/





























































































































































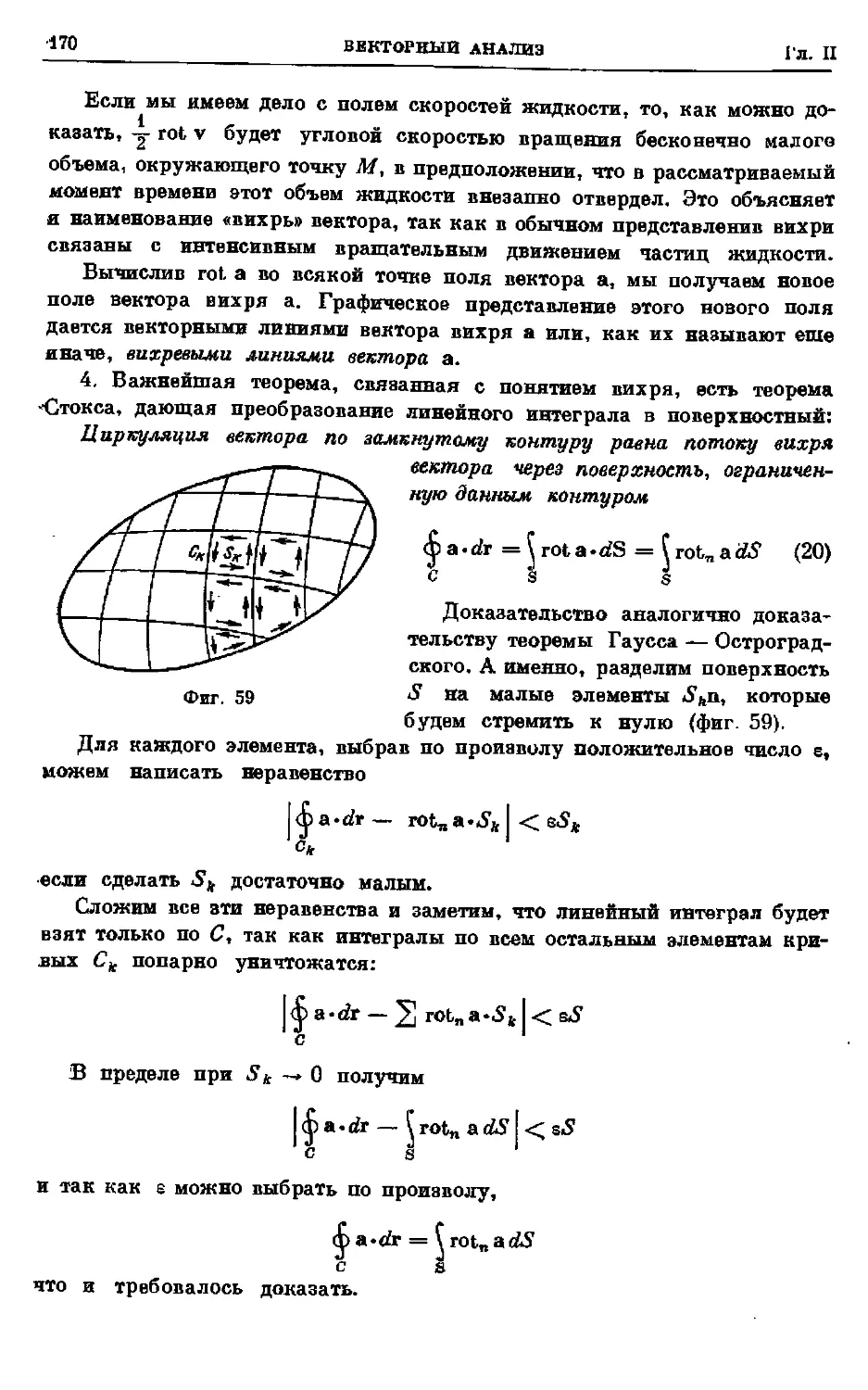


























































































































































































































































Текст
АКАДЕМИЯ НАУК СССР
Н. Е. КОЧИН
ВЕКТОРНОЕ ИСЧИСЛЕНИЕ
И НАЧАЛА
ТЕНЗОРНОГО ИСЧИСЛЕНИЯ
ИЗДАНИЕ ДЕВЯТОЕ
ИЗДАТЕЛЬСТВО «НАУКА»
Москва— 1965
Настоящее девятое издание книга акад. Н. Е. Котина
«Векторное исчисление и начала тензорного исчисле-
исчисления» перепечатано с матриц восьмого издания.
Ответственный редактор
академик П. Я. К О Ч И Н А
ПРЕДИСЛОВИЕ К СЕДЬМОМУ ИЗДАНИЮ
Настоящее издание является перепечаткой шестого издания с той раз-
разницей, .что нами изменены обозначения скалярного и векторного произ-
произведении, упрощена система знаков препинания и устранены замеченные
ошибки и опечатки.
П. Kwu.ua.
ИЗ ПРЕДИСЛОВИЯ КО ВТОРОМУ ИЗДАНИЮ
Настоящее пособие имеет своей целью дать изучающим его, главным
образом студентам вузов и втузов, необходимые сведения по векторному
исчислению для того, чтобы можно было в дальнейшем изучать вектор-
векторным способом другие дисциплины, как, например, теоретическую меха-
механику, гидромеханику, теорию электричества.
Курс снабжен большим количеством задач геометрического и элемен-
элементарно-механического характера, помогающих лучшему усвоению понятий
и методов векторного исчисления.
Н. Кочин.
ПРЕДИСЛОВИЕ К ЧЕТВЕРТОМУ ИЗДАНИЮ
Настоящее издание значительно расширено по сравнению с предыду-
предыдущими. В частности, в целях иллюстрации понятий векторного анализа,
введен ряд примеров физического характера.
Основу курса составляют главы о векторной адгебре и векторном
анализе. В третьей и четвертой главах даны основы теории аффинных
ортогональных тензоров с применением ее к теории упругости и основные
элементы общей теории тензоров.
Н. Кочин.
ПРЕДИСЛОВИЕ К ПЯТОМУ И ШЕСТОМУ ИЗДАНИЯМ.
Настоящее издание почти не отличается от предыдущего; в текст
внесены некоторые исправления и устранен ряд замеченных опечаток.
Н. Кочин.
ГЛАВА Г
ВЕКТОРНАЯ АЛГЕБРА
§ 1. Определение скаляра в вектора. Равенство векторов
1. В математике и физике (в частности, в механике) приходится иметь
дело с величинами двух родов: одни из величин связаны с понятием о на-
направлении в пространстве, другие же имеют чисто числовой характер
и не связаны с понятием о направлении. Рассмотрим, например, темпе-
температуру, массу, плотность, энергию, перемещение точки, скорость, уско-
ускорение, силу. Резкое отличие последних четырех величин от первых четырех
состоит в том, что с ними должно быть связано понятие о направлении:
например, точка может перемещаться вверх или вниз, вперед или назад
и т. д. Первые четыре величины, не связанные с понятием о направлении,
принадлежат к классу величин, называемых скалярами. Остальные
четыре величины, имеющие определенное направление, относятся к классу
величин, называемых векторами.
Рассмотрим один иа скаляров — температуру. Чтобы охарактеризо-
охарактеризовать температуру воздуха в данном месте в некоторый момент, мы должны
измерить температуру, например, в градусах Цельсия, полученное число
(положительное или отрицательное) даст величину температуры. Точно
так же мы можем измерить в соответствующих единицах массу тела, его
плотность и т. д. Поэтому мы можем дать следующее определение ска-
скаляра:
Скаляром называется величина, характеризующаяся, при выбранной
единице меры одним числом.
Наиболее типичным скаляром является отвлеченное число. Другие
примеры скаляров мы уже указывали: температура, масса, плотность,
энергия.
Остановимся несколько на вопросе о сравнении и равенстве скаляров.
Очевидно, нельзя сравнивать температуру и массу или температуру и
плотность и т. д. Обе сравниваемые величины непременно должны обла-
обладать одинаковой размерностью, т. е. единицы их меры должны быть одина-
одинаковым образом связаны с основными единицами. В механике за основ-
основные единицы принимают единицу длины (символ L), единицу массы (символ
М) vs. единицу времени (символ Т) (вместо единицы массы в техниче-
технической системе мер вводят в качестве основной единицу силы). Тогда,
g ВЕКТОРНАЯ АЛГЕБРА Гл. I
например, плотность будет иметь размерность ML'3, ибо единица плотности
есть плотность однородного тела, имеющего объем, равный единице, при
условии, что масса этого тела также равна единице. Поэтому, ара увели-
увеличении единицы массы, например, в два раза, единица плотности также
увеличивается в два раза; при увеличении же единицы длины в два раза
единица плотности уменьшается в восемь раз. Символ MLT* выражает
только что указанную зависимость единицы плотности от основных
единиц.
Два скаляра одной и той же размерности равны, если при измерении
ах одной и той же единицей мери получаются одинаковые числа.
Рассмотрим теперь один из векторов — скорость точки. Указания
величины скорости, измеренной, скажем, в сантиметрах в секунду, недо-
недостаточно для характеристики скорости. Нужно еще задать направление
движения точки. Точно так же имеют определенное направление в уско-
ускорение точки и сила, действующая на некоторую материальную точку.
Дадим поэтому следующее определение:
Вектором называется величина, характеризующаяся, помимо измеряю-
измеряющего ее в определенных единицах меры числа, еще своим направлением
в пространстве.
Как простейший скаляром является отвлеченное число, так простей-
простейшим вектором является прямолинейный отрезок АВ, имеющий опреде-
определенную величину — длину АВ и определенное направление — от началь-
начальной точки А к конечной точке В.
Мы уже указывали другие примеры векторов: перемещение точки,
ускорение, сила. Каждому такому вектору можно сопоставить прямоли-
прямолинейный отрезок, имеющий направление рассматриваемого вектора и дли-
длину, равную численному значению вектора (отложенному в некотором мас-
масштабе).
Численное значение вектора называется величиной, модулем или дли-
длиной вектора.
На чертежах векторы обозначаются стрелками (фиг. 1). Направление
стрелки указывает на направление вектора, длина
стрелки дает длину вектора.
Обычно векторы обозначаются жирными готически-
готическими или латинскими буквами. Иногда мы будем обо-
фаг j значать вектор, начальная точка которого есть А,
а конечная — В, символом АВ.
Длину вектора, т. е. его численную величину, мы будем обозначать
теми же курсивными буквами: а, А, АВ или же будем пользоваться знаком
модуля:
|а|= а, |А| = А, \АВ\ = АВ
2. Перейдем к вопросу о сравнении и равенстве векторов. Сравни-
Сравниваемые векторы должны обладать одной я той же размерностью, напри-
например, нельзя сравнивать силу со скоростью, и т. п.
{ 1 ОПРЕДЕЛЕНИЕ СКАЛЯРА И ВЕКТОРА 7
Два вектора aiib, обладающие одной и той же размерностью, мы бу-
будем считать равными, если они имеют одно и то же направление и одну
и ту же длину.
Равенство двух векторов а и Ь мы будем обозначать следующим об-
образом:
а=Ь A)
Таким образом, если два вектора имеют неодинаковую длину или
неодинаковое направление, они не могут быть равными.
Возьмем какой-нибудь параллелограмм и снабдим две противополож-
противоположные стороны его одним и тем же направлением; полученные векторы бу-
будут, по нашему определению, равными; таким образом, положение на»
чальной точки вектора для нас роли не играет.
Легко видеть, что для численного задания вектора нужно указать
три числа. В самом деле, одним числом нужно задать величину вектора
и двумя числами -«- его направление (например в астрономии направление
на небесное светило определяют, указывая: 1) азимут и высоту или 2) пря-
прямое восхождение и склонение или 3) долготу и широту светила).
Равенство двух векторов сводится к равенству попарно трех чисел,
эти векторы определяющих. Таким образом, одно векторное равенство
равносильно трем скалярным.
3. Отметим, что различают векторы трех родов: свободные,
передвижные и определенные векторы. Введенные
нами векторы относятся к типу свободных, так как точку их приложения
можно выбирать по произволу. У передвижных векторов точку прило-
приложения вектора можно перемещать произвольно вдоль самого вектора,
так что последний может лежать на любой части определенной прямой.
Примером передвижного вектора является сила, приложенная к твердому
телу, так как за точку приложения силы можно взять любую точку на
линии действия силы. Наконец, у определенных векторов точка приложе-
приложения вектора должна быть зафиксирована. Так, например, при рассмотрении
движения жидкости за точку приложения силы, действующей на какую-
либо частицу жидкости, принимается некоторая точка самой частицы.
Изучение передвижных и определенных векторов сводится к изучению
свободных векторов, почему достаточно ограничиться рассмотрением толь-
только последних.
В фи.8ике приходится рассматривать еще величины тоже направлен-
ного характера, но более сложного, чем векторы, строения. Эти вели-
величины называются тензорами. Определение их будет дано в главе III.
Сейчас укажем только несколько примеров: распределение моментов инер-
инерции относительно различных осей, проходящих через некоторую точку
твердого тела, приводит к понятию тензора моментов инерции; распре-
распределение напряжений на различно направленные элементы в некоторой
точке упругого тела приводит к понятию тензора упругих напряжений
и т. д.. Наконец, в главе IV будет дано еще более общее определение. •
g ВЕКТОРНАЯ АЛГЕБРА Гл I
4. Скаляры, векторы и тензоры являются объектами, изучаемыми
в векторном исчислении.
Как всякое исчисление, векторное исчисление должно ввести ряд
операций с векторами и тензорами, как например сложение, умножение,
дифференцирование, и изучить эти операции. Эти операции определяются
таким образом, чтобы при их помощи легко было интерпретировать те
комбинации векторов, которые приходится изучать в математике, меха-
механике и физике. Так, например, в физике очень часто встречается пра-
правило параллелограмма: параллелограмм скоростей, сил и т. д. Этому
правилу отвечает операция сложения векторов, которая будет рассмо-
рассмотрена в следующем параграфе.
В результате как основные элементы векторного исчисления — вектор
и тензор, так и операции с этими элементами, оказываются хорошо при-
приспособленными для изучения тех геометрических, механических и фи-
физических явлений, в которых большую роль играет направление величия;
поэтому применение векторного исчисления для изучения таких явлений,
с одной стороны, упрощает исследование, а с другой стороны, ведет его
более естественным и наглядным образом, не требуя введения посторон-
посторонних элементов, как ато имеет место в обычном методе координат.
§ 2. Сложение, вычитание и разложение векторов. Умножение вектора
на скаляр. Единичные векторы
1. Чтобы подойти к понятию суммы двух векторов а и Ь, рассмотрим,
что будет с некоторой точкой Р, совершающей последовательно одно за
другим два перемещения, представляемые векторами а и Ь. Первое пере-
перемещение переведет нашу точку из начального
положения А (фиг. 2) в положение В (пря-
(прямолинейный отрезок АВ есть вектор а, т. е.
АВ = а), второе перемещение переведет рас-
рассматриваемую точку иа положения В в поло-
положение С, такое, что ВС = Ь. В результате
точка перейдет из Л в С. Перемещение АС
определяет вектор с, который естественно
назвать суммой векторов lib. Отсюда вытекает следующее опреде-
определение;
Чтобы получить вектор с, представляющий геометрическую сумму
двух векторов а и Ь, надо от произвольной точки А пространства отло-
отложить вектор а, к концу его приложить начало вектора, b и соединить
точку А с концом С вектора Ь, тогда АС по величине а направлению пред-
представляет с.
Для обозначения операции сложения векторов пользуются обыкновен-.
ным знаком алгебраического сложения:
с = а + Ь A)
5 2
СЛОЖЕНИЕ. ВЫЧИТАНИИ И РАЗЛОЖЕНИЕ ВЕКТОРОВ
Векторы а и Ь называются слагаемыми векторами, вектор е
геометрической суммой или результирующим вектором.
Из фиг. 3 видно, что сумма двух векторов а и Ь является диаго-
диагональю параллелограмма, построенного на слагаемых векторах а и Ь.
Отсюда сразу вытекает формула
Ь+а
B)
выражающая коммутативность {т. <".
переместительность) геометрического сло-
сложения: геометрическая сумма не меняет-
меняется от перестановки слагаемых.
Мы останавливаемся на этом простом
свойстве геометрической суммы потому, что некоторые операции вектор-
векторного исчисления таким свойством не обладают.
Чтобы образовать сумму трех векторов а, Ь и с, мы складываем сна-
сначала а с Ь и к результирующему вектору прибавляем е, окончательна
получаем (фиг. 4) вектор AD; ив чертежа очевидно, что тот же самый
результат получится, если к а прибавить сумму Ь + е, таким образом
имеем формулу
(а + Ь) + с = а + (Ь + с) = а + b + с C).
выражающую ассоциативность (сочетатель-
(сочетательность) геометрического сложения: в геометри-
геометрической сумме скобки можно раскрывать и вво-
вводить как в обыкновенной алгебре.
Для сложения трех и более векторов полу-
получается таким образом правило многоугольника
векторов: надо последовательно отложить в лю-
любом порядке векторы аи а9, . . . , а„, совмещая
начало каждого следующего с концом предыдуще-
предыдущего, и образовать замыкающую линию полученной-
ломаной линии, ведя ее огп начала первого вектора к концу, последнего. Из
коммутативности и ассоциативности сложения вытекает, что мы можем
складывать векторы в любом порядке, в частности можем заменять лю-
любое количество их соответствующим результирующим вектором.
Отметим особо правило сложения трех векторов, не лежащих в одной
плоскости: геометрическая сумма таких трех векторов изображается
диагональю параллелепипеда, построенного на данных трех векторах, как
на ребрах. Так_например, на фиг. 8 вектор OD равен геометрической сум-
сумме векторов OK, ~OL и ОМ.
2. Перейдем к вычитанию векторов. Рассмотрим тот частный случай
сложения двух векторов а и Ь, когда результирующий вектор сведется,
в точку, т. е. обратится в нуль (фиг. 5):
Фиг. 4
10
ВЕКТОРНАЯ АЛГВВРА
ГЛ. 1
Очевидно, в этом случае вектор Ь равен по величине, но противо-
противоположен по направлению вектору а.
Если бы с уравнением D) можно било поступать по правилам обыч-
обычной алгебры, то мы легко вывели бы, что
Ь = — а
E)
Фиг. 5
В соответствии с этим под вектором — а мы бу-
будем понимать вектор, противоположный а, т. е.
равный по величине, но противоположный по напра-
направлению вектору а.
Вычитание, как действие, обратное сложению,
определяется следующим образом: вектор х = а — Ь называется раз-
разностью векторов а и Ь, если сумма х и Ь дает а:
х + Ь = а F)
Прибавляя к обеии частям этого уравнения вектор — Ь, мы получим:
а — Ь = х = а + (— Ь) G)
Таким образом, чтобы вычесть ш вектора а вектор Ь, надо приба-
прибавить к вектору а вектор — Ь, противоположный вектору Ь. Иначе можно
получить вектор а — b следующим образом: отложив оба вектора а и Ь
от общего начала О, проведем вектор из
конца В вектора Ь к концу Л вектора а
(фиг. 6), это и будет а — Ь.
В самом деле:
ВА= ВО'+ 6Т= — Ь + а
Таким образом, в параллелограмме, по-
построенном на а и Ь (фиг. 6), одна диаго-
диагональ представляет сумму векторов а и Ь,
другая — их разность.
3. Нужно отметить, что правило параллелограмма для геометриче-
геометрического сложения векторов ограничивает область направленных величин,
которые мы можем назвать векторами. Например, вращение твердого
тела около некоторой оси на конечный угол может быть представлено
направленным отрезком, но это не будет вектор, ибо два последователь-
последовательных вращения около разных осей складываются (как доказывается в ки-
кинематике) не по правилу параллелограмма, а по более сложному закону.
Это объясняется тем, что направленная величина, представляющая пово-
поворот твердого тела на конечный угол около некоторой оси, является тен-
тензором, т. е. величиной более сложного характера, нежели вектор.
Напротив, бесконечно малые вращения могут быть представлены векто-
векторами, ибо для них правило параллелограмма справедливо, так же как
.для сил, скоростей и I. д.
Фиг.
I 2 СЛОЖЕНИЕ, ВЫЧИТАНИЯ И РАЗЛОЖЕНИЕ ВЕКТОРОВ Ц
Таким образом, точнее было бы определить вектор как величину, харак-
характеризующуюся своим численным, значением, своим направлением & про-
пространстве и подчиняющуюся правилу геометрического сложения.
Действием, обратным геометрическому сложению, является, помимо
геометрического вычитания, еще геометрическое разложение, состоящее
в том, что данный вектор заменяют равной ему суммой нескольких век-
векторов. Геометрически это сводится к построению ломаной линии, имею-
имеющей данный вектор замыкающей стороной. Очевидно, задача в таком
виде имеет неопределенный характер и надо наложить на геометриче-
геометрические слагаемые ряд условий, чтобы сделать задачу определенной.
Важнейшие случаи разложения мы сейчас и рассмотрим, но предва-
предварительно остановимся на вопросе об умножении вектора на скаляр.
4. Пусть мы имеем вектор а; умножить его на целое положительное
число гп — значит сложить между собою т векторов, равных а; в резуль-
результате, очевидно, получится вектор Ь, имеющий то же направление, что
и а, но по длине в т раз больший:
b = ma = am, b = та (8)
Отсюда можно вывести, что при всяком положительном т мы должны
принимать за вектор тл вектор длины та, имеющий то же направле-
направление, что и а.
Раньше мы уже определили умножение вектора а на — 1; это есть
вектор, противоположный а; поэтому при умножении а на отрицатель-
отрицательное число т мы получаем вектор длины \ т\ а, параллельный а, но имею-
имеющий противоположное направление.
Из этих определений непосредственно вытекает справедливость сле-
следующих формул:
(т + п) а = тл + па (9)
т (яа) = (тел) а = л (теа) A0)
Если умножить два вектора а и Ь на то и потом сложить, то полу-
получится результат, одинаковый с тем, который мы получили бы, если бы
сначала сложили а и Ь, а потом умножили на то:
тл + теЬ = т (а + Ь) A1)
В этой выражается дистрибутивный {распределительный) закон умно-
умножения вектора на скаляр: скобки можно раскрывать, как в обыкновен-
обыкновенной алгебре. Для доказательства достаточно представить себе геометри-
геометрический смысл уравнения A1), которое выражает, что если мы изменим
на фиг. 2 стороны ДАВС в отношении т, то из полученных векторов
составится новый треугольник, подобный данному.
Формула A1), очевидно, справедлива и для нескольких векторов
т&1 + таг + . . . + ma» = m (aj -f ^ + . . . + aj A2)
i2 ВЕКТОРНАЯ АЛГЕБРА Гл. I
5. Только что рассмотренные нами векторы а и Ь:
Ь = яга A3>
параллельны между собой; такие векторы называются,
также кол ли неарными.
Обратно, всякий вектор Ъ может быть выражен через коллинеарный
вектор а но формуле A3), где т — скалярный множитель, представляю-
представляющий отношение длин векторов b и а, взятое со знаком плюс или минус,
смотря по тому, имеют ли векторы а и Ъ одинаковое направление или
как раз противоположное.
Особенно важен частный случай, когда один из коллинеарных векто-
векторов имеет длину, равную единице. Такие векторы называются единич-
единичными векторами или ортами.
Орт вектора а часто обозначают через а1г
указывая значком 1, что вектор а3 есть
единичный. Тогда для всякого вектора а
_^ А будем иметь:
а = ав! A4)
В формуле A4) разделены два элемен-
элемента, характеризующие вектор: его длина а и его направление а!.
6. Бели векторы аи b не коллинеарны, то вектор
о = ma + nb A5)
параллелен плоскости, определяемой векторами а и Ъ, ибо геометре»
ческая сумма векторов, лежащих в одной плоскости, лежит в той же
плоскости.
В этом случае говорят, что векторы а, Ьио компланарны,
т. е. параллельны одной плоскости.
Обратно, всякий вектор о, компланарный двум неколлипеарнкш
векторам а и Ь, может быть представлен формулой A5). Для доказа-
доказательства отложим все три вектора а, Ь и с от общего начала О (фиг. 7)
и проведем через конец С вектора с прямые CD и СЕ, параллельные век-
векторам а и Ь; тогда е представится как геометрическая сумма двух векто-
векторов, коллинеарных соответственно векторам а и Ь, т. е. равных та и пЪ.
В результате получается разложение A5). Это разложение единственное,
так как если бы мы имели два разложения:
с аш та + пЬ
с = от'а + п'Ъ
то, вычитая нижнее равенство из верхнего, мы получили бы
О = (т — т') а + (п — га') Ь (lfi)
Отсюда непременно
т — т' = 0, га — п' = О
СЛОЖВНИВ, ВЫЧИТАНИЯ И РАЗЛОЖЕНИЕ ВИКТОРОВ
13
т. е. т = т', п — я'. В самом деле, если бы, например, m — т
решая уравнение A6) относительно а, мы нашли бы
0, то,
а = , b
т — т
т. е. а был бы коллинеарен с Ь, что противоречит предположению.
Итак, разложение A5) единственно.
7. Если три вектора a, b а с не компланарны, то всякий вектор d
может быть представлен в форме
d = ma -i- /ib + ре
A7)
т. е. р.азложен на три составляющие,
параллельные соответственно векто-
векторам a, b и с.
Для доказательства отложим все
четыре вектора а, Ь, с, d от общего
начала О (фиг. 8) а проведем через
конец D вектора d плоскости, парал-
параллельные граням трехгранного угла,
образованного векторами a, b и с,
тогда d представится как сумма трех векторов (например OK, 0L, ОМ),
коллинеарных соответственно векторам a, b и с, т. е. равных та, пЪ
а /из. В результате получается разложение A7). Это разложение единст-
единственное, так как, если бы мы имели два разложения:
ma
пЪ + рс
d = то'а + »'b + p'e
мы из них получили бы
О = (т — т') а + (л — n') b + (р — р') с
а если бы хоть одна из разностей m — то', п — п ,
р — р' не равнялась нулю, то векторы a, b и с ока-
оказались бы компланарными, что противоречит пред-
предположению. Поэтому т' = т, п' = п, р' — р, т. е.
разложение A7) единственно.
Разберем несколько примеров на сложение и разложение векторов.
Задача 1. Какому условию должны удовлетворять три вектора
а, Ь, с, чтобы из них можно было образовать треугольник (фиг. 9).
Из чертежа видно, что искомым условием является
а + Ь +в =0
так как тогда и только тогда ломаная линия ВСАВ замкнется и обра-
образуется треугольник.
Задача 2. Доказать, что можно построить треугольник, стороны
которого равны и параллельны медианам данного Д ABC (фиг. 10).
14 ВЕКТОРНАЯ АЛГЕБРА Гл. I
Обозначим середины сторон ВС, СА и АВ соответственно черев А',
В' и С. Выразим векторы, представляющие медианы треугольника»
т. е. АА', Ъ~В' вИС', через а, Ь и с. Найдем, например, АА':
q АА' =АВ
ибо
Циклической перестановкой (т. е. заменой
п' с а на Ь, Ь на с и с на а) получаем
фиг 10 ¦ .
ВВ' - а+ \-Ь, СС = b + f с
Проверяем условие яадачи 1, что иа векторов .4.4', Яй', С<7' можно
составить треугольник; для чего составляем
АА' +Ш -fCC7 =c + i-a + a + -i-b-f-b+-i-c=-§-(a + b+c)=O
Условие задачи 1 выполняется; следовательво, из АА', ВВ" и СС
действительно можно составить треугольник.
Прежде чем переходить к дальнейшим примерам, мы введем несколько
необходимых нам понятий.
Положение какой-нибудь точки пространства Р может быть опреде-
определено вектором ОР, начальной точкой которого служит некоторая опре-
определенным образом выбранная точка О, а концом — точка Р; вектор ОР
мы будем называть радиусом-вектором точки Р относительно точки О а
будем обозначать обычно буквой г. Про точку Р, заданную радиусом-
вектором г, мы будем говорить, для сокращения речи, что дана
точка Р (г).
Задача 3. Найти радиус-вектор т середины С отрезка АВ, зная
точки A fa) и В (гг). Вычисляем
г = Ъ~С = ОА +АС~='ОА + ±-АВ'= ОА+ \-{ОВ — Ш) =
= b+j-(r2- rj = i (rt + r2) A8)
Задача 4. Доказать, что если диагонали четырехугольника делят
друг друга пополам, то четырехугольник есть параллелограмм.
В самом деле, если радиусы-векторы четырех последовательных вер-
вершин четырехугольника ABCD суть ти г2, г3, г4, то середина диагонали
АС будет иметь радиус-вектор
i' —!-(*!+"%>
а середина диагонали BD будет иметь радиус-вектор
** = г (*> + г<>
§ 2 СЛОЖЕНИИ, ВЫЧИТАНИЕ И РАЗЛОЖЕНИЕ ВЕКТОРОВ 15
Но так как диагонали делят друг друга пополам, то эти точки сов-
совпадают; откуда
j(ii+ra) =4-(rs + rJ
или
г, — г, = г, — г4
т. е. вектор АВ = г2 — гх равен и параллелен вектору DC = rs — г4,
в следовательно ABCD есть параллелограмм.
Задача 6. Выяснить геометрическое значение уравнения
г = а + пЬ A9) * лЪ J?
где а и b — заданные векторы, п — переменный
параметр, г — переменный вектор.
Найдем геометрическое место конца Р радиуса-
вектора г (фиг. 11); если конец радиуса-вектора
а есть точка А, то Фиг 41
АР = г — а — пЪ
будет коллинеарен с Ь, следовательно, АР параллелен Ь; поэтому искомое
геометрическое место есть прямая, проходящая черев точку А и парал-
параллельная Ь. Уравнение A9) есть векторное 'уравнение этой прямой.
Задача 6. Показать, что необходимое
и достаточное условие того, чтобы три точки
А (а), В (Ь) и Р (I), где
г = та + пЪ B0)
лежали на одной прямой, состоит в той-,
чтобы
Фиг. 12 т + п = 1 B1)
Исключение представляет случай коллинеарности векторов а и Ь,
когда при всяких тип точки А, В и Р лежат на одной прямой.
В самом деле, пусть точки А, В и Р лежат на одной прямой (фиг. 12),
тогда векторы АР = г — аи АВ= b — а коллинеарны, следовательно,
г — а = п (Ь — а) B2)
Отсюда
г = а 4- п (Ь — а) = A — п) а + пЬ
так что в силу единственности разложения вектора г по векторам аи Ь
(в случае их неколлинеарности) мы должны иметь
/и = 1 — я, т. + п = 1
Обратно, пусть т -\- п = 1, тогда
г — а = та + пЪ — я = та + rib — (т ¦{- п) а = п (Ъ — а)
16 ВЕКТОРНАЯ АЛГЕБРА рл [
Следовательно, АР= г — а коллинеарен с АВ = Ь — а, т. е. АВ и А~Р
параллельны, а так как эти векторы отложены от одной точки А, то
А, В и Р лежа? на одной прямой.
Таким образом уравнение B0) при условии B1) можно рассматри-
рассматривать, как векторное уравнение прямой, проходящей через две заданные
точки А (а) и В (Ь). Полезно выяснить значение коэффициентов от в. п.
Из формулы B2) видно, что п равно отношению длин АР я АВ, взятому
•со знаком плюс, если точки В и Р лежат по одну сторону точки А., и со
знаком минус, если эти точки лежат по разные стороны А. Точно так
же т равно отношению длин ВР и ВА, взятому с надлежащим знаком.
Как простое приложение этого замечания, найдем радиус-вектор точки Р,
делящей АВ в заданном отношения х: у. По условию
Отсюда
Следовательно
АР
АВ^"
АР х
РВ~ у
АР
АР + РВ я
i 1 т, =
я
+ V
У
уа + *Ь
B3)
Задача 7, Показать, что необходимое и достаточное условие того,
чтобы четыре точки А (а), В (Ъ), С (о) л Р (г), где
т = ma -f- пЪ + ре B4)
лежали в одной плоскости, состоит в том, чтобы
от + п + р — 1 B5)
Исключение составляет случай компланарности векторов a, b и о,
когда при всяких от, п и р вектор г будет им компланарен, так что при
всяких от, п и р точки А, В, С и Р будут лежать в одной плоскости.
В самом деле, чтобы доказать необходимость условия B5), предпо-
предположим, что точки А, В, С и Р лежат в одной плоскости. Тогда векторы
Л? = г — а, АВ — Ь — а, 1<? = с — а
'будут компланарны, следовательно
г — а = п (Ъ — а) + р (с — а)
г = а A — я — р) + яЬ -(- /ms
5 2 СЛОЖЕНИЕ, ВЫЧИТАНИЕ И РАЗЛОЖЕНИЕ ВЕКТОРОВ 17
так что в силу единственности разложения вектора по векторам а, Ь, с
(в случае их некомпланарности) мы должны иметь
т = 1 — п — р, т + п + р = 1
Обратно, пусть т 4- п + р = 1, тогда
г — л = та + пЬ + ре — а= та + nb + рс — (т 4- п 4- р) а =
= га (Ь — а) 4- р (с — а)
следовательно, вектор АР компланарен векторам АВ и АС, так что
А, В, С и Р лежат в одной плоскости.
Таким образом, уравнение B4) при условии B5) можно рассматривать
как векторное уравнение плоскости, проходящей через три заданные
точки А (а), В (Ь) и С (с).
. Задача 8. Пусть радиусы-векторы вершин ДABC суть п, г» и гз.
Доказать, что медианы треугольника пересекаются в одной точке и найти
радиус-вектор этой точки.
Обозначим середины сторон ВС, С А, АВ через А', В", С. Радиус-
вектор А' будет, по задаче 3, равен
поэтому уравнение медианы АА', как уравнение прямой, проходящей
через точки А и А', будет по задаче 6
г = отп 4- Х-~ (п + п.) B6)
Точно так нее найдем уравнение медианы ВВ':
г = гагг 4—у^ (п 4- гз) B7)
Чтобы найти точку пересечения медиан А А' и ВВ', надо приравнять
оба выражения B6) и B7), так как для этой точки оба вычисления должны
давать одно и то же выражение; итак
7RT1 -р - уГ2 -\~ ГЗ^ ^ ЛГ2 -\ п \Г1 -р *3) \~>О)
Мы удовлетворим этому уравнению, если приравняем коэффициенты
при п, га и г» в обеих частях равенства B8):
1 —а 1 —т _ 1 — т 1 —и
Отсюда находим
так что искомая точка пересечения D медиан -4Л' и ВВ' имеет следующий
радиус-вектор:
Н. В. Кочни
18 ВЕКТОРНАЯ АЛГЕВРД Гл. 1
Если бы мы стали определять точку пересечения медиан ВВ и СС,
мы получили бы, по симметрии полученного выражения B9), тот же
самый результат, так что третья медиана проходит через ту же точку D,
Задача 9. Доказать, что биссектрисы треугольника сгересекаются
в одной точке.
Проведем биссектрисы А А' и ВВ" углов с вершинами А и В и обозначим
точку пересечения этих биссектрис через Р (фиг. 13).
Обозначим орты векторов a, b и с
соответственно через
Если мы на сторонах АВ и АС отло-
_„ ншм единичные векторы АК — ci и
AL = — bi и построим на них параллело-
параллелограмм, то диагональ его и будет, очевидно,
биссектрисой угла А. Поэтому вектор АР, направленный по этой биссек-
биссектрисе, будет коллинеарен с вектором
служащим диагональю параллелограмма AKML, поэтому
где х — не определенный пока параметр.
Циклической перестановкой (т. е. заменой а на Ь, Ъ на с, с на а, х на у)
получим аналогичное уравнение для вектора ВР:
Чтобы найти х и у, заметим, что
АР = А~В + 'ВР
Мы не можем в этом уравнении приравнять по отдельности коэффи-
коэффициенты при а, Ь, с, так как эти векторы компланарны, а имении
а+ Ь + с = О C1)
Исключим поэтому а; из уравнения C1) мы найдем
а = — Ь — с
Подставляем это выражение в уравнение C0):
I 2
СЛОЖЕНИЕ. ВЫЧИТАНИЕ И РАЗЛОЖЕНИЕ ВИКТОРОВ
19
Теперь мы можем приравнять по отдельности коэффициенты при Ь и с,
ибо разложение по двум не ко л линеарным векторам b и с должно быть
единственно:
1-
Решая эти уравнения, находим
ас
У ~
Следовательно
Ъс
АР =
fee — сЪ
• в'
ВР =
Ь+е
Если бы мы стали искать точку Р' пересечения биссектрис ВВ' и СС,
то нашли бы результат, который можно получить иэ предыдущего цикли-
циклической перестановкой букв:
СР' =
аЪ — ba
а+Ь + е
Отсюда видно, что ВР = ВР', т. е. точки Р и Р' тождественны, что
и требовалось доказать.
Задача 10. Найти радиус-вектор точки пересечения биссектрис
Д ABC, радиусы-векторы вершин которого суть А (п), В (га), С (rs), а дро>
тиволежащие этим вершинам стороны суть а, Ъ, с.
Ответ:
аГ1 + Ь
а+Ь
Задача 11. Доказать, что следующим построением можно найти
любую целую часть (половину, треть,
четверть и т. д.) отрезка АВ.
Проведем (фиг. 14) прямую CD, парал-
параллельную АВ, внешнюю точку О соединим
с тачками А и В прямыми, которые пусть
пересекут CD в точках С и D.
Проведем диагонали получившейся
трапеции AD и ВС и соединим точку их
пересечения К% с О прямой ОКа, которая
пусть пересечет АВ в точке L8, тогда
АЬг = -j- АВ; соединим далее ?2 с С,
найдем точку пересечения Кг прямых
AD и LiC, проведем прямую ОК3, тогда
в пересечении последней с АВ найдем
точку L^, такую, что Л?,„ — -|- АВ и т. д.
Для доказательства возьмем точку О за начало радиусов-векторов
и будем обозначать радиус-вектор какой-либо точки Р через тр.
Lt Ls
Ф г 14
2*
20 ВЕКТОРНАЯ АЛГВБРА Гл. I
Прежде всего из подобия треугольников OCD и ОАВ заключаем, что
«•д = 1гс, Гц = lrD C2)
где I есть совершенно определенное число — коэффициент подобия.
Впрочем, формулы C2) можно вывести и ае прибегая к теореме о подо-
подобии треугольников; прежде всего в силу коллинеарности с одной сто-
стороны гл в тс, с другой стороны СЪ в АВ и, наконец, га и тв, имеем
гл = *с> ЛВ = liCD, rB = UtD
Но так как
гв = гл + АВ, то = тс + CD
то
г„ + АВ = 1тс + 1г CD = i2rD = i8rc + ^3CS
Отсюда и вытекает
/, = /, lt _ Z
т. е. теорема о подобии треугольников и одновременно вторая формула C2).
Теперь пишем уравнения прямых AD в ВС:
г = пгтл + (i — m) rD = тогА +^-^ гв
г = ргв + 0 — р) гс = рг? + tz-f Гл
Для точки пересечения этих прямых Kt должно быть
m=—J, ——«р
Отсюда можем найти тп, р а гКс:
m = T+~i > ^ = Г+1' Га« ~ Г+Т^* + Га^
Точка L3 является точкой пересечения прямых ОК* и Ли. Но урав-
асние прямой ОКг есть
г = \тКг = ~ (гЛ + гв)
и чтобы точка атой прямой лежала на прямой АВ, необходимо и доста-
достаточно, чтобы сумма коэффициентов при тА и ть равнялась единице
(задача 6):
Отсюда
'L, — у ('А + гв)
так что, действительно, La является серединой АВ.
3 2 сложении, вычитлнив в разложение векторов 21
Теперь мы покажем, что от точки ?*, можно дритти к точке ?„+1.
Мы предполагаем, что
так что радиус-вектор точки ?,„ есть
_ {» — 1) гд + гв
ГЧ~ «
Уравнение прямой CLU есть
г= щ, + A - ,) гс= /"-<>;»
Для точки пересечения А"п+1 прямых Л/? и С?„ должно быть
л — 1,1 — о 1 — m я
Отсюда
Точка Z.n+j является точкой пересеченая прямой ОКп+1
r-Ar-
. с прямой 4Д, так что должпо быть
Отсюда
это показывает, что ?^+i делит Дй в отношении 1 : п, так что
Что и требовалось доказать.
Задача 12. Найти соотношение между шестью отрезками AM, MB,
ВК, КС, CL, LA, которое должно выполняться для того, чтобы три пря-
прямые АК, BL, СМ, соединяющие вершины треугольника ABC с проти-
противоположными сторонами, пересекались в одной точке Р (фиг. 15).
Беря вне плоскости треугольника произвольную точку О, назовем
через ri, га, гз радиусы-векторы вершив треугольника ЛВС относительно
точки О, через R же назовем радиус-вектор точка пересечения Р трех
прямых: АК, BL. СМ- Разлагая R по трем ее компланарный Викторам
ri, r<s, г3, будем иметь
R = ajfi + a3r2 + asr3
22
ВЕКТОРНАЯ АЛГВБРА
Гл. I
При этом, согласно задаче 7
Так как точка К лежит на прямой АР, то для радиуса-вектора Tg
этой точки будем, согласно задаче 6, иметь
гк = &R + A — к) тх = (Ли, + 1 — k) rt 4- *а»г2 4- &a8r3
'Гак как точка К лежит в то же время на прямой ВС, то мы должны
еще иметь согласно той же задаче
При этом оба эти соотношения приво-
приводят к одному и тому же результату
, 1 1
Итак
Сравнивая это с формулой B3), аа-
к л юта ем, что
ВК «з
КС Яз
Аналогично получим
CL
LA
AM
MB ''
Перемножая полученные три равенства, найдем требуемое условие
ВК CLAM .
или
KCLAMB
BKCLAM = KCLAMB
C3)
Это условие является, очевидно, в достаточным условием пересечения
прямых АК, BL, СМ, так как если обозначить через Р точку пересе-
пересечения прямых АК и BL, то прямая СР должна, согласно предыдущему,
пересечь АВ в такой точке М', для которой
AM-
КС LA
MB ~ ВК CL
Но если выполняется условие C3), то мы имеем
АМ _KC-LA
MB ~ BKCL
и, следовательно, точки М' и М должны совпасть.
Задача 13. Доказать компланарность векторов
ис — рЪ, р& — тс, тЬ — па
ПРОЕКЦИЯ ВЕКТОРА НА КАКОВ-ЛИБО НАПРАВЛЕНИЕ
23
Задача 14. Найти центр тяжести системы трех материальных то-
точек Mi (гг), Mt (r8), Мг (га), в которых сосредоточены массы т\, тя, ma,
зная, что цевтр тяжести двух масс лежит ва линии, соединяющей эти
массы, о делит ее в отношении, обратно-пропорциональном массам.
Центр тяжести точек Мг и М2, который мы обозначим через М' (г'),
определяется по формуле B3):
Поэтому центр тяжести системы трех точек будет
(От] + тг) г- + /я»га
4- m, + "is
C4)
Задача IS. Пусть А', В, С середины сторон Д ABC (фиг. 10),
а О — какая-либо точка: доказать равенство
ОА' + ОБ' Л-ОС' =ОА +65 + ОС
Задача 16. Хорды АРВ и CPD круга с центром О пересекаются
в точке Р под прямым углом. Доказать равенство:
РА+РВ + РС + Р7>= 2РО
§ Л. Проекция вектора ва какое-либо направление. Координаты вектора.
Правая в левая системы координат. Аналитическое выражение равен-
равенства, сложения н вычитания векторов
1. Выберем какое-нибудь определенное направление, характеризуе-
характеризуемое единичным вектором и. Рассмотрим какой-нибудь вектор а (фиг. 16).
Проекцией а^ вектора а на направление а называется длина отрезка
А'В', отсекаемого на какой-нибудь прямой, параллельной а, плоскостями,
перпендикулярными к а и проходящими через концы А и В вектора а, взя-
взятая со знаком плюс или минус, смотря по тому, имеет ли А'В' то же
направление, что и, или как рая противоположное.
Проекцию вектора а ва направление
и мы будем обозначать а„. Проводя через
точку А до пересечения с плоскостью,
перпендикулярной кии проходящей
через В, прямую АВ°, параллельную и
очевидно равную А'В, из прямоугольного
треугольника ABB" найдем, вводя угол ср
между векторами а в и:
Оа = OCOS<p ¦ A) Фиг. 16
Если ср не превышает -j- л, это следует сразу ив рассмотрения прямо-
прямоугольного треугольника ABB" а того обстоятельства, что в этом
24
ВЕКТОРНАЯ АЛГЕБРА
Гл I
случае А'В" направлен одинаково с и. Если же ф превышает — я, то
{фиг. 17)
АВ" = a cos (л — ф) B)
Но в этом случае АВ" направлен противоположно и, поэтому
Ли == — АВ" ~ — о cofe (я — ф) = a cos ф C)
Следовательно, всегда проекция вектора на какую-либо ось равна
произведению длины вектора на косинус угла между вектором и осью,
g Мы можем рассматривать проекцию вектора а
на направление и как вектор; тогда мы будем
обозначать этот вектор через а„; очевидно,
а„ = о^и = a cos ф u D)
2. Теорема. Проекция геометрической суммы век-
векторов на какое-либо направление и равна алгебраической сумме проекций
слагаемых векторов на то же направление:
g"\ :
Фаг. 17
«ц,
= oln
E)
Достаточно, очевидно, доказать теорему для суммы двух векторов,
т. е. из
с = а + Ь F)
вывести
Си = Ои + Ь» G)
Докажем предварительно, что если на
оси имеются три точки ах, о2, os, то всегда
а5л2 + <*sAi + <*sei = 0 (8)
если брать отрезки а^а, со знаком плюс или
минус, смотря по тому, совпадает ли направ-
направление OjB, с направлением оси или ему противоположно (фиг. 18).
В самом деле, одна из точек а^, «ц, as лежит между двумя другими;
пусть, например, oj, лежит между а1 н а,; тогда
Фиг. 18
Отсюда, перенося все в правую часть и замечая, что
= — а1«з» найдем уравнение (8).
Аналогично рассматриваются случав нахождения at иди о2 между
двумя другими точками.
Так как (фиг. 18)
&и = ai^a, bu = a2as, Сц = OjOj (9)
го в силу (8)
<Ь1+Ьи-си = О A0)
это и требовалось доказать.
ПРОЕКЦИИ ВЕКТОРА НА КАКОЕ-ЛИБО НАПРАВЛЕНИЕ
25
3. В § 2 мы видели, что всякий вектор d можно разложить по трем
некомпланарным векторам a, b и с. Возьмем за векторы а. Ь, с взаимно
перпендикулярные единичные векторы, направленные по трем осям
прямолинейной прямоугольной системы координат
Oxyz (фиг. 19). Эти единичные векторы называются
основными векторами или ортами и обозначаются
«, j. t-
Назовем проекции вектора а по направлениям
i, j, k или, что то же, по осям х, у, z через ая, Оу, аг;
тогда при разложении вектора а по векторам i, j, k
мы получим
а = а* + ау + аг = axi + avj + агк (W
В том, что коэффициентом при i является ' ах
можно еще убедиться, составляя проекции обеих
частей равенства A1) на ось х, пользуясь теоре-
теоремой о проекции геометрической суммы и принимая
во внимание, что проекции j и к на ось х, очевид-
очевидно, равны 0. Фиг. 19
Проекции ах, Оу, аг называются прямо-
прямоугольными координатами или составляющим и,
или слагающими, или компонентами вектора а.
-Они однозначно определяются по формуле A) в виде
ау = a cos (a, x), av ~ a cos (а, у),
a cos (a, z)
A2)
Обратно, если мы зададим вектор а его составляющими ах, av, az,
то мы полностью определим его. В самом деле, его длина получается,
как диагональ прямоугольного параллелепипеда, по теореме Пифагора:
Направление же вектора а получится из формулы A2):
cos (a, x) = -f-,
cos (а, у) = — , cos (a,
A3)
A4)
Возвышая три равенства A4) в квадрат и складывая, получим
в силу A3)
cos2 (а, х) + cosa (а, у) + cos2 (a, z) = 1 A5)
соотношение, справедливое для всякого вектора а.
4. Отметим, что различают два рода прямоугольных прямолинейных
координатных систем, а именно: правую и левую системы. В левой системе
(фиг. 19) вращение от оси х кратчайшим образом к оси у вокруг оси г
26 РВКТОРНАЯ АЛГВБРА Г Л I
происходит по часовой стрелке (в правой против часовой стрелки); если
мы одновременно с вращением от оси х к оси у будем перемещаться вдоль
оси г, то получим движение винта с левой нарезкой, при левой системе,
и соответственно винта с правой нарезкой (пробочника), при оравой си-
системе. Наконец, можно указать еще правило правой и левой руки. На-
Направим большой, указательный а средний пальцы соответственно по осям
х, у я z, тогда правая рука укажет соотношение осей в правой системе,
а левая в левой. Мы будем в дальнейшем пользоваться как правой, так
в левой системами.
5. Если два вектора равны между собой, то их координаты равны
между собой и обратно, т. е. если
а = Ь A6)
то
ах = 6», Оу = 6„, а, «= Ьг A7)
Это — непосредственное следствие единственности разложения вектора
по трем некомпланарныы направлениям.
Координаты геометрической суммы нескольких векторов равны алге-
алгебраическим суммам координат слагаемых векторов, т. е. если
Ь = а, + а, + . . . + а„ A8)
то
К = alV + а*и +" - - - + ^п» (^
Ь7 = ахг 4- <н, + ¦ ¦ - + «пг
Для доказательства надо применить теорему о проекции геометри-
геометрической суммы к осям х, у, г.
В частности, если
с = а — b B0)
то
с, = ax~br, <v = Оу — bv, et = аг — Ь, B1)
Наконец, умножение на скаляр столь же просто выражается в коорди-
координатах вектора
та = т. (exi + Oyj + агк) = maxi + ma^j + тагк B2)
6. Мы рассматривали прямоугольные проекции а прямоугольные
компоненты вектора а.
Но с равным успехом мы могла бы ввести три единичных некомпла-
некомпланарных вектора i, j, k, образующих косоугольную систему координат.
Разложим вектор а по этим ортам:
а = aj + ад + e2k B3)
тогда мы можем назвать ох, Оу, аг — косоугольны if и компо-
компонентами вектора а. Но в обшем случае косоугольные составляющие
не будут определяться формулами A2), так как для определения, напри-
например, ах нужно через концы вектора а провести плоскости, параллельные
I 3 ПРОЕКЦИЯ ВЕКТОРА НА КАКОЕ-ЛИБО НАПРАВЛЕНИЕ 27
двум другим осям у и z и найти отсекаемый ими на оси х отрезок; послед-
последний будет зависеть ве только от угла между а и плоскостью yz, но еще
и от угла между осью я и плоскостью yz. Отметим, что теорема о проекции
геометрической суммы векторов и ее следствие — соотношения A9) спра-'
ведливы и для общего случая косоугольных координат.
7. Выведенные в этом параграфе формулы и теоремы имеют большие
приложения, например, в статике.
Равнодействующая нескольких сил F]( F2, . . . , Fn, действующих на
материальную точку, выражается геометрической суммой их:
R = F, + F2 + ... + Fn
.Проекция равнодействующей на какое-либо направление равна сумме
проекций на то же направление всех действующих сил:
Если проекции силы Ff на оси х, у, z обозначить через Xit У{, Zt,
то проекции равнодействующей будут
Rx = X, + . . . + Хп, Ry = У, + . . . + Уп, R, = 2а+ . . . +Zn
Величина и направление равнодействующей определяются по форму-
формулам A3) и A4) (только для прямоугольной системы координат):
Д = У Rx* + RJ + Лгг
cos (R, х) = %-, cos (R, у) = ^-, cos (R, z) = ^
Если точка, находящаяся под действием системы сил, находится в по-
покое, то R = 0, и обратно, если В = 0 и точка а начальный момент по-
покоилась, она и дальше будет находиться в состоянии покоя.
Векторное равенство R = 0 равносильно трем алгебраическим:
Rx = X, + . . . + Х„ = О
Д„ = У, + . . . + Уп = 0 B4)
Д2 = Z, + . . . + Zn = О
В задачах статики на равновесие системы сил, пересекающихся в
одной точке, не может быть более трех неизвестных, так как условий
равновесия, как мы только что видели, три. Эти неизвестные всегда мож-
можно определить, спроектировав уравнение R = 0 на оси координат х, у, г,
т. е. написав уравнения B4). Но часто удается проектировать уравне-
уравнение R = 0 на такое направление, чтобы все неизвестные, кроме одной,
пропали, тогда сразу получается эта неизвестная.
Примеры на этот параграф мы дадим в конце следующего параграфа.
28
ВЕКТОРНАЯ АЛГЕБРА
Гл. 1
§ 4. Преобразование координат. Преобразование составляющих
вектора при переходе от одной системы координат к другой
1. Зная компоненты вектора а по осям х, у, г, мы можем вычислить
его компонент по любому направлению и. Воаьмвм для этого проекции
на направление и обеих частей равенства A1) предыдущего параграфа
и воспользуемся теоремой о проекции геометрической суммы; в резуль-
результате получим
ах cos (u, х)
cos (и, у) + аг cos (и, z)
A)
Таким образом, компонент вектора а по любому направлению может
быть выражен черев компоненты по осям прямоугольной системы, при-
притом, как видно из формулы A), линейным образом. Это свойство харак-
характерно для векторов и должно было бы быть положено в основу определе-
определения вектора, если бы мы исходили из аналитического определения вектора
при помощи его координат.
В формуле A) поставим вместо а„, ах, Оу, аг их выражения по фор-
формулам A) и A2) § 3 и сократим на а; обозначая через ф угол между направ-
направлениями векторов а и и, найдем
cos<p = cos (a, u) = cos (а, ж) cos (и, х) + cos(a,j/).cos(u,j/)+cos(a, z)cos{a,z)
B)
Получили формулу аналитической геометрии, дающую косинус угла <р
между двумя направлениями а и и.
2. Допустим, что мы знаем компоненты вектора в некоторой коорди-
координатной системе Oxyz (фиг. 20); возьмем другую координатную систему
Oxyz, определенную тремя взаимно перпендикулярными ортами i, J к;
компоненты вектора по новым осям будут иметь уже другие значения
а*, <ц, ai. Спрашивается, как выражаются новые компоненты вектора
а через старые?
Ответ дается формулой A).
Чтобы упростить писание формул, мы введем таблицу косинусов де-
десяти углов, совтавленных новыми осями со старыми:
C)
Фиг. 20
X
У
z
X
«1
Pi
Ti
У
Та
z
«8
Рз
Тз
Так, например
«1 = cos (ж, х), оц = cos (ж, ~у).
= cos (х, у) а т. д.
I 4 ПРЕОБРАЗОВАНИЕ КООРДИНАТ 29
Эти косинусы представляют координаты новых ортов по старым осям;
в самом деле,
\ = 1 cos (х, x) ~ at, ~j* = ot8, kx = as
ц, = 1-со8(г, у) = рх, ^ = Эа, К = р8 D)
iz = 1-cos (if, г) = Yn /х = Уз, *Ч = Ys
Отметим, что между девятью косинусами таблицы C) существует
шесть зависимостей, так что только три косинуса независимы между
собой (последнее обстоятельство отвечает тому, что ориентация одного
координатного триэдра относительно другого может быть задана тремя
параметрами, например тремя углами Эйлера). В самом деле, по форму-
формуле B) можем написать следующие 6 соотношений:
1 = cos (х, X) = cos* (Ж, х) + cos2 ($, у) + cos2 (x, г) =
а»2 + Р»* + гз* = 1 E)
О = cos (у, г) = cos (§, х) cos (я, х) + cos (jj, у) cos (z, у) + cos (?, г) cos B, г) =
— OtsOts + ргрз +
азш + psfli
«на» + pi^2
Если мы будем рассматривать систему OSyz как старую, а систему
Oxyz как новую, то получим шесть совершенно аналогичных соотно-
соотношений:
си2 + <хг' + аз* = 1, PiY> + PiY» + P»Y* = °
pi2 + ps2 + Зза = 1, Yi«i + Т20й + y*O3 = 0 F)
Ti2 -Ь Y22 + Т»* = 1. <aPi + а2Вг + аз38 = О
Напишем теперь новые компоненты вектора а. По формуле A)
<Ч = 0.x cos (х, х) + (Ьц cos (х, у) + a* cos {x, г) G)
(8)
Обратно, Ох, Оу, аг выразятся через aj, aj, a^ по следующим форму-
формулам:
ах = аз»! + а^а„ + а? аз
(9)
30 ВЕКТОРНАЯ АЛГЕВРА Гл. I
Как частный случай, отсюда можно получить преобразование коор-
координат при переходе от одной системы координат к другой, имеющей
то же начало, системе координат.
Возьмем точку М а соединим общее начало обоих координатных
триэдров О с точкой М.
Полученный радиус-вектор г точки М будет иметь в старой коорди-
координатной системе координаты х, у, г, а в новой координатной системе ко-
координаты х, у, z. По формулам (8) и (9) будем иметь:
A0)
3. Когда мы' задаем вектор его составляющими в какой-нибудь си-
системе, то мы тем самым подразумеваем, что его составляющие в любой
другой системе будут определяться по формулам (8) преобразования
компонентов вектора. Но можно задавать вектор еще другим способом,
а именно указать некоторый способ вычисления его составляющих в лю-
любой координатной системе. В последнем случае надо еще проверить,
выполняются ли формулы (8), когда мы от одной системы координат
переходим к любой другой.
В качестве примера положим, что компоненты х, у, ъ радиуса-век-
радиуса-вектора г суть некоторые функции параметра t; определим составляющие но-
нового вектора v формулами:
dx dy dz
v " v
У
z
= OlX
= а*х
= аза;
4- Pi
+ Pi
4-3.
ijf 4- Y»2>
sj/ 4- T«z,
<y 4- Гзг,
ж
z
= сиЖ
= м
4- Va
<у 4-
»^ +
й 4-
для всякой координатной системы. Проверим, что это действительно
вектор
= а,вж 4- М» + 4\V* A2)
(а,, Pj, fi дифференцировать не надо, так как это суть постоянные коси»
нусы углов между неподвижной осью ? и неподвижными же осями х, у, г),
аналогичные формулы получатся для других составляющих. Действи-
Действительно, v есть вектор.
Отметим еще несколько следствий из выведенных формул,
В § 3 была выведена формула A3), дающая длину вектора через
его компоненты
а2 = aj 4- а/ 4- а,2 A3)
Здесь выражение слева не зависит от того, в какой координатной
системе вычисляются компоненты вектора ах, Оу, аг, поэтому выражение
ах2 4- Чуг 4- ахг сохраняет свое значение при всех переходах от одной пря-
прямоугольной координатной системы к другой; в этом случае говорят об
§ 4
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
31
и н в а риа н т в о с т в ах" + ауг -J- а/ для всех таких переходов. Со-
Составляя выражение ai2 + ajf + агг по формулам (8) а приравнивая его
flat2 + <V* -f* flz2> мы сразу получили бы все соотношения F)
Задача 17- Найти координаты точки пересечения медиан тре-
треугольника, верпганы которого заданы координатами (хл, у,, z,), (x8, ys, га),
(хя, уз> г,).
По формуле B9) § 2 имеем для радиуса-вектора рассматриваемой точки
сдедо вательно
A5)
Задача 25. Найти координаты центра тяжести системы трех мате-
материальных точек Мг, Мг, Л/8, в которых сосредоточены массы mi, mi, ma
По формуле C4) § 2:
Г т,
отсюда, проектируя на оси х, у, г, находим'
Задача 19. Рассмотрим Д ABC (фиг. 21) и выведем некоторые
формулы прямолинейной тригонометрии.
Спроектируем ломаную линию АС В и
ее замыкающую на АВ, по теореме о сумме
проекаий мы получим:
о cos В + b cos A =• с A8)
циклической перестановкой получим отсюда
еще две формулы:
Ъ cos С -\- с cos В = в, с cos А + а сов С «= й
Фиг 21
Спроектируем теперь ту же ломаную ливню и ее замыкающую на
перпендикуляр DC к АВ.
Проекция замыкающей на перпендикулярное направление будет 0(
проекция АС есть Ь sin А. проекция СВ есть — a sin/?, следовательно
Ь sin A — а sin В
точно так же найдем две другие формулы
с sin В = b sin G, а sin 6' = sin A
в результате получаем теорему синусов:
sin A sin S sin G
A9)
32
ВЕКТОРНАЯ АЛГЕБРА
ГЛ. 1
Задача 20. Впишем в круг единичного радиуса (фиг. 22) правиль-
правильный п-угольник РлРг . . . Pn—i и пусть сторона />„/•, составляет с осью
Ох угол ф0, каждая следующая
сторона будет составлять с осью Ох
угол на 2 п/п больше, чем предыду-
предыдущая, так что
2я
составит угол (р0 -f- —-
Р2Р3 составит угол <р0 + —
—
наконец,
Фиг. 22
я, , 2(п —1)я
составит угол ф0 Н й
Спроектируем теперь замкнутую ломаную линию Р^Рг . . . Рп.\Ра на
ось х так как все стороны ее равны между собой, то получим тригоно-
тригонометрическое тождество:
. +cos(q,o + iOLril") = о
Например, будет:
при ф0 == О
при ф0 = у
¦ ?*.
а
sin—
п
. 2 (и — 1) я
п
= 0
Задача 21. Тяжелая точка веса Р находится в равновесии на
гладкой наклонной плоскости под действием двух сил Qi и Qa (фиг. 23);
величина каждой из этих сил равна -|- Р, сила Q]
горизонтальна, сила 0г направлена вдоль наклонной
плоскости вверх. Требуется определить угол а наклона
плоскости к горизонту.
Если мы введем в рассмотрение еще реакцию плос-
плоскости R, направление которой перпендикулярно к на-
наклонной плоскости, четыре силы Р, Qi, Qa и R будут на-
находиться в равновесии, так что
Р+ Qi Н- Q» 4- R = 0
B0)
Фиг. 23
Величина реакции R нам неизвестна, она нас не интересует, поэтому
уравнение B0) надо проектировать на такое направление, чтобы проек-
проекция R пропала, т. е. нужно проектировать на направление силы Q?
Так как угол между Qi и Qa есть а, между Р и Qs есть 90° -)- о, то проек»
I 4 ПРЕОБРАЗОВАНИЕ КООРДИНАТ 33
цией Qi будет служить -i-Pcosa, проекцией Р будет служить
Р cos (90° -f- о) = — Р sin о, наконец, проекцией Qs будет -\Р'-
-~Р cos о +-^Р — Psina = 0
Отсюда
-J- cos о + —¦ — sin a = 0, или CO4S a + 1 — 2 sin a = 0
Но
1 + cos a = 2cosay, sin a = 2 sin 4 cos ^
Следовательно
2 cos* у - 4 sin у cos у = 2 cos y (cos -| — 2 sin y) = 0
Отсюда, сокращая на cos у (так как о < 90°, то cos у ф 6), инеем
cos|- 2 sin у = 0, tg-| = T, o = 53°7'48-
Задача 22. Точка М (г) притягивается неподвижными точками
Mi fa), . . . , Afn (rj с массами ml? . . . , ягп, причем силы притяжения
пропорциональны расстояниям до этих точек и массам их. Найти ре-
результирующую силу и положение равновесия точки М.
Сила притяжения точки М точкою М, равна, очевидно, кт\ (т< — г),
где к — коэффициент пропорциональности, ибо этот вектор направлен
от М к Мх о пропорционален расстоянию ММЛ. Точно так же найдутся
в другие силы. Поэтому результирующая сила будет
R = ктл (г, — г) + knti (ra — г) +¦ . . . + ктп (г„ — г)
Преобразуем это выражение
R = к (тгтх + отаг2 + . . . + тпгп) — к (т, 4- . . . + тп) г
Введем центр тяжести масс тх, т2, . - - , т„, обозначив иго радиус-
вектор череэ р:
лип + mara +¦ . .+ тпгп
Р
+З+ +тп
Тогда
R = к (ж, + . . . + тп) (Р - г)
т. е. результирующая сила есть сила притяжения точки М к центру
тяжести масс пг^, .... гпп, в котором сосредоточена ыасса ш, ¦+-¦... +- от„.
Отсюда сразу вытекает, что точка М будет в равновесии, если
р = г
т. е. если точка М находится в центре тяжести масс mlt пг^, . . . , тпп.
3 Н. В. Кочяа
34
ВЕКТОРНАЯ АЛГЕБРА
Гл. 1
Если мы введем прямоугольные координаты х, у, г, то для положения
равновесия точки М получим:
11^1 +¦ ¦ ¦+ ">ПХП
Ш, +. . -+ '«п
У
щ +
¦ ¦ ¦ +
. . . +тп
В общем случае для проекций результирующей сияя получим:
X = к (ТОхЯ] 4- ... 4- тпхп) — к (т., -|-... + mJi
Y = к (гщуг 4- . . . + т^/п) — к (иг, + . . . + т») у
Z = к (rriiZj + . . . + т,,!^) — к (пц 4- . . . + Шп) г
Задача 23. К вершине О прямоугольного параллелепипеда
OABCDEFG приложены три силы, изображаемые векторами ОБ, ОЁ, OG,
найти величину и направление равнодействующей R (фиг. 24).
Очевидно,
-. R = ОВ Л-Ш + OG
а, ОС = b, OD = с;
а+е, ОО=Ъ + в
Фиг. 24
Обозначим ОА
тогда
ОВ = а -Ь Ь, 0?
Откуда
R=a+b+a+c+b+c
= 2 (а + Ь 4- е) = 25?
т. е. искомая равнодействующая изображается удвоенной диагональю
параллелепипеда OF.
Задача 24. На точку действуют три силы, проекции которых на
прямоугольные оси равны: Xt = 1, Y\ = 2, Zt = 3; Ха = — 2, Yj = 3,
Za = — 4; Xs = 3, Y3 — — 4, Z3 == 5; найти величину и направление рав-
равнодействующей.
Ответ. R =УТ, cos(R, х)
^ , cos (R, у) = ^= . cos (R, 2) = т=
3 ад а ча 25. Пусть в Д ABC угол Л прямой и пусть 4D есть высота,
опущенная на гипотенузу ВС. Доказать, что равнодействующей двух
сил, приложенных к точке А, из которых
одна направлена по АВ и равна ^ •
другая направлена по АС и равна -jp,
является сила -j^, направленная по AD.
Задача 26. Пусть ABCDEF есть правильный шестиугольник. Найти
равнодействующую сил АВ, AC, AD, AE, AF, приложенных к точке А.
Ответ. 3AD.
I 5 СКАЛЯРНОЕ ИЛИ ВНУТРЕННЕЕ ПРОИЗВЕДЕНИИ ДВУХ ВЕКТОРОВ 35
§ 5. Скалярное или внутреннее произведение двух векторов.
Его свойства
1. В § 2 дано было определение геометрической суммы двух векто-
векторов и было показано, какие соображения геометрического я физического
характера привели к установлению этого понятия. Оказывается, что
если мы хотим соответствующим образом ввести понятие произведения
двух векторов, то мы должны определить два различных действия умноже-
умножения: умножение скалярное и умножение векторное.
Остановимся сначала на скалярном произведении двух векторов.
Вспомним простейшее определение работы А, производимой постоян-
постоянной силой Р на прямолинейном перемещении s при условии, что сила
составляет с перемещением постоянный угол а
А = Fs cos а (i)
Выражения, построенные аналогично выражению A), встречаются
очень часто в математике и физике. Поэтому представляется целесооб-
целесообразным ввести операцию составления из двух векторов а и b выраже-
выражения, аналогичного A). Введем поэтому следующее определение:
Скалярным или внутренним произведением двух векторов а и b пазы-
вается произведение длин обоих векторов, умноженное на косинус угла
между обоими векторами.
Будем обозначать скалярное произведение векторов а и b точкой,
т. е. а^Ь; итак
a-b — ab cos (a, b) B)
Среди других обозначений скалярного произведения отметим, как
наиболее употребляемые, еще такие ':
ab и (а, Ь)
В результате скалярного умножения получается скаляр, что и объяс-
объясняет название скалярного произведения. Так, в вышеуказанном при-
примере у нас получилось выражение для работы — скалярной величины,
в виде скалярного произведения вектора силы F и вектора перемеще-
перемещения s.
Скалярное произведение векторов а в b положительно, если эти век-
векторы составляют между собой острый угол, в отрицательно, если угол
между а и Ь — тупой. В частности а»Ь == 0, если Ь перпендикулярно а
(так как тогда cos (a, b) = cos — я = 0). Если а и b имеют одинаковое
1 Последнее из указываемых обозначений для скалярного произведения было
принято в предыдущих изданиях книги К. Е- Кочина.
Однако в настоящее время обозначения «точка» для скалярного произведения
векторов, т. е. а Ь, в «косой крест» для векторного произведения векторов, т. е-
а X b (определение векторного произведения; см. следующий § 6), подучили более
широкое распространение в нашей научной литературе, чем равео принятые сим-
символы (а, Ы для скалярного произведения я [а, Ь) для векторного произведения.
3*
36 ВЕКТОРНАЯ АЛГЕБРА Гл. I
направление, то cos (а, Ь) = cos 0 = 1, поэтому a-b =ab, произведению
длив обоих векторов (отсюда ясно наименование всей операции умно-
умножением). В частности а-а = а2; если а как раз противоположно Ь, то
cos (a, b) = — 1 и а«Ь = — аЬ.
2. По самому определению скалярное произведение
коммутативно, т. е. не меняется от перестановки множителей:
а>Ь = Ь.а C)
Группируя в формуле B) разными способами множители, составляю-
составляющие а-b, мы получим:
a»b = a cos (a, b) -Ь = аф
D)
a-b = b cos (а, Ъ)-а = Ьла
т. е. скалярное произведение двух векторов равно произведению длины
одного аз векторов на. проекцию другого вектора на направление первого.
Отсюда сразу выводится дистрибутивность скалярного
произведения:
а«(Ь + с) = а«Ь + а«с E)
т. е. мы имеем право перемножать почленно, как в обыкновенной алгебре.
В самом деле, но теореме о проекции геометрической суммы имеем
(Ь + с)а = Ьа + са F)
умножая обе части этого уравнения на а, получим формулу E), что в
требовалось доказать.
Таким образом, мы имеем право раскрывать скобки, как в обыкно-
обыкновенном умножении, например:
(а + Ь) • (с + d) = а.с + b-c + a.d + b-d G)
Очевидво далее, что скалярный множитель можно выносить из-под
знака скалярного произведения
та'пЪ — тп (а-Ь) (8)
т. е. скалярное произведение ассоциативно по отношению к ска-
скалярному множителю.
Составляя скалярное произведение основных ортов, получим
i.i = j.j-k.k =1, i.j = j.k = k-i =0 (9)
При помощи этих формул легко найти выражение а*Ь через коорди-
координаты:
a.b = (axi + Oyj + azk).(bxi + bvj + Ьгк) =
= aj>x (i-i) -+¦ aj>v (i.,j) + афг (bk) + Oybx (j-i)+aA (J-J) + ^ (j*k) +
+ aj>x (k-i) + azbv (bj) -Ь <»Л (k-k) = aj>x + афу + azbz A0)
I 5 СКАЛЯРНОЕ ИЛИ ВНУТРЕННИЕ ПРОИЗВЕДЕНИЕ ДВУХ ВИКТОРОВ 37
Так как выражение a- b не зависит от координатной системы, то выра-
выражение aj>x + афу + афг инеариантно по отношению ко всем прямо-
прямоугольным прямолинейным координатным системам, т. е.
а*Ь; + ацЬу + агЪ-г — aj>x + афу + а А A1)
Эту инвариантность можно проверить непосредственно по форму*
лам (8) и F) § 4.
Из формулы A0) легко вывести, далее, условие перпендикулярности
двух векторов, заданных своими составляющими, а именно:
оА + «А +" «А = 0 (a J_ Ь) A2)
При помощи символа скалярного произведения можно легко пред-
представить ряд важных величин. Составим, например, скалярное произве-
произведение вектора
a.i = ах A3)
получилась проекция вектора а на направление орта i.
Если вектор а сам есть единичный вектор, то скалярное произведе-
произведение a-i дает косинус угла между направлением вектора а и осью х.
Так, например, выбирая за вектор а орт j (фиг. 20), мы найдем, что
i. j = cos (ж, у) = аг. Таким образом, все девять косинусов таблицы § 4 могут
быть представлены скалярными произведениями соответствующих ортов.
Далее, при помощи скалярных произведений очень аросто вывести
формулы перехода от одной координатной системы к другой, например:
а% = a.i = (axi + Oj,j + агк)-\ =
= a, (i.i) + a» (j.i) + a, (k.i) = a^ai + «^pi + <VYi f14)
Аналогично выводятся все остальные формулы преобразования со ста-
вляющих вектора § 4.
Составим таблицу важнейших свойств скалярного произведения:
1) а-Ь = ab cos (а, Ь) (определение)
2) а-b = Ь-а
3) а • Ь = 0, если а == 0 или Ь = 0, или а _L b
4) а-b = ±ab, если а и b коллинеарны, в частности а-а = а}
5)
6) пг&'пЬ = mn (а-b)
7) а-b = axbx + aj>v -j- aj>z
Разберем несколько примеров.
38 ВЕКТОРНАЯ АЛГВБРА Гл. I
Задача 27. Дан прямолинейный треугольник ABC (фиг. 21). Вы-
Вывести основную формулу прямолинейной тригонометрии
са = в* + й2 — lab соз С A5)
Для доказательства достаточно помножить обе части тождества
с = а + Ь
скалярно сами ва себя
с2 = {а 4- Ь).(а ¦+¦ Ь) = а-а + 2а.Ь +- b-Ь = а% 4- lab cos (a.M +- б1
Но угол (а, Ь)=180°— С; следовательно, cos (а, Ь)= cos A80° — С) =—cos С.
Отс юда
с* = а? ~ 2abcosC +- Ь2
что а требовалось доказать.
Задача 28- Выведем несколько соотношений между сторонами и
диагоналями параллелограмма.
Пусть стороны параллелограмма ОАВС (фиг. 6) представляют век-
векторы а и Ь, так что~0А = ВС = л^АС = ОВ = Ь, тогда диагонали его
представят векторы а + Ь = ОС и а — b =* ВА. Составим тождества.
(а + Ь).(а + Ь) = а1 + 2a-b + ba
(a — b).(a — b) = aa — 2a.b + ba A6)
Складывая их, получим:
(a + W + (a - bJ = 2 (a2 + u2) A7)
т. о. сумма квадратов диагоналей параллелограмма равна сумме квадра-
квадратов его сторон.
Вычитая нижнее тождество A6) из верхнего, найдем:
(а + ЪУ — (а - ЬJ = 4а.Ь A8)
т в, скалярное произведение па сторон параллелограмма равно четверти
разности квадратов диагоналей. Отметим, между прочим, что из этого
результата можно сразу вывести выражение а»Ь через составляющие
векторов а и Ь:
(а + b)s = (a* + Ьху + (^ + \У + (аг + Ьг)а =
= ахг + 2афх + Ъх* + а,,2 + 2аД, + V + а22 +¦ 2аА + bz*
(а - Ь)г = (ах - ЪХГ + К - Ъу)* +¦ (аг - йг)а =
= ахг - 2ахЬх + V + а,,2 - 2аД + V + <*г* - 2аД 4- Ъ?
4 (а-Ь) = (а + ЬJ - (а - ЬJ = 4 (axbx + ayby +- az6j
Отсюда
а-b = о А + aj)y + atbt
16 скалярной или внутрвн-нен произведение двух векторов 39
Составим, наконец,
(а + b)-(a - Ь) = а.а.— Ь.Ь = а2 - Ь2 A9)
Следовательно, скалярное произведение диагоналей параллелограмма
равно рааности квадратов сторон, поэтому диагонали параллелограмма
тогда и только тогда взаимно перпендикулярны, когда а = Ь, т. е. когда
параллелограмм есть ромб.
Задача 29. Доказать, что работа равнодействующей R нескол ьких
сил Fj., F2, . . . , Fn, приложенных к одной и той же точке, на переме-
перемещении s этой точки, равна алгебраической сумме
работ составляющих сил.
В самом деле, умножая скалярно на s обе части
равенства
R = Fx + F2 + ¦ ¦ ¦ + F»
получим
R.s = F^s + F2.s + . . . 4- Fn.S B0) Ф». 25
т. е. работа равнодействующей равна сумме работ составляющих.
Задача 30. Вывести формулу для косинуса суммы двух углов.
Возьмем в плоскости ху (фиг. 25) два единичных вектора а и Ь, со-
составляющих с осью х соответственно углы аи — |3 (отсчитываем углы
от оси х к оси у) и составим а-Ь. С одной стороны это есть косинус
угла между векторами, т. е. cos (a + |3), с другой стороны это есть
axbx + aj>v + aj>t\ но
Oj. = cos а, Оу =» sin а, а2 = 0
bx = cos p, bv = — sin р, Ьг = 0 B1)
Сл едовательно
cos (а + р) = cos а cos p — sin а sin p B2;
Задача 31. Векторы а и b заданы косоугольными составляющими
ах, Оу, а2 и Ьх, Ьу, Ьг\ найти аналитическое выражение для а-Ь.
Ответ вытекает из формулы A0), в которой надо подставить вместо
L«j его значение cos (x, у), далее j«k = cos (у, z), k.i = cos (z, z)
a- b = a A .+ Oyby + аъЬг + (a A + V*) cos (*• У) +
+ (axbz + aj)x) cos (x, z) + (a^ -f aj>v) cos (г/, z) B3)
В частности длина вектора а, заданного своими косоугольными коор-
координатами ах, пу, а2, выражается следующей формулой:
а1 = а*2 + а,/ + а22 + 2ах0у cos (ж, #) + 2а^аг cos (#, z) + 2azax cos (z, ж) B4)
Задача 32. Доказать, что вектор х = b (а-с) — а (Ь»с) перпенди-
перпендикулярен вектору с.
10 ВЕКТОРНАЯ АЛГЕБРА Гл. I
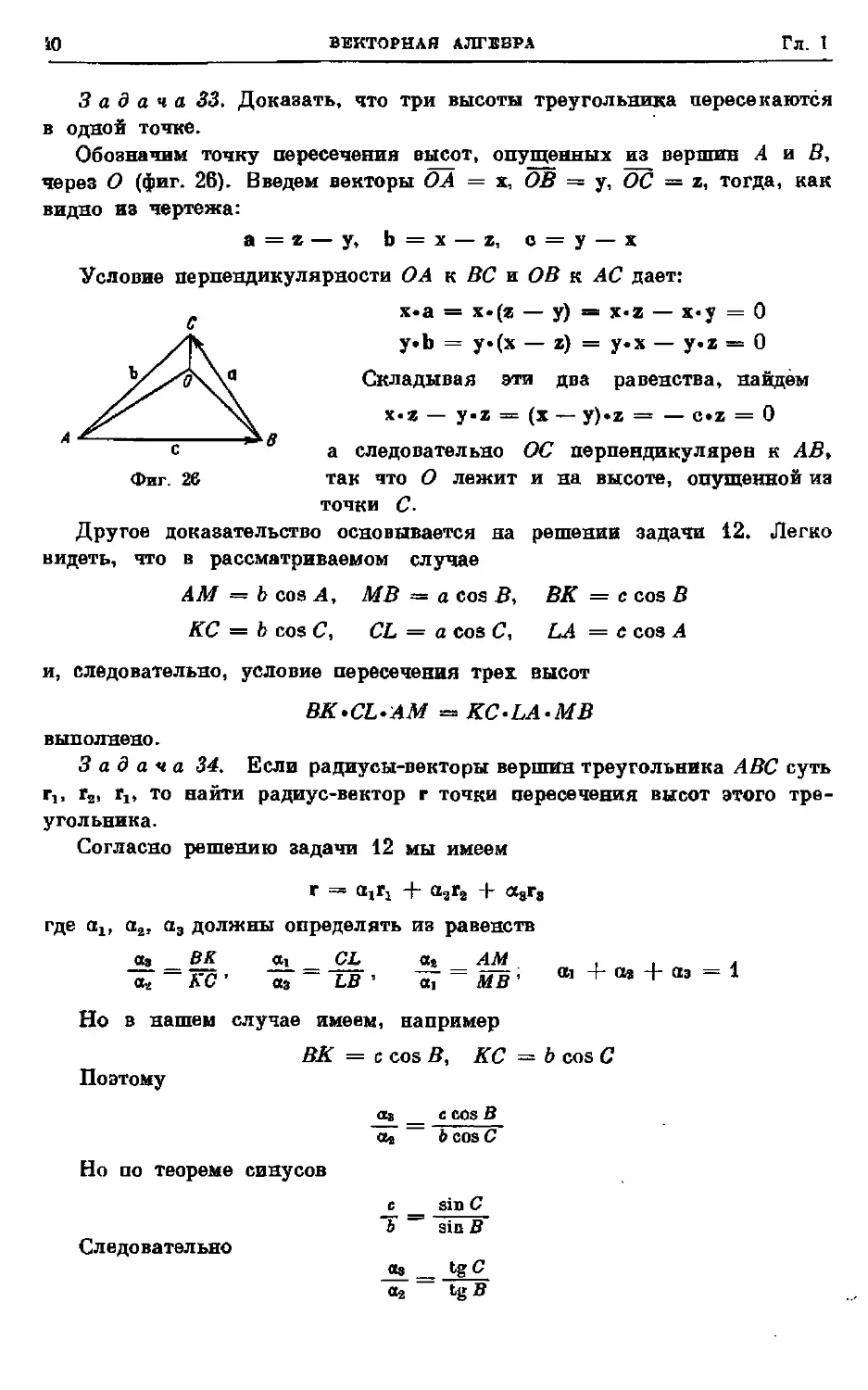
Задача 33. Доказать, что три высоты треугольника пересекаются
в одной точке.
Обозначим точку пересечения высот, опущенных из вершин А а В,
через О (фиг. 26). Введем векторы ОА = х, ОВ == у, ОС = z, тогда, как
видно из чертежа:
а = г. — у, b = х — z, о=у — х
Условие перпендикулярности ОА к ВС и ОВ к АС дает:
х-а = х.(я — у) = x-z — х-у = О
у.Ь = у»(х — z) = у-х — y.z = О
Складывая эти два равенства, найдем
х-а — y-z = (х — y)>z = — c»z = О
с а следовательно ОС перпендикулярен к АВ,
Фиг. 26 так что О лежит и на высоте, опущенной из
точки С.
Другое доказательство основывается на решении задачи 12. Легко
видеть, что в рассматриваемом случае
AM — Ь cos A, MB = a cos В, ВК = с cos В
КС = Ь cos С, CL = a cos С, LA = с cos A
и, следовательно, условие пересечения трех, высот
BK-CL'AM =*KC-LA-MB
выполнено.
Задача 34. Если радиусы-векторы вершин треугольника ABC суть
г,, г2, 1*!, то найти радиус-вектор г точки пересечения высот этого тре-
треугольника.
Согласно решению задачи 12 мы имеем
где ах, а3, а3 должны определять ив равенств
ctg BK
ota л С
а, _ CL
аз ~ LB '
Но в нашем случае имеем,
Поэтому
Но по теореме
Следовательно
ВК = с
с
синусов
а« AM
~о7 ~ MB"
например
cos В, КС =
d с cos В
(г 6 COS С
е sin С
4 ~ sin В
о, +
b cos С
a» tgB
{ 5 СКАЛЯРНОЕ ИЛИ ВНУТРЕННЕЕ ПРОИЗВЕЛВНИБ ДВУХ ВЕКТОРОВ 41
И аналогично
Отсюда легко получить
а ^Л _ tg В tgC
1 tg/l 4-tjrB + tgC ' *2 tg.4 +tgB + tgC" а»~ tgA + tgB
Следовательно, для точки пересечения высот треугольника получаем
выражение
fitg 4 + rstgfl+ra tgC
1* Л + tg fl + tg С
Задача 35. Найти уравнение плоскости, перпендикулярной к за-
заданному вектору а в проходящей через данную точку М\ (ti).
Возьмем любую точку М (г) плоскости, тогда, при перпендикуляр-
перпендикулярности плоскости и вектора а, вектор МгМ = г — rt будет перпендику-
перпендикулярен к вектору а и обратно, «ели вектор М\М перпендикулярен к а,
то точка М лежит в плоскости; выразим это условие перпендикуляр-
перпендикулярности векторно:
(г — г^а = О, t*& — гх.а = О
т. е.
г-а = гх.а
представляет уравнение искомой плоскости. Вводя координаты хг, ух, %
точки М] и составляющие ах, Оу, аг вектора а, найдем аналитическое
уравнение плоскости
а* (я — хх) + Оу (у — jrj + az (z — гг) = О
или
ахх + 0^ + 0x2 — axXi + dyj/i H- агг,
Задача 36. Найти расстояние от точки М1 (т±) до плоскости
г. а = a B5)
Плоскость B5) перпендикулярна к а; в самом деле, пусть две точки
М' (г') и М" (г*) лежат в плоскости, тогда
г'.а — а, г"«а = a
следовательно (г' — г*).а = 0, т. е. М'М" перпендикулярно к а, так
что всякая прямая плоскости перпендикулярна к а, что может быть
только при условия перпендикулярности плоскости и вектора а.
Легко написать уравнение перпендикуляра, опущенного из точки
М1 (гх) на плоскость B5):
г -. tl + ak B6)
где X — переменный параметр, пробегающий все значения. Найдем точку
пересечения этого перпендикуляра с плоскостью, для чего надо сов-
совместно решить уравнения B5) и B6).
42 ВЕКТОРНАЯ АЛГЕБРА Гл. I
Подставляя выражение для г из уравнения B6) в B5), найдем:
(г, + аЯ)-а = а, га-а + а*\ = а, Ь = а~?'*
Самый перпендикуляр представляется вектором А,а, длина же его
d = I ХаI = 1°— fi а1 __ Iа — (°ж^ + "язл + д««0I
1 ° V а*г + V + вИ
В частности расстояние d0 от начала координат до плоскости B5)
выражается формулой:
11 B8)
Задача 37. Точка М (г) движется с постоянной скоростью v, в на-
начальный момент она находилась в точке Мо (г0); узнать, в какой, момент
она встретит плоскость, заданную уравнением
г» а = а
Очевидно, точка М пробегает прямую
г = г0 + v«
а надо определить момент t, отвечающий пересечению этой прямой с пло-
плоскостью; вставляем выражение для г в уравнение плоскости
(г0 + v?)<a =-= a, ro.a + (v«a) t = a
Отсюда
Задача 38- Найти уравнение плоскости, проходящей через сере-
середину отрезка, соединяющего две точки Мг (гх) и М2 (г3), и перпендикуляр^
вой к этому отрезку.
Ответ. Г.(Г] _ rs) = i.(n* — га2)
Задача 39. Найти уравнение сферы радиуса а с центром в начале
координат, а также уравнение касательной плоскости к сфере в точке
сферы Aft (rt).
Уравнение сферы, как геометрического места точек, удаленных от
начала координат на расстояние а, имеет, очевидно, следующий вид:
г.г == а2
или в координатной форме:
з? 4- ^ + ^ = о»
Касательная плоскость проходит через точку М, (rt) и перпендику-
перпендикулярна к вектору г15 следовательно, ее уравнение можно написать в таком
виде:
г«г, = г,-i1! = аг, или XX] + yy-i + zzx — as
I 5 СКАЛЯРНОЕ ИЛИ ВНУТРЕННЕЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 43
Задача 40. Рассмотрим сферу радиуса а с центром в начале коор-
координат. Две точки, лежащие на одном луче, проходящем через начало
координат, и находящиеся на таких расстояниях R и R' от последнего,
что произведение RR' — а2, называются гармоническими. Доказать сле-
следующее свойство гармонических точек: отношение расстояний любой
точка сферы до двух гармонических точек есть величина постоянная.
В самом деле, если радиус-вектор одной гармонической точки Р есть
К&, причем J а | = а, то радиус-вектор другой гармонической точки Q
будет у- а. Возьмем теперь произвольную точку М (г) на сфере, так что
г-г = а2
Составим выражения для МРг и М Q*:
МР* = (г — \&)*(г — Ха) = г.г — 2Яат + Я2а.а = а2 — 2\а-т +
= <z2-2-i-a.r + p a2
Очевидно, МР2 = \2MQ*, так что МР = ХМQ, что и требовалось до-
доказать.
Задача 41. Какой угол составляют между собой два вектора:
а = i + j — 4k, b = i — 2j + 2k
Ответ. 135°.
Задача 42. Какой угол составляют между собой два вектора а и Ь,
если известно, что вектор а + ЗЬ перпендикулярен вектору 7а — 5Ь,
а вектор а — 4Ь перпендикулярен вектору 7а — 2Ь?
Ответ. 60°.
Задача 43. Пусть г есть радиус-вектор точки в плоскости. Какая
кривая выражается уравнением г«(г — 2а) = 0? Какое свойство этой
кривой вытекает непосредственно из только что написанного уравнения
кривой?
Ответ. Окружность; вписанный в окружность угол, опирающийся
на диаметр, есть прямой.
Задача 44. Доказать, что если А, В, С — вершины треугольника,
Р — точка пересечения его медиан, & О — какая-либо точка, то имеет
место тождество
АВг + ВС2 + С А2 + 9ОР* = 3 (О А2 — <95а + ОС2)
Задача 45. Доказать, что если А, В, С — вершины треугольника,
А', В', С — середины противоположных сторон (фиг. 10) и О — какая-
либо точка, то имеет место тождество
АВ* -j- ВС* + СА2 + 4 {(ОАТ + (ОВ'}2 4- (ОС')г) = 4 [ОА'-А-ОВ2 + ОС*}.
44 ВЕКТОРНАЯ АЛГЕБРА Гл. I
§ 6. Векторное или внешнее произведение двух векторов.
Изображение площадей векторами. Вектор замкнутой поверхности.
Свойства векторного произведения. Полярные и аксиальные векторы.
Приложения к статике и кинематике
1. В предыдущем параграфе мы рассмотрели скалярное умножение
двух векторов. Теперь мы рассмотрим векторное умножение двух век-
векторов, в результате которого получается новый вектор.
К необходимости рассматривать такую операцию приводят требования
геометрического и физического характера.
Например, вспомним определение момента относительно начала ко-
координат О силы F, приложенной к точке Р, характеризуемой радиусом-
вектороч г; ато есть вектор, равный по величине площади параллелограм-
параллелограмма, построенного на векторах г и F, и направленный по перпендикуляру
к этой площади. Вектор, таким образом составленный из г a F, и назы-
называется векторным произведением г и F. Дадим более точное определение.
Векторным или внешним произведением двух векторов а и b называет-
называется вектор, по величине равный площади, параллелограмма, построенного на
векторах а и Ь, перпендикулярный плоскости этих векторов и направ-
направленный в такую сторону, чтобы вращение от а к b на кратчайшем пути
вокруг полученного вектора происходило в ту же сторону, как вращение
от оси х к оси у вокруг оси z.
Если выбрать левую систему координат, то нужно
вращать ось х вокруг оси г по часовой стрелке, чтобы
совместить ее с осью у. Поэтому векторное произведение
векторов а и Ь нужно направлять в такую сторону, что-
чтобы, глядя оттуда, видеть вектор а слева от Ь, т. е. пе-
переход от а к b видеть совершающимся по часовой стрелке
(фиг. 27). Если же пользоваться правой системой коорди-
Фиг. 27 нат' в которой вращение от оси х к оси у на кратчай-
кратчайшем пути вокруг оси z происходит против часовой стрел-
стрелки, то векторное произведение векторов а и b придется направить в про-
противоположную сторону, как показывает фиг. 27.
Будем обозначать векторное произведение а и b косым крестом, т. е.
е = axb A)
Из других обозначений наиболее употребительны [ab], la, b].
Длина вектора е по определению равна
с = ab sin (a, b) B)
Отсюда сразу же можно вывести, что при параллельности а и b вектор-
векторное произведение а на Ь равно нулю:
axb = 0 (a lib) C)
6
ВЕКТОРНОЕ ИЛИ ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ
45
В частности всегда
а х а = 0 D)
Напротив, если а перпендикулярно Ь, то
с = аЪ E)
2. От перестаноеки сомножителей векторное произведение меняет свой
знак.
Ьха = — ахЬ F)
ибо величина параллелограмма и его плоскость не меняются, направле-
направление же произведения мы должны изменить на прямо противоположное.
Таким .образом, векторное произведение некоммутативно.
Далее, векторное произведение ассоциативно по отношению
к скалярному множителю, т. е. скалярный множитель можно выносить
из-под знака векторного произведения:
m(axb) = яга х b G)
при положительном т. эта формула очевидна, ибо она выражает, что
при увеличении одной стороны параллелограмма в т раз площадь па-
параллелограмма тоже увеличится в т раз. Чтобы убедиться в справед-
справедливости формулы G) для случая отрицательного т, достаточно обратить
внимание на то, что при изменении знака одного из множителей вели-
величина векторного произведения остается неиз-
неизменной, направление же этого произведения
меняется на прямо противоположное.
Теперь мы докажем дистрибутив-
дистрибутивность векторного произведе-
произведения, т. е. формулу:
ах(Ь + с) = ахЬ -f- ахс (8) фиг. 28
Для доказательства разложим векторы b и с на две составляющие,
параллельно и перпендикулярно вектору а:
b = ma ¦+• b' (b'J_a)
с = да + с' (c'J_a) (9)
тогда b ¦+- с тоже разложится на две составляющие:
Заметим теперь, что
ахЬ = ахЬ'
A0)
A1)
ибо площадь параллелограмма, построенного на а и Ь, равна площади
прямоугольника, построенного на a a b' (фиг. 28).
Точно так же
ахс = ахс', ах(Ь + с) = ах(Ь' + с')
A2)
ВЕКТОРНАЯ АЛГЕБРА
Гл. I
Фиг. 29
Но нетрудно показать, что
ах(Ь' + с') = axb' + ахс' A3)
ибо, если выбрать, например, левую систему координат и если вектор а,
перпендикулярный к фиг. 29, выполненной в плоскости векторов Ь' и с',
направлен от чертежа вперед к нам, то векторное произведение axb' будет
представляться отрезком длины ab', повернутым на 90° по часовой стрелке.
Таким образом, весь параллелограмм, построен-
построенный на Ь' и с', поворачивается на 90° и удли-
удлиняется в отношении а, а так как при этом диаго-
диагональ продолжает оставаться геометрической сум-
суммой сторон параллелограмма, то получается соот-
соотношение A3). В силу равенств A1) и A2) это со-
соотношение равносильно (8).
3. Приведем другое доказательство формулы
(8), для чего покажем сначала, как можно при
помощи векторов изображать не только направ-
направленные отрезки, но и направленные площади.
Такая площадь только что встретилась нам
в виде параллелограмма, построенного на векто-
векторах а я Ь, причем был существен порядок,
в, котором следовали векторы а и Ь. Отклады-
Откладывая сначала вектор а, а потом Ь, мы получаем
определенное направление, контура параллелограмма (фиг. 27); этот па-
параллелограмм мы изобразили вектором с.
Мы будем всякую площадку S, на контуре которой задано направле-
нм обхода, изображать вектором, длина которого равна площади площад-
площадка, а направление совпадает с направлением положительной нормали
к площадке.
При этом положительной нормалью к площадке называется перпен-
перпендикуляр, восставленный к площадке и направленный в ту. сторону, от-
откуда обход по контуру кажется совершающимся по часовой стрелке,
если выбрана левая система координат, и против часовой стрелки, если
выбрана правая система.
Иначе это можно высказать следующим образом: бу-
будем ввинчивать в площадку винт, вращая его в направ-
направлении обхода контура, тогда он будет перемещаться и по-
поступательно в направлении положительной нирмали к пло-
площадке, если только пользоваться при левой системе ко-
координат винтом с левой нарезкой, а в правой системе
винтом с правой нарезкой или буравчиком.
Мы будем обозначать вектор, изображающий площад-
площадку S, через S или Sn, понимая под а — единичный вектор, направлен-
направленный по положительной нормали (фиг. 30).
Дальше мы несколько остановимся на свойствах векторов такого рода.
Фиг. 30
§ в ВЕКТОРНОЕ ИЛИ ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 47
Докажем теперь следующую теорему: проекция площади S, изобра-
изображаемой вектором S, на какую-либо плоскость Р может быть изображена
вектором, являющимся проекцией вектора S на перпендикуляр к плоскости Р.
Пусть плоскости S и Р составляют между собой угол а (фиг. 31);
обозначим линию их пересечения через КК'.
Рассмотрим прямоугольник ABCD, две
стороны которого АВ и CD параллельны
прямой КК', а две другие стороны AD и
ВС перпендикулярны КК'. Этот прямо-
прямоугольник спроектируется в прямоугольник , ,
Л' В' С D', две стороны которого A'B'=C'D'
будут равны АВ = CD, две же другие сто-
стороны, очевидно, уменьшатся, а именно:
A'D' = В'С = AD cos a = ВС cos а
Фиг. 31
Поэтому площадь dS четырехугольника
ABCD спроектируется в площадь dS' = dS cos«. А отсюда следует,
что проекция 5' всей площади S равна 5' = S cos а, так как площадь S
можно составить из большого числа прямоугольников вида ABCD со
сторонами, параллельными и перпендикулярными к КК', каждый ив
которых будет при проектировании уменьшаться в отношении cos a.
Спроектируем с другой стороны вектор S (на фиг. 31 принята левая
система координат) на перпендикуляр к плоскости Р.
Так как угол между перпендикулярами, к плоскостям S и Р равен
углу между самими плоскостями, т. е. а, то проекция S на перпендикуляр
Я плоскости Р равна S cos а, т. е. величине площади S'.
С другой стороны, иа чертежа видно, что проекция S на перпендику-
перпендикуляр к Р. рассматриваемая как вектор, является положительной нормалью
для S',
Поэтому S' может быть представлена проекцией S на нормаль к Р,
что и требовалось доказать.
Возьмем теперь какую-нибудь многогранную поверхность S, на кон-
контуре которой задано определенное направление обхода.
Приведем в соответствие каждой грани Sx, S3, . . . , Sn этой поверх-
поверхности изображающий ее вектор Sj, Sl5 . . . , Sn, причем направление по-
положительного обхода каждой грани определяем из направления обхода
всей поверхности.
Сумму векторов Sa + S2 4- . . . + Sn мы будем считать вектором,
представляющим нашу многогранную поверхность.
Если поверхность замкнута, то за положительное направление нор-
нормали к каждой грани мы будем принимать направление внешней нор-
нормали.
Если мы имеем дело с кривой поверхностью, на контуре которой
аадано какое-нибудь направление, то мы можем определить представ-
ВЕКТОРНАЯ АЛГЕБРА
Гл 1
Фиг. 32
ляющий эту поверхность вектор следующим образом. Впишем в данную
поверхность многогранную поверхность с очень малыми гранями, опре-
определим для нее представляющий ее вектор и перейдем к пределу, устремляя
все грани к нулю; полученный вектор и называется вектором данной по-
поверхности.
4. Докажем теперь важную теорему: Вектор замкнутой поверхности
всегда равен нулю.
Докажем теорему сначала для тетраэдра.
Достаточно доказать, что любая проекция век-
вектора поверхности тетраэдра равна нулю.
Спроектируем его на какую-нибудь плоскость, на-
например, плоскость ху, в проекции мы получим тре-
треугольный (фиг. 32, а) или четырехугольный контур
(фиг. 32, Ь).
Каждый треугольник проекции представляется
вектором, заправленным по положительной или
отрицательной оси z, смотря по тому, составляет
ли внешняя нормаль к той грани, проекция которой
рассматривается, с осью г острый или тупой угол.
В случае фиг. 32, а треугольники ВАС, BDA, DCA представляются
векторами, направленными противоположно вектору BCD, ибо если
грань, отвечающая BCD, смотрит в одну сторону оси z, то три другие гра-
грани будут направлены в другую сторону оси z. А так как
пл. BCD = пл. ВАС + пл. BDA + пл. DCA
то сумма векторов проекций граней тетраэдра равна нулю, так что для
этого случая теорема доказана.
Точно так же разбирается случай фиг. 32, Ь; в этом случае треуголь-
треугольники ВАС, BDA представляются векторами, направленными противопо-
противоположно векторам треугольников BCD, CAD.
В соответствии с этим здесь имеется соотношение:
пл. ВАС + пл. BDA = пл. BCD + пл. CAD
Итак, проекция вектора поверхности тетраэдра на плоскость ху равна
нулю; так как за плоскость ху можно принять любую плоскость, то проек-
проекция вектора поверхпости тетраэдра на любую плоскость равна нулю,
а значит, самый вектор тождественно равен нулю.
Теперь докажем теорему для замкнутого многогранника, Мы всегда
можем разбить последний на ряд тетраэдров. Применим теорему для
каждого из последних и сложим результаты, тогда получится, что сумма
векторов всех граней многогранника плюс сумма векторов по всем доба-
добавочным граням, которые мы провели при разбитии многогранника на
тетраэдры, равна нулю. Но рассмотрим какую-нибудь добавочную грань;
она будет служить гранью для двух тетраэдров, причем один раз мы
§ fi HKKTOPHOE ИЛИ ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 49
должны за внешнюю нормаль к ней брать одно направление нормали,
а другой раз как раз противоположное. Поэтому сумма векторов, от-
отвечающих добавочным граням, тождественно равна нулю, так что сумма
лекторов по всем граням замкнутого многогранника или, что то же,
вектор замкнутого многогранника, равен пулю.
Непосредственным следствием отсюда является вывод, что вектор
псякой замкнутой поверхности равен нулю, ибо, вписывая в ату поверх-
поверхность ряд многограппиков с гранями, стремящимися к нулю, мы будем
получать равные нулю векторы этих многогранников, а следовательно,
и в пределе получим для вектора замкнутой поверхности нуль.
Только что доказанная теорема допускает очень простую физическую
интерпретацию.
Рассмотрим несжимаемую жидкость, находящуюся в покое, причем
никакие внешние силы на нее не действуют. По закону Паскаля
гидростатическое давление всюду будет одним и тем же; обозначим его
через р.
Выделим теперь некоторый объем жидкости, ограниченный произволь-
произвольной поверхностью S; так как выделенный объем жидкости находится
в равновесии, то геометрическая сумма всех приложенных к нему сил
должна равняться пулю.
Но внешних сил нет, следовательно, на выделенный объем будут
действовать только силы гидростатического давления.
Рассмотрим какую-нибудь малую часть поверхности, ограничивающей
• выделенный объем; пусть эта часть поверхности представляется векто-
вектором Si, тогда действующая па эту часть поверхности сила будет равна
pSi и будет направлена по нормали к поверхности опутрь поверхности,
т. е. как раз противоположно вектору Si.
Значит, действующая на рассматриваемую часть поверхности сила
равна — pSi.
Поэтому геометрическая сумма всех сил, действующих на поверх-
поверхность S, только миожителвм — р отличается от геометрической суммы
всех векторов Si, равной вектору замкнутой поверхности S. И так как
геометрическая сумма всех сил по вышесказанному равна нулю, то и
вектор замкнутой поверхности S должен равняться нулю.
5. Примет»! только что докавапную теорему для вывода формулы (8):
ax(h-i-c) =axb + axo
Построим для этого геометрическую сумму векторов b + с и яа по-
получившемся таким образом (фиг. 33) Д ABC построим призму, ребра
которой равны я параллельны вектору а.
Вектор полученной замкнутой поверхности, равный по только что
доказанному нулю, составляется из пяти членов.
Два члена, отвечающие граням ABC и А' В' С, очевидно взаимно
уничтожаются, ибо площади этих граней равпы, а внешние нормали
к ним как раз противоположны.
4 и. Е. Кочян
50
ВЕКТОРНАЯ АЛГЕБРА
Гл.
"А
Три остальные грани при пользовании левой
системой координат и при расположении векто-
8' ров, указанном на чертеже, чего всегда можно
добиться перестановкой векторов b и с, дают
соответственно векторы:
грань СС'А'А ... ахЬ
» АА'В'В . . . ахс
» ВВ'С'С . ..ах[-(Ь + «I
ибо когда мы,смотря извне, обходим, нацри-
Фяг. 33 мер, грань СС'А'А по стрелке часов,_то вектор
b = С А' следует за вектором а =СС. Скла«
дывая три полученных вектора, мы должны получить нуль, так что
axb +ахс — ах(Ь + с) =0
Отсюда
ах(Ь -1-е) =axb
Что и требовалось доказать.
6. Образуем векторные произведения основных ортов; прежде всего,
is силу D), имеем
ixi = jxj = kxk =0 A4)
далее, непосредственно иа самого определения векторного произведения
вытекают формулы
ix j = k, jxk — i, kxi = j
jxi = -k, kxj= — i, ixk= —j A5)
При помощи этих формул легко найти составляющие axb, если
известны составляющие а и Ь; в самом деле, вычислим
axb = (aj + avj + агк) X (bxi + bv\ -+• bzk) =
= axbx (ix i) + axbv (ix j) + aja2 (iX k) + a,Jbx (jx i) + aj)v (jx j)' +
+ <*A (jxk) + «A (kxi) + «A (kxj) -(-аА<Ьхк) A6)
В силу формул A4) и A5) произойдут большие сокращения:
— atby) + j (агЪх — афг) + k {axby — афх) A7)
axb
Отсюда
(a x b)*
(axb),,
(axb):
aj>v —
Укажем, как непосредственное приложение этих формул, вывод
условий параллельности двух векторов а и Ь, заданных своими соста-
5 6 ВЕКТОРНОЕ ИЛИ ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 51
вляющими. В этом случав axb = 0, приравнивая составляющие этого
вектора нулю, получим:
*?-Ь=,^ (а ||Ь) A9)
т. е. соответствующие составляющие двух параллельных векторов про-
пропорциональны.
Этот результат, впрочем, ясен и из того обстоятельства, что в силу
коллинеарности векторов аи b один из них выражается произведением
другого на скалярный множитель: b = Xa, откуда
что равносильно A9).
Из формул A8) можно вывести, далее, ряд соотношений, связывающих
косинусы углов, составляемых осями двух прямоугольных систем ко-
координат (фиг. 20). В самом деле, возьмем, например, за вектор а орт i,
а за вектор b орт j, тогда вектором а X b будет служить к, если новая
система Oseyz ориентирована так же, как старая, и — к, если новая си-
система будет ориентирована противоположно старой.
_ _Вшгасывая из таблицы девяти косинусов § 4 компоненты векторов
j, j, k и подставляя их в формулы A8), мы найдем:
+ «з
± fa B0)
где верхний знак берется при одинаковой ориентации старых и новых
осей, нижний — при разной. Циклической перестановкой значков 1, 2
и 3 мы можем получить еще шесть новых формул.
Составим таблицу важнейших свойств векторного произведения.
1) axb = c, с = absin (a, b), с_[_а, c_Lb, вращение от а к b вокруг
с таково же, как вращение от оси х к оси у вокруг оси z
(определение)
2) bxa=—axb
3) а х b = 0, если а = 0 или b = 0 или а II b
4) ах а = О
6) та. х пЪ = пгп (а х Ь)
г(а х b)s = aJbz — aj>y
7)
(ахЬ)„ = а А, — ахЪг
(а х Ь)г = aj)y — ajb&
¦52 ВЕКТОРНАЯ АЛГЕБРА Гл. I
7. Прежде чем иллюстрировать теорию примерами, мы остановимся
¦^ще на одной свойстве векторного произведения.
В сущности представление некторпого произведения вектором чисто
условно; гораздо естественнее было бы изображать его площадкой,
например, параллелограммом, построенным на векторах а и Ь, имеющим
определонпое направление обхода в зависимости от порядка сомножителей.
Однако для целей векторного анализа гораздо удобнее оперировать
•с вектором, представляющим эту площадку и являющимся как бы ее
дополнением в нашем трехмерном пространстве.
Такие векторы, связанные с направлением некоторого обхода, пазы-
яаются аксиальными, осевыми, или псевдовекторами.
К числу их принадлежит, помимо вектора, представляющего пло-
площадку, и помимо векторного произведения двух обыкновенных или, как
их обычно называют, полярных векторов, еще, например, угловая
скорость вращения твердого тела, которую можно представлять вектором,
направленным по оси вращения о ту илл другую сторону в зависимости
от наличия обхода вокруг оси в ту или другую сторону (отсюда название
аксиальный, или осевой, вектор).
Полярными же векторами являются, например, перемещение, ско-
скорость, ускорение, сила.
Природу того или другого механического вектора можно узнать по
следующему правилу.
Отразим явление в плоскости, перпендикулярной к рассматривае-
рассматриваемому вектору; если при этом направление, в котором протекает явле-
явление, изменится на обратпое, то вектор есть полярный; если же направ-
направление явления останется прежним, то мы имеем дело с аксиальным век-
вектором. Так, отражая векторное произведение двух полярных векторов
и плоскости составляющих векторов, мы последние, очевидно,не изменим,
явление не изменится, следовательно, пекторное произведение двух по-
полярных векторов есть вектор аксиальный.
В качестве другого примера рассмотрим вращоппе твердого тела
вокруг оси.
Отражая явление вращения п плоскости, перпендикулярной оси вра-
вращения, увидим, что вращение будет происходить опять в ту же самую
сторону, поэтому вектор угловой скорости мы должны считать вектором
аксиальным. Напротив, отражая вектор скорости точки в перпендикуляр-
перпендикулярной к нему плоскости, мы увидим, что точка будет двигаться в обратную
сторону, следовательно, вектор скорости есть полярный вектор.
Когда мы имеем дело с координатным представлением, то различие
между полярными и аксиальными векторами сказывается в том, что
при зеркальном отображении в одной ив координатных плоскостей,
например г/г, т. е. при переходе от одной прямолинейной прямоугольной
«истемы к другой но формулам
х = — х, у = ?/, ? = г B1)
§ 6 ВЕКТОРНОЕ ИЛИ ВНЕШНЕЮ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 53
составляющие полярного вектора преобразуются как координаты по
формулам
<К лх, а~ = ау, а- = аг B2)
в то время как составляющие аксиального вектора меняют еще свой
знак; так, например, вычислим составляющие векторного произведения
axb двух полярных векторов. По условию
а- = - ах, а- = ау, а- = az
Поэтому
(а х b)- г= aJ>- - a-b- = ауЬг - aby = (ах !>)„
(ах b)- = аф- -а-Ь-г т, - агЬг + ахЬг =-(ах Ь)у B3}
(ах Ь)^ = a-kj — а-Ь- = - axby + аД = -(ах Ь),
Точно так же, если мы произведем инверсию координатных осей, т. е.
преобразование
? = - х. у = -?/,. z = - 2 B4)
то составляющие полярного вектора изменят свой знак па обратный, в то
время как составляющие аксиального вектора останутся без изменения.
Заметим, что при зеркальном отображении и при инверсии левая
система координат переходит в правую и обратно, так что пока мы ос-
остаемся и области одних левых или одних правых систем координат, ни-
никакого различия между полярными и аксиальными векторами нет.
Когда зке мы переходим от левой системы к правой или обратно, то
аксиальный вектор изменяет слое направление на прямо противоположное,
в то время как полярный вектор остается без изменения.
Это и пыяывает то различие в поведения составляющих вектора, ко-
которое было выше указало.
Значение различия между аксиальными а полярными векторам»
состоит и том, что, подобно тому как складывать, вычитать и приравни-
приравнивать можно только вели чипы одинаковой размерности, так точно векторы
разного рода не могут быть складмиаемы или сравниваемы. В самом
деле, иначе при переходе от левой системы координат к правой соста-
составляющие некоторых членов суммы или равенства изменили бы свой знак
на обратный, в то время как другие члены сохранили бы его, при этом
значение суммы изменилось бы, а равенство нарушилось.
Оказывается, что и скаляры, подобно векторам, надо делить на две
группы: скаляры первого рода, пли просто скаляры,
и скаляры второго рода или псевдоскаляры. Все
величины скалярного характера, получающиеся в результате измерения
какого-либо физического объекта, например масса, температура я т. д..
являются скалярами первого рода; напротив, некоторые из выражений,
получающихся в результате математических операций над векторами,
54 ВЕКТОРНАЯ АЛГЕБРА Гл. J
могут изменять свой знак на обратный при переходе от левой системы
к правой или от правой системы к левой.
Такие величины называются псевдоскалярами. Так, например, ска-
скалярное произведение полярного и аксиального векторов является псевдо-
псевдоскаляром.
8. Мы указывали в самом начале этого параграфа, что момент силы F
относительно начала координат О есть rxF, где г есть радиус-вектор
точки приложения силы. Обозначая момент силы Р относительно точки О
символом та (F), будем поэтому иметь
m0 (F) = rxF B5)
В статике доказывается, что силу, приложенную к твердому телу,
можно, не изменяя ее действия на твердое тело, перевесить вдоль линяй
ее действия (иными словами, сила, приложенная к твердому телу, есть
передвижной вектор). Докажем, что при таком переносе момент силы не
меняется. В самом деле, пусть радиус-вектор новой точки приложения
силы есть г' (фиг. 34), так как мы можем переносить точку приложения
f силы только вдоль самой силы, то вектор г' — г
должеп быть коллинеарен с F, так что
1" — г = XF, г' = г+ ХЕ
Вычислим новый момент
г'х F=(r + IF)XF= гх F + X(FxF) =rxF
Видим, что момент не изменился.
Фиг w Докажем теорему Вариньона: момент от-
относительно какой-нибудь точки О равнодейст-
равнодействующей двух сил F] и F2, приложенных в одной и той же точке, равен
сумме моментов этих сил.
Если О выбрать за начало координат и обозначить радиус-вектор
точки приложения силы через г, то теорема явится непосредственным
следствием формулы
rx(F, + F2) = гх Fj + гх F2 B6)
Рассмотрим систему сил Flt F2 . . ., Fn, приложенных к твердому те-
телу. Геометрическая сумма этих сил называется главным вектором сил:
В - F, + F, + . . . + F. B7)
Геометрическая сумма моментов данных сил относительно точка О
называется главным моментом системы сил относительно точки О:
h> = r,xF, + r!xF!+...+ rnx Fn B8)
где rlt rs гп — радиусы-векторы точек приложения сил Flt F2,...,Fn
относительно точки О.
I g векторное или внешние: произведении двух векторов 55
Изучим, как изменяется главный момент системы сил при различном
выборе точки О. Возьмем точку С, радиус-вектор которой есть гс, и вы-
вычислим главный момент системы относительно точки С; радиусы-векторы
точек приложения сил относительно точки С суть очевидно
V = '1 — Гс. Га' = Г2 — Гс, . , . , Г„ = Г„ — Гс
Поэтому
U = г, х F, + . . . + !>„' х Ри =. (г; — гс) х F, + . . . + (г„ — ге) X Р„ =
= Г!х Fj + . . . + г„х Fn — rcx F, — . . . — rcx Fn =
= Le — rtx(F1 + ...+ FJ -
= L0-(rcxR) B9)
Если R = 0, т. е. главный вектор системы сил равен нулю, то Lc= Lo,
т р. главный момент системы в этом случае постоянен. Бели же R не
равно нул со, то главный моиент системы определяется для любой точки С
но формуле B9).
Докажем, что скалярное произведение LC»R есть величина постоян-
постоянная. В самом деле,
Lc.R = L0.R— (rcxR).R
Но так как г,хВ перпендикулярно к R, а скалярное произведение
двух перпендикулярных векторов равно нулю, то
Lr.R = L0.R C0)
Что и требовалось доказать.
Главный вектор системы R а скалярное произведение L0>R называют-
называются статическими инвариантами системы, потому что
они не зависят от того, какая точка О выбирается за основную.
Найдет составляющие главного вектора и главного момента:
Rv = У, + - . . + Yn
H = ? А- -г- 7
C1)
Lo» R = Loaci?x + LavRv -f-
9. Другое важное приложение векторного произведения связано
с выражением для скорости точек твердого тела, вращающегося около
некоторой оси.
5fi
ВВПТОРЧАП АЛГЕБРА
Гл I.
Пусть твердое тело вращается около оси ОА (фиг. 35). Возьмем какую-
нибудь точку М твердого тела; при вращении- твердого тела эта точка
будет описывать окружность, лежащую в плоскости, перпендикулярной
к оси вращения, и имеющую свой центр Р на оси вращения.
За время At радиус РМ повернется на угол Д6 и точка М опишет
дуть РММ, скорость же точки М будет равна
Лева?
и будет направлена по перпендикуляру к РМ. Ве-
Величина
а> = Jim -Г7-
называется угловой скоростью вращения тела.
Отложим от точки О вектор ю, равный по величине
Фиг 35 •* и направленный по прямой О А в ту сторону, откуда
вращение кажется совершающимся по часовой стрелке,
если выбрана левая система координат, и против часовой стрелки, если
выбрана правая система; назовем этот вектор вектором угловой ско-
скорости. Обозначим далее через г радиус-вектор точки М относительно
какой-нибудь точки О оси вращения и составим векторное произведение
» х г. Величина его равна о>г sin (АОМ) = ш • РМ = V, направление же
перпендикулярно к О А и ОМ и притом оно направлено так же, как V,
так как, глядя с конца вектора V, мы видим «и слева от г при выборе левой
системы координат и справа от г при выборе правой. Таким образом
м X г совпадает с v как ио величине, так и по направлению, т. е.
v = ы х г C2)
Напишем составляющие скорости любой точки М:
vx = <ovz — <огу
Vy = <агх — o)xz C3)
vz = шху — щх
Если твердое тело принимает участие одновременно в нескольких
вращениях около разных осей, проходящих через одну и ту же точку О,
причем векторы угловых скоростей суть v>i, т2, . . . , шп (пример — гиро-
гироскоп), то составные скорости точки М будут
V, = to, X Г, Vj = «з X I, . . ., V,, = й>„ X Г
Так как скорость состанпого движения равна геометрической сумме
скоростей составляющих движений, то
V = Vt + V3 + . . . + Vn = Щ X Г + . . . + Wn X Г = (<0, + ¦ ¦ • + W») X Г = W X Г
где положено
w = ©! 4- • • •
C4)
I б ВЕКТОРНОЕ ИЛИ ВНЕШНЕЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 5"
Получили теорему сложения угловых скоростей: если твердое тело
принимает участие в ряде вращений около точки О, то оно вращается
с угловой скоростью а», равной геометрической сумме угловых скоростей
давних вращений.
Задача 46. Доказать, что
(axb).(axb) -ff (а-ЬJ =* ог6а
В самом деле,
(ах ЬJ = aW sin3 (a. b), (а- Ь)а = а2/;2 соч* (а. Ь)
Складывая эти два равенства, получим требуемый результат.
Введя составляющие векторов а и Ь, мы получим следующее алгебраи-
алгебраическое тождество, часто встречающееся и известное под именем тождества
Эй лера-Ла гранжа:
(ауЬг - aj>vf + (a7bx — aj?zy + (aj>,, - ауЬ^ + (а,Лх + aj>v + atbz)* =
- («xa + < + a,1) (V + V + b*) C5)
Задача 47. Вычислить (а + Ь) х (а — Ь)
(а + Ь)х(а— Ь) = аХа + Ьх» — ахЬ — ЬхЬ = — 2ахЬ
Геометрический смысл этого равенства состоит в том, что площадь
параллелограмма, построенного на диагоналях параллелограмма, в два
раза больше площади самого параллелограмма.
Задача 48. Найти формулу для sin (a + C).
Рассмотрим векторное произведение двух единичных векторов аи Ь,
лежащих в плоскости ху (фиг. 25) и составляющих с осью х соответ-
соответственно углы аир. Непосредственное определение ахЬ дает
— sin (a + 8) к; вычисляя с другой стороны z-ую координату а X Ь через
составляющие векторов аи Ь, найдем
(ах Ь)г = ахЬ„ — аф* = — cos a sin |3 — sin a cos ?J =
— — (sin a cos C -f- cos a sin {$)
Сравнивая эти два выражепия, найдем требуемую формулу:
.sin (a + p) = sin a cos f$ + cos a sin $
Задача 49. Пусть вершины: ABC треугольника заданы своими
радиусами-векторами А (тг), В (г2), С (г3). Найти вектор S, представляю-
представляющий треугольную площадку ABC, на которой задано направление обхода
контура от А к Б а от В к С.
Так как АВ = га — rlf ВС = т3 — г2, то искомый вектор есть
S-y (г« — rt) х (г3 — г2) = 1-г2хг3 i
= -j (Г2 X г3 + г3 X Г! +
58 ВЕКТОРНАЯ АЛГЕБРА Гд. I
Задача 50. Найти уравнение прямой, проходящей через Mi (rt)
л параллельной данному вектору а. Если радиус-вектор какой-либо
точки прямой есть г, то вектор г — и должен быть коллинеарен с а, т. в.
г — rj — Х.а
где X — переменный параметр (задача 5). Чтобы исключить последний,
умножим обе части уравнения векторно на а, тогда получим
(г — «ч) х а =0, или г х а = г, х а
Это и есть векторное уравнение прямой. Вводя компоненты вектора а,
можно написать уравнения прямой в одном из следующих двух видов:
я — xi у— jfi г — н
"х ~ av ~ аг
ИЛИ
Oyz — azy = OyZi — azyt
агх — axz = агх, — ахъ\
<ЗД — OyX = OxJ/i — ЩХ!
Задача 51. Найти уравнение кругового цилиндра радиуса р, ось
которого проходит через начало координат и имеет направление, задан*
ное ортом и.
Нам нужно выразить, что расстояние точек цилиндра до оси равно р.
Составим векторное произведение u x г; величина этого вектора есть
1-г-sin (и, г), т. е. как раз р, следовательно, искомое уравнение есть
(их г)* =р*
Проще всего взять такую систему координат, чтобы ось цилиндра
пошла по оси z, тогда u = k и так как
(кх г)* = —у, (кхг)„ = х, {кх гJ = 0
уравнение цилиндра принимает простой вид .х2 -f- у1 — р*.
Задача 52. Найти величину площади параллелограмма, сторонами
которого являются векторы a = i — 2j + 4kn b = 3i + j — 2k.
Ответ. 7 УЪ.
3 а д а ч а 53. Найти вектор, лежащий в плоскости ijz, имеющий
длину, равную 10, в перпендикулярный к вектору а = 2i — 4j + 3k.
Ответ. ± Fj + 8k).
Задача 54. Найти длину р перпендикуляра, опущенного из начала
координат на прямую (г — rj x a =0.
Ответ, р = 1П2±±1.
Задача 55. Найти главный вектор R и главный момент Lo отно-
относительно начала координат О системы сил, представленных последова-
последовательными сторонами плоского многоугольника, если вектор площади
этого многоугольника есть S.
Ответ. R = 0, Lo = 2S.
I 7 ПРОИЗВЕДЕНИЯ ТРЕХ ВЕКТОРОВ 58
§ 7. Произведения трех векторов. Их свойства
1. Перейдем к вопросу о перемножении трех векторов a, b и с. В силу
двойственности понятия умножения, из векторов а, Ь и смежно составить
несколько произведений разного рода. Чтобы составить ив а, Ь, с про-
произведение, мы должны сначала перемножить два вектора, а потом полу-
полученный результат помножить на третий вектор. Если мы перемножим
первые два вектора, например b и с, скалярно, то произведение будет
скаляром Ь*с, который нужно затем умножить на вектор а, в результате
получится вектор а (Ь«с), коллинеарный с а. Такого же типа будут про-
произведения Ь(а-с) и с (а-Ь).
Пусть b множится на с векторно; вектор а можно умножить на полу-
полученное произведение Ьхс или скалярно, или векторно. В результате
получаются две величины а»(Ьхс) и ах (Ьхс), первая из которых есть
скаляр и может быть названа еекторно-скалярным произведением; вторая
же величина есть вектор и называется двойным векторным произведением
векторов a, b и с.
2. Начнем с выяснения геометрического .
значения векторно-скалярного произведения
а«(Ьхс). Выберем основную систему коор-
координат определенного вида, например левую.
Применим формулу D) § 5, по которой
скалярное произведение двух векторов равно
произведению из величины одного вектора с
на проекцию другого вектора на направ- фиг 36
ление первого.
В нашем случае величина вектора Ьхс равна площади параллело-
параллелограмма, построенного на векторах b и с. Чтобы найти, чему равна проекция
вектора а на направление Ьхс, построим на векторах а, Ь, с паралле-
параллелепипед (фиг. 36).
Направление Ьхс есть направление перпендикуляра к грани с реб-
ребрами b и с, поэтому проекция а на это направление равна высоте k парал-
параллелепипеда, опущенной на грань Ь, с и взятой со знаком плюс, если
ребра a, b и с образуют левую систему (потому что в этом случае угол меж-
между а и направлением Ьхс острый), и со знаком минус, если a, b и с обра-
образуют правую систему {в этом случае угол между а я Ьхс тупой).
Так как произведение площади грани с ребрами Ьи сна высоту, опу-
опущенную на эту грань, равно объему параллелепипеда », то мы полу-
получаем замечательную формулу:
а.(Ьхс) = ± v A)
где нужно брать знак плюс, еелв векторы a, b и с образуют левую си-
систему, и знак минус, если векторы a, b и с дают правую систему.
Если бы мы ваяли за основную — правую систему координат, то со-
совершенно аналогичными рассуждениями мы пришли бы к заключению,
«U ВЕКТОРНАЯ АЛГЕБРА Гл' I
что в формуле A) надо брать знак плюс, если векторы a, b и с образуют
правую систему, и знак минус в противном случае.
Поэтому получается общее заключение: если векторы a, b и с обра-
образуют систему, одноименную с основной, то в формуле A) надо брать
знак плюс; если же система векторов a, b и с рааноименна с основной,
то в формуле A) надо брать знак минус.
Из этой формулы сразу вытекает следующее следствие:
а-(Ьхс) = b.(cxa) — c(axb) B)
т. е. при циклической перестановке векторов (замена а на Ь, Ь на с, с на а)
векторно-скалярное произведение не меняется. В самом деле, вели а, Ь, е
образуют, например, левую систему, то, как легко видеть, векторы Ь, с, а
тоже будут образовывать левую систему.
При перестановке только двух векторов иа числа трех левая система
переходит в правую или наоборот; поэтому векторно-пкалярное произве-
произведение меняет знак:
a-(cxb) = Ь.(ахс) =с(Ьха) = — а(Ьхс) C)
При компланарности трех векторов а, Ь, с объем параллелепипеда
обращается в нуль, поэтому
а-(Ьхс) = 0 D)
(а компланарно с b и с).
В частности, если два из векторов а, Ь, с равны между собой, векторно-
скалярное произведение обращается в нуль.
Обратно, при выполнении равенства D) объем параллелепипеда ра-
равен нулю, а поэтому или один из векторов равен нулю, или два иа них
коллинеарны или же онв компланарны. .
3. Чтобы найти выражение а«(Ьхс) через составляющие векторов
а, Ь, с, заметим, что ив свойств скалярного и векторного произведений
вытекает дистрибутивность векторно-скалярного произведения, выра-
выражающаяся формулами:
(а, 4- а3)-(Ь хс) = а, *(Ь х с) +¦ а2- (b x с)
а-[Ь х (ct + с2)] = а*{Ьхс1) + а>(Ьх с3)
Поэтому
а-(Ьхс) = (axi 4- ej + euk).[(M + byj + b,k)x(cxi 4- <У + с,кI
может быть представлено в виде суммы двадцати семи членов, однако
только шесть из вих отличны от нуля, именно те, в которых комбини-
комбинируются i, j в к, так как все члены вида
i-(jxj), b(jxi)
в которые входят два одинаковых орта, обращаются в нуль. Поэтому
а-(Ьхс) = ахЬ^г — а.хЬгСу + aj>zcx — ОуЬхсг + агЬ^и — афуСх E)
ПРОИЗВЕДЕНИЯ ТРЕХ ВЕКТОРОВ
Мы взяли со знаком плюс три коэффициента при
i.(jXk), j.(kxl), k-(ixj)
(ибо эти произведения равны объему куба с ребрами длины единицы)
и со знаком минус три коэффициента при
i.(kxj) = — 1, j-(ixk)=-l, k.(jXi)=-l
Выражение в правой части формулы E) называется определителем
третьего порядка из составляющих векторов а, Ь и си обозначается сле-
следу ющнм символом:
ах Ну аг
Ьх Ьу Ьг
Сх Су Сг
F)
Правило для раскрытия определителя 3-го порядка состоит в том,
что мы должны приписать справа и слева
от определителя по одной колонне (соглас-
(соглас,
*
но схемы, приведенной здесь справа), сое- й*ч
тавить произведения из трех элементов
каждой из шести получающихся диагона- *¦«
лей я взять со знаком плюс произведения,
отвечающие, диагоналям, идущим сверху *¦» "* "и "* "х
слева вправо вниз, и со зпаком минус
три остальные произведения.
Укажем еще, что определитель 2-го порядка раскрывается по формуле
,
Х
/
Итак
bx by
a-(bxc) =
±*
G)
(8)
Эта формула, указывающая тесную связь векторно-скалярныз про-
произведений и определителей 3-го порядка, дает, таким образом, также вы-
выражение объема параллелепипеда, построенного на векторах a, b 1С.
Как важное применение этой формулы, выведем соотношение между
девятью косинусами углов, составляемых осями двух координатных
триэдров (фиг. 20). Выбирая за векторы а, Ь, о соответственно векторы
i, j и к, мы получим, что
<Ха Р;
1 Ti
2 f ?
(9)
где нужно взять знак плюс или мину*;, смотря по тому, имеют ли оба
триэдра одинаковую ориентацию или разную.
62 ВЕКТОРНАЯ АЛГЕБРА Гл.1
Попутно отметим, что векторное произведение двух векторов а и b
также можно представить в форме определителя, а именно:
i j к
axb =
A0)
Для доказательства достаточно раскрыть определитель правой части
этой формулы, получится формула A7) § 6.
4. Перейдем к рассмотрению двойного векторного произведения
ах(Ьхс); этот вектор, с одной стороны, перпендикулярен к а, с дру-
другой стороны, будучи перпендикулярным к b x с, т. е. к перпендикуляру
к плоскости, определяемой векторами b н с, он должен быть компланарен
векторам b и с. Итак, вектор а х (b x с) направлен по линии пересе-
пересечения плоскости, перпендикулярной к а, с плоскостью, компланарной
векторам b и с.
Вектор ах(Ьхс), компланарный векторам Ь и с, можно разложить
по этим векторам, так что
ах(Ьхс) = тЪ + пе A1)
где шил — подлежащие определению скаляры.
Примем, что основная система координат есть левая система. Для опре-
определения т мы исключим л, для чего умножим обе
части уравнения скалярно на вектор с', лежащий в
плоскости векторов b и с, перпендикулярный к о
и направленный так, чтобы с', с и Ьхс образо-
образовали левую систему. Фиг. 37, выполненная в пло-
плоскости векторов b и с, показывает, что вектор с'
нужно направлять в сторону вектора b (вектор
Ьхс направлен от чертежа вперед). В результа-
результате умножения получается
[ах(Ьхс)]-с' = т(Ь-с') A2)
Преобразуем векторно-скалярное произведение левой части по фор-
формуле B):
(ах(Ьхс)Ьс' = [(Ьхс')хс'Ьа
Но двойное векторное произведение (Ьхс)хс' можно вычислить не-
непосредственно.
Вектор Ьхс имеет величину be sin (b, с) и направлен по перпендику-
перпендикуляру к чертежу (фиг. 37), вперед от чертежа. Поэтому вектор (Ьхс)хс'
имеет длину be sin (b, с)-с' = cbc' sin {Ь, с) = cbc' cos (Ь, с') = с (b«o') a
направлен по вектору с, а значит
(Ьхс)хс' = е (Ь-с')
[ах(Ьхс)]-с' = (а.с) (Ь.с')
§ 7 ПРОИЗВЕДЕНИЯ ТРЕХ ВЕКТОРОВ @3
Подставляя это выражение в уравнение A2) и сокращая на Ь-с' ве-
величину, не равную нулю, если только b ве параллельно с, найдем
т = а.с A3)
Чтобы найти га, перепишем формулу A1) в виде
а х (с х Ь) = — тЪ — лс
Применяя только что найденный результат, сразу найдем
— п = а-Ь A4)
так что окончательная формула будет
ах(Ьхс) = Ь(а.с) — с (а-Ь) A5)
Эта формула остается справедливой в при коллинеарности Ь и с, так
как тогда обе части равенства обращаются в нуль.
Отметим, что в двойном векторном произведении очень важно подчер-
подчеркивать порядок перемножения. Так, например, вычисляя (axb)xc, мы
получим совершенно другой вектор:
(ахЬ)хс = — сх(ахЬ) = сх(Ьха) = b (а.с) — а (с«Ь) A6)
Сопоставляя формулы A5) и A6), можно вывести следующее правило
для запоминания разложения двойного векторного произведения:
Скалярное произведение крайних векторов надо взять коэффициентом
при среднем векторе и вычесть из полученного вектора произведение дру-
другого вектора, заключенного во внутренние скобки, на скалярное произведе-
произведение двух остальных векторов.
Формулу A5) очень легко вывести другим путем, если вайти состав-
составляющие вектора ах(Ьхс):
[а х (Ь х е)]я == Оу (Ь х сJ — аг (Ь х с)„ = Оу (Ъ^— Ь^сх) — аг (Ь,сх — Ьхсг) =
прибавим и вычтем по яхЛхсх, тогда получим:
[ах(Ьхо)]ж = Ьх {ахсх + ajv + eA) — ex(aj>x + Vv
~ Ьх (а.с) — сх (а-Ь)
Так как совершенно аналогичные формулы получаются для двух
других составляющих, то имеем право написать векторное равенство
а х (Ьхс) = Ь(а.с) — с (а.Ь)
восстанавливающее формулу A5).
5. При циклической перестановке векторов а, Ь, с формула A5)
приводит к трем разным векторам:
[ах(ЬхсI = Ь (а«с) — с (а-Ь)
[Ь х (с х а) I = с (Ь-а) — а (Ь«с)
fcx(axb)] = а (с-Ь) — Ь (с-а)
44 ВВКТОРНАЯ АТТВБРА Гл. t
Складывая эти три равенства вместе, получаем тождество
ax(bxc) + bx(cxa) + cx(axb) = 0 A7)
Наконец, важное приметшие формулы A5) состоит в выводе разло-
разложения данного вектора b на две составляющие, из которых одна парал-
параллельна, а другая перпендикулярна к заданному вектору а,
А именно, положив в формуле A5) с = а, найдем
а х (Ьх а) = b (а-а) — а (а- Ь) = Ьаг — а (а. Ь)
решаем это уравнение относительно Ь:
а^1 A8)
Первый из слагаемых векторов правой части, очевидно параллелей а,
а второй перпендикулярен.
Формула для разложения упрощается* если а будет единичный век-
вектор:
b = {а-Ь) а + ах(Ьха) о = 1 A9)
Рааобранные нами случаи произведений трех векторов играют боль-
большую роль в векторной алгебре. Произведения четырех и большего числа
векторов могут быть сведены к низшим произведениям; мы их рассмотрим
в качестве примеров.
Задача 56. Через точку Mt (rt) провести плоскость, параллельную
«екторам а и Ь-
Если радиус-вектор какой-либо другой точки плоскости есть г, то
вектор г — Г1 должен быть перпендикулярен к а х Ь, т. е. должно бмть
(* — rj).(axb) = 0 B0)
В декартовых координатах уравнение плоскости будет
х — xt у — Уг г — zx
ак av аг
B1)
3 ад а ча 57. Вычислить (axb).(cxd).
Обозначим на время cxd = e; в векторно-скалярном произведении
(ахЬ).е произведем перестановку
{а < b)«(cx d) = (a xb)-e = a.(bxe) = a»[bx(ex d)l =
=a.lc(b-d)— d(b-cK = (а.с) (b-d) — (a-d) (b«c) =
a>c а.<1
b>c b«d
B2)
В частном случае при d = а, найдем
(axb).(axc) = as (b-c) — (a-b) (a-c) B3)
§ 7 ПРОИЗВЕДЕНИЯ ТРВХ ВЕКТОРОВ E5
Из этой формулы легко вывести основную формулу сферической
тригонометрии, для чего рассмотрим на сфере единичного радиуса сфе-
сферический треугольник ABC, радиусы-векторы вершив которого относи-
относительно начала координат пусть будут r1? r8, rs (фиг. 38). Ив формулы
B3) при а и» ru b = га, с = г3 получим:
(*iXrs)'(*iXrj) = Гг-г„ — (Ti-rJfa.Tg) B4)
Но если обозначить стороны треуголь-
треугольника через а, E, •{, то
Г]«г3 = cos у. rs#rs = cos а< гл'т1 = cos Р
Вектор г, х га, по величине равный
sin т, перпендикулярен к плоскости ОАВ, фиг' ^
точно так же вектор гг х г3, по величине
равный sin (J, перпендикулярен к плоскости О АС. Угол между векторами
г, х г8 и Г! х гя равен поэтому углу между плоскостями ОАВ и О АС,
т. е. равен двугранному углу А, а поэтому
to xr3) = sin 3 sin y cos A
Подставляя все найденные выражения в формулу B4), найдем
sin 3 sin f cos A = cos a. — cos 3 cos у
или, как эту формулу обычно пишут:
cos a = cos p cos Y + sin 3 sin y cos A B5)
Задача 58. Вычислить (a x b) x (с X d).
Утит вектор должен лежать как в плоскости векторов а и b (ибо он
'перпендикулярен к а х Ь), так и в плоскости векторов end; следова-
следовательно, он направлен по линии пересечения плоскости векторов а и Ь
с плоскостью векторов end.
Чтобы вычислить его, заменим в формуле
(axb)xc = b (а«с) — а (Ь-с)
вектор с на cxd, тогда получим искомую формулу:
(axb)x(cxd) = bla.(cxd)] - a[b.(cxd)l B6)
Эта формула дает разложение произведения по векторам а и Ь; но
его можно разложить также и по векторам end:
(;ixb)x(cxd) = — (cxd)x(axb) = — dfc-(axb)] + c[d-(axb)] B7)
Если мы сравним два найденных выражения для произведения четы-
четырех иекторов, то получим следующую связь между четырьмя произволь-
произвольными векторами а, Ь, с и d:
afd-(bxc)] + hfd-(cxa)] + cfd.(axb)] — d fa.(bxc)] = 0 B8)
Б н. а.
66 ВЕКТОРНАЯ АЛГЕБР А. Гл. I
Если а, Ь, с не компланарны, то можем решить это уравнение от-
относительно d:
Л » <>'(Ьхс) u d.(exa) d.(axb) ,2q\
d = a a.(bxe) + Ь а.(ЬХо) + * a.(bxc) B9>
Эта формула дает в явной форме разложение вектора d по трем не-
некомпланарным векторам а, Ь и с.
Особенно простой вид принимает формула B6), если положить d = a
(axb)x(axc) = а Га-(Ьхс)] C0)
Что в этом случае произведение четырех векторов коллинеарно с а,
исно из того соображения, что плоскость векторов а и Ь и векторов а
и с' пересекаются очевидно по а.
3 а д а ч а &9. Вычислить (Ьхс)- [(ex a) x(a x Ь)]. Прежде всего вы-
вычисляем
(сха)х(ахЬ) = (ахЬ)х(ахс) = а [а.(Ьхс)]
Поэтому
(Ьхс).[(сха)х(ахЬI = [а.(Ьхс}ЩЬхс).а] = [а.(Ьхе)? C1)
Задача 60. Применить формулу C0) для вывода теоремы синусов
сферической тригонометрии.
Обращаемся к обозначениям и чертежу задачи 57. Полагая в фор-
формуле C0), а = г,, Ь = тг, с = г3, найдем
(г, х г2) х (ri х г8) = г, [rj.foх г3)]
Мы уже выяснили, что величины векторов г5 х гя, тл х г8 суть sin f
и sin p, а угол между ними равен А, поэтому величина произведения че-
четырех векторов слева равна sin f( sin f sin А и мы получаем таким обра-
образом интересную зависимость
sin Э sin Y sin A = ][г,.(г4хг3)] j C2)
выражающую объем параллелепипеда, построенного на трех единичных
векторах, произведением синусов двух сторон сферического треуголь-
треугольника и синуса угла между ними.
Так как все равно, какие стороны брать за C, f> мы можем написать
еще две формулы
sin y sin a sin В — | г, ¦ (гг х r3) j
sin я sin f$ sin С = j г,-(гях га) [
Сравнивая эти три формулы, найдем
sin C sin Y sin i4 = sin -у sin « sin В = sin a sin p sin С
откуда и выведем теорему синусов делением на sin a sin p sin T:
gin A sin В sin С
яш а ~ sinp
5 g ВЕКТОРНЫЕ УРАВНЕНИЯ 67
Задача 61. Выяснить, что векторно-скалярное произведение трех
полярных векторов есть псевдоскаляр, а двойное векторное произведе-
произведение трех полярных векторов тоже есть полярный вектор.
Задача 62. Каким вектором р изображается перпендикуляр, опу-
опущенный из начала координат на прямую (г — п)ха = 0?
Ответ:
¦Задача 63. Найти линию пересечения двух плоскостей г.а = а
а г.Ь = р.
Ответ:
р х (а х Ь) = За — «Ь
Зада ча 64. Доказать формулы
ах [Ьх(сх d)! = (Ь.<1) (ахс) — (Ь-с) (ах d)
ах Ibx(cxd)] = [a-(cxd)!b — (a-b) (cxd)
Задача 65 Доказать формулу
(axb).[(cxd)x(ex ГI = Г(ахЬ).е) ff.(cxd)l - f(axb)-fl le-(cxd)l
§ 8. Векторные уравнения
1. 6 силу двойственности понятия об умножении векторов нельзя
поставить вопроса о действии деления векторов в обычном смысле слова.
Приходится заменять это действие решением различных векторных урав-
уравнений, как например,
г.а = т или гха = Ь
где г есть неизвестный вектор.
Рассмотрим в этой параграфе несколько вопросе* теории векторных
уравнений.
Мы уже ранее при определении действия вычитания векторов рас-
рассмотрели уравнение
г + а = Ь A>
в показали, что его решением является
р = b - а B)
Уравнение
г-а = т C)
имеет бесчисленно»' мнбж^Р'гво решений, так как оно определяет только
составляющую вектора 'г в ааправлении вектора а, величина которой
будет го = т/а; составляющая же в направлении, перпендикулярном
к а, остается совершенно произвольной. Таким образом, если рассматри-
рассматривать с как радиус вектор аекоторов точки М относительно начала коор-
координат О, то геометрическое место коацов всех векторов г, удовлетворяющих
:¦>*
US ВЕКТОРНАЯ АЛГЕБРА Гл. (
уравнению C), будет плоскостью, перпендикулярной к вектору а
в отстоящей 'от :начала координат на расстоянии т/а.
Причина такой' неопределенности решения векторного уравнения C)
заключается в том, что вектор полностью определяется тремя соста-
составляющими, а 'уравнение C) дает только одну алгебраическую зависи-
зависимость между этими тремя составляющими
ахх + ауу + azz = m D)
где х, у, z —составляющие вектора г.
2. Полностью вектор г может быть определен ив системы двух век-
векторных уравнений, дающих скалярное я векторное произведение г на а:
г.а = т, гха — b E)
где, конечно, b должно быть перпендикулярно к а.
Для решения этой системы применим формулу A8) $ 7, дающую раз-
разложение вектора г на две составляющие, из которых одна параллельна,
а другая перпендикулярна к »:
Подставляя сюда данные выражения г-а и гха, найдем единствен*
вое решение системы E), в виде
г=т*_ axh 6)
{проверка показывает, что это г действительно удовлетворяет системе).
Такая определенность решения получилась благодаря тому, что си-
система E) равносильна трем алгебраическим уравнениям, служащим для
определения трех составляющих вектора г:
ахх + Оуу + azz = m
axy-ayz = bx
— a^t -Ь az = b * '
(Ив тпех последних уравнений этой системы одно является следст-
следствием двух других, в чем легко убедиться, умножая их соответственно
аа ах, Оу, аг, складывая результаты и принимая но внимание соотно-
соотношение а«Ь = axbx + афу + aj)t — 0.)
Таким образом решение трех линейных уравнений системы G) есть
* — ^i—1 а I 3~ "т~ 'at •?. I a™-
*х" + а1/ + аг ах + V + °2
= m"« + azf>X ~ "А ,дч
I 8 ВЕКТОРНЫЕ УРАВНЕНИЯ 69
Если мы хотим найти общее решение уравнения C)
г-а = т C)
то должны считать Ь произвольным (мы можем в данном случае отбро-
отбросить условие Ь.а = 0, так как в Ьха параллельная а составляющая
вектора Ь все равно пропадает), так что общее решение уравнения C)
можно написать в виде
f = 7+axB (9)
где В — произвольный вектор.
Если же мы ищем решение уравнения
гха = Ь {Ь-а = 0} A0)
роизвольн
вольный параметр ц, будем иметь.
то должны считать т произвольным, так что, вводя вместо ^ произ-
произй б а
Очевидно, это есть уравнение прямой, параллельной вектору а.
3. Поставим теперь задачу решить систему уравнений:
г.а = а
г.с = Y
где a, b и с образуют систему трех некомпланарных векторов, необхо-
необходимым и достаточным условием чего является
а.(Ьхс)=^0 A3)
Геометрическое значение решения этой системы легко выяснить,
если считать г радиусом-вектором некоторой точки относительно начала
координат. Тогда конец г должен лежать в трех плоскостях, определяе-
определяемых каждым из уравнений системы, так что задача сводится к нахож-
нахождению точки пересечения трех плоскостей
Мы начнем с решения более простои системы, а именно
г-а = i
г.Ь=0 A4)
г-с = О
Два последних уравнения указывают на перпендикулярность г как
к Ь, так икс, следовательно, на параллельность г вектору Ьхс, так
что
г = m (Ьхс)
где т. — подлежащий определению скаляр, который можно найти иа
первого уравнения системы A4)
m(a.(bxc)t = 1
70 ВЕКТОРНАЯ АЛГЕБРА Гл. I
Отсюда
_ 1
т ~ а.(Ьхс)
Таким образом решение системы A4) есть
._ Ьхс
Г~ а.(Ьхс) A?))
Обозначим этот вектор через а*.
Точно так же можно найтп решение двух других систем, а именно:
г-а = 0, г.а = 0
г.Ь= 1, г-Ь= 0 A6)
г.с = 0, г-с = 1
в виде векторов Ь* и е*
h* аха - ахЬ
Три вектора а*, Ь* и с*
а* - Ьхс к* - еха с* - ахЬ A8)
а ~а.(Ьхс)' ° -а.(Ьхо)' С ~ а.(Ьхс) К '
называются взаимными с a, b в с векторами.
Они получились у нас как решевяе трех систем уравнений:
а*.а = 1, Ь*.а=0, с*-а = 0
а*.Ь = О, Ь*-Ь=1, в*-Ь = 0 A9)
а*.с = 0, Ь*-с = 0, с*.с = 1
Теперь легко убедиться, что вектор
г - оа* + pb* + f«* B°)
является решением данной системы уравнений
г.а = а
г-Ь = р
г-с = f
В самом деле, проверим, например, первое уравнение
г.а «= (аа* + pb* -t- fc*).a — a (a*.a) + p (b*-a) + f (e*-a) = a
Это решение единственное. В самом деле, если бы имелось два ре-
решения г' и г" предложенной системы, то разность г' — г" была бы ре-
решением системы
(г' _ г")-а = 0
(г' — г")-Ь «= 0
(г' _ г").с == 0
] 8 ВЕКТОРНЫЕ УРАВНЕНИЯ 71
т. е. вектор г' — г" был бы перпендикулярен сразу к трем некомпланар-
ньтм вектора» а, Ь и с, что невозможно.
Особенно просто определить систему взаимных векторов для системы
ортогональных ортов i, j и к. В самом деле, вычислим:
1' Г-* к*=к B1)
Таким образом, в этом случае взаимные векторы совпадают с исход-
исходными векторами.
4. Докажем теперь, что и обратно: векторы а, Ь, с являются взаим-
взаимными для системы векторов а*, Ь* и с*. Отметим, прежде всего, что век-
векторы а*, Ь* и с* некомпланарны. Если бы а*, Ь* и с* были компланарны
то один из них можно было бы выразить через два других по формуле
вида
с* = та* 4- пЬ*
Но тогда, по скалярном умножении на с, мы получили бы противо-
противоречие
1 = е*-е »= т (а*.с) + л (Ь*-с) = О
Докажем не компланарность векторов а, Ь, о еще другим способом,
а именно, непосредственным вычислением
а*-(Ь*хс*) „__L__{(bxc).[<cxa)x(axb)]}
Но в задаче 59 было найдено, что
(Ьхс).[(сха)х(ахЬ)] = [а.(Ьхс)]*
Поэтому
Раз а*. (Ь* х с*) ф 0 векторы, а*, Ь*, с* не могут быть компланар-
компланарными. Попутно мы получили, что объем параллелепипеда, построенного
на векторах а*, Ь*. с*, обратен объему параллелепипеда с ребрами а,
b я с и что векторы а*, Ь*, с* образуют систему координат того же вида
(правую или левую), что я а, Ь, с.
Теперь доказательство взаимности векторов а, Ь, с с векторами а*,
Ь*, с* не представит никаких затруднений. Достаточно сгруппировать
уравнения системы A9) в три системы, относя в каждую три уравнения,
стоящие в одной и той же строке, чтобы сразу увидать, что векторы а, Ь, с
взаимны с векторами а*, Ь* и о*.
5. Еще в самом начале курса мы видели, что всякий вектор d может
быть разложен по трем некомпланарным векторам a, b и с:
d = ma + »b 4- joe B3)
При помощи взаимных векторов очень легко найти коэффициенты
этого разложения.
72
ВЕКТОРНАЯ АЛГЕБРА
Гл.!
В самом деяе, умножим обе части уравнения скалярно на а*, тогда,
так как
а.а* = 1, Ьа* = 0, с-а* = О
мы сразу получим
т — d-a*
Точно так же найдем
d-b*. p — d-c*
Значит
d = (d-a*) a + (d.b*) b + (d-c*) с =
[d.(bxc))a + [d.(cxa)} b + {d.(aX b)] e
B4)
B5)
B6)
Эта формула другим путем была нами получена в задаче 58. Полу-
Получили пример определения трех скаляров из одного векторного уравне-
уравнения. Прием решения состоит, как видим, в скалярном умножении на
три некомпланарных вектора.
Разлагая d по векторам а*, Ь*, с*, мы точно так же получили бы
d = (d-a) a* + (d.b) Ь* + (d-c) с* B7)
Полученные формулы имеют тесную связь с решением системы трех
уравнений с тремя неизвестными. В самом деле, уравнение B3) равно-
равносильно трем алгебраическим уравнениям:
B8)
dy
dz
— тах -\
= may J
= таг •
Vnbx
f пЬг
+
+
+
РСх
рСг
с тремя неизвестными т, па р. Мы нашли решение в виде;
с dy dz
а ~
а.(Ьхс)
b,
bx bv bz
B9)
а цве аналогичные формулы для пар. Таким образом мы восстановили
решенве системы трех уравнений с тремя неизвестными при помощи опре-
определителей..
6. В § 6 мы ввели понятие о главном векторе R и о главном моменте
Lo относительно точки О системы сил, приложенных к твердому телу:
R = Fx + F2 + . . . + F,
Lo = rL x Fx + r»x F2 + . . . + rnx FB
§ g ВЕКТОРНЫЙ УРАВНЕНИЯ 73
и показатели, что главный момент относительно всякой точки С может
быть вычислен по формуле
Lc = Lo — r,xR
где r{ — радиус-вектор точки С.
Геометрическое место таких точек С, для которых главный момент
параллелен главному вектору, называется центральной осью системы.
Поставим задачу отыскать ее.
По условию, для точек центральной оси
t. e.
LoXR — (rcxR)xR =0
Отсюда
-R (rc-R) -+- rc(R-R) = 0
Предположим, что (re.R) = ji, тогда можем решить уравнение отно-
относительно г„
Величина |Л остается неопределенной, поэтому конец радиуса-векто-
радиуса-вектора г,, лежит на прямой линии, параллельной главному вектору. Значит,
центральная ось есть прямая, параллельная главному вектору. Формула
дает возможность построить одну ее точку, зная R и Ц,. Нужно отло-
отложить по перпендикуляру к плоскости, содержащей R и Lj, в ту сторону,
откуда врашенве от R к L, кажется совершающимся по часовой стрелке
(для левой системы координат), отрезок длины:
Losin(Lo. R)
Я
Полученная точка будет одной из точек центральной оси.
Так как для точек центральной оси главный момент параллелен глав-
главному вектору, то для этих точек главный момент достигает своего мини-
минимума. В самом деде, в § 6 была доказана инвариантность
VR =ЬаП cos {Ь„, R)
а следовательно, неизменность проекции главного момента на главный
вектор. Поэтому величина главного момента Lo обратно пропорциональ-
пропорциональна cos (Lo, R) и, следовательно, достигает своего минимума тогда, когда
cos (L,,, R) достигает своего максимума 1, т. е. когда Lo параллельно R.
Разберем еще несколько задач.
3 а д а ч а 66. Найти точку пересечения плоскости
г-а = т C1)
74 ВЕНТОРНАЯ АЛГЕБРА Гл. I
и прямой
гхЬ = В {В.Ь = 0} C2)
не параллельной плоскости. Так как плоскость перпендикулярна век-
вектору а, а прямая параллельна вектору, Ь, то условие параллельности
плоскости и прямой есть а • Ь = 0, значит у нас а- Ь Ф 0.
Составим двойное векторное произведение
ах(гхЬ) = ахВ
Раскроем его
г(а.Ь) — Ь(г-а) = ахВ
Решаем относительно г, воспользовавшись данным выражением для
г-а:
тЪ , ахВ
Можно проверить, что это действительно есть решение и притом един-
единственное, но геометрически это совершенно ясно.
Задача 67. Найти условие, при котором три плоскости
г-а = а, г.Ь = р, г-с = у C4)
параллельны одной прямой.
Чтобы плоскость г.а = л была параллельна вектору d, необходимо
и достаточно, чтобы а было перпендикулярно к d. Если все три вектора
а, Ь и с перпендикулярны к d, то они компланарны, обо они все парал-
параллельны плоскости, перпендикулярной к d. Обратно, если а, Ь, с ком-
компланарны и если плоскость, которой все они параллельны, перпенди-
перпендикулярна вектору d, то и а, Ь, с перпендикулярны к d, следовательно,
плоскости C4) параллельны d. Поэтому искомое условие совпадает с ус-
условием компланарности векторов а, Ь, с, т. е.
а.(Ьхс) = 0 C5)
Задача 68. Найти уравнение плоскости, проходящей через три за-
заданные точки Мг (г-J, Мп (г3), М3 (г3), предполагая три вектора ri, га, t»
некомпланарными.
Допустим, что искомое уравнение есть
a-r = m
Тогда, раз точки Мх, Мг, М3 лежат в плоскости, мы имеем следую-
следующие три уравнения;
а. г, = т, а-г2 = т, а.г3 = т
Если векторы rlt r3, г3 не компланарны, то эти уравнения можно ре-
решить по формуле B0):
тч* + тг3* = т г' >< * + ^'*¦*
'i*('a X
I g ВЕКТОРНЫХ УРАВНЕНИЯ 75
так что искомое уравнение будет
A,ХС, + Г,ХГ, + Г,ХГ,).Г = ^.(^ХГ») C6)
Задача 69. Найти кратчайшее расстояние между двумя непарал-
непараллельными прямыми
гха = А {А-а = 0} C7)
гх Ь = В (В-Ь = 0}
Возьмем какую-нибудь точку М, на первой прямой, а пусть ее ра-
радиус-вектор есть г,, другую точку М2 с радиусом-вектором rs возьмем
на второй прямой. Тогда
^х» = A, r,xb = В
Умножим первое уравнение скалярно на Ь, второе уравнение скаляр-
скалярно на а:
<г,ха)-Ь = А-Ь «лв ra.{axb) = А-Ь
(r,xb)-a = В-а или г,.(Ьха) = В.а
Сложим эти уравнения
(г, — гг).(ахЬ) = А-Ь + В-а
Обозначим на время а х Ь = с, тогда
(»i — «"я)'0 = А-Ь + В-а
т. е.
f^,. е) = А>Ь+В>а
Следовательно, проекция МаМл на направление вектора с постоянна,
А значит МХМ3 будет иметь наименьшую длину тогда, когда Mj?f2 бу-
будет совпадать по направлению с с = ах Ь, т. е. будет общим перпенди-
перпендикуляром к обеим прямым.
Величина же этого кратчайшего расстояния есть
Отсюда сразу получается условие того, чтобы две прямые. C7) пере-
пересекались:
А-Ь + В.а = 0 C9)
так как тогда кратчайшее расстояние должно равняться нулю.
Задача 70. Возьмем шесть иекторов а, Ь, с, d, e, f и докажем
следующее тождество:
a>d b*d c-d
[a.(bxc)][d.(ex f)l =
a-e b-e c-e
a-f b-f cf
D0)
76
ВВКТОРНАЯ АЛГЕБРА
Гл.1
Предположим для простоты векторы а, Ь, с некомшшнарными, тогда
можем разложить векторы d, e, f по а*, Ь*, с*
d = (d-a)a* + (d-b)b* + (d.c)o*
e = (e-a)a* + (e-b) b* + <e-c)c*
t = (f-a)a* 4- (f-b) b* + (f-c)c*
Составим d.(exl). При перемножении мы получим двадцать семь
произведений, но только шесть из них не обратятся в нуль, так что мы
получим:
d.a d>b d-e
d-(ex
е-а
(•a
f«b
е-с
f-c
la*.(b*xc*)]
Но мы доказали [формула B2)], что
Следовательно,
[а
•(Ьхс)]
Id
• (ex
1I-
а-
а-
а<
d
е
f
b
b
b
• d
•e
• f
с
с
с
.(I
n
• f
Если выразить это тождество через составляющие векторов, то полу-
получится теорема об умножении определителей 3-го порядка.
bv bz
Cy Cz
axdx
dx dv dz
€jc &*j Cj
/. /„ /,
byfv
cvfv
c,dz
сгег
D1)
Если в формуле D0) положить d = а, е = b, f = с, то получится
формула, дающая квадрат объема параллелепипеда, построенного на
ребрах а, Ь, с:
[а-(Ьхс)]* =
а<Ь
а.Ь а.с
Ь2 Ь-с
Ь»с с2
D2)
_ a*
5)s _ fis (c.a)a _ c* (a.b)i + 2 (a-b) (be) (c-a) =
= aWc2 {1 — cos2 (b,c) — cos8 (c, a) — cos2 (a,b) ¦+¦ 2 cos (a,b) cos (b,c) cos (c,a)}
ГЛАВА И
ВЕКТОРНЫЙ АНАЛИЗ
§ 9. Переменные векторы, зависящие от скалярного аргумента.
Годограф вектора. Дифференцирование вектора
по скалярному аргументу. Формулы дифференцирования.
Интегрирование по екалярноиу аргументу
1. Посвятим настоящую главу изучению вопросов, связанных с пере-
переменными векторами. Начнем с рассмотрения того случая, когда незави-
независимой переменной является - скалярный аргумент t. Например, в меха-
механике, чаще всего, таким скалярным аргументом является время. Итак,
пусть нам задан вектор a (?), изменяющийся вместе с ? и представляю-
представляющий некоторую функцию I. Отметим, что задание функции a (t) эквива-
эквивалентно заданию трех скалярных функций от t: ax (t), <ц (t), аг (t), ибо
a (t) = ax(t) i + о„ (t) j + az (t) k A)
Мы будем всегда предполагать a (t) непрерывной функцией t, т. е.
будем считать, что для двух соседних значений аргумента t и t + Д2
разность a (t+ Д?) — a (t) может быть сделана сколь угодно малой при
достаточно малом At. В этом случае говорят также, что a (t) есть пре-
предел а (?-ЬД?) при Д<, стремящемся к нулю, и записывают это следую-
следующим образом:
a (t) — lim a (I + Дг) B)
Будем откладывать значения вектора а ((), при различных значениях t,
от общего начала О; изменяя I на некотором интервале, мы заставим
конец вектора a {t) описать некоторую непрерывную кривую, которая
называется годографом вектора a (t).
Итак, годограф вектора есть геометрическое место концов векторов а (г),
откладываемых от общего начала О.
2. Чтобы установить понятие о производной вектора a (t), будем
поступать как обычно: возьмем два соседних значения аргумента t a
и I. +- Дг, найдем соответствующие им значения вектора a (t) и а
составим приращение вектора, т. е. разность
Да = а (/ + Д/) — a (t)
{на фиг. 39 эта разность представляется вектором АА').
78 ВВКТОРНЫ Й АНАЛИЗ Гл. II
Составим далее отношении
Да a(t -t- At) — а(<)
7 " А«
и перейдем к пределу при Д* — 0.
Если этот предел существует, то его называют производной
вектора i(() i обозначают
Ц- или a (t)
Имея в виду, что в механике время постоянно употребляется в ка-
качестве независимого скалярного переменного, выгодно производные а
по времени обозначать сокращенно символом
а (<), ставя над вектором точку.
То же применимо конечно а к скалярам:
•и т
если t — время. Итак,
* и„ .(« + &О —(«) C)
Так например, если взять за а радиус-вектор г некоторой движущей-
движущейся точки М (г), а за 1 — время то
Дг = р (t + Д<) — р (t) будет вектором перемещения за время Д<,
— будет вектором средней скорости за этот промежуток времени
а, наконец,
~ = г будет вектором скорости v (t) к моменту t,
Гакии образом скорость движущейся точки есть
производная ее радо уса-вектора по времени:
v (*) - i{t) D)
Если мы начертим годограф вектора а (фиг. 39) а отметим концы
А в А' векторов а (г) и а (( -)- Д<), то частвоо
a (t + At) — а @ = АЛ
будет иметь то же ваправпяние, что а хорда годографа ~АА'. При дг — О
вто направление Луде* стремиться совпасть С направлением касательной
к годографу, поэтому
направлевве проияводаой -^ совпадает с ва-
правлеаием касательной к годографу вектора a (t).
j 9 ПЕРЕМЕННЫЕ ВЕКТОРЫ. ЗАВИСЯЩИЕ ОТ СКАЛЯРНОГО АРГУМЕНТА 79
Очевидно, что производная вектора a (t) есть в свою очередь вектор,
зависящий от I, поэтому от него можно взять производную; эта произ-
производная называется второй производной вектора а и обозначается
Так например, производная вектора скорости называется векто-
вектором ускорения w {<):
w{/) =v{«) =f(t) E)
значит, вектор ускорения есть вторая производная радиуса-вектора по
времени.
Отметим раз навсегда, что мы будем предполагать все производные,
о которых идет речь, существующими и непрерывными.
3. Докажем, что все основные свойства производных сохраняются
и для производных векторов.
Производная суммы равна сумме производ-
производных. Пусть имеем два вектора а (г) и Ь (t), тогда
dt
*¦ >
Постоянный множитель можно выносить из-
под знака производной:
d[ma(l)] da(t) , ¦ . ._.
dt = т -?-' (m ~= const) G)
Если т есть тоже функция от I, то справедлива формула диф-
формула дифференцирования произведения:
Для доказательства составляем:
din» ,. (т -^ Am) (a -t- Аа> — та ,. Д/па + otAa + AmAa dm d&
•j/ ^ 11Ш — 77 -*- ШП т- = -ТТ" а 4- ТП —г-
Л А< А/ "" dt
Точно так же доказываются формулы дифференцирования
скалярного и векторного произведений:
Относительно последней формулы нужно заметить, что в ней порядок
множителей в каждом члене имеет строго определенное значение и не
может быть переставляем.
80 ВЕКТОРНЫЙ АНАЛИЗ Гл. I!
Правило дифференцирования сложных функ-
функций применяется и к векторам, так что если t будет в свою очередь функ-
функцией другого скалярного аргумента и, то
du~dtdu \LL)
Если вектор a (t) разложен по постоянный ортам i, j, k:
a (t) = ах {I) i+o,, @ j + az (t) k
то, по только что выведенным формулам, найдем:
откуда выводим, что компоненты производной вектора
равны производным от компонентов данного
вектора.
4. Введем в рассмотрение длину вектора a (t) и его орт а} (г), так что
а(*)= а(/)а, @ A3)
Тогда будем иметь:
Различим три случая.
а) Пусть вектор a (t) меняется только по величине, не меняясь по на-
направлению; в этом случае
aj = const
а. следовательно,
?-°
а значит
Таким образом производная имеет то же направление (или прямо
противоположное), что и сам вектор. Это ясно геометрически, ибо в рас-
рассматриваемом случае годографом служит прямая, проходящая череа
начало координат.
б) Пусть вектор a (t) меняется только по направлению, не меняясь
по длине. 6 этом случае годографом служит кривая, лежащая на сфере
радиуса а, и геометрически ясно, что проиаводная вектора, будучи каса-
тельна к этой кривой, а следовательно и к сфере, будет перпендику-
перпендикулярна к самому зектору. Докажем это векторно.
Имеем
а = const
Следовательно,
а-а — а3 = const A6)
Поэтому
9 ПЕРЕМЕННЫЕ ВИКТОРЫ, ЗАВИСЯЩИЙ ОТ СКАЛЯРНОГО АРГУМЕНТА
81
da
а значит - перпендикулярен к а, что и требовалось доказать. В рас-
рассматриваемом случае
da da,
A8)
Найдем величину вектора ~. Отложим (фиг. 40) значения ах (t)
для двух соседних значений t и t + At
и обозначим угол между иими через Д<р.
Величина приращения Aai, представляю-
представляющего основание равнобедренного треуголь-
треугольника, равна 2 sin -i- Д<р, поэтому
Irfa,
|dT
^S A9)
Обозначая аредел отношения угла поворота вектора к приращению
аргумента через
(о = lim -~
будем поэтому в меть
dal
dt\
B0)
da,
Из фиг. 40 видно также непосредственно, что -j~ перпендикулярно
к ai, ибо в силу равнобедренности треугольника ОАА' углы при его ос-
основании оба стремятся к прямому, когда At -> О.
в) Пусть, наконец, a (t) меняется как по длине, так и по направле-
направлению. В этом случае формула
.da,
da _^_ da
di~ Jtk
B1)
дает разложение производной вектора а на две составляющие, из кото-
da
рых первая направлена по вектору а в имеет значение -г, , а вторая
направлена по перпендикуляру кап имеет величину
da,
di
5. Формула Тейлора, дающая разложение скалярной функции в ряд
по возрастающим степеням приращения аргумента:
/ (i) = / (to) + (t - to) /' (to) + K^f-
остается верной и для векторов:
a (t) = a (to) + (t - to) a (to) +• ('~f<>)* a'
6 н. в. к<
¦/•(<•)
B2)
(to) + ... + {t д]'о)" ta'"' (to) -t- e]
B3)
82
ВЕКТОРНЫЙ АНАЛИЗ
Гл. II
Вывод формулы B3) совершенно аналогичен выводу формулы B2),
почему мы на нем не останавливаемся.
Можно доказать B3) еще иначе: написать ряды Тейлора для функций
Ox {t), Oy (t), аг [t), умножить их на i, j, k и сложить.
Дадим теперь понятие об интеграле от вектора по скалярному аргу-
аргументу. Если
то а (?) называется неопределенным интегралом от b
и обозначается
а («) = ( Ь @ dt + const B4)
Определенный интеграл
Ь dt = a (t) — a (to)
B5)
Фиг. 41
равный разности значений вектора а для
границ интегрирования, можно еще рас-
рассматривать, как предел некоторой суммы векторов
B6)
где г{ — ряд значений аргумента *, вставленных между to и t = tn+i,
притом таким образом, что при стремлении п к бесконечности все раз-
разности ti+l — Ц стремятся к нулю.
Доказательство формулы B6) совершенно такое же, как для скаляр-
скалярных функций, почему мы на нем не останавливаемся. Впрочем, можно
сразу доказать формулу B6), написав ее для Ьх, bv, Ьг, умножив на i, j, k
и сложив.
в. Дадим теперь несколько приложений дифференциального исчисле-
исчисления векторов.
Пусть точка М с радиусом-вектором г описывает некоторую кривую
в пространстве (фиг. 41).
Будем определять положение на кривой всякой точки М длиной дуги s,
отсчитываемой от некоторой определенной точки А до точки М й считае-
считаемой положительной в одну сторону от точки А я отрицательной в другую.
Таким образом г рассматривается вами как функция скалярного аргу-
аргумента s.
Выясним геометрическое значение —г- и -t-j- .
Рассматриваемая кривая является, очевидно, годографом радиуса-
л
вектора г, поэтому направление —г- совпадает с направлением касатель-
касательной к кривой в сторону возрастания дуги s. Величина же -^- равна еди-
ПЕРЕМЕННЫЕ ВЕКТОРЫ. ЗАВИСЯЩИЙ ОТ СКАЛЯРНОГО АРГУМЕНТА 83
нице, потому что -^ есть предел отношения -г— . величина же
равная отношению малой корды к соотввтствующей дуге, приближается
к единице при стремлении Д« к нулю. Итак,^-^- есть единичный вектор,
направленный по касательной к кривой в точке М в сторону возрастаю'
шего аргумента s.
Мы будем обозначать единичный касательный вектор череа <г.
в = 7 • а = 1 B?)
Компонентами единичного вектора о, очевидно ппляются косинусы
углов, образуемых им с осями координат:
ох — cos (о, х) ¦= -j- . о„ = cos (о. v) = ^г- ¦ »* = с"» V<», z) =* ~
Вычислим
7" ~ ds
Так как в есть единичный вектор, то к нему полностью применимо рассу-
рассуждение пункта 4-6, в котором мы должны положить / — %, а, = в. Поэтому,
—— есть вектор, перпендикулярный к а и по величине равный lim —,
где Дф означает угод между днумя соседними единичными касатель-
касательными векторами в в с + As, яазыпаемыв углом смежности.
Предел отношения угла смежности к элеыепту дуги Д* называется
кривизной кривой в данной точке а обозначается так:
Для прямой липии, очевидно, кривизна равна нулю- так что кривизна
есть некоторая, мере отклонения кривой от прямой. Для окружности
радиуса R. очевидно As = /?Д<р а кривизна постоянна в равна -тг .
Величина R, обратная кривизне кривой, называется радиусом
кривизны кривой в рассматриваемой точке.
Разберемся в вопросе о направлении вектора -у~ Предельное аоложе-
нир плоскости, проходящей через касательную и параллельной соседней
касательной, называется соприкасающейся плоскостью.
Так как вектор До равный разности векторов в + До п и лежит как раз
в плоскости, проходящей череа касательную п иараллельдой соседней
касательной, то
,. Да da
lira —z— = —5—
будеп- лежать в соприкасающейся плоскости.
84 ВЕКТОРНЫЙ АНАЛИЗ Гл. U
С другой стороны, мы видели, что вектор -г- перпендикулярен к ка-
касательной в точке М. Прямые, проходящие через точку М и перпенди-
перпендикулярные к касательной в этой точке, называются нормалями
к кривой, а плоскость, их содержащая и, очевидно, перпендикуляр-
перпендикулярная к касательной, называется нормальной плоскостью
к кривой в точке М. Та нормаль к кривой, которая лежит в соприкасаю-
соприкасающейся плоскости, называется главной нормалью. Из сказан-
<Рт da i
ного выше следует, что оектор -^ = -^- имеет величину -^ и направлен
по главной нормали, очевидно, в сторону вогнутости кривой.
Введем, аналогично единичному касательному вектору а, единичный
вектор п, направленный по главной нормали в ту же сторону, как и -j- ,
тогда
dh _ do n _ . 1 <йг rf*r
Ъё — ~пГ-Н' n—i, -fti"--^'^
Последняя формула, дающая R, получается скалярным умножением
обоих членов формулы C0) самих на себя.
В компонентах мы будем иметь:
Я = 1 — C1)
Та нормаль к кривой, которая перпендикулярна к соприкасающейся
плоскости, называется бинормалью. Введем третий единичный
вектор Ь, направленный по бинормали в такую сторону, чтобы о, n a b
образовали систему того же рода, какая образована осями х, у, г.
Тогда
Ь = вхп, 6 = 1 C2)
Найдем компоненты единичного бинормального вектора:
dz
h
* ~ Us «is2 ~ ds ds* I
C3)
h — ftC** ^y dy d*x \
7 \d* ds' ds ds' )
Изучение изменения направления единичного касательного вектора
привело нас к понятию кривизны кривой. Рассмотрение изменения на-
направления соприкасающейся плоскости или, что то же, бинормали при-
приводит к понятию кручения кривой. Итак, аналогично -Д- составам
as
-^-. Так как b — единичный вектор, т. е. b-b = 1, то Ь- -^ = 0, так
5 9 ПЕРЕМЕННЫЕ ВЕКТОРЫ. ЗАВИСЯЩИЕ ОТ СКАЛЯРНОГО АРГУМЕНТА 85
что -^- перпендикулярно к Ь; с другой стороны, непосредственное вы-
вычисление дает:
_!2?__.Х11 + ах
dt, ds ds ds
Но первая скобка пропадает, так как -т- = -= а векторное произведе-
произведение двух коллинеарных векторов равно нулю, поэтому:
C4)
Отсюда следует, что -г- перпендикулярно также и к а. Поэтому -т-
коллинеарно с а, так что мы можем написать
Ъ ~ ~?
Величина Т называется радиусом кручения кривой в точке М. ж- —
кручением кривой Так как Ь — единичный вектор, то по пункту 4-6
ds
где Дф есть угол между двумя соседними бинормалями Если кривая
плоская, то бинормаль не меняет своего направлении, так что для пло-
плоской кривой кручение равно нулю; значит, кручение является мерой
отклонения кривой от плоской кривой.
Выведем, наконец, в дополнение к формулам C0) и C5). характери-
характеризующим изменение а и Ь, еще аналогичную формулу для а, для чего
вычислим
rfn _ d (Ь х ff) _db . ^?__JL * hx — — — —
при преобразовании пришлось воспользоваться формулами
Q=bXff, DXe = — b, bXD = — <J
вытекающими ия того, что а п и b представляют систему трех единичных,
взаимно перпендикулярных векторов, идущих в том же порядке, как
оси х, у, z.
Соберем вместе формулы C0), C5) и C6):
C7)
da
da
rfn
ds
db
ds
n
~~ Я~
= —1 Л
n
~ ~Y
. b
Эти формулы называются формулами Френе.
86 ВВКТОРНЫВ Л.ИАЛИЗ Гл. II
Выясним ищи вопрос о вычислении Т и его знаке. Сраашшая фор-
формулы C4) и C5), найдем
п rfn
т = 37*°
Умножим скалярно на п и переставай в получившемся векторно-ска-
лярноы произведении порядок произведений
1 /da \ 1 da\
г -¦¦(г~>")-«-(||Хг\>
Но а =^ , далее по формуле C0) о = Д^, следовательно
da Dd*t
H
rfn adh /Rd*x dR
Значит, получаем окончательную формулу
Т = R [di • U? Х d?)\ = ' gr.^ {38)
Ля* rf*4
Эта формула показывает, что Т является псендоскаляром, т. е. меняет
свой знак при переходе от левой системы к правой. Это получается потому,
что в выражение для Т входит векторное произведение двух полярных
векторов, т. е. аксиальный вектор, который после скалярного умножения
на полярный вектор дает псевдоскаляр.
Ниже, в задаче 74, будет показано, что левый винт имеет в левов систе-
системе положительное кручение, а правый — отрицательное. Это оправды-
оправдывает выбор знака в формуле C5).
7. Рассмотрим теперь движение материальной точки, заданное указа-
указанием ее радиуса-вектора для всякого момента времени t:
г = г (t) C9)
Годограф радиуса-вектора г представляет, очевидно, траекторию
точки.
Мы уже определили выше скорость v а ускорение w точки:
v = г, w =» г = v D0)
Мы можем определять движение точки, задавая пройденную точкой
дугу s в функция времени (.
Тогда г будет сложной функцией I через посредство s, поэтому
v = r=-r-s=sa=#a D1)
; 9 ПЕРЕМЕННЫЕ ВЕКТОРЫ, ЗАВИСЯЩИЙ ОТ СКАЛЯРНОГО АРГУМЕНТА 87
Таким образом, вектор скорости направлен по касательной к траекто-
траектории, а величина скорости
» = ?-• D2)
равна производной пути по времени.
Точно так же вычисляем w:
W = V = -i™ = V9 + VG = V9 +V -r- $ — V<t + V -5 V — V<S f — П
Полученная формула
w = va -t- ^ n D3)
представляет разложение ускорения на два слагаемых: касательное уско-
ускорение, направленное по касательной к траектории я численно равное v,
и нормальное ускорение величины ^, направленное по главной нор-
нормали. Поэтому величина полного ускорения есть
D4)
Если г {?) задано своими координатами х (г), у (t), г (г), то мы будем
иметь:
г = xi + yj + гк
v = г = xi + yj + гк
w = г = ял + yj + гк
8. В § 6 мы рассмотрели вращение твердого тела около оси и по-
показали, что скорость любой точки твердого тела может быть представлена
формулой
v = w х г D6)
где о» — вектор угловой скорости.
Докажем теперь, что если тело имеет неподвижную точку, около кото-
которой оно вращается, то в каждый данный момент скорость любой точки
тела может быть вычислена но формуле D6).
Свяжем с твердым телом некоторую прямоугольную систему коор-
координат Oxyz, имеющую начало в неподвижной точке. Тогда радиус-век-
радиус-вектор точка с координатами х, у, г будет
г = xi + yj + гк D7)
Задать движение твердого тела значит задать движение координат-
координатного триэдра Oxyz. Это можно сделать различными способами, напри-
например, можно задать векторы t, ,j я к, как функции времени I. Каждый
вектор нужно задавать тремя числами; таким образом всего надо задать
девять функций времени t, но из них только три можно задать по произ-
S8 ВЕКТОРНЫЙ А.НАЛИЗ Гл. II
волу, потому что между векторами i, j и к существует шесть зависимо-
зависимостей:
i-i-i, j.j-1, k-k = l 48
i.j = O, j.k=O. k-i=O
Так как движение твердого тела, вращающегося около неподвижной
точки, определяется тремя независимыми функциями времени, то гово-
говорят, что имеющее неподвижную точку твердое тело обладает тремя сте-
степенями свободы.
Отметим, что между первой формулой D5) а D7), несмотря на их
внешнее сходство, существует огромное различие. В формуле D5) х, у, z
являются функциями времени, в то время как i, j, k — постоянные орты,
значит, в формуле D5) рассматривается движение точки, перемещающей-
перемещающейся относительно неподвижной системы координат. В формуле же D7)
х, у, z постоянны, a i, j, k являются функциями времени, поэтому здесь
рассматривается движение точки, неизменно связанной с осями, переме-
перемещающимися в пространстве, т. в. рассматривается движение точки твер-
твердого тела, вращающегося около начала координат. В следующем парагра-
параграфе при изучении относительного движения мы рассмотрим общий случай,
когда меняться будут и координаты х, у, г и орты i, j, k.
После этого отступления перейдем к нахождению скорости точки тела
М с радиусом-вектором D7):
Проекция на ось х будет
Но в силу D8)
Поэтому
/Д .
Циклической перестановкой (заменой % на у, у яа z, г на х, i на .
j на к, к на i) подучим:
Поэтому, если обозначить
и если ввести вектор
ш (t) = и»! + в), j + co2k E0)
ПЕРЕМЕННЫЕ ВЕКТОРЫ. ЗАВИСЯЩИЕ ОТ СКАЛЯРНОГО АРГУМВНТА 89
то будет
vx — <йуг — Qd/, vy = шгх — шхг, vz = аху — ®vx E1)
или в векторной форме
v = «oxr D6)
Формулы D9) позволяют вычислять проекции вектора угловой ско-
скорости на оси х, у, з, связанные с твердым телом. Выберем неподвижную
систему координат OZyl и зададим векторы i, j, к их проекциями на
оси Osyz, т. е. девятью косинусами таблицы § 4. Так например, проек-
проекции .} и к суть
/i =- cos {у, Я) = plt fi = cos (у, у) = р«, /г = cos {у, Щ — ps
dt dt dt dt ' dt dt
Поэтому
«I tt( tt«
Циклическая перестановка a, C, у Аает <>>v и а)г.
Общий случай движения твердого тела приводится к только что рас-
рассмотренному; если обозначить радиус-вектор начала О подвижной систе-
системы координат относительно начала О неподвижной системы координат
через ?0, а радиус-вектор точки тела через г и сохранить обозначение Т
для радиуса-вектора точки тела относительно О, то
F = г„ + х\ + j/j + гк
При дифференцировании прибавится лишний член, аредставляющий
екорость v0 точки О:
Поэтому формула, дающая распределение скоростей различных точек
твердого тела, будет
v = v0 + «о х г E3)
или в координатах
vv — vou + <°zX — <o*z E4)
Для вычисления ускорения различных точек твердого тела диффе-
дифференцируем E3):
^^ ^ g wx(»xr) E5)
90 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Таким образом, ускорение точек твердого тела состоит из трех частей:
ускорения' точки О, вращательного ускорения их'и осестремительного
ускорения <ох(в>хг).
Вектор последнего, о одной стороны, перпендикулярен к <о, с дру-
другой стороны, лежит в плоскости векторов «иг, откуда и можно заклю-
заключить о его осестремвтельности.
9. Рассмотрим простейшие вопросы динамики материальной точки.
Вектор mv, где т — масса материальной точки, называется количе-
количеством движения точки.
Закон Ньютона говорит, что производная по времени количества
движения точки равна действующей на эту точку силе F:
dt — г
или
mw = mv = mr = F E6)
Умножим обе части уравнения E6) векторно на г:
гх»и= гх F
Преобразуем левую часть атого уравнения, воспользовавшись тожде-
тождеством
^ . . , t4 ,Л
-^j-(rx mt) = гх тт + гх пгт = rx mt
первый член пропадает в силу коллинеарности г и тт.
Поэтому
-±(rxmi) =rxF E7)
Справа стоит момент силы относительно начала координат, слева же •
производная от момента количества движения rxmv. Получили закон
моментов количеств движения: производная по времени момента коли-
количества движения точки относительно точки О равна моменту действую-
>цей на точку силы относительно той же точки О-
Если сила центральная, т. е. проходит через постоянную точку, ко-
которую мы возьмем за начало координат, то F будет направлена по г
в ту или другую сторону, так что F = кг, поэтому г х F для централь-
вой силы равно 0 и из E7) мы выводим
гхг = const = о E8)
Найдем геометрическое значение этого равенства. Прежде всего, умно-
умножая E8) скалярно на г, найдем, что
с.г = 0
Следовательно, движение происходит в плоскости, перпендикулярной
к вектору с и проходящей череа центр силы. Величина rxdr представ-
I 9 ПЕРЕМЕННЫЕ ВЕКТОРЫ. ЯАВИСЯЩИВ ОТ СКАЛЯРНОГО АРГУМЕНТА М
ляет площадь параллелограмма, построенного аа t и dt, т. е. удвоенную
площадь треугольного' сектора, описанного радиусом-вектором г аа время
dt. Поэтому -»¦ | г х г | представляет величину секториальной скорости* и
уравнение E8) говорит, что точка движется в постоянной плоскости е
постоянной секториальной скоростью, так что радиус-вектор точки опи-
описывает в равные времена равные площади, почему интеграл E8) называют
еще интегралом сохранения площадей.
Умножим, с другой стирояы, основное уравнение E6) скалярно аа
у dt = dr:
mv-v dt = F-dt
но v dt = dv, следовательно
замечая далее, что
chr = d(v-v) = 2(v-riv), (v-rfv) = </-г
подучим
d~= F-dr E9)
Выражение 4r тг^ называется живой силой точки, скалярное же про-
произведение F-dr представляет элементарную работу силы F на переме-
перемещении dr.
Формула E9) выражает так называемый закон живой силы в диффе-
дифференциальной . форме:
Приращение живой силы материальной точки за
промежуток времени di равно элементарной работе
силы, действовавшей на точку, но перемещении точки / '
dt за тот же промеж\/ток времени ^—^
Перепишем, наконец, закон Ньютона в следующей
. Фиг 42
форме:
dmv = FA
проинтегрируем теперь обе части этого равенства в пределах от момента 1а
до момента I, тогда получим:
ту — гп\а = \ F dt F0)
i,
Интеграл от силы F по времени, т. е.
I = j F dt
называется импульсом силы F за промежуток времени г — t9.
Формула F0) выражает закон количества движения, геометрическое
приращение количества движения точки за некоторый промежуток вре-
времени равно импульсу силы, действовавшей на точку, за тот же проме-
промежуток времени. Фиг. 42 дает геометрическое выражение формулы F0).
92 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Задача 71, Доказать, что если кривизна равна нулю, то кривая
есть прямая.
По условию -g — 0. Из формулы C7)' выводим
Следовательно, интегрируя, имеем
а = -f = а — const, а = 1
Интегрируя еще раз, получим
г == as + е, с = const
А это есть уравнение прямых линий.
Задача 72. Доказать, что если кручение равно нулю, то кривая
есть плоская.
По условию ^ — 0< Ив формулы C7) выводим
Следов ательно,
b — я = const, о = 1
Но так как Ь перпендикулярно к а, т. е. Ь-ст = 0, то
а.» = а-?=0
ds
Отсюда, интегрируя
а-г = т
А это есть уравнение плоскости,.в которой и должна лежать кривая.
Задача 73. Написать уравнение соприкасаюшейся плоскости в точ-
точке М (г„).
Обозначим переменный радиус-вектор точки плоскости через г; так
как соприкасающаяся плоскость перпендикулярна к бинормали, то ее
уравнение есть
(г — го) • b = 0
или, так как Ь =
(г — ц).(ихп) == О
Это можно записать в координатах в форме определителя
X — Ха У — Уо 2 —
dx dy dz
ds ds ds
d? dip d~F
I 9 ПЕРЕМЕННЫЕ ВИКТОРЫ. ЗАВИСЯЩИЕ ОТ СКАЛЯРНОГО АРГУМЕНТА 93
Задача 74. Определить кривизну а кручение винтовой линии.
Найдем сначала уравнение винтовой линии. Пусть винтовая линия
нанесена на цилиндр радиуса а с осью z и пусть высота каждого витка
винта равна 2 як, тогда можно взять за уравнение винтовой линии
г = о cos / i + о ain t j + ht k
В самом деле, a (i cos t + j sin 0 предстапляет вектор длины а, лежа-
лежащий в. плоскости ху и составляющий с осью х угол t; вектор же ht k па-
параллелен оси z и тоже пропорционален t, поэтому при развертывании
боковой поверхности цилиндра в плоскость каждой абсциссе at будет
отвечать ордината ht, так что мы получим прямую линию с углом на-
наклона arc tg —. Это есть угол подъема винта.
Прежде всего мы должны ввести в качестве независимой переменной
длину дуги s. Если мы будем рассматривать параметр t, как время, то
Скорость точки будет
г = — a. sin t\ + a cos tj + Ak
величина же ее
г. = s=Vvx* + V + vz2 = yV sin21 -+ «2 cos2 t + h2 = m
где
m = j/a* + A2
Отсюда
s — mt 4- const
Мы выберем постоянную равной нулю:
s= mt, t = —
т
Теперь вводим вместо t параметр $:
Вычисляем
dx a . s . , a s . , h .
-г- = sin — l H— cos — \ -\ к
an mm т т ° т
d'T a s . а . s .
3-5= 5 C°S — 1 5 94' — J
й&г т? т rnr m *
d?r ос s . а s .
ТЗ = ~5S'° — ' Scos — j
ds8 tnP т. т° т
Наконец, определяем R и Т:
1 d2r d4r aa / » s . , s \ a.*
si = tt* j = —г (cos hsin — ) = —г
IP as2 as" m* \ m ml m1
ttX 3-5 = —, cosa H sin* —) k = —г k
94 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Таким образом, кривизна в кручение винтовой линии постоянны.
Кроме того, при положительном h у вас получилось положительное кру-
кручение. Но при положительном h в левой системе координат шл имеем
левую винтовую линию- Таким образом, при левой системе координат
девая винтовая линия имеет положительное кручение, в правой же си-
системе координат положительным кручением будет обладать правая вин-
винтовая Ливия.
Задача 76 Доказать, что если ваять близкую в точке М» точку
кривой М, отстоящую от Мо на бесконечно малом расстоянии б«, то рас-
расстояния точки М от нормальной, спрямляющей и соприкасающейся пло-
плоскостей к кривой в точке А/о будут соответственно порядка бе, 6**, б«*.
При атом спрямляющей плоскостью называется плоскость, перпен-
перпендикулярная в главной нормали, т. е. проходящая черев а а Ь.
Для доказательства раяяожиы радиус-вектор точки в ряд Тейлора!
Но
й <Pt a
X - e' d? = я"
П
(по формул* C7) для ?у, следовательно.
Заметим теперь, что расстояние точки М до нормальной плоскости
равно проекции Л/„Л/ = г — п> на касательную, т. е. равно
(г — г„).а0 = (о0»ов)вв + ...«- 6s Ч- ...
расстояние до спрямляющей плоскости равно проекции MJS4 на главную
нормаль:
(г — Го)*°п = 5д- (По*о«) о*1 + • • • — 5д-ог1* + • • •
[так как член (а0-п0)б.>. = 0 пропадает I. Наконец, расстояние до сопри-
соприкасающейся плоскости равно проекции МдМ на бинормаль
так как остальные члены разложения, в силу равенств а0. Ьо = 0 в
Qo-bo = 0, пропадают.
Задача 76. Найти выражения для j-la-(bxe)).
Ответ
ПЕРЕМЕННЫЕ ВЕКТОРЫ, ЗАВИСЯЩИЕ ОТ СКАЛЯРНОГО АРГУМЕНТА
Задача 77. Найти выражение для ^ [ах(Ьхс)].
Ответ:
Задача 78. Точка движется по винтовой линии с постоянной ско-
скоростью v, найти ее ускорение.
Так как v = coast, то касательное ускорение равно нулю; остается
одно нормальное ускорение -^, и так как по аадаче 74
_1__ а
Л "~ а*+ А»
ТО
Задача 79. Точка массы т движется под действием притягиваю-
притягивающей силы — аг. Найти движение.
Составляем уравнение движения
т -^ = — <хг, или тх + «г = О
Это линейное однородное уравнение можно решать чем же приемом,
как и скалярное. А именно, чтобы взбежать мнимостей, ищем решение
в тригонометрической форме:
г = A sin to, ~ = feA cos kt, S- = — й?А sin Ы
Получаем для определения к уравнение:
{— те*2 + a) A sin kt = 0, — mA* + a = О
Отсюда
Таким образом
есть решение уравнения. Так же найдем, что и
Bcos(j/|,)
является решением уравнения, где А и В — произвольные постоянные
векторы. Поэтому общее решение уравнения будет
г = A sin
96 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Векторы А и В нужно определить из начальных условий, для чего
вычислим сначала v:
0
Положим теперь t = 0:
Следовательно,
В общем случае, когда 'о и v0 не коллинеарны, это есть уравнение
эллипса, потому что, если ввести косоугольные координаты, ось х ко-
которых направлена по направлению г0, а ось у по направлению v0, то урав-
уравнение траектории в декартовых координатах найдется исключением t
из уравнений:
в виде
Х" + »" - i
а
Векторы г и v дают во всякий момент времени направления сопря-
сопряженных диаметров эллипса F1), ибо вектор v параллелен касательной
к эллипсу в конце радиуса-вектора г, а диаметр, сопряженный с г, как
раз параллелен этой касательной.
Чтобы найти величину сопряженного с г диаметра, заметим, что
моменту
отвечает радиус-вектор
(l)()|) F2)
Поэтому
так что радиус-вектор F2) имеет как раз направление v, а значит, это
и есть сопряженный с т полудиаметр как по величине, так и по направ-
направлению. Докажем два свойства сопряженных диаметров.
1. Сумма квадратов двух сопряженных аолудиаметров есть величина
постоянная, т. е. не зависит от того, какую именно пару сопряженных
полудиаметров мы взяли.
9 ПЕРЕМЕННЫЕ ВЕКТОРЫ, ЗАВИСЯЩИЕ ОТ СКАЛЯРНОГО АРГУМЕНТА
В самом деле,
г* = г.г = (A-A) sin2 (|/*?
,,1 = r,.tl = (A.A) cos* [Y± t) -
in (/I «) cos (/I «) + (B.B) sin* (j/1 i)
Складывая, получим
г* + г,* = A-A + B.B = const
2. Площадь параллелограмма, построенного на двух сопряженных
диаметрах, есть величина постоянная. Эта теорема является следствием
постоянства гхгг:
[Asin [Yli)+"«(Vl г)]х[А -iV! 0-Bsin (/
= (BxA) [cos* ( y/"± A + sin2 ( |/"^- f )J = Bx A = const
Задача 80. Показать, что если a (t) х ~ = 0, то aj= const.
Задача 81. Дано, что радиус-вектор точки есть г (t) = r (cos q>i +
+ sin <pj), где г и <р суть функции времени г; найти проекции vT и рф
скорости v на направление радиуса и направление, перпендикуляр-
перпендикулярное к нему. Найти проекции wT и wv ускорения w на те же направления.
Ответ:
vr —r, v9 = пр, wr = r — гфа, ю,= гф + 2тчр
Задача 82. Точка движется равномерно со скоростью v по кругу
радиуса г с центром в начале координат; показать, что ускорение точки
есть
Задача 83. Показать, что формулы Френе C7) могут быть полу-
получены из общей формулы
если в последней последовательно заменить а на <г, а, Ь. Найти век-
вектор W.
Ответ:
о . b
7 н. в. кочин
98' ВЕКТОРНЫЙ АНАЛИЗ Гл. II
3 а д а ч а 84. Пусть твердое тело вращается около неподвижной
точки О, так что единичные векторы i, j, k, направленные по осям ко-
координатного триэдра Oxyz, связанного неизменна с твердым телом, яв-
являются функциями времени t. Доказать равенство
rfi fdj dk
§ 10. Дифференцирование вектора, отнесенного в подвижной
системе координат
1. В механике, особенно в динамике твердого тела, часто приходится
встречаться с дифференцированием вектора, заданного по отношению
к подвижной системе координат, чаще всего связанной неизменно с дви-
движущимся твердым телом. Правила такого дифференцирования мы сейчас
и рассмотрим.
В предыдущем параграфе мы рассмотрели движение точки, неиз-
неизменно связанной с подвижной системой, а нашли,
что ее скорость и ускорение выражаются формулами
т=?0 + »хг, w = w9 +йхг 4- toX(юхг) A)
Теперь мы предположим, что точка М движется относительно по-
подвижной координатной системы так, что, если единичные орты подвиж-
подвижной системы координат обозначить через i, j, k, ее начало — через О,
то вектор ОМ = t будет иметь в подвижной системе координаты х (I),
у (г), z (?)) являющиеся функциями времени:
г = xi + у) + zk B)
Но так как система подвижная, то единичные орты i, j, k сами будут
функциями времени, как было выяснено в § 9.
Введем еще неподвижную точку О и обозначим через ?0 — радиус-
вектор точки О относительно О и через г — радиус-вектор точки М
относительно точки О.
Тогда, очевидно, будет
г = *о + г = h + xi + г/j 4- гк C)
ибо в треугольнике 00М сторона ОМ есть вектор г, стороны О~О и ОМ —
векторы г0 и г.
Абсолютная скорость точки М, которую мы будем обо-
обозначать через va, получается, как обычно, дифференцированием радиуса-
вектора г относительно неподвижной точки б по времени:
I 10 дифференцирование Виктора gg
Если бы х, у, z были постоянными, мы получили бы скорость
точки, неизменно связанной с подвижной системой координат, почему
эта часть абсолютной скорости называется переносной ско-
скоростью движения точки и обозначается через vc. Б предыдущем па-
параграфе мы нашли для нее следующее выражение:
v, = v0 + o>xr F)
где v0 — абсолютная скорость начала О подвижной системы, о> — вектор
мгновенной угловой скорости подвижной системы координат.
Выясним теперь значение трех последних членов формулы D).
Рассмотрим положение подвижной системы в момент I. Отметим,
кроме точки М, eme ту точку М', связанную с подвижной системой, в
которой будет находиться точка М в момент t 4- ДЛ тогда вектор ММ'
представит, очевидно, вектор относительного перемещения точки Л/, а
будет, вектором относительной скорости тот
к и М. Ми будем его обозначать через vu. Так как
ММ' = Дая + Дг/j + Дгк
то
v, = х\ + у j 4- гк G)
Поэтому формула D) приводит к теореме: вектор ибсолттпой ско-
pof.ma точки равен сумме векторов переносной и относательнод. скорости
v« = ve + v, (8)
Если начало подвижной системы координат О совпадает с О, то
г = г, v0 = 0, уе = ш х г
и мы получаем формулу
v а = г" = vr + ш х г (9)
Отсюда
vr = f — «х г A0)
2. Возьмем теперь любой вектор a (t). Отложим его от начала О по-
подвижной системы координат, которое мы предположим совпадающим
с О, а будем рассматривать коней вектора а как движущуюся точку.
Тогда относительную скорость конца вектора а можно назвать относи-
относительной производной вектора а; обозначая ее в отличие от абсолютной
7*
100 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
производной ^ через ^ найдем имеющую очень важное значение
формулу
Если проекции вектора а на подвижные орты i, j, k обозначить че-
через ах, ау, az, то относительная производная будет иметь компоненты
йх, йу, аг, поэтому мы получаем следующую систему трех скалярных
уравнений:
= "в + шАг — »*«* A2)
Выведем, наконец, формулу, дающую связь между абсолютным и
относительным ускорением. Продифференцируем формулу D)
Бели х, у, z постоянны, то и: первые в вторые производные равны
нулю. Позтому первые четыре члена правой части дают ускорение точки,
неизменно связанной с подвижной системой координат, поэтому эта часть
абсолютного ускорения называется переносным ускорением
и обозначается через we:
Выражение для we дается формулой A):
w« = wo + <"хг + «йХ(юхг) A5)
Последние три члена формулы A3) представляют, очевидно, относи-
относительное ускорение точки М, которое обычно обозначается через wr:
wr - 'к + у'} + "гк A6)
Наконец, чтобы истолковать три средних члена формулы A3), вспом-
вспомним, что имеем формулу
dx dv di
значит, заменяя г на vr, вектор с компонентами -т- , -^, ^, получаем:
5 ji ФУНКПИЯ ОТ ВЕКТОРНОГО АРГУМЕНТА 101
это выражение называется ускорением Кориоласа в обо-
обозначается через w0.
Таким образом получаем теорему; вектор абсолютного ускорения точки
является суммой трех векторов: вектора переносного ускорения, вектора
относительного ускорения и вектора ускорения Кориоласа:
wa = we + wr + wc A8)
§ 11. Функции от векторного аргумента. Скалярное и векторное поле.
Поверхности уровня. Векторные линии
1. До сих пор мы рассматривали векторы или постоянные или изме-
изменяющиеся в зависимости от скалярного аргумента (времени). Теперь
мы рассмотрим более сложный случай, когда с каждой точкой простран-
пространства (или части пространства) связывается значение некоторого скаляра
или вектора. Рассматриваемая часть пространства называется тогда
полем, с к ал я р н ы м или векторам м, смотря по тому, какая
функция, скалярная или векторная, изучается. Так, например, мы имеем
в атмосфере скалярное поле давления, ибо каждой точке атмосферы отве-
отвечает некоторое значение давления. В реке мы имеем векторное поле ско-
скорости частиц воды и т. д.
Так как каждую точку поля можно определять ее радиусом-вектором,
то задать скалярное или векторное поле значит привести в соответст-
соответствие каждому радиусу-вектору г значение некоторой скалярной функции
ф (г) или некоторой векторной функции а (г). Таким образом, в рассмат-
рассматриваемом случае независимой переменной является радиус-вектор г.
Аналитически задание скалярной функции <р (г) сводится к заданию
функции <р (х, у, г), от трех координат точки, задание векторной функции
а (т) равносильно заданию трех скалярных функций ах(х, у, г), Оу(х, у, г),
аг{х, у, г), дающих компоненты вектора а.
Очень часто приходится рассматривать скалярные или векторные
функции, изменяющиеся с течением времени: <р (r, t), а (г, t). Соответствую-
Соответствующие поля называются тогда переменными или нестац ио-
иона р н ы м и; поля же, не меняющиеся с течением времени, называются
постоя иными или стационарными.
Мы всегда будем предполагать, если только не сделано особой оговорки,
функции векторного аргумента непрерывными, т. е. будем считать, что
разности <р (г + Д«") — <р (г) или а (г +- Дг) — а (г) могут быть сделаны
по модулю сколь угодно малыми при достаточно малом Дг.
2. Для наглядности представления имеет большое значение графи-
графическое изображение полей. Пусть мы имеем дело со скалярным полем,
так что нам задана функция <р (г) или что то же, функция <р (х, у, г).
Если нам задано нестационарное поле, то мы рассматриваем его в опре-
определенный момент времени. Пусть в некоторой точке Мп (г„) функция <р (г)
принимает значение <р0 = <р (га). Отметим все точки, в которых значение
102
ВЕКТОРНЫЙ АНАЛИЗ
Гл. И
Фиг. 43
функции равно ср0. Эти точки, вообще говоря, заполнят некоторую поверх-
поверхность или несколько раздельных поверхностей, которые называются
поверхностями уровня или изоповерхностя ми
(фиг. 43). Их уравнение в декартовых координатах, очевидно, имеет вид:
Ф {а:, у, z) = const
Например, на синоптических картах таким образом наносятся изо-
изобары, т. е. линии уровня для скалярного поля давления (линии, потому
что здесь рассматривается двумерное пространство — поверхность земли).
При атом изобары наносятся обычно через каждые
5 миллибаров (единицы давления), так что ряд по-
последовательно идущих изобар отвечает значениям
1000, 1005, 1010, 1015 и т. д. миллибаров.
Если аналогичным образом провести поверхно-
поверхности уровня функции <р (г), отвечающие равноотсто-
равноотстоящим значениям функции, то получится картина,
указывающая уже ряд свойств изучаемой функции.
Так, например, места сближения двух последова-
последовательных изоповерхностей указывают на быстрое
изменение здесь функции, причем очевидно, что это изменение происхо-
происходит в направлении, перпендикулярном к изоповерхности, в то время как
при перемещении вдоль самой поверхности значение функции совсем
не меняется.
3. Рассмотрим теперь векторное поле. Введем для наглядного изо-
изображения его векторные линии, т. е. такие линии, во всякой
точке которых вектор имеет направление касатель-
касательной к линии. Приближенно мы можем построить эти
линии следующим образом. Выберем какую-нибудь
точку поля и отложим вдоль отвечающего этой
точке пектора отрезок весьма малой длины е; с кон-
концом этого отрезка поступим совершенно таким же
способом и будем продолжать таким образом даль-
дальше; в результате получится ломаная линия, которая
тем ближе будет представлять нашу векторную линию, чем меньше
взято е, и при бесконечно малом е, т. е. в пределе, перейдет в саму век-
векторную линию (фиг. 44).
Возьмем на векторной линии какую-нибудь точку М (г), единичный
вектор касательной к векторной линии есть-j1-, но по условию вектор а
в точке М тоже должен касаться векторной линии, следовательно, два
dr
вектора аи— коллинеарны, а значит
Фиг. 44
*-
или, умножая на ds,
йгха = 0
A)
B)
I 12 ГРАДИЕНТ. ЕГО СВОЙСТВА 103
Это есть дифференциальное уравнение векторных линий в векторной
форме.
Если составляющие вектора о (г) суть ах(х, у, г), Оу(х, у, г) и аг(х, у, z),
то условие B) параллельности касательной к векторной линии и самого
вектора приводит к дифференциальным уравнениям векторных линий:
*? = * = ** C)
ах av аг ч
Интегрирование этих уравнений введет две произвольные постоянные,
так что мы получим двупараметренную совокупность векторных линий.
Однако задание векторных линий и ориентировка их дает нам только
направление вектора во всякой точке поля, величину нее вектора мы
должны графически изобразить каким-либо другим способом. Можно,
имея в виду, что величина вектора есть скаляр, рассматривать наше
векторное поле еще как скалярное поле модуля вектора и построить соот-
соответствующие изоповерхности У ах2 + пу1 + агг = const. Но можно по-
поступить иным способом, а именно, характеризовать величину вектора гу-
густотой проводимых линий. При этом густоту линий мы должны иамер5[ть,
проводя через каждую точку маленькую ортогональную к линии пло-
площадку, отсчитывая на ней число пересечений ее векторными линиями
и относя это число к единице площади. Нужно отметить, что, вообще го-
говоря, придется часть линий заканчивать внутри поля, а часть начинать
внутри его. Мы впоследствии укажем то условие, при котором этого явле-
явления не будет.
Задача85. Найти векторнне линии для векторного поля а = -^ ¦
Ответ. Прямые линии, проходящие через начало координат.
Задача 86. Найти векторные линии дяя случая векторного поля
а = е х г, где с — постоянный вектор.
Ответ. Окружности, лежащие в плоскостях, перпендикулярных
к прямой, проходящей через начало координат и имеющей направление
вектора с; центры этих окружностей лежат на этой прямой.
§ 12. Градиент. Его свойства. Линейный интеграл.
Потенциал
1. Мы рассмотрели выше вопрос о дифференцировании вектора по
скалярному аргументу. Вопрос о дифференцировании по векторному аргу-
аргументу гораздо более сложен, особенно в случае векторного поля.
Рассмотрим скалярное поле функции q> (г) = tp (х, у, г). Выберем не-
некоторую точку поля М (г); проведем через нее какую-либо прямую и обо-
обозначим черев s единичный вектор, направленный по этой прямой. Возь-
Возьмем на этой прямой соседнюю с М точку М' (г + ss), где е = ММ' —
бесконечно малая величина; при переходе от М к М' функция <р приобре-
приобретает приращение Д*р = *р (М') — ф (М) = Ф (г + es) — ф (г). Составим,
104 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
как это естественно сделать, отношение — и перейдем к пределу, устре-
устремив е к 0, полученный предел назовем производной <р по на-
направлению s в точке М и обозначим через -^ :
— Ит Ф
мм'
Знание производной— для любого направления s поаволяет вычи-
вычислить во всех точках, соседних с точкой М, значение функции <р с точностью
до членов второго порядка малости.
Для вычисления -~ введем систему координат х, у, г и заметим, что
единичный вектор s имеет составляющими
sx = cos (s, i), Sy = cos (s, у), «г = cos (s, z) B)
Поэтому
Ф (r + es) — <p (r) = <p (i + e cos (s, x), y + e cos (s, y), z + г cos (s, z)) —
Эту разность можно рассматривать, как сложную функцию е. Раз-
Разложим ее в ряд Тейлора по возрастающим степеням е, причем ограни-
ограничимся членом, содержащим первую степень е:
<р (г + es) — ф (г) = 8 [^ cos (s, х) +1? cos (s, у) + ^ cos {s, z) + t)J
где т) — бесконечно малая величина (как мы условились уже раньше,
мы будем всегда считать все вводимые производные существующими
и непрерывными).
По разделении на 8 и переходе к пределу, мы получим требуемую
формулу
J = g- cos (s x) 4- g
g- cos (s, x) 4- gcos (s, „) + ^cos(s, z) C)
Заметим, что эту же самую формулу мы получили бы, если бы при
определении производной ^- мы брали соседнюю с М точку М' ае на
луче, проходящим череа точку М в направлении s, а яа какой-либо кри-
кривой ML, касательная к которой в точке М имеет направление S. Обозна-
Обозначая через s длину дуги, отсчитываемой по этой кривой от точки М, мы
будем иметь, что функция <р {х, у, z) будет сложной функцией от s через
посредство х, у, z; по прапилу дифференцирования сложных функций
мы получим
Зф 99 dx d<f dy ,d<f dz
'-¦ и так как
^- = cos (s, x), -?- = cos (s, y), ^ = cos (s, s)
J2 ГРАДИЕНТ. ЕГО СВОЙСТВА iO5
то опять получается соотношение
s (S *> + ж
тс-
cos
Но вспомним правяло преобразования составляющих вектора а (фор-
(формула A) § 4):
а, = a* cos (s, х) + пу cos (s, у) + о, cos (з, г) D)
Отсюда видно, что если мы определим вектор, составляющие которого
по основным ортам суть -?-, -^-, -?-, то его составляющая по любому
направлению s будет -j?-.
Назовем этот вектор градиентом <р в точке М и обозначим сим-
символом grad<p. Его составляющие
gradBq> = -^-, grad^ = 4?-, grad, Ф = -^- E)
Таким образом
^gk-gL F)
Этот вектор, конечно, не зависит от выбора системы координат х, у, z,
так как его составляющие по любому направлению были нами опре-
определены непосредственно.
Величина grad <p, очевидно, равна
Производная по любому направлению s равна проекции grad ф на это
направление, следовательно
= s»grad ф = | grad ф | cos {grad q>, s) (S)
Из этой формулы видно, что -^- достигает наибольшего значения
для направления s, совпадающего как раз с направлением grad q>, при-
причем это наибольшее значение равно величине grad ср. Поэтому мы мо-
можем дать другое определение градиента:
Градиентом <р называется вектор, имеющий направление быстрейшего
увеличения у и по величине равный производной по этому направлению.
Из других обозначений градиента ср укажем, как наиболее употребляе-
употребляемое, V ф. где знак V читается «набла».
При этом обозначении мы будем иметь
106
ВЕКТОРНЫЙ АНАЛИЗ
Гл. II
Ив этой формулы видно, что V можно рассматривать, как дифферен-
дифференциальный оператор
(Ю)
который, будучи применен к скаляру <р, дает grad «р. Этот оператор, ко-
который можно рассматривать также как символический вектор, будет
нами в далъпейшем рассмотрен более подробно. Его называют иногда
оператором Гамильтона.
Проведем через точку М поверхность уровня функции ф и докажем,
что вектор градиента ф направлен по нормали к этой поверхности уровня
в точке М. В самом деле, так как на поверх-
поверхности уровня ф— const, то производная по вся-
всякому направлению s. лежащему в касатель-
касательной плоскости к поверхности уровня в точке
М, равна нулю, следовательно, для всякого
такого направления по (8)
cos (grad ф, s) = О
45
что иожет быть только, если grad ф перпен-
перпендикулярен к поверхности уровня в точке М.
Далее очевидно, что grad ip направлен в ту
сторону нормали, куда ф eospacmaem.
Связь между градиентом функции ф и производной от ф ио различ-
различным направлениям имеет очень простое геометрическое истолкование.
Проведем через точку М (фиг. 45) поверхность уровня ф = const,
к этой поверхности уровня восставим в точке М нормаль MN и отло-
отложим по этой нормали вектор MN = grad ф. Построим далее на MN,
как на диаметре, сферу и рассмотрим «акой-нибудь луч Ms, проходя-
проходящий через точку М и имеющий направление s. Пусть этот луч пересе-
пересечет сферу в точке К. Так как угол при К в Д MNK есть прямой (по из-
вестБому свойству окружности), то МК является проекцией MN на на-
направление Ms; но проекция grad ф на какое-либо направление есть про-
производная ф по этому направлению, следовательно, мы получаем, что
Если бы луч Ms' не пересекал сферу, то, продолжив его в другую
сторону, мы нашли бы точку К' и получили бы, что
Отметим еще, что если единичный вектор нормали к поверхности
уровня обозначить через п, а производную от функции ф по направлению
этой нормали через ~ , то, очевидно, будет
I 12 ГРАДИВНТ. ЕГО СВОЙСТВА 107
Из формулы
^ = s-gradq)
вытекает, если через dr = s ds обозначить бесконечно малый вектор,
идущий из точки М в направлении s, следующее соотношение:
d<p = -?-=- ds — s ds-grad ф = dr.grad ф
Иначе это соотношение можно получить следующим образом. Напи-
Напишем выражение полного дифференциала функции <р
Но, с другой стороны, мы имеем
dr = i dx + j dy 4- к dz
Составляя по известному правилу скалярное произведение этих двух
векторов, мы легко получим
dф = dr grad ф A1)
Это соотношение характерно для grad q>. Если мы найдем такой
вектор а, что для произвольного dr будет
а?ф = dr. a A2)
то можем утверждать, что а = grad <p, ибо dф = dr«a = dr.grad ф приво-
приводит к соотношению dr.(а — grad ф) = 0; откуда видно, что а—grad ф
перпендикулярно к любому направлению, что может быть только, если
э = grad ф.
2. Разберем несколько примеров вычисления градиента.
Самым важным случаем является тот, когда <р зависит только от рас-
расстояния точки до некоторой определенной точки, которую мы выберем
за начало координат.
Итак, пусть
<Р-Ф« A3)
Поверхностями уровня служат концентрические сферы с центром
в начале координат. Нормаль к поверхности уровня совпадает с радиу-
радиусом-вектором, поэтому по величине grad ф равен
а направлен grad ф в ту сторону, куда ф возрастает, т. е. при положи-,
тельном (р' (г) ортом grad ф служит —, а при отрицательном ф' (г) ортом
grad ф является .
108 ВККТОРНЫИ АНАЛИЗ Гл. II
Таким образом, всегда будет
grad ф (г) = q>' (r) -I A4)
Этот же реаультат можно вывести и веаосредственяым вычислением,
рассматривая ф, как сложную функцию х, у, г, заданную черев посред-
посредство Р5
Эф dip дг
~Э* Чг"дх
Но
Поэтому
Эф г оСф Ар у dtp д<р г d<f
дев ~~ г dr ' йу г dr * dz r dr
в значит,
, .Эф, .Эф, .Эф xi + у) + гк «!ф rf<p _г_
* ™ Эзе *!/ d« ~ г dr dr r
Наконец, мы можем вычислять grad ф (г) и третьим способом, опи-
опираясь на формулу A2). Для этого составляем
dtp (г) = ф' (г) dr
Но, с другой стороны, заметим, что, так как
г.г= г3
то
d (г» г) = 2 (г.айг) = 2r dr
Следовательно,
dr = l(
Поэтому
Отсюда, в силу сказанного о формуле A2), сразу можем написать
grad <p (r) = JLi^- r
Принимая, например
Ф (г) = г, у, г"
легко докажем, что
grad г = -1 A5)
= - -^ A6)
grad r" = лг^г A7)
5 12 ГРАДИЕНТ. ЕГО СВОЙСТВА 109
Прежде чем переходить к другим примерам, докажем основные в тео-
теории градиента формулы
grad (<р 4- г|0 = grad q> + fjrad тр A8)
grad (q>tp) = <f grad ty + ф grad q> A9)
grad F (ф) = F' (ф) grad ф B0)
Эти формул» являются почти очевидными, ибо, проектируя, например,
обе части равенства A8) на какое-либо направление s, мы получаем
Ф + И _ y ^
as ~ д* ~^ а«
что, очевидно, представляет собой тождество — производная суммы равна
сумме производных.
Однако, несмотря на свой простой характер, формула A8) является
очень важной, потому что на ней основано сложение векторных полей.
Бели мы имеем два вектора а а Ь, являющихся градиентами двух
функций
а = grad ф, b = grad ф
то вектор
е = а + b
будет градиентом функции
% = ф 4- \|>
Пусть теперь мы имеем поверхности уровня функции ф, построенные
для равноотстоящих значений <р:
<Р — ¦ ¦ - т Фо — За, ф0 — 2а, ф0 — а, ф„, фе + а, ф0 + 2а, <р0 + За, . . .
и поверхности уровня функции \|>, построенные для равноотстоящих зна-
значений \|>, с той же разностью а между двумя смежными значениями
Ч> % - За, i|H - 2а, Чь - в, to. % + <*. 4>о + 2«' 4>о + За
Тогда на поверхности уровня Ф + ф = ф„ + \|H будут -лежать линии
пересечения поверхностей
Ф = <ра и ф = %
ф = Ф0 + а a i|)=tp0 — а
ф=ф„ — а в ij)=\|)o +а
Точно так же поверхности уровня Ф+ф = фо+1р0 + а буду!
принадлежать линии пересечения поверхностей
Ф=Ф0 + о и Ч> — 4>о
ф=ф„ И ЧЗ = -Фо + <*
ио
ВЕКТОРНЫЙ АНАЛИЗ
ГЛ. II
Отсюда вытекает приближенный способ построения поверхностей уров-
уровня функции х> который мы поясним фиг. 46. На этом чертеже нанесены
линии уровня двух семейств
ф = const, ¦ф = const
Линии уровня
X = const
получаются, если провести диагональные кривые для получившейся
серии криволинейных четырехугольников: легко сообразить, что диаго-
аальные кривые другой системы (пунктирные) являются линиями уровня
функции <р — tp.
-га
В качестве примера возьмем в плоскости два фокуса А и В; расстоя-
расстояние переменной точки Р до фокуса А обозначим через п, а расстояние
той же точки до фокуса В обозначим через г2.
Если теперь веять ср = гх, то линиями уровня функции ср будут слу-
служить концентрические окружности с центром в точке А; точно так же
для ip = га линиями уровня будут концентрические окружности с цен-
центром в точке В.
Если теперь, по предыдущему правилу, построить линии уровня функ-
функции х = <Р + Ч1 = ri + г2, то мы, очевидно, получим эллипсы с фоку-
фокусами А а В; в качестве же линий уровня функции Х = Ф — 'Ф= r\ ~~ rt
получатся, очевидно, гиперболы с теми же фокусами.
6 качестве второго примера рассмотрим векторное поле а = grad ф,
где
1 . 1
причем г, и гг опять расстояния переменной точки Р до двух фокусов
А и В. В электростатике такое поле получается в том случае, если в точ-
точках А и В находятся отрицательные электрические заряды одинаковой
величины. Чтобы построить графически поде потенциала ф, мы строим
в плоскости чертежа, которой принадлежат точки А в В, семейство ок-
R й й
рунгаостей с центрами в точках А и В и с радиусами R, -к-, -«-, -г-, ¦ • •
I 12 градиент: его свойства 111
{так как поле симметрично относительно прямой АВ, достаточно рас-
рассмотреть ооле только в этой плоскости). Проводя опять диагональные
кривые, мы получим линии уровня ср = const.
В каждой точке grad q> направлен со нормали к линии уровня. При
построении нужно брать R большим, например, равным R ~ \0АВ,
чтобы сетка кривых получилась достаточно густая.
Но представляет большой интерес отыскать векторные линии вектора
а = grad ф. В только что рассмотренном случае это будут силовые ли-
линии, происходящие от двух одинаковых зарядов, находящихся в точках
А я В- Укажем способ построения этих
силовых линий, который может быть при- "Jrad
менен и- к целому ряду других случаев.
Для этого нам предварительно надо
найти градиент erne одной функции,
а именно, рассматривая в плоскости по-
полярные координаты в и /-точки М (фиг.47),
мы можем рассматривать 9 как функцию
точки М. Линиями уровня этой функции 6
Фиг 47
являются, очевидно, полупрямые, выхо-
выходящие из полюса О полярной системы.
Поэтому grad 9 направлен по перпендикуляру к ОМ. Чтобы найти
его величину, достаточно заметить, что бесконечно малому приращению
угла db соответствует расстояние между двумя бесконечно близкими ли-
иияли уровня, равное dn — г <#), поэтому мы имеем:
Igrad 6 | =-^S-= ~
Итак, вектор grad 6 направлен по перпендикуляру к ОМ (конечно
в сторону возрастания в) и по численной величине равен —. Сравним
его с вектором grad г = — ; последний направлен по ОМ а по численной
величине равен 1. Отсюда мы можем вывести заключение, что если мы
повернем вектор grad г на 90° в направлении возрастающих углов в,
то получим вектор г grad в.
Применим этот результат к нашей задаче. Мы имеем
а = grad<p = —-^-grad rt — -
Повернем теперь в каждой точке этот вектор на 90° против часовой
стрелки. Вводя углы 9г и 02 (фиг. 48), мы получим новый иектор Ь, для
которого, согласно предыдущему, будем иметь выражение
b = grad 9t grad 92
|12 ВЕКТОРНЫЙ А.НАЛИЗ Гл. II
Но если расстояние точки Р до прямой АВ обозначить через А, то,
очевидно,
гг sin в, = А, . ra sin 92 = h
и, следовательно, предыдущее выражение можно переписать, пользуясь
формулами B0) и A8), так:
b = — -j- (sin Ъх grad в, + sin 8a grad ва) = ygrad (cos flj +¦ cos ва)
Ясно теперь, что если мы рассмотрим функцию точки
•ф = cos 9i + cos 92
д то вектор Ь будет всюду направлен по нор-
нормалям к линиям уровня функции i|), а сле-
следовательно, вектор а, перпендикулярный
к вектору Ь, будет направлен всюду по
\* касательной к линии уровня функции if.
-L~ А это по самому определению векторных
линий означает, что линии уровня функции гр
Фиг' являются вентерными линиями вектора
а = grad ф, т. е. искомыми силовыми линия-
линиями. Для их графического построения нужно, согласно предыдущему,
начертить хотя бы систему прямых
cos 8, = 0, ±0,1, ±0,2 ±1
затем систему прямых
cos62 = 0, ±0,1, ±0,2, .... +1
и затем произвести графическое сложение.
Совершенно аналогично можно рассмотреть случай электростатиче-
электростатического поля, происходящего от двух произвольных зарядов одинакового
или равного знака, чему соответствует функция
л целый ряд других примеров.
Задача 87. Вычислить grad (е-г), где с — постоянный вектор. Так
как
<р = с.г = схх + Суу + сгг
то
grad (сг) = i -^- + }-^ + к-^-= cxi + cj + сгк = с.
Другой способ вычисления, более короткий, основывается на том,
что если d<$ = dt'&, то а = grad <p.
В нашем случае d<$ = d(c-r) = c-dr, следовательно,
grad (с*г) = е
5 М ГРАДИЕНТ. ЕГО СВОЙСТВА 413
Задача 88. Вычислить grad [ cxt j8, где с — постоянный вектор.
Вычисляем d (ex г) . <схг) = 2 (cxr) . (exdr). Положим на время
схг=Ь, тогда в векторно-скалярном произведении b-(cxo!r) можно
произвести циклическую перестановку векторов
= dr-(bxo) = d
значит
d [(cxr).(cxr)] = dr-2 [(cxr)xc]
Это показывает, что
grad | сx г Is = 2 (сx г) xc = 2г (ее) — 2с (г«с)
Задача 89. Если ср (a, v) есть сложная функция от г через посред-
посредство двух вспомогательных функций и и г?, то доказать формулу
grad ф = -gjj-grad в + -~ grad v
Задача 90. Воспользовавшись тем, что эллипс ri 4- r3 = 2а есть
линия уровня для функции ф — г, + rt, где rt и га суть расстояния пере-
переменной точки до двух фокусов (длины радиус-векторов), доказать, что
нормаль к эллипсу делит пополам угол между радиусами-векторами.
3 а д а ч а 91. Решить задачу, аналогичную предыдущей, для гипер-
гиперболы гл — г2 = 2а, а также для параболы г — х = р с фокусом в начале
координат.
Задача 92. Найти геометрический способ построения касательной
к овалам Касеини
где г, и г2 суть расстояния переменной точки до дпух фокусов А -а В,
воспользовавшись тем, что эти кривые суть линии уровня для функ-
функции r,rs.
Ответ. Соединив точку М кривой с фокусами А и В, отложим на
продолжении AM от точки М отрезок МК = ВМ а на продолжении
ВМ отрезок ML = AM. Диагональ параллелограма, построенного на МК
и ML, и будет нормалью к овалу Касеини в точке М.
3 а д а ч а 93. Ра смотреть линии уровня и векторные линии для поля
а = grad ф, где ф lg >•, — lg л2, причем г, и г8 - расстояния перемен-
переменной точки Р до двух фокусов А и В.
Ответ. Линии уровня — окружности rx/r3 = const, векторные ли-
линии — окружности 6j — 9 j = const, проходящие через точки А и В.
Задача 94. Имеется скалярное поле ф в плоскости. Зная произ-
производные по двум направлениям d<p/ds1 и ckp/ds2 в некоторой точке М, найти
геометрическим построением grad ф в этой точке.
Ответ. Отложим от точки М в направлении sx отреэок МК = dqlds^
(если 9ф / дц отрицательно, то откладываем отрезок МК = | дф / dsx [ в
8 н. я. кочяв
114 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
направлении, противоположном направлению sx) и восставляем в точке К
перпендикуляр КР к МК; аналогично поступаем с направлением s2;
если точка пересечения этих двух перпендикуляров есть Р, то вектор МР
будет по величине и направлению представлять grad q>.
Задача 95. Имеются три заданные точки: Mlt М2, М3. Требуется
яайтв такую точку Р, чтобы сумма расстояний М^Р + М3Р + МЛР была
минимальной.
Прежде всего ясно, что точка Р должна лежать в плоскости М\МЪМЛ.
Введем обозначения МХР = ги М2Р — гя, МЯР — rs.
Если рассмотреть функцию
ф = г, + г2 + rs
то ясно, что в окрестности той точки Р, где эта функция принимает ми-
минимальное значение, линии уровня должны быть замкнутыми кривыми,
охватывающими точку Р, так что в самой точке Р необходимо должно
быть
grad q> = О
Это приводит к условию
grad rj -Ь grad r2 + grad r3 = 0
или
Но если сумма трех векторов равна нулю, то из этих векторов мо-
может быть составлен замкнутый треугольник. Но в данном случае все
три вектора являются единичными, следовательно, треугольник будет
равносторонний, а потому все углы его равняются 60°. Поэтому мы при-
приходим к заключению, что искомая точка Р обладает тем свойством, что
все три угла МгРМ%, М^РМ3, MaPMt равны 120°, т. е. все эти отрезки
М^Мъ, il/aAf8, A/gA/j видны из точки Р под углом 120°, что дает возмож-
возможность простого геометрического построения точки Р.
Задача 96. Имеются п заданных точек Л/4 (г{) в пространстве.
Требуется найти такую точку Р (г), чтобы сумма квадратов расстояний
была минимальной.
Ответ:
3 а д а ч а 97. Вывести закон преломления света на границе КК раз-
раздела двух однородных сред, зная, что коэффициент преломления второй
среды относительно первой равен л, и что поэтому свет распространяется
в первой среде со скоростью, в п раз большей, чем во второй. Кроме
I 12
ГРАДИЕНТ. ЕГО СВОЙСТВА
115
того известно, что луч МХРМ, должен иметь такую форму, чтобы время
прохождения светом расстояния между точками Мх и М2 было
мальным (фиг. 49).
Бели обозначить МгР = г„
= гъ, то задача сводится
к нахождению минимума функ-
функции
если точка Р перемещается по
кривой КК; но известно, что
в точке минимума Р должно
быть
-|2.=0
если s есть направление касательной к КК в точке Р. Поэтому в точке И
вектор grad <p должен иметь направление нормали к КК; но
grad ф = grad гх •+• п grad г, = -у- 4- п -~-
Легко отсюда вывести, что если а — угол падения луча, а Э — угол
преломления, то
sin a = n sin (J
Задача 98. Вычислить grad (xmyn).
Ответ:
zm~'yn~1 (my grad x-\-nx grad у)
Задача 99. Дано семейство поверхностей уровня
Ф (г) — const
Написать векторное уравнение нормали к поверхности уровня, про-
проходящей через точку М„ (г0), и уравнение касательной плоскости в этой
точке.
Ответ. Уравнение нормали
(г— гo)xgгadф = О
уравнение касательной плоскости
(Г _ ro).grad ф = О
где значение grad ф берется в точке Мо.
Задача 100. Показать, что grad ф есть полярный вектор.
3. Вектор, являющийся градиентом некоторого скаляра ф, называется
потенциальным вектором, а поле такого вектора называется
потенциальным. Величина же ф называется потенциалом.
116 ВЕКТОРНЫЙ АНАЛИЗ Гл. ц
Потенциальные векторы обладают особыми, характеризующими их
свойствами, связанными с понятием линейного интеграла вектора вдоль
некоторой кривой.
Пусть нам задано векторное поле вектора а; возьмем какую-нибудь
кривую L, соединяющую две точки Ма (г„) и Мх (rj, разобьем ее на бес-
бесконечно малые элементы, которые заменим хордами dr, составим далее
скалярные произведения a-dr, где а есть вектор поля, отвечающий
началу вектора dr. Составим далее сумму всех таких скалярных про-
произведений и перейдем к пределу, устремляя все элементы dr к нулю.
Полученный предел называется линейным интегралом век-
вектора а вдоль кривой t в обозначается через
Этот интеграл часто пишут в двух других формах. Вспоминая прежде
всего, что а- Ь = Ьаь, замечая, что | di ] = ds, где ds — элемент длины
кривой, и обозначая через а, — касательную составляющую вектора а,
мы будем иметь, что
a-rfr = a/ls
и, следовательно, мы можем написать
'/с
-dr = \asds
J
L
Воспользовавшись же выражением a-dr в проекциях на оси коорди-
координат
а • йг = dgdx -Ь Щ/$у ~\~ cLjdz
мы будем иметь
\ а -аг = иа-Дт + a^/dy + azdz)
I I
Для вычисления этого последнего интеграла обычно выражают коор-
координаты точки кривой L функциями какого-либо параметра и сводят дело
к вычислению простого интеграла. Например, вычислим интеграл
\ (х dy — у dx)
взятый по контуру круга
Координаты точек этой окружности можно выразить функциями одного
параметра в
х = R cos в, у = R sin в
причем, когда 0 меняется от 0 до 2я. то точка описивает всю окружность.
Мы имеем далее
dx = — R sin 0 f/0, dy = R cos 6 c№
j) i2 ГРЛДИИНТ. ВГО СВОЙСТВА Ц7
в, следовательно,
хйу — ydx = R cos 8 R cos 8 <й + Л sin в Я sin в dB — R1 dti
-ydx) = '
L
Линейный интеграл вектора по замкнутой кривой называется еще
циркуляцией вектора по этой кривой.
Если взять за вектор а вектор силы F, действующей на материаль-
материальную точку, а за L — траекторию точки, то
дает работу силы при перемещении точки из Д/о в М,. так как
F-rfr = F\dr\cos\(F, dt)\
означает элементарную работу силы на перемещении dr.
Вообще говоря, линейный интеграл вектора зависит от того пути L,
который соединяет крайние точки Мо и Л/,. Иначе обстоит дело с потен-
потенциальными векторами.
Докажем следующую теорему: линейный интеграл чектора grad q>
вдоль какой-либо кривой L, соединяющей точки Мй (г0) и М1 (rt), равен
разности значений функции ф в точках М, и М„.
В самом деле
grad cp.dr *= ^ dip = ф (г,) — <р (г0) = <р (я1? 'уи z,) — (р (ж0, у0, г0) B1)
Отсюда, как непосредственное следствие, вытекает, что если (р —
однозначная функция (дальше мы дадим пример многознач-
многозначной функции), то значение линейного интеграла
grad ф не зависит от пути интегрирования,
а только от конечных точек пути. В частности, и я-
теграл по замкнутой кривой будет равен нулю,
ибо конечная и начальная точки пути здесь совпадают. Последнее свойство
характерно для потенциального вектора, ибо справедлива и обратная
теорема:
Если линейный интеграл вектора а вдоль всякой замкнутой кривой
равен нулю, вектор а есть градиент некоторого скаляра <р.
Сначала докажем, что линейный интеграл вектора а, взятый по не-
некоторому пути от неподвижной точки Ма (г0) до какой-нибудь точки М (г),
не зависит от выбора пути. В самом деле, пусть L и L' — два пути, со-
соединяющие Мо с М. Образуем замкнутый контур, состоящий из кривой L
и кривой L', пробегаемой от точки М к точке Мо; в силу условия имеем
г,
a'dr +\ a-dr = О
118 ВЕКТОРНЫЙ АНАЛИЗ Гл. И
Но очевидно, что
U г
\ a-dr = — [ &-dt
ибо при перемене направления на кривой L' все элементы dr меняют
свой анак. Поэтому
г г
\ a.dr=[ a-rfr B2)
Раз интеграл не аависит от кривой, его значение есть функция г (ведь г0
мы считаем постоянным); обозначим ее через <р (г);
г
\ л-dr = <р (г) B3)
г.
Возьмем соседнюю с М точку М' (г + Д*) и пусть Д* — длина ММ',
s — единичный вектор, идущий в направлении ММ'. Рассмотрим путь
МеММ', проходящий череа точку М. Тогда мы будем иметь
<р (М') — <р (М) = \ a.tit— [ a.dr = \ л-dr
м,мм' M^d мм'
Но если путь ММ' ваять прямолинейным, переменную точку этого
пути обозначить через Р, а расстояние этой точки до точки М обозна-
обозначить через и, то мы будем иметь на ММ'
dr = srfw, a.rfr = as (P) du
Следовательно,
Лъ
^ a-rfr = [ as {P)dn
мм' о
По теореме о среднем это выражение будет равно
a.rfr = а, (/¦') Дз
¦
где Р' — некоторая точка отрезка ММ'. Итак,
Переходя к пределу при As —>• 0, получим
ректор а, как всегда, предполагаем непрерывной функцией точки).
Полученное условие, по самому определению grad <p, выражает, что
а = grad <p
что и требовалось доказать.
$ 12 ГРАДИЕНТ. ЕГО СВОЙСТВА Ц9
Более просто то же самое можно получить, беря элементарное при-
приращение обеих частей равенства B3) на бесконечно малом перемещении dr:
a-dr = <&р
Отсюда, согласно A2), следует, что
а = grad ф
4. Примером потенциального вектора является консерватив-
консервативная сила, которая характеризуется тем, что работа, совершаемая ею
при переходе материальной частицы, на которую она действует, из одного
положения в другое, зависит только от начальной и конечной точек пути
перехода. Поэтому консервативная сила F является градиентом неко-
некоторой функции V:
F = grad U
U называется силовой функцией, — V — потенциаль-
потенциальной анергией, или потенциалом. Совершенная на неко-
некотором пути, соединяющем точки Мо (г0) в Л/j (rj, работа А определяется
формулой
А = \ F.tfr = U (г,) - U (г0) B4)
L
т. е. работа, совершенная консервативной силой, равна увеличению сило-
силовой функции или, что то же, уменьшению потенциала. В частности работа
консервативной силы на замкнутом пути всегда равна нулю
Пусть материальная точка движется под действием консервативной
силы.
Из закона живых сил [формула E9) § 9] имеем
В этом случае найдем
Следовательно,
U = const
Таким образом, сумма кинетической энергии —mi?- и потенциальной
энергии — V во все время движения сохраняет свое значение.
Задача 101. Показать, что если сила F — центральная, т. е. на-
направлена к неподвижной точке О и зависит только от расстояния г до этой
точки, то она имеет потенциал.
По условию
120 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Составим работу этой силы вдоль кривой L, соединяющей точки
Ма (rJ и М (г).
Но, как уже упоминалось ранее,
r-rfr = г dr
Поэтому для работы силы F получаем выражение
я
J <р (г) а(г = Ф (г) - Ф <г0)
м,
если Ф' (г) = ф (г); так как это выражение не зависит от пути интегри-
интегрирования, а только от конечных точек пути интегрирования, то сипа F
имеет потенциал, и притом равный — Ф (г). Например, если взять цен-
центральную силу F, обратно пропорциональную квадрату расстояния до
точки О, то будем иметь
F=Ar
Следовательно, здесь
<р (г) = - ±-, Ф (г) = ± , F = grad ±
Задача 102. Показать, что если сила F в каждой точке направлена
по перпендикуляру к некоторой прямой (например оси г) и зависит только
от расстояния р до этой прямой, то она имеет потенциал; найти последний.
Ответ. Если
^р, где р = xi + у}
то
F = — grad Ф, где Ф = — >.<р (р) dp
Полезным применением полученных результатов является также оты-
отыскание функции <р по ее полному дифференциалу. Допустим, что мы знаем,
пто выражение
Ж? = ах (х, у, г) dx -У Оу (х, у, г) dy + az {х, у, z) dz
является полным дифференциалом. Тогда для отыскания функции <р мы
можем воспользоваться тем, что путь интегрирования можно брать по
произволу. Чаще всего удобным оказывается такой путь интегрирования.
Сначала идем из точки Ма (х0, уа, z0) параллельно оси х до точки
М1 {х,у0, г0), на этом пути dy = dz = 0 и поэтому
\ а-о?г = \ах (х, г/0, z0) dx
I 12 ГРАДИЕНТ. ЕГО СВОЙСТВА 121
Затем идем из точки Mt (ж, у0, z0) параллельно оси у до точки
Мъ (х, у, z0), на этом пути dx = dz — 0, и поэтому
1" Г
* а . tfr = \j о,, {ж, у, z0) dy
и, v.
Наконец, из точки М3 (х, у, г„) идем параллельно оси z до точки
М (х, у, z); на этоы пути dx = dy = 0, и поэтому
и г
\ m-dr =\ az(x, у, z) dz
I i
В результате, идя по пути M^M^M^d, мы приходим к следующему
выражению для функции <р:
Ф (х, у, г) = ф (жв, г/0, z0) 4-
г
х. № г,
В качестве примера найдем <р по полному дифференциалу
<Лр = Bху + зя) dx + BVz -H x2) dy 4- B za: + у*) dz
Полагая з0 = yQ = z0 = 0, сразу найдем
Ф(ж, у, г) ^^x2dy + \>Bгх + y*)dz + C = x*y + z*x 4- y*z 4- С
0 D
5. Теорема о том, что линейный интеграл градиента ср по замкнутому
контуру равен нулю, была нами выведена в предположении, что скаляр ф
задан -однозначным образом. Если ф будет многозначной функцией, эта
теорема перестает быть верной. Разъясним на примере, в чем тут дело.
Зададим ф следующим образом: во всякой полуплоскости, проходящей
через ось z, наш скаляр имеет постоянное значение, равное углу, состав-
денному рассматриваемой полуплоскостью с полуплоскостью xOz.
Определяя <р, как функцию х, у, z, получим:
Поэтому
ф = arc tg-f-
дх г» + 2/* ' ду i3 4- !f" дг ~
Заставим точку обойти ось г, двигаясь все время в положительном
направлении, а вернуться в исходное положение; угол ср будет непре-
непрерывно увеличиваться и при полном обходе увеличатся на 2л; таким об-
образом, линейный интеграл вектора grad ф по всякой замкнутой кривой,
обходящей ось г один раз в положительном направлении, равен 2л, а не
нулю. Причина этого заключается в многозначности функции ф, при-
причем ось z является особенной линией для функции ф, так как при прибяи-
t22 ВЕКТОРНЫЙ АНАЛИЗ Г Л. II
жении точки к оси г значение функции ф остается неопределенным. Чтобы
сделать поле функции q> непрерывным, мы должны выделить ось z, окру-
окружив ее цилиндром малого радиуса. Но получающееся таким образом
пространство уже не будет односвязиым; оно будет д в у-
связным.
Односвязным называется такое пространство, в котором любая зам-
замкнутая линия может быть стянута в точку непрерывным образом, не
задевая границ области. В нашем случае этого сделать нельзя, ибо кон-
контур, окружающий ось г, таким образом стянуть в точку нельзя. Чтобы
превратить наше пространство в односвязное, мы можем воспользоваться
следующим приемом: проведем полуплоскость zOx и будем считать обе
ее стороны также границами области. Этим контуры, окружающие ось г,
запрещаются, все же остальные контуры могут быть стянуты в точку.
Поэтому область делается односвяаной; так как нам понадобилось при-
присоединить одну границу, то первоначальное пространство называется
двуевязным. Бслв бы вам надо было провести две границы, чтобы сделать
область односвязной, то мы назвали бы область трехсвязной и т. д.
Укажем еще ряд односвязных и многосвязных пространств: простран-
пространство внутри или вне сферы очевидно односвязно; пространство между
двумя концентрическими сферами тоже односвязно; напротив, внутрен-
внутренность кольца дает, очевидно, двусвязное пространство, ибо после того,
как мы проведем меридиональное сечение, оно делается односвяаным.
Бели в доске сделать два отверстия, то получится трехсвязное про-
пространство, ибо надо сделать два сечения, чтобы сделать его односвязным
и т. д. Итак, на примере мы убедились в том, что в случае многосвяз-
пого пространства потенциал может быть многозначным и потому линей-
линейный интеграл вектора градиента может зависеть от путв интегрирования,
в частности интеграл по замкнутому контуру может не равняться нулю.
Многозначность потенциала сказывается на графическом представлении
поля градиента векторными линиями. Если потенциал однозначен, век-
горные линии его градиента не могут быть замкнутыми, потому что ли-
линейный интеграл вдоль такой линии
состоял бы из элементов одного знака (ведь на таком контуре а имеет то
же направление, что dr нли как раз противоположное) и не мог бы рав-
равняться нулю. В случае же многозначного потенциала такие замкнутые
векторные линии становятся возможными. Покажем это на только что
рассмотренном примере. Составим уравнение векторных линий grad <p:
dx dy di
сир d(p d<p
~дх ~ду~ ~~§Г
т. е. в нашем случае
dx dy dz
— у~~х~ б"
I 12 ГРАДИВНТ. ЕГО СВОЙСТВА 123
ИЛИ
dz = 0, х dx + у dy — О
Отсюда
z = coast, я? + у* = const
Таким образом, векторными линиями grad arc tg — являются круги,
лежащие в плоскостях, параллельных плоскости хОу, и имеющие свой
центр на оси z; таким образом, как и следовало ожидать, все замкнутые
линии окружают ось z.
6. Понятие потенциального вектора находит себе многочисленнейшие
применения в самых разнообразных отделах физики.
Так, например, рассматривая явление теплопроводности, рассматри-
рассматривают поле температуры Т. Бели в теле, движение тепла в котором изу-
изучается, провести малую площадку dS, направление нормали к которой
. есть п, то принимают, что через эту площадку проходит каждую едини-
единицу времени количество теплоты, равное
где k — коэффициент теплопроводности, который в различных точках
тела может иметь разное значение, т. е. является функцией точки, но
ве зависит (в случае изотропного тела) от ориентации площадки dS.
Отсюда видно, что поток тепла внутри тела характеризуется вектороы
grad Т.
Точно так же в гидромеханике большую роль играют так называемые
потенциальные течения, в которых вектор скорости является вектором.
потенциальным
v = grad <p B6)
Функция ф называется при атом часто потенциалом ско-
скорости.
Наконец, в электростатике напряжение электрического поля, т. е.
сила, действующая на единичный заряд положительного электричества,
тоже является, как установлено из опытных данных, вектором потен-
потенциальным
Е = — grad <p B7)
где ф называется потенциалом электростатического
поля. Если в рассматриваемой точке находится заряд е1г то действую-
действующая на него сила F будет пропорциональна этому заряду, как найдено
из опытных данных:
F = е,Е B8)
В простейшем случае поля, происходящего от находящегося в начале
координат заряда е положительного электричества, по закону Кулона
мы будем иметь
Е = -1-г B9)
Отсюда следует, что
<р = -1 C0)
124 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Заметим, что во всех применениях векторного анализа к теории, элек-
электричества и магнетизма, которые мы будем делать, мы будем предпола-
предполагать, что электрические и магнитные явления происходят в пустом про-
пространстве, т. е. что так называемая диэлектрическая постоянная в
и магнитная проницаемость [л равны единице.
Если мы имеем в точках М^ Mt, .... Мп заряды eu е„, . . . , еп и если
расстояния точка Р до точек Л/,, М2, . . . , Мп обозначить через г,, г4,..,/•„,
то мы получим для потенциала поля, происходящего от этих зарядов,
выражение
§ 13. Производная вектора по направлению. Градиент одного
вектора по другому
1. Будем теперь изучать векторное поле некоторого вектора
а (г) «=» а (х, у, z)
Иными словами, будем предполагать, что в каждой точке рассматриваемой
нами области пространства задан вектор а.
Нашей задачей является рассмотрение различного рода дифферен-
дифференциальных операций с полем вектора а.
Мы видели, рассматривая скалярное поле функции <р, что изменение
функции ф в окрестности некоторой точки М характеризуется вектором
grad ф. Этот вектор grad ф играет по отношению к функции ф (г) ту же
роль, как обыкновенная производная /' (х) векоторой функции / (х)
играет по отношению к этой самой функции. С этой точки зрения и ао
отношению к вектору а казалось бы естественным ввести такую вели-
величину, которая играла бы ролъ производной, однако такой подход вывел
бы нас за рамки векторного анализа. Дело в том, что в то время, как ф
является скаляром, grad ф является уже вектором; подобно атому вели-
величина, которая могла бы играть роль производной для вектора а, оказы-
оказывается уже тензором. Не желая уже сейчас вводить в рассмотрение тен-
тензоры, мы должны поэтому несколько ограничить себя. Так, мы подошли
к понятию grad q>, рассматривая сначала производную ф ао направлению
Сейчас нам придется ограничиться исключительно только рассмотрением
производных от вектора а (г) ао какому-либо направлению s.
Как и в предыдущем параграфе, возьмем какую-либо точку М и про-
проведем через нее прямую, имеющую направление единичного вектора а,
или кривую, касательная к которой в точке М имеет направление s.
На этой прямой или кривой возьмем соседнюю с М точку М', причем
пусть длина дуги ММ' равна Д$. Составим теперь отношение разности
значений вектора а в точках М' и М к As:
а(АГ)-а(АГ)
I 13 ПРОИЗВОДНАЯ ВЕКТОРА ПО НАПРАВЛЕНИЮ 125
предел этого отношения при Д» -» 0 (если таковой существует) назы-
называется производной вектора а по направлению з в рассматриваемой
точке М и обозначается через
?- Нш «<"> — <"> A)
Если на нашей дуге, начинающейся в точке М, мы будем отсчиты-
отсчитывать длину дуги от точки М и обозначим ее черев s, то a (х, у, а) будет
сложной функцией от s черев посредство х, у, z и потому по обычному
правилу дифференцирования сложных функций мы будем иметь
Но
^ = cos (s, х), ^ = cos (з, у), ^ — сое (з, г)
Поэтому мы получаем соотношение
^ = cos (s, х) ? + cos (s, у) y + cos (s, z) ^ B)
совершенно аналогичное формуле C) предыдущего параграфа для ^.
В предыдущем параграфе мы имели формулу (8)
По аналогии с этим мы введем обозначение
^ = (s-V)a C)
Рациональность такого обозначения может быть обоснована следую-
следующим образом. Составим скалярное произведение вектора
s = i cos (s, x) H- j cos (s, у) -)- k oo« (s, z)
и символического вектора
В результате мы получим новый дифференциальный оператор
s. V = cos (s, х) ^ + cos (а, у) ^ + cos (s, г) ^. D)
применение которого к вектору а дает по формуле C) как раз ^, по-
поэтому обозначение C) является совершенно естественным.
Рассмотрим теперь весколько более общую операцию, а именно, вве-
введем понятие градиента вектора а по вектору v, который обозначается
символом (v • ^7) а. Чтобы определить этот вектор, мы можем поступить,
например, таким образом: составим формально скалярное произведение
126 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
вектора
v = ivx + jvv ¦+¦ k»t
и символического вектора V; в результате получим дифференциальный
оператор
Поэтому под вектором (v-V) а мы будем понимать вектор
(v. V) a = г^Ц? + vv ^ + vz — (в)
Если вектор v имеет то же направление, что единичный вектор s,
так что
v = vs
где v = j v j есть модуль вектора v, то мы будем иметь
vx = v cos (s, х), vv = v cog (s, у), », = v cos (s, z)
Поэтому
(v¦ V) a = pjcos (s, x) -^ + cos (s, у) щ, -h cos (s, г) ^
ала, что то же,
Итак (v-V) * есть производная вектора а «о направлению вектора
v, умноженная на величину вектора V.
Беря в формуле F) за вектор v бесконечно малый вектор
dr = i dx -\- j dy + kdz
мы получим
и так как справа стоит da, то получаем весьма важную формулу
{efr.V)a = rfa (9)
очевидно, аналогичную формуле
dtp = а!г-\7ф
Проектируя обе части формулы F) на оси координат, получим состав-
составляющие градиента одного вектора по другому:
A0)
I 13 ПРОИЗВОДНАЯ ВИКТОРА ПО НАПРАВЛЕНИЮ 127
Между прочим И8 этих формул следует, что
{{v.V)a}x = v.Va* A1)
и аналогичные формулы для осей у и г.
Рассмотрим следующий пример. Пусть в пространстве задана система
линий так, что через каждую точку пространства проходит одна и только
одна линия системы. Пусть а есть единичный вектор касательной к линии,
проходящей через рассматриваемую точку. Выясним геометрическое
значение (сг^у)сг.
По самому определ ению
rue производная берется по направлению касательной к линяй; но в
п. 6 § 9 было выяснено [формула C7)], что
до а
где п — единичный вектор главной нормали, а Л — радиус кривизны
для линии, проходящей через рассматриваемую точку. Итак,
Задача 103. Найти, чему равно (с* V) г. где г есть радиус-вектор.
Ответ: с.
2. Градиент одного вектора по другому часто встречается в вычисле-
вычислениях. Мы здесь остановимся на одном важном применении этого понятия.
Допустим, что мы имеем движение некоторой сплошной среды, на-
например жидкости, и пусть поле скоростей в этом движении дается функ-
функцией v (г, t), так что v есть вектор скорости частицы жидкости, прохо-
проходящей в момент времени t через точку М (г). Рассмотрим некоторую ска-
скалярную функцию поля ф (г, г), например, температуру различных частиц
жидкости, причем мы предполагаем, что эта функция зависит и от вре-
времени t.
Если мы желаем изучать изменение функции <р за некоторый проме-
промежуток времени, то мы можем поступать двояким способом, а именно, мы
можем рассматривать изменение <р в данном месте, или же мы
можем рассматривать его для данной частицы. Разницу между
этими двумя изменениями можно уяснить на следующем примере. Бели
мы измеряем изменение температуры на поверхности земли, то мы полу-
получаем, очевидно, изменение температуры в данном месте. Если же мы на-
находимся на воздушном шаре, который уравновесился в воздухе и движет-
движется вместе с воздушным потоком, то изменение температуры, измеряемое
на этом шаре, может, очевидно, быть рассматриваемо как изменение тем
пературы для частиц воздушного потока.
128 векторный анализ Гл. И
Изменение q> в данном месте характеризуется частной или мест-
местной или локальной производной qp no ft
ф _ цт^( + p(, 0
при вычислении которой радиус-вектор точки М рассматривается как
постоянный.
Чтобы охарактеризовать изменение q> для данной частицы за проме-
промежуток времени At, мы должны за приращение q> веять разность между
значением функции ф в момент t + Д2 в том положении частицы М',
в котором она находится в этот момент, и значением функции в момент t
в начальном положении ее М. Предел отношения этого приращения к
At при Д/ —> 0 называется полной или индивидуальной
или субстанциональной производной ф по t и обозначается
Чтобы установить связь между частной и полной производными,
проще всего заметить, что когда мы .составляем полную производную
от функции ф (х, у, ъ, t), то мы должны считать х, у, z функциями от t,
ибо частица, имеющая координаты х, у, z, перемещается со скоростью v,
причем
Но рассматривая ф (х, у, z, t) как сложную функцию от t, мы полу-
получим
д(р д<$ Зф д<р
или
J~ "~ A5)
Это же соотношение можно получить и более непосредственно. Прежде
всего
:> ,. ММ'
ММ'
переходя к пределу, получим, в силу того, что при Ы -» 0 точка М'
стремится к М е что
следующую формулу:
7 = ? + 5Гг; = §Г
$ 13 ПРОИЗВОДНАЯ ВИКТОРА ПО НАПРАВЛЕНИЮ 129
Если мы рассматриваем векторную функцию поля а (г, t), зависящую
от времени I, то определение частной и полной производной будет со-
совершенно аналогично таковым для скаляра
dt
da = j.m a(M',
dt
1?
Связь между частной и полной производной по t вектора а устанавли-
устанавливается так же, как для скаляра. Рассматривая а (х, у, з, t) как слож-
сложную функцию от I через посредство х, у, 2, легко найдем
da _да fadx fady ^ d&dz_ _да _,_ п да ^ ^ оа _,_ п да
dt ~ dl + dxdt "*" dydt
Отсюда
da
То же самое получается и непосредственно, ибо прежде всего из фор-
формулы A7) следует, что
и, замечая, что
получим
da да , . да
или
Члены v.yip в формуле A5) и (v. V) а в формуле A8) называются
конвективными членами, так как они появляются только при
движении сплошной среды и связаны с переносом (конвекцией) частиц.
В качестве примера рассмотрим ускорение частицы жидкости. Чтобы
его вычислить, мы должны сравнить скорости одной а той же
частицы в два соседние момента времени t и t 4- Д?, поэтому вектор
ускорения частицы жидкости выражается полной производной вектора
скорости v, для которой по формуле A8) имеем
S-S+<'•*)*
В составляющих будем иметь
9 Н. Е. Качин
130 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
§ 14. Поток вектора- через поверхность. Расхождение вектора. Его
аналитическое выражение. Теорема Гаусса. Источники
1. Рассмотрим поле какого-нибудь вектора
а (г) = а (х, у, z)
т. е. предположим, что для каждой- точки пространства или некоторой его
части задано значение этого вектора. Рассматривая значения этого векто-
вектора в окрестности некоторой фиксированной точки М, мы видели в преды-
предыдущем параграфе, что изменения этого вектора вблизи точки М характе-
характеризуются с точностью до бесконечно малых второго порядка величинами
производных вектора по всевозможным направлениям я:
да
Эз
так как, зная эти производные и рассматривая вблизи точки М соседнюю
точку М', лежащую на луче, имеющем направление единичного век-
вектора s, мы будем иметь приближенное равенство
а(М') = а (ДО +d?sMM'
Мы видели, кроме того, что вся совокупность бесчисленного коли-
количества производных da / ds no всевозможным направлениям s опреде-
определяется простой формулой B), если известны производные по трем взаимно
перпендикулярным направлениям
дл За да
дх' ду'1 Эг
Теперь мы приступим к изучению еще некоторых величин, до не-
некоторой степени характеризующих изменения векторной функ-
функции а (г) в окрестности рассматриваемой точки.
Этими величинами, играющими необычайно важную роль в вектор-
векторном анализе, являются, с одной стороны, скалярная величина, называе-
называемая расхождением вектора а, и, с другой стороны, — век-
векторная величина, называемая вихрем вектора а.
Отметим сразу же, что значение этих величин для векторного анализа
и для многочисленных приложений последнего тесно связано с тем об-
обстоятельством, что эти величины естественно появляются при рассмо-
рассмотрении поверхностных и криволинейных интегралов от вектора а. На
многочисленных примерах мы увидим, что при изучении задач механики
и физики является совершенно необходимым рассмотрение объемных,
поверхностных и криволинейных интегралов. Значение последних было
уже до некоторой степени выяснено в § 12, где мы видели, например, что
криволинейный интеграл от вектора силы дает значение работы, совер-
совершаемой этой силой, и что обращение в нуль криволинейного интеграла
от вектора а по любому замкнутому пути указывает на то, что вектор а
есть вектор потенциальный, т. е. является градиентом некоторой скаляр*
ной функции ф. Откладывая дальнейшее изучение свойств криволиней-
§ 14 ПОТОК ВЕКТОРА ЧВРЕЗ ПОВЕРХНОСТЬ 131
ных интегралов и связанных с этим свойств вихря вектора, мы рассмот-
рассмотрим в настоящем параграфе вопрос о поверхностных интегралах, о рас-
расхождении вектора и о его свойствах.
2. Возьмем в пространстве некоторую поверхность S, замкнутую или
незамкнутую. Определим теперь поверхностный интеграл
вектора а по поверхности 5, или, как его чаще называют,
поток вектораа через поверхность S, следующим об-
образом. В каждой точке поверхности проведем единичный вектор
нормали и; мы условимся при этом в том случае, когда поверхность S —
замкнутая, брать всегда направление внешней нормали; в том же случае
когда поверхность S незамкнутая, мы будем брать по произволу одно из
двух направлений нормали (оговаривая, конечно, какое из этих двух на-
направлений мы выбираем), однако, так, чтобы направление нормали изме-
изменялось непрерывно, когда мы переходим от какой-либо точки поверхности
в соседним.
Если а — значение вектора в некоторой точке М поверхности 5>
an — единичный вектор нормали к поверхности в той же точке, то, как
всегда, через
Оъ = а«п = ах cos (п, х) + ау cos (n, у) + аг cos (n, z)
иы обозначаем проекцию вектора а на направление нормали, т. е. нор-
нормальную составляющую вектора а.
Разделим теперь поверхность S на большое число малых элементов,
каждый из последних изображается, как это было выяснено в § 6, век-
вектором AS- Например, если мы впишем в поверхность S многогранную
поверхность, каждая грань ее будет изображаться вектором, направлен-
направленным по нормали к этой гранв и равным по величине площади этой гранв.
Составим для каждого элемента скалярное произведение a-AS и обра-
образуем сумму 2a*AS, распространенную по всем элементам поверх-
поверхности. Эта сумма стремится к пределу, когда все элементы поверхности
стремятся к нулю, если только сделать предположение (которое мы всегда
будем считать выполненным), что поверхность" может быть разделена
на конечное число кусков, каждый из которых обладает непрерывной
кривизной и на каждом из которых вектор а меняется непрерывным
образом. Получаемый предел обозначается через
\ a-dS = lim 2a"^s A>
и называется поверхностным интегралом вектораа
по поверхности S или потоком вектораа через
поверхность 5.
Если численную величину элемента поверхности dS иы обозначим
через dS, то мы, очевидно, будем иметь
в поэтому
dS ()iS = andS
132 ВЕКТОРНЫЙ АНАЛИЗ Гл II
Поток вектора а через поверхность S может быть поэтому записан
также в одной из следующих форм:
с?$ = Jan dS =
= \ [ar cos (п, х) + Оу cos (п, у) + а2 cos (n, z)J dS B)
Наконец, вводят следующие обозначения:
cos (n, х) dS = dy dz
cos (n, у) dS = dz dx
cos (n, z) dS = dx dy
понимая, например, под dy dz проекцию элемента dS на плоскость у г,
взятую с надлежащим знаком (положительным, если нормаль к поверх-
поверхности в той точке, в которой рассматривается элемент, образует с осью х
острый угол, и отрицательным, если угол нормали с осью — тупой).
Тогда поверхностный интеграл принимает следующий вид:
J a.rfS = ^ (Ojc dy dz + avdz dx + a2 dx dy) C)
s s
Вычисление поверхностных интегралов производится по обычны-м
правилам вычисления двойных интегралов.
3. Рассмотрим сейчас в качестве примеров несколько поверхностных
интегралов, которые понадобятся нам в дальнейшем.
1) Пусть вектор а есть постоянный вектор а0. Тогда, если S замк-
замкнутая поверхность, то
".o!S = O D)
Б самом деле, в силу постоянства вектора а,,, его можно вынести из-
под знака интеграла, так что можно написать
Но, как было установлено в § 6, п. 4, вектор замкнутой поверхности
равен нулю, т. в.
&S = Q E)
Иными слонами
& cos (n, x) dS = 0, <6 cos (n, у) dS = 0, & cos (n, z ) dS = 0 F)
S S
Поэтому, действительно, получаем формулу D).
5
ПОТОК ВЕКТОРА ЧЕРЕЗ ПОВЕРХНОСТЬ
13»
Фиг. 50
2) Пусть теперь а = t — радиусу-вектору точки. Докажем, что в этом
случае
<? t'dS = 3V G)
где V — объем, ограниченный замкнутой поверхностью S. В самом деле,
рассмотрим какой-либо бесконечно малый телесный угол, выходящий из
начала координат, и пусть он вырезает
из поверхности несколько элементов.
Рассмотрим для определенности случай,
изображенный на фиг. 50, когда такой
телесный угол вырезает из поверхно-
поверхности три ' элемента.
Если радиусы-векторы из точки О,
¦ведущие к этим элементам, обозначить
через гг, г2, г,, а единичные векторы
нормалей к этим элементам через п1?
п2, Пц, то очевидно, что г^П] есть
высота пирамиды с вершиной О и основанием MxNt — dSlt поэтому
rj-dSi = ri-nj dSi — 3 об. OMiNi
Точно так же гг.п2 есть взятая со знаком минус высота пирамиды
с вершиной О и основанием M^N% = dS3, поэтому
r2.rfS2 = ra.n2 dSz = — 3 об. 0M,N2
Точно так же
r3.dSs = 3 об. ОМ^з
В результате получаем
Гг-dSi + ra.dS2 + r3.rfS3 = 3{об. ОМ№ — об. 0M«N% Л- об. OM3N3) =
= 3 (об. MiMiNJV^ + об. 0MAN3)
т. е. как раз утроенный объем, вырезаемый из объема, ограниченного по-
поверхностью S, вашим телесным углом. Повторяя это рассуждение по от-
отношению ко всем телесным углам с вершиной в О, мы и подучим в ре-
результате суммирования формулу
& T.dS = ЗУ
3) Вычислим следующий поверхностный интеграл по замкнутой по-
поверхности
ф 2 cos (n, г) dS = ср г dx dy
а докажем, что он равен объему V, ограниченному поверхностью S: ¦
& z cos (n, г) dS •= V (8)
134
ВЕКТОРНЫЙ АНАЛИЗ
Гл II
Рассуждение будет совершенно аналогично предыдущему, только рас-
рассечение надо производить при помощи цилиндров с образующими, парал-
параллельными оси z. При этом про поверхность S мы предполагаем, что пря-
прямые, параллельные осям координат, пересекают ее в конечном числе точек.
Рассмотрим теперь какой-нибудь цилиндр, построенный на прямоуголь-
прямоугольном бесконечно малом основании d 2, лежащем в плоскости ху, и имею-
имеющий ребра, параллельные оси z (фиг. 51). Пусть этот цилиндр пересекает
поверхность S в четырех точках Мг, М2, Мл, Mt-
Те элементы cos (n, z) dS, которые вырезаются цилиндром у точек Mt
и Ms, равны dZ, ибо нормаль а к поверх-
поверхности S образует с осью г в точках М1 и М3
острые углы; напротив, элементы cos (n, г) dS,
вырезаемые цилиндром у точек М2 и М4,
надо считать равными — dIS, так как нор-
нормаль п в этих точках обравует с осью z ту-
тупые утлы.
Обозначим z-вые координаты точек Мх
М2, М3, Mt соответственно черев zt, za,
z8, г4; легко видеть, что сумма элементов'.
z cos (n, z) dS рассматриваемого поверхностно-
поверхностного интеграла, соответствующих элементам
поверхности, вырезаемым цилиндром, по-
построенным на основании d I!, равна
Фиг 51 \zi ~ za "•" Ч~ Ч) а&
т. е. равна как pas той части объема V, которая вырезается цилиндром,
построенным на «!2. Повторяя это рассуждение по отношению ко всем
таким цилиндрам и производя суммирование по всем элементам d 2, мы
докажем формулу (8).
4) Докажем, наконец, что для замкнутой поверхности S интегралы
i х cos (a, z) dS = 0, &у cos (n, z) dS = 0
(9)
обращаются в нуль.
Точно такое же рассуждение, как только что проделанное, приводит
к выводу, что сумма элементов х cos (n, z) dS первого поверхностного
интеграла, соответствующих элементам поверхности, вырезаемым цилинд-
цилиндром, построенным на основании ri2, равна
(х— х + х — х) dT, = О
а значит и весь поверхностный интеграл равен нулю.
4. Рассматривая поле какого-либо вектора а, очень часто для большей
наглядности удобно говорить об этом поле, как о поле скоростей некото5-
пой фиктивной жидкости. С этой точки зрения легко уяснить себе смысл
I 14 ПОТОК ВЕКТОРА ЧВРЕЗ ПОВЕРХНОСТЬ 135
названия поверхностного интеграла потоком вектора а; в самом деле,
пусть через некоторую площадку, представляемую вектором dS, фик-
фиктивная жидкость, полем скоростей которой служит наше поле, вытекает
так, что а направлено во вне; за малый промежуток времени А* через
площадку dS, очевидно, вытечет объем жидкости в виде цилиндра, осно-
основание которого представляется вектором dS, а ребра векторами аД?;
величина этого объема есть как раз аДг-rfS = an&tdS, ибо это скалярное
произведение равно величине вектора dS, т. е. площади основания dS
цилиндра, помноженной на an&t, т. е. на проекцию ребра аД* на нор-
нормаль к этой площади, каковая проекция является высотой цилиндра.
Отнесенный к единице времени поток через элемент dS будет я-dS,
а через, всю поверхность
Если S есть замкнутая поверхность, ограничивающая некоторый объем,
то вытекающая жидкость дает положительную часть потока, втекаю-
втекающая — отрицательную. Иначе говоря, если мы проведем линии вектора а,
то элементарные площадки поверхности, где эти линии входят а объем,
дают отрицательные элементы интеграла, а где выходят — положи-
положительные.. Таким образом, поток вектора а укааывает количество жидкости,
вытекающее из данного объема в единицу времени (если в данный объем
жидкость втекает., будет получаться отрицательный поток).
5. Возьмем теперь какую-либо точку поля Р, окружим ее малым
объемом V и вычислим поток вектора а через поверхность S, ограничи-
ограничивающую объем V; разделим его на V, чтобы отнести к единице объема,
и перейден к пределу, устремляя к нулю все размеры V, что мы будем
обозначать символом V -— 0, стягивая при этом объем V к точке Р. В ре-
результате получится некоторое число, зависящее от поведения а вблизи
точки Р и характеризующее степень истечения иг области точки Р. Это
число называется расхождением вектора а в точке Р и
обозначается чаше всего символом diva (от слова divergeie— расхо-
расходиться). Таким образом
div a = lim — р - A0)
т. е. расхождение вектора а есть отнесенный к единице объема поток
вектора а через поверхность бесконечно малого объема, окружающего рас-
рассматриваемую точку.
Это определение нужно оправдать в том смысле, что нужно показать,
что тот предел, которым определяется расхождение вектора а, действи-
действительно существует и не зависит от вида объема, который стягивается
к точке Р. Мы покажем это, установив аналитическое выражение div a
через составляющие вектора а. При атом мы будем предполагать, что
частные производные по х, у, z от составляющих вектора ах, а„, аг
136 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
существуют и непрерывны, и что поверхность 5 стягивается к точке Р рав-
равномерно в том смысле, что наибольшее и наименьшее расстояния точек
поверхности S до точки Р являются бесконечно малыми величинами одного
порядка, который мы примем за первый, что величина всей поверхно-
поверхности S есть бесконечно малая величина второго порядка, а величина
объема V, ограниченного поверхностью S,— бесконечно малая величина
третьего порядка.
Переходя к вычислению div а в точке Р, примем последнюю на врем»
за начало системы координат О; нам надо вычислить
andS = d> [ax cos (n, х) + а^ cos (п, у) + Ог cos (n, z)]dS
Вычислим
Ф az (ж, у, z) cos (n, г) dS
Так как поверхность S стягивается к началу координат, то на этой
поверхности х, у, z — бесконечно малые величины. По формуле Тейлора,
ограничиваясь первыми членами разложения, мы имеем
а2(х, у, z) = at@, 0, 0) +
где индекс О указывает, что нужно брать значения производных в начале
координат и elt e2, еа означают бесконечно малые величины.
Умножая обе части предыдущего равенства на cos (n, z) dS и интегри-
интегрируя по замкнутой поверхности S, получим, вынося еще постоянные мно-
множители за знак интегралов,
& аг (х, у, г) cos (n, г) dS =
(azH & cos (n, z)dS + (Ь)о ф х cos (n, г) dS + (^)q §y cos (n, г) dS +
$?)o § z c°s (а. г) <№ + § (a*! + уег + zes) cos (n, z) dS
Но мы имели, что
ф cos (a, z) dS — & x cos (n, г) dS = <fc у cos (a, z) dS = 0
s s s
s s
z cos (n, z) dS =V
Наконец
ф (a;8j + ye2 + zea) cos (n, z) dS = eV
I 14 ПОТОК ВЕКТОРА ЧЕРЕЗ ПОВЕРХНОСТЬ 137
где в — бесконечно малая величина, ибо х, у, z — бесконечно малые
первого порядка, полная поверхность S — бесконечно малая второго
порядка и V — бесконечно малая третьего порядка. Итак,
ф az (х, у, г) cos (n,,z) dS = (^)q V + tV
Точно так же найдем
ф ах (*, у, z) cos (n, х) dS = (^jQ V + eV
& о^ (х, у, z) cos (п. у) dS = (&)о V + вТ
S
где s' и s" — бесконечно малые величины. Следовательно,
Деля это равенство на V и переходя к пределу при V —> 0, сразу уви-
увидим, что в точке Р
div а = -г-3 + -з-2 + -5^ A1)
Эта имеющая основное значение формула доказывает существование
предела A0), независимого от вида объема V, и дает величину этого пре-
предела (от наложенных на объем V ограничений мы можем, как показано
ниже, освободиться).
Так как основное определение div а совершенно не зависит от выбора
системы координат, то выражение A1) для div а инвариантно
по отношению ко всем переходам от одной прямолинейной прямоугольной
координатной системы к другой, в чем можно убедиться, впрочем, и не-
непосредственным вычислением.
6. Важнейшая теорема, связанная с понятием расхождения вектора,
есть теорема Гаусса — Остроградского о преобразовании поверхностного
интеграла в объемный:
Поток вектора через замкнутую поверхность равен объемному интегра-
интегралу от расхождения вектора:
ф andS = \ div а dV A2)
Чтобы показать справедливость этой формулы, мы поступим, как часто
это делается в математике, следующим образом: мы докажем, что форму-
формула A2) верна сколь угодно приближенно. В самом деле, выберем малое
число а; разобьем V на столь малые элементы Vk, в сумме составляющие V,
что для каждого из них имеет место неравенство
138
ВВКТОРНЫЙ АНАЛИЗ
Гл. П
где Sk— поверхность Vk и значение div а берется в некоторой точке Vh.
Сложим все эти неравенства, умножив их предварительно на Vk, тогда
получим:
Is * *
ибо те части поверхностных интегралов, которые относятся к элементам
поверхностей Sk, не входящим в S, попарно сократятся. Всякий такой
элемент должен являться границей двух смежных Vh, причем, как гра-
граница одного или другого из этих объемов, он имеет внешние нормали
п' и п" = — о' прямо противоположного направления, а потому
- в.'
= 0
Увеличивая к до бесконечности, a Vk уменьшая до нуля, получим:
и так как s мы можем выбирать сколь угодно малым, то непременно
dS = \ div a dV
В аналитической форме теорема Гаусса — Остроградского имеет вид
[ах cos (n, х) 4- а„(сов п, у) + аг cos (n, z)\ dS —
Ввиду фундаментального значения формулы Гаусса — Остроградского,
мы дадим еще непосредственные вывод - этой формулы.
Пусть имеем замкнутую поверхность S, которая прямыми, параллель-
параллельными координатным осям, пересекается в конечном числе точек, и пусть
<р (х, у, z) — функция, имеющая непрерывные производные
ф p
die' ду'
Тогда имеют место формулы
\ $х ^ =
V
cos ^п'
A4)
V
.z) dS
I 14 ПОТОК ВИКТОРА ЧЕРЕЗ ПОВЕРХНОСТЬ 139
Докажем последнюю из них. Метод доказательства будет тот же,
которым мы пользовались при вычислении интегралов в п. 3. Если мы
спроектируем объем V (фиг. 51) на плоскость Оху, то в проекции полу-
получим некоторую площадь 2. Возьмем элемент <fZ этой площади с ребрами,
параллельными осям х и у, и построим на этом элементе цилиндр с обра-
образующими, параллельными оси г. Этот цилиндр вырежет из нашего объе-
объема V некоторую часть; пусть, например, это будет, как изображено на
фиг. 51, часть объема V, заключенная между элементами поверхности 5,
находящимися в точках Мг и Ма, и часть объема V, заключенная между
элементами поверхности S, находящимися в точках Ма и Мх.
Та часть объемного интеграла
которая происходит от части объема, вырезаемой цилиндром, равна, оче-
очевидно,
Но, как было объяснено выше, в точках Мг и М3
d S = cos (n, z) dS
в точках же Мъ и Mt
— d 2 = cos (n, z) dS
Поэтому та часть объемного интеграла, которая происходит от части
объема, вырезаемой цилиндром с основанием dH, равна той части по-
поверхностного интеграла
ффеоэ (и, z) dS
в
которая происходит от элементов поверхности, вырезаемых этим цилинд-
цилиндром иа поверхности S и находящихся у точек Mlt Afa, Afs, M4. Производя
суммирование по всем элементам площади S, мы получим, что
=|)(pcos(n, z)dS
Применяя формулы A4) к функциям ах, а^, а„ мы получим
(Ьаяс08A1, x)dS
S
С
Ф ay cos (n, у) dS
<| а2 сое (n, z) dS
V
да
i40 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Сложение этих трех формул вновь приводит к формуле Гаусса — Ост-
Остроградского A3). Получив тем или другим способом формулу Гаусса —
Остроградского A3), мы сможем теперь доказать существование предела
A0) для объема V любой формы, стягивающегося к точке Р.
В самом деле, по теореме о среднем
х dav , дал „, ., /дах dav да
где значение суммы в правой части берется в некоторой средней точке
Q объема V.
На основании формулы Гаусса — Остроградского мы имеем поэтому, что
Будем теперь стягивать объем V к точке Р, тогда и Q непременно
в пределе перейдет в точку Р и так как производные
дах day даг
~5Z ' ~ду ' Ж
по предположению непрерывны, то мы получим, что
и, следовательно,
,. dug , dag , длг
дх ду dz
Таким образом формулы A1) и A3) могут быть получены одна из
другой.
7. Чтобы уяснить себе, как на графическом представлении поля
сказывается то или другое распределение div а, проведем линии век-
гора а и рассмотрим трубку этих линий, пересекающих какую-нибудь
площадку dS, проходящую через некоторую точку Р и перпендикулярную
к линии вектора, проходящей череа точку Р. Эта трубка состоит, очевид-
очевидно, из a dS линий, если мы условимся проводить векторные линии так
густо, чтобы число векторных линий, нормально пересекающих площадку
единичной площади, было бы пропорционально величине вектора. На
небольшом расстоянии dl, считая по векторной линии, проведем другое
сечение трубки dS\ тоже перпендикулярное к векторным линиям. Через
него проходит уже a' dS' линий.
Вычислим поток через всю поверхность трубки. Череэ боковую поверх-
поверхность трубки, состоящую из линий вектора, поток, очевидно, отсутствует,
ибо на ней дл = 0. Потоки же через основания трубки равны — adS
и a dS'.
I 14 ПОТОК ВЕКТОРА ЧЕРЕЗ ПОВЕРХНОСТЬ 141
Поэтому полный поток будет a' dS' — adS, а так как рассматривае-
рассматриваемый объем имеет величину dSdl, то расхождение будет
a'dS'-adS
dSdl I10'
Бели a'dS' > adS, то расхождение положительное; через сечение dS'
выходит больше векторных линий, чем вошло через сечение dS, значит,
в рассматриваемом объеме dS dl возникло a' dS' — a dS векторных ли-
линий, в единице же объема воанлкает div а векторных линий; таким обра-
образом div а служит мерой возникновения или уничтожения (цри отрицатель-
отрицательном diva) линий.
Если мы обратимся к интерпретации поля при помощи фиктивной
жидкости, то мы должны будем сказать, что div а служит мерой возник-
возникновения или уничтожения жидкости, так как, например, при a' dS' > adS
больше вытекает жидкости, чем втекает. Таким образом в каждой точке про-
странства мы имеем как бы источник (положительный или отрицательный
возникновения жидкости, a div а служит мерой обильности этого ис-
источника.
Рассмотрим поле скоростей действительной несжимаемой жидкости.
В этом случае объем жидкости, выходящей через какую-нибудь поверх-
поверхность, всегда равняется объему входящей, полный поток равен нулю
я потому
div a = 0 A6)
Это уравнение называется в гидродинамике уравнением неразрыв-
неразрывности несжимаемой жидкости.
Векторные поля, у которых div a = 0, имеют важное значение и на-
называются свободными от источников или солено-
и д а л ь н ы м и, т. е. трубчатыми.
Последнее название связано с тем
обстоятельством, что в соленоидаль-
ном поле векторные линии не мо-
могут нигде ни начинаться, ни кон-
кончаться; они могут уходить в беско-
бесконечность или быть замкнутыми.
Чтобы показать это, докажем сле-
следующее основное свойство солено- Фиг 52
идальных векторов: для солено-
идального вектора поток вектора через любое поперечное сечение вектор-
векторной трубки имеет одну и ту же величину.
Для доказательства рассмотрим векторную трубку, ограниченную
боковой поверхностью 2' (фиг. 52). Пересечем эту трубку двумя попе-
поперечными сечениями 2 в 2г и рассмотрим замкнутую поверхность S,
образованную сечениями 2, 2, а частью боковой поверхности трубки 2',
заключенной между 2 и 2,.
142 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Обозначая через V объем, лежащий внутри поверхности S, и применяя
к этому объему теорему Гаусса — Остроградского, найдем, что
& а„ dS = \ div
Ъ v
Но по условию
div a = О
Следовательно, объемный интеграл обращается в 0, а значит и
или, что то же самое
s г-
Но на поверхности 2' мы имеем <!„ = 0, ибо вектор а в точке поверх-
поверхности 2' направлен по касательной к векторной линии, лежащей на
этой поверхности и, следовательно, составляет с нормалью п к этой по-
поверхности 2' угол в 90".
На поверхностях 2 и Sj направления внешней нормали различны;
ивменим поэтому направление нормали у поверхности 2 на прямо проти-
противоположное, тогда и значение потока вектора
s
¦вменит свой знак, поэтому окончательно получаем
что и доказывает высказанное выше свойство соленоидальното вектора.
Так как поток
5
s
дает число векторных линий, проходящих через сечение 2, в так как мы
получили, что это число вдоль векторной трубки не меняется, то отсюда
и вытекает, что в соленоидальном поле векторные линяй нигде не могут
ни начинаться, ни кончаться.
Очень близко к только что доказанному свойству соленоидального
вектора еще другое его свойство. А именно, возьмем какой-нибудь кон-
контур L, и пусть две поверхности S и 5Х опираются на этот контур.
Докажем, что потоки соленоидального вектора а череэ эти две поверх-
поверхности равны между собой, если поверхность St может быть непрерывной,
деформацией переведена в поверхность S а если после этой деформации на-
направления нормалей к поверхностям S а ^ совпадут. Доказательство опять
основывается на применении формулы Гаусса — Остроградского к объе-
§ 14 ПОТОК ВЕКТОРА ЧХРВ8 ПОВЕРХНОСТЬ 14а
wyV, ограничеввону поверхностями S a S^, если, например, нормаль к по-
поверхности 5, является для объема внешней, а нормаль kS — внутренней,
то мы будем иметь
Uivad7= \
v sJ.
и так как в вашем случае левая часть равна нулю, то и правая часть
равна нулю, что и требовалось доказать.
Доказанная теорема аналогична теореме о независимости криволи-
криволинейного интеграла потенциального вектора от пути интегрирования,
потому что она может быть высказана еще в такой форме:
Если вектор а соленои-
дальний, . то поток этого
вектора через любую поверх-
поверхность S, натянутую на яа-
банний контур L, не зави-
зависит от вида этой поверх-
поверхности, а только от кон-
контура L.
Однако теорема о том, что Фиг. 53
криволинейный интеграл от
потенциального вектора по замкнутому контуру равев нулю, справед-
справедлива только для случая односвязного пространства. Аналсгично этому
доказанная только что теорема справедлива только для случая таких
областей, в которых всякая поверхность типа сферической поверхности,
может быть стянута в точку, не выходя из пределов области.
Рассмотрим два примера. Пространство, заключенное между двумя
сферами Sx и 52, не принадлежит к этому классу областей, ибо, если взять
сферическую поверхность, расположенную между St и 52, то ее нельзя
стянуть непрерывной деформацией в нашей области в точку. Однако,
это пространство будет односвязным, ибо всякая замкнутая кривая
в этой области может быть стянута в точку. Другим примером является
кольцо (фиг. 53); мы уже внаем, что эта область двусвязна, однако, легко
сообразить, что эта область будет принадлежать к вышеуказанном]
классу областей.
8. До сих пор мы предполагали расхождение вектора непрерывной ко-
конечной функцией поля. Во многих случаях приходится, однако, иметь
дело с таким распределением вектора а, что объем V, в котором происхо-
происходит интенсивное образование (или уничтожение) жидкости (при интер-
интерпретации поля жидкостью), имеет очень малую толщину, так что мате-
математически мы можем заменить его поверхностью. В других случаях он
сводится даже к линиям и точкам. Такие точки называются источ-
источниками или стоками, смотря по тому, образуется в них,
жидкость или уничтожается.
Разберем в качестве типичного примера, каково будет поле по-
потенциального вектора, расхождение которого всюду, кроме начала
144 ВЕКТОРНЫЙ АНАЛИЗ Гл II
координат, равно нулю; в начале же координат пусть находится источник
с обильностью е, так что в каждую единицу времени из этого источника
вытекает е единиц жидкости. Таким образом поток вектора а через бес-
бесконечно малую замкнутую поверхность s9, окружающую начало коорди-
координат, равен е. Покажем, что аоток через любую поверхность S, окружаю-
окружающую начало координат, равен е. В самом деле, применим теорему Гаусса—
Остроградского A2) к объему, заключенному между поверхностями
so и S. Так как div а = 0, то объемный интеграл пропадает. Поверхност-
Поверхностный же интеграл через поверхность s0 равен, очевидно, — е, потому что
теперь за направление внешней нормали к поверхности s0 надо прини-
принимать то, которое смотрит внутрь объема, ограниченного поверхностью sa
и содержащего начало координат.
Поэтому
\ andS = e A7)
По условию вектор а потенциальный
а = grad ф
и естественно по симметрии считать ср функцией только расстояния г.
Но тогда
а = gradqi =<р'(г)у
Возьмем в формуле A7) за поверхность S поверхность сферы радиуса
г с центром в начале координат, тогда
а = у , о* = Ф' (г)
и поток вектора будет 4яЛр' (г); значит
4nrV (/•) = е
Отсюда
Итак,
Изучим поле полученного вектора а несколько подробнее. Проверим,
прежде всего, что этот вектор является соленоидальнын. В самом деле
для проекции его мы имеем, очевидно, выражения
Поэтому
дх
Зу
да,
дг
е
е(г» —
4лг
Звя; Ьг
' 4яг*дх
л
в
= 4яй~
Зст ж
4яг*
5 14 ПОТОК ВЕКТОРА ЧЕРЕЗ ПОВЕРХНОСТЬ
145
Отсюда
Полученный вектор имеет особенность в начале координат, поэтому
областью его задания мы должны считать все пространство с выключен-
выключенным зачалом координат. Но такое пространство не принадлежит к ука-
указанному в конце предыдущего пункта классу областей- Этим объясняется,
что в то время как поток вектора а через замкнутую поверхность, не
заключающую внутри себя втачала координат, будет цо геореме Гаусса
обращаться в нуль:
" div a dV = О
поток через поверхность, содержащую внутри себя начало координат,
будет отличен от
нуля и будет pa- . f
вен е. * \ I У
Общий харак- I \ I Jf
тер поля, достав- \. | / ^ '
ляемого всточни- -*. >- -t .^_ ^_ , ^ ш-^т
ком и стоком, ясен f 1 Ч.
И3 фиг. 54. / \ ^ / | \
Векторными ли-
нлнми служат пря-
мыв, проходящие
CniBK ' Источник
через источник
или Сток, причем Фиг 54
величина вектора
изменяется обратно пропорционально квадрату расстояния точки ло
источника или стока. Значение потока вектора через бесконечно малую
поверхность, охватывающую источник или сток, будем называть обиль-
обильностью, мощностью ала интенсивностью источника.
Если мы имеем систему « точек Mt, Д/«, .... Мп с обильностямп
е-,, е», . . . , е„ и если расстояния точки М (г) от этих точек обозначить
чврез г1( г2, . . . , г„, то потенциальное поле
а (г) = grad (~ 1^7 - 4S7 -¦ • — •?-) A8)
имеет расхождение, всюду равное нулю, за исключением указанных п
источников.
Рассмотрим яамкнутую поверхность S я пусть часть точек Л/,,
Д/3, ; . . , Мп лежит внутри ее; тогда аоток вектора а черев S равен сумме
обильностей тел источников, которые лежат внутри S:
Векторными ли- * ^ У Т ' Ч
ш» служат пря- Т .
J24 . A9)
10 Н. S. Кочвя
146 векторный анализ Гл. II
где сумма распространяется по тем источникам, которые лежат внутри S.
В самом деле, окружим эти источники малыми сферами si в применим тео-
теорему Гаусса A2) к объему, получающемуся выделением иа пространства
внутри S малых шариков, ограниченных сферами st.
Так как внутри этого объема div а — 0, то полный поток через S
и через все поверхности st равен нулю, но, как было выяснено выше,
поток вектора а через s{ равен — е{; поэтому
$ei=0 B0)
это и есть формула A9).
Сравнивая ату формулу с формулой Гаусса
? = ^ div &dV
мы можем сказать, что в элементе объема dV находится источник интенсив-
интенсивности div a dV. Таким образом, мы приходим к выводу, что diva дает
меру интенсивности источников, непрерывно распределенных по про-
пространству и отнесенных к единице объема.
Задача 104. Доказать, что
div (a, + aj) = div a! + div a.
Задача 105. Вычислить div r.
,. дх Эу . Эг -
dlvr= *Г +7^ + 17= 3
Задача 106. Вычислить div (фа), где ф — скалярная, а — вектор-
векторная функция поля.
Задача 107. Вычислить div (re) и div (r*c), где с постоянный вектор.
Ответ, div (л}) = tlL , div (i^c) = 2с . г.
Задача 108. Вычислить div (ar), где а — постоянный скаляр.
Ответ, div (ar) = За.
Задача 109. Вычислить div -?-.
Ответ.
divf = J-dWr + г. grad-J---5--." ? = Т--Т-Т
I 14 ПОТОК ВЕКТОРА ЧЕРЕЗ ПОВЕРХНОСТЬ ]47
Задача 110. Вычислить div b (r «a), div г (г . а), где а и b — постояв-
вые векторы.
Ответ, div b (г . а) = а • Ь, div г (г . а) = 4г.а.
Задача 111. Вычислить расхождение в поле скоростей и ускорении
в движении твердого тела.
Ответ. По формулам E3) и E5) § 9:
v = v0 + ю х г
w = wo + ю х г 4- to х («в X г) = w0 + ш х г 4- ш (ш . г) — г («о . щ)
Вычислим div (а х г), где а — постоянный вектор,
(а х-г)^ = avz — а$, (а х r)v = агх — a*z, <а х гO = аху — а%1х
div (а х г) = -^ (а„г — агу) + -^ (агх — axz) + ~ (а^у — avx) = О
Поэтому
div v = div v0 + div (в) х г) = О
div w — div w0 + div (wxr) 4- div ад(ш-г) ~ div r (w-w)
Ho no задачам 110 в 108
div »(»«г) = м-» = a)8, div г («о . ю) = Ъш • ш = 3<о2
Поэтому
div w = <os — 3<o2 = — 2<о2
Задача 112. При какой функции if (г) будет div i[) (г) г = О?
Ответ. По задаче 106
div ij) {г} г = if {.r) div г + grad i|) (г) . г = Злр (г) + ф (г) — . г =
Поэтому надо решить уравнение
3i|) + гф' = О
или
-?- + -^- = 0, 3 log г + log i|j = log С, t|)r4 = <7
и окончательно
где С — произвольная постоянная.
Задача ЛЗ. Найти div (r*r).
Ответ. 7 г4.
Задача 114. Найти div |г (w х г)], где w — постоянный вектор.
Ответ, 0.
Задача 115. Найти div [ax(r х Ь)], где а и Ь — постоянные векторы.
Ответ. 2а - Ь.
10'
148 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
§ 15. Оператор Гамильтона. Некоторые применения
1. Рассматривая вектор grad <p
grad<p = V<P=i-^+j-^+k^ A)
мы указали, что этот вектор можно получить формальным применением
оператора Гамильтона шабла»
V«? + l? + k B)
к скалярной функции ф. Мы видели далее, что при помощи этого опе-
оператора выражается также и градиент одного вектора по другому
Применение оператора V оказывается чрезвычайно удобным во мно-
многих вопросах векторного анализа. Поэтому мы подробно остановимся на
его свойствах.
Покажем прежде всего, что расхождение вектора а можно формально
рассматривать как скалярное произведение символического вектора V на
вектор в
a = iar 4- jau 4- каг
В самом деле, производя это перемножение по формуле скалярного
умножения двух векторов
1) . а = Ьхах ¦
и полагая
. 6 , Ь . д
получим
Покажем далее, что вектору V можно дать другое толкование. С этой
пелью запишем наше первоначальное определение div а следующим
образом
(Dn.
div a = lim —
im ——Tr
Сравнивая это выражение с предыдущим, получаем
I П •
S7 • а = lim -2—^ E)
5 15 ОПЕРАТОР ГАМИЛЬТОНА 149
-Рассматривая это равенство, мы видим, что под знаком поверхно-
поверхностного интеграла стоит скалярное произведение иа единичного вектора
нормали в вектора а в соответствии с тем обстоятельством, что слева стоит
скалярное произведение из S7 и вектора а. Покажем еше на двух приме-
примерах, что это обстоятельство неслучайное.
Примем во внимание три формулы A4) § 14; умножим первую из этих
формул на i, вторую на j, третью на к и сложим три полученных равен-
равенства. Так как
i cos (n, x) + j cos (n, у) + k cos (n, z) = n
то мы получаем формулу, аналогичную формуле Гаусса — Остроградского
Fq> n dS = { grad ф dV F)
S V
Пусть теперь V обозначает бесконечно малый объем, стягивающийся
к точке М\ тогда мы имеем по теореме о среднем, что
Следовательно,
где Mi, М% и М3 — какие-то средние точки объема V. Разделив пррлы-
дущее равенство на F, перейдя к аределу при V —> 0 в заметив, что при
атом точки Л/,, М% и Ма переходят в точку М, получим в предположе-
предположении непрерывности производных dqi I dx, dq> I dy, dtp I dz, что
CD
или
V-0
Эта формула для grad cp совершенно аналогична формуле E) для
div а. При этом опять под знаком интеграла стоит выражение пер, по-
построенное яз Уф путем замены V на единичный вектор нормали о.
TSO ВЕКТОРНЫЙ АНАЛИЗ Г Л. Ц
Обращаясь теперь к операции (v • V)a< мы должны ожидать, что для
этой операции справедлива формула
& (v . и) adS
(T'V) a = Hm 2 (8)
Покажем, что это действительно так, однако лишь с той весьма су-
существенной оговоркой, что вектор v считается постоянным- В самом
деле, постараемся при этом условии вычислить интеграл
<?(v . n)adS = ф [vx& cos (u, х) -+- vva cos (n, у) -+- »га cos (n, z)]dS (9)
Мы имели ранее формулу
<pcos(n, x) dS = [ -||- dV
Очевидно, что эта формула справедлива и для вектора
& a cos (n, x) dS = \ |S.rfF A0)
8 V
(ибо она справедлива для каждой составляющей этого вектора); точно
так жо мы имеем
§acos(n,y)dS=^dV A1)
& a cos (n, z) dS = [ ^dV A2)
[ ^
Помножая эти три формулы по порядку на постоянные чиела vx, vy, vz
а складывая, мы найдем
& [»ха cos (n, х) +¦ vva cos (n, y)+ »га cos (n, г)\ dS =
или
r-V)adV A3)
откуда, повторяя то же рассуждение, что и для grad qp, выведем фор-
формулу (8). Разъясним теперь, почему нам нужно в этой формуле считать v
постоянным. Дело в том, что символический вектор V является диффе-
дифференциальным оператором, так как он содержит в себе производные по
координатам. Между тем, в выражении (v ¦ V) а вектор v стоит перес
оператором Vi и поэтому этот оператор V «б может действовать на v,
почему паы и приходится считать нектор v постоянным.
( 15 ОПЕРАТОР ГАМИЛЬТОНА 151
2. Три рассмотренных примера позволяют нам дать общее правило для
определения значения выражения L (\7)> гДе L (а) есть линейное одно-
однородное выражение относительно вектора а, т. е. выражение, удовлет-
удовлетворяющее двум условиям:
L (а 4- Ь) = L (а) + L (Ь), L (Яя) = XL (a)
где а и Ь — какие-нибудь векторы, X — какое-нибудь число.
Бели в атом выражении мы рассматриваем V как оператор
то иы должны в выражении L (V) произвести с этим оператором все
требуемые действия, причем мы условимся, что оператор V действует
па все векторы, которые стоят позади него, и не действует на те векторы,
которые стоят перед ним.
Примеры:
да да,, да.
A7)
A8)
Чтобы дать другое представление L (V). докажем следующую общую
формулу Гаусса — Остроградского:
? (n)dS A9)
?
В самом деле, в силу линейности L (V) »1Ы имеем прежде всего, что
Рассмотрим последний из этих интегралов; так как векторы, стоящие
перед V. мы условились считать постоянными, то мы имеем право на-
написать в силу линейности L (а)
и, следовательно,
152 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
Выражение L (к) является либо скаляром ср, либо вектором а; в пер-
первом случае мы можем применить формулу
\ -^LdV = <?ф cos (n, г) dS
Во втором случае формулу
s
В обоих случаях мы будем иметь
\ -^L (k) dV = <? cog {n, z) L (к) dS
v s
в, следовательно, еще раз, пользуясь свойством линейности,
L (к -^)OV = &L (cos (n, г) к) rfS
Точно так же получим
v
^&L (cos (n, x) i) dS
s
V S
6 результате сложения этих трех формул, найдем требуемое равен-
етво
\V = &L (n) dS
9 3
Допустим теперь, что V есть бесконечно малый объем, стягивающийся
к точко М, и что L (V) есть непрерывная функция точки М.
Тогда в точках объема V значения L (V) мало отличаются от значения
этой величины в точке М:
L (V) = {
где s — бесконечно малая величина. Поэтому
L (V) dV = J {{L (V)b + e} dF =
где т) тоже бесконечно малая величина. Итак, мы получаем, что
\
+П
15 ОПЕРАТОР ГАМИЛЬТОНА 153
Переходя к пределу, когда объем V стягивается в точку М, получим
L (ц) dS
B0)
Это второе определение L (V) совершенно эквивалентно с первона-
первоначальным определением L (V). однако оно гораздо удобнее первоначального
определения, так как не содержит ни малейшего намека на Прямоуголь-
Прямоугольную систему координат; в частности, только что полученное нами ра-
равенство с удобством может быть применено для вычисления L (V) в любой
системе криволинейных координат.
3. В Дальнейшем мы будем весьма широко пользоваться символи-
символическим методом вычислений, связанным с применением оператора Гамиль-
Гамильтона V. сейчас же на двух простых примерах покажем сущность этого
символического метода.
Пусть мы имеем скалярную функцию точки ф (г) = ф (а, у, z) и век-
векторную функцию точки а (г) =а (х, у, z), и требуется вычислить div (фа).
В задаче 106 уже было проделано это вычисление обычным способом.
Покажем теперь применение символического метода. Мы имеем
div (фа) — V • (фа)
Мы видим, что дифференциальный оператор
состоящий в существенном из трех производных по координатам, приме-
применяется к произведению двух функций ф и а. Но по правилу дифференци-
дифференцирования произведения производная от произведения нескольких функций
составляется следующим образом: дифференцируем первый множитель,
считая все остальные постоянными, затем дифференцируем только второй
множитель, считая все остальные постоянными и т. д., все полученные
выражения складываем.
В дальнейшем мы будем в тех случаях, когда это может вызвать со-
сомнение, отмечать все векторы, которые мы на время считаем постоянными,
индексом с (const). Поэтому, согласно только что высказанному правилу,
мы должны написать
V • (фа) = V • ЧМ» + V • <раг
Рассматривая выражение V-фсЯ, мы можем постоянный множитель
ф„ вынести за знак \J, в результате получим
V • «Ре*» = <PcV • а = фV • а
где мы уже можем заменять фс на ф, так как <р стоит перед V и< следова-
следовательно, не подвергается действию V'
154 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
"^ _~—. : — *——^^———^^^^_————
В выражении S7 ¦ Фас оператор V действует только на скаляр ф, по-
поэтому мы можем написать, что
V • фвс = VV •¦« — ¦«• V<P = а * V<P
В результате получаем формулу
V • (<ра) = фУ ¦ а + а • V<P B1)
или при обычных обозначениях
div • (фа) = ф div a 4- a-grad <p B2)
В качестве второго примера возьмем операцию (V *v) а. Так как
здесь v и а стоят после \7, то действие дифференциального оператора V
мы должны считать распространяющимся и на v и на а. Согласно выше-
вышеприведенному правилу дифференцирования мы должны написать
(V-v) a — (V-v,.) a -f- (V-v) a,.
В выражении (V ¦ vc) мы должны, имея в виду постоянство вектора v0,
переставить V с vc; итак
(V * vc) a =- (vc. V) а + (v ¦ V) а
(раз v стоит перед V- оператор V на v не действует, и незачем писать
значок с). Далее
(V • v) ае = а,. (V • v) = а (V Ў)
и значит
{V • Ў) а = (v • V) а + а (V v) = (v - V) а + a div v B3)
Если мы применим обобщенную формулу Гаусса — Остроградского
A9) к (V •v) a» мы получим
WV • v) a dV = <Ь (п • v) a dS =
a
В силу предыдущей формулы, получаем важное соотношение
[(W • V) а + a div v] dV = <f> a vndS B4)
В частности при а = v, получаем формулу
\ [(v. V) v + vd\v\)dV = §vnvdS B5)
4. Остановимся еще на одной дифференциальной операции второго
порядка, а именно, составим расхождение потенциального вектора
div grad (p.
Так как
j 15 ОПЕРАТОР ГАМИЛЬТОНА 155
ТО
или
Выражение
--Ir-Д B7)
назынают оператором Лапласа, а уравнение
Д Ф = 0 B8)
уравнением Лапласа.
В символической форме мы имеем
divgradq» = V • Уф = (V • V)<P B9J
Но скалярное произведение V * V> которое чаще обозначают через
V2> очевидно, равно как pas Д:
Заметим еще, что так как
$ *я dS
div a = lim ——5
то, полагая а = grad qp, а„ == -=^-, получим
Д«р = V^ = lim 8 „ C1)
V У
и в соответствии с этим
^fy^ C2)
5. Откладывая пока дальнейшее изучение символического способа,
обратимся к некоторым физическим применениям понятия расхождения-
Начнем с вывода уравнения теплопроводности. Допустим, что мы
рассматриваем некоторое тело в изучаем тепловое состояние его. По-
Последнее будет известно, если для каждой точки тела мы будем знать тем-
температуру Т в любой момент; иными словами, тепловое состояние тела
характеризуется скалярной функцией Т- (г, t) = Т (х, у, г, t).
Если функция Т не зависит от времеап, мы говорим о стационарной
Задаче теплопроводности, в противном илучае о нестационарной.
156
ВЕКТОРНЫЙ АНАЛИЗ
Гл. П
Рассмотрим внутри тела некоторый объем V, ограниченный поверх
аостью S, и подсчитаем двумя способами изменение количества тепла,
заключенного в объеме V (фиг. 55).
Плотность тела обозначим через р (если тело неоднородное, то р будет
функцией точки р (г) = р (х, у, z)), а теплоемкость через с (в случае
неоднородности тела с тоже есть функция точки).
Рассмотрим элемент dV объема; масса этого элемента равна р dV; за
время dt этот элемент нагревается на
1гЛ
градусов; на это требуется, по самому опреде-
определению теплоемкости, количество тепла, равное
интегрируя по всему объему, увидим, что за
Фиг. 55 время dt всему объему V необходимо было
сообщить количество тепла, равное
Это же самое количество тепла можно подсчитать иным способом.
Мы принимаем, что тепло передается только процессом теплопровод-
теплопроводности, тогда в каждой точке тела будет существовать такой вектор по-
потока тепла q {г, t), поток которого через некоторую поверхность S дает
количество тепла, протекающего через эту поверхность в единицу вре-
времени. Таким образом за врем dt через поверхность S вытечет количество
тепла, равное
§qndS dt
s
и, следовательно,
Q = _ (f> qn dS dt
I
Приравнивая два полученных выражения для Q, находим равенство
Но по теореме Гаусса — Остроградского
» qn dS = [ div q dV
а, следовательно,
C4)
5 15 ОПЕРАТОР ГАМИЛЬТОНА 157
Так как это равенство справедливо для любого объема V, то подынте-
подынтегральная функция должна тождественно равняться нулю. В самом деле,
возьмем какую-либо точку М а примем за объем V бесконечно малый
объем, стягивающийся к точке М, тогда мы будем по теореме о среднем
иметь
где М\ — некоторая средняя точка объема V. При стягивании объема V
к точке Л/, точка Мх тоже будет стремиться к точке М и в силу непрерыв-
непрерывности подынтегрального выражения в формуле C4) ми получим, переходя
в последнем равенстве, поделенном на V, к пределу, что
ср -§?- + dJv q = 0 C5)
в любой точке М внутри тела.
Рассмотрим теперь, как зависит q от Т. Так как поток тепла направ-
направлен, очевидно, от более нагретых частей тела к более холодным, а вектор
grad T направлен, наоборот, от более холодных частей к более теплым,
то можно принять, по крайней мере для изотропных тел, что
q = — к grad T C6)
где к — коэффициент теплопроводности, который в случае неоднородно-
неоднородности тела будет иметь в различных точках различные значения. Подстав-
Подставляя значение C6) для q в уравнение C5), получим уравнение теплопро-
теплопроводности в следующем виде
ср-|?- — div (к grad Г) = 0 C7)
Остановимся еще на том частном случае, когда к и ср являются по-
постоянными величинами; обозначая в этом случав А/ср через а и вспоми-
вспоминая, что div grad T = Д7\ получим, что
~ = аДГ C8)
Наконец для случая стационарной задачи теплопроводности -gj- = О,
я уравнение теплопроводности принимает вид
0 C9)
так что в этом случае температура удовлетворяет уравнению Лапласа.
Для того, чтобы можно было полностью решить какую-лвбо задачу
о теплопроводности, нужно задать еще граничные и, в случае неста-
нестационарной задачи, еще начальные условия, но на этих вопросах мы будем
останавливаться только при наличии в том надобности.
6. Рассмотрим теперь основные уравнения гидромеханики.
Выведем прежде всего так называемое уравнение неразрывности.
458 векторный анализ Гл. П
Мы будем рассматривать движение rasa или, как иначе принято на-
называть, движение сжимаемой жидкости. Обозначая плотность послед-
последней через р, будем иметь, что р есть функция точки а временя р (г, t).
Движение жидкости может быть охарактеризовано заданием поля ско-
скорости т, т. е. заданием скорости v как функции точки и времени v (r, t).
Во всякой движении жидкости функции тир связаны уравнением, ко-
которое называется уравнением неразрывности. Мы выведем это уравнение
аналогично уравнению теплопроводности, подсчитывая двумя различ-
различными способами изменение массы жидкости, находящейся внутри непо-
неподвижной поверхности S, произвольно взятой.
Если V — объем, ограниченный этой поверхностью, то масса элемента
объема dV будет равна pdV, а масса жидкости, находящейся внутри по-
поверхности S, равна
М
За время dt плотность р получит приращение -grdt и соответственно
с этим изменение иассы М, находящейся внутри неподвижной поверх-
поверхности S, будет равно
dM =\^-dV dt
Но изменение.массы ыогло произойти только за счет того, что какая-то
масса жидкости прошла через поверхность S, ограничивающую наш объем.
Бели рассмотреть элемент поверхности dS, внешняя нормаль к которому
есть п, то через этот элемент за время dt вытечет наружу объем жидкости,
равный vndSdt, масса же этого объема равна pvndS dt, через всю же
поверхность вытечет масса
щ р vn dS dt
и, следовательно,
dM = — &pvndSdt
Приравнивая два полученных выражения для dM, мы находим ра-
равенство
%-dV +&pvndS=0 D0)
pvn dS = \ div (pv) dV
V
По теореме Гаусса — Остроградского
& pvn dS = \ div
S V
Следовательно, предыдущее уравнение принимает вид
I 15 ОПЕРАТОР ГАМИЛЬТОНА 159
Так как это уравнение имеет место для любого объема V, то должно
быть тождественно
^ + div (pv) = 0 D1)
Это и есть искомое уравнение неразрывности. Бго можно напи-
написать еще в другой форме. В самом деле, мы имели [формула B2)]
div (pv) = р div v + v • grad p
Поэтому предыдущее уравнение примет вид
-^ + v • grad р 4- р div v = О D2)
Но в § 13, п. 2 мы установили следующую связь между полной и част-
частной производной
Принимая это во внимание, мы можем переписать уравнение нераз-
неразрывности в следующей, часто употребляемой форме
^ + р div v = 0 D3)
Рассмотрим частный случай несжимаемой, но может быть неодно-
неоднородной жидкости. В этом случае плотность каждой частицы жидкости
остается неизменной и, следовательно, по самому определению индиви-
индивидуальной производной
? = 0 D4)
поэтому уравнение неразрывности принимает вид
div v = 0 D5)
так что в случае несжимаемой жидкости вектор скорости- является пек-
тором соленоидальным. Мы знаем, что для соленоидального вектора
поток вектора через любое поперечное сечение векторной трубки яв-
является постоянным. Векторные линия вектора скорости v называются
линиями тока, а соответствующие трубки — трубками тока. Если взять
трубку тока с бесконечно малым поперечным сечением, то произведе-
произведение из величины скорости на площадь поперечного сечения, нормального
к оси трубки, будет вдоль трубки одинаково и, следовательно, скорость
увеличивается там, где трубка тока сжимается, и уменьшается, где трубка
тока расширяется.
Если движение несжимаемой жидкости обладает потенциалом ско-
скорости <р> т. е. если
v = grad ф D6)
160 ВЕКТОРНЫЙ АНАЛИЗ Гц. II
то уравнение неразрывности дает нам в силу
div v = div grad ф = Дф
уравнение Лапласа
ДФ = 0 D7)
Итак, потенциал скорости в движении несжимаемой жидкости удов-
удовлетворяет уравнению Лапласа.
Выведем теперь основное уравнение гидродинамики идеальной жид-
жидкости. В гидромеханике различают жидкости идеальные а вязкие; в основе
этого различия лежит характер внутренних сил. Если мы внутри жид-
жидкости вырежем объем F, ограниченный поверхностью S, то со стороны
находящихся вне объема частиц жидкости будут оказываться воздей-
воздействия на частицы, лежащие внутри объема V (фиг. 56). Эти силы назы-
называются внутренними, так как они происходят
от взаимодействия частиц жидкости. Когда же
мы рассматриваем объем V, то по отношению
к нему упомянутые только что силы становятся
внешними. Их действие учитывают, принимая,
что на каждый элемент dS поверхности S дейст-
действует поверхностная сила q dS, пропорциональ-
пропорциональная площади элемента поверхности. Если эта
сила действует всегда нормально к элементу
поверхности, то жидкость называется идеальной.
В этом случае вектор q имеет направление, прямо
противоположное направлению единичного вектора внешней нормалв а,
и мы имеем
q pa D8)
где р — называется давлением жидкости.
Если вектор q может иметь не только нормальную, но и касательную
составляющую к элементу поверхности dS, то жидкость называется
вязкой.
В идеальной жидкости величина давления, как можно показать, не
зависят от ааправления элемента. Таким образом гидродинамическое
давление есть функция от точки и времени:
р (г, 0 = р (х, у, z, t)
Для вывода основного уравнения гидродинамики мы примем начало
Даламбера, по которому, если ко всем внешним силам, действующим
на точки системы, присоединить еще силы инерции, то полученная
система сил будет находиться в равновесии и, следовательно, ее глав-
главный вектор, х. е. геометрическая сумма сил системы, будет равняться
нулю.
Обозначим через F внешнюю силу (как например силу тяжести),
отнесенную к единице массы, и применим начало Даламбера к системе
} 15 ОПЕРАТОР ГАМИЛЬТОНА 161
жидких частиц, заполняющих объем V; рассмотрим элемент dV этого
объема; масса этого элемента объема равна pdV; внешняя сила, действую-
действующая на этот элемент объема, будет равна pFdV, а сила инерции будет
равна
(ибо сила инерции равна взятому со знаком минус произведению из массы
частицы pdV на ее ускорение dr/dt). Поэтому главный вектор массовых
сил и сил инерции будет равен
Но на частицы объема V действуют, как было выяснено выше, еще
поверхностные силы, которые по отношению к частицам объема V долнсны
тоже рассматриваться, как внешние силы. Так как на элемент поверх-
поверхности dS действует по вышесказанному сила давления — р п dS, то глав-
вый вектор поверхностных сил будет равен
— w р a dS
Согласно началу Даламбера, получаем равенство
(PF- p^Lyv -§pndS = 0 D9)
Применяем теперь формулу F) п. 1 § 15, аналогичную формуле Гаус-
Гаусса — Остроградского
(Ь pa dS = \ grad p dV
в результат» получаем
я так как это равенство справедливо для любого объема V, то необходимо
должно быть
pF-p?-gradp = O, или ? = F - -i-grad p E0)
Это и есть основное уравнение гидродинамики идеальной жидкости.
Часто его пишут еще в форме
g | E1)
используя известное нам соотношение между полной и частной производ-
производными вектора (§ 13, п. 2).
11 Н. Б. Кочвв
162 ВЕКТОРНЫЙ АНАЛИЗ Гл. И
В качестве последнего примера рассмотрим электростатическое поле.
Мы уже знаем (§ 12, п. 6), что электрическое напряжение Е, т. е. сила,
действующая на единичный заряд положительного электричества, по-
помещенный в данной точке, имеет потенциал:
Е = — grad ф E2)
Вычислим поток этого вектора через некоторую замкнутую поверх-
поверхность S; по теореме Гаусса — Остроградского этот поток равен
j E3)
Но мы внделн ранее (§ 12, п. 6), что в случае электростатического
поля, создаваемого я зарядами ег, е3, . . . , еп, находящимися в точках Alt,
Мя, • « • 1 Мт потенциал имеет выражение
E4)
где гх, га, . . . , гп — расстояния от точек М,, М2, .... Мл до перемен-
переменной точки М, в которой вычисляется значение потенциала.
Следовательно, в этом случае
E=-gradf-?- + -^+-.. + 4s-) E5)
Сравнивая это выражение с выражением A8) § 14 и принимая во
внимание формулу B0) того же параграфа, мы легко увидим, что
= 4я у'е. E6)
где сумма правой части распространена на те заряды, которые находятся
внутри поверхности.
Представим себе теперь заряды, непрерывно распределенные в про-
пространстве, и пусть р означает плотность этих зарядов, тогда в элементе dV
будет находиться р dV зарядов, а внутри поверхности S будет иметься
зарядов. В этом случае формула E6) должна быть заменена следующей
pdV E7)
&EndS
S
S
Сравнивая ее с формулой E3), мы видим, что можно принять
div E = 4 яр E8)
§ 15 ОПЕРАТОР ГАМИЛЬТОНА 163
т. е. расхождение вектора электрической силы можно трактовать как
умноженную на 4п плотность зарядов, непрерывно распределенных в про-
пространстве. Так как
div Е = — div grad <p = — Дф
то
Дф _ _ 4 яр E9)
Уравнение такого типа называется уравнением Пуассона. Там, где за-
зарядов нет, т. е. где р = О, оно превращается в уравнение Лапласа
Дф = 0 F0)
Все тела делятся на проводники и непроводники. Проводники обла-
обладают тем свойством, что внутри них электрическая сила обращается
в нуль: Е = 0; следовательно, внутри проводников
grad ф = 0
и, следовательно, потенциал <р есть постоянная величина
Ф = const F1)
кроме того, так как внутри проводника div Е — 0. то р = 0, и следо-
следовательно, внутри проводника не может быть электрических зарядов, по-
последние должны сосредоточиваться на поверхности проводника.
Задача 116. Чему равняется интеграл по замкнутой поверхности S.
ограничивающей объем V
<? г (a-n) dS
где г — радиус-вектор, а — постоянный вектор, а — вектор внешнее
нормали к S.
Решение. По формуле A3)
& (а-n) г dS = \ (a-V) rdV
но по задаче 103 мы имеем (a»V)r = a> следовательно
(a.a) rdS = \ &dV = &V
S V
Задача 117. Найти значение интеграла
& (г.a) d dS
s
Ответ. Fa, где V есть величина объема, ограниченного поверхностью iS-
11'
164 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
§ 16. Циркуляция вектора вдоль контура. Вихрь вектора.
Его составляющие. Теорема Стокса
1. При изучении градиента (§ 12) мы ввели понятие линейного инте-
интеграла вектора а вдоль кривой L:
в показали, что обращение в нуль этого интеграла, взятого по любому
замкнутому контуру, есть необходимое и достаточное условие того, чтобы
вектор а был градиентом некоторой однозначной функции
a = gradq>, ах = ^ , Оу = щ , аг = ^ A)
Рассмотрим теперь поле любого вектора а (г). Более подробное изуче-
изучение линейного интеграла по замкнутому контуру приводит к понятию
некоторой дифференциальной операции, которая, будучи применена
к вектору а, дает новый вектор, называемый вихрем вектора а.
Итак, рассмотрим замкнутую кривую линию С и ваятый по этой кри-
кривой криволинейный интеграл
a2dz) B)
Бели кривая С плоская, то она ограничивает некоторую плоскую
площадь S, которая, согласно сказанному в § 6, может быть представлена
вектором, равным по величине S и имеющим направление положитель-
положительной нормали к площадке S, т. е. нормали, направленной в ту сторону,
откуда направление обхода контура С кажется совершающимся в ту же
сторону, как направление поворота от оси х к оси у вокруг положитель-
положительной оси z (при. левой системе координат — по часовой стрелке). Если п есть
единичный вектор положительной нормали, то мы имеем
S = 5п C)
в проекциях же на оси координат мы будем иметь
S = 5*1 + Svj + 52k D)
Если мы площадку S спроектируем на плоскость ху, то получим пло-
площадку, ограниченную контуром Сг, являющимся проекцией контура С-
Покажем, что эта площадка представляется как раз вектором Szk, направ-
направленным по оси z в ту или другую сторону. В самом деле, в § 6 было до-
доказано, что величина проекции площади равна проектируемой площади S,
Умноженной на косинус угла между плоскостью S и плоскостью проекции,
в настоящем случае | cos (n, z) | и следовательно величина проекция пло-
площади равна
16
ЦИРКУЛЯЦИЯ ВИКТОРА ВДОЛЬ КОНТУРА
165
С другой стороны, если п составляет с осью z острый угол и выбрана,
например (как показано на фиг. 57), левая система координат, то Сг
направлена по часовой стрелке (если смотреть с положительной стороны
оси г), так что вектор, представляющий ограниченную контуром Cz пло-
площадь, надо направлять по положительной оси z, т. е. надо брать рав-
равным | б'г j k = 5гк (ибо в этом случае ] Sz | = St). Если же угол п с осью г
тупой, то Сг обходится против часовой стрелки, и площадь проекции
надо представлять вектором — |52|к, опять
равным Szk, ибо в этом случае
\S,\ = S \ cos (u, г) [ = — S соз (а, г) = — 5г
Если С кривая, не лежащая в одной плос-
плоскости, т. е- кривая двоякой кривизны, то она
не- ограничивает плоской площадки; в этом
случае можно рассмотреть кривые поверхности,
ограниченные контуром С, эти кривые поверх-
поверхности могут быть представлены вектором S,
который получается следующим образом. Про-
Проектируем контур С на три плоскости координат
Oyz, Ozx, Оху; полученные проекции С„ С„,
Сг ограничивают три площадки, которые мо-
могут быть представлены векторами Sxi,
S2k; тогда
S= \SX + jSy + kSz
Фиг. 57
Вычислим теперь несколько криволинейных интегралов, которые нам
понадобятся при вычислении общего криволинейного интеграла B).
Прежде всего очевидно, что
d (%¦ I = 0
) dx = 0, & x dx ¦¦
с с
л
Вычислим далее ф у dx. Прежде всего ясно, что
E)
F)
ибо в соответствующих точках контуров С и Сг коор-
координаты х в у одни и те же, и только координаты
z —разные. Но легко видеть, что
у dx — &у dx
Фиг. 58
& у dx = —
G)
В самом деле, пусть ордината, отвечающая элементу dx, пересекает Сг
в двух точках: Мг и Ма (фиг. 58), тогда при обходе контура по часовой
стрелке элемент, отвечающий точке Мх, надо брать с отрицательным зна-
знаком [на этом элементе х убывает (фиг. 58)], а элемент, отвечающий точке
166 ВЕКТОРНЫЙ АНАЛИЗ Гл. И
М%, с положительным,, поэтому элемент dx дает интегралу член
(— уг + уг) dx = — (yi — у2) dx
где yi и уг означают ординаты точек Мх и Мг. Но (г/j —j/2) tfa; есть как
раз часть площади, отвечающая элементу dx; суммируя по всем элемен-
элементам, найдем:
ш у dx = — St
с?
и, следовательно,
ф у dx = — 5, (8)
wo и требовалось доказать. Точно так же доказывается, что
z(b=(tJ dx = iSu (9)
С/ч
2. Возьмем теперь фиксированную точку пространства М, которую,
удобства ради, перенесем на время в начало координат. Рассмотрим
далее расположенный вблизи точки М бесконечно малый контур С, на
котором задано определенное направление обхода. Предположим, нако-
наконец, что соответствующий всем поверхностям, натянутым на этот кон-
контур С, вектор S = iSn стремится по величине к 0, а по направлению —
к фиксированному направлению,, орт которого обозначим через нй.
Поставим теперь задачу вычислить значение линейного интеграла
вектора а вдоль С или, как его называют иначе, циркуляцию а вдоль С:
ф а.<й- = ф {а,?1х + аЯу + azdz)
Точнее говоря, вычислим значение следующего предела;
> (axdx + а^у + ajiz)
с ^A0)
S-H) л S л
когда контур С стягивается к точке М.
Достаточно найти, чему равняется
ах (х, у, г) da
lim
Разлагая ах (х, у, z) в ряд Тейлора по степеням х, у, z и ограничи-
ограничиваясь только членами первой степени, будем иметь
«х (х, у, z) =
- МО, 0, 0) + «[(?)о+ 81] + у[(^)о+ и] + .[fe)o+ и]
I 16 ЦИРКУЛЯЦИЯ ВЕКТОРА ВДОЛЬ КОНТУРА 167
где индекс О укааывает, что нужно брцть значение указанных производ-
производных в точке М (как всегда, производные дах I дх, дах I ду, daj дг в т. д.
предполагаем непрерывными) и где ег, ег, еэ оаначают бесконечно малые
величины.
Проинтегрируем вдоль кривой С, причем постоянные множители вы-
вынесем аа знаки интегралов
ах (х, у, г,) dx = ах @, 0, 0)
у dx + f-gj4 & zdx -
Применим выведенные выше формулы
Ф dx — (Ь х dx = О, Ф у dx = — Sz = — S coa(n, 2)
& z dx = Sy =S cos (n, y)
предположим далее, что контур С обладает таким свойством, что если
наибольшее расстояние точек контура от М обозначить через р, то длине
контура будет порядка р, а величина S порядка ра, тогда легко видеть, что
Ф (яе! + уея + zs8) dx = Sa
с
где в — бесконечно иалая величина. Итак
J- <$ ах (х, у, z)dx = - (^)ocos (n, z) + (%)осо8 (п, у) + г
Отсюда в пределе S —> О получим
ajlx
Ф
S
Аналогично получаем еще две формулы (циклической перестановкой
букв х, у, г)
. .... ... . [~3?1пМЗ (ПО"
S->O
hm ^—p—= —(-r1) c°s (no, y) + \-р-)„coa (n0, x)
B_t% S \dxjo о " \dyjo
168 ВЕКТОРНЫЙ АНАЛИЗ Гл.- II
Складывая все три выражения и отбрасывая значок О, получим сле-
следующую формулу:
фа dr
lim -^—s— =
S-H>
A1)
да, да \ /да_ да \ /да., да \
-в^ —5^) cos (п« *) + тг^ — "sr c°s (n, у) 4- s2- — тг5 cos (п,г)
dj/ & у l ' \ дг дх 1 v *' ' V Эх ду ' v
Таким образом, подобно тому, как значение dq>/ds позволяет вычис-
вычислить ф в соседних с М точках, лежащих на определенной прямой, зна-
значение только что найденного выражения позволяет вычислить прибли-
приближенно циркуляцию по любому достаточно малому контуру, окружающе-
окружающему точку М и лежащему в плоскости, перпендикулярной к вектору п.
3. Принимая во внимание, что если мы имеем вектор А, проекции
которого на оси координат суть Ах, Ау, Аг, то проекция его на любое
направление п будет равна
Ап = Ах cos (n, х) 4- Ау cos (n, у) 4- Аг cos (и, а)
Мы можем заключить в силу формулы A1), что если ввести вектор
rot а с проекциями
то проекция этого вектора на любое направление а (в том числе и на на-
направления х, у, z) будет определяться формулой
limV" =rotna A3)
Эта последняя формула дает определение любой проекции вектора rot a
и притом, как видно, совершенно независимое от выбора координатной
системы.
Полученный нами вектор rot а называется вихрем вектора а; обозна-
обозначение его rot а происходит от латинского слова rotor (вращатель). Часто
вихрь вектора а обозначают через curl (читается кёрль, что значит по-
английски локон, завиток). Наконец очень часто вихрь вектора а запи-
записывают как векторное произведение оператора Гамильтона у а вектора а:
rot а = V х а
В самом деле, составляя векторное произведение по формуле
АхВ = i {AJBZ - A*BV) + j DД - AJBZ) + k {AXBV - A«BX),
где
A = A A B ° B В
§ 16 ЦИРКУЛЯЦИЯ ВЕКТОРА ВДОЛЬ КОНТУРА 169
легко найдем
Отсюда, в силу § 15, следует сразу еще новое представление rot a
> п х a dS
rot а = lim -2—v A5>.
где V — бесконечно малый объем, стягивающийся в точку М, S — огра-
ограничивающая этот объем поверхность, наконец а — единичный вектор нор-
нормали к этой поверхности. Эта формула аналогична формуле E) § 15 для
div а и формуле G) § 15 для gradiy.
Но вернемся к первоначальному определению A3) rot а. Эту формулу
можно переписать еще так:
rota-n = |rot а| cos (rota, n) = lim ° „ A6)
S-K» "
причем площадка S перпендикулярна единичному вектору п.
Отсюда сразу выводим, что если для различных направлений п мы оп-
определим значение предела
^— A7)
и найдем максимум С„, то rot а равен по величине атому максимуму и
имеет то направление о, при котором этот максимум достигается (ибо-
проекция всякого вектора будет максимальной тогда, когда за ось проек-
проекций берется направление этого вектора).
Чтобы разъяснить на простом примере, что характеризует собою вихрь
вектора, рассмотрим ноле скоростей твердого тела в некоторый момент-'
времени
v = v0 -+¦ <о х г
vv — voy + <ага; — (oxz
Составляем
Следовательно,
rot v = 2 (<oxi + <bvj + шгк) = 2ш A9)
Таким образом rot v в этом случае представляет удвоенную угловую
скорость вращения твердого тела
170
ВЕКТОРНЫЙ АНАЛИЗ
Гл. II
Бели мы имеем дело с полем скоростей жидкости, то, как можно до-
доказать, -к- rot v будет угловой скоростью вращения бесконечно малого
объема, окружающего точку М, в предположении, что в рассматриваемый
момент времени этот объем жидкости внезапно отвердел. Это объясняет
и наименование «вихрь» вектора, так как в обычном представления вихри
связаны с интенсивным вращательным движением частиц жидкости.
Вычислив rot а во всякой точке поля вектора а, мы получаем новое
поле вектора вихря а. Графическое представление этого нового поля
дается векторными линиями вектора вихря а или, как их называют еше
иначе, вихревыми линиями вектора а.
4. Важнейшая теорема, связанная с понятием вихря, есть теорема
-Стокса, дающая преобразование линейного интеграла в поверхностный:
Циркуляция вектора по замкнутому контуру равна потоку вихря
вектора через поверхность, ограничен-
ограниченную данным контуром
\ rot a -dS = \ rot, a dS B0)
Доказательство аналогично доказа-
доказательству теоремы Гаусса — Остроград-
Остроградского. А именно, разделим поверхность
Фиг 59 $ на малые элементы Ska, которые
будем стремить к нулю (фиг. 59).
Для каждого элемента, выбрав по произволу положительное число е,
можем написать неравенство
' — го^я а*'^'л "^ в^и
если сделать Sk достаточно малым.
Сложим все эти неравенства в заметим, что линейный интеграл будет
взят только по С, так как интегралы по всем остальным элементам кри-
кривых Ск попарно уничтожатся:
\<SS
В пределе при Sk -» 0 получим
и так как е можно выбрать по произволу,
что и требовалось доказать.
5 16 ЦИРКУЛЯЦИЯ ВЕКТОРА ВДОЛЬ КОНТУРА 171
Заметим, что обратно, аз формулы Стокса можно вывести формулу A3)
и притом уже без тех ограничений, которые мы накладывала на вид
контура С при первоначальном выводе формулы A3).
5. Укажем несколько следствий из теоремы Стокса.
Бели а — потенциальный вектор, т. е. а — grad <р, то линейный инте-
интеграл по всякому достаточно малому контуру, окружающему точку Р,
обращается в нуль, т. е.
<?>а.сйг = О
Следовательно,
rotna = О
а, так как это справедливо для всякого направления, то тождественно
rot grad ф = 0 B1)
Это видно в непосредственно из выражений для градиента и вихря,
ибо
Обратно, если rot а равен 0, то по формуле B0) линейный интеграл
по всякому контуру, могущему быть стянутым в точку, равен нулю, так
как между таким контуром можно провести поверхность S. А значит
а = grad (p. Итак, если
даг дау _ дах даг „ дау дах п
0?---аГ = О' "ЯГ"-*-0' -д^~-^-°
ТО
**=?• ^ = аТ' ** = ? B3)
или, что то же,
axdx + a^ty -+- azdz = cup B4)
т. е. a^dx + avdy + a^z является полным дифференциалом. Итак,
необходимое и достаточное условие того, чтобы а был потенциальным век-
вектором и чтобы axdx + a^dy + ajiz было полным дифференциалом, со-
состоит в выполнении условий B2), т. е. в равенстве вихря вектора а нулю.
Потенциальные поля называют поэтому также безвихревыми.
Очевидно далее, что если S означает замкнутую поверхность, то
ибо в атом случае контур С стягивается в точку.
172 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Но вспоминая определение расхождевня, из формулы B5) сразу заклю-
заключаем, что
div rot а = 0 B6)
т. е. векторное поле вихрей любого вектора а свободно от источников.
Соотношение B6) можно проверить а непосредственным вычислением.
В силу отсутствия источников в поле вихря, вихревые линии не могут
внутри жидкости ни начинаться, ни кончаться; онп могут быть замкнуты-
замкнутыми или могут иметь свои концы иа границе поля.
Рассмотрим вихревую трубку, полученную следующим образом:
берем площадку и проводим через контур ее вихревые линии, тогда по-
поток вектора rot а через всякое сечение этой трубки будет постоянной
величиной, в силу общей теоремы, доказанной нами в а. 7 § 14. Величина
этого потока называется напряжением вихревой трубки.
Докажем теперь обратную теорему: всякий соленоидальный вектор а
может быть представлен как вихрь некоторого другого вектора Ь. Иными
словами, если
div a = О B7)
то можно найти такой вектор Ь, что
а = гot Ь B8)
Для доказательства выберем какую-либо прямоугольную систему
координат и положим Ьг = 0, тогда равенство B8) приведется к трем
уравнениям с двумя неизвестными функциями Ьх (ж, у, z) и 6„ (х, у, г)
дЬу ЗЬХ дЬу дЬх
Общим решением первых двух из этих уравнений являются
z
bv (х, у, г) = — ^ ах {х, у, г) dz + / (я, у)
Z
*х (*. У, z) = ^ щ, (х, у, z)dz + g (ж, у)
где / (ж, у) и g (ж, у) — пока произвольные функции своих аргументов.
Подставляя эти выражения, в последнее уравнение системы B9),
получим
Z Z
~~ ) a^dz + S ~ } "% dz ~" Щ = вг (*• ^' z> C0>
г,
Но так как
го
§16 ЦИРКУЛЯЦИЯ ВЕКТОРА ВДОЛЬ КОНТУРА 173
и,, следовательно, уравнение C0) приводится к виду
2-й-•.<«.**>
Мы удовлетворим атому уравнению, полагая
X
/ = ^ аг (*. У. г„Ма;, g = О
к»
Итак, если взять:
Z
Ьх (х, у, z) = \^av (х, у, z) dz
г х
Ьу (х, у, z) = — \ ах (х, у, г) dz + \ az {x, у, z0) dx C1)
6Г (а;, у, г) = О
то равенства B8) будет иметь место, что и требовалось доказать.
Наконец, заметим, что, применяя обобщенную формулу Гаусса — Ост-
роградского [§ 15 A9I к выражению
V х а = rot a
мы получаем преобразование поверхностного интеграла в объемный:
? \F C2)
s i
Задача 118. Доказать, что
rot (&г + *а) = rot aJ + rofc a2 C3)
Задача 119. Вычислить rot (фа).
(grad фха)х
Отсюда
rot (фа) = ф rot а 4- grad ф х а C4)
Задача 120. Вычислить rot {/ (г) г)}.
Так как
с
по всякому замкнутому контуру, то
rot / (г)г = О
Это можно легко показать и вычислением.
174 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Задана 121. Вычислять rot {Ь (г. а)}, где а и b — постояннйе век-
векторы.
rot{b (г.а)) = grad (r-a)xb = axb C5)
Задача 122. Вычислить rot га, где а — постоянный вектор
rot (га) = grad гха =|ха= Щ?
Задана 123. Вычислить div {a (r) x Ь (г)}. Имеем
— "А) . 9(aJ>x — ахЬг) д (ахЬу — ауЬх) _
да*
= b-rot a — a-rot b
Таким образом
div (axb) = b-rot a — a.rot Ь C6)
Задана 124. Представить ах grad ф, где а — постоянный вектор,
в виде вихря некоторого вектора.
Ответ, ах grad q> = — rot (ф а).
Задача 125. Вектор г (шхг), где » есть постоянный вектор, есть
вектор еоленоидальный (см. задачу 114). Представить его в виде вихря
некоторого вектора.
Ответ: г (ш х г) = — rot (¦- г3 «>)'.
§ 17. Некоторые формулы с дифференциальными операциями.
Дифференциальные операции второго аорядка. Применения
t. Выведем ряд основных формул векторного анализа, причем будем
широко пользоваться символическим методом. В § 12 [формула A9)] и
§ 15 [формула B2)] нами были выведены следующие форыулы (ф и ф —
скалярные функции, а — векторная):
grad (qnp) =¦ ф grad -ф Н- -ф grad ф A)
div (фа) = ф div a +¦ a «grad ф B)
В задачах 119 в 123 мы непосредственным вычислением определили
rot (фа) и div (a x Ь).
§ 17 нвкоторыв формулы с дифференциальными операциями 175.
Покажем теперь, как получить эти величины применением символи-
символического метода. Мы имеем
rot (ф, а) = V X (ф а)
Согласно данному в § 15 правилу, мы должны написать
где значок с указывает, что соответствующую величину надо считать,
постоянной. Но ясно, что
V X фс а = q>cV X а = ф rot a
V X ф ас = Уф X а0 = — а„ х Уф = ~ а X grad ф
Следовательно,
rot (фа) = ф rot а — а X grad ф = ф rot a + grad <p X a CV
Точно так же пусть два переменных вектора а и Ь — функции точки;
тогда, пользуясь свойством циклической перестановки векторно-скаляр-
иого произведения [§ 7 B)], легко получим
div (а х Ь) = V-{» X b) = V-(a x b<.) + V-(ae X Ь) =
= (V X a).be - V-(b X ac) = (V X a)-bc - (V X b)-ac =
= bo.(V X a) — ao.(V X b) = b-(V X a) — a.(V X b)
т. e.
div (a X b) = b-rot a — a-rot b D)
Как видно, метод вычисления состоит в том, что когда все векторы,
кроме одного, положены постоянными, нужно так преобразовать выра-
выражение, чтобы все постоянные векторы оказались перед оператором V,
а переменный — позади него.
В качестве следующего примера вычислим
rot (а х Ь) = V х (а х b)
По общему правилу имеем
V X (а х Ь) = V X (« х 1ц) + V х (а, х Ь)
Преобразуем первый член суммы правой части; по формуле для двой-
двойного векторного произведения имеем
С X (А X В) = А (В-С) - В (С-А) E)
причем правую часть этой формулы можно написать в шестнадцати раз-
различных видах, так как, например, выражение А (В«С) равно также б
А(С.В) и (В.С) А и (С-В) А,
176 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Полагая в предыдущей формуле С — V. А = а, В = Ъе, мы должны
дать такую форму правой части, в которой he стоит серед V> a a после
V) т. е. мы должны написать
Vx(axbc) = (hc.V)a-hc(V-a)
Точно такие же рассуждения приводят к формуле
Vx(aexb) = ас (V-Ь) - (ae-V) b
Складывая оба эти выражения и откидывая ненужные теперь значки с,
мы придем к формуле
Vx(axb) = (b»V)a — b(V-a) -f- a (V-b) — (a-V)b
или, что то же,
rot (axb) = <Ь V) a — (a-V) b 4- a div b - b div a F)
В качестве следующего примера вычислим grad (a-b). Прежде всего
-имеем
grad (а-Ь) = V (а-Ь) = V (a-bj H- V («с-Ь)
Но из E) ясно, что мы имеем формулу
В (С-А) = А (В.С) — Сх(АхВ)
или, произведя циклическую перестановку А, В, С
С (А-В) = В (СА) — Ax(BxQ G)
Переставим в этой формуле А с В:
С (В.А) = А (С-В) — Вх (AxQ (8)
Положим в формуле G) С = V» А = а, В = Ьс, тогда получим
V (a-bc) = bc{V-a) + (beXVJXa
Эта формула верна, но непригодна для нас, так как в правой части
стоит сложная операция (Ь X V) X а, а мы хотим все выразить через
более простые операции. Поэтому применим формулу (8), положив С = V.
В = Ьс, А — а и взяв ее в форме
С (В.А) - (В-С) А + Вх(СхА)
В результате получим
V(bc«a) = <bc.V) a + b,.x(VXa)
Точно так же мы выведем, применяя формулу G) и полагая С = V>
А = а,., В = Ь
) = (ас-V) b-
17 НВКОТО РЫ1 ФОРМУЛЫ С ДИФФЕРЕНЦИАЛЬНЫМИ ОПЕРАЦИЯМИ 171
Складывая оба выражения и отбрасываяненужные теперь значки с,
получим
V(a-b) = (b-V)a + bx(VXa) + (a-V) b -fax(VXb)
или, что то же,
grad (a-b) = (b. V) a 4- (a-V) b + bxrot a -+- a rot b (9)
Положим, в частности, в этой формуле Ь = а. В результате получим
grad ~- = (а* V) а + а X rot a A0)
2. Операции grad, div, rot, v-V могут быть названы дифференциаль-
дифференциальными операциями первого порядка.
Рассмотрим теперь основные дифференциальные операции второго
порядка. Так как grad ф и rot а суть векторы, к ним можно применить
операции div и rot, в результате получаем четыре операции div grad q>,
rot grad ф, div rot a, rot rot а; к расхождению же div а можно применить
только операцию grad, в результате получится grad div а. Мы уже ви-
видели (§ 14), что
div gradq> = V«V<p = (V*V)<p = Ч\ = Дф A1)
Далее, по формулам B1) и B6) предыдущего параграфа, вихрь гра-
вихрь градиента и расхождение вихря равны нулю:
rot grad ф = 0 A2)
div rot а = 0 A3)
Символическим способом эти формулы получаются моментально, ибо
rot grad ф = VX V<P = (Vx V) <Р = О
так как векторное произведение двух одинаковых векторов равно нулю.
Точно так же
div rot а = V • (Vxa) = 0
так как векторно-скалярное произведение трех векторов, из которых
два одинаковы, обращается в нуль. Однако такой вывод формул A2)
в A3) нужно признать скорее мнемоническим правилом, чем строгим
доказательством, так как обращение с символическим вектором V тре-
требует известной осторожности.
Рассмотрим еще несколько важных для дальнейшего формул. Пусть
Ф и i|) — две скалярные функции точки. Составим вектор
a = фgгad^|> A4)
Тогда по формуле B) будем иметь
div (ф grad i|>) = ф div grad if + grad ф-grad t|> = фДгЦ-grad ф-grad ty A5)
12 н. e.
178 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Применим теперь формулу Гаусса — Остроградского
div adV =
V
Заметим, что в рассматриваемом случае
<*п = Ф ~ A6)
В результате получим так называемую формулу Грнна
- grad ф-grad \f} dV = <bq> ¦—- dS A7)
которая при л|> = <р превращается в формулу
\ (ФДФ + (grad q>)a> dV = ф <р -^-dS A8)
а ори q> = 1 — в формулу
фЦ.ЛУ A9)
* S
Поменяем теперь в формуле A7) ф a if местами и вычтем получив-
получившуюся в результате формулу
\ (трДф + grad Ф-grad ф} cfF
v s
иэ формулы A7). Мы найдем тогда вторую формулу Грина
$ §{Sfg} B0)
Конечно, при всех этих выводах предполагается, что те функции,
с которыми приходится иметь дело, так же, как их производные, которые
встречаются в формулах, являются непрерывными функциями в рассмат-
рассматриваемой области. Но легко видеть, что эти формулы будут верны, на-
например, и тогда, когда вторые производные функции <р и гр терпят на
некоторой поверхности разрыв.
Из формулы {19) вытекает следующее представление оператора Д<р:
Д<р = Иш -2—v B1)
Если теперь мы нмеем поле некоторого вектора а, то мы можем опре-
определить вектор V2a = Да аналогичный соотношением
Ф (n-V)adJ
V*a = Да = !im ^—v = lim -§ v B2)
§ 17 НЕКОТОРЫЕ ФОРМУЛЫ С ДИФФЕРЕНЦИАЛЬНЫМИ ОПЕРАЦИЯМИ 179
Если вектор а имеет составляющие ах, ау, аг:
а = \ах + jay + каг B3)
то очевидно, что
так что проекциями вектора Да являются Дах> Аан, Да^
Аналогичной формуле A9) является формула
«Г <tn J
Применим символический метод к вычислению вектора rot rot a:
rot rot a = VX(VXa) = V (V-a) — (V'V) a — V (V-«) — V2a
или
rot rot a = grad div a — Да B6)
Дадим более строгий вывод этой формулы. Вычислим для этого со-
составляющую вектора rot rot а по оси х. Имеем
rotx rot a = у rot2 a — -%- rot,, a =
1=5 ду \ дх ду J dz \ дг дх j ~ \ дх ду ' дх Ш } \ ду* ' За2 )
Прибавляя и вычитая по -*? , получим:
так как такие же равенства имеем для осей у и 2, то, умножая соответ-
соответственно на i, j, k и складывая, сразу получим
rot rot a = grad div a — Да
3. Рассмотрим теперь некоторые применения выведенных в этом пара-
параграфе формул.
Мы вывели в § 15 п. 6 основное уравнение гидродинамики идеаль-
идеальной жидкости
|f + (v- V) v = F - -I grad p B7)
Воспользовавшись формулой A0), можем переписать это уравнение
В другой форме
|f - vxrot v + grad -у- = F - -J-grad p B8)
12*
¦180 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
Сделаем теперь еще добавочные предположения, а именно:
1) Будем считать, что вектор внешней силы F, действующей на еди-
единицу массы жидкости, обладает потенциалом U (такие силы называются
консервативными):
F = — grad U B9)
Например, если действует сила тяжести и ось г направлена верти-
вертикально вверх, то
U = gz C0)
2) Будем кроме того считать, что плотность жидкости р является
функцией давления:
Р = 1 (Р) CD
в этом случае жидкость навивается баротропной.
Это имеет место, например, для несжимаемой жидкости (р = const);
далее это имеет место для тех движений газа, которые происходят изо-
изотермически, т. е. при постоянной температуре, так как в этом случае,
как известно из физики, по закону Бойля-Мариотта, имеет иесто ра-
равенство р = ЯТр, т. е. pip = const; наконец равенство C1) имеет иесто
я для тех движений газа, которые происходят изэшпропически, т. е.
так, что выполняется равенство
-?-= const (у.=^.\ C2)
р" V ех> I
где х есть отношение теплоемкостей при постоянной давлении и при
постоянном объеме; из термодинамики известно, что при выполнении
равенства C2) движение каждой частицы жидкости происходит беа ка-
какого-либо притока или отдачи тепла.
Введем теперь в рассмотрение функцию
р-№-\-&-ем C3)
и заметим, что
grad Р = F' (p) grad р = -~ grad p = i. grad p C4)
Поэтому уравнение B8), при выполнении упомянутых выше двух
условий, может быть переписано так:
^ — vX rot v = — grad (U + Р + -j-) = — grad П C5)
где
U-U + P+-Z- C6)
Возьмем теперь какую-нибудь точку жидкости Ма и проведем через
нее линию тока M<J\1. Составляя криволинейный интеграл по этой линия
тока от обеих частей предыдущего равенства, получим
мм м
\ |j- -<йг — \ (vxrot v) • de = — \ grad Ib<fr C7)
й.
\
I 17 НЕКОТОРЫЕ ФОРМУЛЫ С ДИФФЕРЕНЦИАЛЬНЫМИ ОПЕРАЦИЯМИ 181
Но в каждой точке линии тока касательная к ней имеет то же на-
направление, что и вектор скорости v, т. е.
~ Xv = 0, или <йгХт=О
Поэтому на линии тока MJM
(vXrot v)-<ir = rotv-(rfrxv) = О
В результате равенство C7) принимает вид
м м
\ ~ .*¦ = _ \ т = и (м0) - п (М) C8)
м„ м,
В частности, в случае стационарного движения, т. е. движения,
в котором v, p и р не зависят от времени t, а могут зависеть только от
координат х, у, 2, мы будем иметь, что
и, следовательно:
П (М) = П (Ma) = const C9)
т. е. в случае стационарного движения идеальной баротропной жидкости,
находящейся под действием консервативных сил, вдоль каждой линии
тока сумма
U + P +-?= const D0)
сохраняет постоянное значение. Это равенство называется уравнением
Бернулли; при этом U вазывается потенциальной энергией, Р — внутрен-
внутренней энергией и -j- »• — кинетической энергией (отнесенной к единице
массы). Таким образом, при указанных условиях сумма кинетической,
потенциальной и внутренней энергий сохраняет постоянное значение
вдоль линии тока. Например, для случая несжимаемой жидкости, нахо-
находящейся под действием силы тяжести, будем иметь
gz + f + "Т"= const D1)
Возвращаясь к уравнению C5), т. е. считая условия 1) и 2) выпол-
выполненными, сделаем теперь другое предположение, а именно, что рассмат-
рассматриваемое нами движение жидкости является безвихревым, т, е. что
v = grad <p D2)
Мы знаем, что в этом случае
rot v = 0 D3)
Далее мы имеем очевидное равенство
? D4)
182 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
и, следовательно, равенство C5) принимает вид
grad -^ = — grad П
Отсюда следует, что
не зависит от положения точки и может зависеть только от времени,
так что
-??•+?+ />+-?-*<*) («)
во всей области, занятой жидкостью. Это равенство называется интег-
интегралом Коша; оно имеет место для безвихревых движений идеальной баро-
тропной жидкости, находящейся под действием консервативных сил.
Если жидкость несжимаема, то получим
и можем отсюда найти р. Мы знаем, что в этом случае уравнение нераз-
неразрывности имеет вид
div v = 0 D7)
или, если воспользоваться D2),
Д<р = 0 D8)
Рассмотрим теперь случай сжимаемой жидкости. В этом случае урав-
уравнение неразрывности имеет вид (§ 15, формула 42)
~§f + v-grad р ¦+- р div v = 0
или
-~?- + grad ф-grad р + рД<р = 0 D9)
Уравнение же D5) принимает вид
*L+O+P + \ (grad cpJ = g (I) E0)
и так как Р есть определенная функция от р, то получилось два урав-
уравнения с двумя неизвестными функциями р и ср.
Остановимся в частности на случае малых колебаний сжимаемой
жидкости при отсутствии внешних сил. Таким образом надо положить
U = 0 и кроме того надо пренебречь всюду квадратами производных
в сравнении с их первыми степенями. В результате получим
|г + РАФ = 0 E1)
¦8" + Р = S @ E21
17 НЕКОТОРЫЕ ФОРМУЛЫ С ДИФФЕРЕНЦИАЛЬНЫМИ ОПЕРАЦИЯМИ iS3
Сделаем теперь замену функции <р, положив
Ф = Ф + [ g (t) dt
Тогда, очевидно, будет
Поэтому предыдущая система примет вид:
0 E3)
™ + Р = 0 E4)
Продифференцировав последнее уравнение по t, получим
ЭЧ> дР _
¦д^ + at = °
где
^= Р'(т>№ = _i_?^= ' rfjp ар _ rfp
Si ^'А /(/>)Л р dp dt dp dt
Так как колебания газа предполагаются малыми, тор и р мало отли-
отличаются от значений ро я ро, соответствующих состоянию покоя.
Обозначим через с2 значение
*-% E6)
вычисленное для значений ро в ро величин р и р; тогда можем считать,
что
и в силу уравнения E3) будем иметь
^=-е*ДФ E8)
Поэтому уравнение E5) приводит нас к уравнению для функции Ф
U _ с* ДФ = 0 E9)
которое носит название волнового уравнения.
Вернемся еще раз к уравнению C5), т. е. опять будем считать условия
1) и 2) выполненными, но не будем теперь предполагать движение без-
безвихревым, иными словами будем считать, что
rot v = Q F0)
отличен от нуля.
184 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
В этом случае можно составить дифференциальное уравнение, опре-
определяющее изменение вихря Q с течением времени. К выводу этого урав-
уравнения мы сейчас и обратимся. Для этого применим к обеим частям урав-
уравнения C5) операцию rot, в результате получим
rot|j- — rot (v X rot v) = — rot grad II F1)
Но мы имеем следующие формулы: прежде всего ясно, что
dv
t5T
dv д rot v <?Q /(.,,
rot5T = -<*- = Ж <в2>
далее, по формуле F)
rot (vxrot v) = rot (vX Q) = (fl. V) v — (v-V) Q+vdiv Й—Q div v F3)
Наконец по формулам A2) и A3) мы имеем
rot grad П = 0, div Q = div rot v = 0
Поэтому уравнение F1) принимает следующий вид
|+(y-V)fi- (Q- V) у + Й div v = 0 F4)
или, вспоминая связь между полной и частной производными вектора
[§ 13, формула A8)]
^_ (Q-v)v 4- Qdiw =0 F5)
Это уравнение и определяет изменение вихрей с течением времени. Мы
выясним характер этого иаменения более подробно в дальнейшем.
В качестве следующего примера рассмотрим вопрос о вычислении
кинетической энергии в гидродинамике.
Допустим, что мы рассматриваем движение несжимаемой жидкости.
Рассмотрим некоторый произвольно вырезанный объем жидкости V,
ограниченный поверхностью S, тогда элемент объема dV, имеющий массу
pdV, будет обладать кинетической энергией
а полная кинетическая энергия всего объема жидкости V будет равна
?dV F6)
Бели мы рассматриваем безвихревое движение несжимаемой жидко-
жидкости, так что
v = grad<p F7)
то мы будем иметь
v
I 17 никоторый формулы с дифференциальными операциями 185
До формуле A8) мы можем преобразовать это выражение в случае,
если ф есть однозначная функция, к виду
~p^A<f>dV F9)
Но для безвихревого движения несжимаемой жидкости, как мы знаем
div v = Д ф = 0 G0)
и, следовательно,
Заметим, что если жидкость ограничена неподвижной твердой стенкой,
то вдоль нее жидкость может только скользить, так что на такой стенке
непременно должно быть
vn = 0 G2)
и следовательно, в нашем случае
й = ° <73>
В частности, если жидкость заполняет односвязную область, огра-
ограниченную исключительно только неподвижными твердыми стенками,
то она не может совершать никакого безвихревого движения. В самом
деле, в этом случае потенциал скорости q> — непременно однозначная функ-
функция, и, следовательно, применима формула G1); но так как на всей по-
поверхности S выполняется условие G3), то Т = 0, т. е. кинетическая
энергия жидкости равна нулю, следовательно, все ее частицы покоятся.
4. Рассмотрим аналогичный предыдущему вопрос об энергии электро-
электростатического поля. Мы уже внаем, что электрическое поле определяется
потенциальным вектором
Е = — grad ф G4)
Если поле происходит от одного заряда е, находящегося в начале
координат, то
Ф = f G5)
Сила, действующая на заряд ei, будет равна
F = etE = — et grad ~ G6)
Подсчитаем ту работу, которую надо затратить, чтобы перенести
варяд ег из бесконечности в данное положение М (г); эта работа, очевидно,
равна той работе, которую совершает сила F на перемещение заряда
из точки М в бесконечность:
W= \?.dr = - ег ^grad y-dt eAd(~) = -^ G7)
м м at
186 ВЕКТОРНЫЙ АНАЛИЗ Г Л II
Полученную величину можно назвать потенциальной энергией системы
двух зарядов.
Пусть теперь имеем систему п зарядов еи е2, . . . , еп, находящихся в
точках Мъ М2, .... Мп, и пусть Гц, означает расстояние между точками
М, и Мк. Тогда мы получим потенциальную энергию системы зтих зарядов,
образовав всевозможные произведения
ri*
и взяв их сумму:
п
J i. *=l r'*
причем коэффициент-i нужно взять потому, что каждая комбинация
значков i и к встречается дважды.
В рассматриваемом случае мы имеем для потенциала выражение
где тъ — расстояние переменной точки М„ до точки М.
В частности мы имеем, что
R
ер, = ф {МО = 2' т- <8°)
есть значение в точке Mt потенциала, происходящего от всех остальных
зарядов (штрих у суммы показывает, что при суммировании надо про-
пропустить значение к — i). Так как
го получаем, что
Допустим теперь, что мы имеем непрерывное распределение зарядов
по некоторому объему V; если объемная плотность зарядов петь р, то
в элементе объема dV будет находиться ааряд pdV; обозначая соответствую-
соответствующее значение потенциала через ер, получим вместо (81) формулу
(82)
определяющую потенциальную энергию заданного поля зарядов.
Так как вне объема V плотность электрических зарядов р = 0, то
можно также написать
(83)
где V1 — любой объем, охватывающий V.
I 17 НЕКОТОРЫЕ ФОРМУЛЫ С ДИФФЕРЕНЦИАЛЬНЫМИ ОПЕРАЦИЯМИ 187
Но мы видели (§ 15, п. 7), что плотность электрических зарядов опре-
определяется равенством
div E = 4яр (84)
или, что то же, равенством
Дф = - 4яР (85)
Поэтому, выражая потенциальную энергию W черев значение <р, будем
иметь в силу формулы (83)
(86)
Воспользуемся теперь формулой A8), в результате получим
w = ш\ terad »!• & - яг § *й dS <87)
\
где ?г — поверхность, ограничивающая Vv Возьмем за Sl сферу весьма
большого радиуса R, который мы будем затем стремить к бесконечности,
и заметим, что если все заряды находятся на конечном расстоянии, то для ф
и ду/дп мы будем иметь, как можно доказать на основании результатов
одного из дальнейших параграфов, оценки
где А и В — постоянные числа. Поэтому, так как величина сферы
равна 4itfls, мы будем иметь
Отсюда следует, что
lim ф ф ^- до ^ О
А тогда из формулы (87) вытекает, что
(grad ф)а <*F = ~ \ В? dV (88)
i 00
где интегралы берутся по всему бесконечному пространству.
Полученный результат мы можем иначе истолковать следующим обра-
образом: в электростатическом иоле энергия распределена по всему прост-
пространству, причем на каждую единицу объема приходится количество
энергии, равное
1 ™ 1
188 ВЕКТОРНЫЙ АНАЛИЗ Гл. \1
5. Рассмотрим в заключение этого параграфа несколько задач.
Задача 126. Доказать формулы
(v V) <ра = a (v-grad <р) + <р <v V) а (90)
c-grad (а-Ь) = а.(с-V) Ь + b-(c-V) а (91)
(o-V) (axb) = ax(o-V) Ь—bx(c-V)a (92)
(axb)-rot c= b.(a«V) с — a.(b-V) е (93)
(по поводу последней формулы см. зад. 57).
Задача 127. Доказать следующие формулы
(axV)xb = (a-V) Ь + axrot b — a div Ь (94)
(axV)xr=-2a (95)
(Vxa)xb = — (а- V) Ь — axrot Ь -Ь rot ах Ь + a div Ь (96)
Задача 128. Доказать следующие формулы, являющиеся анало-
аналогичными формуле Гаусса — Остроградского:
& (fun dS = [ {ф div a ¦+- a-grad q>} dV (97)
& (a x Ь)„ dS = \ {b-rot a — a-rot b} dV (98)
Задача 129. Доказать следующие формулы
& Ф^ф || dS = \{<р div (ip grad x) + * grad ф -grad %} dV (99)
s " v
§ Дф If- dS = J {(Дф)» + (grad ф-grad Дер)} dV A00)
F (ax grad ф)„ dS = \ grad qi'Tot a dV A01)
Задача 130. Доказать, что если div a = 0, то
\ n-(rot ах Да) dS = — \ {(ДаJ + rot а. Д rot a} dV A02)
s v
Задача 131. Доказать следующие формулы, являющиеся анало-
аналогичными формуле Стокса
|§Ф<гг = ^/nxgrad<p\- -jdS A03)
Афа.агг= ({<protna + (grad ф х а)п} dS A04)
с s
где п — единичный вектор нормали в точках поверхности S, опирающейся
на контур С.
§ 17 НЕКОТОРЫЙ ФОРМУЛЫ С ДИФФЕРЕНЦИАЛЬНЫМИ ОПЕРАЦИЯМИ 189
Задача 132. Доказать формулу
udv «= \ (grad их grad v)-n dS A05)
f
где S — поверхность, опирающаяся на контур С, и — единичный вектор
нормали к этой поверхности, и и у — две переменных функции точки.
Задача 133. Доказать справедливость следующего интегрального
представления оператора Лапласа Д<р:
дф = 6 lim Фв~* (Ю6)
д-н) л
где ф0 — значение функции <р в той точке 0, в которой вычисляется зна-
значение Дф, а фв есть среднее значение функции ф на сфере SR радиуса R
с центром в только что указанной точке:
Для доказательства можно поступить, например, следующим образом.
Обозначим черев dQ телесный угол, под которым виден из точки О эле-
элемент dS сферы SB. Подобно тому, как центральный угол, опирающийся
на дугу длины / окружности радиуса г, измеряется в радианах вели-
величиной
получающейся от деления длины дуги на радиус окружности, телесный
угол dQ, опирающийся на площадку dS сферы Sr, намеряется величиной
получающейся от деления величины площади dS на квадрат радиуса
сферы, иными словами, измеряется величиной площади той части сферы
единичного радиуса с центром в вершине телесного угла, которая выре-
вырезается этим телесным углом.
Ясно теперь, что
С другой стороны очевидно, что
Фо = ?Г § *» dQ
Поэтому
Фя — Фо = ?гФ (Ф —
190 ВЕКТОРНЫЙ АНАЛИЗ Рл. II
Но мы можем написать, что если значение <р берется и точке сферы
SB, то
ф — фо =
где интегрирование производится по радиусу, идущему из центра сферы.
Поэтому
Но из формулы B1) следует, что
,-p-dS =V [(ДфH + е] = i-яг8 Г(Дф)о + е]
ОТ О
где е — бесконечно малая вместе с г величина. Поэтому
Следовательно,
а н к
+ в1 dr == ^Дф)"^^ + т\redr
6 о
где Ei — бесконечно малая вместе с R величина.
Формула A06) вытекает из полученной формулы, как непосредствен-
непосредственное следствие.
Задача 134. Доказать, что если о — переменный вектор, числен-
численная величина которого всюду одинакова, т. е. | n | = const, то
(n-V)n — rot nxn A07)
Задача 135. Вычислить, чему равно
n.fgrad (a-n) — rot (ахв)]
где а — перемепный вектор, an — единичный постоянный вектор.
Ответ: div a.
Задача 136. Доказать, что необходимое и достаточное условие
¦того, чтобы переменный вектор а мог быть представлен в форме
a = <pgradt|> A08)
где фиф — переменные скалярные функции, состоит в выполнении ра-
равенства
a-rot а = 0 A09)
5 17 НЕКОТОРЫЕ ФОРМУЛЫ С ДИФФЕРЕНЦИАЛЬНЫМИ ОПЕРАЦИЯМИ {91
Заметим, что если мы имеем поле вектора а, и если мы проведем по-
поверхности
¦ф = const
то в каждой точке поля вектор а направлен по нормали к той поверхности
этого семейства, которая проходит через рассматриваемую точку.
Для доказательства необходимости условия A09) составим rot a:
rot а = rot (ф grad ф) = ср rot grad if> + grad фxgrad \p =
= grad ф х grad ф A10)
Ясно, что полученный вектор перпендикулярен вектору а.
Докажем теперь достаточность условия A09).
Пусть имеем поле вектора а, удовлетворяющего уравнению A09).
Возьмем какую-нибудь плоскость, тогда на ней, вообще говоря, можно
провести семейство Г линий, в каждой точке которой касательная пер-
перпендикулярна вектору а.
Так, например, если мы возьмем плоскость О ту и в ней какую-либо
точку М и какую-либо кривую, проходящую через точку М, то условие
того, чтобы единичный вектор касательной к этой кривой в точке М
~dl ~ 1а~л ~^~ ~ё7*
был перпендикулярен к вектору а, состоит в том, чтобы
ах dx + ов dy = 0, иди — = ——
а такое уравнение всегда может быть проинтегрировано, за исключением
случая, когда в некоторой области рассматриваемой плоскости окажется
ах = Оу = 0, т. е. вектор а окажется как раз перпендикулярным к рас-
рассматриваемой плоскости. Но в этом случае можем исходить из другой
плоскости.
Проведя теперь через все точки каждой линии полученного семейства
вихревые линии вектора а, мы получим семейство поверхностей.
Пусть уравнение этого семейства поверхностей есть
ф (х, у, z) = const
Докажем, что вектор а в каждой точке любой из этих поверхностей
направлен по нормали к этой поверхности. В самом деле, рассмотрим
определенную поверхность S и на ней произвольную дугу кривой АВ.
Покажем, что взятый по этой дуге криволинейный интеграл от вектора а
равен нулю:
" а.«йг = 0
Действительно, проведем через точки А и В вихревые линии вектора а
до пересечения в точках А' и В' с той линией вышеупомянутого семей-
192 ВЕКТОРНЫЙ АНАЛИЗ Гл U
ства Г, исходя из которой была построена поверхность S. Составим те-
теперь криволинейный интеграл от а по пути АА'В'ВА; он равен
& &-dr = U rotn a dS
причем поверхностный интеграл взят по куску поверхности S, ограни-
ограниченному контуром АА'В'ВА. Но ведь на всей поверхности S
rotna = О
ибо эта поверхность состоит из вихревых линий, так что в каждой точке
S вектор rota лежит в касательной плоскости к S. Итак
\ а-айг + \ л-dt *\- \ л-dt + \&.Aт = 0 (Ш)
А А" А'В' В'В В А
А А" А'В' В'В В А
Но по выбору линии А'В' мы имеем
A12)
Далее, на линиях АЛ' и ВВ' по самому определению вихревых линий
вектор dx параллелен вектору rot а, последний же по условию перпен-
перпендикулярен к вектору а, откуда вытекает, что на А А' и ВВ' вектор dt
перпендикулярен к а, и, значит,
\ a-dr = 0, \ a.rfr = 0
АА- ВВ-
A13)
Из сравнения A11), A12) и A13) следует, что
АВ
для любого пути АВ на поверхности S, что может быть только, если
в каждой точке S вектор а направлен по нормали. Но тогда векторы а
и grad i|> коллинеарны и, следовательно,
а — ф grad t|)
что и требовалось доказать.
Задача 137. Доказать, что всякий вектор а может быть представ-
представлен в форме
а = ф grad i|> + grad % A14)
где <р, if1, % — переменные скалярные функции.
Для доказательства рассмотрим вихревые линии вектора а. Мы знаем,
что поле вектора rot а соленоидально. Поэтому можно ировести два се-
семейства вихревых поверхностей (вихревой поверхностью называется по-
поверхность, образованная вихревыми линиями)
qp = const, t|> = const A15)
5 17 НЕКОТОРЫЕ ФОРМУЛЫ О ДИФФЕРЕНЦИАЛЬНЫМИ ОПВРАПИЯМИ 193
таким образом, чтобы интенсивность вихревой трубки, лежащей между
двумя соседними поверхностями
ф = const, <р Н- dip = const A16)
и двумя соседними поверхностями
1|> = const, ф + <й|> = const A17)
была равна как раз «ftp «ftp. Так как каждая вихревая линия лежит на
одной из поверхностей <р = const, то непременно
rot a _|_grad <p
и точно так же
rot a J_ grad i|>
Отсюда вытекает, что. по направлению rot а совпадает с вектором
grad ф xgrad ф A18)
Но рассмотрим поперечное сечение вышеупомянутой бесконечно малой
трубки, перпендикулярное к оси трубки, и составим поток вектора rot a
через это сечение. Вела расстояние между поверхностями A16) в рас-
рассматриваемом месте обозначить через dn^, а расстояние между поверх-
поверхностями A17)—через dnt, то по определению градиента
Бели далее угол между поверхностями A15) в рассматриваемой точке
обозначить через а, то поперечное сечение вышеупомянутой трубки будет
представлять собою параллелограмм, стороны которого равны
sin a sin а
а площадь равна
с другой стороны
x gradi|)| = [grad<p[[grad *| sin
Отсюда следует, что поток вектора A18) через рассматриваемое сече-
сечение равен <Лр dtp, так же как и поток вектора rot а. Поэтому, меняя, еще,
в случае нужды, знак у ф, мы будем иметь
rot a = grad ф х grad ip A19)
Заметим теперь, что
rot (ф grad i|>) = grad cp x grad ip A20)
и, следовательно,
rot (a — ф grad ф) =• О
Отсюда сразу следует формула A14).
13 Н. Е. Кочив
194
векторный анализ
Гл. II
§ 18. Криволинейные координаты
1. Как мы знаем, положение точки М в пространстве может быть
определено ее радиусом-вектором г относительно некоторой неподвижной
точки О. В прямоугольных декартовых координатах мы имеем для ра-
радиуса-вектора г выражение
Фиг. 60
Однако во многих задачах выгодно определять положение точки М
не тремя декартовыми координатами х, у, г, а тремя другими числами
?i> ?г> 9з> более отвечающими рассматриваемой
частной задаче. Мы предположим, кроме того, что,
обратно, каждой такой тройке чисел qu ?2, ?з
отвечает свой радиус-вектор г и, следовательно,
некоторая точка М (иногда приходится, как мы
увидим на примерах, несколько ограничивать
область изменения переменных qlt g±, д3).
Величины qlr qv qa называются криволи-
криволинейными координатами точки М.
Таи как всякой точке М отвечают три ко-
координаты qv q2, gs, то каждая из этих коорди-
координат, например qu является функцией от радиуса-вектора г'
?i(') = ?i(ж, У, г), дг(г)=дг(ж, у, г), q3(t) = q3(x, у, z) A)
Обратно, радиус-вектор г любой точки пространства, вполне опре-
определяясь заданием трех чисел g,, q%, g3, является функцией от этих пере-
менных: г (qz, g2, g3), а, следовательно, и компоненты этого вектора х, у, z
будут функциями от qlt qs, qa:
x=zx(qlt gs, 9s), y = y{qv fo 9S), z = z{q1, g2, qs) B)
Поверхности уровня функции ^(г), т. е. поверхности
q1 (r) = const
образуют некоторое семейство поверхностей. Рассмотрим еще два семей-
семейства поверхностей
<ji2 (г) = const, gs(r)=const
Через каждую точку М пространства проходит по одной поверхности
каждого семейства (фиг. 60). Назовем эти поверхности координат-
координатными поверхностями. Линии пересечения двух координатных
поверхностей назовем координатными линияии. На коорди-
координатной линии дг, очевидно, меняется только координата qu координаты
же ?3 и q3 сохраняют неизменное значение.
В качестве примера рассмотрим цилиндрические а сферические коор-
координаты. В цилиндрических координатах (фиг. 61) положение точки
18
КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
195
определяется тремя координатами qx = р, дг = ф и q3 = z. Формулы B)
имеют вид
х = р cos <р, у = р sin <р, 2 = г C)
Изменяя координату р от 0 до оо, координату <р от 0 до 2я, коор-
координату z от — °о до + оо, мы получим все точки пространства. Коор-
Координатными поверхностями являются
р = coast — цилиндры с осью Oz
ф = const — полуплоскости, ограниченные осью Oz
z = const — плоскости, перпендикулярные оси Oz
Координатными линиями являются: лучи, перпендикулярные оси Oz
в начинающиеся на этой оси (линия р), окружности
с центром на оси Oz, лежащие в плоскостях, пер-
перпендикулярных этой оси (линии ф), и прямые,
параллельные оси Oz (линии z).
В сферических координатах (фиг. 62) положение
точки определяется координатами д% = г, q% — 9 и
q3 = ф. Формулы B) имеют вид
Я= г sin в cos ф, у = г sin 9 sin ф, z = г cos в D) Фиг. 61
Изменяя г от 0 до оо, в от 0 до я и ф от 0 до 2я, мы получим все точки
пространства. Координатными поверхностями являются
Г = const — сферы с центром О
9 = const — полуконусы с осью Oz
ф = const — полуплоскости, ограниченные осью Oz
Координатными линиями являются: радиусы (ли-
(линии г), меридианы (линии в) и параллели (линии ф).
2. Возвращаясь к общим криволинейным ко-
координатам qu qt, q3, введем в рассмотрение еди-
единичные векторы еь е2, е3, направленные по каса-
касательным к координатным линиям в точке М в сто-
сторону возрастания, соответственно, переменных qx, <?2 и q3 (фиг. 60).
Рассмотрим теперь радиус-вектор г (gL, g2, q3) и составим проазвод-
ную -д—. Поскольку при дифференцировании qz и q3 считаются постоян-
постоянными, годографом вектора т является координатная линия qlt а потому
вектор -^— имеет направление касательной к координатной линии qlt
т. е.
где Hl — длина вектора -~— .
Фиг. 62
13»
196 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Из предыдущего равенства легко выведен, в силу того, что ei есть
единичный вектор:
или, так как
«ft ~ в* + «ft J + «ft
TO
Аналогичные рассуждения приводят к трем формулам:
дг
где
Величины Н1у Н% и Я3 называются коэффициентами Ламэ.
Рассмотрим, с другой стороны, три вектора grad qt (i = i, 2,3)-
Вектор grad qi направлен по нормали к координатной поверхности
<ji = const; поэтому, если мы обозначим через е<* единичный вектор нор-
нормали к этой поверхности, направленный в сторону возрастающих зна-
значений qu то мы будем иметь
grad gi = Ajej* (i = 1, 2, 3) (8)
где hi — длина вектора grad <fe. Очевидно, что
V = ferad tf = &У + {^f + {^f (I = 1, 2, 3) (9)
Величины hu k^ ш h3 называются дифференциальными
параметрами первого порядка.
Покажем, что векторы grad <h, grad qz и grad q3 образуют систему
векторов, взаимных с -?—, -#т-ъ -д—- Для этого, согласно A9) §8, надо
показать, что
grad ft. -^-= 0 (iA)
Но, умножая обе части равенства
Л (ft, ft, ft) = ^- dfc + —
скалярно на grad qu мы получим
dqt = grad gj-dr = (grad д4- -^-j d^ + (grad &¦ -g^-) d?a + (grad ft- ^
откуда, в силу произвольности «!?i, dft, dq3, сразу следуют формулы A0).
; 18 криволинейные координаты 197
Коренное отличие криволинейных координат от обычных прямоуголь-
прямоугольных заключается в том, что в криволинейных координатах направления
векторов е17 е^ез (а равно и ej*, ег*, eg*) зависят от того, для какой точки
М via векторы определяются.
Допустим, что мы рассматриваем в точке М вектор а; разложим его
по трем некомпланарным векторам et, e^, е^
а = а^ 4- Оав,, + ases A1)
Совершенно аналогично мы могли бы разложить вектор а по трем
некомпланарным векторам е^, еа*, es*:
а = «^V + аг*ъ* + аа*е,* A2)
Наиболее часто употребляют криволинейные ортого-
ортогональные координаты. Так называются такие криволинейные
координаты, координатные линии которых в каждой точке взаимно пер-
перпендикулярны. Очевидно, что цилиндрические и сферические координаты
являются ортогональными.
Ясно, что для ортогональных криволинейных координат мы имеем
равенства
A3)
Поэтому, в силу F) и (8), необходимые и достаточные условия для ор-
ортогональности криволинейных координат можно записать в одной иа
следующих двух эквивалентных форм
Зг дг дх дх ду ду , di дг ~
или же
Для ортогональных криволинейных координат между Н^а к, сущест-
существует весьма простая связь. В самом деле, в силу A3) мы имеем
grad qt = Да, ?j- _ Sa
а потому первая из формул A0) дает
к = -щ <*-1. 2,3) A6)
так что, в частности, имеем формулы
grad qt = ~ (i = 1, 2, 3) A7)
J98 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
3. В дальнейшем мы будем рассматривать исключительно ортогональ-
ортогональные криволинейные координаты. Для таких координат разложения A1)
и A2) совпадают
а = алег + a-fo +
Мы будем называть ^, (^ в о, криволинейными состав-
составляющими вектора а или же проекциями вектораа
на оси криволинейных координат. Беря в частности
за а вектор dr, мы получим
<Ь = ^d9l + ? dqt + $L dq3 = НгdQl е, + Ht dq, es + Н%dqs ъ A9)
так что составляющими вектора dr являются
<fei - Я, &ь (i - 1, 2, 3) B0)
Возвышая обе части равенства A9) в квадрат в замечая, что
(drJ = ds*, щг = 1, в|-е» = 0 (i ф к), получим для квадрата длины
элемента dr формулу
ds» = H\dq\ + Htdql + НЫФ, B1)
Пусть dr = MN, где N — бесконечно близкая к М точка; проведем че-
через N три координатных поверхности, которые вместе с тремя коорди-
координатными поверхностями, проходящими черев точку М, образуют криво*
линейный бесконечно малый параллелепипед. Очевидно, ребрами этого
параллелепипеда будут служить
dsx = Hjdq^ dst = Hsdq*, dss = H3dq3 B2)
но тогда грани его будут иметь величины
cfc, = #2#з dqtdqs, daz = H3Hydq^dqx, das = H^Htflqxdqz B3)
а объем его будет равен
dV = HiHsHsdq-Ldq^qs B4)
Приведенными в этом пункте формулами очень удобно пользоваться
для нахождения коэффициентов Ламэ.
Так, например, легко видеть, что в цилиндрических координатах
ребрами бесконечно малого криволинейного параллелепипеда являются
dsl = dp, dsz = pdq>, dss = dz
Сравнение с формулами B2) показывает, что для цилиндрических
координат
Н, =1, Hv = р, Нг = 1 B5)
Точно так же для сферических координат имеем
dsx = dr, dst = г d8, ds3 = r sin 6 dq>
5 18 криволинейный координаты 199
и Поэтому
Яг — 1, Я, = г, J?T=rsin9 B6)
Задача 138. Найти коэффициенты Ламэ для цилиндрических и сфе-
сферических координат по формулам G).
4. Для того чтобы пользоваться криволинейными координатами,
нужно уметь выражать в этих координатах все основные векторные
операции.
а) Начнем с рассмотрения grad <p. Мы, очевидно, имеем (§ 12, задача 89)
grad <f (qlt q» 4i) = -?-grad ?i4-J^ ^
и, воспользовавшись формулами A7), сразу получим
B7)
Этот же результат можно получить иначе; в самой деле, проекцией
grad'? на ось qt криволинейных координат по самому определению яв-
является ¦? , но в силу dsi = Hidqi мы имеем
т. е. те же самые выражения для проекций grad f>, что и в формуле B7).
Задача 139. Доказать формулу B7), показав, что
Задача 140. Вычислить grad ф в цилиндрических координатах.
Ответ:
^^^ B8)
Задача 141. Вычислить grad ф в сферических координатах.
Ответ:
5i B9)
6) Рассмотрим diva. Очень удобно для вычисления diva в криво-
криволинейных координатах применить формулу § 14:
div a = Hm —v—
7-И)
веяв за V объем бесконечно малого криволинейного параллелепипеда
(фиг. 63), одной из вершив которого является та точка М, в которой
ищется значение diva.
200
ВВКТОРНЫН АНАЛИЗ
Гл. II
Грань MMJS-JAZ этого параллелепипеда имеет величину dax —
•= Н\Нtfdqsdqt\ нормальная к этой грани составляющая вектора а равна—а,
(мы считаем, что MMt направлено в сторону возрастающих значений дг,
внешняя же нормаль к рассматриваемой грани направлена в противопо-
противоположную сторону), аоатому поток через грань ММъЫф1ъ будет равен —
a1H2H3dg^dqa. Противоположная грань MtNJVN3 отличается от грани
MM^NiMz только тем, что ей отвечает значение qx + dqt координаты qu
значения же других координат на атих двух гранях одни и те же. Поэтому
поток через грань M^^Na будет равен
{«tff.fi, +
«Ц dqjq,
м,
Складывая его с предыдущим выражением,
получим для потока через две грани
и M,NJtNt выражение
Фиг. 63
и аналогично для потока через грани
и через грани
аМл и MtN3IVN1
dqt
Складывая все три выражения, получим полный потов
фа, ДО
Деля его на объем параллелепипеда V = H^
окончательно
получин
C0)
В частности мы получаем формулы
Задача 142.
Ответ:
4
Вычислить div а в цилиндрических координатах.
I 18 криволинейные координаты 201
Задача 143. Вычислить div л в сферических координатах.
Ответ:
1 Э(г»аг) i 3(sinea9)
A,Уа-- +
в} Рассмотрим rot а. Применим формулу § 16
rot- a = lim -2-я—
8-н) 5
Чтобы получить проекцию rot а на координатную линию <?,, нужно
взять за С контур ММ^лМа; площадь бесконечно малого криволинейного
прямоугольника, ограниченного этим контуром, равна, как мы знаем,
do\ — Hi fit dqadqs
Нетрудно далее вычислить ш л-dt, ваятый по замкнутому контуру
Я. Прежде всего
Далее,
alt,
MJV,
отличается от предыдущего интеграла только тем, что в нем координата qt
имеет другое значение да + dqa, значения же других координат хе же,
что и в интеграле
^ a-rfr
мм,
Поэтому
Точно так же можно вычислить
Поэтому
s4f^f MM, M.N, AfJV, Afjf,
Деля это выражение на rfax. мы и получим требуемое выражение
202 ВЕКТОРНЫЙ АНАЛИЗ Гл- П
Если принять a = ej, то получится формула
^S^S ?e' C5)
Задача 144. Исходя из тождества rotgradg< = 0, доказать формулы
ie, (» = 1, 2. 3) C6)
и, исходя из них, восстановить формулы C4).
Задача 145. Исходя иа тождества
div (е2Х «з) = es • rot es — е, • rot e3
и формул C6), получить формулы C1) и затем C0).
Задача 146. Вычислить rota в цилиндрических координатах.
Ответ:
1 да, да,-
rota=7 г-
C7)
""¦,» — p i, p д9
Задача 147. Вычислить rota в сферических координатах.
Ответ:
1 д (av gin в) 1 дач
T0i9 a~rsin"e 35 г sin в df
1 даг 1 д(таЛ .„оч
f—Fir" C8)
1 д (та ) 1 дат
Задача 148. Вектор ~^, где г есть радиус-вектор, является соле-
ноидальным вектором (§ 14) и, следовательно, может быть представлен
в виде вихря некоторого вектора а (§ 16). Найти вектор а.
Указание. Воспользовавшись сферическими координатами, по-
попробовать сделать предположение, что у вектора а отлична от нуля только
составляющая а^.
Ответ:
? = «*., где а,=0, a,=0, ^1
Здесь /(<р)—произвольная функция.
г) Рассмотрим оператор Лапласа. Так как A<jj = divgrad ф, то, вос-
воспользовавшись формулами B7) и C0), мы сразу получим выражение
оператора Лапласа
д fRxB% dty\\ .„as
^;Ы-^)\ C9)
5 18 КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 203
Так, например, в цилиндрических координатах будем иметь
а в сферических
Задача 149. Вычислить /\гт. Найти частное решение уравнения
Ответ:
т (т + 1) ^я, Д
5. Разберем несколько задач на криволинейные координаты.
За дача 150. Вектор а задан своими проекциями на оси сфериче-
сферических координат г, 8, <р:
аг = —J5-2 , а» = —j5—, в, = 0 D2)
где ft— постоянное число. Выяснить, является ли вектор а потенциаль-
потенциальным и если а = grad i|>, то найти •«(>. Найти векторные линии вектора а.
Решение. Векторные линии вектора а нужно определять в криво-
криволинейных координатах из уравнения
+ OjCj +
которое в
dt =
приводит
, силу
Нл dqt <
нас к
формул A9)
равенствам
«1
В данном случае находим
ft
°г
drx a = 0
и A1)
+ Н3 dq3 ез,
Яа rf,3
а,
rd9 r sin
г а
Оа
2cos 8 sin 6 О
После интегрирования получаем следующие уравнения векторных
линий:
ф=С1, г = С» sin2 в D3)
Составляя по формулам C8) rot а, убеждаемся, что rot a = 0, следо-
следовательно вектор а — потенциальный. Чтобы найти rp, составляем
„ , _ 2к cos 8 dr к sin в d§ ^ /A cos 8
204 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Отсюда следует, что
a=grad(-^i-) D4)
Составляя по формуле C3) div а, легко обнаружить, что div a = 0,
т. е. вектор а является также и соленовдальным вектором. Мы иожем
поэтому представить вектор а в форме
а = rot A D5)
Чтобы найти вектор А, воспользуемся формулами C8), причем при-
примем А, = 0. Тогда получим систему уравнений
2Acos9_ I
r sin 9 дв г sin 9
Второе и третье уравнения этой системы дают
гАщ = ^1 + f (в, ф), Мв = ?(в,ф)
где / и g — произвольные функции в и qp. Теперь первое уравнение дает
0
дЬ Эф ~ "
и может бить удовлетворено, если ваять / (в, ф) = g (9, <р) — 0. Итак
а = rot A
где А есть вектор с составляющими
4г=0, А, =0, 4,-?^l D6)
Задача 151. Вычислить поток вектора а предыдущей задачи через
поверхность полусферы г — R, 0 < 9 <-j-n.
Ответ: -к- .
л
3 а д а ч а 152. Пусть шар радиуса R движется в однородной несжи-
несжимаемой жидкости с постоянной скоростью с вдоль оси Ог. Найти движение
жидкости, предполагая его безвихревым и считая, что на бесконечности
жидкость покоится.
Решение. Мы знаем ив § 15, что если движение несжимаемой жид-
жидкости происходит с потенциалом скорости, то
v = grad Ф D7)
причем
di ут = 0 D8)
Заметим далее, что частицы, прилегающие к поверхности шара, будут
скользить вдоль этой поверхности. Следовательно, скорость какой-либо
I 13 КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 205
из таких частиц относительно поверхности шара, т. е. v — ck должна
лежать в касательной плоскости к поверхности шара, т. е. должна быть
перпендикулярна к нормали п поверхности шара:
(v — ck) • п = О
Если теперь заметить, что нормаль к поверх-
поверхности шара совпадает с радиусом шара, то легко
получим, что (фиг. 63а)
v, — с сое 9 D9)
Предполагая, что в рассматриваемый момент Фиг. 63а
центр шара находится в начале координат, мы
приходим к выводу, что нам нужно найти в области вне шара такую
функцию Ф, чтобы выполнялись равенства D7) и D8) и чтобы при г = R
выполнялось равенство D9). Но вектор а задачи 150 как раз обладает
такими свойствами, ибо, как мы видели, а — grad ф и div a = 0, а при
г = R мы имеем
Следовательно, принимая
2* _ с№
Т55 — ''i или ft — g "
мы получаем решение предложенной задачи в виде
vr = с (—) cos 8, Vf, = yc(t) sin9> »• = 0 E0)
При этом при г = то получается, как должно и быть, v = 0.
Задача 153. Найти решения уравнения Лапласа
Д1р = 0
зависящие только от г или только от 9 или только от<р, где г, fl и ф — сфе-
сферические координаты.
Ответ:
Задача 154. Имеется однородное тело, ограниченное двумя кон-
концентрическими сферами с центром в 0 и с радиусами а и Ь, где а < Ъ.
Найти установившееся распределение температуры в этом теле, если
известно, что на внутренней поверхности тела г = а температура Т под-
поддерживается равной постоянной температуре 7\, а на внешней поверх-
поверхности г = Ь равной постоянной температуре Та, и что уравнение тепло-
теплопроводности для стационарного состояния есть ДГ = 0.
Ответ:
г(Ъ-а)
206 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
6. Наибольшие осложнения, связанные с применением криволиней-
криволинейных координат, коренятся в том обстоятельстве, что единичные векторы
ei, eg, ез имеют в криволинейных координатах различные направления
в разных точках.
Если мы рассмотрим две бесконечно близкие точки
М (9а. 9«. Ф>) и М' (qi + dqi, qa + dq*, q3 + dq»)
то единичные векторы в этих точках будут соответственно
ех, ез, е3
и
ех 4- «fex, ej + rfeg, e, + de,
При этом конечно
и т. д. Поставим себе задачей вычислить производные
а^ ае^ <tei
Так как ei есть единичный вектор, т. е.
ех-ех = 1
то из формулы A0) § 17 следует, что
(et- V)ei + ei X rot ex = 0 E2)
Так как единичный вектор ех направлен по касательной к координат-
координатной л в нип фи, то
<*•*>--&-вгЙ <53)
Вспоминая формулу C5), легко найдем, что
(ex.V)ex = rot elXo,- (g^r^e,- я^Щг6») x ei =
^-жжж^~юпщг^ E4)
и, комбинируя эту формулу с предыдущей, получим
Для вычисления ^ заметим, что аналогично формуле E3) мы имеем
(ea.V)ex = g = ^§| E6)
5 18 криволинейные координаты 207
Но из формул F) и (9) § 17 легко вывести следующую формулу:
2(Ь • V)a = grad(a • b) + rot(a X Ь) — а X rot Ь —
— bxrota — adivb + bdiva E7)
Подставляя сюда а = ег, b = e2, после ряда вычислений найдем
^^-e, E8)
и, следовательно,
?l=%-™1 E9)
Аналогично этому находится формула
7. Рассмотрим в заключение этого параграфа основные понятия диф-
дифференциальной геометрии поверхностей.
Пусть мы имеем поверхность S. Тогда положение каждой точки М
этой поверхности может быть определено двумя криволинейными коор-
координатами <?] и <72, так что радиус-вектор г точки М является функцией
от 9, и д2, иными словами координаты точки М будут функциями от</:ид2:
x = x{q1, ?j), y = y(q,, qj, s = z(qlt qj F1)
Линии поверхности S, на которых одна из координат ql и q2 сохраняет
постоянное значение, а мевяется только другая координата, называются
координатными линиями. Единичные векторы, направлен-
направленные по касательным к координатным линиям qx и д2, обозначим опять
через е, и е,.
Составив вектор дт/дд1У мы легко убедимся в том, что он имеет на-
направление et, а вектор dtjdqt имеет направление е2:
Однако, мы не будем теперь предполагать криволинейные коорди-
координаты д1 и <?2 ортогональными. Перемещению точки из положения М (gv q2)
в бесконечно близкое положение М'(ql-{-dqv q^-^dq^ соответствует
приращение радиуса-вектора
dr = 4d9l + ^^ F3)
квадрат абсолютной величины которого равен
208
ВЕКТОРНЫЙ АНАЛИЗ
ГЛ. II
Введем обозначения
Oil.—
Эд, ' dqt
dq, ' 9qt
dr dt
1' 9t)
(84)
тогда для квадрата дифференциала длины дуги кривой, находящейся
на поверхности, получим выражение
<&* = gu dq* + 2gtt dqi dg, + ga] dq%* F5)
которое называется первой основной формой Гаусса.
Если единичный вектор нормали к поверхности в точке М обозначить
черев п, то вектор п должен быть перпендикулярен как к вектору dt/dqi,
лежащему в касательной плоскости к поверхности, так и к вектору дг/8д%,
следовательно вектор п имеет то же направление, что в вектор
Но так как, по условию, а — единичный вектор, то должно быть
—х—
Заметим теперь, что по формуле B2) § 7
$r
gn gu
gl2 gn
и, следовательно, если ввести обозначение
g = Vgugas — gia*
то
ar .. аг
и
F7)
F8)
F9)
Легко далее вычислить угол л между координатной линией ?i в ко-
координатной линией <ji, проходящими через рассматриваемую точку М.
В самом деле, мы, очевидно, амеем, что
*¦= Щ[' ? =
«А сове -
§ 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 209
в, следовательно,
cos а = *" G0)
VgVg
Отсюда, в частности, следует, что qi и qt образуют ортогональную си-
систему криволинейных координат тогда и только тогда, когда
gi* = 0 G1)
Если мы рассмотрим две бесконечно близкие координатные линии q%
и qt 4- dqx и две бесконечно близкие координатные линии §4 и g* + dq*, то
ати четыре линии ограничивают бесконечно малый параллелограмм, кото-
который, очевидно, может быть но величине и направлению представлен
вектором
ЩхХ W* IП dqi dq* = gdqi dq* a G2)
так что численное значение величины площадки дается формулой
dS = g dq^dqt = У gug2i — gla49l dq2 G3)
§ 19. Определение вектора по его вихрю и расхождению
1. Нашей главной задачей до сих пор было всестороннее изучение
заданного поля скалярной величины <р или векторной величины а. Мы
рассмотрели целый ряд различных дифференциальных операций, кото-
которые в тон или ином отношении характеризуют данное поле. Так, напри-
например, рассматривая скалярное поле функции <р, мы ввели новый вектор
grad ф, который наглядно показывает характер изменения (р. Точно так
же, рассматривая поле вектора а, мы ввели новый скаляр div а и новый
вектор rot а, а также ввели понятие производной вектора по направлению
и понятие градиента одного вектора по другому (v V) a- Все только
что указанные дифференциальные операции наряду с другими, которые
мы рассматривали выше, являются в той или другой степени аналогом
понятию производной в обыкновенном дифференциальном исчислении.
Можно поэтому сказать, что до сих пор мы изучали дифференциальное
исчисление в области векторных величин.
6 настоящем параграфе мы будем решать задачу, аналогичную задаче
интегрального исчисления. Иными словами, мы поставим себе задачу
отыскания поля некоторого скаляра ф или вектора а, когда известно
поле некоторых дифференциальных операций от этих неизвестных вели-
Отметим, что в § 12 нами уже решена одна из задач такого рода: найти
в некоторой области скалярную функцию <р, если для каждой точки этой
области задан градиент этой функции, т. е. если нам известно, что
grad ф = а A)
14 н. В. Кочин
210 ВЕКТОРНЫЙ ЛНАЛИЗ Гл. II
где а — заданный вектор. Мы знаем, что для решения этой задачи необхо-
необходимо, выбрав фиксированную точку Ма и соединив произвольную пере-
переменную точку М с точкой Mv кривой L, лежащей в нашей области, со-
составить криволинейный интеграл
м
q>{Af)= \ a-tfr B)
и.
Тогда, как было показано в § 12, функция B) будет удовлетворять
уравнению A). По поводу этой задачи сделаем несколько замечаний.
Прежде всего заданный вектор а не может быть произвольным векто-
вектором. В самом деле, в силу того, что
rot grad ф = О
непременно должно быть
rot а = О C)
т. е. вектор а должен быть безвихревым.
Далее, криволинейный интеграл B) может оказаться многозначным,
а именно, зависящим от пути интегрирования МаМ. Однако это может
случиться только в том случае, если та область, в которой мы рассматри-
рассматриваем вектор а (и в которой мы предполагаем как вектор а, так и его пер-
первые частные производные непрерывными), является многосвязной. Дейст-
Действительно, если область задания вектора а односвязна и если МйКМ
и MJ^M -— два пути, расположенные в этой области и ведущие ив точ-
точки Ма в точку М, то мы, очевидно, имеем
? а • dr — [ а ¦ dr = [ a • dt + \ а • dt = &
ЯьКМ MJJH МЛН MLM, MtKM
a-dr
ибо при пробегании пути M0LM в противоположном направлении MLM0
криволинейный интеграл меняет свой знак. Путь MJCM можно непре-
непрерывным образом перевести в M0LM, не выходя при атом иа пределов
нашей области. Пусть S — поверхность, образованная последовательными
положениями МаКМ при только что указанном перемещении этого пути.
Тогда по теореме Стокса и в силу C) мы имеем
a 'dt-= ^rotmadS = 0
M.KMLM,
Отсюда и вытекает, что
\ а • dr = \ a -dt
М„КМ Af,LAf
Таким образом в случае односвязной области интеграл B) не может
зависеть от пути интегрирования.
§ 19 ОПРЕДЕЛЕНИЕ ЛЕКТОРА ПО ВТО ВИХРЮ И РАСХОЖДЕНИЮ 2Н
Рассмотрим теперь двусвязную область, например, внутренность тора
(фиг. 64). По самому определению двусвявной области, в ней можно
провести такое сечение 2, после которого область делается односвязной.
В этой односвяаной области интеграл B) бу-
будет уже однозначным, обозначим его через
фо (М) = ^ ачйг
м.км
где МоКМ есть какой-либо путь, соединяю-
соединяющий точки Л/о и М и лежащий в полученной
односвявной области. Пусть теперь MoLM — лю-
любой путь в* нашей двусвязной области, напри-
например изображенный на фиг. 64. Тогда он может быть заменен следующим
путем
MaLMKM* + МоКМ
Обозначим циркуляцию вектора а по контуру MaLMKMa через р:
M.LMKM.
Тогда мы, очевидно, получим, что
La-dr = A + ^ а-di = <ро (М) + |л
Заметим теперь, что циркуляция р будет одна и та же для всех замк-
замкнутых контуров, лежащих в нашей двусвяаной области, один и только
один раз пересекающих сечение 2 в направлении, указанном на фиг. 64
стрелкой, ибо все такие контуры: могут быть непрерывной деформацией
переведены друг в друга, не выходя из пределов области. Если контур
MoLM пересекает сечение ? два раза в направлении, указанном стрелкой,
и ае пересекает этого сечения в обратном направлении, то, как легко
убедиться, окажется, что
a-dr = q>o (M) + 2ц
Наиболее общим выражением для криволинейного интеграла по пути
MoLM будет
и
\a-dt =<ро (М) + пц D)
дг.
где л — целое число, положительное, отрицательное или нуль. Вели-
Величина ц называется при этом циклической постоянной.
?слв бы область была трехсвязной, то мы получили бы, что
м
{ а ¦ dr = qio (Ж) + /»!(*! + д2A2 E)
А
14*
212 АНАЛИЗ Гл. II
где |Xi и \Хг — циклические постоянные, а т и «2 — целые числа. Конечно,
в некоторых случаях циклические постоянные могут обращаться и в нуль.
Наконец, последнее замечание, которое мы сделаем относительно
решения уравнения A), таково. Общим решением уравнения A) является
м
ф (М) = \ a.rfr + С <6)
м.
где С — произвольная постоянная. В самом деле, составим разность
м
i|> (М) = <р (М) — \ a.rfr
где ф — общее решение уравнения A), тогда будем иметь
м
grad iJj = grad q> — grad \ a-dr = a — a = 0
м.
Отсюда и вытекает, что
i|) = fionst
Задача 155. Пусть задано поле вектора а:
Выяснить, имеет ли уравнение grad <p = а решение и, если имеет, то
найти ф.
Ответ.
Две циклические постоянные, обе равные 2л.
2. Основным содержанием этого параграфа будет решение задачи об
определении вектора а, если известны его расхождение div а и его вихрь
.» rot a-
Постараемся прежде всего выяснить, что
именно нужно задать для того, чтобы можно
было полностью определить вектор а.
Пусть мы имеем область V, ограничен-
ограниченную поверхностью S {фиг. 65).
Пусть во всех точках внутри этой области
заданы расхождение и вихрь вектора а:
Фвг. 65 div а = р (z, у, z) G)
rot а = »(z, у, z) (8)
Пусть, кроме того, во всех точках поверхности S известны значения
нормальной составляющей вектора а:
а„ = f (M) на поверхности 5 (9)
I 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА НО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 213
Докажем, что условиями G), (8) и (9) вектор а определяется един-
единственным образом, т. е. что не может быть двух различных векторов at
и аг, которые удовлетворяли бы всем условиям G), (8), (9).
В самом деле, допустим существование двух векторов ах и as, для ко-
которых
div ai = p, div as = р ваутри V
rot а, = ю, rot а„ — ш внутри V
"in = / (ЛО1 в^ = / (Л/) на поверхности S
Составим разность векторов а] и а2:
Ь = ai — а,
Тогда вектор Ь будет очевидно удовлетворять следующим условиям:
div b = div ах — div аа = р — р ±= О внутри V
rot b = rot &i — rot a2 = ш — ш ~ О внутри V
bn = aln - a^ = / (M) - f {M) =0 на S
Так как rot b = 0, то Ь есть вектор потенциальный:
b = grad q> A0)
Но тогда условие div b = 0 дает нам, что
Лф = 0 внутри V (И)
условие Ь„ = 0 на S приводит нас к равенству
Й-0 « S A2)
Применим теперь формулу A8) § 17:
\ (grad ф)Ч <iF = <Ь <р ^ dS A3)
v а
Ввиду условий A1) и A2) это равенство дает нам, что
[ (grad ф)« dV = 0 A4)
v
и, следовательно,
grad ф = 0 A5)
т. е. по A0)
Ь = 0 A6)
Следовательно, векторы а, и а2, удовлетворяющие условиям G), (8)
и (9), ве могут быть различными между собой::
ai = a2
214 ВИКТ0РНЫ2 АНАЛИЗ Гл. П
При этом мы предполагаем как здесь, так и в дальнейшем, что область V
может быть разложена на конечное число частей, в каждой из которых
функции р и ш равномерно непрерывны, так же как и их частные произ-
производные. Точно так же и об искомом векторе а мы будем предполагать,
что сам он всюду непрерывен, а его производные могут терпеть разрыв
только на конечном числе поверхностей. При этих условиях мы, очевидно,
имеем полное право применять формулу A3).
3. Итак, мы должны решить следующую задачу; найти вектор а, удов-
удовлетворяющий системе уравнений
div a = p (ж, у, а) внутри V
rot а = ы (х, у, г) внутри V A7)
Лп *= / (Л/) на поверхности S
Заметим, что эта система не всегда имеет решение. Для возможности
решения функции р (х, у, г), в» (х, у, г) и / (М) должны удовлетворять
некоторым условиям. В самом деле, мы имеем следующие тождества
div rot а = 0, ? div a dV = &
Подставляя сюда вместо rot a, div а и а„ их значения, даваемые фор-
формулами A7), ыы приходим к условиям
div ш = 0, [ р dV = <? / (М) dS A8)
V S
которым необходимо должны удовлетворять функции р, w и /, для того
чтобы система A7) могла иметь решение.
Мы будем решать нашу задачу в три приема. Сначала мы постараемся
отпекать такой вектор ai, который удовлетворяет системе уравнений
div &! = р, rot aa = 0 A9)
Из последнего уравнения следует, что
at = grad <p B0)
а тогда ив первого уравнения получаем, что
Дф - Р B1)
Уравнение B1) носит название уравнения Пуассона.
В случае ограниченной области нам достаточно удовлетворить этому урав-
уравнению только в точках области V. Однако, решив уравнение B1) для слу-
случая всего бесконечного пространства, мы получим одновременно и решение
для любой ограниченной области. В самом деле, если нам известны зна-
значения р только в точках области V", то мы можем произвольно их задать
I 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРГО И РАСХОЖДЕНИЮ 215
вне области V (например положить равными нулю). Решив уравнение B1)
для всего бесконечного пространства, мы получим функцию <р> которая
всюду, а в частности и в точках области V, удовлетворяет уравнению B1).
Итак, нам нужно будет решить уравнение Пуассона B1) для случая
бесконечного пространства.
На втором этапе решения нашей задачи мы будем отыскивать такой
вектор аз, который удовлетворяет системе уравнений
div аа = 0, rot a4 = ю B2)
Из первого аз этих уравнений следует, что
аа = rot A B3)
Тогда из второго уравнения B2) получается, что
rot rot А = и
Применяя формулу B6) в § 17, найдем, что
grad div A — ДА = ш B4)
Мы увидим, что, не нарушая общности, можно будет принять
div A = О
Тогда уравнение B4) приводится к виду
ДА = — ю B5)
Это векторное уравнение разбивается на три скалярных уравнения
= — о)г, ДЛ„ = — (av ДА, = — ш, B6)
где шх, со„, юг — известные, а А1. Ау, Аг — искомые функции. Урав-
ненвя B6) являются уравнениями Пуассона, так что мы сможем пере-
перенести те результаты, которые будут нами получены ари решении урав-
уравнения B1), в на случай векторного уравнения Пуассона B5). Для случая
бесконечного пространства вектор
а = а, + а»
будет, очевидно, в силу A9) в B2) удовлетворять обоим уравнениям
di-v a = p, rot а = «
В случае конечной области V мы вычислим значения нормальны* со-
составляющих векторов aj и аг на поверхности Si
«in = U
и составим затем функцию точки поверхности S
ввкторыыи анализ Гл. II
Третьею частью решения нашей задачи будет тогда отыскание такого
вектора а», который удовлетворяет системе
div аз = 0 внутри V
rot аз = 0 внутри V B7)
<ц. = U {Щ на S
Из второго уравнения этой системы следует, что
а, = grad if B8)
а тогда из первого уравнения мы получим, что
Дг|; = 0 B9)
так что л|з удовлетворяет уравнению Лапласа. Последнее из
условий B7) в силу B8) приводит нас к равенству
-д— = /а (ЛГ) на поверхности S
Определение функции ip, удовлетворяющей уравнению Лапласа, и
у которой производная по нормали на а а данной поверхности S прини-
принимает заданные значения, называется задачей Неймана. Эта
задача имеет чрезвычайно важное значение в гидродинамике- В задаче
152 мы имели как раз гидродинамический пример, приводящий, как легко
убедиться, к задаче Неймана.
Итак, на третьем этапе решения вашей задачи нам нужно будет решить
задачу Неймана. Отметим попутно, что аналогичной задаче Неймана
является так называемая задача Дирихле, состоящая в опре-
определении функции 1р, удовлетворяющей уравнению Лапласа B9) и прини-
принимающей заданные значения на поверхности S:
х|> = / (М) на поверхности S
Мы имели пример решения задачи Дирихле в задаче 154, относя-
относящейся к области теории теплопроводности.
Легко теперь видеть, что в случае конечной области вектор
будет удовлетворять всем уравнениям системы A7) и, в силу теоремы
единственности, будет единственным решением этой системы.
4. Переходя к решению первой из трех стоящих перед нами задач,
мы дадим сначала простое, имеющее физический характер, но в некоторой
степени нестрогое решение этой задачи.
Итак, нам нужно найти поле потенциального вектора
а = grad ф C0)
I 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 217
зная во всякой точке пространства его расхождение
div а = р (х, у, г) C1)
где р (х, у, z) — заданная непрерывная вместе со своими первыми произ*
водными (кроме, быть может, конечного числа поверхностей) функция.
Как мы видели, эта задача эквивалентна решению уравнения Пуассона
Дер =¦ р (х, у, z) C2)
Заметим, что мы всегда в случае бесконечной области будем пред-
предполагать, что функция р (х, у, г) очень быстро делается очень малой,
когда расстояние R = Ух4 + у2 + г! точки М от начала координат де-
делается очень большим. А именно, мы будем предполагать, что при Д — со
величина R^^p, где % есть положительное число, лежащее между 0 и 1,
остается ограниченной
| Д!+Хр | < А при R — оо C3)
где А — конечная величина 0 < X < 1.
В § 14 мы нашли решение рассматриваемой задачи в том частном
случае, когда расхождение всюду равно нулю, за исключением п точек
Ми М^, . . . , М„, в которых находятся источники с обильиостями
ех, es, . . . , е„, причем для функции <у мы нашли выражение
гДе ri — расстояние от точки М {х, у, а) до точки Mi (|^, щ, ?t), т. е.
f4 = У (х - SO* + (у - лО2 "г- B - О"
Мы показали далее, что в этом случае поток вектора а == grad 91
через всякую замкнутую поверхность S равен сумме обильностей тех
источников, которые лежат внутри поверхности
s
Чтобы подойти к решению нашей задачи, разобьем все пространство
на малые объемы Vit возьмем в каждом по точке М, Aг, %, Q и поме-
поместим в Mt источник с обильностью et = Ftp (gt, т){, ^J.'
Тогда функция
даст приближенное решение задачи. Перейдем к пределу, устремив все
объемы Vi к нулю; для <р получится выражение
^ C4)
218 ВЯКТОРНЫЙ АНАЛИЗ Гл 11
В этой интеграле
г = У{х - IY + {у - лJ + («- О1
в интегрировать надо по %, г\ я ?. Покажем, что функция C4) дает реше-
решение задачи.
В самом деле, если а = grad ф, то поток вектора через некоторую по-
поверхность будет
P (St. *li>
Ho no теореме Гаусса — Остроградского
<? ап dS =\ div a dV
Следовательно,
Беря за F бесконечно малый объем, найдем
div а = р
'[то и требовалось доказать.
Заметим, что при сделанных предположения! относительно функции
р (я, у, г) интеграл C4) сходится. На выяснении этого обстоятельства
мы остановимся подробнее потом.
Итак, при сделанных предположениях относительно р, решением урав-
уравнения Пуассона
VV P
а вместе с тем и поставленной выше задачи. является:
4л
Полученное выражение
аосит название объемного или Ньютонова потенциала и имйрт следующее
физическое значение.
Если в начале координат находится масса равная т, а если в точ-
точке M{t) находится другая масса, равная т\ то, при надлежащем выборе
единиц массы, длины и времени, сила притяжения второй массы к первой
будет, согласно закону Ньютона представляться ао величине и направ-
направлению выражением
F ~ — "*"''
Эту силу можно, как легко убедиться, представить в виде
} 19 ОПРЕДЕЛЕНИИ ВЕКТОРА ПО КТО ВИХРЮ И РАСХОЖДЕНИЮ 219
Итак, сила притяжения по закону Ньютона имеет потенциал, равный
Если притягиваемая иасса равна единице, то для потенциала полу-
получается выражение
ту — .™
Пусть теперь массы распределены непрерывно с плотностью р, тогда
в элементе объема dV = d%dr\ d? будет находиться масса Р (?, r\, ?) dV,
и происходящий от этой элементарной массы потенциал в точке М (х, у, z)
будет равен
где
»¦- У(х - Ъ)* + (у ~ л)" + (г - О*
Производя интегрирование по всем массам, мы в получаем для по-
потенциала притягивающих масс выражение
^^)dV C5)
Итак grad T представляет силу, с которой массы, распределенные
по всему пространству с плотностью р, притягивают единичную массу
находящуюся в точке (х, у, г).
5. Теперь мы дадим более строгое решение задачи, поставленной в
предыдущем пункте, для чего нам потребуется, однако, развить ряд
формул, имеющих чрезвычайно большую важность.
В предыдущем пункте' была выяснена важная роль, которую играет
функция —, где г есть расстояние между двумя точками Р (ж, y,z)
и <? (I, -п;Ъ
r = PQ=V(x-iy + iy-T\)* + (z-ty C6)
Заметим, прежде всего, что эта функция — удовлетворяет уравнению
Лапласа
А~ = 0 C7)
Для доказательства достаточно применить формулу D1) § 18, выбрав
точку Q (|, т|, Z) за начало сферических координат. Точнее было бы пи-
писать
д* { i
чтобы отметить, что при дифференцировании считается переменной точ-
точка Р, точка же Q остается постоянной. Конечно, справедлива и друшя
формула
220 ВККТО5НЫИ АНАЛИЗ Гл. Ц
в которой дифференцирование производится по 1, ц, ?, а точка Р счи-
считается неизменной.
Возьмем теперь формулу Грина B0) § 17:
dV= &(<p*t-$9?-)dS C8)
и применим ее к функции <р (|, щ, ?), про которую мы, как всегда, будем
предполагать, что она непрерывна вместе с первыми производными и что
ее вторые производные могут терпеть разрыв только на конечном числе
поверхностей. За функцию же г|> мы примем
_ 1 1
*~~" y^=g)« + (j,_T,)» + B--?)»
причем х, у, z мы рассматриваем, как параметры, переменными же счи-
считаем \, т|, ?, так что в формуле C8) элемент объема есть
dV = d%dr\dt,.
Теперь нам необходимо различить два случая. Первым из них будет
тот, когда точка Р (я, у, z) лежит вне объема V. В этом случае функция —,
рассматриваемая как функция точки Q (|, ц, Q, будет непрерывной и
будет удовлетворять уравнению C7). Поэтому формула C8) дает нам
Рассмотрим теперь второй случай, когда точка Р лежит внутри объе-
объема V. В этом случае мы не имеем права применять формулу C8), так
как функция — , рассматриваемая как функ-
функция переменной точки Q, обращается в бес-
бесконечность при совпадении Q с Р.
Чтобы избежать этого неприятного об-
обстоятельства, мы выделим точку Р малой
сферой 2 с центром в точке Рис радиусом е,
иг' который мы затем устремим к 0 (фиг. 66).
Применим теперь формулу C8) не к области
V, а к области Vt, получающейся из V путем выкидывания сферы радиу-
радиуса в с центром в точке Р.
Так как объем V, ограничен не только поверхностью S, но и поверх-
поверхностью 2, то поверхностный интеграл в формуле C8) будет теперь со-
состоять из двух частей.
К объему V формулу C8) применять можно, так как для него точка Р
является уже внешней (точка Р лежит внутри поверхности 5, но вне
объема Vt, так как она вместе со своей окрестностью не принадлежит
этому объему).
19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 221
Пользуясь опять формулой C7), получим
^?||а D0,
Теперь устремим е к нулю и посмотрим, во что перейдет в пределе
полученная формула. Отыщем прежде всего
так как на сфере S ми имеем г = в, а площадь всей сферы равна 4ле2, то
Ф — -jrdl, < — 4яе* max -^ = 4яе max ^
и значит
lim <? — ^¦d'S = 0 D1)
Чтобы найти предел
заметим, что когда точка Q находится на сфере 2, то внешняя к объему
УЕ нормаль к 2 будет направлена противоположно направлению радиуса
вектора г (отложенного от точки Р к точке Q: г = PQ).
Поэтому
дп г дг т г*
и так как на поверхности 2 мы имеем г = г, то мы находим, что
По теореме о среднем это выражение равно
где ^i есть некоторая точка сферы 2, и фд, означает значение функции ф
в точке Qt. Когда * —> 0, то точка Qi -* Р, и поэтому получаем, что
lim
«-•о
Наконец, интеграл в левой.части формулы D0) в пределе переходит я
222 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
поэтому из формулы D0) путем предельного перехода е — 0 и простых
алгебраических преобразований мы выводим формулу
Первый член правой части называется, как мы знаем, объемным
потенциалом; интеграл типа
f« (Б.Ч. О
ду
носит название потенциала простого слоя, наконец,
интеграл типа
$(?, л.
носят название потенциала двойного слоя. Таким обра-
образом формула D3) дает представление любой функции <р (непрерывной вмес-
вместе со своими первыми л вторыми производными) в виде суммы трех потен-
потенциалов: объемного, простого слоя и двойного слоя.
Бели при г —» оо, т. е. при беспредельном удалении точки на беско-
бесконечность, функция ф стремится к нулю и притом так, что на сфере Sa
радиуса R с центром в начале координат выполняются неравенства
IgradipK^, |Ф|<~ D4)
где А. — есть некоторое положительное число, то формула D3) принимает
более простой вид
В самом деле, примем в этом случае за S сферу SR радиуса R с цент-
центром в начале координат и устремим затем R к бесконечности. Тогда,
так как при неподвижной точке Р мы, очевидно, имеем, что
lim -=¦ = 1
то, как легко убедиться,
1 *Р ,с I ^ 4пН*К I С _ а 1 ,с 1 ^ 4яЛ!АГ
Sp S»
Отсюда следует, что
lim &-p-dS = lim
Замечая еще, что
Hm [
*— i r
легко выведем из D3) формулу D5).
; 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 223
Возвратимся опять к формуле D3) а предположим теперь, что функция
ф есть функция, удовлетворяющая в области V уравнению Лапласа:
ЛЯ> - 0, D6)
Такие функции называются гармоническими (при этом пред-
предполагается, конечно, что функция <р непрерывна вместе с ее первыми в
вторыми производными). В этом случае в формуле D3) пропадает объем-
объемный потенциал, и мы получаем представление гармонической функции
в виде суммы потенциалов простого и двойного слоя.
Эта формула полностью определяет значение функции q> внутри обла-
области V, если на границе этой области известны значения функции q> и ее
нормальной производной.
Однако, обычно бывают известны или значения только самой функции
на поверхности S (задача Дирихле) или же только значения ее нормаль-
вой производной (задача Неймана).
Таким образом знание только формулы D7) не позволяет нам решить
ни задачи Дирихле, ни задачи Неймана.
Отметим здесь, что задание функции q> на граничной поверхности S,
области V полностью определяет гармоническую функцию q> внутри этой
области. Доказательство совершенно аналогично доказательству теоремы
единственности в п. 2.
В самом деле, если (pi и фг — две гармонические в области V функции
(так что Дф! = 0, Дфа = 0), принимающие на поверхности S одинаковые
граничные значения (так что фг = фа на S), то функция ф = ф1 — ф8
будет гармоническая функция (ибо Дф = 0 внутри V), для которой на
поверхности S окажется ф = 0. Но тогда из уравнения A3) вытечет ра-
равенство A4), откуда, в свою очередь, будет следовать, что grad ф = 0
и значит ф = const. Но так как на поверхности S функция <р обращается
в 0, то ясно, что ф = 0 всюду внутри V. Итак, внутри V будет фг = ф2.
Точно так же задание нормальной производной дф / дп на поверхности S
определяет гармоническую функцию ф с точностью до постоянной. 6 са-
самом деле, если ф1 и фг — две гармонические функции, имеющие на
поверхности S одинаковые нормальные производные, то функция
ф = ф! — фг есть гармоническая функция, для которой дф / дп = 0 на
поверхности S. Но тогда из формулы A3) следует A4), а из последней
вытекает, что grad ф = 0 и значит ф = const. Итак, <pi— фг = const.
Заметим, наконец, что для случая всего бесконечного пространства,
гармоническая функция ф, удовлетворяющая на бесконечности условиям D4],
тождественно обращается в нуль.
В самом деле, при выполнении условий D4) справедливо равенство
D5), из которого следует, что фр = 0, ибо гармоническая функция ф
удовлетворяет уравнению Дф = О.
224 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
6. Возвращаемся теперь к вашей основной задаче. Нам нужно найти
потенциальный вектор
а = grad ф
расхождение которого всюду известно и удовлетворяет указанным в на-
начале п. 4 условиям
div а = р
Иными словами, нам нужно решить уравнение Пуассона
Дер = р (х, у, z) D8)
Если это уравнение имеет решение и, притом удовлетворяющее усло-
условиям D4), то согласно формуле D5), этим решением может быть только
Ньютонов потенциал
Т(г тг -) «ГрA.я.Р*_ if р«.л.Р«Е*1* D9
Но так как мы не знаем наперед, имеет ли уравнение D8) решение,
то нужно проверить, что функция D9) действительно удовлетворяет
уравнению D8).
Заметим прежде всего, что если мы имеем Ньютонов потенциал, рас-
распространенный по некоторой области V, конечной или бесконечной
E0)
v
то в точках вне объема V выполняется уравнение Лапласа
ДТ = 0 E1)
В самом деле, если точка Р лежит вне объема V, то г в интеграле E0)
не обращается в нуль, и, следовательно, можно производить дифферен-
дифференцирование под знаком интеграла по х, у, г; в результате получим
Др* = ^ р (g, т|, ?) &р — dV
откуда, в силу C7), вытекает E1).
Рассмотрим теперь тот случай, когда точка Р лежит внутри объема V,
зрячем предположим, что функция р (?, г\, ?) непрерывна вместе со сво-
своими первыми частными производными в этом объеме V.
Вычислим, чему равно A.pV = div grad Y. Составляем прежде всего
Т = ^ р gradp ~ dV E2)
причем заметим, что поскольку переменной считается точка Р, функция р
при* указанном дифференцировании принимается за постоянную.
I 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ВГО ВИХРЮ И РДСХОЖПВПИЮ 2i5
Если мы будем считать радиус-вектор * направленным от точки
<? A. Ч, С) к точке Р {х, у, г):
г = ~QP
то мы будем иметь
!=-? = "? E31
Заметим теперь, что существует простая формула
grad р т = — grado — E4)
в самом деле, в правой части этой формулы мы считаем в г переменной
уже точку Q, а не точку Р, и, следовательно, точки Р п Q должны у нас
поменяться местами, т. е. мы должны иметь
и так как PQ = — ()Р, то и получается формула E4).
По поводу формулы E2), которую можно, в силу E3), написать
в виде
^ E5)
необходимо сделать следующее замечание.
Подынтегральная функция в интеграле правой части обращается
при г = 0 в бесконечность, так что этот интеграл принадлежит к числу
несобственных интегралов; однако, этот интеграл сходится, так как под-
подынтегральная функция будет при г —- 0 бесконечно большой второго по-
порядка, а известно, что объемные интегралы сходятся, если подынтеграль-
подынтегральная функция обращается в бесконечность порядка ниже третьего (считая
г бесконечно малой первого порядка).
Однако дальнейших дифференцирований по точке Р под знаком интег-
интеграла мы уже не имеем права производить, так как при атом подынтеграль-
подынтегральная функция сделается бесконечно большой третьего порядка, и интегра-
интегралы перестанут сходиться.
Мы поступим иначе. В силу E4) перепишем формулу E2) следующим
образом
grad я XY = — \ р grad<3 — dV
Применим теперь формулу
ф gradQij? = grad<5<p\|> — а|) grade <p
положив в ней ф = р, i(> = — ; в результате подучим
\^ \ -|- grad0 p dV
V
15 н. в. кочпв
V
ВЕКТОРНЫЙ АНАЛИЗ Гл. П
Заметим затем, что по обобщенной формуле Гаусса-Остроградского
\ gT*dQldV = фS-iS + §^rfS
v, Г s в
и в пределе про 8 — 0
^ grade у dV =§2LdS
V S
Поэтому мы получаем представление grad Т:
gradP ? =
в виде суммы потенциала простого слоя и объемного потенциала. Теперь
мы можем составить
S V
Применим затем формулу
div (фа) = ф div a + grad ф -а E6)
При втом мы должны векторы р((?)п ((?) в grad$ p считать постоян-
постоянными (так как они не зависят от точки Р); поэтому
-^~
f— gradQ pj = gradp — -grade* 9 = — gradq — .gradQ p
В результате иы получаем
^^ E7)
Чтобы найти значение правой части этой формулы, мы должны про-
провести рассуждение, совершенно аналогичное тому, которое было проде-
проделано при выводе формулы D3), но только должны исходить не из второй
формулы Грина C8), а из первой формулы Грина
\ (фАЧ> ¦+- grad ф • grad г|>) dV = <р ф ^ dS
v s
Полагая в этой формуле ip = — и применяя ее к объему Vt (фиг. 66),
иы найдем формулу (при этом точка Р считается неподвижной, так что
все дифференцирования происходят по точке Q):
j grad ф • grad — dV =
v. ' s
{ 19 ОГГРДЯВЛБНИБ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 227
Производя переход к пределу при в -» 0 и пользуясь формулой D2),
найдем, что
4яфр = \gradq.(p.gracl4—dV — <?<р -^~dS E8)
Полагая в этой формуле <р = р, мы и получим из E7) формулу
Др? 4яря E9)
определяющую значение ДТ в точке Р, лежащей внутри объема V.
В случае функции D9) областью V является все бесконечное прост-
пространство. Возьмем любую точку Р, в окрестности которой функция р
непрерывна вместе со своими первыми частными производными; тогда
пусть Fi — объем, принадлежащий этой окрестности в заключающий
¦точку Р, a Ft — вся остальная часть пространства. Вводя обозначения
будем иметь ДрТ| = — 4лрР в силу E9) и Др^Рг = 0 в силу E1). Скла-
Складывая два полученных равенства, найден формулу
ДФ = р
что и требовалось доказать.
Итак вектор
а (а, у, z) = - ^gradpj ¦'«¦Л.О^ F0)
со
является решением системы уравнений
rot а = 0, div a = p F1)
7. Переходим теперь к нашей второй задаче: решению системы
div а — 0, rot a = ю F2)
причем, конечно, предполагается, что вектор ш удовлетворяет условию
div » = О
Кроме того, мы наложим на вектор <о следующие ограничения: век-
вектор ш (ас, у, х) есть непрерывная вместе со своими первыми частными
производными функция всюду, за исключением, быть может, конечного
числа поверхностей. На »тих поверхностях разрыва нормальная состав-
составляющая вектора М должна оставаться непрерывной, и только касательная
составляющая вектора ш может терпеть разрыв. На бесконечности мы по-
потребуем от вектора ш выполнения условия, аналогичного условию C3)
для функции р, а именно
| < А при R — оо F3)
где 0 < X < 1, Л = Ух* +yz + г5 есть расстояние точки М, в которой
берется значение <о, до начала координат и А — конечная величина.
10"
228 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Из первого из уравнений F2) следует, что
а = rot A F4)
где вектор А, носящий название векторного потенциала, подлежит опре-
определению. Заметим теперь, что, ве нарушая общноств, можно считать, что
div A = 0 F5)
В самом деле, пусть мы нашли вектор Ai, такой, что а = rot Ai, но
что div Ai •={= 0. Положим тогда, что
А = А, + grad ty
Ясно тогда, что опять будет
rot А = rot Ai +¦ rot grad ф = roi Ai = a
div A = div Ai +¦ div grad if = div Ai + Дф
и можно подобрать \|> так, чтобы
Дф = — div Ai
тогда, очевидно, будут удовлетворены как уравнение F4), так и урав-
уравнение F5). Второе уравнение системы F2) дает теперь
rot rot A = to
или о силу формулы B6) § 17
grad div A — ДА = м
а в силу формулы F5)
ДА = — ш F6)
Таким образом, для определения А получилось векторное уравнение
Пуассова, равносильное трем скалярным
ААХ = — «х, Д4и = — юн, ДЛг = — ш,
решения которых даются в силу D9) формулами:
аД¦*!¦?)<&
или, в векторной форме,
l\«*^ F7)
Проверим теперь, что найденный нами вектор А удовлетворяет усло-
условию F5). Вычисляем для этого
a(Q)dV i Г ,. «MQ).™/ /кп\
^= ?j^ divp —j^dV F8)
Применим теперь формулу E6), положив в ней ф = — , а = ю (Q).
§ 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 229
Так как переменной точкой считается Р, то вектор а должен считаться
постоянным в значит divp а = 0; поэтому получим
В силу формулы E4) эта формула принимает вид
^± F9)
Применим теперь формулу E6), но в обратную сторону, а именно
a-gradoq) — divQ (фа) — q> div<pa
положив *в ней а = ш (Q), q> = — и считая уже переменной точку Q.
Тогда получим, замечая, что по условию divQ» (Q) = О,
Сравнение с формулой F9) приводит нас к равенству
divp—j^- «= — diVQ —jt"
а тогда из F8) получается, что
divP А ±- J div0 ^ dV G0)
со
Нам нужно вычислить этот интеграл по всему бесконечному простран-
пространству. Но вычислим его сначала по объему Рц, заключенному внутри
сферы 5в очень большого радиуса Я; по формуле Гаусса-Остроград-
ского имеем
jj ^ &^-dS G1)
(при этом, как всегда, нужно предварительно выделить точку Р сфе-
сферой 2 радиуса е и затем устремить & к нулю). По поводу этой формулы
сделаем следующее замечание. Формулу Гаусса-Остроградекого
\ div a dV = & andS G2)
v s
мы вывели только для того случая, когда вектор а л его производные
непрерывны внутри объема V. Но если объем V можно разбить на ко-
конечное число областей Vx, Vi Vk, ограниченных поверхностями S\,
S , Sk, в каждой из которых вектор а и его производные непре-
непрерывны, то мы, очевидно, будем иметь
\ Ну a dV = [ div a dV + . . . + [ div a dV = & andS +... +<? a^dS G3).
й J J J ч)
V Vi V^ Si tik
230 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Если Л—поверхность разрыва, лежащая внутри V, то в сумму по-
поверхностных интегралов G3) каждая часть такой поверхности разрыва
войдет дважды: один раз как граница области Vb другой раз как гра-
граница смежной области V,, причем направления нормалей для этих двух
областей будут взаимно противоположны; в случае непрерывности нор-
нормальной к поверхности разрыва составляющей вектора а поверхностные
интегралы по всем поверхностям разрыва, лежащим внутри V, сокра-
сократятся, и формула G3) перейдет в G2).
Возвращаясь к формуле G1), заметим, что, по условию, на поверхно-
поверхности сферы 5д<а„ есть малая величина порядка —д+х, — есть величина по-
л
рядка -д- , поверхность сферы равна 4л/?1, следовательно, весь интеграл
есть малая величина порядка —j+x и стремится к 0, когда Я стремится
к бесконечности, поэтому распространенный по всему пространству
интеграл будет равен нулю:
^ divQ-~dV = 0
со
и значит
div A = 0
Итак* решением системы уравнений F2) является
G4)
8. Если нам задано во всем бесконечном пространстве расхождение
вектора а и его вихрь
div a = p, rot a = w G5)
то вектор а будет, очевидно, определяться формулой
а (х, у, г) = grad <р + rot A G6)
где
1^ММ ^«0" {77)
При этом мы предполагаем функции р и ш непрерывными и ограни-
ограниченными вместе с их первыми производными во всем пространстве, аа
исключением разве лишь конечного числа поверхностей.
На этих поверхностях вектор ы может терпеть раарыв только в каса-
касательной своей составляющей, нормальная же его составляющая должна
оставаться непрерывной. Функция в> должна удовлетворять еще условию
div ш = 0. Мы предполагаем далее, что функции р и ю во всех точках
пространства удовлетворяют неравенствам
|»Ла+х|</Г G8)
где 0 < к < 1, К — конечное число, a R = Vl* + ц* + С* есть рас-
расстояние точки, в которой берутся значения pi «до начала координат
I 19 ОПРЕДЕЛЕНИЯ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 231
Докажем теперь, что найденное вами решение G6) системы G5) есть
единственное решение этой системы, удовлетворяющее следую-
следующему условию на бесконечности
]аД1+х|<? при R — оо G9)
где L есть конечное число.
Сначала докажем, что не может быть двух решений системы G5),
удовлетворяющих условию G9). В самом деле пусть а, иа2—два решения
системы G5) и пусть оба эти решения удовлетворяют условию G9). Со-
Составим разность b = Ах — а2. Тогда из G5) ясно, что во всем бесконеч-
бесконечном пространстве
div Ь = 0, rot Ь = О
Из последнего уравнения видно, что
Ь = grad if>
а из первого, что
ДЦ) = О
Далее из G9) находим, что
^ (80)
при всех достаточно больших R. Возьмем теперь любые две точки М
ж М', лежащие на радиусе из начала координат; тогда мы будем иметь
ф (М') - ф (М) = J grad *.* =53-*
прячем в силу того, что при больших ft,
дт I ^- Г1+Л
интеграл в правой части предыдущей формулы будет сходиться, если
М' —» оо. Итак, функция тр имеет на бесконечности определенное зна-
значение. Но ведь вектор b — grad \|> не изменится, если мы значения функ-
функции ijj всюду изменим на одно и то же число. Введем поэтому вместо ф
другую функцию
Тогда опять будет
b = grad^, Д^ = 0, | grad ф | < ^ (82)
Наконец, из формулы (81) при М' = оо вытекает, что
оэ
Г 2ldr 2LX
\
Но в силу сказанного в конце п. 5, из условий (82) и (83) вытекает,
что гр = 0 и следовательно b = 0, т. е. at = аа, что и доказывает един-
единственность решения G6).
232 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
Докажем теперь, что вектор а, определенный формулами G6) и G7),
удовлетворяет условию G9). Прежде всего, мы имеем
как это следует из формулы E5). Вычислим далее
rot A=
Применим теперь формулу
rot (ipu) = t|> rot u + grad ip x u
положив в ней ¦ф = —, u= » (Q), причем заметим, что, поскольку диф-
дифференцирование производится по точке Р, а вектор ы (|, щ, ?) от точки
Р не зависит, этот вектор должен считаться постоянным. Итак,
rotp ^ = grad | X ш(?) = - ? х «> (<?)
В результате мы получаем, что
со
Принимая теперь во внимание условия G8), легко выведем, что
|а {х, у, 1)\<^-Лх-М (85)
где
R = К|2 + Л2 + &г, /» = (а: - SK + (У - -ЛJ + (г-О4. dV = d
Обозначим расстояние точки Р {х, у, г) до начала координат, т. е.
+ у* + г2, через и и заметим, что интеграл в правой части (85),
очевидно, может зависеть только от а:
= f^ (S6)
Возьмем на радиусе ОР точку Р', отстоящую от начала координат
О на расстоянии, равном единице. Для точки Р' мы имеем
'^im <87>
Сопоставим теперь всякому элементу объема dV интеграла (86) эле-
элемент объема dV', получающийся из dV преобразованием подобия, перево-
переводящим точку Р в Р'. Ясно, что тогда окажется
ОР = а-ОР', dV = u*dV', R = uR', r = иг'
5 19 определение вектора по его вихрю и расхождению 233-
и, следовательно,
со со
Итак,
а это и есть то неравенство G9), которое мы хотели доказать.
Итак, найденное нами решение есть единственное, удовлетворяющее
условию G9).
Если этого условия не поставить, то решений системы G5) получите»
бесконечно много. Например система
div a = 0, rot a = О
имеет такие решения:
а = const, a = xi — yj, a = a;j 4- у'\ и т. д.
Но, конечно, все эти решения не удовлетворяют условию G9).
Заметим, что в формуле G6) первый вектор справа есть потенциаль-
потенциальный, а второй — соленоидальный. Таким образом, как следствие полу-
полученных результатов, мы нашли возможность разложения вектора а. на
сумму двух векторов, us которых один будет потенциальным, а другой —
соленоидалъным.
9. Переходим к решению третьей задачи, поставленной нами выше
в п. 3. Эта задача еостоит в отыскании вектора а, удовлетворяющего-
внутри области V условиям
div a = 0, rot a = 0 (88)
а на границе 5 этой области — условию
а» = / (М) на S (89)-
Ив системы (88) следует, что
а = grad ф, Аф = 0 (90>
а из уравнения (89), что
§ а5 (91)-
Таким образом, необходимо определить гармоническую функцию tp,
нормальная производная которой принимает заданные значения на
поверхности S (задача Неймана).
Наряду с этим мы рассмотрим и задачу Дирихле, в которой усло-
условие (91) заменено условием
<р = / (Af) на S (92)
так что заданы значения самой функции <р на поверхности S. Если бы
нам были известны одновременно значения на поверхности S как самоа
234 ВЕКТОРНЫЙ АНАЛИЗ Гд. II
гармонической функции <р, так и ее нормальной производной, то значение
'функции ф в любой точке внутри области V определилось бы моментально
на основания формулы D7):
$Й §?t* <93>
Пусть вам известны только значения функции <р на поверхности S.
Тогда, очевидно, нужно постараться исключить из формулы (93) ду/дп.
Для этого попытаемся отыскать такую функцию g (х, у, г; \, т), ?) =
= g {Pr Q), которая, будучи рассматриваема как функция от |, ц, ?,
удовлетворяет уравнению Лапласа
AQg = 0 (94)
ш которая на поверхности S принимает значения
g = — — ва поверхности S (95)
Функция
G(x, у, г; ?, г,, Q = 1 + g (х, у, ж; Е, л, С) (96)
называется при этих условиях функцией Грина. Как видим,
.для ее определения опять надо решить задачу Дирихле, но только при
•совершенно определенных граничных значениях функции.
Применим теперь к гармоническим функциям ф и g формулу Грина C8).
"Так как Дф = Д# = 0, то эта формула дает нам равенство
s s
Комбинируя эту формулу с формулой (93), можем переписать послед-
последнюю в виде
Но так как по самому определению функции Грина
G (P, Q) = 0, если <? лежит ва S
то получаем окончательное представление гармониче-
гармонической функции <р через ее граничные значения:
^ (97)
8
В этой формуле dG/dn есть значение нормальной производной от
функции Грина, рассматриваемой как функция точки Q в точке Q (|, ц, ?)
поверхности S.
Дадим пример решения задачи Дирихле при помощи функции Грина.
Допустим, что поверхность S есть сфера радиуса а с центром в начали
ОПРЕДЕЛЕНИЕ ВИКТОРА ПО.ЕГО ВИХРЮ И РАСХОЖДЕНИЮ
235
координат. Пусть мы хотим определить значение функции ср в точке
Р {х, у, z), лежащей внутри этой сферы и отстоящей от центра этой сфе-
сферы на расстоянии OP = R. Обозначим через Р* точку, симметричную
« точкой Р относительно сферы S, т. е. точку, лежащую на продолжении
радиуса ОР и отстоящую от точки О на расстоянии ОР9, таком, что
ОР*ОР = а*
Координатами точки Р*, очевидно, будут
* + У> +*» '
а.4
X*
Обозначим еще через г* = P*Q расстояние
¦переменной точки «^ пространства от точки Р*.
Заметим теперь, что если точка Q лежит на
аоверхвостн сферы S, то, согласно задаче 40 § 5, мы имеем соотношение
Фиг. 67
_=_ "ли_ = _
ва S
(98)
Но функция jj- , а, следовательно, и -^, очевидно, являются гармо-
гармоническими функциями от точки Q внутри сферы S. Сравнивая соотноше-
соотношение (98) с формулой (95), мы видим, что можно принять
-2а*(*? + 1/т, + zt)
vi следовательно,
Вычисляем теперь
(99)
A00)
аг*
где г = PQ,t* = P*Q\ поэтому при обозначениях фиг. 67
дв , п соа а а соэ Р
принимая теперь во внимание, согласно фиг. 67, что
г cos а = а — R cos 9, г cos fJ = a cos в — R
легко найдем, что
Эй
дп
а1 —Д»
236 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Поэтому для сферы решение задачи Дирихле дается так называемым'
интегралом Пуассона
где R = OP, r = PQ.
Рассмотрим теперь вопрос о решении поставленной в самом начале-
этого пункта задачи Неймана. В этом случае на поверхности 5 заданы
значения нормальной производной искомой гармонической функции <р,
и потому нужно попытаться исключить из формулы (93) «ходящие в пев
значения функции ф на поверхности. Для этого попытаемся найти такую
функцию Н'(х, у, z; 1, г\, ?) = Н {Р, Q), которая удовлетворяет следую-
следующим условиям: функция
k(P, Q) = И{Р, Q)-± (Ю2>
рассматриваемая как функция точки Q, есть гармоническая внутри S
функция, далее на поверхности S производная функции Н по нормали
имеет постоянное значение и именно равное
?-? <«*>
где iS" есть величина площади всей поверхности S. Как видим, для опре-
определения функции h нужно опять решить задачу Неймана, но при со-
совершенно определенных граничных условиях. Мы знаем уже, что этими,
условиями функция h определяется с точностью до произвольной постояв-
ной. Можно полностью определить Н, если поставить еще требование-,
чтобы
§Н(Р, Q)dS =0
s
Комбинируя теперь равенство (93) с равенством
вытекающим из формулы Грина C8) (ибо ДА = Д(р = 0), мы получим, что-
В силу условия A03) последний интеграл правой части будет произволь-
произвольной постоянной величиной
?-фЧ> (<?) d$ = const
s
Следовательно, мы получаем окончательное представление гармони-
ческой функции <р черев граничные значения ее нормальной производной:
+ С A05>
•§ 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДВВИЮ 237
Сделаем по поводу задачи Неймана одно замечание, а именно: значе-
аия нормальной производной дщ/дп гармонической функции не могут
задаваться на поверхности S произвольно, так как они всегда связаны
.условием
$Й"** = 0 A06)
¦вытекающим из формулы A9) § 17.
10. Теперь мы можем полностью решить задачу об определении век-
вектора по его вихрю в расхождению для случая конечной области. Пусть
нам нужно найти вектор а для точек области V, ограниченной поверх-
поверхностью S, если известно, что
div а = р (я, у, z) внутри V
rot a = ш (х, у, z) внутри V A07)
On = / (Л/) на поверхности S
где р, «if — известные функции, причем функция / (М) удовлетворяет
условию
&f{M)dS-[?<?,iuQdy A08)
s v
а функция ш — условию
div «о = 0 A09)
Далее мы считаем, как всегда, что функции р и со непрерывны вместе
-с частными производными всюду кроме, быть может, конечного числа
¦поверхностей.
В случае, если ш внутри объема V терпит иа некоторой поверхности
разрыв, мы потребуем, чтобы нормальная составляющая вектора ш оста-
оставалась непрерывной.
Мы найдем решение системы A07) в виде суммы трех векторов
а (/>) = grad <p ¦+- rot A + grad 1|> A10)
Прежде всего, полагая р = 0 вне объема V, составляем функцию
С векторным потенциалом А поступить етоль же просто, т. е. нало-
наложить @ = 0 вне объема V и затем применить формулы н. 7, мы не можем,
так как, вообще говоря, на поверхности S нормальная составляющая
вектора вихря <о„ =^= 0, и если мы положим а> = 0 вне объема V, то на
поверхности S нормальная составляющая вектора «в будет терпеть раз-
разрыв, и рассуждения п. 7 перестанут быть верными. Поэтому мы должны
поступить следующим образом:: мы построим вектор ш вне объема У такии
238 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
образом, чтобы на поверхности S величина юп не терпела разрыва, и чтобы
на бесконечности удовлетворялись условия F3); и возьмем затем
A12)
Такой вектор <о можно получить, например, следующим образом:
примем, что ш — grad % вне объема V, тогда на поверхности S должно
быть
где справа стоит нормальная составляющая заданного внутри V век-
вектора ш. Так как div «в = 0, то функция % должна удовлетворять урав-
уравнению
Итак, нужно определить функцию %1 гармоническую вне объема V
я удовлетворяющую условию A13), т. е. нужно решить задачу Неймана.
Заметим, что в силу условия A09) и в силу теоремы Гаусса мы имеем
равенство
&(undS = О A15>
i
В теории потенциала показывается, что гармоническая вне объема V
функция х> удовлетворяющая на поверхности 5, ограничивающей этот
объем, условию A13), в котором функция <оп обладает свойством A15),
будет удовлетворять следующему условию на бесконечности
jiFgradxd, Л. %)\<М A16)
где М — конечная величина. Мы видим, что вектор ш = grad % удовле-
удовлетворяет вне объема V всем поставленным требованиям.
Вектор
Ь (Р) = grad <p + rot A
обладает, очевидно, следующими свойствами
div Ь = р внутри V, rot Ь = ю внутри V A17)
Остается выполнить последнее условие A07). Составим для этого
Ьп (М) = д^ + rotn А на поверхности S
и положим затем
F (М) = / (М) - &n (M) на поверхности S A18)
Определим теперь гармоническую внутри объема V функцию if
§ 19 ОПРЕДЕЛЕНИЕ ВЕКТОРА ПО ЕГО ВИХРЮ И РАСХОЖДЕНИЮ 239»
для которой
д^ = F (М) аа поверхности S
Заметим при этом, что условие A06) выполняется, ибо
&F (М) dS = & / (М) dS— <? 6„ (М) dS =
s s %
= § f (M)dS — § ^ dS - |» rotnArf S = 0
s s s
так как в силу A08)
dS = $pE, ц, l)dV
j
и кроме того тождественно
<fcrotnAdS = 0
i
Поэтому по формуле A05) определим гармоническую функцию тр-
s
Так как
div grad ч[> = 0 внутри V
rot grad i(» = 0 внутри V A205-
¦д— = F (Л!) аа аоверхвости 5
то из A17), A18) и A20) ясно, что функция (НО) дает решение система
A07). В силу теоремы единственности, другого решения поставленной'
задачи, отличного от найденного решения (НО), не существует.
Теорию, развитую в этом параграфе, можно рассмотреть и для случая
плоского поля, т. е. поля векторов а, параллельных плоскости ху и за-
зависящих только от координат х, у. При этом получаются- совершенно-
аналогичные вышеприведенным результаты; мы предлагаем в качестве
упражнения доказать некоторые из них.
Задача 156. Какая функция расстояния г между двумя точками
Р {х, у) и Q (|, т)) является решением уравнения Лапласа в плоскости?-
Ответ. Jg r.
Задача 157. Найти аналог формуле D3) для случая плоского поля.
Ответ.
\^%^§<^ A21У
где S — область, ограниченная контуром С, внутри которой лежит
ка Р; г = P~Q.
240 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
Задача 158. Какой вид имеет решение уравнения Пуассона на
плоскости
Дф = р (х, у) A22)
Ответ.
* <Р) = гН р (i' ^ lg r dl dT1 A23)
Задача 159. Пусть во всей бесконечной плоскости заданы вихрь
и расхождение вектора а:
<ич=т? + т?-=р (*»>. "*•=*(&-^)= »I*, w <124)
Определить вектор а.
Ответ.
_5ф Эф „ _ Лр , Эф
e* ~ &г 9У • "» - а? "+" ai
где
S " S
Задача 160. Вывести для задачи Дирихле на плоскости формулу,
аналогичную (97), и показать, что для круга решение задачи Дирихле
дается интегралом Пуассона
§ 20. Различные векторные поля. Поверхностные
расхождение к вихрь
1. До сих пор мы рассматривали преимущественно непрерывные ска-
скалярные я векторные поля. Теперь мы рассмотрим несколько случаев,
когда научаемые скалярные или векторные функции терпят разрыв не-
непрерывности в некоторых точках, на некоторых линиях или на некоторых
поверхностях.
Один пример такого рода мы имели в § 14 при рассмотрении вопроса
об источниках. Мы видели таи, что веян в некоторой точке, например,
в начале координат, находится источник обильности е, и если в других
точках пространства нет ни вихрей, ни источников, то векторное поле
-будет потенциальным и будет определяться формулой
а = grad <p A)
где
*—IS И
так что
Если бы источник обильности е находился не в начале координат,
а в точке Q, то поле определялось бы той же формулой C); при этом,
§ 20 РАЗЛИЧНЫЕ ВЕКТОРНЫЙ ПОЛЯ 241
если вектор а определяется в точке Р, то следует положить г *=¦ <?Р-
Если координаты точки Р суть х, у, 2, а координаты точки Q суть %, ц, ?, то
' = V {х - D' + (у - т\У + (г - & D)
2. Рассмотрим еще один пример аналогичного рода. Допустим, что
в точке Q (фиг. 68) находится источник обильности — е, в бесконечно
же близкой точке Q\ координаты которой суть ? + dg, t| + dr\, ? + tf?,
находится источник обильности 4- е; длину бесковечно малого вектора
QQ' обозвачнм через е, орт этого вектора черва si,
так что QQ' = ssi. Допустим далее, что обильность
источников е бесконечно велика, причем произведе-
произведение e*QQ''= m остается конечным.
Совокупность источников е и — е в точках Q и
Q'- называют в этом случае дублетом, а вектор ш
называют моментом дублета. Такую примерно кар-
картину us имеем в случае магнита, когда рассматри-
вается магнитное поле на расстояниях, больших по
сравнению с длиной магнита.
Предполагая, что кроме дублета никаких других источников нет, в
и что нет также в вихрей, аайдем векторное поле, производимое дублетом
момента ю, находящимся в точке Q.
Из формулы B) очевидно, что в настоящем случае
а = grad ф
причем
Но разность -р — представляет собою ориращение функции —,
когда точка Q перемещается в положение Q'; значит, рассматривая г
как функцию точки Q, будем иметь ао формуле A1) § 12:
i_l = di = ^'.gradoi- F)
причем мы у знака grad поставили значок Q, чтобы указать что г рас-
рассматривается как функция точки Q, точка же Р остается неизменной.
Вставляя F) в формулу E), получим:
или, так как е QQ' = m есть момент дублета:
Ф = -1-^m.gradg-i.) G)
Вспомним теперь формулу E4) § 19:
grad о — = — grad P у (8)
16 Н. В. Кочив
242 ВЕКТОРНЫЙ АНАЛИЗ Г». П
Поэтому функция ф, характеризующая поле дублета, может быть
написана в таком виде:
(f) (9)
Обозначим далее величину момента дублета через те, а угол, составляе-
составляемый направлением момента дублета с г, через а; так как
то из формулы (9) получим еще такое выражение для ср:
A0)
3. Рассмотрим теперь тот случай, когда источники распределены по
некоторой поверхности (пример — распределение электрических зарядов
на поверхности проводника).
Если плотность источников в точке Q поверхности 2 обозначить
через <j, то это обозначает, что на элементе поверхности <TL, окружающем
точку Q (фиг. 69), находится источник обильности
е = a d2. Векторное поле, происходящее от всех
таких источников, будет очевидно даваться той же
формулой
а = grad<p
причем теперь
Фиг. 69 ф =
ибо функции ф, происходящие от отдельных источников, очевидно нужно
сложить. Выражение A1) было названо в предыдущем параграфе по-
потенциалом простого слоя.
В § 14 ыы видели, что расхождение вектора а есть обильность нахо-
находящихся в поле источников, отнесенная к единице объема. В настоящем
случае основную роль играет плотность источников, распределенных ш>
поверхности 2. Эту плотность естественно поэтому называть поверх-
поверхностным расхождением вектора а.
В § 14 нами была установлена формула Гаусса-Остроградского
Ф пп dS ^ \ div a dv A^)
s V
устанавливающая равенство между потоком вектора а через замкнутую
поверхность S, ограничивающую объем V, и распространенным по этому
объему интегралом от расхождения вектора а, представляющим сумму
обильностей всех источников, находящихся внутри S.
Применим эту формулу к нашему случаю, когда <р определяется фор-
формулой A1), и возьмем поверхность S следующего вида.
I 20
РАЗЛИЧНЫЕ ВЕКТОРНЫЕ ПОЛЯ
243
Фиг. 70
Проведем в точке Q нормаль п к поверхности 2 и сместим элемент
поверхности «?2 параллельно самому себе в направлении нормали п
в обе стороны от поверхности 2 на бесконечно малое расстояние. При
этом смещении элемент о! 2 опишет заштрихованный на фиг. 70 объем
который мы и примем за V, а поверхность, его ограничивающую, при-
примем за S. Обильность источников, находящихся внут-
внутри -5, равна, очевидно, eaffi. S \
Различим теперь две стороны поверхности 2: по-
положительную, прилегающую к области, в которую на-
направлена нормаль п, и отрицательную.
Поток через положительное основание объема V
равен, очевидно, a^dL, поток через отрицательное
основание равен — an~dL; потоком через боковую
поверхность объема V мы можем пренебречь, если вы-
высоту цилиндрического объема V возьмем очень малой
в сравнении с другими его размерами; поэтому полный поток через поверх-
поверхность S будет равен <?5 (а„+ — а„~) и из формулы Гаусса-Остроградского
иы получаем равенство:
dZ (ап+ - а»') = od2
Отсюда
о = ап* — а„- = а ¦ (а+ — а") A3)
Таким образом поверхностное расхождение равно разности нормаль-
нормальных составляющих вектора а с двух сторон поверхности, по которой
распределены источники. Отсюда мы заключаем, что если вектор а на
некоторой поверхности 2 терпит разрыв в нормальной к этой поверхности
составляющей, то мы можем приписать этот разрыв вектора а наличию
источников, распределенных по поверхности 2.
4. Рассмотрим теперь тот случай, когда по поверхности 2 распре-
распределены дублеты с плотностью т), причем в каждой точке Q поверхности
2 момент дублета m направлен по нормали п} к поверхности (фиг. 71),
так что ю = mil]. В этом случае, так как момент
р Дублета, отвечающего элементу поверхности dS,
равен очевидно т. = т)^2, получим, воспользовав-
воспользовавшись формулой G) и тем, что
4- —
да г
следующее выражение для потенциала (р
1
Фиг. 71
Это выражение было нами названо в предыдущем параграфе потен-
потенциалом двойного слоя. Если же исходить из формулы A0), то найдем
следующее выражение для <р:
244
ВЕКТОРНЫЙ АНАЛИЗ
Гл. П
Выражение ^5J5— имеет простой геометрический смысл: это есть
телесный угол dQ, под которым площадка d2 видна из точки Р (фиг. 72).
В самом деле, соединяя точку Р с кривой, ограничивающей элемент
поверхности dZ, мы получим телесный угол dQ. Проведем иа точки Р,
как ив центра, сферу радиуса г. Подобно тому, как угол измеряется в
радианах отношением длины дуги к радиусу, телес-
телесный угол dQ измеряется отношением площади эле-
элемента сферы <22х к квадрату радиуса г2, т. е.
но очевидно, что
чается
d2-cosa, поэтому и полу-
A5)
Фиг. 72
Отметим, что если угол а тупой, то dQ полу-
получается отрицательным, но ясно, что угол а будет
острым и, следовательно, dQ положительным в том
случае, когда из точки Р видна положительная сто-
сторона элемента dS; в том же случае, когда из точ-
точки Р видна отрицательная сторона этого элемента, угол л будет тупым,
а элемент dQ отрицательным. Следовательно, знак dQ, показывает, видна
ли из точки Р положительная или отрицательная сторона элемента dS-
Формула A4) теперь может быть переписана в виде
A6)
B)
Остановимся теперь на том частном случае, когда плотность ц на
поверхности 2 всюду одинакова. Тогда i\ можно вынести за знак интегра-
интеграла, а интеграл
\ dQ
ft)
даст просто угол Q, под которым вся поверхность видна из точки Р
и окончательно получится следующая простая формула:
Ф = -7=
A7)
Итак, в случае равномерного распределения дублетов по поверхности
векторное поле определяется формулой
а = ~
Q
A8)
где Q есть угол, под которым видна поверхность 2! из той точки Р, г ко-
которой определяется значение вектора а.
Из A6) следует, что функция ф терпит на поверхности S разрыв не-
непрерывности. В самом деле, если точка Р стремится к Q, оставаясь с по-
f 20 различный векторные поля 245
ложительной стороны поверхности разрыва, и если мы выделим очень
малую часть поверхности 2i, окружающую точку Q, то 2t будет видна
из точки Р под телесным углом, очень мало отличающимся от 2я, и по-
потому ф (Р) будет очень мало отличаться от
В пределе, если устремить сначала Р к Q, а затем 2х it нулю, получим
Бели же точка Р стремится к Q, оставаясь с отрицательной стороны
поверхности 2, то из Р будет видна отрицательная сторона 2х, и потому
Поэтому получаем
Ф+ — Ф- = — Ч A9)
Вектор, равный произведению ф+ — ф_ на единичный вектор нор-
нормали »!, можно назвать поверхностным градиентом, так как он характе-
характеризует изменение функции <р при переходе через поверхность 2, подобно
тому как grad if характеризует изменение функции г|> при переходе точки
в соседние положения.
5. До сих пор мы рассматривали безвихревые поля, происходящие
от некоторого распределения источников. Рассмотрим теперь случай,
когда задано некоторое распределение вихрей, а источники отсутствуют.
В § 19 мы видели, что если вихри вектора а заданы формулой
rot a = ю (ж, у, z) B0)
а источники отсутствуют, то сам вектор а определяется
формулой
а = rot A B1)
где
^Д^Р" B2)
Как простейший случай рассмотрим тот, когда имеется только одна
вихревая нить в виде замкнутой линии L; напряжение вихревой нити
обозначим через Г.
Обозначим через dS (фиг. 73) поперечное сечение вихревой трубки,
через ds направленный элемент кривой L; если орт касательной к кри-
кривой L в точке Q обозначить черев si, то будет ds — s\ds\ вихрь в точке
Q имеет то же направление касательной к вихревой нити, значит со = <ля\,
наконец напряжение вихревой нити есть произведение из площади попе-
поперечного сечения трубки dS на величину вихря <о, значит Г
248 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
Наконец, очевидно, что объем элемента вихревой трубки равен dV — dSds
(произведение ив площади основания элементарного цилиндрика dS на
его высоту ds).
В формуле B2) надо проинтегрировать только по элементам объема,
составляющим вихревую трубку L, так как никаких других вихрей нет.
Но для алемевта вихревой трубки имеем
<о dV = usi-dS-ds = mdS-ds-si = Г ds
Поэтому выражение для А принимает вид
а 1
Заметим теперь, что напряжение вихревой трубки Г есть величина
постоянная вдоль всей трубки (§ 16), поэтому Г можно вынести аа знак
интеграла, и мы получим
и следовательно
Формулой B5) и определяется поле вектора а, создаваемое вихревой
трубкой L напряжения Г. Формуле B5) можно дать другой вид. Для
этого заметим, что
^ $t^L B6)
Воспользуемся теперь формулой C) § 17:
rot (<pa) = ф rot a + grad <р х а
положив в ней q> = —, а = da; заметим при этом, что переменной точкой,
очевидно, считается точка Р, так что вектор а должен рассматриваться как
постоянный, и следовательно надо положить rot a = 0. Итак
и значит .
а = —г~ \ grad — xds B8)
z.
Вспоминая еще выражение
гэ г'
можем переписать формулу B8) в следующем виде:
B9)
I 20 различный векторные поля 247
Обозначим через а угол между векторами si и г, тогда та часть векто-
вектора а, которая происходит от элемента вихревой нити ofs, будет опреде-
определяться формулой
показывающей, что указанная часть вектора а перпендикулярна как
к элементу вихревой нити da, так и к прямой PQ, соединяющей точку,
где определяется значение вектора а с элементом вихревой нити; числен-
численное же значение вектора da будет
1^ CD
Формулы B9), C0) и C1) играют большую роль в электромагнетизме,
а именно, там показывается, что если L есть проводник, по которому
течет электрический ток силою -^ , а в точке Р находится единичный
положительный магнитный полюс, то на последний будет действовать
сила, равная как раз а, если пользоваться правою системой координат —
в этом состоит закон Био-Савара. Таким образом электрические токи
являются вихревыми нитями для магнитного поля.
6. Проведем теперь какую-нибудь поверхность 2, контуром которой
служит наша вихревая нить, и покажем, что векторное поле, создаваемое
вихревою нитью напряжения Г, и поле, создаваемое равномерно рас-
распределенными по поверхности 2 дублетами плотности Г, совершенно
тождественны вне поверхности 2. В электромагнетизме этому обстоятель-
обстоятельству соответствует теорема Ампера, утверждающая, что магнитное поле,
создаваемое электрический током силою /, совершенно такое же, как
магнитное поле, создаваемое магнитным листком, контуром которого
является проводник, по которому течет ток, и который равномерно на-
намагничен, причем поверхностная плот-
плотность магнетизма равна J.
Для доказательства воаьмем выражение
A8) для векторного поля, создаваемого /pi
равномерно распределенными дублетами ,
а = — -rjrgrad Q A8)
и постараемся привести это выражение
к виду B9). Вычислим для этого прира- фвг 74
щение телесного угла dQ, получающееся,
когда точка Р смещается в соседнее положение Р', причем РР' = dr.
Очевидно то же самое приращение dQ получится, если мы точку Р
оставим в покое, но зато весь контур L (фиг. 74) сместим в новое поло-
положение U параллельно самому себе на отрезок — dt, так что, например,
точка Q перейдет в положение Q', причем QQ' = — dr. Между L и U
образуется поверхность, которая и будет видна под углом dQ. Элемент
этой поверхности, образованный при смещении элемента da кривой L,
248
векторный анализ
Гл. П
представляется очевидно вектором — dixds = dsxdr; проекция послед-
последнего вектора на направление QP равна очевидно {daxdr).n; деля это вы-
выражение на квадрат расстоянии PQ мы в получим телесный угол, под
который видна из точки Р площадка, построенная иа векторах ds и QQ':
Все же изменение телесного угла Q будет
или окончательно
Отсюда можно заключить, что
grad Q
а значит
C2)
C3)
C4)
Если взять т| = Г, то это выражение полностью совпадает с форму-
формулой B9), что и доказывает высказанное выше утверждение
Отметим, что поля, создаваемые вихревой линией и дублетами, со-
совершенно одинаковы только вне поверхности 2; поэтому в области вне
поверхности 2 можно пользоваться в обоях случаях любой иа формул
а = -
однако на самой поверхности 2 дело обстоит несколько
иначе функция Q для случая дублетов терпит разрыв.
Фиг. 75 как мы видели выше, в случае же вихревой нити никакого
разрыва быть не может, ибо самой поверхности 2 в этом
случае не существует, она была введена нами искусственно. Зато в случае,
вихревой нити функция Q получается многозначной; если заставить
точку обойти контур К, охватывающий один раа контур L, как показано
на фиг. 75, то при правой системе координат функция Q получит при-
приращение — 4л; это видно непосредственно, но может быть также легко
доказало на основании теоремы Стокса; в самом деле, вычислим цирку-
циркуляцию вектора а по контуру К-.
I 20 РАЗЛИЧНЫЕ ВЕКТОРНЫЕ ПОЛЯ 249
р
Как видно, приращение этой циркуляции равно произведению иг— j— на
приращение телесного угла Я.С другой стороны, по теореме Стокса цирку-
циркуляция по контуру К равна потоку вихря вектора а через поверхность,
опирающуюся на этот контур. Но контур К охватывает единственный
вихрь над ряжения Г, значит
Отсюда в получается
\2 = — 4я C6)
7. В О- 3 был рассмотрен случай распределения источников по аоверх -
ности и было показано, что в этом случае вектор терпит на этой поверх,
ности разрыв в своей нормальной составляющей.
Сейчас мы предположим, что вихри запол-
заполняют некоторую поверхность 2, и покажем., что
вызываемое такими вихрями векторное поле тер-
терпит на поверхности 2 разрыв непрерывности.
Итак, предположим, что поверхность 2 покрыта
вихрями и пусть плоскость фиг. 76 сечет нормаль-
нормально вихревую линию, проходящую через точку Q,
в пусть вихревая линия смотрит на нас (мы поль-
пользуемся на фиг. 76 правой системой координат). Обозначим еще через а,
единичный Виктор нормали к поверхности 2 и назовем ту сторону поверх-
поверхности S, куда смотрит вектор т, положительной, а противоположную
сторону отрицательной. Проведем, как указано на чертеже, контур ABCD
в виде прямоугольника, стороны которого АВ = CD — dl бесконечно
малы и параллельны как между собой, так и поверхности 2, другие же
стороны этого прямоугольника, перпендикулярные к поверхности 2,
обозначим через AD = ВС = dkvi тоже предположим бесконечно малыми.
Мы предположим, что общая интенсивность вихрей, лежащих на по-
поверхности а расположенных между AD и ВС, равна w dl, т. е. мы будем
считать плотность вихрей равной го.
Обозначим через а* и а~ значения вектора а в двух точках, бесконечно
близких к точке Q и лежащих соответственно с положительной а отри-
отрицательной стороны поверхности 2, а установим связь между этими зна-
значениями а вихрями, расположенными аа поверхности 2. Применим
для этого формулу § 16:
\ ^ C7)
Возьмем объем V следующего вида: сместим прямоугольник ABCD
вдоль вихревой нити, проходящей через Q, т. е. перпендикулярно к пло-
плоскости чертежа, на отрезок ds. При этом смещении прямоугольник ABCD
опишет параллелепипед с ребрами dl, ds, dh, который мы и возьмем за
250 ВЕКТОРНЫЙ АНАЛИЗ Га. II
объем V. Если за высоту этого параллелепипеда взять dh, то одно основа-
основание его будет лежать с положительной стороны поверхности 2, а другое
с отрицательной, площадь обоих оснований будет равна
dS = dlds
а объем всего параллелепипеда будет
V = dl ds dh
Если высоту параллелепипеда dh считать очень налой в сравнении
с размерами dl и (is, то в формуле C7) интегралом по боковой поверхности
параллелепипеда можно будет пренебречь, далее, основание, лежащее
с положительной стороны поверхности 2, представляется вектором
dl ds П), другое же основание представляется вектором — dl ds m, по-
поэтому для правой части формулы C7) получаем выражение
dl ds Их х а* — dl ds nx x a* C8)
Левая же часть формулы C7), очевидно, равна w dl ds. Поэтому и по-
получаем равенство
w = nt х а+ — nt х а~
или
w = nlX (a+ - а") C9)
которое связывает пихри, распределенные по поверхности 2 с разрывом
вектора а. Из этой формулы видно, что поверхностная плотность вихрей
численно равна касательной составляющей разрыва вектора а, причем
самые вихри перпендикулярны к этой составляющей.
8. В качестве примера на применение полученных в атом параграфе
результатов рассмотрим некоторые вопросы электростатики.
Мы видели ранее, что если обозначить электрический потенциал
через ф, то для напряжения электрического
поля будем иметь выражение
Е = — grad <p D0)
причем
div E = 4яр D1)
Фиг. 77 определяет нам плотность р объемных аарядов.
Допустим теперь,' что на некоторой поверх-
поверхности S электрическая сила Е терпит разрыв в своей нормальной со-
составляющей; вычислим этот разрыв а обозначим его через 4я<з:
Егп + Е,„ = 4яо D2)
(мы берем в данном случае сумму нормальных составляющих, а не раз-
разность, так как направления нормалей на обеих сторонах поверхности S
взяты нами, как показывает фиг. 77, различными). Ясно, что с можно
принять за меру плотности электрических зарядов, расположенных на
поверхности S.
{ 20 РАЗЛИЧНЫЙ ВЕКТОРНЫЕ ПОЛЯ 251
Допустим, что кроме разрыва нормальной составляющей Е на поверх-
поверхности S у нас никаких особенностей нет. Тогда, образуя сумму потен-
потенциала
распространенного по всем объемным зарядам, и потенциала
соответствующего поверхностным зарядам и дающего согласно формуле
A3) как раз тот разрыв Еп, который определен формулой D2), мы полу-
получим полный электрический потенциал
D3)
Если мы рассматриваем проводник, ограниченный поверхностью 5,
то внутри проводника электрическое поле отсутствует, т. е. Е = 0, а
следовательно и проекция Е на внутреннюю нормаль к S равна нулю.
Обозначим через Еп проекцию Е на внешнюю нориаль, а через о — по-
поверхностную плотность зарядов (так как div E = 0, внутри проводника
зарядов быть не может, все заряды сосредоточены на поверхности про-
проводника). Тогда из D2) будем иметь
4яо = Еп = - % D4)
Рассмотрим, например, такую аадачу: в пространстве находятся к
проводников, ограниченных соответственно поверхностями Si, St, .. ., Sk.
Этим проводникам сообщены заряды еъ eit . . . , ек. Никаких других
зарядов в пространстве нет. Требуется определить электрическую силу
в каждой точке пространства и распределение зарядов на проводниках.
Так как объемные заряды отсутствуют, то согласно уравнениям D0)
и D1) электрический потенциал удовлетворяет уравнению Лапласа
Д<р = 0 D3)
Далее, так как внутри проводников Б = — grad q> = 0, следовательно,
«р = const, то на поверхности каждого проводника потенциал должен
приникать постоянное значение:
ф = const = <Pi на поверхности Si (-46)
Мы видим, что задача приволась к решению задачи Дирихле. Однако
нужно иметь в виду, что числа q>t не даны нам, так как нам заданы только
заряды е4, которые определяются следующим образом
8,
252 ВЕКТОРНЫЙ АНАЛИЗ Гл. I!
Решав при этих условиях задачу Дирихле, по формуле D4) определим
распределение электричества на каждом проводнике.
9. В п. 1 мы указала, что потенциалом ноля одного источника яв-
является
Ф ^ <48>
далее в п. 2, формула G), мы нашли для потенциала поля дублета выра-
выражение
1/ , (\ т a i ,.nv
«Р = —c(*-Brad«T) = - 4S 1*ГТ <49>
где si есть направление момента дублета.
Представим себе теперь, что мы имеем в двух бесконечно близких
точках Q, и Qi' два дублета с прямо противоположными моментами — m
и+шн пусть QzQi = es»; где sj — единичный вектор, определяющий
направление от Qt к Q*, & г — расстояние между точками Qi и Qi'.
Будем теперь сближать точки Qs и Qt' и одновременно так увеличивать,
момент дублетов т, чтобы произведение те стремилось бы в конечной
величине к Рассуждением, совершенно аналогичным тому, которое при-
привело нас к формуле G), мы докажем, что в пределе получится функция
к а а 1 _т
ф E0)
г
характеризующая поле квадруплета. Очевидно, по тому же пути можно
идти а дальше, строя равличного рода мулътиплеты.
Так как функция у удовлетворяет уравнению Лапласа
то и функции
а 1 а в 1
будут удовлетворять этому уравнению. Заметим при этом, что, полагая
г = V(x - If H- (у - гО* + <* - S)8
- д \
мы должны при образовании -g—- и т. д. считать переменными коор-
координаты |, т), ? точки Q, а при вычислении Дер считать переменными ко-
координаты х, у, 2 точки Р.
Однако, так как
Si • gradq — = — si -gradp —
то функции
в которых переменными считаются всюду координаты точки Р (ж, у, z),
будут при четном числе дифференцирования совпадать, а при нечетном
I 20
различный векторные поля
253
числе дифференцирований будут только знаком отличаться от функ-
функций E2). Положим для простоты | = т)=? = 0и введем сферические
координаты г, fl, i|> с центром в точке О.
Функции E3) имеют следующий вид:
a a i
E4)
Для доказательства заметим, что в силу решения задачи A41), мы
имеем
легко поэтому из формулы
а
1
г*
вывести формулу E4) и, следовательно, по индукции заключить о спра-
справедливости этой формулы E4). Полученные нами функции Yk F, i|>) но-
носят название сферических функций. Можно показать, что каждой сфери-
сферической функции соответствует свой мультиплет и обратно.
10. 6 случае плоского поля, т. в. поля вектора а, параллельного
плоскости ху и не зависящего от координаты z, все понятия, рассмот-
рассмотренные в этом параграфе, сохраняют свою силу, конечно, соответственным
образом видоизменяясь.
Сделаем по этому поводу несколько замечаний.
В п. 1 мы видели, что происходящий от ис-
источника обильности е вектор а определяется
формулой
а =
4яг*
E5)
Возьмем теперь точку (?0 (|, т)) плоскости ху
и проведем через эту точку прямую, параллель-
параллельную оси OZ (фиг. 78). Распределим на этой пря-
прямой источники равномерно и притом так, чтобы фиг 78
на единицу длины приходилась обильность источ-
источников, равная е, и подсчитаем происходящее от
этих источников поле. Совершенно очевидно, что это поле будет плоским.
Взяв теперь точку Р (х, у) и обозначив вектор (V через R, будем иметь,
что г = у ?а + Л*, г — R — ?к и, следовательно,
431
еВ
E6)
254 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Вектор а является потенциальным вектором
а =¦= grad<p E7)
причем
Формулы E7) и E8) определяют, как легко видеть, источник обиль-
обильности е в точке Qa плоскости ху. В самом деле, вне источника поде всюду
соленоидальное, ибо в плоскости
Бели же составить поток вектора а через окружность радиуса R в
центром в точке Qo, то он окажется равный, в силу формулы E6):
Мы могли бы, конечно, сразу получить выражение E8) для источника
обильности е, но мы хотели показать, как к этому выражению можно
прийти, исходя из источников в пространстве.
Поступая теперь аналогично тому, как мы это делали в п. 2, можно
прийти к потенциалу дублета в плоскости:
т д , 1 1 т cos a
Точно так же, рассматривая вихревую нить, параллельную оси Ог,
проходящую через точку Qo, напряжение которой равно Г, нетрудно убе-
убедиться, исходя из формул B9) и C1), что получится плоское поле век-
вектора а, направленного перпендикулярно вектору R и по величине равного
f sinarf? Г fslnacta Г
О
Полученное поле можно представить также в виде
а = -
где в есть угол, составляемый вектором R с осью Ох. Полученные фор-
формулы определяют, как легко видеть, вихрь интенсивности Г в точке
Qt плоскости ху. В самом деле, из формулы F1) ясно, что вне этой точки
поле всюду безвихревое. Если же составить циркуляцию вектора а по
окружности радиуса R с центром в точке Qa, то она окажется равной,
в силу формулы F0),
Опять-таки, мы сразу могли бы написать выражение F0) для поля
вихря интенсивности Г на плоскости, но мы хотели показать, что к атому
РАЗЛИЧНЫЕ ВЕКТОРНЫХ ПОЛЯ
25S
•¦I
выражению можно также прийти, исходя из общих формул для поля,
вызываемого вихревою нитью.
11. Рассмотрим следующий пример, хорошо выясняющий понятие по-
поверхностного вихря. Допустим, что мы имеем движение жидкости такого
сорта: внутренность сферы радиуса R с центром в начале координат
вращается с угловой скоростью ш около оси Oz, жидкость же вне этой
сферы находится в покое. Направляя вектор угловой скорости ш по
оси Oz, мы будем иметь для скорости жидкости внутри сферы выраже-
выражение v = о>хг, для скорости, жидкости вне сферы v = 0. В соответствии
с этим для вихря жидкости получим
внутри сферы значение rot у = 2 », а вне
сферы значение rot v = 0. Поэтому вих-
вихревые линии внутри сферы будут прямые
линии, параллельные оси Oz, вне же
сферы движение будет безвихревым. На
первый взгляд кажется, что получилось
противоречие с доказанной в § 16 теоре-
теоремой о том, что вихревые линии не могут
внутри жидкости ни начинаться, ни кон-
кончаться. Однако, это противоречие сразу
падает, если только мы привлечем к рас-
рассмотрению поверхностные вихри.
Вводя сферические координаты г, 8, ф с центром в О и осью Oz, мы
видим, что скорость жидкости терпит разрыв на сфере г — R, притом
равный по величине oxR sin 9 и направленный по параллели. Как было
выяснено в а. 7, это означает, что поверхностный вихрь в точках сферы
направлен по меридиану и равен как раз caR sin 6, т. е. увеличивается от
полюса к экватору. Рассмотрим пояс сферы, показанный на фиг. 79 и
расположенный между параллелями, для которых 6 принимает значе-
значения в и в +db. Легко видеть, что величина поверхности этого пояса
равна 2 пНг sin б <#), проекция же его на экваториальную плоскость ху
равна 2 яй1 sin в cos в dti.
Поэтому через этот пояс изнутри сферы выходят 4 molt* sin 9 cos в ей
вихревых линий. Выйдя из сферы, они сейчас же загибаются вдоль ме-
меридиана, как показано на чертеже.
В самом деле, через верхнюю параллель пояса, соответствующую
вначевию дополнения широты, равному б, проходит по вышеуказанному
Фиг. 79
<оЛ sin 6 2 яД sin в =
sin2e
вихревых линий, а черев нижнюю параллель будет уже проходить
3in*6
"Ч
т. е. на 4 лшА* sin 9 cos в effi вихревых линий больше. Схематически вид
вихревых линий и их относительная густота показаны на фиг. 79.
256 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
§ 21. Переменные поля в сплошной среде
1. В этом параграфе мы рассмотрим ряд вопросов, относящихся к тео-
теории переменных полей, т. е. полей скалярных или векторных функций,
зависящих от времена t.
Допустим, что мы рассматриваем некоторую сплошную среду, напри-
например жидкость или газ, находящуюся в движении. Для того чтобы знать
движение этой среды, необходимо знать скорость v (r, t) каждой частицы
этой среды в каждому моменту времени.
В § 13 мы уже рассмотрели вопрос об изменении скалярных и вектор-
векторных функций в том случае, когда приходится рассматривать движение
некоторой сплошной среды. Мы установила следующие формулы для
полных производных от скалярных и векторных функций;
В этих формулах левая часть представляет производную по времени
от рассматриваемой функции, высчитанную в предположении, что зна-
значения функции вычисляются в различные моменты времени для одной
и той же частицы, перемешающейся в пространстве вместе со всей сплош-
сплошной средой. Как видно ив формул A) и B), полная производная какой-
либо функции состоит из двух частей: местной производной (первый член
формулы), характеризующей изменение функции в данном месте про-
пространства, и конвективного члена (второй член формулы),.характеризую-
формулы),.характеризующего изменение функции благодаря тому, что рассматриваемая частица
переносится в пространстве.
В первой половине настоящего параграфа мы рассмотрим вопрос о вы-
вычислении полных производных от интегралов от скалярных и векторных
функций по жидким объемам, поверхностям в линиям. Мы называем
при этом объем V жидким, если он во все время движения сплошной среды
состоит из одних и тех же частиц этой среды. Ясно, что, вообще говоря,
жидкий объем с течением времени будет деформироваться, так как ча-
частицы, его составляющие, двигаются, вообще говоря, с различными
скоростями v (r, t). Поэтому, когда мы рассматриваем интеграл по жид-
жидкому объему, например,
h = ^tpdV C)
где ф (г, t) — скалярная функция координат и времени, то при вычислении
его производной необходимо учитывать не только изменение функции
Ф (г, I), но и изменение самого объема V.
2. Вычислим теперь производную по времени от интеграла C). По
общему правилу, даем времени t приращение Л/; за промежуток времени
Д1 частицы, занимавшие к моменту времени t объем V, ограниченный
21
ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДЕ
257
поверхностью S в заштрихованный на фиг. 80 горизонтальными
ками, заполнят в момент времени t -f- Д* объем V, ограниченный
ностью S' и заштрихованный на фиг. 80
вертикальными черточками. Обозначим
теперь общую часть объемов V nV через Vi,
объем, заключенный между поверхностями
Si и Si' и образованный теми частицами, ко-
которые за время At вышли из поверхности S,
через Vt, и, наконец, объем, заключенный
между поверхностями Si и .Sa' и образован-
образованный теми частицами, которые за время At
вошли . внутрь поверхности S, через Vt.
Очевидно, что V = Vx + V3, V = Vi + V*
и поэтому для приращения интеграла C)
за время At получаем выражение
черточ-
поверх-
поверхяг
Ah = I3(t + АО - h (t) = \ ф (г, t + ДО <Ш — ^ ф (г, 0
— } [ф (r,t + At) -Ф {r,t)]dV +|Ф (г,if + At) dV— \ф (г,*)
V
D)
По теореме о среднем
где 0 < 8 < 1; кроме того, при At —» 0 объем Vj обращается, очевидно,
в V, поэтому
lim -L\ [ф (r> f + до — ф (г, t)] dV -.
Если элемент поверхности Si обозначить через dS, то, как видно
из фиг. 80, частицы, проходящие за время At через этот элемент, запол-
заполнят элемент объема V* в виде цилиндра с основанием dS а ребрами, ве-
величина и направление которых определяются вектором v At. Объем этого
элемента равен vn At dS и поэтому
lim ~т-\ tp (r, t -Ь ДО dV = \ Ф»п dS
На части поверхности St нормальная составляющая скорости г>„ от-
отрицательна, поэтому элемент объема V3 будет равен — гпА2 dS и поэтому
lim 4г [ ф (г, t)d V = — [ <pvn
dS
Принимая все полученные формулы во внимание и составляя
-?- = lim -гг
17 Н. Е. Кочин
258 векторный анализ Гл. II
мы и получим, замечая, что 5 = Si + 5а, полную производную от инте-
интеграла /s:
\ \%§S E)
Мы нарочно подробно провели все рассуждение; на самом деле лее
это рассуждение коротко можно передать следующими словами. Измене-
Изменение интеграла /а происходит от двух причин: от изменения функции ф
я от изменения объема V. Если бы изменения объема V не происходило,
то за время dt функция q> получила бы приращение
а интеграл /а приращение
v
что и дает первый член формулы E). Пусть теперь функция <р не меняется,
а изменяется только объем V; это может происходить только потому, что
некоторые частицы выходят или входят через поверхность S.
Через элемент dS этой поверхности за время dt выходит объем сплош-
сплошной среды wn dt dS; это увеличение объема V доставит интегралу /з прира-
приращение <fvn dt dS, а все приращение интеграла /з, происшедшее от изме-
изменения объема V, будет, очевидно, равно
q>wB dS dt
~s
откуда получается второй член формулы E).
По теореме Гаусса-Остроградского, поверхностный интеграл можно
преобразовать в объемный
(Ьфг>п dS = \ div (ф v) dV
a v
Следовательно, выражение для полной производной от объемного
интеграла можно написать и в таком виде:
\[?] F)
Наконец, воспользовавшись формулой
div (<p, v) = ф div v + v.grad ф
и формулой A), можно переписать F) также в следующем виде
I 21 переменные поля в сплошной среде 269
Совершенно аналогичная формула получается для векторной функции
а (г, 0:
3. В качестве применения полученной формулы дадим новый вывод
гидродинамического уравнения неразрывности (один вывод мы уже имели
в § 14).
Рассматривая движение газа, обозначим через р (г, t) его плотность.
Тогда ясно, что масса М газа, заключенного в объеме V, будет
М--
Бсли объем V — жидкий, то масса газа М должна сохранять постоян-
постоянное значение и, следовательно,
Применяя формулу G), получим
Так как объем V можно брать совершенно произвольным, то полу,
чается, что
А это и есть уравнение неразрывности.
В качестве второго примера примем в формуле G) <р = 1, тогда для
величины жидкого объема V получим формулу
4^ = [ div v dV A0)
В частности, если принять жидкий объем бесконечно малым я рав-
равным 6F, то получим формулу
4. Перейдем теперь к вычислению полной проиавопной от поверхност-
поверхностного интеграла по какой-либо жидкой незамкнутой поверхности S:
It = \andS A2)
Изменение потока вектора а через жидкую поверхность S может
происходить от двух причин: 1) от изменения самого вектора а и 2) от из-
изменения жидкой поверхности ?. От изменения вектора а в зависимости
от времени t получается приращение интеграла
17*
260
ВЕКТОРНЫЙ АНАЛИЗ
Гл. И
Пусть теперь вектор а не меняется, а изменяется только жидкая по-
поверхность S; новое положение ее через промежуток времени dt обозна-
обозначим через Si; тогда, очевидно,
= \ andS —
A4)
Обозначим контур поверхности S через L (фиг. 81), за время dt этот
контур при своем смещении опишет поверхность 2, которая вместе с по-
поверхностями S в S\ образует замкнутую поверхность. Если выбранное
нами направление нормали является внешней нормалью для Si, то оно
будет внутренней нормалью для S. Применим теперь к объему, огра-
ограниченному поверхностями S, Si и 2, фор-
формулу Гаусса-Остроградского:
\divadP = \ t^dS — \ondS +[&-d2 A5)
V Si S ?
Ясно, что элементом поверхности d2,
является площадка с ребрами dr (элемент
кривой L) И v dt, следовательно
di
A6)
4/Г
Фиг. 81 "-i =
Далее для элемента объема dV, очевидно, имеем (фиг. 81)
dV = dS »„ di
Поэтому из A5) получаем:
[ andS —\andS =?div
dS dt—
dt)
A7)
Наконец, мы имеем согласно формуле для векторно-скалярного про-
произведения
[ dt) dt\{»x-v)-dt A8)
I
и на основании формулы Стокса
\ (axv)«dr = ^ rotn(axv) dS
L S
На основании A4), A7), A8) и A9) получим:
dj% = \ [vn div a + rotn (axv)] dS dt
и, вспоминая еще A3), получим окончательный результат
-J-^n dS - J (^ + vn div a + rot» (aXv))d5
A9)
B0)
B1)
§ 21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДЕ 261
В случае замкнутости поверхности S, контур L стягивается в точку,
следовательно, интегралы A9) обращаются в нуль, и формула B1) упро-
упрощается
¦jf § andS = ? (*js + vn div &)dS B2)
Формулу B1) можно преобразовать еще дальше, если воспользоваться
формулой F) § 17:
rot (axv) = (у V)a —,(a> V) v + a div v — v div a
В самом деле, мы имеем в силу этой формулы, что
щ.+ vdiv a +rot (axv) =^ + (v-V) a—(a-V)v +adivv =
= 'д— (»*V) v + a div v
Поэтому формула B1) может быть переписана в следующей форме
-?¦ \ andS = ^ (S- <*• V) v + a div у).шИ B3)
s s
5. Переходим к применениям полученных в предыдущем пункте формул.
Выведем прежде всего условие того, чтобы поток вектора а череа
любую жидкую площадку S не менялся бы с течением времени. В этом
случае
-?-[andS=0 B4)
и, следовательно, формула B3) приводит нас к условию:
[($&- (а- V)v +adivv).nfltf = 0 B5)
причем это равенство должно иметь место для любой поверхности S.
Отсюда следует, что во всех точках рассматриваемой области должно
быть
^? — (a-V)v 4-adivv = 0 B6)
Чтобы выяснить значение полученного нами условия B6), введем
новое понятие сохраняемости векторных линий.
Пусть имеем нестационарное поле вектора а (г, /). Проведем векторные
линии этого вектора, отвечающие моменту t, т. е. линии, в каждой точке
которых вектор а имеет направление касательной к этой линии.
Мы уже знаем (§ 11), что уравнением векторных линий является
rfrxa = 0 B7)
или в декартовых координатах
dx dy di
ах (яг, у. z. t) ~ ay (х. у, г, I) ~~ лг (яг, у, z, t)
2E2 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
При этом время t, при интегрировании этих уравнений, мы рассмат-
рассматриваем как параметр, имеющий фиксированное значение.
Проведем теперь векторные линии вектора а, соответствующие дру-
другому моменту времени ?. Тогда могут иметь место два случая.
Вообще говоря, рассматривая какую-нибудь векторную линию, соот-
соответствующую моменту ?, мы обнаружим, что она состоит из частиц среды,
которые в момент t принадлежали различным векторным ли-
линиям. Но, в частном случае, может оказаться, что частицы, составляющие
к моменту t' векторную линию, в момент С тоже образовывали векторную
линию. Если это последнее обстоятельство имеет место для любых мо-
моментов времени (н Си для любых векторных линий данного вектора а,
то мы говорим, что векторные линии вектора а обла-
обладают свойством сохраняемости.
В случае, если векторные линии вектора а обладают свойством сохра-
сохраняемости, каждая векторная трубка будет во все время движения сплош-
сплошной среды оставаться векторной трубкой, так как она ограничена совокуп-
совокупностью векторных линий, каждая из которых остается все время вектор-
векторной линией. Но в этом случае опять-таки можно различить два под слу-
случая: первым подслучаеы будет тот, когда интенсивность векторной трубки
меняется с течением времени; вторым же подслучаем будет тот, когда
интенсивность любой векторной трубки во все время движения сохраняет
свою величину. В этом последнем подслучае мы будем говорить, что
интенсивности векторных трубок обладают
свойством сохраняемости.
Докажем теперь две следующие теоремы.
Покажем прежде всего, что условие, необходимое и достаточное для
того, чтобы сохранялись как векторные линии вектора а, так и интен-
интенсивности векторных трубок, состоит в выполнении равенства
jt — (а. V) v + a divv = 0 B8)
во всей рассматриваемой области для всех рас-
рассматриваемых моментов времени ?.
Покажем сначала необходимость условия B8). Итак, предположим,
что векторные линии обладают свойством сохраняемости, так же как и
интенсивности векторных трубок.
Возьмем теперь в какой-нибудь момент to совершенно произвольную
поверхность Se, ограниченную контуром Со.
Будем рассматривать эту поверхность So, как жидкую. Проведя через
точки контура Со векторные линии, образуем векторную трубку Ко,
которая с течением времени будет деформироваться, но все время, по
условию, будет оставаться векторной трубкой Kt (фиг. 82). При этом по-
поверхность So, являющаяся сечением первоначальной векторной трубки,
тоже будет деформироваться, но тоже будет все время оставаться сече-
сечением S повой векторной трубки. Так как интенсивность векторной труб-
21
ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРБДЕ
263
ки есть не что иное, как ноток вектора а через сечение St этой трубки:
Г = J а. (О dS
и так как интенсивность векторной трубки по условию сохраняется, то
должно выполняться условие B4), а следовательно и условие B5) для
произвольной поверхности <S». Выбирая любую точку и в ней любое на-
направление о, возьмем малую площадку S, перпендикулярную к этому
направлению, и применим к ней формулу B5); мы получим тогда, что
^ _ (а. V)v + a div v)-n = 0 B9)
U
для произвольного направления п. Отсюда
непосредственно следует условие B8).
Докажем теперь достаточность усло-
условия B8). Предположим, что условие B8) вы-
выполнено, и рассмотрим ъ момент Jo некото-
некоторую векторную поверхность So, т. е. такую
поверхность, в каждой точке которой
вектор а лежит в касательной плоскости
к этой поверхности. Докажем что жид-
жидкая поверхность So, деформируясь, все
время остается векторной поверхностью S,. В самом деле, ограничим
на поверхности So кусок этой поверхности So произвольной кривой Го
и рассмотрим поток вектора а через So; очевидно, что
Фиг. 82
= 0
C0)
ибо в каждой точке So будет а„ = 0, так как вектор а лежит в касатель-
касательной плоскости к поверхности So.
Применяя теперь формулу B3) и замечая, что правая часть атой фор-
формулы равна, по условию B8), нулю, получим, что
C1)
следовательно интеграл
во все время движения сохраняет постоянное значение, а так как в мо-
момент to этот интеграл равнялся но C0) нулю, то во асе время движения
должно выполняться равенство
в. «Я = 0 C2)
264 ВВКТОРНЫИ АНАЛИЗ Гл. П
Но это может быть, в силу произвола выбора куска 2, поверхности .2,,
только тогда, когда в каждой точке поверхности 2, выполняется ра-
равенство ап = 0, т. е. когда в каждой точке поверхности 2, вектор а лежит
в касательной плоскости к этой поверхности.
Но это, по определению, и означает, что поверхность 2, есть вектор-
векторная поверхность.
Нетрудно теперь видеть, что при соблюдении условия B8) каждая
жидкая линия L будет все время векторной линией, если она является
векторной линией в какой-нибудь момент to.
В самом деле, через положение Ы жидкой линии к моменту h можно
провести две векторных поверхности 2о' и So", пересекающихся по
линии La. К моменту t жидкие поверхности 2о' и 2о° перейдут в поло-
положения 2;' и 2Л которые по вышесказанному тоже являются векторными
поверхностями.
Жидкая линия Lo, являющаяся пересечением жидких поверхностей
So' и 2о", перейдет к моменту t в линию ?,, пересечения жидких поверх-
поверхностей 2,' и 2(*.
Линия L, является векторной; в самом деде в каждой точке этой линии
вектор а должен лежать как в касательной плоскости к поверхности 2/,
так и в касательной плоскости к поверхности 2,*, а следовательно он
должен быть направлен по касательной к линии L,. А это последнее об-
обстоятельство и является определяющим свойством векторной линии.
Итак, при выполнении условия B8) векторные линии обладают свой-
свойством сохраняемости.
Образуем теперь какую-нибудь векторную трубку Ко, соответствую-
соответствующую моменту времени to, и вычислим ее интенсивность
Г„ =
где Sa — сечение трубки Ка. К моменту t трубка Ка перейдет в векторную
трубку Kt с интенсивностью
где St — то сечение трубки Kt, в которое перешла жидкая поверхность <S0.
Применим опять B3) и воспользуемся B8), в результате получим, что
и следовательно Г = const = Го, т. е. интенсивность векторной трубки
сохраняется во все время движения.
Таким образом при соблюдении условия B8) интенсивности вектор-
векторных трубок обладают свойством сохраняемости. Высказанная нами тео-
теорема доказана полностью.
I 21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДЕ 265
Докажем теперь вторую теорему, а именно, что условие, необходимое
для сохраняемости векторных линий вектора а, состоит в выполнении
равенства
(|-{a-V)v)xa = O C3)
во всей рассматриваемой области для всех рассматриваемых моментов
времени I.
Заметим прежде всего, что если сохраняются векторные линии, то,
очевидно, сохраняются и векторные поверхности, а обратно.
Итак, предположим, что векторные поверхности обладают свойством
сохраняемости; возьмем в момент to какую-нибудь векторную поверх-
поверхность So и выделим на ней произвольный кусок So, тогда по самому
определению векторной поверхности
$ntf2 = О
2".
К моменту t жидкая поверхность 2о перейдет в поверхность 2,, по
условию векторную, a So перейдет в 2,. Ясно, что
а тогда из формулы B3) следует, что
— (а- V) Ў + a di
для любой векторной поверхности 2,. Отсюда сразу выводим, что
(^— (a-V) v +adivv).n = 0
для любого вектора п, перпендикулярного к а, так как всегда можно про-
провести малую векторную поверхность 2,, перпендикулярную в данной
точке к такому вектору п.
Итак, все составляющие вектора
-^¦—(a-V)v + adivv
по направлениям, перпендикулярным к а, равны нулю, а следовательно
этот вектор должен иметь то же направление, что и вектор а. Следова-
Следовательно
(чГ- <a-V)v +adivv)Xa = 0 C4)
каковое условие совершенно эквивалентно условию C3).
Впоследствии мы докажем а достаточность условия C3) для сохраняе-
сохраняемости векторных линий вектора а.
266 ВЕКТОРНЫЙ АНАЛИЗ Гл. П
6. В качестве простого примера выведем условия сохраняемости ли-
линий тока. Линиями тока называются векторные линии вектора скорости v,
так что их дифференциальными уравнениями являются
*» flfr <**
»х (*, у, 2, () Vy (X, у, Z, t) V, [X, у, Z, t)
Полагая в формуле C3) а = v и замечая, что по уравнению B)
rfv , _ч дч
__(v.V)v = ^
можем переписать условие сохраняемости линий тока в впде
¦§Г X v = 0 C6)
или
?- U C7)
где "к {г, t) — скалярная функция координат и времени. Введем вместо А.
другую функцию fi (г, /) равенством
(X dt ' ™
И ПОЛОЖИМ
V = AW
Тогда для определения w получим уравнение
ой , 9»
или
г--о
Отсюда видно, что w не зависит от/ и является, следовательно, функ-
функцией только от х, у, г. Итак, общим решением уравнения C6) является
v (r, t) = Ц (г, t) у, (г) C8)
где р. — произвольная скалярная функция от г и t, a w (г) — произволь-
произвольная векторная функция от г. При этом уравнения линий тока C5) при-
принимают вид
dx dy dz
»i (*. 2/. г) "" »к (*. J/, г) ~ «>z (*. !f. z)
Отсюда видно, что линии тока не зависят от времени и следовательно
являются неподвижными.
Итак, мы нашли все движения, в которых сохраняются линии тока,
в показали, что в этих движениях линии тока являются неподвижными
линиями в пространстве.
В качестве второго примера рассмотрим вихревые линии, т. е, вектор-
векторные линии вектора Q = rot v — вихря скорости жидкости.
^ 21 ПЕРЕМЕННЫЕ НОЛЯ В СПЛОШНОЙ СРЕДЕ 267
В § 17 мы доказали, что если идеальная жидкость находится под
действием консервативных сил и обладает тем свойством, что плотность
жидкости является функцией от давления, то вектор Q удовлетворяет
уравнению
-^-—(Q-V)v + Й divv =0 C9)
Сравнивая это уравнение с B8), мы можем теперь выяснить, что,
собственно, означает уравнение C9). Оно выражает, что вихревые линии
обладают свойством сохраняемости, причем интенсивности вихревых
трубок также остаются с течением времени неизменными
Итак, мы доказали теорему Гелъмгольца: в баротропной идеальной
жидкости, находящейся под действием консервативных сил, как вихревые
линии, так и интенсивности вихревых трубок обладают свойством со-
сохраняемости.
7. Проведем теперь вычисление полной производной от линейного
интеграла вектора а по какой-либо незамкнутой кривой К (фиг. 83):
-dt D0)
Полное изменение этого интеграла за промежуток времени dt сла-
слагается из двух частей; одна часть, происходящая от изменения вектора а
за время dt на величину
А'
^¦dt V"^
А ¦
очевидно, равна
А/. = \ ? • dt D1)
вторая же часть, происходящая от изменения жидкого контура за про-
промежуток времени dt, равна, очевидно,
<*Л- \a.rfr-\a.rfr D2)
к
где Кi — положение жидкого контура к моменту t + dt. Если конечные
точки контура К суть А и В, а конечные точки ¦ контура К\ — А' и В',
то, принимая еще направление контура Jfi от А' к Z?' за положительное,
мы увидим, что контуры К\, WB = — vb dt,— К и АА' = vA dt обра-
образуют замкнутый контур, ограничивающий некоторую поверхность S.
Применим к этому контуру формулу Стокса:
\ rot а • d2 = \ а • efc — \ а • dt — ав • у в dt + аА • vA<U D3)
\ а • dt — \ а • dt — ав • у в dt + аА
268 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
Заметим теперь, что, как видно из фиг. 83, элемент поверхности oJS
представляется по величине а направлению вектором
rfS = v dtxdr
и поэтому
\rot а-<22 = \ rot a.(v dtxdr) — di\^ (rot axv)-*
e к k
В силу этой формулы и в силу D3) равенство D2) принимает впд
d^t = di К (rot axv)-dr +aB-vB — aA.vA] D4)
к
и следовательно, иы получаем следующее выражение для полной про-
производной от линейного интеграла
¦^ a-rfr = ( № + (rotaxv)).rfr + aB.vB — aA-vA D5)
Если контур К замкнутый, то точки В и А совпадают, и поэтому пре-
предыдущая формула сильно упрощается
)r D6)
В случае незамкнутого контура К формуле D5) можно дать другой
вид. Для этого воспользуешься очевидным равенством
aB-vB — aA-vA = \ grad (a-v)-dr D7)
тогда вместо D5) получим
-^-jj a-rfr = \ (^ + rot axv +grad (a-v)Vrfr D8)
к к
к
Подынтегральному выражению можно придать другой вид, если вос-
воспользоваться формулой из § 17:
grad (a-v) = (v-V)a 4- (a- V)v 4- axrot v + v x rot a
В самом деле, мы получаем
-? + rot axv -(- grad (a«v) = -?- -b(v V) a 4- (a-V)т 4- axrot v
На основании формулы B) первые два члена справа можно соединить
вместе, так что получится
¦?- 4-rot axv 4> grad (a«v) = —5- + (а-V) v + axrot v
к значит
it
d\ a-dr = ^(ii + (a . V) v + a x rot v).rfr D9)
§21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДЕ 269
8. В качестве применения последней формулы рассмотрим вопрос
об изменении циркуляции скорости в жидкости. С этой целью положим
в D9) а = v и заметим, что по § 17 A0) мы имеем формулу
I»
(v. V) т + vx rot v = grad
Поэтому из A9) получаем
= \ -jj- • dr + \ grad -S—«isJr E0)
IT К
Если контур К замкнутый, то последний интеграл пропадает, и мы по-
получаем простую и вместе с тем важную формулу:
}-* E1)
составляющую содержание следующей теоремы: производная по времени от
циркуляции скорости по замкнутому жидкому контуру К равна цирку-
циркуляции от ускорения по тому же контуру.
Ввиду важности формулы E1) дадим другое доказательство ее.
Для ясности, будем направленный элемент кривой К обозначать
через dr, а не через dr, как до сих пор, и введем обозначение
Составляем теперь полную производную по времени от Г, для чего
берем полную производную по времени от каждого элемента этого инте-
интеграла (нужно брать полную производную, ибо мы считаем линию К жид-
жидкой):
dp
dt
Докажем теперь, что
В самом деле, если (фиг. 84)
бг = ММ' = г' — р Фиг 84
где г' и г радиусы-векторы точек М и М' от-
восительво какого-нибудь произвольно выбранного начала координат О, то
dbr __ df_ dr _ , _ .
ибо производная по времени от радиуса-вектора г есть как раз вектор
скорости v, разность же v' — v представляет изменение скорости при
переходе от точки М к М'. Итак
270 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
dT Cd(v-flr) С rfv . . 1
и, следовательно,
dT
at j at jT at 2.
К К
что я доказывает вновь формулу E1).
Из формулы E1) очень легко вывести теорему Томсона:
Если движение идеальной жидкости происходит под действием сил,
имеющих однозначный потенциал, и если плотность есть функция дав-
давления {в частности, если жидкость несжимаема), то циркуляция скорости
по любому жидкому контуру во все время движения остается постоянной.
В самом деле, при указанных в теореме условиях основные уравнения
гидродинамики могут быть написаны, как показано в § 17, в виде
^ = grad (i7 — P) E2)
Поэтому правая часть формулы E1) принимает вид
1 dv Г
> jr'dt = m grad(f7 — P)-dt
и по известному свойству градиента обращается в нуль. Итак
v. A = 0 E3)
к
Отсюда вытекает, что
) v-cfr = const E4)
т. е. циркуляция скорости по любому жидкому контуру остается по-
постоянной.
Этот же самый результат можно получить и непосредственно из фор-
формулы D6), полагая в последней а = v:
§ ^(g) E5)
к к
Но в | 17 мы видели, что при соблюдении условий теоремы Тоысопа
~ + rot vxv = grad П = grad (и — Р 1-гР\
следовательно,правая часть формулы E5) обращается в нуль, в мы опять
восстанавливаем формулы E3) а E4).
Так как
-our = ^ rotBv dS
к a
где i1 есть поверхность, опирающаяся на контур К, то, путем применения
рассуждений, совершенно аналогичных тем, которые были приведены
§ 21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДЕ 271
в пункте 5, можно доказать, что при соблюдении условий теоремы Томсо-
на, вихревые линии обладают свойством сохраняемости, также как и
интенсивности вихревых трубок, т. е. можно вновь доказать теоремы
Гельмгольда, полученные нами в п. 6.
9. В этом пункте мы рассмотрим некоторые вопросы, связанные с изу-
изучением уравнения (с — постоянное число, р (х, у, z, I) — заданная функ-
функция):
левую часть которого мы будем иногда обозначать знаком Г]<р:
В § 17 мы видели, что изучение малых колебаний сжимаемой жид-
жидкости при отсутствии внешних сил сводится к изучению уравнения
?Ф = 0 E8)
которое называется волновым уравнением, так как в дви-
движении жидкости, определяемом этим уравнением, возмущения распро-
распространяются во все стороны со скоростью, равной с. При с = оо уравнение
E8) превращается в уравнение Лапласа, а уравнение E6) в уравнение
Пуассона. Имея это в виду, мы постараемся применить к исследованию
уравнений E6) и E8) те же методы, которые мы использовали при ре-
решении уравнений Пуассона а Лапласа.
Мы видели, что решением уравнения Пуассона
Дер <¦= р (а:, у, z) E9)
является Ньютопов потенциал
где г — расстояние между точкой Р (х, у, z) и переменной точкой Q E, т|, Q,
принадлежащей тому объему, по которому производится интегрирование-
При этом функция— обладает тем замечательным свойством, что рассмат-
рассматриваемая, как функция точки Р, она удовлетворяет уравнению Лапласа
всюду, кроме точки Q.
Попробуем обобщить эти результаты на случай неоднородного волно-
волнового уравнения E6). Роль функции — долзкна здесь играть такая функ-
функция Ф (г, t), которая всюду, кроме точки Q, удовлетворяет уравнению
?^=0 F2)
272 векторный анализ Гл. II
Возьмем точку Q за начало сферических координат, так что положение
точки Р относительно точки Q определяется координатами г, 8, rj). Пе-
Переписав уравнение F2) в сферических координатах и замечая, что Ф,
по условию, ве зависит от 6 и гр, найдем уравнение
Отметим теперь одно простое, но важное преобразование
доказательство которого не представляет ни малейших затруднений.
Помножая уравнение F3) на г, можем переписать его в виде
{65)
Легко теперь видеть, что функция
(i) F6)
где / есть произвольная функция своего аргумента, есть решение урав-
уравнения F5). Итак, мы приходим к заключению, что роль функции — для
обобщенного волнового уравнения E6) должна играть функция
ф (г, и = /?^П?> F7)
Чтобы выяснить механическое значение этой функции, вспомним, что
в той задаче о малых колебаниях сжимаемой жидкости, решение которой
приводится к исследованию уравнения E8), вектор скорости опреде-
определяется формулой
v — grad q> F8)
Но
grad HLZIM = ?( ) ( f)}
^() f(f)} <69>
При малых г вторым членом в скобках можно пренебречь в сравнении
с первым. Поэтому вблизи полюса Q мы имеем приближенное равенство
V = -Ug± G0)
Но это равенство соответствует, как мы знаем, источнику обильности
— 4л/ (t). Следовательно движение жидкости, имеющее потенциал ско-
скорости F7), можно себе представлять происходящим в силу того, что
в полюсе Q находится точечный источник интенсивности — 4я/ (*), -ме-
-меняющейся с течением времена. Однако, в силу сжимаемости жидкости,
§ 21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРВДВ 273
эти изменения интенсивности источника не сразу передаются на всю
бесконечную жидкость; в самом деле, И8 формулы F7) видно, что в точке Р,
отстоящей от точки Q на расстоянии г, сказывается та интенсивность
источника, которая имела игесто в момент t — г/с; а так как г/с есть как
раз время, необходимое для пробега расстояния г со скоростью с, то можно
сказать, что первоначальное возмущение в точке Q достигает какой-
либо точки Р с запаздыванием, равным как раз времени пробега от Q
до Р со скоростью с. Поэтому выражение F7) можно назвать запаады-
втощим потенциалом. Заметим, что так как значения функции F7) оди-
одинаковы для фиксированного значения г, то движение, определяемое фор-
формулой F7), представляет сферическую волну.
Принимая теперь во внимание, что решение уравнения Пуассона E9)
дается Ньютоновым потенциалом F0), мы можем ожидать, что решение
уравнения E6) может быть представлено в виде запаздывающего Ньюто-
Ньютонова потепщала:
В § 19 мы проверили непосредственным вычислением, что функция
D9) удовлетворяет уравнению D8). Повторим теперь это вычисление
для функции G1). При этом мы будем предполагать, что функция р,
ее первые частные производные и вторая частная производная, взятая
два раза по /, непрерывны и ограничены всюду, за исключением конечного
числа поверхностей, на которых они могут терпеть разрывы, и что на
бесконечности р является бесконечно малой величиной порядка не ниже
третьего.
Для большей ясности, мы условимся в следующем обозначении: сим-
вилом [/1 мы будем обозначать функцию от \, х\, ?, t, в которой вместо t
подставлено значение / — г/с (таким образом [/] есть запаздывающее
значение /).
Выбрав теперь точку Ро, разобьем в G1) область интегрирования на
две части: на сферу F3 радиуса е с центром в точке Роива всю остающуюся
часть пространства и введем обозначения
V,
>. О - - к \ P(Q''-/"¦>"' G2)
Когда точка Р меняется внутри сферы Vi, то подынтегральная функция
второго интеграла не обращается в бесконечность, и можно производить
дифференцирование функции <pi по х, у, 2, t под знаком интеграла- Поэтому
18 Н. R. Кочин
274 ВЕНТ OP НЫЛ АНАЛИЗ Гл. П
в так как при атом дифференцирования точка Q считается постоянной,
а функция F7) удовлетворяет волновому уравнению, то
?<ра (Р, f) = 0 G3)
Переходим теперь к вычислению ? epi (Р, t). Будем при этом пред-
предполагать, что точка (Pa, t), а следовательно, при достаточно малом е
и весь объем Vt лежит внутри той области, где функция р. ее первые про-
производные и вторая производная, взятая два раза по t, непрерывны. Вычис-
Вычисление проще всего произвести таким способом. Разобьем <pi (P, t) на
две части
<pi (Р, 0 = фи (Р, t) + ф12 (Р, t) G4)
где
Цisa^L G5)
есть обыкновенный Ньютонов потенциал, а
\ p(9it~r/;)~p(Q-')^ G6)
причем числитель подынтегральной функции вместе с г обращается в
нуль, а сама подынтегральная функция остается конечной.
Мы уже знаем, что
ДЯИ1 (Р, t) = р (Л t) G7)
Так как в интеграле для q>la (P. t) подынтегральная функция не об-
обращается в бесконечность, то вычисление Дср^ (Р, t) можно произвести
очень просто. Прежде всего
grad ф12 (Р, t) =
причем легко видеть, что подынтегральная функция остается ограни-
ограниченной при г — 0; в самом деле, разложим ее в ряд Тейлора, ограничив-
ограничившись первыми двумя членами
где * и ¦&! положительные числа, меньшие 1. Сложение этих равенств
показывает, что подынтегральная функция в G8) остается ограничен-
5 21 ПЕРЕМЕННЫЙ ПОЛЯ В СПЛОШНОЙ СРЕДЕ 275
ной. Можно поэтому отыскивать div grad <pia (P, t), дифференцируя под
знаком интеграла. Пользуясь формулой задачи 143 и замечая, что проек-
проекция grad г на направление г равна 1, сразу найдем, что
Сложение G7) и G9) дает нам, что
дф1 IP,*) = р(/>,ч_ » С * р($, t_.L)-^ m
и так как очевидно, что
3*4)! (P. t) __ 1
v,
то сразу находим, что
?<Р1 (Р, I) = р (Р, t) (82)
Принимая еще во внимание G3), приходим к окончательному выводу
Пф (Л О = Р (Р. О (83)
т. е. решением неоднородного волнового уравнения (83) является запазды-
запаздывающий Ньютонов потенциал G1).
10. Наряду с запаздывающим объемным потенциалом G1) мы можем
рассматривать также и запаздывающие потенциалы простого слоя
или запаздывающие потенциалы двойного слоя, получающиеся от рас-
распределения запаздывающих дублетов вдоль некоторой поверхности S.
При этом запаздывающий потенциал дублета определяется сле-
следующим образом.
Допустим, что запаздывающий потенциал, происходящий от источ-
источника, находящегося в точке Q (фиг. 68), есть
9A. Г], t,.t-r/c)
г
сдвинем зигот же самый источник, с его распределением интенсивности
во времени, в бесконечно близкое положение Q' и образуем, разность
Р (I, 1\. ?¦ t - r-/c) _ p(g,Tbg, t—r/c)
т. е. у источника в Q' будем брать то запаздывание, которое соответ-
соответствует именно положению Q'. Обозначим опять (?Q' = г'—г = dr = e's
18*
276 ВВКТОРЯЫЙ АНАЛИЗ Гл. II
и положим, что при бесконечном сближении источников р растет таким
образом, что
lim ер (|, ть ?, 0 = т (|, i\, \, t)
Разность (85) будет, очевидно, в пределе равна
д 1 1 д /г ,. .
Это выражение мы условимся обозначать через
6 М Гт| * 1 1 Г ami Df ,осч
-___«[M|____|_j__ (86)
В соответствии с формулой (86) под запаздывающим потенциалом
двойного слоя мы должны понимать выражение
В § 19 мы пыпели формулу, выражающую значение гармонической
функции <р внутри некоторой области V через значения функции <р и ее
нормальной производной на границе S этой области:
s
Мы выведем теперь для случая, когда функция <р удовлетворяет вол-
волновому уравнению
аналогичную формулу
или, несколько подробнее.
Эта формула имеет место, если точка Р лежит внутри поверхности 5;
если же Р лежит вне поверхности S, то интеграл в правой части фор-
формулы (90) обращается в нуль.
Прежде чем доказывать формулу (89), выясним ее смысл. Мы предпо-
предположили, что внутри поверхности S выполняется урапнение (88); это
значит, иными словами, что внутри поверхности S источники отсутствуют;
следовательно все имеющиеся источники находятся вне поверхности S.
Но правая часть формулы (89) предстапляет сумму потенциалов простого
и дпойного слоя; иными слонами формула (89) дает выражение значений
функции ф внутри поверхности S через фиктивные источники, распреде-
распределенные по поверхности S.
§21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДЕ 277
С такой точки зрения формула (89) пвляется математическим выраже-
выражением принципа Гюйгенса в форме, приданной последнему Кирхгоффом,
которому принадлежит формула (89).
Перейдем теперь к доказательству формулы (89). Для этого применим
формулу D3) § 19 к функции
где г = PQ — расстояние между неподвижной точкой Р и переменной
точкой Q:
Ф (Р, 0 => <р (а;, у, z, t) =
Под знаком интеграла [q>] рассматривается, как функция точки
Q (|, Г). Q, входящей как явно, так а через посредство г, поэтому, вы-
вычисляя по правилу дифференцирования сложных функций, находим
grad [q>] = grad<p ^Q, t — ¦?-) = [grad ф] — -f [|-r] grad г (92)
Отсюда следует, что на поверхности S
Введем теперь для большей ясности сферические координаты г, 8, -ф
с центром в точке Р и введем сверх того обозначение
т = !-.?. (94)
Тогда легко будет вычислить значение функции Д [q>], где
|ф] = <р ((?, t— у) = q>(r, в, ф, т)
В самом деле, по формуле D1) § 18 мы имеем, считая т не завися-
зависящим от г
. 1 д I'.
А? Г
Но если нам надо вычислить Д [ф ], то т является функцией (94) от г,
поэтому в этом случае
Зг 3/- + ат V с)~дг с Эх
*p liJL
*^"аГ ~ с эх
2г
278 ВЕКТОРНЫЙ АНАЛИЗ Гл ц
Сравнивая это выражение с (95), получим, что
^ (96)
Но, но условию, функция <р удовлетворяет волновому уравнению
Дф = 7, ^
поэтому мы находим, что
Д[«р| г_ Зф _ ^ j^ 2 ЭПр
г сг* дх сг дг Зт +
Заметим теперь легко устанавливаемые формулы
Тогда предыдущее равенство можно записать, воспользовавшись еще
формулой B) § 17 в виде
Применим теперь формулу Гаусса-Остроградского к объему У„ полу-
получаемому из объема V путем выкидывания шара малого радиуса в с центрои
в точке Р и ограниченного сферой 2. Тогда получим
На сфере 2 будет г = в, поэтому при в —» 0 подынтегральная функция
последнего интеграла будет порядка —, вся же площадь сферы 2 равна
4яе2; нетрудно отсюда заключить, что
lcos(r, n)_,0 _
Поэтому
lim 4I^1 -—r-1—-dS — 0
\g\\\ (97)
Собирая формулы (91), (9S) и (97), мы и докажем формулу (90).
В качестве примера применения этой формулы примем за S сферу
радиуса R = ct с центром в точке Р. Тогда значения запаздывающих
потенциалов придется брать в момент t — R/c = t — i=0, т. е. в на-
an
I 21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДИ 279
чальный момент времени, и мы находим выражение <р (Р, t) через зна-
значения ф и cty/di в начальный момент времени.
Вводя сферические координаты г, 9, тр, с центром в точке Р и замечая
еще, что направление нормали п совпадает с направлением г, найдем,
что в формуле (90)
dS = Л8 sin в
и, следовательно,
4я J3 [ дП ™ * ' ' ™» е \ dt)t=t, j
Отсюда получаем искомое выражение
q> (Р, 0 = ^ \щ Г Л t^q> (Л, 6, т|>, 0) do»] + t ^ (^) etol (98)
11. В заключение этого параграфа рассмотрим вкратце основные
уравнения теория электромагнитного поля.
При рассмотрении электростатического поля уже введен вектор элек-
электрической силы Е и была указана его связь с плотностью р электрических
зарядов
div E = 4яр (99)
При рассмотрении электромагнитных явлений наряду с вектором Е
вводится вектор магнитной силы Н, дающий по величине и направлению
ту силу, которая подействовала бы на единицу магнитной массы, если
ее поместить в рассматриваемую точку пространства. При этом, однако,
принимают, что
div В = 0 A00)
ибо, как учит опыт, нельзя отделить положительные магнитные заряды
от отрицательных в в каждом куске какого-либо тела полное количество
магнетизма равно нулю.
При рассмотрении переменных электрических и магнитных полей об-
обнаруживается тот основной факт, что изменение магнитного поля вызы-
вызывает электрическое поле и обратно, изменение электрического поля вы-
вызывает магнитное поле. Количественные выражения этих фактов даются
уравнениями Максвелла. Последние представляют собою обобщение
двух основных экспериментальных законов электромагнетизма: закона
Био-Савара и закона индукции.
Мы уже упоминали о законе Био-Савара, когда рассматривали поле
вихревой нити в § 20, п. 5. Мы видели, что если интенсивность вихревой
нити L равна Г, то вызываемое этой вихревой нитью поле будет
а = г; Ф "is- A01>
280 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
причем циркуляция вектора а по контуру К, охватывающему один, раз
в надлежащем направлении кривую L, равна как раз Г
f
A02)
Но по закону Био-Савара, если мы имеем ток силою J, текущий по
ироводнику L, то он производит в окружающем пространстве магнитное
поле, определяемое (в правой системе координат) по формуле
(ЮЗ)
где с — универсальная постоянная, появляющаяся в силу того, что J и
Н измеряются в разных единицах.
Но тогда из формул A01) и A02) ясно, что если мы заставим единицу маг-
магнитной массы обойти контур К, охватывающий один раз в положительном
направлении проводник L, то работа силы Н будет равна
A04)
Формула A04) представляет просто другую формулировку закона
Био-Савара. Ее можно обобщить еще больше, если представить себе, что
электрические токи имеются во всем пространстве.
Если рассматривать только покоящиеся тела, то, по Максвеллу, элек-
электрический ток надо составлять из двух частей. Первая часть получается
в результате обобщения закона Ома, по которому плотность тока, т. е.
количество электричества, протекающее через единицу поперечного
сечения проводника, пропорционально падению потенциала ва единицу
длины, т. е. пропорционально электрической силе ?. Итак
i = oE A05)
где i — вектор плотности тока, а о — коэффициент пропорциональности,
называемый удельной электропроводностью. Если поверхность, опираю-
опирающуюся на контур К, обозначить через S, то количество электричества)
протекающее через S, будет, очевидно, равно
^ indS = ^oEndS A06)
Но, но Максвеллу, чтобы получить J, нужно прибавить к предыдуще-
предыдущему выражению еще так называемый ток смещения, который образуется
во всех тех случаях, когда меняется электрическое поле, и представляется
до величине и направлению вектором
J_dE
in dt
21 переменный поля в сплошной среде 281
Поэтому
\M9?S A07).
и уравнение A04) принимает вид
? н • dt = — \ Dлб?„ + d4f) dS A08),
? S
Применяя формулу Стокса, можем напвсать
^ rotn H dS = -j-
Отсюда, в силу полной произвольности выбора поверхности S, сле-
следует первое уравнение Максвелла:
rotH^E+i_? A09>
Второе уравнение Максвелла получается из обобщенного закона ин-
индукции Фарадея, по которому при изменении магнитного поля в каждом
проводнике возникает электродвижущая сила, пропорциональная скоро-
скорости изменения магнитного потока через поверхность, охватываемую этим*
проводником. Математически закон индукции выражается уравнением
К S
Применяя его к любому контуру К и опять пользуясь формулой
Стокса, получим
^rotn EdS = i- ~ [ HndS
откуда вытекает второе уравнение Максвелла:
Перепишем еще раз все полученные уравнения, причем предположим'
еще, для простоты, что плотность электрических зарядов р равна нулю
rotH=^E+lf A12)
div E = 0 A14)
div Н = 0 (U5)
Покажем прежде всего, что для векторов Е и Н можно получить неза-
независимые и притом совершенно одинаковые уравнения.
282 ВЕКТОРНЫЙ АНАЛИЗ Гл. II
В самом деле, дифференцируя A12) по времени в беря от A13) опера-
операцию rot, найден, считая о и с постоянными числами,
ЭН 4яа ЗЕ . 1 д*Е
rotar = —3T + T-W
, „ с i , ан 1 й rot и
rot rot E — — — rot -т- — *-—
в dt e at
воспользовавшись еще тем, что
rot rot E = grad div E — ДЕ = — ДЕ
получим окончательно для- Е следующее уравнение:
iaadE i ЯРЕ
Такое же самое уравнение получается и для Н. Уравнение типа A16)
называется телеграфным уравнением.
Если токи отсутствуют (а = 0), то оно вырождается в волновое урав-
уравнение
со скоростью распространения с; по электромагнитной теории света с
есть скорость распространения света.
Если в A16) можно пренебречь вторым членом, т. е. токами смещения,
то получится уравнение типа уравнения теплопроводности
Наконец, в случае стационарных процессов, получается уравнение
Лапласа
ДЕ = 0 A19)
Рассмотрение вопроса об энергии электромагнитного поля приводит
к введению важного вектора
A20)
который называется вектором Пойнтинга и дает по величине и направ-
направлению поток анергии. Чтобы это показать, вспомним, прежде всего, что
энергия электрического поля определяется интегралом
да
Точно так же энергия магнитного поля определяется выражением
* 21 ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНОЙ СРЕДЕ 283
Вычислим теперь изменение полной энергии электромагнитного поля,
заключенной в объеме V, ограниченном поверхностью S. Мы имеем
A21,
Применим теперь уравнения A12) и A13):
5 = ^${ETotH-H.rotE}^-J0??rfF A22)
Так как
div (ExH) = H-rot E — E-rot H
то
^\-rotH —H-
= —\ div a dV = — CD an<?S A23)
V 4
Уравнение A22) принимает поэтому вид
^ = -§bndS-\a&dV A24)
Но интеграл
представляет собою джоулево тепло, т. е. то количество электрической
энергии, которое в объеме V переходит в тепловую энергию.
Ясно, что
дает то количество энергии, которое уходит черев поверхность S. Правда,
это рассуждение относится только к замкнутой поверхности S, но, обоб-
обобщая его и на случай незамкнутой поверхности S, можно сказать, что
распространение электромагнитной энергии определяется вектором A20),
т. е. что электромагнитная энергия распространяется в направлении, пер»
аендикулярном как к электрической, так и к магнитной силе, причем через
каждую площадку проходит количество энергии, которое, будучи отне-
отнесено к единице времени, равно потоку вектора Пойнтинга через эту али-
щадку.
Г Л А В А III
АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ
§ 22. Понятие афшного ортогонального тензора.
Примеры тензоров
1. Многие задача геометрии, механики и физики приводят к понятию
тензора, которое имеет более сложный характер, нежели понятие вектора,
и является некоторым его обобщением.
Однако в то время как для каждого вектора мы имеем простую геомет-
геометрическую интерпретацию в виде направленного отрезка, для тензоров
подобного простого наглядного представления мы не имеем. Представ-
Представляется поэтому необходимым дать новое определение вектора, путем есте-
естественного обобщения которого можно охватить и более сложный случай
тензора.
Допустим, что мы имеем прямолинейную прямоугольную систему
координат Oxyz (в общей теории тензоров рассматривают любые криво-
криволинейные координаты, но мы раз навсегда условимся, что будем употреб-
употреблять в этой главе только прямолинейные прямоугольные системы коор-
координат). Проекции некоторого вектора а на оси этой системы координат
обозначим, как обычно, через ах, ау, az, так что
а = \ах 4- jav 4- каг A)
Возьмем теперь другую систему координат Ox'y'z', тогда проекции
того же самого вектора а на новые оси координат будут, согласно § 4,
выражаться формулами
ох- = ах cos (x, х') 4- ay cos (у, х') 4- az cos (z, x')
он- = ах cos (ж, у') + dy cos (у, у') 4- a, cos (z, у') B)
а2- = ах cos (ж, z') 4- ау cos (j/, г') 4- аг cos (г, г')
При этом совершенно очевидно, что, если, наоборот, рассмотреть два
вектора, из которых один определен в системе координат Oxyz и имеет
проекции ах, a,,, az, а другой определен в системе координат Ox'y'z'
и имеет проекции ах', ау\ аг\ связанные с ах, пу, аг линейными соотно-
соотношениями B), то эти два вектора являются совершенно тождественными.
Поэтому мы можем дать следующее новое определение век-
вектора, совершенно эквивалентное прежнему определению.
Если для каждой прямолинейной прямоугольной системы координат
Oxyz мы имеем совокупность трех величин ах, а„, »t, преобрааующихся по
§ 22 ПОНЯТИЕ АФИНИОГО ОРТОГОНАЛЬНОГО ТЕНЗОРА 285
формулам B) в величины ах-, а^, аг>, отвечающие другой системе коорди-
координат Ox'y'z', то совокупность этих трех величин определяет новую
величину а, называемую афинным ортогональным вектором.
Величины ах, ау, а2 называются составляющими этого век-
вектора а по осям Ox, Oy, Oz.
В § 4, п. 1 мы уже упоминали о необходимости введения такого ново-
нового определения вектора и мы фактически его использовали при установ-
установлении понятий grad <р (§ 12, п. 1) и rot a (§ 16).
2. Обобщая данное выше определение вектора, введем понятие тензора.
Если для каждой прямолинейной прямоугольной системы координат
Oxyz мы имеем совокупность трех векторов рх,- ру, р„ преобразующихся
в векторы рх<, р,', р,', отвечающие другой системе координат Ox'y'z'
по формулам
рх = рх cos (ж, х') + pv cos (у, х') + рг cos (г, х')
PS = р* cos (х, у') + р„ cos (у, у') 4- рг cos B, у') C)
Рг' = Рх COS (*> z') + Рн C°s (У. z') + Рг COS (z, г')
то совокупность $тих трех векторов определяет новую величину П, назы-
называемую афинным ортогональным тензором второго ранга. Векторы
Рх< Ру> Рг могут быть названы составляющими тензора П по
осям Ох, Оу, Ог. Часто афинные ортогональные тензоры второго ранга
называют еше афаннорами. Мы будем называть их в этой главе
просто тензорами. По аналогии с обозначением вектора A) можно усло-
условиться ввести для тензоров обозначение
П = iPx + jft, + kp* D)
но только нужно помнить, что при таком обозначении порядок, в кото-
котором мы пишем векторы, играет существенную роль (можно было бы усло-
условиться обозначать тензор П через p^i + pj + ргк, но наше обозначение
больше отвечает общепринятому).
3. В качестве примера приведем тензор упругих напря-
напряжений. Рассмотрим упругое тело, внутри которого вырежем мыслен-
мысленно объем V, ограниченный поверхностью S (фиг. 85).
На каждый элемент dS этой поверхности будет /^~^ S
действовать со стороны частиц тела, лежащих вне
объема V, сила, происходящая от деформации тела.
Эта сила пропорциональна величине площадки dS
и зависит от направления нормали п к рассматри-
рассматриваемому элементу; обозначим ее через pn dS. Век-
Вектор р„, представляющий, очевидно, силу, отнесен-
отнесенную к единице площади, и зависящей от направ-
направления нормали и, называется напряжением на площадку dS с нормалью п.
Отметим, что, вообще говоря, напряжение р„ на площадку с нормалью
286 АФИННЫВ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл ТП
d не будет аерсендикулярно к площадке, т. е. не будет иметь того же
направления, что п. В каждой точке упругого тела каждому направлению
а отвечает свой вектор напряжения рп. Следовательно, для каждой систе-
системы координат мы можем определить векторы рх, р„, р2. Докажем., что
полученные таким образом векторы определяют тензор П, который и на-
называется тензором упругих напряжений; для этого, по определению тен-
тензора, достаточно доказать справедливость равенств C).
Обозначим через F внешнюю силу, действующую на единицу массы
тела, через w — ускорение точки тела, через р — плотность.
Тогда масса элемента'объема dV будет р dV, внешняя сила, действую-
действующая на этот элемент, будет равна р F dV, и, наконец, сила инерции будет
равна — р w dV.
По началу Даламбера главный вектор внешних сил и сил инерции,
приложенных к элементам объема V, и поверхностных сил, приложенных
к элементам поверхности S, должен равняться ыулю:
$P(F-
E)
Применим это уравнение к бесконечно малому тетраэдру МАВС,
построенному при рассматриваемой точке М таким образом, что его три
2 грани параллельны координатным плоскостям,,
а четвертая грань, величины S, перпендикулярна
к вектору q (фиг. 86).
На грань ABC будет действовать поверхност-
л ная сила pniS (причем значение вектора р„ нужно
~ *-У брать в некоторой средней точке площадки ABC).
На грань МВС будет действовать поверхност-
поверхностная сила — ря S cos (л, х). В самом деле, пред-
Фиг. 86 положим сначала, что нормаль а составляет
с осью х острый угол; грань МВС является проек-
проекцией S на плоскость yz и потому имеет величину S cos (n, х). Внешняя
нормаль к этой грани направлена в рассматриваемом случае по отрицатель-
отрицательной оси Ох, напряжение на нее будет — рж, а значит поверхностная сила
на грань МВС будет — р^ cos (n, х). При этом нужно брать значение рх
в некоторой средней точке площадки МВС. Тот же результат получается
и в том случае, когда нормаль п составляет с осью Ох тупой угол.
Совершенно аналогичное вычисление показывает, что поверхностные
силы, действующие на грани MAC и МАВ, соответственно равны
— pyS cos (n, у) и — pjiS1 cos (n, z).
Величина первого члена в равенстве E) пропорциональна объему
тетраэдра МАВС и может быть записана в виде Vq, где q — некоторый
конечный вектор. Поэтому из уравнения E) получаем
s (Рп — Рх cos (n, х) — р„ cos (n, у) — р, cos (n, г)) -f-Fq = О
5 22 понятие афинного ортогонального тензора 287
Разделим это равенство на S и после этого устремим все ребра тет-
V
раздра к нулю; в силу очевидного равенства lim -„ = 0, получим1
Рп = Рх COS (П, X) -\- Qy COS (П, у) Н- pz COS (n, z) F)
Так как направление вектора а можно выбрать по произволу, то
равенство F) влечет за собой выполнение равенств C), что мы а хотела
показать.
В каждой точке упругого тела будет свой тензор упругих напряже-
напряжений; мы имеем таким образом поле тензоров упругих напряжений.
Укажем еще раз на значение величин, входящих в уравнение F): р,.
есть вектор напряжения на площадку, перпендикулярную к оси Ох;
составляющие этого вектора обозначим через р^, р^, pIZ; так как, вообще
говоря, pxv и Рж не равны нулю, вектор напряжения рж будет наклонен
•к плоскости yz; его составляющая р^ дает так называемое нормальное
напряжение, составляющие же р^ и рхг определяют касательное напря-
напряжение на площадку, перпендикулярную к оси Ох.
4. Вернемся к общему определению тензора. Пусть тенаор П опре
делен тремя векторами рх, р„ я рг и пусть разложения этих векторов по
ортам суть
Р* = »/>** + JPxv + kPxz
Pv = i/>v* + IPv» + kPv <7>
Очевидно, что тензор П может быть также определен 9 числами, ко-
которые называются компонентами тензора а записываются'
таблицей:
(Рхх Р*„ Pxzl
П = (Pvx Руу Руг f (8)
\Ргх Pzv Pn)
Такие таблицы называются еще иногда матрицами.
Условимся, для сокращения письма, переименовать координаты х, у, г.
в XL, ж», ?з, орты i, j, k, в ii, ia, >a; тогда для вектора а мы будем иметь
разложение со ортам
а = iiai + iaffia 4- \заз (9)
Вместо р,., pw, рг теперь надо писать pi, рг, ps; тогда будем иметь
П = iipi + ispa + isps A0)
Наконец компоненты тензора надо обозначать через pki (А = 1, 2, 3:
i = l, 2, 3) так что будем иметь
piz pa |
П = { рп
pa
рз1
АФИННЬШ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ
Гл III
Так например, ргя есть третий компонент вектора ра- В старых обозна-
обозначениях это будет р^, т. е. а-я составляющая вектора ру.
Иногда удобно тензор П, заданный таблицей девяти чисел A1), обо-
обозначать через {/>*!}¦ Аналогично вектор а можно обозначать через {ак}.
5. В § 4 мы рассмотрели вопрос о преобразовании компонентов век-
вектора при переходе от одной координатной системы к другой; поставим
тот же вопрос для компонентов тензора.
Напомним таблицу § 4, дающую косинусы
углов, составляемых осями двух координатных
систем ОхххзХэ и Ох\'хгхг.
Мы напишем эту таблицу в несколько дру-
другом виде (приведенном здесь слева), более
удобном для сокращенного писания формул,
так что вц* = cos (x{, жй).
Проекция вектора а на оси координат
ад', хг, хз' обоаначим для краткости черев ai', at', at'. Точно так же обо-
обозначим через pi', pg', ps' составляющие тензора П по осям зд', хъ , хг
¦а через ры' компоненты тензора П для системы координат Ох\' хг хз ,
т. е. величины /jXjf- ж(-.
В новых обозначениях формулы B) можно записать в следующем
компактном виде:
з
а*' = 2 a*iat (* -= 1.2. 3) A2)
х\
х'г
х'г
X!
<*11
<*ai
«si
«и
«22
а*2
х„
<*IS
«S3
Точно так же формулы C) запишутся в аналогичном виде
= 1.2, 3)
A3)
Выясним теперь, как преобразуются компоненты тенаора pki, т. е.
яайдеы выражение величины ры' через девять величин рп (?• * = 1. 2, 3).
Во время вывода, для ясности, будем пользоваться полными обозначе-
обозначениями компонентов тензора. По самому определению рк{ = рХк'Щ- есть
проекция на ось хг вектора рх .. Но но формуле A3)
Беря ароекции от обеих частей этого равенства на ось х{', получим в силу
-того, что проекция вектора р^ аа ось х{, по общей формуле A2), равна
^следующее равенство:
xi' =22
; 22 понятие афинного ортогонального тензора 289
Возвращаясь к кратким обозначениям, получаем следующие основные
формулы преобразования компонентов тензора при переходе от одной
координатной системы к другой
з з
PkV= S S <**г*ьРгш (ft, I - 1, 2, 3) A4)
Таким образом, новые компоненты тензора являются линейными
комбинациями старых. Полученные формулы можно рассматривать как
обобщение формул B) для векторов. В соответствии с этим мы можем
дать- следующее второе определение понятия тензора.
Если для каждой прямолинейной прямоугольной системы координат
х, я3 х3 мы имеем совокупность девяти величин ры, расположенных в виде
матрицы A1) и преобразующаяся в величины pki, отвечающие другой
системе координат Ох^'х^х^ по формулам A4), то совокупность этих
девяти величин определяет новую величину П, называемую афинным орто-
ортогональным тензором второго ранга в пространстве трех измерении.
Величины pki называются компонентами тензора П. Экви-
Эквивалентность нового определения тензора со старым совершенно ясна.
Мы только что получили формулы A4), являющиеся основными для
ноиого определения тензора из формул A3), являющихся основными для
старого определения.
Производя вычисления в обратном порядке, мы, очевидно, из фор-
формул A4) можем получить формулы A3), что и доказывает наше утверж-
утверждение об эквивалентности обоих определений тензора.
Совершенно аналогично можно было бы определить тензоры третьего,
четвертого и т. д. рангов и притом в пространстве любого числа изме-
измерений.
Если мы в формулу A0) внесем выражения G) для векторов pi, рг, ра,
то мы получим так называемую девятичленную форму тен-
тензора:
» а
22 A5)
Конечно, пока для нас формулы A0), A1) и A5) являются только
тремя различными формами записи одного и того же тензора.
6. Рассмотрим еще несколько примеров тензоров.
Покажем, что если для любой системы координат принять
Рч = Раз = Рзз = 1. Ры — 0 (кф1)
то получится тензор
1 0 0 \
1= 0 1 0 \ A6)
0 0 1 J
который называется единичным тензором.
19 Н. В. Кочвн
290 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. III
В самом деле, применяя формулы A4), мы находим для pui величины
з з
Ры' = 2 а*г*> Рм = 2
равные соответственно 1 и 0, в силу формул E) § 4. Таким образом, во
всякой системе координат будет
Ркк = 1, Ры = 0,
что и доказывает наше утверждение. Очевидно, что для единичного тен-
аора
Pi = Ч> Ра = ia. Ps = h
Следовательно, другой формой записи единичного тензора будет
В качестве второго примера возьмем два вектора а и Ъ и составим
матрицу
аЬ = < афл аф,л аф,, > A8)
\ аф^ оА афз )
В силу формул
з з
, _ -у 6 ' = У я 6
мы будем иметь
з з
akbi =2| /i °
Мы видим, что элементы матрицы A8) преобразуются по формулам
(•14), следовательно матрица A8) определяет тензор, который называется
диадой и обозначается через ab. Составляющими этого тензора по
осям хъ хг, хг являются, очевидно,
р, = О]Ь. ра = <23Ь, р3 = ааЪ
Обратим внимание, что диада
j ]
ba = I 6A 62as 62a3 f A9)
j
отлична от диады ab.
Допустим, что мы имеем тензор П с компонентами pki и рассмотрим
таблицу с элементами ды = Рш- Покажем, что матрица с элементами qki
тоже определяет тензор. В самом деле, проверим формулы A4):
S3 3 3 3 3
{ 23 СЛОЖЕНИЕ И РАЗЛОЖЕНИЕ ТЕНЗОРОВ 291
Так как по значкам т и s происходит суммирование, то мы можем г
обозначить черев s ъ s через г; но тогда ясно, что формула A4) для ве-
величин ды имеет место, и следовательно мы действительно получила
тензор, который обозначается через
и называется тензором, сопряженным с тензором П.
Так например, диада A9) является сопряженной с диадой A8). Оче-
Очевидно, что тензором, сопряженным с тензором Пс, является тензор П:
(Пс)с = П B1)
§ 23. Сложение и разложение тензоров
1. Определим сумму двух тензоров: П' с элементами pki' и П* с эле-
элементами рм", как тензор И с элементами
Рм = Phi + Рм" A)
Что П действительно является тензором, следует из линейности со-
соотношения A) и линейности формул преобразования компонентов тен-
вора A4) § 22. Так как
з а з
Pfr = 2j Pbr 1г> Рк = 2л РЬг *f" Pft = 2л Ркг 1г
Р=1 Г*=1 Г=1
то очевидно, что составляющие тензора П по осям х\, хг, Хз определяются
путем сложения составляющих тензоров П' и П":
Рк = Р/ + Рь B)
Точно так же очевидно, что если мы умножим все элементы ри не-
некоторого тензора П на один и тот же скаляр X, то в результате мы получим
новый тензор, которого компонентами будут \рк1.
Этот тензор естественно обозначить через Ш. Составляющими этого
тензора по осям хх, ж2, х3, очевидно, будут являться Хрх, Лр2, Х| 3.
2. Тензор П, обладающий тем свойством, что
Ри = Рш Л * - 1. 2, 3) C)
т. е. значение любого компонента которого не меняется от перестановки
значков этого компонента, называется симметричным тензо-
тензором. Таким образом, компоненты симметричного тензора, симметричны
относительно главной диагонали таблицы тензора, равны между собой.
Поэтому симметричный тензор определяется шестью величинами, а не
девятью, как общий тензор. Заметим, что из формул A4) § 22 легко можно.
19*
292 АФИННЫВ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. Ill
вывести, что если формулы C) имеют место для одной, какой-нибудь ко-
координатной системы, то эти формулы будут справедливы и в любой коор-
координатной системе. Очевидно, далее, что симметричный тензор является
сопряженным самому себе:
Пс = П D)
Тензор П, обладающий тем свойством, что для любых значков к в I
Ры = - Рш (*¦ ' -1. 2. 3) E)
т. е. значение любого компонента которого от перестановки значков
этого компонента меняется на прямо противоположное, называется
антисимметричным тензором.
Очевидно, что элементы антисимметричного тензора, стоящие на глав-
главной диагонали, равны нулю: pkk = 0, ибо ркк = — р^,.
Элементы же, симметричные относительно главной диагонали, равны
по величине, но противоположны но знаку.
Если ввести обозначения
0>1 = РЗЯ *= — Р28. Щ = PlS = Рп, ^S = Pil = — Pl2
то таблица антисимметричного тензора примет вид
10 — ша ffls \
аи 0-вЛ F)
— <0a Mi О J
Таким образом, антисимметричный тензор определяется только тремя
величинами an, fife, Шз.
Заметим, что иа формул A4) § 22 легко вывести, что если формулы
E) имеют место для одной какой-нибудь координатной системы, то эти
формулы будут справедливы и в любой координатной системе, ибо
з я аз зз
plk = Zi Zj а1га>иРп = — ^J ^j Ulr&haPsr ~ — 2л Zl akaalrPsr — — Pkl
г—i »=»i r~i i—i a=i r=i
Покажем, что величины <oi, coa и cos можно рассматривать как компо-
компоненты некоторого аксиального вектора со.
В самом деде, вычислим например
з а
wi — Рза ^ Zi Za "зг '
= Юг (азэагг — азгагг) -Ь (Оа (азкхгэ — аъпаи) + 0)а (азгаа! — азкхгг)
Если воспользоваться теперь формулами B0) § 6, то мы получим
где верхний знак берется при одноименных системах Охх'х3'хя' и
нижний при разноименных.
I 23 СЛОЖЕНИЕ И РАЗЛОЖЕНИЯ ТЕНЗОРОВ 293
Аналогично получаются две другие формулы, так что получаем форму-
формулы преобразования
8
«**¦' = =ь 2 **'*»! G)
1—1
как раз совпадающие с формулами преобразования аксиального вектора.
Таким образом, каждому антисимметричному тензору отвечает неко-
некоторый аксиальный вектор, и обратно. Отметим еще, что составляющими
антисимметричного тензора по осям являются векторы
Pi = — ЩН + ««'* — iiXffl, ра = ijXffl, р3 = 18Х» (8)
Заметим, наконец, что тензор, сопряженный с антисимметричным тен-
вором, отличается от последнего только знаком
Пс = -П (9)
3. Докажем теперь теорему: всякий тензор можно разложить, и при-
притом единственным образом, на сумму двух тензоров, не коих один будет
симметричным, а другой антисимметричным.
Пусть дан тензор П и мы хотим разложить его на сумму двух тензо-
тензоров: симметричного 2 и антисимметричного А:
П = 2 + А A0)
Взяв от обеих частей этого равенства сопряженные тензоры
П== 2С+АС
в силу формул D) и (9) получим
Пс = 2 - А
Отсюда, в соединении с A0), найдем, что необходимо взять
2 = 2 > А =
В силу равенства B1) § 22 тензор 2 действительно будет симметрич-
симметричным, тешор А антисимметричным; впрочем это очевидно и из того, что эле-
элементами тензоров 2 и А являются
Рщlk „ Pkl Plk
Ski = 2 • а*' = 2
Сумма тензоров S и А дает, очевидно, исходный тензор П, следова-
следовательно, теорема доказана.
4. В § 22 мы условились символически записывать тензор
A3)
294 АФИННЫВ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. Ш
в виде
П - iiPi + i2pa + 1зРэ A4)
а также в виде
з з
П=22 РыЬк A5)
В том же параграфе мы ввели в рассмотрение особого рода тензоры,
названные нами диадами; в настоящем же параграфе мы определили, что
мы понимаем под сложением тензоров.
Покажем теперь, что формулы A4) и A5) справедливы и в том случае,
когда правые части этих формул мы понимаем как сумму соответственно
трех и девяти диад. Например, для доказательства формулы A4) доста-
достаточно заметить, что по самому определению диады
ipn pi& ри\ ( 0 0 0 | @00
ilPl = | 0 0 0 |, j2p2 = | рп ры pt»\, i,p, = 0 0 0
{ О 0 0 J \ 0 0 0 J Ipsi рзг раз
Складывая эти три диады, очевидно, получим П. Аналогично доказы-
доказывается и формула A5).
Так как всякий тензор можно представить в форме A4), то мы видим,
что всякий тензор можно представить в виде суммы трех диад.
Заметим далее, что мы имеем право сгруппировать в A5) слагаемые
следующим образом:
Если теперь ввести обозначения
з
то тензор П представляется опять в виде суммы трех диад
но только теперь три взаимно перпендикулярных орта Ь, fa, и будут
стоять в каждой диаде на последнем месте.
Если мы имеем тенаор П, представленный в виде суммы трех диад
П = aab! + а2Ц + asba
то сопряженный тензор будет, очевидно, равен сумме трех сопряженных
диад
Пс = Ьхаа + Ь^ + b3a3
Задача 161. Разложить на симметричную и антисимметричную
части диаду ab. В частности выяснить значение аксиального вектора,
соответствующего антисимметричной части.
I 24 УМНОЖЕНИЕ ТЕНЗОРА НА ВЕКТОР 295
Ответ. ab = S + А,
где
{ «i*i -j {аФг + аф,) \ (aib3 + a3bi) \
S = \(ab + Ьа) = | т(«А 4- аА) аА ± (а А + аф2) I
j 0 щ оL|
А =-,-(ab — Ьа) = | о)э 0 —шЛ, о)=-=-Ьха
I ?
§ 24. Умножение тензора иа вектор
1. Пусть нам дан тензор
(Ри Ргз Рк\
П — lift 4- »«Ps + i>pa — s рц рц Ргз \ A)
l/>»i Pus Рзз)
и вектор
a = Mi 4- цог 4- ча3 B)
Под скалярным произведением тензора П иа
вектор а справа мы будем понимать новый вектор а', который
мы будем обозначать символом П«а или, более коротко в тех случаях,
когда это не может вызвать недоразумений, Па и который мы определим
формулой
а' = П-а = Па = 1г (р,-а) 4- Ц (р^а) + i9 (ps-a) = C)
a) 4- i» (/>ai«i4-раа«г4/?2s«s) 4" is (Pai^
так что проекциями этого вектора а' являются
«l' = Р\\а\ + PiaOa 4- jOia^a
аа' = рпа^ 4- рггй8 4-. Pas^s D)
Л»' = РзЛ 4- РзгОг 4-
Таким образом, скалярное произведение тензора П на вектор а
вектор, составляющие которого линейным однородным образом ьыражаютея
через составляющие вектора а, причем коэффициентами являются компо-
компоненты тензора П. Вектор а' = П-а называется поэтому еще линей-
линейной векторной функцией вектора а.
Из самого вида формул D) ясна дистрибутивность и ассоциативность
скалярного произведения тензора на вектор, выражающаяся формулами
(П, 4- Па)-а = nj-a 4- П,-а
П-(»1 4- а2) = П-aj 4- П-а» E)
П-ma = т (П-а)
296 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. Ш
Рассмотрим частный случай, когда тензор П есть диада
1
\ 63Ci 6sCa 63C3
В этом случае формулы D) приводятся к
а/ = &i (с-а). <ч' = К (е-а), а3' = Ь3 (с-а)
и, следовательно, мы получаем, что
(Ьс).а = Ь(са) F)
Мы видим отсюда, что для того чтобы скалярно помножить диаду
на вектор, достаточно формально помножить на этот вектор ближайший
к нему вектор диады.
Бели тензор П есть сумма нескольких диад, аапример
то в силу дистрибутивности произведения мы получим аналогичный
результат
i + РзЧа + Psqs)-a = Pi (qi-a) + ра (qa-a) + р8 (q3-a) G)
При перемножении тензора на вектор важно указывать порядок
умножения. Условимся понимать под скалярным произведением задан-
заданного формулой A) тензора П на вектор а слева новый вектор а", который
мы будем обозначать символом а-П, или короче аП, и который мы опре-
определим формулой
а* = а-П = (a-ij) р! + (а-ц) р„ + (a-i3) р3 = я^ + а^ + asp3 (8)
в в проекциях
«1* = «iAi + <ЪРя + aaPsi
(9)
Для произведения вектора на диаду получим аналогично F)
а-(Ьс) = (а-Ь) в
и далее, аналогично G),
(a-Pi) qi + (a-p2) q2 + (a-p8) q3 A0)
Формулы G) и A0) приводят к очень простому практическому правилу:
для скалярного умножения суммы нескольких диад на вектор достаточно
помножить последний скалярно аа ближайший к нему вектор каждой
диады.
I 24
УМНОЖЕНИЕ ТЕНЗОРА НА ВЕКТОР
291
Сравнение формул D) и (9) приводит к одному важному выводу, вы-
выражающемуся формулой
а.П = Пс-а A1)
Формула (8) допускает интересное геометрическое
толкование. В самом деле, сопоставим формулы
а"
4- a,is + a3i3
+ а„рг + a3 pg
A2)
it
0
«1
M
«Dei. 81
Мы видим, что произведение а-П так составлено
из векторов pi, рг, рз, как вектор а составлен из основных ортов ii, Ь, is.
Ограничимся, для ясности, случаем двумерного пространства, так что
а
а"
asi2
+
Фиг. 88
Построим на взаимно перпендикулярных
ортах ii и Ь квадратную решетку из растя-
растяжимых прутьев, соединенных шарнирами,
как показано на фиг. 87.
Теперь так сдвинем и растянем стержни,
чтобы образоваласьпараллелограмматическая
решетка (фиг. 88), стороны каждого парал-
параллелограмма которой дают векторы pi и р2
Тогда радиус-вектор а = ОМ любой точки М решетки относительно
точки О перейдет при такой деформации решетки в новый радиус-вектор
а* = СУМ' (О' и М' — новые положения точек О и М). На чертежах
даны а и а" для щ = 3, аа = 2.
2, В результате скалярного умножения тензора П на вектор а мы
получаем новый вектор а' = П«а. Поэтому на тензор П можно еще смот-
смотреть как на оператор, совершающий преобразование одного вектора а
в другой вектор а', проекции которого определяются формулами D). По-
Покажем, что эту точку зрения можно положить в основу еще одного опре-
определения тензора.
Для того чтобы лучше уяснить себе сущность дела, докажем одну тео-
теорему, относящуюся к векторам.
Если для всякой прямолинейной прямоугольной системы координат
OxiX2x3 мы имеем совокупность трех величин bi, Ы, bs а если при пере-
переходе к любой другой {конечно, тоже прямолинейной прямоугольной) системе
координат и для любого вектора а выполняется условие
lit /Л О\
то величины Ь\, Ьг, bt определяют вектор Ь.
298 АФИНИЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. III
Для доказательства положим а\ = 1, аа' — 0, а8'. = 0 и заметим, что
тогда из A3) получится
bi = a1b1 + афг + a8bs
Но в силу того, что а есть вектор и в силу формул B) § 22 будем иметь
a, = cos (xi, Zi), аг = cos (х2, Xi), а3 = cos (z8, х±')
Следовательно
Ьл' = 6j COS (Ж-,, Xi') + Ь2 COS {x2, Xi) + b3' COS {Ж3, XL')
Аналогично устанавливаются формулы для bi и 6з. Совокзшность же
полученных трех формул выражает но § 22, п. 1 как pas тот фак?, что
величины 6i, bi и Ьз определяют вектор fa.
Докажем теперь аналогичную теорему для тензоров.
Пусть для каждой прямолинейной прямоугольной системы координат
мы имеем совокупность девяти величин pki (&> ' = 1,2, 3), и пусть линей-
линейные соотношения
bt = jdmuj + риаг + pi3a3 A4)
определяют в любой координатной системе совокупность трех величин
Ь\, Ьг, 6„. Если эти величины оказываются проекциями некоторого вектора
всегда, как только за alt а2, at взяты проекции какого-нибудь вектора,
то девять величин ры, являющихся коэффициентами линейных соотно-
соотношений A4), определяют некоторый тензор П.
Для доказательства возьмем какую-либо систему координат Oxi'х%'хг
и постараемся выразить величину рц' через девять величин рп. Удобно
взять за а вектор, который в новой системе координат имеет составляю-
составляющие а{ — 1, а,' = 0 (s ф 1); тогда из формулы A4) получим:
Ьк'-ри'
Так как fa и а по условию являются векторами, то
э
V = 2 Л1сгЬ„ а, = аг,
Поэтому, на основании формул A4),
з аз з s
pu' = v = 2 а*А = 2 S a/.Tj»rSe8 =23 а*г°!«Рм №. i = 1.2,3)
Эти соотношения и являются выражением того факта, что величины
образуют тензор.
I 24 УМНОЖЕНИЯ ТЕНЗОРА НА ВЕКТОР 298
3. В качестве применения предыдущей теоремы рассмотрим еще
несколько примеров тензоров.
Допустим, что твердое тело врашается около неподвижной точки О
(фиг. 89). Найдем выражение главного момента количества движения
этого тела относительно точки О через вектор его угловой скорости ».
Пусть положение точки М тела относительно точки О определяется
радиус-вектором г, тогда скорость точки М будет равна (§ 9, п. 8)
т = »хг A5)
Вели взять бесконечно малый элемент массы dm,
окружающий точку М, то количеством движения
этого элемента массы будет
v dm = w х г dm Фиг. 89
Моментом количества движения этого элемента массы относительно
точки О будет по определению
гх v dm = гх (юх ') dm
Сумма всех этих моментов количеств движений и называется момен-
моментом количества движения твердого тела; обозначая его буквой 1, имеем
(.18)
где интеграл распространен по всем элементам массы твердого тела.
В силу формулы
IX (в>хг) = юг2 — г (г-ш) = ш (ajj2 + х%* + х3г) — г (a:,a>i + asao)a
легко получим, что
h = <»] \ (х* + «a8) dm — щ \ xix^fim — юа V x^x^dm
1г = — «>! \ x2xt dm + «а \ <as8 4- xf) dm — ыЛ xsxs dm A7)
ls = — toj \ х3зн dm — <d2 \ x3xa dm + со» \ (х,г 4- a;sa) dm
Мы видим, что вектор момента количества движения является линей-
линейной векторной функцией вектора угловой скорости. Но тогда по преды*
дущей теореме коэффициенты в A7) образуют тензор, который называется
тензором моментов инерции; мы его обозначим через
аз [ A8)
I -/si Л» Л* J
где
Ju = J (xa* + хя3) dm
есть момент инерции тела относительно оси Охх, а
dm
— \
300
АФИННЫВ ОРТОГОНАЛЬНЫЙ ТЕНЗОРЫ
Гл. Ш
есть взятый с обратным знаком центробежный момент инерции или мо-
момент девиации относительно осей хг и ха. Остальные компоненты тен-
тензора моментов инерции имеют аналогичное значение.
Формулы A7) могут быть теперь записаны в весьма простом виде
I =s J-СЙ
или в составляющих
ll = /пС0] + Ji?(>>2 + /[3<»э A9)
«В г= «'Sl^l <~ 22^8 <~ *^28®8 (^^)
It =-~ J 31^1 ~
Отметим, что тензор моментов инерции, очевидно, симметричен,
В качестве второго примера рассмотрим поле вектора а (г) =
= а (хи ха, хя). Дадим радиусу-вектору г бесконечно малое прираще-
приращение <?г и рассмотрим соответствующее приращение da вектора а. Для
проекций этого вектора d& мы будем иметь формулы
B1)
da3-.
На основании теоремы предыдущего пункта мы можем заключить,
что коэффициенты линейных соотношений B1) образуют тензор, который
естественно наввать тензором, производным от век-
вектора а по вектору г, и обозначить через
da
dr
oat
din
dxi
Зоя
B2)
Этот тензор имеет очень важное значение, потому что ив него можно
получить все основные дифференциальные операции, рассмотренные в
в главе II. Формулы B1) можно теперь записать в очень простом виде:
B3)
i da
da = -fa-
вполне оправдывающем обозначение производного тензора.
Введем еще в рассмотрение тензор, сопряженный с B2). По причинам,
которые сейчас выяснятся, его очень удобно обозначить через
grad a =
да\ даг да%
Ьх\ дх\ дх\
да\ даг даг
дх% дх% дх±
да, даг да»
дх$ дхз дх%
B4)
5 24 УМНОЖЕНИЕ ТВНЗОРА НА ВЕКТОР 301
Так как ~ = (V*)<» т<> в силу формулы A1) будем иметь на осно-
основании B3)
<fa = (fr-grada = dt- Va B5)
Полученная формула вполне аналогична формуле
dtp = dr.grad ф = dt- V<P
Более того, если Va рассматривать как символическую диаду, в ко-
которой первым вектором служит символический вектор V< a вторым век-
вектором служит а, и если применить формальное правило скалярного умно-
умножения вектора на диаду, то мы получим из B5)
da = (<fr.V)a = (dr.grad) a B6)
Но эта формула есть как раз формула (9) § 13. Заменяя в формулах
B5) и B6) dt на какой-либо вектор v, мы придем к формуле
v-va = (v.y)a B7)
так что градиент вектора а по вектору v есть скалярное произведение
вектора v на тензор Va, сопряженный с тензором, производным от век-
вектора а по вектору г.
Конечно, формулу B7) можно еще переписать в силу формулы A1)
и того, что
в виде
(v. V)a - *.т B8)
Отметим совершенно очевидную формулу
g = I B9)
Наконец, разложим производный тензор da/dt на симметричнуш и ан-
антисимметричную части. Симметричный тензор есть
дах 1 fd(t\ , Эдя\ 1 /d(ti , даа\
да?] 2 \дэд 0э*1/ 2 \дэ?д д^]
1 /дл^ vdiN да? 1 /dttfi |^ &Л9\ /ОЛ\
1_ /да» , датЛ 1_ (да, 9о»\ dot
2 \dxi + dxj 2 Уда* + Эха) дха
и в том случае, когда вектор а (г) представляет вектор смещения частиц
упругого тела, называется деформационным тензором.
Антисимметричная же часть производного тензора есть
10 — аи а»а \
о>3 0 - ш | C1)
— а»» ом 0 I
302 АФИННЫВ ОРТОГОНАЛЬНЫЕ ТВНЗОРЫ рл т
где, как легко вычислить, вектор ш ранен
w = -| rot a C2)
Отсюда легко заключить, что тензор ^ симметричен только в том
случае, когда а есть потенциальный вектор а = grad <p. В этом случае
очевидно:
rfgrad
(KCi 173:5
¦_ яа_ I
C3)
4. Скалярное произведение симметричного или антисимметричного
тензора на вектор обладает некоторыми особенностями, которые полезно
отметить.
От умножения симметричного тензора П на вектор а как справа, так
в слева получается один и тот же результат.
В самом деле, мы имеем в силу формулы A1) и в силу симметричности
тензора П
а-П = Д..а = П.а C4)
Если образовать квадратичную форму
F = puXi2 + РюХг2 + pasXt? + 2plixlxi + 2plsxtxs +- 2ргзХаХ3
где pki — компоненты симметричного тензора П, то мы будем иметь оче-
очевидные равенства:
/тт 1 dF , ,
P -4- рцхг + р13х3
(П.г)а = -^- -^- = р12хг 4- р&Ха + pwxs C5)
л fiJJ1
"-^- = PisXj, -f РыХъ -Ь
эквивалентные одному векторному равенству
Пт =-i-grad/ C6)
Возьмем теперь антисимметричный тензор
со, 0 — <оЛ C7)
— ша оох 0J
Умножая его на вектор а справа, мы получим вектор b = А-а с со*
ставляющими
Ьг «= Ацпх + А1
Ь3 = — oojaj +
6, = — (йгпг +
24 УМНОЖЕНИЯ ТЯНЗОРА НА ВЕКТОР 303
Отсюда видно, что
А C8)
Совершенно аналогичное вычисление показывает, что
— А-а C9)
Таким образом, результаты скалярного умножения антисимметричного
тензора А на вектор а справа и слева отличаются только знаком. Это
впрочем является непосредственным следствием формулы A1) и формулы
(9) §23.
Пусть вектор а (г) есть вектор смещения частицы упругого тела;
тогда, как мы знаем
где
есть симметричный тензор деформаций, а
антисимметричный тензор. Поэтому
da = —- • dx =Ф.<*г + А.* D0)
Но в силу формул C1), C2) и C8) мы имеем
А-«(г = -^-rolaxrfr
поэтому получаем разложение dr на две части
rfr = Ф-dr 4-у rot axdt D1)
Эта формула определяет относительные перемещения различных
точек бесконечно малого объема, окружающего рассматриваемую точку,
в виде суммы двух членов, последний иа которых дает поворот объема
как целого, а первый определяет истинную деформацию объема
(см. § 29, п. 4).
5. Совершенно аналогично скалярному произведению можно опре-
определить векторное произведение тенаора
П = iiP, 4- i2p3 + i3p8
на вектор а справа как новый тензор П', который мы обозначим симво-
символом Пха и определим формулой
Пха = ix (p,xa) 4- ia (pgxa) 4- i3 (p3xa) D2)
Из самого вида этой формулы видна дистрибутивность векторного
произведения тензора на вектор. Если взять за тензор П диаду be, то,
как легко проверить, получится
Ьсха = Ь
304 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. III
т. е. опять надо формально помножить на вектор а тот вектор диады be,
который стоит ближе к а.
Это правило остается в силе и в случае векторного перемножения
суммы нескольких диад на вектор а справа или слева. Образуем в качест-
качестве примера векторное проиаведение
Ф = a>xl
где ш — некоторый вектор, I — единичный тензор. Так как
I = Mi + Ma + Ma
то
Ф — (»xii) ii + (»xi2) »2 + (»xi3) 4
Помножая тензор Ф на произвольный вектор а справа, получим
Ф-а = (wxii) (ij-a) + (mx'h) (ц-а) +¦ (w xi3) (v») =
= (» X ii)«i + (» X i»)aa + (» X i3)a3 = (w x a)
Сравнение полученной формулы с формулами C7) и C8) показывает,
что тензор Ф совпадает с тензором А, определенным соотношением C7).
Дадим ряд задач, в которых выясним еще некоторые вопросы.
Задача 162. Показать, что если тензор П обладает тем свойством!
что векторы
а' = П.а, Ь' = П.Ь, с' = П-с
где а, Ь, с три фиксированных некомпланарных вектора, оказываются
компланарными между собой, то все векторы П-u, где и — любой вектор,
компланарны и найдется такой отличный от нуля вектор v, что П-v = 0.
Обратно ив наличия такого вектора v следует компланарность всех П.и.
Задача 163. Показать, что если тензор П обладает тем свойством,
что векторы
а' = П-а, Ь' = П-Ь, с' = П«с-
где а, Ь, с — три фиксированных некомпланарных вектора — оказывают-
оказываются коллинеарвтыми между собой, то все векторы П-u, где и — любой
вектор, коллинеарны и найдутся два таких неколлинеарных вектора
v и w, что n>v = 0n n-w = 0. Обратно, из наличия двух таких векто-
векторов v и w следует коллинеарность всех П-и.
Задача 164. Если для трех некомпланарных векторов а, Ь, с мы
имеем
П.а = 0, П.Ь = 0, П.с = 0
то П-11 =0 для любого вектора а.
На основании предыдущих задач все тензоры можно разделить на
4 класса; а именно, возьмем три каких-либо некомпланарных вектора
а, Ь, с и составим векторы
а' = П.а, Ь' = П-Ь, с' = П-с
тогда могут оказаться четыре следующих случая:
§ 24 УМНОЖЕНИЕ . ТЕНЗОРА НА ВИКТОР 305
1) а' = Ь' = с' = 0, в атом случае назовем тензор П нулевым тен-
тензором. Все составляющие нулевого тензора равны нулю, так как из фор-
формул D) ясно, что в противном случае нашелся бы вектор а такой, что
а' фО.
2) а', Ь', о' коллинеарны, но не все сразу равкы нулю — в этом
случае тензор П называется линейным.
3) а', Ь', с' компланарны, но не коллинеарны — в этом случае тен-
тензор П называется пленарным.
4) а', Ь', с' некомпланаркы — в этом случае тензор П называется
полным.
Задача 165. Показать, что если рг, р2, р3 и q1? q2, q3 — две тройки
некомпланарных векторов, то диада р^ есть линейный тензор, сумма
двух диад pjqi + p»qs есть пленарный тензор, а сумма трех диад
pjq, + Р2Ч2 ~Ь РзЧз есть полный тензор.
Задача 166. Показать, что, обратно, полный тензор всегда может
быть представлен в виде суммы трех диад, но не может быть представлен
суммой двух диад.
Задача 167. Показать, что планарный тензор можно представить
в виде суммы двух диад, но нельзя представить одной диадой.
Задача 168. Показать, что линейный тензор может быть представ-
представлен одной диадой.
Задача 169. Если П — тензор, г и г' — радиусы-векторы, то пре-
преобразование г' = П-r можно рассматривать, как преобразование про-
пространства. Выяснить, в чем состоит ато преобразование для следующих
тензоров П:
1) П = al (a — положительное число),
2) П = I'+ аа,
3) П = 2ш» — I, где п — единичный вектор,
4) П = I + аЬ, где вектор Ь перпендикулярен вектору а,
5) П = 1г% +ч'Ц + »s'»s. где ix, i2, ia и i,\ ia', is' — две тройки
взаимно перпендикулярных единичных векторов.
Ответ. 1) Преобразование подобия; 2) растяжение в направлении
вектора а; 3) поворот около оси п на 180°; 4) сдвиг плоскостей Ь«г = const
параллельно направлению вектора а; 5) поворот пространства, при ко-
котором оси ii, i2, Ц переходят в оси it', ц'< h'< сопровождаемый зеркальным
отражением пространства, если ориентация осей i/, i2', h отлична an
ориентации осей ils i,, i3.
Задача 170. Дана линейная векторная функция
г' = ах(Ьхг) = П-г
При каких условиях тензор П будет симметричным?
Ответ. При условии, что а и Ь коллинеарны.
SO н. в. копан
30fi АФИННЫЕ ОРТОГОНАЛЬНЫЙ ТЕНЗОРЫ Гл HI
Задача 171. Для того чтобы тензор П был антисимметричным,
необходимо а достаточно, чтобы для любого вектора а выполнялось ра-
равенство
а.(П.а) = О
Доказать это.
Задача 172. Показать, что кинетическую энергию Т твердого тела,
вращающегося около неподвижной точки, можно выразить формулой
Т = -!¦«*• (J- ы)
где J — тензор моментов инерции, to —• вектор угловой скорости.
Задача 173. Дан тензор П. Разложим его на симметричную и анти-
антисимметричную части и обозначим через ш вектор — соответствующий
антисимметричной части. Доказать формулу
и.(П.у) — v.(Ibu) = — 2<n.(uxv)
где и и v — любые векторы.
Задача 174. Доказать, что
. (ахП)е = — (Ц.ха)
Задача 175. Найти представление в виде суммы трех диад тензора П,
преобразующего три некомпланарных вектора а, Ь, с в три данных век-
вектора р, q, г, т. е. тензора П такого, что Па = р, ПЬ = q, lie = г.
Р е ш е в в е. Обозначим через а*, Ь*, с* тройку векторов, нзашшых
с системой векторов а, Ь, с (см. § 8). Тогда, очевидно, будет
П = pa* + qb* + re*
В самом деле, принимая во внимание формулы A9) § 8, легко убедить-
убедиться, что этот тензор удовлетворяет всем поставленным условиям. С другой
стороны, ясно, что может быть только один тензор, удовлетворяющий
требованиям задачи, так как если бы существовало два различных тензора
111 и Па, дающих решение задачи, то тензор Ф = Ш — Па удовлетворял
бы условиям
Фа = ФЬ = Фс = О
и, следовательно, не мог бы быть отличным от нуля.
Задача 176. Доказать, что а, Ь, с — три некомоланарных вектора,
то имеет место тождество
аа* + ЬЬ** + се* = I
или, что то же,
а(Ьхс) + b (сха) + с (axb) = [a.(bxc)] I
Задача 177. Тождество предыдущей задачи, в силу непрерывности,
должно остаться тождеством и для компланарных векторов а, Ь, с. Исходя
отсюда и предполагая, что векторы а, Ь, с обладают тем свойством, что
из них может быть образован замкнутый треугольпик, доказать теорему
синусов плоской тригонометрии.
§ 25 ПРОИЗВЕДЕНИЕ ТЕНЗОРОВ 307
§ 25. Произведение тензоров
1. В этом параграфе мы рассмотрим оопрос о перемножении тензоров.
Пусть мы имеем тензор Л с элементами а» и тензор В с элементами Ьк1.
Мы сейчас постараемся дать определение произведения тензора А на
тензор В.
К этому определению естественнее всего подойти, исходя из данного
пами в предыдущем параграфе определения тензора, как оператора.
В самом деле, рассмотрим какой-нибудь вектор с я преобразуем его при
помощи тензора В, т. е. образуем скалярное произведение тензора В на
вектор с, в результате мы получим новый вектор с':
с' = В-с = Вс A)
Преобраауем теперь полученный вектор с' при помощи тензора А, т. е.
образуем скалярное произведение тензора А на вектор с'; в результате
мы получим вектор с":
с' = А-с' = А-Вс = АВс B)
В окончательном результате мы получаем преобразование вектора с
в вектор с*. Это преобразование осуществляется при помощи некоторого
тензора П:
с* = П-с = Пс C)
Сравнивая это выражение с предыдущим, мы, естественно, приходим
к мысли назвать тензор П скалярным произведением тен-
тензоров А и В и к тому, чтобы обозначить его через
П = А.В = АВ D)
Найдем теперь выражение компонентов pkt тензора П через компонен-
компоненты aki и bkt тензоров А и В.
Если составляющие векторов с, с', с" обозначим, как обычно, через
с*! с*', ск*, то из формулы A) будем иметь
з
с/ = 2 bnci (г = 1, 2, 3)
1=1
Далее из формулы B) находим
з
Си" = 2 акгСг D=1,2,3)
Следовательно
з з
с*" — 2 S «*аа (*=1,2,
С другой стороны, из C) видим, что
" 2 (А =¦ 1,2,3)
20*
308
АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ
Гл. Ш
Сравнивая эти выражения с предыдущими, находим, что аадо принять
ры =
E)
Итак, скалярным произведением АВ (для краткости
ми будем говорить просто о произведении) двух тензоров АиВ
с компонентами ак1 и 6*< называется тензор П,
составляющие которого определяются форму-
формулами E).
Полученные выражения для элементов тензора АВ совпадают с теми
выражениями, которые приходится рассматривать при перемножении
определителей. Рассматривая тензор А, мы можем составить определи-
определитель из элементов этого тензора, который мы будем обозначать симво-
символом D (А):
аи ai2 ais
D (А) = ом аза <№
331 аза Озз
Точно так же образуем определитель тензора В:
О (В)
Если мы будем умножать определитель D (А) на определитель D (В)
по обычному правилу, но только непременно умножая строки
определителя/) (А) на столбцы определителя D(B),
то, как легко убедиться, для элементов определителя D (A) D (В) получим
как раз выражение E), т. е. мы получим, что
ptl /?12
Р22
D (A) D (В) =
-D (П)
F)
Итак, определитель произведения двух тензо-
тензоров равен произведению определителей этих
тензоров.
Рассмотрим теперь некоторые следствия, вытекающие из данного
нами определения проиавецения двух тензоров
Прежде всего из формул E) очевидна дистрибутивность произведения,
выражающаяся формулами
(А, -1-Аа)-В = Aj-B + А,-В
A-(Bj ¦+- В2) = A-Bj + A-Ba G)
Далее, возьмем за тензоры АиВ две диады
А = pq, В = rs (8)
и составим их произведение; в результате, как легко вычислить, полу-
получится
(pq).(rs) = (q-r) ps (9)
§ 25 ПРОИЗВЕДЕНИЕ ТЕНЗОРОВ 309
На самом деле, впрочем, нет нужды производить какое-либо вычисле-
вычисление. В самом деле, применим к тензорам (8) рассуждение начала этого
параграфа. Выберем какой-либо вектор с, тогда
с' = В-с = (rs)-c = г (s«c)
Преобразуем теперь этот вектор при помощи тензора А:
с* = А.с' = (pq)-c' — р (q«c') = р (q-r) (s-c)
Ясно, что если мы положим
П = (q.r)ps
то окажется по правилу умножения диады на вектор
(П.с) = с*
Отсюда следует, что П = АВ, т. е. следует равенство (9). Итак: чтобы
перемножить две диады, нужно скалярно помножить второй вектор
первой, диады на первый вектор «торой диады и получение» число ваять
коэффициентом при диаде, первым вектором которой, служит первый
вектор первой диады, а вторым вектором кторой. вектор второй диады.
В силу формул дистрибутивности G) и в более общем случав произ-
произведения суммы нескольких диад на другую сумму нескольких диад будет
иметь место формальное правило: последние векторы диад первого мно-
множителя нужно скалярно умножить на первые векторы диад второго мно-
множителя, например,
з з зз
Если А есть тензор с компонентами ак!, то, вводя векторы
аг = аг1?1 +¦ а„\г
as = a31i, + л32]2
мы можем, согласно § 23, написать
А = 1,8] + i2as + iaa3
Точно так же, если В есть тензор с компонентами bkt и
Ь, = &„], + 621is + b31i3
bj = &i*ii + бга'а + huh
bs = 6,3ij + Ajsi, + Ь33\3
то можно написать
В = b,ii + bsis + bgi,
Производя теперь перемножение тензоров А и В по правилу A0),
мы получим, очевидно, что
з з
П =АВ=2 2(«*-bi)i*ii
310 ДЛИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. Ш
Отсюда видно, что компонентами тензора П являются
Pki = a*'b = ак1Ьц + ak2b<.i -\- ак^>з, (*. I = 1, 2, 3)
Эти выражепия совпадают, как и должпо быть, с выражениями E).
2. Тот факт, что произведение двух тензоров, которое мы только что
определили, опять оказывается тензором, является очень важным.
В самом деле мы можем складывать н перемножать тензоры, и в ре-
результате этих действий опять получаются тензоры. Это дает нам воз-
возможность еще одной точки зрения на тензоры; именно, мы можем рас-
рассматривать последние, как особого рода гиперкомплексные числа, обра-
образующие замкнутый класс чисел, из которого мы не выходим, если йроцз-
водим над ними действия сложения и умножения.
Однако алгебра тензоров обладает, рассматриваемая с этой точки
зрения, некоторыми особенностями, которые мы сейчас и отметим.
Мы уже отметили в предыдущем пункте свойство дистрибутивности
произведения двух тензоров, выражающееся формулами G).
Далее совершенно очевидным представляется свойство ассоциативно-
ассоциативности по отношению к скалярному множителю т:
(тА)-В = т(А-В) (И)
А.(тяВ) = т (А-Б)
а также и свойство ассоциативности произведения трех тензоров;
(АВ).С = А (ВС) = ABC A2)
доказательство которого предоставляется читателю.
Остановимся теперь на других свойствах, которые отличают алгебру
тензоров от обычной алгебры.
Прежде всего необходимо резко подчеркнуть некоммутатив-
некоммутативно с т ь произведения двух тензоров. Вообще говоря, произведе-
произведение двух тензоров АВ отличается от произведе-
произведения ВА. Например, если взять за А диаду i,^, а за В диаду i2ij, то
окажется, что АВ = iji,, а ВА = i2i2. Следовательно, в произведении не-
нескольких тензоров важно отмечать порядок сомножителей, которые нель-
нельзя переставлять между собою.
Второе важное отличие алгебры тензоров от обычной алгебры заклю-
заключается в том, что произведение двух тензоров может обратиться в пуль,
хотя оба тензора отличны от нуля. Так например, если взять за А тензоо
( 0 1 0\
А = ijLj = | О О О
\0 0 0 )
то АА = ij (I2- ix) i2 = 0. Отсюда видно, что если мы имеем равенство
АВ = О
то мы не можем отсюда заключить, что иди А = 0 илп В = 0.
§ 25 ПРОИЗВЕДЕНИЕ ТЕНЗОРОВ ЗН
Разберемся в этом вопросе несколько подробнее.
Если мы смотрим на тензор А как на оператор, то, применяя его к ра-
радиусу-вектору г, мы получаем новый вектор г':
г' = Аг
Если мы рассматриваем совокупность всевозможных векторов г,
то совокупность соответствующих им векторов г' может оказаться одной
из следующих четырех видов (см. задачи 162—168):
1°. Все векторы г' = 0, в атом случае А = 0.
2°. Все векторы г' колливеарны, в этом случае А называется линей-
линейным тензором.
3°. Все векторы г' компланарны, в этом случае А называется п л а-
нариым тензором.
4°. Совокупность воктороп г содержит в себе всевозможные векторы,
в этом случае А называется полным тензором.
Допустим теперь, что мы имеем равенство
АВ « 0 A3)
и посмотрим, какие следствия мы можем отсюда вывести. Предыдущее
равенство эквивалентно толу что для любою вектора г
(ЛВ)ч=0 A4)
Но обозначим
Вг = г' A5)
Тогда предыдущее равенство принимает вид
Аг'=0 A6)
Если тензор В полный, то п формуле A5) вектор г' может, при надле-
надлежащем выборе г, принять любое значение, а тогда из A6) легко заклю-
заключим, что А = 0.
Если тензор В пленарный, то в формуле A5) все значения вектора г'
будут компланарны, а тогда, согласно задаче 163, из формулы A6) сле-
следует, что все значения Аг будут коллинеарны. Следовательно, А есть
линейный тензор (или нуль).
Если тензор В линейный, то в формуле A5) все значения вектора г'
будут коллинеарны, а тогда, согласно задаче 162, из формулы A6) сле-
следует, что все значения Аг будут компланарны. Следовательно, А есть
планарный тензор (или линейный или нуль).
Наконец, если В есть нулевой тензор, то A3) выполняется для любого
тензора А. Таким образом, если в равепстве A3) один аз тензоров А или В
полный, то другой должен равняться нулю.
Покажем теперь, что необходимое и достаточное условие для того,
чтобы тензор П был полным, состоит в неравенстве пулю определителя
тензора П:
D (П) ф 0 A7)
3t2 алинные ортогональные тензоры Гл. Ill
В самом деле, приведем тензор П по § 23 к сумме трех диад
П = pj
где ii, ia, is — три взаимно перпендикулярных единичных орта, и соста-
составим произведения
nil = Pi. ni2 = pjj, Ш3= ps
Для того, чтобы тензор П был полным, необходимо и достаточно
чтобы векторы pt, р2, р3 были некомпланарны, т. е. чтобы
Pi (Р2ХРз)=?Ь0
это неравенство, записанное в форме определителя, имеет вид
Ри Ри Рзг
Ри Pis Раз
Ри Ргз Рза
т. е. совпадает с неравенством A7), что и требовалось докааать.
3. Рассмотрим произведения тензора П на самого себя. Вместо ПП
пишут, как в обычной алгебре, Па, вместо П!П пишут П8 и т. д.
Принимают далее условно, что нулевая степень тензора П равна
единичному тензору П° = I.
Дадим теперь определение обратного тензора.
Если существует такой тензор А, что имеет место равенство
АП = I A8)
то тензор А называется обратным для тензора П и обозначается
через И'1.
Не для всякого тензора П существует обратный тензор. В самом деле,
применим формулу F) к произведению A8) тензоров А и П; мы получим
В (A) D (П) = D A) = 1
следовательно, D (П) должен быть отличным от нуля, т. е. тензор П
должен быть полным. Полнота тензора П есть необходимое и достаточ-
достаточное условие существования обратного тензора П. В самом деле, допу-
допустим, что тензор П — полный и докажем, что существует обратный тензор.
Действительно, преобразование
г' = Пг
переводит в этом случае совокупность всевозможных векторов г опять-
таки в совокупность всевозможных векторов г', следовательно, по каж-
каждому вектору г' можно определить соответствующий ему вектор г.
Следовательно
г = Аг<
где А есть некоторый тензор.
Комбинируя это равенство с предыдущим, мы увидим, что АПг = т,
откуда в силу произвольности г следует, что АП =1, т. е. А = П~!
I 25 ПРОИЗВЕДЕНИЕ ТЕНЗОРОВ 313
Итак, для всякого- полного тензора П существует обратный тензор
IT1, причем, если
г' = Пг A9)
то
г = П"гг' B0)
Согласно оенотшому определению A8)
1ГЧ1 = I B1)
Но если мы подставим в A9) выражение B0), то легко увидим, что
. ПГГ1 = I B2)
Отметим еще одно простое правило действия с обратными тензорами
(АВ) = В^А'1 B3)
в самом деле
= В (А-А) В = B~lB = I
Вычислим теперь элементы тензора П через элементы тензора П.
Если полные тензор П задан в диадвой форме
П = чр, 4- 1гр8 + i3p3 B4)
то. в силу полтюти тензора П, векторы plt ръ, Рз не могут быть компла-
компланарными, так как
и по условию полноты D (П) ф 0. Обозначим через рг*, рг*, р3* систему
векторов, взаимных с plt fo, p3:
Pl pi-lp, X pa) ' Pa p,.(Pi X p8) ' Рз pi-(p2 X p3) K '
Составим тензор
A = p,*ii 4- p2*ia 4- ps*is
Образуем теперь по формуле A0) произведение ПА; пользуясь форму-
формулами A9) § 8, увидим, что
ПА = V, +- i2i4 + ist, = I
Это равенство в силу B2) показывает, что А = П. Итак
П" = р,*ч + Ps*U 4- p3*i3 B6)
На основании этой формулы легко выразить составляющие тензо-
тензора П через составляющие тензора П. Но мы поступим иначе.
Формула A9), написанная в составляющих, имеет вид
Х\ = Рпх1 4" />12#2 4" P13Z3
B7)
314
АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ
Гл. III
Решая эту систему уравнении относительно xi, х%, Хз по обычному
правилу Крамера, легко найдем, что
B8)
Хз
Рц*л'
+ fa
+ Лн
D(
+ Р*
.Xi + Psl*i'
П)
где Pki суть алгебраические дополнения элементов pki в определителе
Pl\ Pl2 PlS
Pt\ Pa Pv>
Pi\ Рвг Раз
т. е. миноры элементов ры, умноженные на (— 1)*+'. Например
Ръг Pis
Рз1 Рза
Pl2 Pl3
Р«г Рза
Формулы B8) суть не что иное, как формула B0), написанная в со-
составляющих; поэтому мы получаем следующие формулы для элементов
тензора П.;
4 <29>
4. Выше было указано, что тензоры можно рассматривать как особого
рода числа. Покажем сейчас, что обыкновенные комплексны» числа можно
трактовать как тензоры частного вида в пространстве двух измерений.
Рассмотрим следующее преобразование пространства
ж/ = р (#] cos(p + 2^ sin (р), х3' = р (— х, sin (р + хг cos(p) C0)
где р > 0 и (р — два вещественных числа. Это преобразование состоит,
очевидно, в повороте па угол ф около начала координат и последующем
равномерном расширении или сжатии во все стороны. Преобразование
C0) можно записать в виде
г' = Пг
где
/ pcos«p psinqM
(— р sin ф р cos (p
По правилу сложения тензоров мы можем написать
n=pcos(pj
где через J обозначен тензор
psinq>| I = peos(pl + psin<pJ C2)
-{Л о}
25
ПРОИЗВЕДЕНИЕ ТЕНЗОРОВ
315
соответствующий, очевидно, повороту плоскости па угол 90е п направле-
направлении от оси хг к x-l. Составим теперь J2; простое вычисление по форму-
формулам E) дает, что
Ja = 1 о —1
что впрочем ясно и так, ибо J2 соответствует, очевидно, повороту плоско-
плоскости на 180° около качала координат.
Мы пидим, что тензор J подчиняется тем же правилам перемножения,
что и комплексная единица i. Можно поэтому отождествить J с комплекс-
комплексной единицей i и вместо C2) написать
П = р cos ф + i p sin ф C4)
Таким образом, тензоры вида C1) можно рассматривать, как обычные
комплексные числа.
В качестве весьма простого применения, положим в формулах C1)
и C4) р = 1; тогда получим тензор поворота около начала координат
на угол ф. Ясно, что тензор Пп означает в атом случае операцию пово-
поворота на угол тр. Поэтому мы приходим
к известной формуле Моавра
(сор <р 4- i sin ф)" = cos «ф 4- i sin n ф
5. В предыдущем пункте был рас-
рассмотрен вопрос о тензоре поворота
в плоскости. Теперь мы рассмотрим
вопрос о иовороте твердого тела в про-
пространстве около неподвижной точки О.
П роведем в твердом теле оси коор-
координат хг, аг2, хз и пусть после пово-
поворота эти оси совпали с осями коорди-
координат x-i', Хг , .хз'.
Положение осей х,', х2', хз' относительно осей ajj, жа, х3 характери-
характеризуется таблицей косииусог. a,,i § 22. Однако весьма часто для определе-
определения этого положения пользуются другими величинами. В механике
обычно употребляют так называемые углы Эйлера гр, i(j, в (фиг. 90). Здась
9 есть угол между осями хя и х3', ф — угол между осью xL и линией узлов
ON (так называется линия пересечения плоскостей Оххх^ и Охл'хг'), отсчи-
отсчитываемый от оси х, в направлении к оси ж2, и \р — угол между линией
уалов ON и осью г,', отсчитываемый от линии узлов ON в положительном
направлении вокруг оси х3'.
Все девять косинусов akt могут быть выражены через три угла Эйлера.
В самом деле, мы можем осуществить поворот осей Охгхгхя в новое по-
положение Ох^'хъХъ' путем трех последовательных поворотов:
1) на угол ф около оси х3, при этом ось з\ перейдет в линию уалои ON;
2) на угол 0 около л и пи и узлов ON, при отом ось х3 перейдет в ха';
3) на угол ¦»!) около оси х3', при этом ось ON перейдет а ось и/.
*-.?
Фиг. 90
31R АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл III
В результате этих трех поворотов ось х\ перейдет в z1', ось zs в х3',
и следовательно ось х.г в х/, т. е. тело из старого положения перейдет
в новое.
Но каждому из трех указанных поворотов отвечает свой тензор пово-
поворота, а именно повороту на угол qp соответствует преобразование
Ъ = ?j cos ф + ij sin <p
\г = — хл sin <p + xs cos <p
|з = х8
где ось C?5i совпадает с линией узлов ON, а ось ??|8 с осью Ох3.
В тензорной форме мы будем иметь
где ? вектор с составляющими 11; |2, ?а* а Ф тензор
cos ф sin ф 0 |
0 '
|
Ф = }— sin <p совф
\ О О
Точно так же поворотам на углы 9 и ij> соответствуют преобразона-
ния
ч = Щ, г' = Чг\
где Ti — вектор с составляющими r\lt тJ, т)а, причем ось Ot\i совпадает
с ON, а ось Or\s с осью Охз', а * и W — тензоры
О О
(
cos 9 sin О
cos i|> sin ij) 0
¦ sin ij) cos \p 0
10 — sin 0 cos 0 j { 0 0 1
В результате мы получаем окончательное преобразование
г' = ТЭФг
и так как оно должно совпадать с преобразованием
Xi =
то мы получаем возможность, составив произведение трех тепзоров
по формулам E), вычислить все девять косинусов aki:
<*и — cos ф cos ij) — а1г = sin ф cos 1|) 4- iu = sin i() sin fl
— sin ф sin i|i cos в + cos ф sin ip cos в
O2i = — cos ф sin i|i — ai2 = — sin ф sin "ф + a2s = cos 'Ф sin в
— sin ф cos ij) cos в + cos ф cos i|> cos 0
«3i = sin ep sin 9 a32 = — cos ф sin 8 a33 = cos 9
§ 26 СИММЕТРИЧНЫЕ ТЕНЗОРЫ 317
Задача 178. Доказать симметричность тензора ППС.
Задача 179. Доказать, что (П,.) = (П),..
Задача 180. Показать, что всякому тензору П можно сопоставить
тензор П*, обладающий тем свойством, что для любых двух векторов
и и v имеет место равенство
n*.(uxv) = (Пи)х(Пу)
Найти выражение тензора П* в диад ной форме, если
П — ijPi + isp2 + i8Ps = Piii + P2»s + Р»Ц
Ответ. П* = (p2xp3)ii + (PsXPi)i2 + (PiXp)ia
Задача 181. Показать, что
ПСП* = D (П) I
и, исходя 'отсюда, найти выражения для составляющих {П*}и тензора П*.
Ответ. {П*}и = Рк1, где Рщ — величины, определенные в п. 3-
Задача 182. Показать, что D (П*) = [D (П)Р.
Задача 183. Показать, что если iu i2t i3 — орты, направленные по
осям х1, хг, х9, a i]', ц', i3' — орты, направленные по взаимно перпенди-
перпендикулярным осям xt', x2', х3' (фиг. 90), имеющим'ту же ориентацию, что
и оси хг, z2, xs, то тензор поворота П может быть представлен в форме
П = М,' + М2' + i3i3'.
Задача 184. Показать, что если ППС = 1 и D (П) > 0, те П есть
тензор поворота.
§ 26. Симметричные тензоры. Тензорный эллипсоид
1. Рассмотрим симметричный тенаор П, так что его элементы удовлет-
удовлетворяют соотношениям
Ра = Рш (ft, г = 1,2.3) A)
Докажем следующее важное свойство симметричных тензоров:
Ь-(П-а) = а-(П-Ь) B)
т. е. скалярное произведение из b и скалярного произведения симметрич-
симметричного тензора П на вектор а не меняется при перестановке векторов а и Ь.
В самом деле
зз зз
Ь.(П-а) = 2 Л» S Рм«| = 53 2
*=1 1=к *=1 1=1
.4 :| 3 9
а.(П-Ь) =2 «/ S Pi A =2S
1=1 *=1 «г=1 !=1
и в силу A) оба выражения равны.
318 АФИННЫК ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. Т11
2. Симметричные тензоры допусиают интересную геометрическую
интерпретацию, к изложению которой мы и перейдем.
Заметим, что вектор а можно графически представить не только на-
направленным отрезком (как обычно), но и плоскостью
ат= 1 C)
где г — радиус-вектор переменной точки (фиг. 91). В самом деле, так
как а-г = ага = 1, то го = -, т. е. геометрическое место
концов радиусов-векторов, исходящих из начала коор-
координат и удовлетворяющих уравнению C), есть плоскость,
перпендикулярная вектору а и отстоящая от начала ко-
координат на расстоянии —. Поэтому вектор а перпендику-
Фиг. 91 лярен к плоскости C) я имеет длину, обратную расстоя-
расстоянию пачала координат до этой плоскости. На прямой,
проходящей через начало координат и имеющей направление п, плоскость
C) отсекает отрезок длины р = —- .
71
Будем аналогично поступать с симметричным тензором П. Рассмот-
Рассмотрим поверхность
г-(П.г) = 1 D)
где г — радиус-вектор переменной точки. Производя перемножение, для
левой части уравнения D) найдем выражение
2 4- pi2xf + pssxs* + ZpuX^Xz + 2ргзхгх3 + 2p31x3x, = i E)
Таким образом, мы имеем дело с поверхностью второго порядка, имею-
имеющей центр (фиг. 92). По самому способу получепия поверхность эта не
яависит от выбора системы координат. Найдем
точки пересечения этой поверхности с координат- "ч\^п
ными осями. На оси Oxt имеем х% = х3 = О,
поэтому
Но так как всякий радиус, исходящий из Фиг. 92
начала координат и имеющий направление а,
может быть взят за ось xi, то, значит, этот ра-
радиус пересекает поверхность D) в точке, отстоящей от начала координат
на расстоянии
Р = гт^= F)
VP
Таким образом, если на каждой прямой, проходящей через начало
координат, отложить отрезок, обратный корню квадратному ив рпп, то
геометрическое место концов этих отрезков даст поверхность второго
порядка E). Бели для всякого направления п величина рпп положитоль-
I 26 СИММЕТРИЧНЫЕ ТЕНЗОРЫ 319
на — случай, наиболее важный в приложениях,— поверхность E) будет,
очевидно, эллипсоидом, ибо все р будут ограничены. Поэтому уравнение
E) называется уравнением тензорного эллипсоида (хотя
оно может представлять и другие поверхности второго порядка). Бели
тензор есть тензор моментов инерции, то рпп = ./„„, т. е. рп„ есть в этом
случае момент инерции относительно оси о, величина всегда положитель-
положительная, поэтому, строя по указанному выше правилу поверхность, мы полу-
получаем эллипсоид инерции.
Если для некоторых направлений рпп принимает отрицательные зна-
значения, то в правых частях формул D) и E) можно вместо 1 брать ±1,
а в правой части формулы F) вместо рт брать |/>„„).
Скалярное произведение П.г имеет простое геометрическое значение.
А именно докажем, что если вектор г оканчивается в точке М поверх-
поверхности D), то вектор
п = П.г G)
имеет направление нормали к плоскости, касательной к поверхности
в точке М.
В самом деле, если точка М, оставаясь на поверхности, испытает
бесконечно малое смешение, то радиус-вектор г получит бесконечно малое
приращение dr, лежащее в касательной плоскости к поверхности в точке
М. При этом мы будем иметь
ф-(П.г)] = О
(ибо на поверхности г.(П г) = 1), или
afr (П.г) + r.(n.rfr) = О
Но по оснопному свойству симметричных тензоров оба слагаемых рав-
равны, следовательно
rfr-n = О
т. е. вектор п перпендикулярен к любому направлению, лежащему в ка-
касательной плоскости к поверхности в точке М, что н требовалось дока-
доказать. Впрочем это обстоятельство непосредственно вытекает из формулы
C6) § 24.
Так как г.Г] = 1, топ-Q/V = 1; откуда для величины вектора П.-г
получаем выражение
Задача 1S5. Покапать, что для антисимметричного тензора А имеет
место равенство
b-(A-aL- а.(А-Ь) = О
для любых векторов а и Ь.
Задача 186. Во что переходит поверхность г-г = 1 при преобра-
преобразовании г' = П-г, где П полный тензор?
Ответ. В эллипсоид г'-Тг' = 1, где Т = П,,!!.
320 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. III
§ 27. Главные оси тензора. Главные значения тензора.
Инварианты тензора
1. Рассмотрим какой-либо тензор П и пусть
П.а = Ь
Если вектор b коллинеарев вектору а, т. е. если вектор а после преоб-
преобразования изменяет только свою величину, не изменяя своего направления,
то направление вектора а называется главным направлени-
направлением тензора. Если при этом Ь = Ха, то величина X называется глав-
главным значеваем тензора. Оно показывает, во сколько раз тензор
увеличивает векторы, направленные по главным осям тензора; направ-
направление таких векторов тензор не меняет. Мы воспользуемся этой кол-
коллинеарностью векторов а и Ь = П-а для отыскания главных значений
и главных осей тензора.
Итак, пусть тензор задан в некоторой системе координат своими
компонентами ры и пусть а имеет главное направление, которому отве-
отвечает главное значение X, тогда по самому определению
П.а = Ха A)
что равносильно трем уравнениям
Ьо, B)
Получились три линейных однородных уравнения относительно
at, аг, аг. Эта система уравнений может иметь решение, отличное от нуля,
только если ее определитель равен нулю
^и — ^ Pit Р\з
Pzi Рг\ — ^ Рга
Рз1 Рзг Рзз — ^
C)
Из получепного кубического уравнения нужно определить X, а тогда
из системы B) можно определить отношения ai : as : аз, т. е. главное
направление тензора, отвечающее взятому корню X уравнения C).
2. В случае симметричного тензора П мы сопоставляли ему поверх-
поверхность
PuXi* + Pis?? + Рз»Язг + ZpuXiXz + 2р23х2хя + 2P7ilx3Xy = 1 D)
причем указывали, что поверхность эта не зависит от выбора координат.
Но известно, что уравнение D) надлежащим выбором осей Жх, 22, Хя
можно привести к виду
= 1 E)
§ 27 ГЛАВНЫЕ ОСИ ТЕНЗОРА 32j
Таким образом, в этой системе координат все элементы тензора, кроме
диагональных, обращаются в нуль и сам тензор принимает простейший
вид
( Xi 0 0 |
F)
В соответствии с этим и преобразование вектора Ь = П-а будет иметь
весьма простой вид
8, bs = XgOa G)
Очевидно, что для симметричного тензора направления осей xlt я2 и Х3
являются главными направлениями, а величины Хл, X* и Хэ — соответст-
соответствующими главными значениями.
В случае симметричного тензора существуют, таким образом, три глав-
главных направления и три главных значения, так что уравнение C) имеет
при pki = ргк три вещественных корня.
В качестве примера рассмотрим преобразование
1 = J.co (8)
определяющее главный момент количеств движения твердого тела, вра-
вращающегося около О, взятый относительно начала координат, через
угловую скорость со. Беря за оси координат главные оси эллипсоида
инерции и обозначая через /i, J%, Jt главные моменты инерции, будем
иметь
'i = А«>,, h = Л«>а. h = J3^3 (9)
Применим уравнения (9) для вывода уравнений Эйлера для вращения
твердого тела около начала координат из закона моментов количеств
движения
где L есть главный момент внешних сил относительно начала координат.
Так как мы хотим относить движение к главным осям эллипсоида инер-
инерции, неподвижно связанным с твердым телом, то для вычисления dXIdl
мы должны воспользоваться формулой A2) § 10:
) = jT + т2*з —
f\ at
Составляем уравнения A0), подставляя в них вместо d\!dt выраже-
выражения A1), в которые, в свою ечередь, вставлены значения (9) для 1:
т dC»! , у . г N ,
Ctt
j d(Si^ i / Г т \ f {АУ\
J3 ^J~ t W2 J
21 H- Е- Кочка
322
АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ
Гл. Ш
Уравнения A2) и называются уравнениями Эйлера вращения твер-
твердого тела около неподвижной точки.
3. Возвращаясь к общему тензору П, развернем кубическое уравне-
уравнение C) по убывающим степеням Хг
A3)
ргг
рг*
раз
раа
ри
Р13
pta
раа
ргг
ры
pit
рхг
pia
pa*
раз
= 0
ри
Р32
ри
рш
р*г
pi»
рза
ри
ргг
pat
+
1
ои
pia
рп
pas
раа
SSS
Р31
рвя
-1-
ри
ри
рп
ргг
Мы знаем, что корни этого уравнения Xi, Хя и Хз не должны зависеть
от выбора координатной системы. С другой стороны, известны соотно-
соотношения между корнями я коэффициентами уравнения:
/i = ри 4- ргг + рза = Xi + Хг + Хз
A4)
Поэтому величины It, la и /з не изменяются при преобразовании
координат. Эти величины называются инвариантами тензора.
При помощи этих инвариантов мы можем составить бесчисленное множе-
множество других инвариантов. Так, например, инвариантом является величина
A5)
мы получим
A6)
Составляя инвариант /i для производного тензора ¦—
по формуле B2) § 24
з~ ~Н я-' ¦+¦ ^з— = div a
Таким образом, рассмотрение теязора da/dr привело нас к (v- V) •
rot а и div а, т. е. ко всем основным дифференциальным операциям век-
векторного анализа.
Те тензоры, у которых инвариант h обращается в нуль, называются
девиаторами. Покажем, как можно из любого теязора П получить
девиатор. Для этого достаточно, введя обозначение
а = Ii = ри +¦ jogs + Рза
рассмотреть новый тензор
П' = П - 1«1
У этого тензора диагональными элементами будут величины
A7)
ри—та, ргг— -д-<
сумма которых равна нулю.
раз — у в
5 27 ГЛАВНЫЕ ОСИ ТЕНЗОРА 323
Образуем еще инвариант Л для тензора П = АВ, являющегося про-
произведением двух тензоров А и В. Для определения этого тензора мы имели1
формулы E) § 25:
з
Phi = 2 «*Aj (fc, 1 = 1, 2, 3) A8)
поэтому инвариантом /i для тензора П будет выражение
которое целесообразно назвать бискалярным произведе-
произведением тензоров Аи В. Мы будем обозначать его через
з з
А.-В=2 2а*А* A9)
При В = А выражение A9) делается аналогичным A5).
Задача 187. Вычислить инварианты для диады аЬ.
Ответ, h = а-Ь, h = О, Ia = 0.
Задача 188. Вычислить инварианты для антисимметричного тен-
тензора, которому соответствует вектор ю.
Ответ. /i = 0, /« = в»2, /з = 0.
Задача 189. Показать, что если а, Ь, о — три некомпланарных век-
вектора и
Па = а', ПЬ = Ь', Пс = с',
но
а.(Ьхс)
- «•(»" х е') + Ь.(С X а') + с-(а' X Ь')
a.(bxc)
_ а'»(Ь X о) + Ь'-(с х а) +е'«(а х Ь)
~ a.(bxe)
Решение. Пусть вектор г = <ха ¦+- ЭЬ + ус имеет главное направ-
направление, тогда Пг = Хг, где X — главное значение, т. е.
П (аа -h pb -h fc) = X (аа + рЫ- fc)
или
аа' + pb' + yc' = X («а + рЬ + ус)
или
« (а' — Ха) + (J (Ь' — ХЬ) + Т (с' - Хс) = О
Таким обравом, три вектора
а' — Ха, Ь' — ХЬ, с' — Хс
компланарны, что может быть только, если
(а' — Ха).[(Ь' — ХЬ)х(о' — Хс)] = О
21*
-324 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. II]
Раскрывая это векторно-скаяярное произведение, получим уравнение
третьей степени от X:
а'.(Ь'хс') - Х{а.(Ь'хС) + а'-(Ьхс') + а'.(Ь'хс)} +
+ Ха{а'.(Ьхс) + а.(Ь'хс) + а.(Ьхс')} — Х*а.(Ьхо) = О
сравнивая последнее с уравнениями A3) и A4), получим требуемые в за-
задаче выражения.
Задача 190. Показать, что если П = вд + црг + isp,, то
1г = ц.рх + ia-Pi! + is-p3
h = Ч-(РгХРз) + V(PsXPi) + is-{PiXP2) B1)
h = Pi-(PaXPs)
Задача 191. Показать, что если инварианты тензора П суть
/i, /a, h, то тензор П удовлетворяет уравнению
П" - IJP + /2П - 13\ = 0 B2)
Решение. Пусть П = 1грх + ^р» + i3p3 = р^ + pais + psis. Бу-
Будем исходить из тождества задачи 176
а(Ьхс) +Ь(сха) +с(ахЬ) = [а-(Ьхс)]1 B3)
черного, как указано в задаче 177, для любых трех векторов а, Ь, с.
Заметим, что это тождество можно представить в следующей форме
(а^ + bi2 + ci3). Ei,(bxc) + i2 (cxa) + i8 (axb)] = [a-(bxc)]I B4)
ибо по формуле A0) § 25 левые части формул B3) и B4) тождественны
между собою. Обозначая теперь через X произвольный параметр, положим
а = р, — Xij, Ь = р2 — Хц, с = ps — Xi3
и заметим, что при этих обозначениях
aij -+- Ьц -+- ci3 = piij + p3i2 + p3i8 — Xijij — Хуг — Xiai3 = П — XI
i, (bxc) + ia (cxa) + i3 (axb) = Ko + XKX
где К„, Кц К2 — некоторые тензоры; наконец
Рт Риз Раз — X
= D (П — XI) = 13 — Х/2 + ХЧ1 — Xя
Мы видим, что формула B4) приводит нас к следующему тождеству
(П - XI)-(К. + «, + ХаК2) = (/, - Х/а + ХЧ^ - X3) I
Приравнивая коэффициенты при одинаковых степенях X в обеих ча-
частях этого тождества, находим равенства,
ПК0 = /31, ПК! - К, - - /21, ПК2 - Кх = 41, - К2 = - I
а.{Ьхс)
§ 28 ДИФФЕРЕНЦИРОВАНИЕ ТЕНЗОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ 325
Умножая обе части этих равенств слева соответственно на I, П, IF,
Па, получим
ПК0 = 1,1, ШКа - ПК0 = - /2П
П»К2 - IPKj = /,Пг, - П»Ка = - IP
При сложении этих равенств, все члены, стоящие слева, сократятся
и мы получим
/SI - /аП 4- /J0» - П! = О
что и составляет требуемое тождество.
Задача 192. Разлагая тензор
IPn Pv* Pis\
Рп Ры Раз\
Psi Phi Рзв)
на симметричную и антисимметричную части, мы можем сопоставить
последней, как указано в § 23, аксиальный вектор со. Показать, что
—2ш = (ры — Pa) h + (psi — Ри) h + iPi* — Pu) i3 = »i X Pi + i3 X P a+is X p3
Показать далее, что для любого представления тензора П в виде суммы
трех диад: П = q^ + q2r2 + qsrs имеет место равенство
— 2ш
я что обращение вектора со в нуль есть необходимое и достаточное условие
симметричности тензора. Отметим попутно, что квадрат величины век-
вектора со является, очевидно, тоже инвариантом тензора П.
§ 28. Дифференцирование тензора по скалярному аргументу
1. Переходя к изучению переменных тензоров, мы, как и в вектор-
векторном анализе, начнем с рассмотрения того случая, когда независимой
переменной является скалярный аргумент t, например, время. Итак,
пусть нам задан тензор П (?), изменяющийся вместе с г и представляющий
некоторую функцию t. Как всегда, задание тензора П (t) может быть
существлено или при помощи задания его девяти составляющих:
(Piiit) Pi»(t) Pn(t)\
П [t) = I pa (t) Ры @ pz* (t) \ A)
U»i (i) Рзг @ />зз (t) I
в функции времени или же при помощи задания в диадной форме
П it) = i, Pt(t) + ia Pi(') + i, ps@ G)
или в более общей диадной форме
П @ = q, (I) Tl it) + q2 (t)r2 @ + q3 W'. @ C)
326 АФИННЫВ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. [II
Не останавливаясь на понятии непрерывности функции, понятии
предела и т. п. понятиях, которые могут быть введены совершенно
так же, как в обычном анализе, мы сразу дадим определение производной
от переменного тензора П (t) no скалярному аргументу t.
Производной тензора П по скалярному аргументу t называется предел
отношения изменения тензора к приращению независимой переменной,
когда это последнее стремится ж нулю:
Конечно, мы всегда будем предполагать, что те производные, с ко-
которыми нам надо будет иметь дело, существуют и непрерывны.
Ясно, что если тензор П задан в форме A), то в силу правил вычита-
вычитания тензоров и деления на скалярный множитель мы легко получим
следующее представление производной от тензора (точка обозначает для
краткости дифференцирование по t):
dt
pu(t)
pti(t)
E)
p»i (t) рю (t) pa3 (t)
Таким образом, составляющие производной от тензора но скалярному
аргументу равны производным от соответствующих составляющих этого
тензора. Бели же тензор П представлен в форме B) или C), то в резуль-
результате дифференцирования его соответственно получим
~ = iiP, («) + ЧР2 @ + W. <«) F)
зг = <ь W '109 + qiW r. W + q2 W «¦« <*) + q2 Ю k W +
+ 4iW»eW+qi(*)»iW G)
Доказательство этих формул, основанное на элементарных правилах
действий с диадами, не представляет ни малейших затруднений.
Легко далее видеть, что все основные свойства производных сохра-
сохраняются и для производных от тензоров.
Мы выпишем в качестве примера несколько формул. Так, например,
ясно, что
d (Пх + П„) <Шх йПа „
—di—¦= ж + ж W
%n+m§ (9)
где т — скалярная функция от t.
Если П — тензор, а а — вектор, зависящие от t, то, как нетрудно
вывести,
28 дифференцировании твнзора по скалярному аргументу 327
Аналогичная формула имеет место и для производной от Пха. Если
] и Па два переменных тензора, то
^па + П1§ (И)
Быведем еще формулу для дифференцирования обратного тензора.
Пусть П B) есть полный переменный тензор, так что определитель этого
тензора D (П) отличен от нуля и пусть П~1 есть обратный ему тензор,
так что
ПП = I A2)
Продифференцируем предыдущее равенство по t. Имеем
так как I — постоянный тензор. Отсюда
11 dt - Ж11
Умножим теперь обе части этого равенства слева на ГГ1; замечая
еще, что П-1П = I, получим требуемую формулу
2. Некоторые задачи приводят к необходимости решать дифферен-
дифференциальные уравнения, в которых неизвестными являются тензоры. Мы
рассмотрим простейший пример таких уравнений, а именно уравнение
Ж = их A4>
где X (t) есть искомый тензор, зависящий от t, a U — заданный постоян-
постоянный тензор.
Если бы нам было дано обыкновенное уравнение
S —
где а — постоянное число, то решением его была бы функция
Попробуем поэтому проверить, не будет ли сумма ряда тензоров
°F !?... A6)
которую, по аналогии с суммой ряда A5), обозначают просто через
X1(i) = e°' A7)
решением уравнения A4).
328 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. Щ
Дифференцируя ряд A6) по t, мы получим, что
If
откуда видно, что действительно функция A7) удовлетворяет уравнению
A4). При этом рассуждении мы молчаливо предполагали, что ряд A6)
сходится и что его можно дифференцировать по t; все это без труда можно
доказать, но мы не хотим аа этом останавливаться.
Нетрудно теперь найти общее решение уравнения A4). 6 самом деле,
положим, что
X @ = X, <*> Y (*)
где Y (t) — новая неизвестная функция. По формуле A1) имеем
Но
Следовательно, получаем
UX,Y = UX,Y + Хг§ . или Xif = 0
Вообще из равенства нулю произведения двух тензоров нельзя заклю-
заключать, что один из них должен равняться нулю; но есяи один из тензоров
полный, то другой непременно должен равняться нулю. Но для тензора
Xi (t) = evt существует обратный тензор e~ut, следовательно, по теоре-
теореме § 25 Xi является полным тензором, а следовательно
откуда следует, что Y есть постоянный тензор С.
Итак, общим решением уравнения A4) является
X (г) = еи< С A8)
где С — постоянный тензор, а ет определено рядом A6).
Полагая в формуле A8) ( = 0 i замечая, что в силу A6) е°« = I,
найдем, что
X @) = С A9)
так что тензор С представляет начальное значение тензора X.
3. Дадим несколько примеров для того, чтобы иллюстрировать сказан-
сказанное в предыдущем пункте. В качестве первого примера установим выра-
выражение для тензора поворота.
Рассмотрим вращение твердого тела около неподвижной точки, кото-
которую мы примем за начало координат О. Пусть это вращение происходит
около неподвижной в пространстве оси с угловой скоростью <о, так что
вектор угловой скорости есть со. Тогда скорость какой-либо точки Л/.
§ 28 ДИФФЕРЕНЦИРОВАНИЕ ТЕНЗОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ 328*
радиус-вектор которой есть г, выразится по формуле
v = ц»хг. или ^=о)хг B0>
Проведем в теле три взаимно иерпендикулярные оси, которые в на-
начальный момент t = 0 совпадают с неподвижными осями координат а
имеют орты ij, i2, i3, а затем вращаются вместе с телом и к моменту t имеют
орты р! (i), р2 (t), р3 (I). Тогда тензором поворота мы должны назвать
тензор
П = ft @ ч + Ра (*) ц + р8 (t) i3 Bl>
В самом деле, если мы рассмотрим в теле радиус-вектор г какой-либо
точки М, вращающейся вместе с телом, и если в начальный момент 2 = 0'
мы имели
r0 = a;,ii + z,i2 + ar8i8
то в момент t, когда орты \г, i2? i3 перешли в рг, р2, р3, мы должны'
иметь
г = Xtpt + a;2p2 + х3р3
так как координаты хх, хг, xs точки М относительно подвижных осей
должны оставаться неизменными. Но из B1) очевидно, что
nij = Pl (г), ГО, = р, {t), ma = рз @ B2}
и, следовательно, как легко уяснить себе,
ГЦ, = г B3).
Итак, всякий радиус-вектор г0 после поворота, осуществляемого тензо-
тензором П, переходит в радиус-вектор г.
Запишем теперь уравнение B0) в следующем виде
% - Аг B4)
где, согласно формулам C7) и C8) § 24, А обозначает антисимметричный,
тензор
! О—ой <йа ]
А = I ш3 0 - сох I B5)'
I — <оа аи 0 )
Уравнение B4) применимо к любому вращающемуся вместе с телом,
вектору, в частности применимо к векторам pi (t), p2 (t), p, D'.
Из этих равенств легко вывести следующее
^ h + ^ Ц + ^i3= (A-Pl) ix +(A-p2) i2 + (А.ра)
- A-(Hh + Pa's + Pa's) ^ АД
.330 ДФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. III
или, в силу формулы, аналогичной формуле F)
|П = АП B6)
Итак, тензор поворота П удовлетворяет дифференциальному уравне-
уравнению B6), где А есть постоянный антисимметричный тензор B5). Приме-
Применяя к решению уравнения B6) теорию предыдущего пункта, получим, что
П (t) = е"С B7)
где С есть начальное значение тензора поворота, т. е. С = I (так как
в начальный момент векторы р2 (t), p2 (t) и p8 (*) совпадают с векторами
\, is, i3, а г = г0).
Итак, для тензора поворота мы получаем выражение
еА| B8)
Представим его в другой форме. Прежде всего по формуле A6) будем
иметь
., т . At , аА . АН3 , Ч1 . ,оо.
eA« = I + _r+__ + __+_+..i B9)
Заметим далее, что, как нетрудно вычислить, инвариантами тензора
Л являются
I, = О, /2 = со*, /, = 0
.и поэтому, согласно задаче 191
А3 + ©гА = 0
Впрочем это последнее равенство нетрудно проверить и непосредствен-
но. Из него легко вывести, что
А3 = — <а2А, А4 = — @гА2, А5 = <в4А, Ав = со4Аа, А'=— а>6А, . . .
Поэтому ряд B9) получает следующую форму
тт i.la/'* ">'*" , ">"'' о>*«7 , \iAa/<4 <аг<* , и4'8 \
П-1 + А(т зГ+^а 7Г+-") + А \Я 4Г + -61 ¦¦¦)
Принимая теперь во внимание известные из анализа ряды
. , ,ч <о« apt* tos«» <o7t7
Я"И=1 3T + -si тГ •+¦••¦
cos И) = 1--^ + -^ gj-+...
легко преобразовать предыдущее равенство к следующему виду:
n = l + A^L + A*±=^L C0)
В целях дальнейших преобразований обозначим угол поворота mt
-через ф, а единичный вектор, имеющий направление оси вращения череа
11, так что <¦> = <ш.
§ 2»
ДИФФЕРЕНЦИРОВАНИЕ ТЕНЗОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ
331
Если мы согласно правилу пункта 5 § 24 будем составлять I x а>, то
получим
1хю = (hii + Ms + Ms)x» = iL (iiX«») + ia (isx«») + is (isxw) =
10 — <D3 @2 \
ffls 0 — cei I = A C1)
— «02 0I 0 )
Чтобы вычислить А8, заметим, что
Аг=в)Хг C2)
Поет ому
А2г = А-Аг = А.(а>хг) = BX(d)Xf) = в) (ю-г) — «огг
Отсюда следует, что
Аа = шш — в)Ч = в)я (пп — I) C3)
Принимая все это во внимание, получим
П = nn + sin ф (I xn) + cos ф (I — пд) C4)
Формула C4) и дает окончательное выражение тензора поворота П
через угол поворота <р и через единичный вектор п. дающий направление
оси поворота. Какой-либо вектор го после поворота принимает положение
г, определяющееся формулой
г = Пго == n (n«ro) + sin ф {(I хп)>го}' + cos (р {го — п (п-го)} =
= п (п«го) + sinq> {Ь(пхг»)} + содф {го — о (п.го)}
или
г = п (пто) + sin ф {пхго} + cos ф {го — п (п.го)} C5)
Эту последнюю формулу можно было бы, конечно, получить и непо-
непосредственно из простых геометрических соображений. В самом деле,
пусть О А — ось поворота и пусть го —ОМ (фиг. 93).
Опустим из точки М перпендикуляр МА на на-
направление оси ОА и пусть А — основание этого-
перпендикуляра. После поворота на угол <р вектор го
займет положение г ¦= ON, a AM повернется в пло-
плоскости, перпендикулярной оси, и займет положе-
положение AN, причем /JAAN = ф.
Опустим из точки N перпендикуляр NB на на-
направление AM и пусть В — основание этого перпен-
перпендикуляра.
Мы имеем тогда, что
г = ON = OA +AB +BN
Вектор ОА имеет направление а и по величине
равен проекции вектора го на направление оси,
т. е. равен n-го, поэтому
ОА =n{n.ro)
332 АФИННЫВ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. Ш
Вектор п х г0 равен ио величине r0 sin {МОА) = AM и имеет то же
направление, что вектор BN, величина которого равна AN sin <p = AM sin q>.
Поэтому
BN = sin <p {n x ro}
Наконец, вектор AM = ОМ — 53 = r0 — n (пт0), а поэтому
AB = Cos q> AM = cos q> {r0 — n (n-r0)}
Складывая найденные выражения для векторов О А, АВ и BN, мы
и докажем формулу C5).
4. В качестве следующего примера рассмотрим вопрос о сохраняемости
векторных линий вектора а.
В § 21 свойство сохраняемости векторных линий определялось сле-
следующим образом: если мы имеем нестационарное поле вектора а и если
частицы сплошной среды, образующие векторную линию в какой-нибудь
определенный момент to, в любой момент времени образуют векторную
линию, и если это верно для любой векторной линии, то мы говорим,
что векторные линии вектора а сохраняются. В том же параграфе было
выведено необходимое условие сохраняемости векторых линий вектора а:
a = 0 C6)
где v — вектор скорости сплошной среды.
Докажем теперь достаточность условия C6) для сохраняемости век-
векторных линий. Для этого нам будет удобно перейти к переменным Ла-
гранжа. До сих пор мы рассматривали различные поля векторов, т. е.
рассматривали значения векторов, отнесенных к фиксированным
точкам пространства. Но в некоторых вопросах целесообразно рассмат-
рассматривать значения векторов, отнесенных к фиксированным ча-
частицам сплошной среды. В этих случаях каждой частице
сплошной среды сопоставляются три параметра а, Ъ, с, которые называют-
называются лагранжевыми переменными. Движение всей среды
будет известно, если будут известны координаты каждой частицы к любому
моменту t;
х = х(а, Ь, с, t), У = У (а, Ь, с, t), z = z (a, b, с, t) C7)
Чаще всего за а, Ь, с принимают декартовы координаты частицы в на-
начальный момент времени to. В этом случае мы будем иметь, что
а= х(а, Ъ, с, t0) Ь =* у (а, Ь, с, *0), с = 2 (а, 6, с, *») C8)
Если г есть радиус-вектор в пространстве х, у, z, а г0 есть радиус-
вектор в пространстве а, Ь, с, то формулы C7) запишутся в векторной фор-
форме следующим образом:
г (го. О C9)
28
ДИФФЕРЕНЦИРОВАНИЕ ТЕНЗОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ
333
Чтобы определить скорость какой-либо частицы, мы должны, по об-
общему правилу, составить производную от радиуса-вектора г по времени t
{ведь для каждой данной частицы а, Ь, с остаются постоянными).
В результате получим
или в проекциях
dx (а, Ь, с, t) dy (a, b,o,t) dz (а, Ь, д, t)
»х 21 ' "« Ш ' v* ~ dt
D0)
Мы предположим, что функции C7), их первые и вторые производные
по а, Ь, с, t существуют н непрерывны и что уравнения C7) можно ре-
решить относительно а, Ь, с:
а = а {х, г/, z, t), b = b (x, у, г, t), с = с {х, у, 2, t) D1)
необходимым условием чего является отличие от нуля определителя
D2)
Вставляя выражения D1) в формулу D0), мы получим обычное пред-
представление вектора скорости v через координаты х, у, z, t, т. е. получим
поле скорости. Примем за а, Ь, с, декартовы координаты частицы в мо-
момент ta. Рассмотрим теперь к моменту Со бесконечно малый вектор бго,
декартовы составляющие которого равны 6а, 66, йс; жидкие частицы, об-
образующие этот элемент, расположатся к моменту t вдоль вектора бг с со-
составляющими
дх «г , дх ,
дх
да
ду
да
dz
да-
дх
дЬ
ду
Ж
dz
дЬ
дх
дс
ду
дс
дг
Тс
Sdx
D3)
Вводя поэтому в рассмотрение тензор (см. § 24)
Т — iL —
rfr0
дх
~да~
На
дх
L
дЪ
мы можем записать, что
бг = Т 6г„
дх
~дс
ду_
дс
dz
дс
D4)
D5)
Из самого понятия о сохраняемости векторных линяй вектора а сле-
следует, что для того, чтобы сохраняемость векторных линий вектора а
334 АФИННЫЯ ОРТОГОНАЛЬНЫЙ ТЕНЗОРЫ Гл. III
имела место, необходимо и достаточно, чтобы из коллинеарности векто-
векторов а (го, to) и ого следовала коллинеарность векторов а (г, t) и dr.
Таким образом, если
бгоха(г0, t0) = 0 D6)
то должно быть
fir х а (г, 0 = 0 D7)
Но в силу отличия определителя D2) от нуля, тензор Т является
полным. Поэтому, условие D6) совершенно эквивалентно такому условию
(ибо коллинеарные векторы после преобразования тензором опять пере-
переходят в коллинеарные векторы):
TorfflxTa (r0, g = О
а в силу D5) такому
бгхТа (г0, у = 0 D8)
Итак, из D8) должно следовать D7), иными словами, векторы Та (го, to)
и а (г, t) должны быть коллинеарны.
Мы приходим поэтому к следующему выводу: необходимым и доста-
достаточным условием сохраняемости векторных линий вектора а является
выполнение равенства
а (г, «)xTa(r0, t0) = 0 D9)
Умножая оба вектора на тензор Т слева, иы можем переписать ра-
равенство D9) в эквивалентной форме
T^afr, Ох а (го, ta) =0 E0)
Смысл равенства E0) заключается, очевидно, в том, что вектор
Ь (г, t) = Т-% (г, 0
сохраняет постоянное направление в пространстве. Но необходимым в
достаточным условней для этого является выполнение равенства
E1)
как это следует иа § 9, формулы A5) и из задачи 80.
Заметим теперь, что
и в силу формулы A3)
л = - т"* ti т'1& + Т^
Поэтому формула E1) может быть переписана в виде
T-irfa_ T-i^Ta)x(T'1a)=O
28
ДИФФЕРЕНЦИРОВАНИЕ ТЕНЗОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ
335-
или, умножая оба вектора слева на Т, в виде
E2).
Выясним значение тензора
dt
Из формулы D4) имеем, по правилу дифференцирования тенвора и при-
принимая во внимание формулы D0):
It'
dadt dbdt дс dt
3hj д*у Shf
да dt db dt дс dt
дЧ d*z й'г
dadt dbdt да dt
dvx d^
~да ~db
дс
OVy OVy OVy
~da lib ~dc~
fe
dvz
VVZ VV2 Wz
~Ь~а HF ~de
dv
E3>
Заметим далее, что тенаор Т, обратный для тензора Т, имеет, оче-
очевидно, значение
да да да)
дх ду dt
db db db
дх dy dt
дс дс дс
dx dy di
E4)
Нетрудно поэтому составить произведение {dTldt) T. В самом деле,
возьмем произвольный бесконечно малый вектор dr, тогда в силу E4)
имеем
dr
Далее в силу E3) имеем
Но это означает, что
Отсюда следует, что
dvx dvx dvx
dx dy дг
OVy &&У &^y
dt " —S- ~Ьх~ ~ду~ ~ЬТ
Ыё ~dy ~~dz
Теперь нетрудно вычислить, чему равняется вектор -jj- T"^.
E5)
336 Афиннык ортогональный твнзоры Гл. Ш
А именно по формуле 28 § 24 мы имеем
?.a = (a-V)v
>а, следовательно,
^T-Ja - (a-V)v E6)
Условие E2) переписывается теперь в окончательном виде
»=0 E7)
Так как это условие совершенно эквивалентно условию D9), то иы
можем высказать следующую теорему: необходимым и достаточным
условием охраняемости векторных ланий вектора а является выполнение
равенства E7).
Итак, мы получили условие сохраняемости векторных линий в двух
-формах: в форме E7), годной для случая обычных независимых пере-
переменных х, у, z, г, я в форме D9), пригодной для случая латранжевых
переменных. Это последнее уравнение, будучи выписано в проекциях на
оси координат, имеет, очевидно, следующий вид
дх дх дх ду ду ду dz дг
Т + <Ч + ааЗ а^ + Чэ+Ч& afa + avS
E8)
dz
тдв а*, а^, аг и ах„, Оу., аи — проекции вектора а в два различных мо-
момента времени t и to, но для одной и той же частицы.
§ 29. Расхождение тензора. Применение к теории упругости
1. Из дифференциальных операций иы рассмотрим только вопрос о
расхождении тензора, которое мы определим по аналогии с расхожде-
расхождением вектора. Итак, допустим, что мы имеем поле тензоров
П (г) = ilPl (г) + *цщ (г) + isp3 (г)
Определим в каждой точке поля для каждого направления п вектор
р,, = ц-П = pi cos (n, %) + рг cos (n. x2) + ps cos (n, xs) A)
Рассмотрим теперь интеграл по замкнутой поверхности S:
a
применим к нему формулу Гаусса —Остроградского:
&pKdS = & (Pi cos ,(в, хг) + pj cos (n, хъ\ + р3 cos (u, х„)} dS
5 29 РАСХОЖДЕНИЕ ТЕНЗОРА 33"
Отсюда вытекает, если взять объем V бесконечно малым и считать
dpi dps дра
непрерывными, существование
в равенство его вектору, который называется расхождением
тензора П и обозначается через
Проекциями, этого вектора являются
Формула B) может теперь быть переписана в виде
ф pndS = ^ div П dV E)
Б качестве примера рассмотрим div (<pl), где I — единичный тензор:
Задача 193. Доказать формулу
div ((рП) = ф div П + §гааф-П G)
2. Выведем основные уравнения равновесия и движения сплошной
среды. Мысленно вырежем в последней объем V .(фиг. 85) и, пользуясь
обозначениями п. 3 § 22, применим к этому объему шесть необходимых
условии равновесия и движения сплошной среды, — именно:
Главный вектор всех сил, приложенных к частицам объема, включая
и силы инерции, должен равняться нулю.
Главный момент относительно какой-либо точки всех сил, приложен-
приложенных к частицам объема, включая и силы инерции, должен равняться нулю
22 н. в. кочив
338 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл 111
Если р обозначает плотность, F — заданную внешнюю силу, арихо-
дящуюся на единицу массы, dvldt — ускорение, р„ — напряжение на
площадку с нормалью п, то указанные условия приводят к следующим
двум уравнениям:
^('%) ^ (8)
O (9)
В § 22 мы уже использовали первое уравнение, чтобы показать, что
Vn = Pi cos (n, x,) + pa cos (n, a;s) + p3 cos (n, хя) A0)
откуда следовало, что упругие напряжения образуют тензор П. Но тогда
на основании формулы E) уравнение (8) можно записать в виде
Отсюда в силу произвольности объема V следует основное уравнение
механики сплошной среды
P(F-J)+divn =0 A1)
3. Покажем теперь, что тензор упругих напряжений есть симметрич-
симметричный тензор. Для этого преобразуем в формуле (9) поверхностный интеграл
в объемный
[rx pj dS = § {гхPi cos (п, хг)+ rx ih cos(п, х2) + гх pscos(n, x3)) dS =
= \ {гх div П + i! X Р! + i2 X Рг + is X р3} dV
v
Поэтому формула (9) дает
rx
Ur
Но в силу равенства A1) первый интеграл пропадает, а второй а силу
произвольности объема V, дает
:>>¦ Pi + iSXp2 + i»Xpa = 0 A2)
{ 29 РАСХОЖДЕНИЕ ТЕНЗОРА 339
Но легко видеть, что условие A2) есть как раз условие симметрич-
симметричности тензора П. В самом деде, если помножить A2) векторно на любой
вектор а, то после раскрытия двойных произведений вида
(«1 X Pi)xa = р, (ij-a) — i, (р,.а)
получится
Pi D-а) + Рг (va) + р3 (is-a) — i, (Pl.a) —13(р2.а}—i5 (ps-a) = О
или
(Пс.а) — (П.а) = О
Отсюда
(Пс - П).а = О
и в силу произвольности вектора а
пс = п A3)
Таким образом, тензор напряжений П действительно является сим-
симметричным.
4. Рассматривая упругое тело, обозначим через и = МаМ вектор
смещения некоторой точки М тела, где Л/о — положение точки до дефор-
деформации тела, М — положение после деформации.
Очевидно, что вектор скорости точки М есть
Поэтому уравнения A1) принимают вид
p(F-S-)+divn=0 №
Чтобы получить основные уравнения теории упругости, надо устано-
установить связь между П и н, т. е. между упругими напряжениями и деформа-
деформациями тела. Эта связь устанавливается на основании обобщения элемен-
элементарного закона Гука. Нам надо, однако, предварительно несколько более
осветить вопрос о деформациях.
Если мы возьмем две соседние точки упругого тела Л/о и Mi, положение
которых до деформации характеризовалось радиусами-векторами г и
г + dr, то после деформации положение этих точек будет характе-
характеризоваться радиусами-векторами
г' = г + и (г)
г' + dt' = г + dt + u (г + dr) = г + dr + u + du
и, следовательно, смещение второй точки после деформации будет
и (г -Ь dt) = u + dn = u +¦ ^-.dt
и, применяя формулу D1) § 24,
и (г + dr) = и + Ф-dr + irot uxdi A5)
340 АФНННЫВ ОРТОГОНАЛЬНЫЕ ТИНЗОР-Ы Гл. Щ
Под Ф здесь подразумевается симметричная часть тензора -^-, т. е.
тензор с компонентами
- -Й7' ф13 <* Ь +
Мы будем предполагать деформацию бесконечно малой. Но тогда
вспоминая из кинематики, что бесконечно малое перемещение точки
твердого тела, вращающегося около неподвижной точки с угловой ско-
скоростью ш, есть
Vdt = ««fix г
где вектор ш dt равен по величине углу поворота тела и направлен по
мгновенной оси вращения, мы заключаем, что последний член в фор-
формуле A5) представляет ту часть перемещения точки Л/i относительно
точки Ма, которая происходит от поворота элемента тела, окружающего
точку Мо, как одного целого на угол — [ rot u | вокруг оси, имеющей
направление rot u. Первый член и формулы A5) характеризует смеще-
смещение точки Мо, второй Ф'сйг характеризует деформацию элемента. Мы
можем поэтому высказать следующий результат.
Бесконечно малое перемещение элемента сплошной среды, опреде-
определяющееся формулой A5), можно представлять себе состоящим из трех
частей:
1) из поступательного перемещения элемента, как одного целого,
2) из вращательного перемещения злеыента, как одного целого,
3) из деформации элемента.
Диагональные элементы симметричного тензора Ф имеют простое
значение. А именно, если взять точку М\ так, что вектор dt = MuM\
будет параллелен оси xi, так что dxz = dxa = 0, то после деформации
вектор МоМ\ превратится в вектор dt + du с проекциями
и, следовательно, расстояние между точками Ма и Mi после деформации
будет
где мы отбрасываем малые величины второго порядка. Относительное
удлинение рассматриваемого отрезка после деформации будет, очевидно,
равно
& 29 РАСХОЖДЕНИЕ ТЕНЗОРА 341
Итак, диагональные элементы тензора Ф определяют относитель-
относительные удлинения после деформации линейных эле-
элементов, параллельных осям координат.
Исходя из этого, легко выяснить значение первого инварианта тен-
вора Ф:
d« д
= dlv u
Если взять параллелепипед с ребрами dxi, dxi, dxa, параллельными
осям координат, то после деформации его ребра удлинятся и сделаются
равными (с точностью до бесконечно малых второго порядка)
dXl <1 + ФЛ, dx2 A + Ф22), dx3 A + Фаз)
Грани параллелепипеда несколько скосятся, но все-таки с точностью
до бесконечно малых второго порядка его можно опять считать прямо-
прямоугольным параллелепипедом. Поэтому объем его будет равен
dVt = dx1dxidx3 (I + Ф„) A + Ф22) A + Ф83) =
= dxt dzz dx3 (\ + Фп + Ф22 + Фзз)
Сравнивая это выражение с первоначальным объемом параллелепипеда
dV = dx^ dx2 dxi
мы заключаем, что
Фп + Ф2а + Фж> = ^'"^ A8)
дает относительное объемное расширение элемента.
К симметричному тензору Ф применимы все результаты §§ 26 и 27.
Мы отметим только, что этот тензор во всяком случае имеет три главных
взаимно перпендикулярных направления. Соответствующие главные зна-
значения тензора Ф обозначим через ?г, г2, г3.
5. Тензор упругих напряжений П, как мы видели, тоже является
симметричным, его главные значения обозначим через аг, а2 и а3.
Вспомним теперь закон Гука в элементарной форме: при растяжении
стержня продольными силами, величина которых, рассчитанная на еди-
единицу площади поперечного сечения, равна Р, присходит относительное
удлинение стержня, определяющееся по формуле
Ь=4 A9)
и относительное сжатие поперечных размеров стержня, определяющееся
по формуле „
Ъ = Ш B0)
Постоянные Е и т для разных материалов имеют разное значение:
Е называется модулем Юнга, т — коэффициентом Пуассона.
Рассматривая однородную изотропную среду, обобщим закон Гука
следующим образом. Допустим, что главные значения тензора деформации
я упругих напряжений связаны элементарным законом Гука. А именно,
342 АФИННЫВ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. 111
рассмотрим главное линейное удлинение ei. Это удлинение происходит
от 3i, сг и аз- При этом напряжение oi даст удлинение, определяющееся
по формуле A9), и 34 и вз дадут укорочение, определяющееся по формуле
B0). Мы примем еще, что все эти деформации яеаависимы друг от друга
и могут быть поэтому складываемы по принципу линейной суперпози-
суперпозиции. В результате получаем
в = .5 _ _2L _ _SL
1 Е mE mE
63 g] <jj
Ез ~~ fi ~mH mE
Введем первые инварианты тензоров П а Ф
"i + °з + °з = *» 8i + вг -+- е3 = 9 = div u B2)
Тогда формулы B1) можно записать в виде
Но отнесенные к главным осям тензоры Ф, П и I имеют вид
je, 0 0 \ jo, 0 0 \ fl 0 0\
Ф=|0 840}, П =J0 с, О L 1 = {0 10}
10 О B.J [О О 33J (О 0 lj
Поэтому формулы B3) приводят к соотношению между тензорами Ф
и П:
которое и представляет обобщенный закон Гука.
Решим уравнение B4) относительно П. Беря предварительно от обеих
частей равенства B4) первые инварианты, найдем соотношение
Отсюда
9^ (m~2)t. s=_^_e B5)
та т — 2.
Воспользовавшись этим соотношением, мы беа труда решим B4) от-
относительно П:
П =* J^- Ф + , , "f 5\в1 B6)
1 + т (т + 1> (л» — 2) '
Введем вместо т и Е постоянные Ламэ [i i 1 положив
mk, ty mE »
Y±~m = lX' (m 4-1) (m — 2) =
Тогда получим
П = 2цф -f Ш B8)
§ 29 РАСХОЖДЕНИИ ТЕНЗОРА 343
Получив соотношение B8) между тензорами П и Ф, мы можем теперь
найти компоненты тензора напряжении в любой системе координат:
B9)
6. Теперь нам нетрудно будет составить основные уравнения теория
упругости; из A4) видно, что достаточно для этого вычислить div П.
Но из B8) ясно, что
div П = 2ц div Ф + X div (81)
и по формуле F)
div (BI) = grad в C0)
Далее по формуле D0) § 24
2 div Ф = div-^ + div <V«)
но из формул B2) и B4) того же параграфа ясно, что
-jj- = ii grad »i + U grad as + Ь grad «•
Поэтому по формуле (З) будем иметь
^ C2)
Собирая все полученные результаты, приходим к выводу, что
divll = цДи + {Х + ц) grad в C3)
Поэтому уравнение A4) может быть записано о виде
5 grad div u C4)
7. Разберем еще вопрос об энергии деформации упругого тела. Воаь-
ием в какой-либо точке тела малый объем в форме параллелепипеда
с ребрами а, Ь, с, параллельными главным направлениям тензоров де-
деформаций и напряжений в рассматриваемой точке. Мы предполагаем,что
энергия А деформации, приходящаяся на единицу объема, зависит только
от элементов тензора деформации, в данном случае от ei, 8г и вз- Бели
344 АФИННЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ Гл. 1Й
мы хотим увеличить удлинение ei на величину 6ei, оставляя без изме-
изменения ев и ез, то действующие на грани аараллелепипеда силы произ-
произведут некоторую работу, и так как перемещение происходит только в на-
направлении оси xi, то работу пронвведет только сила <л6е на перемещение
a 6ei; величина этой работы будет abcoidm.
Относя эту работу к единице объема и проиаведя аналогичное вычис-
вычисление для удлинений ег и 8s, мы приходим к выводу, что функция
A (ei, бг, в») обладает тем свойством, что
ЬА = eidei 4- забег + °зб8а C5)
Но из уравнений B8) ясно, что
як = 2^е„ 4- >¦ (в, 4- 8» 4- еа) <* = 1.2,3) C6)
Подставляя это в предыдущее выражение и интегрируя, мы получим
искомое выражение для работы деформации, приходящейся на единицу
объема:
А = |i(ei8 4- rf 4- es*) + .*- (ft + е« + 8e)* C7)
Выражение, стоящее справа, должно являться инвариантом тензора Ф;
и действительно, сравнивая его с формулами A4) и A5) § 27, ми легко
найдем, что
А = 1~^-h* (ф> ~ 21х/а (ф> <38>
Из формулы же C8) по тем же формулам A4) § 27 мы в состоянии вы-
вычислить энергию деформации в любой системе координат:
А = Ь + ^L (фп 4- Фга 4- Фз»J —
— 2р.{ФцФаг 4- ФагФаа + ФззФи — ФиФ21 — ФиФз» — ФазФзг} C9)
Укажем, что энергия деформации очень просто выражается, если ее
выражать частью через тензор напряжений, частью через тензор дефор-
деформаций; а именно, легко проверить на основании формул C6) и C7), что
А = — (a iei + игба 4" оавз) D0)
Сравнивая это выражение с A9) § 27, видим что
4=~Ф--П D1)
и так как последнее выражение есть инвариант, то мы можем им вос-
воспользоваться для вычисления энергии деформации в любой координат-
координатной системе; по той же формуле A9) § 27
з з
D2)
ГЛАВА IV
ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ
§ 30. Общее определение вектора и тензора
1. 5 настоящей главе мы займемся изложением основ общей теории
тензорного исчисления. Тензорное исчисление, являясь необходимым ору-
орудием исследования в таких дисциплинах, как дифференциальная геомет-
геометрия и теория относительности, крайне полезно и само по себе, так как
оно дает возможность более глубоко проникнуть в сущность тех понятий
а связей, с которыми мы ознакомились в предыдущих главах при илуче
нии афинных ортогональных векторов я тензоров.
Основную идею тензорного исчисления можно охарактеризовать сле-
следующим образом.
В аналитической геометрии в основание рассуждений всегда кладется
определенная координатная система. При построе-
построении векторного исчисления стараются координатную систему уничтожить
совсем, сопоставлял каждому вектору направленный отрезок в простран-
пространстве, что дает возможность определить различные операции с векторами
чисто геометричееким образом; точно так же симметричному тензору мож-
можно сопоставить центральную поверхность второго порядка; однако,
при изучении более сложных объектов мы уже теряем возможность про-
простого наглядного представления их; так, например, у нас нет простого
наглядного представления для несимметричного афинного ортогонального
тензора. Поэтому мы опять вводим в рассмотрение координатные системы;
так, например, в § 22 нами было дано определение афинного ортогональ-
ортогонального тензора второго ранга как таблицы девяти величин, преобразую-
преобразующихся по определенным формулам преобразования при переходе от одной
прямолинейной прямоугольной системы координат Ox, х* x3 к другой
Oxi' хг хз'. При этом новый координаты Xi, хг', х3' связаны со старыми
xi, Xi, хз формулами
Х\ = Лц Хл ¦+- «14 Хй 4" <Х,з Х3
Хг =» о» ях +¦ «ja х3 + а23 хя A)
Xi — Ogl Хх + 0Ц2 Х^ 4" «S3 Zg
Преобразование координат, выражаемое формулами A), является ли-
линейным — такие преобразования называются еще афинными; более
того, так как это преобразование соответствует переходу от одной
346 элвмвнты общей теории тензоров Гл. IV'
прямолинейной системы координат к другой таков же системе координат,
оно называется ортогональным преобразованием.
В соответствии с тем, что нами рассматривались до сих пор только афин-
ные ортогональные преобразования координат, мы и называли векторы
и тензоры афинными ортогональными векторами и тензорами. Однако
между только что указанным подходом к определению тензора и методом
аналитической геометрии имеется коренная разница, состоящая в том,
что при определении тензора ни одной из координатных
систем не оказывается ни малейшего предпочтения; составляющие тензора
определяются сразу для всех систем координат, причем эти составляющие
при переходе от одной системы координат к другой преобразуются по
определенным формулам преобразования. Эта же самая идея является
основной идеей общего тензорного исчисления с тем лишь весьма сущест-
существенным дополнением, что в последнем ие ограничиваются линейными
преобразованиями координат вида A), а рассматривают самые общие
преобразования координат вида
V = А (Хг, Хг, Xs), Xi' = U («I, Ъ, Х3), Х3' = f3{xu Хг, Х„) A')
Мы остановимся на этом вопросе несколько подробнее.
2. В § 18 мы видели, что положение точки в пространстве можно
определять вместо декартовых координат тремя криволинейными коор-
координатами д,, дг, q3. При этом в случае, если эти криволинейные коорди-
координаты являются ортогональными, расстояние ds между двумя бесконечно
близкими точками определяется формулой
Л» = Я,2 (<?„ qit q3) dqf + Н? (qlt <?„, qa) dqj + i?3s (<?„ ?a, 9s) dq^ B)
При различном выборе криволинейных координат qi, q-i, qs, функции
H\ {Qi> 9i< qa), Иг (9i. ?a. <7з) и Нг {qx, q2, qs) будут иметь различное значе-
значение, но правая часть формулы B) будет сохранять постоянное значение,
так как оно равно квадрату расстояния между двумя бесконечно близ-
близкими точками.
В том же § 18 мы видели, что положение точки на поверхности, рас-
расположенной в пространстве, можно определять двумя координатами
qt в qz и что в этом случае расстояние ds между двумя бесконечно блиакими
точками, у одной аз которых координатами являются qi a <J2, а другой
4i ~t~ ^9i и </я -f- dqv определяется формулой
ok2 = g-а (?i. &> d4\ + 2?iS (ft, qt) dqx dq2 ¦+- g22 (qu q%) dq* C)
Так как положение точки в пространстве определяется тремя коорди-
координатами qi, q2,qa, то говорят, что пространство есть многообразие трех из-
измерений; поверхность же есть многообразие двух измерений, так как
положение точки на ней определяется двумя координатами q\ ш qz. Если
мы рассмотрим какую-нибудь линию в пространстве, то она будет много-
многообразием первого измерения, так как положение точки на заданной линии
может быть определено одним параметром. Однако во многих случаях
оказывается невозможным, ограничиваться рассмотрением многообразий
} 9Q ОВЩВЕ ОПРЕДЕЛЕНИЯ ВЕКТОРА И ТЕНЗОРА 347
трех измерений; так, например, в теории относительности приходится
рассматривать пространство четырех измерений. В связи с этим необхо-
необходимо обобщить введенные нами понятия.
В нашем трехмерном пространстве, вводя прямолинейную прямоуголь-
прямоугольную систему координат Охх х2 xs, мы можем определить положение каж-
каждой точки М ее декартовыми координатами х\, хг, хз. Если другая точка N
имеет декартовы координаты ух, у$, y3, то расстояние между этими двумя
точками М и N определяется по теореме Пифагора:
MN* - (у, - *,)* 4- (у% - xtf + B/s - x3f
Совершенно аналогично этому можно определить те-мерное эвклидовое
пространство Ет1 в котором положение каждой точки М задается ее
декартовыми координатами хл, хг, ¦ . . , хт относительно прямолинейной
прямоугольной системы координат Ох, хг . . . хт, причем, если другая
точка N имеет декартовы координаты ух, у2, . . . , ут, то расстояние между
точками М и N определяется по формуле
Если N есть точка, бесконечно близкая к М, и ее координаты суть
Х\ ¦+- dxx, х% + dxf, . . . , хт -f- dxm
о расстояние ds между точками Л/ и N дается формулой
ds1 = dx-f + dx2i ¦+¦...+ dxm2 D)
Но положение точки М может быть определено в лг-мерном эвкли-
эвклидовом пространстве Ет и криволинейными координатами qx, qa, . . . , qm:
тогда, аналогично формуле B), для расстояния между двумя бесконечно
близкими точками получим формулу вида
rfs2 = S 2 Si*. (9i> 9г. • ¦ • . Чт) Mi. dqh E)
в которой можно считать, что gik = gki.
3. Подобно тому как в пространстве трех измерений мы рассматриваем
поверхности и линии, так в пространстве т измерений мы можем рас-
рассматривать подпространства меньшего числа измерений. Допустим, что
мы рассматриваем подпространство 7?п, имеющее п. измерений. Для опре-
определения точек этого подпространства можно воспользоваться какими-то
криволинейными координатами, которые мы опять обозначим через
9i> Я*> ¦ ¦ ¦ ¦> 9п. аналогично тому, как в формуле C) параметры, опреде-
определяющие точку на поверхности, были обозначены через q-, и <?2. Ясно, что
декартовы координаты точек подпространства Д„ будут определенными
функциями от <?i> </s, . . . , qn:
xi — Si (Яи ?2> • • • > 9п)
F)
"^т ^ -^7п(^1) Яъ* • • • i Яги
348 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Расстояние между двумя бесконечно близкими точками подпрост-
подпространства Дп будет определяться по формуле D), в которой вместо ха нужно
подставить их выражения через криволинейные координаты q±, qit . ,.,qn.
Но очевидно, мы имеем
дхл дхл дха .Д дхх
41 Яг Чп J_l Я1
4 я п я ппяа
Поэтому
a* = /л <*%a. = 4-1 2a Za з— a— <*9i(*9b=: /л 2л \ /\ a— i— "9!'
Введем теперь обозначение
17k .
Причем, очевидно,
gik = gu (8)
Тогда окажется, что
п п
«» — /j Z4 Sihi^t 92, . . . , 9n) "9i"9ft (9)
тппЯЯ n " / m
При п = т отсюда, как частный случай, получается формула E),
в этом частном случае пространство Лт совпадает с Ет, и только поло-
положение точки в этом пространстве определяется не декартовыми коорди-
координатами xi, х», . . . , хт, а криволинейными координатами qu q2, . ¦ . , qm.
Итак, если в эвклидовом лг-мерном пространстве рассматривается
тдпространство га измерений Л„, определенное формулами F), в которых
xi, .. . , хт суть непрерывные вместе со своими первыми частными про-
производными функции, обладающие тем свойством, что в рассматриваемой
области изменения координат qu q2< . . . , qn различным системам зна-
значений qt, ?*! • ¦ ¦ • ?« отвечают различные точки пространства Ет, то
квадрат расстояния между двумя бесконечно близкими точками подпро-
подпространства Rn определяется формулой (9), как квадратичная форма от
дифференциалов координат. Говорят, что формула (9) устанавливает
метрику подпространства Я.п. Полезно сразу же отметить, что в некоторых
случаях метрика двух различных подпространств может оказаться совер-
совершенно одинаковой; так, например, в нашем трехмерном пространстве
метрика какой-либо цилиндрической поверхности не отличается от мет-
метрике плоскости.
I 30 ОБЩЕЕ ОПРЕДЕЛЕНИЕ ВЕКТОРА И ТЕНЗОРА 349
Отсюда видно, что метрика подпространства Rn не вполне характери-
вует это подпространство; оказывается, однако, что метрика характери-
характеризует одни из самых глубоких свойств подпространств Лп.
4. Риман поставил задачу обратно; он исходил из многообразия л
измерений, т. е. совокупности точек, каждая из которых определяется л
координатами qi, q%, . . . , qn, меняющимися в некоторой области, причем
точки, соответствующие различным системам значений qx, qit . . . , qn,
считаются различными.
Затем Риман по произволу задавал функции gik (qi, q%, . . . , qn)
с тем лишь условием, чтобы квадратичная форма в правой части форму-
формулы (9) была определенной положительной формой, т. е. принимала лишь
положительные значения при любых dqu dq%, . . . , dqn, не равных нулю
одновременно.
Наконец, Риман определял расстояние между двумя бесконечно близ-
близкими точками исходного многообразия, имеющими координаты qx, q^,... ,qn,
Mi+ dqlf q, 4- dq*, . . . , qn + dqn, формулой (9), в которой gik удов-
удовлетворяют условию (8)J.
Многообразие п измерений, в котором формулой (9) установлена мет-
метрика, т. е. задано расстояние между двумя любыми бесконечно-близкими
/почками, называется пространством Римана и обозначается обыкновенно
через Ип.
Совершенно естественно возникает вопрос о том, нельзя ли всякое
риманово пространство Rn рассматривать как подпространство в эвкли-
эвклидовом m-мерном пространстве Ет, где т )> п. Из предыдущего изложе-
изложения ясно, что этот вопрос эквивалентен следующему: нельзя ли найти
число т и такие функции xi (qu . . . , qn), . . . , хт (q\, .... qn), чтобы
выполнились равенства G), где gik суть заданные функций от gi, qn, ..., qn
удовлетворяющие условиям (8).
Но легко подсчитать, что G) есть система —л (л 4- 1) уравнений
(п уравнений получается при i = k n -jn (п — 1) уравнений при i < к,
уравнения при i > к в силу условия (8) рассматривать не надо); число
же неизвестных функций равно т.
Можно поэтому ожидать, что уравнения G) можно решить при т =
= ^»(п + 1), а в частных случаях и при т < ~-п (л 4- 1). Как гово-
говорят, риманово пространство л измерений может быть вложено в эвкли-
эвклидово пространство -j-n(n-fl) измерений; так, например, риманово про-
пространство двух измерений всегда может быть вложено в наше эвклидово
трехмерное пространство, иными словами, всегда можно подыскать такую
поверхность, для которой ds* представляется наперед заданной опреде-
определенной положительной квадратичной формой C); точно так же риманово
пространство трех измерений может быть вложено в эвклидово простран-
пространство -"* = 6 измерений а т. д.
1 См. обзор проф. В. Ф. К а г а а а, Геометрические идеи Риыана и их совре-
современное развитие. ГТТИ, 1933 Там же аодробаая литература.
350 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Г Л. W
Иногда, как, например, в теории относительности, приходится рас-
рассматривать и те случаи, когда правая часть формулы (9) является не-
неопределенной квадратичной формой, т. е. может принимать как положи-
положительные, так и отрицательные значения. Во всяком случае стоящая
в правой части формулы (9) квадратичная форма будет в дальнейшем
играть колоссальную роль; поэтому эта форма называется основной,
или фундаментальной, формой.
Но на первых порах изложения тензорного исчисления квадратичная
форма (9) нам не понадобится. Точнее говоря, можно дать определение
тензора в построить тензорную алгебру, совершенно вне зависим оста
от того, определена ли метрика пространства или нет, и только при пост-
построении тензорного анализа метрика начинает себя проявлять.
Поэтому в основу наших первоначальных рассуждений мы положим
самое общее многообразие п измерений, координаты точек которого
обозначим в соответствии с установившимся обычаем через х1, Xs, . . . , Xя
(вместо <?j, <7а» - - • • Яп> так что значки 1, 2, . . . , л являются не пока-
показателями, а индексами; мы скоро увидим, почему удобнее эти индексы
ставить наверху, а нэ внизу).
5. Итак, рассмотрим многообразие л измерений Уп,
понимая под ним совокупность всех его точек, под точкой же мно-
многообразия мы понимаем совокупность значений л независимых
переменных ж1, z2, . . . , хя, сами же числа х1, х2, . . . , х11 будем назы-
называть координатами точки.
Вместо координат х1, х2, . . - , ас™ можно ввести новые координаты
Я1, Я2, .... ж", связанные со старыми некоторыми соотношениями
ха= ?« (Я1, Ж2 ?п) (а= 1, 2 п) (Ю)
В этом случае мы будем говорить, что формулы A0) определяют пре-
преобразование координат. Про функции, стоящие в правой части формул
A0), мы будем предполагать, что в рассматриваемой области изменения
координат Я1, . . . , хп эти функции однозначны, непрерывны и имеют
непрерывные производные всех тех порядков, какие нам в дальнейшем
понадобятся. Вообще все функции, с которыми мы будем иметь дело,
будем считать удовлетворяющими этим условиям. В рассматриваемом же
случае мы потребуем, сверх того, чтобы якобиан
d (x1, г3,.,.,
дха дх™ дхп
di1 Sx" " " " Эг"
дх1 д& ' " " Эх"
A1)
был отличным от нуля. Как известно, в этом случае можно решить урав-
уравнения A0) относительно Я1, &,..., ?п:
г« = г«(а;1, хг хп) (в=1.2 в) A2)
§ 30 ОБЩЕЕ ОПРЕДЕЛЕНИЕ ВЕКТОРА И ТЕНЗОРА 351
Полученное преобразование координат называется обратным по от-
отношению к преобразованию координат A0).
В общей теории тензоров рассматриваются, как было упомянуто в п. 1,
всевозможные координатные системы, связанные одна с другой фор-
формулами преобразования A0), в то время как при изучении афиппых орто-
ортогональных тензоров нам достаточно было ограничиться рассмотрением
линейных ортогональных преобразований координат A) (аналогичные A)
формулы могут быть написаны и для пространства п измерений).
6. Дадим теперь общие определения скаляра, вектора и тензора.
Если для каждой системы координат х1, з?, . . . , хп определена функ-
функция / (a;1, х2, . . . , х"), так что для системы координат я1, жа, . . . , Яп
мы имеем свою функцию 7 (**. 2*. • ¦ ¦ > ?")> и если при преобразовании
координат A0) значения этих функций в соответствующих точках совпа-
совпадают, т. е. если
/ (««. г1 «-) - 7 (*', «", *") A3)
то говорят, что функция точек / (as1, з2, ¦. . . , хп) есть инвариант
или скаляр. Примером скаляра является какое-либо постоянное
число. Другим примером является основная квадратичная форма рима-
нова пространства Rn:
п п
di? - S S &* (**• *¦ *") <**"da:* <14>
i—1*=1
так как в любой системе координат величина d& должна сохранять одно
и то же значение- Наконец, в качестве третьего примера укажем, что если
ограничиться афинными ортогональными преобразованиями A), то вы-
выражение
/ = an2 -H ад2 + хя*
будет скаляром, так как do самому определению ортогональных преобра-
преобразований должно иметь место равенство
xi'2 + ж2'2 4- a'* = an2 + xS 4- хзг
Поэтому функцию A5) можно вазвать афинным ортогональным инва-
риавтом, но эта функция не будет инвариантом в данном вами выше
смысле A3), ибо для случая любых преобразований A') окажется, вообще
говоря, что
х,'* + жг'г + за'2 ф xi* + а»2 + хг .
7. Переходим теперь к определению вектора. Согласно определению
афииного ортогонального вектора, данного в § 22, составляющие этого
вектора преобразуются при ортогональном ореобразовании координат A)
¦+¦ а13х3
«22*3 И
X* =
352 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
ао формулам
01' = янда -Ь «120г + сизоэ
а> =« astai + &па& + aasas A7)
as' = asiai 4- азгаи + азааэ
где ai, аг, вэ — составляющие вектора по осям Oxixzxs, а ал', а.%', аз' —
составляющие того же вектора по осям Охх'хг'я»'.
Чтобы обобщить это определение, заметим, что коэффициенты лц,
преобразования A6) можно представить следующим образом:
оц-ip- С".* = 1.2. 3) A8)
и поэтому формулы A7) можно записать в следующей форме
^'"З^-а* (' = 1.2,3)
Обобщая эти равенства, можно дать следующее определение:
Если для каждой системы координат х*, а:8, . . . , х" определена сово-
совокупность я функций А1, А*, . . . , Ап, так что Зля системы координат
х1, х1, . . . , хп мы имеем сваю совокупность функций А1, А2, . . . , Ап,
а если при преобразовании координат A0) эти функции преобразуются по
следующим формулам преобразования
Л4 = 2|1.Л" (,.i й) B0)
то мы будем говорить, что совокупность величин А1, . . . , Ап определяет
контравариантный вектор, и будем называть величины А1 составляющими
или компонентами контравариантного вектора А1.
Так как в дальнейшем постоянно придется употреблять суммы, по-
подобные тем, которые стоят в правой части равенства B0), то условимся,
как это принято в литературе, опускать в этих случаях знак суммы,
мысленно его подразумевая.
Таким образом, мы условимся всякий раз, как нам встретится одночлен,
в выражении которого фигурирует два раза один и тот же индекс, произ-
производить по этому индексу суммирование по всем значениям этого индекса
от 1 до п (если только не сделано специальной оговорки).
При этом условии формула B0) может быть записана в следующей
форме:
А<=^А" B1)
причем здесь, как и в дальнейшем, мы уже не указываем, что мы имеем
в сущности п формул, соответствующих значениям индекса i = 1, 2, . . ., п.
Наиболее важным примером контравариантного вектора является век-
вектор dx\ составляющими которого являются дифференциалы координат.
§ 30 ОБЩЕЕ ОПРЕДЕЛЕНИЕ ВЕКТОРА И ТЕНЗОРА 353
6 самом деле, из формул A2) но правилу составления дифференциала
сложной функции сразу следует, что
B2)
так что Аг1 подчиняются формулам преобразования B1), а следователь-
следовательно, являются составляющими контравариантного вектора.
Может быть, полезно отметить, что в силу чрезвычайной общности
приведенного выше определения контравариантного вектора несколько
ускользает физическая сущность этого понятия. Так, например, рассмат-
рассматривая движение точки в нашем трехмерном эвклидовом пространстве,
возьмем за as1, з?, з? прямолинейные прямоугольные координаты, а за
2х, хг, S3 — хотя бы сферические координаты г, в, tp. Тогда
«fa1 dafl <№
dt ' dt ' dt
будут, очевидно, составляющими по декартовым осям координат вектор а
скорости; согласно вышесказанному составляющими этого вектора в ко-
координатах г, 9, i)> будут
dr dp ад?
if dt ' dt
Но эти три величины носят существенно различный характер, хотя
бы по одному тому, что drldt есть линейная скорость, в то время как
dWdt и dty/dt являются угловыми скоростями. Таким образом, составляю-
составляющие контравариантного вектора dbldt, dty/dt не могут быть проекциями,
в обычном смысле этого слова, вектора скорости.
Определенные нами выше векторы были названы контравариантными.
дело в том, что в общей теории тензоров оказывается необходимым раз-
различать два вида векторов, одному из которых присвоено наименование
контравариантных, а другому — ковариантных.
Прежде чем давать определение ковариантного вектора, рассмотрим
один пример. В векторном анализе нами был введен вектор grad <p, со-
составляющими которого служат
Определим теперь для каждой системы координат ж1, хг, . . . , хп
совокупность л величин
где q> есть скалярная функция, и посмотрим, как преобразуются эти
величины при преобразовании координат A0).
По правилам дифференцирования сложных функций мы имеем
дф ftp dsi , *д<р Эх* , дф дхп _ Эф Эха
¦«г - a«i a5i + з^ -^г ¦+¦ • • • + -& -& ~ Ijr-^i-
23 н. В. Кочии
354 ЭЛЕМЕНТЫ ОБЩЕЙ ТВОРИВ ТЕН80РОВ Гл. IV
Бели мы положим
~дх* ~ *' Hip = *
то получим, что
A~i » -*« % B4)
ох
Этот закон преобразования отличен от закона преобразования B1);
его мы и положим в основу определения ковариантного вектора.
Если для каждой системы координат Xя определена совокупность п
функций Аа и если при преобразовании координат A0) эти функции
преобразуются по формулам B4), то величины Аа определяют новари-
антный вектор, составляющими или компонентами которого они
являются.
Из вышесказанного ясно, что примером ковариантного вектора является
Является интересный выяснить, почему в обычной теории тензоров
нам яе пришлось различать ковариантные и контравариантные векторы.
Составим формулы преобразования B4) для случая афиняых ортогональ-
ортогональных векторов. Для этого постараемся из формул A6) выразить старые
координаты xi, хг, хз через новые xi', х*', хя'. Но, вспоминая таблицу
косинусов из п. 5 § 22, мы сразу можем написать, что
xi — аиаа' + апжз' + азхжз'
xs — аагхх' + aaaas' + азгад' B5)
xs = aisxi' + агзхи' +
Отсюда следует, что
Поэтому формулы A7) могут быть записаны в форме
0Ч' = 2«4^ B7)
*=i l
не отличающейся от формул B4).
Это показывает, что в случае афиныых ортогональных векторов форму-
формулы преобразования B1) и B4) являются тождественными и, следовательно,
понятия контравариантного и ковариантного вектора являются совпадаю-
совпадающими.
Скажем еще несколько слов относительно обозначений. Мы будем от-
отличать контравариаптные векторы от ковариантных тем, что будем ста-
ставить индексы у контравариантного вектора наверху, а у ковариантного
внизу. Так как dxl есть контравариантный вектор, то принято у коорди-
аат х1 ставить индексы наверху.
j 30 ОБЩЕЕ ОПРЕДЕЛЕНИЕ ВЕКТОРА И ТЕНЗОРА 355'
8. Переходим к определению тензора ¦ второго ранга. Принимая во-
внимание формулы преобразования компонентов афинного ортогонального
теазора [§ 22, формулы A4)] и формулы A8) и B6) и обобщая ати фор-
формулы надлежащим образом, мы приходим к следующим определениям:
Если для каждой системы координат х* определена совокупность п2
функций А"Я, которые при преобразовании координат A0) испытывают
преобразование
то эти функции определяют контравариантный тензор второго рангаг
составляющими которого они являются.
Точно так же п2 составляющих Аф ковариантного тензора второго
ранга преобразуются по формулам
Наконец, составляющие А% смешанного тенаора второго ранга пре-
преобразуются по формулам
Очевидно, мы можем дать совершенно аналогичные определения тен-
тензоров третьего ранга, четвертого и т. д. Так, например, составляющие
тензора Аь&, два раза ковариантного и один раз контравариантного, пре-
преобразуются по формулам
C1)
Приведем в качестве примера один очень важный смешанный тензор
второго ранга. Составляющими этого тензора в любой системе координат
являются числа
I, если Л = р
C2)
Чтобы доказать, что б? действительно являются составляющими сме-
сметанного тензора, необходимо проверить, что выполняются формулы C0),.'
т. е. нужно показать, что
«-*??• C3)
Возвратимся на минуту к обычаю писать знак суммы Тогда мы будем
иметь
„в дхл \п .р Эха
**' ?z, «'
но в этой сумме все члены, которые отвечают значениям ее =fc p, аропа-
23'
356 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
дают в силу C2), а при а = |3 мы получаем -^j- . Итак
и, следовательно,
JSS C4)
Но согласно формулам A2) и A0) ж* есть функция от з?, я? хп,
которые в свою очередь зависят w f1, х2, . . . , ?п; следовательно, ж*
можно рассматривать как сложную функцию от г1, Ж2, . . . , ж™, заданную
через посредство вспомогательных функций я1, з? хп, причем,
конечно,
х" (а;1 (г1 г"), . . . , хп (х\ . . . , г")) = х«
Дифференцируя обе части этого равенства по я1, мы получим, очевидно,
что
что в связи с C4) и доказывает справедливость формул C2).
Отметим попутно формулу, аналогичную формуле C5):
C6)
Полученный тензор обладает тем замечательным свойством, что любая
его составляющая имеет то же самое значение во всех системах коорди-
координат. Заметим еще, что с точки зрения общего определения можно векторы
называть тензорами первого ранга, а скаляры — тензорами нулевого
ранга.
§ 31. Тензорная алгебра
1. Перейдем теперь к установлению основных операций с тензорами.
Основное, на что нужно обратить внимание, заключается в том, что опре-
определения действий с тензорами должны быть таковы, чтобы в результате
производства этих действий вновь получился тензор.
Так, например, умножая все составляющие какого-либо тензора, на-
например Ala, Ha скаляр X, мы получаем, очевидно, составляющие кА^
нового тензора; В этом состоит операция умножения тензора
на скаляр.
Операция сложения двух тензоров одного и того же
вида (т. е, имеющих одинаковое количество нижних индексов и одинаковое
количество верхних индексов) естественно определяется следующим об-
образом: нужно сложить соответствующие составляющие данных тензоров
§ 31 ОБЩЕЕ ОПРЕДЕЛЕНИЕ ВИКТОРА И ТЕНЗОРА 357
в результате получатся, как нетрудно показать, составляющие нового
тензора, который и называется суммой двух данных тензоров. Так,
например,
СЪр. = Alp + Biz A)
есть сумма тензоров А1$ и В1&.
Нетрудно- видеть, что сложение тензоров обладает обычными свойст-
свойствами, как например, коммутативным и ассоциативным.
Рассмотрим контравариантный тензор второго ранга Аа^. Если при
изменении порядка индексов его составляющие не изменяют своих зна-
значений, т. е. если
А** = А**
то тензор Аа& называется симметричным; если же при измене-
изменении порядка индексов составляющие тензора А°^ меняют свой знак на
обратный, так что
то тензор называется антисимметричным. Такие же опреде-
определения можно дать и в случае ковариантного тензора второго ранга.
Так же как в § 23 можно доказать, что любой контравариантный или
ковариантныи тензор второго ранга можно представить в виде суммы сим-
симметричного и антисимметричного тензоров.
2. Переходим к определению произведения двух тензоров. Пусть
даны два совершенно произвольных тегзора, например А® и ??*5-
Первый тензор имеет ла составляющих, второй тензор имеет л* состав-
составляющих. Перемножим каждую ив па составляющих первого тензора на
каждую из res составляющих второго тензора; в результате мы получим
п& составляющих
C?U = 4вЬ B)
Докажем, что эти п5 составляющих образуют тензор; в самом деле,
так как Л„ есть тензор, то мы имеем следующие формулы преобразования
?о той же причине
Кп r>
01т = О VS -ТГ1 IZni T~i
дх Эх ох
В результате перемножения этих равенств мы получим
1кЪ" 0* дха-дхкдх~< дх*дхп
Ъх*< дх*
358 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
а это последнее равенство, по определению, выражает, что С^Хь есть
тензор три раза ковариантный, два раза контравариантный. Полученный
тензор и называется произведением двух данных тензоров.
В случае афинных ортогональных тензоров, из формул A8) и A9)
I 22 следует, что диады ah и Ьа, составляющие которых получаются пере-
множением составляющих двух векторов аи Ь, могут быть рассматриваемы
как произведения лекторов а и Ь в только что указанном смысле.
3. Рассмотрим теперь так называемую операцию сокращения
индексов. Пусть мы имеем какой-либо тензор, в состав которого
входит, по крайней мере, один ковариантный индекс и, по крайней мере,
один контравариантный. Для определенности предположим, что речь
идет о тензоре AZ&- Этот тензор имеет л3 составляющих. Обратим в этом
тензоре внимание на один из ковариантных значков, например, J3 и на
контравариантный у- Составим теперь выражение А% (т. е. примем у = C
и произведем затем суммирование по ^ в пределах от 0 = i до ?$ = п).
В результате мы нолучим п чисел
Вл = А%> C)
Докажем, что эти п чисел образуют тензор первого ранга.
В самом деле, так как А1$ есть тензор, то формулы преобразования
имеют вид
.1 .-, дха дз? дх
А = А\л
Положим в этой формуле I = к и просуммируем по значку к в пре-
пределах от к = 1 до А: = п, тогда получим
-г» .-, дх* дя? 3?*
Но по формуле C6) предыдущего параграфа
Следовательно,
3?ft=^|?a? D)
Заметим теперь, что по формуле C)
В{ = Ж E)
С другой стороны, пользуясь для ясности знаком суммы, будем иметь
п п п
= 2i >J
Произведем сначала суммирование по т, так как б? = 0, если
то ясно, что при суммировании по f останется только тот член.
I 31 ТЕНЗОРНАЯ АЛГВВРА 359
который соответствует значению у = {5, итак как при -у = Р мы инеем
Ьу != 1, то
п п
" 11
Но по определению C).
2 а% = ва
19=1
Поэтому из D), E) и F) легко получим, что
^-*-!?¦ ™
Но G) есть как раз формула преобразования составляющих ковариапт-
ного вектора, следовательно, Вл есть ковариантный вектор, что и требо-
требовалось доказать.
Итак, из всякого сиешанного тензора можно путем сокращения одного
ковариантного индекса и одного контравариантного индекса получить
новый тензор, ранг которого на две единицы ниже ранга исходного тен-
тензора. Этот новый тензор мы будем называть тензором, сокра-
сокращенным из данного по таким-то индексам.
Так, например, имея тензор четвертого ранга А^, мы можем образо-
образовать из него четыре сокращенных тензора второго ранга, а именно
В| = All, С» = Л$. D% = A%, El = All
Так как в результате получились опять смешанные тензоры, то опе-
операцию сокращения индексов можно повторить; в результате получим два
тензора нулевого ранга, т. е. два инварианта
F = А% G=A%
Приведем пример на сокращение индексов из теории афинных ортого-
ортогональных тензоров. Заметим только предварительно, что в случае афин-
афинных ортогональных тензоров нет никакой разницы между контравариант-
ными и ковариантными значками, поэтому в случае афинных ортогональ-
ортогональных тензоров мы можем сокращать по любым двум индексам. Рассмотрим
теперь афинный ортогональный тензор ры в пространстве трех измерений.
Сокращая его по индексам к и I, мы должны получить инвариант
рп + рм + раз
и действительно, в § 27 мы видели, что эта сумка является одним из ин-
инвариантов тензора.
4. Комбинируя операцию произведения двух тенаоров с операцией
сокращения индексов, мы получаем новую весьма важную операцию,
которая содержит в себе, как частный случай, всю теорию скалярного
умножения тензора на вектор и тензора на тензор, изложенную нами
в § 24 и § 25. Мы рассмотрим эту операцию на ряде частных примеров.
360 ЭЛЕМЕНТЫ ОБЩИЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
1°. Возьмем контравариантныц вектор А" и ковариантный В$. Пере-
Перемножая их, мы получим тензор АаВ$, а сокращая этот тензор по индексам
аир, получим инвариант АаВл, который можно, очевидно, назвать ска-
скалярным произведением векторов Аа и 2?0. В случае афинных ортогональ-
ортогональных векторов а и Ь мы получаем, очевидно, операцию скалярного произ-
произведения этих векторов а-Ь = а\Ь\ + а*Ьг + азЫ.
2°. Возьмем ковариантный тензор Аа$ и контравариантный вектор В4 ¦
Перемножая их, мы получим тензор Л a/Ji?v; а сокращая тензор по индексам
а и у, получим вектор <7р = Аа$В*, сокращая же предыдущий тензор
по индексам р и yi получим вектор Da — Аа$В*. В случае афинных орто-
ортогональных тензоров, согласно формулам D) и. (9) § 24, вектор р^а^ являет-
является скалярным произведением тензора р^ на вектор аа слева, вектор же
Рсрвц является скалярным произведением тензора ра& на вектор аа справа.
3°. Возьмем ковариантный тензор Аа$ и контравариантный тепзор В15.
Перемножая их, получим тензор Аа&Ву8; сокращая его по индексам C а f 7
получим тензор второго ранга С* = А^В^. Сокращая полученный тен-
аор еще раз по индексам а и б, получим инвариант Аа$В^.
Обе эти операции мы уже имели в случае афинных ортогональных тен-
тензоров. В самом деле, согласно формулам E) § 25 тензор pki = а^ф^
является скалярным произведением тензоров аы и Ьы. В формуле же
A9) § 27 нами было определено бискалярное произведение двух тевзоров
aHt и ^*ь при новых обоаначениях выражение для этого произведения
следовало бы записать так: a^fiuc, или, что то же, a^6^z.
Мы видим, таким образом, как развитая в этом параграфе общая тео-
теория тензоров объединяет в одно целое различные понятия теории афин-
афинных ортогональных тензоров.
5. Рассмотрим какой-либо тензор, например А^. В соответствие
каждому ковариантному значку этого тензора, приведем произвольный,
контравариантный вектор, в данном случае м\ в соответствие значку а,
и iP, в соответствии значку J3; в соответствие же каждому контравариант-
ному значку этого тензора приведем произвольный ковариантный вектор,
в данном случав вектор w,. Составим теперь произведение A^u^VHi/y,
получим тензор шестого порядка, сократим теперь .его по индексам а и X,
3 и (i, 1 и v, тогда мы получим инвариант
/ = Aleu<4favr (8)
Эта теорема может быть обращена. Другими словами, справедлива
следующая теорема:
Если мы для каждой системы координат ж1, я2, . . . , х" имеем совокуп-
совокупность п3 величин Al$ и если при любом выборе трех векторов иа, и", wr
выражение (8) является инвариантом, то величины Л^ являются состав-
составляющими тензора два раьи ковариантног.о, раз контравариантного.
Доказательство весьма просто. Нам нужно проверить, выполняются
ли формулы преобразования C1) § 30.
§ 31 ТЕНЗОРНАЯ АЛГЕБРА 361
Но в силу произвольности векторов иа, г#, wY мы можем ваять их так,
чтобы в новой системе координат з?, . . . , ?" они имели значения
й" = 6?, & = 6g, wy = 6^
Тогда в новой системе координат значение формы / будет равно-
В старой же системе координат значения векторов могут быть оттре
делены по формулам B1) и B4) предыдущего параграфа, в которых только
нужно поменять роли новых и старых координат.
дхл _, дх* хг вха
дх дх дх
= е- ^ а' **
Следовательно,
ЛУ
и так как по условию выражение (8) является инвариантом, т. е. / = /, то.
~\1 лу дх дзг дх
Л№= Л^-^г-^- —
Полученная формула преобразования доказывает, что А"?р есть тензор..
Доказанная теорема высказана нами не в самой общей форме. Но со-
совершенно ясно, как нужно формулировать и применять теоремы, анало-
аналогичные только что доказанной. Ввиду важности этой теоремы, мы при-
присвоим ей особое наименование «теоремы деления тензоров».
Более того, высказанную теорему можно еще обобщить. Так, напри-
например, если для каждой системы координат мы имеем совокупность л8 ве"
личин 4JP и если для любого тензора В143 выражение AlpB^ являете»
контравариантным вектором, что величины А^р являются составляющими
тензора два раза ковариантного, раз контравариантного.
Всю совокупность теорем такого типа условимся называть обобщенной
теоремой деления тензоров.
Частным случаем этой последней теоремы является такая: если для/
любого вектора а? величины рараР суть составляющие ковариантного
вектора, то р„3 суть составляющие ковариантного тензора. Для случая-
афинных ортогональных тензоров эта теорема была доказана нами в
п. 2, § 24 [формулы A4)]. Мы видели там, что эта теорема является весьма,
важным орудием для распознавания тензорного характера ряда величин.
Подобно этому теорема деления тензоров служит в целях установления
тензорного характера различных величин. В заключение настоящего-
пункта докажем еще одну теорему аналогичного содержания.
362 ЭЛЕМЕНТЫ ОБЩЕЙ ТВОРИИ ТЕНЗОРОВ Гл. IV
Если для каждой системы координат х* мы имеем совокупность п*
величин Адф и если при любом выборе вектора иа выражение
f = А^и'и? (9)
•является инвариантом, то величина
A0)
являются составляющими ковариантного тензора.
Для доказательства заменим в выражении (9) вектор и* суммой двух
произвольных векторов v1 и vf-, т. e. положим
а« = v* + и^
тогда, очевидно, получим
/ = 4„5 (р* 4- w*) (i? + «^) =
Заметим теперь, что выражения
¦инвариантны по условию теоремы и что
так как аир являются здесь значками суммирования в поэтому MorvT
быть обозначены произвольными буквами. Поэтому выражение
g = (А,ф + ApJ vPitfi
является инвариантом и так как р* и гс* уже произвольные векторы, то
можно применить теорему начала этого пункта и утверждать, что вели-
величины A0) обраауют ковариантный тенаор.
Если величины Аа& обладают свойством симметричности, т. е. Л„л = А$Л,
то из инвариантности выражения (9) для любого вектора вытекает, что
Лф являются составляющими ковариантного тензора.
В самом деле, в атом случае Аай совпадают с Б„ф.
§ 32. Фундаментальный тензор
1. Введем теперь в рассмотрение фундаментальную квадратичную
¦форму
ds2 = gifc (з1, . . . , xn) dx'dx" A)
определяющую квадрат расстоявия между двумя бесконечно близкими
точками многообразия. Формулой A) устанавливается метрика этого
многообразия и само многообразие превращается уже в риманово про-
пространство Rn.
По самому определению, значение квадратичной формы A) должно
оставаться тем же самым, независимо ОТ того, в каких координатах про-
32
ФУНДАМЕНТАЛЬНЫЙ ТЕНЗОР
363
изводится вычисление; иными словами, квадратичная фор-
форма A) является инвариантом.
Кроме этого условия, функции gik считаются удов-
удовлетворяющими условию симметрии
gik "" glu
и, кроме того, мы потребуем еще, чтобы определитель
е», р*я . . .
g
B)
C)
был отличен от нуля в рассматриваемой области
¦а вменения переменных.
Так как дифференциалы координат могут быть взяты совершевво про-
произвольными и так как dx' есть контравариантный вектор, то из послед-
последней теоремы предыдущего параграфа вытекает, что gu являются со-
составляющими ковариаитного тензора. Мы будем называть этот тензор
ковариантвым фундаментальным тензором. Определи-
Определитель g назовем фундаментальным определителем.
Возьмем теперь любой контравариантный вектор А", составим произ-
произведение gik Ал и сократим его по значкам к а а, в результате мы получим
ковариантный вектор, составляющие которого мы обозначим через А{
Ai^gtbA" D)
Попробуем теперь обратно выразить составляющие векторы А* через
Ai. Равенства D) можно рассматривать как систему п линейных уравне-
уравнений относительно п неизвестных А1, А*, . . . , Ал:
gn А*
1 + . . . 4- gln An
At
Решая эту систему по обычному правилу Крамера, мы получим, что
r. . . +OniAn
где Gib есть алгебраическое дополнение элемента gik в фундаментальном
определителе, т. е. минор, соответствующий этому элементу, умножен-
умноженный аа (—1) *+*. Вводя обозначения
E)
можем записать полученные формулы коротко в виде
Аг
364 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Заметим теперь, что уравнения D) при g =j= О могут быть решены при
любом выборе Ai. Иными словами, в формулах F) за А* можно взять
произвольный ковариантный вектор. А тогда, применяя одну из теорем
последнего пункта предыдущего параграфа, можно утверждать, что
величины gilr являются составляющими некоторого контравариантного
тензора, который мы назовем контравариантным фунда-
фундаментальным тензором. Легко видеть, что в силу условия B)
окажется G4 = Gki и, следовательно, g'* = g*». Таким образом, контра-
вариантный фундаментальный тензор, подобно ковариантному фундамен-
фундаментальному тензору, обладает свойством симметрии.
Наконец, производя перемножение обоих фундаментальных тензоров
и последующее сокращение индексов, мы получим смешанный
фундаментальный тензор
«?=**.«"* (?)
Чтобы найти значение составляющих этого тензора, подставим в фор-
формуле D) выражения F). Мы тогда подучим
Так как это равенство должно иметь место при всех значениях Ак,
то необходимо должно быть, чтобы
Но,
I, ... 1-*
[и 1фк
Таким образом, смешанный фундаментальный тензор совпадает с хо-
хорошо известным нам тензором, составляющими которого в любой системе
координат являются величины о«.
Если в тензоре G) произвести сокращение индексон i и Ус, то получится
инвариант
g\ = giagai = « (9>
дающий, очевидно, число измерений рассматриваемого римаяова про-
пространства.
2. В предыдущем пункте мы видели, что при помощи фундаменталь-
фундаментальных тензоров gfi, и gik можно из контравариантного вектора А* получить
ковариантный вектор А{ и обратно на основании формул
At = gikAk; A' = g*Ak A0)
Так как мы знаем составляющие фундаментальных тензоров в любой
системе координат, то мы легко можем вычислить составляющие одного
из векторов А{, А1 по составляющим другого. Ввиду этого представляется
весьма удобным рассматривать А{ и А1 не как составляющие двух раз-
различных векторов, а как различные (соответственно ковариантные и конт-
равариантные) составляющие одного и того же вектора.
Совершенно то же самое можно сказать и про тензоры любого ранга
I 32 фундаментальный тензор 366
Возьмем теперь контравариантный тензор второго ранга А^. Тогда
можно аналогично тому, как от вектора Л1 мы пришли к вектору Аь про-
произвести операцию понижения одного из значков
этого тензора; в самом деле, умножая этот тензор на g^ и произ-
производя сокращение по индексам а и /с, мы получим тензор
A^gl<L = ^ A1)
производя же умножение тензора Аа& на g№ и производя сокращение по
индексам C и i, мы получим другой тензор
A"*g№ = A% A2)
Принятый в формулах A1) и A2) способ обозначения смешанных тензо-
тензоров отчетливо указывает на то, какой именно иа индексов подвергся по-
понижению (над этим индексом наверху или под ним внизу стоит точка),
и мы впредь будем часто пользоваться этим способом.
Нетрудно аналогичным приемом опустить и второй индекс тензора
3 для этого достаточно составить выражение
= Aik A3)
Обратно, от А\к можно вернуться к а? и Аа<1. В самом деле, составим
пользуясь теперь формулами (8), легко установим, что
A^p-At A4)
Аналогично этому можно доказать, что
Aikg*f> gia - Af gl* = A*$ A5)
Совокупность всех полученных нами формул и позволяет рассматри-
рассматривать Ал^, At, A?i, А^ как контравариантные, сметанные и ковариантные
составляющие одного и того же тензора. Не останавливаясь на дальней-
дальнейших примерах применения процесса понижения и повышения индексов,
укажем только одно простое правило, касающееся того случая, когда в не-
некотором одночлене какой-либо значок встречается два раза и, следователь-
следовательно, по этому значку происходит суммирование. Мы знаем, что в этом слу-
случае непременно один значок стоит наверху, а другой внизу (иначе рас-
рассматриваемая величина не имела бы тензорного характера). Так вот
в этом случае мы можем верхний значок суммирования опустить вниз
¦с тем, чтобы нижний значок суммирования поднять наверх. Например
А°* Ва& = А*Я$ = А%В* = А*В* A6)
Доказательство этой теоремы предоставляется в качестве упражне-
упражнения читателю.
36g ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл IV
Заметим в заключение этого пункта, что мы можем рассматривать g№ ,.
g*k и gf как ковариантные, контравариантные и смешанные компоненты
фундаментального тензора, ибо процесс повышения и понижения индек-
индексов применим и к этому тенаору, например
gik Г* = g"> 8*^ gkt> = g°* A7>
При этом, как мы видели выше, процесс повышения значка произво-
производится при помощи тензора g'", процесс понижения при помощв тензора gik.
Применение же тензора g\ производит, как легко видеть, только замену
одного значка другим, например
A^gt=Aaf A8)
поэтому gt называют еще тензором подстановки.
3. Перейдем теперь к приложениям.
В основу наших рассуждений мы положим фундаментальную форму
rfs2 = gik №, . . . , х") dx'dx* A9)
определяющую расстояние между двумя бесконечно близкими точками
риманова пространства Rn. Про квадратичную форму A9) мы будем пред-
предполагать, что она принимает только положительные значения и что она
произошла указанным в § 30 образом. А именно мы будем считать, что
мы имеем m-мерное эвклидово пространство Ет, в котором положение
какой-либо точки определяется прямолинейными прямоугольными ко-
координатами г/i, г/а, • . • , ут, и что в этом пространстве мы рассматриваем
подпространство Rn, определенное формулами
t/i = уг (ас1, . . ., Xя)
120)
Ут=Ут№, ¦ -- , *")
Подставляя в формулу
определяющую расстояние между двумя бесконечно близкими точками
в энклидовом пространстве, выражения B0) для функций ул, мы и полу-
получим формулу A9), в которой, как было показано н § 30, коэффициенты g^
чмеют следующие значения:
При этом мы всюду будем писать знак суммирования, если оно проис-
происходит в пределах от 1 до т.
Нашей первой задачей будет изучение метрики пространства Rn,
т. е. рассмотрение того какое значение имеет длина какого-либо вектора
в пространстве Rn в какое значение имеет угол между двумя векторами
I 32 ФУНДАМЕНТАЛЬНЫЙ ТЕНЗОР 367
в этом пространстве. При этом мы будем исходить яз известной нам метри-
метрики нашего трехмерного эвклидова пространства, которая весьма легко
обобщается на случай эвклидова пространства т измерений.
Итак, возьмем какой-либо контравариаятный веквдр А\ Легко найти
такой бесконечно малый вектор dx*, который имеет то же направление,
что и вектор А*, точнее говоря, вектор dx', составляющие которого про-
пропорциональны составляющим вектора А1:
dx1 = \Al B3)
Так как при переходе от одной координатной системы к другой со-
составляющие векторов dx' и А1 преобразуются по одним и тем же формулам,
то величина Л при этом изменении координат остается инвариантной.
Вектору dx' отвечает в пространстве Ет бесконечно малый вектор dy
с составляющими dya, длина которого равна ds.
Естественно поэтому за длину вектора dxi принять
выражение для ds, определяемое формулой A9).
Так как составляющие вектора А' в Л раз меньше составляющих век-
вектора dx*, то и длину вектора А1 следует принять в \ раз меньше, чем ds.
Но при выполнении условий B3) мы имеем, что
ds* = X2 gilt A*Ak
Отсюда вытекает, что за длину вектора А1 следует принять выражение
ЦА*)=У8иА1А*. (Щ
Заменяя контравариантные составляющие вектора А* его ковариант-
ними составляющими по формулам
gikA* = Ait A1 = ga At B5).
получим еще два выражения для длины вектора А*:
I Ц{) = VAtA< l(A*) = Vg'lAiA~, B6>
Заметим, что так как вектору dxi отвечает в пространстве Ет вектор
с составляющими
dya=~?dxi (с. = 1 т) B7)-
то вектору
А*-±&
будет соответствовать афинный ортогональный вектор а а пространстве-
Ет с составляющими
аа=^^* (e-l m) B8>
ох
Чтобы определить значение угла между двумя векторами А1 и Вг
в пространстве Rn, рассмотрим предварительно вопрос о скалярном
наведении этих двух векторов.
Зв8 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Вектору А' будет соответствовать в пространстве Ет вектор а с состав-
составляющими B8), точно так же вектору В1 будет соответствовать вектор Ъ
с составляющими
ь« = 5в*(в = 1 т) B9)
Составляя по обычному правилу скалярное произведение двух век-
векторов а и Ь, получим
а.ь = s «а - s 2г *¦ 5 в» = s SS4is*=**^ C0)
Таким образом, под скалярным произведением, векторов Аг и 5* следует
понимать следующие выражения, равные между собой в силу формул B5):
gitAlBk = AkBk = A% = guAlBl C1)
Теперь не составит никакого труда найти угол между двумя векто-
векторами Л' и Вн, понимая под этим угол ф между соответствующими этим
векторам векторами а и Ь в пространстве Ет. В самом деле, мы, очевидно,
инеем
C2)
Отметим в частности условие ортогональности двух векторов Аг и В*:
* = А% = g^A,^ = 0 C3)
4. Переходя к дальнейшим приложениям тензорной алгебры, мы в це-
целях простоты изложения допустим, что мы имеем дело с эвклидовым
трехмерным пространством, в котором введены произвольные криво-
криволинейные координаты х1, Xs, я?.
Рассуждения предыдущего пункта остаются в этом частном случае
в полной силе; однако в данном случае их можно еще сильно упростить.
Основным признаком эвклидова пространства является то обстоятель-
обстоятельство, что хотя в общих криволинейных координатах выражение для rfs2
имеет форму A9), существуют такие прямолинейные прямоугольные
системы координат yi, уъ, уз, что ds2 принимает форму
ds* = tfy,* + dy? + фзг C4)
и что, следовательно, составляющие фундаментального тензора в этой
системе будут иметь вид
g» = «i* C5)
В общем же римановом трехмерном пространстве привести cb? к фор-
форме C4) нельзя, и только, если включить это пространство в эвклидово
пространство более высокого числа измерений, можно привести <?s*
§ 32 ФУНДАМЕНТАЛЬНЫЙ ТВНЗОР 369
к форме B1). Но в координатах г/i, уг, г/з мы превосходно знаем, чему рав-
равна длина вектора, угол между двумя векторами и т. п. Это дает возмож-
возможность, как. мы сейчас увидим на ряде примеров, сразу написать анало-
аналогичные выражения в общих криволинейных координатах.
Рассмотрим какой-либо вектор, и пусть А* его контравариантные
компоненты, a At — ковариантные. Тогда из общей теории тензоров мы
знаем, что выражение AiAi является инвариантом. Но в системе коорди-
координат у\, г/г, г/а различие между контравариантными и ковариантными ком-
компонентами пропадает; для ясности будем обозначать в координатах
уь 2/2, г/з составляющие вектора А через a», a%, at, вектора В через
bi, Ьг, Ьз и т. д. Тогда инвариант A%At будет иметь в координатах j/i, уг, уз,
значение ei* 4- ага + аз2, а это, как известно, есть квадрат длины вектора.
Итак, длиной вектора А* в любых криволинейных координатах является
I (Аг) = VYIK = Vg^A* = Vg^A^u C6)
Сопершенно аналогично можно составить скалярное произведение
двух векторов Л* и В*. Из общей теории тензоров мы знаем, что АгВг
есть инвариант; в координатах у\, г/г, уз это выражение приводится
к aibt + avbz + азЬз, т. е. к скалярному произведению векторов А' и В*.
Следовательно, скалярным произведением векторов А* и -В1 в любых кри-
криволинейных координатах является
А% = gtkAlB* = g^A^ C7)
Совершенно естественно, что для косинуса угла между двумя векто-
векторами мы вновь получаем формулу C2).
Поставим теперь себе задачу выяснить значение контравариантных и
ковариантных составляющих некоторого вектора.
Пусть мы рассматриваем вектор а в точке М. Проведем через эту точку,
как мы это делали в § 18, три координатных поверхности
х1 = const, з? = const, з? = const C8)
которые пересекутся по трем координатным линиям. Направления каса-
касательных к этим линиям в сторону возрастания координат ж1, ж2, з? обо-
обозначим через si, S2, sa; направления же нормалей к поверхностям C8)
в сторону возрастания координат х1, г*, з? обозначим через ш, пг, пз.
Найдем углы, образуемые этими шестью направлениями с осями пря-
прямолинейных прямоугольных координат у\, у%, г/з. Возьмем, например,
направление s(; вдоль соответствующей координатной линии меняется
только координата х\ остальные же две координаты остаются беа изме-
изменения; бесконечно малый вектор dr, идущий по касательной к этой линии,
имеет своими проекциями на оси координат у\, уг,уг величины (заметим,
что в нижеследующих формулах не нужно суммировать по значку i)
dy, = ^ dx\ dyi = i^ dx*t dyz = ^ duf
OX 03S OX
24 а. В. ночка
370 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ ГЛ. IV
величина же самого вектора а?г равна [см. еще B2)]
Отсюда сразу следуют такие выражения для косинусов углов между
направлениями si, sa, ss и осями t/i, г/2, уз
сп {щ, у,) ш, -±=^{ C9)
V«a дх
(заметим, что хотя в эту формулу значок г входит три раза, но по нему
суммировать не надо, что ясно из вывода). Точно так же вычисляются
косинусы углов между направлениями ш, ш, пз и осями г/i, г/г, г/s.
Рассмотрим, например, вектор grad xl, где х1 рассматривается как
функция от г/1, г/г, уз- Проекциями этого лектора на оси г/i, г/а, уз являются
Efl !Ei *L
дщ* дуг' ду3
Покажем теперь, что квадрат длины этого вектора равен
В самом деле, gik есть контраваряаитный тензор, составляющие ко-
которого в системе координат г/i, г/а, г/з равны
(ибо в прямолинейной прямоугольной системе координат значения конт-
контра вариантных и смешанных составляющих тензоров совпадают). Поэтому
в любой системе координат я1, а?, з? согласно общему правилу пре-
преобразования контравариантпых тензоров будем иметь
i* .&дх1дх" ш дх1 Sxk
В = Оа а > ИЛИ в = т— т— D2)
Отсюда, как частный случай, следуют и формулы D1). Выпишем еще
для аналогии и формулы B2)
Возвращаясь к определению косинусов углов между направлениями
ш, па, пэ и осями координат г/i, г/а, г/з, можем теперь в силу формул D0) и
D1) сразу написать, что
*«(*'Уд-урщ D4)
Рассматривая теперь какой-либо вектор, введем для отчетливости
изложения следующие обозначения. Пусть А' и At контравариантные
и ковариантные составляющие этого вектора в любых криволинейных
координатах; пусть ах аа, а, составляющие этого вектора по осям пря-
§ 32 ФУНДАМЕНТАЛЬНЫЙ ТЕНЗОР 371
молинейных прямоугольных координат щ, у3, у3; обозначим далее через
а^ и ащ ортогональные проекции вектора а соответственно на касатель-
касательные к координатным линиям и на нормали к координатным поверхно-
поверхностям C8); наконец, вводя, как в § 18, три единичных вектора ei, ег, ез,
направленных по касательным к координатным линиям (см. фаг. 00)
и, через е1, е2, е3 — три единичных вектора, направленных do нормалям
к координатным поверхностям C8) (в § 18 эти векторы были обозначены
через в!*, е^*, еа*), обозначим через Ац и Л^ косоугольные составляющие
вектора а соответственно по направлениям s1, s2, a3 и m, па, n«, иными сло-
словами, коэффициенты разложения вектора а по векторам ег, е^, е8 ие*,е2,е3:
а = Л,,в1 + A,jst + А,?з D5)
а = А^ + АПге* + А^ D6)
Переходим к вычислению введенных нами величин. Прежде всего,
согласно основной формуле об ортогональной проекции какого-либо век-
вектора на любое направление, мы имеем
а« = о., cos (sb у) =
Но в силу основных формул преобразования ковариантных векторов
мы имеем
и, следовательно, получаем окончательную формулу
Таким образом, ковариантные составляющие вектора At только мно-
множителем y~gi, отличаются от ортогональных проекций вектора а на
направления касательных к координатным линиям.
Совершенно аналогично вычисляется
ani = a, cos (n4, yj) = -=== a3 g—
D8)
Но в силу основных формул преобразования контравариаигных век-
векторов мы имеем
л дх1
~~" i я*, '
и, следовательно,
ащ = ф= DЙ)
Таким образом, контравариантные составляющие вектора А* толыга
множителем VHF1 отличаются от ортогональных проекций вектора а.
на направления нормалей к координатным поверхностям.
24»
372 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Переходим теперь к вычислению Ан и Ащ. Просматривая вниматель-
внимательно предыдущие выводы, мы легко заметим, что составляющими вектора et
по осям координат у\, уч, уз являются величины
cos (я,, у,) = r^-A
составляющими же вектора е< являются
1 Эх1
cos (щ, у}) = —= 5—
Поэтому, проектируя равенства D5) и D6) на оси координат у\, уч., уз,
получим
2 1 oyt ¦*-. *¦ Sx*
А
Но в силу формул преобрааования контравариантных и ковариантных
векторов мы имеем, что должно быть
S я 3 .
Сравнивая эти формулы с предыдущими, ыы видим, что
E0)
E1)
Эти формулы дают нам еще одно истолкование контравариантных и ко-
аариантных составляющих вектора.
Отметим еще раз, что во всех формулах D7), D9), E0) и E1) поаначку i,
хотя он и встречается три раза, никакого суммирования производить
не нужно.
В случае ортогональных криволинейных координат я1, аг1, з? направ-
направления щ и щ совпадают друг с другом, и поэтому
ац = а., = Ан - Ащ
общую величину этих составляющих обоаначим через ащ и будем назы-
называть эти величины физическими составляющими вектора а. Так как о слу-
случае ортогональных координат мы имеем, очевидно, соотношения
8а = Вг, gu = ~ E2)
где Н; — коэффициенты Лама (см. § 18), то связь между контравариант-
ными, ковариантными и физическими составляющими некоторого векто-
вектора принимает вид
Л^~ах1, At-Нл^. E3)
{
ФУНДАМЕНТАЛЬНЫЙ ТЕНЗОР
373
5. Покажем теперь, как следует определять в римановом пространстве
векторное произведение. При этом мы рассмотрим для простоты только
случая пространства трех измерений.
Возьмем три произвольных вектора А*, В*, С1 и образуем из их
контравариантных и ковариантных составляющих два определителя
А1 А* А*
В1 & В*
С1 С* С*
Ал Аг Аг
B, U &
Ci Ci С«
E4)
Так как контравариантные и ковариантные составляющие какого-
либо вектора связаны соотношениями
то легко видеть в силу правила перемножения определителей, что
g"
gl2 gl3
gab gis
gSt g33 I
A1 A1 As
B1 B* B»
О С1 С3
E5)
Перейдем теперь к другой системе координат я1, ж2, г3 и обозначим
через D определитель преобразования, т. е.
дх1 дхл
дх* дх>
as»
E6)
Составляющие вектора А{ преобразуются при этом по формулам
~А =А дх"
Поэтому преобразованное значение определителя V, по той же формуле
перемножения определителей, окажется равным
V'
В,
9хл
дх"
дх*
55"
А
А
дх"
V'D
E7)
Наконец, применяя то же правило перемножения определителей к опре-
определителям V а V, из E4), получим
A* At A% А*С,
W
BiAi B'Bt
374 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Отсюда видно, что выражение VV является инвариантом, так что
W =И/' E8)
Сравнивая это выражение с E7), видим, что должно быть тожде-
тождественно
VD =V E9)
что, впрочем, может быть доказано и непосредственно.
Наконец, из формулы E5) следует, что
V = gV
принимая еще раз во внимание E5), заключаем, что
Теперь, в силу E7) и E9) выводим
°=н
Отсюда вытекает важная формула преобразования фундаментального
определителя
g = gD* F0)
Так как определитель преобразования D всегда считается отличным
от нуля, то из предыдущей формулы вытекает, между прочим, что зна-
значение фундаментального определителя будет отличным от нуля во всех
системах координат, если это имеет место для какой-нибудь одной системы
координат.
Мы будем считать g и Vg в некоторой фиксированной системе коор-
координат ж1, Я*, я3 положительными, тогда из F0) получим
Vg = D V~g. F1)
причем мы условимся Vg приписывать тот знак, который имеет опреде-
определитель преобразования D.
Из формул E7) и E9) следует теперь, что
¦¦VV7 F2)
v\ vv
т. е. величины
янляются инвариантами. Эти величины равны друг другу в силу E5).
Придадим этим инвариантам другую форму, для чего введем к рас-
рассмотрение систему чисел 6Ш, зависящих от трех значков i, k, I и задан-
заданных следующим образом:
^ баг] ^ — 1 F3)
во всех прочих случаях
§ 32 ФУНДАМЕНТАЛЬНЫЙ ТЕНЗОР 375
Легко видеть, что при таиих обозначениях определитель V может быть
записан следующим образом:
V = A1BiC3 + А2В*С1 + А3В1С* -
= &^
в точпо так же
V = д
Итак, выражения
YgV = Vgd^A'BPCr F4)
y^V' = -^&^АаВеСу F5)
при любом выборе векторов Аа, Ва, С* являются инвариантами. Но тогда
из теоремы деления тензоров п. 5 § 31 вытекает, что величины
являются составляющими ковариантного теваора третьего ранга, который
мы обозначим через е^, а величины
являются составляющими контравариантного тензора третьего ранга,
который мы обозначим через е"*т.
Итак
= Vg д«зт. eY = -y= 6«<sY F6)
Оба тензора обозначены одной буквой, ибо из равенства выражений
F4) и F5) очевидно, что они являются сопряженными друг другу (один
может быть получен из другого понижением или повышением индексов).
Можно дать и непосредственное доказательство атому факту:
ili g& g»
gU git §31
Vg 6«,i = em
= y=
Теперь формулы F4) и F5) могут быть записаны следующим образом:
VgV = -LrV = еа*хА*ве& = fi-AJBfa F7)
у g
Пусть теперь нам даны два вектора Аа и Ва. Из предыдущей формулы
ясно, что мы можем определить формулами
vu, = еа$уАаВ^, W = e'^Ar.Bf, F8)
ковариантные и контравариантные компоненты некоторого вектора, ко-
который естественно назвать векторным произведением
376 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
данных векторов, так как в случав эвклидова пространства он
просто совпадает с этим векторным произведением. В самом деле, в случае
эвклидова пространства мы можем взять прямолинейные прямоугольные
оси координат, при этом окажется g = 1, и формулы F8) примут обычный
вид
щ = АгВг — ASB2 и т. д.
Конечно, формулы F8) можно писать в различных формах, так, на-
например, можно написать, что
щ = сУАьВц = gtj**AJ, = F9)
A& — A2Bt)}
§ 33. Дифференциальные уравнения геодезических линий.
Символы Кристоффеля и их свойства
1. Теперь мы переходим в область тензорного анализа. Нашей основ-
основной задачей будет являться установление понятия производной тензора.
При этом мы должны, согласно общей идее тензорного исчисления, дать
такое определение производной тензора, которое имело бы тензорный
характер,
Б этом параграфе мы не будем еще заниматься этим вопросом, так
как нам необходимо предварительно провести ряд вспомогательных для
вашей главной щели рассуждений; но мы хотим уже сейчас выяснить,
в чем состоит встречающееся затруднение, которое нам предстоит пре-
преодолеть.
Когда мы имеем дело со скалярной функцией точки <р и рассматриваем
дифференциал этой функции dtp, соответствующий переходу из точки М
в бесконечно близкую точку М\ то ясно, что dff является инвариантом по
отношению к преобразованиям координат.
Допустим теперь, что мы рассматриваем поле ковариантного вектора Аг.
так что Аг являются функциями точки. На первый взгляд, казалось бы, что
за дифференциал вектора следует взять вектор, имеющий ковариант-
ными составляющими в,Аг. Но вся трудность заключается в том, что ве-
величины dA( не могут являться ковариаятными составляющими, так как
они не преобразуются по формулам для ковариантных векторов. В самом
деле, мы имеем по правилу составления полного дифференциала
Но величины At являются составляющими ковариантного вектора
и следовательно, при переходе к новой системе координат х1,..., хп
мы будем иметь
I, = A«i? B)
ОХ
{ 33 ДИФФВРВНДИАЛЬНЫВ УРАВНЕНИЯ ГЕОДЕЗИЧЕСКИХ ЛИНИИ 377
Составим теперь дифференциал
Если бы величины dAx были составляющими коварнантного вектора,
то формулы преобразования имели бы вид
Это будет в том случае, если
при всех значках a, i, к, т. е. если х* являются линейными функ-
функциями от ж*. В случае афиниых ортогональных тензоров мы имеем как
раз такой случай, вот почему мы не встретили там того затруднения,
которое получается теперь.
Итак, в оищем тензорном исчислении, в силу отличия от нуля
величины dAa не носят тензорного характера. Совершенно естественно
возникает вопрос, как подправить эти величины с тем, чтобы вновь вер-
вернуть им тензорный характер. Решение этого вопроса, правда не в самой
общей форме, будет дано в следующем параграфе.
Для решения указанного вопроса нам понадобятся, в качестве вспомо-
вспомогательного орудия, дифференциальные уравнения гео-
геодезических линий в рассматриваемом нами рг
мановом пространстве Л„.
2. Дадим сначала опредолепие геодезической линии в пространстве /?„.
Рассмотрим какую-нибудь линию L в этом пространстве, уравнениями
которой в параметрическом виде пусть служат
х1 = ? @, *" = х* (t) , хп = хп (t) D)
Возьмем на этой линии две точки Ми и Мл и пусть значения пара-
параметра t, соответствующие этим точкам, будут to и h. Вычислим длину I
отрезка кривой L между точками Мо и Mi. Принимая во внимание, что
rfs2 определяется основной формой
ds* = g^dx'dx^ , E)
и обозначая производные по параметру t для краткости точкой, будем
иметь, что
ds = }*rgiltxix>'dt F)
и, следовательно,
G)
378 ЭЛЕМЕНТЫ ОБЩИЕ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Линия, длина отрезка которой, расположенного между двумя про-
произвольными достаточно близкими ее точками, меньше длины любой другой
соседней кривой, соединяющей те же точки, называется геодези-
геодезической. Установим уравнение, которому должны удовлетворять гео-
геодезические линии. Пусть La есть геодезическая линия; удобнее всего за
параметр t взять дугу s линии La, отсчитанную от точки Мп, и пусть зна-
значение s для точки Mi будет равно U. Координаты точек кривой Lo будут
функциями от $:
a^-VW («-1 *> (8)
Возьмем теперь произвольные п функций от s, которые мы обозначим
через ?" (*)> и подчиним лишь тому условию, чтобы при s = 0 и s = la
все эти функции обращались в нуль:
Г <Р) = 6* (*•) - О <«=i n) (9)
Рассмотрим теперь семейство кривых Lt, координаты которых являют-
являются следующими функциями от s:
s« = V («) + eS«(s) (a = l в) (Ю)
где б есть малый параметр, могущий принимать как положительные, так
и отрицательные значения.
Обозначим, наконец, через Ф (х, -р\ функцию
причем заметим, что из равенства E) следует соотношение
Принимая в G) за параметр t дугу s кривой Lo, будем иметь для длины
отрезка кривой Lz, лежащего между точками Ма и Mi, выражение
Так как при е = 0 мы получаем длину Zo дуги кривой Lo, меньшую по
условию, чем длина I (г) дуг соседних кривых Lt, то I (е), рассматривае-
рассматриваемая как функция от е, должна при е == 0 иметь минимум. Но известно,
что необходимым условием минимума функции является обращение
8 нуль производной этой функции в той точке, где достигается минимум.
Итак, должно быть
Функцию A3) можно дифференцировать под знаком интеграла, причем
подынтегральную функцию надо дифференцировать, как сложную функ-
I 33 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ГЕОДЕЗИЧЕСКИХ ЛИНИЯ 379
цию от е. В результате дифференцирования и подстановки после этого
значения 8 = 0 получаем
В силу A2) и A4) приходим к такому условию (конечно, по г надо
суммировать в пределах от 1 до п):
(is)
Второй интеграл левой части можно проинтегрировать по частям:
(
= г J^
ds
так как проинтегрированная часть обращается в нуль в силу условий (9).
Уравнение A5) принимает теперь такой вид:
Но фупкции V могут быть выбраны совершенно произвольно при
соблюдении лишь условий (9), поэтому необходимо, чтобы на кривой L
выполнялось л равенств
?® </J^\ 0 A7)
(мы отбрасываем излишний теперь значок 0); в самом деле, если бы эти
равенства не амели места, то мы взяли бы за функции I1 функции,
имеющие тот же знак, что и их сомножители: тогда получилось бы из A6),
что интеграл от положительной функции равен нулю, чего не может быть.
3. Изменяя данное выше определение геодезической линии, мы назо-
назовем теперь геодезическими линиями все те линии, которые удовлетворяют
уравнениям A7).
380 ЭЛЕМЕНТЫ ОБШЕЙ ТВОРИВ ТЕНЗОРОВ |'л. IV
Воспользовавшись теперь выражением A1) для функции Ф, раскроем
левую часть уравнения A7). Прежде всего мы имеем
(„ .... dx* dx*
двойка появляется потому, что в равенстве A1) наряду с gik — —
dx* dxx \
имеем еще член g^ —;—^— I и> следовательно,
мы
d m
производную по s от функции gy, (ж1 хп) надо брать, как произ-
производную от сложной функции. При этом нам удобно вести вычисление
следующим образом:
Ц* dx* = dSi* *** _ dgia dx* dx*
ds ds da ds fa3 ds da
и точно так же
dgtk dx" _ rffju dx* _ д8® dm" diP
~dT ~di 2T Is fte* ~dT ~Ш~
Складывая оба выражения и подставляя в A8), найдем, что
Наконец, написав формулу A1) в виде
легко получим, что
В силу A9) и B0) уравнения A7) принимают вид
Полученные дифференциальные уравнения геодезических линий мм
запишем в другом виде, введя особые символы — так называемые пря-
прямые скобки Кристоффеля или символы К р и с т о ф-
феля первого рода:
т( ТЭГ + IF1- ^)-r,.--r*1-[tl-r«U.4 B2)
мы уже указала несколько обозначений этих символов, которыми поль-
пользуются разные авторы.
33 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ГЕОДЕЗИЧЕСКИХ ЛИНИЙ 381
При новых обозначениях уравнения B1) запишутся так;
Умножая ох на g'x и вспоминая, что
„ x x <PxH
* = gk, g* -jp
мы можем придать уравнениям B3) еще такую форму:
А* , ixr <te" **" n
Введем поэтому еще волнистые скобки К р и с т о ф-
ф е л я -или символы Кристоффеля второго рода,
определив их формулами
giXVu * = Г?9 = {f} _ {а0, %} B4)
тогда окончательно уравнения геодезических линий напишутся так:
6 этих уравнениях Г^ представляют собой совокупность пл функций
от координат х1, з?, . . . , ж", определенных формулами B2) и B4).
4. Рассмотрим теперь свойства символов Кристоффеля.
Отметим прежде всего, что символы Кристоффеля не
являются тензорами. Это видно хотя бы из того, что в случае
эвклидова пространства, если мы возьмем прямолинейные координаты,
то геодезические линии — в данном случае прямые линии — выразятся
линейными уравнениями вида
ал = axs 4- Ьх . B6)
где а* и 6х — постоянные; поэтому окажется
и из уравнений B3) видно, что в этом случае Г^ = 0. Если же ваять,
скажем, сферические координаты, то прямые линии уже не могут быть
выражены уравнениями вида B6) и, следовательно, Г^ не могут все
сразу обратиться в нуль. Между тем составляющие любого тензора, в снлу
линейности формул преобразования, должны обладать тем свойством,
что если они все сразу равны нулю в одной системе координат, то они
должны равняться нулю в любой другой системе координат. Так как
Г?E не удовлетворяют этому условию, то они не являются составляющими
тензора.
Заметим далее, что наряду с формулами B4)
ГЪ = *»Г,. «е B7)
мы имеем взаимные им формулы
Г*. <* = #Л B8)
382 ЭЛВМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
доказательство которых почти очевидно:
Далее необходимо отметить свойство симметрии, выражающееся фор-
формулами
ri.ae = ri.Sa, Г*9=Г?а B9)
непосредственно вытекающими ив B2) и B7).
Нетрудно далее выразить производные от составляющих фундамен-
фундаментального тензора через символы Крвстоффеля первого рода; а именно
легко простым вычислением проверить справедливость следующих фор-
формул:
•^¦«Г.. * + !>.„ C0)
Наконец, легко выразить через символы Кристоффеля ——, где g—
фундаментальный определитель.
Б самом деле, дифференцируя определитель C) § 32 по ж" по правилам
дифференцирования определителей (сперва необходимо продифферен-
продифференцировать первую строку, оставляя остальные неизменными, затем только
вторую строку и т. д., все полученные определители нужно затем сло-
сложить), мы .получим
где Gik — алгебраическое дополненве элемента g№, равное по формул" E)
| 32 величине gg**. Итак
Применим теперь формулу C0):
-?¦ = gg*' (Г«. *. + Г», te
OX
Полученную формулу запишем следующим образом:
Г
5. Выше было отмечено, что символы Кристоффеля не являются тен-
тензорами; интересно в связи с этим выяснить, по каким формулам совер-
совершается преобразование символов Кристоффеля при переходе от одной
системы координат к другой.
Эти формулы преобразований очень легко получить, если исходить
из уравнений B5) геодезических линий. В самом деле, геодезические ли-
линии, со самому их определению — быть кратчайшими среди прочих ли-
линий, соединяющих две достаточно близкие точки геодезической линии
к мало отличающихся от этой линии,— не могут зависеть от системы
§ 33 дифференциальный уравнения геодезических линий 383
координат. Поэтому, преобразовывая уравнения B5) к новой системе ко-
координат я1, . . . , %п, мы должны получить те же уравнения B5), но только
написанные в новых координатах.
Прежде всего, находим
dx* d? d*i* _ dx* d?? d?_ J_ I
~ dx{ ~~№~ "•" ~dT ~Ж\
ds дх* ds ' ds2
Далее по правилу вычисления производной от сложной функции
Итак
dx*
da
ds&
дне"
дхг
to*
da
d#
da1
7
¦ + ¦
dx*
ds
3h*
dJ
dx*
ds
dP
ds
di*
ds
Подставляя все эти выражения в уравнение B5), найдем
С другой стороны, уравнения геодезических линий в новых коорди-
координатах имеют вид
Умножая их на -4- и сравнивая полученные уравнения с предыду-
щими, придем к важной формуле
дх1
из которой, путем умножения на —г и принимая еще do внимание
дхг
легко получим формулы
показывающие, как преобразуются символы Кристоффеля второго рода
при переходе от одних координат к другим. Конечно, при переходе от
координат хг к координатам Xе получаются совершенно аналогичные
формулы преобразования
384 ЭЛЕМЕНТЫ ОБЩЕЯ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Мы видим, что символы Кристоффеля не являются тензорами, пото-
потому, что вообще говоря,
отличны от нуля; но в начале этого параграфа мы видели, что по той же
самой причине величина dAi не является вектором.
В следующем параграфе мы покажем, как можно использовать не-
тенаорный характер величин 1% с тем, чтобы при их помощи скомпен-
скомпенсировать нетензорный характер величин dA{. В результате мы получим
возможность установить имеющее тензорный характер понятие тензор-
тензорной производной вектора или тензора.
§ 34. Тензорная производная вектора и тензора
1. Задачей этого параграфа будет установление понятия производ-
ний от вектора и тензора, причем мы должны дать такое определение
производной, которое имело бы тензорный характер. Допустим, прежде
«сего, что мы имеем в римановом пространстве Rn поле скалярной функ-
функции <р, так что ф есть функция от п координат х1, з*, . . . , х". Тогда п
величин ду/дх* будут составляющими ковариантного вектора, ибо при
преобразовании координат эти величины преобразуются по формулам
характерным для ковариантных векторов. Этот вектор является, оче-
очевидно, обобщением хорошо нам известного вектора grad <p обычного век-
векторного анализа.
2. Теперь положим, что мы имеем поле ковариантного вектора Ait
так что в каждой точке риманова пространства нам аадан вектор его ко-
вариантпыми составляющими. Возьмем две бесконечно близкие точки
пространства: точку М с координатами xi и точку М' с координатами
xi + da:* и попробуем сравнить между собой векторы Ait соответствую-
соответствующие этим двум точкам. В обычном векторном анализе мы поступали
очень просто, а именно, мы откладывали оба сравниваемых вектора от
одной точки. В римановом пространстве сразу же встречается в этом
пункте затруднение. В самом деле, какой вектор в точке М' мы должны
считать равным вектору, которого составляющие в точке М равны Аг?
Сказать, что это есть вектор, которого составляющие в точке М' равны
тоже Ait мы не можем, потому что тогда для разных систем координат
мы получили бы в точке М' рааные векторы. В самом деле, по определе-
определению ковариантного вектора, его компоненты меняются при преобразова-
преобразовании координат следующим образом:
I 34 'ТЕНЗОРНАЯ ПРОИЗВОДНАЯ ВЕКТОРА И ТЕНЗОРА 385
причем если вектор рассматривается в точке М, то и значение производ-
производных дха1дх* нужно брать в этой точке; если же вектор рассматривается
в точке М', то значения производных, вообще говоря, изменятся. А отсю-
отсюда видно, что при переносе в точку М' значений величин At в точке Л/
мы но получим вектора А\ ибо формулы B) будут справедливы для точка
М и перестанут быть справедливыми для точки М'.
Указанное затруднение имеет место даже в случае эвклидова про-
пространства, если только мы пользуемся криволинейными координатами.
Возьмем самый простой случай полярных координат г, 6 на эвклидовой
плоскости. Пусть точка движется по окружности радиуса R с центром
в начале координат с постоянной угловой скоростью ю. Вектор скорости
будет иметь в этом случае контравариантные составляющие
?=о, ^ = »
dt dt
которые сохраняют постоянную величину, между тем как мы хорошо
знаем, что вектор скорости в этом случае все время изменяется по своему
направлению. Бели же взять вектор, сохраняющий постоянными как
свою величину, так и направление, другими словами, если совершать
параллельный перенос вектора, то его составляющие в полярных коорди-
координатах будут изменяться, причем не трудно составить формулы для вы-
вычисления этих составляющих в любом положении вектора.
В римановом пространстве дело обстоит гораздо сложнее и притом
в силу двух обстоятельств. Во-первых, в этом случае мы прежде всего
должны обобщить самое понятие параллельного переноса вектора, при-
причем мы проделаем это обобщепие сначала аналитически, при помощи
формул, и лишь в следующем параграфе укажем на геометрическое ис-
истолкование понятия параллельного переноса вектора. Во-вторых, в то
время как в эвклидовом пространстве можно совершать параллельный
перенос вектора из какой-либо точки пространства в любую другую
точку пространства, оказывается, что в римановом пространстве можно
говорить только о параллельном переносе вектора из точки. М в другую
точку N вдоль какой-либо кривой L, подобно тому, как
в случае сил, не имеющих потенциала, работа их на перемещении из
топки М в точку N должна вычисляться для определенного пути, соеди-
соединяющего эти точки М и N. Подобно тому, как в этом последнем случае
работа силы зависит от пути, так и в случае риманова пространства при
параллельном переносе какого-либо вектора из точки М в точку N по
различным путям получатся различные значения вектора в точке N.
В связи с этим мы ограничимся изучением параллельного переноса из
точки М в соседнюю точку М', подобно тому как в механике рассмат-
рассматривают элементарную работу, т. е. работу силы на бесконечно малом
перемещении.
3. Рассмотрим ковариантньгй вектор At в римановом пространстве Rn.
Составляющие этого вектора получат при переходе из точки М с коор-
25 н. Е. Кочяп
386 ЭЛЕМЕНТЫ ОБШЕЙ ТЕОРИИ ТВНЭОРОВ Гл IV
динатами х* в соседнюю точку М' с координатами ж* + da? приращения
характеризующиеся п! величинами dAJdxk. Одвако эти величины не
образуют, как мы сейчас покажем, тензора.
В самом деле, величины Аг при преобразовании координат изменя-
изменяются по формулам B). Дифференцируя эти равенства по 2*, мы получим
ал, _дА
причем мы при дифференцировании Ал по ж* рассматривали ее, как слож-
сложную функцию от Я" через посредство х1, ж8,. . ., хп. Мы видим, что вели-
величины dAijdx* не имеют теи горного характера потому, что в правую часть
формулы C) вошли вторые производные —¦?—-, вообще говоря, отличные
дхх дх*
от нуля. В случае афииных ортогональных тензоров ха являются линей-
яыми функциями от я', вторые производные —,—- все обращаются
дх1 дх
в нуль и никаких аатрудвений при построении производных от векторов
и тензоров не получается.
Но в копце предыдущего параграфа [формула C2)] мы выразияи до-
доставляющие нам затруднения вторые производные через символы Крв-
стоффеля
D)
Заменяя в последнем члеве формулы C) значок суммирования а на
X в внося в эти формулы выражение D), получим
ЗАа
В силу формулы B) имеем
и, следовательно, предыдущее равенство принимает вид
Но это равенство показывает, что величина
^i . F)
является ковариантным тензором второго ранга.
Этот тензор, который мы будем обозначать символом Vp^a» и назы-
называется ковариантной производной ковариантно-
г о вектора.
I 34 ТЕНЗОРНАЯ ПРОИЗВОДНАЯ ВЕКТОРА И ТЕНЗОРА 38?
4. Определим теперь ковариантную производную
новтравариантного вектора А*. Для этого мы введем
в рассмотрение произвольный ковариантный вектор В, и составим выра-
выражение
Ф = А'ВЛ
Будем теперь под yBq> понимать ковариантнын вектор -% и потребу-
дзР
ем, кроме того, чтобы ковариантное дифференцирование подчинялось
правилу дифференцирования произведения
V* (А*В,) = В^еА* + А'Ъ&К* G)
Так как при произвольном векторе Ва выражение
является ковариантным вектором, то в силу теоремы деления тензоров
п. 5. § 31 можем заключить, что S7&-A" будет смешанным тензором. Для
вычисления его используем формулу F)
Отсюда, в силу произвольности вектора Ва, легко заключим, что
я ла
(8)
Полученная формула и дает выражение ковариантной производной
контравариантного вектора.
Тем же самым приемом легко определим ковариантную производную
любого тенаора. Возьмем в качестве примера тензор третьего ранга А^.
возьмем три произвольных вектора ил, гР, щ в составим инвариант
ф =
Мы потребуем, как выше, выполнения правила дифференцирования
произведения
V* {A'^u^Wy) = (9)
Так как при произвольном выборе векторов и", ?*, гоу выражение
является ковариантным вектором, то в силу теоремы деления тензоров
§ 31 можем заключить, что S7kAa^r будет тензором четвертого ранга, три
раза ковариантным, раз контравариаятным. Для вычисления его во
пользуем формулу (9), в которую подставим вместо Vx»", Vx<^ я Va«\
25*
388 ЭЛЕМЕНТЫ ОБЩЕЙ ТВОРИИ TJSH30POB Гл. IV
их выражения, получаемые по формулам F) и (8). Принимая еще во
внимание, что
пооле несложных алгебраических действий получим, что
Переставляя в правой части этого равенства местами индексы ji и а
во втором члене, jx и р в третьем, ц и у в четвертом и сокращая после этого
на иа v& Wf, что можно сделать в силу произвольности векторов ц", г>9, wy,'
получим окончательную формулу
Таким образом, при составлении ковариантной производной тензора
из обыкновенной производной нужно вычесть столько дополнительных
членов, сколько тензор имеет нимших значков, и прибавить столько до-
дополнительных членов, сколько тензор имеет верхних значков. Каждый
дополнительный член представляет собою произведение рассматриваемого
тензора, в котором один из значков заменен переменным значком сум-
суммирования р. на символ Кристоффеля второго рода, в котором значок
дифференцирования стоит внизу.
5. Ввиду важности понятия тензорной производной мы приведем
еще один вывод ковариантной производной ковариантного вектора А^
Мы знаем, что бесконечно малый вектор dx' является контравариант-
ным вектором, а величина ds является инвариантом. Поэтому величины
dx^ids образуют контравариантный вектор. Произведение
будет поэтому инвариантом.
Проведем через рассматриваемую точку М геодезическую линию
в произвольном направлении и пусть aJa;' означают дифференциалы коор-
координат при смещении точки вдоль этой геодезической линяй. Обозначая
через dcp дифференциал функции <р при смещении вдоль геодезической ли-
аии, мы можем, очевидно, утверждать, что выражение dq>/ds тоже будет
инвариантом, ибо геодезические линии имеют абсолютное значение, не-
независимое от специального выбора координат. Но
da/ _dAidxi . . rfV _ dAi dxk dx* . . cPxx
~d7 — 7 ds "+¦ Ai ds» ~ ~?Z ~dT Ж "г Лх IF
§ 34 ТЕНЗОРНАЯ ПРОИЗВОДНАЯ ВЕКТОРА И ТЙНЗОРА 389
С другой стороны, на всякой геодезической линии по уравнению B5)
предыдущего параграфа
d*xx __ _л dj- dx*
Поэтому
<htx dx"
Левая часть этого равенства есть инвариант, следовательно, и правая
часть является инвариантом. Но за dx' можно взять произвольный вектор,
ибо мы можем брать геодезическую линию, проходящую через точку М
в любом направлении. А тогда из теоремы п. 5 § 31, формула A0) выте-
вытекает, что величины
образуют ковариантный тензор второго ранга.
С другой стороны, нетрудно показать, что величины
тоже образуют ковариантный тензор второго ранга. В самом деле, меняя
в формуле C) _
индексы г в & местами, получим
^*- = ^i^^! . 1 av1 _ ^-4о ас13э^" . а^
ж' &» а«*аг4 """ "a*1 as* ~ a*" as*as* + "аг'
Вычитая эту формулу из предыдущей, найдем
а это соотношение выражает как раз тензорный характер выражения A3).
Складывая тензоры A2) и A3), мы получим новый тензор
главной частью которого являются величины дАг1дхк и который можно
назвать ковариантной производной ковариантного вектора. Таким обра-
образом, мы вновь пришли к выражениям F), но только иным путем.
€. Рассмотрим теперь правила действий с ковариантными производ-
производными. При этом может быть полезно еще раз напомнить те действия,
которыми мы пользовались до сих пор.
390 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТВН8ОРОВ Гл. iV
Прежде всего под V <Р> гДе Ч> есть скалярная функция, мы условились
понимать ковариантнъга вектор:
V«9 = |i A6)
Эх"
Далее мы имеем основное определение ковариантной производной от
тензора, которое для случая тензоров третьего ранга выражается фор-
формулой A0):
Vx
Наконец, для случая, когда произведение тензора на несколько век-
векторов дает скаляр, мы имели правило дифференцирования такого произ-
произведения, выражающееся формулами вида (9).
Теперь мы установим правило дифференцирования произведения тен-
тензоров в самом общем виде. А именно покажем, что дифференцирование
произведения тензоров совершается по тем же правилам, что и в обыкно-
обыкновенном анализе.
Как всегда, доказательство будем проводить на тензорах частного
вида.
Покажем, например, что ковариантная производная от произведения
равна
Vx UJQ) = ЯК Vx А. + Aa V, BI A8)
Применяем формулу A7)
Аналогичное доказательство применяется и в более сложных случаях.
Докажем далее, что производная тензора, сокращенного по нескольким
значкам, может быть получена сокращением по этим значкам производ-
производной исходного тензора. Доказательство проведем на следующем частном
случае; пусть
В;0т.х= Vx^T A9)
Тогда SLsTx дается формулой A7); положим в этой формуле -j = J3,
тогда третий и четвертый члены в правой части этой формулы сократятся,
ибо Aejf.Fjax и Aejf,r?x отличаются только значками суммирования ц и {5,
которые можно поменять местами. Итак
^ B0)
что и требовалось доказать.
I 34 ТЕНЗОРНАЯ ПРОИЗВОДНАЯ ВЕКТОРА И ТЕНЗОРА 391
Применяя только что доказанную теорему к произведению нескольких
тензоров, сокращенному по некоторым индексам, получим правило диф-
дифференцирования, обобщающее известное уже нам правило, выражаемое
формулой (9). Так, например, мы имеем формулу
Z B1)
7. Последнее правило, которое мы рассмотрим, касается дифференци-
дифференцирования фундаментальных тензоров. А именно мы покажем, что кова-
риантные производные всех трех фундаментальных тензоров равны нулю.
Прежде всего рассмотрим тензор g^. Применение основной форму-
формулы A7) дает
и с силу формул B8) и C0) предыдущего параграфа
Точно так же, помня, что
^ A при г = А
\ 0 при i 3^s ^
найдем
Наконец, применяя к тензору
61 = g**g* (Z4J
правило дифференцирования произведения, найдем
Отсюда, в силу B2) и B3),
gikVxgkl = О
Умножая это равенство на g^ и принимая во внимание B4), получим
0
Итак, мы получили основные равенства
0 B5)
выражающие, что лрв тензорном дифференцировании фундаментальные
тензоры ведут себя как постоянные величины.
8. Введем теперь понятие контравариантной производной от вектора
или тензора, определив ее формулами вида
B6)
B7)
392 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
таким образом, для получения контравариантной производной тензора
надо сначала образовать ковариаптную производную этого тензора и за-
затем поднять тот значок X, который соответствует операции дифференци-
дифференцирования.
Принимая во внимание доказанное в предыдущем пункте свойство
фундаментальных тензоров и только что данное определение контрава-
контравариантной производной, мы можем без всякого труда написать составляю-
составляющие различного рода производной от какого-либо тензора. Так, например,
у Vx^a* мы имеем следующие 8 типов составляющих:
В самом деле, докажем, например, что
Действительно, в силу формул B5),
V»4-1 = Vn (А
а в силу формулы B7)
.» B8)
§ 35. Параллельный перенос вектора
1. Рассмотрим теперь затронутый в предыдущем параграфе вопрос
о параллельном переносе вектора в римановом пространстве и о геометри-
геометрическом истолковании тензорного дифференцирования.
С этой целью нам придется вернуться к изложенному в начале этой
главы представлению о римановом пространстве п измерений, как о под-
подпространстве в эвклидовом пространстве равного или большего числа
измерений т. При этом предположим, что мы можем ввести в этом эвкли-
эвклидовом пространстве прямолинейные прямоугольные оси координат
yi, yz ут таким образом, что элемент длины будет выражаться фор-
формулой
ds* = 2 */*2 М)
4=1 ^ '
Если в римановом пространстве координатами служат ж1, жа, . . . , хп,
то для точек этого пространства уг, . . . , ут будут определенными функ-
функциями от ж1, . . . , хп
У* = У* (х1, ¦ • • , х") (а = 1, 2, ..., т) B)
Подставляя эти функции в A), мы получим фундаментальную форму
для риманова пространства
rfs2 = gik <z\ . . . , хп) dxi dx« C)
l2^
§ 35 ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРА 393
Возьмем теперь в пространстве Римана контравариашный вектор А
в некоторой точке М. Проведем через эту точку геодезическую линию
в направлении вектора А*, понимая под этим, что в точке М величины
dx4ds, где dx1 суть бесконечно-малые приращения координат при пере-
перемещении вдоль геодезической линии, пропорциональны величинам А*,
так что
* = «? E)
Вектор dtflds мы назовем единичным касательным век-
вектором к геодезической линии. Для него мы имеем, со-
согласно C)
dxx dx" ,
^1 F)
Величину же а мы назовем длиной вектора А1; для нее мы, в силу пре-
предыдущего равенства, будеи иметь выражение
а2 = gutA'A" G)
Построим теперь в эвклидовом m-мерном пространстве в точке М
вектора а, длина которого равна а и который имеет направление касатель
ной к выше рассмотренной геодезической линии в точке М. Проекции
этого вектора на оси координат будут, очевидно, равны числам
а« = «-^Г (а=1 т) (8)
где dya суть приращения координат уа, соответствующие приращениям
dx1 координат х1. Следовательно,
и, значит,
или окончательно
Итак, всякий контравариантный вектор А1 в пространстве Римана Нп
мотет быть представлен геометрически в пространстве Эвклидова Ет,
в которое вложено пространство Римана, вектором а, имеющим ту же
самую длину, что и вектор Ait и направленным по касательной геодези-
геодезической линии, проходящей через точку М в направлении вектора Аг.
Весьма важно отметить, что при т > п всякому вектору Ах соответ-
соответствует свой вектор а, но обратное не всегда имеет место. Не для всякого
вектора а найдется соответствующий вектор А*. Это вполне понятно
аналитически, ибо вектор а определяется т числами, в то время как век-
вектор А задается п числами, и ясно, что систему (9) т уравнений сл<м
неизвестными А1, . . . , Ап не всегда можно решить относительно этих
неизвестных. Это так же ясно и геометрически в простейшем случае
п = 2, т = 3. когда мы имеем дело с поверхностью в пространстве. В этом
394 ЭЛЕМЕНТЫ ОБЩЕЙ ТВОТ'ИИ ТЕНЗОРОВ Гл. IV
случае очевидно, что те векторы а в пространстве Ез, которые соответст-s
вуют векторам А1 в пространстве Римана Д2, лежат в касательной пло-
плоскости к поверхности в точке М. Всякому же вектору а, выходящему из
этой плоскости, очевидно, уже не может соответствовать никакой вектор А*.
По аналогии мы можем говорить и в общем случае об эвклидовом подпро-
подпространстве Тп, касающемся пространства Rn в точке М, понимая под Гп
геометрическое место всех прямых в пространстве Еш, проходящих через
точку М и касающихся в этой точке какой-либо из кривых, целиком при-
принадлежащих Вп.
2. Теперь мы дадим, следуя итальянскому ученому Т. Леви-Чивита,
геометрическое определение параллельного переноса вектора, причем
сначала для ясности рассмотрим случай пространства Да, вложенного
в Ез, иными словами, рассмотрим тот случай, когда в трехмерном про-
пространстве рассматривается поверхность S.
Возьмем на этой поверхности S две бесконечно-близкие точки М и М'
и рассмотрим в точке М контравариантный вектор А*. Последний
может быть представлен в пространстве вектором а, касательным к
поверхности S в точке М. Перенесем теперь вектор а параллельно са-
самому себе в точку М'. Ясно, что, вообще говоря, он не будет лежать
в касательной плоскости к поверхности S в точке М' и, следовательно,
ему не будет соответствовать никакой контравариантный вектор в про-
пространстве /?2.
Основная идея Леви-Чивита заключается в том, что он, перенеся век-
вектор а в точку М' параллельно самому себе из точки М, проектирует
его затем на касательную плоскость к поверхности S в точке М'. В ре-
результате получается вектор а', лежащий уже в касательной плоскости
к поверхности S в точке М', а поэтому можно отыскать такой контрава-
контравариантный вектор А'г в точке М', который геометрически представляется
в пространстве вектором а'. По определению, результатом параллельного
перенесения вектора Аг из точки М в точку М' является вектор А'*. Та-
Таким образом, вектор А1 в точке М и вектор А'1 в бесконечно-близкой
точке М' риманова пространства Да можно условиться считать равными
векторами.
Совершенно аналогичное определение правила параллельного пере-
переноса вектора можно дать и для случая любого риманова пространства Rn.
Пусть в точке М задан контравариантный вектор А'. Рассмотрим беско-
бесконечно-близкую точку пространства М' и построим в э*ой точке вектор А'1
следующим образом. Пусть Ет — то m-мерное эвклидово пространство
(т]>№), в которое можно вложить Rn; построим в этом пространстве
в точке М вектор а с составляющими аа, определяющимися по формулам
(9); этот вектор является геометрическим изображением вектора Аг;
перенесем затем вектор а параллельно самому себе в точку М'. Иными
словами, рассмотрим тот же самый вектор а, с теми же составляющими,
но только приложенный к точке М'\ затем спроектируем этот вектор на
касательное эвклидово подпространство Г„, которое лежит в Ет и касается
35
ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРА
395
Л„ в точке М', полученный вектор обозначим через а', а его составляю-
составляющие через а,,,: По формулам (9) мы можем по этим aj определить соот-
соответствующие им величины А", причем необходимо, конечно, принимать
в формулах (9) для дуа/дх1 значения этих функций в точке М'.
Контравариантный вектор с составляющими Аг в точке М мы будем
считать равным вектору с составляющими А'х в бесконечно-близкой точ-
точке М' и будем говорить, что вектор с составляющими А'1 в точке М' по-
получается из вектора А' в точке М путем параллельного переноса в про-
пространстве Rn.
3. Перейдем теперь к вычислению составляющих вектора А" через
составляющие вектора А* и через составляющие dx1 вектора бесконечно-
мал ого перемещения из точки М в точку М'. В основу вычисления мы
положим следующий, геометрически очевидный для случая R* (фиг. 94)
факт: среди всех векторов а' = M'N', касающихся пространства Rn,
тот вектор является проекцией вектора а = M'N, для которого расстоя-
расстояние N'N является наименьшим. Но вектор NN' имеет в пространстве Ет
своими составляющими величины
АЛ_^А} (Ю)
где штрих указывает на то, что зна-
значение рассматриваемой величины берет-
берется в точке М'. Введем теперь обо-
обозначение
ЬАХ = А'1 — Ai A1)
и заметим, что
Фиг. 94
Тогда, ограничиваясь бесконечно-малыми величинами первого порядка,
будем из A0) иметь, что-
дх
и, следовательно,
¦ А{<1з*}
A2)
Рассматривая в этом равенстве 6А' как независимые переменные,
определим их таким образом, чтобы сумма A2) была минимумом. Для
этого, согласно правилам дифференциального исчисления, нужно прирав-
приравнять нулю производные этой суммы по всем величинам ЬАГ (с = 1,..., в).
В результате получим я равенств
(г = 1, 2 л)
ЗУЬ ЭЛВМВНТЫ ОБЩЕЙ ТЕОРИИ ТВНЗОРОВ Гл. IV
Итак, при параллельном переносе вектора А* его составляющие полу-
получают приращения ЬА1, определяющиеся из следующих равенств:
Но согласно формулам D) мы имеем, что
Нетрудно далее показать, что
? «У. ду>
2) ~^7
в самом деле, мы имеем, согласно определению символов Кристоффеля
[формула B2) § 33} и в силу формул A4):
( о-
2 \. а-* +13 l?i
f ^» ^"i ^ зау" ) ( аау* ^ эу. Э8уа и _
^7
В результате формулы A3) принимают вид
gir64* +rr>Ut4W =0
Умножая их на grx и пользуясь тем, что
получим окончательные выражения для разности значений ЗЛ* контра-
вариавтныз составляющих двух одинаковых векторов, приложенных
в двух бесконечно-близких точках
&АХ +rbcAidxk= 0 A6)
4. Весьма замечательным является то обстоятельство, что согласно
только что полученным формулам приращения ЬАХ могут быть выражены
исключительно через величины, относящиеся к нашему риманову про-
пространству Д„. Геометрически это означает следующее: одно и то же рима-
ново пространство может быть вложено в эвклидово пространство раз-
разными способами и можно было бояться, что данное нами выше определение
параллельного переноса вектора может привести к различным резуль-
результатам, смотря по тому, каким образом связано данное риманово про-
§ 35 ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРА 397
странство Лп с эвклидовым пространством Ет. Но как видно из A6), в ре-
результате параллельного переноса вектора в бесконечно близкую точку
риманова пространства получается всегда- один и тот же вектор, неза-
независимо от того, каким образом было вложено риманово пространство
в эвклидово. Иными словами: процесс параллельного переноса вектора
в бесконечно-близкую точку есть внутреннее свойство ри-
риманова пространства.
В связи с этим интересно отметить, что, вообще говоря, невозможно
определить параллельный перенос вектора из одной точки М риманова
пространства Лп в другую точку Р, отстоящую от первой
на конечном расстоянии, при помощи того же самого спо-
способа, которым мы пользовались выше, а именно при помощи вложения
пространства Rn в эвклидово пространство Ет. В самом деле, легко по-
показать, что в этом случае при различном выборе пространств Ет у нас
будут получаться в результате описанной выше операции различные век-
векторы в точке Р и, следовательно, в этом случае описанная выше операция
не дает нам внутреннего свойства риманова пространства и, следователь-
следовательно, не может быть взята за определение параллельного переноса вектора
из одной точки в другую. Проиллюстрируем на простом примере это
явление. Возьмем круговой цилиндр радиуса 1 с осью, идущей по оси Oz
в эвклидовом пространстве трех измерений. Будем определять положение
точки в пространстве цилиндрическими координатами р, <р, z. Тогда
квадрат элемента длины в пространстве имеет выражение
ds1 = dp" + рг «V + dz*
Для кругового цилиндра радиуса 1 с осью Oz имеем р = 1 и для квад-
квадрата элемента длины на поверхности цилиндра мы получаем выражение
ds* = dp» + dz2
Рассмотрим с другой стороны в- том же эвклидовом пространстве
плоскость Оху. Для нее квадрат элемента длины имеет выражение
ds1 = di? + dy1
Сравнивая это выражение с предыдущим, мы видим, что с точностью
до обозначений поверхность кругового цилиндра и плоскость имеют
совершенно одинаковые выражения для квадрата элемента длины, т. е.
представляют собою совершенно одинаковые римаяовы пространства Ла.
Между тем ясно, что, если мы возьмем вектор, касательный к поверх-
поверхности цилиндра и перпендикулярный к оси Oz, а перенесем его в трех-
трехмерном пространстве параллельно самому себе, то в некоторых точках
цилиндра он будет перпендикулярен к поверхности цилиндра и, следо-
следовательно, его проекция на касательную плоскость будет равна нулю.
В плоскости же Озсу каждый вектор при параллельном переносе его
сохраняет свою величину. Таким образом, данный выше метод параллель-
398 ЭЛЕМЕНТЫ ОБШЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
ного переноса вектора при помощи эвклидова пространства Ет, объемлю- -
щего данное пространство Rn, не годится для случая переноса из одной
точки в другую, отстоящую от первой на конечном расстоянии.
Оказывается, что вообще нельзя даже н говорить о параллельном
переносе вектора в римановом пространстве Rn из одной точки М в дру-
другую Р. Можно говорить о параллельном переносе век-
вектора из точки М в точку Р вдоль какой-нибудь
определенной линии L, соединяющей эти точки,
подобно тому, как работу силы на перемещении точки из одного положе-
положения в другое можно вычислять, вообще говоря, только по какому-либо
пути, соединяющему эти точки, так как для разных путей эта работа
оказывается различной.
Вычисление результата параллельного переноса вектора по пути L
из точки М в точку Р мы должны производить следующим образом: мы
должны путь переноса разбить на малые участки, к каждому из которых
мы можем уже применить формулы A6); говоря точнее, мы должны про-
проинтегрировать уравнения A6) вдоль пути L, всходя из данных значений
вектора Аг в точке М; в результате мы получим какие-то значения состав-
составляющих этого вектора в точке Р. Подчеркнем еще раз, что эти значения,
вообще говоря, зависят от выбора пути L, соединяющего точки М и Р.
5. Теперь мы можем дать геометрическое истолкование тензорного
дифференцирования, связав его с изложенным в предыдущем пункте по-
понятием параллельного переноса вектора.
Рассмотрим в римановом пространстве Яп контравариантный вектор
А' и пусть точка М с координатами х* и точка М' с координатами
ж? + dx* две бесконечно-близкие точки этого пространства. Значения со-
составляющих вектора А1 в точке М' обозначим через Аг + dA%, где, оче-
очевидно, i
dAi = ^7-dx" A7)
Поступим теперь для определения производной вектора А* так же
как поступали в векторном анализе, а именно, прежде всего совершим
параллельный перенос вектора А* из точки М в точку М'\ в результате
мы получим согласно формулам A6) вектор с составляющими
А1 + 6Аг = А' - r{kAxdxk
Образуем теперь разность между значением вектора Ai в точке М' и век-
вектором А' + 6А* в точке М' (последний вектор мы считаем равным век-
вектору Аг в точке М); в реаультате получим вектор
(А* + dAf) - (А1 + ЬА1) = dAi - ЪАг = /-^ + r^A^dx* A8)
который можно назвать геометрическим приращением
вектора Аг.
I 35 ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРА 399
Так как величины dx" образуют произвольный бесконечно-малый век-
вектор, то величины
^*Л*-|? + Ах1а A9)
являются составляющими смешанного тензора, который, очевидно, не
отличается от ковариантной производной контравариантного вектора.
Итак, геометрическое значение ковариантной производной контрава-
риантвого вектора состоит в том, что через нее непосредственно выражает-
выражается геометрическое приращение вектора Аг при переходе из точки М (х*)
в бесконечно-близкую точку М' (я4 + dx') по формулам
dAi-bAi = S/kAidxk B0)
Нетрудно теперь дать формулы для параллельного переноса кова-
риантного вектора At. В самом деле, мы можем рассмотреть поле такого
вектора А', для которого в точке М для любого направления окажется
dA1 = &А1; но тогда из B0) ясно, что для такого вектора в точке М
= 0
а следовательно, в силу тензорного характера этого выражения и
VkAi = 0
т. е. по формулам F) предыдущего параграфа
Отсюда следует, что
d^dxk - 4Х Г?й ch* = dA, - АЯЪ d2*=G
дх
ааменяя в этом выражении dA{ на 6Аи мы получим требуемые выра-
выражения для изменепая ковариантяых составляющих
вектора при его параллельном переносе
6^- АхТ&х" = 0 B1)
6. Укажем основные свойства параллельного переноса векторов.
Скалярное произведение двух векторов А1 и В* не меняется при их
параллельном переносе. В самом деле, мы видели в § 32, что скалярное
произведение двух векторов А1 и В' надо определять как
4\8t = А& = ft* AW = g4* Аф„
Но тогда, согласно- формулам A6) и B1), мы будем иметь
б (А%) = Вг6Аг + Л1дВ{ = — BtAxTikdxK + А*В
= - В,А* Г)* dx* + А^ГЦ dx* = 0
что и доказывает наше утверждение.
400 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Беря в частности вектор В' равным вектору А* и замечая, что
определяет квадрат длины вектора Аг, мы приходим к выводу, что длина
каждого вектора при его параллельном переносе остается неизменной.
Наконец, вспоминая, что по формуле C2) § 32 угол ¦& между друмя век-
векторами А1 и В* определяется формулой
cos» = —_jfB*
нетрудно заключить, что угол между двумя векторами при одновремен-
одновременном параллельном переносе этих векторов остается неизменным.
Рассмотрим еще, что происходит при параллельном переносе вектора
вдоль геодезической линии. Пусть через точку М проходит геодезическая
линия L. Обозначим через ?' = dx*/ds вектор, касательный к этой линии;
длина этого вектора равна, очевидно, единице, ибо
Основное уравнение геодезических линий § 33 B5)
«г* гх dxldx* „
+ l 0
мы можем теперь переписать в виде
dlK + It* I* dxk = 0
и, сравнивая его с уравнением A6), примененным к вектору |\
Ь? + Г^Е'Лв* - О
мы можем заключить, что при параллельном переносе вдоль геодезиче-
геодезической линии й|х = d%x. Иными словами, при параллельном переносе
вдоль геодезической линии L из одной точки М в другую точку Р единичный
вектор, касающийся линии L в точке М, переходит в единичный вектор,
касающийся той же самой геодезической линии в точке Р.
7. В заключение настоящего параграфа сделаем одно общее замеча-
замечание. При построении тензорных производных основную роль играли сим-
символы Кристоффеля Г?,з. Можно поэтому было бы исходить, не вводя
в рассмотрение основную форму ds* = gik dx* dx",
прямо из определения тенэорных производных формулами F) предыду-
предыдущего параграфа, понимая в этих формулах под Г^ величины, подчиненные
некоторым требованиям весьма общего характера. В результате такого
построения теории получаются пространства гораздо более общего типа,
чем риманово. Мы ограничимся этим кратким указанием, причем попут-
попутно отметим,- что римановым пространством называют обычно такое, в ко-
§ 36 НЕКОТОРЫЕ ПРИМЕНЕНИЯ 401
тором задана основная форма ds2 и в котором операция тензорного диффе-
дифференцирования определена так, как мы это проделали выше, т. е. с помо-
помощью формул F) и (8) предыдущего параграфа, в которых 1% суть символы
Кристоффеля второго рода, определяющиеся через фундаментальный тен-
тензор gift при помощи формул B2) и B4) § 33.
§ 36. Некоторые применения
1. Установленное нами в предыдущих параграфах понятие тензорной
производной является могущественным средством для преобразования
векторных выражений к любым криволинейным координатам.
Дело в том, что данное нами определение тензорной производной
годится для любой системы координат, ас другой сто-
стороны, имеет тензорный характер.
Поэтому, взяв какую-либо векторную операцию и выразив ее через
тензорные производные, мы получаем выражение, имеющее тензорный
характер и потому пригодное для вычисления в любой системе коорди-
координат. Мы применим эту богатую по своему содержанию идею к целому
ряду частных случаев, причем для определенности рассмотрим наиболее
важный с рассматриваемой точки зрения случай криволинейных коорди-
координат в трехмерном эвклидовом пространстве; этот случай был нами с дру-
другой точки зрения рассмотрен в § 18.
2. Рассмотрим трехмерное эвклидово пространство и в нем прямоли-
прямолинейные прямоугольные оси координат О у\ у% уз- Введем далее, как в § 18,
криволинейные координаты gi, q%, да, которые мы теперь будем обозначать,
как обычно, через х1, з?, х3. Тогда уи уз, у3 будут функциями от х1, х*, з?
а обратно
Уа. = У л (&> з?, х3), х1 = xi (yi, jfs, ys) A)
Расстояние между двумя бесконечно-близкими точками пространства
будет выражаться в координатах у\, уз, уз формулой
в координатах же ж1, ж2, z3 формулой
ds2 = gikdz1dx* C)
где, как обычно, по каждой паре одинаковых значков производится сум-
суммирование в пределах от 1 до 3 и где, согласно общей теории,
причем в последней формуле опять-таки подразумевается суммирование
оо а. Зная giic, по формуле E) § 32 определим составляющие gik контра-
вариантного фундаментального тензора.
28 Н. Е. Катав
402 ЭЛЕМЕНТЫ О13ЩЕЙ ТЕОРИИ ТЕНЗОРОВ рл уу
В случае криволинейных ортогональных координат, обозначая, как
в § 18, через Bt коэффициенты Ламэ
будем иметь
^ 4* = gi* = 0 „рИ*=М F)
i
Мы уже выясняли в § 32, что если обозначить ортогональные проек-
проекции вектора а, приложенного к точке М, на оси криволинейных коорди-
координат, через ах>, ах>, а*, и назвать их физическими составляющими вектора,
то между контравариантньши составляющими вектора о1, его ковариавт-
ными составляющими <ц и физическими составляющими axi имеют место
соотношения
axi = H^=±.ai G)
3. Перейдем теперь к рассмотрению различных векторных операций.
Начнем с простейшей из них: градиента скалярной функции /. В декарто-
декартовых координатах этот вектор имеет составляющие
3/ a/ df
%i ' ду% • дуг
Но мы знаем, что вектор с составляющими 9//9ж* есть ковариантный
вектор, причем ясно, что составляющие этого вектора в системе коорди-
координат ух, уъ, уз совпадают с составляющими вектора grad /. Отсюда мы
сразу можем заключить, что ковариантными составляющими, вектора
grad f в любой системе координат являются величины.
Контравариантными составляющими этого вектора будут служить
величины
В случае криволинейных ортогональных координат, переходя от ко-
вариантных составляющих к физическим но формулам G), легко получим
для проекций grad / на оси криволинейных координат выражения
совпадающие с выражениями, получающимися из формул B7) § 18.
4. В качестве следующего примера возьмем расхождение вектора а.
В координатах г/г, г/г, г/з мы имеем
(div a) - ^ (И!
§ 36 НЕКОТОРЫЕ ПРИМЕНЕНИЯ 403
Переходя к криволинейным координатам as1, з?, з? и заменяя обыкно-
обыкновенные производные на тензорные, мы приходим к выражению Vi«' =
= V^i. которое имеет инвариантный характер и в случае координат
2/1, уз, J/3 совпадает с выражением A1), ибо в декартовых координатах,
очевидно, все символы Кристоффеля равны нулю и, следовательно, тен-
тензорное дифференцирование совпадает с обыкновенным. Итак, в любой
системе координат мы имеем равенство
div a = Via* = V1* = g**V*ei = Vi te*4t) A2)
Это выражение можно представить в другой форме, если воспользо-
воспользоваться для ковариантной производной
? A3)
полагая в этой формуле к — г, суммируя по i и пояьауясь формулой C1) § 33
получим
и, следовательно,
В ортогональных координатах, пользуясь физическими составляю-
составляющими, в силу формул F) и G) получим
diva- ' r'gr*' +**?,'¦• +dBi*?*) A6)
выражение, которое не отличается от формулы C0) § 18.
Применяя формулы A5) и A6) к вектору а = grad /, т. е. полагая в
этих формулах
¦ 3/ i гь. df
Oi = T-i, a = gik Л
ax dx"
найдем выражение для оператора Лапласа в лю-
любых криволинейных координатах
V/ = divgrad / = ^(y-ggbg} A7)
и в частности в ортогональных координатах
df\ , д (ЯгНх df
) +
25*
404 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
5. Дадим теперь выражение для составляющих вихря вектора а.
В декартовых координатах для этих составляющих мы имеем выражения
вида
Однако, если мы, заменяя обыкновенные производные тензорными,
составим выражения вида
то мы получим, очевидно, ковариантный тензор второго ранга, причем
легко вычислить, что его составляющими являются
Нетрудно, однако, из этого тензора образовать вектор; для этого
нужно только воспользоваться контравариантным тензором е*^, введен-
введенным нами в п. 5 § 32.
Все составляющие этого тензора равны нулю, кроме
В самом деле, образуем контравариаптный вектор
гх = e^^ViO* B2)
составляющими которого являются
! _ 1 (да» ЗаД 2 _ 1 /д«! Эа3\ 3 _ 1 (да% ЬаЛ
В декартовых координатах g = 1 и эти выражения совпадают с выра-
выражениями A9), поэтому ясно, что в любых криволинейных координатах
эти формулы дают контравариантные составляющие вектора rot а. Ко-
вариаытные составляющие будут, по общему правилу, вычисляться по
формуле
так что
1 f /да3 дал /dai да*\ , (даъ даЛЛ ,9гч
'= 71 igil'& ~ ^ ^ ~ ^ ^"" ^J
Наконец, в физических составляющих для случая ортогональных ко-
координат получим в силу формул G) и B3):
a^} B6)
и две аналогичные формулы для двух остальных осей. Эти формулы
совпадают с формулами C4) § 18.
$ Зв НЕКОТОРЫЙ ПРИМЕНЕНИЯ 405
6. Рассмотрим теперь расхождение тензора второго ранга П. Обо-
Обозначим составляющие этого тензора в декартовых координатах yi, уз, уя
через Ругук> физические составляющие этого тензора в криволинейных
ортогональных координатах я?, а?, з? через ptk и, наконец, контрава-
риантвые составляющие его через Р**.
Тогда аналогично формулам G) мы будем иметь соотношения
р№ = НгНкР* = ^- Pik B7)
В самом деле, по общим формулам преобразования составляющих
тензора мы имеем, что
„ш а*1 дз*
Р = p™*WaW?
в силу формул D4) § 32 мы можем написать для случая ортогональных
координат
р1к =1Щ~^«у&cos (п" У^ cos (п*' У»)
где П{ — направления нормалей к координатным поверхностям или, что
то же, направления касательных к координатным линиям. Но в силу
формул A4) § 22
cos К' У«) cos (п*> У») = Рм
а тогда из предыдущей формулы вытечет дервая из формул B7). Вторая
из этих формул получается простым переходом от ковтравариантных со-
составляющих к ковариантным.
В случае прямолинейных прямоугольных осей координат расхождение
тензора П было определено в § 29, формула D), как вектор с составляю-
составляющими
др
В любых криволинейных координатах за расхождение тензора необ-
необходимо, следовательно, взять вектор
Q" = у**1** B8)
Общее выражение для ковариантной производной от тензора
приводит к следующему значению для Q"
дх1
и в силу формулы A4)
406 ЭЛЕМЕНТЫ ОБЩЕЙ ТВОРИВ ТЕНЗОРОВ Гл. IV
или окончательно
ViP«= i ?АУ7?!)+раг* B9)
г ё дх
Если тензор Р антисимметричный, то при суммировании по i и X
последний член, очевидно, пропадает я остается
C0)
Если тензор Р№ симметричный, то удобнее воспользоваться смешан-
смешанными компонентами />* (в этом случае Р'? — Р*\, так что точек можно
не ставить). Так как
то в силу формулы A4)
Но в силу симметричности тенаора Р№ и в силу формулы C0) § 33
мы имеем
PkrTr. u = 1 (Р*ГГ, „ + РГ*ГГ. „) = 1 р» (Гг< u
В результате получаем окончательную формулу для расхождения
симметричного1 тензора
Заметим, что в случае произвольного тензора Ргк необходимо разли-
различать между собою Vi-P'* и V*-P**i представляющие собою различные век-
векторы.
7. Рассмотрим еще два примера преобразования векторных выраже-
выражений к любым криволинейным координатам.
В качестве первого примера яроизведем преобразование основных урав-
уравнений гидромеханики вязкой несжимаемой жидкости плотности р, на-
находящейся под действием силы F (F дает силу, действующую на единицу
массы). Основное уравнение механики сплошной среды, выведенное
в | 29, имеет вид
p(F-g-)+divn =0 C2)
где v — вектот» скорости частицы среды, а П — тензор напряжений.
§ 36 НЕКОТОРЫЕ ПРИМЕНЕНИЯ 407
Последний имеет в декартовых координатах yi, уъ, ув следующие
составляющие:
л*»-|*Ь? + -яг t33)
где X и ц — коэффициенты вязкости, причем обычно принимают, что
X = — -| fi. He останавливаясь на выводе формул C3), заметим только
что, полагая X и \х равными нулю, мы получим, что П = — pi ив силу
формулы F) § 29 уравнение C2) приведется к уравнению движе-
движения идеальной жидкости
так что р есть гидродинамическое давление. Члены же тензора П, со-
содержащие X и ц, построены совершенно так же, как составляющие тен-
тензора упругих напряжевий [см. формулу B9) § 29], с той лишь разницей,
что вместо составляющих вектора смещения в формулы C3) входят со
ставляющие вектора скорости, ибо в вязкой жидкости напряжения
определяются скоростями деформаций, в то время как
в упругом теле они определяются самими деформациями.
Так как жидкость предполагается несжимаемой, то уравнение не-
неразрывности имеет вид
div т = 0 C5)
Возьмем теперь любые криволинейные координаты ас1, з?, ж8. Тогда
контравариантными составляющими вектора скорости будут служить
величины
»*-# C6)
Что касается вектора ускорения w = -j , имеющего в декартовых
координатах проекции
то очевидно, что его контравариантными составляющими являются
^=~ + v^Vkvi C7)
Далее, ковариантные составляющие вектора F обозначим через Fk.
Для тензора П из C3), в силу C5), удобнее всего получить смешанные
составляющие
1 + V4) C8)
Для расхождения же этого тензора будем иметь в ковариантных со-
составляющих
i = - Ч*Р +1* Vj (V* vl + V4) C9)
408 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕВ30Р0В Гл. IV
В результате, уравнения C2), написанные в ковариантных составляю-
составляющих, будут иметь вид
• Р** —?F + * Vi (V* *• + V***) D0)
( Чг
6 приложениях приходится иметь дело чаще всего с криволинейными
ортогональными координатами и притом с физическими составляющими.
Преобразуем уравнения D0) для этого частного случая.
Физические составляющие вектора скорости обозначим через vxn
»*¦, и*, вектора силы через Fx4 F&, F*.; физические составляющие
тензора n(V*pi 4- V1"*) обозначим через Хщ. Если коэффициенты Ламэ
обозначить через Hi, H%, H», то
По формулам
легко далее вычислить для случая криволинейных ортогональных коор-
координат символы Кристоффеля:
Л In И И ч/т
если ijkh\ Г* L г* t f
Л In И И
Г* =L г* = _ _t
_t
Составим теперь тензорную производную
В силу формул D1) и D2) легко получим, что ее можно записать
в следующей общей форме:
_ t I dvxi КцдНк , .% ^l
V-1 ^^ + 6S
После простого вычисления находим
з 3 _ ,» аи 3
~Г + 2 rw -r-f D4)
Прибавляя сюда
"ЗГ = "Щ~ЫГ
и переходя путем умножения на Ht к физическим составляющим, найдем
физические составляющие вектора ускорения
+ 2l 1ПГ. -ТТ W
у
I 36 НИКОТОРЫЕ ПРИМЕНЕНИЯ 409
Для вычисления т*к можно поступить следующим образом: перейдем
в тензоре D3) к физическим составляющим путем умножения на Н^Нк,
прибавим к полученному тензору тензор, получающийся из него пере-
перестановкой индексов, и умножим на ji.; в результате получим
2 К
Л—1
Преобразовывая к физическим составляющим pik формулу C1), имеем
Щ V** = я- Ьi
Замечая еще, что физическими составляющими grad <p являются
1 dip
найдем из D0) окончательный вид уравнений гидромеханики вязкой
несжимаемой жидкости в любых криволинейных ортогональных коорди-
координатах
1 dp I 4i I * a (HiHtHsBi \ dlnHl
где Tjj. определены формулами D6).
Наконец,, уравнение неразрывности C5) в силу формулы A6) можно
записать в виде
<Х№.рх.) t
В качестве простейшего примера рассмотрим цилиндрические коор-
координаты г, ф, г. В этом случае мы имеем
Нг = 1, Я, = г, Яг = 1 E0)
и предыдущие формулы приводят к следующим выражениям для тен-
тензора Т{№;
410 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. VI
а к следующим уравнениям гидромеханики:
г
"'- _1- * д"' ** 4- * ^ 2 a"*X ^
^ "Г" г "эГ —?г ¦+¦ ^""Зф^ ~~ й"Эф"+ F~
_ u Г
> 3v,
E 4 44^0
Зг ^ г Эф ^ Эг ^ г
При преобразовании первых трех из этих уравнений мы пользовались
четвертым.
8. Дадим теперь преобразование к ортогональным криволинейным
координатам уравнений равновесия теории упругости. Эти уравнения,
согласно C2), имеют вид
pF + div П = 0 E3)
где П есть тензор упругих напряжений, F — сила, действующая на еди-
единицу массы. Обозначая ортогональные проекции силы F на оси криво-
криволинейных ортогональных координат, иными словами, физические состав-
составляющие силы F через Fx,, Fxi, Fx>, а физические составляющие тенаора
П на те же оси через Ту, и применяя формулы D7), сразу иапишем урав-
уравнения равновесия теории упругости
Если вектор бесконечно-малого смещения частиц упругого тела обо-
обозначить через и, а его расхождение через в = div u, то, согласно фор-
формуле B8) § 29, имеем
П = 2цф + X8I E5)
где Ф есть тензор деформации, для составляющих которого в декартовых
координатах имеем выражение
I 36 НЕКОТОРЫЕ ПРИМЕНЕНИЯ 411
Обозначая физические составляющие этого тензора на оси криволи-
криволинейных ортогональных координат через е**, получим для этих составляю-
составляющих выражения, совершенно аналогичные выражениям D6) для %ц,г
E7)
Ддя 0 из формулы A6) получим
E8)
Jc=i
Наконец, в силу формул E5) имеем следующие соотношения между
xik = 2p,eift + 6?Х9 E9)
Уравнения E7), E8), E9) и E4) я представляют собою уравнения рав-
равновесия теорий упругости в криволинейных ортогональных координатах.
В частном случае цилиндрических координат эти уравнения при-
принимаю! следующую форму:
ОТ
причем для составляющих тевяора'деформации имеем выражения, совер-
совершенно аналогичные формулам E1), а именно:
+ |^) F1)
9. Рассмотренные нами обычные векторные операции в трехмерном
пространстве мы можем по аналогии определить и для любого риманова
пространства.
В частности, под градиентом скалярной функции / мы можем пони-
понимать вектор с ковариантныыи состапляющими (8), под расхождением
вектора можем понимать выражение A2), под оператором Лапласа, при-
примененным к скалярной функции /, выражение A7), под расхождением
тензора второго ранга выражения B9), C0), C1).
412 ЭЛЕМЕНТЫ ОБЩИЙ ТЕОРИИ ТЕНЗОРОВ Гл. VI
§ 37. Тензор Римана-Кристоффеля
1. Наиболее резкое отличие тензорного дифференцирования от обык-
обыкновенного состоит в том, что при повторном дифференцировании резуль-
результат тензорного дифференцирования зависит, вообще говоря, от порядка
дифференцирования.
В самом деле, рассмотрим поле какого-нибудь контравариантного
вектора Аа, составим для него вторые копариантные производные
и ViV*-^a я образуем их разпость. Мы имеем прежде всего
и далее
дхл дхл I
Tim
ЗА"
Car
La»" J
При перестановке индексов j и к сумма первых пяти членов последне-
последнего остается, очевидно, неизменной; последние же два члена превратятся в
т АИ . ГЛ ГР
дх J
Поэтому легко получаем следующее важное равенство:
[лра ЛГ* Т
^--^ + СГ^-г-л,1 A)
Так как это равенство имеет мосто для произвольного вектора А*- и так
как слева стоит тензор третьего ранга, два раза ковариантаый и раз
контравариантвый, то выражение в квадратных скобках в формуле A)
является тензором четвертого ранга, три раза ковариаптным, раз контра-
вариантным. Этот тензор называется тензором Римана-Кри-
Римана-Кристоффеля и обозначается следующим образом:
RlГ=^—^?+ ПЛл - г;Л* B)
При этом обозначении равенство A) перепишется следующим образом
у„\7гАл - ViV«4* = A*R*? C)
Иа него следует, что при ковариаптном дифференцировании вектора
порядок дифференцирования можно изменять только в том случае, если
тензор Римана-Кристоффеля обращается в нуль. Бела в основной кпад-
ратичной форме пространства
ds* = gibdx1 das* D)/
S 37 ТЕНЗОР РИМЛНА-КРИСТОФФЕЛЯ 413
коэффициенты g« ве зависят от коорд1щат> Т0) как следует из формул
B2) и1 B4) § 33, все симаолы Кристоффеля обращаются в нуль. Но тогда
по формулам B) И тензор Римана-Кристоффеля обращается в нуль.
Можно показать, что обратно, если тензор Римана-Кристоффеля во
всех точках пространства обращается в нуль, то в этом пространстве
можно выбрать такие координаты х1, ж2, . . . , хп, чтобы оснопная квад-
квадратичная форма приняла вид D) с постоянными коэффициентами gi]t. Но
ясно, что в этом случае ковариавтное дифференцирование совпадает
с обыкновенным, и поэтому делается понятным, почему в этом случае
порядок дифференцирования не влияет на его результат.
2. Рассмотрим теперь свойства тензора Римана-Кристоффеля. Отме-
Отметим прежде всего, что, как явствует из самого определения этого тензора,
он зависит только от составляющих фундаментального тензора g^ и их
первых и вторых производных, входящих через посредство символов
Кристоффеля.
Из формулы B) непосредственно следует, что при перестановке первых
двух индексов составляющие тензора Римана-Кристоффеля меняют
свой знак:
r;z=-rjl E)
в частности,
д;л>о <б)
Столь же непосредственно, простым вычислением по формуле B),
можно установить интересное свойство циклической сим-
симметрии относительно трех ковариантных знач-
значков, выражающееся формулой
зсcr+&;;:=о т
Понижая у тензора Римана-Кристоффеля значок v, получим кова-
риантные составляющие этого тензора
из которых можем опять восстановить смешанные составляющие обычным
способом
ВИС
Дадим аналогичные формулам B) выражения для ковариантных
ставляющих тензора Римана-Кристоффеля. Так как
I«м ЭГХ \ 8(8|t,rb) _Э^уГр _ ejjK
**• \1* ~~ "ь^! ~ *# axi *•*
^ Хк дх1 дх* дх1
то из формулы B) следует, после простых сокращений, что
27 в. н. Кочив
414 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Вспоминая выражения B2) § 33 для символов Кристоффеля первого
а, можем еще написать, что
р () §
рода, можем еще написать, что
д _ i I
— g^Ta, м Гр, ^ + g°*Ta. ххГ0, „* A1)
Отсюда видно, что составляющие тензора Римана-Кристоффеля зави-
зависят от вторых производных от составляющих фундаментального тензора
линейным образом.
Из формул A0) и A1) можно вывести еще ряд свойств симметрии тен-
тензора Римана-Кристоффеля, А именно из формулы A1) видно, что как при
перестановке первых двух индексов iix, тал и при перестановке послед-
последних индексов X и |х, составляющие тензора A1) меняют свой знак:
A3)
Следующим свойством симметрии составляющих Д^^ является их
неизменность при перестановке первой пары индексов со второй; это
свойство выражается формулой
и непосредственно проверяется по формуле A1).
Наконец, понижая в равенстве G) значок v, мы приходим к свойству
циклической симметрии относительно трех ковариантных значков, вы-
выражающемуся формулой
JW + Rmu. +• Дм* =0 A5)
Тензор четвертого ранга Льощ имеет п* составляющих, однако эти
составляющие связаны соотношениями A2), A3), A4) и A5). В резуль-
результате арифметического подсчета получается, что все п* составляющих
тензора Римана-Кристоффеля могут быть выражены через ^ л2 (л2 — i)
составляющих. Для пространства двух измерений число независимых
составляющих тензора Римана-Кристоффеля сводится к 1, для прост-
пространства трех измерений к 6, для пространства четырех измерений к 20.
3. Для случая ковтраварнантного вектора мы имеем формулу
Нетрудно установить аналогичную формулу для случая ковариант-
ного вектора. В самом деле, понижая в обеих частях предыдущего ра-
равенства значок а, получим
Далее в силу равенства A2)
5 37 ТВНЗОР РИМАНА-КРИСТОФФВЛЯ 415
и, наконец, понижая значок у ах ж одновременно повышая у RWaXt по-
получаем окончательную формулу
При дифференцировании скалярной функции / (а-1, . . . , хп) порядок
дифференцирования никакой роли не играет. В самом деле, мы имеем
то же самое выражение получается и для V»Vx/, откуда и следует наше
утверждение.
Можно дать формулы, аналогичные A6) и.A7) для случая тензора лю-
любого порядка. Мы рассмотрим метод получения этих формул на простом
примере смешанного тензора второго ранга А\.
Введем еще в рассмотрение два произвольных вектора ал и »р и соста-
составим инвариант
По только что доказанному мы будем иметь
VxVs ^ и""в)
Но ясно, что
Последние шесть членов при перестановке индексов i и к не меняются
поэтому мы получаем следующее равенство:
Воспользовавшись теперь формулами A6) и A7), найдем
или
Отсюда, в силу произвольности векторов в" и »р, получаем
^^- ViVx^S = А^ГхТ.-^~,x. A9)
Закон образования правой части совершенно очевиден.
Из тензора Римана-Кристоффеля можно получить путем сокращения
индексов тензор второго ранга и инвариант.
27*
416 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
Прежде всего путем сокращения по крайним индексам i улучается
тензор второго ранга, так называемый тензор Эйнштейна:
Л^ B0)
Так как, в силу формул A4), A2) и A3),
то
GKX = ^iW - g*%A*i •= Gxx B1)
т. е. тензор Эйнштейна есть тензор симметричный. Сокращая его, полу-
получим инвариант
G = <% = g^G* B2)
4. В § 35 нами было выяснено геометрическое значение ковариант-
ного дифференцирования и было показано, что оно может быть тесно
связано с понятием параллельного переноса вектора. Так как тензор
Римана-Кристоффеля тоже выражает некоторое свойство тензорного диф-
дифференцирования, указывая на характер его зависимости от порядка диф-
дифференцирования, то естественно думать, что тензор Римана-Кристоффеля
тоже имеет какое-то геометрическое значение. Более того, мы уже видели,
что в случае эвклидова пространства, когда составляющие фундаменталь-
фундаментального тенаора являются постоянными величинами, тензор Римана-Кристоф-
Римана-Кристоффеля обращается в нуль, следовательно, этот тензор характеризует до
некоторой степени отклонение рассматриваемого риманова пространства
Rn от эвклидова. Можно поэтому думать, что тензор Риыана-Кристоффеля
как-то характеризует кривизну риманова пространства, подобно тому
как отклонение кривой линии от касательной к ней в некоторой точке
характеризуется в первом приближении кривизной кривой в этой точке.
Так оно на самом деле и оказывается, поэтому тензор Римана-Кри-
Римана-Кристоффеля носит еще название тензора кривизны.
Не рассматривая вопроса о кривизие риманова пространства деталь-
детально, мы выясним только несколько основных понятий на частном примере
риманова пространства двух измерений, которое всегда можно представ-
представлять себе как некоторую поверхность в пространстве трех измерений.
Прежде всего заметим, что, как было указано выше, в случае риманова
простравства двух измерений, все 16 составляющих тензора Римана-
Кристоффеля выражаются через одну из них, за которую можно взять
Л1212.
Возьмем теперь в эвклидовом пространстве ух, уг, уг сферу радиуса в
yi2 + г/г* + уз* = а*
в рассмотрим поверхность этой сферы в качестве риманова пространства.
Вводя в рассмотрение сферические координаты г,.9, <р, можем характе-
характеризовать положение точки па сфере двумя координатами 9 п tp, т. е. ми
можем положить
д1 = в, Ж2 = ф
I 37 ТЕНЗОР РИМАНА-КРИСТОФФЕЛЯ 417
Очевидно тогда, что для квадрата элемента длины мы получим вы-
выражение
dsa = с? (dQ* + sin2 9 Жра) = a* {d&y + a2 sin» xx {da*)* B3)
и, следовательно, составляющими фундаментального тензора будут
gu = о2, giss = 0, gas = a2 sin2 (ar1) B4)
Теперь легко вычислить, что
Гьи = Гца = Г2,п
Формула A1) приводит к следующему значению для
Rim = a2 sin2 (г1) B6)
В силу формул A2), A3) и A4) для любого пространства.^ мы имеем
соотношения
/?i2i2 = —Ruiz = —Rita = Л2121 B7)
все же остальные составляющие тензора Римана-Кристоффеля равны
нулю. Составляя по формулам B4) и B2) инвариант G, мы придем в слу-
случае Ш к выражению
G = gbg^R^ = 2Rlm {&*)* - g"g»2} = - ^Р B8)
ибо, как нетрудно убедиться,
Итак, выражение
Дни
g
для любого пространства Римана двух измерений является иввариаятом.
Составляя это выражение для сферы, получим
^-а = р B9)
но для сферы радиуса а величина — является как раа гауссовой кривиз-
кривизной.
5. Теперь мы приведем в связь понятие кривизны поверхности с по-
понятием параллельного переноса вектора, опять-таки только для частного
случая сферы.
А именно, рассмотрим на сфере радиуса а площадь S, ограниченную
контуром L, и будем, исходя из точки Мп кривой L, совершать парал-
параллельный перенос какого-либо вектора, касательного к поверхности сферы,
вдоль кривой L способом, указанным в § 35. После обхода кривой L рас-
418 ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ ТЕНЗОРОВ Гл. IV
сматриваемый нами вектор не возвратится, вообще говоря, в свое перво-
первоначальное положение, а составит с ним некоторый угол е. Мы хотим
доказать, что
Для доказательства возьмем сначала за i5 сферический треугольник
ABC, углы которого тоже обозначим через А, В, С. Тогда из сферической
тригонометрии известно, что площадь сферического треугольника ABC
равна
S = а* (Л + В + С - я) C1)
За точку Мо контура, ограничивающего треугольник, примем точку А,
а за вектор, который мы будем параллельно переносить, примем единич-
единичный вектор а, касательный в точке А к дуге
~*~ большого крута АН.
Так как сферический треугольник образован
дугами больших кругов, которые являются на
сфере геодезическими линиями, то в силу ска-
сказанного в § 35 параллельный перенос вектора
будет совершаться очень просто. А именно, при
параллельном переносе по геодезической линии
АВ единичный касательный вектор а » точке А
к этой линии перейдет в единичный касатель-
касательный вектор а» в точке В (фиг. 95); проведем
Фиг. 95 теперь в точке В единичный касательный век-
вектор b к геодезической линии ВС; ясно, что угол
между векторами ai и b равен л — В.
Будем теперь переносить вдоль геодезической линии векторы b и at;
в силу сказанного в § 35 вектор b перейдет в вектор Ьг, касающийся ли-
линии ВС в точке С, а вектор а, перейдет в вектор а2, составляющий с Ьх
тот же самый угол л — В, который был образован векторами а, и Ь. Про-
Проведем, наконец, в точке С единичный касательный вектор с, который
образунт, очевидно, с вектором bt угол л — С.
При иараллельяом переносе из точки С в точку А векторы с, blg а8
перейдут соответственно в clf Ь2, аз, причем углы между векторами аз
в Ц, Ь, и Cj, Cj и а будут равны соответственно я — В, я — С, я — А.
Из фиг. 95 ясно, что угол между вектором а и тем вектором а3, в кото-
который превращается этот вектор после его параллельного переноса вдоль
контура сферического треугольника ABC, будет равен
8 = 2я — (л — В) — (л — С) — (л — А) = А + В + С — я C2)
Сравнивая это равенство с C1), докажем формулу C0) для того част-
частного случая, когда контур L есть контур сферического треугольника.
Формула C0) остается, очевидно, справедливой и в том случае, когда L
I 37 тензор римана-нристоффеля 419
есть контур сферического многоугольника, ибо последний можно разбить
на ряд сферических треугольников. Но так как во всякую кривую L
можно вписать сферический многоугольник, отличающийся от L сколь
угодно мало, то легко заключить, путем предельного перехода, что фор-
формула C0) справедлива для любого контура на сфере.
Полученные результаты могут быть обобщены на случай любой поверх-
поверхности. А именно, можно показать, что гауссова кривизна поверхности К
может быть выражена как формулой
К = ^ C3)
S
так и формулой
К = lim 4г C4)
причем в есть угол отклонения от первоначального положения вектора,
перенесенного параллельно себе вдоль контура бесконечно-малой пло-
площади S, стягивающейся к рассматриваемой точке поверхности.
Связь между параллельным переносом вектора и кривизной поверх-
поверхности, выражаемая формулой C4), может быть положена в основу иссле-
исследования свойств кривизны любого риманова пространства Rn.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолютная скорость 98, 99
Аксиальный вектор 52
Антисимметричный тензор 292, 357
Афиппое ортоголальное преобразование
345. 351
Афшшое преобразование 345
Афипвый ортоговалышй вектор 285, 351,
354, 355
Афинный ортогональный инвариант 351
Афинный ортогональный тензор второго
ранга 285, 289
Афинор 285
Баротропная жидкость 180, 181, 182
— идеальная жидкость 267
Безвихревое движение 182
Безвихревые поля 171
Бесконечно-малое перемещение 340
Бинормаль 84, 92
Бискалярное произведение тензоров 323
Вектор 5, 6, 7
— относительной скорости 99
— Пойптинга 282
— угловой скорости 56, 57
— уснорегаая 79
Векторная поверхность 265
Векторно-скалпрное произведение 59
Векторное поле 101
— произведение 44, 375
— уравнение 67
Векторные линии 102
Векторный потенциал 228
Величина вектора 6
Вихревая поверхность 192
Вихревые линии 170, 266
Вихрь вектора 130, 168, 169, 170, 171
— скорости жидкости 266
Внешнее произведение 44
Введшие силы 160
Внутреннее произведение 35
— свойство римаиова пространства 397
Внутренние силы 160
Внутренняя энергия 181
Волнистые скобки Кристоффеля 381
Волновое уравнение 183, 271, 278
Вращательное перемещение 340
— ускорение 90
Второе уравнение Максвелла 281
Вязкая жидкость 160
Гармонические точки 43
— функции: 223
Гауссова кривизна 417
Геодезическая линия 378, 379, 388, 393,
400
Геометрическая сумма 8
Геометрическое приращение вектора 399
Гилеркомплексные числа 310
Главная нормаль 84, 94
Главное значение тенгора 320
— направление тензора 320
Годограф вектора 77, 78, 82
— радиуса-вектора 86
Градиент 105, 106, 107
— вектора 125
Давление жидкости 160
Движение сжимаемой жидкости 158
Двойное векторное произведение 59, 74
Двумерное пространство 297
Двусвязное пространство 122
Девиатор 322
Девятичлевиая форма тепзора 269
Деформации 407
Деформационный тензор 301
Деформация объема 305
— элемента 341
Джоулево тепло 283
Диады 290. 294, 304. 308, 309
Дистрибутивность 36, 45, 60, 295. 304,
308, 309
Дистрибутивный закон умножения 11
Дифференциальные операции первого по-
порядка 177
Дифференциальные параметры первого
порядка 196
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
421
Дифференциальные уравнение геодези-
геодезических ливий 376
Дифференциальный оператор 106, 151
Длина вектора 6
Дублет 241, 244
Единичные векторы 12
Единичный касательный вектор 393
— тензор 289, 312
Живая сила точки 91
Жидкая линия 263, 264, 266
поверхность 256, 259, 262, 263, 264
Жидкий объеи 259, 266
Задача Дирихле 216
— Неймана 216, 236
Закон Био-Савара 279, 280
— Гука 339, 341
— индукции 279, 281
— моментов количеств движения 90
— Ньютона 90, 91
— Ома 280
— преобразований 354
Запаздывающий дублет 27S
— ньютонов потенциал 273, 275
— объемный потенциал 275
— потенциал 273
двойного слоя 275, 276
дублета 275
дублета 275
простого слоя 275
Идеальная жидкость 160, 267
Изоповерхности 102
Импульс сипы 91
Инвариант 351, 363
— тензора 322
Инвариантность 31, 37, 73
Инверсия координатных осей 53
Индивидуальная производная 128
Интеграл Копта 182
— Пуассона 256
Интенсивность источника 145
Источник обильности 242, 270
Источники 143
Касательное напряжение 287
— ускорение 87
Квадруплет 252
Кинетическая энергия 181
Ковариангная производная ковариант-
ного вектора 386
Ковариантная производная контравари-
антного вектора 387
Ковариантный вектор 3S3, 354
— тенаор второго ранга 355, 357, 386
Ковариавтньш фундаментальный тензор
363
Коллинеарность 90, 304
Коллиыеарные векторы 12
Количество движения точки 90
Коммутативность 9
Компланарный вектор 12
Компоненты вектора 25
— единичного вектора 83
— производной 80
— тензора 287, 289
Конвективный член 129
Конвекция 129
Консервативная сила 119, 180
Контравариантный вектор 352, 353, 3S4
— тензор второго ранга 355, 357
Когггравариаытный фундаментальный тен-
тензор 363
Координатная система 345, 346
Координатные линия 194, 195, 207
— поверхности 194, 195
Координаты точки 3S0
Косоугольные компоненты 26
Коэффициенты Ламэ 196, 198
— Пуассона 341
Кривизна кривой 83
Криволинейные координаты 194
— составляющие 197
Кручение винтовой линии 93, 94
— кривой 85
Лаграпжевы переменные см. Переменны»
Лагранжа
Левая система 26
Линейная векторная функция 295
— скорость 353
Линейные функции 377
Линейный интеграл 116
— тензор 305, 311
Линии тока 159, 266
Локальная производная 128
Матрицы 287
Медиана 17, 18
Местная производная 123
Метрика 349, 3S0
— плоскости 349
— подпространства 348
Многообразие измерений 349
Модуль 6
— Юнга 341
Момент дублета 241
422
ПРВДМЕТНЫЙ УКАЗАТЕЛЬ
Мощпость источника 145
Мудыиплет 252, 253
Направление момента дублета 252
Напряжение вихревой трубки 172
Начало Даламбера 286
Независимая переменная 77
Некоммутативвость 310
Некомплапарность 17
Некомиланарный вектор 69, 71
Неопределенный интеграл 82
Неподвижная система координат 89
Непрерывная функция 77
Нестационарное поле 101
Нормаль к кривой 84
Нормальная плоскость 84
Нормальное напряжение 287
— уекореняе 87
Нулевой тензор 305
Ньютонов потенциал 219, 224, 273
Обильность источника 145, 242, 243
Обобщенный закон индукции Фарадея
281
Обратный тензор 312
Объемное расширение элемента 341
Объемный потенциал 218, 222
Односвязвое пространство 122
Оператор Гамильтона 106, 148, 153, 168
— Лапласа 155, 202, 403, 411
Определенные векторы 7
Орт 12
Ортогональное преобразование 346, 351
Осевой вектор 52
Осестрвмительное ускорение 90
Основная форма 350
Относительная скорость 99
Параллелограмматическая решетка 977
Параллельный перенос вектора, 385, 392,
394, 397
Первая основная форма Гаусса 208
Первое уравнение Максвелла 281
Передвижение вектора 7
Переместимость 8
Переменное поле 101, 256
Переменные Лаграпжа 332
— тензоры 325
Переменный вектор 77
Перенос 129
Переносная скорость 99
Переносное уравнение 100
Перпендикулярность 41
Планерный тензор 305
Плотность источников 242
Поверхность уровня 102
Поверхностное расхождение 242, 243
Поверхностный градиент 245
— заряд 251
— интеграл 131, 132
Полная производная 128, 269
Полное ускорение 87
Полпота тензора 312
Полный тензор 305, 311
Положительная нормаль 46
Положительное кручение 94
Полярный вектор 52, 67
Постоянное поле 101
Поступательное перемещение 340
Потенциал 115, 119
— двойного слоя 222, 243
— объемный 219, 224, 273
— простого слоя 222, 242
— скорости 123, 159
— электрического поля 123
Потенциальная энергия 119, 181
системы двух зарядов 186
Потенциальное иоле 115, 171
Потенциальный вектор 115, 171
Поток вектора 131, 135
Правая система 26
Правило дифференцирования сложных
функций 30
Правило Крамера 314
— правой и левой руки 26
Преобразование 53
Принцип Гюйгенса 277
Притягивающая сила 95
Проекция вектора 24, 198
— геометрической суммы векторов 24
— слагаемых векторов 24
Произведение двух тензоров 357
Производная вектора 79, 126
— суммы 79
Пространство Римана 349
Прямоугольные координаты 25
Прямые скобки Кристоффедя 380
Псевдовектор 52
Псевдоскаляр 59, 67, 86
Радиус-вектор 14, 19—22, 69, 73, 75, 96, 97
Радиус кривизны кривой 83
— кручения 85
Различные векторные линии 262
Разложение 12
Разрыв непрерывности 244
Распределение вихрей 245
— источников по поверхности 249
Распределительный закон умножения 11
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
423
Расхождение вектора 130, 135
— тензора 337
Результирующий вектор 8
Риманово пространство 362, 366, 373, 377,
384, 392—395, 397—398
Свободные векторы 7
— от источников векторные поля 141
Свойство сохраняемости 262, 265
— циклической симметрии 413
Секториальная скорость 91
Сала инерции 161
Силовая функция 119
Символы Кристоффеля второго рода 381
Символы Кристоффеля первого рода 330
Симметричный тензор 292, 317, 318, 320,
357
Скаляр 5, 6, 7, 53, 69, 351
— второго рода 53
— первого рода 53
Скалярная функция 353
Скалярное поле 101
— произведение 35, 36, 37, 3f7
тепзоров 307
Скалярный аргумент 77
Скорости деформаций 407
Скорость распределения света 282
Слагаемые вектора 8
Слагающие вектора 24
Сложение векторных нолей 109
— двух тензоров 356
Смешанный тензор второго ранга 355
— фундаментальный тензор 363
Сокращение индексов 358, 359
Сокращенный тензор 359
Соденоидальиое поле 141, 254
Соленоидальный вектор 141, 142
Соприкасающаяся плоскость 84
Составляющие вектора 25
— коваряантпого тензора 361, 362
Сохраняемость векторных линий 335
Сочетательность 9
Соирммляющая плоскость 94
Статический инвариант системы 55
Стационарное поле 101
Стоки 143
Субстанциальная производная 128
Сферическая волна 273
Сферические функции 253
Телеграфное уравнение 282
Тензор 7, 10, 284, 285
— кривизны 416
— моментов инерции 299, 319
Тензор подстановка 366
— производный от вектора по век-
вектору 300
— Римана-Кристоффеля 412,. 413
— упругих напряжений 336, 337, 385—387
— Эйнштейна 416
Тензорная алгебра 357
Тензорный эллипсоид 319
Теорема Гаусса 137, 138, 146
— деления тензоров 388
— Томпсона 270
Тепловая энергия 283
Ток смещения 280
Точка многообразия 350
Трехсвязное пространство 122
Трубки тока 159
Трубчатое векторное поле 141
Угловая скорость 56, 353
Умножение тензора на скаляр 356
Уравнение Берну.чли 181
— винтовой линии 93
— Лапласа 155, 160, 216, 224, 271, 282
— церазрывяоети 157—159
— плоскости 93
— Пуассона 163, 214, 215, 217, 224, 271
— теплопроводности 155
Уравнения гидромеханики 157, 161
Ускореипе Кориолиса 101
— переносное 100
— точки 89
Условие сохраняемости линии тока 265,
266
Физические составляющие вектора 372
Фиксированные точки ирострацетва 332
— частицы сплошной среды 332
Формула Гаусса-Остроградского 138, 140.
142, 146, 226, 229
— Грина 220, 226, 234, 236
Формула Моавра 315
— Френе 85, 97
Фундаментальная форма 350
Фундаментальный определитель 363
— тензор 363, 368
Центральная ось системы 73
— сила 90
Циклическая перестановка 14, 88
— постоянная. 211
Циркуляция вектора 117, 164, 166, 170
— от ускорения 269
— скорости 269, 270
Часгная производная 128
424
ПРБДЮТГНЫЙ УКАЗАТЕЛЬ
Эвклидова плоскость 385
Эвклидово пространство 347, 353, 366.
Зв8, 384, 385, 392, 393, 394
Экспериментальные законы электромаг-
электромагнетизма 279
Электрическая сала 2S1
Электрический заряд 250
— потенциал 251
Электрическое поле 2S1, 279
Электромагнитная энергия 383
Электромагнитное поле 279
Электромагнитные явления 279
Электростатика 250
Электростатическое поле 161, 195, 279
Элементарная работа силы 91
Энергия магнитного поля 283
Энергия электромагнитного поля 283
ОГЛАВЛЕНИЕ
Предисловие к седьмому изданию 3
Из предисловия ко второму изданию 3
Предисловие к четвертому изданию 3
Предисловие к пятому и шестому изданиям 3
Глава I
ВЕКТОРНАЯ АЛГЕБРА
§ 1. Определение скаляра и вектора. Равенство векторов 5
§ 2. Сложение, вычитание я разложение векторов. Умножение векторов на
скаляр. Бдиничные векторы ...•••...•¦• ......... 8
§ 3. Проекция вектора на какое-либо направление. Координаты вектора.
Правая и левая системы координат. Аналитическое выражение равен-
равенства, сложения и вычитания векторов 23
§ 4. Преобразование координат. Преобразование составляющих вектора при
переходе от одной системы координат к другой 28
§ 5. Скалярное или внутреннее произведение двух векторов. Его свойства 35
§ 6. Векторное, или внешнее, произведение двух векторов. Изображение пло-
площадей векторами. Вектор замкнутой поверхности. Свойства векторного
произведения. Полярные к аксиальные векторы. Приложения к статике
и кинематике 44
§ 7. Произведения трех векторов. Их свойства 59
§ 8. Векторные уравнения 67
Глава II
ВЕКТОРНЫЙ АНАЛИЗ
§ 9. Перемеппые векторы, зависящие от скалярного аргумента. Годограф век-
вектора. Дифференцирование вектора по скалярному аргументу. Формулы
дифференцирования. Интегрирование по скалярному аргументу .... 77
§ 10. Дифференцирование вектора, отнесенного к подвижной системе коор-
координат 98
§11. Функции от векторного аргумента. Скалярное а векторное поле. Поверх-
Поверхности уровня. Векторные пинии 101
§ 12. Градиент. Его свойства. Линейный интеграл. Потенциал 103
I 13. Пуилаводмая век-тара iio аддр&адвашо. Граддовт одного вектора ш>
другому 124
S И. Натек Виктора черов поверхаоиь. Расхождение лектора. Его отгалсттп-
ческое выражение. Теорема Гаусса. Источники 430
§ 15. Оператор Гамильтона. Некоторые применения 148
426 ОГЛАВЛЕНИИ
§ 16. Циркуляция вектора вдоль контура. Вихрь вектора. Его составляющие.
Теорема Стокса 164
§ 17. Некоторые формулы с дифференциальными операциями. Дифферен-
Дифференциальные операция второго порядка. Применения 174
5 18. Криволинейные координата 194
§ 19. Определение вектора по его вихрю н расхождению 209
§ 20. Различные векторные поля. Поверхностные расхождение я вихрь . . . -240
§ 21. Переменные поля в сплошной среде . . . ' 256
Глава III
АФИВНЫЕ ОРТОГОНАЛЬНЫЕ ТЕНЗОРЫ
§ 22. Понятие афинного ортогонального тензора. Примеры тензоров .... 284
§ 23, Сложение и разложение тензоров 291
§ 24. Умножение тензора на вектор 295
§ 25. Произведение тензоров 307
§ 26. Симметричные тензоры. Тензорный эллипсоид 317
| 27. Главные оси тензора. Главные значения тензора. Инварианты тензора 320
§ 28. Дифференцирование тензора по скалярному аргументу 325
§ 29. Расхождение тензора. Применение к теория упругости. 339
Глава IV
ЭЛЕМЕНТЫ ОВЩЕЙ ТЕОРИИ ТЕНЗОРОВ
§ 30. Общее определение вектора и тензора 345
| 31. Тензорная алгебра • 358
§ 32. фундаментальный тензор 362
§ 33. Дифференциальные уравнения геодезических линий. Символы Крнстоф-
феля и ах свойства 376
§ 34. Тензорная производная вектора и тензора 384
§ 35. Параллельный перенос вектора 392
§ 36. Некоторые применения 401
5 37. Тензор Рнмана-Кристоффеля . 412
Предметный указатель 420
ОПЕЧАТКИ И ИСПРАВЛЕНИЯ
Страница
31
ИЗ
154
199
206
255
ЗОВ
311
341
Строка
3 сн.
9 ся.
8 св..
10 сн.
6 св.
19 сн.
10 ся.
13 св.
Юсе.
Напечатано
= sin A
Ч> Iff1*!
f(|V'V)« +
V
df
*р
j" (gs> 82' e3)
0ПДНМ
что а, Ь, с
г
Должно выл
= c8inA
Ч>= «g»-i
J
V
M {ei, g». уэ)
видим
что если а, Ь, и
г'
d*t(l+»n)
П. В. Кочив