


















































































































































































































































































































Автор: Комиссаров Ю.А. Гордеев Л.С. Вент Д.П. Бабокин Г.И.
Теги: электротехника общее машиностроение технология машиностроения электроэнергетика электроника микроэлектроника
ISBN: 978-5-98109-048-6
Год: 2007




/ для
'высшей
школы
Ю. А. Комиссаров, Л. С. Гордеев,
Д. П. Вент, Г .И. Бабокин
ОСНОВЫ ЭЛЕКТРОТЕХНИКИ,
МИКРОЭЛЕКТРОНИКИ и
УПРАВЛЕНИЯ
ТЕОРИЯ И РАСЧЕТ
Под редакцией П. Д. Саркисова
В двух томах
Том 1
Допущено Учебно-методическим объединением высших учебных
заведений РФ по образованию в области химической технологии и
биотехнологии в качестве учебного пособия для студентов
высших учебных заведений, обучающихся по химико-
технологическим направлениям подготовки бакалавров,
магистров и дипломированных специалистов.
Авторы учебного пособия удостоены премии Правительства
Российской Федерации в области образования 2007 года
МОСКВА
“ХИМИЯ”
2007
'ЭОССИ»'(> ИИ
химики-пвгис.ч' > к-ин
унивврогтет им, £ и bk'MWneer.i
НА Wn WMA:
УДК 621.3:621(075.8)
ББК 31.2:32.85я73
К63
Рецензенты:
Заведующий кафедрой теоретической электротехники и электрификации
нефтяной и газовой промышленности Российского государственного
университета нефти и газа им. И.М. Губкина, докт. техн, наук,
проф. М.С. Ершов. Заведующий кафедрой электрификации и энергоэф-
фективности горных предприятий Московского государственного
горного университета, докт. техн, наук, проф. А.В. Ляхомский.
Комиссаров Ю.А. и др.
К63 Основы электротехники, микроэлектроники и управ-
ления. Теория и расчет: В 2 т. Т.1. Учебное пособие для
вузов / Ю.А. Комиссаров, Л.С. Гордеев, Д.П. Вент, Г.И.
Бабокин; Под ред. П.Д. Саркисова - М.: Химия, 2007. -
451 с.
ISBN 978-5-98109-048-6
Рассмотрены основные понятия теории электротехники, микроэлек-
троники и управления. Приведены анализ и методы расчёта однофазных и
трёхфазных электрических цепей; нелинейных и магнитных цепей; пере-
ходных процессов в электрических цепях. Даны основы теории электро-
технических трансформаторов и электрических машин, в том числе мик-
ромашин для автоматических устройств, их основные характеристики, а
также основы электропривода, электроснабжения и электротехнологии.
Рассмотрены элементная база современных электронных устройств, уси-
лители электрических сигналов, источники питания, цифровые устройства
и основы микропроцессорной техники.
Предназначено для студентов технологических и технических высших
учебных заведений.
УДК 621.3:621(075.8)
ББК 31.2:32. 85я73
Bases of electrotechnics, microelectronics and automatics.
Theory and computation. In 2 Vols. Volume 1. Training appli-
ances for higher educational institutions / Ju.A. Komissarov,
L.S. Gordeev, D.P. Vent, G.I. Babokin; Edited by P.D. Sarkisov
- M.: Chemistry, 2007. 450 p.
The basic concepts of electrotechnics, microelectronics and controls theory are con-
sidered. Analysis and computation method of single and threephase electric circuits:
nonlinear and magnetic circuits; transient processes in electric circuits are given. The-
ory bases of electrotechnics transformers and electric machines including micromachi-
nes for automatic systems, their basic characteristics, bases of electric drive, power
supply and electrotechnology are given. Element base of moderun electronic devices,
amplifirs of electric signals, power source, digital devices and bases of microdigital
technigue are considered. The is intended for the students of technological and engi-
neersing higher educational institutions.
ISBN 978-5-98109-048-6(T.l) © Комиссаров Ю.А., Гордеев Л.С.,
ISBN 978-5-98109-060-8 Вент Д.П., Бабокин Г.И., 2007
ОГЛАВЛЕНИЕ
Предисловие...............................................10
Сокращения и обозначения..................................15
ТОМ ПЕРВЫЙ
Глава 1
Электрические цепи постоянного тока.......................17
1.1. Введение.............................................17
1.2. Электрическая цепь и её топология....................18
1.3. Резистивный элемент..................................21
1.4. Источники электрической энергии постоянного тока.....24
1.5. Первый и второй законы Кирхгофа......................30
1.6. Работа и мощность электрического тока. Энергетический баланс... 31
1.7. Преобразование участков электрической цепи...........33
1.8. Анализ и расчёт электрической цепи постоянного тока с одним
источником электрической энергии. Метод эквивалентных пре-
образоваий...............................................36
1.9. Анализ и расчёт разветвлённых электрических цепей с несколь-
кими источниками энергии.................................38
1.9.1. Метод двух узлов..............................39
1.9.2. Метод контурных токов.........................41
1.9.3. Метод наложения (суперпозиции)................45
1.9.4. Метод эквивалентного генератора (активного
двухполюсника).......................................48
1.10. Условия передачи максимальной мощности приёмнику....52
1.11. Анализ схемы четырёхплечего моста...................55
Глава 2
Электрические цепи синусоидального тока...................58
2.1. Введение.............................................58
2.2. Индуктивный и ёмкостный элементы цепи синусоидального тока... 59
2.3. Основные параметры, характеризующие синусоидальные токи,
ЭДС и напряжения.........................................65
2.4. Изображение синусоидальных функций в комплексной форме.....69
2.5. Однофазные электрические цепи синусоидального тока...74
2.5.1. Законы Кирхгофа для цепи синусоидального тока.74
2.5.2. Синусоидальный ток в цепи с активным сопротивлением.74
2.5.3. Синусоидальный ток в электрической цепи с индуктивно-
стью .................................................77
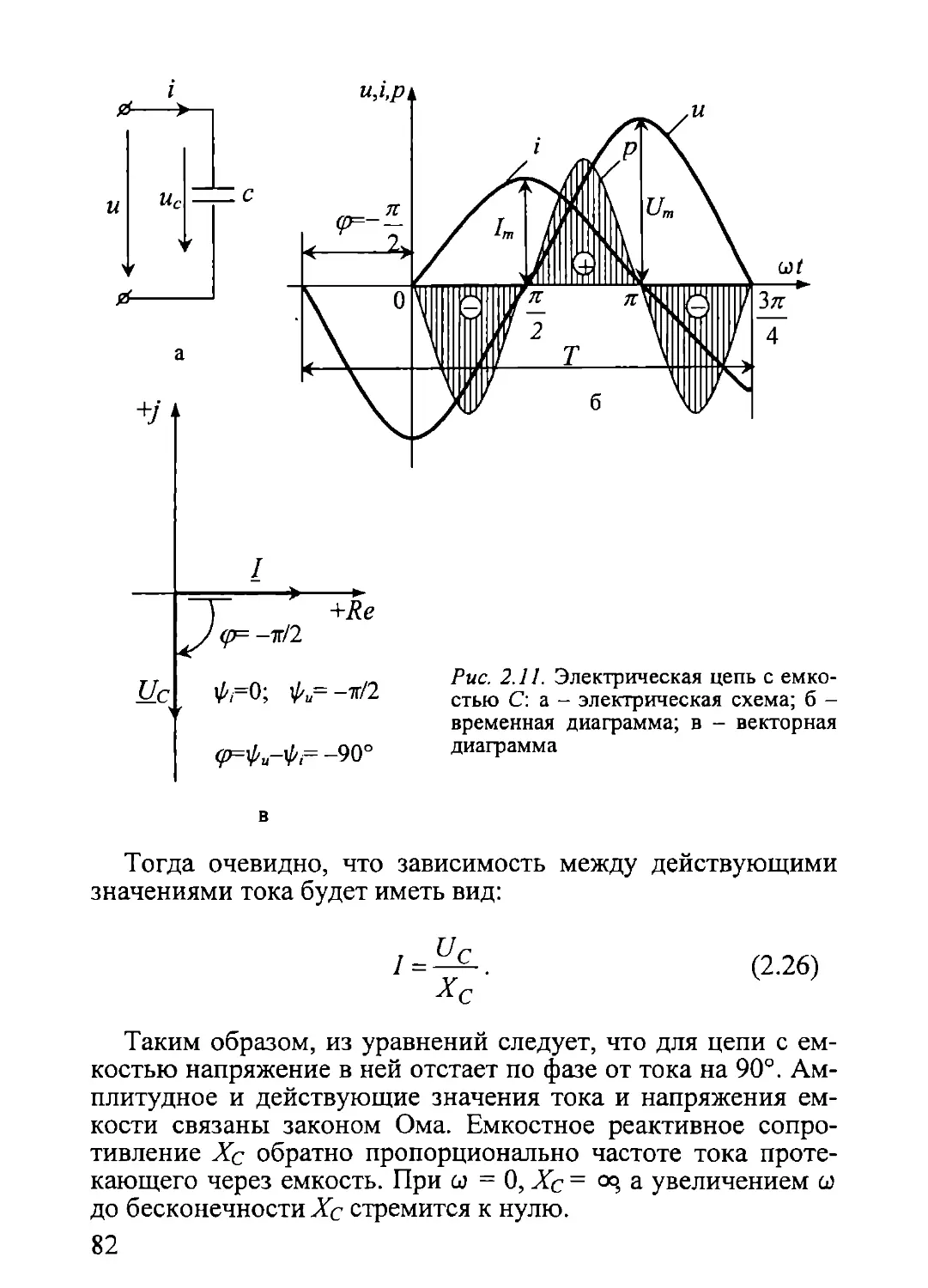
2.5.4. Синусоидальный ток в цепи с ёмкостью................81
2.5.5. Синусоидальный ток в электрической цепи с последова-
тельным включением активного сопротивления (R) и ин-
дуктивности (L)......................................85
2.5.6. Синусоидальный ток в электрической цепи с последова-
тельным включением активного сопротивления (R) и ём-
кости (С)............................................87
3
2.5.7. Синусоидальный ток в электрической цепи с последова-
тельным включением сопротивления (R), индуктивности
(L) и ёмкости (С).......................................90
2.5.8. Законы Кирхгофа в комплексной форме. Расчёт электри-
ческих цепей синусоидального тока.......................95
2.6. Резонанс напряжений....................................99
2.7. Переменный синусоидальный ток в цепи с параллельным включе-
нием потребителей энергии..................................104
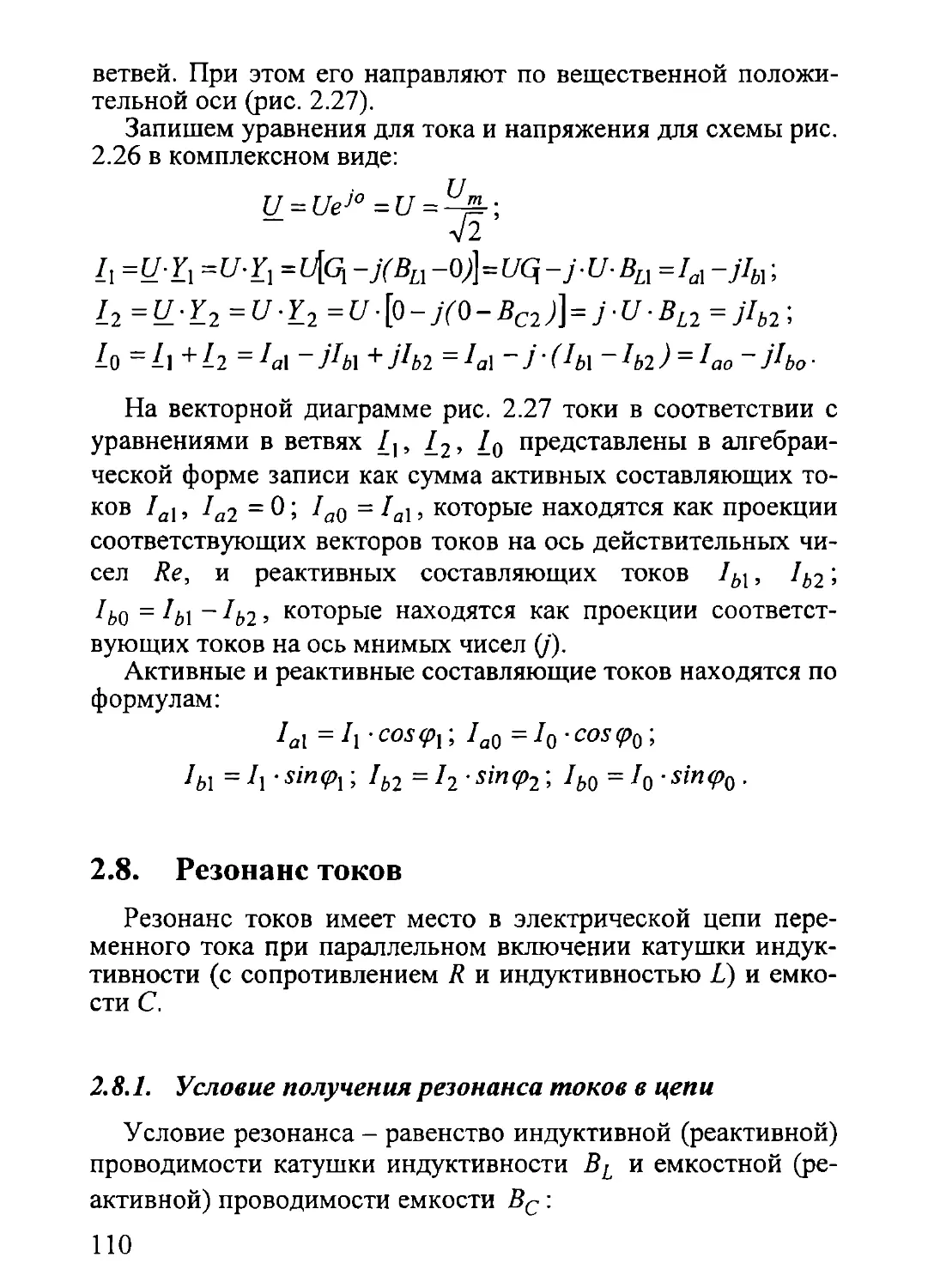
2.8. Резонанс токов.........................................110
2.8.1. Условия получения резонанса токов в цепи.........110
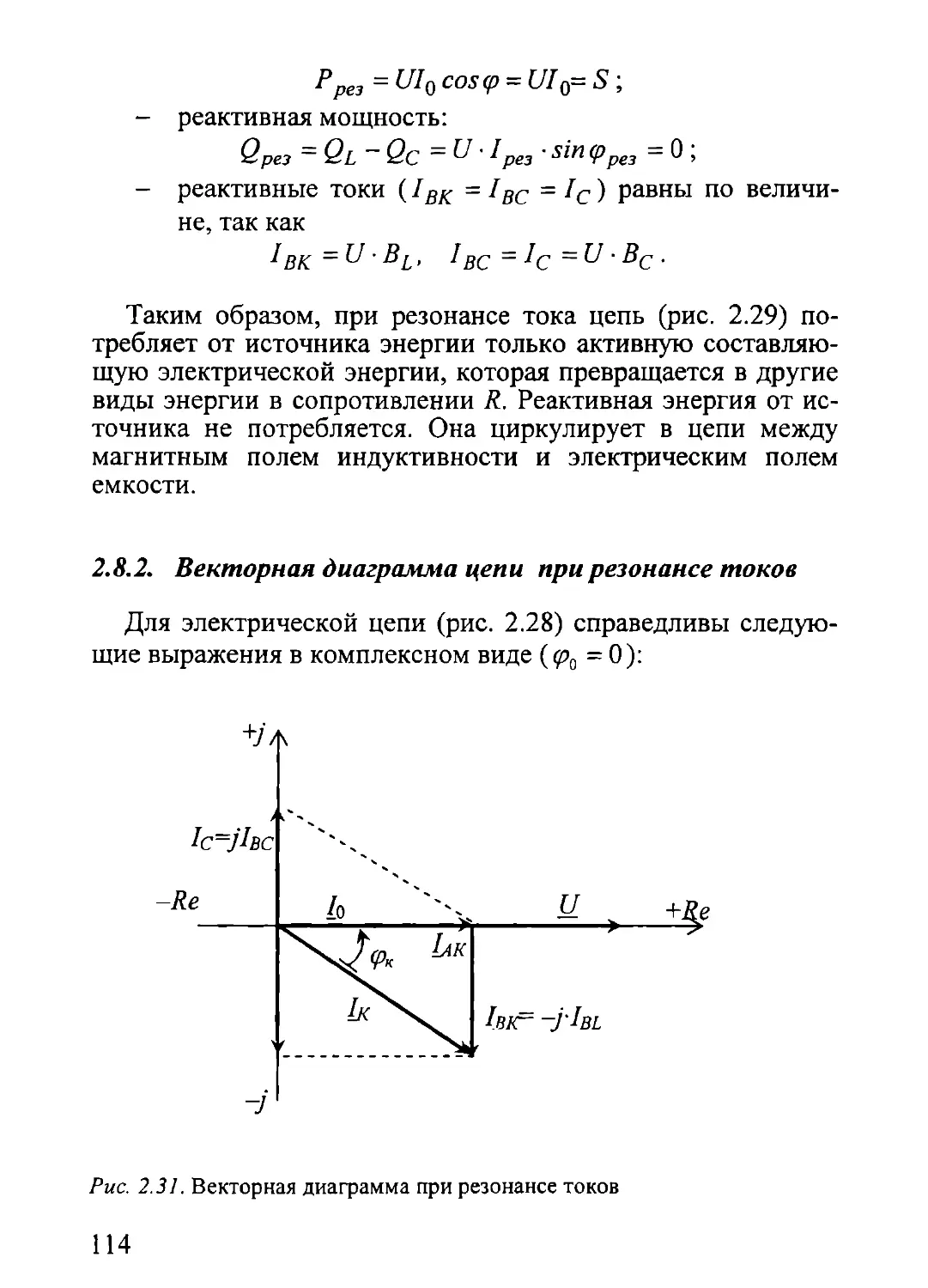
2.8.2. Векторная диаграмма цепи при резонансе токов..... 114
2.8.3. Коэффициент мощности (cos <р) и его экономическое зна-
чение..................................................115
2.9. Лабораторные, семинарские и курсовые работы. Расчёт электри-
ческих цепей...............................................119
2.9.1. Лабораторная работа №1..........................133
2.9.2. Расчет электрических цепей с последовательным соеди-
нением активно-реактивных сопротивлений. Резонанс
напряжений (семинар). Программа CON11..................138
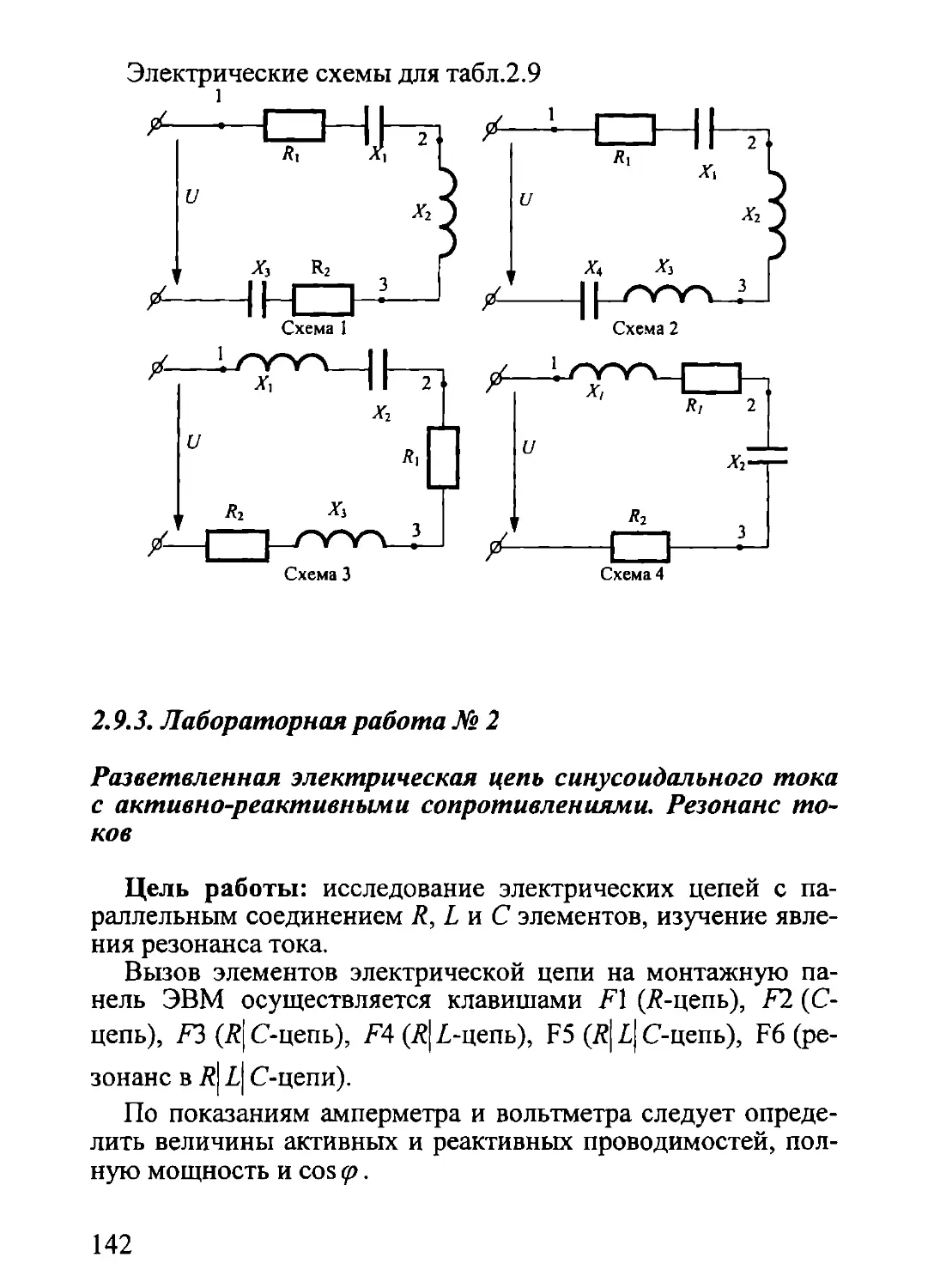
2.9.3. Лабораторная работа №2..........................142
2.9.4. Расчет электрических цепей с параллельным соединением
активно-реактивных сопротивлений. Резонанс токов
(семинар). Программа CON2_1............................147
2.9.5. Элементы электрических цепей переменного тока...152
2.9.6. Законы Ома и Кирхгофа в цепях переменного тока...153
2.9.7. Расчет замкнутого контура электрических цепей с одним
или несколькими источниками питания (семинар). Про-
грамма CON31...........................................156
2.9.8. Расчет сложных электрических цепей методом контурных
токов (семинар). Программа CON4_1......................161
2.9.9. Расчет сложных электрических цепей методом межузло-
вого напряжения (семинар). Программа CON51.............165
2.9.10. Частотные характеристики электрических цепей (курсо-
вая работа)............................................170
2.9.11. Расчет однофазных многоконтурных цепей переменного
синусоидального тока (курсовая работа).................180
Глава 3
Нелинейные электрические и магнитные
цепи.......................................................187
3.1. Классификация нелинейных элементов....................187
3.2. Методы расчёта нелинейных цепей........................187
3.3. Нелинейные электрические цепи постоянного тока........188
3.3.1. Графический метод анализа нелинейных цепей......190
3.3.2. Аналитический метод анализа электрических цепей..196
3.4. Магнитные цепи с постоянной магнитодвижущей силой......199
3.4.1. Понятие о магнитной цепи........................199
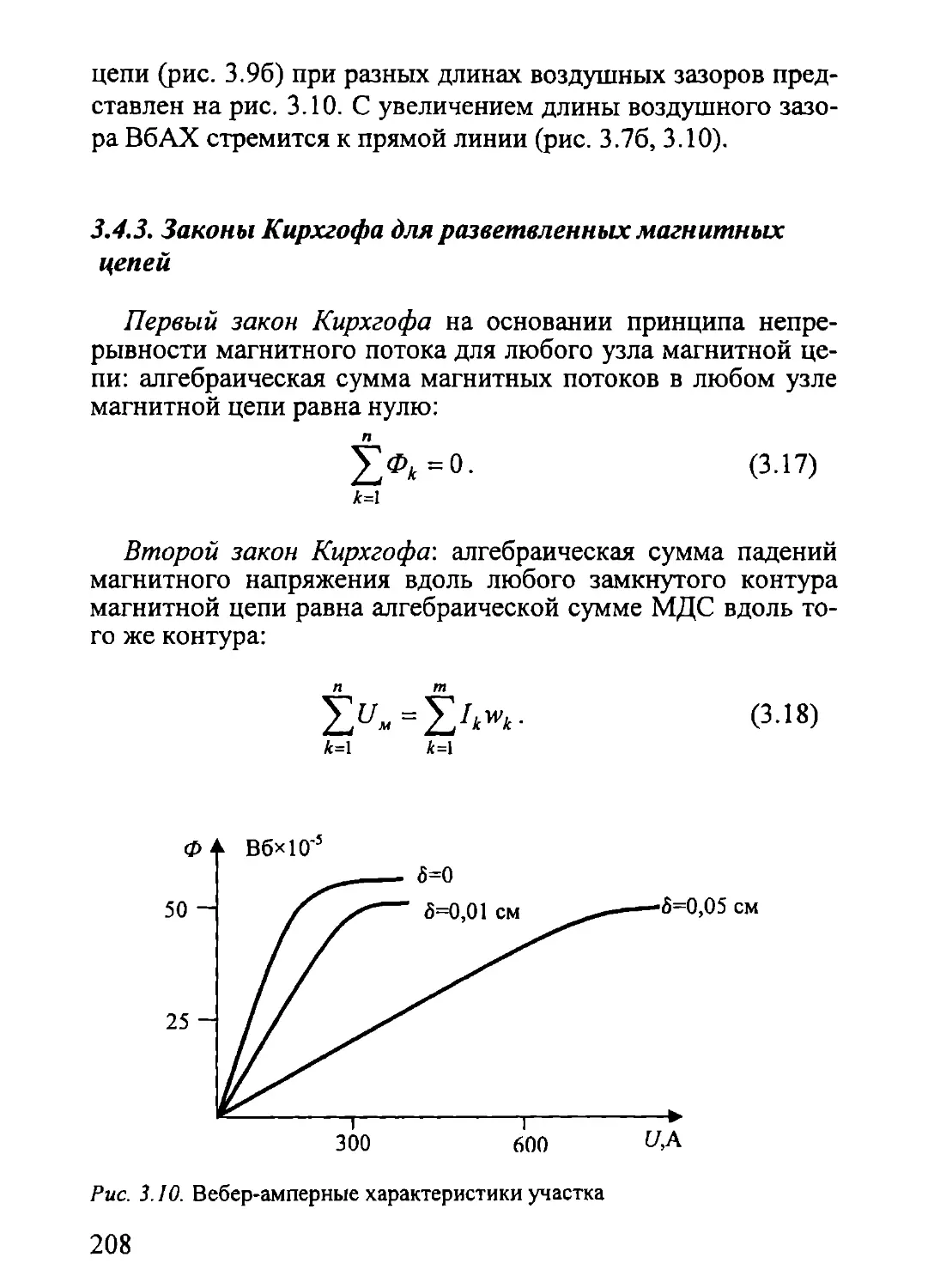
3.4.2. Вебер-амперная характеристика участка магнитной цепи.... 205
4
3.4.3. Законы Кирхгофа для разветвлённых магнитных цепей.208
3.4.4. Расчёт неразветвлённой магнитной цепи............210
3.4.5. Расчёт разветвлённой магнитной цепи..............213
3.5. Магнитные цепи с переменной магнитодвижущей силой.......214
3.5.1. Процесс намагничивания магнитопровода............216
3.5.2. Магнитные потери в реальном магнитопроводе.......217
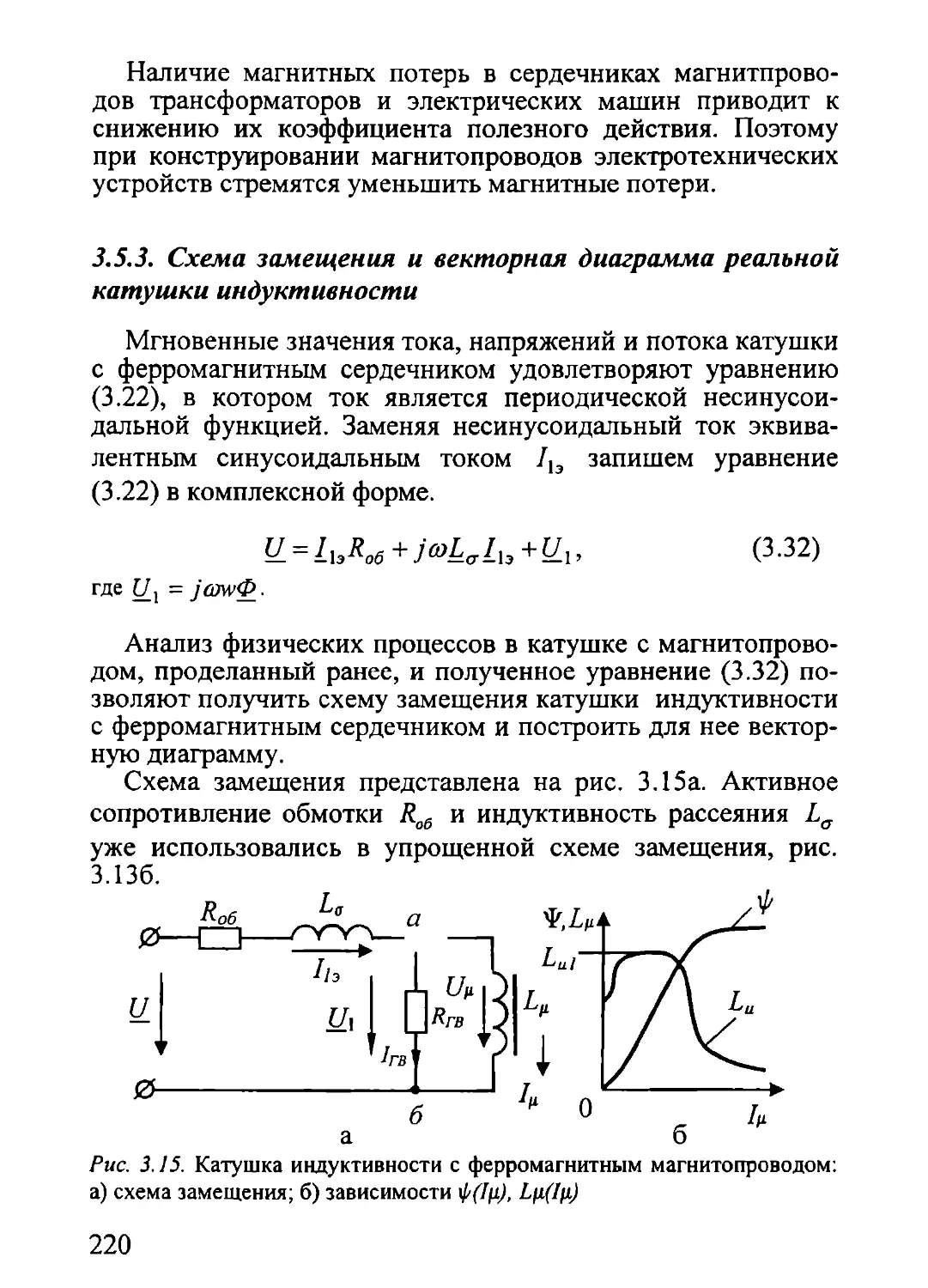
3.5.3. Схема замещения и векторная диаграмма реальной ка-
тушки индуктивности....................................220
3.5.4. Феррорезонанс напряжений и тока..................223
Глава 4
Трёхфазные электрические цепи синусои-
дального ТОКа...............................................226
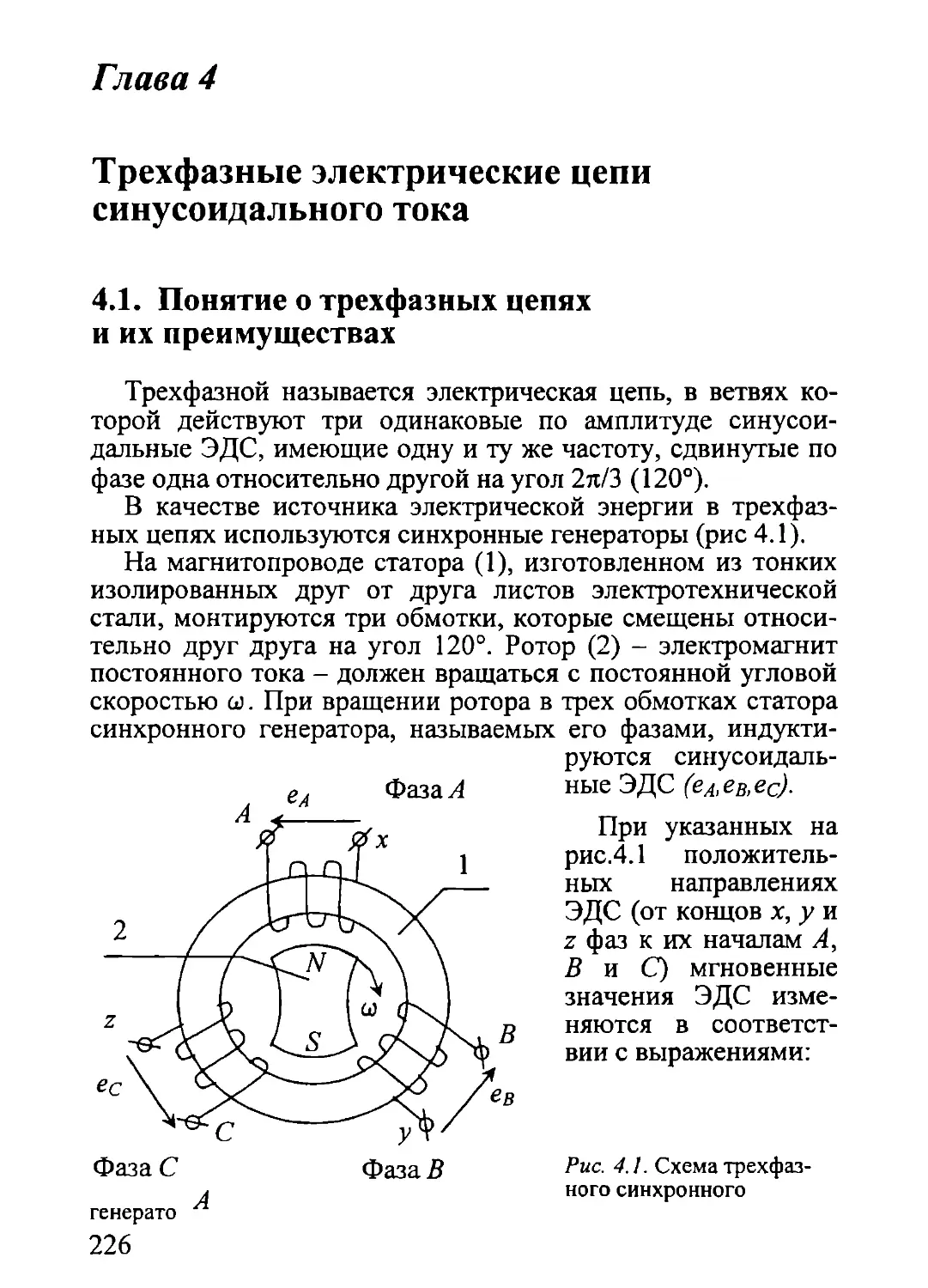
4.1. Понятие о трёхфазных цепях и их преимуществах..........226
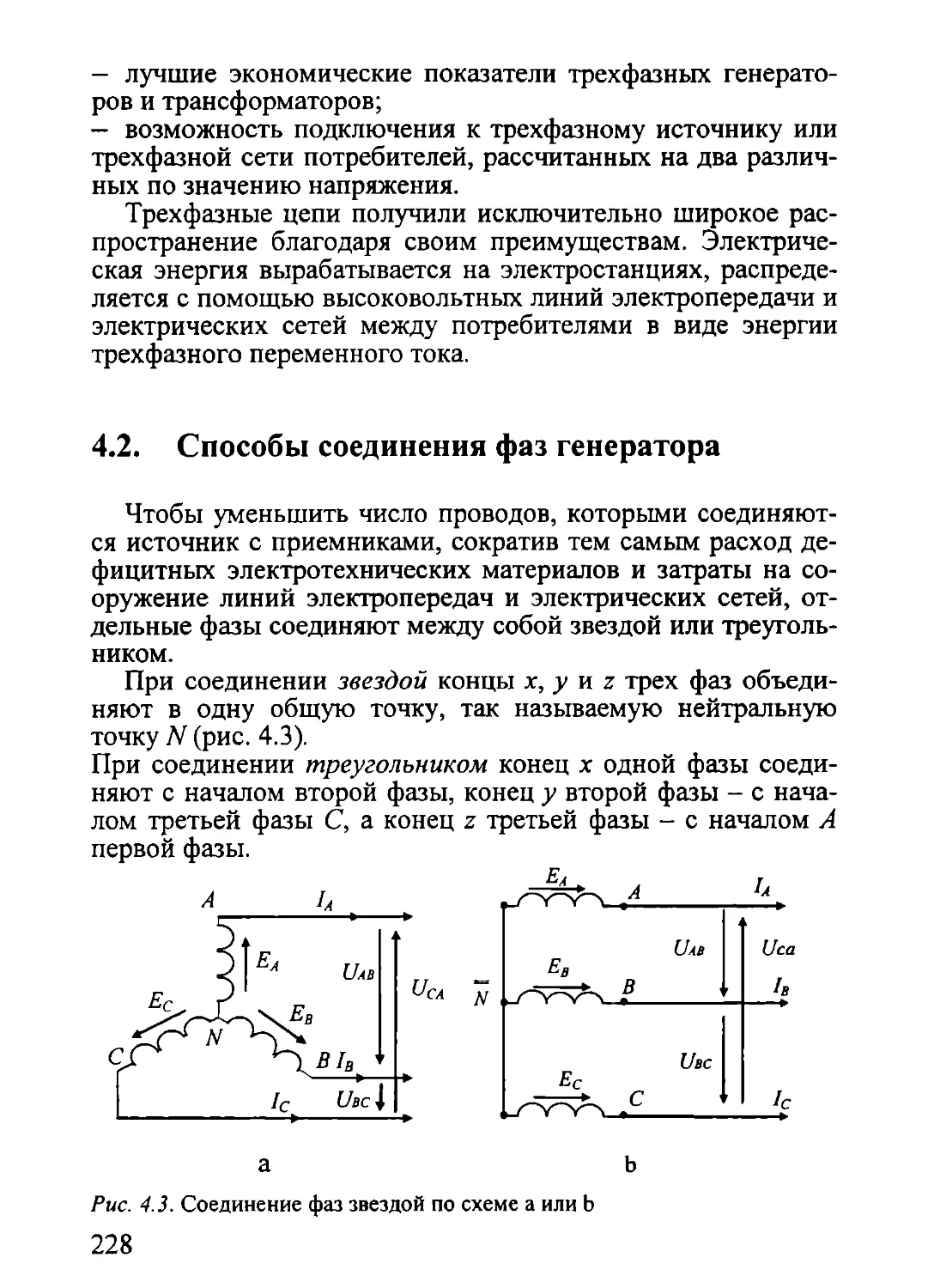
4.2. Способы соединения фаз генератора......................228
4.2.1. Соединение фаз генератора звездой................229
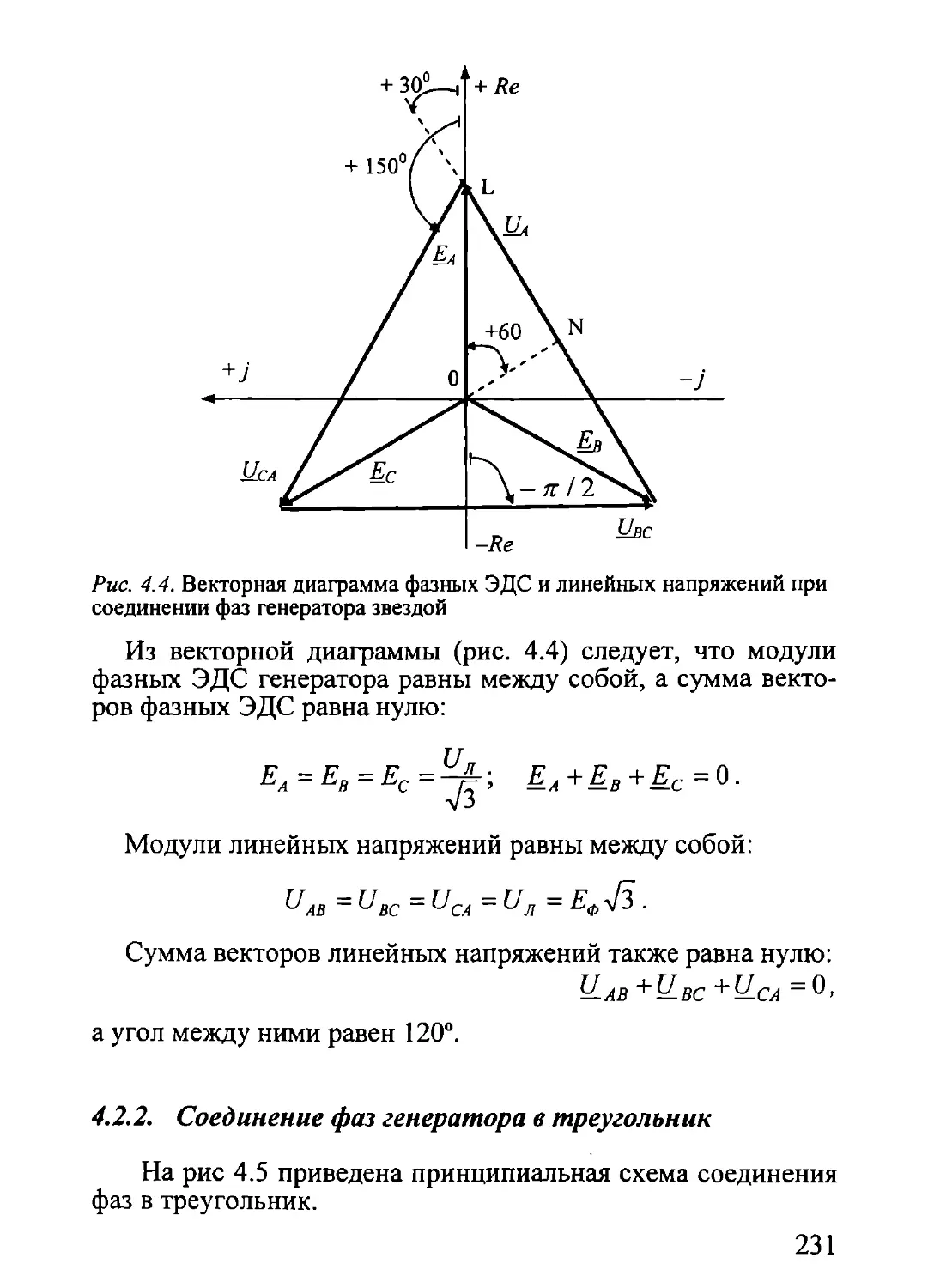
4.2.2. Соединение фаз генератора в треугольник..........231
4.3. Схема соединения генератора и потребителей звездой с нейтраль-
ным проводом................................................233
4.4. Симметричный трёхфазный потребитель, соединённый звездой.... 236
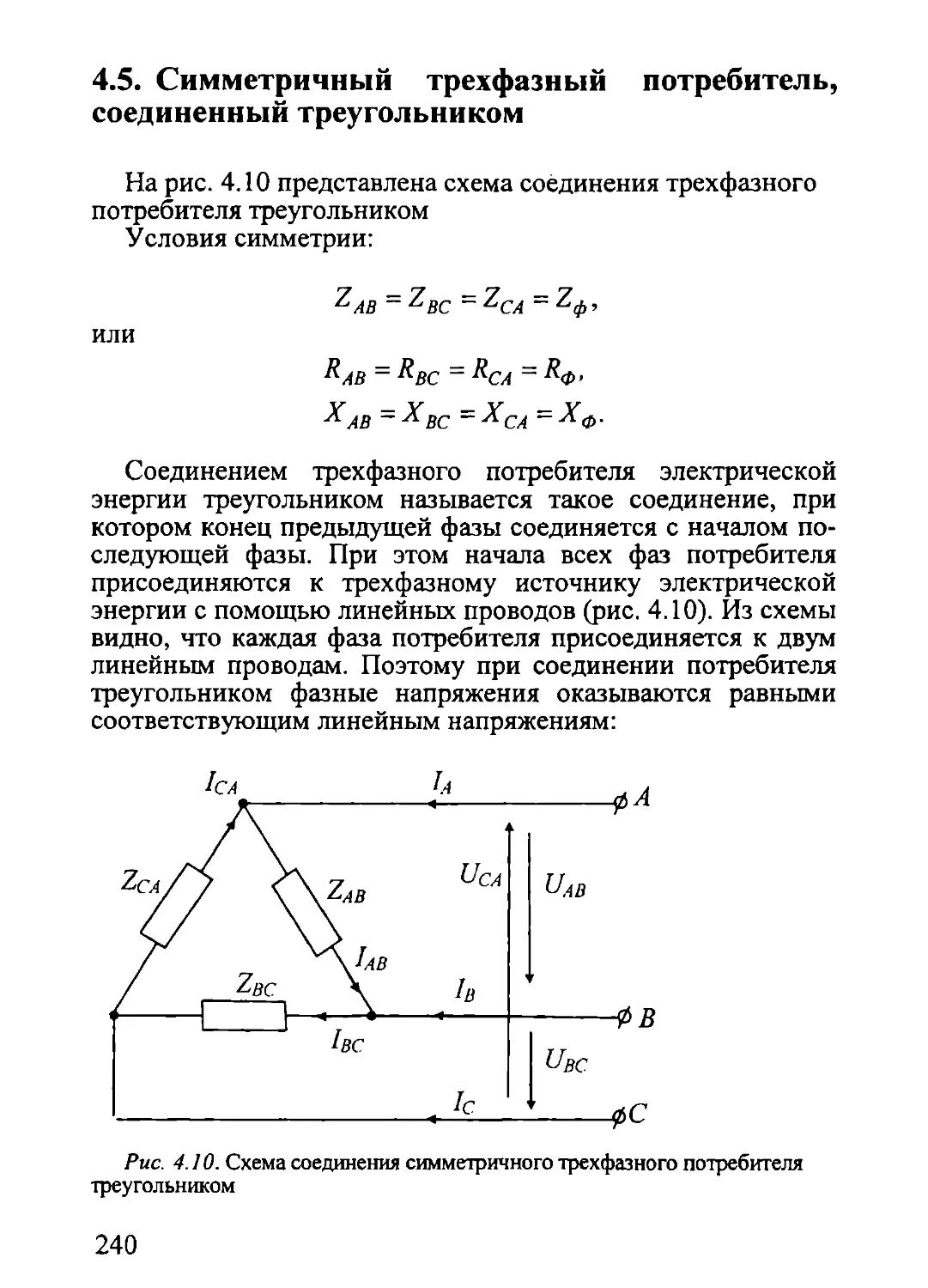
4.5. Симметричный трёхфазный потребитель, соединённый треуголь-
ником ......................................................240
4.6. Мощность потребителя трёхфазного тока..................244
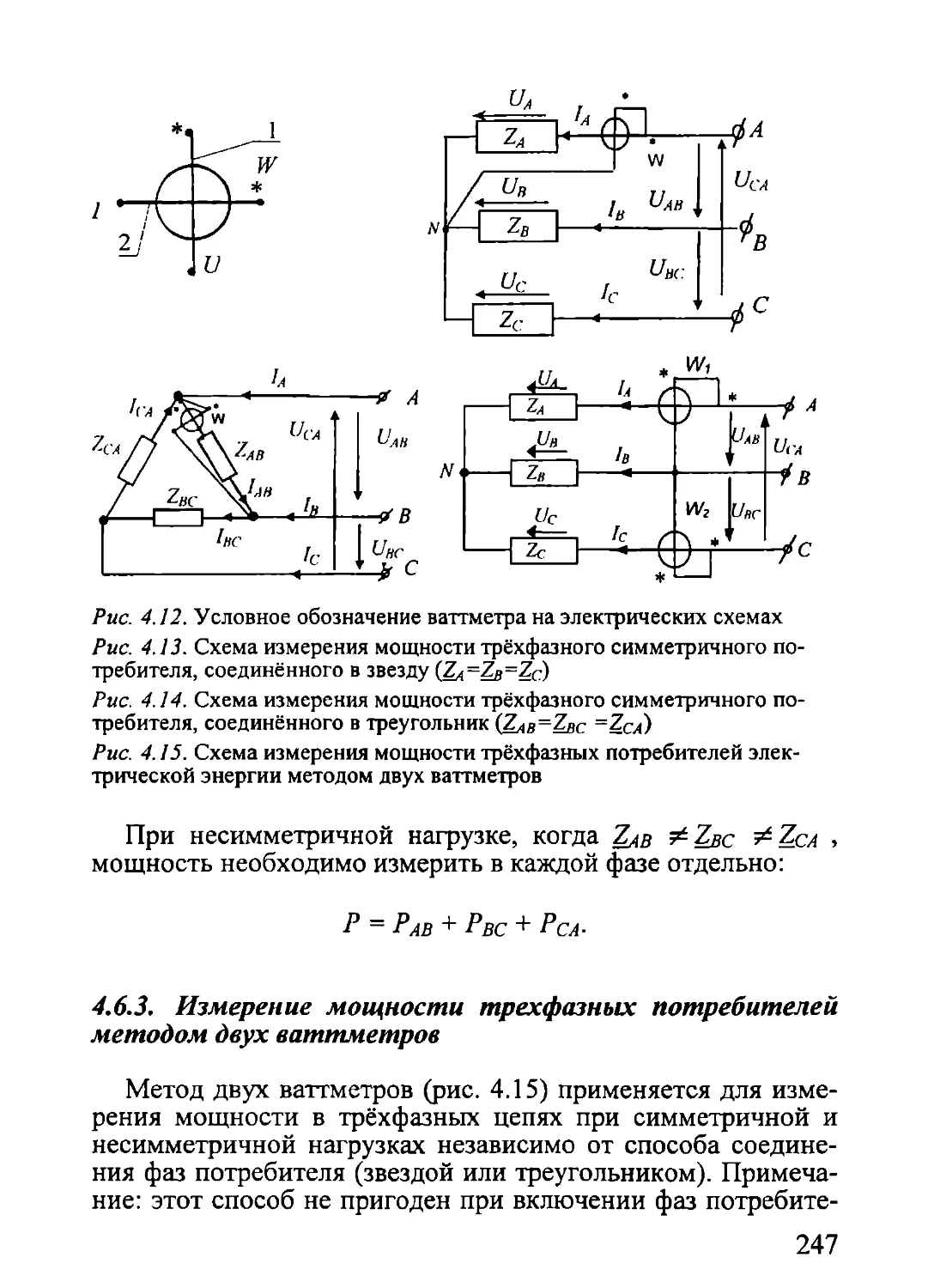
4.6.1. Измерение мощности в трёхфазных электрических цепях.... 246
4.6.2. Измерение мощности симметричного трёхфазного потре-
бителя, соединённого звездой или треугольником..........246
4.6.3. Измерение мощности трёхфазных потребителей методом
двух ваттметров........................................247
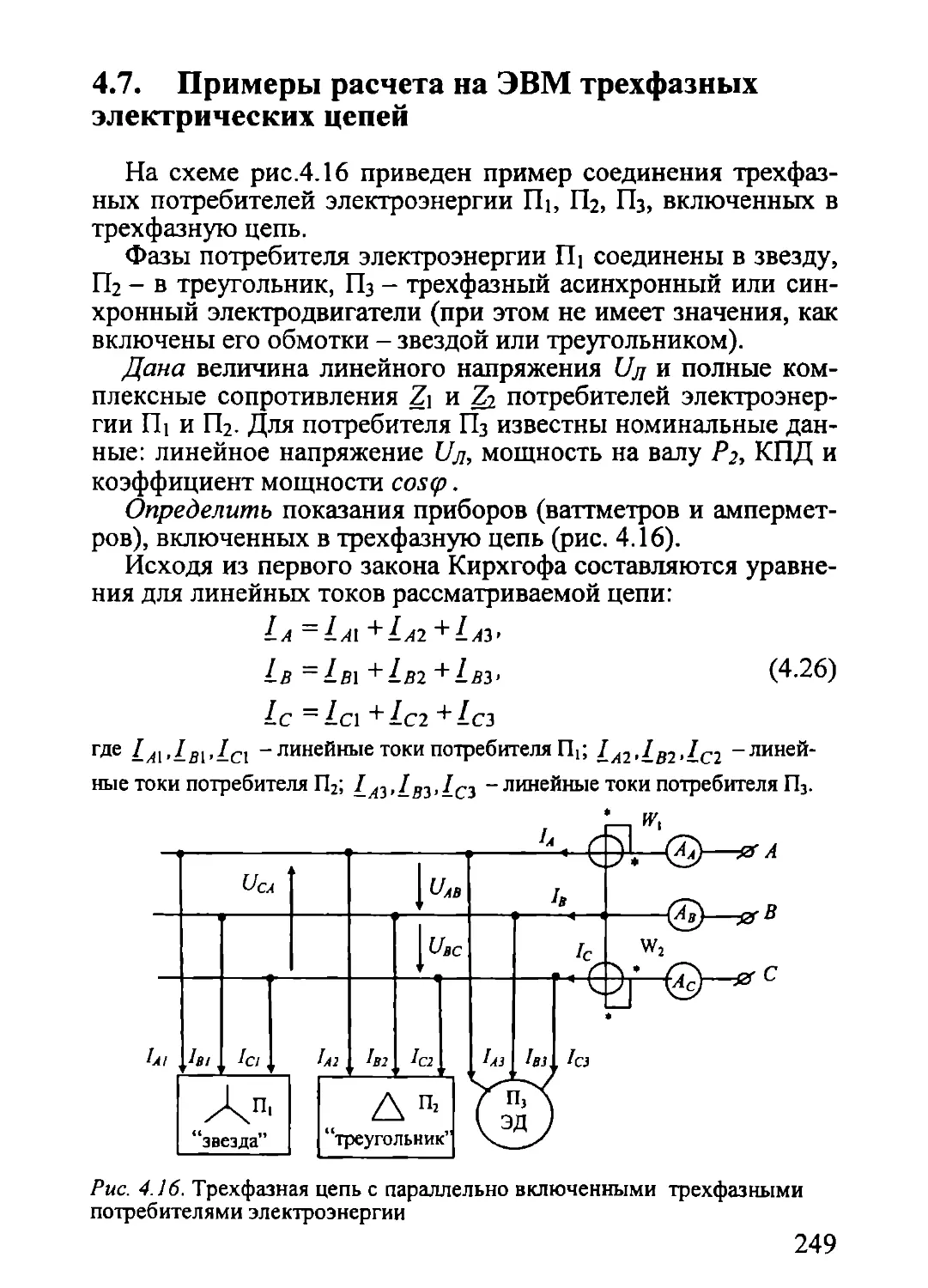
4.7. Примеры расчёта на ЭВМ трёхфазных электрических цепей...249
4.7.1. Расчёт токов потребителя электроэнергии П1, соединён-
ного звездой...........................................250
4.7.2. Расчёт токов потребителя электроэнергии П2, соединён-
ного треугольником......................................253
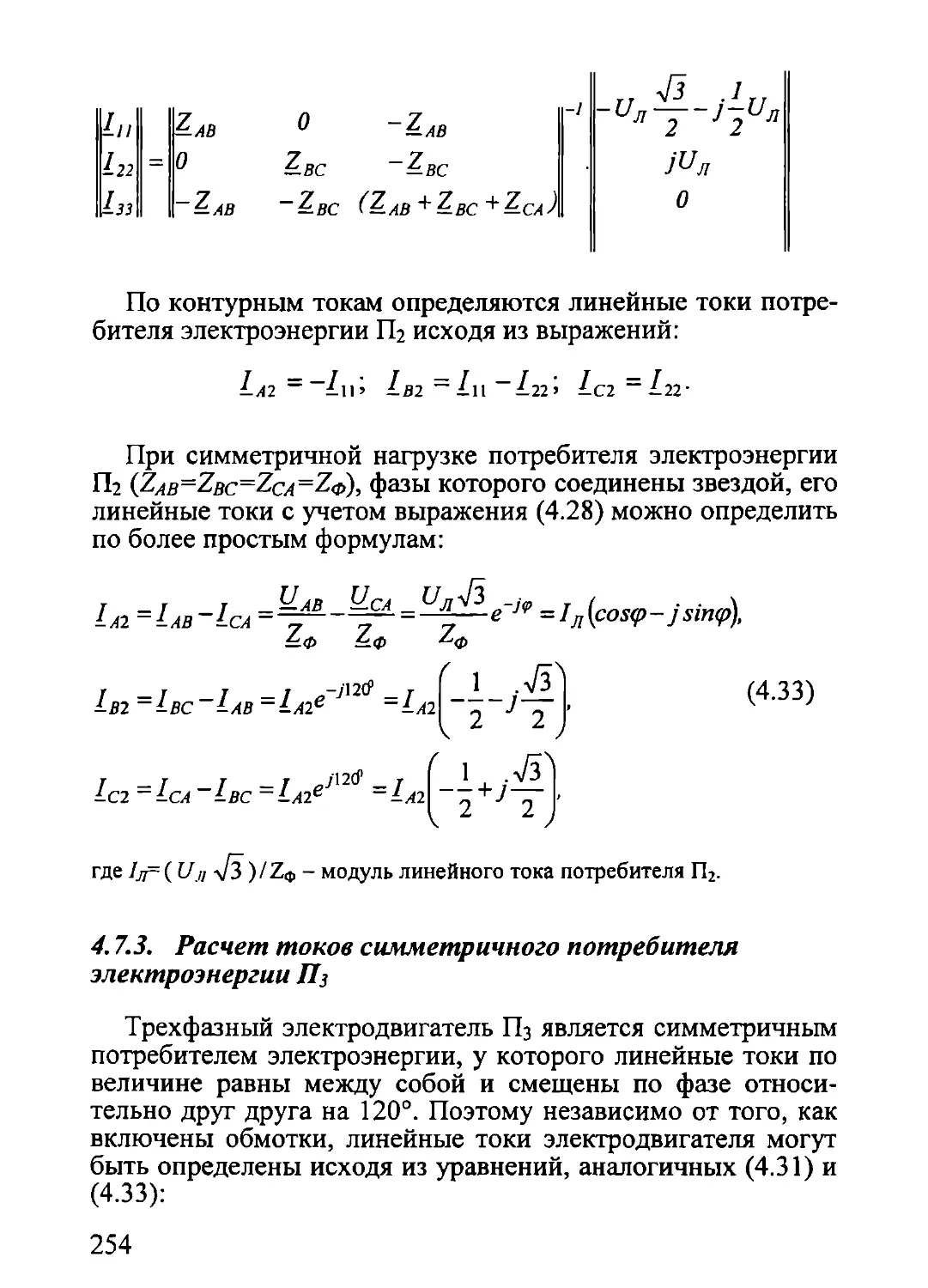
4.7.3. Расчёт токов симметричного потребителя электроэнергии
ПЗ.....................................................254
4.7.4. Расчёт трёхфазных электрических цепей с помощью оп-
ределителей ...........................................256
4.8. Лабораторная работа №3.................................259
4.9. Расчёт трёхфазных потребителей электрической энергии, соеди-
ненных звездой (семинар). Программа CON 6_1.................265
4.10. Расчёт трёхфазных потребителей электрической энергии, соеди-
ненных треугольником (семинар). Программа CON 71............269
4.11. Варианты соединения трёхфазных потребителей и их векторные
диаграммы. Аварийные режимы трёхфазных потребителей..........272
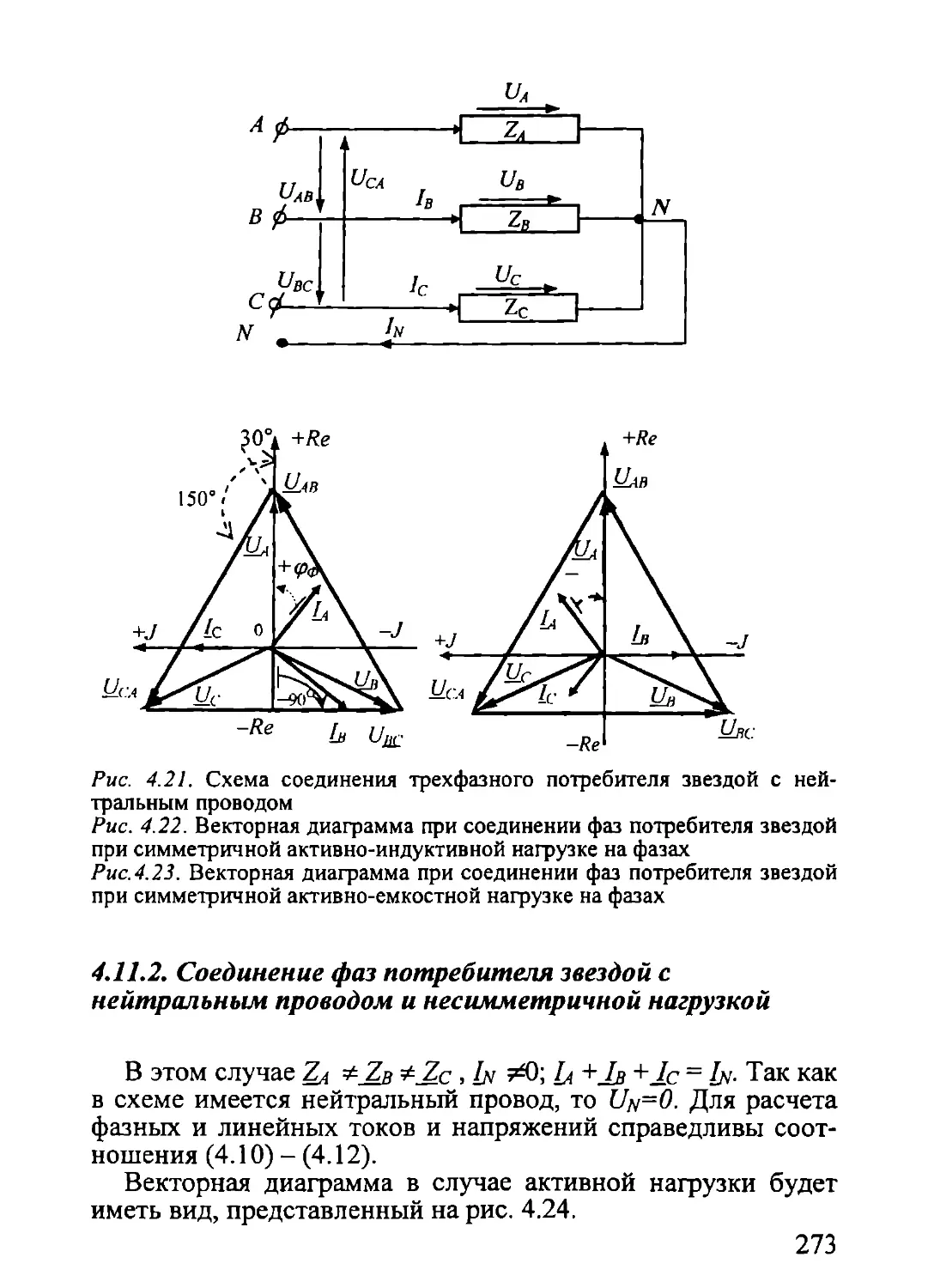
4.11.1. Соединение фаз потребителя звездой с нейтральным
проводом и симметричной нагрузкой.................272
4.11.2. Соединение фаз потребителя звездой с нейтральным
проводом и несимметричной нагрузкой....................273
5
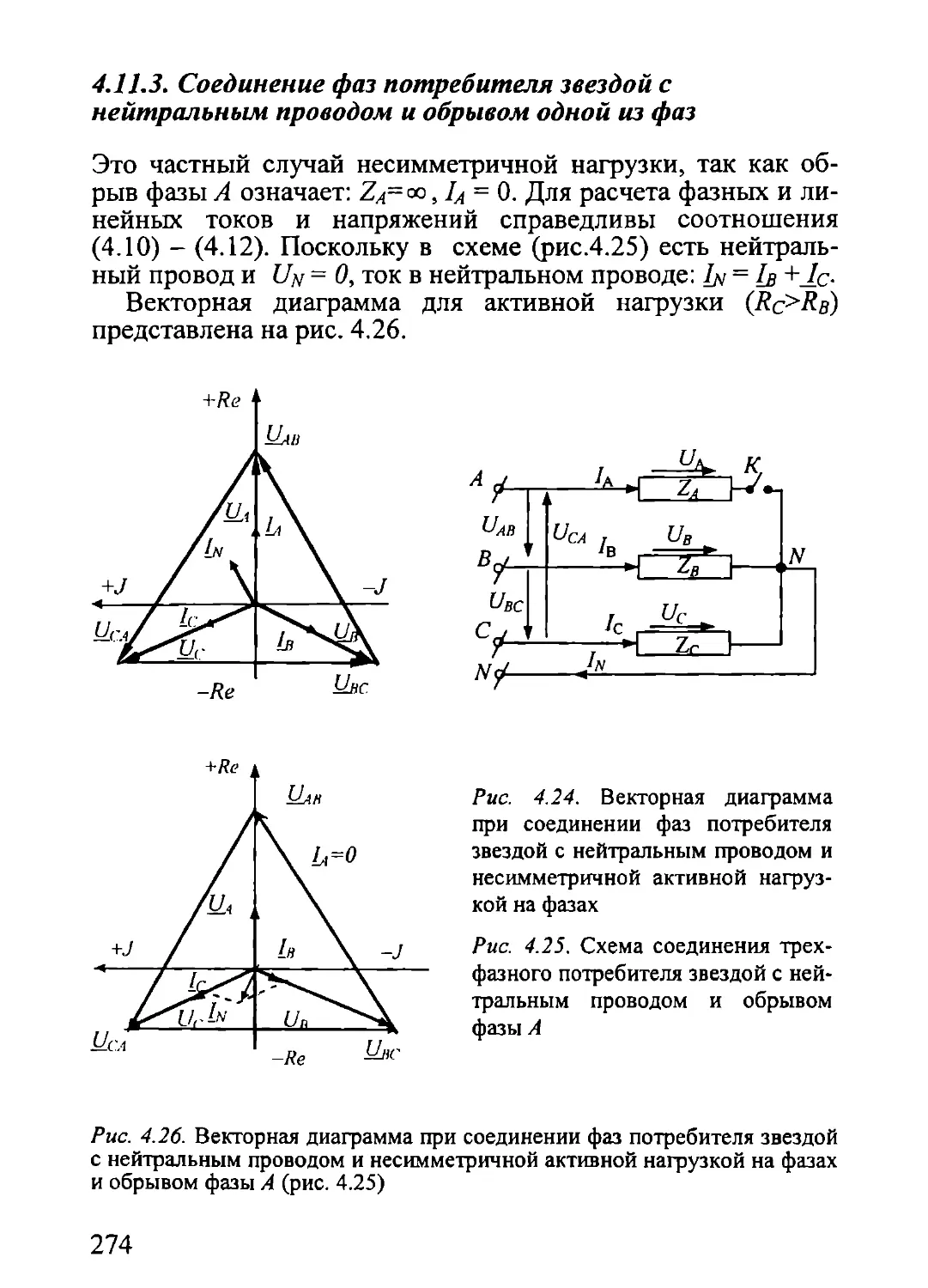
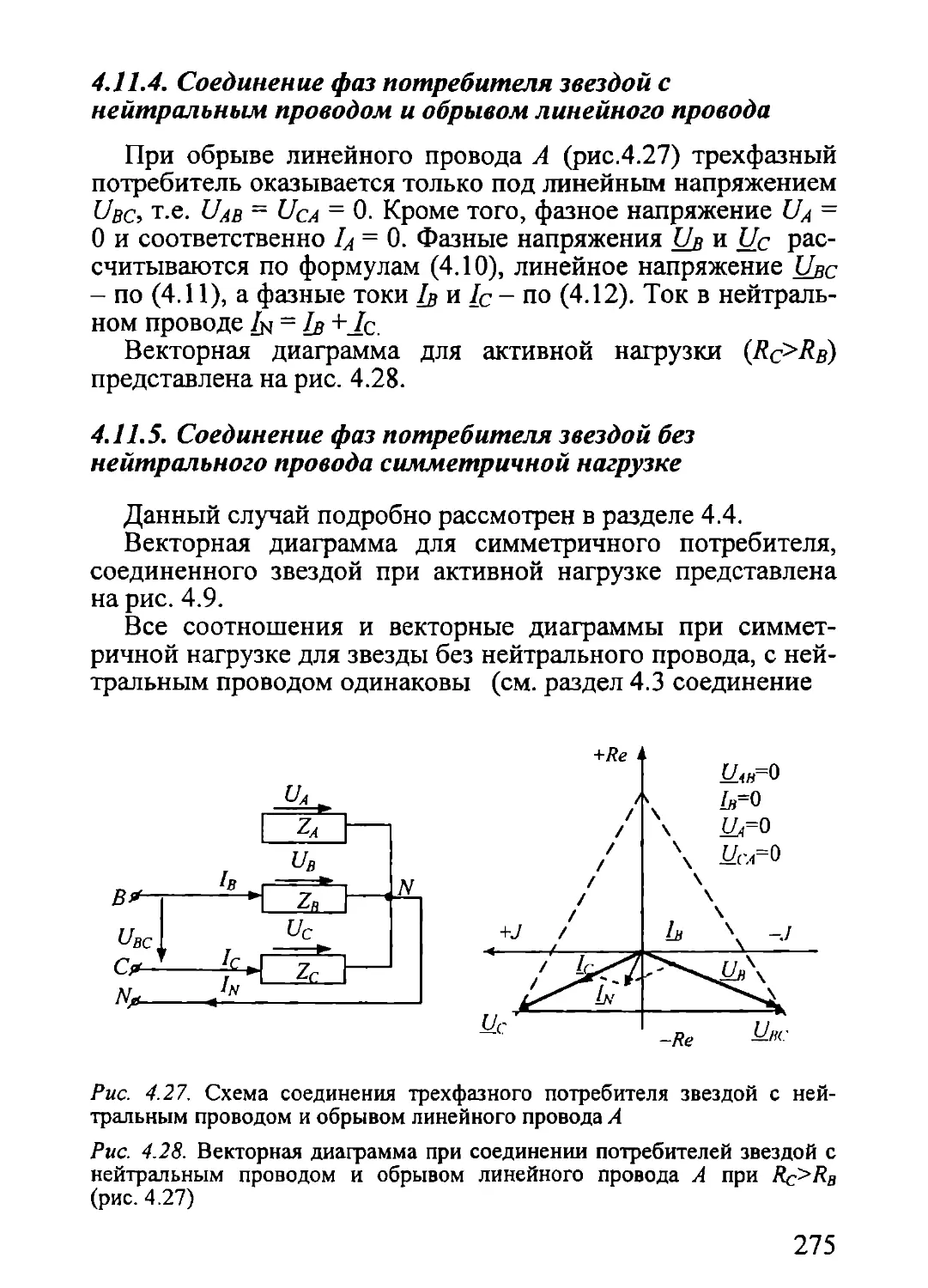
4.11.3. Соединение фаз потребителя звездой с нейтральным
проводом и обрывом одной из фаз........................274
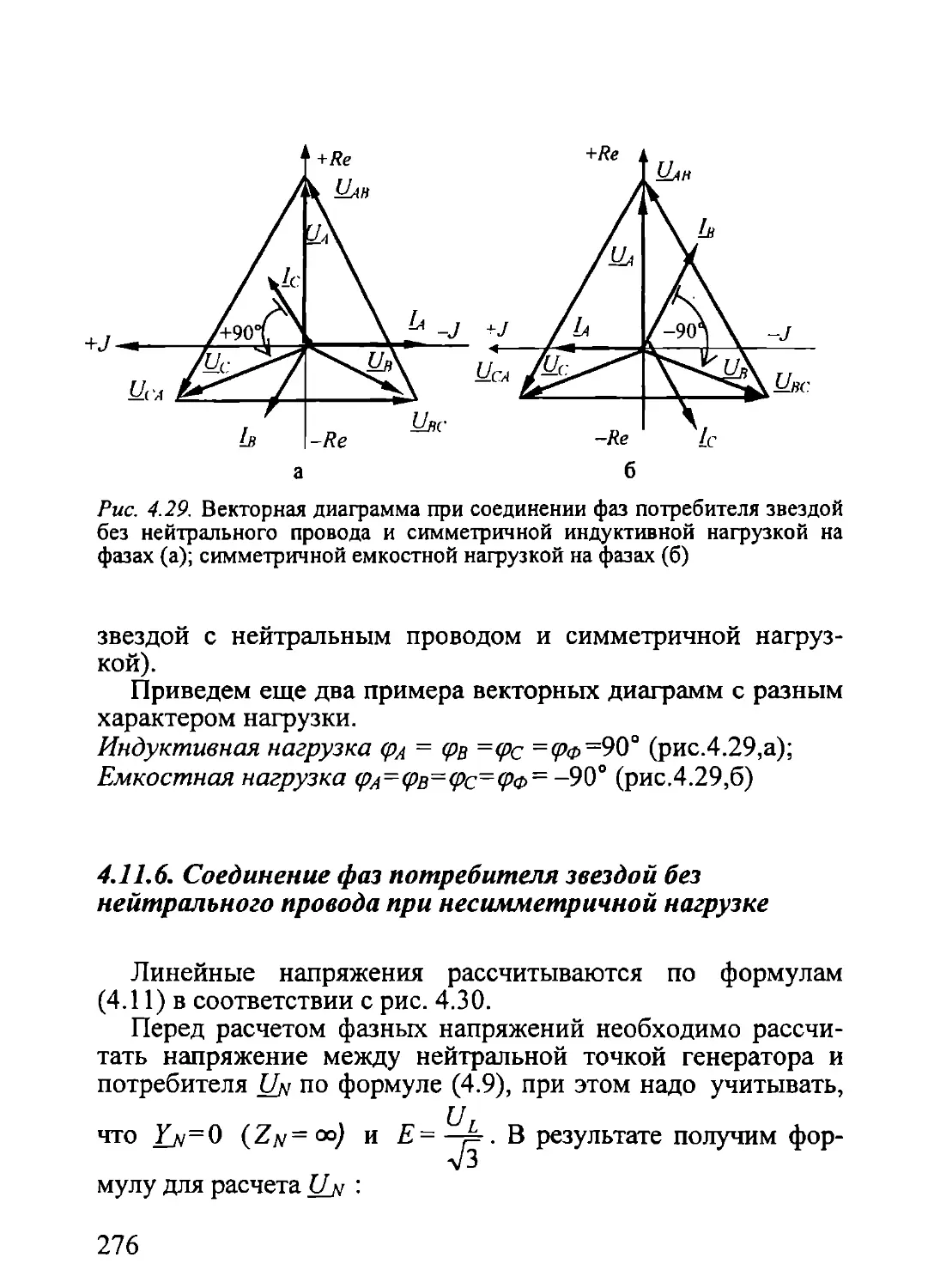
4.11.4. Соединение фаз потребителя звездой с нейтральным
проводом и обрывом линейного провода....................275
4.11.5. Соединение фаз потребителя звездой без нейтрального
провода при симметричной нагрузке.......................275
4.11.6. Соединение фаз потребителя звездой без нейтрального
провода при несимметричной нагрузке.....................276
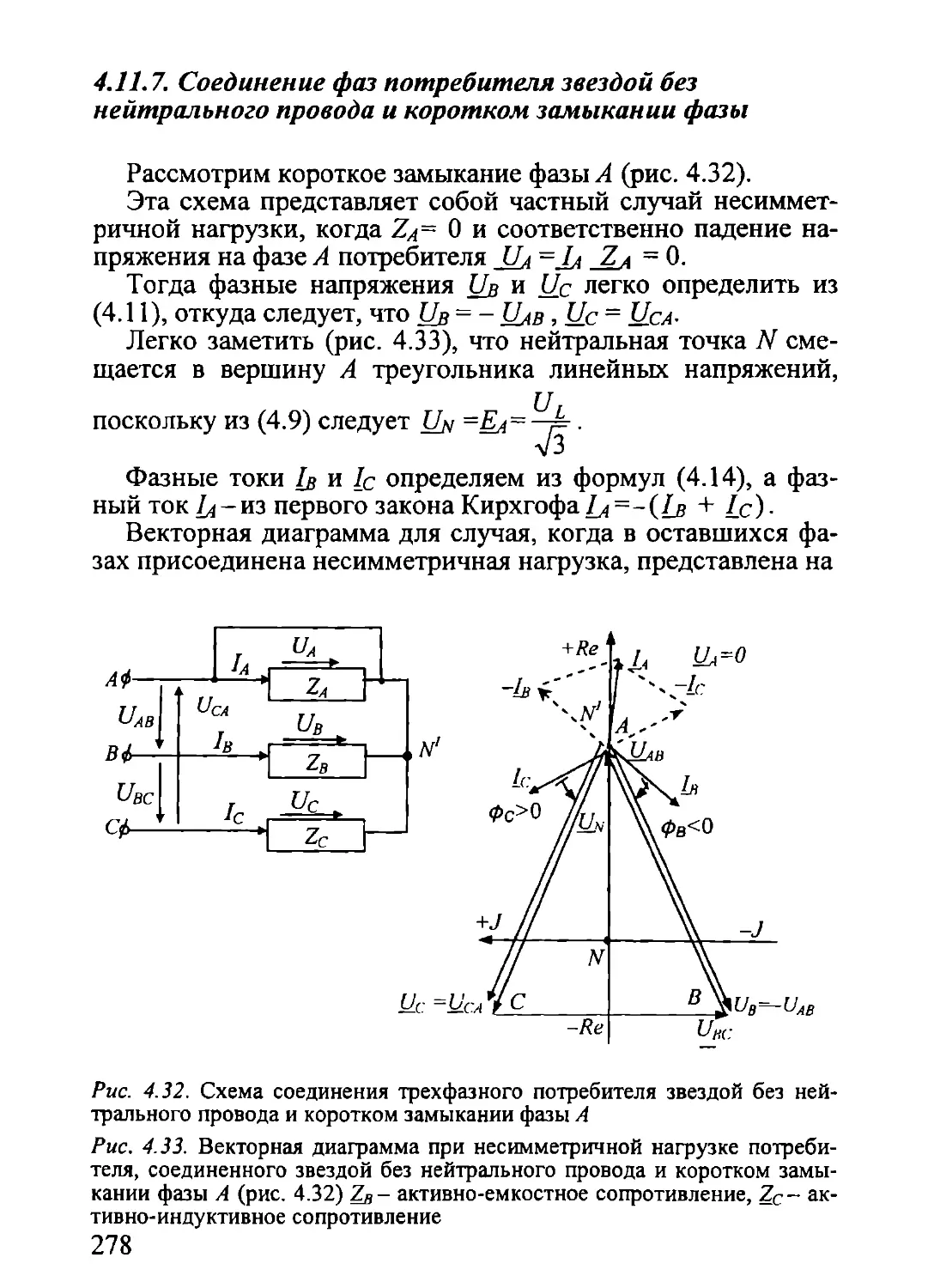
4.11.7. Соединение фаз потребителя звездой без нейтрального
провода и коротком замыкании фазы.......................278
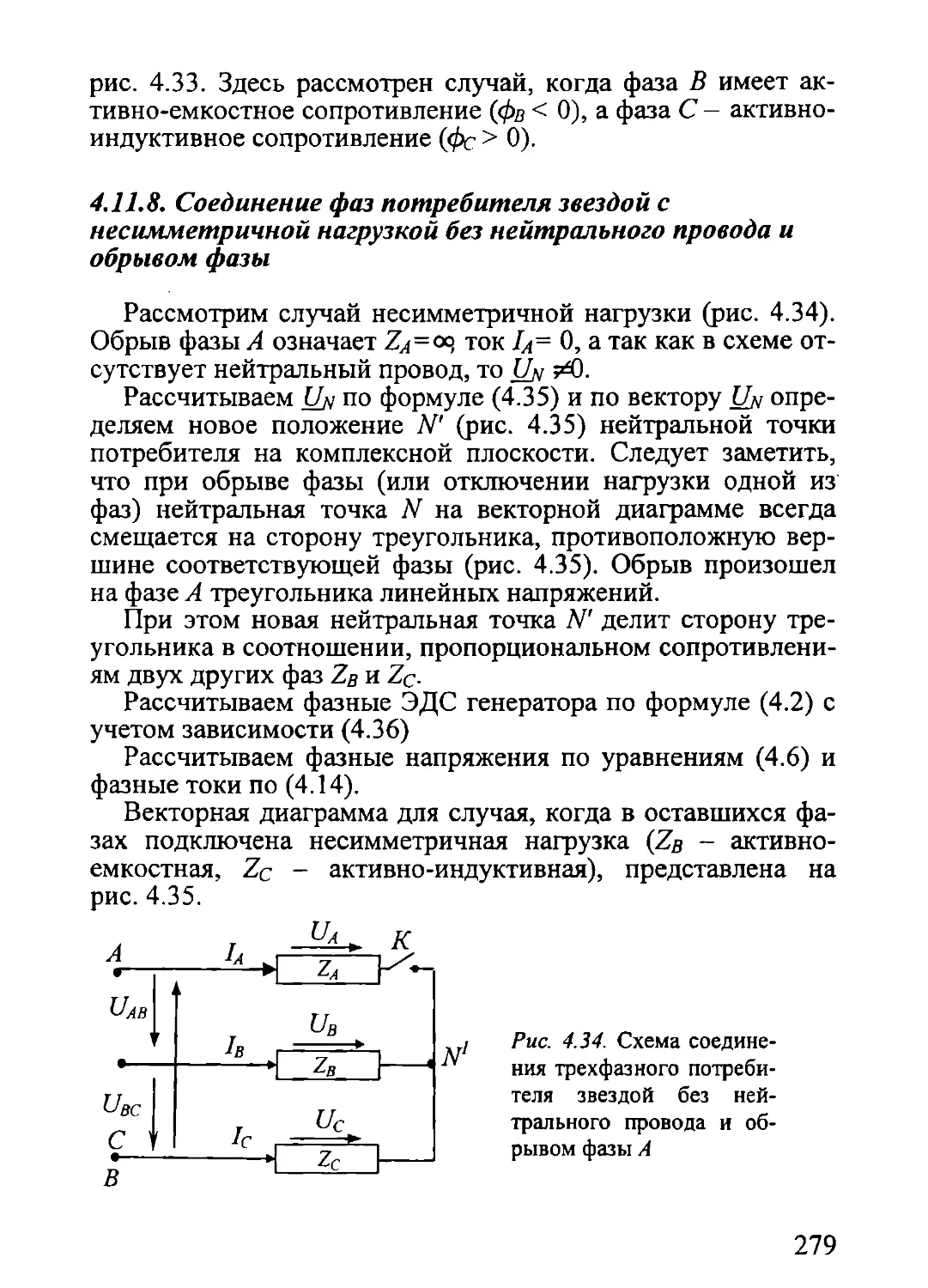
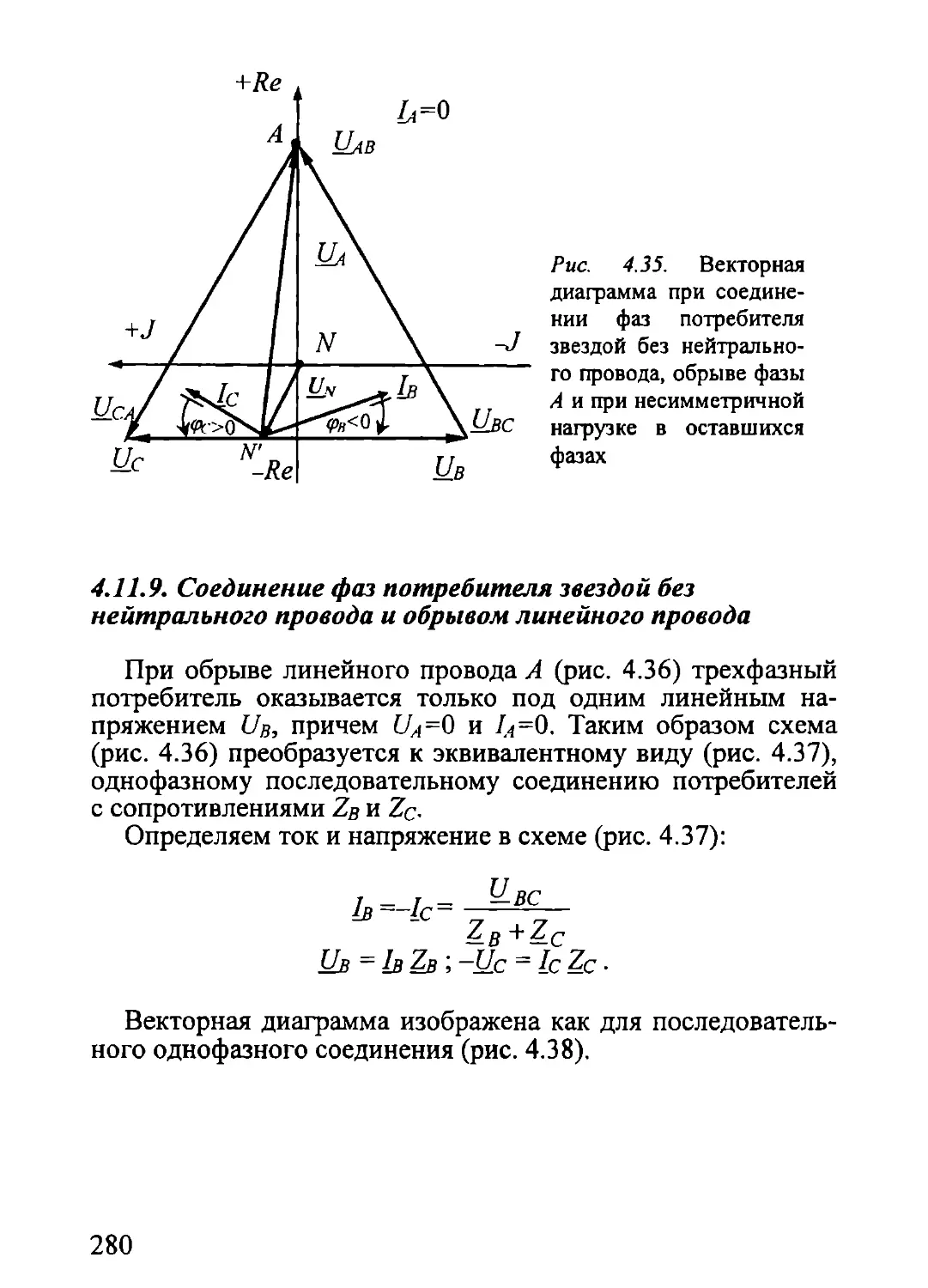
4.11.8. Соединение фаз потребителя звездой с несимметричной
нагрузкой без нейтрального провода и обрывом фазы.......279
4.11.9. Соединение фаз потребителя звездой без нейтрального
провода и обрывом линейного провода....................280
4.11.10. Соединение фаз потребителя треугольником при сим-
метричной нагрузке......................................281
4.11.11. Соединение фаз потребителей треугольником при не-
симметричной нагрузке...................................282
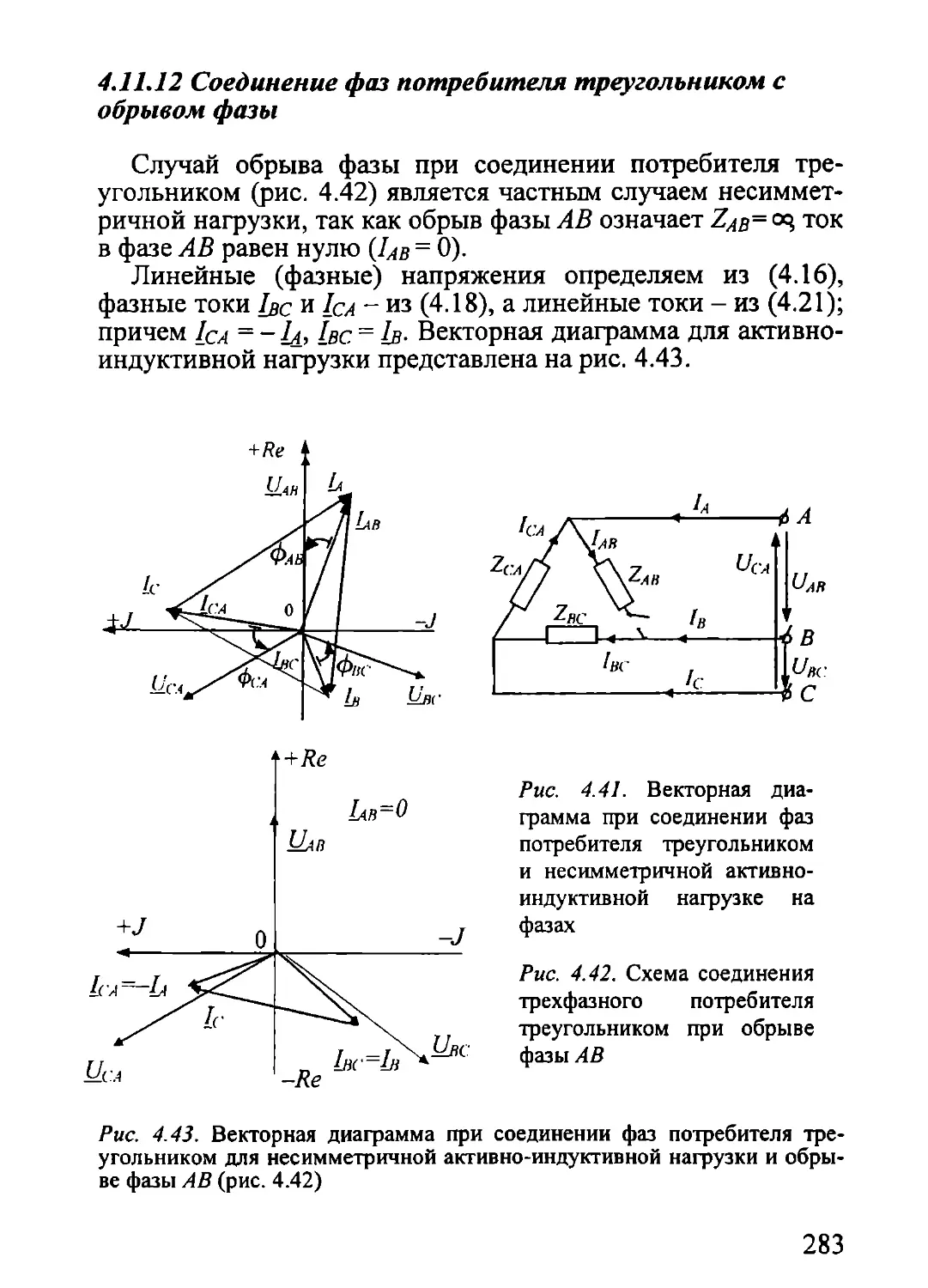
4.11.12. Соединение фаз потребителя треугольником с обрывом
фазы...................................................283
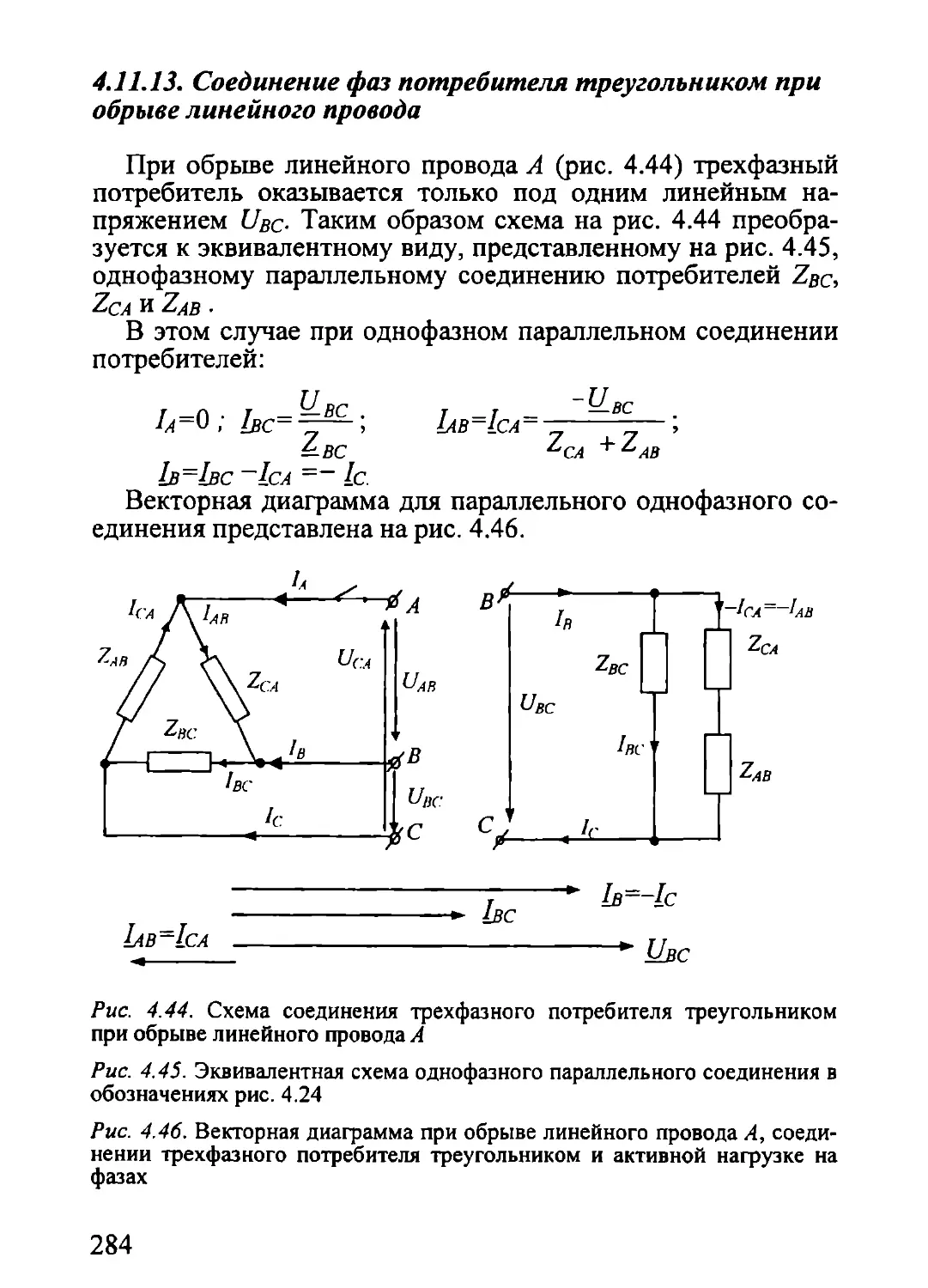
4.11.13. Соединение фаз потребителя треугольником при обры-
ве линейного провода...................................284
4.12. Расчет трехфазных цепей (курсовая работа) ...........285
Глава 5
Электрооборудование промышленных пред-
приятий ...................................................292
5.1. Трансформаторы.........................................292
5.1.1. Принцип действия и область применения трансформато-
ров....................................................293
5.1.2. Приведённый трансформатор.......................296
5.1.3. Схема замещения приведённого трансформатора.....298
5.1.4. Потери мощности в трансформаторе................298
5.1.5. Опыт холостого хода трансформатора..............302
5.1.6. Опыт короткого замыкания трансформатора.........305
5.1.7. Рабочий режим трансформатора....................308
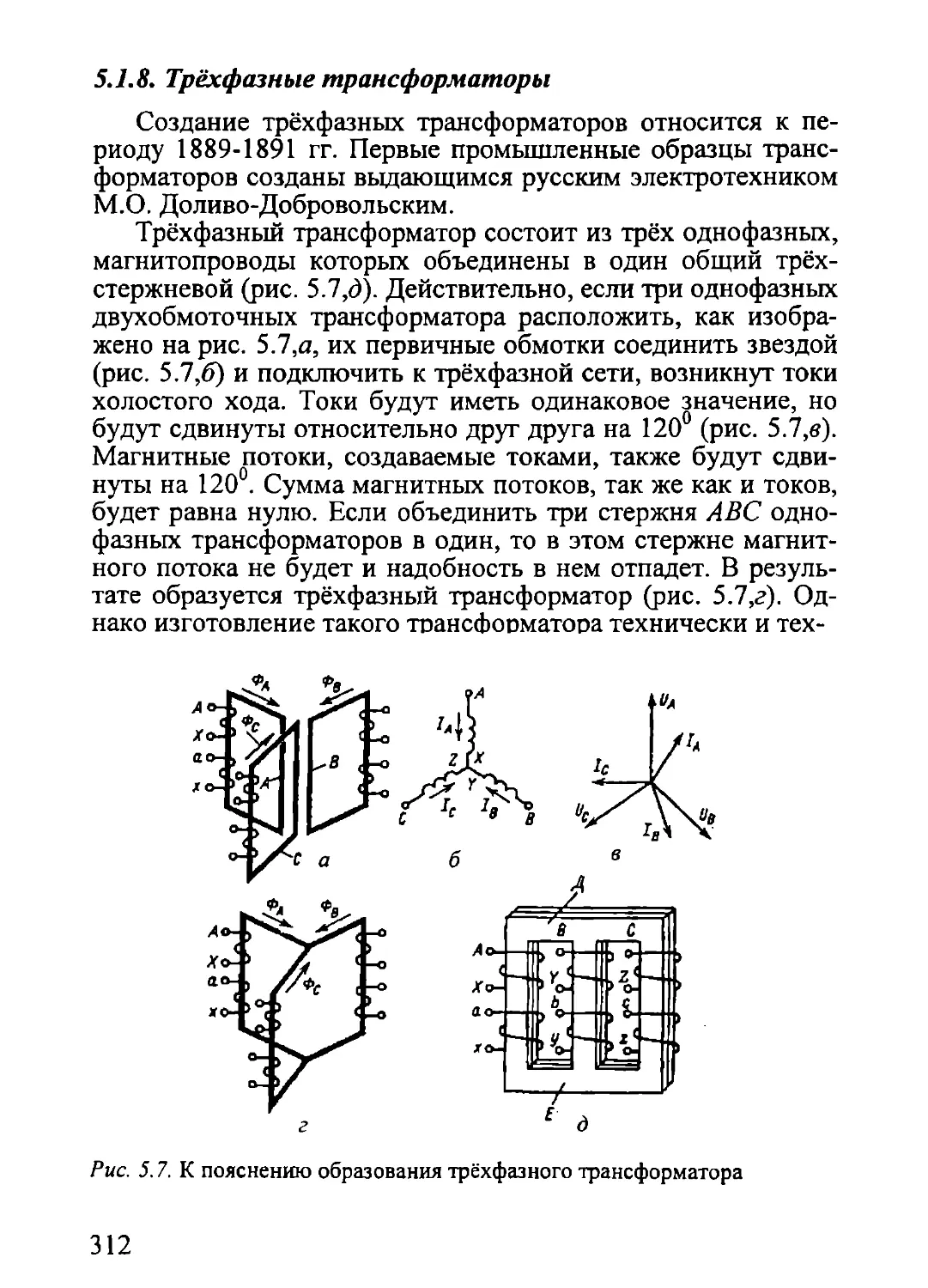
5.1.8. Трёхфазные трансформаторы.......................312
5.2. Асинхронные машины....................................314
5.2.1. Устройство асинхронного электродвигателя трехфазного
тока...................................................315
5.2.2. Принцип действия асинхронного электродвигателя..318
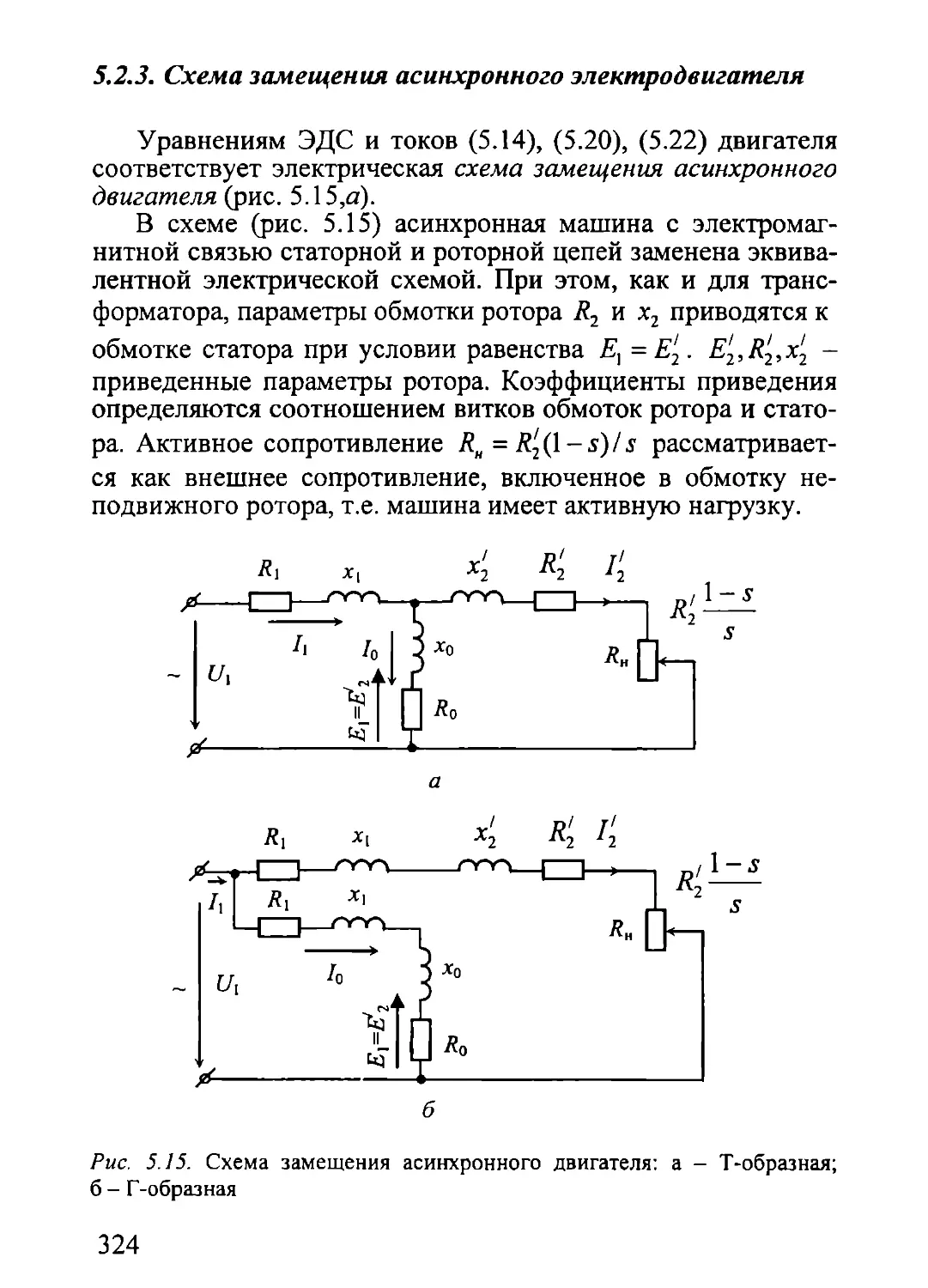
5.2.3. Схема замещения асинхронного электродвигателя...324
5.2.4. Механическая характеристика асинхронных электродви-
гателей................................................326
5.2.5. Расчёт мощности приводных нерегулируемых асинхрон-
ных электродвигателей ряда механизмов..................330
5.2.6. Способы регулирования частоты вращения (числа оборо-
тов в минуту) асинхронного электродвигателя............334
5.2.7. Пуск асинхронных двигателей.....................340
5.2.8. Тормозные режимы работы асинхронных двигателей....347
5.3. Синхронные машины.......................................351
5.3.1. Устройство трёхфазной синхронной машины...........351
5.3.2. Принцип действия трёхфазного синхронного электродви-
гателя...................................................353
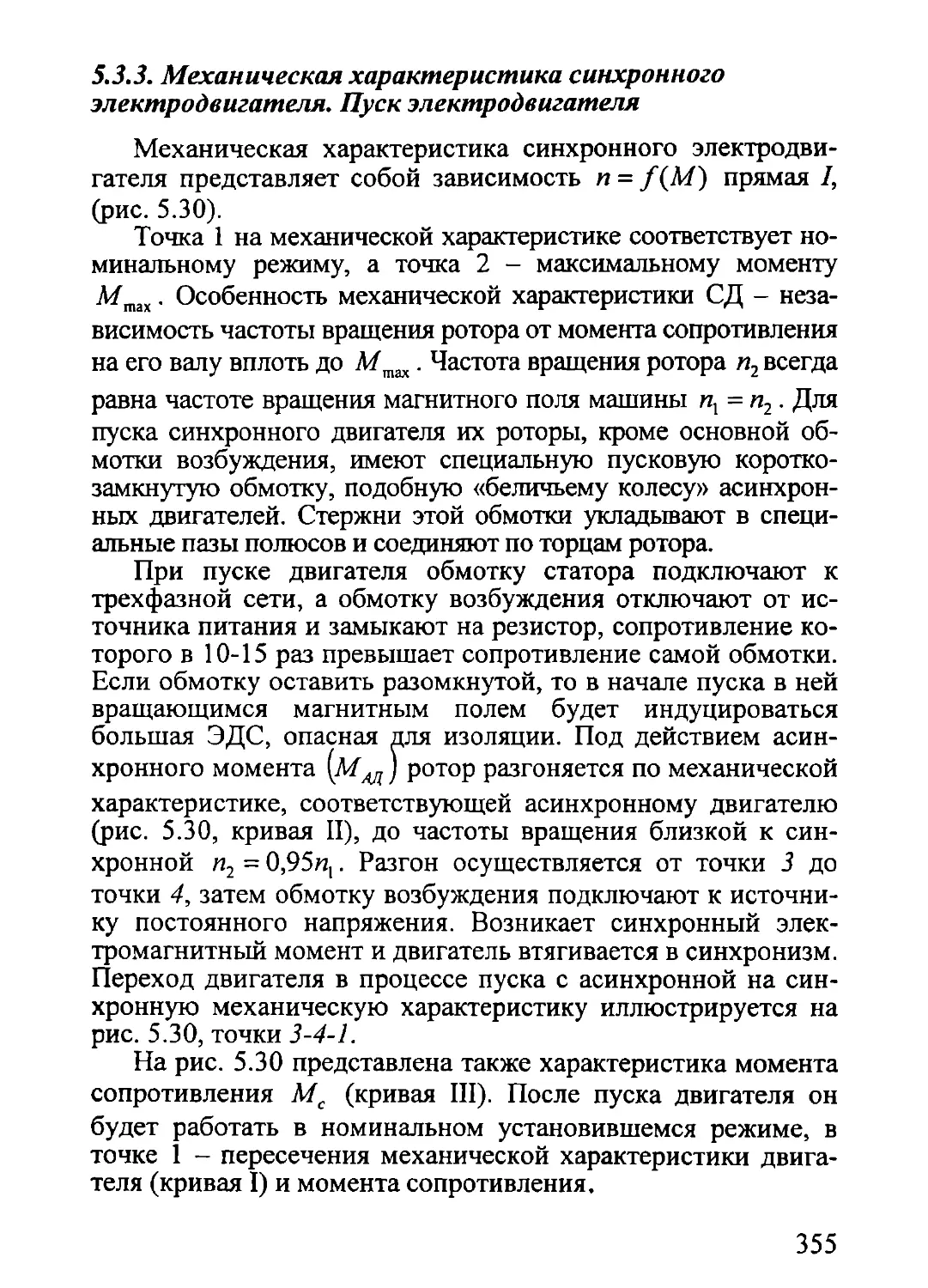
5.3.3. Механическая характеристика синхронного электродвига-
теля. Пуск электродвигателя..............................355
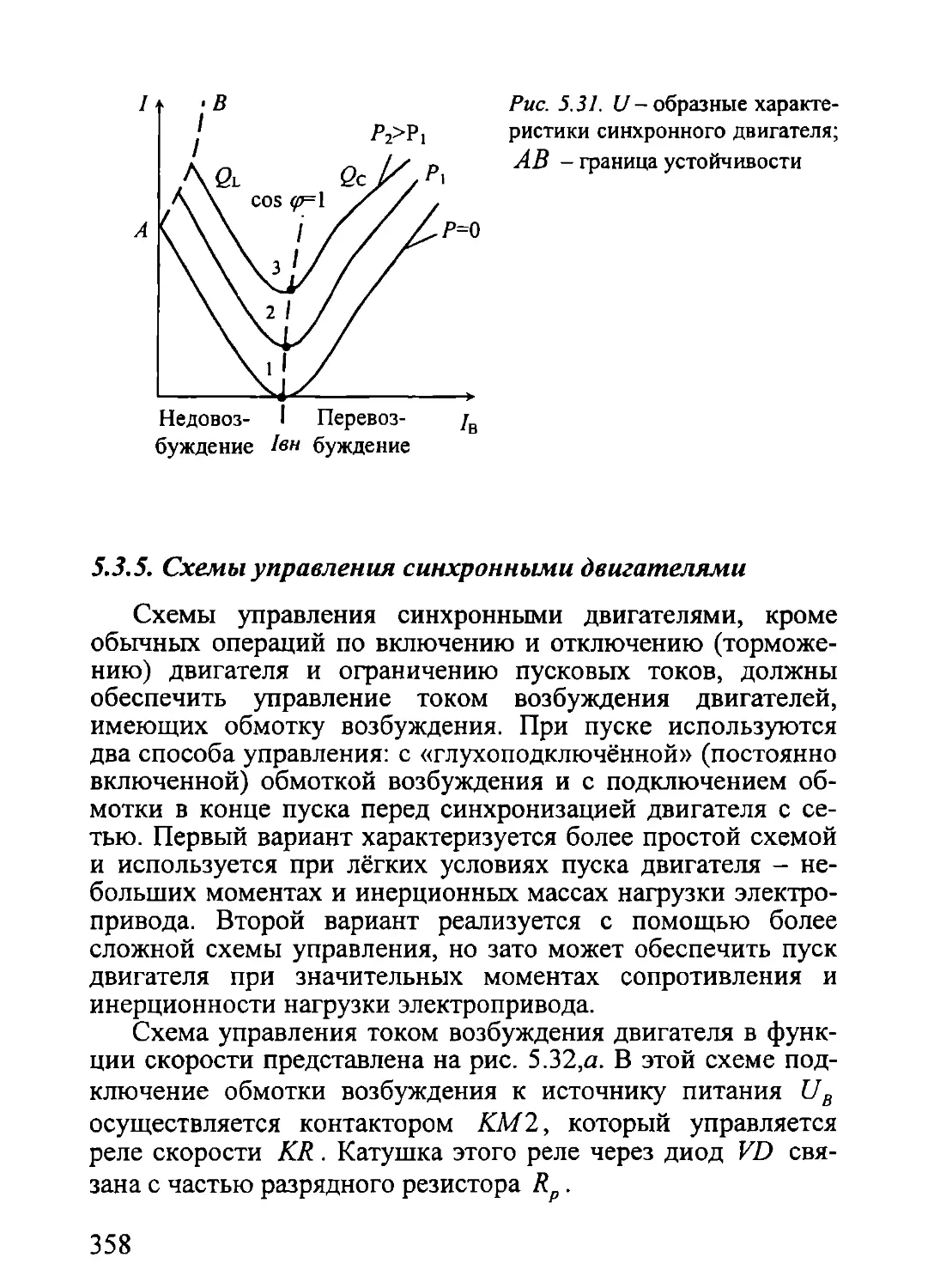
5.3.4. Область применения синхронных двигателей..........356
5.3.6. Схемы управления синхронными двигателями..........358
5.4. Машины постоянного тока.................................361
5.4.1. Устройство машины постоянного тока...............361
5.4.2. Принцип действия двигателя постоянного тока......363
5.4.3. Электродвижущая сила якоря и электромагнитный мо-
мент двигателя...........................................365
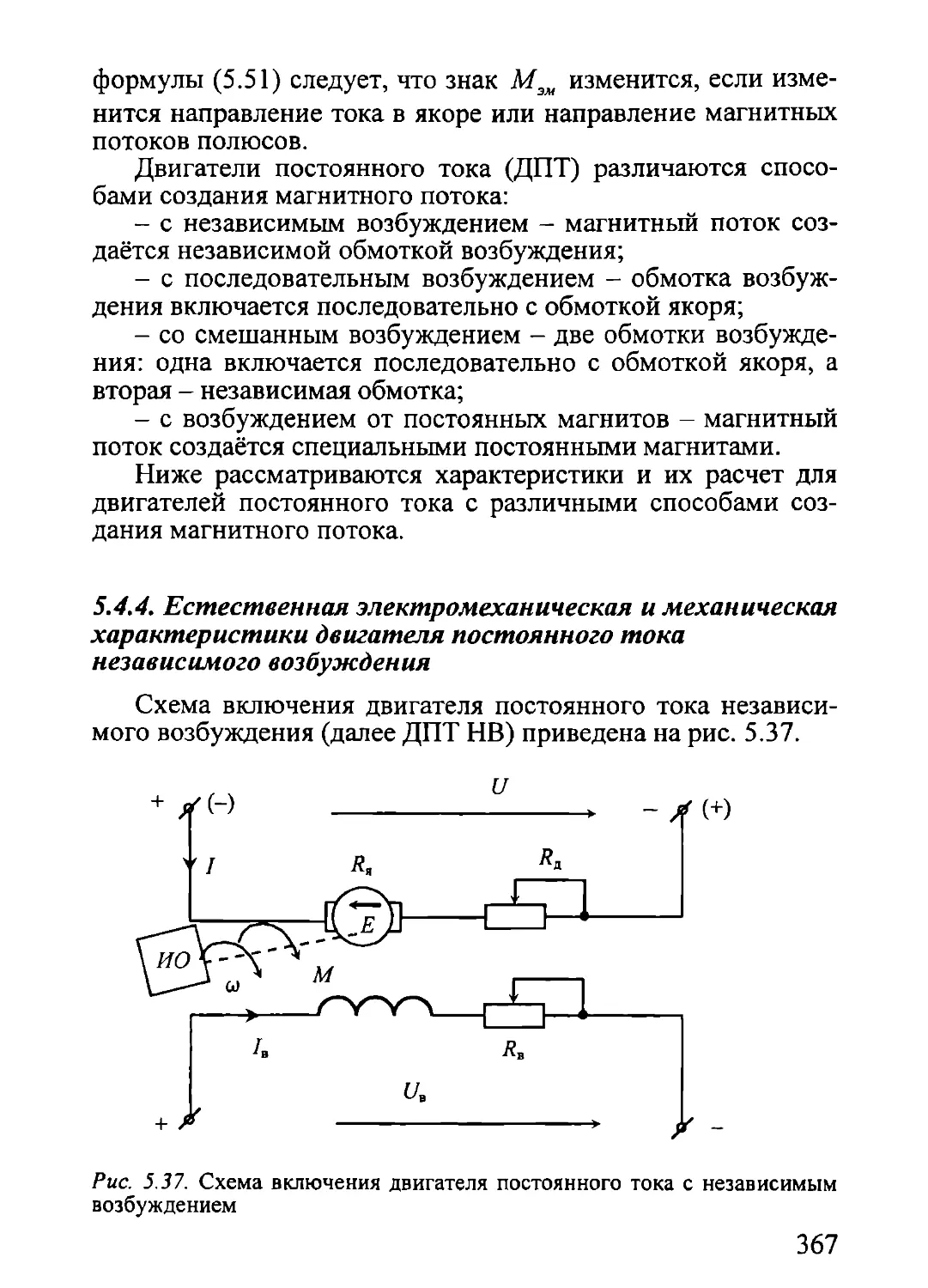
5.4.4. Естественная электромеханическая и механическая харак-
теристики двигателя постоянного тока независимого воз-
буждения..................................................367
5.4.5. Работа двигателя постоянного тока независимого возбуж-
дения в двигательном режиме...............................371
5.4.6. Расчёт естественной механической характеристики двига-
теля постоянного тока с независимым возбуждением по
номинальным данным.......................................373
5.4.7. Естественные электромеханическая и механическая ха-
рактеристики двигателя постоянного тока е последова-
тельным возбуждением.....................................374
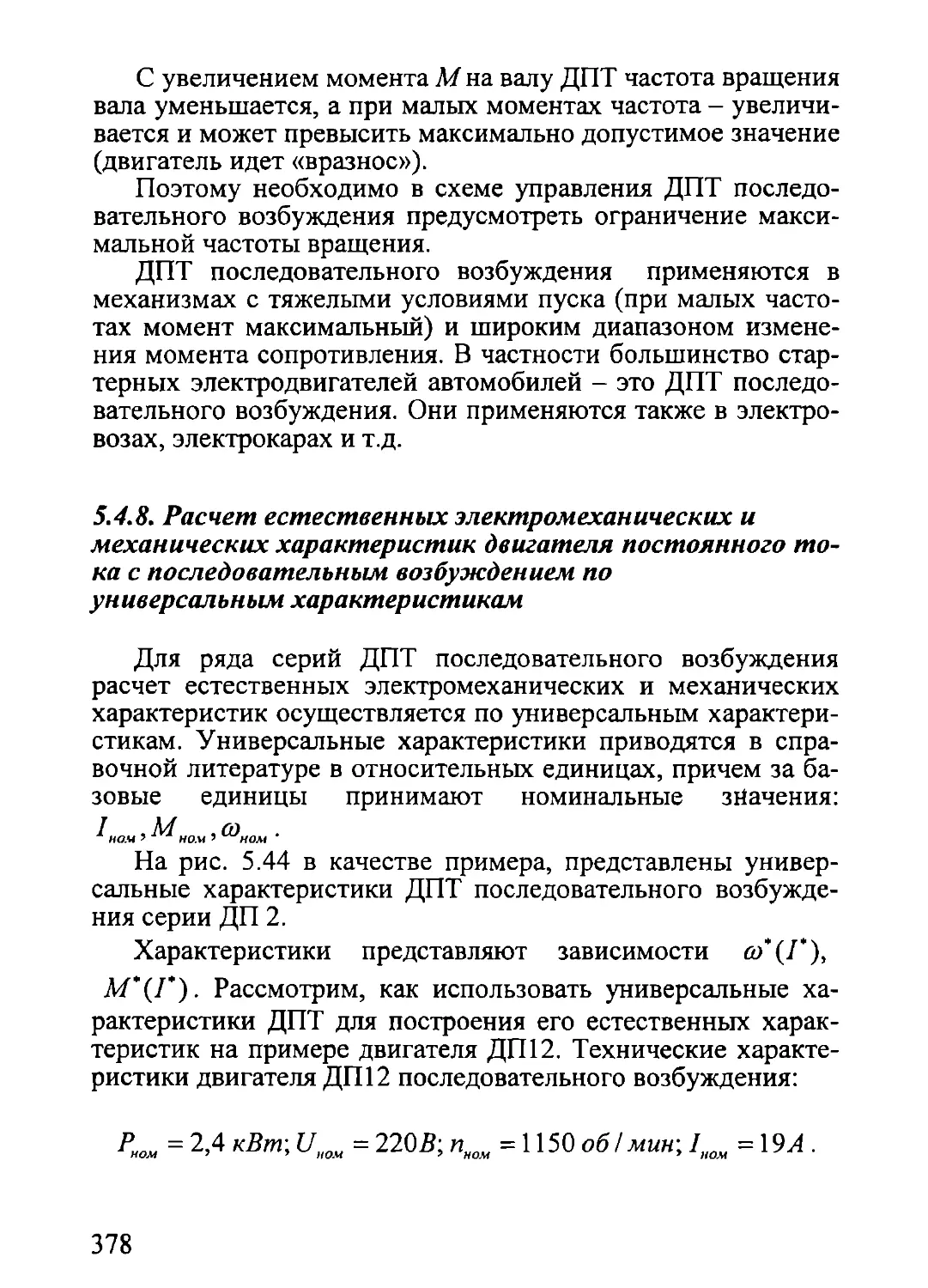
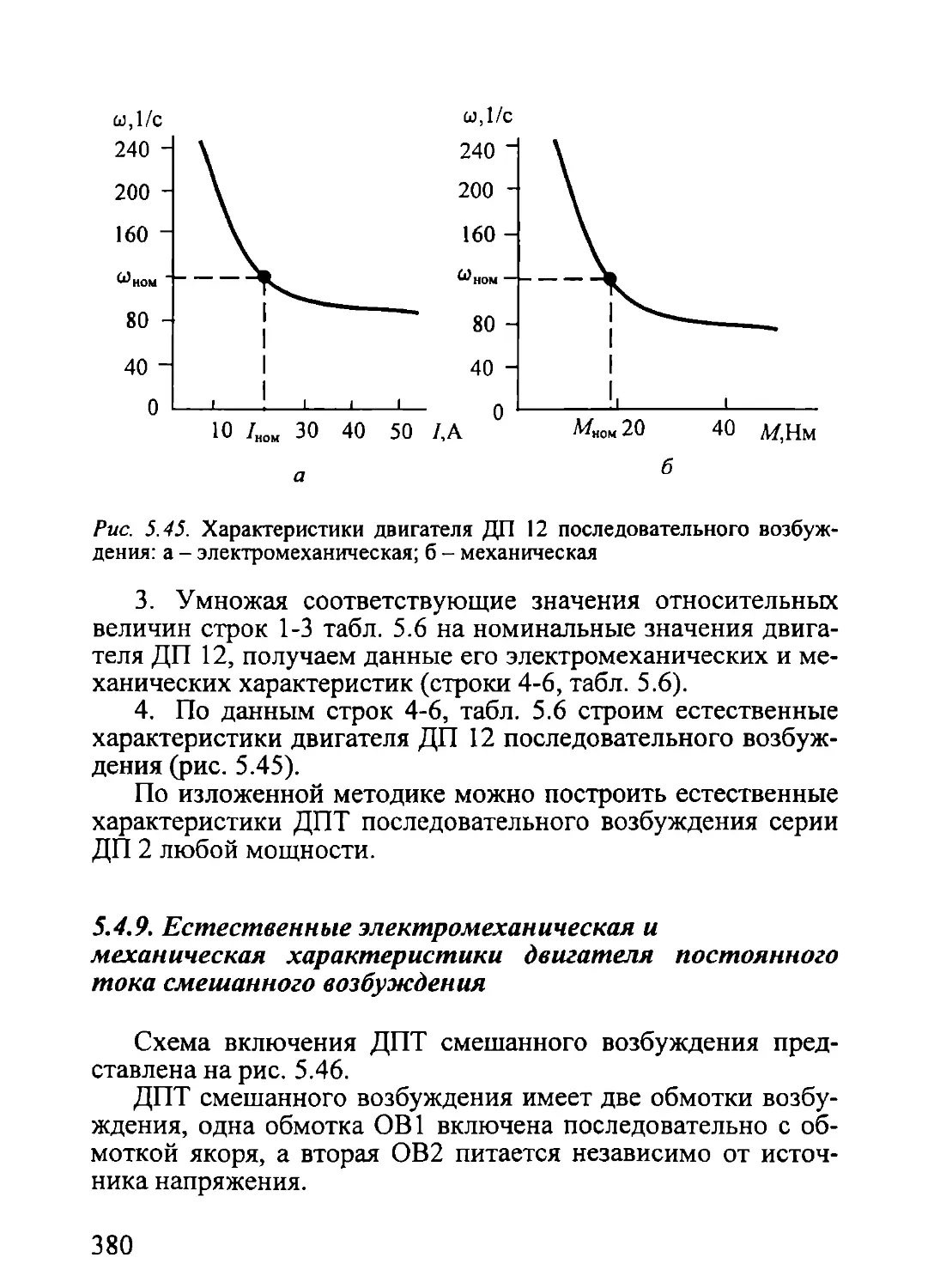
5.4.8. Расчёт естественных электромеханических и механиче-
ских характеристик двигателя постоянного тока с после-
довательным возбуждением по универсальным характе-
ристикам.................................................378
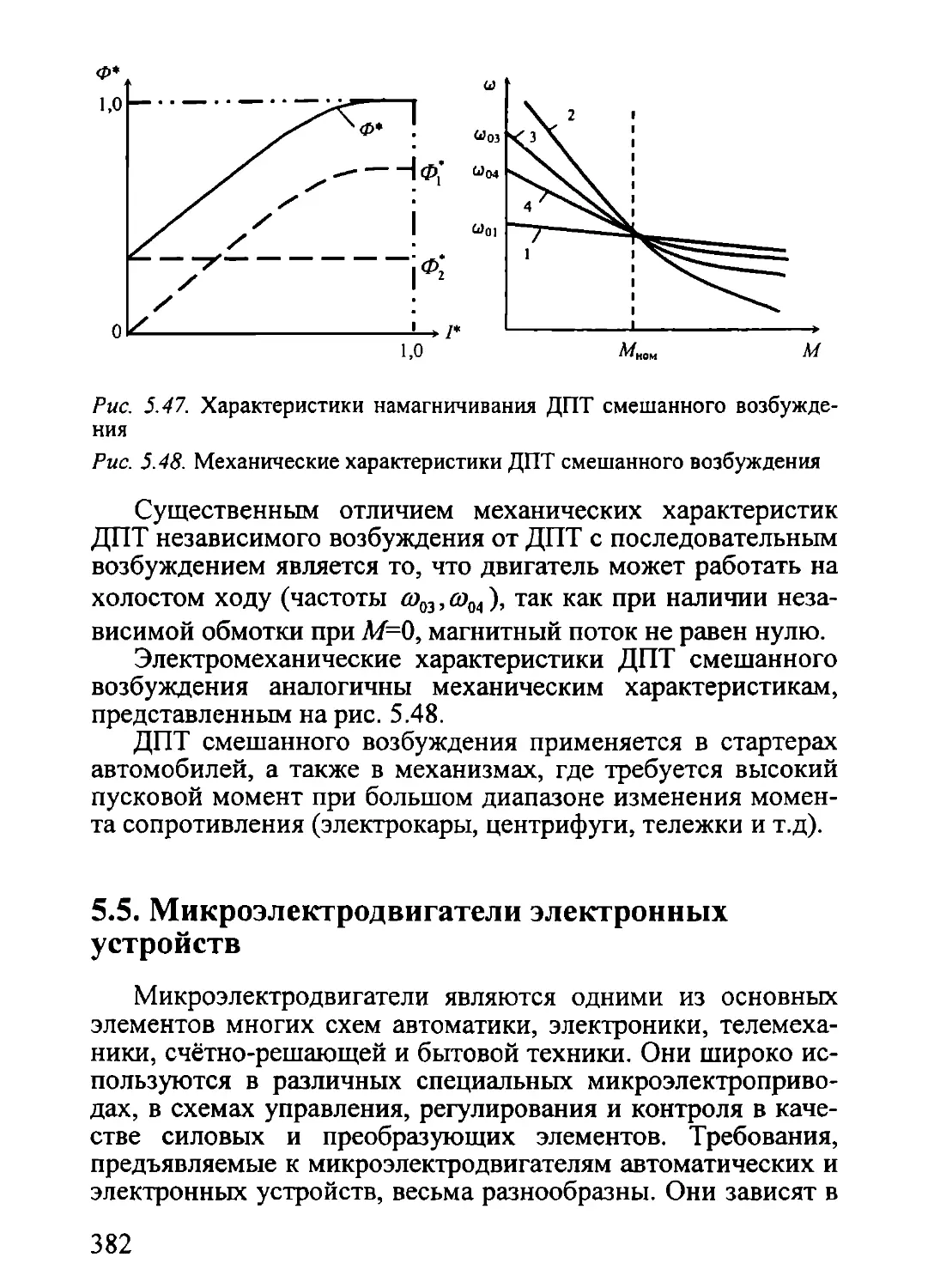
5.4.9. Естественные электромеханическая и механическая ха-
рактеристики двигателя постоянного тока смешанного
возбуждения..............................................380
5.5. Микроэлектродвигатели электронных устройств.............382
5.5.1. Классификация микроэлектродвигателей.............383
5.5.2. Принцип действия и устройство однофазного асинхрон-
ного электродвигателя....................................385
5.5.3. Однофазные асинхронные электродвигатели с пусковыми
элементами (емкостью или сопротивлением).................388
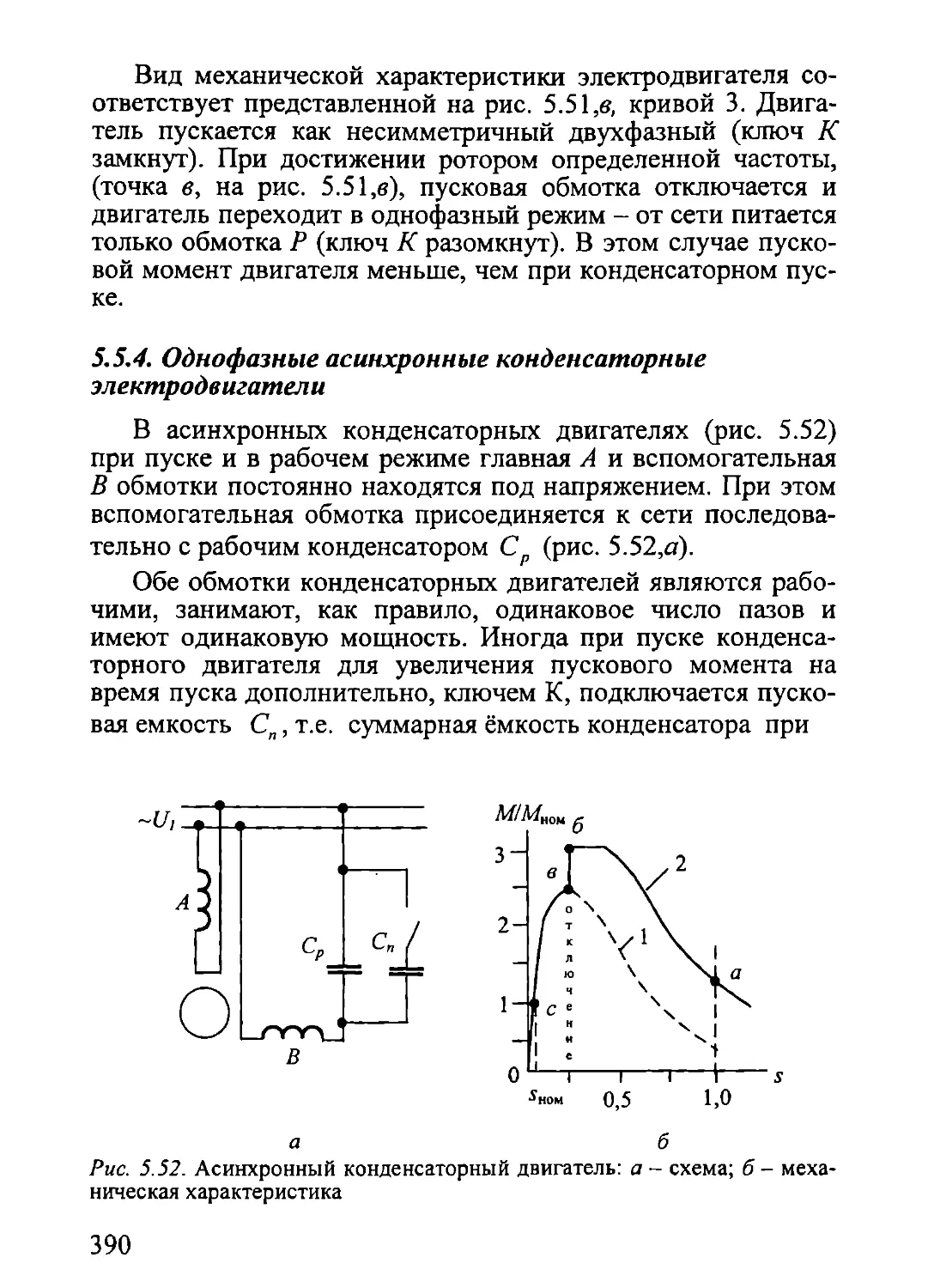
5.5.4. Однофазные асинхронные конденсаторные электродвига-
тели.....................................................390
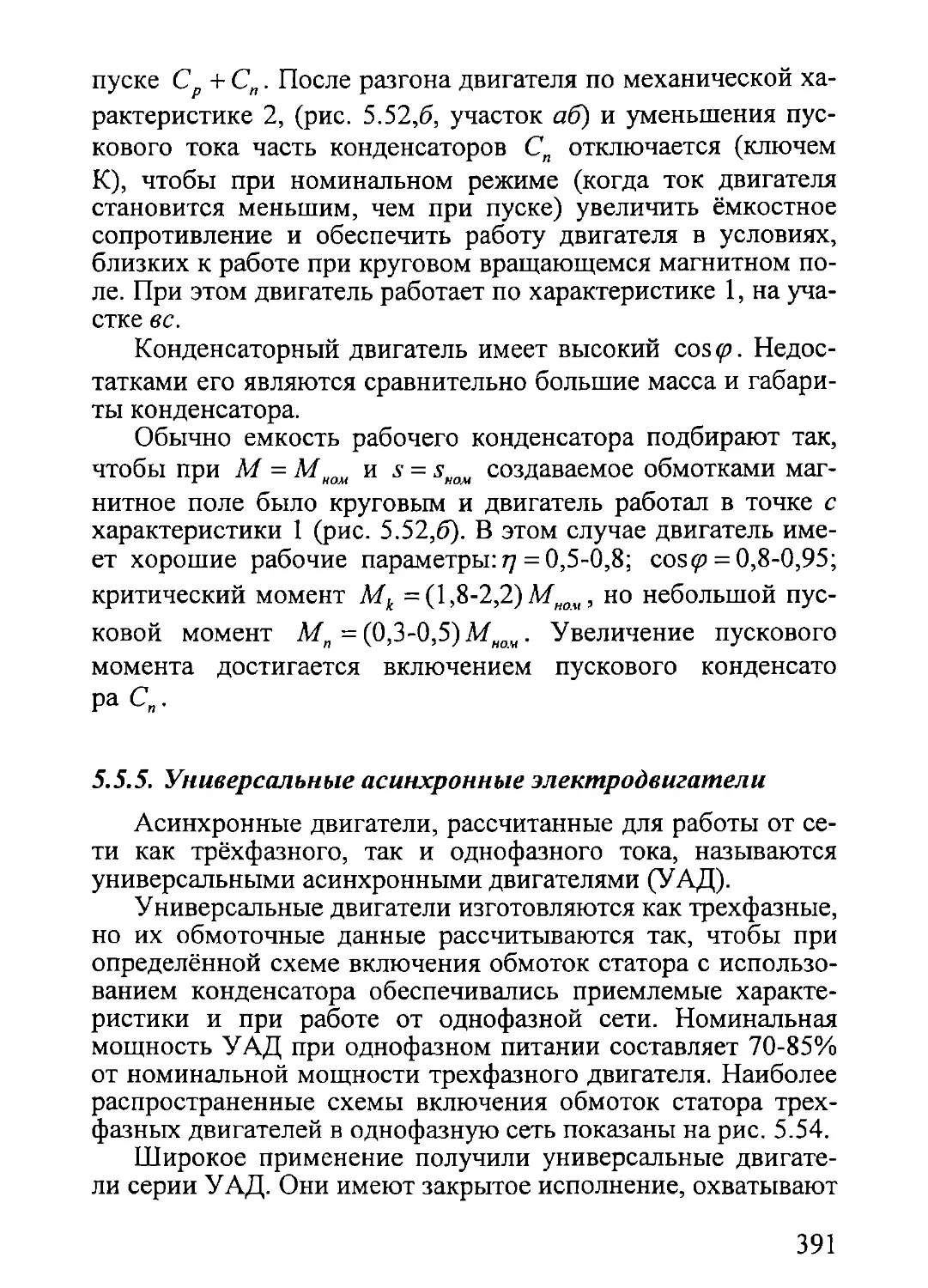
5.5.5. Универсальные асинхронные электродвигатели........391
5.5.6. Синхронные микроэлектродвигатели с постоянными маг-
нитами...................................................393
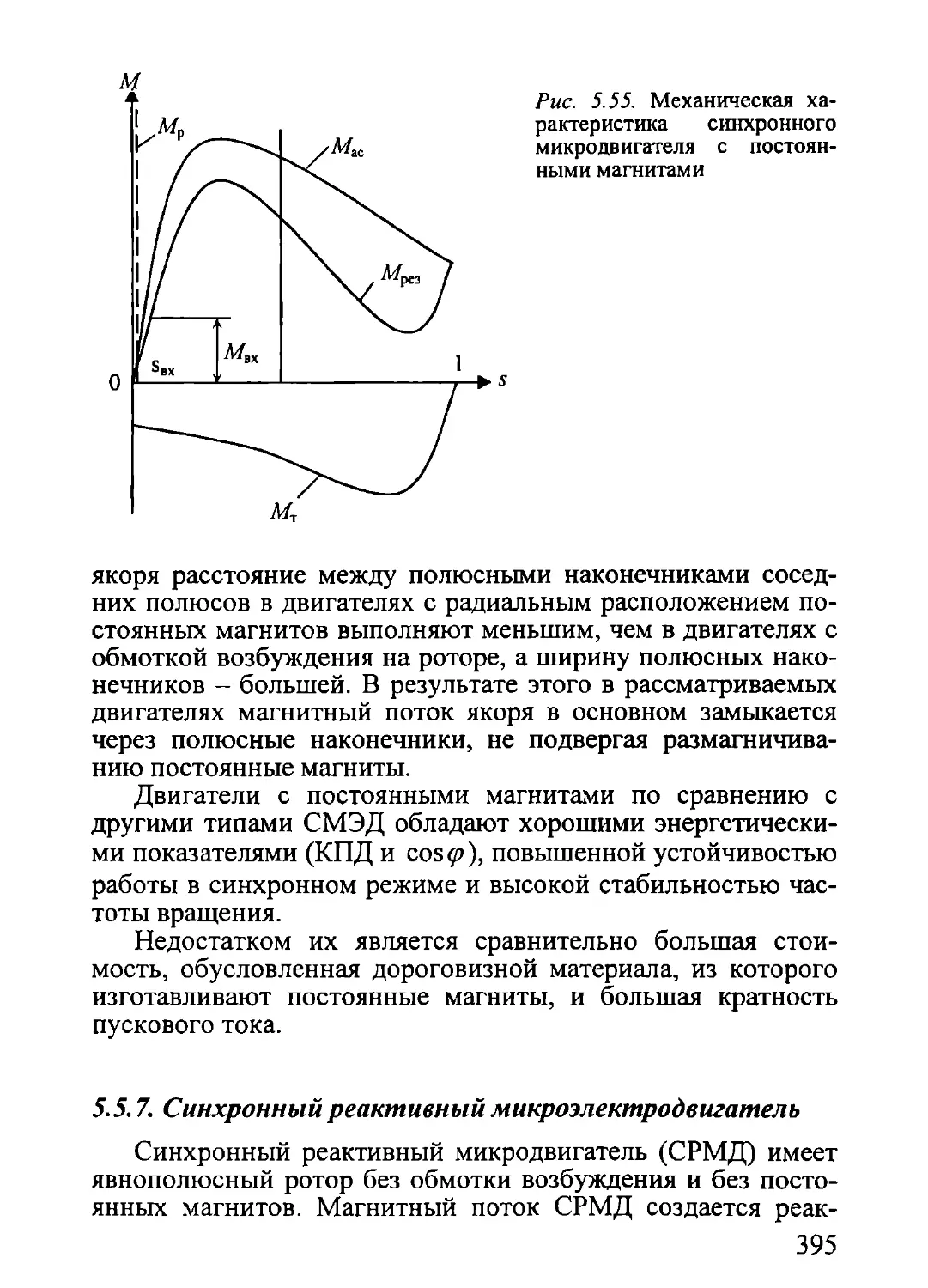
5.5.7. Синхронный реактивный микроэлектродвигатель.......395
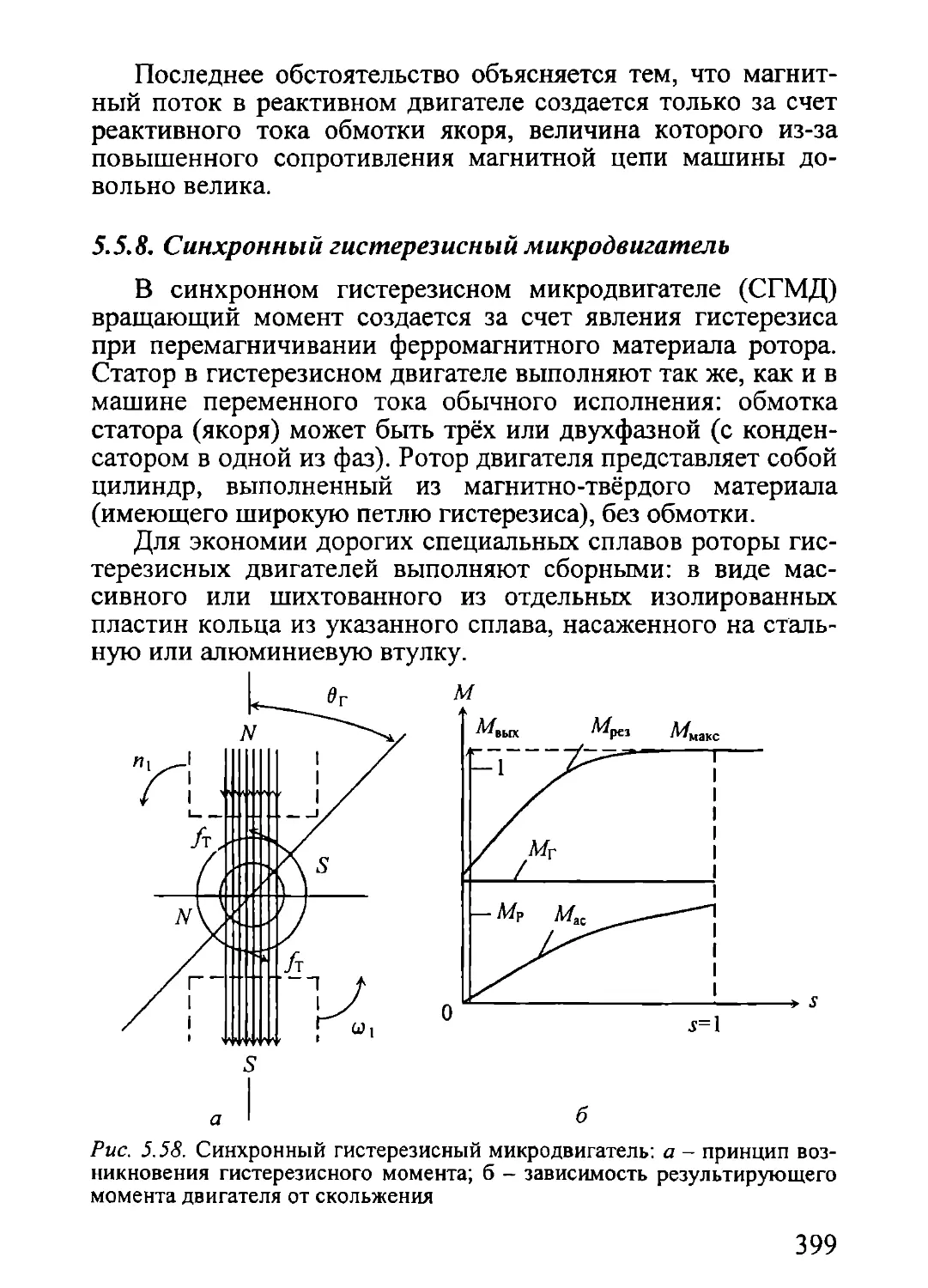
5.5.8. Синхронный гистеризистный микродвигатель..........399
5.5.9. Коллекторные микродвигатели постоянного тока......401
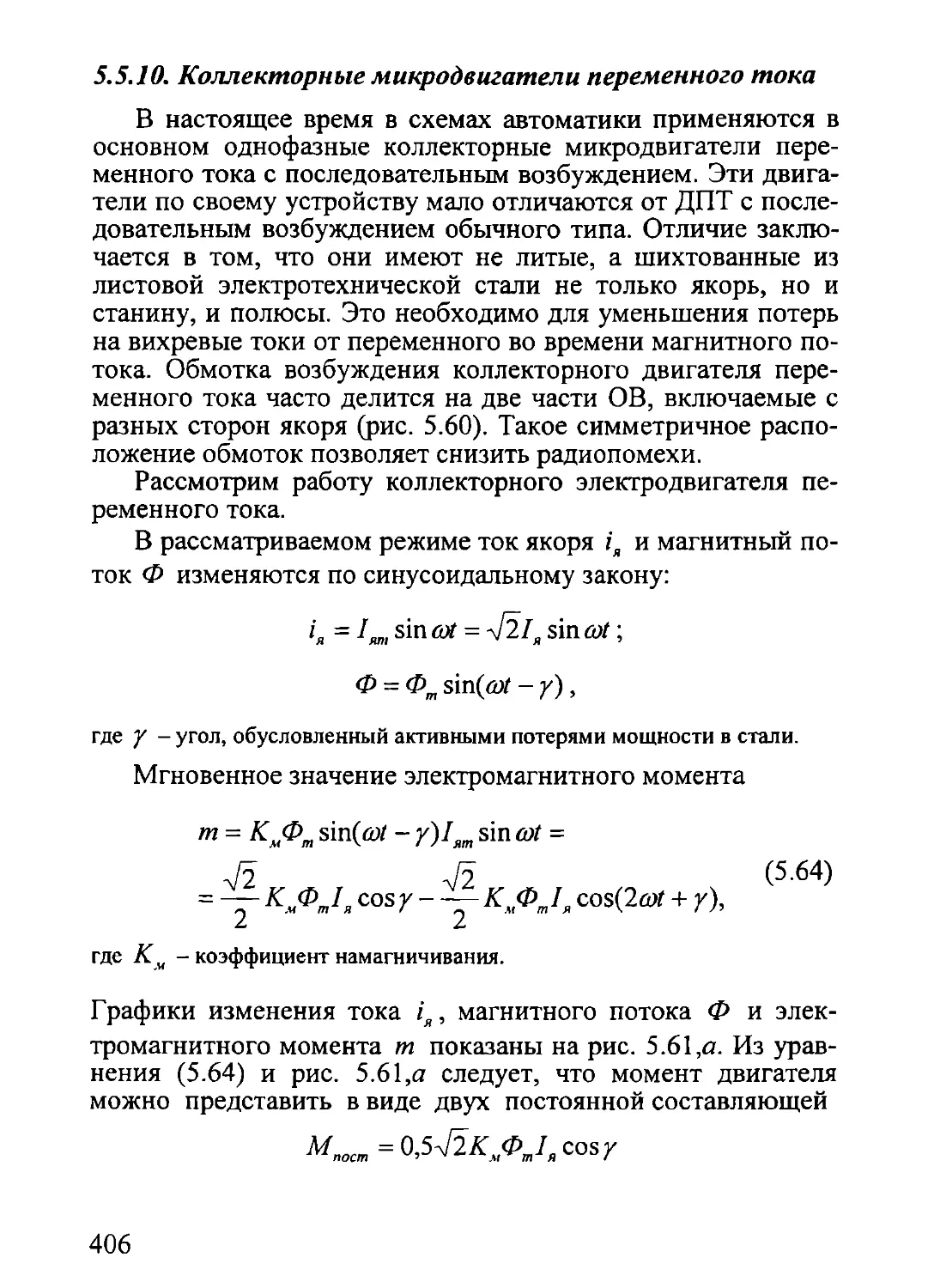
5.5.10. Коллекторные микродвигатели переменного тока.....406
5.5.11. Универсальные коллекторные двигатели.............410
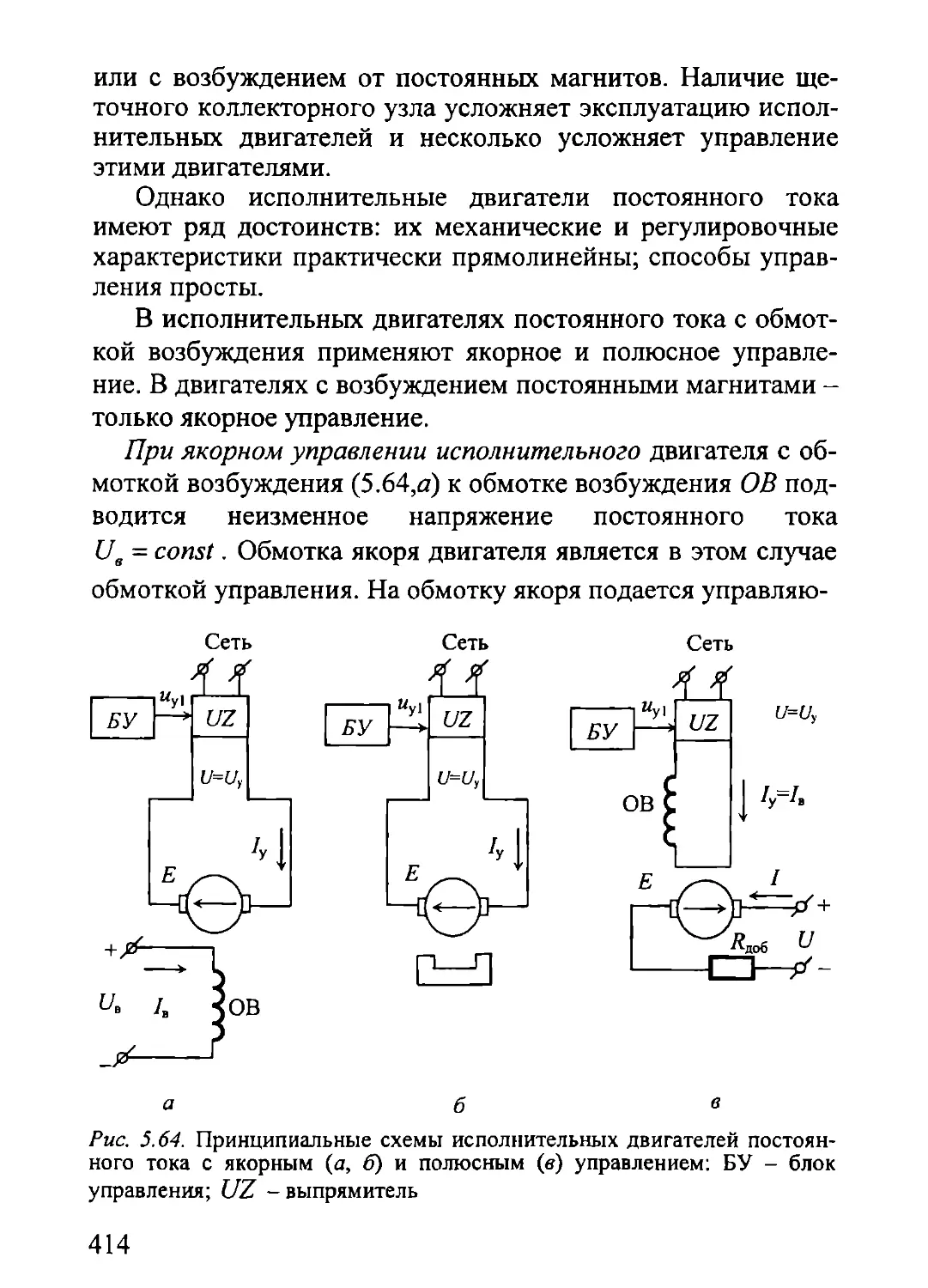
5.6. Управление исполнительными двигателями..................411
7
5.6.1. Требования предъявляемые к исполнительным электро-
двигателям .............................................412
5.6.2. Управление исполнительными двигателями постоянного
тока....................................................413
5.6.3. Управление асинхронными исполнительными двигателя-
ми......................................................422
5.7. Шаговый электродвигатель................................429
5.7.1. Устройство и принцип действия шагового двигателя.430
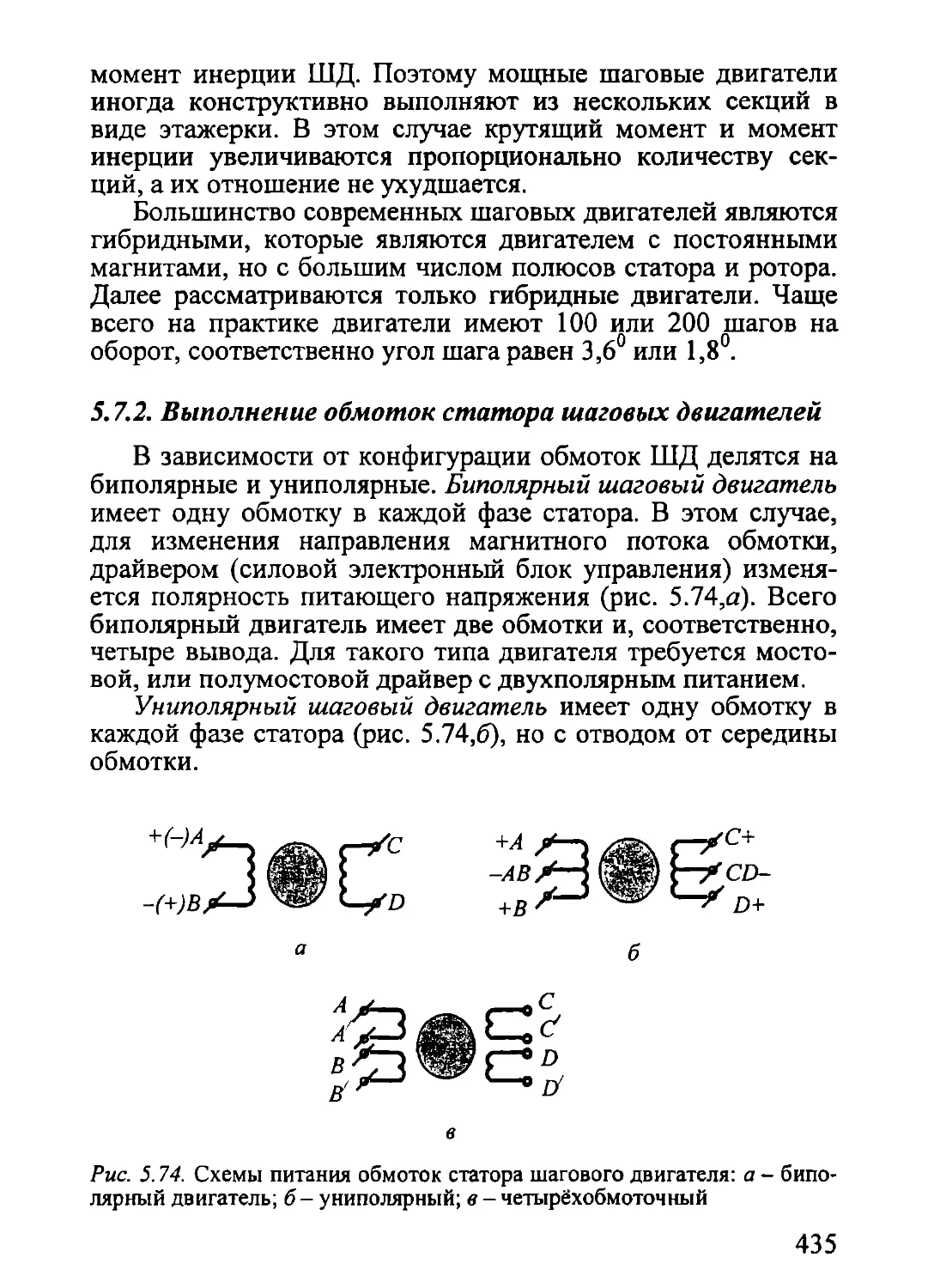
5.7.2. Выполнение обмоток статора шаговых двигателей ...435
5.7.3. Способы управления шаговым двигателем............436
5.7.4. Момент шагового двигателя........................440
5.7.5. Механическая характеристика шагового двигателя...442
Приложения..................................444
Приложение 1 Структура программного обес-
печения для расчета электрических цепей.....444
Рекомендуемая литература....................447
ТОМ ВТОРОЙ
Глава 6
Полупроводниковые приборы...............
Глава 7
Выпрямление переменного тока............
Глава 8
Усилительные каскады....................
Глава 9
Операционные усилители. Цифровые устрой-
ства. Элементы автоматики...............
Глава 10
Основы электроснабжения промышленных
предприятий.............................
8
Глава 11
Электротехнологии и электротехнологиче-
ские установки..................................
Приложения......................................
Приложение 2 Переходные процессы в линей-
ных электрических цепях.........................
Рекомендуемая литература........................
Сведения об авторах.............................
9
Посвящается нашему коллеге
Олегу Гаджиевичу Дружинину
Предисловие
Бурное развитие новейшей техники и всё большее разви-
тие современных методов математического моделирования,
оптимизации и системного анализа повысили требования к
подготовке студентов при изучении основ электроники и
электротехники.
На кафедре электротехники и электроники Российского
химико-технологического университета им. Д.И. Менделеева
О.Г. Дружининым разработано математическое, информаци-
онное и программное обеспечение для лабораторных работ,
контрольных задач и курсовых работ по электротехнике и
электронике.
Программное обеспечение для контрольных задач позво-
ляет студентам полностью их рассчитать и проверить на
ЭВМ. Для работы с комплексными числами предусмотрена
встроенная программа «Калькулятор комплексных чисел», с
помощью которой можно производить все необходимые
арифметические операции с комплексными числами. В со-
став программного обеспечения также включена программа
«Решение линейных алгебраических уравнений для ком-
плексных чисел». Располагая этими программами, студенты
освобождаются от сложных рутинных математических рас-
чётов, сосредотачивая свои усилия на анализе и преобразо-
вании электрических цепей. Для каждой контрольной задачи
приведён пример, где поэтапно в динамике на экране мони-
тора показывается, как необходимо решать задачу данного
типа.
Студент должен ввести в ЭВМ промежуточные и конеч-
ные результаты расчёта. Если допущена ошибка, то ЭВМ
указывает на характер допущенной ошибки, например, «про-
изведено неправильно преобразование параметра», «непра-
вильно применён закон Ома» и т.д. Задача считается решён-
ной, если ошибки в расчётах не превышает 0,5% (от вычис-
10
лений ЭВМ). Накопление ошибок приводит к снижению ито-
говой оценки, которая отражается на экране монитора.
После выполнения 4-х курсовых работ студент может об-
ратиться к соответствующей программе, позволяющей:
- вычислить контурные токи при условии правильно со-
ставленной исходной матрицы. Программа указывает на
ошибки, допущенные при составлении исходной матрицы.
Если ошибки не могут быть исправлены в исходной матрице,
то программой предусмотрен поэтапный контроль за преоб-
разованиями электрических параметров в комплексные числа
и контроль за составлением комплексных сопротивлений;
- определить минимумы и максимумы в амплитудно-
частотной и в фазо-частотной характеристиках. Студенту в
динамике демонстрируется, как составлять уравнения, свя-
зывающие амплитуду и угол сдвига фазы с частотой. После
окончания процедуры составления уравнений студенту пред-
лагается проанализировать формулы и выбрать вид графика
из восьми вариантов. После трёх неудачных попыток задача
считается нерешённой;
- произвести для трёхфазных потребителей контроль ко-
нечных и промежуточных расчётов;
-проверить при построении векторных диаграмм трёх-
фазной цепи правильность расчётов векторных диаграмм.
Если расчёты выполнены правильно, то на экране монитора
изображены векторные диаграммы до включения (или вы-
ключения) участков цепи.
При выполнении лабораторных работ студенты имеют
возможность выполнить до 11-и различных работ, в том чис-
ле: работы по неразветвлённым и разветвлённым однофаз-
ным электрическим сетям, изучить явления резонанса на-
пряжения и токов, исследовать различного вида соединения
в трёхфазных электрических сетях, изучить работу транс-
форматора и электродвигателя, изучить переходные процес-
сы в сетях постоянного тока, исследовать работу различных
схем выпрямителей, изучить работу диодов и триодов в раз-
личных электрических схемах, изучить работу операционных
усилителей, логических и цифровых схем.
При вызове исполнительной программы на экране мони-
тора изображается подробная схема электрической цепи с
встроенными измерительными приборами и источниками
питания. На экране монитора выделено окно, в котором, как
11
на экране осциллографа, изображаются стационарные и пе-
реходные процессы, протекающие в электрических цепях. В
выделенном окне изображены задатчики, с помощью кото-
рых можно изменять параметры электрической цепи. При
изменении положения какого-либо задатчика производится
математическая обработка этого изменения, а результаты
расчётов выводятся на экран в виде цифровой информации, в
виде отклонённой стрелки измерительных приборов или как
изменения векторных диаграмм.
Десятилетний опыт проведения лабораторных работ на
ЭВМ показал ряд преимуществ по сравнению с работами на
стендах, которые заключаются в следующем:
-студенты получают возможность более углубленно за-
ниматься исследованием электрических цепей, так как на фи-
зических стендах более половины времени занимает сборка
электрической цепи с помощью коммутационных шнуров и
поиски потерь в контактах. За время лабораторных работ по-
является возможность изучить и проанализировать значи-
тельно больше ситуаций и режимов, которые могут возник-
нуть в электрических цепях;
- ЭВМ позволяет моделировать и предупреждать возник-
новение предаварийных и аварийных ситуаций. «Короткое
замыкание» или значительное «зашкаливание» приборов
вследствие ошибок, допущенных студентами, не приводит к
выходу из строя физических приборов. О неправильных дей-
ствиях студенты предупреждаются звуковым сигналом и ми-
гающими рамками в изображении приборов;
- в электрическую цепь всегда можно включить «идеаль-
ные» элементы, например, катушку, обладающую нулевым
активным сопротивлением, диод, не имеющий внутреннего
сопротивления, и т.п.;
- при работе на ЭВМ можно в режиме реального времени
изучить, например, изменение векторов напряжений, токов
или мощностей при любом изменении параметров электри-
ческой цепи;
- ЭВМ позволяет «организовать» приборы, измеряющие
какие-либо параметры цепи, например, реактивную мощ-
ность, со5ф, эквивалентную ёмкость или индуктивность в
схемах замещения и т.п.
12
Проведение лабораторных работ по электротехнике и
электронике на ЭВМ является перспективным направлением
и безусловно не исключает физические стенды для приобре-
тения у студентов навыков работы с реальными измеритель-
ными приборами и другими устройствами. Так как в основу
электронных моделей ЭВМ положены реальные элементы
физических стендов, поэтому особенно эффективна парал-
лельная работа ЭВМ и физических стендов. При этом сту-
дент предварительно производит все необходимые действия
на ЭВМ, получает представление об изменениях параметров
электрической цепи, а затем переходит к действиям на физи-
ческом стенде.
Наиболее сложную часть программного обеспечения
представляют программы, связанные с анализом электриче-
ских схем, собранных студентами на ЭВМ из отдельных эле-
ментов. На этом этапе предлагается разместить на экране
монитора набор: источников питания, активно-реактивных
сопротивлений, отдельных электротехнических устройств и
измерительных приборов, а затем соединить эти элементы в
замкнутую электрическую цепь для исследования переход-
ных и стационарных электрических процессов. ЭВМ прове-
ряет правильность подключения всего этого набора к источ-
нику питания, наличие в опытах всех необходимых измери-
тельных приборов и правильность их подсоединения и в слу-
чае обнаружения ошибок указывает на них сигналом.
Лабораторные работы по электронике желательно полно-
стью проводить на ЭВМ, которая позволяет изучать не толь-
ко отдельные электронные приборы, но и интегрированные
аналоговые и цифровые микросхемы.
Использование информационной базы математических
моделей аппаратов химической технологии делает более
предметным курс электротехники. В этом случае на экране
монитора одновременно отображаются как технологические
процессы, протекающие в аппаратах, так и процессы, проте-
кающие в электрических цепях, образуемые электрооборудо-
ванием (приводами насосов, нагревателями и т.п.)
Применение ЭВМ существенно смещает акценты препо-
давания, настраивая студентов на самостоятельное выполне-
ние задания и самооценку результатов расчётов. Преподава-
тель в определённой мере освобождается от контроля про-
межуточных математических расчётов, произведённых сту-
13
центами, сосредотачивая своё внимание на объяснении
принципиальных ошибок, допущенных при анализе или пре-
образовании электрических цепей или в применении законов
электротехники, что особенно важно при больших потоках
студентов. Относительная лёгкость изменения вариантов на-
чальных условий позволяет существенно разнообразить за-
дачи, не допуская их повторения. В главах 1-11 изложены
основные теоретические положения основ электротехники,
микроэлектроники и автоматики, изучив которые можно
предлагать к выполнению расчётных, курсовых и лаборатор-
ных работ.
Авторы выражают большую благодарность академику
РАН П.Д. Саркисову за общее редактирование рукописи, ре-
цензентам за ценные замечания и внимание, проявленное
при подготовке рукописи к изданию, а также сотрудникам
кафедры электротехники и электроники РХТУ им.
Д.И, Менделеева, персонально доценту М.Т. Чиркову.
Л.С. Гордеев написал главы 1,3,4, Приложения.
Д.П. Вент-главы 3,5,7,9,10,11.
Ю.А. Комиссаров - главы 1-9, Приложения.
Г.И. Бабокин - главы 3,5,7,10,11.
Предлагаемое учебное пособие будет полезным для сту-
дентов высших учебных заведений технических и техноло-
гических специальностей.
Авторы надеются, что это издание позволит в дальнейшем
укреплять и развивать отдельные вопросы, связанные с ме-
тодологией обучения студентов основам электротехники,
электроники и автоматики в инновационном направлении
обучения.
Авторы также с благодарностью примут все замечания и
пожелания читателей, которые просим направлять по адресу:
125047, г. Москва, Миусская пл. 9, РХТУ им. Д. И. Менде-
леева.
Авторы.
14
Сокращения и обозначения
АВ — автоматический выключатель;
АВМ — аналоговая вычислительная машина;
АД — асинхронный двигатель;
АЦП — аналого-цифровой преобразователь;
БИС - большие интегральные схемы;
ВАХ — вольт-амперная характеристика;
ВбАХ — вебер-амперная характеристика;
ДПТ — двигатель постоянного тока;
ДПТ НВ — двигатель постоянного тока независимого воз-
буждения;
ДПТ 11В — двигатель постоянного тока последовательного
возбуждения;
ДПТ СВ — двигатель постоянного тока смешанного возбу-
ждения;
ДПТ ПМ - двигатель постоянного тока с постоянными маг-
нитами;
ИО — исполнительный орган;
ИП — источник питания;
ИС — интегральная схема;
ИТП — индукционные тигельные печи;
КПД — коэффициент полезного действия;
мдп — транзистор (металл-диэлектрик-полупроводник);
МДС — магнито-движущая сила;
МОП — транзистор (металл-оксид-полупроводник);
МЭП — межэлектродное пространство;
15
НЭ — нагревательный элемент;
ОБ — общая база;
ОЗУ — оперативное запоминающее устройство;
ОК — общий коллектор;
ОУ — операционный усилитель;
ОЭ — общий эмиттер;
ПЗУ — постоянное запоминающее устройство;
СГМД — синхронный гистерезисный микродвигатель;
СД — синхронный двигатель;
СРМД — синхронный реактивный двигатель;
СМЭД — синхронный микродвигатель;
ТЭН — трубчатый электронагреватель;
У АД — универсальный асинхронный двигатель;
УЭ — управляющий электрод;
ЦДЛ — цифро-аналоговый преобразователь;
ШД - шаговый двигатель;
ЭДС — электродвижущая сила;
ЭВМ — электронно-вычислительная машина;
ЭИТ — электронно-ионная технология;
ЭЛУ — электронно-лучевые установки;
ЭПС — электрические печи сопротивления;
ЭХО — электрохимическая обработка;
ЭЭО — электроэрозионная обработка.
16
Глава 1
Электрические цепи постоянного тока
1.1. Введение
Исследование электрических явлений и их практических
приложений начиналось на рубеже XVIII - XIX вв с изуче-
ния свойств не изменяющегося во времени - постоянного
тока. Это было обусловлено изобретением источников элек-
трической энергии постоянного тока - сначала гальваниче-
ских элементов (А. Вольта, 1745 - 1827), позднее аккумуля-
торов, а также первыми успехами применения электричества
для освещения (П.Н. Яблочков, 1847 - 1894), электролиза и
гальванопластики (Б.С. Якоби, 1801 - 1874).
Экспериментальные исследования свойств постоянного
тока позволило выявить и обосновать ряд закономерностей и
понятий (А.М. Ампер, 1775 - 1836; Г.С. Ом, 1787 - 1854;
Ш.О. Кулон, 1736 - 1806 и др.). В дальнейшем исследования
(М. Фарадей, 1791 - 1867; Э.Х. Ленц, 1804 - 1865; Д. Ген-
ри1797 - 1878; В. Сименс, 1816 - 1892; Д.П. Джоуль, 1818 -
1889; В.Э. Вебер, 1804 - 1891; Д.К. Максвелл, 1831 - 1879;
Г.Р. Герц, 1857 - 1894 и др.) показали, что большинство за-
кономерностей, первоначально полученных при анализе це-
пей постоянного тока, являются фундаментальными закона-
ми, заложившими основы электротехники.
Электротехническое устройство (аккумулятор, линия
передачи энергии, амперметр, реостат, лампа накаливания)
предназначено для выработки, распределения, контроля,
преобразования и использования электрической энергии. По-
стоянный ток применяется при электрохимическом получе-
нии алюминия, на городском и железнодорожном электро-
транспорте, в электронике, медицине и других областях нау-
ки и техники.
С особой остротой стоит проблема создания экономичных
способов передачи электрической энергии на дальние и
сверхдальние расстояния. Применение высоковольтных ли-
ний передачи постоянного тока на большие расстояния явля-
ется экономически наиболее целесообразным.
Разрабатываются новые источники электрической энергии
постоянного тока - магнитогидродинамические генераторы.
17
Их освоение позволит существенно повысить КПД электри-
ческих станций.
Быстрыми темпами развиваются и совершенствуются раз-
личные типы возобновляемых источников электрической
энергии постоянного тока. К возобновляемым источникам
энергии относятся энергия солнца, ветра, приливов и отливов
и других природных источников. Так, например, источники,
преобразующие солнечную энергию, служат основными ис-
точниками энергии космических аппаратов в автономном
полете, для привода электромобилей, отопления жилых по-
мещений и т.д.
1.2. Электрическая цепь и ее топология
Электрической цепью называют совокупность устройств и
объектов, образующих путь для электрического тока, элек-
тромагнитные процессы в которых могут быть описаны с
помощью математических зависимостей, электродвижущей
силы (ЭДС), тока и напряжения. Понятия об ЭДС, токе и на-
пряжении рассмотрены в курсе физики.
Электрическая цепь включает: источник электрической
энергии; приемник электрической энергии; устройства, свя-
зывающие источник и приемник; вспомогательные устройст-
ва.
Источники электрической энергии преобразуют химиче-
скую, механическую, тепловую, световую и другие виды
энергии в электрическую. В процессе преобразования не-
электрической энергии в электрическую на зажимах источ-
ников за счет действия выше указанных видов энергии соз-
дается ЭДС. В качестве источников, преобразующих указан-
ные виды энергии в электрическую, могут быть аккумулятор,
генератор постоянного тока, термопара и фотоэлемент.
В приемнике электрической энергии происходят необра-
тимые преобразования электрической энергии в другие виды
энергии. Например, в электрической машине, работающей в
режиме двигателя, электрическая энергия превращается в
механическую; в электрической печи или резисторе - тепло-
вую; в лампе накаливания - световую. Ряд электрических
устройств в определенных условиях может работать как ис-
точник электрической энергии или генератор и как потреби-
тель ее. Например, аккумулятор работает как источник энер-
18
гии, когда отдает ее приемнику (в сеть) и как приемник, ко-
гда при зарядке воспринимает электрическую энергию, пре-
вращая ее в химическую.
В качестве устройств, связывающих источник электри-
ческой энергии и приемник, применяются провода, обладаю-
щие минимальным сопротивлением протеканию тока. Про-
вода обеспечивают передачу электрической энергии от ис-
точника к приемнику.
К вспомогательным устройствам электрической цепи
относятся: выключатели, коммутаторы, изменяющие режим
работы цепи; предохранители, обеспечивающие предохране-
ние элементов цепи от токов короткого замыкания; измери-
тельные приборы, служащие для измерения параметров цепи
- тока, напряжения.
При анализе и расчете электрических цепей элементы ре-
альной цепи заменяются графически условными обозначе-
ниями. Графическое изображение электрической цепи в виде
условных обозначений называется схемой электрической це-
пи.
На рис. 1.1а представлена упрощенная физическая электри-
ческая цепь фонарика. Она включает аккумулятор АК, лампу
накаливания Л, выключатель В и провода П, соединяющие
элементы цепи. На рис. 1.16 и 1.1 в представлены электриче-
ские схемы указанной цепи, состоящие из условных обозна-
чений. На этих схемах представлены аккумулятор АК - ис-
точник энергии и резистор R - лампа накаливания (Л).
Электрическая цепь и соответствующая ей электрическая
схема может быть просто неразветвленной (рис. 1.1), а может
быть сложной разветвленной цепью, т.е. включать несколько
источников и приемников, соединенных проводами
(рис. 1.2).
а
б
в
Рис. 1.1. Физическая электрическая цепь (а) ее электрические схемы (б),
(в) (обозначения приведены в тексте)
19
Рис. 1.2. Схема разветвленной электрической цепи (обозначения в тексте)
На схеме в качестве источников электрической энергии
представлены источники ЭДС Е\ и Е1 (например, гальвани-
ческие элементы), а в качестве приемников резисторы R1 -
R5 (например, нагревательные элементы - тэны).
При анализе электрических цепей применяют основные то-
пологические понятия: ветвь; узел; контур; двухполюсник и
четырехполюсник.
Ветвь схемы - участок электрической цепи, по элементам
которой протекает один и тот же ток. Ветвь может состоять
из одного или нескольких элементов, в последнем случае
элементы соединены последовательно. На рис. 1.2 представ-
лена разветвленная схема электрической цепи с пятью вет-
вями, по которым протекают разные токи - 1$).
Узел схемы - место соединения трех и более ветвей. Раз-
личают понятия геометрического и потенциального узлов.
На схеме рис. 1.2 имеется четыре геометрических и три по-
тенциальных узла. Геометрические узлы 3 и 3', имеющие
одинаковые потенциалы, могут быть объединены в один по-
тенциальный узел.
Контур схемы - замкнутый путь, проходящий через не-
сколько ветвей и узлов разветвленной электрической цепи.
Например, на схеме рис. 1.2 контур / включает элементы Е1-
7? 1-(точка 1)-/?2-Е2-(точка 3).
Двухполюсник схемы - часть электрической цепи с двумя
выделенными полюсами-зажимами, с помощью которых она
соединяется с другой частью схемы.
На рис. 1.2 можно выделить, например, двухполюсник с
элементами, находящимися слева от зажимов а и Ь, т.е. ЭДС
Е\ и резистор 7?1. Двухполюсник обозначается прямо-
угольником: А - активный или П - пассивный. Активный
20
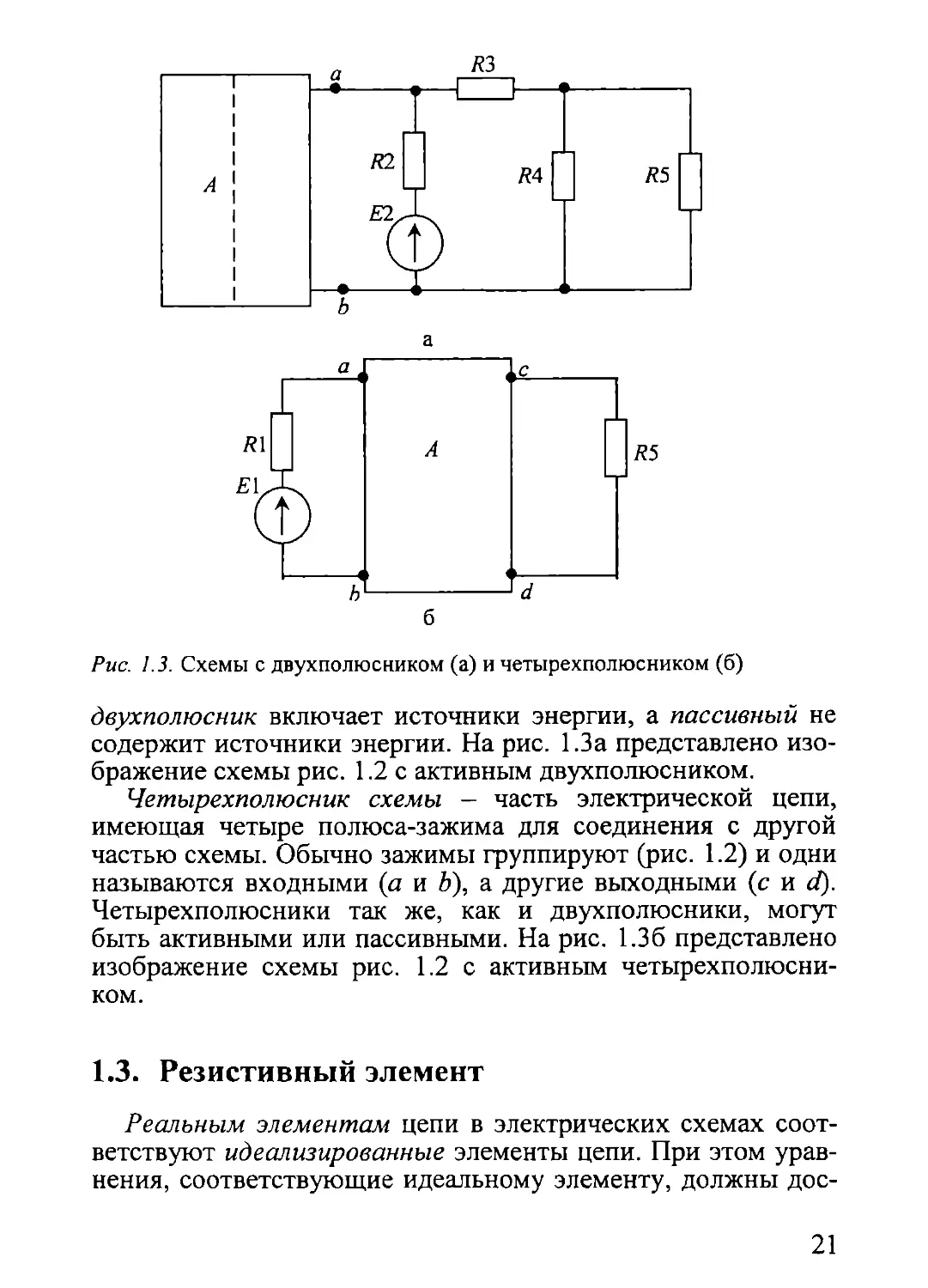
Рис. 1.3. Схемы с двухполюсником (а) и четырехполюсником (б)
двухполюсник включает источники энергии, а пассивный не
содержит источники энергии. На рис. 1.3а представлено изо-
бражение схемы рис. 1.2 с активным двухполюсником.
Четырехполюсник схемы — часть электрической цепи,
имеющая четыре полюса-зажима для соединения с другой
частью схемы. Обычно зажимы группируют (рис. 1.2) и одни
называются входными (а и Ь), а другие выходными (с и d).
Четырехполюсники так же, как и двухполюсники, могут
быть активными или пассивными. На рис. 1.36 представлено
изображение схемы рис. 1.2 с активным четырехполюсни-
ком.
1.3. Резистивный элемент
Реальным элементам цепи в электрических схемах соот-
ветствуют идеализированные элементы цепи. При этом урав-
нения, соответствующие идеальному элементу, должны дос-
21
таточно точно отражать физические процессы, происходя-
щие в реальном элементе.
В цепях постоянного тока основным пассивным двухпо-
люсным элементом является резистивный элемент или со-
противление.
Резистивный элемент или сопротивление - это идеализи-
рованный элемент цепи, заменяющий реальное изделие (ре-
зистор), в котором происходит необратимый процесс преоб-
разования электрической энергии в тепловую. Резистивный
элемент характеризуется зависимостью напряжения между
его полюсами от тока протекающего через него U =
называемой вольт-амперной характеристикой (ВАХ). На
рис. 1.4 представлены ВАХ двух резистивных элементов: ли-
нейного (рис. 1.4.а) и нелинейного (рис. 1.4.в).
Величина сопротивления линейного резистивного элемен-
та R определяется отношением напряжения U\ к току 7/, со-
ответствующих точке 1 на рис. 1,4а:
(1.1)
А т!
где Шу, т, - масштабы координат напряжения и тока; ft - угол наклона
прямой 1 (рис. 1.4а).
Очевидно, что сопротивление линейного резистивного
элемента во всех точках ВАХ одинаково.
На рис. 1.46 представлена зависимость сопротивления ли-
нейного резистивного элемента от напряжения на нем
R = f(u). На рис. 1.4в изображена схема с нелинейным рези-
стивным элементом и его ВАХ. Для нелинейного резистивно-
го элемента его сопротивление зависит от напряжения на
этом элементе (рис. 1.4г). Для характеристики нелинейного
сопротивления применяются два параметра: статическое и
динамическое сопротивления.
Статическим сопротивлением нелинейного элемента Rcm
в заданной точке 1 (рис. 1.4в) его характеристики называют
отношение напряжения на элементе к току в нем. Статиче-
ское сопротивление определяется по формуле (1.1), оно про-
порционально тангенсу угла наклона /3 между прямой, про-
веденной из начала координат через рассматриваемую точку
1 ВАХ и осью тока (рис. 1.4в):
22
R.m=^s/3.
m!
Динамическим сопротивлением нелинейного элемента
RdUH в заданной точке 1 его характеристики называют отно-
шение бесконечно малого приращения напряжения к соот-
ветствующему приращению тока. Динамическое сопротив-
ление определяется как тангенс угла наклона а между каса-
тельной в точке 1 ВАХ и осью тока (рис. 1.4в).
„ dU т,,
Rdm=-7T = —tga. (1.2)
di т,
Статическое и динамическое сопротивления нелинейного
элемента являются функциями тока и напряжения.
На рис. 1.4г представлена зависимость статистического и
динамического сопротивления, имеющего ВАХ, изображен-
ную на рис. 1.4в.
Рис. 1.4. Вольт-амперные характеристики линейного(а) и нелинейного(в)
резистивных элементов, а также зависимости для них R = f(u) (б, г)
23
Ниже рассматриваются электрические цепи с линейными
резистивными элементами.
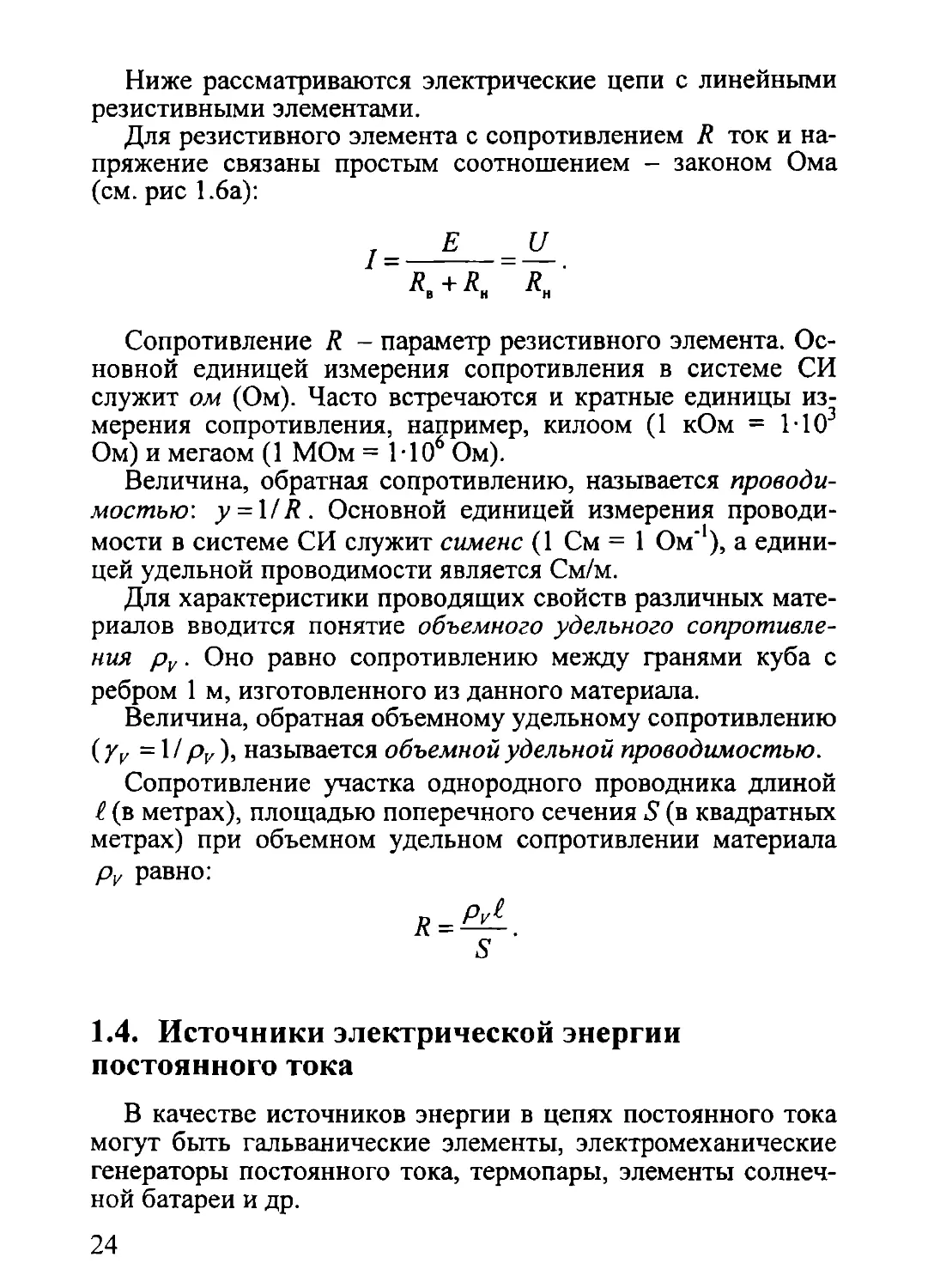
Для резистивного элемента с сопротивлением R ток и на-
пряжение связаны простым соотношением - законом Ома
(см. рис 1.6а):
/?в
Сопротивление R - параметр резистивного элемента. Ос-
новной единицей измерения сопротивления в системе СИ
служит ом (Ом). Часто встречаются и кратные единицы из-
мерения сопротивления, например, килоом (1 кОм = Г103
Ом) и мегаом (1 МОм = 1 • 106 Ом).
Величина, обратная сопротивлению, называется проводи-
мостью'. y = \!R. Основной единицей измерения проводи-
мости в системе СИ служит сименс (1 См = 1 Ом'1), а едини-
цей удельной проводимости является См/м.
Для характеристики проводящих свойств различных мате-
риалов вводится понятие объемного удельного сопротивле-
ния pv. Оно равно сопротивлению между гранями куба с
ребром 1 м, изготовленного из данного материала.
Величина, обратная объемному удельному сопротивлению
(yr = М pv), называется объемной удельной проводимостью.
Сопротивление участка однородного проводника длиной
I (в метрах), площадью поперечного сечения 5 (в квадратных
метрах) при объемном удельном сопротивлении материала
pv равно:
7? = ^.
5
1.4. Источники электрической энергии
постоянного тока
В качестве источников энергии в цепях постоянного тока
могут быть гальванические элементы, электромеханические
генераторы постоянного тока, термопары, элементы солнеч-
ной батареи и др.
24
Рассмотрим основные процессы, происходящие в гальва-
ническом элементе, одном из распространенных источников
электрической энергии постоянного тока. В простейшем
случае гальванический элемент (рис. 1.5а) представляет со-
бой две пластины (из меди и цинка), помещенные в раствор
электролита - серной кислоты. В водном растворе серная ки-
слота диссоциирует на ионы: H2SO4 -» 2Н+ + SO4 .
Вследствие химических процессов положительные ионы
цинка Zn++ переходят в раствор серной кислоты, оставляя на
цинковой пластине избыток отрицательных свободных заря-
дов, т.е. цинковая пластина заряжается отрицательно. Одно-
временно в растворе серной кислоты тяжелые и малопод-
вижные положительные ионы цинка Zn++ оттесняют легкие и
подвижные положительные ионы водорода H4- к медной пла-
стине, на поверхности которой происходит восстановление
нейтральных атомов водорода. При этом медная пластина
теряет свободные отрицательные заряды, т.е. заряжается по-
ложительно. Между разноименно заряженными пластинами
возникает однородное электрическое поле с напряженно-
стью е . В/м.
Если к выводам гальванического элемента подключить
приемник (например, резистор), то в замкнутой электриче-
ской цепи возникнет ток. Заряд каждой из пластин умень-
шится и появится направленное движение ионов в растворе
электролита. Направленное противоположное движение ио-
нов сопровождается их взаимными столкновениями, что соз-
дает внутреннее сопротивление гальванического элемента
постоянному току.
Таким образом, гальванический элемент (рис. 1.5а), а изо-
бражение на электрических схемах - рис. 1.56, можно пред-
ставить в виде схемы замещения (1.5в), состоящей из после-
довательно включенных источника ЭДС Е и резистивного
элемента с сопротивлением Re, равным внутреннему сопро-
тивлению гальванического элемента. Стрелка ЭДС указывает
направление движения положительных зарядов
внутри источника под действием электрического поля с на-
пряженностью £.
Схема замещения электрической цепи - это математиче-
ская модель реального устройства, учитывающая происхо-
дящие в нем физические процессы. Математическая модель
25
замещения (в) (пояснения в тексте)
строится из идеальных элементов, соединенных таким обра-
зом, что уравнения схемы замещения соответствуют матема-
тическому описанию реальных элементов. Схемы замещения
отображают свойства электрической цепи при определенных
условиях. Одной и той же физической электрической цепи
для разных условий могут соответствовать несколько раз-
личных схем замещения. В схемах замещения электрических
цепей используют универсальные обозначения источников и
приемников электрической энергии независимо от вида энер-
гии, преобразуемой в электрическую (в источниках), и от ви-
да энергии получаемой из электрической энергии (в прием-
никах). Следовательно, вместо многочисленных условных
графических обозначений источников и приемников элек-
трической энергии в схемах замещения применяют единые
обозначения источников ЭДС и резистивных элементов
(рис. 1.5в).
Рассмотрим процессы в простейшей электрической цепи,
состоящей из источника электрической энергии, подключен-
ного к резистору.
Заменим источник электрической энергии схемой заме-
щения (рис. 1.5в), а резистор - резистивным элементом с по-
стоянным сопротивлением RH. Схема замещения рассматри-
ваемой электрической цепи представлена на рис. 1.6а, где
буквами а и Ь обозначены выводы источника электрической
энергии.
26
Свойства источника электрической энергии как элемента
схемы замещения характеризуются внешней характеристи-
кой - зависимостью напряжения между его выводами от тока
I источника (Uab = f (/)).
Если ЭДС и внутреннее сопротивление источника элек-
трической энергии являются постоянными величинами (ли-
нейный источник), то его внешняя характеристика определя-
ется выражением
Uab=<pA-<pB=E-ReI, (1.3)
которому соответствует прямая 1 на рис. 1.7а,
где (рл и фв - потенциалы электрического поля в сечениях а и Ь;
Е = £od - ЭДС; Ео - напряженность, при которой накопление зарядов
на пластинах прекращается.
Уменьшение напряжения между выводами а и b источни-
ка электрической энергии (рис. 1.6а) при увеличении тока
объясняется увеличением падения напряжения на внутрен-
нем сопротивлении RB источника (увеличением напряжения
на резистивном элементе с сопротивлением RB).
Во многих случаях внутреннее сопротивление RB источ-
ника электрической энергии мало по сравнению с сопротив-
лением RH и справедливо неравенство RBI <Е. В этих слу-
чаях напряжение между выводами источника электрической
энергии практически не зависит от тока и является постоян-
ным (Uab ~Е = const).
а б
Рис. 1.6. Схема замещения источников электрической энергии: а - источник
ЭДС; б - источник тока (пояснения в тексте)
27
t/д
->
I
Рис. 1.7. Зависимость напряжения от тока (пояснения в тексте)
Источник электрической энергии с малым внутренним со-
противлением можно заменить идеализированной моделью,
для которой RB = 0. Такой идеализированный источник
электрической энергии называется идеальным источником
ЭДС с одним параметром Е. Напряжение между выводами
идеального источника ЭДС не зависит от тока. Внешняя ха-
рактеристика идеального источника ЭДС определяется вы-
ражением
Uab = <Ра - <Рв = Е = COnSt
которому соответствует прямая 2 на рис. 1,7а.
На рис. 1.76 изображен идеальный источник ЭДС электри-
ческих цепей.
В цепях с полупроводниковыми приборами, внутреннее
сопротивление RB источника электрической энергии во мно-
го раз больше сопротивления нагрузки RH (внешней по от-
ношению к источнику части цепи). При выполнении условия
RB » Ен в таких цепях ток источника электрической энер-
гии
т.е. равен току /к короткого замыкания источника. Источник
электрической энергии с большим внутренним сопротивле-
нием можно заменить идеализированной моделью, у которой
28
RB —> oo и E и для которой справедливо равенство
E/RB=J. Такой идеализированный источник электриче-
ской энергии называется идеальным источником тока с од-
ним параметром J = 1К. Ток источника тока не зависит от
сопротивления RH внешней цепи. При изменении сопротив-
ления внешней цепи изменяется напряжение между вывода-
ми источника UаЬ = RHJ.
На рис. 1,7а построена прямая 3 - внешняя характеристика
идеального источника тока. На рис.1.7в представлено изо-
бражение идеального источника тока на схемах электриче-
ских цепей.
От схемы замещения реального источника энергии, пред-
ставленной в виде последовательного соединения источника
ЭДС Е и резистивного элемента с сопротивлением RB (рис.
1.6а), можно перейти к схеме замещения с идеальным источ-
ником тока. Для этого разделим все слагаемые выражения
(1.3) на внутреннее сопротивление источника энергии RB и
получим:
или
^jJ^ + 1^1,+1. (1.4)
^В Кв
Из уравнения (1.4) следует что, ток источника тока J
складывается из тока I в резистивном элементе 7?н (во
внешнем участке цепи) и тока 1В в резистивном элементе с
сопротивлением RB, включенном между выводами а и b ис-
точника энергии. Соответствующая эквивалентная схема за-
мещения электрической цепи показана на рис. 1.66.
Представление реальных источников электрической энер-
гии в виде двух схем замещения (рис. 1.6а,б) является экви-
валентным представлением относительно внешнего участка
цепи: в обоих случаях одинаковы напряжения между выво-
дами источника и токи во внешнем участке цепи.
Однако энергетические соотношения в двух схемах заме-
щения реальных источников энергии не одинаковы. Не рав-
29
ны между собой мощности, развиваемые источником ЭДС
(рис. 1.6а) - EI и источником тока (рис. 1.66) - UJ, а также
мощности потерь, определяемые по закону Джоуля-Ленца:
RBI2*RHI2
В В В
1.5. Первый и второй законы Кирхгофа
Первый и второй законы Кирхгофа, называемые иногда
правилами Кирхгофа, - это основные законы электрических
цепей.
Первый закон Кирхгофа: алгебраическая сумма токов в
любом узле электрической цепи равна нулю:
Z(±4) = 0. (1.5)
4=1
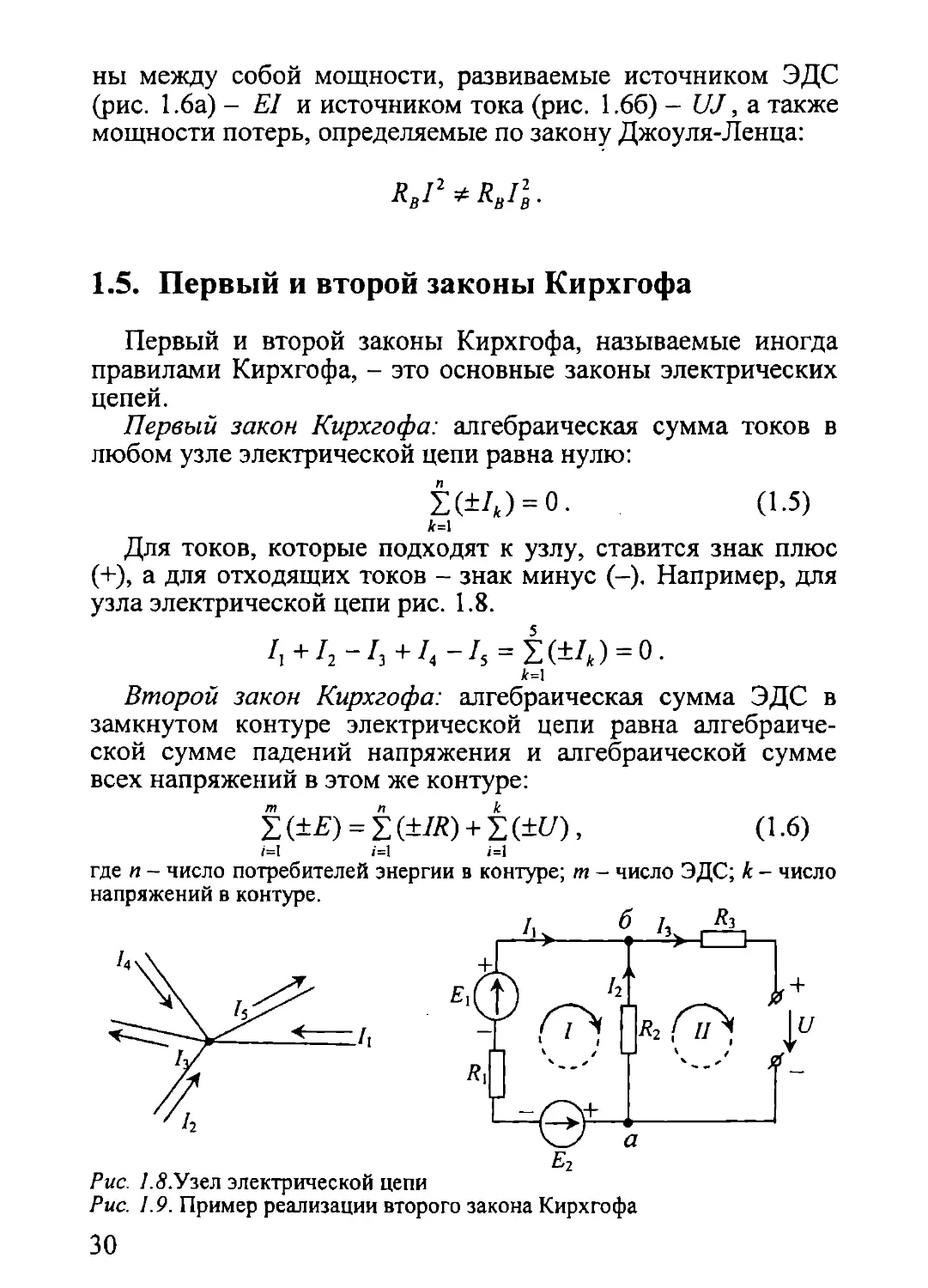
Для токов, которые подходят к узлу, ставится знак плюс
(+), а для отходящих токов - знак минус (-). Например, для
узла электрической цепи рис. 1.8.
5
z, + z2-/3+z4-z5 = E(±A) = 0-
4=1
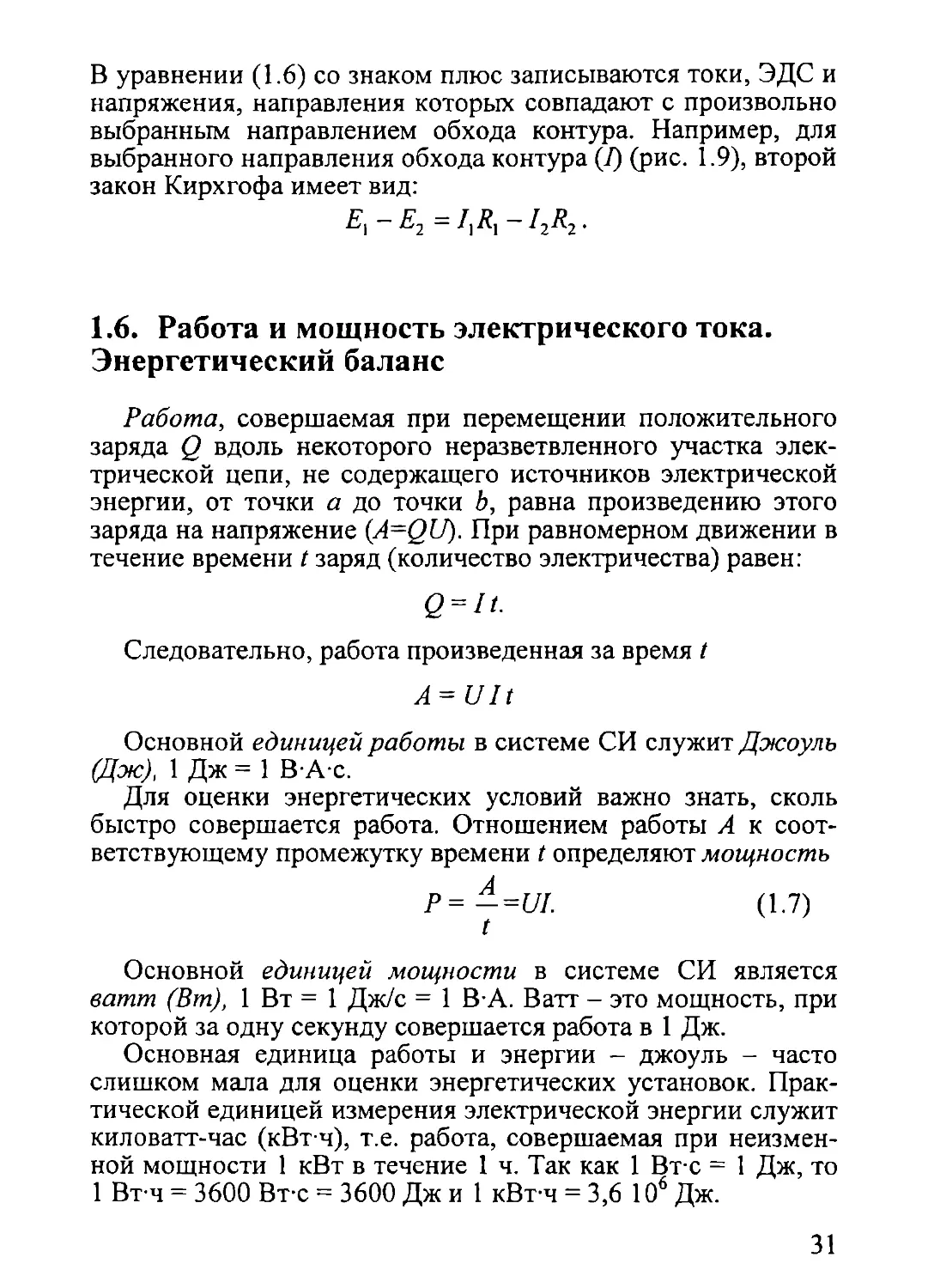
Второй закон Кирхгофа: алгебраическая сумма ЭДС в
замкнутом контуре электрической цепи равна алгебраиче-
ской сумме падений напряжения и алгебраической сумме
всех напряжений в этом же контуре:
т п к
£(±£) = £(±/Я) + 1(±С7), (1.6)
<=i i=i /=1
где п - число потребителей энергии в контуре; т - число ЭДС; к - число
напряжений в контуре.
Рис. 1.8.Узел электрической цепи
Рис. 1.9. Пример реализации второго закона Кирхгофа
30
В уравнении (1.6) со знаком плюс записываются токи, ЭДС и
напряжения, направления которых совпадают с произвольно
выбранным направлением обхода контура. Например, для
выбранного направления обхода контура (7) (рис. 1.9), второй
закон Кирхгофа имеет вид:
Ej - ^ = 7,7?] - I2R2.
1.6. Работа и мощность электрического тока.
Энергетический баланс
Работа, совершаемая при перемещении положительного
заряда Q вдоль некоторого неразветвленного участка элек-
трической цепи, не содержащего источников электрической
энергии, от точки а до точки Ъ, равна произведению этого
заряда на напряжение {A-QU). При равномерном движении в
течение времени t заряд (количество электричества) равен:
Q-It.
Следовательно, работа произведенная за время t
A = UIt
Основной единицей работы в системе СИ служит Джоуль
(Дж), 1 Дж = 1 ВАс.
Для оценки энергетических условий важно знать, сколь
быстро совершается работа. Отношением работы А к соот-
ветствующему промежутку времени t определяют мощность
P=-=UI. (1.7)
t
Основной единицей мощности в системе СИ является
ватт (Вт), 1 Вт = 1 Дж/с = 1 ВА. Ватт - это мощность, при
которой за одну секунду совершается работа в 1 Дж.
Основная единица работы и энергии - джоуль - часто
слишком мала для оценки энергетических установок. Прак-
тической единицей измерения электрической энергии служит
киловатт-час (кВт ч), т.е. работа, совершаемая при неизмен-
ной мощности 1 кВт в течение 1 ч. Так как 1 Втс = 1 Дж, то
1 Вт-ч = 3600 Вт-с = 3600 Дж и 1 кВт-ч = 3,6 106 Дж.
31
Рис. 1.10. Схема передачи электроэнергии от источника к потребителю
Выражение мощности в цепи постоянного тока (1.7) мож-
но преобразовать, заменив в нем на основании закона Ома
напряжение UH = RI, или I = U / R. Получается три выраже-
ния мощности для электрической цепи постоянного тока с
сопротивлением RH (рис. 1.6а):
II2
P-UHI = RHI2 =^. (1.8)
Очень большое практическое значение имеет то обстоя-
тельство, что одну и ту же мощность можно получить при
низком и высоком напряжениях.
На рис. 1.10 представлена схема передачи электрической
энергии от источника ЭДС к приемнику RH . Баланс мощно-
сти для этой схемы запишется в виде:
El = I2Rjj+Uн I, (1.9)
где El = UI - мощность источника ЭДС; I2Rn - мощность потерь в
проводах линии передачи с сопротивлением RJt (на нагревание); UHI -
U2 2
мощность приемника. UН1 = —— = 1RH .
RH
Если, не изменяя мощности приемника UHI = const, уве-
личить в 2 раза напряжение Uн на приемнике, что потребует
увеличения его сопротивление RH в 4 раза. Выбрав источ-
32
ник с большей ЭДС ток в цепи должен быть уменьшен в 2
раза до значения Г = I/2 при условии UHI = const. Это вы-
зовет уменьшение мощности потерь в проводах линии пере-
дачи в 4 раза:
Следовательно, для уменьшения потерь энергии в линиях
передачи желательно передавать электроэнергию при воз-
можно более высоком напряжении.
1.7. Преобразование участков электрической
цепи
При анализе электрической цепи часто приходится ее уп-
рощать, заменяя отдельные участки цепи их эквивалентным
соединением. Такая замена называется преобразованием
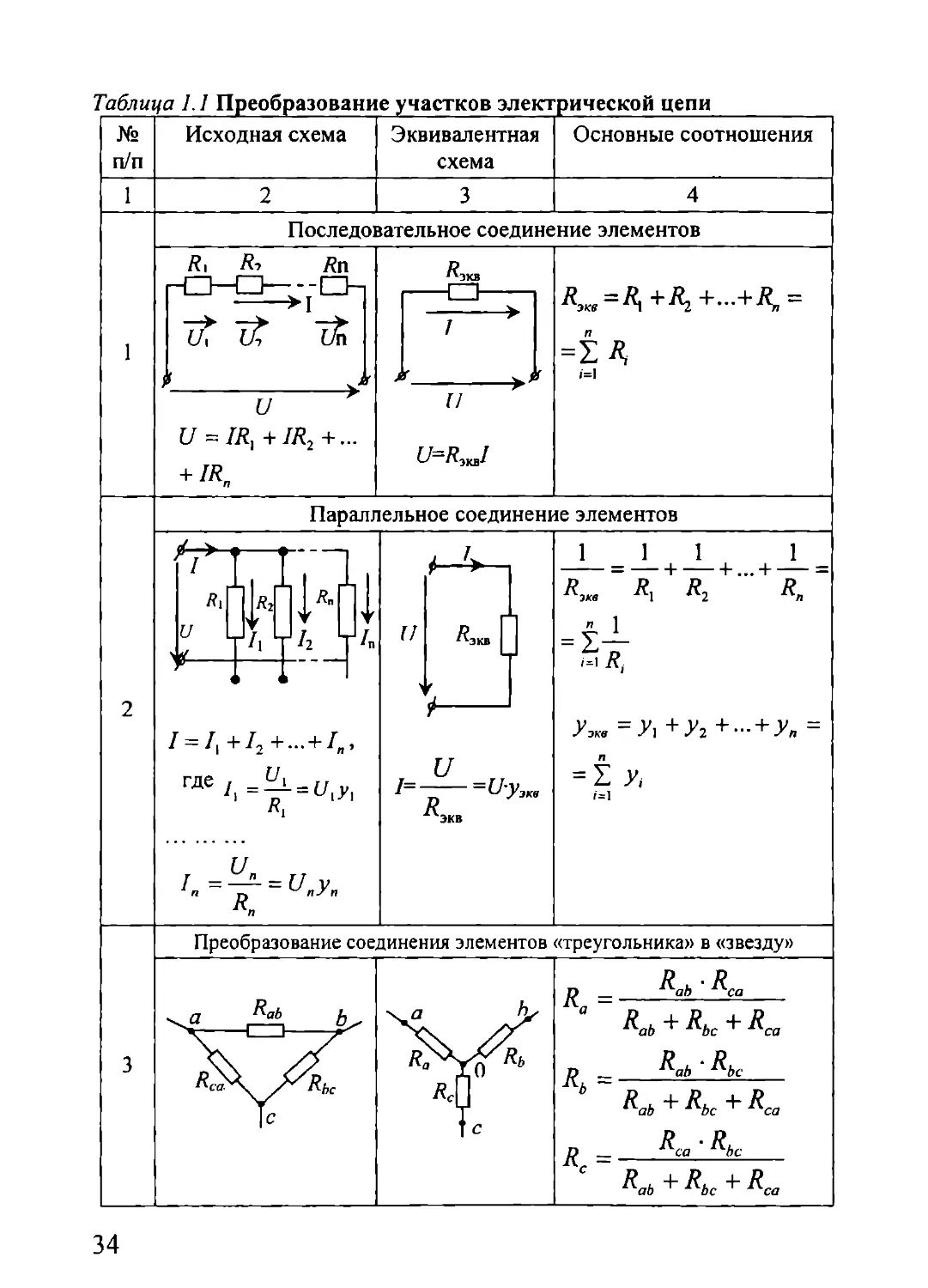
электрической цепи. Наиболее частые преобразования участ-
ков электрической цепи представлены в табл. 1.1. Это преоб-
разование последовательного и параллельного соединения
элементов в одно эквивалентное (п. 1,2 табл. 1.1), преобра-
зование элементов соединенных «треугольником» в «звезду»
и наоборот (п. 3, 4 табл. 1.1), преобразование последователь-
ного соединения источников ЭДС в эквивалентную ЭДС (п.
5 табл. 1.1) и преобразование источника тока в источник
ЭДС (п. 6 табл. 1.1).
При получении параметров эквивалентных схем из исход-
ных учтены законы, связывающие токи и напряжения для
этих схем, а условием эквивалентности являлось неизмен-
ность мощности исходной и эквивалентной электрических
цепей.
Часто при преобразовании схемы необходимо находить
эквивалентное сопротивление смешанного соединения пас-
сивных элементов, которое представляется сочетанием их
последовательных и параллельных соединений.
Рассмотрим электрическую схему рис. 1.11, в которой в
качестве нагрузки имеется два параллельно включенных при-
емника.
33
Таблица 1. / Преобразование участков электрической цепи
№ п/п Исходная схема Эквивалентная схема Основные соотношения
1 2 3 4
1 Последовательное соединение элементов
) X Qin ts ^ЭКВ > / > r R3Ke=R\ +R2 +-+Rn = J=1
и U = IRt+IR2 + ... II U-R^I
2 Параллельное соединение элементов
111 1 = — + — + ... + — = Лзи Л] R2 r„ = £- =3'1 +У2 +-+yn = n = S Z f=l
'П J А u у/.Цл уд U I=- x-v- ЛЭКВ f i U — =u- ^3KB ] Уэк,
* 1 1 1 r = Л1
Л=^ = ^х %
3 Преобразование соединения элементов «треугольника» в «звезду»
i^g6i А, Jc Zo Q / / >3 // r> ok °’ v" R = ^ah ^ca Rab + Rbc + Rca _ Rab ' Rbc Rab + Rbc + Rca R ~ &са ^bc Rab + Rbc + Rca
34
Окончание табл. 1.1
1 | 2 | 3 | 4
Преобразование соединения элементов «звезды» в «треугольник»
Преобразование последовательного соединения источников ЭДС
= Еу + Ег +... + Еп
п
/=1
Кэкв = R\ + R2 +-+Rn '
= tR.
Преобразование источника тока в источник ЭДС
E = J-Re
35
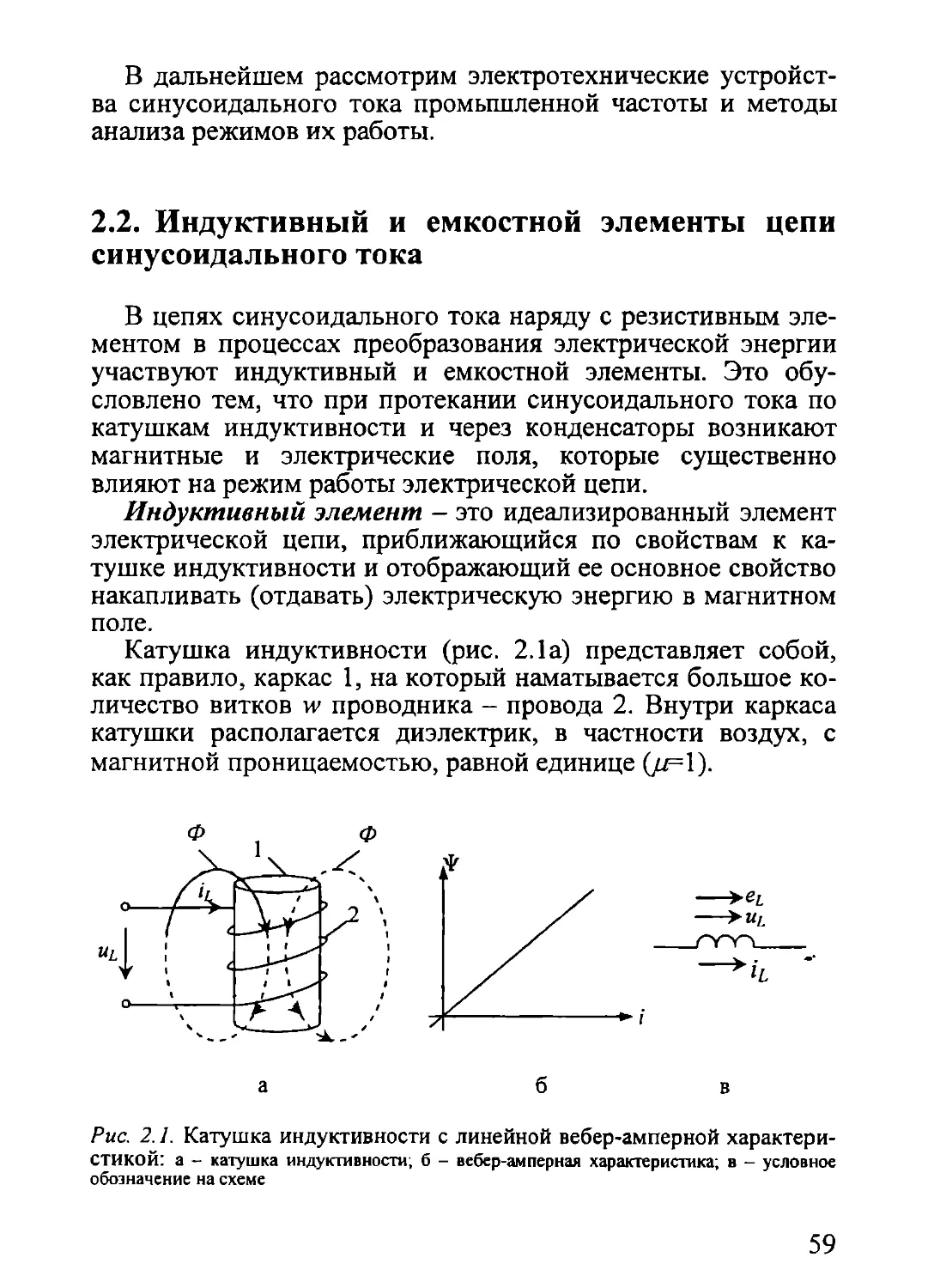
1Л
2^
н\
ЛН2 Рис. 1.11. Электрическая
Ц-1 схема с двумя парал-
лельно включенными
приемниками
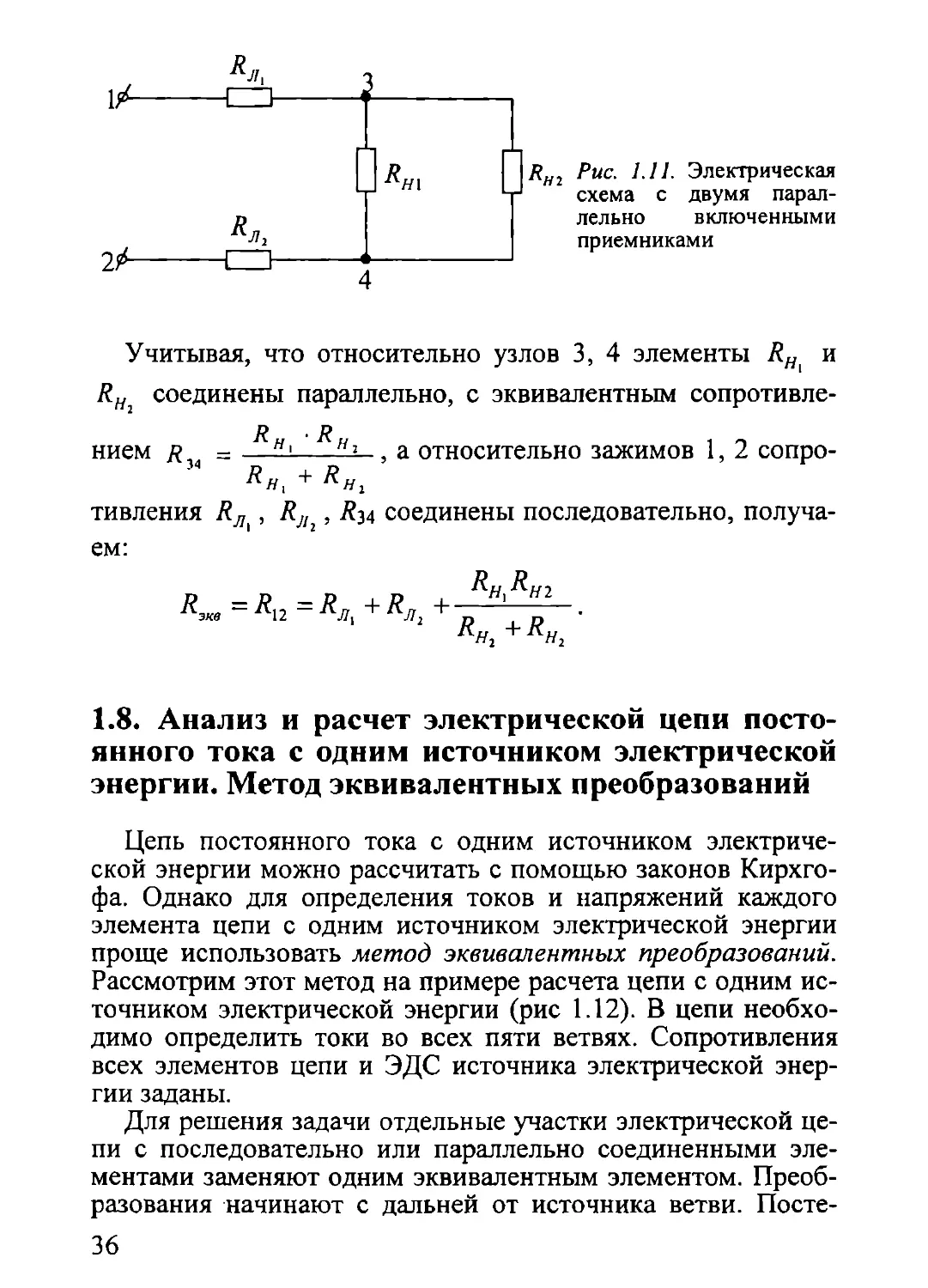
Учитывая, что относительно узлов 3, 4 элементы RHi и
RHi соединены параллельно, с эквивалентным сопротивле-
R • R
нием R = —, а относительно зажимов 1, 2 сопро-
RHl + RHl
тивления Rjjt, RJl2, Л34 соединены последовательно, получа-
ем:
RH Rh2
R3m=Rn=R„l+R„1+1^^.
нг н.
1.8. Анализ и расчет электрической цепи посто-
янного тока с одним источником электрической
энергии. Метод эквивалентных преобразований
Цепь постоянного тока с одним источником электриче-
ской энергии можно рассчитать с помощью законов Кирхго-
фа. Однако для определения токов и напряжений каждого
элемента цепи с одним источником электрической энергии
проще использовать метод эквивалентных преобразований.
Рассмотрим этот метод на примере расчета цепи с одним ис-
точником электрической энергии (рис 1.12). В цепи необхо-
димо определить токи во всех пяти ветвях. Сопротивления
всех элементов цепи и ЭДС источника электрической энер-
гии заданы.
Для решения задачи отдельные участки электрической це-
пи с последовательно или параллельно соединенными эле-
ментами заменяют одним эквивалентным элементом. Преоб-
разования начинают с дальней от источника ветви. Посте-
36
пенным преобразованием участков схему электрической це-
пи упрощают и приводят к простейшей схеме, состоящей из
последовательно соединенных источника электрической
энергии и одного эквивалентного пассивного элемента (рис.
1.12в). Для схемы рис 1.12а вначале находят эквивалентное
сопротивление участка, состоящего из двух параллельно со-
единенных ветвей с сопротивлениями и /?5
_ R4R5
45 (Д4 + я5)’
и получают схему рис. 1.126.
Затем находят эквивалентное сопротивление цепи относи-
тельно зажимов а и Ь\
yj _ ^2(^3 + ^45)
ab r2+r3 + r45
б
ь
Рис 1. 12. Схема разветвленной цепи с одним источником (а) и упрощен-
ные схемы (б и в)
37
В результате исходная разветвленная цепь (рис. 1.12а)
сведена к простейшей цепи рис 1.12в, для которой определя-
ется ток I] в ветви источника ЭДС Е с сопротивлениями Д и
1 W + Rab)'
Далее, зная ток 1\, находят напряжение на зажимах двух-
полюсника ab
U аЬ = RabI} и токи в ветвях /2 и /3:
12=^-, 73 =—-----------.
R2 (7?3+7?45)
Наконец, по известному току /3 определяют напряжение
U45 = R45I3 и токи в ветвях Ц и /5:
[ = ^45 _ ^45 Л _ ^5 у _ ^45 _ ^45 Л = ^4 у
4 R< R, R.+R, 3’ 5 R5 Rs R4+R5 3‘
1.9. Анализ и расчет разветвленных электриче-
ских цепей с несколькими источниками энергии
Любая электрическая цепь при заданной конфигурации и
известных параметрах источников энергии и пассивных эле-
ментов может быть рассчитана, т.е. определены токи в вет-
вях, непосредственным применением законов Кирхгофа.
Методика расчета включает следующие этапы:
1. Упрощают расчетную схему с помощью преобразова-
ний табл. 1.1.
2. Наносят на схему известные направления ЭДС и заме-
няют эквивалентную схему источника тока источником ЭДС
(см. раздел 1.4).
3. Задаются положительными направлениями неизвестных
токов в ветвях. Число токов равно к -ветвям.
4. Составляют (п-1) уравнений по первому закону Кирх-
гофа, где п - число узлов в схеме.
38
5. Составляют т = к-(п-\) уравнений по второму закону
Кирхгофа.
6. Решают систему из к уравнений относительно неиз-
вестных токов.
Значения токов получаются со знаками “+” и Это оз-
начает, что для положительных значений токов выбранное
направление тока в ветви совпадает с фактическим. Если
знак тока получился отрицательный, то фактическое направ-
ление этого тока в ветви направлено навстречу выбранному в
качестве положительного.
Если в результате расчета цепи направление тока в источ-
нике электрической энергии совпадает с ЭДС, то это означа-
ет, что источник отдает энергию в цепь и работает в режиме
генератора (аккумулятор разряжается). Если ток в источнике
электрической энергии и его ЭДС направлены навстречу
друг другу, то это означает, что источник является электро-
приемником (аккумулятор заряжается), потребляя электри-
ческую энергию от других источников цепи.
При расчете электрической цепи могут быть заданы лишь
некоторые значения ЭДС, токов и резистивных элементов. В
этом случае общее число неизвестных величин должно соот-
ветствовать возможному числу независимых уравнений, со-
ставленных по законам Кирхгофа.
В ряде случаев для расчета электрических цепей с не-
сколькими источниками энергии применяются другие мето-
ды расчета, каждый из которых имеет свою область приме-
нения.
1.9.1. Метод двух узлов
Часто электрическая цепь содержит только два узла или
легко может быть преобразована к цепи с двумя узлами.
Наиболее простым и удобным методом расчета в этом случае
является метод двух узлов (узлового напряжения).
На рис. 1.13 показана схема цепи с двумя узлами а и Ь, со-
стоящая из п ветвей.
Так как ветви между узлами а и b соединены параллельно,
то разность потенциалов или напряжение между этими узла-
39
ми можно выразить через ЭДС Ек, ток Ik и сопротивление
элемента Rk любой из ветвей.
По второму закону Кирхгофа составляем уравнение для
замкнутых контуров:
Ek=RkIk+Uab-Un,
откуда
Uab=Ek-RkIk+Un, (1.10)
где Uab - узловое напряжение цепи между узлами а и Ь.
На основании уравнения (1.10) ток в к -й ветви
Ik^Ek-Uab + Un)yK, (1.11)
где ук = 1 / Rk - проводимость к -той ветви.
В схеме цепи (рис. 1.13) было принято, что все ЭДС на-
правлены к одному из узлов цепи (к узлу а) и положительное
направление каждого тока совпадает с направлением ЭДС в
ветви, т.е. все токи направлены к тому же узлу. В действи-
тельности некоторые ЭДС могут быть направлены к узлу Ь.
В этом случае при расчете токов значения ЭДС должны быть
записаны со знаком минус.
Рис. 1.13. Иллюстрация метода
двух узлов (пояснения в тексте)
40
Согласно первому закону Кирхгофа алгебраическая сумма
токов в узле цепи равна нулю, т.е.
I}+ 12+... + 1к= ^1к = 0
4=1
и, следовательно,
Ё[(£.-^)+^.]п=о,
4-1
откуда узловое напряжение
4 п
ХЕкУк+ТРпУп
иаЬ=^----=7^------ (1-12)
ЬУк
В уравнении (1.12) со знаком плюс записываются ЭДС,
направленные к узлу а, и со знаком минус, направленные от
узла а.
При известных ЭДС и резистивных элементах электриче-
ской цепи с двумя узлами расчет схемы сводится к определе-
нию напряжения Uab по уравнению (1.12) и токов в ветвях
по уравнению (1.11).
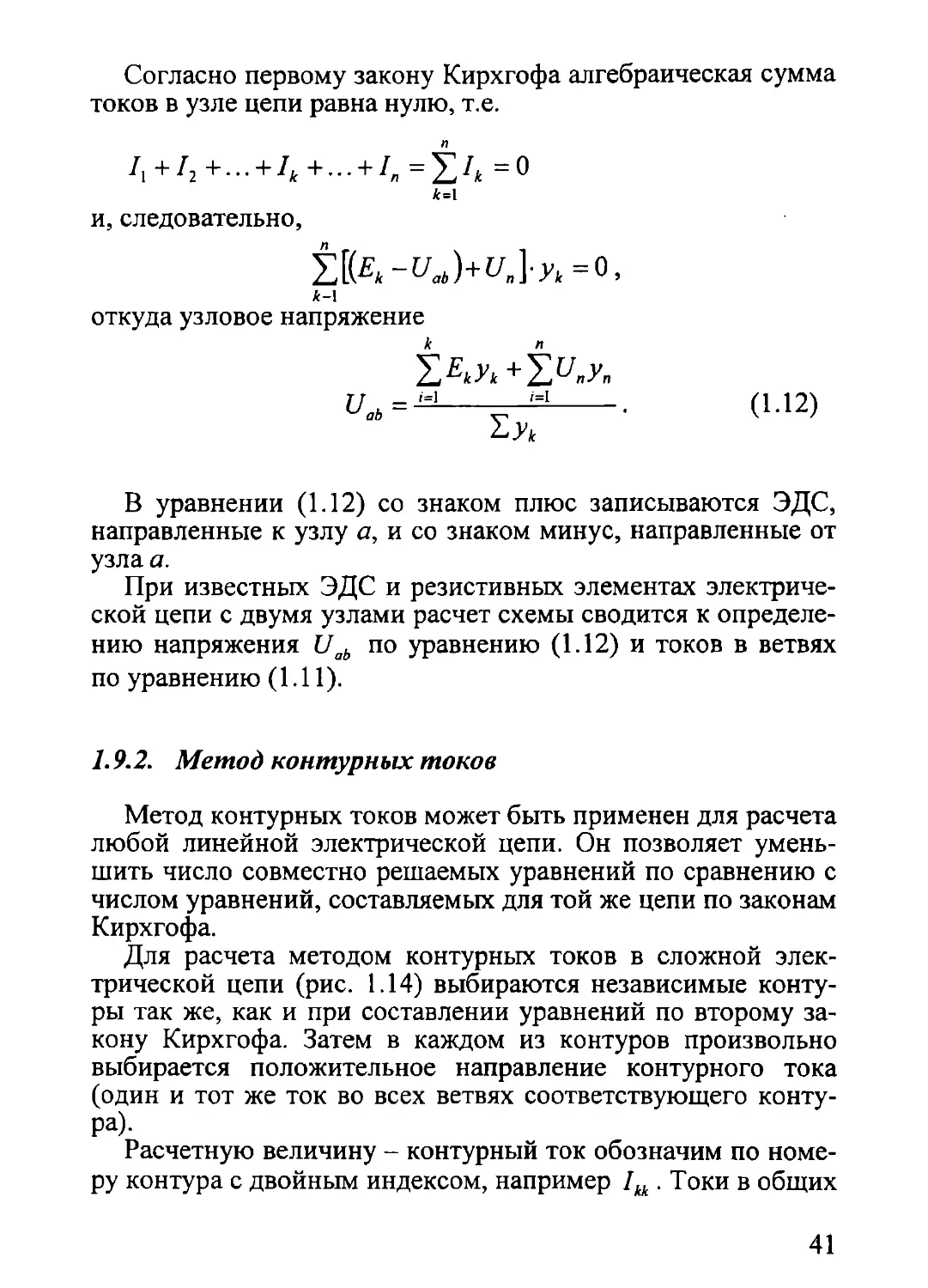
1.9.2. Метод контурных токов
Метод контурных токов может быть применен для расчета
любой линейной электрической цепи. Он позволяет умень-
шить число совместно решаемых уравнений по сравнению с
числом уравнений, составляемых для той же цепи по законам
Кирхгофа.
Для расчета методом контурных токов в сложной элек-
трической цепи (рис. 1.14) выбираются независимые конту-
ры так же, как и при составлении уравнений по второму за-
кону Кирхгофа. Затем в каждом из контуров произвольно
выбирается положительное направление контурного тока
(один и тот же ток во всех ветвях соответствующего конту-
ра).
Расчетную величину - контурный ток обозначим по номе-
ру контура с двойным индексом, например Ikk. Токи в общих
41
ветвях для двух или более контуров определяются на осно-
вании первого закона Кирхгофа как алгебраические суммы
соответствующих контурных токов.
Алгебраическая сумма ЭДС всех ветвей, входящих в каж-
дый из выбранных независимых контуров, называется кон-
турной ЭДС Ekk (с двойным индексом номера контура), т.е.
для любого к - го контура
В этом выражении все ЭДС ветвей, направление которых
совпадает (не совпадает) с направлением обхода контура, за-
писываются со знаком плюс (минус).
Арифметическая сумма сопротивлений всех резистивных
элементов, входящих в каждый из выбранных контуров, на-
зывается собственным контурным сопротивлением Rkk (с
двойным индексом номера контура), т.е.
Ез
Рис. 1.14. Иллюстрация метода контурных токов (пояснения в тексте)
42
Арифметическая сумма сопротивлений, находящихся в
общих ветвях двух контуров т и I, называется общим со-
противлением этих контуров, причем, очевидно,
7? . = R. .
Ис < т
Для контурных токов, как и для токов в ветвях, должен
выполняться второй закон Кирхгофа. Поэтому составим сис-
тему уравнений для контурных токов по второму закону
Кирхгофа для электрической цепи, у которой п независимых
контуров:
^11A1+^I2^22 +-" + ^1пЛи = ^П
^21Л1+^22^22 +-’ • + R-liJm = ^22
/?я1/1 i+T?--,/,! +... + R„„Inn — Е
Л| II Л 2 22 пп пп пп
Эта система уравнений является математической форму-
лировкой метода контурных токов. Так как число контурных
токов всегда меньше числа токов в ветвях (рис. 1.14), то
применение метода контурных токов уменьшает число неиз-
вестных величин в решаемой системе уравнений, что весьма
существенно при расчете сложных электрических цепей.
Решение системы уравнений (1.13) может быть записано
для контурных токов в общей форме с введением определи-
телей
/»=^£1, + Л7!£,!+.. + ^£и+.(1.14)
ДА А А
где Д - определитель системы уравнений:
^11-^12 "'^1к"'^п
д _ ^21-^22 '"^2к ^2л
^к\^к2'"^кк'"^кГ!
^п1^п2 "^nik -Rnn
где ДАр(р = 1,2,...,л) - алгебраические дополнения, получаемые из опре-
делителя Д посредством вычеркивания Л-той строки и р-го столбца и
умножения полученного определителя на (-1)**'’.
43
В качестве примера рассмотрим расчёт электрической це-
пи по рис. 1.14, содержащей шесть ветвей и три независимых
контура. Считаем, что значения всех ЭДС и сопротивлений
заданы. Элементы каждой ветви и токи в ветвях обозначим
соответствующими индексами. Для определения шести неиз-
вестных токов в ветвях применим метод контурных токов.
Составим уравнения, предварительно выбрав положительное
направление каждого контурного тока совпадающим с на-
правлением обхода соответствующего контура (рис. 1.14):
^11А1 ^12^22 + ^1зЛз ~ ^11 ’
(Л + ^4 + Л6)А1 “ + -^4 Лз = -^1 ~ ^4 ’
— R2\^\ 1 + ^22-^22 + ^2зЛз = ^22 ’
_^бА1 +(-^2 +^5 + Я6)/22 + ^Лз ~ Е2; (1.15)
^з1А 1 + Ei2I22 + R33I33 = Е33,
^4^и + Е3122 + (7?3 + Ra + Л5)733 = Е3 — Е, ,
где Ц1 , /22 , /33 - контурные токи; Е,, = Е, - Е4, Е22 = Е2, Е33 = Е3-Е4-
контурные ЭДС; =Я,+Я4 + д., Л22 =Л2+Л,+7^; R33 = Л3 + R4 + Л, -
собственные контурные сопротивления; Л12 = Rll = R6, Ri3= R3i= R4,
й23 = R31 = /I. - общие сопротивления соответственно первого и второго,
первого и третьего, второго и третьего контуров.
В соответствии с уравнением (1.14) запишем решение сис-
темы уравнений (1.15) в общем виде:
Т — ^*1 С । ^к2 Г7 । ^ki г
lkk +~Л22 + —-С-ЗЗ’
Д Д А
где определитель (третьего порядка)
^11^12^13
Д — R2]R22R23
~ E\\R22R33 + R2lR32Rl3 + R2\Ri2R22
^31^32^33
RuRnE^ E2lRl2R33 R3'R22R]3 — ЛпДц + Л2]Д21 + /?31Д31
44
Алгебраические дополнения определителя:
Ап ~
7?22 ^23
Л32Л33
“^22^33 ^23^32’
А|2 ~ А21 — (-^12-^33 ^32^1з) И Т-Д-
Вычислив значения контурных токов, по первому закону
Кирхгофа определим токи во всех ветвях электрической це-
пи:
А = A i» А = Аг > А ~ Аз ’
А = А1+ Аз ’ А = Аг+ Аз ’ А = А i - Аг •
Таким образом, применяя метод контурных токов, доста-
точно рассчитать определитель и алгебраические дополне-
ния, после чего контурные токи рассчитываются по уравне-
нию (1.14).
1.9.3. Метод наложения (суперпозиции)
Для линейных электрических цепей постоянного тока с
источниками ЭДС, тока и резистивными элементами соглас-
но принципу наложения ток в любой ветви равен алгебраи-
ческой сумме токов в этой ветви (частичных токов) при дей-
ствии каждого источника в отдельности. Остальные источ-
ники заменяются элементами с сопротивлениями, равными
внутренним сопротивлениям соответствующих источников.
Для расчетов линейных цепей часто применяется метод
наложения (суперпозиции), который может быть применен
ко всем электрическим цепям, описываемым линейными
уравнениями.
В математической форме это общее положение показыва-
ет, например, решение системы уравнений для контурных
токов (1.14). Заменив в нем каждую из п контурных ЭДС ал-
гебраической суммой ЭДС ветвей, входящих в соответст-
вующий контур, после приведения подобных членов полу-
чим (считая, что каждый к-й контур содержит одну к-ю
ветвь, не входящую в другие контуры):
45
hk ~h ~ Ук\Е1+Ук2Е2+--- + УккЕк+--- ,,
„ (l.lo)
+ Ук/Е/+---+УктЕт’
где It - ток к-й ветви, входящей только в к-й контур; укк - собственная
проводимость k-й ветви; у - взаимная проводимость ветвей к и /; т -
число ветвей, содержащих источники ЭДС.
Отметим, что собственная проводимость укк и взаимная
проводимость у у не являются величинами, обратными собст-
венному сопротивлению и общему сопротивлению контуров.
Как следует из уравнения (1.16), собственная проводи-
мость ветви есть отношение тока в ветви к ЭДС источника в
этой ветви при условии, что ЭДС остальных источников рав-
ны нулю.
Взаимная проводимость двух ветвей есть отношение тока
в одной ветви к ЭДС источника в другой ветви при условии,
что ЭДС остальных источников равны нулю.
Если в цепи действуют источники, у которых при расчете
токов нельзя пренебречь внутренними сопротивлениями, то
источники должны заменяться элементами с сопротивления-
ми, равными внутренним сопротивлениям источников.
Для цепей с линейными резистивными элементами всегда
справедливо равенство
= Е/к ’
т.е. для электрической цепи выполняется условие взаимности.
Метод наложения может быть применен и при действии
идеальных источников тока. В этом случае ток в любой ветви
равен алгебраической сумме частичных токов при действии
каждого источника тока в отдельности. При определении ка-
ждого частичного тока остальные источники тока следует
заменить резистивными элементами с бесконечно
а б в
Рис. 1.15. Иллюстрация метода наложения (пояснения приведены в тексте)
46
большими сопротивлениями, т.е. соответствующие участки
электрической цепи разомкнуть.
На рис. 1.15 показана последовательность расчета элек-
трической цепи с применением метода наложения, содержа-
щей источники ЭДС в двух ветвях. Исходная схема изобра-
жена на рис. 1.15а.
После исключения ЭДС Е2 получается простое смешан-
ное соединение сопротивлений (рис. 1.156).
По второму закону Кирхгофа:
£1=z,'W+±+±) = /l'W+ii^),
откуда ток в неразветвленной части цепи
т/ _____^1_____
1 R>+(R2 + R3Y
R2R3
токи в двух параллельных ветвях:
,/ .5. -У,7. Г/
2 R1 ’ 3 R. '
Затем исключается ЭДС ЕДрис. 1.15в) и аналогично рас-
считываются токи 12 , // и .
По методу наложения токи в ветвях электрической цепи
рис. 1.15а
Применяя метод наложения, можно определять частичные
токи не отдельно от каждого источника, а от источников,
разделенных на группы. Метод наложения применяется то-
гда, когда необходимо оценить вклад в токораспределение в
ветвях от действия каждого источника электрической энер-
гии.
47
1.9.4. Метод эквивалентного генератора (активного
двухполюсн ика)
Этот метод применяется в тех случаях, когда нужно рас-
считать ток только в одной ветви ab сложной электрической
цепи, например в приемнике, подключенном к выходу уси-
лителя. Подобного рода задача часто встречается также при
расчетах устройств для электрических измерений неэлектри-
ческих величин, систем автоматического регулирования
и т.п.
Будем считать ветвь ab внешней по отношению ко всей
остальной части электрической цепи (рис. 1.16а), которая
может содержать источники ЭДС, источники тока и посто-
янные сопротивления. Эту часть цепи рассматриваем как ак-
тивный двухполюсник по отношению к ветви ab, с которой
она соединяется двумя полюсами а и Ь. На этом рисунке ак-
тивный двухполюсник условно изображен в виде прямо-
угольника с буквой А (активный) и показаны два его вывода
а и b .
Если к выводам а и b активного двухполюсника подклю-
чить сопротивление RH (нагрузить), то во внешней части це-
пи (ветви ah') появится ток Iab = I (рис. 1.16а).
Рис. 1.16. Иллюстрация метода эквивалентного генератора (пояснения в
тексте)
48
Рассматриваемый метод позволяет рассчитать ток в со-
противлении RH (сопротивлении нагрузки), представляя ак-
тивный двухполюсник в виде эквивалентного генератора (от-
сюда название метода).
Чтобы определить параметры эквивалентного генератора,
произведем в заданной электрической цепи (рис. 1.16а) ряд
последовательных преобразований.
Включим последовательно с приемником и навстречу
друг другу два одинаковых источника ЭДС Е{ = Е2 (рис.
1.166). Так как эти ЭДС одинаковые и действуют в противо-
положных направлениях, то ток 1аЬ= I в ветви ab не изме-
нится. Следовательно, не изменится и режим работы актив-
ного двухполюсника, т.е. схема рис. 1.166 эквивалентна за-
данной (рис. 1.16а).
Для расчета тока Iab= I в цепи (рис. 1.166) применим ме-
тод наложения (см. разд. 1.9.3), представив ток I в виде
суммы трех частичных токов: тока 1Л при действии всех ис-
точников активного двухполюсника А; I' при действии ис-
точника ЭДС Е} и тока I" при действии источника
ЭДС е2-.
I =1A + I' + 1".
Выберем ЭДС Ех = Е2 равные напряжению холостого хо-
да Uabx = U х активного двухполюсника между выводами а и
b , т.е. напряжению при отключенном приемнике (7 = 0),
как показано на рис. 1.16в. В этом случае при действии всех
источников активного двухполюсника и источника ЭДС
Е\ = U х ток в сопротивлении нагрузки (рис. 1.16г) будет ра-
вен нулю (1А +11 = 0).
Следовательно, при определении тока I все эти источни-
ки можно исключить, заменив их резистивными элементами
с сопротивлениями, равными внутренним сопротивлениям
соответствующих источников. В полученной после такого
преобразования электрической цепи (рис. 1.16д) активный
двухполюсник заменен пассивным, который содержит толь-
ко резистивные элементы, так как источники активного
двухполюсника не действуют. Параметром пассивного двух-
49
полюсника является его входное сопротивление Rex между
выводами а и b . Ток I в приемнике при действии одной
ЭДС Е2 = Ux (рис. 1.16д) такой же, как и для заданной цепи
(рис. 1.16а).
Сравнив схемы на рис. 1.16а и 1.16д, заключаем, что для
активного двухполюсника можно составить эквивалентную
схему замещения с ЭДС Еэк = Е2 =UX и внутренним сопро-
тивлением R3K = Rax, т.е. заменить его эквивалентным гене-
ратором (рис. 1.1 бе).
Для электрической цепи с эквивалентным генератором
(рис. 1.1 бе)
7 _ Еэк _ Uх
+ Шк+Кж)'
Выражение (1.17) показывает, что для определения тока в
приемнике достаточно знать два параметра активного двух-
полюсника: напряжение холостого хода между его выводами
и входное сопротивление, которые можно измерить при по-
мощи соответствующих приборов или рассчитать. Парамет-
ры электрической цепи активного двухполюсника при этом
могут быть неизвестны.
Для определения параметров активного двухполюсника
часто используются экспериментальные методы холостого
хода и короткого замыкания. Измерив при помощи вольт-
метра напряжение холостого хода между выводами двухпо-
люсника Ux, а затем при короткозамкнутых выводах а и b
(RH = 0 ) - ток короткого замыкания при помощи ампермет-
ра, непосредственно из уравнения (1.17) можно определить
входное сопротивление
В качестве примера рассчитаем ток Ц в ветви с резисто-
ром Т?5 (рис. 1.17а), методом эквивалентного активного
двухполюсника. Параметры схемы Е, Rx - Rs известны.
50
Рис. 1.17. Иллюстрация метода эквивалентного генератора (пояснения в
тексте)
В соответствии с методом эквивалентного генератора
представляем исходную цепь в виде эквивалентного генера-
тора с параметрами - Еэк = U аЬх; R3K = Rab и ветви с сопро-
тивлением (рис. 1.176).
Определяем напряжение Uabx при разомкнутой ветви ab с
резистором /?5 (рис. 1.17в):
Uabx = Еэк = R3lxi - RJ:
R3E R.E
R3 + R4 R\ + R2
51
Сопротивление R,3Kab определяем по схеме рис. 1.17г
(внутреннее сопротивление источника ЭДС равно нулю):
+ ^3^4
экаЬ R, + R2 R3 + Я4
Ток /5 в диагональной ветви моста находим из схемы
рис. 1.176:
5 (^+Л5)‘
1.10. Условие передачи максимальной
мощности приемнику
В устройствах связи, в электронике, автоматике и т.д.
очень часто желательно передать наибольшую возможную в
данных условиях энергию от источника к приемнику (испол-
нительному механизму), причем КПД передачи имеет второ-
степенное значение.
В качестве примера такой передачи рассмотрим питание
приемника с сопротивлением RH от источника энергии с
ЭДС Е и внутренним сопротивлением RBH , находящегося на
некотором расстоянии от приемника и соединенного с ним
двухпроводной линией с общим сопротивлением проводов
Rn (рис. 1.18).
Обозначим сумму внутреннего сопротивления RBH ис-
точника энергии и сопротивления проводов Rn через R , т.е.
R = Rn + RBH . По закону Ома ток в рассматриваемой цепи
/ = £/(Л+Л„) и мощность приемника (по закону Джоуля-
Ленца)
p"‘RhI2=7^TV (118)
(л + ля)
Согласно этому выражению при значениях сопротивлений
Rfj = 0 и RH = оо мощность приемника будет равна нулю,
52
так как в первом случае равно нулю напряжение между вы-
водами приемника, а во втором случае - ток в цепи. Следова-
тельно, некоторому определенному значению RH соответст-
вует наибольшее возможное (при данных Е и R ) значение
мощности приемника. Чтобы определить это значение со-
противления RH, приравняем нулю первую производную
мощности Рн по RH:
ЛРН _ £2 [С^ + ^я) (2^? + )] _ Q
dRH {R+RHy
Так как знаменатель этого выражения не равен бесконеч-
ности, то
(R + RH}2-2RR„-2Rl =0,
откуда следует, что мощность приемника будет максимальна
при условии
Эта максимальная мощность
_Е_У _ Е2
2RJ ~ 4R'
53
На рис. 1.19 показаны зависимости мощности приемника
от тока Рн = RHI2, мощности, развиваемой источником
энергии РЕ = (RH + R)I2 = El, напряжения приемника UH и
КПД передачи энергии
После подстановки значений Рн и РЕ получим зависи-
мость КПД от сопротивления приемника:
(RH+R)I2 {Rh+RY
В режиме максимальной мощности (RH = R) КПД переда-
чи энергии г) = 0,5, т.е. половину мощности, развиваемой
источником, составляет мощность потерь на внутреннем со-
противлении источника и в передающей линии. Такой низ-
кий КПД неприемлем для электроэнергетических систем, где
потери энергии в источниках и линиях передач составляют
примерно 8-10% энергии, вырабатываемой источниками.
54
В устройствах электросвязи, автоматики и т.п. передавае-
мые потоки энергии и мощность приемников энергии неве-
лики и составляют доли ватт. Поэтому с энергетической точ-
ки зрения в таких устройствах допустимы передачи с отно-
сительно малыми КПД. Важно, чтобы как можно большая
доля мощности источника была использована в исполни-
тельном устройстве. По указанной причине режим макси-
мальной мощности широко используется в электросвязи и
автоматике.
Полученное условие может быть применено и в сложных
линейных цепях, содержащих источники энергии и соеди-
ненных с приемником при помощи двух выводов. В этом
случае сложную цепь можно заменить эквивалентным гене-
ратором с ЭДС Езк и внутренним сопротивлением 7?ж(см.
1.9.4.). К такому эквивалентному генератору, замещающему
любой активный линейный двухполюсник, применимо усло-
вие передачи максимальной мощности. При подключении к
выводам активного двухполюсника приемника с сопротив-
лением RH = R3K мощность, передаваемая в приемник, будет
максимальна.
1.11. Анализ схемы четырехплечего моста
В устройствах автоматики и измерительной техники часто
встречается четырехплечий мост, в диагональ которого
включается измерительный прибор, обмотка реле или обмот-
ка какого-либо другого исполнительного устройства. Если
четырехплечий мост находится в равновесии, то тока в диа-
гонали моста нет. Если четырехплечий мост вывести из со-
стояния равновесия, например, изменив значение параметра
одного из плеч, то в диагонали моста появится электриче-
ский ток. По значению и направлению тока в диагонали че-
тырехплечего моста можно судить о степени разбаланса мос-
та и в конечном счете получить количественную оценку при-
чин, вызывающих этот разбаланс.
На рис. 1.20 показана схема цепи четырехплечего моста
постоянного тока, подключенного к источнику ЭДС Е, с пле-
чами - резистивными элементами R}, R2, R} и R4.
55
Рис. 1.20. Схема цепи че-
тырехплечего моста посто-
янного тока
Для определения тока
в диагонали моста
/ = 1аЬ при замкнутом
ключе применим ме-
тод эквивалентного
генератора.
Представим четырехплечий мост относительно точек а и
b в виде активного двухполюсника (рис. 1.16а), к выводам
которого а и b подключен резистивный элемент RH .
Чтобы рассчитать ток по формуле (1.17), определим сна-
чала напряжение между выводами а и b в режиме холосто-
го хода (диагональ моста разомкнута). В этом режиме токи
т _ Е т Е
12x~(ri + r2) и
напряжение
^х = ^Ах'^Лх ------------
2 х 4 /?1+Я2 r3 + r,
Входное сопротивление двухполюсника относительно вы-
водов а и Ь (источник ЭДС Е не действует и точки с и d
короткозамкнуты, т.е. параллельно соединены сопротивле-
ния Л,, R2, Rj и R4):
D _ ^1^2 , ^3^4
Лпу -- 1 '
Л, + r2 r3 + r4
Ток в диагонали четырехплечего моста по уравнению
(1.17)
Ux г _____________[ад+Я4)-Я4(/?,+7?2)]£___________
rbx + Ъ + Я„) + R3Rt(R] + Л2) + RH(Ri +R2)(R3 +Л4)
56
Если сопротивления резистивных элементов трех плеч
моста и ЭДС источника неизменны, то изменение тока в диа-
гонали моста будет зависеть только от изменения значения
сопротивления резистивного элемента одного плеча. В слу-
чае зависимости этого сопротивления от параметров внеш-
ней среды (концентрации, температуры, давления, влажности
и т.д.), изменение тока в диагонали моста будет в некотором
масштабе отражать изменения этих параметров. Такой четы-
рехплечий мост может служить преобразователем для изме-
рения неэлектрических величин.
Кроме того, четырехплечий мост применяется в устройст-
вах регулирования в цепях обратной связи. Значение и на-
правление тока в диагонали моста являются исходной ин-
формацией для изменения положения рабочих органов регу-
лирующей аппаратуры.
57
Глава 2
Электрические цепи синусоидального
тока
2.1. Введение
Электротехнические устройства синусоидального (пере-
менного) тока находят самое широкое применение в различ-
ных областях промышленности, сельского хозяйства, быту и
т.д.: при генерировании, передаче, трансформации и преоб-
разовании электрической энергии, в электроприводе, быто-
вой технике, промышленной электронике, радиотехнике и
др. Преимущественное распространение электротехнических
устройств синусоидального тока обусловлено прежде всего
тем, что при передаче электрической энергии на дальние
расстояния при помощи электрического тока и ее распреде-
лении имеются наименьшие потери энергии в элементах по
сравнению с другими видами энергии. Преобразование энер-
гии при передаче лишь в электротехнических устройствах
переменного тока - трансформаторах, которые имеют наи-
больший КПД преобразования в современной электроэнерге-
тике. Исключение составляют лишь линии передачи посто-
янного тока сверхвысокого напряжения и некоторые техно-
логические установки, но и они входят составной частью в
систему цепей синусоидального тока.
Большим преимуществом для разработки и развития элек-
тротехнических устройств синусоидального тока является
возможность получения источников электрической энергии
большой мощности. У современных турбогенераторов теп-
ловых электростанций мощность составляет 100-1500 МВт
на один агрегат. Большие мощности имеют и генераторы
гидростанций.
К наиболее простым и дешевым преобразователям элек-
трической энергии в механическую относятся асинхронные и
синхронные двигатели синусоидального тока.
Для электроэнергетических установок (в частности, для
всех электрических станций) в России и в большинстве стран
мира принята стандартная частота 50 Гц (в США - 60 Гц).
58
В дальнейшем рассмотрим электротехнические устройст-
ва синусоидального тока промышленной частоты и методы
анализа режимов их работы.
2.2. Индуктивный и емкостной элементы цепи
синусоидального тока
В цепях синусоидального тока наряду с резистивным эле-
ментом в процессах преобразования электрической энергии
участвуют индуктивный и емкостной элементы. Это обу-
словлено тем, что при протекании синусоидального тока по
катушкам индуктивности и через конденсаторы возникают
магнитные и электрические поля, которые существенно
влияют на режим работы электрической цепи.
Индуктивный элемент - это идеализированный элемент
электрической цепи, приближающийся по свойствам к ка-
тушке индуктивности и отображающий ее основное свойство
накапливать (отдавать) электрическую энергию в магнитном
поле.
Катушка индуктивности (рис. 2.1а) представляет собой,
как правило, каркас 1, на который наматывается большое ко-
личество витков w проводника - провода 2. Внутри каркаса
катушки располагается диэлектрик, в частности воздух, с
магнитной проницаемостью, равной единице (//=1).
б
Рис. 2.1. Катушка индуктивности с линейной вебер-амперной характери-
стикой: а - катушка индуктивности; б - вебер-амперная характеристика; в - условное
обозначение на схеме
59
В цепях синусоидального тока напряжения и токи в ветвях
зависят от времени, поэтому далее их будем называть мгно-
венными значениями и обозначать и, i.
Если по катушке индуктивности протекает переменный
ток i, создающий магнитный поток катушки, то для какого-то
фиксированного момента времени ti можно изобразить маг-
нитное поле катушки, которое характеризуется магнитным
потоком Ф - распределение непрерывных магнитных линий
вектора индукции В внутри и вне катушки. Две магнитные
линии поля представлены на рис. 2.1а.
Для катушки индуктивности магнитный поток Ф, создан-
ный током в катушке пересекает все витки катушки w. По-
этому потокосцепление катушки 4х, называемое потокосцеп-
лением самоиндукции или собственным потокосцеплением
для катушки, будет иметь вид:
у/=Ф-и>. (2.1)
Потокосцепление и ток всегда положительны.
Потокосцепление и магнитный поток имеют размерность
в системе СИ - вебер (Вб).
Индуктивностью катушки называется отношение пото-
косцепления самоиндукции к току катушки
£ = —. (2.2)
Д
Индуктивность имеет размерность в системе СИ - генри
(Гн). 1Гн= 1Вб/А= 1Вс/А.
Индуктивность характеризуется зависимостью потокосце-
пления самоиндукции от тока катушки y/(i) , называемой ве-
бер-амперной характеристикой (ВАХ). На рис. 2.16 пред-
ставлена вебер-амперная характеристика катушки индуктив-
ности, которая имеет линейную зависимость. Очевидно, что
отношение / iL для всех точек этой характеристики одина-
ково, т.е. индуктивность такой катушки постоянна
(L = const). Такая индуктивность называется линейной.
Условное обозначение линейной индуктивности в элек-
трических схемах представлено на рис. 2.1 в.
Если ток в катушке индуктивности изменяется, то изменя-
ется магнитный поток и потокосцепление самоиндукции.
60
Поэтому согласно закону электромагнитной индукции в вит-
ках катушки индуцируется ЭДС самоиндукции eL. Выбрав
положительное направление ЭДС совпадающим с направле-
нием тока в катушке iL (рис. 2.1 в), получим
=-
(2-3)
Знак «минус» в этом уравнении, согласно правилу Ленца,
указывает на то, что ЭДС самоиндукции всегда препятствует
изменению тока в катушке. Напряжение на зажимах катушки
по 2-ому закону Кирхгофа всегда уравновешивает ЭДС са-
моиндукции, поэтому
Для линейной индуктивности (L=const) уравнения (2.3) и
(2.4) запишутся в виде:
(25)
dt dt dt
uL=-eL=L^. (2.6)
Проинтегрируем обе части
индуктивности будет равен
этого уравнения, тогда ток в
z
1г ,
L =~iUL-dt-
Lj
Катушка индуктивности может быть выполнена в виде
кольцевого сердечника 1 из ферромагнитного материала, на
котором равномерно намотана обмотка 2 (рис. 2.2а).
Фа
Рис. 2.2. Катушка индуктивности с
нелинейной характеристикой: -
поток рассеяния; <Р- магнитный поток
61
Ток, протекающий в обмотке, создает магнитный поток Ф,
который замыкается в основном по сердечнику и пересекает
все витки w обмотки.
Емкостной элемент - это идеализированный элемент
электрической цепи, приближающийся по свойствам к кон-
денсатору и отражающий его основное свойство накапливать
(отдавать) электрическую энергию в электрическом поле.
Конденсатор - это устройство, которое имеет два провод-
ника 1 (обычно пластины) рис. 2.3а, разделенные диэлектри-
ком 2, свойства которого характеризуются абсолютной ди-
электрической проницаемостью £а. Связь между вектором
электрического смещения D в любой точке электрического
поля конденсатора и напряженностью Е определяется урав-
нением:
D = £а- Е = £• Eq- Е,
где е - относительная диэлектрическая проницаемость диэлектрика; с0
- электрическая постоянная, равная 8,86 • 1042 (Ф/м).
Как правило, в конденсаторах применяются диэлектрики,
у которых зависимость D = f(E) является линейной, т.е.
Еа = const.
Емкостной элемент или конденсатор количественно ха-
рактеризуется величиной емкости:
С = -^-, (2.7)
«с
где q - заряд на пластинах конденсатора, кулоны (К); ис - напряжение на
конденсаторе, вольты (В).
Емкость в системе СИ измеряется в фарадах (Ф), микро-
фарадах (1мкФ = 10”6Ф), пикофарадах (1пФ = 10-1^Ф).
В соответствии с (2.7) емкостной элемент характеризуется
кулон-вольтной характеристикой (КВХ) - зависимость за-
ряда на пластинах конденсатора от приложенного напряже-
ния q(uc).
62
б
Рис. 2.3. Конденсатор с линейной ку-
лон-вольтной характеристикой: а -
конденсатор; б - кулон-вольтная характеристи-
ка; в - условные обозначения на схеме
На рис. 2.36 представлена кулон-вольтная характеристика
конденсатора с диэлектриком, у которого диэлектрическая
постоянная £а = const.
Под влиянием приложенного напряжения на пластинах
конденсатора сосредотачиваются равные количества элек-
тричества противоположных знаков: на пластине с высоким
потенциалом - «+9», с низким потенциалом «-«у». При изме-
нении напряжения ис изменится электрический заряд на
пластинах и через конденсатор будет протекать ток
dq
dt
(2.8)
Для конденсатора, имеющего линейную КВХ (рис. 2.36),
величина емкости С не зависит от приложенного напряжения
и для всех точек характеристики равна
а- та
С - — = — • tga = const, (2.9)
м, ти
где тч,ти - масштабы по осям зарядов и напряжения; а - угол наклона
прямой к оси напряжений.
63
Такой емкостной элемент называется линейным, его ус-
ловное изображение на электрических схемах представлено
на рис. 2.3в.
Тогда, подставляя в (2.8) уравнение (2.7), получим:
z = d(C-uc) = (2.Ю)
с dt dt
Таким образом, ток, проходящий через емкостной элемент
(конденсатор), является током смещения в его диэлектрике.
Ток смещения прямо пропорционален скорости изменения
напряжения ис во времени (скорости изменения напряжен-
ности электрического поля). Согласно (2.10) ток, проходя-
щий через емкость, положителен (/с > 0), С > 0 и > 0. В
этом случае напряжение и заряд емкости увеличиваются, а
емкость заряжается.
Если = 0, то ис = const или ис = 0, ток, проходящий
dt
через емкость, равен нулю (ic =0), т.е. через емкость посто-
янный ток не протекает и в цепях постоянного тока в устано-
вившемся режиме ветвь с емкостью представляет бесконечно
большое сопротивление (разрыв ветви).
Е dUC Г\
Если —- < 0, то напряжение ис и заряд q емкости
dt
уменьшаются - емкость разряжается.
Ток в проводниках, присоединенных к емкостному эле-
менту, является током проводимости.
Напряжение на емкости из (2.10) равно
ис=- \ic dt. (2.11)
с J
Существует определенный класс диэлектриков (сегнето-
диэлектрики), у которых зависимость электрического сме-
щения D от напряженности электрического поля Е является
нелинейной. В связи с этим конденсаторы и емкостные эле-
менты с такими диэлектриками имеют нелинейную КВХ, и
называются нелинейными емкостными элементами.
64
Рис. 2.4. Условное обозначение нелинейно-
го емкостного элемента
Условное обозначение нелинейного емкостного элемента
представлено на рис. 2.4.
В магнитном поле индуктивного элемента и электриче-
ском поле емкостного элемента при изменении тока и на-
пряжения на их полюсах может накапливаться и изменяться
электрическая энергия, поэтому их можно рассматривать как
аккумуляторы энергии в электрических цепях.
2.3. Основные параметры, характеризующие
синусоидальные токи, ЭДС и напряжения
Переменный ток (ЭДС, напряжение) может изменяться во
времени как по периодическому, так и непериодическому
закону. В промышленности используется периодический ток
(ЭДС, напряжение), изменяющийся по синусоидальному за-
кону. Периодически изменяющаяся величина характеризует-
ся периодом Т (время одного цикла - рис. 2.5). Измеряется
период в секундах (с). Число периодов изменения электриче-
ской величины в секунду характеризует ее частоту /= 1/Г.
Частота выражается в Герцах (Гц). Частота промышленного
переменного тока в России и ряде стран принята 50 Гц, в
США и Японии - 60 Гц. В авиации (в бортовом электрообо-
рудовании) применяют частоты 400, 800 и 1000 Гц.
Мгновенные значения синусоидального тока, ЭДС, на-
пряжения могут быть представлены в аналитическом виде:
i = Im sin(cot + ); e = Em- sin(cot + i//c );
u = Um- sin( cot + y/u)
где i, e,u- мгновенные значения синусоидального тока, ЭДС, напряжения
соответственно, т.е. их значения в данный момент времени; Im,Em,Um -
амплитуды (максимальные значения) синусоидального тока, ЭДС, на-
пряжения; а) = 2rf = 2л/Т (рад/с или 1/с) -угловая частота, характери-
зующая скорость изменения фазы синусоидального тока, ЭДС, напряже-
ния; у/\(ч/е,Ч/и) - начальные фазы синусоидального тока, ЭДС, напря-
жения, (рад).
65
На рис. 2.5. приведены графики мгновенных значений си-
нусоидального тока и напряжения, фазы колебаний которых
различны.
Начальную фазу синусоиды отсчитывают от начала отсче-
та времени (7=0). Как видно из рисунка, начальная фаза тока
у/г сдвинута вправо от начала отчета, а начальная фаза на-
пряжения ц/и - влево. При этом начальная фаза тока отрица-
тельна (<//, <0), а начальная фаза напряжения положительна
(у/и >0). Алгебраическая величина, равная разности началь-
ных фаз двух синусоидальных функций, называется сдвигом
фаз (<р). На рис. 2.5 сдвиг фаз между напряжением и током
В зависимости от значений начальных фаз и их знаков сдвиг
фаз может быть как положительным, так и отрицательным.
Положительное значение <р указывает на то, что напряжение
опережает по фазе ток; отрицательное значение <, - напряже-
ние отстает от тока. В инженерной практике обычно имеют
дело не с мгновенными значениями электрических величин,
а с действующими значениями. Практические расчеты про-
изводят для действующих значений: в паспортных данных
различных электротехнических устройств указаны дейст-
вующие значения токов и напряжений; шкалы почти всех
измерительных приборов отградуированы в действующих
значениях измеряемых величин.
Рис. 2.5. График мгновенных значений синусоидального тока и напряже-
ния
66
Действующее значение переменного электрического тока I
численно равно такому постоянному току, при прохождении
которого через активное сопротивление R за время, равное
периоду Т, совершается одинаковая работа, что и при прохо-
ждении переменного тока.
Работа, совершаемая при постоянном токе за время Т\
Работа совершаемая, при синусоидальном переменном то-
ке за период от 0 до Г определяется по формуле:
т т т
Апер = ^Pdt = $iR2dt = j/2 sin2 cotdt.
oo о
где P - мощность цепи.
Приравняв правые части, получим действующее значение
тока:
JT т
1 Гг2 • 2 7 , 1 r\-cos2cot .
— j/„sin citdt =Im — -----------dt . (2.13)
у? J ffi rn 1 I ГТУ JO *
1 о vo
T T
Так как ^dt -T, a Jco.y2cot = 0, to
о 0
7 = ^. (2.14)
V2
Аналогично определяют действующие значения ЭДС и
напряжения:
Е U
Е =-£ = 0.707 Em; U =—~ = 0.707Um.
V2 V2
Таким образом, Im = 421; Em = 42Е; Um = 42U.
Действующее значение выбрано в качестве основной ха-
рактеристики синусоидального тока потому, что в большин-
стве случаев действие тока пропорционально квадрату этого
значения (например, тепловое действие). Кроме того, элек-
67
троизмерительные приборы ряда систем (тепловые, электро-
динамические, электромагнитные и электростатические)
пригодны для измерения как постоянного, так и синусои-
дального токов. Проградуированные при постоянном токе и
включенные в цепь синусоидального тока эти приборы пока-
зывают его действующее значение.
При расчете изоляции важно учесть, что дважды в течение
периода максимальное значение синусоидального напряже-
ния больше его действующего значения в Л раз. Следова-
тельно, изоляция в установке синусоидального тока находит-
ся в менее благоприятных условиях, чем изоляция в анало-
гичной установке при прохождении постоянного тока. Это
одна из причин, по которой для сверхдальних передач элек-
троэнергии в настоящее время стремятся применять посто-
янный ток высокого напряжения.
Среднее значение переменного тока за определенный мо-
мент времени
z(
о
При i = lm sin cot и (,=Т
1 Гг
Irn = — Iт sin cotdt - 0,
ср j m 7
1 0
т.е. среднее значение тока за период Т для синусоидальной
величины равно нулю.
Т
При = — среднее значение тока
Т/2
2 г 21
Ir=— sincotdt = ——,
ср Т J я
Аналогично для ЭДС и напряжения
Р И -_UE”
i-'cp ’ и ср
71 ТС
68
2.4. Изображение синусоидальных функций в
комплексной форме
Для анализа и расчета электрических цепей синусоидаль-
ного тока применяют комплексный метод, базирующийся на
теории комплексных чисел.
Любой вектор А на плоскости, проведенный из начала
координат и изображающий действующее значение ЭДС, на-
пряжения или тока однозначно определяется точкой, соот-
ветствующей концу этого вектора (точка А на рис. 2.6). При
этом модуль вектора равен действующему значению (А), а
угол между вектором и осью вещественных чисел Re равен
начальной фазе (у/). На плоскости комплексных чисел точке
А соответствует одно комплексное число А . Таким образом,
любой вектор, проведенный из начала координат, однознач-
но изображается комплексным числом, соответствующим
координатам конца этого вектора. Комплексный метод рас-
чета применим только к цепям с синусоидальными ЭДС, на-
пряжениями и токами, так как только синусоидальные вели-
чины можно изображать векторами.
Вектор А имеет вещественную (а) и мнимую (Z>) состав-
ляющие:
А = а + jb.
Координаты точки А могут быть выражены через длину
вектора |ОЛ| = А и угол у/: a = Acosy/, b = Asiny/. Тогда
вектор в комплексном виде
Рис. 2.6. Составляющие ком-
плексного числа на ком-
плексной плоскости
69
A = Afcosy/+ jsini//), (2.15)
где A = Vfl2 + Z>2 - модуль комплексного числа, равный длине вектора
ОА\ у/ = arctg— ~ угол, на который вектор О А повернут по отношению к
Ь
положительному направлению вещественной оси (Re ).
Угол положителен, если он отсчитывается в направле-
нии, противоположном вращению часовой стрелки, и отри-
цателен, если отсчитывается в направлении вращения часо-
вой стрелки.
Используя формулу Эйлера
cost}/ + jsin у/ = eJV/,
из (2.15) получим
А = Ае^,
где eiv - поворотный множитель, указывающий, на какой угол по от-
ношению к вещественной оси должен быть повернут вектор, длина кото-
рого равна модулю |/1|.
е±^/2=±;;е±^=-1;е±2;г=1.
Таким образом, поворот вектора О А на угол ± /л"/2 соот-
ветствует умножению его на ± j; поворот на ± jn - умно-
жению его на -1 и т.д.
Над комплексными числами, изображающими векторы
ЭДС, напряжений и токов, можно производить все алгебраи-
ческие действия:
• Сложение и вычитание чисел:
4д+А2 = (a}+jbl)+(a2+jb2) = A3 = a3+jb3,
а3 = П] ± а2; Ь3 = Ьх ± Ь2;
• Умножение чисел:
а) Ах-А2 = (а} +jbx)-(a2+jb2) = Ai =a4+jb4,
а4 = axa2-bxb2; b4 = axb2 +a2bx,
70
6) A} -A2 = Axeja' A2eja* = A^ = A± • e'4
A^=AX-A2; a^=ax+a2
• Деление чисел-.
ау^=(^1>. = А5=а,+Л
4 2 (a2+Jb2)
(ala2+bib2) (a2bx-axb2)
a5 =----~2---> bs =---------
А2 = al + bl
4
42
6) ej<*,
A2 A2eja'
^5=^1 A2; a^-ax-a2.
Таким образом, сложение и вычитание чисел лучше про-
изводить в алгебраической форме, а умножение и деление -
показательной форме.
Представим синусоидальный ток в комплексной форме.
Мгновенное значение синусоидального тока
i = Im- sin( cot + ys),
можно представить вектор тока Z в комплексной форме
(рис. 2.7):
L = La+Lb=Ia +jlb =I-eJVl ^-COSVi+j-I-Siny/i,
где Ia — I cosy/i - вещественная часть комплекса тока (активная состав-
ляющая тока); Ih = I-siny/j - мнимая часть комплекса тока (реактивная
составляющая тока); I = |/| = = 1т/-Д - модуль комплекса
тока.
Пример 2.1. Дано мгновенное значение тока:
7Г
i = 10 • sin( cot - —),
Требуется записать вектор тока в комплексной форме.
Решение:
В показательной форме:
71
Рис. 2.7. Вектор синусоидального тока на комплексной плоскости
Рис. 2.8. Расположение вектора тока I
4
>/2
В алгебраической форме:
т г / лсО 1 г / лсО । Ю V2 . 10 л/2
I = I cos(-45 ) + jI sin(-45 ) = -j=’——
Пример 2.2. Дан вектор тока:
7 =-5-/5
Требуется записать мгновенное значение тока, определить
угол у/, между вектором I и вещественной осью и изобразить
вектор I графически.
Решение:
В общем виде:
i = Im -sin(arf + y/j),
где Im = 1-Л =7б2+52 -V2=10J
y/t = arctg(—9 + 180°= arctg(—) +180° = 45° +180° = 225°.
Re -5
Таким образом мгновенные значения тока и у/1:
72
Табл. 2.1. Синусоидальные функции времени в комплексной форме
Va а= Amsin(al ± уа) 1 1+ А = A(cosy/a ± jsint/7a)
0, рад ±2.77 0° ±360° П] = Ат sin ant =феу0 — V2 А = — V2
±77 / 6 ±30° «2 = Ат sin{ax ± л7б) А2 = Ae±j30° ^2 = /
±77 / 4 ±45° а3 = Ат sin(cot ±77/4) ^3=^45° Ау — ? I2 21
±77 /Ъ ±60° а4 ~ sin(at ± я7 з) Л4=^60’ Л4 = А +1 ~|<N \ у j
±л72 ±3я72 ±90° ±270° а5 = Ат sin(cot ±тг/2) Л5=Ле±>90’ A^ = ±jA
±2я73 +4л-/3 ±120° ±240° = Ат sin(a)t ± 2тг/з) 4 = Ле±у120° = я \ 1 to I - 1+
±77 ±180° а7 - Ат sin(a>t ± тг) ^ = Л^'80° Я7 =-А
i = 10-sin(ай + 225°) или z = 10-sin(a}t-\35°);
=+225° u -135°.
На рис. 2.8. приведено расположение вектора / на ком-
плексной плоскости в примере 2.
В табл. 2.1. представлены синусоидальные функции вре-
мени в комплексной показательной и алгебраической формах
для различных аргументов. Использование этих выражений
поможет при решении задач в комплексной форме и прове-
дении различных преобразований комплексных чисел.
2.5. Однофазные электрические цепи
синусоидального тока
2.5.1. Законы Кирхгофа для цепи синусоидального тока
Первый закон Кирхгофа - алгебраическая сумма мгновен-
ных значений токов в узле электрической цепи равна нулю:
т
X±ik = 0.
к=2
Второй закон Кирхгофа - алгебраическая сумма мгновен-
ных значений ЭДС в замкнутом контуре электрической цепи
равна алгебраической сумме падений напряжений и алгеб-
раической сумме мгновенных значений напряжений в этом
же замкнутом контуре:
( \
т т t- г п
S±e' = S ±ikRk±Lk-~±—\‘kdt +£±uk-
/=1 4=1 ( k J к-i
2.5.2. Синусоидальный ток в цепи с активным
сопротивлением
В теории цепей синусоидального тока сопротивление R
называют активным сопротивлением в отличие от цепей по-
стоянного тока, где R - просто сопротивление (резистор).
Рассмотрим электрическую цепь с активным сопротивле-
нием (рис. 2.9а), к которому приложено синусоидальное на-
пряжение
74
u = Um sino)t. (2.16)
Согласно второму закону Кирхгофа для этой цепи
О = IR - и ,
откуда
j_u__Um_sina>(_ I sjn(Ot (2.17)
R R m
где lm = ^22-, Um - амплитудные значения синусоидального тока и на-
R
пряжения соответственно.
Из уравнений (2.16) и (2.17) следует, что напряжение и
ток в цепях с активным сопротивлением совпадают по фазе,
а амплитудные значения тока и напряжения связаны законом
Ома. Так как действующие значения тока и напряжения в
л/2 раза меньше амплитудных, то можно записать U^IR, т.е.
действующие значения синусоидального тока и напряжения
связаны законом Ома так же, как и для постоянного тока.
^/=0 Рис- 2-9- Электрическая цепь сину-
соидального тока с активным со-
противлением а - электрическая
ц схема; б - временная диаграмма для
—> + мгновенных значений тока и мощ-
» ности; в - векторная диаграмма в
/ комплексном виде
в
75
Временная диаграмма тока, напряжения и мощности элек-
трической цепи с активным сопротивлением представлена на
рис. 2.96.
Выражения для комплексного значения векторов тока и
напряжения электрической цепи с активным сопротивлением
с учетом мгновенных значений тока и напряжения
$7=0) имеют вид:
/ = 1е^> = IeJQ =I,U = Uej^ = Uej0 = U .
При этом векторная диаграмма приобретает вид, пред-
ставленный на рис. 2.9в.
Комплексное сопротивление электрической цепи с актив-
ным сопротивлением:
[Ом]
Мгновенное значение мощности электрической цепи с ак-
тивным сопротивлением:
p = i u = Im sina>t-Um -sincot =
т тт l-cos2at , гтч , (2-18)
= -Uт-----------= IU(\ - cos 2cot) [Вт]
Мгновенная мощность характеризует скорость поступле-
ния электрической энергии в цепь.
Из диаграммы (рис. 2.9в) следует, что мгновенная мощ-
ность изменяется с двойной частотой и всегда положительна
(р > 0). Последнее указывает на то, что активное сопротивле-
ние R потребляет электрическую энергию от источника на-
пряжения и необратимо преобразует ее в другие виды энер-
гии. Если, например, активное сопротивление - нагреватель-
ный элемент, то электрическая энергия преобразуется в теп-
ловую.
Активная мощность характеризует работу, совершаемую в
электрической цепи за период Т и таким образом, определяет
электрическую энергию W, необратимо преобразовываю-
щуюся в другие виды энергии:
76
т
W = \p-dt = P-T = UI-T = RI2 T .
о
(2.19)
Среднее значение мощности электрической цепи с актив-
ным сопротивлением за период Т называют активной мощ-
ностью и обозначают Р:
n n 1 7 > 1 7- - 1 7г г г l-cos2at ,
Р = Р = — \pdt = — \iudt = — / {/ --------------dt =
Ср гр I-* гтч I rri I Щ ГП л
О о о z (2.20)
= = IU = l1R= — = р[Вт]
2 R
На рис. 2.96 активной мощности соответствует уровень Р.
2.5.3. Синусоидальный ток в электрической цепи с
индуктивностью
Рассмотрим идеальную катушку с постоянной индуктив-
ностью L, у которой активное сопротивление равно нулю.
Пусть в цепи с индуктивностью L (рис. 2.10а) протекает
синусоидальный ток i = Im sin cot. Этот ток создает магнит-
ный поток Ф, который согласно закону электромагнитной
индукции индуцирует в катушке ЭДС самоиндукции
dФ Т di
е, = -со— = -L—,
L dt dt
где co - число витков катушки.
На рис. 2.10а показаны условные положительные направ-
ления тока i в цепи и падение напряжения ид на элементе с
индуктивностью L.
Согласно уравнению (2.4) падение напряжения ир= - е^.
Для электрической цепи рис. 2.10а справедливо уравне-
ние, составленное по второму закону Кирхгофа:
0 = uL-u. (2.21)
Так как ток изменяется по синусоидальному закону
i = Im sin cot,
77
то из уравнения (2.6) мгновенное значение напряжения
т di т т
ит = L — = Lcolm cos cot -
L dt
(2.22)
г T
- (OLlm cot H—
*** I Л
к
= Um sin\ a>t + —
где a>L - XL - индуктивное реактивное сопротивление, Ом.
Um=Im<oL=ImXL,
или
78
откуда определяется связь между действующими значениями
напряжения (U) и тока (7):
U = IXL. (2.23)
Временная диаграмма для тока, напряжения и ЭДС пред-
ставлена на рис. 2.106.
Таким образом, из уравнения (2.23) следует, что значение
мгновенного напряжения на катушке индуктивности щ опе-
режает ток в ней на 90°, а амплитудные и действующие зна-
чения напряжения и тока связаны законом Ома (2.23).
Индуктивное (реактивное) сопротивление Х]_ линейно за-
висит от частоты ш протекающего по ней тока, т.е. с увели-
чением частоты от 0 до оо индуктивное сопротивление растет
от 0 до оо.
Если вектор тока направить по положительной вещест-
венной оси (+7?е), комплексной плоскости, то комплексные
значения тока и напряжения с учетом их мгновенных значе-
ний для данной электрической цепи запишутся в следующем
виде:
/ = /е7>, = /е70 = ;.
U = Ue"“ = Uej90° = jU = jIXL.
Согласно этим выражениям векторная диаграмма имеет
вид, представленный на рис. 2.10в, на которой вектор напря-
жения опережает вектор тока на угол тг/2. Угол сдвига фаз
между напряжением и током ф = у/и-
я
Комплексное сопротивление электрической цепи с индук-
тивностью
Z = ==~ = jy = JXL [Ом].
Мгновенное значение мощности электрической цепи с ин-
дуктивностью L
т тт \ 71 I г г г sin2a>t
р — iu — Im sina>tUm sin a>t + —\ = ImUm--------------= IUsin2cot.
-* *»• in Л | fit Irl Л
79
Изменения мгновенных значений тока, напряжения и
мощности электрической цепи переменного тока с индук-
тивностью за период Т представлены на временных диа-
граммах рис. 2.106.
Из анализа диаграммы мгновенной мощности (рис.2.106)
следует, что в интервале времени от Г=0 (точка 1) до t= Tl\
(точка 2), когда ток в цепи возрастает от 0 до Im, электриче-
ская энергия из сети поступает в индуктивность, преобразу-
ется и накапливается в ней в виде энергии магнитного поля р
> 0 (направления тока и напряжения совпадают), т.е. индук-
тивность потребляет электрическую мощность от источника
и запасает ее в магнитном поле индуктивности, при этом
I2 L
энергия WL = увеличивается, так как ток в этом интер-
вале возрастает. Запасенная энергия пропорциональна за-
штрихованной площади на рис. 2.106 со знаком «+» в этом
интервале. Наибольшее значение энергии магнитного поля
будет в момент, соответствующий точке 2, когда ток дости-
гает амплитудного значения (/т).
Во вторую четверть периода между точками 2 и 3 ток в
цепи убывает. Мощность р < 0 (направления тока и напряже-
ния разные), т.е. в этом интервале электрическая энергия
магнитного поля индуктивности передается источнику энер-
гии. Действительно, в этом случае ток уменьшается по вели-
чине и следовательно энергия также уменьшается. В момент
/=Т/2 (точка 3) ток и энергия магнитного поля равны нулю,
вся запасенная энергия будет отдана источнику энергии. За-
штрихованная площадь на рис.2.10б, (со знаком «-») в этом
интервале соответствует переданной источнику электриче-
ской энергии. Далее процесс периодического обмена элек-
трической энергией между источником энергии и магнитным
полем индуктивности повторяется. Из графиков рис. 2.106
видно, что площади, определяющие запасенную и отданную
энергию, равны.
Таким образом, в электрической цепи переменного тока с
идеальным индуктивным элементом происходит периодиче-
ский обмен энергией между источником и магнитным полем.
Интенсивность обмена энергией принято характеризовать
наибольшим значением скорости поступления энергии в
магнитном поле, т.е. амплитудным значением мгновенной
80
мощности, которое называют индуктивной (реактивной)
мощностью и обозначают Ql,:
QL=UI = XLI2 (2.24)
Реактивная мощность имеет размерность Вт, однако еди-
нице реактивной мощности присвоено название вольт-ампер
реактивный, сокращенно «вар». Это позволяет говорить со-
кращенно «мощность, равная стольким-то вар», не добавляя
слово «реактивная».
Среднее значение мощности электрической цепи с индук-
тивностью:
Т т
Р = — jpdt = • U sin2a>t dt = 0,
О о
т.е. в цепи с индуктивным элементом не совершается работа,
а происходит только периодический обмен между источни-
ком и магнитным полем индуктивности.
2.5.4. Синусоидальный ток в электрической цепи с
емкостью
Рассмотрим электрическую цепь, (рис. 2.11), включаю-
щую источник энергии и линейную емкость.
Пусть мгновенное значение тока изменяется по синусои-
дальному закону
I - Imsincot.
По второму закону Кирхгофа для электрической цепи рис.
2.12а справедливо:
О = ис - и.
В соответствии с уравнением 2.11:
1 f. j 1 Г, L
иг =— \irdt=— \lmsm(ot =——cos cot =
С z-т J c p J "» z-Z-1
c c , (225)
= -77Im cot -?-) = UCm sin(cot~)
coC 2 2
где Im----- UCm - амплитудное значение напряжения; Xc - —— -
aC m cdC
емкостное (реактивное) сопротивление.
81
в
Тогда очевидно, что зависимость между действующими
значениями тока будет иметь вид:
*с
(2.26)
Таким образом, из уравнений следует, что для цепи с ем-
костью напряжение в ней отстает по фазе от тока на 90°. Ам-
плитудное и действующие значения тока и напряжения ем-
кости связаны законом Ома. Емкостное реактивное сопро-
тивление Хс обратно пропорционально частоте тока проте-
кающего через емкость. При и = 0,Хс = °0, а увеличением ш
до бесконечности Хс стремится к нулю.
82
Изменения мгновенных значений тока и напряжения од-
нофазной электрической цепи с емкостью представлены на
рис. 2.116.
Если вектор тока направить по положительной вещест-
венной оси (+Re) комплексной плоскости, то комплексные
значения векторов тока и напряжения записываются в виде:
I_ = Iej0=I;
Uc^Vc^'^-jU-
В соответствии с этими выражениями векторная диаграм-
ма для рассматриваемой цепи имеет вид (рис. 2.11 в), на ко-
торой вектор напряжения отстает от вектора тока на угол тг/2.
Угол сдвига фаз между напряжением и током
(p = 4'u~^i = ~л/2.
Комплексное сопротивление электрической цепи с емко-
стью определяется как
Z = ^=^ = -j~- = -jXc [Ом]
/ аС
Мгновенное значение мощности электрической цепи с ем-
костью с учетом угла сдвига фаз между напряжением и то-
ком
р = iu = I т sincotUт sin(cot -—) =
. ТГ , sin2cot . ттт . „
= Um (---------) = -IU sin 2a>t
Irl III ' '
Изменения мгновенных значений тока, напряжения и
мощности электрической цепи переменного тока с емкостью
за период Т представлены на временной диаграмме рис.
2.116.
Анализ диаграммы рис. 2.115 показывает, что в первую
четверть периода (t = Q^T/4 или cot = (Нтг/2) ток и напряжение
имеют разные знаки и мгновенная мощность отрицательна р
< 0, т.е. электрическая энергия, запасенная в электрическом
поле емкости, убывает, возвращаясь к источнику энергии
(знак «-»). Энергия электрического поля W3 =CU^/2 зави-
83
сит от напряжения и максимальна в момент t = 0, когда на-
пряжение имеет амплитудное значение.
К моменту времени (г = 774 или шг = тг/2) напряжение ста-
новится равным нулю и вся энергия, запасенная в электриче-
ском поле, возвращается к источнику. Эта энергия пропор-
циональна заштрихованной площади на рис. 2.116. На этом
интервале знак «-» указывает на отдачу энергии из электри-
ческого поля к емкости.
Во вторую четверть периода (t = TI4+TI2 или = тг/2—тг)
ток и напряжение совпадают по знаку, р > 0, т.е. емкость за-
пасает энергию в электрическом поле. Максимум энергии
Т ЗТ
соответствует моменту t = Т/2. В интервале между t = у —
ток изменяет направление, а напряжение на конденсаторе
убывает. Происходит разряд конденсатора: энергия электри-
ческого поля возвращается в сеть. Энергия, возвращенная в
сеть, равна площади ограниченной кривой р(t) и отмечена
знаком «-». Дальше процесс обмена электрической энергии
между электрическим полем конденсатора и источником
энергии повторяется. Из графиков рис. 2.116 видно, что
площади определяющие запасенную и отданную энергии
равны.
Активная мощность, характеризующая необратимые про-
цессы преобразования электрической энергии в другие виды,
определяемая средним значением мгновенной мощности за
период, для емкости равна нулю:
, г т
Р = — j"pdt = J/t/c sin(2&tf)dt = 0 .
о о
Таким образом, в цепи с емкостью не совершается работа,
а происходит периодический обмен энергией между источ-
ником энергии и электрическим полем емкости. Интенсив-
ность обмена энергией принято характеризовать наибольшим
значением скорости поступления энергии в электрическое
поле, т.е. амплитудным значением мгновенной мощности,
которое называют емкостной (реактивной) мощностью и
обозначают Qc'-
QC=UC! = XCI2 (2.27)
84
Емкостная (реактивная) мощность элемента, так же как и
индуктивная (реактивная) мощность, измеряются в вольт-
амперах реактивных, сокращенно «вар».
2.5.5. Синусоидальный ток в электрической цепи с
последовательным включением активного
сопротивления (R) и индуктивности (L)
На рис. 2.12 представлена электрическая цепь с последо-
вательным включением активного сопротивления R и индук-
тивности L, к которой приложено синусоидальное напряже-
ние и.
Для электрической цепи (рис. 2.12а) в соответствии со
вторым законом Кирхгофа справедливо выражение;
0 = uR+uL-u = iR + L^--u. (2.28)
Принимая, что ток
i = Im sin cot,
уравнение (2.28) с учетом фазовых соотношений перепишем:
Рис. 2.12. Электрическая цепь с последовательным включением активно-
го сопротивления и индуктивности (а); векторная диаграмма (б); тре-
угольник сопротивлений (в); треугольник мощностей (г)
85
u = U Rm sin at + ULm sin(a>t + —),
где
U Rm m > ULm m ' L ’
или для действующих значений:
UR = I-R;UL=IXL.
Выражения для комплексного тока и напряжения цепи с
учетом фазовых соотношений можно записать в виде:
I_ = IeJ0 =1;
U = Ur+LLl=^R+JUl-
(2.29)
При построении векторной диаграммы (рис. 2.126) за ба-
зовый вектор принимаем вектор тока I, направленный по по-
ложительной вещественной оси (+Re). Вектор напряжения на
сопротивлении Ur, согласно 2.29, совпадает по фазе с векто-
ром тока I, а вектор напряжения на индуктивности Ui. опере-
жает ток на 90°. Вектор приложенного напряжения U равен
геометрической сумме векторов Ur и U_l. Угол ср на вектор-
ной диаграмме (рис. 2.126) равен
<P = Vu ~Vi =arctg
Полное комплексное сопротивление цепи:
„ U U R U L UR ,UL
Z = = = =И- + =±- = —± + J—± =
~ I I I I I
(2.30)
По этому уравнению построим треугольник сопротивле-
ний (рис. 2.12в). При построении первоначально откладыва-
ем в масштабе (Ом/мм) отрезок R, перпендикулярно к кото-
рому против часовой стрелки откладываем в масштабе отре-
86
зок Xl (умноженный на у). Диагональ полученного треуголь-
ника - отрезок Z называется полным сопротивлением цепи.
Уравнение (2.30) можно переписать в показательной фор-
ме:
Z=Z-ei4>
где
Л
Из треугольника сопротивлений связь между полным со-
противлением Z, R и Xl можно записать:
R = Zcos(p‘, X L~Zsin(p.
Полная мощность цепи:
S = UI = URI + jULI = I2R + jI2P + jQL,
где S = IU - полная мощность, ВА (вольт-ампер); Р = I2 R - активная
мощность, Вт (ватт); QL = I2X L - индуктивная (реактивная) мощность,
вар.
На рис. 2.12г построен треугольник мощности, в котором
полная мощность 5 является диагональю треугольника. Угол
(р определяется
Ql\
(р = arctg .
Связь между полной мощностью S' и составляющими Р и
Ql (рис. 2.12г):
P-Scoscp-, QL=Ssin(p.
2.5.6. Синусоидальный ток в электрической цепи с
последовательным включением активного
сопротивления (R) и емкости С
На рис. 2.13а представлена электрическая цепь с последо-
вательным включением активного сопротивления R и емко-
сти С, к которой приложено синусоидальное напряжение и.
87
Рис. 2.13. Электрическая цепь с последовательным включением активно-
го сопротивления и емкости (а); векторная диаграмма (б); треугольник
сопротивлений (в); треугольник мощностей (г)
Для электрической цепи (рис. 2.13а) в соответствии со
вторым законом Кирхгофа запишем уравнение:
О = uR + ис - и = iR + — iidt -и . (2.31)
Приняв, что ток в цепи изменяется по синусоидальному
закону
i = Im sin cot,
уравнение (2.31) перепишем в виде:
u = U Rm sin cot + UСт sin( cot-—),
где
U Rm ~ ImR > Ucm ~Jm'XC
или для действующих значений
Ur = I R, Uc=I-Xc.
88
Перепишем уравнения для тока и напряжения в комплекс-
ной форме:
/ = iej° = I
U = UR+UC=UR-juc-
По этим уравнениям строим векторную диаграмму напря-
жений и тока (рис. 2.136).
Из векторной диаграммы угол ф определяется:
<p = arctg(-Uc/UR).
Полное комплексное сопротивление цепи:
г=£==£л _ .^с =LA_ =7г_ т (232)
- I- I I I I с
По этому уравнению для искомой цепи треугольник со-
противлений (рис. 2.1 Зв).
Уравнение (2.32) можно представить в показательной
форме
Z = Z-e7<’,
К
Связь между полным сопротивлением Z и составляющими
R,XC:
К = Хсо5ф-, Хс=7зтф.
Полная мощность цепи:
S = OT = UKI-jUcI = I2R-jl2Xc = P-JQC, (2.33)
где S' - IU - полная мощность; P = I2R - активная мощность;
Qc =I2Xc - емкостная (реактивная) мощность.
По уравнению (2.33) строим треугольник мощности
(рис.2.13г). Угол ф определяется
89
Связь между полной мощностью S и составляющими Р и
Ql-
P = Seos ср-, Qc=Ssin<p.
2.5.7. Синусоидальный ток в электрической цепи с
последовательным включением сопротивления (R),
индуктивности (L) и емкости (С)
Электрическая цепь с последовательным включением ак-
тивного сопротивления R, индуктивности L и емкости С
представлена на рис. 2.14а. Цепь присоединена к источнику с
синусоидальным напряжением и.
Для электрической цепи в соответствии со вторым зако-
ном Кирхгофа запишем:
O = uR+uL+uc-u = iR + L — + — iidt - и . (2.34)
dt С J
Учитываем, что при последовательном соединении эле-
ментов R, L, С протекающий через них ток является одина-
ковым и равным
i = Iт sin cot.
С учетом фазовых соотношений уравнение (2.34) перепи-
шем в виде
и = U Rm sin Mt + ULm sin(d)t + ^-) + UCm sin(at >
URm = ’ Ubm = U Cm ~ An ’ %C •
Для действующих значений эти уравнения перепишутся в
виде
Ur=I-R-Ul=I-Xl-Uc=I-Xc.
Уравнения для тока и напряжения в комплексной форме
имеют вид:
I_ = Iej0 = I;
U = О.r + UL + Uc = UR + jUL - jUc =
= IR + jIXL-jIXc=l[R + j(XL-Xc)]
90
Ur Ur
Рис. 2.14. Неразветвленная электрическая цепь с последовательным со-
единением активного, индуктивного и емкостного сопротивлений (а);
треугольник сопротивлений (б)
Комплексное сопротивление электрической цепи (рис.
2.14,а) определяется как
z = = = = R + j(Xl _Хс; = R + jX_ (2 з6)
где X = XL - Хс - реактивное сопротивление цепи.
Исходя из (2.36) модуль общего сопротивления электри-
ческой цепи определяется выражением:
\Z\ = Z = ^R2+(XL-XC)2 = Jr2+x2 .
Модуль напряжения сети из выражения (2.35) запишется в
виде:
и = и = = IZ.
Согласно (2.36) треугольник сопротивлений электриче-
ской цепи будет иметь вид, представленный на рис. 2.146
сплошной линией - для XL >ХС, или X >0 и пунктирная
линия XL < Хс, или X < 0.
Из треугольника сопротивлений рис. 2.146 имеем:
91
ср = arctg —--— = arctg—,
или R R (2.37)
<p = arccos—.
Z
На рис. 2.15a,б,в представлены векторные диаграммы тока
и напряжений цепи с R, L, С элементами при различных со-
отношениях реактивных сопротивлений.
Векторная диаграмма рис. 2.15а соответствует случаю ко-
гда индуктивное (реактивное) сопротивление Xl больше ем-
костного (реактивного) сопротивления Хс (Xl > Хс). В этом
случае напряжение на индуктивности Ul больше напряжения
на емкости (Ul> Uc), а угол между вектором напряжения Uи
вектором тока в цепи / (2.37) - ср > 0. Это указывает на то,
что в целом R L С цепь как приемник электрической энергии
имеет активно-индуктивный характер (ток I отстает от на-
пряжения U на угол <р).
На векторной диаграмме рис. 2.156 изображены напряже-
ния и ток в цепи при следующих соотношениях: Xl < Хс; X <
0; Ul < Uc; <р < 0. В этом случае электрическая R L С цепь как
приемник электрической энергии имеет активно-емкостный
характер (ток I в цепи опережает напряжение U на угол <р).
На векторной диаграмме рис. 2.15в изображены напряже-
ния и ток в цепи при следующих соотношениях: Xl - Хс; X =
0; UL~ Uс; (р= 0. В этом случае электрическая RLC цепь как
приемник электрической энергии имеет чисто активный ха-
рактер (ток I в цепи совпадает с напряжением U).
Рассмотрим соотношения для мощности в электриче-
ской цепи. Если все стороны треугольника сопротивлений
(рис. 2.146), умножить на Z2, получим треугольник мощно-
стей, показанный на рис. 2.16 сплошной линией - при Q > 0
(Ql> Qc).
Соотношения для треугольника мощностей:
Р О XL-X с
COS(p = — tg(p=^ = -X-—^-,
о г К
где S = I2Z - IU - полная мощность электрической цепи, В А (вольт-
ампер); Р = I2R - активная мощность, Вт (ватт); Q = Ql~Qc ~ реактив-
ная мощность электрической цепи, вар; Qc - 12ХС - емкостная (реактив-
ная) мощность, вар; QL = 7 2 XL - индуктивная (реактивная) мощность, вар.
92
Рис. 2.15. Векторные диаграммы тока и напряжений: а - XL > Хс (Ui >
ОД; б - XL < Хс (Ur. < UJ-в-XL =ХС (UL=UJ.
Если Qc >Ql, то Q < 0 и треугольник мощностей изобра-
жается с углом (-ср), на рис. 2.16, пунктиром.
Коэффициент мощности (cos^>) для электрической цепи
из треугольников мощности:
Р R
COS ф = — = —.
S Z
Значение коэффициента мощности может изменяться от О
до 1 в зависимости от отношения R/Z цепи.
Из треугольника мощностей можно установить следую-
щие соотношения между S, Q, Р и cos qr.
93
Рис. 2.16. Треугольник
мощностей электрической
цепи с последовательным
включением активного, ин-
дуктивного и емкостного
сопротивлений
S = I2Z = IU = ^- = ^Р2 + Q2 , ВА;
Р = I2R - IU cos (р, Вт;
Q = Ql~Qc=i1(xl-xc) = 1u sin<P’ eaP-
Полная комплексная мощность электрической цепи вы-
ражается следующим образом:
S = S-ej(p = Ulej<p = UIcosq> + jUI sin<p = P + jQ.
Выражая P и Q через ток, получим:
S = PR + jP(XL-Xc) = P[R + j(XL -XcЯ = I1 Z.
Модуль тока в квадрате (/2) можно представить в виде
произведения сопряженного комплекса тока /* на его ком-
плекс (/*•/), тогда выражение для полной комплексной
мощности примет следующий вид:
S = I2Z = I_*-L-Z = f -U
При этом, если комплекс тока / = I • eJV, то сопряженный
комплекс/* =/ е--/'/| .
94
2.5.8. Законы Кирхгофа в комплексной форме. Расчет
электрических цепей синусоидального тока
Анализ и расчет сложных электрических цепей синусои-
дального тока, производится с помощью уравнений электри-
ческого состояния, составленных на основе законов Кирхго-
фа в комплексной форме. Используя уравнения, записанные
в комплексной форме для электрических цепей, легко рас-
считать токи и напряжения в ветвях.
Первый закон Кирхгофа в комплексной форме
Алгебраическая сумма комплексных токов, сходящихся в
узловой точке электрической цепи, равна нулю, т.е.:
Z(±n=o
Можно принять, что со знаком «+» берутся токи, которые
идут к узлу, а со знаком «-» - токи, которые идут от узла.
Второй закон Кирхгофа в комплексной форме
Алгебраическая сумма комплексных ЭДС в любом замк-
нутом контуре электрической цепи равна алгебраической
сумме комплексных падений напряжений и алгебраической
сумме комплексных напряжений в этом же контуре.
Математически можно записать второй закон Кирхгофа:
X±£ = 2±/-Z + £±l/.
Применяя законы Кирхгофа в комплексной форме, анализ и
расчет цепей синусоидального тока можно прово дить мето-
дами, рассмотренными в гл. 1 «Электрические цепи постоян-
ного тока» разд. 1.5: методами контурных токов, методом
узлового напряжения и эквивалентного генератора.
Пример 2.3. Дана электрическая цепь (рис. 2.17), с пара-
метрами ЭДС, R, L, С:
Требуется рассчитать токи в ветвях цепи, активные и ре-
активные мощности всей цепи и отдельных ветвей.
Решение.
1. Обозначим положительные направления комплексных
токов в ветвях Z ], /2 > 1з-
95
Рис. 2.17. Схема цепи
e = Emsin ot-
169,7 sin 3147;
7?i=10 Ом;
7?2=24 Om;
/?з=15 Ом;
Zi=1 9 мГн;
7,3=64 мГн;
C2=450 мкФ
2. Определим комплексные значения параметров цепи:
е = 169,7sinot => Е = ^2J-.ej0 =120 В;
V2
Z[ — + jXj ~ R} + ~ Ю + _/6 Ом;
Z.i = Ri~j^2 = R\~Л Ом;
coC^
Zз = + jX3 = /?з + jo • Z,j =15 + у 20 Ом.
3. Определим полное сопротивление цепи
Z = Z, + =
- Z2 + Z 3 39 + J13
= 24,4 + JI0,8 = 26,7еу23°55’ Ом.
4. Определим ток в неразветвленной части цепи
-l z
120
26,7^23°55'
= 4,5е->23°55' А.
5. Выразим токи в параллельных ветвях через ток в не-
разветвленной части цепи:
96
^— = 4,5e-'23’w
" z2+z3
15 + -'20-2,74г>|от5, A;
39 + /13
+3
7,—^2—
Z2+Zj
= 4,5e->23"55' .^ZJL = 2,74e-258‘35'
39 + /13
A.
Токи h и /з можно определить и другим путем:
_ — ab
. А^ = 4,5е-^' /24-J7X15+J2Qj =
_а* _1_а* _1 z2+z3 39+/13
= 68,4e-j5°30' В;
/ _ ^-ab _ 68,4e~j5 30 _ 68,4е~у5 30 _ 74 /10’45' д.
-2’Z2“ 24-/7 ’ 25e">16°15' ’ ’
г _ V-ab _ 68,4е“у5 30 _ 68,4е-75 30 -/58’55' А
15 +/20 ’ '
6. Определим активные мощности всей цепи и отдель-
ных ее ветвей:
—ab
Р = ]= Ле[120- 4,5еу23°55' ] = 120-4,5со523°55' = 494 Вт;
Р} =i^R} = 4,52-10 ~ 202 Вт;
р2 = I^r2 = 2,74 2 • 24 »180 Вт;
р3 = /32/?3 = 2,742 15«112 Вт.
Проверка показывает, что Р = Р\ + Р2 + /3 = 494 Вт.
7. Определим реактивные мощности всей цепи и от-
дельных ее ветвей:
Q = 1т • Zj ] = 1т [120• 4,5еу23°55' J = 120 • 4,5jz«23°55' = 218 вар;
2, = = 4,52 -6 * 122,5 вар;
02 = 12Х2 = 2,742 -(-7)~ -52,6 вар;
Q3 = ljx3 = 2,742 • 20 ® 149 вар.
97
Рис. 2.18. Схема цепи
Исходные данные:
q = Y20y[2 sinart В;
е3 =ЮО/2.уги(йГ-ЗОР)В;
J?i=2 Ом;
—— =ю Ом;
суС2
<уА3 = 50 Ом.
С учетом Pi, Qi и <Э3 реактивная мощность всей цепи:
2 = 121,5-52,6 + 149 ® 218 вар.
Пример 2.4. Найти токи в схеме рис. 2.18 методом двух
узлов. Положительные направления ЭДС указаны на схеме
стрелками.
Решение.
1. Запишем ЭДС в комплексной форме:
=120 В
Е3 = 100 • е-730° В
2. Произвольно выберем положительные направления
для токов (от узла b к узлу а)
3. Определим проводимости ветвей:
- = 0,5 См;
2
-----= 0,1 j См;
-10/
—1— = —= -0,2/ См.
5J
4. Определим напряжение между узлами а и Ь:
98
+Гз
120 • 0,5 -100е~у30° • 0,2e^90° , . . _ ,-8.
0,5 + 0,1 j - 0,2j
5. Определим токи в ветвях схемы:
/ = ~^ь = 120-104е ;8 = + = t!75е-/40»25' д
- Zx 2
l2 = 0^ = z!0^ = 10.4e^ А;
-2 Z2 — 10ej9°
_ Е3-UаЬ _ Ю0е’у30° -104е’78° = З9,1еу245’30' _
-3" Z3 “ 5ey90° " 5е>90°
= 7,82е'155°30' А.
2.6. Резонанс напряжений
В цепи с последовательным соединением сопротивления
R, индуктивности L и емкости С возможно явление называе-
мое резонансом напряжения. Явление резонанса наблюдает-
ся при последовательном соединении катушки индуктивно-
сти с активным сопротивлением R и емкости.
Рассмотрим явление резонанса напряжений на примере
цепи рис. 2.19.
При резонансе напряжения в цепи ток и напряжение сов-
падают по фазе, т.е. угол ср = 0, и полное сопротивление (Z)
цепи равно ее активному сопротивлению (7?):
2 = Л/Л2+('Л'Д-^С/=Л.
Это равенство, очевидно, будет иметь место, если выпол-
няется условие резонанса напряжения
=Хс,
т.е. реактивное сопротивление цепи (XL —Xс) равно нулю.
99
Рис. 2.19. Резонансный контур напряжения
Выразив XL и Хс соответственно через L, С и частоту
приложенного синусоидального напряжения f, получим
откуда
где fpe3 - резонансная частота.
Таким образом, при XL =ХС в цепи возникает резонанс
напряжений, так как резонансная частота равна частоте на-
пряжения, подведенного к цепи.
Из закона Ома ток для цепи (рис. 2.19):
z Jr2+(Xl-Xc)2 '
Анализ этой зависимости показывает, что ток в цепи при
резонансе (XL-XC =0), равен напряжению деленному на
активное сопротивление:
R
Ток в цепи достигает максимума, так как полное сопро-
тивление Z минимально (Z - R).
100
При резонансе напряжения напряжение на индуктивности
равно напряжению на емкости (UL = UC), так как UL = IXL ,
^uc = ixc.
При больших значениях XL и Хс относительно R эти на-
пряжения могут во много раз превышать напряжение сети.
Напряжение на активном сопротивлении при резонансе
напряжения равно напряжению сети:
Ur=IR = U.
На рис. 2.20 изображена векторная диаграмма цепи рис.
2.19 при резонансе напряжений.
Из диаграммы видно, что ток совпадает по фазе с напря-
жением сети, напряжение на активном сопротивлении равно
напряжению сети, а напряжение на индуктивности UL и ем-
кости Uc больше напряжения сети:
UL=UC>U = UR.
Явление, при котором напряжение на индуктивности и
емкости в цепи может при определенных условиях
(XL -Хс » R) превышать напряжение сети, получило на-
звание резонанса напряжений. При этом:
- коэффициент мощности цепи равен единице:
или sincp = 0.
Рис 2.20. Векторная диаграмма
при резонансе напряжений
101
активная мощность цепи равна полной мощности:
Ррез = VI COS(P = UI = Spe3.
- реактивная мощность цепи равна нулю:
Qpe3 =Ql~Qc= IV sin(p = 0.
- поскольку резонанс напряжений возникает при усло-
вии XL = Хс:
то резонанс может быть получен или путем подбора пара-
метров цепи (L, С) при заданной частоте сети (/" = const), или
путем подбора частоты сети при заданных параметрах цепи
(2 = const, С = const).
Таким образом, в режиме резонанса R L С цепь потребляет
из сети только активную электрическую энергию (имеет чис-
то активный характер), не потребляя реактивной энергии (Q
= 0). При этом реактивная энергия периодически переходит
из электрического поля емкости в магнитное поле индуктив-
ности и наоборот.
Рис. 2.21. Зависимости I,cos<p,Z,R,Xc,XL,UR,UL,UC от частоты на-
пряжения сети
102
Для анализа цепи используем частотный метод, позво-
ляющий выяснить зависимость параметров цепи и других
величин от частоты f при ее изменении от 0 до оо.
На рис. 2.21 изображены графики зависимости
UR UC,UL I, Хс, XL,Z,cos(p от частоты сети при неиз-
менном напряжении сети.
При f - 0 ток I = 0, сопротивления XL = 2л/7, = 0,
Хс = l/2rfC = <n, напряжения Ur=IR = 0, Ul=IXl=0,
UC=U. При f = fpe3, XL=XC, I=U/R, UL=UC,
UR —U . При f -> oo XL —> oo, Xc —> 0, (7Л —> 0, Uc —> 0,
В интервале частот от 0 до fpe3 нагрузка имеет активно-
емкостной характер, ток опережает по фазе напряжение сети.
В интервале частот от f до / —> со нагрузка носит актив-
но-индуктивный характер, ток отстает по фазе от напряже-
ния сети.
Наибольшее значение напряжения на емкости получается
при частоте, несколько меньшей резонансной, на индуктив-
ности - при частоте, несколько большей резонансной.
Явления резонанса широко используются в радиоэлек-
тронных устройствах и в заводских промышленных установ-
ках.
Пример 2.5. Определить напряжение электродвигателя U
сопротивление которого состоит из активного (7?) и индук-
тивного сопротивлений (XL) (рис. 2.19) и частоту сети, при
которой в цепи возникает резонанс напряжений, если цепь
имеет следующие параметры:
R=20 Ом, Z=0,1 Гн, емкость цепи С-5 мкф, напряжение
сети С/=220 В.
Решение.
Резонансная частота
- 1 1
рез 2л41с 2-3.14- Vo.l-5-Ю-6
= 224 Гц.
103
Индуктивное сопротивление обмотки электродвигателя
при резонансе напряжения
XL = Хс = 2rfpe3L = 6.28 • 224• 0.1 = 140 Ом.
Напряжение на электродвигателе при резонансе напряже-
ния
t/3=7Z3 =
^И_°=1540В
20
Очевидно, что при напряжении 1540 В (при расчетном
значении для изоляции электродвигателя 220 В) изоляция
может быть пробита и электродвигатель выйдет из строя.
2.7. Переменный синусоидальный ток в цепи с
параллельным включением потребителей
электроэнергии
Рассмотрим параллельное соединение сопротивлений, ко-
гда все ветви электрической цепи (потребители) находятся
под одним и тем же напряжением (рис. 2.22).
Для принципиальной схемы параллельного соединения
элементов запишем первый закон Кирхгофа в комплексной
форме:
Lq =Zi +1г +--- + Ln-
Векторы токов в параллельных ветвях:
I{=^- = UYi- I2=-^ = UY2-, In=-=^ = UY,
Z2
где у -_L; у _ ‘ ; у =_L_ - полные комплексные проводимости 1-
— 1 /у —2 7 —и 7
^2 ^-п
й, 2-й, ... и-й ветвей; Z1,Z2,ZW - полные комплексные сопротивления
1-й, 2-й, ... и-й ветвей.
104
Рис. 2.22. Принципиальная схема параллельного соединения приемников
Общий ток в цепи:
1о^=и-го.
Z0
где у_ =—!— - полная комплексная проводимость параллельного соеди-
z0
нения; Zo - полное комплексное сопротивление параллельного соедине-
ния.
Очевидно, что
20 =
1 1
Zi+z2
1
Z,
Определим проводимость для 1-й ветви К]:
1
у1 = —
Умножим числитель и знаменатель уравнения
[Л ~j(XL\ ~ХС1)1 получим:
[2?! + j(XLX - Хсх )]• fa - j(XLX - Xcx )]
R\________j (Xlx-Xcx) __
Rx + (XLl - Xcx )2 R2 + (XLX - XC2 )2
= ;(xLX-xC})
Zi2
(2.38)
(2.38) на
(2.39)
= GX-JBX,
Z1
105
2 2 2
где Zx = Rx + (XLX - Xcx) - квадрат модуля полного сопротивления
1-й ветви; Cq
1-й ветви; Вх
7?1
—= —------------5----------активная проводимость
Zj2 R2 + j(XLX-Xcx)2
JT,, ~Xci n
———-—= BLX — BqX - реактивная проводимость 1-и
_ Ли
ветви. Bi 1 = ——
Z2
D _ ЛС1
Bc'-^
Учитывая соотношения (2.39), полную проводимость для
1-й ветви можно записать в следующем виде:
Yx=Gx-j(BLX-Bcx).
Тогда модуль полной проводимости 1-й ветви
Г,=^^в^(Ви-Ва)2 .
На комплексной плоскости (рис. 2.23) слагаемые ком-
плексной проводимости цепи изображены в виде векторов
для двух случаев: BLX > Всх (рис. 2.23а) и BLX < Всх (рис.
2.236). В первом случае комплексная проводимость цепи
имеет индуктивный характер, во втором - емкостной.
Если комплексная проводимость цепи имеет индуктивный
характер, то общий ток (в неразветвленной части цепи) от-
стает по фазе от напряжения, так как q> > 0, т.е. у/и > у/,. Ес-
ли комплексная проводимость цепи имеет емкостной харак-
тер, то общий ток опережает по фазе напряжение, так как
<р<0, т.е. у/и <ytj. Заметим, что, как и ранее, положитель-
ные значения угла <р отсчитываются против часовой стрелки
от вектора комплексного значения тока / или проводимости
51-
Треугольник проводимости для 1-й ветви представлен на
рис.2.23в:
-Вс, G,
• •' , cos<px=^-
G, Г,
106
Рис. 2.23. Проводимости для 1-й ветви на комплексной плоскости: а -
б - В£1<ВС1;треугольник проводимости (в)
Аналогично для всех остальных ветвей находятся прово-
димости и строятся треугольники проводимости. Следова-
тельно, проводимость для всей цепи
/=1
- <д0 - jB0
п п п
^0 = ^0 = ^j^Li ~У^0,-
i=l С=1 i=I
Модуль полной проводимости всей цепи:
Го=Ь>Ы<Зо+го •
Пример 2.6. В соответствии со схемой (рис. 2.24) дано:
U,Rx,X lx,Xcx,XC2,R2
107
Определить: Y_q,Yq,Lq>Iq>L\>L.2-
Из треугольника проводимости для параллельной цепи
(рис. 2.25)определим угол (ро'.
Во Go
tg<Po=-^-> cos(p0=-^-.
Gq 'О
Решение.
1. Находим комплексную проводимость цепи:
Y.q=(G\+G2)~ j(BL\- Всх - ВС2 ) = Gq - jB0;
Gq - Gx + G2; Bo - BLl - Bcx - BC2 ;
Q _ . Q _ ^2 _ B2
1 zl R^+(Xlx-Xcx)2, 2 z2 R22+XC22,
Puc. 2.24. Схема параллельной цепи
Рис. 2.25. Треугольник проводимости параллельной цепи (рис. 2.24)
108
2. Находим модуль комплексной проводимости цепи:
Ц = |Го| = J(Gi+G2)2+(BLI-Bcl-Bc2)2 .
3. Находим комплекс тока, потребляемого цепью от источ-
ника энергии:
£о= К^0=|iol = y-10=V/»/ + /4o2
где Ло = Л ' cos <Ро ~ активная составляющая тока /0; 1Ьо = 10 • sin (ро
- реактивная составляющая тока /0; у = _ угол между Un и /0-
Go
4. Комплексы токов Ц и /2 равны:
/1=-=-=УГ,; 1-г=^-=и-гг.
^-1 —2
5. По первому закону Кирхгофа ток /0 равен:
/»='1+/2=^ + -^ = "-Г!+У'Г2
^1 —2
Векторную диаграмму для схемы с параллельным соеди-
нением элементов, изображенную на рис. 2.26 удобно стро-
ить относительно вектора напряжения, так как при данном
соединении вектор напряжения является общим для всех
Рис. 2.26. Схема параллельного соединения элементов
Рис. 2.27. Векторная диаграмма при параллельном соединении эле-
ментов
109
ветвей. При этом его направляют по вещественной положи-
тельной оси (рис. 2.27).
Запишем уравнения для тока и напряжения для схемы рис.
2.26 в комплексном виде:
U = Ue‘° =и=-&;
V2
Zl =C/-Z1 =u r, =lfa-J(Bu-O^UCi-jUBu =Id-jIa',
L2=U-Y2=U-Y2=u[0-j(0-Bc2)] = j-U-BL2=jIb2-,
Lo =L\ +Li =Ia\ ~ih\ +Лы =Ia\ ~J'(h\ ~hi) = Iao ~iho-
На векторной диаграмме рис. 2.27 токи в соответствии с
уравнениями в ветвях /)5 /2, /0 представлены в алгебраи-
ческой форме записи как сумма активных составляющих то-
ков Iai, 1а2 = 0; 1а0 = 1а1, которые находятся как проекции
соответствующих векторов токов на ось действительных чи-
сел Ле, и реактивных составляющих токов 1Ь\,
Ib0 = Ib\ - Ib2, которые находятся как проекции соответст-
вующих токов на ось мнимых чисел (/).
Активные и реактивные составляющие токов находятся по
формулам:
Л1 = Л • cos<P\; Ло = Л) cos<Ро;
=I} -sin<p}; Ib2 =I2-sin<p2-, IbQ= I0-sin<p0.
2.8. Резонанс токов
Резонанс токов имеет место в электрической цепи пере-
менного тока при параллельном включении катушки индук-
тивности (с сопротивлением R и индуктивностью L) и емко-
сти С.
2.8.1. Условие получения резонанса токов в цепи
Условие резонанса - равенство индуктивной (реактивной)
проводимости катушки индуктивности BL и емкостной (ре-
активной) проводимости емкости Вс:
110
Bl ~ Вс (T e- Bq - BL - Bc - 0).
На рис. 2.28 изображен резонансный контур.
Для этой схемы справедливы следующие соотношения:
ГО=|Г| = 7С2+ГВ£-ВС>)2 ; О = А = _«;
d %L -% l _ Xq
В{ = —± = --L-- = —------вс=-±- = й)С;
Z2 R2+X2l R2+(a>L)2 X2
Io=U-Yo; cos<p= —,
*o
где G , BL, Bc , Yq - активная, индуктивная, емкостная, полная прово-
димости, соответственно.
Рис 2.28. Контур резонанса
тока: U - напряжение питающей
сети; R,Xl, - активное и индук-
тивное сопротивления катушки ин-
дуктивности; Хс - емкостное со-
противление конденсатора; Iу, 1^
/q - ток катушки индуктивности, в
цепи конденсатора (емкости), общий
ток в цепи, соответственно
Рис. 2.29. Электрическая цепь
111
Резонанс токов может быть получен путем подбора пара-
метров цепи L, С при заданной частоте (f= const) источника
питания или путем подбора частоты источника питания/при
заданных параметрах цепи (L = const, С = const).
Рассмотрим влияние частоты источника питания на зна-
чения токов в цепи (рис. 2.29).
Ток в ветви с индуктивностью обратно пропорционален
частоте:
L 2rtfL ’
а ток в ветви с емкостью прямо пропорционален частоте:
Ic = П2т/С.
Ток в ветви с активным сопротивлением не зависит от
т U
частоты: I р = — .
R R
Вектор общего тока в цепи равен геометрической сумме
векторов токов ветвей:
/о = Lr +Ll+Lc-
Значение модуля тока Iq:
Io = yll2R+(lL-Ic)2 = = I , U = UY0.
Z« ^G2+(BL-BC)2
Проанализируем изменение параметров цепи при измене-
нии частоты/от 0 до оо
При/= О
Il=co> Ic =0<’ Л)=о°-
К
При / = fpe3, когда BL - Вс = 0:
Il=Ic: Io=Ir^Yo=^,
К
112
ток Iq имеет минимальное значение.
При f —> оо
-^оо; 1С—>оо; JR-—; 70->оо.
К
Зависимости costp, IR, IL, Ic, Iq, Ko, от частоты изо-
бражены на рис. 2.30.
При резонансе токов (BL = Вс) имеют место следующие
соотношения:
- полная проводимость цепи - Ype3 = G (активная про-
водимость - минимальное значение);
- полный ток цепи - lQpe3=U• Ype3 = U-G- IR (актив-
ная составляющая тока - минимальное значение);
G G
- коэффициент мощности - cos(ppe3 =---------- — = 1,
Ype3 G
sin<Ppe3 = 0;
- активная мощность, потребляемая цепью:
cos ср, IR, Ic, h, Io, Го
> cos ср
Рис. 2.30. Зависимости coscp, IR, Ij, Ic> Iq’ Y0 от частоты/
113
Ppe3=UIOc°s<P = UIo=S’
- реактивная мощность:
Qpey =Ql~Qc=U' I реэ • sin Фрез = 0 ’
- реактивные токи (I = IBC = Ic) равны по величи-
не, так как
I вк =U ВL> Iвс = Ic = U' Вс
Таким образом, при резонансе тока цепь (рис. 2.29) по-
требляет от источника энергии только активную составляю-
щую электрической энергии, которая превращается в другие
виды энергии в сопротивлении R. Реактивная энергия от ис-
точника не потребляется. Она циркулирует в цепи между
магнитным полем индуктивности и электрическим полем
емкости.
2.8.2. Векторная диаграмма цепи при резонансе токов
Для электрической цепи (рис. 2.28) справедливы следую-
щие выражения в комплексном виде (<р0 =0):
Рис. 2.31. Векторная диаграмма при резонансе токов
114
U_ = U-ejo = U;
L =-^ = U-YK =U[Gt-J(BL-O)]=UGK-jUB -jI,L,
— K
Lc=^ = U-Yc=U-[O-j(Q-Bc)]=jUBc=jlBC,
YlC
Lo = Lk + Lc = Iak. ~ Л bl + Л вс = !ak
На рис. 2.31 представлена векторная диаграмма для случая
резонанса токов в цепи при параллельном включении катуш-
ки индуктивности и конденсатора.
Резонанс токов широко применяется в электронных уст-
ройствах, а в силовых электроустановках используется для
увеличения их коэффициента мощности (costp).
2.8.3. Коэффициент мощности (cos ф) и его
экономическое значение
При более высоком cos(p и неизменных мощности и на-
пряжении сети (Р = UI cos<p , U = const), ток /о будет меньше
(рис. 2.30), следовательно, электрические потери
(ЛРЭ= у1 Iq R )в электроустановках будут меньше.
Поэтому желательно, чтобы электроприемник потреблял
электрическую энергию при максимальных значениях cos(p.
Большинство промышленных потребителей переменного
тока имеют активно-индуктивный характер и некоторые из
них работают с низким коэффициентом мощности, следова-
тельно, потребляют значительную реактивную мощность QB.
К таким потребителям относятся асинхронные двигатели,
особенно работающие с неполной нагрузкой, установки
электрической сварки, высокочастотной закалки и т.д.
Для уменьшения реактивной мощности и повышения ко-
эффициента мощности параллельно потребителю включают
батарею конденсаторов.
Реактивная мощность конденсаторной батареи Qc умень-
шает общую реактивную мощность установки Q, так как
Q ~ Ql ~ Qc
и тем самым увеличивает коэффициент мощности.
115
Повышение коэффициента мощности приводит к умень-
шению тока в проводах, соединяющих потребитель с источ-
ником энергии, и полной мощности источника.
Докажем это рассмотрев схему рис. 2.32. Источник энер-
гии ИЭ питает через линию передачи сопротивлением R по-
требитель П.
В исходной схеме потребитель П представлен параллель-
но включенными сопротивлением R и индуктивности L. Для
повышения cos (р потребителя параллельно ему с помощью
ключа К подключается конденсатор емкостью С. Такой при-
ем называется компенсацией реактивной мощности. Таким
образом, снижается потребление реактивной мощности.
Линия
P-IrR
а б
Рис. 2.32. Схема реализации способа увеличения коэффициента мощно-
сти
Рис. 2.33. Треугольники мощности: а - схема без емкости Qt=QL = 1%ХL= Ptgq* 1
б - схема с емкостью = Ql ~ Qc ~
116
В соответствии с рассмотренной схемой (рис. 2.32) на
рис. 2.33 представлены два треугольника мощностей: а - для
схемы без емкости и б - для схемы с емкостью (замыкается
ключ К). Из анализа этих треугольников следует, что с уве-
личением емкости С уменьшается угол <р2 между напряже-
нием U и током Iq (схема рис. 2.33,6) и, соответственно, уве-
личивается coscp2, а общая потребляемая реактивная мощ-
ность Q2 падает.
Реактивные мощности схемы без емкости Q и с емкостью
Q2 определяются по формулам:
Q\ = Ql = Ptg<P\; Q2 = Ql - Qc = Ptg<P2
Таким образом, при включении емкости в схеме, рис. 2.32,
потребление ею реактивной мощности снижается, так как Q2
становится меньше Qx (Q2 < Qi )•
Найдем разность:
Qc = Q\ - Q2 = p{$g<P\ ~ ig(p2 )
или
2 U2 >
Qc = l}Xc= — = U1aC. (2.40)
лс
При известном значении cos<px потребителя и за-
данном значении cos(p2 (^g^)» необходимом потребителю,
из выражения (2.40) можно определить необходимую ем-
кость конденсатора для достижения cos<p >0,96 по формуле:
с =
a)U2
где со = Inf = 314 1/С, т.е./= 50Гц.
Если в рассматриваемой цепи принять, что потребляемая
цепью активная мощность неизменна до компенсации и по-
сле компенсации реактивной мощности (P=const), а напря-
жение на зажимах приемника постоянно (U=consf), то мощ-
117
ности источника энергии (ИЭ) до компенсации (51) и после
компенсации (S2") будут равны:
51=7p2+ei2; 52=7/,2+е22 •
Так как > Q2, то очевидно мощность источника энер-
гии без компенсации реактивной мощности будет больше,
чем после компенсации: Sj > S2 •
Токи, потребляемые схемой до компенсации /01 и после
компенсации /02, запишутся в виде:
т _sx Jp2+Q? .
01 и U ’
. _s2 Jp2+qI
02 и и
Так как Qx >Q2, то очевидно ток, потребляемый схемой
от источника энергии ИЭ после компенсации, будет меньше
/02 <Лл- Поэтому снижаются потери активной мощности
ЛРЛ =IqRjj (Rjj - сопротивление линии) в линии, связы-
вающей источник с приемником.
Таким образом, компенсация реактивной мощности, по-
требляемой электроприемником путем параллельного вклю-
чения с ним емкости, обеспечивает снижение потребляемого
тока и потерь активной мощности в проводящих проводах
линии передач. Кроме того, при постоянной потребляемой
активной мощности Р может быть уменьшена полная мощ-
ность источника или к нему могут быть подключены допол-
нительные потребители.
На крупных предприятиях для обеспечения заданного
значения коэффициента мощности, равного 0,96 - 0,98, ис-
пользуются блоки емкостей (конденсаторные батареи), а
также синхронные электродвигатели, которые потребляют
активную мощность и генерируют емкостную (реактивную
118
мощность) в сеть (работают как емкость), компенсируя, та-
ким образом, индуктивную реактивную мощность.
2.9. Лабораторные, семинарские и курсовые
работы. Расчет электрических цепей на ЭВМ
На кафедре электротехники и электроники РХТУ им.
Д.И. Менделеева разработано математическое, информаци-
онное и программное обеспечение для лабораторных работ,
контрольных задач, курсовых работ по электротехнике и
электронике (Приложение 1).
Программное обеспечение для контрольных задач позво-
ляет студентам полностью рассчитать и проверить собствен-
ные расчеты на ЭВМ. Контрольные задачи содержат 7 типо-
вых задач, каждая из которых включает 30 вариантов зада-
ний. Студентам предоставляется комплекс обучающих про-
грамм, где для каждой контрольной задачи приведен пример,
в котором поэтапно в динамике на экране монитора показы-
вается алгоритм решения задачи данного типа. В состав обу-
чающего программного обеспечения включены программа
«Калькулятор комплексных чисел», с помощью которой
можно производить все необходимые арифметические опе-
рации с комплексными числами, и программа «Решение ли-
нейных алгебраических уравнений для комплексных чисел».
Располагая этими программами, студенты освобождаются от
сложных рутинных математических расчётов, сосредоточи-
вая свои усилия на анализе и преобразовании электрических
цепей. Программа «Справка» содержит сведения об основ-
ных понятиях и законах электротехники, способах преобра-
зования электрических величин в комплексные числа и др.
После выполнения всех расчётов студенты вводят проме-
жуточные и конечные результаты расчётов в ЭВМ. Контро-
лирующие программы поэтапно анализируют введенные
данные и указывают на допущенные ошибки, если таковые
имеются. Если допущена ошибка, то ЭВМ указывает на её
характер: например, «произведено неправильно преобразо-
вание параметра», «неправильно применён закон Ома» и.т.д.
Задача считается решённой, если ошибка в расчётах не пре-
вышает 0,5% (от вычислений ЭВМ). Накопление ошибок
приводит к снижению итоговой оценки, которая отражается
на экране монитора.
119
Студенты имеют возможность выполнить до 11 различ-
ных лабораторных работ, в том числе: работы по неразветв-
лённым и разветвлённым однофазным электрическим цепям.
Они могут: изучить явления резонанса напряжения и токов,
исследовать различного вида соединения в трёхфазных элек-
трических сетях, изучить работу трансформатора и электро-
двигателя, изучить переходные процессы в сетях постоянно-
го тока, исследовать работу различных схем выпрямителей,
изучить работу диодов и триодов в различных электрических
схемах, изучить работу операционных усилителей, логиче-
ских и цифровых схем.
Подготовка к исследованию начинается с размещения на
«монтажной панели» ЭВМ источника питания, элементов
электрических цепей и измерительных приборов. Для этого
из представленного набора вызывается изображение того или
иного элемента схемы и перемещается в выбранную область
на монтажной панели, где фиксируется. После того, как
часть или все элементы схемы зафиксированы на монтажной
панели, производится соединение их проводами (проводни-
ками). В первую очередь формируются токовые цепи, на-
пример, источник питания - амперметр - активное сопротив-
ление - источник питания. Далее производится подключение
вольтметров и вольтовых обмоток ваттметров и т.д. В ре-
зультате на монтажной панели ЭВМ собирается заданная
электрическая схема со всеми измерительными приборами,
необходимыми для исследования, например, резонанса на-
пряжений в последовательных цепях и т. п.
Основная проблема заключается в анализе правильности
собранной электрической и измерительной схемы при произ-
вольной ее конфигурации. Для этой цели используются пра-
вила формальных грамматик. Во время сборки схемы при
соединении проводниками элементов электрической цепи
или других проводников в ЭВМ автоматически записывают-
ся элементарные предложения типа Al-pl'.pl-R, р2-рЗрЗ-А\
или р2-рЗрЗ-р6, обозначающие соответственно, что ампер-
метр А1 соединен проводником pl с активным сопротивле-
нием R, провод р2 соединен проводом рЗ с амперметром А1
или провод р2 соединен проводом рЗ с проводом рб. Из по-
добных элементарных предложений можно построить более
сложные предложения, которые соответствуют описанию
соединений элементов для участков цепи или для всей цепи.
120
Непосредственно во время сборки схемы после каждого
соединения элементов схемы проводником выявляются не-
которые ошибки, которые указывают на недопустимость со-
единений типа «провод-провод», на недопустимость «шун-
тирования» элементов, когда проводом соединяются вход и
выход элемента, и другие подобные ошибки. Более подроб-
ный анализ осуществляется после сборки всей схемы.
На первом этапе производится «статистический» анализ,
когда указывается на недостаточность или избыточность из-
мерительных приборов с указанием их типа. Студенты име-
ют возможность скорректировать схему - вызвать или уда-
лить те или иные измерительные приборы и соединительные
провода.
На втором этапе производится анализ наличия токовых
цепей, которые соответствуют заданному типу соединений -
последовательное соединение, параллельное соединение, со-
единение звездой или треугольником и т.п. При этом необ-
ходимо учитывать произвольный характер соединений. Так,
последовательное соединение источник питания - ваттметр -
амперметр - активное сопротивление - источник питания бу-
дет соответствовать предложению формальных грамматик U-
W-A1-R-U. Правильные соединения будут соответствовать
предложениям U-JV-A1 -R-U, U-Al-W-R-U, U-W-R-AX-U и
U-R-W-AX-U и др., всего 6 вариантов, равное числу переста-
новок из трех . Предложение U-AX-R-W-A2-U свидетельству-
ет об избыточности приборов измерения (два амперметра в
последовательной цепи), предложение U-R-W-U - об отсут-
ствии амперметра в цепи, а предложение, например, R-U-W-A
-U свидетельствует о неправильно собранной схеме. Симво-
лом «|» (или) обозначаются параллельные соединения эле-
ментов. Например, предложение С/-((Л-/?1) | (A2-R2))-U со-
ответствует электрической цепи с параллельным подключе-
нием цепочек Л1-Л1 и A2-R2 к общему источнику питания.
Достаточно сложным является анализ наличия избыточных
проводов, приводящих к замыканию отдельных участков це-
пи. Например, предложение (/-РГ-Л-7?-(Л1|(7) означает, что
второй конец активного сопротивления соединен как с ис-
точником питания, так и с началом амперметра, что является
недопустимым.
Следующим этапом является анализ соединений вольт-
метров и вольтовой обмотки ваттметра для измерения на-
121
пряжений. Проводники, соединяющие вольтметр с другими
элементами, выделяются (серым) цветом, показывающим от-
сутствие в проводнике тока (идеальный вольтметр). Анализ
правильности подсоединений измерительных приборов так-
же происходит на основе формальных грамматик. Так, со-
единения И-Л-И, И-Л-Л-И и Pl-W-R-A-V\ являются пра-
вильными (допустимыми) соединениями при измерении па-
дения напряжения на сопротивлении R.
Несмотря на относительно небольшое количество элемен-
тов, предоставляемое для сборки электрических цепей, коли-
чество вариантов, (в том числе и неправильных соединений),
весьма велико. Анализ предложений в правильно собранной
схеме указывает на отсутствие разрывов в токовой цепи ис-
точник питания - источник питания, на отсутствие коротко-
замкнутых контуров и на правильность подключений ампер-
метров, вольтметров и обмоток ваттметров.
Таким образом, использование формальных грамматик
дает возможность описать и анализировать электрические
схемы и схемы измерений и при этом указывать на допущен-
ные ошибки.
Заключительным этапом сборки схемы является выбор
шкалы измерительных приборов, которые после выбора диа-
пазона измерений фиксируются на изображении измеритель-
ного прибора.
После того как анализ электрической схемы и схемы из-
мерений показывает, что они собраны правильно, монтажная
панель дополняется окнами в нижней части экрана монитора
ЭВМ, в которых изображены задатчики величин сопротив-
лений, напряжения и частоты источника питания. Изменени-
ем положения движка задатчика изменяется и соответст-
вующая величина сопротивления или напряжения. Студенты
приступают к исследованию собранной схемы.
Аналогичные действия по сборке измерительных схем
производятся при изучении на ЭВМ работы оборудования -
трасформатора и электродвигателей. На монтажную панель
вызывается изображение источника питания и изображение
оборудования. Ставится задача правильно подключить обо-
рудование к источнику питания и собрать схему измерения
основных характеристик оборудования. После того, как под-
ключение оборудования и схема измерения выполнены пра-
122
вильно, производится исследование рабочих характеристик
оборудования.
Сложность собранной электрической схемы определяется
количеством элементов, которые можно разместить на мон-
тажной панели ЭВМ. В действующих программах размер
монтажной панели составляет 640-300 пикселов, а размер
изображения элемента схемы - 66-55 пикселов. При умень-
шении размеров изображения число элементов, размещае-
мых на монтажной панели, увеличивается, однако при этом
исчезают детали изображения и эти элементы становятся
трудно различимыми. При существующих размерах на мон-
тажной панели можно разместить до 12 изображений эле-
ментов цепи или измерительных приборов.
Использование монтажной панели ЭВМ для сборки и ис-
следования электрических цепей имеет определенные пре-
имущества по сравнению с физическими стендами в части
различных комбинаций элементов схем и их соединений и в
наглядности процессов, протекающих в электрических це-
пях. Режим работы электрической цепи разъясняется с по-
мощью векторных диаграмм, отображающих в реальном
времени все изменения режимов или параметров электриче-
ской цепи, или с помощью построения рабочих характери-
стик оборудования. Оптимальным вариантом проведения ла-
бораторных работ является вариант, при котором работа на
ЭВМ предшествует работе на физических стендах.
Учитывая то, что сборка схемы является самым трудоём-
ким элементом лабораторных работ, студентам могут выда-
ваться программы сборки и анализа электрических схем и
схем измерений на ЭВМ. Используя лекционный материал и
инструкции, студенты собирают электрическую схему и схе-
му измерений на ЭВМ вне аудитории. Собранная схема за-
писывается в файл, который воспроизводит ее на лаборатор-
ных ЭВМ.
Опыт работы показал ряд преимуществ методики прове-
дения лабораторных работ на ЭВМ:
а) студенты получают возможность более углубленно за-
ниматься исследованием электрических цепей, так как на фи-
зических стендах более половины времени занимает сборка
электрической цепи с помощью коммутационных шнуров и
поиски потерь в контактах. За время лабораторных работ по-
является возможность изучить и проанализировать значи-
123
тельно больше ситуаций и режимов, которые могут возник-
нуть в электрических цепях;
б) ЭВМ позволяет моделировать и предупреждать возник-
новение предаварийных и аварийных ситуаций. «Короткое
замыкание» или значительное «зашкаливание» приборов
вследствие ошибок, допущенных студентами, не приводит к
выходу из строя физических приборов. О неправильных дей-
ствиях студенты предупреждаются звуковым сигналом и ми-
гающими рамками в изображениях приборов;
в) в электрическую цепь всегда можно включить «идеаль-
ные» элементы, например, катушку, обладающую нулевым
активным сопротивлением, диод, не имеющий внутреннего
сопротивления и т.п;
г) при работе на ЭВМ в режиме реального времени можно
изучить, например, изменение векторов напряжений, токов
или мощностей при любом изменении параметров электри-
ческой цепи;
д) ЭВМ позволяет измерять реактивную мощность, cos ср,
эквивалентную емкость или индуктивность в схемах заме-
щения и т.п.
Проведение лабораторных работ по электротехнике и
электронике на ЭВМ является перспективным направлением
и, безусловно, не исключает использования физических
стендов. Так как в основу электронных моделей ЭВМ поло-
жены реальные элементы физических стендов, особенно эф-
фективна параллельная работа студентов на ЭВМ и на физи-
ческих стендах. При этом студенты предварительно произ-
водят все необходимые действия на ЭВМ, получают пред-
ставление об изменениях параметров электрической цепи, а
затем переходят к работе на физическом стенде.
Использование информационной базы математических
моделей аппаратов химической технологии делает курс элек-
тротехники более предметным. В этом случае на экране мо-
нитора одновременно отображаются как технологические
процессы, протекающие в аппаратах, так и процессы в элек-
трических цепях, образуемых электрооборудованием (при-
водами насосов, нагревателями и т.п.).
Применение ЭВМ существенно смещает акценты препо-
давания, настраивая студентов на самостоятельное выполне-
ние задания и самооценку результатов расчётов. Преподава-
тель в определённой мере освобождается от контроля про-
124
межуточных математических расчётов, сосредоточивая свое
внимание на объяснении принципиальных ошибок, допу-
щенных при анализе или преобразовании электрических це-
пей или в применении законов электротехники. Это особенно
важно при массовых потоках студентов. Относительная лег-
кость изменения вариантов начальных условий позволяет
существенно разнообразить задачи, не допуская их повторе-
ния.
Сборка измерительной электрической схемы на ЭВМ.
Измерительные приборы
Амперметр измеряет силу тока в цепи и включается по-
следовательно (в разрыв цепи) с элементами цепи. При под-
ключении амперметра необходимо отключить цепь от источ-
ника питания, произвести подключение амперметра и вновь
подключить источник питания цепи. Условное изображение
и схема включения амперметра приведена на рис.2.34.
Амперметр измеряет действующую силу тока, равную
модулю комплексного значения силы тока в цепи /=|7|.
Вольтметр измеряет падение напряжения на участке цепи
и подключается параллельно этому участку цепи. Измерение
падения напряжения можно производить не отключая цепь
от источника питания. Условное обозначение и схема под-
ключения вольтметра изображены на рис.2.35.
Вольтметр измеряет действующее напряжение, равное
модулю комплексного значения падения напряжения на уча-
стке цепи {7=| С7|.
Ваттметр измеряет активную мощность, потребляемую
на участке электрической цепи. Ваттметр имеет две обмотки:
токовую обмотку и обмотку напряжения. Токовая обмотка
включается в цепь последовательно, а обмотка напряжения -
параллельно измеряемому участке цепи. Для правильного
включения один из выводов токовой обмотки и обмотки на-
пряжения помечены звездочками (*). Эти выводы необходимо
Рис.2.34. Схема включения амперметра в электрическую сеть
Рис.2.35. Схема включения вольтметра к электрической цепи
125
Рис.2.36. Схема включения ваттметра в электрическую сеть
Рис. 2.37. Схема включения приборов для измерения активной и полной
мощности цепи
Рис. 2.38. Схема подключения двух ваттметров для измерения
активной мощности в трехфазной сети
включать со стороны источника питания. При подключении
ваттметра необходимо отключить цепь от источника пита-
ния, произвести подключение токовой и вольтовой обмотки
ваттметра и вновь подключить источник питания цепи.
Условное изображение и схема включения ваттметра в
электрическую цепь изображены на рис.2.36. Измеряемая
активная мощность* на участке цепи W=P=Re(S)=Re(U 1)=
=S cos (р =RI2=YU2 (/*- сопряженный комплекс тока).
Для того чтобы измерить полную S, активную Р и реак-
тивную Q мощности, а также cos<p, необходимо включить
амперметр, вольтметр и ваттметр по схеме, изображенной на
рис.2.37.
В этом случае активная мощность Р измеряется ваттмет-
ром W, полная мощность S равна произведению показаний
амперметра А и вольтметра V (S=VA), cos(p=P/S, а реактив-
ная мощность (2=у5зт <р.
Измерение активной мощности трехфазной сети можно
проводить с помощью метода двух ваттметров. Если ватт-
126
метры включить, например, по схеме рис.2.38, то активная
мощность сети будет равна Р= Re^U^cLi +Цвс1в ^Pwi+Phq-
Измеряемая мощность не зависит от вида нагрузок (сим-
метричная, несимметричная) и способа включения нагрузок,
кроме звезды с нейтральным проводом.
Сборка схемы измерений на панели ЭВМ
При вызове программы на экране монитора высвечивается
"монтажная панель" с источником питания и исследуемыми
элементами электрической цепи.
В нижней части экрана монитора расположены два окна:
- окно с информацией о возможных действиях - серый
фон;
- окно сообщений - коричневый фон.
Для того чтобы составить электрическую схему экспери-
мента, следует:
а) разместить на монтажной панели измерительные при-
боры, необходимые для исследования;
б) соединить проводниками элементы электрической цепи
и измерительные приборы в единую электрическую схему.
Составление электрической схемы начинается с размеще-
ния на монтажной панели монитора ЭВМ измерительных
приборов.
Как вызвать изображение измерительного прибора?
При нажатии клавиши "А" или "а" (лат), "V" или "v", "W"
или "w" в левой верхней части монтажной панели появится
изображение амперметра, вольтметра, ваттметра соответст-
венно.
Как разместить измерительный прибор на монтажной
панели?
С помощью клавиш <—14—> можно перемещать изобра-
жение прибора по панели. При нажатии клавиши "Insert"
изображение прибора фиксируется на монтажной панели.
При размещении приборов следует ориентироваться на то,
что амперметры и токовая обмотка ваттметров включаются в
электрическую цепь последовательно (в "разрыв цепи")
(рис.2.1, 2.3) , а вольтметры и вольтовая обмотка ваттметра
подключаются параллельно измеряемым участкам
(рис.2.2, 2.3).
Информация о возможных ошибках при размещении из-
мерительных приборов появляется в окне сообщений.
127
Как удалить измерительный прибор с монтажной пане-
ли?
Если появляется необходимость удаления измерительного
прибора во время перемещения его по монтажной панели (до
нажатия клавиши "Insert"), то это можно сделать нажав кла-
вишу "Delete"
Если изображение измерительного прибора необходимо
исключить после фиксации его на монтажной панели, то для
этого следует с помощью клавиш <-ТФ—> установить мар-
кер на изображении прибора (в любой его части) и нажать
клавишу "Delete".
Как произвести соединение элементов электрической це-
пи?
Изображение каждого элемента электрической цепи имеет
две (или четыре для вольтметра и ваттметра) выделенные го-
ризонтальные и вертикальные "точки" для подсоединения
проводников. Желтым цветом выделены точки для последо-
вательного включения элемента в цепь, а серым цветом - для
параллельного подключения к участкам электрической цепи.
Для соединения элементов электрической схемы необхо-
димо:
а) с помощью клавиш <—Т I—> подвести маркер к соответ-
ствующей точке присоединения прибора или проводника и
нажать клавишу "Ноте" - начало проводника;
б) с помощью клавиш <— ТФ—> подвести линию проводни-
ка к выбранной точке на схеме и нажать клавишу "End" -
конец проводника. При передвижении маркер оставляет след
- желтую линию - линию проводника.
Если конец проводника пересекает другой проводник, то
конец проводника фиксируется автоматически.
Проводники, соединяющие вольтметр и вольтовую об-
мотку ваттметра с другими проводниками или элементами
цепи, имеют серый цвет.
Как удалить проводник из схемы?
Если необходимо удалить проводник во время перемеще-
ния <—ФФ—> по монтажной панели, то достаточно нажать
клавишу " Delete" и линия проводника исчезнет с монтажной
панели.
Если проводник на монтажной панели зафиксирован, то
для его удаления необходимо с помощью клавиш
128
<—ТФ-> установить маркёр на одном из участков линии и
нажать клавишу "Delete", при этом линия полностью исчеза-
ет. Если установить маркёр в узле - точке соединения не-
скольких проводников и нажать клавишу "Delete", то с мон-
тажной панели удаляются все проводники, принадлежащие
данному узлу.
После окончания сборки электрической схемы для анали-
за соединений следует нажать клавишу F1. Все ошибки, свя-
занные с неправильной сборкой электрической схемы, ука-
зываются в окне сообщений.
Если схема собрана правильно, то в нижней части экрана
появляются окно с задатчиками параметров электрической
цепи и окно векторных диаграмм.
Примечание: Правильно собранная схема измерения ак-
тивной и полной мощности электрической цепи (рис.3.4.) в
начальном эксперименте лабораторной работы переносится
на монтажную панель монитора ЭВМ следующих экспери-
ментов.
Изменение параметров электрической цепи
После сборки измерительной схемы на монтажной панели
производится формирование рабочей панели эксперимента.
Активным и реактивным сопротивлениям, измерительным
приборам и другим элементам цепи присваиваются порядко-
вые номера или символьные индексы в соответствии с кон-
кретной задачей.
В окне в правой нижней части экрана (синий фон) разме-
щаются задатчики частоты и напряжения сети, задатчики R,
L, и С, с помощью которых можно изменить параметры элек-
трической сети.
В окне в левой нижней части экрана (чёрный фон) разме-
щаются векторные диаграммы напряжений или токов на всех
участках цепи. Векторы диаграмм каждый раз нормируются
относительно максимального значения U или I, поэтому диа-
граммы дают только общее представление о взаимном рас-
положении векторов и относительном соотношении их зна-
чений. Вектор напряжения (или тока) на активном сопротив-
лении R имеет красный цвет, вектор напряжения (или тока)
на индуктивности L - голубой цвет, вектор напряжения (или
тока) на емкости С - фиолетовый цвет.
Под каждым элементом R, L и С на черном фоне печата-
ются значения соответствующих задатчиков.
129
Для источника переменного тока "Сеть" указана частота
Fe в герцах и напряжение Ue в вольтах.
Для каждого измерительного прибора: ваттметра, ампер-
метра и вольтметра указаны шкалы - зеленые цифры и зна-
чение измеряемого параметра - красные цифры. Если изме-
ряемый параметр находится в пределах шкалы прибора, то
прибор заключен в темно-синюю рамку. Если измеряемый
параметр выходит за пределы шкалы, то прибор заключается
в красную (штриховую) рамку и подается звуковой сигнал
пониженной тональности.
Окно задатчиков. Каждый задатчик содержит: маркёр -
прямоугольник красного или синего цвета, наименование па-
раметра, минимальное значение параметра, вертикальную
отметку красного цвета на зеленой линии, максимальное
значение параметра и размерность параметра.
Задатчики элементов цепи R, Ln С отградуированы в про-
центах шкалы (их значения соответственно в омах, микро-
генри и микрофарадах определяются из опытов). Задатчики
параметров сети Fe и Ue отградуированы в герцах и вольтах.
Изменение значений Fe, Ue, R, L или С производится сле-
дующим образом:
а) С помощью клавиши Т или Ф выбирается задатчик.
Маркер выбранного задатчика изменяет свой цвет с синего
на красный;
б) С помощью клавиши <— или —> изменяется значение
параметра, что влечет соответственно сдвиг вертикальной
отметки задатчика и изменение значения соответствующего
параметра на схеме. Если задатчик выходит на одно из край-
них значений (минимум или максимум), то подается звуко-
вой сигнал, предупреждающий о том, что дальнейшее изме-
нение в эту сторону невозможно.
Помимо этого для элементов цепи R, Ln С:
а) с помощью клавиши "Del" можно исключить из элек-
трической цепи элемент R, L или С.
б) с помощью клавиши "Esc" можно "закоротить" элемент
электрической цепи.
в) с помощью клавиши "Ins" можно восстановить ранее
исключенные или закороченные элементы цепи.
В некоторых лабораторных работах на экране высвечива-
ются дополнительные инструкции.
130
Структура программного обеспечения лабораторных
работ
Программное обеспечение состоит из комплекса программ
ЭВМ, в основу работы которых положен статический рису-
нок на «монтажной панели ЭВМ» Программное обеспечение
предусматривает выполнение начального этапа лаборатор-
ных работ на трёх уровнях сложности:
а) "сборка" на монтажной панели ЭВМ полной электриче-
ской цепи, включая систему измерительных приборов - ам-
перметры, вольтметры и ваттметры, (коэффициент сложно-
сти 2);
б) "сборка" на монтажной панели ЭВМ только системы
измерительных приборов при фиксированной ("собранной")
электрической цепи (коэффициент сложности 1),
в) "вызов" на монтажную панель ЭВМ электрической це-
пи вместе с системой измерительных приборов (коэффици-
ент сложности 0.5)
Стандартным уровнем является уровень, при котором
электрическая цепь вместе с её активно-реактивными эле-
ментами и оборудованием выводятся на монтажную панель
ЭВМ в «собранном» виде.
В этом случае на первом этапе исследований производит-
ся сборка и размещение на монтажной панели ЭВМ системы
измерительных приборов (амперметров, вольтметров и ватт-
метров) для измерений токов, напряжений и мощности в
электрической цепи. Монтаж системы измерений начинается
с размещения на монтажной панели измерительных прибо-
ров, а затем производится их соединение с элементами элек-
трической цепи. Непосредственно во время сборки системы
измерений после каждого соединения элементов схемы про-
водником выявляются некоторые ошибки, которые указыва-
ют, например, на недопустимость соединений типа «провод -
провод», на недопустимость «шунтирования элементов», ко-
гда проводом соединяются вход и выход элемента, и т.п.
Ошибочные действия при сборке комментируются в виде
окон с сообщениями. Результаты сборки измерительной сис-
темы записываются в файл, что позволяет проводить эту
часть лабораторной работы вне аудитории.
После сборки системы измерений в соответствии с харак-
тером лабораторной работы изображение на экране монитора
добавляется окнами управления, в которых размещены за-
131
датчики номиналов элементов электрической цепи и кнопки
управления, а также информационными окнами с изображе-
ниями векторных диаграмм и графиков.
На втором этапе производится собственно исследование
электрических цепей. Результаты измерений номиналов эле-
ментов электрической цепи или изменений в соединениях
участков цепи отображаются (в динамике) на монтажной па-
нели ЭВМ и в соответствующих информационных окнах эк-
рана.
В основу программного обеспечения лабораторных работ
положены математические модели физических лабораторных
стендов (с расширением их функциональных возможностей).
Содержание исполняющих программ:
- slabl.exe - программа «Неразветвленная электрическая
цепь синусоидального тока с активно-реактивными сопро-
тивлениями»;
- slab2.exe - программа «Разветвленная электрическая
цепь синусоидального тока с активно-реактивными сопро-
тивлениями»;
- slab3.exe - программа «Трёхфазные электрические цепи
при соединении потребителей звездой и треугольником»;
- slab4.exe - программа «Однофазный трансформатор»;
- slab5.exe - программа «Трёхфазный асинхронный элек-
тродвигатель»;
- slab6.exe - программа «Трёхфазный синхронный элек-
тродвигатель»;
- slab7.exe - программа «Электродвигатель постоянного
тока»;
Все элементы рисунков электрических схем и тексты ин-
формационных окон размещены в субдиректориях ТЕК,
ERO, HLP.
Для вызова программ из системы Norton (или из «провод-
ника» Windows) необходимо раскрыть директорию \SLAB и
выбрать соответствующую исполняющую программу.
Программное обеспечение лабораторных работ по сило-
вым электрическим цепям входит составной частью в общее
программное обеспечение курса «Электротехника и основы
электроники».
После запуска ЭВМ на экран монитора вызывается кар-
тинка, где расположено главное меню общего программного
обеспечения курса. Для того чтобы начать выполнение рабо-
132
ты, необходимо в главном меню выбрать строку «Лабора-
торные работы» и нажать клавишу Enter. На экране монитора
появляется меню с перечнем всех лабораторных работ, как
по силовым электрическим цепям, так и по основам электро-
ники. Для вызова конкретной лабораторной работы необхо-
димо выбрать строку с названием этой работы и нажать кла-
вишу Enter. После выполнения лабораторной работы следует
нажать клавишу F10, после чего ЭВМ возвратится к главно-
му меню.
2.9.1. Лабораторная работа №1
Неразветвленная электрическая сеть синусоидального
тока с активно-реактивными сопротивлениями. Резо-
нанс напряжений
Цель работы: исследование электрических цепей с по-
следовательным соединением R, L и С элементов, изучение
явления резонанса напряжений.
Вызов элементов электрической цепи на монтажную па-
нель ЭВМ осуществляется клавишами F1 (F-цепь), F2
(С-цепь), F3 (FF-цепь), F4 (FC-цепь), F5 (FZ-цепь), F6
(FZC-цепь), F1 (резонанс в FZC-цепи).
По показаниям амперметра и вольтметра определяют ве-
личины активных и реактивных сопротивлений, полную
мощность и cos (р .
F-цепь. К источнику питания подключить активное со-
противление R.
Собрать на монтажной панели ЭВМ электрическую схему
измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности Sцепи;
- ваттметр W для измерения активной мощности Р цепи;
- вольтметр Vr для измерения падения напряжения Ur на
активном сопротивлении F.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить табл.2.2, измеренными значе-
ниями.
Определить величину активного сопротивления F.
Построить векторную диаграмму для Ur (опыт 220 В,
50 Гц).
133
Таблица 2.2. Измеряемые и расчетные параметры в R - цепи
№ Установить Измерить Вычислить
/гц и, в I, А | Р, Вт Ur, В R, Ом | 5, ВА costp
1 50 127
2 50 220
3 100 220
Таблица 2.3. Измеряемые и расчетные параметры в С - цепи
№ Установить Измерить Вычислить
/Гц и, В I, А Р, Вт Сс.В Хс, Ом с, мкФ S, ВА COS ^9
1 50 127
2 50 220
3 100 220
Таблица 2.4. Измеряемые и расчетные параметры в RR - цепи
№ Установить Измерить Вычислить
/Гц и, В I, А Р, Вт им, В Urz, в Ся1+Я2 В Z, Ом /?ь Ом «2, Ом S, ВА cos (р
1 50 127
2 50 220
3 100 220
Объяснить полученное значение cos ср.
С -цепь. К источнику питания подключить конденсатор С.
На монтажной панели ЭВМ составить электрическую
схему измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности 5 цепи;
- ваттметр W для измерения активной мощности Р цепи;
- вольтметр Ус для измерения падения напряжения Uc на
конденсаторе С.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить измеренными значениями
табл.2.3.
Определить величину ёмкости конденсатора С.
Построить векторную диаграмму для Uc (опыт 220 В, 50 Гц).
Объяснить полученное значение cos <р.
RR -цепь. К источнику питания последовательно подклю-
чить два активных сопротивления 7?1 и R2.
На монтажной панели ЭВМ составить электрическую схе-
му измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности 5 цепи;
134
Таблица 2.5. Измеряемые и расчетные параметры в RC- цепи
№ Устано- вить Измерить Вычислить
f, Гц и, В /, А Р, Вт Ur, В иС, в Ur+c В Z, Ом R, Ом Хс, Ом с, мкФ S, ВА cos<p
1 50 127
2 50 220
3 100 220
Таблица 2.6. Измеренные и расчетные параметры к RL - цепи
№ Установить Измерить Вычислить
f Гц и, В ДА Р, Вт £4, В Z, Ом Як, Ом Хк, Ом мГн S, ВА cos (р
1 50 127
2 50 220
3 100 220
- ваттметр IV для измерения активной мощности Р цепи;
- вольтметр V для измерения падения напряжения Ur\ на
активном сопротивлении R\;
- вольтметр И2 для измерения падения напряжения Urz на
активном сопротивлении Т?2;
- вольтметр Из для измерения падения напряжения Ur\+ ю.
на участке цепи R\ - Л2.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить измеренными значениями
табл.2.4.
Определить величину активных сопротивлений R\ и Т?2.
Проверить второй закон Кирхгофа (в комплексной форме).
Построить векторные диаграммы для Ur\, Urz, Ur\+rz,
(опыт 220 В, 50 Гц).
Объяснить полученное значение cos^>.
RC - цепь. К источнику питания последовательно под-
ключить активное сопротивление R и конденсатор С.
На монтажной панели ЭВМ составить электрическую с-
хему измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности Sцепи;
- ваттметр W для измерения активной мощности Р цепи;
- вольтметр К] для измерения падения напряжения Ur на
активном сопротивлении 7?;
- вольтметр Г2 для измерения падения напряжения Uc на
конденсаторе С;
135
- вольтметр Из для измерения падения напряжения Ur+c
на участке цепи 7? - С.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить измеренными значениями
табл.2.5.
Определить величину сопротивления R и емкость конден-
сатора С.
Проверить второй закон Кирхгофа (в комплексной форме).
Построить векторные диаграммы для Ur, Uc, Ur+c, (опыт
220 В, 50 Гц и опыт 220 В, 100 Гц).
Объяснить полученное значение Ur+c, cos<p.
RL - цепь. К источнику питания подключить катушку ин-
дуктивности.
На монтажной панели ЭВМ составить электрическую схе-
му измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности 5 цепи;
- ваттметр W для измерения активной мощности Р цепи;
- вольтметр Ki для измерения падения напряжения UK на
катушке индуктивности LK.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить измеренными значениями
табл.2.6.
Определить величину активного сопротивления RK прово-
дов и индуктивность LK катушки индуктивности.
Построить векторную диаграмму для £/к (опыт 220 В,
50 Гц и опыт 220 В, 100 Гц).
Объяснить полученное значение cos ср.
RLC - цепь. К источнику питания последовательно под-
ключить активное сопротивление R, индуктивность L и кон-
денсатор С.
На монтажной панели ЭВМ составить электрическую схе-
му измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности S' цепи;
- ваттметр JV для измерения активной мощности Р цепи;
- вольтметр Г1 для измерения падения напряжения Ur на
активном сопротивлении 7?;
136
Таблица 2.7. Измеренные и расчетные параметры в RLC - цепи
№ Установить Измерить Вычислить
f, Гц и, В 1, А Р, Вт Ur, В ULC, в Z, Ом R, Ом Zlc, Ом S, ВА cos (р
1 50 127
2 50 220
3 100 220
Таблица 2.8. Измеряемые и расчетные параметры в RLC - цепи
№ Установить Измерить Вычислить
С, мкФ и, В I, А Р, Вт Ulc, В UR, В Ul. В ис, в Z, Ом S, ВА cos ^7
1 Ср 127 О
2 Ср+10 127
3 Ср+20 127
4 Ср-10 127
5 Ср-20 127
- вольтметр Vi для измерения падения напряжения Ulc на
участке индуктивность - конденсатор L - С.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить табл.2.7. измеренными значе-
ниями.
Определить величину активного сопротивления R и вели-
чину сопротивления участка L - С.
Проверить второй закон Кирхгофа (в комплексной форме).
Построить векторную диаграмму для £/, £7/?, Ulc, (опыт
220 В, 50 Гц и опыт 220 В, 100 Гц) при условии Xj>Xc-
Объяснить полученное значение cos <р .
Определить условия резонанса напряжений в неразветв-
ленной цепи.
Для электрической 7?£С-цепи дополнить схему измерения
вольтметрами Vj и Г4 для измерения падения напряжения Ul
и Uc на катушке индуктивности и конденсаторе. Установить
/=50 Гц, Е7=127В.
Изменяя задатчиком ёмкость конденсатора, установить
напряжение Ulc на участке цепи L-С равным 0. Измерить на-
пряжения Ulc, Ur, Ul, Uc и занести в табл.2.8. Записать по-
лученное значение емкости конденсатора Ср (резонансное).
Установить значение ёмкости конденсатора: Ср+10 мкФ,
Ср+20 мкФ, С» - 10 мкФ, Ср - 20 мкФ. Измерить напряжения
Ulc, Ur, Ul, Uc и занести в табл.2.8.
137
Определить значение сопротивления всей ЛЛС-цепи.
Проверить второй закон Кирхгофа (в комплексной форме).
Построить векторную диаграмму для U, Ur, Ul, Uc (для
всех опытов).
Объяснить полученное значение cos^>.
Построить графики/=7(0), Z=flC), cos (p=flC).
2.9.2 Расчет электрических цепей с последовательным
соединением активно-реактивных сопротивлений. Резо-
нанс напряжений (семинар). Программа CON1_1
Электрическая цепь состоит из последовательно соеди-
ненных резисторов, индуктивностей и емкостей. К электри-
ческой цепи приложено внешнее напряжение.
Заданы', внешнее напряжение, величины сопротивлений в
цепи.
Требуется определить'.
- действующий ток в цепи, действующие напряжения на
участках цепи, полную, активную и реактивную мощности в
цепи, cos (р;
- условия резонанса напряжений в цепи, действующий ток
и активную мощность при резонансе.
Закон, используемый при решении задачи'. - закон Ома;
Алгоритм решения задачи'.
а) преобразовать заданные параметры электрической цепи
в комплексные числа;
б) вычислить комплексный и действующий токи в цепи;
в) вычислить действующее напряжение на участках цепи;
г) вычислить полную, активную и реактивную мощности в
цепи, cos ср;
д) вычислить величину реактивного сопротивления, обес-
печивающего резонанс напряжений в цепи;
е) вычислить значение действующего тока и активную
мощность в цепи при резонансе.
Пример расчета
Для схемы, изображенной на рис.2.39, определить:
- комплексный I и действующий / токи в цепи;
- полную S, активную Р и реактивную Q мощности в це-
пи, cos ;
138
- действующие напряжения U\.2, U2-3 на участке цепи 1-2
и 2-3;
- величину %2Л, обеспечивающую резонанс напряжений в
цепи;
- величину тока Ir и активную Pr мощность при резонансе
напряжений.
Решение:
а) преобразование параметров электрической цепи в ком-
плексные числа:
£7=40+/0 В, Zri=10+j'Q Ом,
Zxi=0 - j5 Ом, 2*2=0+78 Ом, Zy3=0 - j5 Ом;
б) полное комплексное сопротивление цепи:
Z= Zri +^Z¥i+.Zx2+.Zt3=10 -у2 Ом.
Комплексный ток в цепи
7=Ш=(40+/’0)/(10 -j2)=3.846+/0.759А.
Действующий ток в цепи
Z=|Z| =3.927А;
в) комплексные напряжения на участках 1-2 и 2-3:
Ui -2=( Zri+^yi)/=(10 -j5)(3.846+/0.759)=42.3 -/11.53 В,
IZ2-3=Zv2Z=(0+j8)(3.846+/0.759)= - 6.07+>30.77 В.
Действующие напряжения на участках цепи
^1-2=1^-21=43.84 6, С72.3=|[72_з|=31.36 В;
Рис. 2.39. Схема электрической цепи с последовательным соединением
активно-реактивных сопротивлений: £7=40 В; Я(=10 Ом; Jfi=^3=5 Ом;
Х2=8 Ом
139
г) полная, активная и реактивная мощности в цепи, cos<p :
S=U-f =(40+;0)( 3.846 -/0.759)=153.84 -/30.76 ВА,
5=|5| =156.89 ВА, Р= /?е(5)=153.84 Вт,
Q=Im(S)=30.76 вар, cos^?=P/5=0.98;
д) Из условия резонанса напряжений Хс ин-
дуктивное сопротивление (Ау при резонансе должно быть
равно
^^+^3=10 Ом;
е) действующий ток в цепи и активная мощность при ре-
зонансе напряжений равны:
7р=С7//г1 =40/10=4 А,
Рр= и-Iv =40-4 = 160 Вт.
Задание:
Для заданного варианта табл.2.9, рассчитать комплексный
[ и действующий I токи в цепи, полную S, активную Р и ре-
активную Q мощности, cos ф, действующее значение напря-
жений {/j . 2, Uz. з на участках 1-2 и 2-3 цепи, величину со-
противления Xzp, обеспечивающую резонанс напряжений в
цепи, действующий ток 1Р и активную мощность Рр в цепи
при резонансе напряжений.
Расчеты можно проводить на ЭВМ с использованием про-
граммы «Калькулятор комплексных чисел».
Для контроля расчетов предназначена программа
CON 11, которая позволяет контролировать:
- преобразование параметров электрической схемы в ком-
плексные числа;
- вычисленные значения комплексного / и действующего I
токов в цепи;
- вычисленные значения действующих напряжений на
участках цепи U\.z, U2.3, вычисленные значения мощностей S,
P,Qh cos ф;
- вычисленную величину сопротивления Х^р, обеспечи-
вающую резонанс напряжений в цепи, вычисленные значе-
ния тока 1Р и активной Рр мощности цепи при резонансе на-
пряжений.
В состав программы включен контрольный пример.
140
Таблица 2.9. Параметры электрических цепей по схемам 1-4
№ вар. № схемы и, В Я1, Ом я2, Ом Х» Ом х2, Ом х3> Ом Х«, Ом
1 1 220 6 8 24 12 6 -
2 4 ПО 10 2 10 12 - -
3 1 110 8 3 12 16 2 -
4 1 220 2 2 16 16 16 -
5 3 ПО 10 2 3 3 8 -
6 3 220 12 12 4 16 16 -
7 2 220 12 - 8 12 12 6
8 2 220 4 - 4 4 8 4
9 3 ПО 2 2 3 3 3 -
10 4 220 3 4 5 3 - -
11 4 380 10 2 4 6 - -
12 1 ПО 4 10 5 5 5 -
13 2 380 2 - 3 4 6 4
14 3 ПО 3 1 4 6 4 -
15 1 110 2 2 4 3 4 -
16 4 но 2 1 4 6 - -
17 1 по 8 3 6 10 6 -
18 2 220 2 - 6 3 3 4
19 3 380 2 4 6 2 1 -
20 4 220 6 8 12 6 - -
21 1 380 2 2 3 1 1 -
22 2 ПО 3 - 5 3 5 1
23 3 220 2 4 10 3 3 -
24 4 220 5 5 4 10 - -
25 1 ПО 5 6 8 24 8 -
26 1 220 6 1 8 24 8 -
27 2 380 12 - 8 12 12 4
28 3 220 6 6 8 8 8 -
29 4 ПО 2 10 4 6 - -
30 1 ПО 10 2 5 16 5 •
141
2.9.3. Лабораторная работа № 2
Разветвленная электрическая цепь синусоидального тока
с активно-реактивными сопротивлениями. Резонанс то-
ков
Цель работы: исследование электрических цепей с па-
раллельным соединением R, L и С элементов, изучение явле-
ния резонанса тока.
Вызов элементов электрической цепи на монтажную па-
нель ЭВМ осуществляется клавишами F1 (7?-цепь), F2 (С-
цепь), F3 (7?| С-цепь), F4 (7?| Л-цепь), F5 (7?| £| С-цепь), F6 (ре-
зонанс в 2?| L\ С-цепи).
По показаниям амперметра и вольтметра следует опреде-
лить величины активных и реактивных проводимостей, пол-
ную мощность и cos <р.
142
Л-цепь. К источнику питания подключить активное со-
противление R.
На монтажной панели ЭВМ составить электрическую схе-
му измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности S' цепи;
- ваттметр W для измерения активной мощности Р цепи;
- амперметр А[ для измерения силы тока Ir, протекающего
через активное сопротивление R.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить табл.2.10 измеренными зна-
чениями.
Определить величину проводимости активного сопротив-
ления R.
Построить векторную диаграмму для Ir (опыт 220В, 50Гц).
Объяснить полученное значение cos <р.
С-цепь. К источнику питания подключить конденсатор С.
На монтажной панели ЭВМ составить электрическую
схему измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности S цепи;
- ваттметр W для измерения активной мощности Р цепи;
- амперметр А\ для измерения силы тока 1с, протекающего
через конденсатор С.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить измеренными значениями
табл.2.11.
Таблица 2.10. Измеренные и расчетные параметры в 17-цепи
№ Установить Измерить Вычислить
/Гц | 17, В I, А Р, Вт IR, А У/?,См S, ВА cos (р
1 50 127 2 50 220 3 100 220
Таблица 2.11. Измеренные и расчетные параметры в С-цепи
№ Установить Измерить Вычислить
/Гц и, В /, А | Р, Вт | 1с, А Ус,См S, ВА cos (р
1 50 127
2 50 220
3 100 220
143
Определить величину проводимости конденсатора С.
Построить векторную диаграмму для 1с (опыт 220 В, 50 Гц
и 100 Гц).
Объяснить полученное значение cos $9.
/?| С-цепь. К источнику питания параллельно подключить
активное сопротивление R и конденсатор С.
На монтажной панели ЭВМ составить электрическую схе-
му измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности 5 цепи;
- ваттметр W для измерения активной мощности Р цепи;
- амперметр A i для измерения силы тока Ir, протекающего
через активное сопротивление Л;
- амперметр Аг для измерения силы тока 1с, протекающего
через конденсатор С.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить табл.2.12. измеренными зна-
чениями.
Определить величину общей проводимости J?| С-цепи.
Проверить первый закон Кирхгофа (в комплексной фор-
ме).
Построить векторные диаграммы для Ir, Ic, I (опыт 220 В,
50 Гц и 100 Гц).
Объяснить полученное значение I, cos ф.
ЛЛ-цепь. К источнику питания подключить катушку ин-
дуктивности.
На монтажной панели ЭВМ составить электрическую схе-
му измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности S цепи;
- ваттметр W для измерения активной мощности Р цепи;
- амперметр A i для измерения силы тока 1К, протекающего
через катушку индуктивности L.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить измеренными значениями
табл.2.13.
Определить общую проводимость RL - цепи.
144
Построить векторную диаграмму для 1К (опыт 220 В,
50 Гц).
Объяснить полученное значение cos<p.
RL\ С-цепь. К источнику питания параллельно подключить
активное сопротивление R, индуктивное сопротивление L и
конденсатор С.
На монтажной панели ЭВМ составить электрическую схе-
му измерений, включающую:
- амперметр А и вольтметр V для измерения общей мощ-
ности 5 цепи;
Таблица 2.12. Измеренные и расчетные параметры А С-цепи
№ Устано- вить Измерить Вычислить
Гц I/, В ДА Р, Вт Ir, А 1с, А Yr, См Yc, См Y, См S, ВА cos (р
1 50 127
2 50 220
3 100 220
Таблица 2.13. Измеренные и расчетные параметры в /?£-цепи
№ Установить Измерить Вычислить
/Гц и, В Д А Л Вт | /К,А Гк,См Ск | Вк | 5, ВА |cos<p
1 50 127
2 50 220
3 100 220
Таблица 2.14. Измеренные и расчетные параметры в Л£| С-цепи
№ Устано- вить Измерить Вычислить
f Гц С, В I, А Р, Вт Ir, А 11, А 1с, А Y, См Yr, См Yl, См Yc, См 5, ВА cos (р
2 50 220
3 100 220
Таблица 2.15. Измеренные и расчетные параметры Я£| С-цепи
№ Установить Измерить Вычислить
с, мкФ и, В ДА Р, Вт Л?, А 11, А 1с, А Y, См См S', ВА cos <р
2 Ср+10 127
3 Ср+20 127
4 Ср- 10 127
5 Q,-20 127
145
- ваттметр W для измерения активной мощности Р цепи;
- амперметр A i для измерения силы тока Ir, протекающего
через активное сопротивление R;
- амперметр Az для измерения силы тока 1с, протекающего
через конденсатор С;
- амперметр Аз для измерения силы тока /д, протекающего
через индуктивное сопротивление L.
Провести серию опытов, установив напряжение источника
питания U 127 В, 220 В с частотой 50 Гц и 220 В с частотой
100 Гц. Составить и заполнить табл.2.14, измеренными зна-
чениями.
Определить общую проводимость RL\ С-цепи.
Проверить первый закон Кирхгофа (в комплексной фор-
ме).
Построить векторные диаграммы для I, Ir, Ic, II (опыт
220 В, 50 Гц и 100 Гц).
Объяснить полученное значение cos q>.
Определить условия резонанса токов в разветвленной це-
пи.
Для электрической RL\ С-цепи установить напряжение пи-
тания цепи 127В и частоту 50 Гц.
Изменяя задатчиком емкости конденсатора, установить
равенство токов в ветвях конденсатора 1с и индуктивного со-
противления II. Измерить силу тока в ветвях и занести в
табл.2.15. Записать полученное значение емкости конденса-
тора Ср (резонансное).
Установить значение емкости конденсатора: Ср+10 мкФ,
Ср+20 мкФ, Ср - 10 мкФ, Ср - 20 мкФ. Измерить силу токов
Ir, II, Ic и занести в табл.2.15.
Определить общую проводимость RL\ С-цепи.
Проверить первый закон Кирхгофа (в комплексной фор-
ме).
Построить векторные диаграммы для I, Ir, II, Ic (для всех
опытов).
Объяснить полученное значение cos у.
Построить графики I=J(C), Y =flC), cos (p=J[C).
146
2.9.4. Расчет электрических цепей с параллельным соеди-
нением активно-реактивных сопротивлений. Резонанс
токов, (семинар). Программа CON2 1
Электрическая цепь состоит из соединённых последова-
тельно-параллельно резисторов, индуктивностей и ёмкостей.
К электрической цепи приложено внешнее напряжение.
Заданы: внешнее напряжение, величины сопротивлений в
цепи.
Требуется определить:
- действующие токи в ветвях, показание вольтметра,
полную, активную и реактивную мощности цепи;
- условия резонанса токов, действующие токи в ветвях и
активную мощность цепи при резонансе.
Законы применяемые при решении задачи:
- закон Ома;
- первый закон Кирхгофа.
Алгоритм решения задачи:
а) выразить заданные параметры электрической цепи в
комплексной форме;
б) выбрать направления токов на участках цепи;
в) вычислить комплексные, действующие значения токов
в ветвях;
г) вычислить комплексное и действующее значения на-
пряжения между заданными точками цепи;
д) вычислить полную, активную и реактивную мощности,
cos^;
е) из условия резонанса токов определить действующие
значения токов в ветвях и вычислить активную мощность в
цепи.
Для схемы, изображенной на рис. 2.40, определить:
- комплексные /, [\, действующие I, Ц, Л токи в вет-
вях;
- показания вольтметра Ki. 2 , включенного между точка-
ми 1 - 2;
- полную S', активную Р и реактивную Q мощности в це-
пи, cos ;
- значение Хз, обеспечивающее резонанс токов;
- действующие токи Ip, I\p, Iip в ветвях при резонансе то-
ков;
- активную мощность Рр при резонансе токов.
147
Рис.2.40. Схема электрической цепи с параллельным соединением
активно-реактивных сопротивлений: t/=20sin (ffit) В; А|=Л'|=А'з=10 Ом;
Х2=20 Ом
Решение:
а) преобразование параметров электрической цепи в ком-
плексные числа:
£/=14.1 4-/0 В, Z/ц =10+/0 Ом ,
Zri =0 -/10 Ом, Zxi =04-/20 Ом, 2лз=0 -/10 Ом;
б) направления токов выбраны согласно схеме рис.2.40;
в) комплексные и действующие значения токов в ветвях:
Zi =U-Yi=(20/42 )(0.05 4/0.05)= 0.7094-/0.709,
Zi = |Z,|= 1,0 А,
h =U-Yi = -14.18(/0.1)= -1.41 /, I2 = |/2| = 1-418 A.
Общий ток:
/= /14- /2=0.709 -/ 0.709 A, / = |/| = 1,0 A,
где комплексные проводимости ветвей:
Xi =51 -/(0 - В.) = А + = =0.05 + j 0.05 Ом,
Z/ Z/ 100 + 100
Ь =& -JB2 = о - —2 = -j 0,1 Ом.
Z2
^2
148
г) комплексное и действующее значения напряжения ме-
жду точками 1 и 2 (вольтметр показывает действующее зна-
чение t/i-2):
Ui-2=-ZR} Ц +ZX2 /2 =-10-(0,7094-/0,709)+/20(-/1,418) =
=21,27 4-/7,09 В,
C/i-2= fc.2^22,42 В;
д) полная, активная и реактивная мощности цепи:
S = U-I*=P+jQ = 14,18*(0,709 -/0.709)= 10,05 -/10,05 ВА,
S=|S|= 14,21 ВА; P=/?e(S)= 10,05 Вт , Q = Im(S) = 10,05 вар,
cos ^=Р/5 = 0.707;
е) условие резонанса токов: В\= В2.
При неизменном значении сопротивлений ветви 1 уравне-
ние для реактивной проводимости Bi при резонансе токов
имеет вид:
В2=В/=^- = -^-,где Z^A^-A^,
соответственно для первой ветви
В, = ——7 = 0,05 Ом,
1 Л+Л
тогда
D, = — = 20 Ом.
В.
В этом случае резонанс тока наступает при
1) A3 = Х2 - D2 = 0 Ом (Аз =0, Х2 =20 Ом),
или
2) Аг = £>2 + Аз = 30 Ом (Аз =10, Аг =30 Ом).
Комплексный ток 12р в ветви 2 при резонансе токов:
1(-j20)
hP= U»X2 = 14,18 — = 14,18-----= -/0.709 А
Z2 400
149
Ip = |Zip +/2р|= °-709 + /0.709-/0.709 =0.709A.
Действующие значения токов:
/|р=|/„|=1.0А,/2р-|/2р|=0.709А,
Активная мощность в цепи при резонансе токов:
Pp=(Rfr />10-1,02=10 Вт
При неизменном значении сопротивлений ветви 2 (В2=0,1)
уравнение резонанса токов имеет вид:
O,lxj -X! +10 = 0
Корни этого уравнения мнимые.
Задание:
Для заданного варианта (табл.2.16.) вычислить комплекс-
ные токи в ветвях I, определить действующие значения токов
I, Ii, I2 и показания вольтметра вычислить полную S, ак-
тивную Р и реактивную Q мощности в цепи, cos<p, величину
сопротивления Хзр, обеспечивающего резонанс токов в цепи,
определить значения действующих токов Ip, I\p, hp в ветвях и
вычислить активную Рр мощность в цепи при резонансе то-
ков.
Расчеты можно проводить на ЭВМ с использованием про-
граммы «Калькулятор комплексных чисел».
Для контроля расчетов предназначена программа
CON21, которая позволяет контролировать:
- преобразование параметров электрической схемы в ком-
плексные числа;
- значения действующих токов I, Д, /2 в ветвях;
- показания вольтметра U\.2;
- вычисленные значения мощностей S, Р, Q и cos (р;
- вычисленные значения сопротивления Хзр, действующие
значения токов Ip, I\p, 12Р в ветвях и значение активной мощ-
ности Рр при резонансе токов.
В состав программы CON21 включен контрольный при-
мер.
150
Таблица 2.16. Параметры электрических цепей для схем 1-3
№ вар. № схе- мы и, В R, Ом хь Ом Х2, Ом Ху, Ом х4, Ом
X 1 100 10 10 30 70 70
2 " 1 - 100 10 30 10 40 40
3 2 100ехр(-7'30°) 60 80 150 20 -
4 3 100 6 8 - 10 -
5 1 100 10 10 40 70 70
6 3 220 2 6 - 10
7 1 - 100 10 50 20 40 40
8 2 100 ехр(-у30°) 60 60 200 100 -
9 3 100 6 4 - 16 -
10 1 - 100 10 40 15 40 40
И 3 220 2 6 5
12 1 100 10 15 40 70 70
13 3 100 6 6 - 14 -
14 2 100 exp(-j'30°) 60 70 180 100 -
15 3 220 2 4 - 12 -
16 3 100 2 4 - 20 -
17 1 100 10 10 30 70 70
18 2 100 ехр(-/30°) 60 80 160 120 -
19 1 - 100 10 30 10 40 40
20 3 220 2 6 - 3 -
21 2 100 ехр(-/30°) 60 70 170 100 -
22 3 100 6 10 - 8 -
23 1 - 100 10 35 10 40 40
24 2 100 exp(-j30°) 60 80 160 200 -
25 1 100 10 10 35 70 70
26 3 220 2 8 - 14
27 2 100 ехр(-;30°) 60 60 100 200 -
28 3 100 6 8 - 6 -
29 1 100 10 10 30 270 270
30 1 - 100 10 30 10 40 40
Схемы для табл.2.16
151
2.9.5. Элементы электрических цепей переменного тока
Электрическая цепь состоит из пассивных и активных эле-
ментов, соединенных между собой проводниками тока. К
пассивным элементам относятся резисторы, индуктивности и
емкости. К активным элементам относятся источники тока
или напряжения (ЭДС).
Топология схемы электрических цепей
Схема электрической цепи (рис.2.41.) представляет собой
графическое отображение реальной электрической цепи. В
схеме условные обозначения элементов цепи соединены ли-
ниями (проводниками). Решение любой задачи связано, в
первую очередь, с топологическим анализом схемы, основ-
ными понятиями которого является узел, ветвь и контур.
Узлом называется место на схеме, в котором соединяется
более двух элементов (или ветвей электрической цепи). Узел
обозначается точкой, однако часто для наглядности на одной
сплошной линии (проводнике) размещаются несколько то-
чек, принадлежащих одному узлу. В схеме на рис.2.41 име-
ются два узла: "а" и "б".
Ветвью называется участок схемы между двумя ближай-
шими узлами. Ветвь может содержать несколько элементов.
В схеме на рис.2.41 имеется три ветви: —>б-4-Е1-С-1-7?1-а—>,
—>а-/?2-б —>, и —>а-£-2-Е2-3-./?3-б—>.
Контуром называется участок схемы, который образует
замкнутый путь, проходящий (только один раз) через не-
сколько ветвей и узлов. В схеме рис.2.41 можно выделить
три контура: б-4-Е1-С-1-7?1-а-Л2-б, a-Z-2-E2-3-/?3-6-/?2-a и
6-4-Е1 -С-1 -Я1 -а-£-2-Е2-3-ЯЗ-б.
Рис.2.41. Схема
разветвленной
электрической цепи
152
Между количеством узлов (У), ветвей (В) и независимых
контуров (К) существует связь:
К=В-У+ 1.
Следовательно, в схеме рис.2.41, из трех контуров можно
в качестве независимых выбрать любые два, например: 6-4-
.El-C-l-.Kl-a-.K2-6 и а-£-2-Е2-3-КЗ-б-К2-а. Контур является
независимым, если в нем содержится хотя бы одна ветвь, не
включенная в другие независимые контуры. Если контур со-
держит все ветви, которые имеются в независимых контурах,
то такой контур считается зависимым, например 6-4-Е1-С-1-
К1-а-£-2-Е2-3-7?3-б.
2.9.6. Законы Ома и Кирхгофа в цепях переменного тока
Переменный ток не имеет направления, однако для ана-
лиза и расчетов цепей переменного тока задаются условные
направления токов в цепи и источников ЭДС. Тогда сложе-
ние и вычитание переменных токов, напряжений и ЭДС в
схеме происходит с учетом этих направлений, что в свою
очередь, позволяет применять при расчетах все законы по-
стоянного тока.
Для расчёта токов, напряжений и других параметров вет-
ви применяется закон Ома (в комплексной форме):
Комплексный ток (I).
Комплексное сопротивление (Z).
Комплексная проводимость (Y).
Последовательное соединение элементов составляет не-
разветвленную электрическую цепь. Ток, протекающий через
эти элементы, один и тот же:
l=U{/Zi=U2/Z2 =lb/Z3=...
где Zj - комплексное сопротивление пассивного элемента; U, - комплекс-
ное падение напряжения на пассивном элементе.
Общее комплексное сопротивление ветви составляет:
Z= Z1+Z2+Z3+...
В схеме рис.2.41 комплексные сопротивления ветвей
153
->6-4-5i-C-l-7?i-a->; ->a-J?2-6-> и ->а-£-2-£2-3-7?з-б-> со-
ответственно равны:
Zi=/?1 -jXc, Z2=R2, Zj=R3+jXL
Если в последовательную цепь включены источники ЭДС,
заданы направление тока в цепи и сопротивление отдельных
элементов, то напряжение на участке цепи можно определить
из обобщенного закона Ома для комплексных величин:
U= Х(±£)+Е(±Т2)
При вычисления U прежде всего задается (положитель-
ное) условное направление напряжения. Суммирование па-
дений напряжения на отдельных элементах производится с
учетом знаков:
ЭДС Е принимает знак " + " при совпадении условного об-
хода контура с положительным направлением источника
ЭДС, в противном случае - знак
Ток I принимает знак "+" при совпадении условного обхо-
да контура с направлением тока, в противном случае - знак
и п
В схеме рис.2.41, в ветви -^б - 4 - Е\ - С - 1 - Ri - а-> на-
пряжение
I/ба= - Ei+Zc 'L+Zjirl, Ua6=+E\ - Zc'I-ZrvL
Параллельное соединение элементов имеет только два уз-
ла, к которым подключены все ветви электрической цепи.
Если к этим узлам приложено напряжение U, то ток в каж-
дой ветви соответственно будет равен:
1гЦ-Ъ,№,Ь=ЦЪ,...,
где У/ — комплексная проводимость ветви.
Общая проводимость параллельного соединения равна:
У= Г1+Ь+В+...
В схеме рис.2.41, ветви —>б - 4 - Ei - С - 1 - - а—>а -
/?2 - б —> и—>а-£-2-Е2-3-7?з-б—> соединены параллель-
но. Соответственно комплексные проводимости ветвей будут
154
равны:
Для расчета токов в узле применяют первый закон Кирх-
гофа - алгебраическая сумма комплексных токов 7 в любом
узле электрической цепи равна нулю:
м
S(±'>)=°
k=\
Со знаком "+" суммируются токи с условным направлени-
ем к узлу, а со знаком " - " токи с условным направлением от
узла. Из первого закона Кирхгофа следует, что сумма ком-
плексных токов, направленных к узлу, равна сумме ком-
плексных токов, направленных от узла.
В схеме рис.2.41 сумма токов:
В узле "а" 71 - 72 - 73 = 0, в узле "б" - 71 +72+73 =0.
Для расчета токов и напряжений в замкнутом контуре
применяют второй закон Кирхгофа в комплексной форме:
N М N
£(±£,)=£±(л2,)+П±<г.)
/=1 4=1 т=1
Алгебраическая сумма комплексных ЭДС (Е) в замкну-
том контуре равна алгебраической сумме произведений ком-
плексных значений тока (7) на соответствующие комплекс-
ные значения полных сопротивлений (Z*) и алгебраической
сумме комплексных напряжений (U) в этом же контуре.
Знак «+» Е, 7 или U принимает в случае совпадения с ус-
ловным направлением обхода контура, в противном случае
Е, 7 или U принимает знак « - ».
Второй закон Кирхгофа применим только к одному кон-
туру, поэтому для многоконтурной электрической цепи не-
обходимо выделить независимые контуры, задать условные
направления токов, напряжений и ЭДС, выбрать условное
направление обхода контуров и учесть влияние смежных
контуров. Для электрической схемы рис.2.41:
а) Контур 6-4-£i-C-l-/?i-a-7?2-6 получаем, ис-
ключив из схемы ветвь -^a -L-2-E2-3 - 7?з - б—>. Для это-
го контура при обходе в направлении тока Ii i второй закон
Кирхгофа:
155
E\-(Zc+Zj^+Zjn)-_[]\',
б) Контур а-£-2-Е2-3-/?з-б-/?2-а получаем, исклю-
чив из схемы ветвь -> б - 4 - Ei - С - 1 - 7?i - а—>. Для этого
контура при обходе в направлении тока [22 второй закон
Кирхгофа:
- E2=(Zt+ZR3+Z«2) '£22',
в) Если рассматривать эти два контура совместно, то для
контура б-4-Ei-C -1 - R[- а - J?2 - б необходимо учитывать
ток I22, направление которого противоположно току 7ц (на-
правлению обхода),
E:=(Zc+Zri+Zjo) 711 -Zja'in,
а для контура а - L - 2 - Е2-З-Е3 - б- /?2 - а необходимо учи-
тывать ток /ц, направление которого противоположно току
/?? (направлению обхода)
- E2=(Zl+2^}+Zr2) 'I22 - Zr2'I\\.
2.9.7. Расчет замкнутого контура электрических цепей с
одним или несколькими источниками питания. (Семи-
нар). Программа CON3 1
Электрическая цепь состоит из последовательно соеди-
ненных резисторов, индуктивностей, ёмкостей и источников
переменного тока и приведена на рис.2.42.
Заданы: ЭДС источников тока, величины сопротивлений
в цепи.
Требуется определить:
- комплексный и действующий контурный токи;
- падение напряжения на заданных участках цепи;
- полную, активную и реактивную мощности в цепи,
cos .
Законы, применяемые при решении задачи:
- закон Ома;
- второй закон Кирхгофа;
Алгоритм решения задачи:
а) преобразовать заданные параметры электрической це-
пи в комплексные величины;
156
Рис.2.42. Схема замкнутого контура электрической цепи:
ei=70sin (cot + 7г/4) В, E2=(-5-j15) В, /?!=! Ом, R2=3 Ом, ^=8 Ом,
Х2=3 Ом.
б) выбрать направление контурного тока;
в) вычислить комплексное и действующее значения кон-
турного тока, применив второй закон Кирхгофа;
г) определить показания вольтметра для заданного ли-
нейного участка цепи;
д) вычислить полную, активную и реактивную мощности
цепи, cos^j .
Определить:
- комплексное £ и действующее I значения контурного
тока;
- показания вольтметра включенного между 1 и 2
точками;
- полную S, активную Р и реактивную Q мощности в це-
пи, cos .
Решение:
а) преобразовать параметры цепи в комплексные величи-
ны
Ei=35+j35 В; Ej= - 5 - j 15 В; Z^i=l+/0 Ом; Zxi=0+J8 Ом;
157
Zx2=0 -/3 Ом; Z^2=3+j0 Ом;
б) выбрать направление тока I в контуре - "по часовой
стрелке";
в) вычислить комплексное и действующее значение кон-
турного тока.
Из второго закона Кирхгофа при обходе по направлению
контурного тока следует:
Е\ - E2=Zr\-I+ Zx\ I+Zx2'1+Zr2'I, откуда вектор тока:
/ =--------------------= 40 + /50 =ш д
2я1 +Z^2 4 +/5
Z=|/|=10A;
г) определить показания вольтметра. Для определения по-
казания вольтметра Ki.2, включенного между точками 1 и 2,
выделим два линейных участка в контуре:
1) т. 1-> £2->^2-> Я2-> т.2
2) т.1 —>2Г]——>Е\—>т.2.
Направление обхода первого участка совпадает с направ-
лением контурного тока, а второго участка - противополож-
но направлению контурного тока. Вычисление напряжения
между точками 1 и 2 можно проводить по любому из двух
участков с учетом направления обхода. Комплексное напря-
жение £71.2 между точками 1 и 2 будет равно:
для 1 -го участка
£71,2= E2^Zxi-I+Zji2-I=- 5 -/15 -/3-10 + 3-10 = 25 -/45 В;
для 2-го участка (как проверка)
£7i.2-(£! -Zki-7-ZyiT) = 354/35 - 1 10-/8 10 =25 -/45 В.
Показания вольтметра равно модулю комплексного на-
пряжения £7[.2
£7Ь2= |C7i.2| = л/252 +452 = 51.5 В;
158
д) вычислить полную S, активную Р и реактивную Q мощ-
ности цепи.
Полная мощность цепи:
м
8 = ^Ек-Г = ЕгГ-Е2-1*= (35+/35)10 - (-5-/15)10 =
4=1
cos =
= 400 +7'500 ВА,
S=(Zm +Zn+^2 +Zfi2)72=(4 +/5 )(10 +/0)2=400+/500 BA,
S= |S|= 640.3 BA.
Активная P и реактивная Q мощности равны:
P =Re (S)- 400 Вт, =500 вар,
l=™_=o.625.
S 640,3
Задание
Для заданного варианта (табл.2.17) рассчитать: комплекс-
ное I , действующее I значения контурных токов, падение
напряжения на участке т - п, полную 5 , активную Р и реак-
тивную Q мощности в цепи, cos^?.
Расчеты можно проводить на ЭВМ с использованием
программы "Калькулятор комплексных чисел".
Для контроля расчетов предназначена программа
CON3_1, которая позволяет контролировать:
- преобразование параметров электрической схемы в ком-
плексные числа;
- комплексные и действующие значения контурных то-
ков;
- величину падения напряжения на участке цепи;
- значения полной, активной и реактивной мощностей в
цепи, cos ср.
В состав программы CON3_1 включен контрольный при-
мер.
159
Таблица 2.17. Параметры электрической цепи для схем 1-3
№ вар № сх. (е>), В £z(e2), В Я, Ом X,. Ом Хг, Ом x3> Ом m-n
1 1 141 sin (йЛ) 141cos(ftrt) 4 4 14 7 1-4
2 1 100 282sin(£i)t-7r/2) 5 5 0 5 2-5
3 1 0 lOOsin 7Г/4) 10 0 15 5 3-6
4 2 0 60 -/80 0 15 0 5 6-3
5 2 lOOsin (йЛ + тг/4) 200 exp (/я /2) 4 12 0 0 4- 1
6 2 0 lOOsin (fflt + 0.93) 0 5 28 3 2-5
7 3 282sin ((У t - Л) 141 sin (cot + тг/2) 40 30 0 10 1 -4
8 3 80+/60 0 20 10 5 0 4- 1
9 3 100+/100 141sin( CO t - Л) 0 75 25 50 5-2
10 1 ;юо 0 0 18 15 7 1 -4
11 1 ЗОехр (jtr /2) - 20+/50 0 0 12 10 3-5
12 1 42.3sin(<yt + л/2) 0 9 0 0 12 6-4
13 2 30 - j40 80 exp (-jzr /2) 6 6 15 1 5-3
14 2 141 sin (cyt + Л/2) -100 -yioo 5 5 15 1 5-3
15 2 ЗОехр (ул-/2) 70 exp (-j;r /2) 0 5 10 15 3-6
16 3 /80 0 0 35 0 15 6-3
17 3 282sin(fyt) 282cos(<yt) 3 0 0 1 3-6
18 3 60 sin (pA + Я-/4) 0 3 0 6 9 1 -4
19 1 jlOO 50 0 18 13 0 2-5
20 1 100 200sin ( CO t - Л /4) 0 5 0 20 6-4
21 1 0 60+j80 8 0 6 0 2-4
22 2 ЮОехр (-jff /2) 0 8 0 8 14 2-6
23 2 /160 120 6 0 8 0 2-5
24 3 40 40 12 12 6 34 6-3
25 3 0 282sin (<Wt) 0 0 24 4 1 -4
26 2 141sin(ot) 141cos(<Ut) 4 4 14 7 1 -4
27 3 lOOsin (<Dt + л/4) 200 exp (jn/2) 4 12 0 0 4-1
28 2 /100 0 0 18 15 7 1 -4
29 1 100 exp (-j?r /2) 0 8 0 8 14 2-6
30 3 100 282sin( CO t -Л /2) 5 5 0 5 2-5
160
Схемы для табл.2.17.
2.9.8. Расчёт сложных электрических цепей методом
контурных токов (семинар). Программа CON4_1
Разветвлённая электрическая цепь содержит один или не-
сколько замкнутых контуров, в которые включены источни-
ки ЭДС.
Заданы, сопротивления в цепи, значения ЭДС источни-
ков.
Требуется', рассчитать комплексные токи в ветвях элек-
трической цепи.
Законы, применяемые при решении задачи:
- закон Ома;
- первый и второй законы Кирхгофа;
Алгоритм решения задачи:
а) для заданной схемы выделить контуры и задать на-
правление контурных токов. В соответствии с направлением
контурных токов определить направление токов во всех вет-
вях цепи;
б) преобразовать заданные параметры электрической це-
пи в комплексные числа;
в) для каждого контура согласно второму закону Кирхго-
фа составить уравнение, отражающее равенство сумм ЭДС
контура и падений напряжений в этом контуре;
г) из уравнений контуров составить систему уравнений, в
которой неизвестными являются контурные токи. Решить эту
систему;
161
д) определить комплексные токи в ветвях согласно пер-
вому закону Кирхгофа;
е) вычислить полную, активную и реактивную мощности
цепи, cos^>.
Определить (согласно рис. 2.43):
- комплексные контурные токи в ветвях 1\, Ь, h',
- полную, активную и реактивную мощность цепи.
Решение'.
а) схема цепи содержит два узла (а, б) и три ветви -> б -
Е\ - Z1 - а ->, —>а- E2-Z2-5 —>, —>a-Z3-£3-6 —>, следо-
вательно количество независимых контуров равно
К=В-У+\ =3-2+1=2.
Примем независимыми контуры: б - £1 -Z1 - а - Е2 - Z2 - б
и a - Z3 - ЕЗ - б - Z2 - Е2 - а. Выберем направление контурных
токов /п и /22 (по часовой стрелке). Выбранные направления
токов в ветвях показаны в схеме рис.2.43;
б) комплексные значения сопротивлений и ЭДС
Zi =1+/1 Ом; Z? = 0 -jl Ом; 2з—у 1 -у 1=0 Ом; £1=6+76 В;
Рис.2.43. Схема двухконтурной электрической цепи: R=\ Ом;А/-1 Ом;
Хс=1 Ом; Z{=R+XL\ Z2=Xc.-,Z3=Xl+Xc.-, e^Wexpljп/4)В;
e2=12sin(60r-Зтг/4)В;е3=14,1425ш(й^-Зяг/4)в
162
Ex= -6-j6 В; Ез=8 -ty6B;
в) для замкнутых контуров
Zi Z1 1+Z2 L\ 1 - Z2122= - Е\ - Еа
Z3122 + Z2I22 ~ Z21u= Ед + Еу,
После подстановки численных значений получим
(1+/0) /п+(0+/1)Ь2=0+/0
(l+jl)Zn+(O-jl) 722=2-t70.
Решение этой системы
7П=(1 -71) А, Т22=(1+71)А;
г) комплексные токи в ветвях
Zi=/ii=(l -71) А; ^=1п-/22= (0 -72) A; b=I_22=U+jV) А.
д) полная, активная и реактивная мощности цепи
S= -Exh* -Е211'+Ез1х'= - (6476)(1471) - (- 6 -76)(О472) +
+(847'6)(1 -71)=2-72BA,
5= |5|=2,83 ВА,
P=Re(S)=2 Вт, (>=/w(S)= - 2 вар;
Р
cos(p - — =0,707.
Задание
Для заданного варианта в табл.2.18 рассчитать контурные
токи и токи в ветвях схемы, изображенной на рис.2.43.
Расчеты можно проводить на ЭВМ с использованием про-
граммы "Калькулятор комплексных чисел" и программы
«Решение системы алгебраических уравнений для комплекс-
ных чисел».
Для контроля расчетов предназначена программа
CON4_1, которая позволяет контролировать:
- преобразование параметров электрической схемы в ком-
плексные числа;
- значения комплексных контурных токов 7ц и
- вычисленные значения комплексных токов в ветвях Zj9 Ь,
Ь’,
- вычисленные значения полной, активной и реактивной
мощностей в цепи, cos (р .
В состав программы включен контрольный пример.
163
Таблица 2.18. Параметры электрической цепи для рис.2.43
№ вар. Z1, Ом n, Ом Z3, Ом El, В E2, В E3, В
I 0 Ac=l XL=\ б42з1п(аП + л) 6ехр()л) 6\f2sin( an + л/2)
2 Xl=2 X^2 0 6+/8 0 - 6 -j&
3 Х^5 Xl=5 R=5 5ехр(-]л) 542со5(а1 + л12) 0
4 %с=4 Л=4 0 - 4 - j4 4у[2со5(а1-л) 4ехр(+j3n-/2)
5 XL=2 %c=2 Л=3 Л=Ю 10j2sin(at +Зл/2) lOex^j Зл/2) 0
6 Хс=2 XL=2 %l=5 Ac=5 lOexp(jn) 0 10\l2cos(al+л/2)
7 XL=3 Xc-3 R=2 Xc=2 6>[2sin(an-2n) 6exp(j2n) 0
8 R=6 XL=6 Xc=3 Xc~3 -60-j'30 0 -узо
9 0 Xl=2 Xc=2 6^2sin (al-3 л/2) 0 6ехр/)л/2}
10 XL=4 Xc=4 0 8j~2sin( аП + л/2) 0 8>[2sin(an-л/2)
11 Xl=5 Xc=5 XL= 10 10j2sin(al +0.927) 6+/8 0
12 xL=\ Xc=l R=\ 10j2cos( at) I0-j2sin(ol + л) 2) 10\Г2з1п(аЛ + л)
13 R=\ Ac=l л=1 5exp(j0,972) 42cos( an) •J~2sin(an - л/2)
14 A^l xL=l xL=\ Xc=2 0 lexp(jnl2) l(+[2sin(al+x/2)
15 Xc=5 Xl=5 xL=t Xc=l 20exp(- j2x) Sexp(j0) 50exp(jn/2)
16 Xl=15Xc=]5 tf=15 Al=15 0 15y[2cos( ait) 15exp(j л/2)
17 0 Xl=4 Xc=4 8j2sin(at-3n/2) 0 8exp(- j л/2)
18 Xl=2 X^2 0 4~j2sin(ax + л/2) 0 4j2sin( an - л/2)
19 0 Xc=3 xL=3 б42$1п(аХ-л) 6exp(- jл') 8\[2sin( an + л/2 )
20 xL=3 Ac=3 0 10j~2sin(al+0.927) 0 - 6 -;8
21 X^2 Л=2 0 -2-J2 2y[2cos(al - л) 2exp[j 3л/2)
22 XL=l Xc=l 0 10/2sin(al+3^2) 10exp(j 3 л/2) 0
23 0 Xc-1 XL=\ 6>/2sin(ait-2л) 6exp(- )л) &/2sin(al+Зл/2)
24 XL=2 Ac=2 0 10exp(j0,972) 0 - 8 -y8
25 Xl=5 Xc=5 Л=7 10exp{- )2л) 5>[2cos( a>t) - 5+/8
26 Xl=2 X(^6 0 4y[2sin( ая + л/2) 0 442з1п(аП + л/2)
27 Xl=\G X(f=5 A},=10 - 60 -J'30 10j2cos( an) J0j2sin(al+n/2)
28 Xl=2 Xc=\2 0 4-J~2sin(cot + л/2) 0 12ехр()л/2]
29 X,=5 x<ri Al=10 10ехр()2л) 5y[2cos( ait) 5'/2sin(at-3n/2)
30 XL=6 Xc=2 0 60+/30 0 8j2sin(aI+n/2)
164
2.9.9. Расчет сложных электрических цепей методом
межузлового напряжения (семинар). Программа CON5_1
Электрическая цепь состоит из параллельно соединенных
ветвей, в которых находятся пассивные и активные элементы
(рис,2.44).
Заданы: схема соединений элементов цепи, значения со-
противлений и ЭДС источников в ветвях.
Требуется рассчитать параметры электрической цепи.
Законы, применяемые при решении задачи:
- закон Ома;
- первый закон Кирхгофа;
Алгоритм решения:
а) проанализировать заданную электрическую схему. Вы-
делить ветви и элементы, содержащиеся в этих ветвях. За-
дать направление межузлового напряжения. Используя метод
межузлового напряжения, составить уравнение для опреде-
ления напряжения между двумя узлами;
б) преобразовать заданные параметры электрической це-
пи в комплексные величины;
в) вычислить проводимость ветвей. Вычислить напряже-
ние между двумя узлами;
г) используя закон Ома, определить токи во всех ветвях, а
также полную, активную и реактивную мощности цепи, cos (р.
Решение:
а) электрическая цепь содержит четыре ветви. Направле-
ние токов в каждой ветви выбрано согласно схеме рис.2.44.
Из обобщенного закона Ома следует
ILb=lh - или /!=([/! - С^)У1;
- hZa. или l2=(Ei - [£,/>) У2;
LLab= - Ь 2з или £з=( - Еу- Цдь)Хз',
Цдь= LaZa или /4=( +Цдь)Уа-
В соответствии с первым законом Кирхгофа сумма токов
в узле «а» равна:
/1+^+Тз+/4=0.
Подставив значения и /4 и решив полученное выраже-
ние относительно Ц^ь, найдем
165
Рис.2.44. Схема электрической цепи с параллельными ветвями:
%2=Xi=l Ом, -¥3=^5= Л1= Яб =2 Ом, £73=60 В, £>=(6 -у8) В, £,= -;8 В.
и _u,y, + e2y2-e}y3'
ab Yt+Y2 + Y3 + Y4 ’
б) преобразование параметров цепи в комплексные числа
Zi=24y0, Z?=0+/l, Z}=0 -/2, £4=0471, Z5=0 -у'2, 2б=24у’О;
С/^бОчуО, Е2=6-JS, £з=0 -78;
в) проводимость ветвей
Zi=l/(Zi)=(0.54-/0) См, Ь=1/(£) =(0 -7'1) См,
1з=1/(2з)=(0+/0.5) См, r4=l/(Z4+Z5+Z6 )=(0.4+7’0.2) См.
Межузловое напряжение:
~‘ь = 0'9^ J03 = (20+>0) В; и-”= 1^ I =2° В;
г) токи в ветвях
Zi=(t7i - Г1=(4047’0)(0.547’0)=(2047’0) A; Z7= |Z,| =20 A,
Ь={Е2 -l^b) &=(- 14 -7’8)(0 -71)=(- 847’14) A; Z2=|Z2|=16.1 A,
Iy=(- E3 - l^b) b=( - 2047’8)(047’0.5)=(- 4-/10) A;
Z3=|Z3|=10.8A,
166
l4=(+Uab) I4=(20470)(0.44-70.2)=(8+j4) A; Z4=|Z4| =8.9 A,
Активная мощность
P=7?i Ji+J?2 Z4=2-202+2-8.92=800+158.4=958.4 Вт.
Реактивная мощность:
О=Х2-1_12+ХуЬ2+(Х4-Х5)-142 = 1 -16.12+(-2)-10.82+(2-1) 8.92 =
= - 53.28 вар
Полная мощность:
S=P+jQ=95Z - >53.28 В А, 5= |S| =960 ВА, cosp=P/S=0.998.
Задание
Для заданного варианта в табл.2.18, определить межузло-
вое напряжение Цдь, токи I в ветвях, полную S, активную Р и
реактивную Q мощности цепи, cos <р.
Расчеты можно проводить на ЭВМ с использованием про-
граммы "Калькулятор комплексных чисел".
Для контроля расчетов предназначена программа
CON5_1, которая позволяет контролировать:
- преобразование параметров электрической схемы в ком-
плексные числа;
- вычисленное значение узлового напряжения Uae',
- вычисленные значения токов в ветвях 1\ -
- МОЩНОСТИ (S,P,Q), COS ^9 .
В состав программы CON5_1 включен контрольный при-
мер.
Схемы к табл.2.19.
Схема I
Схема 2
167
Схема 4
Схема 6
Схема 7
Схема 8
Схема 9 Схема 10
168
Таблица 2.19. Параметры электрических цепей для схем 1-10
№ № № сх. отк ЛЮ чен Ех (с), В E2(e2), В £з (e3), В Rt, Ом R2, Ом Xit Ом x2, Ом Хз, Ом л Oi
1 1 К1 60 60 • 2 2 4 3
2 2 К1 60/2sin(al) 6o/2sin(<ut) 4 4 2 - - •
3 3 К1 ft ft 1 - 1 3 2
4 4 К1 20 - 20 0.2 0.2 - 0.5 1 1
5 5 К1 12O/2sin(cut) 60y[2sin(aX + + */2) - - - 2 5 5 -
6 6 К1 60+/80 60+/80 - - - 5 2 15 5
7 7 К1 100 /100 -/100 2.5 - 10 2 - •
8 8 К2 26>/2sin(ffit) 26>/2sin(at) - 2 2 5 - - •
9 9 К1 - 120 -j30 - - 30 - 30 6
10 10 К2 10+/20 10exi{jnl2) 8 - 4 5 5
11 1 60 60 2 2 2 4 3
12 2 - 120/2sin(at) 12O/2sin(at) - 4 4 2 2 - •
13 3 - ft ft - 1 - 1 3 2 2
14 4 - 20 fto 20 0.2 0.2 0.5 0.5 1 1
15 5 - 60>/2sin(dt) 60/2sin(<ut) - 2 - 2 5 5 -
16 6 - 60+/80 604/80 100 2 - 5 2 10 5
17 7 - 100 у 100 -/100 2.5 5 10 2 4 -
18 8 К1 26/2sin(aX) 2&/2sin(<iI) - 2 2 - 5 - -
19 9 К2 /60 - /60 - - 5 - 10 5
20 10 К1 10exp(j7r/2) - 10 3 - 4 5 - 5
21 8 - 15/2sin(at) 15 - 2 2 5 5 - -
22 1 - узо -;30 - 2 - 3 3 6 3
23 2 - 80 /60 - 4 4 1 1 - -
24 3 - 14.1V2sin(ffit) /10 - 2 - 2 1 2 1
25 4 - 60+/80 60 -/80 100 2 2 1 1 1 1
26 6 - 100 /100 -/100 2 - 4 4 2 4
27 9 - 282sin(aX + + я/2) 141sin(oX) 282sin(aX - -*/2) - - 20 5 20 5
28 10 - 10+/20 - 30 -/20 10exp(j)r/2) 8 - 4 10 20 К
29 4 К2 40+/60 60 - 0.5 0.5 1.5 - 1.0 2.1
30 9 К2 >120 - /80 - - 20 20 - К
169
2.9.10. Частотные характеристики электрических цепей
(курсовая работа)
Частотные характеристики представляют собой зависи-
мость полного сопротивления и угла сдвига фаз электриче-
ской цепи между током и напряжением ((р) от частоты под-
водимого к ней напряжения, т.е. зависимости Z=y(<i?) и
<Р=Л<у).
В процессе построения и анализа частотных характери-
стик электрических цепей электрические цепи представля-
ются как совокупность отдельных элементов - активных со-
противлений (а), реактивных индуктивных (б) и емкостных
(в) сопротивлений (рис.2.45). При этом для активного сопро-
тивления справедливы следующие соотношения:
J 7 п
Z-R; Z = |Z| = R; <р = arctg—= arctg— - 0,
ReZ R
где JmZ - мнимая часть комплексного сопротивления; ReZ - веществен-
ная часть комплексного сопротивления.
С учетом этого частотные характеристики Z=f(a>) и
(р =J( (У) электрической цепи, содержащей только активные
сопротивления, имеют вид представленный на рис.2.46.
Для индуктивного сопротивления (рис.2.45,б) частотные
характеристики запишутся в виде выражений:
_ .г I г-г\ г *1 т Z COL П
Z = jxL = 1«>Ц Z = \Z\ = (oL-, (р = arctg-^~ = arctg— = -.
U 2
Частотные характеристики для индуктивного сопротив-
ления электрической цепи представлены на рис.2.47.
Аналогичным образом, для емкостного сопротивления
(рис.2.45,в) частотные характеристики имеют вид:
R
XL ХС
Рис.2.45. Элементы электрических цепей: а - активное сопротивление;
б - индуктивное сопротивление; в - ёмкостное сопротивление
170
Рис.2.46. Частотные характеристики электрической цепи, содержащей
активное сопротивление: a) Z=J{
Рис.2.47. Частотные характеристики электрической цепи, содержащей
индуктивное сопротивление: a) Z=/( СО); б) <р =Д СО)
Рис. 2.48. Частотные характеристики электрической цепи, содержащей
емкостное сопротивление: a) Z=_/( СО ); б) ср =/( СО)
171
Z = -jxc=-j— -Z = \Z\ = —,
~ c coC 1-1 coC
л JmZ ( l^coCy л
<P = arctg = arctg\ - = -- ,
ReZ \ 0 ) 2
Частотные характеристики для этого элемента электриче-
ской цепи представлены на рис.2.48.
Для схемы цепи с последовательным соединением индук-
тивности и емкости полное комплексное сопротивление при-
Рис.2.49. Частотная характеристика Z=J(CO) электрической цепи с
последовательным включением индуктивности и емкости; СОН- частота
при резонансе напряжения
Рис. 2.50. Частотная (фазовая) характеристика (р =J{ СО Электриче-
ской цепи с последовательным включением индуктивности и емкости
172
Модуль полного сопротивления данной электрической
цепи
Z = \Z\= = coL-—^—.
V соС СйС
В соответствии с этой зависимостью частотная характе-
ристика для рассматриваемой электрической цепи приобре-
тает вид, представленный на рис.2.49.
Резонансная частота:
_ гг
4 V LC ’
Частотная характеристика <p=f[a>') для этой электриче-
ской цепи определится выражением:
r 1
r ~ COL----------
J Z (ПС
<Р = arctg =arctg-----.
ReZ О
Из анализа этого выражения видно, что при еу=О угол
сдвига фаз ср = ~—, при <у=«ун угол сдвига фаз <р=0, а при
со > со н угол сдвига фаз ср = —. С учетом этого частотная ха-
рактеристика имеет вид^представленный на рис.2.50.
Из проведенного анализа следует, что при последова-
тельном соединении индуктивности и ёмкости электрическая
цепь в диапазоне частот 0<<w<<yH обладает ёмкостным со-
противлением {ср <0), а в диапазоне частот й?><ун эта цепь
обладает индуктивным сопротивлением (<р>0).
Для электрической цепи с последовательным включением
активного сопротивления, индуктивности и емкости полное
комплексное сопротивление:
Z = R + j coL---------
Модуль полного сопротивления цепи:
173
f 1 \2
Z=|Z| = J^+ &L——
Угол сдвига фаз между током и напряжением:
<р - arctg
R
В соответствии с полученными выражениями для Z и (р
частотные характеристики Z=X су ) и (р =j{ а>) электрической
цепи имеют вид, приведенный на рис.2.51.
Для электрической цепи с параллельным включением ин-
дуктивности и емкости полное комплексное сопротивление и
его модуль имеют вид:
Рис.2.51. Частотные характеристики электрической цепи с последо-
вательным включением R, Х^, Хс : a) Z=/( СУ); б) (р 6))
174
При этом угол сдвига фаз между током и напряжением:
<Р = arctg= arctg
ReZ О
(2-42)
т
При параллельном соединении индуктивности и емкости,
когда имеет место резонанс токов (а> = сот), полное сопро-
тивление электрической цепи (Z=0) при <у=0 в соответствии
с выражением (2.41). При увеличении частоты в диапазоне
низких частот (0< со < to т) вследствие того, что coL « ,
соС
полное сопротивление этой электрической цепи Z « toL . От-
сюда следует, что в диапазоне низких частот электрическая
цепь обладает полным сопротивлением, имеющим индук-
тивный характер, поэтому с увеличением частоты полное со-
противление будет возрастать и при со = сот
индук-
тивное сопротивление XL = coL будет равно емкостному со-
противлению Хс =-----. При этом полное сопротивление це-
соС
пи стремится к бесконечности (Z = оо), так как знаменатель
выражения (2.41) стремится к нулю. При дальнейшем увели-
чении частоты (to>tor) знаменатель выражения (2.41) воз-
растает, полное сопротивление электрической цепи умень-
шается.
При <у»(Ут-, т.е. при coL »---, выражение (2.41) при-
соС
обретает вид:
Z= + —
Из этого выражения видно, что в диапазоне высоких час-
тот рассматриваемая электрическая цепь характеризуется
полным сопротивлением, которое имеет ёмкостной характер
и которое при значительном увеличении частоты стремится к
нулю.
175
Рис.2.52. Частотные характеристики электрической цепи с параллельным
включением R, XL, Хс : a) Z=X СО); б) (р =j{ СО)
Рис.2.53. Схема электрической цепи при смешанном соединении реак-
тивных элементов
Частотные характеристики электрической цепи с парал-
лельным соединением индуктивности и ёмкости приведены
на рис.2.52. При 0<со<сот в выражении (2.42) мнимая часть
(числитель) будет положительна, следовательно, угол сдвига
фаз ср = \
При со = со т, когда наступает резонанс токов, угол сдвига
фаз <р = 0.
В процессе дальнейшего увеличения частоты (со>сот
мнимая часть выражения (2.42) становится отрицательной
(полное сопротивление имеет емкостной характер), а угол
сдвига фаз <р = -—. Частотная характеристика Z=j(co) при-
ведена на рис.2.52, а, а частотная характеристика (p=f[co) -
на рис.2.52,б.
Для схемы, изображенной на рис.2.53 полное комплекс-
ное сопротивление имеет вид:
176
;0c-J^,(2.43)
где для последовательной цепи - - °>Li ~ ; для параллельной
цепи -
2 аС
Модуль сопротивления - Z-\Z_\ = | Хпос„ + Хпар
Угол сдвига фаз между общим током и подводимым к
цепи напряжением:
Р = arCtS^ReZ = arCt§ ХпОадХпаР • (2-44)
В соответствии с выражениями для Z и д> частотные ха-
рактеристики Z=/( со) и ср =j{ а)) для схемы электрической це-
пи (рис.2.53) представлены на рис.2.54.
п
7
Рис.2.54. Частотные характеристики электрической цепи рис.2.53:
а)7=У(бУ);б)^=у{бУ)
177
Анализ выражения (2.43) показывает, что при а>=0 реак-
тивное сопротивление Хпосл--^ , а реактивное сопротивле-
ние Хпар=0. При этом модуль полного сопротивления элек-
трической цепи будет равен бесконечности (Z=oo), а угол
ТС
сдвига фаз в соответствии с выражением (2.44) (р = . При
дальнейшем увеличении частоты в диапазоне (Q<a«a>H )
г 1 т i
можно принять coL, «----- И (ОЬ2 «----.
соС] соС2
В связи с этим Хпося ® ——, а X « a>L2. Однако в
соС,
этом случае (Хюсл + ХигР)<0, поэтому угол сдвига фаз оста-
нется без изменения (<р = ), а полное сопротивление цепи
с увеличением частоты будет уменьшаться.
При частоте а> = J = <oHi в электрической цепи
V ^'2^'1
(рис.2.53) наступит резонанс напряжений (Хпосл + Хпар=0).
При этом Z=0 и <р = 0. В процессе дальнейшего увеличения
частоты (<у><уЯ/ ) индуктивное сопротивление XL] = a>L2 бу-
z- tz /
дет преобладать над емкостным сопротивлением Xс =------,
соС j
поэтому (Хпосл + Хпар)>0, при этом угол (р изменит свой знак
на плюс и станет равным —. При (ХП0сл + Хк>р)>0 полное со-
противление электрической цепи будет возрастать при уве-
личении частоты, так как для рассматриваемой цепи оно оп-
ределится индуктивным сопротивлением XL = a>L2. При
I 1
частоте а> = а>т= I---- в параллельном контуре наступит
V ^2^2
резонанс токов. В этом случае coL2 = , следовательно,
й)С2
178
Z = [X,^ + -X„opi = 00 • Угол сдвига фаз при любом резонансе в
данной электрической цепи равен нулю (<р = 0).
При увеличении частоты (а>>а>т) реактивное сопротив-
ление, обусловленное индуктивностью L2 , будет больше ем-
костного сопротивления (a>L2 > ). Угол сдвига фаз в
соС2
Л
этом случае, в соответствии с выражением (2.44), <р=-
Полное сопротивление электрической цепи уменьшается, так
как Хпар, которое определяет величину полного сопротивле-
ния электрической цепи при частотах а> т < а> < а)н,, убывает
и будет отрицательным (ХосР’О увеличивается при увеличе-
нии частоты). При а> = а)н общее сопротивление цепи Х„осл
v т 1
=Х„ар, при этом coL. =- и в электрической цепи наступает
соС2
резонанс напряжений.
При дальнейшем увеличении частоты, (щ->оо), полное
сопротивление Z стремится к бесконечности, так как
ХПосл 00 j а ХПар 0-
В результате анализа частотных характеристик, пред-
ставленных на рис.2.54, можно установить, что в диапазоне
низких частот при 0<a><a>Hi участок (контур) смешанного
соединения реактивных сопротивлений электрической цепи
(рис.2.53) обладает ёмкостным сопротивлением Хс а
(oCt
при й>н <а><(0 т - индуктивным сопротивлением XL '(oLP
В диапазоне высоких частот (О т <(о<соИ рассматриваемый
контур имеет ёмкостной характер и обладает ёмкостным со-
хл 1
противлением Хс »------, а при а>н <<d->oo контур имеет
соС2 2
индуктивный характер XL « a>Lt.
179
2.9.11 Расчет однофазных многоконтурных цепей
переменного синусоидального тока (курсовая работа)
1. Начертить в соответствии с ГОСТ 2.728-74 схему «А»,
номер которой указан в табл. 2.20.
2. На схеме показать условные положительные направле-
ния токов в ветвях замкнутых цепей.
3. Записать все табличные величины (сопротивления,
ЭДС) в комплексной форме.
4. Используя метод контурных токов, составить необхо-
димые уравнения для расчета токов в ветвях схемы «А» (ус-
ловное положительное направление всех контурных токов
следует задавать по часовой стрелке, а обход свободных кон-
туров выбирать совпадающим с направлением контурных
токов).
5. Полученную систему уравнений записать в матричной
форме для решения ее на ЭВМ.
6. Записать в общем виде решение системы уравнений по
формулам Крамера.
7. Рассчитать комплексные и действующие значения то-
ков в ветвях схемы «А» (расчет произвести на ЭВМ).
8. Определить режимы работы всех источников электри-
ческой энергии (Ei, Ei), исходя из выражения SE = ±Е I .
9. Определить показания ваттметра, если токовая его об-
мотка включена на ветвь «п-т», а начало обмотки (*) напря-
жения (вольтовой обмотки) подключено к точке «а», а ее ко-
нец (U) - к точке «Ъ», исходя из выражения: Pw = Re(U_abI*nm)
10. Рассчитать общую комплексную мощность всех ис-
точников электрической энергии схем «А», работающих в
режиме генератора (5Г = Е±£г •/^) и определить общий
, , ReSr
коэффициент мощности cos^e = .
|£г|
11. Определить мгновенное значение тока i = f(t) ветви
«п-т».
12. Определить мгновенное значение напряжения между
точками «с» и «<7» схемы.
13. Начертить по ГОСТ 2.728-74 схему «В» и построить
для неё частотную характеристику.
180
Таблица 2.20. Варианты схем «А» и «В» для курсовой работы
№ вар № сх «А» № вар № сх«А» Параметры схемы «А»
zl (Ом) z2 (Ом) Z3 (Ом) z< (Ом) Zs (Ом) Z6 (Ом)
1 2 3 4 5 6 7 8 9 10
I 1 15 6 Я=40 Л-30 Л=0 Л=50 Я=30 Л—40 Я=40 Л£=40 Я=40 Л=60 Я=60 А'с—бО
2 2 16 7 R=Q Л=50 Л=40 Л=60 Л=0 Л=40 Я=10 X(f=30 Я=0 Л-40 Я=20 Хс=0
3 3 17 8 Я=10 хс=о Я=15 хс=о Я=30 Л-20 Я=30 л£=зо Я=40 Л=40 Я=50 Л=50
4 4 18 9 Я=30 Л—40 R=0 Л=зо Я=40 Л-0 я=о Л=50 Я=50 Ас^О я=зо Л=40
5 5 19 10 Я=20 Л?=Ю я=зо Лс=20 Я=40 Л=30 я=о Л=20 Я=50 Л-Ю я=зо Л-Ю
6 6 20 1 R=0 XL=40 R=0 Л=зо R=0 Л=20 я=о Л=20 я=о Л=30 я=о Л=40
7 7 21 2 R=0 Л-20 R=0 Л-зо Я=0 Л-40 я=о Лг=40 R=0 Хс=30 я=о Л=20
8 8 22 3 R=10 Л-50 Я=20 Л-40 л=зо Л=30 Я=30 Л=зо Л=20 Л,=40 Я=40 Л=50
9 9 23 4 Я=0 Л=50 Я=0 Л=30 я=о л=зо R=0 Л=40 R=0 Лл=40 Я=0 Л=40
10 10 24 5 R=0 Л-Ю R=0 Л-20 R=0 л-зо Я=0 Л-40 Я=0 Л-50 я=о Л-60
11 1 25 6 Я=0 Л=ю Я=0 Л=20 R=Q Л=зо Я=0 Л=40 Я=0 Л=50 я=о Л=60
12 2 26 7 R=0 Л-50 R=0 Л=50 я=зо Л=40 я=зо ^с=40 Я=40 Лс=30 Я=40 Л=30
13 4 28 8 Я=30 Лс=40 Я=30 Л—40 Л=40 Лс=30 Я=0 Л=50 R=0 Л=50 я=о Л=50
14 4 28 9 Я=10 Л=60 Я=20 Л=50 я=зо Л=40 Я=40 Л=зо Я=40 Хс=30 Я=40 Лт=30
181
Продолжение табл. 2.20.
Источники схемы «А» Ветвь Точки на схеме «А» Схема «В»
£i(B) S2(B) n - m а Ь с d № Част, хар-ка
11 12 13 14 15 16 17 18 19
ej = 200>/2sin<u t ej = 10(h/2sin(ty t - я) 1-2 2 4 1 3 1 Z=f(o>) cp=f(co)
ej = 2OoTiin «a t +— I 6J «2 = lOoTiinl cot-— I \ 27 4-2 2 3 3 4 2 Z=f(a>)
в| =2OoViin <ut+— k V 62 = lOoTiinl <ut-— 1 k 2/ 2-4 1 3 2 4 3 Z=f(<o)
e| = 2OoT2sin <at + — k 2/ в2 = lOoVIsin© t 2-3 1 4 3 4 4 Z-f(co) <P=f(a>)
в| = 200 i/Lirt(<u t + лг) e2 = lOoVLinl co t+— k 27 1-2 3 4 1 4 5 Z=f(o>) <p=f(a>)
ej = 200 •flsmco t «2 = lOoVzsinl <y t+— 1 k 2J 4-3 2 3 3 4 6 Z=f(<o)
в| = lOoVzsin I <at- — \ 6J 62 = ioo72sin<a t 2-4 3 4 2 4 7 Z=f(a>)
ej = 200^2sin йИ-— «2 = 200^2з1п&) I 3-4 1 2 3 4 8 Z=f(a)
ej = lOoJsinl cot-— \ 27 ^2 = ZOoTzsin® t 2-3 3 4 2 3 9 Z=f(<D)
e( = 100 Jlsin t - я) &2 = 2OoT2sin<y t 1-3 2 4 1 3 10 Z=f(co)
182
Схемы «А»
№3 №4
183
№7
№8
184
№9
№10
№3
185
№5
№9
186
Глава 3
Нелинейные электрические и магнитные
цепи
Процессы в нелинейных электрических цепях описывают-
ся нелинейными алгебраическими или дифференциальными
уравнениями, т.е. уравнениями, которые содержат нелиней-
ные функции тока, напряжения и их производные.
Цепь называется нелинейной, если она содержит хотя бы
один нелинейный элемент. Параметры нелинейных пассив-
ных элементов R, L, С зависят от токов и напряжений, дей-
ствующих в цепи.
Основная особенность нелинейных цепей заключается в
том, что к ним не применим принцип наложения. Кроме то-
го, реакция нелинейной цепи на синусоидальное воздействие
будет несинусоидальной, т.е. в выходном сигнале появляют-
ся гармоники других частот, которые не содержат входной
сигнал.
Если в линейных электрических цепях зависимость между
током и напряжением (вольт-амперная характеристика) при
постоянстве частоты представляет прямую линию (рис.
1.4,а), то в нелинейных цепях эта зависимость представляет
собой кривую или ломаную линию (рис. 1.4,в). Таким обра-
зом, сопротивление (активное, индуктивное или емкостное)
нелинейного элемента меняется при изменении тока и на-
пряжения.
3.1. Классификация нелинейных элементов
Нелинейные элементы подразделяются по характеру со-
противления'.
- нелинейные активные сопротивления, например ваку-
умные и полупроводниковые диоды и триоды;
- нелинейные индуктивные сопротивления, или нелиней-
ные индуктивности, которыми обладают все катушки и
трансформаторы с ферромагнитными сердечниками;
187
- нелинейные емкостные сопротивления (нелинейные ем-
кости), например, конденсатор с диэлектриком из сегнето-
электрика, который называется варикондом (или варикапом).
По управляемости различают: неуправляемые нелинейные
элементы (резистор, диод и т.д.) - имеют два зажима для
присоединения к электрической цепи - и одну вольт-
амперную характеристику; - управляемые нелинейные эле-
менты - имеют три зажима для присоединения к электриче-
ской цепи, причем, как правило, один является управляю-
щим. Эти элементы имеют семейство характеристик, опреде-
ляющихся управляющим параметром. Например, для транзи-
стора, это уровень напряжения на управляющем электроде,
для фотоэлемента - это освещенность чувствительного эле-
мента.
Следует отметить, что деление электрических цепей на
линейные и нелинейные несколько условно. Дело в том, все
реальные элементы электрических цепей, в силу происходя-
щих в них физических процессов, всегда обладают некото-
рой нелинейностью. Поэтому элемент цепи может считаться
линейным или нелинейным в зависимости от степени нели-
нейности и той задачи, которая ставится при рассмотрении
данной цепи. Наиболее многочисленными и широко приме-
няемыми нелинейными элементами являются нелинейные
активные сопротивления.
3.2. Методы расчета нелинейных цепей
Расчет любой электрической цепи, линейной или нели-
нейной, сводится либо к нахождению токов и напряжений по
заданным параметрам цепи и источников (анализ), либо к
определению параметров цепи по заданным характеристикам
(синтез).
Для расчета линейных электрических цепей созданы мно-
гочисленные методы (метод контурных токов, метод узловых
потенциалов, операторный метод и др.), которые позволяют
рассчитать любую цепь в стационарном или переходном ре-
жиме. Расчет нелинейных электрических цепей затрудняется
тем, что к нелинейным цепям не применим принцип наложе-
ния, а вольт-амперные характеристики нелинейных элемен-
тов в подавляющем большинстве случаев определяются экс-
188
периментально и задаются в виде графиков, представляющих
собой кривые линии. Аналитические выражения характери-
стик, как правило, отражают сущность процессов с малой
точностью. Все многообразие методов расчета нелинейных
электрических цепей можно свести в три большие группы:
а) графические методы, реализуемые геометрическими
построениями на основе заданных характеристик. Методы
обладают наглядностью и дают вполне удовлетворительную
точность решения;
б) аналитические методы, основанные на том, что харак-
теристика нелинейного элемента выражается приближенной
аналитической функцией. Аналитический метод обычно ме-
нее нагляден, но с его помощью удается получить общие
расчетные зависимости;
в) численные методы, основаны на приближенных спосо-
бах решения алгебраических и дифференциальных уравне-
ний. Они имеют малую наглядность, но позволяют с помо-
щью вычислительных машин решить любую конкретную за-
дачу по расчету нелинейных цепей с высокой точностью.
Кроме того, в практике расчета нелинейных цепей, широ-
ко используются комбинированные методы, например гра-
фоаналитические.
При расчете конкретных нелинейных цепей следует иметь
в виду, что характеристики нелинейных элементов различны
для различных образцов одного и того же вида и имеют
весьма существенный разброс, обычно 8±15 % и более.
3.3. Нелинейные электрические цепи
постоянного тока
В общем случае у всех электротехнических устройств по-
стоянного тока зависимость тока от напряжения между вы-
водами устройства нелинейная: 1(1Г). Если эта нелинейность
в широком диапазоне изменений значений тока и напряже-
ния невелика, то при расчетах можно такое электротехниче-
ское устройство представить линейной схемой замещения.
Однако значительное число электротехнических уст-
ройств имеют зависимости I(U) существенно нелинейные.
189
Рис. 3.1. Пример трех устройств при постоянном токе
На рис. 3.1. приведены в качестве примера нелинейные
вольт-амперные характеристики 7(7/) трех электротехниче-
ских устройств при постоянном токе. Вольт-амперные харак-
теристики нелинейных цепей: 1 - лампы накаливания;
2 - полупроводникового диода; 3 - транзистора.
Для расчета электрических цепей с нелинейными элек-
тротехническими устройствами последние необходимо пред-
ставить в виде нелинейных схем замещения. В простейшем
случае элементами нелинейной схемы замещения являются
нелинейные элементы (рис. 1.4).
Вольт-амперная характеристика (сокращенно ВАХ) не-
линейного сопротивления может быть задана аналитически,
графически или в виде таблицы.
В общем случае нелинейные схемы замещения электро-
технических устройств постоянного тока содержат кроме не-
линейных элементов еще и нелинейные источники напряже-
ния и тока.
Далее ограничимся анализом нелинейных электрических
цепей, содержащих только нелинейные элементы.
3.3.1. Графический метод анализа нелинейных цепей
При графическом методе расчета используются вольт-
амперные характеристики линейных и нелинейных элемен-
тов электрической цепи.
190
Рассмотрим особенности применения графического ме-
тода для анализа электрических цепей с последовательным,
параллельным и смешанным соединениями нелинейных ре-
зисторов.
Последовательное соединение нелинейных элементов.
На рис. 3.2 дана схема электрической цепи, содержащая два
последовательно соединенных нелинейных элемента R\ и
R2, и построены их вольт-амперные характеристики Z(f/t) и
Z(tZ2).
Если к такой электрической цепи подключить источник
тока, то анализ цепи становится простым. Действительно,
при известном токе источника, а значит и в нелинейных эле-
ментах, напряжения на элементах можно определить непо-
средственно по вольт-амперным характеристикам I(UX),
I(U2).
Анализ цепи сложнее, если к электрической цепи подклю-
чен источник ЭДС Е. В этом случае для расчета цепи вы-
полняется эквивалентное преобразование цепи. Схема
Рис. 3.2. Последовательное соединение нелинейных элементов: вольт-
амперные характеристики (а); последовательное соединение сопротивле-
ний (б); эквивалентная схемам (в)
191
цепи с двумя последовательно включенными элементами
(рис. 3.26) заменяется схемой с одним эквивалентным нели-
нейным элементом Rwg (рис. 3.2в). Так как значения токов в
преобразуемых и эквивалентном нелинейном элементах
должны быть одинаковы (последовательное соединение), то
вольт-амперная характеристика эквивалентного нелинейного
элемента /(Ц + U2) строится графическим суммированием
по напряжению вольт-амперных характеристики /(Ц) и
I(U2), как показано на рис. 3.2а. Это соответствует второму
закону Кирхгофа для цепи Е = + U2. Например, задаваясь
током I, определяются отрезки аб и ав, соответствующие
напряжениям U2 и Ц. Затем, суммируя отрезки аб и ав
получаем отрезок аг, соответствующий ЭДС Е вольт-
амперной характеристики /(Ц +U2).
По вольт-амперной характеристике эквивалентного рези-
стивного элемента 1(UX + U2) при известном значении ЭДС
Е источника сразу графически определяется ток в цепи I
(рис.3.2а, построение указано стрелками). Для найденного то-
ка по вольт-амперным характеристикам нелинейных элемен-
тов /(t/J и I(U2) находятся значения напряжений Ux hU2.
Если электрическая цепь содержит не два, а большее чис-
ло последовательно соединенных нелинейных элементов с
известными вольт-амперными характеристиками, то анализ
цепи выполняется аналогично.
На практике часто встречаются электрические цепи, со-
держащие последовательное соединение нелинейного и
линейного R элементов (например, в электронных усилите-
лях, в которых нелинейным элементом является транзистор).
Анализ таких цепей целесообразно выполнять графическим
методом нагрузочной характеристики.
Для расчета режима цепи (рис. 3.3) запишем уравнение по
второму закону Кирхгофа:
RI + U, = Е,
откуда
192
Рис. 3.3. Последовательное соединение линейного и нелинейного элемен-
тов: вольт-амперная и нагрузочная характеристика (а); последовательное
соединение сопротивлений (б)
При постоянных значениях Е и R из уравнения (3.1) сле-
дует, что между током / в линейном элементе и напряжени-
ем Ц на нелинейном элементе существует линейная зависи-
мость 1 = F(U{), которая называется нагрузочной характери-
стикой (это внешняя характеристика активного двухполюс-
ника относительно выводов нелинейного элемента).
Построим нагрузочную характеристику - прямую
(рис. 3.3а), которая должна проходить через две точки соот-
ветственно на оси абсцисс и ординат: из уравнения (3.1) при
р
1 = 0 находим Ц = Е и при Ц = О ток I = —.
R
Ток в элементах при последовательном соединении имеет
одинаковое значение, которое должно удовлетворять как на-
грузочной характеристике / = F(U}), так и вольт-амперной
характеристике нелинейного резистивного элемента
Очевидно таким условиям удовлетворяет точка пересечения
этих характеристик (точка А на рис. 3.3а), которая определя-
193
ет режим цепи, а значит и величины тока I и напряжений Ц
и U2.
Метод нагрузочной характеристики можно применять и
для анализа электрической цепи, содержащей линейный ак-
тивный двухполюсник, к выводам которого подключен не-
линейный резистор. Действительно, линейный активный
двухполюсник можно заменить эквивалентным генератором,
содержащим последовательно соединенные идеальный ис-
точник ЭДС Еэкв и линейный резисторный элемент R3Ke. При
нелинейном резисторе RH эта цепь аналогична приведенной
на рис. 3.36.
Параллельное соединение нелинейных элементов. На
рис. 3.4 дана схема электрической цепи, состоящей из двух
нелинейных элементов Rt и R2, соединенных параллельно.
Подключение к такой цепи источника ЭДС приводит к про-
стой задаче. При заданном напряжении, равном ЭДС, ток в
каждом из нелинейных элементов определяется непосредст-
венно по вольт-амперным характеристикам Д(С/) и /2(f7),
Рис. 3.4. Параллельное соединение нелинейных элементов: вольт-
амперные характеристики (а), параллельное соединение сопротивлений
(б); эквивалентная схема (в)
194
Если к цепи, состоящей из параллельного соединения не-
линейных элементов и R2, подключить источник тока J
(рис. 3.46), то анализ цепи можно выполнить графическим
методом.
Для этого заменим два нелинейных элемента 7?] и R2, со-
единенных параллельно, одним эквивалентным нелинейным
элементом R.jKe (рис. 3.4в). Так как значения напряжений на
преобразуемых и эквивалентном нелинейном элементах
должны быть одинаковыми, а токи в цепи удовлетворяют со-
отношению J = Ц +12, то вольт-амперная характеристика
эквивалентного нелинейного элемента 1^1/)+ I2(u) строится
графическим суммированием по току вольт-амперных харак-
теристик 7/tZ) и Z2(f/).
На рис. 3.4а, задаваясь напряжением проводится верти-
каль, определяются отрезки аб и ав и точка г вольт-
амперной характеристики J получается суммированием от-
резков ав + аб.
При известном токе J источника тока по характеристике
эквивалентного элемента 7?эга определяется значение прило-
женного к нему напряжения U, которое равно напряжению
на каждом из нелинейных резистивных элементов R},R2, со-
единенных параллельно. По вольт-амперным характеристи-
кам /)(£/) и 12(1Г) определяются токи Ц и 12 в нелинейных
элементах (рис. 3.4а).
Если электрическая цепь содержит не два, а большее чис-
ло параллельно соединенных нелинейных элементов с из-
вестными вольт-амперными характеристиками, то анализ це-
пи выполняется аналогично.
Анализ цепи со смешанным соединением нелинейных
элементов и одним источником энергии базируется на изло-
женных выше положениях. При применении графического
метода сначала параллельное соединение нелинейных эле-
ментов заменяется эквивалентным нелинейным элементом,
как было показано на рис. 3.4. После такого преобразования
схема электрической цепи содержит два нелинейных элемен-
та, соединенных последовательно. Анализ такой цепи также
рассмотрен на рис. 3.3.
195
Графические методы расчета нелинейных электрических
цепей очень наглядны, достаточно трудоемки и не дают об-
щего решения задачи.
3.3.2 Аналитический метод анализа электрических
цепей
Из различных аналитических методов расчета нелинейных
электрических цепей наиболее часто применяется метод ли-
неаризации вольт-амперных характеристик. В этом методе
вольт-амперная характеристика каждого нелинейного эле-
мента делится на несколько участков, каждый из которых
затем аппроксимируется отрезком прямой линии. Совокуп-
ность всех линеаризованных участков дает аппроксимацию
вольт-амперной характеристики в виде ломаной линии. В
пределах каждого линеаризованного участка зависимость
между током и напряжением задается линейным уравнением.
В результате нелинейный элемент представляется линейной
схемой замещения, содержащей элементы с постоянными
параметрами.
Представив все нелинейные элементы в анализируемой
схеме в пределах рабочих участков вольт-амперных характе-
ристик соответствующими линейными схемами замещения,
получим полную линейную схему замещения нелинейной
цепи. Для расчета режима работы полной линейной схемы
замещения можно пользоваться всеми рассмотренными в
главе I методами анализа линейных цепей. Условие приме-
нения того или иного метода - режим каждого нелинейного
элемента определяется рабочей точкой, которая находится в
пределах линеаризованного рабочего участка его вольт-
амперной характеристики.
Рассмотрим линейные схемы замещения нелинейных эле-
ментов и определим параметры элементов этих схем заме-
щения на примере нелинейных сопротивлений, вольт-
амперные характеристики которых представлены на рис.
3.5а,б.
Если некоторый участок нелинейной вольт-амперной ха-
рактеристики можно приближенно заменить отрезком пря-
мой, то в пределах этого участка отношение изменения на-
пряжения dU к изменению тока di есть величина постоян-
ная (dU/dl -const'). Величина dU/dl = RdUH называется ди-
196
намическим или дифференциальным сопротивлением нели-
нейного элемента.
Можно определить статическое сопротивление
U/1 = Rcm в каждой точке того же участка вольт-амперной
характеристики. Однако даже на линеаризованном участке
вольт-амперной характеристики Rcn Ф const / Исключение
составляют лишь характеристики, у которых линеаризован-
ный участок (или его продолжение) проходит через начало
координат. Поэтому статическое сопротивление редко при-
меняется в расчетах.
Рис. 3.5. Нелинейные вольт-амперные характеристики и их схемы заме-
щения
197
На рис. 3.5а приведена нелинейная вольт-амперная харак-
теристика, участок которой выше точки а можно считать ли-
нейным и, следовательно, изобразить отрезком прямой ли-
нии. Продолжим этот линеаризованный участок до пересече-
ния с осью напряжения. Отсеченный на оси напряжений от-
резок изображает в масштабе построения некоторую фик-
тивную ЭДС Eq>0.
Линеаризованному участку вольт-амперной характеристи-
ки соответствует динамическое сопротивление
_dU т (U-Eo)
кдиН --7Г- —lSa ~, (3.2)
al т{ I
где a - угол между прямой аб и осью тока.
Из выражения (3.2) получаем уравнение, связывающее
напряжение и ток нелинейного элемента в пределах рабочего
участка аб на рис. 3.5а:
U = Eo + RdJ.
(3.3)
Отсюда следует, что нелинейный элемент при напряжении
U > Ua можно заменить линейной схемой замещения, со-
стоящей из источника постоянной ЭДС Ео, направленной
навстречу току, и линейного элемента с сопротивлением RdUH
(рис. 3.5а).
Линеаризованный участок вольт-амперной характеристи-
ки нелинейного элемента, расположенный выше точки а,
может быть и таким, как показано на рис. 3.56. Продолжение
участка отсекает отрезок, изображающий в масштабе по-
строения ЭДС £о<О на отрицательной полуоси напряжения.
В этом случае динамическое сопротивление
n dU ти
Кдш. =~7Г= lS<^ =
al mI
(3-4)
т.е. в пределах линеаризованного участка справедливо урав-
нение
U = -Eo + RdJ.
(3-5)
198
Следовательно, схемы замещения нелинейного элемента
по рис. 3.5а и б совпадают с той разницей, что в первом слу-
чае Ео> 0, а во втором £о<О.
3.4. Магнитные цепи с постоянной
магнитодвижущей силой
В различных областях техники находят широкое приме-
нение эл.ектромагнитные устройства, преобразующие элек-
трическую энергию в механическую или создающие магнит-
ные поля с заданными характеристиками. К таким электро-
магнитным устройствам относятся электромагнитные реле,
тяговые электромагниты, электрические машины, трансфор-
маторы и т.п. Электромагнитное устройство включает ис-
точник, создающий магнитное поле, и магнитопровод, опре-
деляющий путь протекания магнитного потока, а также
вспомогательные устройства' для подвода " электрической
энергии и использования механической „энергии.
МагнитопрдвосГом называется совокупность различных
ферромагнитных и неферромагнитных частей электротехни-
ческого устройства для создания магнитных полей нужной
конфигурации и интенсивности. В зависимости от принципа
действия электротехнического устройства магнитное поле
может стдапатъсяпостоянным магнитом или катушкой с
^окомГТасположенной в той или иной части магнитопрово-
да.
По катушке, создающей магнитное поле, может протекать
постоянный или переменный (синусоидальный) ток. В пер-
вом случае поле создает постоянная магнитодвижущая сила
(МДС), во втором - переменная МДС.
3.4.1. Понятие о магнитной цепи
Совокупность источника магнитного поля и магнитопро-
вода называется магнитной цепью.
Величина МДС определяется по формуле
F = Ixw, (3.6)
где /(f) - ток протекающий по катушке; w - число витков катушки.
199
К-Шюстейшим магнитным цепям относится тороид из од-
нородного ферромагнитного материала (катушка индуктив-
ности) рис. 2.2. Такие магнитопроводы применяются в мно-
гообмоточных трансформаторах, в элементах персональных
компьютеров и других электротехнических устройствах.
Магнитное поле в каждой ючке лространства характери-
зуется вектором магнитной индукции В Единицей магнит-
ной индукции является тесла (Тл).
..Магнитный поток (поток вектора магнитной индукции) Ф
в магнитопроводе с площадью поперечного сечения 5, оп-
ределяется соотношением:
КХ Ф = ^BxdS =BdSxcosa , (3.7)
-> ->
где а - угол между векторами В и ds .
Если магнитное поле равномерно и а = 0, то
Ф = В*8. (3.8)
где S' - площадь сечения пересекаемого магнитным потоком.
Единицей магнитного потока является вебер (Вб):
1Вб=.17лх1лЛ
Магнитное поле может создаваться вокруг проводников, в
которых протекает электрический ток. Величина и направле-
ние вектора магнитной индукции В этого поля зависят от
величины тока в проводниках (в обмотке) и от свойств сре-
ды, окружающей обмотку (свойств магнитопроводов).
Связь между вектором магнитной индукции В, напря-
женностью Н магнитного поля и током I определятся зако-
ном полного тока
(3-9)
Согласно (3.9) линейный интеграл напряженности маг-
нитного поля вдоль замкнутого контура равен алгебраиче-
200
ской сумме токов, проходящих сквозь поверхность, ограни-
ченную контуром интегрирования. Единицей напряженности
магнитного поля является ампер на метр (Ахм).
Рассмотрим связь между индукцией и напряженностью
магнитного поля для кольцевого сердечника, выполненного
из ферромагнитного материала (рис. 3.6а), и неферромагнит-
ного материала, рис. 3.7а. Катушки для обоих сердечников
имеют одинаковое число витков и по ним протекает один и
тот же ток I. Создаваемый катушкой магнитный поток Ф в
основном протекает по магнитопроводу кольца и одна сило-
вая линия его проведена внутри сердечников с радиусом г.
Этот поток называют основным. Кроме этого существует по-
ток рассеяния Фа, который замыкается частично по магни-
топроводу кольца и частично по воздуху (диэлектрику). При
дальнейшем анализе потоком рассеяния пренебрегаем
Фа =0, так как ф»фд из-за различного магнитного сопро-
тивления участков цепи, по которым они замыкаются.
Применяя закон полного тока к магнитным цепям и вы-
брав контур интегрирования в виде окружности с радиусом
г (рис. 3.6,а и 3.7а), найдем:
Рис. 3.6. Магнитная цепь с кольцевым магнитопроводом из ферромаг-
нитного материала
201
Рис. 3.7. Магнитная цепь с кольцевым магнитопроводом из неферромаг-
нитного материала
Сумма токов через поверхность, ограниченную контуром
интегрирования, есть магнитодвижущая сила, равная I х w
(3.6).
Если учесть, что в данном случае угол между векторами
Н и di равен нулю и значение Н в любой точке контура
интегрирования одинаково, то, пренебрегая различием Н по
сечению колец, найдем среднее значение напряженности
магнитного поля в первом (рис. 3.6а) и во втором (рис. 3.7а)
кольцах:
/w
НХ= — =Н2,
1ср
(3.11)
где Н{, Н2 - напряженности магнитного поля, соответственно, в коль-
цах из ферромагнитного и неферромагнитного материала; I - средняя
длина магнитной линии поля.
Соотношение (3.11) показывает, что средняя напряжен-
ность магнитного поля является удельной магнитодвижущей
силой обмотки и зависит только от размеров колец. Напря-
женность магнитного поля кольцевого магнитопровода (без
учета полей рассеяния) не зависит от его магнитных свойств
и равна магнитодвижущей силе обмотки, приходящейся на
единицу длины средней линии магнитопровода.
202
Если измерить величины средней магнитной индукции
и В2 в кольцах (рис. 3.6а и 3.7а) и построить зависимости
В(Н), то они будут иметь вид, изображенный на рис.3.66
В}(Н}) - для ферромагнитного материала и на рис. 3.76,
52(//2) - Для неферромагнитного материала.
При одинаковом токе 1 напряженности Нх и Н2 будут
также одинаковы. Как видно из рис. 3.66 и 3.76, при
- Н2= Но значения индукции Во (кольца из неферромаг-
нитного материала) и индукции Вф (кольца из ферромагнит-
ного материала) значительно отличаются. Значение магнит-
ной индукции в ферромагнитном материале во всех случаях
значительно (в сотни и тысячи раз) превышает значение ин-
дукции в неферромагнитном материале.
Связь между магнитной индукцией В и напряженностью
магнитного поля Нъ любой среде определяется соотноше-
нием:
В = £1а*Н = //0 х /2x77 , (3.12)
где /у0 - магнитная постоянная, равная 4ях 10~7 Гн/м ; fia - абсолют-
ная магнитная пропорциональность, Гн/м ; /л - относительная магнит-
ная проницаемость.
Относительная магнитная проницаемость /л зависит от
напряженности Н магнитного поля и определяет качество
ферромагнитного материала, т.е. способность магнитопрово-
да из этого материала «проводить» магнитный поток, созда-
ваемый током обмотки.
Магнитная индукция В$ в неферромагнитном материале
пропорциональна напряженности магнитного поля (// = 1)
А = //0=47ГХ10-7 Гн/м. (3.13)
но
Если в равномерном магнитном магнитопроводе из не-
ферромагнитного материала известна индукция В0(7л), то
напряженность магнитного поля Н0(А1м) найти по формуле
203
0= —=------^-y = 8xlO5Bo.
° //0 4jTxlO 0
(3-14)
Различные ферромагнитные материалы обладают неоди-
наковой способностью «проводить» магнитный поток. Ос-
новной характеристикой ферромагнитного материала являет-
ся петля магнитного гистерезиса В(Н). Эта зависимость
определяет значение магнитной индукции, которая будет
создаваться в магнитопроводе из данного ферромагнитного
материала при воздействии конкретной напряженности поля.
Если в обмотке рис. 3.9а медленно изменять значение тока
I, то фиксируя соответствующие значения В и Н в магни-
топроводе, можно получить петлю магнитного гистерезиса,
характеризующую материал магнито провода (рис. 3.8).
Если процесс циклического изменения тока I (цикличе-
ского перемагничивания) повторять при разных амплитуд-
ных значениях тока, то получим семейство петель магнитно-
го гистерезиса. При увеличении тока Imax (а значит и напря-
женности Нтзх) выше некоторого предела площадь петли
практически не увеличивается. Наибольшая по пло-
щади петля называется предельной петлей гистерезиса.
Другую большую группу ферромагнитных материа-
лов составляют магнитотвердые материалы, имеющие ши-
рокую петлю гистерезиса. Отличительной особенностью
этих материалов, применяемых для изготовления постоян-
ных магнитов, является способ-
ность сохранять намагниченное
состояние после воздействия
внешней магнитодвижущей силы.
В магнитной цепи, содержащей
намагниченные элементы из маг-
нитотвердых материалов (посто-
янные магниты), существует маг-
нитный поток, значение которого
зависит от свойств как постоян-
ных магнитов, так и остальной
части магнитопровода.
гистерезиса
204
Для того чтобы образец из магнитотвердого материала
(например, цилиндр) стал постоянным магнитом, его необ-
ходимо намагнитить.
Особенностью магнитотвердых материалов являются
большие значения остаточной магнитной индукции Вг и ко-
эрцитивной силы Нс. Важным энергетическим параметром
постоянных магнитов является удельная магнитная энергия
W = ВН/2.
Значительная часть магнитотвердых материалов выпуска-
ется в виде сплавов железа, никеля, алюминия, кобальта,
ферритов, а также сплавов на основе редкоземельных эле-
ментов (самария, кобальта и др.).
3.4.2. Вебер-амперная характеристика участка
магнитной цепи
Введем понятие падение магнитного напряжения для
участка магнитной цепи. Возьмем участок цепи (рис. 3.9а) по
которому протекает магнитный поток Ф. Участок имеет
длину 1а6 и сечение 5 = const. Для этого участка век тор ин-
дукции В совпадает с магнитным потоком Ф.
Так как мы рассматриваем анизотропный в магнитном от-
ношении ферромагнитный материал (// не зависит от на-
—► —>
правления Н), то вектор Н совпадает с В .
Рис. 3.9. Участки магнитной цепи (пояснения в тексте)
205
Падением магнитного напряжения на участке цепи от
точки а до точки б (рис. 3.9а) называют линейный интеграл
от напряженности магнитного поля по пути между этими
точками:
UMa6 = \Hxdl.
а
(3-15)
Принимаем вектор Н = const на пути аб и совпадающим
-> ►
с dl, поэтому скалярное произведение Ях dl = Hxdlx cosO0
и падение магнитного напряжения на участке аб равно
б
U„a6=Hx\dl = Hxla6, (3.16)
а
где ^аб “ средняя магнитная линия участка аб.
Размерность падения магнитного напряжения
А
— хм
м
=[4
Если участок аб магнитной цепи можно разделить на п
отдельных частей, на которых Hk = const, то интеграл по пу-
ти аб можно представить суммой
п
к=\
где 1к - длина к-го участка.
Вебер-амперной характеристикой (ВбАХ) участка цепи
называется зависимость потока Ф по какому-либо участку
магнитной цепи от падения магнитного напряжения на уча-
стке Ф - f(UM). Она играет такую же роль при расчете маг-
нитной цепи, как и ВАХ нелинейного сопротивления. Вебер-
амперную характеристику (ВбАХ) при расчете магнитной
цепи не задают, так как ее необходимо рассчитывать.
206
Рассмотрим методику расчета ВбАХ для участка магнит-
ной цепи.
Пусть дан участок магнитной цепи с размерами: длина -
Z,, /2; сечение - S,, S2; 8 - сечение воздушного зазора (рис.
3.96). Известна зависимость В(Н) для ферромагнитного ма-
териала. Требуется построить Ф(им}. При расчете допуска-
ем, что поток рассеяния отсутствует и сечение магнитного
потока в воздушном зазоре такое же, как и на участке 1{,12
(боковой распор силовых линий в зазоре отсутствует). По-
следнее допущение бывает справедливо при малой длине
воздушного зазора 8.
Для построения ВбАХ задаемся значениями Фк, например
для электротехнической стали Фк = BkxSk, где Вк изменя-
ется от 0 до 1,5 Тл. Затем, для каждого значения Фк для за-
данного участка с сечением Sk находим магнитную индук-
ф.
цию Вк = —-. При этом сечение воздушного зазора
$к
So=S.+y-
Для каждого значения Фк и определенных Вк находим
значения напряженности магнитного поля Нк на участках.
При этом для ферромагнитных материалов Нк находится по
кривой намагничивания материала В(Н), а для неферромаг-
нитного участка (воздушный зазор) - из соотношения (3.14).
Затем, для каждого значения Фк определяются значения
(рис. 3.96) падения магнитного напряжения
маб = Н К\ Х А + ^К2 х ^2 + ^0 Х ’
где НК{,Н- значения напряженности магнитного поля соответ-
ствующих участков.
По результатам подсчетов строим ВбАХ зависимость
Ф = f(UM). Характер зависимости для участка магнитной
207
цепи (рис. 3.96) при разных длинах воздушных зазоров пред-
ставлен на рис. 3.10. С увеличением длины воздушного зазо-
ра ВбАХ стремится к прямой линии (рис. 3.76, 3.10).
3.4.3. Законы Кирхгофа для разветвленных магнитных
цепей
Первый закон Кирхгофа на основании принципа непре-
рывности магнитного потока для любого узла магнитной це-
пи: алгебраическая сумма магнитных потоков в любом узле
магнитной цепи равна нулю:
Еф*=°- <317)
к=\
Второй закон Кирхгофа', алгебраическая сумма падений
магнитного напряжения вдоль любого замкнутого контура
магнитной цепи равна алгебраической сумме МДС вдоль то-
го же контура:
п т
(318)
*=1 Л=1
Рис. 3.10. Вебер-амперные характеристики участка
208
Запись уравнений (3.17) и (3.18) возможна только при вы-
боре положительного направления для потоков Фк в ветвях
и положительного направления обхода контуров. Обычно
принимают следующее правило: в уравнении (3.17) потоки,
направленные к узлу, берутся со знаком «+», а от него - со
знаком «-».
В уравнении (3.18) падения напряжения совпадаю-
щие с направлением обхода контура, берутся со знаком «+»,
если встречно, то со знаком «-».
Магнитодвижущая сила 1к^к входит в правую часть
уравнения (3.18) со знаком «+», если совпадает с направле-
нием обхода контура, и со знаком «-» - в противном случае.
Пример. Составим уравнения по законам Кирхгофа для
магнитной цепи, представленной на рис. 3.11.
Цепь включает магнитопровод, имеющий три стержня 1,
2, 3, соединенных планками 4, 5. На крайних стрежнях маг-
нитопровода находятся обмотки с числом витков w, и w2, по
Рис. 3.11. Разветвленная магнитная цепь: /, = /1+/1”+/1"; /2 = h + ^2 + ^2 >
/3 = аг; /] = сб; /2 = f6; l} = cd', l2=ef \ =da ', 12 = аг
209
которым протекают токи 1Х и /2. Для составления уравнений
по законам Кирхгофа выбираем положительные направления
магнитных потоков ФХ,Ф2,Ф3 в магнитной цепи и определя-
ем направление МДС F{, F2 по правилу «правой руки». Затем
разбиваем магнитную цепь на участки, имеющие одинаковое
сечение магнитопровода Sk, и определяем длины средних
силовых магнитных линий 1к. Длина зазора равна 8 .
Составляем уравнение по первому закону Кирхгофа для
узла а магнитной цепи
Ф1 - Ф2 + Ф3 = О
Для составления уравнений по второму закону Кирхгофа
выбираем два контура и принимаем положительное направ-
ление обхода по часовой стрелке:
- контур a6cda\
I-pvx=UM\-Uм3 =
= Нбсх1'\+ Hcd х + Hda х 1\ -На^-НъКЗ'
- контур aef6cda\
Ixwx+I2w2 =UMi+UM2 =
= Нбс Х l\ + Hcd Х l\ +HdaX 4" + Нае Х l2 + Нef *l2 + Н#*1'2.
В указанных уравнениях напряженности магнитного поля
Нбс^с<1,Нл,,Наг,Н0,Нае,Н<1/,Нсоответствуют участкам
магнитной цепи с постоянным сечением магнитопровода и
постоянны на соответствующих участках.
3.4.4. Расчет неразветвленной магнитной цепи
В неразветвленной магнитной цепи (рис. 3.12) если пре-
небречь потоком рассеяния, магнитный поток Ф во всех се-
чениях магнитопровода постоянен. Кроме того, в воздушном
зазоре пренебрегаем явлением распора боковых магнитных
210
Рис. 3.12. Неразветвленная магнитная цепь
линий и для расчета используем основную кривую намагни-
чивания ферромагнитного материала, т.е. пренебрегаем яв-
лением гистерезиса.
При расчете магнитных цепей возникают две задачи: пря-
мая и обратная.
В прямой задаче требуется найти магнитодвижущую
силу wl обмотки, необходимую для создания в данной маг-
нитной цепи заданного магнитного потока Ф, если известны
размеры, конфигурация и материал магнитопровода, а также
размеры и конфигурация воздушного зазора.
Решение задачи включает следующие этапы:
1. Разбиваем магнитную цепь на участки с постоянным
сечением магнито провода и определяем средние силовые
линии участков 1к. Так, для магнитопровода (рис. 3.12) оди-
наковое сечение магнитопровода имеют участки аб (Sx) и
6cda (S2). Сечение воздушного зазора принимаем равным
211
So = S2. Средние длины участков равны: для первого -
Z, + /]" + l'i', для второго Z2 +1'2.
2. Определяем магнитные индукции на участках маг-
нитной цепи, учитывая, что магнитный поток в магнитопро-
воде постоянен. Для цепи рис. 3.12 находим:
Ф
5.
R - Ф
’ 2~s2
В1 =
,в0 = *
s2
3. Определяем напряженности магнитного поля в фер-
ромагнитном материале Нх в воздушном зазоре магнитопро-
вода для ферромагнитного материала Н2 по кривым В(Н) и
для воздушного зазора Но по формуле (3.14).
4. Определяем искомую МДС по второму закону Кирх-
гофа
Iw = /7| (/[ + /| + /] j + Н2 (l2 + Z2 j + Но х <5 .
В обратной задаче требуется найти магнитный поток Ф в
данной магнитной цепи, если известны: значение магнито-
движущей силы Iw = F3ad ; число витков обмотки; размеры,
конфигурация и материал магнитопровода; размеры и кон-
фигурация воздушного зазора.
Данная задача решается методом последовательного при-
ближения. Задаются конкретным значением магнитного по-
тока Фх (определяемого на основе опыта расчетов магнит-
ных цепей) и в соответствии с методикой решения прямой
задачи находится значение МДС Fx, обеспечивающее поток
Ф1-
Сопоставляется полученное значение Fx с F3ad. Если
Fi<F3ad, то берем Ф2> Ф\ и еще раз решаем прямую задачу,
находим МДС F2. Сопоставляем значение МДС F2 с F3ad, и
продолжаем решение, пока не получим при каком-то иско-
мом потоке Фиск МДС отличающуюся от нее на небольшую
величину МДС Fjad. Задача решается методом итерации на
ЭВМ.
212
3.4.5. Расчет разветвленной магнитной цепи
Разветвленная магнитная цепь может быть симметричной
и несимметричной. Для симметричной разветвленной маг-
нитной цепи (рис. 3.11) выполняются следующие условия:
- цепь имеет плоскость симметрии 00', относительно ко-
торой ее можно разделить на две или несколько одинаковых
в геометрическом отношении части, т.е. размеры сечений и
средних длин магнитных линий одинаковы;
- обе части магнитной цепи изготовлены из одинаковых
материалов;
- для МДС выполняется соотношение = I2w2.
Без учета потока рассеяния для симметричной разветв-
ленной цепи верны следующие соотношения:
ф] =ф2, ф3 =2Ф, =2Ф2. (3.19)
Несимметричная разветвленная магнитная цепь получа-
ется из предыдущей, если не выполняется хотя бы одно из
перечисленных условий. Для этой цепи выполняются законы
Кирхгофа (3.17), (3.18) и в общем случае магнитные потоки в
стержнях магнитопровода не равны, а МДС могут отличать-
ся.
При расчете симметричной разветвленной магнитной це-
пи она разбивается на две (или больше) симметричные части
(рис. 3.11) являются неразветвленной магнитной цепи. Рас-
чет такой цепи изложен выше (3.4.4). В результате расчета
находятся магнитные потоки Фх = Ф2 или МДС 7)^ = /2w2.
Магнитный поток в средней части магнитопровода находит-
ся по уравнению (3.19).
Несимметричная магнитная цепь рассчитывается путем
применения законов Кирхгофа (3.17), (3.18) или метода двух
узлов.
213
3.5. Магнитные цепи с переменной
магнитодвижущей силой
Конструкция магнитопроводов и их функциональные на-
значения в электротехнических устройствах переменного то-
ка (двигателях, генераторах, трансформаторах и т.д.) очень
разнообразны. В данном разделе рассмотрим только магнит-
ную цепь с неразветвленным магнитопроводом из ферромаг-
нитного материала - дроссель или катушку с ферромагнит-
ным сердечником. Однако отдельные понятия и соотноше-
ния, полученные в этом разделе, будут использоваться при
анализе трансформаторов и электрических машин. На рис.
3.13а представлена магнитная цепь, включающая неразветв-
ленный магнитопровод и катушку с числом витков w, к ко-
торой приложено синусоидальное напряжение u = Umsincot.
В катушке магнитной цепи возникает переменный ток i, ко-
торый создает в магнитопроводе и вокруг него переменное
магнитное поле. Силовые линии магнитного поля, реальной
катушки с магнитопроводом изображеньГна рис. 3.13а штри-
ховыми линиями. Большая часть магнитных линий замыка-
ется по магнитопроводу, создавая основной магнитный по-
ток Ф. Другая часть магнитных линий охватывает отдельные
витки и группы витков, замыкается по воздуху и частично по
а
б
Рис. 3.13. Магнитная цепь дросселя: распределение потоков (а); схема
замещения (б).
214
магнитопроводу, образуя поток рассеяния Фа и связанное с
ним потокосцепление рассеяния \ра. Последнее зависит от
конструкции обмотки (взаимного расположения ее витков,
сечения провода) и частично от магнитных свойств магнито-
провода.
В воздухе (диэлектрике) индукция пропорциональна на-
пряженности магнитного поля: 50 = • Поэтому можно
принять, что потокосцепление рассеяния пропорционально
току:
= Lai, (3.20)
где Lg - индуктивность рассеяния обмотки, не зависящая от тока i.
Полное потокосцепление созданного магнитного поля с
витками катушки равно
у/ = мФ + у/а.
(3-21)
Применяя второй закон Кирхгофа к входному контуру ка-
тушки с учетом (3.20) получим:
п • U = Ro6l + —T dt - + dt dФ - + w dt
п г di = R06l + La~Tf at С1Ф + w dt = uR + “La+ul
(3.22)
где - активное сопротивление обмотки катушки; uR = iR^;
r di. d<P
и, =L —, ц, = w - соответственно, падения напряжения на ак-
° dt 1 dt
тивном сопротивлении, индуктивности рассеяния и на входе идеализиро-
ванной катушки (рис. 3.13,6).
Из (3.22) следует, что реальную катушку с магнитопрово-
дом можно представить схемой замещения в виде последова-
тельного соединения резистивного элемента с сопротивлени-
ем витков обмотки Ro6, индуктивного элемента с индуктив-
ностью рассеяния La и идеализированной катушки, на входе
215
которой действует напряжение их. Идеализированная катуш-
ка не имеет индуктивности рассеяния и активного сопротив-
ления. Свойства идеализированной катушки зависят от пара-
метров материала магнитопровода, его размеров, конфигура-
ции и режима его намагничивания, а напряжение между ее
выводами определяется ЭДС самоиндукции в витках обмот-
ки:
аФ
и, = -в, = w-----.
1 1 dt
(3.23)
3.5.1. Процесс намагничивания магнитопровода
Рассмотрим режим намагничивания магнитопровода
идеализированной катушки (с параметрами = 0, La = 0),
подключенной к источнику синусоидального напряжения ,
рис. 3.136. Очевидно, напряжение щ является частью напря-
жения и.
В этом случае уравнение (3.23) перепишется в виде:
щ = Uml sin cot = w-. (3.24)
dt
Из уравнения (3.24) найдем t/Ф
t/Ф = l^-sintt)tdt. (3.25)
w
Проинтегрируем выражение (3.25) и получим изменение
магнитного потока от времени:
Uml г . J Uml л U,J2 . ( л-) л
Ф = —— jsincotdt = ——coscot + А - —!cot-----------+ А.
w J cow 2nfw v 2 )
Постоянная интегрирования А будет равна нулю, ввиду
отсутствия постоянного магнитного потока в магнитопрово-
де. Тогда магнитный поток равен
216
Ф =Фт 5ZH (Dt------,
»п \ 2 7 ?
где Фт - амплитуда магнитного потока.
(3.26)
(3.27)
Таким образом, из (3.26) следует, что при синусоидальном
напряжении на входе идеализированной катушки магнитный
поток в магнитопроводе также синусоидальный и отстает по
фазе от напряжения щ на угол я/2.
Действующие значения напряжения [/, между выводами
идеализированной катушки и ЭДС самоиндукции одина-
ковые (3.23). Поэтому из (3.27) имеем
Ех = 4,44/л>Фт.
(3.28)
Соотношения (3.27) и (3.28) используются при анализе
трансформаторов и электрических машин.
Так как магнитный поток Ф в магнитопроводе синусои-
дальный (при приложенном синусоидальном напряжении
щ), а ток i и поток рассеяния связаны между собой нели-
нейной зависимостью В(Н'), то можно показать, что ток в
катушке (рис. 3.13) является периодической несинусоидаль-
ной функцией. Данное положение верно, если амплитудное
значение магнитного потока в магнитопроводе Фт больше
BmaxS (рис. 3.8), где 5 - сечение магнитопровода. При даль-
нейшем анализе несинусоидальный ток заменяется эквива-
лентным (по площади) синусоидальным током.
3.5.2. Магнитные потери в реальном магнитопроводе
Переменный магнитный поток Ф, протекая по сердечнику
магнитопровода, индуцирует в нем вихревые токи гф (токи
Фуко), замыкающиеся в плоскости, перпендикулярной к оси
магнитного потока (рис. 3.14).
217
Рис. 3.14. Схема возникновения вихревых токов: а) в сплошном сердеч-
нике; б) в шихтованном сердечнике
Вихревые токи вызывают потери мощности и энергии в
сопротивлении сердечника (ЛРв = PRC, где Rc - объемное
электрическое сопротивление сердечника) и нагрев сердеч-
ника.
Потери мощности и энергии от вихревых токов значи-
тельно уменьшаются при выполнении сердечника магнито-
провода из тонких, изолированных друг от друга листов. В
этом случае вихревые токи замыкаются по контурам листов с
меньшей площадью (рис. 3.146) и уменьшаются.
Другой метод уменьшения вихревых токов - увеличение
удельного электрического сопротивления материала сердеч-
ника.
При промышленной частоте тока 50 Гц, применяемого в
отечественных установках, толщина листов обычно равна
0,35-0,5 мм. При более высоких частотах толщина листов
уменьшается до 0,02-0,05 мм. В материал магнитопровода
добавляется присадка кремния в пределах 0,5-4,5%, которая
значительно увеличивает удельное электрическое сопротив-
ление материала и мало влияет на его магнитные свойства.
Потери мощности на вихревые токи выражается эмпири-
ческой формулой:
218
APe=cref2}GB2m,
(3.29)
где <Te - коэффициент вихревых токов, значение которого зависит от
марки электротехнической стали и конструкции магнитопровода; f -
частота тока; G - масса магнитопровода; у - удельная проводи-
мость материала; Вт - амплитуда магнитной индукции.
При возбуждении переменного магнитного потока в маг-
нитопроводе происходит непрерывное циклическое перемаг-
ничивание ферромагнитного материала.
В каждый момент времени магнитное состояние материа-
ла магнитопровода определяется точкой на симметричной
петле В(Н), похожей по конфигурации на петлю магнитного
гистерезиса (рис. 3.8). При перемагничивании материала
магнитопровода затрачивается определенная энергия, выде-
ляющаяся в нем в виде теплоты, нагревающей ферромагнит-
ный материал. Энергия, выделяющаяся за один цикл пере-
магничивания в единице объема материала, характеризуется
площадью, заключенной внутри соответствующей петли гис-
терезиса В(Н). Эта энергия затрачивается источником на-
магничивающего тока на преодоление сил магнитного гисте-
резиса. Уменьшение потерь мощности и энергии на гистере-
зис достигаются применением в магнитопроводе специаль-
ных электротехнических сталей, имеющих малую площадь
петли гистерезиса.
Потери мощности на гистерезис выражается эмпириче-
ской формулой:
APr=arfBnmG, (3.30)
где (5 г - гистерезисный коэффициент, значение которого зависит от
сорта электротехнической стали и определяется из опыта; п - показатель
степени ( п = 1,6 при Вт< Пл; п = 2 при Вт > 17л).
Сумма потерь мощности от вихревых токов и на намагни-
чивание называется магнитными потерями
ЛРм=ДРв+ЛРг. (3.31)
219
Наличие магнитных потерь в сердечниках магнитпрово-
дов трансформаторов и электрических машин приводит к
снижению их коэффициента полезного действия. Поэтому
при конструировании магнитопроводов электротехнических
устройств стремятся уменьшить магнитные потери.
3.5.3. Схема замещения и векторная диаграмма реальной
катушки индуктивности
Мгновенные значения тока, напряжений и потока катушки
с ферромагнитным сердечником удовлетворяют уравнению
(3.22), в котором ток является периодической несинусои-
дальной функцией. Заменяя несинусоидальный ток эквива-
лентным синусоидальным током /1э запишем уравнение
(3.22) в комплексной форме.
U = (3-32)
где Ц_\ = j(OW&-
Анализ физических процессов в катушке с магнитопрово-
дом, проделанный ранее, и полученное уравнение (3.32) по-
зволяют получить схему замещения катушки индуктивности
с ферромагнитным сердечником и построить для нее вектор-
ную диаграмму.
Схема замещения представлена на рис. 3.15а. Активное
сопротивление обмотки Ro6 и индуктивность рассеяния La
уже использовались в упрощенной схеме замещения, рис.
3.136.
Рис. 3.15. Катушка индуктивности с ферромагнитным магнитопроводом:
а) схема замещения; б) зависимости Рц(1ц)
220
В схеме рис. 3.15а дополнительно введены два элемента:
RrB - активное сопротивление, отражающее магнитные потери
мощности в реальном сердечнике и - индуктивность иде-
альной катушки. Величина RrB тем выше, чем меньше маг-
нитные потери мощности в магнитопроводе.
Индуктивность Lp характеризуется зависимостью потокос-
цепления 1// = мФ катушки от тока намагничивания (рис.
3.156). Эта зависимость практически повторяет в масштабе за-
висимость В(Н) для ферромагнитного материала магнитопро-
вода (рис. 3.6а). Так как зависимость является нелиней-
ной, то величина индуктивности Lp зависит от тока , проте-
кающего через нее. Определяя индуктивность Lp по форму-
ле (2.2) как отношение для различных точек характе-
ристики получим зависимость (рис. 3.156). Как
следует из зависимости лД/р), с увеличением от нуля до
бесконечности Lp первоначально растет, стабилизируется на
уровне £р1 и затем уменьшается, стремясь на участке насыще-
ния кривой ) к нулю.
Рис. 3.16. Векторная диаграмма катушки индуктивности
221
При построении векторной диаграммы катушки индуктив-
ности по уравнению (3.32) за базу принимаем вектор магнитно-
го потока Ф (рис. 3.16).
Согласно уравнению (3.26) магнитный поток Ф отстает по
фазе от напряжения U_} на я/2, а ЭДС самоиндукции Ех нахо-
дится в противофазе с напряжением . ЭДС (рис. 3.16). Экви-
валентный ток в катушке /1э отстает от напряжения на
угол ф1<7Г/2 из-за наличия магнитных потерь мощности в маг-
нитопроводе ЛРМ.
Ток /1э представим в виде двух составляющих
1\э ~ Iгв + Л ц >
где Iгв - активная составляющая тока /ь ; Iр - реактивная составляю-
щая тока /1э или ток намагничивания.
Угол а между током 71э и потоком Ф равен: а = л/2 -<р{.
Напряжение U, приложенное к катушке, строится на век-
торной диаграмме с учетом уравнения (3.32).
Схема замещения катушки индуктивности с ферромаг-
нитным сердечником (рис. 3.15а) в ряде случаев может быть
упрощена. Так, если принять активное сопротивление обмот-
ки Ro6 = 0 и индуктивность рассеяния La = 0, то схема за-
мещения соответствует участку, находящемуся справа от уз-
лов аб. Если дополнительно пренебречь магнитными поте-
рями мощности (ДД, = О), то в этом случае RrB = оо и схема
замещения будет представлять только нелинейную индук-
тивность , к которой приложено напряжение Ux - Uр, в
которой протекает ток /1э = . Зависимость Uр (l ) является
вольт-амперной характеристикой для нелинейной индуктив-
ности и будет нелинейной, повторяя характеристики В(н)
ферромагнитного материала (рис. 3.66).
222
3.5.4. Феррорезонанс напряжений и тока
Феррорезонансом называется явление резонанса в колеба-
тельном контуре, содержащем катушку с магнитопроводом,
имеющую нелинейную вольт-амперную характеристику, ем-
костный и резистивный элементы. В зависимости от вида со-
единения элементов колебательного контура различают:
феррорезонанс напряжений и феррорезонанс токов.
Феррорезонанс напряжений возможен в цепи (рис. 3.17а),
состоящей из соединенных последовательно катушки с маг-
нитопроводом и конденсатора, подключенных к источнику
синусоидального напряжения.
Напряжение, приложенное к цепи равно
U=UL+Uc=Jal(!)l+^-I, (3.33)
jcoC
где напряжения на индуктивном UL и емкостном Uc эле-
ментах противоположны по фазе (рис. 2.20). Следовательно,
действующее значение напряжения питания равно модулю
разности действующих значений напряжений на индуктив-
ном и емкостном элементах:
U=\UL-UC\. (3.34)
Для определения модуля этой разности построим (рис.
3.176) в координатах напряжение-ток вольт-амперные харак-
теристики линейного индуктивного элемента UL(l) и нели-
нейного емкостного элемента UC(I):
UL(l) = = XL(1)I-, ис(Г) = -^—1 = X l.
coC
На том же рисунке по (3.18) построена вольт-амперная ха-
рактеристика Е/(7) всей цепи. При малых значениях напря-
жения питания U ток в цепи I отстает по фазе от этого на-
пряжения на четверть периода, так как сопротивление цепи
имеет индуктивный характер (U[>Uc)- При постепенном по-
вышении напряжения питания действующие значения тока
/ и напряжений UL и Uc увеличиваются. При дальнейшем
увеличении напряжения питания больше Ц (точка М), ток в
223
цепи изменится скачком от значения 1Х до значения 12 (ра-
бочая точка N). Одновременно скачком изменяется напря-
жение: на индуктивном элементе - от ULX до Ul 2 (незначи-
тельное увеличение из-за насыщения) - и резко увеличится
напряжение на емкостном элементе - от UCI до UC2. При
дальнейшем увеличении напряжения питания U > U] (после
скачкообразных изменений напряжений и тока) наблюдается
плавное увеличение тока и напряжений UL и Uc.
Рис. 3.17. Феррорезонанс напряжений: электрическая схема (а); вольт-
амперные характеристики (б)
224
Рис. 3.18. //-образная вольт-амперная характеристика цепи
Если плавно уменьшать напряжение питания U (теорети-
чески до нуля), можно добиться резонанса напряжений, т.е.
равенства UC=UL, которому соответствует рабочая точка Р
на вольт-амперной характеристике цепи. В действительности
из-за наличия потерь энергии в катушке А-образная вольт-
амперная характеристика цепи (рис. 3.18) отличается от по-
строенной на рис. 3.176. Рабочей точке Р соответствует не
напряжение U = 0, а напряжение Ui > 0. При дальнейшем
самом малом уменьшении напряжения питания U ток изме-
нится скачком от значения 13 до значения /4 (рабочая точка
Q). Далее при уменьшении напряжения до нуля ток плавно
уменьшается до нуля (рис. 3.18).
Напряжение UL, между выводами катушки с насыщенным
магнитопроводом мало изменяется при изменении напряже-
ния питания (участок Ul > Ul\ на рис. 3.176). Эта особен-
ность вольт-амперной характеристики используется в ферро-
резонансных стабилизаторах, у которых напряжение на ка-
тушке служит выходным стабилизированным напряжением.
Феррорезонанс токов можно получить при параллельном
соединении катушки с магнитопроводом и конденсатора при
питании цепи от источника синусоидального напряжения.
Анализ феррорезонанса токов аналогичен анализу ферроре-
зонанса напряжений.
225
Глава 4
Трехфазные электрические цепи
синусоидального тока
4.1. Понятие о трехфазных цепях
и их преимуществах
Трехфазной называется электрическая цепь, в ветвях ко-
торой действуют три одинаковые по амплитуде синусои-
дальные ЭДС, имеющие одну и ту же частоту, сдвинутые по
фазе одна относительно другой на угол 2л/3 (120°).
В качестве источника электрической энергии в трехфаз-
ных цепях используются синхронные генераторы (рис 4.1).
На магнито проводе статора (1), изготовленном из тонких
изолированных друг от друга листов электротехнической
стали, монтируются три обмотки, которые смещены относи-
тельно друг друга на угол 120°. Ротор (2) - электромагнит
постоянного тока - должен вращаться с постоянной угловой
скоростью ш. При вращении ротора в трех обмотках статора
синхронного генератора, называемых его фазами, индукти-
руются синусоидаль-
ные ЭДС (еА,ев,ес).
При указанных на
рис.4.1 положитель-
ных направлениях
ЭДС (от концов х, у и
z фаз к их началам А,
В и С) мгновенные
значения ЭДС изме-
няются в соответст-
вии с выражениями:
Рис. 4.1. Схема трехфаз-
ного синхронного
226
еА = Emsina>t
ев = Emsin(a>t - 2л2 3) (4.1)
ес = Emsin(cot + 2it/ 3)
Эти выражения в комплексной форме запишутся сле-
дующим образом:
Еа =EeJ0 =
-а Л
Ев - Ee~jl20 = ^^со$(-2я/3) + ^= jsin(-2x/3) = j^-)
Ec=Ee-jno =^(-- + j—), (4’2')
~c Jl 2 2
где E - действующее значение ЭДС.
На основании уравнений (4.2) векторная диаграмма имеет
вид, показанный на рис. 4.2. Обмотки статора могут соеди-
няться в звезду или в треугольник в зависимости от парамет-
ров генератора и потребителя.
Трехфазные электрические цепи имеют ряд преимуществ
по сравнению с однофазными:
- возможность получения вращающегося магнитного поля
и использование наиболее простых, надежных и дешевых
асинхронных электродвигателей;
— меньший расход проводниковых материалов на сооруже-
ние линий электропередачи и электрических сетей;
Модули векторов:
Еа - Ев = Ес = Е.
Сумма векторов:
Е А + £ я + Ес - 0.
Рис. 4.2. Векторная диаграмма фаз-
ных ЭДС
— лучшие экономические показатели трехфазных генерато-
ров и трансформаторов;
— возможность подключения к трехфазному источнику или
трехфазной сети потребителей, рассчитанных на два различ-
ных по значению напряжения.
Трехфазные цепи получили исключительно широкое рас-
пространение благодаря своим преимуществам. Электриче-
ская энергия вырабатывается на электростанциях, распреде-
ляется с помощью высоковольтных линий электропередачи и
электрических сетей между потребителями в виде энергии
трехфазного переменного тока.
4.2. Способы соединения фаз генератора
Чтобы уменьшить число проводов, которыми соединяют-
ся источник с приемниками, сократив тем самым расход де-
фицитных электротехнических материалов и затраты на со-
оружение линий электропередач и электрических сетей, от-
дельные фазы соединяют между собой звездой или треуголь-
ником.
При соединении звездой концы х, у и г трех фаз объеди-
няют в одну общую точку, так называемую нейтральную
точку 7V (рис. 4.3).
При соединении треугольником конец х одной фазы соеди-
няют с началом второй фазы, конец у второй фазы - с нача-
лом третьей фазы С, а конец z третьей фазы - с началом А
первой фазы.
а Ь
Рис. 4.3. Соединение фаз звездой по схеме а или b
228
Следует заметить, что способы соединения фаз генератора
и потребителя могут быть как одинаковыми, так и различ-
ными. При соединении фаз генератора и потребителя звездой
иногда применяется нейтральный провод, соединяющий ней-
тральные точки генератора и потребителя.
4.2.1. Соединение фаз генератора звездой
На рис 4.3. дана принципиальная схема соединения гене-
ратора (соединение фаз звездой), где Uab, Ubc, Uca - на-
пряжения между линейными проводами, N - нейтральная
точка, Еа, Ев, Ес- фазные ЭДС.
Комплексные векторы линейных напряжений (Uab, Ubc.
Uca) в соответствии со вторым законом Кирхгофа и с учетом
уравнений (4.2) можно записать в следующем виде:
I 1 V3
UAB=EA-EB=E-E\---j^-
В показательной форме вектор U_AB можно записать:
иАВ=иле^=\иАВ\е^=Е
- + — е'* =43Ее^,
W ( 2 )
у = arctg^m~AB = arctg-\= =>q> = 30°;
RcU-ab v3
где JmLLiB. ReUjB - мнимая и действительная составляющие вектора
ил=^Е - линейное напряжение.
В алгебраической форме вектор Uab имеет вид:
VM = <V° =Е/л(со530-+75т30-) = С/л(У + 7'1) (4.3)
Вектор линейного напряжения Unc'.
229
(Lx = E,-Ec=E(-±-j^)-E(-± + j£) =
= -jE^/3=-jUj, = U^-'K
Вектор линейного напряжения Uca :
LLa^Ee-E^E^-j^-E^
= UJ,(~ + J^ = UJ,e^.
(4.4)
(4.5)
Соответственно модули линейных напряжений равны ме-
жду собой ( UАВ = Uвс = иСА)и сдвинуты на 120°.
На основании выражений для комплексных фазных ЭДС
(4.2) и линейных напряжений (4.3) - (4.5) генератора вектор-
ная диаграмма на комплексной плоскости изображена на
рис.4.4. Для удобства построения векторной диаграммы раз-
вернем оси комплексной плоскости (Re, j) на + 90° против
часовой стрелки, при этом вектор фазной ЭДС направля-
ем по вещественной положительной оси (+Re). Относитель-
но вектора Ej строим векторы Ес к Ед под углом ±120°.
Из анализа выражений (4.3) - (4.5) для комплексных ли-
нейных напряжений следует, что при соединении фаз генера-
тора звездой линейные напряжения равны по модулю и
сдвинуты по фазе относительно друг друга на угол 2л/3. Век-
торы линейных напряжений (рис.4.4.) соединяют концы век-
торов соответствующих фазных ЭДС.
Из прямоугольного треугольника ONL следует, что
LN = = OL sin 60° = Еа —.
2 А 2
Отсюда линейное напряжение в у/з раза больше фазного
ЭДС.
230
Рис. 4.4. Векторная диаграмма фазных ЭДС и линейных напряжений при
соединении фаз генератора звездой
Из векторной диаграммы (рис. 4.4) следует, что модули
фазных ЭДС генератора равны между собой, а сумма векто-
ров фазных ЭДС равна нулю:
Еа = Ея = Ес = ; Е А + Ев + Ес = 0.
л 13 и ' — ri — и
Модули линейных напряжений равны между собой:
иА,=и,с = иа^и„=Еф4з.
Сумма векторов линейных напряжений также равна нулю:
U. АВ + Ц-ВС + У-СА = О'
а угол между ними равен 120°.
4.2.2. Соединение фаз генератора в треугольник
На рис 4.5 приведена принципиальная схема соединения
фаз в треугольник.
231
а б
Рис. 4.5. Соединение фаз генератора в треугольник (а или б)
Модули линейных напряжений равны между собой и рав-
ны фазным ЭДС: Uab=Ubc=Uca=E&.
Векторная диаграмма линейных напряжений при соедине-
нии фаз генератора треугольником изображена на рис 4.6.
На основании вышеизложенного можно сделать следую-
щие выводы.
Независимо от способа соединения фаз источника звездой
или треугольником между линейными проводами трехфаз-
ной цепи существуют три одинаковых по действующему
значению линейных напряжения, сдвинутых по фазе относи-
тельно друг друга на угол 2л/3. При случае соединении фаз
генератора звездой линейные напряжения оказываются в -/з
раз больше, чем при соединении фаз того же источника тре-
угольником.
Линейные напряжения Uab, Ubc, Uca в векторной форме
в соответствии со вторым Кирхгофа можно записать:
(/.«, =£,=£«'’=£ = Ул,'
VK = Е, = Е e'W = E(-^- jE-).
У-сл = Ес=Ее*'10 =E(-~+‘jE-).
232
+Re
+120°
Uсa~ Ес
-Re
Рис. 4.6. Векторная диаграмма линей-
ных напряжений при соединении фаз
генератора треугольником
4.3. Схема соединения генератора и
потребителей звездой с нейтральным
проводом
Соединением трехфазного потребителя электрической
энергии звездой называется такое соединение, при котором
концы всех фаз соединены в одну точку, называемую ней-
тральной, а начала всех фаз потребителя соединяются с фаз-
ным источником электрической энергии (генератором) с по-
мощью линейных проводов. Нейтральную точку потребителя
можно соединить с нейтральной точкой генератора ней-
тральным проводом. Такое соединение называется соедине-
нием звездой с нейтральным проводом или «звезда с ней-
тральным проводом».
Рис. 4.7. Принципиальная схема трехфазного соединения генератора и
потребителя звездой с нейтральным проводом (пояснения в тексте)
233
На рис. 4.7 приведена принципиальная схема соединения
трехфазного генератора и потребителя звездой с нейтраль-
ным проводом, где Ej=Es=Ec=C4/V3 - фазные ЭДС генера-
тора, соединенные в звезду; Uab=Ubc=Uca =Ул =Еу[з - ли-
нейные напряжения; Nl,N - нейтральные точки потребителя
и генератора; Za, Zb, Zc - полные фазные сопротивления трех-
фазного потребителя; Ua, Ub, Uc - фазные напряжения по-
требителя; 1а, 1в, 1с - линейные фазные токи; Zn - сопротив-
ление нейтрального провода; Un - напряжение между ней-
тральными точками потребителя и генератора; In - ток в ней-
тральном проводе.
Согласно второму закону Кирхгофа векторы фазных на-
пряжений потребителя можно определить по формулам:
Ea=Ua+Vn< (4-6)
откуда
Ua=Ea~UN>
Ub-Eb-Un,
Uc= Ес-Un-
Соответственно фазные токи потребителя:
1л =^ = (Ел-ик)гл:
Za
~в (4.7)
Lc = = fe - —N fe >’
Zc
?а=^; Гс=^->
Za Zb Zc
где Ei. Хв, Хс ~ полные комплексные проводимости фаз А, В и С соответ-
ственно; Ei.Zg, Zc - полные комплексные сопротивления фаз.
234
С учетом первого закона Кирхгофа можно определить ток
в нейтральном проводе:
Ln=La+Lb+Lc: <4-8)
Из этого уравнения, с учетом (4.7), (4.2) и тока в ней-
тральном проводе: I_N =U_N Xn (где Уу - полная комплекс-
ная проводимость нейтрального провода), получим выраже-
ние для напряжения между нейтральными точками генерато-
ра и потребителя:
UnYn=EaYa+Eb Yb+Ec Yc-Un(Xa+Yb+Yc),
f ( i .ж (
ц JaIa+EbYb+EcYc
-N Xa+Xb+yc+yn
& (Ia+L+Yc+yj
(4.9)
Выводы:
1. При симметричной нагрузке (2а=7в=Хс=Хф или
Ха=Хв=Хс=Хф) необходимость в нейтральном проводе отсут-
ствует, так как в соответствии с уравнением (4.9) напряжение
Un равно нулю. Ток In также равен нулю
(Zy = —
Zy
= 0).
2. На практике сопротивление нейтрального провода при-
нимается равным нулю (Zy =0, Xn =о0)- Тогда из формулы
(4.9) следует, что при включенном нейтральном проводе и
любой нагрузке (симметричной или не симметричной)
t/y =0.
3. Ток в нейтральном проводе рассчитывают из первого
закона Кирхгофа, при этом фазные токи определяются из
уравнений (4.7):
I -1 +i +i - - о
LN _ Lc -
Zy 0
235
Математическая неопределенность при решении этого
уравнения для несимметричной нагрузки разрешается опре-
делением токов в каждой фазе LA,LB,I_C.
4. При tZv = 0, согласно уравнениям (4.6) и (4.2) модули
фазных напряжений потребителя при любой нагрузке (сим-
метричной или несимметричной) всегда равны между собой
по величине:
UA=UB=UC=U„=E = ^.
Трехфазная схема с нейтральным проводом применяется
при несимметричной нагрузке (Z ZB Ф Zc ) для
освещения бытовых и производственных помещений, так
как фазовые напряжения всегда равны между собой и
постоянны по величине.
4.4. Симметричный трехфазный потребитель,
соединенный звездой
На рис. 4.8 приведена схема соединения симметричных
трехфазных потребителей звездой.
Условия симметрии:
^-А = —В ~ ~ или — А = ^В = &С ~ ^Ф ’
ХА=ХВ=ХС=ХФ.
Фазные напряжения потребителя, соединенного звездой,
согласно (4.6) и с учетом Un=0 запишутся:
<J B=EB-UK=E,^e^ ХА- 1-4]- (4.10)
Uc=Ec-UN=Ec=^ei{2<f ..
~С -с -N -с Д 2 7 2J
236
Рис. 4.8. Схема соединения симметричного трехфазного потребителя
звездой
Рис. 4.9. Векторная диаграмма фазных и линейных напряжений при
симметричной нагрузке, соединенной звездой
Тогда сумма векторов фазных напряжений:
иА+ив+ис^.
При симметричной нагрузке напряжение между нейтраль-
ными точками потребителя и генератора равно нулю
(tZv = O). Из уравнения (4.10) модули фазных напряжений
равны между собой (Ua=Ub=Uc) и смещены относительно
друг друга на 120° (векторная диаграмма для симметричного
потребителя, соединенного звездой, представлена на
рис. 4.9).
Линейные напряжения потребителя.
Согласно второму закону Кирхгофа и с учетом уравнений
(4.10) можно записать:
иВс=и,-ис=-]ил=иле-^;
(4.11)
U
237
Тогда сумма векторов линейных напряжений:
Uab+Ubc+Uca=^ (4-12)
Соответственно модули линейных напряжений равны ме-
жду собой: UAB = UBC = UCA = ил= 4зиф (4.13)
и смещены на 120°.
Фазные (линейные) токи потребителя:
J -U-A.T _UB. г _Uc
La - 7 > Lb ~ 7 > Lc ~ 7 '
LlA LlB —С
где 7фе^.
Угол между [ф'к.иф срф .определяется:
(Рф = arctg—
К-ф
С учетом (рф комплексные значения векторов токов:
(4.14)
Соответственно модули токов равны между собой:
1А ~ 1В ~ “ 1Л ~*Ф-
Фазные углы потребителя.
(4-15)
Из треугольников сопротивлений (см. рисунок) для каж-
дой фазы находим углы (р (между [а и Ua: [в и Ujb; IckUc)’-
238
±%4
±х
tS<PB=~^
"в
Из условия симметрии: (ХА=Хв=Хс и Ra=Rb=Rc) следует,
что угол сдвига фаз один и тот же, т.е.
<Ра = фв =(рс =<Рф-
Допустим, что нагрузка на фазах симметричная и чисто
активная (рис. 4.9), т.е. R& 0, Х<р = 0, Тогда угол убудет
равен нулю, так как tg^ = ХфЖф = 0. Соответственно ср = 0.
Исходя из этого допущения следуют выводы:
1. Сумма векторов линейных (фазных) токов равна нулю:
[a+Jb +J.c =0 (по первому закону Кирхгофа). Из векторной
диаграммы (рис. 4.9) видно, что угол между ними равен 120°.
Модули фазных токов равны между собой (4.15):
1л ~ h ~ Ic ~ Лт—1ф~ UЛ
/ЛХф.
2. Из прямоугольного треугольника OLN (рис. 4.9) следу-
ет, что - LN= = IAB sin 60° = — 1АВ, или 1В = 431АВ.
3. Сумма векторов линейных напряжений равна нулю: Uab
+ Urc+ Uca =0 и угол между ними равен 120° (см. векторную
диаграмму на рис. 4.9 и уравнение 4.12). Модули линейных
напряжений равны между собой (4.13):
UAb~ Usc=UcA=Ujj=y/3 U<t>.
4. Сумма векторов фазных напряжений равна нулю:
Ua+Ub+Uc=0 (см. уравнение (4.10) и векторную диаграмму
на рис. 4.9). Модули фазных напряжений равны между собой
- UA=UB=Uc=U<!>=Unl41 и угол между ними равен 120°.
239
4.5. Симметричный трехфазный потребитель,
соединенный треугольником
На рис. 4.10 представлена схема соединения трехфазного
потребителя треугольником
Условия симметрии:
АВ ~ % ВС ~ %СА ~ ,
или
^АВ ~ К ВС - &СА ~ &Ф>
%АВ = % ВС = ХСА ~ Хф-
Соединением трехфазного потребителя электрической
энергии треугольником называется такое соединение, при
котором конец предыдущей фазы соединяется с началом по-
следующей фазы. При этом начала всех фаз потребителя
присоединяются к трехфазному источнику электрической
энергии с помощью линейных проводов (рис. 4.10). Из схемы
видно, что каждая фаза потребителя присоединяется к двум
линейным проводам. Поэтому при соединении потребителя
треугольником фазные напряжения оказываются равными
соответствующим линейным напряжениям:
Рис. 4.10. Схема соединения симметричного трехфазного потребителя
треугольником
240
иФ = ил
Вместе с тем, фазные токи при соединении потребителя
треугольником не будут равны линейным токам, так как в
начале каждой фазы потребителя имеется узел разветвления
токов. При этом, независимо от величины и характера сопро-
тивлений потребителя, между фазными и линейными токами
существуют соотношения, полученные на основании первого
закона Кирхгофа.
Линейные( фазные) напряжения потребителя.
Если при расчете линейных токов потребителя (1а, 1в, 1с),
векторы линейных (фазных) напряжений {Uab, Ubc, Uca)
трехфазного источника (генератора) разместить на ком-
плексной плоскости так, как это показано на рис. 4.4 (соеди-
нение фаз генератора звездой), то векторы линейных (фаз-
ных) напряжений будут определяться по формулам:
( 1Л
и =иле^°=ил —+J- ;
— АВ J О J Э
\ )
(4.16)
Сумма векторов линейных (фазных) напряжений:
Uab+Ubc+LLca^-
Модули напряжений:
иАв=ивс=исА=иФ=ил. (4.17)
Фазные токи потребителя:
г _ У-ав . Т _ У-вс . j _ U-CA
Lab ~ 7 > Lbc > Lca ~~z >
— АВ Li.BC —СА
где Zab~ Zbc- Zca~ Z**'”; <p~ угол между фазными токами и фазными
напряжениями.
241
„ ЬФ СФ
Ф =arctg—^~—
Лф
Тогда вектора фазных токов с учетом уравнений (4.16)
можно определить по формулам:
Lab = =-^e~J<p =I0(cos<pAB - jsin<pAB{^- + Д ;
AB < 2
Lbc = =~^е~^-e~j9° = -)1ф(соз<рвс -jsin(pBC); (4-18)
Lca = ~^-e~Jv e+>15° = 1ф(соз<рсл -jsin(pCA .
ЛСА k 2 2 7
Сумма векторов фазных токов (рис. 4.11) с учетом урав-
нений (4.18) равна нулю.
Lab + he + Lca ~ 0. (4.19)
Модули фазных токов при симметричной нагрузке (Z^b =
Zbc = Zca) равны между собой:
Lab = he = Тел- (4.20)
Фазные углы находим из треугольника сопротивлений для
каждой фазы:
±.УЛЯ +ХВС tg<PAB = р ' ЪФвс = р ; КАВ КВС ±ХСА tg<PcA^ D • ^СА Из условия симметрии: Фав ~ Фвс ~ Фса = Фф • Zab/ АВ II Rab
242
Рис.4.11. Векторная диаграмма фазных и линейных токов при сим-
метричной нагрузке, соединенной треугольником
Линейные токи потребителя.
Если все векторы линейных напряжений Uab, Ubc, Uca
рассчитывать из условия соединения фаз генератора звездой
по уравнениям (4.3) - (4.5), то векторы линейных токов для
симметричного трехфазного потребителя, соединенного тре-
угольником, согласно первому закону Кирхгофа и уравнени-
ям (4.18) определяются по формулам:
(4-21)
Lc =1сл-1вс =1л{~+?4'| =
\ Z L)
Сумма векторов линейных токов с учетом уравнений
(4-21):
£4 + Zb + Zc=0 (4.22)
Модули линейных токов для уравнений (4.21):
243
1а = 1в = 1с = 1л = ^1ф. (4.23)
Допустим, что нагрузка на фазах симметричная и чисто
активная, т.е. У?ф * 0, Аф = 0. Тогда угол ср = 0 так как
X 0
= —— - — = 0, соответственно <р = 0.
R-ф
Исходя из этих допущений следуют выводы:
1. Сумма векторов токов равна нулю: Уд + I& + [с - 0 (см.
уравнение 4.22 и векторную диаграмму).
Модули линейных токов равны между собой, Уд = Ув = Ус =
Уф, V3 ( 4.23) и углы между ними равны 120°.
2. Из прямоугольного треугольника OLN (рис. 4.11) сле-
У д/З г-
дует, что LN = ^ав sin 60° = — 1АВ, или 1В = <3 1АВ.
3. Сумма векторов фазных токов равна нулю:
Удв + Уве +_Уса = 0; (см. уравнение (4.19) и векторную диа-
грамму).
Модули фазных токов равны между собой и углы между
ними равны 120°. Удв = Уве ~ Уса=д/з (4.20).
4. Сумма векторов линейных (фазных) напряжений равна
нулю:
Uab + Ubc + Uca = 0 (см. уравнение (4.16) и векторную диа-
грамму).
Модули линейных напряжений равны между собой -
иАВ-ивс=иСА=ил (4.17) и углы между ними равны 120°.
4.6. Мощность потребителя трехфазного тока
Рассмотрим потребитель трехфазного тока, имеющий фа-
зы Ф1, Ф2, ФЗ. Тогда вектор полной комплексной мощности
потребителя 5 равен сумме векторов комплексных мощно-
стей фаз потребителя:
•S’ = $Ф1 + $Ф2 + $ФЗ
244
S<pi = иФ11Ф1 со5фФ] + ]иФ11Ф1 sin(p<t>i = Рф! + jQ<t>i
S<p2 = U<p2l<t>2 СО$(рФ2 + jU<p21<P2 Sin<p<t>2 = РФ2 + jQ<I>2
S<p3 — иФз1Фз со5(рФз + ]иФз1Фз sin<p<t>3 = РФз + jQ<I>3
s = (РФ1 + РФ2 + РФз) +j(Q<Dl + 0Ф2+ Qo3) = Р + jQ,
где Р, РФк - активная мощность соответственно потребителя и его фазы;
Q, вши -реактивная мощность соответственно потребителя и его фазы;
<P<t>k - угол между векторами тока и напряжения фазы потребителя (к -
1, 2, 3).
Модуль полной мощности:
S = \S\ = y/p2+Q2
Если нагрузка симметричная, то
Рф1 = Рф2 = РфЗ = Рф', (Эф! = 0.Ф2 = вфЗ = 0.Ф;
фФ1 = <рФ2 — <рФз — <рФ , Р = ЗРФ = Зиф1ф cos <рФ:
Q = 3Q.fi = 311ф1ф sin <рФ,
При соединении фаз потребителя звездой:
1ф = 1л; ил = 4зиФ,
а при соединении фаз потребителя треугольником:
иФ = ил; 1Л=431Ф.
Мощности для «звезды» и «треугольника»:
Р = 7з ил1л cos (рф; Q = ил1л sin срФ ;
s = yjp2+Q^ = 7з ил1л = 3 иФ1Ф.
Отсюда следует вывод, что при симметричной нагрузке
соответствующие (активная, реактивная и полная) мощности
потребителя независимо от способа их соединения (звездой
или треугольником) определяются по одним и тем же фор-
мулам.
245
4.6.1. Измерен ие мощности в трехфазн ых
электрических цепях
Ваттметр - прибор, с помощью которого измеряется ак-
тивная мощность (вещественная часть комплексного числа
Re) в электрических цепях. Ваттметр показывает мощность
Pw, которая определяется по формуле:
Pw = Uwlw cos (р— Re +1 w* j]
где Uw - напряжение на вольтовой обмотке ваттметра, Iw - ток, проте-
кающий через токовую обмотку ваттметра; <р- угол между векторами
и Uw; /*- сопряжённый комплексный ток. Знак «+», если направление
тока выбрано от * (начала) токовой обмотки к ее концу; знак «-» - от
конца токовой обмотки к * (началу).
На рис.4.12 приведено условное обозначение ваттметра
(W) на электрических схемах, где 1 - вольтовая, высокоом-
ная обмотка (включается параллельно потребителю (нагруз-
ке), как вольтметр); 2 - токовая, низкоомная обмот-
ка(включается последовательно с потребителем, как ампер-
метр); * - начало обмотки; U, I- конец обмоток.
4.6.2. Измерение мощности симметричного
трехфазного потребителя, соединенного звездой
или треугольником
Показания ваттметра по схеме рис. 4.13 (Za -Zb = Zq)'-
Pw=Pa=Ua1 a cos (pA = Re (uAIA ).
Так как Pa = Рв = Pc = Рф, to полная активная мощность
трёхфазного симметричного потребителя: Р = 3PW
При несимметричной нагрузке, когда Z^ ^Z$ ^-Zc, мощ-
ность необходимо измерить в каждой фазе отдельно:
Р = Ра + Рв + Рс-
Так. как Рав Рвс= Рса = Рф, то полная активная мощность
трёхфазного симметричного потребителя, соединенного тре-
угольником (рис. 4.14).
246
Рис. 4.12. Условное обозначение ваттметра на электрических схемах
Рис. 4.13. Схема измерения мощности трёхфазного симметричного по-
требителя, соединённого в звезду (Zx=Zs=Zc)
Рис. 4.14. Схема измерения мощности трёхфазного симметричного по-
требителя, соединённого в треугольник (2ля=2яс =2сл)
Рис. 4.15. Схема измерения мощности трёхфазных потребителей элек-
трической энергии методом двух ваттметров
При несимметричной нагрузке, когда Zjb ^ZiBC ^Zca ,
мощность необходимо измерить в каждой фазе отдельно:
Р ~ Рав + Рве + Рса-
4.6.3. Измерение мощности трехфазных потребителей
методом двух ваттметров
Метод двух ваттметров (рис. 4.15) применяется для изме-
рения мощности в трёхфазных цепях при симметричной и
несимметричной нагрузках независимо от способа соедине-
ния фаз потребителя (звездой или треугольником). Примеча-
ние: этот способ не пригоден при включении фаз потребите-
247
ля звездой с нейтральным проводом. Как следует из схемы
рис. 4.15, вольтовая обмотка ваттметра И7) находится под
действием линейного напряжения Uab, при этом по токовой
его обмотке проходит линейный ток 1а. Поэтому показание
ваттметра определяется выражением:
Pwi = Uab La cos срАв Re (Uab L a)-
Вольтовая обмотка ваттметра Wi включена под линейное
напряжение Ucb = - Ubc, а в цепи токовой обмотки проходит
линейный ток 1с, поэтому ваттметр покажет мощность,
определяемую выражением:
Рwi = Ucb Lc cos фс Re [(-Ubc) L а].
Активная мощность трехфазного потребителя:
P/=P_A+PjA-P_c=UAlACOS(pA + UBlBCOS(pBJrUcIcCOSq)c =
=Re{LbtA)+Re{UBI-B)+Re{UcL*c')- (4.24)
Согласно первому закону Кирхгофа:
Га + L* в + Г с = 0, откуда Г в = - Га- Г с (4-25)
Исключим ток I в из уравнения (4.24), так как он не про-
ходит через обмотки ваттметров, и подставив (4.25) в (4.24),
получим:
Р = Re[( Ua ~ Цв)Га]+ Re [(Uc - Цв)Гс] = Rc(Uab L*a) +
Re(Uce I c). Ubc=—Urc
Таким образом, мощность трехфазного потребителя опре-
деляется как алгебраическая сумма показаний двух ваттмет-
ров:
Р = Pwi + Pw
В основу принципа работы всех трехфазных ваттметров и
электросчетчиков положен метод двух ваттметров.
248
4.7. Примеры расчета на ЭВМ трехфазных
электрических цепей
На схеме рис.4.16 приведен пример соединения трехфаз-
ных потребителей электроэнергии Пь П2, Пз, включенных в
трехфазную цепь.
Фазы потребителя электроэнергии П] соединены в звезду,
П2 - в треугольник, Пз - трехфазный асинхронный или син-
хронный электродвигатели (при этом не имеет значения, как
включены его обмотки - звездой или треугольником).
Дана величина линейного напряжения f/д и полные ком-
плексные сопротивления Z\ и Z? потребителей электроэнер-
гии П1 и П2. Для потребителя Пз известны номинальные дан-
ные: линейное напряжение Од, мощность на валу Р2, КПД и
коэффициент мощности coscp.
Определить показания приборов (ваттметров и ампермет-
ров), включенных в трехфазную цепь (рис. 4.16).
Исходя из первого закона Кирхгофа составляются уравне-
ния для линейных токов рассматриваемой цепи:
La = Lai + La2 + La3>
Lb = Lb\ + Lb2 + Lb3> (4.26)
Lc = Lev + Lc2 +Lc3
где La\’Lbv>Lc\ -линейные токи потребителя Пй Zh2>Zb2>Zc2 -линей-
ныетоки потребителя П2; La3'Lb3<Lc3 - линейные токи потребителя П3.
Рис. 4.16. Трехфазная цепь с параллельно включенными трехфазными
потребителями электроэнергии
249
Из уравнений (4.26) следует, что для расчета линейных
токов необходимо знать комплексные линейные токи всех
потребителей, включенных в трехфазную цепь.
При расчете токов потребителей векторы фазных и линей-
ных напряжений трехфазного источника (генератора) целе-
сообразно разместить на комплексной плоскости так, как по-
казано на рис.4.4. При этом Ea=Ua; Er=Ub и Ec=Uc.
Векторы фазных напряжений трехфазного потребителя
могут быть записаны в комплексной форме в виде:
(4-27)
Линейные напряжения с учетом (4.27) определятся:
Uab=Ua-Ub=U
^-АВ
V3 i
л —+ 7- = ^ле
л 2 2 л
.узо'
иВс=ив-ис=-1ил=иле^ ,
( д/З 1
'л - — + j~ = ил^
л 2 2
U.ca-Uc-ILa=U.
У-СА
J150'
(4-28)
4.7.1. Расчет токов потребителя электроэнергии Пц
соединенного звездой
Схема потребителя П], фазы которого соединены звездой,
представлена на рис. 4.17.
При расчете токов потребителя П1 методом контурных то-
ков для этой схемы с учетом второго закона Кирхгофа можно
записать уравнения:
250
O~l]i(ZA+Zs) L22 — B~^—AB>
L22^B + Z.c)~ Lll^-B +^-BC-
(4-29)
С учетом выражений (4.28) для линейных напряжений,
систему уравнений (4.29) можно представить в виде:
+Z.b)~I-22^.B Л
(4-30)
Систему уравнений (4.30) можно записать в матричной
форме:
1-22
(Zla + ?в) Zb
~Z.b (Zb+Zc)
J'-'л
Определив контурные токи (7ц и I22), линейные токи по-
требителя П1 можно найти исходя из выражений:
La, =L\}> Lb, =L\\~L22' Lc, = Li2-
Puc. 4.17. Схема трехфазного потребителя электроэнергии П]
251
Для трехфазного симметричного (Z/4=Zb=Zc=Z<x>) потреби-
теля Пь фазы которого соединены звездой, линейные токи с
учетом выражения (4.27) можно определить в общем виде:
Iа\= = г-Л ' = ' 7=^ e~J<P =1л(cos<Р~ jsin
4згф 7згф
Ln ==^=1^'*’ <431’
^.ф V 2 2 7
I eji20° -I [--+} —
Lc\~ 7 ~ кл\е ~Lai - <
L-ф V 2 2 7
„ XL-XC . Кф . • ±ХФ
гф=гфе^; = arctg — D—, costp = -^; sincp^—^,
л Z<j> £ф
где /д - модуль линейного тока потребителя Пр
Знак "+" перед Хф принимается для индуктивной нагруз-
ки, а знак для емкостной нагрузки; (р- угол между векто-
ром тока и вектором напряжения фазы зависит от характера
сопротивления фазы (Хф).
Рис. 4.18. Схема трехфазного потребителя электроэнергии П2
252
Если имеет место
индуктивная нагрузка
тельный). Тогда:
симметричная активно емкостно-
(Л 0; Хс > XL), то<р < 0(отрица-
I
7 -
и»
4згф
= ил -]<Р
^гф
= IA[cos(-p)-jsin(-<p)]=
- IА (cos <р + j sin <р).
Если имеет место симметричная емкостно-индук-тивная
или индуктивно-емкостная нагрузка, то линейный ток в фазе
А определяется по формуле:
/Л1 = Ч-л -e~j<p = iScos--j sin^-\ = -j!jj.
у/згф Ч 2 2J J Л
4.7.2. Расчет токов потребителя электроэнергии П2,
соединенного треугольником
Схема потребителя П2, фазы которого соединены тре-
угольником, представлена на рис.4.18.
При расчете токов потребителя электроэнергии П2 мето-
дом контурных токов система уравнений, полученных для
соответствующих замкнутых контуров с учетом второго за-
кона Кирхгофа, имеет следующий вид:
-W—AB 1зЗ—АВ~~^АВ~~^Л
рз
I2
Ll^Z-BC 1зз^вс~~^вс~+Л1л> (4.32)
-Z1 \Z.A в ~Lii^bc+1зз&ав+£вс +Zca) = 0-
Полученная система уравнений для решения на ЭВМ за-
писывается в матричной форме:
253
Ln
L22
1зз
—AB
0
— AB
0
Z.BC
~?LBC
По контурным токам определяются линейные токи потре-
бителя электроэнергии Пг исходя из выражений:
— А2~~ —11’ L.B2~L\\~ L12’ — С2~—22'
При симметричной нагрузке потребителя электроэнергии
П2 (Zab=Zbc=Zca=Z<i>), фазы которого соединены звездой, его
линейные токи с учетом выражения (4.28) можно определить
по более простым формулам:
Iа2 =1 ав~!са ==^--=^ = UjI-^-e j<p = Iл(со5<р-jsirup),
^.Ф ^Ф
I -I -I -1 e~ji2&-I 1 —— —/— (4-33)
±B2 -i-BC ±AB~±A2e ~—A2 2 2 ’
гд.е Ijf=(Uл V3)/Zo - модуль линейного тока потребителя П2.
4.7.3. Расчет токов симметричного потребителя
электроэнергии Пз
Трехфазный электродвигатель Пз является симметричным
потребителем электроэнергии, у которого линейные токи по
величине равны между собой и смещены по фазе относи-
тельно друг друга на 120°. Поэтому независимо от того, как
включены обмотки, линейные токи электродвигателя могут
быть определены исходя из уравнений, аналогичных (4.31) и
(4-33):
254
1АЗ=1де~]<Р = IaCOS(p- jlд sin(p,
( 1 /тЛ
j _/ e+yl20°
LC3-LA3e -La3 2+J 2
(4.34)
где Ia =| [л31 = | Igj | = | IC31 - модули линейных токов электродвигателя.
Следует отметить, что в уравнениях (4.34) синус изменит
свой знак, если угол (р < 0 (емкостной характер нагрузки).
Модуль линейного тока (/д) электродвигателя может
быть найден исходя из потребляемой им активной мощности
(Р2) иегоКПД(?7):
Рх=Лил1дСО5(р, rj = ^,
Р\
где Р2 - мощность на валу электродвигателя; Р2 — мощность от сети.
В результате совместного решения этих уравнений полу-
чим:
/ =_______12______
COS(p Г)
По значению модуля линейного тока (1д) электродвигателя
представляется возможным рассчитать комплексные значе-
ния его линейных токов по формулам (4.34). Зная комплекс-
ные значения линейных токов всех трехфазных потребителей
электроэнергии, включённых в трёхфазную сеть, комплекс-
ные значения линейных токов питающей сети (/д, 1с)
можно найти по формулам (4.34). При этом общий коэффи-
циент мощности всех потребителей, включённых в сеть, оп-
ределяется из выражения:
=
где Re 1д- вещественная часть комплекса тока I^.
255
Следует отметить, что общий коэффициент мощности
всех потребителей можно определить и через линейные токи
1в, /с (при этом необходимо учитывать, что эти токи смеще-
ны относительно тока Ц соответственно на -120° и +120°):
=
________Лг1 +~^2________
L*aU.a + L*BLLB + LcU-c
Для симметричной нагрузки:
-Ди *" ^№2
COS (О = ,
^ил1л
где (Рщ+Ри?) - активная мощность трехфазной электрической цепи, оп-
ределяемая по методу двух ваттметров как алгебраическая сумма показа-
ний ваттметров.
4.7.4. Расчет трехфазных электрических цепей с
помощью определителей
Определителем второго порядка называется выражение D,
образованное из четырех элементов а^, расположенных в
квадратной таблице элементов вида:
аи а\2
а2\ а22
Индекс i в обозначении а,к указывает номер строки, в ко-
торой находится данное число, а индекс к - номер соответст-
вующего столбца.
Определители второго порядка вычисляются по формуле:
а21 а22
°12 а12 а21
Девять элементов а,к, расположенных в квадратной табли-
це элементов, образуют определитель третьего порядка вида:
256
а11 «12 «13
«21 а22 «23
«31 «32 а33
Приписав к элементам определителя третьего порядка
справа два первых столбца, можно его вычислить по сле-
дующей схеме:
D =
«п
«21
«12 «13 «11 «12
«22 «23 «21 «22
= «1 I^22^33 + ^12O22^33 +
«31
«32 «33 «31 «32
+ Я1 16723^31 +«13^21^32 - 7731^22^13 -77327723*7 1 1~ 7*33^21 «12-
Определитель второго порядка, полученный из определи-
теля третьего порядка вычеркиванием строки (/) и столбца
(Л), на пересечении которых расположен элемент а,*, носит
название минора этого элемента.
Минор элемента умноженный на (~1)'+*, называется
алгебраическим дополнением элемента и обозначается
через А,К:
Каждый определитель третьего порядка можно разложить
по элементам строки или столбца следующим образом:
£>-77цЛц + «12^12 + «1зАз “«11А1 + «21А1 + «31А1 “
- «з 14з 1 + «32 Аг + «зз Аз
«23 А «21
;Аг=-
«33 «31
«23 , «21
;Аз =
«33 «31
«22
«32
ит.д.
257
Используя это свойство, можно вычислить и определитель
четвертого порядка, сведя его к четырем определителям
третьего порядка, и т.д.
С учетом уравнений, составленных по второму закону
Кирхгофа для контурных токов (где Z12 = Z21; Z13 = Z31 и Z23 =
Z32), алгебраические дополнения с теми же индексами также
будут равны между собой (А 12 = Яц; А]з = Аз1 и А23 =Азз).
Систему уравнений (4.30), составленную для трехфазного
потребителя, фазы которого соединены звездой (рис. 4.17),
можно решить с помощью определителей. При этом:
Z211 у _ Р.22 . _ (Zj +Zb) Zlb
—z ~ Dz ~^-b (Zb+Zc)|
DH = ил Z s I (N . ZB : d22 = (Za+Zb) Ул — KN
-]ил &в + ~ZB -&Л
Соответственно, система уравнений (4.32), составленная
для потребителя, фазы которого соединены треугольником
(рис. 4.18), может быть решена исходя из выражений:
2ц
0 Z./1B
Z-ВС ~ — ВС
~ ZlBC ^АВ + — ВС + —СА )
0
~—АВ
—22 ~
— АВ
~Z.BC 5
Zab +Z.BC + Zca)
258
JUjj
% ВС
~Zbc
~Z-AB
~Z.BC
Z-AB + ZbC + Z.CA.
Решение определителей более высокого порядка при рас-
чёте задач методом определителей является трудоёмким.
В приложении П1 приведены возможные варианты соеди-
нения трехфазных потребителей и их векторные диаграммы.
4.8. Лабораторная работа №3
Трехфазные электрические цепи при соединении
потребителей звездой и треугольником
Трехфазная цепь. Соединение "звездой". Нейтральный
провод. Линейный провод. Соединение "треугольником".
Линейные и фазные токи и напряжения. Измерение тока, на-
пряжения и мощности в трехфазной цепи. Коэффициент
мощности cos ф трех фазной цепи.
Цель работы. Исследование трехфазных цепей при соеди-
нении потребителей электроэнергии "звездой" и "тре-
угольником".
Вызов элементов электрической цепи на монтажную па-
нель ЭВМ осуществляется клавишами F1-соединение потре-
бителя звездой и Р2-соединение потребителей треугольником.
Соединение потребителей электрической энергии
"звездой "
Нажать на клавишу F1. На монтажную панель ЭВМ выво-
дятся изображения источника трехфазного тока, нагрузок Za,
Zb, Zc трех фаз потребителя и трех вольтметров VA, Ув, Ус для
259
измерения падения напряжения на нагрузке каждой фазы.
Источник питания имеет две точки подключения к нейтрали:
"N1" и "N2" Собрать электрическую схему соединения фаз
потребителя звездой и схему измерения электрических пара-
метров цепи. Для этого:
- подключить амперметры А а, Ав, Ас - к фазам Za, Zb,
Zc потребителя для измерения силы тока Ц ,Ig, Ic,
- подсоединить цепочки Aa-Za, Ab-Zb , Ac~Zc к фазам
источника питания;
- соединить свободные концы фаз Za, Zb и Zc общим
проводом;
- подключить амперметр А у для измерения силы тока
IN в нейтральном проводе, соединяющем общий провод фаз-
ных нагрузок (т. "N2") и нейтраль источника питания
(т. "7W");
- подключить вольтметр Иу для измерения напряжения
17ц между общим проводом фазных нагрузок (т. ’W2") и
нейтралью источника питания (т. "NI”).
Чтобы изменить характер нагрузки в фазе потребителя,
необходимо подвести маркер к данной фазе и нажать клави-
шу "7?" - активное сопротивление, клавишу "С" - конденса-
тор или клавишу - индуктивное сопротивление.
В окне задатчиков помещена кнопка "нейтральный про-
вод". Для отключения нейтрального провода следует подвес-
ти маркер к данной кнопке и нажать клавишу "Del". Для вос-
становления электрической схемы следует нажать клавишу
"Ins".
Для записи результатов экспериментов составить
табл. 4.1, где в столбце N"(+)" означает соединение потреби-
телей звездой с нейтральным проводом, а соединение
потребителей звездой без нейтрального провода.
1. Симметричная нагрузка (Ra=Rb=Rc)-
Включить в каждую фазу потребителя активное сопротив-
ление R. С помощью задатчиков Ra, Rb и Rc установить рав-
ные значения сопротивлений.
Включить нейтральный провод. Измерить и записать дан-
ные в табл. 4.1 (строка 1).
Отключить нейтральный провод. Измерить и записать
данные в табл. 4.1 (строка 2).
260
Таблица 4.1. Результаты экспериментов при соединении потребителей
звездой
№ Измерить Вычислить
ЛГ иА и В Uc Ia h Ic In Un Ра Рв Рс Qi cosy
1 (+) 0 2 (-) 0 3 (+) 0 4 (-) 0 5 (+) 0 6 (-) 0 7 (+) 0 8 (-) 0 9 (+) 0 10 (-) 0
Вычислить активные РЛ, Рв, Рс и реактивные Qa, Qb, Qc
мощности фаз потребителя, коэффициент мощности cos <р
трехфазной цепи.
2. Несимметричная нагрузка (RA *RB Ф Rc)
Включить в каждую фазу потребителя активное сопротив-
ление R. С помощью задатчиков RA RB и Rc установить
значения сопротивлений, отличающиеся друг от друга.
Включить нейтральный провод. Измерить и записать дан-
ные в табл. 4.1 (строка 3).
Отключить нейтральный провод. Измерить и записать
данные в табл. 4.1 (строка 4).
Вычислить активные РА, Рв, Рс и реактивные Qa, Qb, Qc
мощности фаз потребителя, коэффициент мощности cos ср
трехфазной цепи.
3. Несимметричная нагрузка с катушкой индуктивности
(L, R, R).
Включить в одну из фаз потребителя индуктивное сопро-
тивление L. В две оставшиеся фазы потребителя включить
активные сопротивления R. С помощью задатчиков R уста-
новить значения сопротивлений равными друг другу.
Включить нейтральный провод. Измерить и записать дан-
ные в табл. 4.1 (строка 5).
261
Отключить нейтральный провод. Измерить и записать
данные в табл. 4.1 (строка 6).
Вычислить активные РА, Рв, Рс реактивные QA, Qb, Qc
мощности фаз потребителя, коэффициент мощности
cos ср трехфазной цепи.
4. Несимметричная нагрузка с конденсатором (С, R, R).
Включить в одну из фаз потребителя конденсатор С. В две
оставшиеся фазы потребителя включить активные сопротив-
ления R. С помощью задатчиков R установить значения со-
противлений равными друг другу.
Включить нейтральный провод. Измерить и записать дан-
ные в табл. 4.1 (строка 7).
Отключить нейтральный провод. Измерить и записать дан-
ные в табл. 4.1 (строка 8).
Вычислить активные РА, Рв, Рс и реактивные Qa, Qb, Qc
мощности фаз потребителя, коэффициент мощности cos<p
трехфазной цепи.
5. Несимметричная нагрузка (обрыв фазы потребителя).
Включить в каждую фазу потребителя активное сопро-
тивление R. С помощью задатчиков RA, RB и Rc установить
равные значения сопротивлений.
Отключить одну из фаз потребителя. Для этого подвести
маркер к одному из задатчиков R и нажать клавишу “Del”.
Для восстановления электрической схемы следует нажать
клавишу "Ins".
Включить нейтральный провод. Измерить и записать дан-
ные в табл. 4.1 (строка 9).
Отключить нейтральный провод. Измерить и записать
данные в табл. 4.1 (строка 10).
Вычислить активные РА, Рв, Рс и реактивные QA, Qb, Qc
мощности фаз потребителя, коэффициент мощности cos ср
трехфазной цепи.
В каждом опыте:
- определить комплексные величины токов 1А, 1в, 1с и In',
- для соединений звездой с нейтральным проводом прове-
рить первый закон Кирхгофа (в комплексной форме);
- построить векторную диаграмму токов;
- объяснить влияние нейтрального провода при несиммет-
ричной нагрузке.
262
Соединение потребителей электрической энергии
"треугольником ".
Нажать на клавишу F2. На монтажную панель ЭВМ выво-
дятся изображения источника трехфазного тока и нагрузок
Zab, Zbc и Zca трех фаз потребителя. Собрать электрическую
схему соединения фаз потребителя "треугольником" и схему
измерения электрических параметров цепи. Для этого необ-
ходимо:
- подключить амперметры Аав, А вс и Аса к фазам ZAb,
Zbc и Zca для измерения силы тока Iab, he и 1са потребителя;
- соединить "треугольником" полученные цепочки Аав~
Zab, Abc-Zbc и Aca-Zca- Для этого следует соединить свобод-
ный конец фазы Zab с началом цепочки Abc-Zbc, свободный
конец фазы Zbc с началом цепочки Aca-Zca и свободный ко-
нец фазы Zca с началом цепочки A ah-Zab',
- подключить амперметры Аа, Ар и Ас к соответствую-
щим фазам источника питания для измерения силы тока 1а, 1в
и 1с к линейных проводах потребителя;
- соединить свободный конец амперметра Аа с началом
цепочки Aab-Zab свободный конец амперметра Ав с началом
цепочки Abc-Zbc и свободный конец амперметра Ас с нача-
лом цепочки Aca-Zca-
Чтобы изменить характер нагрузки в фазе потребителя,
необходимо подвести маркер к данной фазе и нажать клави-
шу "7?" - активное сопротивление, клавишу "С" - конденса-
тор или клавишу "L" - индуктивное сопротивление.
Для того чтобы отключить фазу потребителя, необходимо
подвести маркер к данной нагрузке и нажать клавишу “Del”.
Для восстановления электрической схемы следует нажать
клавишу "Ins".
Составить табл. 4.2 для записи результатов опытов.
1. Симметричная нагрузка (Rab = Rbc = Rca)-
Включить в каждую фазу потребителя активное сопротив-
ление R. С помощью задатчиков Rab, Rbc и Rca установить
равные значения сопротивлений.
Измерить и записать данные в табл. 4.2 (строка 1).
Вычислить активные Рав, Рве, Рса и реактивные Qab, Qbc,
Qca мощности фаз потребителя, коэффициент мощности
cos ф трехфазной цепи.
2. Несимметричная нагрузка ( RAB RBC * RCA).
263
Таблица 4.2. Результаты опытов при соединении потребителей треугольником
3 L, R, R
4 С. R, R
5 Обрыв
фазы
Включить в каждую фазу потребителя активное сопротив-
ление R. С помощью задатчиков Rab, Rbc и Rca установить
разные значения сопротивлений.
Измерить и записать данные в табл. 4.2 (строка 2).
Вычислить активные Рав, Рве, Рса и реактивные Qab, Qbc,
Qca мощности фаз потребителя, коэффициент мощности
cos (р трехфазной цепи.
3. Несимметричная нагрузка с катушкой индуктивности
(Д R, R).
Включить в одну из фаз потребителя индуктивное сопро-
тивление L. В две оставшиеся фазы потребителя включить
активные сопротивления R. С помощью задатчиков R уста-
новить значения сопротивлений равными друг другу.
Измерить и записать данные в табл. 4.2 (строка 3).
Вычислить активные РАв, Рва, Рса и реактивные Qab, Qba,
Qca мощности фаз потребителя, коэффициент мощности
cos (р трехфазной цепи.
4. Несимметричная нагрузка с конденсатором (С, R, R).
Включить в одну из фаз потребителя конденсатор С. В две
оставшиеся фазы потребителя включить активные сопротив-
ления R. С помощью задатчиков R установить значения со-
противлений равными друг другу.
Измерить и записать данные в табл.4.2 (строка 4).
Вычислить активные Рав, Рве, Рса и реактивные Qab, Qbc,
Qca мощности фаз потребителя, коэффициент мощности
coscp трехфазной цепи.
5. Несимметричная нагрузка (обрыв фазы потребителя).
264
Включить в каждую фазу потребителя активное сопротив-
ление R. С помощью задатчиков Rab, Rbc, Rca установить
значения сопротивлений равными друг другу.
Отключить одну из фаз потребителя. Для этого подвести
маркер к одному из задатчиков R и нажать клавишу "Del".
Для восстановления электрической схемы следует нажать
клавишу "Ins".
Измерить и записать данные в табл. 4.2 (строка 5).
Вычислить активные Рав, Рве, Рса и реактивные Qab, Qbc,
Qca мощности фаз потребителя, коэффициент мощности
cos (р трехфазной цепи.
В каждом опыте:
- определить комплексные величины токов Iab, Ibc, 1са‘,
- для линейных и фазных токов проверить первый закон
Кирхгофа (в комплексной форме);
- построить векторные диаграммы токов.
4.9. Расчет трехфазных потребителей
электрической энергии, соединенных звездой
(семинар). Программа CON 6_1
Электрическая цепь потребителя представляет собой со-
единение звездой с нейтральным проводом и приведена на
Рис. 4.19. Схема соединения трехфазных потребителей энергии звездой
(с нейтральным проводом)
265
Заданы: линейное напряжение трехфазной сети и полные
сопротивления фаз потребителей.
Рассчитать показания приборов, включенных в ветви
трехфазной цепи.
Законы, применяемые при решении задачи:
закон Ома;
первый закон Кирхгофа.
Алгоритм решения задачи:
а) определить комплексные фазные напряжения для соеди-
нения звездой с нейтральным (или без него) проводом;
б) преобразовать заданные сопротивления в комплексные
числа;
в) вычислить фазные комплексные токи в соответствии с за-
коном Ома;
г) вычислить (если задано) комплексный ток в нейтральном
проводе в соответствии с первым законом Кирхгофа;
д) определить показания амперметра, вольтметра и ваттметра
в соответствии с заданной схемой включения.
Определить:
- показания приборов An, Уд, W\
- линейные напряжения Uab, Ubc ,Uca-
Пример расчета
Решение:
а) комплексные фазные напряжения для соединения звездой
с нейтральным проводом:
UA = £/л/Тз =220 В;
UB = {ил/4з)-(-0.5-j-0,886) = -110-/190,5 В;
Ц_с =(^л/Тз)-(-0.5 + j-0,88б)=—110 + /190,5 В;
б) комплексные сопротивления:
Za~ °°; У в =0 + /10 Ом;
266
в) комплексные фазные (линейные) токи:
Ъ=ёл = ^ = 0А;
й, = (-ио-т5)=_1
Z, (0+/10)
^J-iioyi^)
~с Zc (0-/10)
г) комплексный ток в нейтральном проводе:
L N = L а + L в + Lc = 0+(-19>05+У10+(-19>05 - У10=-3 8Д А;
д) показания приборов.
Амперметр включен в нейтральный провод. Модуль тока
In '•
/я=|/| = 38,1 А.
Вольтметр включен между фазой А и нейтральным прово-
дом. Модуль напряжения UA:
ил =1^1 = 220 В.
Токовая обмотка ваттметра включена в провод фазы В, а
вольтовая обмотка - между фазой В и фазой С. Активная
мощность в комплексном виде:
Pw=Re(UB +Uc)l*B =/?e(-220X-19,05-;il)=4191-j2420 Вт.
Показания ваттметра Pw =4191 Вт.
Задание
Для заданного номера варианта в табл. 4.3 определить по-
казания амперметра, вольтметра и ваттметра, линейные на-
пряжения и угол сдвига фазового тока.
267
Таблица 4.3. Параметры электрической цепи
№ \UB, В| ZA, Ом | ZB, Ом | Zc, Ом | Zn, Ом 1 * 1 f' | W
1 220 ОО Я=10 Л=10 OO Ib Uc 1BUA
2 380 оо Я=10 Я=10 0 In UA Ic Uc
3 220 0 Л=10 Я=10 oo Ia Ub lcUc
4 220 0 Я=10 Я=10 oo Ib Uc Ia Uca
5 380 Д=10 Ai,=10 Л-10 0 In Uc I в Ubc
6 380 Л=10 Я=10 %£=Ю 0 In UN Ia Ubc
7 220 0 Л=10 Я=10 00 1a Un Ic Ubc
8 380 %£=ю Лс=Ю Я=10 0 In Ub IaUab
9 220 х£=ю Л=ю 0 oo Ic Ua Ic UAB
10 220 Я=10 Л=10 оо 00 Ic Uc IaUab
11 220 Я=10 оо Я=10 OO Ib UB IcUb
12 380 Ал=10 Л=10 0 Ic Uc I A UBc
13 380 Л=10 Л=10 00 Oo In UN Ib Uc
14 220 Я=10 Я=10 0 OO Ic Uc I в UBc
15 380 Лс=Ю Л=10 Л=10 0 In uN IcUca
16 380 Л=22 Л=22 Хс=22 0 In UN IaUab
17 220 0 Х<г22 Xl=22 OO 1a uA Ia Uab
18 220 Хс=22 0 Xl=22 oo Ib UB Ib UBc
19 220 Х^22 XL=22 0 oo Ic Un Ic UBc
20 220 R=22 Л=22 ОО oo Ia Un Ia Uab
21 220 R=22 Я=22 ОО 0 In uA IaUab
22 220 XL=\0 ОО х£=ю 0 In Uc Ia Uab
23 380 ОО R=22 R=22 0 In UB Ib Ubc
24 220 00 Xl=22 Xl=22 oo Ia Un Ic UcA
25 220 AZ=10 Л=10 XL=10 0 1a Ub I a Uca
26 380 Л=22 0 R.=22 00 Ib Uc Ib Ubc
27 380 0 Xl=22 Ai=10 00 Ic UA Ic UBc
28 380 XL=22 Xl=22 Л=ю 0 Ib Uc Ia UBc
29 220 xl=\q Я=10 0 00 Ia Uc Ib UBc
30 220 Лс=10 Ас=10 Лс=Ю 0 Ic Ua Ic Uca
Расчеты можно проводить на ЭВМ с использованием про-
граммы "Калькулятор комплексных чисел".
Для контроля расчетов предназначена программа СО№ 1,
которая позволяет контролировать:
268
- преобразование параметров электрической схемы в ком-
плексные числа;
- вычисленные значения фазных токов 1А, 1в, 1с, тока в ней-
тральном проводе In',
- вычисленные показания амперметра, вольтметра и ватт-
метра.
В состав программы включен контрольный пример.
4.10. Расчет трехфазных потребителей
электрической энергии, соединенных
треугольником (семинар). Программа CON 7_1
Электрическая цепь потребителя представляет собой со-
единение треугольником и приведена на рис 4.20.
Заданы', линейное напряжение трехфазной сети, полные
фазные сопротивления потребителя.
Требуется: рассчитать параметры электрической цепи по-
требителя.
Законы, применяемые при решении задачи:
- закон Ома;
- первый закон Кирхгофа.
Алгоритм решения задачи:
- определить комплексные линейные напряжения для
соединения треугольником;
- преобразовать заданные сопротивления в комплекс-
ные числа;
- вычислить комплексные фазные токи в соответствии с
законом Ома;
- вычислить комплексные линейные токи в соответст-
вии с первым законом Кирхгофа;
- вычислить заданные параметры сети.
Пример расчета
Решение:
а) комплексные линейные напряжения для соединения
треугольником:
Определить:
- линейный ток 1А,
- активную мощность РАВ,
- реактивную мощность QCA.
269
Рис. 4.20. Схема соединения трехфазных потребителей треугольником:
С/д=220 В; Zab = —j 10 Ом; Zrc ~10 Ом; Z^ =(5 +/з + у'5) Ом
иАВ =ил= 220 В;
£7ВС =?7л(-0.5-; 0,86б) = -110-;-190,5 В;
UBC =ил(-0.5 + _/0,86б) = -110 + j-190,5 В.
б) комплексные фазные сопротивления:
ZAB =0~ j 10 Ом;
ZBC =10-у 0 Ом;
ZCA = 8,66 + j 5 Ом;
в) комплексные фазные токи (закон Ома):
LAB
= f^ = 7-^-T = (° + ;-22) А;
— АВ J' Ю/
Zlbc (10 7'0)
= ё»=Ц10±У190;5) = (0 ,22) А.
Za (8,66 + 75)
комплексный линейный ток (первый закон Кирхгофа):
— АВ
г U ВС
Lbc ~~z
— ВС
Lca
La=Lm-Lca=J ^-J ^ = o а, Л-|ЪНоВ;
д) активная мощность РАВ и реактивная мощность Qca'
Рлв = /;„)= 220 (0-/22)=0 Вт;
Qca =/„^с<Тсл)=(-110+7190,5) (0-7-22)=2420 вар.
270
Таблица 4.4. Параметры электрической цепи
№ С/л, В Zab, Ом Zee, Ом Zc^, Ом Вычислить
1 220 5 5+7 5 Л 5-75 Л 1аЦРbcQab
2 380 10 5+7 5 Л 10+710 Л IaIaPabQbc
3 220 20 5-7 5 Л 5+7 5 Л LdcPcaQca
4 380 “7 20 10е’уз° 10е+уз° IaIaP caQab
5 380 -у 10 10 e+j3° 20е+уз° 1аЦР caQab
6 220 -7 5 5 e+j3° 10 е+у3° LdcPabQca
7 380 75 5-7 5 Л 10 е+у60 LdcPcaQab
8 220 710 е-7б0 20 е+у60 LdcPabQab
9 380 у 20 5V3-75 5 Л-75 LrIrP caQca
10 380 5 10V3-710 10Л-710 LdaPbcQca
11 220 5+7 5 7з -75 10 LthPabQca
12 380 10+/10 Л 7Ю 20 LJaP bcQab
13 220 5+7 5 Л -75 5 IaIaPcaQbc
14 380 10+71 о Л 7Ю 10 IaIaPabQbc
15 380 10+710 Л 7Ю 20 1аЦРbcQca
16 220 10-710 Л 5 -75 IaIaP bcQca
17 220 5-7 5 Л 10 75 LdaPbcQab
18 220 1+7 Л 20 -710 LdaP caQbc
19 220 ю-710 Л 5 710 LdaPabQca
20 220 5-7 5 Л 10 -720 LdaP bcQab
21 380 5-7 5 л 20 720 LdaP caQbc
22 220 5 10е+73° -75 LdcPabQab
23 220 -7 5 -75 10 LdcP bcQbc
24 380 710 10+/10Л 10 LdcP caQca
25 380 10+71 о Л 10+71 о Л 10-710Л La^aP bcQca
26 220 -У 10 Ю-уЮЛ 20 LdaP caQbc
27 220 10е+у6° 10 10е+уз° LdcPabQca
28 380 20е+у6° 20 2Ое-уэо LaIaP bcQbc
29 380 10-J10V3 10 е~у30 20 LdaP caQca
30 380 20 10 -7 20 LdcPbcQab
Задание
Для заданного номера варианта табл. 4.4 определить ли-
нейные токи, активную и реактивную мощности фаз.
271
Расчеты можно проводить на ЭВМ с использованием про-
граммы "Калькулятор комплексных чисел".
Для контроля расчетов предназначена программа
CONSZ1, которая позволяет контролировать:
- преобразование параметров электрической цепи в
комплексные числа;
- вычисленные значения фазных токов Цв, he, 1са,
- вычисленные значения комплексного и действующего
тока, активной Р и реактивной Q мощностей.
В состав программы включен контрольный пример.
4.11. Варианты соединения трехфазных потреби-
телей и их векторные диаграммы. Аварийные
режимы трехфазных потребителей
Далее рассматриваются возможные варианты соединения
трехфазных потребителей с симметричной и несимметрич-
ной нагрузкой, отличающиеся характером нагрузки (актив-
ной, активно-индуктивной, активно-емкостной и т. д.). Кроме
того, рассмотрены аварийные режимы работы трехфазных
потребителей, когда происходит обрыв линейного или фаз-
ного провода, либо короткое замыкание одного из фазных
потребителей.
4.11.1. Соединение фаз потребителя звездой с нейтраль-
ным проводом и симметричной нагрузкой
Схема соединения трехфазного потребителя представлена
на рис. 4.21.
Так как Z^=Za=Zc , то 7л + /я +_/с =0; Tn = 0; Uy = 0, а ли-
нейные и фазные напряжения определяются по формулам
(4.10) и (4.11), фазные (линейные) токи - по формулам (4.12).
При активно-индуктивной нагрузке, когда срА=<Рв=фс-
=<Рф >0, векторная диаграмма имеет вид, представленный на
рис. 4.22.
При активно-емкостной нагрузке, когда (Ра=<Рв~<Рс-
=<Рф<0, векторная диаграмма представлена на рис. 4.23.
272
Рис. 4.21. Схема соединения трехфазного потребителя звездой с ней-
тральным проводом
Рис. 4.22. Векторная диаграмма при соединении фаз потребителя звездой
при симметричной активно-индуктивной нагрузке на фазах
Рис.4.23. Векторная диаграмма при соединении фаз потребителя звездой
при симметричной активно-емкостной нагрузке на фазах
4.11.2. Соединение фаз потребителя звездой с
нейтральным проводом и несимметричной нагрузкой
В этом случае Z^ Zfl *Zc , In ^0', Ia + 1в +lc = In- Так как
в схеме имеется нейтральный провод, то Un=0. Для расчета
фазных и линейных токов и напряжений справедливы соот-
ношения (4.10) - (4.12).
Векторная диаграмма в случае активной нагрузки будет
иметь вид, представленный на рис. 4.24.
273
4.11.3. Соединение фаз потребителя звездой с
нейтральным проводом и обрывом одной из фаз
Это частный случай несимметричной нагрузки, так как об-
рыв фазы А означает: ZA=x>, 1А = 0. Для расчета фазных и ли-
нейных токов и напряжений справедливы соотношения
(4.10) - (4.12). Поскольку в схеме (рис.4.25) есть нейтраль-
ный провод и и^= 0, ток в нейтральном проводе: Ь/ — [в +Jc-
Векторная диаграмма для активной нагрузки (Rc>Rb)
представлена на рис. 4.26.
Рис. 4.24. Векторная диаграмма
при соединении фаз потребителя
звездой с нейтральным проводом и
несимметричной активной нагруз-
кой на фазах
Рис. 4.25. Схема соединения трех-
фазного потребителя звездой с ней-
тральным проводом и обрывом
фазы А
Рис. 4.26. Векторная диаграмма при соединении фаз потребителя звездой
с нейтральным проводом и несимметричной активной нагрузкой на фазах
и обрывом фазы А (рис. 4.25)
274
4.11.4. Соединение фаз потребителя звездой с
нейтральным проводом и обрывом линейного провода
При обрыве линейного провода А (рис.4.27) трехфазный
потребитель оказывается только под линейным напряжением
Ubc, т.е. Uab ~ Uca = 0. Кроме того, фазное напряжение Ua =
0 и соответственно 1а = 0. Фазные напряжения UbvlUc рас-
считываются по формулам (4.10), линейное напряжение Ubc
- по (4.11), а фазные токи [в и [с - по (4.12). Ток в нейтраль-
ном проводе b-i = 1в +7с.
Векторная диаграмма для активной нагрузки (Rc>Rb)
представлена на рис. 4.28.
4.11.5. Соединение фаз потребителя звездой без
нейтрального провода симметричной нагрузке
Данный случай подробно рассмотрен в разделе 4.4.
Векторная диаграмма для симметричного потребителя,
соединенного звездой при активной нагрузке представлена
на рис. 4.9.
Все соотношения и векторные диаграммы при симмет-
ричной нагрузке для звезды без нейтрального провода, с ней-
тральным проводом одинаковы (см. раздел 4.3 соединение
Рис. 4.27. Схема соединения трехфазного потребителя звездой с ней-
тральным проводом и обрывом линейного провода А
Рис. 4.28. Векторная диаграмма при соединении потребителей звездой с
нейтральным проводом и обрывом линейного провода А при Rc>Rb
(рис. 4.27)
275
Рис. 4.29. Векторная диаграмма при соединении фаз потребителя звездой
без нейтрального провода и симметричной индуктивной нагрузкой на
фазах (а); симметричной емкостной нагрузкой на фазах (б)
звездой с нейтральным проводом и симметричной нагруз-
кой).
Приведем еще два примера векторных диаграмм с разным
характером нагрузки.
Индуктивная нагрузка (рл = (рв =<Рс = <Рф=90° (рис.4.29,а);
Емкостная нагрузка (Ра=<Рв~<Рс=(Рф--90° (рис.4.29,б)
4.11.6. Соединение фаз потребителя звездой без
нейтрального провода при несимметричной нагрузке
Линейные напряжения рассчитываются по формулам
(4.11) в соответствии с рис. 4.30.
Перед расчетом фазных напряжений необходимо рассчи-
тать напряжение между нейтральной точкой генератора и
потребителя Uy по формуле (4.9), при этом надо учитывать,
что 2Lv=0 (Z^oo) и Е=^. В результате получим фор-
л/3
мулу для расчета Uy
276
Рис. 4.30. Схема соединения трехфазного потребителя звездой без ней-
трального провода при Ra<Rb<Rc
Рис. 4.31. Векторная диаграмма при соединении фаз потребителя звездой
без нейтрального провода при несимметричной активной нагрузке на
фазах (рис. 4.30)
(435)
При симметричной нагрузке нейтральная точка потреби-
теля N на комплексной плоскости находится в начале коор-
динат, поскольку Un = 0. При несимметричной нагрузке ней-
тральная точка потребителя смещается в некоторую точку N
которая определяется концом вектора Un, а расстояние ме-
жду точками N nN1 есть Un .= | Un\ - модуль вектора Un.
Рассчитываем фазные ЭДС генератора по формулам (4.2),
учитывая что
Ет U,
т — L
V2 д/з ‘
(4.36)
Рассчитываем фазные напряжения по формулам (4.6), а
фазные токи - по формулам (4.12).
Векторная диаграмма для случая активной нагрузки
(Ra<Rb<Rc) представлена на рис. 4.31.
277
4.11.7. Соединение фаз потребителя звездой без
нейтрального провода и коротком замыкании фазы
Рассмотрим короткое замыкание фазы А (рис. 4.32).
Эта схема представляет собой частный случай несиммет-
ричной нагрузки, когда Z^= 0 и соответственно падение на-
пряжения на фазе А потребителя Ua =Ja Za = 0.
Тогда фазные напряжения t/я и Uc легко определить из
(4.11), откуда следует, что t/в = - Пав , Цс = Цса-
Легко заметить (рис. 4.33), что нейтральная точка N сме-
щается в вершину А треугольника линейных напряжений,
поскольку из (4.9) следует Uy =Еа=~7=-
7з
Фазные токи /д и [с определяем из формул (4.14), а фаз-
ный ток [а-из первого закона Кирхгофа La=~(JLb + Lc)-
Векторная диаграмма для случая, когда в оставшихся фа-
зах присоединена несимметричная нагрузка, представлена на
Рис. 4.32. Схема соединения трехфазного потребителя звездой без ней-
трального провода и коротком замыкании фазы А
Рис. 4.33. Векторная диаграмма при несимметричной нагрузке потреби-
теля, соединенного звездой без нейтрального провода и коротком замы-
кании фазы А (рис. 4.32) 2д- активно-емкостное сопротивление, Zc— ак-
тивно-индуктивное сопротивление
278
рис. 4.33. Здесь рассмотрен случай, когда фаза В имеет ак-
тивно-емкостное сопротивление (фв < 0), а фаза С - активно-
индуктивное сопротивление (фс > 0).
4.11.8. Соединение фаз потребителя звездой с
несимметричной нагрузкой без нейтрального провода и
обрывом фазы
Рассмотрим случай несимметричной нагрузки (рис. 4.34).
Обрыв фазы А означает Z^=°4 ток 0, а так как в схеме от-
сутствует нейтральный провод, то Un #0.
Рассчитываем Un по формуле (4.35) и по вектору Un опре-
деляем новое положение N' (рис. 4.35) нейтральной точки
потребителя на комплексной плоскости. Следует заметить,
что при обрыве фазы (или отключении нагрузки одной из
фаз) нейтральная точка N на векторной диаграмме всегда
смещается на сторону треугольника, противоположную вер-
шине соответствующей фазы (рис. 4.35). Обрыв произошел
на фазе А треугольника линейных напряжений.
При этом новая нейтральная точка N' делит сторону тре-
угольника в соотношении, пропорциональном сопротивлени-
ям двух других фаз Zg и Zc-
Рассчитываем фазные ЭДС генератора по формуле (4.2) с
учетом зависимости (4.36)
Рассчитываем фазные напряжения по уравнениям (4.6) и
фазные токи по (4.14).
Векторная диаграмма для случая, когда в оставшихся фа-
зах подключена несимметричная нагрузка (Zb - активно-
емкостная, Zc - активно-индуктивная), представлена на
рис. 4.35.
Рис. 4.34. Схема соедине-
ния трехфазного потреби-
теля звездой без ней-
трального провода и об-
рывом фазы А
279
Рис. 4.35. Векторная
диаграмма при соедине-
нии фаз потребителя
звездой без нейтрально-
го провода, обрыве фазы
А и при несимметричной
нагрузке в оставшихся
фазах
4.11.9. Соединение фаз потребителя звездой без
нейтрального провода и обрывом линейного провода
При обрыве линейного провода А (рис. 4.36) трехфазный
потребитель оказывается только под одним линейным на-
пряжением Ub, причем UA=0 и Ia=Q. Таким образом схема
(рис. 4.36) преобразуется к эквивалентному виду (рис. 4.37),
однофазному последовательному соединению потребителей
с сопротивлениями Zb и Zc.
Определяем ток и напряжение в схеме (рис. 4.37):
Zb + Zc
Ub=1bZb-,-Uc = IcZc.
Векторная диаграмма изображена как для последователь-
ного однофазного соединения (рис. 4.38).
280
Рис. 4.36. Схема соединения
трехфазного потребителя
звездой без нейтрального
провода и с обрывом линей-
ного провода А
Рис. 4.37. Эквивалентная
схема однофазного последо-
вательного соединения в
обозначениях рис. 4.36.
Рис. 4.38. Векторная диаграмма при соединении фаз потребителя звездой
без нейтрального провода и с обрывом линейного провода А при несим-
метричной нагрузке в оставшихся фазах (ZH и Zc - активные сопротивле-
ния)
4.11.10. Соединение фаз потребителя треугольником при
симметричной нагрузке
Данный случай подробно рассмотрен в разделе 4.5. Век-
торная диаграмма для симметричного трехфазного потреби-
теля, соединенного треугольником при активной нагрузке
представлена на рис. 4.10.
Линейные (фазные) напряжения определяем из уравнений
(4.16), фазные токи - из (4.18), линейные токи - из (4.21).
Приведем еще два примера векторных диаграмм для сим-
метричных потребителей с разным характером нагрузки.
281
Рис. 4.39. Векторная диаграмма при соединении фаз потребителя тре-
угольником и симметричной индуктивной нагрузкой на фазах
Рис. 4.40. Векторная диаграмма при соединении фаз потребителя тре-
угольником и симметричной емкостной нагрузкой на фазах
Индуктивная нагрузка.
В этом случае <рдв = ^вс =<йСа = +90°. Векторная диаграм-
ма представлена на рис. 4.39.
Емкостная нагрузка.
В этом случае срАв = фвс =фсл = -90° и векторная диа-
грамма представлена на рис. 4.40.
4.11.11. Соединение фаз потребителей треугольником при
несимметричной нагрузке
При соединении потребителя треугольником независимо
от характера нагрузки фазные напряжения всегда равны ли-
нейным.
При несимметричной нагрузке фазные токи и фазные уг-
лы между фазными токами и фазными напряжениями не рав-
ны между собой.
Линейные (фазные) напряжения (см. раздел 4.5) определя-
ем из уравнений (4.16), а линейные токи - из (4.21).
Векторная диаграмма для случая активно-индук-тивной
несимметричной нагрузке представлена на рис. 4.41 Здесь
рассмотрен вариант активно-индуктивной нагрузки на всех
трех фазах, когда ZAb <Zca < Zbc и Фав < <?вс <<Рса >0°.
282
4.11.12 Соединение фаз потребителя треугольником с
обрывом фазы
Случай обрыва фазы при соединении потребителя тре-
угольником (рис. 4.42) является частным случаем несиммет-
ричной нагрузки, так как обрыв фазы АВ означает Zab= ток
в фазе АВ равен нулю (Jab = 0).
Линейные (фазные) напряжения определяем из (4.16),
фазные токи [вс и [са - из (4.18), а линейные токи - из (4.21);
причем [са ~ ~ [а> [вс = [в- Векторная диаграмма для активно-
индуктивной нагрузки представлена на рис. 4.43.
+Re
Рис. 4.41. Векторная диа-
грамма при соединении фаз
потребителя треугольником
и несимметричной активно-
индуктивной нагрузке на
фазах
Рис. 4.42. Схема соединения
трехфазного потребителя
треугольником при обрыве
фазы АВ
Рис. 4.43. Векторная диаграмма при соединении фаз потребителя тре-
угольником для несимметричной активно-индуктивной нагрузки и обры-
ве фазы АВ (рис. 4.42)
283
4.11.13. Соединение фаз потребителя треугольником при
обрыве линейного провода
При обрыве линейного провода А (рис. 4.44) трехфазный
потребитель оказывается только под одним линейным на-
пряжением Ubc- Таким образом схема на рис. 4.44 преобра-
зуется к эквивалентному виду, представленному на рис. 4.45,
однофазному параллельному соединению потребителей Zbc,
Zca и Zab •
В этом случае при однофазном параллельном соединении
потребителей:
и ПС ~ивс
1а=0 ; 1вс==^\ 1ав=1са= - -ву- ;
—вс ^са + £ав
Ib=Lbc ~Lca Lc
Векторная диаграмма для параллельного однофазного со-
единения представлена на рис. 4.46.
1ав~[са
1в—[с
~* Ubc
Рис. 4.44. Схема соединения трехфазного потребителя треугольником
при обрыве линейного провода А
Рис. 4.45. Эквивалентная схема однофазного параллельного соединения в
обозначениях рис. 4.24
Рис. 4.46. Векторная диаграмма при обрыве линейного провода А, соеди-
нении трехфазного потребителя треугольником и активной нагрузке на
фазах
284
4.12. Расчет трехфазных цепей (курсовая работа)
Курсовая работа по расчету трехфазных цепей состоит из
двух частей:
1. В трехфазную сеть, представленную на рис.4.16, вклю-
чены трехфазные потребители П1, П2, ПЗ. Фазы потребителя
П1 соединены в звезду, фазы П2 соединены в треугольник, а
потребитель ПЗ - трехфазный электродвигатель. Параметры
потребителей представлены в табл. 4.5. Необходимо рассчи-
тать с применением ЭВМ или методом определителей пока-
зания приборов, включенных в общую сеть, а также вели-
чины, указанные в табл. 4.5.
2. Из представленных ниже схем выбрать схему, соот-
ветствующую номеру варианта. Нарисовать схему и опреде-
лить показания приборов при разомкнутом и замкнутом
ключах. Построить векторную диаграмму для обоих случаев.
Проверить полученные результаты с помощью программы
К4.
285
Таблица 4.5. Параметры потребителей в трехфазной электрической
цепи
NN вар ил, В Параметры потребителей Рассчитать
П1э Ом П2, Ом П3, Ом
1 380 Za = 10 [4= 220/380 В Ia совф
2 Zb =-/10 P2 ~ 10 кВт Ib
3 Zc=jlO 4 = 0.9 cos <p= 0.9 (Z) Ic 1Z2
4 220 Z< = ю Zab = -/10 LcWx
5 Zb = /10 Zbct ~j5 1в совф
6 Zc=;10 Zca =7’5 LcW2
7 220 = -/20 [4 = 380/220 В La Wx
8 Zb =/10 P2 = 20 кВт [в созф
9 Zc- 10 4 = 0.8 cos<p= 0.9(C) Lc ^2
13 220 Z4B=/10 [4=380/220 В Lb Wx
14 Zbc = -/5 P2 = 10 кВт La W2
15 Zca =4$ 4 = 0.9 cos<p = 0.8 (Z) lc совф
16 380 Z^= 10 Zab = 10 La Wx
17 Zb = -/10 Zbc = -/10 Lb W2
18 Zc = -/10 Zca = /10 Ia совф
19 220 Za =-710 Zab = -/Ю Lc wx
20 Zb=/5 Zbc =j5 Ia совф
21 Zc=j5 ZcA=jS 4 W2
22 220 Za=20 [4= 127/220 В Lb совф
23 ZB = -j\Q P2 = 10 кВт La W2
24 Zc = ~j™ 4 = 0.9 cos<p= 0.8 (Q Lc wx
25 380 Za = /Ю Zab =j5 Ia совф
26 Zb = -/I0 Zbc = -/IO LbW2
27 Zc= 10 Zca =j$ Lc Wx
28 380 Za = 10 [4 = 220/380 В L JV2
29 Zb = -/10 P2=30 кВт [в совф
30 Zc =-/20 4 = 0.8 cos(p = 0.8 (Z) Lc Wx
286
Варианты схем для расчета курсовой работы
287
288
Вариант 15
Вариант 16
Вариант 17 Вариант 18
289
Вариант 19 Вариант 20
290
Вариант 25
A
Вариант 26
Вариант 27
291
Глава 5
Электрооборудование промышленных
предприятий
В этой главе рассматриваются: трансформаторы, асин-
хронные, синхронные электродвигатели; двигатели постоян-
ного тока; микроэлектродвигатели автоматических уст-
ройств, шаговые электродвигатели.
В главе рассмотрены принцип действия, устройство, осо-
бенности эксплуатации и элементы конструкции указанных
электрических машин и трансформаторов, получивших ши-
рокое применение для привода механизмов и устройств,
применяемых на различных производствах и автоматике.
Кроме того, уделено внимание вопросу электромашинных
элементов, составляющих основу современных автоматиче-
ских систем: исполнительные двигатели постоянного и пе-
ременного тока, шаговые двигатели.
В качестве основных характеристик трансформаторов и
электрических машин анализируются их энергетические ха-
рактеристики и механические характеристики электрических
машин. Достаточно подробно рассмотрены способы регули-
рования скорости исполнительных органов механизмов сред-
ствами регулируемого электропривода и упрощенные схемы
управления электродвигателями. Уделено внимание механи-
ческим и регулировочным характеристикам исполнительных
двигателей.
5.1. Трансформаторы
С целью экономичной передачи электроэнергии на даль-
ние расстояния и распределения ее между потребителями не-
обходимо трансформировать ее параметры - напряжение и
ток. Последнее осуществляется с помощью повышающих и
понижающих трансформаторов.
Трансформатор - статический электромагнитный аппа-
рат, действие которого основано на явлении взаимной ин-
дукции. Он предназначен для преобразования электрической
энергии переменного тока с параметрами UX,I} в энергию
переменного тока с параметрами U2,12 той же частоты.
292
Принцип индуктивной связи двух обмоток впервые от-
крыт Фарадеем в 1831 г. В период 1870-1880 гг. был создан
однофазный трансформатор с разомкнутым магнитопрово-
дом, а в 1880-1890 гг. был разработан трансформатор с замк-
нутым магнитопроводом, который усиливал магнитную
связь между обмотками и обеспечивал повышенные технико-
экономические показатели трансформатора.
5.1.1. Принцип действия и область применения транс-
форматоров
Трансформатор (рис. 5.1) состоит из ферромагнитного
магнитопровода 1, собранного из отдельных листов электро-
технической стали, на котором расположены две обмотки с
числом витков W] и w2, выполненные из медного или алю-
миниевого провода.
Обмотку, подключенную к источнику питания, называют
первичной, а обмотку, к которой подключаются приёмники,
- вторичной. Все величины, относящиеся к первичной и вто-
ричной обмоткам, принято обозначать соответственно ин-
дексами 1 и 2.
Если первичную обмотку трансформатора с числом витков
Wj включить в сеть переменного тока, то напряжение сети
Рис. 5.1. Устройство однофазного трансформатора
293
(см. главу 3). МДС создает основной переменный маг-
нитный поток Ф, замыкающийся по магнитопроводу транс-
форматора. Магнитный поток Ф индуцирует в первичной
обмотке w, ЭДС , а в обмотке и>2 - ЭДС Е2. Если к вто-
ричной обмотке присоединена нагрузка Z.„, то она оказыва-
ется замкнутой и ЭДС Е2 вызовет в ней ток 12.
Таким образом, электрическая энергия первичной цепи с
параметрами Ц,/, и частотой f будет преобразована в
энергию переменного тока вторичной цепи с параметрами
U2,I2nf.
Мощность трансформатора при этом определяется по
формуле:
S2 = Е212.
Допускаем, что Ux « Ех; U2 « Е2.
Мгновенные значения ЭДС первичной и вторичной об-
моток в соответствии с явлением электромагнитной индук-
ции, определяются по формулам:
Их действующие значения (при синусоидальном измене-
нии) соответственно равны:
Ех = 4,Ыкх/Фт-, Е2 = 4,44w2/0m,
где Фт - амплитудное значение магнитного потока.
Разделив значение ЭДС первичной цепи на соответст-
вующее значение ЭДС вторичной цепи, получим
£2 w2
294
Величина п называется коэффициентом трансформа-
ции.
На рис. 5.1 цепи обмоток трансформатора представлены
активными сопротивлениями первичной - Rx и вторичной
обмоток R2, а также и индуктивностями Д и Ь2. Индуктив-
ности Ц и Ь2 обусловлены потоками рассеяния соответст-
венно первичной - ФаХ и вторичной обмоток Фа2. Потоки
рассеяния ФаХ и Фа2 пропорциональны токам соответствен-
но 7, и /2, причем коэффициенты пропорциональности - это
индуктивности L, и ^2, (см. 3.5).
Передача электрической энергии большой мощности на
большие расстояния технически возможна и экономически
целесообразна при малых сечениях проводов линии передачи
и малых потерях энергии в них. Сечение проводов и потери
мощности в них определяются величиной тока, а ток при за-
данной мощности S, как известно, зависит от напряже-
ния U:
Естественно, чем выше напряжение, тем меньше ток,
меньше сечение проводов и потери мощности в них.
Напряжение синхронных генераторов электрических
станций относительно невелико: 15 000 - 24 000 В, сечение
проводов и потери мощности в проводах линии передачи при
этом напряжении были бы слишком велики. Поэтому на
электрических станциях с помощью трансформаторов на-
пряжение повышают до 110000 - 750000 В и при таком на-
пряжении электроэнергию передают на большие расстояния
к местам потребления. Энергия такого высокого напряжения
не может быть использована подавляющим числом потреби-
телей, поскольку по технико-экономическим соображениям и
условиям безопасности они рассчитаны для работы при от-
носительно низком напряжении - порядка 220 - 380 - 500 В.
Следует отметить, что имеется довольно широкая группа по-
требителей, работающих при напряжении 10 кВ. Поэтому в
местах потребления электрической энергии (в конце линии
передачи) напряжение понижают до требуемых значений -
также с помощью трансформаторов. Таким образом, силовая
295
электроэнергетика - это основная область применения
трансформаторов, где без них обойтись невозможно.
Трансформаторы широко используются также во всякого
рода измерительных устройствах, радиоприемниках, телеви-
зорах, осциллографах, для местного освещения и т.п. В этих
случаях трансформатор преобразует имеющееся стандартное
напряжение электрической сети в напряжение другого зна-
чения, которое необходимо для питания отдельных элемен-
тов электротехнических устройств. Во многих случаях
трансформаторы имеют несколько обмоток. Трансформато-
ры используются в сварочных и электротермических уста-
новках. Трансформаторы широко используются при измере-
нии тока, напряжения и мощности в электрических сетях с
большим напряжением или с большими токами. В этом слу-
чае они называются измерительными. Существует много
специальных трансформаторов, работающих во всякого рода
автоматических установках. Напряжение на их обмотках во
многих случаях несинусоидальное.
5.1.2. Приведенный трансформатор
Схема трансформатора, рис. 5.1, имеет магнитно-
связанные контуры, что для анализа электрических режимов
трансформатора неудобно. Для устранения магнитной связи
между обмотками трансформатора составим его эквивалент-
ную электрическую схему. При этом необходимо объединить
обе обмотки трансформатора в одну, сделав равными ЭДС
этих обмоток, Ei = Eli . Равенство ЭДС будет выполнено, ес-
ли новое число витков вторичной обмотки Wj сделать рав-
ным числу витков первичной обмотки wt, w2 = w,.
Очевидно, что при таком преобразовании изменятся все
величины, характеризующие вторичную цепь (I2, U2, Е2,
R2, Х2, ZH) и их необходимо пересчитать на новое число
витков.
Трансформатор, у которого все параметры вторичной об-
мотки (E2,U2,12, R2, X2,ZH) приводятся к параметрам пер-
вичной обмотки, называется приведённым. У приведённого
трансформатора коэффициент трансформации п'= 1.
296
Условия приведения параметров трансформатора
1 .Параметры первичной обмотки (Ех, Ux, Jp Rx, Xt) оста-
ются без изменения.
2 .Мощности первичной и вторичной обмоток (Рх и Р2)
должны оставаться без изменения.
З .Углы между векторами токов и напряжений первичной
и вторичной обмоток (^) и ((р2) должны оставаться без из-
менений.
Методика приведения параметров трансформатора сле-
дующая:
1.Определим Е2 (приведенная ЭДС вторичной обмотки).
Е Е
Учитывая, что — = п, —7 = 1, имеем:
Е2 Е'
Е2=пЕ2 = Ех или U2=nU2 = Ux. (5.1)
2.Определим 12 (приведённый вторичный ток). Из 2-го
условия приведения трансформатора Е212 = Е212 и из урав-
нения (5.1) Е2 = пЕ2.
Совместное решение этих уравнений даёт:
— = (52)
п
Так как Е212 = ЕХЦ (второе условие приведения транс-
, . Ех 12 /2
форматора) то, —L = — = п или 1Х = —.
Е2 Ц П
3.Определим R2 (приведённое активное сопротивление
вторичной обмотки).
Из 2-го условия приведения трансформатора имеем
I2R2 = /22/?2 и из уравнения (5.2) - 12 = .
п
Совместное решение этих уравнений даёт:
R2 = n2R2 = Rx.
(5.3)
Так как 1} R2 = IXRX
R, 2 1
= -z~ = n или n R2 = Rx.
R2
297
4.По аналогии приведённое индуктивное сопротивление
и приведенное сопротивление нагрузки можно определить по
формулам:
г'и = n2zH.
(5-4)
5.1.3. Схема замещения приведённого трансформатора
На рис. 5.2,а приведена принципиальная схема приведён-
ного трансформатора.
Если точки тп и т’, п и п' замкнуть, так как они обла-
дают одинаковым потенциалом (е\= Е^), а первичную и
вторичную обмотки заменить на намагничивающий контур с
активным (/?о) и индуктивным х0 сопротивлениями, то схе-
му (рис. 5.2,а) можно заменить на схему (рис. 5.2,6).
Так как xo»xi и Rq»R] (установлено экспериментально),
то схема (рис. 5.2,6) заменяется на упрощённую схему (рис.
5.2,в) соответственно с параметрами:
Л) = = I 2 1 v2 ’ = R\+ ^2’ Хк = Х1 + Х2-
zo ^R$ +л0
Т.е. после приведения сопротивлений R^ и х2 в схеме за-
мещения трансформатора имеем Rk и хк, которые называ-
ются соответственно активным и реактивным сопротивле-
ниями короткого замыкания трансформатора.
5.1.4. Потери мощности в трансформаторе
Потери мощности в трансформаторе определяются выра-
жением:
ЕР = ЕР3 + ЕРМ,
где ЕР3 - электрические потери мощности в активных сопротивлениях
обмоток трансформатора (Rx и Т?2); ЕРМ - магнитные потери мощно-
сти в магнитопроводе трансформатора) от вихревых токов и от перемаг-
ничивания сердечника.
298
Рис. 5.2. Принципиальная схема приведённого трансформатора (а); схема
замещения приведённого трансформатора (б); упрощенная схема заме-
щения приведённого трансформатора (в)
299
Электрические потери мощности определяются по фор-
муле:
ДР = 7,2Р. + 72Я2 = 72Я. + I2R' = l2Rk,
где /2 = nlx; R2 = -у; Rk = Rx+ R2.
n
Электрические потери мощности можно записать через
номинальное их значение:
bP, = I2Rk=p2bPH, (5.5)
где ft = у-
-'' коэффициент загрузки трансформатора по току;
AP3=I2HRk - номинальные электрические потери, при номинальном
токе (/,„).
Магнитные потери мощности в трансформаторе:
(т т Л ( р \
ДР„ = /0Ч = — = А- Ц2 = Кми2
М U V ry 3J Т* 1 Ml
kZoy \zoJ
где Км = RqjZq - магнитный коэффициент, зависящий от качества же-
леза и частоты тока; Zo = -JPg2 + Xq - полное сопротивление цепи на-
магничивания.
Магнитные потери мощности можно записать через но-
минальное их значение:
*PM=KMUf=y2bPMH, (5.6)
L7,
где у =----- - коэффициент относительного напряжения трансформато-
Ци
pa; ^Рм„ = KMU2H - номинальные магнитные потери (при номинальном
напряжении).
300
Таким образом, суммарные потери мощности в транс
форматоре:
ЛР = ^2АДн + у2АРин.
КПД трансформатора:
^2 = Ъ = yPS2„^<P2_________ ,57)
У’ Р2+ДР Z^2hcos^+?02AP3H+Z2APm/V '
где Д COS (р} - активная мощность, потребляемая трансформато-
ром от сети; Р2 = U2I2COS<p2 = yPU2hI2h COS^?2 = yPS2llCOS(p2 - ак-
тивная мощность, передаваемая трансформатором в нагрузку;
У = U2IU2H; Р = Л//2м; cos^2 = RjZH .. „
На рис. 5.3 показаны зависимости КПД, потерь мощности
трансформатора ДРЭ и АРИ от коэффициента загрузки
трансформатора по току (/?), из которых видно, что зависи-
мость 7 = f (/?) имеет экстремальный характер.
Определим максимум КПД трансформатора из условия:
*2=о.
dfi
В результате дифференцирования уравнения (5.7) по Р
получим:
/ S2h cosp2(Z2AP„H - Д2ЛДн)= 0 ,
откуда максимальному значению КПД будет соответствовать
Рис. 5.3. Зависимость КПД,
ДРЭ и АРМ от коэффициента
загрузки трансформатора по
току (/3)
1,0
0
301
Р = ±у
При АД,,, = ДРЭН, Ртм = у. После подстановки /? в урав-
нение (5.7) получим:
1
1 +-----
52„ cosp2
Так как S2„»APJH, то из этого уравнения следует, что
КПД трансформатора имеет оптимальное (максимальное)
значение близкое к единице при загрузке, близкой к номи-
нальной мощности.
5.1.5. Опыт холостого хода трансформатора
В опыте холостого хода трансформатора первичная об-
мотка трансформатора присоединяется к сети, а вторичная
обмотка разомкнута. В режиме холостого хода трансформа-
тора в обмотке ток не протекает и она не оказывает влияния
на режим работы первичной обмотки.
На рис. 5.4,а приведена принципиальная схема опыта хо-
лостого хода трансформатора (ключ S1 разомкнут), а на рис.
5.4,6 - упрощенная схема замещения.
Определим параметры трансформатора п, ЬРМ„, Ro, z0,
х0 в этом режиме.
1. Так как, потребитель отключен (l2 = 0), следовательно:
р =4-=о.
^ХХ г/
12н
На практике ток холостого хода трансформатора
= Ц w (5 +10)%А„ > поэтому р = — » 0,05.
Ли
2. При опыте холостого хода = UXh , следовательно:
Ц. и,.
302
3. Определим коэффициент трансформации п в соответ
ствии со вторым законом Кирхгофа:
^1н = £р Ц =Е‘2, или U2h=E2,
тогда —— = — = п.
и2н е2
В опыте холостого хода измеряются напряжения на входе
и выходе трансформатора с помощью вольтметров PV\ и
PV2, ток в первичной обмотке с помощью амперметра РА} и
активная мощность, потребляемая трансформатором из сети
с помощью ваттметра PW.
Рис. 5.4. Принципиальная схема опыта холостого хода трансформатора
(а); упрощенная схема замещения (б)
303
Отношение показаний вольтметров PKi и РК2 равно ко-
эффициенту трансформации трансформатора п ® Ц/С/2 • По-
скольку ток холостого хода и активное сопротивление пер-
вичной обмотки малы, электрические потери в ней незначи-
тельны и намного меньше потерь в магнитопроводе транс-
форматора.
4. Определим АРМН (магнитные номинальные потери
мощности). Показания ваттметра в этом опыте равны (см.
пп.1 и 2):
По этой причине можно считать, что ваттметр измеряет
мощность потерь в магнитопроводе трансформатора.
5. Определим параметры схемы замещения (рис. 5.4,6)
Rq,x0,z0, а также значения тока 1,=1„ и его реактивную и
активную составляющие 1}р и 1,а, на основании опытных
данных. Если пренебречь R, и X] (так как R\«Rq и xi«xo,
т.е. приняв /?! = 0, х, = 0), то мощность, потребляемая от се-
ти:
Ри, = АР = I2 х Л,.
If'xx МН XX Ч)
Отсюда Rq = ,
XX
(определяется с помощью показаний ваттметра PW и ам-
перметра РА,).
Ток в намагничивающем контуре:
откуда z0 = —,
* XX
(определяется с помощью показаний амперметра РА„ и
вольтметра PV,).
Другие параметры трансформатора - индуктивное сопро-
тивление трансформатора х0, коэффициент мощности холо-
304
стого хода cos^0, реактивная Ilp и активная 11а составляю-
щие тока холостого хода определяются по формулам:
x0 = y/z20-l^; cos<p0=^-;
zo
sin %; cos ^>0.
Магнитопровод трансформатора собирается из отдельных
листов электротехнической стали толщиной 0,35-0,5 мм, ме-
жду которыми есть изоляционная прослойка в виде лака и
клея. Потери электрической энергии в магнитопроводе неве-
лики и, следовательно, невелик и ток /,=/„, определяющий
эти потери. Воздушный зазор между листами магнитопрово-
да, определяемый качеством обработки отдельных листов и
качеством сборки, относительно невелик. Листы слоев маг-
нитопровода собираются внахлёстку: последующий слой
прекрывает воздушные промежутки в стыках листов преды-
дущего слоя, что приводит к существенному уменьшению
эквивалентного воздушного зазора магнитопровода транс-
форматора. По этой причине намагничивающий ток 11р
трансформатора и ток холостого хода трансформатора, рав-
ный
невелики. Ток холостого хода составляет всего 5-10% номи-
нального значения /1н.
Необходимо отметить, что ток 11а значительно меньше
1]р. Поэтому при анализе работы и в расчетных формулах
часто принимают « Цр .
5.1.6. Опыт короткого замыкания трансформатора
Схема опыта короткого замыкания трансформатора изо-
бражена на рис. 5.5,а. В схеме вторичная обмотка замкнута
накоротко. В опыте измеряются напряжение сети (вольтметр
PVi), токи первичной и вторичной обмоток (амперметры РАХ
305
и РА2), активная мощность, потребляемая трансформатором
из сети (ваттметр PW). Значение полного сопротивления
обмоток трансформатора zk составляет всего 5-15% сопро-
тивления нагрузки, и если бы вторичная обмотка оказалась
замкнутой накоротко при номинальном напряжении на пер-
вичной обмотке, то в обмотках трансформатора возник бы
опасный для обмоток ток, больший номинального примерно
в 10-20 раз.
Поэтому опыт короткого замыкания проводят следую-
щим образом. После сборки схемы опыта с помощью регуля-
тора напряжения устанавливают напряжение на первичной
обмотке такого значения, при котором ток в обмотках равен
их номинальным значениям. Напряжение при этом окажется
не более 5-15% номинального. Это напряжение называют
напряжением короткого замыкания и обозначают U[k . Затем
записывают показания приборов. На рис. 5.5,6 изображена
схема замещения трансформатора при опыте короткого за-
мыкания.
Опыт короткого замыкания проводят для выяснения со-
ответствия значений расчетных данных сопротивлений Rk и
хк трансформатора их действительным значениям, а также
когда их расчётные значения не известны.
Мощность, измеряемая ваттметром, равна мощности всех
потерь энергии в трансформаторе. Однако из-за малого зна-
чения напряжения на первичной обмотке потери мощности в
магнитопроводе которые пропорциональны квадрату
амплитуды индукции (3.29), (3.30), или квадрату напряжения
первичной обмотки трансформатора, намного меньше, чем
при номинальном напряжении, и значительно меньше элек-
трических потерь мощности в обмотках трансформатора при
номинальном токе.
Поэтому ими можно пренебречь (&Рм=0). Параметры
трансформатора (ДРЭИ, zK, Хк, RK) в режиме короткого замы-
кания определяются следующим образом.
1. Определим коэффициент относительного напряжения
трансформатора
306
б
Рис. 5.5. Принципиальная схема опыта короткого замыкания трансфор-
матора (о); упрощённая схема замещения (б)
При опыте короткого замыкания вторичная обмотка
трансформатора замкнута накоротко (zH = О, U2 = 0), следо-
вательно:
U2 0 _
к, = —- = — = о •
и, и,
2н 2н
2. Определим коэффициент загрузки трансформатора по
току Д,. Опыт короткого замыкания проводится при номи-
нальных значениях токов (Д = А„;/2 =/2я). Поэтому к пер-
вичной обмотке трансформатора подводят напряжение
5Н0% от U]H, следовательно:
А
Рк,
= 1.
307
3. Определим электрические номинальные потери АРЭН
(см. пп.1 и 2):
Pw =Р=Р,+ЛР = ЬР= В2&р +у\:,ЬР = &Р„-
Wkk 1 2 г'кз*-^ эн / мн эн
По этой причине можно считать, что электрические поте-
ри определяются с помощью ваттметра PW (рис, 5.5,а).
1. Определим параметры схемы замещения трансформа-
тора zk,xk,Rk. Так как номинальный ток: 1Хн=—то
Zk
UK3 Z
zk = (определяется с помощью показании вольтметра
Aw
PKj и амперметра 7Ц).
Мощность, потребляемая от сети:
^Wkk ~ ~ Цн^к ’
откуда Rk = —~ (определяется с помощью ваттметра PW и
амперметра PAt).
Индуктивное сопротивление короткого замыкания
трансформатора
*к
'к
В трансформаторах малой мощности (10-500 ВА) Rk»Xk,
средней (0,5-10 кВА) - Rk<Xk, большой (более 10 кВА) -
5.1.7. Рабочий режим трансформатора
В рабочем режиме первичная обмотка трансформатора
присоединена к сети, а к вторичной обмотке присоединены
электроприемники с результирующим сопротивлением ZH.
Зависимость напряжения на вторичной обмотке транс-
форматора от тока нагрузки U2 = /(/2) или U2 = f([P) при
Ц = const и cos <р2 = const называется внешней характери-
308
стикой, соответствующей рабочему режиму трансформато-
ра.
Значение напряжения на вторичной обмотке определяет-
ся не падением напряжения, а потерей напряжения в обмот-
ках. Потеря напряжения есть арифметическая разность ме-
жду первичным и приведённым вторичным напряжением:
ДС/'=Ц-£/'.
При отсутствии нагрузки (/2 = 0) приведённое напряже-
ние на вторичной обмотке U2 = U1^ = Ц, а поскольку напря-
жение Ц не зависит от нагрузки, то ДС/2 есть изменение на-
пряжения U2 по сравнению с его значением при холостом
ходе U'a, или
Д^=^-С/';
^U2=U„-U2,
откуда
и2 = и„-ьи2.
Для вывода этой зависимости проведём ряд математиче-
ских преобразований. Запишем второй закон Кирхгофа для
вторичной обмотки обычного трансформатора с параметрами
Я2,х2>*„:
E2 = bU2+U2,
откуда
U2 = E2-bU2. (5.8)
Проведём замену £2 и Д[/2 с учётом упрощенной схемы
замещения (рис. 5.2,в).
309
Из уравнения (5.1) следует, что U'2=nU2 или
&U2 = n&U2,
ктт
откуда Дс/2 = -—-.
п
Приведённая величина ДС/2 для вторичной обмотки
трансформатора из схемы замещения, (рис. 5.2,в):
Д U2 = lxRk cos (р2 + jlxxk sin <р2 = lxZ.k,
al эс
где /, = /31Хи; cos^2 = —; sin (р2 = —.
z z
н и
Подставим в уравнение (5.8) значения Е2 и ДС72, полу-
чим:
и2 = — - - (АЛ cos <Pi + 7Алsin ) •
п п
(5-9)
В данном уравнении холостому ходу трансформатора со-
ответствует первое слагаемое, т.е. = —.
п
На рис. 5.6,а изображены внешние характеристики
трансформатора при различных значениях коэффициента
мощности потребителей. Изменение напряжения U2 во мно-
гом зависит, как это видно из выражения (5.9), не только от
значения cos<p2, но и от соотношения значений Rk и хк.
Изображенные внешние характеристики (рис. 5.6,а) спра-
ведливы для трансформаторов средней и большой мощности,
у которых zk мало и xpRk- У трансформаторов малой мощ-
ности zk относительно велико и Rk>Xk. Поэтому изменение
напряжения у них более значительное и взаимное располо-
жение внешних характеристик при различных значениях ко-
эффициента мощности потребителей существенно отличает-
ся от трансформаторов большой мощности. Примерные
внешние характеристики трансформаторов малой мощности
при различных значениях cos^2 изображены на рис. 5.6,5.
310
Внешние характеристики трансформатора при различных
нагрузках приведены на рис. 5.6,в:
1 - при активной нагрузке RH * 0,хн = 0 (<рг>0);
2 - при активно-индуктивной нагрузке RH ф 0, х1Ф 0;
3 - при активно-ёмкостной нагрузке RH * 0,хс 0 (<рг<0);.
В большинстве случаев потребителей нагрузка транс-
форматора является активной или активно-индуктивной, по-
этому из рис. 5.6 следует, что с увеличением нагрузки на-
пряжение на нагрузке и на зажимах потребителей уменьша-
ется.
Рис. 5.6. Внешние характе-
ристики трансформаторов
средней и большой мощно-
сти (а); внешние характери-
стики трансформатора ма-
лой мощности (б); внешние
характеристики
=/(/?) W
311
5.1.8. Трёхфазные трансформаторы
Создание трёхфазных трансформаторов относится к пе-
риоду 1889-1891 гг. Первые промышленные образцы транс-
форматоров созданы выдающимся русским электротехником
М.О. Доливо-Добровольским.
Трёхфазный трансформатор состоит из трёх однофазных,
магнитопроводы которых объединены в один общий трёх-
стержневой (рис. 5.7,6). Действительно, если три однофазных
двухобмоточных трансформатора расположить, как изобра-
жено на рис. 5.7,а, их первичные обмотки соединить звездой
(рис. 5.7,6) и подключить к трёхфазной сети, возникнут токи
холостого хода. Токи будут иметь одинаковое значение, но
будут сдвинуты относительно друг друга на 120° (рис. 5.7,в).
Магнитные потоки, создаваемые токами, также будут сдви-
нуты на 120°. Сумма магнитных потоков, так же как и токов,
будет равна нулю. Если объединить три стержня АВС одно-
фазных трансформаторов в один, то в этом стержне магнит-
ного потока не будет и надобность в нем отпадет. В резуль-
тате образуется трёхфазный трансформатор (рис. 5.7,г). Од-
нако изготовление такого трансформатора технически и тех-
Рис. 5.7. К пояснению образования трёхфазного трансформатора
312
нологически затруднено. Гораздо удобнее расположить
стержни магнитопровода в одной плоскости, как изображено
на рис. 5.7Д В этом случае по существу ничего не изменит-
ся. Однако при этом немного уменьшится длина магнито-
провода для среднего стержня В. Это несколько нарушит
симметрию магнитопровода трансформатора и приведёт к
тому, что намагничивающий ток (ток холостого хода) обмот-
ки среднего стержня В будет несколько меньше, чем ток об-
моток стержней А и С. Однако такая асимметрия не имеет
практического значения.
Таким образом, современный трёхфазный двухобмоточ-
ный трансформатор (рис. 5.7,д) имеет один трёхстержневой
магнитопровод с двумя обмотками на каждом из стержней.
Каждая фаза трёхстержневого трансформатора представляет
собой по существу однофазный трансформатор. Поэтому
анализ работы и расчёт трёхфазных трансформаторов при
равномерной нагрузке каждой фазы аналогичны однофазным
и схема замещения изображается для одной фазы.
Начала и концы первичных обмоток обознаются больши-
ми буквами - соответственно АХ, BY, CZ, вторичных обмоток
- малыми буквами ах, by, cz. Фазы вторичных и первичных
обмоток могут быть соединены звездой или треугольником.
Номинальными параметрами трансформатора являются
номинальные значения мощности SH, напряжений UiH,U2H,
токов - /1я, 12н, частоты fH и, определяемые опытным путем,
параметры трансформатора в режимах холостого хода и ко-
роткого замыкания. Используя эти параметры можно опре-
делить все эксплуатационные характеристики трансформато-
ра: диапазон колебания напряжения на приёмнике при изме-
нениях тока в нём; наибольший возможный ток при корот-
ком замыкании; потери энергии в трансформаторе; распреде-
ление мощностей между параллельно работающими транс-
форматорами и др.
Параметрами трансформатора в режиме холостого хода
(сокращённо - параметрами XX) являются относительное
значение тока 71JC в процентах от 7]н и мощность потерь в
магнитопроводе Рх, измеренные при (71н. Параметрами
трансформатора в режиме короткого замыкания (сокращённо
- параметрами КЗ) является напряжение ик в процентах от
313
UlH и мощность потерь в обмотках трансформатора Рк н при
С •
Для преобразования электрической энергии высокого на-
пряжения 35, ПО, 220 кВ на территории промышленных
предприятий или рядом с ними устанавливаются трансфор-
маторы, понижающие напряжение до 10 (6) кВ. Электриче-
ские сети предприятия распределяют электроэнергию по це-
хам предприятия с этим напряжением.
В цехах предприятия, в свою очередь, с помощью цехо-
вых трансформаторов напряжение понижается до 220, 380,
500, 660 В, при котором работают большинство потребите-
лей.
С целью сокращения длины проводов низковольтных се-
тей, (а они имеют значительное сечение), и бесперебойного
снабжения электроэнергией приемников целесообразно ус-
танавливать не один трансформатор на один цех или про-
мышленное предприятие, а несколько и включать их парал-
лельно. При аварийном выходе из строя или профилактиче-
ском ремонте одного из них остальные обеспечат приёмники
электроэнергией. С той же целью бесперебойного снабжения
промышленных предприятий на электрических станциях ус-
танавливаются несколько трансформаторов, включенных па-
раллельно.
5.2. Асинхронные машины
Асинхронная машина - это бесколлекторная машина пе-
ременного тока, у которой в установившемся режиме маг-
нитное поле статора, участвующее в основном процессе пре-
образования энергии, и ротор вращаются с разными скоро-
стями.
Наибольшее распространение из всех электрических дви-
гателей получили асинхронные двигатели. Преимущества
асинхронного двигателя состоят в простоте устройства, изго-
товления и эксплуатации, а также в большой надежности и
сравнительно низкой стоимости. Широкое применение нахо-
дит трехфазный асинхронный двигатель, изобретенный в
конце XIX века М.О. Доливо-Добровольским. Используют
также однофазный асинхронный двигатель. Трехфазные дви-
гатели применяют во всех отраслях народного хозяйства, од-
314
нофазные - в основном в схемах автоматики, для привода
электроинструмента, бытовых машин и т.п.
Промышленность выпускает асинхронные двигатели на
рабочее напряжение от 127 В до 10 кВ, мощностью от долей
ватта до нескольких тысяч киловатт. Однофазные асинхрон-
ные двигатели имеют мощность, как правило, не превы-
шающую 1 кВт. Двигатели максимальной мощности изго-
тавливаются на напряжение 6-10 кВ.
Асинхронные машины могут работать в режиме генера-
тора. Но асинхронные генераторы как источники электриче-
ской энергии применяются мало, так как они не имеют соб-
ственного источника возбуждения магнитного потока и мо-
гут работать только параллельно с другими (синхронными)
генераторами, имеющими лучшие показатели.
5.2.1. Устройство асинхронного двигателя трехфазного
тока
Асинхронный двигатель (АД) состоит из статора - непод-
вижной части и ротора - вращающейся части.
Статор представляет собой полый цилиндр (рис. 5.8,а), из
стальных пластин, имеющих вид кольца и изолированных
друг от друга.
Они образуют неподвижную часть магнитопровода. Пла-
стины стягивают болтами. Выполнение магнитопровода из
отдельных пластин уменьшает потери мощности в стали, вы-
зываемые вихревыми токами. Стальной сердечник магнито-
провода статора закрепляется в стальном или алюминиевом
корпусе, охватывающем его со всех сторон. С боков сердеч-
ник магнитопровода закрывается крышками, в которых име-
ются места для подшипников.
Рис. 5.8. Детали маг-
нитопровода статора
асинхронного двига-
теля: а - магнитопро-
вод в собранном виде;
б - стальная пластина
315
При штамповке стальных пластин (рис. 5.8,6) на внут-
ренней их стороне делают выступы различной формы. В ре-
зультате при сборке на внутренней поверхности цилиндра
статора получаются пазы, направленные вдоль образующей
цилиндра. В пазы закладывают обмотку статора, которая у
трехфазного асинхронного двигателя состоит из трёх фазных
обмоток, смещённых по окружности цилиндра друг относи-
тельно друга на 120°. Начала и концы фазных обмоток выво-
дят наружу, они могут быть присоединены к зажимам специ-
ального щитка.
На щитке двигателя выводы обмоток располагают так,
как показано на рис. 5.9. Это позволяет легко и удобно с по-
мощью коротких плоских пластин соединять обмотки стато-
ра звездой (рис. 5.9,а) или треугольником (рис. 5.9,6).
На паспортной пластинке, укреплённой на корпусе двигате-
ля, указывают два номинальных линейных напряжения, раз-
личающихся в -Уз раза. Если номинальное линейное напря-
жение источника питания равно наибольшему напряжению,
указанному в паспорте двигателя, то обмотку его статора со-
единяют звездой, в противном случае - треугольником. При
этом на зажимах фазной обмотки в этих случаях будет одно
и то же значение фазного напряжения. В некоторых случаях
обмотки соединены внутри двигателя и снаружи имеется
только три вывода.
Насаженные на вал, они образуют ротор, имеющий фор-
му цилиндра. По окружности диска выштамповывают отвер-
стия, образующие пазы ротора, в которые закладывают об-
мотку.
Un
а 6
Рис. 5.9. Расположение выводов обмоток статора на щитке двигателя:
а - соединение звездой; б - соединение треугольником
316
Рис. 5.10. Стальные диски, из которых набирается магнитопровод ротора:
1 - пазы; 2 - отверстия для вентиляции; 3 - отверстие для вала и шпонки
Рис. 5.11. Короткозамкнутая обмотка ротора («беличье колесо»): 1 -
стержни; 2 - короткозамыкающие кольца
Ротор асинхронного двигателя также набирают из сталь-
ных штампованных листов в форме диска (рис. 5.10).
Форма пазов может быть различной. Двигатели большей
мощности имеют ротор с вентиляционными отверстиями для
охлаждения.
По конструктивному исполнению обмотки ротора асин-
хронные двигатели подразделяют на двигатели с коротко-
замкнутым ротором и двигатели с фазным ротором. Корот-
козамкнутая обмотка образуется медными или латунными
неизолированными стержнями, помещаемыми в пазы ротора.
Поперечное сечение этих стержней имеет форму паза. По
торцам стержни соединяют медными короткозамыкающими
кольцами. Получается обмотка, не имеющая никаких выво-
дов (рис. 5.11).
У машин малой мощности (до 100 кВт) пазы ротора зали-
вают расплавленным алюминием. При этом сразу отливают-
ся стержни обмотки, короткозамыкающие кольца и вентиля-
ционные лопатки.
Обмотку фазного ротора выполняют из изолированных
проводников. В пазы ротора, аналогичные пазам статора, ук-
ладывают три фазные обмотки, сдвинутых относительно
друг друга в пространстве на 120°. Таким образом, обмотка
ротора получается такой же, как и обмотка статора. Фазные
обмотки ротора соединяют звездой, при этом их начала со-
единяют с контактными кольцами (1), насаженными на вал
(2) и изолированными как от вала, так и друг от друга.
317
1
Рис. 5.12. Фазный ротор
(с контактными кольцами)
Контактные кольца вращаются вместе с валом. По ним
скользят неподвижные щетки, которые могут быть замкнуты
накоротко или присоединены к реостатам Кд , соединенным
звездой (рис. 5.12).
5.2.2. Принцип действия асинхронного электродвигателя
Если подключить трёхфазную обмотку статора асин-
хронного электродвигателя к трёхфазной системе напряже-
ний (рис. 5.13), то в каждой фазе обмотки возникнут пере-
менные магнитные потоки Ф,,Ф2,Ф3, которые так же, как и
фазные напряжения будут изменяться по синусоидальному
закону и смещены во времени относительно друг друга на
угол 120°. Вследствие того, что магнитные потоки фаз сме-
щены друг друга относительно друга и в пространстве на
угол 120°, то результирующий магнитный поток статора
электродвигателя Ф ре1 окажется вращающимся в пространст-
ве.
Действительно, магнитные потоки статора, создаваемые
переменными токами, пропорциональны соответствующим
фазным напряжениям \ФХ «иА',Ф2 ® UВ',ФЪ «Uc), поэтому
мгновенные значения магнитных потоков, создаваемых каж-
дой из фаз во времени, можно записать в следующем виде:
Ф, - Ф„ sin cot;
I т 5
Ф2 = Фт sin(<D/ -120°);
Ф3 = Фт sin(«rf +120°).
В комплексной форме выражения для магнитных потоков
фаз статора в пространстве (с учетом того, что магнитный
318
Рис. 5.13. Схема включения
трехфазной обмотки статора
асинхронного двигателя
поток фазы А совпадает с положительной вещественной
осью), можно записать в следующем виде:
Ф = Ф„ sin cotejO = Фт sin cot;
-^-4 т т >
Ф2=Фт sin (cot - 120°)е“,12° =
= Фт sin (cot -120°)(-1/2 - j Л/2); (5.10)
Ф3 =Фт sin (<rf +120° )еу120° =
= Фт sin +120°) - - + j-J3/2 .
<2 )
Результирующий магнитный поток статора:
Фрез = Ф1+Ф2+Ф3 = -фЛС0^1 - J sincot)j = — Фшехр/ --со/
2 2 \^2
Из этого выражения следует, что результирующий маг-
нитный поток статора электродвигателя в пространстве явля-
ется вращающимся, поскольку при:
3
ш/ = 0 результирующий поток Фрез = j—Фт;
л - 3 _
“^ = - - Фрез = ~фт>-
= Л - Фрез=-^Фт’-
3^
- Фрез=--Фт-
319
+Ле
0pe3(wt=7r/2)
Рис. 5.14. Изменение результирую-
щего магнитного потока во времени
на комплексной плоскости
<Z>p„(wt=7T)
0p„(Wt=O)
. Из полученных выражений
-Ле ре1Ш 3/2видно, что с изменением вре-
мени вектор результирующего
магнитного потока статора (рис. 5.14) будет вращаться на
комплексной плоскости.
Частота вращения (скорость вращения) магнитного пото-
ка статора в пространстве пх(об/мин) определяется выраже-
нием:
где yj - частота питающего напряжения, Гц; р - число пар полюсов
обмотки статора.
Из полученного выражения видно, что при = 50 Гц :
пх = 3000 об/мин, при р = 1;
пх = 1500 об/мин, при р = 2.
Вращающийся магнитный поток статора пересекает об-
мотки статора и ротора и наводит в них ЭДС, при этом в об-
мотках статора и ротора протекают токи 1Х и 12.
В процессе работы двигателя токи в обмотках статора и
ротора создают в машине две магнитодвижущие силы: ста-
тора и ротора. Совместным действием этих МДС в двигателе
создается результирующий магнитный поток, вращающийся
относительно статора с синхронной частотой вращения пх.
Магнитный поток можно рассматривать состоящим из ос-
новного потока Ф, сцепленного как с обмоткой статора, так и
с обмоткой ротора, и двух потоков рассеяния: обмотки ста-
тора ФаХ, который замыкается только по магнитопроводу
статора и воздуху, и обмотки ротора Фа2, который замыкает-
ся только по магнитопроводу ротора и воздуху.
320
Основной магнитный поток Ф, вращающийся с частотой
/j, наводит в неподвижной обмотке статора ЭДС Е,, вели-
чина которой определяется уравнением:
E}=Wf<^, (5.11)
где w, - число витков в обмотке статора; Коб1 - обмоточный коэффи-
циент обмотки статора.
Магнитный поток рассеяния Фа1 наводит в обмотке ста-
тора ЭДС рассеяния, величина которой определяется индук-
тивным падением напряжения в обмотке статора:
—ai ~ >
(5-12)
где X] - индуктивное сопротивление рассеяния одной фазы обмотки ста-
тора.
Кроме того, в обмотке статора имеет место падение на-
пряжения в активном сопротивлении
UR=J&, (5.13)
где R} - активное сопротивление одной фазы обмотки статора.
Таким образом, напряжение сети Ux, подведенное к об-
мотке статора, уравновешивается суммой ЭДС и падением
напряжения в Rx:
U^-^+jx^+I^. (5.14)
В процессе работы двигателя под действием момента
двигателя ротор вращается в сторону вращения магнитного
поля статора с частотой п2. Поэтому частота вращения поля
статора относительно ротора равна разности частот пх - п2.
Основной магнитный поток Ф, обгоняя ротор со скоростью
и, - п2, индуцирует в обмотке ротора ЭДС E2s, которая про-
321
порциональна частоте вращения /2 магнитного поля АД от-
носительно ротора:
E2s = 4,44/2Ф^2коб2,
(5-15)
где f2 - частота ЭДС ротора; и»2 - число последовательно соединенных
витков одной фазы обмотки ротора; коб2 — обмоточный коэффициент
обмотки ротора.
h~n2)p
(5.16)
«! ~П2
где 5 =------- скольжение двигателя.
«I
Подставив (5.16) в (5.15) получим
= 4,44/50 w2Zro62 = E2s ,
где Е2 - ЭДС, наведённая в обмотке ротора при скольжении 5 = 1, т.е.
при неподвижном роторе.
Поток рассеяния ротора Фа2 индуцирует в обмотке рото-
ра ЭДС рассеяния, величина которой определяется индук-
тивным падением напряжения в этой обмотке:
— JX2-2S ’
(5-18)
где х2 - индуктивное сопротивление рассеяния обмотки при неподвиж-
ном роторе (s=l).
В процессе работы АД с короткозамкнутым ротором его
обмотка замкнута накоротко, поэтому сумма ЭДС цепи рото-
ра равна нулю.
E2s - jxj^s -/2Л2 = 0,
(5-19)
где R2 - активное сопротивление цепи ротора.
322
Разделив все члены уравнения (5.19) на s, получим урав-
нение для ЭДС обмотки ротора
E2=jx2I2+^. (5.20)
Из уравнений (5.11) и (5.14) следует, что при = 0 и
%! = 0 основной магнитный поток машины Ф, создаваемый
результирующей МДС Fo машины, будет пропорционален
напряжению сети Ц и поэтому практически постоянен во
всех режимах её работы. Поэтому и результирующая МДС
Fq, равная сумме МДС ротора F{ и статора F2 (Fo= Ft + F2)
будет также постоянной.
Уравнению МДС соответствует уравнение токов
Л =!>+_<> (5-21)
где /0 - ток намагничивания двигателя; - ток статора; 12 - ток ротора
приведенный к обмотке статора (коэффициент приведения, как для
трансформатора определяется отношением числа витков обмоток).
Из (5.21) следует, что ток статора состоит из двух состав-
ляющих
7, =/0 + (-!'). (5.22)
Нагрузка на валу двигателя влияет на величину скольже-
ния s, которое определяет ЭДС E2s = E2s и ток ротора 12.
Последний в соответствии с (5.22) вызывает изменение тока
статора .
В режиме холостого хода, когда нагрузка на валу мала
или отсутствует: (5 = 0 и 12 = 0), ток в обмотке статора
/, ~_(0 равен току намагничивания. Если же ротор стопорить,
не отключая обмотки статора от сети (режим короткого за-
мыкания), то скольжение 5 = 1 и ЭДС обмотки ротора E2s
достигнет своего наибольшего значения Е2. Также наи-
большего значения достигнет ток 12, а следовательно, и ток в
обмотке статора /,.
323
5.2.3. Схема замещения асинхронного электродвигателя
Уравнениям ЭДС и токов (5.14), (5.20), (5.22) двигателя
соответствует электрическая схема замещения асинхронного
двигателя (рис. 5.15,а).
В схеме (рис. 5.15) асинхронная машина с электромаг-
нитной связью статорной и роторной цепей заменена эквива-
лентной электрической схемой. При этом, как и для транс-
форматора, параметры обмотки ротора R2 и х2 приводятся к
обмотке статора при условии равенства Е}= Е2. E2,R2,x2 -
приведенные параметры ротора. Коэффициенты приведения
определяются соотношением витков обмоток ротора и стато-
ра. Активное сопротивление RH = /?2(1 -s)/s рассматривает-
ся как внешнее сопротивление, включенное в обмотку не-
подвижного ротора, т.е. машина имеет активную нагрузку.
Рис. 5.15. Схема замещения асинхронного двигателя: а - Т-образная;
б - Г-образная
324
Величина этого сопротивления определяется скольжени-
ем, а следовательно механической нагрузкой на валу двига-
теля. Если нагрузочный момент на валу двигателя Мс = 0, то
скольжение 5 « 0; при этом величина R2(\-s)ls = оо, что
соответствует работе двигателя в режиме холостого хода.
Если же нагрузочный момент на валу двигателя превышает
его вращающийся момент, то ротор останавливается (5 = 1).
При этом величина Я2(1 - s)/s = 0, что соответствует ре-
жиму короткого замыкания.
Схема рис. 5.15,а называется Т-образной схемой замеще-
ния АД. Она может быть преобразована в более простой вид.
С этой целью намагничивающий контур Zo = + jx0 (R0,x0
- активное и индуктивное сопротивления цепи намагничива-
ния) выносят на общие зажимы. Чтобы при этом намагничи-
вающий ток /0 не изменял своей величины, в этот контур
последовательно включают сопротивления R{ и х] (рис.
5.15,6). В полученной Г-образной схеме замещения сопро-
тивления контуров статора и ротора соединены последова-
тельно. Они образуют рабочий контур, параллельно которо-
му включен намагничивающий контур. Такой переход к Г-
образной схеме замещения АД приводит к некоторым по-
грешностям при расчетах, но они существенно облегчаются
и упрощается анализ электромагнитных процессов асин-
хронных двигателей.
Величина тока в рабочем контуре схемы замещения (рис.
5.15,6)
//=______________Ц
л/[7?1 + /?2/ + ^(1-5)/5]2 + (х1+х;)2 ’
Л2 п/ п/1~5
или, используя соотношение — = R2 + R2--, получим
5 5
л/(л1+л;/5)2+(х1+х;)2,
где U] - фазное напряжение сети (обмотки статора).
325
5.2.4. Механические характеристики асинхронных
электродвигателей
Преобразование энергии из электрической в механиче-
скую в АД связано с потерями энергии. Эти потери делят на
механические, магнитные и электрические.
Из сети в обмотку статора поступает электрическая энер-
гия с мощностью Д . Часть этой энергии расходуется на по-
крытие магнитных потерь в сердечнике статора мощностью
APW1, а также - электрических потерь в обмотке статора,
обусловленных нагревом обмотки, мощностью
AP31=VX (5.24)
где тх - число фаз статора; Rt - активное сопротивление фазы статора;
- тока в фазе статора.
Оставшаяся часть мощности магнитным потоком переда-
ется на ротор и поэтому называют ее электромагнитной
мощностью:
(5-25)
Часть электромагнитной мощности затрачивается на по-
крытие электрических потерь в обмотке ротора:
АД2 = m2I22R2 = m^R^, (5.26)
где т2 - число фаз ротора, равное тх.
Остальная часть электромагнитной мощности преобразу-
ется в механическую мощность двигателя, называемую пол-
ной механической мощностью
Р’=Рэм-ЛРэ2. (5.27)
Полную механическую мощность можно записать как
(1— -О
мощность, выделяющуюся в сопротивлении RH - R2 -------
5
(рис. 5.15,6).
326
5 S'
Это выражение подставим в (5.27), получим:
др _ р _ др
Гэм ^з2 •
s
Отсюда
ДРэ2=Рэ^, (5.28)
т.е. мощность электрических потерь в роторе пропорцио-
нальна скольжению. Поэтому работа асинхронного двигателя
более экономична при малых скольжениях.
Электромагнитный момент асинхронного двигателя соз-
дается взаимодействием тока в обмотке ротора с вращаю-
щимся магнитным полем. Электромагнитный момент М оп-
ределяется через электромагнитную мощность:
Р
(5.29)
где 6Ц - угловая частота вращения магнитного поля статора.
Подставив в (5.29) значение электромагнитной мощности
из (5.28) получим:
G\S O\S
(5.30)
т.е. электромагнитный момент асинхронного двигателя про-
порционален мощности электрических потерь в обмотке ро-
тора.
Подставляя в (5.30) значение тока 12 из (5.23) получим
электромагнитный момент - (Нм):
mxUxR2/s____________
2(У|[(7?[ + R2 / s)2 + (Х[ + Xj)2]
(5-31)
Приняв в уравнении (5.31) число фаз двигателя
тх = 3; х, + х2 = хк (индуктивное сопротивление упрощенной
327
схемы замещения по аналогии с трансформатором, см.
5.1.З.), исследуем его на экстремум. Для этого приравниваем
производную dM I ds к нулю и получаем две экстремальные
точки. В этих точках момент Мк и скольжение sK называ-
ются критическими и соответственно равны:
5
(5.32)
подставив sK в уравнение (5.31) получим:
зи?
(5-33)
Мк ~--------- / ' ' -' .
2бц(Л1±7/г12+хк)
где знак «+» относится к области скольжений 5 > 0, а знак «-» к облас-
ти s<0.
Если разделить уравнение (5.31) на (5.33) и выполнить
преобразования, то получаем компактную и удобную форму
записи уравнения механической характеристики АД:
м = 2MK(\ + asK)
s s
— + — + 2asK
SK SK
(534)
тде а .
В ряде случаев для АД мощностью более 10 кВт можно
считать, что /?1 = 0. В этом случае уравнение механической
характеристики (5.34), и уравнения (5.32), (5.33) упрощаются
соответственно принимают вид:
М =-----,
--+ -*-
sk s
3U*
Мк =----
2а>}хк
(5.35)
328
Механические характеристики асинхронного двигателя в
виде зависимостей M(s) и п2(М) представлены на
рис.5.1 био-
механические характеристики двигателя имеют следую-
щие характерные точки.
Точка 1 соответствует режиму идеального холостого хода
двигателя. В этой точке
5 = 0; со = бУ,; М = 0.
Точка 2 соответствует режиму короткого замыкания АД,
или начальному этапу пуска двигателя. В этой точке
5 = 1;бУ = 0;М = Ма=Мпуск
где Мкз - момент короткого замыкания и пусковой момент.
Рис. 5.16. Зависимость момента на валу АД от скольжения S (а) и скоро-
сти вращения п2 от момента на валу (б)
329
Точка 3 расположена на участке от точки 1 до точки 2 и
соответствует режиму работы двигателя с критическим
скольжением sK. В этой точке
5 = sK; М = Мк,
где Мк и sK - критический момент и скольжение двигателя соответст-
венно.
Точка 4 соответствует номинальному режиму работы
двигателя, когда он работает с номинальным моментом Мн и
П\ ~Пи
номинальным скольжением sH = —-------.
«1
5.2.5. Расчет мощности приводных нерегулируемых асин-
хронных двигателей ряда механизмов
Основные формулы расчета параметров асинхронных
двигателей имеют вид.
Активная мощность, потребляемая от сети, В/и:
pi = V3t7,7„ cos ,
где UД,1п - линейное напряжение (В) и линейный ток (Л) АД, cos(р -
коэффициент мощности АД.
Мощность на валу двигателя, Вти:
2 9,554
где М - приведенный к валу АД момент сопротивления исполнительно-
го органа механизма, Нм ; п2 - частота вращения вала АД, об / мин.
р
КПД асинхронного двигателя: г) = —.
Pi
Привод большинства технологического оборудования
осуществляется с помощью асинхронных двигателей. По-
330
этому важно уметь рассчитывать мощность электродвигате-
ля.
Мощность электродвигателя насоса (например, для по-
дачи флегмы в ректификационную колонну), кВт:
Р{=к3Р2 =
Ю00?7)Лл
где Q - производительность насоса, м3/с; Н - высота подачи флегмы,
м; Н = 7?! + h2 + h3; ( \ - высота всасывания; h2 - высота нагнетания;
h3 - потери); 7/и - КПД насоса (= 0,5 4- 0,8 - для центробежных на-
сосов, насосов высокого давления и т/н=0,3^-0,6 - для насосов низкого
давления); р „ - КПД передачи от электродвигателя к насосу, равный
77=0,9-^0,95 (77„=1 при непосредственном соединении насоса с двигате-
лем); р - плотность перекачиваемой жидкости, кг/м3; g - ускорение сво-
бодного падения, равное 9,81 м/с2; к3 - коэффициент запаса, равный
1,М,2).
В зависимости от расчетной величины Р\ по каталогу вы-
бирают электродвигатель с номинальной мощностью (равной
или ближайшей большей).
Мощность электродвигателя компрессора, кВт:
Л =
k3QA
ЮОО7Д77л ’
где А - работа сжатия 1 м3 воздуха; рк - КПД компрессора; Г)п - КПД
передачи; Л/=1,1-1,3.
Работа сжатия зависит от заданного рабочего давления р
компрессора. Так при
р = 6,2МПа, работа А = 71,6Дж/м3;
р = 0,4МПа - А = 152,2Дж/м3;
р = 6,6МПа - А = 203Дж / м3;
р = ДдМПа - А = 273Дж / м3.
331
Вентиляторы и кондиционеры устанавливаются в быто-
вых, служебных и производственных помещениях, исполь-
зуются также для технологических нужд. В комплекте с раз-
личными нагревателями они применяются для обогрева и
сушки зданий.
Мощность электродвигателя вентилятора, кВт,
Р = £3Р2=-Л-^3
100077Лл
где pv - полное давление, в общем случае, приведенное к стандартному,
Па; Tje - КПД вентилятора; г/п - КПД передачи (7]п = 1 при насадке ра-
бочего колеса на вал электродвигателя; 0,98 - при соединении валов вен-
тилятора и электродвигателя при помощи муфты; 0,95 - при клиноре-
мённой передаче и 0,9 - при передаче с помощью плоских ремней).
При выборе электродвигателя учитывают коэффициент
запаса к3 (табл.5.1).
Мощность электродвигателя (кВт), для привода лен-
точного конвейера определяется по формуле:
Р = k3Р2 = -kiQ (CL + Я),
1 3 2 1000/7m
где к3 - коэффициент запаса (к3 = 1,1-1,25); С - опытный коэффициент,
зависящий от производительности конвейера и его длины (табл. 5.2); Г)т
- коэффициент полезного действия механизма, Т)т =0,7-0,85; L - рас-
стояние транспортировки конвейера, длина, м; Н - высота подъема гру-
за, м.
Мощность электродвигателя (кВт), для скребковых и
винтовых конвейеров (шнеков) определяется по формуле:
P-k3P.= (kcL + Н),
1 3 2 1000т/т v с 7
где кс - коэффициент сопротивления материала для малоабразивного
материала (кусковой уголь, поваренная соль и т.п.), принимается для
скребковых конвейеров по табл. 5.3
332
Коэффициенты кс для шнеков (сыпучие материалы) -
принимают следующие значения: неабразивный (зерно и
т.д.) 1,85-2,0; малоабразивный - 2,5; абразивный (песок, гра-
вий, цемент и т.д.) - 3,2; сильноабразивный (зола, известь,
сера и т.д.) - 4,0; к3 = 1,2-1,4.
Таблица 5.1. Значения коэффициента запаса к3
р, кВт Тип вентилятора р, кВт Тип вентилятора
радиальный осевой радиальный осевой
2 01- <0,5 1,5 1,2 у} 1,15 1,05 0,51-1 1,3 1,15 >5 1,1 1,05 1,01-2 1,2 1,1 - -
Таблица 5.2. Определение коэффициента С для ленточных конвейе-
ров
Рас- стоя- ние, L,m Производительность, т/ч (Н/с)
10(28) 20(56) 50(140) 100(280) 200(560) 400(1120)
10 2 1,4 0,92 0,67 0,5 0,37
50 0,66 0,5 0,35 0,27 0,22 0,18
125 0,35 0,28 0,21 0,17 0,14 0,12
Таблица 5.3. Зависимость коэффициента кс
от производительности
скребкового конвейера
Производительность конвейера, т/ч (Н/с) Значение коэффициента кс
конвейера с ролико- выми цепями конвейера со сколь- зящими цепями
4,5(12) 2,25 4,2
9(24) 1,7 3,0
18(48) 1,3 2,25
27(72) 1,1 1,9
36(96) 1,05 1,7
45(120) 0,87 1,6
333
5.2.6. Способы регулирования частоты вращения (числа
оборотов в минуту) асинхронного электродвигателя
Для получения наибольшей производительности, соблю-
дения регламента технологии, снижения энергоемкости ис-
полнительный орган ряда производственных механизмов
должен вращаться или перемещаться поступательно с соот-
ветствующей оптимальной скоростью. В связи с этим возни-
кает необходимость принудительного регулирования скоро-
сти исполнительного органа. Как правило, регулирование
скорости осуществлялось с помощью механических коробок
скоростей, вариаторов и т.п.
Перечисленные способы имеют ряд существенных недос-
татков - это усложнение кинематики механизма, а также
ступенчатое регулирование. Поэтому в настоящее время ста-
ли широко использовать регулировочные свойства двигателя
- регулирование скорости механизма путем изменения час-
тоты вращения (числа оборотов в минуту) ротора асинхрон-
ного двигателя. Это привело к значительному упрощению
кинематики электропривода и управления, удешевлению ме-
ханизма, осуществлению плавного регулирования скорости.
Рассмотрим способы регулирования частоты вращения
ротора асинхронного двигателя с короткозамкнутым рото-
ром. Как известно, частота вращения ротора в нормальном
режиме работы несколько меньше (на 2-8%) частоты враще-
ния магнитного поля. Поэтому изменение частоты вращения
магнитного поля вызывает изменение в той же степени и
частоты вращения ротора двигателя.
Из выражения частоты вращения магнитного поля
вытекают два наиболее распространенных способа регулиро-
вания скорости вращения ротора двигателя: изменением чис-
ла пар полюсов р; изменением частоты напряжения ис-
точника fv
Регулирование изменением числа пар полюсов двигателя
осуществляется изменением схемы соединения обмотки ста-
тора с помощью переключателя асинхронного двигателя.
Схема включения двигателя путем изменения числа пар по-
334
люсов приведена на рис. 5.17,а. Электродвигатель Л/ под-
ключается к трехфазной сети АВС с помощью автомата
QF через коммутационное устройство SA. Обмотка каждой
фазы состоит из нескольких частей (секций), которые соеди-
няются между собой параллельно или последовательно. В
результате образуются разное число пар полюсов. На рис.
5.17,6 изображена обмотка одной фазы статора, имеющая две
части, которые соединены между собой параллельно, а на
рис. 5.17,в-последовательно.
Как следует из рис. 5.17,6 в магнитное поле обмотки ста-
тора АД имеет число пар полюсов р = 1, а на рис. 5.17,в -
р = 2 и разные синхронные скорости п ь
р=1; «1=3000 об/мин
р=2; «7=1500 об/мин
в
Рис. 5.17. Схема регулирования
скорости вращения асинхронного
двигателя с короткозамкнутым
ротором путем изменения числа
пар полюсов (а) и схема соедине-
ния одной фазы обмотки статора
двухскоростного двигателя при
двух (б) и четырех (в) полюсах
335
Переключение секций обмоток в схеме рис. 5.17 б,в осу-
ществляется с помощью переключателя SA. Переключений
обмотки ротора не требуется, так как ток обмотки ротора
всегда образует столько пар полюсов, сколько их создано
обмоткой статора. Рассмотренный (рис. 5.17) способ дает
возможность получить только две скорости, отличающиеся
по значению в 2 раза, что является его недостатком.
Отечественная промышленность выпускает двухскорост-
ные асинхронные двигатели со следующими частотами (ско-
ростями) вращения магнитных полей: 3000/1500; 1500/750;
1000/500 об/мин и др.
Трёхскоростные и четырёхскоростные двигатели имеют
две независимые обмотки статора, одна из которых образует
две скорости, а другая в трехскоростном двигателе - одну, в
четырехскоростном двигателе - две скорости.
Выпускаются двигатели со следующими частотами вра-
щения : трехскоростные - 1500/1000/750, 1000/750/500
об/мин; четырехскоростные - 3000/1500/1000/500,
1500/1000/750/500 об/мин.
На рис. 5.18 представлено семейство механических ха-
рактеристик четырёхскоростного асинхронного двигателя с
числами пар полюсов 1,2,3,4. В этом случае при номиналь-
ном моменте нагрузки (сопротивление на валу двигателя) Мн
исполнительный орган механизма может вращаться с часто-
тами Л1н, И2н, «зн, »4н, соответствующим точкам 1, 2, 3, 4 пере-
сечения прямой Мч с механическими характеристиками АД.
Многоскоростной асинхронный двигатель сложнее в из-
готовлении и стоит больше, чем односкоростной асинхрон-
ный двигатель.
Для регулирования скорости вращения ротора изменени-
ем частоты тока статора необходимо иметь отдельный
источник или преобразователь энергии с регулируемой час-
тотой.
Схема частотного регулирования скорости асинхронного
двигателя представлена на рис. 5.19. Схема включает транзи-
сторный преобразователь частоты UZ,включенный между
сетью с промышленной частотой и обмоткой статора асин-
хронного двигателя М.
336
п2, об/мин
Рис. 5.18. Семейство механических характеристик
Рис. 5.19. Структурная схема частотного регулирования скорости асин-
хронного двигателя с короткозамкнутым ротором
Назначение преобразователя частоты UZ преобразовать
напряжение трехфазной стандартной сети с частотой 50 Гц и
напряжением Ц = 220/380 в трехфазное напряжение с регу-
лируемой частотой fpe! и регулируемым уровнем напряже-
ния Uрег. Частота на входе преобразователя UZ изменяется с
помощью сигнала иу. Электродвигатель М приводит в дви-
жение исполнительный орган ИО механизма с переменной
частотой п2.
Частота fpei напряжения обмотки статора асинхронного
двигателя изменяется, и в соответствии с этим изменяется
60/рег
скорость вращения магнитного поля статора щ , а
Р
значит, и скорость вращения ротора п2 асинхронного корот-
козамкнутого двигателя М и исполнительного механизма
ИО. На рис. 5.20 изображены механические характеристики
асинхронного двигателя при частотном регулировании ско-
рости. При постоянном номинальном моменте Л/Ина валу
двигателя частота вращения ИО при частотах / /5 будет
337
определяться точками пересечения прямой Мн с механиче-
скими характеристиками АД (точки 1,2,3, 4, 5) и изменяться
от и, до п5. Для поддержания основного магнитного потока
двигателя с изменением частоты в такой же степени изменя-
ется и напряжение, а их отношение ихф/ f остается постоян-
ным.
Такой способ регулирования частоты ротора АД позволя-
ет получить постоянный критический момент двигателя
Мк = const, широкий диапазон и плавное регулирование час-
тоты вращения. Однако стоимость преобразователя частоты
достаточно высока. Тем не менее, данный способ регулиро-
вания находит все большее применение в промышленности.
Существуют также другие способы регулирования часто-
ты вращения короткозамкнутого двигателя, например, изме-
нением напряжения на обмотке статора с помощью тири-
сторного регулятора напряжения. Способ применяется в ос-
новном для плавного пуска асинхронных двигателей.
Регулирование частоты вращения ротора асинхронного
двигателя с фазным ротором в большинстве случаев осуще-
ствляется путем введения в цепь обмотки ротора дополни-
тельного сопротивления (рис. 5.12).
Как следует из зависимости (5.32) с введением К!Д крити-
ческое скольжение равно
Рис. 5.20. Механические
характеристики асин-
хронного двигателя при
частотном регулирова-
нии скорости
338
R^R'X
Г = — -
' 7^’
где Ry - приведенное добавочное сопротивление.
Как следует из этого уравнения, добавочное сопротивле-
ние в цепи обмотки ротора увеличивает критическое сколь-
жение sK и не влияет на значение максимального момента
Мк (5.33). Искусственные (реостатные) характеристики дви-
гателя рассчитывают с помощью уравнения (5.34) или (5.35).
На рис. 5.21 изображены естественная (а) и искусствен-
ные (б, в) механические характеристики асинхронного двига-
теля для различных значений добавочных сопротивлений в
цепи обмотки ротора. При этом /?дз > = 0, а со-
гласно (5.32) при Мн sy > s2 > (точки 1, 2, 3). Из кривых
следует, что при заданном номинальном моменте на валу Мн
номинальная скорость вращения ротора на каждой из меха-
нических характеристик будет разной («1Н,л2/<,пзи)> так как
определяется точками 1, 2, 3 пересечения прямой Ми с ме-
ханическими характеристиками а, б, в.
Рис. 5.21. Естественная (а) и искусственные (б, в) механические характе-
ристики асинхронного двигателя с контактными кольцами
339
К недостаткам реостатного способа регулирования часто-
ты вращения относятся: значительные потери энергии в ре-
гулировочном реостате; малая жесткость механических ха-
рактеристик, из-за чего небольшое изменение момента на ва-
лу вызывает значительное изменение частоты вращения;
дискретное регулирование частоты вращения. Рассмотрен-
ный способ используется в системах, где работа на искусст-
венных характеристиках непродолжительна (например, в ре-
жимах пуска и торможения), а основное время двигатель ра-
ботает на естественной характеристике.
5.2.6 Пуск асинхронных двигателей
Для пуска двигателя обмотку его статора подключают к
трехфазной сети с помощью автомата QF\ при включенном
автомате QF2 (рис. 5.22,а).
После включения автомата QFX происходит разгон двига-
теля до установившейся частоты вращения, при которой мо-
мент, развиваемый двигателем, равен моменту сил сопротив-
ления на его валу. Такой пуск называют прямым. В условиях
нормальной работы момент сопротивления (нагрузки) Мс на
валу двигателя может изменяться в довольно широких пре-
делах и, если момент окажется больше критического Мк,
двигатель остановится. Принято, что допустимые изменения
момента находятся в пределах от М = 0 до М = (0,8 -е- 0,9)ЛУк.,
при этом двигатель работает на участке механической харак-
теристики, где 5 < .
Длительная работа двигателя допустима при моментах на
его валу, не превышающих номинального значения Мн
(рис. 5.16).
К недостаткам прямого пуска относятся: относительно
малый пусковой момент: Мп = (1,2 4- 1,6)Л/И; большой пуско-
вой ток: 1п = (5 1)1 н.
Из-за первого недостатка иногда приходится выбирать
двигатель большей мощности, чем это требуется по услови-
ям работы при установившемся режиме, что экономически
нецелесообразно.
340
Большой ток в периоды пуска двигателя может вызвать
значительное падение напряжения в сети малой мощности,
что неблагоприятно скажется на работе других потребите-
лей, включенных в сеть, например, вызовет мигание освети-
тельных приборов, снижение момента на валу двигателей,
подключенных к сети.
Большой пусковой ток ограничивает допустимое число
пусков (включений) двигателя в час. При большом числе
включений даже мало загруженный в установившемся режи-
ме двигатель из-за больших пусковых токов может пере-
греться и выйти из строя.
В маломощных сетях со значительной протяженностью
кабельных линий для ограничения пускового тока применя-
ют пуск с активным или индуктивным сопротивлением,
включенным в цепь обмотки статора (рис. 5.22,а) или пуск с
переключением обмотки со звезды на треугольник
(рис. 5.22,6).
Перед пуском автомат QF2 (рис. 5.22,а) устанавливают в
выключенное положение, затем включают автомат QFI. По-
сле окончания разбега ротора двигателя включают автомат
QF2 , чем шунтируют добавочные пусковые резисторы Кд .
Соответствующим подбором сопротивления Кд можно ог-
раничить пусковой ток до любого необходимого значения.
Рис. 5.22. Схема пуска асинхронного двигателя с короткозамкнутой об-
моткой ротора: с добавочным сопротивлением в цепи обмотки статора
(а): с переключением фаз обмотки статора со звезды на треугольник (б).
341
Однако в этом случае одновременно уменьшаются пуско-
вой и критический моменты из-за снижения напряжения на
обмотках статора, вызванного падением напряжения на со-
противлении Яд .
Пуск двигателя с переключением обмоток статора двига-
теля со звезды на треугольник возможен, когда обмотка ста-
тора может быть соединена звездой и треугольником и на-
пряжение сети (ил) соответствует соединению обмотки ста-
тора треугольником. Например двигатель имеет номинальное
напряжение 380/220 В, (это означает, что двигатель рассчи-
тан для работы с напряжением на фазе обмотки статора
иф = 220В. Для включения двигателя в сеть с линейным на-
пряжением £/л= 380В его обмотки соединяются звездой, а
при линейном напряжении сети Ux = 220В - треугольником),
а линейное напряжение сети 220 В. Установив предвари-
тельно автомат QF2 (рис. 5.22,6) в положение 1 (на схеме он
установлен в положении 2), что соответствует соединению
обмотки статора звездой, автоматом QF1 включаем двига-
тель в сеть. После пуска автомат QF2 переводим в положе-
ние 2, благодаря чему обмотка статора оказывается соеди-
ненной треугольником. Напряжение на фазе обмотки статора
(гт UA К
во время пуска будет меньше номинального в
л/З раз (например, при напряжении сети 220 В оно составит
127 В). Вследствие этого ток фазы уменьшится в той же сте-
пени
/А = JK-
1ф 1 л
, а поскольку при соединении треуголь-
ником линейный
Ла=^=^-
ток больше фазного в -Уз раз,
пусковой линейный ток при таком спо-
собе пуска будет меньше по сравнению с прямым пуском
когда обмотки статора включены в треугольник - Д) в 3 раза
= з). Одновременно в 3 раза уменьшатся пусковой и
максимальный моменты, так как они пропорциональны
квадрату фазного напряжения (уравнение 5.33). Значение
342
критического скольжения не изменится, так как оно не зави-
сит от напряжения.
Ввиду значительного снижения пускового момента ука-
занный способ пуска возможен только при малых моментах
сил сопротивления на валу двигателя и для маломощных ис-
точников энергии.
В последнее время широкое распространение получили
схемы плавного пуска асинхронных двигателей с помощью
тиристорных регуляторов напряжения, включенных между
сетью и обмоткой статора двигателя (см. раздел 6.7). Изме-
няя управляющее напряжение иу тиристорного регулятора
можно регулировать фазное напряжение обмоток иф двига-
теля в пределах от 0 до ифиом. При плавном пуске двигателя
напряжение на обмотках статора плавно изменяется от на-
чального значения до номинального, например по экспонен-
те. При этом пусковой ток и момент двигателя изменяются
также плавно от начальных до номинальных значений. Регу-
лируя темп нарастания напряжения добиваются нужной
плавности пуска и требуемых ограничений тока и момента.
Пуск двигателя с фазным ротором (контактными кольца-
ми) (рис. 5.23) осуществляется подключением обмотки ста-
тора к сети с предварительно введенными в цепь ротора до-
бавочными резисторами Кд . По мере разгона двигателя ре-
зисторы Кд выводятся из цепи ротора.
Рис. 5.23. Схема включения асинхронного
двигателя с фазным ротором (контактными
кольцами)
343
Введение добавочного сопротивления в цепь ротора при
пуске асинхронного двигателя с контактными кольцами по-
зволяет увеличить пусковой момент вплоть до максимально-
го значения и одновременно значительно снизить пусковой
ток (рис. 5.21).
Это является одной из главных причин, почему в отдель-
ных механизмах вместо асинхронных двигателей с коротко-
замкнутым ротором применяются двигатели с фазным рото-
ром.
Наиболее распространенная схема дистанционного
управления асинхронным двигателем изображена на
рис. 5.24.
Защита силовых цепей и двигателя от коротких замыка-
ний осуществляется автоматом QF, а от перегрева, вызван-
ного перегрузками или другими причинами, - тепловым реле
КК . Включение и отключение двигателя производятся элек-
тромагнитным аппаратом - контактором КМ. Для пуска и
останова используются две кнопки: «Пуск» - SB1 и «Стоп» -
SB2.
Автоматический выключатель (автомат) QF служит для
подачи и снятия напряжения с установки и защиты установ-
ки от коротких замыканий. Рассмотрим устройство и прин-
цип действия аппаратов управления, использованных в дан-
ной схеме.
Рис. 5.24. Схема дистанционного управления асинхронным двигателем
344
Контактор - силовой электротехнический аппарат, по-
средством которого осуществляется включение и отключе-
ние силовых цепей: двигателей, электрических печей и дру-
гих устройств. Он включает катушку и контакты: замыкаю-
щие и размыкающие.
В некоторых случаях вместо контактора используются
автоматы или бесконтактные схемы включения на тиристо-
рах.
Однако прежде чем рассматривать работу схемы управ-
ления АД, необходимо обратить внимание на следующее.
Все элементы схемы имеют установленные ГОСТ условные
обозначения и их наименование, наиболее распространенные
из которых приведены в табл. 5.4. Всем элементам одного
итого же аппарата присваивают одинаковое буквенное обо-
значение.
Замыкающим контактом электромагнитного аппарата
называется такой контакт, который разомкнут при отсутст-
вии тока в его катушке, а в аппаратах, не имеющих катушек
(кнопочные станции, путевые выключатели и т.п.), - при от-
сутствии внешнего воздействия. Размыкающий контакт при
этих условиях замкнут.
Рассмотрим работу схемы рис. 5.24. При нажатии на
кнопку SBI катушка контактора КМ получает питание,
якорь контактора притягивается и в результате силовые кон-
такты контактора КМ замыкаются и подключают двигатель
к сети. Одновременно с этим замыкается блокировочный
контакт контактора КМ и шунтирует кнопку SB1, что по-
зволяет отпустить кнопку, не прерывая питания катушки
контактора. Для останова двигателя нужно нажать на кнопку
SB2.
При этом цепь катушки контактора размыкается, якорь
контактора отпадает, и его силовые контакты КМ размыка-
ются и отключают двигатель от сети.
В случае перегрузки двигателя срабатывает тепловое реле
КК , которое своими контактами размыкает катушки контак-
тора, что приводит к отключению двигателя.
Электромагнитные аппараты КМ,КК кнопки SB\,SB2 вхо-
дят, как правило, в одно устройство, называемое магнитным
пускателем.
345
Таблица 5.4. Графические условные обозначения элементов схемы
О Условные бозначения Наименование элементов схемы
а) б) а) б) а) ф 9 Резистор регулируемый (реостат) Предохранитель плавкий Контакты кнопки с самовозвратом: а) с замыкающим контактом б) с размыкающим контактом Контакты путевого выключателя: а) замыкающий б) размыкающий Контакты и вспомогательные контакты контактора, пускате- ля, реле:
б) а) замыкающий б) размыкающий
а) б) а) Обмотка контактора или реле: Замыкающие контакты реле времени с выдержкой: а) при размыкании 6) при замыкании Размыкающие контакты реле времени с выдержкой: а) при размыкании
б) б) при замыкании Обмотка теплового реле Размыкающий контакт теплового реле
346
5.2.7. Тормозные режимы работы асинхронных
двигателей
Работа многих производственных механизмов состоит из
трех этапов: пуска в ход, технологической операции и оста-
нова. После отключения двигателя останов (торможение)
происходит под действием сил трения, при этом кинетиче-
ская энергия движущихся частей выделяется в виде теплоты
в узлах трения механизма и двигателя (подшипниках). В тех
случаях, когда запас кинетической энергии велик, а силы
трения малы, время торможения может составить десятки
секунд и даже минут.
Применяемые механические тормоза имеют ряд сущест-
венных недостатков, главными из которых являются быст-
рый износ трущихся поверхностей, трудность регулирования
силы трения, значительное место, занимаемое тормозом и
т.д. Однако двигатель может выполнять функции механиче-
ских тормозов, работая при этом в том или ином тормозном
режиме.
В настоящее время широко используются тормозные
свойства двигателя, что во многих случаях позволило отка-
заться от механических тормозов.
Асинхронный двигатель может работать в следующих
тормозных режимах:
- генераторном с отдачей энергии в сеть;
- противовключения;
- динамического торможения.
Во всех тормозных режимах двигатель развивает момент,
действующий в сторону, противоположную направлению
вращения ротора, поэтому он называется тормозным мо-
ментом. Под действием этого момента в одних случаях про-
исходит быстрый останов, в других - поддержание заданной
скорости. Рассмотрим только режим динамического тормо-
жения.
Для создания режима динамического торможения необ-
ходимо обмотку статора двигателя отключить от сети трех-
фазного тока и подключить на время торможения к источни-
ку энергии постоянного тока по одной из схем, изображен-
ных на рис. 5.25,а-в.
Постоянный ток создает неподвижное в пространстве
магнитное поле, картина которого для схемы рис. 5.25,а
двухполюсного двигателя изображена на рис. 5.26.
347
Если ротор вращается, например, по часовой стрелке, то
его проводники пересекают неподвижное магнитное поле и в
них возникает ЭДС, а, следовательно, ток указанного на-
правления (рис. 5.26). В результате взаимодействия тока ро-
тора с неподвижным магнитным полем статора возникает
сила F и момент, действующие на ротор в направлении, про-
тивоположном направлению вращения ротора.
Кроме рассмотренного тормозных режимов существуют
и другие, например конденсаторное торможение. Конден-
саторное торможение осуществляется по схеме, изображен-
ной на рис. 5.27. После отключения от сети обмотка статора
оказывается замкнутой на конденсаторы. Энергия магнитно-
го поля двигателя и электрического поля конденсатора воз-
буждает в цепи трехфазный ток. Магнитное поле двигателя,
образованное этим током, вращается в ту же сторону, что и
Рис. 5.25. Схемы соединения обмоток статора при динамическом тормо-
жении
Рис. 5.26. К пояснению режима динамического торможения асинхронно-
го двигателя
Рис. 5.27. Схема включения двигателя при конденсаторном торможении
348
ABC
Рис. 5.28. Схема управления асинхронным двигателем с короткозамкну-
тым ротором с динамическим торможением в функции времени
ротор, но с меньшей частотой, чем ротор. В результате в об-
мотке ротора возникают ЭДС, ток и тормозной момент. По
мере торможения энергия магнитного и электрического по-
лей уменьшается, превращается в теплоту в обмотках и тор-
мозной момент убывает.
На рис. 5.28 изображена схема управления асинхронным
двигателем, предусматривающая динамическое торможение.
Кроме описанных выше аппаратов схема содержит электро-
магнитное реле времени КТ и контактор КМ2, с помощью
которого обмотка статора двигателя включается в сеть посто-
янного тока для осуществления динамического торможения.
Катушка реле КТ, включенная в сеть переменного тока,
создаёт магнитный поток Ф, под действием которого его
якорь быстро притягивается к сердечнику. При этом контак-
ты КТ замыкаются.
349
С момента отключения катушки реле КТ переключение
контактов КТ происходит не сразу, а спустя определенное
время, называемое выдержкой времени.
Рассмотрим работу схемы, изображённой на рис. 5.28.
Перед пуском схемы включается автомат QF, подающий
напряжение на установку и защищающий ее от коротких за-
мыканий. При нажатии на кнопку «Пуск» - SB\ срабатывает
контактор КМ\ и своими главными контактами КМ\ вклю-
чает двигатель в сеть. Один из вспомогательных контактов
КМ\ шунтирует кнопку SB\, а другой КМ\ подключает
обмотку реле времени КТ к сети переменного тока.
Якорь реле притягивается и связанные с ним контакты
реле времени КТ в цепи катушки контактора КМ2 замыка-
ются. Однако контактор КМ2 не срабатывает, так как цепь
его катушки разомкнута контактами контактора КМ\. Дви-
гатель работает в двигательном режиме, приводя в движение
исполнительный орган механизма.
Для останова двигателя нажимают на кнопку «Стоп»-
SB2. Контакты кнопки в цепи катушки КМ\, размыкаются,
контактор срабатывает, его силовые контакты КМ\ размы-
каются и отключают обмотки статора двигателя от сети пе-
ременного тока. Другие контакты контактора КМ1 замыкают
цепь катушки контактора КМ2. Контактор срабатывает и
своими силовыми контактами КМ2 подключает обмотку
статора двигателя к сети постоянного тока по схеме рис.
5.25. Возникает процесс динамического торможения, двига-
тель быстро останавливается. Одновременно с размыканием
силовых контактов контактора КМЛ размыкается и его
вспомогательный контакт КМ\ в цепи катушки реле време-
ни КТ. Реле начинает отсчёт времени. По прошествии опре-
деленного времени, на которое оно рассчитано, якорь реле
отпадает и размыкает свои контакты в цепи катушки контак-
тора КМ2. Контактор КМ2 срабатывает - размыкает свои
силовые контакты КМ2 и отключает двигатель от сети по-
стоянного тока. Схема возвращается в исходное положение -
она снова готова к очередному пуску двигателя. Время вы-
держки реле времени КТ должно быть несколько больше
времени торможения, в противном случае динамическое
торможение прекратится раньше, чем двигатель остановится.
Замкнутые вспомогательные контакты КМ2 контактора
КМ2 в цепи катушки КМ1 и вспомогательные контакты
350
КМ1 контактора KM\ в цепи катушки КМ2 предотвраща-
ют возможность одновременного включения контакторов
КМ\ и КМ2. Сопротивление R ограничивает значение тока
при динамическом торможении.
53. Синхронные машины
Синхронные машины используются в качестве генерато-
ров, двигателей и синхронных компенсаторов. Устанавли-
ваемые на тепловых электростанциях генераторы приводятся
во вращение паровыми турбинами и называются турбогене-
раторами. Синхронные генераторы гидроэлектростанций
вращаются помощью гидротурбин и носят название гидроге-
нераторов. Кроме электростанций синхронные генераторы
находят применение в установках, требующих автономного
источника электроэнергии. Примером могут служить авто-
мобильные электрические краны, на которых синхронные
генераторы приводятся во вращение двигателями внутренне-
го сгорания.
Области применения синхронных двигателей рассматри-
ваются после изучения их свойств в разделе 5.3.4.
Синхронный компенсатор представляет собой машину,
предназначенную для повышения коэффициента мощности
электротехнических установок (cos ^>).
Трехфазные синхронные генераторы, двигатели и син-
хронные компенсаторы имеют в принципе одинаковое уст-
ройство.
В разделах 4.1-4.2 приведены соотношения для трехфаз-
ного генератора.
5.3.1. Устройство трехфазной синхронной машины
Статор синхронной машины устроен так же, как асин-
хронной. В пазы пакета из листов электротехнической стали
уложены катушки трехфазной обмотки, токи которой созда-
ют вращающееся магнитное поле.
Ротор синхронной машины представляет собой электро-
магнит. На рис. 5.29,а, показана электрическая схема статора
и ротора. Обмотка ротора 2, которую называют обмоткой
возбуждения, подключают через два контактных кольца 3 и
351
Рис. 5.29. Электрическая схема син-
хронной машины: 1 - обмотка статора;
2 - обмотка ротора; 3 - контактные
кольца; 4 - щетки
щетки 4 к источнику постоянного напряжения Uв .
Роторы синхронных машин выполняются явнополюсны-
ми или неявнополюсными. Явнополюсный ротор имеет вы-
ступающие полюсы, на которые надеты катушки обмотки
возбуждения. Неявнополюсный ротор имеет распределенную
обмотку возбуждения, которая укладывается в пазы.
Синхронные машины проектируются таким образом,
чтобы количество полюсов на статоре было равно количест-
ву полюсов на роторе. От количества полюсов зависит син-
хронная частота вращения ротора
и, = 60—,
Р
где fx - частота токов статора; р - число пар полюсов.
Неявнополюсные роторы применяются в синхронных
машинах большой мощности, имеющих одну или две пары
полюсов и соответственно частоту вращения п = 3000 или
1500 об/мин.
Источниками постоянного напряжения для обмоток воз-
буждения являются специальные устройства, называемые
возбудителями. Простейшим возбудителем является само-
возбуждающий генератор постоянного тока, установленный
на валу синхронного двигателя. Его мощность составляет не
более 3 % от мощности синхронного двигателя.
352
Однако генератор постоянного тока из-за коллекторно-
щеточного аппарата требует постоянного ухода (регулиров-
ки) в процессе эксплуатации и недостаточно надежен. Кроме
того, генератор требует установки на фундамент и тщатель-
ной балансировки ротора.
В последнее время в качестве источника постоянного на-
пряжения применяются в основном вентильные (диодные и
тиристорные) выпрямители, питающиеся от сети переменно-
го тока. Они не имеют указанных недостатков.
5.3.2. Принцип действия трехфазного синхронного
электродвигателя
Подключим трёхфазную синхронную обмотку статора
синхронного двигателя к трёхфазной сети (рис. 5.36). Так как
фазы обмотки статора смещены в пространстве, а токи в
трёхфазной сети сдвинуты по фазе на угол 120°, то токи об-
мотки статора создадут вращающееся магнитное поле с час-
тотой пх. Предположим, что ротор за счет внешнего привод-
ного двигателя был разогнан до частоты вращения
п2 = 0,95И] и внешний двигатель был отключен. В обмотку
ротора двигателя подан ток возбуждения. Ток возбуждения
ротора создает неподвижное относительно ротора магнитное
поле. Вращающееся магнитное поле статора «захватывает»
магнитное поле ротора и ускоряясь, начинает вращаться с
частотой вращения магнитного поля статора п2 = и,. Син-
хронная машина работает в режиме двигателя.
Магнитные поля токов ротора и статора, неподвижные
относительно друг друга, образуют результирующее магнит-
ное поле. При идеальном холостом ходе (момент нагрузки
Мс = 0) ось результирующего магнитного поля будет сов-
падать с магнитной осью ротора, (угол в = 0).
Если к валу двигателя приложен момент сопротивления
(Л/с > 0), то ось магнитного поля ротора сместится относи-
тельно оси результирующего магнитного поля на угол в в
сторону отставания, создается электромагнитный момент
двигателя, увеличивающийся с увеличением угла в, который
уравновесит момент сопротивления: Мм = Мс.
Таким образом, с увеличением механического момента
сопротивления возрастает угол рассогласования в, увеличи-
353
вается механическая мощность на валу двигателя и электро-
энергия, потребляемая им из сети. При этом частота враще-
ния ротора будет оставаться постоянной и равной частоте
вращения магнитного поля статора п}.
Результирующее магнитное поле синхронного двигателя
(потоком рассеяния статорной обмоткой пренебрегаем) ин-
дуцирует ЭДС во всех трех фазах обмотки статора. Для каче-
ственного рассмотрения процессов в синхронной машине
примем, что ее магнитная цепь не насыщена. Синусоидально
изменяющийся магнитный поток Фрез(Г) результирующего
магнитного поля, пересекаясь с фазой обмотки статора, ин-
дуцирует в ней результирующую ЭДС е:
еРез=е0+ео’ (5-36)
где е0 - ЭДС, обусловленная действием магнитного поля ротора; еа -
ЭДС, обусловленная действием магнитного поля статора.
Уравнение (5.36) в комплексной форме имеет вид:
Ерез = Ей + Еа. (5.37)
Для одной фазы обмотки статора двигателя, исходя из
второго закона Кирхгофа, можно записать уравнение:
U = EQ + Ea + RI_3 (5-38)
где R - активное сопротивление фазы обмотки статора; I - ток в об-
мотке статора.
Заменим ЭДС Еа падением напряжения на индуктивном
сопротивлении х обмотки статора
Ea=-jxl_. (5.39)
Величина х называется синхронным индуктивным со-
противлением.
В синхронных машинах обычно R«х. Пренебрегая
членом RI в уравнении (5.38), получим упрощенное уравне-
ние электрического состояния фазы синхронного двигателя
U = Ей + jxJ_. (5.40)
354
5.3.3. Механическая характеристика синхронного
электродвигателя. Пуск электродвигателя
Механическая характеристика синхронного электродви-
гателя представляет собой зависимость п = прямая I,
(рис. 5.30).
Точка 1 на механической характеристике соответствует но-
минальному режиму, а точка 2 - максимальному моменту
Л/тах. Особенность механической характеристики СД - неза-
висимость частоты вращения ротора от момента сопротивления
на его валу вплоть до Мтах. Частота вращения ротора п2 всегда
равна частоте вращения магнитного поля машины пх = п2. Для
пуска синхронного двигателя их роторы, кроме основной об-
мотки возбуждения, имеют специальную пусковую коротко-
замкнутую обмотку, подобную «беличьему колесу» асинхрон-
ных двигателей. Стержни этой обмотки укладывают в специ-
альные пазы полюсов и соединяют по торцам ротора.
При пуске двигателя обмотку статора подключают к
трехфазной сети, а обмотку возбуждения отключают от ис-
точника питания и замыкают на резистор, сопротивление ко-
торого в 10-15 раз превышает сопротивление самой обмотки.
Если обмотку оставить разомкнутой, то в начале пуска в ней
вращающимся магнитным полем будет индуцироваться
большая ЭДС, опасная для изоляции. Под действием асин-
хронного момента [МЛД) ротор разгоняется по механической
характеристике, соответствующей асинхронному двигателю
(рис. 5.30, кривая II), до частоты вращения близкой к син-
хронной п2 = 0,95и,. Разгон осуществляется от точки 3 до
точки 4, затем обмотку возбуждения подключают к источни-
ку постоянного напряжения. Возникает синхронный элек-
тромагнитный момент и двигатель втягивается в синхронизм.
Переход двигателя в процессе пуска с асинхронной на син-
хронную механическую характеристику иллюстрируется на
рис. 5.30, точки 3-4-1.
На рис. 5.30 представлена также характеристика момента
сопротивления Мс (кривая III). После пуска двигателя он
будет работать в номинальном установившемся режиме, в
точке 1 - пересечения механической характеристики двига-
теля (кривая I) и момента сопротивления.
355
п
Рис. 5.30. Механические
характеристики синхрон-
ного двигателя
5.3.4. Область применения синхронных двигателей
Синхронные двигатели имеют ряд преимуществ перед
другими электрическими двигателями: независимость угло-
вой частоты вращения ротора от момента нагрузки; возмож-
ность иметь большой зазор между статором и ротором, что
позволяет повысить их надежность в процессе эксплуатации;
возможность изготовления двигателей на очень большие
мощности (до несколько десятков МВт).
Основное их преимущество заключается в возможности
генерировать в электрическую сеть реактивную мощность,
что позволяет регулировать и повышать коэффициент мощ-
ности промышленной электрической сети предприятия
(cos ср). Это вытекает из характерных для синхронных двига-
телей так называемых U - образных характеристик - зависи-
мости тока статора от тока возбуждения ротора 1 = f(IB),
Их строят при условии U = const, Мс = const (Р = const).
Двигатель имеет семейство U - образных характеристик для
различных значений момента М и мощности Р.
Из характеристик рис. 5.31 следует три энергетических
режима работы синхронного двигателя в зависимости от ве-
личины тока возбуждения 1В синхронного двигателя.
При номинальном токе возбуждения /Дн потребляемый
ток статора двигателя совпадает по фазе с напряжением сети
356
и двигатель работает как активный элемент, потребляя из се-
ти только активную энергетическую мощность, при cos 47 = 1.
На рис. 5.31 этому режиму соответствуют точки 1, 2, 3 (при
разных нагрузках на валу Р{,Р2) и пунктирная линия
cos^j - 1.
При токе возбуждения меньшем номинального {1В < 1Вн),
- недовозбуждение двигателя, ток его статора отстает от на-
пряжения сети (активно-индуктивная нагрузка) и электро-
двигатель потребляет из сети реактивную мощность QL > О
(область Ql, рис. 5.31).
При токе возбуждения большем номинального (/в > 1Ви)
- перевозбуждение двигателя, ток статора опережает напря-
жение сети (активно-емкостная нагрузка) и электродвигатель
отдает в сеть емкостную реактивную мощность Qc < 0 (об-
ласть Qc, рис. 5.31). Режим работы синхронного электродви-
гателя с перевозбуждением позволяет компенсировать ин-
дуктивную реактивную нагрузку потребителей питающихся
от одного источника энергии и повысить его коэффициент
мощности (cos<p).
Обычно мощные синхронные двигатели мощностью 0,5-
50 МВт применяются для электроприводов компрессоров,
вентиляторов, технологических насосов и ряда других меха-
низмов, работают с перевозбуждением <JB>IBll) при
cos^ = -(0,7-e-0,9).
При этом емкостные составляющие токов статора син-
хронного двигателя компенсируют индуктивные составляю-
щие токов асинхронных двигателей, трансформаторов и дру-
гих приемников, уменьшая токи и потери энергии в линиях.
Перевозбужденный синхронный двигатель без нагрузки
на валу является «синхронным компенсатором» - потребите-
лем ёмкостного тока. Синхронные компенсаторы используют
для улучшения коэффициента мощности (cos$>) и стабили-
зации напряжения промышленных сетей. Мощности син-
хронных компенсаторов достигают 100-160 Мвар.
Расчёт мощности указанных механизмов осуществляется
по формулам раздела 5.2.5.
357
буждение 1вн буждение
Рис. 5.31. U- образные характе-
ристики синхронного двигателя;
АВ - граница устойчивости
5.3.5. Схемы управления синхронными двигателями
Схемы управления синхронными двигателями, кроме
обычных операций по включению и отключению (торможе-
нию) двигателя и ограничению пусковых токов, должны
обеспечить управление током возбуждения двигателей,
имеющих обмотку возбуждения. При пуске используются
два способа управления: с «глухоподключённой» (постоянно
включенной) обмоткой возбуждения и с подключением об-
мотки в конце пуска перед синхронизацией двигателя с се-
тью. Первый вариант характеризуется более простой схемой
и используется при лёгких условиях пуска двигателя - не-
больших моментах и инерционных массах нагрузки электро-
привода. Второй вариант реализуется с помощью более
сложной схемы управления, но зато может обеспечить пуск
двигателя при значительных моментах сопротивления и
инерционности нагрузки электропривода.
Схема управления током возбуждения двигателя в функ-
ции скорости представлена на рис. 5.32,а. В этой схеме под-
ключение обмотки возбуждения к источнику питания Uв
осуществляется контактором КМ2, который управляется
реле скорости KR. Катушка этого реле через диод VD свя-
зана с частью разрядного резистора Rp.
358
При включении контактора КМ\ (его цепи управления
на рисунке не показаны) обмотка статора двигателя подклю-
чается к сети переменного тока и образует вращающееся
магнитное поле, которое вызовет появление момента двига-
теля. Под действием этого момента двигатель начнёт разбег
наведет ЭДС в обмотке возбуждения. Под действием ЭДС по
катушке реле KR начнёт протекать выпрямленный ток, оно
включится и его контакт разомкнет цепь питания контактора
КМ2. Тем самым разбег двигателя будет происходить без
тока возбуждения с закороченной на разрядный резистор Rp
обмоткой возбуждения.
Рис. 5.32. Узлы схем управлением возбуждением синхронного двигателя
с использованием принципа скорости (а) и тока (б)
359
По мере роста скорости ротора его ЭДС, а следовательно
и ток в катушке реле KR , снижаются. При скорости ротора
близкой к синхронной, ток в катушке реле K.R станет мень-
ше тока отпускания, реле отключится и вызовет тем самым
включение контактора КМ2. Контактор КМ2 подключит
обмотку возбуждения к источнику питания, и далее происхо-
дит процесс синхронизации двигателя с сетью, в конце кото-
рого частота вращения ротора и2 становится равной частоте
вращения магнитного поля статора п2 = и,.
Схема управления возбуждением двигателя в функции
тока (рис. 5.32,6) содержит реле тока КА, обмотка которого
питается от трансформатора тока ТА, и реле времени КТ.
При подключении двигателя к сети контактором КМ\ в цепи
обмотки статора возникает бросок пускового тока, что при-
водит к срабатыванию реле КА. Контакт этого реле замыка-
ет цепь питания реле времени КТ, что вызовет отключение
контактора возбуждения КМ2. Разбег двигателя, как и в
предыдущем случае, осуществляется с закороченной на раз-
рядный резистор Rp обмоткой возбуждения.
В конце пуска при подсинхронной скорости двигателя и
уменьшении тока в обмотке статоре отключается реле КА и
катушка реле времени КТ отключается от питания. Через
заданную выдержку времени включается контактор КМ2, и
через его контакты обмотка возбуждения подключается к ис-
точнику питания Uв, после чего двигатель входит в синхро-
низм.
Отметим, что в рассмотренных схемах (рис. 5.32, а и б)
после срабатывания контактора возбуждения КМ2 разрыва-
ется цепь разрядного резистора Rp, что облегчает тепловой
режим его работы и повышает экономичность схемы.
В качестве источника питания обмотки возбуждения син-
хронных двигателей применяются управляемые тиристорные
выпрямители, напряжение на выходе которых UB регулиру-
ется путем изменения напряжения управления (см. раз-
дел 6.7).
360
5.4. Машины постоянного тока
Машины постоянного тока используют в качестве гене-
раторов и двигателей.
Электрическая энергия постоянного тока, вырабатывае-
мая генераторами, служит для питания двигателей постоян-
ного тока, электролитических ванн, электромагнитов различ-
ного назначения, аппаратуры управления и контроля и т.д. В
настоящее время генераторы постоянного тока во многих ус-
тановках заменяют полупроводниковыми преобразователями
переменного тока в постоянный.
Двигатели постоянного тока применяют на транспорте
для привода некоторых металлорежущих станков, прокатных
станов, подъемно-транспортных машин, экскаваторов и т.д.
Одной из главнейших причин применения двигателей посто-
янного тока вместо наиболее широко распространенных
асинхронных двигателей является возможность плавного ре-
гулирования частоты вращения в широком диапазоне и по-
лучения желаемых механических характеристик и(ЛГ).
5.4.1. Устройство машины постоянного тока
Машина постоянного тока состоит из двух основных час-
тей: неподвижной части (статор), предназначенной для соз-
дания магнитного потока и вращающейся части - ротора.
Между статором и ротором имеется небольшой воздушный
зазор.
На рис. 5.33 показана упрощенная схема машины в виде
поперечного разреза магнитной цепи двухполюсной маши-
ны.
Статор состоит из станины 1, представляющей полый
цилиндр, к внутренней поверхности которой крепятся глав-
ные полюсы 2 (N и S). Станина и полюсы выполняются из
ферромагнитного материала.
На главных полюсах размещены катушки обмотки воз-
буждения 3, которые питаются от источника постоянного то-
ка. Постоянный ток в обмотке возбуждения создает магнит-
ное поле. Катушки обмотки возбуждения соединяются по-
следовательно так, чтобы полюсы N и S на статоре чередова-
лись. Главные полюсы имеют полюсные наконечники 4,
361
1
Рис. 5.33. Схема машины постоянного тока
Рис. 5.34. Схема обмотки якоря
обеспечивающие равномерное распределение магнитной ин-
дукции в воздушном зазоре между статором и ротором.
Якорь 5 представляет собой стальной цилиндр, закреп-
ленный на валу 7. На поверхности якоря расположены пазы
(на рис. 5.33 не показаны), в которых расположены якорные
обмотки 6. Обмотка якоря состоит из витков, охватывающих
якорь вдоль оси. Витки объединяются в секции. Секцией на-
зывается часть обмотки якоря, состоящая из одного или не-
скольких последовательно соединенных витков, присоеди-
ненных своими концами к коллекторным пластинам
(рис. 5.34).
Секция состоит из двух активных сторон ab и cd, которые
располагаются вдоль оси машины под полюсами разной по-
лярности. Индуктируемая в секции ЭДС максимальна, если
шаг обмотки у равен полюсному делению
т = -—
2/?
где - диаметр якоря; р - число пар полюсов.
Из рис. 5.34 следует, что полюсное деление г - это часть
окружности якоря, принадлежащая одному полюсу.
5.41)
362
Рис. 5.35. Условное обозначение
электрической схемы машины по-
стоянного тока с независимым воз-
буждением
На якоре располагается коллектор 9 (рис. 5.33), который
представляет собой цилиндрическое тело, состоящее из мед-
ных коллекторных пластин. Пластины изолируются друг от
друга изоляционными прокладками. К каждой пластине кол-
лектора присоединяются два конца секций обмотки якоря,
поэтому количество пластин коллектора равно количеству
секций обмотки. Электрический контакт с вращающимся
коллектором осуществляется с помощью неподвижных
электрографитовых щеток 10, помещенных в щеткодержа-
тели. Коллектор и щеточный аппарат являются ответствен-
ными узлами машины, от конструкции и качества изготовле-
ния которых в большой степени зависит надежная работа
машины. Магнитное поле, созданное постоянным током об-
мотки возбуждения статора, - неподвижное. Основная часть
магнитного потока замыкается через сердечник северного
полюса N, воздушный зазор, якорь, сердечник южного полю-
са 5 и станину. На рис. 5.33 показаны силовые линии 8 маг-
нитного поля.
Сердечники полюсов выполняются массивными, либо
шихтованными - набранными из тонких листов электротех-
нической стали. Якорь набирают из листов электротехниче-
ской стали толщиной 0,3-0,5 мм для уменьшения потерь от
вихревых токов при перемагничивании.
На электрических схемах якорь машины постоянного то-
ка изображают условно в виде окружности с двумя диамет-
рально расположенными щетками, а обмотку возбуждения -
как индуктивный элемент (рис. 5.35).
5.4.2. Принцип действия двигателя постоянного тока
Обмотки якоря и возбуждения двигателя постоянного то-
ка подключаются к источникам постоянного напряжения.
363
Допустим, что направление тока /в проводниках обмотки
якоря такое, как указано на рис. 5.36,а.
Проводники якоря с током будут находится в неподвиж-
ном магнитном поле, созданном постоянным током в обмот-
ке возбуждения, полюсы N-S. Поэтому в соответствии с за-
коном Ампера на проводники действуют электромагнитные
силы F3M, приложенные к якорю. По правилу левой руки
электромагнитные силы F^, (рис. 5.36) создают вращающий
электромагнитный момент Мэм. Под действием этого мо-
мента якорь двигателя будет вращаться. Если вращающий
электромагнитный момент равен моменту сопротивления
механизма на валу Мзи = Мс, то скорость якоря со постоян-
на.
Во вращающемся магнитном поле в обмотке якоря наво-
дится ЭДС. Определив направление ЭДС в проводниках яко-
ря по правилу правой руки, установим, что оно противопо-
ложно направлению тока. Поэтому ЭДС якоря двигателя час-
то называют противо-ЭДС, - Е.
Схема замещения цепи якоря двигателя представлена на
рис. 5.36,6. Напряжение, приложенное к якорю уравновеши-
вает противо-ЭДС и падение напряжения на активном сопро-
тивлении обмотки якоря RK:
U = E + RXI. (5.42)
Рис. 5.36. Принцип действия двигателя постоянного тока (а); схема за-
мещения цепи якоря (б)
364
Из (5.42) ток якоря двигателя
Уравнение баланса мощностей якоря двигателя имеет
вид:
L7 = £Z + V2- (5-44)
Из (5.44) следует, что электрическая мощность Рэ =UI
превращается в электромагнитную мощность Рэм = EI и
мощность потерь в обмотке якоря. Электромагнитная мощ-
ность равна механической мощности, развиваемой двигате-
лем:
Рзм=М(0 = Рма (5.45)
5.4.3. Электродвижущая сила якоря и электромагнитный
момент двигателя
ЭДС якоря машины постоянного тока Е равна сумме
мгновенных ЭДС е; проводников одной из параллельных
ветвей обмотки якоря. Если общее количество проводников
якоря равно N, количество параллельных ветвей 2а, ЭДС в
. N
одной ветви, содержащей — проводников
2а
N N
2а 2а
E = ^eJ=lv^Bnj, (5.46)
7 = 1 7=1
Л
где V = й) - линейная скорость движения проводника; I - активная
длина проводника; Bnj - магнитная индукция.
N
2а
Сумму "^Bnj можно выразить через среднее значение
7=1
магнитной индукции Вср на полюсном делении т :
365
N
20 N
(5-47)
Ф
где В =— ; Ф - магнитный поток полюса.
т1
N
2а
Подставив выражения приведенные выше, и т
7=1
из (5.41) в (5.46), получим:
Е=Р^-оф, (5.48)
2ла
где (О - круговая частота вращения якоря, 1/С .
pN
Обозначим —— = кЕ получим:
Е = кЕсоФ . (5.49)
Таким образом, ЭДС якоря пропорциональна частоте его
вращения и магнитному потоку полюса машины.
Электромагнитный момент машины
Р FI
А/ЭЛ(= —= —, (5-50)
со со
где Рэм = EI - электромагнитная мощность.
Подставив выражение (5.49) для Е в (5.50) получим:
М,м = кЕФ1. (5.51)
Таким образом, электромагнитный момент машины по-
стоянного тока пропорционален магнитному потоку полюса
и току якоря. Он является вращающим моментом в двигате-
ле.
Направление вращения якоря двигателя можно изменить
на обратное, изменив направление вращающего момента. Из
366
формулы (5.51) следует, что знак Мэм изменится, если изме-
нится направление тока в якоре или направление магнитных
потоков полюсов.
Двигатели постоянного тока (ДПТ) различаются спосо-
бами создания магнитного потока:
- с независимым возбуждением - магнитный поток соз-
даётся независимой обмоткой возбуждения;
- с последовательным возбуждением - обмотка возбуж-
дения включается последовательно с обмоткой якоря;
- со смешанным возбуждением - две обмотки возбужде-
ния: одна включается последовательно с обмоткой якоря, а
вторая - независимая обмотка;
- с возбуждением от постоянных магнитов - магнитный
поток создаётся специальными постоянными магнитами.
Ниже рассматриваются характеристики и их расчет для
двигателей постоянного тока с различными способами соз-
дания магнитного потока.
5.4.4. Естественная электромеханическая и механическая
характеристики двигателя постоянного тока
независимого возбуждения
Схема включения двигателя постоянного тока независи-
мого возбуждения (далее ДПТ НВ) приведена на рис. 5.37.
Рис. 5.37. Схема включения двигателя постоянного тока с независимым
возбуждением
367
ДПТ НВ включает цепь якоря, подключаемую к источни-
ку постоянного напряжения U, и цепь возбуждения, также
подключаемую к источнику постоянного напряжения UB.
Цепь якоря содержит последовательно соединённые якорь
ДПТ и дополнительный резистор , который может отсут-
ствовать. Напряжение источника подводится к вращающейся
обмотке якоря с помощью коллекторно-щёточного аппарата.
Цепь возбуждения содержит обмотку возбуждения, распо-
ложенную на неподвижных полюсах, и дополнительный ре-
зистор RB, который может отсутствовать. Якорь двигателя
механически связан с исполнительным органом (ИО) меха-
низма.
Уравнения характеристик ДПТ получим при следующих
допущениях:
- полагаем, что гистерезис в магнитной цепи машины и
реакция якоря не проявляются, тогда ток возбуждения ДПТ
1В однозначно определяет её магнитный поток:
Ф^кв-1в, (5.52)
где kB — коэффициент пропорциональности;
- щётки расположены на оси, перпендикулярной оси по-
люсов, и коммутация идеальна, т.е. ток переходит от одной
секции якоря к другой мгновенно, без искажений;
- к валу со стороны машины приложен электромагнит-
ный момент Мэм = М, и все моменты, обусловленные меха-
ническими потерями, входят в момент сопротивления на-
грузки.
Уравнение электрического равновесия (5.42) (статиче-
ский режим) цепи якоря запишется в виде:
U = E + IR, (5.53)
где R = RB + Ra — полное сопротивление цепи якоря;
= гая + гдп + гко +Гщ — полное сопротивление якорной цепи,
включающее сопротивление обмоток якоря гоя, дополнительных полю-
сов гдп , компенсационной гко, и щёточного контакта Гщ .
368
Подставляя (5.49) в (5.53), получим формулу для элек-
тромеханической характеристики ДПТ НВ:
U-IR U IR
со =-----------.
кФ кФ кФ
(5-54)
Уравнение для механической характеристики получаем
из (5.54), если подставить в него ток из (5.51), выраженный
через момент:
U MR
а> =---------.
кФ (кФ)2
(5.55)
Из (5.54) и (5.55) следует, что электромеханическая <y(Z)
и механическая а>(М) характеристики ДПТ НВ являются
прямыми линиями, исходящими из одной точки, с координа-
тами: I = 0, (М = 0); си0, где частота идеального холостого
хода ДПТ НВ:
<4,=-^-. (5.56)
кФ
При положительном напряжении U питания цепи якоря
U>0, полярность напряжения указана на рис.5.37, естест-
венная электромеханическая и механическая характеристики
проходят соответственно через точки с координатами:
электромеханическая : «у = 0; / = /„
2.
R’
механическая: со = 0; - 1КЗФ-
Так как у ДПТ НВ для естественной схемы включения
кФ = const, то поток пропорционален току. Поэтому элек-
тромеханическую и механическую характеристики ДПТ НВ
можно представить совмещёнными в виде прямой 1,
(рис. 5.38).
Если изменить полярность питающего цепь якоря напря-
жения (U < 0) (на рис. 5.37 полярность его указана в скоб-
ках), то естественная электромеханическая и механическая
характеристики могут быть представлены в соответствии с
уравнениями (5.54) и (5.55), подставив в них (-U), в виде
прямой 2, рис. 5.38.
369
Рис. 5.38. Электромеханическая и механическая характеристики ДПТ
НВ: искусственные 1 - ОО; 2 - С/<0; 3 - L/=0; 4 - естественная (tZ>0)
Рис. 5.39. Схема включения ДПТ НВ в режиме динамического торможе-
ния
370
Схема включения ДПТ НВ в режиме динамического
торможения представлена на рис. 5.39. После установивше-
гося режима работы ДПТ НВ его цепь якоря отключается от
источника постоянного тока и подключается к добавочному
сопротивлению КДТ.
Затухающая ЭДС якоря создаёт в замкнутом контуре ток
якоря I, изменивший направление, по сравнению с двига-
тельным режимом (сравнить рис. 5.37, 5.39). Момент двига-
теля также изменит знак и станет тормозным. Под действием
момента двигателя М и момента сопротивления Мс частота
вращения ротора будет уменьшаться.
В этом режиме запасенная механическая энергия ротора в
процессе торможения превращается в тепловую в резисторах
В-ДТ И Кд •
Уравнение электромеханической и механической харак-
теристик ДПТ в режиме динамического торможения полу-
чаются из (5.54) и (5.55) подстановкой в них U = 0:
MR
Эта характеристика представлена на рис. 5.38 прямой 3.
Характеристики 1, 2, 3 (рис. 5.38) являются искусственными,
так как могут быть получены включением в цепь якоря до-
бавочного сопротивления Яд, рис. 5.37, (характеристики
1,2), либо изменением схемы цепи якоря двигателя, рис. 5.39,
(характеристика 3).
5.4.5. Работа двигателя постоянного тока независимого
возбуждения в двигательном режиме
Двигательный режим ДПТ НВ является основным режи-
мом его работы в производственных механизмах. Двигатель-
ный режим реализуется в виде прямой 1 между точками а и б
электромеханической и механической характеристик ДПТ,
(рис. 5.38).
371
В этом режиме параметры двигателя находятся в преде-
лах:
О < со < со0; Е < (/; I > 0.
При этом ЭДС двигателя Е и напряжение сети U на-
правлены навстречу, друг другу, а ток якоря протекает от по-
ложительного полюса к отрицательному.
На рис. 5.40,а представлена схема включения ДПТ НВ в
двигательном режиме. В качестве ИО может быть крыльчат-
ка вентилятора, шнек экструдера и т.д.
В двигательном режиме ДПТ НВ потребляет из сети
электрическую энергию, характеризуемую мощностью
Р{ = U • I > 0. Часть электрической энергии превращается в
механическую энергию мощностью РМЕХ = Л/ • «у > 0, отда-
ваемую исполнительному органу (ИО), а часть электриче-
ской энергии в виде потерь превращается в тепло в активных
сопротивлениях цепи якоря. На рис. 5.40,6 представлена
энергетическая диаграмма двигателя в этом режиме.
Потери электрической мощности в ДПТ НВ определяются
уравнением:
ДР = Р, - PMFX = UI - Мео = кФсо(. I - кФ 1со -
1 МС.Л U
, Л т со0 - со п с
= кФсой I—------= Д 8,
"о
(5-57)
где о =---------относительный перепад частоты вращения ротора.
Рис. 5.40. Двигательный режим ДПТ НВ: а - схема включения; б - энер-
гетическая диаграмма
372
Энергия
сети
Из уравнения видно, что потери мощности пропорцио-
нальны относительному перепаду частоты. При отсутствии в
цепи якоря дополнительных сопротивлений (работа на есте-
ственной характеристике) для ДПТ НВ относительный пере-
пад частоты составляет 0,05-0,08, т.е. потери мощности
(энергии) составляют не более 8 % от потребляемой.
Следует отметить, что на характеристике 2, участок а! в1,
(U <0, рис. 5.38) двигатель также работает в двигательном
режиме, но с частотой вращения а> < 0. Напомним, что на
характеристике 1, участок а,в,-со > 0, при U> 0. Таким об-
разом изменив полярность питающего якоря двигателя на-
пряжения мы изменяем направление вращения вала двигате-
ля (осуществляем реверсирование частоты вращения).
Регулирование частоты вращения ДПТ НВ в соответст-
вии с уравнениями (5.54) и (5.55) возможно изменением до-
бавочного сопротивления Яд в цепи якоря (рис. 5.37), изме-
нением магнитного потока Ф двигателя и регулированием
напряжения U цепи питания якоря.
Свойства указанных способов регулирования рассмотре-
ны в разделе 5.6 применительно к исполнительным органам
систем автоматизации.
5.4.6. Расчёт естественной механической
характеристики двигателя постоянного тока с
независимым возбуждением по номинальным данным
Расчёт естественной механической характеристики осу-
ществляется по номинальным параметрам ДПТ НВ: РИОМ -
номинальная мощность, Вт; пнвм - номинальная частота вра-
щения, об/мин; UM0M, 1ИОМ - номинальное напряжение и ток
соответственно, В и А; Т]ИОМ - номинальный КПД.
Методика расчёта включает 6 этапов расчета:
1. Номинальной частоты вращения, 1/с :
373
2. Номинального момента, Нм:
л/ = ном
ном
со
ном
3. Номинального сопротивления ДПТ, Ом:
п ____ ном _ ном
НОМ г j
1 ном 1 НОМ
4. Сопротивления якоря ДПТ, Ом:
=О,5Янан(1-77ТОА().
Сопротивление якоря ДПТ часто приводится в его техни-
ческой характеристике.
5. Коэффициента кФ, Вс:
II — / • /?
хф — H0At 1 ном
^ном
6. Синхронной частоты вращения вала двигателя, 1/с:
U
кФ
На основе вычисленных параметров строится естествен-
ная механическая характеристика ДПТ НВ, по двум точкам с
координатами: й>о,Л/ = О - точка а; а>ном; Мном - точка в,
(рис. 5.38, прямая 4).
5.4.7. Естественные электромеханическая и
механическая характеристики двигателя постоянного
тока с последовательным возбуждением
Схема включения ДПТ с последовательным возбуждени-
ем (ДПТ ПВ) представлена на рис. 5.41.
Обмотка возбуждения ОВ данного двигателя включается
последовательно с обмоткой якоря, т.е. в этом двигателе ток
возбуждения равен току якоря. Магнитный поток Ф зависит
374
Рис. 5.41. Схема включения двигателя постоянного тока с последова-
тельным возбуждением
Рис. 5.42. Кривая намагничивания ДПТ последовательным возбуждением
от тока возбуждения или тока якоря I в соответствии с кри-
вой намагничивания представленной на рис. 5.42.
Кривая намагничивания Ф(7) является нелинейной функ-
цией тока якоря, (рис. 5.42, кривая 1).Рабочая точка на кри-
вой намагничивания для ДПТ ПВ обычно соответствует точ-
ке А - номинальный режим работы. Аналитически выраже-
ние кривой намагничивания практически не применяется в
расчётах. Расчёт естественных электромеханических и меха-
нических характеристик ДПТ последовательного возбужде-
ния осуществляют аппроксимацией кривой намагничивания,
прямой 2, рис. 5.42, либо ломаной линией ОБС, (рис. 5.42),
или использованием универсальных характеристик ДПТ по-
следовательного возбуждения определённой серии.
Рассмотрим естественные электромеханическую и меха-
ническую характеристики ДПТ при представлении кривой
намагничивания прямой линией 2, (рис. 5.42). В этом случае
магнитный поток машины определяется уравнением
375
Ф = а1,
(5.58)
т.
где а = tg(p----коэффициент; (р - угол наклона прямой 2 к оси то-
ков, (рис. 5.42); тф, т1 - масштабы представления потока и тока на рис.
5.42, если расчет ведется в абсолютных величинах.
Подставляя (5.58) в уравнение (5.51), получим зависи-
мость для момента двигателя,
М = кФ1 = ка1г. (5.59)
Подставляя (5.58) в уравнение (5.54), получим уравнение
электромеханической характеристики ДПТ последовательно-
го возбуждения
kal ка
Заменяя в уравнении (5.60) ток через момент из (5.59),
получим уравнение механической характеристики ДПТ ПВ
U R
со = —---------.
'jkaM ка
(5.61)
Из анализа уравнений (5.60) и (5.61) следует, что зависи-
мости со(Г) и 69(Л/) для данного ДПТ являются гиперболи-
ческими, при этом с приближением тока и момента к нулю
(У -> 0, М —> 0) частота вращения стремится к бесконечно-
сти (со —> оо). Если ток или момент стремятся в бесконеч-
ность (/ -> оо, М —> оо), то частота вращения ДПТ асимпто-
« ( R "I
тически приближается к величине--------
\ ка)
(рис. 5.43). При
изменении тока и момента ДПТ в пределах от нуля до номи-
нальных значений характеристики находятся в первом квад-
ранте со(Г), со(М).
Снижение частоты вращения ДПТ до нуля происходит
при токах и моментах МКЗ значительно превышающих
их номинальные значения (рис. 5.43).
376
При представлении кривой намагничивания ломаной ли-
нией ОБС, (рис. 5.42), точку перелома характеристики (точка
Б) выбирают при токе якоря (возбуждения) ГБ = 0,95.
В этом случае в диапазоне изменения токов якоря (воз-
буждения) от нуля до 0,95/Вном (участок ОБ) уравнения есте-
ственных электромеханической и механической характери-
стик соответствуют (5.60) и (5.61), так как магнитный поток
ДПТ зависит от тока якоря - уравнение (5.58).
В диапазоне изменения токов якоря выше 0,95/НОЛ1 маг-
нитный поток двигателя является постоянным (участок БС,
рис. 5.42), Ф = const. Поэтому в этом режиме электромеха-
ническая и механическая характеристики ДПТ последова-
тельного возбуждения строятся по уравнениям (5.54), (5.55)
и являются прямыми линиями.
На рис. 5.43 представлены естественные электромехани-
ческая и механическая характеристики ДПТ, которые состоят
из двух участков: первый участок I (от 0 до /^построен по
уравнениям (5.60) и (5.61); второй участок II (Г > ГБ) по-
строен по уравнениям (5.54) и (5.55).
Из анализа естественной механической характеристики
ДПТ последовательного возбуждения (рис. 5.43,6) следует,
что она имеет переменную и достаточно малую жесткость и
поэтому её часто называют «мягкой».
Рис. 5.43. Естественные характеристики ДПТ последовательного возбуж-
дения: а - электромеханическая; б - механическая
377
С увеличением момента М на валу ДПТ частота вращения
вала уменьшается, а при малых моментах частота - увеличи-
вается и может превысить максимально допустимое значение
(двигатель идет «вразнос»).
Поэтому необходимо в схеме управления ДПТ последо-
вательного возбуждения предусмотреть ограничение макси-
мальной частоты вращения.
ДПТ последовательного возбуждения применяются в
механизмах с тяжелыми условиями пуска (при малых часто-
тах момент максимальный) и широким диапазоном измене-
ния момента сопротивления. В частности большинство стар-
терных электродвигателей автомобилей - это ДПТ последо-
вательного возбуждения. Они применяются также в электро-
возах, электрокарах и т.д.
5.4.8. Расчет естественных электромеханических и
механических характеристик двигателя постоянного то-
ка с последовательным возбуждением по
универсальным характеристикам
Для ряда серий ДПТ последовательного возбуждения
расчет естественных электромеханических и механических
характеристик осуществляется по универсальным характери-
стикам. Универсальные характеристики приводятся в спра-
вочной литературе в относительных единицах, причем за ба-
зовые единицы принимают номинальные зйачения:
I ном ’ М ном ’ ^ном •
На рис. 5.44 в качестве примера, представлены универ-
сальные характеристики ДПТ последовательного возбужде-
ния серии ДП 2.
Характеристики представляют зависимости йГ(/‘),
М\Г). Рассмотрим, как использовать универсальные ха-
рактеристики ДПТ для построения его естественных харак-
теристик на примере двигателя ДП12. Технические характе-
ристики двигателя ДП12 последовательного возбуждения:
Рном = 2,4 кВт- UH0M = 220В; = 1150 об / мин; 1НОМ = 19А .
378
Рис. 5.44. Универ-
сальные характери-
стики двигателей с
последовательным
возбуждением серии
ДП2
Таблица 5.6 Результаты расчета характеристик ДПТ последователь-
ного возбуждения серии ДП12
№ стро- ки Параметры Значения параметров
1 7* 0,4 0,8 1,2 1,6 2,0
2 М* 0,4 0,8 1,25 1,8 2,5
3 ы* 2,0 1,15 0,9 0,8 0,7
4 Ш=Ы*й)ном 240,8 138,5 108,4 96,3 84,3
5 /=/*/ном 7,6 15,2 22,8 30,4 38,0
6 М=М*Мти 8,0 16,0 24,9 35,9 49,8
Методика расчета универсальных параметров включает че-
тыре этапа:
1. Определяем номинальные параметры двигателя ДП12:
= 23.14.Ц50=| ._|
60 60
Р 2400
МЯОЛ1 = ^- = ^^ = 19,93 Нм.
120,4
2. Используя универсальные характеристики (рис. 5.44),
переносим графические данные зависимостей - Г, со , М* в
табл. 5.6 (первые три строки).
379
Рис. 5.45. Характеристики двигателя ДП 12 последовательного возбуж-
дения: а - электромеханическая; б - механическая
3. Умножая соответствующие значения относительных
величин строк 1-3 табл. 5.6 на номинальные значения двига-
теля ДП 12, получаем данные его электромеханических и ме-
ханических характеристик (строки 4-6, табл. 5.6).
4. По данным строк 4-6, табл. 5.6 строим естественные
характеристики двигателя ДП 12 последовательного возбуж-
дения (рис. 5.45).
По изложенной методике можно построить естественные
характеристики ДПТ последовательного возбуждения серии
ДП 2 любой мощности.
5.4.9. Естественные электромеханическая и
механическая характеристики двигателя постоянного
тока смешанного возбуждения
Схема включения ДПТ смешанного возбуждения пред-
ставлена на рис. 5.46.
ДПТ смешанного возбуждения имеет две обмотки возбу-
ждения, одна обмотка ОВ1 включена последовательно с об-
моткой якоря, а вторая ОВ2 питается независимо от источ-
ника напряжения.
380
Рис. 5.46. Схема включения
двигателя постоянного тока
смешанного возбуждения
По обмотке OB 1 протекает ток якоря I, а по обмотке не-
зависимого возбуждения ОВ2 ток 1вн. Токи якоря и обмотки
ОВ2 можно регулировать, изменяя сопротивления /?1 и R2.
Магнитный поток Ф состоит из двух составляющих - потока
Ф1, создаваемого обмоткой ОВ1 и зависящего от тока якоря,
и постоянного потока Ф2, создаваемого обмоткой ОВ2. На
рис. 5.47 представлены характеристики намагничивания ДПТ
смешанного возбуждения при определенном соотношении
магнитных потоков Ф\ и Ф2.
Естественные электромеханическую и механическую ха-
рактеристики ДПТ последовательного возбуждения рассчи-
тывают по формулам (5.54) и (5.55), подставляя в них маг-
нитный поток как функцию тока якоря - Ф(Г).
Механическая характеристика ДПТ смешанного возбуж-
дения (рис. 5.48) будет располагаться между характеристи-
ками ДПТ с независимым возбуждением (если Ф* = Ф2’ = 1, а
число витков обмотки возбуждения OB 1 - W\ = 0, то магни-
тодвижущая сила обмотки F{ = W\ х I = 0), прямая 1 на
рис. 5.48, и характеристикой двигателя с последовательным
возбуждением (если Ф* = ф*(Г), а магнитодвижущая сила
обмотки ОВ2 равна нулю F2 = W2IeH = 0, где W2 - число вит-
ков обмотки независимого возбуждения ОВ2), кривая 2 на
рис. 5.48.
Так, например, механическая характеристика 3 ДПТ сме-
шанного возбуждения соответствует преобладанию магнито-
движущей силы обмотки последовательного возбуждения
над магнитодвижущей силой обмотки независимого возбуж-
дения > W21т, а характеристика 4, наоборот -
381
Рис. 5.47. Характеристики намагничивания ДПТ смешанного возбужде-
ния
Рис. 5.48. Механические характеристики ДПТ смешанного возбуждения
Существенным отличием механических характеристик
ДПТ независимого возбуждения от ДПТ с последовательным
возбуждением является то, что двигатель может работать на
холостом ходу (частоты й903 , (У04), так как при наличии неза-
висимой обмотки при Л/=0, магнитный поток не равен нулю.
Электромеханические характеристики ДПТ смешанного
возбуждения аналогичны механическим характеристикам,
представленным на рис. 5.48.
ДПТ смешанного возбуждения применяется в стартерах
автомобилей, а также в механизмах, где требуется высокий
пусковой момент при большом диапазоне изменения момен-
та сопротивления (электрокары, центрифуги, тележки и т.д).
5.5. Микроэлектродвигатели электронных
устройств
Микроэлектродвигатели являются одними из основных
элементов многих схем автоматики, электроники, телемеха-
ники, счётно-решающей и бытовой техники. Они широко ис-
пользуются в различных специальных микроэлектроприво-
дах, в схемах управления, регулирования и контроля в каче-
стве силовых и преобразующих элементов. Требования,
предъявляемые к микроэлектродвигателям автоматических и
электронных устройств, весьма разнообразны. Они зависят в
382
основном от назначения схемы, условий работы и от тех
функций, которые микроэлектродвигатели выполняют в схе-
ме. В одних схемах от микроэлектродвигателей требуется
плавное и в широких диапазонах регулирование скорости
вращения вала, в других - абсолютное постоянство скорости
вращения. В одних схемах вал микроэлектродвигателя при-
водится во вращение без нагрузки, в других - при большом
моменте сопротивления. Иногда от них требуются сверхвы-
сокие скорости вращения (до 300000 об/мин и более), а ино-
гда - очень малые скорости вращения (доли оборота в мину-
ту). В одних схемах микроэлектродвигатели питаются от ис-
точника постоянного тока, в других - от источника перемен-
ного тока промышленной частоты (50 гц) в третьих - от ис-
точника повышенной частоты (до 3000 гц). Эти разнообраз-
ные требования накладывают свои отпечатки как на устрой-
ство, так и на конструктивное оформление микроэлектродви-
гателей. Мощность микроэлектродвигателей находится в
пределах от долей ватта до нескольких сотен ватт номиналь-
ной мощности (от 0,005 Вт до 600 Вт).
5.5.1. Классификация микроэлектродвигателей
По конструктивному устройству и принципу действия все
микроэлектродвигатели подразделяются на три основные
группы:
- асинхронные бесколлекторные;
- синхронные;
- коллекторные.
Асинхронные и синхронные микроэлектродвигатели яв-
ляются двигателями переменного тока.
Асинхронные бесколлекторные микродвигатели класси-
фицируются по числу фаз:
- однофазные;
- двухфазные;
- трехфазные.
По модификации ротора:
- короткозамкнутые (в виде простой беличьей клетки, с
заливкой алюминием, с массивным ротором, с полым маг-
нитным или немагнитным цилиндрами);
- с контактными кольцами.
Синхронные микроэлектродвигатели подразделяются на:
383
- синхронные реактивные;
- синхронные гистерезисные;
- синхронные с магнитоэлектрическим возбуждением;
- синхронные шаговые, или импульсные.
Коллекторные микроэлектродвигатели делятся на:
- двигатели постоянного тока;
- двигатели переменного тока (асинхронные коллектор-
ные);
- универсальные двигатели, работающие, как от источни-
ка постоянного, так и переменного тока.
Асинхронные бесколлекторные микродвигатели приме-
няются в основном там, где требуется регулирование скоро-
сти вращения или где небольшое изменение скорости не
имеет существенного значения. Синхронные микродвигатели
используются в тех случаях, когда требуется строгое посто-
янство скорости вращения. Синхронный реактивный и гист-
резисный двигатели по своей конструкции являются про-
стыми, так как они имеют только одну обмотку статора. Ис-
пользование переменного тока и отсутствие скользящих кон-
тактов позволяют применять их в тех случаях, когда требует-
ся синхронная скорость вращения при относительно неболь-
шом вращающем моменте.
Синхронный шаговый или импульсный микродвигатели -
это синхронный микродвигатель с явнополюсным реактив-
ным или активным ротором, предназначенный для преобра-
зования электрических импульсов в дискретные угловые пе-
ремещения - шаги. Микроэлектродвигатели постоянного то-
ка широко используются как для привода с регулируемой
скоростью вращения, так и для приводов с постоянной ско-
ростью.
Коллекторные асинхронные микродвигатели применяют-
ся в основном там, где при наличии источника переменного
тока промышленной частоты (50 гц) необходимы скорости
вращения, превышающие 3000 об/мин., т.е. те скорости, ко-
торые при промышленной частоте не могут обеспечить син-
хронные и бесколлекторные асинхронные двигатели.
Коллекторные универсальные микроэлектродвигатели
применяются в схемах, питание которых осуществляется или
от сети переменного тока, или от сети постоянного тока. Они
используются как для приводов с регулируемой скоростью
вращения, так и для приводов с постоянной скоростью.
384
Микроэлектродвигатели, применяемые в автоматических
и электронных устройствах, в зависимости от характера вы-
полнения функций, т.е. их назначения, могут быть разделены
на:
а ) основные - исполнительные, предназначенные для
осуществления различных функциональных зависимостей;
б ) вспомогательные силовые, предназначенные для
обычного привода вала отдельных механизмов и узлов авто-
матических и электронных схем.
Впервые микроэлектродвигатели для автоматического
регулирования применил в 1871 г. русский ученый В.Н. Чи-
колев. Первые двухфазные асинхронные микроэлектродвига-
тели были построены югославским ученым Н. Тесла в 1887 г.
Исполнительные микроэлекродвигатели постоянного тока в
системах автоматики применяются со второй половины
прошлого столетия. Но особенно интенсивно микроэлепро-
машины переменного и постоянного тока начали применять-
ся в автоматических и электронных установках в 30 - х годах
прошлого столетия на основе работ отечественных ученых
В.С. Кульбакина, К.И. Шенфсра, М.П. Костенко, В.А. Тра-
пезникова, В.Ф. Миткевича, А.Н Ларионова, А.Е. Алексеева,
Т.Н. Петрова, Ю.С. Чечета, А.Г. Иосифьяна, Н.П. Ермолина,
Д.А Завалишина, И.М. Постникова и др.
5.5.2. Принцип действия и устройство однофазного асин-
хронного электродвигателя
Рассмотрим асинхронный электродвигатель, имеющий на
статоре однофазную обмотку и короткозамкнутый ротор,
(рис. 5.49). Обмотка статора однофазного двигателя распо-
ложена в пазах, занимающих примерно две трети окружно-
сти статора, которая соответствует паре полюсов.
Поэтому распределение магнитодвижущей силы и ин-
дукции в воздушном зазоре близко к синусоидальному. По-
скольку по обмотке статора проходит переменный ток, МДС
пульсирует во времени с частотой сети f.
Можно показать, что неподвижная пульсирующая МДС
является суммой идентичных круговых МДС (Fnp и Fo6p),
вращающихся в противоположных направлениях и имеющих
одинаковые частоты вращения: <уОяр = со0обр = со0. Каждая из
385
Рис. 5.49. Поперечный разрез однофазного
асинхронного двигателя: 1 - статор; 2 - ротор
вращающихся МДС наводит в роторе ЭДС и токи, которые
взаимодействуют с магнитными потоками и создают усилия
и два момента Мпр и Мо6р, направленных навстречу
друг другу (рис. 5.49).
Допустим, что направление вращения ротора совпадает с
направлением одной из вращающихся МДС и частотой маг-
нитного поля, например с соопр. Тогда скольжение ротора от-
носительно потока Фпр , созданного Fnp,
где 6О0 - синхронная частота вращения магнитного поля статора; СО -
частота вращения ротора двигателя.
Скольжение ротора относительно потока , созданно-
Г0 FO6P>
so6p = й)°°6р + = 1 + — • (5.63)
^Ообр ^0 ^0
Из уравнений (5.62) и (5.63) следует, что
^=1 + ^ = 2-^.
<у0
Электромагнитные моменты Мпр и Мобр, образуемые
прямым и обратными полями, направлены в противополож-
386
ные стороны, а результирующий момент однофазного двига-
теля М при одной и той же частоте вращения ротора:
Мргз = Мпр + .
На рис. 5.50 приведена зависимость М = f(s) для од-
нофазного асинхронного двигателя. Из анализа этой зависи-
мости можно сделать следующие выводы:
- однофазный асинхронный двигатель не имеет пусково-
го момента, так как при 5 = 1, М= 0 он будет вращаться в
ту сторону, в которую приводится внешней силой;
- частота вращения однофазного двигателя при холостом
ходе (5 = 0) меньше, чем у трехфазного двигателя из-за на-
личия тормозящего момента, образуемого обратным полем.
Рабочие характеристики однофазного асинхронного двигате-
ля хуже, чем трехфазного: он имеет повышенное скольжение
при номинальной нагрузке; меньший КПД; меньшую пере-
грузочную способность, что также объясняется наличием об-
ратного поля. Мощность однофазного асинхронного двига-
теля составляет примерно две трети от мощности трёхфазно-
го двигателя того же габарита, так как в однофазном двига-
теле рабочая обмотка занимает только две трети пазов стато-
ра. Заполнять все пазы статора нерационально, так как при
этом обмоточный коэффициент получается малым, расход
меди возрастает примерно в 1,5 раза, в то время как мощ-
ность двигателя увеличивается на 12 %.
Рис. 5.50. Механиче-
ская характеристика
однофазного асин-
хронного двигателя
387
5.5.3 Однофазные асинхронные электродвигатели с
пусковыми элементами (емкостью или сопротивлением)
Для получения пускового момента однофазные асин-
хронные двигатели (ОАЭ) дополняют пусковой обмоткой
статора, сдвинутой на 90 электрических градусов относи-
тельно основной рабочей обмотки статора. В этом случае ра-
бочая и пусковая обмотки создают вращающееся магнитное
поле статора, т.е. двигатель пускается как двухфазный. На
период пуска пусковую обмотку присоединяют к сети через
дополнительные фазодвигающие элементы - емкость или ак-
тивное сопротивление. После окончания разгона двигателя
пусковую обмотку отключают, при этом двигатель продол-
жает работать с одной рабочей обмоткой. Так как пусковая
обмотка работает лишь короткое время, ее выполняют из
провода меньшего сечения, чем рабочую и укладывают в
меньшее число пазов. Обычная рабочая обмотка размещается
в две трети пазов статора, а пусковая в одну треть пазов.
Рассмотрим процесс пуска ОАЭ при использовании в ка-
честве фазосдвигающего элемента ёмкости С (рис. 5.51,а).
а
б в
Рис. 5.51. Однофазный асинхронный двигатель с конденсаторным пус-
ком: а - схема; б - векторная диаграмма; в - механические характеристи-
ки (1 - при включенной пусковой обмотке с конденсатором, 2 - при вы-
ключенной пусковой обмотке, 3 - при включенной пусковой обмотке с
активным сопротивлением в цепи пусковой обмотки)
388
На пусковой обмотке П напряжение _Uxn =UX - Uc -
= U} + jl 1П xc, т.е. оно сдвинуто по фазе относительно на-
пряжения сети Ux, приложенного к рабочей обмотке Р.
Следовательно, векторы токов в рабочей-/^ и пусковой_/177
обмотках сдвинуты по фазе на некоторый угол. Выбирая оп-
ределенным образом емкость фазосдвигающего конденсато-
ра, можно получить режим работы при пуске, близкий к
симметричному (рис. 5.51,6), когда токи Д и_/1Я сдвину-
ты на 90°, т.е получить круговое вращающееся поле.
На рис. 5.51,в представлены зависимости М = f(s) для
двигателя при включенной (кривая 1) и выключенной (кри-
вая 2) пусковой обмотке. Пуск двигателя осуществляется на
части ab характеристики 1; в точке Ь пусковая обмотка вы-
ключается, и в дальнейшем двигатель работает на части сО
характеристики 2.
Ключ К служит для включения и выключения дополни-
тельной обмотки двигателя. Обычно переключение осущест-
вляется автоматически при достижении ротором определен-
ной частоты вращения. В качестве пусковых конденсаторов
применяют либо металлобумажные герметизированные час-
тотные конденсаторы типа МБГ 4, либо электролитические
конденсаторы в алюминиевых корпусах с электроизоляцион-
ным покрытием типа К-50.
При лёгких условиях пуска (небольшой нагрузочный мо-
мент в пусковой период) вместо конденсатора применяются
двигатели с пусковым сопротивлением R .
Наличие активного сопротивления в цепи пусковой об-
мотки, вместо емкости, обеспечивает меньший сдвиг фаз <рп
между напряжением и током в этой обмотке (рис. 5.65,6),
чем сдвиг фаз (рР в рабочей обмотке {(рп<(рР}- В связи с
этим токи в рабочей и пусковой обмотках оказываются сдви-
нутыми по фазе на угол <рР-(рп и образуют несимметричное,
эллиптическое вращающееся магнитное поле статора двига-
теля, благодаря которому и возникает пусковой момент. Дви-
гатели с пусковым сопротивлением надежны в эксплуатации
и выпускаются серийно. Пусковое сопротивление встраива-
ется в корпус двигателя и охлаждается тем же воздухом, ко-
торый охлаждает весь двигатель.
389
Вид механической характеристики электродвигателя со-
ответствует представленной на рис. 5.51,в, кривой 3. Двига-
тель пускается как несимметричный двухфазный (ключ К
замкнут). При достижении ротором определенной частоты,
(точка в, на рис. 5.51,в), пусковая обмотка отключается и
двигатель переходит в однофазный режим - от сети питается
только обмотка Р (ключ К разомкнут). В этом случае пуско-
вой момент двигателя меньше, чем при конденсаторном пус-
ке.
5.5.4. Однофазные асинхронные конденсаторные
электродвигатели
В асинхронных конденсаторных двигателях (рис. 5.52)
при пуске и в рабочем режиме главная А и вспомогательная
В обмотки постоянно находятся под напряжением. При этом
вспомогательная обмотка присоединяется к сети последова-
тельно с рабочим конденсатором Ср (рис. 5.52,а).
Обе обмотки конденсаторных двигателей являются рабо-
чими, занимают, как правило, одинаковое число пазов и
имеют одинаковую мощность. Иногда при пуске конденса-
торного двигателя для увеличения пускового момента на
время пуска дополнительно, ключем К, подключается пуско-
вая емкость С„, т.е. суммарная ёмкость конденсатора при
Рис. 5.52. Асинхронный конденсаторный двигатель: а - схема; б - меха-
ническая характеристика
390
пуске Ср + Сп. После разгона двигателя по механической ха-
рактеристике 2, (рис. 5.52,6, участок аб) и уменьшения пус-
кового тока часть конденсаторов С„ отключается (ключем
К), чтобы при номинальном режиме (когда ток двигателя
становится меньшим, чем при пуске) увеличить ёмкостное
сопротивление и обеспечить работу двигателя в условиях,
близких к работе при круговом вращающемся магнитном по-
ле. При этом двигатель работает по характеристике 1, на уча-
стке вс.
Конденсаторный двигатель имеет высокий cos <р. Недос-
татками его являются сравнительно большие масса и габари-
ты конденсатора.
Обычно емкость рабочего конденсатора подбирают так,
чтобы при М = Мн<ш и s' = создаваемое обмотками маг-
нитное поле было круговым и двигатель работал в точке с
характеристики 1 (рис. 5.52,6). В этом случае двигатель име-
ет хорошие рабочие параметры: т/= 0,5-0,8; cos^ = 0,8-0,95;
критический момент Мк = ( 1,8-2,2) Мном, но небольшой пус-
ковой момент Мп = (0,3-0,5)A/HOW. Увеличение пускового
момента достигается включением пускового конденсато
ра Сп.
5.5.5. Универсальные асинхронные электродвигатели
Асинхронные двигатели, рассчитанные для работы от се-
ти как трёхфазного, так и однофазного тока, называются
универсальными асинхронными двигателями (УАД).
Универсальные двигатели изготовляются как трехфазные,
но их обмоточные данные рассчитываются так, чтобы при
определённой схеме включения обмоток статора с использо-
ванием конденсатора обеспечивались приемлемые характе-
ристики и при работе от однофазной сети. Номинальная
мощность УАД при однофазном питании составляет 70-85%
от номинальной мощности трехфазного двигателя. Наиболее
распространенные схемы включения обмоток статора трех-
фазных двигателей в однофазную сеть показаны на рис. 5.54.
Широкое применение получили универсальные двигате-
ли серии УАД. Они имеют закрытое исполнение, охватывают
391
Рис. 5.54. Схемы включения обмоток статора трёхфазных двигателей в
однофазную сеть
диапазон мощностей от 1 до 70 Вт и могут работать от трех-
фазных и однофазных сетей одного и того же напряжения
(220 В). Отметим, что на практике для работы от однофазных
сетей могут использоваться и обычные трёхфазные двигате-
ли. При этом рабочие ёмкости конденсаторов должны быть
выбраны таким образом, чтобы фазные токи при нагрузке не
превышали номинальных значений.
Приближенно значения рабочих ёмкостей, можно опре-
делить по формулам, мкФ:
с..28004ол<
ином
ц,о.и
с..27407НОД(
- для схемы рис. 5.54,а;
- для схемы рис 5.54,6;
- для схемы рис. 5.54,в,
где 1Н0М - номинальный ток трехфазного двигателя; Uном - номиналь-
ное напряжение однофазной сети.
При тяжёлых условиях пуска необходимо на время за-
пуска параллельно с рабочей ёмкостью включать пусковую
емкость Сп = (2,5-3) Ср. Так как при работе УАД напряжение
на конденсаторах может превышать напряжение сети, то при
392
их выборе для рассматриваемых схем включения следует со-
блюдать условие UK р > V5UHOM, где UK р - рабочее напряже-
ние конденсатора.
5.5.6. Синхронные микроэлектродвигатели
с постоянными магнитами
В синхронных микродвигателях (СМЭД) с постоянными
магнитами магнитный поток возбуждения создается блоком
постоянных магнитов, изготовленных из магнитно-твёрдого
материала, обладающего большой коэрцитивной силой. По-
стоянные магниты располагают на роторе. Статор имеет
обычную конструкцию: в его пазах размещают одно-, двух-
или трехфазную обмотку. В синхронных микродвигателях на
роторе, кроме блока постоянных магнитов, устанавливают
собранный из листовой стали пакет, в пазах которого разме-
щают пусковую короткозамкнутую обмотку типа беличьей
клетки, которая в рабочем процессе выполняет еще роль
демпфера, уменьшающего качания ротора.
Наибольшее применение получили микродвигатели двух
конструктивных исполнений: с радиальным и аксиальным
расположением блока постоянных магнитов и пакета ротора
с короткозамкнутой обмоткой. В первом случае пакет ротора
выполнен в виде кольца, напрессованного на блок постоян-
ных магнитов, в котором имеются прорези, разделяющие по-
люсы разной полярности. Размеры прорезей выбирают из ус-
ловий оптимального использования энергии постоянных
магнитов. Во втором случае кольцевой пакет ротора насажи-
вают непосредственно на вал ротора, а по краям его устанав-
ливают один или два блока постоянных магнитов, выполнен-
ных в виде дисков.
Пуск СМЭД с постоянными магнитами и трехфазной об-
моткой статора обычно производят непосредственным вклю-
чением в сеть. Разгон двигателя осуществляется за счет
асинхронного вращающего момента Мас, возникающего в
результате взаимодействия вращающегося магнитного поля с
током в пусковой обмотке ротора (асинхронный пуск). При
питании двигателя от однофазной сети применяются две об-
мотки статора. При этом в цепь одной обмотки включают
393
конденсатор, необходимый для получения вращающегося
магнитного поля.
Особенностью СМЭД является то, что при пуске его,
кроме асинхронного вращающего момента Мас, возникает
еще и тормозной момент Мт, образующийся из-за наличия
на роторе постоянных магнитов. Действительно, в процессе
разгона двигателя поле постоянных магнитов пересекает об-
мотку статора (якоря), индуцируя переменную ЭДС£1Я, из-
меняющуюся с переменной частотой, пропорциональной
частоте вращения ротора. Для ЭДС Е1П обмотка статора мо-
жет считаться короткозамкнутой, так как сеть, питающая
двигатель, является мощной и имеет внутреннее сопротивле-
ние, равное нулю. Возникающий от ЭДС Е1П переменный
ток в статоре двигателя, взаимодействуя с магнитным пото-
ком ротора, создает тормозной момент.
Таким образом, момент Мас возникает в результате
взаимодействия вращающего магнитного потока статора с
током в пусковой обмотке ротора, а момент Мт - в резуль-
тате взаимодействия вращающегося потока ротора с током в
обмотке статора. При этом зависимости этих моментов от
скольжения ротора будут различными. Так ЭДС Е2, индуци-
руемая потоком статора в пусковой обмотке ротора в про-
цессе его разгона, пропорциональна скольжению s, а ЭДС
Е1П, индуцируемая потоком ротора в обмотке статора, про-
порциональна cz>0(1 — s'). Зависимость s(Mac) соответствует
механической характеристике асинхронного двигателя (рис.
5.55). Поэтому максимум момента Мас находится в области
небольших скольжений х Максимум тормозного момента
Мг будет находиться в области небольших значений (1 - s).
Поэтому зависимость результирующего пускового момента
М = Мас + Мт от скольжения 5 будет иметь минимум в
области малых частот вращения. Вход в синхронизм СМЭД
происходит при скольжении sei с достаточно большим мо-
ментом . В рабочем режиме двигатель имеет характери-
стику Мр , (рис. 5.55) параллельную оси моментов.
Для снижения размагничивающего действия реакции
394
Рис. 5.55. Механическая ха-
рактеристика синхронного
микродвигателя с постоян-
ными магнитами
якоря расстояние между полюсными наконечниками сосед-
них полюсов в двигателях с радиальным расположением по-
стоянных магнитов выполняют меньшим, чем в двигателях с
обмоткой возбуждения на роторе, а ширину полюсных нако-
нечников - большей. В результате этого в рассматриваемых
двигателях магнитный поток якоря в основном замыкается
через полюсные наконечники, не подвергая размагничива-
нию постоянные магниты.
Двигатели с постоянными магнитами по сравнению с
другими типами СМЭД обладают хорошими энергетически-
ми показателями (КПД и cos<р), повышенной устойчивостью
работы в синхронном режиме и высокой стабильностью час-
тоты вращения.
Недостатком их является сравнительно большая стои-
мость, обусловленная дороговизной материала, из которого
изготавливают постоянные магниты, и большая кратность
пускового тока.
5.5.7. Синхронный реактивный микроэлектродвигатель
Синхронный реактивный микродвигатель (СРМД) имеет
явнополюсный ротор без обмотки возбуждения и без посто-
янных магнитов. Магнитный поток СРМД создается реак-
395
тивным током, протекающим по обмотке статора (якоря).
Вращающий момент в двигателе возникает из-за различия
магнитных проводимостей по продольной и поперечной осям
ротора. При этом явно выраженные полюсы ротора стремят-
ся ориентироваться относительно магнитного поля так, что-
бы магнитное сопротивление для силовых линий поля было
минимальным, вследствие чего появляются тангенциальные
силы fT (рис. 5.56) образующие вращающий момент. В ра-
бочем режиме ротор вращается в том же направлении и с той
же частотой вращения, что и поле статора а>й - .
Статор реактивного двигателя выполняется так же, как и
в машине переменного тока общепринятого исполнения. Об-
мотка статора (трех- или двухфазная с конденсатором в од-
ной из фаз) распределенная, она создает вращающееся маг-
нитное поле.
Для запуска СРМД необходимо пусковое устройство.
Наиболее широкое распространение получили СРМД с асин-
хронным пуском. До недавнего времени в основном приме-
нялась конструкция простого явнополюсного ротора. Явно
выраженные полюсы в таком роторе образуются путем вы-
рубки больших пазов в межполюсном пространстве. Пуско-
вая короткозамкнутая обмотка выполняется в виде беличьей
клетки путём заливки всех пазов алюминием. При оптималь-
ной геометрии ротора простые СРМД имеют малую перегру-
зочную способность ЛС1Г/Л/„ = 1,2-1,5, (Л/,.-момент
** О ЬХХ л UM ' ' X о смд
Рис. 5.56. Принцип возникновения реактивного
момента
396
выхода двигателя из синхронизма), большую кратность пус-
кового тока 1п / 1ИОМ = 5-7, низкие энергетические и синхрони-
зирующие показатели.
Мощность, которую может развивать простой СРМД в
габаритах асинхронной машины при равенстве суммарных
потерь, не превышает 40% от мощности асинхронного двига-
теля.
Улучшение рабочих и пусковых свойств СРМД происхо-
дило с совершенствованием конструкции ротора. В настоя-
щее время применяются СРМД с сегментным ротором с ро-
тором, имеющим внутренние немагнитные пазы с секциони-
рованным ротором. Из них наиболее широкое распростране-
ние получила конструкция ротора с дополнительными внут-
ренними пазами. СРМД с усовершенствованными роторами
приближаются по своим массогабаритным и энергетическим
показателям к асинхронным двигателям. Благодаря простоте
и технологичности конструкции, надежности и невысокой
стоимости СМРД находят все более широкое применение на
практике. Однако в силу присущих им недостатков область
их использования ограничивается электроприводами не-
большой мощности с малым моментом инерции нагрузки.
В пусковом режиме СМРД токи якоря двигателя по осям
du q (рис. 5.56) образуют несимметричную двухфазную сис-
тему МДС, которая создает электрическое вращающееся
магнитное поле статора. Суммарный ток якоря в пусковом
асинхронном режиме равен
1 =lu\ +J.U2 ’
где J.U2 ~ составляющие тока прямой и обратной последовательно-
стей.
В неподвижной по отношению к статору системе коорди-
нат ток /у] изменяется с частотой сети /У1 = f{, а ток 1^2 - с
частотой fU2 = (1 - 2s)j\.
В результате взаимодействия вращающегося магнитного
поля статора, созданного токами /у], с наведенными им то-
ками в пусковой обмотке ротора образуется вращающий
электромагнитный момент Ми1, (рис. 5.57). Зависимость
397
Ми} от скольжения s практически соответствует асинхрон-
ному двигателю.
Момент Ми2, созданный током 1и2, зависит от степени
магнитной и электрической несимметрии ротора (рис. 5.57).
При s > 0,5 Ми2 > 0 с максимумом Ми2Д, при
5 = 0,5 Ми2 =0, при s < 0,5 Ми2 < 0 с максимумом MV2T.
Суммарный пусковой момент СРМД - Mg = Ми} + Ми2
имеет при 5 ~ 0,3 -0,4 провал в кривой момента, Ма.
После входа двигателя в синхронизм при моменте Мвт
СРМД имеет рабочую характеристику Мр (рис. 5.57), па-
раллельную оси моментов. Предельное значение момента на
этой характеристике Мвых соответствует выходу двигателя
из синхронизма при перегрузке.
СРМД проще по конструкции, надёжнее в работе и де-
шевле синхронных двигателей с обмоткой возбуждения на
роторе (для них не требуется иметь источник постоянного
тока, питающий цепь возбуждения). Основными недостатка-
ми реактивного двигателя являются сравнительно небольшой
пусковой момент и низкий cos $9, не превышающий обыч-
но 0,5.
Рис. 5.57. Механические характеристики СРМД
398
Последнее обстоятельство объясняется тем, что магнит-
ный поток в реактивном двигателе создается только за счет
реактивного тока обмотки якоря, величина которого из-за
повышенного сопротивления магнитной цепи машины до-
вольно велика.
5.5.8. Синхронный гистерезисный микродвигатель
В синхронном гистерезисном микродвигателе (СГМД)
вращающий момент создается за счет явления гистерезиса
при перемагничивании ферромагнитного материала ротора.
Статор в гистерезисном двигателе выполняют так же, как и в
машине переменного тока обычного исполнения: обмотка
статора (якоря) может быть трёх или двухфазной (с конден-
сатором в одной из фаз). Ротор двигателя представляет собой
цилиндр, выполненный из магнитно-твёрдого материала
(имеющего широкую петлю гистерезиса), без обмотки.
Для экономии дорогих специальных сплавов роторы гис-
терезисных двигателей выполняют сборными: в виде мас-
сивного или шихтованного из отдельных изолированных
пластин кольца из указанного сплава, насаженного на сталь-
ную или алюминиевую втулку.
а ' б
Рис. 5.58. Синхронный гистерезисный микродвигатель: а - принцип воз-
никновения гистерезисного момента; б - зависимость результирующего
момента двигателя от скольжения
399
В рабочем режиме СГМД вращающееся с синхронной час-
тотой поле статора намагничивает ротор. При этом из-за явле-
ния гистерезиса (молекулярного трения) ось намагничивания
ротора отстает от оси вращающегося магнитного поля статора
на некоторый угол 0Г гистерезисного сдвига. Поэтому возни-
кают тангенциальные составляющие fT сил взаимодействия
между полюсами ротора и магнитным потоком статора (рис.
5.58,а). Для данной машины угол 9Г определяется только
свойствами материала ротора и чем шире петля гистерезиса
ферромагнитного материала ротора, тем больше угол вг,
больше сила fT и гистерезисный момент М г.
В СГМД с массивным ротором в процессе пуска и до
входа в синхронизм на ротор действуют два момента: гисте-
резисный Мг и асинхронный Мас. Асинхронный момент
Мас, возникает в результате взаимодействия вращающегося
магнитного поля статора с вихревыми токами, индуктируе-
мыми этим полем в роторе. Так как ротор имеет большое ак-
тивное сопротивление, то зависимость Мас = /($) близка к
линейной и асинхронный момент будет максимальным при
На рис. 5.58,6, изображены зависимости моментов
Мг, Мас и результирующий М рез от скольжения j . Резуль-
тирующий момент М pej = Мг + Мас.
Электромагнитный момент М в асинхронном режиме
пропорционален потерям мощности в роторе ДРм2 > поделен-
ным на скольжение 5. Поэтому гистерезисный и асинхрон-
ный моменты можно определить по формулам:
APr _ sAPr н _ ЬРГ н
6O1S й)ь
где АРГ - потери мощности, на перемагничивание ротора (гистерезис-
ные потери) и пропорциональные частоте перемагничивания ротора
У2 = f}s , т.е. скольжению 5; &Рвихр потери мощности на вихревые то-
400
ки в роторе и пропорциональные , т.е. S2; ДРГ н и ^Рвихр „ - значе-
ния и &Рвихр при неподвижном роторе (при s=l).
В режиме пуска наибольшего значения вращающий мо-
мент Мдостигает в начальный момент пуска, т.е. при
5 = 1. Характеристика СГМД в установившемся режиме со-
ответствует прямой Мр . Мвых - момент, при котором двига-
тель выходит из синхронизации в случае перегрузки.
СГМД могут работать как в синхронном, так и в асин-
хронном режиме. Однако работа двигателя в асинхронном
режиме неэкономична, так как при этом возникают значи-
тельные магнитные потери энергии в роторе:
ДР = АРГ + ДР = sAPp., + 52 ДР
Таким образом, при переходе гистерезисного двигателя в
асинхронный режим его КПД резко уменьшается. Достоин-
ствами СГМД являются: простота конструкции, надежность
в работе, малый пусковой ток (/п / 1ИОМ = 1,2 4-1,5), плавность
входа в синхронизм, бесшумность и сравнительно высокий
КПД - до 60%. К недостаткам относятся: повышенная стои-
мость из-за значительной стоимости магнитно-твердых спла-
вов и трудности их обработки, низкий cos ср = 0,4 4-0,5 и
склонность к качаниям при резких изменениях нагрузки.
Гистерезисные двигатели выпускают на мощность до 2000
Вт и частоту 50, 400 и 500 Гц в трёх и двухфазном исполне-
ниях.
5.5.9. Коллекторные микродвигатели постоянного тока
Коллекторные микродвигатели постоянного тока (ДПТ),
применяемые в схемах автоматики, разнообразны по конст-
рукции. Их конструктивные особенности связаны с назначе-
нием, областью применения, требованиями к механизмам и
аппаратам, в которых они применяются. Коллекторные ДПТ
по способу возбуждения можно разделить на двигатели с не-
зависимым (рис. 5.37) или параллельным возбуждением; по-
следовательным и смешанным возбуждением (рис. 5.41 и
5.46) возбуждением от постоянных магнитов. Смешанное
401
возбуждение в микродвигателях обычно не применяется.
Двигатели с электромагнитным возбуждением проектируют-
ся на мощность от нескольких десятков ватт и выше.
Конструктивно ДПТ имеют закрытое или защищенное
исполнение. Их магнитная система, как правило, выполняет-
ся двухполюсной в виде сплошной стальной станины с цель-
ными или шихтованными полюсами. Иногда полюсы и ярмо
в ДПТ штампуются, как одно целое из электротехнической
стали. На полюсах размещается обмотка возбуждения, соз-
дающая основной магнитный поток ДПТ.
Якорь ДПТ набирается в пакет из штампованных листов
электротехнической стали толщиной 0,35-0,5 мм, изолиро-
ванных друг от друга для уменьшения потерь от вихревых
токов. Пакет стали якоря на внешней окружности имеет па-
зы, в которых укладывается обмотка из медного изолирован-
ного провода. В пазу обмотка удерживается клиньями из
изоляционного материала. Пазы якоря имеют скос на одно
зубцовое деление для уменьшения пульсаций магнитного по-
тока и для устранения реактивных моментов. Чаще обмотка
якоря выполняется петлевой; реже применяются волновые
обмотки.
В зависимости от конструкции якоря микродвигатели по-
стоянного тока подразделяют на: двигатели с якорем обыч-
ного типа; полым якорем; беспазовым (гладким) якорем; с
дисковым и цилиндрическим якорем с печатной обмоткой.
Микродвигатели с якорем обычного типа. Магнитный
поток в них создается обмоткой возбуждения, расположен-
ной на полюсах или постоянными магнитами. В первом слу-
чае магнитную систему выполняют, как правило, полностью
шихтованной, причем корпус и полюсы изготавливают в ви-
де одного общего пакета, собранного из штампованных лис-
тов требуемого профиля. Последнее необходимо, поскольку
микродвигатели работают обычно в переходных режимах.
В машинах с возбуждением от постоянных магнитов на
статоре располагают массивный постоянный магнит цилинд-
рической формы или несколько магнитов, выполненных в
виде полюсных сердечников, и др. Магнитную систему ДПТ
обычно делают ненасыщенной, чтобы реакция якоря не ока-
зывала влияния на магнитный поток машины, а следователь-
но, и на частоту ее вращения. Обмотку якоря укладывают в
пазах сердечника якоря и присоединяют к коллектору. Ток к
402
этой обмотке подводится с помощью щеткодержателей труб-
чатой или другой конструкции.
Микродвигатели с полым якорем. Магнитный поток в
этих ДПТ создается обмоткой возбуждения или постоянны-
ми магнитами. Якорь представляет собой полый стакан, рас-
положенный между полюсами и неподвижным ферромаг-
нитным сердечником, который насаживают на втулку под-
шипникового щита. Вместо сердечника внутри якоря может
быть установлен неподвижный цилиндрический постоянный
магнит. Обмотку якоря укладывают на цилиндрический кар-
кас и заливают эпоксидной смолой.
Момент инерции полого якоря ДПТ мал, благодаря чему
существенно повышается быстродействие двигателя. Отсут-
ствие насыщения в зубцах позволяет значительно увеличить
индукцию в воздушном зазоре машины (т.е. её магнитный
поток и номинальный вращающий момент по сравнению с
микродвигателями, имеющими якорь обычного типа), что
также способствует повышению быстродействия двигателя.
Эти микродвигатели имеют также меньшую индуктив-
ность. Это улучшает условия коммутации двигателя, что в
свою очередь увеличивает срок службы щеток и повышает
стабильность характеристик двигателя.
Недостатками микродвигателей с полым якорем является
необходимость значительного увеличения МДС обмотки
возбуждения, так как воздушный зазор у них гораздо больше,
чем в обычных двигателях. Последнее приводит к некоторо-
му увеличению массы, габаритов двигателя и потерь мощно-
сти в обмотке возбуждения. Однако КПД рассматриваемых
микродвигателей из-за отсутствия потерь в стали имеет при-
мерно такую же величину, как и у микродвигателей с якорем
обычной конструкции (?) = 0,3-0,45) в двигателях мощностью
1-15 Вт.
Микродвигатели с беспазовым (гладким) якорем. В
этих ДПТ обмотку якоря укладывают не в пазах, а на гладкой
наружной поверхности якоря. Ее выполняют в два слоя и за-
ливают эпоксидной смолой с ферромагнитным наполните-
лем; каждый слой обмотки стягивают стеклолентой. Микро-
двигатели этого типа имеют более высокое быстродействие
по сравнению с машинами с зубчатым якорем из-за большей
индукции в воздушном зазоре (в данном случае она не огра-
ничивается насыщением зубцов) и меньшего момента инер-
403
ции якоря. Перегрузочная способность и срок службы щеток
этих микродвигателей примерно такие же, как и микродвига-
телей с полым ротором.
Микродвигатели с печатной обмоткой якоря. Эти ДПТ
могут быть выполнены дисковым и цилиндрическим якорем.
Микродвигатели с дисковым якорем имеют плоскую пе-
чатную обмотку якоря, нанесенную на тонком диске из не-
магнитного материала (керамики, текстолита, алюминия).
Возбуждение осуществляется постоянными магнитами с по-
люсными наконечниками, имеющими форму кольцевых сег-
ментов. Создаваемый ими магнитный поток проходит в ак-
сиальном направлении через два воздушных зазора и диско-
вый якорь с печатной обмоткой и замыкается по двум коль-
цам из магнитно-мягкой стали, выполняющим роль ярма.
Обычно микродвигатели с печатной обмоткой якоря не
имеют коллектора, его роль выполняют часть проводников,
расположенных на одной из сторон дискового якоря, по ко-
торым скользят щетки. Однако в некоторых конструкциях
для повышения срока службы печатной обмотки на валу яко-
ря устанавливают коллектор, к которому выводят концы сек-
ций. Для подвода тока к печатной обмотке якоря в большин-
стве случаев используют серебряно-графитные щетки,
имеющие незначительное падение напряжения в переходном
контакте.
Недостатки микродвигателей с печатными обмотками
якоря по сравнению с микродвигателями обычными являют-
ся:
- большая МДС возбуждения из-за увеличенного воз-
душного зазора;
- увеличенные потери мощности вследствие повышенной
плотности тока в обмотке якоря, а при электромагнитном
возбуждении также и вследствие увеличенных потерь в об-
мотке возбуждения.
Однако в рассматриваемых машинах практически отсут-
ствуют потери в стали, поэтому при возбуждении их от по-
стоянных магнитов КПД имеет приблизительно такое же
значение, как и в обычных машинах; меньший срок службы
из-за износа проводников печатной обмотки, возникающего
от трения щеток.
Микродвигатель с цилиндрическим печатным якорем вы-
полнен принципиально так же, как и микродвигатель с по-
404
лым якорем. На обе стороны полого якоря электромеханиче-
ским способом наносят печатную обмотку, концы которой
присоединяют к коллектору. Свойства этих ДПТ аналогичны
ДПТ с полым якорем.
Электромеханические и механические характеристики
микродвигателей постоянного тока и способы регулирования
частоты вращения такие же, как рассмотренные выше, для
ДПТ обычного типа (раздел - 5.4.4 и 5.4.9).
Так, например, схема включения двигателя постоянного
тока с возбуждением от постоянных магнитов (ДПТ с ПМ)
представлена на рис. 5.59.
Цепь якоря ДПТ питается от источника постоянного на-
пряжения (U) определённой полярности. В цепи якоря может
быть включено добавочное сопротивление Кд . Магнитный
поток ДПТ создаётся постоянным магнитом и не изменяется.
Электромеханические бу(/)и механические а> (М) харак-
теристики ДПТ ПМ имеют те же свойства, что и ДПТ НВ.
Уравнения электромеханической и механической характери-
стик соответствуют уравнениям (5.54) и (5.55).
ДПТ с ПМ может работать в тех же режимах, что и ДПТ
НВ: холостого хода; короткого замыкания; двигательном; ге-
нераторном с рекуперацией энергии в сеть; противовключе-
ния; динамического торможения.
Расчёт естественной механической характеристики ДПТ с
ПМ производится по методике, изложенной в разделе 5.4.7.
ДПТ с ПМ нашли широкое применение в схемах автома-
тики.
Рис. 5.59. Схема включения коллекторного двигателя постоянного тока с
возбуждением от постоянных магнитов
405
5.5.10. Коллекторные микродвигатели переменного тока
В настоящее время в схемах автоматики применяются в
основном однофазные коллекторные микродвигатели пере-
менного тока с последовательным возбуждением. Эти двига-
тели по своему устройству мало отличаются от ДПТ с после-
довательным возбуждением обычного типа. Отличие заклю-
чается в том, что они имеют не литые, а шихтованные из
листовой электротехнической стали не только якорь, но и
станину, и полюсы. Это необходимо для уменьшения потерь
на вихревые токи от переменного во времени магнитного по-
тока. Обмотка возбуждения коллекторного двигателя пере-
менного тока часто делится на две части ОВ, включаемые с
разных сторон якоря (рис. 5.60). Такое симметричное распо-
ложение обмоток позволяет снизить радиопомехи.
Рассмотрим работу коллекторного электродвигателя пе-
ременного тока.
В рассматриваемом режиме ток якоря и магнитный по-
ток Ф изменяются по синусоидальному закону:
t„ = sin = V2Z, sin ;
Ф = Фт sin(<y/ - у),
где у - угол, обусловленный активными потерями мощности в стали.
Мгновенное значение электромагнитного момента
™ = к»фт - /)/ят sin at =
72 л/2 (5-64)
= КмФт1я cos(2at + у),
где К и - коэффициент намагничивания.
Графики изменения тока 1Я, магнитного потока Ф и элек-
тромагнитного момента т показаны на рис. 5.61,<7. Из урав-
нения (5.64) и рис. 5.61,а следует, что момент двигателя
можно представить в виде двух постоянной составляющей
Л/_=0,5л/2КЛЛсо8г
406
и переменной составляющей, которая изменяется с двойной
частотой,
М„р = 0,5~12К„Ф„1, cos(2arf + /).
Электромагнитный момент двигателя т является знако-
переменным и в отдельные промежутки времени отрица-
тельным (тормозным) (рис. 5.61).
Рис. 5.60. Схема включения коллекторного двигателя переменного тока
Рис. 5.61. Характеристики коллекторного двигателя переменного тока: а
- временная диаграмма 1я,Ф,т\ б - векторная диаграмма при работе на
переменном токе
407
Однако якорь двигателя вращается с равномерной часто-
той, так как он имеет достаточно большой момент инерции.
Среднее значение момента
= Л-Л™, = 0,5^Ф.ЛСОЗ/ = , (5.65)
где K'v = 0,5 V2 Км cosy - коэффициент.
Векторная диаграмма однофазного коллекторного двига-
теля переменного тока (рис. 5.61,6) строится на основании
уравнения
+ E = + (5.66)
где ^7? и Хх - суммы активных и реактивных сопротивлений в цепи
обмотки якоря.
ЭДС, индуцируемая в обмотке якоря,
£ = <Фтщ. (5.67)
Из уравнений (5.66) и (5.67) можно получить зависимость
частоты вращения от тока якоря (электромеханическую ха-
рактеристику двигателя):
ш Е
К'.Ф. <Ф„
На основании уравнений (5.67) и (5.68) получаем уравне-
ние механической характеристики двигателя:
К'еФ К'еК'мФ2
Механическая характеристика коллекторного двигателя
переменного тока представлена на рис. 5.62 и имеет вид ги-
перболы (кривая 1). Там же для сравнения представлена ме-
ханическая характеристика коллекторного двигателя посто-
янного тока, (кривая 2).
Как следует из рис. 5.62 при питании коллекторного дви-
гателя постоянным током характеристика располагается вы-
ше, чем при питании переменным током. Это обусловлено
408
Рис. 5.62. Механические ха-
рактеристики коллекторного
двигателя переменного (1),
постоянного тока (2) и уни-
версального (З)УКД:
со = а>1сон, М' = М/М„
тем, что у коллекторного двигателя переменного тока в урав-
нении (5.69) для механической характеристики имеется до-
полнительный член А/Г„(/У^х), а У коллекторного двигателя
постоянного тока он равен нулю.
По своим рабочим характеристикам однофазный коллек-
торный двигатель переменного тока идентичен аналогично-
му двигателю постоянного тока. Однако он имеет несколько
худшие энергетические показатели, что объясняется увели-
ченными потерями в стали за счет потерь в станине и полю-
сах.
Большим недостатком коллекторных двигателей пере-
менного тока является плохая их коммутация - значительное
искрение под щетками. Причина этого заключается в том,
что в коммутируемой секции (секции, замкнутой щетками
накоротко) кроме реактивной ЭДС и ЭДС вращения наво-
дится еще ЭДС трансформации. Эта ЭДС возникает вследст-
вие пульсации потока полюсов, с осью которых совпадает
ось коммутируемой секции, являющейся как бы замкнутой
накоротко вторичной обмоткой трансформатора, первичной
обмоткой которого является обмотка возбуждения.
Положительными свойствами коллекторных двигателей
переменного тока, способствующими их широкому распро-
странению в схемах автоматики являются: возможность по-
лучения при промышленной частоте 50 Гц практически лю-
бых частот вращения; возможность простого, плавного, ши-
рокого и экономичного регулирования частоты вращения.
Эти двигатели особенно широко применяются там, где при
промышленной частоте требуется получить высокие частоты
вращения от 3000 до 20000 об/мин, чего невозможно добить-
ся с помощью синхронных и асинхронных двигателей.
409
5.5.11. Универсальные коллекторные двигатели
В устройствах автоматики и электробытовых приборах
широко применяют универсальные коллекторные двигатели
(УКД) мощностью от нескольких ватт до нескольких сотен
ватт, которые могут работать от источника как постоянного,
так и однофазного переменного тока (рис. 5.63).
Универсальный коллекторный двигатель устроен прин-
ципиально так же, как и двигатель постоянного тока с после-
довательным возбуждением (ДПТ ПВ).
Отличие универсального коллекторного двигателя от
двигателя постоянного тока состоит в том, что магнитная
система УКД выполнена полностью шихтованной, а катушки
обмотки возбуждения ОВ имеют две секции и промежуточ-
ные выводы (рис. 5.63). Секционирование обмотки возбуж-
дения двигателя вызвано тем, что при работе от источника
переменного напряжения из-за падения напряжения в индук-
тивном сопротивлении двигателя номинальная частота вра-
щения оказывается меньшей, чем при работе на постоян-
ном токе со_ (рис. 5.62).
Для выравнивая частот вращения при работе на постоян-
ном токе в цепь якоря включают все витки обмотки возбуж-
дения, а при работе на переменном токе - только часть их,
вследствие чего соответственно уменьшается магнитный по-
ток двигателя. В этом случае механическая характеристика на
УКД на переменном токе соответствует кривой 3 (рис. 5.62).
~ и + и -
Рис. 5.63. Схема включения универсального коллек-
торного двигателя
В универсальных коллекторных двига-
телях, выпускаемых отечественной про-
мышленностью, так же как и в коллектор-
ных двигателях переменного тока, обмотку
возбуждения разделяют на две части и
включают с обеих сторон якоря. Такое
включение (симметрирование обмотки) по-
зволяет уменьшить радиопомехи, создавае-
мые двигателем.
410
При работе на постоянном токе УКД имеет такие же ха-
рактеристики как двигатель постоянного тока с последова-
тельным возбуждением (рис. 5.43). Работа же двигателя на
переменном токе имеет ряд специфических особенностей,
которые были рассмотрены выше. Характеристики УКД при
питании постоянным и переменным током представлены на
рис. 5.62.
Рабочие характеристики УКД при его работе на постоян-
ном и переменном токе имеют приблизительно одинаковую
форму. При переменном токе ток якоря несколько больше,
чем при постоянном токе, из-за появления реактивной со-
ставляющей и увеличения активной составляющей вследст-
вие возрастания потерь в стали. По этим же причинам КПД
двигателя при переменном токе меньше, чем при постоянном
токе.
Регулирование частоты вращения УКД при работе на по-
стоянном токе осуществляют путем включения в цепь якоря
переменного активного сопротивления, изменения питающе-
го напряжения и тока возбуждения (шунтированием обмотки
возбуждения реостатом). При переменном токе регулирова-
ние частоты вращения осуществляют в основном изменени-
ем питающего напряжении, реже - включением реостата в
цепь якоря.
УКД применяются в схемах автоматики и в бытовых уст-
ройствах и приборах, которые могут питаться от источника
постоянного или переменного тока.
5.6. Управление исполнительными двигателями
В схемах автоматики исполнительные двигатели предна-
значены для преобразования управляющего электрического
сигнала в угловое механическое перемещение вала. Эти дви-
гатели работают в условиях частых пусков и останов, так как
сигнал управления меняется в широких пределах и в соот-
ветствии с программой регулирования.
В системах автоматики применяют исполнительные дви-
гатели трех видов - постоянного тока, асинхронные и шаго-
вые. По характеру работы исполнительные двигатели делят-
ся на двигатели непрерывного и дискретного (прерывистого)
действия.
411
В исполнительных двигателях непрерывного действия
угловое перемещение вала происходит в течение всего вре-
мени действия управляющего сигнала, при этом частота
вращения вала зависит от параметров этого сигнала (ампли-
туды, фазы). К исполнительным двигателям непрерывного
действия относятся двигатели постоянного тока и асинхрон-
ные.
В исполнительных двигателях дискретного действия уг-
ловое перемещение вала происходит скачками, т.е. при по-
ступлении управляющего сигнала на обмотку двигателя вал
поворачивается на определенный угол независимо от про-
должительности действия этого сигнала. К исполнительным
двигателям дискретного действия относятся шаговые двига-
тели.
5.6.1. Требования, предъявляемые к исполнительным
электродвигателям
К исполнительным двигателям предъявляют следующие
требования:
- отсутствие самохода (при прекращении управляющего
сигнала ротор двигателя должен остановиться);
- минимальная нелинейность механических и регулиро-
вочных характеристик;
- надежность и экономичность способов управления; бы-
стродействие (малоинерционность), т.е. минимальное время
разгона до установившейся частоты вращения;
- минимальное напряжение трогания - значение управ-
ляющего сигнала, вызывающее вращение ротора двигателя.
Кроме того, исполнительные двигатели должны удовлетво-
рять общим требованиям, предъявляемым к электрическим
машинам общепромышленного назначения:
- минимальные габаритные размеры и масса;
- высокие эксплутационные показатели (надежность,
КПД, коэффициент мощности), удобство и безопасность об-
служивания, соответствие климатическим условиям и т.п.
Специфика требований, предъявляемых к исполнитель-
ным двигателям, привела к необходимости создания специ-
412
альных конструкций этих двигателей - микродвигателей ко-
торые были рассмотрены в разделе 5.5.
Для удобства сравнения свойств исполнительных двига-
телей, различающихся мощностью, принципом действия и
способом управления, используют относительные значения
основных параметров: момента т= М /М6; частоты враще-
ния v = п / п6; напряжения управляющего сигнала
a=Uу / U6', механической мощности р2 =mv . Здесь Мб,п6 и
U6 - величины момента, частоты вращения и напряжения,
принятые при расчёте относительных величин за базовые.
Как правило, за базовые значения принимаются номиналь-
ные значения этих величин.
При оценке эксплутационных свойств исполнительных
двигателей непрерывного действия пользуются следующими
характеристиками.
Механические характеристики - зависимость электро-
магнитного момента от частоты вращения т = /(v) при на-
пряжении управления (коэффициенте сигнала) а = const.
Как правило, эти характеристики строят для ряда значений
коэффициента сигнала а, получая семейство механических
характеристик.
Регулировочные характеристики - зависимость частоты
вращения от напряжения управления (коэффициента сигна-
ла) v = f (а) при электромагнитном моменте т = const. Эти
характеристики строятся для ряда значений момента т, по-
лучая семейство регулировочных характеристик.
Зависимость полной механической мощности от часто-
ты вращения р2 = /(v) при а = const .Эти характеристики
строят для различных значений коэффициента сигнала а, по-
лучая семейство характеристик механической мощности.
5.6.2. Управление исполнительными двигателями посто-
янного тока
В качестве исполнительных двигателей постоянного тока
применяют двигатели с обмоткой независимого возбуждения
413
или с возбуждением от постоянных магнитов. Наличие ще-
точного коллекторного узла усложняет эксплуатацию испол-
нительных двигателей и несколько усложняет управление
этими двигателями.
Однако исполнительные двигатели постоянного тока
имеют ряд достоинств: их механические и регулировочные
характеристики практически прямолинейны; способы управ-
ления просты.
В исполнительных двигателях постоянного тока с обмот-
кой возбуждения применяют якорное и полюсное управле-
ние. В двигателях с возбуждением постоянными магнитами -
только якорное управление.
При якорном управлении исполнительного двигателя с об-
моткой возбуждения (5.64,а) к обмотке возбуждения ОВ под-
водится неизменное напряжение постоянного тока
Ue = const. Обмотка якоря двигателя является в этом случае
обмоткой управления. На обмотку якоря подается управляю-
щие. 5.64. Принципиальные схемы исполнительных двигателей постоян-
ного тока с якорным (а, б) и полюсным (в) управлением: БУ - блок
управления; UZ - выпрямитель
414
щий сигнал (напряжение якоря, которое называется далее
напряжением управления) U =U„. Напряжение якоря
Uя = Uy подаётся, например, от управляемого выпрямителя
UZ, причём уровень напряжения якоря U зависит от вели-
чины сигнала с блока управления выпрямителем БУ - (иу}).
Блок управления является элементом автоматической систе-
мы. Напряжение U = Uy подаётся в моменты времени, опре-
деляемые автоматической системой управления, когда тре-
буется включение и работа исполнительного двигателя. В
двигателях с возбуждением от постоянных магнитов обмотка
возбуждения отсутствует, и к двигателю подводят лишь ре-
гулируемое напряжение якоря U = Uy (рис. 5.64,6). Таким
образом, изменяя напряжение якоря двигателя согласно
(5.54) и (5.55), изменяется частота вращения вала двигателя.
При полюсном управлении к обмотке якоря двигателя
подводится постоянное напряжение U = const, а к обмотке
возбуждения ОБ напряжение с выхода выпрямителя UZ
(рис. 5.64,в) которое является управляющим U . Для ограни-
чения тока якоря I в неподвижном якоре, когда противо-
ЭДС Е-0 (рис. 5.37), и в обмотке якоря проходит ток ко-
роткого замыкания / = IKJ = U/R (при мощности двигателя
более 10 Вт) в цепь якоря последовательно включают рези-
стор сопротивлением Rdo6. При изменении напряжения U
изменяется ток возбуждения 1в двигателя, а значит изменя-
ется магнитный поток двигателя согласно уравнению (5.52).
Изменение направления вращения вала (реверс) исполни-
тельного двигателя постоянного тока осуществляется изме-
нением полярности управляющего сигнала (напряжения яко-
ря или напряжения возбуждения).
При расчете относительных параметров исполнительных
двигателей постоянного тока за базовую величину при опре-
делении относительного электромагнитного момента прини-
мают пусковой момент МП ном при номинальных напряжени-
ях на обмотках якоря и возбуждения:
(5.70)
415
Уровень управляющего сигнала оценивается коэффици-
ентом сигнала
иУ иУ
а = —— = - , (5.71)
U U
в ном ном
где Vвном, UH0M - номинальные напряжения питания обмотки возбуж-
дения и цепи якоря двигателя.
Исполнительный двигатель с якорным управлением,
или с изменением напряжения якоря. При якорном управ-
лении самоход в двигателе не возникает, так как при снятии
управляющего сигнала, равного напряжению якоря
Uy=U = 0, ток якоря I = 1у = 0, электромагнитный момент
двигателя (5.51) М = кмФв1у = 0. Уравнение механической
характеристики исполнительного двигателя при якорном
управлении в относительных единицах получаем на основе
уравнений (5.55), (5.70), (5.71):
m = a-v, (5.72)
где V = п/пх - относительная частота вращения двигателя при
М - 0; а - иу/ииом ;Uy=U, UH0M - текущее (регулируемое) и но-
минальное значение напряжения якоря.
Из уравнения (5.72) следует, что механическая характе-
ристика исполнительного двигателя постоянного тока
т = f{v) при а = const прямолинейна.
На рис. 5.65,а показаны механические характеристики дви-
гателя при якорном управлении, построенные для различных
значений коэффициента сигнала а . Анализ характеристик по-
казывает, что механические характеристики прямолинейны и
параллельны: двигатель развивает максимальный вращающий
момент при пуске (v = 0); относительный пусковой момент ра-
вен коэффициенту сигнала (тп =а). Из (5.72) получим урав-
нение регулировочной характеристики двигателя
v = а - т,
из которого следует, что регулировочная характеристика
двигателя с якорным управлением v = f (а) при т = const
прямолинейна (рис. 5.65,6).
416
б
Рис. 5.65. Характеристики исполнительного двигателя с якорным управле-
нием: механическая (а), регулировочная (б), механической мощности (в)
Анализ характеристик, построенных для различных зна-
чений т, показывает, что частота вращения двигателя прямо
пропорциональна коэффициенту сигнала а во всем диапазо-
не нагрузок двигателя. Наибольшая частота вращения двига-
теля соответствует а = 1.
Механическая мощность исполнительного двигателя в
относительных единицах р2 = mv. Используя (5.72), получим
уравнение характеристики механической мощности:
p2=av-v2. (5.73)
Из (5.73) следует, что характеристика механической
мощности исполнительного двигателя с якорным управлени-
ем р2= f (v) при а = const - квадратичная функция частоты
вращения v. Анализ этих характеристик, построенных при
различных а (рис. 5.75,в), показывает, что снижение коэф-
фициента сигнала а резко уменьшает механическую (а, сле-
довательно, и полезную) мощность двигателя. Это объясня-
ется тем, что максимальное значение механической мощно-
сти р2тах ПРИ заданном а пропорционально квадрату коэф-
фициента сигнала
а2
Р1тлх ~ л ‘
417
Следовательно, при работе исполнительного двигателя с
малыми значениями коэффициента сигнала а плохо исполь-
зуется его механическая мощность. Максимальная механиче-
ская мощность р2п1ах будет при относительной частоте вра-
щения v'= 0,5а.
Мощность возбуждения исполнительного двигателя с
якорным управлением равна электрическим потерям в об-
мотке возбуждения, Вт:
Ре = ДР = I,Re.
Так как ток возбуждения 1в двигателей постоянного тока
независимого возбуждения в несколько раз меньше тока якоря
в номинальном режиме, то мощность возбуждения Л/^~/в2
составляет небольшую величину. Мощность возбуждения не
зависит от нагрузки двигателя, а в двигателях с возбуждением
от постоянных магнитов эта мощность равна нулю.
Мощность управления для двигателей с якорным управ-
лением равна, Вт
Ру = UУ1У = Р2+ Iy R + 6PM + bPMei,
т.е. равна сумме полезной механической мощности Р2 элек-
трических потерь в обмотке якоря lyR, магнитных потерь в
сердечнике якоря Л/>ц и механических потерь ДРиех. Эту
мощность представим равной разности всей потребляемой
двигателем мощности Рх и потерь на возбуждение двигателя
Р„Вт:
Ру=Р.-Рв-
Потери мощности возбуждения составляют от 5% (в дви-
гателях мощностью 10^-250 Вт) и до 30% (в двигателях мощ-
ностью до 7 Вт). Таким образом, мощность управления ис-
полнительных двигателей с якорным управлением равна со-
ответственно 95-70% от всей подводимой к двигателю мощ-
ности. Это недостаток якорного управлении, так как необхо-
димо применять управляемые выпрямители UZ мощностью
практически равной номинальной мощности двигателя.
418
Исполнительный двигатель с полюсным управлени-
ем, или с изменением магнитного потока. Существенный
недостаток полюсного управления - возможность самохода
исполнительного двигателя. Это объясняется тем, что после
снятия сигнала управления двигатель остается возбужден-
ным за счёт небольшого магнитного потока остаточного маг-
нетизма Фост и на якорь продолжает действовать небольшой
электромагнитный момент, Нм:
М = К Ф I
ост .и*осгггв’
который при небольшой нагрузке на валу двигателя может
вызвать самопроизвольное вращение якоря при а = 0. Для
устранения самохода двигатель должен иметь на валу посто-
янно действующую механическую нагрузку Мс > Мост.
Уравнение механической характеристики двигателя с по-
люсным управлением в относительных единицах получаем
на основе (5.55) с учетом относительного момента и сигнала
управления:
m-a(y~av), (5-74)
где а = иу[ивиом = ив/ивном-, Ue,UeHQM - напряжение возбуждения
двигателя соответственно текущее и номинальное.
Из (5.74) следует, что механические характеристики дви-
гателя с полюсным управлением прямолинейны, но в отли-
чие от механических характеристик двигателя с якорным
управлением они не параллельны друг другу (рис. 5.66,а),
т.е. при разных коэффициентах сигнала а жёсткость харак-
теристики неодинакова (с уменьшением а жёсткость харак-
теристики возрастает).
При полюсном управлении частота вращения идеального
холостого хода обратно пропорциональна коэффициенту
сигнала:
так как частота вращения обратно пропорциональна магнит-
ному потоку (5.56).
419
Для двигателей малой мощности такое влияние а на час-
тоту вращения не опасно, так как механическая нагрузка Мс
якоря таких двигателей, вызванная в основном трением в
подшипниках, достаточна для ограничения частоты вращения
двигателя. Но в двигателях мощностью более нескольких де-
сятков Вт, (при отсутствии нагрузки на валу и малых значени-
ях сигнала управления или после прекращения подачи сигна-
ла) частота вращения может достигнуть опасного значения
для механической прочности двигателя. Для предотвращения
этого необходимо искусственно создать на валу двигателя по-
стоянно действующий момент нагрузки такой величины, что-
бы частота вращения якоря не достигла опасного значения.
Уравнение регулировочной характеристики исполни-
тельного двигателя с полюсным управлением v = f {а) имеет
вид:
а - т
что свидетельствует о нелинейности регулировочных харак-
теристик исполнительных двигателей с полюсным управлени-
ем (рис. 5.66,6). Это серьезный недостаток полюсного управ-
ления. Кроме того, при малых нагрузочных моментах
(/и < 0,5) регулировочные характеристики неоднозначны (при
двух различных значениях коэффициента сигнала а можно
получить одинаковую частоту вращения у). Этот недостаток
ограничивает применение полюсного управления только для
привода автоматических устройств, которые создают момент
сопротивления на валу двигателя не меньше 0,5 Мп.
Используя (5.74), определим механическую мощность
р2 = av - a2v2.
(5-75)
Из характеристик механической мощности р2 = f(y)
(рис.5.68,в) видно, что максимум механической мощности
соответствует частоте вращения v'=l/(2a). Подставляя
v' = l/(2tz) в (5.75), получим выражение максимальной меха-
нической мощности
1 2 1 1
и 2а 4а2 4
420
Из этого уравнения следует, что максимальная механиче-
ская мощность при полюсном управлении не зависит от ко-
эффициента сигнала а. Это достоинство полюсного управ-
ления, позволяющее при небольших значениях а получить
значительную механическую мощность.
в
Рис. 5.66. Характеристики исполнительного двигателя с полюсным
управлением: механическая (а), регулировочная (б), механической мощ-
ности (в)
421
Мощность возбуждения при полюсном управлении равна
сумме механической мощности, электрических потерь в цепи
якоря, магнитных и механических потерь исполнительного
двигателя:
р. = U.I. = Р2 + 1г(к + Кы)+ДР, +
Мощность возбуждения составляет до 70-90% всей по-
требляемой двигателем мощности. Остальные 30-10% от
всей потребляемой двигателем мощности Р}, составляет
мощность управления Р. Малая величина мощности управ-
ления является преимуществом полюсного управления ис-
полнительными двигателями, так как позволяет в значитель-
ной степени уменьшить мощность усилителя в блоке управ-
ления.
Регулирование частоты вращения двигателя постоянного
тока с независимым возбуждением общепромышленного ис-
полнения в различного рода механизмах осуществляется из-
менением напряжения якоря ДПТ (якорное управление), из-
менением тока возбуждения (или магнитного потока) двига-
теля (полюсное управление) или изменением добавочного
сопротивления Бд в цепи якоря (рис. 5.37). Механические
характеристики ДПТ в первых двух случаях в относительных
единицах соответствуют уравнениям (5.72) и (5.74) и пред-
ставлены на рис. 5.65,а и 5.66,а.
5.6.3. Управление асинхронными исполнительными дви-
гателями
Двухфазные асинхронные двигатели получили наиболь-
шее применение в качестве исполнительных двигателей. На
статоре такого двигателя расположена двухфазная обмотка
(см. раздел 5.5.4). Одна из обмоток фазы статора - это об-
мотка возбуждения ОБ, которая постоянно включена в сеть
переменного тока на неизмененное напряжение Ц. Другая
обмотка фазы статора - это обмотка управления ОУ, на нее
подают сигнал управления напряжением U от блока управ-
ления БУ (рис. 5.67,а,б).
422
Для работы асинхронного исполнительного двигателя не-
обходимо, чтобы обмотка статора создавала вращающееся
магнитное поле. Условие возникновения такого поля - нали-
чие в двигателе пространственного и временного сдвига
МДС обмоток фазы статора (см. раздел 5.5.2). Пространст-
венный сдвиг МДС обеспечивается конструкцией двигателя:
обмотки фазы статора расположены так, что их оси сдвинуты
в пространстве относительно друг друга на угол 90 эл. град.
Временной (фазовый) сдвиг МДС создается включением
обмоток статора по специальным схемам, содержащим фа-
зовращатель или фазодвигающий конденсатор в цепи одной
из обмоток фазы.
Для управления асинхронными исполнительными двига-
телями применяют три способа: амплитудный, фазовый и
амплитудно-фазовый.
При амплитудном управлении напряжение управления Uу
независимо от его значения имеет фиксированный фазовый
сдвиг на 90° относительно напряжения Ux (рис. 5.67,в).
Рис. 5.67. Схемы включения (а, б) и векторные диаграммы (в, г, д) асин-
хронных исполнительных двигателей: а - амплитудное управление;
б - фазовое и амплитудно-фазовое управление; в - амплитудное управле-
ние; г - фазовое управление; д - амплитудно-фазовое управление.
423
Управление исполнительным двигателем выполняется
путем изменения амплитуды напряжения управления. Изме-
нение частоты вращения магнитного поля двигателя вызвано
тем, что при равенстве МДС обмоток возбуждения и управ-
ления фазы статора (F = Fe) вращающееся поле в двигателе
круговое, а при изменении напряжения Uy равенство нару-
шается, поле становится эллиптическим и на ротор двигателя
действует не только прямой (вращающий), но и обратный
(тормозящий) момент (см. раздел 5.5.2). Реверс двигателя
при амплитудном управлении достигается изменением фазы
Ц,на 180°.
Относительное значение напряжения управления при ам-
плитудном управлении определяется эффективным коэффи-
циентом сигнала
_kUy
где к = —°6-8—- , ко6 в и к^ - обмоточные коэффициенты обмоток
коб.у^у
возбуждения и управления; wg и Wy - число витков в этих обмотках.
Круговое вращающееся поле статора соответствует
ае=1.
При фазовом управлении напряжение управления имеет
тг
постоянную амплитуду U = —, управление двигателем вы-
к
полняется путем изменением угла фазового сдвига этого на-
пряжения относительно Ц в диапазоне Д = 0 ч- 90° (рис.
5.67,г). Коэффициент сигнала при фазовом управлении
а = sin р. При фазовом сдвиге между напряжениями U и
U{ на угол Р = 90° вращающееся поле статора круговое и
а = 1. Если Р < 90°, магнитное поле статора становится эл-
липтическим, если р = 0 - пульсирующим. Если Р < 0, т.е.
угол фазового сдвига отрицательный, то двигатель изменяет
направление вращения ротора.
424
При амплитудно-фазовом управлении в цепь обмотки
возбуждения ОВ (рис. 5.67,6) включают фазосдвигающий
конденсатор С. При изменении значения (амплитуды) на-
пряжения управления U изменяется ток в обмотке управле-
ния и возбуждения. Это приводит к изменению как величи-
ны, так и фазы напряжения на обмотке возбуждения Ue (рис.
5.67,6). Емкость конденсатора С выбирается такой, чтобы
при номинальном напряжении управления UH и непод-
вижном роторе (п2 = О) вращающееся поле в двигателе было
круговым. Этому режиму соответствует коэффициент сигна-
ла а = а0. При других значениях напряжения управления
вращающееся поле в двигателе становится эллиптическим.
Реверс двигателя осуществляется так же, как и при ампли-
тудном способе управления.
У асинхронных двигателей существует два типа самохода
параметрический и технологический. Причина параметриче-
ского самохода - неправильный выбор параметров двигателя
при его проектировании, а технологического самохода - по-
явление в двигателе дефектов.
Параметрический самоход возникает при снятии управ-
ляющего сигнала. Общепромышленные асинхронные двига-
тели имеют небольшое активное сопротивление обмотки ко-
роткозамкнутого ротора и работают с малым критическим
скольжением. Они непригодны в качестве исполнительных
двигателей, так как обладают самоходом. Это объясняется
тем, что при снятии сигнала управления (отключение обмот-
ки управления) двигатель продолжает работать как однофаз-
ный. В этом случае поле статора становится пульсирующим
и электромагнитный момент двигателя остается положитель-
ным и будет вращать ротор в прежнем направлении с мень-
шей частотой вращения. В результате при ае = 0 двигатель
самопроизвольно вращается, что недопустимо в системах ав-
томатики. Если в двигателе увеличить активное сопротивле-
ние обмотки ротора, то критические скольжения, соответст-
вующие прямому Мкрпр и обратному Мкро6р моментам, воз-
растут до значений, превышающих единицу, (рис. 5.50). При
ае = 0 и переходе двигателя в однофазный режим электро-
магнитный момент двигателя становится тормозящим, МТ
425
оказывает на ротор тормозящее действие и исключает само-
ход. Для надёжного устранения самохода активное сопро-
тивление обмотки ротора увеличивают так, чтобы sKp > 2.
При этом увеличиваются электрические потери мощности в
роторе (др,г=/2Ч). снижаются КПД двигателя и пусковой
момент Мп, уменьшается пусковой ток 1П. Повышенное
сопротивление R2 двигателя допускает работу двигателя при
неподвижном роторе, в режиме короткого замыкания.
Технологический самоход возникает из-за замыканий ме-
жду частью листов пакета статора, межвитковых замыканий
или неодинаковой магнитной проводимости магнитной сис-
темы двигателя в различных радиальных направлениях. Ка-
чественное изготовление всех элементов двигателя позволяет
устранить технологический самоход.
Характеристики асинхронного исполнительного дви-
гателя при амплитудном, фазовом и амплитудно-фазовом
управлении. Введем обозначения: пусковой момент при
круговом вращающемся магнитном поле Мпо\ относитель-
ный момент т = М/Мпо‘, синхронная частота вращения
р; относительная частота вращения v = n2/nx.
Рис. 5.68. Механические характеристики асинхронного исполнительного
двигателя при амплитудном (а), фазовом (б), амплитудно-фазовом (в)
управлении
426
Механические характеристики т = /(v) при ае = const
асинхронных исполнительных двигателей при различных
способах управления почти не отличаются друг от друга
(рис. 5.68). Все они нелинейны, особенно при больших зна-
чениях коэффициента сигнала а . При амплитудно-фазовом
управлении в зоне средних значений частоты вращения (v =
0,2-0,8) двигатель развивает больший вращающий момент,
чем при амплитудном и фазовом способах управления.
Это объясняется тем, что с ростом частоты вращения v
увеличиваются напряжение UB на обмотке возбуждения
(рис. 5.67,6), магнитный поток возбуждения и, следователь-
но, электромагнитный вращающий момент двигателя.
Частота вращения ротора приближается к синхронной
(v «1) только при наибольших значениях коэффициента сиг-
нала (ае = 1; sin /7 = 1; а/а0 = 1). С уменьшением коэффициен-
та сигнала а , снижается частота вращения v холостого хода,
так как с уменьшением напряжения управления вращающее-
ся поле статора становится все более эллиптическим, увели-
чивается обратная составляющая этого поля, создающая на
роторе тормозной момент. При амплитудно-фазовом управ-
лении даже при значении коэффициента сигнала a/tz0 = 1
частота вращения холостого хода меньше синхронной (у < 1).
Это вызвано тем, что значение фазосдвигающей емкости С
выбирается из условия получения кругового вращающегося
поля только при пуске двигателя, т.е. при т = 1, поэтому в
режиме холостого хода (т = 0) вращающееся поле двигателя
становится эллиптическим.
Пунктиром представлены прямые, которыми можно ап-
проксимировать механические характеристики двигателя.
Регулировочные характеристики асинхронных исполни-
тельных двигателей при амплитудном v = f(ae), фазовом
v = /(sin/7) и амплитудно-фазовом v = f(a/a0) способах
управления нелинейны (рис. 5.69). Для всех способов управ-
ления начальные участки регулировочных характеристик при
небольшой частоте вращения очень близки к прямолиней-
ным, поэтому асинхронные исполнительные двигатели целе-
сообразно использовать при небольших частотах вращения
427
v = 0,4. При этом исполнительные двигатели рассчитаны на
работу от сети переменного тока с частотой 400-500 Гц.
Из регулировочных характеристик следует, что мини-
мальное значение сигнала управления (ае; sin/?; а/а0), при
котором ротор двигателя с нагрузкой на валу приводится во
вращение (напряжение трогания), равно относительному
значению электромагнитного момента т .
Зависимости механической мощности от частоты вра-
щения р2 = f(v) при неизменном коэффициенте сигнала по-
казаны на рис. 5.70.
Рис. 5.69. Регулировочные характеристики асинхронного исполнительно-
го двигателя при амплитудном (а), фазовом (б), амплитудно-фазовом (в)
управлении
Рис. 5.70. Зависимость механической мощности от частоты вращения
асинхронного исполнительного двигателя при амплитудном (а), фазовом
(б); амплитудно-фазовом (в) управлении
428
Анализ характеристик показывает: при всех способах
управления они нелинейны.
Наибольшее значение механической мощности двигателя
соответствует частоте вращения v = 0,52 -? 0,58. Наибольшую
механическую мощность двигатель развивает при амплитуд-
но-фазовом, а наименьшую - при фазовом управлении.
С помощью зависимости р2 = f(y) можно определить
номинальную мощность и частоту вращения асинхронного
исполнительного двигателя. За номинальную механическую
мощность принимают наибольшее значение мощности при
коэффициенте сигнала ае = 1; sin/7 = 1; a/aQ = 1, за номи-
нальную частоту вращения принимают частоту вращения,
соответствующую номинальной мощности.
Выбор способа управления асинхронным исполнитель-
ным двигателем определяется условиями работы автомати-
ческой системы и требованиями, предъявляемыми со сторо-
ны системы к исполнительному двигателю. Наибольшее
практическое применение получил амплитудно-фазовый
способ управления с включением фазосдвигающего конден-
сатора в цепь обмотки возбуждения (рис. 5.67,6). Это объяс-
няется простотой схемы управления и высоким значением
коэффициента мощности (cos^ = 0,8 4--0,95).
5.7. Шаговый электродвигатель
Шаговые двигатели (Step motors) относятся к классу бес-
коллекторных двигателей и являются разновидностью син-
хронных машин. Они имеют высокую надёжность и большой
срок службы, что позволяет использовать их в схемах авто-
матики, видеокамерах, видеомагнитофонах, музыкальных
центрах, в дисководах, принтерах, плоттерах, сканерах, фак-
сах. По сравнению с коллекторными двигателями постоянно-
го тока, шаговые двигатели (ШГ) имеют более сложные схе-
мы управления, которые выполняют коммутации обмоток
двигателя. Кроме того, шаговые двигатели применяются там,
где нужно точное позиционирование исполнительного орга-
на (ИО). В этом случае главное преимущество шаговых дви-
гателей - это реализация точного позиционирования ИО и
регулировка частоты вращения без датчика обратной связи.
429
Это очень важно, так как датчики могут стоить больше само-
го двигателя.
По конструкции шаговые двигатели имеют следующие
типы:
- двигатели с переменным магнитным сопротивлением
(реактивные двигатели);
- двигатели с постоянными магнитами (активные двига-
тели);
- гибридные двигатели.
5.7.1. Устройство и принцип действия шагового
двигателя
Шаговый двигатель имеет неподвижный статор и вра-
щающийся ротор. На статоре ШД располагаются обмотки,
ротор, как правило, не имеет обмоток.
В шаговом двигателе вращающий момент создается
взаимодействием магнитных потоков статора и ротора. Ста-
тор изготовлен из материала с высокой магнитной прони-
цаемостью и имеет несколько магнитных полюсов. Магнит-
ный полюс - это область намагниченного тела, где магнит-
ное поле сконцентрировано. Магнитные полюса имеют как
статор, так и ротор. Для уменьшения потерь на вихревые то-
ки магнитопроводы статора и ротора собраны из отдельных
пластин. Вращающий момент ШД пропорционален величине
магнитодвижущей силы поля статора, которая пропорцио-
нальна току в обмотке и количеству ее витков. Если хотя бы
одна обмотка шагового двигателя имеет питание, ротор при-
нимает определенное положение. Он будет находиться в
этом положении до тех пор, пока внешний приложенный
момент (момент сопротивления) не превысит некоторого
значения, называемого моментом удержания. В последнем
случае ротор повернется, и будет находиться в одном из сле-
дующих положений равновесия.
Двигатели с переменным магнитным сопротивлением,
или реактивные двигатели.
Эти двигатели на статоре и роторе имеют несколько по-
люсов зубчатой формы из магнитомягкого материала
(рис. 5.71). Намагниченность ротора отсутствует. Для про-
стоты на ротор имеет 4 зубца, а статор - 6 полюсов. Двига-
тель имеет 3 независимые обмотки, каждая из которых рас-
положена на двух противоположных полюсах статора.
430
Рис. 5.71. Конструкция двигателя с пере-
менным магнитным сопротивлением (по-
перечный разрез)
Такой двигатель имеет шаг поворота ротора 30°.
При подаче тока в одну из катушек, создаётся магнитное
поле статора и ротор стремится занять положение, когда маг-
нитный поток замкнут по пути с минимальным магнитным
сопротивлением, т.е. ротор повернётся так, что его зубцы бу-
дут находиться напротив тех полюсов, обмотки которых
обтекаются током. Если затем обесточить первую обмотку и
подать ток в следующую, то ротор поменяет положение, пе-
реместившись на шаг и снова замкнув своими зубцами
магнитный поток. Таким образом, чтобы осуществить
непрерывное вращение ротора, нужно последовательно
переключать фазы обмотки статора. Реальный ШД может
иметь большое количество полюсов статора и зубцов ротора,
что соответствует большему количеству шагов за оборот или
шаг поворота ШД будет меньше. Часто поверхность каждого
полюса статора выполняется зубчатой с большим
количеством зубцов и при большом количестве зубцов
ротора обеспечивается малое значение угла шага, порядка
нескольких градусов. Двигатели с переменным магнитным
сопротивлением применяются довольно редко, так как они
имеют малый момент.
Двигатели с постоянными магнитами, или активные
двигатели. Эти двигатели состоят из статора, который имеет
обмотки, и ротора, включающего постоянные магниты (рис.
5.72). Постоянные магниты имеют прямолинейную форму и
расположены параллельно оси двигателя. Благодаря магнит-
ному потоку, который создают постоянные магниты, в таких
двигателях обеспечивается больший суммарный магнитный
поток двигателя и, как следствие, больший момент, чем у
двигателей с переменным магнитным сопротивлением.
431
Представленный на рисунке шаговый двигатель имеет 3
пары полюсов ротора и 2 пары полюсов статора. Двигатель
имеет две независимые обмотки А и В (рис.5.72), каждая из
которых расположена на двух противоположных полюсах
статора. Двигатель, имеет величину шага поворота ротора
30 . При подаче тока в одну из катушек статора, ротор стре-
мится занять положение, при котором разноименные маг-
нитные полюса ротора и статора находятся друг против дру-
га. Для осуществления непрерывного вращения нужно по-
следовательно подавать попеременно ток в фазы обмотки
Рис. 5.73. Конструкция гибридного шагового двигателя: поперечный раз-
рез - а; продольный разрез - б; 1 - вал; 2 - статор; 3 - обмотка статора; 4
- постоянный магнит ротора; 5 - зубчатые полюсные наконечники
Рис. 5.72. Конструкция шагового двигателя с постоянными магнитами:
поперечный разрез - а; общий вид - б; 1 - ротор; 2 - вал; 3 - обмотка А; 4
- обмотка В; 5 - чашка статора А; 6 - чашка статора В
432
статора. На практике ШД с постоянными магнитами имеют
значительно большее число пар полюсов, что обеспечивает
угол шага 7,5-35°.
Конструкция шагового двигателя с постоянными магни-
тами показана на рис. 5.72,6. Магнитопровод статора выпол-
нен в виде штампованного стакана с полюсными наконечни-
ками в виде ламелей. Обмотки фаз статора А и В размещены
на двух разных магнитопроводах, которые установлены друг
на друге.
Ротор представляет собой цилиндрический многополюс-
ный постоянный магнит. С торцов обмотки фаз статора кре-
пятся с помощью чашек статора А и В.
Гибридные двигатели. В этих двигателях отражены луч-
шие свойства двигателей с переменным магнитным сопро-
тивлением и двигателей с постоянными магнитами. На рис.
5.73 представлен вариант конструкции гибридного ШД. Ро-
тор гибридного двигателя имеет зубцы, расположенные в
осевом направлении, и включает постоянные магниты.
Ротор разделен на две части, между которыми располо-
жен цилиндрический постоянный магнит.
Зубцы верхней половинки ротора являются северными
полюсами, а зубцы нижней половинки - южными. Кроме то-
го, верхняя и нижняя половинки ротора повернуты друг от-
носительно друга на половину угла шага зубцов ротора. Чис-
ло пар полюсов ротора равно количеству зубцов на одной из
его половинок. Зубчатые полюсные наконечники ротора, как
и статор, набраны из отдельных пластин для уменьшения по-
терь на вихревые токи.
Статор гибридного двигателя также имеет зубцы, обеспе-
чивая большое количество эквивалентных полюсов, в отли-
чие от основных полюсов, на которых расположены обмотки.
Обычно используются 4 основных полюса для двигателей с
шагом 3,6° и 8 основных полюсов для двигателей с шагом
1,8° и 0,9°. Зубцы ротора обеспечивают меньшее сопротивле-
ние магнитной цепи в определенных положениях ротора, что
улучшает статический и динамический моменты. Это обес-
печивается соответствующим расположением зубцов, когда
часть зубцов ротора находится строго напротив зубцов ста-
тора, а часть между ними. Зависимость между числом полю-
сов ротора, числом эквивалентных полюсов статора и числом
фаз определяет угол шага S двигателя:
433
360° =360
p-h W
(5-76)
где p — число эквивалентных полюсов на фазу, равное числу полюсов
ротора; h — число фаз; N = p-h — полное число полюсов для всех фаз
ШД.
Ротор двигателя (рис. 5.73) имеет 100 полюсов (50 пар),
статор имеет 2 фазы, поэтому полное количество полюсов -
200, а шаг, соответственно, 1,8°. На рис. 5.73,а представлено
продольное сечение гибридного шагового двигателя. Стрел-
ками показано направление магнитного потока постоянного
магнита ротора. Часть потока (на рис. 5.73,6 показана чёрной
линией) проходит через полюсные наконечники ротора, воз-
душные зазоры и полюсный наконечник статора и не участ-
вует в создании вращающего момента.
Как видно на рис. 5.73, воздушные зазоры у верхнего и
нижнего полюсного наконечника ротора разные. Это дости-
гается благодаря повороту полюсных наконечников на поло-
вину шага зубьев. Поэтому существует другая магнитная
цепь, которая содержит минимальные воздушные зазоры и
обладает минимальным магнитным сопротивлением. По этой
цепи замыкается другая часть потока постоянного магнита
(на рисунке показана светлой штриховой линией), которая
взаимодействует с магнитным потоком обмотки статора и
создаёт вращающий момент ШД. Часть этой магнитной цепи
находится в плоскости, перпендикулярной рисунку, и поэто-
му не показана. В этой же плоскости создают магнитный по-
ток катушки статора, который частично замыкается полюс-
ными наконечниками ротора.
Величина зазора между зубцами ротора и статора не-
большая - обычно 0,1 мм. Это требует высокой точности при
сборке, поэтому шаговый двигатель не разбирают.
Чтобы магнитный поток не замыкался через вал, который
проходит внутри магнита, его изготавливают из немагнит-
ных марок стали, которые обладают повышенной хрупко-
стью.
Для получения больших вращающих моментов ШД уве-
личивают магнитную индукцию магнитного поля, создавае-
мого статором, и индукцию поля постоянного магнита. При
этом требуется больший диаметр ротора, что увеличивает
434
момент инерции ШД. Поэтому мощные шаговые двигатели
иногда конструктивно выполняют из нескольких секций в
виде этажерки. В этом случае крутящий момент и момент
инерции увеличиваются пропорционально количеству сек-
ций, а их отношение не ухудшается.
Большинство современных шаговых двигателей являются
гибридными, которые являются двигателем с постоянными
магнитами, но с большим числом полюсов статора и ротора.
Далее рассматриваются только гибридные двигатели. Чаще
всего на практике двигатели имеют 100 или 200 шагов на
оборот, соответственно угол шага равен 3,6° или 1,8°.
5.7.2. Выполнение обмоток статора шаговых двигателей
В зависимости от конфигурации обмоток ШД делятся на
биполярные и униполярные. Биполярный шаговый двигатель
имеет одну обмотку в каждой фазе статора. В этом случае,
для изменения направления магнитного потока обмотки,
драйвером (силовой электронный блок управления) изменя-
ется полярность питающего напряжения (рис. 5.74,а). Всего
биполярный двигатель имеет две обмотки и, соответственно,
четыре вывода. Для такого типа двигателя требуется мосто-
вой, или полумостовой драйвер с двухполярным питанием.
Униполярный шаговый двигатель имеет одну обмотку в
каждой фазе статора (рис. 5.74,б), но с отводом от середины
обмотки.
А
А
В
в
Рис. 5.74. Схемы питания обмоток статора шагового двигателя: а - бипо-
лярный двигатель; б - униполярный; в - четырёхобмоточный
435
Это позволяет изменять направление магнитного потока
поля статора, создаваемого обмоткой, переключением поло-
винок одной обмотки.
При этом существенно упрощается схема драйвера, кото-
рый должен иметь только 4 простых ключа. Таким образом, в
униполярном двигателе используется другой способ измене-
ния направления магнитного потока поля. Средние выводы
обмоток фаз статора могут быть объединены внутри двига-
теля, поэтому такой двигатель может иметь 5 или 6 выводов.
Иногда униполярные двигатели имеют раздельные 4 обмотки
статора, поэтому их ошибочно называют 4 фазными двигате-
лями, каждая обмотка которых имеет отдельные выводы, по-
этому выводов всего 8 (рис. 5.74,в). При соответствующем
соединении обмоток такой двигатель можно использовать
как униполярный или как биполярный. Униполярный двига-
тель с двумя обмотками и отводами тоже можно использо-
вать в биполярном режиме, если отводы оставить неподклю-
ченными. В любом случае ток обмоток следует выбирать так,
чтобы не превысить максимальной рассеиваемой мощно-
сти ШД.
Если сравнивать между собой биполярный и униполяр-
ный двигатели, то биполярный имеет более высокую удель-
ную мощность. При одних и тех же размерах биполярные
двигатели обеспечивают больший крутящий момент.
5.7.3 Способы управления шаговым двигателем
Применяются четыре способа управления шаговым дви-
гателем.
Первый способ управления ШД полношаговый режим
(’’one phase on” full step или wave drive mode). В этом случае
включена одна фаза статора и вращение ротора обеспечива-
ется попеременной коммутацией фаз обмоток статора, при
этом они не перекрываются, т.е. в один момент времени
включена только одна фаза обмотки. На рис. 5.75 представ-
лен простейший ШД, имеющий две обмотки статора А В, DC
и однополюсный момент ротора. Точки равновесия ротора
для каждого шага совпадают с «естественными» точками
равновесия ротора у незапитанного двигателя. Недостатком
этого способа управления является то, что для биполярного
двигателя в один и тот же момент времени используется 50%
обмоток, а для униполярного - только 25%. Это означает, что
436
в таком режиме не может быть получен полный максималь-
ный момент ШД. На рис. 5.75,а показаны фазы вращения ро-
тора двигателя. На I этапе ток подаётся в обмотку АВ (“+” в
начало А), которая создает магнитное поле статора, южный
полюс которого совпадает с положительным напряжением
тока в обмотке «+». Ротор двигателя поворачивается так, что
разноименные полюса S и N статора и ротора притягиваются
На II этапе ток подаётся в обмотку СД (“+” в начало Q, а
обмотка АВ обесточивается. Ротор поворачивается на 90°.
Далее на III этапе ток подается в обмотку АВ (“+” в конец
обмотки В) с другим направлением тока и т.д. В этом случае
ротор ШД дискретно вращается по часовой стрелке с ша-
гом 90°.
Второй способ управления ШД - также полношаговый
режим-, включены две фазы обмотки статора (управление
фазами с перекрытием), в этом случае две фазы включены в
одно и то же время (”two-phase-on” full step или просто full
step mode). В этом способе управления ротор фиксируется в
промежуточных позициях между полюсами статора (рис.
5.75,6).
При этом способе обеспечивается примерно на 40%
больший момент ШД, чем в случае одной включенной фазы.
Этот способ управления обеспечивает такой же угол шага,
как и первый способ, но положение точек равновесия ротора
смещено на полшага. Первый и второй способы управления
называются полношаговыми режимами.
Третий способ управления ШД - полушаговый режим,
(’’one and two-phase-on” half step или просто half step mode)
представляет комбинацию первых двух способов. В этом
случае ротор двигателя делает шаг в половину основного при
полношаговом режиме.
В этом способе управления в каждый второй шаг ШД за-
питана его одна фаза, а в остальных случаях запитаны две
фазы (рис. 5.75,в). В результате угловое перемещение ротора
ШД составляет половину угла шага для первых двух спосо-
бов управления. Полушаговый режим обычно не позволяет
получить полный момент ШД в полношаговом режиме с
включением двух фаз, хотя наиболее совершенные драйверы
реализуют модифицированный полушаговый режим, в кото-
ром двигатель обеспечивает практически полный момент, и
437
при этом рассеиваемая мощность не превышает номиналь-
ной.
Рис. 5.75. Способы управления фазами шагового двигателя: а - полноша-
говый режим, включена одна фаза; б - полношаговый режим, включены
две фазы; в - полушаговый режим; I, II, III, IV - этапы подачи тока в об-
мотки АВ и CD
438
Четвертый способ управления ШД - микрошаговый ре-
жим (micro stepping mode). При этом способе управления ток
в фазах обмотки статора меняется небольшими шагами, при-
чём величина токов в фазах принимается разной. Когда од-
новременно включены две фазы, но их токи не равны, то по-
ложение равновесия ротора будет лежать не в середине шага,
а в другом месте, определяемом соотношением токов фаз.
Меняя это соотношение, можно обеспечить некоторое коли-
чество микрошагов внутри одного шага. Кроме увеличения
разрешающей способности, микрошаговый режим имеет и
другие преимущества, которые будут описаны ниже.
Вместе с тем, для реализации микрошагового режима
требуются значительно более сложные драйверы, позволяю-
щие задавать ступенчатый ток в обмотках с необходимой
дискретностью. Полушаговый режим (третий способ) явля-
ется частным случаем микрошагового режима, но он не тре-
бует формирования ступенчатого тока питания катушек, по-
этому реализуется чаще.
При работе ротор ШД принимает равновесные положе-
ния смещения на шаг, полшага или долю шага. Однако по-
ложение ротора не сохраняется неизменным после выключе-
ния тока обмоток. Поэтому при включении и выключении
питания двигателя ротор будет смещаться на полшага. Для
того чтобы он не смещался при остановке, необходимо пода-
вать в обмотки ток удержания.
Ток удержания может быть меньше номинального, так
как от двигателя с неподвижным ротором обычно не требу-
ется большого момента. Однако есть механизмы, у которых в
остановленном состоянии двигатель должен обеспечивать
полный момент, что для шагового двигателя возможно. Ука-
занное свойство ШД позволяет в таких ситуациях обходиться
без механических тормозных систем. Поскольку современ-
ные драйверы позволяют регулировать ток питания обмоток
статора ШД. Задание необходимого тока удержания обычно
не представляет технических трудностей. Задача решается
разработкой соответствующего программного обеспечения
микроконтроллера управляющего электропривода.
Формирование токов обмоток ШД осуществляется спе-
циальными электронными схемами (драйверами), которые
содержат силовые ключи и, как правило, микроконтроллер
управляющий ключами.
439
5.7.4. Момент шагового двигателя
Рассмотрим полушаговый режим работы ШД. Принцип
работы двигателя заключается в создании опережающего
магнитного поля обмоткой статора, которое заставляет ротор
поворачиваться. Вращающееся магнитное поле создается
обмотками статора, в которые соответствующим образом по-
даётся ток.
Для ШД, у которого запитана одна обмотка, зависи-
мость момента от угла поворота ротора относительно точки
равновесия является приблизительно синусоидальной. Эта
зависимость для двухобмоточного двигателя, который имеет
N шагов на оборот (угол шага 5 в радианах определяется по
формуле 5.76).
Реально характер зависимости может быть несколько
другой, что объясняется неидеальностью геометрии ротора и
статора. Пиковое значение момента Му называется момен-
том удержания. Зависимость момента двигателя от угла по-
ворота ротора имеет следующий вид:
360°
М = -Му -(sin —) а, (5.77)
У
где М - момент двигателя; Му- момент удержания двигателя; 5 - угол
шага; а - угол поворота ротора.
Если к ротору ШД приложить внешний момент, который
превышает момент удержания, то ротор провернется. Если
внешний момент не превышает момента удержания, то ротор
будет находиться в равновесии в пределах угла шага. У
обесточенного двигателя момент удержания не равен нулю
из-за действия постоянных магнитов ротора и обычно со-
ставляет около 10% максимального момента двигателя.
Иногда используют термины «механический угол поворо-
та ротора» и «электрический угол поворота ротора». Ме-
ханический угол вычисляется исходя из того, что полный
оборот ротора составляет 2р: радиан. При вычислении элек-
трического угла принимается, что один оборот соответствует
одному периоду угловой зависимости момента. Для приве-
денных выше формул а является механическим углом пово-
рота ротора, а электрический угол для двигателя, имеющего
440
4 шага на периоде кривой момента, равен —- \а или —а ,
\ 251 ) 4
где - число шагов на оборот. Электрический угол факти-
чески определяет угол поворота магнитного поля статора.
Если запитать одновременно две обмотки двигателя, то
момент будет равен сумме моментов, обеспечиваемых об-
мотками по отдельности. На рис. 5.76 кривые 1,2 соответст-
вуют моменту от действия каждой обмотки в отдельности, а
кривая 3 - суммарному моменту от действия двух запитан-
ных обмоток.
При этом, если токи в обмотках одинаковы, то точка мак-
симума момента будет смещена на половину шага.
На половину шага сместится и точка равновесия ротора
(точка е на рисунке). Этот факт и положен в основу реализа-
ции полушагового режима. Пиковое значение момента при
двух запитанных обмотках (момент удержания) при этом бу-
дет в V2 раз больше, чем при одной запитанной обмотке.
МУ2 =^2Myi,
где МУ2 - момент удержания при двух запитанных обмотках; Му} -
момент удержания при одной запитанной обмотке.
Рис. 5.76. Зависимость момента шагового двигателя от угла поворота ро-
тора для двух запитанных обмоток: 1 - момент от действия первой об-
мотки; 2 — второй обмотки; 3 - от действия двух обмоток
441
Именно этот момент Му2 обычно и указывается в харак-
теристиках шагового двигателя.
5.7.5. Механическая характеристика шагового двигателя
Частота коммутаций фаз шагового двигателя определяет
частоту его вращения. Зависимость момента ШД от частоты
вращения является механической характеристикой.
Поведение момента при увеличении частоты коммутации
фаз таково: при частотах коммутации фаз от нуля до соср мо-
мент уменьшается мало (практически постоянен), а начиная с
некоторой частоты среза соср монотонно падает. Обычно для
шагового двигателя приводятся две кривые зависимости мо-
мента от частоты, рис. 5.77 и он имеет две частоты среза:
бУср(. - частота старта; а>срр - частота разгона.
Внутренняя кривая (кривая старта, или pull-in curve) по-
казывает, при каком максимальном момента трения для дан-
ной частоты вращения шаговый двигатель способен начать
вращение (тронуться). Эта кривая пересекает ось частот в
точке, называемой максимальной частотой старта <утах ст
или частотой приемистости. Точка определяет максималь-
ную частоту, на которой нагруженный двигатель может на-
чать вращение. На практике эта величина лежит в пределах
200-500 полных шагов в секунду или это частота следования
импульсов, подаваемых силовым драйвером в обмотке ста-
тора двигателя (число импульсов в секунду кратное числу
шагов в секунду).
Рис. 5.77. Зависимость момента от
частоты вращения шагового двига-
теля
442
Момент инерции исполнительного органа сильно влияет
на вид внутренней кривой. Большому моменту инерции со-
ответствует меньшая область под кривой Л/(*ц). Эта область
называется областью статора.
Внешняя кривая (кривая разгона, или hull-out curve) пока-
зывает, при каком максимальном моменте трения для данной
частоты вращения шаговый двигатель способен поддержи-
вать вращение без пропуска шагов. Кривая разгона пересека-
ет ось частот в точке, называемой максимальной частотой
разгона а>тах . Она показывает максимально возможное чис-
ло полных шагов в секунду для данного шагового двигателя
без нагрузки. Область, которая лежит между кривыми, назы-
вается областью разгона.
443
Пр иложение 1
Структура программного обеспечения для
расчета электрических цепей
Программное обеспечение состоит из двух частей:
CONL - комплекс обучающих программ;
CONT - комплекс контролирующих программ;
Комплекс обучающих программ содержит программы с
примерами расчета электрических цепей. В каждую из этих
программ включены вспомогательные программы: «Кальку-
лятор комплексных чисел», «Решение систем алгебраических
уравнений», «Справка».
Программа «Калькулятор комплексных чисел» позволяет
провести все необходимые операции с комплексными числа-
ми, вычислить значение модуля комплексного числа и угла
ft), значение cos (fi) и sin (/?), необходимых при расчете па-
раметров электрических цепей.
Программа «Решение систем алгебраических уравнений»
позволяет получить решение систем алгебраических уравне-
ний с комплексными числами, что необходимо при расчете
многоконтурных электрических цепей.
Программа «Справка» предназначена для вывода на экран
монитора информации об основных понятиях и законах
электротехники. Эта информация необходима для анализа и
решения проблем, возникающих в ходе решения контроль-
ных задач.
Студенты, используя предоставленный комплекс обучаю-
щих программ, могут самостоятельно, в том числе и вне ау-
дитории, решить заданный вариант задачи.
Контролирующий комплекс предназначен для контроля
решения задач. Для этого в ЭВМ необходимо ввести проме-
жуточные и конечные результаты расчетов. В случае обна-
ружения ошибки программа указывает на допущенные
ошибки, при этом снижается общая оценка за выполненную
работу. Для анализа и оперативного исправления допущен-
ных ошибок в программы включены: «Калькулятор ком-
444
плексных чисел», «Решение систем алгебраических уравне-
ний» и «Справка».
Содержание программного обеспечения'.
Все программы в комплексах CONL и CONT имеют одни
и те же имена:
Spra.exe - исполняющая программа «Справка» по основ-
ным понятиям и законам электротехники;
Са1с.ехе - исполняющая программа «Калькулятор ком-
плексных чисел»;
Alur.exe - исполняющая программа «Решение систем ли-
нейных уравнений для комплексных чисел»;
Conl_l.exe - исполняющая программа контроля задач
«Расчет электрических цепей с последовательным соедине-
нием активно-реактивных сопротивлений»;
Con2_l.exe - исполняющая программа контроля задач
«Расчет электрических цепей с параллельным соединением
активно-реактивных сопротивлений»;
Con3_l.exe - исполняющая программа контроля задач
«Неразветвленных электрических цепей с одним или не-
сколькими источниками питания»;
Con4_l.exe - исполняющая программа контроля задач
«Расчет сложных электрических цепей методом контурных
токов»;
Con5_l.exe - исполняющая программа контроля задач
«Расчет сложных электрических цепей методом межузлового
напряжения»;
Con6_l.exe - исполняющая программа контроля задач
«Соединение трехфазных потребителей электрической энер-
гии «звездой»;
Con7_l.exe - исполняющая программа контроля задач
«Соединение трехфазных потребителей электрической энер-
гии «треугольником».
Все элементы рисунков схем, содержимое окон и таблиц с
исходными данными размещены в субдиректориях ТЕК,
ERO, EPL, HLP.
445
Для вызова программ из системы Norton необходимо рас-
крыть директорию CONL и CONT и выбрать соответствую-
щую исполняющую программу.
В системе Windows 95 или аналогичной системе необхо-
димо найти изображение Norton Commander или MSDOS,
раскрыть его и найти соответствующую директорию и про-
грамму.
В случае выхода из Windows 95 в систему MSDOS для вы-
зова исполняющей программы указывается командная стро-
ка, включающая название директории и имя программы, на-
пример, \CONL\conl_l.exe.
Объем программ CONL и CONT позволяет разместить их
на дискете 1.44 Mb. Запуск программ можно также осущест-
влять с дисковода А.
446
Рекомендуемая литература
1. Агаханян Т.М. Интегральные микросхемы / Т.М Агаханян. М.: Выс-
шая школа. 1983. - 240 с.
2. Армейский Е.В. Электрические микромашины / Е.В. Армейский, Г.Б.
Фалк . - М.: Высшая школа!968. 273 с.
3. Блантер С.Г. Промышленная электроника. / С.Г. Блантер. - М.: Не-
дра. 1967. -400 с.
4. Борисов Ю.М., Общая электроника. / Ю.М. Борисов, Ф.Н. Липатов. -
М.: Высшая школа. 1974. - 324 с.
5. Борисов Ю.М. Электротехника. Ю.М. Борисов, Липатов Ф.Н., Зо-
рин Ю.Н. - М.: Энергоатомиздат. 1985. - 550 с.
6. Болотов А.В. Электротехнологические установки / А.В. Болотов.
- М.: Высшая школа. 1998. - 320 с.
7. Браммер Ю.А. Импульсные и цифровые устройства / Ю.А. Брамер,
И.Н. Пращук. - М.: Высшая школа. 2003. - 351 с.
8. Брускин Д.Э. Электрические машины. Часть 2 / Д.Э. Брускин,
А.Е. Зорохович, В.С. Хвостов. - М.: Высшая школа. 1979. - 304 с.
9. Веселовский О.Н. Очерки по истории электротехники / О.Н. Весе-
ловский, Я.А. Шнейберг. - М.: Изд-во МЭИ. 1993. - 252 с.
10. Волынский Б.А. Электротехника / Б.А. Волынский, Е.Н. Зейн,
В.Е. Шатерников. - М.: Энергоатомиздат. 1987.-451 с.
11. Герасимов В.Г. Основы промышленной электроники / В.Г. Гераси-
мов, О.М. Князьков, А.Е. Краснопольский, В.В. Сухоруков.
- М.: Высшая школа. 1986. - 336 с.
12. Герасимов В.Г. Электротехника. Программированное учебное посо-
бие. / В.Г. Герасимов, Х.Э. Зайдель, В.В. Коген-Далын, Э.В. Кузне-
цов, Д.Н. Морозов, И.В. Сильванский, В.Б. Соколов, М.С. Цепляева,
ВЛ. - под ред. В.Г. Герасимова. - М.: Высшая школа. 1983. -480 с.
13. Глазенко Т.А. Электротехника и основы электроники / Т.А. Глазен-
ко, В.А. Прянишников. - М.: Высшая школа. 1996. - 207 с.
14. Данилов И.А. Общая электротехника с основами электроники /
И.А. Данилов, П.М. Иванов. - М.: Высшая школа. 2000. - 752 с.
447
15. Ермуратский Е.П. Справочное пособие по основам электротехники
и электроники / Е.П. Ермулатский, А.А. Косякин, В.С. Листвин,
А.В. Нетушил, Г.П. Мычкина. - М.: Высшая школа. 1987. -240 с.
16. Жаворонков М.А. Электротехника и электроника / М.А. Жаворонков,
А.В. Кузин. - М.: Академия. 2005. - 393 с.
17. Иванов И.А. Электротехника. Основные положения, принципы и
задачи. - СПб: Лань. 2002. - 192 с.
18. Иванов Н.И. Электротехника / Н.И. Иванов, Г.И. Соловьёв,
В.С. Равдоник. - СПб: Лань. 2006. - 496 с.
19. Игумнов Д.В. Основы микроэлектроники / Д.В. Игумнов, Г.В. Коро-
лёв, И.С. Громов. -М.: Высшая школа. 1991. -253 с.
20. Каганов И.Л. Промышленная электроника / И.Л. Каганов. - М.: Выс-
шая школа. 1968. - 598 с.
21. Касаткин А.С. Электротехника / А.С. Касаткин, М.В. Немцов.
- М.: Энергоатомиздат. 1995. - 304 с.
22. Кацман М.М. Электрические машины автоматических устройств /
М.М. Кацман. - М.: Форум - ИНФРА - М. 2002. - 263 с.
23. Кауфман М. Практическое руководство по расчётам схем в электро-
нике. В 2-х томах: Пер. с англ / М. Кауфман, А. Сидман - под ред.
Ф.Н. Покровского. - М: Энергоатомиздат. 1991. - 652 с.
24. Кононенко В.В. Электротехника и электроника. / В.В. Кононенко,
В.И. Мишкович, В.В. Муханов, В.Ф. Планидин, П.М. Четолин -
Ростов-на-Дону: Феникс. 2005. - 748 с.
25. Князьков О.М. Лабораторные работы по основам промышленной
электроники. / О.М. Князьков, А.Е. Краснопольский, П.С. Культиа-
сов, А.Д. Покровский, Л.А. Чернов. -М.:Высшая школа. 1989. -173с.
26. Киселёв В.Н. Электротехника и электроника. В 3-х книгах. / В.Н.
Киселёв, А.И. Копылов, Е.В. Кузнецов, Д.Н. Морозов, В.Б. Соколов,
М.С. - под ред. В.Г. Герасимова. - М.:Энергоатомиздат. 1997. - 720с.
27. Лопухина Е.М. Асинхронные микромашины с полым ротором /
Е.М. Лопухина, Г.С. Сомихина М-Л.: «Энергия». 1967. - 198 с.
28. Мелешин В.А. Транзисторная преобразовательная техника / В.А. Ме-
лешин. - М.: Техносфера. 2005. - 241 с.
29. Миловзоров О.В. Электротехника: учебник для вузов / О.В. Милов-
зоров, И.Г. Панков. - М.: Высшая школа, 2004. - 287 с.
448
30. Митин Г.П. Условные обозначения в отечественных и зарубежных
электрических схемах. / Г.П. Митин. - М.: Изумруд. 2003. - 183 с.
31. Мещеряков В.В. Микроэлектродвигатели электронных устройств /
В.В. Мещеряков. - М.: РХТУ им. Д. И. Менделеева. 1978. - 124 с.
32. Миклашевский С.П. Промышленная электроника / С. П. Миклашев-
ский. - М.: Высшая школа. 1973. - 351 с.
33. Немцов М.В. Электротехника и электроника / М.В. Немцов.
- М.: Изд-во МЭИ. 2003. - 595 с.
34. Новиков Ю.В. Основы микропроцессорной техники / Ю.В. Новиков,
П.К. Скоробогатов. - М.: Бином. 2006. - 357 с.
35. Опадчий Ф.Ю. Аналоговая и цифровая электроника / Ф.Ю. Опадчий,
О.П. Глудкин, А.И. Гуров. -М.:Горячая линия-Телеком. 2002. -768с.
36. Осин И.Л. Электрические машины автоматических устройств. / И.Л.
Осин, Ф.М. Юферов. - М.: Изд-во МЭИ. 2003. - 425 с.
37. Попов В.П Основы теории цепей / В.П. Попов. - М.: Высшая школа.
2000. - 576 с.
38. Портала О Н Цифровая электроника/ О.Н. Портала. - СПб: Наука и
техника. 2001. - 220 с.
39. Прянишников В.А. Электротехника и электроника в примерах и за-
дачах / В.А. Прянишников, Е.А. Петров, Ю.М. Осипов. - М: Корона-
Принт.2003. - 336 с.
40. Радин В.И. Электрические машины: асинхронные машины /
В.И. Радин, Д.Э. Брускин, А.Е. Зорохович. - М.: Высшая школа.
1988.-327 с.
41. Рекус Г.Г. Лабораторные работы по электротехнике и основам элек-
троники / Г.Г. Рекус, В.Н. Чесноков. - М.: Высшая школа. 1989.
- 240 с.
42. Рекус Г.Г. Основы электротехники и электроники в задачах с реше-
ниями: учебное пособие / Г.Г. Рекус. - М.: Высшая школа. 2005.
- 343 с.
43. Степаненко И.П. Основы микроэлектроники / И.П. Степаненко.
- М.: Лаборатория Базовых Знаний, 2004. - 488 с.
44. Степаненко И.П. Основы теории транзисторов и транзисторных
схем / И.П. Степаненко. - М.: Энергия. - 670 с.
449
45. Фриск В.В. Основы теории цепей. Сборник задач с примерами при-
менения переносного компьютера / В.В. Фриск. - М.: Солон-Пресс.
2003.- 192 с.
46. Фриск В.В. Основы теории цепей / В.В. Фриск. - М.: РадиоСофт.
2002.-288 с.
47. Хвощ С.Т. Микропроцессоры и микроЭВМ в системах автоматиче-
ского управления / С.Т. Хвощ, Н.Н. Варлинский, Е.А. Попов. - СПб:
Машиностроение. 1987. - 639 с.
48. Чиликин М.Г. Общий курс электропривода / М.Г. Чиликин,
А.С. Сандлер. - М.: Энергоатомиздат. 1981. - 576 с.
49. Чунихин А.А. Электрические аппараты. / А.А. Чунихин. - М.: Энер-
гоатомиздат. 1988.-311 с.
50. Шеховцев В.П. Электрическое и электромеханическое оборудова-
ние. / В.П. Шеховцев. - М.: Форум - ИНФРА - М. 2004. - 405 с.
51. Ялышев А. У. Многофункциональные аналоговые регулируемые уст-
ройства автоматики / А.У. Ялышев, О.И. Разорянов. - М.: Машино-
строение. 1981.-399 с.
450
Учебное издание
Комиссаров Юрий Алексеевич
Гордеев Лев Сергеевич
Вент Дмитрий Павлович
Бабокин Геннадий Иванович
Основы электротехники, микроэлектроники и управле-
ния. Теория и расчет
Том 1
Редактор Н.А. Заходякина
Оригинал-макет подготовлен авторами
Подписано в печать 27.12.2006.
Формат 60 х88 1/16. Бумага офс.№1.
Гарнитура Таймс. Печать офсетная
Печ.л. 28,25. Уч.изд. 31.22
Тираж 1000 экз. Заказ № 292т
АНО Издательство “Химия”
Юридич. адрес: 107076, г.Москва, ул. Стромынка 21, корп. 2
E-mail: ano_chem@rambler.ru
Огпечатапо в типографии ФКП «НИИ «Геодезия»
141292 Моск. обл. г. Красноармейск
просп. Испытателей, 14