/





















































































































































































































Текст
Г. ШОКЕ
,‘Ч
л;..рЛ -
ГЕОМЕТРИЯ
издательство
«МИР»
GUSTAVE CHOQUET
Profeeseur i la Faculte des Sciences de Paris
L’ENSEIGNEMENT DE
LA GfcOMETRIE
HERMANN
Paris 1964
«СОВРЕМЕННАЯ МАТЕМАТИКА»
Популярная серия
Г. Шоке
Геометрия
Перевод с французского
Н. //. Родман
Под редакцией И, М. Яглома
ИЗДАТЕЛЬСТВО «МИР»
Москва 1970
У.Д.К. 513.0
Книга видного французского математика и педа-
гога содержит своеобразное изложение элементарной
геометрии, основанное на разработанной автором си-
стеме аксиом, весьма далекой от классической. Близкая
к наглядной очевидности аксиоматика Шоке отличается
тем, что основные геометрические факты получаются в
пей легко и естественно. За рубежом книга Шоке по-
лучила широкое признание как одна из наиболее проду-
манных попыток персе громки школьного курса геоме-
трии.
Кишу с интересом прочит читатели разных кате-
горий, начиная от учащихся старших классов школ с
математической специализацией. Она будет, несомнен-
но. полезна учителям математики и студентам педаго-
гических институтов.
Редакция литературы по математическим наукам
Инд. 2-2-3
29-70
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
«Математическая экспансия» последних десятиле-
тий— бурное вторжение математики в самые различ-
ные области знания, — привела к осознанию необхо-
димости усиления математической подготовки школь-
ников, что вызвало к жизни широкое международное
движение за модернизацию учебных планов и про-
грамм и период серьезных реформ, затрагивающих
интересы огромного количества люден: учащихся и ро-
дителей учащихся, учителей и воспитателен учителей.
При этом, если общее направление преобразования
курса алгебры средней школы является в общих чер-
тах достаточно ясным (хотя и тут возникло много раз-
нообразных и зачастую неожиданных точек зрения,
представление о которых может дать, например, экст-
ремистская платформа Папи [44]1)), то пути пере-
стройки школьного курса геометрии по сей день
остаются куда более неясными.
Сегодня, кажется, уже почти все согласны с тем,
что традиционная система Евклида [1], в русской
учебной литературе наиболее последовательно про-
веденная в созданных еще в прошлом веке учебниках
Киселева [49], не заслуживает сохранения: ведь ни
в науке, ни в практической жизни выпускнику сред-
ней школы далее не придется иметь дело с многими
теоремами сложившегося курса геометрии и с типич-
ными для этого курса методами рассуждений. Но чем
следует заменить эту систему? По этому последнему
’) Цифры в квадратных скобках отсылают читателя к списку
литературы на стр. 221—224. (По поводу «платформы Папи» см.,
например, рецензию на т. I книги [44] — «Математика в шкале»,
1965, № 4, стр. 81—89.)
6
Предисловие редактора перевода
поводу сегодня высказываются самые разные мнения,
причем спектр предложений и проектов отличается
реДкой широтбй: от категорических возражений про-
тив преподавания геометрии в старших классах сред-
ней школы вообще до попыток включения в програм-
му средней школы чуть ли не всей аксиоматики
Гйльберта [2] (см., например, учебник [44]) и от
Предложений возрождения в школе изощренной «про-
ективной техники» Я. Штейнера и немецких геомет-
ров XIX века до вариантов последовательного по-
строения курса геометрии на базе алгебраической
теории групп и исчисления симметрий (см. [34]).
Однако в общем достаточно нестройном хоре экс-
пертдв по вопросам преподавания геометрии в сред-
ней школе можно отметить несколько голосов, бес-
спорно заслуживающих того, чтобы прислушаться к
ним внимательнее.
Исторически первое серьезное предложение о пе-
рестройке школьного курса геометрии принадлежит
известному американскому математику Джорджу
Биркгофу* [8]. Написанный одновременно со статьей
[8] школьный учебник [9], составленный Биркгофом в
сотрудничестве с методистом Р. Битли, вышел в свет
первым изданием еще в 1933 г. и затем неоднократно
переиздавался. Этот учебник оказал весьма серьезное
влияние на всю последующую деятельность амери-
рйканских ученых и методистов: так, например, ав-
торы всех учебников [13]—[17] придерживаются сход-
Ной системы изложения1)- Основная идея Дж. Бирк-
гофа заключалась в последовательно проводимом
взгляде на прямую как на точечное множество, а
также в известной алгебраизации геометрии, связан-
ной с отождествлением точек прямой с веществен-
ными числами, что снимает все трудности, с кото-
рыми столкнулся Д. Гильберт [2] в своих-попытках
строгого описания понятия порядка (точек на пря-
1) Свидетельством неиссякающего интереса американских гео-
метров и педагогов к этим идеям может служить недавняя ста-
тья [18], посвященная выводу из аксиоматики Биркгофа неко-
торых тонких фактов элементарной геометрии, имеющих, по су-
ществу, топологический характер.
Предисловие редактора перевода 7
мой). Близкой системы изложения придерживается и
советский геометр А. В. Погорелов, автор недавно
изданных учебников [50] элементарной геометрии.
А. В. Погорелов, подобно Дж. Биркгофу, выдвигает
на передний план понятие расстояния между точка-
ми, что сразу вводит в геометрию понятие числа;
однако в ряде пунктов он отклоняется от принятой
американскими авторами схемы, достигая большей
геометричности, чем они.
Следующим серьезным шагом в области методики
геометрии, причем шагом, еще дальше идущим по
пути алгебраизации основ геометрии, следует считать
книгу, предлагаемую ныне вниманию русского чита-
теля. Ее автором является видный французский ма-
тематик, профессор Парижского университета (Сор-
бонны) Густав Шоке. Эта книга, которой предшество-
вал ряд других публикаций Г. Шоке на ту же тему’)»
порождена «векторной» аксиоматикой геометрии,
впервые предложенной еще в 1917 г. одним из круп-
нейших математиков XX века Германом Вейлем* 2).
Правда, Шоке не решается прямо положить в основу
предлагаемой им системы изложения аксиоматику
Вейля, достаточно далекую от всех школьных тради-
ций, и проявляет немало остроумия в стремление
как-то адаптировать схему Вейля, приблизив ее к
школьной практике. Однако близость излагаемой в
этой книге системы построения геометрии к широко
известному всем математикам (но не педагогам!)
векторному пути обоснования геометрии очевидна и
переход от аксиоматики Шоке к аксиоматике Вейля
никаких затруднений не составляет.
Укажем также, что настоящая книга не является
последней в ряду сочинений, ставящих своей целью
сближение геометрии и алгебры. В том же 1964 г.,
в каком вышел в свет французский оригинал настоя-
щей книги, и в той же серии «Преподавание наук»
(«Enseignement des Sciences») парижского издатель-
’) См., например, ранее переведенную на русский язык ста-
тью [24].
2) См., например, [30], кп. IV, стр. 369—380 или статью [58].
8 СТредисловие редакторе перевода
ства Hermann появилась книга одного из авторитет-
нейших французских математиков Жана Дьедонне
«Линейная алгебра и элементарная геометрия» [29];
эта книга, в значительной степени инспирированная
предшествующими ей работами Г. Шоке, вся пося-
щена утверждению следующей методической идеи:
линейная алгебра — это и есть элементарная геомет-
рия (и никакой иной элементарной геометрии нет и
быть не должно!). Свои взгляды Ж. Дьедонне отстаи-
вает с характерной для всех полемических выступле-
ний этого автора страстностью; однако учителю сред-
ней школы, вероятно, придется более по вкусу сдер-
жанность Шоке, чем пафос Дьедонне. В последние
годы появились и некоторые рассчитанные непосред-
ственно на использование в школе реализации мето-
дических идей Дьедонне, из числа которых наиболь-
шего внимания заслуживают обстоятельные «геомет-
рические» тома «Современной математики» Ж. Папи
[44]: т. 2, Действительные числа и векторная плоскость
(442 стр.); т. 3, Вот Евклид (452 стр.); т. 6, Планимет-
рия (277 стр.; этот том посвящен Ж. Дьедонне).
Скажем еще несколько слов о лежащей перед
Вами книге. Ее направленность и круг возможных
читателей достаточно подробно раскрывает сам автор
в предисловии и во введении; здесь мне хочется лишь
отметить близость многих идей Шоке к методическим
поискам, ведущимся в нашей стране (ср., например,
п. 96 этой книги с содержанием § 52 нового учебни-
ка [51]). Заметим еще, что книга Г. Шоке предпола-
гает у читателя некоторую математическую культуру,
выражающуюся, в частности, во владении рядом сим-
волов и терминов, давно уже завоевавших права гра-
жданства во французской учебной и методической
литературе, но недостаточно знакомых нашим уча-
щимся и преподавателям; для того чтобы сделать эту
книгу возможно более доступной широкому кругу чи-
тателей, к ней приложены составленные редактором
русского издания словарь математических терминов и
список обозначений. Немногочисленное подстрочные
примечания редактора обозначены звездочками в от-
личие от нитрованных сносок автора. Редактор тме
Предисловие редактора перевода
9
же присоединил к авторскому списку литературы два
последних раздела V и VI и добавил ряд наименова-
ний в других разделах; номера прибавленных книг и
статей отмечены звездочками. При этом и в настоя-
щем своем виде список литературы, дающий некото-
рое представление о современных поисках в области
преподавания геометрии, имеет чисто иллюстративное
значение и не претендует ни на какую полноту.
И, Л1. Я г лом
ПРЕДИСЛОВИЕ
Эта книга написана для преподавателей матема-
тики средних школ, для тех, кто готовится к этой
деятельности, и для всех тех, кто любит геометрию.
Ее могут с пользой для себя прочитать под руковод-
ством учителя учащиеся старших классов средней
школы.
Евклид положил в основу своей геометрии на плос-
кости признаки равенства треугольников. Двадцать
три века спустя математики определяют плоскость
как аффинное пространство размерности 2 с задан-
ным в нем скалярным произведением. Я полагал, что
нашим детям понадобится изложение геометрии, кото-
рое, как и изложение Евклида, исходит из наглядных
представлений, но которое даст им возможность очень
быстро перейти к использованию гибких и плодотвор-
ных методов алгебры.
Эта книга содержит, таким образом, аксиоматику
геометрии, основанную на понятиях параллельности,
перпендикулярности и расстояния, но в таком виде,
который позволяет естественным образом быстро пе-
рейти к алгебраической структуре плоскости и про-
странства.
В связи с этим многие главы посвящены разъяс-
нению вопросов, которые часто считают каверзными:
движений, углов и их измерения, ориентации.
Написанию этой книги немало способствовали дис-
куссии со многими математиками и преподавателями,
как французскими, так и зарубежными. Особую бла-
годарность я приношу Андре Ревузу, критика и пред-
ложения которого мне были чрезвычайно полезны.
Густав Шоке
ВВЕДЕНИЕ
Здесь не будет обсуждаться необходимость пре-
подавания геометрии*), предметом нашего исследо-
вания будет лишь способ ее преподавания.
В настоящее время в разных странах существует
более или менее единое мнение по следующим двум
основным вопросам:
1. Преподавание геометрии в младших классах
школы не может основываться на дедукции. Оно
должно быть основано на наблюдении; его целью
является выработка фундаментальных понятий, ба-
зирующихся на опыте.
2. Самый элегантный, глубокий и быстрый спо-
соб определения плоскости (или пространства) для
математика — это определение ее как двумерного
(трехмерного) векторного пространства над /?, снаб-
женного скалярным произведением, т. е. симметрич-
ной билинейной формой и • v, такой, что и • и > 0 для
любого вектора и 4= 0. Кроме того, именно это опре-
деление наилучшим образом подготовлено для пло-
дотворных обобщений (пространства R'\ (У\ гиль-
бертово пространство и т. д.).
По свидетельству многих преподавателей старших
классов средней школы, из их опыта следует, что
этим определением могут весьма эффективно поль-
зоваться уже ученики выпускных классов (в возра-
сте 17 лет), овладевшие предварительно понятием
скалярного произведения. Такой метод обеспечивает
*) В последние годы в разных странах мира неоднократно
раздавались голоса, предлагающие вовсе отказаться от препода-
вания геометрии в старших классах средней шкоты.
12 Введение
в этом классе значительную экономию мышления и
совершенно естественно приводит к доказательствам,
основанным на методах, представляющих реальный
интерес. В то же время такая методика оказывает
неоценимую помощь преподавателю физики, так как
она позволяет наконец-то правильно ввести и изучить
такие понятия, как работа, центр тяжести, равнодей-
ствующая сил.
Проблема становится менее простой, когда речь
заходит о детях промежуточного возраста, скажем
о подростках от 13 до 16 лет. В этом возрасте дети
начинают понимать, что такое доказательство; у не-
которых из них пробуждается настоящая жажда ло-
' гики, показывающая, что пришло время всерьез при-
ступить к дедуктивным рассуждениям. Следователь-
но, здесь надо выделить какие-то фрагменты,
построенные дедуктивно с точным указанием предпо-
сылок всех выводов.
Поэтому особенно важно, чтобы учитель, имею-
щий дело с учащимися этого возраста, владел при-
водимой ниже полной аксиоматикой геометрии. Кро-
ме того, многочисленные эксперименты показали, что
некоторые дети определенно обладают вкусом к стро-
гой дедукции: математика кажется им игрой со стро-
v гимн правилами, и им очень нравится играть в эту
игру, соблюдая все ее правила. Следовательно, нам
надо найти простую аксиоматику с аксиомами, ко-
торые были бы сильными, т. е. позволяющими очень
быстро выводить неочевидные теоремы, и интуитивно
ясными, т. ' е. представляющими свойства окружаю-
щего нас пространства в форме, которая допускает
простую проверку.
То, что аксиомы при этом не будут независи-
мыми, не столь существенно, хотя не хотелось бы
исходить из слишком большого числа аксиом, как
эт® предлагают некоторые преподаватели: математи-
ческая «игра» с очень большим числом правил стано-
вится сложной и утрачивает свою четкость и опреде-
ленность. ;
Хорошо известно, что «аксиоматика» Евклида не
отвечает больше нашим требованиям логической точ-
Введение 13
пости; то же самое можно сказать о лучших аксио-
матиках, встречающихся в школьных учебниках, хотя
в последних изданиях этих учебников заметны уси-
лия, направленные на их совершенствование.
Известно, что Гильберт исключил лишние аксиомы
из аксиоматики Евклида и добавил недостающие,
превратив ее в логически удовлетворительную си-
стему. Однако преподавание элементарной матема-
тики не было его основным занятием; разработка
элементарных формальных понятий, основанная на
его аксиоматике (см., например, «Рациональную гео-
метрию» Хальстеда*)) также мало приспособ-
лена для преподавания.
Аксиоматика Евклида — Гильберта основана на
понятиях длины, угла, треугольника. При этим iKEyo
но скрывается векторная структура просталств.%
причем до такой степени, что многие века понятие
вектора оставалось неизвестным. Гот что тре*
угольник есть «полупараллелогрэмм», нисколько ит
мешал в течение более чем двадцати веков уделят-,
основное внимание доскональному изучению cbu;-cjr
высот, медиан, медиатрис**) и биссектрис
ников, условиям равенства треугольников и м-дриче*
ским соотношениям в треугольнике. В о: сове всей
геометрии лежал треугольник, а не параллелограмм,
который мог бы легко привести г понятию вектора.
Конечно, треугольник всегда сохранит за собой
достойное место, полагающееся ему в силу того, что
это простейший плоский многоугольник и что всякий
треугольник определяет плоскость и притом только
одну. Но надо решительно сдерживать развитие из-
вращенного вкуса к изучению замечательных точек
треугольника и подчас элегантных, но совершенно бес-
полезных его метрических свойств.
Мы должны отдать предпочтение методам, осно-
ванным на фундаментальных понятиях, выкри-
сталлизовавшихся за двадцать веков развития
*) См. [3]; ср. также элементарный учебник [44]. -
**) То есть перпендикуляров, восстановленных к сторонам
треугольника в их серединах.
14
Введений
математики: понятиях множества, отношений эквива-
лентности и порядка, алгебраических законах, вектор-
ном пространстве,, симметрии и геометрических пре-
образованиях.
Эти методы не только позволяют на очень ранних
стадиях использовать простые и эффективные сред-
ства алгебры, приведя таким образом к своеобразной
экономии умственных усилий, но, предполагая обра-
щение к фундаментальным понятиям, они, кроме того,
разовьют мыслительные способности наших учеников
и подготовят их тем самым к будущей работе.
Направляющая идея, ведущая к хорошей аксио-
матике
Как построить систему, удовлетворяющую нашим
требованиям? Хотелось бы, чтобы, в этой системе
было удобно выявить векторную структуру простран-
ства, равно как и существование и свойства скаляр-
ного произведения. Следовательно, ситуацию можно
резюмировать следующим образом: сегодня мы вла-
деем простым «царским путем» в геометрию*), веду-
щим через понятия «векторного пространства» н
«скалярного произведения»; однако этими понятиями
нельзя «овладеть штурмом», без всякой подготовки,
особенно в том возрасте, когда у ученика еще не
совсем сформировалось понятие алгебраической опе-
рации. Тем не менее эти понятия будут служить нам
путеводной нитью. Мы попытаемся, избегая изли-
шеств, так одеть сам по себе совершенный, но слиш-
ком абстрактный для ребенка логический каркас,
чтобы он превратился в нечто 'знакомое и привет-
ливое.
Проанализируем кратко основные понятия:
а) Понятие векторного пространства существенно
опирается на понятие сложения—как сложения
точек прямой (чисел!), так и сложения векторов; это
*) Здесь имеется в виду известный исторический анекдот,
согласно которому Евклид якобы ответил властителю Египта
Птолемею» обратившемуся к нему с. просьбой о скорейшем изло-
жении основ геометрии: «В геометрию нет царского пути».
Введениё
15
последнее сводится к понятию параллелограм-
ма, или к понятию середины пары точек*).
Ь) Скалярное произведение векторов есть били-
нейная симметрическая функция; первое
(«билинейная») связано с особой ролью сложения;
нельзя игнорировать также новое понятие — симмет-
рию, без которой нам не обойтись.
с) Скалярное произведение положительно {или
положительно определенно) в том смысле, что и • и > О
для всех и =# 0.
Таким образом, нам предстоит строить нашу
аксиоматику на основе аддитивной структуры пря-
мой, параллельности и симметрии.
Во всех учебниках элементарной геометрии исполь-
зуется понятие симметрии — никто не знает, как без
нее обойтись, — но редко кто вводит это понятие
в аксиоматику**); в результате строгая система
аксиом остается неудовлетворительной, а ее авторы
лишаются мощного оружия.
Многие преподаватели полагают, что понятие сим-
метрии весьма сложно, и приучают своих учеников
систематически пользоваться признаками равенства
треугольников, даже в тех случаях, когда очевидная
симметрия позволяет решить задачу очень быстро.
С этой боязнью симметрии следует всячески бороть-
ся; с самого начала симметрии следует по заслугам
отвести почетное место.
Нам остается отразить в нашей аксиоматике поло-
жительность скалярного произведения. Она предпола-
гает упорядоченность поля скаляров, что выразится
*) Здесь имеется в виду существование двух определений
суммы векторов а — ОД и b = ОВ.
Г ОД + О В = ОС О О, А, С, В — вершины параллелограм-
ма (это определение не имеет смысла, если О, А, В— точки одной
прямой; на этот случай оно распространяется по транзитивности);
2° ОД + ОВ = ОСф^середины пар (А, В) и (О, С) совпадают;
наряду с ними существует еще и третье определение:
3° ~АВ + ВС = АС.
**) Ср. с книгой Бахмана [20] (см., в частности, вступитель-
ную статью редактора русского перевода этой книги).
16 Введение..,
аксиомой порядка . на множестве точек прямой.
Hq кроме того положительная определенность позво-
ляет задать некоторую норму в пространстве и, сле-
довательно, некоторое расстояние, удовлетворяющее
неравенству треугольника. Быть может, нам придется
ввести в состав аксиом это неравенство, если ока-
жется, что другие аксиомы недостаточно сильны, что-
бы обеспечить его.
Ниже будет построена некоторая аксиоматика,
базирующаяся на указанных принципах. Метрические
понятия в ней тщательно отделены от понятий аф-
финных; первых аксиом достаточно для полного изу-
чения векторной структуры плоскости или простран-
ства 9.
По-видимому, аксиомы инцидентности I и аксиомы
порядка II должны фигурировать во всякой разумной
аксиоматике плоскости. Я прошу обратить внимание
на аксиому инцидентности 1ь, которая утверждает,
что через любую точку проходит прямая, параллель-
ная данной прямой, и притом только одна. В посту-
лате Евклида утверждается единственность парал-
лельной; существование же ее может быть доказано
с помощью других аксиом. Я полагаю, что объедине-
ние в одной аксиоме утверждений о существовании и
единственности чрезвычайно упрощает построение
геометрии и что, с другой стороны, очень немногие
дети моложе 16 лет могут «почувствовать» доказа-
тельство существования, поскольку существование
параллельных представляется им по крайней мере
столь же экспериментально ясным, как и единствен-
ность.
Сначала я строю аксиоматику плоскости; несколь-
ко дополнительных аксиом позволят впоследствии
очень просто определить аффинную и метрическую
структуру пространства*
’) Впервые эта аксиоматика была представлена в 1959 г.
на семинаре ОБСЕ в Руаомопе. В приложении я привожу набро-
сок второй аксиоматики, в которой главная роль отводится ме-
трическим свойствам плоскости и осевым симметриям.
Введение
17
Аксиоматика плоскости строится по следующей
схеме: плоскость есть некоторое множество, опреде-
ленные подмножества которого называются пря-
мыми. На каждой прямой задана определенная струк-
тура порядка и некоторая алгебраическая структура.
Для каждой прямой эти две структуры связаны меж-
ду собой аксиомой совместимости. Кроме того, струк-
туры различных прямых связаны между собой соот-
ветствующими аксиомами. Зато аксиомы инцидентно-
сти не связаны со структурой прямых: они просто
уточняют степень «разреженности» прямых и пар па-
раллельных. Мы увидим, что только из одних аксиом
групп I и II можно вывести многие свойства, обычно
считающиеся связанными с аффинной или метриче-
ской структурой плоскости.
Роль чисел в геометрии
Древние греки очень долго не знали о существо-
вании каких-либо чисел, отличных от рациональных,
и даже после их знаменитого открытия иррациональ-
ности числа ]/ 2 они не пришли к общему понятию
числа: число всегда оставалось для них связанным
с геометрией. Последователи Евклида, пытаясь дове-
сти до совершенства его творение, отточили «исчис-
ление отрезков», которое позволяет, хотя и с боль-
шим трудом, выявить структуру поля на множестве
чисел, исходя из геометрии плоскости*). Мы не дол-
жны никоим образом повторять эту ошибку. Как
можно раньше ребенок должен получить представле-
ние о множестве R чисел как о линейно упорядочен-
ном поле: другими словами, он должен осознать, что
в процессе счета он из всех свойств сложения и умно-
жения использует лишь небольшое число свойств, ко-
торые математики называют аксиомами линейно упо-
рядоченного поля.
Позднее, если это потребуется, он воспользуется
аксиомой Архимеда (например, в форме: «Для вся-
кого числа существует мажорирующее его целое чис-
ло»), или более сильной аксиомой непрерывности
*) Ср. Гильберт [2}; см., в частности, § 15 и след.
18 Введение
(например, в форме: «Всякое ограниченное подмно-
жество множества R обладает наименьшей мажоран-
той»).
Конечно, изучение алгебраической структуры опе-
раций может быть проиллюстрировано на прямой; но
при этом не должна затрагиваться геометрия плоско-
сти. Следует совершенно исключить обращение к
исчислению отрезков, использующему в применении
к отрезкам прямых (числам) развернутые построе-
ния геометрии плоскости: параллельные, секущие,
иногда даже перпендикуляры.
ГЛАВА I
АКСИОМЫ ИНЦИДЕНТНОСТИ
И АКСИОМЫ ПОРЯДКА
§ I. ПРЯМЫЕ И ПАРАЛЛЕЛЬНЫЕ
1. Структура плоскости
Плоскость есть множество, обозначаемое через П,
на котором определена некоторая структура путем
задания системы Ф подмножеств множества П, назы-
ваемых прямыми. На каждой прямой в свою очередь
задана некоторая структура, которая точно опреде-
ляется аксиомами; структуры различных прямых
связаны между собой с помощью другой группы
аксиом, которые можно назвать аксиомами пе-
рехода.
Для простоты изложения поставим первой сле-
дующую аксиому:
Аксиома 0. Плоскость содержит по крайней мере
две прямые, и каждая прямая содержит по крайней
мере две точки.
Мы приписали этой аксиоме номер 0, потому что
ее можно будет вывести из аксиомы Ша, гласящей,
что всякая прямая содержит по крайней мере две
точки, и аксиомы IVa, гласящей, что плоскость со-
держит по крайней мере две прямые. Таким образом,
аксиома 0 есть следствие идущих за ней аксиом, но
изложение выигрывает от того, что мы будем исполь-
зовать ее с самого начала.
Для того чтобы нам было удобнее формулировать
следующую аксиому, введем
Определение 1.1. Говорят, что две прямые А, В
плоскости П параллельны (и пишут А||В), если либо
А = В, либо АПВ 0.
2!
20 Гл. I. Аксиомы ишщдент прети и аксиомы порядка
Во многих учебниках параллельность определяется
более узко условием А ПВ = 0; это приводит к услож-
нению языка и затушевывает тот факт, что здесь
имеет место отношение эквивалентности, с которым
мы скоро столкнемся. Уже сейчас отметим, что, как
следует из самого определения, параллельность есть
симметричное и рефлексивное бинарное отношение на
множестве 3) прямых.
Нам будет удобно пользоваться следующей тер-
минологией:
Говорят, что две прямые пересекаются, если
их пересечение в теоретико-множественном смысле
содержит единственную точку.
Говорят, что прямая D проходит через точку а,
если а е D.
Говорят, что точки подмножества X множества П
коллинеарны, если существует прямая, содержа-
щая X.
2. Аксиомы инцидентности
Аксиома 1а. Для любой пары (х, у) различных
точек плоскости существует прямая, и притом един-
ственная, содержащая эти точки.
Аксиома 1ь- Для любой прямой D и любой точ-
ки х существует прямая, и притом единственная, па-
раллельная D и проходящая через х.
Для всякой пары (х, у) различных точек плоско-
сти П будем обозначать прямую, проходящую через
эти точки, символом Д (х, у).
В соответствии с аксиомой 1а две прямые либо
пересекаются, либо параллельны, но не то и другое
вместе *).'
Предложение 2.1. 'Отношение параллельности
есть отношение эквивалентности на 3).
*) Две разные прямые не могут иметь две общие точки в
силу аксиомы 1а.
$ /. Прямые и параллельные
21
Действительно, как мы уже знаем, это отношение
симметрично и рефлексивно; остается показать, что
оно транзитивно. Пусть Л||В и ВЦ С. Если ЛПС — 0,
то и А||С; в противном случае А и С параллельны В
и содержат общую точку — следовательно, А = С, от-
куда опять получаем, что ЛЦС.
Известно, что со всяким отношением эквивалент-
ности R на некотором множестве Е связано разбие-
ние этого множества на классы эквивалент-
ности, которые являются элементами некоторого
нового множества, обозначаемого через E/R; вос-
пользуемся этим для следующего определения.
Определение 2.2. Классы эквивалентности на мно-
жестве 2), порожденные отношением параллельно-
сти, называются направлениями', класс эквивалентно-
сти, которому принадлежит прямая D, называется
направлением прямой D,
Тогда тот факт, что две прямые параллельны,
можно выразить иначе, сказав, что они имеют одно
и то же направление. Через всякую точку проходит
некоторая прямая данного направления, и притом
только одна.
На рисунках часто удобно указывать направле-
ние S заданием одной из прямых направления б.
Предложение 2.3. Для всякой прямой D дополне-
ние к D не пусто.
Доказательство. Пусть D' — некоторая прямая,
отличная от D. Если D'\\D, то дополнение к D содер-
жит D'. Если D и D' пересекаются, то пусть а — их
общая точка; тогда существует такая точка xeD7,
что х=#а (аксиома 0); при этом x^D.
Эти два случая исчерпывают доказательство пред-
ложения 2.3.
Предложение 2.4. Пусть D — некоторая прямая, и
пусть афО (следовательно, для всех x^D прямая
Д(а, х) определяется однозначно).
22 Гл. I. Аксиомы'' инцидентности и аксиомы порядка
Отображение х.~* Д(й, х) множества D в множе-
ство Я) есть биективное отображение (биекция) мно-
жества D на множество прямых, проходящих через
точку а и не параллельных прямой D.
Доказательство. Это отображение взаимно одно-
значно, потому что всякая прямая, проходящая че-
рез а, встречается в 2), и притом только один раз.
С другой стороны, всякая прямая Д(я, х) пересе-
кается с О; и наоборот, всякая проходящая через а и
пересекающаяся с D прямая пересекает ее в некото-
рой точке х и, следовательно, имеет вид Д(а, х).
Следствие 2.5. Существует по крайней мере три
направления.
Действительно (сохраним обозначения предложе-
ния 2.4), D содержит по крайней мере две точки;
следовательно, через а проходят по крайней мере
три прямые: прямая, параллельная D, и две прямые
Д (а, х) (где хей).
Предложение 2.6. Пусть б — произвольное на-
правление и R —бинарное отношение на П, опреде-
ляемое условием:
(х ~ у), если существует прямая направления б,
содержащая х и у.
Тогда R —отношение эквивалентности на П, и клас-
сы эквивалентности по этому отношению — это пря-
мые направления б.
- Доказательство. Прямые направления б образуют
разбиение Р множества П, поскольку, с одной сто-
роны, две такие прямые либо не пересекаются, либо
совпадают, и с другой стороны, всякая точка мно-
жества П принадлежит какой-нибудь прямой направ-
ления б. Наконец, для каждой точки х множество
точек у, таких, что х ~ у, есть не что иное, как
прямая направления б, проходящая через х; следо-
вательно, данное отношение R есть не что иное; как
отношение эквивалентности, порождаемое разбие-
нием Р.
£ /. Прямые и параллельные
23
Замечали е. Следует четко различать отноше-
ние параллельности, которое является отношением
эквивалентности на 3), и только что описанное отно-
шение R, которое является отношением эквивалент-
ности на П и которое, кроме того, зависит от выбора
направления б.
3. Косая проекция
Пусть D — некоторая прямая и б — некоторое на-
правление, отличное от направления прямой D
(такое б существует по f
следствию 2.5). Для вся- S/
кой точки т И прямая / z
направления б, проходя- /
щая через пг, пересекает ] ?П1
D в некоторой точке / /
ф(ш) (рис. 1). / /
/ /
Определении 3.1. Ото- /
бражение ср множества ГТ
в множество D назы-
вается косой проекцией II Рис. 1.
на D параллельно напра-
влению б (поскольку б является направлением не-
которой прямой А и всех ей параллельных, то го-
ворят также «параллельной проекцией в направле-
нии 4»).
Легко видеть, что неподвижными точками отобра-
жения ср, т. е. такими точками х, что ф(х) = х, будут
точки прямой D, и только они.
Имеем
ср(И) = £> и ф (D) = D.
Косая проекция — одно из основных орудий, ис-
пользуемых в геометрических доказательствах; по
мере того как мы будем увеличивать число аксиом,
будет расти, как мы увидим, число свойств косой
проекции.
'24 Гл. 1. Аксиомы инцидентност и и аксиомы, порядка
Иногда будет удобно называть также косой проек-
цией ограничение косой проекции на некоторое под-
множество множества П.
Предложение 3.2. Пусть А, В —две произвольные
прямые и S — произвольное направление, отличное от
направлений этих прямых (такое направление суще-
ствует по следствию 2.5). Косая проекция прямой А
на прямую В параллельно S есть биекция множе-
ства А на множество В.
Рис. 2.
Доказательство. Пусть ф— такая косая проек-
ция; она взаимно однозначна, поскольку если х и
х' — две различные точки прямой А, то прямые на-
правления S, проходящие через эти точки, также
различны и, следовательно, пересекают прямую В в
дву^ различных точках ф(х) и ф(х'). Наконец,
ф(Л) = В, поскольку для всякой точки у прямой В
прямая направления 6, проходящая через у, пересе-
кает прямую Д в некоторой точке х, и ф(х) = #.
Очевидно, косая проекция прямой В на прямую А
параллельно S есть не что иное как ф'1-
Следствие 3.3. Мощность всех прямых (подмно-
.жеств) множества П выражается одним и тем же
кардинальным числом (это кардинальное число будет
обозначаться йерез а; оно конечно или бесконечно в
зависимости от того, какую плоскость П мы изучаем).
$ I. Прямые, и параллельные
25
Замечание Симметричность ролей прямых А
и В по отношению к косым проекциям ср и ср4 можно
подчеркнуть следующим фактом:
Разбиение множества П на прямые направления 6
влечет за собой некоторое разбиение множества
ЛОВ, каждый класс которого содержит две точки,
X и ср(х), — одну на прямой А и другую на прямой В
(рис. 2, щб); эти точки различны, за исключением
точки х = <р(х) = ЛПВ (мы здесь рассматриваем слу-
чай, когда прямые А и В пересекаются).
4. Система осей
Рис. 3.
Пусть D], D2— две пересекающиеся прямые. Обо-
значим через epi косую проекцию на параллельно D2
и через ср2 — косую проекцию на D2 параллельно
Для любой точки т е П точки cpi(m) и ф2(7^)
(рис. 3) называются составляющими точки т
по отношению к системе
осей Z)i, D2\ пересечение
прямых £)] и D2 называет-
ся началом системы.
Каждой паре (ть т2)
точек плоскости П, где
е Di и т2 е D2, соответ-
ствует единственная точка
т плоскости П, для ко-
торой = cfi(m) и т2 —
= ф2(ш); это — точка пере-
сечения прямой, параллель-
ной D2 и проходящей через
дельной D\ и проходящей через т2. Отображение
т ->(ф1(т), Фг(^)) есть, следовательно, биективное
отображение множества П на множество-произведе-
ние D\ X D2.
Это можно до некоторой степени выразить так:
(Dh D2) есть репер*) плоскости, и каждая точка
/771, и прямой, парал-
*) Под «репером» (от французского слова герёге — метка,
зарубка) некоторого множества элементов Л1 в математике по-
нимают геометрический образ, позволяющий охарактеризовать
положение по отношению к нему каждого элемента g множе-
ства М определенной системой Чисел («координатами» g).
26 Гл. /. Аксиомы инцидентности а аксиомы порядка
плоскости П определяется двумя своими составляю-
щими.
В частности, отсюда вытекает, что кардинальное
число множества П (плоскости) есть а2 — это сохра-
няет силу как для конечного, так и для бесконеч-
ного а.
§ 2. АКСИОМЫ ПОРЯДКА
Первая аксиома порядка вводит порядок на каж-
дой прямой; вторая аксиома устанавливает связь
между порядками на различных прямых.
5. Структура порядка на произвольной прямой
Аксиома Па. С каждой прямой D связаны две
структуры линейного порядка, противоположные друг
другу.
Эта аксиома сформулирована сжато, поскольку
предполагается известным понятие линейного
порядка на множестве.
С помощью этой аксиомы на прямой вводится
сразу две структуры порядка; это связано с тем, что
на прямой не существует никакого естественного при-
знака, позволившего бы отдать предпочтение одному
из этих порядков. Очевидно, задание одного из этих
порядков определяет второй. Можно было бы избе-
жать обращения к этим двум порядкам, рассматривая
вместо них тернарное отношение «точка х располо-
жена меж ду точками у и г», удовлетворяющее соот-
ветствующим образом подобранным аксиомам; но
таким отношением сложнее пользоваться, чем отноше-
нием порядка, может быть из-за того, что оно тер-
нарное.
Терминология. 1. Всякую прямую, на которой
задан один из существующих на ней двух порядков,
называют ориентированной прямой.
2. Для любых двух различных точек а, Ь выраже-
ние «ориентированная прямая &{а,Ь)ъ обозначает
прямую Л (я, 6) , ориентированную так, что а <
$ 2. Аксиомы порядка
27
3. Для всякой ориентированной прямой D и вся-
кой точки a^D множество {х : а < х} (соответственно
а^.х) называют открытым (соответственно замкну-
тым) положительным лучом (ориентированной) пря-
мой D с началом в точке а. Выражение «луч О(я, &)»
обозначает положительный луч (открытый или зам-
кнутый) ориентированной прямой А (а, Ь) с началом
в точке а.
4. Для любых двух различных точек а, b плоско-
сти П прямая A (a, Ь) определяется единственным
образом; относительно обоих порядков па этой пря-
мой интервалы [а, Ь], ]а, Ь[, [а, Ь[ совпадают; следова-
тельно, эти обозначения имеют точный смысл.
Наконец, для всякой точки а по смыслу наших
обозначений
[а, а] = {а} и ] а, а [ = 0,
Определение 5.1. Говорят, что подмножество X
множества П выпукло, если для всех х, у е X имеем
к у]сх.
Например, множество П выпукло; всякая прямая,
всякий луч и всякий интервал — выпуклые множества;
другие важные примеры мы сможем привести немного
позже. Легко видеть, что пересечение любого семей-
ства (А^) выпуклых подмножеств множества П есть
выпуклое множество. Пусть теперь А — произвольное
подмножество множества П; существуют выпуклые
множества, содержащие А и отличные от 11; их пере-
сечение выпукло и является, очевидно, наименьшим
выпуклым множеством, содержащим А; его называют
выпуклой оболочкой множества А.
6. Аксиома перехода
Аксиома Пь- (Связь между структурами порядка
на различных прямых.) Для всякой пары (А, В) па-
раллельных прямых и для любых точек а, Ь, а', Ь',
таких, что а, а' А и Ь, Ь'^В, всякая прямая, па-
28 Гл. Г Аксиомы Ш1цадентностйи аксиомы порядка
раллельная этим двум прямым и пересекающая [а, Ь],
пересекает также и [а', (рис. 4).
Заметим, что если А = В, то эта аксиома выра-
жает очевидное следствие из предыдущих определе-
ний. Таким образом, она интересна лишь в слу-
чае А =# В.
Рис. 4»
Предложение 6.1. Пусть D — некоторая прямая,
6 — некоторое направление, отличное от направления
Прямой D, и ср — косая проекция на D параллельно б.
Тогда для всех х, у е П
ф ( [х, у] ) = [ф (*), Ф (Z/)].
Доказательство. Утверждение очевидно в том
случае, когда хну расположены на одной прямой А
направления 6, так как при этом <р(х) = const для
л е.4, и следовательно,
’ ' ф([х, 2/]) = {ф(х)} = {ф(г/)}.
Пусть теперь Л и В —две различные прямые направ-
ления 6, "проходящие через точки х и у соответствен-
но; по аксиоме Пь отображение ф есть биекция от-
резка [х, у] на отрезок [<р(х), ф («/)], что и доказывает
предложение 6.1.
Следствие 6.2, Для всякого выпуклого множества
X с П его проекция ф(Х) на D есть также выпуклое
множество.
. Для всякого выпуклого множества X сз D множе-
ства ф'1 (X) также выпукло.
§ 2. Аксиомы порядка
29
Следствие 6.3. Пусть А, В — две ориентированные
прямые и S — некоторое направление, отличное от на-
правлений этих прямых. Косая проекция ф прямой А
на прямую В параллельно направлению 6 относитель-
но порядков прямых А и В есть монотонное отобра-
жение А на В — убывающее или возрастающее.
Действительно, из предложения 6.1 следует, что
для всякой тройки (%, у, г) точек прямой А
(у между х и г)=>(ф(г/) между ф(х) и ф(г)),
откуда следует, что отображение ср монотонно (воз-
растающее или убывающее).
Следствие 6.4. Если отвечающее всякой прямой
А плоскости П кардинальное число а > 2, то всякий
открытый луч плоскости П не пуст.
Доказательство. Пусть D — произвольная прямая,
и пусть а & D. На плоскости II существует прямая
параллельная прямой D и отличная от нее; по пред-
положению на прямой D' существует по крайней
мере три различных между собой точки х', у', а',
такие, что а' е [%', у'].
Направление прямой Д(щ а') отлично от направ-
лений прямых D и D'; следовательно (предложе-
ния 3.2 и 6.1), проекции а, х, у точек а', х', у" на пря-
мую D параллельно прямой А(щ а') все попарно раз-
личны, и а [х, у]. Поэтому оба открытых луча
прямой D с началом а не пусты.
Из следствия 6.4 сразу же вытекает, что кардиналь-
ное число а > 2, отвечающее всякой прямой плоско-
сти П, обязательно бесконечно. Последний резуль-
тат непосредственно следует из аксиомы III, но нам
удобнее уже сейчас считать его известным.
7. Разбиение плоскости некоторой прямой
Предложение 7.1. Предположим, что кардиналь-
ное число а > 2. Для всякой прямой D существует
единственное разбиение множества (П\О) на два
30 Гл. 1. Аксиомы инцидентности- и аксиомы порядка
выпуклых множества П1 и П2. Оба эти множества не
пусты, и для любых xj е Пг, х2 П2 отрезок (хь х2]
пересекается с прямой D.
Доказательство. 1) Существование. Пусть Л — пря-
мая, пересекающая прямую D в точке а. Обозначим
через ср проекцию на А параллельно D и через At,
А2 — открытые лучи прямой А с началом в а. Эти
лучи выпуклы и образуют разбиение множества
Л\{а}; следовательно (следствие 6.2), оба множества
П^ = ф~1(Лг) (i = 1, 2) выпуклы и образуют разбие-
ние множества (П\£>).
2) Единственность. Пусть (£i,£2)—еще одно раз-
биение множества (П\О) на выпуклые множества.
Каждое из множеств ф(£\) выпукло и содержится
в множестве Л^Лг, т. е. в одном из лучей Ль Л2.
Другими словами, каждое из множеств содер-
жится в одном из множеств Пг, и так как Е\ U Е2 =
= IIiUn2 и каждое из множеств Пг- не пусто, то
либо Е1 = П1 и Е2 = П2, либо Е} = П2 и Е2 = Пр
Следовательно, с точностью до порядка индексов
разбиение (£ьЕэ) совпадает с разбиением (Пь Пг).
3) Наконец, если Х1^П1 и х2^Пг, то концы от-
резка ф((хь х2]) принадлежат соответственно Л! и Л2,
и значит, этот отрезок содержит точку а. Следователь*
но, [xi,x2] пересекается с множеством ф”1 ({и}) = D.
Определение 7.2. Множества Пь П2, фигурирую-
щие в предложении 7.1, называются открытыми по-
луплоскостями, определенными прямой D. Множества
П1 U D, П2 U D называются замкнутыми полуплоско-
стями, определенными D; они также выпуклы (так как
Пг и D = ф-!(Лг- и {п})).
Упражнения к главе 1
' Приведенные- ниже упражнения отнюдь не являются- обяза-
тельными, при этом некоторые, из них могут быть решены более
простым способом после прохождения некоторых из последую-
щих разделов. Цель этих упражнений — приобретение навыков
§ 2. Аксиомы порядка
31
обращения с аксиомами на той стадии, когда в распоряжении
учащегося еще почти нет теорем.
1. Пусть £ —некоторое множество и «^ — множество его
подмножеств. Для Ц, L2ee 2? будем говорить, что Lx и Д
параллельны (обозначается £1||Л2), если либо = Л2, либо
Ц П L2 = 0.
Предположим, что 2? удовлетворяет следующей аксиоме;
«Для любого £ е и любого а е Е существует
единственное L' е 2?, такое, что а е L' и L' || L».
Показать, что эта аксиома эквивалентна следующей:
«Отношение параллельности есть отношение
эквивалентности на 2?».
Используя эту аксиому, показать, что для любого L отноше-
ние на множестве £, определяемое условием
«а~Ь, если существует L', параллельное L и
содержащее а и Ь»,
есть отношение эквивалентности и что его классы эквивалент-
ности есть элементы множества параллельные L.
2. Пусть К — произвольное поле; назовем прямой множе-
ства Д2 = Д X Д всякое подмножество этого множества, опреде-
ляемое отношением вида
ахХ\ + а2х2 = b (ab а2, b е Д; а\ и а2 не равны нулю
одновременно).
Показать, что в этом случае множество Д2 удовлетворяет аксио-
мам группы I.
3. Исследовать, в частности, случай, когда Д — конечное поле
(например, поле вычетов по модулю р, где р — простое).
Исследовать также случай, когда Д есть поле С комплексных
чисел.
Во всех следующих упражнениях мы будем предполагать
выполненными аксиомы I и II.
4. Показать, что за исключением того случая, когда карди-
нальное число а равно 2 (в этом случае П изоморфно Д2, где
Д — поле вычетов по модулю 2), кардинальное число всякого
открытого интервала ]я, Ь[ бесконечно (если афЬ).
Более точно: показать, что всякий открытый луч и всякий
непустой открытый интервал изоморфны (относительно дан-
ного порядка) некоторой прямой.
Во всех следующих упражнениях мы будем предполагать,
что а > 2.
5. Пусть А, В, С — три луча с началом в точке 0, принадле-
жащие трем разным прямым.
с 2 Гл. 1. Аксиомы инцидентности и аксиомы порядка
Показать, что либо любые два из этих лучей расположены
по разные стороны от прямой, несущей третий луч, либо суще-
ствует прямая, не проходящая через 0 и пересекающая А, В и С.
6. Пусть Д, В — два луча с общим началом 0, не принадле-
жащие одной прямой. Назовем сектором (Д, В) пересечение по-
луплоскости, определенной прямой А и содержащей луч В, с по-
луплоскостью, определенной прямой В и содержащей луч Д.
Пусть теперь D — произвольный луч с началом 0, отличный от
лучей Д и В и принадлежащий сектору (Д,В).
Показать, что D пересекает любой отрезок [а, 6], где а е А
и b е В, равно как и всякую прямую, параллельную А и пересе-
кающую В.
7. Вывести из предыдущего упражнения, что если (а, Ь, с) —
произвольная тройка точек, не принадлежащих одной прямой,
и с'— точка пересечения прямых, параллельных прямым
А (а, с) и А (6, с) и проходящих через точки b и а соответственно,
то с и с' лежат по разные стороны от прямой А (а, Ь).
Показать, что интервалы ]а, &[ и ]с, с'[ пересекаются.
8. Пусть 0, а, b — три точки плоскости П, не принадлежащие
одной прямой, и пусть а' е [0, а] и Ь' е [0, 6].
Показать, что для всех пг^[а,Ь] отрезки [0, т] и [а', Ь'] пе-
ресекаются. Вывести отсюда, что объединение отрезков [0, л],
соединяющих точку 0 с точками х некоторого выпуклого мно-
жества, выпукло. Распространить этот результат на случай объе-
динения отрезков, соединяющих точки двух выпуклых множеств.
9. Показать, что выпуклая оболочка всякого конечного мно-
жества (наименьшее выпуклое множество, содержащее данное
множество) есть пересечение конечного числа замкнутых полу-
плоскостей.
В частности, выпуклая оболочка трех не принадлежащих
одной прямой точек а, Ь, с называется треугольником’, это есть пе-
ресечение замкнутых полуплоскостей, определенных прямыми
А(а, 6), А(6, с), А(а, с) и содержащих соответственно точки с,а,Ь.
10. Дать несколько эквивалентных определений полосы, за-
даваемой двумя параллельными прямыми А, В. Под направле-
нием полосы мы будем впредь понимать направление задающих
ее параллельных прямых.
11. Подмножество X множества П называется ограничен-
ным, если для всякого направления д множество X содержится
в некоторой полосе этого направления.
Показать, что всякое конечное множество ограничено.
Показать, что если множество X содержится в двух полосах
различного направления, то оно ограничено.
Показать, что всякое ограниченное множество содержится
в некотором треугольнике.
12. а) Определить топологию на прямой, исходя из понятия
открытого интервала.
Ь) Пусть DbD2 — две пересекающиеся прямые плоскости П;
отождествить И с никужеством D\ X D2 и задать на П топологию
§ 2. Аксиомы порядка
33
пространства-произведения, исходя из топологий на прямых Di
и Z>2. Показать, что эта топология не зависит от выбора пря-
мых D\ и £>2.
13. Пусть X с: П, и пусть atb^X; положим (а ~ /?), если
существует такая ломаная линия с концами а и /?, что все ее
прямолинейные звенья принадлежат множеству X. Это отноше-
ние есть отношение эквивалентности на X; его классы эквива-
лентности называются компонентами связности множества А
Пусть теперь Р — замкнутый плоский многоугольник без са-
мопересечений, т. е. такой, что любые две его не смежные сто-
роны не имеют общих точек, и пусть С граница многоуголь-
ника Р (объединение его сторон). Показать, что множество
Ш\С) имеет в точности две компоненты связности, одна из ко-
торых ограничена; показать, что в топологии пространства П обе
эти компоненты являются открытыми множествами и что всякая
точка множества С является для них точкой прикосновения
(теорема Жордана).
Решение этой задачи элементарно, но не очевидно.
Указание: выбрать некоторое направление б, отличное от
направлений сторон многоугольника, и провести прямые на-
правления б через вершины многоугольника Р; упорядочить мно-
жество этих параллельных и рассмотреть последова гельность
определяемых ими полос.
14. Пусть ft— линейно упорядоченное поле:
(а Ь) =^> (а + х b + х) и (О а, 0 < Ь) (0 < ab).
Определить на множестве № структуру плоскости, удовлетворяю-
щей аксиомам 1 и II (см. сначала упр. 2).
Привести примеры подобных полей К, отличных от под-
полей поля R вещественных чисел.
15. Пусть П — открытый круг классической плоскости R2.
Пазовом «прямой» множества П всякую открытую дугу окруж-
ности, содержащуюся в П, концы которой являются концами ка-
кого-нибудь диаметра круга П; на каждой из них введем есте-
ственным образом порядок.
Показать, что в П выполняются аксиомы I и II и что это
пространство не изоморфно (относительно введенного таким об-
разом порядка) пространству R2, хотя его «прямые» изо-
морфны R.
Построить другие аналогичные примеры в открытом круге П,
выбрав в качестве семейства «прямых» те или иные семейства,
инвариантные относительно вращения, причем концы этих «пря-
мых» должны совпадать с концами некоторого диаметра круга.
(Для того чтобы проверить, изоморфна ли такая плоскость
классической плоскости, рекомендуем воспользоваться классиче-
ским свойством сетки, образованной двумя системами параллель-
ных прямых.)
3 Зак. 323
ГЛАВА II
АКСИОМЫ АФФИННОЙ СТРУКТУРЫ
§ 1. АФФИННАЯ СТРУКТУРА ПРЯМЫХ ПРОСТРАНСТВА П
8. Первая аксиома аффинной структуры
В формулировке аксиомы, которую мы сейчас
приведем, фигурируют вещественные числа; но на
самом деле во всей главе будет существенно лишь
то, что 7? есть линейно упорядоченное архимедово
поле (но без аксиомы ^непрерывности!). Из этого за-
мечания следует, что при обучении подростков 12—
16 лет можно обойтись без использования полноты
поля R и связанных с этим понятий верхней грани,
сечения, возрастающей последовательности или фун-
даментальной последовательности.
Аксиома Ша. (Аффинная структура прямой.) Для
плоскости П определено некоторое отображение d
множества П X П в множество R+, называемое рас-
стоянием и обладающее следующими свойствами:
1. d(y,x) = d (х, у) для всех х, у е П.
2. Для любой ориентированной прямой D, любого
x^D и любого числа 1^-0 на прямой D существует
единственная точка у, такая, что
х^у и d(x, у) —I.
3. (хе[а,6]) => (d(a, х) + d(x, b) = d(a, b)).
Эта аксиома задает аффинную структуру каждой
отдельной прямой D плоскости П; несколько ниже
она будет дополнена аксиомой Шь, устанавливаю-
щей связь между аффинными структурами различ-
ных прямых.
§ 1. Аффинная структура прямых пространства П
35
Очевидные следствия
1. В соответствии с аксиомой Шаз для всех х, у
d(x, x) + d(x, y) = d(x, у), откуда d(x, х) = 0.
Если х4=у, то при х < у из отношения x<x^z/ по
аксиоме Шаа следует, что d(x, у) =# 0 *).
Таким образом, (d(x, у) = 0)<4(* = у)-
2. По аксиоме IIIa,
(х е [a, b])==?(d(a, x)^d(a, &)),
где равенство имеет место только в случае х = Ь,
9. Изоморфизм R и центрированной прямой
плоскости П
Предложение 9.1. Для всякой ориентированной
прямой D и для любой точки a^D существует одно
и только одно такое возрастающее отображение f
прямой D на R, что
f (а) = 0 и d(x, у) = | f (у) — f (х) | для всех х, у s D.
Это отображение есть биекция множества D на мно-
жество R.
Доказательство. 1. Единственность.
Из условий, накладываемых на отображение /,
следует, что d(x, а) = (х) | (положите у = а), отку-
да, поскольку отображение f возрастающее и f(a) = О,
вытекает
f (х) = d (а, х), если а<х;
f (х) = — d (а, х), если х<а,
2. Покажем, что отображение f, задаваемое этими
двумя равенствами, удовлетворяет условиям теоремы.
*) Ибо в противном случае равенства d (х, х) = d (х. у) — О
противоречили бы условию единственности в аксиоме
3*
38 Гл. II. Аксиомы аффинной структуры
Из аксиомы Ша3 следует ' . . .
(х< а ^у) =?(d (х, y)=xd (х, а) + d{a, у) —
(а х у) ==? (d (a, у} = d (а, х) + d (х, у)),
т- е. f(y) = f(x)+d(x, у);
(х у а) =^> (d (х, а) = d (х, у) 4- d (у, а)),
т. е. - f (х) = d (х, у) - f (у).
В каждом из этих случаев имеем, следовательно,
d(x, у) = f (у) — f (х) для всех х, у, таких, что х^у.
Так как с/(х, г/)>0, то отсюда вытекает также, что
d(x, z/)-|f(y)-f(x)| и f(x)<f(t/),
т. е. отображение f — возрастающее.
С другой стороны,
(х < у) => (/ (у) — f(x) = d (х, у) 0);
следовательно, отображение f взаимно однозначно.
Наконец, как видно из аксиомы Ша2, для всякого
/>0 найдутся такие х, у, что
а^х и d(a, x) = Z, откуда f(x) = Z;
у^а и d(a,y) — l, откуда f(y)= — l.
Другими словами, f(D) = R.
Следствия. Из теоремы 9.1 вытекает, что всякая
ориентированная центрированная прямая D (т. е. пря-
мая, на которой выбрано некоторое «начало») изо-
морфна множеству R\ этот изоморфизм единствен и
сохраняет структуру рассматриваемой прямой, опре-
деляемую введенными на ней порядком и расстоя-
нием.
Поэтому мы можем всегда, когда нам это удобно,
отождествлять ориентированную центрированную пря-
мую с пространством R, перенося на такую прямую
с помощью изоморфизма f все понятия и свойства
поля R. Точнее, пусть (D, 0)—некоторая ориентиро-
§ 1. Аффинная структура прямых пространства П
37
ванная центрированная прямая с началом в точке О
и f—каноническое отображение этой прямой на про-
странство R.
1. Абсциссой точки х в системе (0,0) будет
f(x); значение абсциссы равно d(0, х) или —d(O,x)
в зависимости от того, имеет ли место случай 0 < х
или х < 0.
2. Ориентированным расстоянием то-
чек (х, у) центрированной прямой (D, 0) будем на-
зывать число
Ty = f(y)-f(x) = Oy-Ox.
Ориентированное расстояние ху равно d(x,y) или
—d(x, у) в зависимости от того, имеет ли место слу-
чай х^у или у-^х; таким образом, оно не зависит
от выбора начала 0 на прямой D и меняет знак при
изменении порядка прямой D на обратный. При этом
ясно, что здесь выполняется тождество Шаля
ху + yz + zx = 0, или xy + yz = xz для всех х, у, z.
Часто бывает удобно, если в ходе рассуждений
начало отсчета 0 на прямой D не меняется, обозна-
чать одной буквой х и точку %, и ее абсциссу; это
упрощает выкладки; например, можно писать ху =
= у — х, как в случае поля R.
3. Центрированная прямая (О, 0) обладает струк-
турой одномерного векторного пространства /?1 с на-
чалом в точке 0.
4. Переносом а в системе (0,0) называется
преобразование
х -> х + а;
перенос есть движение.
Растяжением *) в системе (О, 0) называют пре-
образование х -> kx + a (k е R*); при k=l или
*) Отметим непривычное для русского читателя использова-
ние двух разных терминов «гомотетия» (homothetie — см. ниже,
стр. 55) и «растяжение» (dilatation) для родственных друг дру-
гу понятий: растяжение x~>kx + a с «коэффициентом» k =£ 1
есть гомотетия. (См. ниже предложение 24.3.)
38
Гл. II. Аксиомы аффинной структуры
k = —1 это будет также движение (перенос или цент-
ральная симметрия). Обратно, всякое движение пря-
мой D есть либо перенос, либо (центральная) сим-
метрия.
5. Серединой пары (х, у) точек плоскости П,
где x=hy, называется точка m прямой Д(х, у), опре-
деляемая на этой прямой с произвольно выбранным
началом условием m — х — у — т\ таким образом,
это есть точка /п = у(х +у). Серединой пары
(х, х) называется точка х.
6. Для всех точек х, у, z прямой D имеем
d(x, z)^.d(x, y) + d(y, z);
здесь равенство достигается, если у е [х, г], и только
в этом случае.
7. Деление пары (х, у) в заданном отношении;
сложное отношение, в котором пара точек делит дру-
гую пару точек той же прямой.
8. Дробно-линейные (проективные) преобразования
прямой D, дополненной бесконечно удаленной точкой;
инволюции.
§ 2. СТРУКТУРА АДДИТИВНОЙ ГРУППЫ В СИСТЕМЕ (П,0)
10. Аксиома перехода
Аксиома Шь. (Связь между аффинными структу-
рами различных прямых.) Для всякой пары (А, В)
параллельных прямых и для любых точек а, Ь, а', Ь',
таких, что а, а' е А, и Ь, Ь'^В, прямая, параллель-
ная данным двум прямым и проходящая через се-
редину пары (а,Ь), проходит также через середину
пары (а', Ь') (рис. 5).
Теперь мы можем перейти к определению группо-
вой структуры на множестве П с заданной на нем на-
чальной точкой («началом»).
§ 2. Структура аддитивной группы в системе (П. 0) 39
11. Косая проекция и параллелограмм
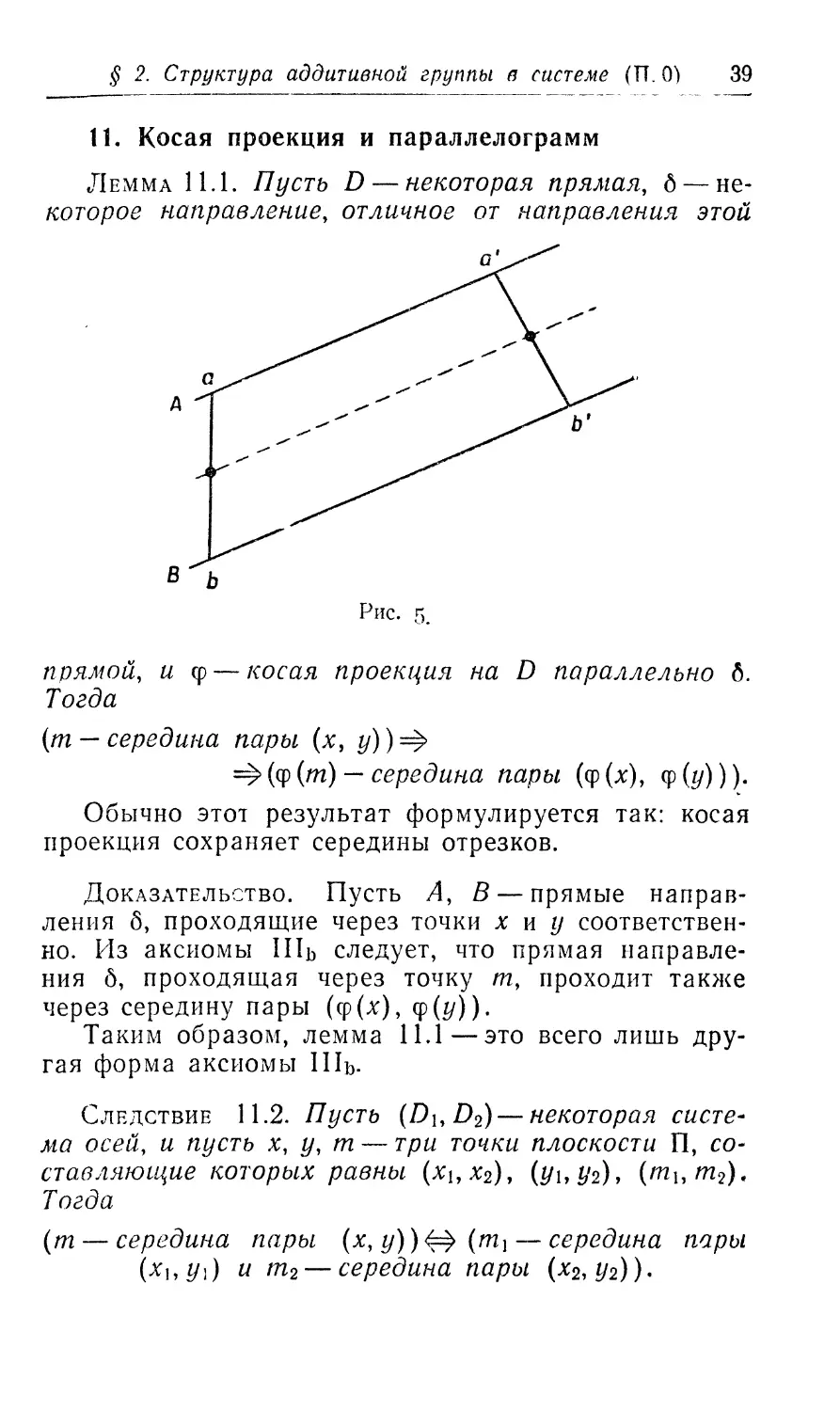
Лемма 11.1. Пусть D — некоторая прямая, б— не-
которое направление, отличное от направления этой
прямой, и ф — косая проекция на D параллельно б.
Тогда
(т — середина пары (х, #))=>
=>(ф(т) — середина пары (ф(х), ф (*/))).
Обычно этот результат формулируется так: косая
проекция сохраняет середины отрезков.
Доказательство. Пусть А, В — прямые направ-
ления S, проходящие через точки х и у соответствен-
но. Из аксиомы Шь следует, что прямая направле-
ния 6, проходящая через точку т, проходит также
через середину пары (ф(х), ф(#)).
Таким образом, лемма 11.1—это всего лишь дру-
гая форма аксиомы Шь.
Следствие 11.2. Пусть (Di,D2)— некоторая систе-
ма осей, и пусть х, у, m — три точки плоскости П, со-
ставляющие которых равны (xi,x2), (mi,m2).
Тогда
(m— середина пары (х,у))^(т} — середина пары
(Х],у\) и т2— середина пары (х2,у2)).
40
Гл. IL Аксиомы аффинной структуры
Определение 11,3. Параллелограммом называется
всякая четверка {а, Ь, а', Ь') точек плоскости П, та-
кая, что середины пар (а, а') и (Ь, Ь') совпадают.
При этом пары точек (а, а') и (&,&') называются
диагоналями параллелограмма.
Непосредственно из определения следует, что
(a,b',a',b) также есть параллелограмм. Пользуясь
понятием центральной симметрии, можно дать другое
определение параллелограмма.
Пусть х, у, говорят, что х, у симметричны
относительно точки т, если m есть середина пары
(х, у). Для любых х, m е П существует единствен-
ная точка //, такая, что х, у симметричны относитель-
но пг: если х = т, то у = т; если х =# т, то точка у
лежит на ориентированной прямой Д(х, т) и опреде-
ляется равенством кт = ут.
Определение 11.4. Для любой точки т е П будем
называть центральной симметрией с центром в точ-
ке пг (или центральной симметрией относительно пг)
отображение s плоскости П в себя, при котором каж-
дой точке х ставится в соответствие точка s(x), сим-
метричная х относительно точки т.
Очевидно, s2 — тождественное отображение; сле-
довательно, s — инволютивное преобразование
плоскости П.
Имеет место следующая эквивалентность:
((а, а', Ь') — параллелограмм)^^', Ь'— образы
точек а, Ь при некоторой центральной симметрии).
Теперь понятно, что для любых точек а, Ь, Ь'еН
найдется такая точка а', и притом только одна, что
(а, Ь, а', Ь') будет параллелограммом; это точка, сим-
метричная точке а относительно середины пары
Ь').
Следствие 11.5 (из леммы 11.1). При любой косой
проекции параллелограмм переходит в параллело-
грамм.
§ 2. Структура аддитивной группы в системе (П,0)
41
Действительно, если середины пар (а, а') и (Ь,1/)
совпадают, то, согласно лемме, совпадают и середины
пар (ф(а),ф(а')); (ф(О,ф(Ю)-
12. Сложение на центрированной плоскости (11,0)
и ее групповая структура
Определение 12.1. Для любой точки О^П будем
называть пару (II, 0) центрированной плоскостью II
с началом 0.
Сложением на (II, 0) будем называть бинарную
операцию (х, у)-+х Ту на П, задаваемую условием
х Ту = г, где z— такая точка плоскости П, что чет-
верка точек (0, х, г, у) образует параллелограмм.
Лемма 12.2. Пусть D — произвольная прямая, про-
ходящая через 0.
1. На прямой D операция Т совпадает со сложе-
нием на центрированной прямой (0,0).
2. Если ф — произвольная косая проекция на пря-
мую D, то для любых х, у е П
ф(%Т//) = ф(л')Тф(//).
Доказательство. 1. Для любых х, y^D точка
хТ у есть такая точка z^D, что (0, х, г, у) — парал-
лелограмм; следовательно, х + у = хТу. Отсюда сле-
дует, что D устойчиво относительно оператора Т*)
и образует относительно Т коммутативную группу.
2. Последствию 11.5 проекция (0, ср(х).ф(х Гу),ф(у))
параллелограмма (0, х, хТу, у) также есть паралле-
лограмм, откуда и следует утверждение леммы.
Теорема 12.3. 1. Центрированная плоскость (11,0),
на которой задана операция Т, образует коммутатив-
ную группу с нейтральным элементом 0.
2. Всякая прямая плоскости П, проходящая че-
рез 0, образует подгруппу этой группы.
) Другими словами, что если x,y^D, то и D.
42
Гл. Л. Аксиомы аффинной структуры
3. Для любой пары D\, D2 различных прямых,
проходящих через точку 0, группа (П, 0) есть прямая
сумма подгрупп и D2, другими словами, любой
х е П может быть представлен единственным образом
в виде
x = xlTx2l где х1 D1 и x2^D2.
Кроме того, Xi и х2 есть составляющие точки х
в системе осей (D\,D2).
4. Всякий перенос группы (П, 0) переводит каж-
дую прямую, проходящую через О, в параллельную
ей прямую', всякая прямая плоскости П может быть
получена переносом из некоторой прямой, проходя-
щей через О.
Доказательство. 1. Пусть D\, D2— две различные
прямые, проходящие через 0; обозначим через фЬ <р2
проекции на Dx, D2 параллельно D2 и Dx соответ-
ственно. Как следует из леммы 12.2, для всех
х, у, z е П и для любого i (/ = 1, 2) имеем
ф/ (*Тг/) = ф, (х) ТФ; (у) = ф4 (у) Тфг (х) = Фг (г/Тх),
Ф< ((xTi/) Tz) = (фг (х) Тф,- (у)) Тф, (z) =
= Ф/ (х) Т (ф£ (у) Тфг (z)) = фг (хТ (г/Tz)).
Отсюда следует, что составляющие точек хТу и
уТх в системе осей (ОЬО2) совпадают и, следова-
тельно, эти точки идентичны; аналогично доказываем
равенство (хТг/)Тг = хТ(г/Тг).
Другими словами, Т — коммутативная и ассо-
циативная бинарная операция. Наконец, 0, очевидно,
является нейтральным элементом относительно этой
операции, и для всякой точки хеП точка х', сим-
метричная х относительно 0, удовлетворяет, очевидно,
соотношению хТх' = 0, т. е. элементы х и х' группы
противоположны относительно этой операции.
2. Как следует из леммы 12.2, всякая прямая, про-
ходящая через 0, образует подгруппу группы (П, 0).,
3. Пусть хе П, и пусть хь х2 — составляющие точ-
ки % в системе осей (£>1,О2). Тогда
<Pi UjTx2) = Ф1 Ui) Тф! (х2) = XjTO = Xj;
§ 2. Структура аддитивной группы в системе (П, 0) 43
аналогично ф2(*1Тх2) == х2- Другими словами, состав-
ляющие точки XiTx2 равны хь х2, так что XiTx2 = x,
Наоборот, если х = ух Т г/2, где у\ е и у2 е Д2, то
*1 = ф! (х) = ф! (^Тг/2) = ^Т0 = 1/р
аналогично получаем
= у2.
Отсюда следует единственность разложения.
4. Пусть D\ — некоторая прямая, проходящая че-
рез 0, и пусть а е П.
Если a^D\, то (Z)iTa) = Z)i, так как — под-
группа группы П. Если a^Di, то прямая D2, прохо-
дящая через точки а и 0, не совпадает с D{, и, сле-
довательно, (Di, D2) есть система координат с нача-
лом в точке 0. Пусть Di — прямая, параллельная
прямой Di и проходящая через точку а\ тогда имеют
место очевидные эквивалентности:
(х (= Di)^(x2 = а)Ф^>(х = аТх{, где
aTD{).
Иначе говоря,
D\ = аТ£>ь
Рассмотрим теперь произвольную прямую не
проходящую через точку 0; пусть D[ — прямая, па-
раллельная Di и проходящая через 0. Мы только что
видели, что для всех а D\ выполняется равенство
Df{ = a!D[.
Обозначения. Так как рассмотренная бинар-
ная операция Т в системе (П, 0) является групповой
операцией коммутативной группы, а ограничение ее
на всякую прямую, проходящую через 0, обозначается
знаком +, то и сама операция будет обозначаться
тем же знаком.
Следствие 12.4. Пусть х, у, у' — три точки, не ле-
жащие на одной прямой, D —- прямая, параллельная
&(х,у'), проходящая через точку у, и D'— прямая, па-
44
Гл. Н. Аксиомы аффинной структуры
раллелъная Д(х, г/), проходящая через точку у'. Тогда
((х, г/, х', у') — параллелограмм) 4Ф(х' = (Of) D')).
Эта эквивалентность непосредственно следует из
третьей части теоремы 12.3, если за начало принять
точку х.
Следствие 12.5.
(Точка а — середина отрезка (х,
ФФ(х + У = а + а. или х + у = 2а).
Отсюда следует, что симметрия с центром в точ-
ке а есть отображение х—>2а— х; это сразу приво-
дит к тому, что произведение двух симметрий с цент-
рами в точках а и b соответственно есть перенос пло-
скости (П, 0):
х -> 2(Ь — а) + х
и что произведение любого числа центральных сим-
метрий и переносов есть перенос или центральная
симметрия (в зависимости от четности или нечетно-
сти числа центральных симметрий).
Замечание. В доказательстве теоремы 12.3 ни-
где не используется структура порядка на плоскости:
мы пользовались только аддитивной структурой на
прямой. Поэтому можно ожидать, что это доказа-
тельство будет справедливо и при более слабых пред-
положениях (аксиомах); мы приводим схему такой
системы аксиом в приложении.
§ 3. ПЕРЕНОСЫ ПЛОСКОСТИ П
13. Характеристика переноса
Лемма 13.1. \.На центрированной плоскости (П, 0)
середина пары (а, а') есть определяемая единствен-
ным образом точка р, такая, что 2р = а + а'.
2. ((а, 6, а', Ь') — параллелограмм) ФФ (а + а' ==
~b + b').
§ 3. Переносы плоскости П
45
Первое утверждение следует непосредственно из
определения сложения, второе вытекает из эквива-
лентности
(2р = 2^)ФФ(р = ^).
Следствие. 1. При всяком переносе середина пары
точек переходит в середину их образов.
2. При всяком переносе параллелограмм перехо-
дит в параллелограмм.
Действительно, заметим сначала, что
(2m = х + у) ==> (2 (tn + а) = (х 4- а) 4- (// 4~ а)).
Отсюда также вытекает, что если (су а') и (b,b')
имеют общую середину, то она будет общей и для
их образов при всяком переносе.
Предложение 13.2. Отображение f множества II
в себя будет переносом группы (II, 0) тогда и только
тогда, когда для всех х, у е П четверка точек
(x,f(x)J(y),y) образует параллелограмм.
Доказательство. Обозначив через f перенос
х-*х 4- с, получим равенство
х + f (у) — f (х) + У>
так как оно может быть записано в виде х4- (у 4- а) =
- (х 4- а) 4- у.
Обратно, если преобразование f таково, что для
всех х, у выполняется равенство х 4- f (у) = f (х) 4- у. то,
положив х = 0, получим
/(г/) = f (0) + г/.
Следовательно, f — перенос. Из доказанного утвер-
ждения следует, что понятие переноса не зависит от
выбора начала; в частности, получаем
Следствие. Для любых a, b <= II всякий перенос
группы (II, л) есть некоторый перенос группы (II, &).
46
Гл. II. Аксиомы аффинной структуры
14. Изоморфизм групп (П, 0)
Предложение 14.1. 1. Переносы группы (П, 0) об-
разуют однотранзитивную группу преобразований
плоскости П; эта группа ST изоморфна группе (П, 0);
соответствующий изоморфизм имеет вид
а -> (перенос ta\ х->х + а).
2. Для всех a, b s П отображение x-+f(x), где
f — перенос, переводящий а в Ь, есть изоморфизм
группы (II, а) на (П, Ь).
Доказательство. 1. Это свойство любой группы;
докажем его для данного случая. Обозначим через fa
перенос х-+х + а системы (П, 0).
Отображение а-*1а взаимно однозначно, так как
(а=#=Ь)=^(М0)¥=Ы0)).
Далее,
fa+t>(x) = x + (a + b) = (x + a) + b = ft>(fa(x)) =fb<> fa (x);
следовательно, отображение a-^fa есть представле-
ние, а значит, и изоморфизм.
2. Прежде всего, f—биекция группы (П, а) на
группу (П,Ь). Обозначим групповые операции в
этих группах соответственно через Т и 1. Для всех
a,/./geII четверка (а, х, х Т у, у) есть параллелограмм;
следовательно, и четверка (b,f(x), f (xly), f(y)) об-
разует параллелограмм (следствие из леммы 13.1).
Иначе говоря, f(xTy) = f (х) (у).
15. Свободные векторы и тождество Шаля
Определение 15.1. Для всякой пары (х, у) точек
плоскости свободным вектором, порожденным парой
(х, у), называется перенос плоскости П, переводя-
щий х в у\ этот перенос (свободный вектор) обычно
обозначают символом ху.
На языке свободных векторов композиция пере-
носов обозначается с помощью аддитивной симво-
лики.
§ 3. Переносы плоскости П
47
Для любых х, у, z е П
ху + yz = xz;
это отношение просто выражает тот факт, что резуль-
татом переноса, переводящего х в у, и переноса, пе-
реводящего у в 2, является перенос, переводящий х
в г.
В общем случае
— > -—> --------------> —>
х^2 + х2х3 + ... + х1г_ххп = х{хп (тождество Шаля).
В частности, хх есть тождественный перенос, обо-
значаемый через 0; таким образом, можно писать
ху 4- ух = 0, или ху = — ух.
Заметим, что в системе (П, 0) для всех х, у, гбЕ(П, 0)
ху-=(х + z) (у + г),
откуда, в частности, следует, что
ху==0(у-х).
Часто в ходе вычислений бывает также удобно
отождествлять множество свободных векторов пло-
скости П с множеством элементов группы (П, 0); од-
нако, не следует никогда упускать из виду, что в этом
случае речь идет о двух различных множествах, не
совпадающих, а только изоморфных.
16. Действие переноса на ориентированную
прямую
В п. 4 теоремы 12.3 утверждается, что множество
прямых, отвечающих направлению д, устойчиво
относительно всякого переноса и что группа перено-
сов транзитивно действует на этом множестве.
Сейчас мы займемся изучением действия произ-
вольного переноса на ориентированную прямую.
48
Гл. 11. Аксиомы аффинной структуры
Предложение 16.1. Пусть D — произвольная ори-
ентированная прямая и f — некоторый перенос. Если
f(D) = D, то f есть изоморфизм прямой D на себя
(по отношению порядка). Если f(D) #= D, то f есть
изоморфизм или антиизоморфизм прямой D на мно-
жество f(D) (в зависимости от порядка, выбранного
на множестве f(D)).
Доказательство. Если f(D) = D, то ограничение
отображения f на D есть перенос прямой D и, следо-
вательно, есть возрастающее отображение.
Если f(D) =# D, то рассмотрим некоторую точку О
прямой £>; точка f(0) и при любом x^D чет-
верка (0, х, f(x), f(0)) образует параллелограмм
(см. рис. 6). Следовательно, Д(х, f(x'))||A(O,/(0)). Ог-
раничение отображения f на прямую D есть не что
иное, как проекция на f(D) параллельно Д(0, f(0)).
Таким образом (следствие 6.3), f есть изоморфизм
или антиизоморфизм прямой D на f(D) в зависимо-
сти от ориентации прямой f(D). Следовательно, всег-
да можно так ориентировать f(D), чтобы f было изо-
морфизмом.
Определение 16.2. Говорят, что две ориентирован-
ные прямые D и D' параллельны и одинаково напра-
влены (обозначается DffZX), если существует такой
перенос f, который является изоморфизмом ориен-
$ 3. Переносы плоскости П
49
тированной прямой D на ориентированную пря-
мую D'.
Предложение 16.3. 1. Отношение есть отноше-
ние эквивалентности на множестве ориентированных
прямых плоскости П.
2. Для всякого направления б множество 3)ъ ори-
оптированных прямых направления б есть объедине-
ние двух классов эквивалентности этого отношения;
две ориентированные прямые, отвечающие одной и
той оке (неориентированной) прямой направления б,
принадлеокат двум различным классам.
Доказательство. 1. Это утверждение следует не-
посредственно из того факта, что отображение, об-
ратное к некоторому изоморфизму (для отношения
порядка), в свою очередь есть изоморфизм, равно как
и произведение двух изоморфизмов есть изоморфизм.
2. Переносы действуют транзитивно на множестве
3)&, таким образом, из утверждения 16.1 следует, что
Зл представляет собой либо единственный класс, ли-
бо объединение двух различных классов. Однако для
каждой ориентированной прямой D всякий перенос
этой прямой есть изоморфизм; следовательно, ника-
кой перенос не преобразует О в ту же самую прямую,
обращая порядок на этой прямой. Таким образом,
эти две ориентированные прямые принадлежат двум
различным классам.
Следствие 16.4. Если две ориентированные пря-
мые D, D' параллельны и одинаково направлены, то
всякий перенос, переводящий D в D', есть изоморфизм
(по отношению порядка) прямой D на D'.
Если две ориентированные прямые параллельны,
но не одинаково направлены, то говорят, что они на-
правлены противоположно.
Приложения
16.5 . Понятие ориентированного направления
Ориентированные направления плоскости II суть
4 Зак. 323
50
Гл. II. Аксиомы аффинной структуры
классы эквивалентности, порожденные отношением
эквивалентности на множестве 3)' ориентирован-
ных прямых плоскости П.
16.6 . Образ луча при переносе
Определим на множестве замкнутых лучей пло-
скости П отношение
(А~В), если существует такой перенос f, что f (Л) = В.
В этом случае А и В будем называть парал-
лельными и одинаково направлен-
н ы м и.
Легко видеть, что это отношение есть отношение
эквивалентности.
Из определения луча и предложения 16.1 следует,
как нетрудно показать, что при всяком переносе f об-
разом произвольного луча с началом а будет некото-
рый луч с началом f(a) и что
(Л ~В)^(ориентированные прямые, ассоциированные
с Л и В, параллельны и одинаково направлены).
16.7 . Образ отрезка при переносе
Всякий отрезок [а, Ь] есть пересечение лучей
D(a, b), D(b, а)\ следовательно, для любого пере-
носа f образ f([a,b]) есть пересечение лучей
D(f(a),f(b)), D(f(b),f(a)), т. е. отрезок [f(а), f(b)].
Аналогичные утверждения справедливы и для интер-
валов (открытых и полуоткрытых).
Отсюда следует, что образ всякого выпуклого мно-
жества при переносе есть также выпуклое множе-
ство.
§ 4. СТРУКТУРА ВЕКТОРНОГО ПРОСТРАНСТВА НА (П, 0)
17. Умножение на скаляр и его свойства
Напомним, что векторным пространством над по-
лем R называется всякая коммутативная группа Е
с заданной на ней бинарной операцией (%, %)—
называемой умножением на скаляр, которая отобра-
жает множество R X Е в Е так, что выполняются
§ 4. Структура векторного пространства на (П, 0)
51
следующие условия, использующие как групповые
свойства множества Е, так и свойства поля R:
Для всех Z, е и всех х, у е Е
К (х + у) = Zx + Ку, (1)
(Z -F р) х = Кх + рх, (2)
К (рх) = (Zp) х, (3)
1х = X. (4)
До сих пор мы связывали с каждой центрирован-
ной плоскостью (П, 0) структуру коммутативной
группы; нам остается определить умножение на ска-
ляр. Это определение будет опираться на существо-
вание на каждой ориентированной прямой структуры
векторного пространства.
Определение 17. 1. На центрированной плоскости
(П, 0) отображение
(Z, х) ~>Кх
множества R X П в множество П определяется сле-
дующим образом:
1. Х0 = 0.
2. Для любого х 0 произведение х на скаляр
Кх есть результат умножения х на Z в векторном про-
странстве, задаваемом центрированной прямой
Д(0, х) с началом 0. Эта операция называется умно-
жением на скаляр на центрированной плоскости (П, 0).
Свойства умножения на скаляр в системе (П, 0)
Проверим выполнение соотношений (2), (3), (4).
Для х = 0 они очевидны.
Для х =/= 0 эти соотношения также выполняются,
поскольку они касаются лишь векторного простран-
ства, образованного центрированной прямой Д(0, х)
с началом 0 (см. следствие 3 предложения 9.1).
Заметим для дальнейшего, что (—1)х =—х есть
точка, противоположная точке х (относительно опре-
деленной выше операции сложения).
4*
52
Гл. IL Аксиомы аффинной структуры
18. Линейность косой проекции
Для доказательства соотношения (1) нам понадо<
бится лемма, которую во Франции принято имено-
вать леммой Фалеса.
Лемма 18.1. Пусть D — некоторая прямая, прохо-
дящая через 0, 6 — некоторое направление, отличное
от направления этой прямой, и ф— косая проекция
на D параллельно 6.
Тогда для всех ле/? и всех хе П
Ф (Хх) = Хф (х). (5)
Покажем сначала, что это равенство справедливо
для рациональных X. При любом целом и >0
из равенства пх == х + х + ... + х следует, что
п раз
Ф (пх) = n<f (х). (6)
Так как (—п)и =—(пи) и ф(—и) = —ф(п), то
соотношение (6) выполняется для всех п е Z. Если х
имеет вид ~ у (где и =рО), то соотношение (6) при-
нимает вид
/X ( 1 \ (1 \ 1 / \
ф (у) = шр у), откуда <р у) = - ср (у).
Следовательно, для всех целых p,q =# 0 и всех
х е П
<Р х) = <Р (р (X х) ) = РФ ( е х) = Р (X- <Р (х)) = £- ф (х).
Таким образом, для всех рациональных X равен-
ство (5) справедливо.
Положим теперь х=#0 (случай х = 0 тривиален).
Если прямая А (0, х) имеет направление 6, то
ф(Хх) = 0 для всех X, и, следовательно, равенство (5)
удовлетворяется. В противном случае ф(х)¥=0; вве-
дем порядок на прямых А(0,х) и D таким образом,
чтобы на прямой А (0, х) выполнялось неравенство
О < х, а на прямой D — неравенство 0<ф(х).
Отображение X—>Хх множества R па А(0,х) будет
возрастающим. Отображение у—*ф(у) прямой А(0, х)
$ 4. Структура векторного пространства на (П, 0) 53
на прямую D также будет возрастающим (следствие
6.3). Значит, и отображение А-^ф(Ах) возрастающее,
равно как и отображение А—*Аф(х); однако мы пока-
зали, что эти отображения совпадают для всех ра-
циональных А; следовательно, они совпадают для
всех Хе/? (будем считать, что поле R обладает та-
ким свойством). Иначе говоря, лемма доказана.
Следствие. Для всех Ze R и всех х, у е П имеет
место равенство
К (х 4~ у) ~ Ах 4~ А//. (1)
Доказательство. Если х и у принадлежат одной
прямой, проходящей через 0, то равенство (1) выпол-
няется, поскольку центрированная прямая (25,0)
есть векторное пространство.
Пусть теперь прямые А(0, х) и Д(0, у) различны.
Для того чтобы убедиться в справедливости равен-
ства (1), достаточно показать, что левая и правая
части этого равенства имеют одинаковые составляю-
щие в системе осей (Д(0, х), Д(0, у)).
Итак, пусть, папример, ф — проекция на Д(0, х)
параллельно Д(0,у). Из леммы 18.1 следует, что
Ф (А (х + у)) = Аф (х + у) = Ах.
С другой стороны, поскольку АхеД(0,х) и
АуеД(0, у), имеет место равенство
Ф (Ах -г Ау) = Ах.
Отсюда и следует искомое равенство (1).
19. Теорема о векторной структуре
Теорема 19.1. Центрированная плоскость (11,0),
на которой заданы указанным выше образом опера-
ции сложения и умножения на скаляр, есть двумерное
векторное пространство над R\ его одномерные аффин-
ные подпространства суть прямые плоскости П.
Доказательство. Мы только что показали, что
(П,0) есть векторное пространство над R. С другой
54 Гл, IL Аксиомы аффинной структуры
стороны, для всех а=£0 прямая Д(0, а) есть не что
иное, как множество точек La плоскости П (где
ле#).
Наконец, (П, 0) есть прямая сумма двух произ-
вольных несовпадающих прямых, проходящих через
точку 0; следовательно, размерность пространства
(П, 0) равна 2.
Как мы уже знаем, все прямые плоскости П полу-
чаются переносом из прямых, проходящих через точ-
ку 0; следовательно, они образуют одномерные аф-
финные подпространства пространства П.
Приложение 19.2. Теперь, когда на (П, 0) задана
структура векторного пространства, из соотношения
(5) леммы 18.1 и аддитивности проекции ср можно
вывести следующее утверждение:
Косая проекция ср центрированной плоскости
(П, 0) на центрированную прямую (D, 0) есть линей'
ное преобразование.
20. Базисы и координаты. Уравнение прямой
В соответствии с общим определением, справедли-
вым для произвольных векторных пространств, б а-
зисом центрированной плоскости (П, 0) называется
пара (аь а2) элементов множества П, отличных от
точки 0 и не коллинеарных с ней.
Каждый элемент х множества П записывается
единственным образом в виде
х = g^ + g2a2.
Скалярные величины gi и g2 называются коор-
динатами точки х относительно базиса (аьа2);
легко видеть, что gi^i и g2a2 есть составляющие точ-
ки х относительно системы осей (Д(0, ai), Д(0, а2));
обратно, если gi, g2 — произвольные скаляры, то точ-
ка х с координатами gi, g2 обозначается через
(£ь Ь)«
1. Пусть D — прямая, параллельная Д(0, а2) и пе-
ресекающая прямую Д(0, Я1) в точке, первая коорди-
$ 4. Структура векторного пространства на (П, 0)
55
ната которой равна оц. Очевидно, что
. Аналогичный результат имеет место для прямых,
параллельных Д(0, ai).
2. Пусть D — прямая, проходящая через точку 0
и отличная от Д(0, ди) и Д(0, а2); пусть, далее, 6 =
== (₽ь ₽г)— точка D, отличная от 0; тогда
(хе£))ф(х имеет вид М), где Л е=/?)4ф(|у" =
Отношение p2/Pi называется угловым коэф-
фициентом прямой D относительно заданного ба-
зиса.
3. Пусть, наконец, D — произвольная прямая, пе-
ресекающая обе оси. Для каждой точки а = (aj,a2)
прямой D прямая (D— а) проходит через 0. Следо-
вательно, обозначив через (₽i, р2) точку прямой
(D — а), отличную от 0, получаем
С помощью этого результата легко показать, что
всякая прямая плоскости П имеет уравнение вида
+ vg2 + = 0,
где u, v не равны нулю одновременно, и обратно, вся-
кое уравнение такого вида есть уравнение некоторой
прямой.
21. Описание гомотетий
В процессе изучения группы (П, 0) мы охаракте-
ризовали переносы х->х + а системы (П, 0), что по-
зволило нам впоследствии доказать изоморфность
групп (П, а) и (II, Ь) при любых а, Ь. Выясним те-
перь строение преобразований вида х-Лх.
Определение 21.1. Для любой точки ОеПи лю-
бого скаляра k =£ 0 гомотетией с центром 0 и ко-
эффициентом k называется отображение /7(0, k)
50
Гл. П, Аксиомы аффинной структуры
плоскости П в себя, определяемое (в связанных с пло-
скостью (П, 0) обозначениях) как
x-*kx.
Для любого X cz П множество всех точек kx, где
х е X, обозначается через kX.
Следующие свойства вытекают непосредственно из
определения:
1. Произведение гомотетий x-+kx и у -*-£ у есть
тождественное отображение; следовательно, Я(0, k)
есть преобразование плоскости П, и обратным к не-
му будет преобразование н[о, -yj.
2. -Имеют место тождества
k(X + a) = kX + ka и k(X + Y)==kX + kY.
3. Если k =k 1, то
(х = ^х)<ф((1 -й)х = 0)ФФ(х = 0).
Следовательно, единственной неподвижной
точкой любой гомотетии с коэффициентом k=f=\
является ее центр.
Предложение 21.2. Отображение f плоскости П
в себя есть гомотетия с центром в точке 0 тогда и
только тогда, когда /(0) =0 и для любой прямой D
множество f(D) есть прямая, параллельная D.
Доказательство. 1. Пусть f — гомотетия x—>kx с
центром в точке 0. Тогда /(0) = 0 и для всякой пря-
мой D, проходящей через 0, /(D) = D.
Если D — произвольная прямая, то, как известно,
D = D' + а, где D' — прямая, проходящая через 0 и
параллельная D, а а — некоторая (произвольная!)
точка прямой D. Следовательно,
/(D) = kD = k (1У + а) = kD' + ka = D' + ka,
и /(D) есть прямая, параллельная прямой D', а сле-
довательно, и прямой D.
§ 4. Структура векторного пространства на (П, 0)
57
2. Наоборот: пусть f — такое отображение пло-
скости П в себя, что f(0) =0 и что f(D) для всякой
прямой D есть прямая, параллельная D.
Для всякой прямой D, проходящей через 0,
f (D) = D; значит, для каждой точки х =# 0 плоскости П
найдется такой скаляр что f(x) = Кхх\ остается по-
казать, что кх =# 0 и что лх не зависит от х.
Пусть Л, В — две различные произвольные пря-
мые, проходящие через 0; так как f(A) =?Л, то на
прямой Л существует такая точка я=#0, что f(a) =#0,
и следовательно, Ка =#0; обозначим через g гомотетию
/7(0, Ха).
Рассмотрим произвольную точку fee В\ прямые В
и A (a, fe) пересекаются, и точкой их пересечения бу-
дет fe; следовательно, образы этих прямых при ото-
бражении f пересекаются и точка их пересечения
есть f(b). Однако образами этих прямых будут пря-
мая В и прямая, параллельная Д(п, fe), сдвинутая на
f(a) = kaa\ они совпадают с образами прямых В и
Д(а, fe) при отображении g.
Таким образом,
W) = g(*) = M>.
Иначе говоря, Ха = Хъ для всех b е В; поменяв
ролями А и В, получим, что Ха — Хь для всех а е А и
всех b е В, т. е. что на множестве A U В величина Хх
постоянна.
Следовательно, Хх — Ху ¥= 0 для всех х, у ¥= 0, т. е.
Хх ф0 и Хх не зависит от х.
Но это нам и требовалось доказать.
Следствие 21.3. На центрированной плоскости
(П,0) отображение f
x->k(x —а) + а (где а <= П и k е /?*)
есть гомотетия H(a,k).
Действительно, / есть композиция переноса и го-
мотетии; следовательно, оно преобразует всякую пря-
мую в прямую, ей параллельную; с другой стороны,
f (а) = а и, значит, f есть гомотетия с центром а.
58
Гл. II. Аксиомы аффинной структуры
Если а = 0, то, очевидно, f = /7(0, k). Если а =#0,
то прямая Д(0, а) устойчива относительно отображе-
ния f и на этой прямой соотношение
у = k (х — а) + а
может быть представлено в виде ay = kax; следова-
тельно, коэффициент гомотетии равен k.
Это следствие может быть также сформулировано
следующим образом.
Следствие 21.4. Пусть (а, х), (Ь,у)—такие две
пары точек плоскости П, что ах = by. Пусть х', у' —
образы точек х и у соответственно при гомотетиях
H(a,k) и H(b,k)\ тогда ax' —by'.
Замечание. Предложение 21.2 можно допол-
нить следующим образом:
Всякая гомотетия с положительным (соответст-
венно отрицательным) коэффициентом преобразует
каждую ориентированную прямую в прямую, парал-
лельную ей и одинаково направленную (соответствен-
но противоположно направленную).
Это очевидно для прямых, проходящих через
центр гомотетии; общий случай сводится к этому по-
следнему применением двух переносов, сохраняющих
направление.
22. Изоморфизм векторных пространств (П, 0)
Предложение 22.1. Для любых а, b е П отображе-
ние x->f(x), где f — перенос, переводящий а в Ь, есть
изоморфизм векторного пространства (П, а) на век-
торное пространство (П, Ь).
Доказательство. Как мы уже знаем, f есть изо-
морфизм относительно групповой структуры этих
пространств (предложение 14.1). Остается доказать,
что
f(Vx) = bf(x),
§ 4. Структура векторного пространства на (П, 0)
59
где символами • и •* обозначены умножения на ска-
ляр в (П, а) и (П, 6). Но если сложение в (П, а) обо-
значить через +, то перенос f определяется равен-
ством
f (и) = и + Ь;
следовательно,
f (Л • х) = Л • х + Ь.
Произведение X*f(x) (в силу следствия 21.3) запи-
шется в виде
К * f (х) = Л • (f (х) — b) + b = К • х + Ь,
откуда и следует искомое тождество.
23. Структура векторного пространства на
множестве переносов
Пусть 0 G П; для любого а е (П, 0) обозначим
через ta перенос х—>(х + а) центрированной плоско-
сти (П, 0). Из предложения 14.1 следует, что отобра-
жение фо: а -> ta есть изоморфизм аддитивной группы
(П, 0) на группу ЗС переносов. Очевидно, отображе-
ние фо единственным образом задает на ЗГ структуру
векторного пространства так, чтобы фо было изомор-
физмом между векторными пространствами (П, 0) и
ЗГ (путем перенесения структуры с (П, 0) на ЗГ}.
Определенная таким образом на ЗГ структура
векторного пространства не зависит от выбора на-
чальной точки 0; это непосредственно следует из
предложения 22.1.
Пользуясь несколько иной терминологией, можно
сказать, что мы задали на множестве свободных век-
торов плоскости П структуру векторного простран-
ства; эта структура такова, чтр для любой точки
0 G П отображение х-»0х определяет векторный изо-
морфизм центрированной плоскости (П, 0) на вектор-
ное пространство свободных векторов плоскости П.
60
Гл, ГГ. Аксиомы аффинной структуры
§ 5. РАСТЯЖЕНИЕ ПЛОСКОСТИ
24. Характеризация растяжений
Определение 24.1. Растяжением плоскости П назы-
вается всякое преобразование этой плоскости, запи-
сываемое в системе (П, 0) следующим образом:
x->kx + a (& =/= 0 — скаляр).
Непосредственно из определения следует, что рас-
сматриваемое преобразование имеет тот же вид на
всякой центрированной плоскости (т. е. при любом
выборе начала). Всякое такое преобразование есть,
очевидно, произведение гомотетии и переноса.
Предложение 24.2. Отображение f плоскости П в
себя есть растяжение тогда и только тогда, когда для
любой прямой D ее образ f(D) есть прямая, парал-
лельная D.
Доказательство. Выберем на плоскости П на-
чальную точку 0. Всякое преобразование f вида
x-*kx + а (где k =# 0) есть произведение гомотетии и
переноса и, следовательно, переводит всякую прямую
в прямую, параллельную ей.
Обратно, пусть отображение f обладает этим
свойством; отображение x~*f(x)—/(0) оставляет не-
подвижной точку 0 и переводит всякую прямую в
прямую, ей параллельную, а значит, это гомотетия
с центром в точке 0 (предложение 21.2); если k — ее
коэффициент, то
f (х) = йх + f (0).
Предложение 24.3. Пусть f — растяжение x-^kx+a
плоскости П с началом 0. Если k = 1, то f — это пере-
нос-, если же k 4= 1, то f — это гомотетия с коэффи-
циентом k.
Действительно, если &¥=1, то уравнение' х = f(x)
имеет единственное решение
. хо = (т^)°-
§ 5. Растяжение плоскости
61
Следовательно, f — гомотетия Н (х0, k) (следствие
21.3).
Величину k называют коэффициентом преоб-
разования f.
Из равенства х0 = 2'у) а следует, что в некото-
ром смысле (который легко может быть уточнен) пе-
ренос х-+х + а есть предел гомотетий при стремле-
нии их центров к бесконечности по направлению пря-
мой Д(0, а) и при стремлении их коэффициентов к 1.
25. Группа растяжений
Рассмотрим на центрированной плоскости (П, 0)
растяжение f (соответственно /')
х —>kx + a (соответственно х -+k'x + а').
Легко видеть, что:
1. Обратным к преобразованию f будет растяже-
ние х->(4)х-(т)а-
2. Композиция растяжений fr ° f есть растяжение
х k'kx + (k'a + а')
с коэффициентом k'k.
3. (Г °f — f ° f') О {k'a + а' — ka' + а) фф
<=> ((1 — k)a' = (1— k')a).
Таким образом,
либо f или f' — тождественное преобразование;
либо f и f' — переносы;
либо k =h 1, k' 1 и a'> t. e. f и
f' — гомотетии с общим центром.
4. Если существует такая прямая D, что f(D) = D
и f'(D) — D, то и = D.
Следовательно, если f и f'— две гомотетии с цент-
рами 0, О' (причем 0#=0'), то f' °f (и f°f') есть либо
гомотетия с центром, принадлежащим прямой D =
= Д(0, О'), либо перенос в направлении, параллель-
ном прямой D.
Аналогично, если f — гомотетия с центром 0 и
f'— перенос х-> х + а (а¥=0), то композиции f' ° f и
62
Гл. II. Аксиомы аффинной структуры
f*f будут гомотетиями, центры которых принадле-
жат прямой А(0, а).
Сформулируем кратко основные полученные ре-
зультаты: н
Предложение 25.1. Растяжения плоскости П об-
разуют группу 3 преобразований', эта группа неком-
мутативна'. два элемента группы 3 перестановочны
только в том случае, когда это либо два переноса,
либо две гомотетии с общим центром*).
Отображение
f -> (коэффициент преобразования f)
есть представление группы 3 в мультипликативной
группе R* поля R.
26. Подгруппы группы растяжений
1. Для всех аеП множество 2№(а) гомотетий с
фиксированным центром а образует коммута-
тивную подгруппу группы 3. изоморфную мультипли-
кативной группе R*. Всякой подгруппе М. группы /?*
соответствует, таким образом, некоторая подгруппа
группы
Группе М = {1, —1} соответствует группа, образо-
ванная тождественным преобразованием и симмет-
рией относительно центра а (определяемой как
х-»2а— х).
Группе М = /?*+ соответствует группа положи-
тельных гомотетий (гомотетий с коэффициентом
k > 0) с центром а.
Упомянем еще группы М = Q и М = {kn}ne=z (где
А?=#0).
2. Подгруппа ?Г переносов и все ее подгруппы.
Для изучения подгрупп группы удобно воспользо-
ваться изоморфизмом между группой и аддитив-
ной группой R2. Подгруппам Z X {С}, Z X Z, Z X R
♦) Заметим, что тождественное преобразование х->х можно
рассматривать как гомотетию с центрам в произвольной точ-
ке а и коэффициентом 1 или как перенос на 0 (т. е. либо как пре-
образование либо как преобразование х~»х + 0).
§ 5. Растяжение плоскости
63
группы R2 соответствуют при этом изоморфизме ин-
тересные подгруппы группы так, например, груп-
пе Z X Z при любом выборе точек а, b е П, неколли-
неарных с точкой 0, соответствует группа переносов
вида (ра 4- qb), где р, q е Z.
3. Пусть ф — каноническое представление группы
S' в /?*, определяемое как
/-^(коэффициент преобразования /).
Для всякой подгруппы М группы /?* множество
ф-ЦА!) есть нормальный делитель группы S’.
Если М = {1}, то ф’ЦА!) есть группа переносов.
Если М = {1, —1}, то ф'ЦА!) есть группа переносов
и центральных симметрий.
Если М = 7?+, то ф-1(А1) есть группа растяже-
ний, сохраняющих направления ориентированных
прямых.
27. Растяжения подмножеств множества П
По традиции в элементарной геометрии много
внимания уделяется изучению пары гомотетичных
треугольников; мы рассмотрим более общий случай
растяжений произвольных частей плоскости П.
Лемма 27.1. Для любых и, v, и', о' еП, таких, что
u^v, u'=r=v', k(u, v)\\k(u', v'),
существует единственное растяжение f плоскости П,
для которого f(u) =и' и f(v)= v'.
Доказательство. 1. Существование. Пару (и, у)
переведем переносом в пару (и', v"); далее, некото-
рая гомотетия с центром и' преобразует (и', v") в
[и', ц'); произведение этих двух растяжений и будет
искомым преобразованием.
2. Единственность. Если f, g — два преобразова-
ния, удовлетворяющие условиям леммы, то растяже-
ние f~{°g оставит точки и и и на месте; представим
его в виде x-*kx + а\ тогда:
ku + a = u и kv + a = v, откуда (I — k) (и — у) ~ 0.
64
Гл. 11. Аксиомы аффинной структуры
Следовательно, k=l и а = 0; иначе говоря,
отождественное преобразование, и значит,
f = £•
i
Предложение 27.2. Пусть X — некоторое подмно-
жество множества П, не принадлежащее целиком од-
ной прямой, и пусть f — отображение множества X в П.
Если для всякой пары различных точек х, у^Х
точки f(x) и f(y) принадлежат прямой, параллель-
ной &(х,у), то либо f(X) есть единственная точка,
либо f есть ограничение на множество X некоторого
(однозначно определяемого) растяжения плоскости П.
Доказательство. 1-й случай. Существуют по край-
ней мере две неподвижные точки а, b преобразова-
ния f.
Для любой точки х^Х, такой, что хф\(а, Ь),
прямые Д(а, х) и &(Ь,х) соответственно пересекаются
с прямыми Д(а, f(x)) и &(b,f(x)) и параллельны им,
откуда следует, что f (х) = х.
Следовательно, f тождественно вне прямой Д(а, Ь).
Но по предположению в X найдется по крайней мере
одна точка с^Д(а, 6). Рассуждая аналогичным об-
разом, покажем, что f тождественно вне прямой
Д(а, с); следовательно, f тождественно всюду на X.
2-й случай. Предположим, что множество $(Х) не
сводится к одной точке; тогда существуют две раз-
личные точки a, ЬеХ, для которых f(a) ^f(b); так
как Д(а, b) II X(f(a), f (b)), то существует (лемма 27.1)
такое растяжение g плоскости П, что g(a) = f (а) и
g(b) =f(b). Отображение g~iof множества X в мно-
жество П удовлетворяет условиям, описанным в фор-
мулировке предложения, и обладает двумя неподвиж-
ными точками а и Ь; следовательно, оно является
тождественным на X. Иначе говоря, отображение f
есть ограничение растяжения g на множествоX. Един-
ственность отображения g следует, например, из при-
веденной выше леммы 27.1.
Замечание. Очевидно, что если X принадлежит
одной прямой, то всякое отображение f множества
X в некоторую прямую, параллельную прямой, со-
.§ 6. Дальнейшее изучение аффинной структуры
65
держащей X, обладает всеми свойствами, указанны-
ми в формулировке предложения. Таким образом,
условие «X не принадлежит одной прямой» в форму-
лировке предложения 27.2 существенно.
§ 6. ВОЗМОЖНЫЕ ПУТИ дальнейшего изучения
аффинной структуры
28. Некоторые темы для дальнейшего изучения
1. Аффинные преобразования плоскости: это, по
определению, преобразования вида х-*1(х) 4- а, где
I — такое линейное отображение (П, 0) в себя, что
Рис. 7.
(/(%) = 0) ==> (х = 0). Можно показать, что множе-
ство аффинных преобразований совпадает с множе-
ством преобразований плоскости П, переводящих
каждую прямую снова в прямую*).
2. Более общий объект изучения представляют
собой аффинные отображения плоскости П в другую
плоскость П'.
Интуитивное представление о таких преобразова-
ниях легко получить с помощью (вообще говоря,
*) См., например, Я гл ом И. М. и А ш к и н у з е В. Г.,
Идеи и методы аффинной и проективной геометрии, ч. J, М.,
«Просвещение», 1962, § 2, гл. I.
5 Зак. 323
66
Г л. II. Аксиомы аффинной структуры
косоугольной) координатной сетки на плоскости П и
ее образа в плоскости 1Г при преобразовании f (см.
рис. 7). К тому же физический мир предлагает нам
многочисленные иллюстрации такого отображения^
например: тень на полу от оконной рамы, освещенной
солнцем; проекция некоторой вертикальной плоскости
на горизонтальную плоскость; шарнирная сетка и ее
деформации.
3. Аффинные отображения плоскости на прямую
и линейные формы; аффинные отображения поля
R в плоскость П (параметризации прямых плоско-
сти П).
4. Центр тяжести', его инвариантность относитель-
но любого аффинного преобразования; приложение к
изучению выпуклых множеств.
29. Косая симметрия
Покажем на примере, как с помощью очень про-
стых средств можно подойти к изучению косой сим-
метрии.
Определение 29.1. Пусть А—некоторая прямая и
6 — некоторое направление, отличное от направления
прямой А. Косой симметрией параллельно б (или в
направлении 6) с осью А (или относительно Л) на-
зывают отображение f плоскости II в себя, опреде-
ленное следующим образом:
Для всех хеП точка f(x) расположена на пря-
мой направления б, проходящей через точку х, при-
чем середина пары (х, f(x)) принадлежит прямой А.
Очевидно, что Р — тождественное преобразование;
следовательно, f — инволютивное преобразова-
ние плоскости П.
Пусть В — произвольная прямая направления б,
пересекающая А в точке 0. Обозначим через Xi, х2
составляющие некоторой точки х плоскости П в си-
стеме осей (Л, В). Тогда составляющими точки f(x)
будут точки Xi и —х2 (отсюда следует, что f — ли-
нейное преобразование центрированной плоскости
(П, 0)); аналогично, если g— косая симметрия парал-
§ 6. Дальнейшее изучение аффинной структуры
67
лельно прямой А с осью В, то составляющими образа
g(x) будут —Xi и х2.
Отсюда следует, что композиции f°g и g°f суть
не что иное, как отображение
Ul> Х2)->(-%!, -Х2),
т. е. центральная симметрия he центром О
(или симметрия относительно 0).
Обратно, если произведение двух косых симмет-
рий есть симметрия с центром 0, то очевидно, что эти
косые симметрии связаны описанным выше образом
с парой пересекающихся в точке 0 прямых; такие две
симметрии называются сопряженными.
Отношение
g°f =f о g = h
может быть записано также в виде
g = f °h = h°f>
следовательно, произведение косой симметрии с
осью D и центральной симметрии, центр которой при-
надлежит D, есть косая симметрия, сопряженная с
первой.
Предложение 29.2. Всякая косая симметрия пе-
реводит прямую в прямую.
Доказательство. Пусть в принятых выше обозна-
чениях (а, Ь)—такой базис системы (П, 0), что
а е А, b ее В.
Уравнение любой прямой D плоскости П имеет
вид
и^ + гщ 4- w = 0 (где и и v не равны 0 одновременно).
Но симметрия f есть отображение ($, rj)->(g,—т|);
поэтому уравнение образа f(D) имеет вид и% — arj 4-
+ w = 0, и следовательно, f(D) есть прямая.
Отсюда следует, что произведение косых симмет-
рий есть аффинное преобразование плоскости П;
можно показать (см. упражнения), что множество
таких произведений совпадает с группой э к в и а ф -
5*
68
Гл. IL Аксиомы аффинной структуры
финных преобразований, т. е. аффинных
преобразований с детерминантом +1 или —1 (аф-
финных преобразований, сохраняющих площадь); эта
группа играет в множестве аффинных преобразова-
ний роль, аналогичную роли подгруппы движений
группы преобразований подобия. Другими словами,
всякое аффинное преобразование есть произведение
(положительной) гомотетии и косых симметрий.
Упражнения к главе II
1. Пусть А—подмножество плоскости П, центр симметрии
которого есть точка 0; показать, что если всякая прямая D, про-
ходящая через 0, пересекает А в конечном числе nQ > 0 точек,
то 0 — е д и н с т в е н н ы й центр симметрии множества А.
2. Пусть А — подмножество плоскости П, обладающее цент-
ром симметрии, а / — растяжение П; показать, что существует
еще одно растяжение g=£f, такое, что /(Л) = g(A).
3. Пусть («ь а2,ап) — конечная последовательность то-
чек плоскости II; найти такие последовательности (хь х2,..., хп),
что серединой каждой пары (хг-,хг+1) служит точка аг- (при со-
глашении: х„ j 1 — Xi).
4. Пусть А — произвольное подмножество плоскости П. По-
казать, что множество X центров симметрий множества А сим-
метрично относительно каждого из них; показать, что множе-
ство X замкнуто, если множество А замкнуто. Найти все замк-
нутые множества X на плоскости II, симметричные относительно
каждой своей точки.
5. Пусть di, дз — направления трех попарно различных
прямых, и пусть А, В — две прямые, направления которых отлич-
ны от 61.
Для каждой прямой Di направления di обозначим через D2
прямую направления 62, проведенную через точку А П Dj, и
через D3 —- прямую направления д3, проведенную через точку
B(\D,
Положим /(Z)i) = D2 П D2. Каково множество точек /(£>1)?
6. Пусть (А, В), (А', В')—две пары прямых, таких, что
А || А' и В || В'. Найти все растяжения, переводящие A U В в
Л'и в\
7. Пусть А, В — два ограниченных отличных от точки под-
множества плоскости П. Показать, что существует не более двух
растяжений f плоскости П, таких, что f(A) = В.
8. Пусть f — отображение плоскости П в себя и 6 — неко-
торое направление. Показать, что если для всех х, уе 11, таких,
что x=f=ij, точки f(x), f(y) принадлежат прямой, параллельной
§ 6. Дальнейшее изучение аффинной структуры
69
А(х, у), и если для любой точки хеП точки х, f(x) принадлежат
некоторой прямой направления 6, то отображение f есть перепое.
9. Растяжения R:
а) Отождествим растяжение x->kx + a плоскости П с точ-
кой (k, а) множества 7?2; группа & растяжений плоскости И
отождествится тем самым с некоторым подмножеством множе-
ства 7?2; читателю предлагается полностью разобрать этот во-
прос. Зададим на группе топологию, индуцированную на ней
топологией пространства R2 при таком отождествлении. Что
будет образами в пространстве R2 подгрупп группы образо-
ванных: 1) гомотетиями с центром в точке 0? 2) переносами?
Ь) Показать, что если некоторая подгруппа группы со-
держит гомотетию Н(х0, k) с коэффициентом k=£l,— 1
и такое растяжение f, что f(x0) =£*о, то множество центров го-
мотетий из группы коэффициент которых равен k, всюду
плотно в R. Пользуясь этим, показать, что если замкнуто,
то оно содержит все переносы пространства R.
10. Показать, что детерминант всякой косой симметрии плос-
кости П равен —1. Показать, что всякое аффинное преобразова-
ние плоскости П, детерминант которого равен ±1, есть произве-
дение 3 или 4 косых симметрий (доказательство аналогично до-
казательству теоремы 45.6).
И. Найти все замкнутые группы линейных преобразований
центрированной плоскости (П, 0), однотранзитивные на множе-
стве П \{0}.
ГЛАВА Ш
АКСИОМЫ МЕТРИЧЕСКОЙ СТРУКТУРЫ
§ 1. ПЕРПЕНДИКУЛЯРНОСТЬ
30. Аксиома перпендикулярности
Формулируя аксиому III, мы использовали поня-
тие расстояния; но расстояние было введено в рас-
смотрение лишь для того, чтобы несколько упростить
задание аффинной структуры на прямых, и плоскость,
определяемая аксиомами I, II, III, не обладает мет-
рической структурой в полном смысле этого слова:
на каждой прямой плоскости П задана некоторая
метрика, но метрики различных прямых не согласо-
ваны, не связаны между собой никакой аксиомой пе-
рехода; аксиома Шь вводит лишь понятие середины
отрезка, и, следовательно, носит чисто аффинный ха-
рактер.
Этот факт можно подчеркнуть следующим заме-
чанием:
Пусть П — плоскость, удовлетворяющая аксиомам
I, II, III, и пусть d — расстояние на этой плоскости;
рассмотрим произвольное отображение f множества S)
прямых плоскости П в интервал [0, оо[.
Для всех хеП положим d'(%, х) =0. Для всех
х, у е П, таких, что х =# у, положим
d' (х, у) = kx,yd (х, у), где kx,y = f (А (х, у)).
Очевидно, что плоскость П, на которой задано рас-
стояние d'f также удовлетворяет аксиомам I, II, III и
обладает той же аффинной структурой, что и пло-
скость П с расстоянием d, хотя расстояние на каждой
прямой умножается на некоторый положительный
скалярный множитель, зависящий от выбора прямой.
§ 1. Перпендикулярность
71
Теперь мы попытаемся установить связь между
метриками на различных прямых с помощью ортого-
нальных проекций; для этого мы должны сначала
уточнить понятие перпендикулярности прямых.
Аксиома IVa (о перпендикулярах). Перпендику-
лярность (обозначается через 1) есть бинарное отно-
шение на множестве S) прямых плоскости П, такое,
что:
1) (Л 1 В)ФФ (В 1 Л) (симметричность отноше^
ния 1);
2) (Л1В)=> (А и В не параллельны);
3) Для всякой прямой А существует по крайней
мере одна такая прямая В, что A J.B;
4) Для любой пары (А. В), такой, что (Л 1 В),
справедлива эквивалентность
(В \\В')&(А±В').
31. Перпендикулярность двух направлений
Мы говорим, что два направления б и 6' перпен-
дикулярны, и пишем 6 1 б', если существуют та-
кие две прямые D, D' направлений б и б' соответствен-
но, что D 1 D'.
Тем самым мы определили бинарное отношение на
множестве D направлений; из аксиомы IVa следует,
что это отношение обладает следующими свой-
ствами Р':
1. Симметричность;
2. Антирефлексивность (б 16 невоз-
можно) ;
3. Для всякого направления б существует един-
ственное направление б', такое, что б 1 б' (суще-
ствование и единственность).
Другими словами,
(D1/У) О (направление прямой D 1 направлению
прямой D').
Легко убедиться, что и обратно, всякое бинарное
отношение на множестве D направлений, обладающее
свойствами Р', есть отношение, порожденное некото-
72
Гл. III. Аксиомы метрической структуры
рым отношением перпендикулярности на множестве
Ф прямых (Z) и D' считаются перпендикулярными,
если направления прямых D и D' перпендикулярны).
Общность отношения перпендикуляр-
ности
Только что изложенное позволяет оценить степень
общности отношений перпендикулярности на Ф, удо-
влетворяющих аксиоме IVa. Действительно, задание
на Ф такого отношения эквивалентно заданию на D
некоторого отношения, обладающего свойствами Р'\
а это все равно, что задать некоторое разбиение мно-
жества D на подмножества, каждое из которых со-
держит в точности два элемента (образующие пару
перпендикулярных направлений).
В связи с такой чрезвычайной общностью аксиома
IVa ничего не дает для изучения метрических свойств
плоскости, если эту аксиому не дополнить аксиомой
IVb, которая вводит в рассмотрение расстояния; по-
следней аксиоме, несмотря на то что она очень про-
ста, каким-то сверхъестественным образом удается од-
ним ударом исключить возможные особенности мет-
рики и перпендикулярности.
Комментарий. В аксиоме IVa перпендикуляр-
ность вводится как исходное понятие; мы полагаем,
что это не вызовет трудностей при преподавании, по-
скольку ученики уже встречались с различными аспек-
тами этого понятия: лист бумаги в клетку, горизон-
тальное и вертикальное направления, кратчайшее рас-
стояние от точки до прямой и т. д.
32. Аффинные свойства, имеющие вид метрических
Несмотря на свой весьма общий характер, аксио-
ма IVa позволяет без особого труда формулировать
многие результаты, которые обычно формулируются
на более поздних стадиях изучения геометрии:
1. Всякое растяжение сохраняет перпендикуляр-
ность прямых.
Более точно, для всякого растяжения f
§ 1. Перпендикулярность
73
Это очевидно, поскольку D || f (D) и D'\\f(D').
2. Назовем осевой симметрией с осью-й
(или симметрией относительно прямой
D) косую симметрию с осью D параллельно направ-
лению, перпендикулярному к направлению прямой О.
Тогда имеет место
Предложение 32.1. Произведение двух симметрий
относительно перпендикулярных прямых D, D' есть
центральная симметрия с центром в точке D П D'.
Действительно, это есть частный случай предло-
жения о двух сопряженных косых симметриях, следо-
вательно, этот факт выражает чисто аффинное свой-
ство плоскости, хоть формулировка его такова, что
может создать впечатление о метрической его при-
роде.
33. Коэффициент проекции пары лучей с общим
началом
Пусть D — произвольная прямая; назовем орто-
гональной проекцией и a D косую проекцию
на D параллельно направлению, перпендикулярному
направлению прямой D.
Пусть теперь Alf А2— два луча с началом в точ-
ке 0 и Dlf D2 — содержащие их прямые, ориентиро-
ванные таким образом, что и Л2 0. __
Для каждой точки х ge D{ обозначим через Ох
ориентированное расстояние d(0,x) на ориентирован-
ной прямой Dy аналогичные обозначения введем для
прямой D2.
Пусть ф — ортогональная проекция на £>ь а а —
такая точка луча А2, что 0а = 1. Известно, что при
любом Z G /?
ф(ля) = (а).
Следовательно, поскольку все xeD2 имеют вид Ка.
отношение 0ф(х)/0х, определенное для всех х 4= 0,
не зависит от х и равно Оф (я), поэтому можно ввести
74
Гл. III. Аксиомы метрической структуры
Определение 33.1. В принятых выше обозначениях
коэффициентом проекции луча А2 на луч Af назы-
вается число k (обозначаемое через с(Л1,Л2)), такое,
что для всех x s
Oqp (х) = kOx.
Таким образом, c(At, А2) = Оф(а).
Непосредственно из определения следует, что
(с(Д, Л2) = 0)^(ф(а) = 0)^(Л1±Л2)
(где запись At ±А2 означает, что Dt £ D2).
Если Ai = А2, то с(Л1,Л2)= 1; если Ai и Л2 про-
тивоположно направлены, то с(Ль Л2) =—1; однако
доказать обратное, пользуясь только аксиомой IVa,
невозможно.
§ 2. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
34. Аксиома симметрии
Аксиома IVb. Для любой пары (Ль Л2) лучей с об-
щим началом имеет место равенство
с(Л1, Л2) = с(Л2, Л^.
Приведем эквивалентную формулировку этой
аксиомы, более элементарную, но менее поучитель-
ную:
Пусть (0, а, Ь) — произвольная тройка точек, не
принадлежащих одной прямой и таких, что d(0,a) =
= d(O,b); обозначим через а' и Ь' ортогональные
проекции точек а и b на прямые А (О, Ь) и А (0, а) со-
ответственно; тогда, если прямые Л(О,Ь) и А (0, а)
ориентированы так, что 0 4b и соответственно 0 а,
то на этих прямых Оа' = Ob'.
35. Норма и скалярное произведение
Определение 35.1. На центрированной плоскости
(П,0) нормой точки х (где хеП) называется поло-
жительное число || х || = d(0, х).
§ 2. Скалярное произведение
75
Непосредственно из определения следует, что нор-
ма || х || равна 0 только для х = 0 и что для любого
числа X
11^ II = 111 • II х ||,
откуда, в частности, вытекает, что
1|-^|| = ||х||.
Определение 35.2. На центрированной плоскости
(П, 0) скалярным произведением х • у векторов х и у
называется действительное число, определяемое сле-
дующим образом:
1. Если хотя бы один из векторов х, у равен 0, то
х • у = 0.
2. Если х 4= 0 и у 4= 0, то
х • у - II х || • || у || • с (X, У), где X = А (0, х), Y = А (0, у).
Часто бывает удобно обозначать число х*х че-
рез х2.
Непосредственные следствия.
1. Отношение х • у = 0 эквивалентно следующему:
либо один из векторов х, у равен 0, либо X У.
Для удобства часто уславливаются считать, что
два вектора х, у центрированной плоскости (П, 0) пер-
пендикулярны (обозначается х _£ у) в том слу-
чае, когда один из векторов х, у равен 0, или х ¥= 0,
у Ф 0 и X У- При такой договоренности получаем
(х.?/ = 0)4Ф(х1г/).
2. Пусть D — произвольная ориентированная пря-
мая, содержащая 0 и х; обозначим через ср ортого-
нальную проекцию на D\ тогда
х • // = Ох • Oqp (у).
Это равенство, очевидно, удовлетворяется, если
хотя бы один из векторов х, у равен 0; в противном
случае ввиду того, что изменение ориентации не
влияет на величину бх-Оф(г/), достаточно доказать
76
Гл. 111. Аксиомы метрической структуры
это равенство для случая, когда D есть ориентиро-
ванная прямая А(0, х). Тогда
0Ь= II X IL И М7) = II у ||с(Х, У),
откуда и следует искомое равенство.
Обозначения. На центрированной плоскости
(П, 0) иногда бывает удобно обозначать с(Х, У) через
с(х, у); это последнее обозначение, очевидно, не имеет
смысла в случае х = 0 или у = 0.
Теорема 35.3. Отображение (х, у) —> х • у множе-
ства (П, 0) X (П, 0) в множество R симметрично и би-
линейно.
Кроме того, оно положительно в том смысле, что
х • х > 0 для всех х =г 0; точнее: для любого х
х • X = II X II2.
Доказательство. 1. Равенство х-у=у-х очевид-
но, если один из этих векторов равен 0; в противном
случае оно вытекает из определения 35.2 и из равен-
ства с(Х, У) = c(Y, X), т. е. из аксиомы IVb-
2. Для любого фиксированного х отображе-
ние у -> х • у центрированной плоскости (П, 0) в мно-
жество R линейно:
Если х «= 0, то это очевидно, поскольку в этом слу-
чае х • у = 0 для любого у\
Если х 4= 0, то пусть ср — ортогональная проекция
на ориентированную прямую А(0, х); тогда отображе-
ние y->q(y) центрированной плоскости (II, 0) на пря-
мую А(0, х) с началом 0 линейно; так как отобра-
жение и —► Ои прямой Д(0, х) в R также линейно,
то и композиция у—>Ocp(z/) также будет линейным
отображением, а значит, и
у -> Ох • Oqp (у) — х • у
л и н е й н о.
Так как х-у = у-х, то билинейность скалярного
произведения тем самым доказана.
3. Равенство х • х = || х ||2 следует непосредствен-
но из определения скалярного произведения.
§ 2. Скалярное произведение
77
36. Тождества и неравенства
1. Билинейность и симметричность скалярного про-
изведения удобны при вычислениях: так, например»
имеет место тождество
j P/У/j СС/Р/Х/ * У/ Р/ ^)*
Отсюда, в частности, получаем классические то-
ждества
(а + Ь)2 = а2 + Ь2 + 2а • Ь,
(а — Ь)2 = а2 + Ь2 — 2а • 6,
сложение и вычитание которых дает
(а + &)2 + (а-&)2 = 2(а2 + й2),
(а 4- Ь)2 — (а — Ь)2 = 4а • Ь,
2. Из свойств скалярного произведения легко по-
лучить одно важное неравенство.
Пусть х, у — два вектора из (П, 0), причем х, у + 0;
тогда для любого числа А
(Лх — у}2 = А,2х2 — 2Лх • у + у2 0.
Этот трехчлен второй степени относительно А по-
ложителен при любом Z; следовательно, его дискри-
минант <С0*); другими словами, для любых х,
(х • у)2 < X1 • у2, или I X • у | <11XII • II у
Равенство здесь имеет место лишь в том случае»
когда трехчлен относительно X может обратиться в 0,
т. е. если существует такое К. что у = Zx; последнее
равенство означает, что 0, х, у принадлежат одной
прямой.
Резюмируем:
] х • z/1 < (| х || • II II, если 0, х, у не принадлежат
одной прямой;
х • У = II х II • II УII, если у = Хх и Z > 0;
х • у = — || х || • || у ||, если у = кх и К < 0.
*) Ибо дискриминант положительного при любых Л много
члена 2-й степени относительно X должен быть отрицателен.
78
Гл. ПГ Аксиомы метрической структуры
Легко видеть, что если х = 0 или у — 0, то выпол-
няются оба последних равенства. Соотношение х • у =
= II х || • || у || с (%, у) дает возможность представить
эти результаты как
Предложение 36.1. Для любых векторов х, у из
(П, 0) при х =/= 0 и у =/= 0:
(| с (х, у) |< 1)0(0, х, у не принадлежат одной
прямой);
(с(х, у) = 1)^(лучи Z)(0, х) и £>(0, у) совпа-
дают);
(с(х, у)= — \)4=Длучи £)(0, х) и £>(0, у) про-
тивоположны).
37. Инвариантность расстояния и скалярного
произведения относительно переноса
Скалярное произведение, которое мы только что
рассмотрели, связано с выбором некоторого начала
в плоскости П. Мы хотим показать, что в некотором
смысле (который мы уточним ниже) оно не зависит
от выбора этого начала.
Чтобы придать доказательству большую нагляд-
ность, мы будем исходить в нашем доказательстве из
инвариантности расстояния.
Определение 37.1. Прямоугольником называется
такой параллелограмм (а, Ь, а', Ь') центрированной
плоскости (П, а), что b • Ь' = 0 (последнее условие мо-
жет быть также записано в виде b £ Ь').
Лемма 37.2. Во всяком прямоугольнике длины про-
тивоположных сторон равны.
Доказательство (см. рис. 8). На центрированной
плоскости (П,а)
а' = b 4- Ь' и b\_bf,
откуда
a'2 = (b + Ь')2 = Ь2 + Ь'2 + 2& • Ь' = Ь2 + Ь'2
§ 2. Скалярное произведение
79
d2(a, af) = d2(a, b) + d2(a, b').
To же рассуждение остается в силе для всех
остальных вершин прямоугольника; воспользуемся
Рис. 8.
этим и, употребляя обозначения, указанные на рис. 8,
получим
а2 4- Р2 = а'2 4- р'2; а2 4- Р'2 = а'2 4- р2.
Складывая и вычитая эти равенства, имеем
а2 = а'2 и р2 = р'2,
что и требовалось доказать.
Эта лемма допускает также следующую формули-
ровку:
Для всякой прямой D и всякого переноса f в на-
правлении, перпендикулярном этой прямой, ограни-
чение отображения f на прямую D есть движение (т. е.
сохраняет расстояния). В более общем случае имеем:
Предложение 37.3. Всякий перенос есть движение.
Доказательство. Пусть х, у е П, и пусть / — пере-
нос и —► и 4- а плоскости (П, 0); требуется доказать,
что
d(x, y) = d(fU), f (у))-
80
Гл. Ill. Аксиомы метрической структуры
Случай х = у тривиален.
При х 4= У предложение справедливо, если пере-
нос / производится в направлении, параллельном пря-
мой Д(х, у) (потому что f в этом случае оставляет
неподвижной прямую Д(х,//)) или перпендикулярном
этой прямой (см. предыдущую лемму).
Пусть теперь а1у а2— составляющие точки а на
двух прямых, проходящих через 0 и соответственно
параллельных и перпендикулярных прямой Д(х, у), и
пусть fi — перенос и —► и + fl/ (z = 1,2).
Перенос f есть произведение переносов f\,f2 соот-
ветственно в направлениях, параллельном и перпенди-
кулярном прямой Д(х, у); следовательно, расстояния
между парами точек (х, у) и (f(x) ,f(y)) равны.
Следствие 37.4. На центрированной плоскости
(П, 0) для всех х, у е П
d2 U, у) = || у - х ||2 = (х - у)2.
Действительно, в системе (П, 0) предложение 37.3
принимает вид
d(x, у) = d(x + а, у + а)
для всех а.
В частности, при а = —х получаем
d (х, у) = d (0, у- х) = || у - х ||.
Отсюда непосредственно вытекает справедливость
следствия.
Предложение 37.5. При любых a, b е П, если «•»
и «о» — символы скалярного произведения векторов
соответственно в (П, а) и (П, Ь), то для всех х, у П
X ‘ У = f (х) ° f (у),
где f — перенос, переводящий а в Ь.
Действительно, равенство
(х + у)2 = х2 4- у2 + 2х • у
показывает, что х • у может быть выражено через ска-
лярные квадраты, а следовательно, и через расстоя-
§ 2. Скалярное произведение
81
пия, но f сохраняет расстояния, и значит,
X X = f(.v) о f(x); у • y = f(y)°f(y)'>
(х + у) • (х + у) = (f (х) + f (у)) (x) + f («/)).
Отсюда легко выводится справедливость предло-
жения.
Из предложений 22.1 и 37.5 следует, что перенос f
есть изоморфизм векторного пространства (П, а) со
скалярным произведением на векторное пространство
(П,6).
38. Скалярное произведение в векторном
пространстве переносов
В п. 23 мы определили структуру векторного про-
странства на множестве ЗГ свободных векторов (или
переносов) плоскости П таким образом, чтобы для
всякой точки 0 е П отображение х —* Ох было бы век-
торным изоморфизмом системы (П, 0) на ЗГ.
При фиксированной точке 0 это отображение за-
дает, очевидно (путем перенесения структуры), ска-
лярное произведение на множестве ЗГ\ из предложе-
ния 37.5 следует, что это скалярное произведение не
зависит от выбора начальной точки 0. Оно может
быть охарактеризовано тем, что для любого 0е 11
—> —>
х • у == Ох • 0z/,
где скалярные произведения слева и справа взяты со-
ответственно в (П, 0) и ЗГ.
Такие выражения, как ab • ху отныне имеют, сле-
довательно, четкий смысл. Заметим, что иногда бы-
вает удобно в том случае, когда в плоскости П вы-
брана некоторая начальная точка 0, пользоваться
одновременно обозначениями, сохраняющими смысл
для центрированной плоскости (П, 0) и для простран-
ства ЗГ, что равносильно отождествлению этих двух
множеств с помощью отображения х —* Ох.
6 Зак. 323
82
Гл. III. Аксиомы метрической структуры
Например, мы будем писать
ху = О// ~ Ох = у — х,
d2(x, у) = (ху)2 = (у- х)2 = у2 - 2х • у + х2.
§ 3. ОСНОВНЫЕ МЕТРИЧЕСКИЕ СВОЙСТВА
39. Метрические соотношения в параллелограмме
и треугольнике
Предложение 39.1. а) Во всяком параллелограмме
сумма квадратов диагоналей равна сумме квадратов
сторон.
Ь) Параллелограмм тогда и только тогда является
прямоугольником, когда его диагонали равны.
Доказательство. Для простоты примем за началь-
ную точку 0 одну из вершин; тогда параллелограмм
будет иметь вид (0, х, х А- у, у).
Тождество
(х + у)2 + (х - у)2 = 2 (х2 + у2)
выражает первое свойство, которое нам надо дока-
зать. Далее из тождества
(х + у)2 - (х - у)2 = 4х • у
следует, что
(II * + у II = II X - у II) <==>(х • у = О)ФФ
Ф>((0, х, х + у, у) есть прямоугольник).
Предложение 39.2. Пусть (а, &, с)— произвольный
треугольник плоскости II, такой, что а^Ь и а 4= с;
пусть а, р, у — его соответственные стороны и k — ко-
эффициент проекции лучей D(a, 6), D(a, с). Тогда
а2 = р2 -г у2 — 2&ру-
В частности,
(а2==Р2 + у2)О(£>(а, 6)1D(g, с)).
§ 3. Основные метрические свойства
83
Действительно, в плоскости (П, а) можно записать
а2 = d2 (b, с) = (с — Ь)2 = с2 + Ь2 — 2с • b = р2 4- у2 — 2Аф у.
С другой стороны, поскольку (Зу =# О,
^у = 0)О(£ = 0Ю(Ж b)j,D(a, с)).
В этом предложении читатель легко узнает теоре-
му Пифагора; в приложении 1 мы дадим также дока-
зательство этой теоремы, не использующее в явной
форме скалярное произведение.
Предложение 39.3. Для всех х, у е (П, 0)
1|х + у||<||х||-Ы|//||.
Равенство здесь достигается лишь в случае
х еЕ [0, у] или у е [0, х].
Доказательство. Случай х — 0 или у — 0 тривиа-
лен; будем считать поэтому, что х 0 и у =Р 0. По-
ложим
а = II х ||, р = 1Ы1, У = 11* + Н-
Имеем
у2 = а2 4- р2 4- 2арс (х, у) < а2 4- Р2 4- 2ар = (а + Р)2,
где равенство имеет место лишь в случае с(х, у) = 1.
Иначе говоря, у а 4- Р и равенство имеет место
только тогда, когда х е [0, у] или у е [0, х].
Следствие 39.4. Для всех х, z/, z е П
d(x, y)^d(x, z)4-d(z, у);
равенство здесь достигается лишь при z <= [х, у].
Действительно, на центрированной плоскости (П, z)
искомое соотношение записывается так:
\\Х-У\\^ ||Х||4- II У\\.
Требуемое неравенство получается теперь из пред-
ложения 39.3 заменой у на —у.
6*
84
Гл. III. Аксиомы метрической структуры
Можно также доказать это следствие, исходя не-
посредственно из соотношения
а2 4- Р2 — 2сфс (х, у) а2 + р2 + 2ар = (а + р)2,
в котором равенство имеет место лишь при с(х, z/) =
= —1, т. е. при 0 е [х, у].
Предложение 39.5. Для всякой тройки (а, р, у)
неотрицательных чисел следующие свойства эквива-
лентны между собой:
а) существует треугольник со сторонами а, р, у;
6) наибольшее из этих чисел не больше суммы
двух остальных]
с) каждое из этих чисел не больше суммы двух
остальных]
d) |а —pj<y<a + р.
Доказательство. Мы докажем эти эквивалентно-
сти, установив следующую цепочку импликаций:
а^> b c=^> d^> а.
1. Справедливость импликации {а =Ф Ь) вытекает
из следствия 39.4.
2. (6==>с) очевидно, потому что если, например,
&<Су и Р^Су, то а Р 4~ у и р<Су4-а.
3. (с=$> d), поскольку соотношения а Р + у и
Р<1а4-у могут быть представлены также в виде
а — р<у и р — а<Су, что влечет jcx — р|^у; соот-
ношение у<Са + р выполняется по предположению.
4. (d=>a); это очевидно, если а = 0 или (3 = 0;
предположим, что а ¥= 0 и р ¥= 0. Соотношение
|а— р)^Су<Са + р может быть также представлено
в виде
а2 4- р2 — 2ар у2 а2 4- Р2 4- 2ар,
или
у2 = а2 4- р2 — 2&ар, где — 1 k 1 •
Допустим на какое-то время, что существует такая
пара (А, В) лучей с начальной точкой 0, что
c(A,B) = k.
£ 3. Основные метрические свойства
85
Пусть тогда /X— точка луча Л, для которой
<7(0, х) = а, и у — точка луча В, для которой d(0, #)==
= ₽-
Из соотношения
d2 (*> i/) = а2 + р2 — 2сфс(Л, В) == а2 + р2 — 2£ар
следует, что стороны треугольника (0, %, у) равны
а, р, у соответственно.
Остается доказать существование такой пары
(Л, В).
Лемма 39.6. Для любого числа —1, 1] найдет-
ся пара (Л, В) лучей с общим началом 0, такая, что
c(A,B) = k.
Доказательство. Пусть U, V — две перпендику-
лярные ориентированные прямые, проходящие че-
рез 0, и пусть b — точка с координатами (k, yi -fe2)
в системе осей (7, V.
Легко проверить, что искомыми лучами Л, В бу-
дут соответственно положительный луч оси U и луч
D(0, b).
Комментарий. Заметим, что это построение
основано на существовании квадратного корня
У 1 — k2. Лемма может на самом деле оказаться не-
верной в случае плоскости, которая удовлетворяет
аксиомам I, II, III, IV, но для которой поле R заме-
нено каким-нибудь его подполем К. Действительно,
пусть К — такое подполе поля /?, что
(хе К и у<= К)=$(Ух2 + у2 к)
и при этом в поле К существует число а > 0, для ко-
торого
У а фК.
Определим очевидным образом на К2 структуру
плоскости, удовлетворяющую аксиомам I, II, III, IV;
однако для этой плоскости предыдущая лемма будет
85
Г л. Ill. Аксиомы метрической структуры
неверна, так как если положить £=(1—а)/(1+а),
то число 1 — k2 не будет принадлежать К.
Можно показать, что существует много таких по-
лей К.
Именно поэтому необходимо в процессе препода-
вания точно оговаривать, подобно тому, как это сде-
лано в последнем доказательстве, что требуется суще-
ствование корня квадратного для всех положитель-
ных чисел; благодаря этому нам удается избежать в
дальнейшем при изучении пересечения двух окружно-
стей пустых «псевдодоказательств», основанных на не-
точных понятиях непрерывности.
40. Ортогональная проекция
Предложение 40.1. Пусть D — некоторая прямая,
а^П, и пусть р — ортогональная проекция точки а
на D.
1. Для всех х, у D,
(d(p, x) = d(p, y))^(d(a, x) = d(a, у)).
2. Пусть D\ — один из лучей прямой D с началом
в точке р.
Отображение x-*d(a,x) луча Di в R будет строго
возрастающим.
Доказательство. Оба утверждения немедленно сле-
дуют из соотношения
d2(a, x) = d2(a, p) + d2(p, х).
Можно также добавить, что поскольку известен
факт существования квадратного корня из всех по-
ложительных чисел, то функция x—*d(a, х) взаимно
однозначно отображает на [d(a, р), оо[.
Следствие 40.2. Расстояние d(a,x) достигает ми-
нимума в единственной точке х = р.
Следствие 40.3. Пусть D — некоторая прямая,
a^D и b фИ. Тогда
b))^(d(a, b)^.d\a, х) для всех х D).
§ 3. Основные метрические свойства
87
Следствие 40.4. Для всех а, Ь, с (= П и всех
х <= [&, с]
d(a, х)^. sup(d(<2, b), d(a,c)).
Предложение 40.5. Ортогональная проекция на
произвольную прямую уменьшает расстояния.
Доказательство. Пусть D — некоторая прямая, и
пусть х, е П. Обозначим через D' прямую, парал-
лельную D и содержащую х, через х', yf — проекции
точек х, у на прямую D и через у" проекцию точки у
на D' (рис. 9). Тогда в прямоугольнике (х, у", у’, х')
d(x', y') = d(x, у"),
В прямоугольном треугольнике (х, у, у")
d (х, /') < d (х, у).
Следовательно, d(x', у') ^Cd(x, у)\ равенство
имеет место только в том случае, когда х, у принад-
лежат прямой, параллельной D,
41. Медиатриса
Определение 41.1. Для любых а, & еП, таких, что
а Ь, медиатрисой пары (а, Ь) называется прямая,
проходящая через середину пары (а, Ь) и перпенди-
кулярная прямой Д (я, fe).
88
Гл. III. Аксиомы метрической структуры
Предложение 41.2./7/;стб а, b е П, а 4= Ь, 0 — се-
редина пары (а,Ь), и пусть D — медиатриса пары
(а, Ь).
Тогда для всех х е П
d2(x, Z?)-d2(x, а)-4/£,
где l = d(0, а) и £ — абсцисса точки х в системе осей
(&(a,b),D) (рис. 10; прямая Д(я, b) ориентирована
так, что 0 < а).
Доказательство. Действительно, на плоскости
(П, 0)
d2(x, b) — d2 (х, а) = (х — Ь)2 — (х — а)2 =
= (х + а)2 — (х — а)2 = 4а • х = 4/g.
Следствие 41.3. Пусть D — медиатриса пары (а,Ь),
и пусть Па, Щ — открытые полуплоскости, определяе-
мые D и содержащие соответственно точки а и Ь.
В зависимости от того, принадлежит х полупло-
скости Щ, прямой D или полуплоскости Па
d(x, b)<d(x, a); d (х, а) = d(x, b) или d(x, b)>d(x, а).
Действительно, в соответствии с тем, принадле-
жит х полуплоскости Щ, прямой D или полуплоско-
сти Па, имеем £ < 0, g = 0 или £, > 0; остается при-
менить предложение 41.2.
§ 3. Основные метрические свойства
89
Следствие 41.4. Для любого h^R множество то-
чек х плоскости П, для которых
d2(x, b) — d2(x, a) = h,
есть прямая, перпендикулярная прямой \(а,Ь) и пе-
ресекающая эту прямую в точке с абсциссой £ = h/4Z.
42. Моменты инерции
Определение 42.1. Назовем системой точечных масс
плоскости П всякое конечное семейство пар (я?, аг),
где ai П и аг- е R.
Для любого хеП моментом инерции такой систе-
мы относительно точки х называется число*)
f (х) = 2 «/d2 (*» atY
i
Предложение 42.2. Пусть (ai9 — система
точечных масс плоскости П.
1. В случае 2ах = 0 момент инерции f этой систе-
мы есть аффинная функция точки х; более точно: на
центрированной плоскости (П, 0)
f (х) = 2 «Д2 -2(2 а,.а£) • х.
Следовательно, если, кроме того, то f(x)
не зависит от х.
2. Пусть ^ai=^=0,u пусть а — центр тяжести рас-
сматриваемой системы; тогда
f (х) = (2 аг)d2 (а, х) + 2 а^2 (я, «/)•
Доказательство. 1. Действительно,
f (х) = 2 а/ (х - atf = (2 аг) х2 -2(2 а,аг) • х + 2 «,4
*) Ясно, что если все >0, то момент инерции относитель-
но точки х системы материальных точек, расположенных в пунк-
тах at плоскости П и обладающих массами аг-, понимаемый
в том смысле, в каком употребляется этот термин в механике,
равен f(x); обобщение здесь состоит в отказе от требования
а» >0.
90
Гл. 1П. Аксиомы метрической структуры
откуда получаем первое соотношение, поскольку 2 Щ =
— 0.
2. Если то, как известно, 2 = 0 в том
случае, когда точка а принята за начало, откуда и сле-
дует искомое соотношение.
Следствие 42.3. 1. Если = 0 и то
множество таких х, для которых f(x) = /z, есть прямая,
перпендикулярная 2аА*.
2. Если то момент инерции f(x) достигает
в центре тяжести а строгого минимума или строгого
максимума в зависимости от того, положительна или
отрицательна величина
3. Множество таких х, для которых f(x) = h, есть
либо окружность с центром а, либо множество {а}, либо
пустое множество 0.
Частные случаи. Рассматривая систему, обра-
зованную точками а, b с массами 1, 1 или 1, —1, мы
получим ранее доказанные результаты (см. предложе-
ния 39.1 и 41.2).
43. Скалярное произведение и расстояние
в произвольном базисе
Пусть («1, а2)—базис центрированной плоскости
(П, 0), и пусть (gi, g2), (£[, £2)— координаты векторов
х, х' относительно этого базиса. Из соотношений
х = 11а1 + %2а2, х' = + 12а2
следует, что
X • у = + &2^2а2 + (£1^2 + £2^) а1 * а2*
При х = у получаем квадратичную форму, выра-
жающую Ы12 как функцию координат g2.
Эти формулы существенно упрощаются, если
(яь а2)—о р т о н о р м и р о в а н н ы й базис, т. е. если
IIЩ || = || а21| = 1 и а{ 1 а2.
Тогда
х-у^& + ^ и ||х||2 = х.х = ^ + ^.
ГЛАВА IV
ДВИЖЕНИЯ. ПРЕОБРАЗОВАНИЯ ПОДОБИЯ.
СИММЕТРИЧНЫЕ МНОЖЕСТВА
§ 1. ДВИЖЕНИЯ
В метрической геометрии плоскости наиболее важ-
ными преобразованиями являются те, которые сохра-
няют как аффинную, так и метрическую структуру
плоскости.
Среди них осевые симметрии занимают привилеги-
рованное положение; можно даже — это будет показа-
но в приложении 1 — построить аксиоматику плоско-
сти, основанную на осевых симметриях*). Действи-
тельно, с одной стороны, они порождают группу дви-
жений, а с другой стороны, являются схематизацией
очень простых конкретных операций, как, например
складывание листа бумаги, вращение плоской пла-
стины вокруг отрезка прямой, отражение в зеркале.
44. Осевые симметрии и центральные симметрии
В гл. II мы определили косую симметрию с осью D
параллельно некоторому направлению б; здесь мы
хотим заняться изучением того частного случая, когда
6 перпендикулярно D. Сейчас мы заново дадим
определение такой симметрии, пользуясь понятием ме-
диатрисы.
Определение: 44.1. Для всякой прямой D плоскости
П будем называть симметрией относительно D (или
симметрией с осью D) отображение f плоскости П в
себя, определяемое следующим образом:
Если хе/3, то f (х) = х;
*) Ср. также Дельсер [34] (и Бахман [20]).
92
Гл. IV. Движения. Преобразования подобия
Если x^D, то f(x) есть определяемая единствен-
ным образом точка, такая, что D есть медиатриса па-
ры (xj(x)).
Иногда бывает удобно обозначать симметрию от-
носительно D через (D).
Как и в случае косой симметрии, мы опять заме-
чаем, что f2 есть тождественное преобразование и,
следовательно, f — инволютивное преобразование пло-
скости П.
Предложение 44.2. Всякая осевая симметрия есть
аффинное преобразование плоскости П, и более того,
движение.
Доказательство. Первое свойство есть частный слу-
чай предложения 29.2. Пусть теперь А — ось симмет-
рии f, и В — перпендикуляр к Л; в системе осей (Л, В)
обозначим через (хь х2) составляющие точки х; тогда
точка f(x) будет иметь составляющие (хь—х2); сле-
довательно, для всех х, у s П
(f (х) - f (у) У = (%! - у,)2 + (х2 - у2)2 = (X - У)2.
Из этого равенства следует, что f — движение.
Следствие 44.3. Всякая осевая симметрия преобра-
зует любой луч в луч, любой отрезок в отрезок (и, сле-
довательно, также любое выпуклое множество в вы-
пуклое множество).
Это следует из аффинного характера симметрии,
либо из инвариантности расстояний; можно также
доказать это более элементарным способом, исходя
из координатной записи (осевой) симметрии 5
(х1; х2)->(х„ -х2).
Следствие 44.4. Всякая осевая симметрия преоб-
разует любую пару перпендикулярных прямых в пару
перпендикулярных прямых.
Действительно, симметрия сохраняет расстояние;
однако перпендикулярность прямых может быть вы-
ражена в терминах расстояний (теорема Пифагора
или минимум расстояния; см. следствие 40.3).
§ 1. Движения
93
Предложение 44.5. Пусть Д, В — две перпендику-
лярные прямые, проходящие через 0. Произведение
осевых симметрий (Я), (В) есть центральная симмет-
рия с центром в точке 0. Произведение осевой сим-
метрии (Д) и центральной симметрии с центром в
точке 0 есть осевая симметрия с осью В.
См. предложение 32.1.
Следствие. Всякая центральная симметрия есть
движение.
Предложение 44.6. Произведение двух осевых
симметрий с параллельными осями есть перенос, на-
правление которого перпендикулярно этим осям.
Произведение осевой симметрии с осью D и пе-
реноса, направление которого перпендикулярно D,
есть осевая симметрия с осью, параллельной пря-
мой D.
Доказательство. Пусть Д, В — две параллельные
прямые, и пусть (Di,D2)—система перпендикулярных
осей, таких, что D[ ||Д.
Осевая симметрия с осью А записывается как
(%ь х2)—>(%ь 2а2— *2); аналогично для оси В.
Произведение (В) о (Д) этих симметрий есть, сле-
довательно, перенос
(х{, х2)—>(х15 х2 + 2 (Ь2 — а2) ) = (хн х2) + (0, 2(62-а2)).
Вторая часть утверждения доказывается анало-
гично.
Следствие. Всякий перенос есть произведение двух
осевых симметрий с осями, перпендикулярными на-
правлению этого переноса', первой (или второй) из
этих осей может служить любая прямая, перпенди-
кулярная направлению переноса.
Действительно, равенство /061 = 62 эквивалентно
равенству / = 62°6i; аналогично, 61 ° / = б2 эквива-
лентно / = 61° 62.
Произведения осевых симметрий дадут нам воз-
можность заняться теперь изучением произвольных
движений плоскости П.
91
Гл. IV. Движения. Преобразования подобия
45. Движения
Мы уже исследовали ранее некоторые движения
плоскости; сейчас мы переходим к систематическому
изучению этого понятия.
Определение 45.1. Пусть X с П, и пусть f — ото-
бражение множества X в П; говорят, что f есть дви-
жение множества X, если для любых х, у е X выпол-
няется условие
f(y)) — d(x, у).
Ясно, что всякое движение есть взаимно однознач-
ное отображение, что ограничение движения множе-
ства X на некоторое его подмножество У есть дви-
жение множества У, и что композиция двух движений
есть движение.
Например, перенос, осевая симметрия и централь-
ная симметрия — движения множества П.
Теперь мы переходим к доказательству одного за
другим четырех предложений, которые приведут нас
к важной теореме.
Предложение 45.2. Для всякого X cz П любое дви-
жение f, переводящее X в подмножество П и имею-
щее по крайней мере три неподвижные точки, не при-
надлежащие одной прямой, есть тождественное пре-
образование.
Доказательство. Пусть а\, а2, а$— неподвижные
точки; тогда для всех х е X
d (х, at\ = d(f (х), f (az)) = d (f (x), at) (i = 1, 2, 3).
Таким образом, случай x=£f(x) возможен только
тогда, когда все точки ai принадлежат медиатрисе
пары (х, f(x)), что исключается условием.
Предложение 45.3. Для любого X с: П всякое дви-
жение f, переводящее X в подмножество П и имею-
щее по крайней мере две различные неподвижные
точки ах, а2, есть либо тождественное преобразова-
ние, либо осевая симметрия с осью А(ах,а2).
§ 1. Движения
95
Действительно, если f не есть тождественное пре-
образование, то найдется такая точка а3 е X, что
^з=^Н^з); медиатриса пары (a3,f(a3)) содержит
и а2 (рассуждение строится так же, как в доказа-
тельстве предложения 45.2); следовательно, это есть
прямая Д(б?1, а2); поэтому, с одной стороны, а2, а3
не принадлежат одной прямой, а с другой стороны,
если обозначить через s3 осевую симметрию с осью
Д(аь а2), то а2, а3— неподвижные точки движе-
ния s3 ° [.
По предложению 45.2 получаем, следовательно:
s3 ° f — тождественное преобразование, откуда f = s3.
Следствие. Пусть А — открытый или замкнутый
луч. Всякое движение f плоскости П, переводящее ее
в себя, для которого f(A) = A, есть либо тождествен-
ное преобразование, либо осевая симметрия, ось ко-
торой содержит А.
Предложение 45.4. Для любого X cz П всякое дви-
жение f, переводящее X в подмножество П и имеющее
по крайней мере одну неподвижную точку ах, есть
либо тождественное преобразование, либо осевая сим-
метрия, ось которой содержит точку а{, либо произ-
ведение двух, таких симметрий.
Доказательство. Действительно, если f не есть
тождественное преобразование, то найдется такая
точка а2^Х, что a2=£=f(a2)', медиатриса D2 пары
(a2,f(a2)) проходит, следовательно, через точку а{;
обозначив через s2 осевую симметрию с осью D2, по-
лучим, что ai и а2 — различные неподвижные точки
отображения s2°f. Из предложения 45.3 следует, та-
ким образом (обозначения сохраняются), что либо
s2°f— тождественное преобразование, либо s2°f = s3,
откуда либо f = s2, либо f = s2 ° $з.
Предложение 45.5. Для любого X с П всякое дви-
жение f, переводящее X в подмножество П, есть про-
изведение не более чем трех (т. е. О, 1,2 или 3) осе-
вых симметрий.
96
Гл. IV. Движения. Преобразования подобия
Доказательство. Действительно, если f не есть
тождественное преобразование, то найдется такая
точка ах^Х, что a\4=f(a\)\ обозначив через Si осе-
вую симметрию относительно медиатрисы £>i пары
заключаем, что щ есть неподвижная точка
преобразования 51 о /.
По предложению 45.4 получаем, следовательно
(используя те же обозначения что и выше):
либо Si of — тождественное преобразование, либо
Si of = s2, либо 51 °f = 5о °53, откуда либо f = S1, либо
f = Si о 52, либо f = Si о s2 ° Ss-
Teopema 45.6. 1. Всякое движение плоскости П, пе-
реводящее ее в себя, есть либо тождественное пре-
образование, либо преобразование, имеющее один из
следующих трех видов'. 5b 5to52, 51 0 52 °5з, где Si —
осевые симметрии.
Движение есть аффинное преобразование плоско*
сти\ оно сохраняет перпендикулярность прямых.
2. Пусть X с: П; тогда, если X не принадлежит
одной прямой, то всякое движение f, переводящее X
в подмножество П, единственным образом может быть
продолжено до движения g плоскости П, переводя-
щего ее в себя', если же X принадлежит некоторой
прямой и содержит не менее двух точек, то это дви-
жение может быть продолжено до движения всей пло-
скости двумя способами.
Доказательство. Первая часть вытекает из пред-
ложения 45.5 и из того факта, что всякая осевая сим-
метрия есть аффинное преобразование плоскости П,
сохраняющее перпендикулярность. Во второй части
теоремы существование преобразования g есть след-
ствие предложения 45.5. С другой стороны, пусть
g,g' — два продолжения движения f\ тогда g~x °g'
тождественно на X; следовательно, если X не принад-
лежит одной прямой, то g"1 °gz тождественно всюду
на П, а если X принадлежит одной прямой и содер-
жит по крайней мере две точки, то g"1 ° g' есть либо
тождественное преобразование, либо осевая симмет^
$ 1. Движения
97
рия, причем в этом случае либо g' = g, либо g' = g с п,
где о — осевая симметрия, ось которой содержит X.
46. Группа движений с неподвижной точкой
Сейчас мы займемся изучением множества «7о Дви-
жений плоскости П, оставляющих неподвижной не-
которую точку 0 этой плоскости; это важно потому,
что, с одной стороны, понятие вращения очень суще-
ственно, а с другой стороны, нам это понадобится при
определении углов. При изучении множества о основ-
ным орудием опять-таки будут служить осевые сим-
метрии.
Очевидно, что есть группа преобразований плос-
кости П. Через обозначается часть группы
образованная осевыми симметриями, оси кото-
рых содержат 0; а через — часть группы
образованная вращениями вокруг точки 0, т. е.
элементами группы 6ХО, имеющими вид 5i°s2, где
и s2 е (другими словами1)» ^o = ^o° 5^о)- Для
изучения нам понадобится некоторое
вспомогательное множество; это может быть либо
множество лучей с началом в точке 0, либо образ
этого множества при взаимно однозначном отобра-
жении его на окружность с центром в точке 0.
Итак, пусть Со — множество таких точек х плос-
кости П, для которых d(0, х)=1 (впрочем, радиус
окружности несуществен).
Составим теперь список свойств, которые мы уже
знаем и которыми (и только ими!) мы будем пользо-
ваться в предстоящем исследовании:
II — некоторое множество, Со — его подмножество;
<7 о— группа преобразований множества П,^о — часть
этой группы; положим 0 ^о. Элементы мно-
жества называются (осевыми) симметриями,
’) Напомним, что в более общем случае, если А, В — два
подмножества некоторого множества £, снабженного бинарной
операцией, обозначаемой через Т, то через АТ В обозначается
совокупность элементов множества, Е, имеющих вид хТу, где
х с= А и у СЕ В.
7 Зак. 323
98
Гл. IV. Движения. Преобразования подобия
элементы множества — вращениями. Кроме
того:
1°. Для всякой осевой симметрии о преобразова-
ние о2 есть тождественное преобразование.
2°. Тождественное преобразование не есть осевая
симметрия.
3°. Для всех х, у Со существует, и притом един-
ственная, осевая симметрия о, такая, что о(х)==г/;
она будет обозначаться через оух.
4°. Для каждой осевой симметрии о существует
хотя бы одна точка хе Со, такая, что о(х) = х.
5°. Для любого f е <7о и всех хе Со
(/(х) = х) О (либо f есть тождественное
преобразование, либо f = охх).
Все эти утверждения описывают уже известные
нам свойства:
В п. 3°, если у = х, то <зхх есть осевая симметрия
с осью А (0, х); если же у 4= z, то оух есть осевая
симметрия, осью которой является медиатриса пары
(рс, //);
Упоминаемая в п. 4° точка х множества Со есть
одна из двух точек оси симметрии о, для которых
d(0, х) = 1; пункт 5° есть не что иное как иначе сфор-
мулированное предложение 45.3.
Предложение 46.1. Никакое вращение не может
быть осевой симметрией (иначе говоря, Л <^о =0).
Доказательство. Действительно, пусть р, п, те SPo\
по свойству 3° найдется такое а е Со, для которого
т(я) = а. Покажем, что равенство р —пот невозмож-
но:
(р = о ° т) ==> (р (а) = о (т (а)) = о (а))
=Ф(р = о) =Ф (т — тождественное преобразование),
что невозможно в соответствии с п. 2°.
Вторая из этих импликаций следует из свойства 3°;
третья следует из сопоставления равенств р = о и
р = о ° т.
Предложение 46.2. Для любых х, у Е Со найдутся
только два элемента f^JQy для которых y = f(x):
осевая симметрия вух и вращение оух о охх.
§ 1. Движения
99
Доказательство. Действительно,
(f W = У И Оху (у) = х) => (аху °f(x) = х).
В соответствии с п. 5° получаем, следовательно:
либо Gxy°f— тождественное преобразование, либо
Оху ° f Охх*
Отсюда либо f = бух, либо f = оух ° охх.
Следствие 46.3. Для любых х, у G Со существует
единственное вращение, переводящее х в у.
Следствие 46.4. 5?0 и образуют разбиение мно-
жества &Q.
Действительно, для любого и всех а е Со
из предложения 46.2 следует, что f есть либо осевая
симметрия, либо вращение, переводящее а в f(a).
Предложение 46.5. Для всякого вращения f е
и любого о е найдется такое т е что f = т с о
(и такое т', что f = в от').
Доказательство. Действительно, в соответствии
с п. 3° существует такое а е Со, что в(а) = а; поло-
жим f(a) = b.
Имеет место равенство: Оба°о(я) = £; поэтому
вращения f и (Уьа°о совпадают по следствию 46.3.
Отсюда вытекает, что оъа — искомая осевая сим-
метрия т.
Наконец, обратным к любому вращению будет
также вращение, и следовательно, существует такое
т' €= что f”1 = х' о о, т. е. f ~ о о /.
Предложение 46.6. Произведение четного (соот-
ветственно нечетного) числа осевых симметрий есть
вращение (соответственно осевая симметрия).
Доказательство. Достаточно показать, что произ-
ведение трех осевых симметрий есть осевая сим-
метрия; справедливость утверждения будет полу-
чаться отсюда индукцией по числу сомножителей. Но
в соответствии с предложением 46.5 для всех
7*
100
Гл. IV. Движения. Преобразования подобия
л, р, a G найдется такое т 5^, что л ° р = т ° о, от-
куда Л о р о о = Т.
Теорема 46.7. 1. Множество вращений с цент-
ром в точке 0 есть коммутативная подгруппа груп-
пы 31 q.
2. Для всех о <^.9% имеют место равенства =
= 5?о и = Д
3. Группа однотранзитивна1) на множестве Со.
Доказательство. 1. Из предложения 46.6 следует,
что произведение двух вращений есть также враще-
ние; преобразование, обратное к вращению poor, есть
вращение сор. Следовательно, есть группа; пока-
жем, что эта группа коммутативна.
Для любых f, и любых оп= 9% найдутся та-
кие л, р <= £/?о, что / = л°ог и g’ = o,°p; отсюда полу-
чаем эквивалентности
(f ° g = g ° f) О(л ° о ° О' ° р = О' о р о л о а) О
О((л° р ° о)2 — тождественное преобразование).
Последнее утверждение выполняется вследствие
того, что лороо есть осевая симметрия (предложе-
ние 46.6); следовательно,
f ° g = g0 f.
2. Как видно из предложения 46.6, имеют место
соотношения: и а о 9?о cz 5?0; последнее
включение может быть представлено также в виде
cz оо^0, так что имеет место равенство =
Аналогично получаем Дос = ^о-
Этот результат эквивалентен утверждению, что Ж
есть нормальный делитель группы З^о и что компози-
ции всех элементов группы и некоторого преобра-
зования f ez <70 образуют ^?0 или в зависимости от
того, или Другими словами, фактор-
группа ^о/^о есть группа второго порядка.
*) То есть для любых х, у е Со существует единственное пре-
образование f такое, что у = f(x).
§ 1. Движения
101
3. Справедливость третьего свойства устанавли-
вается в следствии 46.3.
Мы вернемся к изучению вращений после того, как
дадим определение угла. Теперь мы собираемся ис-
пользовать полученные результаты для того, чтобы
провести краткое исследование произвольных движе-
ний плоскости П.
47. Собственные и зеркальные движения
Определение 47.1. Говорят, что движение плоско-
сти П есть собственное движение (соответственно
зеркальное движение), если оно есть произведение
четного (соответственно нечетного) числа осевых сим-
метрий 9.
Множество движений плоскости П (собственных
движений, зеркальных движений) будет обозначаться
через У (соответственно еУ+,
Как видно из теоремы 45.6, справедливо равен-
ство 3 = мы скоро увидим, что 7+П«7" = 0.
Непосредственно из определения следует, что 3+ есть
подгруппа группы «7, и даже более того, — нормаль-
ный делитель.
Мы сведем изучение произвольных движений к
изучению движений, оставляющих на месте некото-
рую точку 0; предлагаемый ниже метод очевидным
В этом пункте терминология является весьма разнообраз-
ной и нечеткой. Мы отказались от терминов «прямое» и «обрат-
ное» движение, так как могло бы возникнуть смешение понятий
«обратное движение» и «движение, обратное к данному»; мы
также отказались от «положительного» и «отрицательного» дви-
жения, так как центральная симметрия тогда окажется одно-
временно «положительным движением» и гомотетией с отрица-
тельным коэффициентом; наконец, мы отказались от «прямого» и
«непрямого» движения, поскольку интуитивный смысл этих тер-
минов может стать понятен только после усвоения понятия дви-
жения плоскости как целого. [Автор использует здесь термины
«четное» и «нечетное» Движение, неупотребительные в русской
литературе; из двух бытующих у нас выражений «движения 1-го
рода», «движения 2-го рода» (см., например, Перепелкин [43])
и «собственные движения», «зеркальные движения» (Я г л о м [331)
второй вариант кажется нам более выразительным. — Прим. ред.}.
102
Гл. IV. Движения. Преобразования подобия
образом можно приспособить для изучения преобра-
зований пространства; равным образом легко полу-
чить его аналитическое описание.
Мы будем обозначать через группу переносов
плоскости П; множества <7о, ^о, — те же, что и
в п. 46.
Лемма 47.2. 1. Любое преобразование f(=3I мо-
жет быть представлено единственным образом _в виде
f = где и (преобразование / назы-
вается приведенной формой преобразования
f на плоскости (П,0)).
2. Если f — некоторая осевая симметрия с осью
D, то ее приведенной формой будет осевая симметрия
с осью D', параллельной прямой D и проходящей че-
рез точку 0.
Доказательство. 1. Требуется представить f в
виде х —* а 4- f (х) (в системе (П, 0)).
Единственность. Если f есть преобразование та-
кого вида, то очевидно, что а = f(0) и f(x) = f(x) —
-f(0).
Существование. Пусть / — отображение х ->f(x) —
— f(0); это движение, при котором точка 0 остается
неподвижной; следовательно, ?^3^о-
Так как f(x) ~/(0) 4- / (х), то мы получили, таким
образом, искомую каноническую форму.
2. Пусть g— осевая симметрия с осью D'; по пред-
ложению 44.6 преобразование f°g есть перенос /, от-
куда получаем, что f = t °g\ следовательно, g = f.
Предложение 47.3. 1. Отображение f~+f груп-
пы 37 в 37о есть представление группы ЗУ в группе 3?о.
2. Образами подмножеств ЗУ* и 37~ при этом пред-
ставлении будут соответственно и
Доказательство. 1. Рассмотрим преобразования
f,g^37 и /, g— приведенные формы этих преобра-
зований.
Так как f и g линейны, то из соотношений
f(x) = f(O)+f(x); g(y) = g(0) + g(y)
§ 1. Движения
103
следует, что
g (f(x)) = g (0) + g(f (0)) + g (7(X)) = g (HO)) Cf (x)),
откуда получаем:
(g°b=g°f-
2. Мы знаем (лемма 47.2), что для всякой осевой
симметрии f ее приведенная форма / есть также осе-
вая симметрия; только что было показано, что приве-
денная форма произведения п осевых симметрий есть
произведение п элементов множества ^о> что доказы-
вает вторую часть предложения.
Следствие 47.4. Множества и образую!
разбиение множества для любого справед-
ливо равенство
Следствие 47.5. Для любой пары Ль А2 замкну-
тых лучей плоскости П существует, и притом только
одно, собственное движение плоскости П, переводя-
щее А\ в Л2; аналогичное утверждение справедливо
для зеркальных движений.
Это следствие вытекает из теоремы 45.6 и след-
ствия 47.4.
Об одной подгруппе группы «7+
Группа, образованная центральными симметрия-
ми и переносами плоскости П, есть подгруппа груп-
пы <7+; действительно, каждое из этих преобразова-
ний есть произведение двух осевых симметрий.
48. Структура движений
Пусть / о/ — каноническая форма некоторого дви-
жения f на центрированной плоскости (П,0).
1. Если f — вращение, то представим t в виде
р о ст, где р и о — осевые симметрии и ось симметрии а
содержит 0; как известно, f можно представить в
виде / = где т—еще одна осевая симметрия.
104
Гл. IV. Движения. Преобразования подобия
Таким образом,
f = t ° f = р°о'оо'от = р°т;
следовательно, f — либо перенос, либо вращение (в
зависимости от того, параллельны оси симметрий р
и т или пересекаются).
2. Если f — осевая симметрия, выберем систему
перпендикулярных осей так, чтобы первая ось совпа-
дала с осью этой симметрии. В этой системе осей
отображение f имеет вид
(%i, x2)->(xi + alt -“Х2 + а2);
или иначе, после соответствующего переноса первой
оси,
(xn х2)->(х{ + а{, -х2).
В случае = 0 преобразование f есть осевая сим-
метрия; в противном случае, хотя существует неко-
торая прямая D, которая при этом преобразовании
переходит сама в себя, f не есть осевая симметрия
с осью D.
В качестве резюме сформулируем следующее
Предложение 48.1. 1. Всякое собственное движе-
ние является произведением двух осевых симметрий,
поэтому оно есть либо перенос, либо вращение.
2. Всякое зеркальное движение есть произведение
некоторой осевой симметрии и переноса, направление
которого параллельно оси этой симметрии *).
Отсюда ясен характер неподвижных точек всякого
движения.
§ 2. ПРЕОБРАЗОВАНИЯ ПОДОБИЯ
49. Характеристические свойства
Определение 49.1. Пусть X cz П и k — некоторое
положительное число; рассмотрим отображение f
множества X в множество П. Говорят, что f есть пре-
*) Произведение симметрии с осью D и переноса в направле-
нии б в D называется скользящей симметрией с осью D.
$ 2. Преобразования подобия 105
образование подобия с коэффициентом подобия k,
если для любых х, у (= X имеет место равенство
d(f (х), f(y)) = kd(x, у).
Преобразование подобия с коэффициентом 1 есть
не что иное как движение.
Лемма 49.2. Всякое растяжение плоскости П с ко-
эффициентом h есть преобразование подобия с коэф-
фициентом подобия \h\.
Действительно, такое растяжение в центрирован-
ной плоскости (II, 0) может быть представлено в виде
х —> hx 4- а,
откуда
d (f (х), f (у)) = || Цх) - f (у) || = | h | • || х - у || = | h | d (х, у).
Предложение 49.3. Для любого X cz И всякое пре-
образование подобия f, переводящее X в подмноже-
ство П, с коэффициентом k может быть продолжено
до преобразования подобия множества П, переводя-
щего П в себя и имеющего тот же коэффициент подо-
бия k, причем это продолжение единственно, если X
не принадлежит одной прямой, и может быть опреде-
лено двумя способами, если X принадлежит некото-
рой прямой и содержит не менее двух точек.
Доказательство. Действительно, пусть ср — неко-
торая гомотетия плоскости П с коэффициентом k;
преобразование есть движение множества X, и
следовательно, может быть продолжено до движе-
ния ф плоскости П, переводящего ее в себя, либо
единственным образом, либо двумя способами в за-
висимости от ранее указанных условий (теорема
45.6); искомым продолжением будет преобразование
подобия ф о ф.
Принимая во внимание это предложение, мы мо-
жем ограничиться изучением преобразований подо-
бия, переводящих плоскость П в себя.
106
Гл. IV. Движения. Преобразования подобия
Теорема 49.4. Всякое преобразование подобия с
коэффициентом подобия k, переводящее плоскость П
в себя, есть произведение некоторой гомотетии с тем
же коэффициентом и движения.
Это аффинное преобразование плоскости П, со-
храняющее перпендикулярность.
Преобразования подобия плоскости П образуют
группу S и отображение
f -> (коэффициент подобия k(f))
есть представление этой группы S в мультипликатив-
ной группе /?+.
Все эти свойства доказываются элементарно в
том порядке, в котором они сформулированы. Приве-
дем еще обратное утверждение к одному из них.
Предложение 49.5. Всякое аффинное преобразо-
вание плоскости П, сохраняющее перпендикулярность,
есть преобразование подобия.
Доказательство. Пусть f — заданное преобразова-
ние, и пусть Ль А2 — два перпендикулярных луча с
общим началом в точке 0; тогда f(A{) и f(A2) будут
перпендикулярными лучами с началом в точке /(0);
следовательно, существует движение g, переводящее
Ль Л2 в f(A1),f(A2).
В таком случае g~[°f есть линейное преобразова-
ние системы (П, 0), сохраняющее перпендикуляр-
ность и оставляющее неподвижными лучи Ль А2.
Пусть (а}, а2) — базис плоскости (П, 0), опреде-
ляемый условиями
|| at || = 1 и ge At (z = 1, 2).
В этом базисе преобразование g~l°f имеет вид
(£ь где а,, а2>0.
Но векторы (1,1) (1,—1) перпендикулярны; на-
писав условие перпендикулярности их образов
(al, аз) и (он,—сс2), получим
af ~ а2= откуда Qj = а2.
$ 2. Преобразования подобия
197
Следовательно, g~l °f — гомотетия Я(0, czi), и зна-
чит,
f = g°H(0, щ),
что и доказывает требуемое утверждение.
50. Собственные и зеркальные преобразования
подобия
Определение 50.1. Говорят, что преобразование
подобия f плоскости П является собственным (соот-
ветственно зеркальным) преобразованием подобия.
если оно может быть представлено в виде f = d о g.
где d есть растяжение с положительным коэффициен-
том, a g — собственное (соответственно зеркальное)
движение.
Предложение 50.2. Никакое преобразование по-
добия плоскости П не может быть собственным и зер-
кальным одновременно.
Доказательство. Действительно, из соотношения
d о g = б оу получаем о"1 о d = у ° g-1; это есть соотно-
шение вида
(растяжение с положительным коэффициентом) =
= (движение).
Такое соотношение возможно только в том случае,
когда оба члена равенства — переносы; следователь-
но, y°g'1 есть собственное движение, т. е. у и g либо
оба собственные движения, либо оба зеркальные дви-
жения.
Теорема 50.3. 1. Произведение двух преобразова-
ний подобия есть собственное преобразование подо-
бия. если оба данных преобразования являются соб-
ственными или оба они зеркальные', если же одно из
преобразований подобия собственное, а второе —
зеркальное, то их произведение есть зеркальное пре-
образование подобия.
108
Гл. IV Движения. Преобразования подобия
2. Множество S+ собственных преобразований по-
добия образует группу; эта группа действует транзи-
тивно на множестве пар (х, у) различных между со-
бой точек плоскости П.
Доказательство. 1. Пусть f,_geS; в* плоскости
(П, 0) преобразование подобия /:
где X — коэффициент подобия преобразования f, при-
надлежит группе ^о; поэтому получаем соотношение
f(x) = f(0) + z7(x).
Аналогично,
g(f/) = £(0) + Hg(y),
где ge.7o.
Следовательно, поскольку g линейно,
g ° f (Ч = g ° f (0) + w °Т (*)•
Но если назвать (как это иногда делают*)) соб-
ственные преобразования четными, а зеркаль-
ные — нечетными, то в соответствии с определе-
нием 50.1 четности преобразований f, g и g°f будут
соответственно совпадать с четностями преобразова-
ний g и g°f, откуда следует справедливость утвер-
ждения.
2. Непосредственно из только что доказанного
следует что S+ есть группа. Оставшаяся часть утвер-
ждения следует из предложения 49.3, потому что,
положив X = {х, у} и X' = {х', у'}, где х =£ у и х7 =# у\
получаем, что отображение х—>х', у-*у' множе-
ства X на множество X' есть преобразование подо-
бия f множества X, а из двух преобразований подо-
бия плоскости П, являющихся продолжениями ото-
бражения /, одно является собственным, а второе —
зеркальным.
*) Эта терминология используется во французской (pair,
impair) и в немецкой (gerade, ungerade) математической литера-
туре — но не в английской, и не в русской.
§ 2. Преобразования подобая
109
Из доказанного следует, что на множестве
А = (П X П\диагопаль),
на котором выбрана в качестве начала произвольная
пара (х0, z/0), может быть каноническим образом за-
дана структура группы, изоморфной S+, с нейтраль-
ным элементом (х0, go); такое отождествление Л с 5+
удобно: оно позволяет, например, задать на S+ топо-
логию, вводимую как образ топологии пространства А
(рассматриваемого как подпространство пространства
П X И) при каноническом отображении множества А
на St
Предложение 50.4. Всякое растяжение (с положи-
тельным или отрицательным коэффициентом) есть
собственное преобразование подобия.
Действительно, любое растяжение есть произве-
дение переносов, положительных гомотетий и цент-
ральных симметрий, а каждое из этих преобразова-
ний является собственным преобразованием подобия.
51. Группа преобразований подобия с одной
неподвижной точкой
Предложение 51.1. 1. Группа So преобразований
подобия, оставляющих неподвижной некоторую точ-
ку 0, есть прямое произведение подгруппы положи-
тельных гомотетий с центром 0 {изоморфной /?+) и
группы движений У о.
2. Подгруппа So этой группы, образованная соб-
ственными преобразованиями подобия, коммутативна
и действует однотранзитивно на П* (т. е. на П без
точки 0).
Доказательство. I. Пусть f, g^S0 и X, р— их
коэффициенты подобия; можно единственным обра-
зом представить f и g в виде f — Xf, g = pg, где
f, g^3^Q. Следовательно,
/ ° g (%)=%7 fag (%)) = (xji) (7 ° g) (x),
по
Гл. IV. Движения. Преобразования подобия
или иначе, __ *
f°g = M (f°g)-
Поэтому отображение f —► (X,/) группы So на пря-
мое произведение /?+ X групп есть изоморфизм.
2. В частности, So" изоморфна группе /?*+ X
поскольку обе группы-сомножители коммутативны, то
So также коммутативна.
По теореме 50.3, для любых х, х' е П* найдется, и
притом единственным образом, собственное преобра-
зование подобия f, переводящее пару (0, х) в (0, х');
так как /(0) = 0, имеем также f <= So , откуда следует
утверждение.
51.2. Приложение к определению поля комплекс-
ных чисел.
Фиксируем некоторую точку е е П*. Из второй ча-
сти предложения 51.1 следует, что отображение ф
группы So на П*, определяемое как / —>/(е), взаим-
но однозначно.
Перенесем на П* при помощи отображения ф за-
данную на So групповую структуру и обозначим
мультипликативно операцию в П*, являющуюся обра-
зом произведения в группе So при отображении ф;
распространим, наконец, эту операцию на П, положив
для любого х е П
хО = Ох = 0.
Для всех х, у П* элемент группы So, переводя-
щий е в ху, есть произведение элементов f и g группы
Sj, переводящих е в х и у соответственно: другими
словами, ху — f о g(e) = f (у); очевидно, что это со-
отношение выполняется и при у — 0.
Так как f линейно, то для всех а, b е П
х (а + b) = f(a 4- b) = f (а) + f (b) = ха + xb.
Теперь легко убедиться в том, что множество II,
на котором задано сложение, определенное на цен-
трированной плоскости (П, 0), и умножение, которое
мы только что ввели, есть поле, нулем которого яв-
ляется точка 0, а единицей — точка е.
§ 2. Преобразования подобия
111
Таким образом, налицо все элементы корректного
определения комплексного числа. Пусть i — один из
двух векторов системы (П, 0), которые перпендику-
лярны е и норма которых равна || е ||, и пусть f — вра-
щение, переводящее е в i.
Из отношения i 1 е следует, что /(f) 1 /(е) или
/(f) jl f; следовательно, /(f) = е или /(f) = ~е\ дру-
гими словами, по определению умножения
f2 = _ е или /2 _ е.
Второе решение влечет (е + i) (е — i) = е — I2 = 0,
что невозможно ни в каком поле; следовательно,
f2 = —
Векторы е, i образуют базис системы (П, 0); по-
этому любой элемент х е П может быть представлен
в виде
х = ае 4- р/, где а, р е R.
Однако, если отождествить каждое X е R с точкой
Ze плоскости (П, 0), то становится очевидным, что для
любого и е (П, 0) точка Хи есть результат умноже-
ния Хе на и\ можно, следовательно, в дальнейшем пи-
сать
х = ае + pf — а + р/, где а, ре R,
Тогда
(а + р/) (az + P'f) = (аа' — ppz) + i (ар' + а'р).
Структура определяемого таким образом на П
поля, очевидно, изоморфна структуре поля, задавае-
мого на R X R = R2 с помощью операций
(а, р) + (а', р') = (а + а', Р + Р')>
(а, Р) X (а', р') = ((аа' — РР'), (аР' + а'Р)).
Обычно предпочитают называть полем С комплекс-
ных чисел плоскость R2, на которой заданы эти по-
следние операции, а структуру поля, определяемую
на (П, 0, е), рассматривают лишь как удобную гео-
метрическую модель поля С.
112
Гл. IV. Движения. П реобразования подобия
52. Структура преобразований подобия
Мы уже знаем структуру преобразований подобия
с коэффициентом подобия k = 1; при коэффициенте
подобия k ф 1 структура таких преобразований го-
раздо однообразнее.
Предложение 52.1. Всякое преобразование подо-
бия f плоскости П, коэффициент подобия которого
k=f=\, имеет неподвижную точку (называемую цен-
тром преобразования /).
Самым элегантным доказательством было бы сле-
дующее: так как неподвижные точки преобразований
f и f"1 совпадают, можно при отыскании их положить
^<1; тогда отображение f есть сжимающее отобра-
жение с коэффициентом k < 1; следовательно, так как
II — полное метрическое пространство, f имеет непо-
движную точку, которая совпадает с пределом любой
последовательности {^(а)} (а — произвольная точка
плоскости П).
Но это доказательство использует неэлементарные
понятия; более того, оно основано на утверждении,
что R удовлетворяет аксиоме непрерывности, аксиоме,
без которой можно обойтись в элементарной геомет-
рии; поэтому здесь мы от него отказываемся.
Доказательства, основанные на понятиях угла и
вмещающей дуги, были нами решительно отвергнуты
по другой причине: в них используются углы и окруж-
ности для решения вопросов, относящихся к линей-
ной алгебре.
Правильный подход заключается в отыскании ре-
шения векторного уравнения
f (0) + kf(x) = х, где Те ^о;
решение ищется в фиксированной плоскости (П, 0).
1. Если f е ^о, то относительно пары осей, первая
из которых есть ось симметрии /, это уравнение запи-
шется так:
§ 2. Преобразования подобия 113
kxx + aj = Xf, — kx2 + a2 = x2;
отсюда легко получаем выражения для х{ и х2.
2. Если / е^о, то в плоскости (П, 0), на которой
задана структура поля путем выбора единицы е (см.
51.2), это уравнение запишется так:
f (0) + «2 = 2, где а е\
отсюда
z = f(O)/(l — а).
Предложение 52.1 описывает структуру преобра-
зований подобия с коэффициентом подобия k + 1.
Действительно, пусть f—преобразование подобия
с центром а и с коэффициентом подобия k.
Если f — собственное преобразование, то оно яв-
ляется элементом группы Sj.
Если f — зеркальное преобразование, то оно есть
произведение гомотетии H(a, k) и некоторой осевой
симметрии, ось I которой проходит через а\ эта ось на-
зывается осью преобразования подобия f *).
53. Классификация замкнутых групп
преобразований подобия
В геометрии, и даже в анализе рассматриваются
только те группы преобразований, которые замкнуты
относительно естественной топологии, задаваемой *) на
*) Само преобразование f в этом случае иногда называют
центрально-подобной симметрией (с центром а, осью I и коэффи-
циентом k).
!) Относительно некоторого фиксированного базиса плос-
кости П всякое аффинное преобразование f плоскости П запи-
сывается в виде
х' = ах + by + с\ у' == а'х + Ь'у + с', где ab' — ba' 0.
Если отождествить множество преобразований f с множест-
вом точек (а, Ь, с, а', Ь', с') пространства /?6, таких, что ab' —
— Ьа' =+ 0, то естественно задать на этом множестве топологию,
индуцированную на нем топологией пространства /?б; отсюда по-
лучаем топологию на множестве аффинных преобразований.
Легко показать, что эта топология не зависит от выбора базиса
в плоскости П и что при такой топологии операции и
(f, g) -> f ° g непрерывны.
Говорят, что подгруппа группы замкнута, если она
есть замкнутое подмножество топологического пространства <5/.
8 Зак. 323
114 Гл. IV. Движения. Преобразования подобия
группе всех аффинных преобразований с помощью ко-
эффициентов матриц, определяющих эти преобразо-
вания (относительно некоторого фиксированного
базиса). В упражнениях мы предложим задачу
систематического исследования некоторых замкнутых
подгрупп группы преобразований подобия; здесь же
мы ограничимся лишь описанием некоторой класси-
фикации этих подгрупп.
Изучение некоторых из этих групп необязательно
в курсе обучения; они включаются в программу по
выбору. Нам будет удобно познакомиться с замкну-
тыми подгруппами групп R2 и мультипликативных
групп /?*, С*.
Для аддитивной группы поля R вещественных чи-
сел нас будут интересовать само R и дискретные
группы {/га}пе7, где а е R. Для аддитивной группы
вещественной плоскости R2 (аддитивной группы пло-
ских векторов) рассмотрим линейные взаимно одно-
значные отображения плоскости R2 на себя; тогда
замкнутыми подгруппами будут образы следующих
подгрупп *)
R2, Z2, RXZ, RX {0}, Z X {0}, {0} X {0}.
Для С* замкнутыми подгруппами будут образы
замкнутых подгрупп аддитивной группы С (изоморф-
ной аддитивной группе плоскости R2) при отображе-
нии z-+ez множества С комплексных чисел на С*.
В частности, замкнутыми подгруппами группы /?* бу-
дут группы
R*, R*+ и каждое из множеств {kn}nE=z, где /г ¥= 0.
53.1. Замкнутые группы растяжений плоскости П
(или, в более общем случае, — евклидова простран-
ства).
*) Геометрическим образом группы Z2 (аддитивной группы
множества целочисленных векторов) служит плоская ре-
шетка — множество точек плоскости с целочисленными коорди-
натами.
§ 2. Преобразования подобия
115
Пусть (Е, 0) — центрированное евклидово про-
странство размерности п. Для простоты изложения
отождествим всякое отображение вида х —>х + а про-
странства Е на себя с точкой а пространства (£, 0);
при этом группы переносов пространства Е можно
представить как подгруппы пространства (Е,0).
а) Переносы. Рассмотрим линейные отображе-
ния пространства Rn на (£, 0). Замкнутыми группами
переносов пространства Е будут образы при таких
отображениях подгрупп пространства Rnt имеющих
вид Rp X Z* X {0}г (где р + q + г = п).
Ь) Центральные симметрии и перено-
с ы. Для всякой замкнутой подгруппы G группы
(Е, 0) группа, порождаемая центральными симмет-
риями с центрами, принадлежащими G, будет замк-
нутой.
с) Другие группы. Для всякого аффинного
подпространства А пространства Е (включая про-
странство, состоящее из одной точки) и всякой
замкнутой подгруппы G группы R* группа растяжений
х—>kx + a, где k^G и
замкнута.
53.2. Замкнутые группы движений плоскости П*).
а) Замкнутые группы движений с одной неподвиж-
ной точкой 0.
Таковыми являются «70, конечные группы вра-
щений (порождаемые вращением на угол 2л/п), ко-
нечные группы осевых симметрий и вращений (поро-
ждаемые парой осевых симметрий, угол между осями
которых равен 2л//г).
Ь) Для всякой замкнутой подгруппы G группы 3f$
такой будет группа, порожденная группой G и пере-
носами плоскости П.
*) Ср. Мальцев А. И., Группы и другие алгебраические
системы, в книге «Математика, ее содержание, методы и значе-
ние», т. Ill, М., Изд-во АН СССР, 1956, стр. 268—275.
8*
116
Гл. IV. Движения. Преобразования подобия
с) Бесконечные дискретные группы движений1).
К таким группам относятся произвольные подгруп-
пы следующих групп:
Группа, порождаемая четырьмя осевыми симмет-
риями, осями которых являются стороны некоторого
прямоугольника;
Группа, порождаемая тремя осевыми симметрия-
ми, осями которых являются стороны равносторон-
него треугольника (соответственно равнобедренного
прямоугольного треугольника).
Эти подгруппы очень разнообразны; приведем
в качестве примера некоторые из них:
Группа, порождаемая некоторым зеркальным дви-
жением;
Группа, порождаемая двумя вращениями на 60°
(или на 120°) с разными центрами.
Примечателен тот факт, что в любой бесконечной
дискретной группе движений период всякого враще-
ния может быть равен только 2, 3, 4 и 6; специали-
сты по декоративному искусству открыли это ограни-
чение очень давно.
53.3. Другие замкнутые группы преобразований
подобия плоскости П.
а) Группы собственных преобразований подобия
с одной неподвижной точкой 0.
Отождествим плоскость П* с мультипликативной
группой С*; тогда замкнутыми группами будут упо-
мянутые выше замкнутые подгруппы группы С* — и
только они.
Ь) Группы произвольных преобразований подобия
с неподвижной точкой 0. В качестве упражнения пре-
доставляем читателю найти их.
с) Для любой замкнутой подгруппы G преобразо-
ваний подобия с неподвижной точкой 0 замкнутой
будет группа порождаемая группой G и перено-
сами плоскости П.
*) Так называют подгруппы группы аффинных преобразова-
ний, которым отвечают дискретные подмножества полной группы
(т. е. группы всех аффинных преобразований), т. е. множества,
состоящие из одних только изолированных точек.
3. Устойчивые множества 117
§ 3. МНОЖЕСТВА, УСТОЙЧИВЫЕ ОТНОСИТЕЛЬНО ГРУППЫ
ПРЕОБРАЗОВАНИЙ*)
54. Регулярность множества
Впечатление правильности или симметричности,
которое возникает у нас при взгляде на некоторые
множества, может быть объяснено с математической
точки зрения тем, что эти множества устойчивы отно-
сительно некоторой группы преобразований; эта устой-
чивость и придает им определенную однородность.
Точнее, если Е — некоторое множество и ё — груп-
па преобразований этого множества, причем каждое
из этих преобразований сохраняет какие-то свойства
множества £, достаточно легко непосредственно вос-
принимаемые органами чувств, то создается впечат-
ление «симметричности» множества Е. Это впечатле-
ние усиливается с обогащением множества ё. Конечно,
сказанное вовсе не означает, что чем богаче элемен-
тами множество ё, тем множество Е «красивее» —
ведь понятие красоты субъективно и не может быть
описано **) в строгих математических терминах.
Например, говорят, что пара (Е, ё) есть одно-
родное пространство, если ё действует тран-
зитивно на Е, т. е. если для любых х, у £ най-
дется такое f ^ё, что
f W = у-
В тех случаях, когда элементы множества ё та-
ковы, что они не воспринимаются достаточно непо-
средственно органами чувств наблюдателя, может
оказаться, что правильность множества Е останется
незамеченной. Например, гомеоморфизм (непрерыв-
ное взаимно однозначное преобразование, обратное к
которому также непрерывно) ни в какой степени не
воспринимается наблюдателем нематематиком, и про-
стые замкнутые кривые, несмотря на их однородность
*) В связи с содержанием этого параграфа см. превосход-
ную книгу Вейля [32].
**) По крайней мере в настоящее время.
118
Гл. (V. Движения. Преобразования подобия
относительно группы гомеоморфизмов, обычно не про-
изводят впечатления правильных множеств.
Иначе говоря, ощущение симметричности возни-
кает лишь тогда, когда преобразования из <S сохра-
няют в каком-то подходящем смысле «форму» множе-
ства Е. Например, аффинные преобразования воспри-
нимаются уже легче, чем гомеоморфизмы, но они
обычно еще кажутся несколько нескладными, коря-
выми. Поэтому пары (£,<??), которые — за неимением
лучшего слова — принято обычно называть правиль-
ными или симметричными — это те, для которых
Е есть часть евклидова пространства, а каждый эле-
мент множества § есть ограничение на Е некоторого
движения этого пространства, или, в виде исключе-
ния, преобразования подобия*).
Мы рассматриваем здесь только элементы симмет-
рии (точечных) множеств; в исследовании, в большей
степени ориентированном на эстетику, механику или
физику, следовало бы также принять во внимание
свойства симметрии цвета (учитывая здесь все от-
тенки видимого спектра), массы, химического соста-
ва, электромагнитных свойств и т. д.
55. Построение правильных пар (£, S)
Мы намерены дать последовательное описание
процесса построения правильных пар (£, <У), который
был бы применим как для плоскости, так и для про-
странства.
Пусть А — некоторое множество и — группа
преобразований, определенных на этом множестве.
Для любого X с: А и любого / g
f(X)cf(A) = A.
*) Для иллюстрации этого положения укажем, что каж-
дому непредубежденному наблюдателю окружность, группа само-
совмещепий которой состоит из движений, покажется более
правильно устроенной или «более симметричной», чем логариф-
мическая спираль, группа самосовмещений которой состоит из
преобразований подобия, хоть и последняя кривая
представляется достаточно «симметричной» даже человеку, не-
знакомому с наличием транзитивной группы ее самосовмещений,
образованной преобразованиями подобия.
§ 3. Устойчивые множества
119
Положим
^(Х) = £ = (J f(X).
fe Л
Для любого g е st-
g(E) = g^UHX^ = Ug°KX).
Однако — группа; следовательно, множество
преобразований вида gf (где f пробегает совпа-
дает с поэтому
g(E) = E для всех
Обозначим через <S множество ограничений на Е
преобразований из тогда <8— группа преобразо-
ваний множества Е (очевидно, может случиться так,
что при соответствующем выборе X множество Е бу-
дет устойчиво относительно еще каких-то интересных
преобразований, не входящих в й5).
Говорят, что пара (Е,<8) порождается множе-
ством X в паре (Л,5^); на языке декоративного ис-
кусства можно было бы сказать, что X есть мотив,
порождающий Е.
Отображение, которое каждому f е ставит в со-
ответствие его ограничение из группы 8, есть пред-
ставление группы зФ на группе 8\ в общем случае оно
не взаимно однозначно.
Самые простые мотивы — это множества, сводя-
щиеся к одной точке: для любого х е А множество
Е = <&({х}) называется траекторией точки х от-
носительно группы каждая траектория есть класс
эквивалентности по следующему отношению эквива-
лентности на Л:
(х~#), если существует такое преобразование
f е что f (х) = у.
Различные траектории множества А могут иметь
различную структуру; например, если — группа,
порождаемая на плоскости А двумя осевыми сим-
метриями с взаимно перпендикулярными осями, то
траектории могут содержать одну, две или четыре
точки.
120
Гл. /V. Движения. Преобразования подобия
Из соотношения
следует, что каждое множество j/(X) есть объедине-
ние траекторий; следовательно, множества Е будут
известны, если только известны все траектории мно-
жества А.
Случай евклидовых пространств.
Если А — плоскость (или, в более общем случае,
евклидово пространство некоторой размерности п) и
—группа преобразований подобия, то представ-
ляют интерес главным образом лишь те случаи,
когда — замкнутая группа, и такие пары (Е, <§Г),
в которых Е замкнуто.
Классификация замкнутых групп подобия, приве-
денная выше, упрощает изучение множеств Е, устой-
чивых относительно такой группы; это будут, действи-
тельно, объединения траекторий, а нахождение этих
траекторий незатруднительно для всех групп, точно
описанных ранее.
Заметим, что большинство таких групп приводит
к неинтересным множествам Е,— например, в случае,
когда каждая траектория совпадает со всем простран-
ством Л! Зато бесконечные дискретные группы дви-
жений и группы собственных преобразований подобия
с одной неподвижной точкой порождают множества,
приятные для глаз, т. е. декоративно ценные*).
56. Элементы симметрии заданного множества
Мы только что видели, как для любой группы
преобразований подобия плоскости П можно найти
множества Е, устойчивые относительно j/; кроме
того, мы уже отмечали, что такое множество Е может
*) Соответствующие идеи широко использовались голланд-
ским графиком Морисом Эшером (см. его альбом Е s h е г М. С.,
Grafiek en Tekeningen, Zwolle, 1959 и след., из которого, в част-
ности, заимствована суперобложка русского издания книги
Г. Вейля [32]).
$ 3. Устойчивые множества 121
оказаться устойчивым относительно преобразований
подобия, не входящих в В общем случае вопрос
ставится так: для любого Ес П найти множество сГ
преобразований подобия / плоскости П, таких, что
f(E) = £; это множество, очевидно, образует груп-
пу®1*).
В элементарной геометрии по установившейся тра-
диции рассматриваются только оси симметрии и
центры симметрии множества Е, т. е. те эле-
менты группы ®, которые являются осевыми или цен-
тральными симметриями. Однако множество этих
симметрий в общем случае не образует группу; таким
образом, упускается отличная возможность изучения
группы преобразований и из рассмотрения исклю-
чаются композиции полученных симметрий. С другой
стороны, ограничиваясь только симметриями, обычно
забывают существенную роль сдвигов и гомотетий.
Например, наилучший способ дать определение ци-
линдра и конуса в Rn заключается в том, чтобы опре-
делить конус с вершиной 0 как множество, устойчивое
относительно группы положительных гомотетий с цен-
тром 0, а цилиндр с образующими направления б —
как множество, устойчивое относительно группы пе-
реносов в направлении б.
Тем не менее, оси симметрии и центры симметрии
точечных множеств имеют первостепенное значение;
весьма существенно, чтобы ученик умел распоз-
навать элементы симметрии следующих простых мно-
жеств:
Прямая, луч, отрезок, пара точек;
Объединение двух прямых (пересекающихся — пер-
пендикулярных или нет, параллельных);
Объединение двух лучей с общим началом;
Равносторонний треугольник; равнобедренный тре-
угольник; прямоугольник.
Позднее будут изучены элементы симметрии объ-
единения двух окружностей или окружности и прямой.
*) Эту группу можно было бы назвать группой симметрии
множества Е, хотя чаще последнее наименование присваивается
группе движений, переводящих Е в себя.
122 Гл. IV. Движения. Преобразования подобия
Два простых принципа являются направляющими
при отыскании осей и центров симметрии:
1. Если множества Л, В устойчивы относительно
некоторой симметрии <р, то устойчивы и множества
Л U В. А П В, а также дополнения множеств Л и В.
2. Пусть (р — некоторая симметрия; для любого X
множества ХЯф(Л’) и Х11ф(Х) устойчивы относи-
тельно ф.
Вот еще одно очень полезное свойство:
3. Пусть (DA — конечное семейство попарно раз-
личных прямых; тогда каждая прямая, содержащаяся
в множестве UDiy есть одна из прямых
Действительно, каждая прямая содержит беско-
нечное число точек, следовательно, она пересекается
с какой-то прямой Di по крайней мере в двух точках
(«принцип клеток» Дирихле *)) и, следовательно, сов-
падает с этой прямой.
Очевидно, аналогичное утверждение имеет место
для семейства окружностей и для семейства окруж-
ностей и прямых; можно даже (используя тот факт,
что мощность континуума превышает мощность счет-
ного множества) распространить это утверждение на
случай счетных семейств.
Мы рассмотрим только один простой
Пример. Предположим известным, что осями
симметрии некоторой прямой D являются сама пря-
мая D и все перпендикуляры к ней, и только эти пря-
мые. Найдем теперь оси симметрии объединения двух
несовпадающих параллельных прямых А, В.
Общими осями для А и В будут перпендикуляры
к А и В; с другой стороны, А и В симметричны отно-
сительно прямой В, равноудаленной от этих прямых
и параллельной им; следовательно, D — ось симмет-
рии множества A U В.
Остается показать, что множество A U В не имеет
никаких других осей симметрии.
*) Обычная формулировка «принципа клеток» Л. Дирихле
такова: если т зайцев рассажены по п клеткам и т > п, то хотя
бы в одной клетке сидят два зайца.
§ 3. Устойчивые множества
123
Допустим противное: пусть ф— симметрия с осью
С, такая, что
ф(лив) = лив.
Из включения ф(А) czA U В в соответствии с ука-
занным выше свойством 3 следует, что прямая <р(Л)
совпадает либо с прямой А, либо с прямой В; если
ф(Л) = Л, то С есть ось симметрии прямой Л и так
как решение С = Л сразу исключается, то С перпен-
дикулярна Л; если же ф(Л) = В, то, как легко видеть,
С не может пересекать ни Л, ни В, являясь, таким об-
разом, параллельной прямым А и В и равноудален-
ной от этих прямых, т. е. С совпадает с найденной
уже ранее прямой D.
Упражнения к главе IV
1. Пусть А, В — две прямые плоскости П. Для любого хе И
обозначим через а(х), р(х) расстояние от % до прямых А и В
соответственно и положим f(x) = а(х) + |3(х). Каково множе-
ство таких точек х, для которых f(x) I (или Дх) = I), где
/ — заданное положительное число?
Пусть D — произвольная прямая; найти точки х этой пря-
мой, минимизирующие функцию f(x); при каких условиях это
будет единственная точка?
2. Пусть (Di)—конечное семейство прямых; для любого
хеП расстояние от точки х до прямой D, обозначим через
а,г(х). Показать, что все функции а, выпуклы.
Вывести из этого свойства, что множество точек х, для ко-
торых
2 (х) / (где и I — неотрицательные числа),
есть выпуклый многоугольник, ограниченный или нет.
3. Пусть D — прямая плоскости П и а, b е П.
Для любого х е D положим f(x) =d(a,x) +d(b,x).
Показать, что функция f выпукла; найти точки х прямой Z),
в которых функция f имеет минимум.
Решить аналогичную задачу для максимума функции
\d(а, х) — d(b, х)|.
4. Пусть А, В — две несовпадающие параллельные прямые, и
пусть а,Ь е П.
Найти точки хе/ЦеВ, минимизирующие сумму
d (a, х) + d (х, у) + d (у, Ь).
124
Гл. IV. Движения. Преобразования подобия
Решить аналогичную задачу для точек х, у, таких, что Д(х, у)
имеет заданное направление 6.
5. Пусть (tz/, bi) (i = 1,2,3)—три пары точек плоскости П,
таких, что d(ai, b\) = d(a2, b2) = d(a3, b3). Существуют ли такие
три прямые Di и такая пара (а, Ь) точек плоскости П, что для
любого i пара (ai, bi) симметрична паре (а, Ь) относительно пря-
мой Z);?
6. Пусть f (соответственно g) — вращение на угол 0 вокруг
точки х (соответственно на —0 вокруг точки у). Найти g°f.
7. Пусть (tzi, а2, а3)—тройка различных точек плоскости П;
обозначим через di углы этой тройки (см. следующую главу).
Найти произведение f3°f2° fi, где fi — вращение на угол di во-
круг точки ai.
8. Пусть a, b е II и а =^=Ь; далее, пусть f — вращение с цен-
тром в точке а.
а) Найти множество $ вращений g с центром в точке Ь,
таних, что g° f есть вращение.
Ь) Найти множество центров всех вращений g ° f (где
g<^&)-
9. Пусть .9— подгруппа группы показать, что если Э1
содержит хотя бы одну осевую симметрию, то порождается
входящими в нее осевыми симметриями.
10. Найти порядок группы самосовмещений для следующих
множеств X (здесь ищутся лишь движения, переводящие X
в себя *)):
Множество вершин равностороннего треугольника, квадрата,
прямоугольника, ромба.
11. Пусть А, В — две прямые плоскости II, и пусть а А,
b (= В.
Исследовать собственные движения f, для которых f(a) А
и [(b) се В.
12. Пусть Z — метрическое подпространство пространства R,
образованное множеством целых чисел. Определить все разбие-
ния пространства Z на два изометричных множества.
Аналогичная задача для N, для В и для R+.
13. Определить все разбиения плоскости П на два пзометрич-
ных множества.
14. Пусть А, В — два подмножества плоскости П, такие, что
А П В содержит по крайней мере две точки, х\ и х2. Показать,
что если существует движение f, отображающее множество А
на множество В и такое, что его ограничение на A f] В есть
тождественное преобразование, то либо f — тождественное пре-
образование, либо
ЛПВ = (ЛиВ)ПД(хь х2).
Исследовать связь между этим свойством и тем фактом, что
линия сгиба листа бумаги всегда есть отрезок прямой.
*) Почему?
<S 3. Устойчивые множества
125
15. Пусть f — собственное преобразование подобия плоско-
сти П и Л — произвольное число. Для любого х П обозначим
через f^(x) точку, делящую в отношении Л. Что можно
сказать об отображении х->/^(х)?
16. Пусть A i (z = 1, 2, 3) —- три прямые плоскости П, и
ai^Ai (i = 1,2,3).
а) Рассмотрим множество собственных преобразований
подобия f, таких, что /(аг)еДг- (z = 1,2,3).
Показать, что либо все эти преобразования подобия имеют
общий центр а, либо все они — переносы.
Рассмотрим произвольную точку х плоскости П, такую, что
хфа.
Что можно сказать о множестве точек f(x), где
b) Пусть % — множество собственных преобразований по-
добия g, таких, что cii е £(Лг) (z = 1, 2, 3).
Какова связь между и
17. Пусть (0, а, Ь) — тройка точек плоскости П, такая, что
а и b отличны от 0. Описать такие отображения f плоскости II
в себя, при которых для всех хеП тройка (0, х, f(x)) либо
совпадает с тройкой (0,0,0), либо есть образ тройки (0, а, Ь)
при некотором собственном преобразовании подобия.
18. Пусть Е— произвольное множество и — коммутатив-
ная и однотранзитивная группа преобразований множества Е.
Пусть а, b — две точки множества Е и f — такое отображе-
ние Е в себя, что для любого х е Е существует такое £е^,что
g(a) = x и g(b) = f(x).
Что можно сказать о преобразовании f?
19. Воспользовавшись решением упр. 9 к гл. II, построить
классификацию замкнутых групп растяжений плоскости П (и
пространства /?п), указанных в п. 53.
Упражнения на сопряженные преобразования. Напомним, что
если fug — два преобразования некоторого множества Е, то
сопряженным образом преобразования f отно-
сительно преобразования g называется преобразова-
ние g°f°g~l\ при любом х оно переводит g(x) в g(f(x)).
20. Пусть f — гомотетия с центром а и коэффициентом k.
Показать, что сопряженным образом преобразования f относи-
тельно любого преобразования подобия g (и даже вообще отно-
сительно любого аффинного преобразования) будет гомотетия
с центром g(0) и с коэффициентом k (рассмотреть сначала слу-
чай g(0) = 0 и случай, когда g — перенос).
21. Показать, что сопряженным образом любого переноса
х~>х + 6 относительно линейного преобразования g будет пере-
нос х -> х -I- g(b).
22. Пусть f — осевая симметрия с осью D и g — произволь-
ное преобразование подобия; показать, чго сопряженным обра-
зом f относительно преобразования g будет осевая симметрия
с осью g(D),
126 Гл. IV. Движения. Преобразования подобия
23. Пусть fi — осевая симметрия с осью Di (i = 1, 2,..., п)
и g — произвольное преобразование подобия. Показать, что со-
пряженным образом fi °/2 °... относительно g будет преобра-
зование /| °/2° ... ° jn, где — осевая симметрия с осью g(Di).
24. Пусть f — вращение па угол 0 вокруг точки а. Показать,
что сопряженным образом преобразования f относительно неко-
торого преобразования подобия g будет вращение вокруг точки
g(a) (на угол 0, если g — собственное преобразование, и на
угол — 0, если g — зеркальное преобразование).
ГЛАВА V
УГЛЫ
§ 1. ГРУППА УГЛОВ
57. Трудности, связанные с понятием угла
Понятие угла, без сомнения, порождает в препо-
давании геометрии больше всего споров и трудностей.
Эти трудности возникают отчасти из-за термино-
логических неточностей, отчасти из-за создавшейся
здесь мешанины из нескольких математических поня-
тий, обозначаемых одним и тем же термином «угол»,
но по существу совершенно различных, а частично
также из-за реальной сложности этого вопроса.
Путаница возникает, прежде всего, из-за исполь-
зования одного слова «угол» для обозначения поня-
тий более или менее связанных, но вовсе не идентич-
ных: плоский сектор, пара лучей, некоторая мера
(«угловая мера») и т. д. *)
Наименее разработанным определением является
следующее: углом с вершиной в точке 0 — или пло-
ским сектором — называется пересечение двух замк-
нутых полуплоскостей, граничные прямые которых
различны и проходят через 0.
Это определение хорошо приспособлено для изо-
бражения угла на чертеже, для вырезания, для изме-
*) Вот четыре наиболее распространенных (но совсем раз-
ных!) подхода к понятию «угла»: Г геометрическая фигура, об-
разованная парой лучей с общим началом (подход Д. Гиль-
берта [2]); 2° часть плоскости (ограниченная «углом» в смыс-
ле Г); 3° мера вращения, определенная так, что совпадение двух
вращений равносильно совпадению их центров и углов поворота
(здесь «угол» есть «величина» а, заключенная в пределах
0 а < 2л или — л < а л); 4° аргумент тригонометрических
функций (заметим, что сложение без всяких трудностей опреде-
ляется лишь для «углов» в смысле 4°).
128
Гл. V. Углы
рений транспортиром, одним словом, для «интуитив-
ной» геометрии детей до 12—13 лет. Однако оно при-
водит к затруднениям, как только требуется сложить
много довольно больших углов; при этом часто дают-
ся путаные объяснения и определения, в которых ис-
пользуются измеряемые «по спирали» углы (большие
360°)*); это затемняет вопрос и служит причиной
того, что к понятию угла начинают относиться, как
к западне.
Некоторых трудностей удается избежать, несколь-
ко разгрузив понятие угла: угол становится не частью
плоскости, а упорядоченной парой лучей с общим на-
чалом. Однако часть трудностей остается; они свя-
заны со сложением двух углов. Во избежание этих
затруднений приходится сначала вводить некоторое
отношение эквивалентности на множестве пар лучей
и затем определять сложение на фактормножестве по
этому отношению. Эта процедура математически со-
вершенно корректна, но довольно громоздка и мало
доступна большинству учащихся средней школы.
Чтобы избавиться от этой громоздкости, некото-
рые авторы постулируют существование «меры» на
множестве упорядоченных пар лучей (не противопо-
ложно направленных) и аддитивность этой меры для
«малых углов». При всей кажущейся строгости такая
аксиоматика в конечном счете пагубна, так как в этом
случае стираются существенные различия между груп-
пой углов и аддитивной группой 7?; например, тот
факт, что в первой из этих групп из равенства
0 4-0 = 0 не следует равенство 0 = 0; с другой сто-
роны, это определение плохо работает даже в самом
начале курса элементарной геометрии, так как оно
не допускает итерации очень простой операции удвое-
ния 0 —>20.
Во всех корректных определениях углы выступают
как нечто довольно абстрактное; задача преподава-
теля заключается в том, чтобы сделать эту абстрак-
*) Соответствующие конструкции приводят к своеобразным
<многолистным образам», подобным римановым поверхностям
теории функций комплексного переменного; педагогически они
совершенно неприемлемы.
$ 1. Группа углов
129
цию доступной, приняв определение, в которое ис-
пользуются только интуитивно ясные понятия.
Например, алгебраисту может показаться блестя-
щим следующее определение.
Заметим сначала, что множество 3" переносов пло-
скости II образует нормальный делитель группы +
собственных движений (так как сопряженный образ
переноса относительно некоторого движения есть пе-
ренос); группой углов будет по определению фактор-
группа ^!2Г. Углом собственного движения f будет
канонический образ этого движения в факторгруппе;
для любой пары (Л, В) лучей плоскости П, обозначив
через f собственное движение, переводящее А в В, по-
ложим:
угол (Л, В) (обозначается) АВ = угол отображения f.
Такое определение предполагает хорошее знаком-
ство с алгебраической теорией групп. Мы выберем
более осязаемое определение, отождествив углы с вра-
щениями вокруг некоторой точки 0; в дальнейшем бу-
дет показано, что выбор точки 0 несуществен.
В заключение этого обсуждения заметим, что мы
смогли без каких бы то ни было неудобств построить
значительную часть элементарной геометрии, даже не
упомянув углов: аффинная структура плоскости П,
теорема Пифагора, теория преобразований подобия
не требуют использования углов и равенства тре-
угольников.
Злоупотребление понятием угла в нашем препода-
вании имеет свои исторические причины: с одной сто-
роны, углы входят в число простейших понятий аксио-
матики Евклида и даже аксиома параллельных дол-
гое время формулировалась в терминах углов*);
с другой стороны, последователи Евклида сочли
уместным повсюду использовать без всякого на то ос-
нования понятия направленного угла и угла между
прямыми лишь потому, что они достаточно хорошо
понимали эти понятия.
*) Здесь имеется в виду вринятая Евклидом форма аксиомы
параллельности (см. Евклид [1], ч. 1, стр. 15, постулат 5).
9 Зак. 323
130
Гл. V. Углы
Более обоснована попытка построения почти всей
геометрии без введения «меры» углов; будучи суще-
ственно необходимым орудием в анализе и приклад-
ной математике, в геометрии она часто используется
лишь из соображений удобства и подчас становится
источником ошибок.
58. Определение и обозначения
Определение 58.1. Для любой точки ОеП углом
с вершиной в точке 0 называется каждое вращение
с центром 0.
Для любой пары (Ai,A2) лучей с общим началом 0
углом этой пары называют вращение, переводящее А[
в А2\ этот угол обозначается через Лр42-
Множество углов с вершиной в точке 0 есть, таким
образом, не что иное, как множество вращений с цен-
тром 0; следовательно, это коммутативная группа.
Традиционно принята аддитивная символика для
групповой операции в этой группе; такое обозначение
оправдано тем, что, как мы увидим ниже, понятие
меры угла выявляет тесную связь между сложением
действительных чисел и сложением углов.
Сравнение углов с разными вершинами. Понятие
угла было бы почти бесполезным, если бы мы не уме-
ли сравнивать углы с разными вершинами. Перенос
дает нам возможность произвести такое сравнение.
Для любых точек fl, 6 е П перенос !ъ, а> переводя-
щий а в Ь, есть изоморфизм (относительно структуры
векторного пространства и структуры метрического
пространства), отображающий центрированную пло-
скость (П, а) на центрированную плоскость (П, 6);
этот изоморфизм транзитивен в том смысле, что для
любых а, с е П
а I с, b 0 Д. а*
Так как вращения определены в терминах прямых
и расстояний, изоморфизм 1ъ, а индуцирует изоморф-
$ 1. Группа углов
131
ное отображение аддитивной группы углов с верши-
ной а на аддитивную группу углов с вершиной &; мы
его будем обозначать тем же символом 1ь,а- Таким
образом, нам удобно воспользоваться здесь тем же
методом, что и при определении множества N нату-
ральных чисел.
Выберем на плоскости П произвольное начало а и
отождествим с помощью изоморфизма /ь, а каждый
угол с вершиной b с соответствующим углом с верши-
ной а. Транзитивность изоморфизмов / гарантирует
согласованность такого отождествления. Пусть теперь
At, А2— два произвольные луча с началом а; так как
изоморфизм /ь, а плоскости (П, а) на плоскость (П, Ь)
переводит каждый луч Дг- в параллельный ему луч Bi
с началом в точке Ь, то, учитывая принятое отожде-
ствление, получаем ])
~ BiB2'
Это рассуждение оправдывает введение следую-
щего определения, которое только внешне зависит от
выбора начала 0:
Определение 58.2. В центрированной плоскости
(П, 0) углом между двумя лучами (£>i,D2) с произ-
вольными началами называется угол с вершиной 0
между лучами Di, D2 с общим началом 0, параллель-
ными соответственно лучам D\,D2. Этот угол обо-
значается ЬХЬ2.
Аддитивная группа углов будет обозначаться че*
рез
Дальне й ш и е обозначения
С обозначением 6{О2 удобно связать некоторые
производные обозначения. В общем случае пусть Е —
’) Было бы легко построить семейства (/£ транзитивных
изоморфизмов множества центрированных плоскостей (П,х), для
которых эти равенства не всегда бы выполнялись; но единствен-
ное «естественное» семейство изоморфизмов — это то, которое мы
здесь рассмотрели.
9*
132
Гл. V. Углы
множество каких-то математических объектов, таких,
что с каждым из них связан луч плоскости П или мно-
жество параллельных лучей плоскости II. Для лю-
бых х, у е= Е будем обозначать через ху угол между
лучом, связанным с объектом х, и лучом, связанным
с объектом у.
Например, с каждым вектором х ф 0 плоскости
(П, 0) связан луч £)(0, х); с каждой ориентированной
прямой D связан положительный луч этой прямой;
следовательно, можно говорить об угле xD. Аналогич-
но, для любых a, 6, cell, таких, что атЬ и сФЬ,
сокращенное обозначение abc означает угол между
лучами D(b, а) и 0(6, с).
Нулевой угол и развернутый угол. В аддитивной
группе углов нейтральный элемент обозначается
через 0, а угол, связанный с центральной симметрией
с центром 0, — через таг (символ таг отдаленно напоми-
нает л).
Таким образом, для любой пары (Оь 02) лучей с
общим началом имеют место следующие эквивалент-
ности:
(DJ)2 = ^^(Dx^D2}y
(D{D2^ таг)0(0{ и D2 противоположно направлены).
Кроме того, от + от = 0, или —от = от.
Формула Шаля. Пусть А, В, С— три произ-
вольных луча с общим началом 0; вращение, перево-
дящее А в С, равно произведению вращения, перево-
дящего А в В, и вращения, переводящего В в С. Дру-
гими словами,
В частности,
АВ + В А = АА = 0, откуда АВ-= — ВА,
и, более общо, для любой конечной последовательно-
сти (Оь О2, DH) лучей с общим началом О
1)ХЬ(1^ DXD2 + DJh-y ... +
$ 1. Группа углов
133
Это равенство носит название формулы Шаля;
оно, очевидно, распространяется (с помощью перено-
са) на случай лучей с произвольными началами.
59. Сумма углов замкнутого плоского
многоугольника
Пусть Р — замкнутый плоский многоугольник с
п вершинами, т. е. последовательность (аь а2,..., ап)
точек плоскости П, определенная с точностью до ци-
клической перестановки.
Будем здесь предполагать, что для всех i имеет
место неравенство ai =£ (следовательно, также
ап 01); положим, далее, б< = луч D(ait ai+i).
Внешним углом многоугольника Р в верши-
не о/ называется угол 6/-Д; углом многоугольни-
ка Р в вершине ог- называется угол а^а^а^.
Предложение 59.1. Сумма внешних углов всякого
замкнутого плоского многоугольника равна 0.
Доказательство. Действительно, в силу равенства
Шаля
6Д + б>з + ... + 01 = 6Д = 0.
Следствие 59.2. Сумма углов всякого замкнутого
плоского многоугольника равна 0 или тв в зависимо-
сти от четности или нечетности числа п его вершин.
Действительно, пусть луч Р(ой Qi-i); тогда
Следовательно,
= С Д-1 + = «г + С А-
Сумма этих углов равна, таким образом, пш + О,
т. е. О или пт в зависимости от того, четно или нечет-
но п (поскольку ПУ + лв = 0).
В частности, сумма углов тройки (аь а2, о3) рав-
на пу; когда будет введено понятие ориентации, мы
сможем уточнить этот результат, показав, что все три
угла такой тройки имеют одинаковую ориентацию.
г.1. V. Углы
pl
*—
§ 2. УГЛЫ И ПРЕОБРАЗОВАНИЯ ПОДОБИЯ
60. Угол, симметричный данному углу
Лемма 60.1. Пусть о— некоторая осевая симмет-
рия. ось которой проходит через 0. Для любой пары
{А, В) лучей с началом 0 имеет место равенство
А'В'= — ЛВ, где /V = сг(Л) и Bz=-o(B).
Доказательство. Пусть D—любой из двух лучей
с общим началом 0. лежащих на оси симметрии о, и
пусть т — осевая симметрия, меняющая местами пря-
мые D и А'. Вращение т-о преобразует D в А' и А
в D, так что
DA' = /13.
Аналогично
DB' = ВО,
откуда получаем
А'В'— AZB + DBZ-Z)/1-|- BD = BA или - АВ.
61. Образ угла при преобразовании подобия
Предложение 61.1. Для любой пары (А, В) лучей
плоскости П и для любого преобразования подобия f
плоскости П выполняются равенства
f (A) f (В) = Ав, если I — собственное преобразование
подобия’,
f (АД (В) = — АВ, если f — зеркальное преобразование
подобия,
Доказательство. Известно, что всякое преобразо-
вание подобия / есть произведение гомотетии с поло-
жительным коэффициентом и оставляющего непо-
движным начало 0 движения, собственного или
зеркального в зависимости от того, является ли преоб-
разование / собственным или зеркальным. Так как
гомотетия с положительным коэффициентом сохра-
§ 2. Углы и преобразования подобия
135
няет направление лучей, а следовательно, и углы, нам
остается рассмотреть случай, когда / — движение с
неподвижной точкой 0.
С другой стороны, поскольку образами параллель-
ных прямых при преобразовании f будут параллель-
ные прямые, то будем предполагать, что прямые А, В
имеют общее начало 0.
Если f — зеркальное преобразование, то это — осе-
вая симметрия, и из леммы 60.1 следует, что имеет
место равенство
f ufm = - ав.
Если же f — собственное преобразование, то оно
есть произведение двух осевых симметрий, и искомое
соотношение следует из равенства
АЙ) = .4В.
62. Характеристика вращений
Предложение 62.1. Пусть 6 — некоторый угол,
а е II и f — некоторое отображение плоскости II
в себя. Отображение f тогда и только тогда есть вра-
щение на угол 0 с центром а, когда f(a) = а и для
всех х =/-= а
d {а, a) =d(a, f (а) ) и xaf (а) = 0.
Доказательство. Действительно, вращение на
угол 0 с центром а обладает этими свойствами. С дру-
гой стороны, для всех х 4= а соотношения
d (а, а) == d (а, у) п хау = 0
определяют точку у единственным образом; следова-
тельно, всякое отображение, обладающее указанными
в предложении свойствами, есть вращение на угол 0
с центром а.
Предложение 62.2. Пусть а е И, и пусть f — неко-
торое отображение плоскости П в себя.
136
Гл. V'. Углы
Отображение f тогда и только тогда является вра-
щением с центром а, когда, выполняются следующие
три условия:
1. f(a) = л;
2. Для всех х^=а имеем d(a, х) cl (а, / (х));
3. Для всех х, у Ф а имеем хау = f (х) af (у).
Доказательство. В соответствии с предложением
61.1 всякое вращение с центром а обладает свой-
ством 3; свойства 1 и 2 очевидны.
Обратно: если f обладает свойством 3, то из ра-
венства Шаля следует, что для всех х, у =т а
xaf(x) « хау 4- yaf(y) + f (у) af (х) = yaf (//).
Поэтому xaf(х) = 0 = const, что приводит нас к
предложению 62.1.
63. Характеристика преобразований подобия
Предложение 63.1. Пусть X—часть плоскости П,
не принадлежащая целиком одной прямой, и f —
инъективное отображение X в П.
Если для любых различных точек х, у, z е П вы-
полняется условие
f (*) f (у) f (z) = хУг (соответственно — xyz),
то f есть ограничение на X преобразования подобия
плоскости П, определяемого единственным, образом;
кроме того, f — собственное (соответственно зеркаль-
ное) преобразование подобия.
Доказательство. Начнем с того, что умножим в
случае необходимости преобразование f на некото-
рую осевую симметрию; предложение сведется к слу-
чаю отображения f, сохраняющего углы.
Выберем затем две различные точки a, b X;
пусть g — собственное преобразование подобия, пере-
водящее (а,Ь) в (f(a),f(b)).
§ 2. Углы и преобразования подобия
137
Отображение h = g~x о f множества X в П остав-
ляет неподвижными точки а и b и сохраняет углы;
следовательно, для все?; хе^Х, таких, что &),
прямые Д(а, х), Д(6, х) пересекаются и параллельны
соответственно прямым Д(щ/г(х)), Д(6, Л(х)), откуда
следует, что h(x) = х.
Таким образом, преобразование h тождественно
вне прямой Д(щ&). Однако по предположению в X
найдется еще по крайней мере одна точка сфк(а, Ь),
аналогичное рассуждение показывает, что h — тожде-
ственное преобразование вне прямой Д(«, с); следо-
вательно, h тождественно на X, и так как X содержит
три точки, не принадлежащие одной прямой, то един-
ственным преобразованием подобия плоскости П, ко-
торое является продолжением преобразования /г, бу-
дет тождественное преобразование. Другими словами,
f есть ограничение отображения g на множество X и
это отображение g единственно.
Заметим, что это доказательство является точной
копией доказательства предложения 27.2; как и там,
условие взаимной однозначности отображения f мож-
но снять, но это несколько усложнит изложение. На-
против, требование, чтобы множество X не принадле-
жало целиком одной прямой, является существенным.
Замечание 63.2. Предложение63.1 справедливо,
в частности, в случае, когда множество X образовано
тремя неколлинеарными точками а, Ь, с. В этом слу-
чае оно превращается в точную форму «признака по-
добия» треугольников; в предложении 61.1 содержит-
ся второй признак. Из них тотчас же получаются точ-
но сформулированные два случая равенства треуголь-
ников.
Тем не менее мы хотим подчеркнуть, что нигде
в нашем курсе мы не столкнулись с необходимостью
этих признаков подобия и равенства; фактически
можно, по-видимому, считать установленным, что,
кроме как в задачах, придуманных специально для
употребления этих признаков, их использование не-
существенно и что обычно их выгодно заменять про-
стыми аналитическими или векторными методами.
138
Гл. V. Углы
64. Бисекция угла
Предложение 64.1. Для любого угла а уравнение
2х = а имеет в точности два решения; их разность
равна таг.
Точнее', если А и В — два произвольных луча с об-
щим началом 0, то лучами с началом 0, удовлетво-
ряющими условию
2AD = AB (или AD = DB),
будут лучи, принадлежащие оси симметрии о, меняю-
щей местами прямые Л и В.
Доказательство. Пусть А, В — два луча с общим
началом 0, такие, что АВ = а. Равенство 2AD = AB
может быть записано также в виде
2AD = AD + DB или AD = DB,
Таким образом, оно выполнено, если D есть один
из лучей £>i, принадлежащих оси симметрии о
(лемма 60.1).
В обратную сторону: положим AD = DB; пусть
В' — прямая, симметричная А относительно прямой,
содержащей D; из леммы 60.1 следует, что AD=^DB\
откуда DB' = DB; следовательно, В = В'.
Другими словами, прямая, содержащая D, есть ось
симметрии о; следовательно, D = D{ или D = D2.
Следствие 64.2. 1. Решением уравнения 2х ~ 0 мо-
гут быть только либо 0, либо тп.
2 . Уравнение 2х = ш имеет два решения (которые
называются прямыми углами); кроме того,
(А ±В)4==}(АВ есть прямой угол).
3 а м е ч а и и е. На этой стадии нашего курса мы не
можем еще исследовать в уравнения вида нх = 0
§ 2. Углы и преобразования подобия
139
или пх = а (n^Z). Напротив, это исследование ста*
нет чрезвычайно простым, когда в нашем распоряже-
нии окажется мера углов. Впрочем, мера не есть нечто
абсолютно необходимое для элементарной геометрии.
65. Углы между двумя прямыми
Определение 65.1. Пусть (Л, В)—пара прямых,
проходящих через 0. Углом этой пары называют вся*
кое вращение вокруг точки 0, переводящее А в В.
Непосредственно из определения следует, что су-
ществует два таких угла; это углы, образованные од-
ним из лучей прямой А с каждым из лучей прямой В;
разность между ними равна ш.
Воспользовавшись параллельностью, можно от-
сюда вывести определение угла между произвольными
прямыми или угла между направлениями.
Следующее обобщение поможет лучше усвоить по-
нятие угла между прямыми. Пусть А—объединение
лучей с общим началом 0, инвариантное относительно
подгруппы группы 5?0; пусть, далее, реД и
Вращения р', для которых В = р'(Л), принадлежат
множеству р°$, что влечет неоднозначность угла ме-
жду прямыми пары (А, В). Если же мы хотим непре-
менно сопоставить каждой паре (Л, В) однозначно
определенный «псевдоугол», то таким можно считать
элемент факторгруппы В случае, когда А — пря-
мая, множеством <3 будет подгруппа {0,пг} группы
(которую можно отождествить с ь^).
Заметим, что если со] и а2— два угла пары (Л, В),
то равенство + w влечет равенство 2а2 = 2аг,
так как, с другой стороны, равенство 2х = 2а влечет
х = сс] или x = ai + nr = a2, то легко видеть, что очень
удобно связывать с парой (Л, В) не углы ai<z2, а
удвоенный угол 2ои = 2а2. Последнее замечание
позволяет избавиться от многих трудностей, встре-
чающихся при рассмотрении углов между прямыми.
Приведем пример, иллюстрирующий это.
Пусть А и В — две прямые, проходящие через 0, и
пусть а — один из углов пары (Л, В).
ио
Гл. V. Углы
Произведение осевых симметрий, из которых пер-
вая имеет ось Л, а вторая — ось В, есть вращение
вокруг точки 0; определим угол этого вращения f.
Пусть — один из лучей с началом в точке 0, при-
надлежащих прямой Л; пусть Вх—луч прямой В,
такой, что АЛВ\ = а. Тогда луч f(A{) симметричен
лучу относительно В, откуда по лемме 60.1
л7(Л) - дв, + BJ G4j) - XBj - Bpli = 2а.
Угол вращения f равен, таким образом, 2а.
ГЛАВА VI
ОРИЕНТАЦИЯ
66. Трудности, связанные с понятием ориентации
Понятие ориентации наряду с понятием угла счи-
тается наиболее трудным для преподавания. За не-
имением настоящего математического определения это
понятие обычно задают либо с помощью маленького
человечка с хорошей памятью, насаженного на конец
стрелки, либо пользуясь правилом штопора, либо с
помощью трех растопыренных пальцев левой или — в
зависимости от страны — правой руки.
Однако, в то время как учение об углах по-настоя-
щему трудно, определение понятия ориентации воз-
никает в геометрии совершенно естественным путем
из свойств группы движений.
Одно из препятствий на пути к глубокому усвое-
нию понятия ориентации связано с тем, на каком ма-
териале оно строится. Обычно — это множество пар
(Л, В) лучей с общим началом, не принадлежащих од-
ной прямой. Но с такой парой связана также и пара
(В, Л), полученная перестановкой лучей; ориентация
этих пар противоположна. Таким образом, такой
исходный материал порождает смешение понятий упо-
рядоченной пары (или, в более общем случае, упоря-
доченного множества) и ориентации; несомненно су-
ществует определенная связь между этими двумя по-
нятиями, но не следует подчеркивать этого до тех
пор, пока понятие ориентации не будет как следует
усвоено на определенном материале без обращения к
отношению порядка.
112
Гл. VI. Ориентация
67. Ориентация частей плоскости П
Переходим к изучению некоторых примеров.
1°. В плоскости II существуют такие множества из
трех точек, что расстояния между этими тремя точ-
ками равны 2, 3, 4; каждое такое множество не при-
надлежит одной прямой, поскольку 4<2 + 3 (следствие
39.4 и предложение 39.5).
Пусть Е— множество таких подмножеств плоско-
сти II.
Это множество устойчиво относительно группы «7
движений плоскости П; с другой стороны, .7 действует
на Е однотранзитивным образом. Действительно, для
любых Xi, Х2 Е, очевидно, найдется —и притом
единственное — отображение f множества Ari на АД
которое является движением и может быть продол-
жено единственным образом до движения всей пло-
скости II, отображающего ее на себя, поскольку Х{
не принадлежит целиком одной прямой (теоре-
ма 45.6).
Говорят, что ориентация множеств АД А^ со-
впадает, если движение f плоскости II, для кото-
рого Х2 = ((Х{), есть собственное движение; в против-
ном случае говорят, что Хх и Х2 имеют противопо-
ложную ориентацию. Из того факта, что «7^
образует группу, немедленно следует, что ориентация
есть отношение эквивалентности на Е.
Если АД Х2 противоположно ориентированы и
АД Х3 также противоположно ориентированы, то А\
и Х3 ориентированы одинаково, поскольку произведе-
ние двух зеркальных движений есть собственное дви-
жение.
Следовательно, данное отношение эквивалентности
на Е имеет в точности два класса эквивалентности, а
именно, два множества образов произвольного эле-
мента Хо множества Е при преобразованиях из Z7+ и
соответственно.
Выясним теперь, что называют положительной и
отрицательной ориентацией', выберем совершенно про-
извольным образом элемент АоеЕ, который будет
называться основным репером, и условимся говорить.
Ориентация ПЗ
что элемент X множества Е имеет положительную (со-
ответственно отрицательную) ориентацию, если ориен-
тации А'о и X совпадают (соответственно противопо-
ложны). Таким образом, чтобы быть совершенно
точным, следует сказать: ориентация множества X по-
ложительна при данном выборе основного репера XQ;
мы можем опускать эту ссылку на основной репер
лишь до тех пор, пока не’ забываем о существовании
этого строго фиксированного репера.
Знак ориентации, очевидно, не меняется в резуль-
тате замены основного репера другим репером той же
ориентации.
Еще несколько аналогичных примеров
2°. В общем случае пусть А — некоторое подмноже-
ство плоскости П, не принадлежащее одной прямой,
такое, что единственным движением этого множества,
отображающим его на себя, является тождественное
преобразование; далее, пусть Е—множество подмно-
жеств (частей) плоскости П, имеющих вид f(A), где
f е «7.
Очевидно, что Е устойчиво относительно «7 и что
3 действует однотранзитивным образом на Е, так что
относительно Е можно повторить все сказанное в пре-
дыдущем примере. Например, можно принять за А
поляризованную полуплоскость или
флаг — объединение точки а, открытого луча D с на-
чалом а и одной из открытых полуплоскостей, опре-
деляемых прямой, несущей D.
3°. Обобщим эту процедуру: пусть А — подмноже-
ство плоскости II, не принадлежащее одной прямой и
такое, что всякое движение, отображающее это мно-
жество на себя, есть собственное движение (в том
смысле, что продолжение этого движения на пло-
скость П является собственным движением). Опреде-
лим тогда множество Е описанным выше образом.
Множество Е устойчиво относительно для любых
АЗ, Ал2 е Е найдется по крайней мере одно движение
переводящее Х{ в Х2; по предположению все та-
кие движения являются одновременно собственными
или зеркальными.
И4
Гл, V/. Ориентация
Следовательно, можно очевидным образом опреде-
лить совпадение ориентаций двух элементов множе-
ства Е. Остальные рассуждения аналогичны предьь
дущим.
Например, за множество А можно принять объ-
единение двух противоположных сторон квадрата и
одной из его диагоналей (буква Z) или объединение
отрезков, получающихся из некоторого отрезка [а, Ь]
при переносах in где t — перенос, направле-
ние которого не параллельно и не перпендикулярно
отрезку [а, Ь].
68. Ориентация прочих геометрических объектов
связанных с плоскостью П
Нам известны некоторые геометрические объекты,
связанные с плоскостью П, но не являющиеся ее ча-
стями: пара точек, тройка точек, пара лучей, ориенти-
рованная прямая, преобразование, угол и т. д.; опре-
делим понятие ориентации для некоторых из этих
объектов.
Г. а. Пусть Е — множество пар (Л, В) принадле-
жащих плоскости П перпендикулярных лучей с общим
началом. Это множество устойчиво относительно груп-
пы ЕЕ и эта группа действует на Е однотранзитивным
образом; следовательно, для множества Е справед-
ливо все сказанное в предыдущих примерах; условие,
при котором пары (Л, В) и (Л7, В7) имеют одинако-
вую ориентацию, записывается здесь так:
АВ = АВ'.
Но помимо этого здесь возникает нечто новое, а
именно существование инволютивного преобразования
(Л, В) (В, Л) множества Е, которое ставит в соот-
ветствие всякому элементу (Л, В) из Е противо-
положный элемент (В,А).
Известно, что движение, переводящее (Л, В) в
(В, Л), есть осевая симметрия; следовательно, проти-
воположные пары (Л, В) и (В, Л) имеют противопо-
ложную ориентацию.
Ориентация
145
Ь. В общем случае можно принять за Е множество
пар (Л, В) лучей с общим началом и таких, что Л£> = 0
или АВ =—0 (где 0 — заданный угол, отличный от О
и от).
с. Приведем менее классический пример: Е есть
множество пар (Z), х), где D — ориентированная пря-
мая плоскости П, а х — точка плоскости II, удаленная
от прямой D на расстояние 1.
d. Множество Е образовано тройками (х,//, г), изо-
метричными дайной тройке (а, Ь, с) точек, не принад-
лежащих одной прямой. В частности, если \\Ь — а|| =
= ||с— я|| = 1 и Л ( я, b) j_A(a, с), то векторы Ь, с цен-
трированной плоскости (II, а) образуют ортонормиро-
ванный базис этой системы, так что в этом случае
можно, следовательно, рассматривать Е как множе-
ство ортонормированных реперов плоскости П. Поня-
тию положительного репера здесь возвращается его
классический смысл.
2°. С помощью приведенных ниже двух примеров
мы убедимся, что понятие ориентации не связано с по-
нятием движения; кроме того, эти примеры позволят
нам сравнить ориентации двух произвольных троек
неколлинеарных точек и двух пар лучей, не принад-
лежащих одной прямой.
Обозначим через й группу аффинных преобразо-
ваний плоскости П, через й+— ее подгруппу, образо-
ванную преобразованиями с положительным опреде-
лителем (это понятие мы полагаем известным).
а. Пусть Е — множество троек (х, //, г) некол-
линеарных точек плоскости II; это множество
устойчиво относительно группы й преобразований, и
эта группа действует на Е однотранзптивио. Говорят,
что (х, //, г) и (xz, //z, zz) одинаково ориентированье
если элемент f группы й, переводящий (х, //, z) в
(xz, у', г'), принадлежит й+.
Тот факт, что для всех f, g е й определитель пре-
образования f og равен произведению определителей
преобразований f и g, позволяет проводить исследо-
вание таким же образом, как это было сделано для
группы движений.
Ю Зак. 323
146
Гл. VI, Ориентация
Заметим, что если аффинное преобразование f есть
движение, то его определитель положителен или отри-
цателен в зависимости от того, является ли f соб-
ственным или зеркальным движением; таким образом,
ориентация, которую мы только что определили, совме-
стима с определенной в примере Г, d.
Как и в примере Г, а, здесь появляется нечто но-
вое: с каждой тройкой (х, //, г) множества Е ассо-
циируются шесть троек, получающиеся из нее всевоз-
можными подстановками. Сравнить их ориентации
позволяет следующая
Лемма 68.1. Ориентация всякой тройки, получаю-
щейся из (х, у, г) транспозицией [перестановкой двух
элементов), противоположна ориентации тройки
(X, у, г).
Доказательство. Действительно, элемент f группы
Я, переводящий (х, //, г), например, в (х, г, у), есть
косая симметрия параллельно прямой А (у, г), ось ко-
торой проходит через х и через середину пары (у, z);
определитель преобразования f равен (— 1).
Отсюда следует, что среди шести троек, ассоции-
рованных с (х, у, z), тройки (х, у, г), (у, z, х), (z, х, у)
ориентированы одинаково; остальные тройки имеют
противоположную ориентацию.
Ь. Пусть Е— множество пар (А, В) лучей плоско-
сти П, не принадлежащих одной прямой и имеющих
общее начало; это множество устойчиво относительно
группы й, и эта группа действует на Е транзитивно
(но не однотранзитивно).
Кроме того, все преобразования /еЯ, переводя-
щие (А, В) в (Д,В), в системе осей, связанной с этой
парой, имеют вид
($, где v>0.
Следовательно, определитель преобразования f поло-
жителен.
Таким образом, для всех (А, В), (А', В') ^Е опре-
делители всех преобразований Д переводящих (А, В)
в (Д', В'), имеют одинаковый знак. Поэтому далее
Ориентация
147
теория может строиться так же, как в предыдущих
примерах.
Наконец, легко видеть, что две противоположные
пары имеют противоположную ориентацию.
Заключение. Из всех предыдущих примеров
становится ясным, что некоторую теорию ориентации
можно связать со всякой тройкой (В, где Е —
произвольное множество, — группа преобразований
множества В, транзитивная на нем, и — нормаль-
ный делитель группы S7, такой, что $/$+ есть группа
порядка 2 и при любом хе£ подгруппа элементов
группы S?, оставляющих неподвижной точку х, содер-
жится в S+ (ясно, что если это условие выполнено
для некоторого х, то оно выполнено и для всех хеЕ).
69. Элементарное исследование ориентации пар
лучей, не принадлежащих одной прямой
Исходя из методологических и методических сооб-
ражений, мы попытаемся исключить обращение к аф-
финной группе 51 при определении ориентации пар
лучей, не принадлежащих одной прямой.
Пусть Е— множество пар (Л, В) лучей плоскости
П, не принадлежащих одной прямой и имеющих об-
щее начало.
Для любых (Л, В), (Л', В') е£ будем говорить,
что (Л, В) и (Л', В') имеют о д и н а к о в у ю ориен-
тацию, если в случае собственного движения Д
переводящего Л в Л', лучи В' и /(В) оказываются по
одну сторону от прямой, несущей А' (иначе говоря,
в одной полуплоскости, ограниченной этой прямой;
см. рис. 11).
Так как всякое движение преобразует полупло-
скость в полуплоскость и собственные движения об-
разуют группу, то это отношение есть отношение эк-
вивалентности на В; легко видеть, что оно имеет в
точности два класса эквивалентности (достаточно рас-
смотреть множество пар (Л, X), где Л —данный луч).
Следовательно, в дальнейшем можно говорить об ос-
новном репере и о положительной или отрицательной
ориентации, как и в предыдущих примерах.
ю*
148
Гл. VI. Ориентация
Легко видеть, что всякое растяжение с положи-
тельным коэффициентом и всякое собственное дви-
жение, а следовательно, и всякое собственное преоб-
разование подобия сохраняют определенную таким
образом ориентацию.
Для всякой пары (Л, В) симметрия о относительно
прямой, содержащей луч А, переводит, очевидно,
(Л, В) в противоположно ориентированную пару. Но
для любого зеркального преобразования подобия /
преобразование подобия foo = g является собствен-
ным и, следовательно, сохраняет ориентацию; иначе
говоря, /((Л, В)) и (Л, В) имеют противоположную
ориентацию.
Ориентация углов
Пусть О, О' — два произвольных угла, отличных от
О и Говорят, что 0 и 0' имеют одинаковую ориен-
тацию, если найдутся две пары (Л, В), (Л', В') лучей
с общим началом, для которых
ЛВ — 0; AzBz = 0z; (Л, В) и (Л', В') имеют одинаковую
ориентацию.
Легко видеть, что это есть отношение эквивалент-
ности на множестве углов, отличных от 0 и ш, и что
это отношение имеет в точности два класса эквива-
лентности.
Ориентация
149
Предложение 69Л. Для любой тройки (x,y,z) не-
коллинеарных точек три угла xyz, yzx, zxy имею?
одинаковую ориентацию.
Доказательство. Покажем это для первых двух
углов.
Пусть х' — некоторая точка медпатрисы пары
(у, г), расположенная по ту же сторону от Д(у, г), что
и точка х.
Углы xyz и xryz ориентированы одинаково; то же
самое можно сказать про углы yzx и yzx'.
Однако x'yz = — x'zy (симметричность); следова-
тельно, xryz = yzx', откуда и вытекает требуемое
свойство.
3 а меча н и е. Для этого элементарного исследования ориен-
тации пар лучей, не принадлежащих одной прямой, мы исполь-
зовали метрическую структуру плоскости. По-видимому, это едва
ли можно считать удовлетворительным, поскольку аффинной
структуры здесь было бы достаточно; по в свою очередь и аф-
финная структура отнюдь не обязательна; можно построить тео-
рию ориентации, исходя только из аксиом I, II. Мы предло-
жим проделать это исследование в качестве упражнения.
70. Связь между понятиями ориентации и непре-
рывного преобразования
Мы провели исследование понятия ориентации алгебраиче-
скими методами, потому что на элементарном уровне невозможно
правильно использовать понятие непрерывности; истинная же
причина, побудившая нас выбрать именно такие определения и
обеспечившая их успех, носит топологический характер. Напри-
мер, можно показать, что на плоскости П две тройки точек (х, z)
и (%', у', г') имеют одинаковую ориентацию только в том случае,
когда существует непрерывное семейство троек (пеколлииеарных)
точек, которое связывает первую тройку со второй, или точнее
если в множестве таких троек, на котором задана естественная
топология, найдется дуга, концами которой являются два данных
элемента. Аналогичный результат имеет место для случая ориен-
тации пар лучей, не принадлежащих одной прямой.
Фактически, поскольку ориентация всегда определяется ис-
ходя из задания подгруппы некоторой группы преобразований,
нам достаточно изучить вопросы, связанные с этой подгруппой.
150
Гл. VI. Ориентация
Группы 3 преобразований, изучаемые в геометрии, действу-
ют на топологических пространствах — обычно многообразиях ко-
нечной размерности, — и сами эти группы снабжены некоторой
топологией, согласованной с их групповой структурой (непрерыв-
ность умножения и симметрии). Например, для группы линейных
преобразований евклидова пространства размерности п топология
в группе легко может быть задана с помощью (числовых!) ко-
эффициентов определяющей преобразование матрицы (пгд): есте-
ственно отождествить матрицу (ягд) с точкой пространства
(где N = л2), имеющей координаты гщ-, и принять топологию,
индуцированную топологией пространства RN.
В такой топологической группе <3 можно рассматривать дуги
и компоненты связности; через 3 + обозначается компонента связ-
ности, содержащая нейтральный элемент е группы т. е. в
обычном случае множество элементов х группы для которых
существует дуй а с концами е,х. Можно доказать, что есть
нормальный делитель группы факторгруппу $/$ + называют
г р у п п о и о р и е и т а ц и й группы
Обычно эта факторгруппа имеет порядок 2; мы ограничились
рассмотрением только этого случая, но может оказаться, что
дело обстоит и не так.
Например, если — группа дифференцируемых преобразо-
ваний объединения двух непересекающихся окружностей, то
$/$+ имеет порядок 8. Может случиться также, что $— связное
множество; тогда и + содержит единственный эле-
мент; это имеет место в случае проективных преобразований про-
ективной плоскости.
Перейдем теперь к исследованию частного случая
группы движений; одновременно мы попытаемся ра-
зобраться в смешении понятий (физического) процес-
са движения и движения как преобразования.
71. Процесс движения
Ребенок, пытающийся вникнуть в понятие движе-
ния, сталкивается с определенной трудностью, так как
физический мир дает мало моделей (геометрического)
движения в чистом виде1); чаще всего мы сталки-
ваемся с (физическим) процессом движения,
т. е. непрерывным семейством (геометрических) дви-
жений. Эта трудность усугубляется тем, что плоскость
или кусок плоскости не имеет дискретной структуры
!) Существуют, однако, элементарные примеры такого рода,
скажем отражение в зеркале или соответствие между двумя от-
тисками одной и той же гравюры.
Ориентация
151
и поэтому физически трудно определить образ какой’
нпбудь точки материальной модели при некотором
геометрическом движении.
Этот второй вопрос можно несколько упростить,
если вначале рассматривать лишь преобразования ко-
нечных подмножеств плоскости, определяя затем ме-
стонахождение точек плоскости — «молекул» мате-
риальной модели — с помощью системы координат.
От первой трудности можно избавиться полностью,
только если наряду с понятием движения будет точно
определено понятие процесса движения.
Определение 71.1. Пусть У — множество движений
плоскости II. Процессом движения называется всякое
отображение t —► ft отрезка [и, у] пространства /\ в «7,
которое непрерывно в следующем смысле: для любой
точки йеП отображение отрезка [и, и] в П
непрерывно.
Легко видеть, что если существуют три неколлине-
арные точки cz2, и3 плоскости П, такие, что каждое
из отображений t-^ft(cii) непрерывно, то отображе-
ние t-^ft непрерывно.
Действительно, каждое П может быть пред-
ставлено единственным образом в плоскости (11,0)
в виде
а = (где f==l, 2, з).
Но каждое ft есть аффинное преобразование; следо-
вательно,
ft (.а) = 2 atft (^);
функция ft есть сумма трех непрерывных функций и,
следовательно, также непрерывна.
В следующем предложении устанавливается связь
между понятиями процесса движения и ориентации;
оно объясняет тот факт, что псевдоопределения ориен-
тации, основанные на скольжении одной плоскости по
другой, не приводят к ошибкам.
Предложение 71.2. В любом процессе движения
t --з»ft либо все движения ft являются собственными,
либо все они — зеркальные движения.
152
Г.i. VI. Ориентация
• Доказательство. Формулировка и доказательство
останутся теми же и для случая произвольных аффин-
ных преобразований: определитель аффинного преоб-
разования ft есть непрерывная функция от t (посколь-
ку коэффициенты матрицы преобразования ft не-
прерывны по предположению); но он никогда не
обращается в нуль и имеет, следовательно, постоян-
ный знак, откуда и следует искомое свойство.
Следствие. Если fu — тождественное преобразова-
ние, то все движения ft суть собственные движения.
Частный случай: процесс вращения. Немного
ниже в связи с мерой углов мы займемся изучением
непрерывных представлений аддитивной группы R в
аддитивной группе углов. Пусть I—>&(/) — такое
представление; обозначим через ft вращение на угол
сс(/) вокруг некоторой точки 0. Процессом вра-
щения вокруг точки 0 называется всякий про-
цесс движения вида t-+ft (где /е[0, ц]).
Траекторию точки плоскости П при таком дви-
жении мы будем называть дугой окружности.
Заметим, что с таким процессом движения связано
вполне определенное вращение, а именно вращение
fv, но обратное, очевидно, неверно.
Упражнения к главе VI
Предлагается доказать, пользуясь только аксиомами I и II
и полагая, кроме того, что мощность а прямых плоскости П пре-
восходит 2 (тогда, как это следует из упр. 4 к гл. I, кардиналь-
ное число а бесконечно), некоторые свойства, которые были нами
ранее доказаны с использованием аффинной структуры плос-
кости П.
Понятие ориентированного направления
1. Пусть А, В — две параллельные прямые; выберем для
каждой из этих прямых одну из ее возможных ориентаций.
Говорят, что эти ориентированные прямые имеют одинако-
вую ориентацию, если существует такое направление б, не парал-
лельное прямым А и В, что проекция прямой А на прямую В
параллельно направлению б (как известно, эта проекция моно-
тонна по следствию 6.3) будет монотонно возрастающей. По-
казать, что для любого другого направления д', не параллельно-
го прямым А и В, проекция также будет монотонно возрастаю-
щей (можно использовать для этого упр. 7 к гл. I).
Ориентация
153
2. Вывести отсюда, что определенное таким образом отноше-
ние есть отношение эквивалентности на. множестве ориентиро-
ванных прямых, несущие прямые которых имеют заданное
направление; показать, что это множество разбивается на два
класса эквивалентности и что две ориентированные прямые, по-
рождаемые одной и той же прямой, принадлежат различным
классам.
Ориентация пар лучей с общим началом, не принадлежащих
одной прямой
3. Будем называть ориентированной полуплоскостью всякую
пару (А,Р), где А — ориентированная прямая и Р — одна из
замкнутых полуплоскостей, определяемых этой прямой.
Говорят, что две ориентированные полуплоскости (4, Р),
(Д', Р') имеют одинаковую ориентацию, если:
либо А и А' пересекаются и один из лучей (4 П Pz),
(Д' П Р) ориентирован одинаково с содержащей его прямой А
пли А', а другой противоположно;
либо А п А' параллельны и одинаково направлены и одна
из полуплоскостей Р, Р' содержит другую;
либо Д и Д' параллельны и противоположно направлены и
ни одна из полуплоскостей Р, Р' не содержит другую.
Показать, что это отношение есть отношение эквивалентно-
сти на множестве ориентированных полуплоскостей и что суще-
ствует в точности два класса эквивалентности по этому отноше-
нию; показать также, что ориентированные полуплоскости, опре-
деляемые одной и той же прямой, имеют различные ориентации.
Укажем, наконец, еще один, более элегантный способ срав-
нения ориентаций двух ориентированных полуплоскостей.
Пусть (А, Р) и (Д', Р')—две ориентированные полуплоско-
сти; каждой прямой D, пересекающей А и Д', поставим в соот-
ветствие число a a, a'(D), равное 1 или —1 в зависимости от
того, возрастает или убывает косая проекция прямой А на А' па-
раллельно D, и число (Зр, p'(D), равное 1 или —1 в зависимости
от того, имеют лучи D П Р и D П Р' одинаковую ориентацию на
прямой D или нет. Можно доказать, что произведение этих двух
чисел не зависит от D; это произведение равно 1 или —1; если
оно равно 1, то говорят, что (А, Р) и (Д', Р') имеют одинако-
вую ориентацию. Из очевидных соотношений
«Л, А' аД', Л» «Л, А 1 ’ аЛ, Л" = аЛ, А' ‘ аЛ', А"
и аналогичных соотношений для р немедленно получаем, что
только что определенное отношение есть отношение эквивалент-
ности, имеющее в точности два класса эквивалентности.
Далее, можно доказать, что это отношение совпадает с от-
ношением, определенным в начале этого упражнения.
4. Для любой пары (А, В) лучей с общим началом, не при-
надлежащих одной прямой, обозначим через f(A, В) ориентиро-
ванную полуплоскость, образованную ориентированной прямой,
порождаемой лучом А, и замкнутой полуплоскостью, определяе-
мой этой прямой и содержащей В.
151
Гл. VI, Ориентация
Будем говорить, что две такие пары (А, В}, (А', В') имеют
одинаковую ориентацию, если f (А, В) и f(A', В') имеют одина-
ковую ориентацию. Показать, что это отношение есть отношение
эквивалентности, имеющее в точности два класса эквивалент-
ности, и что две противоположные пары (А, В), (В, А) имеют
противоположную ориентацию.
5. Пусть X, Y, Z — три непустые выпуклые плоские множе-
ства, такие, что никакая прямая не пересекает все три множе-
ства сразу.
Показать, что все пары лучей (D(x,y), Z)(.v, г)), где х е X,
у е У, z е Z, имеют одинаковую ориентацию.
ГЛАВА VII
ТРИГОНОМЕТРИЯ
§ 1. ЭЛЕМЕНТАРНАЯ ТРИГОНОМЕТРИЯ
Элементарная тригонометрия состоит, в сущности,
из правильного определения тригонометрических ли-
ний угла, соответствующих формул сложения и неко-
торых соотношений между углами и расстояниями.
72. Косинус и синус угла относительно некоторого
базиса
Определение 72.1. Пусть (а, Ь)— ортонормирован-
ный базис центрированной плоскости (П, 0) и f—
вращение вокруг точки 0 па угол а.
Косинусом и синусом угла а относительно базиса
(а, Ь) называются координаты точки f (а) в базисе
(а, &); они обозначаются через cos a, sin а.
Мы перейдем сразу к изучению того, насколько
cos а и sin а зависят от выбора базиса.
Предложение 72.2. Величина cos а не зависит от
выбора ортонормированного базиса; напротив, значе-
ния sin а в двух ортонормированных базисах проти-
воположной ориентации противоположны по знаку.
Доказательство. 1. В плоскости (П, 0) после за-
мены базиса (я, Ь) базисом (а, —Ь) координаты точ-
ки f(a) будут равны cos а и —sin а.
2. Пусть g — произвольное вращение вокруг точ-
ки 0.
156
Гл. VII. Тригонометрия
Из равенства f(a) = (cos ct) а + (sina)b получаем
f (g (а)) = g (f (а)) = (cos а) g (а) + (sin а) g (b).
Следовательно, косинус и синус угла а относи-
тельно базисов (а, Ь) и (g(a), g(b)) равны.
3. Очевидно, косинус н синус угла а относительно
базисов, получающихся один из другого переносом,
одни и те же (сохраняются углы и координаты).
Из этих трех частных случаев следует справедли-
вость предложения, поскольку переход от базиса (а, Ь)
к любому другому ортонормированному базису осуще-
ствляется с помощью (возможно) осевой симметрии
с осью А(0, а), вращения вокруг точки 0 и переноса.
Следовательно, во всех тех вопросах планиметрии,
для решения которых мы хотим использовать синус,
существенно точно указать, какой репер выбирается
в качестве ортонормированного базиса. 11з соображе-
ний удобства и для поддержки интуиции обычно при
изображении на классной доске за оси принимают
горизонтальный луч А (О, а), направленный вправо, и
вертикаль А (0, /?), направленную вверх.
Предложение 72.3. Для всякой упорядоченной
пары А, В лучей с общим началом соз(ЛВ) равен
коэффициенту проекции с(Л,В).
Доказательство. Пусть 0 — начало лучей Л, В, и
а — точка, принадлежащая Л и определяемая усло-
вием d(0, а)=1. Если обозначить через f вращение
на угол АВ вокруг точки 0, то f(a) окажется точкой
луча В, определяемой условием rf(0, f(«))= 1.
Если а\ — ортогональная проекция точки f(a) на
прямую, несущую Л, то получаем, что cos а равен
скалярной величине k, такой, что = ka ~ с(Л, В)а.
73. Матрица вращения относительно
ортонормированного положительного базиса
Пусть (а, Ь) — ортонормированный базис плоско-
сти (П, 0), имеющий одинаковую ориентацию с ба-
§ 1. Элементарная тригонометрия
157
зпсным : репером, и f — вращение вокруг точки 0 па
угол а.
Пусть g— вращение вокруг точки 0, переводя-
щее а в Ь\ известно, что g2 есть центральная симмет-
рия с центром 0, откуда следует, что
g (а) = b; g (6) = g2 (а) = - а.
Из равенства
f (а) = (cos а) а 4- (sin а) b (1)
получаем, следовательно,
f W = f (g (а)) = g (f (a)) = (cos a) g (a) + (sin a) g (b),
ИЛИ
f (b) = (cos a) b — (sin a) a. (2)
Обозначим через g, ц координаты некоторой точ-
ки к в базисе (я, Ь); из соотношения х = 1а + ч\Ь по-
лучаем, учитывая (1) и (2),
f (*) = if (a) + (ё cos a -Wa) л +
+ (gsina-f-r]cos a)b.
Матрица преобразования f в базисе (a, b) имеет,
следовательно, вид
/cos a — sina\
\sina cos а/
В качестве легкого упражнения предлагается про-
верить, что это матрица некоторого движения; опре-
делитель этой матрицы равен 1.
Замечания. 1. Пусть (щ Ь) — ортонормирован-
ный базис плоскости (П, 0), ориентация которого от-
рицательна; в этом базисе косинус и синус угла a
равны cos а и —sin а; следовательно, матрицей пре-
образования f относительно (а, Ь) будет матрица
/ cosa sina\
\ — sin a cos а/
158
Гл. VI1. Тригонометрия
2. Производя вращение вокруг точки 0 и затем
осевую симметрию с осью А(0, я), можно получить
произвольное зеркальное движение, оставляющее точ-
ку 0 неподвижной; его матрица имеет, следователь-
но, вид
/cos a sin а
\sina — cos а
Можно показать, что ее определитель равен (—1)
и что неподвижные точки связанного с пей движения
заполняют некоторую прямую.
74. Формулы сложения
Пусть Д g— два вращения вокруг точки 0 на
углы а и р соответственно; их произведение f°g =
= g of есть вращение на угол (а + р).
Относительно произвольного базиса получаем:
матрица преобразования (/<>£) =
= (матрица преобразования f) X
X (матрица преобразования g).
В частности, после выбора ортонормированного
базиса (положительной или отрицательной ориента-
ции) из этого соотношения *) следуют тождества
cos (а + р) = cos а • cos р —- sin а • sin р, (3)
sin (а + р) = sin а • cos р + cos а • sin р. (4)
Эти соотношения могут быть представлены в дру-
гом, очень удобном, виде.
Положим для любого угла 0
Е (0) = cos 0 + i sin 0.
Из соотношений (3) и (4) получаем:
£(а + р) = £(<х).£(р). (5)
*) То есть, например, из соотношения
'cos a — sin a\ /cos p — sin p\ /cos(a + p)
ksin a cos a/ \sin p cos p/ \sin (a + p)
— sin (a + P)\
cos (a + p)/
§ 1. Элементарная тригонометрия
159
И наоборот, из соотношения (5) следуют (3) и
(4); таким образом, оно эквивалентно этим равен-
ствам. Если мы отождествим плоскость комплексного
переменного с плоскостью (П, 0), отождествляя
(g + it]) с (£а + т]6), то получим, что Е(0) есть не
что иное, как точка /(а), где f — вращение на угол 0
вокруг точки 0; следовательно, Е есть взаимно одно-
значное отображение множества Ж углов на множе-
ство Т комплексных чисел модуля 1. Из соотношения
(5) следует, что Е, помимо того, есть изоморфизм
в алгебраическом смысле этого слова, отображающий
группу на мультипликативную группу Т.
Этот изоморфизм совершенно замечателен, так
как с его помощью можно задать на топологию,
исходя из топологии, индуцированной на Т тополо-
гией плоскости. Такая топология не зависит от вы-
бора репера (а,Ь), потому что движение, позволяю-
щее переходить от одного репера к другому, сохра-
няет расстояния и, следовательно, непрерывно, так же
как и обратное ему движение.
Выводы
Элементарная тригонометрия может теперь стро-
иться очень просто.
Из соотношения (5) выводятся формулы умноже-
ния углов с помощью равенства
£(/га) = (Е(а))Л;
затем дается определение tga и из (3), (4), (5) по-
лучаются формулы сложения и умножения углов для
этой функции; затем доказывается, что «угол» между
двумя прямыми характеризуется его тангенсом.
Соотношение, имеющее место во всяком треуголь-
нике:
а2 == р2 + у2 — 2£у cos А,
уже известно (см. предложение 39.2).
Наконец, принимая во внимание тот факт, что си-
нусы двух углов (отличных от 0 и от) одинаковой
160
Гл. VII. Тригонометрия
ориентации имеют одинаковый знак, устанавливаются
соотношения
« = Р V
sin A sin В sin С
§ 2. МЕРА УГЛОВ
75. В поисках определения
Выделим сначала существенные особенности мер
таких величин, как площади, объемы, массы.
Пусть Е— некоторое множество и <£— какое-то
множество его подмножеств; будем предполагать,
что <S устойчиво относительно объединения конеч-
ного числа элементов, т. е. если A'i, Х2 е <F, то
и Xi их2 ее (S.
Ale рой на множестве <S называется отображе-
ние X —>/п(Х) множества & в такое, что
m(XiUX2) = in (Xi) 4- пг(Х2) для любых непересекаю-
щихся или «почти непересекающихся» А\, Х2; смысл
этого «почти» в каждом конкретном случае легко
уточнить.
Например, если Е— плоскость П и $ — множество
объединений конечного числа замкнутых треугольни-
ков, то говорят, что Xi, Х2 «почти не пересекаются»,
если Х}ПХ2 есть объединение конечного числа точек
п отрезков прямых; тогда площадь является мерой
на & в вышеуказанном смысле.
В этой общей схеме множество & есть, следова-
тельно, множество подмножеств множества £, устой-
чивое относительно объединения конечного числа
членов, a m — некоторая функция.
Каждой группе углов, отождествленной с
окружностью Т плоскости С комплексных чисел, ока-
зывается возможным эффективным образом поста-
вить в соответствие привилегированную меру такого
рода с общей массой 1, инвариантную относительно
групповой операции этой группы; се называют ме-
рой Хаара на группе. Эта мера имеет некоторое
отношение к тому, что мы называем «мерой углов»,
и именно в связи с этим возникает путаница, царящая
$ 2. Мера углов
161
зачастую в преподавании всюду, где речь заходит об
измерении углов.
Но то, что мы ищем, не есть функция множества,
так как нельзя трактовать сумму двух углов как
объединение двух множеств. Нельзя также опреде-
лить искомую меру как представление группы .5$
углов в аддитивной группе поля R, т. е. как числовую
функцию f, такую, что
f(a + p) = f(a) + f(p),
потому что тогда для прямого угла d мы получилибы
4f(d) = f(4d) = H0) = 0,
откуда f (d) = 0, что неприемлемо.
Мы вынуждены действовать в обратном порядке
и принять за «меру углов» представление группы R
в группе Для того чтобы подчеркнуть интуитив-
ную идею, лежащую в основе этого определения, мы
используем конкретную модель группы Рассмот-
рим окружность Сг с центром в точке 0 и радиу-
сом г; пусть со— некоторая произвольная точка
окружности Сг; для любого угла а обозначим че-
рез ф(а) точку окружности Сг, для которой
coO(p(a) = a. Взаимно однозначное отображение
а—►ф(а) множества на Сг задает на этой окруж-
ности структуру группы, изоморфную л/, с соответ-
ствующим изоморфизмом ф, нейтральным элементом
этой группы будет со.
Мерой углов будет не что иное, как представлен-
ная в математической форме операция наматывания
нити (представляющей /?) на Сг таким образом, что
начало нити R отображается на начало со окруж-
ности Сг.
Видно заранее, что эта операция будет неодно-
значной, поскольку, с одной стороны, радиус г про-
изволен, а с другой стороны, наматываемая нить мо-
жет быть ориентирована двумя различными спосо-
бами (рис. 12).
Н Зак. 323
162
Гл. VII. Тригонометрия
76. Определение и очевидные следствия
Определение 76.1. Мерой угла называется всякое
непрерывное отображение <р поля R на аддитивную
группу углов, такое, что для любых х, у е R
ф (х + Z/) = ф (х) + ф (z/). (1)
Непрерывность, о которой здесь идет речь, соот-
ветствует топологии группы задаваемой изомор-
физмом группы зФ и мультипликативной группы Т
комплексных чисел.
Из соотношения (1) следует, что эта непрерыв-
ность эквивалентна следующему условию:
<р(х) стремится к 0, если х стремится к 0.
Для любого числа й=#0 отображение x-*kx есть
непрерывный изоморфизм аддитивной группы R на
себя, и, следовательно, отображение x~+q(kx) будет
также непрерывным представлением группы R в
$ 2. Мера углов
163
В элементарном курсе геометрии мы будем счи-
тать, что существует такое представление ср и что все
другие представления совпадают с теми, которые мы
только что связали с представлением ф.
Элементарного доказательства этого факта не
существует; следовательно, необходимо, чтобы мы
открыто сказали об этом, как того требует честность,
не пытаясь это доказать. Можно показать правдопо-
добность этого факта, пользуясь моделью типа «нить,
накручиваемая на окружность».
Свойства такой меры ф
Если ф — непрерывное представление группы R
в то ф-1(0) есть замкнутая подгруппа группы /?;
существует такой элемент х 4= 0, что ф (х) = ш, откуда
следует, что ф(2х) = 0; значит, ф-1(0) отлично от R
и от {0}; это будет, следовательно, множество чисел
па (n&Z), кратных некоторому числу а > 0, назы-
ваемому периодом меры ф.
Для всех х е R и всех n^Z
Ф (х + па) = ф (х) + ф (па) = ф (х).
Угол ф(а/2), будучи удвоенным, равен 0; следо-
вательно, он равен 0 или но так как н/2 не
кратно а, то ср(а/2) = w.
Следовательно, удвоенный угол ф(п/4) равен от,
откуда ф(л/4) — прямой угол.
Выберем в плоскости П в качестве репера неко-
торый ортонормированный базис; тогда говорят, что ф
положительно, если ф(а/4) есть положительный пря-
мой угол; если ф не положительно, то —ф положи-
тельно.
Для любого числа b > 0 существует единственная
положительная мера ф с периодом Ь. Если ф — про-
извольная положительная мера с периодом а, то
мерой ф служит отображение
/ а \
Х~>Ф^уХ].
В зависимости от того, равно ли а 400, 360 или
2л (длина окружности радиуса 1), говорят, что
11*
164
Г л. VII. Тригонометрия
единицей меры ср является град*), градус или ра-
диан.
Для любого угла ао уравнение ф(х) = &о имеет
хотя бы одно решение, потому что ф(/?) = <5$; если
Хо — это решение, то данное уравнение может быть
записано в виде ф(х— хо)=О; следовательно, его ре-
шениями будут числа х = х0 + па (где neZ). Каж-
дое из них называется значением меры угла
ао; то из этих чисел, которое принадлежит отрезку
[О, а[, иногда называется главным значением
меры угла ао-
Всякое равенство ои = аг может теперь быть пред-
ставлено в следующем виде:
(%1 — х2) есть число, кратное а, где Xt — произ-
вольное значение меры угла аг- (/ = 1, 2).
Приложение. Пусть ао<=«я/ и р е Z; равен-
ство ра = ао в Ж эквивалентно равенству рх=х§+па,
где х, л'о — произвольные значения меры углов а, ао-
Следовательно,
/ *о । па \ ( xG\ , ( па \
Существует р различных решений, получаемых
при п = 0, 1, ..., (р— 1).
77. Схема доказательства существования
непрерывного представления группы R в группе Т
Существуют различные доказательства существования непре-
рывного представления группы R в мультипликативной группе Т
комплексных чисел модуля 1; вот одно из них:
оо
V zn
Для любого комплексного z ряд ~ут сходится абсолютно;
о
пусть f(z)—его сумма; это непрерывная функция от z (сходи-
мость «нормальна» на всем круге и, следовательно, равномерна).
Можно проверить (произведение абсолютно сходящихся ря-
дов!) тождество
/(« + ») = /(«)/(»)•
*) Применяемая иногда единица измерения углов—сотая
часть прямого угла.
$ 2. Мера углов
.165
Так как
f (z) = f (z) (где х + iy = х - iy),
то, в частности, получаем для всех у £/? ;
f (iy) f = f (iy) f(~ iy) = f(0) = 1. откуда | f (iy) | = 1.
Отображение ф, определяемое как y->f(iy), будет, следова-
тельно, непрерывным представлением группы R в Т.
Для того чтобы доказать, что ф(7?) = Т, положим
Ф (у) = с (у) + is (у) (с (у) и s (у) — действительные числа).
Функции с и s дифференцируемы (дифференцирование рядов) и
с' = — s и s' = с.
Из этих соотношений и из равенства ДО) — 1 элементарно
выводится, что существует такое число I > 0, для которого
с (I) == 0 и с, s О на [О,/].
Отсюда следует, что $(/) = !, а также что ф(/) = f и что
ср ([О, /]) есть множество элементов группы Т, действительная и
мнимая часть которых положительна; отсюда сразу получаем, что
ф([0, 4/j) = Т и что 4/ — период меры ф.
Длину дуги ф([0,/]) группы Т вычислить легко: действитель-
но, так как ,
г2 . ,2 9 1 2 1
С + s = S2 + с2 = 1,
то длина этой дуги равна Z; она имеет классическое обозначение
л/2 (точное вычисление числа л производится, например, исходя
из формулы Мешэна*), использующей разложение в ряд функ-
ции arctg х).
Единственность. Утверждение, что все непрерывные пред-
ставления группы R в Т могут быть получены из какого-то
одного из них Путем композиции этого представления с авто-
морфизмом x-+kx группы R, сводится к утверждению, что если
период одного такого представления ф равен 2л и если Ф =
*) Так называется следующая формула:
yd у 1_1 JL11 1 _1 J. 1 _!______________\
Ляв1Ь\1в5 3 ' б3 "Г 5-’ 55 7 ’ 57 + 9 ’ 59
/1 1 1 1 1______________\
\ 239 3 * 2393 + 5 * 2395 ’ J
(она получается элементарными преобразованиями из разложе-
ния в ряд функции arctg х и соотношения arctg X + arctg у =»
Л * +У Л л у
= —, если -—р эта формула отличается быстротой схо-
димости стоящего в правой части ряда, что делает ее очень
удобной для приближенного вычисления л.
166
Гл. VI1. Тригонометрия
то это есть не что иное, как только это изученное представле-
ние (р.
Чтобы в этом убедиться, покажем сначала, что образы чисел
[зт "1
О, — при представлениях ф и гр совпадают; это сле-
дует из того факта, что для всякого целого п > 0 имеет место
равенство
следовательно, ф и гр совпадают на множестве чисел вида ~срГ>
которое всюду плотно в /?; поэтому непрерывность представле-
ний ф и гр влечет равенство ф = гр.
Замечания. 1. В анализе функции с и s называют коси-
нусом и синусом; эта терминология оправдана тем, что, напри-
мер, s(t) равно синусу угла, связанного с ф(/). Это удобная
условность; но следует помнить, что при этом мера угла пред-
полагается положительной и за единицу измерения принят ра-
диан.
2. В элементарном курсе анализа доказывается, что для
всякой меры углов ф отображение /-> sin (ф(/)) дифференци-
руемо; делают это, скорее «показывая», чем доказывая, справед-
ливость равенства
lim sin (ф (t) )/t = 1,
/->о
где ф — положительная мера угла в радианах.
Было бы честнее прямо сказать, что допускается существо-
вание некоторого представления ф, удовлетворяющего этому со-
отношению; впоследствии будет доказано, что для такого ф вы-
полняется равенство dx2 + dy2 = dl2; это соотношение может
быть интерпретировано на интуитивном уровне («накручива-
ние» R на Т).
78. Арифметическая мера угла
Определение 78.1. Пусть <р — некоторая мера угла
в радианах. Для любого угла а арифметической ме-
рой этого угла (в радианах) называется положитель-
ное число р(а), определяемое условием р(а) — inf |х|'
(inf берется по всем х, удовлетворяющим равенству
<р(х) = а).
Очевидно, что /Да) = р(—а), так как <р(—%) =
= —ф(х).
Покажем, что
р (а + Р)< р (а) + р (Р).
§ 2. Мера углов
167
Действительно, найдется такое x^R, что ср(х)=а
и |х| = р(а); найдется также такое у е /?, что
<р(//)= р И \у\ = р(Р).
Но ср(х + у) = а + Р; следовательно,
p(a + p)<|x + z/K|x| + |z/|=p(a) + P (Р)-
Отсюда получаем, что если для любых а,
положить
d (а, Р) = Р (Р - а),
то d будет расстоянием на инвариантным отно-
сительно переносов группы
Отсюда же получаем расстояние на множестве на-
правлений лучей, полагая
й(л, в) = р(£в).
Замечание. Всякий угол, отличный от ш, ха-
рактеризуется своей арифметической мерой и ориен-
тацией; это объясняет, хотя и не оправдывает, тот
факт, что углы можно изучать, исходя из их ариф-
метической меры и ориентации.
Упражнения к главе VII
1. Пусть f — непрерывное отображение отрезка [а, Ь] в груп-
пу Т ~ R/Z, такое, что f(a) = 0, и пусть <р — каноническое ото-
бражение группы R на Т,
Показать, что существует, и притом единственное, непре-
рывное отображение g отрезка [«, 6] в 7?, такое, что g(a) — О
и f = Ф ° g-
2. Пусть (аО —любое конечное семейство углов одинаковой
ориентации. Обозначим через р арифметическую меру углов; по-
казать, что
(2 р (ai) < я) (р (5 a<)=2 -р («,))•
3. Показать, что для любого треугольника (а, Ь, с) с несов-
падающими вершинами сумма арифметических мер углов этого
треугольника равна л.
ГЛАВА VIII
ОКРУЖНОСТЬ
79. Определение окружности; симметрии
окружности
Определение 79.1. Пусть а П и р— некоторое
положительное число. Три части плоскости П, опре-
деляемые соотношениями
d(a, х) = р; d(a, х)<р; d(a, х)>р,
называются соответственно окружностью радиуса р
с центром в точке а, внутренней областью окружно-
сти, или кругом, и внешней областью .окружности.
Будем обозначать окружность и круг соответст-
венно через С(а, р) и D(a, р).
Множество D(a, р) называется также открытым
кругом радиуса р с центром а, а множество D(a, р) U
С (а, р) замкнутым кругом радиуса р с центром а.
Очевидно, что всякий луч с началом в а пересе-
кает С (а, р) в единственной точке и что а есть центр
симметрии множества С(&, р).
Предложение 79.2. 1. Точка а — единственный
центр симметрии множества С(а,р).
2. Осями симметрии множества С (а, р) являются
прямые, проходящие через точку а, и только эти пря-
мые.
Доказательство. 1. Пусть а' — некоторый центр
симметрии множества С (а. р), и пусть D — прямая,
проходящая через а и а'. Прямая/) пересекает С (а, р)
в двух точках; точки а и а' — середины этой пары то-
чек, следовательно, а = а'.
Окружность
169
2. Пусть D — прямая, проходящая через а, и пусть
Ф — осевая симметрия с осью £>;
(% С (а, р)) (d(a, ф (х)) = d (а, х) = р) =>
4(ф(х)еС(а, р)).
Следовательно,
<р(С(а, р))с=С(а, р),
откуда
С (а, р) = <р2(С(а, р)) с: <р (С (а, р)),
Поэтому ф(С(а, р)) = С (а, р); иначе говоря, D есть
ось симметрии множества С (а, р).
В обратную сторону: пусть D—ось симметрии мно-
жества С (а, р), и пусть D'— перпендикуляр к О, про-
ходящий через a; D и D' — две перпендикулярные
оси симметрии; следовательно, их пересечение есть
центр симметрии множества С (а, р), т. е. а. Иначе
говоря, D проходит через а.
Следствие 79.3. (С (а, р) = С (а', р')) (и = а' и
р = р')-
Действительно, поскольку а и а —центры сим-
метрии одной и той же окружности, то а = п'; отсюда
очевидно следует, что р = р'.
Следствие 79.4. Множество С(а, р) устойчиво от-
носительно любого вращения вокруг а. Более точно*
окружности С(а,р) и множество {а} являются траек-
ториями группы 91а вращений вокруг точки а.
Следствие 79.5. Для всякой пары С, С' окружно-
стей прямая, соединяющая их центры (предполагае-
мые различными), является осью симметрии мно-
жеств CUC' и СПС'.
80. Образ окружности при преобразовании
подобия
Предложение 80.1. Образом окружности С(а,р)
при преобразовании подобия f с коэффициентом k
будет окружность C(f(a),kp).
>70
Гл. VIII. Окружность
Доказательство. Имеют место следующие очевид-
ные импликации:
(х <= С (а, р) )=>(d(а, х) = р) => (d (f (х), f(a)) = &р)=>
=Ф (f (х) ё= С (f (a), £р)).
Иначе говоря,
НС(ц, Р))ссш ^р). (1)
Преобразование f~\ обратное к преобразованию f,
есть преобразование подобия с коэффициентом k~l;
следовательно, аналогичным образом получаем
Г’(С(На), kp))czC(a, р). (2)
Применив f к обеим частям включения (2), по-
лучим
kp)cf(C(a, р)). (3)
Сравнение включений (1) и (3) доказывает пред-
ложение.
Предложение 80.2. Для всякой пары окружностей
С(а,р), С(а\р') найдется в точности два (различных
между собой) растяжения плоскости П, переводящих
первую из них во вторую\ коэффициенты этих растя-
жений противоположны.
Доказательство. В центрированной плоскости
(П, 0) образ окружности С (а, р) при преобразовании
х —>hx + b (h е /?*, b е (П, 0)) есть по предложе-
нию 80.1 окружность радиуса |Л1р с центром в точ-
ке ha 4- b.
Так как эта окружность совпадает с окружностью
С (а', р'), то
a' = ha + b', р' = | h | р.
Эти соотношения эквивалентны следующим ра-
венствам:
Л = — или ; b — a' — ha.
Р Р
Окружность
171
Эти последние точно определяют искомые растя-
жения; они различны, поскольку их коэффициенты
противоположны по знаку.
Частные случаи ♦
1°, р = р'; одно из двух растяжений есть перенос
х-+х + (а'— а), а другое — центральная симметрия с
центром в середине пары (а, а').
2°. а = а'; растяжения — две гомотетии с центрами
в точке а = а'.
3°. Если р 4= р' и а 4= а', то оба растяжения — го-
мотетии; их центры, очевидно, лежат на прямой
А (а, а') и делят пару (а, а') в отношениях р/рх и
—р/р', так что они гармонически сопряжены относи-
тельно этой пары точек.
Замечание. Все только что сказанное об
окружностях справедливо также как для кругов, так
и для внешних областей окружностей.
81. Выпуклость круга
Предложение 81.1. Всякий открытый (или замкну-
тый) круг есть выпуклое множество.
Доказательство. Действительно, допустим, что
Z?, c^D(a, р). По следствию 40.4
с]) =>(d(a, x)<sup(d(a, 6), d(a, с))),
откуда d(a, х) < р.
Для замкнутого круга доказательство аналогично.
Следствие. Пересечение двух кругов (называемое
линзой) выпукло. Пересечение круга и полупло-
скости (называемое сегментом) выпукло.
82. Пересечение круга и прямой
Предложение 82.1. Пусть D — некоторая прямая,
С — окружность радиуса р с центром а и d — рас-
стояние от а до D\ обозначим через D' перпендикуляр
172
Гл. VIII. Окружность
к прямой D, проходящий через а, и через х0— точку
пересечения прямых D и D'. Тогда
(d> р)=> (Z) П С = 0) и внешняя область окружности С
содержит D\
(d = р) (£) Q с = {х0}) и внешняя область
окружности С содержит D \ {х0};
(d<р) => (D П С = {хи х2}, где х{ =И= х2) и
( внутренняя область С содержит ]хи х2[;
[ внешняя область С содержит D \ [хн х2].
Это предложение есть простое следствие предло-
жения 40.1.
Следствие 82.2. Если и и v принадлежат соот-
ветственно внешней и внутренней областям окружно-
сти С, то отрезок [и, у] пересекает С и притом в един-
ственной точке.
Действительно, пусть D — прямая, содержащая и
и v\ очевидно, имеет место третий случай предыду-
щего предложения; следовательно, z/e]xi,x2[ и
v е D \ [хь х2]; отсюда сразу следует доказываемое
свойство.
Приложение. Пусть иь и2, ..., ип е П, при-
чем Ui принадлежит внутренней области окружности
С, а ип — внешней; тогда среди отрезков [uit ui+l] най-
дётся такой, который пересекает С.
Действительно, пусть р — наибольший из индек-
сов z, для которых щ принадлежит внутренности
окружности; дано, что рфп и up+i принадлежит
внешней области окружности; следовательно, [ир, wp+i]
пересекает С.
83. Касательная к окружности
Определение 83.1. Касательной к окружности
С (а, р) в точке х этой окружности называется пря-
мая D, проходящая через х и перпендикулярная пря-
мой Д(я, х).
Окружность
173
Из предложения 82.1 следует, что D пересекается
с окружностью в единственной точке х и что множе-
ство (£>\{х}) лежит во внешней области окружности;
это значит, что не существует точки внутри окружно-
сти, через которую проходит какая-нибудь касатель-
ная к этой окружности, и что единственной касатель-
ной, проходящей через точку х окружности, будет
касательная к окружности в этой точке.
Имеют место следующие очевидные эквивалент-
ности:
(D — касательная к С в x)£>(DQC = {х})^4
(проекция точки а на D есть х и d(at х) — р).
Предложение 83.2. При любом преобразовании
подобия f плоскости П для всякой окружности С
имеет место эквивалентность
(D — касательная к С в х)<=^
4=^(f (D) — касательная к f (С) в f(x)).
Доказательство. Это следует, например, из того,
что оба сформулированных в предложении свойства
могут быть представлены соответственно в следую-
щем виде:
(ОПС) = М и (f(D)nf(C))^f(x).
В частности, если f — растяжение, то касательные
к окружностям С и f(C) в соответствующих точках
параллельны.
84. Пересечение двух окружностей
Пусть С(п, р) и С (а', р') — две окружности; если
они имеют общую точку х, то расстояния между точ-
ками тройки (п, а', х) равны соответственно d(a, а').
р', р.
И наоборот, если найдется на плоскости треуголь-
ник (6, Ь', у) со сторонами d(a, а'),р', р, то существует
движение /, отображающее (6, Ь') на (а, а'); точка;
f(y) принадлежит в этом случае обеим окружностям.
174
Гл. VIIJ. Окружность
Применив один из критериев существования тре-
угольника на плоскости с данными длинами сторон
(предложение 39.5), можно, следовательно, сформу-
лировать следующее утверждение:
Предложение 84.1. Пусть С, С' — две окружности
с радиусами р, р', расстояние между центрами кото-
рых равно d. Тогда
(С Л С' #= 0) О (I Р - р' I < d < р + р').
Это предложение легко дополнить следующим:
Если d = 0, то условие пересечения запишется в
виде р = р', и в этом случае СГ\С' = С = С'.
Если d=?=0 и имеют место строгие неравенства, то
СП C, = {a7i, А72}, где и х2 различны и симметричны
относительно прямой, проходящей через центры
окружностей.
Если хотя бы одно из неравенств обращается в
равенство, то х{=х2 и обе окружности имеют общую
касательную в этой точке (в этом случае говорят, что
они касаются).
85. Уравнение окружности
Пусть (ui, и2)—ортонормированный базис пло-
скости (П, 0); через хь х2 будут обозначаться коорди-
наты точки х относительно этого базиса.
Предложение 85.1. (х^С(а, p))Oi((^i—Л1)2-Е
+ (Х2 —а2)2 = р2).
Доказательство. Действительно, свойство (х е
еС(а, р)) может быть записано в виде d2 (я, х) =р2,
откуда следует искомая эквивалентность.
Соотношение (хх — £])2 + (х2 — а2)2 = р2 есть равен-
ство вида:
х2 + х2 + 2«Xj + 20х2 + у = 0.
Исследуем, в каком случае такое уравнение будет
уравнением окружности.
Окружность
175
Оно может быть представлено в виде „
(xj + а)2 + (х2 + Р)2 + у — а2 — р2 = 0.
Если у > а2 + р2, то, так как сумма первых двух
слагаемых всегда больше 0, решения не существует.
Если у = а2 + р2, то единственным решением будет
точка (—а, —Р).
Если у<а2 + р2, то, положив р=(а2 + Р2 — у)1'2, по-
лучим, очевидно, уравнение окружности с центром в
точке (—а, —Р) и радиусом р.
Окружность С (а, р) проходит через точку 0 тогда
и только тогда, когда
а2 + а2 == р2 или у = 0.
86. Некоторые характеристические свойства
окружности
Перечислим некоторые классические свойства
окружности, которые хорошо предложить в качестве
упражнений, не преувеличивая, однако, их значения.
1. Пусть а, Ь^П и точка 0 — середина пары (а, Ь).
Для всех хе С(0, р) имеет место равенство
d2 (х, а) + d2 (х, Ь) = 2р2 + 2d2 (0, а).
Обратно, для любого k>2d2(0, а) множество
точек х е П, таких, что d2(x, a) -bd2(x, b) —k, есть
окружность с центром в точке 0.
2. Пусть а, b е П, а4=Ь и k — положительное число;
обозначим через Е множество таких точек х плоскости
П, для которых
d(x, а) = Ы(х, &).
Нахождение Е с помощью способов, называемых
элементарными, — довольно тонкая задача; здесь мы
сталкиваемся с прекрасной возможностью применить
точные методы и проиллюстрировать мощность
средств алгебры.
Выберем ортонормированный базис так, чтобы его
первая ось проходила через точки а, Ь. Данное равен-
ство запишется тогда в виде
d2 (х, а) — k2d2 (х, Ь) = 0
175
Гл. VIII, Окружность
ИЛИ
((х, - df 4- х2) - ^((х, - ft)2 + x2) = 0.
Если £=1, то множество E есть, очевидно, медиат-
риса пары (a, ft).
Если &#=!, то это уравнение, очевидно, можно пе-
реписать так (разделив его на (1 —k2))\
х2 4- х* 4- 2axj 4- 2рх2 4~ у = 0.
Так как Е содержит две различные точки ть /т?2
прямой A (a, ft), то рассуждение, аналогичное прове-
денному в доказательстве предложения 85.1, показы-
вает, что Е есть окружность; так как A (a, й) есть, оче-
видно, ось симметрии множества £, то диаметр этой
окружности равен (тьт2); заметим, что (mbm2)
делит отрезок (a, ft) гармонически.
Обратно, если С — произвольная окружность,
a, ft — две произвольные различные точки некоторой
оси симметрии D окружности С, гармонически сопря-
женные относительно точек множества СП/),
то множество точек х, таких, что
d(x, a) = kd(x, b), где k = ,
очевидно, совпадает с С.
Можно, далее, рассмотреть множество окружно-
стей, получающихся при различных значениях k и
фиксированных а, b (это будет пучок окружностей);
исследовать пучок, сопряженный этому пучку*), ит. д.
3. При исследовании множества точек, из которых
некоторьш отрезок виден под заданным углом, обыч-
но различаются углы, образованные прямыми, и углы,
образованные лучами. Мы сейчас увидим, что при
соответствующей формулировке можно обойтись без
углов между прямыми и очень просто решить эту
задачу.
*) Относительно упоминаемых здесь понятий геометрии окруж-
ностей см., например: «Энциклопедия элементарной геометрии»,
кн. IV (геометрия), М., Физматгиз, 1963, статья «Окружности».
Окружность
177
Лемма 86.1. Пусть (%, 0, у)—тройка попарно раз-
личных точек, образующая равнобедренный треуголь-
ник: d(O, х) = d(O,y), Тогда имеет место равенство
хОу + 20ух = хОу + 2#х0 = пт.
Доказательство. Действительно (следствие 59.2),
имеет место равенство
хОу + Оух + ухО = ш и Оух — ухО.
Предложение 86.2. Для всякой тройки (а, х, Ь)
неколлинеарных точек плоскости П имеет место ра-
венство
2axb = a0b, где 0 — центр окружности, проходящей
через точки а, Ь, х.
Доказательство. Действительно, по лемме 86.1
для равнобедренных треугольников (х, 0, а) и (Ь, 0, х)
имеют место равенства
х0а + 2ах0 = тп и ЬОх + 2Qxb = ет.
Сложив эти равенства, получим
bQa 4- 2axb = 0, или 2axb = a&b.
Следствие 86.3. Пусть а, b — различные точки плос-
кости П и сс=#О — некоторый угол\ рассмотрим
окружность С, проходящую через а и Ь, центр кото-
рой определяется из условия
2ЬаО = (пт — а).
Тогда для всех х^=а, b имеет место эквивалент-
ность
(х ^ С)^(2ахЬ = а).
Доказательство. Действительно, для любой точ-
ки 0 медиатрисы пары (а,Ь) равенство 2ЬаО = (пт — а)
эквивалентно равенству аОЬ = а; с другой стороны,
если а, х, b принадлежат одной прямой, то
2ахЬ = 0 5^ а.
12 Зак. 323
178
Гл. VHI. Окружность
Пусть теперь хе П, причем хфа и х ¥= Ь.
Если х е С, то из предложения 86.2 следует, что
2ахЬ = аОЬ = а; и наоборот, если 2ахЬ = а, то точки
а, х, b не принадлежат одной прямой. Если О' —
центр окружности, проходящей через эти точки, то
из того же предложения следует, что aQ'b = а и, сле-
довательно, 0 = О' и х е С.
Замечание, Пусть Pi, р2— два решения урав-
нения 2рг= а. Тогда рг=#0, рг-¥= w (i = 1, 2) и
Pi — р2 = w; следовательно, один из этих углов имеет
положительную ориентацию, а другой — отрицатель-
ную.
Однако в зависимости от того, в какой из откры-
тых полуплоскостей П1, П2, определяемых прямой
Л (я, Ь), находится точка х, угол axb будет иметь
положительную или отрицательную ориентацию (све-
сти к рассмотрению угла xba, пользуясь предложе-
нием 69.1).
Следовательно, на одной из дуг СИП; угол axb
равен Pi, а на другой — р2. Отсюда следует, что для
любого угла р множество точек х плоскости П, та-
ких, что
axb = р,
есть дуга окружности с концами а и Ь.
87. Степень точки относительно окружности
Определение 87.1 Степенью точка х плоскости П отно-
сительно окружности С(а,р) называется число
Р (х) = d2 (а. х) — р2.
Функция х~>Р(х) называется степенью относительно С (а, р).
Очевидно, в зависимости от того, лежит точка х внутри
окружности, вне нее или принадлежит ей, имеет место одно из
соотношений
P(x)<0; Р(х)>0; Р (х) = 0.
В произвольном ортонормированием базисе получаем
р U) = (*! - <h)2 + (*2 ~ а2)2 - р2.
Окружность
179 •
Предложение 87.2. Пусть Р — степень относительно не-
которой окружности С\ рассмотрим точку хеП.
1. Для любых диаметрально противоположных точек p,q
окружности С имеет место равенство
Р (х) = хр • xq.
2. Для любых различных точек р, р' окружности С, лежа-
щих на одной прямой с точкой х> имеет место равенство
Р (х) = хр • хр' = хр ♦ хр'.
3. Если точка х принадлежит касательной к окружности С
в точке р, то
Р (х) = (хр)2 = d2 (х, р).
Доказательство. Пусть а — центр окружности С и р —
ее радиус.
1. хр • xq — (ха + ар) • (ха — ар) — ха2 — ар2 = d2 (а, х) — р2 =
= Р(х).
2. Пусть q — точка, симметричная точке р относительно
центра а\ известно, что p'q и хр перпендикулярны; следова-
тельно,
хр • хр' = хр • (xq + qp') = хр * xq — Р (х).
3. Из прямоугольного треугольника (х, а, р) получаем
d2 (х, р) = d2 (а, х) — р2 = Р (х).
Радикальная ось и пучки окружностей
Пусть С и С' — две несовпадающие окружности, Р и Р' —
степени относительно этих окружностей, k — произвольное число.
Проделав несложные выкладки, можно найти (в подходящем
ортонормированием базисе) уравнение, задающее множество то-
чек х, таких, что Р(х) = kP'(x), и сравнить полученный резуль-
тат с результатом для окружностей, задаваемых уравнением
d (х, а) = hd (х, Ь).
Упражнения к главе VIII
1. Пусть X — внешняя область некоторой окружности. Пока-
зать, что X связно, в том смысле, что две произвольные точки
множества X могут быть соединены ломаной, все звенья кото-
рой принадлежат X.
2. Показать, что всякий замкнутый (соответственно откры- ♦
тый) круг есть пересечение семейства замкнутых (соответствен-
но открытых) полуплоскостей. Вывести отсюда, что такой круг
есть выпуклое множество.
12*
180
Гл. VIII. Окружность
3. Пусть D — замкнутый круг в плоскости П. Показать, что
для любой точки х е П найдется единственная точка у ^D, для
которой расстояние d(x,y) минимально; эту точку р(х) назы-
вают проекцией точки х на круг D.
Показать, что такая проекция р на D уменьшает расстояния
(т. е. что d(p(u), p(v)) d(u,v)).
4. Пусть X — произвольное подмножество плоскости П,
г > 0 — некоторое число ид — направление прямой.
Каково множество точек касания касательных к окружно-
стям С(х, г), где х е X, имеющих направление 6?
5. Пусть X — произвольное подмножество плоскости П, точка
OgU и 6—направление прямой. Рассмотрим множество Y то-
чек касания прямых направления 6 и проходящих через точку О
окружностей, центры которых принадлежат Х\ как найти У,
зная X?
6. Пусть А, В— две прямые и ug/1, v^B (u=£v). Для
любой точки х, отличной от и и v, обозначим через а(х) (со-
ответственно Р(х)) окружность или прямую, проходящую че-
рез х и касающуюся прямой А в точке и (соответственно пря-
мой В в точке у). Каково множество точек х, таких, что а(х)
и Р(х) касаются?
7. Пусть f — собственное преобразование подобия плоско-
сти II и я е П.
Каково множество точек х, таких, что x^=f(x), и таких, что
ае= &(x,f(x))?
8. Пусть С, Cz — две окружности различного радиуса.
Найти множество собственных преобразований подобия, пе-
реводящих С в С'. Та же задача для зеркальных преобразова-
ний подобия; показать, что оси этих преобразований подобия
проходят через одну неподвижную точку.
9. Пусть D — некоторая прямая, С — окружность и k — за-
данное число.
Для любой точки х обозначим через Р(х) степень точки х
относительно окружности С и через d(x) —расстояние от тонких
до прямой D.
Каково множество точек х, для которых Р(х) = kd(x)?
10. Пусть (Ci). е j — некоторое конечное семейство окружно-
стей и (A/)z е / — семейство чисел. Для любого i е I обозначим
через Pi степень относительно Ci.
Каково множество точек х, для которых
^kiPi(x) = С (С — заданная константа)?
В частности, каково это множество, если 5Лг- = 0?
В каком случае функция ЕМЛ- будет постоянной на плос-
кости П?
ГЛАВА IX
ПРОСТРАНСТВО
§ 1. аксиомы
88. Выбор метода
Мы уже подчеркивали во введении, что для на-
чального дедуктивного курса геометрии плоскости
необходима аксиоматика, состоящая из интуитивно
ясных аксиом, в которой совершенно отчетливо видна
связь между миром, воспринимаемым нашими орга-
нами чувств, и миром математики.
Когда же ученик усвоил такую аксиоматику и
научился пользоваться векторами и скалярным про-
изведением, то далее уже нет необходимости снова
проделывать ту же самую работу при изучении сте-
реометрии, особенно если в результате обращения к
подходящему материалу у учащегося возникло ин-
туитивное представление о геометрии пространства
и в частности, о декартовой системе координат в про-
странстве, прямоугольной или нет.
Однако мы увидим, что можно сформулировать
аксиоматику пространства, являющуюся расширением
аксиоматики плоскости и позволяющую очень бы-
стро, благодаря предшествующему изучению плани-
метрии, дать определение структуры векторного про-
странства с заданным в нем скалярным произведе-
нием.
Мы полагаем, таким образом, желательным от-
нести систематическое изучение понятия векторного
пространства, снабженного скалярным произведе-
нием, на последний класс средней школы (подростки
17—18 лет). Такое изучение, проведенное в рамках
пространств произвольной конечной размерности, ока-
жется весьма плодотворным, если ему предшествовало
182
Гл. IX. Пространство
аксиоматическое изучение планиметрии и стерео-
метрии.
Для того чтобы получить аксиоматику простран-
ства из аксиоматики плоскости, нужно добавить к
последней весьма немногое:
а) Через любые три точки пространства прохо-
дит по крайней мере одна плоскость;
Ь) Всякая плоскость, содержащая две различные
точки некоторой прямой, содержит всю эту прямую;
с) Для любой плоскости Р существует разбиение
множества-дополнения к Р на две непустые части Еь
Е2, такие, что всякий отрезок, концы которого при-
надлежат соответственно Ех и Е2, пересекает Р.
Однако эти формулировки по-настоящему станут
ясны только после присоединения к ним множества
остальных аксиом. Кроме того, после такого присое-
динения мы получим точную аксиоматику элементар-
ной стереометрии.
89. Аксиомы трехмерного пространства
Пространством мы называем некоторое мно-
жество Е, на котором задана определенная структура
путем выделения множества S) подмножеств Е, на-
зываемых прямым и, и множества & подмножеств
Е, называемых плоскостями; эти прямые и
плоскости в свою очередь снабжены структурами,
каждая из которых точно описывается совокупностью
аксиом; связь между этими структурами определяется
другой совокупностью аксиом.
Будем предполагать, что Е содержит по крайней
мере две различные плоскости, что всякая плоскость
содержит по крайней мере две различные прямые и
что всякая прямая содержит по крайней мере две
различные точки.
Определение 89.1. Говорят, что две прямые А, В
параллельны (обозначается Л||В), если либо (Л=В),
либо Л, В принадлежат одной плоскости и не пере-
секаются.
§ 1. Аксиомы
183
I. Аксиомы инцидентности
а) Для любой пары (х, у) различных точек мно-
жества Е существует одна и только одна прямая, со-
держащая х и у,
Ь) Для любой плоскости Р, любой прямой Dc.P
и любой точки х е Р через точку х проходит прямая
плоскости Р, параллельная прямой D, и притом един-
ственная.
с) Всякая плоскость, содержащая две различные
точки некоторой прямой, содержит всю эту прямую,
d) Для любой тройки (х, у, г) точек множества Е
существует по крайней мере одна плоскость, содер-
жащая эти точки.
II. Аксиомы порядка
а) Со всякой прямой D связаны две структуры
линейного порядка на D, противоположные друг
другу.
Ь) Для любой пары (А, В) параллельных прямых,
и для любых точек а, Ь, а', Ь', таких, что а, а' А и
b, Ьг В, всякая прямая, параллельная этим прямым
и пересекающая отрезок [а, 6], пересекает также и
отрезок \а', Ь'].
III. Аксиомы аддитивной структуры
а) С множеством Е связано отображение d мно-
жества Е X Е в R+, называемое расстоянием, такое,
что\
1. d {у, х) = d (х, у) для всех х, у\
2. Для любой ориентированной прямой D, любого
x^D и любого числа 1^0 на прямой D существует
единственная точка у, такая, что
х^у и d(x, у) = 1;
3. (х е fa, b])=$(d(a, х) + d(x, b) = d(a, Ь)).
Ь) Для любой пары (А, В) параллельных прямых
и для любых точек а, Ь, а', Ь', таких, что а, а' А
и Ь, Ь' е В, всякая прямая, параллельная этим пря-
мым и проходящая через середину пары (а,Ь), про-*
ходит также и через середину пары
184
Гл. IX. Пространство
IV. Аксиомы перпендикулярности и
симметричности
а) Для всякой плоскости Р на множестве прямых
этой плоскости задано бинарное отношение, называе-
мое отношением перпендикулярности и обозначаемое
через 1, такое, что:
1. (Л1 В) (В 1 Л) (симметричность отношения jl).
2. (Л1В)=^(Л и В не параллельны).
3. Для всякой прямой А плоскости Р существует
по крайней мере одна прямая В этой плоскости, та-
кая, что А1 В.
4. Для всякой пары (А, В) прямых плоскости Р,
таких, что А ±В, и для любой прямой В' плоскости Р
имеет место эквивалентность
(В||В'ЮМ1В').
Ь) Для любой пары (Л1,Л2) лучей с общим на-
чалом имеет место равенство
с(Лн Л2) = с(Л2, Л,).
V. Аксиома размерности
Для любой плоскости Р существует разбиение до-
полнения к Р на два непустых подмножества Е[, Е2,
таких, что
(XlEEfj, Х2еВ2)^ф(РГ|[х1, Х2]У=&).
В формулировках некоторых аксиом используются
термины или обозначения, которые, очевидно, в де-
тальном изложении должны быть определены через
уже известные термины; таково, например, обозначе-
ние с(Л1,Л2). Эти определения очевидным образом
копируются с соответствующих определений, давае-
мых при аксиоматическом построении планиметрии.
В дальнейшем мы будем говорить, что две пря-
мые А, В пересекаются, если А =£ В и ЛПВ =# 0
{по аксиоме 1а их пересечение сводится в этом слу-
чае к единственной точке). Будем говорить, что пря-
мая D и плоскость Р пересекаются, если ОфР
и 2>Г1Р=£0 (по аксиоме 1с их пересечение сводится
в этом случае к единственной.точке).
$ 1. Аксиомы
185
90. Первые следствия
Заметим сразу, что на каждой плоскости Р про-
странства Е рассматриваемая система аксиом сво-
дится к системе аксиом планиметрии; следовательно,
в плоскости Р справедливы все установленные ранее
результаты.
Мы увидим в дальнейшем, что аксиомы I, II, III,
IV характеризуют аффинное пространство самого
общего типа, снабженное некоторой метрикой, опре-
деляемой скалярным произведением. Аксиома размер-
ности V понадобится нам лишь в самом конце изло-
жения: с ее помощью можно доказать, что размер-
ность пространства равна 3.
Предложение 90.1. Для любых а, Ь, с^Е, не
принадлежащих одной прямой, существует единст-
венная плоскость, содержащая эти точки.
Доказательство. Из аксиомы Ц следует, что
такая плоскость существует; пусть теперь Рь Р2—
две плоскости, содержащие а, Ь, с. Из аксиомы 1с
следует, что Pi и Р2 содержат А (я, &), А(&, с) и
А (я, с); для любой точки х плоскости Pi, не принад-
лежащей этим прямым, найдется прямая плоско-
сти Р2, пересекающая А(а, Ь) и А(&, с) в двух раз-
личных точках у и г. Так как у, z^ Р^ то и А (у, г)е
еЕ Р2, откуда следует, что х е Р2. Иначе говоря,
Р2 cz Pj; аналогично получаем Pi cz Р2, откуда следует
совпадение Pi и Р2.
Следствие 90.2. Для любой пары пересекающихся
прямых существует единственная плоскость, их со-
держащая.
Для всякой прямой D и любой точки x^D суще-
ствует единственная плоскость, содержащая Dux.
Следствие 90.3. Для любой прямой D и воякой
точки х существует, и притом единственная, прямая,
параллельная D и проходящая через точку х.
186
Гл. IX. Пространство
Докажем следствие 90.3: оно очевидно в случае
x^D; в противном случае найдется единственная
плоскость Р, содержащая D и х; в этой плоскости
применим аксиому 1ь.
Из этого следствия получаем, что для любой пря-
мой D отношение
«(х ~ у), если существует прямая, параллельная D
и содержащая х и у»
есть отношение эквивалентности на Е, классами экви-
валентности которого являются прямые, параллель-
ные D. Однако на этом этапе мы еще не умеем до-
казывать, что на множестве 2) прямых отношение
параллельности есть отношение эквивалентности.
§ 2. АФФИННАЯ СТРУКТУРА ПРОСТРАНСТВА
91. Центрированное пространство (Е, 0)
Теперь мы свяжем с пространством; в котором
выбрана некоторая начальная точка, структуру век-
торного пространства над /?; для этого нам понадо-
бятся только аксиомы I, II, III. Ниже обозначения
(Е, 0), (Р, 0) соответствуют прямой и плоскости, на
которых задана структура векторного пространства,
определенная в гл. II.
Определение 91.1. Для любой точки 0е£ центри-
рованным пространством (Е, 0) называется множе-
ство Е, в котором заданы бинарная операция
(х,у)-*х + у и умножение на скаляр, определяемые
следующим образом'.
1. Если 0, х, у не принадлежат одной прямой,
то (х + у) есть сумма векторов х, у центрированной
плоскости (Р, 0), содержащей эти три точки;
2. Если 0, х, у принадлежат одной прямой и хотя
бы одна из точек х, у отлична от 0, то (х + у) есть
сумма векторов х, у центрированной прямой (Е, 0),
содержащей эти точки;
3. Если х “ у = 0, то х 4- у = 0.
§ 2. Аффинная структура пространства
137
Наконец, умножение (Z, %) —определяется оче-
видным образом в каждой центрированной прямой
(D, 0), содержащей точку х.
Мы можем сразу доказать, основываясь на ре*
зультатах гл. II, следующее важное
Предложение 91.2. Центрированное пространство
{Е, 0) есть векторное пространство на R. Его подпро-
странствами размерности 1 и 2 будут прямые и плос-
кости, проходящие через точку 0.
Доказательство. 1. Почти все аксиомы вектор-
ного пространства, включая соотношение
Х(х 4- у) = Хх 4- Ху,
которое выполняется в центрированной плоскости
(Р, 0), содержащей точки 0, х, у, легко проверяются;
единственным неочевидным свойством является ассо-
циативность
(а 4- Ь) 4- с = а 4- (Ь 4- с). (1)
Для проверки этого свойства положим
у —середина пары (а, Ь) и а— середина пары (Ь, с).
Имеют место равенства
2у = а 4- 6 и 2а == & 4- с
(рассмотреть плоскости, содержащие (0, а, Ь) и
(0, Ь,с) соответственно).
Соотношение (1) эквивалентно следующему ра-
венству:
(2у 4- с) = 4- (а 4- 2а). (2)
о о
Однако для любых х, у <^Е точка — (х 4-2//) де-
лит пару (х, у) в отношении k ——2 (рассмотреть
плоскость, содержащую 0, х, у).
Таким образом, соотношение (2) выполняется в
соответствии с хорошо известным свойством тройки
(а, Ь, с) точек плоскости (центр тяжести).
Гл. IX. Пространство
2. Прямые множества Е, проходящие через О,
суть, очевидно, векторные подпространства размерно-
сти 1. Всякая плоскость Р, проходящая через точку О,
имеет векторную структуру центрированной плоско-
сти (Р,0); следовательно, она является подпростран-
ством размерности 2 центрированного пространства
(Е, 0). И наоборот, пусть А — векторное подпростран-
ство центрированного пространства (Е, 0), имеющее
размерность 2; если (ai,a2)—базис пространства Л,
то центрированная плоскость (Р, 0), содержащая точ-
ки 0, «1, а2, есть векторное подпространство простран-
ства Е, имеющее размерность 2; следовательно, А~Р.
92. Перенос
Определение 92.1. Переносом множества Е назы-
вается такое отображение f множества Е в себя, что
для всех х, у^Е точки (%, у, f(x), f(y)) образуют
параллелограмм (т. е. f таково, что середина пары
(X,f(y)) совпадает с серединой пары (y,f(x)).
Предложение 92.2. Для любых a, b Е суще-
ствует, и притом единственный, перенос, переводящий
а в Ь; для всего пространства (Е, 0) таким переносом
будет отображение х —>х + (Ь —- а).
Доказательство. Если существует такой пере-
нос f, что b~f(a), то для любых х имеем (относи-
тельно операций, определенных в системе (Е, 0))
у (а + f (х)) =-у (х + f (а)) = у (* + Ь),
откуда
f (х) = х + (Ь — а).
II наоборот, легко видеть, что отображение /:
х —► х + (Ь — а) есть перенос и что f (а) = Ь.
Переносы множества Е образуют, очевидно, ком-
мутативную и однотранзитивную группу преобразо-
ваний множества Е, изоморфную аддитивной группе
(Е, 0) с произвольной точкой 0.
§ 2. Аффинная структура пространства 18&
Предложение 92.3. Для любых а, Ь<=.Е обозна-
чим через Т и JL соответственно сложение в (Е, а)
и (Е,Ь); через л и V соответственно умножение
на скаляр в этих пространствах и через f — перенос,
переводящий а в Ь.
Перенос f есть изоморфизм пространства (£, а),
отображающий его на пространство (Е, Ь); другими
словами, для любых х, у е Е и R
f (х Т у) = f (х) ±f (у)
И
f (Л Л х) = X v f (х).
Первое равенство следует, например, из того, что
b = f(a) и что f переводит любой параллелограмм в
параллелограмм.
Второе равенство выполняется в плоскости, содер-
жащей точки а, Ь, х, f(x).
Следствие 92.4. Перенос f переводит всякую пря-
мую (или плоскость), проходящую через точку а, в
прямую (или плоскость), проходящую через точку Ь.
Действительно, f есть изоморфизм пространства
(Е, а) на пространство (Е,Ь), и, следовательно, со-
храняет размерность подпространства.
93. Параллельность
Определение 93.1. Говорят, что две плоскости Р,
Р' пространства Е параллельны (обозначается Р\\Р'),
если существует перенос, переводящий Р в Р'.
Это частный случай общего определения, которое
справедливо для любого векторного пространства.
Предложение 93.2. (Р\\Р7) (Для всех а^Р и
всех а' ^Р7 перенос, переводящий а в а’, перево-
дит Р в Р'),
Аналогичный результат имеет место для прямых.
190
Гл. IX. Пространство
Доказательство. Для прямых справедливость
свойства уже установлена, так как в этом случае рас-
сматриваются переносы плоскости.
Для плоскостей доказательство то же самое, что
и для аффинных подпространств некоторого вектор-
ного пространства.
Следствие 93.3. Параллельность есть отношение
эквивалентности на множестве S) прямых и на мно-
жестве ГР плоскостей.
Отсюда выводятся понятия направления прямой и
направления плоскости, конкретизированные множест-
вами прямых и плоскостей, проходящих через выбран-
ную начальную точку 0.
Следствие 93.4. Для любого направления плоско-
сти и для любой точки х е Е через эту точку прохо-
дит единственная плоскость данного направления
(и то же самое для прямых).
Определение 93.5. Говорят, что прямая D парал-
лельна плоскости Р (обозначается через D\P), если
для плоскости Р' и прямой D', параллельных данным
и проходящих через 0, имеет место включение D'czP'.
Это определение, очевидно, не зависит от выбора
точки 0. Определенная таким образом параллельность
есть бинарное отношение между элементами мно-
жеств S) и не объединяющееся, однако, вместе с
существующими на S) и SP отношениями параллель-
ности в одно действующее на S) U & отношение экви-
валентности.
Так, например, из того, что (В\Р и D\P'} не сле-
дует, что (Р|1Р'); аналогично, (D\P и \Р} не влечет
Зато из определения следует, что
(D\P, D\\D', P\\P')=^(D'\P').
С другой стороны, для всех хе£ и для любой
плоскости Р объединение прямых D, проходя-
щих через точку х и таких, что D\P, есть плоскость Р\
параллельная плоскости Р и проходящая через
точку х.
$ 2. Аффинная структура пространства 1М
Аналогично, для любой точки х е Е и любой пря-
мой D пересечение плоскостей Р, проходящих
через точку х и таких, что D\P, есть прямая D', па-
раллельная прямой D и проходящая через точку х.
94. Следствия аксиомы размерности
Мы сразу перейдем к применению аксиомы V для
определения размерности пространства £; но полу-
ченный результат не будет использован для изучения
метрической структуры пространства. Таким образом,
наше изучение метрической структуры будет отно-
ситься к любому аффинному пространству.
Предложение' 94.1. В случае выполнения аксиом I,
II, III аксиома V эквивалентна любому из следующих
утверждений:
а. Если Р, Q — две произвольные различные плос-
кости, то либо P(]Q = 0, либо Pf}Q есть некоторая
прямая;
р. При любом выборе точки 0 е Е центрированное
пространство (Е, 0) есть векторное пространство раз-
мерности 3.
Доказательство. 1. При доказательстве эквива-
лентности формулировок а и ₽ достаточно, очевидно,
предположить, что плоскости Р, Q проходят через вы-
деленную точку пространства (Е, 0).
Обозначим через (P<jQ) векторное подпростран-
ство пространства (Е, 0), порождаемое плоскостями Р,
Q, и обозначим через d(X) размерность произвольного
векторного подпространства X пространства (Е, 0).
Известно, что
d(P^Q)4-d(PnQ)-d(P) + d(Q) = 2 + 2 = 4. (1)
Покажем, что если утверждение а справедливо, то
б/(Е)<^3; в противном случае в пространстве (Е, 0)
найдется четыре линейно независимых вектора р\, р>ь
qx, q2\ если Р — плоскость, порождаемая векторами рь
р2, a Q — плоскость, порождаемая векторами qXy q^
то d(PoQ)=4; следовательно, в соответствии с
192
Гл. IX. Пространство
равенством (1), d(PAQ)=O, что противоречит утвер-
ждению а.
Так как, с другой стороны, пространство Е содер-
жит по крайней мере две различные плоскости, то
его размерность ^>3, следовательно, d(E) = 3.
В обратную сторону: если утверждение р справед-
ливо, то d(PoQ)^3, откуда следует, что d(Pf]Q)<^ L
так что Р и Q либо совпадают, либо пересечение их
есть прямая.
2. Из утверждения р следует аксиома V; действи-
тельно, если Е имеет размерность 3, то всякая плос-
кость Р есть множество решений уравнения /(%)= а,
где f — линейная форма и а —некоторый скаляр; по-
лупространства £i, Е2 пространства £, определяемые
плоскостью Р, есть множества, задаваемые соответ-
ственно неравенствами f(x)<a и f(x)>a.
3. Покажем, наконец, что из аксиомы V вытекает
утверждение р или а; мы используем обозначения
аксиомы V.
а) Доказательство для алгебраистов.
Можно предположить, что плоскость Р проходит
через 0; пусть тогда S — подпространство, дополни-
тельное к Р; положим Ai = QAЕ{ (i = 1, 2).
Очевидно, что каждое из множеств £\ и Е2 есть
объединение плоскостей, параллельных плоскости Р;
следовательно, и Л2— проекции полупространств
£ь £2 на S параллельно Р. С другой стороны, А^ и Л2
образуют разбиение пространства S\{0} и
(%! е Л1? х2^ Л2)=>(0 е [Xj, х2]).
Отсюда сразу получаем, что S есть прямая, от-
куда d(E) = 3.
b) Элементарное доказательство, использующее
только аксиомы I, II.
bi) Пусть Р — произвольная плоскость и (£ь£2) —
разбиение пространства (£\Р), определяемого плос-
костью Р. Покажем, что всякая прямая Л, пересекаю-
щая плоскость Р, пересекается с £i и £2.
Пусть а = ЛАР, и пусть b будет некоторая точка
прямой Л, отличная от а\ предположим, что b^Ei
(рис 13).
§ 2. Аффинная структура пространства
193
Рассмотрим произвольную точку с множе-
ства £2; если с^А, утверждение доказано; в против-
ном случае плоскость Р'> содержащая А и с, пересе-
кается с плоскостью Р в точке [&, с](1В, отличной от а,
и, следовательно, по некоторой прямой В.
Пусть d — некоторая точка прямой Л, расположен-
ная в плоскости Р' по ту же сторону от прямой В,
чго и точка с. Так как отрезок [с, */] не пересекается
с прямой В, то он не пересекается и с плоскостью В, и,
следовательно, d е Е2.
1ъ) Пусть теперь В, Q — две различные плоскости,
такие, что а е BCIQ.
Рассмотрим две различные прямые Ль Л2 плоско-
сти Q, проходящие через точку а. Если хотя бы одна
из них принадлежит В, то предложение доказано; в
противном случае на прямой Ai лежит точка
а на прямой А2 — точка х2еЕ2; отрезок [%], х2] пе-
ресекает плоскость В в точке а', отличной от а\ пря-
мая Д(я, а') и есть искомая прямая.
Следствие 94.2. В случае выполнения аксиомы V
условие параллельности (B||BZ) эквивалентно усло-
вию (Р = Р' или В Г) В' = 0).
1 ] Зак. 323
Ш
Гл. IX. Пространство
§3. МЕТРИЧЕСКАЯ СТРУКТУРА ПРОСТРАНСТВА
Теперь мы переходим к выводу следствий из акси-
ом I, II, III, IV. Как и при изучении аффинной струк-
туры пространства Е, мы будем широко пользоваться
метрической структурой плоскостей пространства Е;
мы столкнемся здесь с хорошо известным фактом, за-
ключающимся в том, что большинство метрических
свойств векторного пространства со скалярным произ-
ведением легко выводятся из метрических свойств
его двумерных подпространств.
95. Перенос и перпендикулярность
Предложение 95.1. Всякий перенос пространства Е
есть движение.
Доказательство. Действительно, при любом пе-
реносе для всех точек %, у еЕ точки х, у, f(x), f(y)
компланарны, а известно, что в любой плоскости
перенос есть движение.
Следствие 95.2. Всякий перенос пространства Е
сохраняет перпендикулярность (двух пересекающих-
с я прямых).
Доказательство аналогично доказательству след-
ствия 44.4.
Исходя из этого, введем новое понятие:
Определение 95.3. Говорят, что две прямые Л, В
пространства Е (пересекающиеся или нет) перпенди-
кулярны, если прямые, параллельные этим прямым и
проходящие через некоторую точку а, перпендику-
лярны.
Это определение не зависит от выбора точки а
(по предыдущему следствию).
96. Скалярное произведение
Определение 96.1 (скалярного произведения).
В центрированном пространстве (Е, 0) скалярным
произведением называется отображение (х, у) —> х • у
§ 3. Метрическая структура пространства
195
множества Е X Е в /?, определяемое следующим об-
разом:
1. Если точки 0, х, у не принадлежат одной пря-
мой, то х-у есть скалярное произведение векторов х,
у центрированной плоскости (Pf 0), содержащей точ-
ки 0, х, у.
2. Если точки 0, х, у принадлежат одной прямой
и хотя бы одна из них отлична от 0, то х-у есть ска-
лярное произведение векторов х, у центрированной
прямой (Ь, 0), содержащей 0, х, у.
3. Если х = у = 0, то х • у = 0.
Предложение 96.2. В любом центрированном про-
странстве (Е, 0) отображение (х, у)~+х - у симмет-
рично, билинейно и положительно определенно в том
смысле, что х2 = х • х > 0 для всех х 0. Кроме того,
для всех х, у имеет место равенство
d2(x, у) = (х-у)2.
Доказательство. Соотношения х • у = у • х,
(Хх)-у = Х(х * у) 11 х*х>0 при х ф 0 очевидны.
Также очевидно равенство rf2(0, х) = х2; таким об-
разом, пользуясь предложением 95.1, получаем для
всех х, у
d2 (х, у) = (х - у)2.
Остается показать, что для всех х, у, z выпол-
няется равенство
х - (у -Ь z) -= х • у + х • z, (1)
Но это равенство верно во всякой центрированной
плоскости (Р, 0) и, следовательно, для любых х, у, г,
компланарных с точкой 0. В частности, для любых Ь, с
(Ь + с)2 = b • (Ь + с) + с • (Ь + с) = b2 + 2Ь • с 4- с2.
В общем случае для доказательства равенства
(1) положим
m у (// +г) = середина пары (у, z)
(рис. 14).
13*
Г л. IX. Пространство
Ж
Каждая из троек точек (0, у, .г) и (х, y,z) лежит
в плоскости, следовательно (формула медианы):
у2 4- г2 = 2m2 4- 2 (m — у)2,
(у — х)2 4- (z — х)2 = 2 (tn — х)2 4- 2 (tn — у)2.
Почленным вычитанием получаем
2х • у 4- 2х • z = 4х • m = 2х • (у 4- г),
откуда следует искомое соотношение.
Рис. 14.
Произведение к-у обладает, следовательно, всеми
свойствами скалярного произведения со всеми вы-
текающими отсюда следствиями, рассмотренными
в гл. HI.
Резюме: аксиомы I, II, III, IV дали нам воз-
можность доказать следующий результат:
Теорема 96.3. При любом выборе точки 0 е Е мож-
но единственным образом задать в пространстве Е
структуру векторного пространства с началом 0, снаб-
женного скалярным произведением] одномерные и
двумерные аффинные многообразия этого простран-
ства будут прямыми и плоскостями пространства Е\
расстояние, порождаемое скалярным произведением,
совпадает с расстоянием, заданным на Е.
$ 3. Метрическая структура пространства 197
97. Приложение к двум классическим теоремам
Как было показано, большинство обычно изучае-
мых геометрических свойств пространства могут быть
легко доказаны в том случае, если имеется возмож-
ность воспользоваться алгебраическими методами.
Тому примером два следующих предложения.
1. Будем говорить, что прямая D п ер п е н д и-
кулярна плоскости Р (обозначается D±P),
если D перпендикулярна всякой прямой плоскости Р.
Предложение 97.1 (теорема о двух перпен-
дикулярах). Пусть Л, В —две непараллельные
прямые плоскости Р и D — некоторая прямая. Тогда
(О±Л и Р±В)=ф(Р1Р).
Доказательство. Применив перенос, сведем зада-
чу к тому случаю, когда Р, 4, В, D проходят через
начало координат. Рассмотрим теперь точки
а е Л, bc^B, d^D, такие, что a, b, d^Q.
Любая точка х^Р представима в виде х = ка 4-
+ Но в центрированном пространстве (Z?, 0) по
предположению имеем
d - а~ 0 и d • b =-- 0;
следовательно, d • x=d-(X« + p&) = Х(<7 • а) +р(г/ • Ь) ™0.
Отсюда вытекает, что D jlP.
2. Одним из классических результатов является и
теорема о трех перпендикулярах. Малая
доза алгебры позволит свести доказательство ее к
очевидному соотношению.
Мы полагаем известным определение проекции
точки х на плоскость или прямую (след перпендику-
ляра к этой плоскости или прямой, проходящего че-
рез точку х; проекция соответствует минимуму рас-
стояния) .
Предложение 97.2. Рассмотрим некоторую плос-
кость Р сгЕ, прямую Da P и точку а с= Е. Пусть
р — проекция точки а на плоскость Р.
198
Гл. IX. Пространство
Тогда проекции точек р и а на прямую D совпа-
дают (рис. 15).
Доказательство. Для любых х е D имеем
d2 (а, х) = d2 (а, р) + d2 (р, х).
Следовательно, d(a, х) принимает минимальное
значение вместе с d(p,x), откуда следует, что проек-
ции совпадают.
В этой упрощенной форме теоремы о трех пер-
пендикулярах просматривается простой способ обоб-
щить ее па тот случай, когда Е— произвольное ко-
нечномерное пространство, Р— некоторое аффинное
подпространство пространства Е, и D — некоторое
аффинное подпространство пространства Р. В еще
более общем случае можно заменить D на произволь-
ное замкнутое подпространство пространства Р.
98. Темы для дальнейшего изучения
Мы завершим изложение стереометрии, указав не-
которые направления дальнейшего изучения, которые
легко включаются в курс обучения благодаря тем
алгебраическим методам, которые имеются теперь в
пашем распоряжении.
$ <?. Метрическая структура пространства
199
1. Аффинная структура. Изучение аффинных пре-
образовании пространства Е (в частности, группы
преобразований подобия), косых проекций, линейных
форм.
Изучение выпуклых множеств.
Конусы и цилиндры (в связи с группой гомотетий
с центром в точке 0 и группой переносов).
2. Метрическая структура
Ортогональная проекция (она минимизирует рас-
стояния) .
Симметрия относительно плоскости, прямой, точки.
Движения пространства; вращения вокруг некото-
рой оси; множества, устойчивые относительно некото-
рых групп движений или преобразований подобия;
конусы, цилиндры, сферы.
У п р а ж н е н и я к г л аве IX
1. Пусть —произвольное семейство прямых, такое, что
любые две из этих прямых пересекаются.
Показать, что либо все эти прямые проходят через одну
точку, либо все они принадлежат одной плоскости.
2. Как измени!ся это заключение, если известно только, что
любые две из этих прямых компланарны?
3. Пусть Р, Р' — две различные плоскости и (at) (/=1,2,3)
(соответственно (п^)) — тройка попарно различных точек плос-
кости Р (соответственно Р').
Показать, что если каждая прямая Д(пг-,п;) (где i j) пе-
ресекает прямую Д (гщ Пу), то прямые д(пр Пу), если они
определены, параллельны или совпадают, и тройка точек
Д(пр Пу)Г)Д(н., Пу) припатлежпт одной прямой.
4. Пусть ЛдДгМз — три плоскости и П],п2, п3 — три точки
трехмерного пространства Е.
Каково множество гомотетий /, таких, что
/(п.)с=Л. (/ = 1, 2, .3)?
5. Пусть D — некоторая прямая векюрпого пространства
Е, X — подмножество пространства Е и k — некоторое отличное
‘от 0 число.
Каким будет множество центров гомотетий f с коэффициен-
том /г, таких, чтэ x(D) пересекается с X?
Тот же вопрос, если заменить прямою D на плоскость Р;
на любое подмножество Y пространства Е.
200
Га. IX. Пространство
6. Перенести упр. 3 и 4 к гл. IV на случай пространства
сначала без изменений, а затем заменив прямые на плоскости.
7. Пусть Е— трехмерное пространство, D — прямая этого
пространства и точка 0е/:.
Найти подмножества пространства Е, устойчивые одновре-
менно относительно вращений вокруг прямой D и относительно
положительных гомотетий с центром в точке 0.
Рассмотреть отдельно случаи 0 ей и 0 ф D.
Та же задача при замене гомотетий с цен i ром в точке 0
на переносы в направлении д.
8. Пусть D — прямая в пространстве; винтовым пере-
м е щ е н и е м с осью D называется всякое произведение f пере-
носов в направлении прямой D и четного числа симметрий отно-
сительно плоскостей, содержащих D.
Показать, что множество таких f есть группа, изоморфная
группе-произведению Т X R.
9. Пусть f, g— два винтовых перемещения с осями А, В. По-
казать, что I ° g и g ° f — винтовые перемещения, оси которых
симметричны относительно общего перпендикуляра к прямым Л. В.
10. Рассмотрим в пространстве Е произвольную пару (Л, В)
лучен с общим началом; арифметической мерой пары (А, В)
(в радианах) называется арифметическая мера р(А, В) угла Л 3
в плоскости, содержащей А и В (если эта плоскость определена
не единственным образом, то арифметическая мера, очевидно,
равна 0 или л).
Показать, что если (Л, В) и (Д', В')—две произвольные
пары, то равенство р(А,В) =р(А',В') выполняется тогда и
только тогда, когда существует движение пространства Е, пере-
водящее (А, В) в (А', В'); показать, что средн, таких движений
всегда найдется собственное движение и зеркальное движение.
П Р И Л О Ж Е П И Е 1
АКСИОМАТИКА
НА МЕТРИЧЕСКОЙ ОСНОВЕ
Аксиоматика, которую я изложил в предыдущих
главах, в основе своей векторная; метрика появляется
только после того, как векторная структура плоско-
сти установлена и исследована.
Некоторые преподаватели считают, что метриче-
ские понятия интуитивно понятней и легче усваивают-
ся детьми, чем векторные понятия. Фактически еще не
было случая, чтобы школьникам преподавали регу-
лярный курс, в основу которого было положено по-
нятие вектора, а только продолжительная экспери-
ментальная проверка различных методов дает воз-
можность прийти к какому-то выводу.
Тем не менее может оказаться предпочтительнее
начать изложение геометрии с метрических понятий;
поэтому я предлагаю здесь некоторый вариант1) пер-
вой аксиоматики, основанный на «аксиоме складыва-
ния», которая является математической формулиров-
кой, описывающей физическую операцию сгибания
листа бумаги по некоторой прямой.
99. Первые аксиомы
Аксиомы снова распадаются на четыре группы:
Аксиомы Г и 1Г совпадают с аксиомами I и II
гл. I.
’) Эта аксиоматика — сильно переделанный вариант аксио-
матики, предложенной автором ранее (см. [24]).
Полученное здесь упрощение есть следствие введения связан-
ной с параллельностью аксиомы инцидентности Ь и такого изме-
нения содержащей неравенство треугольника аксиомы, чтобы в
ней фигурировало строгое неравенство. Кроме того, в пашей но-
вой аксиоматике удалось избежать недостатков чипа определе-
ния прямых как множеств, изометрнчных некоторой фиксирован-
ной прямой.
202
П риложение 1
Аксиома ПГ содержит аксиому Ша гл. II, допол-
ненную неравенством треугольника; предполагается,
казалось бы, что известно определение поля Л?; фак-
тически же, как видно из нижеследующего изложения,
можно получить многие результаты, пользуясь только
структурой аддитивной линейно упорядоченной груп-
пы поля /?.
Аксиома II Г. С плоскостью II ассоциировано ото-
бражение d множества П X П в множество R+, назы-
ваемое расстоянием, такое, что:
1. d(y, х) = d(x, у) для всех х, у е II;
2. Для каждой ориентированной прямой D, любо-
го x^D и произвольного числа />0 найдется един-
ственная точка y^D, такая, что хл^ у и d(x,y)=t\
3. (хе [а, 6]) =^(d(a, х) + d(x, b) = d(a, 6));
4. Пусть {а, х, Ь} — произвольная тройка точек, не
принадлежащих одной прямой. Тогда
d(a, b)<d(a, х) -F d (х> &)
(строгое неравенство треугольника).
Прямые следствия аксиом Г, 1Г, ИГ.
1. Очевидно мы опять получим следствия из аксио-
мы объединенные в предложении 9.1, которое
позволяет отождествить всякую центрированную
ориентированную прямую с числовой прямой R.
2. Для любых трех точек а, х, b плоскости П
d{a, b)^.d(a, x) + d(x, b).
Равенство имеет место тогда и только тогда, когда
х е [я, Ь].
3. Пусть X cz П и f— отображение множества X
в П; говорят, что f есть движение, если
(a, b^X)^(d(a, b) = d(f(a),
Из приведенного выше замечания 2 следует, что вся-
кое движение сохраняет коллинеарность и отношение
«между».
Аксиоматика на метрической основе
203
Отсюда следует, что каждое движение переводит
любой отрезок в отрезок и любую прямую в прямую»
две параллельные прямые в две параллельные пря-
мые и полуплоскости в полуплоскости. Всякое движе-
ние плоскости П, переводящее се в себя, отображает
Л п а себя и является изоморфизмом относительна
структуры, задаваемой аксиомами Г, 1Г, IIГ.
Упражнение. Пусть Ai,A2— две выпуклые замкнутые
фигуры на плоскости, ограниченные многоугольниками, такие, что
А
Показать, что если 1\ и /2 — длины границ фигур А, А» то
причем равенство имеет место лишь в случае А = А2.
Благодаря этому свойству можно легко дать определение
длины границы замкнутого выпуклого множества.
100. Аксиома складывания (или симметрии)
Для удобства изложения последней аксиомы обо-
значим через ПДР) и II2(D) открытые полуплоскости,
определяемые прямой D; склад ы в а и и е м по пря-
мой D называется любое движение ф, отображающее
DUlIi (D) на множество DUll^D), такое, что для лю-
бого х ее D мы имеем ф(а) = х.
Аксиома IVх. Для любой прямой D существует по
крайней мерс одно складывание по прямой D.
Мы докажем единственность складывания по пря-
мой D\ опа не постулируется, так как доказательство
чрезвычайно просто.
101. Симметрия относительно прямой
Лемма 101.1. Для любой прямой D существует
только одно складывание по этой прямой.
Пусть ПДО) и 119(D) — открытые полуплоскости,
определяемые прямой D, гр — некоторое складывание
по этой прямой и положим а' = От-
резок [я, а'} пересекается с прямой D в точке /?; вся-
кая точка х прямой D, отличная от р, лежит вне от-
резка [щ я'], следовательно,
a')<d(a, а) + г/(а, = а).
2i)4
П риложение 1
Но d{a, а') = 2d (а, р); отсюда следует, что
d (a, p)<d(a, х).
Точка р обладает той характерной особенностью,
не зависящей от выбора отображения ср, что она яв-
ляется ближайшей к а точкой прямой D\ говорят,
что р есть ортогональная проекция, или,
короче, проекция точки а на D. Эта проекция
есть середина пары (а,а')\ следовательно, точка а\
симметричная точке а относительно р на прямой, со-
держащей а и р, не зависит от ср, т. е. ф единственно.
Обозначим теперь через ф продолжение ф на П,
определяемое следующим образом:
Ф(х) = ф(х) для всех х е йиП| (D);
ф(х) = ф“1(х) для всех хеП2(Э).
Лемма 101.2. Продолжение ф отображения ф есть
движение плоскости П, отображающее ее на себя.
(Эго движение естественно назвать симметрией
относительно прямой D.)
Прежде всего сразу получаем, что ф есть отобра-
жение плоскости П на себя.
Затем рассмотрим а, бе 11.
Если a, b Z)UTI| (£>), то имеем
d (ф (а), ф (й)) = d (а, Ь),
так как ф = ср на (а, Ь}.
К тому же заключению мы придем и в том слу-
чае, если а, b е £> U П2(£>) -
Предположим теперь, что а е П1 (£)) и 6еП2(О);
пусть х “ £) П [a, fe]; положим
а'— ф(а); й' = ф(й).
Имеем
rf(x, a) = d(x, а'}\ d(x, b)=^d(x, й').
Аксиоматика на метрической основе
205
Таким образом,
d(a', b')^d(a't x) + d(x, b') =
= d (a, x) 4- d (x, b) = d (a, b).
Иначе говоря, d(a', b')^id(a, b).
Но аналогичным образом получаем и неравенство
d(a, b)^d(a\ b'), откуда следует искомое равенство
d (а, Ь) = d(a', У).
102. Перпендикуляр и проекция
Определение 102.1. Говорят, что некоторая пря-
мая D' перпендикулярна прямой D (записывается
/)'!/)), если D' D и прямая [У совпадает с пря-
мой, симметричной ей относительно прямой D.
Как видно из леммы 102.4 ниже, это отношение
симметрично. Непосредственно из определения сле-
дует, что через любую точку х D проходит перпен-
дикуляр к прямой D, и притом только один, а именно,
прямая, соединяющая точку х с точкой, симметричной
ей относительно прямой D.
Лемма 102.2. 1. Если D' i D, то эти прямые пе-
ресекаются.
2. Если D и D' — две прямые, пересекающиеся в
точке р, то
(D' 1/))фЬ(каждая точка прямой D' проектируется
в точку р прямой В)^=}(существует отличная от р
точка прямой D', которая проектируется в точку р
прямой D).
Доказательство. 1. Прямая D' содержит по
крайней мере две различные точки Х[ и х2, симмет-
ричные относительно прямой D; следовательно,
[xi,x2] пересекается с D.
2. Предположим, что D' ± D и x^D'. Точка л"'
симметричная точке х относительно прямой/), лежит
на Dz; значит, точка D П [х, х'], т. е. проекция точки л
на прямую D, есть именно точка р.
?06
П риложение 1
II наоборот, пусть D и D' пересекаются в точке р,
и пусть х— некоторая точка прямой Dr, отличная от
р и такая, что ее проекция на D есть р; рассмотрим
точку х'9 симметричную точке х относительно D. От-
резок [х,х'] пересекает D в точке р. Следовательно,
прямая £Г, содержащая различные точки х, р, содер-
жит также точку х', откуда следует, что D' J_ D.
Следствие 102.3. Пусть D' £ D, и пусть f—дви-
жение множества Z)'U£>. Тогда
Это следует из того факта, что, как видно из пре-
дыдущей леммы, перпендикулярность выразима в тер-
минах расстояний.
Лемма 102.4. Если Df JL D, то и D ±D'.
Доказательство. Предположим, что D' £ D и
что р — точка их пересечения. Рассмотрим некоторунз
точку xgZ): для любой точки х' е D', отличной от р,
выполняется равенство
d(x, x') = d(x, х"),
где х"— точка, симметричная точке х' относительно
прямой D.
Следовательно, х' не может быть проекцией точ-
ки х на D' (единственность минимума); значит, такой
проекцией будет точка р, откуда получаем, что D £D'
по лемме 102.2.
Лемма 102.5. Пусть D ±D'. Тогда
Доказательство. 1. Пусть D j. D' и D' || D”.
Прямые D, D" пересекаются в некоторой точке р.
Прямые D' и Df, симметричные параллельным пря-
мым Dr и D" относительно прямой £), параллельны
(следствие 3 аксиомы ПГ); следовательно, D" и D"
параллельны и проходят через р.
Отсюда следует, что D” = D\ и, наконец, D £ D"*
Аксиоматика на метрической основе
207
2. Пусть D 1 й' и В 1 D".
Рассмотрим точку х прямой D", не лежащую на
D. Как мы видели, прямая, параллельная прямой D'
и проходящая через х, перпендикулярна Z); следова-
тельно, она совпадает с прямой D' вследствие един-
ственности перпендикуляра к прямой Z), проведенного
через точку, не лежащую на D. Иначе говоря, D' || D".
102.6. Следствия
Пусть 61, до — два направления; будем говорить,
что они перпендикулярны, если существуют две пер-
пендикулярные прямые направлений di, 62. Из лемм
102.4 и 102.5 следует, что:
1. Это отношение симметрично, аптирефлексивпо
(6 16 никогда не имеет места), и каждому направле<
нию соответствует перпендикулярное ему направле-
ние, и притом только одно.
2. Для того чтобы две прямые были перпендику-
лярны, необходимо и достаточно, чтобы их направле-
ния были перпендикулярны.
Замечание. Отсюда следует, что отображение,
ставящее в соответствие каждой точке х е П ее орто-
гональную проекцию па некоторую прямую Z), есть
не что иное как косая проекция на D параллельно на-
правлению, перпендикулярному прямой D.
Определение 102.7. Пусть a, b — две различные
точки, 0 — середина этой пары.
Медиатрисой пары (а, Ь) называется перпендику-
ляр к прямой Д(я, 6), проведенный через точку 0.
Лемма 102.8. Пусть а, b — две различные точки
и D — их медиатриса.
Обозначим через Па, Щ открытые полуплоскости,
определяемые прямой D и содержащие соответствен-
но точки а и Ь. Тогда
(х е D) ==> (d (х, а) = d (х, Ь)
(х е: ПД =^> (d (х, о) < d (х, 6));
(xellz,)^(<v, Z>)<rf(x, «)).
208
Приложение 1
Доказательство. Так как а и b симметричны от-
носительно Z), то
(х D)=^>(d (х, а) = d (х, Ь)).
Если х е Па, то пусть у = D Я [х, &]; так как
ус£[а, х] (выпуклость множества П«), то
d(x, a)<d(x, y) + d(y, y) + d(y, b) = d(x, &).
Рассуждения останутся теми же в случае хеЩ.
Следствие 102.9. (х D) (d (х, а) = d (х, Ь)).
Следствие 102.10 (сравнение наклонных). Пусть
р —проекция точки х на прямую, проходящую через
точки а и Ь,
Отношение порядка, связывающее d(p,a) и
d(p,b), совпадает с отношением порядка, связываю-
щим d(x, а) и d(x, Ь).
Доказательство. Действительно, в зависимости от
того, равна нулю, строго меньше или строго больше
нуля величина d(p, а) — d(p,b), точка х принадле-
жит либо D, либо Пй, либо П&.
Этот же результат можно сформулировать так:
Длина наклонной есть строго возрастающая функ-
ция длины ее проекции.
Точное количественное выражение этот результат
находит в теореме Пифагора.
Следствие 102.11. Пусть (0, а, Ь) — треугольник,
для которого d(0,a) = d(O,b) и a4=b. Проекция точ-
ки 0 на прямую, проходящую через точки а, Ь, есть
середина пары (а,Ь).
Этот простой, но очень важный результат выте-
кает из следствия 102.10; он может быть выражен
также следующим образом:
В равнобедренном треугольнике, равные стороны
которого исходят из вершины 0, высота, опущенная
из 0, есть ось симметрии треугольника.
Аксиоматика на метрической основе
209
103. Симметрия относительно точки и произведе-
ние симметрий
Определение 103.1. Симметрией относительно не-
которой точки 0 плоскости П называется отображение
/ плоскости П на себя, определяемое следующим об-
разом:
f (0) = 0 и f(x) = x' при х=А0, где х'— такая точ-
ка прямой Д(0, х), что 0 есть середина пары (х, f(x)).
Непосредственно из определения следует, что
/2— тождественное преобразование и что f(D)=D
для всякой прямой £>, проходящей через точку 0.
Теорема 103.2. Симметрия относительно точки 0
совпадает с произведением симметрий относительно
двух произвольных перпендикулярных прямых, про-
ходящих через точку 0.
Доказательство. Пусть D\, D2— две перпендику-
лярные прямые, проходящие через 0. Рассмотрим
х 0 D\ U D2.
Обозначим через Дь Д2 прямые, параллельные со-
ответственно D\ и D2 и проходящие через х, и пусть
Д' — прямая, симметричная прямой Дг- относительно
прямой Di (i = 1, 2); очевидно, что Д/ параллельна
Д/ (* = 1, 2).
Прямоугольник, образованный двумя парами па-
раллельных прямых Дь Д1 и Д2, Д2, симметричен отно-
сительно прямых Di, D2, следовательно, симметричны и
обе его диагонали; поэтому они пересекаются в точке,
принадлежащей обеим прямым D\ и D2, т. е. в точке
0, и делятся этой точкой пополам. Отсюда вытекает,
что точка, симметричная точке х относительно 0, есть
вершина этого прямоугольника, противолежащая вер-
шине х, а именно в эту точку переходит точка х в
результате последовательного применения симметрий
относительно прямых Di и D2.
Если же хе U D2, то доказательство оче-
видно.
14 Зак. 323
21»
Прамжение f
Следствия 103.3. Симметрия относительно точки
есть движение. Она переводит всякую прямую в пря-
мую, ей параллельную.
(Рассмотреть случай, когда D проходит через 0,
затем общий случай.)
Приложение 103.4. Назовем параллелограм-
мом такой четырехугольник (а, Ь, а', Ь'), что обе па-
ры его противолежащих вершин (а, а') и (6, Ь') име-
ют общую середину.
Из предыдущего следствия вытекает, что четырех-
угольник (a, b,af, Ъг), не принадлежащий одной пря-
мой, будет параллелограммом тогда и только тогда,
когда его вершины попарно различны и
D{a, й)|[£>(а', by, D(a, Ь')Ю(а', Ь).
С другой стороны, во всяком параллелограмме общая
середина диагоналей будет его центром симметрии,
откуда следует, что в параллелограмме противопо-
ложные стороны равны.
Лемма 103.5. Пусть D, D', А — три параллельные
прямые.
1. Если D' и D симметричны относительно прямой
А, то всякая секущая пересекает эти три прямые в
таких точках х, х', а, что точка а есть середина пары
(х, х‘).
2. Обратно, если существует секущая, обладаю-
щая указанным свойством, то D' и D симметричны
относительно А.
Доказательство.
1. Пусть D, D' симметричны относительно At и
пусть х, xf, а—точки пересечения этих трех прямых
с некоторой секущей. Рассмотрим перпендикуляр В
к прямой А, проведенный через точку а. Произведе-
ние симметрии относительно А и симметрии относи-
тельно В переводит D в О'; следовательно, по теоре-
ме 103.2 эти прямые симметричны относительно точ-
ки а, и, значит, эта точка — середина пары (х,х').
2. Если а — середина пары (х,х'), то D симмет-
рична D' относительно точки а. По теореме 103.2 и
следствию из нее прямая, симметричная прямой D
Аксиоматика на метрической основе 211
относительно Л, совпадает с прямой, симметричной
прямой D относительно точки а, т. е. с прямой D\
Теорема Г03.6 (слабая форма теоремы
Фалеса*)). Если секущая пересекает три парал-
лельные прямые D, Df, А в трех таких точках х, х7, а,
что а — середина пары (х, х7), то при пересечении с
любой другой секущей этой тройки прямых точки пе-
ресечения будут обладать тем же свойством (други-
ми словами, D и ТУ симметричны относительно любой
точки прямой 4).
Это следует непосредственно из леммы 103.5.
Следствие 103.7. Для любого целого п'У2 всякий
отрезок может быть разбит (и притом единственным
образом) на п последовательных равных друг другу
отрезков,
(Классическое построение, использующее парал-
лельные, проходящие через последовательность точек,
расположенных на вспомогательной прямой так, что
расстояние между любыми двумя соседними из них
одинаковы.)
Это следствие, очевидно, интересно только в том
случае, когда предполагаются известными лишь не-
многие свойства поля /?, например, если предпола-
гается только, что R — линейно упорядоченная комму-
тативная группа.
104. Схема изложения дополнительного материала
В теореме 103.6 формулируется то же свойство,
что и в аксиоме Шь; таким образом, мы располагаем
теперь аксиомами I, II, III и можем строить аффин-
ную геометрию так, как это сделано в гл. II.
С другой стороны, определение 102.1 вводит в
рассмотрение отношение перпендикулярности, а из
лемм 102.2,4,5 следует, что это отношение удовле-
творяет аксиоме IVa; поэтому можно определить
*) Теоремой Фалеса во французской методической литера-
туре принято называть теорему, трактующую о свойствах угла,
пересеченного параллельными прямыми.
14*
212
Приложение 1
коэффициент проекции двух лучей с общим началом
подобно тому, как это было сделано в п. 33; для этого
коэффициента проекции выполняется аксиома 1Уь:
Действительно, если лучи Л1 и А2 с началом 0 при-
надлежат одной прямой, то равенство c(At,A2) =
= с(Л2, Л]) очевидно; если же они не принадлежат
одной прямой, то пусть П1еЛ1 и а2еД2 таковы, что
d(0, Я1) = d(0, а2) =/= 0; медиатриса D пары (а2, а2)
проходит через 0; следовательно, осевая симметрия
с осью D меняет местами Л1 и Л2; так как эта осевая
симметрия — движение и, значит, сохраняет перпен-
дикулярность, получаем, что с(А\,А2) = c(A2,Ai).
Таким образом, все аксиомы I, II, III, IV выпол-
нены, и далее можно идти по тому же пути, что и
в предыдущем изложении.
Если желательно излагать метрические понятия
до изучения векторных понятий, то нужно доказать
теорему Пифагора, не обращаясь к скалярному про-
изведению. Приводим простое доказательство этой
теоремы, для которого не требуется предварительного
изучения ни подобия треугольников, ни углов в тре-
угольнике:
Пусть D, D' — два луча с общим началом 0; пусть
х е D и k — коэффициент проекции этих лучей.
Рассмотрим проекцию х' точки х на прямую, не-
сущую D', и проекцию х" точки^ х' на прямую, несу-
щую D; очевидно, что Ох" = А20х, откуда следует, что
х" €= D.
Рассмотрим теперь треугольник (а, Ь, с) с пря-
мым углом в вершине а; обозначим в этом треуголь-
нике через р проекцию точки а на прямую Д(&, с),
через а, р, у — длины сторон и через k, k' — коэффи-
циенты проекции пар лучей, определяемых точками b
и с соответственно.
Из вышеизложенного следует, что р е [Ь, с], от-
куда
а = k2a + k'2a или а2 = k2a2 + k'2a2,
что, наконец, может быть записано в виде
а2 = р2 + у2.
Отсюда следует, в частности, что | А|, |£'|< I.
ПРИЛОЖЕНИЕ 2
АКСИОМАТИКА
НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ
Я думаю, что не стоит обсуждать с учениками, ка-
кие изменения могут быть внесены в предлагаемую
им систему аксиом, прежде чем они ее хорошо усвоят
и пока у них не появится некоторая зрелость мысли.
К тому же, евклидовой геометрии свойственна такая
простота, и структура ее содержит в зародыше столь
много фундаментальных понятий, — понятия группы,
вектора, скалярного произведения, — что изучение ее
не должно страдать от конкуренции с другими гео-
метриями.
Однако в конце средней школы или в начале уни-
верситетского курса, когда в распоряжении ученика
уже имеется достаточно алгебраических средств»
очень интересно предложить ему исследование моде-
лей тех или иных неевклидовых геометрий и показать
ему, как те или иные изменения в аксиомах евклидо-
вой плоскости и пространства приводят к аксиомам
этих геометрий.
Я укажу здесь коротко аксиомы «абсолютной» гео-
метрии плоскости, характеризующие и плоскость Ев-
клида, и плоскость Лобачевского.
Здесь также плоскость есть некоторое множество
П, а прямые — его подмножества. Аксиомы разби-
ваются на четыре группы:
I". Для всякой пары (х, у) различных точек пло*
скости П существует прямая, и притом единственная,
содержащая эти точки х, у.
И". На всякой прямой D определены две струк-
туры линейного порядка, противоположные друг
другу.
III". (Эта аксиома совпадает с аксиомой III' при-
ложения 1.)
214
Приложение 2
IV". (Аксиома складывания.) Для всякой прямой
D существует разбиение множества {П\Р) на два
непустых подмножества Hi и П2, таких, чтсс
1. (jqellr, х2 е П2) =>([хь х2]А D не пусто).
2. Существует такое движение f, отображающее
множество П1 U D на множество П2 U D, что f(x)~x
для всех х g D.
Единственность разбиения плоскости П на две по-
луплоскости, определяемые некоторой прямой, дока*
зывается сразу1), равно как и единственность со*
ответствующего складывания. Отсюда получается
понятие симметрии относительно прямой; такая сим-
метрия есть движение плоскости IL
Пользуясь этими симметриями, можно рассмотреть
перпендикулярность; ими же порождаются движения
плоскости П. Как и в евклидовой плоскости, собствен-
ные движения (произведения четного числа симмет-
рий) образуют группу, действующую однотранзитив-
ным образом на множестве замкнутых лучей.
Для любой прямой D и любой точки хфй черезх
проходит по крайней мере одна прямая, параллель-
ная D; если найдется пара (Дъх0), для которой эта
прямая единственна, то и для всех пар (D*x) можно
доказать единственность параллельной; в этом случае
плоскость П евклидова; в противном случае П будет
(гиперболической) плоскостью Лобачевского.
9 Доказательства первых теорем были даны в моей
статье {24].
ПРИЛОЖЕНИЕ 3
АКСИОМАТИКА «НАЧАЛЬНОЙ ГЕОМЕТРИИ»
«Начальной геометрией» (la petite geometric) мы
называем геометрию, преподаваемую школьникам до
14 лет, когда еще противопоказано явное употребле-
ние языка векторов и когда отрезки можно делить
лишь в рациональном, а не в произвольном отноше-
нии. Для учащихся этого возраста геометрия не стро-
ится как последовательно дедуктивная наука; лишь
некоторые простые теоремы предлагается доказывать,
причем за исходные берутся посылки, приемлемые
для ученика вследствие их интуитивного характера;
эти посылки образуют аксиомы маленьких дедуктив-
ных островков («фрагментов геометрии»), возникаю-
щих при таком подходе.
Чрезвычайно важно, чтобы определения и язык,
употребляемые на этой стадии обучения, были бы
именно теми определениями и тем языком, которые
позже будут использоваться систематически.
В равной степени желательно, чтобы некоторая
общая идея могла служить направляющей нитью при
выборе дедуктивных фрагментов; я полагаю, что та-
кой основной нитью могла бы стать аксиоматика с
сильными аксиомами, в которых, однако, используют-
ся только простые понятия, такие, как понятия кон-
груэнтности.
Изучение аффинных понятий
Первыми двумя аксиомами будут аксиомы I и II,
но аксиома II формулируется в терминах отношения
«между» (см. Хальстед [3]).
216
Приложение 3
Аксиома Ша заменяется следующей:
Ша'. В множестве П X П пар точек плоскости П
определено отношение эквивалентности, обозначаемое
через ~ и такое, что:
1. Для всех х, у
(х, у) ~ (у, х).
2. Для любой прямой D и любых х, у. х' е D с
каждой стороны от точки х' существует единственная
точка у' прямой D, такая, что (х, у) ~ (х', у').
3. Для всякой прямой D и всех х, у, z, х', у',
zf е D, таких, что x^y^z и х' у' ^z',
[(х, у) ~ (х', у') и (у, z) ~ (у', z')] =ф [(х, z) ~ (х', г')].
Аксиома Шь остается без изменений.
Классы эквивалентности по отношению ~ назы-
ваются расстояниями, их можно сравнивать между
собой и складывать друг с другом.
Эти аксиомы позволяют доказать1) теорему 12.3
и даже показать, что плоскость П с некоторой на-
чальной точкой есть векторное пространство над Q.
Следовательно, из этих аксиом можно будет вывести
все классические результаты элементарного харак-
тера, касающиеся аффинной структуры плоскости.
Изучение метрических понятий
К предыдущим аксиомам добавляются:
либо неравенство треугольника Ш4 и аксиома
складывания IV', либо аксиома IVa и следующая
аксиома, более сильная, чем 1Уь:
IVt>,z. Пусть (0, х, у) — произвольная тройка точек,
принадлежащих одной прямой и h — проекция точки
О на прямую Д(х, у). Тогда
[d(h, x) = d (h, у)] О [d (0, х) = d (0, у)].
’) Аксиома II для этого также неудобна. В общем случае,
предположим, что выполняется аксиома I, и предположим, что
на каждой прямой А плоскости П однотранзитивным образом
действует некоторая коммутативная группа 6(A), каждый отлич-
ный от 0 элемент которой имеет бесконечный порядок (это дает
возможность ввести определение середины). Тогда можно сфор-
мулировать аксиому Шь и доказать теорему 12.3, а также тот
факт, что плоскость П с выбранным началом есть векторное про-
странство над Q.
ПРИЛОЖЕНИЕ 4
СХЕМА ЕЩЕ ОДНОГО ОПРЕДЕЛЕНИЯ УГЛА
В гл. V было дано определение угла, использую-
щее группу вращений вокруг точки.
Я предлагаю здесь еще один способ, при котором
сохраняется более тесная связь с парами лучей; этот
способ состоит в задании некоторого отношения экви-
валентности на множестве пар лучей с общим нача-
лом 0; при этом множество углов будет образовано
классами эквивалентности по этому отношению; за-
тем дается определение суммы двух углов." Этот ме-
тод очень напоминает введение свободных векторов
с помощью «связанных векторов»*); аналогия здесь
настолько сильна, что оба построения могут преподно-
ситься по одной схеме; я ограничусь тем, что при-
веду здесь эту схему, предоставив читателю удоволь-
ствие перевести ее на язык векторов или на язык
углов.
В первом случае множество Е, которым мы будем
пользоваться, есть П, а множество &— множество
центральных симметрий плоскости П; во втором слу-
чае Е — окружность с центром в точке 0 и — мно-
жество осевых симметрий, оси которых проходят че-
рез 0.
*) Имеется в виду обычный переход от «связанных векто-
ров» (направленных отрезков) к «свободным векторам» (кото-
рые обычно и обозначаются словом «век*гор» без всякого прила-
гательного) — к классам эквивалентности «связанных векторов»
по отношению эквивалентности;
АВ ~ CD, если пары A, D и В, С имеют общую середину
(ср, стр. 40).
218
Приложение 4
Абстрактная схема
Пусть Е— некоторое множество, на котором за-
дано множество & подстановок (множества Е), так,
что:
1. Для любых элемент о2 — тождественная
подстановка.
2. Для любых х, у^Е найдется единственное
меняющее местами х и у.
3. Пусть всякое произведение вида р • о (р, а s
называется переносом', тогда будем предполагать, что
два переноса, совпадающие для некоторого хе£, со-
впадают тождественно.
Лемма а. Всякое произведение р-а-т элементов
множества &Р принадлежит этому множеству.
Действительно, пусть а^Е, и пусть а' = р* о ‘т(а);
рассмотрим элемент я множества меняющий ме-
стами а и а'.
Равенство р • о • т (а) = л (а) влечет равенство
о-т(а) = р • л (о), откуда получаем о-т=р’Л и
р • о • т = л.
Следствие1). Для всех р, о, элемент
(р-О‘т)2 есть тождественная подстановка.
Введем на множестве Е X Е отношение эквива-
лентности.
Будем говорить, что (а, й, с, d) есть параллело-
грамм множества Е, если подстановка о, меняющая
местами а и с, совпадает с подстановкой, меняющей
местами b и d.
Тогда (а, Ь) ~ (а', если (а, й, а', Ь') — парал-
лелограмм.
Непосредственно из определения следует, что
[(а, й) ~ й'ЖФ[(а, а') ~ (й, Ь%
С другой стороны, это отношение есть отношение
эквивалентности: рефлексивность и симметричность
его очевидны; покажем, что оно транзитивно.
!) Эта формулировка эквивалентна, несмотря на свою ка-
жущуюся ослабленность, свойству 3 переносов.
Схема еще одного определения угла 2Т9
Предаюложим, что (а, Ь) (а\ Ь') и —
Это значит, что ал=р(&Х, = (>Й и
= а(^), b" = a(af>.
Можно положить У* = г (а ) , что может быть за«
писано также в виде а = х(Ъ").
Таким образом, получаем равенство а" =•
= о-р-т-е-р(й),, правая часть которого ио приве-
денному выше следствию есть не что иное как т(6);
как показывают равенства Ь" = х(а) и а" — %(Ь),
(а, Ь) ~ (а", Ь").
Лемма ₽. Для всех а, Ь, с, а', Ь', с'
[(а, Ь) ~ (а', Ь') и (Ь, с) ~ (Ь', с')] =$ [(«> с) ~ (а', С')Ь
Действительно, эти отношения эквивалентны соот-
ветственно следующим:
(а, а') ~ (Ь, Ь'); (Ь, Ь') ~ (с, с'); («» а') ~ (с> И»
откуда по транзитивности получаем искомое свойство.
Лемма у. Для всех а, Ь, а' существует единствен-
ное Ь', такое, что (а, Ь) ~ (а', Ь').
Действительно, &' = р(а), где р — элемент множе-
ства такой, что а’ = р(Ь).
Теперь у нас имеется все необходимое для зада-
ния групповой структуры на фактормножестве мно-
жества Е X Е по этому отношению. Коммутативность
этой группы следует из того факта, что в параллело-
грамме любые две противоположные стороны (пары
точек) эквивалентны.
Можно показать, что эта группа изоморфна груп-
пе переносов и что эта последняя совпадает с группой
подстановок множества Е, переводящих любую пару
(а, Ь) в эквивалентную ей пару.
Наконец, можно показать, что для любой точки
а е£ множество Е обладает структурой коммутатив-
ной группы с нейтральным элементом со; группа пе-
реносов этого множества есть не что иное как только
что определенная группа.
220
Приложение 4
Элементами множества являются симметрии
к —* (а — х) этой группы. И наоборот, совершенно оче-
видно, что для любой коммутативной группы G сим-
метрии х -* (а — х) этой группы обладают свойствами
1, 2, 3, выполнение которых требуется от множества
и что группа переносов, определяемая множеством
ЯР, совпадает с группой переносов группы G.
Литература
Здесь указаны лишь некоторые работы, представляющие не-
посредственный интерес для преподавания.
I. СОЧИНЕНИЯ ЕВКЛИДА И ТРУДЫ, БАЗИРУЮЩИЕСЯ НА ТЕХ ЖЕ
ИДЕЯХ
[I] . Евкл ид, Начала, том I—III, М.—Л., Гостехиздат, 1948—
1950.
[2] . Гильберт Д., Основания геометрии, М.—Л., Гостехиздат,
1948.
[3] . На Is ted G. В., Rational Geometry, New York, 1907.
IL АМЕРИКАНСКИЕ РАБОТЫ, БАЗИРУЮЩИЕСЯ НА ПОНЯТИИ
РАССТОЯНИЯ ♦)
[4] . Veblen О., A system of axioms for geometry, Trans. Amer.
Math, Soc„ 5 (1904), 343—384.
[5] . Veblen O., The foundations of geometry, ch. I, New Yorkf
1955.
[6] . Moore R. L., Sets of metrical hypothesis for geometry^
Trans, Amer. Math. Soc,, 9 (1908), 487—512.
[7] . For der H. G., The foundations of Euclidean Geometry,
London, 1927.
[8] . Birkhoff G. D., A set of postulates for plane geometry
based on scale and protractor, Ann. of Math., 33 (1932).
[9] . Birkhoff G. D., Beat ley R., Basic geometry, Manual
to basic geometry, New York, 1941.
[10] . Gillam В. E., A new set of postulates for Euclidean geo-
metry, Revista de Ciencia, 42 (1940), 869—899.
[11] . Blumenthal L. M., Theory and application of distance
geometry, New York, 1953.
[12] . M a c L a n e S., Metric postulates for plane geometry, Ame-
rican Math. Monthly, 66 (1959).
[13] *.Moise E. E., Downs F. L., Geometry, Reading (Mass.).
1964. [Готовится русский перевод.]
*) Обзор некоторых из называемых ниже учебников имеется
в журнале «Математика в школе», K's 2, 1967, стр. 93—96.
222
Литература
[14] *. Н е n d е rso п К. В., Pingry R. Е., R о b i n s о n G. А.,
Modern Geometry, its Structure and Function, New York,
1962.
[15] *. Jurgen son R. C., Donnelly A. J., Doliani M. P.,
Modern Geometry, Structure and Method, Boston, 1963.
[16] *. School Mathematics Study Giwp, Geometry I; Geometry II;
Geometry with Coordinates, part 1; Geometry with Coordina-
tes, part 2, Yale University press, 1960—1962.
[17] *. Moise E. E., Elementary geometry from an advanced Stand-
point, Reading (Mass.), 1964.
[18] *. J а с к s о n S. B., A development of the Jordan curve theorem
and the Schonflies theorem for polygons, Amer. Math. Month-
ly. 75, № 9 (1968), 989—998.
Ш. НЕКОТОРЫЕ БОЛЕЕ ПОЗДНИЕ РАБОТЫ
[19] . Артин Э., Геометрическая алгебра (особенно гл. 4), М.,
«Наука», 1969.
[20] . Бахман Ф., Построение геометрии на основе понятия
симметрии, М., «Наука», 1969.
[21] . Behnke Н., Bachmann F., Fla dt К., Suss W.,
Grundlagen der Mathematik, Bd. TI, Geometric, Gottingen,
1960.
[22] . Bon ligand G., Acces aux principes de la Geometric Euc-
lidienne, Paris, 1951.
[23] . В r i s a c R., Expose elemetaire des principes de la geometric
Euclidienne, Paris, 1955. (Изложение основано на понятии
группы перемещений.)
[24] . Шоке Г„ О преподавании элементарной геометрии, сбор-
ник «Преподавание математики», М., Учпедгиз, 1960,
стр. 65—115. (Изложение основано на понятиях расстояния
и складывания по некоторой прямой.)
[25] . R е v u z А., Развернутое изложение предыдущей работы
(мимиографировано).
[26] . Cartan Н., Cours de Math. II (стеклография) (Аксиома-
тика части планиметрии).
[27] . Kerekjarto В., Les fondements de la geometric, Buda-
pest, 1955.
[28] . I. С. M. I. Seminar on Modern Teaching of Geometry, Mat-
hematisk Institut, Aarhus Universitet, Elemetar Afdeling n°7,
1960.
[29]*. Dieudonne J., Algebre lineaire et geometric dlementaire,
Paris, 1964.
[30]*. Ал ек с а н д р о в П. С., Маркушевич А. И., Хин-
чин А. Я- (ред.), Энциклопедия элементарной математики,
кн. IV (геометрия), М., Физматгиз, 1963; кн. V (геометрия),
М., «Наука», 1966.
[31]*. Кокстер Г. С. М., Введение в геометрию, М., «Наука»,
1966.
Литература
[32]*. Вейль Г., Симметрии, М., «Наука», 19631
[33]*. Яг лам И. М., Геометрические преобразования 1, М., Гост
техиздат, 1955.
[33а]*. tenт Н., Grundtagen der ETementarmathematik, Berlin.
1967.
[34]*. De l es s er t A., Une Construction de la geom&trie elemen-
taire foundee sur la notion de h reflexian, Geneve, 1963.
IV. УЧЕБНИКИ ЭЛЕМЕНТАРНОЙ ГЕОМЕТРИИ,
СОДЕРЖАЩИЕ ИНТЕРЕСНЫЕ ИДЕИ
35]. Cossart et Т Е ё г an, Mathematiques 4-е, Bordas.
36]. Delthefl et C a i г e, Geometric, Paris, Bailliere.
37]. Enriques F., Amaldi U., Element! di Geometria ad uso
delle scuola secondarie superior!, Bologne, Zanichelli.
[38] . Rosati C., Benedett! P., Geometria, Rome, Dante
Alighieri.
[39] . S e v e r i F., Geometria elementare, Florence, Vallecchi.
[40] . Castelnuovo E., Geometria intuitiva, Florence, La nuova
Italia.
[41] . Kenniston E., Jully, Plane Geometry, Ginn and Co.,
1946.
[42] . Morse E., Mathematics for high Schools, Geometry, Sale
University, New Haven, Connecticut, 1959.
[43] . Перепелкин'Д. И., Курс элементарной геометрии, чч. 1,
2, М.—Л., Гостехиздат, 1948—1949.
[44]*. Р ару G., Mathematique moderne 1; 2 (Nombres reels et
vectoriel plan), 3 (Voici Euclide), 6 (Geometrie plane), Bru-
xelles, 1965—1968.
[45]*. В r u m f i e 1 C. F., E i c h о 1 z R. E., S h a n k s M. E., Geo-
metry, Reading Mass., 1962.
[46]*. Queysanne M., R e v u z A., Mathematiques 6-e et 5-e,
Paris, 1965—66.
[47]*. Queysanne M., R e v u z A., Mathematiques 2-e A et 2-e
CT, Paris, 1969.
[48]*. Felix L., Geometrie, Paris, 1964.
V*. НЕКОТОРЫЕ РУССКИЕ УЧЕБНИКИ ГЕОМЕТРИИ
[49] . Киселев А. П., Геометрия (планиметрия); Геометрия
(стереометрия), М., Учпедгиз, 1962.
[50] . Погорелов А. В., Элементарная геометрия (планиме-
трия); Элементарная геометрия (стереометрия), М., «Нау-
ка», 1969 и 1970.
[51] . Клопский В. М., Скопец 3. А., Ягодовский М. И.,
Геометрия, 9 класс, М., «Просвещение», 1970.
[52] . Семенович А. Ф., Нагибин Ф. Ф., Черка-
сов Р. С., Геометрия, 6—8 классы, М., «Просвещение»,
1967.
[53] . Болтянский В. Г., Яглом И. М., Преобразования.
Векторы, М., «Просвещение», 1964.
224
Литература
VP. СТАТЬИ В ЖУРНАЛЕ «МАТЕМАТИКА В ШКОЛЕ»
[54] . Колмогоров А. Н., Новые программы и некоторые ос-
новные вопросы усовершенствования курса математики в
средней школе, 1967, № 2, 4—13.
[55] . Колмогоров А. Н., К новым программам по матема-
тике, 1968, № 2, 21—22.
[56] . Колмогоров А. Н., Яглом И. М., О содержании
школьного курса математики, 1965, № 4, 53—62.
[57] . Яглом И. М., О школьном курсе геометрии, 1968, № 2,
53—-58.
[58] . Болтянский В. Г., Яглом И. М., Геометрия в стар-
ших классах средней школы, 1969, № 4, 9—21.
[59] . П а п и Ж., Геометрия в современном преподавании мате-
матики, 1967, № 1, 39—42.
[60] . Серве В., Аксиоматика и элементарная геометрия, 1967,
№ 6, 45—55.
СЛОВАРЬ МАТЕМАТИЧЕСКИХ
ТЕРМИНОВ
Курсивом в тексте, поясняющем смысл отдельных слов и
выражений, выделены имеющиеся в этом словаре термины.
Абелева группа — см. группа.
Аддитивная символика — такая система записи формул, от-
носящихся к какой-либо алгебраической системе, при которой
имеющаяся в этой алгебраической системе бинарная операция
обозначается знаком 4- и называется «сложением».
Алгебраическая операция, определенная в некотором мно-
жестве М элементов, — правило, сопоставляющее каждым (упо-
рядоченным!) k элементам множества М (где k фиксировано)
какой-то определенный элемент того же множества («результат»
операции); по-другому алгебраическую операцию можно опреде-
лить как отображение (аь а2, ...» «а) -> 0, где аь а2,...» а*, 0 е М.
Алгебраические операции классифицируются по числу k: при
k — 2 говорят о бинарной операции (для обозначения бинарных
операций чаще всего используется аддитивная или мультипли-
кативная символика); при k = 3— о тернарной операции и т. д.
(При k = 1 алгебраическая операция называется унарной;
унарной операцией является, например, операция взятия ком-
плексно сопряженного числа в множестве комплексных чисел.)
Антиизоморфизм — такое отображение множества М с задан-
ной на нем бинарной операцией на другое множество ЛГ с су-
ществующей на нем бинарной операцией, что если а0 = у (где
а, 0, ysAl; мы употребляем здесь мультипликативную симво-
лику) и а -> а', 0 -> 0', у -> у', то 0'а' ® у'. (Множество М' мо-
жет и совпадать с М.)
Архимеда аксиома утверждает, что для любых двух отрез-
ков а и b (первый из которых может быть сколь угодно мал,
а второй — сколь угодно велик) существует такое натуральное
число и, что n-кратный отрезок а больше отрезка Ь. (Эта аксио-
ма играет основную роль в теории измерения длин отрезков.)
Аффинная структура в множестве М — задание в этом мно-
жестве подмножеств, называемых «прямыми» (а также «пло-
скостей» и т. д., если речь идет об аффинной структуре раз-
мерности > 2),« превращающее М в аффинное пространство
15 Зак. 323
226
Словарь
соответствующей размерности, в котором выполняются все ха-
рактеризующие аффинное пространство аксиомы.
Аффинное пространство отличается от евклидова простран-
ства отсутствием1 «метрики»— расстояний между точками и уг-
лов между прямыми. К аффинному пространству можно прийти,
отправляясь от различных систем аксиом, например от из-
вестной системы аксиом Гильберта евклидова пространства, от-
казавшись от группы аксиом конгруэнтности. (В случае плоско-
сти наряду с этим приходится ввести одну новую аксиому,
связанную со свойствами параллельных прямых.) Простейшая
система аксиом аффинного пространства такова: в векторном
пространстве наряду с векторами вводятся новые объекты, на-
вываемые точками; при этом каждым двум точкам А и В
отвечает вектор АВ ==_а; каждой точке А и вектору а отвечает
такая точка В, что АВ = а; для каждых трех точек А, В и С
имеет место равенство АВ 4- ВС 4- СА — 0 (где 0 — нулевой век-
тор). (Дополнение этой системы аксиом группой аксиом, связан-
ной со скалярным п р о-изв ед е ни ем векторов, обра-
щает аффинное пространство в евклидова.)
Аффинные преобразования аффинного пространства — взаим-
но однозначные (биективные) (точечные) отображения аффин-
ного пространства на себя, которые в случае аффинной плоско-
сти (аффинного пространства размерности 2) можно определить
требованием5 о том, чтобы эти преобразования переводили пря-
мые снова в прямые. (В случае аффинного пространства произ-
вольной размерности п надо потребовать, чтобы плоскости раз-
мерности п — 1 переходили снова в такие же плоскости.)
В декартовых (или аффинных) координатах аффинные преоб-
разовании записываются линейными уравнениями: ? = ax-F ^ 4-
4- е, = гх 4- dy 4- Д где ad— beф0 (случай плоскости).
Биективное отображение (биекция) — взаимно однозначное
отображение множества Л4 на множество АГ (которое может и
совпадать с М), т. е. такое отображение, что каждые два раз-
личных элемента множества М отображаются в различные эле-
менты множества №' и каждый элемент множества АГ является
образом какого-то элемента множества М.
Биекция — см. биективное отображение.
Бинарная операция — см. алгебраическая операция.
Бинарное отношение—произвольное отношение в множестве
М, выделяющее некоторые (упорядоченные) пары элементов из
АД считающиеся связанными этим отношением (т. е. подмноже-
ство множества М2 — М X Af). (Примеры бинарного отношения:
отношение < в множестве чисел или отношение «старший брат»
в множестве людей.)
Векторное пространство (оно называется также линейным
пространством)—множество М элементов, называемых векто-
рами, для которых, определены две операции: операция ело-
Сша^ь
227
ж ей и я векто.фев я операция умножения век торя
на число. При этом по сложению векторы должны образо-
вывать коммутативную группу, а умножение вектора на число
подчиняется следующим аксиомам:
1-й = й, (а + р)• a + fhn,
а (а -I- Ь) = а • а + а • Ь, а • (Р • а) = (а|3) • а
(здесь а, и а, Ь^М). Наряду с этим в число аксиом век-
торного пространства обычно включается аксиома размер-
ности, в случае двумерного векторного пространства (векторной
плоскости) формулирующаяся так: существуют два не пропор-
циональных друг другу вектора -<т, е. также векторы и
ЬфО, что не существует числа а, для которого я ка-
ждые три вектора а» с линейно зависимы (т. е. есть такие
числа а, р, у се/?, не все равные нулю, что а*а+ 0ф
где 0 — нулевой вектор). Для более общего п-мерного вектор-
ного пространства аксиома размерности формулируется так: су-
ществуют п линейно независимых векторов, т. е. такие
векторы oi, «2, «и, что равенство
ai • «1 + <х2* а2 + ... + «п -яп = 0, «ь а2, ...,txn е /?,
имеет место лишь при rxi = а2 = ... = ап = О; каждые же п + 1
векторов линейно зависимы. (Присоединение к системе
аксиом векторного пространства дополнительных аксиом, свя-
занных с точками, обращает его в аффинное пространство^
дополнение же системы аксиом аксиомами скалярного ум-
ножения векторов, сопоставляющего каждым двум векторам
а и b число ab причем ab = Ьа; а(Ь Н-£.) — ab -р ас\ (аа)^»
= u(ab); а2 — а • а > 0 при а =£ -0; здесь а, Ь, с е Л£, а е •</?, об-
ращает аффинное лростр анство в е в к л и д о в о и р ос т р а н-
с т во.)
Векторнаяструктура на множестве М—структура вектор-
ного пространства на множестве М, элементы которого в этом
случае называются векторами. .(Иногда выражение «вектор-
ная структура» употребляется в смысле аффинная структура.)
Возрастающее отображение — см. монотонное отображение.
(jf« Хч \
—? I >
> 1 * 2 &ля любых Х| я х2 из области определения
функции f (или из той области, в которой эта функция выпукла).
Геометрически неравенство, определяющее выпуклую функцию,
означает, что середина S 1 — 1 хорды Л В, соеди-
\ jL j6 /
ияющей две точки Лф, Ui) и В(хг, у2) графика функция у =
15*
228
Словарь
„ ^(*l+x2 efXl+XiW .
лежит под точкой CI—Д——£11 графика, отвечаю-
щей значению ——£ аргумента функции; отсюда следует, что
любая дуга графика выпуклой функции лежит над хордой, со-
единяющей концы этой дуги.
Гармоническое деление: точки С и D делят отрезок АВ гар-
ЛС AD .
монически, если (отрезки направленны!), т. е.
точки С и D делят отрезок АВ в одном и том же отношении,
но одна внешним, а другая — внутренним образом. (Точки пе-
ресечения с основанием АВ треугольника АВС биссектрисы угла
С и биссектрисы внешнего угла при вершине С делят отрезок АВ
гармонически.)
Группа — такое множество элементов G с определенной
в этом множестве бинарной операцией, что (мы употребляем
здесь мультипликативную символику) (ab)c = а(Ьс), существует
такой элемент е (нейтральный элемент или единица группы),
что еа — ае = а для любого а е G, и для каждого а е G суще-
ствует такой элемент а-1 группы, что аа~х — а~ха — е. Если, кро-
ме того, аЬ = Ьа для любых a,b^G, то G называется комму-
тативной или абелевой группой.
Группа преобразований — совокупность преобразований не-
которого множества Л4, т. е. взаимно однозначных (биективных)
отображений М на себя, такая, что наряду с каждыми двумя
преобразованиями gi и g2 в эту совокупность входит и их про-
изведение g2gi; совокупность содержит тождественное
отображение е, переводящее каждый элемент М в себя;
наряду с каждым преобразованием g совокупность содержит и
обратное ему преобразование g"1, такое, что если g переводит
а в Ь, то g~l переводит b в а. Если для каждых а, ЬеМ эта
группа содержит преобразование, переводящее а в Ь, то она на-
зывается транзитивной на множестве М; если такое преобразо-
вание единственно — однотранзитивной на М.
Движение — изометрическое отображение метрического про-
странства Л4 на себя.
Декартово произведение множеств М н N (оно называется
также прямым произведением множеств, а иногда и просто про-
изведением множеств) состоит в образовании нового множества
М X N, элементами которого являются (упорядоченные) пары
элементов М и N; таким образом все элементы множества MxN
можно записать в виде (а, Ь), где а е Af, b е N.
Дробно-линейные преобразования евклидова или аффинного
пространства (их называют также проективными преобразова-
ниями) можно определить как такие преобразования, переводя-
щие некоторую область F пространства в другую область F't что
Словарь
каждая прямая, пересекающая F, переходит снова в прямую
(очевидно, пересекающую Fz; мы здець ограничиваемся случаем
преобразований плоскости). Во всем (евклидовом или аффинном)
пространстве такое преобразование (если только оно не есть
аффинное преобразование) не является взаимно однозначным
(биективным); некоторые точки пространства (или плоскостй)
не имеют при этом образов (т. е. никуда не переходят), а дру-
гие— не имеют прообразов. Для . того чтобы сделать преобразо-
вание биективным, приходится евклидово (аффинное) простран-
ство дополнять фиктивными (т. е. в аффинном пространстве
не существующими) «бесконечно удаленными элементами» (точ-
ками; в случае плоскости все эти точки принадлежат одной «бес-
конечно удаленной прямой»). Название «дробно-линейное» при-
своено этим преобразованиям потому, что в декартовых (или
аффинных) координатах они записываются дробно-линейными
. , ах 4- by + k f ex+ dy +1 .
функциями: r =-------1- ; -,-ty~------r-j—:--- (где числа
J ex 4- fy + tn ex + fy + m
a,b,c,d,e,f,k,l,m^R удовлетворяют еще некоторым неравен-
ствам; мы здесь также ограничиваемся случаем плоскости).
Замкнутое множество топологического пространства — мно-
жество, содержащее предельные точки всех бесконечных последо-
вательностей точек этого множества.
Изометрическое отображение — отображение метрического
пространства М на метрическое пространство М' (возможно,
совпадающее с М; тогда изометрическое отображение называет-
ся также движением), сохраняющее расстояние между точками
(т. е. такое, что если Л->Л' и В->В', где Л,В<= Л4, Л', В'е М',
то dAB = dA,B,\ здесь dAB — расстояние между Л и В.
Изоморфизм—такое отображение некоторой алгебраической
или геометрической структуры В (множества с заданными в нем
определенными отношениями элементов) на аналогичную ей
структуру S', при котором связанные определенным отношением
элементы В переходят в элементы В', связанные тем ж е от-
ношением. Так, например, изоморфизм аффинного пространства
А определяется его аффинным отображением на другое аффин-
ное пространство Л', при котором тройка точек а, Ь, се Л, свя-
занная отношением «коллинеарности» (а, Ь, с принадлежат одной
прямой), переходит в тройку точек а', Ь', с'еЛ7, также связан-
ных условием коллинеарности; изоморфизм алгебраической си-
стемы М с заданной на ней бинарной операцией — это отобра-
жение М на такую алгебраическую систему М', что если
а, р, у е М связаны отношением ар = у (мы употребляем здесь
мультипликативную символику) и а -> а', р -> р', у -> у', то
а'р' = и т. д. (См. также линейное преобразование).
Импликация — отношение следования высказываний: импли-
кация P=^q (где р и q— некоторые высказывания) означает,
что «из р следует q».
Словарь
Инволюция — такое преобразование / некоторого множества
М, что р — hi —в (где мультипликативная символика использо-
вана для записи произведения преобразований; е — тожде-
ственное преобразование) шш r‘ = i (примеры: цен-
тральная симметрия, осевая симметрия).
Инъективное отображение (инъекция) — отображение f:
М->ЛГ, пр® котором если х=/=у, то (здесь х,у^М>
М"). (Если нри этом М отображается н а все
то f—биекция]
Итерация (алгебраической операции или отображения) —
многократное повторение (операции, отображения); так, итера-
цию бинарной операции ар (мы используем здесь мультиплика-
тивную символику) образует операция (...((ар)у)б 1)р, сопо-
ставляющая новый элемент рассматриваемой алгебраической
системы ее элементам а, р, у,..., Л, р; итерацию преобразования g
образует преобразование gk — g • g •... • g (k сомножителей).
Кардинальное число — обобщенное «число», указывающее на
мощность множества: так, например, кардинальное число, кото-
рое отвечает счетному множеству, обозначается символом Ко.
Классы эквивалентности — см. эквивалентности отношение.
Коммутативная группа — см. группа.
Линейное пространство — см. векторное пространство.
Линейное преобразование — изоморфизм линейного простран-
ства, т. е. такое отображение линейного или векторного про-
странства V в другое (или то же самое) линейное (векторное)
пространство V', что если 6->У, где о, be V, a‘,b'^Vft
то а 4- b ->а' 4- Ь' и а’а->а»а' (где a ^R произвольно).
Линейный порядок — такое отношение порядка в некотором
множестве М, что для любых двух (различных) элементов а,Ь^М
или а < b или b > а.
Метрическое пространство — множество М элементов, назы-
ваемых точками, в котором каждым двум точкам А и В отве-
чает число называемое их расстоянием (так-что здесь
можно говорить об отображении МхМ ->₽), и выполняются
аксиомы: Г dAB — dSA (симметричность расстояния);
2° (Ga=0; dAR>Q при А=£В (положительность рас-
стояния); 3° dAS + dBc^dAc (неравенство треугольника).
Монотонное отображение: такое отображение множества Л1
в множество М где в М и в N определены отношения линейного
порядка, что если а -> o' и Ъ Ь\ то либо из а > b следует, что
а7 > bf (в этом случае отображение называется возрастающим),
либо из а > Ь следует, что Ь' > аг (в этом случае отображение
называется убывающим).
Мощность множества связана с вводимым в множестве мно-
жеств отношением порядка'. если существует биективное отобра-
жение множества М на часть множества N (возможно, совпа-
Словарь
231
дающую с н0 не существует биективного отображения $ на
часть множества М, то говорят, что мощность множества М
меньше мощности множества если же существуют и биек-
тивное отображение множества М на часть множества М и
биективное отображение множества N на часть множества М
(в этом последнем случае обязательна существует и биективное
отображение М на ЛГ), то говорят, что мощности множеств М
й АГ одинаковы (что множества М и N равно мощи ы);
в этом последнем случае в отношении понятия мощности мно-
жества М и N не различаются. (Таким образом, отношение по-
рядка вводится в фактормножестве множества множеств по
отношению равном ощности.)
Мультипликативная символика — система записи формул, от-
носящихся к алгебраической системе с бинарной операцией, при
которой эта бинарная операция называется «умгюжен-ием» в ре-
зультаты ее применения к элементам аир алгебраической си-
стемы записываются как оф или а • 0.
Нейтральный элемент (относительно бинарной операции) —
такой элемент е, что (мы употребляем здесь мультипликативную
символику) а8 = £(х - а для всех а.
Неравенство треугольника — см. метрическое пространство.
Нормальный делитель группы G— подгруппа GT (т. е. неко-
торое множество Gr элементов группы G, такое, что — если упо-
треблять мультипликативную символику — из ft, Gi следует,
что gig2 е Gt; eeGj; из g^Gi следует, что g“leGj), обла-
дающая тем свойством, что если gi е Gb то и ggig"1 е Gt при
любом g е G.
Ограничение отображения М-+М' — отображение N-&M',
где N — часть (подмножество) множества Л4, определяемое усло-
вием: если ае # и а-»а* при отображении Л1->ЛГ, то мы счи-
таем, что а~>а' и при отображении N ~^М'.
Однотранзитивная группа преобразований — см. группа пре-
образований.
Отношение порядка — см. порядка отношение.
Отношение эквивалентности — см. эквивалентности отношение,
Поле — множество Р элементов с определенными в этом мно-
жестве двумя бинарными операциями, ддя которых принято ис-
пользовать аддитивную и мультипликативную символику, при-
чем по сложению Р должно образовывать коммутативную группу
с нейтральным элементом 0; по умножению все отличные от 0
элементы Р должны также образовывать группу (с другим ней-
тральным элементом е); связь между сложением и умножением
определяется так называемым дистрибутивным зако-
не м, в силу которого а(Ь 4-е) = ab 4- ас для любых а, Ь, с ^Р.
(Из дистрибутивного закона уже следует, например, что 0а=>
= о0 = 0 для всех а е Р.)
232
Словарь
Полнота метрического пространства определяется требова-
нием существования предела у любой фундаментальной после-
довательности точек этого пространства.
Порядка отношение — бинарное отношение, удовлетворяющее
условиям асимметричности (см. симметричность) и тран-
зитивности (т. е. такое, что отношения а<Ь и b <а не могут
иметь места одновременно и из а < 6 и b < с следует, что а < с\
здесь для обозначения отношения порядка принят стандартно
употребляющийся для этой цели символ <).
Представление группы преобразований G — отображение эле-
ментов группы G на некоторое множество G' линейных преоб-
разований, такое, что если a->ga и b->gb (где
ga,gb е G'), то ab->gagb.
Проективные преобразования — см. дробно-линейные преоб-
разования.
Произведение множеств — см. декартово произведение.
Произведение преобразований fug — результат последова-
тельного осуществления этих преобразований (причем преобра-
зование, которое получится, если сначала произвести преобразо-
вание f, а затем—преобразование g, записывается как gf или g • f).
Прямая сумма групп Gi и G2 — множество, представляющее
собой декартово произведение множеств Gi и G2, причем бинар-
ная операция в этом множестве определяется следующим образом:
(£ь gi) + Un h2) = (gi + hb g2 + h2), где gi, hi (= Gh g2t h2 g= G2;
мы употребляем здесь аддитивную символику. Полученное, та-
ким образом множество с определенной описанным образом би-
нарной операцией, очевидно, само представляет собой группу
(с нейтральным элементом (01,0г), где 01 и 02— нейтральные эле-
менты групп Gi и G2, и элементом (—g, —h), противоположным
элементу (g, h)).
Прямое произведение множеств — см. декартово произведе-
ние.
Рефлексивность — бинарное отношение aab (где а — символ
бинарного отношения) рефлексивно, если ааа для всех а (при-
мер: отношение в множестве чисел).
Разбиение множества — подразделение множества М на ча-
сти (подмножества), при котором каждый элемент М попадает
в какую-то из частей и никакие две части не имеют общих эле-
ментов.
Симметричность — бинарное отношение aab (где а— символ
бинарного отношения) симметрично, если из aab следует также
baa (пример: отношение «родственник» в множестве Л!одей),
Отношение а, такое, что ни для каких а и b отношения aab и
baa не имеют места одновременно, называется асимметрич-
ным.
Словарь
233
Сложное отношение четырех точек A, Bt Ct D прямой —ве-
личина
АС . АР
ВС ' BD
(все
отрезки — направленные!).
(Равенство
сложного отношения точек А, В, С, D величине —1 означает, что
пара точек (С, D) делит отрезок АВ гармонически.)
Счетное множество — бесконечное множество, элементы кото-
рого могут быть «пересчитаны», т. е. могут быть поставлены во
взаимно однозначное соответствие с натуральными числами («но-
мерами» элементов).
Тернарная операция — см. алгебраическая операция.
Тернарное отношение — правило, выделяющее некоторые (упо-
рядоченные) тройки элементов множества Л4, про которые гово-
рят, что они связаны этим отношением, т. е. подмножество мно-
жества М3 = М X М X М. (Пример: отношение а 4- b = с в мно-
жестве чисел, связывающее числа а, b и с.)
Транзитивная группа преобразований — см. группа преобра-
зований.
Транзитивность — бинарное отношение aab (где а — символ
бинарного отношения) транзитивно, если из aab и Ьас следует,
что аас. (Пример: отношение «делится на» в множестве чисел.)
Топологическое пространство — множество Л1, в котором тем
или иным способом определены понятия беско н еч н ой б л и-
з о с т и точек и тем самым предела точечной последователь-
ности. Наиболее известное определение топологического про-
странства Т таково: Т есть множество Af с заданной в М си-
стем о й окрестностей — системой © таких подмножеств
Ua, что пустое множество 0 и Само пространство М принадле-
жат системе © и объединение (J Ua любого (конечного или бес-
а
п
конечного) числа окрестностей и пересечение П Ui любого кояеч-
i = i
ного числа окрестностей сами принадлежат ©. При этом точка а
называется пределом последовательности а2,..., ant... то-
чек, если каждой окрестности точки а (т. е. каждому множеству
нашей системы 0, содержащему точку а) принадлежит бесконеч-
но много точек нашей последовательности. (Можно показать,
что любое метрическое пространство является топологическим
пространством, за систему окрестностей которого можно принять
систему так называемых открытых множеств — ее можно опи-
сать как систему всевозможных «открытых шаров» — множеств
таких точек Л1, что d0M< р, где О и р фиксированы, —а также
всевозможных объединений и пересечений «открытых шаров».)
Топология — структура топологического пространства на мно-
жестве М.
231
Словарь
Убывающее отображение — см. монотонное отображение.
Устойчивость относительно преобразований: множество Г
устойчиво относительно совокупности S преобразований, если
каждое преобразование из 5 переводит F в себя.
Факторгруппа группы G по нормальному делителю Н опре-
деляется так: в группе G бинарное отношение еЯ»,
связывающее элементы g и h группы, является отношением
эквивалентности (это вытекает из того, что Н — нормальный де-
литель); в фактормножество множества G по этому отношению
эквивалентности можно ввести групповую операцию сле-
дующим образом: «произведением» G\G2 классов G\ и G2
эквивалентности, содержащих элементы gi и gz, называют класс
эквивалентности, содержащий элемент gigs (мы используем здесь
мультипликативную символику). Можно показать, что это опре-
деление не зависит от выбора «представителей» gi и g2 наших
классов эквивалентности Gj и б2 и что фактормножество мно-
жества G по нашему отношению эквивалентности с так опре-
деленной групповой операцией образует группу (нейтральным
элементом которой служит сам нормальный делитель Н).
Фактормножеством множества М по определенному в М от-
ношению эквивалентности а называют множество классов эквива-
лентности множества М, определенных отношением а. (Пример:
фактормножество множества прямых пр отношению параллель-
ности есть множество направлении.)
Фундаментальная последовательность точек метрического
пространства — такая последовательность а2,...»яп,... точек,
что для каждого (сколь угодно малого!) числа е>0 можно ука-
зать такой номер Я, что ^apaq <8» коль СКОР° Р> N и q > Я.
Эквивалентности отношение — такое бинарное отношение е
в множестве М, которое удовлетворяет условиям рефлексивности
(а&а для всех а), симметричности (из агЬ следует Ьга) и тран-
зитивности (из aeb и Ь&с следует иес). Можно доказать, что в
этом случае существует разбиение множества М. на классы эле-
ментов, попарно связанных между собой отношением е; эти
классы элементов называют классами эквивалентности. (Пример:
отношение «а и b дают при делении на 5 один и тот же оста-
ток», связывающее нары а, b целых чисел, есть отношение экви-
валентности; что представляют собой в этом случае классы экви-
валентности?)
Эквивалентность высказываний: высказывания р и q назы-
ваются эквивалентными (что записывается так: р &q), если из
каждого из них следует второе (т. е. если они либо оба истин-
ны, либо оба ложны).
я-мерное пространство — см. векторное пространство.
СПИСОК ОБОЗНАЧЕНИЙ
С — множество комплексных чисел
2V — множество натуральных (целых положительных) чисел
Q — множество рациональных чисел
Q* —множество рациональных чисел, отличных от нуля
R — множество действительных чисел
jR* — множество действительных чисел,. отличных от нуля
— множество положительных действительных чисел
Z — множество целых чисел
inf —нижняя грань множества действительных чисел (наи-
меньшее число, если оно существует)
sup — верхняя грань множества действительных чисел (наи-
большее число, если оно существует)
символ множества ({a, Ь, с,k} — множество из элемен-
тов а, Ь, с,k)
0 —пустое множество (множество, не содержащее ни одного
элемента)
е — знак принадлежности (хеЛ! — «х есть элемент множе-
ства М»)
cz — знак включения (A cz В — «множество А целиком при-
надлежит множеству В»)
U — символ объединения (A U В — «объединение множеств
А и В»)
П — символ пересечения (А (] В — «общая часть или пересе-
чение множеств А и В»)
\ —символ разности множеств (Д\В— «разность множеств
А и В», т. е. множество всех тех элементов 4, которые
не принадлежат В).
==> — знак следования (а =ф> b — «из а следует Н)
фф — знак равносильности (аффб— «а равносильно
символ отображения (х->у— «х переходит в уъ)
о — символ произведения (композиции) отображений (Ь°а—
произведение отображений а и сначала а, потом Ь)
X — прямое (декартово) произведение множеств (4 X В— де-
картово произведение множеств Л и В)
]а. Н - интервал (множество таких х, что а < х < Ь)
fa, — полуинтервал (множество таких х, что а х < Ь)
fa, 6J — сегмент (множество таких х, что а х Ъ).
предметный указатель
Каждый термин сопровождается номером соответствующего
пункта
Аффинные преобразования................................28
Аффинная структура......................................8
Вектор свободный ........................................15
Векторное пространство ................................ 17
Вращение............................................... 46
Выпуклое множество......................................5
Гомотетия .............................................. 21
Движение ..........................................37
Движения собственные и зеркальные.....................47
Касательная к окружности................................83
Координаты..............................................20
Косинус и синус.........................................72
Круг ...................................................79
Коэффициент проекции с (Ai,A2).......................33
Луч......................................................5
Медиатриса.............................................41
Мера углов..............................................76
Мера углов арифметическая . . . /.......................78
Момент инерции..........................................42
Мощность .........................................87
Направление ............................................. 2
Неравенство треугольника .............................. 39
Норма....................................................35
Окружность.............................................
Ориентация.............................................
Ось преобразования подобия ............................
Ось радикальная ................ ......................
Ось симметрии ....................................
Параллелограмм ........................................
Параллельные (прямые)................................1,
79
67
52
87
56
11
89
Параллельные (прямые и плоскости)......................90
Перенос ............................................12,13
Пересекающиеся (прямые)................................ 1
Перпендикуляр ........................................ 30
Пифагора теорема...................................39,104
Плоскость ...........................................1, 89
Предметный указатель
237
Плоскость неевклидова ................................ 105
Полуплоскость............................................7
Полуплоскость поляризованная............................67
Преобразование подобия..................................49
Преобразования подобия собственные и зеркальные .... 50
Проекции ................................................3
Проекция прямоугольная..................................33
Прямая ................................................. 1
Прямая ориентированная...................................5
Прямоугольник ..........................................37
Расстояние ..............................................8
Репер ...................................................4
Симметрия осевая.......................................44
косая .............................................29
• центральная .......................................II
Система осей........................................... 4
Скалярное произведение ................................ 35
Скл а дыв а ние ...................................100,105
Составляющие............................................ 4
Угол....................................................58
между двумя/ прямыми . ..............................65
Фалеса теорема .........................................18
Центрированная прямая....................................9
Шаля равенство..........................................15
Элементы симметрии .....................................56
Оглавление
Предисловие редактора перевода......................... 5
Предисловие............................................ 9
Введение...............................................10
ГЛАВА I. Аксиомы инцидентности и аксиомы порядка . . 19
§ 1. Прямые и параллельные....................19
§ 2. Аксиомы порядка........................ 26
ГЛАВА II. Аксиомы аффинной структуры...................34
§ 1. Аффинная структура прямых пространства П 34
§ 2. Структура аддитивной группы в системе
(П, 0)........................•...............38
§ 3. Переносы плоскости П.....................44
§ 4. Структура векторного пространства на (П, 0) 50
§ 5. Растяжение плоскости . . . . •...........60
§ 6. Возможные пути дальнейшего изучения аффин-
ной структуры..................................65
ГЛАВА III. Аксиомы метрической структуры...............70
§ 1. Перпендикулярность..................... 70
§ 2. Скалярное произведение...................74
§ 3. Основные метрические свойства............82
ГЛАВА IV. Движения. Преобразования подобия. Симметрич-
ные множества.............................91
§ 1. Движения.................................91
§ 2. Преобразования подобия..................104
§ 3. Множества, устойчивые относительно группы
преобразований .............................. 117
ГЛАВА V. Углы.........................................127
§ 1. Группа углов............................127
§ 2. Углы и преобразования подобия ..........134
Оглавление
239
ГЛАВА VI. Ориентация...............................141
ГЛАВА VII. Тригонометрия...........................158
§ 1. Элементарная тригонометрия...............155
§ 2. Мера углов ..............................169
ГЛАВА VIII. Окружность . . ....................168
ГЛАВА IX. Пространство.............................181
§ I. Аксиомы ................................181
§ 2. Аффинная структура пространства..........186
§ 3. Метрическая структура пространства . . . . .194
ПРИЛОЖЕНИЕ 1. Аксиоматика на метрической основе . . .201
П Р И Л 0 ЖЕ Н И Е 2. Аксиоматика неевклидовой геометрии 213
ПРИЛОЖЕНИЕ 3.Аксиоматика «начальной геометрии» . . 215
ПРИЛОЖЕНИЕМ Схема еще одного определения угла 217
Литература < » . 221
Словарь математических терминов...................... 225
Список обозначений ................................... 235
Предметный указатель................................. 236
Г. ШОКЕ
Геометрия
Редакторы А. А. Бряндинская, Н. И. Плужников а
Художник А, В, Шипов
Художественный редактор В. И. Шаповалов
Технический редактор Г. В, Чечик
Сдано в производство 30/IX 1969 г.
Подписано к печати 18/Ш 1970 г.
Бумага № 1 84Х1О8|/З2=3,75 бум. л. Усл. печ. л. 12,60
Уч.-изд. л. 10,75 Изд. № 1/5114
Цена 70 коп. Зак. 323.
ИЗДАТЕЛЬСТВО „МИР“
Москва, 1-й Рижский пер., 2
Ордена Трудового Красного Знамени
Ленинградская типография № 2
имени Евгении Соколовой Главполиграфпрома
Комитета по печати при Совете Министров СССР.
Измайловский проспект, 29.
7U К.
Евклид положил в основу своей
геометрии на плоскости призна-
ки равенства треугольников. Два-
дцать три века спустя матема-
тики определяют плоскость как
аффинное пространство размер-
ности 2 с определенным в нем
скалярным произведением. Я по-
лагал, что нашим детям понадо-
бится изложение геометрии, ко-
торое, как и изложение Евклида,
исходит из наглядных представ-
лений, но которое даст им воз-
можность очень быстро перейти
к использованию гибких и пло-
дотворных методов алгебры.
Эта книга содержит, таким об-
разом, аксиоматику геометрии,
основанную на понятиях парал-
лельности, перпендикулярности и
расстояния, и притом в виде, ко-
торый позволяет естественным
образом быстро перейти к алгеб-
раической структуре плоскости
и пространства.
Густое Шоке