
















































































































































































































































Автор: Балагуров В.А. Галтеев Ф.Ф.
Теги: электротехника электрические машины и аппараты электронно-и аппаратостроение машиностроение генератор генераторы электромеханика
ISBN: 5-283-00556-9
Год: 1988




В. А. БАЛАГУРОВ
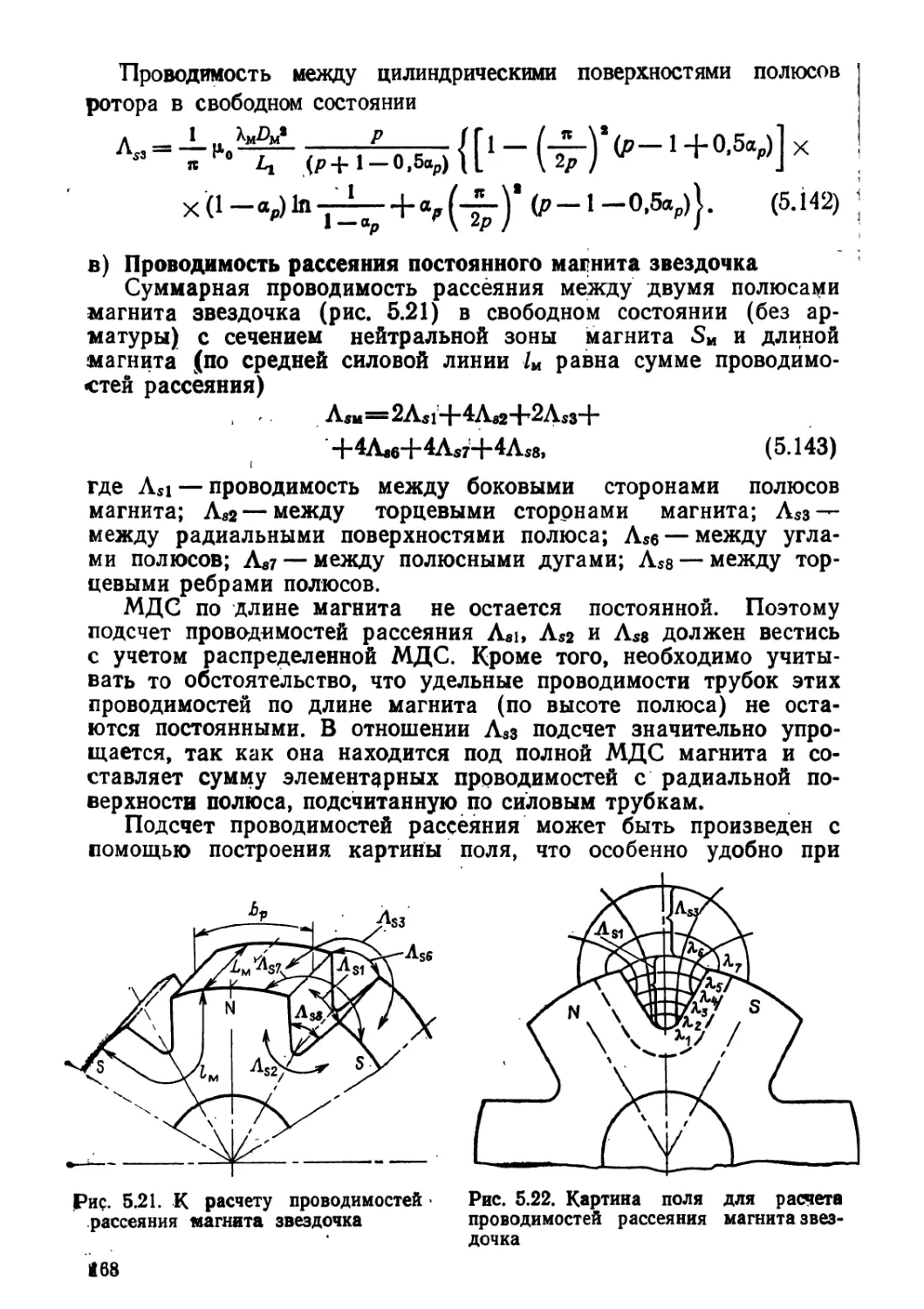
Ф. Ф. ГАЛТЕЕВ
?
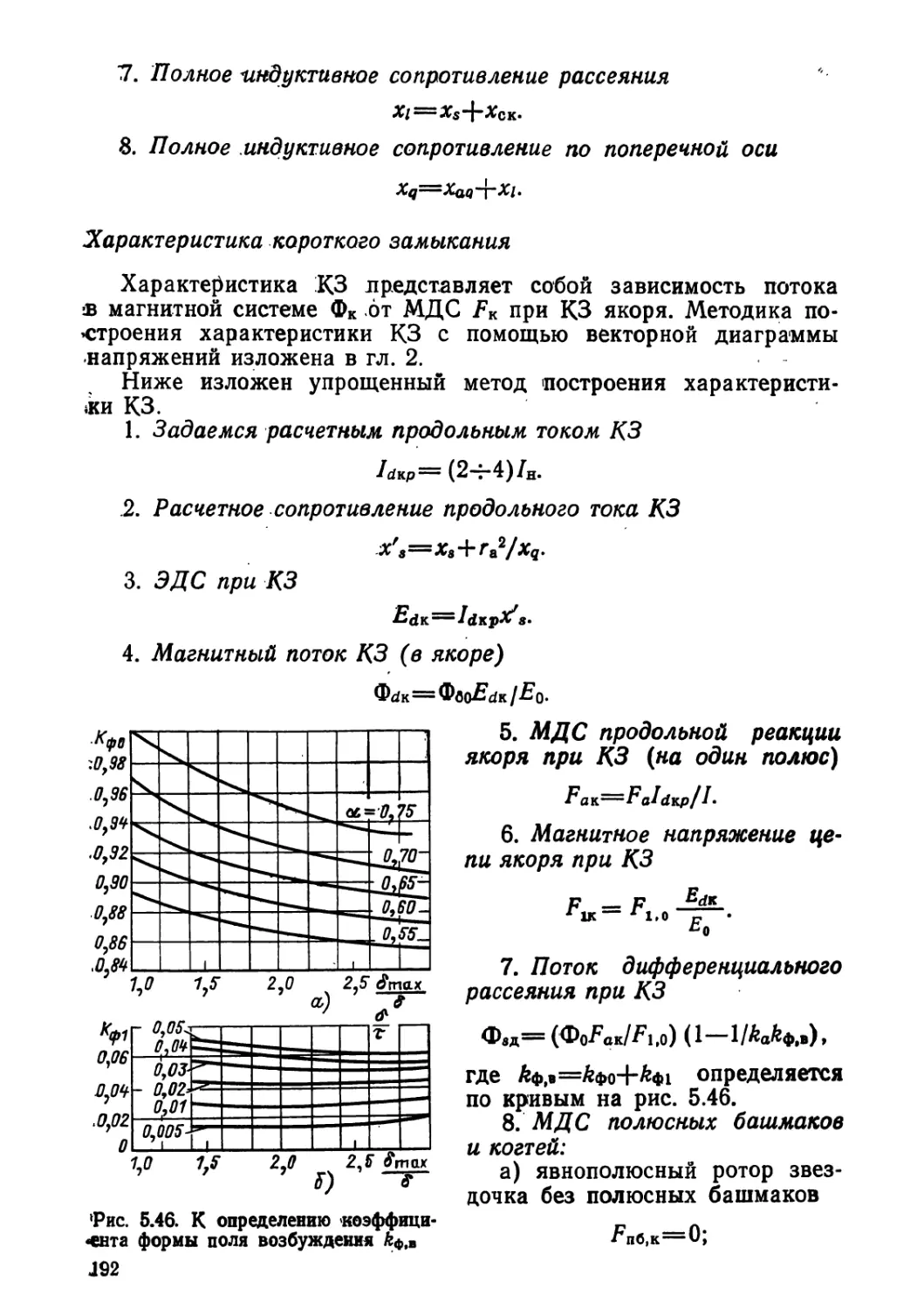
В.А.БАЛАГУРОВ
Ф. Ф. ГАПТЕЕВ
ЭЛЕКТРИЧЕСКИЕ
ГЕНЕРАТОРЫ
с постоянными
магнитами
МОСКВА
ЭНЕРГОАТОМИЗДАТ
1988
ББК 31.261.1
> Б 20
УДК 621.313.8
Рецензент доктор технических наук С. Р. Мизюрин
В. А. Балагуров, Ф. Ф. Галтеев
Б 20 Электрические генераторы с постоянными маг-
нитами.—М.: Энергоатомиздат, 1988.—280 с.: ил.
ISBN 5-283-00556-9.
Излагаются особенности рабочего процесса и проектиро-
вания электрических генераторов с постоянными магнитами,
которые находят широкое применение в различных отраслях
техники: в автономных системах электроснабжения, передвиж-
ных электрических установках, иа. авиационном и автомобиль-
ном транспорте, в автоматике и бытовой технике и т. д.
Для инженерно-технических работников, занимающихся
разработкой и применением электрических генераторов с по-
стоянными магнитами, а также для студентов электромехани-
ческих специальностей.
2302030000-035
Б 051(01Н8------ ,5°-87 ББК 31 261.1
Производственное издание
Балагуров Владимир Александрович
Галтеев Федор Федорович
ЭЛЕКТРИЧЕСКИЕ ГЕНЕРАТОРЫ
С ПОСТОЯННЫМИ МАГНИТАМИ
Редактор Н. 3. Маст лев
Редактор издательства И. В. Боцманова
Художественные редакторы В. А. Гозак-Хозак,
Г. И. Панфилова
Художник переплета В. Ф. Громов
Технический редактор О, Д. Кузнецова
Корректор И. А. Володяева
ИБ № 776
Сдано в набор 28.10.87. Подписано в печат> 05 04.83. Т-10601
Формат бОХЭО1/!® Бумага типографская №2 Гарнитура литературная
Печать высокая Усл. печ. л. 17,5 Усл. кр.-отт. 17,5 Уч.-изд. л.20,03
Тираж 7500 экз. Заказ 6258 Цена 1р.30 к.
Энергоатомиздат. 113114, Москва, М-114, Шлюзовая наб., 10
Ордена Октябрьской Революции и ордена Трудового Красного Зна-
мени «Первая Образцовая типография имени А. А. Жданова» Союз-
полиграфпрома при Госкомиздате СССР. 113054, Москва, М-54,
Валовая, 28.
ISBN 5-283-00556-9 © Энергоатомиздат, 1988
1РЕДИСЛОВИЕ
В автономных системах электрооборудования, которые уста-
гавливаются на передвижных электрических станциях, на авиаци-
>нном и автомобильном транспорте, в автоматике и в бытовой
'ехнике в настоящее время находят широкое применение электри-
1еские генераторы с постоянными магнитами. В связи с появлени-
!м новых материалов постоянных магнитов с высокими магнит-
ными характеристиками были разработаны новые виды электри-
(еских генераторов: генераторы комбинированного возбуждения,
»ентильные генераторы, авиационные генераторы, работающие с
феобразователем частоты в системах электроснабжения стабиль-
юй частоты.
В ряде случаев электрические генераторы с постоянными маг-
штами работают и в двигательном режиме, что предъявляет осо-
бые требования к их параметрам и характеристикам.
Для электрических генераторов с постоянными магнитами ха-
>актерным является многообразие и специфичность конструкций,
«ногообразие характеристик, что объясняется специальными ус-
ювиями применения. Применяется большое количество генерато-
>ов, отличающихся друг от друга не только конструкцией и ти-
юм магнитных систем, но и принципом действия.
- В настоящее время по электрическим генераторам с постоян-
(ыми магнитами литература весьма малочисленна. Наиболее пол-
ю вопросы теории рабочего процесса и расчета машин с посто-
(нными магнитами были отражены в книге под редакцией
V. Н. Ларионова «Электрические машины с постоянными магни-
ами» («Энергия», 1964).
За прошедшие годы значительно изменились конструкции ге-
[ераторов с постоянными магнитами, в связи с широким исполь-
юванием высококоэрцитивных магнитов на базе редкоземельных
•лементов и кобальта, изменились методы расчета, при этом ши-
>око применяется вычислительная техника.
За истекшее время в результате проведения авторами научно-
юследовательских работ и конкретных разработок накоплен боль-
ной фактический материал по вопросам теории рабочего процес-
са и методам расчета электрических генераторов с постоянными
«агнитами. Созданы и работают электрические генераторы с по-
стоянными магнитами различного назначения и на различные
3
мощности. Издание предлагаемой книги позволит восполнить про
бел в литературе по указанным выше вопросам.
В предлагаемой книге изложены особенности рабочего процес
са и расчета следующих электрических генераторов с постоянны-
ми магнитами: синхронных, комбинированного возбуждения, вещ
тильных постоянного тока, разработанных на базе новых матери-
алов постоянных магнитов и новых магнитных систем.
Книга состоит из восьми глав. Глава 1, за исключением § 1.5;
1.6; гл. 2; гл. 5, за исключением § 5.8; § 6.1, 6.2; гл. 7 написаны
В. А. Балагуровым, § 1.5, 1.6; гл. 3 и 4; § 5.8, 6.3—6.5; гл. 8 напи-
саны Ф. Ф. Галтеевым.
Авторы выражают глубокую благодарность за ряд полезных
предложений и замечаний, сделанных при рецензировании руко-
писи доктором техн, наук С. Р. Мизюриным и при peflaKTHpoeaJ
нии канд. техн, наук Н. 3. Мастяевым.
Замечания и советы по книге просим направлять по адресу:
113114, Москва, М-114, Шлюзовая наб., 10, Энергоатомиздат.
Авторы
I лава первая
ОБЩИЕ ВОПРОСЫ ПРИМЕНЕНИЯ И УСТРОЙСТВА
ЭЛЕКТРИЧЕСКИХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ МАГНИТАМИ
1.1. ПРИМЕНЕНИЕ ЭЛЕКТРИЧЕСКИХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ
МАГНИТАМИ В ОТЕЧЕСТВЕННОЙ И ЗАРУБЕЖНОЙ ПРАКТИКЕ
Постоянные магниты в последние годы находят широкое при-
менение в различных областях техники, что объясняется непре-
рывно возрастающими потребностями техники в устройствах с ни-
ми, разработкой новых материалов постоянных магнитов с раз-
личными характеристиками и новых конструкционных сталей с
высокой механической прочностью.
Области применения постоянных магнитов чрезвычайно много-
численны. Они успешно используются в электромашиностроении,
тпаратосiроении, приборостроении, радиоэлектронике, на транс-
чорте, в н'хнике связи, в медицинской технике и т. д.
Поскольку для создания магнитного поля постоянных магни-
тов не требуется специального источника питания, то в ряде слу-
чаев они дают единственно приемлемое техническое решение.
Электрические генераторы с постоянными магнитами, обладая
достоинствами бесконтактных машин с электромагнитным воз-
буждением, имеют еще следующие преимущества: высокую надеж-
ность, простоту конструкции, высокий КПД, надежное возбужде-
ние, улучшенные выходные характеристики, малую инерционность
три переходных процессах. В определенном диапазоне частот то-
ка и мощностей электрические генераторы с постоянными магни-
тами имеют лучшие массогабаритные характеристики, чем гене-
[с. I I. Кривые удель-
й магнитной энергии
и ко »ффициента воз-
Ьта р
5
(BH)wax ,Тл* кА/м i
220- Монокристаллы PrCo5? /
200 7
180-
Sm Со0 5\J
Pro,5 Co0,5------
Магнико
60 “Альнико,
альни
40-
Сталь угле-
9П ров истая
36°foCo
О
SmCo5
160 - \|
140ЮНДК35Т5БА \
,Tt/ (столбчатая текстура)
120 —
ЮНДК25БА
100 - (столбчатая
текстура)
80-
РЧС0 RCos
1900 1920 1940 1960 1980
а) Годы
1200
800
400
Ферриты
Нс,кА/м
2400-
2000
1600
Монокристаллы у
PrCo5, SmCosx. /
Sni0,5 Рг0,5 ^°0,5?
Мп Bi
1-----Z —
। - Альнико (столбчатая Г -
текстура)
- Альнико, \
альни-----
Сталь углеЛ
_родистая
ЗбЧоСо^
^Sm COg
'Ферриты ]
VtCo
___1_
1900 1920 1940 1960 1980
б) Год bi
О
Рис. 1.2. Изменение по годам энергетического произведения (ВН)тах (а) и коэр
ццтивной силы Нс (б) постоянных магнитов
раторы с электромагнитным возбуждением. Применение новы]
материалов постоянных магнитов позволяет разработать генера
торы переменного тока повышенной и высоких частот на больши|
мощности (до 1000 кВ-А) с лучшими массогабаритными показа
телями, чем у генераторов с электромагнитным возбуждением. ।
Свойственные электрическим генераторам с постоянными маг
нитами недостатки: отсутствие прямого способа регулировани
напряжения из-за трудности изменения потока возбуждения о
постоянных магнитов; разброс в характеристиках магнитов, опр€
деляемый характером технологических процессов их изготовле
ния; относительно высокая стоимость генераторов — преодолев^
ются.
Технические и массогабаритные данные электрических генеря
торов с постоянными магнитами зависят прежде всего от магнит
ных свойств постоянных магнитов. О качестве постоянных магнг
тов судят по значению максимальной удельной магнитной энер
пии Wmax (рис. 1.1) или ее удвоенному значению, называемом
энергетическим произведением (В//)тах. Оно равно произведение
коэрцитивной силы Hd и остаточной индукции Bd- Изменение зш
чения энергетического произведения (ВН)тах и коэрцитивной а
6
Рис. 1.3. Общий вид преобразователя мощностью 200 В А:
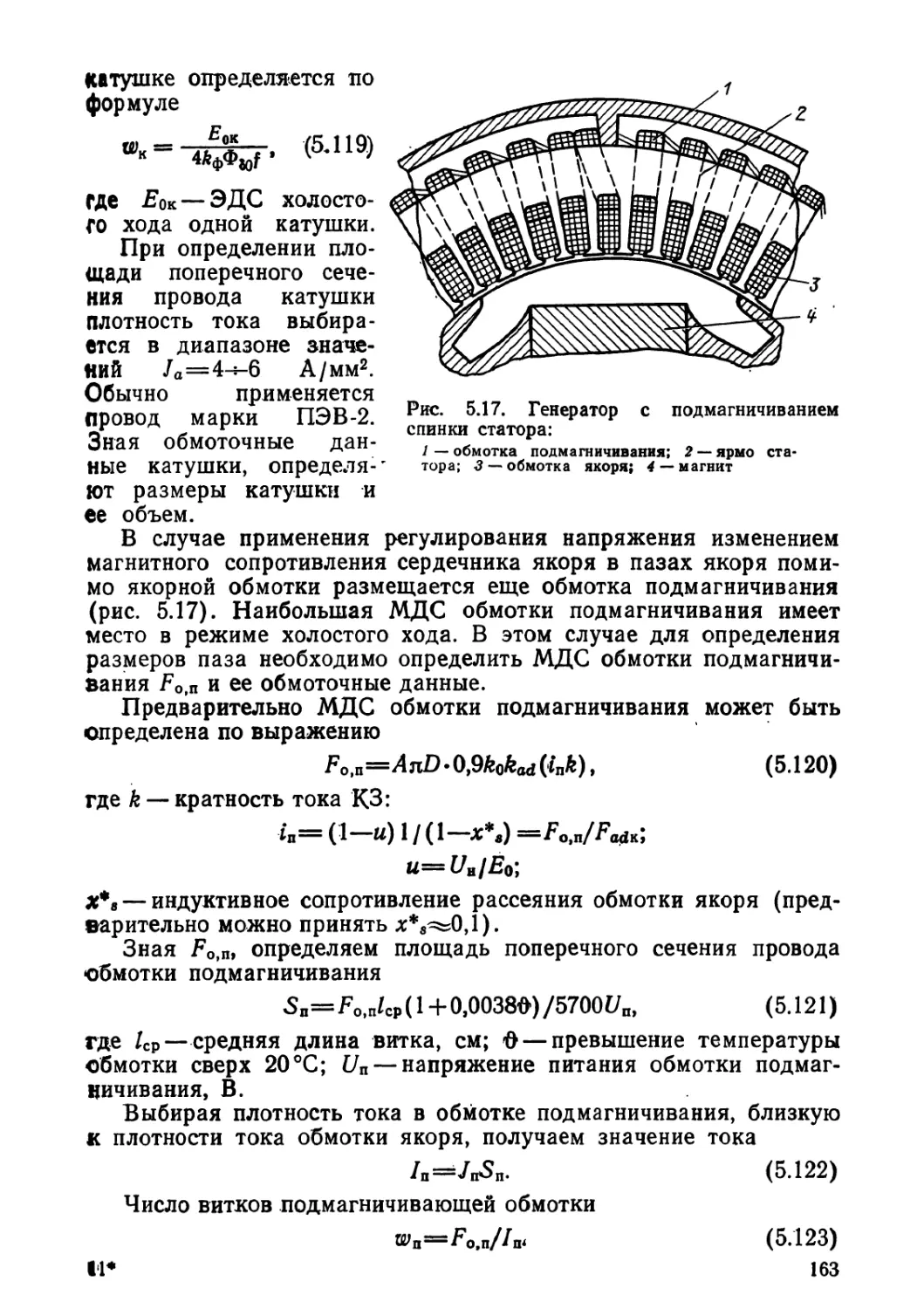
/ — обмотка возбуждения; 2 —щетка; 3 — вентилятор; 4 — корпус; 5—щеточный узел; 6—коробка управления; 7 — ста-
тор генератора; 8 — ротор генератора; 9 — вал; 10 — якорь электродвигателя
Рис. 1.4. Генератор ГЗО-А2
Рис. 1.5. Продольный разрез генератора ГТ-1А:
/ — пакет статора; 2 — обмотка якоря; 3 — подвижный магнит; 4—вал ротора; 5—пр1
жина; 6 — когти; 7 — магнит
В
мы Нс материалов постоянных магнитов по годам приведены на
рис. 1.2.
В электрических генераторах с постоянными магнитами в на-
тоящее время применяются следующие основные группы мате-
риалов для постоянных магнитов: железочикелевые и железони-
кслькобальтовые сплавы, бариевые ферриты, интерметаллические
осдинения на основе редкоземельных элементов и кобальта.
Железоникелевый и железоникелькобальтовые сплавы до на-
•тоящего времени находят широкое применение в электрических
[•снераторах небольшой мощности (авиационных и тракторных
иагнето, магдино), в генераторах преобразователей (типа ПТ,
)ис. 1.3), тракторных генераторах (типа ГЗО-А2, рис. 1.4, Г-46),
снераторах для автономных систем электроснабжения, тахогене-
)«торах постоянного тока и т. д. Наиболее часто используемой
магнитной системой ротора является постоянный магнит в форме
шездочки.
На базе магнитов из бариевых ферритов выполнены трактор-
ное генераторы ГТ-1 А (рис. 1.5).
В 60-х годах были разработаны и нашли широкое применение
щизотропные сплавы на базе ЮНДК24, ЮНДК35Т5, ЮНДК40Т8
направленной кристаллизацией, обладающие большими удель-
юй магнитной энергией и коэрцитивной силой.
Разработка сплавов с направленной кристаллизацией позволи-
|<| значительно расширить диапазон применения электрических
еператоров с постоянными магнитами по мощности и частоте.
Электрические генераторы с постоянными магнитами при частоте
00 Гц по массогабаритным характеристикам стали конкуренто-
иособны с генераторами электромагнитного возбуждения до
ющности 40 кВ-А. С успехом применяются генераторы комбини-
юваиного возбуждения. Последние выпускаются серийно до
0 кВ-A с удельной массой 1,2—1,3 кг/(кВ-А). Значения удель-
ой массы активных материалов генераторов в зависимости от
ющности приведены на рис. 1.6.
Использование магнитов из анизотропных сплавов потребова-
о создания новых магнитных систем ротора (см. § 1.3) с магни-
нмй типа звездочка, призматическими магнитами и составным
ио. 1.6. Кривые значений удельной массы активных материалов в зависимости
г мощности генератора:
-С подмагничиванием спинки якоря; 2 — комбинированного возбуждения; 3 — комбиниоо-
।МИОГо возбуждения с активным валом
9
Рис. 1.7. Эскиз генератора переменного тока комбинированного возбуждения:
1 — постоянный магнит; 2 — полюсный башмак; 3 — статор с обмоткой; 4 — магнитная ст
лица; 5 — магнитная перемычка; 6 — полюсный наконечник; 7 — электромагнитная обмот
возбуждения; 8 — неподвижный магнитный шунт; 9 — немагнитная вставка ’
биметаллическим цилиндрическим кольцом (обоймой). В качес
ве примера на рис. 1.7 приведен эскиз генератора переменного т
ка комбинированного возбуждения с призматическими магнита»
и биметаллическим кольцом на роторе типа звездочка.
В 60-х годах были разработаны для практического применен!
материалы постоянных магнитов на основе редкоземельных эл
ментов и кобальта (RCo5). Применение этих магнитов расшири.
перспективы дальнейшего улучшения характеристик электрик
ских генераторов с постоянными магнитами. Однако специфичн]
свойства новых магнитов не позволили реализовать их достоиж
ва при простой замене старых магнитов на новые. Потребовало
коренное изменение конструкции и схем управления электри*
ских генераторов с постоянными магнитами. В частности, целе<
образным стало применение магнитных систем индуктора с па<
вым размещением магнитов, беззубцовой конструкции якоря, i
парительной системы охлаждения с жидким азотом или други
хладагентами. В последнем случае можно добиться значительно
повышения КПД (до 95%) при малой удельной массе генерач
ров [до 0,35 кг/(кВ-А)]. На рис. 1.8 приведены кривые удельн
массы активных материалов для генераторов с магнитами из р(
поземельных элементов.
Значительное влияние на развитие генераторов с постоянны
магнитами оказала разработка новых перспективных систем эл<
троснабжения переменного тока с преобразователями частоты
систем постоянного тока высокого напряжения (270 В) с при1
нением преобразовательных устройств на базе силовых высо1
вольтных полупроводниковых ключей. В этом случае регулиро]
10
I’НС. 1.8. Кривые значений удельной
ditccfii активных материалов для ге-
нераторов с магнитами из редкозе-
мельных элементов
ще напряжения обеспечивается преобразователем, что позволяет
феодолеть один из существенных недостатков генераторов с По-
годиными магнитами — трудность регулирования напряжения.
1юлее высокие КПД, большая надежность, малые масса и раз-
меры, кратковременность переходных процессов, улучшенные вы-
годные характеристики по сравнению с генераторами электромаг-
1итного возбуждения обеспечивают преимущества электрическим
операторам с постоянными магнитами. В настоящее время спро-
’ктированы, изготовлены и апробированы электрические машины
постоянными магнитами мощностью 60, 150 кВ-А, работающие
1 генераторном и двигательном (стартерном) режимах (фирмы
/{женерал Электрик» — США) [11].
Применение генераторов с постоянными магнитами в системах электроснаб-
жения значительно упрощает проблему охлаждения генераторной установки. Po-
op в большинстве случаев не требует специального охлаждения, так как потери
нем малы. Возможность иметь большой рабочий зазор между ротором и ста-
пром позволяет легко изолировать ротор от статора и тем самым облегчить
геройство системы охлаждения статора.
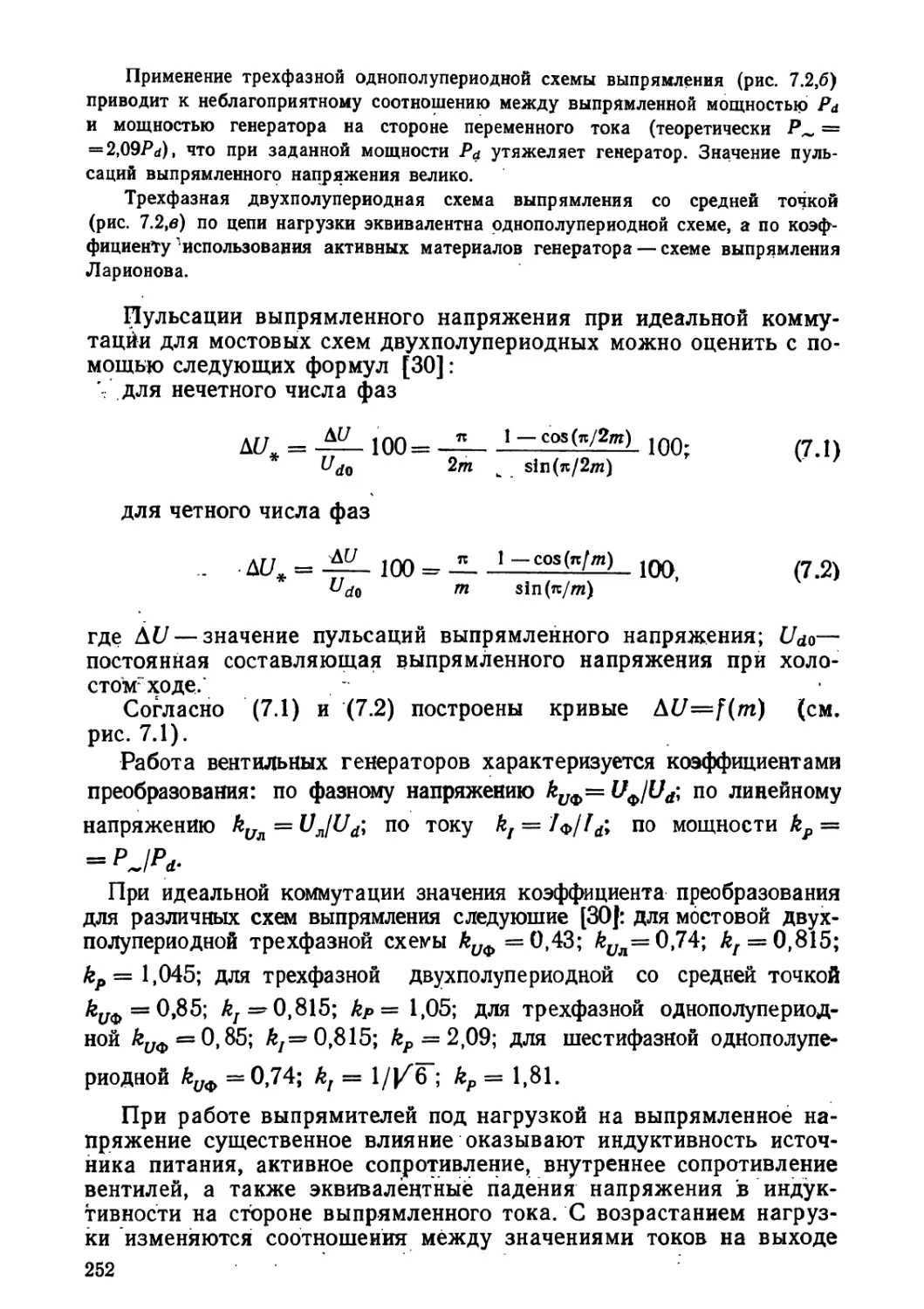
Применение магнитов на базе редкоземельных элементов в индукторах вен-
пльных генераторов постоянного тока позволяет значительно снизить уровень
ульсаций выпрямленного напряжения по сравнению с уровнем пульсаций в ге-
гряторах с электромагнитным возбуждением. Применение магнитной системы
пазовым размещением магнитов на индукторе, вынесение якорной обмотки
рабочий зазор (рис. 1:9), применение в качестве демпфера сплошной медной
Рис. 1.9. Двигатель-генера-
тор с беспазовой конструк-
цией якоря и цилиндричес-
ким магнитом из редкозе-
мельных элементов:
1 — магнитопривод; 2 — обмот-
ка якоря; 5 —каркас; 4 — по-
стоянный магнит
11
Рис. 1.10. Структурная схема автономной
системы электроснабжения с газотурбин-
ные приводом:
ГТ — газовая турбина; ЭМ— электрическая маши-
на; ИЛ —источник питания; СЭЗ — система уп-
равления запуском; СУП— система управления пи-
танием; П — потребитель
трубы на индукторе позволи
примерно в два раза уменыш
пульсации выпрямленного нап|
ження [8].
В последние годы стали i
ходить широкое применение эл
трические генераторы с поста
ными магнитами и высокоско]
стными приводами. Такие гене)
торы применяются в автономн
системах электроснабжения,
передвижных установках,
транспорте и других объект
Мощность генераторов лея
в пределах 1—120 кВ-А.
Получили широкое применение автономные системы электроснабжения, в
полненные на базе высокоскоростных электрических машин, работающих в
нераторном и двигательном режимах. Привод машин в генераторном режи
осуществляется или от газовой турбины (рис. 1.10), или от механического на!
пителя энергии (рис. 1.11).
Рис. 1.11. Структурная схема автоном-
ной системы электроснабжения с меха-
ническим накопителем энергии:
ИП — источник питания; ЭМ — электрическая
машина (вентильная);4 СУП — система управ-
ления питанием потребителеей; ДПР—датчик
положения ротора; Р — редуктор; М — махо-
вик; PH — регулятор напряжения электриче-
ской машины; РНП — регулятор напряжения
проходной (может отсутствовать); Я —потре-
битель
Рис. 1.12. Схематическое изображение индукторного генератора комбиниро!
ного возбуждения:
1 — вал; 2 — индуктор; 3 — крышка; 4 — магнит; 5 — якорь; 6 — крышка магнитопровода,’
обмотка электромагнита
12 I
Наиболее приемлемым типом
ШКТрической машины для этих си-
стем является вентильная синхрон-
ии и машина с постоянными магнита-
ми. Появилась возможность мсполь-
ювания роторов с цилиндрическим
монокристаллическим магнитом из
редкоземельных элементов и кобальта
ДО значительных мощностей (до не-
гкольких киловольт-ампер) и частот
ирйщения. Разработка двигатель-генера-
I ирных установок позволяет получить
сметный технико-экономический эффект:
Рис. 1.13. К определению параметров
постоянного магнита
снижение массы источников электро-
снабжения на 20—25 % и уменьшение
размеров по сравнению с существующими системами, повышение качества элек-
Iроэнергии источников электроснабжения, увеличение надежности и готовности
источников электроснабжения. Применение двигатель-генераторных установок
I ребует разработок схем управления, преобразователей частоты и регуляторов
напряжения.
Большое народнохозяйственное значение имеет внедрение бесконтактных ге-
нераторных установок для автомобилей и тракторов. Создание и внедрение в про-
ниюдство индукторных генераторов комбинированного возбуждения (рис. 1.12)
• •.ииоляет повысить надежность систем электроснабжения автомобилей и трак-
nipOB, а применение новых материалов и прогрессивной технологии — уменьшить
ич размеры и массу, снизить стоимость производства.
1.1. НОВЫЕ МАТЕРИАЛЫ ПОСТОЯННЫХ МАГНИТОВ И МАГНИТОПРОВОДОВ
Постоянные магниты, как и все ферромагнитные материалы,
характеризуются петлей гистерезиса, которая графически изобра-
жает зависимость цндукции в теле ферромагнитного материала от
нппряженности магнитного поля в нем, т. е. Для оцен-
ки качества магнитов основное значение имеет часть петли гисте-
резиса в квадранте II (рис. 1.13). Эта часть кривой, представля-
ющая собой зависимость между напряженностью размагничива-
ющего поля и индукцией в материале постоянного магнита, назы-
нмстся кривой размагничивания. Применительно к машинам с по-
стоянными магнитами (за исключением гистерезисных электро-
диигателей) основной интерес представляет предельная кривая
размагничивания, соответствующая максимально возможному на-
магничиванию магнита.
При проектировании магнитной системы электрической маши-
ны необходимо знать ряд параметров постоянного магнита [13]:
I) индукцию магнитного насыщения Bs, а также соответствую-
щую ей напряженность Hs\
2) остаточную индукцию Вг;
3) коэрцитивную силу Яс; различают два значения коэрцитив-
ной силы: по индукции НсВ (или просто Нс) и по намагниченности
13
Нем {Нем — напряженность размагничивающего поля, при кото-
рой намагниченность М равна нулю);
4) магнитную проницаемость магнита для какой-либо точки
гистерезисной кривой, которая определяется отношением индук-
ции в данной точке к напряженности магнитного поля в той же
точке; для практики представляет интерес магнитная проницае-
мость для точек основной кривой намагничивания в квадранте /
и для кривой размагничивания;
5) коэффициент возврата р (обратимая проницаемость на ча-
стичном цикле петли гистерезиса р*), равный отношению
p=tgp=AB/Atf,
где р — угол между прямой возврата KL и осью абсцисс; коэффи-
циент возврата р для каждой точки кривой размагничивания име-
ет свое значение; для некоторой точки К' на кривой размагничи-
вания рис. 1.1 коэффициент р имеет наибольшее значение pwax;
6) максимальную удельную магнитную энергию (табл. 1.1)
И^пгах= (5Т/)тах/2.
Максимальная удельная магнитная энергия (Дж/м3) соответ-
ствует максимуму произведения (ВН)тах (точке К на кривой раз-
магничивания с координатами Bd и Hd), поэтому на практике для
удобства подсчетов часто максимум удельной магнитной энергии
заменяют энергетическим произведением
(5 Н) тах== В dHd\
7) коэффициент формы кривой размагничивания (коэффициент
выпуклости), равный отношению
у= {ВН)7Пах/{ВгНе)
и являющийся мерой приближения кривой размагничивания к
прямоугольной; чем больше у, тем лучше материал в отношении
обеспечения высоким значением удельной магнитной энергии; для
современных магнитов он равен 0,3—0,75.
Как уже упоминалось, в электрических машинах с постоянными магнитами
применяются следующие основные группы материалов постоянных магнитов:
сплавы альни, альнико, альнико с направленной кристаллизацией, ферритовые
и интерметаллические соединения на основе редкоземельных элементов и ко-
бальта.
Сплавы альни (на основе Fe — Ni — Al) известны с 1932 г. Сплавы имели
уникальные для того времени свойства: Яс=35,8 кА/м, Вг=0,7 Тл, (ВН)тах=
= 11,1 Тл-кА/м. Дальнейшее совершенствование сплава заключалось в подборе
температур охлаждения и дополнительного легирования. В настоящее время по
ГОСТ 17809-72 эти сплавы имеют марки ЮНД4, ЮНД8, ЮНТС.
Легирование этих сплавов кобальтом привело к созданию сплавов альнико
(на основе Fe — Ni — Со — Al) с увеличением значения остаточной индукции на
15—20 %, (ВЯ)тах=16 Тл-кА/м. Охлаждением сплава в магнитном поле напря-
женностью 1200—2400 А/см обеспечивалась магнитная анизотропия и значитель- :
но увеличилась удельная магнитная энергия магнитов [ (ВЯ) max = 30-=-
14
1.1. Магнитные свойства литых постоянных магнитов
/ Страна Марка сплава вг, Тл Нс, кА/м Тл-кА/м
СССР ЮН15ДК25БА 1,25 62 56
СССР ЮНДК31ТЗБА 1,15 92 64
СССР ЮНДК35Т5БА 1,02 ПО 72
СССР ЮНДК35Т5АА 1,05 115 80
СССР ЮНДК40Т8 0,7 145 36
США Альнико VII 1,34 58 59,5
ФРГ Тикональ 750 1,37 59 58
Великобритания 100Х 1,34 58,5 52
Япония NKS-100 1,1 127 87,5
США Альнико VIII 1,05 128 80
40 Тл-кА/м— для магнико]. Создание не только магнитной, но и кристалличе-
ской текстуры в результате направленной кристаллизации при литье и добавле-
ния к сплавам титана, ниобия и других элементов позволило создать магниты
С более высокой коэрцитивной силой и большой удельной магнитной энергией
(ВН)тах — до 96 Тл-кА/м. В ГОСТ 17809-72 включены 22 марки сплавов альнико
(системы Fe — Ni — Со — Al) с равноосной, монокристаллической и столбчатой
(С направленной кристаллизацией) структурой: ЮНДК15, ЮНДК18С,
ЮП14ДК24Т2, ЮН13ДК25БА, ЮНДК35Т5АА и др. Появление сплавов ЮНДК
i имнительно расширило применение магнитов в различных областях техники.
< пойства материалов отечественных марок (табл. 1.1) не уступают зарубежным
МЯТсриалам, рекламируемым различными фирмами [13, 14].
Магнитные свойства магнитов, указанные в стандартах, являются гарантиро-
Иниными при серийном изготовлении их. Практически получены более высокие
|’|Н I 14. Кривые размагничивания и энергетического произведения сплавов:
Н П1/1К24В — поликристаллической структуры (1); столбчатой структуры (2);мо-
Инй|1Ж< гилличсской структуры (3) и ЮНДК35Т5 — поликристаллической струк-
tfpM монокристаллической структуры (5); столбчатой структуры (6)
15
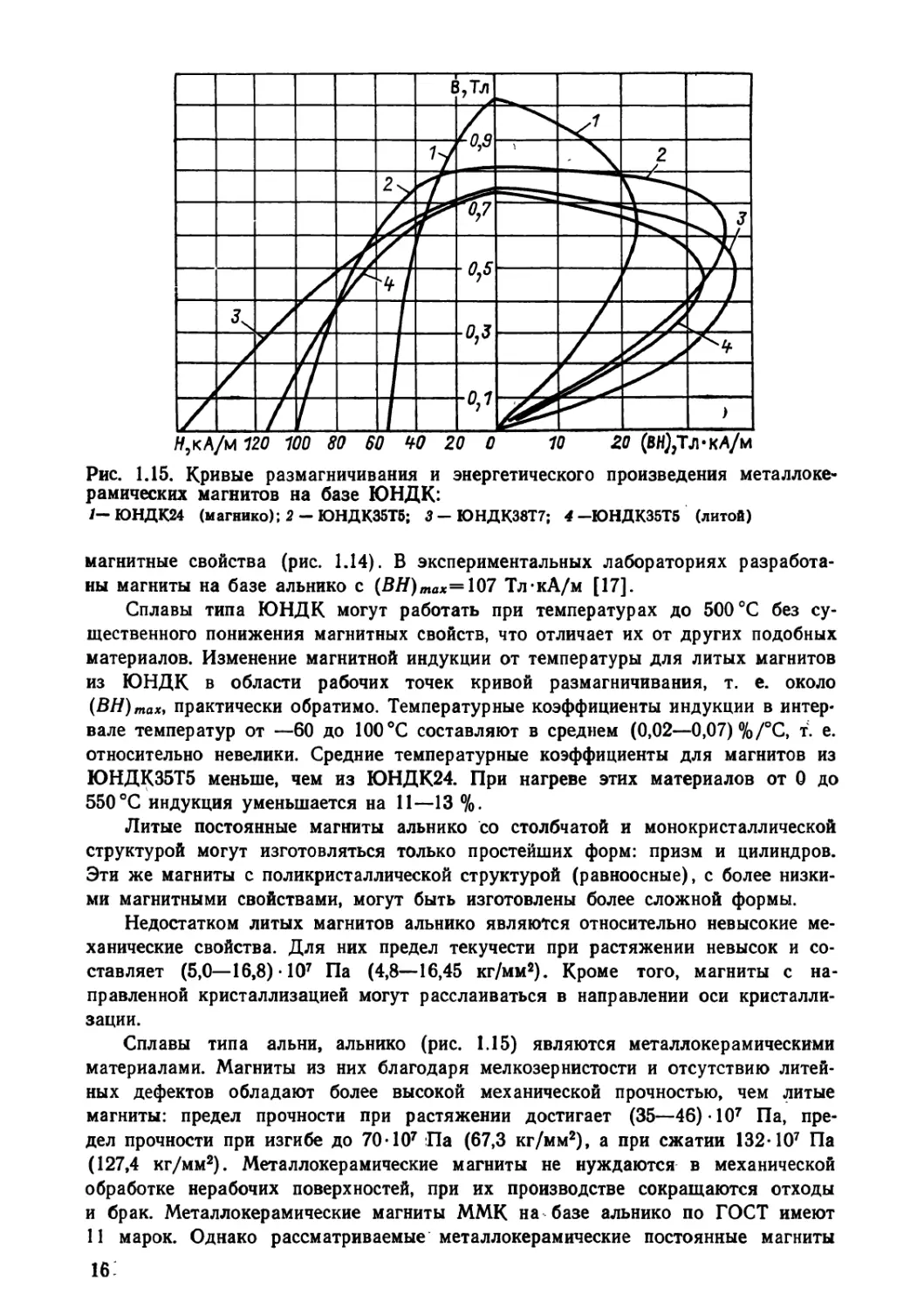
Рис. 1.15. Кривые размагничивания и энергетического произведения металлоке-
рамических магнитов на базе ЮНДК:
/-ЮНДК24 (магнико); 2 - ЮНДК35Т5; 3-ЮНДК38Т7; 4 —ЮНДК35Т5 (литой)
магнитные свойства (рис. 1.14). В экспериментальных лабораториях разработа-
ны магниты на базе альнико с (ВН)та*= 107 Тл-кА/м [17].
Сплавы типа ЮНДК могут работать при температурах до 500 °C без су-
щественного понижения магнитных свойств, что отличает их от других подобных
материалов. Изменение магнитной индукции от температуры для литых магнитов
из ЮНДК в области рабочих точек кривой размагничивания, т. е. около
(ВН)тах, практически обратимо. Температурные коэффициенты индукции в интер-
вале температур от —60 до 100 °C составляют в среднем (0,02—0,07) %/°C, т. е.
относительно невелики. Средние температурные коэффициенты для магнитов из
ЮНДК35Т5 меньше, чем из ЮНДК24. При нагреве этих материалов от 0 до
550°C индукция уменьшается на 11—13 %.
Литые постоянные магниты альнико со столбчатой и монокристаллической
структурой могут изготовляться только простейших форм: призм и цилиндров.
Эти же магниты с поликристаллической структурой (равноосные), с более низки-
ми магнитными свойствами, могут быть изготовлены более сложной формы.
Недостатком литых магнитов альнико являются относительно невысокие ме-
ханические свойства. Для них предел текучести при растяжении невысок и со-
ставляет (5,0—16,8) • 107 Па (4,8—16,45 кг/мм2). Кроме того, магниты с на-
правленной кристаллизацией могут расслаиваться в направлении оси кристалли-
зации.
Сплавы типа альни, альнико (рис. 1.15) являются металлокерамическими
материалами. Магниты из них благодаря мелкозернистости и отсутствию литей-
ных дефектов обладают более высокой механической прочностью, чем литые
магниты: предел прочности при растяжении достигает (35—46) Ю7 Па, пре-
дел прочности при изгибе до 70-107 Па (67,3 кг/мм2), а при сжатии 132-107 Па
(127,4 кг/мм2). Металлокерамические магниты не нуждаются в механической
обработке нерабочих поверхностей, при их производстве сокращаются отходы
и брак. Металлокерамические магниты ММК на базе альнико по ГОСТ имеют
И марок. Однако рассматриваемые металлокерамические постоянные магниты
16:
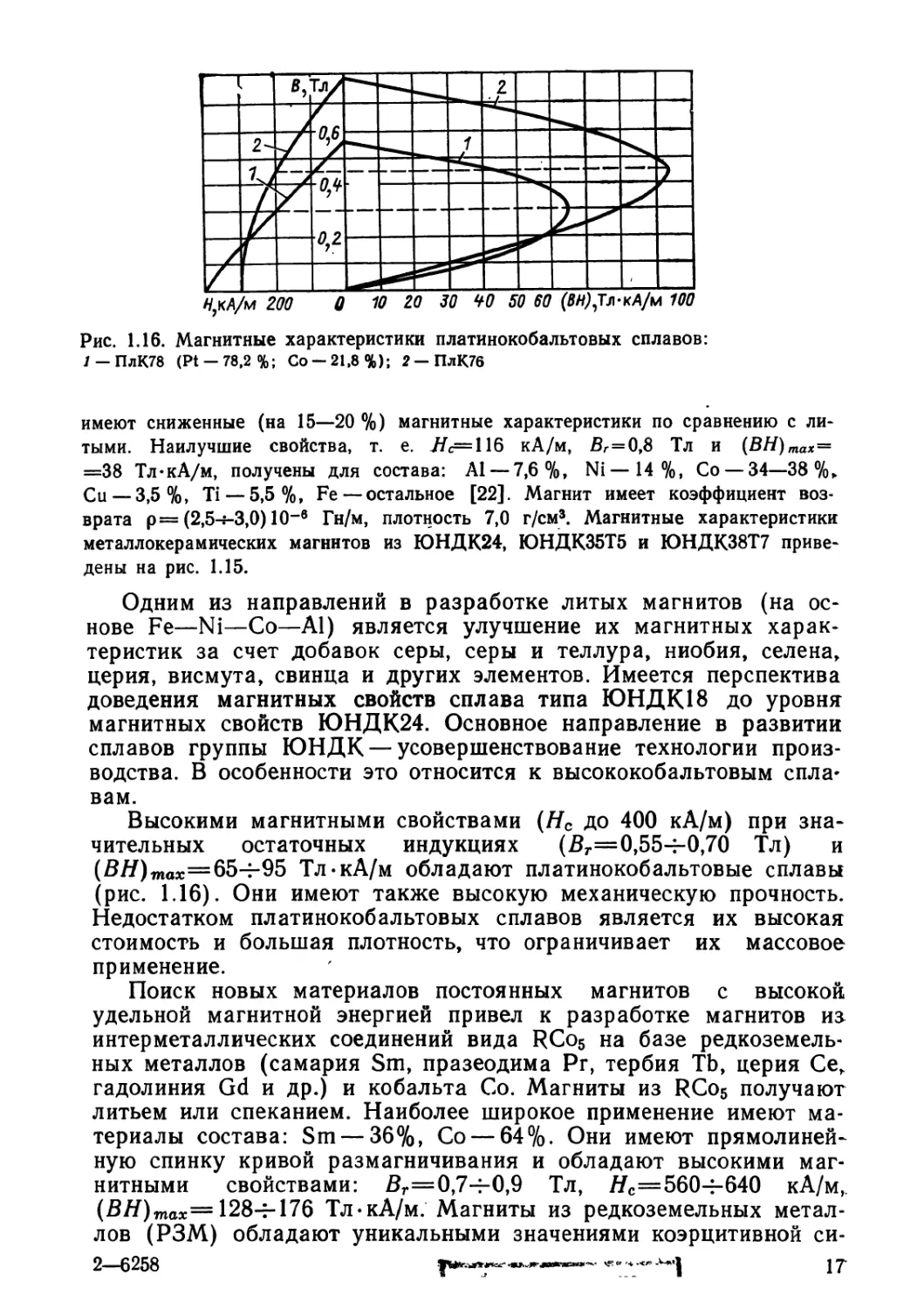
Рис. 1.16. Магнитные характеристики платинокобальтовых сплавов:
1 — ПлК78 (Pt —78.2%; Со-21,8 %); 2—ПлК76
имеют сниженные (на 15—20 %) магнитные характеристики по сравнению с ли-
тыми. Наилучшие свойства, т. е. -Яс=116 кА/м, Вг=0,8 Тл и (ВЯ)т«=
=38 Тл-кА/м, получены для состава: А1 — 7,6 %, Ni—14 %, Со — 34—38%»
Си — 3,5 %, Ti — 5,5 %, Fe — остальное [22]. Магнит имеет коэффициент воз-
врата р= (2,5ч-3,0) 10~в Гн/м, плотность 7,0 г/см3. Магнитные характеристики
металлокерамических магнитов из ЮНДК24, ЮНДК35Т5 и ЮНДК38Т7 приве-
дены на рис. 1.15.
Одним из направлений в разработке литых магнитов (на ос-
нове Fe—Ni—Со—Al) является улучшение их магнитных харак-
теристик за счет добавок серы, серы и теллура, ниобия, селена,
церия, висмута, свинца и других элементов. Имеется перспектива
доведения магнитных свойств сплава типа ЮНДК18 до уровня
магнитных свойств ЮНДК24. Основное направление в развитии
сплавов группы ЮНДК — усовершенствование технологии произ-
водства. В особенности это относится к высококобальтовым спла-
вам.
Высокими магнитными свойствами (Нс до 400 кА/м) при зна-
чительных остаточных индукциях (Вт=0,554-0,70 Тл) и
(ВЯ)тож=654-95 Тл-кА/м обладают платинокобальтовые сплавы
(рис. 1.16). Они имеют также высокую механическую прочность.
Недостатком платинокобальтовых сплавов является их высокая
стоимость и большая плотность, что ограничивает их массовое
применение.
Поиск новых материалов постоянных магнитов с высокой,
удельной магнитной энергией привел к разработке магнитов из
интерметаллических соединений вида RCo5 на базе редкоземель-
ных металлов (самария Sm, празеодима Рг, тербия ТЬ, церия Се,
гадолиния Gd и др.) и кобальта Со. Магниты из RCo5 получают
литьем или спеканием. Наиболее широкое применение имеют ма-
териалы состава: Sm — 36%, Со — 64%. Они имеют прямолиней-
ную спинку кривой размагничивания и обладают высокими маг-
нитными свойствами: Вг=0,74-0,9 Тл, Яс=5604-640 кА/м,
(BH)max— 128-4-176 Тл-кА/м. Магниты из редкоземельных метал-
лов (РЗМ) обладают уникальными значениями коэрцитивной си-
2—6258 + 17
Рис. 1.17. Кривые размагничивания материалов постоянных магнитов на базе
SmCo5:
1 — для серийного образца; 2, 3 — для экспериментальных образцов; 4— сплавы ЮНДК35Т5
с направленной кристаллизацией (для сравнения)
лы, в 6—7 раз превышающими значения для магнитов типа
ЮНДК.
Магнитные характеристики магнитов массового производства
из РЗМ регламентированы ГОСТ 21559-76. Фактически магнит-
ные свойства применяемых магнитов из РЗМ гораздо лучше нор-
мируемых ГОСТ. На рис. 1.17 приведены кривые размагничива-
ния и значения произведений (ВН)та:х постоянных магнитов на
базе SmCoe для серийных опытных и перспективных образцов.
Магниты из РЗМ рассчитаны для работы при температурах от
—70 до + 150 °C при относительной влажности воздуха до 98%, в
условиях вибраций с ускорениями до 150 м/с2 и более, линейных
перемещений с ускорениями до 50—70 м/с2. Магниты из РЗМ
имеют достаточно низкий температурный коэффициент при Вг,
примерно 0,03—0,05% на 1°С в диапазоне температур 20—200°C.
Пределы механической прочности составляют: на изгиб <тИзг=
= (11,2—15,3)-107 Па (11—15 кгс/мм2), на сжатие оСж=81,6Х
ХЮ7 Па (80 кгс/мм2). Твердость этих магнитов приближается к
твердости керамики (твердость по Роквеллу Я/?=404-63). Плот-
ность у=8,5-=-8,6 г/см3. Магниты из редкоземельных металлов и
кобальта имеют высокие значения температур точек' Кюри:
SmCo5— 740, РгСов — 635, СеСо5 — 460 °C. Для соединения допу-
скается применять вакуумную диффузионную сварку. Магниты
выпускаются кольцевой, призматической и дисковой формы.
Характеристики редкоземельных магнитов зарубежных фирм
находятся примерно на таком же уровне, как и отечественных.
Разработка сплавов на основе редкоземельных металлов ц со-
вершенствование технологии практически только начинается. Ме-
тодом жидкофазного спекания при оптимизации режимов термо-
обработки на сплавах SmCoj получено значение энергетического
произведения (ВЯ)таж=176 Тл-кА/м [14]. В лабораторных ус-
ловиях на монокристаллах SmCo5 получены значения (ВН)тах=
= 2404-254 Тл-кА/м [18].
18
Развивается также технология легирования SmCo5 другими
металлами (Pr, La, Мп и др.). При добавке лантана (3%) полу-
чены магниты с (ВЯ)тах=188 Тл-кА/м [14]. Имеется сообщение
о возможности получения на монокристаллических магнитах из
Sm2Coi7(Smi_xPrx)Co5 магнитных свойств с (ВЯ)тазс=320 ТлХ
ХкА/м. На базе Sm—Zr—Со литьем получены магниты с Вг=
= 1,26 Тл, /7с=560 кА/м, (ВЯ)таОх=320 Тл-кА/м, а спеканием с
(ВН)тах до 240 Тл-кА/м.
На основе интерметаллических соединений тяжелых RT и лег-
ких Ял редкоземельных элементов с Со типа (7?Т(1-х)Рл(х)) Со5 полу-
чены постоянные магниты с близкими к нулю температурными
коэффициентами индукции а=0,005 1/°С при (ВН)тах=80^-
128 Тл-кА/м.
Поиски материалов с принципиально новой природой высоко-
коэрцитивного состояния позволили получить соединения с высо-
кой магнитной энергией. Это ПузА12 с (ВЯ)теох=585 Тл-кА/м и
ТЬ3Со с (В//)тах=817 Тл-кА/м, Вг=2,36 Тл, Яс=960 кА/м. Эти
значения получены при температуре 4,2 К на монокристаллах и
убедительно иллюстрируют наличие больших резервов при созда-
нии новых материалов.
Представляется перспективным получение мелкокристалличе-
ских материалов для постоянных магнитов из расплава в аморф-
ном состоянии, полученном при резком охлаждении. Таким спосо-
бом на соединении TbFe2 получены магниты с (ВН)тах=240 ТлХ
ХкА/м при 4,2 К и 68,2 Тл-кА/м при комнатной температуре.
Аморфные материалы обладают повышенной твердостью, прочно-
стью, высокой коррозионной стойкостью. Эти качества обусловле-
ны отсутствием в аморфных сплавах границ зерен, т. е. слабых
мест. Получены постоянные магниты Sm2(CoFe) из аморфного ма-
териала, которые имеют магнитные свойства: Яс=495 кА/м, Вг—
=0,9 Тл, (ВЯ)тах=121 Тл-кА/м.
Методом ионно-плазменного напыления получены постоянные
магниты из аморфного SmCog. Без изменения магнитных характе-
ристик эти магниты нормально работают до температуры 700°С.
В последние годы стали находить применение магнитно-твердые ферриты.
Основой этой группы является феррит бария (BaFe^Ou). Технология изготовле-
ния магнитов из феррита бария включает измельчение исходной шихты (оксидов
железа РеаОз, бария ВаО и стронция SrO), отжиг при 1000—1200 °C, измельче-
ние оксидов до частиц размером примерно 1 мкм, прессование, спекание при
1100—1300 °C. Для получения анизотропных свойств прессование проводят в маг-
нитном поле. Легирование стронцием повышает магнитную анизотропию и ко-
эрцитивную силу, а также упрощает технологию. Магнитные свойства нетексту-
рованных ферритов находятся в следующих интервалах: для изотропных —
(ВЯ) max — 5, 6-4-8,8 Тл-кА/м, Яс= 112,0-?—144,0 кА/м, Вг=0,18-4-0,22 Тл; для ани-
зотропных— (ВН)тах = 14,3-4-27,2 Тл-кА/м, Яс=152—240 кА/м, Вг=0,28-4-0,40Тл.
Свойства магнитно-твердых ферритов определяются техническими условиями,
нормирующими параметры ферритов 28 марок (пяти типов: БИ, БА, СА, КА,
РА).
2*
19
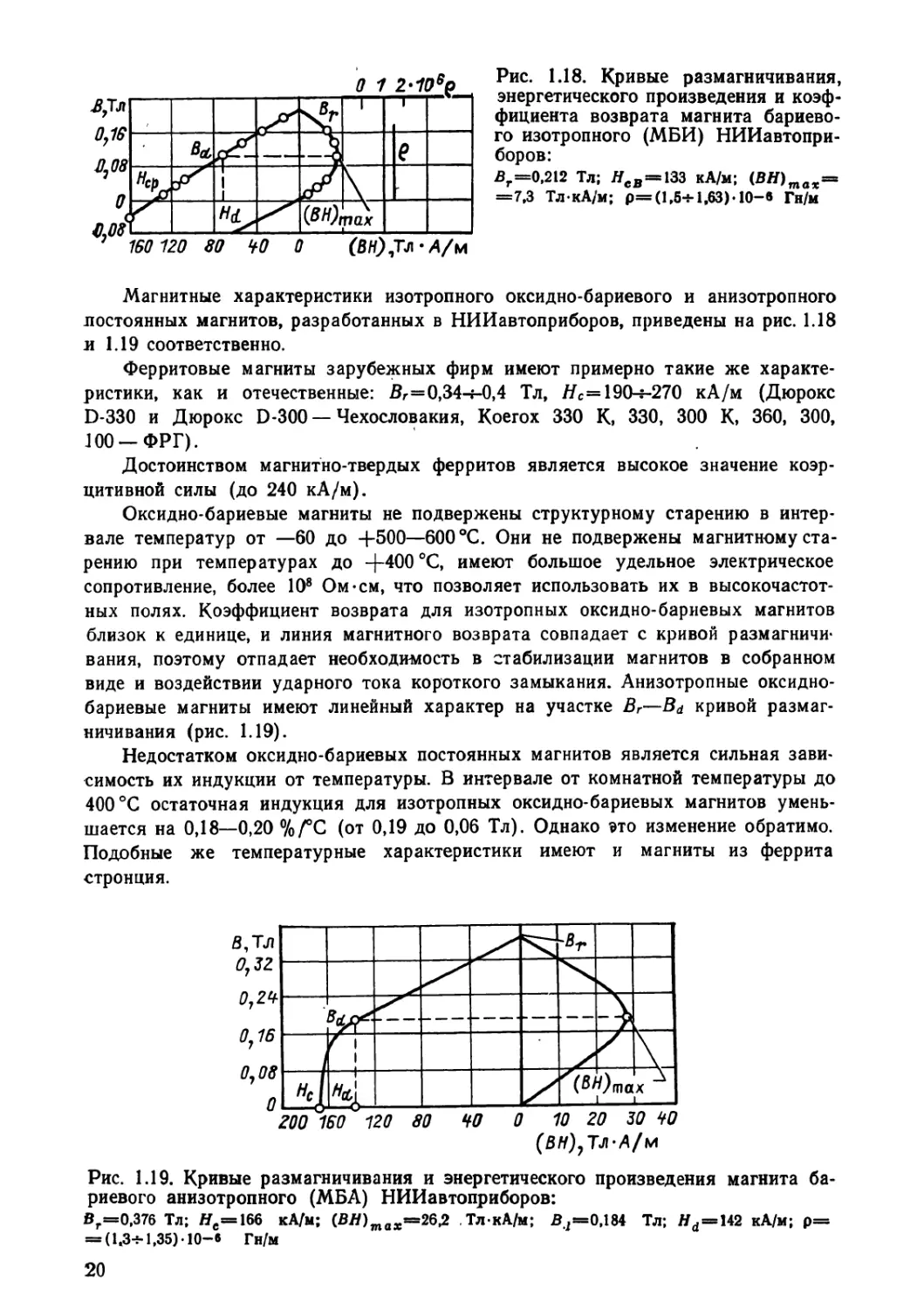
Рис. 1.18. Кривые размагничивания,
энергетического произведения и коэф-
фициента возврата магнита бариево-
го изотропного (МБИ) НИИавтопри-
боров:
вг =0,212 Тл; ясв = 133 кА/м; (ВН)тах=
=7,3 Тл-кА/м; р=(1,5-Н,63)-10-е Гн/м
Магнитные характеристики изотропного оксидно-бариевого и анизотропного
достоянных магнитов, разработанных в НИИавтоприборов, приведены на рис. 1.18
и 1.19 соответственно.
Ферритовые магниты зарубежных фирм имеют примерно такие же характе-
ристики, как и отечественные: Br=0,34-f-0,4 Тл, Яс=190-ь270 кА/м (Дюрокс
D-330 и Дюрокс D-300 — Чехословакия, Коегох 330 К, 330, 300 К, 360, 300,
100 — ФРГ).
Достоинством магнитно-твердых ферритов является высокое значение коэр-
цитивной силы (до 240 кА/м).
Оксидно-бариевые магниты не подвержены структурному старению в интер-
вале температур от —60 до +500—600 °C. Они не подвержены магнитному ста-
рению при температурах до +400 °C, имеют большое удельное электрическое
сопротивление, более 108 Ом-см, что позволяет использовать их в высокочастот-
ных полях. Коэффициент возврата для изотропных оксидно-бариевых магнитов
близок к единице, и линия магнитного возврата совпадает с кривой размагничи-
вания, поэтому отпадает необходимость в стабилизации магнитов в собранном
виде и воздействии ударного тока короткого замыкания. Анизотропные оксидно-
бариевые магниты имеют линейный характер на участке Вг—Bd кривой размаг-
ничивания (рис. 1.19).
Недостатком оксидно-бариевых постоянных магнитов является сильная зави-
симость их индукции от температуры. В интервале от комнатной температуры до
400 °C остаточная индукция для изотропных оксидно-бариевых магнитов умень-
шается на 0,18—0,20 %/°C (от 0,19 до 0,06 Тл). Однако это изменение обратимо.
Подобные же температурные характеристики имеют и магниты из феррита
стронция.
Рис. 1.19. Кривые размагничивания и энергетического произведения магнита ба-
риевого анизотропного (МБА) НИИавтоприборов:
Вг=0,376 Тл; Яс=166 кА/м; (ВЯ)таж=26,2 Тл-кА/м; В,=0,184 Тл; Hd = 142 кА/м; р=
= (1.3-5-1,35) 10-е Гн/м
20
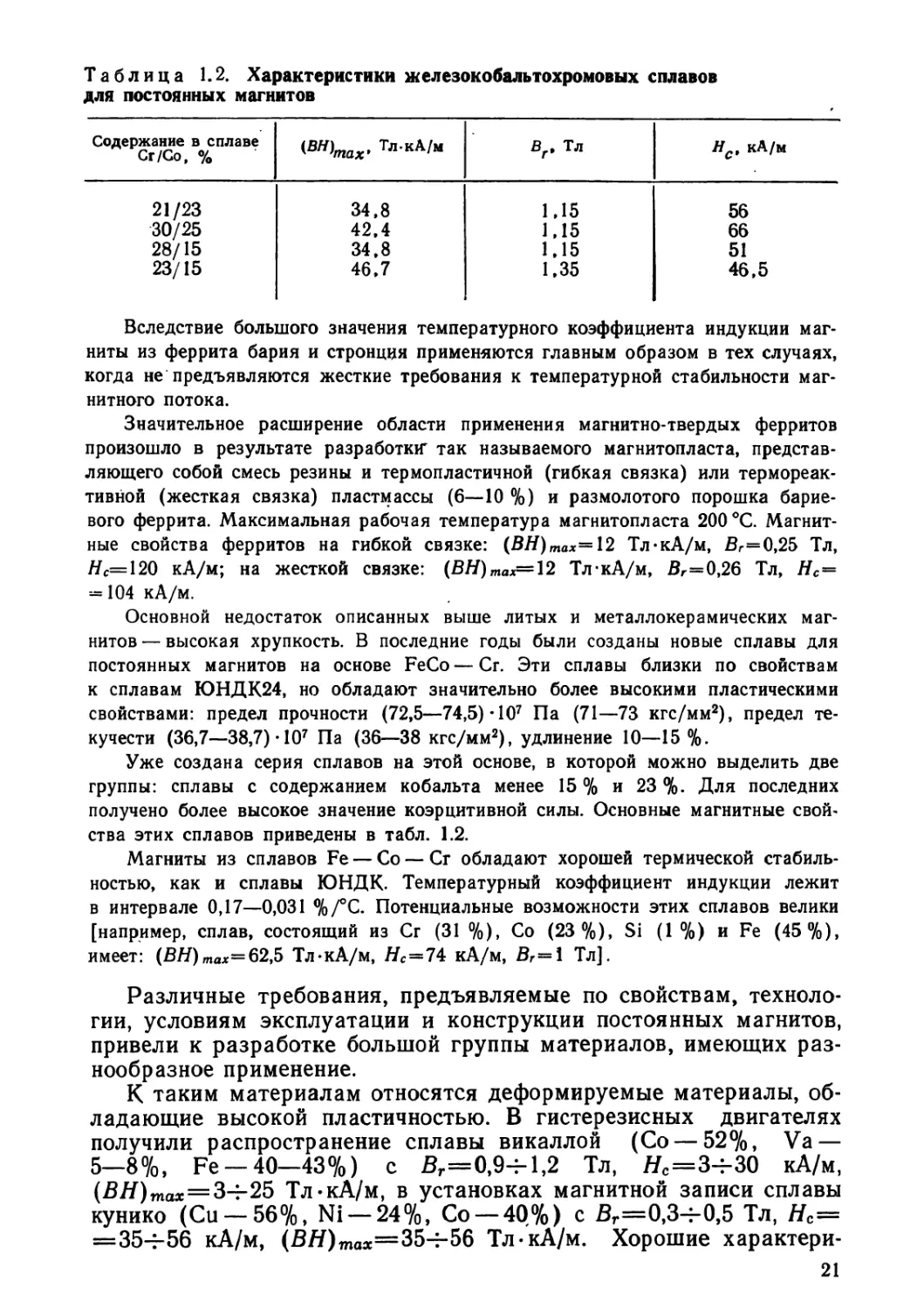
Таблица 1.2. Характеристики железокобальтохромовых сплавов
для постоянных магнитов
Содержание в сплаве Сг/Со, % <ВН)тах. Вг. Тл Нс, кА/м
21/23 34,8 1,15 56
30/25 42,4 1,15 66
28/15 34,8 1,15 51
23/15 46,7 1,35 46,5
Вследствие большого значения температурного коэффициента индукции маг-
ниты из феррита бария и стронция применяются главным образом в тех случаях,
когда не предъявляются жесткие требования к температурной стабильности маг-
нитного потока.
Значительное расширение области применения магнитно-твердых ферритов
произошло в результате разработкрт так называемого магнитопласта, представ-
ляющего собой смесь резины и термопластичной (гибкая связка) или термореак-
тивной (жесткая связка) пластмассы (6—10 %) и размолотого порошка барие-
вого феррита. Максимальная рабочая температура магнитопласта 200 °C. Магнит-
ные свойства ферритов на гибкой связке: (ВН)тах=12 Тл-кА/м, Вг=0,25 Тл,
Яс=120 кА/м; на жесткой связке: (ВН)тах= 12 Тл-кА/м, Вг=0,26 Тл, Яс=
—104 кА/м.
Основной недостаток описанных выше литых и металлокерамических маг-
нитов — высокая хрупкость. В последние годы были созданы новые сплавы для
постоянных магнитов на основе FeCo — Сг. Эти сплавы близки по свойствам
к сплавам ЮНДК24, но обладают значительно более высокими пластическими
свойствами: предел прочности (72,5—74,5)-107 Па (71—73 кгс/мм2), предел те-
кучести (36,7—38,7) • 107 Па (36—38 кгс/мм2), удлинение 10—15%.
Уже создана серия сплавов на этой основе, в которой можно выделить две
группы: сплавы с содержанием кобальта менее 15 % и 23 %. Для последних
получено более высокое значение коэрцитивной силы. Основные магнитные свой-
ства этих сплавов приведены в табл. 1.2.
Магниты из сплавов Fe — Со — Сг обладают хорошей термической стабиль-
ностью, как и сплавы ЮНДК. Температурный коэффициент индукции лежит
в интервале 0,17—0,031 % /°C. Потенциальные возможности этих сплавов велики
[например, сплав, состоящий из Сг (31 %), Со (23%), Si (1 %) и Fe (45%),
имеет: (ВН) max — 62,5 Тл-кА/м, НС=1Ь кА/м, Вг=1 Тл].
Различные требования, предъявляемые по свойствам, техноло-
гии, условиям эксплуатации и конструкции постоянных магнитов,
привели к разработке большой группы материалов, имеющих раз-
нообразное применение.
К таким материалам относятся деформируемые материалы, об-
ладающие высокой пластичностью. В гистерезисных двигателях
получили распространение сплавы викаллой (Со — 52%, Va —
5—8%, Fe —40—43%) с Вг=0,94-1,2 Тл, =34-30 кА/м,
(ВЯ)т<ис=34-25 Тл-кА/м, в установках магнитной записи сплавы
кунико (Си —56%, Ni — 24%, Со —40,%) с Вг=0,34-0,5 Тл, Яс=
=354-56 кА/м, (ВН)тоя=354-56 Тл-кА/м. Хорошие характери-
21
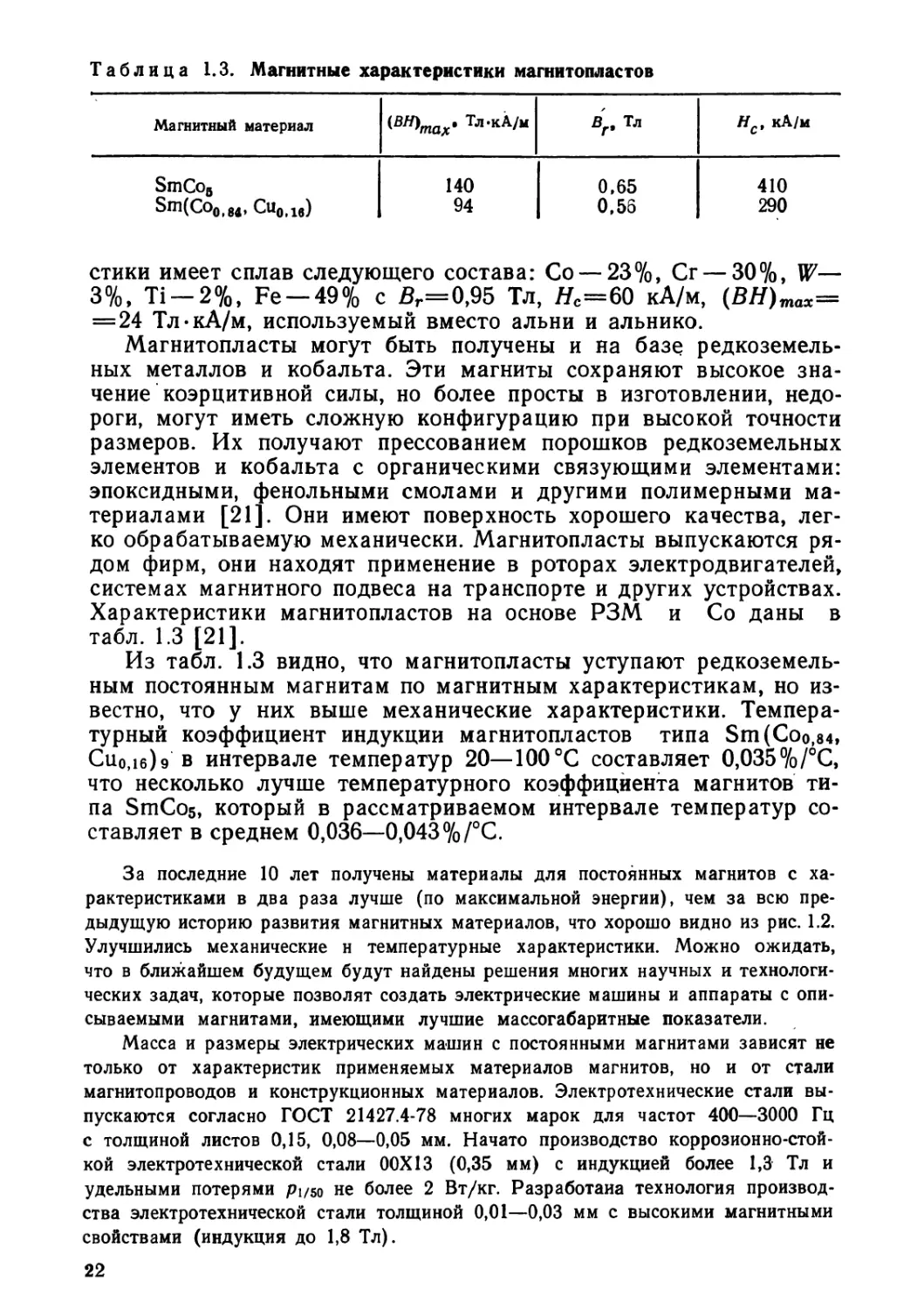
Таблица 1.3. Магнитные характеристики магнитопластов
Магнитный материал <ВН>тах’ Тл'кА'“ Bf, Тл нс, кА/м
SmCoB 140 0,65 410
Sm(Co0rM, CuOrle) 94 0,56 290
стики имеет сплав следующего состава: Со — 23%, Сг — 30%, W—
3%, Ti — 2%, Fe — 49% с Вг=0,95 Тл, Яс=60 кА/м, (ВН)тах=
=24 Тл-кА/м, используемый вместо альни и альнико.
Магнитопласты могут быть получены и на базе редкоземель-
ных металлов и кобальта. Эти магниты сохраняют высокое зна-
чение коэрцитивной силы, но более просты в изготовлении, недо-
роги, могут иметь сложную конфигурацию при высокой точности
размеров. Их получают прессованием порошков редкоземельных
элементов и кобальта с органическими связующими элементами:
эпоксидными, фенольными смолами и другими полимерными ма-
териалами [21]. Они имеют поверхность хорошего качества, лег-
ко обрабатываемую механически. Магнитопласты выпускаются ря-
дом фирм, они находят применение в роторах электродвигателей,
системах магнитного подвеса на транспорте и других устройствах.
Характеристики магнитопластов на основе РЗМ и Со даны в
табл. 1.3 [21].
Из табл. 1.3 видно, что магнитопласты уступают редкоземель-
ным постоянным магнитам по магнитным характеристикам, но из-
вестно, что у них выше механические характеристики. Темпера-
турный коэффициент индукции магнитопластов типа Sm(Co0>84,
Си0,1б)9 в интервале температур 20—100°С составляет 0,035%/°С,
что несколько лучше температурного коэффициента магнитов ти-
па SrnCos, который в рассматриваемом интервале температур со-
ставляет в среднем 0,036—0,043 % /°C.
За последние 10 лет получены материалы для постоянных магнитов с ха-
рактеристиками в два раза лучше (по максимальной энергии), чем за всю пре-
дыдущую историю развития магнитных материалов, что хорошо видно из рис. 1.2.
Улучшились механические н температурные характеристики. Можно ожидать,
что в ближайшем будущем будут найдены решения многих научных и технологи-
ческих задач, которые позволят создать электрические машины и аппараты с опи-
сываемыми магнитами, имеющими лучшие массогабаритные показатели.
Масса и размеры электрических машин с постоянными магнитами зависят не
только от характеристик применяемых материалов магнитов, но и от стали
магнитопроводов и конструкционных материалов. Электротехнические стали вы-
пускаются согласно ГОСТ 21427.4-78 многих марок для частот 400—3000 Гц
с толщиной листов 0,15, 0,08—0,05 мм. Начато производство коррозионно-стой-
кой электротехнической стали 00X13 (0,35 мм) с индукцией более 1,3 Тл и
удельными потерями Pi/sq не более 2 Вт/кг. Разработана технология производ-
ства электротехнической стали толщиной 0,01—0,03 мм с высокими магнитными
свойствами (индукция до 1,8 Тл).
22
Замена электротехнических сталей (ГОСТ 21427.4-78) железокобальтовым
сплавом 49К2ФВИ позволила в 1,5 раза увеличить мощность авиационных элек-
трических машин при неизменных габаритах. Сплавы 49К2Ф и 27КХ имеют более
высокую магнитную проницаемость, чем обычные электротехнические стали. Одна-
ко они имеют большие удельные потери.
Сплав 27КХ имеет следующие механические свойства: предел прочности при-
мерно 5Ы07 Па (50 кгс/мм2) и предел текучести примерно 28,6* 107 Па
(28 кгс/мм2) при комнатной температурё. С увеличением температуры до 400 °C
механическая прочность сплава возрастает. Сплав 27КХ изготовляется в листах
толщиной 0,7; 0,35; 0,2; 0,1 мм.
В промышленных условиях производятся сплавы с Со (27, 49, 65 и 92%)
в поковках, листах и лентах. Новый сплав 18КХ-ВМ по сравнению со сплавом
27КХ имеет сниженные (на 30 %) потери на перемагничивание при сохранении
высокой магнитной индукции, меньшие значения Нс, лучшие технологические
качества. Сплав 92К имеет также высокие технологические качества. Магнито-
проводы из сплава 92К могут работать при температурах до 1000 °C.
Применяемые в настоящее время материалы марок Э (ГОСТ 3836-83), СТЮ,
ОХМ-ЗМ; ЗОХГСА освоены и очень технологичны в изготовлении электрических
машин. Стали ОХМ-ЗМ и ОЗХГСА обладают высокой механической прочностью,
поэтому они применяются для магнитопроводов высокоскоростных роторов.
В последние годы разработаны сплавы с повышенной и высокой механиче-
ской прочностью. Разработан новый сплав 48КНФ-ВИ, имеющий при высоких
индукциях магнитного насыщения высокие механические свойства [<ув=112'Х
Х107 Па (110 кгс/мм2) вместо ав = 61,2-107 Па (60 кгс/мм2) у 49К2Ф-ВИ].
Исследована серия сплавов с временным сопротивлением (102—204) • 107 Па
(100—200 кгс/мм2). Рекомендуется применение сплавов ДИ-48 и ВКС210 в кон-
струкциях с рабочим напряжением 81,6-107 Па (80 кг/мм2) и выше при 20°C.
1.3. МАГНИТНЫЕ СИСТЕМЫ И КОНСТРУКЦИИ
СИНХРОННЫХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ МАГНИТАМИ
Конструкция магнитопровода генераторов с постоянными маг-
нитами определяется назначением и мощностью генератора, а
также в значительной степени магнитными и технологическими
свойствами магнитов.
Магниты с высокими значениями коэрцитивной силы Нс и от-
носительно малыми остаточными индукциями Вг (например, из
феррита бария) имеют большую площадь поперечного сечения и
малую длину, а с небольшими значениями Нс и высокими значе-
ниями Вг имеют меньшую площадь поперечного сечения и боль-
шую длину. Форма магнита предопределяет выбор соответствую-
щей конструкции ротора.
Для генераторов большей мощности требуется и магнит боль-
шего объема. Удовлетворительные магнитные и механические ха-
рактеристики магнитов получаются только лишь до определенных
размеров (массы) и при определенных соотношениях между объ-
емом постоянного магнита и его наружной поверхностью. Поэто-
му магниты большого объема приходится выполнять составными.
Это изменяет конструкцию ротора и всей магнитной системы.
23
Рис. 1.20. Цилиндри-
ческий магнит звез-
дочка
Рис. 1.21. Ротор с цилиндрическим магнитом:
/--цилиндрический магнит; 2 — вал генератора; 3 — залив-
ка (компаунд, клей, металл, эпоксидная смола)
Постоянные магниты вследствие своей малой механической
прочности не выдерживают высоких окружных скоростей. В этих
случаях требуются специальные конструкции роторов.
Для обеспечения требуемых магнитных параметров индуктора
часто приходится применять сложную составную конструкцию ро-
тора, поскольку постоянные магниты высокого качества просто из-
готовляются лишь при простейших формах (цилиндрах, призмах,
дисках).
Генераторы переменного тока с постоянными магнитами име-
ют магнитные системы с вращающимися и неподвижными магни-
тами. По конструктивному выполнению роторы машин с постоян-
ными магнитами можно разделить на следующие группы:
с цилиндрическим магнитом в виде кольца, намагниченным в
радиальном направлении;
типа звездочка с явно выраженными полюсами без полюсных
башмаков и с полюсными башмаками;
типа звездочка с призматическими магнитами и полюсными
башмаками;
коллекторные с призматическими магнитами и тангенциаль-
ным намагничиванием;
когтеобразные с цилиндрическими постоянными магнитами,
намагниченными в аксиальном направлении.
К магнитным системам с вращающимися магнитами относит-
ся также система торцевого типа.
Магнитные системы бесконтактных генераторов с неподвижны-
ми постоянными магнитами выполняются следующих видов: с
внешнезамкнутым магнитопроводом, индукторного и коммутатор-
ного типов.
Роторы с цилиндрическими магнитами
Роторы с цилиндрическими полыми магнитами кольцеобразно-
го типа являются наиболее простыми (рис. 1.20, 1.21). Магниты
изготовляются литыми (из сплавов альни, альниси, альнико),
прессованными (бариевые и из других ферритов), монокристалли-
ческими (РЗМ и др.). Намагничивание магнита производится в
радиальном направлении на многополюсной намагничивающей ус-
тановке. Все полюсы магнита намагничиваются одновременно.
24
Число полюсов 2р=2, 4, 8. Наиболее часто применяются двухпо-
люсные и четырехполюсные магниты.
Магниты на валу крепятся с помощью заливки сплавами ме-
таллов (алюминия, цинка), эпоксидной смолой, компаундами,
клеем. Непосредственная запрессовка магнита на вал недопустима
из-за малой механической прочности магнитов.
Магнитные системы с полыми цилиндрическими магнитами в
настоящее время находят широкое применение: в велогенераторах
типа Г-60, маломощных быстроходных генераторах для автоном-
ных систем электроснабжения, электродвигателях. В случае при-
менения монокристалла из РЗМ становится возможным изготов-
ление машины с беззубцовым якорем (см. рис. 1.9).
Достоинствами роторов с цилиндрическим магнитом являются:
простота изготовления магнита; синусоидальная форма поля в воз-
душном зазоре, а следовательно, и ЭДС в обмотке якоря; повы-
шенные значения допустимой окружной скорости по сравнению с
магнитом звездочка (см. далее), так как цилиндр имеет более вы-
сокую механическую прочность, чем звездочка; небольшие венти-
ляционные потери, что особенно важно для быстроходных машин.
Недостатком роторов с цилиндрическим магнитом является не-
высокая степень использования магнита, снижающаяся с возраста-
нием числа полюсов. Отсутствие междуполюсных впадин на ро-
торе вызывает уменьшение длины средней магнитной линии, а
следовательно, уменьшение активно используемого объема маг-
нита. Для эффективного использования объема постоянного маг-
нита отработан способ изготовления цилиндрических магнитов
звездочка с магнитной анизотропией (рис. 1.20). Повышение сте-
пени использования магнита позволяет при прочих равных усло-
виях уменьшить его диаметр, размеры генератора и вентиляцион-
ные потери.
Применение магнитно-мягкого вала увеличивает степень ис-
пользования магнита и, следовательно, повышает отдаваемую
мощность генератора (на 11—30%).
Роторы с цилиндрическими магнитами применяются в маши-
нах мощностью от нескольких десятков вольт-ампер до несколь-
ких киловольт-ампер.
Роторы с магнитами типа звездочка с явно выраженными полю-
сами без полюсных башмаков и с полюсными башмаками
Роторы с магнитами звездочка без полюсных башмаков (рис.
1.22) получили очень широкое применение. Магнит звездочка кре-
пится на валу с помощью заливки алюминиевым сплавом (чаще
всего АЛ-9) или цинковым сплавом ЦАМ-4. Часто магнит при от-
ливке непосредственно заливается на вал машины. Это особенно
часто практикуется в автотракторных генераторах (см. рис. 1.4).
Заливка алюминием вследствие малого удельного .сопротивления
его и небольшой плотности имеет некоторое преимущество по
сравнению с заливкой цинковым сплавом. Заливка легкоплавким
сплавом магнита звездочка обеспечивает монолитность конструк-
25
Рис. 1.23. Ротор со сдвоенным маг-
нитом звездочка:
/ — магнит; 2 — алюминиевая заливка;
3 — втулка; 4 — вал
Рис. 1.22. Ротор с магнитом звездочка
с явно выраженными полюсами без по-
люсных башмаков (авиационного типа):
/—магнит звездочка; 2 —заливка ротора
(сплав АЛ-9); 3 — вал ротора
ции ротора и выполняет роль демпферной клетки, защищающей
магнит от размагничивания МДС токами ударного КЗ.
В авиационных генераторах большей частью применяются наи-
более оптимальные четырехполюсные и шестиполюснще звездочки.
В общем случае в зависимости от заданной частоты тока и допу-
стимой частоты вращения число полюсов может быть и большим.
Применение большого числа полюсов магнита звездочка приво-
дит к худшему использованию материала и затруднениям с отлив-
кой магнита. Малое число полюсов (например 2р = 2) приводит к
сильному размагничиванию магнита. В целях улучшения кривой
напряжения иногда предусматривается скос полюсов звездочки.
Для генераторов значительной мощности, ширина магнита ко-
торых превышает 40—50 мм, магнитная система ротора собирает-
ся из нескольких магнитов (рис. 1.3, 1.23). Изготовление (отлив-
ка) небольших магнитов проще, чем больших, а магнитные свой-
ства их при одних и тех же материалах выше. Однако крепление
составных магнитов на валу усложняется.
Достоинствами магнитной системы ротора с магнитом звез-
дочка являются высокий коэффициент заполнения объема ротора
магнитом, простота конструкции и технологичность.
Наряду с достоинствами магнитная система ротора с магнитом
звездочка обладает рядом недостатков. Магнит звездочка трудно
намагничивается. Наличие значительных потоков рассеяния меж-
ду полюсами при намагничивании вследствие малой проницаемо-
сти магнита приводит к шунтированию спинки магнита и умень-
шению в ней напряженности поля (спинка звездочки плохо про-
магничивается). В результате получается неполное использова-
ние материала магнита.
Отсутствие полюсных башмаков из мягкой стали на магнитах
приводит к двум нежелательным явлениям. Во-первых, магниты
звездочка сильно размагничиваются под действием МДС продоль-
ной реакции якоря при ударном токе КЗ. Малая проницаемость
постоянных магнитов и относительно высокое удельное сопротив-
ление (0,7—0,8 Ом-мм2/м — для альни и альнико) приводят к сла-
бым вихревым токам в магните и чрезвычайно быстрому их зату-
26
ханию, т. е. практически отсутствует демпферная система. Залив-
ка ротора сплавом алюминия или другим сплавом до некоторой
степени уменьшает размагничивающее действие реакции якоря.
Наличие демпферной системы становится необходимым при мощ-
ности генераторов более 500 В-А. Во-вторых, МД С поперечной
реакции якоря, действующая несимметрично относительно оси по-
люсов, вызывает несимметричное размагничивание концов полю-
сов. Сильные деформации поля постоянного магнита получаются
после КЗ и перегрузок. В результате искажаются форма и поля в
воздушном зазоре и форма кривой ЭДС машины.
Роторы с магнитом звездочка из альни и альнико обладают
невысокой механической прочностью. Как показывает практика,
применение роторов с магнитом звездочка ограничивается окруж-
ной скоростью ротора для сплавов альни и альнико, не превыша-
ющей 50 м/с. При индивидуальном подборе магнитов по механи-
ческой прочности или применении металлокерамических магнитов
предельная окружная скорость не должна превышать 100 м/с.
Требования обеспечения механической прочности и технологиче-
ские требования не позволяют применять звездочки большого диа-
метра, что ограничивает предельную мощность генератора.
При магните звездочка вследствие низких магнитных харак-
теристик изотропных магнитов индукция в воздушном зазоре В& и
линейная нагрузка А получаются небольшими (5$:= 0,24-0,4 Тл,
А = 1004-150 А/см). Применение анизотропных магнитов с боль-
шой удельной магнитной энергией для звездочек еще не освоено.
Роторы с магнитами звездочка находят применение в маши-
нах относительно небольшой мощности: в авиационных генерато-
рах до 1500 В-А (четырех- и шестиполюсные), в тракторных гене-
раторах мощностью 150 В-А (шестиполюсные). При материалах
магнитов типа ЮНДК35Т5, ЮНДК40Т8АА и частоте тока 400 Гц
удается спроектировать генераторы мощностью до 7,5 кВ-А.
Некоторые из перечисленных недостатков машин с магнитом
звездочка устраняются применением магнитно-мягких полюсных
башмаков (рис. 1.24), т. е. полюсные башмаки защищают магни-
ты от размагничивания полем реакции якоря; не образуется оста-
точных деформаций поля от поперечного поля реакции якоря, так
как поток поперечной реакции якоря замыкается через магнитно-
мягкие полюсные башмаки; наличие полюсных башмаков позво-
ляет выполнить полюсы большей длины, чем пакет якоря, что при-
водит к экономии меди обмотки статора, уменьшению размеров и
массы машины; напряжение с ростом частоты вращения увеличи-
вается медленнее, так как при этом xaq больше, чем при магнитах
звездочка без полюсных башмаков, что уменьшает колебания на-
пряжения при отсутствии регуляторов напряжения; может быть
значительно увеличена предельная мощность генераторов.
При наличии полюсных башмаков увеличивается объем рото-
ра и уменьшается коэффициент заполнения ротора магнитом. По-
этому, несмотря на лучшее использование магнита при наличии
полюсных башмаков, может получиться, что размеры машины в
27
Рис. 1.24. Магнитная цепь генерато-
ра Г-37:
1 — магнит; 2 — полюсный башмак; 3—
полюс статора; 4 — обмотка якоря; 5 —
втулка; 6 — вал
целом при заданной мощности
не уменьшаются, а возрастают
(при небольших мощностях).
Значительные трудности с точ-
ки зрения обеспечения механиче-
ской прочности представляет
крепление полюсных башмаков.
В простейших конструкциях кре-
пление полюсных башмаков к
магниту пройзводится с помощью
заклепок (см. рис. 1.24), винтов,
скоб, заливки полюсных башма-
ков и магнита специальными спла-
вами. Заклепки, винты, скобы за-
ливаются в тело магнита, а с дру-
гой стороны они скрепляются с
полюсными башмаками. Такое
крепление полюсных башмаков
не обеспечивает высокой механи-
ческой прочности ротора. Из-за наличия полюсных башмаков по-
лучается более пористая отливка магнита. Между магнитом и по-
люсными башмаками вследствие усадки магнита возникают щели
и раковины.
Лучшее решение получается в случае применения биметалли-
ческой обоймы в виде цилиндрического кольца, имеющего участ-
ки из магнитно-мягкого материала (полюсы) и немагнитной ста-
ли (междуполюсные участки) (рис. 1.25,а—в). Сварной цилиндр
напрессовывается на полюсы магнита с натягом, что обеспечива-
ет высокую механическую прочность и хорошие магнитные свой-
ства индуктора. Эта конструкция магнитных систем, индукторов
с магнитом звездочка и призмами, предложенная В. А. Балагуро-
вым, в настоящее время нашла широкое применение на практике.
Рис. 1.25. Сборные магнитные системы роторов звездочка (а, б) со сварными по-
люсными башмаками:
/—магнитная сталь; 2 — немагнитная сталь; 3 — магнит; 4 — демпферная клетка; 5 —
ступица (магнитная втулка); в —с немагнитным кольцом; / — якорь; 2 — кольцо немагнит-
ное- з — магнит; 4 — вал; 5 — магнитная втулка
28
Роторы с магнитами типа звездочка с призматическими магнита-
ми и полюсными башмаками.
Появление анизотропных материалов постоянных магнитов с
высокой удельной магнитной энергией позволило разработать
звездообразные индукторы с призматическими магнитами
(рис. 1.25,6). Магниты размещаются между магнитной втулкой и
полюсной частью биметаллического сварного цилиндра. Биметал-
лический цилиндр, предварительно нагретый, напрессовывается
на полюсы магнитов. Конструкция ротора получается механиче-
ски прочной. Магниты намагничиваются в радиальном направ-
лении. Генераторы с ротором звездочка, призматическими магнита-
ми и биметаллической обоймой выполняются на большие мощно-
сти (до 100 кВ-A при /1=8000-4-12 000 об/мин). Они имеют не-
большую удельную массу и могут конкурировать с некоторыми бес-
контактными генераторами с электромагнитным возбуждением.
Применение высококоэрцитивных магнитов на базе редкозе-
мельных элементов позволяет применить конструкцию, представ-
ленную на рис. 1.25,в. Магниты 3 (дугообразной формы) удержи-
ваются в собранном состоянии немагнитным цилиндрическим
кольцом из высокопрочной стали. Увеличение расчетного воздуш-
ного зазора б за счет толщины кольца бк не влияет существенным
образом на выходные характеристики машины. Магнитная втул-
ка 5 обеспечивает замыкание магнитной цепи.
Генераторы с ротором звездочка и полюсными башмаками, об-
ладая относительно небольшим рассеянием полюсных башмаков и
магнита, имеют пологие внешние характеристики, что облегчает
условия работы регуляторов и стабилизаторов напряжения.
Роторы коллекторного типа с призматическими магнитами и тан-
генциальным намагничиванием
Генераторы с магнитами на базе РЗМ должны иметь конст-
рукцию магнитной системы роторов с меньшим отношением дли-
ны магнита к площади поперечного сечения его по сравнению с
роторами из сплава альнико, т. е. с более широкими и низкими маг-
нитами. В случае применения магнитной системы звездочка с ра-
диально намагниченными призматическими магнитами (рис.
1.25,6) магниты из РЗМ в виде призм с малой высотой будут за-
нимать только часть высоты полюса, ухудшая тем самым исполь-
Рис. 1.26. Магнитная система генера-
тора с ротором коллекторного типа и
тангенциальным намагничиванием
магнитов:
1— немагнитная втулка; 2— полюс из маг-
нитно-мягкого материала; 3 — магнит; 4 —
полюсный башмак; 5 — немагнитный учас-
ток цилиндра ротора; —магнитный по-
ток в воздушном зазоре
29
Рис. 1.27. Ротор коллекторного типа
с креплением магнитов пластиной:
/— вал; 2 — сварной шов; 3 — пластина
(немагнитная сталь); 4 — постоянный маг-
нит; 5— полюс; 6 — втулка (немагнитная)
Рис. 1.28. Ротор коллекторного типа
с клиновидными магнитами:
/ — бандаж; 2 — магнит; 3 — прокладка;
4 — полюс; 5 — стержень; 6 — втулка
зование объема ротора. Часть объема полюса приходится зани-
мать стальным магнитопроводом. В целях улучшения использова-
ния объема ротора и магнитной энергии магнита целесообразно
применять магнитную систему коллекторного типа с тангенциаль-
ным намагничиванием магнитов (рис. 1.26), предложенную
В. А. Балагуровым, А. А. Кецарисом и В. В. Лохниным [7].
Индуктор коллекторного типа состоит из магнитно-мягких по-
люсов, выполненных в виде сегментов, между которыми располо-
жены призматические магниты, намагниченные в тангенциальном
направлении. Магниты удерживаются от радиального смещения
биметаллическим цилиндром, напрессованным на индуктор. Воз-
можны также другие способы крепления магнитов и полюсов, на-
пример с помощью пластин (рис. 1.27), стержней и клиновидной
формы магнита (рис. 1.28). В последнем случае клиновидный маг-
нит опирается на клиновидные полюсы 4. Полюсы удерживаются
стержнями 5 и бандажным кольцом 1. Между постоянными маг-
нитами 2 и полюсами 4 имеются прокладки 5, которые предназна-
чены для уменьшения механических напряжений и предотвраще-
ния разрушения постоянных магнитов. Стержни 5 являются так-
же элементами демпферной системы. Конструкция не требует при-
менения бандажного кольца большой толщины.
В случае индуктора коллекторного типа значение магнитного
потока Фе в воздушном зазоре удваивается по сравнению с индук-
тором звездообразной формы и радиальным намагничиванием
магнитов, так как поток в каждом полюсе создается двумя маг-
нитами. Высокая коэрцитивная сила магнитов позволяет разрабо-
тать генераторы на большие кратности тока КЗ с беззубцовым
якорем и другие конструкции специальных генераторов. Значи-
тельно снижается удельная масса генераторов (см. рис. 1.8).
Роторы с когтеобразными полюсами с цилиндрическими постоян-
ными магнитами, намагниченными в аксиальном направлении
Роторы когтеобразной формы нашли широкое применение в
синхронных генераторах с постоянными магнитами после того, как
30
Рис. 1.29. Роторы с когтеобразными полюсами:
а — шестиполюсный; б — 18-полюсный
были разработаны магнитные сплавы с достаточно высокой коэр-
цитивной силой.
При когтеобразной форме ротора (рис. 1.29,а, б) магнит пред-
ставляет собой полый цилиндр, намагниченный в аксиальном на-
правлении. Магнит расположен между двумя шайбами (фланца-
ми), снабженными полюсными выступами — когтями. Все полюсы
одной шайбы являются северными, а другой — южными. Шайбы с
когтями изготовляются из магнитно-мягкой стали. Магнит шлифу-
ется по торцевым и внешней поверхностям и крепится в заточках
полюсных шайб. Вал обычно изготовляется из немагнитной ста-
ли во избежание шунтирования магнита. В том случае, когда на
валу имеется втулка из немагнитного материала (обычно латуни)
(рис. 1.30,а, в), вал может быть изготовлен из магнитной стали.
В последнее время разработан способ изготовления фланцев с по-
люсами на основе металлокерамической технологии.
Применение сплошного магнита в конструкции ротора
(рис. 1.30,6) позволяет увеличить коэффициент заполнения объ-
ема ротора магнитом и уменьшить размеры ротора и машины в
целом. Правый и левый концы вала приварены к полюсным шай-
бам. Когти разной полярности механически объединены с по-
мощью приваренных к ним немагнитных пластин.
В целях увеличения потока и мощности генератора применяют
многопакетные конструкции с параллельным включением магни-
тов (рис. 1.30,в, г). Конструкция двухпакетного когтеобразного ро-
тора была предложена А. Н. Ларионовым [24]. Число пакетов
может быть и больше двух. В многопакетной конструкции за счет
увеличения активной длины ротора возрастает соответственно и
мощность генератора или при заданной мощности уменьшаются
радиальные размеры машины.
Роторы когтеобразной конструкции имеют ряд достоинств:
1. Имеется возможность применять магниты с высокой удельной магнитной
энергией, как, например, анизотропные с направленной кристаллизацией, анизо-
тропные оксидно-бариевые, с РЗМ, которые просто изготовляются в виде ци-
линдров, колец, дисков, что уменьшает удельную массу генераторов.
31
Рис. 1.30. Варианты конструкций роторов с когтеобразными полюсами:
а — однопакетная конструкция с полым цилиндрическим магнитом; б — то же с цилинд-
рическим сплошным магнитом; в — двухпакетная конструкция с двумя цилиндрическими по-
лыми магнитами; г — то же с двумя цилиндрическими сплошными магнитами (индексы р
относятся к ротору)
2. Намагничивание магнита когтеобразного ротора с магнитами типа альнико
производится в собранном виде в магнитном поле, весьма близком к равномер-
ному, при этом магниты надежно намагничиваются. Магниты типа РЗМ и фер-
ритовые намагничиваются вне конструкции и также надежно.
3. Наличие полюсов когтеобразного- типа приводит к полной стабильности
поля в воздушном зазоре, определяемого, как и в обычных машинах, конфигу-
рацией поверхности когтей, что позволяет получить синусоидальную форму кри-
вой напряжения.
4. Размагничивающее действие поля реакции якоря меньше, чем в машинах
с ротором звездочка, из-за наличия мощной демпферной системы (когти, флан-
цы) и значительных проводимостей рассеяния магнитной системы ротора. Ста-
билизация магнитов практически производится установившимся током КЗ.
5. Индукции в воздушном зазоре Въ при когтеобразном роторе выше, чем
при звездообразном, так как значение магнитного потока определяется площадью
поперечного сечения магнита, которая может быть выбрана значительной. Маг-
ниты когтеобразных роторов выполняются с малым отношением длины к диа-
метру.
Такие соотношения целесообразно применять для магнитов с высокими зна-
чениями Нс.
6. При повышении частоты (числа полюсов) коэффициент заполнения объема
ротора магнитом не снижается. Он не зависит от числа полюсов, в то время как
для звездообразных роторов с увеличением числа полюсов этот коэффициент сни-
жается.
32
7, Механическая прочность когтеобразных роторов достаточно высокая.
Окружная скорость может быть доведена до 100 м/с и выше.
Наряду с достоинствами когтеобразные роторы обладают и рядом недо-
статков:
1. Конструкции когтеобразных роторов достаточно сложные. При высоких
частотах вращения возможен отгиб концов когтей, что требует специальных
креплений.
2. Радиальные размеры когтеобразного ротора больше, чем звездообразного.
Коэффициент заполнения объема ротора магнитом ниже, чем у звездообразных
роторов, что приводит к увеличению удельной массы машин с когтеобразными
роторами. Резкое возрастание удельной массы наблюдается в диапазоне боль-
ших мощностей.
3. Имеется значительное падение магнитного напряжения в когтях вследст-
вие малой площади поперечного сечения у них, в особенности в начальной части
когтя. Чтобы избежать насыщения, полюсы ротора часто выполняются с пере-
менной шириной.
4. Намагничивание магнитов в когтеобразных роторах представляет значи-
тельные трудности, так как оно производится с арматурой ротора. Требуются
сложные намагничивающие аппараты большой мощности.
Когтеобразная конструкция ротора (по рис. 1.30,6) с магнитами направлен-
ной кристаллизации реализована в одном из генераторов мощностью 7,5 кВ‘А.
Изготовлен ряд образцов тракторных генераторов относительно небольшой мощ-
ности (180—380 В-А) с многопакетным ротором и аксидн'о-бариевыми магнита-
ми. Примером может служить генератор ГТ-1А (см. рис. 1.5).
Известны конструкции генераторов с постоянными магнитами, полюсы рото-
ров которых используются как лопатки воздушной турбины. В этом случае полю-
сы имеют более сложную форму и профиль, соответственно конструкции воздуш-
ной турбины.
Магнитные системы торцевого типа
К положительным качествам торцевых машин относятся: ма-
лые аксиальные размеры, благоприятные условия охлаждения,
короткий и жесткий ротор, экономичное расходование электро-
технической стали (витой сердечник), упрощение обмоточных ра-
бот, создание моноблочных конструкций и удобство встраивания
в различные агрегаты.
Рис. 1.31. Торцевые генераторы однопакет-
ные (а) и двухпакетные (б) с постоянны-
ми магнитами:
1 — статор; 2 — якорная обмотка; 3 — постоянный
магнит; 4 — ярмо; 5 —стержень беличьей клетки;
б — немагнитное бандажное кольцо
а) С)
3-6258
33
Используя РЗМ (монокристаллические структуры) в виде ци-
линдров или в виде других простейших геометрических форм,
Л. М. Паластин разработал ряд торцевых высокоскоростных син-
хронных генераторов [9].
На рис. 1.31 представлены торцевые одно- и двухпакетные син-
хронные генераторы. Статор 1 и якорные обмотки 2 обычного для
торцевых машин исполнения. Постоянные магниты 3 размещают-
ся в стакане (бандаже) 6 из высокопрочной немагнитной стали,
обеспечивающем прочность ротора, а пространство вокруг магни-
тов заполняется алюминиевым сплавом, образующим демпферную
беличью клетку 5, защищающую магниты от размагничивания в
переходных режимах. Для замыкания потоков магнитов в индук-
торе однопакетной машины предусмотрено ярмо 4, которое в двух-
пакетной машине отсутствует.
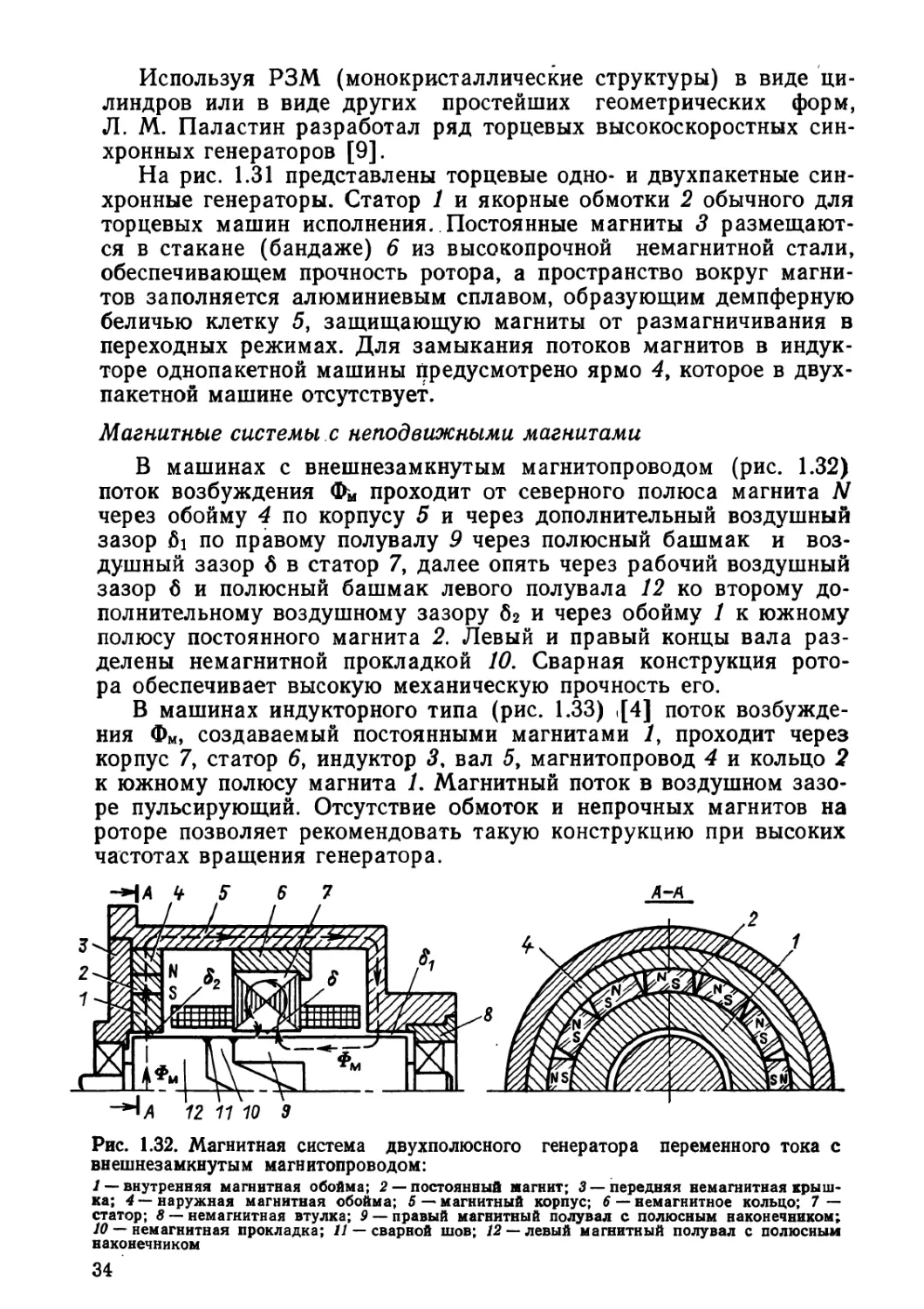
Магнитные системы с неподвижными магнитами
В машинах с внешнезамкнутым магнитопроводом (рис. 1.32)
поток возбуждения Фм проходит от северного полюса магнита N
через обойму 4 по корпусу 5 и через дополнительный воздушный
зазор 51 по правому полувалу 9 через полюсный башмак и воз-
душный зазор б в статор 7, далее опять через рабочий воздушный
зазор 6 и полюсный башмак левого полувала 12 ко второму до-
полнительному воздушному зазору 62 и через обойму 1 к южному
полюсу постоянного магнита 2. Левый и правый концы вала раз-
делены немагнитной прокладкой 10. Сварная конструкция рото-
ра обеспечивает высокую механическую прочность его.
В машинах индукторного типа (рис. 1.33) ,[4] поток возбужде-
ния Фн, создаваемый постоянными магнитами 1, проходит через
корпус 7, статор 6, индуктор 3, вал 5, магнитопровод 4 и кольцо 2
к южному полюсу магнита 1. Магнитный поток в воздушном зазо-
ре пульсирующий. Отсутствие обмоток и непрочных магнитов на
роторе позволяет рекомендовать такую конструкцию при высоких
частотах вращения генератора.
Рис. 1.32. Магнитная система двухполюсного генератора переменного тока с
внешнезамкнутым магнитопроводом:
/ — внутренняя магнитная обойма; 2 —постоянный магнит; 3— передняя немагнитная крыш-
ка; 4 — наружная магнитная обойма; 5 — магнитный корпус; 6 — немагнитное кольцо; 7 —
статор; 8 — немагнитная втулка; 9 — правый магнитный полувал с полюсным наконечником;
10 — немагнитная прокладка; 11 — сварной шов; 12 — левый магнитный полувал с полюсным
наконечником
34
Рис. 1.33. Магнитная система индукторного генератора:
/ — постоянный магнит; 2 — магнитное кольцо; 3 — индуктор; 4 — магнитопровод; 5 — маг-
нитный вал; 6 — статор; 7 — магнитный корпус
В -машинах с магнитными системами коммутаторного типа
(рис. 1.34) магнитный поток в сердечниках якоря является знаке-
переменным в отличие от индукторных систем, где поток пульси-
рующий. При вращении коммутатора происходит коммутация маг-
нитного потока, в результате которой магнитный поток в сердеч-
нике изменяется от 4-Фтах до —Фшая- Каждый выступ и впадина
коммутатора соответствуют паре полюсов генератора. В обмотка v
якоря наводится ЭДС с частотой
f=zn/60, (1.1)
где 2 — число зубцов коммутатора; п — частота вращения об/мин.
Наличие медного демпферного кольца 1, окружающего маг-
нит 2, предохраняет магнит от размагничивания при ударных то-
ках КЗ. Полюсные башмаки и магниты заливаются алюминиевым
сплавом.
Достоинствами коммутаторной магнитной системы являются:
высокие допустимые частоты вращения, высокая надежность, про-
стота в эксплуатации, возможность применения магнитов с на-
Рис. 1.34. Эскиз магнитной
цепи коммутаторного типа
генератора:
/ — демпферное кольцо; 2—маг-
нит; 3 — полюсный башмак ста-
тора; 4 — обмотка якоря; 5 —
сердечники якоря; 6 — комму-
татор; 7 — вал ротора; б — воз-
душный рабочий зазор; Ф —
магнитный поток в сердечнике
з*
35
правленной кристаллизацией, простой выбор оптимальных размер-
ных соотношений магнита.
Но генераторы с магнитной системой коммутаторного типа мо-
гут изготавливаться в основном только однофазными (трехфазные
слишком сложны), имеют значительную удельную массу. При
низких частотах вращения генераторы коммутаторного типа по-
лучаются более тяжелыми, чем генераторы с другими магнитны-
ми системами. Они имеют значительные потоки рассеяния обмот-
ки якоря.
Генераторы с коммутаторной магнитной системой находят
применение в области высоких частот вращения (50000—
60000 об/мин) и высоких частот тока (до 10 кГц) при относитель-
но небольшой мощности (до 1—3 кВ-А).
1.4. МАГНИТНЫЕ СИСТЕМЫ И КОНСТРУКЦИИ
ГЕНЕРАТОРОВ ПЕРЕМЕННОГО ТОКА КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ
К генераторам комбинированного возбуждения (ГКВ) отно-
сятся генераторы, в которых магнитный рабочий поток создается
совместным действием постоянных магнитов и электромагнитных
обмоток возбуждения. Эти генераторы, обладающие всеми до-
стоинствами машин с постоянными магнитами, позволяют осуще-
ставлять глубокое регулирование напряжения за счет дополнитель-
ного электромагнитного возбуждения. Возможность регулирова-
ния напряжения и способность к самовозбуждению определили
широкое распространение этого типа генераторов, главным обра-
зом, в автономных системах электроснабжения малой и средней
мощности (до 120 кВ-А).
Генераторы переменного тока комбинированного возбуждения
синтезируют в себе особенности генераторов с магнитным и элек-
тромагнитным возбуждением и имеют три действующие МДС: по-
стоянных магнитов, электромагнитной обмотки возбуждения и ре-
акции якоря; имеют свою специфику рабочего процесса и поэто-
му могут быть выделены в отдельный класс электрических ма-
шин. Основу ГКВ составляет генератор переменного тока с по-
стоянными магнитами («опорный» генератор).
МДС постоянных магнитов и обмотки электромагнита могут
действовать параллельно или последовательно друг с другом.
В первом случае реализуется ГКВ с параллельной обмоткой элек-
тромагнита (подмагничивания), во втором — с последовательной.
Кроме того, в первом случае генератор имеет дополнительный
магнитопровод, называемый обычно магнитным шунтом (магнит-
ный поток в шунте может изменяться по значению и направлению
в зависимости от значения и знака МДС электромагнитной об-
мотки), а во втором магнитный шунт в генераторе может отсут-
ствовать и с изменением значения и знака МДС электромагнит-
ной обмотки изменяется общий рабочий поток генератора.
В ГКВ с параллельной обмоткой электромагнита возможны
два режима работы генератора: режим управляемого магнитного
36
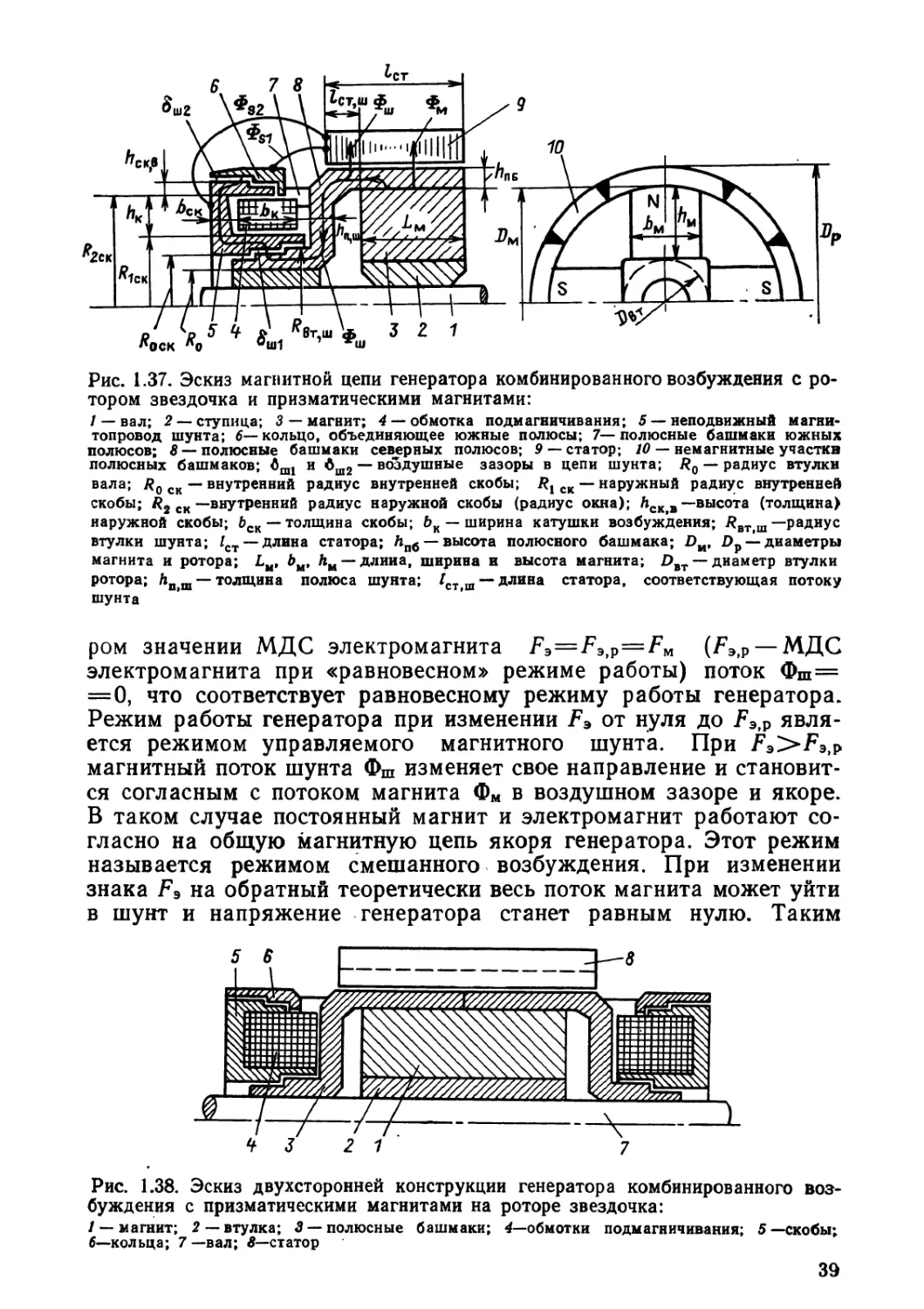
Рис. 1.35. Эскиз магнитной цепи генератора комбинированного возбуждения с
ротором звездочка и сварными полюсными башмаками:
/ — вал; 2 — магнит; 3 — заливка из сплава алюминия; 4 — неподвижная обмотка электро-
магнита (подмагничивания); 5 — неподвижный магнитопровод цепи шунта (скоба); 6—воз-
душные зазоры в цепи шунта (дш1 и бш2); 7 — кольцо, объединяющее южные полюсы; 8—
полюсные башмаки южных полюсов; 9 — статор (якорь); 10 — полюсные башмаки северных
полюсов; 11— немагнитные участки псглюсных башмаков; Лпб — высота полюсного башмака;
LM — длина магнита; Ьм — ширина магнита; ZM —длина силовой линии в магните («высота»
магнита); -- г.ысота спинки магнита; DM — диаметр магнита; Dp — диаметр ротора
шунта, когда в магнитный шунт ответвляется часть магнитного
потока магнита, и режим смешанного возбуждения, когда начи-
ная с некоторого значения МДС электромагнита магнитный поток
в шунте изменяет свое направление на обратное и потоки магнита
и электромагнита в воздушном зазоре складываются. Таким об-
разом, посредством изменения МДС обмотки электромагнита
можно регулировать поток и напряжение генератора при широ-
ком диапазоне изменения нагрузки и частоты вращения.
Известно большое количество магнитных систем и конструк-
ций генераторов комбинированного возбуждения. Их можно клас-
сифицировать по принципу действия электромагнитной части ин-
дуктора и конструктивным признакам [3].
Генераторы комбинированного возбуждения разделяются на
две большие группы: со знакопеременным и пульсирующим пото-
ками. Каждая из этих групп разделяется на генераторы с парал-
лельным и последовательным действием МДС магнита и элек-
тромагнита. Классификация может быть продолжена по признаку
устройства магнитной цепи генераторов, по форме и расположению
магнита в магнитной системе. Наиболее распространенной группой
ГКВ является группа генераторов со знакопеременным потоком
электромагнитной части и параллельным действием МДС обмотки
электромагнита и постоянного магнита.
Магнитные системы и конструкции генераторов со знакоперемен-
ным потоком
Эта конструкция имеет много разновидностей, но наибольшее
применение на практике нашли ГКВ с внутризамкнутым магнито-
проводом электромагнитной части индуктора и магнитами звез-
дочка (рис. 1.35, 1.36) и с призматическими магнитами (рис. 1.7.
1.37) [25].
37
Рис. 1.36. Эскиз генератора переменного тока комбинированного возбуждения с
внутризамкнутым магнитопроводом и ротором звездочка со сварными полюсны-
ми башмаками:
/ — левый магнитный шунт; 2 — левый полюсный наконечник; 3 — статор с обмоткой; 4 —
правый полюсный наконечник; 5 — правый магнитный шунт; 6— правая электромагнитная
обмотка возбуждения; 7 — вал; 3 — постоянный магнит звездочка; 9!— алюминиевая залив-
ка; 10 — левая электромагнитная обмотка возбуждения; //—немагнитная вставка
Магнитоэлектрическая часть индуктора этих генераторов име-
ет обычную конструкцию машин с постоянными магнитами звез-
дочка (см. рис. 1.25) с напрессованным на магниты составным
сварным цилиндром, состоящим из магнитных (полюсных башма-
ков) и немагнитных участков. Полюсные башмаки одной поляр-
ности (северные) переходят в полюсы втулки магнитопровода
шунта, а полюсные башмаки другой полярности (южные) связа-
ны с кольцом магнитопровода шунта.
Обмотка электромагнита и скоба неподвижны. Бесконтактность
обеспечивается наличием нерабочих зазоров бШ1 и 6Ш2 для потоков
электромагнитной части (рис. 1.37). При обесточенной обмотке
электромагнита его магнитопровод является обычным пассивным
шунтом.
При изменении тока в обмотке электромагнита изменяется по-
ток в шунте Фш. С увеличением тока при встречном направлении
МДС обмотки и магнита магнитный поток в шунте уменьшается
(поток постоянного магнита вытесняется из шунта). При некото-
38
Рис. 1.37. Эскиз магнитной цепи генератора комбинированного возбуждения с ро-
тором звездочка и призматическими магнитами:
/ — вал; 2 — ступица; 3 — магнит; 4 — обмотка подмагничивания; 5 — неподвижный магни-
топровод шунта; 6— кольцо, объединяющее южные полюсы; 7—полюсные башмаки южных
полюсов; S —полюсные башмаки северных полюсов; 9 — статор; 10 — немагнитные участки
полюсных башмаков; бш1 и дш2 — воздушные зазоры в цепи шунта; Ro — радиус втулки
вала; /?0 ск — внутренний радиус внутренней скобы; ск — наружный радиус внутренней
скобы; ск—внутренний радиус наружной скобы (радиус окна); hCKB—высота (толщина)
наружной скобы; Ьск — толщина скобы; Ьк — ширина катушки возбуждения; Явтш— радиус
втулки шунта; /ст — длина статора; Лпб —высота полюсного башмака; DK, Dp —диаметры
магнита и ротора; £м, Ьм, Лм — длина, ширина и высота магнита; DBT —диаметр втулки
ротора; Лпш —толщина полюса шунта; /стш —длина статора, соответствующая потоку
шунта
ром значении МДС электромагнита F3=F3tP=FM (F3ip— МДС
электромагнита при «равновесном» режиме работы) поток Фш=
=0, что соответствует равновесному режиму работы генератора.
Режим работы генератора при изменении F3 от нуля до F3,p явля-
ется режимом управляемого магнитного шунта. При F3>F3,p
магнитный поток шунта Фш изменяет свое направление и становит-
ся согласным с потоком магнита Фм в воздушном зазоре и якоре.
В таком случае постоянный магнит и электромагнит работают со-
гласно на общую магнитную цепь якоря генератора. Этот режим
называется режимом смешанного возбуждения. При изменении
знака F3 на обратный теоретически весь поток магнита может уйти
в шунт и напряжение генератора станет равным нулю. Таким
Рис. 1.38. Эскиз двухсторонней конструкции генератора комбинированного воз-
буждения с призматическими магнитами на роторе звездочка:
/ — магнит; 2 —втулка; 3 — полюсные башмаки; 4—обмотки подмагничивания; 5—скобы;
б—кольца; 7 —вал; 8— статор
39
Рис. 1.39. Удельная масса генераторов в
зависимости от отношения потока в
шунте к общему потоку в воздушном
зазоре (100 % соответствуют удельной
массе магнитоэлектрического генерато-
ра):
I — односторонняя конструкция; 2 — двухсто-
ронняя конструкция
образом, при применении реверсивного регулятора напряжения,
способного изменять знак тока в электромагнитной обмотке воз-
буждения, можно добиться большой глубины регулирования на-
пряжения.
С увеличением мощности генераторов до десятков киловольт-
ампер необходимое значение магнитного потока в шунте стано-
вится значительным, что приводит к увеличению поперечного се-
чения магнито провода шунта, возрастанию радиальных и акси-
альных размеров машины и увеличению ее массы. Кроме того,
увеличивается высота полюсных башмаков, диаметр втулки, а вы-
сота окна для размещения обмотки электромагнита уменьшается,
что приводит к увеличению потоков рассеяния обмотки электро-
магнита. В этом случае лучшие результаты дает применение двух-
сторонней конструкции (рис. 1.38). Начиная с определенного зна-
чения потока в шунте масса генератора с двухсторонним шунтом,
несмотря на наличие двух обмоток, становится меньше массы ге-
нератора с односторонним шунтом (рис. 1.39).
Одной из модификаций ГКВ с ротором звездочка является ге-
нератор с активным валом (рис. 1.40). Вал генератора является
частью магнитной систему генератора, через него замыкаются по-
токи от постоянного магнита (направлены по сечению) и электро-
магнита (вдоль оси). Генератор имеет две обмотки электромагни-
Рис. 1.40. Эскиз магнитной системы генератора с ротором звездочка и актив-
ным валом:
/ — магнит (из сплава ЮНДК35Т5); 2 — активный вал (сталь марки 10); 3 — полюсный
башмак (из стали ОХН-ЗМ); 4 — обмотка электромагнита (подмагничивания); 5 —скоба (из
сплава «гиперко 25»); 6 — нерабочий воздушный зазор
40
Рис. 141. Индуктор явнополюсного синхронного генератора комбинированного
возбуждения:
1 — полюс с магнитным шунтом; 2 — достоянный магнит; 3 — обмотка электромагнита (ре-
гулировочная); 4 —вал
Рис. 1.42. Неявнополюсный синхронный генератор комбинированного возбужде-
ния:
1 — якорь; 2 — сталь индуктора; 3 — клин из магнитно-мягкой стали или немагнитного ма-
териала; 4 —обмотка электромагнита (регулировочная); 5 —постоянный магнит
та (обмотки подмагничивания), каждая из которых рассчитыва-
ется на половину общей МДС. При обесточеннцх обмотках элек-
тромагнита левая и правая части магнитопровода электромагни-
та являются магнитными шунтами. При возрастании МДС обмо-
ток электромагнита потоки в шунтах уменьшаются. В режиме
смешанного возбуждения поток от электромагнитов проходит по-
следовательно через вал, скобы шунта, полюсные башмаки и
якорь генератора, дополняя поток магнита через якорь. Генератор
с активным валом позволяет лучше использовать внутреннее про-
странство ротора. При малых значениях магнитного потока в шун-
те генераторы с активным валом имеют несколько меньшую массу
(см. рис. 1.6), чем генераторы с ротором звездочка (см. рис. 1.38).
В автономных системах электроснабжения в целях обеспече-
ния самовозбуждения находят применение генераторы комбини-
рованного возбуждения с индуктором, имеющим электромагнит и
постоянный магнит (рис. 1.41 и 1.42) [9], МДС которых в отли-
чие от систем рис. 1.35—1.38 соединены последовательно. В про-
дольной оси полюсов предусмотрены вырезы прямоугольной фор-
мы, в каждом из которых размещается брусок постоянного магни-
та. Сердечники полюсов, выполняющие роль магнитных шунтов,
и постоянные магниты охватываются катушками электромагнит-
ной (регулировочной) обмотки, наматываемыми непосредственно
на сердечники полюсов. Самовозбуждение обеспечивается посто-
янными магнитами. В основных режимах работы возбуждение ге-
нератора осуществляется совместным действием постоянных маг-
нитов и регулировочной обмотки. Недостатком этих генераторов
является необходимость применения контактных колец на роторе.
41
Рис. 1.43. Эскиз магнитной цепи когтеобразного ротора с неподвижной обмоткой
электромагнита:
1 — неподвижный магнитопровод цепи шунта (скоба); 2— обмотка электромагнита (обмот-
ка подмагничивания); 3, 10—воздушные зазоры; 4 — кольцо, объединяющее полюсные на-
конечники одной полярности; 5 — полюсные башмаки; 6 — вал; 7 — магнит; 8—фланец; 9—
втулка
Рис. 1.44. Эскиз магнитной цепи генератора комбинированного возбуждения с
внешнезамкнутым магнитопроводом:
1— вал; 2 — крышки; 3— магнит; 4—фланцы с полюсами; 5—кольцевая обмотка; б—корпус;
7—якорь; б—рабочий зазор; бш1 и бш2 —воздушные зазоры в цепи шунта
Известны конструкции ГКВ с когтеобразными роторами с
внутренним магнитопроводом шунта (рис. 1.43) и внешним маг-
нитопроводом (рис. 1.44). Принцип построения магнитной цепи
шунта в первой конструкции аналогичен рассмотренному ранее
(см. рис. 1.35 и 1.36). Во второй конструкции (рис. 1.44) пред-
усмотрены две кольцевые обмотки подмагничивания. Магнитный
поток шунта Фш проходит через щиты и корпус генератора. В за-
висимости от значения и направления МДС обмотки электро-
магнита (обмотки подмагничивания) поток изменяет значение
и направление. В этой конструкции генератора крышки и корпус
должны быть выполнены из магнитной стали, и их сечения рас-
считаны на прохождение магнитного потока Фш. Масса генера-
тора получается значительной. Как и у всех генераторов с ког-
теобразным ротором, у них значительные потоки рассеяния.
42
Рис. 1145. Комбинированный генератор с
когтеобразным ротором и активным ва-
лом: |
1 — вал;] 2 — полюсные шайбы с полюсами;
3— магнат; 4 — якорь (статор); 5 — обмотка
электромагнита (обмотка подмагничивания);
6 — скобИ шунта; 7 — заливка из немагнитно-
го материала; бш1 и бш2 — воздушные зазо-
ры в цепи шунта
Представляет интерес конструкция генератора комбинирован-
ного возбуждения с когтеобразным ротором и активным валом
(рис. 1.45). Поток шунта Фш замыкается через вал генератора.
Генераторы с когтеобразным ротором и активным валом при-
меняются в диапазоне небольших мощностей. При большой мощ-
ности генераторов требуется большая площадь поперечного се-
чения вала.
Генераторы комбинированного возбуждения с когтеобразными
роторами имеют значительно большую удельную массу по сравне-
нию с генераторами с ротором звездочка (рис. 1.46). Начиная
с мощности примерно 40 кВ-А и выше удельная масса генерато-
ров с когтеобразным ротором резко возрастает. Для генераторов
с ротором звездочка наименьшие значения удельной массы по-
лучаются при использовании режима комбинированного возбуж-
дения (по сравнению с режимом управляемого шунта и подмаг-
ничивания спинки якоря конструкции — рис. 1.46).
т,,
2,0
1,8
1,8
1,4
1,2
1,0
0,8
0,S
0,4
0 10 20 30 40 50 ВО 70 80 90 100 110 Рг,кВ- А
Рис. 1.46. Характеристики удельной массы генераторов комбинированного воз-
буждения для различных индукторов в зависимости от мощности при /=400 Гц,
л=8000 об/мин (материал магнита ЮНДК24 с Вг=1,35 Тл, Яс=600 А/см):
I—с когтеобразным ротором в режиме управляемого магнитного шунта; 2—с ротором звез-
дочка в режиме управляемого магнитного шунта; 3 —то же с подмагничиванием спинки
якоря; 4 —то же в режиме комбинированного возбуждения
43
Рис. 1.47. Когтеобразный синхронный гене-
ратор комбинированного возбуждения:
/—пакет стали якоря; 2 — обмотка якбря; 3 —
когти индуктора; 4 —бандаж; 5— кольцевая об-
мотка (регулировочная); 6 — постоянный магнит
цилиндрической формы; 7 — втулка из магнитно-
мягкой стали ;
Известны генераторы с когтеобразными роторами комбини-
рованного возбуждения с размещением обмотки электромагнита
на индукторе (рис. 1.47) [9] и последовательным включением
МДС магнита и подмагничивающей обмотки электромагнита.
Самовозбуждение обеспечивается постоянным магнитом. Обмотка
электромагнита (регулировочная) получает питание от источни-
ка постоянного тока через контактные кольца, что является не-
достаткам этого типа генераторов. Если втулка изготовлена из
магнитного материала, то она является магнитным шунтом. При
литании обмотки постоянным током магнитные потоки, созда-
ваемые постоянным магнитом и обмоткой электромагнита, в рас-
точке якоря совпадают по направлению, а в магнитно-мягкой
втулке направлены встречно. По этой причине результирующий
осевой поток генератора значительно уменьшается, тем самым
уменьшается требуемая МДС обмотки электромагнита. Улучша<
лотся характеристики генератора по массе.
Известны конструкции синхронных ГКВ с внешнезамкнутым
•магнитопроводом и с последовательным действием постоянных
магнитов и электромагнитной обмотки возбуждения (рис. 1.48)
14].
В этом генераторе рабочий поток Ф« идет от северных полю-
сов магнитов 11 вверх, как это показано штриховой линией, че-
рез внешнее магнитное кольцо 1 по корпусу генератора 3 в пра-
вый полувал 8, далее через статор 10 и рабочие воздушные за-
зоры б в левый поливал 13 и через внутреннее магнитное коль-
цо 14 к южным полюсам магнитов 11. Генератор имеет допол-
нительные воздушные зазоры- 61 и бг. Электромагнитная обмотка
возбуждения 2 кольцевая, намотана на каркасе 4. Конструкция
магнитной системы достаточно сложная и широкого применения
не получила.
Наряду с генераторами со знакопеременным потоком при-
меняются и генераторы с пульсирующим потоком. Для автоном-
ных систем электроснабжения представляют интерес генераторы
комбинированного возбуждения индукторного типа с пульсирую-
щим потоком- (см. рис. 1.12) —двухсторонняя конструктивная схе-
ма. В этом генераторе МДС постоянного магнита и электромаг-
44
Рис. 1.48. Конструктивная схема синхронного генератора комбинированного воз-
буждения с внешнезамкнутым магнитопроводом и последовательным действием
МДС магнитов и электромагнитной обмотки возбуждения:
/ — наружное магнитное кольцо; 2 — электромагнитная обмотка возбуждения; 3 —магнит-
ный корпус; 4 — каркас обмотки возбуждения; 5—обмотка статора; 6 — немагнитная втулка;
7—правый подшипник; 8—правый магнитный полувал; 9— немагнитная прокладка; 10 — ста-
тор; 11— постоянный магнит; 12 — левый подшипник; 13— левый магнитный полувал; 14 '—
внутреннее магнитное кольцо; 15 — немагнитная крышка
нита направлены параллельно. Постоянный магнит кольцевого
типа намагничен в осевом направлении. Магнитные потоки про-
ходят через вал, зубцовую зону генератора и боковые части
магнитопровода. Генераторы этой конструкции имеют надежное
самовозбуждение и достаточно просты по конструкции.
На рис. 1.49 представлена конструкция однопакетного индук-
торного генератора с односторонним комбинированным возбуж-
дением [3]. МДС магнита и МДС обмотки электромагнита (под-
магничивания) действуют последовательно относительно актив-
ной зоны генератора. Наилучшие результаты при такой магнит-
Рис. 1.49. Конструктивная
схема однопакетного индук-
торного генератора с одно-
сторонним комбинирован-
ным возбуждением:
1— обмотка электромагнита; 2—
постоянный магнит; 3 — магни₽
топровод обмотки электромаг-
нита; 4 — обойма постоянных
магнитов; 5 — вал; 6 — корпус
генератора; 7 — пакет статора;
8 — пакет ротора; 9 — обмотка
статора; 10 — задняя крышка;
11— регулятор напряжения; 72-
корпус регулятора напряжения;
13 — заглушка; 14 —задний под-
шипник; 15 —передняя крышка;
16— передний подшипник; 17 —
выпрямитель; 18 — крышка вы-
прямителя
45
Рис. 1.50. Эскиз магнитной цепи комбинированного коммутаторного генератора:
I — магнит; 2 —коммутатор; 3 —полюсный башмак; 4—катушка якоря; 5 — сердечник якоря;
б —корпус; 7 — обмотка электромагнита (обмотка подмагничивания); в —вал
ной системе получаются с магнитами высокой коэрцитивной силы,
которые имеют линейную характеристику размагничивания. Ге-
нераторы такого типа имеют простую конструкцию и малую массу.
К группе генераторов комбинированного возбуждения с пуль-
сирующим потоком следует отнести генераторы коммутаторного
типа (рис. 1.50). При обесточенной обмотке электромагнита пра-
вая часть генератора представляет собой обычный магнитный
шунт. При вращении коммутатора генератор работает, как индук-
торный генератор. При появлении МДС обмотки электромагнита
и постепенном ее увеличении генератор утрачивает свойства
индукторного генератора и при равенстве МДС магнита и МДС
обмотки становится генератором со знакопеременным потоком
коммутаторного типа. Недостатком генератора коммутаторного
типа следует считать значительную мощность для питания об-
мотки электромагнита. Этот генератор представляет интерес для
автономных систем электроснабжения небольшой мощности.
Генераторы комбинированного возбуждения с пульсирующим
потоком наиболее целесообразно применять в области высоких
частот вращения и частот тока.
1.5. МАГНИТНЫЕ СИСТЕМЫ И КОНСТРУКЦИИ
КОЛЛЕКТОРНЫХ ТАХОГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
С ПОСТОЯННЫМИ МАГНИТАМИ
Генераторы постоянного тока с постоянными магнитами нашли
наибольшее применение в диапазоне мощностей от долей ватта
до нескольких десятков ватт. В этом диапазоне проявляются
46
их следующие преимущества перед аналогичными генераторами
с электромагнитным возбуждением: простота конструкции и вы-
сокая ^.надежность в работе; высокий КПД вследствие отсутствия
потерь1) на возбуждение; меньшая удельная масса; стабильность
рабочих характеристик; более низкие превышения температуры
и, следовательно, возможность работы в худших условиях охлаж-
дения. (
Генераторы постоянного тока с возбуждением от постоянных
магнитов получили наибольшее распространение в качестве та-
хогенераторов из-за отсутствия в них постороннего источника
для возбуждения и меньшего влияния нагрева на выходную ха-
рактеристику по сравнению с аналогичными тахогенераторами
с электромагнитным возбуждением. Тахогенераторы в схемах
автоматики используются для измерения частоты вращения п,
осуществления отрицательной обратной связи в следящих си-
стемах, демпфирования, а также в схемах электрического диф-
ференцирования и интегрирования.
Выбор магнитной системы тахогенераторов постоянного тока
с постоянными магнитами зависит от общей конструкции гене-
ратора и материала магнита. При этом якорь, коллектор,, щеточ-
ный узел, подшипниковые щиты идентичны у генераторов с по-
стоянными магнитами и электромагнитным возбуждением. Маг-
нитные системы генераторов с постоянными магнитами отли-
чаются большим разнообразием, поскольку магнитам, не имею-
щим обмоток, гораздо легче придавать различную форму, чем
электромагнитам. На рис. 1.51 показаны типы магнитных систем
с постоянными магнитами, получившими наибольшее распростра-
нение. На рис. 1.51,а приведена магнитная система с радиально
Рис. 1.51. Магнитные системы тахогенераторов постоянного тока с постоянными
магнитами:
с радиально расположенными призматическими магнитами; б — то же, но с полюсными
наконечниками; в—со скобообразными магнитами: / — магнит; 2—полюс; б —корпус* г—
с внешним кольцевым магнитом; д —с торцевым магнитом: 1 — магнит; 2 —полюсный нако-
нечник; 3—корпус; г—с внутренним кольцевым магнитом: /—магнит; 2—полый якорь: 3 —
47
расположенными магнитами, выполненными в виде призм, /укреп-
ленных на внутренней стороне корпуса генератора. Эта система
подобна системе у генераторов с электромагнитным возбужде-
нием, но электромагнит заменен постоянным магнитом. На
рис. 1.51,6 изображена та же 'магнитная система, но в ней по-
стоянные магниты имеют полюсные наконечники для улучшения
формы кривой индукции в рабочем воздушном зазоре генератора.
На рис. 1.51,в показана магнитная система генератора/с маг-
нитами, выполненными в виде скоб. Магниты 1 своими торцами
соприкасаются с боковыми поверхностями полюсов 2, выполнен-
ных из мягкой стали. Полюсы 2 и магниты 1 запрессов|ываются
в алюминиевый корпус 3. Из-за относительной сложности по-
следней магнитной системы она выполняется, главным образом,
двухполюсной, хотя принципиально может быть выполнена и при
большем числе полюсов. На рис. 1.51,г изображена магнитная
система с внешним кольцевым постоянным магнитом, одновре-
менно являющимся корпусом генератора, что ведет к значитель-
ному упрощению конструкции последнего. Вблизи полюсов на-
магничивания N и S с обоих концов делаются срезы кольца
магнита, поскольку материал магнита у полюсов используется
плохо, так как при его намагничивании силовые линии у полю-
сов JV и S имеют направление, почти противоположное направ-
лению силовых линий при работе магнита в собранном генера-
торе. На рис. 1.51,6 изображена магнитная система с тор-
цевым магнитом. Здесь магнит 1, выполненный в виде кольца
и намагниченный по диаметру, расположен в одном из торцов
полюсных наконечников 2. Полюсные наконечники 2 и магнит
1 запрессовываются в алюминиевый корпус 3. Такая магнитная
система применяется в тех случаях, когда необходимо иметь ге-
нератор малого диаметра. При этом, однако, возрастает осевая
длина генератора и в конструктивном отношении система до-
вольно сложна. Здесь также требуются массивные полюсные
наконечники. На рис. 1.51,е изображена магнитная система с
внутренним кольцевым радиально намагниченным постоянным
магнитом /; якорь 2 в этом случае представляет собой полый
алюминиевый или пластмассовый стакан с приклеенной к нему
обмоткой. Полый якорь 2 вращается между постоянным магни-
том 1 и корпусом 3, выполненным из магнитно-мягкого мате-
риала. В качестве материала для постоянных магнитов приме-
няются литые сплавы, прессованные и металлокерамические ком-
позиции. Применение для тахогенераторов массового выпуска
самарййкобальтовых магнитов пока является экономически неоп-
равданным.
На рис. 1.52 приведена конструкция весьма распространен-
ного тахогенератора типа ТГП-2 [23]. В этом тахогенераторе
применена магнитная система, показанная на рис. 1.51,в со ско-
бробразными магнитами. Все остальные части тахогенератора
такие же, как и у обычного коллекторного генератора постоян-
ного тока.
48
Рис. 1.52. Тахогенератор постоянного тока с постоянными магнитами типа ТГП-2:
1 — корпус с полюсной системой; 2 — якорь; 3—подщипник; 4 —вал; 5—кожух; 6—коллектор; 7— щит; 8— щетки; 5—
постоянные магниты '
8Рис. 1.53. Малоинерционный тахогенератор постоянного ток с постоянными маг-
нитами:
/ — вал; 2 —упорная втулка; 3 — подшипниковая крышка; 4 — подшипниковый щит; 5 —
постоянный магнит; 6 — якорь; 7—корпус; в —защитная лента; 9 — суппорт со щеткодер-
жателем; 10 — подшипниковый щит; // — стальная втулка; 12— шариковый подшипник; 13—
.втулка; 14 — регулировочная шайба
Таблица 1.4. Данные тахогенераторов постоянного тока
с постоянными магнитами серий ТД, ТМГ, ТГП
Параметр тд-юзпм ТД-201ПМ. тмг-зоп ТГП-1
Максимальная частота враще- ния, об/мин Крутизна выходной характе- ристики, В/(об/с) 1000 1000 4000 7000
6 14,4 3,45 0,42
Максимальный ток нагрузки, А 0,1 0,2 0,087 0,1
Сопротивление цепи якоря, Ом 700 750 — —
Максимальная выходная ЭД С, В — — 30 —
Удельная выходная мощность, Вт-с/об 0,051 0,288 0,3 —
Асимметрия выходного напря- жения при изменении направ- ления вращения, % 0,5 0,5 —
Статический момент сопротив- ления возбужденного тахогенератора, 10~6 Н-м 70 120 — 50
Статический момент сопротив- ления невозбужденного тахогенератора (без посто- янных магнитов), 10“6 Н-м 20 25 20
Наружный диаметр тахогене- ратора, мм 50 70 — —
Выход вала, мм 7 9,5 20 10
Длина тахогенератора, мм 88 115 134 66.5
Масса тахогенератора, кг — 0,42 0.15
50
В Системах автоматики в целях осуществления отрицатель-
ной обратной связи, демпфирования и стабилизации применяют
малоинерционные тахогенераторы с внутренним кольцевым маг-
нитом и полым якорем (рис. 1.51). Часто для этой цели исполь-
зуют серийные микродвигатели типа ДПР. Корпус этого
тахогенератора 7 (рис. 1.53), являющийся одновременно магни-
топроводом, представляет собой цилиндр, выполненный из маг-
нитно-мягкой стали. В корпусе имеются закрываемые защитной^
лентой 8 окна для доступа к щеткодержателям. К корпусу 7 с
помощью винтов крепятся подшипниковые щиты 4, 10 и индуктор.
Индуктор состоит из постоянного магнита 5 цилиндрической фор-
мы с аксиальным отверстием, втулки 13 из немагнитной стали
и прилива 4 из алюминиевого сплава. Прилив, 4 объединяет к
жесткий узел постоянный магнит 5 и втулку 13 и имеет фланец
с отверстиями для крепления индуктора к корпусу 7. Якорь (7
тахогенератора полый и бескаркасный. Он состоит из вала 1, кол-
лектора с обмоткодержателем и обмотки якоря. Опрессованный"
пластмассой коллектор с обмоткодержателем укреплен с помощью»
накатки на валу /. Обмотка якоря, выполненная из мягких сек-
ций эмалированным проводом, пропитана эпоксидным компаун-
дом, который после полимеризации превращает якорь в жесткий
монолитный узел.
В табл. 1.4 приведены основные технические данные некоторых
применяемых тахогенераторов постоянного тока с постоянными
магнитами [1].
1.6. ВЫСОКОСКОРОСТНЫЕ ГЕНЕРАТОРЫ
Перспективным направлением в создании автономных систем
электроснабжения является применение в них турбогенераторных
установок, работающих при высоких частотах вращения (30000—
200000 об/мин); при этом отпадает необходимость в канале ре-
гулирования турбин по частоте вращения и улучшаются массога-
баритные показатели генераторов и самих турбин [29].
При создании генераторов переменного тока, работающих в
указанном диапазоне частот вращения, выделяют следующие
специфические особенности, которые следует принимать во вни-
мание: разнообразие конструкций генераторов; обеспечение проч-
ности и оптимальных частот вращения, учет электромагнитных
нагрузок и тепловых режимов.
Первым и основным условием является создание бесконтакт-
ной конструкции генераторов, поскольку на таких частотах вра-
щения трудно обеспечить надежность скользящих щеточных кон-
тактов. Лучшим образом это условие выполняется применением
постоянных магнитов для возбуждения, что также необходимо
в ряде случаев с учетом автономности установок, в которых при-
меняются данные генераторы. Специфика автономных систем
электроснабжения также состоит в том, что в них могут при-
меняться как нерегулируемые по напряжению генераторы, так
4* 51
я регулируемые. Из нерегулируемых генераторов с постоянными
магнитами находят применение синхронные генераторы с магнит-
ными системами звездочка с алюминиевой заливкой, а также
звездочка с призматическими магнитами и коллекторного типа,
у которых на роторах располагаются сварные бандажные кольца
[26—28]. В качестве регулируемых генераторов могут быть при-
менены вышеперечисленные генераторы, у которых регулирование
напряжения производится за счет подмагничивания постоянным
током спинки статора, а также синхронные генераторы комби-
нированного возбуждения с внешнезамкнутым и с внутризамк-
нутым магнитопроводом и индукторные генераторы. В генерато-
рах комбинированного возбуждения постоянные магниты могут
быть неподвижными, а вращающиеся роторы представляют собой
сварные стальные цилиндры для синхронных альтернативных ге-
нераторов и зубчатые — для индукторных.
Основным ограничением для получения предельных электромаг-
нитных мощностей Р' (см. гл. 5) является прочность их рото-
ров, зависящая в общем случае от частоты вращения, вида по-
садки и температур. Учет всех факторов представляет собой
сложную задачу. Поэтому с целью упрощения диаметр ротора
можно рассчитывать, исходя из максимальной допустимой окруж-
ной скорости вращения ротора va. Так, для постоянных магнитов
звездочка с алюминиевой заливкой она равна 50—60, для бан-
дажированных звездочек равна или меньше 100—120, зубчатых
индукторов из стали равна или меньше 80—100 и сварных валов
из сталей марок ОХНЗМ, ЗОХГС равна или меньше 150—200, а
для цилиндрических роторов из постоянных магнитов с покры-
тием специальными волокнистыми материалами с большим удель-
ным сопротивлением равна или меньше 400 м/с [50].
С помощью «машинной постоянной» Арнольда Са‘ DHin/P'—
=6,1-104/(а{кфкоАВб) =СА и с учетом того, что од=л0п/6000,
‘«>•=0,64, £ф=1,11, &о=О,95, /(/£>=0,5, можно получить формулы
для предельных значений электромагнитных мощностей Р', кВ-А,
в функции А, Be, уд, п и максимально допустимого диаметра ро-
тора D, см, для данных ид и п:
P'=0,5AB6vn3/n2-,
£>=60.102уд/(лп).
Анализ этих уравнений показывает, что при данной окруж-
ной скорости oA=const с увеличением частоты вращения п пре-
дельная электромагнитная мощность генератора Р' и возмож-
ные диаметры роторов D уменьшаются, с ростом же уд их зна-
чения возрастают. Определенные ограничения накладываются и
на расстояния между опорами генератора, которые зависят как
от частоты вращения и мощности, так и от конструкции самого
привода, т. е. турбины. Условия механической прочности нужно
выдерживать и при проектировании статора генератора, поскольку
рассматриваемые машины имеют относительно малые диаметры
Д2
фасточки и в ряде случаев геометрические размеры статора вы-
бираются не из условий магнитных нагрузок, а механической
прочности его зубцов и спинки.
Важным вопросом при проектировании автономных источни-
ков электроэнергии переменного тока является правильный вы-
*бор и обоснование частоты вращения турбогенераторной уста-
новки. На первом этапе решения этого вопроса рассматривается
.зависимость массогабаритных показателей генераторов от частоты
вращения, а далее проводится решение всей задачи в целом. Об
удельных показателях генераторов переменного тока вне зави-
симости от его типа, конструкции и способа регулирования на-
пряжения можно судить по показателям его активной зоны:
индуктора, обмотки, зубцов и спинки статора. Уравнение для
массы Ма активной зоны генератора с введением ограничения
для диаметра, см, ротора 102/(ли) может быть пред-
ставлено в функции Л, Вс, и, ид, р, Р', /, е, Вг, В/, где J — плот-
ность тока в якорной обмотке, е — коэффициент заполнения ро-
тора сталью (в=0,9 при р=2,3 и е=0,8 при р=1):
JWa = 561,348If 1 +
а пВъА < 1
2,616-10-Мп
/ (1- 1,111 -J-) Од
1.134Вв
РВ}
-а—)1+
4-42,84- 104—
Jpn*
В этой формуле учтено, что Ав=1,11, &о=О,92, а/=0,64, коэф-
фициенты заполнения паза статора медью и пакета ротора сталью
Л»,м=0,4, £3,с=0,9, плотность стали и меди ?ст=7,8-10-3 кг/см3
и ум=8,5‘10-3 кг/см3, р=1,4. Анализ значения Afa, проведенный
с помощью ЭВМ в широком диапазоне значений P'=250-j-
4000 В-А, Вв=0,34-0,65 Тл, 4=1004-200 А/см, 7=10004-
2000 А/см2, п=50 000—200 000 об/мин, ид=100, 150, 200 м/,с, р=
= 1, 2, 3, показывает, что для каждой электромагнитной мощ-
ности Р' существует частота вращения, при которой масса ак-
тивной зоны имеет минимум. При этом если в качестве мате-
риала для листов статоров брать стали марок 1521 или 27КХ
толщиной 0,2 мм, то окончательный выбор стали и значений
индукций в зубцах Вг и спинке статора В, необходимо проводить
в процессе численного анализа и проверки механической проч-
ности зубцов и спинки (Bz^2 мм, Л/^2 мм), поскольку рассмат-
риваемые генераторы имеют относительно малые диаметры рас-
точек статора. В качестве примера на рис. 1.54 приведены зави-
симости массы активных зон генераторов Ма от частоты враще-
ния п для различных линейных нагрузок А и индукций Вс при
постоянных значениях окружной скорости ротора од= 150 м/с
и мощности Р'=500 В-A (на рисунке дано М&).
Оптимальные частоты вращения пОПт, при которых Afa имеют
минимальное значение, практически мало зависят от сочетания
53
1---------L______I______I____
0 50000 100000 150000п^о5/мин
Рис. 1.54. Зависимости масс активных
зон синхронных генераторов Ма от час-
тот вращения п при ид=150 м/с, J=
= 1500 А/см2, р=2, е=0,9, Р'=500 В-А
для значений линейной нагрузки А, А/см,
равных 100 fa), 150 (б) и 200 fe), и
значений индукции в зазоре Въ, Тл:
/— 0,35; 2 — 0,5; 3— 0,65
200000
180000
160000
1W000
120000
100000
80000
О 1000 2000 3000 Р',В-А
1-----u_J______|_____L_
0 50000 100000 150000 npi/мим
Рис. 1.55. Зависимости оптимальных час-
тот вращения лОпт синхронных генера-
торов от электромагнитной мощности
Р' при р=2, 8=0,9, 7=1500 А/см2 для
различных значений м/с:
/—200 ; 2 - 150; 3 —100
выбранных значений А и Bq в заданном диапазоне Р'=5004-
5000 В-А. На рис. 1.55 построены зависимости пОпт в функции
Р' для Рд=100, 150 и 200 м/с при 7=1500 А/см2. Оптимальная
частота вращения существенно зависит от плотности тока J в ста-
торной обмотке: с ростом J значение пОПт увеличивается, а Л4а
уменьшается; так, для ид=150 м/с и 7=10004-1500 А/см2 иОпт=
= 1000004-150000 об/мин. Существенное влияние на м0Пт ока-
зывает число пар полюсов р; при увеличении р значение п0Пт
уменьшается; так, например, при А =100 А/см, Вб=0,5 Тл, 7=
= 1500 А/см2 и ид=150 м/с увеличение р от 1 до 3 приводит
к изменению м0Пт от 200000 до 100 000 об/мин. При этих значениях
Иопт с ростом р значение Л4а несколько увеличивается. Получен-
ные данные позволяют сделать ряд рекомендаций с учетом при-
нятых электромагнитных нагрузок, а также конструктивных и
технологических особенностей генераторов высокой частоты вра-
щения: при гд=100 м/с следует выбирать яопт в пределах 60000—
70 000 об/мин, при ид=150 м/с — 80000—100 000 об/мин, а
при уд=200 м/с—100 000—125 000 об/мин. При этом чем боль-
ше Р', тем меньшее значение пОПт выбирается [52].
Для рекомендованных частот вращения на рис. 1.56 приве-
дены характеристики удельных мощностей генераторов при гра-
ничных значениях электромагнитных нагрузок: при А = 100 А/см,
54
Рис. 1.56. Области предельных значений удельных мощностей синхронных гене-
раторов в зависимости от электромагнитной мощности при ид=100 м/с, п—
=70 000 об/мин (а); ид=150 м/с, л=90 000 об/мин (б); яд=200 м/с, п=
=110000 об/мин (в)
Вб=0,5 Тл и при А=200 А/см, Вб=0,8 Тл; /=1500 А/см2, р=
= 2 и Ле=£/1/=1,25.
Полученные значения для генераторов повышенных частот вращения пока-
зывают значительный рост та с ростом ид: дляид = 100 м/с до та=5000 В-А/кг,
для Уд =150 м/с до 6500 В-А/кг, для ид=200 м/с до 7000 В-А/кг, в то время
как при частотах вращения у таких же генераторов с п=30 000 об/мин /па<
^2500 В-А/кг. Поскольку генераторы высоких частот вращения имеют неболь-
шие размеры, то во всех магнитных системах в качестве постоянных магнитов
следует рекомендовать только современные материалы с высокой магнитной
энергией и большим значением Нс на базе редкоземельных материалов типа
SmCos [4].
Одним из важных параметров этого типа генераторов является число пар
полюсов, от выбора которого зависят их массогабаритные показатели. Поэтому
для рассматриваемых генераторов целесообразно р выбирать в следующих пре-
делах: для традиционных магнитных систем р=1,2, для роторов коллекторного
типа р=3,4, для одноименнополюсных индукторных генераторов комбинирован-
ного возбуждения р=6. Важным вопросом при проектировании генераторов пе-
55
ременного тока высокой частоты вращения является расчет потерь и пути их
уменьшения. Существенную долю потерь относительно общих составляют меха-
нические потери, состоящие из потерь на трение ротора о воздух и потерь в под-
шипниках. Имеется достаточно точная методика расчета этих потерь. Высокая
частота перемагничивания в индукторных генераторах комбинированного воз-
буждения при р=6 во избежание чрезмерных потерь требует снижения макси-
мального значения индукции в зубцах статора и индуктора до 1—1,2 Тл.
Уменьшить потери в стали ротора и статора, устранить поверхностные' поте-
ри в полюсных наконечниках ротора, улучшить условия охлаждения обмотки
статора и снизить ее индуктивные сопротивления позволяет применение беспа-
зовой конструкции статора с применением печатных обмоток. При кратковремен-
ном режиме работы выше рассмотренных генераторов ЛВд= (80-г-120)Х
ХЮ2 Тл-А/м.
Области предельных удельных показателей активной зоны генераторов вы-
сокой частоты вращения (рис. 1.56) позволяют определить средние значения
удельных мощностей: для нерегулируемых синхронных генераторов с ротором
звездочка, с призматическими магнитами и пазовым статором 5—7 кВ-А/кг,
с беспазовой конструкцией статора с печатной обмоткой 6—8 кВ-А/кг, с ротором
коллекторного типа и пазовым статором 5—6 кВ-А/кг, а с беспазовым статором
6—7 кВ-А/кг; для регулируемых по напряжению синхронных генераторов ком-
бинированного возбуждения с внешнезамкнутым и внутризамкнутым магнитным
потоком 1—2 кВ-А/кг, а с подмагничиванием спинки статора постоянным током
1,5—2 кВ-А/кг; для индукторных генераторов комбинированного возбуждения
в диапазоне частот вращения 80 000—100 000 об/мин 1,8—2 кВ-А/кг. Представ-
ленные здесь рекомендации касаются термоинерционных генераторов с само*
охлаждением, работающих в кратковременном режиме. За время одного цикла
включения генератор не успевает перегреваться, поскольку его постоянная вре-
мени нагревания обмотки в несколько раз превышает время включения генерато-
ра. При проведении расчетов предполагалось, что нагрев генератора имеет адиа-
батический характер. Электромагнитные нагрузки выбирались из опыта проекти-
рования и эксплуатации генераторов таким образом, чтобы превышение темпе-
ратуры обмоток было не более 200 °C.
Глава вторая
ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА
СИНХРОННЫХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ МАГНИТАМИ
2.1. РЕЖИМ ХОЛОСТОГО ХОДА ГЕНЕРАТОРОВ
С ПОСТОЯННЫМИ МАГНИТАМИ
Особенности рабочего процесса синхронных генераторов с по-
стоянными магнитами обусловливаются наличием постоянного
магнита в магнитных цепях. Магнит выполняет две функции:
источника МДС, заменяющего обмотку возбуждения обычной
машины с электромагнитным возбуждением, и участка магни-
топровода с определенным магнитным сопротивлением.
56
Соответственно первой функции отдаваемый магнитом маг-
нитный поток и развиваемая во внешнем пространстве МДС
не остаются постоянными, а изменяются с изменением проводи-
димости внешней магнитной цепи, магнитного поля реакции якоря.
При этом с изменением этих параметров изменяются соотношения
между потоком рассеяния и полезным потоком и изменяются ЭДС
и напряжение генератора.
Внешней магнитной характеристикой постоянного магнита яв-
ляется прямая возврата с углом наклона (3, определяемым ко-
эффициентом возврата р. Ввиду относительно малого значения
р для современных материалов магнитов [р=( 1-4-8) -0,4л><
Х10“6, Гн/м] внутреннее сопротивление магнита с длиной 1М и
сечением SM велико: /?м=/м/ (р5м). Имеется большое внутреннее
падение магнитного напряжения в магните.
Как участок магнитопровода постоянный магнит представ-
ляет собой большое магнитное сопротивление и для потоков реак-
ции якоря. Поэтому они вынуждены замыкаться по путям по-
токов рассеяния. Расчетные формулы для индуктивных сопро-
тивлений по продольной Xad и поперечной xaq осям приобретают
другой вид.
В электрической машине с постоянными магнитами не имеет-
ся прямого способа регулирования значения полезного потока,
отдаваемого магнитом. Косвенное регулирование возможно пу-
тем изменения магнитной проводимости внешней цепи за счет
воздействия со стороны цепи якоря и использования специаль-
ных обмоток подмагничивания.
Такие факторы, как отсутствие обмотки, возбуждения, боль-
шое внутреннее магнитное сопротивление магнита, отсутствие
ощутимых контуров вихревых токов внутри материала магнита,
оказывают существенное влияние на значения ударного и уста-
новившегося токов КЗ.
Рис. 2.1. Схемы замещения магнит-
ной цепи генераторов с ротором
звездочка для статора без высту-
пающих полюсов fa) и с выступаю-
щими полюсами (б):
R., Rz, R&, RM —магнитные сопротивления
ярма, зубцов, воздушного зазора и маг-
нита соответственно; Явя, Rea, RSM — со-
противления рассеяния обмотки якоря, по-
люсов статора и магнита соответственно;
Fu — МДС постоянного магнита; У* —
внутренняя (фиктивная) МДС постоянного
магнита
57
Рис. 2.2. Магнитные цепи генераторов с ротором звездочка без полюсных башма-
ков:
а —статор , без выступающих полюсов; б — статор с выступающими полюсами
В электрических машинах с постоянными магнитами на ра-
бочий процесс оказывают значительное влияние проводимости
рассеяния магнитной цепи, определяющие использование магнит-
ной энергии магнита, внешние характеристики генератора и раз-
виваемую им мощность.
Рабочий процесс в генераторах с постоянными магнитами
должен рассматриваться в тесной связи со схемами замещения
магнитных проводимостей внешней магнитной цепи и магнит-
ным состоянием постоянного магнита.
Полезный поток Ф$о, а следовательно, и ЭДС Eq могут быть
определены с помощью схемы замещения магнитных проводи-
мостей и рабочей диаграммы магнита.
Схема замещения магнитных проводимостей определяется ти-
пом магнитной цепи генератора и магнитным полем машины.
Наиболее простые схемы замещения магнитных проводимо-
стей (рис. 2.1,а и б) * соответствуют магнитным цепям генерато-
ров с ротором звездочка (рис. 2.2,а и б) *.
Для режима холостого хода Fad=0, т. е. со стороны Fad, схе-
ма замещения замкнута накоротко. Тогда, пользуясь схемами
замещения, можно подсчитать результирующие значения прово-
димости холостого хода Лорез, коэффициента рассеяния потока ао,
полезной проводимости Лп и результирующей проводимости рас-
сеяния Л5. Согласно схеме замещения на рис. 2.1,а для магнит-
ной системы рис. 2.2,а
Лорез=Л$м +Л„; (2.1)
Фм __Лп ~Ь Л$м _ J I Л$м _ЛОреэ
°° = фао Лп ~ ”Г Лп; “ Лп ’ 1 ‘ 7
* На рис. 2.1 и последующих схемах замещения магнитные цепи для удобст-
ва представлены на магнитных сопротивлениях R. ОдИако в дальнейшем обсуж-
дение и расчет схем производятся с использованием обратных величин — маг-
нитных проводимостей Л (Л=1//?).
58
д I __^opes .
Л" = 1 2 |—^ ’
Ay Az A j
= ASM = Лррез Лп — Лп (<з0 1).
(2.3)
(2-4)
Полезный поток равняется потоку в воздушном зазоре Фео-
Для магнитной системы на рис. 2.2,6 целесообразно учесть
дополнительный поток рассеяния между полюсами статора Ф5п,
проходящий по пути потока Ф5Я, но имеющий другое физическое
значение. Потоку Ф5П соответствует некоторая эквивалентная при-
веденная к концам полюсов магнитная проводимость Asn, нахо-
дящаяся под магнитным напряжением, равным магнитному на-
пряжению в полюсе и ярме статора. Значение потока Фап обычно
незначительно. Согласно схеме замещения на рис. 2.1,6 имеем
Лорез = Л,(4 = Л,м + —--------------------. (2.5)
лГ + лягН/а/Ау + г/Лг)
«о = ’1.Л.А = (1+ л Аа,л ) (1 + —-AsM;H- <2-6>
\ — Л$п / \ Л3>4 — Адм /
где
л1, = ляя------1-----,
1.» «"Г 1/Д/ + 2/Аг’
Л»,4 = Лзм + 1/лЬ1 + 2/а4 •
— проводимости относительно узловых точек 1—2 и 3—4 соот-
ветственно; 01,2, оз,4 — частичные коэффициенты рассеяния в точ-
ках 1—2 и 3—4 соответственно.
Сумма магнитных напряжений на отдельных участках маг-
нитной цепи равняется МДС, развиваемой 'магнитом во внешнем
пространстве:
FM=2Fe+2Fz+F/, (2.7)
где F&, Fz, Fj — магнитные напряжения в воздушном зазоре, зуб-
цах и спинке якоря соответственно.
Значение потока рассеяния Ф5 в рассматриваемых магнитных
системах определяется в основном проводимостью рассеяния
Ат (соответствует потоку Ф8М), так как эта проводимость нахо-
дится под полной МДС магнита FK.
Для магнитной системы с ротором звездочка без полюсных
башмаков характерными являются сравнительно малые рассея-
ния магнитного потока. Значение потока рассеяния зависит от
значения воздушного зазора б. С увеличением зазора б поток
рассеяния возрастает, а полезный поток Фад и общий поток маг-
нита Фм уменьшаются.
59
Рис. 2.3. Эскиз магнитной цепи генератора с полюс-
ными башмаками (ПБ) и пути магнитных потоков:
Фь Фея, Фепб И Фвм—магнитные потоки в ярме,
рассеяния якоря, рассеяния полюсных башмаков и
рассеяния магнита соответственно
Рис. 2.4. Схема замещения магнитной цепи генера-
тора с ротором звездочка и с полюсными башмака-
ми (на пару полюсов): Rf, Rz, R&, Лпб, Лст.м, Rm —
магнитные сопротивления ярма, зубцов, воздушного
зазора, полюсных башмаков, стыка магнита и маг-
нита соответственно; R8a, Rsn6> Reu — сопротивления
рассеяния обмотки якоря, полюсных башмаков и
магнита соответственно; FM—МДС постоянного маг-
нита; F'M — внутренняя (фиктивная) МДС постоян-
ного магнита
С точки зрения обеспечения наибольших значений полезно-
го потока и лучшего использования магнита зазор 6 должен
быть возможно минимальным.
При наличии полюсных башмаков на полюсах магнита звез-
дочка (рис. 2.3) картина распределения магнитных потоков и
схема замещения магнитных проводимостей (рис. 2.4) усложня-
ются. Помимо потока рассеяния Фпоявляется значительный по-
ток рассеяния полюсных башмаков Ф5Пб. Схема замещения, пред-
ставленная на рис. 2.4, отличается от схемы, изображенной на
рис. 2.1, наличием дополнительных проводимостей: ЛПб — для уча-
стка полюсных башмаков, Лет,м — для участка стыка магнита с по-
люсным башмаком, а Л4Пб — для рассеяния полюсных башмаков.
Значения результирующей проводимости Лорез и коэффициен-
та рассеяния сто определяются выражениями:
Аорез = Atil = Л5М -1 -----------------------------•’ (2.8)
A+v-+-----------------Ч---------
лст,м лпб л . ।---------:_______
Упб + Z/Aj+S/As+l/A,
°0 = = [1 + ЧЧ-1 [1 + TFV-l’ <2-9>
L СЛз,4)п J L (-A-5,e)n J
где
(Лз,4)п-_ i/Ay + 2/Az+2/Aj ;
60
1/Л3,4 + 2/Лпб2/ЛСТ1М ’
•А-3,4 (^3,4-)п | ^Л’пб*
Значения полезной проводимости Лп и проводимости рассея-
ния Л5 определяются выражениями (2.3) и (2.4).
Магнитное напряжение во внешней цепи равняется сумме
магнитных напряжений на отдельных участках магнитной цеп»
Fmq=2F« + 2Fct,m+2Fn6_t_2Fz+Fj. (2.10)?
Для генератора с когтеобразным ротором схема замещения;
приведена на рис. 2.5. По сравнению с предыдущей схемой здесь
имеются дополнительные сопротивления /?5фл и /?фЛ. Решение этой,
схемы замещения подобно решению предыдущей схемы.
Приведенные выше схемы замещения магнитных проводимо-
стей для наиболее характерных магнитных систем составлены
для пары полюсов. Однако иногда пользуются схемами заме-
щения и на один полюс. В этом случае расчет ведется на поло-
винную длину магнита (ZM/2— по средней силовой линии). Рас-
чет сопротивлений (проводимостей) рассеяния полюса произво-
дится относительно эквипотенциальных поверхностей, проходящих^
между полюсами и по своему магнитному потенциалу соответ-
ствующих нейтральному сечению магнита. Для перехода от схемы.
Рис. 2.5. Упрощенная схема замещения маг-
нитных сопротивлений магнитной цепи генера-
тора с когтеобразным ротором (на пару полю-
сов) :
R-, Rz, RK, ЯфЛ, Яст м, — магнитные сопро-
тивления ярма, зубцов, воздушного зазора, когтей,,
фланца, стыка магнита и магнита соответственно;.
Явя. ^вк* ^вфл» -^вм ~ магнитные сопротивления рас-
сеяния якоря, когтей ротора, фланцев и магнита со-
ответственно
Рис. 2.6. Рабочая диаграмма магнита для ре-
жима холостого хода
6F
замещения для двух полюсов к схеме замещения для одного по-
люса в симметричных магнитных системах необходимо от первой
схемы оставить одну ветвь последовательно соединенных сопро-
тивлений (например, левую на схемах рис. 2.1, 2.4, 2.5), сопро-
тивления рассеяния уменьшить в два раза и второй их конец
присоединить к общей линии, имеющей потенциал нейтрального
сечения магнита. В качестве МДС магнита и реакции якоря бе-
рут их половинные значения.
Подсчет значений полезного потока Ф«о, потока рассеяния Фз
и общего потока магнита Фмо производится с помощью рабочей
диаграммы магнита (рис. 2.6).
На рис. 2.6 обозначено: Форез=/(/7)=Лорез/:' —магнитная ха-
рактеристика внешней магнитной цепи, которая при отсутствии
насыщения в стальных участках магнитопровода имеет вид пря-
мой (штриховая линия), а в общем случае является кривой
[кривая &ope3=f(F) строится обычными методами расчета маг-
нитных цепей электрических машин; Ф4==ф(Г) =ASF— характе-
ристика потока рассеяния; Фг—Fe— кривая размагничивания маг-
нита, где Фг=Вг5м — остаточный поток, Fc=HclK — коэрцитивная
МДС. Кривая Фг—Вс повторяет в соответствующих масштабах
«кривую размагничивания материала магнита Вг—Нс.
Для рабочей диаграммы рис. 2.6 углы ао, as и 0 определяются
•с помощью выражений
^ао=Лорез^рМф; (2-11)
tg®3 = \гпр1тф} (2.12)
tgp = (ДФ/ДВ) {тР1тф) = (ЬВ/ЬН) =
= p(WSM)(/nFM#). (2.13)
тде ту и тФ — масштабы по осям В, А/см, и Ф, Вб/см; р — коэф-
фициент возврата, Гн/м.
Положение точки К отхода прямой возврата на кривой раз-
.магничивания определяется рядом факторов: конструкцией маг-
нитной системы, способом намагничивания и стабилизации маг-
нита, характером просекания внезапного ударного трехфазно-
то КЗ.
Если магнит звездочка намагничивается вне статора, то по-
ложение точки К может определиться значением проводимости
.рассеяния ротора в свободном состоянии ASCB (вынутого из ста-
тора) :
tg ax=ASCB (тр/тф). (2.14)
Так как дальнейшая стабилизация такого магнита может про-
изойти уже в собранной конструкции ударным током КЗ, то про-
изводится проверка на размагничивающее действие поля реакции
якоря. Здесь под ударным током КЗ понимается некоторое усред-
ненное по фазам значение максимального тока в фазе генератора
в начальной стадии внезапного трехфазного КЗ, производимого
«2
от холостого хода генерато-
ра, при этом размагничи-
вание магнита ротора по-
лучается наибольшее.
Если магнит звездочка
намагничивается в статоре,
то стабилизация магнита
происходит за счет МДС
реакции якоря при внезап-
ном трехфазном КЗ от хо-
лостого хода.
Роторы когтеобразного
типа намагничиваются вне
Рис. 2.7. Изменение результирующей про-
водимости в генераторе с выступающими?
полюсами на статоре
корпуса. Вследствие боль-
шой проводимости рассеяния ротора и стойкости против размаг-
ничивающего действия полд реакции якоря при ударном токе ко-
роткого замыкания точка отхода прямой возврата определяется
чаще всего значением Л8Св или режимом установившегося КЗ.
Когтеобразные роторы имеют значительное насыщение сталь-
ных участков магнитопровода. Зависимость ®0Pe3=f(F) сильно
отличается от прямой.
Пересечение кривой ®ope3=f (^и) с прямой возврата дает ра-
бочую точку магнитного состояния Ло при холостом ходе и зна-
чения потоков Фмо, Фео, Ф$, а также значение МДС магнита FMo-
Насыщение стальной части магнитопровода приводит, как
это нетрудно видеть из рис. 2.6, к смещению рабочей точки из-'
А'о в Ло, т. е. к уменьшению потока Фео и к увеличению потока*
рассеяния Ф5.
Если статор имеет выступающие полюсы (рис. 2.2,6), то ра-
бочая точка при вращении ротора перемещается по участку пря-
мой возврата вследствие изменения магнитной проводимости воз-
душного зазора между полюсом ротора и полюсом статора от
Лтах при совпадении полюсов до Ат/п при смещении их электри-
ческого угла на 90° (рис. 2.7).
По известному значению полезного потока, который при хо-
лостом ходе генератора практически равен потоку в воздушном»
зазоре Фб0, может быть подсчитано значение ЭДС в обмотке якоря
при холостом ходе Eq
Ео = 4k^tow^ia, (2.15>
где кф — коэффициент формы кривой поля; ko — обмоточный коэф-
фициент; w<t>—число витков в фазе; f — частота тока; Фео — поток
холостого хода.
Форма кривой поля в воздушном зазоре в сильной степени
зависит от значения воздушного зазора. При больших значениях
воздушного зазора и полюсных башмаках из магнитно-мягкого
материала наблюдаются провалы в кривой поля по. оси полюса
б&
и концентрация поля около краев полюсного башмака. При про-
ектировании магнитной системы это обстоятельство необходимо
учитывать.
2.2. РАБОЧИЙ РЕЖИМ СИНХРОННЫХ ГЕНЕРАТОРОВ
С ПОСТОЯННЫМИ МАГНИТАМИ
При нагрузке генератора появляется МДС реакции якоря
Fa, которая обусловливает появление потока реакции якоря.
Как и в синхронных генераторах с электромагнитным возбуж-
дением, МДС реакции якоря может быть разложена на две со-
ставляющие: МДС реакции якоря в продольной оси машины Faa
и МДС реакции якоря в поперечной, оси Faq. Значения этих МДС,
как известно, определяются нижеприведенными выражениями.
Для трехфазных генераторов на пару полюсов
Fod = 0>-^sH; (2.16)
Faq = 0,9m Ikaq cos ф, (2.17)
:где m— число фаз генератора; р — число пар полюсов; / — ток
нагрузки; ф— фазный угол сдвига между векторами ЭДС холо-
стого хода и тока; kaa — коэффициент приведения поля якоря
по продольной оси к МДС постоянного магнита; kaq— коэффициент
«приведения МДС якоря по поперечной оси к МДС постоянного
магнита.
Коэффициент kad учитывает различие форм кривых МДС ре-
акции якоря и МДС магнита. Он является функцией отношения
.длины дуги полюса Ьр к полюсному делению т.
При определении МДС реакции якоря Fadn, приложенной не-
шосредственно к магниту, что бывает необходимо сделать при
построении рабочей диаграммы магнита, в генераторах с посто-
-.янными магнитами приходится пользоваться некоторым допол-
нительным коэффициентом kd\'.
Fadtt==Fadkdl- (2.18)
Коэффициент kdi учитывает, что часть Fad приходится на
^воздушный зазор, полюсные башмаки, если они имеются, и сты-
ки между полюсными башмаками и магнитом.
Коэффициент kdi определяется из схемы замещения на рис. 2.8
,(для простейшего случая)
2(A.+t.) + A,,. <219>
’где Лв1 — эквивалентная проводимость воздушного зазора (с уче-
том падения магнитного напряжения в стали); Лм=р5м//м — маг-
нитная проводимость магнита; ASM — проводимость рассеяния (на
.пару полюсов).
р64
Рис. 2.8. Упрощенная схема замещения магнитной цепи с индуктором звездочка
Рис. 2.9. Поток поперечной реакции якоря в генераторах со звездообразным ро-
тором:
а — без выступающих полюсов на статоре; б — с выступающими полюсами на статоре
Коэффициент kao. берется по кривым [30] для явнополюсных
синхронных машин при 6=0. Так, например, для Ьр/т=0,65
kad== 0,88.
Значение коэффициента kaq зависит от того, имеются полюс-
ные ' башмаки на полюсах или отсутствуют. В случае наличия
полюсных башмаков достаточной толщины подсчет kaq произво-
дится таким же образом, как и для машин с электромагнитным
возбуждением [30]. Для постоянного зазора под полюсом
2 п
ап + —- cos а — — sin ап
к 3 2
t ап
4sinT
(2.20)
Если полюсных башмаков нет, то поток реакции якоря Ф9
замыкается через полюс постоянного магнита в поперечном
направлении (рис. 2.9). Приближенно коэффициент kaq ДЛЯ по-
люсов значительной толщины (а^0,65) может быть определен
как отношение
kaq A.Mq/A-6—UmSuq/lqAi,
(2.21)
где SM<7 — площадь поперечного сечения полюса магнита; lq=lqK+
4-2цм/б — средняя длина силовой линии магнитного потока; Ав —
проводимость воздушного зазора под полюсом; р,мй»Вг/2Яс—
5—6258 65
магнитная проницаемость материала магнита; k=5' — длина
силовой линии в воздухе [1].
Согласно [1] для роторов звездочка без полюсных башмаков
Лад ~ 0,1. При 12-полюсном роторе звездочка без полюсных баш-
маков йОд=0,17.
Для генераторов с сосредоточенными обмотками на выступаю-
щих полюсах статора (тракторные генераторы) значения Fad и
Faq на пару полюсов определяются по формулам:
Fad = — 2 sin ф; (2.22)
Я
Faq = — 2 /2шк/Л соэф, (2.23)
Л
где Wk — число витков в катушке.
Подсчет коэффициентов kad и kaq производится таким же
образом, как в предыдущем случае.
В отличие от генераторов с электромагнитным возбуждением
МДС реакции якоря в машинах с постоянными магнитами, воз-
действуя на магнит, вызывает ряд необратимых процессов в маг-
ните, причем влияние поперечной и продольной реакции якоря
различно по своему характеру.
Влияние поперечной составляющей реакции
якоря Faq в машинах с постоянными магнитами зависит от
конструктивной схемы индуктора. В машинах с индуктором в
форме звездочки без полюсных башмаков поток Фв? поперечной
реакции якоря на своем пути встречает значительно большее со-
противление, чем поток Фадэ машины электромагнитного возбуж-
дения или машины с постоянными магнитами других конструк-
тивных схем индукторов, например с полюсными башмаками,
когтеобразного типа и др. В самом деле поток Ф«4 па общим
правилам для машин с индуктором звездочка (рис. 2.9) равен
Фа, = Ла/а, = -^-Га?. (2.24)
л8 + л„
а ПОТОК Фадэ
ag = A{7‘eg> (2.24a)
где Лб=|Ло5б/д' — магнитная проводимость воздушного зазора;
Лм=|1м5м//мд — магнитная проводимость полюса в поперечном на-
правлении; So, SM — сечения воздушного зазора и полюса; б', lMq —
длина силовой линии в зазоре и полюсе.
Магнитная проницаемость магнита цм незначительно отли-
чается от магнитной постоянной ц0. Например,, для магнитов аль--
ни, альнико, магнико цм=(44-7)ро=(54-9) • 10-6 Гн/м. Соотно-
шение между потоком Фа<7 и потоком Фа<7Э определяется соотно^
шением магнитных проводимостей Лм и Лв:
Фад/’Фадэ==Лад/Лодэ== 1/(1 4~Лф/Ли). (2.25)
С учетом соотношения между и цо и длинами силовых ли-
ний обычно Ла/Лм=2-+-5, поперечный поток ФОд машины е по>-
66 - '
Рис. 2.10. Поле в воздушном зазоре
под полюсом:
1 — поле при холостом ходе; 2 — поле ма-
шины с постоянными магнитами при на-
грузке; 3 — поле идентичной машины с
электромагнитным возбуждением при на-
грузке; Вх — максимальная индукция
в зазоре
Рис. 2.11. Осциллограммы кривых по-
ля в воздушном зазоре машины с по-
стоянными магнитами:
а холостой ход до включения нагрузки;
б — то же при нагрузке; в — то же после
отключения нагрузки
стоянными магнитами с ротором звездочка без полюсных баш-
маков в 3—6 раз меньше потока Ф0<7э машины электромагнитного
возбуждения.
Поле в воздушном зазоре в машинах с постоянными магни-
тами вследствие малого значения поперечного потока искажено
значительно меньше, чем в машинах с электромагнитным воз-
буждением (рис. 2.10). Кривая поля при нагрузке для машины
<с постоянными магнитами без полюсных башмаков ближе к кри-
вой поля при холостом ходе, а ее максимум меньше, чем у иден-
тичной машины электромагнитного возбуждения.
В машинах с электромагнитным возбуждением после снятия
нагрузки поток исчезает и поле машины становится таким же,
каким оно было при отсутствии нагрузки,
явными магнитами после снятия нагрузки
КЗ генераторов) поле резко искажается
вследствие перемагничивания концов маг-
нитов полем поперечной реакции якоря
(рис. 2.11,а—в): одна часть полюса подмаг-
ничивается, а другая размагничивается.
Таким образом, искажение поля в воздуш-
ном зазоре наблюдается не только при на-
грузке (рис. 2.11,6), но и при холостом ходе
после отключения нагрузки (рис. 2.11,в).
Исследования показывают, что искажение
поля уменьшается, если на роторе звездоч-
ка имеется демпферная обмотка.
S* 67
В машинах с посто-
(в особенности после
Рис. 2.12. Картина рас-
пределения потоков от
поперечной М.ДС реак-
ции якоря
Поперечный поток реакции якоря в машинах с постоянными
магнитами (стабилизированными) из-за своего небольшого зна-
чения в случае ротора звездочка без полюсных башмаков прак-
тически не изменяет главного потока и потока рассеяния.
Синхронные генераторы с постоянными магнитами без полюс-
ных башмаков вследствие малой магнитной проводимости по
пути поперечного потока Фа? имеют незначительные индуктивные
сопротивления якоря по поперечной оси xaq и хч:
Xq^^Xs-^-Xaq, (2,26)
где xs — индуктивное сопротивление рассеяния обмотки якоря.
Значение Ход может быть подсчитано [1] по формуле (для маг-
нита звездочка без полюсных башмаков)
х — kx Г в₽Х* | (1 + “р)*®м 1 ГО 97\
°’ 1 " 12 (х4 + k1X„) + З.бТх™ + ]’ (2>27>
где ^1= (4/3)/м'/&м; ар=Ьр/х\ 1'м и &и — длина магнита на полюс
и его ширина; Хд, хм, xSK — индуктивные сопротивления, соответ-
ствующие проводимостям воздушного зазора, постоянного маг-
нита и рассеяния постоянного магнита на один полюс.
Выражение (2.27) получено на основании картины распреде-
ления потоков (рис. 2.12) и схемы замещения для них.
Индуктивное сопротивление рассеяния обмотки якоря xs под-
считывается по известной формуле
xs = ^’^Тоо" ("Too ) (2.28)
в которой SKsa — сумма удельных проводимостей рассеяния об-
мотки якоря.
Индуктивные сопротивления машины могут быть рассчитаны
через соответствующие магнитные проводимости и обмоточные
данные
х = Л2^-^-(щЛ)^«. (2-29)
где Л — проводимость, Вб/А; ka — коэффициент формы продоль-
ного потока якоря, равный отношению основной волны потока
реакции якоря к полному потоку МДС реакции якоря: ka=
= 1,054-1,06.
Продольная составляющая МДС реакции
якоря Fad, действующая в магнитных цепях, схемы замещения
которых представлены на рис. 2.1, 2.4, 2.5, вызывает смещение
рабочей точки на диаграмме магнита. Последнее вытекает из
закона равновесия МДС магнитной цепи машины
Гм=(2Гв+2Рг+Г/+
4-2Fn6+2F6cT4- .. .J-J-FedM» (2.30)
68
где FM — МДС магнита; 2Fi-}-2Fz+Fj+2Fn^+2F6„+...— сумма
магнитных напряжений в воздушном зазоре, зубцах якоря, ярме»,
полюсных башмаках, стыках и т. д.
Воздействие поля реакции якоря на 'магнит сильно зависит
от фазы тока. При отстающем токе продольная составляющая’
МДС реакции якоря размагничивает магнит, перемещая рабочую-
точку по прямой возврата и увеличивая МДС магнита FM. Как.
будет показано далее, при больших значениях установившегося»
и ударного тока КЗ точка отхода прямой возврата К, определен-
ная по режиму холостого хода, может сместиться вниз по кривойв
размагничивания.
Если положение точки отхода прямой возврата К уже ста-
билизировано, то смещение рабочей точки на прямой возврата?
количественно определяется выражением (2.30) с помощью гра-
фического построения, приведенного на рабочей диаграмме маг-
нита (рис. 2.13). Построение для роторов звездочка без полюсных
башмаков состоит в следующем.
Приведенное к концам магнита значение МДС реакции якоря?
FadM в соответствующем масштабе откладывается на оси абсцисс,-
(отрезок ОМ на рис. 2.13). Затем проводится из точки М кри-
вая, параллельная кривой Форез (в случае ненасыщенной магнит-
ной системы — прямая). Точка пересечения кривой МА с прямой:
возврата KL дает рабочую точку А.
В результате смещения рабочей точки А на прямой возвратас
при действии продольной составляющей МДС реакции якоря воз-
растает магнитное напряжение FM, возрастает поток рассеяния
и уменьшается поток по продольной оси Фа=Ф#. Уменьшение-
продольного потока вызывает уменьшение ЭДС в продольной ос»
£а генератора. В режиме холостого хода Ф«=Фйо (рис. 2.13)^.
В некоторых маши-
нах, например в трактор-
ных генераторах с полю-
сами на статоре (рис.
2.2,6), проводимость внеш-
ней магнитной цепи раз-
лична при различных по-
ложениях ротора (рис.
2.7). В таком случае для
определения рабочей
точки магнита необхо-
димо провести кривую
МА параллельно кривой,
соответствующей прово-
димости внешней маг-
нитной цепи при угле ф.
Рабочая точка, соот-
ветствующая режиму
установившегося КЗ, мо-
жет быть найдена также
Рис. 2.13. Рабочая диаграмма магнита прш
роторе звездочка без полюсных башмаков
вышеописанным методом (рис. 2.13). Если точка Дк лежит выше
точки К, то размагничивания магнита током установившегося КЗ
/к не происходит. В отдельных случаях, например при когтеоб-
разных роторах, точка отхода прямой возврата может опреде-
ляться МДС установившегося КЗ Fa(1K.
В случае идеального КЗ, когда предполагается равным нулю
активное сопротивление обмотки якоря (га=0), рабочая точка
магнитного состояния на диаграмме магнита определяется харак-
теристикой КЗ фк=/(Г) или проводимостью КЗ Лк. При идеаль-
ном КЗ напряжение на зажимах машины и полезный поток Ф^
равны нулю. Это равноценно разомкнутому состоянию схем заме-
щения на рис. 2.1, 2.4, 2.5 со стороны Fad- По отношению к маг-
ниту эквивалентная проводимость каждой из схем замещения,
разомкнутых в цепочке Fad, представляет собой проводимость
КЗ Лк. Значения Лк легко находятся из схем замещения:
а) для схемы на рис. 2.1, а
Де = Лум + 2/А# + 1/Дв+2/Дг + 1/А/; (2-31)
б) для схемы на рис. 2.4
2 + 2 t 4 ! ; <2-32)
Лцб Лст.м Л , । -----------------------1-------------
д^б + 2/А# 4- 1/Лет + 2/Лг + 1 /Ау
в) для схемы на рис. 2.5
Лк Л5М-^* 2 2 1
Лфл Лст.м Л,фл+-2---------------------Ц-----------------
Лк +л < ________________1___________
Л« + 2/Л, + 1/Л« + 2/Лг + 1 /Л,
(2.33)
Приведенная проводимость рассеяния обмотки якоря может
быть подсчитана
pq
где U—расчетная длина якоря; р — число пар полюсов; q — число
пазов на полюс и фазу (q=z/2pm).
Значения проводимостей в схемах замещения при установив-
шемся КЗ при роторах звездочка вследствие малого насыщения
могут ^быть взяты постоянными.
70
Проводя на рабочей диаграмме магнита (см. рис. 2.13) ха*
рактеристику проводимости Лк идеального КЗ под углом ак:
tg«K = 4—•
Иф
(2.34)1
получаем точку Ак пересечения с прямой возврата.
По точке Лк можем найти значение Го<йс,м и тока /л.
С помощью построений на рабочей диаграмме магнита можно»
перейти от магнитного состояния магнита к состоянию в про-
дольной оси машины. Если взять наиболее простую схему заме-
щения, приведенную на рис. 2.1,а, то для нее можно произвести:
следующие построения (рис. 2.14).
Вычитая из ординат кривой размагничивания А ординаты пря-
мой рассеяния ASM> проведенной под углом с
tgaSM=ASMmr/m<t>, (2.35 >
получаем кривую В, характеризующую значение магнитного по-
тока на выходе из магнита в зависимости от МДС на полюсах-
На участке прямой возврата Ка—Вл вычитание производится и®
ординат этой прямой. На участке прямой возврата кривая
преобразуется в прямую Bi—Ba-
Вычитая из абсцисс кривой В абсциссы кривой Rt, представ-
ляющей собой зависимость магнитного напряжения в воздушном^
зазоре, зубцах и спинке якоря от значения потока в воздушном!
зазоре, получаем кривую C(Ci—С2)—зависимость между про-
дольным потоком Ф<<=Фб и продольной реакцией якоря FadM,
Рис. 2.14. Рабочая диаграмма магнита для перехода к состоянию по продольной
оси генератора
71
Последнее построение вытекает из соотношения
FadM = FM-Fv, (2.36)
где
Ф83'
~ О.^.Ю-в/рвр-е ~ Ф*^8,
где 6'==Лст£а6 — приведенный воздушный зазор, см; Лст= (^V-H7z-F
•^-Fj)]Fv —коэффициент насыщения стали; 1Р — длина ротора;
1/Де=^в — приведенное магнитное сопротивление зазора, зубцов
и спинки якоря.
Если принять, что имеется линейная зависимость между Ft
и Фе, то
tga.-(Fy/®0(m^. (2.37)
Линия Ci—Cz на рис. 2.14 в соответствующих масштабах так-
же выражает зависимость между продольной ЭДС в обмотке
статора Еа и продольным током Id. Точка С2 соответствует па-
раметрам холостого хода генератора — потоку холостого хода
Фео и ЭДС холостого хода Eq. Точка Си соответствует нагрузке
генератора некоторым продольным током Id (Fadvi). Этой точке
соответствует значение потока Ф<*=ФН и ЭДС Еа=Ев, а на пря-
мой возврата — точка Ая. Точка Ск соответствует режиму КЗ.
При этом FadM=FadK,*, Id=IdK, Ф<*=Ф<*к и Е<*=Е<*к. В случае
идеального КЗ. (га=0) точка Ск определяется как точка пере-
сечения кривой Ci—С2 с прямой Фи,, проведенной под углом с
tg aSH=ASa (тР/тФ). (2.38)
Для случая неидеального КЗ (га#=0), если пользоваться в со-
ответствующих, масштабах величинами Ed и Id,
®«я = ^л/Afc ~ Xs 4~ ra /xq > (2.39)
где xs — индуктивное сопротивление рассеяния обмотки якоря;
га — активное сопротивление обмотки якоря; хя=х*+хад— пол-
ное индуктивное сопротивление по поперечной оси машины. При
КЗ, как видно из рис. 2.14,
Ed=1EdK:=sIdK.(Xs-^~rs^/Xq) X/kXs. (2.40)
В точке КЗ вся ЭДС Ed тратится на проведение тока КЗ
через активное сопротивление и сопротивление рассеяния обмотки
якоря.
• Если из кривой продольного потока Ф^(С1—Cj) вычесть орди-
наты прямой потоков рассеяния Ф5Я, то получаем кривую D, ха-
рактеризующую зависимость полезного продольного потока Фш*
от продольной МДС реакции якоря Fadu- Этот поток обусловливает
продольную составляющую напряжения Ud на выходе генератора.
Здесь следует заметить, что кривые С\—С2 и кривую D мож-
72
но рассматривать как прямые, так как характеристика для
большинства машин с известным приближением представляет
собой прямую.
Если точка установившегося КЗ Ак лежит на кривой размаг-
ничивания в точке Кк на рис. 2.14, то ее абсцисса определяет'
МДС магнита FM,K при КЗ и пропорциональную ей МДС реакцив
якоря при к,и. Из схемы замещения на рис. 2.1,а на один по>-
люс можем получить
FgdK ,ЧА _ _ &8Я_______J_____
к + l+A^j/Aj
(2.41)
При условии, что точка Ак лежит на кривой возврата, ордина-
та точки холостого хода Ао позволяет определить ЭДС холостого
хода Ео. Так как поток Фао меньше потока Фмо в отношении
Фбо/ФмО==Л*м/ (FsM"bFe)
= 1/(1+Лвм/Ла), (2.42)
то Е0=Ем — ордината точки До в масштабе ЭДС.
Если имеется чисто индуктивная нагрузка, то кривая D пред-
ставляет собой в некотором масштабе внешнюю характеристику
генератора.
В практических расчетах очень важно знать полное индуктив-
ное сопротивление генератора по продольной оси хл
Xd=Xs+Xad. (2.43)1
Значение х& может быть подсчитано на основании схем заме-
щения магнитных проводимостей в продольной оси машины
(рис. 2.1, 2.4, 2.15). Так, например, для генератора с ротором звез-
дочка без полюсных башмаков согласно схеме на рис. 2.15 имеем
** X} + Хм + Хда 4
(2.44)
В (2.44) значениям xs, xt, хи, xSM соответствуют значения Л5Я>
Л«, Лм и Л«м- Проводимости Лм и Л«м берутся на один полюс. В ка-
честве проводимости Asm берется рас-
четная проводимость Ллм.р. ___
Индуктивное сопротивление рас- ° | Г ]
сеяния обмотки якоря х, подсчитыва- с £
ется по известной формуле (2.28). x<t ХмС
Связь между сопротивлениями хи ,, | |
проводимостями Л в роторной цепи, °—------------*----: " 1
как уже указывалось, выражается
формулой (2.29).
Формула (2.29) дает значения ин-
дуктивностей обмотки якоря, обу-
словленных магнитными проводимо-
Рис. 2.15. Схема замещения на
один полюс на индуктивных
сопротивлениях для определе-
ния Х4 генератора с ротором
звездочка без полюсных баш-
маков
73
Тис. 2.16. Векторные диаграммы напряжений явнополюсных синхронных генера-
торов:
•а — диаграмма напряжений Блонделя для насыщенного генератора; б — видоизмененная ди-
аграмма напряжений для ненасыщенного генератора с постоянными магнитами при xd<
-<xq; в — упрощенная диаграмма напряжений ненасыщенного генератора с постоянными
^магнитами при xd=xq
«стями роторных цепей. По этой формуле могут быть рассчитаны
значения хм и хт. При расчете х& следует учесть, что обмотка
статора взаимодействует лишь с основной волной потока. Поэто-
му реактивное сопротивление х8) Ом, должно быть рассчитано по
формуле
х5 = Л82х/^(^оу-^-, (2.45)
где Йф—коэффициент формы поля ротора, равный отношению
полного лотока полюса к основной волне этого потока.
Значение Xd подобным же образом может быть подсчитано для
любой схемы замещения магнитных проводимостей.
:Как видно из (2.44), на значение х<г значительное влияние ока-
зывает проводимость рассеяния полюса магнита и полюсных баш-
маков. .Это объясняется тем, что магнитная проводимость посто-
янного магнита ASM мала и поэтому добавочные проводимости
рассеяния полюсов заметно сказываются на значении х^.
Вследствие большого магнитного сопротивления магнита для
машин с постоянными магнитами справедливо соотношение хд>
>Xd, что является их специфической особенностью. Чем меньше
воздушный зазор 6, тем больше отношение хд!х&. Для существую-
щих макЕим отношение хд/ха= 1,5ч-3. Для генераторов с магнитом
звездочка без полюсных башмаков индуктивные сопротивления
JC; и Xd соизмеримы.
Роторы синхронных генераторов с постоянными магнитами
шмеют явно выраженные полюсы, поэтому наиболее точно рабочий
шроцесс в этих машинах может быть отображен с помощью диаг-
раммы напряжений Блонделя (рис. 2.16).
74
Рис. 2.17. Характеристика холос-
того хода
Рис. 2.18. Векторная диаграмма напряже-
ний синхронного генератора с постоянин-
ми магнитами для режима короткого за-
мыкания
Построение диаграммы напряжений Блонделя применительно
к синхронным генераторам с постоянными магнитами обычное.
Отличие от обычных синхронных генераторов с электромагнитным
возбуждением состоит в других соотношениях между индуктив-
ными сопротивлениями в продольной и поперечной осях.
Диаграмма строится следующим образом (рис. 2.16). Вначале
строят векторы напряжений V и тока I под углом <р друг к другу-
Затем к вектору U прибавляют вектор 1<га и jlx3, получают вектор1
Ei. На продолжении вектора jlxs откладывают отрезок BD, ране-
ный Eaq/costy, индуктируемой в обмотке якоря потоком поперечи-
ной МДС реакции якоря F0g/cosi|>. Длина отрезка Дад/созф опре-
деляется с помощью прямолинейной части характеристики холоь-
стого хода (рис. 2.17) по значению МДС
ф = O^mk^Ik^p (2.46>
для многофазных генераторов на пару полюсов и
^/созф=8/2а»Л9/х (2.47)
для генераторов с выступающими полюсами на статоре (на пару
полюсов).
Соединяя конец отрезка Дод/соэф (точка D) с точкой О, по-
лучают направление вектора ЭДС холостого хода Ел.
Опустив перпендикуляр из точки В на линию OD, получают
отрезок ВС, равный Еад. Отрезок ОС представляет собой ЭДС по
продольной оси, наводимую в обмотке якоря потоком в воздуш-
ном зазоре, созданным результирующей МДС по продольной
оси.
Разность Eq и Ed дает значение Еа&— наведенной продольной
составляющей потока реакции якоря.
75
Аналогичным образом может быть построена векторная диаг-
рамма напряжений и для режима КЗ (рис. 2.18). В этом случае
47=0, поэтому начинают непосредственно с построения тре-
угольника падений напряжений в омическом сопротивлении /кга
л индуктивном сопротивлении рассеяния IKxs обмотки якоря ге-
нератора.
-Если известны значения индуктивных сопротивлений Xd и xqi
то при расчетах может быть использована векторная диаграмма
напряжений, представленная на рис. 2.16,6. При равенстве х& и xq
секторная диаграмма приобретает вид, представленный на
рис. 2.16,в.
3.3. РЕЖИМ ВНЕЗАПНОГО ТРЕХФАЗНОГО КОРОТКОГО ЗАМЫКАНИЯ
И РАЗМАГНИЧИВАЮЩЕЕ ДЕЙСТВИЕ ПОЛЯ РЕАКЦИИ ЯКОРЯ
Положение прямой возврата на рабочей диаграмме магнита определяет сте-
пень использования энергии постоянного магнита, а следовательно, внешние* ха-
рактеристики генератора, развиваемую им мощность. Положение рабочей прямой
^возврата зависит от степени наибольшего размагничивания магнита при изготов-
лении машины и в процессе ее эксплуатации.
Для автономно работающего синхронного генератора с постоянными магни-
тами наибольшее размагничивание постоянного магнита происходит вследствие
внезапного КЗ генератора при холостом ходе.
Размагничивающее действие поля реакции якоря зависит от ряда факторов:
характера протекания КЗ, начального магнитного состояния магнита, типа маг-
нитной системы, ее рассеяния и наличия демпфирующих контуров.
Если нарастание МДС реакции якоря происходит замедленно, например пу-
тем постепенного вывода сопротивления нагрузки или путем постепенного увели-
чения частоты вращения замкнутой накоротко машины от нуля до номинальной
скорости, то значение тока КЗ и его размагничивающая составляющая опреде-
ляются прямой возврата и ЭДС холостого хода, имеющей место после устране-
ния к КЗ.
1Если имеет место внезапное трехфазное КЗ, то по правилу постоянства по-
токосцепления значение тока по крайней мере в первое мгновение определяется
ЭДС холостого хода, а следовательно, прямой возврата, имевшей место до на-
ступления КЗ.
Для машин, не имеющих полюсных башмаков или демпферной системы в ка-
ком-либо другом виде, размагничивающее действие продольной составляющей
тока при внезапном трехфазном КЗ может быть большим, чем при установив-
шемся КЗ. Ток внезапного трехфазного КЗ может во много раз превышать уста-
новившийся ток КЗ (рис. 2.19). Максимальный осредненный ток при внезапном
трехфазном КЗ, как было указано выше, будем называть ударным током КЗ.
На рис. 2.20 представлены два случая размагничивания магнита, предвари-
тельно размагниченного до разной степени. Если начальное магнитное состояние
магнита прй холостом ходе характеризовалось для рассматриваемых случаев
точками Fi и Гг» то при ударном токе КЗ значению размагничивания соответ-
ствуют токи А'1 и А'2. Такие искусственно возросшие токи за счет начального
запаса магнитной энергии приводят магнит соответственно в состояния C'i и C'2t
76
Так короткого екмык1хн^\ I Л/ V V V V
Рис. 2.19. Осциллограмма тока при внезапном трехфазном коротком замыкании
определяемые прямыми А\—С'\ и Л'2—С'2, параллельными характеристике хо-
лостого ХОДа Форез.
Чем выше лежит исходная прямая возврата С — D, тем ниже опускается
прямая возврата C'—D' после внезапного трехфазного КЗ. Точка К пересечения
кривой размагничивания с прямой проводимости О—А\ определяет наиболее
высокую прямую возврата, для которой при внезапном КЗ магнит не размагничи-
вается и характеристики машины не ухудшаются. Это явление существования
оптимального предварительного размагничивания было обнаружено впервые
проф. А. С. Кантером [32]. Обоснование этого явления было дано
проф. Т. Г. Сорокером [33]. Размагничивающее действие ударного тока КЗ
в значительной мере зависит от типа магнитной системы.
При больших рассеяниях, как, например, в случае когтеобразных роторов,
токи КЗ (установившийся и ударный) меньше, чем при малых рассеяниях.
Наличие массивных когтей и полюсных башмаков вызывает появление демпфи-
рующих вихревых токов во время внезапного трехфазного КЗ, препятствующих
размагничиванию магнита. Практически в данном случае размагничивание маг-
нита определяется током установившегося КЗ.
Если магнитная система имеет малые рассеяния и слабые демпфирующие
контуры вихревых токов, то при внезапном КЗ размагничивание может полу-
читься значительным. К такой магнитной системе относится система с ротором
звездочка без полюсных башмаков. Слабое демпфирующее действие полюсов
магнита объясняется очень высоким электрическим сопротивлением материалов
постоянных магнитов. Так, удельное сопротивление алюминиево-никелевого спла-
ва равно примерно 1,84* 10-6 Ом-м, в то время как магнитно-мягкое железо
имеет сопротивление 0,1-10”®, а медь 0,0176-10”® Ом-м. Ударный ток КЗ при
отстабилизированной точке отхода прямой возврата только менее чем в два
раза превышает ток установившегося КЗ.
Рассмотрим практические методы определения размагничива-
ющего действия продольной составляющей поля реакции якоря
при ударном токе КЗ для различных магнитных систем, применяя
метод наложения режима внезапного трехфазного КЗ на режим
холостого хода.
В случае магнитной системы с роторам звездочка без полюс-
ных башмаков (см. рис. 2.2,а, б) положение точки отхода прямой
возврата большей частью определяется размагничивающим дей-
ствием продольной составляющей поля реакции якоря в режиме
внезапного КЗ. При размагничивании может значительно сме-
ститься точка отхода прямой возврата от первоначального поло-
77
Рис. 2.20. К вопросу стабилизации
магнита током ударного короткого
замыкания
Рйс. 2.21. Определение точки отхода пря-
мой возврата при внезапном трехфаз-
ном коротком замыкании с помощью!
характеристики короткого замыкания
жения (точка Ко на рис. 2.21 при размагничивании магнита, вы-
нутого из арматуры) вниз по кривой размагничивания.
Рассеяние в этой магнитной системе мало, особенно если crai-
тор не имеет выступающих полюсов. Можно считать, что в маг-
нитную цепь включены две МДС: постоянного магнита Fu и реак-
ции якоря ПО продольной ОСИ Fad (см. рис. 2.1). Это позволяет
считать МДС реакции якоря по продольной ос» Fad, непосредст-
венно приложенной к магниту (после соответствующего приведе-
ния через коэффициент kdi).
Если бы было известно значение тока КЗ, то решение задачи
получилось бы простым: начало прямой возврата (точка К на
рис. 2.21) определяется точкой пересечения с кривой размагничи-
вания прямой В—К, проведенной на расстоянии Fad уд,м от начала
координат О параллельно линии Форез- Однако значение тока
ударного КЗ зависит от начального состояния магнита. Поэтому
вначале приходится определять ток установившегося КЗ, а затем,
пользуясь расчетными или опытными коэффициентами ударности
для данной магнитной системы, уже определять значение МДС
при ударном токе КЗ.
Для определения тока установившегося КЗ строится характе-
ристика КЗ, т. е. зависимость потока Фк от МДС FK в магнитной
системе при КЗ (рис. 2.21):
Фк=/ТО. (2.48)
Значение FK слагается из составляющих
FK=F6zj+Fadxkdir j (2.49)
78
где Гегз=2Гв-|-2Г24-Г3-— сумма магнитных напряжений в воздуш-
ных зазорах, зубцах и ярме статора; Fada определяется по (2.16)
или (2.22) при 1=1К. \
Для построения характеристики КЗ задаются несколькими
произвольными значениями тока 1К- Для каждого значения строим
векторную диаграмму напряжений Бдонделя (см. рис. 2.18). Зна-
чение вектора £ag/cos -ф на диаграмме определяется с помощью ха-
рактеристики холостого хода (см. рис. 2.17) по значению МДС
[см. (2.46) и (2.47)].
Из векторной диаграммы определяется ЭДС по продольной
оси Ed и угол фк. По значению Ed из (2.50) определяется состав-
ляющая потока по продольной оси Фа
^ = 4,44£>фФа. (2.50)
Чтобы не строить несколько векторных диаграмм напряжения,
можно воспользоваться аналитическим методом определения Ец
и угла фк. Суть этого метода состоит в следующем.
Угол фк на диаграмме Блонделя для режима КЗ остается по-
стоянным (при неизменных сопротивлениях обмотки якоря), так
как катеты аб и бв (см. рис. 2.18) пропорциональны току:
цб==/кГа;
Se=Eaq/C0S ф=/кЛг, (2.51)
sin<pK = — =----+ Xs + fet (2 52)
ae /kI/^-Hxs+M2 Иг.2 + (*s + Vs
Здесь ki — коэффициент пропорциональности между отрезка-
ми Eog/cos ф и 1К (имеет размерность сопротивления).
Зная sini|>K для каждого из заданных значений /к, определяем
Гайк, затем по значениям Ed и Фй падение магнитных напряжений
Ftzj и по (2.49) значения FK-
Внешний поток магнитной системы Фк определяется как
сумма
Фк=Фй+Ф™,
где Фхм=Л5МГк — поток рассеяния магнита; ASM — проводимость
рассеяния магнита (приведенная).
Кривая ФК=/(ГК) пересекает кривую размагничивания в неко-
торой точке Кк (см. рис. 2.21), которая определяет значения Гм>к,
Fad к, Fd к, /к и начала прямой возврата. Таким образом, графи-
чески решается система двух уравнений: характеристики КЗ си-
стемы и внешней характеристики магнита*. Положение прямой
возврата Кк—Аок соответствует стабилизации магнита установив-
шимся током КЗ. От ударного тока КЗ происходит дальнейшее
* Если магнитная система якоря не насыщена, что при КЗ практически
всегда имеет место, то построение кривой Фм,упрощается: для произ-
вольного тока Гк находим Фм.к и F. и через точку с координатами Фм.к, F* про-
водим прямую О—Кх.
79
размагничивание магнита. МДС реакции якоря по продольной
оси при ударном токе КЗ равна: /
Рad уд,м =>Г ad к,мЛуд, (2.53)
где Луд — расчетный коэффициент ударности.
Значение расчетного коэффициента ударности в случае ротора
звездочка без полюсных бап/маков и стабилизации током устано-
вившегося КЗ, как показывают эксперименты и расчеты, Луд«1,2.
Откладывая значение/го</ уд,м (рис. 2.13 и 2.21) по. оси абсцисс
и проводя из конца отрезка кривую, параллельную характеристи-
ке результирующей проводимости холостого хода (на рисунках
Фореэ), получаем точку пересечения К на кривой размагничива-
ния. Точка К является началом рабочей прямой возврата К—L,
проведенной под углом
₽= arctgр (SM//M) (тр/Щф),
где /Пр — в А/мм и /п®—в Вб/мм.
Характеристика КЗ Фк=/(/7к) пересекает прямую возврата
К—L в некоторой точке Ак, которая определяет уже другое дей-
ствительное значение МДС 7г'а£<к,м и установившегося тока КЗ
//. после стабилизации магнита током внезапного КЗ.
Точка отхода прямой возврата К в этом случае характеризу-
ется лучом О—К, проведенным из точки О под углом (рис. 2.22),
Ск,уд arctg Лк.уд (/Wp/ffz®), (2.54)
где Лк,уя — эквивалентная проводимость системы при ударном то-
ке КЗ.
Коэффициент ударности, определяемый соотношением КУД=
=Pad ул,м/Fad к.м, может достигать значения 1,6—1,7.
Значение проводимости Лк.уд применительно к роторам звез-
дочка без полюсных башмаков может, быть подсчитано по форму-
ле (на один полюс) [34, 35]:
Лс.уд= . । Ам> (2.55)
1 -f- С
где
Ad s + Aad* Aad Да + Лы+Дда, >
₽i----^(l/x/'+l/x,);
xd" = -----------------.
*м 4* 2Хдм 1
+ *sw) **
Иногда, когда проводимость рассеяния магнита в свободном
состоянии Л* св мала, точка пересечения характеристики КЗ
и кривой размагничивания (точка Кк) лежит выше точки Ко>
определяемой проводимостью рассеяния Леев ротора звездоч-
ка в свободном состоянии (вне : корпуса)- (рис. 2.22). Ха-
рактеристика КЗ пересекает прямую возврата Ко—AJ в нер^тог-
SO
рой точке Л/, которая опреде-
ляет ток 7К и Fad к,м. Значение
расчетного коэффициента удар-
ности в этом случае зависит от\
положения точки Л/ на прямой
возврата. При положении точки
Л/ вблизи точки Ко £уД= 1,2-е-
1,3. При положении точки Лк
значительно правее точки Ко ко-
эффициент ударности в пределе
достигает feyA=l,6-5-l,7, а раз-
магничивание магнита может, не
произойти, так как начальное
значение потока (точка Ло на
диаграмме) мало.
Рис. 2.22. Определение точки отход»
прямой возврата при внезапном трех-
фазном коротком замыкании при на-
магничивании магнита вне корпуса »
без специальных шунтов
Для уменьшения степени 'размаг-
ничивания роторов звездочка на роторе
предусматриваются короткозамкнутые
электрические цепи, компенсирующие
МДС внезапных КЗ.
В качестве демпферных цепей мо-
гут быть применены следующие меры:
устанавливаются короткозамкнутые мед-
ные клетки; рабочая поверхность полю-
са покрывается слоем меди; ротор заливается алюминиевым сплавом, (гл. 1)-
Установка короткозамкнутой медной клетки на роторе усложняет конструк-
цию ротора, усложняет технологию отливки магнита и снижает степень его
использования вследствие уменьшения его сечеиия и усложнения форм полюса.
Поэтому этот метод не нашел применения.
Покрытие поверхности полюса слоем меди или другого проводящего металла
требует увеличения воздушного зазора, что при низкокоэрцитивных магнитах
уменьшает степень использования машины. При высоких частотах вращения слой
меди на полюсах отслаивается и разрушается.
Наиболее эффективным способом демпфирования токов ударного КЗ являет-
ся заливка ротора алюминиевым сплавом. При этом сразу решается вопрос креп-
ления магнита на валу. Исследования, проведенные по определению степени
эффективности алюминиевой заливки как успокоительной системы на генераторах
мощностью 75—500 В-A при частоте 400 Гц, показали следующее [35]:
1) значение остаточной ЭД С генератора (после стабилизации) не зависит от
наличия успокоительной цепи на роторе при стабилизации магнита током уста-
новившегося КЗ. Уменьшение ЭДС после стабилизации составляет 6—3%;
2) значение остаточной ЭДС повышается при наличии успокоительной цепи
на роторе, если стабилизация магнита производится, как обычно, ударным током
мгновенного КЗ (на 10 и 3% при мощностях 500 и 75 В-А соответственно);
. 3) чем больше мощность генератора, тем сильнее влияние успокоительной
системы ротора;
4) в. генераторах с частотой 400 Гц и мощностью менее 100 В ;А\ применение
алюминиевой заливки как успокоительной системы неэффективна- к .
6—6258 ЗЛ
Исследования также показали, что толщина боковой стенки алюминиевой
заливки оказывает незначительное влияние/на эффективность действия успокои-
-тельного контура, поэтому она выбирается исходя из конструктивных сообра-
жений. Значительное влияние на эффективность действия успокоительного кон-
тура оказывает алюминиевый стержет», расположенный между полюсами. Наи-
большая эффективность достигается^при заливке алюминием вровень с поверх-
ностью полюсов, когда потокосцепление успокоительной системы максимально.
Алюминиевая заливка представляет собой продольную успокоительную си-
стему, которую можно представить в виде алюминиевых прямоугольных рамок,
«охватывающих полюсы.
Определение точки КЗ на кривой размагничивания с помощью характеристи-
ки КЗ является общим методом, который учитывает наличие активного сопро-
тивления в обмотке якоря га, нелинейность магнитной цепи. Поэтому этот метод
применим в принципе ко всем магнитным системам.
В том случае, если можно пренебречь га и считать магнитную цепь линейной
(без насыщения), точка КЗ определяется проводимостью при идеальном КЗ
[см. (2.31), (2.32)].
В случае сильно разветвленной магнитной цепи со значительными потоками
рассеяния, например при наличии полюсных башмаков с напусками на полюсах
..звезды (см. рис. 2.3), при роторах когтеобразной конструкции (см. рис. 2.5)
определение смещения рабочей точки на диаграмме магнита под действием МДС
реакции якоря усложняется, так как имеются значительные потоки рассеяния и
магнитные напряжения на последовательных участках магнитной цепи. Проиллю-
стрируем это на примере генератора с когтеобразным ротором (схема замещения
.магнитных проводимостей — см. рис. 2.5).
Для построения диаграммы магнита (рис. 2.23) строятся: кри-
вая размагничивания магнита Фг—Fc, характеристики холостого
хода магнитной цепи Форез=!(Р) и Фк=ф(Л<)-
Характеристика холостого хода магнитной цепи ®ope3=f(f)
строится обычным методом. Задаются потоком холостого хода в
воздушном зазоре Фео- Последовательно подсчитываются магнит-
ные напряжения и потоки рассеяния по участкам (см. рис. 2.5):
F3,4=2Fe+2Fz4-F/; Ф»к=^7з,4Л8к;
/75,6==^:'з,4-|-2/:'кг; Фз флг=-/?5,бЛз фл5
F7,8=F5,6+2Fct>m-|-2/>1; $sm=F7,eASM.
Результирующие значения МДС и потока равняются:
F7,8 — Fm‘, Фо рез = ФвО“ЬФзк_|-Фз фл+Фзм.
По результатам подсчетов МДС и магнитных потоков для не-
скольких значений Фео строятся характеристики ®ope3=f(F) и
Ф«о=ф(Р) (рис. 2.23).
Для построения характеристики КЗ ФК=/(Л<) задаются про-
извольными значениями токов КЗ /к. По аналогии с ранее изло-
женным строятся векторные диаграммы напряжений КЗ (см.
рис. 2.18) и определяются для каждого значения тока /к ЭДС
Еак, магнитный поток GW Далее подсчитываются магнитные на-
до
Рис. 2.23. Графическое определение точки отхода прямой возврата на кривой
размагничивания, МДС и потока при внезапном трехфазном коротком замыка-
нии для магнитной системы с когтеобразным ротором:
ФЛМ, ф«фл» Факг — кРивые потоков рассеяния магнита, фланцев, когтей соответственно;
^ст.м.фл» *к> Я 8' кривые падений магнитного напряжения в стыках магнита с фланцем
и фланцах, когтях, в воздушном зазоре и магнитопроводе якоря соответственно; А — кривая
размагничивания магнита; С, Е, 3 — кривые зависимости потоков от МДС в узловых точ-
ках схемы замещения 7—8, 5—6, 3—4 соответственно (рис. 2.5); В, Д, ЛК — вспомогательные
кривые
пряжения и потоки рассеяния по участкам (см. рис. 2.5):
/7з,4=2Рб+2Гг+Г^4-/:'а<г к, Флк=^з,4Л$к’,
^б1б=Рз(4 + 2^кг, Ф« фл==^'5,бЛ, фл!
^77,8 = ^5,б+2Рст,м-Ь2/?фл> Ф«м=^7,8Ллм.
При подсчете магнитных напряжений на каждом из последу-
ющих участков к магнитному потоку Фйк добавляются потоки рас-
сеяния предыдущих участков.
Результирующие значения М.ДС и потока равняются:
= Фк^Ф<1к4~Флк“Ь ф« фл+Ф«м+Ф«д.
Здесь Фад — поток дифференциального рассеяния:
Ф,д = Фл(1---^-У (2.56>
где ka — отношение основной волны потока реакции якоря к пол-
ному потоку реакции якоря (определяется по кривым рис. 5.42).
Значение ka для типовых генераторов лежит в пределах 1,05—1,10.
На основании результатов расчетов строится характеристика?
КЗ Фк=1(Рк) (см. рис. 2.23). Точка пересечения кривой Фк=
=f(FK) с кривой размагничивания магнита дает точку Кк, опре-
6* 8$
деляющую начало отхода прямой возврата при установившемся
КЗ. Точка Кк определяет значения МДС магнита Км,к и потока
4>м,к. С помощью графических построений на диаграмме магнита
определяется значение МДС магнита от МДС реакции якоря
Fad к,м и потока Фйк. /
В случае магнитной системы с когтеобразным ротором счита-
ется, что точка отхода прямой возврата определяется характери-
стикой установившегося КЗ (см. рис. 2.23). Ударный ток КЗ
вследствие значительных проводимостей рассеяния когтей и флан-
цев, сильного демпфирующего действия вихревых токов практиче-
ски не производит размагничивания магнита, хотя он значительно
-больше тока установившегося КЗ.
Практика, однако, показывает, что в разветвленных магнит-
ных цепях имеется некоторое размагничивание магнита МДС ре-
акции якоря. Если определено значение коэффициента ударности
(см. гл. 3), то -известно значение МДС Га<1к,уд,и (см. рис. 2.23) и
»с помощью графических построений может быть определена точка
отхода прямой возврата К..
2.Л. ЭЛЕКТРОМАГНИТНЫЕ И РАБОЧИЕ ХАРАКТЕРИСТИКИ
СИНХРОННЫХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ МАГНИТАМИ
С точки зрения наиболее эффективного использования объема
постоянного магнита важно правильно выбрать параметры маг-
нитной системы и самого магнита, максимально использовать
энергию магнита. В этом случае получаются минимальные раз-
меры и масса генератора при заданной мощности.
Как известно [1], параметры машины с постоянными магнита-
ми следует выбирать таким образом, чтобы площадь треугольни-
ка КОАо на диаграмме магнита (рис. 2.24) была максимальной.
Использование магнита в машине определяется некоторым коэф-
фициентом £, равным отношению площади треугольника К.ОАо к
площади прямоугольника 0FzN(J)r (рис. 2.24):
* = 4тг- <2-57)
Drnc
Чем выше значение коэффициента тем больше при прочих
^равных условиях произведение EqIk, а следовательно, и мощность
машины.
Коэффициент £ определяется свойствами магнита (Яе, Вг),
характеристикой размагничивания и параметрами магнитной це-
ни, включая рассеяние обмотки якоря. В основном коэффициент £
определяется углами а0 и ак (рис. 2.24). Использование магнита
улучшается с увеличением угла а0 (рис. 2.24) (возрастает пло-
щадь треугольника КОЛо). Так как угол «о определяется в основ-
ном проводимостью воздушного зазора б, то значение б должно
быть минимальным.
•«4
Рис. 2.24. К вопросу оптимального ис-
пользования энергии постоянного маг-
нита
Рис. 2.25. Кривые для определе-
ния оптимальных значении ак и §
при различных значениях fa:
7—0,6; 2 — 0,4; 3 — 0,4; 4-0,6
Для каждого а0 существует оптимальное значение ак (рис.
2.24), обеспечивающее максимальную площадь треугольника
КОАо, т. е. максимальное значение коэффициента £.
Оптимальные значения tgaK для кривых размагничивания (по-
строенных как гиперболы) в зависимости от ctg cto приведены на
рис. 2.25. Коэффициенты возврата р приняты в относительных
единицах (fio=pHc/Br). На том же рисунке нанесены и соответст-
вующие оптимальным углам значения £.
Обычно считается, что точка отхода прямой возврата после
стабилизации магнита должна соответствовать максимуму про-
изведения (ВН)тах на кривой размагничивания. Это положение
является совершенно правильным, если рабочая точка находится
на кривой размагничивания. Для реальных генераторов точка К'
(рис. 2.24) на кривой размагничивания, соответствующая макси-
муму произведения (ВН)тах, не совпадает с точкой отхода пря-
мой возврата К, соответствующей максимуму электромагнитной
мощности генератора, пропорциональной произведению потока
холостого хода на МДС магнита при КЗ (рис. 2.24):
Рmax— .(ФвО^мл) max* (2.58)
Последнее выражение получается из соотношений :
Ртах^=Во!х.‘,
1н=Ра<1к=Ри,к’,
До=ФбО-
В свою очередь, ф«0 и МДС FVlK являются функциями парамет-
ров магнитной цепи и магнита, а также зависят от способа стаби-
лизации магнита.
85
Согласно построениям на рис. 2.24 можем получить аналити-
ческие выражения для подсчета FMtK и Фм,к:
р _ 1 ( Ак-Рg4~Фг \ 1 I АкГс + Фг \*__Фг^с, /259)
2 \ оАк / Г 4 \ аЛк ) аЛк ’ '
®м,к = ^и.кАч (2.60)
где
а- 2^~' ;
т
у— коэффициент формы кривой размагничивания.
Произведение
ФюРм к = д + F (2.61)
Л0 + 1g р
где Лп, Ло, Лк — магнитные проводимости: полезная, холостого хо-
да и КЗ соответственно.
Пусть точка отхода прямой возврата определяется режимом
установившегося КЗ. Тогда, изменяя проводимость рассеяния по-
люсных башмаков (кривые 2—4), получаем различные точки от-
хода прямой возврата (точки К, К1, К11, К111 на рис. 2.26) и им
соответствующие FU,K и Фм,к. Кривые произведений Гм,кФбо для
этих случаев изображены на рис. 2.26. Ниже точки К111 кривая
произведения Гм,кФво построена при стабилизации от внешнего
магнитного поля. Для сравнения на том же рисунке приведена
кривая произведения Fk®k, соответствующая кривой удельной
магнитной энергии магнита. Здесь FK, Фк — МДС и поток в точ-
ке К отхода прямой возврата на кривой размагничивания.
Из сравнения кривых произведений Гм,жФво и ГдФк можем ви-
деть, что кривая ^и,кФбо имеет большее значение максимума про-
изведения (Ри,кФво)таа и он получается в точке отхода прямой воз-
Рис. 2.26. Кривые произведения МДС магнита при коротком замыкании на по-
ток холостого хода (Рм,кФ#о)
86
врата, лежащей ниже точки К, соответствующей максимуму про-
изведения (ГкФк)тах или максимуму произведения (BHjmax. По-
этому при проектировании генератор должен быть рассчитан так,
чтобы точка отхода прямой возврата на кривой размагничивания
была несколько ниже точки К, соответствующей {ВН)тах.
Если стабилизация магнита производится внешним магнитным
полем при неизменном рассеянии полюсных башмаков, т. е. при
неизменном положении характеристики КЗ (кривая 1 на рис. 2.26),
то точки КЗ при различном размагничивании (точки К, К111, №v,
Л7) располагаются на кривой характеристики КЗ. Вследствие
этого произведение Г'м,кФ«о на участке ниже точки Кп меньше
произведений Гм,кФ«о и использование магнита ухудшается.
Электромагнитная мощность синхронной машины с постоянны-
ми магнитами
Как известно, электромагнитная мощность синхронной маши-
ны определяется выражением
^SM = ^ — sin 0 + — {х“~х,,} sin 26. (2.62)
2 XdXq
где 0 — угол внутреннего сдвига между ЭДС холостого хода и на-
пряжением.
В синхронных машинах с постоянными магнитами xq>Xd, по-
этому вторая составляющая мощности Рэм изменяет знак на об-
ратный, становясь отрицательной, по сравнению с синхронными
машинами, имеющими электромагнитное возбуждение и явно вы-
раженные полюсы. Характер кривой РЭм=/(0) вследствие этого
изменяется (рис. 2.27). Увеличивается угол 0м, соответствующий
максимуму электромагнитной мощности. При малых значениях 0
электромагнитная мощность Рэы меньше, чем в машинах с элек-
тромагнитным возбуждением. При заданной мощности машина с
возбуждением от постоянных магнитов работает при большем зна-
чении 0, чем машина с электромагнитным возбуждением (на
рис. 2.27 01 >0г). Удельная синхронизирующая мощность
Pc=dP3M!dQ (2.63)
уменьшается с уменьшением воздушного зазора, так как при этом
увеличивается отношение х9/х<1. Параллельную работу синхрон-
Рис. 2.27. Кривые электромагнитной мощности синхронной машины:
а—* для машины с постоянными магнитами; б —для машины с электромагнитным возбуж-
дением
87
них генераторов с постоянными магнитами вследствие большего
значения 0М и меньшей электромагнитной мощности Рэм при ма-
лых 0 осуществить труднее, поэтому они используются в основном
в качестве генераторов, работающих автономно.
Внешние характеристики и мощность, отдаваемая генератором
Внешние характеристики электрических машин с постоянными
магнитами, представляющие собой зависимость напряжения от
тока нагрузки отличаются от подобных характеристик
генераторов с электромагнитным возбуждением тем, что они рас-
сматриваются не при постоянстве МДС возбуждения, а при оп-
ределенном положении прямой возврата на рабочей диаграмме
магнита. Каждой точке на внешней характеристике соответству-
ет своя рабочая точка на прямой возврата, свои значения магнит-
ного потока и МДС возбуждения.
Характер внешних характеристик для электрических генерато-
ров с постоянными магнитами зависит от характера нагрузки, па-
раметров магнитной цепи и обмотки якоря, численных значений
синхронных индуктивных сопротивлений по продольной Xd и попе-
речной хд осям, а также соотношения между ними.
При индуктивной нагрузке (cos<p=0) синхронные генераторы
с постоянными магнитами имеют резко падающую внешнюю ха-
рактеристику (рис. 2.28). Последнее объясняется сильным умень-
шением полезного потока постоянного магнита при возрастании
МДС реакции якоря, которая размагничивает магнит, и увеличе-
нием потока рассеяния. Рабочая точка Ав на диаграмме магнита
(см., рис. 2.14) при возрастании нагрузки смещается влево по пря-
мой возврата. Особенно круто падает внешняя характеристика
ПрИ Xq = Xd-
Менее резкое падение напряжения наблюдается при активной
нагрузке (cos«p=l), так как в этом случае МДС реакции якоря
по продольной оси Fad мала и значение магнитного потока при
данном токе нагрузки остается более высоким, чем при индуктив-
ной нагрузке. При чисто активной нагрузке машина может отда-
вать в два раза большую мощность (рис. 2.29).
Емкостная нагрузка обусловливает действие, обратное дейст-
вию индуктивной нагрузки. Напряжение с увеличением тока
уменьшается медленно, а при малых значениях cos <р даже
возрастает. Это объясняется подмагничивающим действием про-
дольной реакции якоря при емкостной нагрузке. Включение до-
полнительной емкостной нагрузки позволяет в ряде случаев ком-
пенсировать индуктивность нагрузки и стабилизировать напря-
жение.
Характер внешних характеристик и значения токов КЗ в значи-
тельной степени зависят от индуктивного сопротивления рассея-
ния xs обмотки якоря и рассеяния полюсных башмаков или ког-
тей, если они имеются. Возрастание xs уменьшает ток КЗ, увели-
чивает крутизну спада напряжения (рис. 2.30), так как увеличи-
вается внутреннее сопротивление генератора. Последнее со всей
очевидностью следует также и из рассмотрения векторной диаг-
88
Рис. 2.28. Внешние характеристики син-
хронного генератора с постоянными магни-
тами:
/ — при чисто индуктивной нагрузке; 2 — при ак-
тивной нагрузке; 3 — при активной емкостной на-
грузке; 4 — при чисто емкостной нагрузке
Рис. 2.29. Напряжение и мощ-
ность в зависимости от тока
генератора
P,U^ , xs1<xsZ
о i'K' Тк I
Рис. 2.30. Внешние ха-
рактеристики и кривые
мощности генератора при
различных рассеяниях
обмотки якоря
раммы (см. рис. 2.16). Изменение проводимостей рассеяния по-
люсных башмаков Asn6 или когтей Л4К, а также магнита ASM из-
меняет магнитное состояние магнита и значение продольного по-
тока. Чем больше это рассеяние, тем выше идет линия суммарной
проводимости рассеяния As на рабочей диаграмме (см. рис. 2.14),
тем при данном токе нагрузки меньше значения продольного по-
тока Фа и ЭДС Ed‘, поэтому при увеличенных рассеяниях полюс-
ных башмаков токи КЗ получаются меньше, а внешняя характе-
ристика более крутопадающая.
Характер внешних характеристик генераторов определяет и ха-
рактер кривых отдаваемой мощности Р=
f=^UI. Чем меньше рассеяние полюсных
башмаков (когтей) и пазовое рассеяние,
тем больШе мощность, отдаваемая генера-
тором (рис. 2.30). Специфической особен-
ностью генераторов с постоянными магни-
тами и роторами, имеющими полюсные
башмаки, является соотношение х9>х<ь
При costp, близком к единице, относи-
тельно большое xq ведет к улучшению
внешней характеристики генератора. По-
следнее является очевидным из рассмотре-
ния векторной диаграммы напряжений для
этого случая (см. рис. 2.16;б). Поэтому
увеличение х9, которое может быть достиг-
89
нуто выбором соответствующей конструкции генератора, может
явиться одним из способов стабилизации напряжения. При
cos <р=0-*-0,7 значение отношения Хд/х& не оказывает существен-
ного влияния на внешнюю характеристику. При xq=Xd внешняя
характеристика генератора наиболее неблагоприятная.
Внешние характеристики генераторов с постоянными магнита-
ми при близких значениях Xd и xq хорошо описываются уравнени-
ем эллипса
(U/Е'У + (///к)2 4- 2 cos (Т - е) = 1, (2.64)
где
s = arctg-^-.
Га
Если га=0 (8=90°), то при чисто активной нагрузке (<р=0)
получим внешнюю характеристику в виде части окружности
(С//Ео)2+(///к)2=1. (2.65)
При га=0 и чисто индуктивной нагрузке (<p=s=90°) выраже-
ние (2.64) имеет вид
U/E0+I/IK=l (2.66)
и представляет собой уравнение прямой.
Уравнение (2.64) позволяет при xq&Xd легко построить внеш-
ние характеристики. Для этого перепишем уравнение (2.64)
U = Е, [VI - (W sin2 (? - е) - (///к) cos (т - е)], (2.67)
где
4»/ЛК1+г.7х/.
Значение 4К определяется из рабочей диаграммы магнита
(рис. 2.13, 2.14) по значению Fad*,*
г________FadK,M_____
0.9т(и>фЛо/Р)*<* ’
где шф—число витков в фазе; fe0 — обмоточный коэффициент;
р — число пар полюсов.
При xq>Xd аналитические выражения для внешних характери-
стик имеют более сложный характер:
Ео = U cos (ф — ?) + 7ra cos Ф + Ixd sin ф. (2.68)
где
Ixq + и sin у
sin Ф = . ;
4- U sin у)2 -f- (U cos у 4- Zra)*
COS ? = COS У 4-/Га
К (/лд 4-1/ sin y)at 4- (I/ cos <f 4- /га)а
90
Для лучшего использования генератора необходимо, чтобы
ток генератора равнялся току Ipmax, соответствующему максиму-
му мощности. Оптимальная кратность тока КЗ k=lKIIpmax, а сле-
довательно, и максимальное значение мощности Ртах определяют-
ся, если продифференцировать развернутые выражения для Р,=
=mUl для различного характера нагрузки и приравнять их нулю:
а) для индуктивной нагрузки
P=mUI—m(EoI— (ЕйЦк)Р)-, (2.69)
Йопт == IxJIp max == 2 J (2.70)
Ртахz= fnlxEolA J (2.71)
б) для активной нагрузки
Р = mUI = mIKEJkVl — 1 Ik3; (2.72)
kom = JK!iPmax = V2-, (2.73)
Ртах==т1кЕо№> (2-74)
в) для общего случая (при е=90°)
Р= тШ ах тЕ0 [/1 — (///J8 cos2 ? — (///к) sin ?] /; (2.75)
^опт = Qlpmax = /2 (1 ЯП ?); (2.76)
Ртах = mEJJft (1 + sin <р)]. (2.77)
Из формул (2.71), (2.74) и (2.77) очевидно, что для того что-
бы получить максимальную мощность от генератора в заданных
габаритах, необходимо, чтобы произведение Е0!к было возможно
большим.
Скоростные, нагрузочные характеристики генераторов с постоян-
ными магнитами
Ряд генераторов работают при переменной частоте вращения
на определенную нагрузку, имеющую свою вольт-амперную ха-
рактеристику. К ним относятся автотракторные генераторы, ра-
ботающие с переменной частотой вращения на лампы накалива-
ния. Работа этих генераторов характеризуется частотными нагру-
зочными характеристиками, представляющими собой зависимость
напряжения генератора U от частоты вращения (рис. 2.31) при
определенном сопротивлении нагрузки (кривая /).
При малых частотах вращения с ростом частоты вращения про-
порционально ей увеличивается напряжение генератора и харак-
теристика U—f(n) представляется почти прямой линией. Затем
при возрастании частоты вращения напряжение увеличивается
медленнее и характеристика U=f(n) отклоняется от прямой ли-
нии в сторону оси абсцисс.
Объясняется это тем, что при малых частотах вращения гене-
ратора индуктивное сопротивление х, пропорциональное п, мало
91
Рис. 2.31. Частотные нагрузочные
характеристики:
/ — при малой кратности тока; 2— при
большой кратности тока
Рис. 2.32. Внешние характеристики
генераторов при различных часто-
тах вращения и вольт-амперные ха-
рактеристики нагрузки при кратности
тока короткого замыкания 1к;
1 — малой; 2 — большой
по сравнению с суммарным активным сопротивлением обмотки
якоря и сопротивлением нагрузки гн. Ток генератора и его напря-
жение определяются главным образом значением первого члена
под знаком радикала в приближенном выражении для напря-
жения
р г c&irPrB.
U = (2.78>
V (гв + г.)я + х? |/(гв + Га)а+(«^)*
С увеличением частоты вращения Ха возрастает, а сумма гн4-г»
остается почти неизменной (гн несколько возрастает при увеличе-
нии тока), поэтому прирост напряжения и тока уменьшается. Ток
/к возрастает незначительно.
Оценка частотной нагрузочной характеристики производится
по значению напряжений Umtn при минимальной частоте враще-
ния rimin и Umax при максимальной частоте вращения Птах, отлича-
ющихся от номинального напряжения U„ соответственно на Д£/«
и ДС72- Напряжения itAnm и Umax не должны выходить за установ-
ленные техническими условиями пределы.
Частотная нагрузочная характеристика определяется внешни-
ми характеристиками генератора при разных частотах вращения
и вольт-амперной характеристикой нагрузки U=^(I) (рис. 2.32).
Точки пересечения внешних характеристик при различных часто-
тах вращения генератора (кривая 1) дркп значения напряжений,
при данной частоте вращения.
В целях получения пологой частотной характеристики в рабо-
чем диапазоне частот вращения (уменьшения ДС/) приходится
токи нагрузки выбирать близкими к токам КЗ, т. е. в качестве
рабочих выбирать круто падающие участки внешних характери-
стик. При этом активные материалы генератора плохо использу-
ются вследствие плохого использования мощности генератора.
92
В этих же целях часто увеличивают индуктивное сопротивле-
ние рассеяния или на зажимы генератора включают специальный
дроссель. Это ограничивает напряжение при высоких частотах
вращения, но в то же время приводит к худшему использованию
активных материалов.
Глава третья
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В СИНХРОННЫХ ГЕНЕРАТОРАХ
С ПОСТОЯННЫМИ МАГНИТАМИ
3.1. ОБОБЩЕННЫЕ УРАВНЕНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ
ДЛЯ СИНХРОННЫХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ МАГНИТАМИ
С МАЛОНАСЫЩЕННОЙ МАГНИТНОЙ ЦЕПЬЮ
Вопросам исследования переходных процессов в синхронных
генераторах с электромагнитным возбуждением посвящено боль-
шое количество трудов советских и иностранных авторов. Послед-
ние разработки в этой области связаны с применением вычисли-
тельной техники, позволяющие решать линейные и нелинейные-
дифференциальные уравнения высокого порядка. Для синхронных
генераторов с постоянными магнитами сведения не систематизи-
рованы. При расчете нестационарных процессов в синхронных ге-
нераторах этого типа, кроме определения длительности переход-
ных процессов, выбросов токов в якорных обмотках, значения их
переходных и сверхпереходных индуктивных сопротивлений, спе-
цифическим является расчет коэффициента ударности тока
/Суд, необходимого для определения положения точки отхода kt
(рис. 3.1) прямой возврата на кривой размагничивания постоян-
ных магнитов индуктора, и учет демпфирующего действия массив-
ных частей магнитопровода генератора на положение точки kt.
При выводе уравнений переходных процессов делаются допу-
щения, что параметры генератора в пределах рассматриваемого
процесса неизменны, магнитная система не насыщена, а напряже-
ния и токи синусоидальны. Это позволяет с достаточной точностью
применять метод разложения поля в генераторе по продольной d
и поперечной q осям, жестко связанным с ротором (индук-
тором), и использовать метод наложения. При этом рассматри-
вается обобщенный синхронный генератор с постоянными магни-
тами (рис. 3.2) постоянной частоты вращения (nc=const) с трех-
фазной обмоткой якоря, фазы которого а, Ь, с соединены в звезду*
без нулевого провода; ротор генератора явнополюсный, имеющий
постоянный магнит М, два демпфирующих контура (D — ветви по-
стоянного магнита и Q — по поперечной оси), характеризующих
действие массивных магнитных частей магнитопровода генерато-
ра (полюсных башмаков) или алюминиевой заливки, применяе-
мой в роторах звездочка.
I 9$
Рис. 3.1. Определение рабочей точки Рис. 3.2. Схема расположения обмоток
на диаграмме состояния магнита ин* и демпферных контуров синхронного ге*
дуктора в переходном режиме рабо* нератора с постоянными магнитами
ты синхронного генератора с посто-
янными магнитами
Нагрузка генератора активно-индуктивная [4, 53]. Для дан-
ного генератора исходные уравнения в выбранных осях преобра-
зования d и q одинаковы с классическими [64], за исключение^
уравнения эквивалентного контура, учитывающего изменение со-
стояния постоянного магнита ротора генератора. При продолже-
нии прямой возврата ki—k2 на диаграмме состояния магнита ро-
тора генератора (рис. 3.1) до пересечения с осью абсцисс полу-
ченную МДС магнита Fu можно рассматривать в схеме замеще-
ния магнитной цепи генератора по продольной оси наравне е
МДС Fad продольной реакции якоря. При этом в схему замеще-
ния должно быть введено собственное сопротивление магнита ро-
тора /?м=1/р, где р — коэффициент возврата, определяющий угол
наклона прямой возврата к оси абсцисс на диаграмме состояния
магнита (см. рис. 3.1) (для оксидно-бариевых и редкоземельных
магнитов прямые возврата совпадают со спинкой размагничива-
ния).
Полный поток магнита Фмо связан с полной проводимостью
магнита Лн (см. рис. 3.1) зависимостью
(3-1)
Для результирующего потока магнита Ф'м, пользуясь методом
наложения, можно записать
ф'м=—Фы<г + Фмп4~ФмО, (3.2)
тде Фма, Фш» — составляющие потока магнита от продольной МДС
реакции якоря Faa и МДС FD демпфирующего контура (см.
рис. 3.1 и 3.2).
94
При этом
Фм</ = ^ма^а + (3«3)>
Фма=Л4мо1Ъ> (3-4)
Фм'—A-kF'm, (3-5)
где Mij=(i, j—a, b, с, М, D)—взаимные индуктивности соответ-
ствующих контуров, зависящие по синусоидальным законам от уг-
ла 0; ij(j=a, Ь, с)—токи в контурах; Рм=Р'ы-}-Рм^ Гмр —рабо-
чая (внешняя) МДС (см. рис. 3.1).
После подстановки величин из уравнений (3.1), (3.3)—(3.5) в
(3.2), умножения его левой и правой частей на угловую скорость
генератора [рб], где p=d/dt, и замены постоянного магнита од-
новитковой обмоткой (щм=1) с включенным в нее источником то-
ка /м можно получить уравнение для ЭДС им контура постоянно-
го магнита
WM = [р0| (— Мцд1а — — Mucic-!- -MuDlD “I- 7»м/м) » (3-бУ
где
[р0]^м//м== [₽0] Ф'м, (3.7)
так как индуктивность LM=AM, токи //M=/’,M=var и Im=Fm=
= const, поскольку иум=1.
Исходя из уравнения (3.6), предполагается, что при любых пе-
реходных процессах, включая внезапное трехфазное КЗ, происхо-
дит стабилизация постоянного магнита и в дальнейшем не проис-
ходит его размагничивания ниже точки отхода прямой возврата
ki на рис. 3.1. При этом все рабочие точки всегда находятся на
прямой ki—ki.
Замена стабилизированного постоянного магнита ротора гене-
ратора одновитковой обмоткой позволяет его представить в виде
пассивного сердечника с большим магнитным сопротивлением
^м=77м/Фмо=1/Лм, охваченного фиктивной одновитковой обмот-
кой с FM=const, поскольку по ней протекает ток ZM=const.
Вращающийся синхронный генератор с постоянными магнита-
ми, так же как и синхронный генератор с электромагнитным воз-
буждением, можно представить в виде совокупности магнитосвя-
занных взаимоперемещающихся контуров. Принципиальное отли-
чие заключается только в том, что контур фиктивной обмотки по-
стоянных магнитов присоединен не как обычная обмотка возбуж-
дения к источнику напряжения, а к источнику тока, ток которого
остается постоянным при всех изменениях потока постоянных
магнитов в пределах рабочего участка прямой возврата и, следо-
вательно, он не наводит ЭДС трансформации в других контурах.
Роль Гм и эквивалентного тока /м проявляется при переходных
процессах только в наведении ЭДС вращения. Поскольку FM дей-
ствует по продольной оси d, ЭДС вращения от Fn наводится по
поперечной оси.
Операторные уравнения для мгновенных значений напряжений
и токов в непреобразованных осях координат (а, b, с, D, Q, М)
95
(рис. 3.2) при соответствующих токах (ia, 1ь, ic, io, iq, /м) и напря-
жениях (—Ua, —иь, —ис, О, 0, ии) имеют известное классическое
написание в виде системы линейных дифференциальных уравнений
с переменными коэффициентами, поскольку значения индуктивно-
стей L(° (i=a, b, с) и взаимных индуктивностей Мц = (i, j=
=а, Ь, с, D, Q) контуров являются функциями угла поворота
ротора генератора [54].
Решение этих уравнений возможно по известным методам при-
ближенных вычислений, одинаково затруднительно даже при при-
менении вычислительной техники, поскольку требует много затрат
времени на программирование и решение на ЭВМ. Если считать,
что Ц и Л4?/ изменяются по синусоидальному закону, то пре-
образование токов ia, ib, ic в токи по продольной й и поперечной
iq осям, а напряжения иа, иь, ис в напряжения Ud и ид с соблюде-
нием инварианта мощности и раскрытием функций Z,-0 и Мц
позволит перейти от линейных дифференциальных уравнений с
переменными коэффициентами в непреобразованной системе ко-
ординат (а, Ь, с, D, Q, М) к линейным дифференциальным урав-
нениям с постоянными коэффициентами в преобразованной систе-
ме координат (d, q, D, Q, M) [54]:
-«4=Y(ra+LrfP)r7+TL’lp0I/« + Т/И<,оргЪ+ (3'8)
€ О О
( — «в = -YLq id + (ra + ДгР) iq----[рб] iD -|-
+4 —Г КаИК; (3.9)
О = Ммpid + (r£> + p) Id\ (3.10)
£
0 = ^-MQ,pi9-|-(rQ-|-LQp)tQ; (3.11)
цм = -{адфа Mmd [p0] iD + И1 Im- (3.12)
Здесь через ra обозначено активное сопротивление фазы якоря
тенератора, а через rD и г<? — сопротивления одновитковых (wD—
=wq=A) эквивалентных демпферных контуров соответственно
по продольной и поперечной осям координат. Уравнения (3.8) —
(3.11), соответствующие осям координат d, q, D u Q, (позволяют
определить мгновенные значения токов id, iq, io, iq в генераторе
при любых видах переходных процессов.
Переход к действительным значениям токов в фазах генерато-
ра можно произвести, если учесть, что классические преобразо-
S6
вания токов ia, ib, ie в токи id и t9 проводились в следующем виде:
ia = 4- [iecos fl + ibcos (fl — 120°) 4- ic cos (fl + 120°)]; (3.13)
iq “4lt'esine + /&sin(e —120°) +icsin(9 + 120°)]. (3.14)
u
Поскольку при соединении якоря генератора звездой без ну-
левого провода
ia_bib_b<c=0» (3.15)
то из уравнений (3.13)—(3.15) токи ia, ib, ic легко определятся че-
рез токи id и iq.
Уравнение (3.12) является приписанным к системе линейных
дифференциальных уравнений (3.8) — (3.11) и служит для опреде-
ления движения рабочей точки на прямой возврата диаграммы
состояния магнита, изображенной на рис. 3.1. С учетом (3.7) урав-
нение (3.12) может быть переписано в следующем виде:
Q
=----5“ + ^mD I'D + Фм0, (3.16)
Л
поскольку аум=1, £М=ЛМ, IU=F„.
При переходных процессах из уравнений (3.8)—(3.11) можно
определить токи id и iD как функции времени и tD=f(O>
подставив их значения в уравнение (3.16) и получив зависимость
Ф/м=/(0, можно по диаграмме состояния магнита, изображенной
на рис. 3.1, определить движение рабочей точки магнита по пря-
мой возврата. Определение состояния постоянного магнита рото-
ра генератора особенно важно при внезапных трехфазных КЗ,
когда основным является вопрос о том, размагнитится ли посто-
янный магнит генератора или нет, т. е. перейдет или нет рабочая
точка магнита на новую, более низкую прямую возврата, что бу-
дет связано с уменьшением развиваемых генератором напряжения
и мощности. Получение зависимости Ф'м=/(/) позволяет вычис-
лить коэффициент ударного КЗ kyn, необходимый для определе-
ния длины магнита ротора при проектировании генераторов дан-
ного типа.
3.2. ОПРЕДЕЛЕНИЕ ПЕРЕХОДНЫХ ПАРАМЕТРОВ НЕНАСЫЩЕННЫХ
СИНХРОННЫХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ МАГНИТАМИ
С УЧЕТОМ ДЕМПФИРОВАНИЯ ПОТОКА В МАГНИТНЫХ ЧАСТЯХ
МАГНИТОПРОВОДА И В ДЕМПФИРУЮЩИХ КОНТУРАХ И
АЛЮМИНИЕВЫХ ЗАЛИВКАХ
Для расчета токов id, iq, io, ia в переходных режимах необхо-
димо определить параметры уравнений (3.8) — (3.11), а также па-
раметры (3.12) для определения движения рабочей точки магни-
та по прямой возврата.
7—6258 97
Параметры этих уравнений по своему виду можно разбить на
три группы:
Li(i=d, q, D, Q, M) —индуктивности;
Mij(i,j=d, q, D, Q, M)—взаимные индуктивности; r'D, r’q,
ra — активные сопротивления. Индуктивности Lt и взаимные ин-
дуктивности Mij можно подсчитать по следующим общим фор-
мулам:
Li=Wi2Ai; (3.17)
Mij—WiWjAij, (3.18)
где Wi, Wj — число витков обмоток, причем wd=Wq=wm= 1.
Проводимости Л,- и взаимные проводимости At, определяются
из схем замещения магнитной цепи исследуемого генератора по
продольной d и поперечной q осям. Особенностью этих схем за-
мещения является то, что для генераторов, имеющих массивные
участки магнитопровода (полюсные башмаки, когти, роторы кол-
лекторного типа), параллельно МДС Fd и Fq необходимо вклю-
чить магнитные сопротивления R'D и R'q, характеризующие демп-
фирующие действия этих частей магнитопровода (рис. 3.3 и 3.4).
Для определения проводимости А1=Ф,7Л магнитный поток
проводится по пути тока i через все участки схемы замещения, за-
тем подсчитывается МДС Ft, необходимая для его проведения из
условия, что все другие МДС равны нулю.
Для определения взаимной проводимости Ац=Ф,/Р} проводят
аналогичные расчеты, однако поток Ф, делят на падение МДС F,
в ветви /, от части потока Ф,, проходящей через ветвь /. При этом
надо учитывать, что Л,7=Л,-(-.
На рис. 3.3 и 3.4 изображены со всеми обозначениями схемы
замещения магнитной цепи на один полюс соответственно по про-
дольной d и поперечной q осям синхронного генератора с посто-
янными магнитами, имеющего ротор с призматическими посто-
янными магнитами и массивными полюсными башмаками (см.
рис. 1.25,6) и ненасыщенный магнитопровод.
В этих схемах замещения магнитные сопротивления R'i(i=
=D, Q) отдельных участков определяются как вещественные ча-
сти комплексного магнитного сопротивления массивной части маг-
нитопровода по формуле Л. Р. Неймана [55]:
R' = 1,13— л/— > (3.19)
П У |4.э
где I — эквивалентная длина участка магнитной цепи в направле-
нии вектора магнитной индукции; П — периметр его поперечного
сечения; f—частота перемагничивания; у — удельная электриче-
ская проводимость материала магнитопровода; рэ— эквивалент-
ная магнитная проницаемость материала магнитопровода, опре-
деляемая по действующему значению напряженности магнитного
поля на его поверхности и соответствующая номинальному режи-
му работы генератора.
98
Рис. 3.3. Схема замещения на один полюс магнитной цепи по продольной оси
ненасыщенного синхронного генератора с постоянными магнитами, ротором с
призматическими постоянными магнитами и массивными полюсными башмака-
ми:
Fad, F'M, FD — МДС соответственно продольной реакции якоря, условная постоянного маг-
нита, условная одновитковой демпферной обмотки; R'D, RCT, Яоб» ~~
магнитные сопротивления соответственно массивного магнитопровода (полюсного башмака)
по пути потока в магнит, стыка между магнитом и полюсным башмаком, рассеяния магни-
та, условная магнита, рассеяния полюсных башмаков, рассеяния якорной обмотки, рабоче-
го зазора
Рис. 3.4. Схема замещения на один полюс магнитной цепи по поперечной оси не-
насыщенного синхронного генератора с постоянными магнитами, ротором с приз-
матическими постоянными магнитами и массивными полюсными башмаками:
Faq, fq “ МДС соответственно поперечной реакции якоря, условная одновитковой демпфер-
ной обмотки; R'Qt Rsk, Rq6, Rqu — магнитные сопротивления соответственно массивного
магнитопровода (полюсного башмака) по поперечной оси, рассеяния якорной обмотки, пу-
ти потока в воздухе через полюсный башмак и пути потока в воздухе через постоянный
магнит под действием Faq
Эквивалентные активные сопротивления r'i(i=D, Q) опреде-
ляются [56]
'i
V
Л'
(3.20)
где /'— эквивалентная длина линии вихревого тока в массивном
участке; П' — периметр эквивалентного сечения для вихревого
тока.
Например, для определения R'd по (3.19) величина I (рис. 3.5)
может быть определена следующим образом [66]:
/ = _ат tl Jin f 1 -|- —cos т—Fci« Г1 -|- —— Ci it —
2 I \ li / ат L \ ат / ат
— sin -re — I Si x (1 + ——Si -rei] j ;
ат L \ ax / ат J J
П =2 (at-|-/.).
(3.22)
(3.21)
7«
99
Рис, 3.5. Полюс ротора синхрон-
ного генератора с постоянными
магнитами:
1 — массивный полюсный башмак; 2 —
призматический постоянный магнит
Для подсчета г'в по (3.20) приближенно можно принять Гя»П,
а П'=2(/+А), где А — глубина проникновения в магнитопровод
магнитной волны. При АС/ можно принять А=0. Подсчет R'q и
r'q производится аналогичным способом [55, 56]. Величина RSa
для обеих схем замещения одинакова и равняется [1]:
R = bg
X® + Г%/Xq
где хд, xs — фазовые индуктивные сопротивления
поперечной оси и рассеяния обмотки якоря;
(3.23)
генератора по
(3-24)
(3.25)
<М”ф*0
J/2 ’
0,9/П№фА!о*а</
0 = ---------
р
где юн =[р0]= const — номинальная (синхронная) скорость гене-
ратора; Га — активное сопротивление фазы якорной обмотки; ko —
обмоточный коэффициент; р — число пар полюсов; т — число фаз
генератора; ка& — коэффициент приведения поля реакции к полю
ротора по продольной оси. Остальные магнитные сопротивления
схем замещения (см. рис. 3.3 и 3.4): /?ст, /?SM, RM, Rso, Re, R'q»,
Rqe определяются известными способами по размерам генерато-
ра [1].
Схемы замещения магнитных цепей по осям d и q для ненасы-
щенного генератора с ротором коллекторного типа имеют анало-
гичный вид, а для генераторов с ротором звездочка еще более
простой, поскольку в НИХ Rs6, R'd, r'q, Rq6 отсутствуют (Rs6 =
=R'D=R'Q=Rg6=oo), a /?CT=0. В последнем случае демпфиро-
вание при переходных процессах производится за счет алюминие-
вой заливки постоянных магнитов, если она имеется. Если алю-
миниевой заливки нет, то Fd=Fq=®- После определения пара-
метров схем замещения магнитных цепей генератора по осям d и
q можно приступать к расчету активных сопротивлений, индук-
тивностей и взаимных индуктивностей машины.
Активное сопротивление га фазы якорной обмотки определя-
ется известными методами, как и для обычных синхронных ма-
шин [37]. Для подсчета r'D и r'q необходимо воспользоваться
формулой (3.20).
юо
При подсчете индуктивностей Lt и взаимных индуктивностей
Мц по формулам (3.17) и (3.18) необходимо учитывать, что если
iD=FD, Iq=Fq, 1K=FK, т. е. to Fad и Faq сто-
ками id и iq связаны следующими зависимостями [1]:
Fai=bid\ (3.26)
Faq = tiq, (3.27)
где Ь определяется из (3.25), а с равняется:
с = 0,9тхи)фкока1)1р,
где kaq — коэффициент приведения поля реакции якоря к полю ро-
тора по поперечной оси. Поэтому при определении Lt и Мц по
формулам (3.17) и (3.18) за числа витков эквивалентных обмо-
ток, связывающие Fad и id и Fag и iq, следует брать [см. (3.25) и
(3-27)]
• wd=b; (3.28)
Wq—C. (3.29)
В синхронном режиме работы при постоянной номинальной ча-
стоте вращения генератора (он= [РО] =const индуктивности Ld и
Lg определяются по фазовым индуктивным сопротивлениям xd по
Продольной И Xq ПО ПОПвреЧНОЙ ОСЯМ: Ld = Xd/d)H, Lq = Xql&K. Для
остальных индуктивностей Li и взаимных индуктивностей Мц для
их подсчета необходимо воспользоваться формулами (3.17) и
(3.18). Например, для Lq=Aq из рис. 3.4 имеем
AQ=a1(l//?<z6+l/7?gM+l//?'Q). (3.30)
Величина RSh в расчете не учитывается, так как при Faq—Q
ветвь 1—1 (рис. 3.4) оказывается закороченной; а, учитывает на-
личие башмака с полюсной дугой, меньшей т. Другие параметры
уравнений (3.8) — (3.12) подсчитываются аналогичным способом.
Для учета нелинейности магнитопровода при его насыщении мож-
но воспользоваться методикой Ю. Н. Кронеберга [57].
3.3 РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В СИНХРОННЫХ ГЕНЕРАТОРАХ
С ПОСТОЯННЫМИ МАГНИТАМИ
При внезапных трехфазных КЗ, сбросах и набросах нагрузки,
при внезапных несимметричных КЗ переходные процессы в мало-
насыщенных синхронных генераторах с постоянными магнитами с
достаточной для инженерной практики точностью можно опреде-
лить из решения вышеприведенной системы из четырех линейных
дифференциальных уравнений (3.8) — (3.11) при задании соответ-
ствующих начальных условий, соответствующих данному переход-
ному процессу. При решении этих уравнений с помощью современ-
ных цифровых вычислительных машин задача упрощается, т. е.
для этого имеются стандартные программы. Возможно проводить
определение переходных режимов и с помощью аналоговых вы-
101
числительных машин путем набора соответствующих блоков из
операционных усилителей [53]. В последнем случае более нагляд-
но можно проследить влияние параметров генераторов на пока-
затели переходного режима и дать рекомендации по выбору пара-
метров по заданному переходному режиму для рассматриваемых
типов генераторов.
В автономных системах электроснабжения с синхронными ге-
нераторами с постоянными магнитами, имеющими параметриче-
скую стабилизацию напряжения (см. гл. 4), часто предъявляются
жесткие требования к длительности переходных процессов и вы-
бросам токов и напряжений в фазах при сбросах и набросах на-
грузки. Поэтому расчет переходных процессов в этих условиях
приобретает большое значение для выбора параметров генерато-
ра. Поскольку уравнения переходных процессов в генераторе с по-
стоянными магнитами (3.8) — (3.11) отличаются от соответствен-
ных уравнений генераторов с одним электромагнитным возбужде-
нием только добавлением одного постоянного члена
—3/2Л1м<1[р6]/м в (3.9), то решение их ничем не отличается от
классических методов [54].
Специфическим для синхронных генераторов с постоянными
магнитами является оценка коэффициента ударности &уд тока КЗ,
определяющего расчет длины постоянного магнита ротора гене-
ратора [см. (5.60)]. Известно, что наибольшее размагничивание
постоянный магнит ротора имеет при внезапном (ударном) трех-
фазном КЗ от момента холостого хода, поэтому для расчета наи-
меньшего значения потока магнита Ф'м из формулы (3.16) необ-
ходимо определить и построить графики переходных процессов
id=f(t) и iD=f(t). Начальными условиями при внезапном трех-
фазном КЗ в синхронном режиме являются —«й=0 и —ug=0,
поэтому представление уравнений (3.8) — (3.11) при [р0]=<он=
=const в матричной форме имеет вид
и(р)=г(р)1(р),
(3.31)
где
ы(р) =
d
q
D
Q
0
(3/2)AfMd®H7M
0
о
m(rz+Ldp)
(3/2) MDdp
0
(3/2)^
(3/2)(ra+L,p)
0
тм^р
(3/2)MdDp
<oH
rD-\-LDp
0
i’d
(3.33)
Q
(3/2)MQq(oa
mMqQP
0
rQ-\-^QP
(3.34)
где u(p), z(p) и i(p) —операторные матрицы.
102
Рис. 3.6. Общий график изменения
потока Ф'м=/(7) магнита ротора ге-
нератора при внезапном трехфазном
коротком замыкании:
Ф'мо- ф'м,уд» Ф'м.уст “ соответственно на-
чальное, минимальное и установившееся
значения потоков
В матрице и(р) член (3/2)Мм<№н1м появился от перенесения его
из правой части уравнения (3.9) в левую. Физический смысл это-
го члена в том, что введенная в (3.9) условная величина МДС
магнита «Fm=/m=const не зависит от режима работы генератора.
Для искомых токов id(p) и ip(p) в операторном виде имеем:
id(p)=Dd(p)[z(p); (3.35)
iD(p)=DD(p)/z(p), (3.36)
где операторные матрицы Dd(p) и Dd(p) имеют значения:
Dd(P)~
О (3/2)L,®H (3/2)MdDp (3/2)MQ^„
(3/2)Л1м/Мм (3/2) (ra +L,p) (-3/2)MDrf®H (3/2)AfqQp
0 0 г^Гп^-Ldp 0
0 (3/2)M^ 0 r'Q+LQp
(3.37)
DD(p) =
(3/2) (ra+Ldp) (3/2)L,a>H
(-3/2)1^ (3/2) (ra-|~LQp)
{3/2)MDdp 0
о тм^р
О (3/2)AfQ9©H
(3/2)Mm<Ai/m mMqQp
0 0
0 r’Q + Lqp
. (3.38)
После раскрытия матриц (определителей) z(p), Dd(p), DD(p)
и нахождения оригиналов токов id=f(t) и легко по
(3.16) построить график изменения потока магнита по времени
Ф'м=/(/). Общий вид зависимости Ф/М=Ш) дан на рис. 3.6. Ис-
комый коэффициент кул определяется по следующей формуле:
£ _ ФцО Фм,уд______^к.уд
Ф*М0 Фм.уст ^к,уст
(3.39)
В зависимости от типа генератора Луд может изменяться в пре-
делах 1,7—1,1.
Расчет переходных процессов в синхронных генераторах ком-
бинированного возбуждения проводится аналогичным способом,
за исключением того, что дополнительно записывается пятое урав-
нение к системе уравнений (3.8) — (3.11) по оси возбуждения элек-
тромагнитной обмотки подмагничивания генератора [3].
103
3.4. ИССЛЕДОВАНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ
В СИНХРОННЫХ ГЕНЕРАТОРАХ С ПОСТОЯННЫМИ МАГНИТАМИ
И РЕКОМЕНДАЦИИ ПО ВЫБОРУ ПЕРЕХОДНЫХ ПАРАМЕТРОВ
ПРИ ПРОЕКТИРОВАНИИ ЭТИХ ГЕНЕРАТОРОВ
Формулы (3.34)—(3.38) позволяют с помощью ЭВМ определять влияние
параметров синхронных генераторов с постоянными магнитами на показатели
исследуемых переходных процессов. Наибольший интерес при этом представляет
исследование влияния параметров генератора на значение коэффициента ударно-
сти магнита kyA при внезапных трехфазных КЗ, проводимых от холостого хода,
когда размагничивание магнита ротора генератора будет наибольшим.
Для синхронных генераторов с постоянными магнитами с массивными по-
люсными башмаками наибольшее влияние на kyA имеют значения их активных
сопротивлений по продольной оси r'D. Массивные полюсные башмаки хорошо
защищают магнит от размагничивания и £уд^1,2 [1].
В процессе проектирования синхронных генераторов с постоянными магнита-
ми подобный расчет позволяет определить максимально допустимое значение со-
противлений демпфирующих контуров r'di. при котором &уд не превысит заданное
значение, а по значению г'щ и формуле (3.20) определить размеры полюсного
башмака. Так же можно определить влияние на £уд индуктивностей Ld и LDl
значения которых зависят от значения рабочего воздушного зазора б.
Если внезапное трехфазное КЗ производить от номинальной нагрузки, то ко-
эффициент ударности уменьшится почти в 1,5 раза по сравнению с kya при
внезапном ударном КЗ, производимом от холостого хода, что связано с меньшим
размагничиванием в этом случае постоянных магнитов ротора генератора [53].
При исследовании переходных процессов при набросах нагрузки от холосто-
го хода в операторную матрицу z(p) (3.34) вместо zd=ra-]-Ldp и zq=ra-}-Lqp
необходимо поставить Zda= (ra+rv) + (Ld+LH)p и zqa= (ra4-rH) + (Lq+LK)p;
гя=гя + Ьяр— полное операторное сопротивление нагрузки. Исследования пока-
зали, как и следовало ожидать, что с ростом сопротивления нагрузки гя выбросы
токов в якорных обмотках генератора уменьшаются.
На рис. 3.7 показана осциллограмма переходного процесса в синхронном ге-
нераторе с постоянными магнитами при внезапном трехфазном КЗ. Сравнение
экспериментальных данных с расчетными, полученными с помощью ЭВМ, пока-
зали, что различие составляет от 5 до 25 %, причем точность, близкая к 5 %,
получается при расчетах на ЭВМ, а близкая к 25 % — на АВМ [53]. Хорошее
Рис. 3.7. Осциллограммы токов
ia, ib, ic в фазах якорной обмотки
синхронного генератора с постоянны-
ми магнитами при ударном трех-
фазном коротком замыкании-от хо-
лостого хода при частоте напряже-
ния /=400 Гц
104
совпадение расчетных и экспериментальных данных объясняется тем, что син-
хронные генераторы, с постоянными магнитами, как правило, имеют слабонасы-
щенную магнитную цепь, что позволяет рассматривать всю систему.как линейную.
Таким образом, демпфирующие контуры в цепи постоянного магнита ротора
генератора хорошо защищают магнит от размагничивания. При этом по мере
уменьшения активного сопротивления демпфирующего контура его действие по
защите магнита от размагничивания увеличивается.
По полученным расчетным данным переходного процесса при внезапном трех-
фазном КЗ от холостого хода можно выбрать необходимое значение активного
сопротивления демпфирующего контура и спроектировать демпфирующий контур
и генератор с заданным коэффициентом ударности по размагничиванию.
Процесс проектирования генератора на заданный коэффициент ударности
Луд потребует корректировки параметров демпфирующего контура после расчетов
переходного процесса при внезапном трехфазном КЗ по ранее рассчитанным
параметрам генератора по установившемуся режиму (см. гл. 5). Конструктивное
выполнение демпфирующего контура может быть различным: массивные полюс-
ные башмаки, массивные магнитные-секторы ротора коллекторного типа, омедне-
ние полюсных наконечников, беличья клетка, короткозамкнутые витки на по-
стоянных магнитах, алюминиевая заливка. Тип демпферного контура у синхрон-
ного генератора с постоянными магнитами определяется, как правило, выбран-
ной конструкцией ротора (см. гл. 1).
Глава четвертая
МЕТОДЫ СТАБИЛИЗАЦИИ И РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
ГЕНЕРАТОРОВ ПЕРЕМЕННОГО ТОКА
С ПОСТОЯННЫМИ МАГНИТАМИ
Для обеспечения постоянства напряжения в широком измене-
нии нагрузки и частоты вращения генераторов переменного тока с
электромагнитным возбуждением необходимо изменять поток воз-
буждения Фе в рабочем воздушном зазоре от минимального значе-
ния Фвтш при холостом ходе и максимальной частоте вращения
до максимального Фьтах при перегрузках и минимальной частоте
вращения, т. е. необходимо иметь большую кратность регулирова-
ния потока возбуждения
1- (4.1)
Например, при изменении частоты вращения от 1000 до
15 000 об/мин и нагрузки автомобильного синхронного вентильного
генератора от нуля до номинальной = 15-=-20.
В синхронных генераторах с постоянными магнитами с ротора-
ми классической конструкции (см. рис. 1.4) магнитный поток по-
стоянных магнитов мало изменяется с перемещением рабочей точ-
ки по прямой возврата при режимах их работы от холостого хода
105
Рис. 4.1. Внешняя характе-
ристика генератора
до максимальной нагрузки, поэтому
непосредственное воздействие на зна-
чение потока возбуждения является
мало эффективным. Для стабилизации
и регулирования напряжения этих ге-
нераторов применяются специальные
методы, присущие только данному
классу электрических машин, различ-
ные по принципу действия и эффек-
тивности.
Стабилизацию и регулирование
напряжения можно осуществлять сле-
дующими основными способами:
выбором и изменением внутренних
параметров генератора (параметрической стабилизацией), при-
менением магнитных шунтов, дополнительным насыщением частей
магнитопровода, применением специальных стабилизирующих
обмоток, механическим перемещением частей магнитопровода от-
носительно друг друга;
включением внешних стабилизирующих и регулирующих эле-
ментов (конденсаторов и дросселей насыщения);
включением на выходе генератора полупроводниковых ключей,
периодически разрывающих внешнюю цепь генератора или перио-
дически закорачивающих его якорную обмотку;
комбинированным возбуждением от постоянных магнитов и до-
полнительных обмоток возбуждения (в этом случае классический
магнитоэлектрический генератор перерождается в новый класс
электрических машин — генераторы комбинированного возбужде-
ния [3]);
включением на выходе генератора стабилизированного по на-
пряжению полупроводникового статического преобразователя.
4.1. ПАРАМЕТРИЧЕСКАЯ СТАБИЛИЗАЦИЯ НАПРЯЖЕНИЯ
Стабилизация напряжения синхронного генератора с постоян-
ными магнитами за счет выбора его параметров сводится к спрям-
лению его внешней характеристики, т. е. к уменьшению падения
напряжения при нагрузке (рис. 4.1). Падение напряжения AU
определяется значениями активного га и индуктивного х8 сопротив-
лений рассеяния обмотки якоря и размагничивающего действия на
постоянный магнит ротора генератора продольной составляющей
реакции якоря Fad, уменьшающей магнитный поток в рабочем воз-
душном зазоре генератора.
Для уменьшения AU необходимо уменьшить значения га и х8
(что приводит к увеличению сечения меди и размеров паза), делая
при этом паз большой ширины и малой глубины, а также к умень-
шению числа витков обмотки якоря. Последнее требует увеличения
магнитного потока в воздушном зазоре, что в свою очередь вызы-
вает возрастание объема магнита и массы генератора. Снижение
106
размагничивающего действия Fad и, следовательно, уменьшение
продольного индуктивного сопротивления Xd достигается уменьше-
нием линейной нагрузки якоря за счет сокращения числа витков
якорной обмотки при этом же токе, что требует увеличения магнит-
ного потока, приводящее к увеличению массы генератора и отно-
шения КЗ до 5—6. Уменьшению xd способствует увеличение воз-
душного зазора. Таким образом, стабилизация напряжения генера-
тора за счет изменения внутренних параметров приводит к зна-
чительному уменьшению удельной мощности генератора (по мас-
се и по объему). Так, например, по данным А. И. Бертинова для
уменьшения падения напряжения ДС/ самолетного генератора, име-
ющего ротор звездочка из сплава альниси, от 22 до 5%, необходи-
мо длину и объем магнита увеличивать в 3,5 раза [58].
Однако картина совершенно изменяется, если применять для
роторов генераторов РЗМ на основе SMCos с (ВН)та* до
240 Тл-кА/м и выше. В этом случае при высоких значениях Нс
(70Q—800 кА/м) длины и объемы постоянных магнитов становятся
небольшими, постоянные магниты слабо размагничиваются реак-
цией якоря, что позволяет получить достаточную для инженерной
практики точность стабилизации напряжения генератора. Исследо-
вания, проведенные А. Н. Ледовским, Е. А. Ермаковой, показали,
что генераторы с цилиндрическим РЗМ с относительно большими
воздушными зазорами и беспазовыми статорами имеют жесткую
внешнюю характеристику в области номинальной нагрузки, что при
постоянной частоте вращения позволяет исключить регулятор на-
пряжения [50].
4.2. СТАБИЛИЗАЦИЯ НАПРЯЖЕНИЯ С ПОМОЩЬЮ
МАГНИТНЫХ ШУНТОВ В МАГНИТОПРОВОДЕ ГЕНЕРАТОРА
Для стабилизации напряжения по данному методу магнитные
шунты, изготовленные из магнитно-мягкого материала, устанавли-
ваются между полюсами магнитов ротора генератора, при этом от-
ветвляется часть потока из воздушного зазора в шунты. Положи-
тельный эффект стабилизации напряжения получается при коэф-
фициенте мощности нагрузки cos<p=l, т. е. в этом случае МДС
реакции якоря почти целиком направлена поперек оси полюсов и
замыкается главным образом через шунты, значительно уменьшая
ту часть МДС, которая по продольной оси размагничивает посто-
янные магниты ротора. Этот метод близок к параметрическому
методу стабилизации, т. е. сводится к уменьшению АС/ при номи-
нальной нагрузке генератора (рис. 4.1).
При отстающем токе, когда нагрузка генератора активно-ин-
дуктивная, наличие междуполюсных шунтов сильно ухудшает ха-
рактеристики генератора, поэтому в данном случае этот способ ста-
билизации напряжения не применяется.
Данный метод стабилизации напряжения, требующий увеличе-
ния объема постоянных магнитов за счет ответвления части потока
в шунты и установки самих шунтов, приводит к значительному уве-
107
личению массы и размеров генератора, а ограниченность его эф-
фективности пределами активной нагрузки генератора (cosq>=l)
делает его редко применяемым на практике. Установка междупо-
люсных шунтов может быть использована при cos<p=l только в
том случае, когда это оказывается более экономически выгодным,
чем применение емкостной стабилизации.
4.3 РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ С ПОМОЩЬЮ ПОДМАГНИЧИВАНИЯ
ПОСТОЯННЫМ ТОКОМ ЧАСТЕЙ МАГНИТОПРОВОДА ГЕНЕРАТОРА И
СТАБИЛИЗИРУЮЩИХ ЯКОРНЫХ ОБМОТОК
Сущность регулирования напряжения с помощью подмагничи-
вания постоянным током частей магнитопровода заключается
в том, что на пути рабочего магнитного потока постоянных магни-
тов ротора на отдельных участках магнитопровода в спинке якоря
3 (рис. 4.2) или в магнитной втулке 5 (см. рис. 1.25,6), изменяют их
магнитное сопротивление путем подмагничивания этих участков по-
стоянным током от специальных обмоток, охватывающих эти уча-
стки.
Регулируемый синхронный генератор с постоянными магнитами
с подмагничиванием спинки якоря, предложенный А. И. Бертино-
вым и разработанный до промышленных образцов совместно с
В. Г. Андреевым и С. Р. Мизюриным, имеет для этого дополнитель-
ную тороидальную обмотку подмагничивания / (рис. 4.2), распо-
ложенную в верхней части паза 2 статора и охватывающую его
спинку 3. Для укладки обмотки подмагничивания в верхней части
листа статора генератора имеется специальная гребенка 5 [58].
Аналогичным образом обматывается тороидальной обмоткой и
магнитная втулка ротора генератора, однако в этом случае магни-
тоэлектрический генератор должен иметь контактные кольца и
щетки для подвода тока к обмотке подмагничивания [59].
При изменении значения постоянного тока в обмотке подмагни-
чивания изменяется значение постоянной составляющей напряжен-
ности поля в участке подмагничивания магнитопровода, что приво-
дит к изменению эффективной магнитной проницаемости в каждой
его точке, подверженной одновременному подмагничиванию посто-
янным (от обмотки подмагничивания) и переменным (от вращаю-
щего ротора с постоянными магнитами) полями, что приводит к
изменению общего магнитного сопротивления магнитопровода на
пути рабочего потока.
При холостом ходе магнитный поток в генераторе максималь-
ный, так как реакция якоря Fad отсутствует и МДС магнита FM
идет только на покрытие падения магнитного потенциала в маг-
нитопроводе. Для того чтобы при холостом ходе напряжение гене-
ратора Ео равнялось номинальному UB(E0=UB), МДС подмагни-
чивающей обмотки Fa должна быть максимальной, так как необ-
ходимо увеличить сопротивление участка подмагничиваемого маг-
нитопровода настолько, чтобы оно было эквивалентно размагничи-
вающему действию продольной составляющей реакции якоря Fad
108
Рис. 4.2. Паз статора ге-
нератора с якорной и
подмагничивающей об-
мотками:
1 — подмагничивающая об*
мотка; 2 — паз статора; 3 •—
спинка статора; 4 — обмот-
ка якоря; 5 — гребенка
при номинальной нагрузке, поскольку вся-
кий генератор рассчитывается так, что в
этом режиме U=Ua при номинальной на-
грузке Fn должно иметь минимальное зна-
чение (Гп=0).
Значение требуемой МДС обмотки
подмагничивания FB обычно невелико,
так как на пути потока подмагничивания
нет воздушных зазоров. Расход мощности
на регулирование также незначителен. Си-
стема регулирования потребляет мини-
мальную мощность в рабочем режиме ге-
нератора и максимальную в режиме холо-
стого хода. По данным А. И. Бертинова
регулируемый магнитоэлектрический гене-
ратор мощностью 1000 В-А при /=400 Гц
расходует на регулирование в рабочем
режиме 3% номинальной мощности и око-
ло 10% при холостом ходе [58]. За счет
наличия подмагничивающей обмотки и гре-
бенки на статоре масса регулируемого гене-
ратора увеличивается по отношению к нерегулируемому примерно
на 25—30%, а относительная мощность, необходимая для питания
подмагничивающей обмотки, уменьшается с увеличением мощно-
сти генератора. Подмагничивающая обмотка вследствие отсутствия
воздушных зазоров на пути создаваемого потока обладает большой
индуктивностью.
Расчет регулировочной характеристики генератора и выбор па-
раметров подмагничивающей обмотки представляет собой сложную
задачу, связанную с учетом нелинейных характеристик подмагни-
чиваемых участков магнитопровода генератора, находящихся под
одновременным воздействием МДС вращающегося постоянного
магнита ротора генератора и МДС неподвижной обмотки подмаг-
ничивания [60].
Учет нелинейных характеристик подмагничивающих участков
позволяет определить индуктивность и постоянную времени обмот-
ки подмагничивания, а также динамические характеристики всей
системы регулирования в целом. При этом точность стабилизации
напряжения не ограничивается параметрами генератора, а зависит
только от типа применяемого регулятора.
При всех достоинствах этого метода он имеет и существенный
недостаток, заключающийся в том, что максимальная глубина из-
менения потока Фо в воздушном зазоре генератора
= Фвпюх/Фбт4п^2. Поэтому этот метод находит применение для
синхронных генераторов с постоянными магнитами, работающих
с постоянной частотой вращения n=const при переменной нагруз-
ке. К недостаткам этого метода регулирования также следует от-
109
нести необходимость усложнения конструкции генератора за счет
наличия обмотки подмагничивания, а также увеличения его мас-
сы и размеров.
4.4. РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ ЗА СЧЕТ
МЕХАНИЧЕСКОГО ПЕРЕМЕЩЕНИЯ ЧАСТЕЙ МАГНИТОПРОВОДА
ГЕНЕРАТОРА ОТНОСИТЕЛЬНО ДРУГ ДРУГА
Одним из методов такого регулирования является противопо-
лярный метод, реализуемый сдвигом полюсов генератора относи-
тельно друг друга [1].
Сущность регулирования заключается в том, что при изменении
частоты вращения и нагрузки осуществляется поворот подвижных
полюсов ротора с постоянными магнитами относительно неподвиж-
ных. При этом происходит искажение поля в воздушном зазоре при
малых углах поворота, а при углах поворота порядка половины
полюсного деления и более создается поле, направленное встречно
к полю неподвижных пакетов ротора. Для поддержания постоян-
ства напряжения при изменениях частоты вращения генератора и
его нагрузки поворот подвижных полюсов на нужный угол произ-
водится с помощью центробежного механизма.
На рис. 1.5 приведен общий вид ранее применяемого трактор-
ного генератора переменного тока типа ГТ-1А с противополярным
регулированием напряжения. Статор генератора имеет жгутовую
непрерывную обмотку, состоящую из ряда распределенных секций.
Ротор генератора выполнен из трех секций, состоящих из оксидно-
бариевых кольцеобразных магнитов, расположенных в штампован-
ных из листовой стали когтеобразных полюсных наконечниках. Две
секции из трех жестко связаны с валом генератора, а одна секция
может поворачиваться относительно вала и, следовательно, относи-
тельно двух неподвижно установленных на валу секций с помощью
центробежного регулятора в зависимости от частоты вращения ге-
нератора. В таком генераторе может быть установлен и другой тип
механического регулятора, использующий генераторный момент
или реагирующий на развиваемое генератором напряжение. Точ-
ность поддержания напряжения в генераторе такого типа лежит в
пределах ±10%.
Применяется также метод регулирования напряжения, когда с
изменением частоты вращения с помощью центробежного регуля-
тора ротор генератора вытягивается из рабочего воздушного зазо-
ра или втягивается в него, если частота вращения соответственно
увеличивается или уменьшается.
На рис. 4.3 изображен трехфазный генератор переменного тока
с ротором 2 с постоянными магнитами, насаженными на валу 4 на
скользящей посадке. С левого торца генератора установлена ги-
дравлическая система, содержащая гидравлический привод н блок
его управления. Поршень 5 гидропривода механически связан с
шайбой /, к которой жестко крепится ротор 2. При перемещении
поршня 5 ротор 2 передвигается вдоль вала 4. Блок управления
по
Рис. 4.3. Генератор переменного тока с постоянными магнитами с регулировани-
ем напряжения за счет осевого перемещения ротора относительно статора:
/ — шайба; 2 — ротор; 3 — статор; 4 — вал; 5 — поршень
гидроприводом содержит электромагнитный клапан, усилитель и
элемент, реагирующий на отклонение напряжения генератора от
номинального. Если напряжение генератора становится выше номи-
нального, то чувствительный элемент через усилитель подключа-
ет обмотку электромагнитного клапана к напряжению генератора
и клапан открывается. При этом произойдет перемещение поршня
5 и ротор 2 начнет вытягиваться из статора 3, при этом напряжение
генератора будет снижаться. При напряжении генератора ниже но-
минального происходит втягивание ротора 2 в рабочий зазор ста-
тора 3 и повышение напряжения. При наличии высокочувствитель-
ного элемента (стабилитрона) в блоке управления при применении
данного метода может быть получена высокая статическая точ-
ность регулирования напряжения (до ±1%). Однако наличие по-
движных частей в регуляторе делает данную систему в динами-
ческом режиме весьма инерционной, что является ее существен-
ным недостатком. Система регулирования конструктивно сложная
и малонадежная.
4.5. ЕМКОСТНАЯ СТАБИЛИЗАЦИЯ И РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ
Стабилизацию напряжения синхронных генераторов с постоян-
ными магнитами, работающих при постоянной частоте вращения
можно осуществлять с помощью последовательного или параллель-
ного включения конденсаторов с нагрузкой. Принцип действия по-
следовательного емкостного стабилизатора основан на компенса-
ции или перекомпенсации продольного индуктивного сопротивления
генератора при включении конденсаторов в цепь его якорных об-
моток последовательно с нагрузкой (рис. 4.4,а).
111
Рис. 4.4. Схемы включения последовательного емкостного стабилизатора напря-
жения:
Cl, СЗ, СЗ — конденсаторы; Тр1, Тр2, ТрЗ — трансформаторы
Расчет необходимой емкости конденсаторов Cl, С2, СЗ (рис.
4.4,а) при заданных напряжении стабилизации UCT=£o, номиналь-
ном токе генератора /н при активно-индуктивной нагрузке, коэф-
фициенте мощности cosqp и угловой частоте напряжения <o=2nf
можно произвести графоаналитическим методом, если предвари-
тельно построить внешние характеристики генератора для отстаю-
щих и опережающих токов (рис. 4.5) [1].
Для отстающих cos q> ме-
тодика расчета внешних ха-
рактеристик приведена в §5, 8,
что касается расчета внеш-
них характеристик для опере-
жающих cos<p, то он прово-
дится по той же методике,
однако расчетные формулы
(5.205) и (5.206) несколько
изменяются, а (5.207) и
(5.208) остаются теми же.
Вместо формулы (5.205)
следует написать
+ рА-><;+<>.+,,. (4.2)
Рис. 4.5. Внешние характеристики
синхронного генератора с постоян-
ными магнитами
112
Вместо формулы (5.206) следует написать:
, хч + г. tg <р
d=~b^---------~
-Z-- - Xs — г. tg <р
Tad
(4.3)
Значение стабилизированного напряжения £/ст, прикладывае-
мого к нагрузке, является геометрической суммой напряжения на
конденсаторах Uc и фазного напряжения генератора U. Вектор-
ные диаграммы этих напряжений изображены на рис. 4.6,а и б
соответственно для отстающего и опережающего токов генератора
для заданного cos <р нагрузки.
Для обеих диаграмм можно написать следующее соотношение
между U и UCt‘.
U = t/ercos <?/cos <р' (4.4)
или
U = , (4.5)
cos у'
где 4=С/Ст cos <р.
Поскольку А = Uст cos ф — известная величина, так как значе-
ниями UCt=Eo=Ub и совф задаются, то кривая U=A/cosq' может
быть построена как для отстающих, так и опережающих токов, что
показано на рис. 4.7.
Вторая кривая 1/=/(со8ф') на рис. 4.7 получается из внешних
характеристик генератора, изображенных на рис. 4.5, для задан-
ного тока нагрузки /=/н, если найти точки пересечения вертикаль-
ной прямой, проведенной из точки на оси абсцисс с координатой
1—1в, с семейством внешних характеристик. Точка пересечения этих
кривых В определяет фазное напряжение генератора UB, суммар-
Рис. 4.7. Определение емкости кон-
денсаторов при последовательной ем-
костной стабилизации
Рис. 4.6. Векторные диаграммы на-
пряжений при последовательной ем-
костной стабилизации
8—6258
113
Емкость конденсаторов может быть определена по формулам,
полученным из векторных диаграмм, изображенных на рис. 4.6,а
и б.
Для отстающего тока из рис. 4.6,а можно получить значение
емкостного сопротивления конденсатора Хс, исходя из того, что
Z7c*=Zc^c> a
__ Uasin —
ХС — •
Для опережающего тока из рис. 4.6,6 получим
ил sin <f + U в sin у в
(4.6)
(4-7)
(4-8)
Искомое значение емкости С равно:
®хс
Для определения точности стабилизации напряжения, какую
обеспечивает данный емкостный стабилизатор, необходимо рассчи-
тать внешнюю характеристику стабилизированного генератора
Uc-r=f(J) при cos<p=const и n=const для токов нагрузки O^Z^/н-
Вначале строят кривую U=f (cos q>') (см. рис. 4.7) для какого-
либо выбранного значения Z=const, изображенную на рис. 4.8. Вто-
рая кривая строится по формулам, полученным из векторных диа-
грамм, изображенных на рис. 4.6,а и б.
Из диаграммы (рис. 4.6,а) для отстающих cos ср' имеем
Uct sin <p=/xc+tZsin<p'. (4.9)
Из (4.4) и (4.9) окончательно можно получить
U=________1Хс - . (4.Ю)
cos <р' tg — sin у'
Из диаграмм (рис. 4.6,6) для опережающих cos ср' с учетом
(4.4) окончательно получим
U =_______lXc (4.П)
cos у' tg у + sin у'
На рис. 4.8 функция (4.10) строится слева, а функция (4.11) спра-
ва от абсциссы cos<p=l. Точка пересечения D одной из этих кри-
вых с кривой t7=/(coscp') определяет фазное напряжение на за-
жимах генератора Ud и суммарный коэффициент мощности cos <p'i>.
Стабилизированное напряжение на нагрузке UCT при данном
токе 1 определяется из (4.4)
tZCT=ZZDC0s<pWcosq>. (4.12)
Взяв несколько промежуточных точек для тока 0</<7н, можно
построить всю внешнюю характеристику для стабилизированного
генератора Ue-t=f(I) для cos<p=const и n=const.
114
На рис. 4.9 издбражены
внешние характеристики ста-
билизированного генератора,
построенного по внешним ха-
рактеристикам, изображен-
ным на рис. 4.5 для двух ко-
эффициентов мощности на-
грузки: COS ф = 0,7 И СО8ф=1.
Из характеристик видно,
что наибольшее превышение
напряжения при соэф=0,7
составляет +5 В, т. е. при-
мерно 3,5%, а при соэф=1
составляет +10 В, т. е. 6,9 %
в пределах изменения тока
нагрузки что в jjh-
де применения такого типа
генераторов является вполне
приемлемым. Однако точ-
ность стабилизации напряже-
ния при увеличении cos <р и
приближении его к единице
значительно снижается, что
является принципиальным не-
достатком метода последова-
тельной емкостной стабили-
Отстакщий ток Опережающий ток
Рис. 4.8. Определение напряжения ге-
нератора на нагрузке при последо-
вательной емкостной стабилизации
Рис. 4.9. Внешние характеристики ста-
билизированного синхронного генерато-
ра с постоянными магнитами
зации.
Емкостная стабилизация
напряжения за счет двух-
трехкратного увеличения на-
пряжения на нагрузке позволяет соответственно во столько же
раз увеличить отдаваемую мощность генератора. Эта стаби-
лизация для генераторов с фазным напряжением 1/^500 В и
выше экономична для генераторов средней (единицы киловольт-
ампер) и большой (десятки киловольт-ампер) мощностей, где при
применении малогабаритных высоковольтных конденсаторов мож-
но получить высокие значения удельных показателей у системы
генератор — емкостный стабилизатор. Однако если фазные напря-
жения генераторов U^A 10 В, то батареи конденсаторов становятся
тяжелыми и настолько громоздкими, что возникает необходимость
с целью снижения компенсирующей емкости включение их через
повышающие трансформаторы тока (рис. 4.4,а). Необходимая при
этом емкость С' значительно уменьшается
C'=C/fe2T, (4.13)
где £t=5-j-20 — коэффициент трансформации.
Для еще большего уменьшения массы конденсаторов их обычно
включают треугольником (рис. 4.4,6). В этом случае
С'=С/ЗЛТ2. (4.14)
8е 115
Рис. 4.10. Схема включения парал-
лельного емкостного стабилизатора
напряжения:
Cl, С2, СЗ — конденсаторы
Рис. 4.11. Векторные диаграммы то-
ков при параллельной емкостной ста-
билизации
Повышающие трансформаторы для последовательных емкост-
ных систем стабилизации следует рассчитывать ненасыщенными,
так как в противном случае при резких повышениях тока индук-
тивность трансформатора будет изменяться в широких пределах,
а в контуре трансформатор — конденсатор могут возникнуть резо-
нансные явления, приводящие к нарушению стабилизации напря-
жения. Чтобы избежать перенапряжения на конденсаторах, их не-
обходимо шунтировать резисторами.
С ростом рабочей частоты генератора (2000 Гц и выше) значе-
ния необходимых емкостей конденсаторов уменьшаются, что по-
зволяет применять их без трансформаторов.
При работе генератора с переменной частотой вращения после-
довательная емкостная стабилизация становится малоэффектив-
ной, т. е. с ростом частоты вращения емкостное сопротивление по-
следовательного стабилизатора хс=1/шС уменьшается и поэтому
емкостный стабилизатор не выполняет своих функций. Применение
последовательных емкостных стабилизаторов позволяет получить
для активно-индуктивной нагрузки относительно высокую точность
стабилизации напряжения генератора — до 5—6%. При этом отда-
ваемая мощность генератора может возрасти в 2—2,5 раза. Однако
в целом за счет массы последовательного стабилизатора удельная
мощность системы генератор — стабилизатор при указанной точ-
ности стабилизации снизится на 10—15% по сравнению с удельной
мощностью нестабилизированного генератора.
Параллельная емкостная стабилизация осуществляется путем
включения конденсаторов параллельно с нагрузкой генератора, как
это показано на рис. 4.10. Стабилизация напряжения в этом случае
осуществляется за счет компенсации и перекомпенсации индуктив-
ной составляющей тока нагрузки емкостным током конденсатора.
Если при активно-индуктивной нагрузке генератора точно скомпен-
сировать индуктивную составляющую тока нагрузки, то рабочая
116
точка, например А (см. рис. 4.5), при cos <р=0,7 перейдет на внеш-
нюю характеристику с cos<p=l (точка Б). При уменьшении нагру-
зочного тока имеет место перекомпенсация индуктивной составля-
ющей тока, рабочая точка переходит на кривые для активно-емко-
стной нагрузки (точка В) и напряжение генератора еще больше
будет возрастать. Метод расчета параллельного емкостного стаби-
лизатора подобен методу расчета емкостного последовательного
стабилизатора, однако здесь строятся и рассчитываются векторные
диаграммы не напряжений, а токов [1].
На рис. 4.11 изображены векторные диаграммы токов нагрузки
7Н, конденсатора 1с и генератора 1. Угол <р' определяет сдвиг векто-
ра тока генератора 7 относительно вектора напряжения U. При ак-
тивно-индуктивной нагрузке ток генератора I в зависимости от
значения тока 1с может быть либо отстающим (рис. 4.11,а), либо
опережающим (рис. 4.11,6). Для отстающего тока могут быть на-
писаны следующие соотношения.
/=/Hcos(p/cosq/ (4-15)
или
/ = —(4.16)
COS <f'
Af=7Hcos<p; (4.17)
7c=/Hsincp—7sin<p'. (4.18)
Решая совместно уравнения (4.15) и (4.18), получаем
Ic—I (cos ф' tg ф—sin <р'); (4.19)
7c=7H(sin<p—созф1#ф')- (4.20)
Для опережающего тока формулы (4.15) — (4.17) остаются спра-
ведливыми, а (4.18) следует написать
7С=7Н sin ф4-7 s in ф'. (4.21)
При решении уравнений (4.15) и (4.21) получим
7с=7(созф^ф+зтф/); (4.22)
7с=7н(зтф-|-со8ф1дф/). (4.23)
Напряжение на конденсаторе Uc (рис. 4.10) равняется фазному
стабилизируемому напряжению генератора ии
U=Uc=Ua=IcXc^lcl&C. (4.24)
Определение равных значений емкости конденсаторов Cl, С2,
СЗ (рис. 4.10) для получения необходимого напряжения стабили-
зации генератора при заданных токе нагрузки 7Н, cos ф=сопз1 и п=
=const производится графоаналитическим методом путем опреде-
ления точки пересечения двух вспомогательных кривых, изображен-
ных на рис. 4.12. Кривая 7=Л!/со8ф' строится аналитически по
формуле (4.16), поскольку значение М=7нсозф известно. Кривая
l=f (cos ф') получается из внешних характеристик генератора (см.
117
Рис. 4.12. Определение емкости кон-
денсатора при параллельной емкост-
ной стабилизации
Рис. 4.13. Определение напряжения
генератора при параллельной емкост-
ной стабилизации
рис. 4.5) для постоянного напряжения U=Un, если найти точки пе-
ресечения горизонтальной прямой, проведенной из точки на оси
ординат с координатой с семейством внешних характери-
стик. Точка пересечения Q кривых 7=M/cosq/ и /=/(cos ф') на
рис. 4.12 определяет ток генератора IQ и cosq/Q для заданных UH,
cosqp, п. Полученные значения IQ и cos<p'q позволяют опреде-
лить искомую емкость С для отстающего тока генератора
С = -^-<c°s ? — sin ?'o>. (4.25)
Для опережающего тока генератора
С = (cos tg <j> 4- sin ^); (4.26)
xc=l/«)C. (4.27)
Если точка пересечения кривых Q (рис. 4.12) лежит слева от
абсциссы cos<p'=l, то пользуются формулой (4.25), если справа—
(4.26). Для построения внешней характеристики стабилизирован-
ного генератора задаются каким-то промежуточным значением то-
ка нагрузки 0<7н<<7н при известных costp и п.
Для определения искомого значения напряжения генератора
ищут точку пересечения также двух вспомогательных кривых, изо-
браженных на рис. 4.13. Первая вспомогательная кривая строится
на основании формул, полученных из решения уравнений (4.20) с
(4.24) и (4.23) с (4.24)
C/=7HtXc(sinq>—cos <p tg <р'); (4.28)
[J=7BiXc(sin <p4~cos<p tgcp'). (4.29)
118
Слева от значения cos<p'=l пользуются формулой (4.28), а
справа— (4.29). Вторая вспомогательная кривая U=f (cos <р') при
7Hi=const получается из внешних характеристик генератора (см.
рис. 4.5) с учетом зависимости
/И| cos у S
COS f' cos у'
(4 30)
где 3=/н« cos<p — известная величина.
Задаваясь значениями созф', для которых построены внешние
характеристики на рис. 4.5, определяют по формуле (4.30) ток 1
и находят напряжение U по внешней характеристике для данного
coscp'. Таким образом определяется вторая вспомогательная кри-
вая U=f (cos <р') для /H,=const и cos ф=сопз1. Точка пересечения
этих кривых F соответствует искомому напряжению генератора
(рис. 4.13). Взяв несколько значений токов 0<7н,</н, можно по-
строить искомую внешнюю характеристику стабилизированного ге-
нератора для заданных созф=сопз1 и n=const.
Здесь так же, как и при последовательной емкостной стабили-
зации, с целью снижения емкости конденсаторов их включают че-
рез повышающий трансформатор (рис. 4.14).
При данном методе стабилизации магнитопровод трансформа-
тора должен быть насыщенным, причем при повышении напряже-
ния стабилизатор представляет собой для генератора индуктив-
ную, при понижении—емкостную, а при резонансе токов — актив-
ную нагрузку. Следовательно, такой стабилизатор является допол-
нительной нагрузкой на генератор, увеличивая необходимую мощ-
ность и размеры магнита ротора. При малых токах нагрузки гене-
ратор бесполезно нагружается емкост-
ным током конденсаторов, нагревающим
его якорь.
Параллельный емкостный стабили-
затор может стабилизировать выходное
напряжение с точностью порядка 1—2%
при со5ф=1. При более низком совф
точность стабилизации понижается до
3-5% [58].
Поскольку параллельный стабилиза-
тор реагирует на отклонение стабилизи-
руемого напряжения от номинального,
то он в какой-то мере компенсирует
изменения напряжения генератора, что
является преимуществом по сравнению
Рис. 4.14. Схема вклю-
чения параллельного ем-
костного стабилизатора
с повышающим транс-
форматором:
o'/, с'2, с'З — конденсаторы;
Тр — трансформатор
с применением последовательного емко-
стного стабилизатора, однако вследст-
вие нелинейного сопротивления парал-
лельного стабилизатора последний ис-
кажает форму кривой напряжения гене-
ратора при значительном индуктивном
119
Рис. 4.15. Схема регулирования напряжения синхронного генератора с постоян-
ными магнитами с помощью управляемой емкостной стабилизации при примене-
нии подмагничиваемых трансформаторов:
Г — генератор; Тр1, Тр2, ТрЗ — трансформаторы с подмагничиваемыми шунтами; cl, с2,
сЗ —конденсаторы; ЧЭ — чувствительный элемент» воспринимающий отклонение напряже-
ния генератора от номинального; У — усилитель постоянного тока; wn — обмотка подмагни-
чивания шунта трансформатора; U , — напряжения переменного и постоянного тока
Рис. 4.16. Схема регулирования напряжения синхронного генератора с постоян-
ными магнитами с помощью управляемой емкостной стабилизации при примене-
нии варикондов:
Г — генератор; Тр1, Тр2, ТрЗ — трансформаторы; Bl, В2, ВЗ — вариконды; У —усилитель
постоянного тока; ЧЭ — чувствительный элемент, воспринимающий отклонение напряжения
генератора от номинального; U •— напряжения переменного и постоянного тока
токе. В отношении массы и размеров этот стабилизатор несколь-
ко выгоднее последовательного [58].
Для получения более высокой точности стабилизации напряже-
ния, по сравнению с применением последовательных и параллель-
ных стабилизаторов с обычными конденсаторами (C=const), необ-
ходимо в процессе изменения напряжения изменять эффективное
значение емкости С, чтобы поддерживать напряжение постоянным.
Этого можно достичь либо соответствующим изменением коэффи-
циента трансформации трансформаторов за счет их подмагничива-
ния в процессе регулирования напряжения или за счет применения
нелинейных конденсаторов—варикондов, емкость которых изменя-
ется при изменении как напряжения переменного тока, так и при-
ложенного к ним напряжения постоянного тока. При последо-
вательной емкостной стабилизации для токов 0^7^/н, задавшись
СУст==[7н== const, можно определить значения емкостей конденсато-
ров Ci (i= 1,2,3 ...), при которых стабилизируемое напряжение UCT
120
будет постоянным [1]. Обычно при cos<p=const и n=const перепад
значении емкостей конденсаторов составляет 2-4-4.
Аналогичные расчеты можно произвести и при параллельной ем-
костной стабилизации [1]. На рис. 4.15 изображена схема регу-
лирования напряжения синхронного генератора с постоянными
магнитами при применении трансформаторов с подмагничиваемыми
постоянным током шунтами в целях изменения их коэффициента
трансформации [1]. На рис. 4.16 изображена аналогичная схема
регулирования, но с применением варикондов, емкость которых из-
меняется в зависимости от приложенного к ним дополнительно
напряжения постоянного тока от усилителя У [1].
При применении обеих систем регулирования (рис. 4.15 и 4.16)
может быть получена точность поддержания напряжения генерато-
ра в пределах ±1% [1].
4.6. РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ ДРОССЕЛЯМИ НАСЫЩЕНИЯ
Для регулирования генераторов переменного тока с постоянны-
ми магнитами дроссели насыщения Д1, Д2, ДЗ можно включать
последовательно (рис. 4.17,а) или параллельно с нагрузкой (рис.
4.17,6).
При последовательном включении дросселей насыщения под-
держание постоянным напряжения на нагрузке осуществляется ре-
гулированием значения падения напряжения на дросселях за счет
изменения подмагничивания их постоянным током. При уменьшении
напряжения генератора на нагрузке ниже допустимого чувстви-
тельный элемент ЧЭ воспринимает это отклонение; при этом через
усилитель постоянного тока У происходит подмагничивание посто-
янным током последовательных дросселей, падения напряжения на
них уменьшаются и напряжение на нагрузке U ~ восстанавлива-
ется.
Рис. 4.17. Структурные схемы регулирования напряжения генератора переменно-
го тока с постоянными магнитами, с последовательными (а) и параллельными
дросселями насыщения (б):
Г —генератор; Д1, Д2, ДЗ — дроссели насыщения; ЧЭ — чувствительный элемент; У —уси-
литель постоянного тока; U - ,UB — напряжения переменного н постоянного тока; wn 0
подмагничивающая обмотка постоянного тока; 1, /д, /н—токи генератора, дросселя, на-
грузки соответственно
121
a) I f) I
Рис. 4.18. Векторные диаграммы на-
пряжений при последовательном
дроссельном регулировании:
о— без учета активного сопротивления
дросселя; б — с учетом активного сопро-
тивления дросселя
При параллельном включе-
нии дросселей насыщения под-
держание постоянным напряже-
ния генератора U ~ производит-
ся за счет автоматического регу-
лирования реактивного тока в
дросселях при отклонениях на-
пряжения от допустимого за
счет изменения подмагничивания
постоянным током. Если в про-
цессе регулирования напряже-
ние генератора, а следователь-
но, и напряжение на нагрузке
выше допустимого, то на выхо-
де чувствительного элемента ЧЭ
появится управляющее напряжение, которое увеличит ток усилите-
ля У в обмотке подмагничивания дросселей шп,0» вследствие чего
уменьшится их индуктивное сопротивление. Ток /д в дросселях Д/,
Д2, ДЗ (рис. 4.17,6) увеличится, общий ток генератора I тоже уве-
личится и напряжение генератора U ~ снизится.
Расчет последовательного дроссельного регулирования заклю-
чается в определении значений индуктивных сопротивлений дрос-
селя хд из условия, чтобы при заданном cos ср нагрузки в диапазоне
изменения токов генератора напряжение на нагрузке было
постоянным [/CT=t/H=const [1].
Генератор заведомо должен быть рассчитан так, чтобы его на-
пряжение холостого хода Uxx было больше стабилизируемого
(Uxx>Uct). При этом должны быть известны его внешние харак-
теристики при работе на активно-индуктивную нагрузку, изобра-
женные на рис. 4.20.
Для диаграммы (рис. 4.18,а) можно написать следующее соот-
ношение между напряжением генератора U и напряжением стаби-
лизации UCT (на нагрузке):
U= t/ст cos ф/cos q/=Al/cos ср'. (4.31)
Зависимость напряжения генератора U от cosq/ по (4.31), т. е.
коэффициента мощности генератора, работающего на дроссель и
нагрузку, представлена на рис. 4.19 кривой 1.
Кривая U=f (cos q/) (кривая 2) получается из внешних харак-
теристик (рис. 4.20) для заданного тока нагрузки Z=const, если
найти точки пересечения вертикальной прямой, проведенной из
точки 1 на оси абсцисс, соответствующей току /, с семейством
внешних характеристик, построенных для различных cos ф'. Точка
их пересечения А (рис. 4.19) является графоаналитическим реше-
нием системы двух уравнений: уравнения U=M/cos ф', заданного
аналитически, и уравнения U=f (cos ф'), заданного графически.
Точка пересечения А этих кривых определяет значение напряжения
на генераторе UA, коэффициент мощности соэф'л при заданных
регулируемом напряжении на нагрузке С/ст= токе / и коэффи-
122
и
Рис. 4.19. Определение индуктивного сопротивления дросселя при последователь-
ном включении
Рис. 4.20. Внешние характеристики синхронного генератора с постоянными маг-
нитами при работе на активно-индуктивную нагрузку:
/гр — граничный ток генератора
циенте мощности нагрузки cosqi. Значение индуктивного сопротив-
ления дросселя ХдА может быть определено на основании вектор-
ной диаграммы рис. 4.18,а:
xJiA=(t,Asin(j)/A—t/cTsinep)//. (4.32)
Пользуясь данным методом, можно рассчитать для каждого то-
ка нагрузки и cos q> необходимые значения индуктивных
сопротивлений дросселя ха, чтобы строго поддерживать постоян-
ным напряжение на нагрузке t7CT=^H=const.
Предварительный учет влияния активного сопротивления дрос-
селя гд можно произвести, если после определения минимального
значения индуктивного сопротивления дросселя хд2, соответствую-
щего максимальному току /2, задаться величиной гд в долях хд2
гл= (0,05-*-0,1) хд2.
Из векторной диаграммы (рис. 4.18,6) можно написать по ана-
логии с формулой (4.31) следующее соотношение:
U= (М+/гд)/соз ч>'. (4.33)
Тогда для заданного тока 7 и известного значения гд построение
функции ведется таким же образом, как и функции (4.31). Окон-
чательный учет влияния гд можно произвести только после опре-
деления обмоточных данных дросселя.
При заданных напряжении стабилизации £/<•,< (7И и cos<p на-
грузки максимальный граничный ток генератора /гр>/2 определя-
ется рабочей точкой В, лежащей на естественной внешней харак-
теристике, соответствующей данному cos<p (см. рис. 4.20). Очевид-
но, что эта точка соответствует граничному случаю последователь-
123
кого дроссельного регулирования, когда хд=0. Для всех токов 0<
<!<1гр можно определить такое 0<хд<оо, когда напряжение на
нагрузке поддерживается равным /7Ст=^н- Для холостого хода
/—О напряжение генератора, если не включать балластной нагруз-
ки, будет больше, чем //Ст(^хх>^ст). Таким образом, для осу-
ществления последовательного дроссельного регулирования напря-
жения необходимо рассчитать генератор таким образом, чтобы ма-
ксимальный ток нагрузки /2 при заданном напряжении стабилиза-
ции UCt=Ua был меньше граничного тока /гр, соответствующего
работе генератора на естественной внешней характеристике при
данном cosq> нагрузки. Для практических расчетов вполне доста-
точно выдержать следующее соотношение из условия получения
приемлемого минимального значения индуктивного сопротивления
дросселя хд2:
/2= (0,9-8-0,95)/гр. (4.34)
Максимальное значение сопротивлейия дросселя хД1 определя-
ется минимальным значением тока /1, при котором еще поддержи-
вается стабилизирующее напряжение. Теоретически нижний предел
/1 (рис. 4.20) не ограничен, однако в практических случаях реко-
мендуется отношение токов регулирования не делать более двад-
цати — тридцати во избежание получения очень больших значений
хД1 и трудностей выполнения дросселя. Если генератор работает
с переменной частотой то должны быть известными внеш-
ние характеристики генератора для крайних частот fi и fi. Здесь
для верхнего предела частоты fi и тока /1 определяется хдь а хд2 —
для нижнего предела частоты f2 и тока /2. Таким образом, в об-
щем случае для расчета размеров и обмоточных данных последо-
вательного дросселя оказываются известными хД], хд2, /], /2 и fi, fz,
по которым можно определить соответствующие коэффициенты пе-
репада:
/Сэс==хд2/хД1 1; (4.35)
^=/2//1>1; (4.36)
К/=ЫА<1. (4.37)
Расчет параллельного дроссельного регулирования (см. рис.
4.17,6) заключается в определении значений индуктивных сопро-
тивлений дросселя хд из условия, чтобы при заданном cos <р нагруз-
ки в диапазоне изменения токов нагрузки 0^/н^/Н2 напряжение
на нагрузке, равное напряжению генератора, было также постоян-
ным [1]:
/7CT=^H=const. (4.38)
Для заданного тока /н и cosq> нагрузки необходимое значение
индуктивного сопротивления дросселя хд можно определить, если
найти точку пересечения двух вспомогательных кривых. Первая
кривая /—A,/cosq>/ получается из рассмотрения векторных диа-
грамм токов, построенных на рис. 4.21,а без учета активного со-
противления дросселя гд. Из этой диаграммы можно написать сле-
124
Рис. 4.21. Векторные диаграммы токов при параллельном дроссельном регули-
ровании:
а — без учета активного сопротивления Дросселя; б — с учетом активного сопротивления
дросселя
дующее соотношение между током генератора I и током нагрузки
/н*
1=1 и cos ф/cos <р'=N/cqs ф'. (4.39)
Поскольку N=IB cos <р — известная величина, то кривая 1=
=N/cosq' может быть построена в зависимости от cos ф', т. е. ко-
эффициента мощности генератора, работающего на дроссель и на-
грузку (рис. 4.22).
Вторая кривая /=/(со8ф') для C/cT=^H=const получается из
внешних характеристик генератора, если найти точки пересечения
горизонтальной прямой, проведенной из точки [/CT=f/^=const на
оси ординат, с семейством внешних характеристик (рис. 4.23).
Полученная точка пересечения А (рис. 4.22) является совмест-
ным графоаналитическим решением уравнения 1=М1соз<р', задан-
ного аналитически, с уравнением /=^(со5ф'), заданным графиче*
ски.
Точка пересечения А этих кривых определяет ток генератора /а
и его коэффициент мощности cos ф'А при заданных напряжении ге-
нератора на нагрузке J7Ct— Ub, токе /н и коэффициенте мощности
нагрузки соэф. Индуктивное сопротивление дросселя может быть
определено из диаграммы (рис. 4.21,а), если спроектировать век-
Рис. 4.22. Определение индуктивного
сопротивления дросселя при парал-
лельном включении
Рис. 4.23. Внешние характеристики син-
хронного генератора с постоянными маг-
нитами при работе на активно-индук-
тивную нагрузку
125
торы тока на вертикальную ось для 1=1 а и cos <p'=cos <р'о:
/д=/а sin ф'А—/н sin ф. (4.40)
Если учесть, что
^СТ==^Д-^Д, (4.41)
то окончательно получим
Лд =--------(4.42)
/Asin Та — 4 sin?
Пользуясь данным методом, можно рассчитать для каждого то-
ка нагрузки 0</н</Н2 и cosxp необходимые значения индуктивных
•сопротивлений дросселя, чтобы строго поддерживать постоянным
напряжение генератора 17ст= f/H=const.
При токе нагрузки /н=0 нагрузкой генератора является только
дроссель (рис. 4.17,6). Для рассматриваемого случая /в=0 (гд=0),
cos<p'=0 уравнение (4.39) становится неопределенным. Ток дрос-
селя при этом определяется на рис. 4.22 значением 10х в точке от-
хода кривой I=f (cos q>') от оси ординат или точкой F пересечения
горизонтальной прямой [/cT=tAi=const на рис. 4.23 с характери-
стикой генератора при со5ф'=0.
Индуктивное сопротивление дросселя при 1н=0 определится
Хдо;=С/ст/7ох> (4.43)
где lox — ток потребления дросселя.
При заданном напряжении стабилизации C/CT=(/Hi=const и cos ф
нагрузки максимальный граничный ток генератора /гр определяет-
ся рабочей точкой В, лежащей на естественной внешней характе-
ристике, соответствующей данному созф нагрузки (рис. 4.23). Оче-
видно, что эта точка соответствует второму граничному случаю
дроссельного регулирования, когда хд=оо.
Для всех токов нагрузки 0^/н^/гр можно определить такое
Хдо<Хд<°о, когда напряжение генератора поддерживается равным
(JCT=[)H=const. Поскольку практически получить хд=оо не пред-
ставляется возможным, то для осуществления параллельного дрос-
сельного регулирования напряжения необходимо рассчитать гене-
ратор таким образом, чтобы максимальный ток нагрузки /Н2 при
заданном С7ст был меньше /гр, соответствующего работе генератора
на естественной внешней характеристике при заданном cos ф на-
грузки.
При практических расчетах вполне достаточно выдержать сле-
дующее соотношение из условия получения приемлемого макси-
мального индуктивного сопротивления дросселя Хдг:
/^=(0,9^0,95)/^. (4.44)
Предварительный учет влияния активного сопротивления дрос-
селя можно произвести, если после определения минимального зна-
чения индуктивного сопротивления дросселя Хдо по (4.43) при
Л=0 задаться значением гд в долях хд0:
гд=(0,05-s-O,1)хд0. (4.45)
126
В этом случае для тока дросселя, равного току генератора (7до=
=7), можно написать
Л» = / = ^ / /Гд + 4) (4-46)
ИЛИ
(4-47)
где cos ч>д = Гд------определяет положение тока /д на вектор-
У 4+4
ной диаграмме рис. 4.21,6 при 7н=0, /д=7, cos <pA=cos <р'. Урав-
нение (4.47) окончательно примет вид
1=1 т cos <р', (4.48)
где /г=1/ст/гд.
Если эту прямую построить на рис. 4.22, то точка пересечения
ее Д с кривой 7=f(cos<p') определяет ток дросселя /од и соэф'од
при холостом ходе. На внешних характеристиках (рис. 4.23) этот
ток определяется точкой Е на естественной характеристике гене-
ратора ПрИ U=Ucr И COS ф'=С05 ф'од.
При максимальном значении тока нагрузки 7нг значение Хдг ве-
лико и много больше, чем гд(хдг^>гд). Поэтому влияние гд в этом
случае можно не учитывать. Окончательно учесть влияние гд на
характеристики дроссельного регулирования можно только после
определения обмоточных данных дросселя.
Расчет дросселей насыщения заключается в выборе материала
магнитопровода и его формы, определении размеров и обмоточных
данных дросселей. Как при последовательном, так и при парал-
лельном дроссельном регулировании выбор материала магнитопро-
вода и его формы, расчет размеров и обмоточных данных дросселя
зависит от требований к проектируемой системе электроснабжения.
Если генератор работает на нагрузку переменного тока без вы-
прямления и предъявляются требования сохранения синусоидаль-
ности формы кривой напряжения, то магнитопровод дросселя дол-
жен работать на линейном участке кривой намагничивания. В этом
случае дроссель является неиспользованным в магнитном отноше-
нии, с большой массой и большими размерами. По массе вся систе-
ма регулирования становится сравнимой с массой генератора. Если
же ограничений по форме кривой напряжения генератора не ста-
вится или же вся энергия генератора выпрямляется, то в этом слу-
чае возможен оптимальный выбор параметров дросселя и расчет
его на минимум массы [4].
Системы дроссельного регулирования напряжения при кратно-
сти токов нагрузки &i=7b2//hi^20 позволяет получить точность под-
держания напряжения в пределах ±1%.
Если не ставятся требования строгой синусоидальности кривой
напряжения на выходе, то системы дроссельного регулирования мо-
гут быть сравнимы по массогабаритным показателям с системами
127
регулирования напряжения с подмагничиванием спинки якоря, а
при соблюдении этих требований они проигрывают им.
К недостаткам дроссельного регулирования напряжения отно-
сятся: снижение использования активных материалов генератора,
значительная масса и габариты дросселя насыщения, малый КПД.
Стабилизированное напряжение может иметь несинусоидальную
форму.
К преимуществам систем дроссельного регулирования относят-
ся простота и надежность конструкций ее элементов, большая глу-
бина регулирования токов нагрузки, возможность получения высо-
кой точности поддержания выходного напряжения.
Большая глубина регулирования токов нагрузки при значитель-
ной кратности изменения частот вращения генераторов переменно-
го тока с постоянными магнитами, работающих на выпрямительную
нагрузку, определила применение дроссельного регулирования на-
пряжения в некоторых автомобильных системах электроснабжения.
4.7. РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ ЗА СЧЕТ ВКЛЮЧЕНИЯ НА ВЫХОДЕ
якорных Обмоток генератора полупроводниковых ключей и
СТАБИЛИТРОНОВ
Глубокое регулирование напряжения можно получить, если
кратковременно с определенной скважностью закорачивать якор-
ные обмотки синхронного генератора с постоянными магнитами.
Этот метод регулирования находит применение только для генера-
торов малой мощности, например мотоциклетных и велосипедных,
из-за высоких значений токов КЗ и тяжелого теплового режима. На
рис. 4.24 изображена схема регулирования напряжения магнито-
электрического синхронного мотоциклетного генератора путем им-
пульсного закорачивания его однофазных параллельно включенных
якорных обмоток О/, 02 с помощью тиристоров VI и V2. Отпирание
тиристора VI и закорачивание якорных обмоток 01, 02 происхо-
дят в момент пробоя стабилитрона V3, а отпирание тиристора V2—
при запирании тиристора VI за счет ЭДС, наведенной во вторичной
обмотке трансформатора Тр. Напряжение генератора переменного
тока выпрямляется мостом из диодов V4—V7 и подается для за-
ряда аккумуляторной батареи АБ, к которой подключаются элек-
трические потребители мотоцикла. Данная система регулирования
может поддерживать постоянный уровень напряжения в пределах
±5% [4]. Разработанный в НИИавтоприбор однофазный генера-
тор маховичного типа мощностью 45 Вт, напряжением 6 В пере-
менного тока для мопедов с применением вставных магнитов из
материала ЮНД4 имеет систему регулирования напряжения, осу-
ществляемую с помощью тиристора, замыкающего накоротко фазы
генератора.
В генераторах переменного тока с постоянными магнитами, ра-
ботающих на выпрямительную нагрузку, нашло широкое примене-
ние регулирование напряжения с помощью трехфазных полууправ-
ляемых и полностью управляемых выпрямительных мостов с при-
128
Рис. 4.24. Схема регулирования однофазного генератора переменного тока с по-
стоянными магнитами путем закорачивания якорных обмоток с помощью тирис-
торов:
Г — генератор; Тр — трансформатор; VI, V2 — тиристоры; УЗ — стабилитрон; V4—V7 — дио-
ды; г — резистор; АБ — аккумуляторная батарея
менением как фазового, так и релейного управления тиристорами.
На рис. 4.25 изображена схема системы регулирования напряжения
трехфазного генератора с помощью полууправляемого выпрями-
тельного моста на тиристорах VI—V3 и диодах V4—V6. В зависи-
мости от схемы включения регулятор напряжения может осущест-
влять либо фазовое либо релейное управление открытием тиристо-
ров. В полностью управляемых мостах диоды V4—V6 заменяются
тиристорами. Специфической особенностью тиристорных управляе-
мых выпрямительных мостов является сильное искажение формы
кривой выпрямленного напряжения генератора, особенно в области
высоких частот вращения и малых токов нагрузки. Указанное явле-
ние приводит к появлению значительной разницы между средним
<7ср и действующим U значениями выпрямленного напряжения.
С точки зрения требований со стороны потребителей электрической
энергии эта разница должна быть минимальной, так как измери-
тельные органы регуляторов напряжения, как правило, реагируют
на среднее значение выпрямленного напряжения независимо от
способа управления тиристорами.
Рис. 4.25. Схема регулирования
напряжения трехфазного синхрон-
ного генератора с постоянными
магнитами с полууправляемым
тиристорным мостом:
Г — гевератор; Vl, V2, V3 — тиристо-
ры; VI—Vt — диоды; PH — регулятор
напряжения; </_ — выпрямленное на-
пряжение генератора; ЧЭ—чувстви-
тельный элемент PH; СУ —система
управления PH
9-6258
Анализ полууправляемых и полностью управляемых тиристор-
ных мостов при фазоимпульсном управлении показал, что сближе-
ние {/Ср и U при одной и той же частоте вращения генератора про-
исходит за счет увеличения как числа фаз якорной обмотки генера-
тора, так и тока нагрузки. Однако опыт проектирования подобных
схем управляемых выпрямительных мостов показывает, что увели-
чение числа фаз генератора (т>3) приводит к сильному услож-
нению схем управления. При т=3 на выходе генератора для сгла-
живания пульсаций выпрямленного напряжения следует устанав-
ливать LC-фильтр.
4.8. РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ ЗА СЧЕТ
КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ ОТ ПОСТОЯННЫХ МАГНИТОВ
И ДОПОЛНИТЕЛЬНЫХ ЭЛЕКТРОМАГНИТНЫХ ОБМОТОК
В генераторах комбинированного возбуждения можно обеспе-
чить постоянство напряжения при широком изменении нагрузки и
частоты вращения, так как имеется возможность осуществить вы-
сокую кратность изменения потока возбуждения Фа в воздушном
рабочем зазоре =Фбтах/Фйт,п, получаемую за счет изменения
не только значения, но и знака МДС возбуждения, создаваемой
с помощью имеющихся дополнительных обмоток возбуждения и ре-
версивных регуляторов напряжения. Если большой кратности ре-
гулирования потока возбуждения не требуется, то могут быть при-
менены обычные регуляторы напряжения без реверсирования МДС
возбуждения.
В синхронных генераторах комбинированного возбуждения с
внутризамкнутым магнитопроводом (см. рис. 6.4) и в одноимен-
нополюсных индукторных генераторах с двухсторонним комбиниро-
ванным возбуждением (см. рис. 6.15) МДС постоянного магнита
и МДС электромагнитной обмотки Fa действуют в магнитопроводе
генератора параллельно. В наиболее нагруженном состоянии эти
генераторы работают в режиме смешанного возбуждения (перевоз-
буждения), когда поток в рабочем зазоре Фе равен сумме потоков
магнитной Фм и электромагнитной Фэ частей генератора
(Фв=Фм+Фэ). При этом МДС возбуждения электромагнитной об-
мотки Fa максимальна. При уменьшении МДС Fa поток Ф« умень-
шится за счет его составляющей Фэ, а по достижении его значения
Фв=Фм наступит так называемый критический режим, когда Фэ=0.
При дальнейшем уменьшении МДС Fa поток Фе станет равным
разности потоков Фм и Ф8, поскольку в магнитопроводе электро-
магнитной обмотки поток Фэ изменит свое направление на обрат-
ное (Фе=Фм—Ф8). В этом случае магнитопровод электромагнит-
ной обмотки становится как бы регулируемым шунтом: чем мень-
ше МДС F3, тем большая часть потока Фм будет идти в шунт (Фэ
растет) и меньшая часть в рабочий воздушный зазор (Фе умень-
шается). При МДС 7?в=0 поток Фэ будет наибольшим, а Фе— наи-
меньшим. Представляется возможным еще увеличить поток Ф9 и
уменьшить Ф«, если изменить знак МДС Fa на обратный, т. е.
130
«реверсировать» ее. Тогда магнитное сопротивление шунта еще
уменьшится и теоретически можно достичь такого значения МДС
FB<0, при котором Фв=0, и весь поток постоянного магнита Фм
пойдет в шунт, минуя рабочий воздушный зазор (Фв=|Фм). Прак-
тически это сделать трудно, так как шунт насыщается и дальнейшее
увеличение значения МДС Fa не сказывается на значении потока
Фв, а увеличение размеров электромагнитной части может приве-
сти к неконструктивному выполнению генератора и значительному
увеличению его размеров и массы. Однако при сечениях магнито-
провода шунта, достигающих 25—30% сечения главного магнито-
провода шунта, в генераторах этого типа достигается достаточно
большая кратность регулирования потока возбуждения, обеспечи-
вающая стабилизацию напряжения при высоких диапазонах изме-
нения нагрузки и частоты вращения.
В одноименнополюсных индукторных генераторах с односторон-
ним комбинированным возбуждением (см. рис. 6.17) и в генераторах
комбинированного возбуждения с внешнезамкнутым магнитопрово-
дом МДС магнита FM и электромагнитных обмоток F3 могут дей-
ствовать последовательно: согласно или встречно. Здесь даже без
применения реверсивного регулятора напряжения при встречном
включении МДС F3 можно получить кратность регулирования по-
тока возбуждения в воздушном рабочем зазоре, равную бесконеч-
ности (Аф8=ФвПгах/Фатгп=<»). Т. в. ПОЛуЧИТЬ Фвт£п = 0 [3].
Регулирование напряжения с помощью комбинированного воз-
буждения в магнитоэлектрических генераторах переменного тока
нашло широкое применение благодаря своей относительной про-
стоте и возможности получения высокой кратности изменения по-
тока возбуждения в рабочем воздушном зазоре генератора.
Глава пятая.
ЭЛЕМЕНТЫ ПРОЕКТИРОВАНИЯ СИНХРОННЫХ ГЕНЕРАТОРОВ
С ПОСТОЯННЫМИ МАГНИТАМИ
S.I. АНАЛИЗ ТЕХНИЧЕСКОГО ЗАДАНИЯ
И ВЫБОР ТИПА ГЕНЕРАТОРА
В техническом задании на проектируемую машину обычно ука-
зываются: номинальная Ри и максимальная Ртах мощности гене-
ратора; число фаз т; номинальное напряжение фазное или ли-
нейное ия-, диапазон рабочих частот вращения п-min—Птах и номи-
нальная частота вращения»; частота тока f; коэффициент мощно-
сти cos <р; режим работы (длительный, кратковременный, повтор-
но-кратковременный); масса и габаритные размеры; срок службы.
Помимо того, могут быть заданы дополнительные условия: фор-
ма кривой напряжения, перегрузочная способность, постоянные
9* 131
времени переходных процессов, допустимая степень несимметрии
напряжений, момент инерции ротора.
В ряде случаев значение необходимой мощности генератора при-
ходится определять. Так, например, необходимая мощность трак-
торных генераторов подсчитывается по формуле, установленной
практикой:
Рн=(1,1Рпост+0,35Рп,кр+0,1Ркр) • (1/п), (5.1)
где Рпост — мощность постоянно включенных потребителей; Рп>Кр —
мощность потребителей, включаемых повторно-кратковременно;
Рнр — мощность потребителей, включаемых кратковременно; т|—
КПД, учитывающий потери в сети, выпрямителях; по данным опы-
та и практики значение т; может быть взято примерно 0,9.
В общем случае для сложной системы потребителей
Ря = ИЛМ cos ?1)Г+1(Л/ъ )«п Т1Г , (5.2)
где Pi — мощность канала переменного тока, В-А; Рг— мощность
канала постоянного тока, Вт; т|в — КПД выпрямителя; т]тр — КПД
трансформатора; costpi — коэффициент мощности нагрузки кана-
ла переменного тока.
Результирующий коэффициент мощности равняется
/*»/•% + (Р1/Ър)СО5 ?1
cos«= ---------- -----------. (5.3)
|/((Л/’)тр)51п?1]« + [(Р.ЛЬ) + (Л/^р)С051П]«
На основании технического задания выбирается тип магнитной
системы и конструкция генератора. Критериями выбора типа маг-
нитной системы и конструкции генератора являются: материал по-
стоянного магнита, предельная мощность, механическая прочность,
перегрузочная способность, минимальная удельная масса, инерци-
онность (электромеханическая), качество электроэнергии, надеж-
ность, стоимость.
Таким образом, задача выбора типа генератора является много-
критериальной.
Предельная мощность. Это максимальная мощность, которую
при заданных технических условиях можно получить от генератора
данного типа. В общем случае для синхронного генератора незави-
симо от способа его возбуждения — от постоянных магнитов или
электромагнитного—значение предельной электромагнитной мощ-
ности равно [38]
^>9,првд=765Лг(®д®М2) (АВб)пред» (5.4)
где kr=l/D— отношение длины активной части машины к диамет-
ру якоря; Од — допустимая окружная скорость ротора; п — частота
вращения ротора; (ЛВв)пред — предельное значение произведения
электромагнитных нагрузок (линейной нагрузки и индукции в воз-
душном зазоре).
Согласно (5.4) предельная электромагнитная мощность зависит
от геометрических соотношений в генераторе 1г, сильно зависит от
132
допустимой окружной скорости »д (от механической прочности ро-
тора), и от заданных техническими условиями частоты вращения и
электромагнитных нагрузок.
Электромагнитные нагрузки в генераторах с постоянными маг-
нитами определяются магнитными свойствами магнита, и их нель-
зя выбирать вне связи с этими свойствами. Если принять наиболее
характерные значения расчетных коэффициентов [38], то получаем
(АВ») = 0,346-----------------!---( pkr, (5.5)
1 + sin <f> \ в, /
где Вмо—индукция в магните в режиме холостого хода; Нп,к —
напряженность поля в магните в режиме установившегося КЗ; оо —
коэффициент рассеяния магнитного потока; р — число пар полюсов;
ЛГ=4УМ/ (nD2l) — коэффициент заполнения магнитом объема яко-
ря, зависящий от конструкции ротора; Ум — объем магнита.
Подставляя (5.5) в исходное выражение (5.4), получаем значе-
ние Рэ.пред. В • А,
Рэ поея = 264 А- ?---------(ВМД м J pkr. (5.6)
9,пред в0 л2 l-J-sin? “° M,K/F r ' '
Таким образом, предельная электромагнитная мощность в ге-
нераторах с постоянными магнитами зависит еще дополнительно
от характеристик магнита, cos tp, р, о0 и kr, т. е. от конструкции
индуктора.
Допустимые значения окружной скорости од зависят от конст-
рукции ротора и материала постоянного магнита. Для роторов
звездочка (рис. 1.23) из литого сплава типа альнико допустимые
значения од невелики >— до 70 м/с. Если принять п=30 ООО об/мин,
р=2 (/=1000 Гц), Хг=1, cos<p=0,8, Вмо=0,6 Тл, Нм,к=30000 А/м,
то Р9,пред= 1425 В-А. При этом допустимое значение диаметра
ротора звездочка Рр=60ид/(лп) =0,0445 м=44,5 м.
Допустимые окружные скорости для роторов звездочка с би-
металлическим цилиндром и призматическими магнитами (рис.
1.25,6) достигают 100—150 м/с и выше. Применение современных
материалов с направленной кристаллизацией и редкоземельных
элементов и кобальта для изготовления магнитов позволяет значи-
тельно повысить предельную мощность генераторов. Если выбрать
магниты с направленной кристаллизацией ЮНДК35Т5 с характери-
стиками Вмо=О,9 Тл, Ям,к=114000 А/м, од=100 м/с, Хг=1, <то=
= 1,2, п=8000 об/мин, р=3 (/=400 Гц), cos<p=0,8, fer=0,5, то
получаем Р9,пред=330-103 В-А=330 кВ-A. Если выбрать од=
= 120 м/с при Прочих одинаковых условиях, ТО Рэ,пред =580 кВ-А.
Для генераторов с индуктором коллекторного типа (см. рис.
1.27) магнитный поток в воздушном зазоре создается двумя магни-
тами. Поэтому значение магнитного потока в воздушном зазоре
удваивается. Для этой магнитной системы выражение для подсче-
та предельной электромагнитной мощности имеет вид
^.пред = 264_Д1п (2ВМОДМ1К)pkr. (5.7)
133
Рис. 5.1. Кривые предельных электромагнитных мощностей в зависимости от час-
тоты вращения для разных материалов магнитов и при разных значениях допу-
стимых окружных скоростей од, м/с:
J -200; 2, 4 — 150; 3, 5, 7—100; 6, 9-50; 8—80
Если выбрать магниты редкоземельные с характеристиками
5мо^=О,7 Тл, ЯМ)К=350000 А/м, Од^—100 м/с, 1, оь—1,2, п—
=8000 об/мин, р=3 (/=400 Гц), cos<p=0,8, />г=0,5, то получаем
Ллред=1550-103=1550 кВ -А.
Так как обычно для генераторов автономных систем электро-
снабжения задается двойная перегрузка, то номинальные мощно-
сти рассматриваемых генераторов с биметаллическим цилиндром
будут равны соответственно Рн==165 кВ-А и Р^=ПЬ кВ* А. Прак-
тика проектирования и изготовления генераторов с постоянными
магнитами показывает, что генераторы на мощности, близкие к ука-
занным, выполнимы.
На рис. 5.1 для ориентировочной оценки приведены кривые пре-
дельной электромагнитной мощности в зависимости от частоты вра-
щения для разных магнитных систем и при разных допустимых
окружных скоростях.
Механическая прочность ротора является центральным вопро-
сом конструкторских разработок генераторов и в особенности вы-
сокоскоростных. При предварительных расчетах механическая
прочность ротора характеризуется допустимой окружной скоро-
134
Таблица 5.1
Конструкция ротора Допустимая окруж- ная скорость, м/с
Литая звездочка из сплавов альнико Металлокерамическая звездочка из альнико Сборная конструкция с призматическими магнитами и биме- таллическим цилиндром из сталей ЗОХГСА, ЗЗХНЗМА (ОХНЗМ) Сборная конструкция ротора с призматическими магнитами и биметаллическим цилиндром из сталей ДИ8 и СТ25Х17М2Б2 Когтеобразная сварная конструкция с немагнитной и магнит- ной сталями 60—70 100—120 130—150 150—200 200—250
стью, которая в свою очередь зависит от конструкции ротора, ма-
териала постоянного магнита и технологии изготовления, прочност-
ных характеристик магнитных и конструкционных материалов.
В табл. 5.1 приводятся ориентировочные значения допустимой ок-
ружной скорости в зависимости от конструкции ротора и материа-
лов.
Механическая прочность ротора после определения его разме-
ров проверяется механическим расчетом.
Перегрузочная способность, как известно, обратно пропорцио-
нальна индуктивному сопротивлению по продольной оси Xd. Поэто-
му она возрастает с увеличением воздушного зазора б. Для син-
хронных генераторов с постоянными магнитами увеличение б при*
водит к изменению магнитного состояния магнита (см. рис. 2.24) и
уменьшению электромагнитной мощности генератора. В связи с
этим воздушный зазор в генераторах с постоянными магнитами вы-
бирается из технологических соображений. Здесь уместно отметить,
что если задана перегрузка, то объем магнита и размеры магнито-
провода определяются по мощности перегрузки.
Удельная масса электрических генераторов с постоянными маг-
нитами зависит от типа магнитной системы, магнитных характери-
стик постоянного магнита, способа регулирования или стабилиза-
ции напряжения, частоты вращения.
Для генераторов значительной мощности (16—60 кВ А) с магнитами с на-
правленной кристаллизацией при л=8000ч-12 000 об/мин удельная масса актив-
ных материалов составляет та=0,7ч-0,95 кг/(кВ-А) (см. рис. 1.6), что соответ-
ствует удельной массе генератора т= 1,2-4-1,6 кг/(В-А). При использовании ред-
коземельных магнитов и ротора коллекторного типа при тех же частотах
вращения удельная масса активных материалов значительно снижается: тл =
=0,5-ч-0,30 кг/(кВ-А) [т=0,8ч-0,42 кг/(кВ-А)] при мощностях Р=30ч-120 кВ-А
(см. рис. 1.8). При редкоземельных магнитах и испарительной системе с жидким
азотом при Р=8ч-120 кВ-А т=0,5ч-0,35 кг/(кВ-А) (без учета массы системы
охлаждения). При интегральном исполнении генератора (с размещением в дви-
гателе) с резкоземельными магнитами SmCos мощностью 60—120 кВ-А, частотой
135
вращения л=5300 об/мин и канальным масляным охлаждением
^0,3 кг/(кВ-А). Генератор с когтеобразным ротором дискового типа и внешне-
замкнутым магнитопроводом при п= 12 000-4-24 000 об/мин мощностью 200—
400 кВ-А имеет удельную массу т=2^-3 кг/(кВ-А).
При и=30 000 об/мин, и »д=75ч-100 м/с возможно выполнение генератора
с магнитом звездочка мощностью 3,2—8 кВ-А. С магнитами из ЮНДК35Т5
с диаметром магнита 40—50 мм удельная масса составляет /п=0,5-4-
0,31 кг/(кВ-А) при cos<p=l и т= 1-4-0,383 кг/(кВ-А) при cos<p=0,8. С магни-
тами из ЮНДК24Т1 с диаметром магнита примерно 60 мм т=0,69-4-
0,39 кг/(кВ-А) при cos<p=l и т=0,95-4-0,54 при cos<p=0,8. При более низких
частотах вращения, т. е. 8000 об/мин (в самолетных преобразователях), удель-
ная масса генераторов значительно больше.
Для генераторов кратковременного действия, для которых время работы /Р
много меньше постоянной времени нагревания обмотки, удельная масса может
быть подсчитана по формуле [39]
т = М/Р= 1р(1—*)) cos ?/(Afyccp-n),
(5.8)
где Д67 — допустимое превышение температуры; сср — средняя теплоемкость, при-
мерно 480 Дж/(К*кг); -q — КПД, равный примерно 0,9.
Пусть £р=200 с, т)=0,9, cos<p=0,9, Д<Ь=200°С, тогда т =
Электромагнитная постоянная времени электрических машин с постоянными
магнитами имеет небольшое значение, так как они не имеют обмотки возбужде-
ния. Постоянная времени индуктора близка к нулю. Постоянная времени обмот-
ки якоря мала по величине. Поэтому эти машины обладают явными преимуще-
ствами по сравнению с машинами с электромагнитным возбуждением.
5.2. ОПРЕДЕЛЕНИЕ ОБЪЕМА ПОСТОЯННОГО МАГНИТА
ПРИ РАЗЛИЧНЫХ МЕТОДАХ СТАБИЛИЗАЦИИ И
РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
Расчет синхронной машины с постоянными магнитами, как и
любой электрической машины, разделяется на две части: опре-
деление основных размеров и поверочный электромагнитный
расчет.
Основные размеры синхронного генератора с постоянными маг-
нитами зависят, как правило, от размеров системы возбуждения.
Поэтому для генераторов с постоянными магнитами применима
только известная расчетная формула
D4=6,1.10‘P7(aeVo^),
(5.9)
где D и — диаметр и расчетная длина якоря, см; п — частота
вращения, об/мин; P'=kEP*— расчетная электромагнитная мощ-
ность, В-А; kE—EilUu, Е( — внутренняя ЭДС (см. рис. 2.16,а);
at, кф, k0 — соответственно расчетный коэффициент полюсного
136
перекрытия, коэффициент формы кри-
вой поля, обмоточный коэффициент;
А, В# —линейная нагрузка, А/м, и
индукция в воздушном зазоре, Тл.
В формуле (5.9) исходными при
определении размеров машины явля-
ются электромагнитные нагрузки яко-
ря А и В«. В машинах с постоянными
магнитами мы не можем задаться не-
посредственно этими нагрузками, так
как они являются производными от
объема и размеров магнита, его ха-
рактеристик и степени использования.
В первом приближении произве-
дение (АВв), полученное при усло-
вии оптимального использования энергии постоянного магни-
та, -определяется выражением (5.5). Это произведение позволяет
выбрать материал и характеристики магнита, соответствующие
допустимому тепловому режиму и заданной мощности генератора.
Для определения размеров магнита и магнитопровода следует
определить необходимый объем постоянного магнита Ум.
Необходимое значение объема постоянного магнита зависит от
ряда факторов: характера нагрузки (коэффициента мощности),
способа регулирования напряжения, типа магнитной системы. Осо-
бенностью подсчета объема магнита является то, что в расчет
должна приниматься максимальная мощность Ртах (при пере-
грузке), так как в отличие от машин с электромагнитным воз-
буждением здесь невозможно форсирование возбуждения. В гене-
раторах с электромагнитным возбуждением расчет ведется на
номинальную мощность, а для обеспечения перегрузок увеличива-
ется расчетная МДС возбуждения.
Для генераторов с постоянными магнитами при естественной
стабилизации напряжения и при подмагничивании спинки якоря
объем, см3, магнита при cos<p=0 определяется по формуле [1]
V — 0,9Pcosy!=OglJOfeadfeyA ]f). 1Л,
М“ Л-l IU’
где Pcos <p=o — мощность генератора, В-А, при cos<p=0.
При работе генератора без перегрузки необходимо в формулу
(5.10) подставлять номинальную мощность PCosv=o=Ph и k=
=1к11я (рис. 5.2), а если предусмотрена перегрузка PCos«p=o=Pmaa:
и kK=IK/I№ (рис. 5.2); k — кратность тока КЗ (оптимальное зна-
чение &опт=2); аг — коэффициент, учитывающий падение магнит-
ного напряжения в магнитной цепи в долях МДС реакции якоря;
его можно выбрать предварительно: cti = l, 1-*-1,15 для генераторов
с ротором звездочка, щ = 1,2т+-1,25 для генераторов с коггеобраз-
ным ротором; /гуд — коэффициент ударности (для генераторов
с ротором звездочка без полюсных башмаков Лудя»1,2, со звездо-
образным ротором и полюсными башмаками Ауд^&1,1, с когтеоб-
137
Рис. 5.3. Ориентировочные значения коэффициента рассеяния магнитного потока
магнита в режиме холостого хода для когтеобразных (а), звездообразных ро-
торов с полюсными башмаками (б) и звездообразных без полюсных башмаков
(в) в зависимости от мощности при f=400 Гц, л = 8000ч-12 000 об/мин и раз-
личном числе пар полюсов:
/ — 4; 2-3; 3-2
разными роторами йуд^1,0); kad — коэффициент приведения МДС
реакции якоря по продольной оси к МДС обмотки возбуждения
(можно предварительно выбрать kad=0,85-5-0,86); сто — коэффи-
циент рассеяния в режиме холрстого хода (оо можно выбрать
предварительно по кривым на рис. 5.3); Вмо— индукция при холо-
стом ходе в нейтральном сечении магнита, Тл (рис. 5.4); Ям>к—
напряженность поля в магните при установившемся КЗ генера-
тора, А/м (рис. 5.4); йф — коэффициент формы кривой напряже-
ния (при синусоидальной форме £ф= 1,11); f — частота тока, Гц
Рис 5.4. Диаграмма магни-
та
(если генератор работает с переменной
частотой, то необходимо подставлять
f min ) •
Значение оо зависит от типа ротора,
его диаметра и числа полюсов (рис. 5.3).
Для роторов с магнитом звездочка без
полюсных башмаков предварительно
можно выбрать оо= 1,05-5-1,10. Для ро-
торов коллекторного типа с призмати-
ческими магнитами о0= 1,15-5-1,20.
Выбор Ям,к однозначно определяется
абсциссой точки К (рис. 5.4) на кривой
размагничивания, соответствующей мак-
138
Симальной удельной энергии магнита или несколько ниже этого
максимума. Для магнитов с направленной кристаллизацией
ЯМ(К= (0,80-+-0,85) Нс, для магнико Нм,к= (0,75-!-0,8)Яс, а для
альни и альнико Нм>к— (0,75-t-0,8) Нс.
Оптимальное значение отношения КЗ k=IK/lu при cosq>=0
^ОПТ=/к/7м = 2, (5.11)
что следует из выражения для мощности генератора
(см. рис. 5.2).
После дифференцирования и нахождения тока /ртах, соответ-
ствующего максимуму мощности, получаем выражение (5.11).
Если генератор предназначается для работы на активную на-
грузку (cos<p=l), то расчетная формула для определения объема
постоянного магнита, см3, имеет вид [1]
у __ • 10е
“ «ф^моЯм.кК!-!/^ •
Оптимальное значение k при cos <р= 1 равняется
^опт — ^к/ н =
(5.12)
(5.13)
Если выдержать последнее условие, т. е. положить, что гене-
ратор при мощности Pcos ф—1 работает в точке внешней характе-
ристики, соответствующей максимуму мощности, то формула
(5.12) будет иметь вид
г, __ 1 >8^COS<p=l “х’^СИ^Уд" Ю*
м“ «ФГВм.оЯм,«
В общем случае для любого значения cos<p расчетная формула
для подсчета VM приобретает вид
у _________Q • ^со s <р а1а<Ла^уд^ • 10*_ jg.
4АФВМОЯМ|К К1 - (cos’ у/ft») - (sin у/ft) ' ' }
Оптимальное значение £=/к//м равняется
kom = 4/4 = /2(1 +sin?). (5.16)
При расчете генератора на максимум развиваемой им мощно-
сти формула (5.15) преобразуется
1 »8PCos ср al°0^ad^yA
4^ВМОЯМ(К
(1 -J-simp) • IO”*.
(5.17)
Из (5.10), (5.12), (5.14) и (5.17) видно, что необходимый
объем магнита возрастает с увеличением мощности, коэффициен-
та рассеяния о0, насыщения магнитной цепи (коэффициента a'i),
139
Рис. 5.5. Внешние характе-
ристики генератора:
1— естественная характеристика;
2 — внешняя характеристика при
наличии емкостного стабилиза-
тора (с регулированием емкос-
ти)
размагничивания магнита (коэффициен-
та £Уд). Особенно неблагоприятно влия-
ет требование перегрузки генератора.
В этом случае возрастает расчетная
мощность, что соответствует увеличению
объема магнита и массы генератора.
Объем магнита уменьшается с увеличе-
нием частоты токов, с увеличением
удельной магнитной энергии магнита
(произведения Ви0Ни.к, примерно про-
порционального удельной энергии).
Объем магнита согласно расчетным вы-
ражениям не зависит от числа полюсов,
если со остается постоянным. Но при
большом числе полюсов о0 возрастает,
поэтому увеличивается и объем магни-
та. Минимум объема магнита получается, если выдерживается
Л = ^!опт.
Так как обычно генератор не работает на чисто индуктивную
нагрузку (cos<p=0), то формула (5.10) дает завышенные значе-
ния объема постоянного магнита. Это может быть учтено при
cos<p>0,6 уменьшением расчетного объема магнита на 10—20%.
По (5.14) и (5.17), наоборот, не предусматривается запаса по
объему магнита. На практике всегда наблюдается разброс в маг-
нитных характеристиках магнитов и использование магнитов не
является полным. С этой точки зрения целесообразно выбрать
объем магнита с запасом на 15—20 %.
Кратности тока КЗ на практике выбираются большими, чем
полученные теоретически: при роторах звездочка с полюсными
башмаками £=3-»-4, а без полюсных башмаков 4—6.
Если не предусматривается специальных устройств для стаби-
лизации напряжения, а требования к постоянству напряжения при
изменении нагрузки жесткие, то значения k выбираются больши-
ми (при роторах звездочка &=6-f-7). При этом возрастает масса
генератора.
При наличии емкостной стабилизации напряже-
ния с помощью последовательного или параллельного стабили-
затора напряжение на нагрузке при изменении тока с определен-
ной точностью поддерживается постоянным, равным напряжению
холостого хода (рис. 5.5).
Для этого случая расчетная формула для подсчета объема по-
стоянного магнита имеет вид [1]
0 , • 1 0»
4йф/Вм#ЯмДк ’ (5Л8)
Как можем видеть из последнего выражения, объем магнита
возрастает с увеличением кратности тока КЗ, что объясняется
возрастанием размагничивающего действия поля реакции якоря
и вследствие этого ухудшением использования магнита.
140
Рис. 5.6. Зависимость удель-
ной массы системы от крат-
ности тока короткого замы-
кания генератора с когтеоб-
разным ротором:
t — однопакетная конструкция;
2 — двухпакетная конструкция
При емкостной стабилизации от выбора значения кратности
тока КЗ сильно зависит соотношение масс генератора и всей си-
стемы стабилизации. При малых значениях k получается легкий
генератор и тяжелый стабилизатор, при больших значениях k—
тяжелый генератор и легкий стабилизатор.
Подсчеты массы генераторов и последовательных емкостных
стабилизаторов показывают, что имеются оптимальные значения
отношения йопт, соответствующие минимуму удельного расхода
материалов всей системы (рис. 5.6):
П1с^ (Мг+Л4Ст) /ря,
где Мг — масса генератора; Мст — масса стабилизатора (транс-
форматора плюс конденсаторов).
В общем случае йопт зависит от параметров генератора, часто-
ты тока, схемы соединений стабилизатора, магнитной системы
трансформатора. Наименьшая масса стабилизатора получается
при трехфазных трансформаторах. Масса стабилизатора умень-
шается с возрастанием частоты.
5.3. ОПРЕДЕЛЕНИЕ РАЗМЕРОВ МАГНИТА И МАГНИТНОЙ ЦЕПИ РОТОРА
При определении размеров магнита и магнитной цепи ротора
очень важно выдержать оптимальные соотношения между разме-
рами магнита, а также между активной длиной и диаметром ро-
тора машины при заданном объеме магнита Км.
Характерным параметром для магнитов является отношение
длины средней силовой линии в магните к его сечению Для
общей характеристики соотношений между размерами ротора
пользуются отношением активной длины ротора в аксиальном на-
правлении Lp к диаметру ротора Dp, т. е. 1P=LP/DP.
Методы определения размеров магнита и магнитной цепи ро-
тора зависят от типа его магнитной системы. Рассмотрим эти
методы для различных конструктивных форм роторов.
141
Рис. 5.7. Эскиз магнита звездочка без
полюсных башмаков.
Ротор звездочка без полюс-
ных башмаков (рис. 5.7). В слу-
чае ротора звездочка без полюс-
ных башмаков длина активной
части ротора равняется аксиаль-
ной длине магнита LP=LM, а диа-
метр ротора равняется диаметру
магнита Z>P==DM. Используя отно-
шение можно объем цилиндра ротора записать
Уц=яРм2£м/4=л£>м3Хм/4= V„/fc3(M, (5.19)
где fe3,M— коэффициент заполнения поперечного сечения ротора
магнитом.
Из (5.19) получаем
Da = 1У
V «Мз.м
(5.20)
На практике еще вводится коэффициент запаса по объему магни-
та £зап= 1,2+1,25, так как в магнитном отношении использование
магнита получается неоднородным
D
м
4V м^зад
я^м^з,м
(5.21)
Коэффициент /г3,и является функцией числа полюсов 2р и коэф-
фициента полюсного перекрытия ар=Ьр/х, где Ьр— длина полюс-
ной дуги, а т — полюсное деление; длина полюсной дуги примерно
равна ширине полюса магнита 5М; ар^ап=Ьм/х.
Значения k3,M для типовых тракторных генераторов приведены
в табл. 5.2. Коэффициент £3,м для самолетных генераторов с посто-
янными магнитами выбирается равным примерно 0,7—0,78. Мень-
шие значения k3,M относятся к а'м=0,5, а большие — к ам=0,7.
В общем случае значение Л3>м можно подсчитать по эмпирической
формуле
йз,м = 2амр-₽\ (5.22)
где огм=0,55-*-0,7 — коэффициент полюсного перекрытия; pi =
=0,6-5-0,63, где меньшее значение pi для небольших р; pi = 0,6
при 2р^6.
При выборе отношения Am=Lm/Dm необходимо принимать
в расчет размагничивающее действие поля реакции якоря и меха-
ническую прочность ротора.
Длина средней магнитной линии магнита 1М, а следовательно,
и диаметр DM определяются размагничивающим действием МДС
142
Таблица 5.2
1 i 2р ^З.М ПРИ *м
0,5 о,6 0,7
! 6 0,692 0,754 0,788
8 0,654 0.700 0,720
10 0,629 0,669 0,673
12 0,612 0,639 0,631
реакции якоря при ударном токе КЗ Fad к,уд, так как, с одной сто-
роны,
/ __ а1Лм/к,уд
77
пктах
и, с другой стороны, при fy? = 4-i-8
~ «Ом
1М I 1 Ч-------I СХМ-----,
м \ 8 / “ 2р
то можем получить выражение для подсчета DM:
~ ___ al^adK,yn^P
м “ п(1 -|-Я/8)«кЯкта:г ’
(5.23)
(5.24)
(5.25)
где Нк тах — напряженность поля в магните, соответствующая
максимуму удельной магнитной энергии.
На данном этапе расчета значение Fa<i к,уд неизвестно, поэтому
приходится делать ряд расчетов и уточнять значения D„.
Оптимальные значения аи с точки зрения использования мате-
риала магнита зависят от диаметра магнита D№ (рис. 5.8,а) и
числа пар полюсов (рис. 5.8,6). Для наиболее характерных значе-
ний DM=60-s-120 мм ам лежит в пределах 0,5—0,75. Большие
значения ам соответствуют наибольшим диаметрам магнита
(100—120 мм) и наименьшему числу полюсов (6). Коэффициенты
полюсного перекрытия а'м зависят также от магнитных свойств
материала и наличия стабилизации магнита (рис. 5.8,6).
Рис. 5.8. Оптимальные значения коэффициента полюсного перекрытия для маг-
нита звездочка:
ци|И>ы п₽и кривых — число полюсов; б — нестабилизированного альнико (7), нестабили-
зированного магнико (2), стабилизированного альиико (3), стабилизированного магнико (4)
143
Значение Хм для авиационных генераторов составляет 0,3—0,8,
Выбор больших значений Хм, т. е. применение магнитов с большой
длиной и малым диаметром, приводит к ухудшению характеристик
генератора вследствие уменьшения дуги междуполюсного про-
странства, увеличения рассеяния магнита, уменьшения длины
средней магнитной линии магнита Zm, ухудшения использования
магнита, усложнения конструкции (магнит приходится выполнять
составным). Правда уменьшение диаметра Ом при заданном
объеме магнита Ум приводит к увеличению активной поверхности
полюсов Sa и к возрастанию магнитного потока в воздушном за-
зоре Фе:
*Sa/4л7)м7,мС1м/ ( Л —•
=4aM/(DMfc3,M); (5.26)
Фво= (Вмо/<т) (5а/2р). (5.27)
Для высокоскоростных приводов необходимо произвести про-
верку магнита на механическую прочность, исходя из допустимой
окружной скорости Од. Допустимое значение диаметра магнита
в метрах равно
£м^60од/лп. (5.28)
Как уже приводилось, для литых магнитов окружная скорость
не должна превышать 60—70 м/с.
Зная диаметр магнита DK, можно определить его другие раз-
меры (см. рис. 5.7):
аксиальную длину магнита
(5.29)
ширину полюсной дуги
Ьр—лОмвм/Зр—(5.30)
ширину магнита
&м=Рм sin(naM/2p); (5.31)
высоту полюса
йм= --------------------1 —г Г----!---
2 [ 2р sin (л/2р) ] [з!п(л/2р)
высоту ярма звездочка
Л/и= (0,6-«-0,7)6м;
внутренний диаметр звездочки (под вал)
4* 2г
sin(n/2/>)
(5.32)
(5.33)
(5.34)
2 (й/м-]-/).
Оптимальное использование механических и магнитных свойств
магнита из ЮНДК35Т5 получается при соотношениях
Dm :Db„ : dBT=l: 0,8 : 0,3 при aM=0,65-i-0,70, где DB„=£>и—2ftM—
диаметр по дну междуполюсных впадин.
144
Предварительно могут быть определены электромагнитные ве-
личины:
магнитный поток холостого хода
j Фво^=‘®м1>5м/<То:=^моЬ»Д'м/<То; (5.35)
индукция в воздушном зазоре
5со^=Фво/ (вмТХ.м) ==ВмоЬм/ (Оо<Хм%)
= (2pBMbK)/(nOoaKDM); (5.36)
линейная нагрузка
д = —---------------------------------- (5.37)
nD^kk3 • 0,9ctj ka $
Для магнитов цилиндрической формы (см. рис. 1.20) диаметр
магнита определяется также по (5.20). В отличие от магнита
звездочка коэффициент заполнения /г3,м для цилиндрических маг-
нитов выше 0,9. Эквивалентная ширина магнита определяется по
(5.31). Длина средней магнитной линии в магните из ЮНДК35Т5
(при 2р=4) /и^0,5Рм. Расчетная высота магнита Лм=0,5(Рм—
Ьвп). Для двухполюсных цилиндрических магнитов оптимальное
значение коэффициента полюсного перекрытия составляет ам,Опт=
=0,7-+-0,8 при Яс=50-^-65 кА/м и ам,опт=0,55^-0,65 при Нс=
=80-1-120 кА/м. Применение вала из магнитно-мягкого материа-
ла увеличивает мощность генератора на 11—36%. Форма кривой
напряжения практически синусоидальная (&н=1-!-3%).
Для монолитных цилиндрических магнитов из редкоземельных
металлов и кобальта справедливы соотношения:
/м=0,8£)м при р=1; (5.38)
/м=^>мр_0,6 при р>1. (5.39)
Для цилиндрических магнитов нет строго очерченной полюсной
дуги Ьр, как в магнитах звездочка. Распределение индукции
в воздушном зазоре на полюсном делении можно считать сину-
соидальным. Индукция на поверхности постоянного магнита в ре-
жиме холостого хода равна [50]
Вюм -------------!----------А
* “Г 1 Kpkz
1м Ро
(5.40)
где
1- ?’ + e-v_2
г“ ?*_«-»•
10—6258
5* = 28/Вм.
145
Рис. 5.9. К определению длины средней силовой линии цилиндрического магни-
та
Рис. 5.10. Поперечный разрез ротора
Значение /м может быть подсчитано на основании геометриче-
ских построений (рис. 5.9) при аппроксимации реальной силовой
линии линейными отрёзками
*M = 0tgp/2+ 1/cos р ’|/^-4-DMcosp(DMcosp — Dcosa/2), (5.41)
где
D — Dm. "Ь ^вт / 2 J Ct — CtpJl/2p,
p= (1—ар)л/2р.
Ротор звездочка с полюсными башмаками и призматическими
магнитами (рис. 5.10). В данной магнитной системе с успехом
используются магниты с большой удельной магнитной энергией —
магниты с направленной кристаллизацией из ЮНДК24 и
ЮНДК35Т5 и реже с редкоземельными магнитами. Целесообраз-
ность применения тех или иных магнитов зависит не только от
абсолютного значения удельной магнитной энергии, но и от чис-
ленных значений Вг и Нс, а также от соотношения Вт/Нс. Приме-
нение рассматриваемой магнитной системы требует от магнита
не только повышенных значений Нс, но и повышенных значений
146
Вг. Требуемые значения Вт и Нс определяются следующими соот-
ношениями:
\ Вг>(Ввоо/М(Ьр/М; (5.42)
' Hc^(0,9Ankal)l(2kBp)X
XDPkokad/ [Dm ( 1-Dbt/Dm) ], (5.43)
где B(, и А — оптимальные значения индукции и линейной нагруз-
ки, соответствующие генератору с минимальной массой при допу-
стимом тепловом режиме; bp, bM, Dp, DM, DBn — размеры ротора
согласно рис. 5.10; кв=Вм/Вт, kP=H№,K/Hc — расчетные коэф-
фициенты.
Если в (5.42) и (5.43) подставить наиболее характерные зна-
чения со, кв, kH, си, DM/DP, Dat/Dp, то для магнитов с направлен-
ной кристаллизацией из ЮНДК24, ЮНДК35Т5 получаем
Вг>( 1,8-*-2,0)Вв; (5.44)
Яс>(7-»-8) Ak/p. (5.45)
Необходимое значение коэрцитивной силы Не зависит от вы-
бранной кратности тока и числа пар полюсов.
Выбор повышенных значений Вг особенно стал важен в связи
с применением новых материалов магнитопровода якоря (27КХ,
49КФ2-ВИ), для которых допустимые значения индукций значи-
тельны. Поэтому для создания генераторов с малой массой необ-
ходимо иметь магниты с остаточной индукцией Вт—1,35-^1,45 Тл
при сохранении высоких значений коэрцитивной силы.
Так как мощности генераторов могут быть заданы в широких
пределах, то для обеспечения оптимальных размерных соотноше-
ний требуются магниты, имеющие набор кривых размагничивания
с различными соотношениями BrlHe и различными численными
значениями этих параметров.
Для магнитов с направленной кристаллизацией значения про-
изведения электромагнитных нагрузок (АВ6) по (5.5) находятся
на уровне электромагнитных нагрузок генераторов с электромаг-
нитным возбуждением (рис. 5.11). Поэтому для определения раз-
меров D и I якоря можно воспользоваться известной формулой
[30]
D = 6,1 • lOT'/fa ДД (ABt) лЛ<]. (5.46)
Выбранные габаритные размеры ротора генератора D и 4 и
в какой-то степени размеры всего генератора являются предвари-
тельными. Они не учитывают возможность обеспечения принятых
электромагнитных нагрузок при выбранных материалах постоян-
ного магнита и размерах ротора. Правильность выбора электро-
магнитных нагрузок и геометрии ротора проверяется построением
диаграммы состояния магнита. При выборе геометрии поперечного
сечения ротора нет такой свободы, как при проектировании гене-
раторов электромагнитного возбуждения; выбор геометрии должен
быть связан с наибольшим использованием магнита ротора.
10* 147
Рис. 5.11. Кривые произведения
АВ& для шестиполюсных генера-
торов:
1с электромагнитным возбуждением
при cos<p=0,8; 2 — с постоянными маг-
нитами при coscp=0; 3 — с постоянны-
ми магнитами при cosq)=0,8; 4—с по-
стоянными магнитами при cos<p=l
Предварительное определение геометрии ротора может быть
осуществлено по-разному в зависимости от поставленных условий.
В случае ротора звездочка с призматическими магнитами из спла-
вов высоких энергий (заданных характеристик) и при заданной
кратности тока КЗ это можно осуществить следующим путем.
Определяют высоту полюсных башмаков hnt>, размеры магнита—
высоту Ли, ширину 6М и длину Lu, материал и размеры втулки —
Z?BT> ^вт- Диаметр вала считаем известным. Геометрию поперечного
сечения ротора определим из условия, чтобы точка отхода кривой
возврата с координатами и Вм>к соответствовала оптималь-
ному использованию магнита.
Высота полюсных башмаков ЛПб определяется механической
прочностью сварного цилиндра и условиями прохождения магнит-
ного потока в напуске полюсных башмаков. Предварительно вы-
сота полюсных башмаков ЛПб может быть выбрана с запасом
согласно табл. 5.3 (для д=8000 об/мин).
Таблица 5.3
Диаметр ротора Ор, мм 110-120 130 140—150 150—160 170—180
Высота полюсных башма- ков hrf, мм 5 6 7 8 9
По табл. 5.3 можно сделать вывод, что отношение диаметров
магнита DM=DP—hne и ротора iDp имеет примерно постоянное зна-
чение, не зависящее от диаметра ротора (DM/Dp^0,895-*-0,915).
Задачу нахождения внутренних размеров ротора и прежде
всего высоты магнита можно упростить и сделать более опреде-
ленной, если сделать допущение, что для ротора с полюсными
башмаками и поэтому повышенным рассеянием магнита макси-
мальное размагничивание магнитов определяется режимом уста-
новившегося КЗ. Тогда, приравнивая МДС продольной реакции
якоря при КЗ к МДС магнита, получаем
2/1м//м,к^=-ГМ(2к== (5.47)
148
Необходимая высота магнита йм равна
hu=Q,45k<&adkaixA/HM'K, (5.48)
или
hM/D = Ма>1М/2рНм,к). (5.48а)
Другой вывод из (5.48а) —высота магнита при прочих равных
условиях пропорциональна диаметру якоря. В (5.47), (5.48), как
и ранее, k — кратность тока КЗ, щ — отношение полного МДС
магнита к МДС продольной реакции якоря при КЗ. Из геометрии
поперечного сечения ротора можно определить максимально воз-
можную ширину магнита Ъм>тах (при которой основания магнитов
-соседних полюсов соответственно рис. 5.10 соприкасаются):
Ьм, тах= (П-26-2Лпв-2йм) /tg (л/2р). (5.49)
Зная максимально возможную ширину магнита bM, max, опре-
делим из соотношения между магнитными потоками в зазоре и
в нейтральной зоне магнита, где <мФб=Фмо, минимальную длину
магнита Lu:
(5.50)
где Вио — индукция в нейтральном сечении магнита при холостом
ходе.
Если получим, что Lu<.lit то можем для увеличения сечения
между магнитами уменьшить ширину магнита Ьм, выбрав ее по
(5.50), исходя из условия lt=LM. Если же получим то при
незначительном. превышении можно, выбрав по (5.50) Lu, увели-
чить длину полюсных башмаков /р«а£м и длину втулки
Если же L„ значительно больше £, то это означает, что пред-
полагаемый материал не обеспечивает выбранных значений Вв и
А и нужно или выбрать лучший по магнитным свойствам мате-
риал (большее Вг и Нс), или, уменьшая А и В6 в (5.46), выбрать
большие размеры D и lt.
Диаметр втулки £>вт определяется согласно рис. 5.10
DBT=D—26—2йпб—2йм. (5.51)
Полученный диаметр втулки следует проверить на отсутствие
насыщения во втулке при известном диаметре вала. Высота ярма
ротора й/р из рис. 5.10 равна
й1р=£>вт/[2 cos (л/2р)]—0,5dBT- (5.52)
Тогда индукция во втулке Ввт определяется как
<5®)
Если это условие выполняется, то предварительный выбор гео-
метрии поперечного сечения ротора можно считать выполненным.
Если ВВт незначительно превышает ВВт,доп, то можно снизить
его, увеличив /Вт, сделав ее несколько больше, чем длина магнита
LM. Если отклонение ВЗТ от ВВт,доп значительно, то нужно, умень-
149
шив Xj, увеличить диаметр расточки D и повторить по (5.46) —
(5.53) все расчеты.
При выборе геометрии ротора по (5.47) — (5.53) мы исходили
из того, чтобы обеспечить работу магнита в наиболее тяжелом
режиме в точке с координатами Ям,к и В„,к. Но при этом исполь-
зовали только одно условие — заданное значение Нм,к при опре-
делении высоты магнита. Положение рабочей точки на кривой
размагничивания при КЗ определяется магнитной проводимостью
машины при КЗ, которая определяется в основном магнитной про-
водимостью рассеяния статора (проводимость рассеяния обмотки)
и магнитной проводимостью рассеяния ротора. В (5.47) надо
учесть не расчетную, а фактическую кратность тока КЗ, опреде-
ляемую проводимостью КЗ.
Перепишем выражение (5.47) для FM,K в другом виде
FM,K=O,9aifnkokadWfl>IHk, (5.54)
где значение кратности КЗ равно
Ь==Елк1Хк- (5.55)
Индуктивное сопротивление КЗ при пренебрежении активным
сопротивлением га обмотки статора равно индуктивному сопро-
тивлению рассеяния xt, значение которого
xs = 4ж- (5.56)
ЭДС при КЗ равна
EdK = 4^вЛГф ФЛ = 4£ф^Ф (Фм.к - Фот). (5.57)
где Фм.к, Ф«к — полный поток магнита и поток рассеяния магнита
при КЗ.
Подставляя значения k из (5.55) — (5.57) в (5.54), получаем
О^maik^i^kad ^(Фм.к — Ф$к)
FMK = -—* п-в-----— • (5.57а)
Но потоки Фм>к и Фот (в веберах), в свою очередь, равны
Фмк = М-мВмк-Ю-4; (5.58
4“ ^snd) (5.59)
Подставив их значение в (5.57а), получим
О,9та]Лф£0&а^ q [6mLmBMiK10 4 ^м^м,к^д^т(\м “1“ \пб)^м] /г
-*м,к 577—8 * (5.60) В
В (5.60) обозначено: Х',м, к',аб — удельная магнитная прово-
димость магнита и полюсных башмаков, Гн/см (см. § 5.5); kM —
коэффициент дифференциального рассеяния; Лт — коэффициент,
учитывающий торцевое рассеяние; Вм,к, Ям>к — индукция й напря-
женность точки отхода кривой возврата.
150
Принимая наиболее характерные числовые значения для ряда
коэффициентов: <ц = 1,15; Лф—1,11; Ло=О,92; Лой=0,86; Лдв=1,15;
J:T=1,1 и т—3, получаем
Л.,к = [6мвм,к- 1,26- (5-61)
С другой стороны,
FK к = 2ймЯм „ (5.62)
Из (5.61) и (5.62) получим соотношение параметров машины
и характеристики магнита в точке отхода прямой возврата
вм,к = 2 5 ю-^+о.б^-ю^х^ + х^)
^Ли.к Я
Это соотношение характеризует наилучшее использование маг-
нита (параметры магниту Вм,к и Нп,к по условию соответствуют
работе его в оптимальной точке). Расчет проводимостей рассеяния
•обмотки статора 2Л,вя производится по общепринятым формулам,
а расчет проводимостей рассеяния ротора X'SM с Х'вПб — см. § 5.5.
Но поскольку и проводимость рассеяния статора, и проводимость
рассеяния ротора вначале определяются приближенно, то и оцен-
ка оптимальности выбора геометрии является приближенной.
Более точно положение рабочей точки определяется при построе-
нии диаграммы магнита.
Рассмотренный выше метод проверки правильности выбора
рабочей точки магнита может быть распространен и на роторы
с магнитами звездочка с полюсными башмаками (рис. 5.12) и без
них (см. рис. 5.7). Если обозначить через /м среднюю длину маг-
нита на два полюса, то можно написать
/МЯН к = °-9mk**aik^adk™q'В, * 10* [i в _ о 5ЯМ к/мЛдД (^м+ ^пб) • 10Ч>
М М>К ГСдЛдд I м. М»К ’ М»К М Т \ I <$ПО'
(5.64)
где Луд — коэффициент ударности, Луд= l,l-t-l,2. Принимая наи-
более характерные числовые значения для коэффициентов: ai =
= 1,1; Лф=1,11; Ло=О,92; Ла<г=0>86; Луд=1,1-»-1,2; Лда=1,15; Лт=
= 1,1; т=3, получаем
= (0,87 -ч- 0,92) [ЬМВМ1К - 0,63 • 10*Ям.Л + ^пб)|,
(5.65)
откуда отношение Вм,к/Нм,к, пропорциональное магнитной прони-
цаемости генератора при КЗ, равно
В, J„ - (1.09н- 1.19) + + (5 66)
Я
Меньшие значения коэффициентов перед правой частью
в (5.65) и (5.66) относятся к роторам с полюсными башмаками,
а большие— к роторам без полюсных башмаков.
151
Рис. 5.12. Ротор звездочка
Рис. 5.13. Поперечное сечение ротора
коллекторного типа с тангенциаль-
ным намагничиванием магнита
При расчете геометрии роторов генераторов с полюсами звез-
дочка можно при большом числе полюсов воспользоваться также
следующими соотношениями:
&м==^м sin (л(Хм/2р) (1?вп—^вт)/ (1Л“*"1,2): (5.67)
1„=2й„+0,5£>вп [л/р—2arctg (Ьм / D„) ]; (5.68)
Рм=0вп+2/гм; (5.69)
£>вп=6м2р/л+г[1/8П1(л/2р)—1], (5.70)
где ОВп — диаметр по основанию междуполюсных впадин; г —
радиус закругления впадин, равный 0,3—0,4 см.
Высота полюса hM может быть определена по (5.32). По урав-
нениям (5.67)—(5.70) можно определить геометрию ротора при
известном диаметре магнитов.
Для генераторов с роторами звездочка и призматическими
магнитами (см. рис. 5.10) можно найти связь между индукцией
в зазоре и линейной нагрузкой А, с одной стороны, и размера-
ми и свойствами магнита, с другой стороны (в предположении,
что максимальное размагничивание магнита имеет место при
установившемся КЗ и что расчетная длина якоря А равна длине
магнита £м):
A=4pHM>KhM/ (0,9naikadkkoD);
(5.71)
Вб=2ЬмрВмоей/ (арПОоО),
(5.72)
где ев —отношение ЭДС в номинальном режиме к ЭДС холостого
хода.
Полученные соотношения позволяют записать:
В% 0 Ьм Вм9
А 7fMtK
(5.73)
152
Из (5.73) видно, что уменьшение отношения Bu0/HMiK (следо-
вательно, и уменьшение отношения ВГ1НС) вызывает увеличение
отношения bM/hM, т. е. магниты становятся широкими и низкими.
В результате масса магнитов сосредоточивается на периферии
ротора, объем которого недоиспользуется. Применение в этой
конструкции магнитов РЗМ (SmCo5) позволяет создать сильные
магнитные поля во внешнем пространстве. Последнее дает воз-
можность разработать генераторы на большие кратности тока КЗ
€ импульсным режимом работы, с беззубцовым якорем и другие
специальные генераторы.
Роторы коллекторного типа с призматическими тангенциально
намагниченными магнитами (рис. 5.13). Для рассматриваемой
магнитной системы с магнитами из РЗМ при определении диа-
метра якоря можно воспользоваться расчетной формулой (5.46),
в которой электромагнитные нагрузки (Л и Вв) можно выбрать
равными нагрузкам генераторов с электромагнитным возбужде-
нием [30]. Индукции в воздушном зазоре значительно выше,
чем в генераторах с радиально намагниченными магнитами, бла-
годаря удвоению магнитного потока в воздушном зазоре (Вв=
= 0,7-4-0,9 Тл).
Основными размерами индуктора, которые необходимо опреде-
лить, являются ширина Ьн, высота hM и аксиальная длина LM маг-
нита. Размеры Ьы и йм определяются из условия размещения
магнита в роторе.
Ширина магнита Ь„ может быть выбрана из выражения
2&м<£> — 26 — 2Д„ — 2йп8— dm, |
ИЛИ bM < D (0,5 - 8/D -\JD- hat/D - D^2D). } (5J4)
Высота полюсных башмаков Лпв выбирается по табл. 5.3.'Втул-
ка является немагнитным конструктивным элементом ротора, и
высота спинки втулки выбирается из конструктивных соображе-
ний. Диаметр вала определяется механическим расчетом валов,
гибкого и полого. Ширина магнита составляет примерно Ьм=
= (0,24-0,25)0.
Максимально возможная высота магнита йм из условия раз-
мещения магнита определяется из выражения
bJD 4- 0,5 (hM/D + 2Д/D) ctg ^2р - /(0,5 - 6/D - - (DJ2D)2.
(5.75)
Фактически может потребоваться высота магнита hM меньше, чем
полученная из (5.75):
hM=0,QnaikadkokDA I (2рЯм,к). (5.76)
Для РЗМ можно взять Нм>к=0,5Яс.
Высота магнита в сильной степени зависит от падения магнит-
ного напряжения в рабочем зазоре (коэффициент од). Если кон-
струкция якоря обычная пазовая, то од=1,2-«-1,25. Если конструк-
ция беспазовая, с большим немагнитным зазором, то од может
значительно возрасти.
153
Длина магнита в аксиальном направлении равна
1м=Ум/(2рМм). (5.77}
При подсчете L№ целесообразно произвести проверку по задан-
ной максимальной мощности генератора
LM=kEP„p I (n^fkoaiBiAD2). (5.78}
Для генераторов с коллекторным ротором справедливы рас-
четные выражения для А и В«:
А = 2pHMy.hM/(O,9‘natkadkokD);
__2 0, ^aika^kQke^
А «о®р
(5.79)
(5.80}
(5.81}
Наибольший эффект коллекторная конструкция дает при боль-
шом числе полюсов, когда удается обеспечить большое отноше-
ние bvjbp.
С увеличением числа полюсов (при неизменном диаметре)
появляется возможность выбора большей индукции Be, и может
быть выбрана несколько большая (p/iM=const) [см. (5.79), (5.80)]:
линейная нагрузка А и, следовательно, возрастает при постоян-
ной частоте вращения мощность, отдаваемая генератором, если
это допустимо условиями охлаждения. Указанная закономерность
подтверждается и упрощенным выражением для В«о в режиме
холостого хода
В»о
BM02SM 2BM0SM 2BMOSM2/>
°0^р °oaj^^p
(5.82}
При выборе числа полюсов необходимо проверять возможность,
выполнения конструкции по условиям размещения магнита [см.
(5.75)] и по условиям технологических требований. Необходимо’
также учитывать увеличение коэффициента рассеяния магнитного»
потока с увеличением числа полюсов.
Роторы когтеобразного типа (см. рис. 1.30). Магнит в когте-
образном роторе представляет собой или полый цилиндр
(рис. 1.30,а, в) с площадью поперечного сечения
$м=л(Я2м-£>2вт)/4, (5.83)
или сплошной цилиндр (рис. 1.30,6, г) с площадью поперечного
сечения
SM=nDM2/4. (5.84)
В случае сплошного цилиндра механическая прочность и моно-
литность ротора обеспечиваются применением сварной конструк-
ции его полюсной системы. Полюсы соединены между собой не-
магнитными пластинами.
154
Длина магнита в аксиальном направлении равняется средней
линии магнитного потока
£м=/м. (5.85)
В каждом отдельном случае в зависимости от конструкции и
материала магнита имеются оптимальные соотношения
ImISh И %m = Iu/Du.
Диаметр и длину магнита в общем случае можно определить:
для конструкции без вала (рис. 1.30,6, г)
(5-86)
для конструкции с валом и втулкой (рис. 1.30,а, в)
“ У кХм(1-^т/^)
Значения Хм предварительно выбираются в пределах:
.0,39—0,42* для альни и альнико; 0,31—0,32* для альниси;
0,15—0,2 для изотропных оксидно-бариевых магнитов; 0,2 для
анизотропных оксидно-бариевых магнитов.
Для анизотропных магнитов со столбчатой структурой, приме-
няемых в настоящее время для изготовления генераторов значи-
тельной мощности (единицы и десятки киловольт-ампер), значе-
ние Ам предварительно можно выбрать в следующих пределах:
0,50—0,55 для однопакетной конструкции; 0,65—0,7 для двух-
пакетной конструкции. Приведенные значения Аи относятся к раз-
мерам одного диска магнита.
Рассчитанный диаметр, см, магнита не должен превышать
диаметра, допустимого по условиям механической прочности:
ВМ<6°ДОП'108, (5.88)
лп
где Пдоп — максимально допустимая окружная скорость магнита,
м/с, для литых магнитов типа магнико, цДОп<60 м/с.
Если окружная скорость магнита превышает допустимую,
а уменьшить диаметр не представляется возможным, то должен
быть предусмотрен немагнитный стальной полый цилиндр, на-
прессованный на магнит.
Если известным является необходимое значение потока холо-
стого хода Фад, то диаметр магнита определится выражением
Рм==Г4оо/>Ф»/№#). (5.89)
По известному диаметру магнита DM и объему магнита У„
определяется длина магнита 1м:
в случае полого цилиндра
I _у /е______1Уи__.
" М' M-«(^-^t)’
(5.90)
* При малой мощности генераторов (сотни вольт-ампер).
155
в случае сплошного цилиндрического магнита
/м=4Ум/лОм2. (5.91>
Длина ротора определяется как сумма
£р=/м+2ЬфЛ) (5.92)
где ЬфЛ — толщина фланца.
По известным размерам магнита уточняется магнитный поток
Фео на полюс, определяются сечение когтей 5КГ и их размеры
Фво==5м5мо/оор; (5.93)
5кг==Фбо^кг/5кг, (5.94)
где Вмо= (0,75—0,88) Вг для магнико и магнитов со столбчатой
структурой; Вмо= (0,70-^0,75) Вг для альни и альнико; Вм0=
= (0,8-*-0,9) Вг для РЗМ; оо — коэффициент рассеяния в режиме
холостого хода выбирается по рис. 5.3,а; <ткг—коэффициент рас-
сеяния, характеризует потоки рассеяния, проходящие только через
сечение когтя SKr (<Ткг<0о за счет потоков рассеяния торцевых
поверхностей ротора); Вкт — допустимая индукция в когтях: для
низкоуглеродистых сталей по ГОСТ 3836-83 Вкг= 1,5-*-1,6 Тл,
а для стали марки 10 Вкг= 1,34-1,4 Тл. Высота hp и ширина Ькт
полюса соответственно равны:
йр^5кг/^кг; (5.95)
огрт, (5.96)
где ар=0,6-*-0,8 — коэффициент полюсного перекрытия.
Диаметр ротора равен
Вр=Вм+2/1р+2Дц, (5.97)
где Дц — толщина немагнитного полого стального цилиндра, кото-
рый предусматривается, если окружная скорость магнита v>
>60 м/с (при литых магнитах). Допускается максимальная ок-
ружная скорость когтеобразных роторов обычной конструкции до
100 м/с. При сварных роторах она значительно выше.
Необходимость провести через когти весь активный поток опре-
деляет отношение суммарного сечения когтей к сечению магнита,
а следовательно, и отношение диаметров якоря и магнита. Для
магнитов из сплавов альни и альниси Ь /Вм= 1,25-*-1,35. Для маг-
нитов из сплавов магнико и со столбчатой структурой D/DM=
= 1,5^-1,65.
Характерным для когтеобразных роторов является то, что
коэффициент заполнения поперечного сечения ротора магнитом
не зависит от числа полюсов:
Лз,м= (DM/Dp) г [1—(Лвт/Вм) 2] ^0,35^0,5, (5.98)
где внутренний диаметр магнита DBT= (0,2-*-0,3)Dp.
156
Площадь поперечного сечения и толщина фланца равны
5ф.-Ф«.»^Вф, = ^; (5.99>
(5.100)
Значения допустимых индукций здесь выбираются такими же, как
и для когтей.
Индукция в воздушном зазоре
Вбо=Фво/5б, (5.101)
где Зв —активная площадь полюсного наконечника когтя.
При современных материалах магнитов Вв=0,4-*-0,7 Тл, боль-
шие значения соответствуют мощностям генераторов 7,5—30 кВ-А.
Линейная нагрузка определяется выражением
Д = —2^гмям,к— . (5.102}
Линейные нагрузки лежат в пределах 50—300 А/см в зависи-
мости от мощности генератора. Большие значения соответствуют
мощности генератора 7,5—30 кВ-А.
Магнитный поток Фео проходит через сечение когтя только
в начальной его части. В других сечениях по направлению к концу
когтя магнитный поток постепенно уменьшается. Это позволяет
конструировать полюс с постепенным уменьшением его сечения
за счет толщины или ширины (см. гл. 1).
Длину якоря при когтеобразном роторе нецелесообразно вы-
бирать слишком большой. Увеличение длины якоря ведет к умень-
шению индукции в воздушном зазоре и одновременно приводит
к росту рассеяния якоря и когтей. Обычно длина якоря выбира-
ется меньше длины магнита. При таком соотношении общая дли-
на якоря вместе с вылетами лобовых частей обмотки оказывается
примерно равной общей длине ротора, что ведет к оптимальной
конструкции, простым формам для щитов и т. д.
Если мощность генератора значительная, то приходится ротор
выполнять двух- или многопакетным (см. рис. 1.5 и 1.30). Мощ-
ность, начиная с которой целесообразно переходить на двух- в
многопакетные конструкции ротора, зависит от материала магнита»
частоты вращения, пределов изменения нагрузки генератора, числа
пар полюсов. Количество пакетов, которое необходимо выбрать»
определяется наиболее целесообразным отношением длины маг-
нитоэлектрической части ротора £р к диаметру ротора D?
1р=£р/Ррч=0,65-Ф-1,0. (5.103}
Меньшие значения ХР относятся к многополюсным генераторам
2р>8, однако диаметр не должен превышать допустимого из-за
условия обеспечения достаточной механической прочности.
157
При магнитах типа магнико и с направленной кристаллиза-
цией целесообразно выбирать двухпакетную конструкцию мощ-
ностью 7,5 кВ-А и выше (/=400 Гц, л=8000 об/мин). При оксид-
но-бариевых магнитах роторы тракторных генераторов выполняют-
ся многопакетными при мощности в несколько сотен вольт-ампер.
В случае многопакетного ротора когтеобразного типа расчет-
ные формулы для подсчета D„ остаются теми же, но в них под-
ставляется объем постоянного магнита Уц,п=Ум/пп, где пп — чис-
ло пакетов. При определении размеров когтей и фланцев в расчет
ВВОДИТСЯ ПОТОК ФвОп=Фбо/Пп-
4.4. ПРЕДВАРИТЕЛЬНОЕ ОПРЕДЕЛЕНИЕ ОБМОТОЧНЫХ ДАННЫХ
И РАЗМЕРОВ СТАТОРА
Для самолетных машин переменного тока в настоящее время
наибольшее применение нашли двухслойные петлевые обмотки.
Применение таких обмоток позволяет уменьшить расход меди и
изоляционных материалов за счет уменьшения вылета лобовых
частей, расширяется возможность выбора дробного числа пазов на
полюс и фазу и благоприятного шага, что ведет к улучшению
"формы кривой ЭДС. Вопросы проектирования якорных обмоток
достаточно хорошо изложены в [30, 36, 37]. Здесь мы обратим
внимание только лишь на некоторые особенности проектирования
обмоток якоря генераторов с постоянными магнитами.
Зная ориентировочное значение потока холостого хода, опре-
деляют число витков в фазе
Шф = £0/(4ЗДФю), (5.104)
где Ео — ЭДС холостого хода, подсчитываемое по формуле
я. = £4/2(1 4-sin?), (5.105)
а при емкостной стабилизации напряжения Eo=Uk, — коэф-
фициент формы кривой поля; при синусоидальной форме кривой
поля йф=1,11; ko — обмоточный коэффициент (для трехфазных
генераторов при двухслойной обмотке можно предварительно
взять йо^О,92) [30].
Число витков в фазе уточняется при поверочном расчете для
режима нагрузки
= Д//(4Мо/®»). (5-Ю6)
где Е( и Фа — расчетная ЭДС и поток холостого хода в воздуш-
ном зазоре при максимальной нагрузке генератора; £<=(1,2-»-
1,4) UB — согласно данным расчетной практики (точно определя-
ется из диаграммы напряжений); Фа определяется из рабочей
диаграммы магнита.
Число проводников в пазу
= —7—АО». (5-107)
Чг 6
158
где Oi и Ог — число параллельных ветвей и проводов; q=z/2ptn—
число пазов на полюс и фазу; z=2«7/?/n=2/nw0a1o2/^n — число-
зубцов.
Число q для самолетных генераторов выбирается дробным, так.
как обмотка с дробным q с точки зрения получения лучшей фор-
мы кривой ЭДС эквивалентна обмотке с целым числом q, равным
числителю неправильной дроби. Как известно, для лучшей формы
кривой ЭДС выгодно брать большими значения q. Кроме того,
увеличение q уменьшает рассеяние обмотки якоря, улучшает усло-
вия ее охлаждения. Однако очень большие значения q не приме-
няются, так как при этом зубцы получаются тонкими, механи-
чески непрочными, с большим насыщением, обмотка имеет более-
высокую стоимость, размеры(и масса машины возрастают.
Выбор q определяется полюсным делением машины и числом
фаз.. Так как полюсное деление при данном числе полюсов зави-
сит от мощности генератора Р, то q зависит от Р. При небольшой
мощности генератора Р= 100—250 В-A, /=400 Гц, т=3 и 2р=6-
выбирается q= Р/г. а при 2р=4 <7=272; при мощности Р—
= 10000 В-А и 2р=4 <7=2’/2, при мощностях, измеряемых еди-
ницами и десятками киловольт-ампер, и 2р=6 q=21/2 и 31/2, а пр»
2р=12 <7=Р/г и 27г; при мощности 60 кВ-A, 2р=10, п=
= 12 000 об/мин, z=72, /п=3; р=24/ю; при мощности 150 кВ А,
2р= 14, «=12 000 об/мин, т=9 q—'/г (для новых систем элек-
троснабжения).
. Так как число проводов в пазу Nn не может быть дробным и
нечетным, то, выбрав число q, уточняют число витков в фазе по-
(5.107).
Чтобы ЭДС выбранной обмотки равнялась расчетной (Ео или
Е{), приходится при небольших расхождениях изменять поток.
Фео или Ф« за счет изменения осевого размера якоря I, а следо-
вательно, и ротора.
Уточнение числа витков о)ф не представляет больших трудно-
стей, если провода круглые, а число их велико, т. е. для мало-
мощных генераторов. В случае генераторов большой мощности,,
с проводами прямоугольного сечения, число проводников в пазу
может быть выбрано вполне определенным: 2, 4, 6. Укладка боль-
шего числа проводов в пазу йредставляет значительные техноло-
гические трудности. Поэтому на практике часто расчет ведут
в обратном порядке: сначала задаются числом проводников в па-
зу, а затем определяют q, at, аг. Число параллельных ветвей
в фазе at нельзя выбирать произвольно. Оно выбирается для дроб-
ных обмоток из выражения
2p/dat, (5.108)
которые являются целым числом и где d— знаменатель простой
дроби числа q.
Помимо того, должны быть выполнены условия симметрии-
' 15»
якорной обмотки, т. е.
z/mt— целое число; (5.109)
2p/d— целое число, (5.110)
где t — наибольший делитель z и р.
Обмотка может быть выполнена симметричной, если d не
является кратным трем. При d=3 трехфазная обмотка не может
быть выполнена ни для какого числа полюсов, а при р=3, на-
пример, может быть осуществлена симметричная трехфазная об-
мотка только при d=2.
Площадь поперечного сечения провода За определяется, исхо-
дя из допустимой плотности тока Ja,
«Sa—/н/</(5.111)
Выбор допустимой плотности тока зависит от режима работы
генератора, условий охлаждения, его типа и мощности, линейной
нагрузки, условий эксплуатации (см. [30]). Для генераторов, рас-
считанных на длительный срок службы с самоохлаждением или
охлаждением от вентилятора, выбирается А/мм2; для
генераторов значительной мощности (самолетных) с воздушным
охлаждением от встречного потока воздуха —14—20 А/мм2; для
генераторов с масляным охлаждением —18—25 А/мм2; для гене-
раторов с глубоким охлаждением и испарительной системой — до
40 А/мм2.
При кратковременной работе генератора плотности тока вы-
бираются согласно рис. 5.14. Кривые построены для адиабатиче-
ского процесса (без отдачи тепла в окружающую среду).
В зависимости от площади поперечного сечения провода вы-
бирается круглый или прямоугольный провод и в соответствии
с этим форма паза [30]. При круглых проводах наиболее целесо-
образной формой паза является грушевидная.
Для якорной обмотки генераторов с максимальной температу-
рой меди (до $-<120 °C) выбираются эмалированные провода
марок ПЭВ-2 и ПЭВП. Для облегчения обмоточных работ часто
применяется намотка несколькими параллельными проводника-
ми (а2)-
Для якорной обмотки с максимальной температурой меди
(6=250 °C) выбираются эмалированные провода марок ПНЭТ и
ПНЭТП с полиимидной изоляцией, а также провода марки
ПСДКТ. При температурах 250—400 °C применяются провода ма-
рок ПНСДК и ПНСДКТ, для особо тяжелых температурных усло-
вий (6= 500-J-600°C) —жаростойкие провода марки ПОЖ-
При круглых проводах необходимая площадь паза определя-
ется обычно с помощью коэффициента заполнения паза &3>п
Sn= -iVnSo-"?-, (5.112)
^з.п
160
тока в обмотке якоря в зависи-
мости от времени работы при раз-
личных допустимых превышениях
температуры обмотки Ад:
/-200 К; 2-300 К; 3-400 К
Рис. 5.15. Паз статора генератора с изоля-
цией класса А:
1 — пазовая изоляция из пленкокартона 0»2 мм;
2 —пазовая изоляция из электрокартона ЭВП
0,1 мм; 3 — междуслойная изоляции из пленко-
картона 02 мм; 4—клин из текстолита (0,5—
1,0 мм)
где Sa из — площадь поперечного сечения изолированного про-
вода.
Значения коэффициента k3,a зависят от диаметра провода и
характера изоляции [30, с. 54]. Обычно для генераторов неболь-
шой мощности (до 7,5 кВ-A) fe3,n=0,36^-0,43.
В случае применения изоляции класса А (провода ПЭВ-2,
ПЭВП) в качестве пазовой изоляции применяются электрокартон
марки ЭВП и пленкокартон. В качестве клина применяется тек-
столит (рис. 5.15).
При выполнении обмотки из проводов прямоугольного сечения
паз выбирается прямоугольным (рис. 5.16). Размеры провода вы-
бираются в соответствии с ГОСТ такими, чтобы ширина зубца
осталась достаточной для проведения магнитного потока без насы-
щения и для обеспечения механической прочности зубцов. Коэф-
фициент заполнения для прямоугольного паза Л3,п=0,6-5-0,70.
В случае применения изоляции класса С (провода ПНЭТ и
ПНЭТП) применяются пазы с теплостойкой изоляцией (рис. 5.16).
В качестве пазовой изоляции применяются стеклослюдиниты:
формовочный и гибкий, стеклолакоткань ЛСК-7 или фторопласт
толщиной 0,04 мм. Клин изготовляется из стеклотекстолита марки
СКМ-1 (2X0,5 мм).
Определяются размеры зубца, паза и якоря.
Для зубца с постоянным сечением (рис. 5.15) необходимая
ширина
BiOtz/ Bzkatc, ( 5.113)
а для зубца с неравномерным сечением (рис. 5.16)
bt tMn^Biotzl Вг тахкз,с» (5.114)
161
11—6258
Рис. 5.16. Паз статора генератора с тепло
стойкой изоляцией:
? —провод обмоточный марки ПНЭТП; 2 — стек-
лослюдинит формовочный марки' ГФК-1 или
ФС25К (0,15 мм); S — стеклолакоткань ЛСК-7
(0,06—0,15 мм); 4 — стеклослюдинит гибкий мар-
ки ГС26К (0,15 мм); 5 — стеклослюдинит гибкий
(0,15 мм); 6 — стеклотекстолит СКМ-1 или
СВФЭ-2 (2X0,5 мм)
В (5.113) и (5.114) Вбо — индукция в воздушном зазоре в режи-
ме холостого хода; ti=nDlz — зубцовое деление по диаметру яко-
ря; Вг И Вгтах — ДОПуСТИМЫв ЗИаЧвНИЯ индукции В зубце; Й3,с —
коэффициент заполнения сталью сечения магнитопровода (при
толщине листа Д=0,35 мм fe3,c—0,95, при Д=0,2 мм Л3.с=0,9
[30]).
Для обеспечения механической прочности зубца и уменьшения
влияния наклепа на магнитную проницаемость материала жела-
тельно выдержать соотношение
мм. (5.115)
Максимальные значения допустимых индукций выбираются
для зубца с постоянным сечением 1,4—1,6 для стали 1411 и 1,7—
1,9 для сталей 27КХ и 49КФ2-ВИ.
Максимальные значения допустимых индукций для зубца с не-
равномерным сечением: Вгтах= 1,6-*—2,0 для стали 1411; Б2^1,7
с сечением йа ’/з высоты зубца от минимального; Bzmaie=l,9-t-2,l
для сталей 27КХ и 49КФ2-ВИ (значения индукции—в теслах).
Подсчитанное и выбранное значение Ь1тЛп для зубца с пере-
менным сечением определяет ширину паза (рис. 5.16)
Ьа=л(В-[-2Нк.) JZ bzmint (5.116)
где высота коронки зубца йк=1,3-*-1,5 мм.
Высота спинки якоря, см,
hia=Фео. 104/2/й3.сВ/а, (5.117)
где В/а — допустимая индукция в спинке якоря; для стали 141J
(Э31) В/в<1,5 Тл, для сталей 27КХ и 49КФ2-ВИ В!а^1,7 Тл.
Внешний диаметр якоря
Dtm=D+2hz+2hja. (5.118)
Для тракторных генераторов, имеющих выступающие полюсы
на статоре и сосредоточенные обмотки, число витков в каждой
162
Рис. 5.17. Генератор с подмагничиванием
спинки статора:
1 — обмотка подмагничивания; 2 — ярмо ста-
тора; 3 — обмотка якоря; 4 —магнит
катушке определяется по
формуле
"- = т&Д- <5Л19>
где ЕОк—ЭДС холосто-
го хода одной катушки.
При определении пло-
щади поперечного сече-
ния провода катушки
плотность тока выбира-
ется в диапазоне значе-
ний /а = 4-:-6 А/мм2.
Обычно применяется
Провод марки ПЭВ-2.
Зная обмоточные дан-
ные катушки, определя-
ют размеры катушки и
ее объем.
В случае применения регулирования напряжения изменением
магнитного сопротивления сердечника якоря в пазах якоря поми-
мо якорной обмотки размещается еще обмотка подмагничивания
(рис. 5.17). Наибольшая МДС обмотки подмагничивания имеет
место в режиме холостого хода. В этом случае для определения
размеров паза необходимо определить МДС обмотки подмагничи-
вания F0.n и ее обмоточные данные.
Предварительно МДС обмотки подмагничивания может быть
определена по выражению
Fo^O-О^оЫШ (5.120)
где k — кратность тока КЗ:
1п== (1 И) 1 / (1 =F o,n/Fо4к$
u= 17и/£о;
x*s— индуктивное сопротивление рассеяния обмотки якоря (пред-
варительно можно принять x*s^=0, 1).
Зная Fo.n, определяем площадь поперечного сечения провода
обмотки подмагничивания
5П=F0>nZcp (1 + 0,00380) /5700<7П, (5.121)
где /ср—средняя длина витка, см; О — превышение температуры
обмотки сверх 20°C; Un — напряжение питания обмотки подмаг-
ничивания, В.
Выбирая плотность тока в обмотке подмагничивания, близкую
к плотности тока обмотки якоря, получаем значение тока
7П=Л$„. (5.122)
Число витков подмагничивающей обмотки
wa=F0,n/Iat (5.123)
11* 163
Число витков подмагничивающей обмотки в паву
Wnz=Wn/z. (5.124)
Максимальная мощность подмагничивающей обмотки
1,птм=:М121 (5.125)
где гп — активное сопротивление обмотки подмагничивания.
На практике установлено, что для снижения потока холостого
хода на 17—20 % напряженность поля от МДС подмагничивания
в спинке якоря должна быть примерно 50 А/см. Не следует завы-
шать индукцию в спинке якоря В/а. Для обычных сортов стали
Bja не должна превосходить 1,2 Тл.
Высота обмоток в пазу Лп,о будет определяться высотой обмот-
ки якоря в пазу h0,я и высотой обмотки подмагничивания Л0,п:
^П.О в ^О.я + ^О.П"
Для прямоугольного паза
А°’Я = /аЛз.пН-В4/(А3.сВг)] ; (5> 126)
А°-п = /о.п*з.^(1 -В»/(ВЛ.с)) (5A2J)
Для трапецеидального паза
Ло.я = V (^/4) [ 1-В./(А».вВг)]‘+АО/(^.11/о)-(^2)11 -В»/(^.сВг)];
(5.128)
Ло.п - rO,25(D+ft0J‘[l -В»/(^,вВг)]‘.+Л,п/(Ч.Л.п) -
-0,5 (D + 2ЛО>Я) [1 - ВММ]. (5.129)
5.5. РАСЧЕТ ПРОВОДИМОСТЕЙ РАССЕЯНИЯ РОТОРА
При подсчете проводимостей рассеяния магнитов приходится
учитывать некоторые особенности, характерные для постоянных
магнитов.
1. МДС по длине постоянного магнита является распределен-
ной. Поэтому проводимости рассеяния отдельных участков поверх-
ности магнита в зависимости от расстояния от нейтральной зоны
магнита находятся под неодинаковыми магнитными напряжения-
ми. Поверхности магнита не являются эквипотенциальными.
2. Для большинства форм магнитов поле по длине магнита и
даже по ширине его не остается постоянным, что затрудняет
подсчет магнитного напряжения между отдельными участками
магнита. Различные точки магнита имеют различное магнитное
состояние.
Кроме того, удельная проводимость рассеяния между отдель-
ными участками различна, проведение точных расчетов прово-
димостей рассеяния представляет более значительные трудности,
чем в случае полюсов с эквипотенциальными поверхностями.
164
При расчете постоянных магнитов оперируют приведенным!*.
проводимостями рассеяния, которые представляют собой проводи-
мости рассеяния, приложенные к концам магнита и создающие:
такой же поток рассеяния Ф8М, как и реальные проводимости. Ес-
ли приведенную проводимость рассеяния магнита обозначить че-
рез Л'$м, то она определится выражением
ЛЛвМ^Ф*м/-Ем==Л1М11|Йпр> (5.130)^
где Л«м,г — геометрическая величина проводимости рассеяния»
магнита, определяемая по геометрии (подсчитанная относитель-
но нейтрали магнита); £Пр — коэффициент приведения.
Значение коэффициента приведения зависит от характера из*-
менений магнитного напряжения и проводимостей рассеяния по
длине магнита. При неизменной напряженности поля Н по длине
магнита, например в случае эллипсоида, магнитное напряжение
нарастает относительно нейтрали по линейному закону. При дру-
гих формах магнита, например в случае цилиндра, Н возрастает
по мере удаления от нейтрали к концам магнита.
Если положить Н—const и %sx=const, то ЛПР= 1/34-1/2.
При расчете магнитов с резко различными удельными прово-
димостями рассеяния значение Л.'щ целесообразно подсчитать,
непосредственно
%sm= (5.131),
о
где /к — расстояние между серединами л-й пары участков маг-
нита.
Расчеты проводимостей рассеяния магнитов без арматуры ю
в арматуре ведутся разными методами: аналитическими, графо-
аналитическими и графическими. Выбор метода расчета зависит
от геометрической формы магнита и положения оси его намаг-
ничивания.
а) Проводимость рассеяния кольцевого магнита, намагниченного»
по диаметру
Имеется несколько способов расчета проводимостей рассея-
ния магнитов такого типа. Выбор метода расчета до некоторой
степени зависит от конструк-
тивного выполнения кольцевого
магнита.
При расчете принимается сле-
дующее допущение: магнит рас-
сматривается составленным из
двух полуколец, соединенных од-
ноименными полюсами навстре-
чу друг другу (рис. 5.18). Тогда
расчет кольца заменяется рас-
четом полукольца. Дуга полу-
Рис. 5.18. Магнитные проводимости»
магнита кольцевой формы
16S
кольца заменяется эквивалентными по величине проводимости
рассеяния параллельными призмами. Эквивалентная длина призм
равна [1]
/,=2,4(г+а/2).
Расчет проводимости рассеяния для полукольца имеет неко-
торые особенности. Вследствие наличия второго полукольца про-
водимость между торцами полукольца As< равна нулю (рис. 5.18).
Проводимость Asi следует вычислять без учета выпучивания
магнитных линий в направлении второго полукольца, так как
оно препятствует проникновению магнитных линий в его сто-
рону, т. е.
Asx = 0,4it-10-8 + (5.132)
где ksm0,307.
Проводимость Лез между внешними поверхностями по той
же причине следует подсчитывать только для путей потока в
одном направлении (от оси разреза в сторону рассматривае-
мого полукольца).
Результирующее значение проводимости рассеяния равно
ASM =-1- (An + 2AS, + ЛЙ), (5.133)
*Пр
где fenp=l/2; А,2 — проводимость рассеяния между двумя пло-
скими параллельными поверхностями, лежащими в одной плоско-
сти, равная
Л52 = 0,4ir. 10~‘—In[14-(2а/2г)]; (5.134)
л
Лй = О,4х.1О- (а/6-Н"л). (5.135)
Значения V и Л" берутся согласно рис. 5.19.
Значения Лем по (5.133) относятся к половине кольца. Для
полного кольца эти значения удваиваются; при этом Asm уже
необходимо относить к полной площади нейтрального сечения
кольца.
Изложенный выше метод расчета проводимостей рассеяния
дает достаточную для практических расчетов точность, т. е. по-
грешность не превышает 20 %,
б) Проводимость рассеяния многополюсного монолитного ци-
линдрического магнита
Обычно цилиндрические магниты из РЗМ такой конструк-
ции (рис. 5.20) делаются с большим воздушным зазором между
ротором и статором.
Проводимость рассеяния в собранном состоянии равняется
сумме проводимостей (на пару полюсов)
Asm=2As3+4As2+Asi, (5.136)
366
Рис. 5.19. Кривые для подсчета V и 1" между поверхностями, обращенными в*
противоположные стороны для различных значений т:
/—1,5; 2 — 2; 3 — 3; 4 — 4; 5 — б; л=а/2г и m= (г+а)/г — для подсчета X'; л=Ь/2г и т=-
»(r+W — для подсчета V
Рис. 5.20. К расчету проводимостей рассеяния монолитного цилиндрического маг-
нита
где As3 — проводимость рассеяния между частями цилиндриче-
ской поверхности; As2— проводимость рассеяния между торце-
выми поверхностями полюсов магнита; Asi — проводимость
рассеяния между внутренними частями цилиндрической поверх-
ности.
Указанные проводимости могут быть подсчитаны по аналити-
ческим формулам:
Д = НоТА 1 1+(8/"8) (87OM)
2 я(1-«р/2)/2р l+(i-ap)fp ’
где Xm=Lm/Dm; Sz— эквивалентный воздушный зазор (с учетом-
зубчатости статора); ар—bp/r (Ьр— длина полюсной Дуги);
Asl= AS2-|-AS2,
где A's2 — проводимость между прямоугольными торцевым®
поверхностями полюсов; Л"«2 — проводимость между прилегающи-
ми секторами торцевых поверхностей полюсов;
л;’=!^*-(1—И-^"Р,)[1 + (^),0’-0]; (5.138>
Л'$2 = Sin’ (2Lа W1,83—, (5.139>
в/., \2р р) \ Р Р* J
где
Гз1пя(1 — а„)/2р [( . я . я /, 1 \\ я "I
= р' I ~'si^/2p + ((sln4T ар+~Г I1 “ Т/) sin27ap]:(5-140>
AS1 = (3/2-^) sin-^—ар. (5.141>
16?
Проводимость между цилиндрическими поверхностями полюсов
ротора в свободном состоянии
л,. - - { Г1 - (-£-)' Ч>-1 + 0.5«,)1 х
я \Р +1 — о»*ар) IL \ %Р / J
х(1_ал)1п_!_+ад(^.),(1[,_1_0,5«р)}. (5.142) ;
в) Проводимость рассеяния постоянного магнита звездочка
Суммарная проводимость рассеяния между двумя полюсами
магнита звездочка (рис. 5.21) в свободном состоянии (без ар-
матуры) с сечением нейтральной зоны магнита SM и длиной
магнита (по средней силовой линии /м равна сумме проводимо-
стей рассеяния)
Л»м=2Л$1 -|-4Лв2+2Л»з+
•+4ЛИ+4ЛЛ+4Л*. (5-143)
I
где Ля — проводимость между боковыми сторонами полюсов
магнита; Ля— между торцевыми сторонами магнита; Лзз^-
между радиальными поверхностями полюса; Л«в — между угла-
ми полюсов; Лв7 — между полюсными дугами; Ase — между тор-
цевыми ребрами полюсов.
МДС по длине магнита не остается постоянной. Поэтому
подсчет проводимостей рассеяния Ля, Ля и Л«в должен вестись
с учетом распределенной МДС. Кроме того, необходимо учиты-
вать то обстоятельство, что удельные проводимости трубок этих
проводимостей по длине магнита (по высоте полюса) не оста-
ются постоянными. В отношении Л3з подсчет значительно упро-
щается, так как она находится под полной МДС магнита и со-
ставляет сумму элементарных проводимостей с радиальной по-
верхности полюса, подсчитанную по силовым трубкам.
Подсчет проводимостей рассеяния может быть произведен с
помощью построения картины поля, что особенно удобно при
Рис. 5.22. Картина поля для расчета
проводимостей рассеяния магнита звез-
дочка
Рис. 5.21. К расчету проводимостей •
рассеяния магнита звездочка
К 68
подсчете проводимостей Лц и
Аз (рис. 5.22), или с помощью
расчетных формул [1]. Поля,
соответствующие проводимостям
Л,1 и Л«з, можно рассматривать
как плоскопараллельные.
При подсчете A«i с помощью
расчетных формул высота по-
люса разбивается на ряд уча-
стков. Проводимость между сим-
метричными участками опреде-
ляется как проводимость между
поверхностями, расположенными
под углом друг к другу [1].
Проводимости отдельных уча-
стков приводят к полной .МДС
Рис. 5.23. К расчету проводимостей
рассеяния между боковыми поверх»
костями полюсов
магнита, а затем суммируют.
При подсчете AS2 с помощью расчетных формул поверхности
торцов полюсов также разбиваются на ряд симметричных участ-
ков, проводимости между которыми определяются как проводи-
мости между поверхностями, лежащими в одной плоскости.
Для подсчета проводимостей Asi и AS2 получены упрощен-
ные расчетные формулы, позволяющие сразу определить значе-
ния этих проводимостей [1]. Для этого делается два упрощаю-
щих задачу допущения: МДС магнита возрастает пропорцио-
нально активной длине магнита /м; распределение силовых ли-
ний между боковыми поверхностями (проводимость Ai) про-
исходит по радиусам, имеющим центр в точке О (рис. 5.23).
Выделим бесконечно малый элемент площади боковой сто-
¥оны полюса длиной dx на расстоянии х от нейтральной зоньи
огда элементарный поток рассеяния с этой поверхности на ана-
логичную поверхность противоположной стороны другого полю»
са равен
d<Dxi=Fx</Aaix. " (5.144)
В свою очередь,
Fx=(Fu/h)x;
dAax = 0.4^lO-^L^x,
где а —угол наклона плоскости с осью в радианах (рис. 5.23);
£м — длина магнита по оси. .........
Следовательно,
z&dx.
Суммарный поток рассеяния с поверхности длиной h
= 0,4я • 10- Lu fdx = 0,4ж10- (FM/2a) LM.
169 ’
Отсюда суммарная эквивалентная Проводимость между боко-
выми поверхностями
Ла1—0,4 л- 10-в£и/2а=0(628- 10-8L„/a. (5.145)
Производим аналогичным образом подсчет проводимости
'A.S2- Среднее сечение силовой трубки
Scp=0,5 [а (14-0,5cosa) -f-y sina] dy.
Средняя длина силовой линии между торцевыми поверхно-
стями
/Cp=ni/sina,
откуда
dAs2=0,4n* IO-8- 1/(2лу sina) X
X [a (14-0,5cosa) +у sina]dy.
Умножив полученную величину на МДС и проинтегрировав, по-
лучим
As2=0,4n • IO-8 (sin a) / (2л) X
X[a(l+0>5cosa) + Lisin (a/2)], (5.146)
где Li — высота полюса магнита по средней силовой линии.
Проводимость AS3 может быть определена путем подсчета
проводимости силовых трубок
A«3=0,4n-10-8S(Si/Ji), (5.147)
где Si — среднее сечение трубки; U — средняя длина трубки.
Аналитическое выражение для подсчета Азз имеет вид [46]
Аналитические выражения для подсчета Л5,, Лет и Лу, имеют вид:
(5.И9)
sin л г
2р
Л„ «0,25^Дм sin (ic/4p) лр [(cos (и/2р) -f-sin «/2/?)]; (5.150)
Dm* sin8 (л/2р) (1 — a0)
л„ = 0,06ixo-^-(l +ctgW2p)) (5.151)
170
Таблица 5.4
р \м для Z/D \м.св для l/D
0,75-1,0 | 1,0—1,25 1,25—1,6 1,6-2,0 0,75—1,0 1,0-1,25 1,25-1,6 1,6—2,0
1 1.7 1.4 1,2 1,1 2,2 1,9 1,7 1,6
2 2,1 1.8 1,6 1,5 3,1 2,8 2,6 2,5>
3 2,4 2,1 1,9 1,8 3,5 3,2 3,0 2,9
4 2,6 2,3 2,1 2,0 3,9 3,6 3,4 3,&
Расчетные формулы (5.145), (5.147), (5.148) — (5.151) дают
достаточную для практических целей точность.
В собранном состоянии ротора с магнитом звездочка и ста-
тора проводимость Л«з теряет смысл, так как из активной поверх-
ности полюса выходит рабочий магнитный поток.
Как показали расчеты, значения удельных проводимостей рас-
сеяния магнита при собранной машине Х8М и в свободном состоя-
нии Xsm.cb зависят от числа пар полюсов р и отношения 1/D, где
l=Lu — длина якоря, D — диаметр якоря. Чем больше отноше-
ние, тем меньше доля общей проводимости, обусловленная рас-
стоянием торцевых поверхностей магнита и не зависящая от дли-
ны LM. Значения удельных проводимостей Х$м И XsM.CB, 10-8 Гн/см,
приведены в табл. 5.4.
г) Проводимость рассеяния магнита звездочка с полюсными баш-
маками
Для явнополюсных машин характерным является то, что маг-
ниты из-за наличия потоков рассеяния намагничиваются нерав-
номерно, поэтому кривая размагничивания постоянного магнита
не является одной и той же для всего объема магнита. Обычно
при расчете принимается, что состояние всех частей намагничен-
ного магнита описывается одной и той же характеристикой раз-
магничивания, определяющейся средними значениями остаточ-
ной индукции и коэрцитивной силы, которые на 5—10 % ниже
значений для равномерного поля намагничивания.
Обычно при расчетах постоянных магнитов магнит характе-
ризуют состоянием нейтральной зоны. Однако практически из-за
потоков рассеяния распределение индукции по длине магнита
неравномерное. Значение индукции больше в нейтральном сече-
нии и меньше у концов магнита, и наоборот, для напряженно-
стей поля. Таким образом, распределение магнитного напряже-
ния по длине магнита является также неравномерным.
Магнитное состояние и поля рассеяния магнита зависят от
нагрузки якоря и от предыстории магнита. С увеличением на-г
грузки сильно изменяется характер полей рассеяние
(рис. 5.24,а, б). По мере увеличения тока нагрузки доминирую-
щее значение приобретает поле реакции якоря (рис. 5.24,6). По-»
ле изменяется и для торцевой части магнита. При анализе ра-
боты магнита нужно рассматривать его состояния, в той после-
довательности, в которой они происходят. Магнит,
171
ннж»»>нниннн
ЙРис. 5.24. Картина полей рассеяния индуктора звездочка
« — при холостом ходе; б — при нагрузке
;ля работы в электрической машине, сначала
предназначенный
намагничивается, затем стабилизируется и подвергается размаг-
ничивающему воздействию, меньшему, чем в момент стабилиза-
ции. Для анализа работы магнита и расчета потока на выходе
(постоянного магнита в функции его МДС Ф
тан аналитический
рассмотрим более простой метод расчета магнитного состояния
магнита и проводимостей рассеяния по средним значениям на-
f(Fu) разрабо-
ифференциальный метод расчета. Здесь мы
лряженности поля в магните.
умением
лм
O/Mj н dx = Fм/hM,
(5.152)
где Н—напряженность поля на высоте х от нейтральной зоны;
fiu—высота магнита (рис. 5.25).
Как показали исследования, в момент стабилизации магнита
НДС реакции якоря или большим магнитным сопротивлением
‘(вынутый ротор), когда рабочая точка лежит на кривой раз-
магничивания, напряженность поля в нейтральной зоне меньше
«средней напряженности поля, что мы можем видеть из рис. 5.25.
На рис. 5.25,а точка А соответствует магнитному состоянию маг-
йита в нейтральной зоне, В — на конце магнита, С — среднему
•состоянию. При переходе от условий стабилизации к условиям
нормальной работы или холостого хода (когда режим КЗ якоря
172
йита в нейтральной зоне, В
на конце магнита, С
в
Рис. 5.25. К расчету постоянных магнитов
снят или ротор вставлен в статор) напряженность поля в нейт-
ральной зоне становится больше, чем средняя напряженность в
магните (ЯСр1</^л1 на рис. 5.25,а). Точка магнитного со-
стояния, соответствующая новой средней напряженности в маг-
ните ЯСр1, находится на прямой возврата ССЬ отходящей из
точки С.
Для упрощения расчета потока рассеяния магнита, завися-
щего от распределения МДС по длине магнита, заменяют дей-
ствительный поток рассеяния эквивалентным расчетным Фзм,р,
который проходит по всей длине магнита, так же как и поток
рассеяния полюсных башмаков.
Расчетный поток рассеяния сердечника полюса выбирается
таким образом, чтобы удельная МДС, соответствующая расчет-
ному потоку полюса и являющаяся теперь постоянной величи-
ной, будучи умноженной на длину магнита, равнялась полной
МДС магнита полюса.
Значение расчетного потока рассеяния определяется разно-
стью среднего расчетного потока ФСр(Фс> Фа) и потока, выходя-
щего из конца магнита (Фв, Фв1),
Ф®м,р==Фср ~~ Фв. (5.153)
В случае, если нет полюсных башмаков,
Ф$м,р^=Фср— Фе» (5.154)
где Фе — поток в воздушном зазоре над полюсом.
Расчетному потоку рассеяния соответствует расчетная про-
водимость рассеяния магнита
Л»м,р:=|Ф«м>р/ (HCphM) ==|Фвм,р/^*м. (5.155)
Оперирование средним состоянием магнита, расчетной про-
водимостью рассеяния и расчетным потоком рассеяния позволя-
ет упростить расчет и привести его к случаю неизменной индук-
ции по длине магнита.
Ниже приведены расчетные формулы для подсчета проводи-
мости рассеяния полюсов, полученные Т. Г. Сорокером, с учетом
173
Рис. 5.26. К расчету проводимостей рассеяния ротора звездочка с призматичес-
кими магнитами
неравномерного распределения индукций и напряженностей по
длине магнита [33].
Полная проводимость рассеяния полюсов (рис. 5.26) равна
Азп,р^Лзм,р4"Лвпб> (5.156)
где Лзпб — проводимость рассеяния полюсного башмака.
Значение
Азм,р==^?Л-эм, (5.157)
где Лэм — проводимость рассеяния фиктивного электромагнита,
сердечник которого имеет ту же конфигурацию, что и постоян-
ный магнит.
Формула для подсчета Л9М выведена на основании идеализи-
рованной, упрощенной картины поля тем же методом, которым
в аналогичных случаях пользовались Арнольд и другие авторы
Лэм = (5£м ~~~ <ра+:1,6Лм<р ). 10—, (5.158)
\ “max
где фа определяется по рис. 5.27 в зависимости от dmin/dmaxt
где dmin и dmax по (рис. 5.26):
У dmax /1 dfpin dmax \
dmax “ dmin \ dmax — dmjn <Gn|n /
Значение определяется по рис. 5.28 в зависимости от bjd^t
<р =-.2L_*“—pinfl-f--^--^-^ _ (JL
2 \ 2 dmax ) \ 2 dmax / \ я &m /
Коэффициент kt, одновременно учитывает снижение потока
рассеяния из-за конечной (и весьма малой) проницаемости по-
стоянных магнитов и неравномерное распределение удельной
МДС по высоте магнита. Его значение зависит от конфигурации
междуполюсного пространства, от коэффициента магнитной про-
174
Рис. 5.27. Кривая ^a(dminld max ) для
Рис. 5.28. Кривая Фа(М<*т««) для
расчета проводимостей рассеяния
магнита
Рис. 5.29. Кривые k х (5) для рас-
чета проводимостей рассеяния маг-
нита:
&min
<0.5: a-rfm<n/dm„<o.i5
Рис. 5.30. Кривые <рт1(&Р/Ср) и
Ч>12(2ар/Ср) к расчету проводимо-
стей рассеяния полюсных башмаков
ницаемости магнита и определяется по рис. 5.29 для различных
отношений dmmldmax и значения g
? = , ГймАэмЛО^ (5.159)
г Р*м
где р — коэффициент возврата магнита, Гн/м; Лм — высота маг-
нита.
Проводимость рассеяния полюсных башмаков А<пб может
быть подсчитана по формуле
А«пб^ [5/рЛпб/ Ср+3,2 (An6*Wp,_b
.+,//) <P?i+1,61 M<pv2] IO"8, (5.160)
где Лпб — высота полюсного башмака (см. рис. 5.26); 1М — дли-
на магнита в осевом направлении; Ср — минимальное расстоя-
ние между башмаками двух соседних полюсов; ip — длина по-
люсного башмака; 1Р'= (1Р — Lu)/2 — длина выступающей за
магнит части полюсного башмака; 1Р"^=(1Р—1)/2— длина вы-
ступающей за статор части полюсного башмака.
175
Коэффициенты <pvi и <pV2 определяются по рис. 5.30 в зависи-
мости от Ьпъ/Ср и 2аР!Ср соответственно; йр=(6р— Ьи)/2— ши-
рина полки полюса.
Кривая <р? из рис. 5.30 построена по уравнению <р=1п (1+
4- у) (все размеры в вышеприведенных выражениях берут-
ся в сантиметрах), где ?=&Пб/Ср и у=2ар/Ср.
Имея значения проводимостей, можем подсчитать расчет-
ный поток рассеяния полюса:
®sM,p=A.sn6.Fp-|-AsMp г (5.161}
где Fp — МДС между полюсными башмаками; F't — перепад
МДС в зазоре между магнитом и полюсным башмаком.
Для определения полного потока рассеяния магнита, прони-
зывающего полюсное колесо, т. е. в нейтральном сечении маг-
нита, следует найти соответствующую проводимость по формуле
Asn^ASaAsMp“bAsn6^AsM-{-Asn6, (5.162)
где Лр=Фвм/Ф«мр — коэффициент, равный отношению фактиче-
ского потока рассеяния (разности потока в нижней части, при-
мыкающей к ярму, и потока, входящего в полюсный башмак) к
расчетному потоку рассеяния (разности среднего потока Фср и
потока, входящего в полюсный башмак); значения приведе-
ны на рис. 5.31 в зависимости от
Рис. 5.31. Кривые к расчету потока
рассеяния:
<о.5: s-rfm<„/rf„e.<a.i5
В случае вынутого ротора к тем потокам рассеяния, которые
учтены проводимостями Лзм и Asn6, добавляется еще проводи-
мость AAsne, соответствующая потокам, замыкающимся между
активными поверхностями полюсных башмаков.
Для расчета добавочной проводимости пользуются формулой
^„6=4^1.10-8, (5.163)
175
Рис. 5.32. к расчету проводимостей рассеяния в индукторе коллекторного тип»
выведенной, как и А«Пб, из приближенной картины поля. Коэф-
фициент <pvi определяется по кривой на рис. 5.30 в зависимости'
от bpf Ср'
Если ротор представлен звездочкой без полюсных башмаков
(см. рис. 5.7), то проводимость рассеяния полюсов определится*
по формулам
Дгмр = Лэм> (5.164}
ЛэМ= (5Ьм-А- + 1,6Ли<р У10-’. (5.165}
где <рр определяется по рис. 5.28 в зависимости от thjdmax’, kx —
по кривой 3 на рис. 5.29.
Приведенные здесь расчетные формулы для определения
проводимостей рассеяния отнесены к одному полюсу. Если рас-
чет магнитной цепи ведется на пару полюсов, то значения про-
водимостей рассеяния должны быть приняты в два раза мень-
шими.
д) Проводимости рассеяния ротора коллекторного типа
Проводимости рассеяния ротора (рис. 5.32) слагаются из*
проводимостей рассеяния самого магнита и проводимостей рас-
сеяния полюсов (в необходимых случаях—полюсных наконеч-
ников из магнитно-мягкого материала)
A.-Aw+A.n, (5.166>
12—6258 177
В свою очередь, проводимость рассеяния магнита Лвм скла-
дывается из боковых Л^м,б и торцевых Asm.t проводимостей рас-
сеяний (на один магнит)
Asm 2ASM,6+2Asm,t, (5.167)
где
Asm. 6=^0^^+!); (5.168)
Лзм,т==<&лР>(^м> (5.169)
Ах — отношение проводимости рассеяния магнита к проводимо-
сти рассеяния эквивалентного электромагнита (см. рис. 5.29);
Цг — относительная магнитная проницаемость немагнитной встав-
ки, цо=0,4 л-10-8.
Проводимость рассеяния полюсов Л*п складывается из прово-
димостей бокового рассеяния полюсов Asn.6, торцевого рассеяния
полюсов Л8П,т, бокового рассеяния полюсных наконечников ASH,6
я торцевого рассеяния полюсных наконечников Ash,t:
АЛ = (Asn.6 4* Авп,б) + 2Лет т 4- Лот б AOT T. (5.170)
Проводимость бокового рассеяния полюсов
(Asn.e “I-Ази.б) = Лга
[/ 2Д ( С„ — Ьм \ 1
Ч’+та^+Ч’+'^Чг <5л71>
С, = (1-ар)теР/2р.
Проводимость торцевого рассеяния полюсов:
= <S172>
/= 1 + (лД/Лм) sin (л/2р);
/'= (л&м/Лм)з1п(л/2р); y=ly'-j-y".
Проводимость бокового рассеяния полюсных наконечников
Азн,б^2цо2.мр1г(Лпн/^'р)- (5.173)
Проводимость торцевого рассеяния полюсных наконечников
Л».. = (V In V - V ta V' - V"); (5.174)
v, = ! + (D-28-2^) sJn М2р},
*" = ^SL.sin^/2^);
V = v' 4“ v"
(8 — воздушный зазор).
178
Выражения для подсчета проводимостей рассеяния согласно»
(5.16) — (5.174) даны на один магнит, который обеспечивает по-
ловину результирующего магнитного потока в воздушном зазо-
ре Ф«/2. Полное значение магнитного потока Фа обеспечивается,
двумя магнитами, работающими параллельно. Поэтому при рас-
чете полного магнитного потока Фа проводимости рассеяния,
рассчитанные на один магнит, удваиваются.
е) Проводимости рассеяния ротора когтеобразного типа
В случае когтеобразного ротора (рис. 5.33) магнит представ-
ляет собой полый цилиндр, намагниченный в аксиальном на-
правлении. Поток рассеяния непосредственно самого магнита
крайне мал по сравнению с общим потоком, проходящим через-
магнит. Поэтому при расчетах можно считать, что магнитное-
состояние всего объема магнита одинаковое и характеризуется
одной и той же точкой -на одной и той же прямой возврата
рабочей диаграммы магнита. Можно считать, что магнитное на-
пряжение по длине магнита изменяется по линейному закону.
Весь поток рассеяния ротора можно разбить на несколько-
составляющих: поток, замыкающийся между двумя когтями с
боковых сторон, поток, замыкающийся между двумя когтя-
ми, Ф2 (этот поток частично проходит через магнит); поток, за-
мыкающийся с торца когтя на фланец полюсной звезды противо-
положной полярности, Фз; поток между внешними поверхностя-
ми полюсных фланцев, Ф4; поток, замыкающийся в пространстве-
внутреннего отверстия магнита, Ф5,
Наибольшие значения имеют потоки Фь Ф2 и Ф4; потек Ф&,
мал и им практически можно пренебречь, так как вал ротора;
выполняется из немагнитной стали или предусматривается меж-
ду валом и магнитом втулка из немагнитного материала, поток
Фз, как показывают измерения, при правильно выбранной кон-
фигурации когтя и фланца также невелик. Поверхность торца
когтя выбирается небольшой, а расстояние до фланца — значи-
тельным. Результаты экспериментальных исследований показы-
вают, что потоки Ф1 и Ф2 в сум-
ме составляют около 80 % об-
щего потока рассеяния.
Подсчет проводимостей рас-
сеяния, соответствующих выше-
перечисленным потокам рассея-
ния, представляет значительные
трудности из-за сложной кон-
фигурации полюсных наконеч-
ников — когтей, поэтому при
расчетах применяются упрощен-
ные зависимости, определяющие
проводимости рассеяния в функ-
ции геометрических размеров
ротора.
Рис. 5.33. Распределение потоков рас-
сеяния в роторе когтеобразного типа
17»
12*
Рис. 5.34. Эскиз когтеобразного ротора для расчета проводимостей
Рис. 5.35. Кривая k\=f(blhct)
Рис. 5.36. Кривая кг={з(Ь1ксТ)
Для подсчета проводимости рассеяния между когтями с бо-
ковых сторон Asi, соответствующей потоку рассеяния Фь можно
.воспользоваться расчетной формулой
Ал = 0>.10-
НкЛ, (5.175)
ь
где Якг —высота когтя в среднем сечении (рис. 5.34); 1КГ — дли-
на когтя; b— расстояние между когтями; Лср— среднее расстоя-
ние от магнита до когтя; k\ — коэффициент, который берется из
.кривой k\(bfhcv), представленной на рис. 5.35 и справедливой в
.пределах отношения Нкг/6=0,5ч-1,0.
Для подсчета проводимости рассеяния между когтем и маг-
нитом, соответствующей потоку рассеяния Ф2, можно воспользо-
ваться следующей расчетной формулой:
Art = km 0,4® • 10- [ L 4- kJM
Sa Пр * I L M I a M
L ЛСр
(5.176)
Я 80
| где /ы— длина магнита;
i,; £Пр^0,5 — коэффициент
приведения; Ькг — шири-
> на когтя; k2— коэффици-
ент, являющийся функ-
цией b и hCp, берут из
; кривой на рис. 5.36. ,
В формуле (5.176)
: . первый член в скобках
,?• дает проводимость экви-
7' валентного плоского кон-
9 денсатора, площадь пла-
стин которого равна пло- рис. 537 ротор когтеобразного типа
ф щади нижней поверхно-
J сти когтя (Ькг/М), а рас-
, стояние между пластинами равно расстоянию между когтем и
магнитом в среднем сечении (Лер). Второй член в скобках учи-
2^. тывает искажение поля у острого конца когтя в плоскости, пер-
F пендикулярной оси машины. Искажение поля у острого конца
". когтя в плоскости, проходящей через ось машины, формула не
учитывает.
Для подсчета проводимостей А«з> As4 и Asj простых расчет-
ных формул пока еще нет, поэтому эти проводимости приходит-
ся рассчитывать, исходя из общих правил расчета проводимо-
стей воздушных промежутков.
Можно воспользоваться для расчета проводимостей рассея-
£ ния и более упрощенными зависимостями. Потоки фь Ф2 и Фз
замыкаются через сталь когтя и должны быть учтены при расче-
§ те индукции в когте. Потоки Ф4 и Ф5 замыкаются через магнит с
торцом, минуя когти.
В соответствии с этим проводимость рассеяния полюсов Ля —
ъ- Ass можно разбить на две составляющие [33]: Л»кг,м — проводи-
г мость рассеяния потоков, замыкающихся через когти и магнит,
t. Ast — проводимость рассеяния потоков, замыкающихся только
; через магнит (торцевой поток).
} На основании идеализированной картины поля для обычной
конфигурации когтеобразного ротора (рис. 5.37) предложены
t расчетные формулы для подсчета Лзкг.и и Ast:
I <5177>
где первое слагаемое учитывает потоки рассеяния, замыкаю-
$ щиеся между боковыми поверхностями когтей, второе — между
$ нижней поверхностью когтя и магнитом;
| Лст= 1,8-^--10-’, (5.178)
В РЧ>
В где размеры — согласно рис. 5.37; ар=6р/т; р — число пар по-
В люсов; т — полюсное деление.
18L
I
._Е?т
Рис. 5.38. Сдвоенный ротор
костеобразного типа
При расчете магнитной
Если ротор вынут из корпуса, то
появляется дополнительная проводи-
мость рассеяния магнита со стороны
внешней цилиндрической поверхности
когтя. Величина ее определится вы-
ражением (5.165).
Все рассчитанные здесь проводи-
мости рассеяния отнесены к одному
полюсу. В этом случае поток рассея-
ния на полюс равен сумме потоков:
Ф«п=:ЕпЛ8кг,мЧ"^мЛ«т, (5.179)
где F„— МДС в активном зазоре
(рассчитана на один полюс); FM—
МДС магнита также на один полюс
(падением магнитного напряжения в
зазоре между магнитом и полюсным
диском пренебрегаем).
цепи с когтеобразным ротором удоб-
нее проводимости рассеяния подсчитывать на пару полюсов.
В этом случае в расчет принимается полная длина магнита и
площадь сечения магнита, приходящаяся на пару полюсов
SM/p. Проводимость рассеяния на пару полюсов равна сумме
проводимостей:
Asn=0,5Asi+2Ae2+2AS34-
+2Лм'+2Ал. (5.180)
Проводимость рассеяния всего ротора равна
Asnr = 4^+24.+2Лл +• 2Ai4 +2ASS. (5.181)
£
Если пользоваться для подсчета проводимостей рассеяния
формулами (5.177) и (5.178), то проводимость на пару полюсов
равна
А$п2;==0,5(Л®кг)м4_А«т). (5.182)
ж) Проводимости рассеяния сдвоенного когтеобразного ротора
Магнитная система сдвоенного когтеобразного ротора
(рис. 5.38) состоит из двух симметричных элементов, каждый из
которых имеет свой постоянный магнит. Подсчет проводимостей
рассеяния каждого из этих элементов производится таким же
образом, как и в случае обычного когтеобразного ротора. Отли-
чие в расчете заключается в том, что проводимость рассеяния
торцевого потока для сдвоенного когтеобразного ротора отсутст-
вует.
При расчете проводимости рассеяния полюсного наконечника
сдвоенного когтеобразного ротора можно воспользоваться сле-
дующей формулой:
Л8П= [41 (hp+bp) I (т-М] (5-183)
182
При вынутом из корпуса роторе дополнительная проводи-
мость рассеяния по аналогии с предыдущими случаями подсчи-
тывается по (5.163).
5.6. ПОВЕРОЧНЫЙ ЭЛЕКТРОМАГНИТНЫЙ РАСЧЕТ
СИНХРОННЫХ ГЕНЕРАТОРОВ С ПОСТОЯННЫМИ МАГНИТАМИ
И ПОСТРОЕНИЕ РАБОЧЕЙ ДИАГРАММЫ МАГНИТА
После того как выбраны размеры магнита, магнитной цепи
и определены обмоточные данные обмотки якоря, проводится
поверочный расчет генератора. Целью поверочного расчета яв-
ляется определение расчетных величин, необходимых для пост-
роения рабочих характеристик генератора.
Поверочный расчет генератора состоит из следующих этапов:
расчета магнитной цепи и построения характеристики холостого
хода; расчета параметров обмотки якоря; расчета характери-
стики КЗ; определения размагничивающего действия поля ре-
акции якоря; построения рабочей диаграммы магнита и опреде-
ления действительных параметров генератора; построения внеш-
них характеристик.
Расчет магнитной цепи и построение характеристики холостого
хода
1. Проводимости рассеяния роторов рассчитываются по мето-
дам расчета для роторов с постоянными магнитами, изложен-
ными в § 5.5.
2. Индукция в воздушном зазоре Вц0 и магнитное напряже-
ние Feo
о ФК>
где т — полюсное деление по диаметру якоря; at=bt/x — рас-
четный коэффициент полюсного перекрытия.
При наличии полюсных башмаков или когтей и неравномерном
зазоре расчетный коэффициент полюсного перекрытия at в общем
случае может быть подсчитан по формуле
а, =я„ --------------------. (5.184)
где ар=Ьр/т— конструктивный коэффициент полюсного пере-
крытия; б — воздушный зазор под серединой полюса; бгаа* —
максимальный воздушный зазор под краем полюса; ka=
— расчетный коэффициент, определяемый по
табл. 5.5.
Таблица 5.5
1,0 1,5 2,0 2,5 3,0
К 1,0 0,85 0,77 0,71 0,66
183
имеем
(5.185>
равенстве
Рис 5.39. Формы пазов якоря
' При одинаковом воздушном зазоре, когда 6—бтах,
, 4
л, = ап н------------------,
1 ,/8 + 6/(1-ар)
Приведенная расчетная длина стали якоря Ц при
длин якоря и ротора равна Л=/а+26. При неравенстве дли»
статора и ротора
//«Za+Зб при х/б=8
или
lifttZ-J-4S при х/б=14,
где х=(1р— 1а)/2— одностороннее превышение длины ротора
1Р над длиной статора 1а.
Магнитное напряжение воздушного зазора
f eo^=0>8Seo • 104,
где б — минимальный воздушный зазор; kt— коэффициент воз-
душного зазора:
k» =----ti + Mhlba,--- (5Л86>
*1-Ьшл + 5«1/&шЛ
где t\—nDlz — зубцовое деление по окружности якоря; бШл —
ширина прорези (шлица) паза якоря.
3. Индукция Вго и МДС Fz0 в зубцах. Расчетная индукция в
зубцах
Bto=Btotil (bzks'e),
где коэффициент заполнения стали £3>с=0,93 при толщине ли-
ста 0,35 мм и оксидной изоляции листов; Ьг — расчетная шири-
на зубца, зависящая от его формы; при трапецеидальной фор-
ме зубца (рис. 5.39,а)
Ьг= (Ьzmax“[~2b zmin) /3.
МДС в зубце
Fzo==hzHz>
где hz — расчетная высота зубца.
Для паза с прямым дном (рис. 5.39,6)
hz==hzt>
184
Для паза с полукруглым дном (рис. 5.39,а)
““ 0,1^1.
Напряженность поля в зубце Нг определяется для расчетной
индукции Вго по кривым намагничивания соответствующей
стали с учетом насыщения.
4. Расчетная индукция в спинке якоря В/о и МДС спинки
якоря Ff0
Вю==,Фъо/ (2/ст Л/т Лз,с) ;
Fjo=Hjolfa,
Где Л/т=(1Он—D — 2Лг)/2— высота спинки якоря; Z/=ji(Dh—
—hj)/4p — средняя длина силовой линии; £/=0,25—0,64 — ко-
эффициент, учитывающий непостоянство индукции вдоль сило-
вой линии; Ню — напряженность поля в спинке якоря, опреде-
ляемая по кривым намагничивания соответствующей марки ста-
ли для индукции В/о.
5. Суммарная МДС в магнитопроводе якоря на пару полюсов
Bi,o=2Feo+2Вго+Ffo-
6. Магнитное напряжение полюсных башмаков (или когтей)
и потоки рассеяния:
а) явнополюсный ротор звездочка без полюсных башмаков
F пб=0;
б) явнополюсный ротор с полюсными башмаками (см.
рис. 5.2, 5.10)
F пб=ЛПб На6,
где Лпб — высота полюсного башмака.
, Напряженность поля НПс определяют по индукции
Впб (ФбоЧ'Флпб) / (Лр 1Р),
tue
Ф>Пб=0,5В i,oAsn6j
Лзпб — проводимость рассеяния полюсного башмака (на один
полюс) (см. рис. 5.5); Ьр и 1Р— ширина по дуге и длина по-
люсного башмака;
в) когтеобразный ротор (см. рис. 5.37)
F кг= (/м/24-6фл)Якг,
где ЯКг определяется по кривой намагничивания для данной
марки стали в зависимости от индукции Вкг;
^кг= (ФбО“ЬФ«кг) / (Лр 6р),
где hp — высота когтя (наибольшая); Ьр — длина дуги когтя в
сечении при наибольшем значении hp; Фгкт — поток рассеяния
когтя;
Ф»кг—0,5В 1,оАзкг,
185
где Askf — проводимость рассеяния когтя на один полюс (см.
§ 5.5);
г) сдвоенный когтеобразный ротор (см. рис. 5.38)
7. МДС фланцев когтеобразных роторов и потоки рассеяния
фланцев. Явнополюсные роторы звездочка не имеет такого уча-
стка магнитной цепи:
а) Когтеобразный ротор
Fфл = /фЛ Нфл,
где /фЛ — длина средней силовой линии во фланце; ЯфЛ — на-
пряженность поля во фланце, определяемая по индукции
D _ ®80 “I"
где 5фл=/’флЦфл — средняя площадь сечения фланца, соответст-
вующая одному полюсу; ЯфЛ — средняя ширина фланца на один
полюс;
Флт== (/* 1,о/2-|"^*Кг) AstJ
Ast — проводимость рассеяния торцевого потока на один полюс;
б) Сдвоенный клювообразный ротор
F фл^/фл 7/фЛ;
Яфл — напряженность поля во фланце, которая определяется
по индукции
ВфЛ= (Фао+Ф 8КГ ) /25фл,
где 5фл=&фЛЯфЛ — средняя площадь сечения фланца, приходя-
щаяся на один полюс.
8. МДС стыков магнита на один полюс и потоки рассеяния
магнита:
а) явнополюсный ротор звездочка без полюсных башмаков
F СТ,М== 0.
Поток рассеяния магнита
Фвм=0,5.Р i.oAsxp,
где Asmp — расчетная проводимость рассеяния магнита на один
полюс (см. § 5.5);
б) явнополюсный ротор звоздочка с полюсными башмаками
Fст,м== 0,8Вст,мбст,м • 104,
где Вст.м — индукция в стыке, определяется выражением
„ ___ *^*80 "Ь Ф«11б _ ФМ “Ь Ф«пб
^СГ.М Q *
°СТ,М
где 6И и Ln — ширина и осевая длина полюса; бСт,м — расчетный
размер стыка полюсных башмаков с магнитом (бст,м~0,005 см).
Поток рассеяния магнита
Ф«м= (O,5FI.o+Fn6)AsM1„
186.
где ASMp — расчетная проводимость рассеяния магнита на один
полюс;
в) когтеобразный ротор
Fct,m^=0,85ct,m6ct,m‘ 10\
где
Вст,м= (Фво4~Ф8КГ )/5ст
Sct,m== (л/4р) (jD®m — ^^вт) ;
г) сдвоенный когтеобразный ротор
•/*ст,м==о>85ст,мбст,м" 10*,
где
Вст,м= (Фдо+Ф8КГ )/2Sct,m;
•Sct,m= (л/2р) (О2м — Р2вт).
9. Поток магнита и МДС магнита на пару полюсов при хо-
лостом ходе:
а) явнополюсный ротор звездочка без полюсных башмаков
Фмо=Фво+Ф«м;
Fmo=F ito;
б) явнополюсный ротор звездочка с полюсными башмаками
ФмО = Фбо4"Фвпб + ф smJ
FmO=F i,o+2F пб + 2F ст,mJ
в) когтеобразный ротор
ФмО^|ФдО"ЬФ«Кг4_Ф«Т»
Fмо== F1 ,о+2F кг+2F фл “b2F ст,м;
г) когтеобразный сдвоенный ротор
Фмо ==ФбО_ЬФ«кг
на оба магнита;
FMO=F1,o+2FKr4^„+2FCT>M
на один магнит, так как магниты соединены параллельно.
10. Коэффициент рассеяния
оо= Фмо/ Фео.
11; Характеристики холостого хода. Задаваясь различными
значениями Ф«о(£о) и производя подсчеты результирующего по-
тока Фмо и МДС магнита FMo по вышеизложенной методике,
строят на рабочей диаграмме магнита характеристики Ф«о=
=f(FMo) и Фмо=Форез=/(Fmo) (рис. 5.40); а также характеристику
холостого хода Eo=f(FKo) (рис. 5.40). Если магнитная цепь не
насыщена, то характеристики Фео=/(Fmo) и Фмо= Форез =f(FMo)
представляют собой прямые и для их построения достаточно опре-
деления одной точки.
187
Рис. 5.40. Рабочая диаграмма магнита
Особенности расчета магнит-
ной цепи и построения харак-
теристики холостого хода ге-
нераторов с роторами кол-
лекторного типа
Для генераторов с рото-
рами коллекторного типа (см.
рис. 5.32) расчет магнитной
цепи статора такой же, как и
для других типов роторов.
Особенности магнитного рас-
чета ротора обусловливаются
тем, что магниты намагниче-
ны в тангенциальном направ-
лении и магнитный поток в
воздушном зазоре Фе созда-
ется двумя магнитами. Маг-
нитный расчет более удобно вести на один магнит, т. е. на по-
ток 0,5Фе.
Магнитный расчет ротора производится в следующем порядке:
1. МДС полюсных башмаков (полюсных наконечников)
/^пн^=2/1пн^пн.
Напряженность поля НПЯ находится по индукции в полюс-
ном наконечнике
Впн== (О,5Фво-гФ*пн)/(О,56р/р) •
Поток рассеяния на половину полюсных наконечников, по
(5.174) и (5.183)
Ф«ПН^=^' 1,0 (Лрн.бЧ-ЗЛзн.т) ,
где Лзн.б и Ллн.т — боковая и торцевая проводимости рассеяния
полюсного наконечника.
2. МДС стыка между полюсными наконечниками и полюсами
Рбст==0,8В бстбст • 104;
£вст==^пн- С .
3. МДС полюсов (рис. 5.32) ''
</*п—
Напряженность НП в полюсе определяется по индукции В„
Bn=z (ОДФвоН-ФцГЯ-ЬФрп) /<Sn,
где Фрп=(/71,о+2/?1ш+2/вст) (ASn,6+2Asn,T) — поток рассеяния’меж-
ду двумя полуполюсами.
Площадь поперечного сечения для магнитного потока полу-
полюса
о _ j &м + 0.5$р
ьм 2 *
4. МДС стыка полюса с магнитом
Рбст,м = 0,85дст,м6ст,м‘ 104,
188
Рис. 5.41. Рабочая диаграмма магнит»
из РЗМ
+2ГП+2F6cT>M) Aj
' где
5дст,м= (0,5Фбо4"Фзпн +
4”Фзп) /SmJ
5. Поток рассеяния маг-
нита
" Ф$м= (А+2Гпн+2£бст+
м«
Проводимости рассеяния
-Лзм подсчитываются по
(5.166) и (5.169).
6. Магнитный поток и
\МДС магнита
Фмо=0,5Фео+ Фзпн 4- Ф«П“Ь
Fmo=F i+2FnH+2FecT+
+2Fn+2Foc«,m.
7. Коэффициент рассеяния магнита
8. Характеристика холостого хода. Она строится аналогич-
ным методом, как и для других типов роторов (рис. 5.41).
При подсчете ЭДС холостого хода Ео необходимо за расчет-
ное значение магнитного потока брать Фео, так как магнитный
поток создается двумя магнитами.
Параметры обмотки якоря
1. Средняя длина витка обмотки якоря, м,
/оср=2(/а+У-10-2, (5.187>
Где 1а — длина пакета якоря; /в—длина лобовой части полувит-
ка, подсчитываемая обычными методами; в случае мягких секций
двухслойной обмотки равна (1,4—1,8)т, при однослойной равно-
секционной обмотке (1,4—1,6)т, при однослойной катушечной об-
мотке примерно 0,9т.
2. Активное сопротивление фазы обмотки якоря, Ом,.
'=^5ж-<1+(,.(Ю4д8>.
где Sa — площадь поперечного сечения провода, мм2; Лб—превы-
шение температуры обмотки якоря над 20 °C.
3. МДС реакции якоря (на один полюс)
Fe = J^-^^/Aa, (5.188>
где йв=4 Inkad—kao—kai — отношение основной волны потока ре-
акции якоря к полному потоку реакции якоря (для продольной
Ьси), значение находится по расчетным кривым рис. 5.42.
18»
Тис. 5.42. К определению коэффици-
ента ka в зависимости от ар при
различных значениях 6тах/6 (а) и
6/т (б):
/ —3; 2-2; 3—1,5; 4-1; 5 — 0,05; 5-
0,04; 7 — 0,03; 3 — 0,02; $ — 0,01; /0 — 0,005
Рис. 5.43. К определению коэффици-
ента kaq В ЗаВИСИМОСТИ ОТ Ор При
раЗЛИЧНЫХ ЗНачеНИЯХ бтах/в (а) и
Отах/Т (б):
/—1; 2-1,5; 3 — 2; 4-3; 5 — 0,05; 5 —
0,04; 7 — 0,03; 8 — 0,02; 9 — 0,01; /0-0,005
4. Индуктивное сопротивление обмотки якоря, обусловленное
потоком якоря по поперечной оси:
а) явнополюсный ротор с полюсными башмаками, когтеобраз-
ный ротор, сдвоенный когтеобразный ротор
(5Л89)
где &в<7=(&70-|-&71) (1+йо)/2 — коэффициент приведения попереч-
ной реакции якоря, определяемый по кривым на рис. 5.43;
б) ротор звездочка без полюсных башмаков
ХаЧ~ I 0,4л-10~вар ; ,(5.190)
1+ 4? м"
Для подсчета xaq могут быть использованы также выражения
-(2.26), а для подсчета xad — (2.44).
5. Индуктивное сопротивление дифференциального рассеяния,
обусловленное скосом пазов
Л“=(5Л91>
1 .2'Sin:(aCir/2) « « ^рЬск ^P n
где «ск=---- - — коэффициент скоса; aa= = it —— рск —
-aCK 2
190
Рис. 5.44. Коэффициент скоса пазов для гармонических составляющих:
ACK=(2sinaCK/2)/aCK; aCK=2pbcJDi b„ — скос пазов, мм, отсчитанный по дуге окружност»
якоря
Рис. 5.45. Статор с выступающими полюсами
центральный угол скоса пазов в электрических радианах; рек—
скос пазов в долях зубцового деления якоря; Ьск — скос пазов, от-
считанный по дуге окружности якоря; D — диаметр якоря.
Значения коэффициента скоса Аск приведены на рис. 5.44.
6. Индуктивное сопротивление рассеяния обмотки якоря:
а) многофазный генератор
(5.i92>
где 2Хя=Хп+А«-|-Хд-ЬХ5 — суммарная удельная проводимость,
рассеяния — пазового, коронок зубцов, дифференциального и ло-
бовых частей.
Подсчет проводимостей рассеяния Xsa производится обычным»
методами [30];
б) однофазный генератор с разделенными электрическими и
магнитными цепями и с выступающими полюсами на статоре
Xs=2nfAs№wK2,
где У — число последовательно соединенных катушек; — число
витков в катушке;
As=As14-As2;
Ал — проводимость рассеяния аксиальных частей обмотки; Ад —
проводимость рассеяния торцевых частей обмотки.
Согласно рис. 5.45 имеем
Л ^^Лст04я>10_,
Л 2^т..о,4жЛ0-*.-
4
19Э
1. Полное индуктивное сопротивление рассеяния
Xz=Xs4-Xck.
8. Полное индуктивное сопротивление по поперечной оси
Характеристика короткого замыкания
Характеристика КЗ лредставляет собой зависимость потока
fi магнитной системе Фк от МДС FK при КЗ якоря. Методика по-
строения характеристики КЗ с помощью векторной диаграммы
напряжений изложена в гл. 2.
Ниже изложен упрощенный метод построения характеристи-
ки КЗ.
1. Задаемся расчетным продольным током КЗ
IdKp— (2Ч“4)/и.
.2. Расчетное сопротивление продольного тока КЗ
jc'a=xs+ra2/xq.
3. ЭДС при КЗ
в.
4. Магнитный поток КЗ (в якоре)
Фйк—ФвоД<<к /Eq.
‘Рис. 5.46. К определению коэффици-
«ента формы поля возбуждения fy>,B
J92
5. МДС продольной реакции
якоря при КЗ (на один полюс)
Fак==РcJdtip/1 •
6. Магнитное напряжение це-
пи якоря при КЗ
р — р EdK
21К — Г1.0 р •
7. Поток дифференциального
рассеяния при КЗ
Фзд= (ФоЛис/Л.о) (1
где £ф,«=£фо+&Ф1 определяется
по кривым на рис. 5.46.
8. МДС полюсных башмаков
и когтей:
а) явнополюсный ротор звез-
дочка без полюсных башмаков
F пв,к=0;
б) явнополюсный ротор звездочка с полюсными башмаками
F пб,к ~ 0;
в) когтеобразный ротор
Ркг,к== (0,5/м+6фл) /7 кг,к,
где /7кг,к определяется по кривой намагничивания для стали ког-
тей;
Вкг,к= ( Ф^к+ ®5КГ,к) / (hpbp) ,
где Фвкг.к — поток рассеяния когтя;
Ф$кг,к== (0,5F1k+Fadv.) AsKrJ
г) сдвоенный когтеобразный ротор
FКГ,М= (0,5/м4”6фл) /7кг,к,
где //кг,к определяется по кривой намагничивания для стали
когтей;
Вкг,К= (Фйк + Ф«кг,к)/ (hpbp) ,
где
Ф$кг,к== 1 к+ Fайк) AsKrJ
д) ротор коллекторного типа
F пн,к==2/1пн//пн,к>
где /7пн,к определяется по кривой намагничивания для стали
полюсного башмака;
р _____ 0»5Ф</к + Ф$пн, к
0,5/рбр
где
Фзпн,к= (F\K-{-2FadK.) (ASh,64"2Ash,t) •
МДС стыка между полюсным башмаком и полюсом
/*,дст,к==о»8/?бст,кбст • Ю4.
МДС полюса
F П,К = /п/7п,К»
где /7П,К определяется по индукции
Вп,к= (0,5Фйк+Ф8ПН,К + Ф«п,к)/5П,
где
®sn,K= (F io+2F adK~}~2F пн,к”|”
+2Fест,к И" 2Fп,к) (Азп,б И" 2Авп,т);
»$п==/'м(6м“|_0,56р) /2.
13—6258
193
МДС стыка полюса с магнитом
^дст,м,к===0,8.Вбст>м,кбст,м* 104;
D __ 0»5Ф^к 4~ Ф$РН, К ~Ь Фsn, к .
d8ct, м, к о »
<>м
Sm = ^m£'M«
Поток рассеяния магнита
Ф$м,к= (F 1k+2F adK~j~2F пн,к4"2Рвст,к~1“
4-2Рп,к4”2^бст,м,к) ЛSM-
9. Поток магнита при КЗ
Фм,К = Ф^кН" Ф$дН" Ф$К»
где Фак — расчетный поток рассеяния индуктора (ротора) при КЗ.
а. Явнополюсный ротор и ротор звездочка
Ф$к= (0,5FiK-f-Fadv) Лап,р»
где Лап,р=ЛаМ,р+Лапб для явнополюсного ротора С ПОЛЮСНЫМИ
башмаками; Аап,р=ЛаМ>р для ротора звездочка без полюсных
башмаков;
б) когтеобразный ротор
Ф$к= Факг,к”|” Ф$т»к,
где
Ф$т,к= (0,5F iK“F"FadK“|”F кг,к) AstJ
в) сдвоенный когтеобразный ротор
Фак= Ф$кг,к.
г) ротор коллекторного типа
Ф$к= Ф$пн,к + Ф$П,к+ Ф SM,K«
10. МДС в стыке магнита:
а) ротор звездочка
F ст,м,к=0;
б) явнополюсный ротор, когтеобразный ротор, сдвоенный ког-
теобразный ротор
Fст,м,к^= (0,8бст,мФм,к/5фст>м) Ю4.
11. МДС магнита при КЗ (на пару полюсов)
F м,к=/*'1к“|"2/*’ас(к“|“2/*’кг,к“|“2/*,ст,м,к.
Для магнита ротора коллекторного типа
FM)k=F\к+2Fatf к+2ГПд,кН-
-f-2F 6ct,k4“2F n,K"f"2F дст,м,к.
194
ДИАГРАММА МАГНИТА (см. рис. 5.40, рис. 5.41)
1. Кривая размагничивания
Построение производится по опытным данным или исполь-
зуется аналитическая запись кривой размагничивания для дан-
ной марки сплава.
2. Точка отхода прямой возврата
На диаграмме наносится расчетная точка КЗ К'1(а'к1, 6'ki).
Ординате &'к этой точки соответствует расчетный поток магни-
та Фм,к, а абсциссе точки а'кд — МДС магнита при КЗ Fm,k.. Пола-
гая, что характеристика КЗ вследствие малых потоков при КЗ
имеет линейный характер, проводим прямую OK'i, которая пе-
ресекает кривую размагничивания в точке К'.
В случае когтеобразного ротора и ротора с полюсными баш-
маками со значительными потоками рассеяния точка отхода пря-
мой возврата может определиться характеристикой установив-
шегося КЗ (точкой К' на рис. 5.40). Однако в общем случае
положение действительной точки отхода прямой возврата может
определиться или проводимостью рассеяния ротора в свободном
состоянии, или размагничивающим действием МДС реакции яко-
ря ударного КЗ (точка К). В случае применения магнитов из
редкоземельных металлов и кобальта кривая размагничивания
совпадает с прямой возврата (рис. 5.41).
Определение точки отхода прямой возврата К на кривой раз-
магничивания производится по методике, изложенной в § 5.3.
3. Под углом к оси абсцисс проводится прямая возврата
tg р = — = р (5.193)
где /Пф, Вб/см— масштаб по оси потока Ф; mFi А/см — масштаб
по оси МДС F.
4. Определение точки расчетного холостого хода
На диаграммах (рис. 5.40, 5.41) наносится расчетная точка
холостого хода А'о(а'о, &'о). Ордината b'Q этой точки соответ-
ствует расчетному потоку магнита при холостом ходе Фмо, а абс-
цисса точки а'о — МДС магнита FMo при холостом ходе.
Если магнитная цепь не насыщена, магнитная характеристи-
ка при холостом ходе будет прямой ОА'0.
В общем случае, как уже указывалось, когда насыщение маг-
нитной цепи имеется, приходится строить кривые потока 'магнита
Фмо и потока холостого хода Фео по точкам, задаваясь различны-
ми значениями Фео(£о).
5. Пересечение характеристики КЗ фк=/(77к) с прямой воз-
врата KL определяет точку режима КЗ — точку Ак. Точке Ак со-
ответствует поток Фм,к (ордината Ьк) и МДС FM,K (абсцисса ак).
Пересечение характеристики холостого хода Форез=f(Fo) с
прямой возврата KL определяет точку режима холостого хода —
точку Ао. Точке Ао соответствуют фактически поток Фмо (ордина-
13* 195
та bo) и МДС Fmo (абсцисса ао). Отрезок aoN соответствует по-
току холостого хода Фео, а отрезок NAq — потоку рассеяния при
холостом ходе Ф$о-
Если на диаграмме провести прямую суммарного потока
рассеяния <DS, то можем получить линию MN продольного потока
Фй или, как его еще называют, полезного потока.
6. Продольная составляющая действительного тока КЗ
Id к Id кр ак/а'к 1.
7. ЭДС холостого хода (действительная)
Еол=ЕоЬо/Ь'о,
где Ео — расчетная ЭДС, принятая вначале.
8. Синхронное индуктивное сопротивление по продольной оси
Xd=Eon/ld*—r£/xq. (5.194)
9. Ток КЗ
IK = IdKVl+ra'/xq*. (5.195)
ПРОВЕРКА НОМИНАЛЬНОГО РЕЖИМА
1. Параметры нагрузки при номинальном режиме
Гн= (-C7/Z) cos <р;
Хц= (U/I)sin ф.
2. Требуемая ЭДС холостого хода
= I (ХфХдн Гadn)/l^Xqn Ч" Г
где
Х/7н=-^7”|”Ян’,
XdH=Xd-f-XH’,
Tadn==T а“Ь^ н.
Если Е'о<Еод. то машина должна быть пересчитана на мень-
ший объем магнита и машины в целом.
Если £'о>Еод. то машину следует пересчитать, увеличив
объем магнита.
3. ЭДС при номинальной нагрузке
где
Х$н=Х$-|-Хн.
4. Индукция в воздушном зазоре при номинальной нагрузке
•Вдн—BqqEh/£Од.
196
5. Индукция в зубцах при номинальной нагрузке
Вгн^ ВгоЕи/Еои-
6. Индукция в спинке при номинальной нагрузке
В,-Н=В10ЕН1ЕОЛ.
Уточнение параметров обмотки подмагничивания генератора и
построение его регулировочной характеристики
Расчет обмотки подмагничивания сводится к определению
потребной МДС подмагничивания, числа витков ее и сечения
провода.
Наибольшая МДС подмагничивания имеет место при холо-
стом ходе генератора. Она должна иметь такое значение, чтобы
уменьшить продольный (полезный) поток постоянного магнита
до значения, при котором.ЭДС холостого хода будет равна на-
пряжению Ua при номинальной или максимальной нагрузках,
если задана перегрузка (рис. 5.47).
Чтобы получить уменьшение продольного потока от магни-
та с помощью подмагничивающей обмотки при холостом ходе
на ДФ<1, необходимо сместить рабочую точку магнита на прямой
полезного потока NM влево на AF (рис. 5.48).
Необходимый продольный поток Ф</о при холостом ходе и
напряжении Еао—U» (точка В) определяется из выражений
^о = Г/н = 4,44Ф^ф; (5.196)
Ф^о = ^о/(4,44/шф). (5.197)
Из общей МДС, требуемой на проведение магнитного потока
через рабочую обмотку при холостом ходе генератора и отсут-
ствии тока в подмагничивающей обмотке (точка М на рис. 5.48),
вычитаем МДС, затрачиваемую на проведение этого потока че-
Рис. 5.47. Внешняя характе- Рис. 5.48. Построения на рабочей диаграмме
ристика генератора магнита для определения МДС подмагничи-
вания обмотки
197
Рис. 5.49. Картина распределения
МДС и потоков в спинке статора
при холостом ходе
Рис. 5.50. Схема замещения МДС, по-
токов и магнитных сопротивлений
для спинки якоря
рез воздушный зазор F& и зубцы Fz. В результате получаем точ-
ку М'. Аналогично получаем точку В'. Линия М'В' выражает
зависимость потока от той доли МДС постоянного магнита,
которая, необходима для проведения потока по спинке статора.
Точка В' соответствует ЭДС холостого хода генератора при на-
сыщенной спинке якоря, т. е. при £d0=^H.
Из картины распределения МДС в спинке статора при холо-
стом ходе (рис. 5.49) видно, что на одних участках МДС по-
стоянного магнита FMo и МДС обмотки подмагничивания Fn скла-
дываются (в левой части), а на других вычитаются.
Для спинки якоря генератора можем составить упрощенную
схему замещения распределения МДС, потоков и магнитных со-
противлений (рис. 5.50) (F/ — магнитное напряжение спинки
якоря).
Согласно второму закону Кирхгофа можем написать
Л = Fn + ФХо = Ф'М - FB. (5-198)
Кроме того, должны получить равенство
Фс/о = Ф/о + Ф^ (5.199)
Имея эти соотношения и построения на рабочей диаграмме
магнита, задачу нахождения МДС подмагничивания при холо-
стом ходе генератора можем решить графически.
Строим график найденной зависимости той доли МДС посто-
янного магнита, которая необходима для проведения потока по
спинке якоря (рис. 5.51), т. е. Ф^=/(Г/), соответствующего от-
резку М'В' на рис. 5.48.
Далее строим график зависимости потока в спинке статора
от МДС ФУ=/(В/) для случая, когда МДС подмагничивания
равна нулю. В этом случае Ф']0=Ф"]0=Ф1. Удвоенная ордината
точки L равна ординате точки М.
Для обеспечения равенства между ЭДС холостого хода и но-
минальным напряжением UH необходимо, чтобы общий резуль-
тирующий магнитный поток в воздушном зазоре определялся
198
Рис. 5.51. Графическое построение
для определения МДС FB
Рис. 5.52. Рабочая диаграмма магни-
та для определения МДС Fa при
нагрузке
ординатой точки В'. Для получения такого по значению потока
следует создать определенное насыщение спинки статора за счет
соответствующей обмотки подмагничивания. Для определения Fn
графики Ф'/о и Ф"/о необходимо переместить от начала коорди-
нат на равные расстояния параллельно самим себе: первый —
вправо, а второй — влево, так чтобы получить необходимый
магнитный поток холостого хода, соответствующий потоку в точ-
ке В'. Отрезок OS, соответствующий FnXi определяет необходимую
МДС подмагничивающей обмотки, отнесенную к полюсному де-
лению статора.
Общая МДС подмагничивающей обмотки равняется:
Fn=BnT2p, (5.200)
где р — число пар полюсов.
Далее производится уточненный расчет параметров обмотки
подмагничивания по формулам (5.121)— (5.125).
Для подбора или проектирования регулятора напряжения не-
обходимо знать регулировочную характеристику /п=/(/), т. е. за-
висимость тока подмагничивания /п от тока нагрузки /.
Для определения МДС подмагничивающей обмотки для дан-
ного тока I при заданном напряжении U необходимо найти ра-
бочую точку на диаграмме магнита, соответствующую этому ре-
жиму. Это можно сделать с помощью векторной диаграммы
напряжений. По известным значениям напряжения U, тока I и
cos ф строится векторная диаграмма напряжений (см. рис.2.16,а).
По найденному значению Ed находится поток Ф^
Ф, = £^/(4,44^). (5.201)
Значение определяет рабочую точку на рабочей диаграм-
ме магнита на прямой продольного потока (некоторая точка D
на рис. 5.52).
199
Затем находится необходимое значение магнитного напряже-
ния в спинке якоря
Fi=F„—F6—Fz—Fad,
где FM — МДС магнита, соответствующая точке D\ Fad — про-
дольная МДС реакции якоря, подсчитанная для данного тока 7.
Производя графическое вычитание из общей МДС, потребной
для проведения потока Ф<*, МДС реакции якоря Fad и падения
магнитного напряжения Р& и Fz, получаем точку D', абсцисса ко-
торой в соответствующем масштабе равна Fj.
Дальнейший ход определения
МДС подмагничивающей обмот-
ки Рп аналогичен таковому для
рассмотренного выше режима
холостого хода.
Задаваясь различными значе-
ниями тока нагрузки 7 от 7=0
•до 7=7М и производя подсчеты
Ф<« и Ф/ с помощью рабочей
диаграммы, а затем определив Fn
и 7П, можем построить регули-
ровочную характеристику 7П=
=/(/) (рис. 5.53).
Рис. 5.53. Регулировочная характе-
ристика генератора с подмагничива-
нием спинки якоря
Кратность тока подмагничивания при холостом ходе к его
значению при номинальной нагрузке 7nmax/7n?nin ИЗМвНЯеТСЯ В
широких пределах в зависимости от lamin. Рекомендуется его вы-
бирать в пределах 4—6 соответственно типу регулятора. Чем
меньше кратность тока подмагничивания, тем лучше работает
регулятор, однако при этом повышается ток Inmax и потребляе-
мая мощность подмагничивающей обмотки.
Потери и КПД при номинальном режиме
1. Полные потери в генераторе состоят из следующих слагае-
мых:
SP = PcuH~P/-|-Рг4“Роп+Рон4-Р т4"Р п,
где Реи — потери в меди; Р/ — потери в стали спинки статора;
Рг — потери в зубцах; РОп — поверхностные потери в полюсах при
холостом ходе; РОн— поверхностные потери в полюсах при на-
грузке; Рт — потери на трение и вентиляцию; Рп—потери в об-
мотке подмагничивания.
Подсчет этих потерь производится известными методами [30].
2. Мощность на валу генератора
Pi—P cos <p+SP.
3. Коэффициент полезного действия
• т)=Р cos ф/Рь
200
5.7. ГРАФОАНАЛИТИЧЕСКИЕ МЕТОДЫ ПОСТРОЕНИЯ
ВНЕШНИХ ХАРАКТЕРИСТИК
При построении внешних характеристик необходимо учитывать ту характер-
ную особенность, свойственную машинам с постоянными магнитами, что с изме-
нением тока нагрузки изменяется магнитное состояние магнита и значение по-
лезного потока магнита. Поэтому внешние характеристики строятся с использо-
ванием векторной диаграммы' напряжений и рабочей диаграммы магнита.
Предполагается, что магнит отстабилизирован, т. е. имеется устойчивая точ-
ка отхода прямой возврата на рабочей диаграмме магнита.
Две точки внешней характеристики (Ео и /к) просто определяются (см.
рис. 5.47). Первая точка соответствует режиму холостого хода. При /=0 U=Eq,
т. е. ЭДС холостого хода.
Вторая точка соответствует режиму установившегося КЗ, когда £7=0, а /=
=/к. Значение тока КЗ /к определяется с помощью построения на диаграмме
магнита кривой КЗ ФК=^ЕК) (см. § 2.4 и 5.6).
Для построения всей кривой внешней характеристики необходимо найти зна-
чения напряжений для ряда промежуточных значений тока нагрузки. В частном
случае, если генераторы имеют близкие значения индуктивных сопротивлений
Xd^xq, это легко выполняется с помощый уравнения (2.67).
Для общего случая рассмотрим ряд способов построения внешних характе-
ристик синхронных генераторов с постоянными магнитами.
1. Метод Т. Г. Сорокера. Согласно этому методу задаются некоторыми про-
извольными значениями напряжения U' и тока нагрузки Г (фазные значения).
По заданным U', Г, cos ф и параметрам обмотки якоря га, *d, xq строится
векторная диаграмма напряжений генератора (рис. 5.54). На диаграмме обо-
значено
а6=/'га; Ьс=/%; bd=I'Xd\ E'Q=Oe.
Из векторной диаграммы напряжений определяется ЭДС холостого хода Е'о-
Точка рабочего режима определяется из выражений
?-7'Ео/£'о; £7=£7,Ео/Е,о,
где Ео — действительная ЭДС холостого хода найденная по рабочей диаграмме
магнита.
Задаваясь несколькими значениями U' и определяют ряд точек внешней
характеристики и производят ее построение.
Последние соотношения объясняются пропорциональностью между отноше-
ниями токов и ЭДС, напряжений и ЭДС.
2. Построение внешней характеристики генератора с ротором
звездочка [1]. Рассмотрим построение внешних характеристик
для генераторов с неразветвленной магнитной цепью, когда про-
водимости рассеяния малы. Примером такой магнитной цепи
может служить магнитная цепь с ротором звездочка без полюс-
ных башмаков и статором без выступающих полюсов.
Из построений диаграммы напряжений Блонделя, которые
приведены на рис. 5.55, можем установить, что /ПТА остается
неизменным, равным 90°+ф, так как /_БТА = 180°—^АТМ=
201
Рис. 5.54. Векторная диаграмма на-
пряжений для построения внешней ха-
рактеристики
Рис. 5.55. Векторная диаграмма на-
пряжений для расчета внешних харак-
теристик по методу, разработанному
в МЭИ
= 180°—(90®—<р)=90°4-(р. Через точки диаграммы Б, Т и А мо-
жет быть проведена вспомогательная окружность с центром О\.
Тогда дуга ^57’4 = 360°—о5Ф4=360°—180°—2<р== 180°— 2<р, так
как угол ЛБТА = ^БФА/2, а <^БФА=2 и ^>БФА=2/.БТА,
/57'4 = 2(90°-|-ф) = 180о+2ф, откуда получаем: /5010=
=0,5^57’4 = (180°—2ф)/2=90°—ф, а отрезок 0,0=50 1§ф=
=Д5/21§ф. Таким образом, центр Oi окружности, проходящей
через точки диаграммы 4, Т и Б, и радиус R=O\A — O\B легко
определяются.
Из построений можно установить, что отрезок 45=45-|-55,
где 45=Е<г:
Ed=ik^ko<S>dfw^\
ВБ = (Еад/COS Ip) sin ip.
Численные значения отрезков ВГ и ГД определяются выра-
жениями
Br=Ixs sin ip=(7 sin ip) xs;
ГД=1га tg ф sin ip= (I sin ip) ra tg ф.
Установив эти соотношения, производим построение вектор-
ной диаграммы напряжений, необходимой для определения иско-
мого напряжения U при заданном значении тока 7. Построение
производится в следующем порядке.
Имея рабочую диаграмму магнита, задаемся некоторым зна-
чением Ф<г (рис. 5.56). Проводим прямую Фл, параллельную пря-
мой потока Ф«, определяемого проводимостью рассеяния ротора,
202
до пересечения с прямой возврата, а затем находим соответст-
вующие данному значению продольного потока величины: МДС
реакции якоря по продольной оси Faa, отрезков AB=Ed и ВБ
(см. рис. 5.55):
Fad = O,9mk0(wjp) kadI sin ф = Ы sin
где
b =0,^mko(w9lp)kad,
откуда
I sin ^=Fad/b=cFad\ С—1/Ь;
AB ==rEd =F . •
, ’ ’ * •<.*•* * 1 *
ВБ — (Eaq/cos ф) sin<p = a(Faq!cos <|>) sin'<p=
= а-Ъ$т(кй®Ф1р)1га<11 sin <p = pFad,
где p = ac • 0,9/n k9wjia<llp.
Крутизна характеристики холостого хода a=E/F=tga опре-
деляется по прямолинейной части характеристики холостого хода
(см. рис. 2.17).
В случае однофазного генератора с выступающими полюсами
на статоре и разделенными электрическими цепями выражение
для Fad будет соответственно
Fad = 2V2wf.Ikadsin^.
Далее определяется длина отрезка АБ и находится точка О
на середине отрезка АБ. Отрезок 001=0,5-45 tg ф.
Из точки 01 проводим окружность радиусом 0\А. Подсчи-
тываем значения отрезков ВГ и ГД и откладываем их. Из точки
Д восстанавливаем перпендику-
ляр до пересечения с окружно-
стью (точка Т). Линия АТ дает
направление напряжения, а ли-
ния БТ — направление, перпенди-
кулярное току. Отсюда направ-
ление тока определяется линией
AM.
Перпендикуляр, восстановлен-
ный из точки В, дает отрезок
5P=£ag/cosi|), перпендикуляр из
точки Г — отрезок РП=1х8.
Проведя из точки П прямую, па-
раллельную AM, получаем СП=
=1га, а также AC=U. Зная га,
определяем 1=СП/га=(1га) /га.
Методика определения U и I
значительно упрощается, если
Рис. 5.56. Рабочая диаграмма магни-
та для построения внешней характе-
ристики
203
воспользоваться известным аналитическим выражением для опре-
деления U:
U= (Ed—Ira cos ф—Ixs sin ф) /cos 0. (5.202)
Угол 0 определяется направлением линии напряжения (точ-
ка Г) и отрезком АБ. Значение тока I определяется из произве-
дения 7 sin -ф. Угол 0 определяется соотношением
tg.0=47’/АД.
При использовании формулы (5.202) нет необходимости стро-
ить векторную диаграмму полностью. Для нахождения U доста-
точно определить точку пересечения отрезка ДТ с окружностью,
т. е. найти точку Т.
Таким образом, непосредственно без всяких приближений на-
ходятся значения напряжения U и тока I. Задаваясь различ-
ными значениями Ф</ на участке прямой возврата между точ-
ками холостого хода Ло и установившегося КЗ Ак (рис. 5.56),
строя векторные диаграммы напряжений, получаем ряд точек
внешней характеристики при заданном cos <р.
Методика определения 17 и 7 по заданной величине Ф</ еще
более упрощается, если, пользуясь формулой (5.202), значение
угла ф определять аналитически, исходя из свойств векторной
диаграммы (рис. 5.55).
Согласно рис. 5.55 можно получить следующую зависимость:
Значения отрезков БД и АД определяются расчетным путем
БД—АБ—АД=ВБ—ГД+ВГ=$Еаа—CFad ra tgq>+
“|”C7*adXs== Fad (P—Cf a tg <p-|-CXs) J
АД=АВ+ГД—Br=Ed+CFadra tg <p—CFadXs=
=Ed+Fad(Cra tg <p—Cxs) =
=Ed+CFad(ra tg <p—xs).
Значение тока получают из выражения
7 sin ty=Fad/b; (5.204)
I=Fad/(b sin ф).
При подсчете tg ф в выражении (5.203) перед корнем необ-
ходимо брать знак плюс.
Подставляя значения угла ф в выражение (5.202), получают
сразу значение U, не производя графического построения диа-
граммы напряжений.
204
3. Построение внешней характери-
стики генератора с когтеобразным ро-
тором [30]. При сложной магнитной це-
пи с большими рассеяниями, как напри-
мер, в случае когтеобразного ротора,
непосредственно воспользоваться преды-
дущими формулами нельзя, так как су-
ществует более сложная зависимость
между полезным потоком Ф^ и МДС
реакции якоря Fad, чем в предыдущем
случае. Наличие больших потоков рас-
сеяния вызывает дополнительное паде-
ние магнитного напряжения на отдель-
ных участках магнитной цепи. Отдель-
ные участки магнитной цепи, как, напри-
мер, когти, могут иметь значительное
насыщение. Поэтому при построении
внешних характеристик предварительно
приходится пользоваться графическими
построениями на рабочей диаграмме
магнита, определяя Fad из уравнения
Fm=^jF]гЬкг,ст,мг^Рad.
Рис. 5.57. Графический метод опре-
деления МДС реакции якоря с по-
мощью рабочей диаграммы магнита
Имея схему замещения магнитной цепи генератора с когтеобразным ротором
(см. рис. 2.5), на рабочей диаграмме магнита (рис. 5.57) строят кривые: Фа =
— потока в воздушном зазоре в зависимости от суммы падений маг-
нитного напряжения в воздушном зазоре, зубцах, ярме; Ф5Кг=/2(/? 5кг) — потока
рассеяния когтей и фланцев в зависимости от магнитного напряжения между
когтями; Фвм=£((Рм) — потока рассеяния магнита в зависимости от МДС по-
стоянного магнита; Фкг=/8(^кг,ст)—потока в’когтях в зависимости от суммы
падений магнитного напряжения в стыке, фланцах и когтях; Фм—fs(SF) —потока
в магните в зависимости от суммы падений магнитного напряжения во всей
внешней магнитной цепи.
На рабочем участке прямой возврата (между точками холостого хода А- и
короткого замыкания К) произвольно берут некоторую точку, например точку С
(рис. 5.57). Этой рабочей точке соответствует МДС магнита Гм=04. Под этим
магнитным напряжением находится проводимость магнита Л$м. Поток рассеяния
Ф$м на рабочей диаграмме магнита соответствует отрезку АВ. Отсюда значение
потока в когтях определится как разность
Фкгс=Фм“—Ф$м==^ С—А В=СВ.
Для удобства построений откладывают отрезок СВ от точки А. Тогда по-
лучают отрезок АГ=СВ. Падение магнитного напряжения в когтях, фланцах и
стыках, соответствующее потоку АГ, равно £2,з и измеряется отрезком 2—3. Сле-
довательно, проводимость рассеяния когтей и фланцев ASKr находится под напря-
жением, равным разности магнитных напряжений Fu—F2,3=AO— (2—3) =ОБ.
Этому магнитному напряжению соответствует поток рассеяния когтей и фланцев
Ф$КГ = БД.
205
Поток в воздушном зазоре Ф*=Фкг—Ф$кг=4Г—БД=БГ'—БД', Откладывая
поток Фа от точки Б, получают отрезок БЕ. Этому потоку Фа соответствует па-
дение магнитного напряжения в зазоре, зубцах и ярме F^. Откладывая это зна-
чение вправо от точки Б, получают отрезок ОР=ОБ—(4—5) = (ОБ—BP)=Fad,
где Fad — МДС реакции якоря по продольной оси. Таким образом, графически
решается уравнение FM=YF-\-:Fad, где SF —сумма падений магнитных напряже-
ний на отдельных участках последовательной цепи. Для заданного магнитного
состояния магнита, характеризуемого точкой С на рабочей диаграмме, получают
необходимые расчетные величины: Фа=БЕ и МДС реакции якоря Fad=OP.
Далее, пользуясь векторной диаграммой, определяют значения тока I и на-
пряжения U, которым соответствует точка С на рабочей диаграмме магнита.
4. Построение скоростной нагрузочной характеристики. Скоростная нагрузоч-
ная характеристика С/=ф(и) строится на основании внешних характеристик U=
построенных для нескольких частот вращения, и вольт-амперной харак-
теристики токоприемников (см. рис. 2.32). Точки пересечения кривой вольт-
амперной характеристики токоприемников (/=ф(7) (например, ламп накалива-
ния) с кривыми внешних характеристик дают значения напряжений генератора
при различных частотах вращения: Umint Птах И Т. Д.
На основании этих данных строится частотная нагрузочная характеристика
£/=ф(л) (см. рис. 2.31). Если частотная нагрузочная характеристика оказы-
вается неудовлетворительной, то в этом случае изменяют отношение КЗ или
принимают специальные меры, как, например, включение дросселя в цепь якоря.
5.8. АНАЛИТИЧЕСКИЙ МЕТОД РАСЧЕТА ВНЕШНИХ ХАРАКТЕРИСТИК
[48]
Определение аналитических зависимостей между параметрами
диаграммы состояния магнита ротора генератора (рис. 5.58), схе-
мы замещения его магнитной цепи по продольной оси (рис. 5.59)
и векторной диаграммы Блонделя (рис. 5.60) -позволяет рассчи-
тать внешние характеристики синхронного генератора с постоян-
ными магнитами, не прибегая к каким-либо графическим построе-
ниям. На рис. 5.59 изображена схема замещения магнитных це-
пей по продольной оси на один полюс синхронных генераторов с
постоянными магнитами соответственно, с ротором звездочка
(рис. 5.59,а), с полюсными башмаками (рис. 5.59,6) и когтеоб-
разным ротором (рис. 5.59,в).
Пользуясь схемой замещения магнитной цепи генератора
(рис. 5.59) и диаграммой состояния ротора, можно для любой
рабочей точки генератора найти значения магнитного потока
Фв в рабочем воздушном зазоре и продольной составляющей
реакции якоря Fad [48].
Рабочие точки генератора на диаграмме состояния магнита
ротора находятся на прямой возврата р (рис. 5.58) для обычных
постоянных магнитов либо на спинке прямой размагничивания
для оксидно-бариевых или самарий-кобальтовых магнитов между
точками КЗ М и холостого хода N. Взяв на отрезке прямой MN
произвольное число точек (1—7), для любой из них можно опре-
делить искомые значения Фа и Fad. Например, для точки 1 Фе
206
Рис. 5.58. Диаграмма состояния маг-
нита ротора генератора на одна по-
люс
Рис. 5.60. Диаграмма Блонделя для
явнополюсного синхронного генера-
тора
Рис. 5.59. Схема замещения магнитной цепи по продольной оси на один полюс
ненасыщенных синхронных магнитоэлектрических генераторов:
а — генератор с ротором звездочка; б — генератор с полюсными башмаками; в — генератор
с когтеобразным ротором; Fad, F, F'M — МДС (продольной составляющей реакции якоря,
магнита ротора, условная магнита ротора); ф. Фам, Ф^, Фс Фс кг, факг —маг-
нитные потоки (общий, рассеяния магнита, воздушного зазора, в стыке между магнитом и
башмаком, рассеяния башмака, в стыке между магнитом и когтем, рассеяния когтя); /?'м,
ЯоМ, ^8» *с, 8» Яа8» ^с.кг* ^кг* • ^акг“ магнитные сопротивления (магнита, рас-
сеяния магнита, воздушного зазора, в стыке между магнитом и башмаком, рассеяния баш-
мака, зубцов якоря, спинки якоря, башмака, в стыке между магнитом и когтем, когтя, рас-
сеяния когтя)
и Fad определяются путем проведения потока Ф1 через все участ-
ки схемы замещения на один полюс рассчитываемого генератора
с ротором звездочка (рис. 5.59,а) и оценке падения МДС на этих
участках. Поток в воздушном зазоре Фа определится
Фб—Ф1 — (^*1/^?ом) •
207
По значению Ф« определяют падения МДС на один полюс в
рабочем воздушном зазоре Ге, зубцах Fz и ярме Fj.
Искомое значение Fad будет равно
Fad=Fl — Ft — Fz — Fj.
Такой же расчет проводится и для крайних точек отрезка MN
(рис. 5.58), т. е. для точки М и N. Очевидно, что в точке N Fad=
=0, так как это точка холостого хода генератора.
Векторная диаграмма Блонделя (рис. 5.60), построенная для
активно-индуктивной нагрузки, позволяет определить угол -ф че-
рез параметры генератора [1]
(5.205)
где
xq — гл tg <₽
d ~~ (biEaIFad) -ts + rztet’ (5,206)
га, xq, xs — активное и индуктивное сопротивление по поперечной
оси и сопротивление рассеяния фазы якоря; bi=0,45mko(w ф/р) kad;
Ea=g<l>6', g=4k$fwek0; кф — коэффициент формы кривой индук-
ции в воздушном зазоре; k0 — обмоточный коэффициент; f —
частота напряжения сети; а>ф — число витков в фазе; т — чис-
ло фаз якорной обмотки; р — число пар полюсов; kad — коэффи-
циент приведения продольного поля якоря к полю магнита в
воздушном зазоре.
Для точек 1—7 (рис. 5.58) ток и напряжение фазы опреде-
ляются
/ = Fad -; (5.207)
Ьг sin Ф
(J = ~~ S^n Ф + Г» COS ф) /g 208)
COS (ф — ?)
Для точки N и U=En, а /=0 (холостой ход), для точки М
(короткое замыкание) U=0, а ток /к определится по (5.208)
при условии, что tgi|>=Xg/ra. Аналогичные расчеты внешних ха-
рактеристик проводятся для генераторов с полюсными башма-
ками (рис. 5.59,6), и для генераторов с когтеобразными ротора-
ми (рис. 5.59,в). Общий вид внешней характеристики синхрон-
ного магнитоэлектрического генератора изображен на рис. 5.47.
Глава шестая
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ ГЕНЕРАТОРОВ
ПЕРЕМЕННОГО ТОКА КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ
6.1. ОСОБЕННОСТИ РАСЧЕТА СИНХРОННЫХ ГЕНЕРАТОРОВ
КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ С РОТОРОМ
ЗВЕЗДОЧКА
Электромагнитный расчет генераторов комбинированного
возбуждения имеет ряд особенностей, что объясняется специфи-
кой устройства и рабочего процесса этих генераторов. Главней-
шими особенностями расчета являются: определение оптималь-
ного соотношения потоков магнитоэлектрической и электромаг-
нитной частей генератора, определение размеров магнитопровода
шунта и магнитоэлектрической части генератора, определение не-
обходимой МДС электромагнита, подсчет потоков рассеяния,
построение диаграммы магнита, расчет внешних и регулировоч-
ных характеристик генератора комбинированного возбуждения.
Расчет генераторов переменного тока комбинированного воз-
буждения, как и любой электрической машины, разделяется на
две части: определение основных размеров и поверочный элект-
ромагнитный расчет.
Для определения объема постоянного магнита опорного гене-
ратора (магнитоэлектрической части) и отношения потоков
опорного генератора и шунта может быть принят следующий по-
рядок расчета.
Заданные значения максимальной мощности генератора Ртах
и номинального напряжения U№ определяют максимальный ток
и точку на внешней характеристике генератора (точка А на
рис. 6.1). Вне зависимости от заданного коэффициента мощно-
сти нагрузки и типа проектируемых генераторов кривые внеш-
них характеристик должны пройти через точку А. Если сделать
допущение, что внешние характеристики генераторов комбини-
рованного возбуждения и магнитоэлектрических в первом при-
ближении описываются одним и тем же уравнением
U = Д, [/l-CWcos^- (///,) sin (6.1)
то для каждого из значений cos ср становятся известными £0 и
/к (рис. 6.1), а также внешняя характеристика проектируемого
генератора
E0 = t/H]/2(l-|-sin?);
4= Ли* ^2 (1 -f-sin<p).
Каждому значению cos<p при заданной максимальной мощ-
ности Ртах соответствует свой генератор с определенными объе-
мом магнита, ЭДС холостого хода и током КЗ (рис. 6.1).
С помощью формул (6.1) и (6.2) для заданных costp и мощ-
ности Ртах строится внешняя характеристика эквивалентного
14—6258 209
(6-2)
Рис. 6.1. Внешние характеристики ге-
нераторов при различных cos<p:
/ —0; г —0,8; 3-1
Рис. 6.2. Построение внешней харак-
теристики опорного генератора
Рис. 6.3. Построение внешней харак-
теристики для опорного генератора
при изменении тока нагрузки от
I max ДО I min
тик опорного и проектируемого
совпадают.
проектируемого генератора, про-
ходящая через точку А (кривая
Fa,на рис. 6.2). Затем по фор-
мулам (5.12) — (5.17) определя-
ется объем постоянного магнита
Ум> соответствующий ей. Так
как генератор целесообразно
спроектировать для работы в ре-
жиме управляемого магнитного
шунта и комбинированного воз-
буждения, то внешняя характе-
ристика опорного генератора (без
шунта) должна пройти при хо-
лостом ходе через середину от-
резка ЕопрС^н, т. е. через точку
Еооп,причем MJ'w&U" (рис.6.2).
Точки КЗ внешних характерис-
комбинированного генераторов
'I
Значение тока 10п, соответствующего точке В (рис. 6.2) на
внешней характеристике опорного генератора, определится че-
рез (6.1), если положить V=UH, а /=/оп:
= Ей on [/1 — (Zon//K)2 cos2 <f — (Z^/ZJ sin T]. (6.3)
В частных случаях:
при cos<p=0
Zon—ZK[1 (t/H/Eoon];
(6.4)
при cos ср =1
4п = /кГ1-(ад>оп)г-
(6.5)
210
Объем магнита опорного генератора будет меньше эквива-
лентного магнитоэлектрического за счет меньшего магнитного
потока, т. е. в режиме холостого хода, на значение, пропорцио-
нальное отрезку £опр Еооп (рис. 6.2):
VM,on=(£oon/£onp)VM. (6.6)
Соотношение между потоком в шунте и потоком опорного
генератора в режиме холостого хода определяется в первом
приближении выражением
Фшо/Фооп==Д£^/Д-Ооп^ Д^пр/ЗЕооп- (6.7)
Если генератор проектируется с учетом режима работы с из-
менением тока от /тах до Imin, то внешняя характеристика
опорного генератора должна пройти через середину отрезка
ED (рис. 6.3), т. е. через точку F. Поток в шунте уменьшается,
а объем постоянного магнита опорного генератора Ум,оп прибли-
жается к объему эквивалентного магнитоэлектрического Ум.
При работе генератора на постоянную нагрузку &U'=AU"=
= 0 поток в шунте Фш=0, т. е. нет необходимости в примене-
нии шунта. Внешние характеристики опорного и эквивалентного
магнитоэлектрического генераторов совпадают.
Если помимо изменения нагрузки предусматривается еще из-
менение частоты вращения генератора, то обеспечение постоян-
ства напряжения на высоких частотах вращения требует боль-
шего потока в шунте. Особенно тяжелым в этом отношении яв-
ляется режим холостого хода, так как необходимо снизить
большое значение ЭДС холостого хода. Учитывая, что генератор
рассчитывается на минимальную частоту вращения и максималь-
ную нагрузку, можем написать приближенное соотношение меж-
ду потоком в шунте и потоком опорного генератора
Фщо ^н^тт/^тах) g)
Фооя ^оэп + Us(nmtn/nmax)
где Еооп — ЭДС опорного генератора при минимальной частоте
вращения генератора; птах и timtn — максимальная и минималь-
ная частоты вращения генератора соответственно.
При значительном изменении диапазона частоты вращения,
например двукратном, необходимый поток Фшо получается зна-
чительным. Это требует, как правило, выполнения двухсторон-
ней конструкции магнитной цепи (см. рис. 1.44) и реверсирова-
ния МДС электромагнита.
Значения необходимых потоков в шунте уточняются в даль-
нейшем с помощью рабочей диаграммы магнита.
При определении размеров постоянного магнита и магнито-
провода необходимо учитывать следующие факторы:
1) выбор определенной длины средней силовой линии магни-
та с целью предотвращения размагничивающего действия МДС
реакции якоря в режиме ударного КЗ, т. е. магнит должен иметь
определенные размеры;
И* 211
2) обеспечение требуемой механической прочности на высоких
частотах вращения; окружные скорости не должны превышать
допустимые;
3) возможность размещения обмотки электромагнита (под-
магничивания) ;
4) выбор допустимых отношений длины ротора к его диамет-
ру с учетом допустимых биений.
Методика определения размеров ротора опорного генератора
при известном диаметре якоря D точно та же, что изложена в
§ 5.3 для ротора с призматическими магнитами (см. рис. 5.10).
После предварительного выбора геометрии ротора проверка оп-
тимальности использования объема постоянного магнита (про-
хождения характеристики КЗ, через точку соответствующую мак-
симуму энергии магнита) производится по уравнению (6.9),
аналогичному уравнению (5.63):
Вм.к = 2 5 ю-^Хзя+о.бб-ю^сх^+х^)
^м,к Я Ьм
Наиболее специфичной частью расчета генераторов комбини-
рованного возбуждения является определение размеров магнит-
ной цепи шунта и обмоточных данных обмотки управления.
Магнитный поток в шунте Фш зависит от выбранного режима
работы и характера нагрузки генератора.
В общем случае, когда генератор работает в режиме управ-
ляемого шунта и смешанного возбуждения при изменении тока
нагрузки от нуля до максимального (рис. 6.2), значение потока
Фшо при холостом ходе генератора определяется выражением
(6.7).
Поток Фшо уменьшается с увеличением выпуклости кривой
внешней характеристики, т. е. с увеличением cos<p и тока КЗ 1К
(с уменьшением проводимостей рассеяния).
Построение внешней характеристики опорного генератора для
предварительных расчетов можно произвести, пользуясь выра-
жением (6.1).
Для определения необходимой площади поперечного сечения
шунта необходимо знать значение магнитного потока в шунте и
при нагрузке Фш,н, т. е. в режиме смешанного возбуждения. Не-
обходимое значение потока Фш>н для компенсации падения напря-
жения ДС/" при максимальной нагрузке /отох (рис. 6.2) может
быть приближенно определено по формуле, аналогичной (6.7),
т. е.
Miff и __TJ
Фш.н = Фоун = Ф°Ун kEt‘ <6Л°)
и в.
где Фоин — магнитный поток, соответствующий ЭДС £0= 1/н;
kEi= 1,07-т-1,12 — коэффициент, учитывающий внутреннее паде-
ние напряжения в генераторе.
212
В качестве расчетного потока в шунте Фш необходимо взять
наибольший из потоков Фшо или Фш,н- При правильно выбранном
положении внешней характеристики опорного генератора значе-
ния этих потоков близки друг к другу.
В том случае, если ток нагрузки изменяется от Imax до Imin
(рис. 6.3), т. е. в более узких пределах, то необходимое значе-
ние Фш уменьшается
Фш miп = Фоиг = Ф0У£ . (6.11)
где UF — напряжение опорного генератора при токе нагрузки
l=lmin- фоир—магнитный поток, соответствующий ЭДС Eq=Uf.
Приведенные выше формулы для подсчета потока в шунте
носят приближенный характер. Значения этого потока в даль-
нейшем уточняются при поверочном расчете.
Наличие дополнительного потока Фш в магнитной цепи гене-
ратора вызывает необходимость уточнить размеры полюсных
башмаков, через которые проходит этот поток. Для генераторов
с ротором звездочка (см. рис. 1.36) высота полюсных башмаков
должна быть выбрана не менее следующей:
(6.12)
ь __ Фщ’у.п
”пб — к R k
ОрОрКа >я
где Ьр=арт= (0,6-М),7)т — длина полюсной дуги; ay,n=l,08-s-
1,12 — коэффициент рассеяния потока на удлиненной части
полюса; Вр — допустимая индукция, Тл, в полюсном башмаке,
соответственно марке стали: СтЮ—1,3—1,4, Э—1,5—1,6,
ОХНЗМ— 1,2—1,4, ЗОХГСА— 1,1—1,3; Аи,я — коэффициент ис-
пользования магнитного потока в якоре из шунта, учитывающий
неполное использование потока полюса звезды для наведения
ЭДС вследствие наличия постоянной составляющей в однополяр-
ном потоке внешнего рассеяния генератора (см. рис. 1.35) (пред-
варительно можно выбрать Ли,я=0,84-0,85).
Как уже упоминалось, высота полюсных башмаков может
определиться необходимой механической прочностью цилиндра
ротора. При относительно небольшой мощности генераторов
(меньше 3 кВ-А) высота полюсных башмаков может опреде-
литься технологическими требованиями.
Участок стыка полюсных башмаков магнита с полюсами
звезды магнитопровода шунта является наиболее «узким» уча-
стком магнитной цепи, где в режиме смешанного возбуждения
встречаются потоки: радиальный от постоянного магнита и ак-
сиальный шунта. Чтобы разгрузить этот участок, предусматри-
вается перекрытие пакетом якоря магнитопровода шунта на не-
которую длину L3, которая является длиной электромагнитной
части индуктора и определяется по формуле
f _ ______________________________Фщ
э ВъщЬркн.я
(6.13)
213
где Вбш — допустимое значение индукции в воздушном зазоре
на участке магнитопровода шунта.
Значение В6ш является чисто расчетным, так как в действи-
тельности происходит выравнивание ее по определенному закону
по всей длине полюсного башмака. Можно выбрать Вбш=0,8-?
1,2 Тл.
При большой мощности генераторов, когда потоки Фш велики,
приходится предусматривать магнитную систему с двухсторон-
ней магнитной цепью шунта (см. рис. 1.38), чтобы чрезмерно
не увеличивать высоту полюсных башмаков и массу генератора.
Максимальное значение МДС обмотки электромагнита Гэ,пр
определяется из того соотношения, что при коротком замыкании
генератора и наличии F3,np рабочая точка на диаграмме магнита
не должна опускаться ниже оптимальной, соответствующей мак-
симуму удельной магнитной энергии магнита:
^,пр = ^. (6 К)
где kn= 1,05-? 1,15 — коэффициент, учитывающий падение маг-
нитного напряжения в воздушном зазоре стыка магнита с по-
люсными башмаками, а также в полюсных башмаках.
По значению F3,np известными методами определяются об-
моточные данные катушки электромагнита и производится ее
размещение.
Известное расчетное значение потока шунта Фш и необходи-
мая площадь для размещения обмотки подмагничивания позво-
ляют определить размеры магнитопровода шунта:
площадь поперечного сечения и толщину полюса втулки шун*
та (полюса звезды) (см. рис. 1.37)
5п,ш=ФшО’у,п/(Вп,ш^и,я) j
где пУ1П=1,1 — коэффициент рассеяния потока удлиненной ча-
сти полюсных башмаков и полюсов втулки; Вп,ш — допустимые
значения индукции в полюсе втулки (можно принять те же, что
и для полюсов);
площадь поперечного сечения и внешний диаметр цилиндри-
ческой части втулки шунта
£вТ,ш= дФш^ ; /?вТ1Ш= 1/ --W. (6.16)
£'ВТ,ш'гИ,Я г Т^ВТ.Ш^И.Я
где р — число пар полюсов; Ro — радиус вала или втулки вала,
на которых крепится втулка шунта; ВВт,ш — допустимая индук-
ция в цилиндрической части втулки.
При значительной мощности генератора (несколько кило-
вольт-ампер) специальная втулка на валу ротора не предусмат-
ривается, так как требуется значительная площадь окна для
размещения обмотки электромагнита;
214
(6.15)
площадь поперечного сечения внутреннего цилиндра скобы и
радиус внутренней части окна скобы
= V <6-1?)
£>СКЛИ,Я г я^ск*и,я
где Оск — внутренний коэффициент рассеяния скобы от МДС об-
мотки электромагнита, зависящий от размеров окна скобы
(приближенно можно выбрать сгСк~ 1,104-1,20); Вск— допусти-
мая индукция в скобе; Rock — внутренний радиус скобы, опреде-
ляемый размерами цилиндрической части втулки шунта;
площадь поперечного сечения фланцевой части скобы и ее
толщина (на радиусе Rick)
(6.18)
(6.19)
(6.20)
полюсных
(6.21)
Лек,в мож-
кольца по
площадью
О ______ Ф[11аСкР .
°<Ьл,ск р , э
пскли,я
____ ___Фщ°СкР
я/?1скВсК^И,Я
Для уменьшения массы скобы целесообразно ее выполнить с
переменной толщиной Ьск при сохранении неизменной площади
поперечного сечения ее фланцевой части. На радиусе R2ck тол-
щина скобы должна равняться
L ____ ФщаСК.Р
^СК.В D D Ь
ЛА2СК^СКЛИ,Я
радиус наружной части окна скобы Rzck— определяется ра-
диусом кольца, равным радиусу ротора, и высотой
башмаков ротора
^?2ск=:0,5/)р Лпб-
Высоту начальной части верхнего цилиндра скобы
но выбрать примерно равной ЛСк,в; ширина внешнего
оси генератора определяется в основном необходимой
воздушного зазора 6Ш2> т. е.
« _ ^5ш2
^К,ш2
(6.22)
гя^вск + о.бЛпб) 0>75Лпб’
П5ш2^и-я
(6.23)
где Ввш2 — допустимая индукция, Тл, в воздушном зазоре (мож-
но принять Ввш2=0,4-г0,7);
ширина катушки обмотки электромагнита — определяется по
известной требуемой площади для размещения обмотки и высо-
те окна Лк, т. е.
Лк=«ок/Лк. (6.24)
Если вследствие малых значений Лк ширина катушки Ьк по-
лучается слишком большой, то в ряде случаев бывает целесо-
образно увеличить диаметр ротора за счет применения материа-
ла магнита с меньшим Нс и большим Вг.
215
При большой мощности генераторов магнитопровод шунта
становится массивным и места для размещения обмотки подмаг-
ничивания остается мало (мала высота Лк), сильно увеличива-
ются потоки рассеяния скобы. В этом случае применение двух-
стороннего магнитного шунта является оправданным, хотя и по-
является вторая обмотка электромагнита с той же МДС, что и
первая. Воздушные зазоры 6Ш1 и бШ2 магнитной цепи должны быть
возможно минимальными, их значение определяется технологией
изготовления генераторов. Нежелательно иметь воздушные за-
зоры свыше 0,2—0,3 мм.
Значения индукции в магнитопроводе шунта выбираются в
зависимости от материала. Их можно выбирать по нижнему пре-
делу рекомендуемых допустимых значений для полюсных баш-
маков [см. (6.12)]. Для неподвижной скобы шунта может быть
применен новый материал «гиперко-27», который позволяет до-
пустимые индукции выбирать до 1,7—1,8 Тл.
6.2. ПОВЕРОЧНЫЙ РАСЧЕТ СИНХРОННЫХ ГЕНЕРАТОРОВ
КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ
Поверочный расчет синхронных генераторов комбинирован-
ного возбуждения имеет некоторые свои особенности, связанные
с подсчетом проводимостей рассеяния, построения рабочей диа-
граммы магнита и характеристик генератора.
Подсчет проводимостей рассеяния
В отличие от обычных генераторов с постоянными магнитами
наличие магнитной цепи шунта в синхронных генераторах ком-
бинированного возбуждения обусловливает появление дополни-
тельных проводимостей рассеяния ротора, а также проводимо-
стей рассеяния скобы. Наличие дополнительных проводимостей
оказывает существенное влияние на рабочее состояние магни-
та, на индукции в магнитопроводе шунта и полюсных башмаков
и на выходные характеристики генераторов.
Применительно к магнитной системе с ротором звездочка
(рис. 6.4) наличие цени шунта вызывает дополнительное появ-
ление следующих проводимостей рассеяния: ASM,n— с магнита
на полюс шунта; Asn,K — с полюса на кольцо, являющаяся сум-
мой отдельных составляющих; Леек — скобы.
Подсчет проводимости рассеяния ASM.n (рис. 6.5). Отдельные
участки магнита по его высоте находятся под разным магнит-
ным напряжением по отношению к полюсу шунта. Считая рас-
пределение магнитного напряжения по высоте магнита линейным
и полагая, что поле между магнитом и полюсом шунта являет-
ся плоскопараллельным, можем написать интегральное выраже-
ние для подсчета приведенной проводимости рассеяния ASM,n:
f ~т~ ~г~ dh
д =---------------«м---= я b — V — h dh. (6.25)
SM,n FM ° Лм J h
216
Рис. 6.4. Эскиз магнитной цепи ротора звездочка с призматическими магнита-
ми:
/ — вал; 2—ступица; 5 —магнит; 4 — обмотка размагничивания; 5—воздушный зазор в це-
пи шунта; 6 — неподвижный магнитопровод цепи шунта (скоба); 7 —кольцо, объединяющее
южные полюсы; 8 — полюсные башмаки южных полюсов; 9 — полюсные башмаки северных
полюсов; 10 — статор (якорь); 11 — немагнитные участки полюсных башмаков
Рис. 6.5. Определение проводимостей рассеяния магнита на полюс шунта Л,м.п
где р.о — магнитная постоянная; b — ширина полюса шунта
(перпендикулярно плоскости чертежа), k — расстояние
между магнитом и полюсом шунта на t-м участке; FM — полная
МДС магнита (одного полюса); Лм — высота магнита; h—теку-
щая координата по высоте магнита.
В нашем случае (рис. 6.5)
п
‘м
_1_ (*___h ________С । Л,
Лм .) «-(Aj-^ctga—ftM/J "Г I
О ht
bV-o-
При cr=45°, ctga=l
Л,м,п= [ {fti + (Z-Aj) [In (Z—ft0 -In/]}/ft„+
+ (0,5ZiM2—0,5fti2)/M+ (h2—hM) /Z]hp0. (6.26)
Проводимость рассеяния Лвм,п получена в расчете на один по-
люс. При расчете магнитной цепи на два полюса эквивалентное
217
расчетное приведенное значение проводимости рассеяния равно
Л«м,пр==Л«м,п/4. (6,27)
Подсчет проводимости рассеяния Л«п,л- Точное определение
данной проводимости представляет большие трудности, так как
конфигурация полюсов противоположной полярности весьма
сложная и поле для потоков рассеяния объемное. В этом случае
наиболее целесообразным методом определения проводимостей
рассеяния' является метод разбивки поля по вероятным путям
потока. Поле между полюсами разбивается на элементарные
трубки в соответствии с распределением магнитного потока.
Разбивка производится таким образом, чтобы эти трубки имели
формы простых геометрических фигур, для которых по известным
формулам можно подсчитать магнитные проводимости.
Применительно к нашему случаю распределение элементар-
ных трубок представлено на рис. 6.6.
Результирующее значение проводимости рассеяния Л«п,к
равняется (на пару полюсов)
Asn, к=Л1+Лз++2A/'+2As+2A.s 4-
+2A8"+2Aio+2Asb, . (6.28)
где At = ц0-—- — проводимость трубки призматической
(di + dt)/2
формы между торцами полюса и кольца (рис. 6.6,а,б); Лз=
= цо 0,266— проводимость полуцилиндра с верхней торцевой
грани полюса и кольца (рис. 6.6,a); д4,=ц0.0,526—
проводимость четверти цилиндра с нижней части по-
люса и нижней грани кольца (рис. 6.6,а); Л4,,=0,75цоХ
Рис. 6.6. Определение проводимости рассеяния Лв п,к с полюса шунта на коль
цо и удлиненную часть второго полюса шунта противоположной полярности
218
Х0,52йп,щ — проводимость четверти
цилиндра с торцевой боковой грани
полюса и кольца (рис. 6.6,6) (с уче-
том конфигурации кольца); Л5=
= |ло(6/л) In (l+(2m/d2)] — проводи- '
мость цилиндрического полукольца с
наружных поверхностей полюса и
кольца (рис. 6.6,а); Л8'=О,5цоХ /?2ск
Х0,308с/2 — проводимость шарового
полуквадрата с верхнего переднего
угла на кольцо (с учетом конфигура-
ции кольца); Л8"=0,5цо-0,308с/1—
проводимость шарового полуквадрата J
с нижнего переднего угла на КОЛЬЦО Рис. 6.7. Определение проводи-
(с учетом конфигурации кольца); мости рассеяния скобы Л, е«
Л1о=О,75ц.оЯ1/2 — проводимость полу-
квадрата шаровой оболочки с верхней боковой грани полюса на
кольцо (с учетом конфигурации кольца);
. 1 ^п,ш№ — ^1) 4"
-------------7------------
z 4ср
(6.29)
— внутренняя проводимость рассеяния с боковой поверхности
полюса шунта на внутреннюю поверхность выступающей части
полюса противоположной полярности (рис. 6.6,в); здесь Ь'р —
длина полюсной дуги полюса по внутреннему радиусу; /ср —
средняя длина силовой линии потока рассеяния, выходящая из
середины боковой поверхности втулки шунта и середины полови-
ны полюсной дуги (рис. 6.6,в).
При разбиении поля потоков рассеяния на простейшие эле-
ментарные трубки было сделано допущение: полюсная дуга тор-
цевой части полюса принималась за прямую. Это допущение
вполне приемлемо при большом числе полюсов ротора.
Формулы не учитывают проводимости рассеяния между
внешними, боковыми и внутренними поверхностями выступаю-
щей части полюсов за пределы магнитопровода якоря. Эти про-
водимости учитываются при расчете проводимостей рассеяния
полюсных башмаков Asno на участке длины якоря согласно рас-
четным формулам § 5.5. Подсчет проводимостей рассеяния маг-
нита Asm также проводится согласно § 5.5.
Наличие потоков рассеяния полюса шунта на кольцо и другой
полюс загружает магнитную цепь шунта и в особенности уча-
сток выступающей части полюсного башмака, что необходимо
учитывать при расчете магнитной цепи.
Подсчет проводимости рассеяния скобы Л8Ск. Подсчет эквива-
лентной проводимости рассеяния скобы с учетом распределен-
ного характера МДС обмотки электромагнита может быть про-
изведен с помощью расчетной формулы (рис. 6.7)
219
_____1— ____________^скв__________
"SCK q r*0 / p p
* 1 / 1 i "*'2CK — А1ск
in 1 +------------------
\ A1CK
(6.30)
где bCK= (Ьск,в+&ск,н)/2; &ск.в, &ск,н —ширина полок верхнего и
нижнего колец соответственно; 0=2л/р— угол, приходящийся
на пару полюсов; R2ck — внутренний радиус наружного кольца;
Я1СК — наружный радиус внутреннего кольца.
Расчетная формула (6.30) может быть упрощена (без вычис-
ления логарифма), если упрощенно вычислить вначале полную
проводимость рассеяния
Л = |Л ^ск,д (6 31)
Проводимость рассеяния скобы на пару полюсов
А Лдп _ я (RjCK 4~ ^1ск) ^ск.н
'Чек- Р ^р №ск_Л1ск) 2
Построение рабочей диаграммы и характеристик синхронных ге-
нераторов
Построение рабочей диаграммы магнита необходимо для оп-
ределения магнитных потоков в якоре и других частях магни-
топровода, уточнения размеров магнитной цепи и обмоточных
данных якоря, построения внешних и регулировочных характе-
ристик.
Построение характеристик холостого хода Форез=f(F) и КЗ
Фк=ф(Гк) на диаграмме магнита (см. рис. 6.11) при наличии
F3 в цепи шунта может быть произведено по аналогии с извест-
ными графоаналитическими методами построения этих характе-
ристик для обычных магнитоэлектрических генераторов (см.
§ 5.6). Для этого воспользуемся схемой замещения магнитных
сопротивлений для генераторов с ротором звездочка (рис. 6.8).
При построении характеристик холостого хода и КЗ прихо-
дится многократно определять значение и направление потока в
шунтирующей цепи, которая насыщена. Для удобства расчетов
целесообразно предварительно построить магнитные характери-
стики цепей шунта при разных значениях МДС F3.
Здесь F3li — значения МДС между точками 3 и 4 на схеме заме-
щения магнитных цепей, представленной на рис. 6.8.
При построении характеристик фш=/(1Г34) (см. рис. 6.10)
необходимо учитывать проводимость рассеяния магнитопровода
скобы Леек, наличие которой вызывает появление рассеяния ско-
бы, загружающего магнитопровод скобы, а также проводимость
для внешнего потока рассеяния Д5вш, обусловливающую поток
(Ф $ВШ —Фз2Ч“Ф«1) •
Расчет и построение характеристик Фш=/(^з,4) при различ-
ных значениях применительно к генераторам с ротором
звездочка производится в следующем порядке:
220
Рис. 6.8. Упрощенная схема замещения магнитных сопротивлений для генерато-
ров комбинированного возбуждения с ротором звездочка (на пару полюсов) и
с магнитом звездочка (а), с призматическими магнитами (б):
Кст.м» ^пб> #8, магнитные сопротивления стыка магнита, полюсных башмаков,
воздушного зазора, зубцов якоря и ярма якоря соответственно; /?8М, R9 пб, 7?дЯ — эквива-
лентные сопротивления рассеяния магнита, полюсных башмаков, обмотки якоря соответст-
венно; Япб|Ш1, Япбш2, ₽бш1’ Я&Ш2, ЯСК1’ ^СК2 “ магнитные сопротивления части полюсных
башмаков, ’воздушных зазоров, скобы, первого и второго участков шунта соответственно;
R3CK~ магнитное сопротивление рассеяния скобы шунта (при наличии МДС F9); RCT|M1 и
/?ст,м2 магнитные сопротивления стыков магнитов со втулкой (^Ст,м1=^ст,м2^’ ^вт“маг"
нитное сопротивление для потока во втулке; FM, FM1, Fm2 МДС магнитов; (^И1=^м2'
^mi+^m2=Fm); ₽ст м пб — магнитные сопротивления стыков магнита с полюсными башмака-
ми; Fed — МДС реакции якоря; F9 — МДС электромагнита
а) определяется проводимость рассеяния кольцевого воздуш-
ного зазора с учетом распределенной МДС F3 и проводимость
Asbiu на пару полюсов [47];
б) рассчитывается и строится зависимость потока рассеяния
скобы от МДС на концах скобы (точки 9 и 10 на схеме замеще-
ния) Ф$СК== Г9,10 (Л«ск“|-Л,вш) •
При подсчете Л5Вш учитываются также последовательно со-
единенные проводимости участка цепи якоря Ла и Лг, по кото-
рым замыкается поток Ф$Вш.
Зависимость OSCK=f(^9,10) представляет собой прямую ли-
нию, выходящую из начала координат (рис. 6.9);
в) рассчитываются и строятся в той же системе координат
кривые зависимостей потока в теле скобы от МДС на концах
скобы Фск=/(^э.ю) при различных значениях F3, где F9>l0—
=FKlH-\-FcT+FK,a — суммарная МДС, необходимая для прове-
дения потока ФсК по нижнему кольцу, стенке, верхнему кольцу
скобы, соответственно;
г) строятся суммарные кривые потоков Фск+Фвск=/(/:,9,1о)
при различных значениях F3. Они позволяют определять значе-
221
Рис. 6.9. Кривые зависимостей потока рассеяния Ф3 Ск, потока в скобе ФСк и сум-
марного потока Фш=Фв ск-ЬФск от МДС Fs.io:
Рис. 6.10. Кривые зависи-
мостей потока в шунте Фш
от МДС 7*з,4 при различных
значениях А’
^Э1 <'' ^Э2 ^93 *** ^э4 <'~ ^эб»
ние и направление результирующего потока Ф5Ск + Фск при различ-
ных значениях F3 и F9,io. Эти кривые представляют собой эквива-
лентные кривые намагничивания участка магнитной цепи 9—10
при наличии МДС F3 и потоков рассеяния (рис. 6.9);
д) для построения эквивалентных кривых намагничивания
Фш=/('/7з>4) при различных значениях F3 подсчитываются паде-
ния напряжения на остальных участках магнитопровода шунта
от потока Фск
F 3,4==F бш1 пб,ш2 +Г9 ,10-
Перестраивая эквивалентную кривую намагничивания по но-
вым значениям МДС по оси абсцисс, получаем исходную расчет-
ную кривую зависимости Фш=^(/?з,4) для различных значений
F3 (рис. 6.10).
Имея эти кривые, можем определить не только значение, но
и направление потока в шунтирующей цепи при различных зна-
чениях F3 и
В режиме холостого хода Fad=0, поэтому схема замещения
замкнута накоротко с правой стороны. Расчет характеристики
холостого хода производится в обычном порядке (см. § 5.6), т. е.
задаются несколькими произвольными значениями расчетного
222
потока холостого хода в воздушном зазоре Ф«о и для каждого
из этих значений потока рассчитывают магнитную цепь по уча-
сткам (справа налево) с учетом потоков рассеяния. Определя-
ются потоки и магнитные напряжения на каждом из участков
магнитной цепи. Особенность расчета характеристики холосто-
го хода при наличии F3 состоит в том, что поток в шунте Фш
определяется разностью магнитных напряжений Гз,4 и F3
(рис. 6.8). Магнитный поток определяется по кривой Фш=/(.Езл)
для заданной МДС Гэ.
Если Рэ>Рз,4, то поток Фш отдается шунтом в цепь якоря.
При Гэ-С'Езл поток направлен в шунт от постоянного магнита.
При расчете магнитной цепи необходимо учитывать, что че-
рез участок магнитной цепи якоря: воздушный зазор полюса
звезды шунта 6 и зубцы проходит дополнительный однополяр-
ный поток рассеяния Ф5Вш (рис. 6.8). Последнее может быть
учтено с помощью коэффициента йи,я,к
ФбОз ==Фбо/^и,я,к,
где Фвоз — магнитный поток под полюсом звезды шунта; Аи,я,к —
коэффициент использования магнитного потока в якоре эквива-
лентного генератора комбинированного возбуждения [47]:
£ =----к+Ь------0,95;
+ (Хэ/*и.я)
^М==^м/^! = ^э/^-
В результате расчетов находятся координаты нескольких то-
чек магнитной характеристики холостого хода на диаграмме
магнита, например точек Л'оз, Л"оз, Лоз для характеристики при
F3=F3,„P (рис. 6.11). Через полученные точки проводят кривую,
которая выражает зависимость <DMo=f(^)- Расчетным точкам
результирующего потока Форез=^(Ё) соответствуют точки пото-
ка холостого хода Фзо=/(Ео). Характеристики холостого хода
строятся для различных значений F3: F3,np, Гэ=0, промежуточ-
ных, а также для опорного генератора. Пересечение характери-
стик Форез=/(Е0) с прямой возврата KL дает точки холостого
хода Лоь Лог, Лоз.
Построение характеристик КЗ производится в следующем по-
рядке (см. § 5.6).
Задаются произвольно значениями токов КЗ /к= (1,5-е-3)7н
и для каждого из токов подсчитывают МДС реакции якоря
FadK “ 0,9m —— k3kad sin ф.
При коротком замыкании sim|)=l. Строится векторная диаграм-
ма напряжений для режима КЗ (рис. 6.12). Длина отрезка
Eaq/costy определяется с помощью характеристики холостого хо-
да (рис. 6.13) ПО МДС Fag/cos ф = 0,9/п (а>фАо/р) ЛЛз». Из вектор-
ной диаграммы напряжений определяется ЭДС EdK, а следова-
223
Рис. 6.11. Рабочая диаграмма магнита
тельно, и поток, соответствующей ей,
ф. =________________________________
dK 4к^01аф •
По известному значению Ф<гк определяется падение магнит-
ного напряжения в магнитной цепи якоря при КЗ и МДС меж-
ду точками 3 и 4 схемы замещения рис. 6.8
^?ЗЛ=^вз+‘/7«ц+2/:'г+^7/+^ ad«.
Особенностью расчета является определение потока в шунте
Фш, который определяется разностью МДС Fiti и fэ и магнитной
проводимостью шунта Лш
Фш^= (F 3,4 F э) Лш-
Так как магнитная цепь насыщена, то в этом случае следует
пользоваться кривой намагничивания магнитной цепи шунта
фш=/(Г3>4) (см. рис. 6.10).
Далее определяются потоки рассеяния: полюсных башмаков
Фл1б, магнита Ф^м, дифференциального рассеяния ФД5 (см. § 5.6).
Определяются падения магнитных напряжений: на полюсных
башмаках ГПб, стыках магнита с полюсными башмаками FCT,M,n6,
внутренних стыках магнита с втулкой /'ct.mi и Fct.m-
224
Рис. 6.13. Характеристики холостого
хода
Рис 6.12. Векторная диаграмма на-
пряжений для режима короткого за-
мыкания генератора
Определяют магнитный поток м МДС магнита при КЗ и
данной МДС Fa
Фм,к = Ф<(кН“Фд5"РФш+Фзпб+Фзм!
F>t,к—F3't-\-2F пб+З/^ст.м.пб + 2F СТ1М.
Знак минус перед Фш ставят при Гэ>Гз14.
Расчет и построение характеристики КЗ целесообразно вна-
чале провести для F3=F3,np, так как в этом случае характери-
стика КЗ определяет точку отхода прямой возврата на диаграм-
ме магнита (см. рис. 6.11).
Полученным значениям Fk,k и Фи,к на рабочей диаграмме
магнита соответствует некоторая точка W с координатами Фм,ктг
и Fm,kW‘
Подсчитывая значения Гм,к и Фм,к для нескольких значений
тока, получаем ряд точек. Соединяя их, получаем кривую ха-
рактеристики КЗ. Пересечение ее с кривой размагничивания да-
ет точку К—точку отхода прямой возврата KL. Характеристи-
ка КЗ опорного генератора при правильно выбранных парамет-
рах должна совпадать с характеристикой КЗ при F3=F3,np (луч-
шее использование постоянного магнита). Но практически ха-
рактеристики опорного генератора могут идти ниже и выше ха-
рактеристики генератора при F3=Fa,np (рис. 6.11).
Точка отхода прямой возврата (точка К) практически опре-
деляется установившимся КЗ. Однако все же имеется некоторое
дополнительное размагничивание при ударном КЗ. Поэтому в
генераторах на большую мощность предусматриваются демпфе-
ры в виде медного кольца вокруг каждого магнита.
При построении диаграммы магнита должна быть проведена
проверка на размагничивание магнита при положении ротора
вне корпуса.
15—6258 225
Рис. 6.14. Графическое построение рабочей диаграммы магнита генератора при
F»=F»i
Точка отхода прямой возврата должна соответствовать мак-
симуму удельной магнитной энергии магнита.
Для построения внешних характеристик синхронных генера-
торов комбинированного возбуждения наиболее удобно восполь-
зоваться графоаналитическим методом (см. § 5.7). Согласно это-
му методу исходным для определения напряжения генератора
является зависимость ^d=f(Fad), которая может быть построе-
на на диаграмме магнита (кривая на рис. 6.14) изложенным
ранее методом. Если из начала координат провести прямую, со-
ответствующую потоку рассеяния якоря, под углом Л, тангенс ко-
торого равен
tfr, = fo + 'VM z6 331
до пересечения с кривой ®d (кривая Л), получаем точку 1, со-
ответствующую установившемуся току КЗ. Координаты точки 1
определяют значения потока Ф^к и МДС Га<*к при заданной МДС
F3. Диаграмма магнита определяет также значения ЭДС холо-
стого хода Ео при F3.
226
Известное значение Fad* (рис. 6.14) позволяет определить
значения тока КЗ по продольной оси Цк и полного тока 1К
<^>
/. = /»/•+№,)• (6-35)
Таким образом, имеем две точки внешней характеристики:
холостого хода и КЗ.
Если построенных кривых Ф</=/(Г0(г) нет, то, задаваясь не-
сколькими промежуточными точками на прямой возврата K.L с
координатами FM и Фм (точка А на рис. 6.11) между точками КЗ
и холостого хода, определяются для каждой точки соответствую-
щие ей значения Faa и Ф</. Решение производится согласно схе-
мам замещения, представленным на рис. 6.8, в следующем по-
рядке:
1) по известным значейиям Fu и Фм выбранной точки А оп-
ределяют потоки Фпб, Фвпб и МДС FSfi
Фпб = Фм ~~ Ф«Мг=Фм FмЛод,
Ф»пб F6fiA.s цб J
F$fi==FM — 2ГСТ,„ — 2F пб-
Здесь падения магнитного напряжения Гст,м и Fae определя-
ют по значениям потока ФПб;
2) определяют поток в шунте
Фш= (F3,4 — F9) Лш
или по кривой Фш=Г(^зл) в случае насыщенной магнитной це-
пи; здесь F3,4=FSi6;
3) определяют поток в воздушном зазоре Ф« и падение маг-
нитного напряжения в цепи якоря Гад
Фб—Фпб ~~ Ф«пб — Фш,
где знак плюс перед Фш берется, если ГЭ>Г3,4, а знак минус,
если ГЭ<Г3,4.
Значение Гад определяется по Фе, где
Ftz ]=2Fi+2FZ -|- Fj;
4) определяют искомые значения и Fad для выбранной
точки магнитного состояния магнита
Фй=Ф3 — фвд;
Fad==F'}tt — F (,!!
Поток дифференциального рассеяния Фвд определяется выраже-
нием
где АА0 и КА — отрезки прямой возврата на рабочем участке
К-Ао (рис. 6.11).
15* 227
Определенные значения Ф</ и Fad для каждой из точек маг-
нитного состояния магнита позволяют найти значения напряже-
ния и тока, им соответствующие. Для этого можно воспользо-
ваться формулами (5.202) — (5.204) (см. § 5.7).
Полученные значения Ur и I позволяют нанести на графике
точку внешней характеристики синхронного генератора. Зада-
ваясь несколькими промежуточными точками на прямой возвра-
та и подсчитывая значения UT и Д им соответствующие, полу-
чаем внешнюю характеристику генератора при F3=const.
Построение внешних характеристик опорного генератора и
генератора при Гэ=0 производится по известному общему ме-
тоду (см. § 5.7).
Регулировочные характеристики легко получаются
из построений внешних характеристик. Для этого достаточно че-
рез семейство кривых внешних характеристик [3] провести го-
ризонтальную прямую на уровне номинального напряжения.
Точки пересечения кривых внешних характеристик при разных
F3 с горизонтальной прямой U» и определяют регулировочную
характеристику F3=f(l).
Характер регулировочных характеристик в значительной сте-
пени зависит от выбора режима работы генератора и рабочей
точки на предельной внешней характеристике [3].
Если в соответствии с внешними и регулировочными харак-
теристиками генератор отдает заданную максимальную мощ-
ность и при этом обеспечивается регулирование напряжения в
заданных пределах изменения тока нагрузки при допустимом
расходе мощности на регулирование, то задача является решен-
ной. Если генератор не отдает заданную максимальную мощ-
ность, то требуется произвести перерасчет генератора. При этом
приходится увеличивать размеры магнитной цепи генератора
(магнита и шунта).
Расчет синхронных генераторов с когтеобразным ротором
подобен расчету генераторов с ротором звездочка. Особенности
расчета синхронных генераторов комбинированного возбужде-
ния с когтеобразным ротором изложены в [46].
6.3. ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА И РАСЧЕТНЫЕ СООТНОШЕНИЯ
В ОДНОИМЕННОПОЛЮСНЫХ ИНДУКТОРНЫХ ГЕНЕРАТОРАХ
КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ
Одноименнополюсные индукторные генераторы комбиниро-
ванного возбуждения Могут иметь двухстороннее и односторон-
нее возбуждение. Для выявления особенностей рабочего про-
цесса этих генераторов, отличающих их от аналогичных син-
хронных, необходимо составить для них схемы замещения маг-
нитных цепей с учетом активной зоны, включающей в себя зуб-
цовую зону индуктора и якоря.
На рис. 6.15 изображен эскиз магнитной цепи одноименнопо-
люсного индукторного генератора с пульсирующим потоком воз-
228
Рис. 6.15. Эскиз магнитопровода одноименнополюсного индукторного генератора
е двухсторонним комбинированным возбуждением и радиально расположенными
призматическими постоянными магнитами:
1 — якорь; 2 — корпус; 3 — магнитная крышка; 4 — втулка обмотки; 5 — электромагнитная
обмотка возбуждения; 6 — вал; 7 — втулка индуктора; 8 — индуктор; 9 — втулка магнита;
10 — внутренняя обойма; // — постоянный магнит; 12— внешняя обойма; б, дви, бв0, бвв—
воздушные зазоры соответственно главный, между втулкой и индуктором, втулкой и обой-
мой, валом и втулкой; Дк в, Дв в, ДВ|М>В, Дн,о,м> дв,о,м' дя,к' дв,о,к* Ак,к — воздушные за-
зоры стыка соответственно между крышкой и втулкой, втулкой и валом, втулкой магнита и
валом, нижней обоймой и магнитом, верхней обоймой и магнитом, якорем и корпусом, верх-
ней обоймой и корпусом, корпусом и крышкой
Суждения с параллельным действием МДС магнита и обмотки
возбуждения и внешним магнитопроводом.
Особенностью такого типа генератора является то, что элект-
ромагнитная обмотка возбуждения 5 и радиально расположен-
ные призматические постоянные магниты 11 находятся по обе
стороны якоря 1 и индуктора 8, т. е. генератор имеет двухсто-
роннее возбуждение.
На рис. 6.15 показано направление потоков обмотки Фэ, маг-
нита Фм и суммарного потока в рабочем воздушном зазоре Фе
между якорем / и индуктором 8, а также потоков рассеяния
электромагнитной обмотки Фаэ и магнита Фом, потоков Фэ' и Фм'.
На рис. 6.16 изображена схема замещения магнитной цепи
этого генератора по продольной оси без рассмотрения его актив-
ной зоны.
Необходимость получить самовозбуждающийся генератор при
номинальной нагрузке с остаточным потоком, равным полному
потоку магнита, привела к созданию индукторных генераторов с
односторонним комбинированным возбуждением. При подмагни-
чивании и размагничивании магнита за счет изменения и ревер-
сирования тока в обмотке возбуждения можно изменять значе-
ние потока в воздушном зазоре и тем самым регулировать на-
пряжение генератора [3].
Из рис. 6.17, на котором изображен эскиз магнитопровода та-
кого генератора, видно, что призматические радиально-намагни-
ченные магниты и обмотка возбуждения включены в главной
16—6258 229
Рис. 6.16. Схема замещения магнитной
цепи одноименнополюсного индукторного
генератора с двухсторонним комбиниро-
ванным возбуждением и радиально рас-
положенными призматическими постоян-
ными магнитами по продольной оси:
фэ'. фэ» фаэ» ф&. фм'. фМ’ фам “ маг-
нитные потоки соответственно во втулке, ра-
бочий электромагнита, рассеяния обмотки,
главного воздушного зазора, общий магнита,
рабочий магнита, рассеяния магнита; F*, F'*,
Fad 3 — МД.С соответственно обмотки, услов-
ная постоянного магнита, эквивалентная про-
дольной реакции якоря; Яя к, RK к, RK в,
^в,о,к» ^в.о.м* ^н,о,м' ЯВ,М(В> #в,в,и магнит-
ные сопротивления воздушных промежутков
стыков соответственно между якорем и кор-
пусом, крышкой и корпусом, корпусом и втул-
кой, верхней обоймой и корпусом, верхней
обоймой и магнитом, нижней обоймой и маг-
нитом, втулкой магнита и валом, валом и
втулкой индуктора; RB и, RB>O — магнитные
сопротивления дополнительных зазоров соот-
ветственно между втулкой и индуктором,
втулкой магнита и нижней обоймой; ^я,^к,э»
Рн ₽н /?н Рн Рн Рн Л RH
АК» ^В,Э» ^К, М» лв, О’ о» ^в, м» лв в,и>
RH — нелинейные сопротивления участков
магнитопровода соответственно ярма якоря,
корпуса электромагнитной части возбуждения,
крышки, втулки электромагнита, корпуса маг-
нитной части возбуждения, верхней обоймы,
нижней обоймы, втулки магнита, вала, втул-
ки индуктора, тела индуктора; #39, ^ам"~
магнитные сопротивления соответственно рас-
сеяния втулки электромагнита и постоянного
магнита; R'M — условное магнитное сопро-
тивление постоянного магнита
цепи возбуждения генератора последовательно. На рис. 6.18
изображена схема замещения магнитной цепи этого генератора
по продольной оси также без рассмотрения его активной зоны.
Оба рассмотренных типа индукторных генераторов комбини-
рованного возбуждения отличаются друг от друга только систе-
мами возбуждения—двухсторонней или односторонней, имея
одинаковые активные зоны.
На рис. 6.19,а изображена развертка зубцовой зоны генера-
тора для положения, когда поток в зубцах якоря максимальный
(фгя]=тах), а на рис. 6.19,6 — минимальный (Фгя2=тт).
Поскольку обмотка якоря катушечная, то распределение
МДС продольной реакции якоря Fad вдоль зазора можно пред-
ставить в виде отрезков прямых с высотой Fad№, имеющих поло-
жительное значение у зубцов индуктора и отрицательное у впа-
дин. На рис. 6.20,а, б соответственно рис. 6.19,а, б приведены схе-
230
Рис. 6.17. Эскиз магнитопровода одноименнополюсного индукторного генератора
с односторонним комбинированным возбуждением.
1 _ корпус; 2 — якорь; 3 — индуктор; 4 — вал; 5 — втулка электромагнитной обмотки; 6—по-
стоянный магнит; 7 — обойма магнита; 8 — обмотка возбуждения; б, бэ в — воздушные зазо-
ры соответственно главный, между валом и втулкой обмотки; Дв>и, Дко, Дм0, Дм>в, Дя —
воздушные зазоры стыка, соответственно между валом и индуктором, корпусом и обоймой,
магнитом и его обоймой, магнитом и втулкой, якорем и корпусом
мы замещения активной зоны генератора для этих двух положе-
ний якоря и индуктора генератора. Здесь — Яв12 и
Rn — ₽ftie — магнитные сопротивления трубок потока Фе в воз-
душном зазоре; /?нгя1, /?нгя2, Raz*3 — нелинейные магнитные со-
противления зубцов якоря; /?игиь RHz«2 — индуктора; Фгяь ФгЯ2,
Фгя3 — магнитные потоки в зубцах якоря; Ф2Иь Ф2И2 — индуктора;
Fad — МДС продольной составляющей реакции якоря.
Для определения магнитной проводимости воздушного зазора
на практике применяются упрощенные методы. Простым и до-
статочно точным является метод, предложенный Полем [3].
Для подсчета магнитной проводимости по этому методу стенки
у зубцов якоря и ротора заменяют фиктивными с наклоном к
горизонтальной линии под углом 0. Значение угла в зависимо-
сти от отношения ширины паза к значению воздушного зазора
принимается равным 1,0—1,1 рад. Принято тгкже, что силовые
линии на участке воздушного зазора являются отрезками пря-
мых, а в области паза — дугами окружностей с центрами в вер-
шине зубца. При слабонасыщенных зубцах метод Поля не дает
больших погрешностей. Коэффициент магнитной проводимости
воздушного зазора в области зубца, приходящийся на 1 м акси-
альной длины якоря, постоянен
Kz=bz/6, (6.36)
а в области паза
г-=Ыр <б-эт»
Г1
где bz— ширина зубца; 6 — значение воздушного зазора; и, —
расстояния от вершины зубца до начала и конца трубки, в ко-
торой определяется проводимость: 0 — фиктивный угол наклона
стенок зубца.
16* 231
Формула для подсчета
имеет вид
магнитного сопротивления участка
(6.38)
где ро — магнитная постоянная;
I — осевая длина индуктора.
Действующее значение первой
гармонической ЭДС Ек в катушке
на одном зубце якоря определяет-
ся амплитудой пульсирующей час-
ти потока в зубце
£к=4,44/о»к0,5 (Фгя1 — Фгяг)
(6.39)
Рис. 6.18. Схема замещения магнитной цепи одноименнополюснъго индукторного
генератора с односторонним комбинированным возбуждением по продольной осн:
Фч, фаэ» фм» фом» ф8 “ магнитные потоки соответственно во втулке электромагнитной
обмотки, рассеяния электромагнита, постоянного магнита, рассеяния постоянного магнита,
в рабочем воздушном зазоре; Fad а — МДС соответственно электромагнитной об-
мотки, условная постоянного магнита, эквивалентная продольной реакции якоря; /?э в —
магнитное сопротивление дополнительного зазора между валом и втулкой электромагнит-
ной обмотки; 2?в и, Ямэ, Ям о, Як0, /?як —магнитные сопротивления воздушных промежут-
ков стыков соответственно между валом и индуктором, магнитом и втулкой электромагнит-
ной обмотки, магнитом и его обоймой, корпусом и обоймой магнита, якорем и корпусом;
/?ни, R**, R**, RVq, R*k, /?ня i— нелинейные магнитные сопротивления соответственно тела
индуктора, вала, втулки электромагнитной обмотки, обоймы магнита, корпуса, ярма якоря;
ЯоЭ, Лш — магнитные сопротивления рассеяния: втулки электромагнитной обмотки, посто-
янного магнита; R'*— условное магнитное сопротивление постоянного магнита
Рис. 6.19. Развертка индуктора и якоря вдоль воздушного зазора:
а—зубец якоря находится против зубца индуктора; Фгя1=тах; б—то же между зубцами
индуктора: Ф1я2=пйп
232
A
^гятП |^гя1—max ^гягП|
[m Tp
I | &zH3
I
fa far* Hw r№ r$7 pfra ^9 Ъм ^1м и
i H
\RS12
Fgd
2
Fad
2
Fad
2
Fgd
2
Fgd
Z
n]
Fid
2
Fad
2
Fad
2
Fad
2
Fgd
2
Fgd
Z
Я
Fgd
Z
ЯлюП l^zul
^й|1П|^^ЯТ ^гягП |^82Я2-т^л ^гязП|^гяз
N |д |р
^f2 । ^SlO^Sjl ^JT2^S13^S1^S»^
Рис. 6.20. Схемы замещения магнитных цепей активной зоны одноименнополюс-
ного индукторного генератора:
а—зубец якоря находится против зубца индуктора: Ф2Я1=тах; б— зубец якоря находится
против паза: Ф2я2=п>1п
где f — частота напряжения; wK — число витков в катушке; ФгЯ],
Фгяг — максимальный (рис. 6.20,а) и минимальный (рис. 6.20,6)
поток в зубце £>,=211/(Хг—Ап); къ,— коэффициент, учитываю-
щий высшие гармонические в рабочем зазоре генератора по зна-
чениям удельных магнитных проводимостей: %i — первой гармо-
ники, Xz — максимальной в момент совпадения осей зубцов яко-
ря и индикатора, Хп — минимальной в момент совпадения осей
233
паза индуктора и зубца якоря, которые характеризуют проводи-
мость воздушного зазора на участке зубцового деления якоря
тя при различных положениях индуктора в пределах его поворо-
та на двойное полюсное деление индуктора 2тн, разложенную
на гармоники и отнесенную к единице осевой длины пакета яко-
ря [49].
Если учесть, что частота напряжения f определяется числом
зубцов индуктора гн и частотой вращения генератора п
f=zan/6Q, (6.40)
то для генератора с числом фаз т продольная ЭДС в фазе Еп
равна:
Еп = 0,37гилшф (Фгя1 — Фгя2) ky„ (6.41)
где да® — число витков в фазе обмотки.
Продольная ЭДС Е„ и МДС реакции якоря Fad определяют
напряжение U и ток 1 генератора при любом cos <р, как это пока-
зано в § 5.8.
В индукторных генераторах в активной зоне действуют как
размагничивающие, так и намагничивающие составляющие про-
дольной реакции якоря Fad (рис. 6.20). Однако поскольку намаг-
ничивающие составляющие действуют на участках паза индук-
тора, где сопротивления составляющим потока воздушного за-
зора велики, а размагничивающие составляющие действуют на
участках зубца индуктора, где они малы, то результирующее
действие продольной составляющей реакции якоря Fad в ин-
дукторных генераторах комбинированного возбуждения будет
размагничивающим.
«.4. ОСОБЕННОСТИ РАСЧЕТА ОДНОИМЕННОПОЛЮСНЫХ
ИНДУКТОРНЫХ ГЕНЕРАТОРОВ КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ
Массогабаритные показатели индукторных генераторов с ком-
бинированным возбуждением в значительной степени определя-
ются геометрическими размерами и параметрами активной зоны,
которая включает в себя якорь с обмотками, рабочий воздушный
зазор и зубчатый индуктор. Поэтому расчет таких машин сле-
дует начинать с определения геометрии указанной зоны. Глав-
ные размеры ее могут быть рассчитаны из основного уравнения
для объема активной части индуктора [59]
nv - + zft
> (OeT-ZJ
,сагв , Я&гятах
ги
где D, I — соответственно диаметр и длина индуктора; Р' — рас-
четная электромагнитная мощность генератора; go — магнитная
постоянная; у=62И//>2я— отношение ширины зубца индуктора к
ширине зубца якоря; k3,c — коэффициент заполнения сталью
якоря; аХн=6ги/2ти — отношение ширины зубца индуктора к его
двойному полюсному делению; гя, zK — соответственно число
234
зубцов якоря и индуктора; п — частота вращения индуктора;
Вгятах — максимальное значение индукции в зубце якоря при
холостом ходе; ко, М — соответственно постоянная составляющая
и первая гармоника удельной магнитной проводимости между
зубцами якоря и индуктора; kd— удельная магнитная прово-
димость по продольной оси; &=/к/7—кратность тока КЗ.
Удельные магнитные проводимости1 по продольной и попереч-
ной осям рассчитываются по приближенным формулам [70]
kd Л5Хо4-0(5А.24"^1Ъ (6.43)
кд « ко — 0,5Лг+%п, (6.44)
где Л.2 — вторая гармоника удельной проводимости воздушного
зазора; Хп — удельная пазовая проводимость (на этапе опреде-
ления основных размеров ею можно пренебречь; при повероч-
ных расчетах определяется согласно [49, 59]).
Определив по (6.42) £>4/, рассчитаем D и Z. При этом пред-
варительно задаемся отношением Хг=//Д=0,Зч-0,4. Рассчитав
D и I, можно перейти к расчету геометрических размеров яко-
ря, индуктора и основных параметров активной зоны генера-
тора.
Число витков фазы якоря рассчитывается по уравнению
= 6Л£ф(1 + ЩТ
Ф %1УЧВ1!ятахп1гзло.т
где aZH — отношение ширины зубца индуктора к его зубцовому
делению.
Далее определяются индуктивные сопротивления по продоль-
ной и поперечной осям, а также от первой гармонической удель-
ной магнитной проводимости:
xd =-- Р>о^ф«ме»к2 (Я.о+0,5^4-Я.п); (6.46)
(*о — 0.5*2 + У! (6-47)
*1 = М^ф^Л. (6.48)
где 2ф = 2я//п; <о-2^; f==z„/t/60; wK = а>ф/гф.
Важнейшими параметрами активной зоны индукторных ма-
шин являются амплитуда основной гармоники потока в зубце
якоря (Ф1), постоянная составляющая магнитного потока на
зубцовом делении якоря (Фо) и суммарный поток индуктора
(Фг). Эти параметры рассчитываются по следующим уравне-
ниям:
(6.49)
235
где
z = К2/ + 2z„ra cos <f> + ro2
и
Фо = (1 — 0,5
Xq ^1
+ Xdxq ^2
(6.50)
Фе = Ф»гя,
(6.51)
где FA3 —МДС, приложенная со стороны системы возбуждения
к активной зоне (между спинками якоря и индуктора); гн, хн —
активное и индуктивное сопротивления нагрузки; га — активное
сопротивление фазной обмотки. Значение Ф1 определяет значение
первой гармоники фазного напряжения
Uф»4,44Ф1гфау^. (6.52)
Приведенные соотношения справедливы при ненасыщенной
активной зоне генератора. При учете насыщения можно восполь-
зоваться методикой, изложенной в [59]. Рассчитанные параметры
позволяют перейти к расчету геометрии системы возбуждения.
В генераторах комбинированного возбуждения, как уже ука-
зывалось, поток в активной зоне создается совместным действием
постоянного магнита и обмотки возбуждения. Расчет системы воз-
буждения такого генератора можно разделить на три основных
этапа:
выбор соотношения между магнитной и электромагнитной час-
тями системы возбуждения;
расчет магнитной части (маг-
нитной системы постоянных маг-
гэ=гэ>гоах--
Рис. 6.21. Выходные характеристики
системы возбуждения при гранитных
режимах работы генератора.
нитов);
расчет электромагнитной час-
ти (магнитной системы электро-
магнитной обмотки).
Рассмотрим особенности рас-
чета системы возбуждения для
генераторов с двухсторонним
комбинированным возбуждением,
работающих с постоянной часто-
той вращения и имеющих нере-
версивный регулятор напряже-
ния.
Для того чтобы выходное на-
пряжение генератора оставалось
постоянным при изменении на-
грузки,. необходимо'изменять в оп-
ределенных- пределах поток в ак-
тивной зоне. Это возможно толь-
236
ко при определенном соотношении между магнитной и электро-
магнитной частями системы возбуждения. При этом должны быть
обеспечены граничные режимы работы генератора. Для рассмат-
риваемого генератора такими режимами являются: режим отдачи
максимальной мощности, когда поток в активной зоне создается
магнитом и электромагнитной обмоткой; режим холостого хода,
когда МДС обмотки равна нулю (Рэ=0) и поток в активной зоне
создается только постоянным магнитом. Для этих двух режимов
можно найти значения требуемых потоков Ф2 и МДС ГА3.
Каждый режим будет характеризоваться определенной точкой
в плоскости координат Фе и FA3. Эти точки А и Б показаны на
рис. 6.21 соответственно для первого и второго режимов. Коорди-
наты этих точек определяются следующим образом: при извест-
ном иф (по 6.52) рассчитывается Фь затем из (6.49) находится
FA3 и по (6.50) и (6.51) вычисляется Фе. Через указанные точки
должны проходить «суммарные» характеристики системы возбуж-
дения соответственно при F—F3max (точка Л) и F»=0 (точка Б)
(см. рис. 6.21). Это условие позволяет определить основные пара-
метры выходных характеристик магнитной и электромагнитной
частей системы возбуждения, которые необходимы для расчета их
геометрических размеров.
Выходная характеристика магнитной системы постоянных маг-
нитов может быть представлена следующими уравнениями:
Фм = «mV 2Fa—Гдз при Fa > FA3 > 0;
(6.53)
Фм = «м (27?А — -Рдз) ПРИ 2FA > FA3 > f А, (6-54>
где Фм, ^аз —текущие значения потока на выходе системы и
МДС, приложенной к активной зоне; Fa — координата точки А, в
которой система возбуждения имеет максимум магнитной энергии
(см. рис. 6.21);
= ФБ^(1-а)+аРБ1 + ФАРв(1-ГГ^-а) . (6
^-/а(1+УТ=Ф, (6.56)
а — коэффициент выпуклости выходной характеристики элект-
ромагнитной части системы возбуждения; для рационально спро-
ектированных систем а=0,54-0,8.
Выходная характеристика электромагнитной части с достаточ-
ной точностью описывается уравнением гиперболы
(Рэтаг - РАз)ФА> С1 +
Fэтах а^А.З
(6.57)
где ФА,=ФА—a„FA (см. рис. 6.21).
237
Используя приведенные уравнения, можно рассчитать неизвест-
ные параметры: ам, F3max, Фа, которые определяют соотношение
между магнитной и электромагнитной частями системы возбуж-
дения и являются исходными данными для расчета их геометрии.
«.5. РАСЧЕТ И ПОСТРОЕНИЕ РАБОЧИХ ХАРАКТЕРИСТИК
ОДНОИМЕННОПОЛЮСНЫХ ИНДУКТОРНЫХ ГЕНЕРАТОРОВ
КОМБИНИРОВАННОГО ВОЗБУЖДЕНИЯ
Конечной целью поверочного расчета является построение
внешней и регулировочной характеристик генераторов. В процессе
расчета характеристик производится построение кривых намагни-
чивания магнитопровода генератора, уточняются величины насы-
щения отдельных его участков, проверяется правильность приня-
тых ранее допущений, т. е. проводится поверочный электромагнит-
ный расчет генератора при заданных его размерах и обмоточных
данных. Для расчета рабочих (внешней и регулировочной) харак-
теристик индукторных генераторов с двух- и односторонним воз-
буждением строят семейство выходных характеристик, представ-
ляющих собой зависимости продольной фазной ЭДС Е„, получен-
ной из уравнения (6.41), от продольной составляющей реакции
якоря Fad при различных положительных, нулевых и отрицатель-
ных значениях МДС F3>{ электромагнитной обмотки
E„=f(Fad) при Fs»=const (i=l, 2, 3...).
Вначале строят характеристики намагничивания активной зо-
ны генераторов, одинаковой у обоих типов индукторных генерато-
ров. Характеристиками намагничивания активной зоны генерато-
ра будем называть зависимости полных потоков в воздушном за-
зоре Фе и в зубце Фгя от МДС активной зоны F^ при различных
значениях МДС продольной реакции якоря Fad и двух неподвиж-
ных положениях индуктора, показанных на рис. 6.22:
Ф» = f аз); Фгя = f (^аз) при Fadi = const (i =0, 1, 2, 3...),
где при i=0 реакция якоря fe<io=O, т. е. рассматривается холо-
Рис. 6.22. Характеристики намагничивания активной зоны генератора:
а —при ф'гя1=ГПаХ; б — при Ф2я2=га1п
238
Рис. 6.23. Преобразованная схема замещения активной зоны генератора:
а— при Ф2Я1=шах; б —при <Dzfl2=min
стой ход генератора. При этом под МДС FA3 понимают паде-
ние магнитного потенциала в зубцах индуктора Г3,и, в воздушном
зазоре Ft, в зубцах якоря F3,n при учете намагничивающего или
размагничивающего действия Fad на соответствующих участках,
как это показано на рис. 6.20,
F^ = F3^Ft+F3,a±Fad/2,
где перед Fai/2 берется плюс при размагничивающем действии
продольной реакции якоря и минус — при намагничивающем.
С помощью метода узловых потенциалов преобразуем уча-
сток активной зоны между точками АЗ (рис. 6.20,а) к более
простому виду, показанному на рис. 6.23,а, при пренебрежении
величиной Я«в(#«б=оо). Такое пренебрежение упрощает расчет
характеристик без внесения какой-либо значительной погрешности
ввиду относительно большого значения /?ве и относительно малого
значения потока, проходящего по данному участку, из-за его от-
носительно большой длины в воздушном промежутке
(рис. 6.19,а).
Согласно данному методу в электрических и магнитных цепях
между двумя узлами проводимости и МДС в параллельных вет-
вях можно заменить эквивалентными проводимостями Лэк и МДС
F'3K по формулам:
п
п 2
Тогда для эквивалентных магнитных сопротивлений и МДС
для узлов тп, pq, Iq (рис. 6.20,а и 6.23,а) имеем, зная, что /?,=
239
Rial = 1 /(Ajl + Aj2 + А»з -J” Ли -|" А»)»
Fadi = 0,5Fad/?8si (— Ал 4- A12 -J- Ajs + Am — Ass);
/?8э2 = l/(Aw4~ As8-]“ А&э);
Fads — 0 >5Fo<f/?8s2 (— Aj7 4“ Am 4“ Aw) J
Rm = V(Auo 4-Ami 4-A8i2);
Fad3 = О.бГа^/?5эз (Лио 4“ Ami —Лмг).
Для построения характеристики намагничивания Фа=/(ГД3.
при заданном Fa<i вначале необходимо построить частичные кри-
вые намагничивания ветвей АтпЗ, Apq и Alq (рис. 6.23,а). При
определении суммарной МДС ветви для заданного потока к паде-
ниям МДС на участках необходимо прибавлять F'ad при F'edX>
и вычитать F'ad при F'ed<0.
На рис. 6.24,а показаны характеристики намагничивания участ-
ков Apq п Alq ъ виде кривых, наложенных друг на друга (кри-
вая /).
После суммирования характеристик (кривая 2) определяют
падения МДС от суммарного потока в нелинейном сопротивле-
нии и строят характеристику намагничивания участка Aq3 (кри-
вая 3). Проводят аналогичные построения для участка АтпЗ"
(кривая 1, рис. 6.24,6) и суммируют кривые 1 (рис. 6.24,6) с кри-
вой 3 (рис. 6.24,а). Характеристика (кривая 2, рис. 6.24,6) и бу-
дет являться характеристикой намагничивания активной зоны
при ФгЯ1=тах при заданном Fad- Проводя аналогичные вычисле-
ния для других Fad и Fad=0, получают семейство кривых намаг-
ничивания активной зоны для Ф2Я1=тах, изображенное на
рис. 6.22,а. Здесь каждая кривая определяет в функции МДС FA3
суммарный поток в воздушном зазоре Фв, однако, кроме этого по-
тока, здесь также должны быть нанесены ранее рассчитанные зна-
чения потока Фгяь также соответствующие заданным Fad (штрихо-
вые кривые). При этом нужно помнить, что вышеприведенные вы-
Рис. 6.24. Кривые намагничивания активной зоны генератора при ®i>i=max
240
Рис. 6.25. Выходная характеристика
магнитной части индукторного гене-
ратора с двухсторонним комбиниро-
ванным возбуждением
Рис. 6.26. Кривая размагничивания
постоянного магнита
числения определяют только поток через один участок, а таких
участков в рассмотренном примере N—3. Для получения полного
потока Фа необходимо при построении характеристик по оси орди-
нат откладывать суммарный поток, увеличенный в У раз. Такое
же семейство характеристик необходимо построить и для взаим-
ного положения якоря и индуктора, когда Ф2Я2=гпт (рис. 6.19,6).
Для этого по схеме замещения рис. 6.20,6 на рис. 6.23,6 изобра-
жена схема, построенная по тем же принципам, что и схема на
рис. 6.23,а.
Из рис. 6.23,6 видно, что левая и правая стороны схемы сим-
метричны относительно друг друга, т. е. /?дэ1=/?вэ4;
^?6э2==‘/?6эЗ» F ad2==F ad3t F adl==F adl\ /?Нгя1 ==^?НхяЗ» /?Нги1==^?Н2и2«
#8э4 Л81 + Л82 + Л8з + Лм + А»5’“Л812+ЛМз+Ла14+Л81б+А816 ’
Fad\ = Fad^ = Q,bFadRu\ (— Aji — Л82 Л&3 -|- Afc 4“ Atf) =
= 0»5Fod/?te3 (Л312 + Лиз -|-Am4 — Aug — A8i6);
/?8эЗ A^ + A^-j-Ам л89 4- Agio 4- Ajii ’
Fads = Fad3 = 0,5FadRt92 (Afc—Aay—Лад) = 0,5Fad/?6s3 (—Л59—ЛакгрЛ&п),
поэтому построение характеристики намагничивания можно про-
изводить относительно одной половины схемы, например левой.
Сначала строятся отдельно частичные кривые намагничивания
для ветвей ANM и AQM (рис. 6.23,6). При этом для ветви AQM
при определении падения МДС в сопротивлениях R^ и не-
обходимо учитывать половину потока ФгЯ2. Семейство характери-
стик ®6=f(Fk3) и Фгя2—f(Fдз) для различных значении Pad
(рис. 6.22,6) имеет такой же вид, что и для случая, когда ФгЯ1 =
=тах на рис. 6.22,а.
Для индукторного генератора с двухсторонним комбинирован-
ным возбуждением кривые Фб, ФгЯ1=тах (рис. 6.22,а) и Ф«.
Фгяа=min (рис. 6.22,6) строят не от F^, а от FNA3O, склады-
241
вая с FA3 дополнительные падения МДС от Ф& в магнитных со-
противлениях /?ин, /?ян и 7?я,к (рис. 6.16). Далее для этого генера-
тора строят зависимость потока магнитов фм от МДС FQiilv
(рис. 6.16), изображенную на рис. 6.25.
Для построения этой характеристики задаются произвольно
точкой Д на рабочем участке диаграммы состояния магнитов, изо-
браженной на рис. 6.26. Эта точка имеет координаты: МДС Гд
и потока магнитаФм> д. Поток рассеяния магнитов определится:
Ф«м = Fл/Rw
Тогда рабочий поток магнитов равен
Фм = Ф„.д — Ф,м-
Пропускают этот поток по всем магнитным сопротивлениям
ветви схемы замещения HN (рис. 6.16) и определяют сумму паде-
ний МДС на магнитных сопротивлениях этой ветви от потока
Фм. Тогда выходное магнитное напряжение ветви будет равно:
Fqmn = Л<.д— FEm.
Двигаясь по кривой размагничивания (кривой возврата) по-
стоянного магнита вверх и вниз от точки Д (рис. 6.26) и проводя
аналогичные расчеты, получаем искомую выходную характеристи-
ку магнитной части d>M=f (Fw^.изображенную на рис. 6.25.
Поскольку известны потоки в активной зоне Ф& = f (FN ла(^ и
магнитной части Фм=К/?0ЛГ-ЛГ)при различных значениях F0di=const,
а ^лгазо = = ^омм > т0 легко определить потоки в электро-
магнитной части Фэ (ветви OMN, рис. 6.16) как разность потоков
Ф. и Фм
о м
Фэ==Фб—Фм-
После соответственного графического вычитания из ординат
кривых рис. 6.22,а и б ординат кривой рис. 6.25 получим выход-
ные характеристики электромагнитной части Фэ=)(/?ом«) при
различных значениях Fad, изображенные на рис. 6.27,а, б, соответ-
ственно для Ф2Я1=тах и Фгя2=ппп— двух положений индуктора
генератора.
Для любой точки, например i, кривых рис. 6,27,а, б можно по-
лучить значения МДС F3i электромагнитной обмотки, если соот-
ветствующий этой точке поток Ф9» пропустить соответственно че-
рез участки ветви OMN и определить суммарное падение МДС
во всех магнитных сопротивлениях Г2э от этого потока. Тогда для
F3i можно написать
Fai—FoM
Зависимости /79=/(Гоми) при различных значениях Гв<м=
=const для Фгя1=тах и ф2Я2=пип соответственно показаны на
рис. 6.28,а, б.
242
Рис. 6.27. Выходные характеристики электромагнитной части индукторного ге-
нератора с двухсторонним комбинированным возбуждением:
с-при Ф2Я1=п1ах; б- при Ф2я2=и11п; Фэ= Ф5 - Фм; ^dl>^d2>Fed8>Ped4>FodS
Рис* 6.28. Семейство вспомогательных характеристик для индукторного генерато*
ра с двухсторонним комбинированным возбуждением:
а —при Фгя1=тах; б — при Ф2я2=т1п
Полученные кривые позволяют построить семейство выходных
характеристик индукторного генератора с двухсторонним комби-
нированным возбуждением £п=/(Л><0 при различных положи-
тельных и отрицательных значениях F3i=const (рис. 6.29).
Построение какой-либо одной точки этого семейства проводит-
ся следующим образом. Из характеристик рис. 6.28,а, б для вы-
бранного одного и того же значения F3i и Fadi=Fad2 определяют
соответственно Fomjvi и Fqmn2- По значению Fomki и Fad.2 по
рис. 6.22,а определяют Ф2Я1=тах, а по ГОм№ и Fad2 по рис.
6.22,6 — ФгЯ2=пйп. Величину Еп определяют по (6.41).
Таким образом, для выбранного значения Рэ« рассчитана Еп и
имеется значение Fadt- Другие точки семейства характеристик
рис. 6.29 определяются аналогичным способом.
243
Рис. 6.29. Семейство выходных характеристик индукторного генератора с двух-
и односторонним комбинированным возбуждением
Рис. 6.30. Внешние характеристики одноименнополюсного индукторного генера-
тора с двухсторонним комбинированным возбуждением:
n=const; cos<p=const; Fel> F,2> F,s> fsS=0
Расчет семейства внешних характеристик индукторных генера-
торов с двухсторонним комбинированным возбуждением U=f(I)
при f'3>=const (i=l, 2, 3, 4, 5, 6), n=const и cos<p=const, где U
и 1 — фазные напряжение и ток (рис. 6.30), производится по
(5.207) и (5.208) так же, как и для магнитоэлектрических синхрон-
ных генераторов. При холостом ходе Fad=0 и значении МДС
электромагнитной обмотки ГЭ5=0 (рис. 6.30) в генераторе суще-
ствует одно магнитное возбуждение и поток от магнита Фм (см.
рис. 6.16) разделяется на две части: одна часть Фв>0 идет в ак-
тивную зону (рис. 6.16, ветвь NA3O), а вторая часть Фэ<0 в маг-
нитопровод электромагнитной обмотки, работающей как магнит-
ный шунт (ветвь NM0).
Если при холостом ходе МДС обмотки (например, ГЭ4>0) бу-
дет равной‘внешней МДС Fnho, развиваемой постоянными магни-
тами между точками М и О (см. рис. 6.16), то поток магнитов в
шунт не пойдет (Фэ=0), а будет весь направлен в активную зону
(Фм=Фв). Такой режим будем называть критическим возбужде-
нием индукторного генератора комбинированного возбуждения
при холостом ходе (точка А на рис. 6.16). Очевидно, что такой ре-
жим будет и при нагрузке (Fad^0), только при этом МДС обмот-
ки должна быть более чем F3a. На рис. 6.30 кривая критического
возбуждения АБ показана штриховой линией. Все рабочие точки,
находящиеся выше этой кривой, соответствуют режиму перевоз-
буждения или смешанного возбуждения, когда поток в активной
зоне Фе ра!вен сумме потоков магнита Фм и электромагнитной об-
мотки Фэ, т. е. Фв=Фм+Фэ-
Все точки, находящиеся ниже критической кривой АБ
(рис. 6.30), соответствуют режиму недовозбуждения или шунта,
когда поток в активной зоне Фе равен части потока Фм, так как
вторая часть идет в шунт, т. е. Фе=Фм—Фэ- Легко усмотреть, что
режим шунта будет и при Рэ<0, другими словами, при реверсиро-
вании тока в электромагнитной обмотке.
244
Рис. 6.31. Регулировочная характеристика одноименнополюсного индукторного
генератора с двухсторонним комбинированным возбуждением:
L/H=const; n=const; cos <р=const
Рис. 6.32. Семейство кривых намагничивания индукторного генератора с одно*
сторонним комбинированным возбуждением:
^»1>^>^0>^8>^4>Fs5>^6; Л>0=0
Если на рис. 6.30 провести прямую, параллельную оси абсцисс
с номинальным уровнем напряжения UH, то точки пересечения
этой кривой с семейством внешних характеристик определят ре-
гулировочную характеристику генератора F3=f(l) при n=const,
{/H=const, cos <р=const (рис. 6.31).
Для индукторных генераторов с односторонним комбинирован-
ным возбуждением, схема замещения магнитной цепи которого
изображена на рис. 6.18, также необходимо построить зависимость
значений Ф6 от внешнего выходного магнитного напряжения ГАЗ>
прикладываемого к активной зоне, при различных МДС электро-
магнитной обмотки F3i=const, т. е. Фе=/ (FA3) при F9(=const
(Z=l, 2, 3, ...,n).
Расчет характеристик при этом сводится к получению зависи-
мостей значений потоков Фе, идущих в активную зону, от внешне-
го выходного магнитного напряжения ГАЗ, прикладываемого к
активной зоне при различных значениях МДС электромагнитной
обмотки, т. е. Фа=! (ЕАЗ) при F9i=const (Z=l, 2, 3.п). Общий
вид семейства этих характеристик показан на рис. 6.32.
Рассмотрим построение одной точки на характеристиках для
всех трех случаев значений МДС F3, т. е. Г9>-0, Г9=0 и Г9<0
(соответственно на рис. 6.32 эти точки обозначены через А, Б и
В). При этом примем Гэ>-0, когда F3 направлена согласно с по-
током Фе (см. рис. 6.18). За положительное направление Фаэ на
рис. 6.18 примем его направление, также согласное с Фе. Для этих
трех случаев разница в расчетах будет только в определении па-
дения магнитного напряжения на участке PQ. Для всех случаев
нужно вначале задаться какой-либо точкой на рабочем участке
245
Рис. 6.33. Графическое определение па-
дения МДС в скобе (втулке) генерато-
ра:
а—при Рэ=0; б— при Рэ>0; в—при Рэ<0
кривой размагничивания по-
стоянного магнита, например
точкой Д (рис. 6.26), с коор-
динатами ФМгд и Гд.
Поток рассеяния магнита
определится
Ф»м = Гд//?»ц.
Для искомого потока Фе
можно написать
Ф5 = Фм.д — Ф,м.
Далее пропускают поток
Фе через все участки магнито-
провода, за исключением ак-
тивной зоны и участка PQ, и
находят падения напряжений
в этих участках от Ф« и сум-
мируют их, определяя Г2:
Гх=Ги-|-Гв,и-|-Гв-|-Гэ,в-|-
+ Гм,Э-|-Гм(оЧ-Го4-ГК,о +
“Ь Г к -|- Гя, к 4- Гя ,
ГДе Ги, Г»,и, Гв, Гэ,в, Гм,э» Гм,о,
Го, Гк,о, Гк, Гя.к, Гя —состав-
ляющие падений напряжений
на соответствующих магнит-
ных сопротивлениях схемы
замещения рис. 6.18.
Для определения падения
магнитного напряжения на
участке PQ(Fpq) необходимо
построить кривую намагничи-
вания для втулки электромаг-
нита в виде зависимости потока Фэ от падения МДС в теле втулки
Го: Фэ=/(Г0) (рис. 6.33).
Рассмотрим определение Fpq для случая Гэ=0 (рис. 6.33,а).
Исходные уравнения для расчета имеют вид
Фэ=Фа— Фаэ;
ф __ Ft
--р—.
(6.58)
(6.59)
Из (6.58) и (6.59) можно получить уравнение прямой в коор-
динатах Фэ и Го в виде
фэ=фв_адаэ. (6.60)
Поскольку Фб и /?<тэ известны, то эту прямую можно построить
на графике рис. 6.33,а и получить точку N пересечения прямой с
кривой намагничивания Фэ=/(Го). Координаты точки N опреде-
ляют поток во втулке Фэ^ и МДС Fqh.
246
Искомое падения МДС на участке PQ определится
Fpq—Pon-
Рассмотрим определение Fpq при Гэ>0 (рис. 6.33,5), т. е. ког-
да МДС обмотки подмагничивает постоянный магнит и направле-
на согласно с потоком Фе. Для этого случая уравнение (6.58) оста-
ется в силе, а для определения Фаэ необходимо учесть Гэ:
Ф.»=--а^э • (6-61)
К<г9
Из (6.58) и (6.61) по аналогии с (6.60) получим
Построим эту прямую на графике кривой намагничивания
втулки $3—f(Fo) и найдем точку пересечения М с координатами
Фэ,м И Гом (рис. 6.33,6).
Для малых значений Гэ<Гом имеем
Fpq=Fok—F3>0.
При F3—Fqm имеем
Fpq=0’, Фаэ=0; Фэ=Фб.
При F3>FOn\ получим
Fpq=Fqm—Гэ<0; (6.62)
Фаэ^ (Fom F3)IRa3.
Поток рассеяния изменяет свой знак и идет навстречу Фа, а
Фэ>Ф«:
Фэ=Фв+Фаэ-
Рассмотрим определение FPq при Гэ<0 (рис. 6.33,в), т. е. ког-
да МДС обмотки размагничивает постоянный магнит. Для этого
случая уравнение (6.58) также остается в силе, а для определе-
ния Фоэ необходимо написать
Фаз = "FtfrF3 = F*+JF?I-. (6.63)
Из (6.58) и (6.63) получим уравнения прямой в координатах Фэ
и Fo:
(I р I V
рЭ I имеем на рис. 6.33,в точку т с координа-
тами Фэт и Гот-
Для этого случая
Fpq—Fom4-1F31 >0;
Фэт^Фб-
247
Рис. 6.34. Кривые намагничивания индукторного генератора с односторонним
комбинированным возбуждением:
а- при Ф2Я1=тах; б- при Ф2я2=тп1п; Fi<f2>Fodl>Fed0
При (фа—— О, т. е. когда |ГЭ| =ФдЯ<гэ, получим Фэо=О
И ФаэО=Фб, Fq=0.
В этом случае
FPQ= | Г9| =Фд/?<ум^>0.
При (<Dj—1-А--Ц <0 имеем на рис. 6.33,в точку п с коорди-
ватами Ф9п<0 и Г0п<0.
Для этого случая ФаЭп >Ф« и
Л»<г=|Л|-|Гоа|>О.
Общая формула для определения Газ имеет вид
Газ = Гм,д—Ге—Tpq.
При этом во всех случаях абсолютная величина ГР<} является
вычитаемым, за исключением формулы (6.62), где она является
слагаемым, поскольку само Грд<0.
С помощью кривых рис. 6.27 и 6.32 можно построить выход-
ные характеристики намагничивания (Ф«, Фгя1)=/(ГЭ) и (Ф«,
Фгя2)=^(Гэ) для ra(ii=const (i=l, 2, 3.п), изображенные на
рис. 6.34,а, б.
Для какой-либо одной точки, например i (рис. 6.27,а), при
ro<ii=const для Ф«/ и Газ;, находят на графиках рис. 6.32,a F9{ и
откладывают точку с координатами Г9«, Ф«* на рис. 6.34,а.
Аналогичные построения делают для всех точек кривой для
redt=const и то же для других значений Гв<н (»=1, 2, 3,..., п).
Одновременно строят на рис. 6.34,а зависимость Ф2Я1= f(F3) для
Fadi=const по соответствующим точкам на рис. 6.27,а. Аналогич-
ные построения проводятся для всех Fadi (i=l, 2, 3, ...,л). Для
построения семейства кривых рис. 6.34,6 пользуются соответствен-
но данными рис. 6.27,6 и 6.28,6. Искомые семейства кривых Еп=
248
=f(Fad) для FSj=const (i=l, 2, 3,...,«), изображенные на
рис. 6.29, строятся так же, как для генератора с двухсторонним
комбинированным возбуждением. Это же касается построения
внешних и регулировочной характеристик.
Глава седьмая
ЭЛЕМЕНТЫ ПРОЕКТИРОВАНИЯ ВЕНТИЛЬНЫХ ГЕНЕРАТОРОВ
С ПОСТОЯННЫМИ МАГНИТАМИ
7.1. РАСЧЕТНЫЕ СООТНОШЕНИЯ ДЛЯ ВЕНТИЛЬНЫХ ГЕНЕРАТОРОВ
С ПОСТОЯННЫМИ МАГНИТАМИ
Вентильные бесколлекторные генераторы находят широкое применение
в автономных системах электроснабжения. По сравнению с коллекторными ге-
нераторами вентильные генераторы просты по конструкции, имеют меньшую мас-
су и больший срок службы, требуют меньшего ухода в эксплуатации. Вентильные
генератору с успехом могут применяться в трудных условиях эксплуатации:
в вакууме, при высокой или низкой влажности; в агрессивных средах, в которых
быстро разрушаются контактные устройства; при высоких частотах вращения,
когда коллектор не выдерживает механических усилий; при высоких температу-
рах окружающей среды, когда требуется жидкостное охлаждение.
Важнейшими требованиями, предъявляемыми к вентильным генераторам,
являются низкий уровень пульсаций выпрямленного напряжения; малые масса и
размеры генераторной установки (генератор, выпрямитель, регулятор напряжения,
фильтр); допустимые превышения температуры генератора и блока выпрямите-
ля; заданная перегрузочная способность; высокая надежность; технологичность
изготовления; низкая стоимость.
Одним из важнейших требований является низкий уровень пульсаций вы-
прямленного напряжения (для авиационных основных систем электроснабжения
не выше 8%). Уровень пульсаций выпрямленного напряжения, масса генератор-
ной установки и КПД зависят от числа фаз генератора, схемы выпрямления,
параметров генератора и его нагрузки. Поэтому жесткие требования к уровню
пульсаций выпрямленного напряжения находятся в противоречии с требованиями
обеспечения малой массы и размеров.
Проблема разработки вентильных генераторов с малыми пульсациями напря-
жения, оптимальных по массе и размерам, решается успешно применением элек-
трических машин с постоянными магнитами на базе редкоземельных элементов и
кобальта. Применение указанных магнитов позволяет значительно увеличить дли-
ну воздушного зазора, что в свою очередь дает возможность разместить якорную
обмотку непосредственно в воздушном зазоре, а на индукторе выполнить мощный
симметричный демпфер в виде сплошного проводящего слоя.
Как показывают исследований для уменьшения пульсаций выпрямленного
напряжения и массы фильтра следует применять генераторы с нечетным и наи-
большим практически целесообразным числом фаз т (рис. 7.1).
17—6258 Й49
Рис. 7.1. Зависимость амплитуды пульсаций выпрямленного напряжения при
нагрузке от угла коммутации у (кривые 3, 4, 5) и при XX от числа фаз т
(кривая 1 — для нечетного т; 2 — для четного т)
Рис. 7.2. Трехфазные схемы выпрям-
ления:
а—мостовая двухполупериодная; б — одно-
полупериодная; в — двухполупериодная со
средней точкой; Г—генератор; вП— выпря-
митель
Рис. 7.3. Шестифазная однополупери-
одная схема выпрямления:
Г — генератор; ВП — выпрямитель
250
Рис. 7.4. Схема соединений обмоток
якоря (а) и кривые фазных напря-
жений и выпрямленного напряжения
генератора с двумя обмотками якоря,
сдвинутыми по фазе на 30е (б):
/—пульсации от звезды напряжений АВС;
2 — пульсации от звезды напряжений
А'В'С'; 3 — результирующая кривая пуль-
саций выпрямленного напряжения
Для уменьшения расчетной мощ-
ности генератора целесообразно выби-
рать двухпол упер иодные схемы выпрям-
ления, обеспечивающие более благо-
приятное соотношение между мощно-
стями Р на стороне переменного тока
и Pd на стороне выпрямленного тока.
В качестве схем выпрямления на-
ходят применение трехфазные мосто-
вые двухполупериодные (схема Ла-
рионова) (рис. 7.2, а), пятифазные
двухполупериодные, шестифазные одно-
полупериодные (рис. 7.3); реже при-
меняются трехфазные однополупе-
риодные (рис. 7.2,6) и трехфазные
однополупериодные со средней точкой
. 7.2,в).
Трехфазные двухполупериодные схе-
мы выпрямления нашли наибольшее при-
менение в отечественных вентильных ге-
йераторах. Конструкция трехфазного ге-
нератора достаточно проста и хорошо
отработана. Схема выпрямления также
проста. В трехфазных мостовых схемах
имеется наиболее благоприятное соот-
ношение между выпрямленной мощ-
ностью Pd и мощностью Р генератора
(теоретически Р~ = 1,045Pd), в результате чего генератор получается легче. Трех-
фазная мостовая схема выпрямления обеспечивает относительно небольшие пуль-
сации выпрямленного напряжения.
Если предъявляются повышенные требования к пульсациям напряжения, то
применяют генераторы с двумя трехфазными обмотками якоря, соединенными
параллельно, но со сдвигом электрического угла, равным 30° (рис. 7.4). Лучшие
результаты дает выполнение обмотки якоря с разделенной нейтралью. Получает-
ся двухполупериодная шестифазная схема выпрямления. При таком соединении
обмотки якоря в результате сдвига фаз возрастает постоянная составляющая
выпрямленного напряжения и заметно уменьшаются пульсации напряжения. При
этом КПД генератора почти не ухудшается. Известно применение генераторов
с тремя трехфазными обмотками якоря со сдвигом по фазе, соединенными после
выпрямительных мостов параллельно (девятифазный вентильный генератор). При
этом резко уменьшаются пульсации выпрямленного напряжения.
Известны разработки вентильных генераторов мощностью до 12 кВт в пяти-
фазном исполнении. Применение пятифазной двухполупериодной схемы выпрям-
ления позволяет значительно уменьшить пульсации выпрямленного напряжения,
однако при этом значительно усложняется конструкция генератора и увеличи-
вается число диодов в выпрямительном блоке.
Шестифазная однополупериодная схема выпрямления применяется в случае
генераторов небольшой мощности, как, например, возбудителей в генераторах
с вращающимися выпрямителями, в специальных схемах преобразователей.
17 * 251
Применение трехфазной однополупериодной схемы выпрямления (рис. 7.2,6)
приводит к неблагоприятному соотношению между выпрямленной мощностью Pd
и мощностью генератора на стороне переменного тока (теоретически Р~ =
= 2,09Pd), что при заданной мощности Ра утяжеляет генератор. Значение пуль-
саций выпрямленного напряжения велико.
Трехфазная двухполупериодная схема выпрямления со средней точкой
(рис. 7.2,в) по цепи нагрузки эквивалентна рднополупериодной схеме, а по коэф-
фициенту'использования активных материалов генератора — схеме выпрямления
Ларионова.
Пульсации выпрямленного напряжения при идеальной комму-
тации для мостовых схем двухпол упер иодных можно оценить с по-
мощью следующих формул [30]:
' для нечетного числа фаз
Д{7 = 100 = A-~C0S^mV 100; (7.1)
Ud0 2m sin (тс/2m)
для четного числа фаз
.. Д[7# = 100 = — J-008 100, (7.2)
т sin(rc/m)
где At/ — значение пульсаций выпрямленного напряжения; Udo—
постоянная составляющая выпрямленного напряжения при холо-
стом7 ходе.
Согласно (7.1) и (7.2) построены кривые A£7=f(m) (см.
рис. 7.1).
Работа вентильных генераторов характеризуется коэффициентами
преобразования: по фазному напряжению kutp=U^Ud, по линейному
напряжению kUn = V„IUd; по току k, = I*IId\ по мощности kp —
-PJP*
При идеальной коммутации значения коэффициента преобразования
для различных схем выпрямления следующие [30|: для мостовой двух-
полупериодной трехфазной схемы ЛУф=0,43; 6Ул=0,74; kr = 0,815;
kp= 1,045; для трехфазной двухполупериодной со средней точкой
£уф = 0,85; k{=> 0,815; kp= 1,05; для трехфазной однополупериод-
ной &УФ = 0,85; 0,815; = 2,09; для шестифазной однополупе-
риодной киф =0,74; k, = l/J/^6 ; kp = 1,81.
При работе выпрямителей под нагрузкой на выпрямленное на-
пряжение существенное влияние оказывают индуктивность источ-
ника питания, активное сопротивление, внутреннее сопротивление
вентилей, а также эквивалёнтныё падения напряжения в индук-
тивности на стороне выпрямленного тока. С возрастанием нагруз-
ки изменяются соотношения между значениями токов на выходе
252
и токов в обмотках машины, а
также соотношения между на-
пряжениями на входе и выходе
выпрямляющего устройства, что
объясняется искажением формы
токов и напряжений. Выпрям-
ленное напряжение в период
коммутации не изменяется по
огибающим фазных или линей-
ных напряжений как в режиме
холостого хода. В нагруженном
выпрямителе кривая выпрямлен-
ного напряжения имеет слож-
ную форму (рис. 7.5), что опре-
деляется характером падения
напряжения в различных его
элементах. В период коммутации
напряжение коммутирующих фаз
изменяется по косинусоиде, ам-
плитуда которой равна значению
напряжений в точке пересечения
u^ — U^cosai. (7.3)
Выпрямленное напряжение
t/dv=^o(l+cosT)/2, (7.4)
где у — угол коммутации (рис. 7.5).
Пульсации выпрямленного напряжения
ДП = = _2L_ l- cos("/2/n)co37 100 (7 5
Ud0 2т sin(rc/2/n)
Значение угла коммутации является функцией тока нагрузки
Id и параметров генератора и цепи выпрямления
т = агам^_^.^_). (7.6)
где Ш2=2т — для нечетного числа фаз; хк — индуктивное сопро-
тивление фазы при коммутации.
Практически значение угла у определяется выражением
tg2r/2 = (3/at)x”, (7.7)
ud
В случае симметричного мощного демпфера для трехфазного
генератора можем написать
xK=x-^-^-^xd", (7.9)
Рис. 7.5. Теоретическая кривая фаз-
ных напряжений и пульсации вы-
прямленного напряжения под на-
грузкой (т=3)
фазных напряжений (рис. 7.5)
где Х2 — индуктивное сопротивление обратной последователь-
ности.
253
Рис. 7.6. Экспериментальные коэффици-
енты преобразования напряжения киФ
и тока kj в функции угла коммутации у:
Л 2, 3 — для k уф, 4, 5, 6 — для kl соот-
ветственно для пятифазного, шестифаэного
(две трехфазные обмотки со сдвигом по фазе
30°) и трехфазного генератора с мостовыми
схемами
Коммутационные процессы в
вентильных генераторах вызыва-
ют изменения коэффициентов
преобразования (рис. 7.6), при-
чем чем больше значение угла
коммутации у, тем больше коэф-
фициенты преобразования отли-
чаются от теоретических коэффи-
циентов, характерных для мгновенной коммутации тока. Коэффи-
циенты ku<t> и ku« возрастают с увеличением угла у (с увеличением
тока нагрузки), а коэффициент kt уменьшается. С увеличением
угла у уменьшается и действующее значение тока в фазе
(7.Ю)
С увеличением у возрастает коэффициент преобразования по
мощности kpt возрастает необходимая мощность генератора на
стороне переменного тока Р~ и расчетная мощность генератора
(7-И)
где k Е = £/{/ф; ka — коэффициент, учитывающий дополнительные
потери от высших гармонических поля, появляющихся вследствие
несинусоидальной формы кривой фазного тока, Лп^1,03.
Формула (7.11) должна учитывать: уменьшение выпрямленно-
го напряжения при коммутации тока; уменьшение выпрямленного
напряжения из-за падения напряжения в вентилях; уменьшение
фазного тока по сравнению с идеальной коммутацией.
Имея опытные Или расчетные значения коэффициентов киф
kun и ki, можно определить расчетную мощность трехфазного ге-
нератора на стороне переменного тока:
по фазному напряжению
Р' = й£йпЗРф = 3kEknku<t>kt Pd' = kEkakPPd'-, (7.12)
по линейному напряжению
Р' = kEкпЗРф kEk£ Р'ч -
(7-13)
254
При трехфазной мостовой схеме выпрямления и идеальной
коммутации вентилей, как указывалось, Л₽= 1,045. В практиче-
ских расчетах с учетом возрастания kP с ростом угла у берут в
среднем &Р=1,12 и формула (7.12) принимает вид:
P'=l,l2kEkttP'd, (7.14)
где P'd=U'dId= (иа+2&ил)Ц=ил1л(ил+2Ьил) lUd=kAPd —
мощность по постоянному току с учетом потерь в выпрямителе и
kA=(Ud+2Un)/Ud.
Применение вентильных генераторов с постоянными магнита-
ми на базе редкоземельных элементов и кобальта позволяет зна-
чительно улучшить протекание коммутационных процессов, умень-
шить пульсации выпрямленного напряжения и уменьшить значе-
ние коэффициента преобразования по мощности за счет возмож-
ности выбора более благоприятных параметров генератора.
Возможность вывести якорную обмотку из ферромагнитного
окружения непосредственно в воздушный зазор (беспазовая кон-
струкция статора) и применить в качестве демпфера сплошную
трубу на индукторе позволяет значительно уменьшить индуктив-
ность рассеяния обмотки якоря xs, индуктивное сопротивление по
продольной оси xad и индуктивное сопротивление демпфера xKd.
В результате значительно уменьшается индуктивное со против ле?
ние коммутирующего контура хк. Согласно (7.9) можем написать
лк === xd" = xs -I------------j-----J-------—, (7.15)
Xad ^«6
где xff6 — индуктивное сопротивление рассеяния полюсных баш-
маков согласно рис. 3.3.
Снижение xs получается за счет уменьшения коэффициента
пазовой проводимости
Ли = UO (_Lin^+»_+o, 192), (7.16)
где цо — магнитная постоянная; а — высота активного слоя об-
мотки; б — воздушный зазор.
Снижение индуктивного сопротивления xad происходит за счет
увеличения воздушного зазора б и за счет малой магнитной про-
ницаемости магнитов, в особенности высококоэрцитивных.
Наиболее заметное снижение xKd наблюдается при демпфере
из медной трубы (близкого к идеальному, см. рис. 7.11), что за-
метно снижает амплитуду пульсаций выпрямленного напряжения.
Применение коллекторной конструкции индуктора (рис. 1.27)
позволяет выбрать значительное число пар полюсов, что также
уменьшает величину пульсаций выпрямленного напряжения.
Для проверки возможностей снижения пульсаций выпрямлен-
ного напряжения при выборе генератора с постоянными магнита-
ми беспазовой конструкции был изготовлен макетный образец
255
Рис. 7.7. Временные диаграммы ЭДС и токов при мостовой трехфазной схеме
выпрямления
мощностью 9 кВт, частотой вращения п=4000 об/мин. Исследова-
ния проводились для двух вариантов якорной обмотки: пазовой и
беспазовой. Сравнительные данные по пульсациям приведены
в табл. 7.1.
Таблица 7.1
Параметр Генератор с пазовым статором Генератор с беспазо- вым статором Генератор с электромаг- нитным возбуждением
Ud/U^ ли, 0,33; 0.66; 1.0 1,0; 1.0; 0.855 6.0; 9.0; 11,5 0,33; 0,66; 1,0 1,1; 1,0; 1,0» 5,6; 6,2; 7,0 0,33; 0.66; 1.0 1.0; 1,0; 1,0 9.2; 11,5; 13
Как видно из табл. 7.1, вентильный генератор с постоянны-
ми магнитами SmCos и беспазовым статором имеет низкий уро-
вень пульсаций выпрямленного напряжения, почти в два раза
меньший по сравнению с генератором с электромагнитным воз-
буждением.
В новых системах электроснабжения благодаря успехам в об-
ласти разработки полупроводниковых приборов стали находить
применение вентильные генераторы с постоянными магнитами, в
которых выпрямитель на транзисторах (при малых мощностях)
или тиристорах (при средних н больших мощностях) обеспечива-
ет стабилизацию выходного напряжения. Схема управления таких
256
Рис. 7.8. Векторная диаграмма на-
пряжений вентильного генератора
при Xd=Xq=Xc
выпрямителей должна предусма-
тривать также быстрый и надеж-
ный сброс выходного напряжения
генератора при КЗ, поскольку маг-
нитный поток генератора не может
быть снижен.
Если вентили являются управ-
ляемыми, то можно осуществлять
задержку их включения по сравне-
нию с моментом подачи на них
прямого напряжения. Временные
диаграммы фазных ЭДС (Ед, Ев.
Ес) и ТОКОВ (/1,3,5 И /2,4,б) ДЛЯ ДВуХ-
полупериодной трехфазной схемы
выпрямления приведены на рис.
лирования переключение вентилей происходит в точках пересече-
ния кривых фазных ЭДС Ед, Ев, Ес- В регулируемом режиме вен-
тили включаются с некоторым запаздыванием на угол а.
для идеального случая среднее выпрямленное напряжение
7.7. При отсутствии регу-
Тогда
равня-
ется
5/6тс+а
Ud =—-— Г j/2£rsincrfdait = (3 jAi/it)£rcosa,
2тс/3 J
ic/6+а
(7.17>
где Er — действующее значение фазной ЭДС обмотки якоря, оп-
ределяемое потоком Фе в воздушном зазоре.
Значение Ud уменьшается с увеличением угла а.
В реальных условиях, когда угол коммутации у>0 (рис. 7.7),
за счет коммутации период включения каждого вентиля увеличи-
вается на угол у и становится равным Л=2л/3+у, тогда среднее
значение выпрямленного напряжения равняется
Ud = (з V6/*) Бг cos а — (3/2it) xjd, (7.18)
где Ет — действующее значение ЭДС генератора, определяемое из
векторных диаграмм напряжений:
для явнополюсного генератора
ЕГ=ЕО—j (хл—хк) Id—j (хд—Хк)Iq; (7.19)
для неявнополюсного генератора
ЕТ=ЕО—j(xe—xK)L (7.20)
Соответствующая (7.20) векторная диаграмма напряжений
представлена на рис. 7.8.
Выражение (7.18) является внешней характеристикой вен-
тильного генератора. При £r=const внешняя характеристика ге-
нератора является прямой.
Выражение (7.18) для внешней характеристики справедливо
лишь при условии y<Zn/3.
257.
и Для вентильных генераторов не-
сл=о большой мощности на внешнюю
= 15° характеристику их оказывает за-
метное влияние падение напряже-
ния на активном сопротивлении
«=№ якорной обмотки Га
\ At/r=(2—3y/2n)ra/d. (7.21)
-------------------Д----». Кроме того, при невысоких на-
пряжениях Ud необходимо учесть
среднее падение напряжения At/д
Рис. 7.9. Вид внешней характе- на каждом вентиле.
ристики вентильного генератора В окончательном виде рабо-
при разных а чий участок внешней характери-
стики трехфазного вентильного ге-
нератора с мостовым выпрямите-
лем с учетом падения напряжения в активном сопротивлении об-
мотки га и падения напряжения в вентилях 2&Ug выражается
формулой
= (3 j/K/it) Ercosa —(3/2it) xK/d —(2 —3y/2it) ra/d —2ДС/д. (7.22)
Если разложить кривые тока генератора и фазного напряже-
ния на выходных зажимах при а>0, у>0 в ряд Фурье, то для ре-
жима у<л/3 получаем для первых гармоник тока /Ф и напряже-
ния С/® (рис. 7.7 и 7.8) следующие выражения:
/ф=(3/2ж)К1£г/^.
(7.23)
t/ф = адг,
(7.24)
где
Ki = j/^ + sin’y — 2у sin у cos (2ау);
К2 = у 1 — (3/те) [у — sin у cos (2а -|-у)] -|- (ЗКг/2г)г.
Действующие значения первых гармоник напряжения и потока
на выходных зажимах генератора с выпрямленными напряжением
Ud и током Ц связаны через коэффициенты преобразования
Ы = С/ф/Ц, =-------------; (7.25)
1,17 [cos а 4“ cos (а + Y)]
kt = /ф//й = —---------. (7.26)
2,56 [cos а — cos(a — у)]
С помощью коэффициентов преобразования киф и kz можно
построить внешнюю характеристику вентильного генератора на
стороне постоянного тока Ud—f(Id)- Для этого достаточно коэф-
фициенты точек характеристики переменного тока 4/ф = f (/ф) раз-
делить на соответствующие значения Лиф и kj. Типичный вид кри-
вых Ud(Id) при различных углах а виден из рис. 7.9.
258
Коэффициент использования генератора по мощности для трех-
фазной мостовой схемы при работе на регулируемый выпрямитель
равен
Лис=Р^/Pd= (3/л) cos [а+ (у/2)]. (7.27)
Из (7.27) видно, что регулирование вентильного генератора и
неидеальная коммутация вентилей ухудшают использование гене-
ратора. При о=у=0 максимальное значение коэффициента исполь-
зования составляет 3/л^0,955.
7.2. ОСОБЕННОСТИ РАСЧЕТА ВЕНТИЛЬНЫХ ГЕНЕРАТОРОВ
С ПОСТОЯННЫМИ МАГНИТАМИ
Важнейшими специфическими вопросами проектирования вентильных гене-
раторов с постоянными магнитами являются: выбор типа генератора и схемы
выпрямления; определение расчетной выпрямленной мощности, фазного тока и
напряжения, расчетной мощности генератора, основных размеров генератора;
проектирование обмотки якоря; учет реакции якоря; расчет индуктивных сопро-
тивлений, в том числе и индуктивных сопротивлений коммутации; построение
векторной диаграммы напряжений и подсчет потерь, расчет характеристик.
Выбор типа магнитной системы зависит от мощности генератора, частоты
вращения, технических требований. При небольшой мощности генератора и вы-
сокой частоте вращения (номинальноезначение Л1н=Рн/2л[=0,06ч-0,25 Н-м) це-
лесообразно применять монолитный цилиндрический ротор. При большей мощ-
ности (мощность измеряется в ваттах) и повышенной частоте вращения (Мн =
= PH/2nf=0,25-4-10 Н-м) целесообразно применять сборные конструкции рото-
ров звездочка. При большей мощности генераторов (десятки киловатт)
(Мн=Рн/2л/>10 Н м) целесообразно применять сборные роторы коллектор-
ного типа. Наибольший эффект коллекторная конструкция дает при большом
числе полюсов, когда удается обеспечить высокое отношение Ьм/пРт. Известны
конструкции генераторов с числом полюсов 2р равно 14 или 18. Применение
торцевых машин целесообразно при больших диаметрах роторов. Выбор схемы
выпрямления рассмотрен выше.
При определении расчетной выпрямленной мощности необходи-
мо учитывать наличие преобразовательных устройств, имеющихся
в схеме электроснабжения. В простейшем случае, когда генератор
непосредственно питает потребители, расчетная выпрямленная мощ-
ность равняется
P'd=t/'dZd, (7.28)
где U'd=Ud+2^U^
Если вентильный генератор работает в сложной системе элек-
троснабжения с преобразователями параметров электрической
энергии, как, например, в системе ПСПЧ, то при подсчете необхо-
димо учесть еще падение напряжения в фильтре и инверторе.
Так как инвертор преобразует постоянный ток в переменный,
а на выходе задано значение переменного напряжения, то напря-
жение Ud определяется через коэффициент преобразования напря-
жения инвертора. Значение Id определяется через коэффициент
259
преобразования тока инвертора по заданному фазному току на
выходе.
Расчетная мощность генератора на стороне переменного тока
Р' = kEkJJ'J dktku^m. (7.29)
Значение kE зависит от расчетной ЭДС Et(kE ^EJU^. В свою
очередь, Ei зависит от многих параметров: тока нагрузки Id, пара-
метров коммутирующего контура, угла коммутаций у, сопротивле-
ния фазы га, числа фаз и др.
Значение Е, предварительно можно подсчитать по формуле
Ei = V(С/ф1 cos <рх -|- га/ф1)2 + (Um sin + хк/ф1)2, (7.30
где иф1 и /Ф1—первые гармонические С7ф и /ф..
При изменении угла у от 10 до 30° коэффициенты искажения
токов ku и напряжений k\u изменяются так: кц= 1ф1/1ф в преде-
лах 0,97—0,987 при /и=3 и — 0,981-5-0,89 при m=5; kiu= С/ф1/(7ф —
0,995-М),98 при m=3; k\u в пределах 0,99—0,975 при т=5 в тех же
пределах изменения угла у; cos <р 1 = 0,934-0,95— коэффициент
мощности для рассматриваемых схем выпрямления; га=(0(054-
0,07) ({/®1//ф1)—активное сопротивление фазы обмотки; хк=
= (0,15-5-0,2) (С/ф1//Ф1) — индуктивное сопротивление коммутирую-
щего контура.
Как уже отмечалось, коэффициент потерь kn—1,02-5-1,03 учиты-
вает наличие дополнительных потерь от высших гармонических по-
ля, появляющихся вследствие несинусоидальной формы кривой
фазного тока.
Коэффициент искажения тока якоря
, Л1(. = sin(ic/m) , 1 . — (7.31)
11 л т/2 1 — у(3«) V 7
Значения kj и киф определяются по кривым рис. 7.6. Так как
значения киф из-за влияния третьей гармонической в фазном на-
пряжении получаются завышенными, то при подсчете Р' целесооб-
разно пользоваться формулой (7.14), применяемой при практиче-
ских расчетах. Дальнейший расчет вентильных генераторов связан
с определением объема постоянного магнита, его размеров и раз-
меров магнитной цепи. Для этого можно воспользоваться методи-
ками расчета, изложенными в § 5.2, 5.3.
Число пар полюсов в вентильных генераторах выбирается боль-
шим, так как при этом улучшается использование ротора. Кроме
того, при большом числе полюсов выпрямленное напряжение воз-
растает, а МДС реакции якоря, масса фильтра, ярма, лобовых час-
тей обмотки, потери в обмотке якоря и индуктивные сопротивления
рассеяния обмотки якоря уменьшаются. Выбор числа полюсов огра-
ничивается условиями размещения магнитов на роторе (см. § 5.3)
и частотными характеристиками вентилей. При предварительном
выборе числа полюсов можно пользоваться табл. 7.2.
260
Таблица 7.2
О, см 5—10 9—12 12—14 . -Л 14-16 16-18
2р 4 6 8 10 12 1
Проектирование обмотки якоря зависит от конструкции гене-
ратора: с пазовым статором или беспазовым. При пазовом разме-
щении обмотки якоря методика проектирования ее подобна мето-
дике, изложенной в § 5.4. Для вентильных генераторов для умень-
шения искажения ЭДС целесообразно выбирать число пазов на по-
люс и фазу большим и дробным. Число q выбирается равным 2,5—
5,5 для трехфазных, 2,5—3,5 для пятифазных и 1—3 для шестифаз-
ных генераторов с двухмостовой схемой выпрямления.
Выполнение шестифазных генераторов (с двойной трехфазной
звездой) возможно и с дробным q. Для этого необходимо выдер-
жать условие
Л360°+30°=гаг, (7.32)
где k и г — любые целые положительные числа; az — угол между
соседними пазами.
Число витков в фазе определяется из условия получения требуе-
мой ЭДС и размещения обмотки в пазах (см. § 5.4). Для генера-
торов значительной мощности применяются петлевые и волновые
обмотки с жесткими катушками из проводов прямоугольного сече-
ния. Обычно приходится предусматривать параллельные ветви и
провода. Преимущественное применение нашли петлевые обмотки,
позволяющие укоротить лобовые части обмотки, что уменьшает ак?
тивное и индуктивное сопротивления обмотки.
Для уменьшения xs желательно уменьшать глубину паза и при^
менять полуоткрытые пазы. Поэтому для вентильных генераторов
весьма желательно иметь отношение Лп/т=0,1-*-0,15 и йп/6п<
<1,5-^-2,0.
Амплитуда МДС реакции якоря вентильного генератора рас-
считывается, как и в синхронных машинах, по первой гармониче-
ской фазного тока якоря; она подсчитывается по кривой фазного
тока, форма которой определяется схемой выпрямления и харак-
тером протекания коммутационного процесса. Амплитуда МДС ре-
акции якоря на пару полюсов определяется выражением
г . -Лк (7.3.3)
я р 1 яа р у 2 \ 2 т / ' 4 <
Для вентильных генераторов беспазовой конструкции число вит-
ков в фазе обмотки якоря
= 4k^tfBM°cpDpLp’ I7'34)
где Ввос-р — среднее значение индукции по длине воздушного зазо-
ра; — диаметр ротора; Lp — длина ротора. -
261
Для цилиндрического магнита DP=Z>M; £Р=£М; В^ср определя-
ется по (5.40)< Для ротора коллекторного типа
/ __ 1 О 4* । о /7 ос\
/ Вп'* - А- (1+».)»+1 в- (7'35>
где 8* = 28/Др.
Максимальное значение индукции на поверхности полюса рото-
ра Вмо
8» -------------4------7е. <7/i6>
!+*’7Г*'7-------°
Г*0 «М» со“ с
где kz — коэффициент, учитывающий изменение радиальной состав-
ляющей магнитной индукции по длине воздушного зазора
k 1 (i+^p_i
2 pt, (1+а,)»₽+1’
^м* = Ди/^р>
k -h±lL.
F~ Ft
Якорная обмотка, размещенная непосредственно в воздушном
зазоре, может быть как однослойной, так и двухслойной. Размеще-
ние якорной обмотки в зазоре позволяет выполнить ее намоткой на
шаблоне и способом печатного монтажа. В качестве материала
печатной обмотки обычно используют катаную медную электротех-
ническую фольгу, а в качестве цилиндрической основы и между-
слойной изоляции — стекловолокнистую структуру, пропитанную
эпоксидным компаундом. Для машин значительной мощности
(больше 6 кВт) целесообразно изготовлять активные слои обмотки
штамповкой. Как известно [30, 36, 37], электрические схемы
обмоток, размещенных непосредственно в воздушном зазоре и в
пазах, идентичны. Эскиз катушки беспазового варианта якорной
обмотки приведен на рис. 7.10.
К особенностям конструкции магнитоэлектрических вентильных
генераторов с пониженными пульсациями выпрямленного напряже-
ния можно отнести конструктивное выполнение демпферной системы
на индукторе. На рис. 7.11 представлен общий вид индуктора (без
вала) машины мощностью 5 кВт. Шестиполюсный индуктор состо-
ит из полюсных сегментов 1 и постоянных магнитов 2 (из SmCos) f
намагниченных тангенциально. Основное крепление осуществляется
немагнитными титановыми торцевыми шайбами 3. Со стороны воз-
душного зазора пазы, образованные сегментами, закрываются мед-
ными клиньями 4. Отверстия в сегментах служат для размещения
медных стержней 5. С внешней стороны на индуктор насаживается
медная труба толщиной 0,3 мм. С торцов медные клинья, стержни
и труба припаиваются к медным торцевым кольцам 6, образуя
демпферную систему: труба, клинья, кольцо по оси d, труба, стерж-
ни, кольцо по оси q.
262
Рис. 7.10. Катушка беспазового ва-
рианта якорной обмотки
Рис. 7.11. Общий вид индуктора 6ei
вала
Индуктивные сопротивления вентильных генераторов можно
подсчитать известными методами (гл. 5). В ряде случаев целесо-
образно эти сопротивления подсчитывать в параметрической фор-
ме. В общем случае
^2
Ха = 4*tfp.o —— LmOck (lad 4“ Хп 4“ 4* *д); (? -37)
xq = (7.38)
где bad, Kaq — удельная проводимость для потока реакции якоря по
продольной и поперечной осям; Ап—удельная проводимость пазово-
го рассеяния; Ал—удельная проводимость лобового рассеяния; Хд—
удельная проводимость дифференциального рассеяния; оСк—коэф-
фициент, учитывающий скос пазов, Оск=1-|-0,41(аск/л); аск=
—2лр/г — угол скоса зубцов.
В беспазовых электрических машинах не представляется воз-
можным отделить удельные проводимости для потока реакции яко-
ря от удельной проводимости пазового рассеяния. Для монолитного
ротора звездочка Каа=Кад=Каф [50].
При р=2
[(14- V-54- (—-41n(1 4- и]- (7.39)
1ба*а [ \ 1 + о, j j
При рт^2
Для беспазовой электрической машины с коллекторным рото-
ром значения и Kaq могут быть подсчитаны по формулам [50]
, _ п- ь 2.
26мг+Лм^ *»’
9 __ q . л
“г7а««ог-
(7:41)
(7.42)
263
Удельные Проводимости для потока реакции якоря had и для
генераторов/с паровыми статорами определяются по формулам
(7.37)—(742), В/ которых вместо относительного воздушного зазо-
ра 6* нееюходи^о подставлять расчетный относительный воздуш-
ный за^ор бр*=^ -kftbt.
Проводимости лобового рассеяния не определяются типом рото-
ра или статора машины, а зависят от способа укладки обмотки.
Расчет Хл производится по известным формулам [30].
Проводимость дифференциального рассеяния для монолитных
роторов звездочка может быть подсчитана
где v — номер пространственной гармоники МДС; при симметрич-
ной обмотке v^3k (к — любое целое положительное число больше
нуля); kov—обмоточный коэффициент для v-й гармоники МДС
[50].
Глава восьмая
ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА И РАСЧЕТА
КОЛЛЕКТОРНЫХ ТАХОГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
С ПОСТОЯННЫМИ МАГНИТАМИ
8.1. ХАРАКТЕРИСТИКИ КОЛЛЕКТОРНЫХ ТАХОГЕНЕРАТОРОВ
ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ
Достоинством тахогенераторов постоянного тока с постоянны-
ми магнитами является отсутствие постороннего источника возбуж-
дения, малая зависимость магнитного потока от температуры и от-
сутствие потерь на возбуждение. Основными требованиями, кото-
рые предъявляются к тахогенераторам, являются:
высокая линейность выходной характеристики lh^kTn и боль-
шая ее крутизна к?-,
симметрия выходной характеристики, т. е. Д(л)=Д(—л);
минимальная зона нечувствительности за счет падения напря-
жения в щеточно-коллекторном узле Al/m=min;
минимальная пульсация выходного напряжения;
малые'момент инерции ротора и момент сопротивления;
высокий КПД;
малые размеры и масса.
Выходной характеристикой тахогенератора постоянного тока яв-
ляется зависимость выходного напряжения U от частоты враще-
ния л и сопротивления нагрузки гп.-Определим эту зависимость для
264
идеального тахогенератора, у которого магнитный поток полюсов-
Фе в воздушном зазоре постоянен, а реакция якоря о коммутаци-
онных токов пренебрежимо мала. Для выходного напряжения 1Г
можно написать
и=Е—1гй— (8.1)
где Е=слФв; гя — сопротивление якоря тахогенератора; I=U!ra —
ток в сопротивлении гн нагрузки.
Уравнение (8.1) легко преобразуется к следующему виду:
U — сяФ» _ ДС7ц1
— 1+гя/ги 1+гя/ги
где c=Afp/60a; N, а — число проводников и пар параллельных вет-
вей соответственно обмотки якоря; р — число пар полюсов. Зави-
симости U=f (п) для rH=const изображены на рис. 8.1 сплошными
прямыми. С уменьшением гн крутизна характеристик kT тахогене-
ратора U=f(n) падает, а с учетом дополнительно образу-
ется зона нечувствительности из-за отрицательного смещения вы-
ходной характеристики (прямая 2). Для уменьшения Д[/щ и, сле-
довательно, зоны нечувствительности сводят к минимуму пере-
ходное сопротивление щеточных контактов тахогенераторов,
для чего выполняют коллекторы из коррозионно-стойких материа-
лов (никель, серебро), а щетки делают серебряно-графитовые, мед-
ные с серебряными напайками и т. д. Несмотря на эти меры, нали-
чие в тахогенераторе щеточных контактов приводит к нестабильно-
сти его выходной характеристики из-за зоны нечувствительности
при малых угловых частотах вращения и непостоянства Д{7щ ва
времени; к неодинаковости показаний тахогенератора при враще-
нии якоря в различных направлениях; снижению эксплуатационной
надежности работы тахогенератора с изменением температуры,
влажности и давления окружающей среды; излучению радиопо-
мех. При этом в современных тахогенераторах ошибка асимметрии
составляет 1—3%. Для борьбы с радиопомехами тахогенераторы
снабжаются экранами или фильтрами.
При действии реакции якоря и коммутационных токов, ослаб-
ляющих поток полюсов, происходит откло-
нение выходной характеристики от линей-
ной (штриховые кривые на рис. 8.1). Боль-
шим недостатком тахогенераторов постоян-
ного тока является наличие пульсаций вы-
ходного напряжения. Их можно разделить
на якорные, зубцовые и коллекторные.
Якорные пульсации возникают из-за не-
равномерности воздушного зазора и нера-
венства магнитной проводимости якоря
в различных направлениях. С целью
уменьшения этих пульсаций увеличивают
рабочий воздушный зазор б, обрабатывают
цилиндрическую поверхность якоря, вала,
18—6258
Рис. 8.1. Выходная ха-
рактеристика тахогенера-
тора постоянного тока С
постоянными магнитами:.
/-дищ=о; г-дищЧьо
265
•подшипниковых щитов по высокому классу точности, применяют
'веерную сборку пакетов стали якоря.
Зубцовые пульсации возникают вследствие пульсаций проводи-
мости воздушного зазора из-за зубчатого строения якоря. С целью
их устранения делают скос пазов якоря, правильно выбирают дли-
ну полюсного перекрытия и число пар полюсов, применяют магнит-
ные клинья .
Коллекторные пульсации возникают из-за вибраций щеток
.вследствие неровностей коллектора, периодического изменения чис-
ла секций в параллельных ветвях обмотки якоря. С целью умень-
шения коллекторных пульсаций увеличивают количество коллек-
торных пластин, улучшают надежность щеточного устройства и
^качество обработки коллектора.
Желание свести к минимуму пульсаций выходного напряже-
ния привело к применению тахогенераторов с полым якорем на
базе малоинерционных электродвигателей типа ДМР (рис. 1.53), не
имеющих якорных и зубцовых пульсаций, так как якорь этой кон-
струкции выполнен в виде пластмассового стаканчика с обмоткой
шз тонкого провода.
ЛЛ. ОБЩИЕ ВОПРОСЫ ТЕОРИИ КОЛЛЕКТОРНЫХ ТАХОГЕНЕРАТОРОВ
ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ
Постоянные магниты генераторов могут намагничиваться либо
:в собранном состоянии в генераторе, либо в намагничивающем ап-
парате с последующей его установкой в генераторе. Чтобы обеспе-
чить постоянство крутизны kt выходной характеристики тахогене-
ратора, магнит подвергают стабилизации путем его размагничива-
ния до минимально возможного значения при его эксплуатации. Раз-
магничивание магнита и положение точки отхода прямой возврата
(см. рис. 2.6 и 8.9) может определяться или минимальной магнит-
ной проводимостью Лев свободного (вынутого из статора) ротора
или максимальным размагничиванием от продольной реакции яко-
ря. В некоторых случаях заметно сказывается и размагничиваю-
щее действие от поперечной реакции якоря.
Для тахогенераторов стабилизация постоянных магнитов индук-
тора, как правило, производится при максимальном размагничи-
вающем действии МДС FpmaX, создаваемой полутора-двукратным
значением номинального тока нагрузки, т. е. 1тах, имеющем место
при номинальной (максимальной) частоте вращения пя.
МДС Fp состоит из продольной Fd, поперечной Fq и реакции
якоря коммутационных токов короткозамкнутых секций якоря FK,c.
При этом Fd появляется у генераторов постоянного тока при сдви-
ге щеток из геометрической нейтрали. Если сдвиг производится по
.направлению вращения, что делается для улучшения коммутации,
то Fd ослабляет поле полюсов. Fq размагничивает набегающий край
полюса магнита индуктора и намагничивает сбегающий, при этом
общее действие Fq будет размагничивающим. МДС FK,C также ока-
зывает размагничивающее действие на поле полюсов, поскольку
тахогенераторы имеют замедленную коммутацию.
.266
Рис. 8.2. Поперечная реакция якоря
в тахогенераторе с призматическими
постоянными магнитами без полюс-
ных наконечников
Рис. 8.3. Снижение продольной индук-
ции &Bd железоникелевых магнито»
в зависимости от напряженности по-
перечного поля Ня
При смещении щеток из геометрической нейтрали по направле-
нию вращения на длину дуги окружности якоря Ья МДС Fa будет
равна
Fd=2baA, (8.3>
где А —линейная нагрузка генератора.
Для магнитных систем тахогенератора изображенных на рис.
1.51,6, в, д, поперечный поток реакции якоря замыкается через
стальные полюсные наконечники и влияние МДС Fq на результи-
рующий поток возбуждения генератора определяется обычными ме-
тодами для электрических машин постоянного тока по переходной,
характеристике [36].
Если магниты не имеют полюсных наконечников (рис. 8.2), то*
МДС поперечной реакции якоря Fq обусловливает магнитный по-
ток, проходящий через воздушный зазор и разветвляющийся в по-
люсе на два параллельных пути — продольный путь А с потоком
Фя1 и поперечный путь Б с потоком ФЯ2- Продольный поток реак-
ции якоря ФЯ1 искажает распределение индукции под полюсом, раз-
магничивая одну половину магнита и подмагничивая другую. При
изменении направления тока в якоре размагичиванию подвергает-
ся другая, ранее подмагниченная половина магнита. После не-
скольких циклов изменения направления тока в якоре обе полови-
ны магнита размагничиваются в одинаковой степени приложенны-
ми к ним МДС FM(i и их магнитное состояние становится устойчи-
вым. Поперечный поток реакции якоря ФЯ2 идет поперек магнита,
а приложенная к магниту поперечная МДС FMq производит намаг-
ничивание магнита в поперечном направлении, в результате чего
необратимо снижается продольная индукция в магните до тех пор,
пока магнит не станет стабилизированным. Например, для железо-
никелевых магнитов при их стабилизации среднее уменьшение про-
дольной индукции ДВй от увеличения напряженности поперечного
18* 267
r:
Рис. 8.4. Схема замещения магнитной цепи для потоков поперечной реакции яко-
ря с учетом нелинейных магнитных сопротивлений:
Фя, Фя1, Фя2 —общий, продольный, поперечный магнитные потоки; Fq, FMd, FMg —МДС
поперечной реакции якоря, приложенная вдоль и поперек магнита; ^м,к* ЯМ(р Ямд —
линейные магнитные сопротивления воздушного зазора, стыка магнита с корпусом, магнита
е продольном и поперечном направлениях; — нелинейные магнитные сопро-
тивления ярма якоря, зубцов, корпуса
Рис. 8.5. Схема замещения магнитной цепи для потоков поперечной реакции яко-
ря без учета нелинейных сопротивлений (обозначения те же, что и на рис. 8.4)
поля Нд может быть определено по графику, изображенному на
рис. 8.3. При нормальных режимах работы тахогенератора со ста-
билизированным постоянным магнитом уменьшение продольной ин-
дукции не учитывается [1, 58]. Для этого случая при известном
токе тахогенератора I поперечная МДС Fq, приложенная к магни-
ту, имеет следующее значение:
Fq=kbbpA, (8.4)
где Ьр — длина полюсной дуги магнита (рис. 8.2); fc(>=0,5-i-0,8 —
коэффициент, учитывающий то, что на пути действия поперечной
МДС якоря имеются воздушные зазоры.
Определение МДС FMd и FMq, приложенных к магниту в соот-
ветственно продольном и поперечном направлениях, производится
с помощью схемы замещения магнитной цепи, составленной для по-
токов поперечной реакции якоря ФЯ1 и ФЯ2 (рис. 8.4). Поскольку
линейные магнитные сопротивления Rb, Rud, RKq, Rm,k весьма вели-
ки и МДС Fq не может привести к насыщению магнитную цепь по-
перечной реакции якоря, то значениями ЯД RZB и Якн для инженер-
ных расчетов можно пренебречь (рис. 8.5) [1].
Для этой схемы замещения можно написать следующие урав-
нения:
Фя=Фя1+ФЯ2; (8.5)
268
Т'д=Фя(2/?б-|-^?м<1)_}-Фя2-Кмд> (8-6)
Фя1 (27?M>K+lRMd) —Фя2^мд==0. (8.7)
Решение системы уравнений (8.5)—(8.7) относительно Фя, Фя1
и ФЯ2 имеет вид
Фя=<Д+у) Fq/N\ (8.8)
Qal^FqIN- (8.9)
Фя2=^; (8.10)
y=7?M«/(/?Md+2/?M,K); (8.11)
0МЖ)(2Шй)Я-«- (8.12)
Из (8.8)—(8.10) и рис. 8.5 искомые МДС FMd и FMq определятся
F м<1=Фя1ЯМй/2-|-ФяЯма/2= (14-2у) RMdFql2N; (8.13)
F мд==Фя2^Мд ^RuqF q/N. (8.14)
При малой длине магнитов 1№ и большой полюсной дуге Ьр (рис.
S.2) поток реакции якоря замыкается главным образом в направ-
лении намагничивания по пути вдоль магнита и через корпус
(Фя=ьФя1). Поток ФЯ2, замыкающийся поперек магнита, мал из-за
большого магнитного сопротивления магнита в этом направлении
й им можно пренебречь, считая в формулах 7?Мд=°° и у=оо. Тогда
из формул (8.13) и (8.14) с учетом (8.10) и (8.11) получим
Fud = 2(fls + tfMd + /?M,K) • <8•15>
Формулы (8.13) и (8.14) могут быть получены и непосредствен-
но из рис. 8.5, если разомкнуть магнитную цепь между точками Q
и Р.
Магнитные сопротивления в формулах (8.13)—(8.15) имеют
следующие значения:
р ___ 1 28 . р 1 2/м . р ________ 1 Ьр , п _____ 1 2ДМ1К
Po bpl P bpl P W Ho bpl
где |io — магнитная постоянная; 0 — наклон прямой возврата на
диаграмме состояния магнита, построенной в координатах В и Я;
1к, Ър — длина и полюсная дуга магнита (рис. 8.2); I — осевая дли-
на якоря (то же и магнитов); Дм,к — воздушный зазор стыка меж-
ду магнитом и корпусом.
При этом формула (8.15) упростится
f = __________________________Q,5F<?_____ /О 1
[0(8 + Дм,к)/(н<А.Л + 1 ' (8Л6)
Для магнитной системы тахогенератора, изображенной на рис.
8.6, поток поперечной реакции якоря ФЯ1 также в одной половине
каждого скобообразного магнита подмагничивает магнит, а в дру-
гой половине размагничивает. Размагничивающее действие от по-
тока ФЯ1 можно учитывать по вышеуказанной методике так же,
269
Рис. 8.6. Поперечная реакция
якоря в тахогенераторе со ско-
бообразными магнитами
----1---1---1--1____1- »
О 8 1S 2* Т^Л/см*
Рис. 8.7. Зависимость сопротивления
Г1+г2 в щеточном контакте для то-
ков коммутации от плотности тока
под щетками для щеток типаМГС-7
как и для магнитной системы с радиальными постоянными магни-
тами без полюсных наконечников (рис. 8.2). Что касается потока
Фяг (рис. 8.6), то он замыкается через полюсы (полюсные наконеч-
ники), выполненные из магнитно-мягкого материала, и учет раз-
магничивающего действия от поперечной реакции якоря здесь сле-
дует производить по переходной характеристике так же, как и для
обычных коллекторных машин постоянного тока по МДС FKq [36].
В тахогенераторах обычно не устанавливаются дополнительные
полюсы и имеет место замедленная коммутация в короткозамкну-
тых секциях, вызывающая размагничивающую МДС реакции яко-
ря FK,c по продольной оси. Значение FK,C на пару полюсов мо-
жет быть подсчитано по следующей формуле:
к,с" 2-60-naDSr ’
где Ьк — ширина коммутационной зоны; wc — число витков комму-
тируемой секции; V — удельная проводимость рассеяния секции;
2г=т+г14-Г2 — суммарное сопротивление секции и щеточных кон-
тактов (г — сопротивление секции, ri и г2— сопротивления набега-
ющего и сбегающего краев щетки).
Для определения максимальных значений продольной размаг-
ничивающей МДС FK,C коммутационных токов в (8.17) необходимо
подставить максимальное значение тока / при соответствующей ча-
стоте вращения п. При этом нужно учитывать, что п и гя являют-
ся функцией тока / и зависят от типа применяемых щеток, кон-
тактного давления и других факторов (рис. 8.7).
8.3. ОСОБЕННОСТИ РАСЧЕТА КОЛЛЕКТОРНЫХ ТАХОГЕНЕРАТОРОВ
ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ
К особенностям расчета тахогенераторов постоянного тока с по-
стоянными магнитами в отличие от аналогичных тахогенераторов
с электромагнитным возбуждением относятся: определение разме-
270
ров постоянных магнитов индуктора, расчет магнитной цепи и по-
строение рабочих характеристик.
При расчете тахогенератора постоянного тока с постоянными
магнитами в техническое задание входят следующие данные:
крутизна напряжения выходной характеристики Лт, В-мин/об;
номинальный ток /н при номинальной частоте вращения пв=
=const или номинальное сопротивление нагрузки гн;
режим работы;
конструктивные и технологические требования.
Номинальное напряжение тахогенератора UB при па определя-
ется
И
Номинальная полезная мощность на валу равна
Расчетная мощность Рр—Е1в соответственно [1] равна
Р
р 2т)
где КПД т] задается (т]=0,2-*-0,3).
Диаметр якоря D и осевая длина 1( тахогенератора определя-
ются с помощью машинной постоянной
6-10* _ D4in
aiB^A — Рр ’
(8.18)
где линейная нагрузка А=(3-»-5) • 102 А/м берется малой, чтобы
ослабить действие реакции якоря на полюсы тахогенератора; Вс,—
=0,2-4-0,7 Тл, берется в зависимости от выбранного материала по-
стоянных магнитов ротора (если тахогенератор не имеет полюсных
наконечников, то можно брать Вв=0,65Вг); коэффициент полюс-
ного перекрытия 04=0,4-8-0,7. Если взять А.г=^/Д=0,5-*-1, то из
(8.18) можно определить диаметр якоря D и Ц
h — ^D.
Воздушный зазор б в тахогенераторах выбирается равным 0,2—
1 мм в зависимости от конструкции, технологии изготовления тахо-
генератора и требований к значению пульсаций выходного напря-
жения.
Магнитный поток Фе в воздушном зазоре равен
Площадь сечения магнита 8М определится
8м=оФд/Вм, (8.19)
271
Рис. 8.8. Схема замещения магнитной цепи тахогенератора с радиальными приз-
матическими постоянными магнитами без полюсных наконечников на пару полю-
сов:
фм»фвм» фб-----потоки магнита, рассеяния магнита, воздушного зазора; FM, F'M, Гр—МДС
внешняя магнита, условная магнита и результирующая продольной реакции якоря;
1?м,к —линейные магнитные сопротивления воздушного зазора и стыка магнита с корпусом;
₽HZ, Янк — нелинейные магнитные сопротивления зубцов якоря, ярма якоря, корпуса;
к, Гк —падения магнитного напряжения на соответствующих магнитных со-
противлениях
Рис. 8.9. Диаграмма состояния магнитной системы постоянных магнитов тахоге-
нератора
где Вм= (0,7-5-0,75) Вг, выбирается предварительно из условия, что-
бы магнит развивал наибольшую энергию во внешнем пространст-
ве; коэффициент рассеяния с задается (о=1,5-<-2).
Длина постоянного магнита на пару полюсов /м должна быть
такой, чтобы внешняя МДС магнита Гм была достаточной для обес-
печения необходимого значения потока Фе. Длина /м зависит от
материала магнита и магнитной системы тахогенератора и предва-
рительно может быть выбрана следующей [1]:
для призматических радиальных магнитов (рис. 1.51,а и б)
(0,3—0,8)D;
для скобообразных (рис. 1.51,в) (0,5—0,6)лД;
для наружных кольцевых (рис. 1.51,а)) (1,3—1,4)D;
для торцевых (рис. 1.51,<5) (0,7—0,8)D;
272
для внутренних кольцевых (рис.
1.51,е) (0,7—0,8)D.
Для более точного определения 1М
необходимо составить схему замеще-
ния магнитной цепи тахогенератора по
продольной оси и подсчитать внеш-
нюю суммарную МДС магнита FM,
необходимую для проведения пото-
ка Фе.
На рис. 8.8 изображена схема за-
мещения магнитной цепи тахогенера-
тора с радиальными призматическими
магнитами без полюсных наконечни-
ков на пару полюсов, составленная по
эскизу магнитной цепи, изображенно-
му на рис. 8.2. Внешняя суммарная
МДС магнитов 2FM, необходимая для
проведения потока через всю внеш-
нюю магнитную цепь тахогенератора,
при холостом ходе генератора (Fp=0)
Рис. 8.10. Кривые зависимос-
тей потока постоянных магни-
тов Фм и потока в воздушном
зазоре Фо от размагничиваю-
щей МДС на один полюс Fp
составит
2Fli=Fj+2Fl+2F6+2FM,K+FK.
Длина одного магнита /м определится
/м—F м/Нм.
(8.20)
Предварительно напряженность в нейтральном сечении магни*
та можно выбрать в пределах Ям=(0,30-5-0,35) До-
полученные размеры постоянных магнитов 5М из (8.19) и 1М из
(8.20) позволят построить диаграмму состояния магнита тахогене-
ратора на один полюс, изображенную на рис. 8.9, в которой Фг=
=BrSM и FC=HJM, где Вг и Нс — параметры магнитной характери-
стики выбранного материала постоянных магнитов.
Полученная кривая Фм=? (F) с помощью схемы замещения маг-
нитной цепи тахогенератора (см. рис. 8.8) легко перестраивается в
кривую Фм=/(/?р), если для произвольных точек, взятых на кривой
<I>M=f(FM,K), производить проведение потока по всей схеме заме-
щения магнитной цепи и определять Fp. Например, для точки i
(рис. 8.9) с координатами, Фм» и F, поток рассеяния одного магни-
та Фом( из схемы замещения магнитной цепи на рис. 8.8 равен
Фом* —Fi/R ам-
Поток в рабочем воздушном зазоре генератора Фе,- определится
Фб<—Фм; Фамг-
По значению потока Фе, можно определить падения МДС в уча-
стках магнитной цепи на один полюс Fm, FZi, FM,Ki, F,-,/2, FKi/2.
Тогда результирующая реакция якоря Fpi на один полюс равна
Fpi—F t—F 6i—F zi—FM,Ki—0,5 {F ji-^-FK,).
После проведения аналогичных расчетов для всех точек кривой
размагничивания магнита Фм=/ (F) (рис. 8.9) получим зависимость
ФМ=/(5Р), изображенную на рис. 8.10.
273
Для определения точки отхода k прямой возврата от спинки
кривой размагничивания (рис. 8.9) для обычных постоянных маг-
нитов или положения точки k на прямой размагничивания для ок-
сидно-бариевых или самарийкобальтовых магнитов необходимо
сначала вычислить значение размагничивающий МДС Fpmax для
максимального тока перегрузки /тах= (1,5-^-2)/н-
Для рассматриваемого случая, если длина магнита /м мала, а
а его полюсная дуга 6Р велика и уменьшением продольной индук-
ции магнита от поперечного намагничивания можно пренебречь, то
МДС Fpmax на один полюс будет иметь следующие слагаемые:
F ртах== Fd/2+FMd+FK,c/2, (8.21)
где Fd, Fnd и FK,c определяются соответственно по формулам (8.3),
(8.16) и (8.17) для тока Imax- Полученное значение необходимо от-
ложить по абсциссе на рис. 8.10 и восстановить перпендикуляр до
пересечения с кривой Фм?=/(Гр) в точке k. При этом ордината точ-
ки k определит значение потока Фм,к в точке отхода k прямой воз-
врата от кривой ФМ=НЛ, изображенной на рис. 8.9. Из точки k
(рис. 8.9) под наклоном, определяемым р, проводится прямая воз-
врата.
Поскольку рабочие точки при работе тахогенератора лежат на
этой прямой возврата, то, беря произвольное их число, аналогич-
ным способом легко построить кривую Фй=/(ГР) и нанести ее на
график, изображенный на рис. 8.10. Далее в пределах изменения
тока нагрузки от нуля до /н вычислим соответствующие значения
FP, также как это было сделано для тока /тох, и построим вспомо-
гательную кривую Fp=f (/), изображенную на рис. 8.11. Кривые
Ф«=/(Гр) (рис. 8.10) и Fjr=f(I) (рис. 8.11) позволяют построить
рабочие характеристики тахогенератора: внешнюю мощ-
ности и КПД T)=f(/) для любой постоянной частоты вра-
щения n,=const (рис. 8.12). Для этого для любой из произвольно
выбранных точек / кривой Фв=/(^р) с координатами Фе^ и FPJ- по
(8.2) определяется U,, а по кривой Fp=f(Z) (рис. 8.11)—Ij. В (8.2)
берется в зависимости от тока Ij по соответствующим кривым
или таблицам для щеток различного типа и соответствующего ще-
точного давления [77]. Далее определяется Pj=UjIj.
КПД тахогенератора определяется по формуле
где lAlPj — суммарные потери мощности в тахогенераторе при п=
=const. Внешние характеристики U=f (/) могут быть построены
Для любой частоты вращения п,- вплоть до лн (рис. 8.13). Проведя
на этих характеристиках луч U=rl и найдя точки пересечения это-
го луча с семейством внешних характеристик, определим искомую
выходную скоростную характеристику тахогенератора U=f(n) при
rH=const, изображенную на рис. 8.14 (ДС7щ«к0).
Подобным образом могут быть определены ток I, мощность Р
и т) в функции частоты вращения тахогенератора п при rH=const.
Аналогичные расчеты могут быть проведены для всех тахогене-
274
Рис. 8.11. Кривая зависимости раз-
магничивающей МДС Fp на один
полюс от тока / тахогенератора
Рис. 8.12. Рабочие характеристики
тахогенератора постоянного тока с
постоянными магнитами при п=const
Рис. 8.13. Семейство внешних харак-
теристик тахогенератора постоянного
тока с постоянными магнитами для
нескольких постоянных частот враще-
ния (Л1<Л2<Лз<Лн)
Рис. 8.14. Выходная скоростная ха-
рактеристика тахогенератора посто-
янного тока с постоянными магнита-
ми при постоянном сопротивлении на-
грузки rH=const
раторов постоянного тока с постоянными магнитами, магнитные
системы которых изображены на рис. 1.51. Однако если есть необ-
ходимость в учете уменьшения продольной индукции в магните от
его поперечного намагничивания от МДС реакции якоря Fq, то FKd
определяется по (8.13). Далее необходимо вычислить FMq
по (8.14). Напряженность поперечного поля определится Hq=
=FMq/bp.
Для Hq по графику, изображенному на рис. 8.3, определим не-
обратимое снижение продольной индукции ДВ<2 от поперечного на-
магничивания, определяющее уменьшение потока магнита в ней-
тральном сечении A<Dd=ABdSM. Новое, более низкое положение точ-
ки k' отхода прямой возврата можно найти на диаграмме состоя-
ния магнита (рис. 8.9), если из ординаты Фм,к вычесть значение
ЛФа и из точки k' провести прямую, параллельную уже имеющей-
ся прямой возврата. Теперь рабочие точки для всех режимов ра-
боты тахогенератора будут лежать на прямой возврата, исходящей
от точки k'.
275
СПИСОК ЛИТЕРАТУРЫ
, ।
1. Балагуров В. А., Галтеев Ф. Ф., Ларионов А. Н. Электрические машины
с постоянными магнитами. М.: Энергия, 1964.
2. Электроснабжение летательных аппаратов/ Под редакцией Н. Т. Коро-
бана. М.: Машиностроение, 1975.
3. Балагуров В. А., Галтеев Ф. Ф. Авиационные генераторы переменного то-
ка комбинированного возбуждения. М.: Машиностроение, 1977.
4. Безрученко В. А., Галтеев Ф. Ф. Электрический машины, с постоянным»
магнитами// Итоги науки и техники. ВИНИТИ. Сер. Электрические машины и
трансформаторы. 1982. Т. 5.
5. Балагуров В. А. Перспективы применения новых высококоэрцитнвных по-
стоянных магнитов в электрических машинах и аппаратах// Тр. МЭИ. Темати-
ческий сборник: Применение постоянных магнитов в электрических машинах и
системах. 1975. Вып. 264. С. 6—18.
6. Балагуров В. А. Перспективы развития автономных систем электроснаб-
жения с высокочастотными электрическими машинами// Тр. МЭИ. Тематический
сборник: Системы электроснабжения и электрооборудования подвижных объек-
тов. 1980. Вып. 487. С. 3—8.
7. Балагуров В. А., Кецарис А. А., Лохнин В. В. Перспективы развития маг-
нитоэлектрических генераторов с применением высококоэрцитивных постоянных
магнитов// Электричество. 1977. № 3. С. 54—58. . .
8. Балагуров В. А., Лохнин В. В. Применение Постоянных магнитов в бес-
контактных генераторах постоянного тока для ограничения пульсаций выходного
напряжения// Электричество. 1981. № И. С» 46—47.
9. Паластин Л. М. Синхронные машины автономных источников питания.
М.: Энергия, 1980.
10. Жак 3. Машины постоянного тока с постоянными магнитами// Slektro-
technik. 1977. Vol. 32, № 7, Р. 200—204. (Пер. с чешек. № А-79347.)
11. Брускин Д. Э., Зубакин С. И. Самолеты с полностью электрифицирован-
ным оборудованием// Итоги науки и техники. ВИНИТИ. Сер. Электроборудова-
ние транспорта. 1986. Т. 6.
12. Разработка бесколлекторного генератора постоянного тока малой мощ-
ности с возбуждением от РЗ-магнитов/ И. И. Алексеев, Б. С. Зечихин, М. Г.
Клейман// Межведомственный тематический сборник. М.: МЭИ. 1985. № 67.
С. 3—10.
13. Постоянные магниты. Справочник. — 2-е изд./ Под редакцией Ю. М. Пя-
тина. М.: Энергия, 1980.
14. Лившиц Б. Г., Лилеев А. С. Современное состояние и перспективы раз-
вития материалов для постоянных магнитов// Тр. МЭИ. Тематический сборник:
Применение постоянных магнитов в электрических машинах, аппаратах и при-
борах. 1979. Вып. 416. С. 3—12.
15. Балагуров В. А. Перспективы применения постоянных магнитов в элек-
трических машинах// Тр. МЭИ. Тематический сборник: Применение постоянных
магнитов в электрических машинах, аппаратах и приборах. 1980, № 483. С. 3—8.
16. Сергеев В. В., Булыгина Т. И. Материалы для постоянных магнитов.
Обзор. М.: Информэлектро, 1971.
276
17. Кимура Я. Магниты на основе соединений редкоземельных элементов с
кобальтом и новые области их применения// Журнал «Киндзоку». 1971. Т. 41»
№ 9. С. 80—84. (Пер. с японск. № Ц-4961.)
18. Ермоленко А. С., Королев А. В. Особенности магнитного гистерезиса в
монокристаллах соединений SmCos// Физика металлов и металловедение. 1973..
Т. 36. С. 51—59.
19. Дерягин А. В., Баранов Н. В. Магнитные свойства и магнитные переходы
в редкоземельных интерметаллических соединениях (ТЬ1-х¥я)зСо// Эксперимен-
тальная и теоретическая физика. 1977. Т., 73. С. 1389—1399.
20. Нессбит Е., Верник Дж. Постоянные магниты на основе редкоземельных
элементов. М.: Мир, 1977.
21. Металлопластичные постоянные магниты на основе сплавов SmCo и
Sm(Coo,84Cuo,i6)6.9// В. И. Ермолин, Я. Д. Линецкий, В. А. Сеин, В. В. Сергеев»
В. В. Федякин// Электротехника. 1981. № 2. С. 51—53.
22. Альтман А. Б., Гладышев П. А. Металлокерамические магниты типа маг-
нико. с высокой коэрцитивной силой// Электротехника. 1966. № 4.
23. А. с. 249457 СССР, МКИ Н 02К 21/22. Способ изготовления цилиндри-
ческого ротора магнитоэлектрической машины/ Я. X. Горбульский, Г. Н. Итони-
ев// Открытия. Изобретения. 1968, № 25.
24. Ларионов А. Н. Возбуждение генераторов повышенной частоты с посто-
янными магнитами// Электричество. 1940. № 1. С. 24—27.
,25 . А. с. 206695 СССР, МКИ Н02К 21/22. Бесконтактный генератор/ А. Н.
Ларионов// Открытия. Изобретения. 1968. № 1.
26. Ермакова Е. А., Дедовский А. Н. Особенности расчета синхронных машин
с высококоэрцитивными магнитами// Тр. МЭИ. Тематический сборник:' Примене-
ние постоянных магнитов в электрических машинах, аппаратах и приборах. 1980.
Вып. 483. С. 26—32.
27. А. с. 286037 СССР, МКИ Н02К 21/22. Ротор двухполюсной магнито-
электрической машины/ Л. М. Мережевский, Е. А: Занятное// Открытия. Изобре-
тения. 1970. № 34.
28. БожИн Ю. М., Васильев В. К., Мартынов В. Ф. Некоторые вопросы кон-
струирования высокоскоростной магнитоэлектрической машины// Тр. МЭИ. Те-
матический сборник: Проблемы создания высокоэкономичных электромеханичес-
ких устройств. 1980. Вып. 449. С. 103—106.
29. Электрические генераторы высокой частоты вращения для автономных
систем/ Ф. Ф. Галтеев, В. Г. Морозов, В. М. Стромов, П. А. Тыричев// Тр. МЭИ.
Тематический сборник: Электромеханические системы с постоянными магнитами.
1981. Вып. 523. С. 10—16.
30. Балагуров В. А. Проектирование специальных электрических машин пе-
ременного тока. М.: Высшая школа, 1982.
31. Мастяев Н. 3. К расчету магнитных систем с постоянными магнитами//
Электричество. 1973. № 2. С. 82—83.
32. Кантер А. С. Критическая точка магнитного состояния постоянных маг-
нитов в электрических машинах переменного тока// Изв. АН СССР. Отделение
технических наук. 1939. № 10. С. 9—12.
33. Сорокер Т. Г. Магнитоэлектрические машины постоянного тока: Дис.
докт. техн. наук. М., 1946.
34. Вертинов А. И., Андреев В. Г. Определение параметров магнитоэлектри-
ческих генераторов с ротором типа «звездочка»// Тр. МАИ. Сб. статей. Вып. 133.
М.: Оборонгиз. 1961. С. 5—34.
35. Вертинов А. И., Андреев В. Г. Влияние алюминиевой заливки ротора маг-
нитоэлектрических генераторов на степень их использования. Тр. МАИ. Сб. ста-
тей. Вып. 133. М.: Оборонгиз. 1961. С. 35—40.
36. Сергеев П. С., Виноградов Н. В., Горяйнов Ф. А. Проектирование элек-
трических машин. — 3-е изд. М.: Энергия, 1969.
37. Проектирование электрических машин/ Под. ред. И. П. Копылова. М.:
Энергия, 1980.
38. Балагуров В. А. Предельная мощность синхронных генераторов с посто-
янными магнитами// Электротехника. 1983. № 5. С. 22—24.
277
39. Морозов В. Г. Упрощенное определение удельной мощности генераторов//
Тр. МЭИ. Тематический сборник: Электромеханические системы с постоянными
'магнитами. 1981. Вып. 523. С. 16—19.
40. Клочков О. Г. Особенности проектирования бесконтактных синхронных
«генераторов комбинированного возбуждения// Тр. Третьей всесоюзной конферен-
ции по бесконтактным электрическим машинам. Ч. I. Рига, 1966. С. 293—302.
41. Погожев С. А. Расчет постоянных магнитов кольцеобразной формы//
Электричество. 1939. № 8. С. 63—65.
42. Полтев Н. В. К расчету постоянного магнита звездообразной формы//
бюллетень ВЭИ. 1935. № 3. С. 38—39.
43. Балагуров В. А., Кецарис А. А. К расчету постоянного магнита в маг-
нитных системах звездообразного типа с призматическими магнитами// Тр. МЭИ.
Тематический сборник: Электрические машины н преобразователи автономных
электросистем. 1975. Вып. 258. С. 48—54.
44. Балагуров В. А., Колозезный Э. А. Рабочая диаграмма магнита и расчет
внешних характеристик синхронных генераторов с постоянными магнитами//
Ъюллетень «Автотракторное электрооборудование». НИИавтоприборов. 1958.
-№ 6.
45. Балагуров В. А., Колозезный Э. А. Расчет внешних характеристик гене-
раторов с магнитным возбуждением// Вестник электропромышленности. 1961.
№ 2. С. 41—44.
46. Балагуров В. А. Проектирование авиационных генераторов переменного
тока. Ч. 3. М.: МЭИ, 1975.
47. Андреев В. Г., Вертинов А. И., Зечихин Б. С. Особенности расчета бес-
контактных магнитоэлектрических генераторов комбинированного возбуждения//
Электротехника. 1974. № 2. С. 29—33.
48. Галтеев Ф. Ф. К вопросу расчета внешних характеристик синхронных
генераторов с постоянными магнитами. Научные доклады высшей школы. Элек-
тромеханика и автоматика// Советская наука. 1958. № 4. С. 59—69.
49. Алексеева М. М. Машинные генераторы повышенной частоты. М.: Энер-
гия, 1967.
50. Ледовский А. Н. Электрические машины с высококоэрцитивными посто-
янными магнитами. М.: Энергоатомиздат, 1985.
51. Бут Д. А. Бесконтактные электрические машины. М.: Высшая школа,
1985.
52. Галтеев Ф. Ф., Стромов В. М., Тыричев П. А. Выбор частоты вращения
генераторов переменного тока автономных систем электроснабжения// Тр. МЭИ.
Тематический сборник: Системы электроснабжения и электрооборудования под-
вижных объектов. 1980. Вып. 487. С. 28—36.
53. Галтеев Ф. Ф., Коробченко В. П. Исследование переходных процессов
в синхронных магнитоэлектрических генераторах// Сб.: Устройства электропита-
ния и электропривода малой мощности. Т. 2. Электрические машины и аппараты.
‘М.: Энергия, 1970. С. 34—54.
54. Грузов Л. Н. Методы математического исследования электрических ма-
шин. М.: Госэнергоиздат, 1953.
55. Нейман Л. Р. Поверхностный эффект в ферромагнитных телах. М.: Гос-
энергоиздат, 1949.
56. Куцевалов В. М. Вопросы теории и расчеты асинхронных машин с мас-
сивными роторами. М.: Энергия, 1966.
57. Кронеберг Ю. Н. К анализу переходных процессов электрических машин
комбинированного возбуждения с нелинейными магнитоэлектроприводами// Изв.
Вузов. Электромеханика. 1980. Вып. 2. С. 184—186.
58. Вертинов А. И. Авиационные электрические генераторы переменного то-
ка. М.: Оборонгиз, 1959.
59. Галтеев Ф. Ф.. Тыричев П. А. Проектирование индукторных генераторов
.комбинированного возбуждения. М.: МЭИ, Ч. 1, 1976; Ч. 2, 1977.
60. Галтеев Ф. Ф., Коробченко В. П. Учет нелинейности при работе син-
хронного подмагничиваемого генератора с постоянными магнитами// Электриче-
ство. 1978. № 4. С. 23—27.
ОГЛАВЛЕНИЕ
Предисловие . °*
Глава первая.Общие вопросы применения и устройства электрических
генераторов с постоянными магнитами ... 5*
1.1. Применение электрических генераторов с постоянными магнитами
в отечественной и зарубежной практике...................... 5
1.2. Новые материалы постоянных магнитов и магнитопроводов 13^
1.3. Магнитные системы и конструкции синхронных генераторов с по-
стоянными магнитами .............................................
1.4. Магнитные системы и конструкции генераторов переменного тока
комбинированного возбуждения........................................36-
1.5. Магнитные системы и конструкции коллекторных тахогенераторов
постоянного тока с постоянными магнитами .... 46*
1.6. Высокоскоростные генераторы ... . 512
Глава вторая. Особенности рабочего процесса синхронных генерато-
ров с постоянными магнитами 55
2.1. Режим холостого хода генераторов с постоянными магнитами . 56*
2.2. Рабочий режим синхронных генераторов с постоянными магнитами 64’
2.3. Режим внезапного трехфазного короткого замыкания и размагни-
чивающее действие поля реакции якоря...............................76-
2.4. Электромагнитные и рабочие характеристики синхронных генера-
торов с постоянными магнитами . . ... .84^
Глава третья. Переходные процессы в синхронных генераторах с по-
стоянными магнитами............................................... 93*
3.1. Обобщенные уравнения переходных процессов для синхронных ге-
нераторов с постоянными магнитами с малонасыщенной магнит-
ной цепью...........................................................93?
3.2. Определение переходных параметров ненасыщенных синхронных
генераторов с постоянными магнитами с учетом демпфирования
потока в магнитных частях магнитопровода и в демпфирующих
контурах и алюминиевых заливках.....................................97"
3.3. Расчет переходных процессов в синхронных генераторах с посто-
янными магнитами....................................................101
3.4. Исследования переходных процессов в синхронных генераторах
с постоянными магнитами и рекомендации по выбору переходных
параметров при проектировании этих генераторов......................10Ф
Глава четвертая. Методы стабилизации и регулирования напряже-
ния генераторов переменного тока с постоянными магнитами 105
4.1. Параметрическая стабилизация напряжения . . 105
4.2. Стабилизация напряжения с помощью магнитных шунтов в маг-
нитопроводе генератора...............................................ЮТ
4.3. Регулирование напряжения с помощью подмагничивания посто-
янным током частей магнитопровода генератора и стабилизирую-
щих якорных обмоток....................... . . 105
279*
4.4. Регулирование напряжения за счет механического перемещения
частей магнитопровода генератора относительно друг друга . НО
4.5. Емкостная стабилизация и регулирование напряжения . 111
4.6. Регулирование напряжения дросселями насыщения . . 121
4.7. Регулирование напряжения за счет включения на выходе якорных
обмоток генератора полупроводниковых ключей и стабилитронов 128
4.8. Регулирование напряжения за счет комбинированного возбужде-
ния от постоянных магнитов и дополнительных электромагнит-
ных обмоток.......................................................130
Глава пятая. Элементы проектирования синхронных генераторов
с постоянными магнитами...............................................131
5.1. Анализ технического задания и выбор типа генератора 131
5.2. Определение объема постоянного магнита при различных методах
стабилизации и регулирования напряжения.....................136
5.3. Определение размеров магнита и магнитной цепи ротора . 141
5.4. Предварительное определение обмоточных данных и размеров
статора . ..............................................158
5.5. Расчет проводимостей рассеяния ротора . 164
5.6. Поверочный , электромагнитный расчет синхронных генераторов
с постоянными магнитами и построение рабочей диаграммы магнита 183
5.7. Графоаналитические методы построения внешних характеристик . 201
5.8. Аналитический метод расчета внешних характеристик . . 206
Глава шестая. Особенности проектирования генераторов переменного ;
тока комбинированного возбуждения.................................209
6.1. Особенности расчета синхронных генераторов комбинированного
возбуждения с ротором звездочка...................................209
6.2. Поверочный расчет синхронных генераторов комбинированного
возбуждения.......................................................216
6.3. Особенности рабочего процесса и расчетные соотношения в рдно-
именнополюсных индукторных генераторах комбинированного воз-
буждения .........................................................228
6.4. Особенности расчета одноименнополюсных индукторных генерато-
ров комбинированного возбуждения ........ 234
6.5. Расчет и построение рабочих характеристик одноименнополюсных
индукторных генераторов комбинированного возбуждения 238
Глава седьмая. Элементы проектирования вентильных генераторов
с постоянными магнитами.......................................... 249
7.1. Расчетные соотношения для вентильных генераторов с постоян-
ными магнитами............................................4 . 249
7.2. Особенности расчета вентильных генераторов с постоянными. Маг-
нитами .................................................. ....... 259
Глава восьмая. Особенности рабочего процесса и расчета коллек-
торных тахогенераторов постоянного тока с постоянными магнитами . 264
8.1. Характеристики коллекторных тахогенераторов постоянного тока
с постоянными магнитами ................. 264
8.2. Общие вопросы теории коллекторных тахогенераторов постоян-
ного тока с постоянными магнитами.................................216
8.3. Особенности расчета коллекторных тахогенераторов постоянного
тока с постоянными магнитами ..... . . 276
Список литературы ....... . . 276