/













































































































Похожие



Текст
Библиотека
ЭЛЕКТРОМОНТЕРА
Выпуск 498
К. Н. ДУБОВСКИЙ
<oZ(.
№
ЭЛЕКТРООБОРУДОВАНИЕ
МОСТОВЫХ КРАНОВ
Второе издание, переработанное
и дополненное
<>ж
МОСКВА «ЭНЕРГИЯ» 1980
ББК 31.291
Д 79
УДК 621.874:621.313
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
Андриевский В. Н., Большим Я- М., Зевакин А. И., Камин-
ский Е. А., Ларионов В. И., Мусаэлян Э. С., Розанов С. П..
Семенов В. А., Смирнов А. Д., Устинов П. И.
Дубовский К. Н.
Д 79 Электрооборудование мостовых кранов.—2-е изд.,
перераб. и доп. — М.: Энергия, 1980.— 112 с. ил.—
(Б-ка электромонтера; Вып. 498).
35 к.
Приведены сведения об устройстве мостовых кранов, необходимые
для их обслуживания и ремонта электрического оборудования. Даны
рекомендации по обслуживанию электроблокировки и устройств элек-
тробезопасности. Рекомендуются необходимые изменения в схемах по
безопасной эксплуатации мостовых кранов. Приводятся нормы пре-
дельно допустимого износа деталей, рассматриваются основные не-
исправности электрооборудования и способы их устранения.
Первое издание вышло в 1970 г. Второе издание переработано
и дополнено в соответствии с новыми Правилами устройства и без-
опасной эксплуатации грузоподъемных кранов.
Книга предназначена для электромонтеров, обслуживающих мос-
товые краны, а также может быть полезна лицам, ответственным
за содержание кранов в исправном состоянии.
д
30307-036
-----------83-80.
051(01)-80
2302030000
ББК 31.291
6П2.1.081
Краснослав Николаевич Дубовский
ЭЛЕКТРООБОРУДОВАНИЕ МОСТОВЫХ КРАНОВ
Редактор Ю. В. Рож а нковский
Редактор издательства И. П. Березина
Обложка художника Т. Н. Хромовой
Технический редактор В. В. Ханаева
Корректор И. А. Воло д я е в а
ИБ № 73
Сдано в'набор 23.08.79 Подписано в печать 17.01.80 Т-03619
Формат 84у108,/з2 Бумага типографская № 1 Гари, шрифта литературная
Печать высокая Хсл. печ. л. 5,88 Уч.-изд. л. 6,24
Тираж 40 000 экз. Заказ 258 Цена 35 к.
Издательство «Энергия», 113114, Москва, М-114, Шлюзовая наб., 10
Московская типография Me 10 Союзполиграфпрома при Государствен-
ном комитете СССР по делам издательств, полиграфии и книжной
торговли. 113114, .Москва, М-111, Шлюзовая наб., 10
(6) Издательство «Энергия», 1980
ПРЕДИСЛОВИЕ
Надежная работа электрического оборудования
мостовых и однобалочных кранов в значительной
степени обеспечивает надежность и безопасность
работы этих механизмов.
Предлагаемая вниманию читателей книга пред-
назначена в первую очередь для обслуживающего
и ремонтного персонала электрических кранов.
В ней рассмотрены конструкция и принцип работы
различных электрических аппаратов, а также ти-
повые электрические схемы с асинхронными дви-
гателями, применяемые для управления крановыми
механизмами.
Электрооборудование кранов, его монтаж, за-
земление и токоподвод должны соответствовать
Правилам устройства электроустановок. Эксплуа-
тация электрического' оборудования производится
в соответствии с Правилами технической эксплуа-
тации и безопасности обслуживания электроуста-
новок промышленных предприятий. Кроме того,
электрическое оборудование кранов и его эксплуа-
тация должны удовлетворять специальным прави-
лам Госгортехнадзора.
Этим вопросам уделяется в книге должное вни-
мание. Отмечается, что в настоящее время в экс-
плуатации иногда находятся краны устаревших
конструкций, где эти нормы не выполняются.
Для таких случаев приводятся конкретные реко-
мендации по изменению электрических схем, с тем
чтобы удовлетворить все требования нормативных
документов в отношении безопасности обслужива-
ния кранов.
Замечания и пожелания по книге просьба на-
правлять в адрес изд-ва «Энергия»: 113114, Москва,
М-114, Шлюзовая наб., 10.
Автор
1. ОБЩИЕ СВЕДЕНИЯ ОБ УСТРОЙСТВЕ
МОСТОВЫХ КРАНОВ
Мостовым кран называется потому, что его несущая
конструкция выполнена в виде моста, перекинутого через
пролет цеха и перемещающегося вдоль цеха или спе-
циальной эстакады по надземным рельсовым путям.
Различают следующие конструкции мостовых кра-
нов: однобалочные и двухбалочные, с ручным и элект-
рическим приводом, с кабиной управления и управ-
ляемые с пола (земли). В зависимости от типа
грузозахватного органа мостовые краны подразделяются
на крюковые (с одним или двумя крюками), магнитные
(с подъемным электромагнитом) и грейферные. Кроме
того, имеются мостовые краны, снабженные специаль-
ными грузозахватными органами (клещами, лапами и
т. д.). По способу расположения мостовые краны быва-
ют опорными и подвесными.
Однобалочный мостовой кран (кран-балка) состоит
из прокатной двутавровой балки, прикрепляемой по кон-
цам к концевым (поперечным) балкам, снабженным
ходовыми колесами. В качестве грузовой тележки здесь
используется ручная или электрическая таль, переме-
щающаяся по нижней полке двутавровой балки. При
больших пролетах главная балка усиливается фермами.
С 1947 по 1965 г. нашей промышленностью выпуска-
лись краны типа НК (разработка ВНИИПТМАШ) гру-
зоподъемностью 1—5 т, с пролетами 5—15 м (рис. 1).
В настоящее время они не выпускаются, но еще дли-
тельное время будут эксплуатироваться на предприятиях
страны, поэтому в табл. 1 приводятся их технические ха-
рактеристики.
В 1960 г. ВНИИПТМАШ разработаны новые конст-
рукции опорных кранов. Опорные кран-балки конструк-
ции 1960 г. грузоподъемностью 1 и 2 т имеют пролет
4—22,5 'М, а при грузоподъемности 3 и 5 т пролет состав-
ляет 4—28,5 м. Эти краны по конструкции делят на
4
сл
Рис. 1. Общий вид однобалочного мостового крана типа НК.
главные (продольные) балки; 2 — концевые балки; 3 — тельфер.
Таблица 1
Технические характеристики опорных кран-балок типа НК с
управлением с пола и из кабины
Грузоподъемность кран-балок, 1 2 3 5
Механизм передвижения крана
Скорость, м/мин:
при управлении с пола
при управлении из кабины
Диаметр ходового колеса, мм
Ширина головки рельса, мм
Двигатель
Мощность двигателя, кВт
Частота вращения двигателя,
об/мин
30
80
400
50—60
МТК11-6
2,2
885
30
80
400
50—600
МТК11-6
2,2
885
30
80
400
50—60
МТКП-6
2,2
885
30
80
400
50—60
МТКП-6
2.2
885
Механизм подъема и передвижения крюка
Таль ТЭ-121 ТЭ-221 ТЭг301 ТЭ-501
Масса тали, кг Скорость, м/мин: 440 485 850 1250
передвижения 20 20 20 20
подъема 8 8 8 8
Высота подъема, м 6 6 6 6
Двигатель подъема AOC42-.5 AOC51-6 АОС52-6 AOC62-6
Мощность, кВт 2,1 3,0 4,6 9,5
Частота вращения, об/мин 860 870 890 900
Двигатель передвижения А0ЛТ31-4 АО4124Ф-2 АО41-4Ф-2 (2 шт.)
краны малых пролетов (4—И м) и краны больших про-
летов (12—28,5 м).
У кранов малых нполетов -с управлением из кабины
(рис. 2) пролетное строение моста предста1вляет собой
несущую ездовую двутавровую балку 1, опирающуюся
концами на концевые балки 2. В плоскости верхних
полок ездового двутавра размещена горизонтальная
вспомогательная ферма 4. Вертикальная вспомогатель-
ная ферма и .площадки для обслуживания на кран-бал-
ках отсутствуют, поэтому кабина И управления с обо-
рудованием подвешена к продольному и поперечному
швеллерам 10, опирающимся на несущий двутавр, кон-
цевую балку и специальную вертикальную фермочку —
кронштейн 13. Электроталь 9 перемещается по нижним
полкам несущего двутавра. Ток к ней поступает через
токоприемники 6 от троллеев 5. Краны питаются током
от главных (цеховых) троллеев через токоприемники 7.
Механизм передвижения крапов имеет один привод 12,
укрепленный на валу приводного ходового колеса. Со
вторым приводным колесом привод соединен трансмис-
сионным валом 8 без промежуточных опор.
6
6
Рис. 2. Кран-балка малого пролета (4—11 м) с управлением из ка-
бины.
Рис. 3. Кран-балка большого пролета (11—28,5 м) с управлением
из кабины.
7
На концевой балке со стороны, противоположной
главным троллеям, размещен конечный выключатель 3
механизма передвижения крана. При управлении с пола
здесь располагается также пусковая электроаппаратура
механизма передвижения крана.
У однобалочных кранов больших пролетов с управ-
лением из кабины (рис. 3) подвесная двутавровая балка
1 подвешена посредине между двумя несущими верти-
кальными решетчатыми фермами 10 к поперечным дву-
тавровым балкам 4, опирающимся на несущие фермы.
Вспомогательная горизонтальная ферма 5 размещена
между верхними поясами вертикальных несущих ферм
симметрично по отношению к подвесной балке. Пролет-
ное строение моста опирается на концевые балки 2.
Вертикальная вспомогательная ферма и площадки для
обслуживания на этих кран-балках также отсутствуют.
Кабина 13 управления с оборудованием подвешена
к продольным и поперечным балкам 12 и кронштейну
11, опирающимся на концевую балку и вертикальную
несущую ферму. Электроталь 9 перемещается по нижним
полкам подвесного двутавра, получая ток с помощью
токоприемников 7 от троллеев 6. Ток от главных трол-
леев поступает через токоприемники 8. Механизм пе-
редвижения крана имеет два раздельных привода 14,
укрепленных на валах приводных ходовых колес. На
одной из концевых балок размещены два конечных
выключателя 3 для механизма передвижения крана, а
при управлении с пола — и пусковая электроаппаратура
механизма передвижения однобалочного крана.
Устройство тельфера (электрической тали). Электри-
ческая таль представляет собой грузоподъемный меха-
низм для подъема груза и перемещения его вдоль одно-
рельсового пути в виде двутавровой балки, прикрепляе-
мой к кран-балке или подвешиваемой к потолку здания.
Электротали делятся на три группы: с соосным располо-
жением узлов механизма подъема; с электродвигателем,
вмонтированным в грузовой барабан; с параллельно рас-
положенными осями барабана и электродвигателя.
Электротали первой группы, применяющиеся в ка-
честве грузоподъемных устройств на однобалочных кра-
нах типа НК, состоят из следующих основных узлов
(рис. 4): асинхронного электродвигателя 1 подъема гру-
за, корпуса тельфера 2 с грузовым барабаном, редукто-
ра 3, колодочного или дискового тормоза 4, каната 5,
8
крюковой подвески 6, ведущей 7 и ведомой 8 тележек,
двух электродвигателей передвижения 9. Каждый из
перечисленных узлов является самостоятельным, что по-
зволяет быстро производить оборку, разборку и замену
узлов. Корпус электрической тали представляет собой
цилиндрическую сварную коробку из листовой стали,
на концах которой имеются фланцы с отверстиями под
болты для крепления с одной стороны двигателя подъе-
ма груза, а с другой —картера редуктора. В верхней
части корпуса параллельно друг другу приварены две
щеки с ребрами, с помощью которых тельфер подвеши-
вается :к траверсе тележки передвижения. В нижней час-
ти корпуса с одной его стороны имеется окно для про-
пуска грузового каната, а с другой приварена скоба,
к которой на пальце крепится подвеска уравнительного
блока. Блок и ветви грузового каната, наматываемые
на барабан, расположены на одинаковом расстоянии от
вертикальной оси корпуса. Благодаря этому зев крюка
тельфера находится точно на вертикальной оси корпуса.
В корпусе размещен грузовой барабан, установленный
Рис. 4. Общий вид электротали с соосным расположением узлов
механизма подъема.
9
своими ступицами с одной стороны на подшипниках ка-
чения электродвигателя подъема, а с другой — на полом
валу редуктора. Полый вал редуктора, на шлицевой по-
верхности которого крепится барабан, является валом
последней ступени редуктора и в то же время служит
для пропускания вала-шестерни первой ступени редукто-
ра, передающей усилие от вала двигателя.
Тельфер со встроенным в барабан двигателем при-
меняется на кран-балках конструкции 1960 г. Механизм
подъема указанного тельфера, показанный на рис. 5,
имеет токоподводящую коробку 1, барабан 2, редуктор
3 и тормоз 4. В токоподводящей коробке находятся маг-
нитный пускатель электропривода передвижения тель-
фера, пускатель механизма подъема и контактные коль-
ца. В корпус грузового барабана 2 впрессован статор
5 электродвигателя, а ротор 6 насажен на вал, имеющий
на конце шлицы и соединенный посредством муфты
с первым валом редуктора, на конце которого установ-
лен маховик стопорного тормоза 4. На втором валу
редуктора находится дисковый грузоупорный тормоз 7,
предназначенный для регулирования скорости опускания
груза. Вращающий момент от редуктора к барабану
передается с помощью полого вала, имеющего зубчатый
венец, который постоянно находится в зацеплении со
ступицей барабана. Для всего ряда электроталей (кроме
грузоподъемностей 0,125 и 0,25 т) предусмотрена единая
система индексации (сокращенного обозначения), напри-
мер ТЭ2-511. Две первые буквы означают — таль элект-
рическая, цифра за ними — грузоподъемность в тоннах,
три цифры после черточки соответственно обозначают:
номер исполнения тали, исполнение барабана и число
скоростей механизма подъема.
Двухбалочный мостовой кран (рис. 6) представляет
собой мост 1, перемещающийся по крановым путям 2
на ходовых колесах, которые установлены в концевых
балках 3. Пути укладываются на подкрановые балки,
опирающиеся на выступы верхней части колонн цеха.
Расстояние между осями крановых рельсов называ-
ется пролетом крана. Расстояние между осями ходовых
колес (при установке моста на четырех ходовых коле-
сах) называется базой крана. При числе ходовых колес
больше четырех они устанавливаются попарно на ба-
лансирах.
По верхнему (а в некоторых конструкциях по ниж-
10
Рис. 5. Электротали со встроенным в барабан двигателем,
а —общий вид; б — кинематическая схема механизма подъема.
11
нему) 'поясу балок моста .поперек пролета цеха передви-
гается крановая тележка 4, снабженная подъемным
механизмом. Обычно на тележках мостовых 'кранов гру-
зоподъемностью свыше 15 т устанавливаются два меха-
низма подъема: главный и 'вспомогательный. Механизм
передвижения крана установлен на мосту крана, меха-
низм передвижения тележки — непосредственно на те-
лежке. Управление всеми механизмами производится из
кабины 5, прикрепленной к мосту крана. Для обслужи-
вания троллеев на кране предусмотрена специальная
площадка. Подвод тока к тележке осуществляется с по-
мощью гибкого кабеля или троллеев.
Применение гибкого токоподвода упрощает конструк-
цию, повышает надежность эксплуатации и снижает
массу крана, так как позволяет отказаться от стоек и
площадок для их размещения и обслуживания.
Мост крана и его механизм передвижения. Мост кра-
на состоит из жестко соединенных между собой главных
и концевых балок. Главные балки выполняются в виде
сплошных балок или решетчатых ферм. Имеется два
типа мостовых кранов. Мостовой кран первого типа из-
готовляется из двух балок коробчатого сечения. Мосто-
вой кран второго типа состоит из двух главных верти-
кальных ферм, непосредственно воспринимающих на-
грузку, двух вспомогательных вертикальных ферм и
четырех горизонтальных ферм, две из которых распо-
ложены в плоскости верхних поясов главных ферм
и две — в плоскости нижних поясов. Каждая половина
моста (из четырех ферм) крепится к концевым двух-
ступенчатым балкам. Мост крана передвигается на хо-
довых колесах, приводимых в движение механизмом
передвижения, который смонтирован непосредственно
на мосту. Передача движения от двигателя, установлен-
ного на мосту, к ходовым колесам крана осуществляется
с помощью трансмиссионного вала и зубчатых передач.
Трансмиссионный вал состоит из отдельных звеньев
длиной 4—6 >м, соединенных между собой муфтами.
Обычно не все ходовые колеса крана соединены с дви-
гателем. Ходовые колеса, соединенные с двигателем,
называются приводными (или ведущими), а несоединен-
ные —• холостыми (или ведомыми).
В зависимости от частоты вращения трансмиссион-
ного вала различают следующие механизмы передви-
жения моста: с тихоходным, ореднеходным и быстроход-
13
ным трансмиссионным валом. На рис. 7,а приведена
кинематическая схема механизма с тихоходным транс-
миссионным валом. При этой схеме в средней части
моста устанавливается двигатель 1 механизма передви-
жения, вал двигателя муфтой 2 соединяется с цилиндри-
ческим редуктором 3. Тормоз механизма устанавлива-
ется на 'соединительной муфте 2 или на специальном
тормозном шкиве 5, который располагается на втором
конце вала двигателя. Выходной вал редуктора соеди-
нен с трансмиссионным валом 4, состоящим из отдель-
ных секций. На рис. 7,6 показана схема механизма!
передвижения крана со среднеходным трансмиссионным!
валом. В этой схеме зубчатые передачи находятся не;
в одном месте, а разделены на две ступени: одна у дви-
гателя, а вторая у ходовых колес. Эта схема применя-
ется чаще всего на старых кранах. На рис. 7,в показана
схема механизма передвижения крана с быстроходным
трансмиссионным валом. В отличие от рассмотренных
выше схем здесь вал вращается с той же частотой, что
и двигатель, а передача в виде двух одинаковых редук-
торов устанавливается около концевых балок моста кра-
на. Выходные валы редукторов с помощью муфт соеди-
няются непосредственно с валами ходовых колес.
В последнее время широкое распространение нашла
схема механизма передвижения с раздельным приводом
(рис. 7,г). В этой схеме ходовые колеса концевой балки
моста .приводятся в движение индивидуальными дви-
гателями. Между приводами, расположенными на раз-
личных концах балки, не предусмотрено никакой элект-
рической связи. Выравнивание концевых балок в движе-
нии обеспечивается самой металлоконструкцией крана.
Число ходовых колес, на которых перемещается мост
крана, зависит от грузоподъемности крана. На кранах
грузоподъемностью до 50 т обычно применяют четыре
ходовых колеса. На кранах грузоподъемностью 75—
125 т и пролетом любой длины, а также на кранах гру-
зоподъемностью 150 т и пролетом до 16 м мосты изго-
товляются с восемью ходовыми колесами. Краны грузо-
подъемностью 200 и 250 т с любыми пролетами имеют
мост, перемещающийся на 16 ходовых колесах.
Для равномерного распределения нагрузки между
ходовыми колесами применяют уравновешивающие ба-
лансиры. Ходовые колеса устанавливают в балансирах
попарно.
14
Рис. 7. Схемы механизмов передвижения мостовых кранов.
а — с тихоходной трансмиссией; б — со среднеходной трансмиссией; в — с бы-
строходным валом; г — с раздельным приводом, д — с двумя механизмами
передвижения.
15
Тележка мостового крана представляет собой свар-
ную раму, которая передвигается на ходовых колесах
по рельсам, уложенным на главных балках. Тележки
кранов малой и средней грузоподъемности обычно имеют
четыре ходовых колеса, а кранов большой грузоподъем-
ности (более 200 т)—восемь ходовых колес. В послед-
нем случае для крепления колес используют балансиры.
Ходовые колеса тележки .приводятся ® движение .меха-
низмом передвижения тележки, который состоит из дви-
гателя, редуктора и вала, передающего движение от ре-
дуктора ходовым колесам. Кинематические схемы меха-
низмов передвижения тележек представлены на рис. 8.
По конструкции крановые тележки (рис. 9) разделя-
ют на крюковые, грейферные и магнитные.
Рис. 8. Схемы механизмов передвижения тележек мостовых кранов.
а — механизм передвижения с боковым расположением двигателя: б — то же
с центральным расположением двигателя; 1 — электродвигатель; 2 — редук-
тор; 3 — тормоз; 4 — приводное колесо; 5 —• вал; 6 — зубчатая муфта; 7 —•
подшипник,
16
Рис. 9. Общий вид крановой тележки.
а — крюковая; б — грейферная; в — магнитная.
У крюковой тележки вал двигателя механизма подъ-
ема соединяется с быстроходным валом редуктора при
помощи зубчатой или упругой муфты. Тихоходный вал
редуктора также при помощи муфты соединяется с ва-
лом, на котором находится барабан. От бара'ба.на дви-
жение передается крюку при помощи полиспаста.
В подъемных 'механизмах малой грузоподъемности часто
применяют двукратный полиспаст. На кранах грузоподъ-
2-—258 17
емкостью 125 т устанавливают шестикратные полиспас-
ты. В сдвоенных дву-, четырех- и шестикратных поли-
спастах ось уравнительного блока неподвижно закреп-
лена на раме тележки. В трехкратных полиспастах
уравнительный блок располагают между подвижными
блоками, и при работе полиспаста он перемещается
вместе с ними. К оси подвижных блоков крепится крюк
крана.
Конструкция грейферной тележки крана показана на
рис. 10. В этом случае мост грейферного крана, его ме-
Рис 10 Конструкция грейферной тележки
ханизм передвижения и механизм передвижения тележ-
ки выполнены аналогично кранам с крюковой тележкой.
На тележке с четырехканатным грейфером устанавли-
вают два самостоятельных механизма подъема. На
грузовой барабан одного из них наматывают канаты
подъема грейфера, а на грузовой барабан другого —
канаты замыкания челюстей грейфера. Имеются одно-,
двух-, трех- и четырехканатные, а также моторные грей-
феры. На мостовых кранах в большинстве случаев при-
меняются четырехканатные (два каната замыкания че-
18
люстей и два каната подъема грейфера) и приводные
грейферы.
Устройство четырехканатного грейфера и очередность
операций при захвате и подъеме груза показаны на
рис. 11. К двум барабанам А и Б прикреплены канаты
замыкания 2 и канаты .подъема 3, концы которых за-
крепляются на грейфере и на его блоке. Барабаны .могут
вращаться в любом направлении с различной скоростью.
Если скорости барабанов равны и направления .вращения
совпадают, грейфер поднимается или опускается. При
Рис. 11. Схема работы грейфера.
/ — челюсти грейфера; 2 — канаты замыкания; 3 — канаты подъема.
этом канаты 2 и 3 наматываются на свои барабаны или
разматываются с них. Когда барабаны вращаются с раз-
личными скоростями или в разные стороны, происходит
перемещение канатов относительно друг друга и грей-
фер раскрывается или закрывается. Таким образом, для
подъема или опускания грейфера следует наматывать
или разматывать канаты с одинаковой скоростью, а для
закрывания и открывания грейфера необходимо обеспе-
чить относительное перемещение канатов. Когда откры-
тый грейфер находится над захватываемым материалом,
останавливают барабан Б, вследствие чего канаты 3
несколько ослабляются и грейфер под действием собст-
венной тяжести врезается в материал. Затем включают
барабан А на подъем и закрывают грейфер. Когда грей-
2е 19
фор закроется и начнет 'подниматься, включают на подъ-
ем барабан Б. Канаты 3 при этом быстро натягиваются,
и нагрузка поровну распределится между четырьмя ка-
натами. После подъема барабан Б необходимо остано-
вить для разгрузки грейфера, а барабан А включить
в сторону спуска, грейфер под действием тяжести ма-
териала откроет челюсти. Когда грейфер открыт, он
висит на канатах 3, спуск его происходит также на этих
канатах, в то время как канаты 2 разматываются с той
же скоростью. Спуск закрытого грейфера происходит на
всех четырех канатах.
Следовательно, при управлении грейферными лебед-
ками возникает необходимость включать оба двигателя
грейфера одновременно (при подъеме закрытого грей-
фера) или разновременно, держа контроллеры в разных
положениях относительно друг друга (при открывании
и закрывании грейфера), что трудно делать крановщи-
ку. Для облегчения управления в ряде конструкций грей-
ферных лебедок устраивают механическую или электри-
ческую связь между обеими лебедками, причем более
удачными являются электрические аппараты, произво-
дящие переключение в схеме двигателей при возникно-
вении разницы в числе оборотов, сделанных обоими ба-
рабанами (дифференциальные переключатели или ав-
томаты).
Моторный грейфер имеет обычную схему включения
подъемного двигателя; двигатель закрывания распола-
гается не на тележке, а находится на самом грейфере,
получая питание через гибкий кабель, и выключается
в крайних положениях челюстей грейфера конечными
выключателями. При моторном грейфере применяется
обычная, а не грейферная тележка, так как грейфер под-
вешивается непосредственно на крюк крана. Фактически
такой кран не является грейферным, и грейфер в этом
случае служит сменным грузозахватным приспособле-
нием.
Магнитная тележка отличается от крюковой лишь
наличием кабельного барабана (рис. 12) с кольцевыми
токоприемниками, установленного на раме тележки па-
раллельно грузовому барабану. Для обеспечения равен-
ства скоростей кабеля и крюка кабельный барабан свя-
зан с выходным валом редуктора при помощи зубчатой
передачи с паразитной шестерней. Грузовой электромаг-
нит подвешивается непосредственно на грузовой крюк.
20
Питание к электромагниту поступает через троллеи и
гибкий 'Кабель. Управление механизмами передвижения
моста и подъема осуществляется магнитными станция-
ми, а управление тележкой производится с помощью
силового контроллера. Схема управления должна обес-
печить остановку крана под действием контактов люка,
двери и конечных выключателей без отключения 'магни-
та. Поэтому все панели и 'магнитные контроллеры, кро-
Рис. 12. Кинематическая схе.ма
магнитной тележки.
1 — двигатель; 2 — редуктор: 3 — тор-
моз; 4 — барабан: 5 — подвеска; 6 —
уравнительный блок; 7 — кабельный
барабан; 8 — передача к кабельному
барабану; 9 — плавающий вал; 10 —
зубчатая ступица; 11 — зубчатая муф-
та; 12 — подшипник.
ме панели электромагнита, подключаются к цепи пита-
ния после линейного контактора защитной панели. При
срабатывании указанных контактов или разрыве цепи
управления аварийным выключателем все троллеи обес-
точиваются и приводные двигатели отключаются,
а электромагнит остается подключенным к источнику
постоянного тока. На кранах, работающих от сетей
трехфазного тока, необходимый для электромагнита по-
стоянный ток вырабатывается специальным двигатель-
генератором, установленным на мосту крана. Двигатель-
генератор состоит из трехфазного асинхронного коротко-
замкнутого двигателя, управляемого магнитным пускате-
лем, и генератора постоянного тока. Постоянный ток,
вырабатываемый генератором, поступает по проводам
в панель управления грузоподъемным электромагнитом
типа ПМС и командоконтроллер, предназначенный для
включения электромагнита. Далее от панели ПМС через
троллеи и токоприемники ток поступает на тележку кра-
на. Схема подачи энергии к магниту приведена на
21
рис. 13. Захват груза электромагнитом происходит при
включении его катушки. Магнитный 'поток, создаваемый
током катушки, замыкается через поднимаемый груз.
Отпадание груза происходит после выключения катушки
магнита. Сталь .полюсов плиты грузоподъемного электро-
магнита и полюсных наконечников способна намагничи-
ваться и сохранять остаточный магнетизм после того,
как катушка выключена. Поэтому легкие грузы не всег-
Рис. 13. Схема подачи энергии к грузоподъемному электромагниту.
1 — асинхронный электродвигатель; 2 — генератор; 3 — магнитный пускатель;
4 — кнопка управления; 5 — регулятор возбуждения; 6 — командоконтроллер;
7 — магнитный контроллер; 8 — грузоподъемный электромагнит.
да отпадают от магнита и остаются притянутыми. Для
полного размагничивания плиты грузоподъемного элект-
ромагнита после его выключения в катушку магнита
кратковременно подают небольшой ток обратного на-
правления. Подъемная сила электромагнита зависит
от свойств, формы, плотности укладки и температуры
груза. Химический состав поднимаемых изделий также
влияет на подъемную силу магнита.
Мостовые краны со специальными грузозахватными
органами. К ним относятся краны: литейные (миксерные,
заливочные, разливочные), служащие для заливки жид-
кого чугуна и разливки стали; стрипперные, используе-
мые для освобождения слитков из изложниц; клещевые
(колодцевые), предназначенные для обслуживания на-
гревательных колодцев (посадки и выдачи слитков) и
подачи нагретых слитков от колодцев на слитковоз;
мульдо-завалопные, используемые для загрузки марте-
новских печей шихтой; краны с подхватами (прицеп-
краны), применяемые в прокатных цехах для обслужи-
вания складов заготовок и готовой продукции.
22
Мостовые литейные краны. Мост крана состоит из
двух основных ферм, .на которые уложены рельсы глав-
ной тележки, и двух 'вспомогательных балок, на которых
укреплены рельсы вспомогательной тележки.
Расположение ферм и балок моста таково, что тележ-
ки при работе не мешают друг другу. Вспомогательная
тележка свободно проходит под главной тележкой. Та-
кое расположение тележек и ферм позволяет наклонять
ковш, взятый механизмом главного подъема, в обе сто-
роны. Механизм главного подъема литейного крана име-
ет два грузовых барабана, которые приводятся в дейст-
вие двумя двигателями через редукторы (рис. 14). По-
скольку канаты барабанов поднимают траверсу, на
крюках которой висит ковш с расплавленным металлом,
необходимо, чтобы частоты вращения обеих грузовых
барабанов были строго одинаковыми. Для этого два зуб-
чатых венца, соединенные с грузовым барабаном, нахо-
дятся в зацеплении.
Литейный кран является весьма ответственным аг-
регатом, так как задержка в работе механизмов крана
влечет за собой застывание металла в ковше. Поэтому
двигатели механизма главного подъема выбраны такой
мощности, чтобы каждый из них был в состоянии под-
нять ковш с металлом. Для того чтобы вышедший из
строя механизм главного подъема не мешал работать
второму исправному механизму, в редукторах на зубча-
тых колесах, соединенных с тихоходными валами, име-
ются храповые устройства.
Рис. 14. Механизм главного подъема литейного крана.
1 — грузовые барабаны; 2 — двигатели; 3 — редукторы; 4—зубчатые венцы
барабанов.
23
Главная тележка передвигается на восьми ходовых
колесах. Вспомогательная тележка подобна тележке кра-
на с крюком.
Аналогично механизму главного подъема механизм
передвижения моста приводится в движение двумя дви-
гателями, но храповых устройств здесь нет.
Краны для раздевания слитков служат для выталки-
вания слитков из изложниц. Краны этого типа изготов-
ляют в трех исполнениях: трехоперационные, двухопера-
ционные и однооперационные.
Мост крана имеет восемь ходовых колес. Механизм
передвижения моста оборудован быстроходной транс-
миссией. На тележке смонтированы механизм главного
подъема, привод механизма выталкивания слитка и ме-
ханизм движения тележки.
Шахта крана, представляющая собой стальную трубу
большого диаметра, вверху прикреплена к раме тележки
и движется вместе с ней. По всей высоте шахты располо-
жена трехэтажная кабина. В первом (нижнем) этаже, яв-
ляющемся рабочим местом машиниста, сосредоточено
все управление краном. Во втором и третьем этажах раз-
мещены контакторные панели и ящики сопротивлений.
Клещевые (колодцевые) краны применяются для об-
служивания нагревательных печей колодцевого типа.
Мост клещевого крана передвигается на восьми колесах,
укрепленных на балансирах, и имеет два механизма
передвижения, которые расположены по обе стороны
моста. Кинематическая схема механизмов передвижения
такая же, как у мостового крана с крюком. На тележке
крана размещены механизмы: главного подъема, управ-
ления клещами, вращения клещей, движения тележки
и вспомогательного подъема. К раме тележки прикреп-
лена решетчатая шахта, внутри которой по направляю-
щим скользят две траверсы с колонной. К нижней части
колонны подвешены клещи, захватывающие слиток.
Механизм главного подъема поднимает колонну с кле-
щами. Он состоит из двигателя 1 (рис. 15), муфты пре-
дельного момента 2, двухступенчатого редуктора 3, тор-
моза и канатного барабана 4. Барабан имеет три нарез-
ки: две крайние для канатов подъема колонны и среднюю
для каната управления клещами. Колонна 8 с клещами
соединена с траверсой, подвешенной к барабану на кана-
те 5, огибающем блоки 6 траверсы и уравнительный
блок 7.
24
В механизме управления клещами подвеска клещей
9 соединена с колонной 8 и имеет симметрично располо-
женные наклонные прорези 10, в которых перемещаются
верхние пальцы клещей. Клещи соединены друг с другом
центральной осью //.При перемещении подвески с про-
резями относительно клещей происходит их открывание
или закрывание. Управление
помощи тяги или цепи 12,
проходящей внутри ко-
лонны. Нижний конец тя-
ги соединен со средней
частью клещей, а на верх-
нем конце укреплен блок
13, через который пропу-
щен канат 14. Концы это-
го каната закреплены на
двух барабанах: один на
средней части барабана
главного подъема 4, дру-
гой на барабане меха-
низма управления кле-
щами 15. В случае опу-
скания или подъема кле-
щей без изменения их
раствора действуют ме-
ханизмом главного подъ-
ема 4 при неподвижном
барабане управления 15.
При этом одновременно
с клещами перемещается
колонна, клещи не пере-
двигаются относительно
прорезей и, следователь-
но, их раствор не изменя-
ется. Для изменения рас-
твора клещей включают
механизм управления,
клещами производится при
Рис. 15. Схема механизмов кле-
щевого крана.
вследствие чего клещи начинают передвигаться относи-
тельно направляющих прорезей.
Кинематическая схема механизма управления кле-
щами аналогична схеме механизма главного подъема.
Она состоит из двигателя 16, муфты предельного момен-
та 17, тормоза, двухступенчатого редуктора 18 и канат-
ного барабана 15. Для вращения клещей предусмотрен
25
двигатель 19, соединенный с валом червячного редуктора
20. Червячное колесо редуктора вращает вертикальный
вал 21, расположенный вдоль шахты. На нижнем конце
вертикального вала, имеющего квадратное сечение, на-
ходится шестерня 22. Она вращается вместе с валом и
может перемещаться вдоль вала. С шестерней 22 нахо-
дится в зацеплении зубчатое колесо 23, имеющее в цен-
тре квадратное отверстие, через которое проходит ко-
лонна. Таким образом, шестерня 22 может перемещать-
ся вдоль вертикального вала и зубчатое колесо 23 име-
ет возможность для перемещения вдоль колонны. Такое
устройство позволяет не нарушать зацепление шестерен
22 и 23 при перемещении колонны.
Механизм передвижения тележки и механизм вспо-
могательного подъема устроены так же, как в кранах
с крюком.
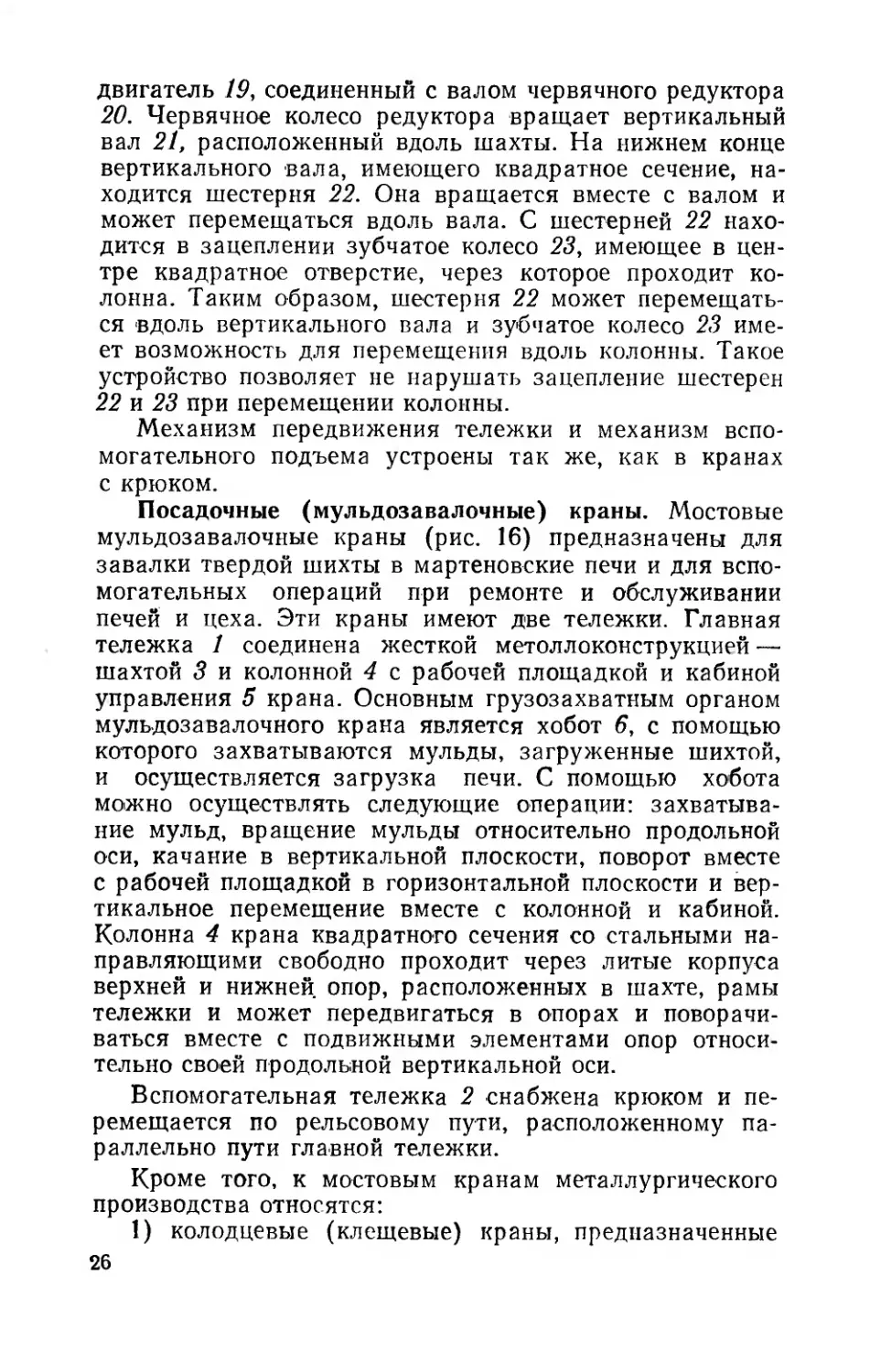
Посадочные (мульдозавалочные) краны. Мостовые
мульдозавалочные краны (рис. 16) предназначены для
завалки твердой шихты в мартеновские печи и для вспо-
могательных операций при ремонте и обслуживании
печей и цеха. Эти краны имеют две тележки. Главная
тележка 1 соединена жесткой метоллоконструкцией —
шахтой 3 и колонной 4 с рабочей площадкой и кабиной
управления 5 крана. Основным грузозахватным органом
мульдозавалочного крана является хобот 6, с помощью
которого захватываются мульды, загруженные шихтой,
и осуществляется загрузка печи. С помощью хобота
можно осуществлять следующие операции: захватыва-
ние мульд, вращение мульды относительно продольной
оси, качание в вертикальной плоскости, поворот вместе
с рабочей площадкой в горизонтальной плоскости и вер-
тикальное перемещение вместе с колонной и кабиной.
Колонна 4 крана квадратного сечения со стальными на-
правляющими свободно проходит через литые корпуса
верхней и нижней опор, расположенных в шахте, рамы
тележки и может передвигаться в опорах и поворачи-
ваться вместе с подвижными элементами опор относи-
тельно своей продольной вертикальной оси.
Вспомогательная тележка 2 снабжена крюком и пе-
ремещается по рельсовому пути, расположенному па-
раллельно пути главной тележки.
Кроме того, к мостовым кранам металлургического
производства относятся:
1) колодцевые (клещевые) краны, предназначенные
26
для посадки стальных слитков в нагревательные колод-
цевые печи и для подачи нагретых слитков на слитко-
воз; основной грузозахватный орган — клещи;
2) ковочные краны, применяемые для подачи заго-
товок и манипулирования ими при производстве ковоч-
ных работ;
Рис. 16. Посадочный кран.
3) краны с подхватами для транспортирования горя-
чего и холодного проката;
4) магнитные, мульдомагнитные и грейферные краны
для работы с шихтой.
27
Подвесные мостовые краны. В зданиях, оборудован-
ных мостовыми кранами, между границами приближения
крюков кранов двух соседних пролетов образуются
«мертвые зоны», составляющие 15—20% площади цехов.
С целью более полного обслуживания цеха вместо мо-
стовых кранов опорного типа, мост которых опирается
на ходовые колеса, применяют подвесные краны
(ГОСТ 7890-73), ходовые тележки которых перемеща-
ются по подвесному рельсовому пути. При применении
подвесных кранов снижается необходимая высота произ-
водственного помещения, так как вертикальный размер
подвесного крана значительно меньше, чем опорного мо-
стового крана. Применение подвесных кранов позволяет
осуществлять безперегрузочную передачу грузов из про-
лета в пролет, что достигается стыкованием несущих
балок (путей грузовых тележек) двух подвесных кра-
нов, расположенных -в соседних пролетах, или стыкова-
нием несущей балки крана с однорельсовым путем со-
седних пролетов.
Подвесные краны могут быть двухогюрными
(рис. 17,а) или многоогюрными (рис. 17,6). Несущими
балками этих кранов являются обычно прокатные дву-
тавровые балки. При больших пролетах эти балки уси-
ливаются шпренгелем, а также горизонтальными и вер-
тикальными фермами жесткости. Балки подвешены к хо-
довым кареткам, которые передвигаются вдоль цеха по
крановым путям (двутаврового сечения), прикрепленным
к строительным фермам перекрытия. Общая длина крана
определяется величиной пролета здания и может дости-
гать 100 м. Горизонтальная жесткость металлической
конструктии достигается связями, располагаемыми
в плоскости верхних поясов несущих балок, а также
диафрагмами, соединяющими балки ходовых кареток
с несущей балкой крана. Каждая балка ходовых каре-
ток имеет отдельный привод механизма передвижения,
расположенный непосредственно на этой балке.
В ряде случаев металлоконструкция подвесного кра-
на выполняется в виде двухбалочного моста, имеющего
повышенную жесткость в горизонтальной плоскости, что
имеет существенное значение при большом пролете кра-
на и при значительных динамических усилиях, возникаю-
щих при пуске и торможении крана.
Для стыковки несущих балок подвесных кранов при
переходе грузовой тележки из пролета в пролет, а также
28
для предотвращения их расцепления предусмотрены
фиксирующие устройства — замки 1 (рис. 17) с электри-
ческой блокировкой, исключающей возможность пере-
движения грузоподъемной машины или ее тележки при
незапертом замке.
Управление подвесными кранами может производить-
ся с пола либо из кабины, подвешенной к металлокон-
струкции крана (неподвижная кабина) или к грузовой
тележке (подвижная кабина). Подвесные краны значи-
Рис. 17. Подвесные мостовые краны.
а — двухопорные; б — многоопорные.
29
Тельно легче мостовых кранов опорного типа. Они имеют
грузоподъемность от 0,25 до 20 т, причем грузоподъем-
ность до 5 т включительно обеспечивается электроталя-
ми, а грузоподъемность 8; 12,5 и 20 т — обычными меха-
низмами подъема груза, унифицированными с механиз-
мами подъема опорных мостовых кранов.
2. ПОДВОД ТОКА К КРАНАМ
Подвод тока к мостовым кранам осуществляется
троллеями или гибким шланговым кабелем. На самом
кране подвод тока к электромагниту осуществляется че-
рез кольцевой токоприемник, находящийся в кабельном
барабане. Кольцевой токоприемник подобен фазным
кольцам электродвигателя.
Троллеи, прокладываемые вдоль цехов, называются
главными. Они крепятся к подкрановым балкам на кон-
струкциях с установленными па них изоляторами. Трол-
леи, прокладываемые по мосту, называются вспомога-
тельными. Для изготовления троллеев применяют в ос-
новном уголок, швеллер, полосу, ленту и т. п. Их
сечение зависит от тока и длины троллейной линии. До-
пускается изготовлять троллеи из алюминиевых спла-
вов, а применение для этой цели меди должно быть обо-
сновано, т. е. использовать ее можно там, где нельзя
применять сталь из-за интенсивного воздействия окру-
жающей среды. Прокладывают троллеи таким образом,
чтобы обеспечить их изоляцию от стен и конструкций.
На рис. 18 показан держатель троллея из угловой ста-
Рис. 18. Держатель троллея из угловой стали.
30
ли. Он состоит из консолей /, изолированных от под-
держивающей их конструкции изоляторами 2 и изоли-
рованными стяжными шпильками 3. Количество вспомо-
гательных троллеев 4 зависит от рода тока, числа
двигателей на тележке и от схемы управления.
Для троллейных проводов, выполненных из стали
жесткого профиля (уголка, швеллера, рельса и т. д.),
должны быть предусмотрены компенсирующие устрой-
ства в местах пересечения ими температурных и осадоч-
ных швов здания. Компенсирующее устройство пред-
ставляет собой перемычку из медного гибкого провода
соответствующего сечения, соединяющую два участка
троллеев, концы которых располагаются с зазором 15—
20 мм. Расстояние между точками крепления троллеев
обычно принимают равным шагу колонн здания. Креп-
ление проводов из проволоки выполняется жестким (про-
вод неподвижно закреплен в конечных точках и на про-
межуточных опорах) или гибким (провод неподвижно
крепится только в конечных точках).
Расстояние от главных троллеев до уровня земли
должно быть не менее 3,5 м при напряжении до 660 В,
а в проезжей части — не менее 6 м. Уменьшение указан-
ных расстояний допускается при условии ограждения
троллеев.
Главные троллеи жесткого типа должны быть окра-
шены в красный цвет, за исключением контактных по-
верхностей. В соответствии с требованием ПУЭ в месте
подвода питания участки троллеев длиной 100 мм окра-
шиваются в следующие цвета при переменном токе: фа-
за А — в желтый, фаза В — в зеленый, фаза С — в крас-
ный; при постоянном токе: положительная шина—в крас-
ный, отрицательная—в синий и нейтральная — в белый.
Главные троллеи должны быть снабжены световой
сигнализацией о наличии напряжения, а при секциони-
ровании троллеев и наличии ремонтных участков этой
сигнализацией должны быть снабжены каждая секция и
каждый ремонтный участок.
При трехфазном токе число ламп сигнализации при-
нимается равным числу фаз (по одной лампе на фазу),
а при постоянном токе две лампы включаются парал-
лельно. Для увеличения срока службы ламп включают
добавочные сопротивления, с помощью которых в нор-
мальных условиях несколько снижают напряжение на
зажимах ламп (до 10% номинального напряжения).
31
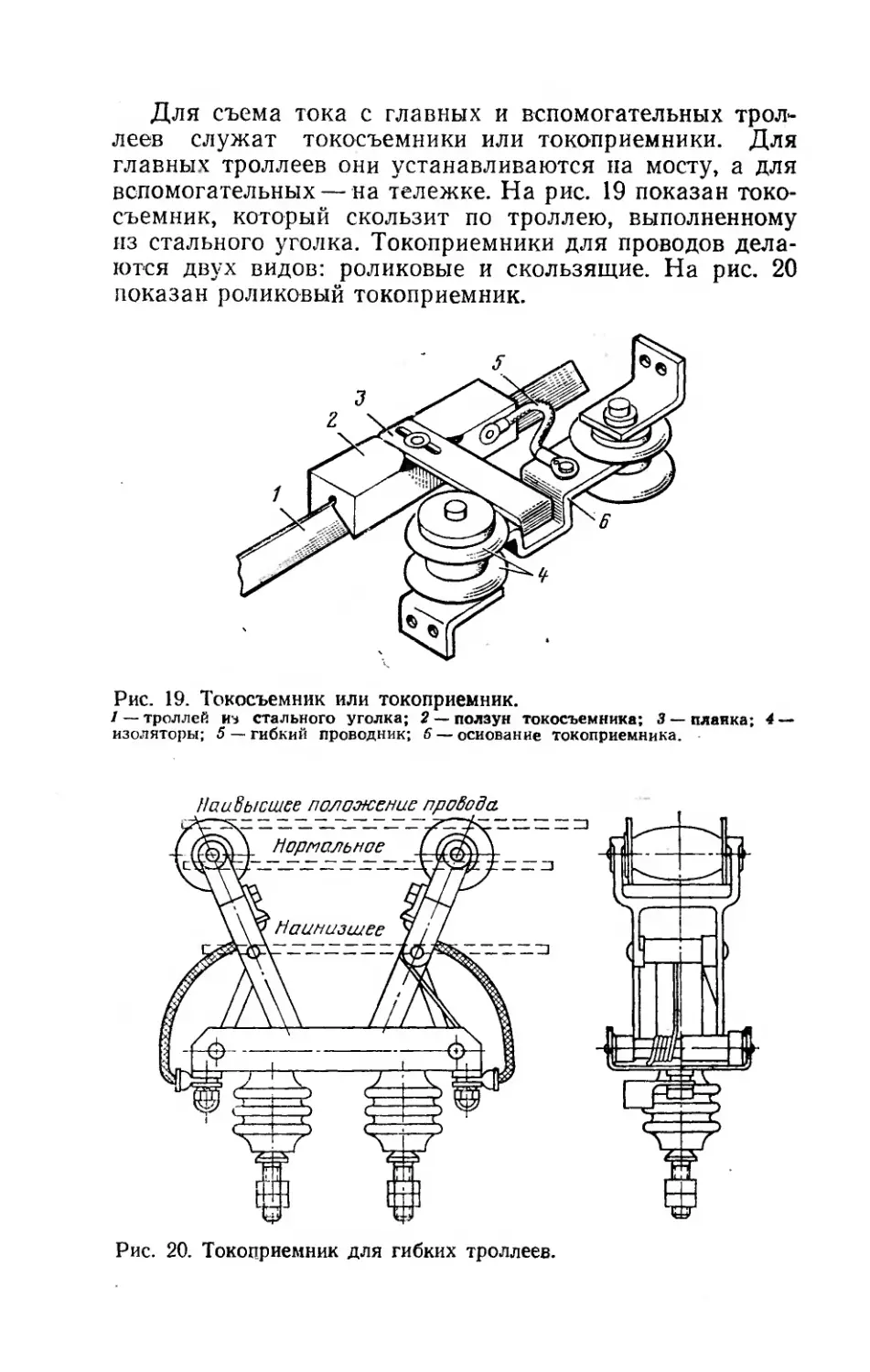
Для съема тока с главных и вспомогательных трол-
леев служат токосъемники или токоприемники. Для
главных троллеев они устанавливаются па мосту, а для
вспомогательных — на тележке. На рис. 19 показан токо-
съемник, который скользит по троллею, выполненному
из стального уголка. Токоприемники для проводов дела-
ются двух видов: роликовые и скользящие. На рис. 20
показан роликовый токоприемник.
Рис. 19. Токосъемник или токоприемник.
/ — троллей из стального уголка; 2 — ползун токосъемника; 3 — планка; 4 —
изоляторы; 5 — гибкий проводник; 6 — основание токоприемника.
Рис. 20. Токоприемник для гибких троллеев.
В местах возможного соприкосновения грузовых ка-
натов с главными троллейными проводами (при распо-
ложении троллеев ниже крана) должны устанавливать-
ся защитные устройства. Главные троллейные провода
и их токоприемники в случаях их расположения выше
моста крана должны ограждаться от моста крана, а так-
же в тех местах, где возможно случайное к ним прикос-
новение (площадки, лестницы). Это требование не рас-
пространяется на вспомогательные троллеи, с которых
напряжение снимается при выходе на настил моста.
Главные троллейные провода должны размещаться
со стороны, противоположной расположению кабины. Мо-
стовые краны (кроме однобалочных) должны быть обо-
рудованы кабинами (площадками) для обслуживания
главных троллейных проводов и токоприемников, если
они располагаются ниже настила галереи крана. Люк
для входа с настила моста в кабину для обслуживания
главных троллейных проводов должен иметь крышку,
закрывающуюся на замок.
Люльки не требуются и ограждение главных тролле-
ев на моету крана не надо производить, если подвод
тока осуществляется с помощью гибкого шлангового
кабеля. Нет необходимости в этом случае устанавливать
контакт люка кабины.
На рис. 21 показано устройство токоподвода к мосто-
вому крану или тележке гибким кабелем. Вдоль пути
Рис. 21. Токоподвод с гибким шланговым кабелем.
3—258
33
механизма прокладываются направляющие 1 из уголка,
горизонтальная полка которого крепится к опорам 2,
а на вертикальной располагаются катки 3 кареток 4
с прикрепленными к ним колодками 5. В колодках за-
жимается необходимое число петель гибкого кабеля 6.
Один конец этого кабеля закрепляется неподвижно
в точке 7, где подводится к нему напряжение. Второй
конец соединяется с поводком 8, установленным на пере-
двигающемся механизме. При движении механизма ка-
ретки расходятся, растягивая кабель, и сходятся, скла-
дывая его в виде гирлянды. Отдельные каретки соедине-
ны между собой тросом 9, предохраняющим оболочку
кабеля от растяжения и разрыва. Для устройства гиб-
кого токоподвода обычно применяют шланговый кабель
марок КРПТ, ГРШС и др. От токоприемника (троллеев
или гибкого кабеля) электроэнергия подводится в каби-
ну крана, к защитной панели, а оттуда к аппаратам и
электродвигателям.
3. ЭЛЕКТРИЧЕСКОЕ ОБОРУДОВАНИЕ КРАНОВ
Устройство и основные данные крановых электродви-
гателей. Устанавливаемые на мостовых кранах электро-
двигатели относятся к специальной группе электрических
машин, называемых крановыми. Крановые электродви-
гатели с фазным ротором обозначают МТ, с короткозам-
кнутым ротором — МТК. Эти двигатели в большинстве
случаев изготовляют на напряжение 220/380 В. Если на-
пряжение питающей сети равно 220 В, статорную обмот-
ку двигателя соединяют треугольником, при напряжении
сети 380 В — звездой.
Отношение максимального крутящегося момента
к номинальному у двигателей серии МТ находится
в пределах 2,5—3, поэтому они могут надежно работать
при некоторых колебаниях напряжения сети. Начальный
пусковой момент двигателей серии МТК в 2,6—3,2 раза
выше номинального. Асинхронный двигатель имеет до-
статочно жесткую характеристику — мало изменяет ча-
стоту вращения при изменении нагрузки. В пределах
нормальной нагрузки и допустимых перегрузок между
током двигателя и нагрузкой на валу существует про-
порциональная зависимость: с увеличением нагрузки
двигатель потребляет из сети больший ток и большую
мощность. При работе вхолостую асинхронный двига-
34
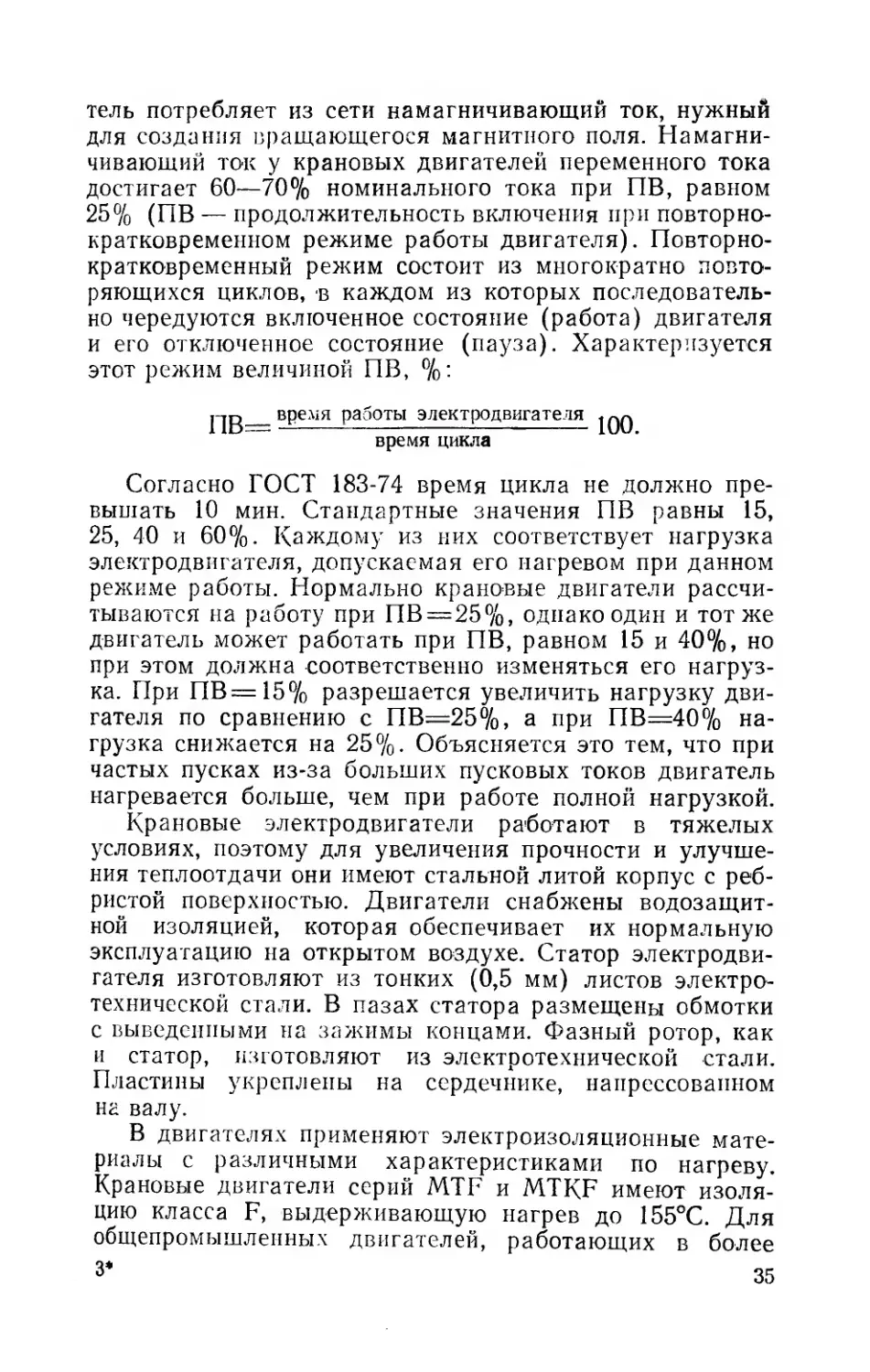
тель потребляет из сети намагничивающий ток, нужный
для создания вращающегося магнитного поля. Намагни-
чивающий ток у крановых двигателей переменного тока
достигает 60—70% номинального тока при ПВ, равном
25% (ПВ — продолжительность включения при повторно-
кратковременном режиме работы двигателя). Повторно-
кратковременный режим состоит из многократно повто-
ряющихся циклов, в каждом из которых последователь-
но чередуются включенное состояние (работа) двигателя
и его отключенное состояние (пауза). Характеризуется
этот режим величиной ПВ, %:
j-jg__вречя раэоты электродвигателя ^qq
время цикла
Согласно ГОСТ 183-74 время цикла не должно пре-
вышать 10 мин. Стандартные значения ПВ равны 15,
25, 40 и 60%. Каждому из них соответствует нагрузка
электродвигателя, допускаемая его нагревом при данном
режиме работы. Нормально крановые двигатели рассчи-
тываются на работу при ПВ = 25%, однако один и тот же
двигатель может работать при ПВ, равном 15 и 40%, но
при этом должна соответственно изменяться его нагруз-
ка. При ПВ=15% разрешается увеличить нагрузку дви-
гателя по сравнению с ПВ=25%, а при ПВ=40% на-
грузка снижается на 25%. Объясняется это тем, что при
частых пусках из-за больших пусковых токов двигатель
нагревается больше, чем при работе полной нагрузкой.
Крановые электродвигатели работают в тяжелых
условиях, поэтому для увеличения прочности и улучше-
ния теплоотдачи они имеют стальной! литой корпус с реб-
ристой поверхностью. Двигатели снабжены водозащит-
ной изоляцией, которая обеспечивает их нормальную
эксплуатацию на открытом воздухе. Статор электродви-
гателя изготовляют из тонких (0,5 мм) листов электро-
технической стали. В пазах статора размещены обмотки
с выведенными на зажимы концами. Фазный ротор, как
и статор, и уготовляют из электротехнической стали.
Пластины укреплены на сердечнике, напрессованном
на валу.
В двигателях применяют электроизоляционные мате-
риалы с различными характеристиками по нагреву.
Крановые двигатели серий MTF и MTKF имеют изоля-
цию класса F, выдерживающую нагрев до 155°С. Для
общепромышленных двигателей, работающих в более
3* 35
легких условиях, используют изоляцию класса А (до
105°С). Ранее выпускавшиеся крановые двигатели серий
МТ, МТБ, МТКВ имели изоляцию класса В, выдержива-
ющую нагрев до 130сС.
Заводы изготовляют электродвигатели с одним или
двумя выступающими концами вала. Концы валов дви-
гателей 0—3-го габаритов — цилиндрические, 4—7-го га-
баритов — конические.
Первая цифра в марке кранового электродвигателя
обозначает условный габарит двигателя, принятый по
диаметру пакета статора, вторая цифра — условную дли-
ну статора, третья — число полюсов. Технические данные
двигателей серий MTF и MTKF приведены в табл. 2.
Обмотка статоров электродвигателей катушечная, од-
нослойная или двухслойная, намотанная из круглого
провода, обмотка ротора (для фазных роторов) —одно-
слойная, катушечная. Статоры и роторы пропитывают
изоляционными лаками или компаундами. Для статоров
и роторов изготовляемых в настоящее время электродви-
гателей серии MTF и статоров короткозамкнутых элек-
тродвигателей серии MTKF применены обмоточные про-
вода ПЭТ-155 класса пагревостойкости F. Эти двигатели
имеют повышенную перегрузочную способность при срав-
нительно небольших токах и малом времени разгона.
Начала обмоток ротора выведены к трем контактным
кольцам на валу ротора. Токосъемный механизм ротора
выполнен с постоянно прилегающими щетками, что по-
зволяет реверсировать двигатель.
Короткозамкнутые двигатели имеют литой ротор из
алюминиевого сплава повышенного удельного сопротив-
ления. На короткозамкнутых кольцах расположены вен-
тиляционные лопатки, которые отлиты заодно с ротором.
Эти лопатки создают циркуляцию воздуха с торцевых
сторон двигателя, что способствует лучшему охлажде-
нию обмоток статора. В основном же электродвигатели
серий MTF и MTKF охлаждаются вентилятором с ра-
диальным расположением лопаток, что создает струю
воздуха вдоль наружной поверхности станины. Венти-
лятор посажен на вал ротора со стороны, противополож-
ной токосъемному устройству.
На кранах иногда применяют также асинхронные
двигатели единой серии АОФ, АОС, АОЛТ с повышен-
ной продолжительностью включения. Электродвигатели
серии А изготовляют семи габаритов, причем каждый из
36
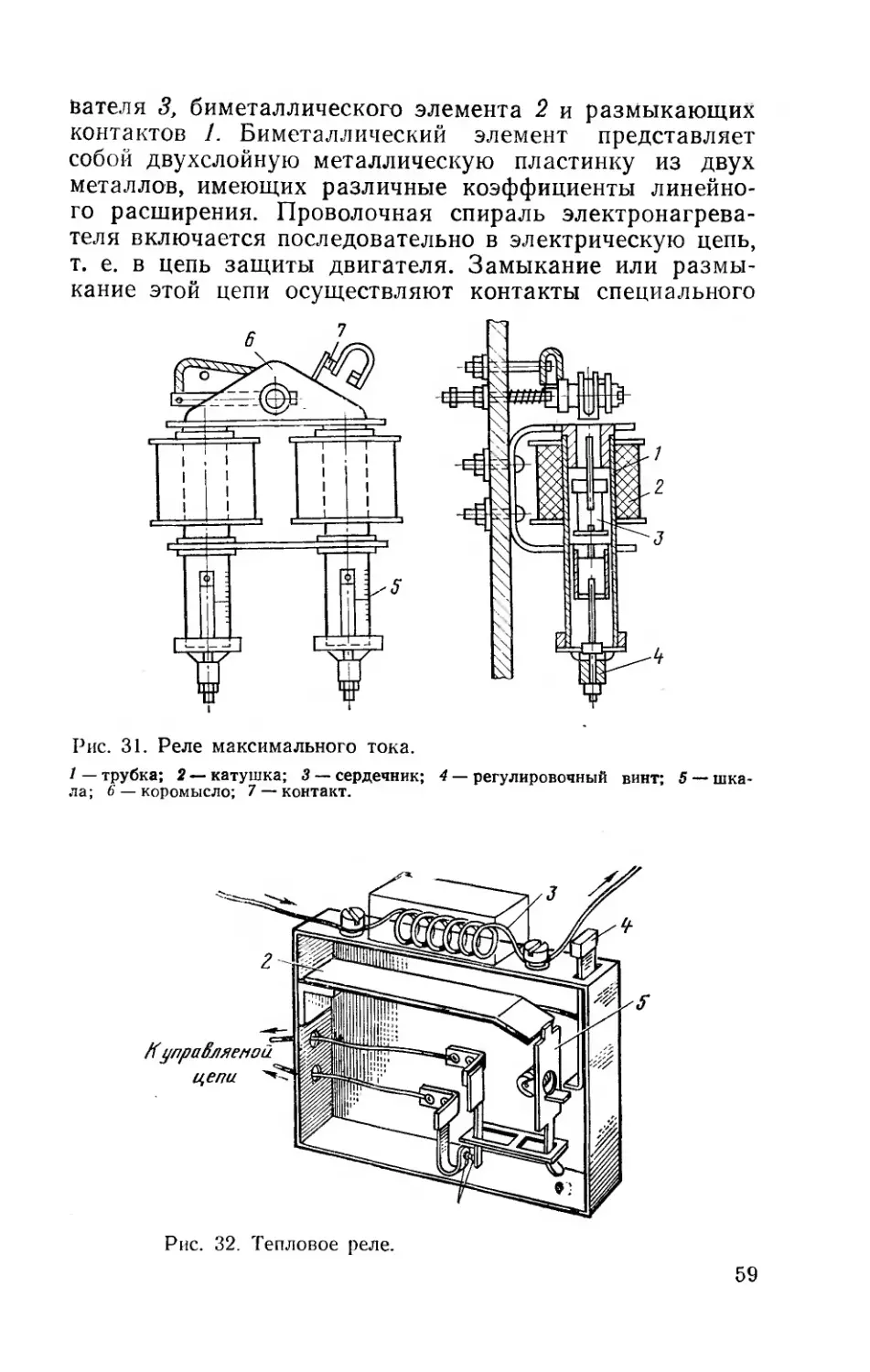
Основные технические данные крановых электродвигателей серий MTF и MTKF
Таблица 2
Тип Мощность на валу, кВт, при Данные при ПВ = 40% Напряжение ме^кду кольцами ротора, В Пусковой ток при 380 В, А Масса, кг
ПВ= 15% ПВ = 25% ПВ - 40% Частота вращения, об/мин Ток ста- тора при 380 В, А Ток ротора, А К. п. д.
MTF011-6 2 1,7 1.4 885 5,3 9,1 0,65 116 51
MTF012-6 3,1 2,7 2,2 890 7,6 11,5 0,68 144 —— 58
MTF111-6 4.5 4.1 3,5 895 10,4 15 0,73 165 — 76
MTF112-6 6.5 5,8 5 930 14,4 16,9 0.7 203 — 88
MTF211-6 10,5 9 7.5 930 21 19,8 0,7 256 — 120
MTF3U-6 14 13 И 945 30.5 42 0,69 172 — 170
MTF312-6 19.5 17,5 15 955 38 46 0,73 210 — 210
MTF411-6 30 27 22 865 55 60 0,73 235 — 280
MTF412-6 40 36 30 970 75 73 0,71 255 —— 345
MTF311-8 10,5 9 7,5 695 22,8 21 0,68 245 —• 170
MTF312-8 15 13 11 705 30.5 43 0.71 165 — 210
MTF411-8 22 18 15 710 42 48.8 0,67 206 — 280
MTF412-8 30 26 22 720 65 57 0,63 248 — 345
MTKF011-6 2 1,7 1,4 875 5.2 — 0,66 — 15 47
MTKF012-6 3,1 2,7 2,2 880 7,2 — 0,69 ““ 22 53
MTKF111-6 4,5 4,1 3,5 885 9,4 0,79 — 35 70
MTKF 112-6 6,5 5,8 5 895 13,8 0,74 —- 53 80
MTKF211-6 10,5 9 7.5 880 19,5 0,77 —• 78 ПО
MTKF311 -6 14 13 11 910 28,5 — 0,76 —— 130 155
MTKF312-6 19,5 17,5 15 910 36 — 0,78 — 205 195
MTKF411-6 30 27 22 935 51 — 0,79 — 275 255
MTKF412-6 40 36 30 935 70 — 0,78 — 380 315
MTKF311-8 10,5 9 7.5 690 21,8 — 0,71 — 95 155
MTKF312-6 15 13 11 700 29 — 0,74 — 150 195
MTKF411-8 22 18 15 695 40 0,71 — 185 255
MTKF412-8 30 26 22 700 60 0,69 295 315
Примечание. Двигатели серий МТ. МТБ. МТК. МТКВ имеют при ПВ=25 и 15% ту же мощность, что двигатели серий MTF и MTKF
соответственно при ПВ — 40 и 25%.
них может иметь обычную в двигателях общего назначе-
ния или специальную механическую характеристику
с повышенным пусковым моментом, повышенным сколь-
жением или фазный ротор. Двигатели серии А изготов-
ляют в алюминиевом или чугунном корпусе, который
имеет защиту от попадания внутрь посторонних предме-
тов и воды, а в закрытых двигателях — и пыли.
В соответствии с исполнением установлено следую-
щее обозначение двигателей: А — защищенный в чугун-
ном корпусе; АО — закрытый, обдуваемый, в чугунном
корпусе; АЛ—закрытый, обдуваемый, в алюминиевом
корпусе. Кроме буквенных имеются также цифровые ин-
дексы: первая цифра указывает условный номер диамет-
ра статора, вторая — длину статора, третья — число по-
люсов. Например, АОЛ-31-6 обозначает электродвига-
тель общего назначения в закрытом обдуваемом
алюминиевом корпусе, третьего диаметра, первой длины,
шестиполюсный. Специальные двигатели единой серии
обозначаются следующим образом: АОЭ — со встроен-
ным электромагнитным тормозом; АОП — с повышенным
пусковым моментом; АОС — с повышенным скольже-
нием
В настоящее время наша промышленность начинает
выпускать новые электродвигатели четвертой серии
с улучшенными технико-экономическими показателями.
Изменяется также их маркировка: вводятся данные о вы-
соте оси вращения, установочные и габаритные размеры
статора согласно международной системе классифика-
ции.
Пуск и регулирование частоты вращения асинхрон-
ных двигателей. Электродвижущая сила, наводимая
в роторе асинхронного двигателя, обратно пропорцио-
нальна его частоте вращения. При неподвижном роторе
она имеет значительную величину, поэтому в начальный
момент пуска под действием этой э. д. с. в роторе про-
ходят токи, в 5—8 раз превышающие номинальное зна-
чение. Чтобы избежать перегрузок в сети, в цепь фазно-
го ротора вводят пускорегулирующие резисторы, которые
ограничивают ток ротора, а следовательно, и пусковой
ток статора. При включении в цепь ротора дополнитель-
ных резисторов получают более пологие (мягкие) харак-
теристики, которые называются искусственными.
Если крановый двигатель с фазным ротором имеет
три пары полюсов (р=3), то синхронная частота вра-
38
щения магнитного поля статора при частоте тока f=
= 50 Гц равна;
п — -^-=60’5-°- = 1000 об/мин.
L р л '
Однако частота вращения п ротора двигателя будет
меньше на значение скольжения, %
Так, при скольжении s=0,055 (5,5%) частота враще-
ния ротора равна:
/2=/2С (1 — S) = 1000 (1—0,055) =945 об/мин.
Если ввести в обмотку ротора дополнительные рези-
сторы, то двигатель будет развивать необходимый мо-
мент при повышенном скольжении, а следовательно, при
меньшей частоте вращения. Введение резисторов сопро-
тивлением, превышающим, например, в 5 раз сопротивле-
ние обмоток ротора, при неизменной нагрузке примерно
во столько же раз увеличит скольжение, которое соста-
вит £=0,055-5=0,275.
Тогда частота вращения ротора будет равна:
/7=1000(1—0,275) =725 об/мин.
В большинстве случаев короткозамкнутые двигатели
небольшой мощности пускают в ход без дополнительных
устройств, так как их характеристики мягче, чем у дви-
гателей с фазным ротором.
Особенности управления двигателем механизма подъ-
ема. При опускании груза его масса способствует вра-
щению, поэтому частота вращения двигателя весьма бы-
стро достигает синхронной и может даже превзойти ее.
Это значит, что скольжение двигателя, уменьшившись
до нуля, может стать отрицательным, т. е. ротор не толь-
ко не будет отставать от вращающегося поля, но и нач-
нет обгонять его. При этом в обмотке ротора, обгоня-
ющей поле статора, наводится э. д. с., пропорциональная
скольжению, под действием которой в роторе проходит
ток. Ток, взаимодействуя с магнитным потоком, создает
вращающийся момент,, направленный в противоположную
сторону по отношению к движущему моменту, создавае-
мому в данном случае грузом. Как только частота вра-
щения настолько превзойдет синхронную, что обратный
тормозной момент полностью уравновесит момент, опре-
деляемый грузом, дальнейшее увеличение частоты вра-
щения прекратится. Частота вращения будет тем боль-
39
ше, чем тяжелее груз и чем больше сопротивления
резисторов, включенных в роторную обмотку. При вра-
щении ротора с частотой выше синхронной (с отрица-
тельным скольжением) двигатель уже не потребляет
тока из сети, а наоборот, отдает его в сеть. При спуске,
так же как и при подъеме, сохраняется пропорциональ-
ная зависимость между моментом двигателя, скольже-
нием и сопротивлением роторной цепи. Чем больше со-
противление при данном моменте, тем больше скольже-
ние. Но так как при спуске в генераторном режиме
скольжение является отрицательным, то чем оно больше,
тем больше частота вращения (при подъеме наоборот).
Поэтому при спуске тяжелых грузов увеличение сопро-
тивления в роторе увеличивает частоту вращения дви-
гателя.
Пускорегулирующие резисторы. Для регулирования
частоты вращения двигателя, уменьшения пускового то-
ка до значения, безопасного для двигателя и сети, и уве-
личения вращающего пускового момента применяют
ящики резисторов (рис. 22). В каждом ящике установ-
Рис. 22. Ящики пусковых резисторов.
а — типа НК-1; б — типа НФ-1.
40
лено несколько одинаковых элементов. Каждый элемент
состоит из стальной пластинки с надетыми на нее сверху
и снизу фарфоровыми гребенками. В пазы гребенок за-
ложена наматываемая на элемент константановая про-
волока или фехралевая лента, которая может выдержи-
вать долговременный нагрев до 300—400°С. Элементы
соединены последовательно, для чего при сборке между
ними прокладывают поочередно фарфоровые изоляторы
и дистанционные трубки. Брызгозащищенный ящик за-
крыт цельными боковинами и крышкой. Передний и зад-
аний щиты имеют отверстия типа жалюзи. Внешние за-
жимы расположены на панели в нижней части ящика.
Ящики резисторов предназначены только для ойреде-
ленного электродвигателя или группы их, управляемой
конкретным типом контроллера. Поэтому внешние зажи-
мы ящиков резисторов маркируются аналогично зажи-
мам контроллера. На кране ящик должен быть установ-
лен строго горизонтально. Для отвода тепла между от-
дельными ящиками в комплекте необходимо иметь зазор
не менее 120 мм. Кожухи ящиков должны быть надежно
заземлены. Согласно действующим правилам устанавли-
вать ящики резисторов в кабине крана запрещается, по-
этому если в старых конструкциях кранов такая уста-
новка была произведена ранее, то ящики надо перенести
из кабины. Это требование необходимо выполнить в двух
случаях: если они мешают нормальной работе кранов-
щика или если кран работает в горячем цехе.
В табл. 3 приведены типы резисторов для крановых
электродвигателей, управляемых кулачковым контролле-
Таблица 3
Резисторы, применяемые для кранозых электродвигателей
Тип электро- двигателя Мощность при ПВ— 40%, кВт Тип резистора Тип электро- двигателя Мощность при ПВ=40%' кВт Тип резистора
MTF011-6 1,4 I-ТбЬ ft MTF311-6 И 1 НФ-1А,
MTF012-6 2,2 г 14/-О, LTrz 1 MTF312-8 11 / НФ-2А
MTF111-6 3,5 Г11\- 1 MTF312-6 15 1 НФ-1А,
MTF112-6 5,0 НФ-1, НК-1 MTF411-8 15 / НФ-2А
MTF211-6 7,5 1 НФ-1, A4TF411-6 22
MTF311-8 7,5 / НК-1 MTF412-8 22 НФ-2А
MTF412-6 30
41
ром ККТ-61А и магнитными контроллерами типов ТА и
ТСА при нормальном режиме работы ПВ=40%.
В табл. 4 приведена разбивка сопротивлений по сту-
Таблица 4
Разбивка сопротивлений по ступеням
Кулачковые контроллеры KKT-61A Магнитные контроллеры j
Маркировка зажимов ступеней Сопро- тивление, R% ном Расчет- ный ток, %/а Маркировка зажимов ступеней ТА(ДТА) ТСА
Сопротив- ление, % D ^НОМ Ток, % /а Сопротив- ление, % ^ном Ток, % А
Pl—Р5 26 59 Pl—Р4 5 83 5 83
Р5—Р61 170 24 Р4—Р7 10 59 10 59
Р61—Р6 75 19 Р7—РЮ 20 50 20 59
Р2—Р4 19 59 РЮ—Р13 40 42 27 50
Р4—Р62 87 35 Р13—Р16 120 21 76 42
Р62—Р2 35 22 Р16—Р19 .— ,— 72 30
РЗ—Р6 61 50 Р16—РЮ — 72 30
Примечание. ^?ном—номинальное сопротивление, определяемое напряжением
между кольцами и номинальным током ротора; номинальный ток ротора.
пеням для кулачкового контроллера ККТ-61А и магнит-
ных контроллеров ТА, ТСА.
При отсутствии пусковых резисторов требуемого типа
их можно подобрать из нормализованного ряда (табл. 5)
Таблица 5
Основные технические данные резисторов типа НФ-1А
Каталажный номер ящика резисторов Ток, А Общее сопротив- ление, Ом ' Сопротивление ступеней, Ом
1—2 2—3 3—4 4—5 5—6
2ТД .754.054.01 228 0,096 0,021 0,017 0,017 0,022 0,019
2ТД. 754.054.02 204 0,118 0,026 0,022 0,022 0,026 0,02
2ТД. 754.054.03 165 0,19 0,042 0,034 0,034 0,042 0,038
2ТД.754.054.04 129 0,318 0,063 0,063 0,063 0,064 0,064
2ТД. 754.054.05 114 0,395 0,079 0,079 0,079 0,079 0,07
2ТД .754.054.06 102 0,48 0,096 0,096 0,096 0,096 0,09
2ТД. 754.054.07 82 0,78 0,156 0,156 0,156 0,156 0,1
2ТД.754.054.08 64 1,28 0,256 0,256 0,256 0,256 0,25
2ТД.754.054.09 57 1,6 0,32 0,32 0,32 0,32 0,32
2ТД .754.054.10 51 2,0 0,5 0,4 0,4 0,4 0,4
42
путем разбивки по ступеням номинального сопротивле-
ния, Ом, определяемого по формуле
^ном —
где U2 — напряжение в цепи ротора, В; ^ — номиналь-
ный ток ротора, А.
Силовые контроллеры. Для включения и регулирова-
ния пусковых характеристик электродвигателей на мо-
стовых кранах применяются контроллеры. Известны два
типа контроллеров: барабанные и кулачковые.
В последние годы для управления электроприводом
преимущественно применяют кулачковые контроллеры.
Эти контроллеры имеют один или два ряда кулачковых
элементов, состоящих из подвижных и неподвижных
контактов с укрепленными на их концах медными губ-
ками. Подвижный контакт контроллера вращается на оси
и постоянно прижат своим хвостовиком с роликом к ку-
лачковой шайбе. Фасонные кулачковые шайбы К
(рис. 23) укреплены на валу, опрессованном электроизо-
ляционным материалом. По шайбам перекатываются ро-
лики Р, изменяющие свое положение в зависимости от
того, находится ролик на участке с меньшим или боль-
шим радиусом. В первом случае медные контактные
элементы контроллера замкнуты и прижимаются пружи-
Рис. 23. Схема работы контактов кулачкового контроллера.
я —принцип действия, б — дугогашение в контроллере; / —катушка; 2 —рог;
3 — камера; 4— полюс; 5—поле катушки; в —поле дуги.
43
ной 77, во втором, наоборот, контакты разомкнуты. За-
мыкание и размыкание контактов сопровождается их
перекатыванием, что позволяет им очищаться от окиси
меди и нагара. Износ контактных поверхностей в кулач-
ковых контроллерах меньше, чем в барабанных, из-за
отсутствия трения скольжения и вследствие того, что
рабочая часть контакта, через которую более или менее
длительно проходит ток, удалена от места образования
искр и дуги. Эти особенности кулачковых контроллеров
дают возможность использовать их при тяжелых режи-
мах работы. Для облегчения работы контактных дета-
лей в контроллерах применяют электромагнитное гаше-
ние дуги. Специальная катушка, выполненная из не-
скольких витков толстой проволоки, укреплена на сталь-
ном сердечнике. По дугогасительной катушке проходит
ток, разрываемый контроллером (ток силовой цепи).
Дуга и дугогасительная катушка создают магнитные
поля, направленные навстречу друг другу, что схематич-
но показано на рис. 23,6.
Ниже приведены основные характеристики силовых
контроллеров:
Тип контрол лера .... НТ-51 НТ-61 ККТ-61А ККТ-62А
Ток ротора, А Номинальная мощность, кЗт, при напряжении, В: 50 60 60 60
220 16 23 22 11
380 Число позиций вперед и 16 30 30 15
назад 5 5 5 5
На кранах применяют в основном контроллеры
ККТ-61А и ККТ-62А двухрядного горизонтального ис-
полнения. В отличие от ранее применяемых однорядных
вертикальных контроллеров НТ-61 и НТ-51 масса и габа-
риты этих аппаратов при одинаковых характеристиках по
току и мощности в 1,5 раза меньше. Контроллеры рас-
считаны на большое число включений (600—1000 в час).
Принципиальная электрическая схема кулачкового
контроллера показана на рис. 24. На этой схеме изобра-
жена развертка кулачковой шайбы, указывающая, на ка-
кой из позиций ее вращения контакты замыкаются.
Шайбы контроллера в нулевом положении не каса-
ются рычагов подвижных губок и, следовательно, сило-
вые цепи разомкнуты. Если перевести рукоятку контрол-
44
лера в первое положение направления Вперед, то обмот-
ки статора электродвигателя окажутся под напряжени-
ем. Включенный в цепь ротора полный комплект рези-
сторов обеспечивает пуск двигателя по мягкой характе-
ристике на пониженную частоту вращения.
Рис. 24. Электрическая схема управления двигателем с помощью
силового контроллера.
1 — двигатель; 2 — пускорегулирующие резисторы; 3 — контроллер.
Цепь управления Статорная цепь
Во второй позиции штурвала контроллера замыкают-
ся контакты Р5, выводя из работы часть сопротивления.
В третьем, а затем и в четвертом положении замыкают-
ся последовательно контакты Р4 и РЗ, выводя из работы
вторую и третью части сопротивления. В пятом положе-
нии все контакты в цепи ротора замкнуты, его обмотки
оказываются соединенными накоротко, поэтому электро-
двигатель развивает наибольшую частоту вращения.
Магнитные контроллеры. Для приводов, работающих
45
в тяжелом режиме, долговечность силовых контроллеров
оказывается недостаточной, а управление с помощью их
утомительным. Поэтому такие приводы снабжают маг-
нитными контроллерами, управляемыми с помощью ко-
мапдоконтроллеров.
Контроллеры серии ТА предназначены для механиз-
мов передвижения. Симметричное расположение контак-
тов командоаппарата позволяет осуществлять одинако-
вую коммутацию пусковых резисторов, как в одном на-
правлении вращения двигателей, так и в другом.
У контроллеров КС и ТСА, управляющих механизмом
подъема груза, контакты расположены несимметрично,
что обеспечивает задание различных режимов при подъ-
еме и спуске (торможении) груза. Буква Д в обозначе-
нии типа контроллера (ДК, ДТА) указывает, что маг-
нитный контроллер имеет спаренное исполнение и может
управлять одновременно двумя двигателями. Цифры,
следующие за буквенным обозначением, указывают но-
минальное значение тока контакторов, буква У — обще-
промышленное, Т — тропическое, 3 — закрытое исполне-
ния. Основные технические данные магнитных контрол-
леров приведены в табл. 6.
Таблица 6
Технические характеристики магнитных контроллеров
Показатель ТА-161 ДТА-160 ТСА-161
Напряжение, В 220 380 220 380 220 380
Общая мощность при 45 80 90 160 45 80
ПВ=40%, кВт Допустимый ток при ПВ=40о/о, А: статора 200 200 2/100 4/50 200 200
ротора 200 200 80 80 200 200
Масса, кг 80 80 110 НО НО НО
Магнитные контроллеры типа ТСА не имеют собст-
венных аппаратов защиты и подключаются к сети через
защитную панель (рис. 25). Обмотки статора подключа-
ются линейным контактором КП (контактором пуска) и
реверсирующими контакторами В и Н. Для однофазного
включения предусмотрен контактор О, а для подключе-
ния двигателя тормозного гидротолкателя — контактор
Т. Сопротивления в цепи ротора подключаются с по-
46
Мощью контакторов ускорения /У—4У и контактора про-
тивовключения П. Пуск двигателя автоматизирован с по-
мощью электромагнитных реле времени /РУ и 2РУ, ка-
Рис. 25. Схема управления электроприводом механизма подъема
груза с магнитным контроллером типа ТСА.
а — электрическая схема силовой части; б — схема цепей управления.
47
тушки которых питаются постоянным током от
выпрямителей ВС.
В первом положении командоконтроллера при подъ-
еме срабатывают контакторы В, КП и Т, реле ГРУ, 2РУ,
а затем контактор П. В результате двигатель подключа-
ется к сети, растормаживается, в цепи его ротора шунти-
руется часть резисторов и происходит разгон двигателя
с предварительной выборкой слабины каната. Во втором
и третьем положении рукоятки срабатывают соответст-
венно контакторы 1У и 2У, что дает возможность полу-
чить промежуточные скорости. При включении контакто-
ра 2У отключается катушка 1РУ, в результате чего с вы-
держкой времени замыкается контакт 1РУ в цепи
катушек ЗУ и 4У. В четвертом положении рукоятки сра-
батывает контактор ЗУ, при этом отключается катушка
2РУ, после чего с выдержкой времени включается кон-
тактор 4У. Двигатель переходит сначала на промежуточ-
ную, а после разгона на рабочую характеристику подъ-
ема.
При быстром переключении рукоятки из нулевого
в четвертое положение двигатель переходит на рабочую
характеристику с автоматической выдержкой времени
с помощью реле 1РУ и 2РУ.
При быстром переводе рукоятки командоконтроллера
из нулевого в четвертое положение при спуске двига-
тель также достигает рабочей характеристики с автома-
тической выдержкой времени с помощью реле 1РУ и
2РУ. При спуске грузов с малой массой, когда потери
трения в механизме больше момента двигателя, послед-
ний будет работать вхолостую, а более тяжелые грузы
будут опускаться со сверхсинхронной частотой враще-
ния. Для уменьшения скорости опускания переводят ру-
коятку командоконтроллера в третье положение, в ре-
зультате чего срабатывает контактор однофазного тор-
можения. В этом случае двигатель работает в режиме
электромагнитного тормоза. Дальнейшее снижение ско-
рости получают во втором и первом положениях руко-
ятки, когда двигатель, подключенный к сети контактором
В, работает в режиме противовключения.
Магнитный контроллер типа ТА (рис. 26) выполнен
по симметричной схеме. Здесь предусмотрена возмож-
ность свободного выбега двигателя в нулевом положении
контроллера, в то время как механическое торможение
осуществляется в любом из остальных положений руко-
48
ятки командокоптроллера, при срабатывании конечных
выключателей или при нажатии кнопки АК. Реле PH и
контактор Т в нулевом положении не отключаются.
В данной схеме режим противовключения обеспечивает
торможение движущегося крана или грузовой тележки.
При вращении двигателя, например, в направлении
Вперед переключают командоконтроллер в одно из поло-
жений Назад. Первым срабатывает контактор Н, в ре-
зультате чего в цепях статора и ротора, включая и пус-
корегулирующие сопротивления, вновь появляется ток.
Рис. 26. Магнитный контроллер типа ТА.
о — электрическая схема силовой части; б —схема цепей управления.
4—258 49
Так как направление вращения магнитного поля проти-
воположно направлению вращения двигателя, напряже-
ние, генерируемое в роторе, возрастает, вследствие чего
срабатывает реле PH, подключенное к пускорегулирую-
щему сопротивлению, и прерывает цепь катушек Н, /У,
2У, ЗУ. Двигатель будет работать в режиме противо-
включения с полным сопротивлением в цепи ротора не-
зависимо от положения командоконтроллера. По мере
снижения частоты вращения напряжение на зажимах
катушки реле РП снижается, и при реле отключа-
ется. Для предотвращения самопроизвольного движения
крана в противоположном направлении командоконтрол-
лер необходимо переключить в нулевое положение.
Командоаппараты. Для приведения в действие маг-
нитных контроллеров, контакторов, защитных и ревер-
сивных панелей применяют аппараты, носящие общее
наименование командоаппаратов. В число командоаппа-
ратов входят командоконтроллеры, универсальные пере-
ключатели, конечные и аварийные выключатели.
Корпуса и крышки командоаппаратов обычно отлиты
из чугуна или алюминиевого сплава. Наружу выведены
рычаги или рукоятки, которые имеют фиксирующее
устройство. Формы и размеры рычагов у рукояток зави-
сят от типа и места установки аппарата. Например, ко-
мандоконтроллеры КП-1400 и КП-1500 встраивают
в кресло крановщика, поэтому у них удлиненная рукоят-
ка с кулисным приводом; у конечных выключателей ры-
чаги с самовозвратом или без самовозврата. На рис. 27
показан командоконтроллер. Контактная система коман-
доконтроллера отличается от контактной системы сило-
вого контроллера тем, что выполнена в виде контактного
мостика, размещенного на рычаге кулачкового элемента.
На контактной поверхности мостика напаяны серебря-
ные пластинки, стойкие к окислению и создающие на-
дежный контакт даже при небольшом давлении пружины
кулачкового элемента. Кулачковый элемент поворачива-
ется под действием кулачковой шайбы, насаженной на вал
с фиксирующим устройством. Так же как и силовые кон-
троллеры, командоконтроллеры на электросхемах изо-
бражают в развернутом виде, где указывается, в каком
фиксированном положении рукоятки кулачкового вала
контактный мостик замыкает цепь.
Если командоконтроллеры имеют несколько контакт-
ных мостиков, то конечный выключатель обычно имеет
50
один или два таких мостика. На кранах широко приме-
няют конечный выключатель типа КУ, который обеспе-
чивает различные схемы замыкания контакторов. Вы-
ключатель типа КУ имеет два контакта, которые могут
быть размыкающими, замыкающими или один замыкаю-
Рис. 27. Командоконтроллер.
1 — корпус; 2 — вал кулачкового барабана; 3 — сектор зубчатый; 4 — рукоят-
ка; 5 — кулачки, изменяющие число фиксирующих положений рукоятки; 6 —
рычаг фиксирующего устройства; 7 — пружина фиксирующего устройства;
8—шайба фиксатора; 9 — кулачковые элементы; 10— кулачковые шайбы;
11 — рейка для крепления кулачковых элементов.
щий, а другой — размыкающий. Механизм рычажного
выключателя типа КУ (рис. 28) размещен в штампован-
ном стальном закрытом со всех сторон корпусе и имеет
снаружи один рычаг, на который и воздействуют упоры,
установленные в крайних положениях на пути следова-
ния перемещающегося механизма. На валу 1 выключа-
теля закреплены шайбы 2. При повороте вала изоляци-
онный (из карболита) рычаг 4 с контактными мостика-
ми 6 замыкает (или размыкает) неподвижные контакты
9, установленные на изоляционной подставке 11. Рычаг
под действием пружины 5 с помощью ролика 3 постоян-
но прижат к кулачковым шайбам. При этом контакты
4* 51
разомкнуты. Для того чтобы в исходном положении кон-
такты были замкнуты, ролик рычага 4 переставляют на
ось 10, а пружину 5 — в положение К. Изменение поло-
жения кулачковых шайб 2 относительно оси 1 произво-
дится их поворотом и фиксированием винтами. Необходи-
мость изменения положения шайб возникает при пере-
Рис. 28. Конечный выключатель типа КУ.
а — принцип действия; б — общий вид со снятой крышкой.,
становках приводного рычага, насаживаемого на конец
вала 1, и при изменении схемы замыкания контактов.
Фиксирующий храповичок 7 и соединенная с ним собач-
ка 8 с пружиной предназначены для возврата приводно-
го рычага выключателя в исходное положение. Кроме
рассмотренного выключателя на кранах применяется
52
шпиндельный выключатель типа ВУ-250А. Такие выклю-
чатели устанавливают для ограничения высоты, подъема
груза. В этом случае контакты замыкаются и размыка-
ются поворотом тихоходного вала червячного редуктора,
имеющего передаточное отношение 1:50. При набегании
замыкающего ролика на выступ контактного рычага по-
следний медленно поворачивается, а затем запирается
в замкнутом положении собачкой. Весь путь замыкания
подвижного контакта соответствует 5/6 оборота вала
с шайбами или 42 оборотам приводного вала. Выключа-
тель возвращается в исходное положение после сраба-
тываний при повороте приводного валика на 1,5 оборота.
Выключатель ВУ-250А имеет два мостика и может
быть настроен на разрыв цепей в двух положениях, что
позволяет ограничивать как верхнее, так и нижнее поло-
жение крюковой подвески. Выключатели ВУ-150А ана-
логичны по конструкции выключателю ВУ-250А, но могут
разрывать только одну цепь. Допустимый длительный
и разрываемый ток у них равен 20 А. Выключатели
КУ-701 имеют одну цепь, их допустимый ток 10 А.
Универсальные переключатели набраны из отдельных
контактных секций, изолированных одна от другой пла-
стмассовыми стенками. Наиболее часто применяется
универсальный переключатель УП-5311. Первые две
цифры обозначают, что аппарат выполнен в открытом
нерегулируемом исполнении, следующие две цифры —
число секций (в данном случае 11).
Аварийные ручные выключатели ВУ-220 служат для
мгновенного разрыва основных цепей управления при
необходимости экстренной остановки всего крана; их вы-
полняют с нормально замкнутыми контактами.
Защитные и реверсивные панели. Защитные панели
предназначены для максимальной и нулевой защиты
двигателей и применяются совместно с кулачковыми и
магнитными контроллерами. Панель расположена в ме-
таллическом шкафу, в котором на изоляционной асбоце-
ментной плите вмонтированы трехполюсный рубильник
с наружной рукояткой и линейный контактор. Панель
также снабжена максимальными реле, действующими на
линейный контактор, предохранителями цепей управле-
ния, переключателем опробования, пусковой кнопкой и
электромеханическим замком.
Электромеханический замок, собранный из серийно
выпускаемых изделий для дверного замка и пакетного
53
выключателя, изображен на рис. 29. От дверного замка
взят механизм 1. Из текстолита изготовлены корпус 2,
муфта 3, крышка 4 и металлическая упорная пластина 5,
которая служит для ограничения поворота контактной
шайбы 6 на 90°. Через фигурное отверстие упорной ме-
таллической пластины проходит поводковая планка 7.
Рис. 29. Электромеханический замок.
Детали электрической части замка 8, 9, 10 взяты от стан-
дартного пакетного выключателя на ток 25 А.
Замок устанавливается в стенке шкафа защитной па-
нели таким образом, что наружу выступает лишь торец
механизма 1. Остальная часть замка помещается внутри
панели, запираемой на замок. С помощью двух зажимов
9 замок включается последовательно в цепь катушки
главного контактора. Нормальное положение контактов
замка разомкнутое. Чтобы включить контактор, необхо-
димо вставить ключ 11 в скважину механизма 1 и, по-
вернув его по часовой стрелке на 90°, замкнуть кон-
такты.
Допускается вместо контактного замка устанавливать
замок с индивидуальным ключом, запирающий рубиль-
ник, автомат или выключатель в отключенном положе-
нии. Ключ из замка должен выниматься только при от-
ключенном и запертом в этом положении рубильнике,
автомате или выключателе. Этому требованию отвечают
защитные панели типа ПЗКБ-160 и ПЗКБ-400.
54
Для изменения направления движения На некоторых
кранах применяют реверсивную панель типа ДР, кото-
рую собирают из двух двухполюсных контакторов.
У этих контакторов обычно имеется рычажная блокиров-
ка, препятствующая их одновременному включению. Кро-
ме того, в цепь катушки одного контактора включается
Рис. 30. Принцип действия контактора.
а — переменного тока; б — постоянного тока.
нормально закрытый блок-контакт второго контактора.
Такая двойная блокировка надежно защищает от корот-
ких замыканий. При ПВ=40% панели допускают 600
включений в час.
Контакторы. Основным аппаратом крановых защит-
ных и реверсивных панелей и магнитных контроллеров
является контактор — прибор для включения и отключе-
ния электрического тока на расстоянии. На рис. 30 по-
казан внешний вид контактора и виден принцип его дей-
ствия. На изолированной оси / квадратного сечения,
подшипники которой для простоты не показаны, уста-
новлены подвижные рабочие контакты 2, якорь электро-
магнита 3 и траверса 4 для блок-контактов. На изоли-
рованной плите укреплены неподвижные рабочие кон-
такты 6, блок-контакты 5 и ярмо 7 с обмоткой электро-
магнита 8. В положении, представленном на рис. 30,а,
рабочие контакты разомкнуты и ток в силовой цепи Ль
Л2 и Л3 отсутствует. Если в катушке 8 появится ток, то
якорь 3 притянется к ярму 7, ось 1 повернется, рабочие
55
контакты 2 и 6, а также верхние блок-контакты 5 замк-
нутся, а нижние блок-контакты 5 разомкнутся. На
рис. 30,а показана упрощенная схема пуска и остановки
короткозамкнутого асинхронного двигателя 9 с кнопоч-
ным управлением при помощи контактора. Силовая цепь
подключена непосредственно к двигателю и обозначена
толстыми линиями. В цепи управления (тонкие линии)
показаны две кнопки — включающая Пуск и отключаю-
щая Стоп. Пуск производится следующим образом. При
замыкании кнопки Пуск ток проходит от провода Л\ че-
рез обмотку электромагнита 8 к проводу Л$. Образуется
замкнутая цепь. Якорь притягивается и поворачивает
ось 1, при этом одновременно замыкаются рабочие кон-
такты 2 и 6 и верхние блок-контакты 5. Последние шун-
тируют кнопку Пуск и позволяют отключить включаю-
щую кнопку. Для выключения двигателя достаточно
разомкнуть цепь управления, нажав на кнопку Стоп.
Контакты отпадут под действием собственной массы
устройства.
Устройство контактора постоянного тока показано на
рис. 30,6. При прохождении тока через обмотку катушки
1 якорь 2 (подвижная часть магнитопрозода) притяги-
вается к неподвижному сердечнику 3. При этом якорь,
поворачиваясь вместе с укрепленным на нем супортом 4
и подвижным контактом 5 вокруг оси 6, вводит подвиж-
ный контакт 5 в соприкосновении с неподвижным кон-
тактом 7. При этом контакты, соединяясь сначала свои-
ми верхними частями, приходят -в дальнейшее соприкос-
новение и смещаются относительно друг друга, как бы
притираясь. Гашение дуги происходит в искрогаситель-
ной камере. Последовательно с главными контактами
включена дугогасительная катушка 8. Создаваемое этой
катушкой магнитное поле направлено таким образом,
что дуга (как проводник с током) выталкивается вверх
по правилу правой руки. Ток от подвижного контакта
5 отводится при помощи гибкого проводника 9. Контак-
тор монтируется на плите 10.
С 1971 г. промышленность выпускает контакторы пе-
ременного тока серии КТ-6000. Допускаемая частота
включения этих контакторов не менее 600 в час. Гаше-
ние дуги — электромагнитное, что позволяет осуществ-
лять включение, реверсирование и отключение затормо-
женных двигателей, в том числе с короткозамкнутым ро-
тором.
56
Блокировочные контакты контактора состоят из прес-
сованного корпуса, неподвижных контактов и траверсы
с подвижными контактами мостикового типа. Траверса
перемещается в металлических направляющих под дей-
ствием кулачка, укрепленного на валу контактора.
В табл. 7 приведены некоторые характеристики кон-
такторов серии КГ-6000 первой, второй и третьей вели-
чин.
Таблица 7
Основные характеристики контакторов КТ-6000
Тип Номиналь- ный ток, А Число главных контактов Масса, кг Габариты, мм
Шири- на Высота Глу- бина
КТ-6012 (КТ-6212) 100 2 6,0 380 205 188
КТ-6013 (КТ-6213) 100 3 7,1 380 205 188
КТ-6014 80 4 8,7 480 216 188
КТ-6022 (КТ-6222) 160 9 6,0 380 205 188
КТ-6023 (КТ-6223) 160 3 7,1 380 205 188
КТ-6024 120 4 8,7 480 216 188
КТ-6032 250 2 17,0 480 232 224
КТ-6033 250 3 17,5 480 232 224
КТ-6034 160 4 25,0 540 232 224
Примечания: 1. Контакторы с серебряно-керамическиминакладками на глав-
ных контактах имеют в обозначении дополнительную букву С.
2. Контакторы монтируют иа рейках, а контакте! ы, указанные в скобках, — на
пластмассовом основании.
3. Контакторы имеют по два размыкающих и по два замыкающих блокировочных
контакта.
Реле. Для защиты электропривода от перегрузок и
падения напряжения применяют промежуточные и теп-
ловые реле, реле тока и напряжения, реле времени.
Промежуточные реле (табл. 8) применяются в элек-
трических цепях в тех случаях, когда количество блок-
коитактов основных аппаратов недостаточно для реали-
зации электрической схемы управления краном. Изготов-
ляют их с передним и задним присоединением проводов.
Для защиты от перегрева обмоток электродвигателей,
работающих в длительном режиме, применяют тепловые
реле типов ТРИ, ТРП, ТРТ. В ряде случаев такие реле
входят в комплект электрических аппаратов, например
магнитных пускателей.
57
Таблица 8
Технические характеристики промежуточных реле
Показатель РПУ-1 (открытое) РПУ-9 (двухпози- ционное) ПЭ-5 (открытое)
Номинальное напряжение, В 12, 24, 36, 127, 220, 380 127, 220 12, 24, 36, 127, 220, 380, 500
Число контактов (замыкаю- щих/ размыкающих) 4/4, 6/2, 8/0 7/7 4,2
Длительно допустимый ток, 6,3 5,0 10,0
н. Время срабатывания, с 0,03 0,06 0,04
Масса, кг 0,5 0,2 0,5
В качестве максимальной токовой защиты в силовых
цепях мостовых кранов применяют реле мгновенного
действия РЭО-401 и РЭ-571Т. Эти реле выпускаются
с самовозвратом, с катушкой для повторно-кратковре-
менного режима, с передним и задним присоединением
проводов. Ниже приводятся некоторые данные реле мак-
симального тока:
Тип реле .............
Длительный ток катуш-
ки, А ................
Время срабатывания, с
Масса, кг..............
РЭО-401
3; 7; 9; 15; 18; 30;
60; 90; 120; 150;
225; 450
0,05
1,4
РЭ-571Т
1,5; 2,5; 5; 10; 15;
40; 50; 80; 100; 150;
200; 300; 400; 500
0,05
2,0
В корпусе этих реле (рис. 31) находится катушка
с несколькими витками. Внутри катушки перемещает-
ся сердечник. При токе, превосходящем определенное
значение, сердечник втягивается и толкает стержень, ко-
торый упирается в коромысло и размыкает контакты
реле. Контакты остаются разомкнутыми в течение все-
го времени прохождения через катушку тока, превыша-
ющего ток срабатывания реле. Реле имеет винт и шка-
лу для регулирования тока срабатывания, который при-
нимают на 25% выше максимального значения пусково-
го тока защищаемых электродвигателей.
На рис. 32 представлена схема работы теплового ре-
ле, служащего для максимальной и тепловой защиты
электродвигателей с короткозамкнутым ротором. Тепло-
вое реле состоит из проволочного электрического нагре-
58
вателя 3, биметаллического элемента 2 и размыкающих
контактов 1. Биметаллический элемент представляет
собой двухслойную металлическую пластинку из двух
металлов, имеющих различные коэффициенты линейно-
го расширения. Проволочная спираль электронагрева-
теля включается последовательно в электрическую цепь,
т. е. в цепь защиты двигателя. Замыкание или размы-
кание этой цепи осуществляют контакты специального
Рис. 31. Реле максимального тока.
1 — трубка; 2 — катушка; 3 — сердечник; 4 — регулировочный винт; 5 — шка-
ла; 6 — коромысло; 7 — контакт.
Рис. 32. Тепловое реле.
59
электромагнитного выключателя (на схеме не указан).
В цепь катушки этого выключателя включен размыка-
ющий контакт теплового реле. При длительной перегруз-
ке двигателя, когда ток в нагревателе заметно возрас-
тает, биметаллический элемент изгибается и освобож-
дает защелку 5, которая под действием пружины пово-
рачивается и размыкает контакты 1. Цепь катушки
электромагнитного выключателя разрывается, его кон-
такты размыкаются и двигатель отключается от сети.
После охлаждения элемента нажатием кнопки 4 воз-
вращают реле в исходное положение. Эти реле изготов-
ляют с самовозвратом или ручным возвратом в исход-
ное положение.
Автоматические выключатели — автоматы предназна-
чены для автоматического отключения тока при корот-
ких замыканиях или перегрузках. На кранах наиболее
распространены автоматические выключатели серий
АП25, АП50, А63, АК63. Автоматические выключатели
А63 и АК63 имеют электромагнитный расцепитель
с гидравлическим замедлителем (А63-МГ и АК63-2МГ)
или без замедлителя (А63-М, АК63-2М). Автоматичес-
кие выключатели АП25 и АП50 оборудованы тепловым,
электромагнитным или комбинированным расцепителем.
При этом приняты следующие обозначения: ЛАТ — эле-
ктромагнитный и тепловой расцепитель, Т — тепловой
М — электромагнитный, Н — расцепитель минимально-
го напряжения, 0 — расцепитель минимального тока
в нулевом проводе. Цифра перед символом указывает
на количество таких расцепителей в автоматическом
выключателе.
На рис. 33 приведены принципиальные схемы наи-
более распространенных автоматических выключателей.
При рассмотрении схем видно, что контакты отключают-
ся при срабатывании теплового или электромагнитно-
го расцепителей, освобождающих крюк подвижного кон-
такта, который удерживается пружиной 1. Электромаг-
нитные расцепители имеют указатель, позволяющий уве-
личить ток срабатывания примерно на 40% за счет
сжатия пружины 8. Включаются автоматические выклю-
чатели вручную.
Магнитные пускатели. Для автоматического дистан-
ционного включения и реверсирования электродвигате-
лей наряду с контакторами применяют магнитные пус-
катели. Они имеют главные контакты (пальцевые или
60
мостиковые) с системой дугогашения, электромагнитную
систему и блок-контакты, как правило, мостикового ти-
па. В реверсивных пускателях кроме электроблокиров-
ки иногда предусматривают и механическую блокиров-
ку. Для защиты от перегрузок на панели пускателя мон-
тируют тепловое реле. Если тепловая защита в схеме
выполнена отдельно, такие реле в пускателе отсутству-
ют.
В реверсивном магнитном пускателе есть два контак-
тора: один для пуска двигателя Вперед, другой — для
Рис. 33. Принципиальная схема автоматического выключателя.
а — с электромагнитным расцепителем; б — с тепловым расцепителем; 1 —
отключающая пружина; 2 — контакт главной цепи; 3 — рычаг; 4 — защелка;
5 — приводной рычаг; 6 — катушка; 7 — электромагнитный сердечник; 8 — пру-
жина; 9 — нагреватель теплового реле; 10 — биметаллический элемент: II —
штифт.
Вперед
Назад
Стоп
Рис. 34. Электрическая схема реверсивного пускателя.
61
вращения в противоположном направлении Назад. Пус-
катель имеет две катушки (КВ — катушка включения
Вперед и КН — катушка включения Назад). Кнопочная
станция имеет соответственно три кнопки: Вперед, На-
зад и Стоп. Оба контактора пускателя имеют механи-
ческую и электрическую блокировку, с тем чтобы при
включении одного из них не мог быть включен другой.
Электрическая блокировка выполняется с помощью раз-
мыкающих контактов кнопок Вперед и Назад.
При нажатии, например, кнопки Вперед ток от одной
фазы проходит через контакт кнопки Стоп, затем через
размыкающий контакт кнопки Назад, катушку Вперед,
далее через контакты тепловых реле ТР на вторую фазу
Включающая катушка КВ возбуждается и замыкаются
линейные контакты В. Одновременно включаются блок-
контакты и шунтируют кнопку Вперед, которую можно
теперь отпустить. Двигатель получает напряжение и на-
чинает вращаться. Следует отметить, что когда нажата
кнопка Вперед, ток проходит через размыкающий кон-
такт кнопки Назад и наоборот. Тем самым осуществляет-
ся электрическая блокировка. Изменение направления
вращения (реверсирование) происходит при включении
контактора КН, который производит переключение двух
фаз двигателя.
У электрических талей и кран-балок, управляемых
с пола, шунтирование кнопок не допускается и работа
механизма должна осуществляться при постоянно нажа-
той кнопке Вперед или Назад.
Тормозные гидротолкатели и электромагниты. В ка-
честве привода тормозов применяют электрогидротол-
катели и тормозные клапанные электромагниты одно-
фазного тока. Электрогидравлический толкатель (рис. 35)
состоит из электродвигателя 1, погруженного в рабочую
жидкость, корпуса 2 толкателя, центробежного насоса 10,
закрепленного на валу электродвигателя, поршня 3 со
штоком 9, цилиндра 4, промежуточной крышки 8 и верх-
ней крышки 7 с резиновым армированным уплотнением
штока 6. Для уплотнения корпусных деталей служат
маслостойкие резиновые кольца 5, 11, 12, 14, 15. Концы
обмоток электродвигателя выведены на панель зажи-
мов 13. Кабель крепится при помощи штуцера 16. Коле-
со насоса 10 имеет прямые радиальные лопатки, кото-
рые независимо от направления вращения колеса обе-
спечивают нормальную работу толкателя. При включе-
62
нии электродвигателя
центробежное колесо на-
гнетает масло под пор-
шень. Создается избыточ-
ное давление, которое
поднимает поршень со
штоком до верхнего поло-
жения. Рабочая жидкость,
находящаяся над порш-
нем, выталкивается через
каналы в корпусе к ниж-
ней части центробежного
колеса. Поршень остается
в верхнем положении все
время пока работает на-
сос. При выключении
электродвигателя цеж
тробежное колесо оста-
навливается, поршень со
штоком опускается в
нижнее положение, вы-
жимая рабочую жидкость
в полость над поршнем.
Электрогидротолка тел ь
допускает до 720 включе-
ний в час. Ниже приведе-
ны характеристики ги-
дротолкателей:
Тип толкателя ...............
Мощность двигателя, кВт . . .
Частота вращения, об/мин . .
Рабочее усилие, Н(кгс) ....
Ход штока, мм................
Объем рабочей жидкости, л
Электродвигатель гидротолкател
Рис. 35. Электрогидравлический
толкатель ТЭГ-25.
ГЭГ-16 м ТЭГ-25 ТГМ-50 ТГМ-80
0,15 0,2 0,2 0,2
2850 2850 2900 2850
160(16) 250(25) 500(50) 800(80)
25 32 50 50
2,5 3,5 3,5 5,0
[ работает в режиме ПВ = 100%
Однофазные электромагниты серии МО состоят из
ярма с катушкой и якоря, закрепленного в щеках, кото-
рые имеют возможность поворачиваться вокруг непод-
вижной оси. На якоре во избежание гудения установлен
короткозамкнутый виток. Рабочий ход этих магнитов
составляет 2—3 мм. Электромагниты рассчитаны на
200—300 включений в час, нормальная их работа обе-
спечивается при колебании напряжения в пределах 85—
110%- Недостатком тормозных магнитов переменного
63
тока является то, что их катушки ие могут выдерживать
большой ток включения в течение длительного времени.
В результате этого при заклинивании или плохой регу-
лировке хода якоря катушки перегорают. Поэтому в но-
вых кранах применяют в основном элсктрогидравличе-
ские тормоза.
Плавкие предохранители. Для защиты силовых це-
пей, а также цепей управления от аварийных перегру-
зок во вводных ящиках, защитных панелях и других
вводных устройствах устанавливаются плавкие предо-
хранители: трубчатые типа ПР2 и пробочные типа Е-27.
При токе 15—200 А применяют трубчатые предохрани-
тели, а при токе 4—60 А — пробочные.
Перегорание предохранителей наступает обычно при
длительных перегрузках, более чем на 25—50% превы-
шающих номинальное значение тока. От небольших пе-
регрузок предохранители не защищают. Плавкие встав-
ки предохранителей выбирают в зависимости от значения
тока, допустимого для крановой проводки, и от продол-
жительности включения электропривода. Иногда возни-
кает необходимость изготовления плавкой вставки из
подручных материалов. В табл. 9 приведен диаметр про-
вода для вставок из различных металлов.
Таблица 9
Диаметр плавких вставок из различных металлов
Ток при плавлении, А Диаметр плавкой вставки, мм из Ток при плавлении, А Диаметр плавкой вставки, мм из
медг олова свинца стали меди олова свинца стали
10 0,25 0,85 0,95 0,55 80 1,60 3,39 3,81 2,2
15 0,33 1,11 1,25 0,72 100 1,16 3,93 4,42 2,55
25 0,46 1,59 1,75 1,01 120 1,31 4,44 4,99 2,88
35 0,57 1,95 2,2 1,28 140 1,45 4,92 5,53 3,19
50 0,73 2,48 2,78 1,61 160 1,59 5,38 6,04 3,49
60 0,83 3,05 3,14 1,81 180 1,72 5,82 6,54 3,77
Рубильники и пакетные выключатели. Для неча-
стых замыканий электрической цепи применяются неавто-
матические устройства — рубильники типов Р, РБ, РПЦ,
РПБ и пакетные переключатели типов П, ППМ и ПВМ.
Рубильники серий РБ и РПБ с боковой рукояткой
или рычагом и серии РПЦ с центральным рычажным
устройством могут размыкать электрическую цепь под
нагрузкой напряжением до 500 В. Рубильники серии Р
64
с центральной рукояткой служат в качестве разъеди-
нителей для отключения предварительно разомкнутой
цепи. Ниже дается характеристика рубильников, при-
меняемых на кранах или в токоподводящих цепях:
Тип рубильника Р11 Р21 Р31 РПБ131 РПБ132 РПЦ131 РПЦ132
Число полюсов 1 2 3 3 3 3 3
Номинальный
ток, А ... 100 100 100 100 250 100 250
При размыкании цепи рубильником между его кон-
тактами образуется дуга. Чтобы понизить действие дуги,
на ножах рубильника устраивают отрывные контакты.
При отводе рычага нож остается в губках до тех пор,
пока натяжение пружины, соединяющей его с рычагом,
не станет больше силы сцепления контактов. При раз-
мыкании нож под действием пружины мгновенно отры-
вается, разрывая дугу.
Рубильники монтируют в защитном металлическом
кожухе-ящике. На кранах устанавливают обычно ящики
ЯВЗ-31 на 100 А и ЯВЗ-32 на 200 А. Пакетные выклю-
чатели (переключатели) используют преимущественно
для эпизодического отключения и переключения вспо-
могательных силовых цепей напряжением 220 и 380 В.
Выключатели набирают из отдельных пакетов по числу
полюсов. Каждый пакет содержит неподвижные контак-
ты с внешними зажимами и пружинный подвижный
контакт. Пакеты скреплены между собой стяжными
шпильками. Контакты вращаются с помощью снабжен-
ного рукояткой валика.
На мостовых кранах применяют открытые переклю-
чатели типа ППМ и выключатели типа ПВМ. Обозна-
чение аппарата содержит, кроме наименования типа,
число контактов и номинальное значение тока при на-
пряжении 220 В. Наиболее распространены в двух- и
трехполюсном исполнении аппараты III, V и VI величин
на ток соответственно 25, 63, 100 А.
4. ЭЛЕКТРИЧЕСКИЕ СХЕМЫ КРАНОВ
Электрические схемы бывают принципиальные или
элементные, монтажные или маркировочные. Принципи-
альные схемы отражают взаимодействие элементов
электрооборудования, указывают последовательность
прохождения тока по силовым цепям и аппаратам
5—258 65
управления. Пользоваться принципиальными схемами
удобно при ремонте и наладке. Аппаратура в них про-
сто и четко разбита на отдельные самостоятельные це-
пи, и они легко запоминаются. Электрические цепи на
принципиальных схемах подразделяются на силовые,
изображаемые толстыми линиями, и цепи управления,
выполненные тонкими линиями. На монтажных или
маркировочных схемах в отличие от принципиальных
изображают электрическую проводку крана и взаимное
расположение электрооборудования.
Электрическая защита. В качестве электрической за-
щиты, как уже отмечалось выше, применяются защит-
ные панели ПЗКБ-160 и ПЗКН-150. Некоторые заводы
выполняют защитные панели собственной сборки. Неза-
висимо от этого каждая такая сборка представляет со-
бой укомплектованную панель, на которой смонтирова-
ны: трехполюсный рубильник, предохранители цепи
управления, трехполюсный контактор, реле максималь-
ного тока, контактные зажимы цепей управления и ли-
нейных проводов, пусковая кнопка и трансформатор
цепей управления.
Рассмотрим электрическую схему защитной панели
ПЗКБ-160 (рис. 36). Цепь управления показана тонки-
ми линиями, силовая цепь — жирными линиями. Поясне-
ние схемы силовой цепи будет дано ниже. В данный
момент рассмотрим схему цепи управления без элемен-
тов, расположенных правее пунктирной линии, соединя-
ющей точки 18 и 19.
Из приведенной схемы видно, что подача напряже-
ния к катушке контактора Л возможна после нажатия
на кнопку КВ, когда рукоятки всех контроллеров КП,
КТ, КМ поставлены в нулевое положение, включен ава-
рийный выключатель АВ, замкнуты контакт люка КЛ,
контакт дверей кабины КД, включена ключ-марка КМ
и замкнуты контакты максимального реле МР. После
включения линейного контактора Л замыкаются его
блок-контакты Л в цепи управления, шунтирующие
кнопку КВ. При этом создается замкнутая цепь: про-
вод Л1, катушка Л, контакты МР, КМ, КД, КЛ, АВ,
КМ, КВМН, КВТН, КТ, КП, блок-контакт Л, про-
вод Л2.
При выводе контроллеров из нулевого положения в
рабочее цепь не размыкается, так как ток проходит не
через нулевые контакты контроллеров, а через цепь
66
18
SJ Рис, 36. Электрическая схема защиты кранов.
с блок-контактом Л, и катушка линейного контактора
запитывается по параллельной цепи.
Вторая замкнутая цепь образуется при включении
контакторов ВМ или НМ, что осуществляется контак-
тами контроллера передвижения КИМ или К9М. При
этом в цепи размыкаются контакты взаимной блоки-
ровки НМ или ВМ, предохраняющие от одновременного
включения этих контакторов.
При срабатывании конечных выключателей механиз-
ма передвижения моста КВМН, КВМВ линейный кон-
тактор Л не отпадает, а отключается только контактор
направления ВМ или НМ и механизм передвижения
останавливается. Линейный контактор отключится при
срабатывании любого другого концевого выключателя
или прибора безопасности. В этом случае отключаются
контакты Л в силовой цепи и механизмы обесточива-
ются. Для пуска рукоятки контроллеров необходимо
снова поставить в нулевое положение и нажать на кноп-
ку КВ.
Реверсирование. Для реверсирования, т. е. измене-
ния направления вращения двигателей, применяют кон-
такторы или реверсивные магнитные пускатели. На
рис. 37,а показана схема реверсивной контакторной пане-
ли, а на рис. 37,6 — схема реверсивного магнитного
пускателя. Для реверсирования двигателей достаточно
двух двухполюсных контакторов. При повороте рукоят-
ки контроллера подается напряжение в цепь управления
22 и включается катушка В, которая замыкает верхнюю
пару контактов линии 1—И и 3—12. При этом двига-
220/380
» п 1 f 9 7
Рис. 37. Схема реверсирования.
а — с помощью контакторной панели; б — с помощью магнитных пускателей.
68
тель вращается в направлении Вперед. При подаче на*
пряжения в цепь управления 21, что соответствует пово-
роту контроллера в противоположную сторону, вклю-
чаются катушка Н и нижняя пара силовых контактов,
замыкая линии 1—12 и 3—11. В этом случае двигатель
вращается в направлении Назад.
Реверсивный магнитный пускатель состоит из двух
трехполюсных пускателей, имеющих взаимную механи-
ческую и электрическую блокировку. При замыкании
контактов 1 и 2 универсального переключателя У/7
включается катушка В пускателя и соответствующими
силовыми контактами В замыкаются линии 1—12, 2—13,
3—11. Двигатель вращается в одну сторону. При вклю-
чении катушки Н замыкаются линии 1—11, 2—13, 3—12,
что вызывает изменение порядка чередования фаз элек-
тродвигателя, поэтому он вращается в противополож-
ную сторону.
Управление электроприводом. Как указывалось вы-
ше, для ‘смягчения пусковых характеристик механизмов
применяют пусковые резисторы. Пусковыми резистора-
ми управляют:
прямым способом, при котором цепи сопротивлений
подключаются непосредственно к зажимам контролле-
ра, установленного в кабине крана;
дистанционным способом, когда цепи резисторов
включаются контакторами магнитной панели, управляе-
мой с помощью командоконтроллера, установленного
в кабине.
На рис. 38 приведена схема управления электропри-
водом крана прямым способом. На схеме показаны кон-
троллер КМ типа ККТ-62А, два пусковых резистора
ПС1 и ПС2 типа НФ-2А, два двигателя Ml и М.3 и два
электрогидротолкателя тормоза М.2, М4. На первой по-
зиции контроллера обмотки роторов замыкаются на пол-
ный комплект сопротивлений, на второй позиции вклю-
чаются контакты 1 и 2 контроллера, часть резистора
отключается. Двигатель переходит на более жесткую
характеристику, его частота вращения возрастает и т. д.
На пятой позиции контроллера все резисторы отключе-
ны, обмотки роторов замкнуты накоротко, двигатели
работают на естественных характеристиках, где скорость
достигает наибольшего значения.
В качестве примера дистанционного способа регули-
рования пуска электродвигателя с фазным ротором на
69
Рис. 38. Схема управления электроприводом крана прямым спо-
собом.
рис. 39 приведена электрическая схема управления ме-
ханизма передвижения. Управляют пуском электродви-
гателя и регулируют частоту вращения в этом случае
70
Рис. 39. Схема управления электроприводом дистанционным спосо-
бом.
а — силовая цепь; б — цепь управления.
с помощью контроллера КК типа ККТ-61А. Однако
здесь контроллер работает в цепи управления как ко-
мандоконтроллер, а пуокорегулирующие резисторы ком-
мутируют с помощью магнитного контроллера. При
71
включении рубильника В напряжение через катушки
реле .максимального тока РТ1 и РТ2 подается к непод-
вижным контактам контакторов К1 и К2. На нулевой
позиции комапдоконтроллера КК втягивающая катушка
промежуточного реле Р1 получает питание по цепи: про-
вод 010, замкнутые контакты КК, УП1, РТ1, РТ2, УП1,
провод 037. Реле Р1 замыкает свои контакты в цепях
020—023 и 025—036.
При установке рукоятки комапдоконтроллера КК на
первую позицию положения Вперед замыкается контак-
тор К1. При этом включаются электродвигатели Ml, М3,
М5 и М7 механизма передвижения и М2, М4, Мб, М8
гидротолкателей тормозов. При переводе командоконт-
роллера на вторую позицию питание получает катушка
контактора Кб, который замыкает секции 'пусковых ре-
зисторов в цепях роторов двигателей передвижения.
Дальнейший поворот рукоятки контроллера последова-
тельно 'включает катушки контакторов К7, К8 и К9. На
последней позиции все сопротивления зашунтированы,
т. е. роторы электродвигателей замкнуты накоротко,
поэтому двигатели работают на естественных характе-
ристиках. При переводе рукоятки комапдоконтроллера
КК в сторону Назад на первой позиции включается ка-
тушка контактора К2. В результате изменения порядка
подключения фаз двигатели вращаются в обратную
сторону.
При срабатывании каждого из реле РТ1 и РТ2 на
любой позиции контроллера размыкается размыкающий
контакт одного из этих реле, катушка Р1 окажется обес-
точенной и разомкнет свои контакты в цепи катушек
KI, К2. Силовая цепь окажется разомкнутой, кран оста-
новится. Дальнейший пуск электропривода станет воз-
можным только после возвращения рукоятки командо-
контроллера в нулевое положение.
Особенности управления магнитным контроллером
типа ТСАЗ-160. У магнитных контроллеров ТСА и КС
первое и второе положения контроллера служат для
спуска с пониженной скоростью грузов выше 50% от
номинального. При этом на первом положении спуска
возможна работа только с номинальным грузом. Для
спуска тяжелых грузов на первом и .втором положениях
необходимо включить педаль НП. Тогда в первом поло-
жении включается реле 1РУ, 2РУ. Включатся при на-
жатой педали и контактор противовключения П, кон-
72
тактор В, контактор пуска КП, контактор тормоза Т
и реле блокировки РБ (рис. 40).
При втором положении командоконтроллера контак-
тор П противовключения отключается. На первом и вто-
ром положениях двигатель работает в режиме противо-
включения.
Груз массой, меньшей 50% номинального, на первом
и втором положениях командоконтроллера опускаться
не будет. Его опускание возможно только в третьем
положении командоконтроллера. В третьем положении
командоконтроллера включаются контакторы Н и О. Это
Рис. 40. Принципиальная схема электропривода подъема с магнит-
ным контроллером ТСАЗ-160.
а — силовая цепь; б — цепь управления; М —двигатель; ТМ — тормозной
магнит; Т — контактор тормозного магнита; КП — контактор пуска; В, Н —
контакторы направления вращения двигателя; О — контактор однофазного
торможения; П — контактор противовключения; 1У—4У — контакторы ускоре-
ния; МР — реле максимального тока; РБ—реле блокировочное; 1РУ, 2РУ—
реле ускорения; КВВ, КВН — конечные выключатели; ВС — выпрямитель се-
леновый; R1—R2— добавочные резисторы; НП — ножная педаль; Р — рубиль-
ник; 1П, 2П — предохранители.
73-
вызывает включение двигателя в режим однофазного
торможения. Контакторы Н и О включают реле блоки-
ровки РБ, которое включает контактор Т — механизм
растормаживается. Цепь контакторов В и КП разорва-
на блок-контактами Н и О. В этом же положении по-
следовательно включаются контакторы 1У, 2У. Контак-
тор 2У разрывает цепь реле 1РУ, которое в свою оче-
редь включает с выдержкой времени контакторы ЗУ и
4У, т. е. закорачиваются пусковые резисторы.
В четвертом положении контроллера контактор О
отключается. Контакторы ускорения 1У — 4У включены,
все резисторы выведены. Контакторы Н, КП, Т и реле
блокировки РБ включены. Осуществляется спуск груза
со сверхсинхронной частотой вращения двигателя.
При медленном переводе рукоятки командоконтрол-
лера с третьего положения во второе и первое легкий
груз в этом 'Случае неизбежно пойдет вверх, так как
включится контактор В, который в свою очередь вклю-
чает КП, затем Т и РБ. На первом положении допол-
нительно включится П. Данная схема позволяет кранов-
щику выбрать соответствующее грузу положение коман-
доконтроллера.
5. РЕКОМЕНДУЕМЫЕ ИЗМЕНЕНИЯ
В ЭЛЕКТРИЧЕСКИХ СХЕМАХ КРАНОВ
Мостовые краны выпускаются с опробованными стан-
дартными электросхемами, примеры которых описаны
выше.
Однако в зависимости от количества установленных
на одном крановом пути кранов, а также в связи с из-
менением Правил устройства и безопасной эксплуатации
грузоподъемных кранов, а также при заменах аппара-
тов управления, производимых в процессе эксплуатации,
возникает необходимость в изменениях электросхем дей-
ствующих кранов.
1. В соответствии с требованиями ст. 166 Правил
краны мостового типа должны быть оборудованы
устройством для автоматического снятия напряжения
с крана при выходе обслуживающего персонала на гале-
рею. Это осуществляется посредством контакта люка.
Контакт этот должен быть установлен так, чтобы при
открывании люка питание троллеев на мосту крана
было отключено. С этой целью используется конечный
74
выключатель КВ типа ВК-211 или ВК-411, который
имеет две пары контактов: 1—2 и 3—4 (рис. 41). Кон-
такты 1—2 замыкаются при воздействии на выдвижном
люке, а в исходном положении когда на подвижной
контакт не действует никакая сила, он под действием
пружины замыкает контакты 3—4. Казалось бы не име-
ет значения куда подключать цепь управления: к кон*
Рис. 41. Установка контакта люка моста.
такту 1—2 или 3—4. В первом случае при открытии люка
цепь размыкается под действием пружины самовозврата
выключателя, а во втором—при воздействии упора на
подвижный штырек выключателя. Однако в последнем
случае может возникнуть опасность оставить троллеи
под напряжением при открытом люке. Это возможно,
если крышка люка будет снята и сойдет с направляю-
щих. Тогда штырек под действием пружины возвратится
в свое первоначальное положение и замкнет контакты
3—4, а следовательно, троллеи окажутся под напряже-
нием при открытом люке. Поэтому цепь должна замы-
каться через контакты 1—2, т. е. при воздействии на
штырек механического упора. Если сдвинуть крышку
с упора или снять ее, то контакты 1—2 сразу же разомк-
нутся.
2. На рис. 36 была представлена электросхема, у ко-
торой произведены необходимые изменения с целью
обеспечения безопасности обслуживания, а именно пере-
несен блок-контакт контактора Л с места, которое обо-
значено стрелкой, и пусковая кнопка КВ имеет две пары
контактов.
У существующих схем ток идет по линии, показанной
пунктиром, т. е. справа нет блок-контакта и второй па-
ры контактов пусковой кнопки. В этом случае также
возникает опасность поражения электрическим током,
так как при открытой крышке люка появится напряже*
75
ние на некоторых троллеях. Это .возможно на кранах
с приведенной схемой, т. е. с раздельным приводом пе-
редвижения (кинематическая схема приведена на
рис. 7,г). Произойти это может, если штурвал контролле-
ра передвижения моста будет сдвинут с нулевого поло-
жения, т. е. контакты К9М или КИМ в связи с этим
замкнутся. В этом случае, как видно из рис. 36, напря-
жение после рубильника через провод 18, по пунктирной
линии (проводник показан условно), катушку ВМ или
НМ, контакт контроллера К9М или КИМ, через кон-
такты контроллеров и конечных выключателей подается
к троллеям питания двигателя подъема, и так как дви-
гатель подключен в звезду, то оно подводится и к осталь-
ны'м троллеям.
Чтобы исключить возможность травмирования ре-
монтного и обслуживающего персонала на мостовых
кранах с раздельным приводом механизма передвиже-
ния, необходимо электросхему привести в соответствие
с той, которая показана на рис. 36.
Эта схема опробована на мостовых кранах автозавода
имени Лихачева. Переделка не требует каких-либо до-
полнительных устройств и заключается в том, что уста-
навливается пусковая .кнопка с двумя парами контак-
тов (взамен существующей с одной парой) и изменя-
ется положение блок-контакта линейного контактора.
В этом случае, как видно из схемы, если линейный кон-
тактор не включен, напряжение не будет подаваться
на катушки ВМ и НМ реверсивного контактора механиз-
ма передвижения и сдвиг рукоятки (штурвала) контрол-
лера не приведет к появлению на троллеях напряжения.
3. Согласно ст. 182 Правил электрическая схема
управления электродвигателями грузоподъемной машины
должна исключать самозапуск электродвигателей после
восстановления напряжения в сети, питающей грузоподъ-
емную машину; пуск электродвигателей не по заданной
схеме ускорения; пуск электродвигателей контактами
предохранительных устройств (контактами конечных вы-
ключателей и блокировочных устройств).
Краны с раздельным приводом передвижения управ-
ляются по схеме, приведенной на рис. 42, т. е. одним
контроллером через магнитный пускатель. Как видно из
рис. 42, после отключения конечного выключателя КНМ
или КВМ отключится контактор Н или В и двигатели
моста будут остановлены. При этом линейный контактор
76
Л не отключится, так как цепь его питания продолжает
быть замкнутой через свои блок-контакты Л.
Если контроллер не переведен в нейтральное положе-
ние, то сразу же после замыкания контактов конечных
выключателей включаются контакторы В или Н и кран
начнет двигаться. Когда на крановом пути установлен
один кран с такой электрической схемой, то особой опас-
Рис. 42. Существующая схема управления механизмом передви-
жения крана с раздельным приводом.
ности в этом нет и он может работать без изменения
схемы., Опасность возникает при установке на одном
крановом пути двух и более кранов. В этом случае их
электрические схемы надо переделать.
Если на одном из кранов контроллер управления дви-
гателя моста оставлен в одном из рабочих положений,
а другой кран в это время отъезжает, то контакты ко-
нечного выключателя остановленного крана замкнутся и
произойдет самопроизвольное включение механизма пер-
вого крана, у которого контроллер был оставлен в ра-
бочем положении. При этом включение может произойти
с выведенными сопротивлениями, если контроллер на-
ходился в пятом положении. Таким образом, (произойдет
нарушение ст. 182 Правил, что может привести к тяже-
лым последствиям в случае нахождения, например, ре-
монтного персонала на мосту крана, при регулировке
конечных выключателей, установке и ремонте «лыж»,
включающих конечный выключатель, и т. д. Для пре-
дотвращения несчастных случаев необходимо схему из-
менить в соответствии с рис. 43, 44.
В схеме на рис. 43 контакты конечных выключателей
КНМ и КВМ включены таким образом, что их размыка-
ние приводит к разрыву цепи линейного контактора Л.
77
В схеме, приведенной на рис. 4,4, конечные выключатели
КНМ и КВМ хода моста включены в цепь управления
линейного контактора и зашунтированы размыкающими
контактами контакторов направления движения В и Н.
Таким образом, конечные выключатели хода моста бу-
Рис. 43. Схема с ограничителями, перенесенными до блок-контакта.
Рис. 44. То же, но подключенными в цепь главного контактора.
дут разрывать цепь управления линейного контактора и
его можно будет включить только после установки всех
контроллеров в нулевое положение..
Если на одном пути установлены два крана и только
один из них имеет раздельный привод, то также суще-
ствует опасность. В этом случае схему переделывают
следующим образом. Устанавливают промежуточное
реле РП типа ЭТ-41, имеющее замыкающий и размы-
кающий контакты (рис. 45). Параллельно замыкающе-
78
му контакту включают свободные контакты ограничите-
ля передвижения моста ОМ1. При размыкании контакта
ограничителя в цепи катушки В замыкаются его контак-
ты в цепи РП, реле включается и размыкает свой кон-
такт в цепи катушки В. Если второй кран отъедет в
Рис. 45. Измененная схема управления механизмом передвижения-
с дополнительным реле.
контакт ОМ1 замкнется, первый кран не начнет само-
произвольного движения, так как контакт реле РП в це-
пи пускателя В останется разомкнутым. Чтобы начать
дальнейшее движение, рукоятку контроллера надо по-
ставить в нулевое положение. Катушка реле РП обесто-
чится при нулевом положении контроллера, и схема вос-
становится. Таким образом, даже без отключения ли-
нейного контактора будет исключаться самопроизвольное
передвижение крана.
Имеются краны старых образцов со схемами, где
конечные выключатели хода моста установлены не в це-
пи управления, а в силовой цепи двигателя. При их
размыкании лишь отключается двигатель передвижения^
а цепь управления остается включенной, что также соз-
дает опасность при нахождении двух кранов на одном
крановом пути, так как возможно их самовключение.
Поэтому такая схема подлежит изменению. Если на
крановом пути имеется один кран, то до установки вто'-
рого электрическая схема может не подвергаться изме-
нению.
4. Если мостовые краны имеют два механизма подъ-
ема, то при работе с одним механизмом может произой-
ти ошибочное включение второго механизма подъема
79*
при неисправном (неработающем) ограничителе вы*
соты подъема трюка произойдет обрыв каната. Чтобы
этого не произошло, предусматривают блокировку, поз-
воляющую работать только одному механизму, а при
включении второго контроллера будет отключаться ли-
Рис. 46. Схема блокировки при наличии двух
механизмов подъема.
нейный контактор. Для этого в каждом контроллере
в обоих механизмах устанавливают параллельные кон-
такты, замкнутые в 'Нулевом положении КВГП и КВВП
на рис. 46. Если перевести рукоятку контроллера в ра-
бочее положение, контакты КВГП и КВВП размыкают-
ся. При включении второго контроллера отключается
и второй контакт и цепь питания катушки линейного
контактора разрывается таким же образом, как при сра-
батывании любого конечного выключателя. Можно так-
же для этой цели предусмотреть пакетный переключа-
тель, и установив его в соответствующее положение,
получить возможность работать только одним из двух
механизмов подъема.
5. В эксплуатации находятся грейферные мостовые
краны, у которых возможна раздельная работа поддер-
живающей и замыкающей лебедок. Ограничитель высо-
ты подъема установлен только на поддерживающей ле-
бедке, которая поднимает закрытый грейфер. Поэтому
имеется возможность поднимать грейфер дальше с по-
мощью замыкающей лебедки, которая, закрыв челюсти
грейфера, может продолжать намотку каната после сра-
батывания ограничителя поддерживающей лебедки. Тем
80
самым не исключается возможность обрыва каната, так
как замыкающая лебедка не имеет своего ограничителя.
Поэтому конечный выключатель необходимо установить
также на замыкающей лебедке. При этом на замыкаю-
щей лебедке выключатель регулируется на срабатывание
при подъеме .закрытого грейфера. Если выключатель бу-
дет срабатывать раньше, то окажется невозможным за-
крытие высокого поднятого грейфера, так как при подъ-
еме грейферного каната (что необходимо для закрытия
грейфера) лебедка окажется преждевременно выклю-
ченной. Необходимо установить правильную последова-
тельность срабатывания конечных выключателей обеих
лебедок. Правильная регулировка заключается в том,
чтобы при подходе закрытого грейфера к крайнему верх-
нему положению сначала останавливался механизм
поддерживающей лебедки, т. е. нельзя допускать, чтобы
передавалась нагрузка на поддерживающие канаты, что
может привести к непредусмотренному открыванию гру-
женого грейфера. Нельзя также забывать об этом при
замене грейфера и канатов, в связи с чем следует про-
изводить после замены проверку работы и регулировку
конечных выключателей на последовательность их вклю-
чения.
6. Из схемы магнитного контроллера типа ТС
(рис. 47) видно, что параллельно блок-контактам кон-
такторов В и Н установлен блок-контакт М контактора
магнита тормоза. Назначение его заключается в том,
чтобы шунтировать контакты В и Н во время перехода
от тормозного спуска к силовому спуску с целью исклю-
чения «прыгания» тормоза. В этой схеме исключается из
действия блок-контакт Н, так как в первом положении
контроллера на подъем и во втором положении при спус-
ке катушка контактора запитывается через блок-кон-
такт В и на других ступенях контроллера питается через
свой блок-контакт.
Питание катушки контактора магнита через свой
блок-контакт может привести к аварии. Например, при
неисправности в цепи катушки В или Н соответствую-
щий контактор отпадет, подача напряжения на двига-
тель прекратится, а тормоз в действие не придет, так
как катушка контактора магнита питается через свой
блок-контакт. Груз под действием массы начнет само-
произвольно опускаться вниз. Указанная схема опасна
в эксплуатации, так как любое отключение контактора
6—258 8!
В или Н должно 'Сопровождаться срабатыванием тор-
моза, а при такой схеме это не (всегда возможно. Чтобы
не возникла такая опасность, необходимо снять перемыч-
ку на участке, который отмечен знаком X. После пере-
делки схемы при отпадании контакторов В или Н в слу-
Рис. 47. Измененная схема магнитного контроллера ТС.
чае неисправности цепи управления обязательно будет
срабатывать тормоз.
7. Иногда возникает необходимость изменения схемы
для повышения производительности труда или экономии
электроэнергии. Примером может служить получение
возможности опускания грейфера при неработающем
двигателе. Согласно существующему .положению меха-
низмы подъема груза должны снабжаться тормозами
замкнутого типа, автоматически размыкающимися при
включении и замыкающимися при выключении приводд.
Ь схемах тормозные катушки подключены в большинстве
случаев параллельно обмоткам статора двигателя. Со-
гласно ст. 128 Правил у грейферных двухбарабанных
лебедок с раздельным электроприводом на механизме
поддерживающего барабана допускается устройство пе-
дали (кнопки) для растормаживания барабана при нера-
ботающем двигателе. Это можно осуществить в схеме
управления двигателем при помощи магнитного контрол-
лера типа ТС.
Катушки тормоза подключаются в силовую цепь до
контакторов Н и В. Тормозной магнит включается при
помощи контактора М. При .переводе рукоятки коман-
доконтроллера в положение спуска включается контак-
тор Н, подключаются контакторы М и 1П, тормоз рас-
тормаживается и происходит опускание грейфера. При
установке рукоятки в нулевое положение контакторы Н
и М отпадут и механизм остановится. Если установить
ножную педаль и перемычку, как показано пунктирными
линиями на рис. 47, то нажатием на педаль во время
опускания грейфера и установкой рукоятки командокон-
троллера в нулевое положение можно, выключив двига-
тель, оставить тормоз в расторможенном состоянии и
продолжать опускание грейфера при выключенном дви-
гателе. При нажатии на педаль без предварительного
включения двигателя движения не произойдет. Таким
образом, можно производить работу грейфером, экономя
электроэнергию.
8. Даже хорошо отрегулированные тормоза механиз-
мов передвижения кранов для плавности остановки перед
окончательным выключением двигателя требуют, чтобы
крановщик несколько раз включил и выключил штурвал
или рукоятку контроллера, в противном случае -возмож-
но раскачивание груза. Во избежание этого крановщики
отпускают тормоза, увеличивая тем самым тормозной
путь, и прибегают при этом к противовключению. Это
небезопасно и приводит к быстрому износу механизма
крана (особенно зубчатых соединений). Чтобы облегчить
работу крановщика, уменьшить износ деталей, увеличить
производительность и улучшить условия безопасной
эксплуатации крана, целесообразно тормоза механизма
передвижения сделать не нормально закрытыми, а нор-
мально открытыми, управляемыми кнопкой. В этом слу-
чае при подходе крана к месту, где необходимо остано-
вить кран, крановщик устанавливает штурвал контролле-
6* 83
ра в нулевое положение и во время движения крана по
инерции периодически, нажатием на специальную кноп-
ку постепенно снижает скорость и плавно останавливает
кран. Тормоза механизмов передвижения кранов должны
быть замкнутого типа, однако если электрической схе-
мой контроллера предусмотрена возможность торможе-
ния двигателя согласно ст. 140 Правил, допускается
устанавливать на механизме передвижения такие тор-
моза, которые при отключении двигателя аппаратами
управления не замыкаются. В этом случае электрической
схемой может быть предусмотрено наложение (снятие)
тормоза добавочным аппаратом (кнопкой) при нахож-
дении контроллера в нулевом положении.
На рис. 48 приведена схема, которая обеспечивает
эти требования и позволяет произвести плавную оста-
новку крана. С этой целью применяются дополнительный
магнитный пускатель КТМ и кнопка КУ1. В указанной
схеме питание тормозных катушек производится не от
статора двигателя, как показано пунктирной линией, а
от сети. При включении линейного контактора включа-
ется также магнитный пускатель КТМ и катушки тор-
мозного электромагнита отжимают колодки тормоза.
Когда контроллером включается двигатель передвиже-
ния, тормоза уже открыты. Если необходимо произвес-
ти плавную остановку крана, штурвал контроллера
устанавливают в нулевое положение и нажимают на
кнопку КУ1. При этом катушка пускателя КТМ отклю-
чается, размыкаются контакты КТМ тормоза и проис-
ходит подтормаживание. При отпускании кнопки колод-
ки тормоза снова растормаживаются.
9. На рис. 49 представлена защитная панель постоян-
ного тока. Если штурвал контроллера находится в ну-
левом положении (и нулевые контакты контроллеров
КМ, КТ, КП замкнуты), замкнуты контакты аварийного
выключателя АВ, люка КЛ, дверей кабины КД, замка
с ключом КЗм, то при нажатии на кнопку КР запиты-
вается катушка линейного контактора Л и замыкаются
ее блок-контакты Л1 и Л2. Кнопка может быть отпу-
щена, так как она блокируется цепью, состоящей из
контактов Л2, МР1, МР2. При перегрузке одного из дви-
гателей контакты реле МР1, МР2 разомкнутся и контак-
тор Л отключится.
Поворотом вала контроллера замыкается соответст-
вующая цепь моста, тележки или подъема. При сраба-
84
Рис. 48. Изменение схемы питания тормоза механизма передвиже-
ния крана.
тывании любого из конечных выключателей движение
в одном из направлений становится невозможным, так
как отключаются контакторы KI, К2 или КЗ двигателя
соответствующего механизма. Защитные панели постоян-
ного тока отличаются от защитных панелей трехфазно-
го тока тем, что при срабатывании конечного выключа-
теля одного из механизмов отключается не общий линей-
ный контактор, а контактор данного механизма.
Например, при разрыве цепи конечным выключателем
подъема ОП (хода вверх) отключается катушка кон-
85
Фактора КЗ, а остальные механизмы могут продолжать
работать.
Однако такие схемы постоянного тока работают с на-
рушением требований ст. 182 Правил устройства и безо-
пасной эксплуатации грузоподъемных кранов, так как
включение двигателей с фазным ротором у этих схем
становится возможным не с первого .положения, а с лю-
бого промежуточного, в том числе и с пятого. Из при-
веденной схемы видно, что 'кнопкой КР подается напря-
жение на катушку контактора Л после восстановления
снятого напряжения или срабатывания защиты. При
этом размыкающий контакт кнопки КР исключает одно-
временную подачу питания на катушку контактора Л
и контакторов К1—КЗ во избежание включения их при
возможном коротком замыкании в сети. Если во время
работы любого механизма, когда контроллер будет на-
86
ходиться fB третьем, четвертом или пятом положении,
нажать на кнопку КР, работа механизма прекратится. Но
когда кнопка КР будет отпущена, механизм мгновенно
включится в том положении командоконтроллера, в ко-
тором он был остановлен, т. е. с третьего, четвертого или
Рис. 50. Измененная схема цепи управления мостовым краном на
постоянном токе.
пятого. Чтобы исключить такой внезапный пуск и одно-
временную подачу питания на катушку контактора Л
и катушки контакторов К1 — КЗ, необходимо внести из-
менения, которые указаны на рис. 50, т. е. размыкающий
контакт кнопки КР исключается, блок-контакт Л1 уста-
навливается перед катушками контакторов К1 — КЗ.
Кроме того, последовательно с контактами максималь-
ных реле МР1 и МР2 включаются контакты передвиже-
ния моста ОМ1 и ОМ2, которые отключают линейный
87
контактор Л в крайних положениях моста. Педаль 77
предназначена для .восстановления схемы.
10. Статьей 175 Правил предусмотрена необходимость
автоматического отключения трехфазного двигателя ме-
ханизма подъема груза при обрыве любой из трех фаз.
Для этой цели разработана защита.
Реле защиты от обрыва 'фазы основано на магнито-
динамическом принципе и
Рис. 51. Реле
го двигателя
защиты асинхронно-
от обрыва фазы.
конструктивно выполнено
в виде линейного двига-
теля. Реле состоит из сле-
дующих элементов (рис.
51): внешнего магнито-
провода 7, имеющего в
поперечном сечении вид
многолучевой звезды, и
системы кольцевых кату-
шек 2, поочередно (по
длине реле) присоединяе-
мых к различным фазам
трехфазной цепи, кото-
рые образуют цилиндри-
ческий индуктор (статор)
линейного двигателя.
Якорь реле является ро-
тором линейного двигате-
ля, в качестве которого
используется трубка 3 из
немагнитного металла.
Подвижные лонтакты 4
закреплены на трубке, не-
подвижные — на стержне
(контактные пружины на рис. 51 не показаны). При
включении катушек реле последовательно с об мотками
двигателя крана системой кольцевых катушек 2 созда-
ется бегущее магнитное поле. Магнитное поле индукти-
рует в т.рубке токи, которые, взаимодействуя с полем,
приводят .к возникновению механической силы. Под дей-
ствием этой силы трубка приходит в движение и замы-
кает контакты 4—5. При обрыве фазы вместо бегущего
появляется пульсирующее поле и якорь возвращается
в исходное положение, размыкая при этом контакты
4—5. При трехфазном несимметричном режиме индуктор
питается в основном током обратной последовательности
и якорь также возвращается в исходное положение,
88
Это реле может быть использовано в простейших
схемах включения асинхронных двигателей. Вариант
включения реле в схему электропривода мостового кра-
на показан на рис. 52. Катушки магнитодинамического
реле РИТ включаются последовательно с обмотками
двигателя подъема. В схему управления катушки ли-
нейного контактора Л включены замыкающий 1РИТ и
Рис. 52. Вариант включения реле
в схему электропривода крана.
размыкающий 2РИТ контакты реле защиты РИТ, вспо-
могательное реле времени РВ с контактом 1РВ и кон-
такт нулевой блокировки командоконтроллера КК.
Схема работает следующим образом. После включе-
ния кнопки Пуск через контакт реле 2РИТ и контакт
командоконтроллера КК получает питание катушка реле
времени РВ. Реле времени замыкает свой контакт 1РВ.
Поступает питание на катушку контактора Л. Схема
подготовлена к работе. При переводе рукоятки командо-
контроллера в рабочее положение КК размыкается, а
1РИТ не успевает замкнуться, так как еще нет тока
в силовой цепи двигателя, но контакт реле 1РВ имеет
выдержку времени на размыкание, поэтому питание про-
должает поступать на катушку контактора. Когда ру-
коятка командоконтроллера принимает рабочее поло-
жение, замыкается контакт 1РИТ и питание продолжает
поступать на катушку реле времени. Его контакт 1РВ
остается замкнутым и катушка Л продолжает получать
питание через этот контакт.
89
При обрыве фазы в цепи питайия асинхронногб Дви-
гателя подъема реле РИТ размыкает свой контакт 1РИТ
и замыкает контакт 2РИТ. Так как рукоятка командо-
контроллера находится в рабочем положении, катушка
контактора Л будет получать питание только в проме-
жуток времени, равный выдержке времени контакта 1РВ.
После этого контактор Л отключает двигатель.
И. Если расстояние от пола ремонтной площадки
до нижних частей крана менее 1800 мм, согласно ст. 229
Правил дверь для входа на ремонтную площадку должна
быть оборудована запором и автоматической электро-
блокировкой, снимающей напряжение с главных трол-
лейных проводов ремонтного участка. На рис. 53,а по-
казаны кран-балка с главными троллеями и троллеями
моста, лестницей с нижней В и .верхней Б дверками, ре-
монтная площадка, сооруженная на крыше кладовой
цеха.
На рис. 53,6 показаны ограждения А главных трол-
леев 1 на ремонтной площадке 2, лестница с верхней
Б и нижней В дверками, на которых смонтированы вы-
ключатели КД-В и КД-Н. При открывании дверей для
выхода на ремонтную площадку выключатели размыка-
ют катушки линейного контактора. При этом главные
троллеи и троллеи моста обесточиваются. Для отклю-
чения ремонтного участка установлен рубильник.
На рис. 53,в приведена принципиальная схема элект-
роблокировки ремонтной площадки однобалочного кра-
на, управляемого с пола, и подключения главных трол-
леев от цеховой электросети.
Во время работы кран-балки электрический ток про-
ходит по следующему пути: фаза ЛЗ, катушка кон-
тактора /С, кнопка Стоп, блок-контакт К, ключ-мар-
ка ДМ, концевые выключатели КД-В, КД-Н и вторая
фаза Л2.
12. На некоторых мостовых кранах установлены маг-
нитные контроллеры типа ТС или ДТС. Особенность
этих контроллеров состоит в том, что при установке
рукоятки командоконтроллера на трех первых положе-
ниях спуска порожний или легко груженный крюк дви-
жется не вниз, а вверх. При этом не работает защита,
ограничивающая высоту подъема крюка, что может при-
вести к подтягиванию крюковой обоймы до упора и
обрыву грузового каната. Указанные схемы контролле-
ров должны быть изменены таким образом, чтобы огра-
93
От цеховой
электросети 0800
Рис. 53. Установка блокировки на ремонтной площадке.
а — кран-балка у ремонтной площадки; б — ограждение главных троллей; в — принципиальная схема электроблокировки ремонтной
площадки однобалочного крана, управляемого с пола.
ничитель высоты подъема крюка был включен в цепь
на первых трех положениях спуска.
Наибольший эффект безопасности при эксплуатации
мостовых кранов достигается при совместном принятии
мер как по электрической, так и по механической части
крана. Чтобы избежать обрыва грузового каната и па-
дения груза, необходимо помимо правильной установки
ограничителя, переделать
грузовой полиспаст. Су-
щество изменения кон-
струкции полиспаста со-
стоит в том, что в каче-
стве уравнительного
устройства применяется
не блок, а барабан 1,
устанавливаемый на вин-
те 2, и с обеих сторон ба-
рабана располагаются бу-
ферные устройства 3
(рис. 54). Два каната 4
и 5 одними концами за-
креплены на барабане 6
лебедки, а другими — на
уравнительном барабане.
На уравнительный бара-
бан канаты заведены с
разных сторон так, что
Рис. 54. Безопасный сдвоенный при вращении его один
полиспаст. канат сматывается, а дру-
гой—наматывается. Меж-
ду торцевыми поверхностями барабана 1 и тарелками
буферных устройств имеется некоторый зазор Д. Устрой-
ство работает следующим образом: когда оба каната
целы, спуск и .подъем груза происходит, как обычно, на-
тяжения в ветвях каната выравниваются за счет вра-
щения уравнительного барабана, перемещающегося при
этом в осевом направлении на величину Д. При обрыве
каната груз, падая, сматывает второй конец каната
с уравнительного барабана, который, двигаясь вдоль
винта, выбирает зазор, упирается в буфер торцевой
поверхностью и плавно тормозится до полной остановки.
Груз при этом удерживается вторым канатом.
92
6. ОБСЛУЖИВАНИЕ И РЕМОНТ
ЭЛЕКТРООБОРУДОВАНИЯ КРАНОВ
Правильно поставленная эксплуатация оборудования
обеспечивает надежную и безаварийную работу крана.
Не должны допускаться режимы 'более тяжелые, чем
те, на которые рассчитаны двигатели, тормозные магни-
ты. сопротивления и прочая аппаратура.
Большое значение по обеспечению исправной и безо-
пасной работы кранов играет техническое обслуживание
кранов. Планово-предупредительные ремонты (ППР)
крана устраняют элементы случайности и позволяют
вести ремонт согласно плану. Характерным для системы
ППР является то, что кран выводится в ремонт через
определенный срок, который определяется не сроком
службы отдельных деталей, а величиной допустимого
их износа. Система технического обслуживания состоит
из ежедневного обслуживания, которое проводит кра-
новщик, плановых осмотров, среднего и капитального
ремонтов. При уходе за электрооборудованием крановая
бригада с участием электромонтера проводит контроль-
ный осмотр электрооборудования и выполняет крепеж-
ный ремонт оборудования, устраняет неисправности, ме-
няет изношенные контакты, пружины, щетки и проверя-
ет их раствор и нажатие. Кроме того, при осмотрах
регулируют токоприемные устройства и проверяют пре-
дохранители, заземляющее устройство, смазку в под-
шипниках, силовую цепь и ее сопротивление, защиту
троллеев, магнитные пускатели, тормозные электромаг-
ниты, контакторы, прочность пайки и т. д. Сроки осмот-
ров и ремонтов устанавливаются, по графику, составлен-
ному в зависимости от загруженности ра'боты крана.
Помимо плановых ремонтов и осмотров возникает
необходимость в ликвидации отдельных неисправностей.
Ревизия электродвигателей сводится, в основном,
к проверке состояния изоляции обмоток статора, пра-
вильности их соединения и качества смазки. При не-
исправностях двигателей возникает шум и местный на-
грев подшипников, биение или смещение вращающихся
частей, чрезмерное искрение щеток и т. д. При нагреве
подшипников необходимо проверить состояние смазки и,
если надо, заменить ее. Для осмотра подшипников и
замены смазки разбирают двигатель. При этом выполня-
93
ют следующие работы: очищают корпус двигателя; сни-
мают крышку с вводной .коробки обмотки статора; отсое-
диняют подводящие концы статорной Обмотки; снимают
муфту, соединяющую двигатель с редуктором, кожух
вентилятора и вентилятор; в двигателях с фазным рото-
ром поднимают щеткодержатели и закрепляют их; от-
винчивают болты подшипниковых щитов; ввинчивают эти
болты в отверстия во фланцах подшипниковых щитов1
и отжимают ими щиты до выхода посадочной поверх-
ности из станины; снимают подшипниковые щиты вместе
с ротором и с наружными подшипниковыми крышками;
снимают подшипниковые крышки со щитов; вынимают
ротор из статора.
После разборки двигателя из снятых крышек и под-
шипниковых щитов удаляют старую смазку, полости
крышек и лабиринтовые канавки промывают керосином.
Ротор при этом следует держать в наклонном положе-
нии, чтобы керосин не попал на изоляцию обмоток. Если
подшипники имеют трещины или выбоины на кольцах,
валиках или шариках или чрезмерный износ, то их за-
меняют. Износ подшипников двигателя определяют щу-
пом, пропускаемым между шариками и обоймой.
Посадку нового подшипника производят с предва-
рительным .подогревом. Все свободное пространство под-
шипника заполняют смазкой. Необходимо помнить, что
чрезмерное заполнение смазочных камер подшипнико-
вого узла смазкой может вызвать дополнительные со-
противления вращению ротора и нагрев двигателя.
Сборку двигателя выполняют в обратной последователь-
ности. При установке ротора в статор прокладывают
между ними картон толщиной, равной зазору. Подшип-
никовые щиты устанавливают в прежнее положение.
После сборки прокручивают ротор от руки. Правильно
собранный ротор двигателя легко проворачивается. За-
тем в течение 10 мин работа ведется вхолостую.
Одной из наиболее уязвимых деталей фазного потора
являются щетки, которые при нормальной работе не
должны искрить. Образование искр указывает на неис-
правность щеточного аппарата. Чтобы щетки не искри-
ли, кольца ротора должны иметь зеркальную поверх-
ность. Для этого кольца шлифуют стеклянной бумагой,
сначала крупнозернистой, а затем более мелкой. Щетки
шлифуют непосредственно на месте установки,, для чего
стеклянную бумагу помещают между колыюм и щеткой.
Р4
При незначительном .нажатии щеток на кольца не
обеспечивается достаточный контакт, а при сильном на-
жатии щетки быстро изнашиваются. Удельное нажатие
в двигателях типа МТ на щетки типа Ml должно быть
не меньше 20 Н/см2. Замер давления на щетку произ-
водится динамометром. При ослаблении давления на
щетки заменяют пружины щеткодержателей. Искрение
щеток может происходить и из-за неисправности кон-
тактных колец, неравномерного их износа по окружности,
образования на поверхности наплывов и загрязнений.
Кольца притирают стеклянной бумагой № 100—120,
прикрепленной к деревянной колодке. Биения или на-
плывы на кольцах устраняют на токарном станке.
Продолжительное хранение на открытом воздухе дви-
гателей приводит к увлажнению их обмоток и резкому
снижению электрического сопротивления изоляции. Нор-
мально сопротивление изоляции, измеренное мегаом-
метром, должно быть не ниже 0,5 мОм в холодном или
0,2 мОм в нагретом состоянии. Если изоляция увлаж-
нена, т. е. сопротивление ее ниже приведенных значе-
ний, электродвигатель нужно сушить. Сушку можно про-
изводить двумя способами: внешним нагревом (лампы
накаливания, электропечи и т. д.) или токами короткого
замыкания.
Перед сушкой по второму способу ротор затормажи-
вается, а кольца фазного ротора замыкаются накоротко.
На статор подается пониженное через трансформатор
или реостат в 9—10 раз напряжение трехфазного тока.
Для сушки электродвигателя можно также использовать
однофазный ток. В этом случае обмотки статора вклю-
чаются последовательно, благодаря чему необходимое
напряжение будет выше, чем при параллельном соеди-
нении обмоток, что облегчает подбор трансформатора
или реостата для понижения напряжения. Нагрев обмо-
ток осуществляется путем постепенного поднятия напря-
жения на зажимах электродвигателя. При сушке изоля-
ции не следует нагревать обмотки выше 105°С. Обмотки
нагреваются постепенно в течение 8—10 ч. Температура
и сопротивление изоляции измеряются сначала через
каждые 30 мин, а при достижении температуры 60—70°С
— через каждый час.
Выход из строя обмоток двигателя и электрических
аппаратов чаще всего происходит из-за повреждения их
изоляции. Замыкание обмотки на корпус определяют
95
*)
Рис. 55. Схема соединения обмо-
ток статора при определении на-
чал и концов фаз обмоток.
а — вольтметр показывает наличие на-
пряжения; б — на вольтметр напря-
жения нет.
мотки в пазу необходимо
мегаомметром. В фазном роторе мегаомметр подклю-
чают к каждому из колец и валу.
В практике встречаются случаи обрыва или плохого
соединения обмоток. При обрыве обмотки двигатель или
трехфазный электромагнит работает ненормально, гудит
и перегревается. Установлено, что 50% двигателей вы-
ходит из строя вследствие работы на двух фазах. Основ-
ной мерой предохранения
от работы на двух фазах
является исправная ра-
бота автоматической за-
щиты.
Прежде чем присту-
пить к отысканию обрыва
в катушках двигателя или
аппарата, необходимо
проверить питающую сеть.
Обрыв фазы обмотки дви-
гателя обнаруживают ме-
гаомметром или контроль-
ной лампой. Место обры-
ва устраняют пайкой
твердым припоем и изо-
лируют. При обрыве об-
заменить секцию или ка-
тушку.
Определение начал и концов обмоток статора. Если
выводные провода обмотки статора двигателя на напря-
жение 220/380 В не имеют обозначений, то начала и
концы обмоток определяют следующим образом: мега-
омметром или контрольной лампой определяют выводы
обмотки каждой фазы и произвольно их обозначают —
для первой фазы 1—1, для второй фазы 2—2, для треть-
ей фазы 3—3; последовательно соединяют любые две
фазы (например, фазу первую и вторую) и подключают
к сети переменного тока напряжением 12, 24 или 36 В,
а к третьей фазе присоединяют вольтметр или контроль-
ную лампу (рис. 55). Если фазы обмотки будут соеди-
нены разноименными выводными проводами (начало —
конец), то вольтметр покажет полное напряжение или
лампа будет гореть полным накалом. Если фазы будут
соединены одноименными выводами, то напряжение на
вольтметре будет почти равно нулю, а лампа не будет
гореть. Таким образом определяются начала и концы
96
двух фаз (один из выводов первой фазы произвольйо
считают началом или концом).
К одной из фаз, выводы которой уже известны, при-
соединяют третью фазу и определяют ее выводы ана-
логичным образом. В этом случае переключают концы
третьей фазы. Затем наносят обозначения: для начал
фаз — Cl, С2, СЗ, для концов фаз — С4, С5, С6.
Ревизия электромагнитов. Тормозные элект-
ромагниты. При осмотре тормозные электромагниты
очищают от пыли и грязи. Проверяют крепление корпу-
са, катушек и ярма, регулируют ход якоря, который
должен втягиваться быстро, без ударов и во включенном
состоянии плотно прилегать к ярму катушки. Неплотное
прилегание якоря может происходить как при недоста-
точном его ходе, так и при перекосах в тормозных ры-
чагах. Регулирование хода электромагнита производят
за счет перестановки скалки якоря на новую позицию.
Перекосы электромагнита устраняют регулировкой бол-
тов, крепящих ярмо. В ряде случаев электромагниты
бездействуют вследствие падения напряжения в элект-
рической сети. Нормальная работа электромагнитов
обеспечивается при напряжении .не менее 85% номиналь-
ного. Наиболее частым дефектом в электромагнитах
является выход из строя катушек вследствие чрезмерного
перегрева или повреждения изоляции.
Грузоподъемны еэлектромагниты. Эффек-
тивность использования и срок службы грузоподъем-
ных электромагнитов во многом зависят от того, на-
сколько правильно они эксплуатируются. При эксплуа-
тации необходимо учитывать, что катушки электромагни-
тов рассчитаны на работу в повторно-кратковременном
режиме с ПВ=50% при продолжительности цикла не бо-
лее 10 мин. Такой режим определяется тем, что при ра-
боте температура частей магнита не должна превышать
допустимых пределов. Если относительная продолжи-
тельность включения больше 50%, то необходимо сни-
зить напряжение на контактных зажимах электромагни-
та для ограничения чрезмерного нагрева катушки,
сохранив при этом напряжение цепей управления. На-
пряжение снижается включением последовательно с ка-
тушкой электромагнита добавочного сопротивления. При
этом подъемная сила электромагнита несколько сни-
зится.
Основная причина выхода из строя электромагни-
7—258 97
Тов — старение изоляции от действия высокой темпера-
туры и резких ее колебаний. Поэтому уменьшение на-
грева электромагнитов в эксплуатации до допустимых
пределов является одним из главных условий повыше-
ния срока их службы.
Примерное время, в течение которого электромагнит
нагревается до температуры 150°С при температуре
окружающей среды 35°С, номинальном напряжении и
ПВ=50%, указано ниже:
Тип грузового электромагнита
М-22, М-62
М-42
ПМ-15
ПМ-25
Время, в течение которого электро-
магнит нагревается до 150С, ч
6
2,5
3
5
Если работа выполняется при более высокой темпе-
ратуре окружающей среды и особенно при работе с го-
рячими болванками, время нагрева электромагнитов
будет существенно отличаться от приведенных выше
данных.
Чтобы убедиться в том, что температура катушки
магнита не превышает допустимой, необходимо периоди-
чески ее измерять. Делается это по окончании смены, в
течение которой использование магнита было типичным
для данного крана. Обычно она равна температуре
окружающего воздуха. Если нагрев электромагнита бу-
дет выше допустимого нормами, то следует работать по-
переменно двумя электромагнитами.
Во избежание резких изменений температуры
электромагнита не следует ставить его горячим на сы-
рую землю, снег, холодный металл. Для этой цели луч-
ше всего иметь специальные деревянные бруски.
На поднимаемый груз электромагнит следует опу-
скать обесточенным. Включать электромагнит следует
только после того, как он плотно лег на груз. Нельзя
сразу же после включения электромагнита включать
двигатель подъема, так как ток в электромагните не
сразу достигает установившегося значения. Чем мас-
сивнее поднимаемый груз, тем больше нужно времени,
чтобы ток достиг значения, определяемого напряжением
сети и сопротивлением электромагнита. Нельзя пользо-
ваться электромагнитом как тараном или ударной мас-
98
сой. Опускать его на груз следует медленно, без резких
ударов.
Ревизия селеновых выпрямителей. Селеновые выпря-
мители предназначены для питания постоянным током
катушки электромагнитного тормоза. Они состоят из
четырех столбов, собранных из отдельных элементов
шайб. Выпрямители смонтированы на двух изоляцион-
ных панелях, укрепленных на стойках сварной кон-
струкции. На одной из панелей расположены реле
постоянного тока, два или четыре трубчатых предох-
ранителя для внешней сети. Четыре селеновых столба
соединены по однофазной мостовой схеме, осуществляю-
щей двухполупериодное выпрямление переменного тока.
Катушка тормозного электромагнита, получающая
питание от выпрямителя, включается контактами реле.
При отключении источника питания контакты реле
разрывают цепь электромагнита. Этим исключается воз-
можность короткого замыкания катушки электромагни-
та выпрямителем и уменьшается время отпадания якоря
тормозного электромагнита.
При включении выпрямителя, находившегося про-
должительное время в обесточенном состоянии (пребы-
вание на складе или перерыв в работе), происходит
увеличение его обратного тока и могут наблюдаться
потрескивание, отдельные искры на поверхности селе-
новых элементов. Выпрямители, долго находившиеся
в обесточенном состоянии, в момент включения могут
потреблять значительный ток, превышающий в 5—10
раз номинальное значение. Это не является признаком
их неисправности. Однако при вводе выпрямителя в ра-
боту следует произвести формовку, т. е. включить его
на напряжение, равное приблизительно 50% номиналь-
ного, и лишь по истечении часа поднять напряжение до
номинального значения. При длительном хранении вы-
прямителя в обесточенном состоянии формовку следует
производить 1 раз в 6 мес.
Выпрямители следует беречь от сырости и воздей-
ствия кислотных паров, содержать их в закрытом виде,
периодически снимать кожух, продувать селеновые
столбы, так как оседание на них пыли ведет к ухудше-
нию охлаждения, очищать или продувать реле.
При длительной эксплуатации выпрямителя проис-
ходит необратимое повышение прямого падения напряже-
ния, так называемое «старение». В результате сни-
7* . 99
жается выпрямленное напряжение на зажимах тормоз-
ного магнита. По истечении определенного периода
эксплуатации это напряжение снизится до значения,
при котором якорь магнита притягивается слишком вя»
ло. В этом случае надо закоротить половину добавочно-
го сопротивления. При дальнейшем снижении напряже-
ния можно закоротить оставшиеся сопротивления.
Если в процессе эксплуатации возникает необходи-
мость в регулировании реле, следует затянуть его воз-
вратную пружину так, чтобы якорь реле, притягивался
при 85% номинального напряжения сети и горячей ка-
тушке реле или при 60% напряжения и холодной катуш-
ке. Регулировать реле, применяемое в качестве реле нап-
ряжения, можно с помощью изменения толщины или ко-
личества сменных немагнитных прокладок, натяжения
пружины и хода якоря. В случае, если контакты реле не
включаются, а проверка вольтметром показывает нали-
чие напряжения на выходе выпрямителя, следует отсо-
единить катушку и выяснить, нет ли обрыва в ее обмот-
ке. Если после включения выпрямителя якорь тормоз-
ного магнита отпадает слишком медленно, требуется про-
верять своевременное размыкание контактов реле.
Селеновые шайбы очень чувствительны к температу-
ре, которая при работе выпрямителя не должна превы-
шать 70°С. Поэтому селеновый выпрямитель применим
в местах, где окружающая температура не превышает
40°С.
Ревизия контроллеров. Дефектами контроллеров
являются обгорание, оплавление или износ контактов,
нарушение регулировки, повреждение изоляции, обрывы
перемычек, износ роликов и осей, ослабление пружин.
Обгорелые контакты зачищают бархатным напильни-
ком, но не наждачной шкуркой, так как внедряющиеся
в металл кристаллы стекла или наждака будут в даль-
нейшем служить причиной интенсивного нагарообразо-
вания. Контакты с износом более 25% первоначальных
размеров должны браковаться, так как в работе они
перегреваются и могут привариваться. После зачистки
или замены контактов необходимо проверить правиль-
ность прилегания по ширине подвижного контакта к
неподвижному, величину раствора и степени начального
и конечного нажатия контактов. При проверке взаимно-
го прилегания контактов по ширине на рабочую поверх-
ность одного из контактов наносят мелом поперечную
100
черту и после включения и отключения контактов
осматривают метку. Если метка стерлась не менее чем
на 2/з, значит контакты прилегают друг к другу нормаль-
но.
Раствор контактов представляет собой кратчайшую
Рис. 56. Регулировка подвижного и неподвижного контактов кулач-
кового элемента контроллера серии НТ-51.
о — полное раскрытие; б — начальное нажатие; в — конечное нажатие.
линию отхода А (рис. 56, а) подвижного 2 от неподвиж-
ного 1 контактов. Для контроллеров типов НТ-51 и
НТ-52 раствор должен быть в пределах 9—14 мм. На-
чальное нажатие представляет собой усилие, создавае-
мое пружиной 4 в точке первоначального касания (рис.
56, б). Конечное нажатие — это усилие, создаваемое
пружиной 4 в точке конечного касания контактов / и 2
101
при их полном включении (рис. 56,в). Силу нажатия
регулируют гайкой 3. Нажатие не должно выходить за
пределы, указанные ниже:
Ширина сухаря, мм
12
15
20
Нажатие, Н (кг)
Не более Не менее
13(1,3) 7(0,7)
16(1,6) 14(1,4)
22(2,2) 4(0,4)
Проверку степени нажатия контактов осуществляют
при помощи полоски бумаги и динамометра так же, как
главных контактов контакторов.
Гибкие дефектные перемычки заменяют новыми, из-
готовленными из медной фольги или сплетенными из
неизолированного провода. Изношенные ролики, оси и
кулачки восстанавливают наплавкой металла или заме-
няют. Ослабевшие пружины заменяют новыми. После
осмотра и ремонта трущиеся поверхности контроллера
смазывают техническим вазелином.
Ревизия контакторов. Дефектами контакторов явля-
ются ослабление крепления, окисление контактов, по-
вреждение короткозамкнутых витков, пробои изоляции
обмотки, поломка пружин, обгорание и износ главных
и блокировочных контактов, нарушение раствора, про-
вала, начального и конечного нажатий главных контак-
тов, прогиб мостиков блок-контактов. Неровности на
главных контактах устраняют бархатным напильником.
Контакты с износом более 30% подлежат замене. Обго-
релые или неплотно прилегающие блок-контакты зачи-
щают, изношенные напайки меняют. Затем проверяют
прилегание каждого подвижного главного контакта по
ширине к неподвижному контакту и производят их регу-
лировку или подгонку. Далее проверяют раствор, провал
и степень начального и конечного нажатия главных кон-
тактов.
Раствор представляет собой кратчайшую линию А
(рис. 57) отхода подвижного контакта 2 от неподвижно-
го 1 при разомкнутом положении. Провал — это расстоя-
ние, на которое смещается место касания подвижного
контакта с неподвижным, если снять с места крепления
подвижный контакт. Практически величину провала
определяют замером зазора Б между контактом 2 и
контрольной пластиной 4 при включенных контактах.
Начальное нажатие представляет собой усилие,
102
создаваемое пружиной 3 в точке первоначального каса-
ния. Конечное нажатие — это величина усилия, создавае-
мая той же пружиной в точке касания контактов при
полном включении.
Силу нажатия контактов проверяют динамометром,
петлей и полоской бумаги. Для определения величины
первоначального нажа-
тия полоску папиросной
бумаги 1 (рис. 58,а) за-
кладывают между по-
движным контактом 2 и
пластиной 3. Накидывают
петлю на контакт 2 и от-
тягивают за кольцо дина-
мометр 5. При этом
следят за показаниями
стрелки динамометра,
а второй рукой вытягива-
ют полоску бумаги. Изме-
ренное динамометром уси-
лие в момент сдвига бу-
Рис. 57. Определение величины
раствора и провала главных кон-
тактов контроллера.
маги соответствует уси-
лию пружины при начальном касании контактов.
Для проверки величины конечного нажатия бумаж-
ную полосу 1 (рис. 58, б) закладывают между контакта-
ми 2 и 6, прижимают к сердечнику якорь и заклинива-
ют его. Через петлю захватывают динамометром 5 ко-
нец контакта 2 и оттягивают его. При этом следят за по-
казаниями стрелки динамометра и второй рукой вытяги-
вают полоску бумаги. В момент сдвига бумаги фиксиру-
ют показание динамометра.
Если полученные усилия не соответствуют нормам, то
изменением сжатия пружины 4 добиваются требуемых
Рис. 58. Определение начального и
контактов контактора.
конечного нажатия главных
.103
результатов. Растворы и провалы должны быть одинако-
выми для всех трех контактов контактора. Нормально
работающий контактор издает легкий ровный гул. Если
гул повышается или сопровождается дребезжанием, зна-
чит контактор неисправен. Для устранения неисправно-
стей проверяют состояние катушки (при замыкании вит-
ков катушку заменяют новой) и работу механической ча-
сти. Проверяют, нет ли перекоса магнитной системы кон-
тактора. Перекос может произойти вследствие износа
или сдвига листов ярма и якоря, а также от изменения
положения якоря и ярма. Чтобы обнаружить перекос,
между якорем и ярмом прокладывают лист копироваль-
ной бумаги и несколько раз замыкают контактор. По от-
печаткам на отшлифованной поверхности якоря опреде-
ляют наличие перекоса. Необходимо следить за состоя-
нием короткозамкнутого витка. Вышедший из строя ви-
ток должен быть заменен новым. Проверяя механиче-
скую часть, необходимо обследовать надежность крепле-
ния аппарата к щиту. Вал контактора должен легко про-
ворачиваться на подшипниках.
Ревизия резисторов. Работа при загрязненном рези-
сторе недопустима, так как возможен его пробой (пов-
реждение изоляции), ухудшение вентиляции. Случайно
попавшие горючие предметы (древесная стружка, бума-
га и т. д.) могут воспламениться. Смазочное масло, ока-
завшееся на элементах резисторов при их нагреве, вы-
деляет дым. Постоянный уход за резисторами предохра-
няет их от быстрого износа и выхода из строя.
Признаком неисправности пускового резистора является
возрастание пускового тока якоря, а следовательно, уве-
личение искрения контактов контроллера и сильный
нагрев элементов. Осматривать их следует после снятия
напряжения на подводящем кабеле.
При осмотре необходимо: очистить от пыли и грязи
элементы и изоляционные шайбы; проверить состояние
винтов на зажимах и контактных соединений и, в слу-
чае их ослабления, подтянуть гайки; окислившиеся кон-
тактные поверхности зачистить напильником и хорошо
протереть сухой тряпкой; проверить затяжку элементов
на шпильках, подтягивая до отказа гайки; при замене
элемента на его место ставят элемент того же номера;
замкнутые накоротко элементы должны быть выправ-
лены путем установки между ними слюды или асбесто-
вых прокладок; при больших перекосах пластин уста-
104
навливают стальные оцинкованные компенсирующие
шайбы; если константановая проволока имеет местный
обрыв при удовлетворительном состоянии в других ча-
стях резистора, неисправность устранить пайкой провод-
ника в месте разрыва; нарушенную изоляцию стержней
необходимо восстановить путем накатывания на стер-
жень возможно более тонкого слоя асбестовой бумаги;
ящики резисторов необходимо предохранить от попада-
ния воды на элементы.
Фехралевые и константановые резисторы не должны
нагреваться ни в одной точке до температуры более
300°С. Низкая температура нагрева резисторов указы-
вает на излишнее количество элементов.
Регулировка реле максимального тока. Двигатели с
фазным ротором защищаются реле максимального тока
типа РЭО-401, а двигатели с короткозамкнутым рото-
ром—предохранителями и тепловыми реле. Надежная
и безопасная работа крана обеспечивается правильно
отрегулированной и исправной максимальной защитой.
При осмотрах и ремонтах крана следует тщательно про-
верить исправность реле максимального тока. Реле
должны срабатывать при токе не выше 225% номиналь-
ного и примерно на 25% выше пускового тока двигате-
ля. Неисправные катушки и иные детали реле заменяют-
ся новыми.
Ревизия конечных выключателей. Характерными де-
фектами конечных выключателей являются нарушения
регулировки кулачковых шайб, загрязнение и окисление
контактных соединений, токопроводов, обгорание и из-
нос подвижных и неподвижных контактных напаек, ис-
кривление мостика и реже износ роликов, осей рычагов,
поломка пружин. Загрязненные контакты очищают от
грязи и окислов. Червячную передачу (там где она
есть) смазывают техническим вазелином. Загрязненные
или обгорелые подвижные и неподвижные контакты ос-
торожно зачищают бархатным напильником. Изношен-
ные напайки удаляют и к мостику и неподвижным стой-
кам припаивают серебряным припоем новые контакты.
Изношенные ролики, оси, защелки, рычаги и дефектные
пружины в зависимости от их состояния ремонтируют
или заменяют. При нарушениях посадки на валу кулач-
ковых шайб положение последних регулируют.
105
7. ОСНОВНЫЕ ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ
Безопасная эксплуатация кранов зависит от их ис-
правности, правильно выполненного заземления, соблю-
дения необходимых условий при ремонте, а также от
правильной эксплуатации кранов. Безопасность эксплу-
атации повышается, если выполнены рекомендуемые из-
менения в электрических схемах, указанных в гл. 5.
Заземление металлоконструкций мостовых кранов и
установленного на них электрооборудования можно вы-
полнять через подкрановые пути. Заземление тележек
на кранах обеспечивается контактом через рельсы и хо-
довые колеса.
Присоединение заземляющего провода к рельсовым
путям крана должно выполняться при помощи сварки,
а присоединение к корпусам электродвигателей, аппа-
ратов и т. п. — болтовыми соединениями, обеспечиваю-
щими надежность контакта (контргайки, контрящие
шайбы).
В тех случаях, когда электрооборудование крана ус-
тановлено на его заземленной металлоконструкции и
между ними имеется надежный контакт, при котором
замеренное сопротивление заземления не превышает ус-
тановленной нормы, присоединение добавочных заземля-
ющих проводников не обязательно. При управлении кра-
ном (электроталью) с пола корпуса кнопочных аппара-
тов управления, выполненные не из изоляционного
материала, должны быть заземлены не менее чем двумя
проводниками: жилой гибкого кабеля и тросиком, при-
крепленным с наружной стороны гибкого кабеля.
В электролизных установках мостовые краны обслу-
живают ряд электролизеров (ванн), работающих под
напряжением 500 В и выше. На этих кранах Правилами
предусматривается устройство трехступенчатой изоляции
грузозахватного органа от земли. Необходимость такой
изоляции вызывается рядом причин, одной из которых
является возможность поражения током обслуживающего
персонала при одновременном прикосновении к крюку
крана и электролизеру во время работы. Изоляция так-
же предохраняет от возникновения токов короткого за-
мыкания, что может привести к несчастным случаям и
вызвать повреждение оборудования. Изоляция произво-
дится текстолитовыми пластинами, прокладками, втул-
ками.
10^
Обычно в мостовых кранах пути изолируют от желе-
зобетонных балок и колонн здания, подтележечные пу-
ти— от крана, а механизм подъема — от тележки. Изо-
ляция осуществляется путем подкладывания под рельсы
текстолитовых подкладок. Крепежные болты и шпильки
изолируются текстолитовыми втулками и шайбами.
Сопротивление каждой ступени изоляции должно
быть не менее 10 МОм. Изоляция электрооборудования,
проводов и кабелей должна быть рассчитана на случай
приложения к ним напряжения от груза при поврежде-
нии или перекрытии ступеней защитной изоляции.
Испытание заземляющих устройств по нормам и в
объеме, предусмотренном ПУЭ, производится при сдаче
устройства в эксплуатацию и периодически не реже 1
раза в год. Результаты измерения сопротивления долж-
ны оформляться протоколом.
В электроустановках напряжением до 1000 В с глу-
хо заземленной нейтралью при приемке в эксплуатацию,
а также периодически в процессе эксплуатации 1 раз в
5 лет должно производиться измерение полного сопро-
тивления петли фаза — нуль для наиболее удаленных и
наиболее мощных электроприемников, но не менее 10%
от их общего количества.
Ремонт крана. Вывод крана в ремонт производится
лицом, ответственным за содержание крана в исправном
состоянии, в соответствии с графиком ремонта, утверж-
денным руководством цеха, предприятия. До начала ре-
монта должен быть выдан наряд-допуск в порядке, уста-
новленном на предприятии. В наряде-допуске указыва-
ются меры по созданию безопасных условий выполнения
ремонта. В частности, указываются меры по предупреж-
дению поражения ремонтного персонала током, падения
с высоты, наезда работающего крана на ремонтируемый,
по предупреждению выхода ремонтного персонала на
крановые пути действующих кранов. Дата и время вы-
вода крана в ремонт и фамилия ответственного за его
проведение должны быть указаны в наряде-допуске и в
вахтенном журнале крановщика.
Без наряда-допуска допускается производить профи-
лактический осмотр крана, а также устранение неисправ-
ностей по вызову крановщика. Использование крана для
работы во время его ремонта недопустимо,
При установке крана на ремонт он должен с обеих
сторон ограждаться упорами (при работе на одном кра-
107
faoBOM пути нескольких кранов). При ремонте тележки
расстояние между настилом рамы тележки и перекры-
тием цеха должно быть не менее 1800 мм. Обеспечивает-
ся это путем установки тележки в проеме между строи-
тельными фермами. При ремонте механизмов тележки
устраиваются подмости. Они должны быть достаточно
прочными, исключающими падение людей, а также ре-
монтируемых узлов и деталей, инструмента.
Если во время ремонта на кране находится кранов-
щик, то он обязан выполнять указание лица, производя-
щего осмотр (ремонт), включать рубильник и механиз-
мы лишь по его указанию.
Запрещается: 1) оставлять на кране инструмент, при-
способления, незакрепленные детали или узлы; 2) бро-
сать на настил рамы, рабочую и троллейную площадки
детали или узлы; 3) сбрасывать что-либо вниз; 4) чи-
стить и ремонтировать, а также открывать во время ра-
боты крана для осмотра пусковые резисторы, защитную
панель, контроллеры и другое находящееся на кране
оборудование; 5) выполнять при включенном рубильни-
ке ремонтные работы, где имеется электрооборудование
(при необходимости работы под током следует пользо-
ваться резиновыми перчатками, галошами и другими
защитными приспособлениями); 6) устанавливать сня-
тые на время ремонта ограждения и смазывать все ме-
ханизмы после пробного пуска механизмов; 7) проверять
наличие тока прикосновением к токоведущим частям
крана (для этой цели следует пользоваться токопскате-
лем); 8) применять защитные средства, имеющие проко-
лы, трещины.
Любые работы с электромагнитом и около него допу-
стимы только при отключенном магните. Включенный
магнит без груза имеет около полюсов более сильное
поле, чем с грузом, и может вырвать из рук человека
металлические предметы (например, гаечный ключ) или
притянуть их вместе с рукой.
При отключении магнита без разрядного сопротив-
ления на питающих проводах возникает перенапряже-
ние до 2000—4000 В. Это необходимо помнить при ре-
монте магнита. В этом случае следует работать с раз-
рядным сопротивлением, снижающим эти перенапряже-
ния до допустимых величин.
Во время осмотра и чистки резисторов следует иметь
в виду следующее: в большинстве случаев резисторы
108
поставляются и монтируются открытыми, т. е. находя-
щиеся под напряжением их части (элементы, соедини-
тельные шины, выводные зажимы и т. д.) доступны при-
косновению и опасны для обслуживающего персонала;
температура элементов резистора при работе настолько
высока, что прикосновение к их поверхности может выз-
вать сильный ожог. Поэтому перед началом ремонтных
работ все элементы необходимо обесточить. Делать это
надо только отключением главного рубильника. Поста-
новка контроллера в нулевое положение не является
надежным средством отключения, так как часть прово-
дов может оказаться неотключенной.
При выполнении ремонтных работ на механизмах
крана, соединенных с двигателями, последние обяза-
тельно отключаются, на включающих устройствах выве-
шиваются предупредительные плакаты и принимаются
меры, предупреждающие ошибочное включение.
При ремонте двигателя он должен быть отключен
всеми имеющимися в его цепи аппаратами (рубильни-
ками, магнитным пускателем, контроллером) и предо-
хранители должны быть сняты. Если двигатель снима-
ется для ремонта, то концы отсоединенных проводов
следует заизолировать.
Ремонтные работы, производимые с моста мостового
крана. С моста крана приходится производить работы,
связанные с ремонтом фонарей и ферм перекрытий, мой-
ку фонарного остекления, профилактические осмотры
строительных конструкций, окрасочные, отделочные и
монтажные работы на верхних участках строящихся про-
мышленных цехов. Для того чтобы избежать установки
и последующего демонтажа и перестановки лесов, под-
мостей, ограждений, разработана и прошла заводские
испытания телескопическая вышка, устанавливаемая на
мосту крана, которая, помимо ликвидации вспомогатель-
ных операций, обеспечивает безопасность для работаю-
щих тем, что управление ею переносится из кабины кра-
на на эту вышку. Вышка (рис. 59) состоит из рамы 3 со
смонтированными на ней четырьмя выдвижными полуо-
сями с катками 8, с помощью которых вышка устанав-
ливается на подтележечный путь 9 мостового крана 2,
телескопическим подъемником 6 с рабочей площадкой
13, защитным экраном 10, гидростанцией 7, противовеса-
ми 4, ходовыми колесами 5 и дышлом 1 для транспорти-
ровки вышки к рабочему месту. На мостовой кран выш-
109
Рис. 59. Вышка для производства ремонтных работ с мостового
крана.
110
ка устанавливается и снимается грузовым крюком крана
и захватом, располагаемым внутри рамы.
Для обеспечения вышки электропитанием в электро-
схеме крана отдельные цепи разрываются и выводятся
на штепсельный разъем, который устанавливается в ка-
бине крана, а при отсутствии вышки разорванная цепь
восстанавливается посредством штепселя-разъема.
Управление механизмом подъема и опускания рабо-
чей площадки 13, а также аварийное отключение систе-
мы электропитания крана и вышки обеспечиваются с
рабочей площадки, на которой расположен пульт уп-
равления 11 с кнопками Вверх, Вниз и аварийным пе-
реключателем. Приборы безопасности: конечный выклю-
чатель, отключающий гидростанцию при достижении ра-
бочей площадкой крайнего верхнего положения, и ко-
нечный выключатель, отключающий механизмы перед-
вижения крана и тележки при подъеме рабочей пло-
щадки на высоту и включающий их при ее опускании в
исходное положение, что исключает возможность пере-
мещения крана или тележки при поднятой рабочей пло-
щадке. Аварийный выключатель отключает электроэнер-
гию крана и вышки. Защитный экран 10, устанавливае-
мый на раме вышки со стороны расположения троллеев,
защищает рабочего от соприкосновения с троллеями кра-
новой тележки.
Для регулирования скорости подъема и опускания
гидросистема снабжена дросселем. При отсутствии эле-
ктроэнергии рабочая площадка с галереи моста крана
опускается с помощью ручного управления гидравличе-
ским распределителем, расположенным в верхней ча-
сти рамы. Вдоль цеха вышка перемещается вместе с
мостовым краном, а поперек — посредством грузовой
тележки, с которой на период работы она находится в
жесткой сцепке 12.
Кроме средств безопасности в инструкции по эксп-
луатации приводятся и комплекс мер, который должен
выполняться при эксплуатации вышки. Так, на все ре-
монтные операции, выполняемые на высоте, должен со-
ставляться план производства, работ, исполнителям дол-
жен выдаваться наряд-допуск. В зоне работы устанав-
ливаются ограждения и знаки, запрещающие хождение.
В журнал крановщика записывается время начала и
окончания работ с применением вышки, а также готов-
ность крана к работе после ее демонтажа.
1.П
Вышка спроектирована для установки ее на однокрю-
ковом мостовом кране грузоподъемностью 5—15 т.
Технические данные вышки
Грузоподъемность рабочей площадки, кг .... 150
Высота подъема рабочей площадки, м............. 7,0
Скорость подъема площадки, м/мин............... 5
Коллея выдвижных катков, м:
наименьшая................................ 1,4
наибольшая.................................. 2
Масса, кг..................................... 2200
Большое значение для обеспечения безопасности
имеет и правильная эксплуатация самого крана.
СПИСОК ЛИТЕРАТУРЫ
Дубовский к. Н. Электрооборудование мостовых кранов. — М.:
Энергия, 1970.
Правила устройства и безопасной эксплуатации грузоподъем-
ных кранов. — М.: Металлургия, 1973.
Меклер А. Г. Электрооборудование подъемно-транспортных ма-
шин. — М.: Машиностроение.
Ушаков П. Н. Справочник по кранам промышленных предприя-
тий. — М.: Металлургия, 1974.
СОДЕРЖАНИЕ
Предисловие .................................. 3
1. Общие сведения об устройстве мостовых кра-
нов ............................................ 4
2. Подвод тока к кранам.........................30
3. Электрическое оборудование кранов ... 34
4. Электрические схемы кранов....................65
5. Рекомендуемые изменения в электрических
схемах кранов ................................. 74
6. Обслуживание и ремонт электрооборудования
кранов..........................................93
7. Основные правила техники безопасности . 106
Список литературы....................., , , 112
112
35 к.
им на
ttifPir fit^ет.пи»ос1м1