признак амплитудной устойчивости
имеет вид:
где значок а0 означает подстановку исследуемой
стационарной амплитуды, т. е. корня уравнения Ф(а) = 0.
В рассмотренном случае генератора при мягком режиме
график закона установления (11,14) имеет вид,
изображённый на рис. 23. При плавном уменьшении 80,
которое, как видно из формулы (11,7), для рассматриваемой
5 к. ф. Теодорчик
06
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
системы имеет место для М < 0, при непрерывном
увеличении обратной связи мы получаем плавное нарастание
стационарной амплитуды автоколебаний.
На рис. 24 по оси абсцисс отложено значение о0, по оси
ординат — соответствующее ему значение амплитуды
автоколебаний. Из этого чертежа видно, что области
устойчивого равновесия и устойчивых
4$ автоколебаний не перекрывают
f друг друга. Далее мы видим,
что при плавном увеличении
^l5^ *~a Регенерации, начиная от порога
Рис. 23. Рис. 24.
самовозбуждения, амплитуда автоколебаний нарастает
непрерывно. Такой режИхМ генерации получил название
мягкого.
Читатель легко может убедиться сам, что те же
результаты получаются и при несимметричном рабочем участке
характеристики, который может быть апроксимироваа
полиномом
и о
Из выражения суммы сил для гармонического
квазилинейного приближения (11,13) мы видим, что наряду с
членами основной частоты появляется и третья гармоника.
Так как вследствие симметрии характеристики
относительно рабочей точки точное решение может содержать
только нечётные гармоники, то следующее приближение
§ ii]
МЯГКИЙ РЕЖИМ ГЕНЕРАЦИИ
67
(11,21)
к решению мы можем искать в виде
х = А1 pin о)£ -f а3 sin 3o)t — bs cos 3o>^, (11,20)
где Аг и А3 = |/#з + &з ~~ амплитУАы первой и третьей
гармоник. Вычислив согласно (8,4) на основании этого
приближения сухмму внутренних сил системы 2 3'» мы
получим для определения частоты и амплитуд систему
алгебраических уравнений:
1) -|8о1:+482(-4! + ^з-2^) = 0,
2) (о>2-о)02)Л + 1в242^-0,
3) - (9ш2 - <og) 63 -г Зю (2 j о01 — 82ilf) а3 -
—- 82а)а3Л| t -о о2со.4| -- 0,
4) (9а)2 - со2) а3 + Зо) (2 | 80 | - 82 A2) fe3 ~
о
— у 82a)63/li --0.
Покажем, что из этих уравнений вытекает написанное
1акже с точностью до третьей гармоники выражение час-
юты (7,9) *). Для этого, умножив 3) па 63, а \) на аь,
иозьмём их разность. Это даёт:
Подставив это в уравнение 2), получим:
2 2 Л1 -ь А\
0 А\ -V ЪА\
Приближённое вычисление амплитуд даёт:
^/^-">М'-К£Л.
is = IJAL = А
Д» 4 о)0 4
(11,23)
(И,24)
где /10 — стационарная амплитуда гармонического
приближения.
*) Эго спойстно указано Л. II. Мииакопои
68
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
Рассмотрим ещё фазовый портрет системы, описываемой
уравнением (11,8). Будучи приведено к собственному
времени, оно принимает вид:
х + 2г(1-х2)х + х=-0*). (И,25)
Разделяющая кривая распадается в данном случае на две
прямые, параллельные оси
ординат (рис. 25) **):
1-а
О, откуда х = ± 1.
(11,26)
Между этими прямыми при
г < 0 фазовая плоскость ин-
крементна, а вне — декремент-
на. В этом случае положение
равновесия неустойчиво и
система самовозбуждается.
Для е > 0 вся плоскость,
за исключением полосы между
разделяющими прямыми, инкре-
ментна. При | s | < 1 обе системы
почти гармоничны внутри об-
b<U; ki«/
Рис. 25. Заштрихованная
часть чертежа — инкрс-
ментная область.
ласти, где | е(1 — х2)\ достаточно
мало по сравнению с единицей.
При наличии самовозбуждения в этой области
справедливы полученные нами при приближённом решении
формулы, которые для приведённой системы принимают вид
х = a sin Ы, "}
со = 1, [
f—0-W-J
(11,27)
*) Для получения уравнения (11,25), называемого
уравнением Ван-дер-Поля, кроме введения собственного времени (см. § 3),
необходимо ещё ввести новое переменное и = I/ ~- х. В
окончательном уравнении мы опять обозначим и буквой х.
**) Этот результат не соответствует реальной физической
системе и получился лишь в силу того, что мы не учли зависимости
нелинейного члена от х. В реальной системе разделяющая
кривая всегда замкнута.
§ ii] МЯГКИЙ РЕЖИМ ГЕНЕРАЦИИ 69
Последнее выражение даёт для стационарной амплитуды
значение
а0 = 2. (11,28)
Таким образом, при чисто гармоническом приближении
предельный цикл есть окружность, описанная из особой
точки радиусом, равным двум *).
Легко видеть, что при е < 0 этот предельный цикл
устойчив, а положение равновесия неустойчиво. При s > О
наоборот.
Рассмотрим ещё процесс установления автоколебаний
с точки зрения поступления колебательной энергии в
контур. Для мягкой самовозбуждающейся системы уравнение
движения запишем в виде:
х + х = 2\е\(1-х2)х. (11,30)
Дравая часть этого уравнения есть, очевидно, внутренняя
сила системы, резонансной частоты, действующая на
консервативный осциллятор, уравнение которого стоит слева.
Умножив обе части на
xdt = dz, (11,31)
мы получим:
d(^+f)==2\e\(l-x2)xdx. (11,32)
Слева мы получим приращение колебательной энергии
контура dW, а справа работу внутренней силы на пути dx
dW = dA = g dx = 2 | г | (1 - x2) x* dt. (11,33)
Рассмотрим теперь работу за один цикл обхода
представляющей точкой положения равновесия, т. е. изменение
*) При этом логарифмический декремент при стационарном
движении даже в точках максимальных отклонений достигает
значения
rf=|6ice|<l. (11,29)
70
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
колеоателыюи энергии за цикл,
колебании
х — a sin t
При гармоническом
работа эта равна интегралу за период от (11,33), т. е.
т т
W\= \ %х d* = 2|e| ^ (1 -x2)x2dt. (11,34)
о 6
Наглядную картину даёт графическое построение этого
интеграла на плоскости энергии (плоскость ft, x) *). Для
этого берём на фазовой плоскости
семейство циклов и умножаем
ординаты каждого цикла (х) на
соответствующие ординаты
нелинейного коэффициента
затухания системы 2Ь (х) = 2 | г | (1 — х2),
построенного графически под
фазовой плоскостью (рис. 26).
Произведение ординат даёт
значение силы ft, действующей на
контур в соответствующей
точке траектории колебания.
Дифференциал работы ft dx
изобразится на чертеже
площадью прямоугольника с
основанием dx и высотой, равной
силе ft. Наконец, изменение
колебательной энергии за цикл,
равное интегралу (11,34),
изобразится площадью
энергетического цикла, построенного
вышеуказанным образом для каждой
амплитуды колебания х. При
амплитудах, меньших единицы, когда колебание лежит
целиком в инкрементной области, энергетические циклы имеют
форму овалов, обегаемых по часовой стрелке. Работа
внутренних сил прк этом на всём пути положительна, т. е. за один
Рис. 2G. Заштрихованиая
часть чертежа—пнкромент-
ная область.
*) К. Теодор чин, ЖТФ, т. JX, n. \\ (193У), стр. 1005
§12] ЖЁСТКИЙ РЕЖИМ ГЕНЕРАЦИИ 71
период в контур поступает колебательная энергия, равная
площади энергетического цикла. При амплитудах,
больших единицы, когда колебания заходят и в декрементные
области фазовой плоскости, форма энергетического цикла
усложняется: на концах центрального энергетического
цикла, площадь которого равна положительной работе,
возникают ещё два цикла, обегаемые против часовой
стрелки, площади которых равны отрицательной работе сил
jr дают колебательную энергию, теряемую контуром за
период при прохождении представляющей точкой декре-
ментных областей фазовой плоскости. Так как эти два
отрицательных цикла с увеличением амплитуды
неограниченно нарастают, то, очевидно, существует такая
амплитуда, при которой площадь всего цикла, считая
положительные и отрицательные его части, обращается в нуль.
На этой амплитуде прекращается приток энергии в
консервативную колебательную систему и колебания достигают
стационарного значения. Значение это, очевидно, устойчиво,
шк как при меньших амплитудах мы имеем поступление
энергии в систему, а при больших — отнятие её.
§ 12. Жёсткий режим генерации
Рассмотрим теперь случай, когда рабочий участок
характеристики может быть удовлетворительно апрокси-
мирован лишь полиномом пятой степени. Для упрощения
вычислений и физической интерпретации рассмотрим
опять случай симметричный относительно рабочей точки
(рис, 27)*):
Ia = S0x + ±S2x*-±StX*. (12,1)
Отсюда для крутизны получаем (рис. 28):
S (x) = S0 + S2x2 - SAz*. (12,2)
Подставив это выражение в уравнение (5,4) и введя
*) Предоставляем читателю самому убедиться, что при
характеристике, содержащей и чётные степени х, гармоническое
приближение даёт те же формулы, что и нижеприведённые.
72 КВАЗИЛИНДЙНЫВ МЕТОДЫ (ГЯ. Л
аналогичные (11,7) обозначения, получим исходное
уравнение в виде:
х + 2 (80 - Ь2х2 +■ 54:г4) х + w$x = 0, (12,3)
где Ь2 и 84 положительны. При
а0<0 (12,4)
система самовозбуждается, а при
80>0 (12,5)
не самовозбуждается (положение
равновесия устойчиво). В данном
случае, однако, регенерация с ростом
Рис. 27. колебаний в системе увеличивается
за счёт второго члена полинома. Если
при этом максимальные значения крутизны больше
критического её значения (рис. 28):
*S*max > ^кр = | м | » (12,6)
то, как мы увидим, возможны устойчивые автоколебания
не самовозбуждающиеся, но возникающие в системе после
S,
0
\
-^- _ - -^V. - - С
у \ ^кр
*JT
Рис. 28.
достаточной величины начального возмущения. Такой
автоколебательный режим получил название жёсткого.,
Обратимся теперь к аналитическому рассмотрению вопроса.
Считая систему (12,3) почти гармонической, но не
предрешая пока знака 80, ищем чисто гармоническое прибли-
12] ЖЕСТКИЙ РВЖИМ ГВНЕРАЦИИ 73
женив решения
£ = asino)£. (12,7)
Согласно общей теории записываем (12,3) в виде:
х + ы*х = ((»2-<»1)х-2(Ь0-Ъ2х2+Ъ1Х*)х=%%, (12,8)
и при помощи (12,7) вычисляем сумму сил:
Vg = («)2- cog) a sin Ы -f
-f 2acof — 80 +т 82Я2— -o-^4fl4 ) cos (о^ + гармоники. (12,9)
Отсюда для процесса установления находим:
^ = a(-80 + 4s2^-ls4a4), (12,10)
и для стационарного режима
• ._„ и ._j/£±/(£)'_8£. (12,11)
Для самовозбуждающейся системы 80 < 0 это даёт
единственное действительное и положительное значение
амплитуды автоколебаний.
Таким образом, в этом случае положение равновесия
системы неустойчиво и существует единственный
устойчивый предельный цикл.
Для несамовозбуждающейся
потенциально-автоколебательной системы 80 > 0, и формула (12,11) даёт два
действительных положительных значения амплитуды, если
0<80<i|-) (12,12)
и ни одного, если
8о>|-|. (12,13)
При этом положение равновесия системы устойчиво и
существуют либо два предельных цикла, если выполняется
условие (12,12), либо ни одного, если удовлетворено (12,13).
74
К ВАЗИЛИНЕИНЫЕ МЕТОДЫ
[ГЛ. 11
Все эти три случая изображены графически на рис. 29,
из которого видно, что в случае двух предельных циклон
устойчив лишь больший.
На фиг. 30 изображены области устойчивых и
неустойчивых состояний равновесия и движения системы.
Типичным в рассматриваемом случае является частичное
перекрытие состоянии устойчивого равновесия и
движения. В интервале значений 0 > о0 >-g--^-, в зависимости
от истории системы, в ней
возможны либо устойчивое
равновесие, либо устойчивые
стационарные автоколебания большей
d0<o ^ амплитуды. При этом при плав-
о Устойчивые состояния
* Неустойчивые состояния
Рис. 29.
Рис. 30.
ном изменении обратной связи переход из одного
стационарного состояния в другое совершается не непрерывно, а
скачками. При переходе через 80 = 0 автоколебания
раскачиваются сразу до конечной амплитуды. Такое жёсткое
возникновение колебаний может быть при достаточной величине скачка
опасным для целости системы; в этом случае надо уметь
избежать приближения к границе самовозбуждения.
Поскольку, как мы увидим ниже, очень многие системы
являются жёсткими потенциально-автоколебательными,
всегда надо иметь в виду возможность существования
таких опасных грапиц самовозбуждения.
§ 12] ЖЁСТКИЙ РЕЖИМ ГЕНЕРАЦИИ 75
Рассмотрим в заключение фазовый портрет жёсткой
автоколебательной системы. Для удобства построения
такого портрета положим, что в исходном уравнении (12,3)
собственная частота равна единице, что не ограничивает
общности, так как уравнение установления и значение
стационарной амплитуды от частоты не зависят. Тогда
исходное уравнение примет вид:
х + 2(о0-о2х2 + о^)х-\-х^О. (12,14)
Для разделяющей кривой это даёт уравнение
.г4-^*2 + ^-0, (12,15)
01 куда
Для Ь0 < О это даёт на фазовой плоскости одну пару
действительных прямых, параллельных оси ординат. Таким
образом, фазовый портрет самовозбуждагощейся жёсткой
системы качественно совпадает с портретом мягкой системы.
Для о0 > 0 формула (12,16) даёт две пары
действительных разделяющих прямых, если
0<so<if- (12-17>
В этом случае эти прямые вырезают на фазовой
плоскости две инкремеитные полосы, параллельные оси
ординат и расположенные симметрично по обе стороны
устойчивого положения равновесия*) (рис. 31). Если
рассматриваемая система почти гармонична, то два предельных цикла
(в гармоническом приближении—окружности) расположены
указанным на рис. 31 образом. Из них меньший
неустойчив, а, больший устойчив.
*) II в этом случае инкремеитные области уходят в
бесконечность лишь вследствие не учтённой в уравнении зависимости
нелинейного члена от .т. В реальных физических системах
разделяющие кривые замыкаются одним из указанных вверху иди
внизу чертежа образов в две замкнутые кривые.
76
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
Наконец, если
K>
(12,18)
то действительных разделяющих кривых нет, вся фазовая
плоскость декрементна и наша система является не
автоколебательной, а нелинейной затухающей системой.
Как видно из сравнений (12,17) с (12,13), предельные
циклы исчезают и система становится не автоколебатель-
Рис. 31. Заштрихованная
часть чертежа—инкре-
ментная область.
Рис. 32. Заштрихованная
часть чертежа—инкре-
ментная область.
ной, затухающей раньше, чем исчезают пнкрементные
полосы, что ясно с энергетической точки зрения.
Действительно, если для жёсткой системы произвести
аналогичным описанному в § 11 способом построение
энергетических циклов для гармонических колебаний различных
амплитуд, то мы получим изображённую на рис. 32
картину.
Из построения видно, что при амплитудах, меньших
первого меньшего положительного корня уравнения
§ 12]
ЖЁСТКИЙ РЕЖИМ ГЕНЕРАЦИИ
77
(12,15), когда колебание происходит целиком во
внутренней декрементной полосе фазовой плоскости, мы имеем
отрицательные энергетические циклы. Это значит, что
положение равновесия системы устойчиво. При
амплитудах, лежащих между первым (меньшим) и вторым
(большим) корнями, когда колебания с обеих сторон заходят
в инкрементные полосы, мы получаем энергетические
циклы, напоминающие по форме вышеописанные циклы
мягкого режима, с той, однако, разницей, что теперь
средняя часть цикла отрицательна, а две
крайние—положительны.
Если при изменении амплитуды сумма площадей
нигде в нуль не обращается, то предельных циклов,
несмотря на наличие инкрементных полос, нет и наша
система затухающая. Если же сумма площадей обращается
в нуль, то система имеет в этих пределах первое
стационарное значение амплитуды. Однако легко видеть, что
эта стационарная амплитуда неустойчива, так как при
амплитудах, меньших её, энергия от системы отбирается,
а при больших—накачивается. Таким образом, эта
первая стационарная амплитуда играет роль водораздела:
колебания с амплитудой меньше её затухают, т. е. система
возвращается при этом к устойчивому состоянию
равновесия, колебания же с большей амплитудой
раскачиваются далее. При этом, после того как амплитуда
превзойдёт больший корень, и колебания начнут заходить
во внешние декрементные области фазовой плоскости,
энергетический цикл получает форму, состоящую из трёх
отрицательных площадей, в середине и по обоим концам
и двух положительных между ними. Соображения,
аналогичные приведённым при рассмотрении мягкого
режима, показывают, что если существует неустойчивая
стационарная амплитуда, то при некоторой амплитуде,
большей второго корня, система всегда имеет
устойчивое стационарное движение. Из изложенного ясно, что
для любого заданного вида функции 28 (х)
вышеуказанным способом может быть построено семейство
энергетических циклов системы и определено число возможных
стационарных значений амплитуды автоколебаний и их
устойчивость.
78
к и v.m.'rini i:i\ 1гт»тк:м нтодтл
[гл. и
Легко убедиться, что жёсткий режим генерации
возможен не только в случае двух максимумов крутизны,
расположенных по обе стороны от рабочей точки, но и при
наличии лишь одного максимума. Такой случай мы можем
встретить- при рабочей точке, лежащей на нижнем или
верхнем загибе характеристики лампы. Покажем это на
простейшем примере. Рассмотрим систему, фазовая
плоскость которой имеетуизображённый на рис. 33 вид:
разделяющая кривая АВ (замыкающаяся за пределами
чертежа) делит фазовую плоскость
на две части: декрементную—
левее и инкрементпую—правее
АВ. Пусть уравнение,
описывающее систему на всей
фазовой плоскости, линейно
аН 2гх~\ х = 0 (12,19)
и изменяет
переходе
1 г-рпвую.
Если
только знак г при
через разделяющую
Н« I,
(12,20)
Рис
то наша система на всей
фазовой плоскости почти
гармонична. Рабочая точка лежит в декрементной области,
следовательно, положение равновесия рассматриваемой
системы устойчиво. Докажем теперь, что эта система имеет
два предельных цикла, расположенных (неустойчивый)
вблизи окружности аг и (устойчивый) вблизи окружности
а2 (рис. 33), т. е. что наша система жёсткая
автоколебательная. Для этого заметим сначала, что изменение
«амплитуды» за один оборот представляющей точки
вокруг начала координат но любой интегральной кривой
системы, очевидно, равно или меньше, чем изменение
«амплитуды» соответствующей линейной системы, для
которой г имеет ту же величину, но не меняет знака.
Последнее изменение, как известно, с точностью до величины
§ 12J .КЮСТКИЙ PF/.КИМ ГЕНЕРАЦИИ 79
порядка г2 равно:
Aa = 2nea. (12,21)
Отсюда следует, что каждый виток интегральных кривых
системы целиком лежит внутри кольца, ширина которого
Ла много меньше радиуса а. Это позволяет каждый цикл
обращения представляющей точки по интегральной
кривой считать почти окружностью.
Предельные циклы будут также почти окружностями
(и даже точнее, чем почти замкнутые циклы). Различие
между замкнутыми предельными и почти замкнутыми
циклами, как легко видеть, состоит в том, что работа
пецонсервативных сил системы при обходе предельного
цикла равна нулю, а при обходе почти замкнутого цикла
отлична от нуля. Это же различие сохранится, если
предельные и почти замкнутые циклы мы согласно
вышесказанному апроксимируем окружностями.
Обращаясь опять к рис. 33, мы видим, что работа
обхода окружностей ах и а2 равна нулю, работа же
обходов окружностей, радиус которых меньше ах или больше
а2, меньше нуля (система рассеивает колебательную
энергию); наконец, работа обхода окружностей с радиусом,
лежащим между ах и а2, больше нуля (система получает
колебательную энергию). Количественно работу при обходе
окружности радиуса а легко подсчитать. Действительно,
при обходе симметричных относительно оси ординат декре-
ментных и инкрементных дуг работы компенсируются,
поэтому остаётся подсчитать работу на близких к оси
ординат несимметричных участках, где силу можно считать
параллельной (антипараллельной) перемещению. В
областях, близких к положению равновесия, некоисервативная
сила системы почти постоянна и равна
g= -2га. (12,22)
Поэтому работа обхода окружности радиуса а будет равна
силе $, умноженной на разность путей по инкрементным
и декремснтным путям па фазовой плоскости (см. рис. 33)
Wf= -4saC5. (12,23)
80
квазилинейные методы
[ГЛ. II
Отсюда мы видим, что при непрерывном увеличении
радиуса работа эта будет изменяться так, как-то
изображено на рис. 34, т. е. предельный цикл, близкий к
окружности а19 будет неустойчив, а близкий к а2—устойчив.
Проследим ещё за изменениями предельных циклов
рассматриваемой системы при смещении рабочей точки.
Из рис. 33 видно, что если рабочая точка О (начало
координат фазовой плоскости) перемещается вправо,
то неустойчивый предельный
Щ цикл аг будет уменьшаться
и сольётся с устойчивым по-
1 >--'- ' , эг ложением равновесия в мо-
^| а* ^\^д мент, когда она достигнет
1 границы инкрементной об-
Рис. 34. ласти. От слияния их
получится неустойчивое
положение равновесия. Больший предельный цикл а2 будет
при этом всё увеличиваться.
При смещении рабочей точки влево оба предельных
цикла будут сближаться и после слияния исчезнут.
В этот момент произойдёт жёсткий срыв автоколебаний
системы. В автоколебательных системах аналогичная
описанной жёсткость и срывы наблюдаются при
определении границ колебательных режимов при изменении
рабочей точки (диаграммы срывов Рукопа-Безменова) *).
§ 13. Метод линеаризации характеристик
В предыдущих разделах мы видели, что в ламповых
генераторах с линейным контуром единственным
нелинейным элементом является лампа. Далее мы убедились,
что при почти гармонических режимах рабочий участок
ламповой характеристики лишь слабо нелинеен. Из этих
фактов, естественно, возникает мысль о возможности
рассмотрения почти гармонических автоколебаний путём
линеаризации рабочего участка характеристики. Такой
метод трактовки автоколебательных систем разработан
*) Безменов, Теория диаграмм срывов Рукопа.
Электросвязь, № 4 (1938), стр. 13.
§ 13] МЕТОД ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК 81
в трудах русских радиотехников: академика М. В. Шулсй-
кина, проф. Бонч-Бруевича и особенно в многочисленных
работах проф. Ю. Б. Кобзарева*).
В первом приближении автоколебания в таких
системах мы можем считать гармоническими, поэтому и
линеаризация характеристики должна быть выполнена для
синусоидального изменения потенциала сетки.
Пусть нам задан аналитически или графически
рабочий участок динамической характеристики ламповой
схемы:
/„ = /(*)• (13,1)
Если потенциал сетки изменяется гармонически
# = a sin со/, (13,2)
то, подставляя (13,2) в (13,1) и разлагая в ряд Фурье,
мы получим:
1а _= /0 (а) 4- S (а) х -j- гармоники. (13,3)
Первый член даёт изменение постоянной
составляющей анодного тока вследствие самодетектирования, а
коэффициент при втором -- выражение крутизны искомого
линеаризованного рабочего участка характеристики.
Крутизна этой линеаризованной характеристики для
заданной амплитуды постоянна, но с изменением амплитуды
изменяется.
Если рабочий участок нелинейной характеристики
можно апроксимировать полиномом третьей степени,
Ia = S<P±\s1x*-±S&*, (13,4)
то после линеаризации мы получим:
Ia=±jS1 a* + (s0-{ S2a^x, (13,5)
что для крутизны линеаризованной характеристики даёт:
S(a) = S0-±-S2a*. (13,6)
*) Ю. Б. К об зарев, ЖТФ, т. II (№ 9 и 10), (1932),
стр. 986. ЖТФ, т. V (№ 2), (1935), стр. 216.
6 К. Ф. Теодорчик
82
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
Крутизна в этом случае монотонно падает с амплитудой
(рис. 35). Если же удовлетворительную апроксимацпю
даёт лишь полином пятой степени
h = So* ± у Sxx* ± i- S2x* ± 1 S3x* - i SiX\ (13,7)
то аналогичным путём мы получим:
(13,8)
32
и
S{a) = Su±\s^-±-S&\
(13,9)
что указывает на возможность в этом случае одного
максимума линеаризованной крутизны (рис. 36).
Рис. 36.
Ясно, что описанная линеаризация может быть
выполнена и графически по заданной кривой нелинейной
характеристики схемы. В линеаризованной характеристике
принципиально необходимая для возможности автоколебаний
нелинейность сохраняется лишь в виде зависимости
крутизны от амплитуды. Для возможности устойчивых
стационарных гармонических автоколебаний, очевидно, доста-
точею, чтобы крутизна линеаризованной характеристики
монотонно падала, начиная с некоторого значения
амплитуды. Действительно, подставив выражение
линеаризованной крутизны S (а) в уравнение регенерированного лампой
контура (5,4), мы получим:
i' + — iMSW' -1 '- - *
R)x +
LC
я = 0,
(13,10)
§ 13] МЕТОД ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК 83
что после подстановки значений (13,6) и (13,9) и лёгких
преобразований приводит к квазилинейным уравнениям
мягкого и жёсткого режимов автоколебаний *):
х^2(\Ь0\^~Ь2а2Ух + ^х^0 (13,11)
и
x + 2fo0^^b2a2+jb^x + ^lx=^0, (13,12)
точные стационарные решения которых равны
* = 2j/JMsincM (13,13)
и
*-/£±J/(£),-8£eintto'- {13Д4)
Таким образом, мы видим, что различие между
изложенным выше энергетическим методом нахождения
гармонического приближения к решению почти
гармонического нелинейного уравнения и методом
линеаризации характеристики состоит лишь в том, что в первом
случае ищется приближённое решение, а во втором-—
делается квазилинейная апроксимация самого нелинейного
уравнения.
Результаты же обоих методов в гармоническом
приближении совпадают. В общем виде квазилинейное
уравнение второго порядка, приведённое к собственному
времени, может быть записано в виде:
х + 2е(а)х + х = 0. (13,15)
Это уравнение описывает самовозбуждающуюся систему,
если
е(0)<0. (13,16)
При этом особая точка (положение равновесия) будет типа
неустойчивого фокуса, если
|в(0)|<1, (13,17)
*) К. Теодорчик, ДАН, т. LII, № 2 (1946), стр. 123.
ЖТФ, т. X (1940), стр. 627.
6*
84
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
и неустойчивого узла, если
|е(0)|>1. (13,18)
Свойства фазовой плоскости квазилинейного
уравнения (13,15) симметричны относительно начала координат
в том смысле, что на любой окружности радиуса а,
описанной из начала, квазилинейное уравнение превращается
в линейное с постоянным коэффициентом затухания
е„ = е(о). (13,19)
Предельные циклы являются окружностями и совпадают
с замкнутыми разделяющими кривыми, делящими фазовую
плоскость на декрементные и инкрементные области.
Радиусы тех и других, а также амплитуды гармонических
автоколебаний определяются действительными корнями
уравнения
е(а)=0. (13,20)
Таким образом, метод линеаризации характеристики
позволяет при решении почти гармонических, нелинейных
уравнений перейти к приближённо
I *-^ 1 описывающим (в гармоническом при-
/--Ьч ^18 ^ 1 ближении) процесс автоколебаний
^~_\—I " л^^|^ квазилинейным уравнениям, допу-
\г^±У ~h fT* ^ екающим точное решение линейными
|Т ^■ ц * Ц методами. Это свойство особенно
I с У ценно при изучении почти гармони-
Рис. 37. ческих автоколебаний в системах
выше второго порядка*). Поясним
это примером. Рассмотрим схему (рис. 37) трёхточечного
генератора, в котором для упрощения мы считаем
сеточную катушку X не связанной индуктивно с анодной L.
Положим, что параметры схемы выбраны так, что схема
работает в мягком режиме вблизи порога
самовозбуждения, т. е. автоколебания почти гармоничны. При этом
условии мы можем линеаризовать характеристику и положить
Ia = S(a)x = S(a)XI. (13,21)
*) К. Теодор ч и к, ЖТФ, т. XVII (1947), стр. 1165.
§ 13] МЕТОД ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК 85
Далее для контура тока / мы можем написать уравнение
XJ + L(/ + iQ) + RI + -£^Idt = 0. (13,22)
Продифференцировав и подставив сюда значение анодного
тока, получим дифференциальное уравнение схемы
XLCS(a)"l +(L + £)C'l +RCI + I = 0. (13,23)
Таким образом, движения нашей системы описываются
квазилинейным дифференциальным уравнением третьего
порядка, характеристическое уравнение которого имеет
вид:
<%LCS(a)s3 + (L + %)Cs2 + RCs+l = 0. (13,24)
Применив к этому уравнению критерии устойчивости Рау-
са-Гурвица (см. (3,30)), мы видим, что лампа может
нарушить лишь условие колебательной устойчивости (второе
условие A| = (a1a2— a0as) > 0), которое в данном случае
принимает вид:
(L + X)C- RC-%LCS{0) • 1 > 0. (13,25)
Нарушение (13,25) даёт условие самовозбуждения системы
д№ + *>-Д<0. (13,26)
Стационарный автоколебательный режим наступит после
самовозбуждения тогда, когда уменьшающееся S (а)
обратит неравенство (13,26) в равенство. Это даёт уравнение
для определения стационарной амплитуды
S{a) = RC(£ + x\ . (13,27)
которое в случае апроксимируемости характеристики
полиномом третьей степени даёт:
S0-±-S2a* = RC(L + X), (13,28)
откуда
86
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. 11
При помощи (13,27) мы можем исключить из
характеристического уравнения S (а) и преобразовать его к
уравнению вида:
[(L + %)Cs2 + l](RCs+l) = 0, (13,30)
чисто мнимые корни которого
в».»=±*"/(Х+^5=±йв (13'31)
дают угловую частоту стационарных автоколебаний, а
действительный
*3"" ~~RC ' (13>32)
коэффициент затухания апериодической составляющей
свободных движений. В стационарном движении эта
составляющая может, конечно, присутствовать только в виде
флуктуационных движений*). Явление самовозбуждения
и процесс установления стационарных гармонических
автоколебаний можно наглядно проследить, рассмотрев
на плоскости комплексного переменного траектории,
описываемые корнями характеристического уравнения
системы (13,24) с момента самовозбуждения до установления
стационарного режима. Действительно, если выполнено
условие самовозбуждения (13,26), то характеристическое
уравнение имеет в этот момент корни
5i,2 = 8 ± Шо и 6'3 = — а = — (j£ — 2Ъ^) , (13,33)
т. е. пара комплексных корней лежит в правой
полуплоскости, а действительный — в левой (рис. 38). По мере
нарастания колебаний пара комплексных корней
приближается к мнимой оси, а действительный уходит дальше
влево. В установившемся же режиме комплексные корни
*) Предоставляем читателю рассмотреть ту же задачу
для случая сопротивления R, включённого в цепь анодной
катушки L, что вносит лишь незначительное усложнение в
решение, но значительно ближе к условиям реальной работы
генератора.
§ 13] МЕТОД ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК 87
ш\
к
V
выходят на мнимую ось (см. (13,31) и (13,32)), а действи-
1
тельный приходит в точку — ^ (кружки на рис. 38)
*1,2=±*'«> и *з=—д£- (13,34)
Как мы видели, вопрос о самовозбуждении
(устойчивости положения равновесия) любой, даже существенно
нелинейной, системы
решается линейным
приближением. С другой
стороны, в мягких
режимах автоколебания (если
они существуют) вблизи
порога самовозбуждения
всегда почти гармоничны,
и при увеличении
регенерации непрерывно
переходят, как мы увидим
ниже, в негармонический
режим. Благодаря этому
квазилинейные методы,
решающие вопрос о самовозбуждении и наличии в
исследуемой системе предельных циклов, не теряют полностью
своего значения, даже в отношении исследования
существенно нелинейных систем. Полученная при этом частота
будет лишь частотой старта автоколебаний, форма же и
частота *) стационарных автоколебаний, конечно,
квазилинейными методами не определяется. Таким образом,
метод линеаризованной характеристики можно применять
к любой ламповой схеме с целью выяснения наличия
условий самовозбуждения и существования предельных
циклов.
То обстоятельство, что при применении этого метода
все получающиеся уравнения линейны или квазилинейны,
позволяет применять к ним оператор s (см. § 3), что
значительно упрощает вычисления. Поясним сказанное
примером: пусть мы хотим исследовать свойства схемы
Рис. 38.
*) Стационарная частота, как мы видели в § 7, будет ниже
астоты старта и связана с ней формулой (7,9).
83
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
рис. 39, состоящей из триода, между каждой парой
электродов которого включена линейная цепь произвольного
вида. Составим квазилинейное уравнение схемы.
Обозначив записанные в операторном виде сопротивления
двухполюсников через Zk(s)*), а линеаризованную
характеристику лампы через S (а), мы можем написать
уравнения системы (рис. 39) в виде:
[Zl(s) + Zi(s)]I + Za(s)(I + Ia) = 0. (13,35)
Далее очевидно, что
/a=5(a)Z1(s)/. (13,36)
Исключив из этих двух уравнений 1а, мы получим
квазилинейное уравнение схемы,
написанное в операторной форме:
{Zx(s) + Z2(s) + Z3(s)[l +
+ Z1(s)S(a)]}-I = 0. (13,37)
Предоставляем самому читателю
убедиться, что из этого общего
уравнения получится операторное уравнение
_ц
й А
[——(—}
ф н
Рис
. 39.
i
!
Г
V'
\
трёхточечного генератора (13,24), если
1
Z1(s) = Xs\ Z2(s) = R +
Cs
Zz(s) = Ls. (13,38)
Заметим ещё, что стационарные гармонические решения
квазилинейного уравнения любого порядка, если они
существуют, могут быть найдены непосредственной
подстановкой вида искомого решения:
х — a sin со/. (13,39)
Действительно, если нам дано квазилинейное уравнение,
например, четвёртого порядка
А0 х +Аг х +А2 х + А3х + А± = 0, (13,40)
*) Z (s) получается из выражения комплексного
сопротивления цепи Z (/со) простой заменой (ia>) оператором s.
§ 14] АВТОКОЛЕБ. СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ 89
где все или некоторые коэффициенты являются
функциями амплитуды а, то подстановка (13,39) в это уравнение
даёт:
(о)М0 — о)М2 + АО a sin Ы — асо (а)2^ — Аг) cos со? = 0. (13,41)
Для вычисления искомых амплитуд и частот
стационарных автоколебаний получаем отсюда систему двух
алгебраических уравнений
(oMi —Л8 = 0, (13,42)
откуда находим:
=vt
(13,43)
А, (АгА2 - А0А3) - А\А± = 0 (13,44)
Последнее уравнение выражает условие того, что система
находится на границе колебательной устойчивости Рау-
са-Гурвица и является в данном случае уравнением,
содержащим только одно неизвестное — амплитуду
стационарных автоколебаний, значения которой и могут быть
из него найдены. После этого из (13,43) для каждого
значения стационарной амплитуды мы находим
соответствующую ей частоту.
Перейдём теперь к исследованию свойств конкретных
автоколебательных систем, линейная сеть которых
описывается уравнением четвёртого порядка. Такая сеть имеет
четыре обычные механические или две колебательные
степени свободы.
§ 14. Почти гармонические автоколебательные системы
с двумя степенями свободы *)
Рассмотрим схему рис. 40, линейная цепь которой
образована двумя связанными колебательными контурами.
Обратная связь в такой схеме может быть подана либо на
*) А. А. Андронов и А. А. В и т т, ЖТФ, т. IV (193',)
стр. 122. К. Тсодорчик, Радиотехника, т. 1, JVj 3 —'j (19'ibj,
стр. 3.
90
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
—ПЯЯ^— ПЯЯГ*
М . Ц
один из колебательных контуров, либо на оба. В
соответствии с этим мы можем различать три типа или три класса
таких систем: А—системы с перекрёстной связью (типа
клистрона), в которых обратная связь подана на более
удалённую от сетки парциальную систему;
В—нагруженные системы, в которых обратная связь подана на
ближайшую к сетке парциальную систему, а вторая
парциальная система играет
роль линейного
колебательного контура,
нагружающего генератор;
С—системы со
смешанной связью.
Так как, очевидно,
р ,0 системы класса А и В
являются частными
случаями систем С, то мы
рассмотрим сейчас уравнения случая С, из которых легко
получим в дальнейшем всё нужное нам для
рассмотрения случаев А и В. Пренебрегая токами в цепи сетки,
получим следующие уравнения схемы:
L,
М1п
(14,1)
(14,2)
Lih -\ ■ ЯЛ +1 J /х А +1 ^ (/2 - /) ей = - И J а
Положив
x=±^Idt; y = £-^hdt и Ia = Sx + ~SzX*, (14,3)
получим:
JC'x + RCx +(i+<L\-<g.y= -Ml* }
(14/0
(14,5)
LC'x + RCx +(i+$L)x.
L&y +R1C1y +(i + 9f)y-
Введя обозначения:
v»-_l_fi_L.£Y
-?iy=-Mia
С
~ к x = ~~ MiIa
a—KLC'
i
•J
Z,C,
1+
KLtCf '
§ 14] АВТОКОЛЕБ. СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ 91
найдём уравнения схемы
х + 2Ь х -f v2 х -* zy ------
2
м
LC
А/,
)
LC (S-S2x*)x,
• / (и>6)
у -^2b1y + ^y-a1x=-^(S-S2x2)x. J
Если рассматриваемая система почти гармоническая,
то в первом приближении мы можем искать для обоих
контуров стационарное периодическое решение в виде
гармонических колебаний, сдвинутых друг относительно
друга по фазе:
х = a sin o)£; y = b sin Ы — е cos со£, (14,7)
где о), а, Ъ и е—искомые частота и компоненты амплитуд.
Представив уравнения (14,6) в виде
л. о)2х = (со2 — v2) х — 2Ьх -\- ау •
М
LC
(S-s2x*)x =.-25,
У -г ы2у = (со2 — vf) у — 2Ьху -Ь clxx -
23ь
(14,8)
мы можем рассматривать 2 S и 2 $i как суммы сил,
действующих на консервативные колебательные системы,
уравнения которых написаны в левых частях.
При помощи (14,7) мы можем вычислить
приближённые значения этих периодических сил в виде рядов Фурье:
5J g = [(со2 - v2) a + ab] sin to* -!-
-f- — 2Ыа — cue — -=-^ a IS — -,- S2a2 ) cos Ы + ...
(14,9)
2 gx = [(со2 — vf) b — 2охсое 4 axa] sin Ы -j-
+ Г _-(0)2_v2)e__2alco6-
MTo
1
£2a'
cosco£-f- ,
LA V ^
Согласно общей теории, приравняв нулю коэффициенты
при членах резонансной частоты, мы получим отсюда
систему алгебраических уравнений, определяющих
стационарные амплитуды и частоту.
92
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
Переходим к рассмотрению основных типов. Если
в рассмотренном общем случае положить Д/ = 0, то мы
получим систему с перекрёстной связью (класс А).
Система уравнений для стационарного режима
получится в этом случае из (14,9) в виде:
1) (a)2-v2)a + a6-0,
2) 28u>a + ae = 0,
Мх
1
4) (a)2 — v2) b — 281(ое |-a1a=-0.
Из уравнений 1) и 2) этой системы находим:
со2 — v2 2осо
6 = а; е= а.
а а
далее из 4) получаем уравнение частот
((D2 — V2) (О)2 — V?) — OLOL1 — 4o01(D2 — О,
(14,10)
(14,11)
(14,12)
Сравним расположение корней этого уравнения с
расположением нормальных частот собственных колебаний
консервативной колебательной системы, соответствующей
колебательной сети рассматриваемой системы:
(a)2-v2)((D2-v2)-aa1 = 0. (14,13)
Возьмём для этого две функции:
Ф(со2)= (a)2-v2)(o)2 —vj) —oui! (14,14)
и
cl)1(a)2)-(co2-v2)(o)2-vf)-aa1-4^1a)2. (14,15)
Рассмотрим изменение значений этих функций при
непрерывном изменении со2 в пределах 0 < о>2 < ос:
0)2
Ф(со2)
Ф, (со2)
о
\2\\ — aotj > 0
V2
—aaj < 0
—aai—mt\2 < 0
4yi
—ac^—4WxvJ<0
-> CO
>o
>0
94 КВАЗИЛИНЕЙНЫЕ МЕТОДЫ [ГЛ. II
Далее мы видим, что генерация возможна лишь
вблизи синхронизма парциальных частот и при
коэффициенте связи, большем некоторого минимального значения,
зависящего от расстройки и коэффициентов затухания.
При М1 — 0 мы получаем нагруженную . систему
(класс В).
Уравнения стационарного режима для этой схемы
получаем из (14,9) в виде:
1) ((i)2-v2)a + a6-0} ^
М _Г о 1 о _,Л л |
2) 2b«a + *e + ^«>a^S-±S^)=0, . lg)
3) (a)2_vf)6-281a)e + a1a = 0,
J
4) .(a>2 —vf)e + 281a>ft = 0.
Уравнения 1) и 4) этой системы дают: #
0 = — а\ е= _i—^ь-—!—-— а. (14,19)
После этого З) даёт уравнение частот автоколебаний
(„« _ v.) (ю« _ V|) _ mi + 48f«.» ■£=£ = 0, (14,20)
а 2) —выражение стационарной амплитуды
\
>|Л
1*1 *_»_»,.•»-*
a = 2l/ 2LC '^-v?
|ЛГ.|„
21С^2
ьг1— • . <14>21)
Из (14,21) мы видим,, что генерация нагруженного
генератора может происходить только при М < 0 и имеет,
вообще говоря, частоту, ближайшую к частоте v
сеточного контура. При этом с приближением к синхронизму
условия генерации ухудшаются, так как дробь, стоящая
множителем при 8Ь увеличивается при этом от значений,
меньших единицы, до единицы (при синхронизме).
94 КВАЗИЛИНЕЙНЫЕ МЕТОДЫ [ГЛ. II
Далее мы видим, что генерация возможна лишь
вблизи синхронизма парциальных частот и при
коэффициенте связи, большем некоторого минимального значения,
зависящего от расстройки и коэффициентов затухания.
При М1 = 0 мы получаем нагруженную систему
(класс В).
Уравнения стационарного режима для этой схемы
получаем из (14,9) в виде:
1) («>2-v2)a + a&=0, ^
2) 2foa + n + ^a(S-*-S**)=0, [(14д8)
3) (со2 - v2) b - 2Ь^е -1- а±а - О,
4) .(a>2-vf)e + 281(ob = 0.
Уравнения 1) и 4) этой системы дают:
о-- г— л; е= ^±—Ъ = -±—= 2 а. (14,19)
После этого 3) даёт уравнение частот автоколебаний
(o)2_v2)(o)2_vf)_aai + 48fu)2^l = 0) (14>2о)
а 2) — выражение стационарной амплитуды
Г\М\ с . . 0)2-^2
F
I М I с
/" ^ W2 V2
= 2|/^-^1. (14,21)
Из (14,21) мы видим, что генерация нагруженного
генератора может происходить только при М < 0 и имеет,
вообще говоря, частоту, ближайшую к частоте v
сеточного контура. При этом с приближением к синхронизму
условия генерации ухудшаются, так как дробь, стоящая
множителем при оь увеличивается при этом от значений,
меньших единицы, до единицы (при синхронизме).
S 14] ЛВТОКОЛЕБ. СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ 95
Для исследовании зависимости этих автоколебаний
от параметров схемы рационально преобразовать (14,21)
при помощи (14,20), представив его в виде:
V'
аа1 — (со2 — v2) (со2—v2)
^ . (14,22)
Дискуссия этих формул позволяет полностью
исследовать поведение системы как при большой расстройке,
так и в области синхронизма парциальных частот.
Действительно, при больших расстройках уравнения
(14,21) переходят в уравнения генератора без нагрузки,
рассмотренного выше. Для исследования же поведения
системы вблизи синхронизма парциальных частот
необходимо рассмотреть свойства уравнения частот (14,20),
которое при синхронизме (vx — v) даёт:
(0)2 _ v2) [(0)2 _ ^2)2 _ ^ + 48f(D2] = 0. (14,23)
Отсюда видно, что один из корней при этом равен v.
Для исследования остальных! корней рассмотрим функцию
Qa(a>2) = ((o2-va)2-(xa1 + 48fa)2. (14,24)
Так как
O2(0) = v*-aai>0,
02(v2)= -а^ + ^тУ^О, (14,25)
Ф2(оо)>0,
то отсюда видно, что необходимо различать две области
значений связи.
В первой области при
aai<48fv2*) (14,26)
график Ф2(со2) имеет изображённый на рис. 42 вид. Таким
образом, в рассматриваемом случае уравнение частот (14,23)
имеет единственный действительный положительный корень
a> = v. (14,27)
*) Точнее, при aoLl < 4uf(v2 — Ьх). Для упрощения мы
пренебрегли Ц но сравнению с v2, что для слабо затухающего контура
законно.
96
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. II
Из формулы (14,22) мы видим, что амплитуда
автоколебаний достигает при этом (т. е. при прохождении через
синхронизм парциальных частот) минимального значения,
равного
^min -~ ^
V
* - аа1
Если
°o>8l45P'
(14,28)
(14,29)
то даже при синхронизме автоколебания не исчезают и
амплитуда автоколебаний изменяется при настройке
нагружающего контура по
обращенной резонансной кривой Ц
(рис. 43). Если же
So < 8i
ааг
(14,30)
то на некотором участке па-
Рис. 43.
строек вблизи синхронизма наступает гашение
автоколебаний (рис. 44). На этих рисунках даны также в коорди-
натах £ = -|, т\ — —-2 диаграммы Бина для соответствующих
случаев. Пунктиром всюду вычерчены диаграммы
консервативной связанной системы, а сплошными линиями —
автоколебательной.
Во второй области при
aa1>48fv2 (14,31)
§ 14] АВТ0К0ЛЕБ. СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ 97
уравнение частот при синхронизме имеет три
действительных положительных корня, относительное
расположение которых, как показывает график функции Ф2(^2)
(рис. 45), такое:
">i < v < о)2. (14,32)
Очевидно, вблизи синхронизма уравнение частот (14,20)
будет иметь также три действительных положительных
корня, расположенных
аналогично:
а>! < Q < а>2. (14,33)
Из формулы (14,21) мы видим,
что в этой области при
V< Si (14,34)
ф\
0
, -
\ /ф'
\ %ft// У2 Mf^Ss''
ай?^>'ш1. Т"
Рис. 44.
Рис. 45.
вблизи синхронизма парциальных частот мы опять будем
иметь гашение, а при
&o>8i (14,35)
в некоторой области вблизи синхронизма возможна
генерация как частоты coi, так и частоты о>2. Вопрос о том,
какая из этих частот будет существовать в системе в этой
области, зависит от истории автоколебаний в системе.
Это явление получило название затягивания. График его
изображён на рис. 46. Из кривой частот, изображённой
на диаграмме Вина, мы видим, что если мы будем
постепенно увеличивать частоту нагружающего контура,
начиная с частот vx < v, то генерироваться будет частота
7 к. Ф. Теодорчик
98
КВАЗИЛИНЕЙНЫЕ МЕТОДЫ
[ГЛ. И
со > v. В точке 1 частота эта от значения со^ перескочит
на более низкую частоту о>(12) (точка 2), (так как частоты
между (021*
и (Di }
неустойчивы (см. § 18). При
этом произойдёт и скачок
амплитуды автоколебании
от а\ до а\. Далее частота
будет изменяться по
ветви, где о) < v. Если теперь
начать уменьшать частоту
нагружающего контура,
то частота колебаний
будет изменяться по ветви,
где со < v до точки 3,
которой соответствует ча-
сюта
(3)
О)! ',
II
здесь перо-
л<4>
скочит на частоту со2 ',
соответствующую верхней
Рис. 46. ветви. Амплитуда при
этом перескочит от
значения а\ до а\. Полоса настроек между £х и с2, где уравнение
частот имеет три действительных положительных корня,
и есть область затягивания.
Г Л А В А III
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
§ 15. Распространение метода амплитудно-частотных
характеристик на квазилинейные и почти
гармонические автоколебательные системы *)
В линейной теории автоматического регулирования
и следящих систем широко применяется разработанный
Михайловым, Найквистом, Солодовниковым, Цыпкиным,
Блохом и рядом других учёных метод графо-аналити-
ческого исследования устойчивости линейных систем
с обратной связью, получивший название метода
амплитудно-фазовых характеристик. Метод этот состоит в
следующем: если нам дана линейная активная (т. е.
содержащая линейные ламповые или другого типа усилители)
система, устойчивая без обратной связи, и мы хотим
решить вопрос о том, останется ли она устойчивой при
прибавлении обратной связи (рис. 47), то необходимо поступить
следующим образом. Разорвав обратную связь,
исследуем теоретически или экспериментально свойства
разомкнутой системы как преобразователя напряжения,
заставляя его работать в тех же условиях нагрузки, как и
замкнутая система. Для этого ко входу присоединяем
источник синусоидальной электродвижущей силы гг,
внутреннее сопротивление которого равно выходному
сопротивлению системы. Амплитуда этого источника не должна
зависеть от частоты, а частота должна допускать непре-
*) К. Тсодорчик, ДАН, т. XL1X, JV* 4 (1945), стр. 265.
7*
100
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ. III
рывное изменение:
и = Re • u0eipt; 0 < р < оо.
На выходе мы получим при этом напряжение
(15,1)
(15,2)
К выходу преобразователя присоединяем вольтметр и
фазометр, внутреннее сопротивление которых равно
входному сопротивлению системы (рис. 47). При помощи этой
схемы измеряем или, если внутреннее строение схемы Q
G>
щ$
2i 0 z\
Рис. 47.
нам известно, вычисляем коэффициент усиления и сдвиг
фазы преобразователя в функции частоты:
©Р-^) » №
(15,3)
или, что то же, комплексный коэффициент усиления
преобразователя
Найдя эти величины, строим в полярных координатах
([х, ф) амплитудно-фазовую характеристику усиления
преобразователя.
При непрерывном изменении частоты от 0 до оо каждой
частоте р будет соответствовать в плоскости (|i, ф)
некоторая точка, определяемая координатами (15,3). При этом
благодаря известным свойствам рассматриваемых лампо-
§ 15] МЕТОД АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК \Q{
вых схем*) частотам р — 0 и р = оо будет соответствовать
одна и та же точка [х (0) = 0. Таким образом, амплитудно-
фазовая диаграмма ламповых схем представляет собой
замкнутую кривую, целиком лежащую в конечной
области плоскости ([а, ф) (примеры различного вида диаграмм
см. на фиг. 48 и др.). Опирающийся на эти диаграммы
критерий устойчивости состоит в том, что если
амплитудно-фазовая диаграмма не охватывает точки |л = 1,
ф=0, которую далее мы будем обозначать символом
(1; 0), то исследуемая система при замкнутой обратной
связи устойчива. Если же точка (1; 0) лежит внутри
диаграммы, то система колебательно неустойчива.
Доказательство этого критерия, основанное на теории вычетов
Коши, читатель может найти во всех курсах
автоматического регулирования, например в книге А. А. Воронова
«Элементы автоматического регулирования». Военное
изд., М., 1950. В этих курсах в качестве критической точки,
определяющей устойчивость, часто указывается не точка
(1; 0), как выше, а (—1; 0).
Это различие в формулировке объясняется тем, что
в теории регулирования в противоположность
автоколебательным системам обратная связь подаётся на вход
с отрицательным знаком.
Метод амплитудно-фазовых диаграмм, строго
обоснованный для линейных систем, может быть распространён
на случай квазилинейных, в частности
автоколебательных, систем и сохраняет при этом полностью свою
строгость. Его можно применить, но уже как приближённый
метод, и для исследования почти гармонических
автоколебательных систем.
Обобщённый для применения к квазилинейным
автоколебательным системам метод амплитудно-фазовых
характеристик даёт полное их решение и позволяет весьма
наглядно физически интерпретировать весь механизм
и особенности как процесса установления, так и
стационарных автоколебаний. Далее этот метод мы будем
называть методом диаграмм регенерации.
*) Предполагаем, что ламповая схема не допускает усиления
постоянного тока.
1()2 МЕТОД ДИАГРАММ ГЕГЕНЕРАЩШ [ГЛ. Ill
Метод диаграмм регенерации состоит в следующем.
Если принять во внимание нелинейность, то
комплексный коэффициент усиления системы |х* как в
действительной, так и в мнимой частях будет, вообще говоря,
функцией не только частоты /;, но и амплитуды и0 входа.
Поэтому
J** = P-(»o, />)е'* <">•*>*). (15,4)
Благодаря этому вместо одной диаграммы
регенерации система будет характеризоваться целым семейством
таких диаграмм, зависящим от одного параметра и0.
Рассмотрим сначала случай, когда семейство это
повсюду, за исключением некоторых линий, однозначно. Это
будет иметь место, если действительный коэффициент
усиления [х с возрастанием и0 монотонно убывает до нуля.
Такие системы мы будем в дальнейшем называть
мягкими **).
Для мягких систем семейство диаграмм регенерации
не только однозначно, но и целиком заключено внутри
огибающей, которой, вообще говоря, является
диаграмма р.* (0, р). Критерий статической устойчивости состоит
в том, что точка положительной действительной полуоси
|а = 1, ф = 0 лежит вне ограниченной диаграммой р.* (0, р)
части плоскости.
Легко видеть, что точка (1;0) соответствует режиму,
удовлетворяющему условиям баланса амплитуд и фаз
автоколебаний ***). Аналитически высказанный выше
критерий устойчивости может быть записан следующим
образом.
Система устойчива, если для всех частот,
удовлетворяющих уравнению
ф(0,/>) = 0, /> = <*,■, (15,5)
*) В простейших радиотехнических системах фазовый угол
от амплитуды входа не зависит, так что (15,4) принимает для
них более простой вид:
!**=-:'("о. P)eiy,(p).
**) Радиотехнические системы, работающие при мягком
режиме, этим условиям удовлетворяют.
***) Эти условия впервые были формулированы Меллером.
§ 15] МЕТОД АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЮЗ
соответствующие им значения действительного
коэффициента усиления
1а(0,ш|)<1, (15,6)
Если условие (15,6) нарушено, т. е. точка (1; 0) лежит
внутри ограниченной диаграммой р,* (0, р) области, и для
одной или нескольких определяемых уравнением
(допускаемых системой) частот (15,5) действительный
коэффициент усиления
[*(0, со,) >1, (15,7)
то система неустойчива.
Уравнение это является, таким образом, условием
самовозбуждения системы на частоте о)г. Если это условие
самовозбуждения выполняется только для одной из
частот, определяемых (15,5), то процесс установления
протекает следующим образом.
С момента начала раскачки представляющая
поведение системы точка пересечения диаграммы, построенной
для и0—±0, с положительной осью р., начинает двигаться
вдоль этой оси к началу координат, переходя на
диаграммы семейства, соответствующие достигнутым системой
амплитудам автоколебаний.
Это движение, изображающее процесс установления
автоколебаний, закончится, когда представляющая точка
достигнет на оси |л точки (1; 0). Это показывает, что
частота о)с и амплитуда ас стационарных автоколебаний
определяются уравнениями
ф(а, о)) = 0и р, (а, а>)=: 1. (15,8)
Таким образом соотношения (15,5)—(15,8) определяют
условия самовозбуждения, частоту старта, а также
частоту и амплитуду стационарных автоколебаний, если
колебания эти устойчивы.
Свободные автоколебания могут быть неустойчивыми
либо по амплитуде, либо по частоте. Легко* убедиться,
что для устойчивости по частоте необходимо и достаточно,
чтобы диаграмма регенерации при увеличении частоты
пересекала положительный участок действительной оси,
переходя от положительных значений сдвига фаз ф к отри-
104 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
цательным, т. е. чтобы выполнялось условие
($).<*■ <«•<»
Действительно, при положительном значении ф во
время процесса установления генерация происходит с
непрерывно нарастающим во времени сдвигом фаз, т. е.
с повышением частоты, а при отрицательном ф частота
непрерывно падает. Оба эти процесса, при соблюдении
формулированного выше условия частотной устойчивости,
возвращают частоту к стационарному значению, которое
оказывается устойчивым.
Если частота автоколебаний устойчива, то условие
амплитудной устойчивости сводится, согласно (§ 11), к
требованию
которое для мягких автоколебательных систем всегда
выполняется.
§ 16. Построение обобщённой диаграммы регенерации *)
Если для заданной системы мы нашли выражение
комплексного коэффициента усиления в виде
* Ч\ + 42, _ gvi -f з^а-Н (^1^2—r2q\)
Р rx + irt r\ + r\
= (A (cos ф + i sin ф), (16,1)
где q и г являются известными нам функциями амплитуды,
частоты р и параметров схемы, то, очевидно, для
выяснения топологического расположения диаграммы
регенерации необходимо найти значения р. и р, соответствующие
точкам пересечения диаграммы с действительной и мнимой
осями.
*) К. Теодорчик, ДАН, т. LII (1946), стр. 33. Я. Цып-
*вин,ЖТФ, т XVI (1946), стр. 723.
16] ОБОБЩЁННАЯ ДИАГРАММА РЕГЕНЕРАЦИИ Ю5
Действительные значения [л* мы получим для частот,
равных корням уравнения
Мпф=™=*р- = 0
или
ri(h- r2qi = 0. (16,2)
Это — уравнение допускаемых системой частот
автоколебаний. Обозначим его корни:
р-=щ. (16,3)
Соответствующие пересечению мнимой оси значения р.*
получатся для частот, определяемых из уравнения
ИЛИ
?л + дл = о. (16,4)
Обозначим эти частоты
p = Qk. (16,5)
Модуль |х* получится из (16,1) в виде
IP- I- js+ti • I10'0'
Для определения топологии диаграмм нас интересуют
не все значения | [х* |, а только те, которые соответствуют
точкам пересечения диаграмм регенерации с действительной
и мнимой осями. Эти значения, соответствующие частотам
o>i и Qk, удобно вычислять следующим образом. Из (16,2)
находим:
О).-(£).-"•• (16'7>
Подставив эти соотношения в исходное равенство (16,1),
получаем:
!*„>--■= ЛГда. (16,8
106
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ. Ш
Эти значения определяют абсциссы пересечения
обобщённых диаграмм с действительной осью*). Аналогично
из (16,4) находим:
?2
Подставив это в (16,1), находим:
р<2 = Ад.
(16,9)
(16,10)
Таким образом, величины Да определяют ординаты точек
пересечения диаграмм
с мнимой осью.
Таблица расположенных
в порядке
возрастания частот со и 2 и
соответствующих им
значений jx^ = N^ и
|ха = До однозначно
определяет
конфигурацию диаграммы
регенерации.
Рис. 48.
Действительно, пусть мы нашли:
0 < а)х < Q1<ci)a < а>з < ОО
О iVj-Ax-iVs-iVe
0
На основании этой таблички диаграмма регенерации имеет
изображённый на рис. 48 вид.
§ 17. Примеры применения метода обобщённых
диаграмм регенерации к решению автоколебательных
задач
1. Ламповый генератор (система с одной
степенью свободы)
Переключив схему рис. 2 так, как этого требует
правило построения амплитудно-фазовых характеристик,
*) Изложенный метод вычисления предложен Я. 3. Цып-
киным.
§ 17]
ПРИМЕРЫ ПРИМЕНЕНИЯ МЕТОДА
107
переходим к схеме рис. 49. Подав на вход сетки
напряжение
и = uQeipt
(17,1)
и приняв для линеаризованном характеристики лампы
выражение
/rt= ( S — TS2u% ) и,
(17,2)
получим для напряжения на зажимах конденсатора С
уравнение
х + 2Ьх + ф= -ipu0Mi*$ (S- jS2u%} е{*>1. (17,3)
Решение ищем в виде
х = Х&*1. (17,4)
Это даёт после подстановки в (17,3):
!^* К> Р)
ipM<*llS—£Suul
sin ф =
cos ф —
_»о — («J-P*) + 2ip«
-M/^^-i.?^
|/(»|-р*)* + (2р8)* '
_ <-Р*
/K-pT-KW'
2РЪ
1-
^K-pV+Pp*)*
(17,5)
(17,6)
108
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ. III
Согласно общей теории (см. (16,2)) находим уравнение
частот
р«-р2) = 0; Pl~o, /v
(17,7)
и соответствующие этим частотам действительные
коэффициенты усиления (см. (16,7))
ц(и0, 0) = 0; {x(w0, o)0):
=MA(s-\sm
2Ь
(17,8)
Р
Воспользовавшись выражениями (16,4) и (16,9), найдём,
что мнимая ось
пересекается диаграммой только при
р = Q = 0, и
соответствующее этому значению Ас = 0.
Следовательно,
диаграмма нашей задачи имеет
вид рис. 50. Эта
диаграмма показывает, что при
М > 0 обратная связь
отрицательна и
автоколебания невозможны.
При М < 0 диаграмма ^даёт положительную обратную
связь.
Из (15,7) получаем при этом условие самовозбуждения
частоты о)0
м>о
М<0
Рис. 50.
\m\*is ..
1,
(17,9)
а из (15,8) уравнение стационарной амплитуды
автоколебаний
\м\
26
i(S-±S2u{) = i,
(17,10)
дающее
щ-
:ас=2 |/.
\M\o>%S-2b 2 /S0
§ 171
ПРИМЕРЫ ПРИМЕНЕНИЯ МЕТОДА
109
Эти результаты полностью совпадают с формулами,
полученными выше для мягкого режима (см. § 11).
В случае жёсткого режима, прп линеаризованной
характеристике лампы
^ ~^~ "4" ^2Mo "
1
S±u* J uy
(17,12)
*~а
мы придём к тем же формулам, только вместо множителя
(17,2) всюду будет входить более сложный полином (17,12).
Диаграмма регенерации будет
теперь иметь вид, соответствующий
рис. 51, некотором двойной
штриховкой выделена двузначная
область семейства диаграмм
регенерации.
Если точка (1; 0) лежит
внутри однозначной области семейства
(заштрихованная косой
штриховкой внутренняя область), то имеет
место самовозбуждение и система
статически неустойчива.
Если же точка (1; 0) лежит в
двузначной области, то
самовозбуждения нет, система статически устойчива, но при
достаточно большом начальном толчке генерация возникает,
и система раскачивается до стационарной амплитуды.
Рассмотрение процесса установления даёт все
характерные для жёсткого режима результаты, полученные выше
(§ 12).
Рис. 51.
П. Диаграммы регенерации систем с двумя
степенями свободы
Применим теперь изложенный метод к исследованию
свойств систем с перекрёстной связью (класс А) и
нагруженных систем (класс В).
Согласно (14,6) система класса А при переключении
её для вычисления диаграмм регенерации (рис. 52)
НО МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
описывается системой уравнений
х -(- 2Ьх + v2x — ау = 0,
ij + 2i1y + yjy — a1x= —тфг («У-т^о ) м-
[ГЛ. Ш
(17,13)
Положив здесь
и = и0е1^: х = Х0е11>1; у^У0е^
и ограничившись в правой частичленами основной частоты,
получим:
Xo[(v2-/?2) + 2*>S]-aF0==0,
- «i*o + [М - Р2) + 2ipb1] Y0 = - v i§- (<У - ± <Уаи0) гг0.
Рис. 52.
Отсюда для комплексного коэффициента усиления получаем
выражение
!l9 —
"о
— г/?а
л/,
й(/
4 Г
*ЗД
(v*-/?*) (v2__ /,2)_4/,2б51 -act, + lip [(^-р*) о1 + (vf —/>*) 6j
= |1*Ч (17,14)
Далее, согласно (10,2) получаем уравнение частот
^[(v2-^2)(v?-/>2)~4/;26ai-aa1J^0, (17,15)
что даёт /? = 0, р=ш1 и /> = о)2. Соответствующие
значения действительного коэффициента усиления равны, оче-
§ 17]
видно:
ПРИМЕРЫ ПРИМЕНЕНИЯ МЕТОДА
111
Мх f
-aLtXS~
-r-S>;
(17,16)
Частота, при которой диаграмма пересекает мнимую ось,
определяется согласно (16,4) из уравнения
РгК^-Рг)^1 + (^-р*)Ц = 0. (17,17)
Это даёт:
(17,18)
Так как частота 2 всегда лежит внутри интервала v, vb a
частоты о)! и о)2, как видно
из уравнения частот, всегда
расположены вые этого
интервала (см. § 14), то
а)-
о)! <2 <о)2. (17,19)
На основании полученных
результатов конфигурация
диаграмм регенерации
определяется однозначно. Для Мх < О
мы получаем рис. 53, а, а для j)-Q
Mi > 0 — рис. 53, Ь. Из этих
диаграмм мы видим, что из
двух допускаемых системой
частот положительная
обратная связь получается только
для одной, для второй же частоты обратная связь
отрицательна.
Для Mi < 0 может возбуждаться только меньшая из
частот («!. Условие самовозбуждения этой частоты
согласно (15,7) и (17,16) есть
| Мх | aS
> 1.
(17,20)
Если это условие выполнено, то стационарная амплитуда
получится согласно (15,8) и (17,16). Это даёт в согласии
112 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
с (14,17):
[ГЛ. III
а = 2
•
2LlC1 о '
2Lfii
— . (17,21)
При Мг > 0 может возбуждаться только большая частота
ш2. Условие самовозбуждения для неё^имеет вид:
M&S
>1-
(17,22)
2L1C1l81(o.*-v») + 8(o.5-vJ)]
Стационарная амплитуда в согласии с (14,16) равна:
а = 2
У
My
2L,G"i
»l — rf ^ a>f —v2
M,
(17,23)
Таким образом, метод обобщённых диаграмм показывает,
что отброшенные нами в § 14 из-за энергетических сооб-
//■^/» и I ''ЕЕ <2Г
и.
:с, /с
Рис. 54
ражении решения недопустимы, так как онп
соответствуют отрицательной обратной связи.
Для системы класса В (нагруженного контуром
генератора) мы после переключения для вычисления диаграмм
регенерации получим схему рис. 54, описываемую
системой уравнений
Положив
х + 2Ьх -f v2# — ay = — -j£ ( S — -j S2ulj u,
(17,24)
§ 17] ПРИМЕРЫ ПРИМЕНЕНИЯ МЕТОДА ИЗ
получим:
р* =
= (^2—Р2) (ч1 — р2) — Ьр2ЬЪ1 — аа1 + 12р [Ь (v2—р2)4Л (v2—р2)]' (17>^5)
Отсюда, согласно общей теории, уравнение частот со:
Р № - Р2) (vf - />2)2 - «он (vf - />2) +
+ 4pa8J(v2-p2)]=0. (17,26)
Это уравнение совпадает с (14,20) и, как там показано,
имеет при связи меньше критической один действительный
положительный корень, а при связи больше критической —
три таких корня.
Для частот 2 получаем согласно (16,4) уравнение
р*[Цч1-р*)* + 4р*№1 + аа1Ъ1] = 0; (17,27)
оно не имеет действительных корней, кроме р = 0,
поэтому диаграмма регенерации пересекает мнимую ось только
в начале координат. Для [л^ формула (16,8) даёт:
^^ 2l*(vJ-a>*) + Mv*--cD*)] ' (17>28)
Эти результаты позволяют однозначно начертить вид
диаграмм регенерации. Для слабой связи (меньше
критической) получаем диаграмму, совпадающую с
диаграммой системы с одной степенью свободы (см. рис. 50).
Для связи больше критической диаграмма дана на
рис. 55, а и б. Из этой диаграммы мы видим: 1) что
генерация возможна только при М < 0, 2) частота со' всегда
неустойчива. Частоты и>г и со2 могут начать раскачиваться,
если выполнено условие самовозбуждения
LC > 1. (17,29)
«t'+^J
Стационарная амплитуда каждой из этих частот опреде-
8 к. Ф. Тводорчик
114 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
ляется совпадающей с (14,21) формулой
а = 2
/:
\м\
2LG
S — Ъ — Ъ!
I Af |
2LC
[ГЛ. Ill
(17,30)
Если условие самовозбуждения выполняется только для
одной из двух допускаемых системой частот, то эта
частому' wVW
Р
М<0
5)
Рис. 55.
та и устанавливается в стационарном режиме. Остаётся
выяснить, какое стационарное движение установится
в системе, если условие самовозбуждения выполняется
для обеих частот. Этот случай будет рассмотрен в
следующем параграфе.
§ 18. Явление затягивания*)
Обратимся теперь к рассмотрению теории затягивания
и доказательству неустойчивости в мягких системах бигар-
монического режима.
Пусть в генераторе, нагруженном контуром, при связи,
больше критической, условие самовозбуждения
выполняется для обеих частот о)х и о)2. Диаграмма регенерации
имеет для этого случая изображённый на рис. 55, б вид,
*) А. П. С к и б а р к о и СП. Стрелков, ЖТФ, т. IV,
(1934), стр. 158. К. Теодорчик, Известия АН СССР (отд. техн.
наук) № 3 (1946), стр. 385.
8 181
ЯВЛЕНИЕ ЗАТЯГИВАНИЯ
115
показывающий, что связь положительна, и имеют место
неравенства
(х (0, щ)>1 и [х(0, а)2)>1. (18,1)
Для решения вопроса о возможности существования
бигармонического режима необходимо рассмотреть законы
сосуществования в системе возможных частот.
Эти законы мы можем найти следующим образом: на
вход разомкнутой исследуемой системы подаём от
внешних источников напряжение, равное сумме напряжений
обеих возможных частот системы
и = аг cos о)^ + а2 cos а)2£
(18,2)
и подсчитываем значения получающихся при этом
действительных коэффициентов усиления. Значения эти будут
для каждой возможной частоты зависеть, кроме этой
частоты, ещё от амплитуд обеих частот а{. При асин-
хронности частот а)х и а>2 и при характеристиках,
допускающих апроксимацию полиномом третьей степени, т. е.
при мягком режиме генерации
мы получим:
[х (а)ь аъ а2)^
(х (со2, аъ а2) -=
/а = Su — -к- S2us,
(18,3)
(18,4)
Из формул (18,4)7мы видим, что возможные асинхронные
частоты автоколебаний при одновременном их
существовании в мягкой системе всегда взаимно ухудшают
условия генерации друг друга.
Если в начальный момент возникновения
автоколебаний мы имели, например, выполненными условия само-
8*
116 MLT/ОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. Ill
возбуждения для обеих частот, т. е.
|л(соь 0, 0)>1 и |х(о)2, 0, 0)> 1, (18,5)
то по мере раскачивания обеих частот условия генерации
будут для них ухудшаться и, наконец, для одной из них,
например для со2, исчезнут совершенно, т. е. мы получим:
{х(а)ь аъ а2) > 1 и (а(о)2, аъ а2)^ 1. (18,6)
Далее частота о)х будет продолжать усиливаться, а частота
со2 начнёт затухать. Очевидно, этот процесс закончится
полным подавлением частоты ш2 и раскачкой частоты щ
до стационарной амплитуды, определяемой равенством
рК,*ю, 0) = 1. (18,7)
Устойчивость этого стационарного движения определится
неравенством
ПК а10, 0)<1. (18,8)
Если это неравенство при каком-либо изменении
параметров системы изменит смысл, то, как легко видеть,
колебания частоты ш1 начнут затухать, а колебания
частоты со2 усиливаться до полного подавления частоты о)1
и достижения стационарной амплитуды а2о, определяемой
равенством
РКО, аао) = 1. (18,9)
Колебания эти в свою очередь устойчивы при условии
[1 (сох, О, а20)< 1. (18,10)
Написав выражение (18,9) и предельное значение (18,8)
в развёрнутом виде, согласно (18,4) получим условия
перехода системы от автоколебаний частоты (% к
автоколебаниям частоты о)2 (от точки А в точку В, рис. 56)
V- К, 0, а20) = = ._мп— = 1,
[i (<о2, а10) 0) = 2 — =-- 1.
(18.11)
§ 18]
ЯВЛЕНИЕ ЗАТЯГИВАНИЯ
117
Из (18,11) мы видим, что переход этот происходит при
условии
<-!<*!<), (18,12)
т. е. при достижении квадратом амплитуды частоты а>г
значения, равного половине квадрата соответствующей
амплитуды частоты со2. Этот результат весьма наглядно
4
sv*
Рис. 56.
может быть изображён графически (рис. 56). Из
вышеизложенного ясна невозможность существования в
нагруженном контуром генераторе устойчивого бигармониче-
ского режима автоколебаний. Действительно, для такого
режима диаграмма регенерации
должна иметь вид, изображённый на рис. 57,
т. е. должны выполняться равенства
[х(о)ь а12, а21) = 1
(х(о)2, а12, а21) = 1, (18,13)
где а]2 и а21 обозначают
стационарные амплитуды бигармонического
режима. Рис. 57.
Отсюда видно, что всякое
нарушение значений стационарных амплитуд бигармонического
режима приводит к переходу системы к чисто
периодическим колебаниям частоты о)х или а)2.
Таким образом, если асинхронные возможные частоты
взаимно подавляют друг друга, то в системе имеет место
взаимное затягивание этих частот. Бигармонический же
режим неустойчив.
118
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
§ 19. Схемы стабильной частоты *)
Рис. 58.
Наиболее распространёнными являются две схемы
стабилизованных пьезокристаллом генераторов: 1)
осцилляторная схема и 2) схема затягивания. Типичная осцилляторная
схема изображена на рис. 58. Схему эту можно
изобразить как схему с двумя
степенями свободы и
перекрёстной связью (класс А)
(рис. 59).
Схема затягивания
также принадлежит к схемам
с двумя степенями свободы
и может быть получена из
схемы нагруженного
контуром генератора (класс В)
простой заменой нагружающего генератор контура
пьезокристаллом (рис. 60). Поэтому при исследовании обеих
этих схем мы можем воспользоваться результатами,
полученными для генераторов классов А и В §§ 14 и 17.
При этом осцилляторную схему необходимо сравнивать
со схемой, получающейся из основной схемы класса А
путём совмещения
катушки обратной связи с
самоиндукцией Lx
второго парциального
контура (рис. 59).
Полученная таким образом
схема эквивалентна ос-
цилляторной схеме.
То обстоятельство,
что в схеме рис. 58
связь между
парциальными контурами обеспечена малой последовательно
включённой ёмкостью, а в схеме рис. 59 —при помощи
ёмкостного делителя напряжения, не существенно.
Рис. 59.
*) С. М. Р ы т о в, А. М. Прохоров, М. Е. Ж а б о т и н-
ский, ЖЭТФ, т. XV (1945), стр. 557 и 613. К. Теодорчик,
Радиотехника, т. I, № 3 — 4 (1946), стр. 3.
§ 19]
СХЕМЫ СТАБИЛЬНОЙ ЧАСТОТЫ
119
Написав уравнения схемы и сравнив их с уравнениями
(14,10), легко убедиться в тождественности этих
уравнений при М1= —Ьг. Поэтому для стационарной
амплитуды автоколебаний формула (14,17) даёт:
i = 2
/
2Сг~
2 — а>?
„ V* О) I
2Сг
(19,1)
где частота о)х равняется меньшей из двух частот,
определяемых уравнением
частот (14,12) (ибо Мг<0).
Приняв во внимание,
что в случае пьезокристал-
лического осциллятора
8 « 8ь (19,2)
мы видим из (19,1), что
генерация возможна даже
при значительной величине
расстройки vf — (of. Это
полностью согласуется с хорошо известной из опыта способностью
осцилляторной схемы генерировать при настройке
анодного контура значительно выше частоты пьезокристалла.
Чтобы* рассмотреть вопрос о том, насколько генерируемая
частота может быть стабилизована кварцем, построим
на основании уравнения частот автоколебаний (14,12)
диаграмму Вина. Вводя для этого координаты
Рис. 60.
у1=^2 и
получим:
5 м2 »
55,
(Ч-1)(ч-6)-^-4^-ч = 0
(19,3)
(19,4)
Это уравнение отличается от уравнения связанных
линейных консервативных контуров наличием последнего члена,
весьма малого вследствие малости 8.
На рис. 61 изображён график Вина для
консервативной системы (пунктир) и сплошной линией—тот же график
120 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
для допустимой в осцилляторной схеме частоты
автоколебаний.
Вследствие указанного выше свойства схемы
генерировать при vx > v область генерируемых схемой частот
простирается далеко вправо, где £>1. В этой области
линия генерируемых частот почти параллельна оси абсцисс,
т. е.
'1 = тг ~const- - (19,5)
Это и есть область стабилизации частоты автоколебаний
кварцем (см. АВ на рис. 61).
Чтобы оценить порядок близости частоты
автоколебаний к частоте пьезокристалла, найдём из уравнения частот
(14,12) генерируемую
частоту. Это даёт:
Из этой формулы мы видим,
что генерируемая частота тем
ближе к частоте пьезокри-
' 7 f сталла, чем меньше
затухание последнего, чем слабее
с* связь и чем выше настроен
анодный контур.
Схема затягивания получается из схемы класса В
(нагруженного контуром генератора), если в качестве
нагружающего контура включить пьезокристалл (см. рис. 60).
Заметим, что согласно принятым нами обозначениям
в схеме затягивания мы имеем:
8i«o. (19,7)
Ввиду этого, согласно (14,31), критическое значение связи
в рассматриваемом случае весьма мало, и система, даже
при слабой связи, находится во второй области, где
возможно либо гашение, либо затягивание. Из формулы (14,35)
видно, что при сколько-нибудь заметном превышении
регенерацией необходимого для самовозбуждения порога мы
§ 191
СХЕМЫ СТАБИЛЬНОЙ HAGTOTbl
121
будем иметь:
Si < В0*),
(19,8)
т. е. гашение в системе станет невозможным, и получится
режим затягивания.
Далее, так как с удалением от выполнения условия
гашения условия генерации ухудшаются с расстройкой
парциальных систем тем медленнее, чем меньше 8Х, то
затягивание с уменьшением Ьг становится возможным на
всё большую глубину. При пьезокристалле оно поэтому
будет очень глубоким.
Чтобы наглядно
проследить за ходом частот
системы, и выяснить
расположение областей
стабилизации кварцем,
удобнее всего опять
воспользоваться диаграммой
Вина.
Введя переменные
VI
1
0
//
1 / —tall ■"-——
1
'
V
ч=ъ
6 = ^-, (19,9) Рис 02.
представим уравнение частот (14,20) в следующем виде
0]-1)(ч-б)-^ +
45?
*]— 5
= 0.
(19,10)
Приняв во внимание изменение последнего члена с
настройкой, легко убедиться, что диаграмма Вина схемы
затягивания будет иметь вид, изображённый на рис. 62
сплошной линией (пунктиром попрежнему изображена диаграмма
Вина для консервативной связанной системы).
Из этой диаграммы мы видим, что области
стабилизации частоты расположены по обе стороны от области
затягивания (обозначены жирными линиями на рис. 62).
*) Если Ь0 < Ь1У то вблизи синхронизма возможно гашение
автоколебаний, разделяющее стабилизованный режим от нестаби-
лизованного.
122
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
§ 20. Отрицательная обратная связь*)
В линейных усилителях и генераторах почти
гармонических автоколебаний желательно, насколько возможно,
увеличить линейную часть и уменьшить нелинейность
прилегающих к этому линейному участку частей
характеристики лампы. Оба эти эффекта могут быть получены
введением в схему отрицательной обратной связи. Для
этого проще всего в схему лампы включить добавочное
сопротивление г (рис. 63). Без этого сопротивления мы
имели бы в пределах линейного
участка характеристики
/« = л7Тл7и = ^' W)
а при его наличии получаем:
т, __ Ръ(и--гГа)
1 п —
Рис. 63.
К
Ri + (H+l)r + Ra
и— S'u.
(20,2)
Сравнение этих формул показывает, что отрицательная
обратная связь равносильна увеличению внутреннего
сопротивления лампы или уменьшению крутизны линейного участка
анодной характеристики в
= 14
fo + l)'
Ri + На
раз.
(20,3)
Спрямляющее действие отрицательной обратной связи на
анодную характеристику весьма наглядно показывается
предложенной А. Ризкиным диаграммой. На рис. 64 дана
эта диаграмма. Линия АВ представляет характеристику
в отсутствии отрицательной обратной связи. Линия ОС
даёт добавочное отрицательное смещение, подаваемое на
сетку от сопротивления г. Пунктирная линия AD,
получающаяся из характеристики АВ путём смещения каждой
*) Г. С. Цыкин, Отрицательная обратная связь. Связьиздат,
1940. А. Ризкин, Электросвязь, № 2 (1938), стр. 7 и № 3
(1939), стр. 88.
§ 21] СИСТЕМЫ С ИНЕРЦИОННОЙ НЕЛИНЕЙНОСТЬЮ 123
точки её вправо на расстояние, определяемое расстоянием
соответствующей точки линии ОС от вертикали, даёт
характеристику при наличии отрицательной обратной связи.
Благодаря вышеуказанным свойствам отрицательной
обратной связи она широко применяется для улучшения
работы усилителей. В почти гармонических генераторах её
влияние сказывается в
улучшении формы почти
синусоидальных
автоколебаний благодаря
подавлению гармоник.
§ 21. Автоколебательные
системы с инерционной
нелинейностью *)
Нелинейность в любой
автоколебательной системе
неизбежна, однако
нелинейный элемент (сопротивление), ограничивающий
нарастание амплитуды автоколебаний, может обладать
различной инерционностью, Безинерционное сопротивление
мгновенно следует за всеми изменениями своего
аргумента. Наоборот, идеально * инерционное сопротивление
совершенно не реагирует на мгновенные значения
аргумента, а определяется лишь некоторым средним его
значением. Конечно, между этими крайними случаями
возможен непрерывный переход.
Примером нелинейности первого рода является
отрицательное сопротивление, вносимое в уравнение
автоколебательной системы катодной лампой, работающей в обычном
режиме.
Примером инерционного нелинейного сопротивления
может служить металлическая нить, нагреваемая
переменным током («термистор»).
*) L. A. Meacbnm, P. I. R. E., v. 26 (1938), стр. 1278.
J. Glopp, The General Radio Experimenter, v. XVIII, № 11
и № 12, (1944). К. Теодорчик, ДАН, т. L (1945), стр. 191.
К. Теодорчик, ЖТФ, т. XVI (1946), стр. 845.
124
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
Сопротивление такой нити есть функция её
температуры, которая складывается из температуры окружающей
среды б0 и нагрева нити 0 протекающим по ней током.
При простейших предположениях (нагрев синусоидальным
током, закон охлаждения Ньютона) закон изменения этой
последней величины описывается уравнением
тсВ -\-Ы^ RIl sin2 pt, (21,1)
где т — масса нити термистора, с —её удельная
теплоёмкость, & —ньютоновский коэффициент теплоотдачи.
В -первом приближении, при усреднении значения
сопротивления в течение периода нагрева, стационарное
решение (21,1) есть
Hi2 TiT2 1
V^(T)
tgT=-^F- (21,2)
Из этой формулы видно, что отношение постоянной
составляющей Ь к амплитуде переменной составляющей
(частоты 2р) равно:
^ = |/l+(2^)2^2/3x. (21,3)
Через т обозначена константа времени установления тем-
тс
пературы термистора: т = -т-.
Таким образом, для больших значений произведения
частоты р нагревающего тока на константу времени
термистора т стационарная температура О практически
определяется только амплитудой (или эффективным
значением) нагревающего переменного тока и не зависит от его
мгновенных значений. Это значит, что при 2рх > 1 тер-
мкстор в стационарных режимах является практически
постоянным сопротивлением, величина которого
определяется амплитудой нагревающего его синусоидального
тока, т. е., по нашей терминологии, инерционным
нелинейным элементом.
§ 21] СИСТЕМЫ С ИНЕРЦИОННОЙ НЕЛИНЕЙНОСТЬЮ 125
Уравнение лампового генератора с колебательным
контуром в цепи анода может быть написано в виде
x_^_{\M±L_Ryx + <x = 0, (21,4)
где х означает ток в цепи самоиндукции колебательного
контура. В скобках этого выражения стоит разность
модуля отрицательного сопротивления, вносимого в систему
лампой, и омического сопротивления контура.
В обычном генераторе первый член этой разности не
постоянен, а является нелинейной функцией (безинер-
ционной) крутизны ламповой ха- +
рактеристики: I j
S = S(x). (21,5) VJ^ А
Подставив (21,5) в (21,4), мы при- £- j i y^—i
дём к обычному виду нелинейного \су^ ^мш "^Т
уравнения лампового генератора. ?_5___Г
Так как в уравнение (21 /i)
модуль отрицательного сопротив- Рис. 65.
ления и омическое сопротивление
контура входят совершенно равноправно, то возможно
построение автоколебательной системы, в которой лампа
будет работать в линейном режиме, а роль нелинейного
элемента будет выполнять омическое сопротивление цепи
самоиндукции колебательного контура, состоящее из
надлежащим образом подобранного термистора. Такая
автоколебательная система (рис. 65) будет описываться
системой уравнений
*--t{^^--tw}*+ a)2°^0' (21'6)
Ф(0, 6, х, х) = 0, (21,7)
где Ф—функция, определяющая закон нагревания
термистора возникающими в системе автоколебаниями.
Решение вышенаписанной системы находится просто
только в случае рассмотрения стационарных состояний
системы и таких квазистационарных переходных режимов,
при которых система в любой момент достаточно близка
к стационарности. В этих случаях сопротивление терми-
126
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ. III
стора, входящее в уравненпе (21,6), мы можем считать
функцией амплитуды автоколебаний (а), второе же
уравнение (21,7) заменяется функцией (графиком)
зависимости стационарного сопротивления термистора от
амплитуды нагревающего его синусоидального тока.
Таким образом, для указанных режимов
автоколебательной системы с инерционной нелинейностью
уравнение (21,6) принимает вид квазилинейного
дифференциального уравнения колебательной системы, коэффициент
затухания которой зависит от параметра; связанного
с амплитудой колебаний:
х-±{№£-Т{а)}х + **х = 0, (21,8)
где Г (а) — заданная функция амплитуды стационарных
автоколебаний. Условие самовозбуждения системы,
описываемой уравнением (21,8), легко написать:
Ш^_.Г(0)>0, (21,9)
стационарное же решение имеет вид
х = а0 sin о)0£, (21,10)
где амплитуда определяется из равенства
Ш£-.Т(а0) = 0. (21,11)
Эту стационарную амплитуду весьма удобно находить
графически как абсциссу точки пересечения прямой
Rx = I—J— с кривой сопротивления термистора R = Т (а)
(рис. 66).
Из этого построения видно, что при монотонно
возрастающей характеристике термистора система всегда мягко
самовозбуждается и стационарные автоколебания всегда
устойчивы.
Конечно, наше решение правильно отображает работу
генератора с термистором лишь при условии, что вплоть
до стационарной амплитуды автоколебаний работа лампы
не выходит за пределы левого прямолинейного участка
характеристики.
22]
ГЕНЕРАТОРЫ ТИПА RC
127
R-T(a)
Таким образом, генератор с (идеально) инерционной
нелинейностью строго описывается квазилинейным
уравнением, вследствие чего он лишён гармоник и даёт чисто
синусоидальные стационарные автоколебания.
Это свойство открывает широкие возможности
построения генераторов практически чисто синусоидальных
автоколебаний.
Вследствие подавления обертонов генераторы с
инерционной нелинейностью дают, при прочих равных
условиях, большую стабильность частоты, так как в них
выпадает поправка частоты, обусловленная обертонами (см. § 7).
Рассмотренный тип инерционно
нелинейного генератора
принадлежит к типу генераторов с
нелинейным контуром.
Действительно, затухание колебательно
го контура, включающего «тер
мистор», не постоянно, а
является нарастающей функцией
амплитуды автоколебаний
&(«)-^- (21,12)
Изучение свойств генераторов с инерционной
нелинейностью позволяет выяснить, какие свойства
автоколебательных систем являФтся квазилинейными и какие
являются следствием безинерционной нелинейности
катодной лампы, т. е. существенно нелинейны.
>р MS
§ 22. Генераторы гармонических автоколебаний
типа RC*)
Почти гармонические автоколебания получаются в
следующих случаях:
1) В автоколебательных системах, линейная
колебательная цепь которых обладает высокой добротностью.
*) В. И. С и ф о р о в, ИЭСТ № 10, 1940. Б. П. Асеев,
Основы нелинейной радиотехники. Связьиздат, 1943. К. Теодор-
чик, Учёные записки МГУ, в. 95, физика, кн. 4(1946). К. Тео-
дорчик. ЖТФ, т. XVI (1946), стр. 941.
128 МЕТОД ДИАГРАММ РЕГЕИЕГАЦИИ [ГЛ. III
j Синусоидальность автоколебаний в таких цепях обу-
, словлена их ярко выраженными резонансными
свойствами, благодаря которым, даже при резко негармонической
форме питающего колебательную цепь анодного тока,
резонансная составляющая автоколебания резко
преобладает над другими гармониками. В генераторах этого типа
мы имеем поэтому синусоидальные автоколебания
только в колебательной цепи, в остальных же частях схемы
напряжения и токи могут быть далеки от
синусоидальности. Синусоидальная форма автоколебаний в
генераторах этого типа обладает, так сказать, значительной
«прочностью» в том смысле, что она сохраняется при
значительном превышении обратной связью необходимого
для самовозбуждения порога. Благодаря такой прочности
формы автоколебаний системы эти не могут быть
переведены в разрывный режим одним увеличением
обратной связи.
2) В автоколебательных системах с цепями малой
добротности при регенерации, лишь незначительно
превышающей порог самовозбуждения. Почти синусоидальные
автоколебания получаются в системах этого типа
следующим образом. При незначительном превышении обратной
связью порога самовозбуждения и при наличии довольно
значительного почти прямолинейного участка
характеристики (что в современных лампах всегда имеет место)
раскачивание автоколебаний происходит по закону слабо
нарастающих синусоидальных колебаний. Благодаря
малости регенерации нарастание это прекращается, и
устанавливается стационарный режим при амплитуде
автоколебаний, лишь незначительно превышающей
протяжённость линейного участка характеристики. Колебания
анодного тока, а следовательно, и колебания в контуре
и в цепи обратной связи испытывают при этом лишь
незначительные отступления от синусоидальности. Таким
образом, почти синусоидальные режимы генераторов этого
типа характеризуются тем, что токи и напряжения здесь
почти синусоидальны во всех частях схемы. Из
вышесказанного ясно, что прочность этого движения мала и форма
автоколебаний резко портится при увеличении обратной
связи.
§ 22] ГЕНЕРАТОРЫ ТИПА RC 129
Это свойство делает такие системы весьма удобными
для изучения непрерывного перехода от синусоидального
режима автоколебаний к релаксационному.
3) Наконец, как мы видели, практически
синусоидальные автоколебания получаются при всех
стационарных режимах работы генераторов с инерционной
нелинейностью. Поэтому введением инерционной
нелинейности удобно и просто могут быть получены весьма чистые
синусоидальные автоколебания в
системах любого типа.
Синусоидальные
автоколебательные системы первого типа
рассмотрены уже нами выше.
Рассмотрим типичный пример
генераторов второго типа, так
называемые генераторы RG.
Это—генераторы, линейная си- Jr_
стема которых образована
только из омических сопротивлений рис 67
и ёмкостей. Сами по. себе эти цепи
апериодичны и только благодаря
регенерации лампой становятся колебательными.
Автоколебательные системы такого рода дают, вообще говоря,
несинусоидальные колебания, весьма богатые обертонами.
Только при регенерации, лишь незначительно
превышающей порог самовозбуждения, автоколебания таких систем
близки к гармоническим. Так как порог самовозбуждения,
вообще говоря, зависит от частоты (настройки системы),
то получение синусоидальных автоколебаний на всём
диапазоне генерируемых частот представляет ряд
трудностей. Поэтому для получения почти гармонического
режима на всём диапазоне настроек в генераторах типа
RC обычно включают термистор в схеме отрицательной
обратной связи (рис. 67). При таком включении термистор
прогревается как постоянной, так и переменной
составляющими анодного тока и действует как автоматический
регулятор амплитуды, удерживающий режим
автоколебаний вблизи порога самовозбуждения на всём
диапазоне настроек. Рассмотрим теперь ряд схем генераторов
этого типа.
9 к. Ф. Тводорчик
130
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ. Ш
I. Многофазные схемы. Рассмотрим систему, состоящую
из N соединённых в кольцо одинаковых элементов. Каждый
элемент собран по схеме фиг. 67. Положим, что на вход
элемента подано косинусоидальное напряжение
и^ШщеЫ. (22,1)
Воспользовавшись линеаризованной крутизной, мы
можем написать:
Idt+RCI=-rC(Ia + I),
отсюда
1
RrS K)^
" п C(R + r) "~~ R + r
Решение ищем в виде
v = Rev0eit)t.
Подстановка в (22,3) даёт:
(22,2)
(22,3)
(22,4)
1
L C(R + r)
отсюда находим:
ip
] v0-.
KrS (и0)
R + r
ipu0;
:{xe11
где
pCRrS (u0)
]/l + P2C2(R + r)*
ф z=z К -
tg<p=-
1
Cp(R + r)
(22,5)
. (22,6)
Если N таких элементов соединить последовательно, то
для всей цепочки комплексный коэффициент усиления
будет, очевидно, равен:
^ = П(^*).
(22,7)
При замыкании цепочки в кольцо в такой системе могут
установиться автоколебания с частотой и амплитудой,
удовлетворяющими требованию баланса фаз и амплитуд.
§ 22] ГЕНЕРАТОРЫ ТИПА RC 131
В случае цепочки одинаковых ячеек фазовые сдвиги всех
звеньев одинаковы и являются функцией только частоты,
и условие баланса фаз
Щ (р) = 2тг/г, п = 1, 2..., (22,8)
даёт уравнение допускаемых системой частот
автоколебаний. Подставив в (22,8) выражение фазы ф(р) (22,6), мы
получим уравнение частот, выраженное через сдвиг фаз
ср (р), создаваемый цепью RC
W[iu-<p(p)] = 2ra или c?(p)=N^2n тс. (22,9)
Так как одна ячейка RC может дать сдвиг фаз, лежащий
в пределах
0<<рМ<4*. (22,10)
то условиям задачи соответствуют только такие
значения у(р), которые лежат в этих пределах. Для N = 3
этим условиям соответствует только одно значение (п = 1)
<Р(Р)=4Я» (22,11)
которое дает единственную допустимую частоту
автоколебаний (см. (22,6))
<о = j—J = -=-1 . (22,12)
tg-i*. C(R+r) V*C(R + r)
Для стационарной амплитуды условие баланса даёт
уравнение (см. (22,7))
П|1*=1, (22,13)
которое для цепочки идентичных звеньев даёт:
|х(а, а>) = 1. (22,14)
Для трёхзвенной цепочки это даёт:
5 (а) = 2(^ + 4-). (22,15)
9*
132
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ. III
Па каждой лампе мы получаем синусоидальные
автоколебания найденной частоты и амплитуды. Так как сдвиг
фаз от одного звена к следующему равен для iV=-3
и п = 1,
тг-ср = |-7: = 120о,
то вся система представляет собой трёхфазный генератор.
Таким образом, рассматриваемые кольцевые схемы являются
многофазными генераторами, весьма удобными для
получения сдвинутых на определённый угол напряжений.
Формула (22,9) позволяет при любом N найти
соответствующие самовозбуждению значения ср- Нужно иметь
только в виду, что почти гармонические колебания
конечной частоты не могут дать
С
k-Az
граничных значении ср
(О или у тс \ Поэтому если
Рис. 68.
(22,9) даёт в качестве допу-
v стимых только зти значения
ср, то это указывает на
невозможность почти
гармонического режима. Так дело обстоит,
например, при N = 2. Было
бы, однако, неверным
заключить, что в этих случаях автоколебания вообще
невозможны. Дело в том, что выше мы считали, что в схему
каждого звена включена только одна ячейка ВС, если же
принять во внимание паразитную ёмкость сетка —нить
лампы, то мы получим схему звена, изображённую па
pir. 68, па котором паразитная ёхмкость следующего звена
изображена ёмкостью К, шунтирующей сопротивление R.
Мы видим, что при учёте этой паразитной ёмкости
в каждое звено оказываются включёнными уже две ячейки
гС и ЯК. Это сразу расширяет интервал допустимых
значений фазы до
О < ср < к,
что указывает на возможность генерации в двухзвеннои
(ДТ = 2 — мультивибратор) замкнутой цепочке.
§ 22J
ГЕНЕРАТОГЫ ТИПА RC
133
Как мы увидим ниже, можно заставить и эти схемы
генерировать в почти гармоническом режиме простым
увеличением ёмкости К. Заметим ещё, что, как легко
убедиться из формулы (22,9), условия самовозбуждения при
достаточно большом числе звеньев могут выполняться для
двух и большего числа частот. Так, например, при одной
ячейке на звено мы
получим для семизвенной
цепочки два значения
допустимой фазы:
Рис. 69.
¥1(р)=утс(прил = 2)и
?2(/0 = у* (ПРИ л = 3).
II. Одноламповая
схема. В схемах этого типа
четырёхполюсник,
выполняющий роль колебательного контура, собирается в
виде цепочки, образованной из элементов R и С. Возможны
два типа таких цепочек: 1) с параллельным включением
сопротивлений и 2) с параллельным включением ёмкостей.
Рассмотрим аналитическую теорию простейших
генераторов такого типа, а затем методом обобщённых диаграмм
регенерации дадим общую их теорию.
Начнём с трёхъячеечной схемы первого рода (рис. 69).
Обозначив напряжение на сетке буквой х, получим
следующие уравнения схемы:
х = Ш,
Ia = S(a)z,
[lidt + CR(I1 — I2) + Crl/1 + Ia) = 0, .
J V } V } ) (22,16)
^ /2 dt + CR (/2 -I) + CR (/2-/x) = 0,
[ Idt + CRI + CR(I-I2) = 0.
Исключив из этой системы все неизвестные, кроме х,
134 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
получим квазилинейное уравнение системы
[2a + $S (а)]х + х + 2йх + и>1х = 0, (22,17)
где
1 R . 2^ _ 1 5Д + г
0 " (ЛС)2 6Д + 4г ' ^ ~ RC № + 4г >
(22,18)
6Я + 4г ' r "~ 6Я + 4г *
Применив к этому уравнению критерии Рауса-Гурвица,
получим (см. § 15) условие устойчивости
28-о)§[2а + р«У(0)] >0. (22,19)
Если это условие нарушено, то в системе возникают
автоколебания. Мы знаем, что автоколебательные системы
с инерционной нелинейностью имеют чисто гармоническое
стационарное решение. Поэтому ищем решение (22,17)
в виде
x = asmo)t. (22,20)
Подстановка в (22,17) даёт:
а (а>§ — со2) = 0 и аа){рсо26'(а) + 2аа)2-2^=0. (22,21)
Из (22,21) мы видим, что либо~а = 0, автоколебаний нет,—
это имеет место при выполнении условия устойчивости
системы (22,19); либо при нарушении этого условия имеем
условие самовозбуждения
[Р«У (0) + 2а] о)2 - 28 > 0. (22,22)
В системе устанавливаются автоколебания, частота которых
со = со0. (22,23)
Стационарная амплитуда этих колебаний определяется
уравнением
[05 (а) 4- 2а] со2 - 28 - 0. (22,24)
Подставив в формулы (22,22) —(22,24) значения
коэффициентов (22,18), получим условие самовозбуждения
rS (0) > 29 + 23 ± + 4 (-02, (22,25)
§ 22] ГЕНЕРАТОРЫ ТИПА. RC 135
частоту стационарных автоколебаний
и уравнение, позволяющее по заданной функции- S (а)
найти стационарную амплитуду
S{a) = 29± + 23± + 4±. (22,27)
Если взять линеаризованное выражение крутизны в форме
S = S0-±S2a*,
то (22,27) даст:
72
(22,28)
Разовьём теперь методом обобщённых диаграмм
регенерации теорию рассмотренного однолампового генератора для
л.
Рис. 70.
общего случая цепочки из п одинаковых звеньев (рис. 70).
На вход подаём гармоническое напряжение
tt = Rett0elP*. (22,29)
Анодный ток берём в виде
Ia = S(u0)u.
Благодаря термистору все токи и напряжения в схеме
также гармоничны, и мы можем применить вдетод
комплексных амплитуд. Положив
h = hkeipt, v = RIn - RIoneb* = v0№, (22,30)
136 -МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
мы получим для нашей схемы систему уравнений
(2 - i) ш°1 - ш°* =-Rs ы «о,)
— RI<n + ( 2 — —д£J RI02 — RI0s = О,
(22,31)
- Л/о, „_,-(- (2 --L^RIon = 0. J
Введя обозначения
мы можем записать систему (22,31) в виде
^Х — £2 = — #*У (^о) й0> )
— х1 + Ах2 — х3 = 0,
— Хп—2 "г Ахп—\ — #п — О,
Хп-,\ -j- AXfi = U. J
i
(22,32)
Решая эту систему уравнений относительно #„ = о,
получим:
,.*_ г'о __ —RsК)
(22,33)
где Дп — детерминант, образованный из коэффициентов
системы (22,32):
А, -1, 0, 0, ..., О
-1, Л, -1, 0, ..., О
О, -1, А, -1, ..., О
О, .
■1, А
(22,34)
§ 22] ГЕНЕРАТОРЫ ТИПА RC 137
Вычислять значения детерминантов Ап удобно,
пользуясь рекуррентной формулой
Д1 = Л> )
Ьг = А(А*~-1)-А, ) (22,35)
Аи = 4Дп-1 —Ап-2- j
При помощи (22,33) и (22,35) мы можем вычислить
значения (х£ для последовательности целых значений п.
Положим
^ = RS (и0) [М (р) + iN (p)]; (22,36)
отсюда
Vt^RS(u0)yrM^(p) + N^(p)9 ]
• ! iV(/>) I
Sm9-VM4p) + N4p)' } (22,37)
м (р) \
COS ф = v^7 .
Эти формулы показывают, что допускаемые системой
частоты автоколебаний равны корням уравнения частот
N(p) = 0, (22,38)
а соответствующие этим частотам значения
действительного коэффициента усиления равны:
^ = RS(u0)M{^). (22,39)
Условие самовозбуждения есть
ц(0,«>)>1, (22,40)
а уравнение стационарных амплитуд
ц(а,и>) = 1. (22,41)
Так, например, для трёхзвенного генератора получаем:
* __ -RS (и0) (pRC)* {4 (pRCY-bpRC +1 [10 (/?ДС)2-!]} ,22 42ч
г ~~ [b(pRCy-6(pRC)]2 +[10 (pRC)2-!]2 ' v ' '
138 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
Отсюда находим частоту
(22,43)
V10 RC
и соответствующее значение |xw:
_ RS(uQ)
^~~ 56"
(22,44)
Это даёт условие самовозбуждения
#£(0)>56 (22,45)
и стационарную амплитуду автоколебаний: для
S (и0) = о о — -j Stfil,
(22,46)
'o^V^
-56
Это решение соответствует полученному выше решению
для схемы однолампового трёхзвенного генератора RG при
г = Д.
Аналогичным путём могут быть вычислены частоты
и пороги генерации для цепочек с четырьмя и большим
числом звеньев.
Тем же путём может быть разработана теория для
второго типа цепочки тождественных звеньев с
параллельным включением ёмкостей.
Если построить диаграммы регенерации для
однолампового генератора с цепочкой из звеньев RC (рис. 70),
то мы получим следующие диаграммы (рис. 71).
Мы видим, что для N — 3 диаграмма занимает три
квадранта. При каждом дальнейшем прибавлении RC звена
диаграмма захватывает ещё один квадрант в направлении
часовой стрелки. Последовательное построение диаграмм
по этому правилу показывает, что от iV=3 до /V = 6
система допускает одну частоту автоколебаний, от N =1
до N = 10 — две таких частоты, от N = 11 до N = 14 —
три и т. д.
§ 22]
ГЕНЕРАТОРЫ ТИПА RC
139
III. Двухламповый генератор RC. Предполагая, что
двухламповый усилитель (рис. 72) не вносит в области
генерируемых частот фазовых искажений, а его
амплитудная характеристика по напряжению имеет благодаря вве-
4
Рис. 72.
дению термистора (Т) и отрицательной обратной связи (г)
вид
V = [X (U0) U,
(22,47)
140 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. Ш
мы можем написать:
/„=/с + /,
Ttdt + dRJa + dBJ^Ctf,
и = RJ.
(22,48)
Исключив отсюда все токи, получим дифференциальное
уравнение схемы
где
и— 28и + o)qU = 0,
23 = [САН (и,) - R£% - Сг (/?! + Д2)] ю§,
С°° CAC'aJRj
(22,49)
(22,50)
Если о > 0, то система самовозбуждается и генерирует
гармонические колебания:
гг — asino)0£,
амплитуда которых определяется уравнением
.Д2С2 + СЛД1 + Д2)
|i(a):
^2^1
которое для случая равных R и С даёт:
р, (а) = 3.
(22,51)
(22,52)
(22,53)
Таким образом, для получения почти гармонических
автоколебаний коэффициент усиления схемы (без термистора)
должен лишь незначительно превышать значение 3. При
двухламповом усилителе это может быть достигнуто
введением соответствующей величины отрицательной обратной
связи. Но полное решение задачи о получении
гармонических автоколебаний на всём диапазоне частот может
быть достигнуто только при помощи соответственным
образом выбранного термистора, включённого в схему моста
(см. § 24).
§ 22] ГЕНЕРАТОРЫ ТИПА RC 141
Рис. 73.
В заключение рассмотрим непрерывные автоколебания
в схеме мультивибратора Абрагама-Блоха.
Как мы уже указывали выше, замкнутая цепочка,
состоящая из двух ламп с цепями RC (рис. 68), может
генерировать резко негармонические колебания благодаря
паразитной ёмкости сетка—нить. Такой генератор получил
название мультивибратора и имеет широкое применение.
Эксперимент показывает, что при некоторых режимах
мультивибратор даёт почти синусоидальные колебания.
Дальнейшие наблюдения
показали, что переход от
разрывных, типично
релаксационных режимов к
непрерывным, близким к
гармоническим, происходит
при повышении частоты
мультивибратора. Обычно
это явление приписывается I
влиянию не учитываемых -*-
разрывной теорией
паразитных самоиндукции
схемы. Легко, однако, убедиться, что непрерывные
автоколебания могут иметь место в обычной схеме
мультивибратора, не содержащей самоиндукции, если учесть в ней
ёмкости между сетками и катодами ламп, которыми
нельзя пренебречь при высоких частотах.
Рассмотрим мультивибратор, состоящий из двух
последовательно соединённых звеньев, каждое из которых
собрано по схеме рис. 73. Обозначим переменное напряжение,
поступающее на вход этого звена, буквой и\ а напряжение
на его выходе — буквой v. В данных на чертеже
обозначениях мы можем написать для рассматриваемого звена
систему уравнений
/ = /* + /*,
(22,54)
142 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
Исключив из этой системы токи, получим основное
уравнение звена
+ слЖ° + т''<»>««0. (22,55)
На основании этого уравнения легко убедиться, что
рассматриваемое звено при подаче выхода на вход не
может самовозбудиться. Действительно, пусть и = u0eipt
и v = v0eipt; тогда комплексный коэффициент усиления-
звена
1
Построив на основании (22,56) диаграмму регенерации,
убеждаемся, что допустимая частота самовозбуждения
(22,57)
VCKRr '
соответствует отрицательной обратной связи.
Отсюда следует, что два звена, соединённые
последовательно, могут генерировать непрерывные автоколебания.
Действительно, такие два звена, соединённые в кольцо,
будут, очевидно, описываться системой уравнений
(предполагая мультивибратор асимметричным)
> (22,58)
._£_B+£/i(0)l;=o.
Пусть оба эти уравнения почти гармонического типа.
Приняв характеристики обеих ламп кубическими и введя
§ 22]
ГЕНЕРАТОРЫ ТИПА RC
143
обычные обозначения, запишем систему (22,58) в виде
v + 2bv + v2y + ~ (а - [За2) и = О,
(22,59)
а + 28i» + vf» + -^- (ах - В^2) v = 0.
В первом приближении решение ищем в виде
и = и0 sin о)2; г; =-—y0sin(co£-fcp). (22,60)
Поступая обычным образом, находим систему
уравнений для определения неизвестных и0, v0, cp и со:
I. (со2 — v2) cos cp -f 28co sin 9 = 0,
II. [(со2 — v2) sin cp — 28со cos cp] v0 +
+ jf(a"~тРиОИо = 0, ■
III. (со2 — vf) cos cp — 2охсо sin cp = 0, ■ ^ ' '
IV. [(со2 — vf) sin cp + 28^ cos cp] u0 —
Из I и III находим:
IgCp:
2b1a> 2$u>
Это даёт уравнение частоты автоколебаний
8(co2-v2) + 81(co2-v2) = 0,
из которого
Из II и IV, приняв во внимание (22,62), находим:
g/(w»-v»)»+48«»» _ " ("1—Т ^ "О
(22,62)
(22,63)
«о
,(а-1'?и{) /Гг/(»»-^)» + 4»1а.»
144 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
ип
Приняв отношение — за параметр, находим отсюда:
^0
о 1 / А "о
V 5
" К
«0 = 2
/
ах г0
) (22,64)
В случае симметричной схемы vx = v, и равенства (22,63),
(22,62), (22,64) и (22,60) дают:
co=^v; ср == 0; u0 = v0; и— — г). (22,65)
Поэтому симметричный мультивибратор описывается во
всех режимах одним дифференциальным уравнением
второго порядка
из которого получаем условие самовозбуждения *)
/'(0)> i + y(i +§-) (22,67)
и частоту старта автоколебательного процесса
"°-7ШГ- <22'68>
В почти гармоническом режиме при кубической
характеристике ламп уравнение (22,66) может быть приведено
к обычному виду уравнения автоколебательной системы
при мягком режиме. Почти гармонические режимы в
асимметричном мультивибраторе описываются полученными
выше формулами (22,61) —(22,64). Только вычисления по
последней формуле представляют некоторые трудности.
Для этих вычислений можно воспользоваться методом
подбора значения параметра ~ .
*) При К—>0 (22,66) и (22,67) дают общеизвестные
соотношения разрывной теории симметричного мультивибратора.
§ 23J СТАБИЛЬНОСТЬ ГАРМОНИЧЕСКИХ СИСТЕМ 145
§ 23. Стабильность гармонических автоколебательных
систем *)
Мы видели, что действительный коэффициент
усиления и фазовый угол являются функциями амплитуды
автоколебаний (а), их частоты (со) и параметров схемы.
Обозначив любой из этих параметров буквой е, мы для
стационарного режима имеем:
;х (а, о), . . . , s) = l, 1
ф(а,«>, ..., 8) = 0. ) {АдЛ)
Для заданного значения параметров эти уравнения
определяют стационарные значения амплитуды а0 и частоты ш0.
Если заданное значение параметра s0 будет возмущено и
получит значение
s-so-rtfs, (23,2)
то стационарные значения амплитуды и частоты также
изменятся и установятся на новых значениях
а = а{) -[- da и о> = ш0 -|- du>. (23,3)
Значения эти должны удовлетворять равенствам
\x(a0+da, a)0 + di», . . . , e0 + dz, . . .) = 1,
ф (а0 + da, co0 + do), . . . , s0 + ds, . . .) = 0.
(23,4)
Разложив эти выражения п ряды, воспользовавшись (23,1)
и ограничившись членами первого порядка малости,
получим:
\да о ' vWo Vde/o " ~ ' i /г>о с\
*) К. Теодорчик, ДАН, т. LVI, № 4 (1947), стр. 367.
В. И. Сифоров, ИЭСТ, № 10 (1940), стр. 4.
10 К. Ф. Теодорчик
146 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
Решая эту систему относительно da и rfco, находим:
(23,6)
(23,7)
Величины (23,6) и (23,7) дают выражения
стабильности системы по амплитуде и частоте при изменении
параметра s.
Из этих выражений мы видим, что стабильность
системы по отношению к любым изменениям параметров
пропорциональна величине
\да Jo
/'/VN
V <т J0
№)
\о'и>;0
(23,8)
которую рационально поэтому назвать мерой абсолютной
стабильности системы.
Во всех рассмотренных выше генераторах почти
гармонических колебаний (-^-) либо равно нулю, либо
является весьма малой величиной. Формулы амплитудной
и частотной стабильности (23,6) и (23,7) принимают в этом
#
§ 24] ГЕНЕРАТОРЫ С КОНТУРОМ В СХЕМЕ МОСТА 147
случае более простой вид:
da
di
\да> /о V дг /о
0?о)
V, да Jo V #<» /о
ш
\ди>у0
(23,9)
Обычно нас интересуют не абсолютная, а относительные
стабильности амплитуды и частоты, равные в последнем
случае:
*. = «»«. = «о (^(Й).
£,„ = и,0аи>==-ш0(|Г)о.
(23,10)
(23,11)
Последняя формула была получена впервые Сифоровым.
§ 24. Теория генераторов с колебательным контуром
в схеме моста *)
Генераторы незатухающих колебаний с инерционной
нелинейностью и колебательным контуром в схеме моста
нашли применение для построения
сверхстабильных кварцевых
эталонов частоты и звуковых генерато- "^^
ров типа RG. Поэтому представляет Ъ
интерес рассмотреть в общем виде
их свойства.
Принципиальная схема
генераторов этого типа изображена на
рис. 74. Буква Q обозначает
линейный пассивный двухполюсник, комплексное
сопротивление которого равно:
Z(p) = r(p) + iX(p). (24,1)
Рис. 74.
*) К. Теодорчик, Радиотехника, т. II, № 7 (1947).
Г. А. Хавкин, ЖТФ, т. XVI (1946), стр. 825.
10*
148 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ., III
Усилитель У предполагаем линейным и не дающим в
области рабочей частоты фазовых искажений (ф = 0 или
ф = тс, в зависимости от числа стуиеней усиления).
Исследование свойств генератора проведём методом
обобщённых диаграмм регенерации.
Разорвав цепь обратной связи в точках a, alt подаём
на вход усилителя напряжение
ю = в0е**'. (24,2)
Если частота р лежит в рабочем диапазоне, то при
сделанных предположениях на выходе усилителя получим
напряжение
W = ia0eW. (24,3)
В этом выражении f > 0, если усилитель не оборачивает
. фазы, и ^ < 0, если фаза оборачивается. Если мост не
вполне сбалансирован, то напряжение W, подаваемое на
вход А, В, вызовет на зажимах С, D напряжение, равное
в=^-е^[ет-вд1^ •и- (24'4)
Отсюда, комплексный коэффициент усиления схемы равен:
* -M-^(/?1 + i?4)[i?8 + Z(/,)] • У***
Развернув это выражение при помощи (24,1), получим:
Р ~^е ~ R1 + Rt Rz + r(p) + iX(P) ' ^4'Ь>
• > -x(p)R» \
а„очЛ_ 7 [RiR3-RApmR3+r(p)}-RilX(p)V I ^%i)
Отсюда получаем уравнение допускаемых системой частот
Х(р) = 0. ' (24,8)
Это . уравнение показывает, что допустимы все частоты
резонансов и .антирезонансов (т. е. резонансов токов и
резонансов напряжений) двухполюсника Q.
§ 2'i] ГЕНЕРАТОРЫ С КОНТУРОМ В СХЕМЕ МОСТА 149
Условие самовозбуждения для каждой из этих частот
имеет вид,:
^-Д1 + Д4 R3-trH >*' ^*'У)
Введя обозначение, характеризующее степень баланса
моста
мы видим из (24,9), что самовозбуждение возможно в двух
случаях:
1) При А > 0 и | > 0 (т. е. при усилителе, не
обращающем фазы).
2) При А<0 и 7<0 (т- о. при усилителе,
обращающем фазу).
Пусть условие самовозбуждении выполнено; тогда
стационарные синусоидальные автоколебания могут
установиться, если при нарастании амплитуды автоколебаний \хм
уменьшается до единицы и если частота возбуждающих
колебаний устойчива.
Для выполнения первого из этих условий необходимо,
чтобы одно из плеч моста было инерционно нелинейным
сопротивлением. При выборе в качестве такого
сопротивления термистора с положительным термическим
коэффициентом сопротивления первое условие будет выполнено:
для А > 0 при включении: термистора в плечо /?4, а для
А < 0 при включении его в плечо /?! или R3.
Для выяснения условий выполнения второго
требования найдём из (24,7) выражение фазового угла
Для устойчивости частоты необходимо, чтобы для р < о>
имело место неравенство ^ > 0, а для р > со — неравенство
6 < 0. Приняв во внимание, что при р ъ со, согласно
(24,8), Х(р) является весьма малой величиной, мы из
(24,10) заключаем, что при А > 0 это условие будет
выполнено, если для
р < (« X (/>) 0,
а для
/>><■> Х{р)>0,
150 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
Как известно, это имеет место, если to есть
резонансная частота. Таким образом, при усилителе, не
оборачивающем фазы, генератор, собранный по схеме рис. 74,
может генерировать только на резонансных частотах
двухполюсника Q.
При А < 0 условие устойчивости частоты выполняется,
если для
р<о> Х(р)>0,
а для
/>>u) Х(р)<0.
Таким образом, при усилителе, оборачивающем фазу,
исследуемый генератор может генерировать только на
антирезонансных частотах двухполюсника Q.
Если условия самовозбуждения и устойчивости
частоты выполнены, то стационарная амплитуда получается
из равенства
■^--тейоЛяртга].-1- !(24Д,)
Значками ( )с обозначены значения соответствующих
величин при прогретом стационарным током термисторе.
Из этого выражения мы видим, что произведение ^c
имеет постоянное, вообще говоря, большое значение:
тДс = (Д1 + Д4)ЛД3 + '>)]с- (24,12)
Отсюда следует, что при почти скомпенсированном мосте
(малое Ас) коэффициент усиления f должен быть велик.
При генерации устойчивой частоты со мы имеем
баланс фаз, т. е.
ф = 0.
При частоте p = m-\-dp фазовый угол с?ф может быть
найден из (24,10), в котором вследствие малости dty
тангенс может быть заменён углом. Обозначив сокращённо
в (24,10) числитель через А(р), а знаменатель через
В(р), имеем:
*=Ш- (24,13)
§ 25] ГЕНЕРАТОРЫ С ПАДАЮЩЕЙ ХАРАКТЕРИСТИКОЙ 151
Если при р = со А (со) = 0, а В (со) =£ 0, то
и мы получаем из (24,10) для p — m + dp:
Ч^Л~ Дс№ + г(ш)]с Л ^ Л>' v^i";
Приняв во внимание (24,12), мы можем вычислить меру
стабильности частоты исследуемых генераторов:
*~-(£X--mSfoF-m.- <24-16>
Из этого выражения мы видим, что стабильность по
частоте генераторов с колебательным контуром в схеме
моста пропорциональна коэффициенту усиления усилителя
по напряжению.
§ 25. Генераторы с падающей характеристикой или
отрицательным сопротивлением лампы
К этому типу генераторов относятся 1) динатронный
и транзитронный генераторы и 2) двухкаскадный
регенерированный усилитель. Рассмотрим сначала первые два
типа.
В динатроне отрицательное сопротивление получается
благодаря эмиссии вторичных электронов с анода.
Схематически механизм этого явления таков: если на сетку
лампы подать постоянный, достаточно высокий
положительный потенциал, а потенциал анода постепенно
увеличивать от нуля, то электроны будут достигать анода всё
в большем числе и со всё возрастающими скоростями.
Благодаря этому мы получим возрастающую ветвь
характеристики О А (рис. 75). При дальнейшем повышении
потенциала анода с его поверхности начинается эмиссия
вторичных электронов, которые притягиваются сеткой,
имеющей больший положительный потенциал. Благодаря
этому анодный ток убывает и может даже изменить знак
(участок ВС характеристики).
152
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ III
Когда потенциал анода превзойдёт потенциал сетки,
электроны как первичные, так и вторичные начинают
всё в большем числе притягиваться анодом, и ток 1а
вновь нарастает. На участке ВС мы получаем отрица-
Рис. 75.
тельную крутизну и отрицательное сопротивление:
5 =
А1±
dV'
dV_a
~dln
1
(23,1)
Трапзитрон представляет coooii обычную трёхсеточыую
лампу, включённую по схеме, представленной на рис. 76.
Рис. 76.
Рис. 77.
При таком включении падающий участок получается на
характеристике второй сетки. Вид этой характеристики
изображён на рис. 77. На участке ВС мы опять находим
отрицательную крутизну и сопротивление.
Отвлекаясь от влияния проницаемости сеток и
пространственных зарядов, можно схематически представить
себе работу транзитрона следующим образом*).
*) Описанная схема работы траизцтрона предложена Г. Хаа-
^нным,
§25]
ГЕНЕРАТОРЫ С ПАДАЮЩЕЙ ХАРАКТЕРИСТИКОЙ
153
Статическое распределение потенциала между катодом
и анодом имеет вид, изображённы11 на рис. 78.
При Vg2— V32 < 0 весь ток эмиссии катода, пройдя
сетку 2, отбрасывается сеткой 3 назад и попадает на
вторую сетку. При этом мы получаем первый
нарастающий участок характеристики ОВ
(рис. 77). и с2 С, ' л
При Vg2 — V32 > 0 электроны
начинают прорываться через сетку
3 к аноду и поэтому лишь часть
их возвращается ко второй сетке.
Ток второй сетки при этом падает
(участок ВС характеристики), и
возникают токи анода и третьей
* сетки. Наконец, при V д2 — Vs2 —
—Vа > 0 создаются условия для
возникновения дииатронного
эффекта на аноде, вследствие чего
ток сетки 2, имеющей
наибольший положительный потенциал,
опять возрастает (участок CD). Из
характеристик рис. 75 и 77 мы
видим, что как для динатрона, так
и для транзитрона характеристика
может быть апроксимирована по отношению к рабочей
точке, взятой в середине её падающего участка, полиномом
третьей степени
ч
\ус
а
Узг
Т
1
Л |
i
i
{
Рис. 78.
Л> = —S0V + -^S2V99
(25,2)
откуда
S(v) =
d!oz
dv
~(S0-S&*);
-S%v*
(25,3)
Рассмотрим теперь схемы дииатронного (рис. 79) и тран-
аитронного (рис. 80) генераторов о простым колебатедьдодм
154
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ
[ГЛ. III
контуром. В обоих случаях мы можем написать:
Исключив отсюда 1С и продифференцировав, получим:
и + Ш±±1 = ±10. (25,5)
Переменная часть напряжения на зажимах контура при
и и,
Рис. 79.
Рис. 80.
пренеорежении малым падением напряжения на омическом
сопротивлении равна
о= -LI.
Отсюда при учёте (25,3) получаем:
LC'f+ RCI + I- S0LI + -i S2L3ia = 0
(25,6)
или
/+28
^)/+^§-2/з+^/ = о.
(25,7)
Из этого уравнения мы видим, что самовозбуждение будет
иметь место при условии
2В < 4?- или -1 =|р(0)|< L
RC
(25,8)
Уравнение (25,7) при наличии самовозбуждения мы можем
написать в виде
/-280/ + 282Р +о,2/ = 0.
(25,9)
§ 26] СИСТЕМЫ С ОТРИЦАТЕЛЬНЫМ СОПРОТИВЛЕНИЕМ 155
Если режим генератора почти гармонический, то обычным
методом получаем приближённое решение
/ = asinatf, (25,10)
где
2 l/Ч
К этому же классу систем с отрицательным
сопротивлением принадлежат многочисленные типы механических
автоколебательных систем, в которых колебания
возникают за счёт падающего участка характеристики трения.
Примерами таких систем являются автоколебания
маятника, подвешенного на вращающейся оси.
Перейдём теперь к рассмотрению последнего типа
генераторов с отрицательным сопротивлением — двухкас-
кадного регенерированного усилителя. Рассмотрение этого
случая, а также получение ряда дополнительных сведений
о свойствах всех вообще генераторов с отрицательным
сопротивлением проще всего осуществляется методом диаграмм
регенерации.
§ 26. Диаграммы регенерации систем с отрицательным
сопротивлением
Из перечисленных выше трёх типов автоколебательных
систем с падающей характеристикой (отрицательным
сопротивлением первого рода (см. ниже) —дикатрои, транзитрон
и регенерированный
двухламповый усилитель)
диаграмма регенерации может
быть непосредственно по^
строена только для
третьего. Действительно, схему
такого генератора легко
представить в виде,
удобном для вычисления
диаграмм (рис. 81).
Возбуждаемый отрицательным сопротивлением
линейный пассивный двухполюсник, комплексное сопротивление
которого равно Z(p), включён в анод первой лампы.
Рис. 81.
156 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
В цепь катода второй лампы включим термистор,
заставляющий всю схему работать в квазилинейном режиме
гармонических автоколебаний.
Считая сопротивления цепей К, г настолько большими,
что можно считать образованные ими ответвления не
нагружающими лампы делителями напряжения, мы можем
написать
/alZ(/>)=-yVV.-b (26,1)
где N1 — положительный числовой множитель, и
Из этих соотношений находим:
bi- NL[Rn + Z(P)]u' (-b'°)
Аналогичным образом для второй лампы получим:
V = " N2[Rtt + £+l)T + R] *i- <26'4)
Из (26,3) и (26,4) для комплексного коэффициента
усиления схемы находим:
|L*___^_ У1Е2Д Z(p) (2а сч
г и N^tlRu + fa+VT + R] ' Rtl+Z(p) ' К U' ;
Первый множитель этого выражения благодаря термистору
есть монотонно убывающая функция амплитуды
автоколебаний. Обозначим его буквой р (а). Развернув, далее,
второй множитель, получим:
^^(^..Х^)^^)- №6)
*) Вообще говоря, ji является функцией не только амплитуды,
но и частоты. В силу общеизвестных свойств катодной лампы
зависимость эта такова, что для />—>0 п />—>оо£ стремится
к нулю, а для конечного рабочего интервала частот практически
от частоты не зависим
8 ет СИСТЕМЫ С ОТРИЦАТЕЛЬНЫМ СОПРОТИВЛЕНИЕМ
157
Отсюда
• t о / \ Ri\% (р)
jx cos'}» — 3(a)
R(p)[Ru + Я (р)) + [Х(р)\*
(26,7)
(26,8)
1Вц + Шр)]* + [Х(р)]2 '
Приняв во внимание, что в пассивном линейном
двухполюснике R (р) > 0, мы видим, что знак sin 6 совпадает
со знаком Х(р), a cos'}> всегда положителен.
Отсюда следует, что диаграмма регенерации
рассматриваемой системы целиком лежит в правой полуплоскости.
Допускаемые системой частоты автоколебаний
определяются корнями уравнения
Х(р) = 09 т. е. р=щ. (26,9)
Соответствующие этим частотам значения действительного
коэффициента усиления равны согласно (26,8):.
(26,10)
Так как в пассивном линейном двухполюснике резонансы
и антирезонансы с возрастанием р чередуются, и резонан-
-МО
v*fr
Щ\
Рис. 82.
сам соответствуют минимумы, а антирезонансам максимумы
функции R{p), то на основании полученного выше
диаграмма регенерации рассматриваемой системы строится
легко.
Когда наименьший корень (26,9) соответствует
антирезонансу, то для 0 < р < о)2 мы имеем X (р) > 0, и
диаграмма регенерации имеет изображённый на рис. 82, а вид.
В частном случае системы, имеющей один антирезонанс
158
МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ. III
и один резонанс, получаем клювообразную диаграмму
(рис. 82, б).
Если же наименьший корень (26,9) соответствует
резонансу, то для 0 < р < о)! значенрю X (р) < 0, и диаграмма
регенерации системы будет иметь вид рис. 83, а. В частном
случае системы, имеющей один резонанс и один
антирезонанс, имеем опять клювообразную кривую (рис. 83, б).
Кг5*"
?>*—^
/г /со3 МсЛ/1
V
0
ч*
р
у^^
- '
б)
Vfc,
7'
Рис. 83.
Таким образом, двухламповый регенерированный
усилитель может устойчиво генерировать только частоты
антирезонансов линейного двухполюсника Z.
Дальнейшая интерпретация диаграмм задачи может
быть проведена вышеизложенным методом.
Для генераторов динатроныого и транзитронпого типов
нельзя провести построение диаграмм регенерации таким
же прямым путём, как для
двухлампового регенерированного усилителя. Для
решения этой задачи рассмотрим в
общем виде вопрос об автоколебаниях
системы, состоящей из отрицательного
сопротивления— р и последовательно с
ним соединённого линейного пассивного
двухполюсника с комплексным
сопротивлением Z(p) (рис. 84).
Если в такой системе установились почти
гармонические автоколебания, то мы можем написать:
Рис. 84.
— pI + IZ (/?)-•= О или p=Z(p).
(26,11)
Как известно, возможны два рода нелинейных
отрицательных сопротивлений. В сопротивлениях первого рода ток
§ 26] СИСТЕМЫ С ОТРИЦАТЕЛЬНЫМ СОПРОТИВЛЕНИЕМ 159
является однозначной функцией напряжения:
dl=-f(v)dv; _p = g = -^. (26,12)
При почти гармоническом v мы можем для кубической
характеристики написать:
dI=-(S-±S,pl)di>; -Р = ^ . (26,13)
В сопротивлениях второго рода, наоборот, напряжение
является однозначной функцией тока:
&>=-А (/)<*/; -P = g= _/,(/), (26,14)
что для кубической характеристики и почти
гармонического / даёт:
*> = -(?--b»'0d/; p=(t-tt«70- (26,15)
Динатронный и транзитронный генераторы обладают
отрицательным сопротивлением первого рода. Поэтому,
подставив (26,13) в (26,11), мы получим для стационарного
режима этих генераторов соотношение
(S-±S*f)Z(p) = l. (26,16)
Разделяя здесь действительные и мнимые части, получаем
уравнение частот автоколебаний
Х(/0 = 0, р = *к (26,17)
и уравнение стационарных амплитуд
(\S—1зд)Д(ш) = 1. (26,18)
Из последнего находим:
>.«2/^г- <26-19>
160 МЕТОД ДИАГРАММ РЕГЕНЕРАЦИИ [ГЛ III
Это равенство показывает, что условие самовозбуждении
автоколебании имеет вид:
дУД(о>)> 1. (26,20)
На основании формул (26,16) —(26,20) легко убедиться,
что диаграммы регенерации рассматриваемых систем
рационально определить равенствами
Р* = (S - 4 S2i>j) Z(p) = a^, (26,21)
Р = (S- jS2v{) уЖСр) + Х*(р), (26,22)
sin6as *И ; С05ф= /_^jgj . (26,23)
Построенные на основании этих формул диаграммы дина-
тронного и транзитронпого генераторов тождественны
с вышерассмотренными диаграммами двухлампового
регенерированного усилителя. Этого и следовало ожидать,
так как все три типа генераторов имеют отрицательное
сопротивление первого рода.
Для генераторов с отрицательным сопротивлением
второго рода формулы (26,11) и (26,15) дают:
-VOzir1' {26'24)
откуда, введя комплексную проводимость
^-)^G{p)-iY(p), (26,25)
получаем уравнение частот автоколебании
Y(p) = X(p) = 0, p = iK, (26,26)
и уравнение стационарных амплитуд
(t-{VS)GH=1. (20,27)
•Зто даёт:
^*/ЦШ (2б28>
§ 26] СИСТЕМЫ С ОТРИЦАТЕЛЬНЫМ СОПРОТИВЛЕНИЕМ 101
и условие самовозбуждения
vG(o))>l. (26,29)
На основании формул (26,24) —(26,29) диаграммы Най-
квиста для систем второго рода определяются равенствами
I** = (г ~ т Т2/02) Щр) = К*, (26,30)
*=(Ч-\Ъ11)У&(Р)Л-УЧР)> (26,31)
s\nb=—=J{p) ; сб8ф=—={р) (26,32)
Vg*(p) + y*(p) t Vg*(p) + Y4p)
Эти диаграммы имеют вид, совпадающий с
изображёнными на рис. 82 и 83, только теперь устойчивы частоты,
соответствующие резонансам, и неустойчивы частоты анти-
резонансов. Рис. 82 соответствует системе, для которой
наименьшая частота соответствует резонансу, а рис. 83
—системе, для которой наииизшая частота — антирезонансная.
ГЛАВА IV
АВТОКОЛЕБАНИЯ, БЛИЗКИЕ К ГАРМОНИЧЕСКИМ
(СИСТЕМЫ С ЗАПАЗДЫВАНИЕМ)
§ 27. Автоколебательные системы, с запаздывающими
силами *)
Выше мы рассмотрели различные типы ламповых
генераторов и видели, что автоколебательный режим
может иметь место в такого рода колебательной системе
благодаря наличию обратной связи. Сейчас мы покажем,
что ламповый генератор с обратной связью является
частным случаем колебательных систем, в которых в силу
каких-либо физических причин наряду с обычными
упругими силами действуют ещё квазиупругие запаздывающие
силы. Уравнение движения системы такого типа мы можем
взять в виде
x + 2(b + tiX2)x + u>lx + v*x% = 0\ (27,1)
чтобы колебательная система в отсутствии запаздывающей
силы не имела периодических решений, мы будем считать
её затухание всегда положительным (8 > 0 и 82 > 0).
Действительно, если бы затухание с возрастанием
размахов колебаний падало (8 > 0, а82<0), то мы имели
бы, даже при отсутствии запаздывающей силы,
рассмотренный выше случай жёсткого самовозбуждения с
последующим неограниченным нарастанием колебаний. Послед-
*) К. Теодорчик, ЖТФ, т, VIII (1938), стр. 960.
Г. С. Горелик, ЖТФ, т. IX (1939), стр. 450 К. Теодорчик,
Радиотехника, № 6, 1937.
§ 27] СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ 163
ний член уравнения (27,1) обозначает квазиупругую
силу, запаздывающую относительно изменения х на
постоянное время х.
Пусть уравнение (27,1) без члена запаздывания почти
гармоническое и коэффициент члена запаздывания —
v2 < < (27,2)
Посмотрим, может ли при этих условиях уравнение типа
(27,1) иметь близкое к гармоническому периодическое
решение. Для этого ищем первое приближение к
решению в виде
х = a sin Ы, (27,3)
где а и со в стационарном режиме — подлежащие
определению константы. Для их нахождения представляем (27,1)
в виде:
х + оз2я = (оз2 — аз2) х - 2 (8 + 82 х2) х - v2 xz - 25- (27>4)
Вычисление 23 ПРИ х-> определяемом (27,3), даёт:
SS ~ ((1)2 ~~ ®о)а s^n <*>£ — 2 (8 -f 82 a2 sin2 Ы) аоз cos Ы —
— v2a sin аз (t — х) = [(оз2 — аз2) а — v2 a cos озх] sin оз£ -J-
+ v2 а sin озх — 2оза8 — у оза382 cos Ы +• • • • (27,5)
Отсюда находим закон установления автоколебаний
J = ^ (v« sin «от-28а»-18, ««•)_, (27,6)
а для стационарного режима систему уравнений,
определяющих амплитуду и частоту:
(оз2 — оз2) а — v2 a cos оз- — 0, ^
Г 111 (27>7)
а I v2 sin озх - 2ооз - i- 82оза2| = 0. i
Из этих уравнений видно, что либо а = 0, что
соответствует устойчивому равновесию, если
v2 sin озх — 28u) < О,
11*
164 АВТОКОЛЕБАНИЯ, БЛИЗКИЕ К ГАРМОНИЧЕСКИМ [ГЛ. IV
и неустойчивому, если
v2 sin сох - 2Ьоу > 0, (27,8)
либо при выполнении условия (27,8) имеет место
самовозбуждение, и (27,7) даёт частоту
(l)2 = (Dj+ V2 COS (1)0Х*) (27,9)
и стационарную амплитуду автоколебаний
^^sin^x-g^ (27Д0)
Из последней формулы видно, что если условие
самовозбуждения выполнено, то стационарная амплитуда
автоколебаний существует всегда. Из рассмотрения условия
самовозбуждения следует, что при соответствующей
величине запаздывания запаздывающая квазиупругая сила
вызовет автоколебания, если
v2 > или — ) > —: (27,11)
Sin a)X Ч^ со у ^ и S1I1 сот \ > /
(d —линейный декремент системы при частоте
автоколебаний). Кроме того, видно, что если (27,11) выполнено,
то при непрерывном изменении величины запаздывания т
будет иметь место не одна, а целая последовательность
областей самовозбуждения системы. Максимальные
амплитуды получаются при этом для
sin сет =1, т. е. для (от=:у±2*Лг; ЛГ=1,2, ... (27,12)
На рис. 85 изображены эти области самовозбуждения
и изменения внутри них частоты w и амплитуды а. Внутри
областей генерации частота зависит от времени
запаздывания, причём сильнее всего в середине областей.
Заметим, что обратная связь обычного лампового
генератора эквивалентна в линейной своей части
запаздывающей на четверть периода квазиупругой силе. Действи-
*) Если ^2<(о§, то в (27,9) мы вправе в аргументе косинуса
заменить о> на со0.
§ 27]
СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
165
тельно, при гармоническом колебании такую силу мы
можем представить в виде
-у4) = -v2acos Ы= — ^х. (27,13)
v^ т = v^asin Ы
В силу этого уравнение (27,1) принимает для
рассматриваемого случая вид
х + 2 [ (§-£) +М2] s + a>3* = 0. (27,14)
Сравнив это уравнение с уравнением лампового генерато-
ра при мягком режиме (§ 11), мы видим, что уравнения
эти совпадают, если
£ = \M\t»*S0. (27,15)
Очевидно, что обычный ламповый генератор работает
в режиме, соответствующем максимальной амплитуде
генерации.
Рассмотрим несколько примеров генераторов с
запаздывающими силами.
I. Электрический прерыватель
На рис. 86 дана схема прерывателя с молоточком.
Уравнение движения такой системы будет:
- тх + гх + кх = /~.
(27,16)
166 АВТОКОЛЕБАНИЯ, .БЛИЗКИЕ К ГАРМОНИЧЕСКИМ [ГЛ. IV
Мы будем считать, что электрический контакт
срабатывает в момент прохождения системы через положение
равновесия (# = 0). Благодаря наличию в электрической
цепи самоиндукции (L) и сопротивления (R) магнитная
сила, действующая на колебательную систему,
устанавливается и исчезает не мгновенно. Порядок времени
запаздывания даётся константой времени цепи '&= д-. На рис. 86
шХ 0 ^ изображён примерный харак-
° тер изменения силы /т. Для
приближённой теории мы
будем считать, что сила
изменяется по закону /*, т. е.
возникает и исчезает
мгновенно, но не в момент
срабатывания контактов, а с
запаздыванием на постоянное время т.
Обозначив величину силы /*
буквой къ мы получим для
разложения этой силы в ряд
Фурье выражение (считая,
что х = a sin Ы)
-/?=
■-к-п кх sin w (t — т) -f-
Z тс
Ри£. 86.
+ ^ кх sin За>(*-т) + ... (27,17)
Поэтому, согласно предыдущему, в первом приближении
уравнение прерывателя будет (смещение положения
равновесия считаем компенсированным регулировкой):
тх + гх + кх -\— кх sin со (t ■
С) = 0
(27,18)
или, разделив все члены на т и введя обычные
обозначения,
x + 2bx + i»20x + -^-xz^0. (27,19)
2 к
Через а мы обозначили величину , a iv = a sin со (t — х)
ест^ смещение, запаздывающее на величину т. Ища первое
§ 27] вИСТВМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ 157
приближение к решению в виде (27,3), получим обычным
путём:
ж + "Ас = 25. (27,20)
где
SS = К0*2 — ^о)а — а cos 0)Х] s'm ®t +
+ [a sin сот — 25соа] cosotf, (27,21)
Отсюда, согласно общим формулам, получим уравнения
установления и уравнение частоты
■J7 = 77- (а s*n ^ — 28аза),
(27,22)
(а)2 — со 2) а — а cos сот =■ 0.
Для стационарной амплитуды и частоты это даёт систему
уравнений
a sin сох — 2§соа = 0, |
(со2 — cog) а — а cos сот = 0, J \ > )
Если — < cog, то приближённое решение системы (27,23)
будет:
й~~ 1/(0)2-0)2)2 + 40,252' I (27,24)
со2 = cog-f- 28co0ctg со0т. '
Из полученных формул видно, что в отсутствии
самоиндукции прерыватель работать не может (ибо если
L = 0, то т = 0).
II. Автоколебания терморегуляторов
Все электрические терморегуляторы с термометрическим
контактом всегда работают в автоколебательном режиме,
аналогичном только что рассмотренному режиму язычкового
прерывателя. Действительно, любой терморегулятор
состоит из нагреваемой камеры (термостата) массы т и удель»
ной теплоёмкости с и того или иного термометра с
электрическим контактом, замыкающим цепь нагревателя
168 АВТОКОЛЕБАНИЯ, БЛИЗКИЕ К ГАРМОНИЧЕСКИМ [ГЛ. IV
(мощности q) при температуре 0О — А6 и размыкающим её
при температуре 60 -]- ДО. Теплопроводность системы
термостата считаем настолько большой, а процесс нагревания
и охлаждения настолько медленным, что в любой
момент температура во всём объёме термостата постоянна.
На наружных стенках термостата мы имеем теплообмен
с окружающим пространством (температуру которого для
простоты примем за 0°), описываемый законом Ньютона.
При этих условиях дифференциальное уравнение
нагревания термостата будет:
qdt = mcdQ-\-S<x6 dt, (27,25)
где значения тис уже указаны, а есть коэффициент
теплоотдачи термостата, S--его наружная поверхность,
а 0 — мгновенное значение температуры. Иначе говоря,
£+£»=£• (27-2б)
Отсюда уравнение, описывающее процесс нагревания
термостата, будет:
So.
6=£(l_e~™ iy (27,27)
Из этой формулы может быть найден промежуток
времени Дгь необходимый для нагревания термостата от
0О — А9 до 0О + Д0. Когда температура выключения
нагревателя достигнута, контакт терморегулятора размыкает
нагреватель, и начинается процесс остывания термостата
от 0О + Д6 до 60 — Д0, согласно уравнению
mc^ + Sa9 = 0. (27,28)
Отсюда, лроцесс остывания будет описываться формулой
В = Ае ™ . (27,29)
Закон остывания позволяет найти время остывания Дг2-
Таким образом, работа терморегулятора будет
проходить * в' последовательных циклах, каждый из которых
§ 27] СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
состоит из нагревания и охлаждения термостата. Период
цикла будет:
Г = Д^ + Д^. (27,30)
Закон же изменений температуры со временем согласно
вышеизложенному изображён на рис. 87.
Таким образом, работа терморегулятора всегда имеет
автоколебательный характер и определяется температурным
9
ва+Ав\
во
<г—\ г—i *
Рис. 87.
запаздыванием срабатывания его контакта. Очевидно, что
работа терморегулятора тем совершеннее, чем меньше это
температурное запаздывание А0.
Мы видим, что колебания температуры в термостатах
имеют не гармонический, а пилообразный характер. Это
зависит от того, что в тепловых процессах мы не имеем
параметра, аналогичного инертной массе.
III. Термомеханическая модель
лампового генератора
Рассмотренными выше колебаниями терморегулятора
можно воспользоваться для построения термомеханической
модели лампового генератора. Представим себе маятник
От (рис. 88), несущий на верхнем конце контакт А>
замыкающий ток батареи Е на нагревательную
проволоку ВС, подобную проволоке тепловых электроприборов.
Середина этой проволоки при помощи пружинки кх
оттянута к стержню маятника. Если снять массу т> то мы
получим обычную схему терморегулятора с контактом.
470 АВТОКОЛЕБАНИЯ, БЛИЗКИЕ К ГАРМОНИЧЕСКИМ [ГЛ. IV
STTL
При замыкании тока контакт А будет периодически
замыкаться и размыкаться, проволока ВС будет периодически
нагреваться и остывать согласно процессу
автоколебаний терморегулятора, описанному в § 26. Колебания
стержня I будут при этом не гармоническими, а
пилообразными*) (см. рис. 87). Мы получим, таким образом,
релаксационную термомеханическую автоколебательную
систему. Пусть теперь на стержень надета масса т такой
величины, что период маятника,
несущего контакт, становится
сравнимым с постоянной времени прогрева
струны. Уравнение движения
маятника будет при этом:
mx + rx+skx + k1(x — x1) = 0. (27,31)
х есть координата отклонения точки
Р маятника от положения
равновесия, Xi — координата отклонения
точки прикрепления пружины кг к
струне ВС (точки Q). При этом для
полупериода, когда х > 0, контакт
разомкнут, и точка Р вследствие
остывания проволоки движется влево,
увеличивая натяжение пружинки к1т
Уравнение движения за этот полупериод имеет поэтому
вид
Рис. 88.
тх + гх + (к -| /ti) х + кгчЬ = 0
(27,32)
(а — коэффициент теплоотдачи нагревательной проволоки).
Для второго полупериода, когда проволока нагревается
(х < 0), точка Р двигается вправо, и уравнение движения
будет:
тх + гх + (к + ki) х — k&t = 0.
(27,33)
*) Предполагаем, что собственная частота колебательной
системы, образуемой несущим контакт стержнем (без массы т),
весьма велика по сравнению с периодом тепловых
релаксационных колебаний, так что несущий контакт маятник (без массы т)
следует за движением точки Р квазистатически.
§ 27] СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ 171
Мы предполагаем, что остывание и нагревание проволоки
идут по экспоненциальному закону, но в связи с
малостью промежутков времени нагревания и охлаждения
и значительной тепловой инерцией проволоки можно
ограничиться простой пропорциональностью времени
(последние члены (27,32) и (27,33)). Чтобы освободиться от
времени, продифференцируем уравнения (27,32) и (27,33).
по времени и введём в качестве переменной скорость
маятника x = v\ тогда, обозначив й^а/т через v2, имеем:
для я > 0 v + 2bv + u20v + 42 = 0, I)
... I (27,34)
дляж<0 v + 2bv f a>02tf-v2 = 0. И J
На рис. 89 изображено движение нашей системы в
течение одного периода. Начавшись с амплитудного значе-
Рис. 89.
ния v = А (уравнение I (27,34)), через полпериода
система получает максимальное отклонение (отрицательное),
равное Аг:
^=0*+я>"*+я (27>35)
(d — логарифмический декремент системы). Начиная отсюда
и до конца периода система (уравнение II (27,34))
получает отклонение А2:
.172 АВТОКОЛЕБАНИЯ, БЛИЗКИЕ К ГАРМОНИЧЕСКИМ [ГЛ. IV
Автоколебания будут стационарными, если А2-*=А*=Ао.
-Отсюда получаем значение стационарной амплитуды:
Лп -г
1 + е
1-е
4у2
(27,37)
В рассматриваемом случае малого затухания колебания
-близки к чисто гармоническим.
IV, Автоколебания резонатора
Гельмгольца
Всем стеклодувам хорошо известно следующее явление.
Если на конце стеклянной трубки диаметром в несколько
вдшлиметров и длиной 10— 15 см раздуть шарик, то весьма
часто, пока шарик горяч, трубка
/S начинает звучать. Частота звуко-
твых колебаний соответствует
основному тону резонатора Гельмгольца:
/Зг • <27'38>
\-Х
0
+в
Рис. 90.
схематически на
номом
рис,
где р0 — нормальное атмосферное
давление, р0 — нормальная
плотность газа, заполняющего
резонатор, 7 — отношение теплоёмкостей
для этого газа, а остальные
обозначения ясны из рис. 90.
Для объяснения этого явления
учитываем, что после раздутия
шарика температура резонатора
распределена так, что она быстро
спадает от шарика к шейке.
Характер спадания, температуры показан
90. Он может быть изображён поли-
"4
T^^+SxX^^S^t
(27,39)
§ 27] СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ 173
При колебаниях воздуха в резонаторе некоторая масса
воздуха т движется вдоль участка стенок с большим
температурным градиентом. Примем, что её средняя
температура в состоянии равновесия равна Т0. Мгновенное
значение температуры при её колебаниях обозначим через Т0+Ь.
Тогда для б получим следующее дифференциальное уравнение:
К (Six - у S2x* - б) = тпсЬ. (27,40)
Дифференциальное уравнение колебаний газа в
резонаторе с учётом теплообмена со стенками может быть
написано в виде
i'+28i + <ojs+pe==0. (27,41)
Посмотрим, допускает ли система уравнений (27,40), (27,41)
автоколебательное решение, близкое к чисто
гармоническому:
z=asm<at. (27,42)
Для этого прежде всего, подставив (27,42) в (27,40), найдём
соответствующий закон изменения температуры газа.
Находим:
тпсЬ + Кб ■==■ (дУх — S2a2) a sin ы - у S2a* sin Зо>*, (27,43)
и для основной гармоники в изменении температуры:
e = b0(S1-S2a*)as[niu(t-z); tgx = ^. (27,44)
Таким образом, при гармоническом колебании газа в
резонаторе температура части m колеблющегося газа будет
также изменяться гармонически, но с запаздыванием
на время т. В согласии с принятыми выше обозначениями
мы можем написать (27,44) в виде
G^ej^-^K, (27,45)
а уравнение (27,41)
х + 28ж + %х + ре0 (S - S2a2) xz = 0. (27,46)
174 АВТОКОЛЕБАНИЯ, БЛИЗКИЕ К ГАРМОНИЧЕСКИМ [ГЛ. IV
Представив последнее уравнение в виде
х + иЛг = (со2 - со*) х — 2Ьх - р0о (Jx - S2a2) xz = 25
и воспользовавшись (27,42), получим:
2 g = [(со2 — o)J) а - рб0 (^х - S2a2) a cos сот] sin utf +
+ [Р0о (<?i — s*a2)a sin ^ — 2Stoa] cos o)^ -] (27,47)
Отсюда обычным образом находим частоту автоколебаний
со2 == o)J + р0о (^ - £2a2) cos сох (27,48)
и закон установления амплитуды
Tt ^ i [Peo («?i - ^2) a sin сот - 28coa]. (27,49)
Для стационарной амплитуды автоколебаний находим:
R a = V^SJ™V=^. (27,50)*)
Таким образом, самовозбуждение воз-
' ' можно, если
Р-Ухво > 28со. (27,51)
Оптимальные для самовозбуждения
условия получаются при
запаздывании:
Рис. 91. Т"" 4 ' 4 У ' '••
Аналогичное явление самовозбуждения получается в
системе следующего устройства (рис. 91): U-образная трубка
на одном конце открыта, а на другом соединена с
резервуаром. Трубка и резервуар вначале заполняются водой.
Затем резервуар подогревается горелкой. Когда вода
в нём закипает и пар вытеснит воду, то столб воды
*) Формула (27,50) даёт действительное положительное
значение амплитуды и при отрицательных значениях sin шт. Однако из
(27,49) видно, что значения эти неустойчивы, так как da/dt для них
меньше нуля.
§28] ДИАГРАММЫ РЕГЕНЕРАЦИИ СИСТЕМ С ЗАПАЗДЫВАНИЕМ 175
в U-образной трубке приходит в автоколебания. Очевидно,
причина этих колебаний та же, что при автоколебаниях
резонатора Гельмгольца, а описанная система является
моделью гейзера. Аналогичные условия имеют место в
порах накипи, покрывающей внутренние стенки сосудов
для кипячения воды (котлы, самовары, чайники). Пока
температура воды ниже точки кипения, а стенка под
накипью нагрета выше точки кипения, в каналах накипи
мы имеем все условия для возникновения автоколебаний.
Эти автоколебания мы и слышим перед закипанием воды.
§ 28. Диаграммы регенерации систем
с запаздывающими силами
Свойства систем с запаздыванием весьма наглядно
могут быть получены методом диаграмм регенерации.
Такое рассмотрение целесообразно ещё потому, что метод
этот охватывает вопрос
значительно полнее, чем
вышеизложенная приближённая
теория.
Рассмотрим
квазилинейную активную систему Q
(рис. 92, а), диаграмма реге-
и
9
ь
Рис. 92.
нерации которой задана комплексным коэффициентом
усиления:
5- = А К, Р) = Pi К, Р) е* («о. р) . (28,1)
Пусть эта диаграмма имеет изображённый на рис. 92, б
вид. Из диаграммы мы видим, что в замкнутом состоянии
система Q устойчива. Положим теперь, что последовательно
с данной системой включено звено запаздывания (рис. 93),
176 АВТОКОЛЕБАНИЯ, БЛИЗКИЕ К ГАРМОНИЧЕСКИМ [ГЛ. IV
которое имеет коэффициент усиления, равный
^ = Г* = 1-е-^, (28,2)
т.-е. поданное на вход гармоническое колебание частоты р
преобразовывает в гармоническое колебание той же
амплитуды и частоты, но запаздывающее по фазе на угол фг = рт.
Такого рода свойствами
обладает ряд распределённых
систем, в которых можно
пренебречь потерями: линии,
Рис. 93. кабели, искусственные
линии и т. д. Если система Q
однонаправлена, т.-е. как, например, все ламповые схемы,
допускает распространение сигнала лишь в одном
направлении, то последовательное соединение системы Q и звена
запаздывания будет иметь комплексный коэффициент
усиления, равный:
-£ = !** (и0, р) = |*? (в* р) • ц* - 1хх (и0, р) е1 [* <"о, р)-рт] t
(28,3)
т. е. диаграмма системы, включающей звено запаздывания,
получится простым поворотом каждой точки диаграммы
системы Q по часовой стрелке на угол
? = Р- (28,4)
Отсюда мы виДим, что если исходная диаграмма целиком
лежит внутри окружности радиуса единица, то при
прибавлении звена с любым временем запаздывания т система
при замыкании обратной связи останется устойчивой *).
Если же, как на рис. 92, между частотами /> = сох и /? = о>2
диаграмма выходит за пределы единичной окружности, то
для значений времени запаздывания, лежащих между
,, = ? <x<T,=f, (28,5)
в системе при замыкании будут возбуждаться колебания,
*) Этот признак устойчивости указан Я. 3. Цыпкиным.
«
§28] ДИАГРАММЫ0РЕГЕНЕРАЦИИ СИСТЕМ С ЗАПАЗДЫВАНИЕМ 177
частота которых оудет с увеличением с падать от со2 до о)1#
Диаграмма системы с запаздывающим звеном принимает
при этом изображённый на рис. 94 вид.
Если а
(28,6)
то при значениях х
х2 < * < t3
(28,7)
система опять становится
устойчивой, а затем при
значениях запаздывания:
<р! + 2ТС
ср2 + 2тс
(28,8)
Рис. 94.
опять будут самовозбуждаться частоты, лежащие между
оз2 и о)!. Такое чередование полос устойчивости и
самовозбуждения будет продолжаться до тех пор, пока точка со2,
поворачивающаяся с увеличением времени запаздывания
т быстрее, не догонит более медленно поворачивающуюся
точку (Ох, совершив один лишь полный оборот. Это будет
при
*»>- 2в:1(!!г;,) • (вд
После этого критического времени запаздывания полосы
устойчивости исчезают и система становится неустойчивой
при любых т > ткр.
Из рис. 94 мы видим, что при запаздывании диаграмма
регенерации превращается в спираль, бесчисленное число
раз окружающую начало координат. Таким образом,
система с запаздыванием имеет в интервале частот 0 < р < оо
бесчисленное число допустимых по фазе частот соЛ, из
которых условию самовозбуждения удовлетворяют только
те, которые лежат в интервале и>х < шк < со2.
ГЛАВА V
РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ
СИСТЕМЫ
Мы видели, что почти гармонические автоколебания
получаются в довольно широких пределах изменений
регенерации в системах с большой добротностью и при
регенерации, лишь незначительно превышающей порог
самовозбуждения—в системах с колебательными цепями
малой добротности. При увеличении нелинейности
колебания всех вышерассмотренных систем всё больше
обогащаются гармониками, благодаря чему форма их всё более
удаляется от гармонической, а период (см. § 7)
монотонно удлиняется.
Резко негармонические автоколебания получили
название релаксационных. Рассмотренные нами
квазилинейные методы трактовки автоколебательных задач
в применении к релаксационным системам (как и
линейная трактовка) могут дать только условия самоврзбу-
ждения, но совершенно недостаточны для нахождения
периода (частоты) автоколебаний и их формы.
Наиболее общим, хотя весьма часто достаточно
трудоёмким, является метод замены непрерывной
характеристики ломаной линией. Такая замена сводит решение
нелинейной задачи к интегрированию цепи линейных
уравнений, решения которых «сшиваются» на границах
отдельных звеньев ломаной в непрерывную
интегральную кривую. Метод становится особенно наглядным, если
это сшивание производить на фазовой плоскости.
Примеры применения этого метода мы рассмотрим
ниже на примере регуляторов управляемых реле. На
той же идее основан рассмотренный в § 6 метод каче-
§ 29] СИСТЕМЫ НЕГАРМОНИЧЕСКОГО ТИПА 179
ственного построения формы предельного цикла для случая
весьма большой нелинейности (см. рис. 17, 18).
Кроме этого общего метода, мы рассмотрим ниже
ещё два: метод графического построения на фазовой
плоскости интегральных кривых (метод Льенара), пригодный
для рассмотрения одного класса автоколебательных систем
при любой нелинейности, и метод разрывной трактовки,
пригодный при рассмотрении систем с весьма большой
нелинейностью.
§ 29. Колебательные и автоколебательные системы
негармонического типа. (Типы движений регуляторов,
управляемых с помощью реле*).)
Значительный класс регуляторов управляется при
помощи реле. В таких механизмах орган, движением
которого хотят управлять (в дальнейшем мы для простоты
будем считать его материальной точкой массы га), связан
тем или другим способом с реле, включающим внешнюю
силу к постоянной величины каждый раз, когда
точка га выйдет из заданного положения равновесия. При
этом внешняя сила к всегда включается в
направлении, стремящемся вернуть точку га к её положению
равновесия.
Для исследования движений, совершаемых такими
системами, необходимо интегрировать цепь
дифференциальных уравнений, последовательно описывающих
движение системы на отдельных участках её траектории.
При этом конечные значения решений предыдущего
уравнения являются начальными значениями решения
последующего. Таким «сшиванием» решений цепи уравнений
всегда можно найти движения любой системы. Однако
этот путь громоздок и лишь в редких случаях приводит
к удобным для исследования движения выражениям.
Значительная наглядность может быть получена, если при
рассмотрении этой задачи воспользоваться
изображением движений системы на фазовой плоскости.
*) Н. L. Hazen, Journ. Franklin Inst., 3 (1934), стр. 279.
К. Теодорчик, ЖТФ, т. VIII (1938), стр. 960.
12*
180 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
Параметрами, определяющими характер движения,
являются:
1. Масса управляемого органа т.
2. Испытываемое им трение, которое может, вообще
говоря, состоять из кулоновского трения, не зависящего
от скорости, — г0 -т—, и из члена, пропорционального
скорости, — гх.
3. Восстанавливающая сила — к -—г, возвращающая
массу т в положение равновесия, которое мы будем
считать неподвижным и примем за начало оси х.
4. Ширина полосы застоя 2s, внутри которой реле
не включает восстанавливающей силы.
5. Время срабатывания реле, т. е. время, протекающее
между моментом прохождения точки т через границу
полосы застоя и моментом включения
восстанавливающей силы (время запаздывания) т.
Рассмотрим последовательно типы таких
механических систем, переходя от менее сложных к более сложным.
I. Механизмы, в которых отсутствует
полоса застоя, и восстанавливающая
сила без запаздывания
Простейшим случаем будет механизм без трения, без
запаздывания и без полосы застоя. Хотя при такой
идеализации система утрачивает большинство интересных
для приложений свойств, но с теоретической стороны
рассмотрение этого случая существенно, так как он,
подобно консервативному случаю в обычных
колебательных системах, послужит отправной точкой для
перехода к более сложным случаям.
Уравнения движения для этого случая имеют вид:
тх — — к для х > 0 )
тх = к для х < 0.
(29,1)
§ 29] СИСТЕМЫ НЕГАРМОНИЧЕСКОГО ТИПА 181
Эти уравнения имеют форму, аналогичную уравнению
движения вертикально брошенного тяжёлого тела.
Поэтому на фазовой плоскости (х, у=х) движение
изобразится отрезками двух парабол, вершины которых
расположены соответственно в точках х= ±х0 и пересекаю-
щих ось у = х в точках х~ =F у 2кх0/т = =f F0 (рис. 95).
Два таких отрезка парабол образуют на фазовой
плоскости замкнутую траекторию, по которой совершается
тз*к | т£*-к
тх'к I тх"-к
Рис. 95.
движение представляющей точки рассматриваемой
системы, если её начальная энергия равна:
W0^^p-==kx0^^ + kx. (29,2)
Таким образом, рассматриваемый механизм ведёт себя
как линейная консервативная система. Амплитуда её
колебаний определяется начальными условиями
движения.
Отличие от обычной линейной консервативной системы
состоит в том, что колебания её негармоничны и период
их, как легко убедиться, существенно зависит не только
от параметров системы, но и от амплитуды (начальных
условий). Элементарный расчёт показывает, что время
движения по каждому из четырёх квадрантов фазовой
плоскости одинаково, и период полного колебания еле-
182 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
дующим образом выражается через параметры
чальную амплитуду:
'==/il/2mxo
и на-
(29,3)
Так как начальные значения х и х могут быть
произвольны, то интегральные кривые на фазовой плоскости
образуют систему окружающих начало координат
замкнутых кривых. Начало координат является особой
точкой типа центра.
Если ввести в рассмотрение кулоновское (не
зависящее от скорости) трение, но попрежнему считать, что
запаздывание и полоса
застоя отсутствуют, то
мы получим систему,
описываемую цепью
четырёх уравнений,
сменяющих друг друга в
каждом квадранте фазовой
плоскости (рис. 96).
Из этих уравнений
видно, что в пределах
каждого квадранта
движение попрежнему
изображается отрезком
параболы, но параболы
имеют одни параметры в I и III квадрантах и другие —
во II и IV. Если движение началось от точки х = 0,
x — V0, to в пределах первого квадранта оно совершается
по параболе:
m(Vl-y*) = 2x(k+r0). (29,4)
Спустя время
тх*к+г0
тх=-к+гп
Рис. 96.
U
г0 + к
(29,5)
масса т достигнет оси х в точке
1 тУ%
2 г0 + к'
(29,6)
§ 29] СИСТЕМЫ НЕГАРМОНИЧЕСЬОГО ТИПА 183
Далее, точка т переходит во второй квадрант и начинает
двигаться по параболе
ту* = 2(к-г0)(х1-х). (29,7)
Время движения по этому квадранту
= |/2^[ ^ т^_ = lA±i, (29,8)
и скорость, с которой точка т достигает третьего квадранта,
равна:
У.= -уШЕёЕ=-У0У^£. (29,9)
Дальнейшее движение, как легко видеть, будет
описываться аналогичными^ формулами, в которых только V0
mx=-rx+k I тх=-гх-к
тх~-гх+к I тх=-гх-к
Рис. 97.
заменено на V2. Каждый полуоборот интегральной кривой
будет сопровождаться уменьшением скорости в 1/ 1>"ГГ° раз.
На фазовой плоскости движение изобразится
спиралевидной кривой, состоящей из отрезков различных парабол.
Полученная картина показывает, что положение
равновесия имеет в рассматриваемом случае характер
устойчивого фокуса. Разность кинетических энергий в точках
184 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
А я В даёт потерю энергии на трение за полуоборот. Эта
потеря равна:
^о=^0-^)=^;
2г„
Если сила трения пропорциональна скорости (вязкое
трение), то движение, как легко видеть/будет иметь
характер, подобный только что рассмотренному случаю (рис. 97).
На фазовой плоскости получится опять спиралеобразная
кривая, но эта кривая складывается не из отрезков
парабол (пунктирные линии), а из отрезков баллистических
кривых. Кроме того, теперь скорость, сообщаемая массе т
восстанавливающей силой А, имеет верхний предел,
равный, в случае силы трения, пропорциональной скорости,
Vs = —. Поэтому при достаточно больших начальных
отклонениях все интегральные кривые пересекают
ось х в точках ^ Vs (линии АВ и i'B на рис. 97).
II. Механизмы с полосой застоя;
восстанавливающая сила
без запаздывания
Если принять, далее, во внимание существование
конечной ширины полосы застоя, при движении внутри
которой на массу т
восстанавливающая сила
не действует, то
интегральные кривые
каждого из трёх
вышеприведённых случаев
видоизменятся "и примут,
как легко показать,
изображённый на фиг. 98
и 99 вид.
При отсутствии сил
трения интегральные
кривые все замкнуты и состоят из отрезков парабол,
соединённых прямыми линиями, параллельными оси х
тхак
тх=0
тх—к
тх*к
тх°0
Рйс.
тх—к
§ 29] СИСТЕМЫ НЕГАРМОНИЧЕСКОГО ТИПА 185
i£«»Ji8)' Эт°-пеРи°Дическое движение с положением
равновесия типа центра, но не с одной особой точкой
ас целым отрезком прямой в качестве геометрического
места возможных положений равновесия (линия АВ
на рис. 98).
При наличии кулоновского трения смена уравнений
и интегральная кривая представлены на рис. 99
Интегральные кривые состоят
из отрезков различных
парабол. Положение
равновесия типа устойчивого
фокуса; соответствующие
различным начальным
условиям кривые,
скручиваясь, оканчиваются
на отрезке АВ оси х
внутри полосы застоя.
И\ наконец, третий ^J~
случаи: трение,
зависящее от скорости
(вязкое). И в этом случае
интегральные кривые имеют характер скручивающихся
выхКа0ЧнИиаГИХСЯ М ЛИНИИ АВ спиралео%азныхЩкри-
Р.™ ' ЯТ И3 отРезков баллистических кривых.
Рассмотрим теперь влияние запаздывания
восстанавливающей силы на постоянное время т. восстан*в
Ш. Механизмы без полосы застоя но
с запаздывающей восстанавливающей
силой
• Первый случай: полосы застоя нет, и трение
отсутствует. Если скорость прохождения через положение рав- «
новесия (* = 0) равна V0, то при ускорении а = ± за
то
время запаздывания т точка т пройдёт путь: Дх=70т+—
Поэтому на фазовой плоскости смена уравнений
будет происходить при переходе интегральной кривой
через линию *~A*=±/(7ett). Менаду этим/линиями
Рис. 99.
1S6 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
интегральная кривая опять будет состоять из отрезков
парабол (рис. 100).
На рисунке видно, что наличие запаздывания
приводит при отсутствии трения к неустойчивости положения
равновесия и к неограниченно возрастающим
колебанием. Положение равновесия здесь типа неустойчивого
фокуса.
Внешняя сила при этом за каждое полуколебание
сообщает системе дополнительную
энергию, равную:
(29,11)
Второй случай: полоса застоя
отсутствует, трение кулоновское.
Рис. 100. В этом случае, рассуждая так
же, как в первом случае,
получим, что запаздывающие силы действуют на пути
Aa=sV0TH—2~, где а = ±—^.
Поэтому вид линий, на которых происходит смена
уравнений, описывающих движение, аналогичен их виду
в первом случае. Между этими линиями и отрезками
оси х интегральные кривые образованы отрезками двух
парабол.
Сравнивая величину потерь на трение (29,10) и величин
дополнительной энергии, получаемой системой
AW, = Ax(k-r0)=(vox + k-=^^(k-r0), (29,12)
мы видим, что потери растут от нуля пропорционально F§,
а приток энергии растёт от постоянной величины (при
V0 = 0) пропорционально V0. Ввиду этого, очевидно, при
малых колебаниях приток энергии за полуоборот больше
потерь, а при больших размахах колебаний — наоборот
Это доказывает, что интегральные кривые движения нашей
системы при больших размахах колебаний скручиваются,
а при мадьгх, наоборот, раскручиваются (рис. 101).
<ЩЬ>
§ 29] СИСТЕМЫ НЕГАРМОНИЧЕСКОГО ТИПА 187
Другими словами, наша система автоколеба1ельная;
положение равновесия неустойчиво, и существует
устойчивый предельный цикл.
Амплитудное (максимальное) значение скорости для
установившегося автоколебательного режима легко найти,
Рис. 101.
приравняв потери величине энергии, подкачиваемой в
систему. Это даёт:
Г. = ^Ф + УГЧ^}. (29,13)
И, наконец, в случае силы трения, пропорциональной
скорости, результат получается аналогичный только что
рассмотренному, так как потери также нарастают от нуля,
только выражение пути, на котором действует
запаздывающая сила, более сложно:
Ьх = Уа*-т([Гв~Уо)(1-е~^). (29,14).
к
Зйесь Vs = — обозначает максимальную скорость, которую
может приобрести масса т под действием силы к при
коэффициенте трения г.
На рис. 102 дана форма кривых х = Д# = ± f (F0, т) и
вычерчены предельный цикл и соседние интегральные
кривые. Вычисление стационарной амплитуды автоколебаний
\ » X
-Дх
mx*-rx+k
mx"-rx+k J
188 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
для этого случая аналитически весьма сложно; проще
получить его графически. г
Заслуживает упоминания ещё следующая особенность
автоколебательных систем рассматриваемого типа: потери
энергии в функции максимальной скорости нарастают для
кулоновского и для
вязкого трения, начиная от
нуля. Приток же энергии
вследствие запаздывания,
как мы видели, нарастает'
начиная с конечной
величины. Отсюда следует,
что при любом трении
(лишь бы его кулонов-
ский член был меньше
восстанавливающей
силы, без чего вообще
движение немыслимо) при
достаточно малых
амплитудах колебания будут
усиливаться. Это
показывает, что в системах рассматриваемого типа нельзя
подавить автоколебания, увеличивая трение.
Рассмотрим в заключение типы движения при наличии
всех вышеперечисленных параметров.
IV. Механизмы^ полосой застоя
и запаздывающей восстанавливающей
силой
Начнём с рассмотрения кулоновского трения. Для того
чтобы решить, какой характер будет иметь в этом случае
движение, рассмотрим энергетический его баланс. При
этом, как и выше, можно ограничиться рассмотрением
движения за время полуоборота представляющей точки
по фазовой плоскости. Потери на этом пути будут равны
потерям на трение вне полосы застоя, равным, " как мы
видели,
x=-Vs
I mx=-rx-H
mx=-rx-k
Рис. 102.
§ 29]
СИСТЕМЫ НЕГАРМОНИЧЕСКОГО ТИПА
189
и потерям на трение внутри полосы застоя, равным,
очевидно,
Д21УГ = 2ег0.
Таким образом, общие потери за полуоборот равны:
А^.-^« + Й7.
VI
(29,15)
Приток энергии за то же время равняется:
ЛИ', =, Д* (к - г0) = V0z (к - г0) + ^р^2 т». (29,16)
Если мы построим &Wr и ДЖТ в функции V0, то могут
иметь место следующие случаи:
а) Кривая AVFr не пересекает прямой ДРУТ (рис. 103, а).
Очевидно, в этом случае компенсации потерь пи при
к
лм
aw
>Щ
V
■—И,
у
U
в
'/
,
{
НС
л
А
К. 9
Рис. 103.
-й
каком V0 не происходит; положение равновесия внутри
полосы застоя устойчиво, и все интегральные кривые,
скручиваясь, заканчиваются внутри этой полосы.
Аналитическим условием этого является комплексность корней
уравнения
это имеет место при условии
(29,17)
(29,18)
190 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
Ь) Изменяя параметры ясным из приведённых формул
образом, мы можем сблизить линии MVr и bW~ до
пересечения в двух точках А и В (рис. 103, б).
При V0, определяемых этими точками, мы получим
на фазовой плоскости два предельных цикла,[амплитудные
значения скорости для которых равны:
Легко видеть, что цикл, соответствующий точке А,
неустойчив; цикл же, соответствующий точке В, устойчив.
Действительно, из рис. 103, б_видим, что в точке В потери
энергии с увеличением
скорости V0 возрастают
быстрее, чем поступления
энергии. В точке же А —
наоборот. Таким образом,
в этом случае мы имеем
устойчивое положение
равновесия [и жёсткое
возникновение автоколебаний,
наступающее при
возмущениях, начальная
энергия которых
т/2
1
[ 1 (Мл
1 --/--
1 /
--' I
л7Ё*/г+гд / тх* *гд / тх=-к* гд
Рис. 104.
W >
mV
АО
(29,20)
Соответствующая этому случаю картина интегральных
кривых дана на рис. 104.
Аналитическим условием движений этого типа является
неравенство
0 < 1 + -**: ^ (*+/»> < 1в (29,21)
с) При дальнейшем сближении кривых bW точки А
и В расходятся и при
2ег0-
2т
(29,22)
§ 30]
ГРАФИЧЕСКИЙ^ МЕТОД ЛЬЕНАРА
191
пересечение А, а с ним и неустойчивый предельный цикл
исчезают, положение равновесия становится неустойчивым,
и система, мягко возбуждаясь, раскачивается
допредельного цикла (рис. 105),
определяемого точкой
пересечения В (рис. 103, в).
В случае вязкого
трения кривая потерь
нарастает от нуля
экспоненциально, линия же
притока энергии имеет
прежнюю форму.
Поэтому в этом случае
границы положений
равновесия всегда неустойчи- тх=к-г0 Мч/ л*-*?»
вы, и существует устой- **-***/*#•+*/ тх*-к+г0
чивый предельный цикл. Рис 1()5.
В рассмотренном
сейчас случае мы
встречаемся с автоколебательной системой, предельный цикл
которой окружает целый континуум возможных
положений равновесия (линия застоя АВ).
§ 30. Графический метод Льенара*)
Метод графического построения интегральных кривых
на фазовой плоскости, предложенный Льенаром,
непосредственно приложим к колебательным и автоколебательным
системам второго порядка, диссипативныи член уравнения
которых зависит только от скорости изменения независимой
переменной. Как мы видели, к этому типу принадлежат
уравнения динатронного и транзитронного генераторов.
Уравнением того же типа описывается и обычный ламповый
генератор с обратной связью при колебательном контуре,
включённом в цепь анода (рис. 106). Действительно, уравне-
*)А. Льенар, Rev. Сёп. de l'Electricite, т. 23 (1928) стр. 901.
R e n s u k i U s u i, I. J. E. E. (Япония), июль-октябрь 1931; март-
декабрь 1932, август 1933, июнь—сентябрь 1934, май Ш5.
«Нелинейные системы», сборник статей под ред. акад. М. Б. Шу-
лейкина. Связьиздат, 1939.
192 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. /
ния, описывающие такой генератор при апроксимации
характеристики полиномом третьей степени и М < 0, имеют
вид:
1) L/ + */ + i-$(/-/e)* = 0, (ад
2) /a = /(|,¥|/)-((>/|50-|Vl/|3^/2)/,
откуда получаем уравнение
/_^(Ш£._Д_1^.л}/ + ^/ = 0 (30,2)
ИЛИ
/-2(80-8а/2)/ + и>5/ = 0.. (30,3)
После приведения к собственному времени уравнение
этого типа автоколебательных систем мы можем написать
в общем виде:
x-F(z) + z = 0. (30,4)
Уравнение кривой
горизонтальных касательных, принимает при
этом вид:
Х! = Р{у). (30,5)
Построив эту кривую рис. 107,
мы можем графически найти
Рис. 106.
Риса 107.
направление касательной к интегральной кривой
системы, проходящей через любую точку фазовой плоскости.
Для этого из точки А(х0, уо), для которой мы ищем
направление касательной, опускаем перпендикуляр на ось
ординат AD и из пересечения этой прямой с кривой го-
§ 30] ГРАФИЧЕСКИЙ МЕТОД ЛЬЕНАРА ЮЗ
ризонтальных касательных С—перпендикуляр на ось абсцисс
СВ. Тогда линия В А = р будет перпендикулярна к
интегральной кривой системы, проходящей через точку А.
Действительно, если представляющая точка системы в
момент t — 0 совпадает с точкой А, то спустя время dt она
переместится вдоль оси ординат на отрезок
dy = x0dt=- [х0 - F (у0)] dt = ACdt = AC7, (30,6)
а вдоль оси абсцисс на отрезок
dx = yQdt = 'BCdt = WC7. (30,7)
Из (30,6) и (30,7) следует, что треугольники ДАСВ и ЬАС'В'
подобны, т. е.
4£l = S- = 4£L = dt. (30,8)
АС ВС АВ Ч '
Из подобия следует, что АВ' J_ AB и
AB' = ABdt = pdt, ' (30,9)
т. е. касательная к интегральной кривой, проходящая через
точку А (#0, У о) перпендикулярна к р и скорость движения
представляющей точки по интегральной кривой равна
При помощи описанного построения Льенара мы можем
шаг за гаагом проследить движение представляющей точки
и исследовать таким образом законы колебаний
рассматриваемой системы.
Приложим описанный метод к ряду конкретных случаев.
Начнём с линейной колебательной системы
» + 2ei + a = 0. (30,11)
На рис. 108, а и б выполнено построение Льенара
для s > 0 и е < 0 (осцилляторная система). Мы видим,
что это построение в согласии с известным аналитичв-
13 К. Ф. Теодорчик
194 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
ским решением даёт затухающую и раскручивающуюся
спирали.
Применим теперь метод Льенара к интегрированию
уравнения лампового генератора с контуром в цепи анода.
а)
Рис. 108.
При мягком режиме такой генератор описывается, как
мы видели (см. (30,3)), уравнением
7_2(80-8a/V+a>2/ = 0.
Введя собственную единицу времени т = о>0* и новую
переменную
получим:
i'_2s (1-я2)^ + ж = 0, (30,12)
где S—.A и точки означают производные по
собственно
ному времени системы т.
К тому же уравнению приводит, очевидно,
рассмотрение динатронного или- транзитронного генератора
(см. § 25).
§ 30]
i I'VOlIHECKIIU. МЕТОД ЛЬЕНАРА
195
Для ттримепенля к уравнению (30,12) построения
Льепара нужно на фазовой плоскости (х, х) нанести
кривую горизонтальных касательных:
•<-i = F(y)--=2*(l-y2)y. (30,13)
*,~т
Эта функция зависит только от одного параметра г и имеет
изображённый па рис. 109
вид.
Исследуем свойства этой
функции:
1) хх обращается в нуль
при у = 0 и у —- + 1.
2) Экстремальные
значения хх имеют место при
. 1
у = ± —= и равны
4г
*i«t=-±^. (30,14)
{у/Л Инкрвментно
Рпс. 109.
Таким образом, петля
тем более вытянута вдоль
оси х, чем больше г.
Наклон к оси х уходящих за пределы диаграммы ветвей
1
при у=±1 равен — a -^arctg;-, а при у = 0 кривая
проходит под углом 3 = arctg-^ .
Это показывает, что при увеличении s петля всё
больше сплющивается, приближаясь к паре прямых
(см. § 6)
На рис. 109 для s^0,5 нанесена кривая функции хи
отмечены все вышеуказанные её свойства и методом
Льенара построен предельный цикл системы.
Из этого построения мы видим, что даже для г = 0,5
(сравнительно большая нелинейность) предельный цикл
несильно отличается от окружности.
13*
196 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
На рис. 110 аналогичное построение выполнено для
е = 5 (большая нелинейность).
Автоколебания при этом сильно отличаются от
синусоидальных, приближаясь по форме к равносторонней пиле.
Очевидно, что к этой форме автоколебания
асимптотически приближаются при неограниченном увеличении s *).
Для таких автоколебаний может быть выведена
приближённая формула для периода, тем более точная,
чем больше г. Формулу эту легко получить, исходя из
рис. 110.
Рис. НО.
Так как скорость движения представляющей точки по
горизонтальным частям предельного цикла равна
(приблизительно) единице, то период автоколебаний
„. ^imax 16s *
или в обычных единицах времени:
T = ±=3Zj£ = 3RC. (30,15)
Из вышесказанного мы видим, чтд чисто
гармоническая (синусоидальная) форма автоколебаний может быть
получена в безинерционном ламповом генераторе только
при s —> 0.
*) Тот же результат даёт метод, развитый в § 6.
§ 31]
РАЗРЫВНЫЕ АВТОКОЛЕБАНИЯ
197
§ 31. Разрывные автоколебания
Автоколебательные явления могут происходить, как
мы видели уже в § 27, при рассмотрении температурных
автоколебаний в термостатах и генераторах типа RC,
не только в колебательных цепях, но и в апериодических.
Конечно, автоколебаний в такой системе мы можем ждать
только в том случае, когда положение равновесия её
неустойчиво. Достигнуть этого мы можем, например,
в электрическсй схеме, изображённой на рис. 111. Чтобы
лишить эту систему устойчивого положения равновесия
при заряде конденсатора, равном нулю, в цепь включён
источник постоянной электродвижущей силы Е, а чтобы
и состояние Q = СЕ было
неустойчиво, параллель- . я
но конденсатору вклю- J£
чён разрядник К, по- |р ' ^-
тенциал пробивания ко- jE
торого V3 < Е. Благо- TL
даря этому система не Рис ш
имеет устойчивого
положения равновесия.
Однако возможен ещё стационарный неколебательный
режим, при котором между электродами К загорается
устойчивая дуга и по цепи течёт постоянной силы
питающий её ток. Но, как известно, при достаточно большом
R дуговой разряд неустойчив. Будем считать, что этот
случай мы и имеем. При этом в нашей системе
установится периодический процесс, состоящий из ряда
последовательных зарядов конденсатора от источника Е и
разрядов его через искровой промежуток. Во время заряда
сопротивление вентиля К бесконечно велико, и система
описывается уравнением
RQ+g = E, (31,1)
откуда
Q = CE{(l-e~™). (31,2)
Процесс заряда происходит от потенциала погасания
искры Vu до потенциала её возникновения V3. Время
198 РЕЛ \КСАЦИ01ШЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
(31,3)
этого заряда получается из (31,2) равным
С момента возникновения искры начинается разряд
конденсатора, которыи продолжается до достижения разности
потенциалов Гп. Сопротивление искры во время разряда
примем постоянным и равным р. Тогда разряд будет
происходить согласно уравнению *)
■о ■ Q
j
откуда Q = Q0e ; , где Q0 — CV3. Па основании эгого
время разряда от V3 до Vu равно:
■■О,
(31,4)
т2 = рС In
г„
(31,5)
(31,6)
Период всего процесса поэтому ранен:
E — V V
?_т^ т2 = ДС In =-== + ?£ ]п^.
F з v п
Форма автоколебании для заряда (и иотенциала) конденса-
Рис. 112
тора изображена на рис. 112. Для тока же в цепи ёмкости
из (31,2) и (31,4) имеем:
т Е л RC „ г
3 = /Ге р
V --
Р
(31,7)
*) Принимаем, что р <^ R, так что зарядным током во прсмя
разряда можно пренебречь.
§ 32] ПЕРЕХОД К РАЗРЫВНЫМ АВТОКОЛЕБАНИЯМ 199
Таким образом, ток в цепи конденсатора меняется
разрывно (рис. 113).
Совершенно то же мы получим, если вместо искрового
промежутка К мы включим в схему неоновую лампу,
тиратрон или любой другой электрический вентиль с
несовпадающими потенциалами зажигания и погасания.
s
S
S
—*-1
Рис. 113.
Аналогичные явления можно наблюдать в сосуде,
снабжённом сифоном и пополняемом от источника постоянной
мощности, если только мощность сифона больше мощности
источника.
§ 32. Непрерывный переход от почти гармонических
автоколебаний к разрывным. Блокинг-генератор
Мы видели, что при малой нелинейности рабочего
участка характеристики генерируются почти гармонические
автоколебания. При увеличении регенерации колебания
захватывают всё больший отрезок характеристики, заходя
в области большой нелинейности. Форма автоколебаний
при этом всё более удаляется от гармонической и
приближается к разрывной, а период всё более удлиняется.
В генераторах с колебательным контуром в цепи сетки
или анода, описываемых приведёнными к собственному
времени уравнениями вида*):
х-2г(1-х*)х + х = 0 (32,1)
*) Уравнение (32,1) впервые получено Ван-дер-Полем, а (32,2) —
Рэлеем.
200 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
И
х-2е(1-х2)х + х = 0, (32,2)
такой переход можно проследить при непрерывном
увеличении параметра е. Конечно, рассмотрение такого перехода
носит формально математический характер и ничего нам
не говорит, как он может быть осуществлён на опыте.
Этот последний вопрос мы рассмотрим в дальнейшем.
Из уравнений (32,1) и (32,2) мы видим, что при
увеличении параметра е в пределах
0 < е < со
положение равновесия этих систем всё время остаётся
неустойчивым, а регенерация непрерывно возрастает. При
е < 1, как мы видели, предельный цикл существует
и имеет форму, близкую к окружности, радиус которой
равен двум. При увеличении в до значения е > 1 особая
точка становится неустойчивым узлом и предельный цикл
деформируется. Чтобы проследить качественно за
характером этой деформации для уравнения (32,1), необходимо
принять во внимание следующее: как мы видели в § 6,
для резко релаксационных автоколебаний характерно
наличие на предельном цикле участков, проходимых
представляющей точкой с весьма малыми скоростями
(ползучее движение вдоль оси х) и участков, обегаемых
ею с большими скоростями и ускорениями (скачков).
На участках первого рода ускорение х весьма мало и
уравнение (32,1) можно приближённо заменить уравнением
первого порядка, совпадающим с уравнением изоклины
горизонтальных касательных
-2е(1-х*)х + х = 0, (32,3)
откуда
На рис. 114 кривые, даваемые этим уравнением,
изображены пунктиром. Наоборот, в областях фазовой плоскости,
удалённых от оси х, где скорости велики и благодаря
§ 32J ПЕРЕХОД К РАЗРЫВНЫМ АВТОКОЛЕБАНИЯМ 201
большой регенерации быстро изменяются (велико
ускорение), мы можем апроксимировать (32,1) другим
уравнением первого порядка
х-2г(1-х2)х-=0. (32,5)
После интеграции по времени оно
даёт:
х = 2е
1 ,
+ const. (32,6)
На фазовой плоскости это даёт
семейство кубических парабол, из
которого две параболы вычерчены
на рис. 114 штрихпунктиром, они
качественно дают форму
интегральных кривых в далёких от оси х
областях. Приняв ещё во
внимание, что интегральные кривые,
пересекающие нормально ось
абсцисс, не могут пересекать
пунктирных кривых изоклины
горизонтальных касательных, мы можем
качественно изобразить форму
предельного цикла при большом е
(сплошная замкнутая кривая на
рис. 114). Предельный цикл для
уравнения (32,2) при большом в
был нами уже построен методом
Льенара (§ 30, рис. НО).
Заметим ещё, что уравнение (32,2) может быть
получено из уравнения (32,1).
Действительно, написав (32,1)
u-2e(l-u2)w-f-w = 0,
проинтегрировав его почленно и введя новую переменную
х = -4= ^udt, (32,7)
\^^Декрешжно
У//Л Инкремент но
Рис. 114.
Уз
мы получим уравнение (32,2)
х-2е (l-xAi + x==0.
(32,8)
202 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
(Константу интегрирования в (32,8) мы опустили, так
как нас не интересует постоянная часть решения.)
Обратимся теперь к рассмотрению непрерывного
перехода от почти гармонического к релаксационному режиму
генерации, происходящему при непрерывном изменении
определённого физического параметра схемы. В качестве
такого параметра может быть взят любой элемент схемы,
допускающий плавную регулировку и вызывающий
непрерывное изменение регенерации от нуля до
соответствующей релаксационному режиму величины. Наличие
такого параметра можно, конечно, увидеть только при
рассмотрении неприведённого уравнения исследуемой
системы вида (32,9). В качестве первого примера
рассмотрим симметричный мультивибратор, почти
гармонический режим которого рассмотрен выше (§ 22).
Общий вид уравнения симметричного мультивибратора
(22,66) имеет, как мы видели, вид:
Если система самовозбуждается при большом К, когда
она почти гармонична, т. е.
' /'(«)> ^--:-т-С1-ь^)» (32'10>
то при уменьшении ёмкости К она всё глубже будет
уходить в область релаксационных режимов и при К —> 0
режим станет разрывным.
Чтобы проследить за этим переходом и найти форму
предельного цикла при К—> 0, представим уравнение
(32,9) в виде
(32,11)
Вспомнив ещё, что
1
и>0 = ——=
V KCRr
(32,12)
есть частота старта при возбуждении автоколебаний (см.
§ 32] ПЕРЕХОД К РАЗРЫВНЫМ АВТОКОЛЕБАНИЯМ 203
§ 22), запишем уравнение (32,11) так:
и-ш« {сДг/'(и)-С[л (l + *)+r]} и + ш*и = 0,
(32,13)
чтобы освободиться от крутизны характеристики S (и) = f (и)
и ввести в уравнение (32,13) саму динамическую
характеристику анодного тока, проинтегрируем (32,13) и введём
новую неременную
x={udt. (32,14)
Тогда (32,13) примет вид (константу интегрирования
в (32,14) выбираем так, чтобы начало системы координат
(х, х) совпало с рабочей точкой характеристики / (х))
!r = o>§ {CRrf(x)-C\R Cl + g-*)+r]x-x}=0. (32,15)
Введя далее сокращённое обозначение для зависящей
от х части уравнения (32,15):
F(x) = CRrf(x)-C\R (i+§~>)+r] *> (32,16)
мы можем кратко записать уравнение (32,15) в виде
s = -^[x-F(x)]. ' (32,17)
При К —>0 частота старта а>0 неограниченно возрастает
и из (32,17) мы видим, что на фазовой плоскости (х, х)
ускорение х, равное нулю на кривой *)
x = F(x), (32,18)
принимает весьма большие положительные и
отрицательные значения в областях, где
x*F(x). (32,19)
*) Кривая (32,18) есть изоклина горизонтальных касательных
уравнения второго порядка (32,15), а уравнение (32,18) есть
уравнение первого порядка, в которое вырождается уравнение
второго порядка (32,15) при К = 0.
204 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
Кривая (32,18) может быть построена по динамической
характеристике схемы и её линейным параметрам. При
учёте анодной реакции и сеточных токов кривая эта имеет
изображённый на рис. 115 вид. Из вышесказанного ясно,
что проходящие на конечном расстоянии правее этой
кривой интегральные кривые (при достаточно малом К)
направлены почти вертикально вниз, а левее—вверх.
Это доказывает, что на отрезках DC и АВ движение
точки, представляющей систему, устойчиво и направлено
к точкам С и В, а на отрезке ВС
движение неустойчиво.
Вследствие этого точка,
представляющая состояние системы, из любого
начального положения, после
единит ственного скачка, попадает на одну
из устойчивых ветвей кривой DCBA
и начинает совершать периодическое
движение по разрывжшу
устойчивому предельному циклу NCMB.
Таким образом, мультивибратор
при непрерывном уменьшении
ёмкости К до нуля совершает
непрерывный переход от почти гармонических автоколебаний к
разрывным.
В качестве второго примера рассмотрим обычный
ламповый генератор с контуром в цепи анода (рис. 116).
Выбрав в качестве независимого переменного ток /,
протекающий по анодной катушке, мы можем написать:
Рис. 115.
Ia = I-Ic^U {(E-U); \M\I} = f(I).
Исключив отсюда Ic, получим уравнение схемы
LCI- [/ (/) - RCI) + 7 = 0.
(32,20)
(32,21)
Из этих уравнений мы видим, что переход к
автоколебаниям, описываемым уравнением первого порядка, возможен
только путём уменьшения ёмкости С. Если свести всю
§ 32] ПЕРЕХОД К РАЗРЫВНЫМ АВТОКОЛЕБАНИЯМ 205
сосредоточенную ёмкость к нулю и учесть неизбежно
остающуюся собственную ёмкость анодной катушки С0,
то мы придём к схеме генератора пилообразного тока,
а при включении гридлика —к схеме блокинг-генератора.
Если не учитывать обратного действия сеточного тока
на анодный контур, то уравнение (32,21) остаётся для
этих схем в силе*) при замене
С на С о. Перепишем это
уравнение в виде
/=-«»»[/-*■(/)]. (32,22)
Здесь введены обозначения
и F(/) = /(/)-
-RC0'l.
Vlc0
Рис. Н6.
Вследствие того, что частота собственных колебаний
анодной катушки о)0 очень велика, уравнение (32,22) показы-
вает, что / равно нулю на кривой
I=rF(I) (32,23)
и получает весьма большие отрицательные значения
правее этой кривой и положительные левее её. При учёте
анодной реакции кривая (32,23) имеет изображённый на
рис. 115 вид. Рассуждения, тождественные с
вышеприведёнными (см. первый пример), приводят к
заключению, что и в £хеме генератора пилообразного тока мы
получаем устойчивые автоколебания, совершающиеся
по предельному циклу NCMB. Так как в
рассматриваемом случае координатами фазовой плоскости
являются / и /, то мы видим, что автоколебания тока
анодной катушки непрерывны и имеют изображённую на
рис. 117, а пилообразную форму, колебания же
производной анодного тока, а следовательно, и сеточного
*) Учёт влияния сеточного тока приводит к уравнению
третьего порядка.
206 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
напряжения разрывны (рис. 117, б). Если учесть
наличие в блокинг-генераторе гридлика, то картина
автоколебаний изменится следующим образом. Ниже
горизонтальной линии, проходящей через точку В
(рис 115, пунктир) лампа заперта и при наличия
гридлика остаётся запертой, пока не стечёт иакоиив-
Рис 117.
шийся во время предыдущего полуколебания
отрицательный заряд сеточного конденсатора. Вследствие
этого ток / успеет затухнуть ранее,чем отопрется лампа.
Это значит, что точка /?, из которой происходит скачок
вверх, близка при этом к началу координат (7 = 0,
/=0). Вследствие этого весь предельный цикл
перемещается кверху и вправо. Значения /, соответствующие
отпертой лампе, возрастают, возрастает и анодная
реакция, что приводит к более резкому загибанию анодной
характеристики и сужению всего предельного цикла.
Таким образом," гридлик укорачивает
полуколебание, когда лампа отперта, и значительно удлиняет
полуколебание, соответствующее запертой лампе. Колебания
сеточного напряжения приобретают благодаря этому
характерный для блокинг-генератора вид
кратковременных импульсов, разделённых длительными паузами
(рис. 118).
В обоих рассмотренных примерах мы считали, что
спадание тока I имеет апериодический характер. Если
§ 33] СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ 207
при запертой лампе / затухает колебательно, то нижняя
часть предельного цикла будет ограничена не
изображённой на рис. 115 прямой, а другой интегральной кривой,
'к
°\
ч N
Y
ч к
II ^ *
V
Рис. 118.
по которой происходит свободный колебательный разряд
анодного контура. На рис. 118 характер этого разряда
изображён пунктиром.
§ 33. Релаксационные автоколебательные системы
с запаздывающими силами
Значительный класс автоколебательных явлений
возникает благодаря тому, что в системах действуют
позиционные запаздывающие силы. С почти гармоническими
системами этого класса мы уже познакомились.
Покажем теперь на простом примере, что и в вырожденных
системах запаздывающие силы могут привести к
возникновению автоколебаний релаксационного характера.
Рассмотрим механическую систему, содержащую
упругость и трение и находящуюся под действием
постоянной силы, направленной всегда к положению равновесия.
Уравнение движения такой системы будет:
кх + гх = — к0,
)
>
(33,1)
I для х > 0
II для я < 0 кх + rx = k0. J
Для х > 0 I даёт при начальных условиях t = 0, х — х0:
х~
к '
Яо + -
-**
(33,2)
208 РЕЛАКСАЦИОННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ [ГЛ. V
Для х < 0 при t ■■
х =
-It
о г
(33,3)
О, х= — х0 получаем из II:
к \x^^ к
Оба эти движения вследствие отсутствия инерции
прекращаются в момент, когда х = 0. Таким образом, положение
равновесия системы устойчиво.
Пусть теперь восстанавливающая сила к0 запаздывает
на постоянное время т. В этом случае движения будут
тоже происходить по законам (33,2) и (33,3), но теперь
Рис. 119.
уравнения I и II не будут сменять друг друга в моменты
прохождения системы через нуль, а в моменты, на время т
более поздние. Начавшись в момент U0 в точке х = х0,
движение будет происходить согласно I до точки В (рис. 119),
которая достигается в момент
t = h + ^ (33,4)
где £х есть время прохождения системы через х = 0. Время
это найдётся согласно (33,2) из условия
Для отклонения
ВМ = хъ
приняв во внимание (33,5), получим:
-i(1
(33,5)
О--')-
(33,6)
§ 33] СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ 209
Стационарное автоколебание получится, очевидно, если
\х1\ = х0 = а.
Отсюда амплитуда установившихся автоколебаний
a = £(l-e"T). (33,7)
Период автоколебаний будет
где ti находится из (33,5) и (33,7). Это даёт:
Отсюда
Для периода автоколебаний получаем отсюда формулу
Г = 2{-£1п(2-е-^) + ,}. (33,8)
Аналогичных явлений мы можем ожидать и при
других законах изменения восстанавливающей силы, если
только сила эта запаздывает. Этого рода
автоколебательное явления, повидимому, весьма часто имеют место
в автоматических регуляторах, где они могут быть иногда
даже полезны, так как уничтожают область застоя (полосу
нечувствительности регулятора). Запаздывание
восстанавливающей силы может происходить от весьма
разнообразных причин, каковы, например, конечное время
срабатывания сервомеханизмов, инерция, игра в шарнирах
и т. д.
ЧАСТЬ 2
НЕАВТОНОМНЫЕ СИСТЕМЫ
ГЛАВА VI
НЕЛИНЕЙНЫЕ КОЛЕБАТЕЛЬНЫЕ
И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ
В этой главе будут рассмотрены случаи 1)
вынужденных колебаний в некоторых простейших нелинейных
колебательных системах, 2) параметрическое воздействие
на системы такого характера и 3) воздействие внешних
сил на потенциально-автоколебательные и
автоколебательные системы. Так как все эти системы нелинейны,
то принцип суперпозиции по отношению к ним
неприменим. Поэтому, рассмотрев воздействие на такие системы
простой гармонической внешней силы, мы не можем
сделать никаких заключений о характере воздействия на них
сложной силы, содержащей несколько гармонических
компонент, т. е. периодических или квазипериодических
внешних сил. Благодаря этому спектральный принцип
теряет как будто по отношению к рассматриваемым
системам своё значение. Однако, как мы увидим ниже,
это не совсем так. В добротных колебательных
системах всегда очень резко выражены резонансные свойства,
поэтому если в спектре сил (всё равно, внешних или
внутренних) присутствует частота, достаточно близкая
к частоте свободных колебаний такой системы, то
воздействие этой спектральной составляющей сил резко
превалирует над воздействиями всех остальных
составляющих. При наличии резонанса мы, даже в нелинейных
системах, можем поэтому решать задачу о поведении
системы при наличии сложных сил так, как будто на
ГЛ. VI] СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ 211
систему действует только гармоническая сила
резонансной частоты. Чтобы не впасть здесь б ошибку, нужно
только иметь в виду, что эта сила резонансной частоты
может не быть внешней силой, действующей на-систему,
а часто появляется как внутренняя сила, возникающая
при взаимодействии движений, происходящих в системе
как благодаря действию на неё внешних сил, так и
благодаря автоколебательным её свойствам.
Для конкретности рассмотрим случай воздействия на
автоколебательную систему частоты со внешней
гармонической силы частоты р. В силу нелинейности нашей
системы в ней наряду с колебаниями основных частот
о) и р возникнут колебания с частотами гармоник и
комбинационные колебания. Таким образом, мы будем
иметь в системе колебания, частоты которых имеют вид
Ni^ ± N2Pi, где Nx и N2 — целые числа. Если теперь
одно из этих колебаний достаточно близко к частоте
собственных колебаний контура, входящего в состав
автоколебательной системы, т. е. если
<о0 ъ 7V> ± N2p,
то внутренняя сила системы, вызываемая этим
движением, может вызвать резонансные явления.
Мы видели, что в почти гармонических
автоколебательных системах со ^ со0, поэтому мы можем в них ждать
особенно сильных воздействий при внешних силах,
частоты которых удовлетворяют условию
N.2 п
СО — -= т- р = р Ъ 0)0,
Nl — 1 l m r °'
где т и п—малые целые числа.
Таким образом, уже при действии простой
гармонической внешней силы на автоколебательную или
потенциально-автоколебательную систему мы можем ждать
своеобразных «резонансных» явлений при целом ряде
частот внешней силы.
Ещё богаче «резонансные» возможности при
воздействии на систему сложной почти периодической внешней
силы. Так, при воздействии на генератор двух внешних
гармонических сил, частоты которых равны рг и /?2,
14*
212 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ VI
можно ждать «резонансных» воздействий при
Г, Pi±np2
a)(J ^ _ f
где т, п и г—малые целые числа.
Вследствие нелинейности рассматриваемых задач
каждый из возможных «резонансов» необходимо, конечно,
рассматривать особо.
Второй характерной особенностью воздействия
внешних сил на автоколебательную систему является
синхронизирующее действие вызываемых внешними силами
«вынужденных» движений на автоколебательные движения.
Явление это, предсказываемое теорией и подтверждаемое
опытом, состоит в следующем. Пусть на
автоколебательную систему частоты а) действует внешняя гармоническая
сила частоты /?. Если частота р не удовлетворяет хотя
бы приблизительно ни одному из вышеуказанных
«резонансных» соотношений, то могут иметь место только
асинхронные взаимодействия между ними. Если же р
достаточно близко к одному из указанных соотношений, то
частота автоколебаний при наличии внешней силы
изменяется в таком направлении, что приближённое
«резонансное» соотношение становится точным. Таким образом,
внешняя сила на некотором интервале около «резонанса»
захватывает и ведёт за собой частоту автоколебаний.
Вдали от этих областей принудительной синхронизации
в системе при внешнем воздействии мы имеем
квазипериодический режим, или режим биений. Внутри же
областей захватывания колебания получаются чисто
периодические с частотой, определяемой внешней силой.
§ 34. Метод нахождения периодических почти
гармонических решений нелинейных систем
при гармоническом внешнем воздействии*)
Рассмотрим почти гармоническую нелинейную
систему, находящуюся под действием внешней
гармонической силы. Уравнение движения такой системы возьмём
*) К. Теодорчик, ЖТФ, т. IX (1939), стр. 1481.
§34] МЕТОД НАХОЖДЕНИЯ ПЕРИОДИЧЕСКИ С РЕШЕНИЙ 213
в виде
x+2bx + u>lx + ty(x, x)x = Pcospt. (34,1)
Если наша система не автоколебательная, то в ней
установятся под действием внешней силы вынужденные
колебания частоты р. Если же наша система
автоколебательная, то вдали от р я& а)0 в ней будут иметь место биения,
вблизи же основного «резонанса» можно ждать
периодического решения частоты р.
Для периодических решений этой частоты фаза
колебаний уже не произвольна, как для свободных
автоколебаний, а определяется внешней силой. Поэтому в этом
случае мы в первом приближении должны искать
периодическое решение в виде
х = a sin pt — b cos pt = A sin (pt — cp). (34,2)
Амплитуды а и b в стационарном состоянии постоянны,
а в период установления—медленно изменяющиеся функции
времени (изменение их за период мало по сравнению с их
средним значением в течение того же периода).
Представим исходное уравнение (34,1) в виде
х + р2х =
= (р2-<»1)х-2Ъх-<\>(х, х)х + Р cos pt^%%. (34,3)
На стоящее в правой части выражение мы смотрим .
как на систему сил (внешних и внутренних), действующих
на консервативную колебательную систему частоты р,
уравнение которой стоит в левой части. Значение этой
суммы сил мы можем приближённо найти при помощи (34,2).
Подставив этот вид решения в выражение суммы сил
и разложив её в ряд Фурье, получим:
2 5 =/К Ъ) sin pt + F (a, b) cos pt + ... (34/0
Поэтому на основании изложенного в § 9 будем иметь:
% = ±рР(а,Ь) и %=±f(a,b). (34.5)
214 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
Эти уравнения определяют закон установления искомого
решения. Стационарные амплитуды получим отсюда как
решения системы уравнений
/(а, 6)-0 и F(a, Ь) = 0. (34,6)
Если решать задачу в полярных координатах А, <р, то
вместо системы (34,5) мы получим:
% = Q(A, =p) и 2 = Ф(Л,ср) (34,7)
и для стационарной амплитуды и фазы систему уравнений
2(4, с?) = 0 и Ф(А, ср) = 0. (34,8)
Ниже мы рассмотрим ряд конкретных применений
изложенной теории. Однако, прежде чем перейти к этому,
необходимо рассмотреть вопрос об устойчивости получаемых
решений.
§ 35. Признаки устойчивости периодического решения
Для автоколебательных систем, находящихся под
внешним гармоническим воздействием, как мы видели,
периодическое решение, определяемое уравнениями (34,6), может
существовать только в ограниченной области вблизи
синхронизма частоты внешней силы с частотой автоколебаний.
Вне этой области имеет место режим биений, при котором
в системе одновременно существуют колебания с частотой,
близкой к частоте автоколебаний, и с частотой внешней
силы. Границы периодического и этого квазипериодического
режима определяются устойчивостью полученных
периодических решений.
Пусть система уравнений (34,6) допускает
действительные положительные решения а0, Ь0. Чтобы исследовать
их устойчивость, рассмотрим поведение системы при слегка
возмущённых значениях амплитуд:
а = а0 + 1 и b — b0 + Tk. (35,1)
Подставив эти значения в систему (34,5), разложив
полученные функции в ряды по малым возмущениям
35]
УСТОЙЧИВОСТЬ ПЕРИОДИЧЕСКОГО РЕШЕНИЯ
215
и приняв во внимание, что а0, Ь0 являются решениями
невозмущённой системы, получим:
dt
dr\
dt'
(35,2)
Эти уравнения определяют закон изменения со временем j
возмущений стационарных амплитуд. При достаточно I
малых возмущениях закон этот с достаточной точностью
определяется линейными их членами, т. е. системой
dt
dt
dr\
It''
~~ \да Jo Z ^ \db
дъ Л'" I
(35,3)
Решение этой системы ищем в виде
6 = 50 е-*, т1=-т)0 в". (35,4)'
Подстановка этих решений в систему уравнений даёт:
[-+00.] <•+(*).*-<>•
(&«•+[-+GD.b-°-
(35,5)
Для совместности этих уравнений необходимо, чтобы
\\daJo *' KdbJo
= 0
(35,6)
или
--[(©.ЧЮ.И
+ [(©.(50.-(£).(й).]-Л <3">
210
СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ
[ГЛ. VI
Решая это уравнение, находим:
j/нсачю.г
dF
да
)о' \dbJo
dbjo
да J о' \
(35,8)
Чтобы возмущения со временем затухали, необходимо, чтобы
оба значения а были отрицательны или имели
отрицательную действшельную часть. Из (35,8) видно, что для этого
должны быть выполнены два условия
I.
\daJo' \dbJo
\daJo' \dbJo
>0.
(35,9)
Если исходные уравнения заданы в виде (34,7), то
аналогичным путём мы придём к следующим двум признакам
устойчивости:
Г.
11'.
Г™*) +(™) <0
\4aJo'
С
ду /0
\dAjo; \dyJo
>0.
(35,10)
Ляпунов показал, что если оба значения Rea
отрицательны, то исследуемое движение устойчиво. Если хотя бы
одно значение Rea > 0, то движение неустойчиво. Если же
хотя бы одно из этих значений равно нулю, то вопрос об
устойчивости движения не решается рассмотрением
линейного приближения.
§ 36] НЕЛИНЕЙНЫЙ КОЛЕБАТЕЛЬНЫЙ КОНТУР 217
§ 36. Нелинейный колебательный контур
Упругая сила пропорциональна деформации только при
достаточно малых деформациях. За этими пределами
упругая сила, если она симметрична, может быть выражена
степенным рядом, содержащим лишь нечётные степени
деформации:
f^—kx-kiX*- ... (36,1)
Поэтому консервативная колебательная система,
содержащая такую упругость, будет описываться уравнением
тх + кх + кгх3 + . .. = 0. (36,2)
Так, например, для обычного математического маятника
уравнение имеет следующий вид:
ср 4- 4- sin ср = 0
или, разлагая синус угла отклонения в ряд и
ограничиваясь кубическим членом,
Рассмотрим колебательную систему, состоящую из
массы т, прикреплённой к середине струны. Пусть длина
струны 21, сечение s, натяжение в положении равновесия т,
модуль упругости материала струны Е. Такая система
описывается уравнением
mx + 2^-x + s-^x3^0. (36,4)
Аналогично для томсоновского контура с железом,
обозначая мгновенное значение магнитного потока
буквой Ф, а силу тока буквой /, получим уравнение
<*Ф , lIdt п /ад *\
Если пренебречь гистерезисом, то сила тока в катушке
в функции магнитного потока может на значительном
участке кривой намагничения быть выражена рядом
/ = аФ + рФ3. (36,6)
Подставив это выражение в (36,5) и продифференцировав
218 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
его по времени, получим:
Ф + -£Ф + ^Ф3=0. (36,7)
Из этих примеров мы видим, что при малой нелинейности
в упругости или массе (коэффициенте самоиндукции)
колебательная система описывается уравнением
я + <*>§я + Т*8 = 0, (36,8)
где коэффициент ^ может быть больше или меньше нуля.
Рассмотрим свойства этого уравнения.
I. Свободные колебания. Предполагая, что | f | < оз2,
ищем приближённое решение в виде
x = asino)t. (36,9)
Уравнение (36,8) представляем в форме
х + ш2я = (ш2 - со2) х - Тж3 = 2J &• (36,10)
Подставив (36,9) в 2 $> получаем:
V g — (о)2 ___ ^l) a sin Ы — ^я3 sin3 atf =
= (а)2 — а)2) а — — ^а3 sin о)^ + — ^а3 sin За)^. (36,11)
Из этого выражения видно, что в точном решении будет
присутствовать, кроме основной частоты, еще по крайней
мере третья гармоника. Для определения стационарной
амплитуды и частоты получаем согласно теории только
одно уравнение
(o2_Wo2)a_3.7fl8 = ()f (36,12)
из которого находим частоту колебаний нашей системы
в функции амплитуды колебаний:
««•««•З+хтв*. (36-13)
Из этого выражения видно, что частота свободных коле-
§ 36]
НЕЛИНЕЙНЫЙ КОЛЕБАТЕЛЬНЫЙ КОНТУР
219
баний нелинейного контура, равная при малых
амплитудах о)0, возрастает с амплитудой колебаний при f > О
и падает при f < 0 (рис. 120).
II. Рынужденные колебания. Если на нелинейную
колебательную систему, описываемую уравнением (36,8),
действует внешняя гармоническая сила, то уравнение
движения будет: ^
х + &о х -+- ух3 — Р sin pt.
(36,14)
Согласно вышеизложенной ш
общей теории в этом
случае первое приближение к
решению мы должны искать
в виде
х = a sin pt — 6 cos pt. О
(36,15)
Представив (36,14) в виде
х -+- р2х — (р2 —- о)2,) ж — -(.г3 + Р sin pt = ^ S>
получим для суммы сил выражение
2g-[(/>2-o)2)a-4Ta^-t-P]sin^ +
+ £ — (р2 — coj)Ь + -J-T&-A2] u*pt+. .. (36,16)
Здесь А2 = a2 -f- 62 есть квадрат амплитуды вынужденных
колебаний нелинейной системы. Амплитуда
установившихся колебаний найдётся из уравнений
*~аг
Рис. 120.
(р2-со2)а-|Та^2 + Р = 0,
-(Р2-К)Ъ + ^1ЬА* = 0.
Решением этой системы является
Ь = 0, а —А,
•4тл»-(^-и)8М-Р=о.
(36,17)
(36,18)
220 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
Последнее уравнение удобно решать графически,
представив (36,18) в следующем виде:
Для этого строим на осях (у, А) обе части равенства (36,19)
(рис. 121). Если т > 0, то первое из указанных равенств
представится на этой плоскости прямой линией,
проходящей через точку ( у = —т ; А = 0 J . При изменении
частоты внешней силы р от нуля до бесконечности прямая
эта поворачивается по часовой стрелке от положения МN
до совпадения с осью у.
р-о>„
Рис. 121.
Второе равенство даёт на нашей плоскости
полукубическую параболу. Точки пересечения этой кривой с
указанной выше прямой определяют возможные значения
амплитуд вынужденных колебаний.
Из приведённого построения видно, что при
возрастании р мы имеем сначала одно, а затем три
действительных значения амплитуды вынужденных колебаний. На
рис. 122 дана резонансная кривая рассматриваемой
системы. В случае наличия в системе потерь резонансная
кривая, как и в линейном случае, не будет уходить в
бесконечность. Для случая малого диссипативного члена,
пропорционального скорости, резонансная кривая будет иметь
изображённую на рис. 122 пунктиром форму. Отличие
этой резонансной кривой от обычной линейной состоит
§ 36] НЕЛИНЕЙНЫЙ КОЛЕБАТЕЛЬНЫЙ КОНТУР 221
в том, что вершина её наклонена в сторону возрастания I
частот внешней силы. Если затухание достаточно велико,
то эта деформация резонансной кривой мало заметна ,
(рис. 122, кривая /). При уменьшении декремента запро- ,
кидывание резонансной кривой всё увеличивается, но сама
кривая остаётся непрерывной до тех пор, пока амплитуда
вынужденных колебаний остаётся однозначной.
Рис. 122. Рис. 123.
Когда же вершина резонансной кривой заходит в
область, где амплитуда имеет три значения, картина
меняется (рис. 123): при увеличении частоты внешней силы,
начиная от малых значений, амплитуда вынужденных
колебаний нарастает сначала по кривой МАВ.
В некоторой точке В амплитуда скачком падает
до точки С и при дальнейшем увеличении частоты
изменяется по кривой CN. Если теперь мы начнём уменьшать
частоту, то амплитуда вынужденных колебаний будет
изменяться по кривой NCD, только в точке D амплитуда
перескочит в точку А на верхней ветви резонансной
кривой MB. Таким образом, получающаяся экспериментально
резонансная кривая имеет в этом случае вид,
изображённый на рис. 123.
Если -у < О, то для графического решения
уравнения (36,19) представляем его в виде
(}-%)а-ц = Ща%=у- (36'20>
Две части этого равенства дают опять
полукубическую параболу и прямую, проходящую через точку
222 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
( 2/=—-^; А = 0) и поворачивающуюся против часовой
стрелки около этой точки, начиная от положения MN при
р = 0 до совпадения с осью у при р = оо (рис. 124).
/7=00
Соответствующая этому случаю резонансная кривая
дана на рис. 125, а.
Наклон резонансной кривой в этом случае имеет место
в сторону частот р < со0. В случае значительной
деформации резонансной кривой, что имеет место при малом
у<0
Рис. 125.
затухании, также наступают разрывы непрерывности
резонансной кривой, которая принимает вид, изображённый
на рис. 125, б. Описанные [особенности резонансных
кривых нелинейного контура позволяют экспериментально
заключать о знаке нелинейного члена.
§ 37]
ПАРАМЕТРИЧЕСКИЙ РЕЗОНАНС
223
§ 37. Параметрический резонанс в нелинейном
контуре
В ряде случаев внешнее воздействие на
колебательную систему происходит не рассмотренным выше способом
непосредственного воздействия внешней силы, а путём
изменения одного или нескольких параметров системы.
Такое воздействие получило название параметрического.
Примером параметрического
воздействия на колебательную систему, на
котором выясняются типичные черты
этого своеобразного явления,
является хорошо знакомый каждому способ
раскачивания качели. Для того
чтобы раскачать качель, стоящий на
доске человек должен приседать,
когда качель отклонена на
наибольший угол от положения
равновесия, и выпрямляться, когда
качель проходит через положение
равновесия.
Если рассматривать капель со
стоящим на ней человеком как
математический маятник, то вышеописанные
движения раскачивающегося приводят, как легко
видеть, к периодическому изменению длины
математического маятника, происходящему по изображённому на
рис. 126 закону. На чертеже стрелками показано
изменение точки прикрепления массы маятника в течение
периода. Мы видим, что длина маятника при этом
изменяется с частотой, вдвое большей, чем частота качания
маятника. Это — первая особенность параметрического
возбуждения: частота возникающих колебаний не
равна вообще частоте изменения параметра, а находится
с ней в простом отношении. Как мы увидим ниже,
частота возбуждения всегда близка к частоте свободных
колебаний системы. Возбуждение на этой частоте легче
всего наступает под действием сил, изменяющих
параметры системы с частотой, вдвое большей резонансной
частоты системы, но может наступать и при других частотах,
224 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
образующих ряд
<*>о __ J_ л _3_ г) _5_
^ - 2 , 1, 2 , 4, 2 , ...
Убедиться в возможности возбуждения системы при
частоте, равной половине частоты изменения параметра,
легко, рассмотрев баланс энергии системы, изображённой
на рис. 126. При приседании (путь АВ) раскачивающийся
совершает работу, равную
&WAB= —mgM.
При подъёме же на пути CD работу
mv
Поэтому баланс работы за половину периода равен:
1W = 2^ = 2W^, (37,1)
где W — колебательная энергия системы за
рассматриваемый полупериод. Отсюда мы видим, что если
колебательная система находится в покое, W — О, то параметрически
возбудить колебания нельзя, но при сколь угодно малом
запасе колебательной энергии консервативная система
возбуждается при сколь угодно малой глубине изменения
параметра. Это значит, что при вышеуказанных условиях
(изменения параметра с частотой, вдвое большей частоты
системы) положение равновесия оказывается неустойчивым.
Если начальный запас энергии колебаний системы,
обусловленный хотя бы флуктуационными движениями, есть
W0, то после первого полупериода запас энергии будет
W1 = W0(i.+ 2^) ,
после второго полупериода:
W, = W0 (l + 2 ^ = Wl (l + 2 ^) . (37,2)
Таким образом, при параметрическом возбуждении
консервативной системы энергия её нарастает со временем
§ 37]
ПАРАМЕТРИЧЕСКИЙ РЕЗОНАНС
225
по геометрической прогрессии. Ясно, что установившегося
движения при этом не существует.
Если колебательная система линейна, но диссипативна,
то наряду с найденным выше притоком энергии за
полупериод &W имеет место ещё рассеяние энергии за то же
время, равное k1W = Wd, где d есть логарифмический
декремент колебаний. Отсюда общий баланс энергий для
затухающей линейной системы:
AW = 2w(^-r^ . (37,3)
Это выражение показывает, что при наличии затухания
параметрическое возбуждение имеет место только начиная
с некоторой конечной глубины модуляции параметра.
Условием возбуждения является
Установившейся амплитуды колебаний нет, очевидно,
и в этом случае.
Покажем теперь, что при параметрическом изменении
любого из консервативных параметров колебательной
системы, происходящем по гармоническому закону с
частотой, близкой к удвоенной собственной частоте системы,
также наступает параметрическое возбуждение. При этом
имеет место стационарная амплитуда колебаний, если
параметрически возбуждаемая пассивная колебательная
система нелинейна.
Любопытно отметить, что в рассматриваемом примере
исследование нелинейного случая оказывается более
простым, чем линейного.
Если в колебательной системе с нелинейной
упругостью гармонически со временем изменяется один из
консервативных параметров, то движение системы описывается
уравнением
х + соо (1 + q cos 2pt) x + чх* = 0- (37>5)
На основании весьма простых комбинационных
соображений легко видеть, что если х будет изменяться
гармонически с частотой /?, равной половине частоты изменения
15 К. Ф. Тввд«рчик
226 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
параметра, то на нашу колебательную систему будут
действовать внутренние силы с комбинационными частотами
2р — р = р и 2р-\-р = 3/?. Первая сила может при
известных условиях поддерживать колебания половинной
частоты р, т. е. обусловить параметрическое возбуждение
системы. Эти же соображения показывают, что точное
решение (37,5) при параметрическом возбуждении не может
быть чисто гармоническим, так как наряду с частотой р
в нём будет присутствовать по крайней мере ещё и
третий обертон. »
На основании этих соображений посмотрим, при каких
условиях уравнение (37,5) будет допускать в первом
приближении решение вида
х = a sin pt — b cos pt. (37,6)
Для этого пишем уравнение (37,5) в виде
х + р2х = (р2 - о)о) х - чхъ — о>о? cos 2pt • х » 2 g. (37,7)
Поступая далее согласно общему методу, вычисляем сумму
сил 2 З^-
Получаем:
[2 3 1 2 1
(р2 — (Do) а — -£ -[аА2 + у о)о?аJ sin pt -f .. . =
= F (a, b) cos pt + / (a, fc) sin /tf -f- ...
Отсюда находим уравнения установления параметрического
возбуждения
db 1 Г/ 2 2Ч 3 ., . 1 2 1 | (37,8)
Амплитуда стационарного колебания получится из системы
уравнений
[-(р*-4) + ^А>л-±Ш1д]ь = 0,
[(p2-<*o)-jlA* + ±«20q]a = 0.
§ 37]
ПАРАМЕТРИЧЕСКИЙ РЕЗОНАНС
227
В написанных выше формулах А означает амплитуду
параметрических колебаний: A— \f а2-\- Ь2.
Система (37,9) допускает следующие решения:
I.
II.
III.
а = Ь = 0 (равновесие),
(Р2-
а = А; 6 = 0; А2 =
О—т<1
Т?
а = 0; Ь = А\ А2
(/>2 —<*>?) +у "'о?
(37,10)
Графически в координатах (/?2, А2) полученные
решения (т. е. зависимость А2 от частоты) изображены для
случая 7 > 0 на рис. 127, а и для ? < 0 на рис. 127, б.
а] о Устойчивые состояния
к Неустойчивые состояния
Рис. 127.
р**а>£
9
Указанные кривые являются не чем иным, как
резонансными кривыми при параметрическом возбуждении.
Характерной является их треугольная форма. Вопросов
устойчивости мы коснёмся несколько далее.
Чтобы составить себе исчерпывающее представление
о свойствах параметрического резонанса в нелинейном
контуре, нам необходимо ещё учесть влияние неизбежно
присутствующего затухания, а также рассмотреть вопрос об
15*
228
СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
устойчивости получающихся решений. Для первого
достаточно дополнить уравнение (37,5) членом, учитывающим
линейные потери, написав его в виде
x + ^l(l + qcos2pt)x + 2bx + ^ = 0. (37,11)
Благодаря этому уравнения установления примут вид:
da
Hi
1 Ь — 2Ъра\ ,
] а — 23/?Ь }
} (37,12)
+ -o-<*>og
Приравняв правые части (37,12) нулю, получим
уравнения, определяющие стационарное состояние системы:
[(p*-o>l)-j-(A* + ±<»lq]a-2bpb = 0.
(37,13)
Решение I попрежнему даёт a = fc = 0, т. е. равновесие.
Остальные решения получим, приравняв нулю
детерминант коэффициентов при а и Ь. Отсюда (при т > 0)
^2 = ^[(/>2-">о)Т /(y^)a-4§V2] • (37,14)
Очевидно, полученные решения имеют смысл только при
условии, что А2 действительно и положительно. Эти
решения отличаются от соответствующих решений
консервативного случая (37,10). Две параллельные прямые,
соответствующие решениям И и III консервативной задачи,
заменяются непрерывной кривой ABC (рис. 128, а).
При экспериментальном снятии резонансной кривой
на основании полученных результатов можно ждать
следующего. Колебания возникнут при увеличении р2 и f > 0
§ 37]
ПАРАМЕТРИЧЕСКИЙ РЕЗОНАНС
229
в точке А и сорвутся в некоторой точке 2?, где
колебания потеряют свою устойчивость.
При последующем уменьшении р2 колебания
возбудятся лишь в точке С. Интервал АС, внутри которого
ралновссие неустойчиво, при наличии затухания уже, чем \
в его отсутствии. Кроме того, все амплитуды резонансной
кривой меньше, чем в консервативном случае (рис, 128, а).
а) о Устойчивые состояния ф
* Неустойчивые состояние
Рис. 128.
При отрицательном *\~*\ = — | f | > аналогично получим:
• ^-3Fi[K-P2)T|/(|^?)2-48v] • (37,15)
Графически эти решения изображены на рис. 128, б.
Из этого чертежа видно, что резонансная кривая
наклонена в этом случае в сторону малых значений р. В обоих
рассмотренных случаях параметрическое возбуждение будет
иметь место при условии, что А2 действительно, т. е. при
A cogg > 28/7, (37,16)
которое определяет минимальную глубину модуляции
параметра, необходимую для параметрического возбуждения
при данном затухании. Для точки синхронизма р = щ это
даёт:
*>S=t- <37>17>
230 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
Если это условие параметрического возбуждения
выполнено, то всегда существует конечная область АС
значений р2, внутри которой имеет место возбуждение. Границы
этой области определяются тем, что на них А2 = 0. Это
условие даёт:
ш§ - 232 - У (1 egg)2 + 48* _ 4о)2§2 <
< Р2 < «>8 - 28»+ f/"(yo>Sg)8 +48*-4со88а . (37,18)
Отсюда ширина АС основания параметрической
резонансной кривой равна:
Др2 = 2 |/(±и*ду + 48*-4(D282 . (37Д9)
Рассмотрим теперь вопрос об устойчивости найденных
решений. В нашем случае первое условие устойчивости (35 9) при
использовании выражений (37,13) для F (а, Ь) и /(а, Ь) даёт
4о/> > 0, что выполняется, если 8 > 0. Это условие физически
совершенно понятно, так как его нарушение показывает
что в колебательной системе имеет место
самовозбуждение даже в отсутствии параметрического воздействия
Второе условие устойчивости (35,9) даёт:
^P2+[{P2-<)~\^lq-^A2-\^]x
X [(p2-a>§)-f--la>2g_|.T^2__3_Ta2J >() (372())
Для положения равновесия системы а = b = 0 эти условия
дают следующее: равновесие системы устойчиво, если:
'• 8>0,
II. 482^ + (p2_0j0)2_|a)^2>()
Последнее неравенство, как легко видеть, даёт для
границ области самовозбуждения уже полученное нами выше
неравенство (37,18).
§ 37] ПАРАМЕТРИЧЕСКИЙ РЕЗОНАНС 231
Ширина области параметрического возбуждения отсюда
равна:
А/?2 = 2 j/7-i фУ + 48* - 482<d2.
Таким образом, положение равновесия устойчиво всюду
вне пределов ширины АС основания параметрической
резонансной кривой.
Исследование устойчивости отличных от нуля решений
в общем виде громоздко, однако из самого вида этих
решений можно ждать, что при f > 0 устойчивым может
быть только отрезок АВ, а при f < 0 —только отрезок С В
(рис. 128).
Резонансные кривые другого типа получаются при
параметрическом возбуждении нелинейного колебательного
контура с нелинейным трением (сопротивлением). Такой
случай мы получим, например, при параметрическом
возбуждении контура, регенерированного лампой.
Уравнение движения в этом случае будет:
х + 2 (80 + Ъ2х2) х + и>§ (1 + q cos 2pt) x = 0. (37,21)
Чтобы при этом не было обычного непараметрического
самовозбуждения, необходимо, очевидно, чтобы 80 было
больше нуля. Посмотрим, при каких условиях в нашей
системе могут возникнуть параметрические колебания,
близкие к гармоническому типу:
х = a sin pt — Ъ cos pt. (37,22)
Представив (37,21) в виде
х + рЧ = (р* - о)2) х - 2 (80 + 82#2) х - <ogg cos 2pt • х = 2 g
и подставив в Jg значение (37,22), получим для суммы
сил выражение
2 Ъ = [ (Р2 - <*8) а - 2%рЬ - I Ь2рЪА* + \ а>»?а ] sin pt +
+ [ ~(Р2-<*2) Ь-2Ъ0ра-±Ъ2раА*+ \ u>2gb] oospt + .. .
232 CHGTEMbI ПОД ДЕЙСТВИЕМ ВНВШНИХ СИЛ [ГЛ. TI
Получаем уравнения установления:
ir—h{-[2boP^i^P^]^-[(p2-<)-i^]b} »
■|-i{[^-M»+Te^] «-[2SoP + J82M2] b} ,
и уравнения стационарного движения:
[280р + |82М2] о+[(/>«-ш2)—i">3?]b = 0,
[V-<■>?) +1"**] a- [280Р + 482М2] Ь = 0.
Отсюда первое решение: а = Ь = 0 (равновесие).
Дальнейшие решения получаются из условия
(280 + i-M")*^+ (/»»-«»?)*-(у °>8«), = °-
Это даёт:
■42=w>AtBoV-4(p2-a,?)2"4"l • (37,23)
Из этого выражения видно, что оптимальные условия
параметрического возбуждения получаются при настройке
контура в точности на половину частоты изменения
параметра (о)0 = />). При этом мы получаем максимальную
амплитуду возбуждения, равную
^ =«*=«».. (37,24)
°2
Отсюда условие параметрического возбуждения получается
в виде
?>^«4<1 . (37,25)
(где d — логарифмический декремент системы), т. е. в виде,
совпадающем с (37,17), полученным для случая
нелинейной упругости контура. Амплитуда колебаний обращается
в нуль при расстройках, определяемых равенством
I »7]
ПАРАМВТРИЧВСКИИ PB39HAHG
233
**~р*
откуда границы резонансной кривой получаются при
р« = ш8-2»8± /(|^)а + 48^4соЯ2. (37,26)
Это опять совпадает с (37,18).
Резонансная кривая параметрического возбуждения
получается в этом случае почти симметричной
относительно максимума (рис. 129).
Рассмотренными двумя
случаями исчерпываются
возможные формы
параметрических резонансных кривых.
Обе эти формы настолько
типичны, что, сняв
экспериментально параметрическую
резонансную кривую, можно сразу
сделать заключение о
характере нелинейности системы.
Кроме параметрического возбуждения при настройке на
половинную частоту (соо = -у-)» возможны параметриче-
2р 3 -2р
ские резонансы на частотах а)0 = -^ ; а)0 = —^- и т. д.,
N
т. е. при 0)0^-9-2/?, где N= 1, 2, 3, ... Возможность
таких резонан^ов может быть также исследована
энергетическим методом, но для этого необходимо учитывать
гармоники при модуляции параметра, т. е. исследовать
уравнение более общего типа, чем (37,5):
я + ^о (1 + Ч\ cos 2/tf +
-f q2 cos Apt + ...)# + 7a;3 = 0. (37,27)
Действительно, например, резонанс на частоте щ = 2р
может быть при этом рассмотрен просто как
параметрическое возбуждение половинной частоты (рассмотренного
выше типа), вызванное второй гармоникой, модулирующей
параметр частоты.
Рис. 129.
234 СИСТЕМЫ ПОД ДЕЙСТВИЕМ-ВНЕШНИХ СИЛ [ГЛ. VI
§ 38. Теория регенеративного приёмника
Пусть на контур сетки регенерированного приёмника,
схема которого изображена на рис. 130, действует
внешняя гармоническая электродвижущая сила
E = E0cospt.
(38,1)
Для случая мягкого режима уравнение колебаний
в такой системе будет отличаться от уравнения (11,8) для
«свободных» колебаний лишь
наличием в правой части
вынуждающей внешней силы
х + 2 (80 + о2х2) х + т2х = Р cos pty
(38,2)
где х обозначает разность потен-
Рис. 130. циалов на обкладках
конденсатора, а Р = а)20Е0. Если в этом
уравнении Ь0 > 0, то мы имеем дело с
потенциально-автоколебательной системой (недовозбуждённым генератором);
если Ь0 < 0, — то с автоколебательной.
Если наша система почти гармоническая, то в первом
приближении искомое «вынужденное» решение будет иметь
частоту внешней силы и будет близко по форме к
гармоническому. Поэтому ищем это решение в виде
х = a sin pt — Ъ cos pt = A sin (pt — cp). (38,3)
Представив исходное уравнение в виде
х + р2х = (р2 - cog) х - 2 (80 + Ь2х2) х + Р cos pt = J]g,
находим после подстановки в правую часть (38,3):
"2 $ = [ (Р2 ~ "о) * - %ьорЪ - у 82рЬЛ2 ] sin /* +
+ [ - {Р2 - О Ь - 2Ь0ра -182раЛ2 + Р ] cos р* + • • • (38,4)
38]
ТЕОРИЯ РЕГЕНЕРАТИВНОГО ПРИЁМНИКА
235
Отсюда, согласно общей теории, получаем уравнения
установления
w = 4?[-(P2-<)b--2b<>ra--i>b*PaA2+p] ■
db
dt
= -^[{Р*-<)"-Я>оРЬ-\ь2рЬА*} .
Или, перейдя к амплитуде и фазе колебаний:
a = ^4coscp; 6 —^sincp; A= \fa2-\-b2\ tgcp = — ;
а л ! * л-\ I ^coscp
(38,5)
dA
dt
dy
2р
р2—и>1 Psintp
щ (38,6)
Л """ 2р 2рА
Положив в этих уравнениях установления скорости
изменения искомых величин равными нулю, получим систему
алгебраических уравнений, определяющих стационарные
амплитуды:
- (Р2 - о>8) 6 - 280/?а - -i Ь2раА* + Р = О,
(р2 _ cog) а - 2ЪоРЪ -1 82рЬЛ2 = О,
или в полярных координатах *):
(38,7)
р»-ш»
Psm <f
2Р
1рА
= 0.
(38,8)
Определив отсюда стационарные значения а и Ь или Л и ср,
мы найдём искомое приближённое решение нашей
задачи. Положив в этих уравнениях внешнюю силу равной
*) Легко убедиться, что синхронизация на основном тоне
является квазилинейным свойством автоколебательных систем.
Для этого достаточно найти решение квазилинейного
уравнения: «♦
У—2 fb0 — — Ь2аЛ x-\r<s>$x = P cos (pt + <р).
Подставив х = A sin pt, мы придём к системе уравнений (38,8).
236 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
нулю, мы получим ф уравнения установления и
уравнение стационарной амплитуды для «свободных»
автоколебаний генератора при мягком режиме.
Заметив это, мы можем следующим образом
графически решать задачу о нахождении амплитуды А и фазы ср,
соответствующих амплитуде внешнего воздействия jfc0 = —^
и расстройке (/? — о)0).
В координатах (At —тг) строим кривую установления
автоколебаний в отсутствии внешней силы][(рис. 131). Мы
Рис. 131.
видели, что это построение весьма наглядно показывает
закон установления (или затухания) колебаний и
позволяет найти графически стационарную амплитуду
свободных автоколебаний А0. Чтобы перейти отсюда к
графическому определению закона установления и
стационарной амплитуды «вынужденных» колебаний, достаточно
учесть ещё влияние последнего члена в первом
уравнении системы (38,6). Для этого вокруг начала координат
Р
строим окружность радиусом, равным у- (рис. 131). Если
теперь от вертикального радиуса OD отложить под
произвольным углом ср радиус OR, то проекция этого ради-
Pcos ср
уса на ось ординат будет равна
пересечения прямой
ВС
2р
Поэтому точка
с кривой установления опреде-
§ 38] ТЕОРИЯ РЕГЕНЕРАТИВНОГО ПРИЁМНИКА 237
лит соответствующее выбранному углу ср значение
стационарной амплитуды А9. Таким образом, мы можем
построить зависимость А9 от ср. Имея эту зависимость
и воспользовавшись вторым уравнением (38,6), мы можем
найти соответствующую заданному значению ср расстройку
Р sinv
(38,9)
Таким образом, для любого Р мы можем построить
«резонансную» кривую синхронных с внешней силой
автоколебаний системы.
Если наша система потенциально-автоколебательная,
то, как видно из рис. 131, а, действительная
положительная амплитуда «вынужденных» колебаний получается для
любого значения ср, лежащего в пределах —^ < ? < "о" *
При синхронизме р = щ мы имеем ср = 0; А9 максимально;
Кривая Л9 в функции угла ср, очевидно, симметрична
и имеет вид, изображённый на рис. 132 (на чертеже
изображены три кривые для всё возрастающих значений Р),
В функции расстройки кривые А? имеют вид, весьма
близкий к обычным резонансным кривым линейной
системы. Убедиться в этом можно, выполнив аналогичное
вышеуказанному построение для линейной системы,
описываемой уравнением
х + 2Ьх + coga: *= /> ces pt. (38,10)
238 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
Ища решение в виде (38,3), мы получим для амплитуды
и фазы уравнения установления
dA
dt
dt
- -84-
о2 — с
гР
Р COS <р
Psin <р
(38,11)*)
dtt
L-£+
Г>^
l
>
А ф
•jei
*
i
j
т^^.
к
э*-Д
Рис. 133.
Таким образом, для нахождения амплитуды и фазы
установившегося вынужденного колебания линейной
системы мы можем воспользоваться построением,
аналогичным изображённому на
рис. 131, а.
Единственным отличием будет то,
что вместо кривой линии
ОС мы будем иметь
прямую, проходящую к оси
абсцисс под углом,
определяемым соотношением
(рис. 133) tga= —8. Это
сопоставление позволяет
сравнить поведение
регенеративного приёмника с поведением обычного линейного
резонансного контура. Примем за определение
чувствительности приёмного устройства отношение амплитуды
вынужденного колебания к амплитуде внешней силы.
Из рис. 133 видно, что чувствительность эта для линейного
контура не зависит от амплитуды внешней силы и обратно
пропорциональна тангенсу угла наклона прямой ОС,
1 п
Для регенерированного приемника так
равная, как видно из
, , uTwuVUi.u хх возрастает с
уменьшением амплитуды сигнала, стремясь для бесконечно сла-
т. е. величине
5
определенная чувствительность,
рис. 131, а, -тр-, переменна и возрастает с
*) Эти уравнения установления дают для вынужденных
колебаний линейной системы верный закон установления:
Аг=
/(/>»-a>J)i + (2j*)»
(1-
9-S*
)•
§ 38] ТЕОРИЯ РЕГЕНЕРАТИВНОГО ПРИЁМНИКА 239
бых сигналов к пределу ^-. Благодаря регенерации ВеЛИ-
чину 80 можно сколь угодно уменьшить. При этом
чувствительность для бесконечно слабых сигналов будет
стремиться к бесконечности. Предел такому повышению
чувствительности кладут флуктуационные колебания
контура в схеме, благодаря которым при достаточном
уменьшении 80 в телефоне появляется характерный для
регенеративного приёмника шум. Из рис. 131, а видно, что
амплитуда рассматриваемых «вынужденных» колебаний
падает до нуля при ср = ± у .
Остаётся рассмотреть вопрос об устойчивости
исследуемых «вынужденных» колебаний. Устойчивость этих
колебаний по амплитуде видна из рис. 131. Мы видим, что
dA ....
кривая -т- всегда пересекает смещенную внешней силой
Pcos<p
на г—- ось амплитуд сверху вниз, а это и есть, как
мы видели, признак устойчивости по амплитуде. Что
касается устойчивости по фазе, то устойчивость эта видна
хотя бы из того, что положение равновесия системы при
наличии внешней силы, очевидно, неустойчиво, никаких
же незатухающих колебаний с частотой, отличной
от частоты вынуждающей силы,
потенциально-автоколебательная система совершать не может. Так как, кроме
того, всесвободные колебания затухают, то отсюда следует,
что рассматриваемое движение не может стать
неустойчивым, так как у системы нет ни устойчивого положения
равновесия, ни какого-либо другого возможного вида
движения.
Конечно, такого рода полуинтуитивные
соображения не вполне убедительны. Мы могли бы применить
здесь общие признаки устойчивости, выведенные в § 35,
но ввиду того, что устойчивость по амплитуде уже
доказана, мы рассмотрим подробнее только вопрос об
устойчивости по фазе.
Для решения этого вопроса, зная зависимость Ау от ср,
строим на осях (ср, -^М график второй функции
240 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
(38,6) (рис. 134). Из этого графика видно, что уравнение
(38,6) либо совсем не имеет действительных решений (т. е.
исследуемое движение не имеет стационарной фазы и
неустойчиво по частоте), либо имеет два действительных
корня, лежащих при р > щ в интервале 0 < ср < тс и при
р < о)0 в интервале —тс < ср < 0. Для устойчивости фазы
(частоты), очевидно, необходимо, чтобы кривая функции
Ж
пересекала ось ср
сверху вниз. Поэтому
из двух значений
стационарной фазы
устойчивым будет всегда
только одно значение. Это
устойчивое значение,
как видно из рис. 134,
лежит при р > о)0 в
интервале 0 < ср<~2 , при
р < о)0 — в интервале
-£<Т<0.
Строгое решение задачи на основании признаков
(35,9) даёт следующие условия устойчивости:
р*ш0
Рис. 134.
I. А2> -?2; П. coscp>
рЪ2А*
(38,12)
Для рассматриваемой потенциально-автоколебательной
системы все параметры, входящие в эти условия,
положительны. Отсюда видно, что условия устойчивости
выполняются всегда.
Если наша система автоколебательная, то все
полученные формулы остаются в силе, но в них нужно
положить 80=—180|. В системе могут существовать в этом
случае два режима: периодический режим захватывания,
где автоколебания системы полностью синхронизованы
(захвачены) частотой внешнего воздействия, и так
называемый «бигарщшический» режим, при котором в
системе наряду с вынужденными " ~
колебаниями внешней
§ 38] ТЕОРИЯ РЕГЕНЕРАТИВНОГО ПРИЁМНИКА 241
частоты существуют ещё и отличные от них по частоте
автоколебания.
Из построения рис. 131, б видно, что уравнения
стационарных колебаний (38,8) дают для амплитуды
синхронизованных (захваченных) автоколебаний
действительные положительные значения для интервала значений <р
более широкого, чем —^ < ср < -^-. Для малых
значений амплитуды внешней силы фаза может даже
изменяться в пределах всей окружности. Ниже, однако,
Рис. 135.
мы увидим, что устойчивость по фазе допускает для фазы
лишь незначительное превышение значений ± -к- .
Если пренебречь этим превышением, то для максимального
значения расстройки, т. е. для спектральной ширины
полосы захватывания, мы получим из (38,9):
А = 21л--1=т£*^. <38'13>
где А0—амплитуда автоколебаний, равная, как мы
видели (§ И), __
Приняв это равенство во внимание, мы можем написать
признаки устойчивости (38,12) в виде
I. А«>1Л5; И. соз?>-^(^у. (38,14)
36 к. Ф. Теодорчик
242 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
На рис. 135 изображены «резонансные» кривые амплитуды
захваченных автоколебаний в зависимости от фазы ср.
При построении этих кривых принято во внимание лишь
условие устойчивости по амплитуде. Пунктирными
кривыми обозначены области режима биений. На рис. 136
изображены те же кривые в функции расстройки. На этом
чертеже приняты во внимание оба признака
устойчивости.
Из нашего рассмотрения следует, что явление
захватывания имеет место вблизи синхронизма при сколь
угодно малой амплитуде внеш-
^\ него воздействия.
Явление это типично для всех
видов автоколебательных
систем как почти
гармонического, так и
релаксационного типа.
Кроме рассмотренною
выше случая
захватывания на основном тоне
генератора, явление
синхронизации имеет место pi
при действии внешней
силы, частота которой
близка к одной из гармоник генератора. Явление это
наблюдается для тем большего числа гармоник, чем дальше
автоколебания синхронизуемой системы от почти
гармонического режима. Понять механизм этого явления
можно на основании следующего: как мы видели в § 7,
отступление частоты автоколебаний от частоты
собственных колебаний контура о>0 определяется спектральным
составом автоколебаний (формула (7,9)). Если на
автоколебательную систему действует внешняя сила, близкая
по частоте к одной из хорошо выраженных гармоник,
например к N-и, то спектральный состав и вместе с ним
(согласно формуле (7,9)) и частота автоколебаний, с
изменением фазы между внешней силой и iV-й гармоникой, будет
изменяться в некотором интервале частот. Если в" этом
интервале лежит частота, N-я гармоника которой точно
совпадает с частотой внешней силы, то на соответствую-
Неуст aol
Рис. 136.
Неуст. по Л
§ 39]
РЕШИМ БИЕНИЙ, МЕХАНИЗМ ЗАХВАТЫВАНИЯ
243
щей этой частоте фазе наступает синхронизация. Так же
как в случае синхронизации на основной частоте,
имеются два значения синхронизующей фазы, из которых
одно устойчиво, а другое неустойчиво (ср. с рис. 134).
§ 39. Режим биений, механизм явления
захватывания
Рассмотренные выше явления синхронизации
проявляются и вне полосы захватывания, где наряду с
«вынужденными» колебаниями частоты р существуют и отличные
от них по частоте автоколебания. Это явление,
получившее название
частичного увлечения частоты
или частичной
синхронизации, состоит в том,
что при приближении
частоты внешней силы
к границам полосы
захватывания частота
автоколебаний
изменяется в направлении
приближения её к частоте
внешней силы.
Явление частичной
синхронизации поясняется рис. 137. По оси абсцисс этого
рисунка отложена расстройка, т. е. разность р—о>0
частоты внешней силы и частоты автоколебаний в
отсутствии внешнего воздействия, по оси ординат—частота
биений Q. Если бы частичное увлечение отсутствовало, то
частота биений изменялась бы с расстройкой по
пунктирным прямым Q = | о)0 — р | . Благодаря же частичной
синхронизации Q изменяется по сплошным кривым
£>' = | а) — р |, и биения исчезают не в начале координат,
а на границах полосы захватывания А и В.
Уравнения установления (38,6) для мягкого режима
остаются приложимыми не только внутри полосы
захватывания, но и вне её, в области биений. Действительно,
движение системы в этой области мы можем рассматривать
как колебание частоты, равной частоте внешней силы
16*
тР-*Ъ
2Vi СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
(/?), но с медленно ( за период Тр = — j изменяющейся
амплитудой и фазой. Это допустимо всегда, если
расстройка | р — о)0 | < р.
Подходя к режиму биений с этой точки зрения, мы
можем воспользоваться изложенным выше способом
составления уравнений установления и придём таким
образом к системе (38,6). Поэтому эти уравнения должны
содержать в себе объяснение не только явления
захватывания, но и частичного увлечения частоты, графически
изображённого на рис. 137. Действительно, путём
численного интегрирования этих уравнений может быть
получена форма огибающей кривой биений, весьма хорошо
согласующаяся сданными эксперимента *). Путь этот
весьма хорош, но довольно громоздок. Поэтому мы ниже
приведём некоторые качественные соображения, естественно
вытекающие из вида уравнения установления фазы
(вторые уравнения групп (38,6)), позволяющие, тем не менее,
почувствовать смысл понятия устойчивости фазы и
механизм процесса частичной и полной синхронизации.
Полученный нами закон установления фазы имеет как для
мягкого, так и для жёсткого режимов вид
d<? = p2 — «>5 Psincp Ш Л
dt 2р 2рА ' V » /
Если бы фаза автоколебаний могла изменяться
независимо от амплитуды, то для каждого значения амплитуды
скорость изменения фазы выражалась бы
синусоидальным законом (рис. 138—сплошная линия).
На рисунке видно, что если кривая зг = /(?) ПРИ
данном значении амплитуды внешней силы пересекает
ось абсцисс, то из двух определяемых этими точками
пересечения стационарных значений сродно (точка А) является
устойчивым, а второе (точка В) неустойчивым. В
действительности дело обстоит сложнее, так как при изменении
фазы неизбежно изменяется и амплитуда. Вследствие
этого кривая скорости изменения фазы не имеет в дей-
*) См. (3) из списка монографий и П. Р я з и н, ЖТФ. т. V,
вып. 1 и 10, 1935.
§ 39J
РЕЖИМ БИЕНИЙ, МЕХАНИЗМ ЗАХВАТЫВАНИЯ
245
ствительности формы синусоиды. При этом «динамичо-
екая», так сказать, кривая изменения -± оудет зависеть и
от расстройки. Действительно, при большой расстройке
скорость изменения фазы настолько велика, что за время
изменения фазы на 2т: амплитуда автоколебаний заметно
не успевает измениться, а следовательно, при больших
расстройках форма кривой ( j-, <р ) лишь незначительно
отклоняется от синусоиды. Установление при этом бу-
Рпс. 138.
дет происходить по амплитуде, фаза же всё время будет
приспособляться к мгновенному значению амплитуды.
Наоборот, при малых расстройках, вблизи границы
захватывания, скорость изменения фазы будет настолько мала,
что амплитуда автоколебаний будет успевать принимать
значения, соответствующие мгновенному значению фазы.
Закон установления будет при этом определяться
законом установления фазы.
Кривая (-ту <? ) будет в этом случае больше всего
отступать от синусоиды. Для её построения наряду с
формулой (39,1) необходимо воспользоваться изображённой
на рис. 132 зависимостью амплитуды от фазы. Приняв
это во внимание, нетрудно убедиться, что кривая / -^ , сП
примет форму, изображённую на рис. 138 пунктирной
246 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
линией. Если эта линия пересекает ось ср, то мы получаем
одно устойчивое стационарное значение ср,
соответствующее заданной расстройке (точка А' на рис. 138). Очевидно,
что с увеличением расстройки (которому соответствует
смещение всей кривой I ~ , ср ) вдоль оси ординат) точка
пересечения А', соответствующая стационарным
значениям Л и ср, перемещается между точками С и D',
расстояние между которыми больше г.. При расстройках,
больших чем CD', стационарного значения ср нет, и
система из области захватывания переходит в область
биений. При этом скорость изменения фазы попрежнему
меняется по кривой \-j,®)<> которая, однако, теперь
лежит целиком выше либо ниже оси абсцисс.
Продолжительность одного биения, т. е. время, в течение которого
фаза изменяется на 2ir, при этом, очевидно, равна:
2к
0
dr _
dz
di
2п
2pS
-^ . (39,2)
2 о Р •
Р —0)о J sln ?
Сама форма этого выражения проливает свет на явление
частичного увлечения частоты. Действительно, наше
выражение показывает, что задача об увлечении частоты
эквивалентна задаче о нахождении времени, в течение которого
точка, вращающаяся с переменной скоростью, среднее
по пути значение которой постоянно, совершит полный
оборот. Легко убедиться, что время это наименьшее, когда
скорость постоянна, и неограниченно нарастает, когда
глубина модуляции скорости возрастает до единицы.
Действительно, пусть, например, скорость to = <jd0(1 + а)
для первой половины пути 0 < ср < тс и о> = «>0 (1 — а) для
второй половины тг < ср < 2ir. Тогда
o>0(l-h<x) ' o)0(l — а) ю0(1 —а*)
(39,3)
откуда и видно вышеуказанное свойство. Результат этот
легко обобщпть на .любой закон изменения скорости,
лишь бы средняя по пути скорость оставалась постоян-
§ 40] ВЗАИМНАЯ СИНХРОНИЗАЦИЯ ДВУХ ГЕНЕРАТОРОВ 247
ной. Форма огибающей биений при этом, очевидно, не
будет синусоидальной, что указывает на наличие в
случае режима биений не двух, а большего числа
гармонических составляющих в спектре автоколебаний. Таким
образом, формула (39,1) полностью объясняет явление
частичного увлечения и захватывания.
§ 40. Взаимная синхронизация двух генераторов*)
Рассмотрим два связанных ламповых генератора при
мягком режиме (рис. 139).
Рис. 139.
Обозначив потенциалы на сетках буксами х и г/,
получим уравнения задачи в виде:
х-2(Ъ0-Ъ2х2)х + ч1х , „LiJ- -f х (401ч
\x-\-a1y = Q1 |
|г/ + а2я = 0. J
2/-2(To-T22/2)2/ + vf*/
Синхронное периодическое решение в первом приближении
ищем в виде:
x — A&osu>t\ \
у = В sin а>г — е cos Ы = В sin (а>£ —ср). J \ u» /
*) А. Мейер, Techn. Phys. of the USSR, т. II (1935),
стр. 465. В. И. Г an оно в, ЖТФ, т. VI (1936), стр. 801.
К. Теодорчик, Радиотехника, т. I, № 3—4 (1946), стр. 3.
Н. Есафов, ЖТФ, т. XVII (1947), стр. 803.
248
СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ
[ГЛ. VI
Поступая далее обычным образом, получим уравнения
стационарного режима:
1) 2^1о)('о0-182лЛ+а1а)26 = 0,
2) {&*-<**) А-а1а>*е = 0,
3) K-vl)6 + 2(»e(To-iT2B2)=0,
4) - (со2 - v2) е + 2ш Ь (j„ -1Т2В2) + а2а>2Л = 0.
Перейдя в этих уравнениях к амплитудам автоколебаний
и относительному сдвигу фаз, при помощи (40,2) находим:
I.
II.
III.
IV.
А = г
В_
2 1
COS cp
:0Cl ~лSlnc?'
(40,3)
02 — V| = С
5 = 2
5
Sincp,
/
Как легко убедиться, каждая пара этих уравнений по форме
совпадает с уравнениями теории захватывания генератора
внешней гармонической силой (ср. с формулой (38,8)).
Обозначим амплитуды автоколебаний несвязанных
генераторов буквами А0 и В0.
Если А0 > В0, т. е. генератор А много мощнее
генератора В, то первая пара полученных уравнений даёт:
^ 21/ ^А = А) — const; о) ^ vb
Г о2
(40,4)
т. е. амплитуда и частота мощного генератора остаются
постоянными, и его роль сводится к генерации внешней
гармонической силы, захватывающей маломощный
генератор согласно уравнениям III и IV.
§ 40] ВЗАИМНАЯ СИНХРОНИЗАЦИЯ ДВУХ ГЕНЕРАТОРОВ 24&
Синхронизация эта, как было указано в § 38, имеет
место в пределах изменения относительного сдвига фаз,
лишь незначительно превышающих
--£<?<•
(40,5)
Ход изменения амплитуды захватываемого генератора
изображён на рис. 135 и 136.
В более общем случае, когда захватывающий генератор
имеет амплитуду А0, хотя и большую, но сравнимую»
с амплитудой В0, мы имеем
взаимную синхронизацию обоих
генераторов.
При сравнимых амплитудах
и малой связи взаимная
синхронизация определяется всей
системой уравнений (40,3).
Картина изменения амплитуд обоих
генераторов в случае, когда А0
сравнима по величине с В0,
дана на рис. J 40.
В изображённом на этом
рисунке случае кривая (А) даёт
ход амплитуды колебаний захватывающего,
хватываемого генератора.
Частота синхронных автоколебаний определяется
получающимся из уравнений II и III системы (40,3) уравнением
синхронизованных частот
*-v
Рис. 140.
а (£) —за-
(о)2 — v2) (со2 -- vj) — a^i
со* sin'
■<р = 0.
(40,6>
Из этого уравнения видно, что синхронизованная частота о>
всегда лежит между парциальными частотами
соответствующих консервативных систем и их нормальными
частотами.
Из II и III, далее, легко видеть, что взаимная
синхронизация всегда происходит при той из двух частот,
определяемых (40,6), которая ближе к парциальной частота
захватывающего (более мощного) генератора, и
приближается к ней тем ближе, чем меньше расстройка обеих
систем.
.250 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
При близких мощностях и увеличении связи различие
меткду захватывающим и захватываемым генераторами
всё более стирается и при перекрытии кривых А и В
рис. 140, наступающем при связи большей критической
в системе возможны два синхронных режима движения:
Л — захватывающий генератор и В — захватываемый, и
наоборот. Так как амплитуды и синхронные частоты в этих
двух режимах различны, то переход из одного
синхронного режима в другой будет сопровождаться скачками
«амплитуд и синхронных частот, обнаруженных
экспериментально Есафовым.
§ 41. Резонанс второго рода*)
Резонансом второго рода называют простейший случай
^комбинационных воздействий на
потенциально-автоколебательную систему. При этом явлении внешняя
электродвижущая сила частоты 2р вызывает в
потенциально-автоколебательной системе, настроенной на частоту о>0 ^ р,
.появление автоколебаний с частотой, точно равной р.
Таким образом, при резонансе второго рода мы имеем
деление внешней частоты точно пополам. Схема, в которой
можно наблюдать резонанс второго рода, ничем не
отличается (кроме настройки) от схемы обычного
регенеративного приёмника. Уравнение, которое описывает это
явление, будет поэтому вида
х + 2о (х) х + о)2 х = Р cos 2pt. (41,1)
В такой системе, как во всякой колебательной системе,
находящейся под внешним гармоническим воздействием
нерезонансной частоты, возникнут слабые вынужденные
колебания с частотой внешней силы. Амплитуда этих
колебаний при малом затухании может быть с достаточной
точностью вычислена из уравнения, в котором опущены
диссипативные члены
ii + К *i = P cos 2pt, (41,2)
*) Акад. Л. И. Мандельштам и акад. Н. Д. П а п а-
лскси, ЖТФ, т. 2 (1932), стр. 775.
§ 41]
РЕЗОНАНС ВТОРОГО РОДА
251
откуда
z1 = \cos2pt, (41,3)
где
}<^ Р
Чтобы помимо этого вынужденного колебания в системе
могли возникнуть ещё и автоколебания половинной
частоты р, необходимо, очевидно, чтобы среди нелинейных
членов исходного уравнения был хотя бы один член,
дающий комбинационное воздействие частоты р. Обозначив
искомое решение буквой z, мы должны искать
решение (41,1) в виде
x = xx + z. (41,4)
Подставив это в (41,1) и приняв во внимание (41,2), мы
убедимся, что z должно удовлетворять уравнению
z + u*z= —2Ъ(х)х. (41,5)
По предположению,
z = a sin pt — b cos pt. (41,6)
Представим (41,5) в виде
z + P8z = (pa-a)§)2-2(80-8ia: + M2)i=SS. (41>7)
где все 8 > 0. Таким образом, мы учитываем в
характеристике не только член первой степени и кубический
член, как мы это делали при рассмотрении внешнего
воздействия основной частоты при мягком режиме, но и
квадратичный член характеристики. Как будет видно
далее, для объяснения явления резонанса второго рода
это необходимо. Подставив в выражение суммы сил (41,7)
значения хх и z и разложив в ряд Фурье, получим:
2 $ = [ (р2 - оа - 2ръо*> - biPlb - ь*р14 -
-1 Ъ2рЬА* ] sin pt+ [ - (р* - cog) b - 2рЬ0а +
+ btfXa — Ь2рк2а — -»- о2раА* cos pt + .. *
252 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
Отсюда уравнения установления получаются в виде
da
di~~ 2p
У[-(р*-*1)Ь-2ра(ъ0-±-Ъ1\+ |
db 1 г /1 Г (41>8>
Стационарные решения получаются из системы уравнений
(Ьо-^1 + 1 Ъ2\*+ ±-Ь2А^ а+г^-Ь = 0,
Р—<
2р
- (»о+4 8ix+48^2+4-8^2) *=°-
(41,9)
Возможны решения:
I. а^Ь = 0
(отсутствие возбуждения автоколебаний частоты р).
JI. Отличное от нуля решение, которое получается из
приравненного нулю детерминанта коэффициентов при а и Ь
в однородных уравнениях (41,9). Это даёт:
(«.+\ *•+4 м<у - (4 v-7+№)' - °-
откуда
Из этого выражения сразу видно, что явление резонанса
второго рода возможно только при наличии
квадратичного члена в характеристике. Далее, из полученного
выражения видно, что амплитуда вынужденных колебаний
(частоты 2р) играет в явлении резонанса второго рода
двойную роль: в качестве множителя при Ъг под корнем
она стимулирует возникновение этого явления, а в
качестве множителя при о.> в последнем члене (41,10)—
§ 41]
РЕЗОНАНС ВТОРОГО РОДА
253
она его гасит. При этом стимулирующее влияние, как
легко видеть, пропорционально первой степени, а
гасящее—квадрату амплитуды вынужденного колебания.
Поэтому при плавном нарастании X (что имеет место при
плавном нарастании амплитуды внешней силы) резонанс
второго рода может возникнуть лишь в ограниченной
как сверху, так и снизу ж
области значений X. Дру- ]
гими словами, явление
резонанса второго рода об- J
ладает не только порогом, 'Г
но и потолком.
Количественные значения порога л [
потолка в функции
расстройки легко найти из Рис. 141.
(41,10). Своеобразна и фор -
ма резонансной кривой второго рода. Из (41,10) видно,
что она имеет максимум при синхронной настройке
контура на половину частоты внешней силы и резко
опускается до нуля при конечной расстройке. Форма такой
кривой дана на рис. 141.
Наконец, из (41,10) видно, что явление резонанса на
половинной по отношению к внешней силе частоте будет
иметь место и при самовозбуждённом приёмнике *).
Резонансная кривая для этого случая также изображена на
«фиг. 141 (верхняя кривая).
Полученные формулы позволяют произвести
подробный анализ всех свойств резонанса второго рода.
Аналогичным образом легко могут быть рассмотрены
и другие комбинационные резонансы, например резо-
нансы на суммарной и разностной частотах при
одновременном воздействии на потенциально-автоколебательную
систему двух гармонических внешних сил, кратные
резонансы и т. д.
*) В этом случае резонанс 2-го рода переходит в
синхронизацию на второй гармонике. Это существенно нелинейное явление
может быть охвачено почти гармоническим приближением теории
только благодаря введению «вынужденного» движения частоты
2р и учёту его нелинейного взаимодействия с автоколебаниями.
й
254 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
§ 42. Асинхронные воздействия*)
Как мы видели, при воздействии внешней
гармонической силы на автоколебательные системы наблюдаются
«резонансные» явления при условии, что частота
автоколебаний и частота внешней силы с достаточной
точностью удовлетворяют соотношению вида
п
oj ^—р; пи т — целые числа.
При этом имеет место захватывание частоты
автоколебаний внешней силой, и система совершает
периодическое движение.
Вне этих областей принудительной синхронизации
в указанных системах возможны либо периодическое
движение с частотой внешней силы (если система
потенциально-автоколебательная), либо квазипериодическое
движение, состоящее из «вынужденных» колебаний и
автоколебаний.
При этом имеют место асинхронные воздействия на
систему.
Эти асинхронные воздействия открыты академиками
Мандельштамом и Папалекси и экспериментально
изучены Рубчинским; их квазилинейная теория дана Коб-
заревым. Они существенно различны при мягком и
жёстком режимах регенерации.
При мягком режиме всегда имеет место подавление
автоколебаний, приводящее при достаточной амплитуде
внешней силы к полному их гашению (синхронизация
гашением).
При жёстком режиме в
потенциально-автоколебательной системе, при известных соотношениях параметров,
имеет место асинхронное возбуждение автоколебаний»
возникающее при некотором «пороге» внешнего
воздействия и исчезающее при достижении «потолка».
Рассмотрим эти асинхронные воздействия энергетически.
*) Л. И. Мандельштам и Н. Д. Папалекси,.
ЖТФ, т. II (1932), стр. 775. Ю. Ко б з а р е в, ЖТФ, т. Ш
(1933), стр. 318. К. Теодорчик, Учёные записки МГУ, вьии
77, Физика, кн. 3 (1945), стр. 112.
fc 42]
АСИНХРОННЫЕ ВОЗДЕЙСТВИЯ
255*
I. Мягкий режим. Уравнение движения системы имеет
вид:
« + 2 (о0 + Ь2х2) х + (о§ х = Р cos /tf. (42,1)
Возможны два случая:
а) 30 > 0. Система потенциально-автоколебательная
(самовозбуждения в отсутствии внешней силы нет).
б) Ь0 < 0. Система автоколебательная
(самовозбуждающаяся в отсутствии внешней силы).
Так как мы рассматриваем случай асинхронного
воздействия, т. е. исключаем из рассмотрения все области
принудительной синхронизации (захватывания), то в
системе возможны «вынужденные» колебания с частотой внешней
силы р и автоколебания с частотой со, близкой к со0 и не
находящейся ни в какой связи с р. Таким образом,
в системе возможны почти периодические движения,
близкие (если система гармоническая) к сумме двух
гармонических колебаний:
х = a sin u>t + X cos pt = z + xx. (42,2)
Так как частоты автоколебаний и «вынужденных»
колебаний не синхронизованы, то начальную фазу мы можем
выбрать произвольно.
Задача нахождения приближённого решения сводится у
таким образом, к нахождению трёх неизвестных — а, ш иХ.
Так как при асинхронном воздействии частота внешней
силы достаточно далека от резонанса, то вынужденное
движение может быть найдено из рассмотрения
консервативной части (42,1)
Хг + <!)§#! = Р COS pt,
откуда
Р
хг = 2_ 2 cos pt = X cos pt. (42,3)
Подставив это выражение в исходное уравнение,
получим для автоколебательной части движения z уравнение
i" + и>* z = — 2 (80 + Ь2х2) х (42,4)
или, написав его в виде
z + a>»z = (u*-uJ)z-2(8o+^x2)i==23 (42,5)
256 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
и подставив в £g выражения для z и хх из (42,2),
найдём для спектра суммы сил, действующих в системе,
выражение
25 "— (а)2 — 0)с) а ьш 0)^ Jr
+ (-2o0-o2X2-i-o2a2Vo)coso^+... (42,6)
Отсюда непосредственно получаем уравнение установления
.автоколебаний
!=!(_250-о2).2-^2а*). (42,7)
Из этого уравнения видно, что асинхронное воздействие
при мягком режиме всегда подавляет генерацию*).
Если в отсутствии внешнего воздействия система не
^амовозбуждается, о0 > 0, то при его наличии она ещё
больше отодвигается от границы самовозбуждения.
При наличии самовозбуждения мы имеем 80 < 0 и для
амплитуды и частоты автоколебаний получаем из (42,6)
уравнения
(о,2_ 0)2) а = 0; 2 | В01 - о2Х2-у о2а2 - 0, (42,8)
откуда
л/ Г°о1-тХ2^
со = ш0; а -= 2 V ^ . (42,9)
Так как амплитуда автоколебаний в отсутствии внешнего
воздействия
то при асинхронном воздействии получаем для амплитуды
автоколебаний:
а = ао|Л-^г. (42,10)
*) При этом вычислении мы видим, что асинхронное
воздействие на автоколебания порождается членом —2Ь2х2х, точнее
силой —2Ь2 X2 cos2 pt • am cos mt = —Ь2 X2 am cos mt + не резонансные
«^лены.
§ 42] АСИНХРОННЫЕ ВОЗДЕЙСТВИЯ
257
Из последнего выражения мы видим,что гашение
автоколебаний наступает при
а
7f- (42>и)
II. Жёсткий режим. Исходное уравнение имеет вид
х + 2 (80 - Ь2х2 + 84я4) х + о>§я = Р cos pt. (42,12)
Аналогично предыдущему ищем в первом приближении
решение в виде
х — z + х1 = a sin о)£ 4~ ^ cos ;>£, (42,13)
где
X
0)2 —р2
Для автоколебательной части решения (z) получаем урав-
не
z + o2z = (со2 - a)2) z — 2 (80 - 82*2 + 84я4) х = 2 5»
нение
где
2 g = (a)2-o)2)asino)i+r-280+y82a2 + X282-
__*_ 84а4___|§4а2Х2_^84),4J fla)cosы+... (42,14)
Отсюда уравнение установления автоколебаний
S=i[(-23o+8*X2-T8*X4) +
Сравнив это уравнение с уравнением установления в
отсутствии асинхронного воздействия
|-| (-280 + 1^-4^).
мы видим, что асинхронное воздействие изменяет коэффи-
17 к. Ф. Теодорчнк
258 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
циенты о0 и §2> которые при его наличии принимают
вид
8|-J,-|W ) (42'16)
8|-84. J
Самовозбуждение при наличии асинхронного
воздействия наступает, когда Ц < 0, т. е. при таких
значениях X2, при которых
Ф(Х2) = 82Х2-280-|-8^4> 0. (42,17)
Так как при 80 > 0 (отсутствие возбуждения без внешней
силы) мы имеем:
Ф(0)<0 и Ф(со)<0,
то (42,17) получает положительные значения только для X2,
лежащих между действительными корнями уравнения
Ф (X2) = 82Х2 - 280 - J 84Х« - 0, (42,18)
т. е. для X2 в интервале Xf < X2 < X2, где
Для того чтобы оба эти корня были действительными
положительными числами, необходимо:
0<8°<irf- (42>2°)
Таким образом, асинхронное возбуждение возможно только
в жёстких потенциально-автоколебательных системах,
параметры которых удовлетворяют (42,20), и имеет «порог» (Хх)
и «потолок» (Х2).
*) Отсюда мы видим, что силы, вызывающие асинхронное
воздействие, порождаются нечётными степенями полинома, апро-
ксимирующего характеристику.
Ji 43J СИСТЕМЫ С ИНЕРЦИОННОЙ НЕЛИНЕЙНОСТЬЮ 259
Как известно (§ 12), в этих пределах
потенциально-автоколебательная система может либо не иметь стационарных
амплитуд автоколебаний ( если Ь0 > —а_ j , либо иметь две
действительные стационарные амплитуды (меньшая
неустойчивая и большая устойчивая).
В первом случае асинхронное возбуждение имеет место,
если
Ж < й« < wt ■ (/!2>21)
При прекращении асинхронного воздействия
автоколебания в системе исчезают.
Во втором случае асинхронное возбуждение не
исчезает с прекращением внешнего воздействия, и система
перебрасывается им из усюйчивого положения равновесия
в устойчивый автоколебательный режим. Это имеет
место при
0<8„<-|г. (42,22)
Из формул (42,16) видно, что внешнее асинхронное
воздействие всегда смягчает режим системы.
§ 43. Действие внешних сил на автоколебательные
системы с инерционной нелинейностью*)
Генераторы с инерционной нелинейностью, как мы
видели в § 21, описываются в стационарных и
квазистационарных режимах квазилинейными дифференциальными
уравнениями. Поэтому, характерной особенностью таких
генераторов является то, что при действии на них внешней
силы выполняется принцип суперпозиции автоколебаний
и установившихся вынужденных колебаний, т. е. в
стационарном режиме не возникают ни обертоны внешней
силы, ни комбинационные тоны. В силу выполнения
принципа суперпозиции для рассмотрения действия
произвольной периодической внешней силы достаточно рассмотреть
действие на систему внешней гармонической силы
Е = E0s\n pt, включённой в анодный контур (см. рис.65).
*) К. Теодорчик, ЖТФ, т. XVI (194В), стр. 845.
17*
260 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
Уравнение получаем в виде:
х-^11-^^--Т(^) | х-г <*>%х = Р cospt, (43,1)
где P = -j^,a х2 означает среднее квадратичное значение
Li
греющего термистор тока.
На основании принципа суперпозиции решение ищем
в виде
x = asirnu0t + \ cos pt = uJrv. (43,2)
После подстановки этого решения уравнение (43,1)
распадается на два:
и -1 { ^ - Т (ii) } и + о>5« = 0, )
v-±{l-^-T&)}v + ofc = Pcospt, J
где Г(я2) = Г/а2 + Х2.
Первое из этих уравнений отличается от уравнения
свободных автоколебаний в отсутствии внешней силы
лишь тем, что термистор нагревается не одним током
автоколебаний (амплитуда а0), а суперпозицией
автоколебаний и вынужденных колебаний (амплитуда а и X). Так
как в обоих случаях сопротивление термистора должно
* \M\S
быть одинаковым и равным '—^—, то мы получаем:
а2, =г а2 + Х2.
Отсюда амплитуда автоколебаний в присутствии
вынужденных колебаний равна:
a==yal-l*. (43,4)
Это соотношение показывает, что в генераторах с
инерционной нелинейностью также имеет место асинхронное
подавление автоколебаний и полное их гашение,
наступающее при
Х-=а0. (43,5)
До наступления гашения всё время
§ 4 3] СИСТЕМЫ С ИНЕРЦИОННОЙ НЕЛИНЕЙНОСТЬЮ 261
вследствие чего второе из уравнений (43,3), определяющее
вынужденные колебания, принимает вид:
v + u*o = Pcospt. (43,6)
Таким образом, пока автоколебания не погашены
вынужденными колебаниями, внешняя сила действует как бы
на консервативную систему частоты а)0. Отсюда
•^w- <43'7>
Из изложенного видно, что гашение автоколебаний
имеет место при сколь угодно малой (но отличной от нуля)
амплитуде внешнего воздействия. Отметим, что при неиде-
альноп инерционности термистора теория сохраняет силу
до тех пор, пока период биений остаётся много меньше
постоянной времени установления температуры термистора.
В случае X ^ а0 имеет место захватывание
(синхронизация гашением) автоколебательной системы внешней
силой. Из этого условия и формулы (43,7) ширина полосы
захватывания получается равной
Д=*. (43,8)
В этой области термистор перегрет, так что
Ц^-7'(Х)<0,
поэтому уравнение свободных колебаний (первое из
системы (43,3)) совсем выходит из игры и остаётся лишь
уравнение вынужденных колебаний вида
»+т{ ТМ~1-^-} » + «>fr=Pcospt. (43,9)
Таким образом, внутри полосы захватывания внешняя
сила действует на затухающую, хотя и регенерированную,
колебательную систему. В стационарных и
квазистационарных режимах мы опять имеем дело с квазилинейной
задачей, решение которой можем искать в виде
v = l sin (pt-у). (43,10)
262
СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ
[ГЛ. VI
Подставив (43,10) в уравнение (43,9) и воспользовавшись
значением Р, получим для определения X и ср два
уравнения:
M^ + ^COScp-J(X) = 0, )
J
С
- = zfsinc?-
(43,11)
Г№
Решать эту систему удобно графически, построив кривую.
[X; Г(Х).Х] (рис. 142).
Проведя на графике
прямую
мы получим значение
Х = а0 как абсциссу
пересечения этих двух
линий. Описав на том же
чертеже вокруг начала
координат окружность
радиусом, равным
амплитуде внешней силы
Е0, мы можем
указанным *на чертеже способом найти значения X,
соответствующие любому значению фазы ср.
«p*mai
Рис. 142.
—р
Амплитудно-частотная диаграмма этого явления имеет
вид, изображённый на рис. 143.
§ 44] РЕЛАКСАЦИОННАЯ АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА 263
Таким образом, явление захватывания в генераторах
с идеально инерционной нелинейностью обладает целым
рядом существенных особенностей по сравнению с
аналогичным явлением в обычных генераторах.
Особенности эти следующие:
1) Захватывание имеет место только в области
основной частоты.
2) В инерционной системе могут иметь место только
либо периодический режим, либо бигармонический режим
биений, но не полигармонический режим.
3) Фаза ср внутри полосы захватывания изменяется
при наличии термистора только в пределах
я .тс
-у <ср<у
§ 44. Действие внешней периодической силы
на релаксационную автоколебательную систему *)
Наиболее удобной для выяснения основных свойств
релаксационных автоколебательных систем при
воздействии на них внешних периодических сил является изоб-
Рис. 144.
ражённая на рис. 144 схема тиратронного релаксатора.
Постоянной силы ток / (ток насыщения диода)
заряжает конденсатор С. Когда потенциал на зажимах этого
*) Ни dec. Arch. f. Electrotechn.,> т. 22 (1936), стр. 458
А. Витт, ЖТФ, т. VI (1936), стр. 1159. Бовшеверов, ЖТФ,
т. VI (1936), стр. 1480. Гуляев, Ж ГФ, т. IX (1939), стр. 1656.
К. Теодорчик. ДАН, т. XL (1943), стр. 63. К. Теодорчик,
Journ. of Phys. (USSR), т. IX (1945), стр. 139. В. В. Виткевич,
ЖТФ, т. XV (1945), стр. 777 и 793.
264 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
конденсатора достигает потенциала зажигания тиратрона V5,
конденсатор разряжается через тиратрон до потенциала
его погасания Vu. Если ток разряда через тиратрон
весьма велик по сравнению с зарядным током /, то мы вправе
пренебречь временем разряда и для периода свободных
автоколебаний системы получаем выражение
ro = ^-(V3~Vn). (44,1)
Форма автоколебаний получается при этом пилообразная
(рис. 145).
Если теперь на сетку тиратрона подать внешнюю
гармоническую электродвижущую силу периода Т, то
потенциал зажигания
тиратрона будет
гармонически модулироваться этой
внешней силой.
Это изменение
потенциала зажигания будет
изменять
продолжительность релаксации. Если
в начале колебания (в
момент погасания
тиратрона) фаза внешней
силы равна ср, то следу-
равен:
Рис. 145.
ющии период
очевидно,
будет,
п
т? = — [V3 — Vn — a sin (jwx.
■?)]• (44,2)
Таким образом, при наличии внешней гармонической
силы продолжительность каждого колебания становится
функцией фазы внешней силы в начальный момент
колебания. Это означает, что при действии внешней
периодической силы релаксационные автоколебания теряют,
вообще говоря, свойство изохронности.
Продолжительность отдельных колебаний может при
этом колебаться в пределах
у (Va - Vn - а)< т, < £■ (Vs -Va + a). (44,3)
Из (44,2) мы видим, далее, что только в одном случае
релаксационные автоколебания могут остаться изохронными.
§ 44] РЕЛАКСАЦИОННАЯ АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА 265
Это будет иметь место при выполнении условия
/>т9 = 2т:ЛГ; Л-=1, 2, 3, ..., ' (44,4)
что означает наступление синхронизации их внешней
силой. Период таких синхронизованных релаксационных
автоколебаний равен (см. (44,2)):
'c = y(^-^n-asincpc) = 7Vr. (44,5)
Синхронизующая фаза внешней силы определяется
отсюда равенством
Это уравнение не имеет решения, т. е. синхронизация
невозможна, если
T0-iVr>^, (44,7)
либо имеет в пределах каждого периода внешней силы
два решения, если
t0-NT <а£. (44,8)
Отсюда для границ областей синхронизации получаем
формулу
^=.NT = 4±^. (44,9)
Формула эта показывает, что ширина всех областей
синхронизации линейно возрастает с амплитудой внешней
синхронизующей силы.
Чтобы доказать физическую возможность
синхронизации, необходимо рассмотреть процесс установления и
устойчивость синхронных режимов. Это рассмотрение мы
выполним графически.
Для этого умножим общее выражение
продолжительности колебания релаксатора (44,2) на угловую частоту
внешней силы
2*
и, введя обозначения
фо- Р*о\ ф = />т и % = а—р, (44,10)
266
СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ
[ГЛ. VI
(44,11)
напишем его в виде
фп^фо — psincpn+i,
В этих выражениях продолжительность тг-го колебания
релаксатора фп связана с периодом его свободных
автоколебаний ф0 и начальной ®п и конечной срп+1 фазами
внешней силы. При этом все эти величины выражены в одной
и той же угловой мере.
Чтобы рассмотреть процесс установления и доказать
устойчивость синхронного режима, достаточно показать,
что при неограниченном возрастании п значения
величин фп и срп стремятся к определённым пределам:
Нтфп = Фс = 2гсЛГ; -Итсрп -срс. (44,12)
п~^ оо п-*сп
Для доказательства этого строим на осях ср, ф
непрерывную функцию (рис. 146)
6^ -фо — Р sin ср. (44,13)
На том же чертеже проводим сеть прямых
ф = 2tt7V; ЛГ=1, 2, ... (44,14)
Если одна из этих прямых пересекает кривую ф_, то
точки пересечения каждой такой прямой дают
допустимые значения синхронизующей фазы (см. (44,6)) для
данного порядка синхронизации N.
§ 44] РЕЛАКСАЦИОННАЯ АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА 267
Заметим ещё, что вследствие введённой нами
одинаковой меры для ср и ф процесс автоколебаний релаксатора
изобразится на наших чертежах пилой, состоящей из
поднимающихся от оси ср под углом 45° прямых, по
которым нарастание происходит до первого пересечения (или
касания) с кривой ф^, и вертикальных срывов от этой
точки на ось ср-
Приняв во внимание всё вышесказанное, мы легко
можем графически проследить установление синхронного
режима при любой исходной фазе срн. Последовательные
значения периодов и начальных фаз даются ломаными
и
p^Q^R->S-> ... ->М.
Из этого построения мы видим, что из двух допустимых
значений синхронизующей фазы срс и ср£ устойчивым
является только одно срс (точка М на рис. 146).
Соответствующий синхронный режим устойчив и устанавливается
при любом значении исходной фазы срн (порядок
синхронизации задаётся при этом формулой (44,14). При малых
амплитудах внешней силы ф < ф0) устойчивая
синхронизующая фаза может принимать любые значения,
лежащие в пределах -^ < срс < — . При (3, больших
некоторого минимального значения, соответствующего
возникновению у модулирующей период синусоиды
касательных, поднимающихся под углом 45° к оси ср, часть
кривой ф^, а следовательно, и часть значений фазы ср
становятся вследствие самоэкраиирования физически
недостижимыми (рис. 147). В этом случае
синхронизующая фаза может принимать только значения,
соответствующие достижимым участкам кривой ф^. Приняв во
внимание сказанное выше, легко убедиться, что в любом
случае допустимые значения синхронизующей фазы
могут получиться только для одной из прямых ф = 2тсУУ.
Это означает, что области синхронизации различных
порядков никогда не перекрывают друг друга. Далее,
легко видеть, что самоэкранирование делает недостижи-
268 СИСТЕМЫ ПОД ДЕЙСТВИЕМ ВНЕШНИХ СИЛ [ГЛ. VI
мым часть синхронизующих значений фазы,
соответствующих удлинению периода релаксатора, и совершенно
не ограничивает значений, соответствующих его
укорочению. Благодаря этому полученные нами выше (см. (44,9))
гг^трпиЗаэкранированнь/е значения
u6l£& синхронизирующей фазы
Ом п Зп 2п
2 2
Рис. 147.
пределы изменения периода с ростом амплитуды внешней
силы сужаются. При этом даваемая (44,9) нижняя
граница синхронного режима остаётся без изменения, а
верхняя—всё более понижается. При [3—>ф0 обе границы
стремятся к нулю. На основании сказанного на рис. 148
построены первые три области синхронизации
релаксатора. Вне этих областей целочисленных синхронизации
и между ними расположены области дробных
синхронизации (n = — , где р и (/ — целые числа и q -£ 1 \
Однако, как легко убедиться из построения,
релаксационные колебания в этих областях не могут быть
изохронны, а распадаются на группы повторяющихся
колебаний неравной продолжительности.
Таким образом, при дробном Л^ = — мы можем иметь
только групповую синхронизацию, при которой на каждых
q периодах внешней силы размещаются р неизохронных
колебаний релаксатора. На рис. 149 начерчена группа
S 44]
РЕЛАКСАЦИОННАЯ \НТОКОЛЗВАТЕЛЬНАЯ СИСТЕМА 269
из трёх неизохронных колебаний релаксатора, сумма про-
должительностей которых равна удвоенному периоду
внешней силы. Такие периодически повторяющиеся
группы дают групповую синхронизацию релаксатора для
Фис. 149.
N = ^-. Все полученные нами выше при рассмотрении
простейшего релаксатора свойства сохраняются при
воздействии внешней периодической силы на любую
релаксационную систему и имеют поэтому общее значение.
ТАБЛИЦА
формул для разложения тригонометрических полиномов
в ряд Фурье
1) sin2 а = у (1 - cos 2а), 2) cos2 а = -1 (1 -f cos 2а),
1 1
3) sin а cos а = у sin 2а, 4) sin3 а = — (3 sin а —sin За),
\
5) cos3 а = -т- (3 cos а -f- cos За),
6) sin а cos2 а = — (sin а + sin За),
\
7) cos а sin2 а — — (cos а — cos За),
8) sin4a = -£- (3 — 4 cos 2a-f cos 4a),
9) cos4 а — — (3 + 4 cos 2a-f cos 4a),
10) sin3 a cos а = -тг (2 sin 2a —sin 4a),
И) sin a cos3 а =-тг (2 sin 2а + sin 4а),
12) sin2 a cos2 а = ~ (1 — cos 4a),
13) sin5 a = j£ (sin 5a — 5 sin За 4-10 sin a),
14) cos5 а — 77^ (cos 5a -\- 5 cos За + 10 cos а),
15) sin a sin $ = ir [cos (a— (3) — cos (a™ [3)],
1 *
16) pin я cos р = j- [sin (a + р) + sin (a - р)],
17) cos a cos р = у [cos (а — р) f cos (а-(- Р)].
ОСНОВНАЯ ЛИТЕРАТУРА
1) А. А. Андронов и С. Э. Хапкин, Теория колебания,
ОНТИ, 1937.
2) I Всесоюзная конференция по колебаниям (сборник докладов).
ГТТИ, 1933.
3) Новые исследования нелинейных колебаний. Г. И. по
вопросам радио, 1936.
4) Н. М. Крылов и Н. Н. Боголюбов, Введение в
нелинейную механику. Изд. АН УССР, Киев, 1937.
5)Н. М. Крылов и Н. Н. боголюбов, Новые методы
нелинейной механики. ОНТИ, 1934.
6) А. А. Ф е л ь д б а у м, Введение в теорию нелинейных цепей.
Госэнергоиздат, 1948.
7) Сборник «Нелинейные системы» под ред. акад. М. В. Шулей-
кина. Связьиздат, 1939.
8) А. Пуанкаре, О кривых, определяемых
дифференциальными уравнениями. ОГИЗ (классики естествознания), 1947.
9) А. М. Ляпунов, Общая задача об устойчивости движения.
ОНТИ, 1935.
10) Л. И. Мандельштам, Полное собрание трудов. Изд. АН
СССР, 1948—1952.
11) Н. Д. Папалекси, Собрание трудов. Изд. АН СССР, 1948.
Указатели литературы по автоколебаниям даны в книге
Андронова и Хайкина (см. 1), Фельдбаума (см. 6) и в выпуске
1-м четвёртого тома ЖТФ за 1934 г. Литературные ссылки,
непосредственно относящиеся к излагаемому в книге материалу,
даны в подстрочных примечаниях.
Редактор Т. Н% Нстребцева. 1
Техн. редактор С. С. Гаврилов. !
Корректор О. А. Сигал. . ;
" ' v ;> !
Подписано к печати 26/IV 1952 г,
Бумага 84х 108/з2-4,25 бум.л.13,94 печ.л
13,8 уч.-изд. л. 39 612 тип. зн. в печ. р
Тираж 7 000 экз. Т-02123.
Цена книги 6 руб. 90 коп. Переплёт 2 р
Заказ № 139.
Номинал по прейскуранту 1952 г.
16-я типография Главполиграфиздата
при Совете Министров СССР.
Москва, Трёхпрудный пер., 9.