/


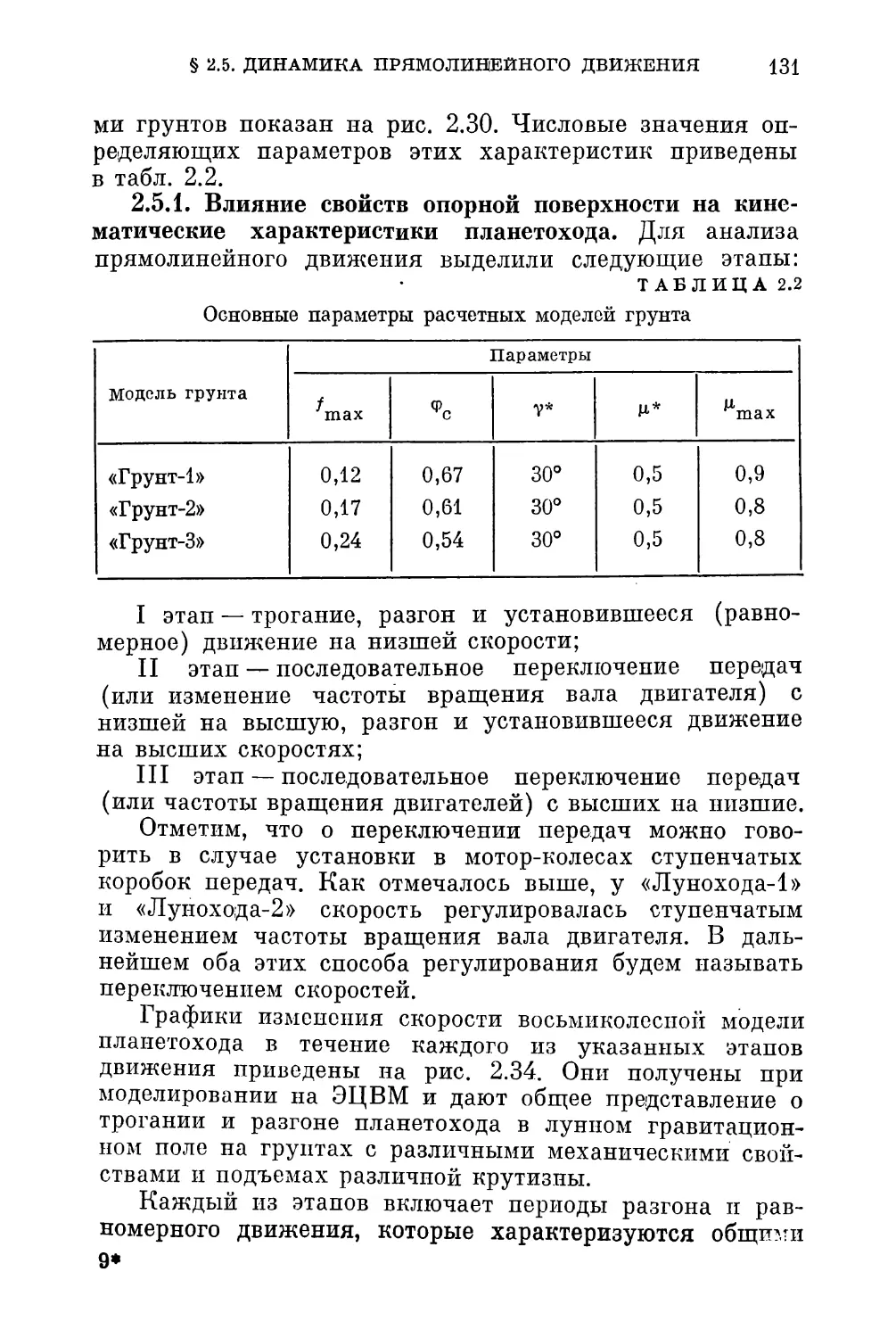
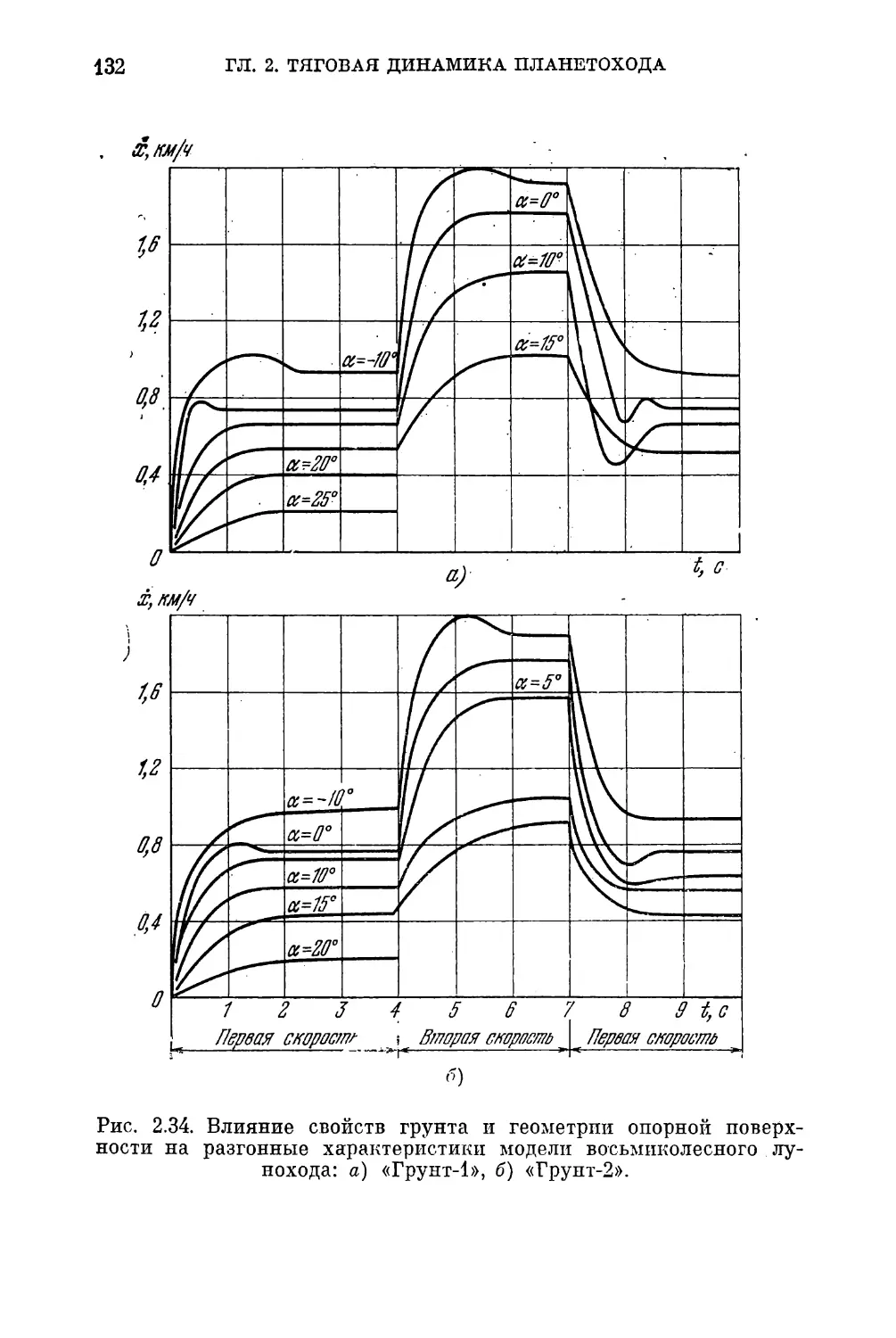

































































































Текст
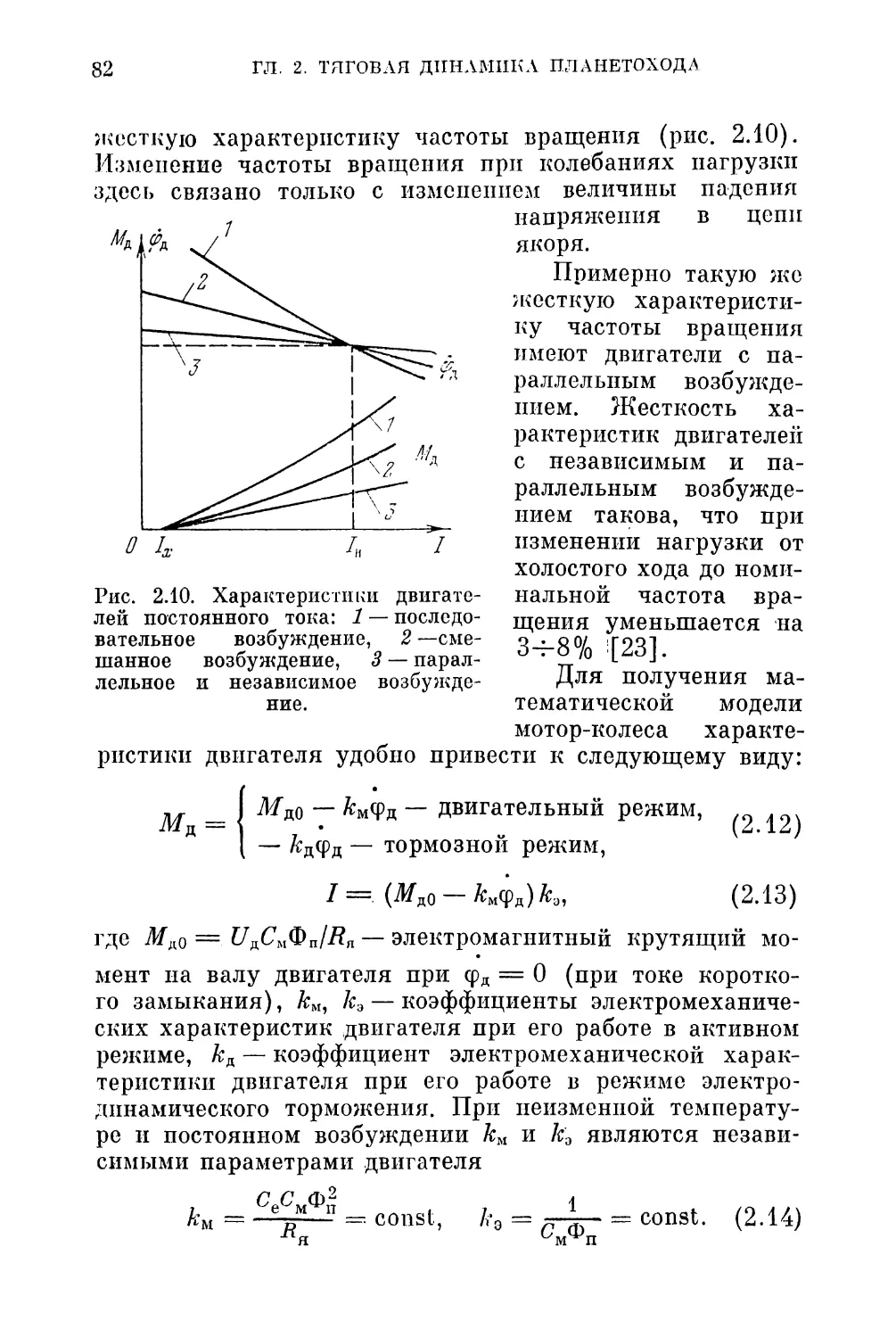
ИЗДАТЕЛЬСТВО «НАУКА»
Главная редакция
физико-математической
литературы
НАУЧНЫЕ
ОСНОВЫ РОБОТОТЕХНИКИ
Е. В. АВОТИН, И, С. БОЛХОВИТИНОВ,
А. Л. КЕМУРДЖИАН, М. И. МАЛЕНКОВ, Ф. П. ШПАК
ДИНАМИКА ПЛАНЕТОХОДА
Под редакцией
академика Б. Н. ПЕТРОВА
и профессора А. Л. КЕМУРДЖИАНА
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1979
39.62
Д 46
УДК 629.787
Авотин Е. В., Болховитинов И. С.,
Кемурджиан А. Л., Маленков М. И.,
Шпак Ф. П. Динамика планетохода.—М.: Нау-
ка, Главная редакция физико-математической
литературы, 1979.— 440 с.
Рассмотрены основные особенности динами-
ки инопланетных подвижных аппаратов — пла-
нетоходов, предназначенных для работы на по-
верхности Луны и планет. Приведены расчетно-
теоретические методы оценки устойчивости дви-
жения планетоходов, методы решения задач их
тяговой динамики. Представлены современные
модели рельефа Луны и Марса и рассмотрены
вопросы взаимодействия планетоходов с неров-
ностями рельефа. Результаты теоретических ис-
следований сопоставлены с данными, получен-
пвтми при эксплуатации на Луне советских ап-
паратов «Луноход-1» и «Луноход-2».
Книга предназначена для разработчиков кос-
мических станций, научных работников, занима-
ющихся исследованиями поверхностного покро-
ва Луны и планет, специалистов в области ро-
бототехники.
Илл. 152, библ. 77.
п 30501 — 123
Д 053(02)~79 178-79. 3607000000
Главная редакция
физико-математической
. литературы
издательства «Наука», 1979
ОГЛАВЛЕНИЕ
Предисловие .... 7
Основные обозначения . 9
Введение .... Н
Глава 1. Поверхность Луны и планет....................14
§ 1.1. Детерминированное представление рельефа . . 15
§ 1.2. Стохастическая модель рельефа...............25
§ 1.3. Спектральный анализ поверхности с применением
теории импульсных случайных процессов ... 35
Глава 2. Тяговая динамика планетохода.................56
§ 2.1. Задачи и методы тягово-динамических расчетов 56
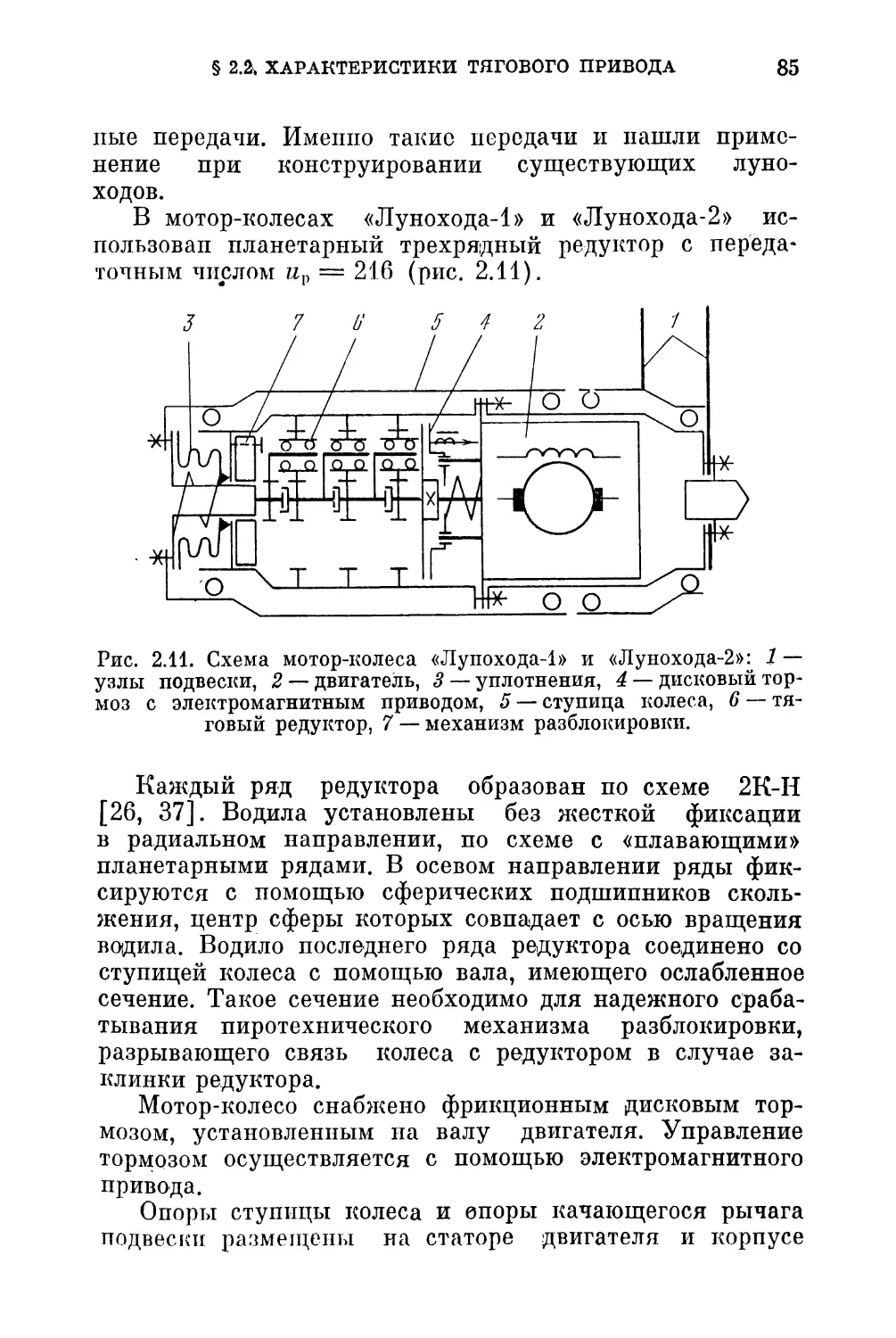
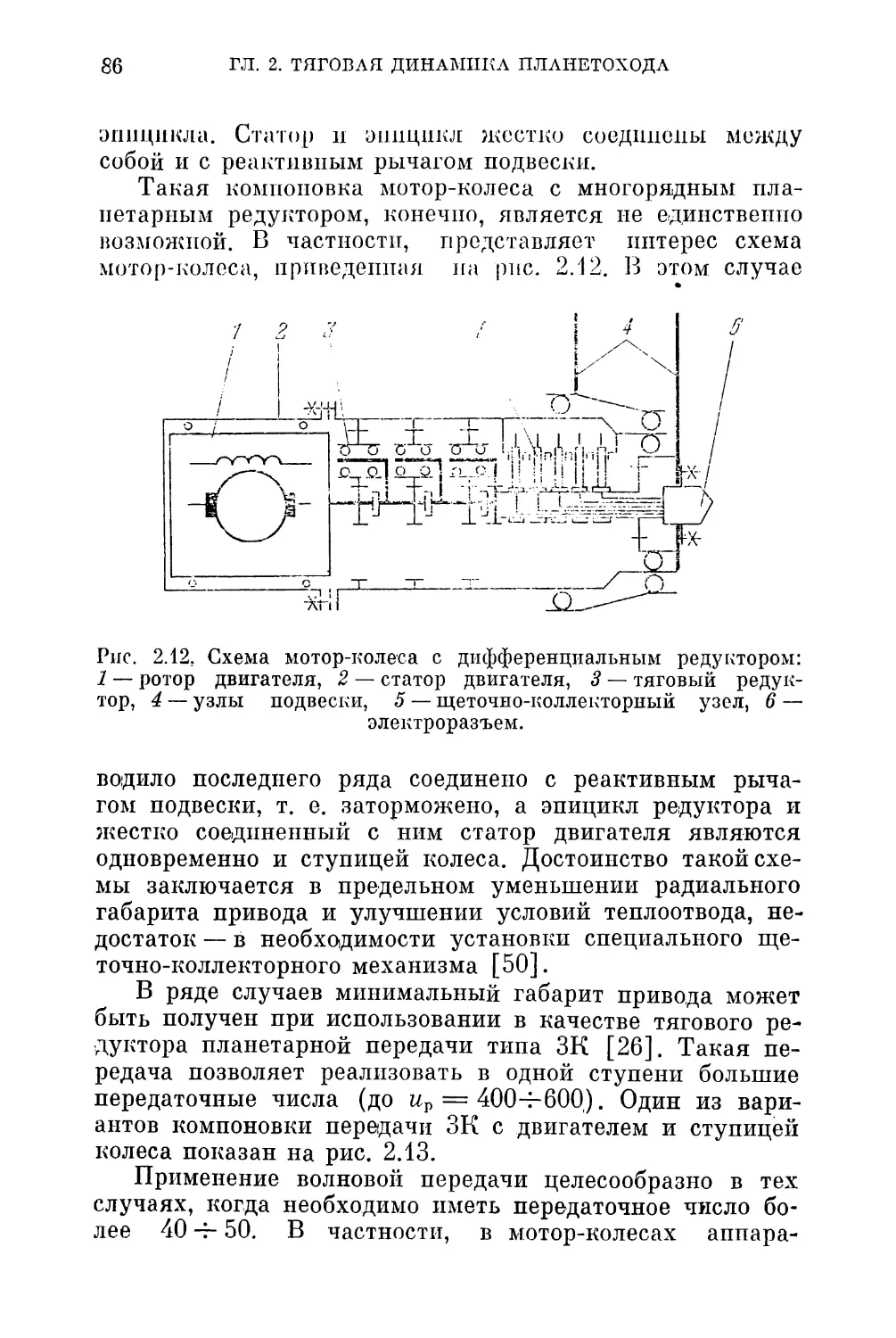
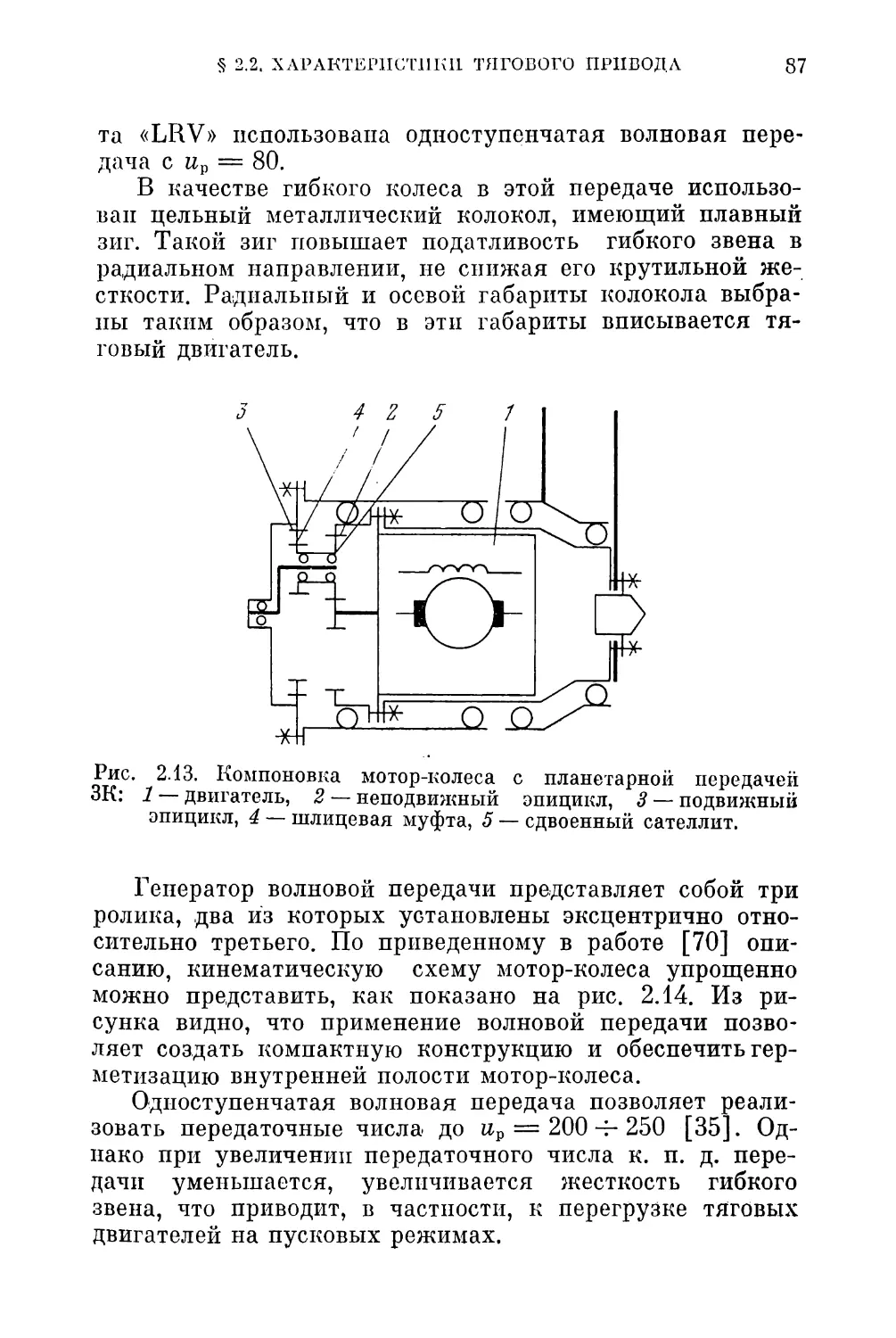
§ 2.2. Внутренние характеристики тягового привода . . 79
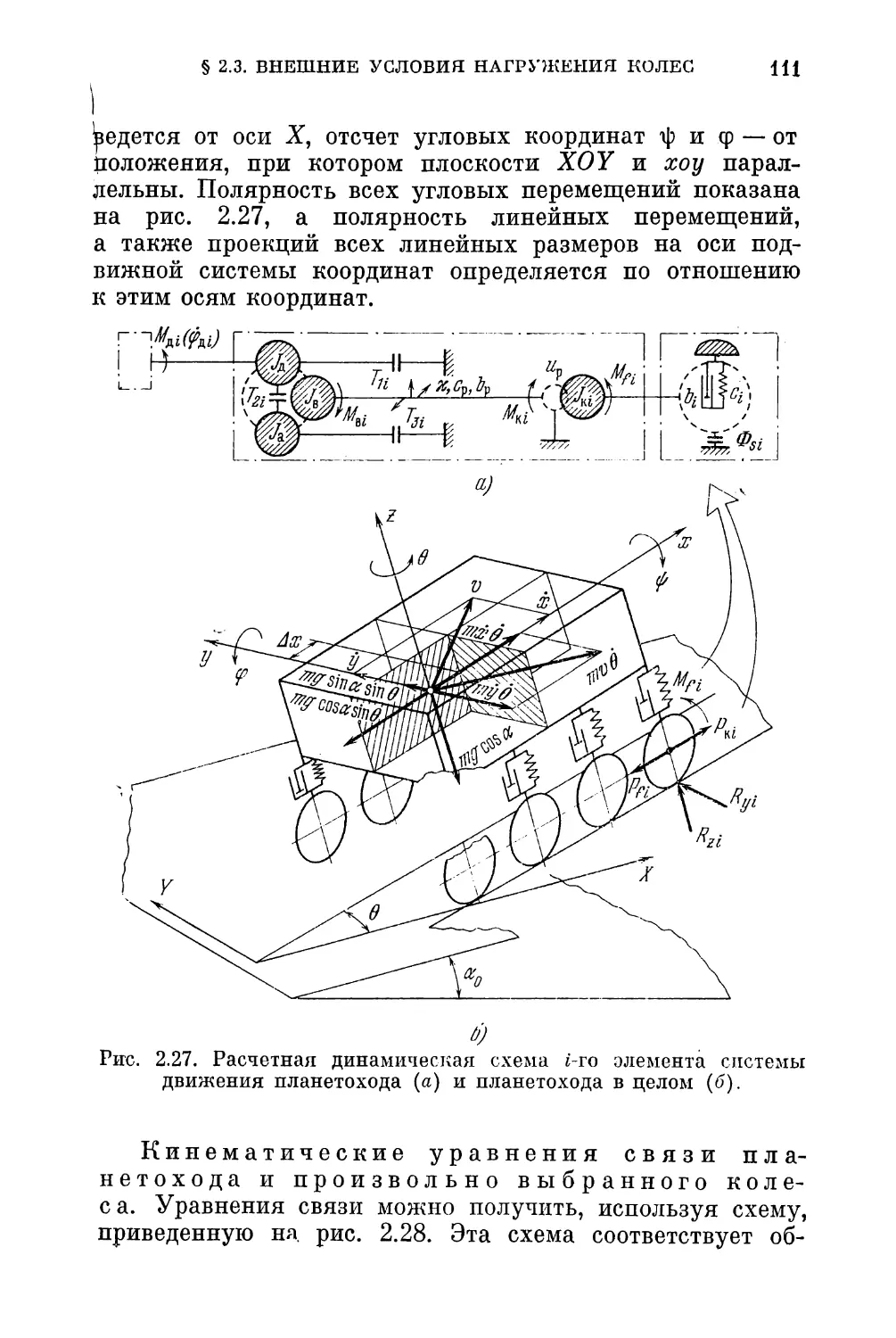
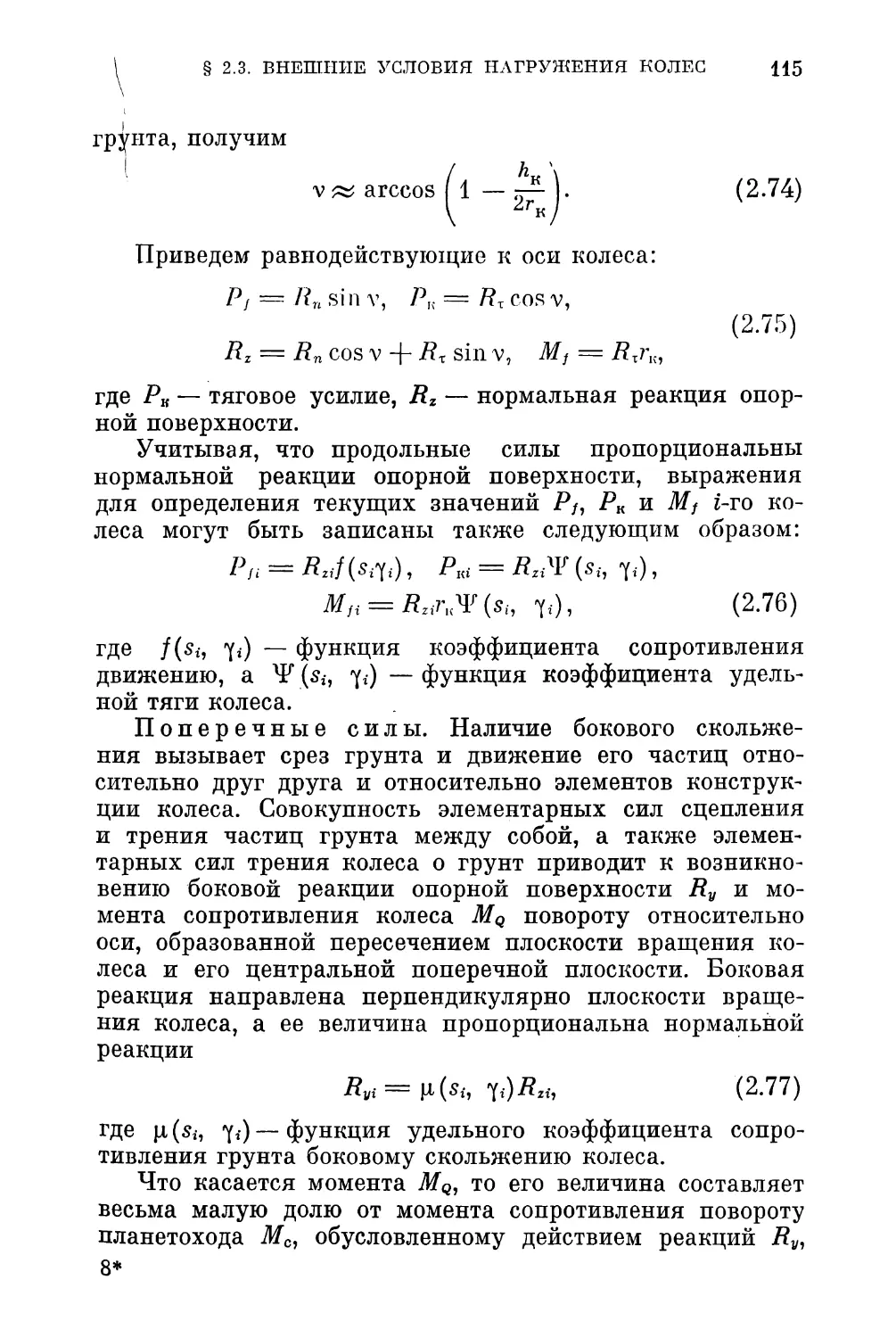
§ 2.3. Внешние условия нагружения колеса . . . . 110
§ 2.4. Математическая модель системы движения плане-
тохода .............................................124
§ 2.5. Динамика прямолинейного движения .... 129
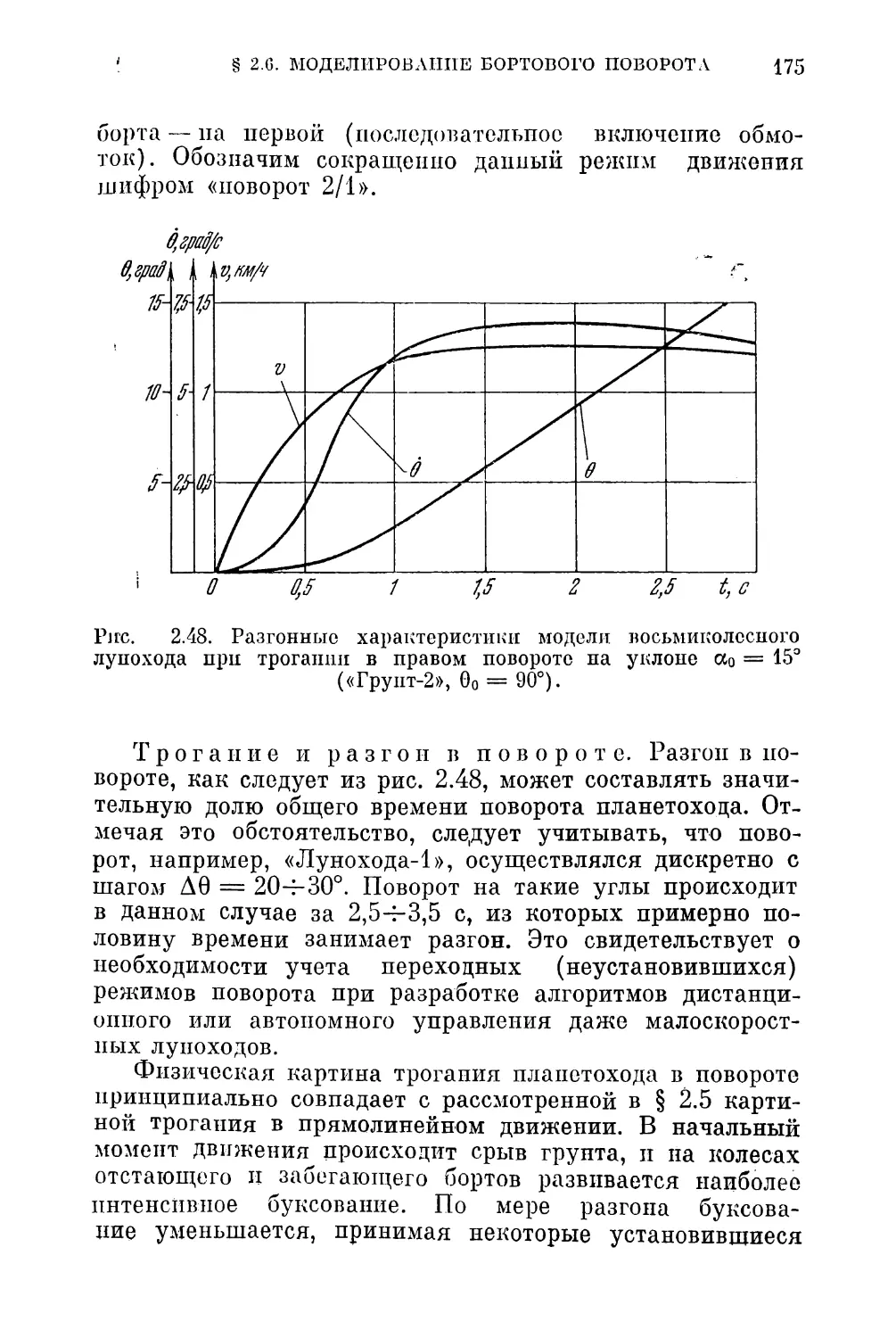
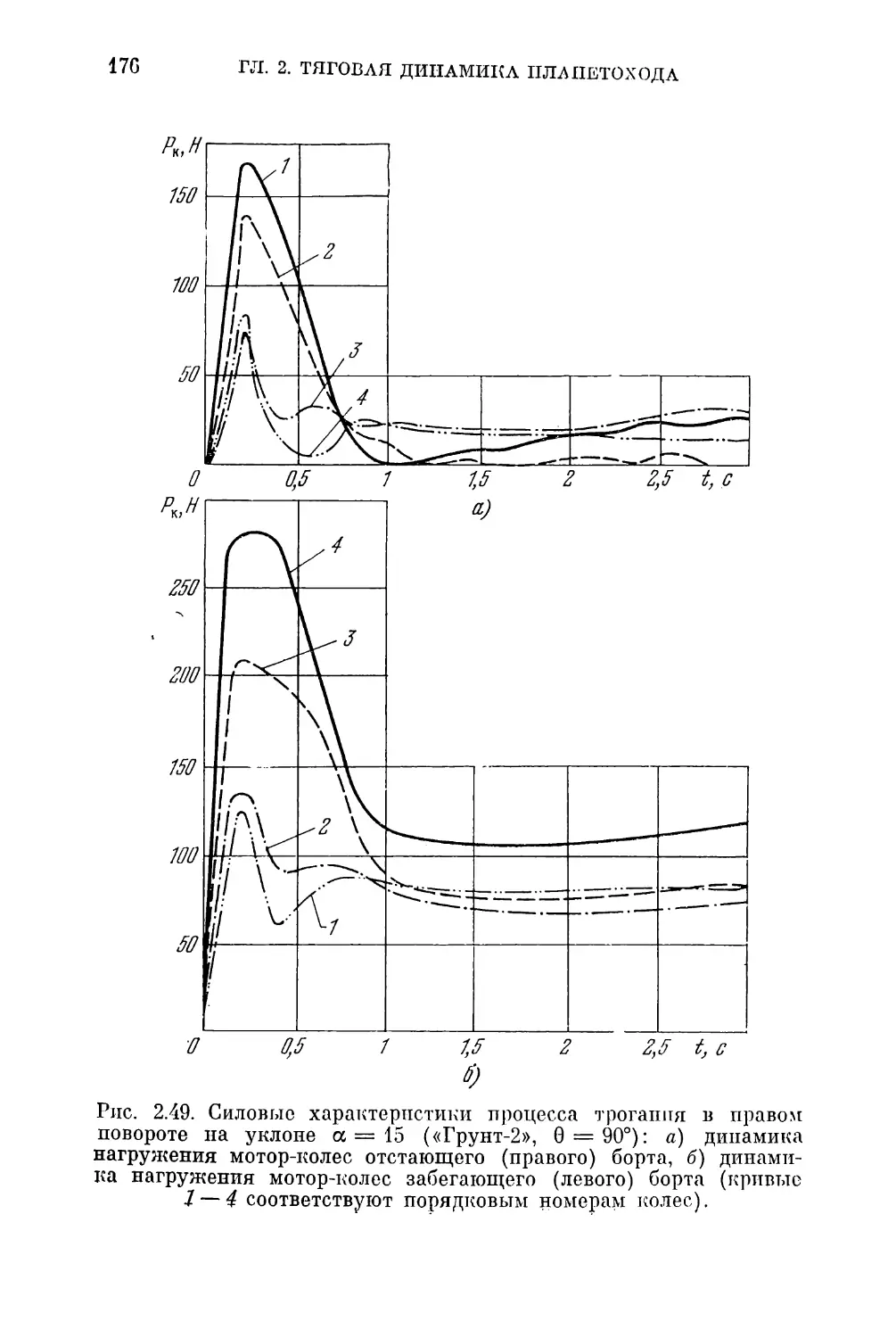
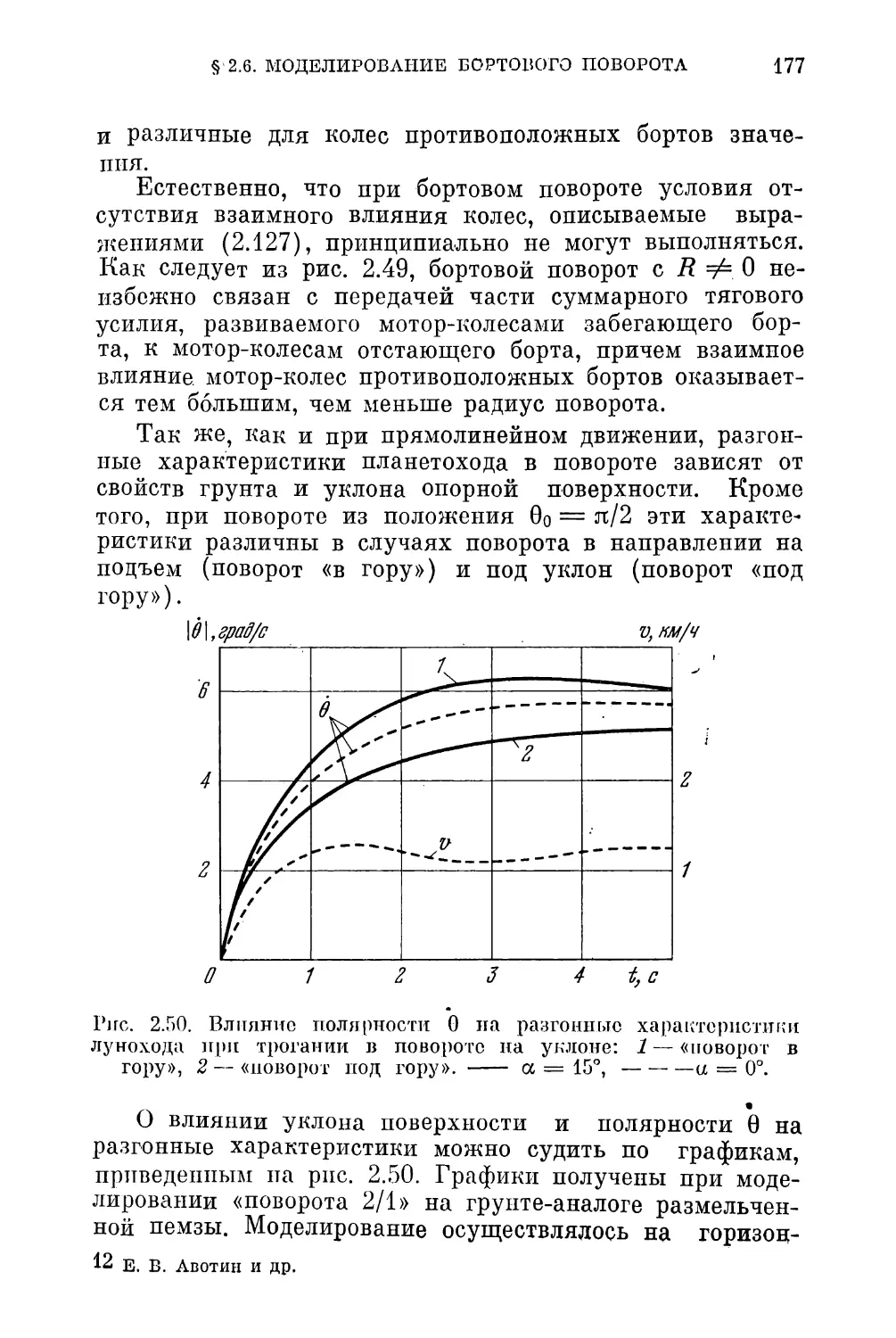
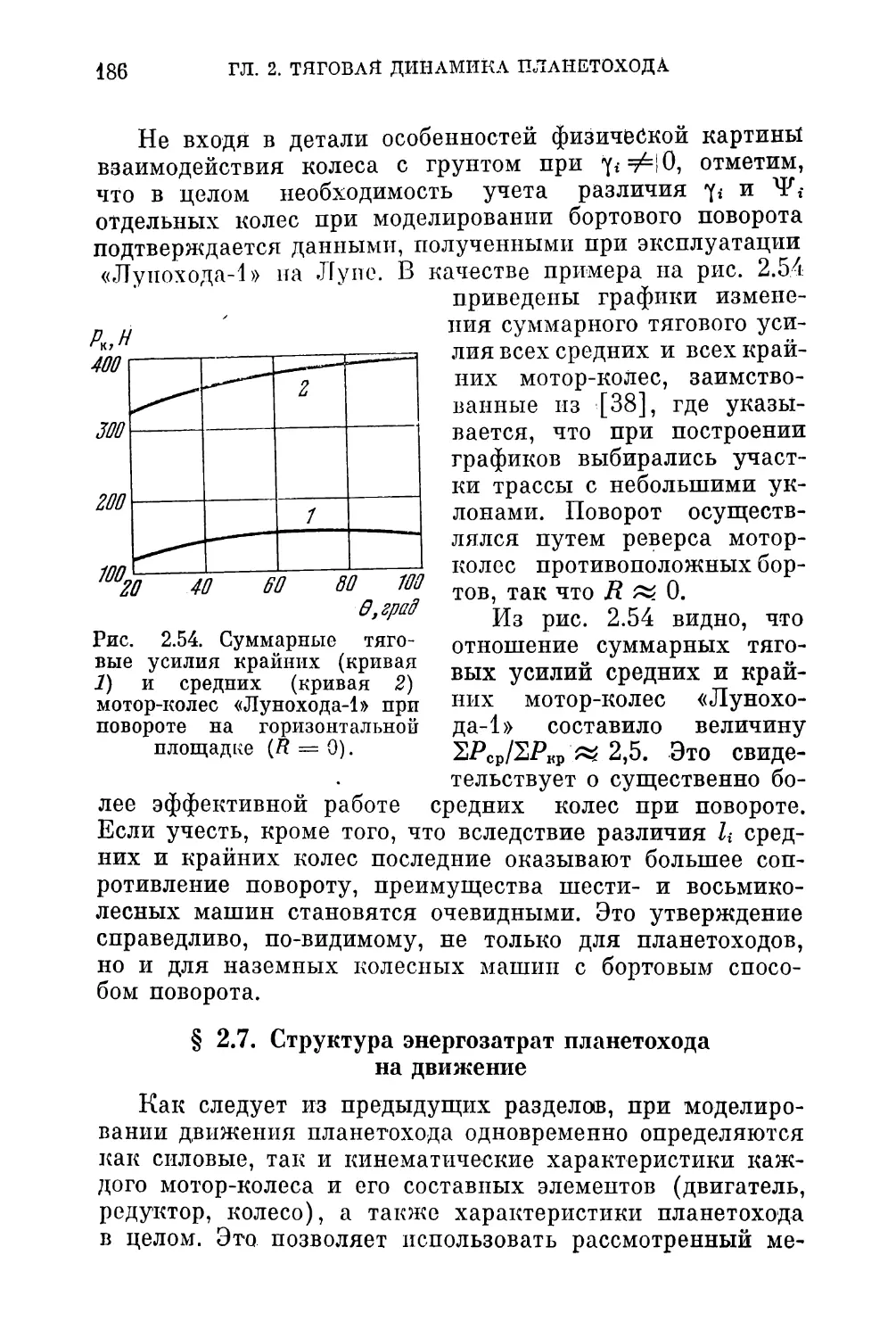
§ 2.6. Моделирование бортового поворота...............170
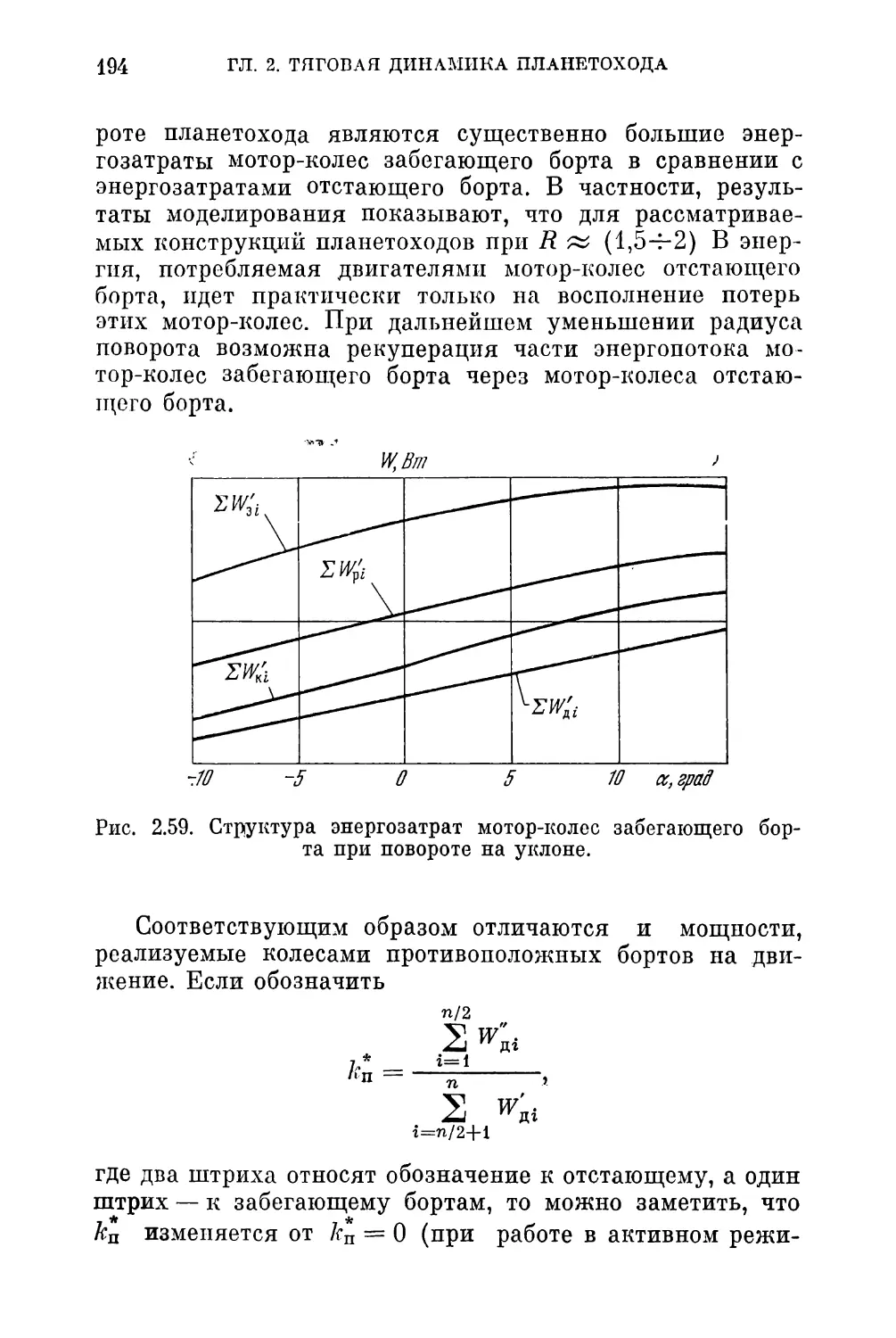
§ 2.7. Структура энергозатрат планетохода на движение 186
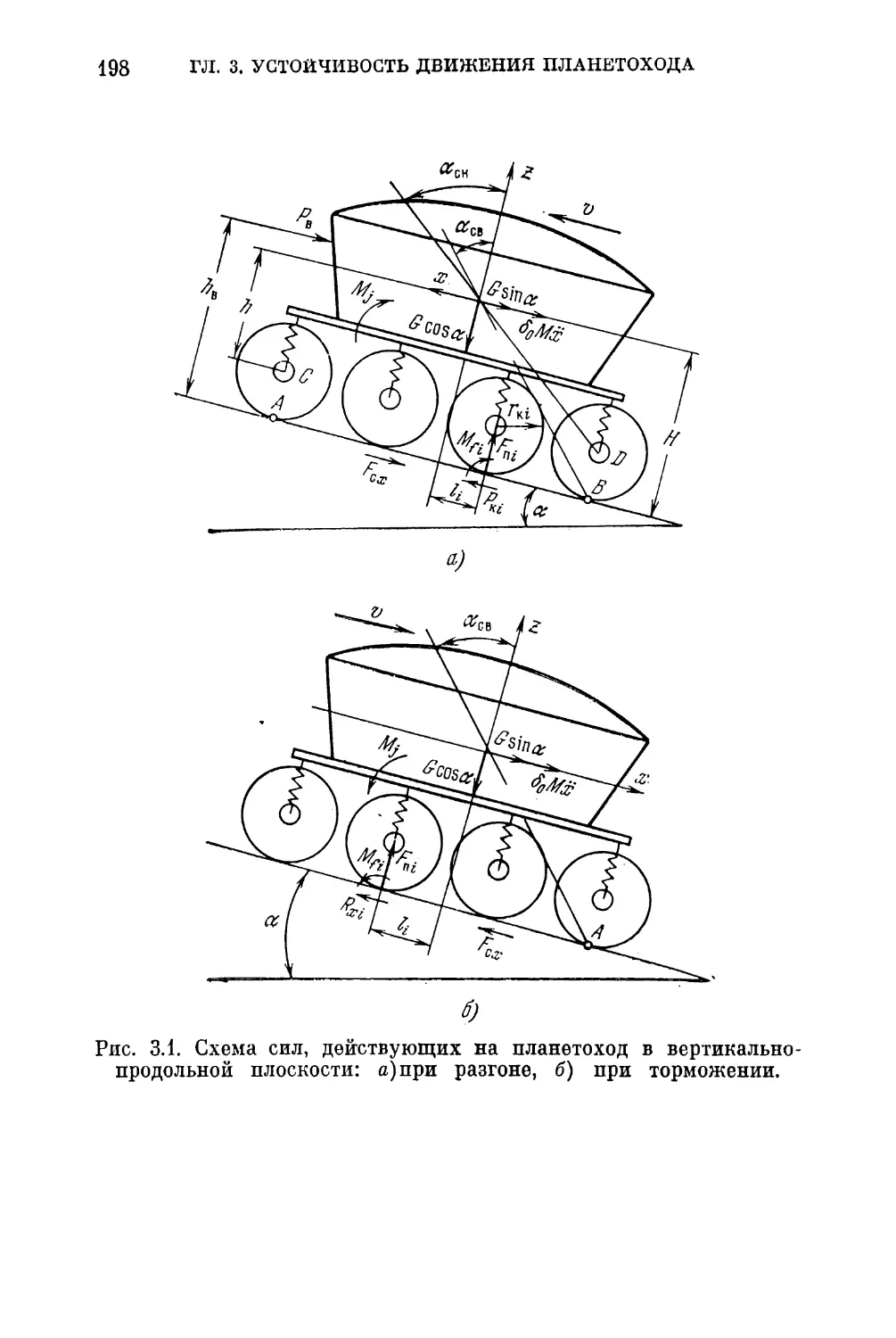
Глава 3. Устойчивость движения планетохода . . 196
§ 3.1. Основные положения........................196
§ 3.2. Статическая продольная устойчивость .... 202
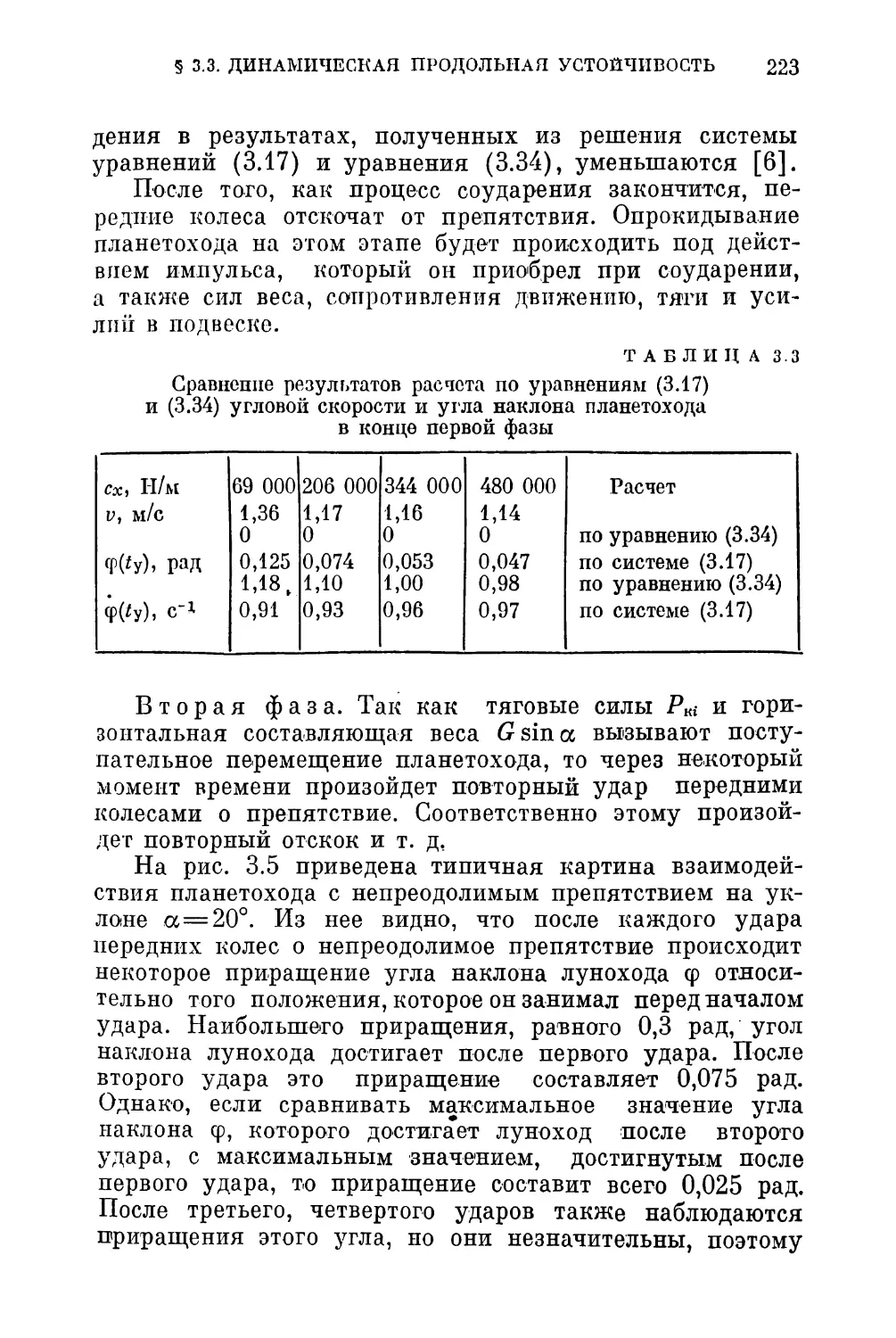
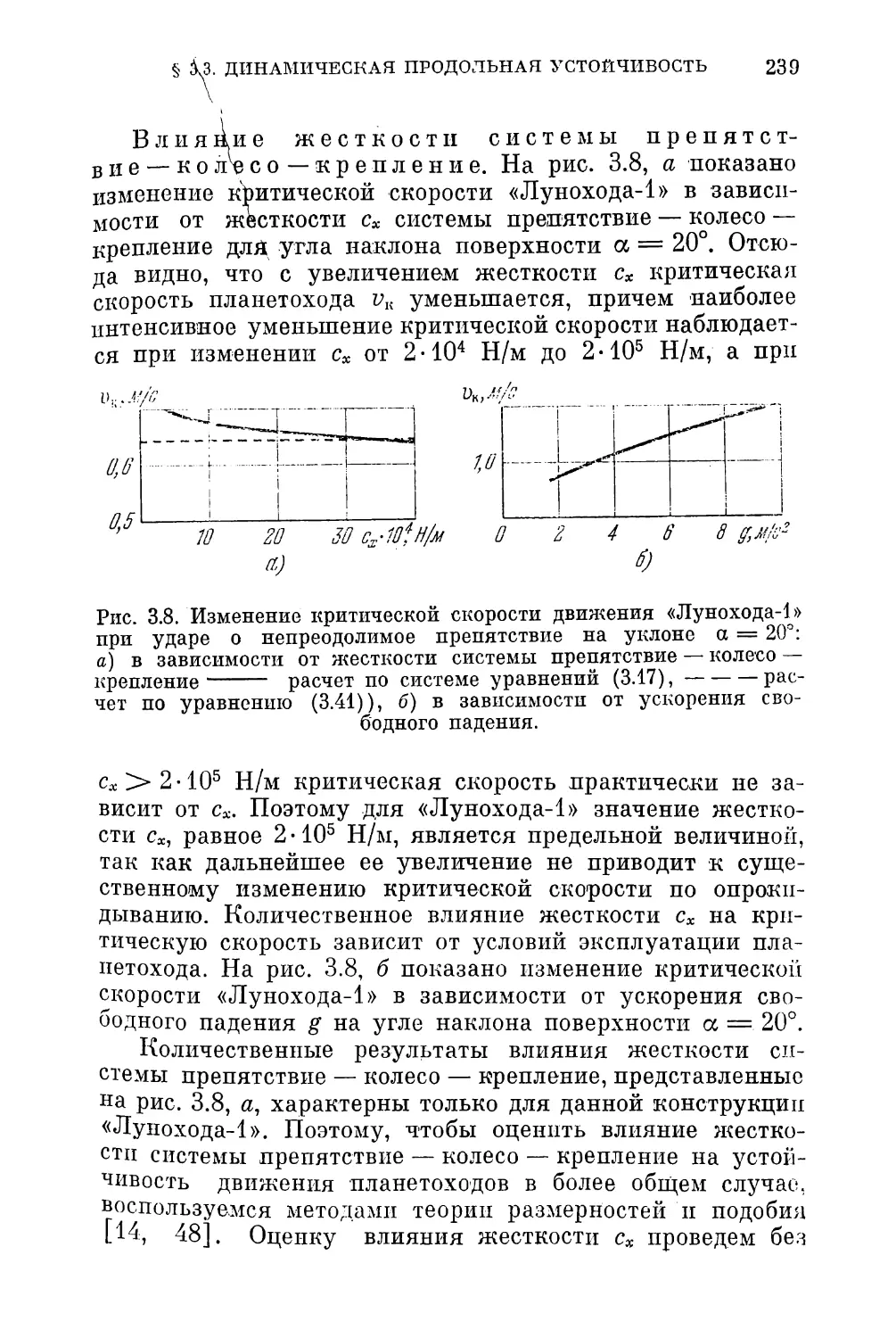
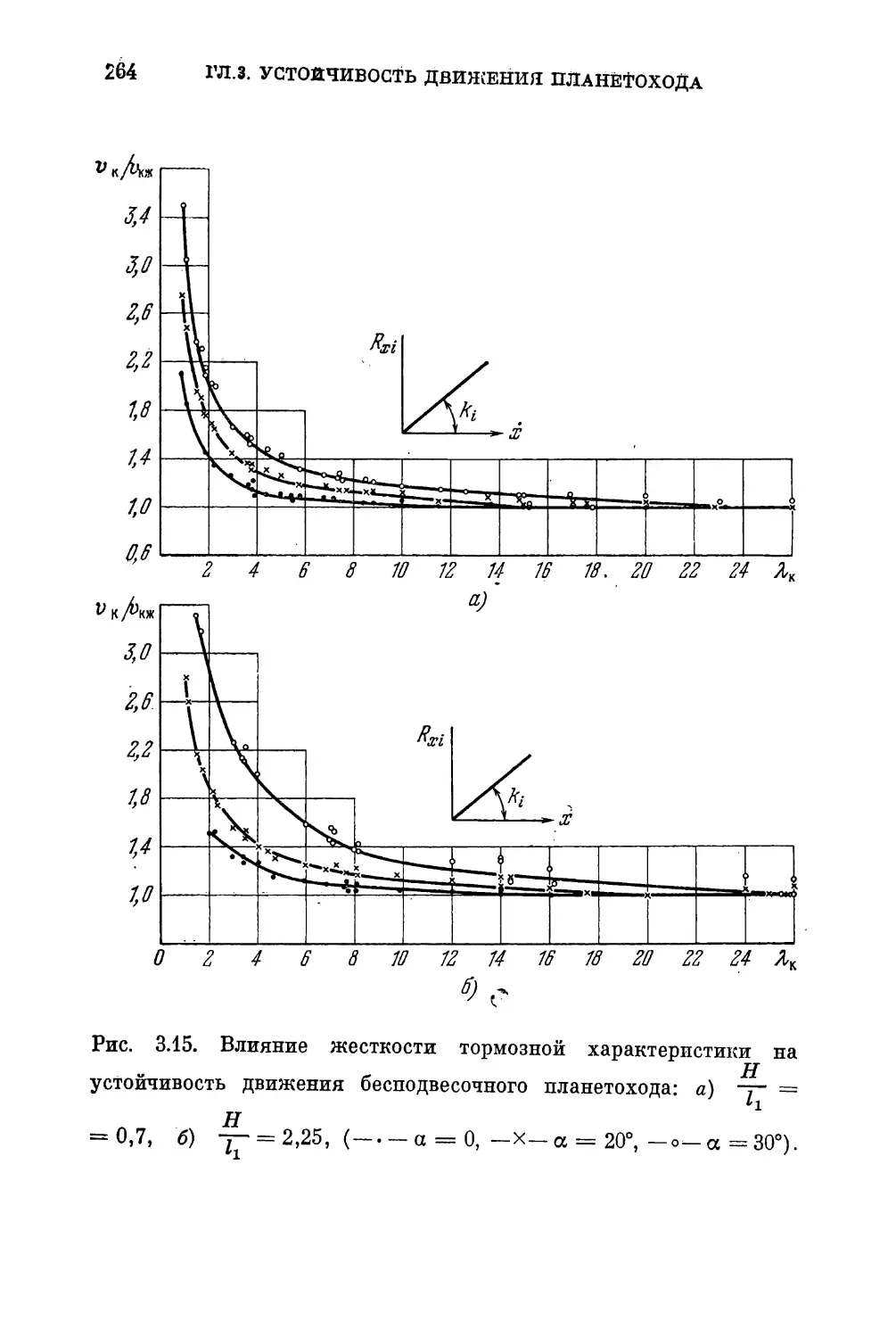
§ 3.3. Динамическая продольная устойчивость . . . 208
§ 3.4. Поперечная устойчивость...................275
§ 3.5. Устойчивость при преодолении характерных пре-
пятствий ...........................................285
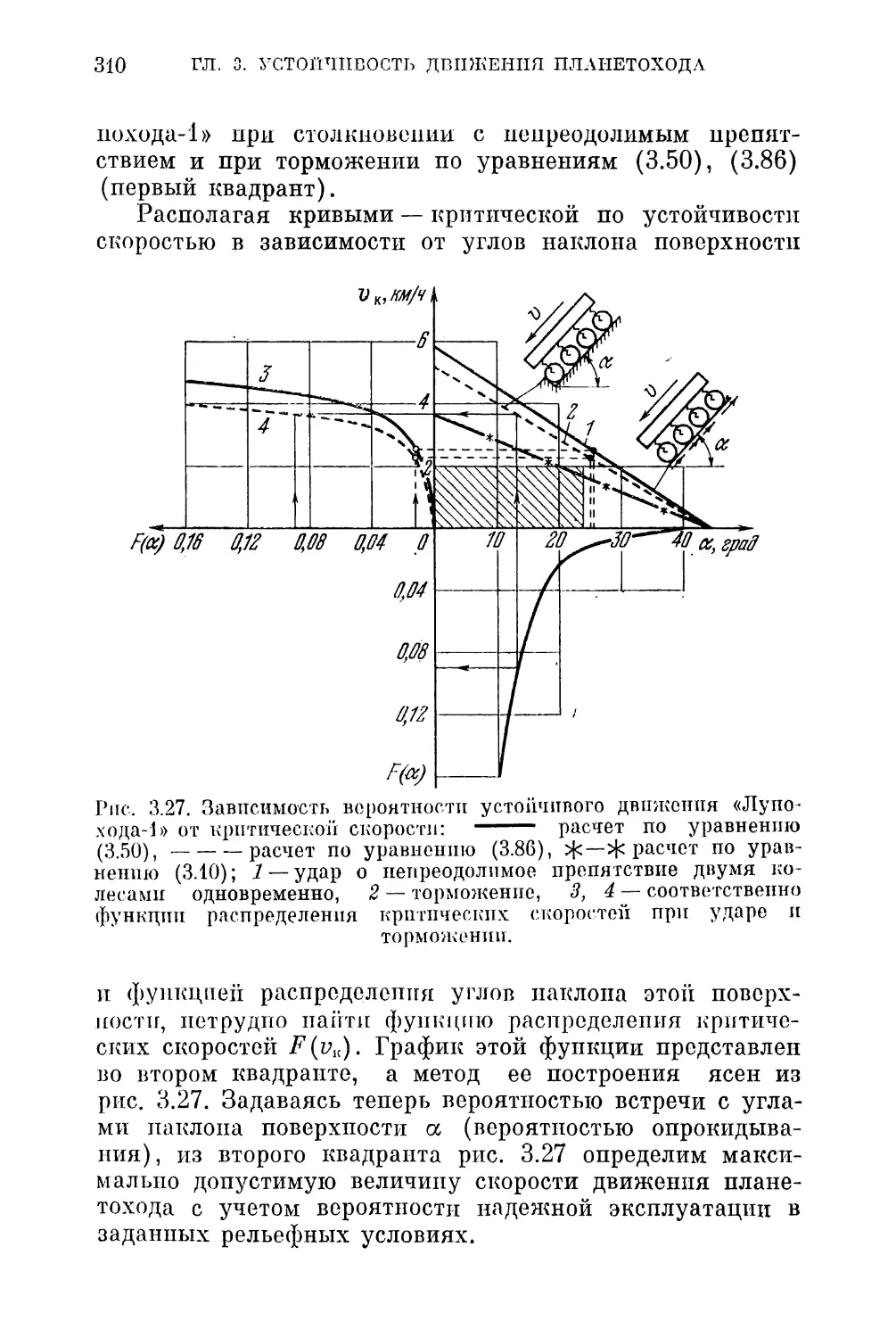
§ 3.6. Оценка устойчивости при проектировании и в про-
цессе эксплуатации..................................302
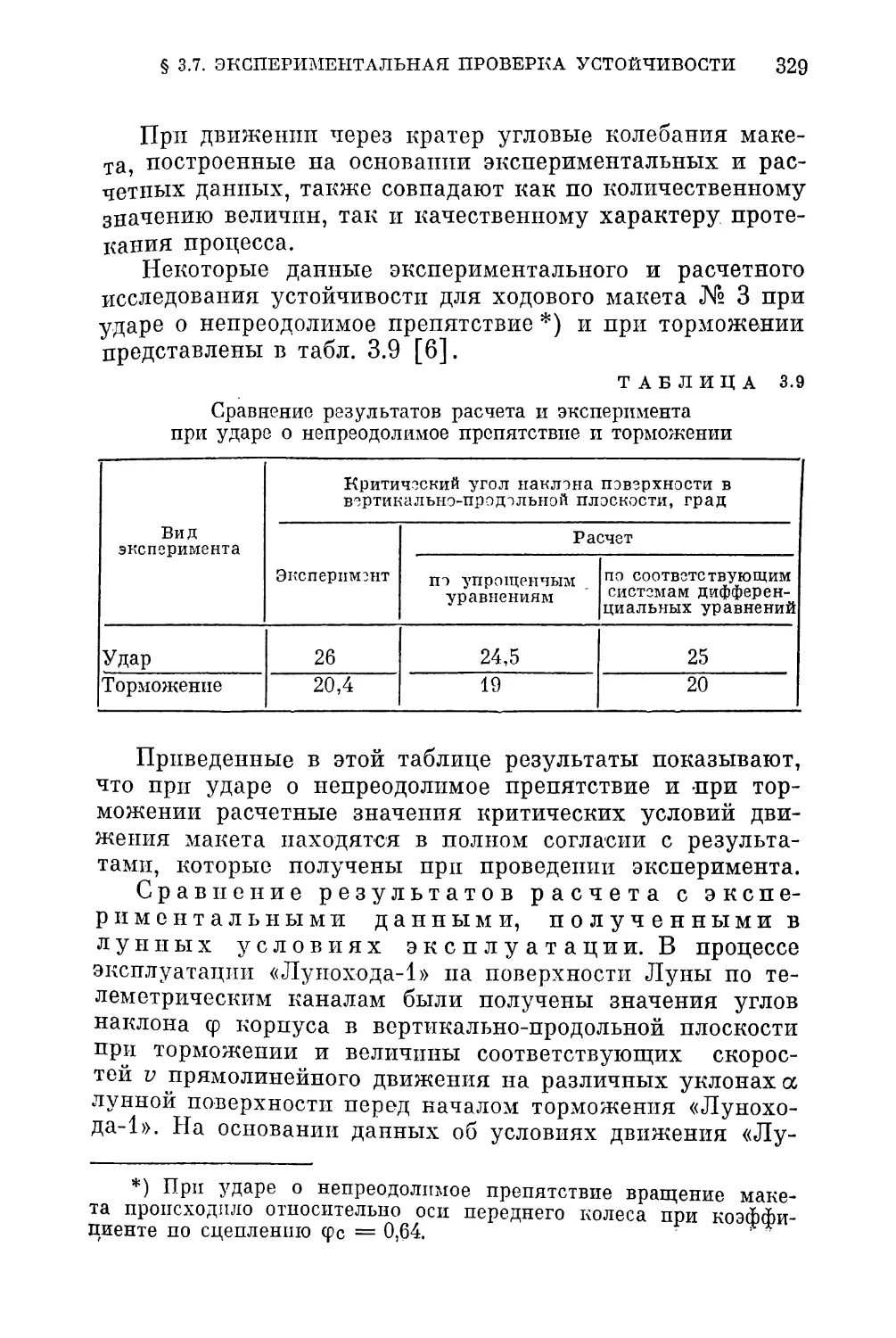
§ 3.7. Экспериментальная проверка расчетных методов
оценки устойчивости.................................321
6 ОГЛАВЛЕНИЕ
Глава 4. Колебания планетохода..........................331
§ 4.1. Методические основы исследования колебаний . . 331
§ 4.2. Колебания планетохода в вертикальных плоскостях 355
§ 4.3. Определение деформаций системы подрессоривания
при преодолении препятствий..........................373
§ 4.4. Динамическая нагружснность элементов ходовой
части при движении по неровностям .... 390
§ 4.5. Плавность хода . . . 420
Литература . . . . f 434
ПРЕДИСЛОВИЕ
В советской программе изучения планет значитель-
ная роль отводится автоматическим станциям. Среди них
особое место занимают аппараты, предназначенные для
исследования поверхности планет контактными методами.
Со времени открытия Советским Союзом в 1957 г. кос-
мической эры запуском первого в мире искусственного
спутника Земли в этом направлении имеются большие
достижения: посадка автоматических станций в различ-
ных районах Лупы, доставка образцов лунного грунта на
Землю, снятие панорам поверхности Венеры.
Новый этап в изучении поверхности планет был отк-
рыт Советским Союзом в 1970 г. доставкой на поверх-
ность Луны передвижной автоматической лаборатории
«Луиоход-1».
Важной вехой в исследовании космоса явилась высад-
ка космонавтов на поверхность Луны по американской
программе «Аполлон».
Можно полагать, что будущее в изучении поверхности
планет непременно связано с планетоходами. А их необ-
ходимо уметь рассчитывать, проектировать, испытывать
и эксплуатировать.
Планетоход — это транспортная машина, и многое из
того, чем располагает теория наземных транспортных
машин, может быть использовано и для планетоходов.
Однако специфичность задач и особенности условий
работы планетоходов приводят к необходимости развития
и разработки соответствующих разделов теории движе-
ния этих машин. Основными направлениями, требую-
щими в первую очередь создания разработанной теории,
являются, на наш взгляд, управление движением, про-
ходимость и динамика планетохода.
В предлагаемой книге излагаются основы динамики
планетохода, причем рассматриваются не все возможные
8
ПРЕДИСЛОВИЕ
динамические процессы, возникающие при его работе,
а лишь динамика движения. В первую очередь рас-
смотрены те вопросы, которые связаны с взаимодействи-
ем планетохода с поверхностью движения и которые
определяют эффективность и надежность выполнения
планетоходом своей главной, наиболее характерной для
него функции — перемещения из одной точки планеты
в другую.
В книге изложены методы и необходимый математи-
ческий аппарат для определения внешних воздействий,
исследования динамических процессов планетохода в це-
лом и в его системах, определения основных факторов,
влияющих на его подвижность, а также параметров,
которые могут иметь значение для работы аппаратуры и
некопэрых систем, устанавливаемых на планетоходах.
Содержание книги служит дальнейшим развитием теории
наземных транспортных машин.
Мы полагаем, что книга будет полезна специалистам,
занятым в области расчета, проектирования, эксплуата-
ции космических аппаратов и в других смежных
областях.
Первая глава книги написана И. С. Болховитиновым,
вторая — А. Л. Кемурджианом и М. И. Маленковым,
третья — Е. В. Авотиным и А. Л. Кемурджианом, в чет-
вертой главе §§ 4.1 и 4.5 — Ф. П. Шпаком, § 4.3 —
Е. В. Авотиным и А. Л. Кемурджианом, §§ 4.2 и 4.4—
Ф. П. Шпаком и Е. В. Авотиным.
Авторы считают своим долгом выразить благодар-
ность Я. Е. Фаробину, взявшему на себя труд ознако-
миться с рукописью и сделавшему ряд ценных замечаний.
Академик Б. Н. Петров
Профессор А. Л. Кемурджиан
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
В — ширина колеи,
С — статический дорожный просвет,
D — динамический фактор планетохода,
Z)K — диаметр кратера,
— усилие в подвеске, обусловленное упругой составляющей,
Fa — сила сопротивления амортизатора,
Н — высота центра тяжести планетохода,
Ян — высота (глубина) неровности,
/х, Jy — момент инерции подрессоренной части относительно
осей X и У соответственно,
Jz — момент инерции планетохода относительно оси Z,
Лх, 1пу — момент инерции планетохода относительно продоль-
ной и поперечной осей опрокидывания соответственно,
3? — расстояние между осями крайних колес (база плането-
хода),
£н — длина неровности,
М — масса планетохода,
Мп — масса подрессоренной части,
Мс — момент сопротивления повороту планетохода,
Мд — электромагнитный крутящий момент на валу дви-
гателя,
/V —число неровностей, приходящееся на единицу площади,
Рк — сила тяги колеса,
Pf — сила сопротивления движению,
Pi — равнодействующая всех сил, действующих на колесо со
стороны планетохода,
Ry — сила сопротивления боковому скольжению,
R — радиус поворота планетохода,
Rz — нормальная реакция опорной поверхности,
Ъ — коэффициент демпфирования подвески,
с — приведенная жесткость подвески,
f — коэффициент сопротивления движению,
g — ускорение свободного падения,
i — индекс, указывающий порядковый номер колеса,
li — проекция на ось X отрезка от центра тяжести планетохо-
да до оси i-ro колеса,
— проекция на ось X отрезка от центра тяжести до оси
качения рычагов подвески i-ro колеса,
гр — плечо рычагов подвески,
гк — радиус качения колеса,
s — коэффициент продольного скольжения,
10
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Sj — длина трассы,
t — время,
Мр, ик — передаточное число редуктора и коробки передач со-
ответственно,
v — скорость движения планетохода,
vyi — поступательная скорость колеса в плоскости дви-
жения и проекции этой скорости на оси X и У соответственно,
а0 — угол наклона опорной поверхности в направлении макси-
мального подъема,
Yi — угол между осью X и вектором Vi,
vN—положительная константа,
Оо — коэффициент учета вращающихся масс,
б г — высота неровности под i-м колесом,
ц — коэффициенты полезного действия,
0 — курсовой угол,
ц — коэффициент сопротивления боковому скольжению,
Рх, Ру, Pz — радиус инерции относительно осей X, Y и Z соот-
ветственно,
<р — угловое перемещение подрессоренной части относительно
поперечной оси,
ср с — коэффициент сцепления движителя с грунтом,
ф — угловое перемещение подрессоренной части относительно
продольной оси,
со — частота периодического процесса,
А — деформация подвески,
Ак — деформация обода колеса.
ВВЕДЕНИЕ
Планетоход, будь это луноход, марсоход и т. п.— это
транспортная машина и, естественно, создание его связа-
но с развитием теории наземных транспортных машин.
Очевидно, что в планетоходе, как и в любом тран-
спортном средстве, должны гармонически сочетаться его
основные эксплуатационные качества — проходимость и
грузоподъемность, управляемость и надежность, скорость
движения и экономичность. В зависимости от назначения
планетохода отдельные его качества приобретают домини-
рующее значение, но в целом возможности планетохода
характеризуются двумя факторами: пространственными,
заключающимися в способности обследовать возможно
большую площадь поверхности и преодолевать труднопро-
ходимые участки, и временными, заключающимися в сок-
ращении времени па выполнение этих операций.
Таким образом, основное свойство транспортных ма-
шин — подвижность — сохраняет свое значение и для
оценки планетоходов. При этом традиционная формули-
ровка подвижности —. способность машины преодолевать
заданное расстояние за конечное время — должна быть
дополнена условием наименьших энергетических затрат,
так как ограниченность веса и габаритов планетоходов
при дефиците источников энергии ставит подвижность
планетохода в прямую зависимость от степени расхода
энергии на движение.
Среди специфических особенностей, влияющих на под-
вижность, существенной является проблема дистанцион-
ного и автономного управления планетоходом.
Динамические аспекты движения планетохода во мно-
гом определяют уровень его подвижности. Тяговая ди-
намика при прямолинейном движении и повороте, устой-
чивость при преодолении неоднородностей рельефа и
торможении, колебания корпуса при движении по неров-
12
ВВЕДЕНИЕ
ной поверхности — от всего этого зависит скорость движе-
ния, работоспособность и возможность маневрирования в
естественных условиях.
Динамика планетохода является новым разделом нау-
ки о движении транспортных средств и базируется на
работах Е. А. Чудакова, Г. В. Зимелева, А. С. Антонова
и др.— по тяговой динамике, Я. М. Певзнера, Н. А. За-
бавникова, А. С. Литвинова и др.— по устойчивости дви-
жения, Р. В. Ротенберга, И. Г. Пархиловского, А. А. Си-
лаева и др.— по колебаниям и плавности хода.
Динамика планетохода при кажущейся общности с
динамикой наземных транспортных машин имеет свои
особенности, связанные как со спецификой условий их
функционирования, так и с особенностями конструкций,
зависящих от возможностей средств доставки на планету.
Важнейшим фактором условий эксплуатации плането-
хода является отличие гравитационного поля от земного.
Для лунохода, в частности, это связано с тем, что при
сохранении массы подвижного аппарата неизменной
сцепной вес уменьшается примерно в 6 раз, что весьма
существенно при разгоне, торможении и преодолении
препятствий. Колебания лунохода на неровностях таят
в себе опасность не только ухудшения функционирования
его систем, но и могут привести к потере управляемости
лунохода из-за прерываний связи с Землей, вызванных
колебаниями остронаправленной антенны.
Окружающая атмосфера, состав ее и давление — это
второй существенный фактор. В частности, лунный ва-
куум оказывает значительное влияние на характер тре-
ния в механизмах лунохода, на величину энергетических
потерь (при отсутствии надлежащих мер в узлах трения
могут возникнуть явления схватывания), и это, в свою
очередь, сказывается на тяговых свойствах машины.
На тяговую динамику планетохода, особенно в случае
многоколесной машины со встроенными тяговыми элект-
родвигателями, существенное влияние могут оказать
также температурные условия. Например, для лунохода —
это резкие перемены температуры в течение лунных су-
ток, особенности условий теплообмена, связанные с от-
сутствием атмосферы, что может привести к значитель-
ной разнице температур освещенной и затененной сторон
лунохода.
ВВЕДЕНИЕ
13
Немаловажным обстоятельством, оказывающим влия-
ние на динамику планетоходов, является состояние и
характер поверхности планеты: наличие поверхностного
слоя слабого грунта с низкой несущей способностью на
достаточно сложном рельефе и в то же время участков
с выходом твердых пород.
При пострении моделей поверхности планетоходов бы-
ли использованы работы К. П. Флоренского, А. С. Бази-
левского, В. С.\ Троицкого и др.
Неопределенность условий движения является важной
особенностью процесса создания планетоходов, оптималь-
ных по динамическим критериям подвижности. Если в
земных условиях трасса эксплуатации транспортных ма-
шин может быть исследована достаточно точными инстру-
ментами и смоделирована, то информация о поверхности
планеты зачастую носит статистический характер, и лю-
бая конкретная реализация может быть построена лишь
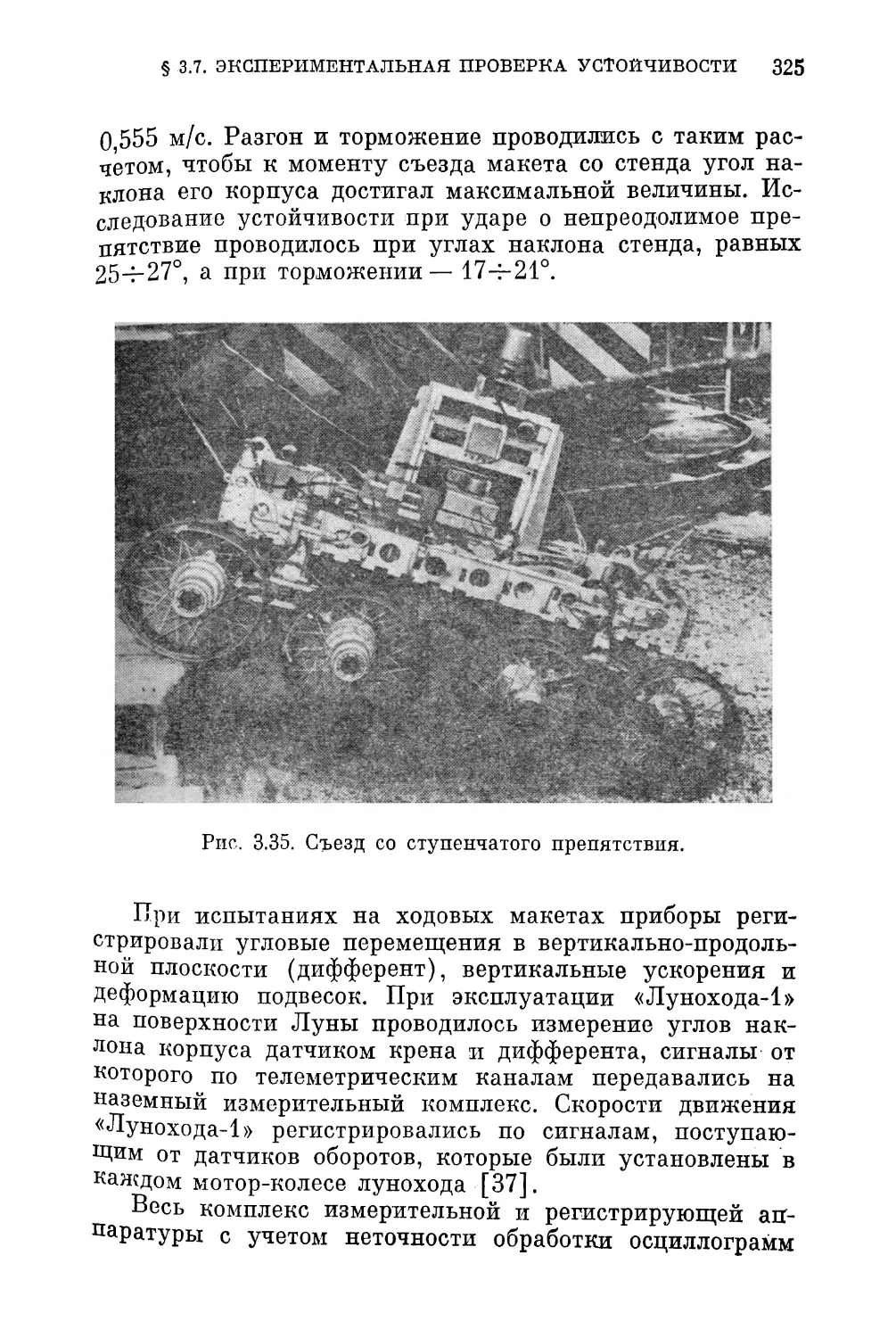
с определенной доверительной вероятностью. Это, в свою
очередь, определяет преимущественное применение ста-
тистических методов исследования динамики планетохо-
дов перед детерминистическими, а представление моделей
поверхности должно развиваться в направлении построе-
ния статистических моделей.
Формированию таких моделей в значительной мере
способствовало развитие статистических методов исследо-
вания систем, представленное в работах Б. Р. Левина,
В. С. Пугачева, В. В. Солодовникова и др. Планетоход
не может рассматриваться изолированно от условий дви-
жения на местности, поэтому в книге рассматриваются
также характеристики рельефа и способы их определе-
ния, при этом характеристики рельефа и систематизация
сведений о нем даны в зависимости от поведения машины
в этих условиях.
В соответствии с этим книга содержит четыре раздела:
рельеф планет, тяговая динамика планетохода, устойчи-
вость планетохода при движении, колебания планетохода.
ГЛАВА 1
ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
Одним из основных факторов, определяющих условия
эксплуатации планетоходов, является рельеф поверхности
планет, характеристики которого существенно влияют на
конструкцию планетохода и методы его расчета. Для ре-
шения задач динамики движения целесообразно рельеф
рассматривать в виде моделей различных по геометрии
неоднородностей поверхности, являющихся причиной тех
или иных динамических процессов в системе «плането-
ход — поверхность».
В зависимости от методов решения динамических за-
дач взаимодействия планетохода с поверхностью рельеф
планеты может быть представлен с помощью математи-
ческих моделей двух типов: детерминированных или
стохастических.
Детерминированные модели, представляющие собой
математическое описание неоднородностей рельефа в виде
детерминированных функциональных зависимостей вер-
тикальных координат поверхности от горизонтальных
измерений, сориентированных относительно планетохода,
применяются для расчета и экспериментальных проверок
граничных значений параметров подвижности плането-
хода: предельной тяги, углов устойчивости, максимальных
скоростей движения без пробоя подвески и т. д.
Стохастические модели, описывающие рельеф в виде
случайных функций вертикальных координат поверхности
от горизонтальных измерений, используются для опре-
деления вероятных значений эксплуатационных показа-
телей планетоходов: средних скоростей движения, энер-
гозатрат, ресурсов и т. д.
Специфика изучения и описания рельефа как одного
из факторов, формирующих динамические воздействия
§ kl. ДЕТЕРМИНИРОВАННОЕ ПРЕДСТАВЛЕНИЕ РЕЛЬЕФА 15
на шассд планетохода, определяет характер классифи-
кации его\образований. В основу классификации образо-
ваний рельефа планет при исследовании динамики пла-
нетоходов могут быть положены факторы, определяющие
подвижностд планетохода на планете. К числу их отно-
сятся: тягово-динамическая характеристика, устойчивость
движения, колебания, плавность хода и динамическая
нагруженностй узлов шасси.
Учитывая, ^то динамические свойства моделей пла-
нетохода, применяемые при исследовании его подвижности
по тому или инбму фактору, существенно отличаются как
по физической природе явлений, так и по частотным ха-
рактеристикам моделей, рельеф следует классифицировать
как описательно — по типу характерных участков по-
верхности (равнинная, бугристая, кратерно-холмистая,
непреодолимая), так и количественно — по геометриче-
ским размерам преодолеваемых планетоходом неоднород-
ностей. При этом количественные критерии зависят
от ходовых качеств планетохода, что неудобно для полу-
чения унифицированных характеристик рельефа.
Во избежание этого неудобства целесообразно клас-
сифицировать поверхность относительно эталонного об-
разца планетохода, а в качестве последнего можно вы-
брать «Луноход-1».
Для проведения такой классификации необходимо
знать количественные характеристики основных элемен-
тов рельефа (их формы и размеры). Их можно получить
в результате обработки фотографий рельефа, позволяю-
щих определить плотности распределения числа неров-
ностей фиксированных размеров на единицу площади,
законы рельефообразования, взаимосвязи различных ви-
дов рельефа и т. д.
§ 1.1. Детерминированное представление рельефа
1.1.1. Качественная модель поверхностей Луны и
Марса. Любая реализация рельефа может быть представ-
лена набором неровностей разных форм и размеров. Среди
этих неровностей наибольший интерес представляют те,
которые, с одной стороны, являются типичными образо-
ваниями рельефа, с другой стороны, наиболее существенно
воздействуют на шасси, движущееся по ним,
46 гл. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
На основании анализа профильной проходимости мож-
но выбрать типовые формы неровностей разных видов,
которые определяются, с одной стороны, из уровня наи-
более типичного и опасного воздействия iHa шасси,
с другой — из условия удобной формализации с целью
проведения простейших расчетов. /
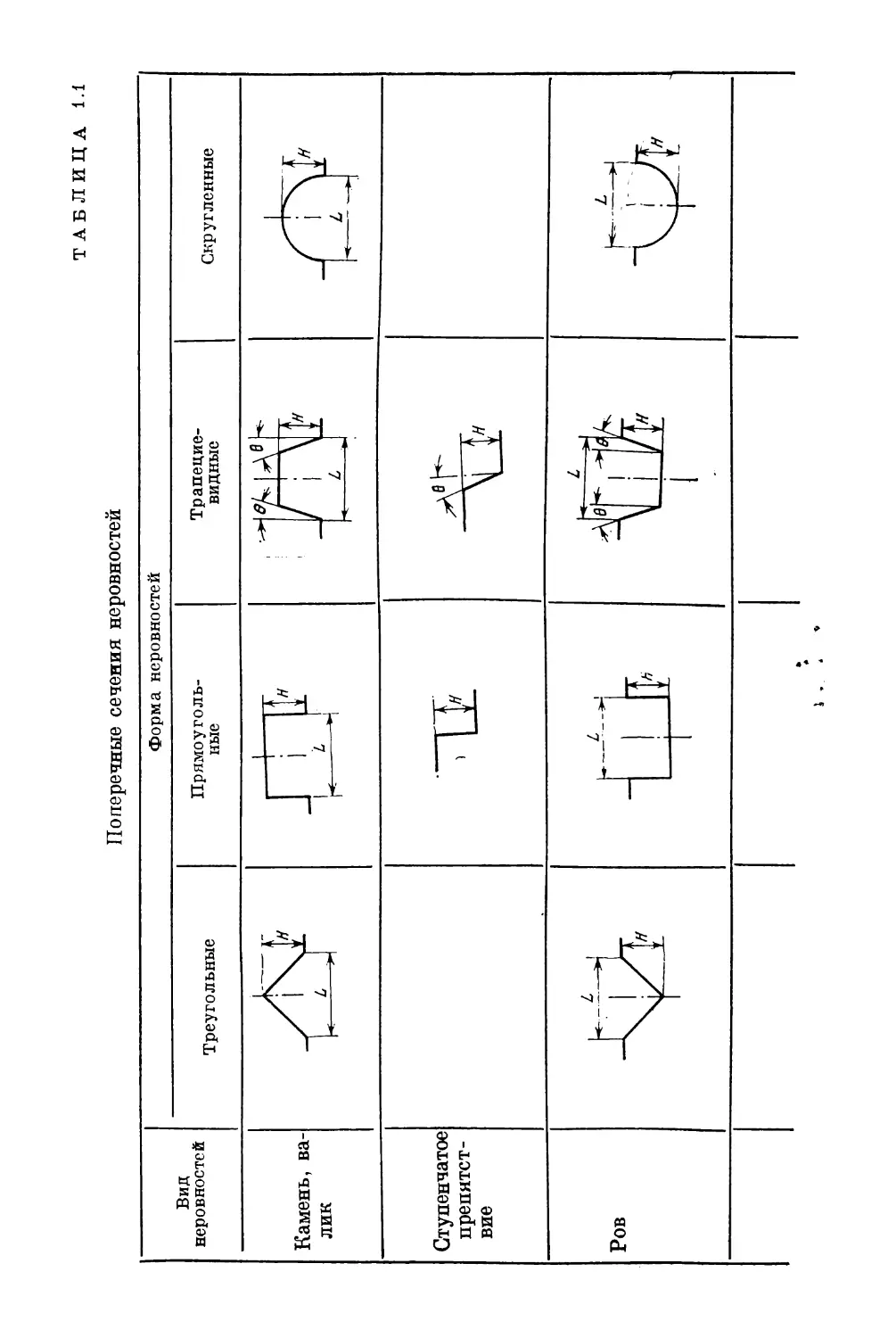
В качестве основных видов стаидратных неровностей
ниже рассматриваются следующие: камеи^ призматиче-
ской или цилиндрической формы с боковом ребром (на-
правляющей), расположенным перпендикулярно направ-
лению движения, и с шириной, равной длине, валик
неограниченной длины, ступенчатая неровность неогра-
ниченной длины, ров неограниченной длины, кратер в
плане круговой формы, холмы в плане круговой формы.
Форма поперечного сечения указанных неровностей
показана в табл. 1.1.
Кроме рассмотренных неровностей, представляет ин-
терес еще ряд характерных препятствий, например, си-
нусоида с длиной волны Lc и высотой HQ, трещина ши--
риной Z/T, представляющая собой бездонный прямостенный
ров, прямостенный обрыв или стенка (это ступенчатое
препятствие с высотой Н= оо), постоянный уклон мак-
симального подъема ао.
Каждое из приведенных видов и форм препятствий
действует на шасси по-разному, и важно правильно вы-
брать воздействующее препятствие для определения
критических реакций элементов шасси. Треугольный ка-
мень или валик опасен для планетохода из-за возможности
«заякорения» его. Наиболее трудными для преодоления
являются прямостенные препятствия. Камни, валики,
ступенчатые препятствия и рвы с наклонными стенками
опасны при ударе колесом с балансирной подвеской,
когда направление балансира перпендикулярно наклон-
ной стенке препятствия. Синусоидальные неровности
можно использовать в модели для исследования резонанс-
ных колебаний. При эксплуатации они могут встречаться
в районах ветровых наносов грунта. Трещина и постоян-
ный уклон представляют интерес для оценки профильной
проходимости и устойчивости движения, а также для
решения задач тяговой динамики планетохода.
Прямостенный обрыв или стенка относятся к катего-
рии непреодолимых препятствий,
§ 1.1, ДЕТЕРМИНИРОВАННОЕ ПРЕДСТАВЛЕНИЕ РЕЛЬЕФА 17
Решая задачи о преодолении стандартных препят-
ствий, необходимо учесть, что линия обкатки препятствия
колесом будет отличаться от формы сечения неровности,
так как представляет собой траекторию оси колеса, об-
катывающего неровность. Представление рельефа в виде
единичных стандартных неровностей является некоторой
идеализацией. Для получения реальной картины необхо-
димы реализации поверхности изучаемых объектов.
Качественная модель поверхности Лупы может быть
получена в результате изучения отдельных ее районов п
их статистического анализа в приложении к задачам дви-
жения луноходов по поверхности.
Луна представляет собой кратсрпо-холмистую поверх-
ность, насыщенную каменистыми включениями. Разли-
чают равнинные (морские) и гористые (материковые)
районы. Материковые районы представляют собой труд-
нопроходимые и непроходимые для планетоходов горные
массивы, высота отдельных вершин достигает 10 км.
На Земле аналоги подобных массивов можно найти в
районах свежих вулканических образований.
Одним из специфических видов лунных рельефных
образований являются кратеры. Свежеобразованные ма-
лые кратеры имеют обычно форму, приближающуюся к
сферической; большие кратеры, как правило, плоскодон-
ные, но бывают кратеры конической, цилиндрической и
других форм. Форма кратеров «старшего возраста» в ре-
зультате эрозии сглаживается и деформируется.
Наряду с кратерами поверхность Лупы включает и
холмистые образования, форма которых в большинстве
случаев скругленная, куполообразная или напоминает
длинный вал, часто изогнутый в виде подковы — остатки
кратерного обрамляющего вала.
Существование камней на Луне, в основном, связано
с кратерообразоваписм. Наиболее насыщены камнями го-
ристые районы; в морских районах скопления камней
наблюдаются вблизи свежих кратеров и внутри их )[56].
Изучение поверхности Марса с помощью космических
кораблей показало, что все характерные элементы рель-
ефных образований на Луне присущи марсианским рель-
ефным образованиям. Но если горные районы на Луне
занимают 3/4 всей поверхности, то на Марсе они
занимают несколько меньшую площадь (2/3 всей поверх
2 Е. В. Апотин и др.
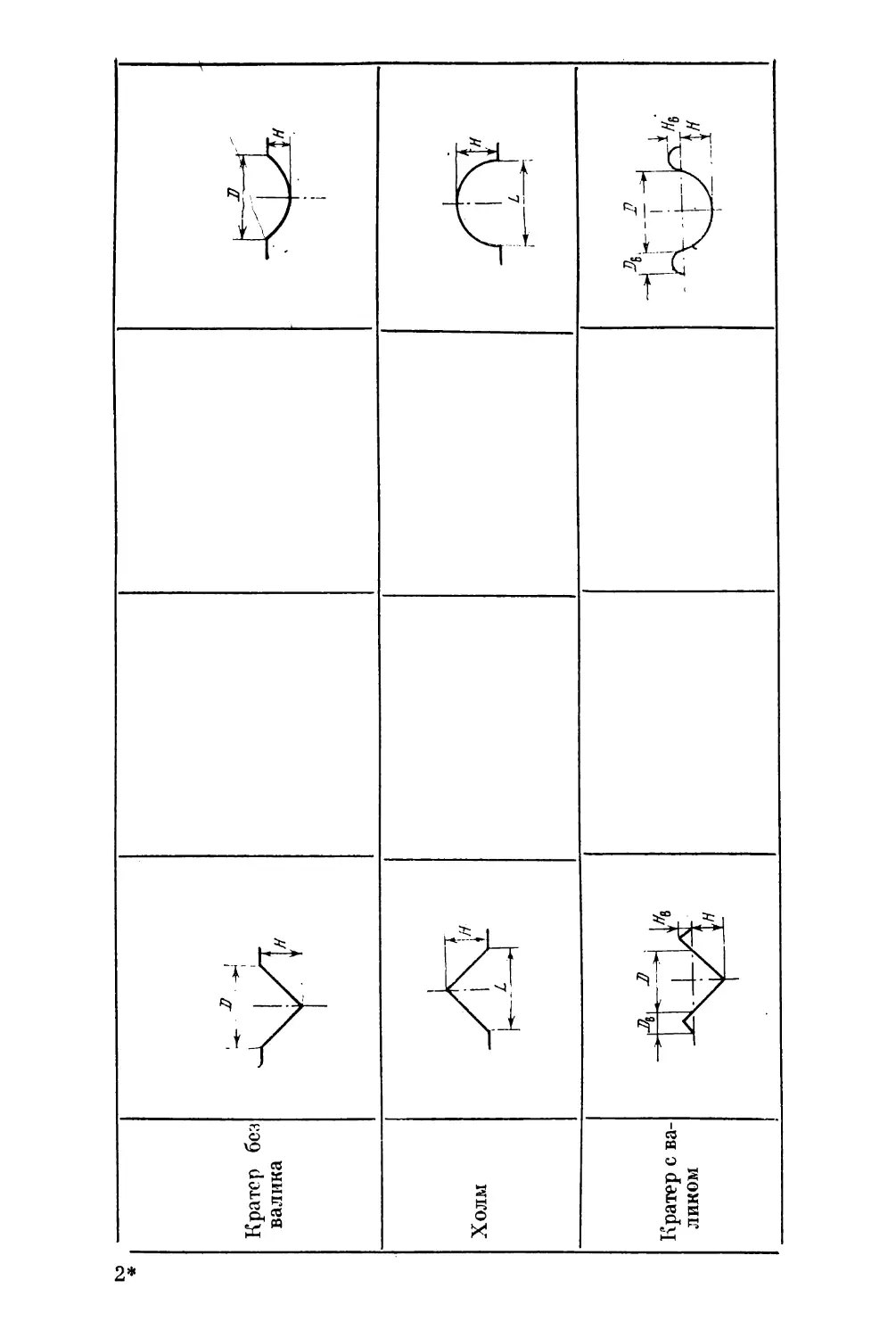
Поперечные сечения неровностей
ТАБЛИЦА 1.1
Вид неровностей Форма неровностей
Треугольные Прямоуголь- ные Трапецие- видные Скругленные
Камень, ва- лик J ! L 4 г- 1' ji' _/i\t И L г
Ступенчатое препятст- вие “О
Ров k L >1 L_^ И и- =t; i
Кратер без валика л - 1
Холм У—Г _г у . .
Кратер с ва- ликом V А. ц 'L н‘«. угу
20
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
ности). Применительно к Марсу модель рельефа Луны
должна быть дополнена рядом особенностей марсиан-
ского рельефа [34, 72, 74]. Рельеф па Марсе более сгла-
жен и более подвижен. Это объясняется наличием силь-
ных ветров, которые, несмотря на большую разреженность
атмосферы (0,01 атм), оказывают влияние на рельеф.
Ветровые образования аналогичны ветровым наносам
земных пустынь. Специфическими образованиями марси-
анского рельефа являются каньоны и каналы. Предпола-
гается, что в районах, где есть пыль, многие каналы пе
видны из-за того, что они засыпаны. Наибольшая плот-
ность каналов наблюдается в экваториальных районах,
которые подвержены интенсивному ветровому воздей-
ствию. Отмечается, что в этом районе почти полностью
отсутствует пылевой покров.
Из других специфических образований следует от-
метить ледяные полярные шапки, которые, как предпо-
лагают, состоят из углекислоты, а также оригинальные
образования типа обширных плато, поверхность которых
напоминает лавовые хаотические нагромождения. Такова
качественная модель рельефа Луны и Марса. Для пере-
хода к математической модели необходимо знание основ-
ных законов рельефообразования.
1.1.2. Распределение числа неровностей на единицу
площади. Из результатов обработки фотографий кратер-
ной поверхности Луны и Марса вытекает близкая к ли-
нейной зависимость между логарифмами числа неровно-
стей N и их средних размеров, не превышающих LN.
Математическая аппроксимация такой зависимости пред-
ставляется в виде степенного закона
N = CnL^\
или для кратеров:
ND = CND~yN, (1.1)
где CN и — положительные константы, LN — длина
неровности, DK — диаметр кратера, ND — число препят-
ствий размером, большим DK.
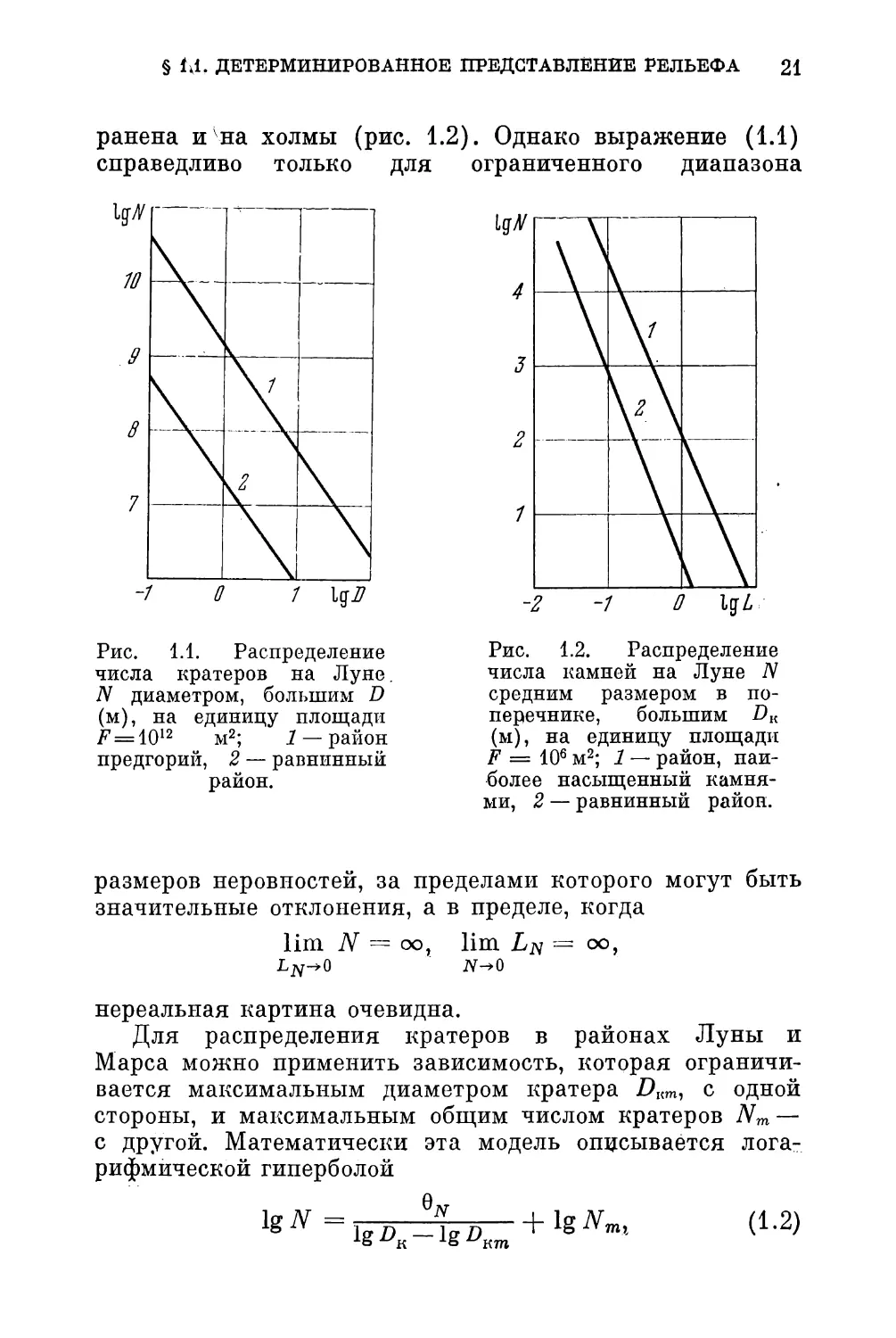
На рис. 1.1 показано графическое представление за-
висимости (1.1). Эта зависимость может быть распрост-
§ 14. ДЕТЕРМИНИРОВАННОЕ ПРЕДСТАВЛЕНИЕ РЕЛЬЕФА 21
ранена и на холмы (рис. 1.2). Однако выражение (1.1)
справедливо только для ограниченного диапазона
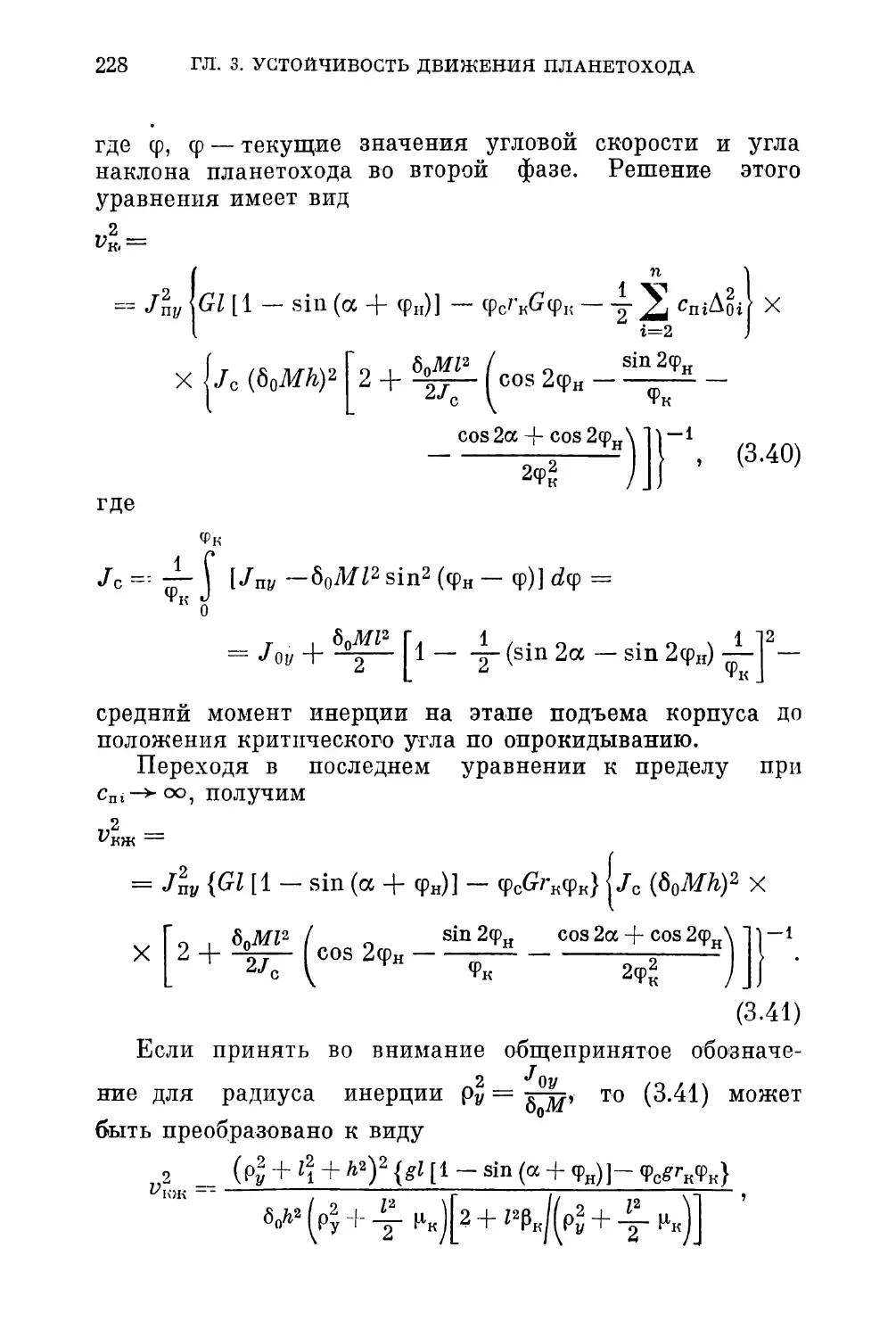
Рис. 1.1. Распределение Рис. 1.2. Распределение
числа кратеров на Луне числа камней на Луне N
N диаметром, большим D средним размером в по-
(м), на единицу площади перечнике, большим DK
F = 1012 м2; 1 — район (м), на единицу ^площади
предгорий, 2 — равнинный F = 106 м2; 1 — район, наи-
район. более насыщенный камня-
ми, 2 — равнинный район.
размеров неровностей, за пределами которого могут быть
значительные отклонения, а в пределе, когда
lini N = оо, lim Lpj — оо,
Ln->0 N-+Q
нереальная картина очевидна.
Для распределения кратеров в районах Луны и
Марса можно применить зависимость, которая ограничи-
вается максимальным диаметром кратера Dnm, с одной
стороны, и максимальным общим числом кратеров Nm —
с другой. Математически эта модель описывается лога-
рифмической гиперболой
(1-2>
22
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
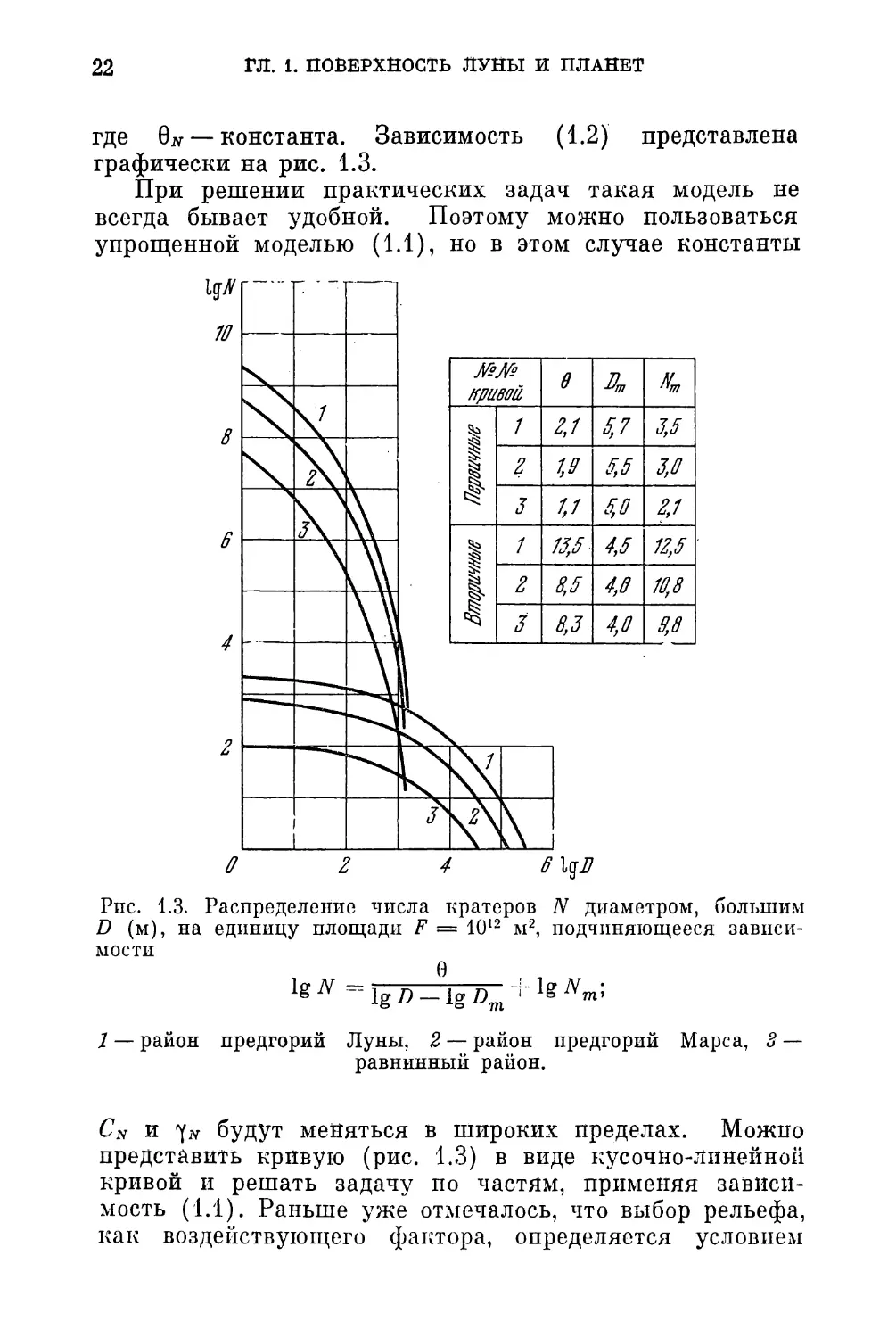
где 0jv— константа. Зависимость (1.2) представлена
графически на рис. 1.3.
При решении практических задач такая модель не
всегда бывает удобной. Поэтому можно пользоваться
упрощенной моделью (1.1), но в этом случае константы
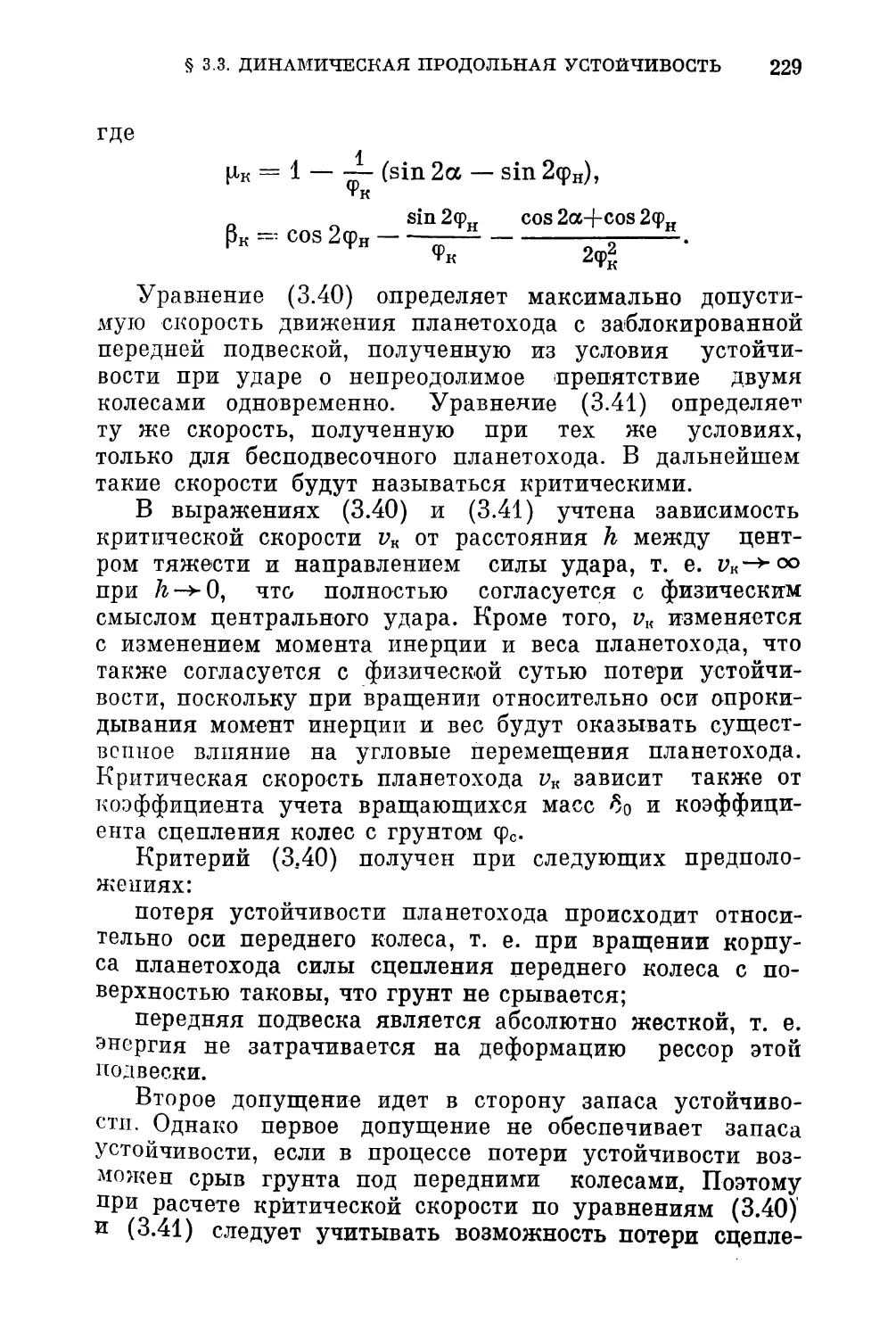
Рис. 1.3. Распределение числа кратеров N диаметром, большим
D (м), на единицу площади F = 1012 м2, подчиняющееся зависи-
мости
О , ,
lg N ~ 1g D — 1g Dm lg Nm>
1 — район предгорий Луны, 2 — район предгорий Марса, 3 —
равнинный район.
CN и будут меняться в широких пределах. Можно
представить кривую (рис. 1.3) в виде кусочно-линейной
кривой и решать задачу по частям, применяя зависи-
мость (1.1). Раньше уже отмечалось, что выбор рельефа,
как воздействующего фактора, определяется условием
§1.1. ДЕТЕРМИНИРОВАННОЕ ПРЕДСТАВЛЕНИЕ РЕЛЬЕФА 23
задачи. Обычно общая задача состоит из частных, в ко-
торых рассматриваются неровности ограниченного диа-
пазона размеров. Для этого диапазона часть кривой
рис. 1.3 может быть заменена прямой, т. е. представлена
выражением (1.1).
При этом по имеющейся зависимости (1.1) при из-
вестном диапазоне учитываемых размеров кратеров
Дс0— Dka нетрудно определить константы CN и для
(1.1). 7,v представляет собой тангенс угла наклона кри-
вой распределения числа неровностей, поэтому
d(lgN)
d(lgDJ = (]gZ)K-]gPi;7n)2 ПРИ D--
2
lg CN = 1g Nd + 1g Dl{.
На рис. 1.3 показано распределение кратеров на Луне
и на Марсе. Надо отметить, что распределение малых
марсианских кратеров диаметром от 1 до 100 м получено
экстраполированием, поэтому достоверность этой части
кривой не высока и, тем не менее, опыт исследования
лунных малых кратеров и сходство законов кратерооб-
разования на Луне и на Марсе позволяет принять пред-
ложенную аппроксимацию. Допустимо предположение,
что верхняя часть кривой распределения на Марсе может
отклоняться от закона (1.1) в сторону уменьшения N
из-за ветровой эрозии.
Таким же законам распределения числа неровностей
N средним размером, большим LN, на единицу площади
подчиняются каменистые и холмистые неровности.
На рис. 1.2 показаны кривые распределения камней на
Луне. Среди возможных форм кратеров преобладают
сферические или параболические формы. Со временем
кратеры осыпаются, формы их сглаживаются, относи-
тельная глубина, характеризуемая отношением глубины
7УК к диаметру Z)K, понижается. Наиболее старые кратеры
разрушены почти полностью.
В картографии планет принято морфологическое раз-
деление кратеров на три основных класса —Л, В и С в
зависимости от их относительной глубины. Для ряда
24
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
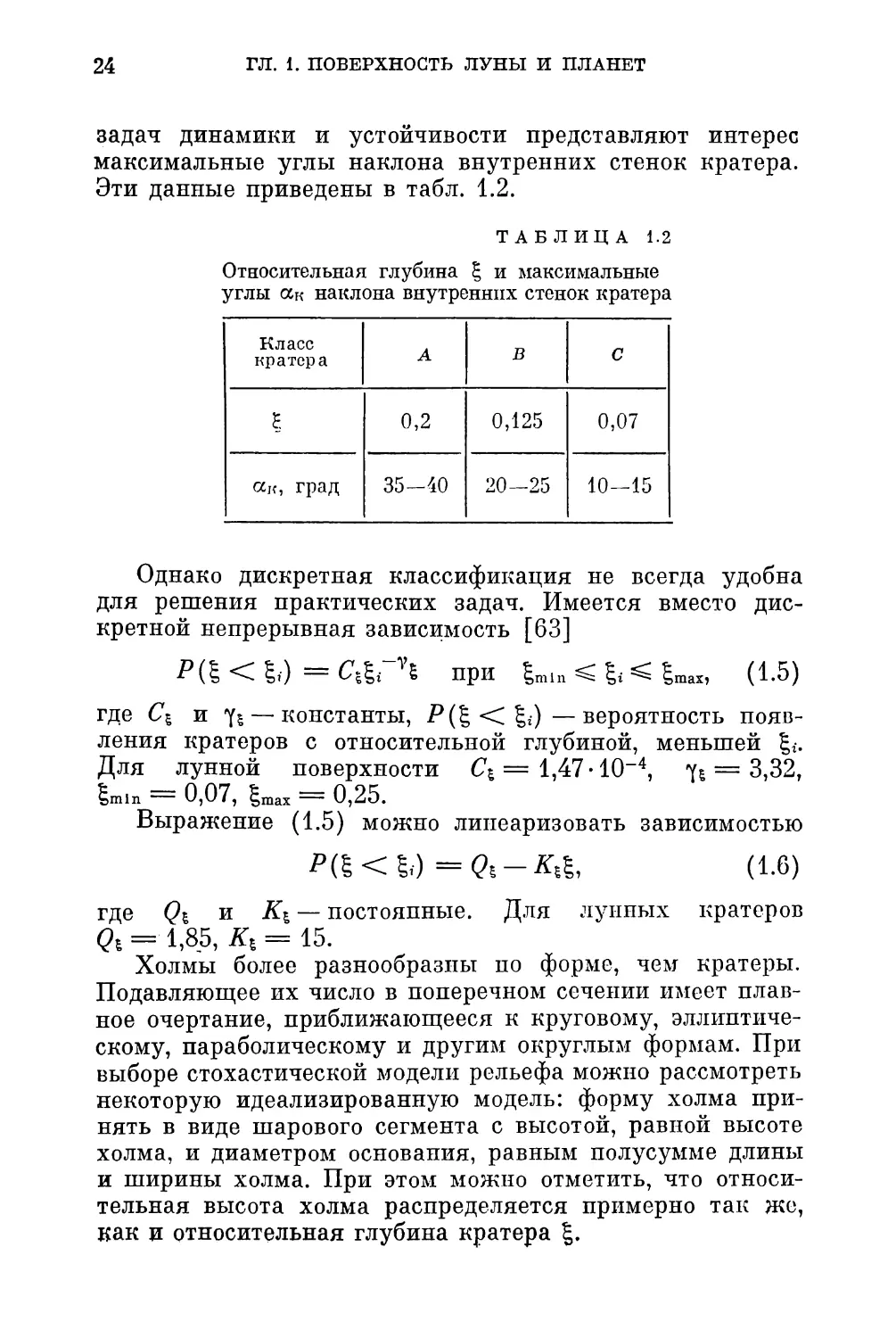
задач динамики и устойчивости представляют интерес
максимальные углы наклона внутренних стенок кратера.
Эти данные приведены в табл. 1.2.
ТАБЛИЦА 1.2
Относительная глубина £ и максимальные
углы ак наклона внутренних стенок кратера
Класс кратера А в С
0,2 0,125 0,07
«к, град 35-40 20-25 10-15
Однако дискретная классификация не всегда удобна
для решения практических задач. Имеется вместо дис-
кретной непрерывная зависимость [63]
Р(В < 5.) = при £mln < < Ux, (1.5)
где и — константы, Р(£ < £г)—вероятность появ-
ления кратеров с относительной глубиной, меньшей £г*.
Для лунной поверхности = 1,47 • 10-4, = 3,32,
gmin = 0,07, gmax = 0,25.
Выражение (1.5) можно линеаризовать зависимостью
Р<Л<Ъ) =Qi-K&, (1.6)
где Qi и — постоянные. Для лунных кратеров
Qi = 1,85, = 15.
Холмы более разнообразны по форме, чем кратеры.
Подавляющее их число в поперечном сечении имеет плав-
ное очертание, приближающееся к круговому, эллиптиче-
скому, параболическому и другим округлым формам. При
выборе стохастической модели рельефа можно рассмотреть
некоторую идеализированную модель: форму холма при-
нять в виде шарового сегмента с высотой, равной высоте
холма, и диаметром основания, равным полусумме длины
и ширины холма. При этом можно отметить, что относи-
тельная высота холма распределяется примерно так же,
как и относительная глубина кратера
§ 1.2. СТОХАСТИЧЕСКАЯ МОДЕЛЬ РЕЛЬЕФА
25
Форма камней может быть самой разнообразной.
Трудно аппроксимировать среднюю форму камня какой-
либо правильной геометрической фигурой. Можно гово-
рить о средних размерах камня, но не о какой-то опре-
деленной форме его. На одном из характерных камени-
стых вулканических районов на Земле был проведен
обмер камней с целью определения средних относитель-
ных размеров. В результате было установлено, что
относительная высота камня (отношение высоты к сред-
нему поперечному размеру) является некоторой случайной
величиной, хорошо подчиняющейся нормальному закону
распределения, со следующими числовыми характеристи-
ками: математическое ожидание М [£] = 0,54, сред-
неквадратическое отклонение = 0,123. Эти цифры
хорошо согласуются с результатами исследования лунных
каменистых участков [37]. Наблюдаемые разновидности
форм камней на Земле в районе свежих вулканических
образований и камни па Луне в районах проводимых
исследований очепь схожи.
Такова общая модель поверхности Луны и Марса.
Эта модель, хотя и построена по результатам статисти-
ческого анализа, все же не может быть использована
непосредственно для исследования стохастических про-
цессов взаимодействия шасси с рельефом, так как не
является временной моделью, но необходима как мате-
риал для построения стохастической модели поверхности
Луны и планет.
§ 1.2. Стохастическая модель рельефа
При рассмотрении рельефа как случайного процесса
необходимо охарактеризовать его качественно и количе-
ственно: качественно — значит установить степень его
эргодичности и стационарности, количественно — значит
найти основные характеристики этого процесса: функцию
распределения случайных величин, корреляционную
функцию и спектральную плотность.
Указанные статистические характеристики рельефа
могут быть получены разными способами: по результа-
там обработки реализаций поверхности, или, в случае
отсутствия последней, по результатам обработки фото-
графий поверхности планеты.
26
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
1.2.1. Статистические исследования поверхности пла-
нет по результатам обработки реализаций. В данной по-
становке задача решается при наличии реализаций,
процесс построения которых трудоемок и имеет много
способов осуществления. В работах [12] и [16] приво-
дятся некоторые интересные варианты этих способов,
однако большинство из них имеет общий недостаток —
сложность измерительной аппаратуры или большую тру-
доемкость произведения работ по снятию реализаций
рельефа. Вряд ли какой-либо из рассмотренных в этих
работах способов может быть использован для снятия
реализаций на Луне и планетах. Представляет интерес
фотограмметрический способ, хотя он менее точен.
Для получения реализаций рельефа трассы был ис-
пользован достаточно эффективный способ контактного
профилографировапия. Сущность этого способа состоит в
том, что на основании непрерывного измерения текущих
значений углов дифферента, крепа, курса и пройденного
пути планетохода осуществляется построение плана трас-
сы и продольно-вертикального сечения поверхности
трассы.
Координаты плана трассы определяются следующими
зависимостями:
4-|-i = 4 -|- р, (sin 0/I-1-O — sin e;+n),
(1.7)
Ун1 = Vi + Pj (cos 0j+o — cos 0i+ i-o),
где 0 — курсовой угол. Индексы при 0 фиксируют на-
чало и конец безостановочного движения без принуди-
тельного поворота. Индекс «+0» фиксирует момент на-
чала движения, «—О» — момент окончания движения па
отрезке пути р, — радиус кривизны отрезка
траектории, который определяется зависимостью
0Ж_О-9Я.О’
(1-8)
j — порядковый номер фиксированной точки трассы.
Координаты рельефа продольного сечения трассы опре-
§ 1.2. СТОХАСТИЧЕСКАЯ МОДЕЛЬ РЕЛЬЕФА
27
деляются выражениями
8 у
щ = I cos ср* ds ж S cos cpj As » sr,
b 5=i
(1.9)
f*
sin (p* ds ж У, sin <pj As 2 TjAs,
о 5=1 5=1
где ср — угол дифферента машины относительно горизон-
тальной плоскости.
По выражению (1.9) графически строится реализа-
ция, па которой визуально отмечаются районы располо-
жения кратеров и холмов. Продольное сечение разделя-
ется горизонталями на высотные уровни, пересечение
этих горизонталей с рельефом отмечается на плане
трассы, построенном по зависимости (1.7). Затем гори-
зонтали одинакового значения в районе явно выраженных
кратеров замыкаются по концентрическим окружностям
или приближающимся к ним кривым. Остальные гори-
зонтали экстраполируются по результатам анализа
околократерных горизонталей. Для облегчения такой
интерполяции определяется угол между фиксированной
горизонталью, пересекающей трассу, и направлением
трассы
(’-‘о)
т тер
где г|)* — угол крена корпуса планетохода относительно
горизонтальной плоскости, а индекс «ср» означает сред-
нюю величину.
При построении реализации рельефа изложенным
способом может накопиться ошибка, обусловленная ря-
дом факторов. Погрешность от замены coscp на единицу
в уравнении (1.9) незначительна, и сю можно пренебречь.
Более существенной является погрешность от буксования,
сползания, от возможного смещения центра тяжести и
наличия постоянного дополнительного угла дифферента,
например, при открытии солнечных батарей на «Луно-
ходе-1». С целью исправления этой систематической
ошибки необходимым условием является замыкание трас-
сы в какой-либо точке 4. При расхождении высот вы-
28
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
численной и истинной полученная разница \zA делится
на длину замкнутой трассы sA. В результате находится
поправка
Дя А
Дф* = —(1.11)
SA
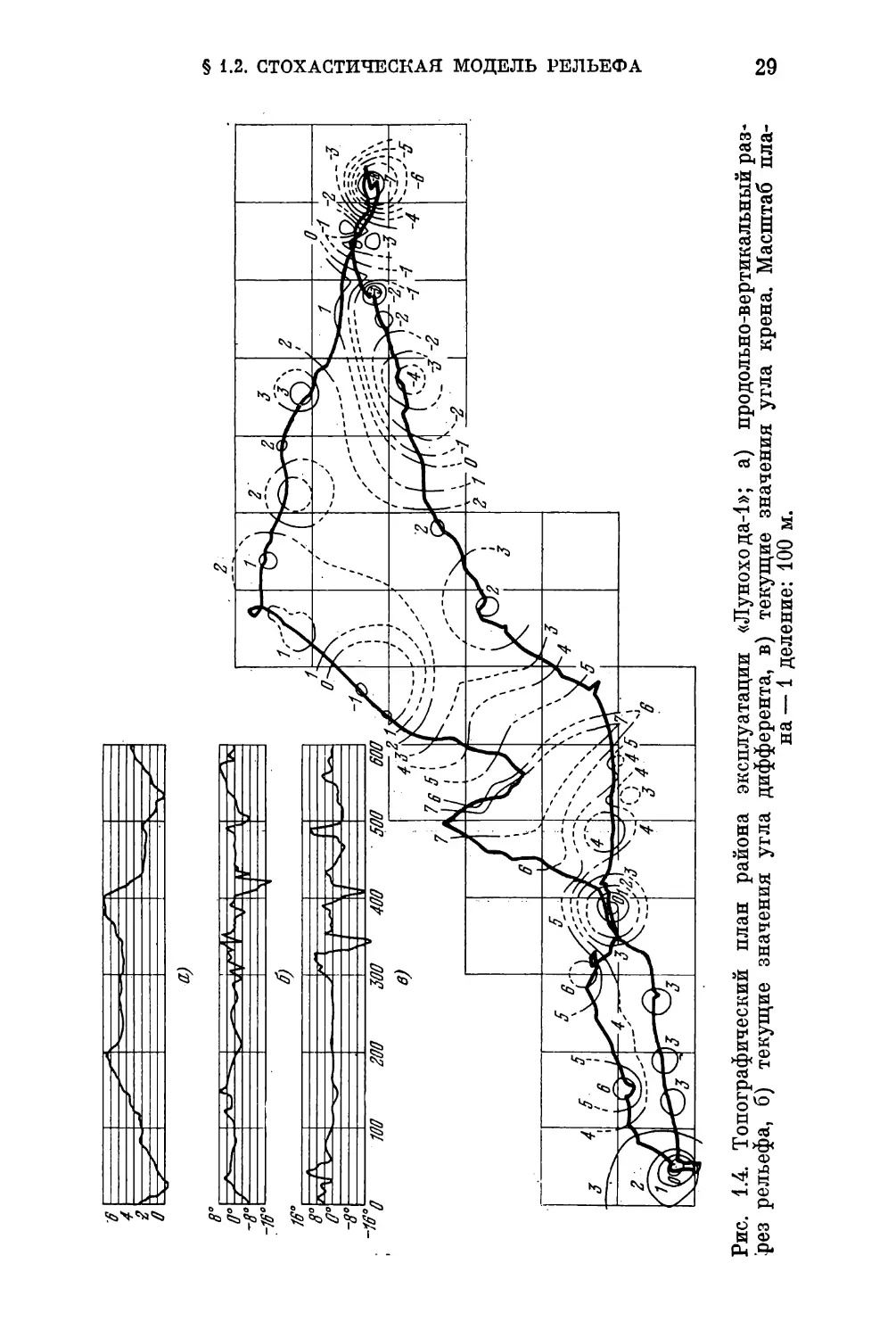
На рис. 1.4 показан продольно-вертикальный разрез
поверхности и план района Моря Дождей, построенный
изложенным способом с помощью «Лунохода-1» [38].
Этот способ достаточно точен для регистрации круп-
ных неровностей и практически неприменим для изуче-
ния неровностей, длина которых меньше базы шасси
планетохода. Более точной является модернизация из-
ложенного способа, сущность которого заключается в том,
что полная реализация рельефа складывается из суммы
реализации, полученной интегрированием углов диффе-
рента, и реализации, полученной при перемещении колеса
относительно корпуса. При этом уравнение сечения
трассы запишется в виде
= z + Д{ + Ц tg Ф* ± tg 1])* « z + Д{ + Цу* ± ip,
(1-12)
где бг — высота неровности под i-м колесом, i — номер
колеса, h — проекция на ось х расстояния от центра тя-
жести планетохода до оси j-ro колеса, Д — деформация
подвески, В — ширина колеи, причем знак плюс берется,
если рассматривается колесо левого борта, а знак ми-
нус — правого.
Для уменьшения погрешности целесообразно изме-
рять величину Д для среднего колеса, наименее подвер-
женного отрыву от грунта.
Погрешности, рассмотренные при изложении первого
способа профилографирования, присущи и этому способу.
Поэтому необходимо при построении реализации замы-
кать трассу и вводить соответствующую коррекцию. Рас-
смотренный способ интересен еще и тем, что позволяет
на одной трассе получить две реализации — по правому
и левому борту, а затем оценить их взаимную корреля-
цию. При исследовании взаимной корреляции текущей
высоты неровностей б(£) с правого и левого бортов было
замечено,, что..она практически, отсутствует, для. неровна-
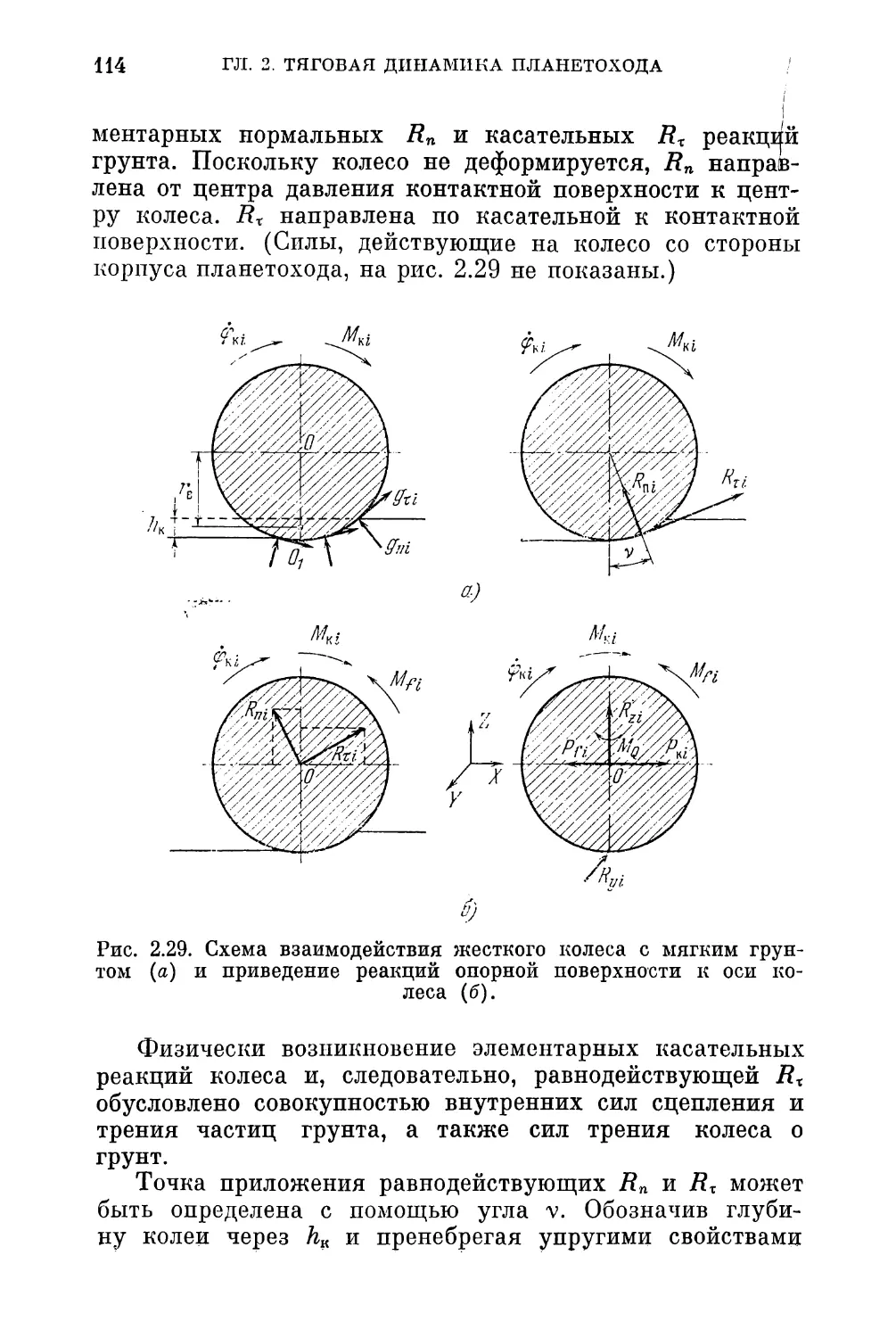
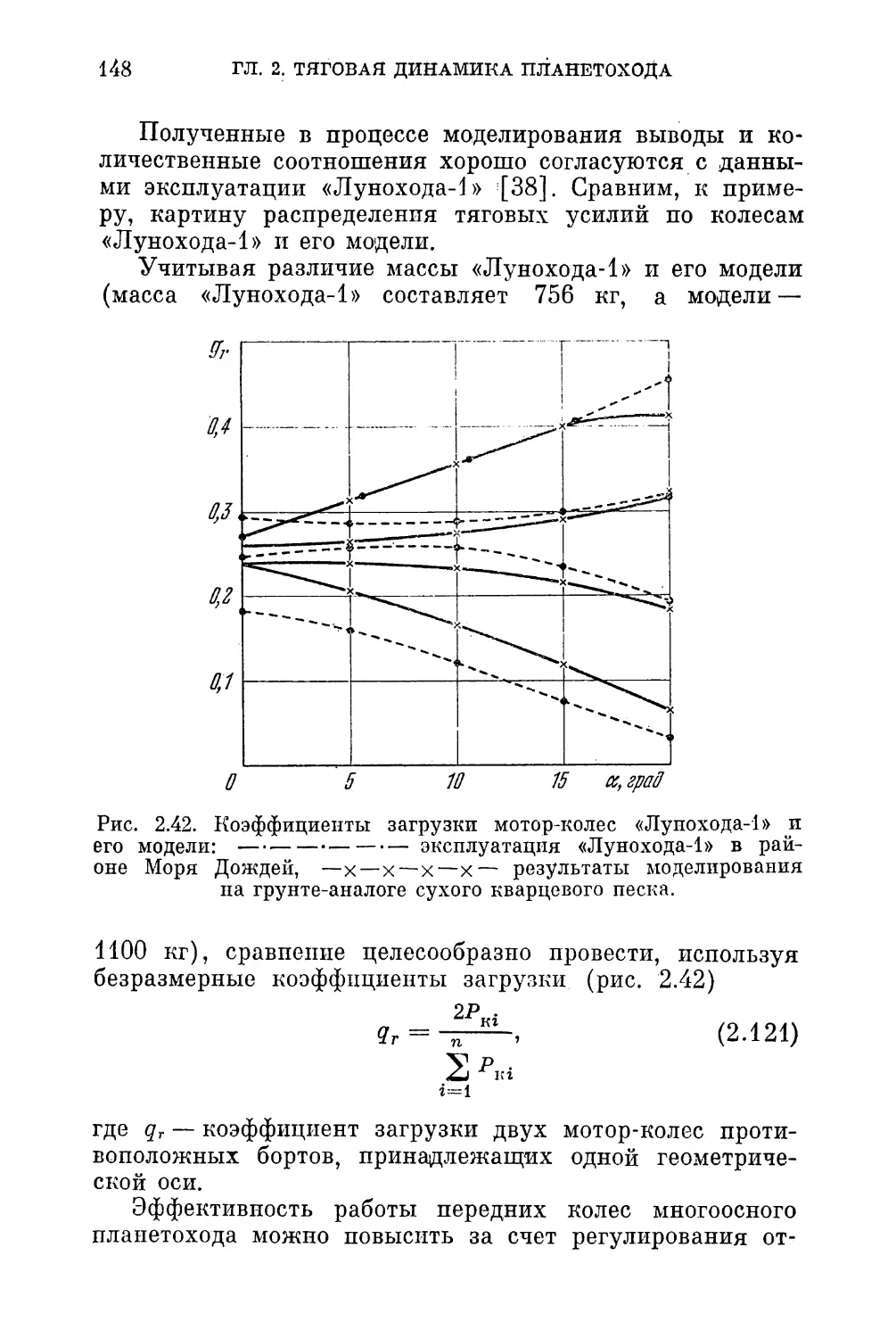
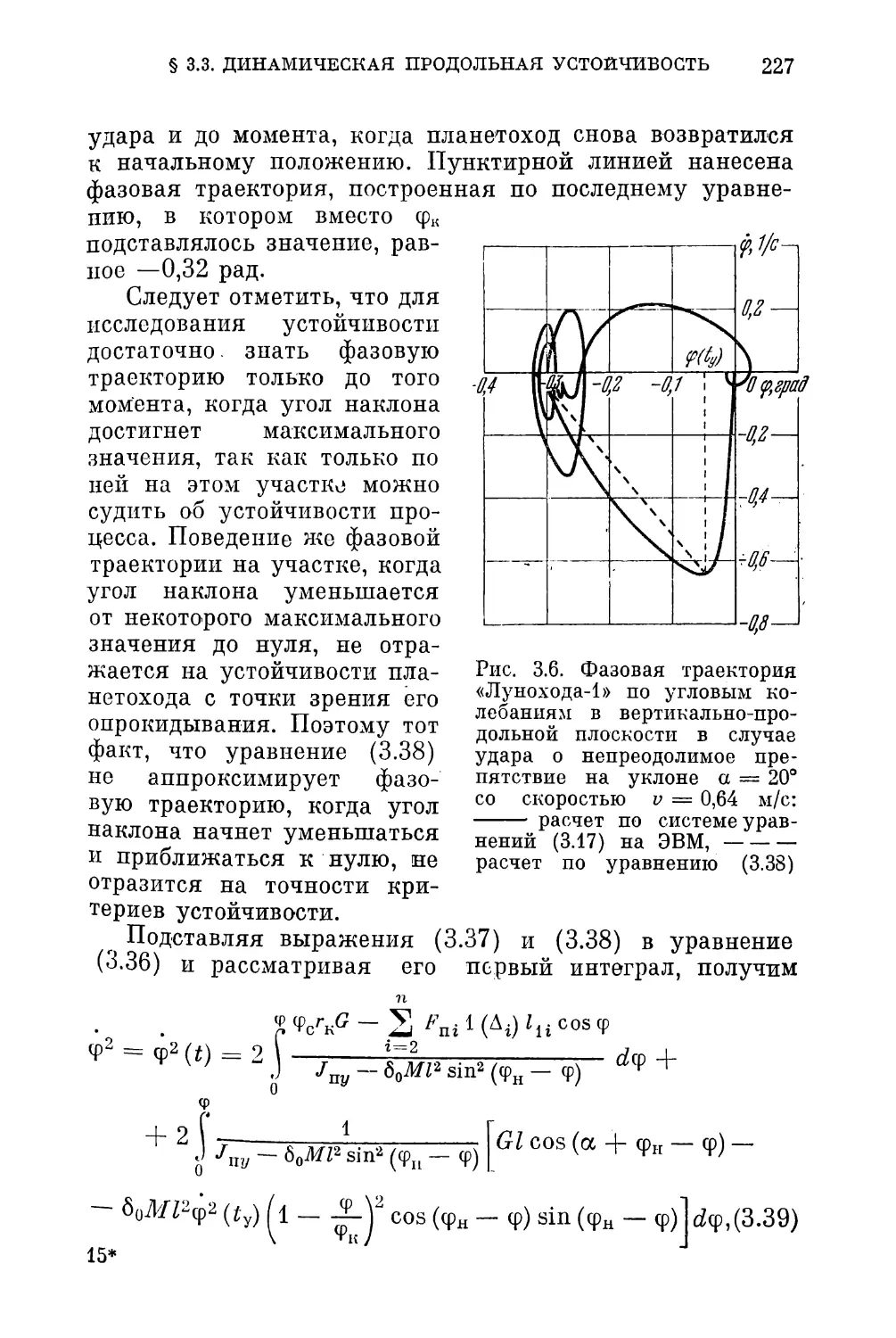
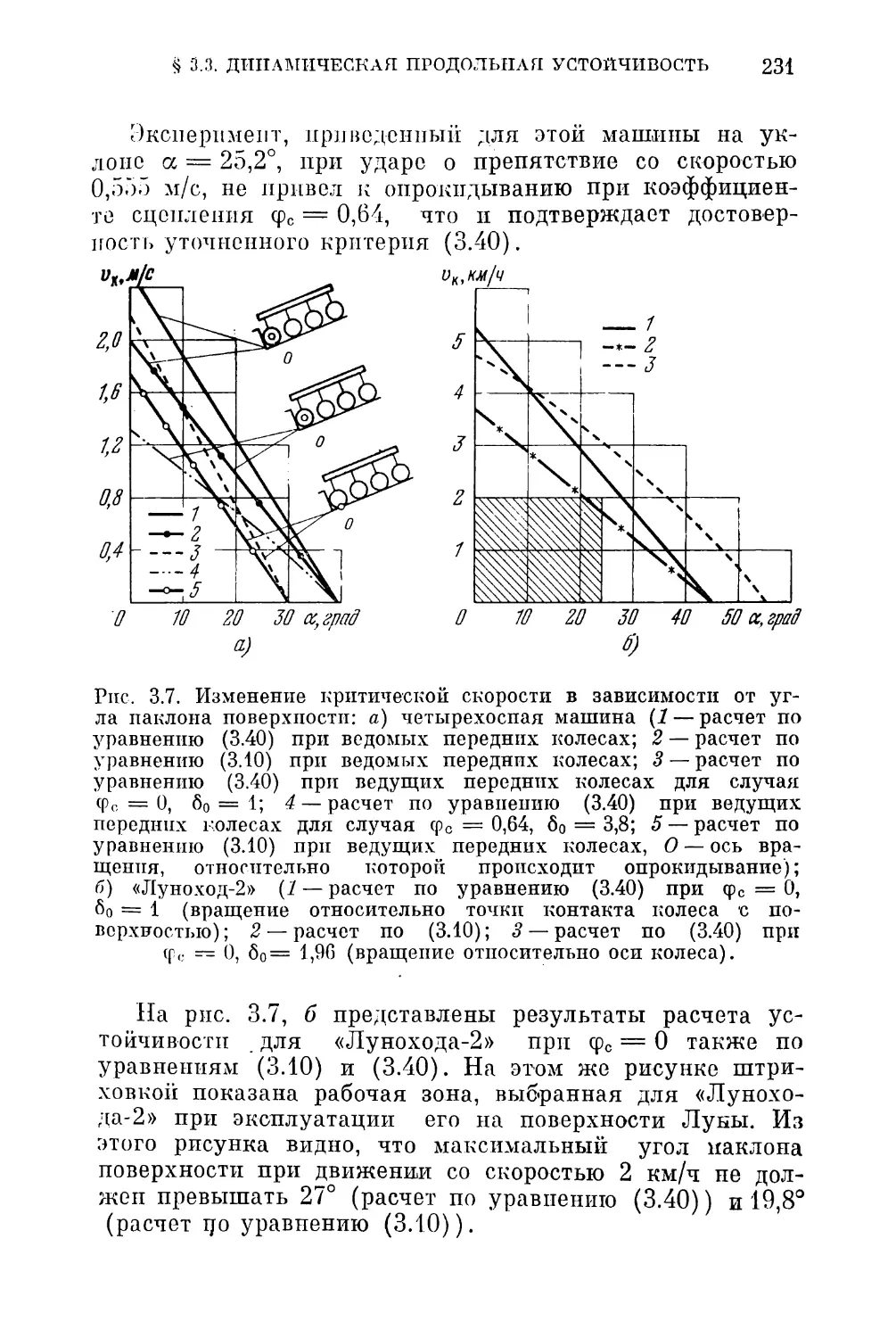
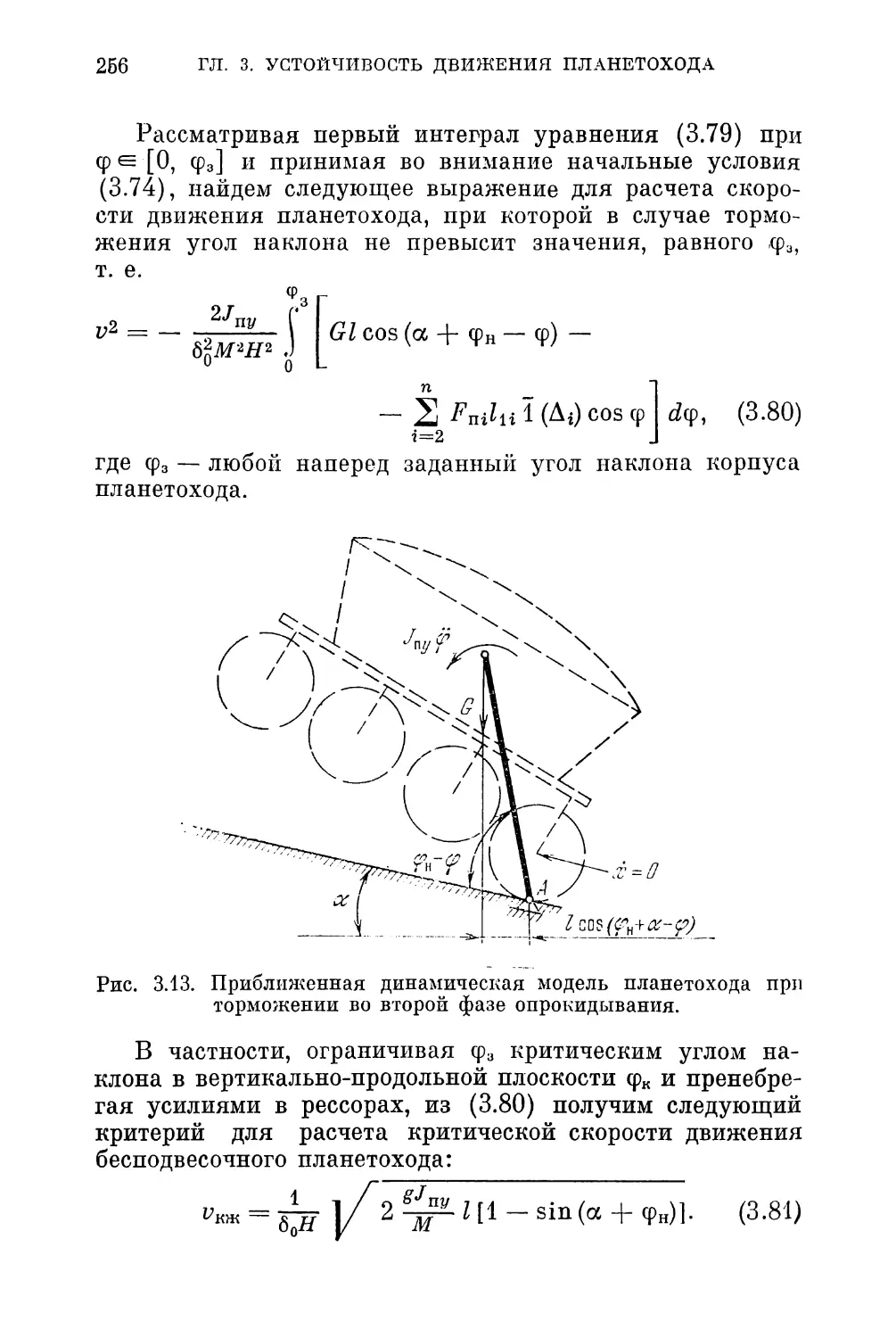
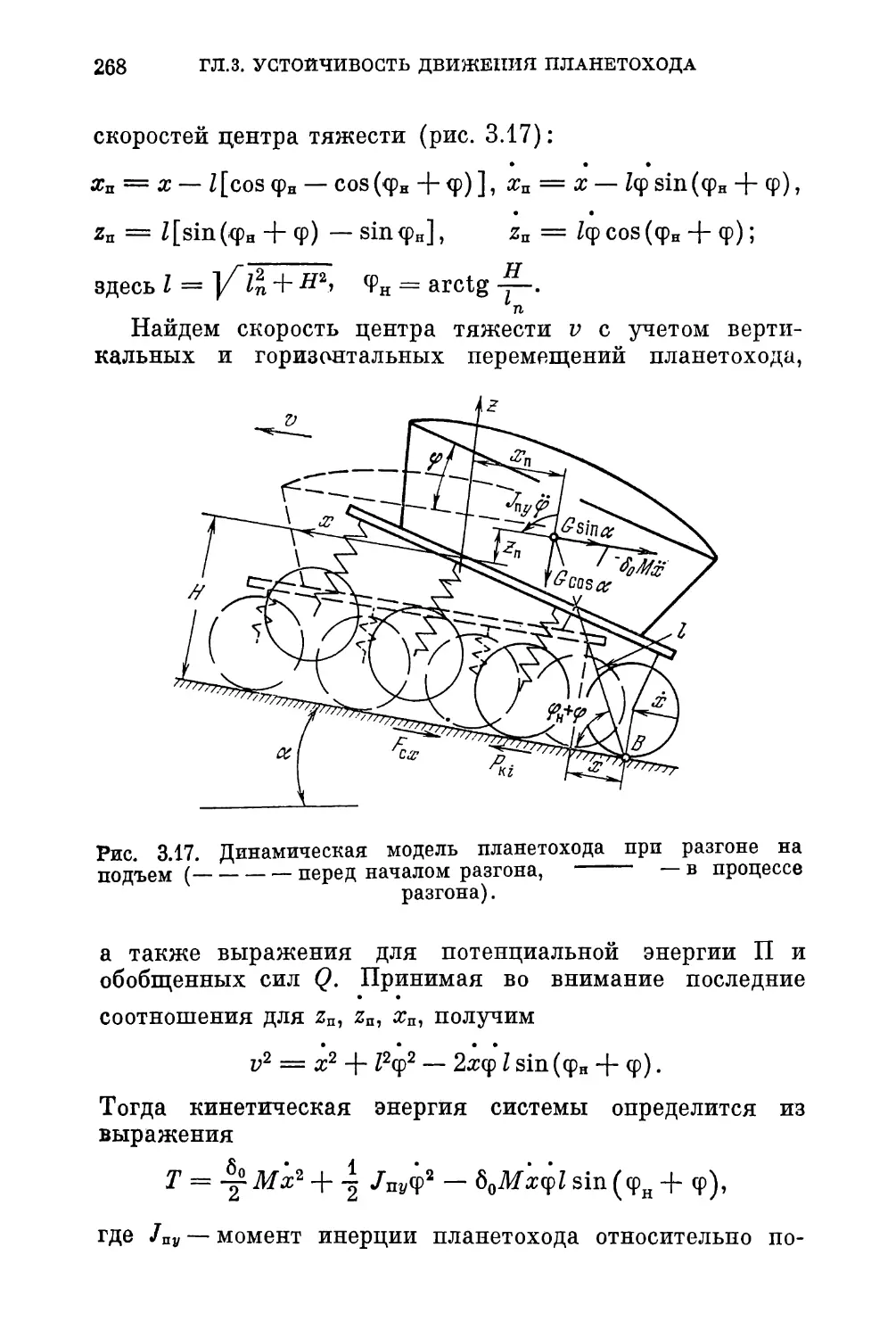
Рис. 1.4. Топографический план района эксплуатации «Лунохода-1»; а) продольно-вертикальный раз-
рез рельефа, б) текущие значения угла дифферента, в) текущие значения угла крена. Масштаб пла-
на — 1 деление: 100 м.
§ 1.2. СТОХАСТИЧЕСКАЯ МОДЕЛЬ РЕЛЬЕФА
30
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
стей, длины которых меньше ширины колеи шасси. Этот
факт будет использован в дальнейшем для построения
автономных математических моделей колебаний плане-
тохода в вертикальных продольной и поперечной пло-
скостях.
Полученная по результатам эксплуатации «Лунохо-
да-1» реализация явилась основой для проведения ста-
тистического анализа.
Исследуемый участок представлял район предгорий,
достаточно изрытый кратерами, холмами и насыщенный
камнями. Анализируемый процесс состоял из ансамбля
реализаций длиной от 200 м до 3000 м, в которых через
0,4 4- 2 м фиксировались значения углов дифферента и
крена шасси.
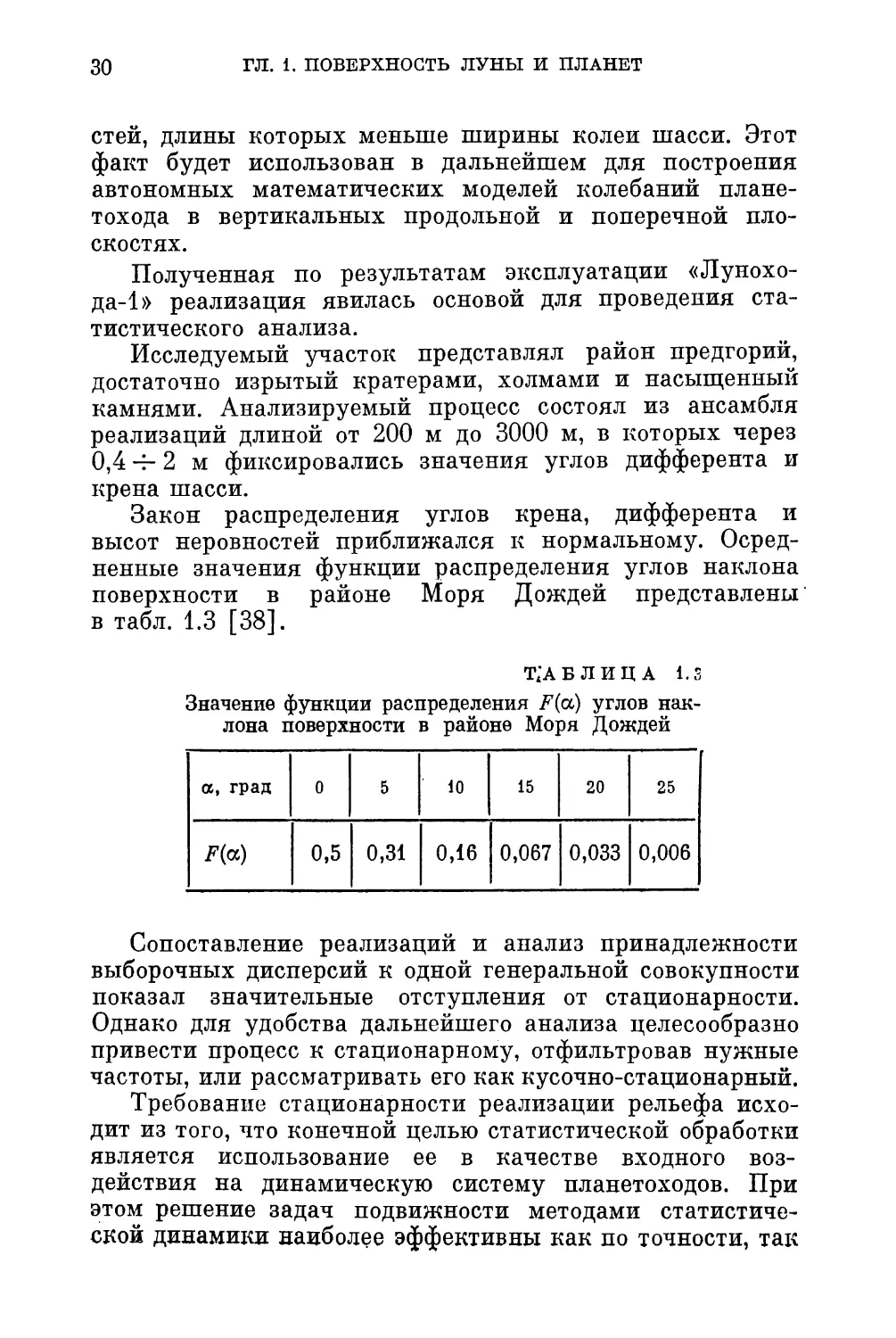
Закон распределения углов крена, дифферента и
высот неровностей приближался к нормальному. Осред-
ненные значения функции распределения углов наклона
поверхности в районе Моря Дождей представлены
в табл. 1.3 [38].
ТАБЛИЦА 1.3
Значение функции распределения F(a) углов нак-
лона поверхности в районе Моря Дождей
а, град 0 5 10 15 20 25
/(а) 0,5 0,31 0,16 0,067 0,033 0,006
Сопоставление реализаций и анализ принадлежности
выборочных дисперсий к одной генеральной совокупности
показал значительные отступления от стационарности.
Однако для удобства дальнейшего анализа целесообразно
привести процесс к стационарному, отфильтровав нужные
частоты, или рассматривать его как кусочно-стационарный.
Требование стационарности реализации рельефа исхо-
дит из того, что конечной целью статистической обработки
является использование ее в качестве входного воз-
действия на динамическую систему планетоходов. При
этом решение задач подвижности методами статистиче-
ской динамики наиболее эффективны как по точности, Tais
§ 1.2. СТОХАСТИЧЕСКАЯ МОДЕЛЬ РЕЛЬЕФА
31
и по трудоемкости расчетов, в случае стационарных нор-
мально распределенных входных воздействий.
1.2.2. Спектральный анализ поверхностей. Полученный
в предыдущем параграфе закон распределения уклонов
поверхности Луны может использоваться для оценки
подвижности луноходов при исследовании ограничений
скоростей их движения по тягово-динамическому факто-
ру и устойчивости. При исследовании плавности хода, на-
груженности узлов шасси, управляемости и других эксп-
луатационных характеристик планетохода методами стати-
стической динамики необходимо реализации рельефа
представлять с помощью корреляционных функций или
спектральных плотностей вертикальных сечений рельефа
по трассе движения.
В этом разделе рассматривается спектральный анализ
участка лунной поверхности, исследованной «Лунохо-
дом-1». Кроме того, рассматривается каменистый участок
земного вулканического района [71]. Насыщенность кам-
нями участка-аналога соответствует насыщенности харак-
терных каменистых участков Луны в зоне движения
«Лунохода-1». Реализация каменистого участка снималась
с учетом геометрии колеса, обкатывающего неровности.
Вся реализация длиной 1000 м разбивалась на 10 прибли-
зительно равных участков, а теоретические значения
характеристик случайного процесса получались усредне-
нием.
Спектральные плотности рассматриваемых участков
находятся как преобразования Фурье от корреляционных
функций:
оо
(со) = J Rx (т) cos сотйт
о
или
оо
5Х (со) = j* Rx (т)
b
где Sx(co) —спектральная плотность процесса х, 7?я(т) —
корреляционная функция процесса х, т —некоторый про-
межуток времени, со — частота периодического процесса,
7 = V-1.
32
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
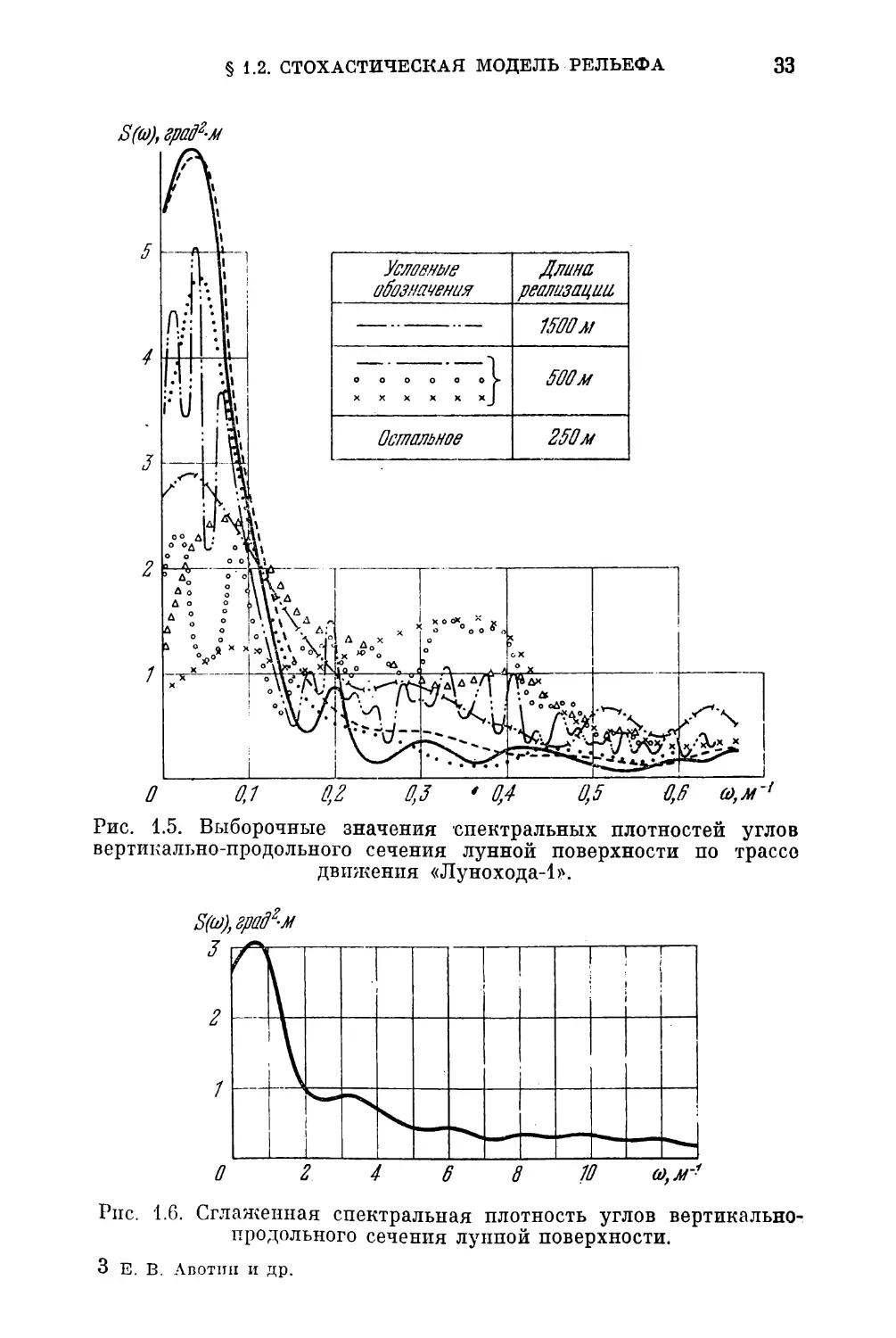
На рис. 1.5 показана серия кривых спектральных
плотностей. Сюда включены кривые, построенные по реа-
лизациям разной длины: от 250 м до 1500 м. Кривые
имеют большой разброс, поэтому для получения аналити-
ческого вида спектральной плотности проведено сглажи-
вание (по Бартлетту) и получены средние значения
k
где к — число реализаций. Сглаженная кривая 5 (со),
представленная па рис. 1.6, выражает нормированную
спектральную плотность стационарного случайного про-
цесса, составленного из текущих значений углов диф-
ферента корпуса. Для того чтобы перейти от углов к
высотам неровностей, надо проинтегрировать процесс
I
б (£) = J v^dt^
о
где v — скорость движения планетохода, t — время,
ф* = б.
Учитывая свойство спектральной плотности, по кото-
рому
(со) = со2£б(со),
спектральная плотность процесса б(£) может быть пред-
ставлена в виде
56(<о)= (1.13)
при V = 1 м/с.
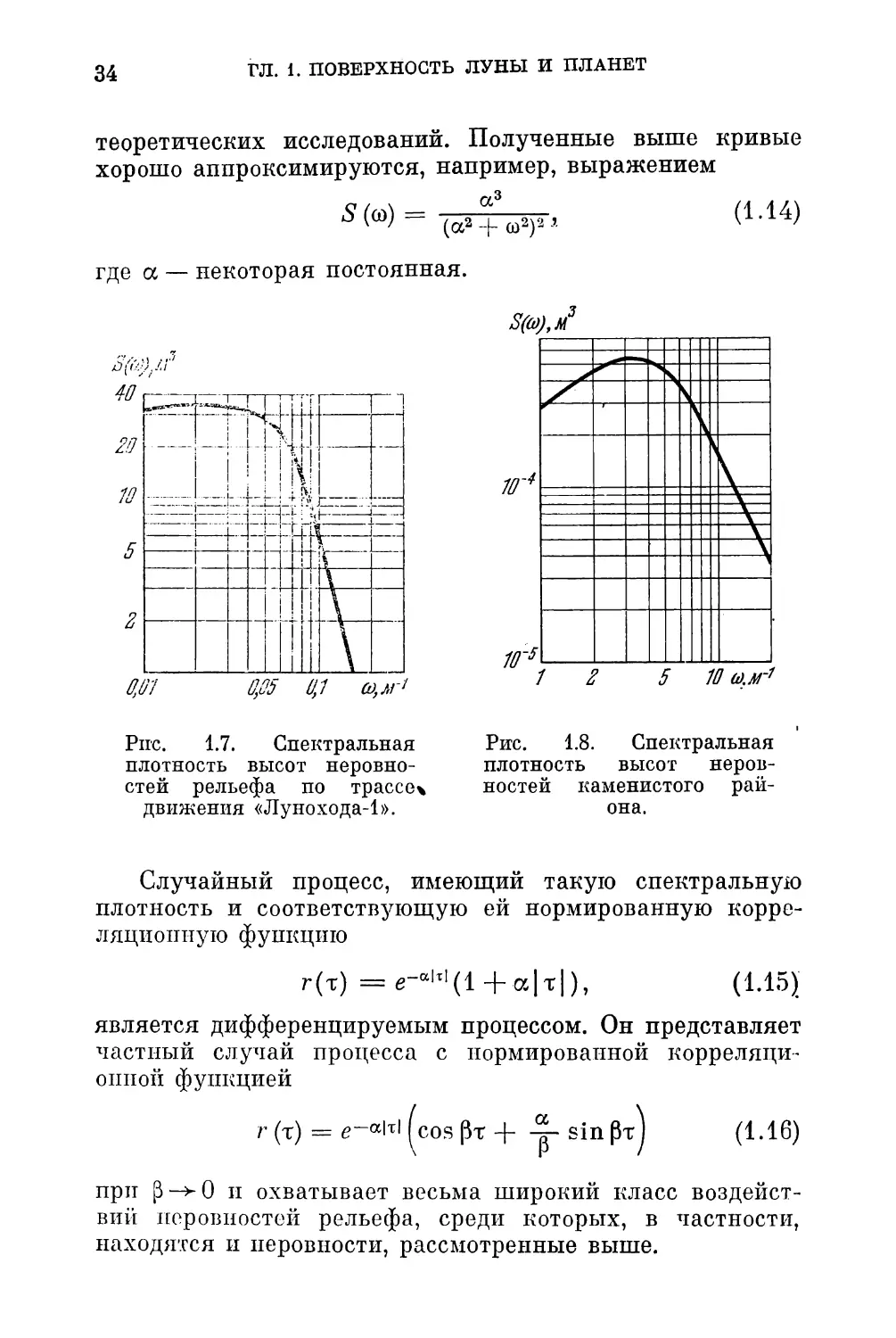
На рис. 1.7 построена спектральная плотность про-
цесса б(£) по формуле (1.13) в логарифмических коор-
динатах.
Для каменистого участка также была получена спект-
ральная плотность как средневыборочное значение
(рис. 1.8).
В теоретических решениях бывает необходимо графи-
ческое выражение спектральной плотности аппроксими-
ровать аналитически. Имеется ряд аналитических ап-
проксимаций спектральных плотностей в виде дробно-
рациональных выражений, наиболее удобных для
§ 1.2. СТОХАСТИЧЕСКАЯ МОДЕЛЬ РЕЛЬЕФА
33
8(о)), градам
Рис. 1.5. Выборочные значения спектральных плотностей углов
вертикально-продольного сечения лунной поверхности по трассе
движения «Лунохода-1».
Рис. 1.6. Сглаженная спектральная плотность углов вертикально-
продольного сечения лунной поверхности.
3 Е. В. Авотш! и др.
34
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
теоретических исследований. Полученные выше кривые
хорошо аппроксимируются, например, выражением
г/З
S = (а2 + со2)3 (1-14)
где а — некоторая постоянная.
Рис. 1.8. Спектральная
плотность высот неров-
ностей каменистого рай-
Рис. 1.7. Спектральная
плотность высот неровно-
стей рельефа по трассеч
движения «Лунохода-1».
она.
Случайный процесс, имеющий такую спектральную
плотность и соответствующую ей нормированную корре-
ляционную функцию
г(т) = е“а|х1(1 + а|т|), (1.15)
является дифференцируемым процессом. Он представляет
частный случай процесса с нормированной корреляци-
онной функцией
г (т) = ^-а|т1 ^cos рт sin рт^ (1.16)
при [3—^0 и охватывает весьма широкий класс воздейст-
вий неровностей рельефа, среди которых, в частности,
находятся и неровности, рассмотренные выше.
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
35
В дальнейшем при решении задач подвижности пла-
нетоходов методами статистической динамики микропро-
филь поверхности, проходимой планетоходом, будет
задаваться в классе случайных процессов, отвечающих
корреляционным функциям вида (1.15), (1.16).
Стохастическая модель поверхности как стационарной
случайной функции полностью может быть представлена
рассмотренными характеристиками, которыми с исчер-
пывающей полнотой описывается процесс на входе ди-
намической системы планетохода.
§ 1.3. Спектральный анализ поверхности
с применением теории импульсных случайных
процессов
Рассмотренные в § 1.2 методы спектрального анализа
основаны па знании реализаций. Однако при решении
стохастических задач взаимодействия шасси планетохо-
дов с рельефом планет, далеко не всегда удается полу-
чить реализацию. Чаще располагают лишь общестатисти-
ческими сведениями, такими, как плотность распределе-
ния числа неровностей и средняя форма неровностей,
рассмотренные в § 1.1. Поэтому имеет смысл поставить,
вопрос, как, располагая этими сведениями, построить
спектральную плотность процесса.
Решение такой задачи приводит к большим упроще-
ниям спектрального анализа: во-первых, отпадает пот-
ребность в снятии реализации — весьма трудоемкого
процесса, во-вторых, становится лишним процесс сглажи-
вания спектральных кривых, так как получается уже
теоретическая кривая, в-третьих, можно построить карту
спектральных плотностей поверхности, т. е. получить всю
спектральную картину района, о чем будет сказано в
конце главы.
1.3.1. Основные сведения из теории импульсных слу-
чайных процессов [28]. Импульсным случайным процес-
сом называется последовательность импульсов, параметры
которых являются случайными величинами.
Форма импульсов может быть случайной или детер-
минированной. Обычно рассматривается детерминирован-
ная форма.
3*
36
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
Если амплитудный спектр Л (со) есть преобразование
Фурье функции x(t):
оо
Л(со)= J (1.17)
—оо
то спектральная плотность 5(со) имеет связь с функцией
x(t) через амплитудный спектр
S (со) = [| < (<о) I2], (1.18)
где Mi [| Ль) (со) |2] — математическое ожидание квадрата
модуля амплитудного спектра, вычисленное по A-й реа-
лизации x(t) длиной L; Tn—среднее значение интервалов
времени между началами последовательных импульсов,
2N + 1 — число импульсов, расположенных по обе сторо-
ны от нулевого импульса, связанного с началом отсчета
времени. Пусть x(t) есть некоторая элементарная функ-
ция. Процесс, составленный из ряда элементарных функ-
ций, выразится в виде их суммы
x(t)= 2 (1.19)
j=—N
В работе [58] было показано, что амплитудный спектр
этого процесса равен сумме спектров элементарных
функций
N
Л (со)- 2 Л; (со). (1.20)
Пусть Xj(t) есть случайная функция длиной LP соста-
вленная из набора импульсов определенной формы и раз-
меров, а функция x(t) есть сумма (1.19). Тогда с учетом
(1.20) и (1.18) спектральная плотность процесса x(t)
выразится следующей зависимостью:
S (со) = lim
2V->oo
2
(2N + 1) TN
(1.21)
Если предположить, что корреляция между импульса-
ми отсутствует, то (1.21) можно представить в виде
s W = + [| W I2]. (1-22)
§1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
37
Для непрерывней модели, учитывая, что
(2N + 1)T„ = 2LT, (1.23)
выражение для 5(ш) примет следующий вид:
5(<о) = Ит-Д- (1.24)
l^oo Lt
где А (со) —амплитудный спектр отдельного импульса,
dN — число импульсов одного размера.
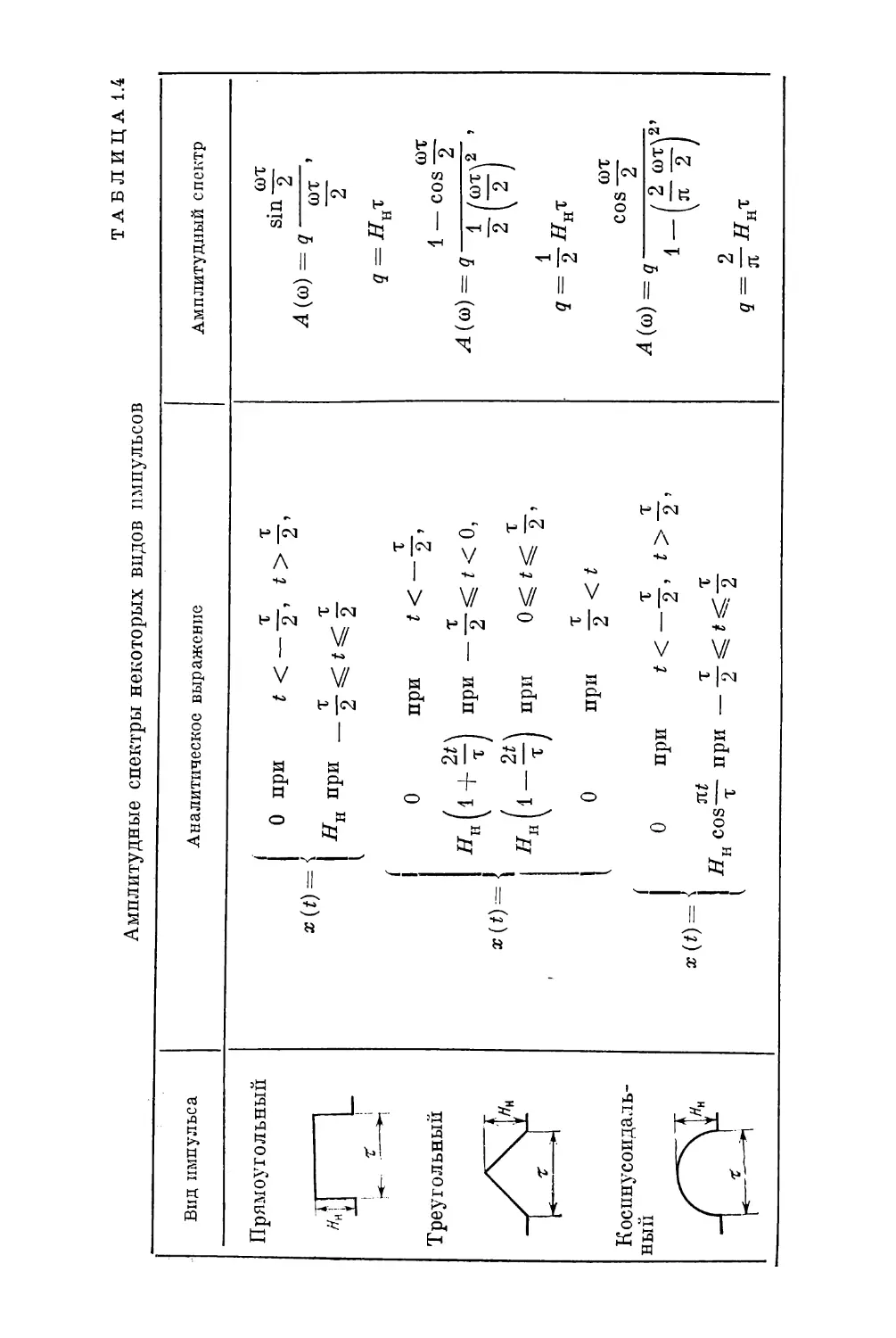
Для импульсов простейших форм, пользуясь преобра-
зованием Фурье (1.17), нетрудно получить их амплитуд-
ный спектр.
В табл. 1.4 даны амплитудные спектры некоторых
элементарных импульсов.
Таким образом, представив реализацию случайного
процесса в виде набора импульсов определенной формы,
можно, с одной стороны, смоделировать реализацию лю-
бого процесса, с другой стороны, вычислить по формуле
(1.24) с учетом табл. 1.4 спектральную плотность этого
процесса.
1.3.2. Спектральная плотность бугристой поверхности.
Бугристая поверхность характерна сравнительно коротки-
ми неровностями. Обкатывая эти неровности, колесо опи-
сывает траекторию, отличающуюся от обводов неров-
ностей.
Рассматривая обкатку колесом камня, нетрудно полу-
чить приближенную зависимость
т = 3,25 WX (1.25)
где т — длина импульса, образованного геометрическим
местом центра колеса при обкатке камня, Do—условный
диаметр камня (валуна), гк—радиус качения колеса.
Отсутствие корреляции между отдельными неровно-
стями дает право воспользоваться основной спектральной
зависимостью (1.24), полученной с помощью теории им-
пульсных случайных процессов. Задача ставится следую-
щим образом. На основании имеющихся данных о плот-
ности распределения числа неровностей размером, боль-
шим заданного па единичной площади, закона изменения
формы неровностей или их относительной высоты, а также
Амплитудные спектры некоторых видов импульсов
ТАБЛИЦ А 1.4
Вид импульса Аналитическое выражение Амплитудный спектр
Прямоугольный ’з L Г Треугольный у//Ч\1//н [ т _г| Косинусоидаль- ный 1^*- -q 1 т т 0 при t < — у, t > у, ян при ( т 0 при t < — у, 1 ^нр + т ПРИ --2<'<0> *(*)={ ( 2t\ т Я„11 — Т) ПРИ 0<г<у, т 0 при у < t т т 0 при t<—у, £>у, гг nt Т т ни COS— при — у < t с у s е II II II II £ a|to II II о ч ' Дн | р Р “е ю|е g м|е ip to § > ^|J । Н м £ N)
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
39
па основании данных о геометрии, размерах движителя и
скорости движения найти выражения для спектральных
плотностей поверхности.
Для решения этой задачи надо, во-первых, выбрать
вид импульса для определения Л (со) и, во-вторых, опреде-
лить dN через известные параметры.
При рассмотрении элементарных импульсов и срав-
нении их с реальными траекториями центра колеса, об-
катывающего неровности, можно заметить, что наиболее
близкими по форме являются косинусоидальные импуль-
сы; значения амплитудных спектров этих импульсов яв-
ляются средними между значениями амплитудных спект-
ров прямоугольного и треугольного импульсов.
Однако1 простейшее решение получается при рассмо-
трении прямоугольного и треугольного импульсов. Поэто-
му дальнейшее решение проведено для этих типов им-
пульсов, а затем для лучшего приближения к реальной
картине взяты средние значения.
Значения амплитудного спектра в формуле (1.24) бу-
дут следующими:
т
sin со ~2
(со) = Нх---— для прямоугольных импульсов,
(1.26)
т
1 — COS СО-у
(со) = Ят —--75— для треугольных импульсов,
ы
(1-27)
Число импульсов одного размера dN есть не что иное,
как число камней одного размера, определяемое по фор-
муле (1.1). Для одного1 размера очевидно dN = 0, поэ-
тому надо рассматривать некоторый бесконечно малый
диапазон диаметров камней DBx — DBi.
Определив число камней dn размером в диапазоне
Въ2 па единицу площади и зная площадь колеи ко-
леса FK, которая равна произведению ширины обода Ьк
па длину трассы 2LT, можно определить значение
о г г
dn = —(1.28)
40
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
где F — единичная площадь, на которой подсчитано рас-
пределение числа неровностей.
С учетом зависимости (1.1)
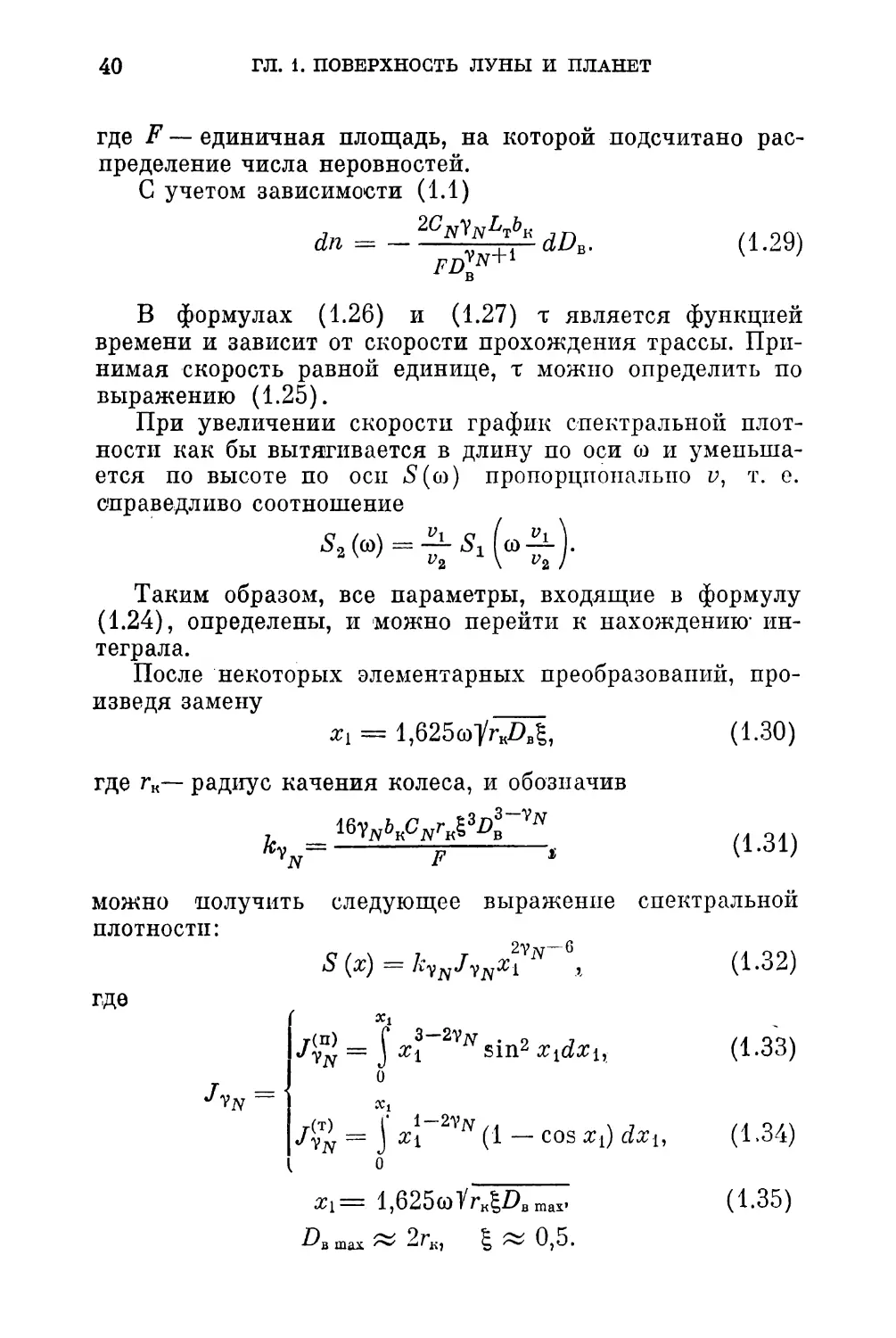
В формулах (1.26) и (1.27) т является функцией
времени и зависит от скорости прохождения трассы. При-
нимая скорость равной единице, т можно определить по
выражению (1.25).
При увеличении скорости график спектральной плот-
ности как бы вытягивается в длину по оси ы и уменьша-
ется по высоте по оси S (со) пропорционально р, т. е.
справедливо соотношение
v2 \ /
Таким образом, все параметры, входящие в формулу
(1.24), определены, и можно перейти к нахождению- ин-
теграла.
После некоторых элементарных преобразований, про-
изведя замену
= 1,625(о]/гкДв^, (1.30)
где гк— радиус качения колеса, и обозначив
16yNbKCNrK^D3~yN
--------F--------*
можно получит ъ следующее выражение спектральной
плотности: (#) х
(1-32)
где jr(n) С 3—? J Y 2^ J i SI Hl 3C i CL у (1.33)
Ajy —' 1 0 = J A 2yN (1 — C0S Xl^ ^Xi’ I 0 (1.34)
X[ —L 1,625(0 VrK^a max’ max ~ 2rK, ~ 0,5. (1.35)
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
41
Принимая за эталонный образец «Луноход-1», т. е.
полагая Ък= 0,2, гк = 0,25 при F = 106 м2, легко опреде-
лить для него значения kyN и Х{
7^=10"7.2VN“3(7NYNt
Ц.36,)'
%1= 0,4(0.
Для пересчета с эталонного образца на реальный со
своими значениями гК1 и bKi надо умножить kyN на Аэ, a Xi
на 4гК1,
, 20&к г
К ____ Ki к*
(1.37)
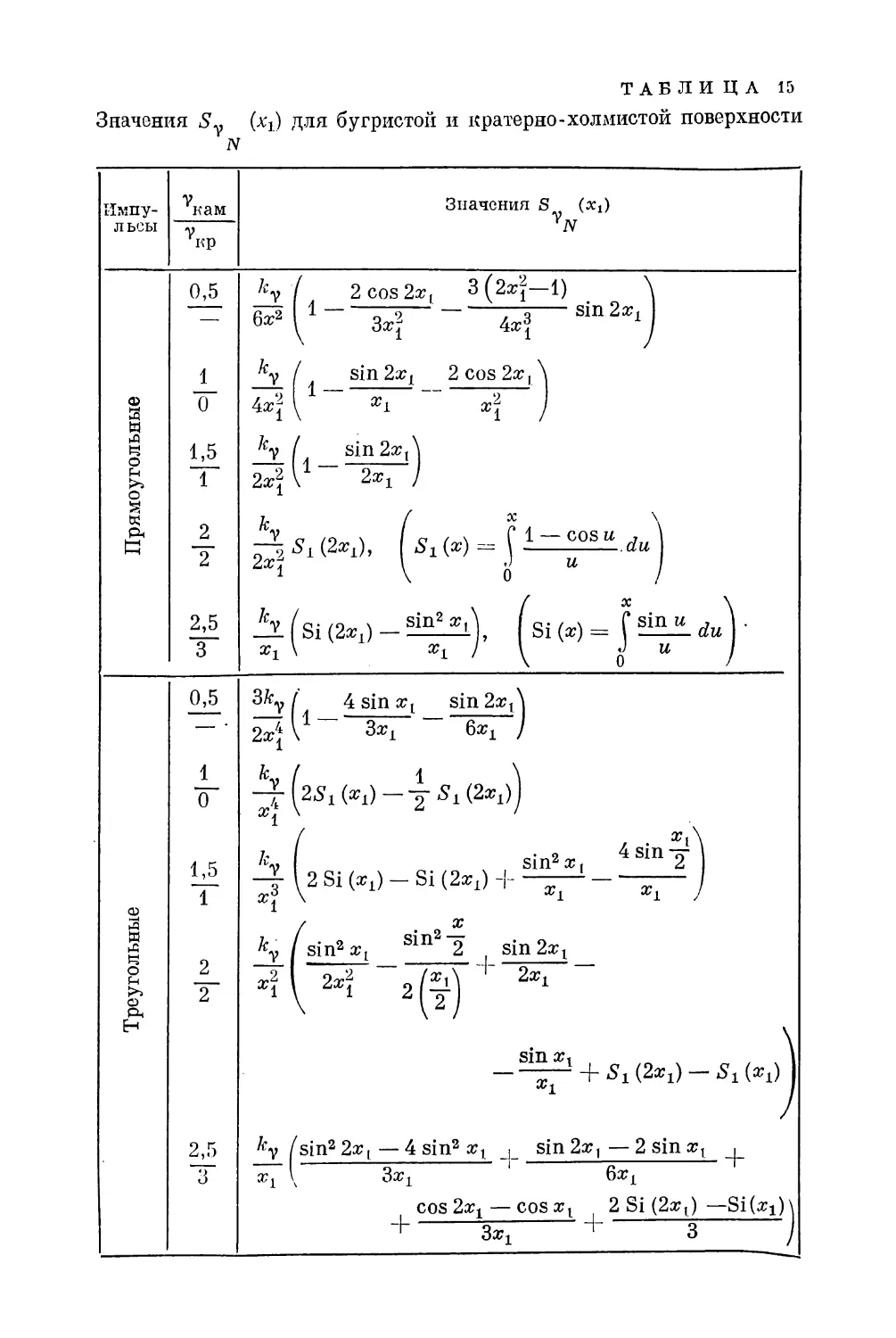
Значения SyN(xt) для разных кратных 1/2, при-
ведены в табл. 1.5.
Для определения значения S(x\) при #1 = 0 надо вы-
числить предел
(0) — kyN lim JyN%i N —
к
0<п> /n\ _ VN
/ d-38)
c(T) /n\ _ JL VN
- 4 6-2^
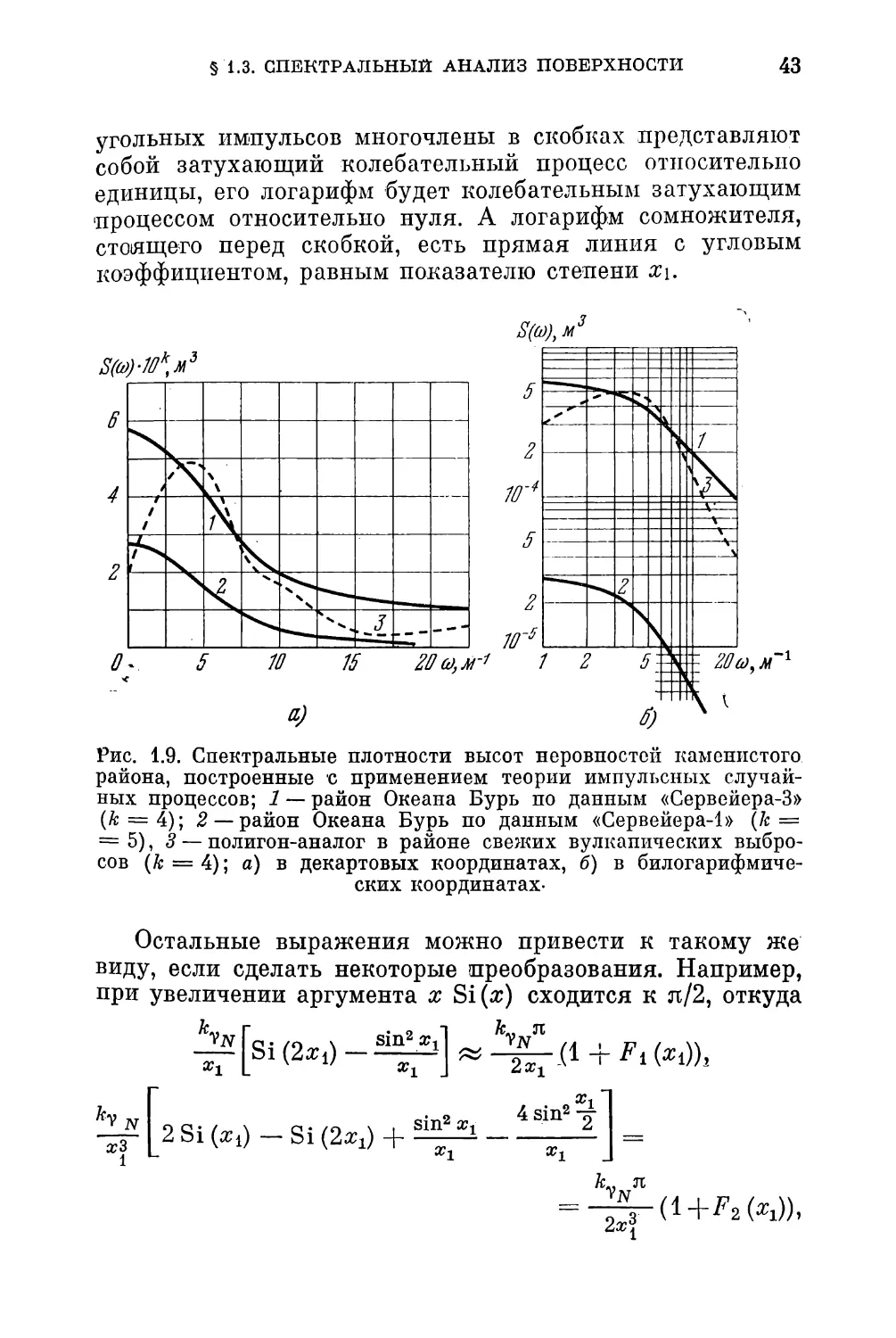
На рис. 1.9 построены кривые спектральной плотности
каменистых районов разной насыщенности, вычисленные
по формулам табл. 1.5. Здесь же представлена кривая
5(со) реализации каменистого полигона-аналога.
Дисперсии высот неровностей на этих участках, опре-
деляемые по формуле
ютах
о2 = У 5(co)dco,
о
будут следующими: на первом участке и? = 0,00022 м2
(oi= 0,015 м), на втором участке (Т2= 0,0064 м2 (02=
= 0,08 м).
По формулам табл. 1.5 можно заметить, что кривые
спектральных плотностей, построенные в логарифмичес-
ких координатах, близки к прямым.
Действительно, в трех первых выражениях для пря-
моугольных импульсов и в первом выражении для тре-
ТАБЛИЦА 15
Значения Sv (xj) для бугристой и кратерно-холмистой поверхности
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
43
угольных импульсов многочлены в скобках представляют
собой затухающий колебательный процесс относительно
единицы, его логарифм будет колебательным затухающим
процессом относительно нуля. А логарифм сомножителя,
стоящего перед скобкой, есть прямая линия с угловым
коэффициентом, равным показателю степени х\.
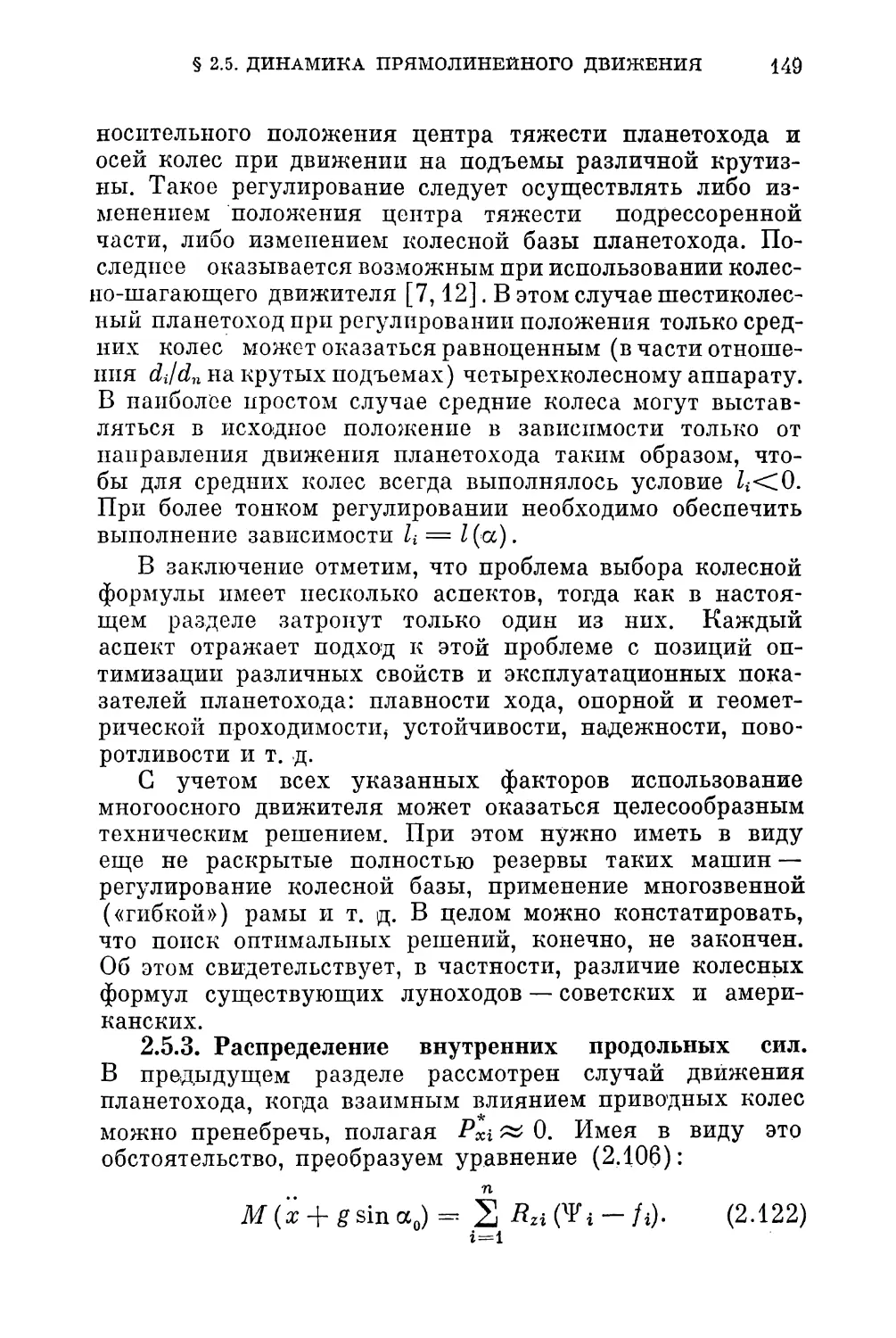
Рис. 1.9. Спектральные плотности высот неровностей каменистого
района, построенные с применением теории импульсных случай-
ных процессов; 1 — район Океана Бурь по данным «Сервейера-3»
(к = 4); 2 — район Океана Бурь по данным «Сервейера-1» (к =
= 5), 3 — полигон-аналог в районе свежих вулканических выбро-
сов (к = 4); а) в декартовых координатах, б) в билогарифмиче-
ских координатах-
Остальные выражения можно привести к такому же
виду, если сделать некоторые преобразования. Например,
при увеличении аргумента х Si (х) сходится к л/2, откуда
Т? [si (2Х,) - ~ + F, Ы),
[2 Si и - Si (2«.) + =
ку л
= -£г<1+р^’
44
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
к г
Vn 1 sin 2a?x 4 sin2 a?t 1 sin 2a?i
3 #3 3^3 6 x2
1 sin xt
xi
1 cos 2a?. 1 cos a?. . 2 o. /o 4 1 c. ,
о-------1-----о- ----L + лг Si (2^1)-----5- Si (^
За?. За?. 1 3 ' 17 3 x '
kVNn
4^ (1 + ^3 (^1))-
Разность Si(tz^i) —Si(xj) при больших x сходится к
Inn, откуда
,CfN
xi
sin2 а?!
2а?^
s*n2 2 . sin (2X1) sin xt
/гг-Л^ 2®, Xi
+ Si (2Ж1) — Si (^1)
0,7k
X1
Во всех этих приближенных выражениях функции Fi(xi)
быстро затухают, и остается один сомножитель типа
S (#i) = mkyNxYn. (1.39)
Логарифм этого сомножителя линеен в логарифмических
координатах:
lg S = 1g mkyN — n 1g xi. (1.40)
Однако при малых значениях х наблюдается отсту-
пление от линейного закона. Это можно пронаблюдать
при графическом построении функции. На рис. 1.9, б
изображены кривые в координатах 1g 5 (со), 1g (со). Здесь
же представлена кривая lg*S'(co) реализации каменисто-
го участка на земном участке-аналоге. Эта кривая не
имеет ярко выраженного линейного закона, так как яв-
ляется выборкой из некоторой генеральной совокупно-
сти. Резкое же отступление от линейного закона наблю-
дается в районе 1g (со) <1. Причиной такого отступле-.
ния является ограничение рабочего диапазона частот,
точнее, при рассмотрении случайного процесса была
принята не истинная, а преобразованная функция, опи-
сывающая рельеф, отфильтрованная в ограниченном диа-
пазоне длин неровностей. Если увеличить размер макси-
мальной длины неровности то при Yjv=.const кривая
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
45
выпрямляется. В идеальном случае (при неограниченном
размере) кривая полностью спрямляется. В этом случае
при х\ = 0 5(0) стремится к бесконечности.
При решении задачи рассматривалось два крайних
случая — прямоугольные и треугольные импульсы. Ре-
альным решением задачи надо считать некоторое среднее
значений кривой 5T(zi). Такие значения приведены в
табл. 1.6.
ТАБЛИЦА 1.6
Средние значения
Средние значения (xj Значения (хО при больших Xi
0,5 1,5 1,0* 2,5 3,0 М (1 + Л (*1)) + 9 (1 + Fa (*,))] pi (1 + Fa (24))+ л (1+ F, (24))] М Щ [3 (1 + Л (24)) + 2 (1 + F3 (24))] + 9 S 122:4 24 + Л 7 4x3 5л kV 122^
В приведенных выражениях Fi(xi) соответствуют рас-
смотренным выше аналогичным функциям, затухающим
при увеличении х. Ниже приводятся в дополнение к уже
рассмотренным функциям Р\(х), ^2(^1), ^з(#1)т ^4(^1)
следующие:
„ , . 2 cos2xi з 2^ — 1 .
F-. (^) = - -у ^з- sin 2xit
I? (т\— 4 sin 24 sin 224
/г / \ sin 2#, 2 cos 2x-i
F7 (*i) = ——l-----------—l,
X1 xf
tj / \ 1 sin 2x\
Рв (*1) = - -2——l.
Практические задачи охватывают ограниченную об-
ласть высот неровностей (а значит, длин и частот), поэ-
тому учет «завала» логарифмической кривой спектраль-
46
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
пой плотности играет существенную роль при определе-
нии числовых характеристик высот неровностей.
При решении динамических задач часто приходится
иметь дело только с относительно высокочастотными про-
цессами. В этом случае Fi(xi) —и выражения для
спектральных плотностей упрощаются (они приведены
в правой колонке табл. 1.6).
Спектральные плотности вида (Axf получен-
ные изложенным методом, подтверждаются эмпирически-
ми выражениями, полученными некоторыми исследовате-
лями. Например, в работе [16] приводится выражение
для спектральной плотности именно такого вида.
Интересно также отметить, что спектральные плотно-
сти для прямоугольных и треугольных импульсов подчи-
няются степенному закону вида
5(со) = C7nco-n, (1.41)
причем 1 п 4, т. е. закон совпадает с законом распре-
деления числа неровностей на единицу площади (1.1)..
В работе [16] нижним пределом п считается 2, в работе
[12] имеются значения п даже менее 1; все зависит от
того, какие формы импульсов преобладают и каково зна-
чение yjv в рассматриваемой задаче. В данном случае
не рассматривается задача для 2,5 (для каменистого
участка), однако прослеживается тенденция к уменьше-
нию п ниже единицы.
Средние значения спектральной плотности при ю = О
вычисляются по формуле
<(0) =
С(°)+С(0)
2
(1.42)
1.3.3. Спектральная плотность кратерно-холмистой по-
верхности. Решение этой задачи аналогично предыдущим
Однако зависимость т для кратеров и холмов отличается
от значения т для камней.
Можно, конечно, решать точную задачу с учетом ши-
рины обода, диаметра колеса и вероятности пересечения
кратера по любой хорде Здесь особой сложности нет,
только расчет становится громоздким. Поэтому проведены
упрощения и приняты допущения, которые не оказыва-
ют практического влияния на результат, но сокращают
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
47
объем вычислений. Во-первых, шириной обода можно
пренебречь, во-вторых, форму кратера в плане можно
принять не круглой, а квадратной со стороной квадрата,
направленной перпендикулярно трассе и равной 0,9Рк.
Поверхность кратера принимается цилиндрической с го-
ризонтальной образующей, перпендикулярной направле-
движения машины, и, наконец, влиянием радиуса колеса
па нивелирование кратерно-холмистого рельефа можно
пренебречь, приняв
т = 0,9Ок. (1.43)
Высота импульса как для малых, так и для больших
кратеров и холмов определяется выражением
як= gz?K.
Учитывая соотношение (1.6),* решение задачи можно
представить в виде
£(®) = lim -Ь [|4(®)|2йУ,
(1-44)
dN = - -%- CNyNLiBD^+i)dDK.
После подстановки всех найденных параметров в (1.44)
с учетом обозначений
а?2= 0,45 ojDk,
_ 0,UByNCN% - Il) d^n
kVn ~ F
(1.45)
(1.46)
можно получить следующее выражение спектральной
плотности: 8 (х) — , (1-47)
где Х2
Jyjj = J а?2 sin2 x2dx2, (1-48)
= 0 xz
JVN = (1+Vjv\l—cos x2)2 dx2, 0 • (1.49)
Х2 — 0,45cdZ)K max!
48
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
£1 и £2 в (1.46) определяются по (1.6) из условия
Л(^<?1) =0,
^а<ь) = 1,
где Р(Л) — вероятность события А. Отсюда
S1 Ь2 з
Обычно F для кратерно-холмистой поверхности прини-
мается равной 1012 м2, кроме того, известно, что для Луны
Qt = 1,85, kt =. 12, для «Лунохода-1» (эталонный обра-
зец)— В = 1,7 м.
Для кратерной поверхности имеется достаточно жест-
кая зависимость (1.3) между и DK. Так как lg ~
#4 и 8,5, то зависимость (1.3) может быть записа-
на в виде
= 8,5(lgZ)K - 4)-2.
Это дает возможность при заданном максимальном DKm
получить значение kyN:
1,7.10-14CnVX Vn-
(1.50)
Для пересчета с эталонного образца на реальный надо
умножить А^на кв, где
/сэ-^= 0,595. (1.51)
Вычисление интегралов JyN соответствует (1.36) и (1.37).
Значения SyN(x) для кратных 1, приведены в табл. 1.5.
Для определения значения SyN(x) при я = 0 вычис-
ляется предел
(0) “ lini Jу^я
х-»0
5(п>(0) =
(1.52)
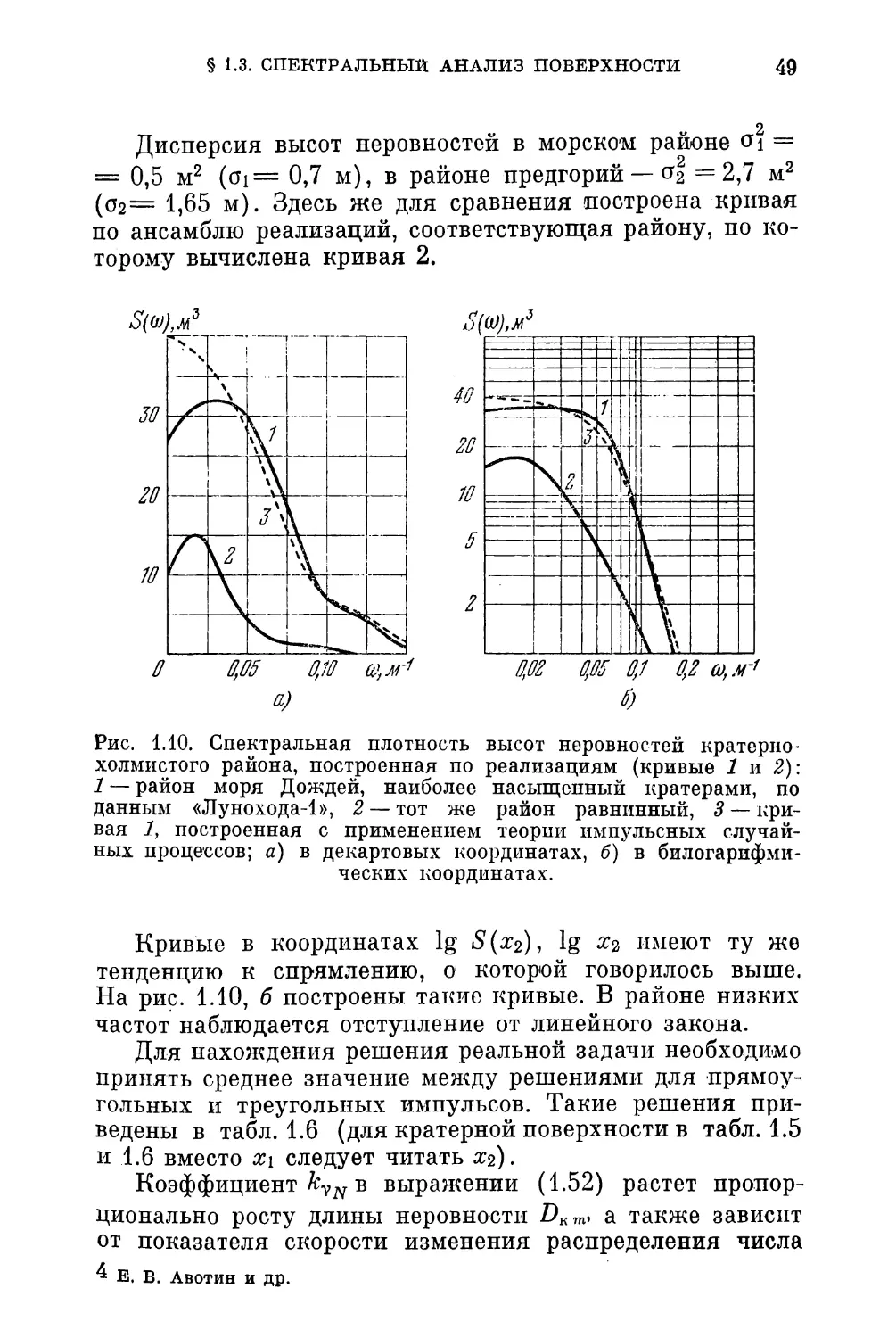
На рис. 1.10, а построены кривые спектральной плот-
ности кратерных поверхностей в типично морском районе
и в районе предгорий.
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
49
Дисперсия высот неровностей в морском районе 04 =
= 0,5 м2 (01= 0,7 м), в районе предгорий —02 =2,7 м2
(02= 1,65 м). Здесь же для сравнения построена кривая
по ансамблю реализаций, соответствующая району, по ко-
торому вычислена кривая 2.
Рис. 1.10. Спектральная плотность высот неровностей кратерно-
холмистого района, построенная по реализациям (кривые 1 и 2):
1 — район моря Дождей, наиболее насыщенный кратерами, по
данным «Лунохода-1», 2 — тот же район равнинный, 3 — кри-
вая 1, построенная с применением теории импульсных случай-
ных процессов; а) в декартовых координатах, б) в билогарифми-
ческих координатах.
Кривые в координатах 1g S(x2), 1g х2 имеют ту же
тенденцию к спрямлению, о которой говорилось выше.
На рис. 1.10, б построены такие кривые. В районе низких
частот наблюдается отступление от линейного закона.
Для нахождения решения реальной задачи необходимо
принять среднее значение между решениями для прямоу-
гольных и треугольных импульсов. Такие решения при-
ведены в табл. 1.6 (для кратерной поверхности в табл. 1.5
и 1.6 вместо х\ следует читать #2).
Коэффициент kVN в выражении (1.52) растет пропор-
ционально росту длины неровности а также зависит
от показателя скорости изменения распределения числа
Е. В. Авотин и др.
50
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
неровностей по их размерам и от показателя плотно-
сти распределения числа неровностей CN. Величину kyN
можно определять зависимостями (1.31) для бугристой
поверхности и (1.50) для кратерно-холмистой поверхно-
сти, для которой влияние радиуса колеса на нивелирова-
ние неровностей незначительно. Средние значения спек-
тральной плотности при Х2 = 0 вычисляются по форму-
ле (1.42).
Спектральные плотности 5(^2) могут быть легко пере-
строены па спектральные плотности S(со), для этого до-
статочно изменить масштаб по осям х и S^x^y.
-----X1 для бугристой поверхности,
(О =
5(ю) =
О 45Р~ для кРатеРно“холмист°й поверхности,
1,625]/ rKDB^S (Х)) для бугристой поверхности,
0,45Z)K$ (#2) для кратерно-холмистой
поверхности.
1.3.4. Статистическая модель поверхности Луны и
Марса. Результаты исследований отдельных районов Лу-
ны и Марса и изучение общих характеристик их поверх-
ностей позволяют перейти к построению карт статисти-
ческих моделей этих ближайших соседей Земли. Для
построения таких карт вся поверхность делится на стацио-
нарные области, числовые характеристики случайных па-
раметров которых задаются в определенных пределах.
Каждая из областей может быть представлена рядом
статистических характеристик. Для решения задач ста-
тистической динамики удобней всего характеризовать по-
верхность спектральными плотностями или параметрами,
по которым спектральные плотности могут быть
получены.
На основании исследования поверхностей Луны и
Марса, результаты которых опубликованы в ряде статей,
например [56, 57, 65, 68, 73], можно построить карты
плотностей распределения кратеров, приняв в качестве
критерия кривую распределения, представленную зависи-
мостью (1.2). Переменные 0,v и Dam являются более или
менее стабильными для всего диапазона возможных от-
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
51
клонений кривой распределения. Остается один перемен-
ный параметр 7Vm, определяющий положение кривой рас-
пределения кратеров. Можно в качестве оценочного
взять критерий CN^ равный TVi, означающий число крате-
ров размером более 1 м. Конечно, построенные карты
статистической модели поверхности лишь приближенно
характеризуют рельеф; для решения задач“передвижения
планетоходов по поверхности планет необходимо иметь
карты более крупного масштаба и с более мелкой гра-
дацией рельефа. Кроме того, эти карты не являются сто-
хастической моделью, так как не характеризуют времен-
ной процесс. Для построения стохастической модели
поверхности надо рассмотреть корреляционную функцию
или спектральную плотность.
Выше рассматривались зависимости между спектраль-
ными плотностями и плотностями распределения неров-
ностей. Используя их, нетрудно построить по картам
статистической модели карты спектральных плотностей.
Как будет показано в дальнейшем, для построения кар-
ты спектральных плотностей можно использовать кар-
ты статистических моделей поверхности.
Для решения поставленной задачи надо прежде всего
выработать критерии. Ранее было замечено, что распреде-
ление числа неровностей N для разных районов можно
считать подчиняющимся одной закономерности, в кото-
рой фигурирует коэффициент CN, меняющийся в доста-
точно широком диапазоне в зависимости от района. Этот
коэффициент может быть выбран в качестве основного
критерия для характеристики рельефа и представления
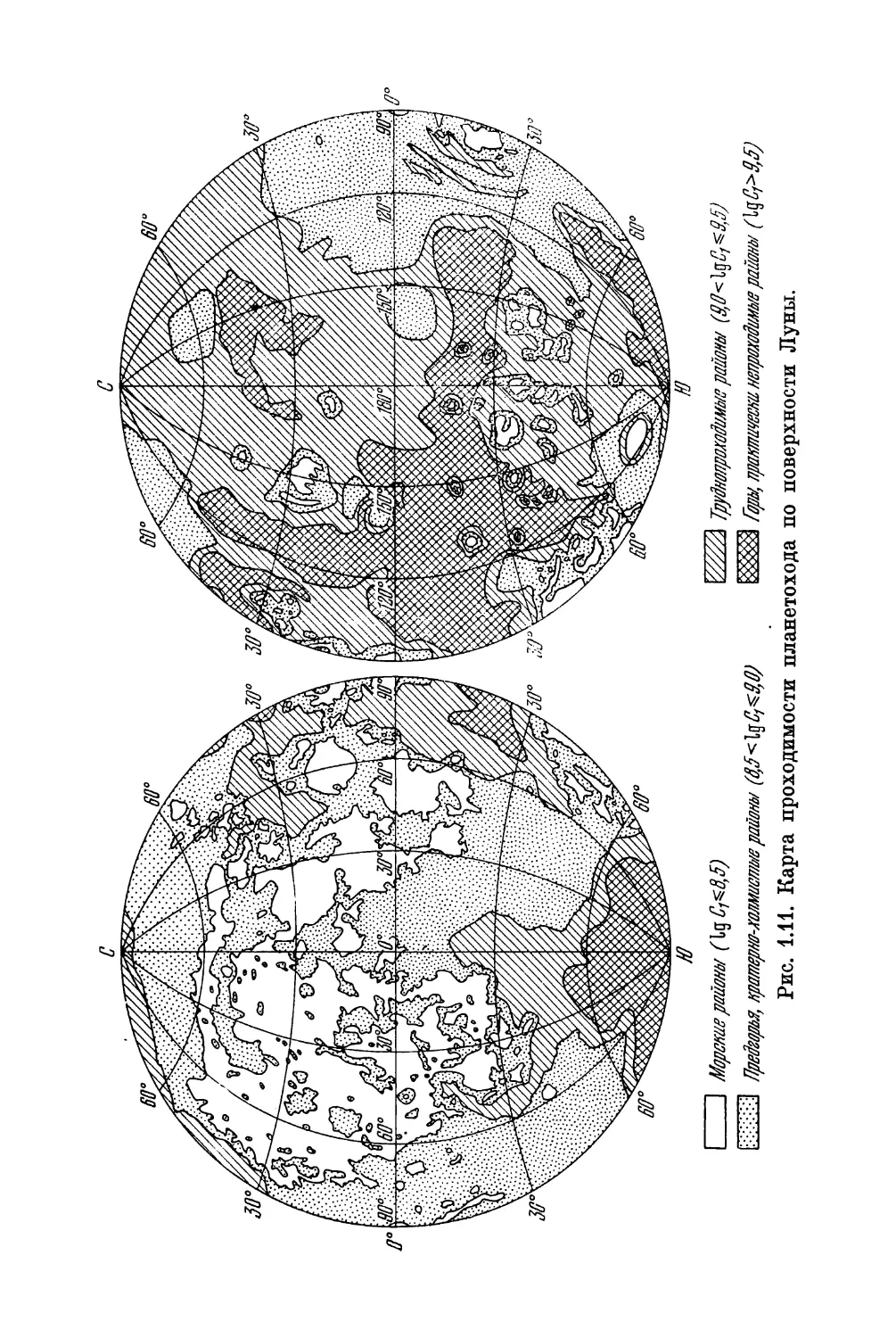
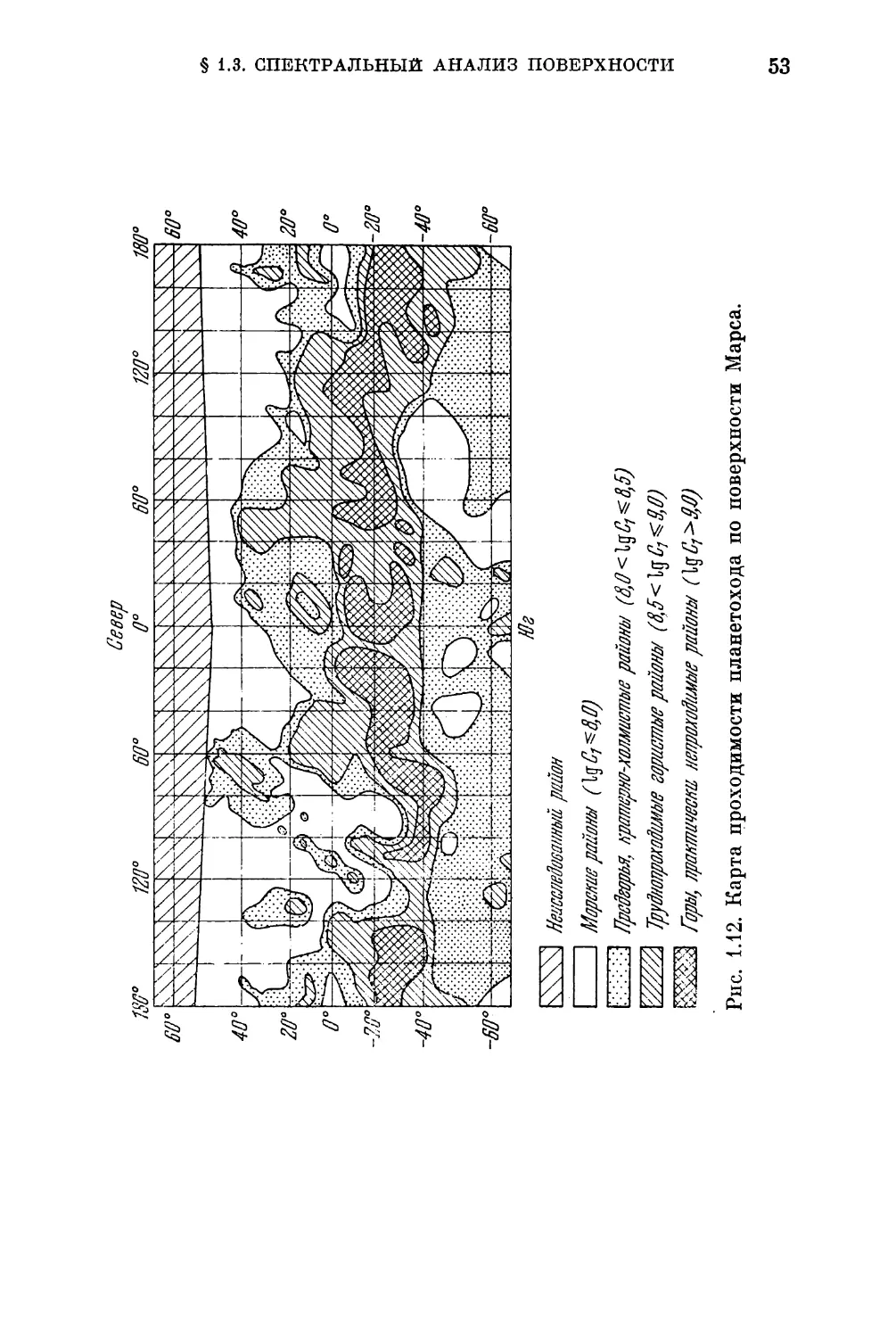
его в виде карты проходимости планетоходов.
На рис. 1.11, 1.12 построены такие карты для поверх-
ностей Луны и Марса. На них нанесены значения lg CN
и дана качественная характеристика рельефа для «Луно-
хода-1». Характеристика дана для четырех категорий
рельефа: типично морских районов со слабо выраженны-
ми рельефными образованиями, предгорий, подобных
районам эксплуатации «Лунохода-1» и «Лунохода-2»,
гористых труднопроходимых районов, по которым движе-
ние машин типа «Луноход-1» представляет серьезные
трудности и, наконец, гористых районов, по которым
движение на большие расстояния невозможно.
По данным значениям на карте могут быть получены
I----1 Морские районы fig Cpt8,5) Труйнопрохойшше районы
ЕЖЗ ffpefapM, кратерно-холмистые районы (6,S^C^S,0) Горы, проктита непрахойимые районы
Рис. 1.11. Карта проходимости планетохода по поверхности Луны.
Север
KSSSJ Неисследованный, район
I.. I Морение районы (1g- 0^8,0)
Предгорья, кратерно-холмистыерайоны (8,08^8,5)
Труднопроходимые гористые районы (8,5 < 1g С1 ^9,0)
Горы, практически, непроходимые районы (]$С7^9,8)
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ
Рис. 1.12. Карта проходимости планетохода по поверхности Марса.
54
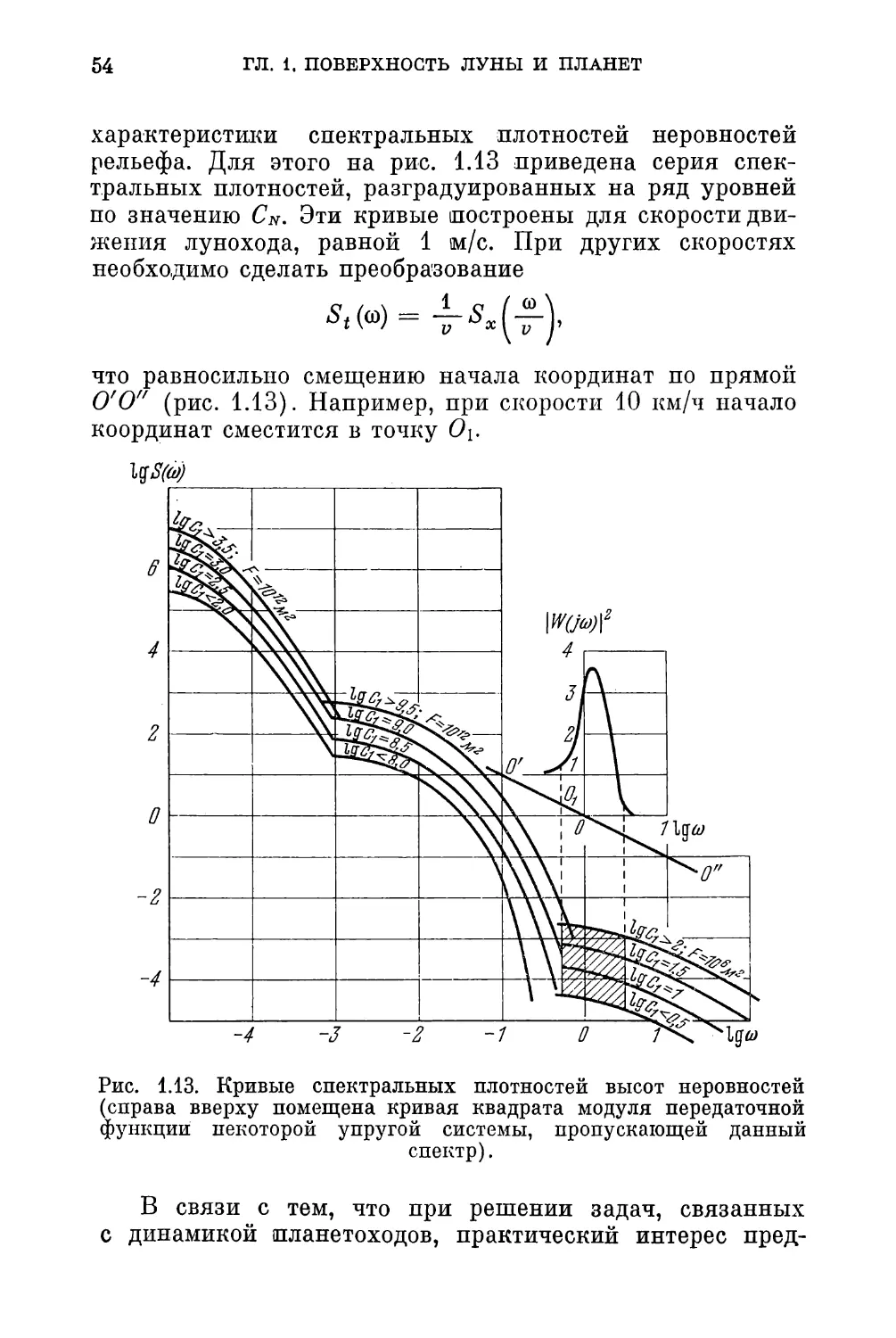
ГЛ. 1. ПОВЕРХНОСТЬ ЛУНЫ И ПЛАНЕТ
характеристики спектральных плотностей неровностей
рельефа. Для этого на рис. 1.13 приведена серия спек-
тральных плотностей, разградуированных на ряд уровней
по значению CN. Эти кривые построены для скорости дви-
жения лунохода, равной 1 м/с. При других скоростях
необходимо сделать преобразование
что равносильно смещению начала координат по прямой
О'О" (рис. 1.13). Например, при скорости 10 км/ч начало
координат сместится в точку Oj.
Рис. 1.13. Кривые спектральных плотностей высот неровностей
(справа вверху помещена кривая квадрата модуля передаточной
функции некоторой упругой системы, пропускающей данный
спектр).
В связи с тем, что при решении задач, связанных
с динамикой планетоходов, практический интерес пред-
§ 1.3. СПЕКТРАЛЬНЫЙ АНАЛИЗ ПОВЕРХНОСТИ 55
ставляют только те входные воздействия, которые ока-
зывают заметное влияние на динамическую систему, це-
лесообразно рассматривать спектральные плотности с ог-
раниченным диапазоном частот. Этот диапазон можно
определить по значению передаточной функции плане-
тохода; те частоты, при которых передаточная функция
незначительна, не рассматриваются. Поскольку переда-
точная функция является комплексной, ее удобно пред-
ставлять квадратом модуля, который является показате-
лем прохождения внешнего сигнала через динамическую
систему: низкие частоты проходят через систему с коэф-
фициентом усиления, близким к единице (слева от за-
штрихованной области на рис. 1.13), высокие частоты —
с коэффициентом, близким к нулю (справа от заштрихо-
ванной области на рис. 1.13).
ГЛАВА 2
ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
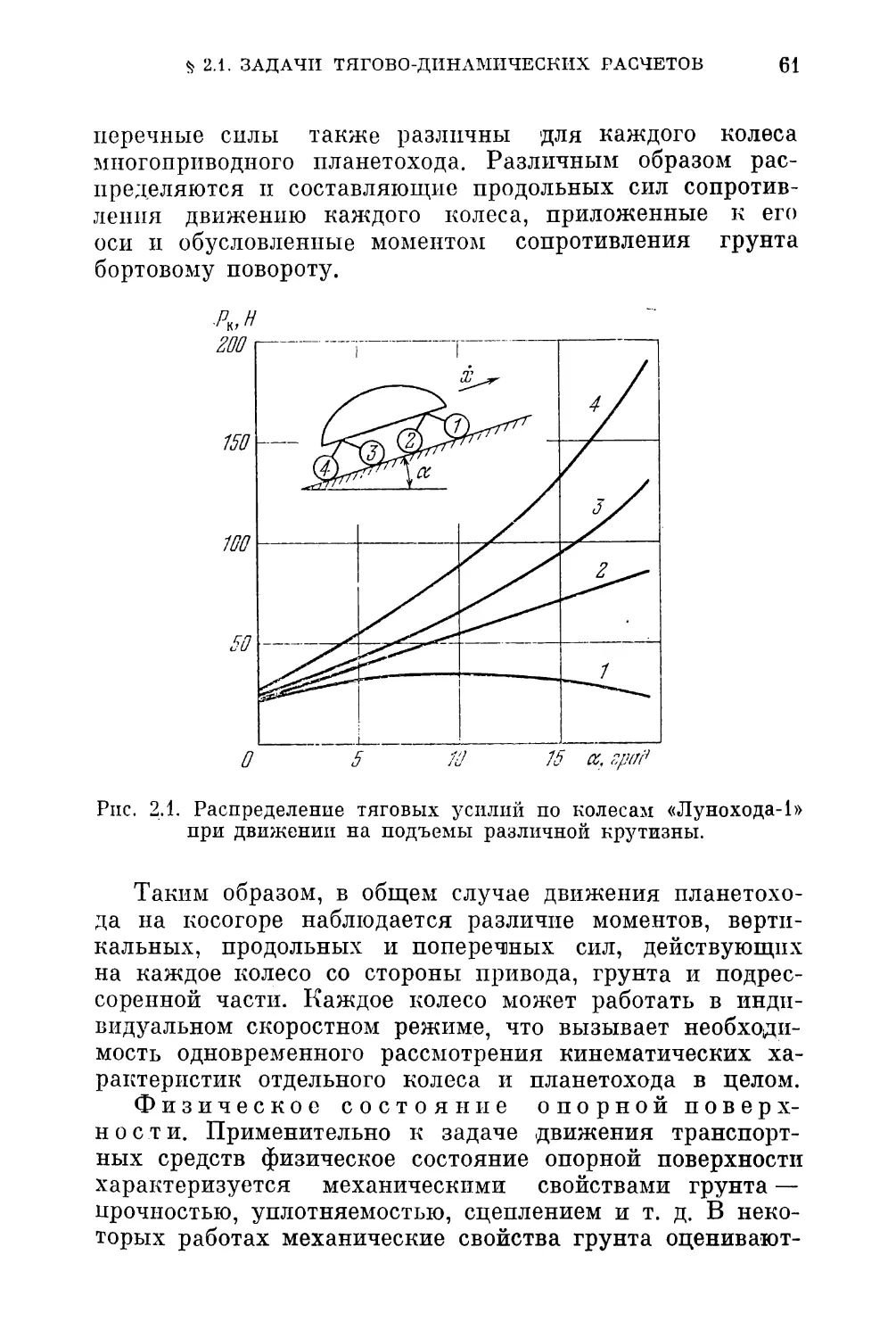
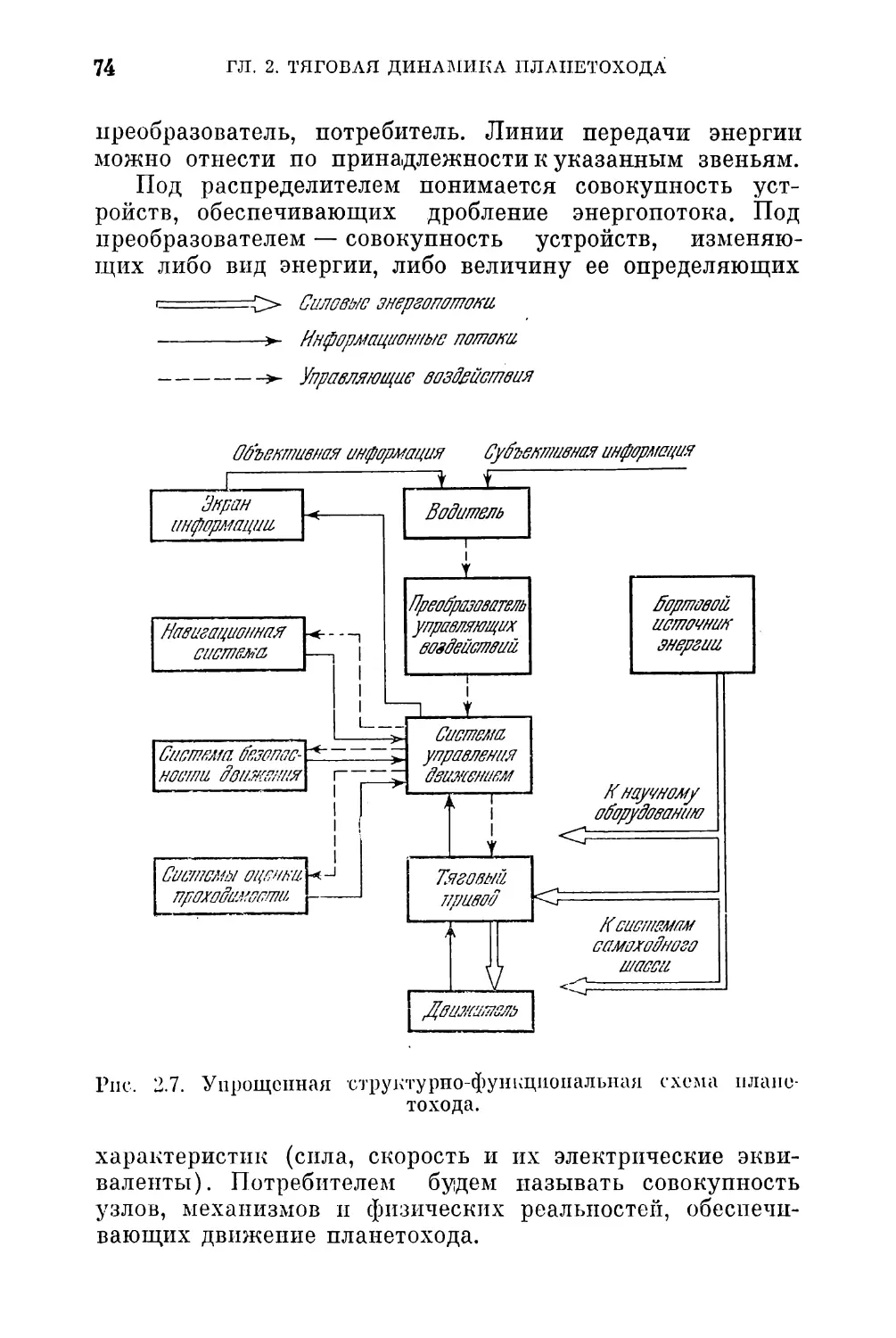
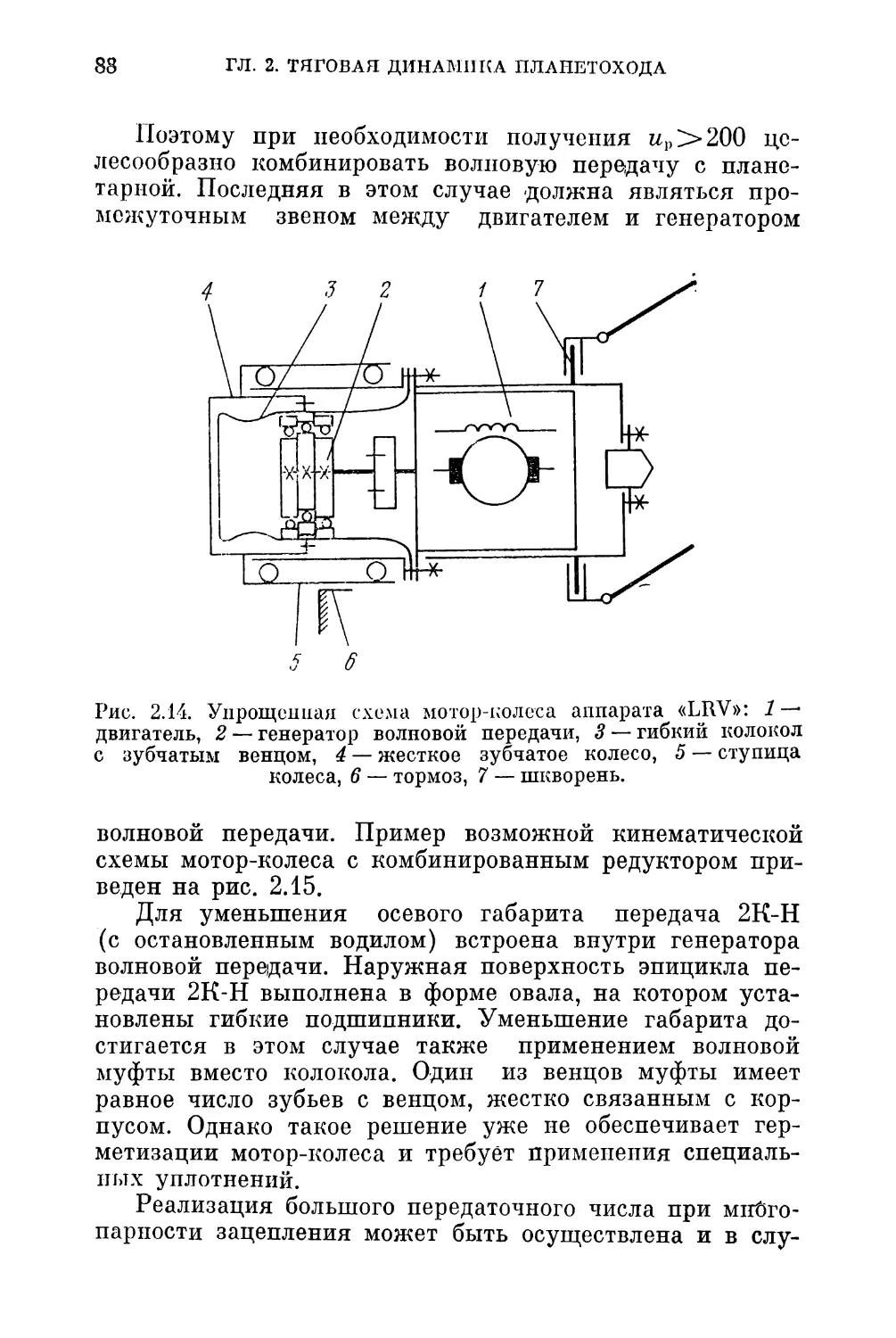
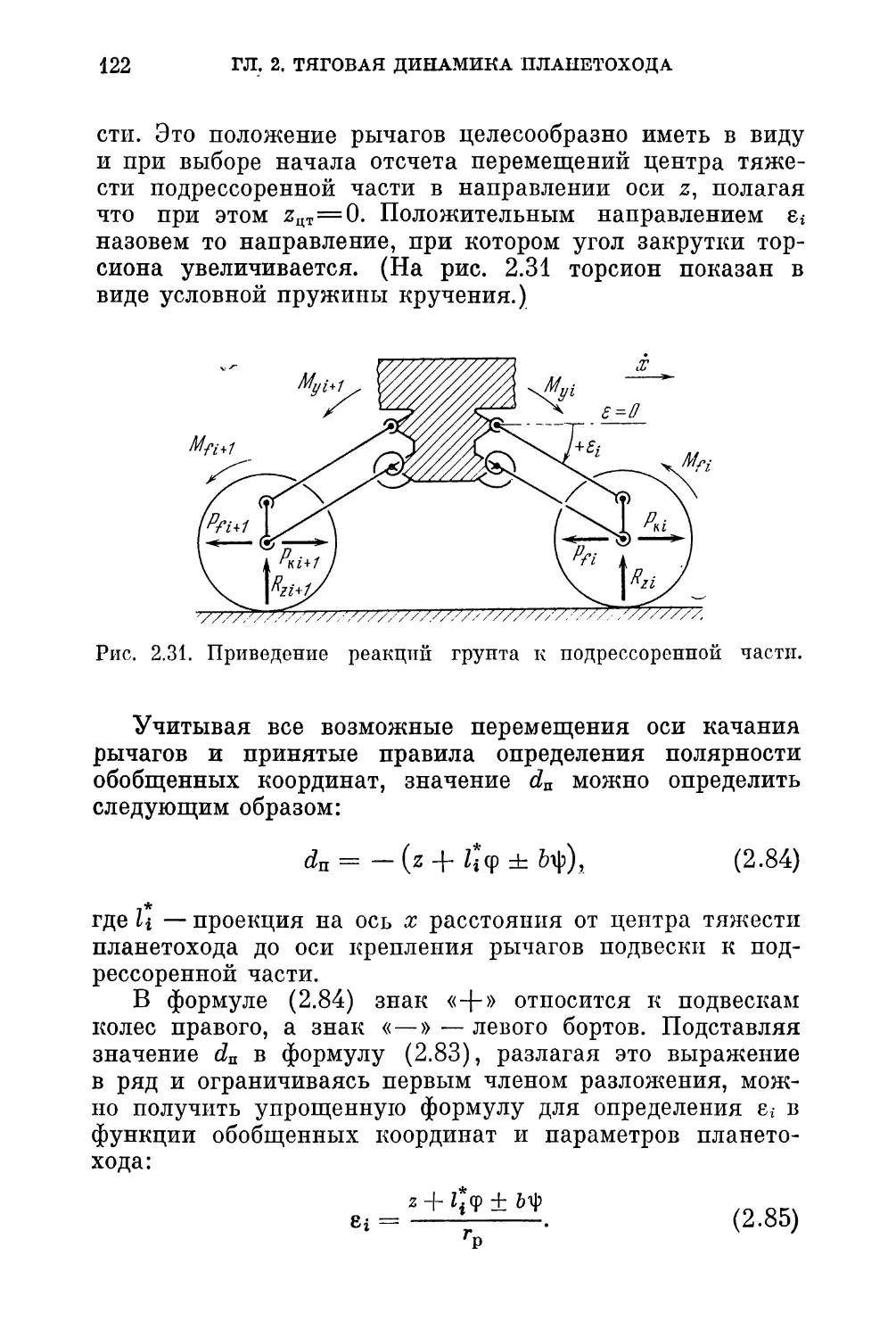
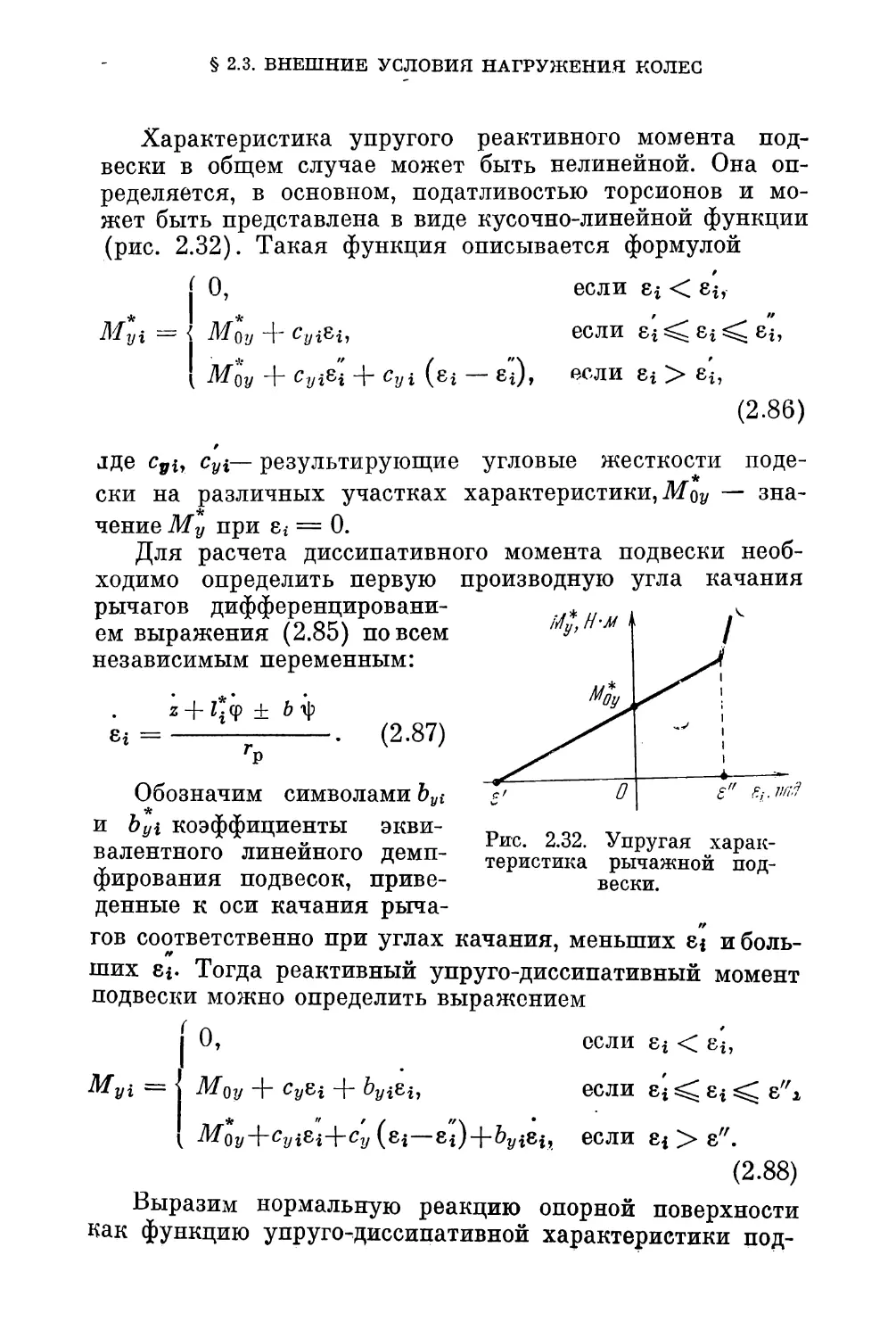
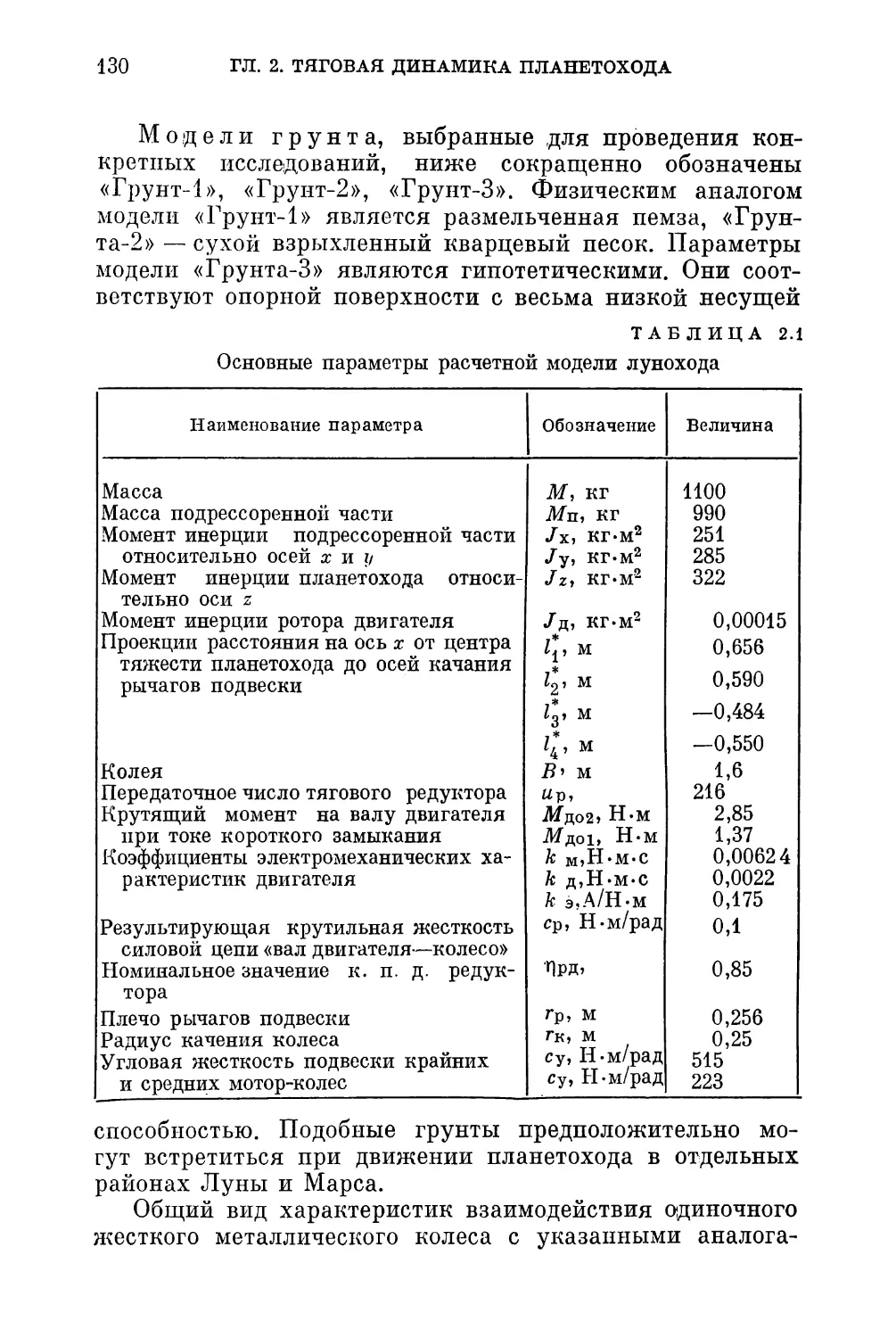
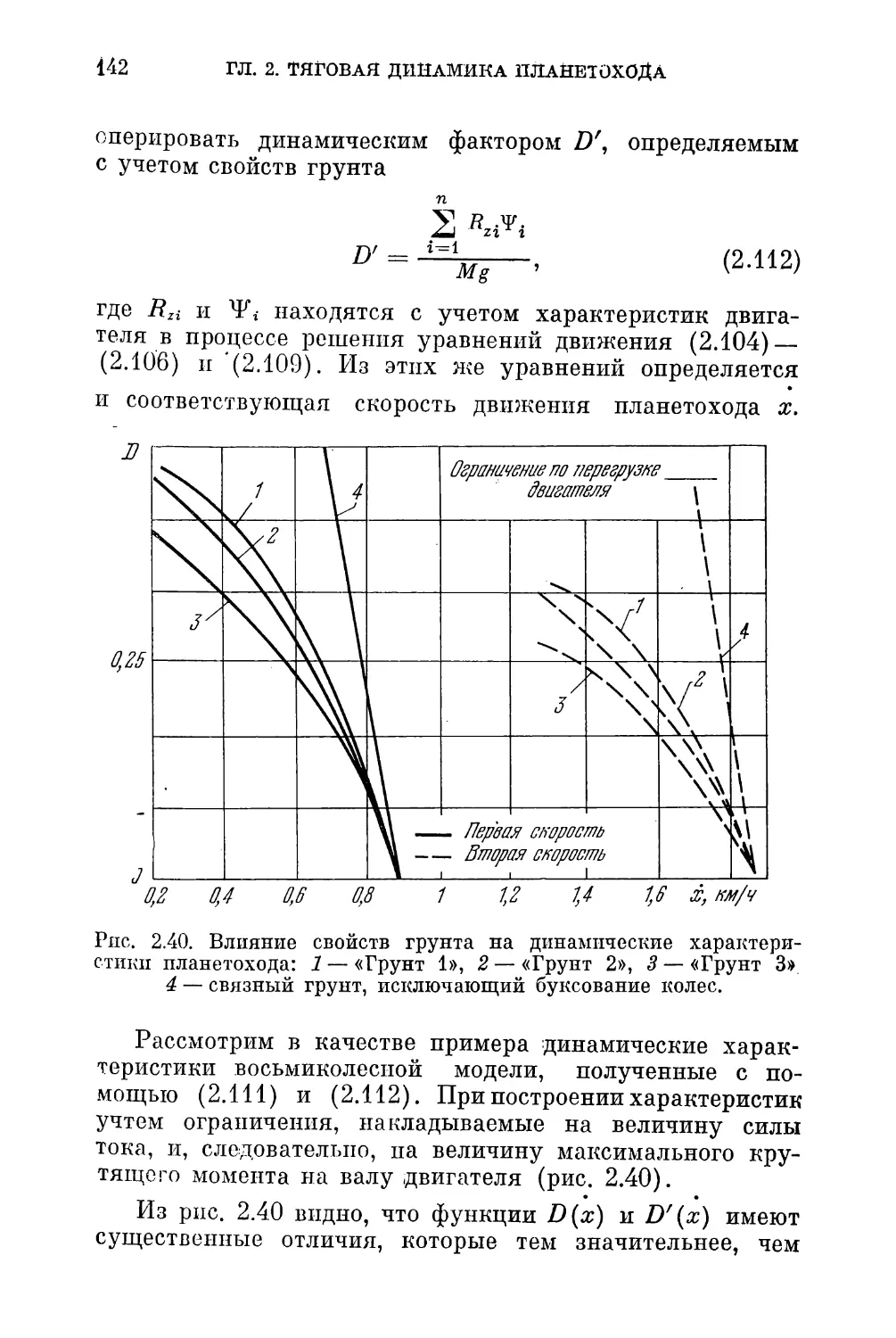
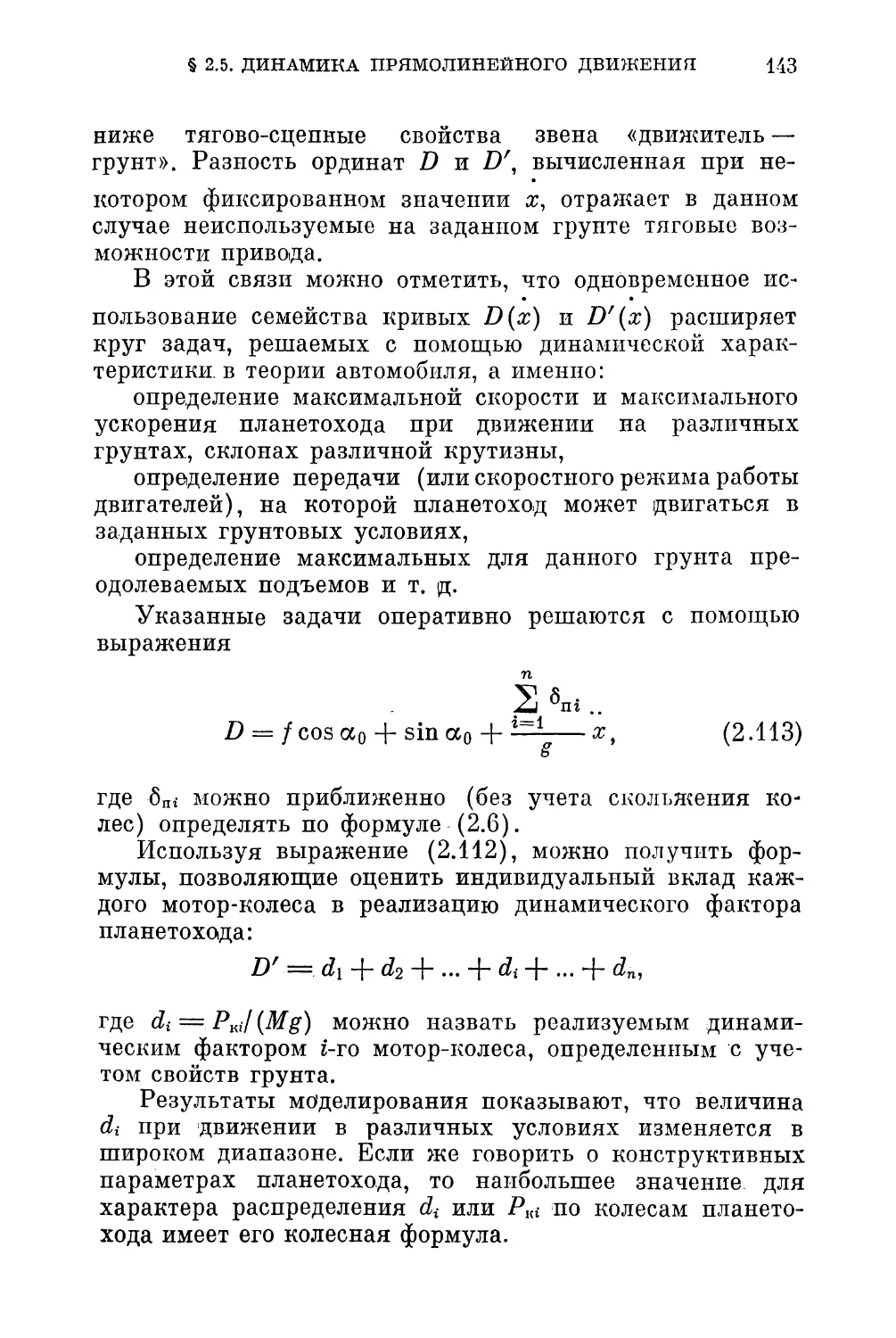
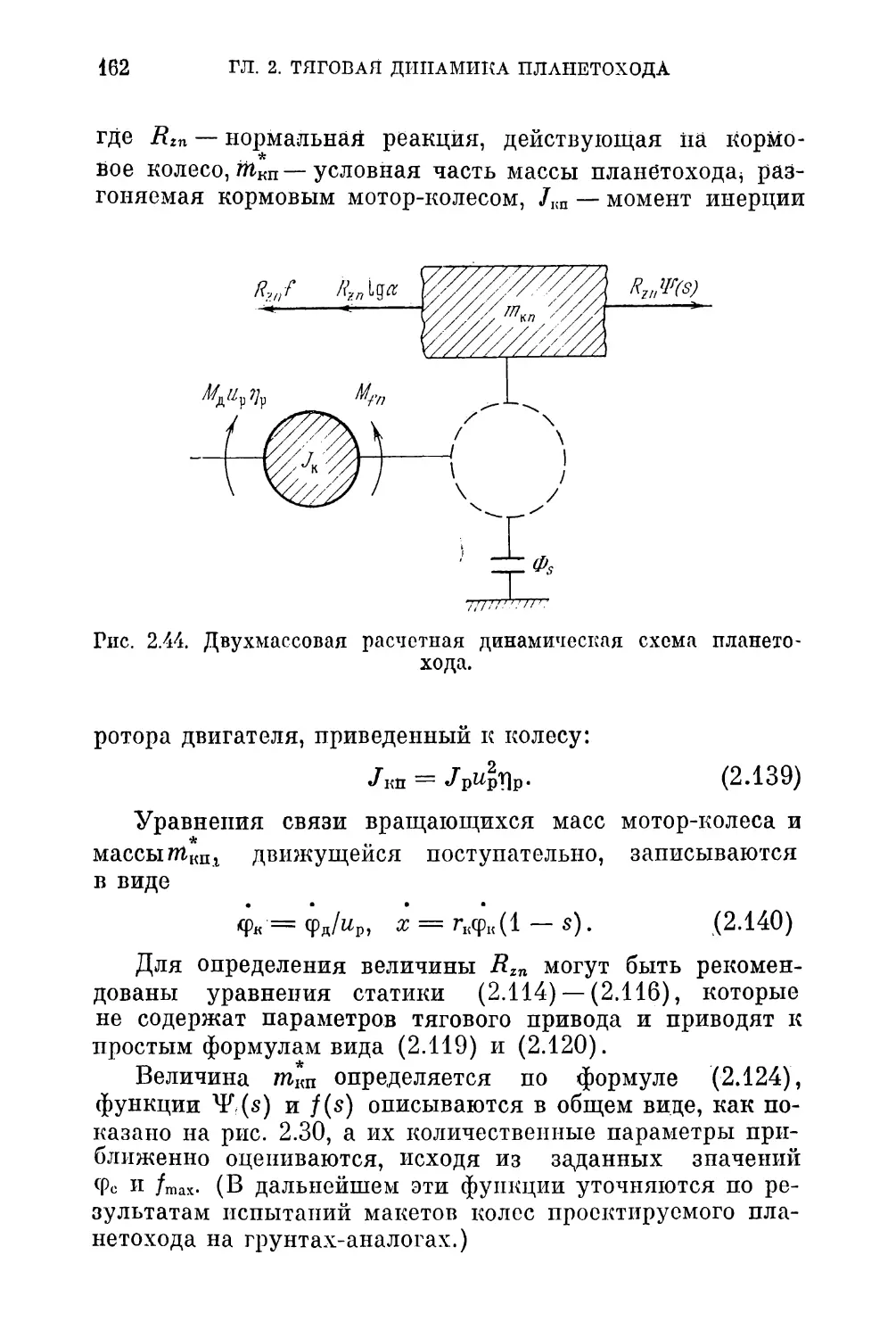
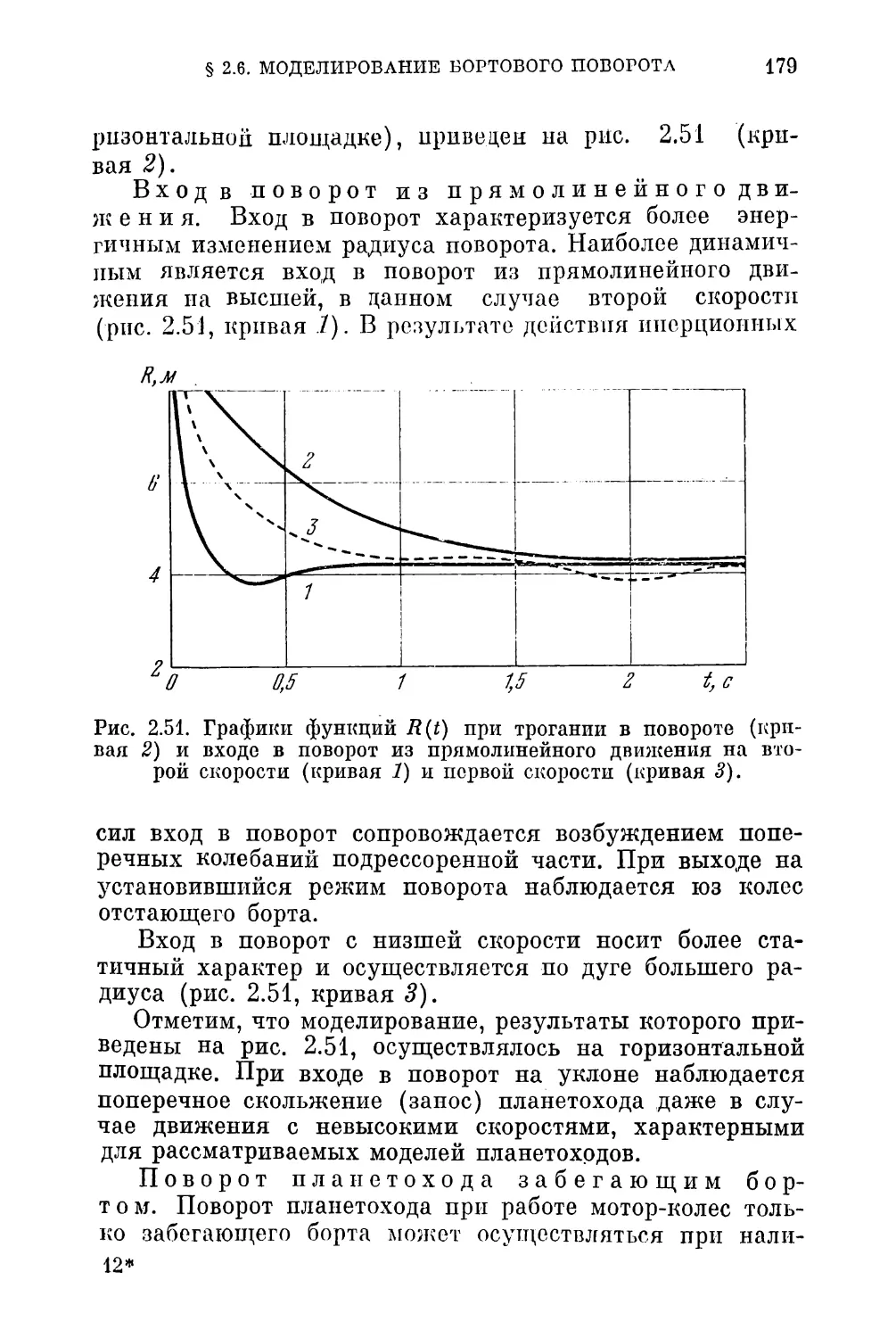
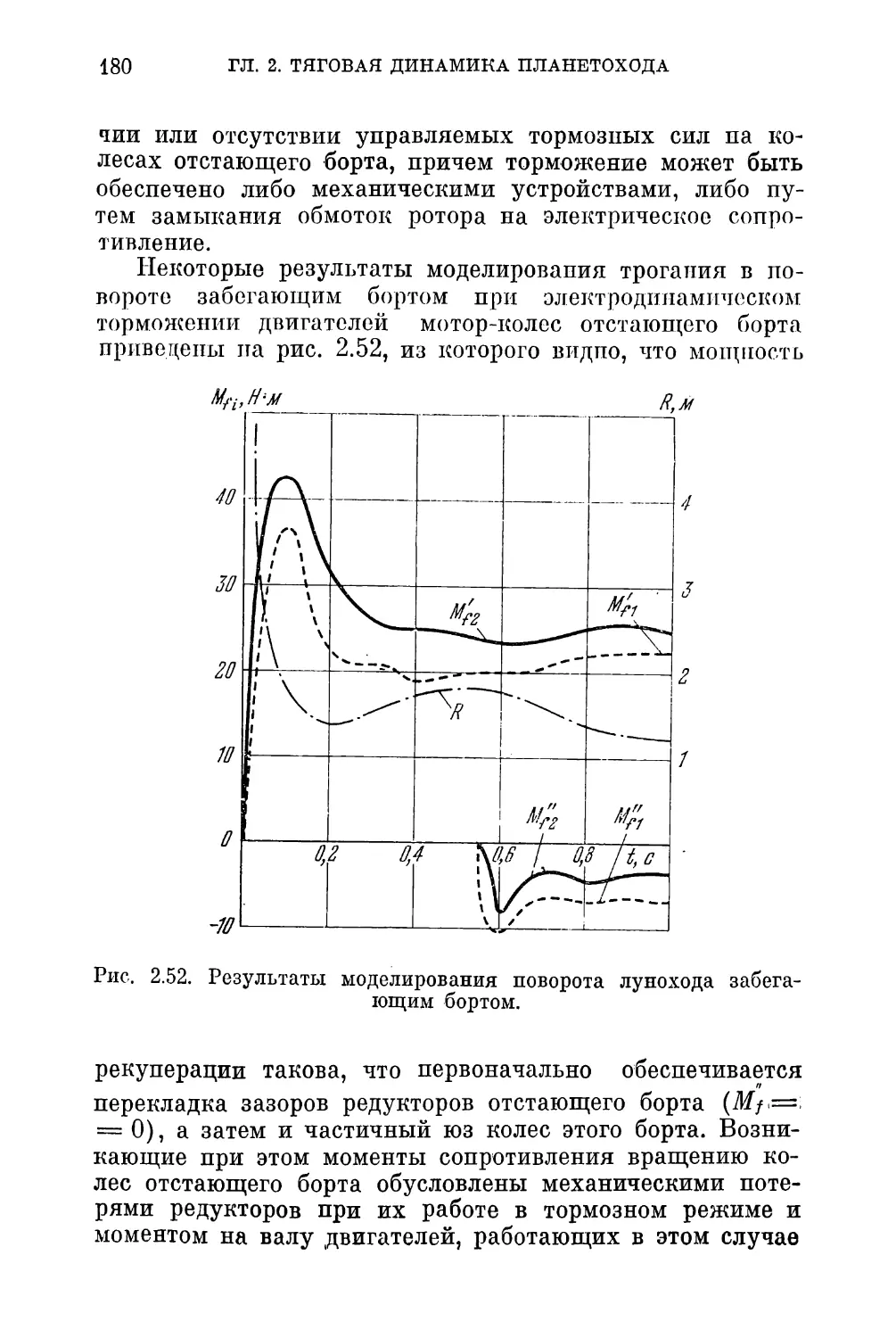
§ 2.1. Задачи и методы тягово-динамических расчетов
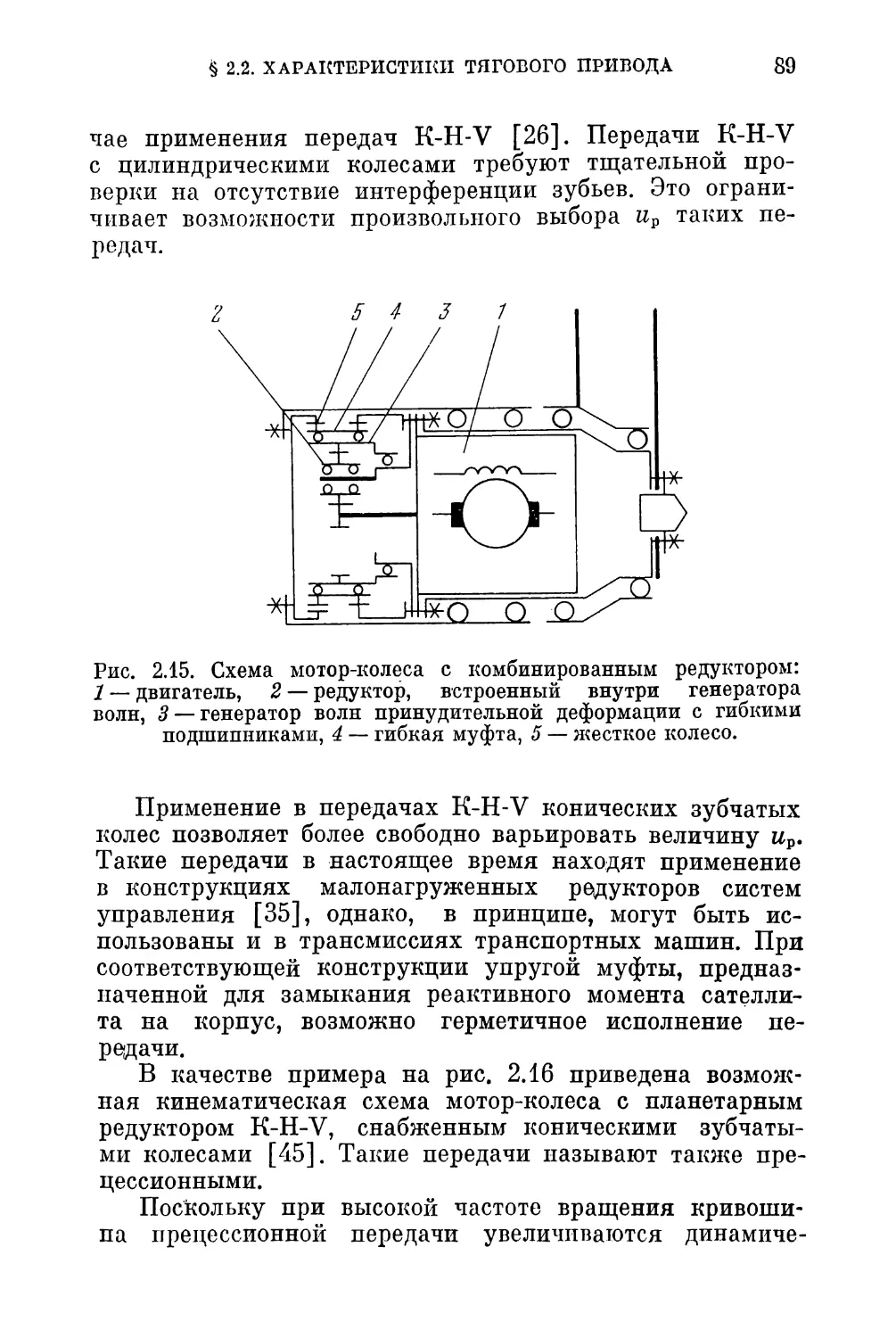
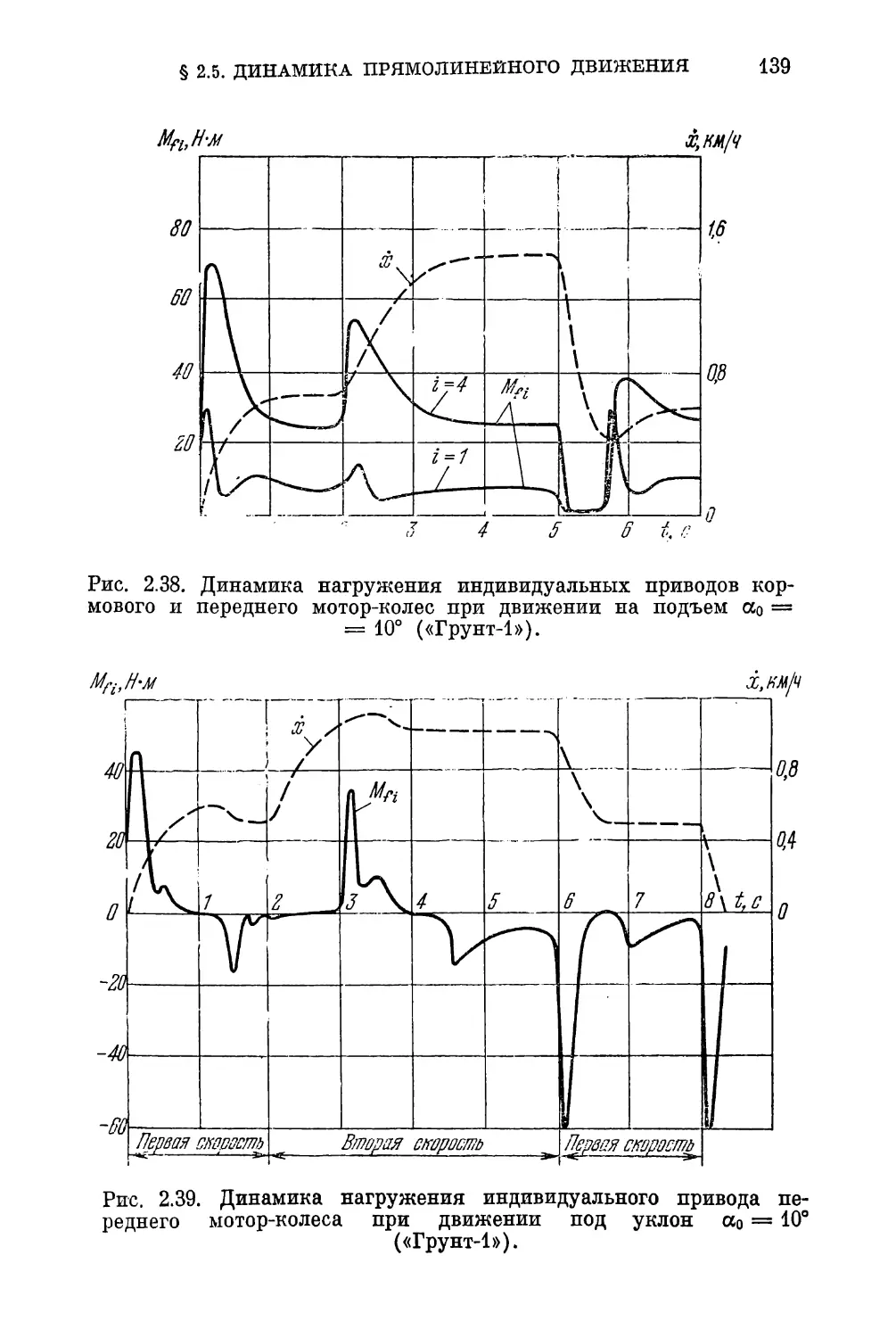
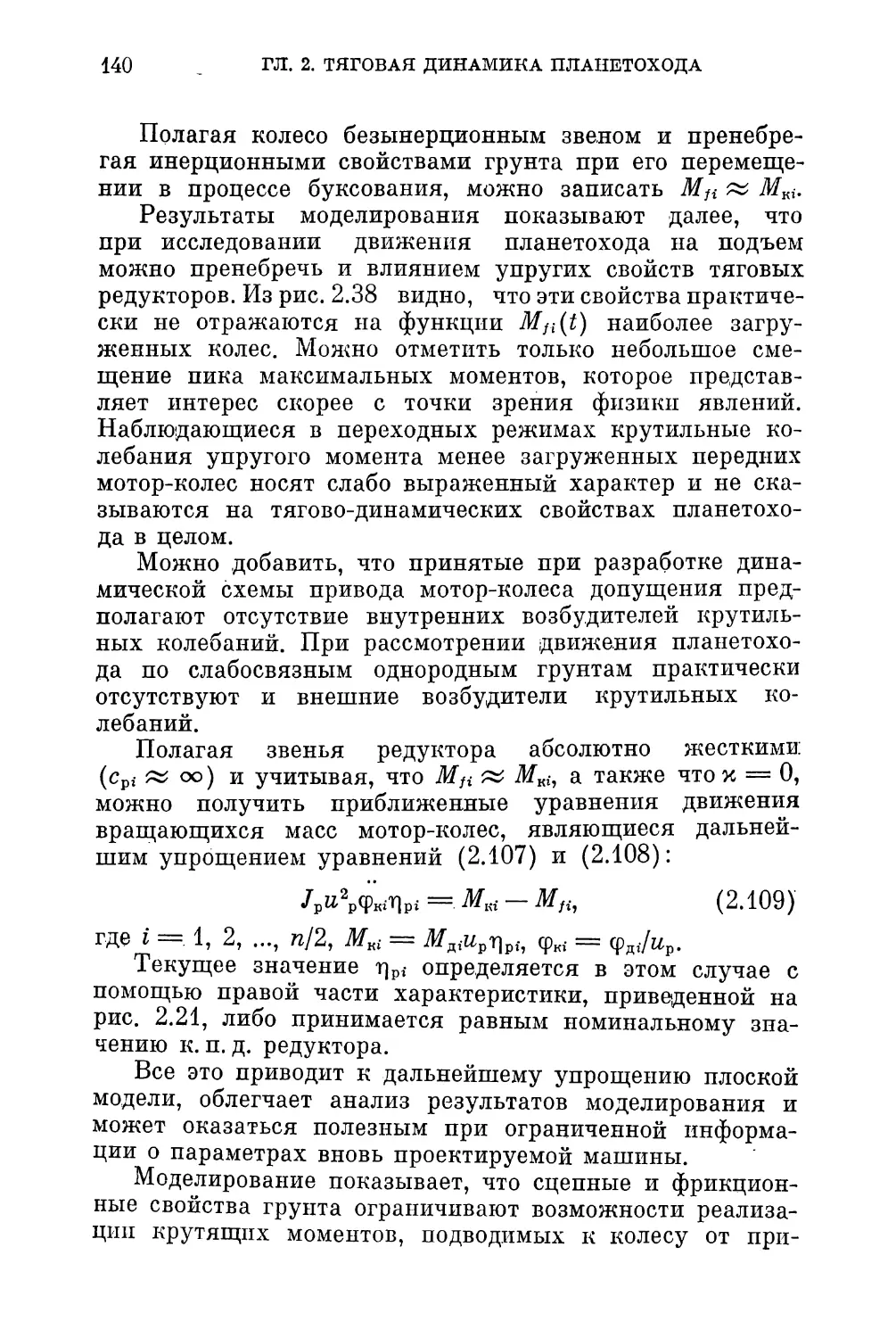
Тяговая динамика планетохода устанавливает функ-
циональные зависимости между конструктивными пара-
метрами привода и тягово-скоростными характеристика-
ми аппарата в случае его движения по плоской опорной
поверхности.
Подобные зависимости являются аналогами некото-
рых реальных тягово-динамических свойств транспорт-
ных средств и могут быть получены при решении диф-
ференциальных уравнений движения. Вывод уравнений
базируется на различных физических предпосылках и
допущениях и может быть осуществлен с различной
степенью детализации. Совокупность этих предпосылок
и допущений, расчетных схем, внутренних характери-
стик транспортных машин, дифференциальных уравне-
ний движения и алгоритма их решения составляет основ-
ное содержание теоретических методов оценки тягово-
динамических свойств.
Необходимость развития существующих методов оцен-
ки тягово-динамических свойств транспортных машин
применительно к задаче движения планетоходов обу-
словлена, в основном, особенностями физических усло-
вий эксплуатации космических аппаратов. Комплексная
имитация этих условий на наземных полигонах представ-
ляет сложную инженерную задачу, что ограничивает
возможности изучения динамических свойств планетохо-
дов экспериментальными метоцами в процессе проведе-
ния ходовых испытаний. Поэтому перед расчетными ме-
тодами ставится задача не только выбора параметров
тягового привода, по и прогнозирования поведения пла-
нетохода в реальных условиях эксплуатации.
§2.1. ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
57
Несмотря на очевидную общность отдельных техни-
ческих решений и элементов конструкции существую-
щих планетоходов и некоторых наземных транспортных
машин, последние не являются прямыми и полными ана-
логами планетоходов. Отсутствие прототипов при созда-
нии планетоходов приводит к увеличению числа вариан-
тов конструкции, обсуждаемых на различных, в особен-
ности па ранних, этапах проектирования. Поэтому теоре-
тические методы исследования тягово-динамических
свойств планетоходов должны быть достаточно универ-
сальными и оперативными.
Универсальность заключается в наличии единых ра-
счетных схем, исходных математических выражений и
алгоритмов решения при анализе различных режимов
работы планетоходов. Сравнительно большое количество
и нелинейность этих характеристик, отражающих разно-
родные физические процессы и явления, ограничивают
возможность применения традиционных аналитических и
графо-аналитических методов решения задач тяговой ди-
намики. Основным инструментом исследования в этом
случае могут быть различного рода масштабные модели,
а также математические модели, оперативная реализа-
ция которых осуществляется на ЭВМ [16, 22, 61]. При
этом сохраняется преемственность с существующими ме-
тодами тягового расчета колесных машин и, в первую
очередь, транспортных средств, снабженных индивиду-
альными электромеханическими приводами колес.
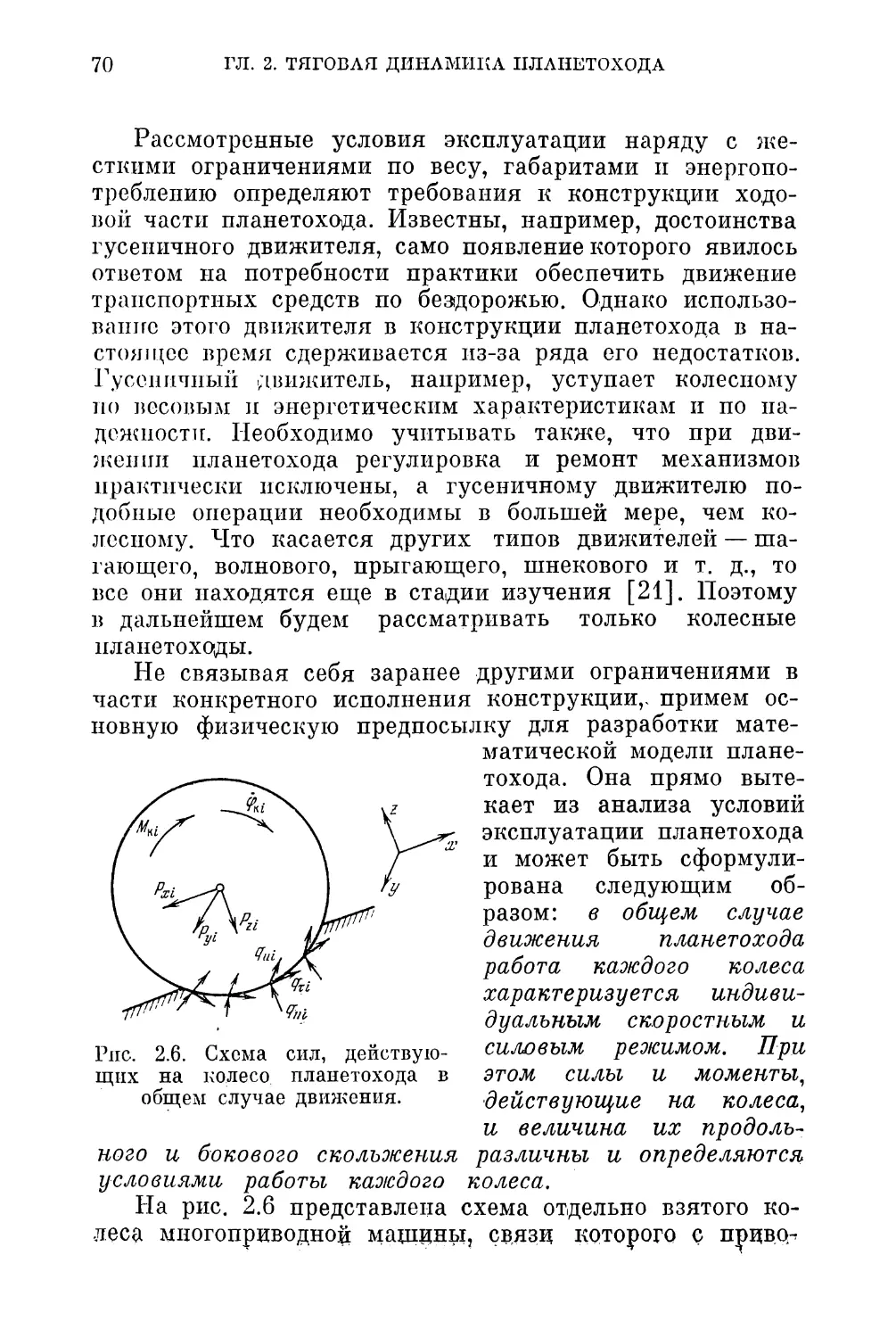
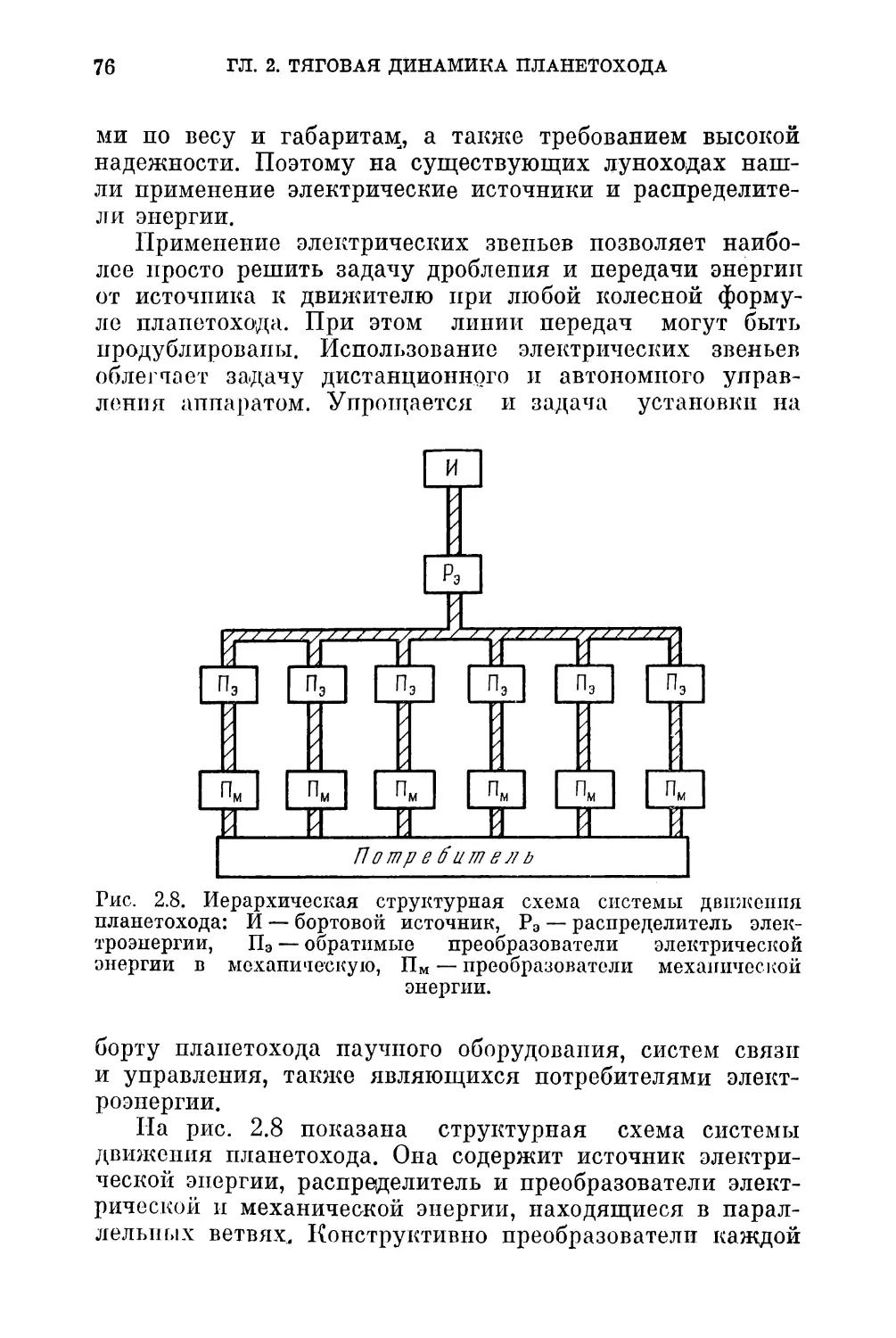
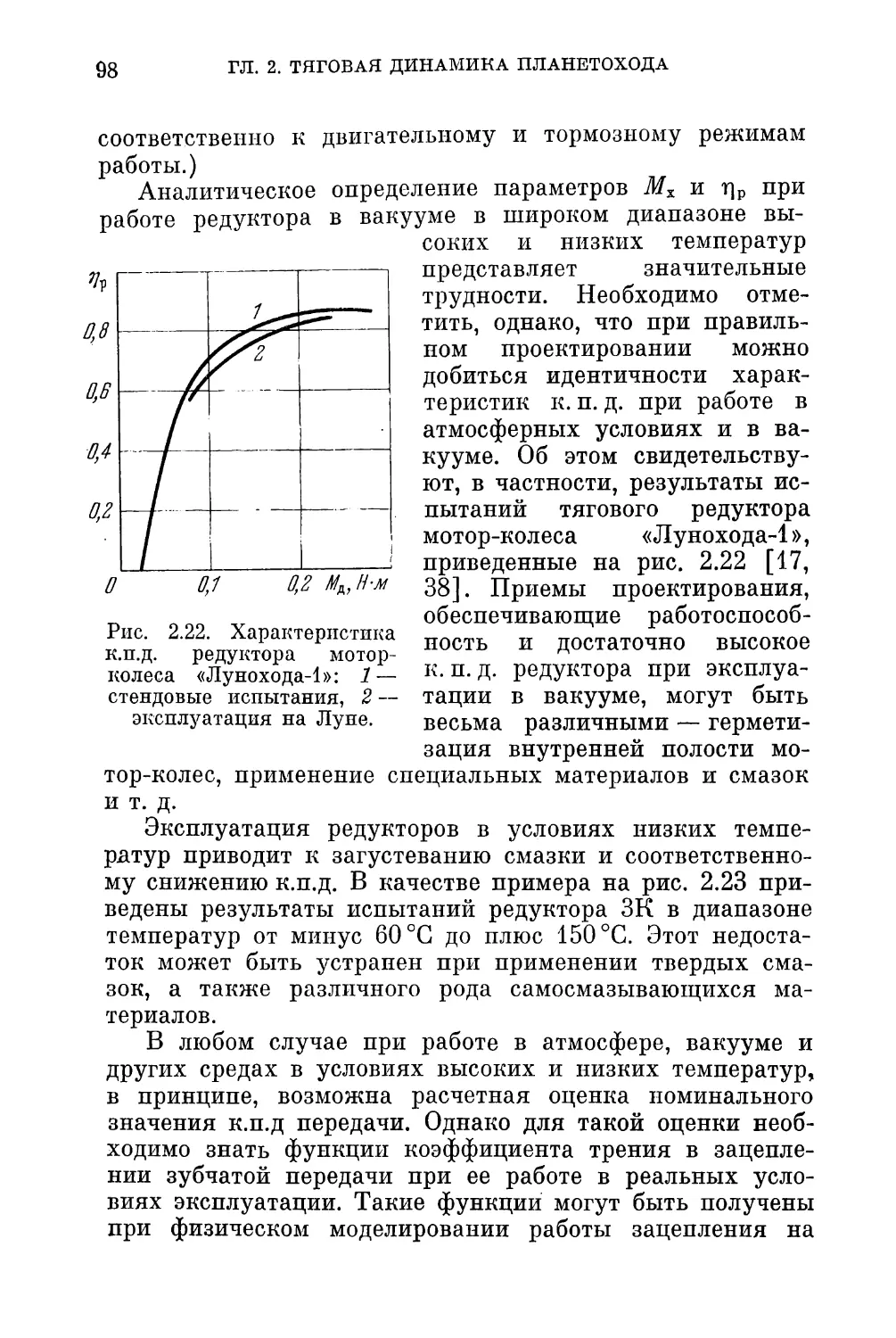
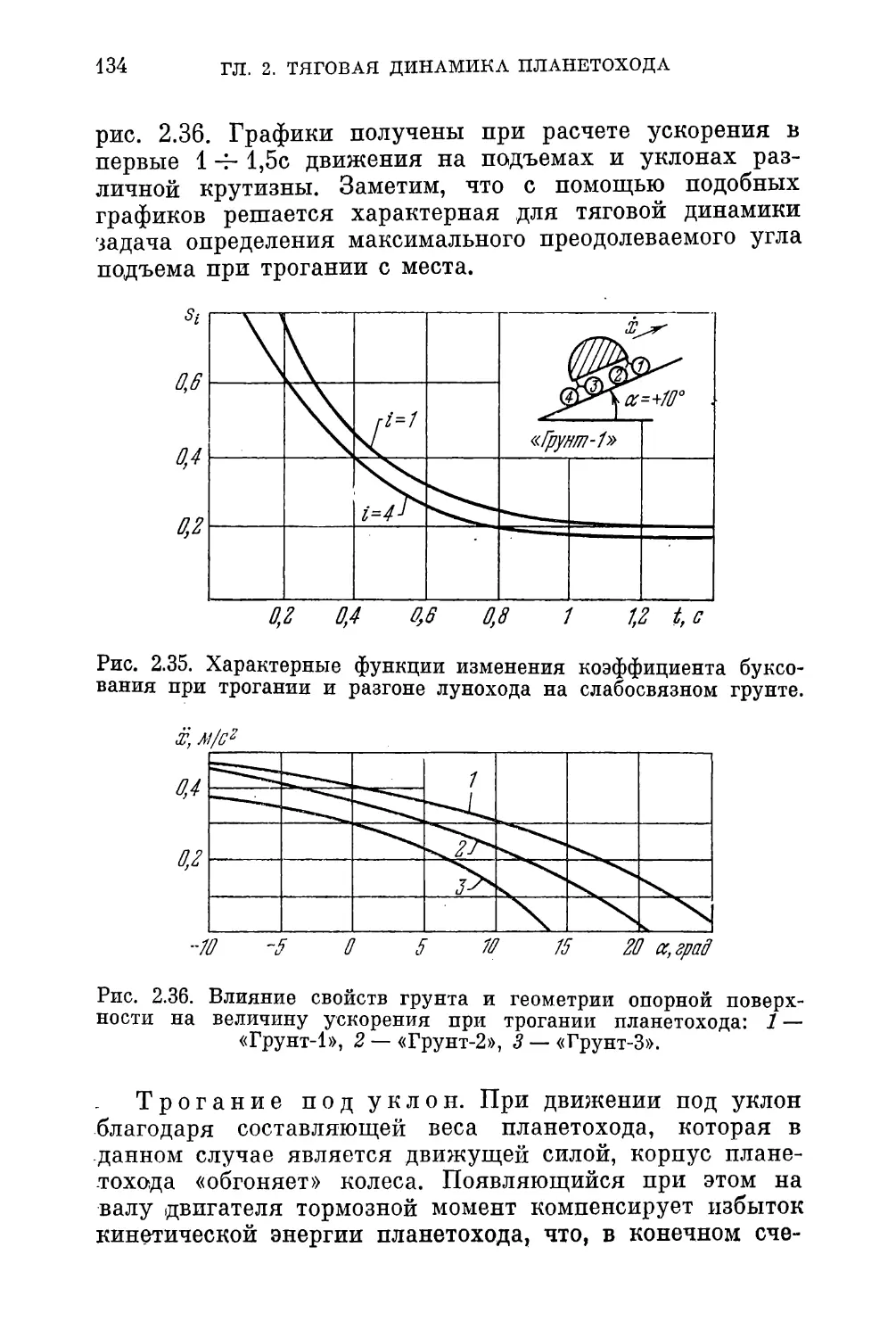
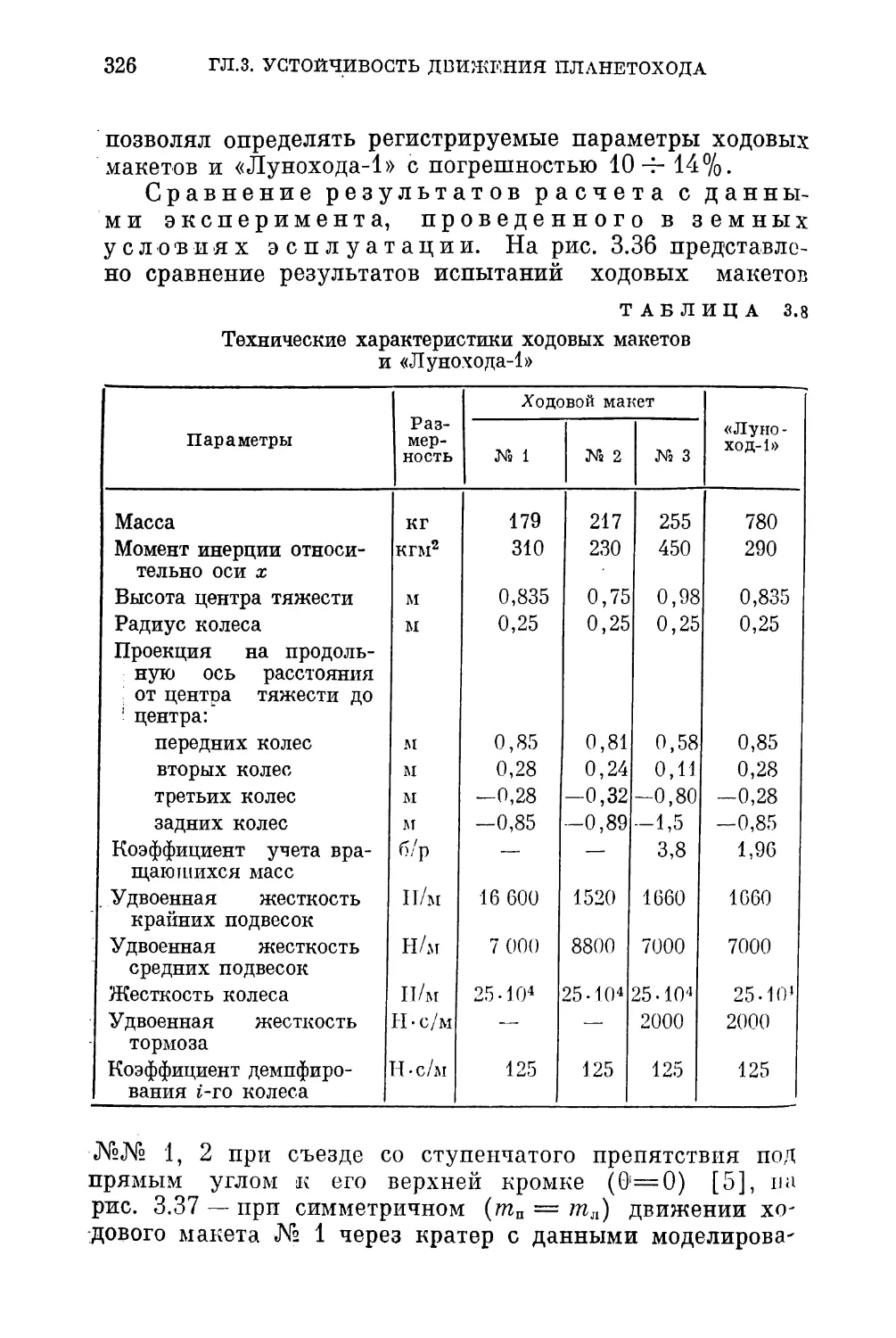
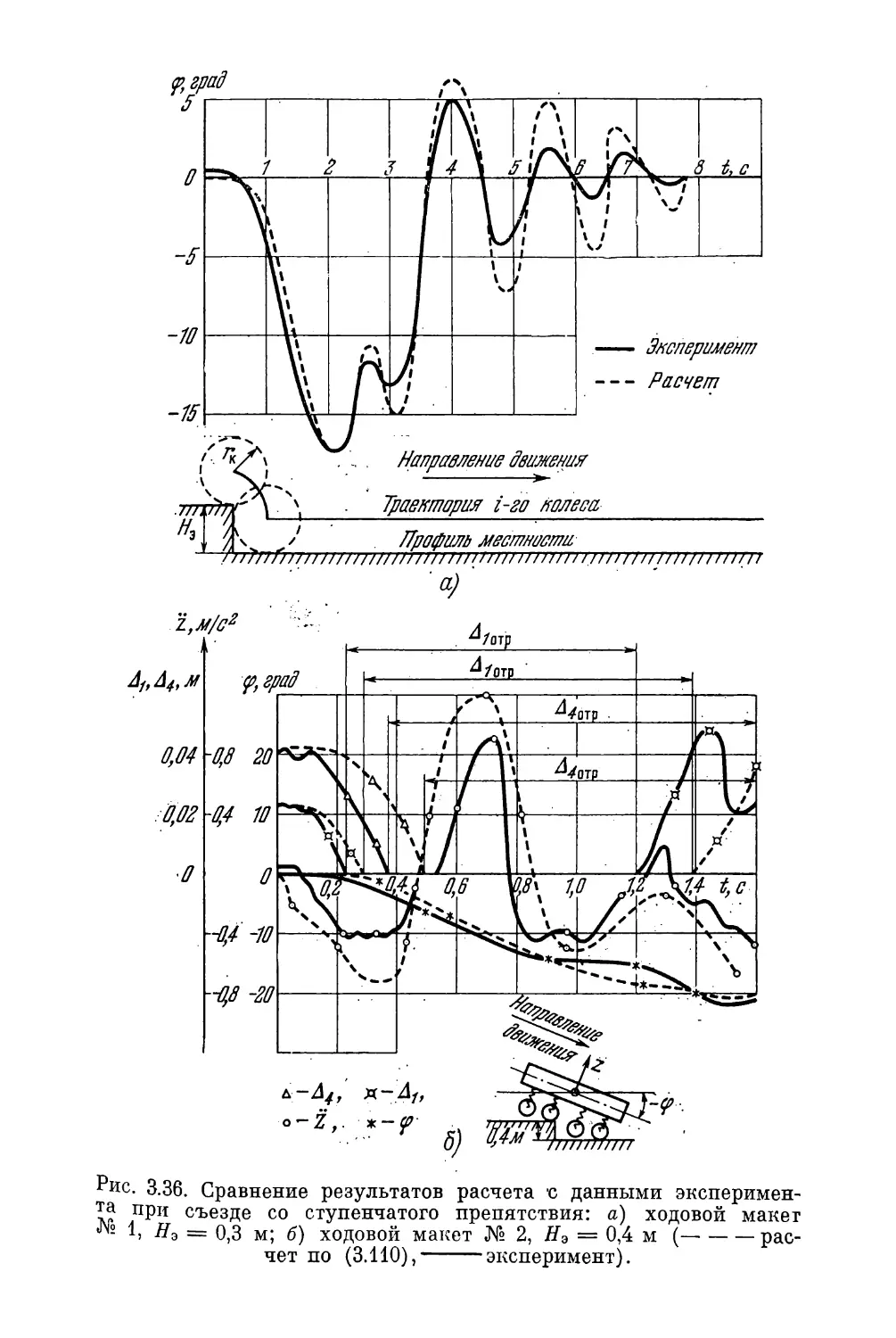
2.1.1. Исходные предпосылки при динамических ра-
счетах наземных машин. В теории транспортных машин;
решение задач тягово-динамического расчета приводят i
для случая прямолинейного движения машины на подъ- I
ем. Основным физическим допущением, принимаемым
при анализе динамики прямолинейного движения, явля-
ется представление о полной идентичности сил и момен-
тов, действующих па каждое ведущее колесо со стороны
грунтовой поверхности, подрессоренной части и привода.
Как показано А. И. Яковлевым в работе [62], такое до-
пущение позволяет оценить тягово-динамические свойст-
ва машины по результатам расчета одного мотор-колеса.
При этом предполагается, в частности, что вес маши-
ны п, следовательно, разгоняемая каждым приводом,
часть массы машины равномерно распределены между
58
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
всеми ведущими колесами
mKi = —, (2.1)
где М — масса транспортной машины, тк( — условная
часть массы машины, взаимодействующая с i-м мотор-
колесом, п — количество мотор-колес.
Дифференциальное уравнение движения машины с
учетом вращающихся масс мотор-колеса в этом случае
может быть записано в виде
— Рк0 Рfi sin OCq, (2.2)
где х — перемещение машины в направлении оси х (про-
дольной оси машины), бПг — коэффициент приведения
вращающихся масс привода, g — ускорение свободного
падения, Рк0 — полная окружная сила колеса, Pf, — сила
сопротивления движению. Принятое допущение не учи-
тывает взаимного влияния мотор-колес, связанных меж-
ду собой как через грунтовую поверхность, так и через
подрессоренную часть. Поэтому сила сопротивления дви-
жению в этом случае является функцией коэффициента
сопротивления движению только рассматриваемого мо-
тор-колеса
Ра = timing cos осо, (2.3)
где / — коэффициент сопротивления движению мотор-
колеса.
С учетом формулы (2.3) дифференциальное уравне-
ние движения имеет аналитическое решение, если для
каждого колеса можно записать
vxi — Гкфкг = о, i = 1, 2, ..., п, (2.4)
где их — проекция поступательной скорости центра коле-
са на ось х, фк — частота вращения колеса, гк — радиус
колеса.
Выражения (2.4) представляют собой уравнения го-
лономной связи колес с грунтом, справедливые в том слу-
чае, когда отсутствует продольное скольжение колес. Они
позволяют выразить положение вращающихся и поступа-
тельно движущихся масс машины через координаты, со-
ответствующие реальному числу степеней свободы [27].
В данном случае, используя уравнения (2.4), можно по-
лучить одномассовую расчетную схему. Из этих уравне-
§2.1. ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
59
ний вытекает, что vxi = х, поэтому Рк0 и бпг- можно опре-
делить по известным формулам
-РкО =
у* 7
(2.5)
бпг = 1 +
Vi/
(2.6)
где Мд — электромагнитный крутящий момент на валу
двигателя, г]р — к. п. д. тягового редуктора, — переда-
точное число редуктора, J# — приведенный к оси колеса
момент инерции /-й массы г-го мотор-колеса, 7 = 1, 2, ...
..., г — порядковый номер расчетной массы динамиче-
ской схемы мотор-колеса, /д — момент инерции ротора
двигателя, приведенный к валу двигателя.
Крутящий момент Мд зависит от скорости вращения
вала двигателя и с учетом уравнений (2.4) может быть
выражен в виде функции Мд = Мд (х). Это позволяет
решить уравнение (2.2), учитывая выражения (2.3),
(2.5) и (2.6).
Представление об отсутствии продольного скольжения
колес является вторым главным физическим допущени-
ем, принимаемым при тягово-динамических расчетах
транспортных машин с электромеханическим приводом.
Такое допущение обычно принимают и при динамических
расчетах других наземных колесных и гусеничных машин.
Реальные свойства грунта здесь учитываются только для
проверки условий движения машины. Используя приня-
тые выше обозначения, эти условия могут быть записаны
в виде [19]
S РкО1>М^фс> SP/i, (2.7)
г=1 i=i
где фс — коэффициент сцепления движителя с грунтом.
В то же время параметры, характеризующие сцепные
свойства системы движитель — грунт, не входят в струк-
туру дифференциальных уравнений движения, а тяго-
вое усилие на колесах при решении этих уравнений счи-
тается функцией крутящего момента двигателя.
К числу других допущений, принимаемых обычно при
решении задач тяговой динамики наземных транспорт-
60
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
ных средств, относятся представления об отсутствии бо-
кового скольжения колес, о неизменности к.п.д механиче-
ских передач, об абсолютно жесткой связи звеньев транс-
миссии и т. д. В большинстве случаев расчетным режи-
мом является движение в направлении угла наибольше-
го подъема по дорогам с покрытием при сравнительно
небольшой крутизне подъема и примерно одинаковой за-
грузке всех ведущих колес.
2.1.2. Особенности условий эксплуатации планетохо-
дов в связи с задачами их тягово-динамического расчета.
При выборе расчетной схемы движения планетоходов
должны учитываться такие особенности эксплуатации,
как отсутствие дорог, специфичность окружающей среды,
широкий диапазон температур,, отличие гравитационного
поля от земного, невозможность осмотра и ремонта уз-
лов самоходного шасси и т. д. Все это предопределяет
своеобразие подхода к разработке методов решения задач
тяговой динамики планетоходов.
С позиций этих задач свойства местности, на которой
эксплуатируется планетоход, можно характеризовать гео-
метрией и физическим состоянием опорной поверхности.
Геометрия опорной поверхности. Как по-
казано в гл. 1, уклоны поверхности на возможных трас-
сах движения луноходов и марсоходов могут достигать
30-7-35°. Движение на крутых уклонах связано с суще-
ственным перераспределением сил и моментов, действую-
щих на каждое колесо многоприводной машины.
Это видно, например, из рис. 2.1, где приведены гра-
фики, иллюстрирующие статическое распределение
тяговых усилий по колесам «Лунохода-1» при его эксп-
луатации на Луне. Графики построены по данным теле-
метрической информации бортовых систем самоходного
шасси «Лунохода-1» [38]. При обработке информации
выбирались такие участки трассы, когда прямолинейное
движение осуществлялось в направлении наибольшего
подъема, т. е. когда крен аппарата был незначительным.
При движении «Лунохода-1» на косогоре перераспре-
деление сил и моментов, действующих на мотор-колеса
противоположных бортов, приводило к курсовому уводу
аппарата. Для оценки величины курсового увода необхо-
димо учитывать не только продольные, но и поперечные
силы даже при анализе прямолинейного движения. По-
2.1. ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
61
перечные силы также различны для каждого колеса
мпогоприводного планетохода. Различным образом рас-
пределяются п составляющие продольных сил сопротив-
ления движению каждого колеса, приложенные к его
оси и обусловленные моментом сопротивления грунта
бортовому повороту.
Рис. 2.1. Распределение тяговых усилий по колесам «Лунохода-1»
при движении на подъемы различной крутизны.
Таким образом, в общем случае движения планетохо-
да на косогоре наблюдается различие моментов, верти-
кальных, продольных и поперечных сил, действующих
на каждое колесо со стороны привода, грунта и подрес-
соренной части. Каждое колесо может работать в инди-
видуальном скоростном режиме, что вызывает необходи-
мость одновременного рассмотрения кинематических ха-
рактеристик отдельного колеса и планетохода в целом.
Физическое состояние опорной поверх-
ности. Применительно к задаче движения транспорт-
ных средств физическое состояние опорной поверхности
характеризуется механическими свойствами грунта —
прочностью, уплотняемостыо, сцеплением и т. д. В неко-
торых работах механические свойства грунта оценивают-
62
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
ся его несущей способностью, под которой понимается
среднее удельное давление под штампом (или подошвой
другого тела) при его вдавливании в грунт на заданную
глубину [21, 37]. В работе [37], в частности, принима-
ется глубина, равная диаметру штампа.
Исследования несущей способности лунного грунта в
естественном залегании и на образцах свидетельствуют
о широком диапазоне значений несущей способности, на-
чиная с самых малых. Так, по трассе движения «Луно-
хода-1» несущая способность колебалась в пределах от
0,2 до 1 кгс/см2, а наибольшей частости соответствовала
величина несущей способности, равная 0,34 кгс/см2 [37].
По своему гранулометрическому составу подобный грунт
представляет собой мелкозернистый материал, рыхлый в
своем верхнем слое и хорошо уплотняющийся при взаи-
модействии с движителем.
Движение транспортных средств на грунтах с малой
несущей способностью связано со скольжением колес в
продольном и поперечном (боковом) направлениях. Ха-
рактер взаимодействия движителя «Лунохода-1» и «Луно-
хода-2» с лунным грунтом подтверждает это заключение.
При движении луноходов образовывалась колея глубиной
до 0,05 м (рис. 2.2). Буксование колес на горизонталь-
ных участках достигало 104-15%. При движении на
подъем глубина колеи увеличивалась, а буксование до-
стигало 204-40% [37].
Фотографии марсианской поверхности, полученные с
борта посадочных блоков космических аппаратов «Vi-
king-1» и «Viking-2», показывают, что на Марсе могут
встретиться районы, в которых условия движения марсо-
ходов будут достаточно сложными. Могут встретиться
участки пылевых отложений с низкой несущей способ-
ностью грунта, с выходами твердых пород, участки с вы-
сокой концентрацией камней различной формы. Как вид-
но из сопоставления рис. 2.3 и 2.4 аналогами таких
участков на Земле могут служить отдельные районы вул-
канических отложений [38, 75].
Благодаря успешным полетам советских автомати-
ческих станций «Венера-9» и «Венера-10» получены
уникальные данные о поверхностном покрове Венеры
(рис. 2.5). Путем прямых измерений установлены пара-
метры окружающей среды, с помощью радиационного
прибора определена плотность венерианских пород, рав-
§ 2.1. ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
63
Рис. 2.2. Колея «Лунохода-1» на различных участках трассы
прямолинейного движения (а) и поворота (б) в Море Дождей.
64
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Рис. 2.3. Фрагменты панорамы марсианской поверхности в месте
посадки космических аппаратов «Viking-1» (с) п «Viking-2» (б).
В правом нижнем углу (рис. 2.3я) — опора посадочного блока
«Viking-1».
§ 2.1. ЗАДАЧИ ТЯГОВО-ДИПЛМИЧЕСКПХ РАСЧЕТОВ
65
Рис. 2.4. Россыпи камней па Камчатке в районе вулкана Ши-
велуч.
5 Е. В, Авотин и др.
Рис. 2.5. Фрагменты панорамы венерианской поверхности в месте посадки автоматических межпланет-
ных станций «Венера-9» (а) и «Венера-10» (б). В нижней части панорам—элементы конструкции стан-
ций «Венера-9» и «Венера-10».
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
§ 2.1. ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
67
пая 2,7 = 2,9 г/см3 [49, 52]. Механическая прочность
пород в месте посадки станций оказалась достаточно вы-
сокой, и по некоторым оценкам примерно соответствует
прочности земных полускальпых пород*).
Учет скольжения колес на грунтах различного типа,
и в особенности на слабых деформируемых грунтах, по-
зволяет не только более точно прогнозировать скорость
и траекторию движения планетохода, но и изменяет под-
ход к расчету текущих значений тяговых усилий каждо-
го колеса. Тяговые усилия в этом случае определяются
изменяющимися во времени характеристиками процесса
взаимодействия движителя с грунтом. У многоприводной,
многоколесной машины эти характеристики могут быть
различными для каждого колеса вследствие неоднородно-
сти грунтовой поверхности, последовательного уплотне-
ния колесами грунта по колее, различия скольжения от-
дельных колес и т. д.
Гравитационное поле Лупы и Марса.
Меньшее, чем на Земле, ускорение свободного падения
на поверхности Луны и Марса приводит к увеличению
времени разгона планетохода в прямолинейном движе-
нии и повороте. Реализация максимальных тяговых уси-
лий колес в этом случае ограничивается не только свой-
ствами грунта, но и уменьшением суммарной величины
вертикальных сил, действующих на планетоход. В то же
время инерционные продольные силы пропорциональны
массе планетохода.
По опыту работы «Лунохода-1» можно заметить так-
же, что движение планетохода при отсутствии на его
борту космонавта-водителя осуществляется короткими
отрезками пути. Поэтому с учетом всех факторов динами-
ческие (переходные) режимы составляют значительную
долю от общего времени работы аппарата.
Другим аспектом является уменьшение величины
восстанавливающих моментов при колебаниях подрессо-
ренной части и отрыве отдельных колес планетохода от
грунта. Как показано в гл. 3, это особенно важно с по-
зиций устойчивости движения планетохода.
*) По материалам доклада А. К. Леоновича, В. В. Громова,
П. С. Семенова, 10. А. Суркова, В. Г. Перминова, А. Д. Дмитрие-
ва «О физико-механических свойствах венерианского грунта»
на XXVIII конгрессе МАФ, Прага, 1977 г,
5*
68
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Окружающая среда вблизи поверхности
планет. Пространство вблизи поверхности Луны харак-
теризуется высоким вакуумом. Трение материалов в ва-
кууме имеет свои особеннности, обусловленные затруд-
ненностью теплоотвода из зоны контакта, отсутствием на
поверхностях трениях защитных окисных пленок и т. д.
Это отражается па характеристиках взаимодействия ме-
ханических звеньев, в первую очередь, на их к. п. д., что
должно учитываться при тягово-динамических расчетах.
Основной составляющей атмосферы Марса и Венеры
является углекислый газ. Однако, если марсианская ат-
мосфера разрежена, то вблизи поверхности Венеры ат-
мосферное давление составляет 90 4-95 атм. [1, 34]. На
обеих планетах обнаружены ветровые потоки, причем на
Марсе во время одной из периодически повторяющихся
там пылевых бурь была зарегистрирована скорость ветра
до 100 м/с [34]. Во время работы аппаратов «Viking-1»
и «Viking-2» средняя скорость ветра составляла менее
10 м/с, а при порывах—19 м/с. Скорость ветра у поверх-
ности Венеры оценивается величиной, равной 0,5 4- 1 м/с.
Запыленность атмосферы Марса в период бурь, спе-
цифичность газового состава атмосферы Марса и Вене-
ры — все это предъявляет определенные требования к
конструкции привода, что, в конечном итоге, отражает-
ся на его характеристиках.
Температура окружающей среды на по-
верхности планет. Температура среды также ока-
зывает влияние на внутренние характеристики электро-
механического привода, причем эти характеристики мо-
гут меняться не только в течение лунных суток, но и
в течение одного и того же периода времени быть раз-
личными для мотор-колес противоположных бортов. Та-
кое явление может иметь место в случае, если колеса
одного борта находятся на освещенной, а другого бор-
та — па теневой стороне.
Из-за отсутствия атмосферы особенно велик темпера-
турный перепад на поверхности Луны. В течение лун-
ных суток температура поверхностного покрова Луны
может измениться примерно от плюс 120 до минус 170 °C
[25]. Перепад температуры освещенной и теневой сто-
рон одного и того же предмета также может быть весь-
ма значительным,
§2.1. ЗАДАЧИ ТЯГОВО-ДИИЛМИЧЕСКИХ РАСЧЕТОВ
69
На поверхности Марса температура изменяется в су-
щественно меньших пределах. В экваториальной зоне,
например, температура в зимнее время года может опу-
скаться до минус 80-г-минус 110°С [34].
Температура вблизи поверхности Венеры составляет
около 500 °C, что будет являться, по-видимому, одним из
основных препятствий для нормального функционирова-
ния всперохода [1].
Особенности управления планетохода-
м и. Планетоходы могут управляться космонавтом, на-
ходящимся па борту аппарата (непосредственное управ-
ление) и оператором, находящимся па Земле (дистан-
ционное управление). Возможно также полуавтономиое
и автономное управление планетоходом. В полуавтоном-
пом режиме низшие уровни управления реализуются на
борту, а решения, связанные с обходом препятствий и
прокладкой курса, принимаются на Земле. В автономном
режиме управление аппаратом осуществляется бортовы-
ми системами.
Во всех этих случаях для разработки алгоритмов уп-
равления необходимо иметь представление о реакций
машины на ту или иную команду, т. е. о ее поведении
в различных дорожных условиях. Подобные задачи ре-
шаются, в основном, при проведении ходовых испыта-
ний. Другим путем является разработка математических
моделей, пе имеющих реальных ограничений как в ча-
сти имитации условий эксплуатации, так и в части объ-
ема проводимых исследований. Подобная модель, глав-
ным назначением которой является решение тяговых
задач, в то же время может явиться составным элемен-
том более сложных моделей, предназначенных для реше-
ния задачи управления планетоходом.
При дистанционном, полуавтономном и автономном
управлении увеличивается вероятность движения плане-
тохода в наиболее неблагоприятных режимах — па кру-
тых подъемах, па косогоре, па грунтах с низкими сцеп-
ными свойствами. Это обстоятельство необходимо учиты-
вать при выборе расчетных режимов движения. При
этом нужно иметь в виду, что движение не должно пре-
кращаться в результате какой-либо аварийной ситуации,
например, непрохождения команды на включение двига-
теля одного из мотор-колес и т. п.
70
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Рассмотренные условия эксплуатации наряду с же-
сткими ограничениями по весу, габаритами и энергопо-
треблению определяют требования к конструкции ходо-
вой части планетохода. Известны, например, достоинства
гусеничного движителя, само появление которого явилось
ответом на потребности практики обеспечить движение
транспортных средств по бездорожью. Однако использо-
вание этого движителя в конструкции планетохода в на-
стоящее время сдерживается из-за ряда его недостатков.
Гусеничный движитель, например, уступает колесному
по весовым и энергетическим характеристикам и по на-
дежности. Необходимо учитывать также, что при дви-
жении планетохода регулировка и ремонт механизмов
практически исключены, а гусеничному движителю по-
добные операции необходимы в большей мере, чем ко-
лесному. Что касается других типов движителей — ша-
гающего, волнового, прыгающего, шнекового и т. д., то
все они находятся еще в стадии изучения [21]. Поэтому
в дальнейшем будем рассматривать только колесные
планетоходы.
Не связывая себя заранее другими ограничениями в
части конкретного исполнения конструкции,- примем ос-
новную физическую предпосылку для разработки мате-
матической модели плане-
Рис. 2.6. Схема сил, действую-
щих на колесо планетохода в
общем случае движения.
ного и бокового скольжения
условиями работы каждого
тохода. Она прямо выте-
кает из анализа условий
эксплуатации планетохода
и может быть сформули-
рована следующим об-
разом: в общем случае
движения планетохода
работа каждого колеса
характеризуется индиви-
дуальным скоростным и
силовым режимом. При
этом силы и моменты,
действующие на колеса,
и величина их продолъ-
различны и определяются
колеса.
На рис. 2.6 представлена схема отдельно взятого ко-
леса многоприводноц мащцны, связи которого с прцвон
§2.1. ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
71
дом, грунтовой поверхностью и корпусом заменены со-
ответствующими силами. На i-e колесо действуют кру-
тящий момент MKi со стороны привода; элементарные
(отнесенные к элементарной контактной площадке) нор-
мальные, касательные и боковые реакции грунта qni, qXi,
qui] равнодействующая всех сил, действующих на колесо
со стороны планетохода (результирующая сила), Л- по-
казана на рис. 2.6 в проекциях па оси координат xyz.
Проекции равнодействующей, приведенные к оси колеса,
обозначены Pxi, Pyit) P2i.
Функциональное описание момента MKi возможно на
основе анализа характеристик привода, включая его ме-
ханические и электрические звенья. При этом величина
и направление момента могут быть произвольными.
Элементарные реакции грунта приложены к колесу
по поверхности его контакта с грунтом, имеющей слож-
ную конфигурацию. При произвольном соотношении де-
формаций грунта и колеса во время движения изменя-
ются не только величина и направление, по и точка при-
ложения равнодействующих этих реакций.
Направление и величина результирующей силы в об-
щем случае движения могут существенно изменяться.
Характер изменения определяется упруго-диссипативны-
ми свойствами подвески, силами сопротивления движе-
нию, возникающими при взаимодействии всех остальных
колес планетохода с грунтом, и силами, действующими
на планетоход в целом: силой тяжести, инерционными
силами, усилием на крюке.
Применительно к задачам тяговой динамики особый
интерес представляет изучение функции Pxi — проекции
результирующей силы на ось х. Эта функция позволяет
судить о взаимном влиянии колес многоприводиого пла-
нетохода, оценивать величину и характер распределения
силовых потоков.
Так, например, в случае равномерного прямолинейно-
го движения однозвенного планетохода без прицепа па
горизонтальной площадке отсутствие взаимного влияния
колес выражается условием Pxi = 0 для i = 1, 2, ..., п.
Пели Pxi 0, то рассматриваемое колесо либо передает
часть усилия па другие колеса (толкающее колесо), ли-
бо, напротив, требует для своего движения толкающей
силы со стороны машины (толкаемое колесо).
72
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
В общем случае движения каждое ведущее колесо
перемещает определенную часть общей массы планетохо-
да. Если предположить, что эта часть общей массы не-
изменна и обратно пропорциональна количеству веду-
щих колес (либо пропорциональна нормальной реак-
ции, действующей на данное колесо), то отсутствие
взаимного влияния мотор-колес в общем виде может
быть выражено условием PXi =0 для Z .=_ 1,2,..п, при-
чем РХг = Рхг — Рхг, где РХг — составляющая Pxi, обу-
словленная действием на выделенную часть массы пла-
*
петохода внешних и инерционных сил, Pxi—составляю-
щая Pxi, обусловленная силами, действующими на выде-
ленные колесо и часть массы планетохода в результате
взаимодействия остальных колес планетохода с грунтом.
п
Очевидно, что S Рхг = 0, так как составляющие Pxi
i=i
являются внутренними продольными силами и могут быть
выявлены только при условном разделении массы, пла-
нетохода на ряд масс, взаимодействующих со «своими»
мотор-колесами.
Эти рассуждения приводят к классификации ,режимов
работы колеса планетохода, основанной на анализе сил,
действующих на колеса со стороны привода и корпуса,
и аналогичной классификации режимов работы колеса
автомобиля. Используя рис. 2.6 и определяя поляр-
ность Pxi по отношению к координате х, а полярность
по отношению к координате фкг-, можно выделить следую-
щие режимы работы:
ведущий режим, толкающее колесо: Pxi<0, 7Икг>0;
ведущий режим, толкаемое колесо: РхгОО, AfKi>0;
ведомый режим: Pxi > 0, MKi — 0;
тормозной режим: Pxi >> 0, MKi < 0;
свободный режим: Pxi = 0, MKi > 0.
Первый из перечисленных режимов принято называть
просто ведущим, а второй — нейтральным [10].
Принятая выше основная физическая предпосылка
означает, в частности, что в произвольный момент вре-
мени каждое колесо многоприводного планетохода или
группа колес могут работать в любом из указанных ре-
жимов. При этом могут возникать как местные контуры
циркуляции мощности (через групт, колеса и корпус),
§2.1. ЗАДАЧИ ТЯГОВО-ДИИЛМИЧЕСКИХ РАСЧЕТОВ
73
так и контуры, замкнутые по отношению к бортовому
источнику, с рекуперацией части эпергопотока в сеть.
Количественное определение рассмотренных выше сил и
моментов возможно при одновременном решении диффе-
ренциальных уравнений движения привода, колес и под-
рессоренной части. Для вывода уравнений необходимо
получить в обобщенном виде характеристики взаимо-
действия перечисленных звеньев планетохода, составляю-
щих в динамическом отношении единую систему.
2.1.3. Структура динамической системы и математи-
ческой модели планетохода. Системой называется опре-
деленная совокупность элементов, находящихся во взаи-
мосвязи, придающей дайной совокупности целостный
характер [20]. Такой характер выявляют обычно по отно-
шению к изучаемому процессу. В частности, при реше-
нии задач тяговой динамики единым признаком, опре-
деляющим принадлежность того или иного элемента к
изучаемой системе, может служить то, что данный эле-
мент непосредственно участвует в процессе превращения
энергии бортового источника в механическую энергию
движения планетохода.
Рассмотрим с этих позиций структурио-функциональ-
пую схему планетохода, приведенную на рис. 2.7. Схе-
ма получена без учета научного оборудования, функцио-
нирование которого прямо не связано с задачей движе-
ния. На схеме не показаны также приемопередающие
устройства, необходимые для связи планетохода с Зем-
лей. Однако и в этом случае структура и функциональ-
ные связи планетохода оказываются достаточно слож-
ными.
Их можно упростить, не рассматривая звенья, пред-
назначенные для формирования и передачи управляю-
щих сигналов. При этом отсчет времени следует вести
от момента получения команды, а перечень команд счи-
тать известным. Процесс превращения (реализации)
энергии бортового источника можно разбить на три са-
мостоятельных и достаточно независимых этапа: распре-
деление, преобразование и потребление энергии, обеспе-
чивающее задапный закон движения планетохода.
Этим этапам соответствуют обобщенные подсистемы
(звенья), каждая из которых характеризуется своей ин-
дивидуальной совокупностью свойств: распределитель,
74
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
преобразователь, потребитель. Линии передачи энергии
можно отнести по принадлежности к указанным звеньям.
Под распределителем понимается совокупность уст-
ройств, обеспечивающих дробление энергопотока. Под
преобразователем — совокупность устройств, изменяю-
щих либо вид энергии, либо величину ее определяющих
|===О Силавь/с знвргопотони,
---------Информационные потони
---------Управляющие воздействия
Ойъентивная информация Судъентивная информация
Рис. 2.7. Упрощенная структурно-функциональная схема плане-
тохода.
характеристик (сила, скорость и их электрические экви-
валенты). Потребителем будем называть совокупность
узлов, механизмов и физических реальностей, обеспечи-
вающих движение планетохода.
§2.1, ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
75
Потребитель также является своеобразным преобра-
зователем энергии, имеющим, однако, то отличие, что
в данном случае речь идет о завершающем этапе преоб-
разования. В состав потребителя должны быть включены
следующие элементы: грунтовая поверхность, движитель,
подвеска и подрессоренная часть. Объединение этих эле-
ментов в одном звене отражает тот факт, что в своей
завершающей стадии преобразование энергии возможно
только при наличии связей колеса с грунтом и плането-
ходом. Некоторые исследователи определяют это обоб-
щенное звено как систему местность — машина [12].
Выделенные звенья — источник, распределители, пре-
образователи и потребитель — составляют систему дви-
жения планетохода. Эти звенья присущи всем подвиж-
ным планетным аппаратам, однако их структурные свя-
зи и внутренние характеристики зависят от конкретного
конструктивного исполнения узлов и механизмов плане-
тохода.
В настоящее время наметились вполне конкретные
тенденции в разработке самоходных шасси планетоходов,
которые полезно кратко проанализировать для большей
определенности дальнейших рассуждений. Выше уже от-
мечалась тенденция к использованию в составе плането-
ходов колесного движителя. Для повышения подвижно-
сти и надежности аппарата все колеса должны иметь
привод.
Привод может быть механическим, гидравлическим п
электрическим. Возможны различные комбинации пере-
численных типов привода. Выбор привода в значитель-
ной мере определяется свойствами бортового источника
энергии планетохода. В качестве таких источников мо-
гут рассматриваться тепловые двигатели, теплоэлектри-
ческие и теплогидравлические установки, а также бата-
реи и аккумуляторы, работающие на различных физиче-
ских принципах.
Использование тепловых двигателей в составе плане-
тохода осложняется отсутствием атмосферы на поверхно-
сти Луны и отсутствием кислорода в атмосфере Марса.
В случае использования тепловых двигателей, не нуж-
дающихся в забортном кислороде, возникают трудности
в передаче механической энергии к многоколесному дви-
жителю, которые усугубляются жесткими ограничения-
76
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
ми по весу и габаритам, а также требованием высокой
надежности. Поэтому на существующих луноходах наш-
ли применение электрические источники и распределите-
ли энергии.
Применение электрических звеньев позволяет наибо-
лее просто решить задачу дробления и передачи энергии
от источника к движителю при любой колесной форму-
ле планетохода. При этом линии передач могут быть
продублированы. Использование электрических звеньев
облегчает задачу дистанционного и автономного управ-
ления аппаратом. Упрощается и задача установки на
Рис. 2.8. Иерархическая структурная схема системы движения
планетохода: И — бортовой источник, Рэ — распределитель элек-
троэнергии, Пэ — обратимые преобразователи электрической
энергии в механическую, Пм — преобразователи механической
энергии.
борту планетохода научного оборудования, систем связи
и управления, также являющихся потребителями элект-
роэнергии.
Па рис. 2.8 показана структурная схема системы
движения планетохода. Опа содержит источник электри-
ческой энергии, распределитель и преобразователи элект-
рической и механической энергии, находящиеся в парал-
лельных ветвях. Конструктивно преобразователи каждой
§ 2.^ ЗАДАЧИ ТЯГОВО-ДИНАМИЧЕСКИХ РАСЧЕТОВ
77
ветви объединены в составе привода мотор-колеса. Все
мотор-колеса идентичны по своим внутренним свойствам
и работают на один потребитель.
Иерархический принцип расположения структурных
звеньев определяет их взаимосвязь в процессе превраще-
ния энергии. Он не накладывает, однако, никаких огра-
ничений па направление передачи силовых энергопото-
ков, в том числе на возможную циркуляцию мощности
внутри системы. Это обусловлено тем, что каждый пре-
образователь в общем случае является обратимым. Поэ-
тому на рис. 2.8 направление энергопотоков не показано.;'
Оно может быть различным и определяется непосредст-
венно при моделировании движения планетохода.
Структура математической модели си-
стемы движения. Математическая модель должна
отражать реальные характеристики взаимосвязи обоб-
щенных звеньев системы движения планетохода. По-
скольку параметры этих характеристик могут изменять-
ся во времени, модель является динамической. Алгоритм
разработки модели и задачи, которые могут быть реше-
ны в процессе моделирования, отражены на рис. 2.9.
При разработке модели будем иметь в виду следую-
щие физические предпосылки: каждое мотор-колесо сое-
динено с подрессоренной частью с помощью независимой
подвески; связь мотор-колеса с подрессоренной частью
является абсолютно жесткой во всех направлениях, кро-
ме вертикального; подрессоренная часть также является
абсолютно жесткой и может совершать вертикальные и
угловые (продольные и поперечные) колебания; влияние
неподрессоренных масс на эти колебания пренебрежимо
мало; центры тяжести планетохода и его подрессорен-
ной части совпадают и расположены в плоскости, про-
ходящей через геометрическую продольную ось симмет-
рии планетохода перпендикулярно опорной поверхности;
координаты центра тяжести в двух других измерениях
могут быть произвольными; произвольными являются и
координаты центра упругости, в общем случае не совпа-
дающие с центром тяжести планетохода; каждое мотор-
колесо представляет собой крутильную многомассовую
схему, характеризующуюся упругими и фрикционными
связями. Другие, частные допущения целесообразно рас-
сматривать по ходу изложения.
78
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА/
Рис. 2.9. Последовательность проведения исследований тягово-
динамических свойств планетохода.
2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА 79
Перечисленные предпосылки позволяют проводить
одновременное и взаимосвязанное исследование как
внешней (тяговой) динамики планетохода, так и внут-
ренней динамики каждого мотор-колеса в общем случае
движения планетохода. При этом предполагается, что
управление поворотом колес отсутствует.
Рассмотрим составные части модели в соответствии ср
схемой, представленной на рис. 2.9.
§ 2.2. Внутренние характеристики тягового привода
2.2.1. Характеристики электрических звеньев. Бор-
товой источник энергии. На советских аппара-
тах «Луноход-1» и «Луноход-2» были установлены акку-
муляторные батареи, подзарядка которых осуществля-
лась от солнечных батарей. Такое решение обеспечивает
длительную эксплуатацию планетохода. «Луноход-1»,
например, работал 11 месяцев и прошел расстоя-
ние 10,5 км, «Луноход-2» за 3 месяца работы прошел
расстояние 37 км. Как по времени эксплуатации, так и
по пройденному расстоянию со стороны источника огра-
ничений не было.
На американских луноходах «Lunar Roving Vehicle»
(«LRV»), входивших в экспедиционный комплекс про-
граммы «Apollo», применены аккумуляторные батареи,
емкость которых составляла 115 А-ч. Это обеспечивало
эксплуатацию аппаратов в течение примерно 78 ч. [70].
Для батарей и аккумуляторов характерно то, что ве-
личина их электродвижущей силы не регулируется, т. е.
& = const. Из-за сравнительно небольшой мощности они
накладывают ограничения на систему:
2W1, (2.8)
г=1
где I — сила тока двигателя, [7] — максимальная допу-
стимая сила тока, потребляемого от источника.
Внутренними потерями источника зачастую пренебре-
гают, полагая t76 = & = const, где £7б — напряжение
бортсетп.
Распределитель электрической энергии.
Распределитель представляет собой силовое коммутирую-
щее устройство, собственными емкостью и индуктив-
ностью которого можно пренебречь. Он практически без
80 гл. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОД^
задержек и без потерь подводит электроэнергию к мотор-
колесам. Ограничения, накладываемые распределителем
на систему, могут быть записаны в виде /
Л^[Л]. / (2.9)
Таким образом, источник и распределитель можно
исключить из структуры динамической модели как без-
ынерционные звенья, учитывая при необходимости толь-
ко ограничения вида (2.8) и (2.9).
Преобразователи электрической энер-
гии. В общем случае преобразователи могут состоять
из тяговых двигателей и статических агрегатов. Стати-
ческие агрегаты предназначены для согласования рабо-
ты источника и тягового двигателя, а именно для преоб-
разования постоянного тока в переменный, регулирова-
ния величины питающего напряжения и т. д.
Тяговые двигатели различаются по роду тока, спосо-
бу возбуждения, способу регулирования частоты вра-
щения и т. да. Принципиальных ограничений по приме-
нению того или иного типа двигателя в составе привода
не существует, однако в каждом отдельном случае выбор
двигателя определяется конкретными условиями эксплуа-
тации и особенностями конструкции планетохода.
В частности, двигатели переменного тока имеют ряд
преимуществ перед двигателями постоянного тока. Они
проще регулируются, имеют более высокий к.п.д. Однако
суммарный вес привода с учетом статических преобразо-
вателей оказывается большим, чем вес привода с двига-
телями постоянного тока.
Двигатели постоянного тока имеют характеристики,
которые описываются известными выражениями
7ИД = СМ7ФП, (2.10)
Un - IR„
(2-11)
где См, Сс — постоянные коэффициенты двигателя, Фх —
магнитный поток возбуждения, /?я — сопротивление об-
мотки якоря, Г7Д — напряжение питания двигателя, срд —
частота вращения вала двигателя.
Из формулы (2.11) видно, что естественные характе-
ристики двигателя, т. е. характеристики при С7Д = =
§ 2.^. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА 81
= const, Rn = const, зависят от способа возбуждения.
На рис. 2.10 приведены для сравнения типовые харак-
теристики двигателей с последовательным, смешан-
ным, а также независимым и параллельным возбужде-
нием [23].
Особенностью двигателей с последовательным возбуж-
дением является малое значение Фп в тех ситуациях,
когда колесо многоприводпого планетохода теряет кон-
такт с грунтом и нагрузка па двигатель резко ^уменьша-
ется. Такая ситуация может возникнуть, например, при
переезде через трещину, выходе на гребень кратера и
т. д. Из формулы (2.11) видно, что при уменьшении Фп
частота вращения возрастает и двигатель может пойти
«в разнос». Уменьшение Фп обусловлено тем, что в пре-
делах ненасыщенного состояния стали величина Фп про-
порциональна току якоря. С увеличением нагрузки маг-
нитный поток увеличивается и при насыщении стали
становится равным Фп = const.
Подчеркивая ярко выраженную зависимость частоты
вращения от величины нагрузки, характеристики двига-
теля с последовательным возбуждением называют мяг-
кими.
Более жесткую характеристику частоты вращения
имеют двигатели со смешанным возбуждением. Они об-
ладают свойствами, соответствующими промежуточному
положению между электродвигателями с параллельным
и последовательным возбуждением. Часть магнитного по-
тока такого двигателя определяется током в параллель-
ной обмотке возбуждения, не зависящим от величины на-
грузки, поэтому двигатель имеет конечную частоту вра-
щения.
Поскольку каждое мотор-колесо многоприводного пла-
нетохода в общем случае движения имеет индивидуаль-
ную нагрузку, применение двигателей с мягкими харак-
теристиками может привести к существенному различию
частоты вращения колес. Следствием этого может явить-
ся увеличение курсового увода планетохода, ухудшение
проходимости на подъемах и т. д.
Поэтому в мотор-колесах «Лупохода-1» и «Лунохо-
да-2» использованы двигатели с независимым возбужде-
нием. У этих двигателей магнитный поток является
практически постоянным, что обеспечивает наиболее
6 Е. В. Авотин и др.
82
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
жесткую характеристику частоты вращения (рис. 2.10).
Изменение частоты вращения при колебаниях нагрузки
падения
здесь связано только с изменением величины
Рис. 2.10. Характеристики двигате-
лей постоянного тока: 1 — последо-
вательное возбуждение, 2 —сме-
шанное возбуждение, 3 — парал-
лельное и независимое возбужде-
ние.
напряжения в цепи
якоря.
Примерно такую же
жесткую характеристи-
ку частоты вращения
имеют двигатели с па-
раллельным возбужде-
нием. Жесткость ха-
рактеристик двигателей
с независимым и па-
раллельным возбужде-
нием такова, что при
изменении нагрузки от
холостого хода до номи-
нальной частота вра-
щения уменьшается на
34-8% {23].
Для получения ма-
тематической модели
мотор-колеса характе-
ристики двигателя удобно привести к следующему виду:
мд =
Мдо — &мфд — двигательный режим,
— йдфд — тормозной режим,
(2.12)
I = (Мдо — Атм(рд) *э, (2.13)
где Л/до = Ё/дС^Фп/^я — электромагнитный крутящий мо-
мент на валу двигателя при срд = 0 (при токе коротко-
го замыкания), кщ к3— коэффициенты электромеханиче-
ских характеристик двигателя при его работе в активном
режиме, &д — коэффициент электромеханической харак-
теристики двигателя при его работе в режиме электро-
динамического торможения. При неизменной температу-
ре и постоянном возбуждении /см и к3 являются незави-
симыми параметрами двигателя
С С 4
кы = -V-2' = const- /’Э = = consL (2-14)
§ 2.2, ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
83
Отметим, что постоянство коэффициентов /см и к3 оз-
начает, что при регулировании скорости движения путем
изменения величины С7Д двигатель имеет ряд практиче-
ских параллельных регулировочных характеристик, каж-
дая из которых определяется в соответствии с верхней
строчкой формулы (2.12). Именно такой способ регули-
рования использован в конструкции существующих лу-
ноходов.
В конструкции «Лунохода-1» и «Лунохода-2» ступен-
чатое регулирование скорости движения осуществляется
путем деления напряжения бортсети. Двигатели мотор-
колес этих аппаратов имеют две якорных обмотки, каж-
дая из которых снабжена собственным коллектором. При
движении на второй скорости обмотки соединяются па-
раллельно и ?7Д = С7б. При движении на первой скорости
обмотки соединены последовательно, и каждая из них
находится под напряжением, отличным от напряжения
бортсети. Отношение частоты вращения на второй скоро-
сти к частоте вращения на первой скорости при номи-
нальной потребляемой мощности 60 Вт составляет
2,2 4- 2,3.
Аппараты «LRV» имеют плавное бесступенчатое ре-
гулирование скорости движения. Скоростной диапазон
регулирования равен ~8ч-10 при номинальной потреб-
ляемой мощности 184 Вт. Регулирование осуществляет-
ся с помощью схемы широтно-импульсного модулирова-
ния, изменяющей среднее значение питающего напря-
жения.
Скоростной диапазон и количество ступеней регули-
рования планетохода связаны с максимальной скоростью
его движения. В свою очередь максимальная скорость
определяется, с одной стороны, особенностями управле-
ния, с другой — особенностями движения в слабом гра-
витационном поле.
Для дистанционно управляемых «Лунохода-1» и «Лу-
похода-2» с телевизионным наблюдением за местностью
максимальная скорость, видимо, не может превышать
4-4-5 км/ч [8]. Можно полагать, что у марсоходов ско-
рость будет еще более низкой в связи с особенностями
автономного управления движением. В этих случаях
двухступенчатое регулирование является вполне доста*
точным. При непосредственном управлении водителем
84
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
скорость движения лунохода может быть более высокой.
Максимальная скорость аппаратов «LRV» достигала,
в частности, 8—10 км/ч.
Таким образом, в дальнейших рассуждениях целесо-
образно оперировать максимальными скоростями движе-
ния планетохода, реальный диапазон изменения которых
для аппаратов различных конструкций и назначений мо-
жет составлять примерно 0,5—10 км/ч.
Для обеспечения универсальности модель системы
движения целесообразно разрабатывать, не привязываясь
к конкретному типу двигателя и способу его регулиро-
вания. Важно то, что в любом случае (будь это двига-
тель постоянного или переменного тока, коллекторный
или бесколлекторный и т. д.) его механическая характе-
ристика может быть представлена в виде функции кру-
тящего момента на валу от частоты вращения: Мя —
= /(фд). Если параметры этой функции изменяются во
времени, то исследователю должен быть известен закон
изменения, определяемый водителем или системой уп-
равления.
2.2.2. Расчетная динамическая схема мотор-колеса с
нерегулируемым редуктором. Расчетные динамические
схемы мотор-колес могут быть получены на основе ана-
лиза их кинематических схем, инерционных параметров,
упруго-диссипативных и фрикционных характеристик и
характеристики к. п. д. тягового редуктора.
Кинематическая схема мотор-колеса. Ки-
нематическая схема мотор-колеса определяется схемой
тягового редуктора и способами его компоновки с двига-
телем и ступицей колеса. Характерной особенностью ки-
нематической схемы редуктора является большее переда-
точное число.
Это обусловлено, с одной стороны, сравнительно не-
высокой скоростью движения планетохода, о чем было
сказано выше, с другой,— стремлением использовать вы-
сокооборотные двигатели, имеющие меньшие вес и габа-
риты. Для диапазона скоростей движения планетохода
от 0,5 до 10 км/ч при фд не менее 200 1/с передаточное
число редуктора может быть в пределах zzp = 80 4- 2000.
Для редукторов с таким передаточным числом, как изве-
стно, целесообразно использовать волновые и планетар-
§ 2,2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
85
пые передачи. Именно такие передачи и нашли приме-
нение при конструировании существующих луно-
ходов.
В мотор-колесах «Лунохода-1» и «Лунохода-2» ис-
пользован планетарный трехрядный редуктор с переда-
точным числом 72р = 216 (рис. 2.11).
Рис. 2.11. Схема мотор-колеса «Лупохода-1» и «Лунохода-2»^ 1 —
узлы подвески, 2 — двигатель, 3 — уплотнения, 4 — дисковый тор-
моз с электромагнитным приводом, 5 — ступица колеса, 6 — тя-
говый редуктор, 7 — механизм разблокировки.
Каждый ряд редуктора образован по схеме 2К-Н
[26, 37]. Водила установлены без жесткой фиксации
в радиальном направлении, по схеме с «плавающими»
планетарными рядами. В осевом направлении ряды фик-
сируются с помощью сферических подшипников сколь-
жения, центр сферы которых совпадает с осью вращения
водила. Водило последнего ряда редуктора соединено со
ступицей колеса с помощью вала, имеющего ослабленное
сечение. Такое сечение необходимо для надежного сраба-
тывания пиротехнического механизма разблокировки,
разрывающего связь колеса с редуктором в случае за-
клинки редуктора.
Мотор-колесо снабжено фрикционным дисковым тор-
мозом, установленным на валу двигателя. Управление
тормозом осуществляется с помощью электромагнитного
привода.
Опоры ступицы колеса и опоры качающегося рычага
подвески размещены па статоре двигателя и корпусе
86
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
эпицикла. Статор и эпицикл жестко соединены между
собой и с реактивным рычагом подвески.
Такая компоновка мотор-колеса с многорядным пла-
нетарным редуктором, конечно, является не единственно
возможной. В частности, представляет интерес схема
мотор-колеса, приведенная на рис. 2.12. В этом случае
Рис. 2.12, Схема мотор-колеса с дифференциальным редуктором:
1 — ротор двигателя, 2 — статор двигателя, 3 — тяговый редук-
тор, 4 — узлы подвески, 5 — щеточно-коллекторный узел, 6 —
электроразъем.
водило последнего ряда соединено с реактивным рыча-
гом подвески, т. е. заторможено, а эпицикл редуктора и
жестко соединенный с ним статор двигателя являются
одновременно и ступицей колеса. Достоинство такой схе-
мы заключается в предельном уменьшении радиального
габарита привода и улучшении условий теплоотвода, не-
достаток — в необходимости установки специального ще-
точно-коллекторного механизма [50].
В ряде случаев минимальный габарит привода может
быть получен при использовании в качестве тягового ре-
дуктора планетарной передачи типа ЗК [26]. Такая пе-
редача позволяет реализовать в одной ступени большие
передаточные числа (до ир = 400-4-600). Один из вари-
антов компоновки передачи ЗК с двигателем и ступицей
колеса показан на рис. 2.13.
Применение волновой передачи целесообразно в тех
случаях, когда необходимо иметь передаточное число бо-
лее 40 50. В частности, в мотор-колесах аппара-
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
87
та «LRV» использована одноступенчатая волновая пере-
дача с ир = 80.
В качестве гибкого колеса в этой передаче использо-
ван цельный металлический колокол, имеющий плавный
зиг. Такой зиг повышает податливость гибкого звена в
радиальном направлении, не снижая его крутильной же-
сткости. Радиальный и осевой габариты колокола выбра-
ны таким образом, что в эти габариты вписывается тя-
говый двигатель.
Рис. 2.13. Компоновка мотор-колеса с планетарной передачей
ЗК: 1 ~ двигатель, 2 — неподвижный эпицикл, 3 — подвижный
эпицикл, 4 — шлицевая муфта, 5 — сдвоенный сателлит.
Генератор волновой передачи представляет собой три
ролика, два из которых установлены эксцентрично отно-
сительно третьего. По приведенному в работе [70] опи-
санию, кинематическую схему мотор-колеса упрощенно
можно представить, как показано на рис. 2.14. Из ри-
сунка видно, что применение волновой передачи позво-
ляет создать компактную конструкцию и обеспечить гер-
метизацию внутренней полости мотор-колеса.
Одноступенчатая волновая передача позволяет реали-
зовать передаточные числа до нр = 200 -4- 250 [35]. Од-
нако при увеличении передаточного числа к. п. д. пере-
дачи уменьшается, увеличивается жесткость гибкого
звена, что приводит, в частности, к перегрузке тяговых
двигателей на пусковых режимах.
88
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Поэтому при необходимости получения wp>200 це-
лесообразно комбинировать волновую передачу с плане-
тарной. Последняя в этом случае должна являться про-
межуточным звеном между двигателем и генератором
Рис. 2.14. Упрощенная схема мотор-колеса аппарата «LRV»: I —
двигатель, 2 — генератор волновой передачи, 3 — гибкий колокол
с зубчатым венцом, 4 — жесткое зубчатое колесо, 5 — ступица
колеса, 6 — тормоз, 7 — шкворень.
волновой передачи. Пример возможной кинематической
схемы мотор-колеса с комбинированным редуктором при-
веден на рис. 2.15.
Для уменьшения осевого габарита передача 2К-Н
(с остановленным водилом) встроена внутри генератора
волновой передачи. Наружная поверхность эпицикла пе-
редачи 2К-Н выполнена в форме овала, на котором уста-
новлены гибкие подшипники. Уменьшение габарита до-
стигается в этом случае также применением волновой
муфты вместо колокола. Один из венцов муфты имеет
равное число зубьев с венцом, жестко связанным с кор-
пусом. Однако такое решение уже не обеспечивает гер-
метизации мотор-колеса и требует применения специаль-
ных уплотнений.
Реализация большого передаточного числа при мпбго-
парности зацепления может быть осуществлена и в слу-
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
89
чае применения передач K-H-V [26]. Передачи K-H-V
с цилиндрическими колесами требуют тщательной про-
верки на отсутствие интерференции зубьев. Это ограни-
чивает возможности произвольного выбора Up таких пе-
редач.
Рис. 2.15. Схема мотор-колеса с комбинированным редуктором:
1 — двигатель, 2 — редуктор, встроенный внутри генератора
волн, 3 — генератор волн принудительной деформации с гибкими
подшипниками, 4 — гибкая муфта, 5 — жесткое колесо.
Применение в передачах K-H-V конических зубчатых
колес позволяет более свободно варьировать величину ир.
Такие передачи в настоящее время находят применение
в конструкциях малонагруженных редукторов систем
управления [35], однако, в принципе, могут быть ис-
пользованы и в трансмиссиях транспортных машин. При
соответствующей конструкции упругой муфты, предназ-
наченной для замыкания реактивного момента сателли-
та на корпус, возможно герметичное исполнение пе-
редачи.
В качестве примера на рис. 2.16 приведена возмож-
ная кинематическая схема мотор-колеса с планетарным
редуктором K-H-V, снабженным коническими зубчаты-
ми колесами [45]. Такие передачи называют также пре-
цессионными.
Поскольку при высокой частоте вращения кривоши-
па прецессионной передачи увеличиваются динамиче-
90
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
ские нагрузки на элементы зацепления и • опоры, соеди-
нение кривошипа с валом двигателя осуществляется че-
рез понижающую ступень редуктора 2К-Н.
Рис. 2.16. Схема мотор-колеса с прецессионным редуктором: 1 —
двигатель, 2 — ступица колеса, 3 — планетарный редуктор, 4 —
кривошип прецессионной передачи, 5 — упругая муфта, 6 — пре-
цессирующий сателлит передачи, 7 — коническое колесо внутрен-
него зацепления.
Инерционные параметры. При определении
инерционных параметров динамической схемы мотор-ко-
леса важно иметь в виду большое передаточное число
редуктора. Стремление разместить привод в габаритах
ступицы колеса исключает установку длинных податли-
вых валов. Мпогопарность зацепления повышает его
крутильную жесткость. В этих условиях определяющее
влияние на динамику мотор-колеса оказывают не мест-
ные факторы, а результирующие упругие характеристики
его силовой цепи, которые могут быть получены с уче-
том внутренней податливости звеньев.
Это позволяет представить расчетную динамическую
схему мотор-колеса с нерегулируемым тяговым редукто-
ром в виде двухмассового эквивалента. Инерционными
параметрами эквивалента являются 7Д, — момент инер-
ции колеса.
Учитывая большую величину ир, в практических ра-
счетах с весьма малой погрешностью можно считать, что
/д /Р, где Ур — момент инерции ротора двигателя.
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОРОГО ПРИВОДА
91
Что касается величины то с учетом частиц грун-
та, перемещаемых в процессе буксования, она определя-
ется по формуле
JК Jк + <^гр»
(2-15)
где JK — собственный момент инерции колеса, Jrp — мо-
мент инерции перемещаемых частиц грунта, приведен-
ный к оси колеса.
Упруг о-д и с с и п а т и в п а я х а р а к т е р и с т и к а.
Для описания упруго-диссипативиой характеристики мо-
тор-колеса необходимо иметь следующие данные: ср —
результирующая крутильная жесткость редуктора, приве-
денная к валу двигателя, х — суммарный угловой зазор
редуктора, приведенный к валу двигателя, &р — приве-
денный коэффициент эквивалентного линейного демпфи-
рования.
При определении указанных величин можно не учи-
тывать такие второстепенные факторы, как нарушения
геометрии зацепления вследствие деформации и износа
зубьев, влияние перекосов зубчатых колес, высокочастот-
ное изменение эквивалентной крутильной жесткости в
процессе обкатывания профилей и т. д. Эти факторы не
оказывают существенного влияния на внутреннюю дина-
мику привода и тем более не отражаются на внешней
динамике планетохода.
Перечисленные допущения позволяют считать вели-
чины ср, х, Ьр независимыми и постоянными для кон-
кретной конструкции параметрами динамической схемы
мотор-колеса. Поэтому упругий момент редуктора может
быть представлен в виде кусочно-линейной функции.
Величина момента, приведенного к валу двигателя, оц-
ределяется по формуле
где фр — относительный угол закручивания масс 7Д и JK,
приведенный к валу двигателя, т. е.
фр — Фа ^рфк}
(2.Щ
92
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
где фд, фк—-угловые перемещения (во вращательном
движении) соответственно вала двигателя и колеса.
С учетом внутренних (гистерезисных) потерь упруго-
диссипативный момент тягового редуктора, приведенный
к валу двигателя, определяется по формуле
Мр = М; + Ьрфр. (2.18)
X а р а к т е р и с т и к а к. п. д. С помощью к. п. д. учиты-
ваются потери энергии, обусловленные внешним трением
в зацеплениях и опорах тягового редуктора. При тягово-
динамических расчетах наземных машин обычно прини-
мают цр = const. Имея в виду различие режимов работы
отдельных мотор-колес и необходимость более точного
определения энергозатрат планетохода, расчетный к. п. д.
редуктора в данном случае целесообразно представлять
в виде функции, учитывающей потери холостого хода ре-
дуктора и зависящей как от величины, так и от
полярности передаваемого крутящего момента, т. е.
Пр = П
С учетом всех видов механических потерь упруго-
диссипативный момент тягового редуктора, приведенный
к валу двигателя Мр и колесу Мк, можно определить с
помощью выражений
Мр = Мр + Ьрфр, Мк = MpUpt] (Мр), если Мр > О,
(2.19)
Мр = (Мр + &рфр) Т) (Мр), Мк = MpUp, если Мр < О,
(2.20)
где ц (Afp) — функция к.п.д. тягового редуктора.
Характеристика механического тормо-
з а. Характеристика тормоза может иметь различный вид
в зависимости от схемы его установки и типа кон-
струкции.
При установке тормоза на валу двигателя снижается
величина тормозного момента, необходимого для останов-
ки планетохода и его удержания на склоне во время сто-
янки. Такое решение позволяет достаточно просто со-
гласовывать совместное электродинамическое и механи-
ческое торможение. При этом может быть использован
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
93
дисковый тормоз с электромагнитным управлением, ко-
торый гармонично вписывается в радиальный габарит
привода мотор-колеса (рис. 2.11).
В случае установки тормоза на ступице колеса его
габариты увеличиваются. Однако при этом элементы
привода при торможении планетохода оказываются раз-
груженными (рис. 2.14). Для большей определенности
в дальнейшем будем иметь в виду фрикционные диско-
вые тормоза, установленные на валу двигателя. В этом
случае тормозной момент на валу двигателя определяет-
ся выражением
Л/тд = Л181 (£)/т (фб) sign срд, (2.21)
где Ai — параметр, связанный с геометрией, количеством
и усилием поджатия тормозных дисков, ei(£) —функ-
ция, описывающая закон управления тормозом во вре-
мени, /т(фб) —характеристика коэффициента трения
скольжения фрикционов, срб — скорость буксования
фрикционов. Для однодискового тормоза
Ai = .РпрГср, (2.22)
где РПр — усилие поджатия тормозного диска, гср —
средний радиус тормозного диска.
Функция 81 (t) задается водителем или системой уп-
равления и в общем случае может иметь различный вид
для тормоза каждого мотор-колеса. Наиболее просто она
описывается при применении электромагнитного привода
управления с нерегулируемым магнитным потоком.
В этом случае срабатывание тормозов всех мотор-колес
происходит одновременно и практически мгновенно, т. е.
8i (t) =0 при выключении тормоза, &i(t) — 1 при вклю-
чении тормоза. Аналогичные рассуждения можно про-
вести и для варианта установки тормоза на ступицах ко-
лес. В любом случае функцию 8i(Z) следует считать из-
вестной.
Из формулы (2.21) видно, что при определении
мгновенного значения 7ИТД учитывается зависимость /т от
скорости буксования, в частности, различие коэффици-?
ентов трения покоя и скольжения. Предполагается, что
/т не зависит от удельного давления в контакте фрикци-
рнной пары.
94
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Расчетная динамическая схема мотор-колеса с нере-
гулируемым редуктором приведена на рис. 2.17. Здесь
сплошными линиями обозначены силовые цепи, штрихо-
выми — кинематические связи. Из рис. 2.17 видно, что
в общем случае движения на ротор двигателя действуют
тгптт
Рис. 2.17. Расчетная динамическая схема мотор-колеса с нерегу-
лируемым редуктором.
крутящий момент двигателя 7ИД, тормозной момент Л/Тд
и упруго-диссипативный момент тягового редуктора Мр.
На колесо действуют упруго-диссппативиый момент ре-
дуктора Мк и реактивный крутящий момент Mh возни-
кающий при контакте колеса с грунтом.
Функция Мд((рд), в частности, для двигателей посто-
янного тока с независимым возбуждением определяется
по формулам (2.12) и (2.14).
Для определения функции Mf колесо необходимо рас-
сматривать в составе обобщенного звена системы движе-
ния, которое выше было названо потребителем. Эта
функция рассматривается в разделе 2.4.1.
Для определения функций ЛГТД, Мр, Мк по формулам,
полученным в настоящем разделе, необходимо оцепить
параметры внутренних характеристик привода.
2.2.3. Оценка параметров внутренних характеристик
цривода.
Определение ср. Разнообразие конструкций мо-
тор-колес ведет к соответственному различию парамет-
ров цх упруго-диссипативных характеристик. Можно за-
метить, однако, что при нр > 100 определяющее влияние
на величину ср оказывает крутильная жесткость выход-
ных звеньев — колеса и ведомого вала редуктора.
Коэффициент крутильной жесткости ведомого вала,
как правило, можно достаточно точно оцепить аналити-
чески, по данным проектных цроработок мотор-колеса.
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
95
Аналитический расчет коэффициента крутильной жест-
кости колеса ср может оказаться затруднительным, так
как колеса планетохода представляют собою сложные
пространственные металлические конструкции. Поэтому
при предварительных расчетах можно ориентироваться
па данные, относящиеся к существующим конструкциям.
Так, например, крутильная жесткость колеса «Лунохо-
да-1» и «Лунохода-2» равна 5000 4-7000 Н-м/рад. Коле-
со аппарата «LRV» имеет меньшую жесткость.
Колеса «Лунохода-1» и «Лунохода-2» представляют
жесткие конструкции (рис. 2.18). Обод колеса образован
Рис. 2.18. Колесо «Лунохода-1» и «Луиохода-2».
тремя металлическими обручами, соединенными между
собой с помощью грунтозацепов. Соединение обручей со
ступицей колеса осуществляется пространственным на-
бором спиц. Наружная поверхность обручей обшита ме-
таллической сеткой. Диаметр колеса (по грунтозацепам)
равен 0,51 м, ширина обода — 0,2 м [37].
Колеса аппаратов «LRV» могут быть отнесены к ме-
таллоэластичным конструкциям (рис. 2.19). Наружный
обод колеса изготовлен из металлической упругой бес-
шовной сетки и представляет в сечении тор. Грунтоза-
£6
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
цепы имеют форму пластин и установлены таким обра-
зом, что не препятствуют упругой деформации наруж-
ного обода. Внутренний, жесткий обод изготовлен из
титановых сплавов. Диаметр колеса равен 0,8 м, шири-
на — 0,23 м [70].
Рис. 2.19. Колесо аппарата «LRV».
Определение х. Величина х зависит, в основном,
от углового зазора в зацеплении тягового редуктора. Эк-
сперименты показывают, что в диапазоне ир = 100 4- 500
угловой зазор планетарных мелкомодульных редукторов
типа 2К-Н и ЗК равен нескольким радианам, тогда
как для волновых передач х не превышает нескольких
минут [67]. Поэтому для волновых передач в данных
расчетах можно полагать х = 0.
Определение &р. Приведенный коэффициент эк-
вивалентного линейного демпфирования отражает внут-
ренние потери энергии, обусловленные гистерезисным
трением. Этот коэффициент можно определить по фор-
муле
(2.23)
где -фр — коэффициент поглощения энергии, сор — часто-
та крутильных колебаний [51].
Для шлицевых соединений рекомендуется принимать
фр = 0,2 4- 0,3 [43]. Примерно такие же значения фр
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
97
можно рекомендовать и при расчете зубчатых передач.
Частота крутильных колебаний определяется непосредст-
венно в процессе моделирования.
Определение функции /т((рб). Эксперимен-
тальные исследования фрикционных материалов в ваку-
умной камере и на воздухе показывают, что в обоих слу-
чаях изменение /т при варьировании скорости буксова-
ния носит идентичный характер. Характеристика /т(фб)
Рис. 2.21. Обобщенная характеристика
к.п.д. тягового редуктора. .
Рис. 2.20. Обобщенная
характеристика коэффи-
циента трепия сколь-
жения.
может быть представлена в виде кусочно-линейной функ-
ции, приведенной на рис. 2.20. Отношение величин коэф-
фициента трения покоя и скольжения составляет ~ 1,4.
Обобщенный вид характеристики к.п.д.
тягового редуктора. С учетом потерь холостого
хода и различий двигательного (Мр > 0) и тормозного
(Мр<0) режимов работы характеристику к.п.д. можно
представить в виде функции, приведенной на рис. 2.21.
Качественно эта функция является общей для рассмот-
ренных выше схем планетарных и волновых передач.
Для количественного описания характеристики к. п. д. не-
обходимо иметь следующие параметры: величину момен-
та потерь холостого хода тягового редуктора Жд, AfXT,
к. п. д. редуктора на горизонтальных участках характери-
стики (номинальное значение к. п. д.) црд, црт и значения
крутящего момента на валу двигателя 2ЙНД, Л/нт, соответ-
ствующие горизонтальным участкам характеристики к. п. д.
(Здесь индексы «д» и «т» относят указанные параметры
7 Е, В. Авотин и др,
98
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
соответственно к двигательному и тормозному режимам
работы.)
Аналитическое определение параметров Мх и т]р при
работе редуктора в вакууме в широком диапазоне вы-
Рис. 2.22. Характеристика
к.п.д. редуктора мотор-
колеса «Лунохода-1»: 1 —
стендовые испытания, 2 —
эксплуатация на Луне.
соких и низких температур
представляет значительные
трудности. Необходимо отме-
тить, однако, что при правиль-
ном проектировании можно
добиться идентичности харак-
теристик к. п. д. при работе в
атмосферных условиях и в ва-
кууме. Об этом свидетельству-
ют, в частности, результаты ис-
пытаний тягового редуктора
мотор-колеса «Лунохода-1»,
приведенные на рис. 2.22 [17,
38]. Приемы проектирования,
обеспечивающие работоспособ-
ность и достаточно высокое
к.п.д. редуктора при эксплуа-
тации в вакууме, могут быть
весьма различными — гермети-
зация внутренней полости мо-
тор-колес, применение специальных материалов и смазок
и т. д.
Эксплуатация редукторов в условиях низких темпе-
ратур приводит к загустеванию смазки и соответственно-
му снижению к.п.д. В качестве примера на рис. 2.23 при-
ведены результаты испытаний редуктора ЗК в диапазоне
температур от минус 60 °C до плюс 150 °C. Этот недоста-
ток может быть устранен при применении твердых сма-
зок, а также различного рода самосмазывающихся ма-
териалов.
В любом случае при работе в атмосфере, вакууме и
других средах в условиях высоких и низких температур,
в принципе, возможна расчетная оценка номинального
значения к.п.д передачи. Однако для такой оценки необ-
ходимо знать функции коэффициента трения в зацепле-
нии зубчатой передачи при ее работе в реальных усло-
виях эксплуатации. Такие функции могут быть получены
при физическом моделировании работы зацепления на
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
99
роликовой машине трения. Моделирование на роликовой
машине отличается высокой оперативностью и позволяет
исследовать фрикционные характеристики зубчатой пе-
редачи во всем диапазоне эксплуатационных нагрузок и
температур.
Рис. 2.23. Влияние температуры на характеристику к. п. д. редук-
тора с консистентной смазкой (i°G — температура редуктора).
Коэффициент потерь зубчатой передачи с неподвиж-
ными осями может быть определен, например, по фор-
муле
Ч'п = 2,3/ср('т-± 7-), (2.24)
где /Ср — осредненное значение коэффициента трения
зубьев передачи, zi, Z2 — числа зубьев взаимодействую-
щих колес. В формуле (2.24) знак «+» относится к пе-
редачам внешнего, а «—» — внутреннего зацепления
[26].
Коэффициент потерь планетарной передачи в движе-
нии относительно водила определяется по формуле
Ч\н = Тпа+ Тпв, (2.25)
где Yna, ^пв — коэффициенты потерь в зацеплениях со-
ответственно солнечной шестерни с сателлитом и сателлита
с эпициклом, определяемые по формуле (2.24).
7*
100
ГЛ. 2. ТЯГОВАД ДИНАМИКА ПЛАНЕТОХОДА
Величину ТПн передачи, полученной остановкой во-
дила, можно связать с к. п. д. планетарной передачи, учи-
тывая мощность, передаваемую в относительном движе-
нии звеньев. Так, например, к.п.д. планетарного ряда
2К-Н при ведущей солнечной шестерне определяется
по формуле
Лпр — 1 —- Ч'пн ~
(2.26)
где ип — передаточное число планетарного ряда при оста-
новленном водиле. Суммарный к. п. д. многорядного редук-
тора, образованного последовательно соединенными ряда-
ми 2К-Н, равен произведению к. п. д. всех рядов. О ха-
рактере влияния передаточного числа многорядного
редуктора 2К-Н на величину цр можно судить по гра-
фику, приведенному на рис. 2.24. Он соответствует слу-
чаю эксплуатации редуктора с пластичной смазкой и
',50 300 450 000 750
Рис. 2.24. Влияние передаточного числа редуктора на его к. п. д.:
1 — передача ЗК, 2 — волновой редуктор, 3 — многоступенчатый
редуктор 2К-Н.
хорошо согласуется с экспериментальными данными.
При работе с консистентной смазкой можно принимать
/ср = 0,11 4-0,15.
Более сложный вид имеют формулы для определения
к.п.д многорядных планетарных передач с разветвленным
потоком мощности. Рассмотрим, например, схему мотор-
колеса, приведенную на рис. 2.12 [44, 50]. Здесь мощ-
ность, реализуемая каждым рядом, передается на выход-
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
101
пой вал параллельными потоками Wr и последователь-
ным потоком W'. Учитывая потери мощности во всех
потоках, к. п. д. редуктора можно определить по формуле
Лр
(2.27)
где Wp — мощность на валу двигателя Wn, Wn — мощно-
сти потерь соответственно в параллельных и последова-
тельном потоках редуктора.
Значения и можно определить, исполь-
зуя кинематические уравнения связи звеньев планетар-
ного ряда, которые для /-го ряда запишутся в виде
- Фю
(2.28)
где фа? Фн, Фв — угловые перемещения соответственно сол-
нечной шестерни, водила и эпицикла планетарного ряда,
/ — порядковый номер планетарного ряда.
Для /-го ряда редуктора Wnj определяется по фор-
муле
- ТУЛ'пн;. (2.29)
Используя уравнения (2.28) и проведя преобразова-
ния, получим
Ж^ = 1Ур^п+У~1)ЦпУ;;,(2.30)
Дг “р
где — передаточное число от вала двигателя к водилу
/-го ряда, 4%- — коэффициент потерь в последовательном
потоке /-го ряда. Подставляя значения Wnj и Wnj в фор-
мулу (2.27), получим
(2.31)
где коэффициенты потерь связаны выражением
К = ТП11(1—М, (2.32)
\ <Paj/
102
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
а отношения угловых скоростей определяются с помощью
уравнения (2.28).
Методика расчета цр планетарных передач ЗК изло-
жена в [26] * и других работах. На рис. 2.24 приведен
график, отражающий зависимость црд передачи ЗК от
передаточного числа. График получен расчетным путем
для случая работы передачи ЗК в масляной ванне. При
этом рекомендовано принимать /ср 0,08.
В работе [35] изложена методика расчета к.п.д вол-
нового редуктора. На рис. 2.24 приведены эксперимен-
тальные графики зависимости црд волнового редуктора
от передаточного числа в случае работы редуктора в мас-
ляной ванне [67].
Момент потерь холостого хода планетарных мелко-
модульных редукторов с ип = 104-500 по результатам
испытаний с консистентной смазкой можно оценить ве-
личиной Л/хд = 0,0008 4-0,01 Н-м, Мхт = 0,1 4- 5 Н-м.
Большие значения Мх соответствуют большему значе-
нию ир.
2.2.4. Расчетная динамическая схема мотор-колеса с
коробкой передач. Коробка передач (КП) может быть
использована в мотор-колесах для ступенчатого регули-
рования скорости движения планетохода. Как отмеча-
лось, для автономных и дистанционно управляемых пла-
нетоходов необходимый диапазон скорости движения
может быть обеспечен двумя ступенями регулирования.
В этом случае целесообразно использовать планетарную
двухступенчатую КП с электромагнитным приводом уп-
равления. Такой привод обеспечивает наиболее простое
решение задачи одновременного управления работой КП
всех мотор-колес.
Кинематические схемы КП. Схемы КП мо-
гут быть получены на основе планетарного ряда 2К-Н,
снабженного тормозом и фрикционной муфтой. Управ-
ление работой тормоза и фрикциона может осущест-
вляться одним электромагнитом. При включении фрик-
циона основные звенья планетарного ряда (ведущее,
дифференциальное и ведомое) оказываются сблокирован-
ными. При включении тормоза планетарный ряд рабо-
тает как понижающая передача.
В качестве примера на рис. 2.25 приведена кинема-
тическая схема КП, у которой на прямой передаче бло-
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
103
кируются ведущее (солнечная шестерня) и дифферен-
циальное (эпицикл) звенья [24]. При включении элект-
ромагнита его тормозной диск поджимается к корпусу.
Под действием пружин 4 барабан 5, соединенный с
дифференциальным звеном, перемещается влево и
Рис. 2.25. Кинематическая схема двухступенчатой планетарной
коробки передач: 1 — солнечная шестерня, 2 — водило, 3 — эпи-
цикл, 4 — пружина фрикциона, 5 — барабан, 6 — пружина тор-
моза, 7 — электромагнит, 8 — электромагнит КП.
фрикционно соединяет солнечную шестерню 1 и эпицикл 3.
При этом КП работает на прямой передаче. После
выключения электромагнита 8 пружина 6 отжимает ба-
рабан 5 вправо, что приводит к затормаживанию эпицик-
ла, и КП работает на низшей передаче. Для нормальной
работы необходимо, чтобы усилие пружины тормоза бы-
ло большим, чем усилие пружин фрикциона.
Возможны и другие варианты блокировки основных
звеньев [62], однако в большинстве случаев кинемати-
ческое уравнение связи основных звеньев КП можно
описать единым выражением
Фа=1ёЧ(Фд-Г^(фв, (2.33)
где фд, фв, фа — угловые перемещения соответственно ве-
дущего, ведомого и дифференциального звеньев, ик —
передаточное число КП на низшей передаче.
104
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Расчетную динамическую схему мотор-колеса с КП
можно представить в виде четырехмассового эквивалента
(рис. 2.26). Параметрами эквивалента, помимо /д и /к,
о которых говорилось выще, являются /в, /а — моменты
инерции соответственно ведомого и дифференциального
звеньев.
Упруго-диссипативный момент редуктора в этом слу-
чае целесообразно привести к ведомому звену КП:
( Мр, если
Мв = , * (2.34)
( Л/Рт] (Мр), если Л/р < 0,
где Л/р и J/р определяются по формуле (2.16) и (2.18),
а ц(Л/р) — в соответствии с рис. 2.21.
При этом звенья планетарного ряда КП можно счи-
тать абсолютно жесткими, а механические потери в за-
цеплении и опорах КП полагать равными нулю. Такое
допущение вполне оправдано, так как <С иР.
Тормозные моменты фрикционов КП, приложенные • к
выделенным массам динамической схемы, определяются
выражениями, аналогичными по структуре выражению
(2.21):
Л/тв = Л2/т (фб) sign (фд — фа) 82 (Q ,
Л/та = Лз/Т (фб) Sign фа83 (t) ,
(2.35)
(2.36)
где 42, Аз — параметры КП, e2(i), ез(О — функции, опи-
сывающие закон управления тормозами КП во времени.
Для схемы, приведенной на рис. 2.25, постоянные А2
и Аз определяются по формулам
А2 = Рср» А3 = Рпр^ср + (Рпр Рпр) ср»
где Рпр и Рпр — усилия пружин 4 и 6.
Правильное проектирование КП позволяет переклю-
чать передачи при отсутствии опорного момента в под-
вижных соединениях тормозных дисков. Так, например,
для схемы, приведенной на рис. 2.25, сопротивление осе-
вому перемещению барабана 5 обусловлено только тре-
нием в шлицевом соединении, которое пропорционально
собственному весу барабана. Поскольку зазоры между
тормозными дисками выбираются минимально возмож-
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
105
нымш (доли миллиметра), перемещение барабана осу-
ществляется весьма быстро. Поэтому функции 8з(£) и
ез(О могут быть описаны аналогично тому, как это сде-
лано для функции 81(0- Текущее значение /т описывает-
ся функцией, приведенной па рис. 2.20.
2.2.5. Модель привода мотор-колеса. В предыдущем
разделе рассмотрены характеристики электрических
звеньев системы и характеристики преобразователей ме-
ханической энергии. На основании анализа этих харак-
теристик получены расчетные динамические схемы мо-
тор-колеса. Это позволяет разработать математическую
модель привода i-ro мотор-колеса. Она представляет со-
бой систему нелинейных дифференциальных уравнений
движения эквивалентных масс динамической схемы мо-
тор-колеса и алгоритм их решения. Получим эти урав-
нения, используя схему, приведенную на рис. 2.26,
и учитывая только угловые перемещения масс этой
схемы.
Рис. 2.26. Расчетная динамическая схема мотор-колеса с двух-
ступенчатой коробкой передач.
Уравнение движения колеса. Уравнение
движения колеса можно получить, используя уравнение
[27]
= (2-37)
где К — момент импульса колеса, SAf — сумма моментов
активных сил и реакций связи, действующих на колесо:
К= (7к + 7гр)фк, (2.38)
Хм = мк-Мр (2.39)
106
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Для определения 7гр приравняем кинетические энер-
гии перемещаемых масс грунта и приведенной массы,
упрощенно предполагая, что скорости перемещения всех
частиц равны, а расстояние от центра тяжести переме-
щаемой массы грунта до оси колеса равно гк:
~~2~ *^"грфк = “2~т^гр^гр> (2.40)
где тпгр — максимальная масса грунта, перемещаемая
при буксовании колеса, Ргр — скорость перемещения ча-
стиц грунта при буксовании:
угр = фкгк^1 дГт)’ (2.41)
В формуле (2.41) выражение в скобках представляет
собой коэффициент продольного скольжения колеса s.
Учитывая это и проведя преобразования, получим
/гр = 77*грГк$2- (2.42)
После подстановки выражений (2.38) и (2.39) в фор-
мулу (2.37) и дифференцирования, получим
2/гр s срк -|- (/к Jгр$2) Фк = Мfi (2.43)
т' 2
где /Гр = ^гргк — максимальная величина момента
инерции частиц грунта, приведенного к оси колеса.
Уравнения движения привода. Уравнения
движения масс привода удобно получить на основе урав-
нений Лагранжа II рода. Система трех приведенных
масс привода имеет две степени свободы,
ат dT _ п
di ауд ^д “
d дТ dT п (2.44)
dt a^B Уф2’
где Т — кинетическая энергия системы, (?ф1, (?ф2 — обоб-
щенные силы.
Определим значения Т\
т=<2-45)
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
107
С учетом уравнения связи (2.33) можно записать,
что
4 • п 4 • о 4 [ 4 * к * \
Т =т /дфд + — А<Рв+ уЛ
(2.46)
или, после преобразований,
Т7 = 4-пг'фд + у щ//ф“ + 4-'7г'///фд Фв’ (2-47)
Ct Ct Ct
где
т^.7д +Ja (2.48)
и2
(2.49)
(2-50)
Найдем производные кинетической энергии:
!dT_ _ Г</Г , 0
йфд <2<рв ’
дТ г' । да ‘
—- = т/<рд + «г <рв,
Зфд
= 7П"фв + ^'"срд,
Яфд
A.-2L = пг'фд m"(pBj
4 Зфв
4--^?- = тп' срвг+ иг"'фд.
f Зфв
(2.51)
(2.52)
(2.53)
(2.54)
(2.55)
При определении обобщенных сил необходимо учи-
тывать все связи планетарного ряда КП и полярность
действующих моментов. В самом общем случае, если не
замкнуты тормоза и фрикцион, показанные на рис. 2.26,
108
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
С?<₽1 и (?Ф2 определяется по формулам:
(?(₽1 — Мд — Мтд l( h Мтв __и (2.56)
Q(p2 = Мв + Мта 7"““------^тв \ _ и * (2.57)
i i uK
Подставляя выражения (2.51) — (2.57) в уравнения
(2.44), получим
т'срд + 7Пда(рв = Мл — Мтд — мга 4- Мтв , " ,
(2.58)
771"(рв + ТП^фд = мв + Мта -------Мтв 7~~~- (2.59)
Алгоритм решения уравнений. При пере-
ключении передач и торможении алгоритм решения
уравнений (2.58) и (2.59) описывается следующим обра-
зом. При замыкании тормоза 7\ дифференциальное зве-
но КП затормаживается, т. е. фа = фа = 0.
В этом случае уравнение связи (2.33) принимает вид
срв = Фд/^к (КП работает на низшей передаче).
Поэтому уравнения (2.58) и (2.59) запишутся в виде
^сумфд = Мд Л/тД ------ ---Мв, (2.60)
где
^сум = /д "I" Л 7Г”‘ (2.61)
При замыкании фрикциона получаем фд = фа = фв
(КП работает на прямой передаче). Уравнения движе-
ния масс привода в этом случае записывается в виде
^сумфд ~ Мд Мтд АГв, (2.62)
где
^сум — /д+/в + А‘ (2.63)
Уравнение (2.62) справедливо и для мотор-колеса с
нерегулируемым редуктором (рис. 2.17). В этом случае
§ 2.2. ХАРАКТЕРИСТИКИ ТЯГОВОГО ПРИВОДА
109
тпСум = /д- Условия срыва фрикционов записываются в
виде
|м2|*>л2/.г„,
|Мз|*^ л3/тп
(2.64)
где М3, М2 — реактивные моменты соответственно в
тормозе Тз и фрикционе Т2. Эти моменты определяются
по следующим формулам. При движении на низшей пе-
редаче
* / •• \
71/з = (1 ик) [ Л/д МТд 4- Мтв. Jдфд I. (2.65)
\ 1 к у
При движении на прямой передаче
м\ = Ц-- т4т7 - ^фд)- (2-66)
WK \ 1 ик /
Торможение мотор-колеса может осуществляться ли-
бо одновременным замыканием тормозов Т\ и Тз, либо
замыканием тормоза и фрикциона Т2.
При этом уравнения движения вырождаются в ра-
венство фд = фв = фа = 0. Условия срыва фрикционов
Т2 и Тз определяются в соответствии с неравенствами
(2.64), а тормоза Т\ — по формуле | М11 * > A i/T. Реак-
тивные моменты при этом определяются в зависимости
от способа торможения по следующим формулам:
если замкнуты Т\ и Т2^ то
М\ = М^ (2.67)
(2.68)
К
если замкнуты Ti и Тз, то
M*t = Мя —Мв-^~,
м*3 = мв1-^.
“к
Для решения уравнений (2.43), (2.58), (2.59) необ-
ходимо иметь функцию реактивного крутящего момента
но
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Mf. Эта функция, а также функции других сил, действу-
ющих в контакте колеса с грунтом, могут быть получены
на основании анализа внешних условий нагружения ко-
леса.
§ 2.3. Внешние условия нагружения колеса
2.3.1. Кинематика колеса при движении планетохода.
В соответствии с принятой выше основной физической
предцосылкой равнодействующие элементарных реакций
грунта определяются его физико-механическими свойст-
вами (несущая способность, уплотняемость, сцепление и
т. д.), конструктивными параметрами колеса (диаметр,
форма беговой дорожки, радиальная податливость коле-
са и т. д.) п его кинематическими характеристиками,
включая величину относительного продольного и попе-
речного скольжения колеса. Эти характеристики можно
связать с геометрическими параметрами и кинематикой
планетохода в целом.
Заметим, что для решения поставленных в § 2.1 тя-
гово-динамических задач движение планетохода целесо-
образно рассматривать, используя подвижную и непо-
движную системы координат (рис. 2.27). Подвижная си-
стема координат х, у, z связана с планетоходом таким
образом, что положение центра тяжести планетохода в
этой системе в любой момент времени определяется вы-
ражениями .гцт = 0, 1/цт = О, £цт = 0, где z — текущее
значение перемещения центра тяжести от некоторого на-
чального положения по оси, нормальной к опорной по-
верхности. Ось х совпадает с продольной геометрической
осью симметрии планетохода, а ось у в общем случае
может быть смещена относительно поперечной оси сим-
метрии на произвольную величину \х (рис. 2.27).
Неподвижная система координат XY необходима для
изучения траектории движения планетохода. Эта систе-
ма связана с опорной поверхностью так, что ось X сов-
падает с направлением угла наибольшего подъема, а ось
Y направлена при этом влево.
Угловые перемещения планетохода на опорной по-
верхности описываются курсовым углом 0, а угловые пе-
ремещения подрессоренной части относительно осей х и
у — углами гр и ср соответственно. Отсчет курсового угла
§ 2.3. ВНЕШНИЕ УСЛОВИЯ НАГРУЖЕНИЯ КОЛЕС
Ш
’редется от оси X, отсчет угловых координат хр и ср — от
Положения, при котором плоскости XOY и хоу парал-
лельны. Полярность всех угловых перемещений показана
на рис. 2.27, а полярность линейных перемещений,
а также проекций всех линейных размеров на оси под-
вижной системы координат определяется по отношению
к этим осям координат.
Рис. 2.27. Расчетная динамическая схема Z-ro элемента системы
движения планетохода (а) и планетохода в целом (б).
Кинематические уравнения связи пла-
нетохода и произвольно выбранного коле-
са. Уравнения связи можно получить, используя схему,
приведенную ня рис. 2.28. Эта схема соответствует об-
112
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
щему случаю движения планетохода, когда я У= О, у =/= О
О =И= 0. В качестве примера на рис. 2.28 рассмотрены
переднее левое и заднее правое колеса. Аналогично оп-
ределяются скорости остальных колес.
Рис. 2.28. Определение поступательной скорости i-ro колеса.
Из рис. 2.28 видно, что проекции скорости f-ro колеса
на осп х и у составляют
ряг = х±|-0, ^ = у±/г0. (2.70)
где В = 2Ъ — колея планетохода, знак « + » относится к
колесам правого, знак «—» — левого борта, а поляр-
ность U определяется по отношению к оси х, т. е. для
передних колес Ц имеет положительный знак, а для зад-
них — отрицательный.
Модуль поступательной скорости i-ro колеса опреде-
ляется выражением
Vi = v v'^i + (2.71)
ИЗ
§ 2.3. ВНЕШНИЕ УСЛОВИЯ НАГРУЖЕНИЯ КОЛЕС
исправление v{ — углом у(:
1 Yi = arctg^-.
хг
(2.72)
Условимся, что положительное направление уг- сов-
падает с положительным направлением курсового угла 0.
Отметим также, что по углу можно судить об относи-
тельной величине поперечного скольжения i-го колеса.
Величину коэффициента продольного скольжения
можно получить, учитывая, что фактическое перемеще-
ние f-ro колеса в направлении оси х определяется ско-
ростью а теоретическое — частотой вращения колеса
л х +
Si = 1---------Г=------
(2.73)
Из выражения (2.73) видно, что в общем случае дви-
жения для различных колес планетохода Si может быть
положительным (буксование), отрицательным (юз) и
равным нулю (чистое качение).
Проскальзывая в продольном и поперечном направ-
лениях, каждое колесо находится во фрикционном взаи-
модействии с грунтом. Поэтому в дальнейшем в качест-
ве динамического эквивалента реальной связи колеса с
грунтовой поверхностью можно использовать фрикцион.
Свойства этого условного фрикциона могут быть описа-
ны с помощью зависимостей, характеризующих физиче-
ский процесс качения одиночного колеса. Подобные за-
висимости вместе с уравнениями неголономной связи,
выражаемыми формулами (2.72) и (2.73), позволяют оп-
ределить силы, действующие в контакте каждого колеса
с грунтом.
2.3.2. Определение равнодействующих элементарных
реакций грунта. Продольные силы. Рассмотрим
реакции грунта, действующие па колесо в плоскости его
вращения, полагая для определенности, что при качении
колеса его деформация в радиальном направлении не-
значительна по сравнению с деформацией грунта (каче-
ние жесткого колеса по мягкому грунту).
Как показано на рис. 2.29, а в этом случае набегаю-
щая часть контактной поверхности больше сбегающей
части, что вызывает смещение равнодействующих эле-
8 Е. В. Авотин и др.
114
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
I
ментарных нормальных Rn и касательных Rx реакций
грунта. Поскольку колесо не деформируется, Rn направ-
лена от центра давления контактной поверхности к цент-
ру колеса. Rx направлена по касательной к контактной
поверхности. (Силы, действующие на колесо со стороны
корпуса планетохода, на рис. 2.29 не показаны.)
Рис. 2.29. Схема взаимодействия жесткого колеса с мягким грун-
том (а) и приведение реакций опорной поверхности к оси ко-
леса (б).
Физически возникновение элементарных касательных
реакций колеса и, следовательно, равнодействующей Rx
обусловлено совокупностью внутренних сил сцепления и
трения частиц грунта, а также сил трения колеса о
грунт.
Точка приложения равнодействующих Rn и Rx может
быть определена с помощью угла у. Обозначив глуби-
ну колеи через h* и пренебрегая упругими свойствами
§2.3. ВНЕШНИЕ УСЛОВИЯ НАГРУЖЕНИЯ КОЛЕС
115
грунта, получим
arccos
(2-74)
V &
Приведем равнодействующие к оси колеса:
Pj = 7?n si п v, Рц = Rx cos v,
(2.75)
Rz = Rn cos v + Rx sin v, Mf = Rxi\.,
где P„ — тяговое усилие, Rz — нормальная реакция опор-
ной поверхности.
Учитывая, что продольные силы пропорциональны
нормальной реакции опорной поверхности, выражения
для определения текущих значений Pf, Рк и М} i-го ко-
леса могут быть записаны также следующим образом:
Рц = Rzif(S^i) , PKi = 7?Z?IT уг),
Mfi = Rzir^(sh (2-76)
где /(^i, у<) — функция коэффициента сопротивления
движению, a Y (sz-, 7О — функция коэффициента удель-
ной тяги колеса.
Поперечные силы. Наличие бокового скольже-
ния вызывает срез грунта и движение его частиц отно-
сительно друг друга и относительно элементов конструк-
ции колеса. Совокупность элементарных сил сцепления
и трения частиц грунта между собой, а также элемен-
тарных сил трения колеса о грунт приводит к возникно-
вению боковой реакции опорной поверхности Rv и мо-
мента сопротивления колеса MQ повороту относительно
оси, образованной пересечением плоскости вращения ко-
леса и его центральной поперечной плоскости. Боковая
реакция направлена перпендикулярно плоскости враще-
ния колеса, а ее величина пропорциональна нормальной
реакции
Ryi = ц($г, 7г)Ян, (2.77)
где ц(5г-, y<)—функция удельного коэффициента сопро-
тивления грунта боковому скольжению колеса.
Что касается момента MQ, то его величина составляет
весьма малую долю от момента сопротивления повороту
планетохода Мс, обусловленному действием реакций Ry,
8*
116 ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА I
т. е. nMq Л7С. В практических расчетах можно полагать
MQ 0, a Ry приложенным в центре контакта колес^ с
грунтом (рис. 2.29, б). 1
Функции вида
/* = /(«*, ъ)> ^.= ^(5., ъ), н< = н(*<» ъ) (2-78)
могут быть названы обобщенными характеристиками
взаимодействия колеса с грунтом, так как они отражают
влияние на величину и направление внешних сил и мо-
ментов как свойств грунта и конструктивных параметров
колеса, так и относительной величины его продольного
и поперечного скольжения.
Методы определения обобщенных харак-
теристик взаимодействия с грунтом. Ана-
литические методы определения функций (2.78) базиру-
ются на уравнениях, связывающих напряжения сдвига
грунта, величину его деформации под нагрузкой, удель-
ную работу деформации и т. д. с независимыми парамет-
рами грунта. К числу этих параметров, определяемых
экспериментальным путем, относятся угол внутреннего'
трения частиц грунта <р0, внутреннее сцепление со, мо-
дуль сдвига грунта Е' и другие.
В частности, при решении задачи определения коэф-
фициента сцепления колеса с грунтом обычно отталки-
ваются от уравнения Кулона
т = с0 + g tg фо, (2.79)
где т — удельное сопротивление грунта сдвигу, q — дав-
ление на грунт.
При оценке глубины колеи и величины коэффициента
сопротивления грунта качению колеса используют кри-
вые деформируемости грунтов, из которых наиболее рас-
пространены кривые, соответствующие формуле Винкле -
ра — Герстнера — Бернштейна
q = c’h*, (2.80)
где < р/ — параметры грунта, определяемые при пене-
трировании, hm — деформация грунта под штампом.
Подробный анализ расчетных формул для оценки
обобщенных характеристик взаимодействия колеса с
грунтом, принадлежащих различным авторам, приведен
' § 2.3, ВНЕШНИЕ УСЛОВИЯ НАГРУЖЕНИЯ КОЛЕС Ц7
\
в работах [7, 12] и других трудах. В своей совокупности
эти формулы достоверно отражают качественную сторо-
ну физических процессов, происходящих при качении
колес по грунтам с различными физико-механическими
свойствами. Однако применение подобных формул в ди-
намических расчетах существенно ограничивается из-за
сложности конечных аналитических выражений, спра-
ведливых, как правило, только для определенных конст-
рукций колес, катящихся с вполне определенным про-
скальзыванием. С количественной стороны точность этих
выражений в значительной мере зависит от точности
экспериментального определения параметров, характери-
зующих данный грунт.
Другой путь получения обобщенных характеристик
взаимодействия — применение методов физического мо-
делирования режимов работы движителя планетохода в
процессе испытаний одиночного колеса в грунтовом ка-
нале. Естественно, что при этом могут имитироваться
только статические режимы, т. е. движение произволь-
ного колеса планетохода с установившейся скоростью.
Однако полученные таким образом статические характе-
ристики могут быть использованы для решения динами-
ческих задач в процессе математического моделирования,
причем возможная нелинейность функций (2.78), полу-
чаемых экспериментально, не является препятствием для
их использования в математических моделях благодаря
применению ЭВМ [32, 33].
Достоинством такого подхода, сочетающего физиче-
ское и математическое моделирование, является доста-
точно высокая достоверность количественных зависимо-
стей, связывающих силовые и кинематические характе-
ристики взаимодействия колеса с грунтом. Главная проб-
лема здесь заключается в правильном выборе земных
аналогов лунного и марсианского грунтов. Что касается
модели колеса, то желательно иметь возможно более
близкую аналогию (по геометрии и конструктивному ис-
полнению) с реальными конструкциями колес плането-
хода.
Общие методические положения испы-
таний одиночного колеса. Предположим, что
испытываемое одиночное колесо транспортного средства
(или макет этого колеса) снабжено собственным приво-
118
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
дом, подводящим крутящий момент Мк. Очевидно, что в
этом случае для имитации реальных режимов нагруже-
ния движителя планетохода к оси одиночного колеса
необходимо приложить указанные на рис. 2.6 силы Pxil
Pyi, Pzi. Чтобы обеспечить условие Р^^О, направление
поступательной скорости движения колеса должно со-
ставлять с плоскостью его вращения некоторый угол ^г.
При этом имитируется работа колеса в режиме поворо-
та планетохода. При имитации прямолинейного движе-
ния у» = 0 [18].
К приводу и устройствам, обеспечивающим нагруже-
ние колеса силами Pxi, Pyi, Рц, не предъявляется особых
требований в части идентичности их конструкции и кон-
струкции аналогичных узлов планетохода. Независимо от
конкретного конструктивного исполнения указанные уст-
ройства должны обеспечивать возможность варьирования
величинами Мк, Pxi, Pyi, Pzil срк< во всем диапазоне дейст-
вующих на планетоход реальных нагрузок. Изменяя по-
лярность Мк и Pxi, можно получить любой из выделен-
ных в разделе 2.1.2 режимов работы колеса.
При физическом моделировании статических режимов
работы планетохода условия равновесия одиночного ко-
леса запишутся в виде
P^Pxi + Pfi, Mfi = MKi, Pzi = Rzi, Pyi = Ryi. (2.81)
Используя эти выражения, формулы для определения
обобщенных характеристик взаимодействия при испыта-
ниях одиночного колеса можно записать в виде
Р„. Р,..
у (Si, Yi) « yf, f (Si, Yi) = TKi - /i, (Xi (sit Yi) = /2.
zik zi zi
(2.82)
Входящие в формулы (2.82) величины, включая и
Yt, с достаточно высокой точностью могут быть опреде-
лены прямыми измерениями. Это предопределяет и до-
стоверность последующего расчета по формулам (2.76)
и (2.77) текущих значений продольных и поперечных
сил, действующих на каждое колесо планетохода. В слу-
чае математического моделирования движения плането-
хода по однородной грунтовой поверхности различие
§ 2.3. ВНЕШНИЕ УСЛОВИЯ НАГРУЖЕНИЯ КОЛЕС
119
этих сил может быть обусловлено различием значений
Pti, Si, yi отдельных колес. При моделировании движения
планетохода по неоднородному грунту различными для
отдельных колес могут быть не только эти параметры,
но и сами функции (2.78), характеризующие взаимодей-
ствие колес с тем или иным участком опорной поверхно-
сти. Поэтому математическая модель планетохода раз-
рабатывается без привязки к какому-либо наперед за-
данному виду функций (2.78). В то же время для каждого
конкретного сочетания «колесо — грунт» эти функции
могут быть описаны определенными количественными
зависимостями. При этом наибольший интерес представ-
ляет взаимодействие металлического колеса с земными
аналогами лунного и марсианского грунтов, в качестве
которых могут быть использованы грунты вулканическо-
го происхождения, пески, пылевые отложения и т. д.
Увеличение удельной тяги колеса на подобных грун-
тах неизменно связано и с увеличением коэффициента
его относительного продольного скольжения. Взаимосвязь
величин и Si характеризуется отсутствием максимума
функции 4^(5;). Это согласуется с данными, приведен-
ными в работе [7], и объясняется малым внутренним
сцеплением рассматриваемых грунтов.
При работе колеса в ведущем режиме удельная тяга
сначала быстро увеличивается с ростом 5г. Однако уже
при Si = 0,3 ~ 0,5 тяга приближается к предельному зна-
чению Фг = фс. При Si < 0 абсолютная величина Ч7г
также первоначально интенсивно возрастает, достигая
затем предельного значения = ТЮг.
Увеличение поперечного скольжения колеса при про-
чих равных условиях приводит к уменьшению удельной
тяги колеса, т. е. наибольшую тягу колесо развивает при
Ъ=0 [38].
Наряду с уменьшением тяги при увеличении угла
увеличивается коэффициент сопротивления движению
колеса. Зависимость /г- от продольного скольжения вы-
ражена менее ярко.
Величина поперечного скольжения колеса оказывает
определяющее влияние и на удельный коэффициент со-
противления щ, что физически вполне может быть объ-
яснимо увеличением нагребания грунта боковинами ко-
леса при увеличении
120
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Учитывая изложенное и выделяя только главные оп-
ределяющие факторы, характеризующие взаимодействие
металлических колес со слабосвязанпыми грунтами,
и пренебрегая побочными явлениями, функции (2.78)
можно представить в обобщенном виде, как показано на
рис. 2.30. В таком виде эти функции могут быть исполь-
зованы в качестве исходного материала для динамиче-
ских расчетов на ЭВМ. Численные параметры графиков,
приведенных на рис. 2.30, в первом приближении можно
считать независимыми от скорости движения колеса. При
этом имеется в виду скоростной диапазон движения ав-
тономных и дистанционно управляемых планетоходов,
о котором говорилось выше, т. е. х ~ 0,5 4- 4 км/ч.
2.3.3. Приведение реакций грунта к подрессоренной
части. Формулы для приведения равнодействующих эле-
ментарных реакций грунта к подрессоренной части мо-
гут иметь различный вид в зависимости от схемы подве-
ски. Рассмотрим, для определенности, рычажную инди-
видуальную независимую подвеску с продольным кача-
нием рычагов. Подвеска подобного типа была использо-
вана в конструкции «Лунохода-1» и «Лунохода-2».
(В конструкции американского аппарата «LRV» исполь-
зована подвеска с поперечным качанием рычагов.) Уп-
ругий элемент такой подвески — торсион. Применение в
качестве материала торсиона титановых сплавов позво-
лило добиться минимального веса и габаритов подвески
«Лупохода-1» [37]. Направляющий механизм подвески
может быть выполнен в виде параллелограмма, исклю-
чающего загрузку торсиона реактивным моментом Mf
(рис. 2.31). Ход рычагов обычно ограничивают верхним
и нижним упорами.
Текущее значение угла качания 8г- рычагов подвески
f-го колеса определяется следующим образом:
= arcsin—, (2.83)
гр
где dn — проекция на ось z перемещения оси колеса от
положения, при котором 8 = 0 в направлении, проти-
воположном направлению оси z, гр — плечо рычагов под-
вески.
Условимся за начало отсчета 8г принять положение
рычагов, при котором они параллельны опорной плоско-
§ 2.3. ВНЕШНИЕ УСЛОВИЯ НАГРУЖЕНИЯ КОЛЕС
121
Рис. 2.30- Обобщенные характеристики взаимодействия одиночного
колеса с грунтом: а) функция = T б) функция fi =
= в) функция Pi = |1($Пг).
122
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
сти. Это положение рычагов целесообразно иметь в виду
и при выборе начала отсчета перемещений центра тяже-
сти подрессоренной части в направлении оси 2, полагая
что при этом 2цТ=0. Положительным направлением 8г
назовем то направление, при котором угол закрутки тор-
сиона увеличивается. (На рис. 2.31 торсион показан в
виде условной пружины кручения.)
Рис. 2.31. Приведение реакций грунта к подрессоренной части.
Учитывая все возможные перемещения оси качания
рычагов и принятые правила определения полярности
обобщенных координат, значение dn можно определить
следующим образом:
dn = — (z + Zj(p ± Ьхр),
(2.84)
где li — проекция на ось х расстояния от центра тяжести
планетохода до оси крепления рычагов подвески к под-
рессоренной части.
В формуле (2.84) знак «+» относится к подвескам
колес правого, а знак «—» — левого бортов. Подставляя
значение dn в формулу (2.83), разлагая это выражение
в ряд и ограничиваясь первым членом разложения, мож-
но получить упрощенную формулу для определения 8г в
функции обобщенных координат и параметров плането-
хода:
z + ± &Я3
В» = -
Р
(2.85)
§ 2.3. ВНЕШНИЕ УСЛОВИЯ НАГРУЖЕНИЯ КОЛЕС
Характеристика упругого реактивного момента под-
вески в общем случае может быть нелинейной. Она оп-
ределяется, в основном, податливостью торсионов и мо-
жет быть представлена в виде кусочно-линейной функции
(рис. 2.32). Такая функция описывается формулой
О,
Myi — ' Mqij -4'
> М$у + + Cyi (si 6i),
если
если
если
8$ Ег,
8{ 8$ 8j,
8| > Ег,
(2.86)
аде Cyi— результирующие угловые жесткости поде-
ски на различных участках характеристики, М$у — зна-
чение Му ПрИ 8г = 0.
Для расчета диссипативного момента подвески необ-
ходимо определить первую производную угла качания
рычагов дифференцировани-
ем выражения (2.85) повеем
независимым переменным:
z + #p ± М
8i= -------------. (2.87)
гр
Обозначим символами byi
и byi коэффициенты экви-
валентного линейного демп-
фирования подвесок, приве-
Рис. 2.32. Упругая харак-
теристика рычажной под-
вески.
денные к оси качания рыча-
гов соответственно при углах качания, меньших 8< и боль-
ших 8{. Тогда реактивный упруго-диссипативный момент
подвески можно определить выражением
Л/yi — | Мцу + Cy8i + byi8^
MQy-{-Cyi8i-\-Cy (e,i — 8j) + Ьг/<8{,
если 8j,
если ej < е{ < е"г
если > е".
(2.88)
Выразим нормальную реакцию опорной поверхности
как функцию упруго-диссипативной характеристики под-
124
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
вески и характеристик взаимодействия движителя с
грунтом, используя рис. 2.31. При этом необходимо учи-
тывать, что реактивный крутящий момент Mf переда-
ется на подрессоренную часть через рычаги параллело-
грамма подвески и поэтому не влияет на функцию Myi.
Из рис. 2.31 можно получить
Myi = Rzirv cos 8г ± (Pvi—Pfi) Гр sin 8{. (2.89)
Полагая sin 8г ж 8г-, cos 8; 1 и учитывая выражения
(2.76), получим нормальную реакцию, приведенную к
оси качания рычагов подвески:
^Уг
Rzi М^СЬ-Л)8*]'
(2.90)
В формуле (2.90) знак «+» относится к подвескам,
рычаги которых направлены в сторону движения плане-
тохода, «—» — против.
Таким образом, в результате взаимодействия f-ro ко-
леса с грунтом на подрессоренную часть действуют реак-
тивный крутящий момент Mfi и нормальная реакция Rzi,
приведенная к оси качания подвески. На планетоход
действуют силы Рк и Pf, приведенные к оси колеса, и си-
ла Ry, приложенная в центре контакта колеса с грунтом.
Все перечисленные силы выражены через обобщенные
координаты, геометрические параметры планетохода и
характеристики взаимодействия колеса с грунтом. С уче-
том уравнений, полученных в разделе 2.2.5, это позволя-
ет разработать динамическую модель системы движения
планетохода. При этом параметрами динамического эк-
вивалента планетохода будем считать массу планетохода
М, массу подрессоренной части 7ИП, моменты инерции
подрессоренной части Jx и Jy относительно осей хну
соответственно и момент инерции планетохода Jz относи-
тельно оси z.
§ 2.4. Математическая модель системы
движения планетохода
Составными элементами модели являются расчетная
динамическая схема планетохода и дифференциальные
уравнения его движения на плоской опорной поверхности.
Поскольку численное решение уравнений практически
§ 2.4. МОДЕЛЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
125
может быть осуществлено только с помощью электронно-
вычислительной техники, необходимо иметь и соответст-
вующую программу расчета на ЭВМ.
Расчетная динамическая схема i-ro элемента системы
движения планетохода приведена на рис. 2.27, а. Эта
схема отражает связи всех выделенных ранее обобщен-
ных звеньев системы и соответствует структуре, приве-
денной на рис. 2.9. (Структурные звенья на рис. 2.27, а
выделены штрихпунктирпыми линиями.) На рис. 2.27, а
показаны также силы и моменты, действующие на со-
средоточенные массы привода i-ro мотор-колеса при ра-
боте двигателя и контакте колеса с грунтовой поверхно-
стью. В соответствии с принятой выше основной физиче-
ской предпосылкой расчетного метода все эти силы и
моменты имеют, в общем случае, индивидуальное значе-
ние для каждого элемента системы. Функции, описываю-
щие текущее значение указанных сил моментов, рас-
смотрены в обобщенном виде в предыдущих параграфах.
Связь вращающихся масс каждого мотор-колеса и
массы планетохода осуществляется с помощью условного
фрикциона Ф5г, свойства которого рассмотрены в преды-
дущем разделе.
Расчетная динамическая схема системы в целом при-
ведена на рис. 2.27, б. Для более удобного использования
этой схемы на ней не указаны внутренние связи привода,
отраженные на рис. 2.27, а. Помимо сил и моментов,
действующих со стороны привода и грунтовой поверхно-
сти, на планетоход действуют силы тяжести и центро-
бежная сил MvB. Проекции этих сил на подвижные оси
координат соответственно равны Jfgcosao, Mg sin czo cos 0,
Mg sin ao sin 0 и MQx, MQy. Кроме того, при расчете мо-
гут быть учтены сила тяги на крюке и сила сопротивле-
ния атмосферы.
В соответствии с основными допущениями, оговорен-
ными в разделе 2.1.4, при выводе дифференциальных
уравнений будем считать, что центр тяжести планетохода
и его подрессоренной части находится в одной точке,
лежащей в продольной плоскости симметрии. Вертикаль-
ные колебания подрессоренной части описываются урав-
нением .. п
Mnz = S Rzi — Mng cos a0. (2.91)
126
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Угловые продольные и поперечные колебания под-
рессоренной части выражаются уравнениями
•М = £ - Pfi) (h' + z)] + £ Mfi, (2.92)
i=l " i=l
J хф —
2 Rzi
i=l
n
2 Rzi
i=n/2+l
& 4~
+ 2 RVi{h' + rK + 2), (2.93)
1=1
где h' — проекция на ось z расстояния от центра тяжести
до оси качания рычагов подвески.
Движение планетохода на опорной поверхности опи-
сывается уравнениями
Мх = 2 (Риг — Pfi) — Mg sin а0 cos 0 + MyQ, (2.94)
i=i
n
My = Mg sin a0 sin0 — MxQ — 2 Ryi, (2.95)
лё = 4 ~п/2 п 4 п ^(PKi-P/i)- 2 (PKi-Pfi) _i=i i=n/2-\-i J 1=1 (2.96)
Уравнения движения планетохода и колебаний его
подрессоренной части должны решаться совместно с по-
лученными ранее уравнениями вращательного движения,
которые в этом случае распространяются на каждое мо-
тор-колесо планетохода:
2 Jгр$1фк1 4" фкг («/"к 4“ Jгр$ ) = M^i Мfit (2.97)
фд| + иг^Фв! = М^ Мта Мта z - F Мтв
1 “ ии 1 ~ мк
(2.98)
фв{ 7,фд1 = MBi 4~ Мта . Мтв z -—it (2.99)
1 1 UK
где i = 1, 2, п.
§ 2.4. МОДЕЛЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
127
Алгоритм решения уравнений (2.97) — (2.99) при
различных режимах движения планетохода рассмотрен
в § 2.2. В уравнении (2.96) величина Ц для варианта
конструкции торсионной подвески с продольным качани-
ем рычагов определяется следующим образом:
Ц = li ± гр cos (2.100)
где знак « + » относится к подвескам, рычаги которых
направлены от центра тяжести к периферии, а знак
«—»—в противоположном направлении. Как было пока-
зано выше, в расчетах можно принимать cos е» & 1, поэ-
тому ± гр. Остальные функции, входящие в диф-
ферециальные уравнения движения, рассмотрены в пре*
дыдущих разделах.
Траектория движения планетохода на опорной по-
верхности определяется при совместном решении урав-
нений движения планетохода и привода каждого мотор-
колеса со следующими уравнениями:
X = х cos 9—у sin 0,
sin 04-1/ cos 9. (2.101)
Скорость движения центра тяжести планетохода равна
v = ТХ2 + У2. (2.102)
Совокупность уравнений (2.91) — (2.102) и выраже-
ний, описывающих функции сил, моментов, кинематиче-
ских и геометрических характеристик, входящих в эти
уравнения, составляет пространственную многомассовую
математическую модель системы движения планетохода.
Она может быть использована для анализа общего случая
движения планетохода на косогоре, и в этом смысле яв-
ляется базой для получения более простых моделей, опи-
сывающих частные случаи движения. Подобные модели
рассмотрены ниже в связи с решением конкретных задач.
Укрупненная блок-схема программы расчетов на
ЭЦВМ «БЭСМ-4», отражающая основные стадии расчет-
ного анализа, приведена на рис. 2.33. Программа пре-
дусматривает автоматическое определение начальных
значений обобщенных координат и численное интегриро-
вание уравнений (2.91) — (2.99) при моделировании пря-
молинейного движения и бортового поворота.
128
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Рис. 2.33. Укрупненная болк-схема' программы расчетов на
ЭЦВМ.
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
129
Рассмотрим некоторые примеры моделирования, ил-
люстрирующие возможности метода для изучения дви-
жения планетохода на плоской опорной поверхности и
исследования его тягово-динамических свойств и энерге-
тических характеристик.
§ 2.5. Динамика прямолинейного движения
Для определения основных закономерностей, харак-
теризующих движение многоприводного планетохода, и
получения количественных соотношений по влиянию
геометрии и физического состояния опорной поверхности
па его тягово-динамические свойства целесообразно рас-
смотреть следующие моменты:
влияние свойств опорной поверхности на кинемати-
ческие характеристики планетохода, трогание и разгон
аппарата;
распределение сил и моментов, действующих в кон-
такте колес с грунтом, динамическая характеристика
планетохода с учетом свойств грунта;
взаимное влияние мотор-колес, распределение внутрен-
них сил, упрощенные методы тягово-динамического
расчета;
траектория планетохода в режиме прямолинейного
движения на косогоре.
Для этой цели используем расчетные модели плане-
тоходов и грунта. Как показано в предыдущих разде-
лах, эти модели характеризуются совокупностью пара-
метров и характеристик, которые могут быть заданы
в численном или графическом виде.
Модели планетоходов. Чтобы обеспечить сопо-
ставимость результатов конкретных теоретических и
экспериментальных исследований, в качестве основной
модели целесоообразно выбрать планетоход, параметры
которого практически полностью совпадают с параметра-
ми «Лунохода-1» и «Лунохода-2». Исключение составля-
ет масса модели, выбранная большей, чем масса этих
аппаратов. Соответственно скорректированы масса под-
рессоренной части и моменты инерции модели. Сводка
основных параметров восьмиколесной модели приведена
в табл. 2.1. Идентичные параметры характеризуют моде-
ли шести- и четырехколесных планетоходов.
9 В. В. Авотин и др,
130
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Модели грунта, выбранные для проведения кон-
кретных исследований, ниже сокращенно обозначены
«Грунт-1», «Грунт-2», «Грунт-3». Физическим аналогом
модели «Грунт-1» является размельченная пемза, «Грун-
та-2» — сухой взрыхленный кварцевый песок. Параметры
модели «Грунта-3» являются гипотетическими. Они соот-
ветствуют опорной поверхности с весьма низкой несущей
ТАБЛИЦА 2.1
Основные параметры расчетной модели лунохода
Наименование параметра Обозначение Величина
Масса Масса подрессоренной части Момент инерции подрессоренной части относительно осей х и у Момент инерции планетохода относи- тельно оси z Момент инерции ротора двигателя Проекции расстояния на ось х от центра тяжести планетохода до осей качания рычагов подвески Колея Передаточное число тягового редуктора Крутящий момент на валу двигателя при токе короткого замыкания Коэффициенты электромеханических ха- рактеристик двигателя Результирующая крутильная жесткость силовой цепи «вал двигателя—колесо» Номинальное значение к. п. д. редук- тора Плечо рычагов подвески Радиус качения колеса Угловая жесткость подвески крайних и средних мотор-колес М, кг Мп, кг Jx, кг-м2 /у, КГ-М2 Jz, кг-м2 Уд, КГ-М2 7* Zp м 7* z2, М 7* z3, и 7* Z4, М В’ м up, Мдо2, Н-М Мдо1, Н-М к м,Н-м-с к д,Н-м-с к э,А/Н-м ср, Н-м/рад ПРД’ Гр, м гк, м су, Н-м/рад су, Н-м/рад 1100 990 251 285 322 0,00015 0,656 0,590 —0,484 -0,550 1,6 216 2,85 1,37 0,00624 0,0022 0,175 0,1 0,85 0,256 0,25 515 223
способностью. Подобные грунты предположительно мо-
гут встретиться при движении планетохода в отдельных
районах Луны и Марса.
Общий вид характеристик взаимодействия одиночного
жесткого металлического колеса с указанными аналога-
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
131
ми грунтов показан на рис. 2.30. Числовые значения оп-
ределяющих параметров этих характеристик приведены
в табл. 2.2.
2.5.1. Влияние свойств опорной поверхности на кине-
матические характеристики планетохода. Для анализа
прямолинейного движения выделили следующие этапы:
ТАБЛИЦА 2.2
Основные параметры расчетных моделей грунта
Модель грунта Параметры
^шах V* ц* %iax
«Грунт-1» 0,12 0,67 30° 0,5 0,9
«Грунт-2» 0,17 0,61 30° 0,5 0,8
«Грунт-3» 0,24 0,54 30° 0,5 0,8
I этап — трогание, разгон и установившееся (равно-
мерное) движение на низшей скорости;
II этап — последовательное переключение передач
(или изменение частоты вращения вала двигателя) с
низшей на высшую, разгон и установившееся движение
на высших скоростях;
III этап — последовательное переключение передач
(или частоты вращения двигателей) с высших на низшие.
Отметим, что о переключении передач можно гово-
рить в случае установки в мотор-колесах ступенчатых
коробок передач. Как отмечалось выше, у «Лунохода-1»
и «Лунохода-2» скорость регулировалась ступенчатым
изменением частоты вращения вала двигателя. В даль-
нейшем оба этих способа регулирования будем называть
переключением скоростей.
Графики изменения скорости восьмиколесной модели
планетохода в течение каждого из указанных этапов
движения приведены на рис. 2.34. Они получены при
моделировании на ЭЦВМ и дают общее представление о
трогании и разгоне планетохода в лунном гравитацион-
ном поле на грунтах с различными механическими свой-
ствами и подъемах различной крутизны.
Каждый из этапов включает периоды разгона и рав-
номерного движения, которые характеризуются общими
9*
132
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Рис. 2.34. Влияние свойств грунта и геометрии опорной поверх-
ности на разгонные характеристики модели восьмиколесного лу-
нохода: а) «Грунт-1», б) «Грунт-2».
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
133
явлениями и могут рассматриваться поэтому вне их свя-
зи с конкретным этапом. Отдельно должны быть рас-
смотрены только особенности процессов, характеризую-
щих смену этапов движения — трогание, переключение
с низших на высшие скорости движения и с высших на
низшие. Особый интерес представляет физическая кар-
тина трогания планетохода, которая на основании ре-
зультатов моделирования может быть описана следующим
образом.
Трогание на подъем. При трогании на подъем
угловые зазоры редукторов к моменту начала движения
отсутствуют, т. е. к = 0. Поэтому вслед за включением
двигателей начинается упругое закручивание силовых
цепей мотор-колес. Этим объясняется задержка начала
движения планетохода, которая оказывается заметной
при счете с интервалом 0,01 с.
Вращение j-ro мотор-колеса начинается тогда, когда
подведенный к нему от двигателя крутящий момент ока-
жется большим, чем момент сцепления колеса с грунтом
MKi > Mfi. Процесс упругого закручивания развивается
весьма быстро, поэтому, несмотря на различие значений
Mfi, вращение всех колес начинается практически одно-
временно.
После выполнения условия MKi^>Mfi происходит
срыв грунта и развивается наиболее интенсивное буксо-
вание колес (рис. 2.35). Чем выше сцепные свойства
грунта, тем большей оказывается начальная величина
упругой энергии редукторов.
При трогании планетохода на подъем х = 0, срРг>0
для i = 1, 2, . . ., п. Это позволяет рекомендовать проведе-
ние динамических расчетов данного режима движения
без учета нелинейности упругого момента и гистерезис-
ных потерь при крутильных колебаниях:
Л/рг = Л/pi £рфрг* (2.103)
Буксование колес при трогании планетохода в извест-
ной мере компенсирует отсутствие специальных механиз-
мов сцепления или пусковых блоков в структуре тягово-
го периода рассматриваемых луноходов, способствуя бо-
лее плавному ^троганию аппарата. Влияние физико-меха-
нических свойств грунта на величину ускорения при
трогании иллюстрируется графиками, приведенными на
134
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
рис. 2.36. Графики получены при расчете ускорения в
первые 1 4- 1,5с движения на подъемах и уклонах раз-
личной крутизны. Заметим, что с помощью подобных
графиков решается характерная для тяговой динамики
задача определения максимального преодолеваемого угла
подъема при трогании с места.
Рис. 2.35. Характерные функции изменения коэффициента буксо-
вания при трогании и разгоне лунохода на слабосвязном грунте.
Рис. 2.36. Влияние свойств грунта и геометрии опорной поверх-
ности на величину ускорения при трогании планетохода: 1 —
«Грунт-1», 2 — «Грунт-2», 3 — «Грунт-3».
Трогание под уклон. При движении под уклон
благодаря составляющей веса планетохода, которая в
данном случае является движущей силой, корпус плане-
тохода «обгоняет» колеса. Появляющийся при этом на
валу двигателя тормозной момент компенсирует избыток
кинетической энергии планетохода, что, в конечном сче-
§2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
135
те, приводит к равномерному движению аппарата. Это
явление хорошо заметно при анализе рис. 2.34, из кото-
рого видно, что трогание под уклон сопровождается из-
менением полярности упругого момента MKi.
Разгон планетохода. Разгон планетохода после
его трогания или переключения скоростей также в зна-
чительной мере определяется механическими свойствами
грунта. Из рис. 2.34 видно, например, что при движении
на подъем а = 10° по «Грунту-1» планетоход развивает
скорость до х «1,45 км/ч, а по «Грунту-2» только
х « 1,02 км/ч. В данном случае отличие скорости движе-
ния обусловлено, главным образом, различной величиной
буксования колес.
Если же сравнивать разгонные характеристики пла-
нетохода на склонах различной крутизны, то к указан-
ной причине следует добавить и изменение режимов ра-
боты двигателей мотор-колес вследствие перераспределе-
ния нормальных реакций. Как видно из рис. 2.34, учет
обоих отмеченных явлений позволяет существенно уточ-
нить расчетное определение скоростных характеристик
планетохода.
Если разгон осуществляется в направлении угла наи-
большего подъема, т. е. при t = 0 оси х и X совпадают,
то в процессе движения курсовой угол не изменяется и
отсутствует боковое скольжение планетохода v = х,
0 = 0 = 0, у = у = у = 0. Это справедливо, однако,
только в том случае, если идентичны электромеханиче-
ские характеристики двигателей и упругие характеристи-
ки подвесок мотор колес противоположных бортов. Необ-
ходимо, кроме того, рассматривать грунтовую поверх-
ность, однородную по своим свойствам, по крайней мере,
в пределах колеи планетохода.
Естественно, что в реальных условиях эксплуатации
трудно ожидать одновременного выполнения перечислен-
ных условий. Верно, однако, и то, что за время разгона
изменение 0 и у может быть весьма небольшим. Все это
позволяет использовать при расчетах прямолинейного
движения в направлении угла наибольшего подъема
плоскую расчетную динамическую схему планетохода.
Ее достоинством является большая простота математиче-
ской модели и уменьшение количества исходных данных,
необходимых для расчета.
136
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Уравнения движения при рассмотрении плоской мо-
дели могут быть получены, используя более общие урав-
нения (2.91) — (2.97). При отсутствии фрикционных свя-
зей двигателя с колесом они запишутся в виде
п/2
-4" Mnz = \Rzi-----Mng cos а0, (2.104)
2=1
п/2 п/2 п/2
4-лф = 2 + 2^ + 2 (рк« - pfi) W + z),
i=l i=l i=l
(2.105)
п/2
4-Mx = 2 (Ad - Pfi) -4- Ms sin “o> (2-Ю6)
i=l
= (2.107)
/д<рд1 = Мд4-Мр<, (2.108)
i=l,2, ..., n/2.
При этом
п п/2 п
2<2»=0, 2 Rzi,
г=1 i=l i=n/2+l
n/2 n
2(Р«-Р/<)= S (P.i-Pfi).
i=i i=n/2+i
В этих уравнениях принято /гр = 0, что вполне допу-
стимо для оценочных расчетов. Кроме того, при анализе
движения на подъем вместо формулы (2.18) для опреде-
ления может использоваться формула (2.103).
Плоская модель вполне применима и для анализа пе-
реходных процессов при переключении скорости движе-
ния планетохода.
Переключение скорости движения с низ-
шей на высшую. При переключении скорости дви-
жения с низшей на высшую угловой зазор редукторов не
раскрывается и фр< не изменяет знака. Поэтому упругий
момент в этом случае может быть определен по формуле
(2.1031.
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
137
При переключениях с высшей скорости на низшую
происходит раскрытие угловых зазоров. Отсутствие в те-
чение некоторого времени кинематической связи двига-
телей с колесами резко уменьшает скорость движения
планетохода (рис. 2.34). Затем зазоры выбираются, связь
восстанавливается и начинается процесс разгона до не-
которой, установившейся для данного режима, скорости
движения.
При равномерном движении планетохода стабилизи-
руется и величина коэффициента продольного скольже-
ния, имеющая индивидуальное значение для каждого
колеса (рис. 2.35). Наибольшее буксование характеризу-
ет кормовые колеса, режим работы которых и определя-
ет скорость равномерного движения планетохода.
Рис. 2.37. Влияние геометрии и физического состояния опорной
поверхности на скорость равномерного движения планетохода:
1 — «Грунт-1», 2 — «Грунт-2», 3 — «Грунт-3».
Влияние геометрии опорной поверхности и механиче-
ских свойств грунта на скорость равномерного движения
планетохода может быть оценено количественно с по-
мощью графиков, приведенных в качестве примера на
рис. 2.37. Графики получены при моделировании движе-
ния восьмиколесного планетохода, основные параметры
которого приведены в табл. 2.1. Подобные графики мо-
138
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
гут быть использованы для определения максимального
преодолеваемого угла подъема.
2.5.2. Динамические реакции грунта. Динамическая
картина распределения продольных сил P1{i и крутящих
моментов MKi по колесам планетохода определяется со-
отношением мгновенных значений нормальных реакций
Rzi и коэффициентов сцсчпления колес с грунтом Тг-, ко-
торые, в свою очередь, зависят от параметров планетохо-
да, характеристик привода, свойств грунта и т. п.
Моделирование функции Mvi=MK(t), при котором
все перечисленные факторы учитываются в их совокуп-
ности, позволяет выделить наиболее важные взаимосвязи
и исключить при дальнейшем анализе второстепенные
явления.
Динамика нагружения индивидуальных
приводов мотор-колес. Движение автономных и
дистанционно управляемых планетоходов осуществляется
малыми отрезками пути и поэтому характеризуется мно-
гократным повторением перечисленных в предыдущем
разделе этапов движения, которые должны быть допол-
нены этапом торможения. Рассмотрим на примере вось-
миколесной модели характерные особенности изменения
MKi при смене режимов прямолинейного движения на
подъем и под уклон.
Вследствие быстродействия электромагнитного поля
двигателей приложение крутящих моментов к звеньям
мотор-колес при трогании и переключении передач носит
ударный характер (рис. 2.38). По мере разгона плането-
хода величина уменьшается по экспоненте до некото-
рого номинального для данного режима значения. При
переключении с высшей па низшую скорость MKi резко
уменьшается и может даже изменить полярность.
Как следует из рис. 2.39, при движении под уклон
упругий момент подводится к колесу короткими знако-
переменными импульсами.
Из уравнения (2.107) следует, что Mfi и MKi отлича-
ются на 7кфкь Моделирование показывает, что указанная
величина для рассматриваемых планетоходов весьма неве-
лика, и в практических расчетах ею можно пренебречь.
Это связано с тем, что при больших ир определяющее
влияние на инерционные параметры привода оказывает
момент инерции ротора двигателя.
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
139
Рис. 2.38. Динамика нагружения индивидуальных приводов кор-
мового и переднего мотор-колес при движении на подъем ао =
= 10° («Грунт-1»).
Рис. 2.39. Динамика нагружения индивидуального привода пе-
реднего мотор-колеса при движении под уклон а0 = 10°
(«Грунт-1»).
140
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Полагая колесо безынерционным звеном и пренебре-
гая инерционными свойствами грунта при его перемеще-
нии в процессе буксования, можно записать Mfi « MKi.
Результаты моделирования показывают далее, что
при исследовании движения планетохода на подъем
можно пренебречь и влиянием упругих свойств тяговых
редукторов. Из рис. 2.38 видно, что эти свойства практиче-
ски не отражаются на функции наиболее загру-
женных колес. Можно отметить только небольшое сме-
щение пика максимальных моментов, которое представ-
ляет интерес скорее с точки зрения физики явлений.
Наблюдающиеся в переходных режимах крутильные ко-
лебания упругого момента менее загруженных передних
мотор-колес носят слабо выраженный характер и не ска-
зываются на тягово-динамических свойствах планетохо-
да в целом.
Можно добавить, что принятые при разработке дина-
мической схемы привода мотор-колеса допущения пред-
полагают отсутствие внутренних возбудителей крутиль-
ных колебаний. При рассмотрении движения планетохо-
да по слабосвязным однородным грунтам практически
отсутствуют и внешние возбудители крутильных ко-
лебаний.
Полагая звенья редуктора абсолютно жесткими
(cPi оо) и учитывая, что Mfi ~ MKi, а также что х = 0,
можно получить приближенные уравнения движения
вращающихся масс мотор-колес, являющиеся дальней-
шим упрощением уравнений (2.107) и (2.108):
(2.109)
где i = 1, 2, ..., zz/2, = M^pT]pf, сркг- = срдг-/^р.
Текущее значение г]рг- определяется в этом случае с
помощью правой части характеристики, приведенной на
рис. 2.21, либо принимается равным номинальному зна-
чению к. п. д. редуктора.
Все это приводит к дальнейшему упрощению плоской
модели, облегчает анализ результатов моделирования и
может оказаться полезным при ограниченной информа-
ции о параметрах вновь проектируемой машины.
Моделирование показывает, что сцепные и фрикцион-
ные свойства грунта ограничивают возможности реализа-
ции крутящих моментов, подводимых к колесу от при-
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ 141
вода. Так, для случая движения модели на « Грунте-1»
фактическое значение составляет примерно 1/3
часть максимальной величины AfKi, определенной по фор-
мулам вида (2.5), т. е. полученной исходя из характерис-
тики двигателя. Это характерно не только для предель-
ных случаев движения, когда текущее значение
близко к значению <рс и когда для оценки максимальных
(по сцеплению) сил можно использовать формулы вида
(2.7). В любой момент времени значение MKi зависит от
проскальзывания колеса, относительная величина которо-
го определяется при решении уравнений движения пла-
нетохода, что позволяет получить динамические характе-
ристики планетохода с учетом свойств грунта.
Динамическая характеристика плането-
хода. Динамической характеристикой, как известно,
называют зависимость динамического фактора от скоро-
сти движения транспортной машины D =D (я), где D —
динамический фактор. В теории автомобиля эти зависи-
мости получают, используя непосредственно характери-
стики двигателя и учитывая потери мощности в транс-
миссии. Исходя из этого, для рассматриваемых плането-
ходов можно записать
S -^дг
D = 1=1. ----------. (2.110)
Mg гк 4
Если характеристики двигателей всех мотор-колес
одинаковы, то выражение (2.110) можно записать в
виде
D = (2.111)
MgrK v '
Таким образом, динамическая характеристика пред-
ставляет собой в этом случае характеристику двигателя
произвольного мотор-колеса, приведенную к оси колеса
и отнесенную к части веса планетохода. Она отражает
потенциальные возможности аппарата, но не учитывает
фактического индивидуального вклада каждого колеса и
его реальных тягово-сцепных характеристик при движе-
нии на грунтах с различными механическими свойства-
ми. Для выполнения целого ряда расчетов целесообразно
142
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
оперировать динамическим фактором D', определяемым
с учетом свойств грунта
i R^i
D' = --Mg - ’ <2Л12>
где Rzi и ЧЛ находятся с учетом характеристик двига-
теля в процессе решения уравнений движения (2.104) —
(2.106) и (2.109). Из этих же уравнений определяется
и соответствующая скорость движения планетохода х.
Рис. 2.40. Влияние свойств грунта на динамические характери-
стики планетохода: 1 — «Грунт 1», 2 — «Грунт 2», 3 — «Грунт 3»
4 — связный грунт, исключающий буксование колес.
Рассмотрим в качестве примера динамические харак-
теристики восьмиколесиой модели, полученные с по-
мощью (2.111) и (2.112). При построении характеристик
учтем ограничения, накладываемые на величину силы
тока, и, следовательно, на величину максимального кру-
тящего момента на валу двигателя (рис. 2.40).
Из рис. 2.40 видно, что функции D(x) и D'(x) имеют
существенные отличия, которые тем значительнее, чем
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
143
ниже тягово-сцепные свойства звена «движитель —
грунт». Разность ординат D и D', вычисленная при не-
котором фиксированном значении х, отражает в данном
случае неиспользуемые на заданном грунте тяговые воз-
можности привода.
В этой связи можно отметить, что одновременное ис-
пользование семейства кривых D(x) и D'(x) расширяет
круг задач, решаемых с помощью динамической харак-
теристики, в теории автомобиля, а именно:
определение максимальной скорости и максимального
ускорения планетохода при движении на различных
грунтах, склонах различной крутизны,
определение передачи (или скоростного режима работы
двигателей), на которой планетоход может двигаться в
заданных грунтовых условиях,
определение максимальных для данного грунта пре-
одолеваемых подъемов и т. д.
Указанные задачи оперативно решаются с помощью
выражения
п
£ Sni ..
D = /cosa0 + sinao + ——£, (2.113)
где бПг можно приближенно (без учета скольжения ко-
лес) определять по формуле (2.6).
Используя выражение (2.112), можно получить фор-
мулы, позволяющие оценить индивидуальный вклад каж-
дого мотор-колеса в реализацию динамического фактора
планетохода:
D' •== d\ с?2 4“ ••• 4“ 4“ ... 4“ dn,
где di = PKi/ (Mg) можно назвать реализуемым динами-
ческим фактором г-го мотор-колеса, определенным с уче-
том свойств грунта.
Результаты моделирования показывают, что величина
di при движении в различных условиях изменяется в
широком диапазоне. Если же говорить о конструктивных
параметрах планетохода, то наибольшее значение для
характера распределения di или PKi по колесам плането-
хода имеет его колесная формула.
144
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Влияние колесной формулы на распре-
деление di мото p-к олес планетохода. Влияние
колесной формулы иллюстрируется графиками, приведен-
ными на рис. 2.41. Они получены при моделировании рав-
номерного движения восьми-, шести- и четырехколесных
планетоходов на однородной грунтовой поверхности и
являются весьма характерными для многоосных машин.
(В данном случае можно говорить о геометрических осях
соответствующих колес противоположных бортов.) Мо-
делирование осуществлялось на грунте-аналоге сухого
кварцевого песка («Грунт-2»).
Понятие «однородная грунтовая поверхность» отража-
ет то обстоятельство, что при моделировании предполага-
лось полное совпадение обобщенных характеристик взаи-
модействия колес с грунтом, т. е. /г=/2=--- = /п и
ЧГ1 = ЧГ2 = .. . = ЧГП. Это понятие включает, следовательно,
допущение об отсутствии влияния количества проходов
колеса на его тягово-сцепную характеристику. Можно
заметить, что, как показывают результаты испытаний
одиночного колеса в грунтовом канале, такое допущение
с весьма малой погрешностью может быть принято для
случая движения по песку [33].
Таким образом, при движении на однородной поверх-
ности соотношение величин ЧЛ- различных колес опреде-
ляется только соотношением коэффициентов продольного
скольжения колес. Как следует из рис. 2.35, в случае
равномерного движения на слабосвязных грунтах (при
использовании двигателей с жесткими характеристика-
ми) Si различных колес близко совпадают.
Поэтому решающее влияние на картину распределе-
ния оказывает соответствующее распределение нормаль-
ных реакций, т. е.
d. К?,
ж для ^ = 1,2, ..., п.
йг+1 ^(i+l)
Полученные соотношения свидетельствуют о том, что
взаимное влияние мотор-колес, снабженных двигателями
с жесткими характеристиками, при прямолинейном рав-
номерном движении планетохода на подъем по однород-
ному слабосвязному грунту весьма невелико. Используя
введенные в разделе 2.1.2 обозначения, можно записать,
что в этом случае
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
145
-10 ~5 О 5 10 15 а, граО
Рис. 2.41. Влияние колесной формулы на статическое распреде-
ление di по колесам планетохода: а) колесная формула 8X8,
б) колесная формула 6 X 6 и колесная формула 4X4.
Ю Е. В. Авотин и др.
146
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Этот вывод является важным, в частности, потому,
что расчетная оценка распределения Rzi представляет
значительно меньшие трудности, чем оценка распределе-
ния Я7,. Естественно, что при этом Rzi можно опреде-
лять не только по формулам (2.91) — (2.99), пригодным
для машинного расчета, а по более приближенным зави-
симостям. Достоверность этих зависимостей может ока-
заться достаточной для первых этапов проектировочного
расчета. Так, для случая равномерного движения на
подъем значения RZi можно определить из уравнений
(2.104)-(2.106) при i — 2 = ф = 0.
Чтобы не связывать расчетные выражения с конкрет-
ным конструктивным исполнением подвески, далее будем
оперировать линейной жесткостью подвесок сПг и обозна-
чим через hc проекцию на ось z отрезка от оси колес до
центра тяжести планетохода. Учитывая, что hc z, уп-
рощенно примем hc ~ const. Пренебрегая различием мар-
сы планетохода и массы его подрессоренной части, будем
полагать также М ж Ма. С учетом изложенного получим
п/2
2 — 4'^cosao = 0> (2.114)
1=1
п/2 п/2 п/2
2 Pzih + 2 Mfi 4- hc 2 (Ркг Pfi) — 0» (2.115)
1=1 1=1 1
п/2
2 (PKi - PZi)-4 ^sina0 = °. (2.116)
1=1
При проектировочных расчетах важно оценить мак-
симальные значения Rzi и PHi кормового, наиболее загру-
женного, колеса при движении на максимальный прео-
долеваемый подъем. Для этого, учитывая предыдущие
рассуждения, можно принять
1 = = Чгп = const, Л = fi — fn — const.
Для обеспечения равноценности прямого хода и ре-
верса целесообразно симметричное расположение мотор-
колес относительно центра тяжести планетохода, т. е.
I k | = |^| = 1^1 = | h |. Полагая линейные жесткости
подвесок всех мотор-колес одинаковыми и учитывая, что
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
147
Rzi = Cni(z — Zf(p), из уравнения (2.114) в этом случае
получим
Ял = - CniZiT, (2.117)
где полярность Ц определяется, как показано в § 2.3,
т. е. с учетом направления движения планетохода. Фор-
мулу для определения ср можно получить из уравнений
(2.114)— (2.116). Так, для шестиколесного планетохода
с симметричным расположением колес получим
frKMg cos а0 + Mghc sin а0
Ф = ----------—2------------. (2.118)
При этом нормальные реакции передних и крайних
колес определятся из выражений
R = Mg cos <х„ + Лк Mg cos g0 + Mgfec sin(x0
где знак «-(-» относится к кормовым, знак «—» — к пе-
редним колесам, Z — расстояние между осями крайних
колес (колесная база). Нормальные реакции средних ко-
лес определятся по формуле
Rzi = (2.120)
Таким образом, при движении по однородной грунто-
вой поверхности влияние колесной формулы на распре-
деление di и Рк можно оценить, используя выражения
(2.114) — (2.116). Как следует из этих выражений и гра-
фиков, приведенных на рис. 2.1, движение восьмиколес-
ного аппарата на крутых подъемах (ао>1О°) характе-
ризуется неэффективной работой передних колес. Если
в качестве критерия оптимизации колесной формулы
выбрать отношение динамического фактора передних
(dn) и кормовых (dK) колес, то для восьмиколесно-
го планетохода при ос0 = 15° dn/dK-~ 0,22, тогда как
для шестиколесного аналогичное отношение равно 0,43,
а для четырехколесного — 0,48. Очевидно, что в идеа-
ле нужно стремиться к тому, чтобы rfn/dK->l при
осо = var.
10*
148
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Полученные в процессе моделирования выводы и ко-
личественные соотношения хорошо согласуются с данны-
ми эксплуатации «Лунохода-1» -[38]. Сравним, к приме-
ру, картину распределения тяговых усилий по колесам
«Лунохода-1» и его модели.
Учитывая различие массы «Лунохода-1» и его модели
(масса «Лунохода-1» составляет 756 кг, а модели —
Рис. 2.42. Коэффициенты загрузки мотор-колес «Лупохода-1» и
его модели:----------------эксплуатация «Лунохода-1» в рай-
оне Моря Дождей, —х—х —х—х— результаты моделирования
па грунте-аналоге сухого кварцевого песка.
1100 кг), сравнение целесообразно провести, используя
безразмерные коэффициенты загрузки (рис. 2.42)
2Р .
= (2.121)
2 Л.ч
где qr — коэффициент загрузки двух мотор-колес проти-
воположных бортов, принадлежащих одной геометриче-
ской оси.
Эффективность работы передних колес многоосного
планетохода можно повысить за счет регулирования от-
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
149
носптельного положения центра тяжести планетохода и
осей колес при движении на подъемы различной крутиз-
ны. Такое регулирование следует осуществлять либо из-
менением положения центра тяжести подрессоренной
части, либо изменением колесной базы планетохода. По-
следнее оказывается возможным при использовании колес-
но-шагающего движителя [7,12]. В этом случае шестиколес-
ный планетоход при регулировании положения только сред-
них колес может оказаться равноценным (в части отноше-
ния dildn на крутых подъемах) четырехколесному аппарату.
В наиболее простом случае средние колеса могут выстав-
ляться в исходное положение в зависимости только от
направления движения планетохода таким образом, что-
бы для средних колес всегда выполнялось условие Zf<0.
При более тонком регулировании необходимо обеспечить
выполнение зависимости Ц = I (а).
В заключение отметим, что проблема выбора колесной
формулы имеет несколько аспектов, тогда как в настоя-
щем разделе затронут только один из них. Каждый
аспект отражает подход к этой проблеме с позиций оп-
тимизации различных свойств и эксплуатационных пока-
зателей планетохода: плавности хода, опорной и геомет-
рической проходимости^ устойчивости, надежности, пово-
ротливости и т. д.
С учетом всех указанных факторов использование
многоосного движителя может оказаться целесообразным
техническим решением. При этом нужно иметь в виду
еще не раскрытые полностью резервы таких машин —
регулирование колесной базы, применение многозвенной
(«гибкой») рамы и т. д. В целом можно констатировать,
что поиск оптимальных решений, конечно, не закончен.
Об этом свидетельствует, в частности, различие колесных
формул существующих луноходов — советских и амери-
канских.
2.5.3. Распределение внутренних продольных сил.
В предыдущем разделе рассмотрен случай движения
планетохода, когда взаимным влиянием приводных колес
можно пренебречь, полагая Pxi ~ 0. Имея в виду это
обстоятельство, преобразуем уравнение (2.106):
п
М (х g sin а0) = 2 OF г f i) • (2.122)
i=l
150
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Разделив оба члена последнего уравнения на
и умножив на Rzi, получим для этого случая
п
1
м (х + gsin а0) = 7?г{(ТI-fi). (2.123)
i=l
Обозначим выражение
MRzil Rzi — 771кг
/ г=1
(2.124)
в отличие от тм=М1п, которое используется в уравне-
нии (2.2). Очевидно, что mKi— часть массы планетохода,
разгоняемая г-м мотор-колесом и определенная с учетом
перераспределения инерционных сил.
Выражение (2.123) представляет, таким образом,
уравнение поступательного движения (в направлении
оси х) Z-ro мотор-колеса и связанной с ним части общем
массы планетохода. Для того чтобы это уравнение было
справедливо в общем случае движения (включая дви-
жение по неоднородным грунтам при произвольном со-
отношении рабочих характеристик двигателей различных
мотор-колес), необходимо учесть внутренние продольные
силы
(я + g sin а0) = Rzi (Yi — fi) ± Pxi, i = 1, 2,..., n.
(2.125)
Для определения величины и направления PXi необ-
ходимо совместное решение уравнений (2.125), состав-
ленных для каждого мотор-колеса, и уравнений прост-
ранственного или плоского движения планетохода. Пос-
леднее зависит от постановки задачи: при анализе
прямолинейного движения в направлении угла наиболь-
шего подъема целесообразно использовать более простую
плоскую модель, в остальных случаях движения, строго
говоря, необходимо учитывать поперечные силы и попе-
речные колебания подрессоренной части.
Поскольку текущие значения m^i, Rzi, х, f i могут
быть определены только при анализе динамической си-
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
151
стемы в целом, уравнения (2.125) не имеют самостоя-
тельного значения. Они, однако, оказываются необходи-
мыми не только для количественного определения Рхг но
н для получения общих условий отсутствия взаимного
влияния мотор-колес.
Условие о т с у тс т в и я взаимного в ли я н и я
мото p-к о л е с. В общем случае движения планетохода
условие отсутствия взаимного влияния мотор-колос мож-
но получить из уравнения (2.125), положив в пих РХг = О-
При этом
(х + g sin а0) = Ti - А, (2.126)
2 RZi
г=1
откуда следует, что в произвольный момент времени и
для произвольного колеса должны выполняться следую-
щие равенства:
= Ч^-А = ...= ¥п-/п. (2.127)
Равенства (2.127) подчеркивают то обстоятельство,
что картина сил, действующих на каждое колесо, опре-
деляется не только взаимодействием этого колеса с грун-
том, но и взаимодействием с грунтом всех остальных
колес планетохода. Они позволяют сделать некоторые
частные выводы, касающиеся движения по однородным
грунтам, включая однородное твердое основание.
Для случая прямолинейного движения, когда 7г = О
и значения и определяются для конкретных колес
только механическими свойствами грунта и величиной^-,
можно, в частности, сформулировать следующий вывод:
внутренние контуры циркуляции между ведущими коле-
сами при движении по однородной поверхности отсутст-
вуют, если все колеса работают с равным по величине
и направлению продольным скольжением.
Из формулы (2.73) следует, что если 0 = 0, то Si
определяется только частотой вращения колеса и его
кинематическим радиусом. Поэтому отсутствие взаим-
ного влияния колес обеспечивается, если rKi = const и
<Рк1 = фкг = фкп ДЛЯ i = 1, 2, ..., п.
В теории автомобиля подробно рассматривается слу-
чай, когда у многоприводной машины с блокированной
152
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
механической трансмиссией (групповой привод колес)
возникают циркулирующие контуры вследствие наруше-
ния указанных условий. Первопричиной могут быть
технологические погрешности изготовления колес (rKi¥=
=Н= const) и различие путей, пройденных каждым колесом.
Оба эти фактора приводят к тому, что фК£ ¥= Ф«п. (Пово-
рот в данном разделе не рассматривается.)
Все это может привести к возникновению паразитных
циркулирующих потоков, замкнутых в рамках системы
«механические передачи — колеса — грунт».
Если связи этой системы являются достаточно жест-
кими, то замкнутый упругий момент может достигать
весьма большой величины
Мз = СрезЛф1,2, (2.128)
где Срез — результирующая угловая жесткость звеньев
системы, приведенная к колесу, Дф1,2 — суммарный от-
носительный угол закручивания двух блокированных
через грунт и трансмиссию колес. Если, к примеру, раз-
личие пути двух соседних приводных колес составляет
величину Д5 = 51 — 52, то при rKi = гк2, Дф1,2 = AS/rK.
Однако, поскольку срез определяется наиболее подат-
ливым звеном, то при движении по слабосвязным грун-
там, когда работа колеса осуществляется в зоне неупру-
гого, фрикционного скольжения, М$ не может достигать
существенной величины.
Это является, однако, не единственным и не самым
важным фактором, отличающим задачи определения вну-
тренних сил транспортных машин с механической транс-
миссией и с индивидуальными электромеханическими
приводами колес. В последнем случае, даже при исполь-
зовании двигателей с жесткими характеристиками, воз-
можности естественного регулирования скорости враще-
ния каждого колеса оказываются все-таки достаточно
большими. Поэтому, если между какими-либо приводными
мотор-колесами возникают внутренние продольные силы,
то это приводит к дополнительному (по отношению к
перераспределению, обусловленному различием нормаль-
ных реакций) перераспределению силы тока, потребля-
емого двигателем каждого мотор-колеса.
Следовательно, в данном случае речь идет не о цирку-
ляции мощности в том смысле, как она понимается в
§2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
153
теории автомобиля, а именно о перераспределении внут-
ренних продольных сил, как и указано в заголовке на-
стоящего раздела. Однако в результате этого перераспре-
деления, а также вследствие внутренних причин, в том
числе аварийных, в общем случае движения планетохода
одно или несколько мотор-колес могут работать в тор-
мозном режиме. При этом имеют место действительно
замкнутые в рамках всей системы движения контуры
циркуляции, сопровождающиеся дополнительными поте-
рями энергопотока при его рекуперации.
Как следует из предыдущего раздела, при движении
на однородном слабосвязном грунте рекуперация отсут-
ствует. Все мотор-колеса работают в ведущем режиме.
Моделирование показывает далее, что это наблюдается
и при небольшом отличии параметров характеристик
различных колес одного борта.
Поскольку функции Y ($г) и f(Si) в рассматриваемом
случае идентичны для всех колес, разница величин PKi
каждого колеса определяется только различием коэффи-
циентов продольного скольжения колес. При использова-
нии двигателей с независимым возбуждением различие
оказалось весьма небольшим (рис. 2.36). Еще менее раз-
нятся значения Yi, так как при достаточно больших зна-
чениях Тг колесо работает на пологих участках функции
Y ($г). Все это и приводит к тому, что при движении на
песке
Yl-Л ~ ... « Уп-fn.
Результаты моделирования показывают, в частности,
что при равномерном движении па подъем а = 10° по
грунту-аналогу сухого песка РХг составляет по отноше-
нию к Рк кормового колеса не более 3 4- 7%.
Из проведенного анализа следует, что перераспреде-
ление внутренних продольных сил может иметь как от-
рицательное, так и положительное значение: отрицатель-
ное в том случае, когда дополнительно нагружается коле-
со, находящееся под действием наибольшего нормально-
го усилия, и наоборот.
Речь идет, следовательно, о направлении действия
внутренних сил.
Определение направления действия
внутренних сил. Возвратившись к рис. 2.6, отметим,
154
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
что определяя полярность PXj (так же как и внешних
сил) по отношению к направлению движения, получим,
что ведущее колесо является толкающим, если PXi<®i
и, толкаемым, если Рхг > 0 (саг. § 2.2).
Из уравнений (2.125) следует, что поскольку
(я + gsin а0) + — Ч^
Rzi, (2.129)
то
* М ”
Рхг < 01 если Vi > —----------(х + g sin а0) + fit
i— 1
P*xi > о, если Vt < nM (x + g sin a0) +
^zi
i=l
Неравенства (2.130) имеют смысл только при их од-
новременном применении для анализа работы всех веду-
щих колес. Поэтому в наиболее простой форме они могут
быть записаны для двух взаимодействующих друг с дру-
гом через корпус колес. Полагая, что эти два колеса не
испытывают влияния всех остальных колес планетохода,
можно записать:
Рхг > о, Р*х2 < о, если^Чт2 - /2 (2.131)
Возвратившись к результатам моделирования, приве-
денным на рис. 2.35, заметим, что > $4 и, следователь-
но, ЧГ1>ЧГ4. Поскольку при моделировании предпола-
галось, что /1 ~ /4, то из неравенства (2.131) следует,
что при движении на подъем на однородном грунте
внутренние силы направлены от передних к кормовым
колесам. Таким образом, в данном случае можно гово-
рить о положительных последствиях перераспределения
внутренних сил, хотя количественно влияние этих сил
на выравнивание загрузки кормовых и передних колес
невелико. Однако при прямолинейном движении по по-
верхности с неоднородными механическими свойствами
взаимное влияние мотор-колес может быть более замет-
ным и иметь большее значение для повышения проходи-
мости многоприводной машины.
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
155
Физический механизм взаимного в л и я-
ниямотор-колес. Механизм взаимного влияния колес
можно рассмотреть, используя наиболее простую плоскую
схему движения четырехколесного планетохода. Особен-
ностью такой схемы является то, что па ней выделены
условные части массы планетохода, а их реальные связи
заменены действием внутренних силРХ1 и Рх2. Величи-
на этих масс определяется по формуле (2.124), откуда
видно, что они пропорциональны нормальным реакциям
(или развесовке планетохода по колесам).
Предположим, что в рассматриваемый момент време-
ни кормовые колеса находятся на мягком грунте, тогда
как передние взаимодействуют с твердым основанием
(выходы коренных пород, поверхность глубоко засыпан-
ных камней и т.п.). В этом случае удельная тяга перед-
него колеса определяется в том числе и силовыми реак-
циями в контакте жестких грунтозацепов с микронеров-
ностями основания. Все это может привести к положению,
когда, как показано на рис. 2.43, T’i (si) > Тг^г) и
/1 < /2. В этом случае (Т2—/2) < (Чг1 — /1) и внутренние
силы направлены от переднего колеса к кормовому. Это
играет положительную роль, выравнивая режимы работы
двигателей мотор-колес.
Задавшись произвольно направлением действия внут-
ренних сил, полагая для упрощения х = z = 0 и, следо-
п-
вательно, 5 Rzi = Mg cos а0, получим уравнения посту-
1=1
нательного движения выделенных масс в направлении
угла наибольшего подъема:
(Ч\ — Д — tg cz0) — = О,
^2(^2-/2-tgao) + P:2 = O.
Поскольку | Pxi 1 = | Рх2 L то при сложении уравне-
ний (2.132) получается уравнение прямолинейного рав-
номерного движения планетохода. (Здесь рассматрива-
ется плоская схема, когда силы, действующие на колеса
правого и левого бортов, идентичны.)
Рассматривая схему, приведенную на рис.х 2.43,
и уравнения (2.132), можно получить следующие условия:
Рх1<0,Рх2>0, если (Ч^2—/2) <tgcxo< (Ч^!—/1). (2.133)
156
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Численную величину Pxi можно определить, также
используя уравнения (2.132)
Pxi = 4- 1^1 (^1 - /1) - (^2 - /2) +(Ях2 - Rzl) tg <Xol-
(2.134)
Левая часть неравенства (2.133) показывает, что при
данной величине s2 кормовое колесо не может самосто-
Рис. 2.43. Схема для определения величины и направления внут-
ренних продольных сил: а) схема движения планетохода на
неоднородной поверхности, б) упрощенные тягово-сцепные ха-
рактеристики колес.
ятельно перемещать «свою» часть массы планетохода.
Но двигаться с большим буксованием кормовому колесу
мешает переднее колесо, которое имеет большое значение
уже при очень малой величине проскальзывания.
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
157
Из правой части неравенства (2.133) видно, что сво-
бодная удельная тяга (Ti—/1) переднего колеса могла
бы обеспечить ускоренное движение «своей» части мас-
сы планетохода. Поскольку обе части фактически связа-
ны через раму, этого не происходит, но передние колеса
подключают к себе часть массы планетохода, взаимодей-
ствующую с кормовыми колесами.
Явление взаимодействия тех или иных мотор-колес с
частями общей массы планетохода не пропорциональны-
ми нормальным реакциям грунта и составляет физиче-
скую сущность взаимного влияния ведущих колес.
Полученные результаты дополняют представления о
физической картине прямолинейного движения плането-
хода, рассмотренные в разделах 2.5.1 и 2.5.2. Все это
создает необходимые предпосылки для разработки уп-
рощенных методов тягово-динамического расчета на ста-
дии проектирования планетохода.
2.5.4. Методы проектировочных расчетов. Целью про-
ектировочного тягово-динамического расчета является
определение основных параметров привода и оценка тя-
гово-скоростных характеристик планетохода при прямо-
линейном движении в направлении угла наибольшего
подъема. К числу основных параметров привода отно-
сятся: номинальная (или установочная) мощность тяго-
вого двигателя и параметры его характеристики Л/д(фд),
передаточное число редуктора при движении на низшей
скорости, количество мотор-колес, диапазон изменения
передаточных чисел (или диапазон регулирования часто-
ты вращения вала двигателя).
Проектные расчеты носят предварительный характер,
так как проводятся при ограниченном объеме необходи-
мых исходных данных.
Исходные данные. При проектных расчетах ис-
ходные данные первоначально определяются из общих
требований, предъявляемых к планетоходу в данной косми-
ческой экспедиции, и непрерывно уточняются по мере фор-
мирования основных концепций создаваемой машины.
Эти требования вытекают из программы научных ис-
следований в заданном районе Лупы и планет и учиты-
вают технические возможности соответствующих средств
доставки — носителей, орбитальных блоков и т.п. При
этом формируются достоверные или предположительные
158
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
условия эксплуатации планетохода, а также ограничения,
накладываемые на его габаритно-весовые и энергетиче-
ские характеристики. В результате с большей или мень-
шей достоверностью оказывается возможным оценить
численные значения основных параметров, таких, как
масса планетохода М, колесная база 2, ширина колеи 5,
максимально допустимая мощность, потребляемая само-
ходным шасси планетохода от источника Г7ПЛ, макси-
мальные углы подъема с&о на предполагаемых трассах
движения и т. д. Компоновочные проработки вариантов
размещения планетохода во внутренней полости посадоч-
ного блока, геометрический анализ проходимости по пре-
пятствиям, приведенным в табл. 1.1, расчет параметров
опорной проходимости — все это позволяет затем выб-
рать колесную формулу, предварительно оценить радиус
колес гк, проекцию отрезка на ось z от центра тяжести
до оси колес hc и т. д. Для разрабатываемых вариантов
конструкции движителя оценивается, кроме того, воз-
можный диапазон изменения определяющих параметров
взаимодействия одиночного колеса с аналогами грунтов дан-
ной планеты, т. е. значения /тах, <рс. Перечисленных
данных оказывается достаточно для приближенного опре-
деления функции /?2г(ао) по формулам (2.119) — (2.120).
Параллельно с тягово-динамическим расчетом прово-
дятся расчеты по оценке устойчивости планетохода от
опрокидывания, оценке плавности хода при движении по
неровностям и т. д. Эти расчеты, методы которых описа-
ны в последующих главах книги, позволяют, в частности,
определить максимально допустимую скорость движения
v, установить ограничения по максимальному ускорению
при разгоне, максимальному замедлению при торможе-
нии. Уточняются значения жесткости подвесок, коорди-
наты центра тяжести и т. д.
При этом одновременно могут просчитываться не-
сколько вариантов конструкции самоходного шасси, от-
личающихся колесной формулой, геометрическими ха-
рактеристиками движителя, параметрами подвески и тя-
гового привода.
Множественность рассматриваемых вариантов, раз-
нообразие предполагаемых грунтовых условий, необхо-
димость одновременного учета различных динамических,
технологических и других факторов составляют отличи-
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
159
тельные особенности проектировочных расчетов плането-
хода. В этих условиях процесс проектирования можно
представить как непрерывную цепь решения все более
усложняющихся оптимизационных задач.
Критерии оптимизации. Правильность выбо-
бора параметров тягового привода можно оценить только
при изучении свойств планетохода. В этой связи целесо-
образно говорить не об оптимизации параметров, а об
оптимизации свойств.
От параметров тягового привода зависят, по крайней
мере, следующие свойства планетохода: проходимость,
маневренность, экономичность и нагруженность эле-
ментов.
Для обеспечения универсальности определений выде-
ленных свойств можно воспользоваться приемом идеали-
зации реальных объектов, который широко применяется
в физике. Речь идет о таких, например, понятиях, как
«абсолютно жесткие, абсолютно черные» тела и т. д. При
этом целесообразно опираться на понятия, сложившиеся
в теории наземных транспортных машин.
В идеальном случае планетоход не имеет каких-либо
ограничений, исключающих достижение цели, поставлен-
ной в формулировке свойств; поэтому эти формулировки
могут быть записаны следующим образом:
проходимость — совокупность свойств, характеризую-
щих способность планетохода двигаться по поверхности
Луны и планет с наименьшими отклонениями от задан-
ного маршрута для объезда препятствий и с наименьшим
снижением скорости при их преодолении;
маневренность — совокупность свойств, характеризу-
ющих способность планетохода изменять по заданному
закону величину и направление скорости своего движе-
ния в наименьшее время;
экономичность — совокупность свойств, характеризую-
щих способность планетохода выполнять свою задачу с
наименьшими энергозатратами.
Что касается величины действующих нагрузок, то в
идеальном случае отношение динамических и статиче-
ских сил и моментов при движении в заданных условиях
должно быть близко к единице.
Данные определения совокупных свойств позволяют
сравнить технические альтернативы по количественным
160
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
критериям, содержание которых заложено уже в самой
формулировке того или иного свойства. Реальный объект
является тем более совершенным, чем в большей степени
его свойства, описываемые функциями угловых и линей-
ных скоростей, ускорений, сил и моментов, а также фун-
кциями энергозатрат, приближаются к свойствам идеаль-
ного планетохода.
В ряде случаев, когда сравнение по каждому из вы-
деленных свойств дает противоречивые результаты, иеоб-
ходимо использовать интегральные критерии. В теории
транспортных машин таким критерием зачастую счита-
ют среднюю скорость движения ^ср.
Более универсальным критерием можно считать ре-
зультирующий к. п. д. системы движения планетохода,
учитывающий не только его скорость, но и удельные
энергозатраты
п
v 2 Ркг
Пил = (2.135)
и
Этот критерий, однако, недостаточно связан с эффек-
тивностью работы планетохода, которая определяется
объемом и качеством научной информации, получаемой
с борта планетохода.
Если говорить о непилотируемых объектах, то в иде-
альном случае объем и качество научной информации
пропорциональны весу установленного на борту плането-
хода научного оборудования. Эффективность планетохода,
таким образом, оказывается связанной с грузоподъем-
ностью самоходного шасси и средней скоростью движе-
ния. Учитывая, кроме того, энергетические показатели
планетохода, обобщенный критерий может быть представ-
лен в безразмерном виде следующим образом:
п = ^, (2.136)
* и
где G' — грузоподъемность самоходного шасси, т. е. вес
планетохода за вычетом веса самоходного шасси.
При выборе параметров привода необходимо стре-
миться к тому, чтобы П—>тах, а рассматриваемые ва-
рианты наилучшим образом удовлетворяли накладывав-
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
161
мым на систему движения планетохода технологическим,
конструктивным и другим ограничениям*
Очевидно, что для решения оптимизационных задач
можно использовать рассмотренные ранее пространствен-
ную и плоскую модели планетохода. При этом програм-
мы и алгоритм решения уравнений движения на ЭВМ
могут быть ориентированы на конечную цель, т. е. па
отбор лучших вариантов в процессе их последовательно-
го перебора.
Такие модели, однако, оказываются непригодными на
ранних этапах проектирования. Ограниченность исход-
ных данных требует в этом случае применения наиболее
простых расчетных схем и математических моделей. Это
возвращает к идее оценки тягово-динамических свойств
планетохода по результатам расчета одного мотор-коле-
са, рассмотренной в разделе 2.1.1. Но при этом должны
быть учтены основные физические явления, характеризу-
ющие работу мотор-колес в составе транспортного
средства.
Двухмассовая динамическая модель пла-
нетохода. Исходные предпосылки упрощенного мето-
да проектных тягово-динамических расчетов могут быть
сформированы на основе результатов моделирования, рас-
смотренных в разделах 2.5.1—2.5.3 и относящихся к
случаю движения планетохода на деформируемых одно-
родных грунтах. Из этих результатов следует, что к чис-
лу определяющих явлений, учет которых необходим иа
всех стадиях тягово-динамического расчета, следует от-
нести перераспределение нормальных реакций по коле-
сам и проскальзывание колес в контакте с грунтом. В то
же время внутренние характеристики всех мотор-колес,
а также условия их взаимодействия с опорной поверх-
ностью п окружающей средой в данном случае следует
считать идентичными.
Указанные предпосылки приводят к двухмассовой
расчетной динамической схеме планетохода, приведенной
па рис. 2.40. Уравнения движения двухмассовой модели
при анализе работы кормовых, наиболее загруженных
колес, запишутся в виде
m'imx = Rzn[xV (s) —sin а0—f(s)cos a0], (2.137)
Лспфкп ==- -^д(ф)^рЛр (s)rK, (2.138)
11 E. В. Авотпп и др.
162
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
где Rzn — нормальная реакция, действующая на кормо-
йое колесо, ягКп—условная часть массы планетохода^ раз-
гоняемая кормовым мотор-колесом, 7КП — момент инерции
Гис. 2.44. Двухмассовая расчетная динамическая схема плането-
хода.
ротора двигателя, приведенный к колесу:
«Лш = «/р^рЦр* (2.139)
Уравнения связи вращающихся масс мотор-колеса и
массы движущейся поступательно, записываются
в виде
<Рк —Фд/Up, X = гкфк(1 — $). (2.140)
Для определения величины Rzn могут быть рекомен-
дованы уравнения статики (2.114) — (2.116), которые
не содержат параметров тягового привода и приводят к
простым формулам вида (2.119) и (2.120).
Величина 7ПКП определяется по формуле (2.124),
функции Т,($) и /($) описываются в общем виде, как по-
казано на рис. 2.30, а их количественные параметры при-
ближенно оцениваются, исходя из заданных значений
фс и /тах. (В дальнейшем эти функции уточняются по ре-
зультатам испытаний макетов колес проектируемого пла-
нетохода на грунтах-аналогах.)
§ 2.5. ДШ1ЛМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
1G3
На данной стадии расчета можно полагать также г)р —
= т]рд = const, причем для оценки величины цр можно
использовать графики, приведенные на рис. 2.24.
С учетом изложенного уравнения (2.137) и (2.138)
можно привести к следующему виду:
s=5=g[T(s)—tgao—/(s)], (2.141)
Фк = [Мд (фд) - RznV (*) 'к!- (2.142)
J КП
Хотя полученные уравнения справедливы только для
наиболее загруженных колес, они вполне пригодны для
приближенного решения задач тяговой динамики прямо-
линейного движения, перечисленных в начале предыду-
щего раздела. В процессе машинного моделирования они
позволяют варьировать минимальным количеством опре-
деляющих характеристик опорной поверхности ао, Т* ($),
/(5), основных параметров планетохода М, S', характери-
стикой тягового двигателя Л/д(фд),втомчисле при его ре-
гулировании, а также параметрами тягового редуктора
ир, ик и движителя п, гк.
Сопоставление получаемых при этом функций x(t),
x(t), x(t), и т. п. обеспечивает возможность вы-
бора оптимальных вариантов.
Уравнение (2.141) позволяет оценить влияние грави-
тационного поля на кинематические характеристики пла-
нетохода. Из него видно, в частности, что при прочих
равных условиях ускорение лунохода при разгоне меньше
ускорения аналогичной наземной транспортной машины
§л.
хл = хз—> где индексы «л» и «з» относятся соответствен-
на
по к луноходу и наземной машине.
Равномерное движение планетохода.
Полученные уравнения движения могут быть использо-
ваны и для предварительной количественной оценки па-
раметров тягового привода при анализе равномерного
движения. Последовательность определения этих пара-
метров может быть различно,й в зависимости от номенкла-
туры исходных данных. Так, если из условий обеспече-
ния устойчивости планетохода от опрокидывания задана
его максимальная скорость tw, то установочная мощность,
11*
164
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
тягового двигателя определяется из выражения
Жэн
Шд (1 ~ *) ’
(2.143)
где т]д — к. и. д. двигателя при работе в номинальном ре-
жиме, ЛПд — допустимый коэффициент перегрузки дви-
гателя при движении на максимальный для данной ско-
рости движения подъем. При движении с максимальной
скоростью Утах значение ао, очевидно, должно быть не-
велико: ао = 3 4- 5°. Исходя из этих значений ао, опре-
деляется и соответствующая величина Т. Используя
уравнение (2.141) при х = 0 и учитывая, что при равно-
мерном движении на малых уклонах s 0, получим
= отахДг (tgao+Z) при з 5о. (2 144)
лпдМд
Если задана минимальная скорость движения (напри-
мер, из условий, определяемых особенностями движения
в автономном режиме управления), то установочная
мощность определяется для случая движения на подъем
максимальной крутизны. Опыт эксплуатации советских
и американских луноходов позволяет рекомендовать
сс0=18 4-22°. Коэффициент продольного скольжения в
этом случае определяется по характеристике Т ($) при
4r=tgao+/, а установочная мощность будет равна
w9U = У УГУ при ао =18 - 22°- (2Л45)
"пдЧрЧд (1 —
При использовании формулы (2.145) для новых дви-
жителей, когда оценка величины s может оказаться за-
труднительной, допустимо полагать s=0. Однако в по-
следующем необходима коррекция расчетов, причем, ес-
ли параметры двигателя определены окончательно, следу-
ет учитывать возможное различие расчетной и фактиче-
ской скоростей движения.
Без учета скольжения колес и перераспределения тя-
говых сил получим
(tg ао + /)
(2.146)
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
165
Сопоставление результатов вычислений 1УЭ11 по фор-
мулам (2.145) и (2.146) показывает, что уже при а0 >
> 10° на грунтах типа сухой песок последняя формула
занижает расчетную величину ТУЭН в 3 4- 5 раз, что недо-
пустимо.
Минимальная скорость движения, если она нс задана
исходными данными для тягово-динамического расчета,
определяется из условия обеспечения примерного посто-
янства WdH при различной скорости движения. В этом
случае tfmin определяется из выражения (2.145), где ве-
личина ГИэн, в свою очередь, предварительно определяет-
ся по формуле (2.144). Полагая, что к. п. д. редуктора изме-
няется незначительно, и отмечая штрихом обозначения,
относящиеся к случаю движения на максимальный подъ-
ем, получим
Vznin = ~ (2Л47)
^n(tg«o + /)
Соотношение ртах и ^min определяет диапазон регули-
рования частоты вращения двигателя или, в случае при-
менения коробки передач, передаточное число КП на
низшей передаче:
ик = ^ах(1-У). (2.148)
^min
Передаточное число тягового редуктора определяется
исходя из максимальной скорости движения и характери-
стики двигателя:
ир = (2.149)
гк<Рд
В дальнейшем параметры привода уточняются с по-
мощью двухмассовой плоской и пространственной моде-
лей, причем для решения ряда задач пригодна только
пространственная модель. К числу этих задач относятся
определение траекторных ошибок планетохода в прямо-
линейном движении, исследование поворота и структуры
суммарных энергозатрат планетохода па движение.
2.5.5. Траекторные ошибки в прямолинейном движе-
нии. В предыдущих разделах движение планетоходов рас-
сматривалось для случаев, когда мотор-колеса противот
166
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
положных бортов, принадлежащие одной геометрической
оси, работают в одном скоростном режиме, грунтовая по-
верхность по трассе движения является однородной, а на-
чальный курсовой угол равен нулю. При этом 0= г/ = 0,
т. е. траектория движения представляет прямую линию,
а учет поперечных сил является необязательным.
Результаты моделирования показывают, что в общем
случае режим прямолинейного движения характеризует-
ся боковым сносом и курсовым уводом планетохода
(рис. 2.45).
Рис. 2.45. Траекторные ошибки курсового движения.
Боковой снос планетохода. Под боковым
сносом относительно заданного курса понимается посту-
пательное движение в направлении, перпендикулярном
плоскости вращения колес, т. е. по линии оси у. При на-
личии бокового сноса (в случае, если 0 = 0) траектория
движения записывается в вице
Х=х cos 0.Q—у sin 0о,
(2.150)
Y = у cos 0o+# sin 0о.
Из рис. 2.45 видно, что, совместив начало неподвиж-
ных и подвижных координат, т. е. положив Хо = Уо = О,
получим Xt =: — уt.
Условие отсутствия бокового сноса можно получить
из уравнения (2.95), полагая 0 = 0 и учитывая, что в
этом случае г- = у и, следовательно, значения Уг раз-
личных колес бдазки друг к другу, Потому в первое
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
167
приближении можно записать
Мъ) > tg czo sin 0.
(2.151)
При движении планетохода по слабосвязным грунтам
|1 отличается от нуля только при наличии того или ино-
го поперечного скольжения колеса, т. е. при =# 0. По-
этому боковой снос будет иметь место практически во
всех случаях прямолинейного движения планетохода по
слабосвязному грунту на уклоне, когда 0о 0.
Курсовой увод планетохода. Курсовой
увод представляет собой неуправляемое изменение курсо-
вого угла 0о в режиме прямолинейного движения и ха-
рактеризуется углом А0 = 0£. Предположим, что боковой
снос отсутствует (у = 0); тогда траектория движения
описывается выражениями (рис. 2.45)
X = х cos (0о + 00, У = х sin (0о + 00. (2.152)
Условие отсутствия бокового увода можно записать
в виде
Л/пов < >с, (2.153)
где момент тяговых сил при повороте (поворачивающий
момент) Л/пов и статический момент сопротивления
повороту Мс определяются из уравнения (2.96)
М пов
Г п/2 п
= 2 , (2.154)
Li=l i=n/2+l
i=n/2+l
n
i=l
(2.155)
Учитывая опять-таки тот факт, что на слабосвязном
грунте =# 0, если уг =#'(), можно заметить, что курсо-
вой увод отсутствует, если Мпов = 0, т. е.
п/2 п
2(Ркг-Ря)= S (Л.г-Р/г). (2.156)
1 г=п/2-|-1
Таким образом, причиной курсового увода может быть
пе только движение на уклоне, как это было при боковом
сносе. При движении на горизонтальной площадке увод
168
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
может быть связан с неоднородностью грунтовых условий
колес противоположных бортов, с различием характери-
стик двигателей мотор-колес, с несимметричным отклю-
чением отдельных мотор-колес в аварийных ситуациях.
При этом полярность 0 в общем случае может быть про-
извольной.
Как отмечалось, курсовой увод может быть весьма
значительным в случае применения двигателей с после-
довательным возбуждением. Поэтому в конструкции аппа-
рата «LRV», где использованы именно такие двигатели,
применена автоматическая система индивидуального ре-
гулирования частоты вращения каждого двигателя. Об-
ратная связь осуществляется с помощью датчиков частоты
вращения, которыми снабжено каждое мотор-колесо.
В режиме прямолинейного движения такая система должна
обеспечивать равенство срк1 = фк2 = • • • ••=т’фкп. В этом
случае одинаковы и коэффициенты продольного скольже-
ния колес и, следовательно, коэффициенты удельной тяги.
При работе двигателей мотор-колес на естественных
характеристиках курсовой увод может быть скомпенси-
рован дискретной коррекцией траектории. Поскольку бо-
ковой снос вообще не зависит от характеристик привода,
он может компенсироваться только дискретной коррек-
цией.
При разработке непрерывных и дискретных коррек-
тирующих устройств, при всесторонней оценке показате-
лей разрабатываемых колес и в других случаях необходи-
мо получить прогноз траектории прямолинейного движе-
ния на уклонах различной крутизны и на различных
грунтах.
Пример расчета параметров траектории
движения. Результаты моделирования, приведенные
па рис. 2.46 в качестве примера подобного прогноза, по-
•
зволяют количественно оценить A0f и Xt при движении
восьмиколесного планетохода на уклонах различной кру-
тизны.
Моделирование осуществлялось на грунте-аналоге су-
хого песка, причем было принято Оо = л/2. Предполага-
лось, что характеристики Мд(фд) и ц(*у) идентичны для
всех мотор-колес планетохода.
§ 2.5. ДИНАМИКА ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
169
Величина Xt отражает результирующее влияние как
бокового сноса, так и курсового увода:
Xt = t[x cos (л/2 + 00 — У sin (л/2 + 00 ]. (2.157)’
Учитывая, однако, что время движения при моделиро-
вании было выбрано небольшим (7 — 5 с), можно счи-
тать, что в данном случае Xt — —yt, т. е. суммарный ли-
нейный увод обусловлен практически только боковым
сносом аппарата.
Рис. 2.46. Влияние геометрии опорной поверхности на величину
бокового сползания (Xt) и курсового увода (0J модели восьми-
колесного лунохода: а) схема движения, б) результаты модели-
рования прямолинейного движения на грунте-аналоге сухого
песка.
Отметим, что, по свидетельству специалистов, явления
курсового увода и бокового сноса отмечались при экс-
плуатации «Лунохода-1» и «Лунохода-2» на поверхности
Луны. Этот факт подчеркивает, во-первых, актуальность
170
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
вопроса, а во-вторых, целесообразность разработки еди-
ной модели для анализа прямолинейного и криволиней-
ного движения.
В самом деле, курсовой увод представляет собой не
что иное, как поворот планетохода, характеризующийся
вполне определенным, хотя и большим по величине ра-
диусом кривизны. Поэтому при анализе прямолинейного
движения планетохода на уклоне могут быть использова-
ны некоторые результаты, относящиеся к случаю борто-
вого поворота планетохода. Рассмотрим подробнее этот
режим движения.
§ 2.6. Моделирование бортового поворота
2.6.1. Методические положения. Под бортовым поворо-
том транспортных средств с неуправляемыми (неповорот-
ными) колесами понимают способ поворота, обеспечива-
емый либо реверсом колес противоположных бортов, ли-
бо их работой в различных скоростных режимах. Такой
способ поворота применяют для некоторых наземных
транспортных машин высокой проходимости, например,
сельскохозяйственных тракторов. Этот способ, как изве-
стно, был использован и разработчиками самоходных шас-
си «Лунохода-1» и «Лунохода-2» [21, 37].
Применение неповоротных колес и соответственно
бортового способа поворота можно объяснить стремлени-
ем исключить следующие недостатки, органически прису-
щие конструкциям машин с управляемыми (поворотны-
ми) колесами:
невозможность обеспечить поворот планетохода с ра-
диусом, равным нулю (поворот на месте);
усложнение системы дистанционного и автономного
управления планетохода в связи с увеличением количе-
ства исполнительных органов, контрольных приборов и
обратных связей (индивидуальные приводы поворота ко-
лес, датчики их положения и т. д.);
увеличение веса самоходного шасси при установке
указанных выше устройств.
В свою очередь, бортовой способ поворота многоколес-
ных транспортных средств имеет ряд специфических, в
том числе отрицательных особенностей, для оценки кото-
§ 2.6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
171
рых необходима разработка соответствующих расчетных
методов.
Ключевой проблемой разработки теоретических мето-
дов исследования динамики бортового поворота является
определение текущих значений нормальных, продольных
и поперечных сил, действующих в контакте колеса с
грунтом, как функций кинематических характеристик
движения колеса и планетохода в целом, уклона опорной
поверхности, а также механических свойств грунта.
Меньшие трудности представляют вопросы учета гео-
метрических параметров транспортной машины (колея,
база, смещение центра тяжести), хотя и в этой части
есть еще немало нерешенных задач. Можно отметить, в
частности, задачу выбора рациональной колесной фор-
мулы с позиций маневренности машины при повороте и
другие задачи. В целом вопросы влияния собственных
параметров колесной машины с механической трансмис-
сией освещены в литературе [55]. Кроме того, при реше-
нии указанных вопросов в ряде случаев удается исполь-
зовать отдельные методические положения, зарекомендо-
вавшие себя в теории гусеничных машин.
Что касается сформулированной выше главной про-
блемы, то она практически не получила отражения в ли-
тературе, хотя и имеет научное и практическое значение.
Как отмечалось в § 2.1, постановкой такой проблемы ста-
вится задача изучения взаимодействия машины и грун-
товой поверхности, составляющих в совокупности слож-
ную динамическую систему с множественными неголо-
номными связями. В прикладном отношении решение
поставленной проблемы необходимо как для достоверно-
го прогнозирования поведения планетохода в реальных
условиях эксплуатации, так и для обеспечения необходи-
мой глубины при обосновании технических решений на
стадии проектирования.
Специфические особенности методов исследования бор-
тового поворота можно проследить, если рассмотреть раз-
личные подходы к задаче определения радиуса пово-
рота.
Наиболее простую формулу для оценки статиче-
ской поворотливости машины получают, пренебрегая
продольным скольжением колес и полагая, что скорости
вращения всех колес одноименных бортов являются по-
172
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
стоянными величинами:
R = 0,5В
^ + ип
1 - ип
(2.158)
где ип = vJv.A, a v0 и р;) — соответственно скорости отста-
ющего и забегающего бортов, R — радиус поворота.
В теории гусеничных и колесных машин называют
передаточным числом механизма поворота. В данном слу-
чае этот термин может быть использован условно, так
как фактически в составе тягового электромеханического
привода планетохода такой механизм отсутствует.
В работе [55] приведено уточнение формулы (2.158)
с улетом кинематического скольжения колес:
/ О \ 1 I ^'тт
2? = 0,5 (1 + А1)—Н
1 U
(2.159)
где кь — 2?/В — коэффициент базы.
Далее в работе [55] получены выражения для опре-
деления радиуса поворота двухосного автомобиля при
v — const и иа = const. При этом продольные силы, дей-
ствующие па колеса противоположных бортов, предпола-
гаются равными и противоположно направленными, а по-
перечные силы определяются с помощью коэффициентов
сопротивления осей боковому уводу и соответствующих
углов бокового увода. Последние, однако, определяются
из геометрических соотношений и не связаны с кинема-
тикой колеса и транспортной машины:
купкув ___твкУп
куп + кув кхк \ купкув
г« 1 — ип
где Луп, Лув — коэффициенты сопротивления боковому
уводу соответственно передней и ведущей осей, тп, тв —
части массы машины, приходящиеся соответственно на
переднюю и ведущую оси.
Применительно к планетоходу с ицдивидуальным при-
водом колес поперечные и продольные силы необходимо
определять для каждого мотор-колеса. Способ определе-
ния этих сил, базирующийся па использовании расчетио-
§ 2.6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
173
экспериментальных уравнений связи колеса и плането-
хода, рассмотрен в § 2.3.
В принятой системе координат кинематические харак-
теристики поворота определяются функциями угловой
скорости 0 и проекциями скорости центра тяжести пла-
нетохода па оси х и у. Это позволяет затем найти мгно-
венный радиус и положение мгновенного центра поворо-
та планетохода. Расчетная схема для определения этих
функций приведена на рис. 2.47, где учтено, что в общем
случае у 0.
Рис. 2.47. Определение положения мгновенного центра поворота
планетохода.
Из рис. 2.47 видно, что угол между осью у и направ-
лением радиуса поворота (угол £) составляет величину
£ = л/2 — vn. Поскольку vn = arctg то
У
£ = л/2 — arctg-?-,
у
(2.160)
где х и у определяются при численном интегрировании
уравнений (2.91) — (2.99).
Модуль вектора мгновенного радиуса поворота опре-
деляется выражением
V
е
(2.161)
174
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
где v определяется по формуле (2.102), а 0 получаем
при интегрировании уравнений (2.91) — (2.99).
Вращательное движение масс привода каждого мотор-
колеса может описываться в зависимости от целей иссле-
дования и конструкции привода либо уравнениями
(2.97) — (2.99), либо упрощенными уравнениями
(2.115) — (2.116). Система уравнений оказывается замк-
нутой благодаря использованию уравнений связи (2.72)
и (2.73) и функций, приведенных па рис. 2.30.
Таким образом, R оказывается связанным как с гео-
метрическими характеристиками планетохода (Z,, В, гк
и т. п.), упругими параметрами подвески (сг), характери-
стиками привода, колесной формулой, так и с уклоном
опорной поверхности и характеристиками взаимодействия
каждого колеса с грунтом.
Отметим, что достоверность прогнозирования поведения
планетохода при повороте в реальных условиях в значи-
тельной мере определяется достоверностью характеристик
/(МО, получаемых в этом случае экспе-
риментальным путем. В этой связи необходимо подчерк-
нуть важное значение соответствующих исследований,
проводимых в грунтовых каналах, и также исследований,
направленных на изыскание естественных или создание
искусственных аналогов лунного и марсианского грунта.
При решении оптимизационных задач точность опре-
деления обобщенных характеристик взаимодействия оди-
ночного колеса с грунтом имеет не столь принципиаль-
ное значение. Конкурирующие варианты рассматривают-
ся здесь при некоторых равных внешних условиях.
Не претендуя на всесторонний анализ процесса бор-
тового поворота, кратко рассмотрим отдельные результа-
ты моделирования, иллюстрирующие возможности мето-
да при изучении этого процесса и решении оптимизаци-
онных задач.
2.6.2. Динамика планетохода при повороте на уклоне.
Характерную картину изменения кинематических и си-
ловых параметров планетохода при повороте на уклоне
можно рассмотреть, используя рис. 2.48 и 2.49. Здесь при-
ведены некоторые результаты моделирования поворота
модели восьмиколесного лунохода, при котором двигате-
ли мотор-колес левого борта работают на второй скорости
{параллельное включение обмоток ротора), а правого
§ 2,6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
175
борта — на первой (последовательное включение обмо-
ток). Обозначим сокращенно данный режим движения
шифром «поворот 2/1».
Рис. 2.48. Разгонные характеристики модели восьмиколссного
лунохода при трогании в правом повороте на уклоне осо = 15°
(«Групт-2», 0о = 90°).
Трогание и разгон в повороте. Разгон в по-
вороте, как следует из рис. 2.48, может составлять значи-
тельную долю общего времени поворота планетохода. От-
мечая это обстоятельство, следует учитывать, что пово-
рот, например, «Лунохода-1», осуществлялся дискретно с
шагом Д9 = 204-30°. Поворот на такие углы происходит
в данном случае за 2,54-3,5 с, из которых примерно по-
ловину времени занимает разгон. Это свидетельствует о
необходимости учета переходных (неустановившихся)
режимов поворота при разработке алгоритмов дистанци-
онного или автономного управления даже малоскорост-
ных луноходов.
Физическая картина трогания планетохода в повороте
принципиально совпадает с рассмотренной в § 2.5 карти-
ной трогания в прямолинейном движении. В начальный
момент движения происходит срыв грунта, и па колесах
отстающего н забегающего бортов развивается наиболее
интенсивное буксование. По мере разгона буксова-
ние уменьшается, принимая некоторые установившиеся
17G
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Рис. 2.49. Силовые характеристики процесса трогания в правом
повороте на уклоне а = 15 («Грунт-2», 0 = 90°); а) динамика
нагружения мотор-колес отстающего (правого) борта, б) динами-
ка нагружения мотор-колес забегающего (левого) борта (кривые
7 — 7 соответствуют порядковым номерам колес).
§ 2.6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
177
и различные для колес противоположных бортов значе-
ния.
Естественно, что при бортовом повороте условия от-
сутствия взаимного влияния колес, описываемые выра-
жениями (2.127), принципиально не могут выполняться.
Как следует из рис. 2.49, бортовой поворот с Я #= 0 не-
избежно связан с передачей части суммарного тягового
усилия, развиваемого мотор-колесами забегающего бор-
та, к мотор-колесам отстающего борта, причем взаимное
влияние мотор-колес противоположных бортов оказывает-
ся тем большим, чем меньше радиус поворота.
Так же, как и при прямолинейном движении, разгон-
ные характеристики планетохода в повороте зависят от
свойств грунта и уклона опорной поверхности. Кроме
того, при повороте из положения 0о = л/2 эти характе-
ристики различны в случаях поворота в направлении на
подъем (поворот «в гору») и под уклон (поворот «под
гору»).
Рис. 2.50. Влияние полярности 0 на разгонные характеристики
лунохода при трогании в повороте на уклоне: 1 — «поворот в
гору», 2 — «поворот под гору». ----- а = 15°,-------а = 0°.
О влиянии уклона поверхности и полярности 0 на
разгонные характеристики можно судить по графикам,
приведенным па рис. 2.50. Графики получены при моде-
лировании «поворота 2/1» на грунте-аналоге размельчен-
ной пемзы. Моделирование осуществлялось на горизон-
12 Е. В. Авотин и др.
178
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
тальной площадке и уклоне ао — 15°. В последнем слу-
чае обеспечивалось условие 0о = л/2.
Из рис. 2.50 видно, что при повороте «в гору» ускоре-
ние 0 имеет более высокие значения, чем при повороте
«под гору». Это можно объяснить следующим образом.
Запишем формулу (2.155) для определения Мс в виде
п/2 п
мс= s s (2.162)
i=l i=(n/2+l)
где верхний индекс относит обозначение к забегающему
(один штрих) и отстающему (два штриха) бортам.
Анализируя формулу (2.72) для определения уг, не-
трудно заметить, что при прочих равных условиях и,
следовательно, всегда имеют большие значения для
колес отстающего борта.
Поэтому величина Мс оказывается различной при из-
менении полярности угловой скорости 0. При «повороте
п/2 п
в гору» из положения 0о = л/2 У RZi > У Rzt и,
г=1 г=п/2+1
следовательно, в этом случае Мс оказывается мепыпим,
чем при «повороте под гору».
Другой причиной различия кинематических характе-
ристик планетохода при разных направлениях угловой
скорости поворота на уклоне является изменение вели-
чины поворачивающего момента. Записав формулу
(2.154) в виде
£
2
А/ по в
"п/2 п
2 RzdWi- fi)
_i=l i—п/2+1
(2.163)
можно заметить, что М11ов увеличивается с ростом величи-
ны нормальных реакций, действующих на мотор-колеса
забегающего борта. Именно это и происходит при «пово-
роте в гору» на уклоне из положения 0о = л/2.
Изменение радиуса поворота при трогании плането-
хода па слабосвязпом грунте от R — со до некоторого
установившегося значения осуществляется достаточно
плавно. Характерный график функции R(t), полученный
при моделировании «поворота 2/1» на «Грунте-1» (на го-
§ 2.6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
179
рпзонтальной площадке), приведен па рис. 2.51 (кри-
вая 2).
Вход в поворот из прямолинейного дви-
ж е н и я. Вход в поворот характеризуется более энер-
гичным изменением радиуса поворота. Наиболее динамич-
ным является вход в поворот из прямолинейного дви-
жения иа высшей, в данном случае второй скорости
(рис. 2.51, кривая 7). В результате действия инерционных
Рис. 2.51. Графики функций R(t) при трогании в повороте (кри-
вая 2) и входе в поворот из прямолинейного движения на вто-
рой скорости (кривая 1) и первой скорости (кривая 3).
сил вход в поворот сопровождается возбуждением попе-
речных колебаний подрессоренной части. При выходе на
установившийся режим поворота наблюдается юз колес
отстающего борта.
Вход в поворот с низшей скорости носит более ста-
тичный характер и осуществляется по дуге большего ра-
диуса (рис. 2.51, кривая 3).
Отметим, что моделирование, результаты которого при-
ведены на рис. 2.51, осуществлялось на горизонтальной
площадке. При входе в поворот на уклоне наблюдается
поперечное скольжение (занос) планетохода даже в слу-
чае движения с невысокими скоростями, характерными
для рассматриваемых моделей планетоходов.
Поворот планетохода забегающим бор-
том. Поворот планетохода при работе мотор-колес толь-
ко забегающего борта может осуществляться при нали-
12*
180
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
чии или отсутствии управляемых тормозных сил па ко-
лесах отстающего борта, причем торможение может быть
обеспечено либо механическими устройствами, либо пу-
тем замыкания обмоток ротора на электрическое сопро-
тивление.
Некоторые результаты моделирования трогания в по-
вороте забегающим бортом при электродинамическом
торможении двигателей мотор-колес отстающего борта
приведены на рис. 2.52, из которого видно, что мощность
Рис. 2.52. Результаты моделирования поворота лунохода забега-
ющим бортом.
рекуперации такова, что первоначально обеспечивается
перекладка зазоров редукторов отстающего борта (Mf—\
— 0), а затем и частичный юз колес этого борта. Возни-
кающие при этом моменты сопротивления вращению ко-
лес отстающего борта обусловлены механическими поте-
рями редукторов при их работе в тормозном режиме и
моментом на валу двигателей, работающих в этом случае
§ 2.6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
181
в генераторном режиме. Очевидно, что при таком спосо-
бе поворота принципиально обеспечивается возможность
рекуперации части электроэнергии в бортсеть. Результа-
ты моделирования показывают, однако, что абсолютная
величина рекуперируемой мощности сравнительно неве-
лика. Большая часть возвращенного энергопотока теря-
ется в редукторах, являющихся в этом случае мультипли-
каторами, и в генераторах.
Выбор зазоров в зацеплениях, временные остановки
колес отстающего борта из-за резкого увеличения тормоз-
ного момента генераторов, нелинейность функции к. и. д.
редукторов приводят к скачкообразному изменению ки-
нематических характеристик планетохода при трогании.
Это видно, например, из анализа функции R (t), приве-
денной на рис. 2.52.
Поворачивающий момент при рассматриваемом спосо-
бе поворота определяется коэффициентом свободной тяги
кт забегающего борта
п/2
ТИпов = 4 2 (2-164)
г=1
где
*Ti= (2.165)
Учитывая изменение полярности результирующей про-
дольной силы колес отстающего борта, момент сопро-
тивления повороту можно записать в виде
п п/2
мс=2 R'^ih+42 (2Л66)
i=l
где — коэффициент сопротивления движению Z-ro ко-
леса отстающего борта при частичном юзе этого колеса.
Из формулы (2.166) видно, что момент сопротивле-
ния повороту и, следовательно, радиус поворота могут
регулироваться, хотя и в ограниченном диапазоне, изме-
нением коэффициента тормозной характеристики генера-
торов. В самом деле, используя (2.12), можно записать,
что
4'i > д д р ™ р р-. (2.167)
V-Ai
182
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Если обмотки, роторов двигателей отстающего борта
разомкнуты к* = 0), Мс будет наименьшим.
При замыкании обмоток накоротко 7?я = 0, а кд имеет
наибольшее значение, что сказывается на уменьшении
радиуса поворота. В частности, при = Ч^гю Мс прини-
мает максимальное значение, а радиус поворота прибли-
жается к значению R & В/2.
В заключение этого раздела отметим, что главным не-
достатком рассмотренного способа бортового поворота
является ужесточение нагрузочных режимов работы мо-
тор-колес забегающего борта.
2.6.3. Установившийся поворот. При движении па ук-
лоне установившийся поворот является неравномерным.
Моделирование показывает, что равномерный поворот
может иметь место практически только на горизонталь-
ной площадке. Уже на небольших уклонах (а > 5°) по-
ворот сопровождается непрерывным изменением угловой
и окружной скоростей движения планетохода.
Для иллюстрации этого вывода на рис. 2.53 приведе-
ны характерные результаты моделирования поворота
восьмиколесиого планетохода на грунте-аналоге сухого
Рис. 2.53. Характерные зависимости Я(0) и 0(0) при повороте
планетохода на уклоне.
песка. Изменение скорости поворота обусловлено в дан-
ном случае, в основном, перераспределением нормаль-
ных реакций по колесам планетохода при изменении по-
ложения колес относительно опорной поверхности.
Что касается количественных оценок, то из рис. 2.53
видно, что, например, при повороте от 0о = 0 до 0* = л
на уклоне осо = 15° максимальные и минимальные значе-
ния 0 отличаются более чем в 3 раза. Естественно, что
§ 2.6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
183
неучет столь значительных различий при ручном расчете
может привести к существенным ошибкам при прогнози-
ровании траектории движения планетохода.
Влияние колесной формулы на поворот-
л ив ос ть планетохода. Сопоставляя формулы
(2.162) и (2.163), оперируя коэффициентом свободной тя-
ги и пренебрегая различиями Rzi колес отстающего и за-
бегающего бортов из-за действия центробежной силы
инерции, условие равномерного поворота па горизонталь-
ной площадке можно записать в виде
4 2 бЛ
\1В при Л^О. (2.168)
Правую часть неравенства (2.168) можно использо-
вать в качестве критерия оптимизации колесной форму-
лы с позиций статической поворотливости планетохода,
которая является составным компонентом маневренности
аппарата. При прочих равных условиях поворотливость
будет тем выше, чем меньше правая часть неравенства
(2.168). Пренебрегая для упрощения различиями и щ-
колес отстающего и забегающего бортов и рассматривая
планетоход с симметричным расположением мотор-колес,
можно получить следующее:
колесная формула 8X8:
колесная формула 6X6:
kTi > 1,ЗцК1А, (2.170)
колесная формула 4X4:
> 2Икр7сь, (2.171)
гДс цкр и Цср — коэффициенты сопротивления боковому
скольжению крайнего и среднего колеса, <2’* — расстоя-
ние между осями средних колес.
Для планетоходов, геометрические параметры которых
аналогичны параметрам «Лунохода-1» и «Лунохода-2»,
3? и |лср ~ цкр. Поэтому неравенство
184
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
(2.169) для восьмиколесного планетохода приближенно
можно записать в виде
к« > 1,15Икр/сь. (2.172)
Сравнивая выражения (2.170) — (2.172), можно заме-
тить, что при неизменной величине цкр и кь лучшая по-
воротливость характеризует планетоход с колесной фор-
мулой 8X8. Одновременно следует подчеркнуть суще-
ственное преимущество по поворотливости планетоходов
с колесной формулой 6X6 перед аналогичными машина-
ми с колесной формулой 4X4. Естественно, что это за-
ключение относится к рассматриваемому в настоящей
книге бортовому способу поворота.
Из теории гусеничных машин известно, что для обес-
печения поворота этих машин [19] необходимо выпол-
нение условия
кт > 0,5 цг/сь, (2.173)
где цг — коэффициент сопротивления повороту гусенич-
ной машины.
Сравнивая выражения (2.169)— (2.171) и (2.173),
можно получить формулы для определения величины kL
колесной машины, эквивалентной по поворотливости гу-
сеничной машине. Например, для планетохода с колесной
формулой 4X4 получим
кьк
0,5рг
(2.174)
где индексы «к» и «г» относят kL соответственно к ко-
лесной и гусеничной машинам.
Согласно работе [19] при R/В 2 цг = 0,5 4-0,7,
а оптимальное значение kL для гусеничных машин
составляет kLr = 1,5 [55]. Для колесной машины
при R/В ж 2, ркр 0,184-0,25, ’ если kLl< = 14-1,2.
Таким образом, в данном случае можно считать, что
А’ьк ~ 0,7 кьг-
Проведенные расчеты хорошо согласуются с данными
работы [55], где путем других рассуждений получено,
что для четырехколесной машины kLl{ 0,725 kLT. Отме-
тим также, что и у восьмиколесных «Лупохода-1» и
«Лунохода-2» коэффициент базы выбран близким к еди-
нице (&L = 1,06).
§ 2.6. МОДЕЛИРОВАНИЕ БОРТОВОГО ПОВОРОТА
185
Поворот, осуществляемый путем ревер-
са двигателей мотор-колес противополож-
ных бортов. Для рассматриваемых конструкций пла-
нетоходов такой поворот носит статический характер.
В частности, установившийся поворот близок к равно-
мерному даже на уклонах ссо = 5 4- 10°. В этом случае
х — у = 0 и при движении па однородной поверхности^
зависит только от геометрических параметров планетохо-
да, поскольку
21-
Уг = arctg-^. (2.175)
При повороте на уклонах большей крутизны возмож-
но сползание планетохода, поэтому радиус поворота
может отличаться от нуля.
Поворачивающий момент определяется из формулы
(2.163) с учетом изменения полярности результирующей
продольной силы колес отстающего борта:
Мпов = в 2 Rzik.ti. (2.176)
1=1
Соответственно условие равномерного поворота на гори-
зонтальной площадке можно записать в виде неравенства,
аналогичного неравенству (2.168):
п
2 У lU.
кг>-^в— приЯ = 0. (2.177)
Распределение тяговых сил при пово-
роте между колесами одного борта. При
уменьшении радиуса поворота Уг крайних колес увеличи-
вается в большей мере, чем уг средних колес. Наиболее
существенно отличаются значения уг крайних и средних
колес одного борта при R = 0. Согласно формуле (2.175)
для шестиколесной машины с симметричным расположе-
нием колес в этом случае 7ср = 0, тогда как, полагая
kL ~ 1, получим 7кр = 45°. Естественно, что именно для
этого режима оказывается наиболее заметным различие
тяговых усилий крайних и средних колес. Действительно,
как отмечалось в разделе 2.3.2, при прочих равных усло-
виях коэффициент удельной тяги оказывается более
высоким для колеса с меньшим боковым скольжением.
186
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Не входя в детали особенностей физической картины
взаимодействия колеса с грунтом при =#|0, отметим,
что в целом необходимость учета различия и ЧЛ-
отдельных колес при моделировании бортового поворота
подтверждается данными, полученными при эксплуатации
«Лупохода-1» на Лупе. В качестве примера на рис. 2.54
приведены графики измене-
Рис. 2.54. Суммарные тяго-
вые усилия крайних (кривая
I) и средних (кривая 2)
мотор-колес «Лунохода-1» при
повороте на горизонтальной
площадке (Я = 0).
пня суммарного тягового уси-
лия всех средних и всех край-
них мотор-колес, заимство-
ванные из [38], где указы-
вается, что при построении
графиков выбирались участ-
ки трассы с небольшими ук-
лонами. Поворот осуществ-
лялся путем реверса мотор-
колес противоположных бор-
тов, так что R ~ 0.
Из рис. 2.54 видно, что
отношение суммарных тяго-
вых усилий средних и край-
них мотор-колес «Лунохо-
да-1» составило величину
2РСр/2^кр 2,5. Это свиде-
тельствует о существенно бо-
лее эффективной работе средних колес при повороте.
Если учесть, кроме того, что вследствие различия Ц сред-
них и крайних колес последние оказывают большее соп-
ротивление повороту, преимущества шести- и восьмико-
лесных машин становятся очевидными. Это утверждение
справедливо, по-видимому, не только для планетоходов,
но и для наземных колесных машин с бортовым спосо-
бом поворота.
§ 2.7. Структура энергозатрат планетохода
на движение
Как следует из предыдущих разделав, при моделиро-
вании движения планетохода одновременно определяются
как силовые, так и кинематические характеристики каж-
дого мотор-колеса и его составных элементов (двигатель,
редуктор, колесо), а также характеристики планетохода
в целом. Это позволяет использовать рассмотренный ме-
§ 2.7. СТРУКТУРА ЭНЕРГОЗАТРАТ НА ДВИЖЕНИЕ
187
тод и для изучения структуры энергозатрат планетохода
и оценки его экономичности при движении на уклонах
ризличной крутизны и на грунтах с различными механи-
ческими свойствами. При этом практический интерес
представляет как структура энергетических потерь при
последовательном преобразовании электроэнергии борто-
вого источника совокупностью однородных звеньев систе-
мы (все двигатели, все редукторы, многоколесный дви-
житель), так и изучение картины распределения парал-
лельных энергопотоков, преобразующихся каждым мотор-
колесом. В первом случае конечным итогом расчетов
могут быть функции к. п. д. планетохода в целом и сум-
марные к. п. д. двигателей, редукторов, движителя, во вто-
ром — функции к. п. д. отдельно взятых мотор-колес и их
приводов.
Расчетные формулы для изучения
энергетических показателей планетохо-
д а. При моделировании движения планетохода на ЭВМ
формулы для оценки энергозатрат являются дополнени-
ем уравнений движения, описывающих пространственную
или плоскую математическую модели. Они не нуждаются
в специальных пояснениях:
(2.178)
1
w.j{= 77д(МдЛ + 7хх), (2.179)
Ж1>(= Мд.фдъ (2.180)
WKi= (2.181)
Wai = PKix, (2.182)
n
2wKi =
i-1
где РИпл — мощность, потребляемая планетоходом от ис-
точника, Woi — мощность, потребляемая от источника
двигателем г-го мотор-колеса, Жр£ — мощность на валу
двигателя i-ro мотор-колеса, — мощность, реализуе-
188
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
мая г-м колесом при движении планетохода, WKi — мощ-
ность па выходном валу тягового редуктора, — потери
холостого хода двигателя,
п
В отношении S W^i можно заметить, что при прямо-
1
линейном движении
2 = х 2 (2.184)
i=l г =1
Перечисленные функции позволяют определить к. п. д.
каждого звена системы движения планетохода, индиви-
дуального электромеханического привода и каждого мо-
тор-колеса:
_ Wvi _ Wpi _ W*i
Лэг — "Ту » 'Прг — ту > Лкг — ту , Лмг — ту ,
уу эг рг дг уг эг
w .
nni = (2.185)
эг
где цЭг, т]Рг, Цкг — соответственно текущие значения к. п. д.
двигателя, редуктора и колеса Z-ro мотор-колеса. Для Цмк
и Цпр— текущих значений к. п. д. j-ro мотор-колеса и его
привода справедливы формулы
*Пмк - ЛэгЛрг'ЛкЬ ЛПР Лэг’Лрг» (2.186)
Суммарные к. п. д. двигателей, редукторов и движите-
ля определяются соответственно по формулам
2 2 wKi J
Лэ=г1п^, Пр = , Пд = , (2-187)
пл 2 2
г=1 г = 1
а к. л. д. планетохода определяется выражением
п
2 w.i
Ппл = й5г-. (2.188)
уу пл
Очевидно, что расчет по формулам (2.178) — (2.188)
не увеличивает объем вводимого в машину исходного чи-
слового материалу однако существенно увеличивает вы-
§ 2.7. СТРУКТУРА ЭНЕРГОЗАТРАТ НА ДВИЖЕНИЕ
189
ходкую информацию, получаемую при моделировании
прямолинейного движения и поворота.
2.7.1. Прямолинейное движение. Распределе-
ние суммарных энергетических потерь
однородных звеньев системы движения
планетохода. Характерная картина распределения
энергетических потерь приведена на рис. 2.55. Она полу-
чена при моделировании равномерного прямолинейного
движения восьмиколесного планетохода на уклоны раз-
личной крутизны. В качестве модели грунта в данном
случае использован «Грунт-3».
Рис. 2.55. Структура энергозатрат планетохода при прямолиней-
ном движении.
Из рис. 2.55 видно, что наибольшие потери характери-
зуют работу двигателей мотор-колес. Эти потери опре-
п
деляются разностью — S WPi и увеличиваются с
г=1
увеличением угла подъема, что обусловлено пелипейпо-
стыо характеристики к.п.д. двигателя, имеющей экстре-
мальные значения в сравнительно малом диапазоне из-
менения Л/д.
190
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
Суммарная мощность потерь редукторов мотор-колес
п п
определяется разностью 2 Wpi~ 2 ^к1- Как видно из
1=1 1=1
рис. 2.55, эта разность с увеличением угла подъема прак-
тически не увеличивается. Объясняется это тем, что с
ростом 7Идг- к. п. д. редукторов увеличивается, оставаясь ста-
бильным при Мдг>ЛГнд (рис. 2.21).
С увеличением угла подъема резко возрастают поте-
ри, обусловленные буксованием колес и определяемые
п п
разностью 2 — 2 Рассмотренный характериз-
1=1 1=1
мепения энергетических потерь приводит к отчетливо
п
выраженному экстремуму функции 2 ГРд1(ао)? т. е. функ-
ции мощности, реализуемой на движение планетохода.
При этом влияние механических свойств грунта сказы-
вается двояким образом. Во-первых, на грунтах с более
высокими тягово-сцепными свойствами увеличивается аб-
п
солютная величина 2 за счет увеличения скорости
1=1
движения; во-вторых, происходит смещение экстремума
п
функции 2 М^дг вправо по оси сс0. Последнее связано с
недогрузкой тягового привода при движении на малых
уклонах по хорошему грунту.
Графики, приведенные на рис. 2.55, указывают на су-
щественную нелинейность функции к. п. д. планетохода.
Результаты исследования результирующего к.п.д. пла-
нетохода и его подсистем приведены на рис. 2.56. Они
отражают влияние на эти функции внутренних характе-
ристик привода, а также геометрии и физического состо-
яния опорной поверхности. При малых углах подъема
определяющее влияние па величину т]Пд оказывает вели-
чина суммарных к.п.д. двигателей п тяговых редукторов.
При больших углах подъема щ и повышаются, однако
при этом снижается к. п. д. движителя, что и ограничивает
возможность увеличения цпл.
Из рис. 2.56 можно сделать также следующий вывод.
Несмотря на очевидное влияние свойств грунта на функ-
цию к. п. д., максимальная величина т|цЛ на различных
§2.7. СТРУКТУРА ЭНЕРГОЗАТРАТ НА ДВИЖЕНИЕ
191
грунтах изменяется в сравнительно небольшом диапазо-
не. Длй рассматриваемых конструкций планетоходов этот
диапазон составляет цпл .= 0,32 4- 0,36.
Распределение параллельных энерго-
потоков. Из логических рассуждений следует, что для
повышения экономичности системы в целом необходимо
а) 6)
Рис. 2.56, Влияние свойств грунта и геометрии опорной поверх-
ности на суммарный к.п.д. планетохода и его подсистем:
а) «Грунт-1», б) «Грунт-3».
обеспечить работу каждого мотор-колеса в оптимальном
режиме. Однако простота этого заключения не отражает
сложности путей практической реализации поставленной
задачи для планетоходов с индивидуальными приводами
колес.
Значительное перераспределение нормальных реак-
ций и различие величины продольного скольжения ко-
лес приводит к существенному неравенству параллель-
ных энергопотоков, преобразующихся каждым мотор-ко-
лесом.
О величине и характере перераспределения парал-
лельных эпергопотоков можно судить по графикам, при-
веденным на /рис. 2.57. В случае прямолинейного дви-
жения восьмиколесного планетохода оно таково, что при
осо>10° энергопоток кормового колеса, реализуемый в
общем балансе механической энергии движения (функ-
192
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
ция W\4), оказывается большим, чем энергопоток, по-
требляемый передним колесом от источника (функция
ЖЭг). Отношение полезной мощности кормового и перед-
него мотор-колес при ао=1О° составляет величину
Жд4/Жд1 = 24-3.
Рис. 2.57. Распределение параллельных эпергопотоков: а) функ-
ции WOi и ГРдг кормового и переднего мотор-колес, б) к.п.д.
кормового и переднего мотор-колес.
На рис. 2.57, б приведены графики суммарных к.п.д.
кормового и переднего мотор-колес при прямолинейном
движении. Существенное различие к. п. д. этих мотор-колес
не позволяет приравнивать к. п. д. планетохода в целом к
к. п. д. отдельно взятого мотор-колеса. Так, например, при
движении на «Грунте-1» на подъем а0=15° т)мк4=0,46
(рис. 2.57, б), тогда как в этом же режиме т]Пл=0,33
(рис. 2.57, а). Очевидно, что в подобных случаях следует
ориентироваться па среднее значение
п
X ^мк
Лпл = ^Г- • (2.199)
§ 2.7. СТРУКТУРА ЭНЕРГОЗАТРАТ НА ДВИЖЕНИЕ
193
Оценка достоверности результатов ра-
счета энергетических показателей пла-
нетохода. Достоверность результатов моделирования
может быть проверена данными телеметрической инфор-
мации с борта «Лунохода-1». На рис. 2.58 приведены ги-
стограмма и кривая распреде-
ления суммарного тока двигате-
лей мотор-колес «Лунохода-1»,
полученные при анализе ре-
жимов движения аппарата в I
и IV лунные дни [38]. Из рис.
2.58 видно, что наибольшая
частость характеризует значе-
п
ние 2 /« 7ЛХ что соответст-
г=1
вует прямолинейному движе-
нию на уклонах ао=ОЧ-5°. На-
пряжение бортсети на «Луно-
ходе-1» составляло С7б=27 В,
поэтому РИпл «190 Вт. Обра-
ботка данных эксплуатации,
приведенных в работе [38], по-
казывает далее, что при
85 5,5 8,5 11,5 14,5 17,5
Рис. 2.58. Распределение
суммарного тока двигате-
лей мотор-колес «Лунохо-
да-1» в I и IV лунные
Дни.
п
а0 — 5° 2 = 67 Вт и, следовательно, цпл « 0,35.
г=1
Моделирование дает следующие показатели энерго-
затрат модели «Лунохода-1» на «Грунте-2»: при <хо=5°
п
РИПЛ=185 Вт, =60 Вт, т]пл:=0,32.
1
Достаточно хорошее совпадение расчетных и экспери-
ментальных данных подтверждает обоснованность поло-
жений, принятых при разработке комплексного метода ис-
следования динамических свойств системы движения
планетохода. Как следует из §§ 2.2—2.5, полученные ра-
счетные выражения позволяют учитывать индивидуаль-
ные нелинейные потери мощности каждого двигателя, ре-
дуктора и колеса, включая потери холостого хода и поте-
ри, обусловленные буксованием колес.
2.7.2. Поворот планетохода. Распределение энергопо-
тока источника между мотор-колесами. Основной особен-
ностью картины распределения энергопотока при пово-
Е. В. Авотин и др.
194
ГЛ. 2. ТЯГОВАЯ ДИНАМИКА ПЛАНЕТОХОДА
роте планетохода являются существенно большие энер-
гозатраты мотор-колес забегающего борта в сравнении с
энергозатратами отстающего борта. В частности, резуль-
таты моделирования показывают, что для рассматривае-
мых конструкций планетоходов при R ~ (1,54-2) В энер-
гия, потребляемая двигателями мотор-колес отстающего
борта, идет практически только на восполнение потерь
этих мотор-колес. При дальнейшем уменьшении радиуса
поворота возможна рекуперация части энергопотока мо-
тор-колес забегающего борта через мотор-колеса отстаю-
щего борта.
Рис. 2.59. Структура энергозатрат мотор-колес забегающего бор-
та при повороте на уклоне.
Соответствующим образом отличаются и мощности,
реализуемые колесами противоположных бортов на дви-
жение. Если обозначить
где два штриха относят обозначение к отстающему, а один
штрих — к забегающему бортам, то можно заметить, что
кп изменяется от /сп = 0 (при работе в активном режи-
§ 2.7. СТРУКТУРА ЭНЕРГОЗАТРАТ НА ДВИЖЕНИЕ
195
ме только мотор-колес забегающего борта) до кп = 1 (при
/?->оо). В частности, при R = (1,54-2,5) В, /сп~0,2.
Что касается распределения энергозатрат мотор-колес
забегающего борта, то о нем можно судить по графикам,
приведенным на рис. 2.59. Графики получены при моде-
лировании поворота восьмиколесной модели (7?п 2В)
на уклонах различной крутизны. Моделирование осущест-
влялось на «Грунте-1» при 0о=л/2. Значения мощности
приведены для момента времени, когда курсовой угол
(отсчитывая от О.о=л/2) составлял плюс 10° при пра-
вом повороте и минус 10° при левом повороте.
13*
ГЛАВА 3
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Трудность обеспечения устойчивости планетохода как
транспортной машины усугубляется при эксплуатации
его на поверхности Луны или планет с пониженной гра-
витацией (Марс, Венера) и особенно в режиме дистанци-
онного или автономного управления.
При движении планетохода в режиме дистанционного
или автономного управления по сравнению с земным
транспортом значительно повышается вероятность встре-
чи с различного рода препятствиями. В результате таких
встреч может произойти удар крайними колесами в. не-
преодолимое препятствие, экстренное торможение, прео-
доление препятствия в объезд или без маневра (если его
высота окажется соизмеримой с радиусом колеса).
При эксплуатации планетохода на поверхности с по-
ниженной гравитацией при торможении и подобных ре-
жимах на него будет действовать меньший, по сравне-
нию с земными условиями, восстанавливающий момент,
в то время как момент количества движения, вызываю-
щий опрокидывание, остается постоянным на любой пла-
нете.
При наличии на борту планетохода экипажа тем более
должна быть обеспечена его устойчивость, так как безо-
пасность человека является самой основной задачей, ко-
торая должна решаться в процессе проектирования и
эксплуатации планетохода.
§ 3.1. Основные положения
Потеря устойчивости планетохода связана с измене-
нием его положения в пространстве или на пло-
скости. Поэтому для планетохода, как и для наземных
транспортных машин, необходимо различать устойчивость
§3.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
197
к опрокидыванию и устойчивость к заносу или спол-
занию.
В обоих случаях может существовать два вида ус-
тойчивости движения — статическая и динамиче-
ская.
Под статической устойчивостью обычно понимают спо-
собность транспортной машины сохранять исходное поло-
жение, находясь в покое или в движении, а под динами-
ческой — способность машины противостоять достижению
заданного угла наклона ее корпуса при воздействии воз-
мущающих факторов.
В дальнейшем применительно к планетоходам дина-
мическую устойчивость будем связывать с опрокидыва-
нием в вертикально-продольной или вертикально-попе-
речной плоскостях. Соответственно с этим будем разли-
чать продольную и поперечную устойчивость к опроки-
дыванию.
Потеря продольной устойчивости планетохода проис-
ходит относительно некоторой оси, лежащей в попереч-
ной плоскости, которая называется осью продольного оп-
рокидывания.
Опрокидывание планетохода в вертикально-продоль-
ной плоскости возможно при движении под уклон или
на подъем в случае резкого разгона, торможения, наезда
на выступающие непреодолимые препятствия или прео-
доления различного рода неровностей рельефа. Потеря
продольной устойчивости планетохода в зависимости от
условий, указанных выше, может происходить относи-
тельно передних или задних колес вокруг соответствую-
щих осей опрокидывания.
На рис. 3.1 показано положение планетохода в верти-
кально-продольной плоскости и оси, относительно которых
возможна потеря продольной устойчивости. Если колеса
являются ведущими или заторможенными, то ось про-
дольного опрокидывания проходит через точки контакта
(Л, В) передних или задних колес с поверхностью. Если
колеса являются ведомыми, то продольная ось опроки-
дывания проходит через центры соответствующих колес
(С, D). Потеря поперечной устойчивости планетохода
происходит относительно некоторой оси, лежащей в про-
дольной плоскости, называемой осью поперечного опро-
кидывания.
198
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
§ 3J. ОСНОВНЫЕ ПОЛОЖЕНИЯ
199
Опрокидывание планетохода в вертикально-попереч-
ной плоскости возможно при движении по косогору в
случае бортового удара колес о препятствие при боковом
скольжении при преодолении различного рода препятст-
вий или в процессе поворота.
При оценке поперечной устойчивости будем считать,
что опрокидывание планетохода происходит относительно
осей, проходящих через точки контакта колес с поверх-
ностью (/?, 0), которые определяют ширину колеи
(рпс. 3.2).
Рис. 3.2. Схема сил, действующих на планетоход в вертикально-
поперечной плоскости при условии, что сползания в поперечном
направлении не происходит.
Правомочность сделанного допущения определяется
тем, что система грунт — колесо — подвеска не является
абсолютно жесткой. Поэтому в процессе поперечного оп-
рокидывания происходит деформация этой системы, что
в какой-то степени приведет к смещению оси опрокиды-
вания от наружной к внутренней точке контакта колеса
с грунтом.
На рис. 3.1 и 3.2 показаны предельные углы наклона
корпуса, при достижении которых планетоход теряет ус-
тойчивость, т. е. опрокидывается. Эти углы называются
углами статической устойчивости в вертикально-продоль-
ной асв, асн и вертикально-поперечной £с плоскостях.
200
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
При исследовании устойчивости будем пренебрегать
изменением координаты центра тяжести вследствие де-
формации подвески и колес при движении планетохода
на уклонах, т. е. будем предполагать, что высота центра
тяжести определяется координатой Н (рис. 3.1, а).
В действительности в результате перераспределения
нагрузок между колесами на уклонах деформация соот-
ветствующих подвесок и колес не остается постоянной,
что приводит к изменению положения центра тяжести по
высоте. Но так как деформации подвесок и колес огра-
ничены и по величине значительно меньше координаты
центра тяжести Я, то можно считать, что отклонение уг-
лов статической устойчивости асв, асн, Рс от соответству-
ющих расчетных значений будет незначительно. Тогда
углы статической устойчивости планетохода в верти-
кально-продольной и в вертикально-поперечной плоско-
стях определятся из выражений
асв = arctg асн = arctg Pc = arctg Д t
(3.1)
где lK — проекция на ось х отрезка от центра тяжести до
центра крайнего колеса.
При разгоне асв определяется расстоянием ZK=Zn до
оси последнего колеса, при торможении — расстоянием
1К = h до оси первого колеса.
Статические углы устойчивости определяют мак-
симально допустимые уклоны поверхности в соответству-
ющей плоскости, при движении на которых с постоянной
скоростью планетоход не потеряет устойчивость без при-
ложения возмущающих воздействий.
Выражение (3.1) написано в предположении, что
планетоход симметричен относительно поперечной оси.
В случае несимметричности в формулы должны подстав-
ляться (в соответствии с направлением опрокидывания)
проекции на ось у отрезков от центра тяжести до центра
колес соответствующего борта sKi, $к2 (рис. 3.2).
Соответствующие статические углы устойчивости
в вертикально-продольной и поперечной плоскостях со-
ветских планетоходов «Луноход-1» и «Луноход-2» равны
между собой, что говорит о равных возможностях плане-
§3.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
201
тохода при движении вперед и назад (табл. 3.1). У аме-
риканского аппарата «LRV» значения статических
углов устойчивости в вертикально-продольной плоскости
относительно передних и задних колес отличаются до 80 %.
ТАБЛИЦА 3.1.
Статические углы устойчивости относительно осей
опрокидывания, проходящих через точки контакта колес
с поверхностью [38, 72]
Статические углы устойчивости, град «Луноход-1» «Луноход-2» «LRV»
Отностельно передних колес 45 45 32
Относительно задних колес 45 45 58
Относительно правого борта 43 43 41
Относительно левого борта 43 43 41
Из выражения (3.1) видно, что статические углы ус-
тойчивости, определенные в таком вице, являются посто-
янными и не зависят от скорости движения планетохо-
да v. Влияние последней на процесс опрокидывания свя-
зывают с динамической устойчивостью.
Динамическую устойчивость обычно разделяют на
критическую и докритическую. Под критической динами-
ческой устойчивостью планетохода следует понимать такое
состояние, при котором его корпус повернется на угол,
равный углу статической устойчивости. При меньших
углах планетоход находится в зоне докритической дина-
мической устойчивости.
В силу специфических условий эксплуатации плане-
тоходов надежность расчетной оценки его устойчивости
на стадии проектирования приобретает особо важное зна-
чение. Поэтому при расчете критической устойчивости
планетохода следует принимать наиболее неблагоприят-
ный вариант воздействия внешних возмущений.
Так как устойчивость движения планетохода в значи-
тельной степени зависит от его скорости, то оценка его
устойчивости в динамике должна заключаться в опреде-
лении такой минимально допустимой скорости, при дви-
жении с которой угол наклона планетохода не выйдет
заранее заданные пределы при воздействии на него вне-
202
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
шних возмущающих факторов. Пределы изменения угла
наклона корпуса выбираются исходя из конструктивных
особенностей планетохода, режима движения и способа
управления. Если угол наклона корпуса ограничен неко-
торым значением фд, причем фд<?ас*), то за характери-
стику запаса устойчивости планетохода можно принимать
величину
Дф _ 1 -
“с
где ас — статический угол устойчивости в вертикаль-
но-продольной плоскости.
Из этого выражения, в частности, видно, что при
фд=.(хс планетоход обладает нулевым запасом устойчиво-
сти. Такое состояние планетохода обычно называется
критическим. Соответственно скорость движения плане-
тохода, при которой он достигает критического состояния,
например, в случае удара о препятствие, торможения,
преодоления единичного препятствия и т. п., называется
критической.
Ниже, при исследовании продольной динамической
устойчивости рассматриваются следующие ситуации, вы-
зывающие опрокидывание планетохода:
удар о непреодолимое препятствие крайними колеса-
ми или колесами одного борта,
торможение и разгон на уклонах поверхности,
поворот и преодоление единичных препятствий.
§ 3.2. Статическая продольная устойчивость
В принятом определении статической устойчивости
планетохода применено понятие о способности его со-
хранять исходное положение в покое или движении.
Под исходным положением здесь понимается такое
положение планетохода, при котором не происходит по-
ворота его корпуса относительно оси опрокидывания.
Тогда исходное положение планетохода в покое со-
храняется в том случае, если вектор силы веса G, прило-
*) При дальнейшем рассмотрении независимо от того, рас-
сматривается ли планетоход с ведущими или ведомыми колеса-
ми, статические углы устойчивости будут обозначаться через ас.
§ 3.2. СТАТИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
203
женный в центре тяжести, не выйдет за пределы перед-
ней или задней осей опрокидывания (рис. 3.1). Макси-
мальный угол наклона поверхности, на котором может
находиться планетоход в покое без потери статиче-
ской устойчивости, определяется из выражений (3.1).
Однако такое положение равновесия планетохода следует
считать неустойчивым, так как при любом бесконечно
малом случайном внешнем воздействии он изменит свое
положение [19].
Статическую устойчивость планетохода в движении
рассмотрим в предположении, что подвеска и колеса яв-
ляются абсолютно жесткими и радиусы всех колес равны
между собой.
На рис. 3.1, а показана схема сил, действующих на
планетоход в процессе разгона при движении на подъем.
Из схемы видно, что исходное положение планетохода в
движении сохраняется при выполнении условия
(боМх + G sin а)Я.+ Mj
< lnG cos а - £ Fni (ln + h) - PBhB - £ Mti, (3.2)
i=l i=l
где Рз — сила сопротивления атмосферы, Fvi — усилие в
подвеске i-ro колеса, Mj — инерционный момент, обуслов-
ленный угловыми перемещениями корпуса, бо — коэффи-
циент учета вращающихся масс, определяемый из соот-
ношения
’•=‘+^+
2
4=1
(3.3)
Здесь Удп — момент инерции деталей приводов, приведен-
ных к оси колеса, JKi — момент инерции i-ro колеса.
Анализ уравнения (3.2) показывает, что опрокидыва-
ние планетохода может произойти при преодолении мак-
симального подъема в результате действия горизонталь-
ной составляющей силы веса, силы сопротивления возду-
ха, а также в процессе разгона из-за действия инерцион-
ной силы.
Движение планетохода на максимальный подъем
обычно происходит па малой скорости. Поэтому влиянием
204
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
силы сопротивления воздуха можно пренебречь. Кроме
того, можно предположить, что движение на максималь-
ный подъем происходит с постоянной скоростью, так
как разгон на максимальном подъеме практически исклю-
чен. Поэтому можно считать, что инерционная сила от-
сутствует. В первом приближении можно также прене-
бречь величиной инерционного момента, что обеспечит
некоторый запас по устойчивости. Если учесть, что в мо-
мент потери исходного положения реакции Fni = 0, i =
= 1, 2,..., п — 1, то из (3.2)
GH sin а — Gln cos а + GfrK cos а = 0.
Из этого уравнения определяется максимальная вели-
чина угла подъема поверхности, который планетоход
может преодолеть, не опрокидываясь, т. е.
tgaM=^^. (3.4)
Уравнение (3.2) и схема сил, действующая на плане-
тоход (рис. 3.1, а), показывают, что сила сопротивления
воздуха и инерционная сила уменьшают максимальный
угол подъема по опрокидыванию.
Однако не любой планетоход по своим тягово-сцеп-
ным качествам колес с опорной поверхностью может пре-
одолеть максимальный по опрокидыванию подъем.
Поэтому в процессе проектирования и составления ин-
струкции по эксплуатации важно знать, чем ограничи-
вается максимальный угол подъема — опрокидыванием,
буксованием или недостатком тяговой силы. Если угол
подъема, ограниченный буксованием или величиной тя-
говой силы, по величине меньше, чем максимальный угол
по опрокидыванию, то опасность опрокидывания для та-
кого планетохода практически исключена.
Рассмотрим движение планетохода на подъем и най-
дем величину максимального угла подъема с учетом ог-
раничений по буксованию.
Проектируя на продольную ось планетохода действу-
ющие на него силы (рис. 3.1, а), найдем
б07Их = У Ркг — Рсх — Рв — G sin а,
i=i
§ 3.2. СТАТИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
205
п
где Fcx = 2 = Gf cos а — суммарная сила сопротив-
г=1
ления движению планетохода по грунту в направлении
оси я, Аг — тяговое усилие, определяемое либо по фор-
муле (2.76), либо как полное окружное усилие по форму-
ле (2.5). В последнем случае его величина ограничена по
сцеплению, т. е.
п
cpcGcosa.
г=1
Подставляя это выражение в последнее уравнение и
принимая Р3 = 0, х = 0, получим
tg ав =. ерс — /. (3.5)
Это уравнение определяет максимальный угол подъ-
ема ос, который может быть преодолен полноприводным
планетоходом.
Чтобы буксование предшествовало опрокидыванию,
должно выполняться условие
tg &fj < tg сем,
'г. е.
(3.6)
Условие статической устойчивости планетохода в слу-
чае равномерного торможения при движении под уклон
может быть записано аналогичным образом.
Действительно, если планетоход движется под уклон
в режиме торможения, представленном па рис. 3.1, б,
то с точностью до знаков может быть получено уравне-
ние, аналогичное (3.2), с той разницей, что вместо 1п
должно подставляться 1\.
Поэтому в силу выше сделанных допущений макси-
мальное значение угла наклона поверхности, на котором
планетоход может осуществлять спуск с постоянной ско-
ростью, не опрокидываясь, определится из выражения
tgaM = —й к. (3.7)
Найдем угол наклона поверхности, на котором тор-
можение планетохода будет происходить без юза.
20G
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Уравнение движения планетохода (рис. 3.1, б) при
торможении запишется в виде
6QMx = 2 Rxi + Fcx — G sin а, (3.8)
i=l
где Rxi — тормозное усилие, приложенное к Z-му колесу.
Тормозное усилие, так же как и тяговое, ограничено
по сцеплению, т. е.
п
S Rxi ФсС cos а.
г=1
Если при спуске торможение производится с таким
расчетом, чтобы сохранить постоянную скорость плането-
хода, то х = 0. Тогда из (3.8) с учетом последнего со-
отношения найдем следующее выражение для определе-
ния максимального угла наклона поверхности, на кото-
ром торможение планетохода будет происходить без юза
заторможенных колес:
tg аю = фс + /•
Если
tg аю < tgам, т. е. фс -|- / < 1 (3.9)
то потере устойчивости будет предшествовать юз, что,
с точки зрения безопасности планетохода, является более
благоприятным.
Из приведенных соотношений (3.4), (3.6), (3.7),
(3.9) видно, что статическая устойчивость планетохода
в движении зависит, с одной стороны, от характеристик
взаимодействия колес с грунтом (рс и /, а с другой — от
расположения центра тяжести (расстояния Zi, 1п и Я).
Так как тяговые (тормозные) усилия ограничены по
сцеплению, то для планетоходов, параметры которых
удовлетворяют этим условиям, потере статической ус-
тойчивюсти предшествует буксование (юз) ведущих (за-
торможенных) колес. Поэтому, если потере статической
устойчивости предшествует, например, юз колес, то в
данной ситуации планетоход будет оползать из-за не-
достаточного сцепления колес с грунтом.
В табл. 3.2 приведены значения коэффициентов сцеп-
ления и сопротивления движению для лунного грунта и
некоторых грунтов-аналогов, применявшихся при испы-
§ 3.2. СТАТИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 207
тании «Лунохода-1» и «Лунохода-2» на стадии их раз-
работки [21].
Для наземных транспортных машин максимальные
значения срс — f и <рс + / ограничены сверху соответст-
венно значениями 0,785 и 0,818 [10, 29]. Что касается
ТАБЛИЦА 32
Значения коэффициентов сцепления и сопротивления движению
для колесного движителя типа «Луноход-1» в лунных условиях
эксплуатации и на некоторых земных грунтах-аналогах
Грунт Коэффициент сцепления Коэффициент сопро- тивления движению
Лунный грунт 0,7—0,8 0,15-0,25
Песок 0,4-0,5 0,10-0,30
Пемза 0,5-0,6 0,10-0,20
правых частей соотношений (3.6), (3.9), то для надзем-
ных транспортных машин они, как правило, больше или
равны единице. Поэтому в теории автомобиля обычно
делается вывод, что продольная устойчивость подобных
машин практически обеспечивается на любых уклонах
поверхности, которые не превышают их статических уг-
лов устойчивости. Применительно к «Луноходу-1», «Лу-
ноходу-2» и «LRV» также 1\1Н~Л и Однако для
пих гарантировать устойчивость на уклонах поверх-
ности, не превышающих статических углов по опрокиды-
ванию, является неоправданным. Объясняется это следу-
ющим.
Движение транспортных машин в земных условиях
происходит, в основном, по подготовленной поверхности,
причем управляет ими водитель, находящийся на борту,
и в зависимости от сложившейся обстановки (пересечен-
ность рельефа, повышение сопротивления движению) он
может принимать необходимые меры для предотвраще-
ния опасных ситуаций, ведущих к опрокидыванию (сни-
жение скорости, объезд препятствий, остановка и т. п.).
Планетоходы эксплуатируются в условиях полного
бездорожья, а планетоходы с дистанционным или авто-
матическим управлением — без непосредственного уча-
стия водителя.
~08
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Поэтому весьма вероятно в процессе движения пла-
нетохода значительное увеличение коэффициентов сцеп-
ления и сопротивления движению по сравнению с теми,
которые указаны в табл. 3.2. Последнее может быть
вызвано случайным наездом передними колесами на пре-
пятствие, заклиниванием колес в трещине, а также
«бульдозерным сопротивлением» при сползании плането-
хода и т. д. Поэтому для планетоходов устойчивость
движения должна оцениваться с учетом динамики взаи-
модействия его с рельефом поверх пости. Статическая
устойчивость может быть использована только для срав-
нительного анализа, на основании которого можно су-
дить о большей или меньшей степени устойчивости раз-
личных планетоходов в заданных условиях эксплуатации.
§ 3.3. Динамическая продольная устойчивость
3.3.1. Удар в непреодолимое препятствие двумя ко-
лесами одновременно. Потеря продольной устойчивости
в случае удара передними колесами о непреодолимое
препятствие аналогична потере устойчивости при съезде
с уклона в случае резкого возрастания сопротивления
движению или при переходе с ровного участка на
подъем.
Для этих случаев имеются приближенные оценочные
критерии [10]. Исходя из закона сохранения энергии,
получена зависимость для расчета критических скоростей
движения:
= 2g /(А2 + ID [1 - sin (а + ф„)Ь (3-10)
Если рассмотреть предельный случай (рис. 3.3), при
котором сила удара Руд проходит через центр колеса,
т. е. И — гк = 0 (центральный удар), то из (3.10) сле-
дует
lim vl{ =- \/"2gl1 (1 — sin а).
h=(H-rk)->0
Это противоречит физическому смыслу центрального
удара, так как в этом случае опрокидывания не должно
происходить, т. е. lim должен стремиться к оо.
(Н—гк)->0
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
209
Таким образом, погрешность расчета критических
скоростей по выражению (3.10) при (Я — гк)->0 очевид-
на.. Помимо этого, критерий (3.10) получен без учета
инерционных характеристик машины в вертикально-про-
дольной плоскости, упругих характеристик колеса, рес-
соры и препятствия, а также без учета сил тяги. Все это
Рис. 3.3. Схема сил при центральном ударе о непреодолимое пре-
пятствие двумя колесами одновременно.
может привести к существенным погрешностям, недо-
пустимым с точки зрения обеспечения надежности движе-
ния планетохода. Рассмотрим динамическую устойчи-
вость, основываясь на исследовании уравнений движе-
ния планетохода, описывающих процесс его опрокидыва-
ния. При составлении дифференциальных уравнений дви-
жения п-осного планетохода принято, что подвеска пе-
редних колес является абсолютно жесткой конструкцией,
система препятствия — колесо — крепление обладает ко-
нечной жесткостью в направлении оси х, коэффициен-
ты сцепления фс всех колес с поверхностью равны между
собой и массы неподрессоренных, а также подрессорен-
ных частей объединены в общую массу всей системы,
равную М.
Допущение относительно подвески переднего колеса
повышает запас устойчивости, так как не учитывает
частичное рассеивание кинетической энергии корпуса
планетохода при переворачивании. При этом с увеличе-
нием угла наклона поверхности погрешность от сделан-
ного допущения уменьшается вследствие перераспреде-
№ Е. В. Авотин и др.
210
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
ления нагрузок между колесами и дополнительной де-
формации передних подвесок.
На данном этапе проведения исследований это допу-
щение сделано только для упрощения математических
выкладок при составлении и решении дифференциальных
уравнений движения планетохода. В дальнейшем влия-
ние жесткости передней подвески будет рассмотрено и
учтено в общем критерии устойчивости.
Вывод дифференциальных уравнений движения в
процессе опрокидывания планетохода можно провести,
основываясь на уравнении Лагранжа 2-го рода
d / дт \ дТ ЗП дф ...
— = — + (г = 1,2), (°- )
где #1= ф — обобщенная координата по углу поворота,
= # — обобщенная координата по продольному пере-
мещению центра переднего колеса.
Рассмотрим вращение планетохода и предположим,
что оно происходит относительно оси, проходящей через
центры передних колес (точка С, рис. 3.4). Тогда в про-
екциях на декартовы оси координат найдем следующие
выражения для перемещений центра тяжести:
= х + I [cos фн — соз (фн — ф) ],
zn = /[sin (фн — ф) — эшфн], (3-12)
для скоростей центра тяжести:
Хп = х + /ф sill (фн — ф) ,
Zn = — /ф COS (фн — ф) ,
(3.13)
где / = 11 + —’геометрический параметр,фн = arctg-^-
— угол между осью х и геометрическим параметром I.
Выразим скорость центра тяжести планетохода и че-
рез проекции этой скорости па оси координат х и у. Из
(3.13) получим
у2 = + Zn = х2 + /2ф2 — 2х ф/sin (фн — ф).
Тогда кинетическая энергия системы, определяемая
выражением
Т =
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
211
преобразуется к виду
Т = б0Мя2 + -у 1п?/ф2 — 80ТИ xql sin (фд — ф),
где Zov — момент инерции планетохода относительно по-
перечной оси, проходящей через его центр тяжести,
7ny=Ah+8oZ2Af — приведенный момент инерции плане-
тохода к поперечной оси опрокидывания, проходящей
Рис. 3,4. Динамическая модель планетохода при нецентральном
ударе о непреодолимое препятствие двумя колесами одновре-
менно: -------положение планетохода перед началом удара,
-----положение планетохода после удара.
через точку С. Выражения для потенциальной энергии
11 и диссипативной функции Ф имеют вид
п
II = -Ь сххг + -4- 2 сп»А i + Gzn cos at
i=2
i—2
где Д t = Ao; + In sin cp —- деформация Z-й подвески при
вращении планетохода относительно точки С, До* — ста-
14*
212
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
тическая деформация г-й подвески, 1ц = h — k — рассто-
яние между центрами t-го и переднего колес, bi — коэф-
фициент демпфирования i-й подвески, G — вес плането-
хода с учетом подрессоренных и неподрессоренных ча-
стей, сх — жесткость в направлении оси х системы пре-
пятствие — колесо — крепление, х — перемещение центра
тяжести, определяемое деформацией системы препятст-
вие— колесо — крепление в направлении продольной оси.
Здесь так же, как и в гл. 2, отрезки расположен-
ные впереди центра тяжести, берутся со знаком плюс,
а позади — со знаком минус.
Для определения статических деформаций подвесок
рассмотрим равновесие планетохода в статическом поло-
жении. Проектируя все силы на вертикальную ось и со-
ставляя уравнение моментов относительно центра тя-
жести, получим
п
S Fni = Geos а,
Г1 (3.14)
У = HG sin а,
i=l
где Fni — сп/(/о + ^фо)—усилие в подвеске Z-ro колеса,
Фо — поворот планетохода в статическом положении от-
носительно поперечной оси, проходящей через центр
тяжести, /о — проседание центра тяжести планетохода в
направлении оси z в статическом положении.
Система уравнений (3.14) составлена в предположе-
нии, что сила сопротивления Fcx уравновешивается со-
ставляющей от силы веса, т. е. Fcx = Gsina.
Разрешая систему (3.14) относительно фо и /о, найдем
(п п \
Н sin а 2 спГ”cos а У cni^i )
_________ы_____L.
то / п______________________\2п п_’
I У Спг^г ) У cni У Спг^2г
\i=l / 1=1 1=1
(п \ I п
<Ро s Cuili + Geos а /2 Сп».
1=1 // 1=1
Тогда статическая деформация t-й рессоры опреде-
лится из уравнения
Дог =/о + Афо. .(3.15)
§ 3.3-. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 213
Далее найдем производные и обобщенные силы Qqi,
необходимые для подстановки в уравнение Лагранжа, т. е.
дТ 9Qi дТ = — = /Пуф — 8^М1х sin (фн — ф), dtp
дТ ^2 дТ * * = — = 60Мгс — 6O7I/Z(p sin (фн — ф), дх
дТ S<li = 1^= ^0М1х ф COS (фн — ф),
дТ _ ^2 — дТ дх п ап ап п 5Ф дФ „ = 0, я— = -д- = схх — Руд, — = — = 0, ^2 дх dq2 дх
п
— = £2- = V CniAi^H cos Ф — Gl cos a cos (<рн — ф) =
д91 9<Р 1^2
п
— 5 Pmhi cos ф — Gl cos а cos (фн — ф),
1=2
^5 = = 2 biAjiii cos Ф = 2 Fbdiicos Ф>
dqY dtp i=2 1=2
~~r— f = — 60А/7ф sin (фн — ф) +
' \3ф /
4- 60М/ф2 cos (фн — ф),
4- f 1 — 80Ml(f sin (фн — ф) +
\С7 X /
+ 607И/ф2соз (фн — ф),
(?91 = <?ч> = Г к ( 2 Р кг — Рсх signx ) —
— Gl sin а sin (фн — ф),
(?«2 = Qx = G sin а — Рсх sign х 4- 2 Р>а,
г=1
где Fai — усиление в амортизаторе i-й подвески, Руд —
сила, обусловленная ударом передних колес о препятст-
вие. Тяговое усилие, приложенное к i-му колесу, вво-
214
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
дится следующим образом:
р (Ркп еСЛИ Ркг^Рпафс»
1фс^пг? еСЛИ -Ркг> -^пгфс*
Подставляя полученные выражения 'В уравнение
(4.11), можно получить систему дифференциальных урав-
нений, описывающих процесс поворота планетохода от-
носительно оси опрокидывания [6]:
.Тщ/ф — f^Mxl sin (срн — <р) = Gl cos (а + срн —- ф) + Мр —
п
— S (Fni/ц COS ф + Failn COS ф) 1 (Ai), (3.16)
i=2
60Мх — 60М/ф sin (фн — ф) = У, PKil (Д{) —
i= 1
— 60Л/Zcp2 cos (<ри — ср) — Руд! (я) + G sin а — Fcx sign.r.
После разрешения относительно переменных (р и i:
эта система уравнений примет вид
” 1 (
Ф = т--------о .^,9 »;-------х < Gl cos (а 4- Фн — ф) —
4 Jny — 60MZ2 sin2 (<рп — <p) ( \ । сн 1/
п
— 2 (Fni + ^ai) hi cos ф! (Ai) + Ч7р —
i=2
60MZcp2 COS (фн —
п
— ф) -г -Руд! (я) — Gsin а — 2 РкЛ(Аг) + PcxSignx
i=l
X
X Zsinfait — ф)}, (3.17)
1 (Г
х = ---------о »>,» ---------т I Gl cos (а -4- фп — ф) —
/пу - 6„М/2 8Ш(фя - ф)v 14 17
— 2 (Fni + F&i) ZHcos ф1 (A{) + Mp
i=2
Z sin (фи — ф)
1 60ЛЛф2 cos (фн — ф) 4- Руд1 (.г) — G sin а —
п
— 2 Рк«1 (Ai) + Fcx sign х
i=l
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
215
Исследование устойчивости планетохода проведем при
следующих начальных условиях:
Z = О, ф(0) = 0, ф(0) =0, х(0) =0, #(0) = v. (3.18)
п
2 Piai (Ai) — Fcx sign x
Здесь Мр = г1{
— суммарный
реактивный момент, приложенный к корпусу планетохода,
1(Дг), 1 (х) — единичные функции, которые обращаются
в нуль при отрицательных или равных пулю значениях
своих аргументов. Эти функции определяют условия от-
рыва колес от опорной поверхности и от соударяемой
стенки.
Система уравнений (3.17) справедлива при любых уг-
ловых и горизонтальных перемещениях корпуса и явля-
ется существенно нелинейной. Нелинейность обусловле-
на, с одной стороны, отрывами колес от поверхности,
а с другой — нелинейностью входящих функций. К не-
линейным функциям могут быть отнесены тригонометри-
ческие функции, усилия в рессорах Fni, амортизаторах
F.di, на колесе Руд и тяговые усилия РКг.
Нелинейность усилий Fni, FAi, может быть связа-
на с переменной жесткостью упругих элементов подвески
и колеса, характеристик амортизаторов при сжатии и от-
бое, а также установкой ограничителей хода подвески.
Нелинейность Ркг вызвана ограничениями тяговых уси-
лий по сцеплению и переменным наклоном тяговой ха-
рактеристики в зависимости от скорости планетохода.
Система уравнений (3.17) получена в предположении,
что передние колеса планетохода являются ведущими и
его вращение происходит относительно оси, проходящей
через центры этих колес. Если при ведущих передних
колесах вращение происходит относительно оси, прохо-
дящей через точки контакта этих колес с опорной по-
верхностью, то в рассмотренных выше уравнениях вместо
значения I = + l\ подставляется выражение I =
= 2 + li- Если передние колеса являются ведомыми,
то в соответствующих уравнениях реактивный момент Мр
принимается равным нулю.
Так как система уравнений (3.17) является нелиней-
ной, то найти ее аналитическое решение в общем случае
216
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
не представляется возможным. Поэтому с целью упро-
щения этой системы дифференциальных уравнений для
случая жесткого удара (сх->оо) можно принять, что за
время соударения*) планетоход не имеет угловых пере-
мещений, т. е. <р = 0.
В этих предположениях процесс потери устойчивости
планетохода условно можно разбить на две фазы: фазу
соударения с препятствием и фазу опрокидывания.
На первой фазе планетоход по угловым перемещениям
сохраняет статическое положение, т. е. ср = <р(0) = 0.
Однако угловая скорость изменяется в широких преде-
лах от ср (0) = 0 и до некоторого максимального значения,
которое достигается в конце фазы соударения.
Во второй фазе под действием импульса момента,
полученного на первой фазе в результате удара передних
колес о препятствие, планетоход совершает угловые пе-
ремещения, по величине которых можно судить о его
устойчивости. Поэтому конечной целью исследования
системы уравнений (3.17) является определение макси-
мальных угловых перемещений (угла наклона) плането-
хода, которых он достигает при ударе о препятствие с
заданной скоростью.
Прежде чем приступить к определению угловых пе-
ремещений, надо знать величину угловой скорости пла-
нетохода в конце первой фазы, величина которой может
быть определена следующим образом.
Первая фаза. Так как в фазе соударения угловых
перемещений планетоход не совершает (ср = 0), то си-
стема уравнений (3.17) на данном этапе преобразуется
к виду
'Р = 7—[Gl C0S (а + фп) ~
п
— G sin а — 5 ЛА (Ai) + Рсх sign х
г=1
(3.19)
*) Под временем соударения понимается время с момента
начала соударения передних колес с непреодолимым препятст-
вием до момента их отрыва.
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 217
х = 7~-1бо1йг4[Сг C°S (а + фн) “
- 1 (fni + Fai) ZH1 (Ai) + л/р
i—2
h
n e
+ РУДТ (x) — G sin а — s PKil (Ai) + Fcx signa?
i = l
Система (3.19) должна удовлетворять начальным ус-
ловиям (3.18).
Вычитая из первого уравнения системы (3.19) вто-
рое, получим
&0Mh "Г
Ф = х + \Gl cos (а + фн) —
— 2 ”Ь а|) -ь -^р
i=2
1 д0ш2
Отсюда в силу начальных условий (3.18) найдем
= + t<tyi (3i2l)
Jny
где
2V(0 =
/ 6aMh*\ t
I1" Jav Jf
/ny-«o^2J
u 0
Gl cos (a + фн) —
— 2 (^ni + ai) lli + Mp
i=2
dti
x(t) — скорость деформации системы препятствие — ко-
лесо— крепление в данный момент времени t, x(t) —
деформация системы препятствие — колесо — крепление
в тот же момент времени t, h — время соударения перед-
них колес с препятствием.
218
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Тогда система (3.19) на фазе соударения представи-
ма в виде
ф = _ V) 4- N ( t),
Jny
i = 7^W^{[GZcos(a + f^
п
-2 (Fni +Fai)ZH-|-Mp
i—2,
(3.22)
h~$l М//1Ф2 + Руд-
— С sin а — 2 Риг + Fcx sign х ?•
г=1 J J
Уравнение (3.21) определяет угловую скорость пла-
нетохода на фазе соударения с непреодолимым препятст-
вием, а (3.22) — деформацию и скорость деформации
системы препятствие — колесо — крепление.
Из (3.22) видно, что угловая скорость <р и динамика
системы препятствие — колесо — крепление планетохода
на этой фазе зависят от конструктивных параметров, и
характеристик взаимодействия движителя с грунтом <рс, /.
Для упрощения выкладок, связанных с определением
угловой скорости в момент окончания процесса соударе-
ния, воспользуемся следующим приемом. Вначале опре-
делим эту скорость без учета сил тяги, т. е. при РКг = О,
а впоследствии проследим влияние этой силы на полу-
ченный результат. Кроме того, в дальнейшем будем пре-
небрегать влиянием сил сопротивления в амортизато-
рах Fat.
Так как в процессе соударения планетоход сохраняет
статическое положение (рассматривается случай сх = оо)
по угловым перемещениям его корпуса, то
Gl cos (а + <р1Г) — 21 Fnila + Л/р = 0.
г-2
Поэтому система уравнений (3?22) примет вид
j ПУ . (3.23)
Х ~ ~ 60М (Jwj — (М^1ф2 + Руд —
— G sin a + FCx sign x).
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
219
Отсюда при Руд = схх
х + а2х! (z) — Ъх + сх2 = Q, (3.24)
t = О, ж(0) = 0, i(0)=v, (3.25)
где
2_________Juy сх , 2(60МЛ)Ч,р
“ 60 М (Jny - 80Mh>) ’ ' /лу (/П!/ - 6„Ш2) ’
_ («ЛВД Z,
^(•^ny-So^)’
п Jay G sin а — Fcx sign х (80MhyiLv-
4-Jny-80Mh*[ 60M j2y •
В уравнении (3.24) нелинейный член х2 линеаризу-
ем следующим образом:
х2 = рхх sign х, (3.26)
где
V | V
= J x2dxК xdx = -|- и.
о /о
Подставляя в уравнение (3.24) вместо х2 выражение
(3.26), получим
х + а2х1(х}— (Ь — ensign ж) х = Q. (3.27)
Уравнение (3.27) представимо в виде двух различных
линейных уравнений, одно из которых справедливо на
этапе сжатия системы препятствие — колесо — крепление,
другое — на этапе отскока. Первое из них
хс + a2xG — (Ъ—с$х)хс = Q, хс 0, t ti, (3.28)
а второе
x + a2x-{b + c^x)x = Q, i<0, (3.29)
Уравнение (3.28) удовлетворяет начальным услови-
ям (3.25), а начальные условия для {3.29) получаются
220
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
из решения (3.28) в тот момент времени, когда xG = 0,
т. е. при t = x(t\) = 0, x(t\) = xG(t}.
Рассмотрим решение линейных дифференциальных
уравнений (3..28) и (3.29) и применим метод припасовы-
вания решений. Кроме того, при исследовании уравне-
ния (3.29) введем новую переменную x = t — ti. Тогда
для достаточно больших значений сх, при которых вы-
полняются условия
4 < 1. 166071/3^4/^2 < QJayCx (Jny _ 60Ш2)2,
аг
получим следующие соотношения для определения ско-
рости передних колес в момент их отрыва от соударяе-
мого препятствия:
х (t2) = — exp
fb 4- срх \ ((6 -I сРх)2 рс (*1) — ]
t“2~ Ч I ^2 -
где
arctg
2р
(3.30)
(Di
— момент времени, соответствующий максимальной дефор-
мации системы препятствие — колесо — крепление, £2 =
1
— arctg
2cd2
— промежуток времени, отсчитываемый
с момента максимальной деформации системы препятст-
вие — колесо — крепление и до момента отрыва передних
колес от препятствия, хс (£i) = exp {[ <7”
(& — срх) <?] . п 1 п
4---2(о а2— sincMi — cos 4- максимальная
деформация системы препятствие — колесо — крепление,
И1= Ш2 = уГ _ (»+/<
— ti Ч" ^2’-
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 221
Переходя в последних уравнениях к пределу, найдем:
lim £у = 0, lim x(t)== lim # (^2) = “ (3.31)
сх->оо t^ty,cx-+<x> Z2~»fy,Cx-»oo
Если рассмотреть процесс соударения колес с препят-
ствием с учетом сил тяги и предположить, что силы тяги
ограничены по величине, то и в этом случае соотношение
(3.31) остается справедливым. Действительно, пусть
рк. < к = const. Тогда N(t) = DKt, DK= const, и система
(3.22) может быть преобразована к виду
х + а2Н (ж) — Ъх + сх2 =
„ , 2l1^MhDKvt-JIiyl1D^ + 2^Mhl1Dl{tx
= <2 +------------/пу-бом^--------------•
Уравнение (3.32) удовлетворяет начальным условиям
(3.25) и является нелинейным дифференциальным урав-
нением с переменными коэффициентами, что в значи-
тельной степени усложняет поиски его решения в замк-
нутом виде.
Поэтому, чтобы оценить влияние силы тяги, наряду
с (3.32) рассмотрим уравнение вида
х 4- а2#1 (х) — Ъх + сх2 =
2l1Dlfi0Mhvt + JnylLD*t* + 2dQMhl1DKvt
Jny-^Mh*
При сравнении уравнений (3.32) и (3.33) видно, что
их левые части совпадают, а правые отличаются. При
этом в (3.33) вместо внешней силы, которая присутст-
вует в (3.32), введена гипотетическая внешняя сила,
величина и направление которой выбраны таким обра-
зом, чтобы она была больше реально действующей.
В уравнении (3.32) перед последним членом стоит
знак минус, что указывает на то, что внешняя сила стре-
мится оторвать колесо от препятствия. В уравнении
(3.33) перед последним членом стоит знак плюс. Это со-
ответствует в данном случае тому, что внешняя сила
стремится прижать колесо к препятствию. Кроме того,
в (3.33) действие внешней силы на интервале. времени
(3.33)
222 ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
О < t 1 увеличено за счет того, что время t входит в
первой степени, а скорость деформации колеса х заме-
нена на наибольшую, равную v. Поэтому время соударе-
ния £у, рассчитанное по (3.33), должно быть не меньше
соответствующего времени, рассчитанного по (3.32). Од-
нако, если в уравнении (3.33) линеаризовать нелинейный
член х2 по формуле (3.26) и рассмотреть решение двух
линейных уравнений, аналогичных (3.28) и (3.29), то
получим, что lim ty = 0.
СХ"*°°
Таким образом, и при наличии сил тяги время соуда-
рения стремится к нулю. Подобным образом из (3.32)
может быть получено, что при наличии сил тяги ско-
рость в момент отрыва колеса от соударяемого препятст-
вия равна минус V. Аналогичные результаты получим,
если перед последним членом в (3.33) поставить знак
минус.
Таким образом, вместо уравнения (3.32) мы рас-
смотрели два новых уравнения, одно из которых описы-
вает процесс соударения с большим внешним возмуще-
нием, а другое — с меньшим. Однако конечный результат
не изменяется и получается таким, каким он был полу-
чен без учета силы тяги. Следовательно, соотношения
(3.31) следует считать справедливыми как при наличии
сил тяги, так и при отсутствии последних, при условии,
что сх->оо.
Подставляя в уравнение (3.21) значение х(1) при
t = и учитывая (3.31), получим следующие выраже-
ния для определения угловой скорости и угла наклона
планетохода в момент отрыва передних колес от соуда-
ряемото препятствия:
Ф(Ь) = -Ц^. ф(М=0. (3.34)
В табл. 3.3 представлено сравнение результатов рас-
чета на ЭВМ по системе уравнений (3.17) и по уравне-
нию (3.34) в зависимости от жесткости системы
препятствие — колесо — крепление сх без учета сил тяги.
Расчет проведен при следующих значениях параметров
и условий эксплуатации: 70у= 324 кг-м2, G = 860 Н,
I = 1,05 м, h = 0,72 м, g = 1,63 м/с2, а = 0, б0 = 1. Из
табл. 3.3 видно, что с увеличением жесткости сх расхож-
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
223
дения в результатах, полученных из решения системы
уравнений (3.17) и уравнения (3.34), уменьшаются [6].
После того, как процесс соударения закончится, пе-
редние колеса отскочат от препятствия. Опрокидывание
планетохода на этом этапе будет происходить под дейст-
вием импульса, который он приобрел при соударении,
а также сил веса, сопротивления движению, тяги и уси-
лий в подвеске.
ТАБЛИЦА 3.3
Сравнение результатов расчета по уравнениям (3.17)
и (3.34) угловой скорости и угла наклона планетохода
в конце первой фазы
сх, Н/м 69 000 206 000 344 000 480 000 Расчет
v, м/с 1,36 1,17 1,16 1,14
0 0 0 0 по уравнению (3.34)
cp(Zy), рад 0,125 0,074 0,053 0,047 по системе (3.17)
1,18 _ 1,10 1,00 0,98 по уравнению (3.34)
<р(/у), с-1 0,91 0,93 0,96 0,97 по системе (3.17)
Вторая фаза. Так как тяговые силы PKi и гори-
зонтальная составляющая веса Gsina вызывают посту-
пательное перемещение планетохода, то через некоторый
момент времени произойдет повторный удар передними
колесами о препятствие. Соответственно этому произой-
дет повторный отскок и т. д?
На рис. 3.5 приведена типичная картина взаимодей-
ствия планетохода с непреодолимым препятствием на ук-
лоне а=20°. Из нее видно, что после каждого удара
передних колес о непреодолимое препятствие происходит
некоторое приращение угла наклона лунохода ср относи-
тельно того положения, которое он занимал перед началом
удара. Наибольшего приращения, равного 0,3 рад, угол
наклона лунохода достигает после первого удара. После
второго удара это приращение составляет 0,075 рад.
Однако, если сравнивать максимальное значение угла
наклона ср, которого достигает луноход после второго
удара, с максимальным значением, достигнутым после
первого удара, то приращение составит всего 0,025 рад.
После третьего, четвертого ударов также наблюдаются
приращения этого угла, но они незначительны, поэтому
224
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
не могут привести к дальнейшему возрастанию угла ср,
т. е. после второго удара угол наклона уменьшается и луно-
ход возвращается к положению, которое он занимал пе-
ред столкновением с непреодолимым препятствием.
Рис. 3.5. Изменение динамических параметров «Лунохода-1» при
нецентральном ударе о непреодолимое препятствие на уклоне
а = 20° со скоростью и = 0,64 м/с (силы тяги на колесах от-
сутствуют) : — • — угол наклона планетохода ср,---угловая
скорость ф,----деформация соударяемого колеса х, £от — про-
должительность отрыва соударяемых колес от препятствия.
Из рис. 3.5 также следует, что по мере того, как
происходят повторные удары колес о непреодолимое
препятствие, сила повторных ударов уменьшается и
после пятого из них приближается к некоторому посто-
янному значению, которое зависит от составляющей силы
веса, сил тяги и сопротивления, а также от центробеж-
ной силы, которая, в свою очередь, пропорциональна <р2.
Если пренебречь угловой скоростью ср, то прибли-
женно можно считать, что после того, как сила удара
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
225
достигла постоянного значения, выполняется условие
п
РуДТ(;г) — 6? sin а + /Assign х — X P*iA (А<) = 0. (3.35)
2 = 1
Таким образом, приведенные рассуждения и рис. 3.5
показывают, что процесс опрокидывания планетохода
происходит по достаточному сложному закону. Поэтому
во второй фазе (£ > 4) проведем некоторое упрощение
математической модели (3.17):
во-первых, пренебрегаем энергией повторных ударов
о непреодолимое препятствие;
во-вторых, считаем, что условие (3.35) выполняется с
момента окончания первого удара и до момента дости-
жения планетоходом максимального угла по опрокиды-
ванию;
в-третьих, в качестве начальных условий во второй
фазе опрокидывания принимаем значения, определяемые
уравнением (3.34).
Тогда из (3.17) найдем уравнение для исследования
угловых перемещений планетохода во второй фазе
ф = -7---• •> /--------7 C0S (а + фн “ ф)
Jny - ^Ml Sin (Фн - Ф)
— 60Л772ф2 cos (срн — ф) sin (фн — ф) 4- Л/р —
п
— 2 ^ni/iiT(Aj) cos ср
г - 2
с начальными условиями
<р = <р(М, гр = ф(Ь)-
(3.36)
В уравнении (3.36) величина реактивного момента
п
Л7Р, обусловленного силами тяги У Лл, ограничена по
L
сцеплению, поэтому
п
г,< 2 P,ti 1 (Ai) =
2—1
П П
= гкфс Mil (Аг) = ГкфсГnl 4- фсгк 2 Л12 1 (Аг) =
1 = 1 1=2
п _ “I 72
G - 2 Рщ 1 (Ai) + гк<рс 2 Рщ i (Ai) = cpcrKG.
1=2 J 1=2
(3.37)
15 e. В Авотин и др.
226
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Кроме того, в реактивном моменте Мр пренебрежем си-
лой сопротивления движению Fcx вследствие ее знакопе-
ременности. Это связано с тем, что направление силы
Fcx зависит от знака скорости гг, которая, как было по-
казано выше, изменяет свое направление в процессе
вращения планетохода относительно оси опрокидывания,
j (оэтому сила сопротивления движению Fcx будет вхо-
дить в реактивный момент со знаком плюс или минус,
что и приведет к некоторой нейтрализации влияния силы
Fcx на устойчивость планетохода.
Чтобы уравнение (3.36) допускало первый интеграл,
тга интервале ф е [0, фк] линеаризуем в нем нелинейный
член ф2 по формуле
ф2 = ф2 (fy) (i — -5L)2, (3.38)
где <рк — а — arctg— — критический угол наклона пла-
нетохода в вертикально-продольной плоскости.
Уравнение (3.38) определяет фазовую траекторию
планетохода по угловым перемещениям с момента отры-
ва передних колес от соударяемого препятствия и до
момента, когда угол наклона корпуса планетохода приб-
лизится к критическому углу по опрокидыванию. Аппро-
ксимация фазовой траектории уравнением вида (3.38)
приводит к положительным результатам в том случае,
если к моменту отрыва соударяемых колес от непреодо-
лимого препятствия угол наклона планетохода ср->0.
Как было показано выше, только при сх->оо угол накло-
на планетохода ф к моменту отрыва соударяемых колес
от непреодолимого препятствия стремится к нулю. Поэ-
тому в более общем случае уравнение фазовой траекто-
рии во второй фазе опрокидывания может быть пред-
ставлено в виде [3]
<р _ Ф (У Г1 -
• к
фЕ[0, фк].
Фазовая траектория по угловым колебаниям для «Лу-
нохода-1», показанная на рис. 3.6 сплошной линией,
построена по результатам решения системы уравнений
(3.17) на ЭВМ. Эта траектория отражает весь динамиче-
ский процесс движения планетохода с момента начала
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
227
удара и до момента, когда планетоход снова возвратился
к начальному положению. Пунктирной линией нанесена
фазовая траектория, построенная по последнему уравне-
нию, в котором вместо фк
подставлялось значение, рав-
ное —0,32 рад.
Следует отметить, что для
исследования устойчивости
достаточно. знать фазовую
траекторию только до того
момента, когда угол наклона
достигнет максимального
значения, так как только по
ней иа этом участке можно
судить об устойчивости про-
цесса. Поведение же фазовой
траектории на участке, когда
угол наклона уменьшается
от некоторого максимального
Рис. 3.6. Фазовая траектория
«Лунохода-1» по угловым ко-
лебаниям в вертикально-про-
дольной плоскости в случае
удара о непреодолимое пре-
пятствие на уклоне а — 20°
со скоростью v = 0,64 м/с:
----- расчет по системе урав-
нений (3.17) на ЭВМ,--------
расчет по уравнению (3.38)
значения до нуля, не отра-
жается на устойчивости пла-
нетохода с точки зрения его
опрокидывания. Поэтому тот
факт, что уравнение (3.38)
не аппроксимирует фазо-
вую траекторию, когда угол
наклона начнет уменьшаться
и приближаться к нулю, не
отразится на точности кри-
териев устойчивости.
Подставляя выражения (3.37) и (3.38) в уравнение
(3.36) и рассматривая его первый интеграл, получим
S Фсгкс — 2 1 (д<) lacos Ф
ф2 = <р2 (£) = 2 I-----------*=2
о
/пу-60^8т2(Фн- <р) dcP +
ф
+ 2 I 7---------ё лл-,?1. .---------г \Gl cos (а 4- ср., — ср) —
J Jny - 60MZ2 sin2 (фн — ф) I v
— 6(рШ2ф2
15*
cos (срн — ср) sin (фн
ф) йф,(3.39)
228
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
где ср, ср — текущие значения угловой скорости и угла
наклона планетохода во второй фазе. Решение этого
уравнения имеет вид
Gl [1 — sin (а + сри)] — фс'кСфк
X (л (60 W Г2 + (cos 2<рн - ^2-
\ • к
cos 2а + cos2cpH
м
где
с
Фк
—60Л/72 sin2 (фи — ф)] d(p
т , ЬдМР Г. 1 / • О • о v 1 I2
= Jou+ Л— 1------р- sin 2а — sin 2фн) —
6 I Z Фк
средний момент инерции на этапе подъема корпуса до
положения критического угла по опрокидыванию.
Переходя в последнем уравнении к пределу при
cni-*oo, получим
= /од {Gl [1 — sin (а + фн)] — фсбгкфк} j Ja (80Mh)2 х
„ sm2(p cos2a + cos2<p
cos 2фн--------— ----------------5----5
2/с \ Фк 2<р2
(3-41)
Если принять во внимание общепринятое обозначе-
ние для радиуса инерции Ру = то (3.41) может
быть преобразовано к виду
р2ж = ((>у + г1 + А2)2 [1 ~ sin (« + Фн)]~ Фс£гкФк}
№ (ру + 4 [2 + *2₽к/(р2 + 4 Нк)]
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
229
где
[лк = 1 — (sin 2а — sin 2фн),
sin 2ф„ cos 2a+cos 2<р„
₽K„cos2(PH_—.————
Уравнение (3.40) определяет максимально допусти-
мую скорость движения планетохода с заблокированной
передней подвеской, полученную из условия устойчи-
вости при ударе о непреодолимое препятствие двумя
колесами одновременно. Уравнение (3.41) определяем
ту же скорость, полученную при тех же условиях,
только для бесподвесочного планетохода. В дальнейшем
такие скорости будут называться критическими.
В выражениях (3.40) и (3.41) учтена зависимость
критической скорости ик от расстояния h между цент-
ром тяжести и направлением силы удара, т. е. >°°
при /г->0, что полностью согласуется с физическим
смыслом центрального удара. Кроме того, vK изменяется
с изменением момента инерции и веса планетохода, что
также согласуется с физической сутью потери устойчи-
вости, поскольку при вращении относительно оси опроки-
дывания момент инерции и вес будут оказывать сущест-
венное влияние на угловые перемещения планетохода.
Критическая скорость планетохода vK зависит также от
коэффициента учета вращающихся масс бо и коэффици-
ента сцепления колес с грунтом срс.
Критерий (3.40) получен при следующих предполо-
жениях:
потеря устойчивости планетохода происходит относи-
тельно оси переднего колеса, т. е. при вращении корпу-
са планетохода силы сцепления переднего колеса с по-
верхностью таковы, что грунт не срывается;
передняя подвеска является абсолютно жесткой, т. е.
энергия не затрачивается на деформацию рессор этой
подвески.
Второе допущение идет в сторону запаса устойчиво-
сти. Однако первое допущение не обеспечивает запаса
устойчивости, если в процессе потери устойчивости воз-
можен срыв грунта под передними колесами, Поэтому
при расчете критической скорости по уравнениям (3.40)
и (3.41) следует учитывать возможность потери сцепле-
230
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
ния с грунтом, т. е. если rKPKi тах < фсгкб? (вращение пла-
нетохода в процессе опрокидывания происходит относи-
тельно оси переднего колеса), то критическая скорость
рассчитывается по приведенным выше формулам при
коэффициенте сцепления <рс = Ры max/G; если гкРк1 шах >
> фсгк£ (вращение планетохода в процессе опрокидыва-
ния происходит относительно оси опрокидывания, про-
ходящей через точки контакта передних колес с поверх-
ностью), то критическая скорость рассчитывается по со-
ответствующим уравнениям, в которых вместо I2 —/21 + ^
подставляется I2 = Zi + И2, а в выражения, определяющие
значения фк и фн, вместо h — величина Я; если же
Рк1 max = 0 (планетоход с ведомыми передними колеса-
ми), то вращение планетохода происходит относительно
оси переднего колеса. В этом случае критическая ско-
рость рассчитывается по уравнению (3.40) при фс = 0.
На рис. 3.7, а представлены результаты расчетов по
уравнениям (3.10) и (3.40) в земных условиях для че-
тырехосной машины с параметрами G = 2480 Н, Н =
= 0,98 м, гк = 0,25 м, /оу = 450 кг-м2, Ц = 0,58 м, Z2 =
= 0,11 M, /з = 0,8 М, Ц = 1,48 М, Ркгтах = 1600 Н, 60 =
= 3,8 [6]. Отсюда видно, что расчет по уравнению
(3.10) для машины с ведомыми передними колесами
приводит к занижению результатов до 25% (сплошная
кривая), а для машины с ведущими колесами —20%
(пунктирная кривая). Такой результат для машины с
ведущими колесами получается при условии, что 6о = 1
и отсутствует сцепление передних колес с соударяемой
стенкой фс = 0, т. е. опрокидывание происходит относи-
тельно оси опрокидывания, проходящей через точки
контакта передних колес с поверхностью.
Если сцепление с соударяемой стенкой таково, что
опрокидывание с ведущими передними колесами проис-
ходит относительно оси опрокидывания, проходящей че-
рез центры этих колес, то в этом случае расчет по (3.10)
для машин с ведомыми колесами приводит к завыше-
нию результатов в среднем на 30%, а расчет по (3.10)
для машин с ведущими колесами на углах наклона до
15° — к завышению на 30% и к занижению результатов
до 20% на углах наклона поверхности от 15 до 30°
(штрихпунктирная кривая).
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
231
Эксперимент, при веденный для этой машины на ук-
лоне а = 25,2°, при ударе о препятствие со скоростью
0,555 м/с, не привел к опрокидыванию при коэффициен-
те сцепления фс = 0,64, что и подтверждает достовер-
ность уточненного критерия (3.40).
Рис. 3.7. Изменение критической скорости в зависимости от уг-
ла наклона поверхности: а) четырехосная машина (1 — расчет по
уравнению (3.40) при ведомых передних колесах; 2 — расчет по
уравнению (3.10) при ведомых передних колесах; 3 — расчет по
уравнению (3.40) при ведущих передних колесах для случая
Фс = 0, 60 = 1; 4 — расчет по уравнению (3.40) при ведущих
передних колесах для случая срс = 0,64, 60 = 3,8; 5 — расчет по
уравнению (3.10) при ведущих передних колесах, О — ось вра-
щения, относительно которой происходит опрокидывание);
б) «Луноход-2» (1 — расчет по уравнению (3.40) при срс = 0,
60 = 1 (вращение относительно точки контакта колеса с по-
верхностью); 2 — расчет по (3.10); 3 — расчет по (3.40) при
фс — (), 60= 1,96 (вращение относительно оси колеса).
На рис. 3.7, б представлены результаты расчета ус-
тойчивости .для «Лунохода-2» при срс = 0 также по
уравнениям (3.10) и (3.40). На этом же рисунке штри-
ховкой показана рабочая зона, выбранная для «Лунохо-
да-2» при эксплуатации его на поверхности Луны. Из
этого рисунка видно, что максимальный угол наклона
поверхности при движении со скоростью 2 км/ч не дол-
жен превышать 27° (расчет по уравнению (3.40)) и 19,8°
(расчет ijo уравнению (3.10)).
232
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Для «Лунохода-2» максимальный рабочий угол по-
верхности а был ограничен 24°, что на 13% меньше, чем
предписывает расчет по уравнению (3.40) (запас устой-
чивости), и на 21% больше, чем расчет по уравнению
(3.10).
3.3.2. Анализ формулы устойчивости при симметрич-
ном ударе. Влияние жесткости системы под-
рессоривания. В уравнении (3.40) последний член,
равный
Av2 =
Jny cni^0i
i=2_________________________
Г________________________________________sin 2<pH cos 2a -j- cos 2cpH
------
1
(«Л!{2+»
(3.42)
характеризует влияние на устойчивость жесткости си-
стемы подрессоривания только в том случае, если перед-
няя подвеска является абсолютно жесткой (cni->°a),
так как процесс потери устойчивости бесподвесочных
планетоходов и планетоходов с заблокированной передней
подвеской начинается сразу с вращения относительно
оси опрокидывания. В тех случаях, когда эта подвеска
обладает конечной жесткостью (cni < °°) — наиболее
реальный случай,— началу блокировки передней под-
вески должна предшествовать некоторая деформация ее
элементов. Поэтому для подрессорных планетоходов про-
цессу вращения относительно оси опрокидывания должен
предшествовать процесс перемещения подрессоренной
части на элементах подвески.
Влияние жесткости системы подрессоривания на ус-
тойчивость рассмотрим в предположении, что центр тя-
жести совпадает с центром упругости и планетоход сим-
метричен относительно поперечной оси, проходящей
через центр тяжести.
Пусть на планетоход с осью вращения, проходящей
через центры передних колес, воздействовал кратковре-
менный импульс S(t) (см. рис. 3.4).
Процесс перемещения планетохода на элементах под-
весок характерен тем, что момент сопротивления поворо-
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
233
ту его относительно центра тяжести возрастает по мере
сжатия упругих элементов подвесок. Поэтому после того,
как на планетоход подействовало внешнее возмущение
(например, сила удара), он будет совершать угловые
перемещения относительно центра тяжести до тех пор,
пока момент сопротивления повороту относительно цент-
ра тяжести Мцт будет оставаться меньшим или равным
моменту сопротивления повороту относительно оси опро-
кидывания т. е. Л/цт < Моп.
Момент сопротивления повороту планетохода относи-
тельно центра тяжести, обусловленный упругостью под-
вески и реактивным моментом Мр, равен М =
п
— S 1 (Д{) + Мр. Момент сопротивления повороту
г=1
относительно оси опрокидывания, обусловленный состав-
ляющей веса Geos а, упругостью подвески и реактивным
моментом Мр, равен
п
Л/оп = Gl\ COS ОС Спг&г (^1 ^i) 1 (Д|) Ч- М^ р.
г=2
Следовательно, до тех пор, пока выполняется условие
п
GcosocJ>2 CniAiT(Ai),
i=l
(3.43)
планетоход будет совершать поворот относительно цент-
ра тяжести на элементах подвески.
Таким образом, процесс потери устойчивости под-
рессоренным планетоходом происходит следующим об-
разом.
В начальный момент времени, пока выполняется ус-
ловие (3.43), планетоход совершает поворот относительно
центра тяжести. Поворот планетохода относительно цент-
ра тяжести сопровождается затратами энергии на дефор-
мацию упругих элементов подвески.
В последующий момент времени, когда неравенство
(3.^3) изменит знак, т. е. превратится в неравенство
1 (Д{) > G cos а, планетоход будет совершать
поворот относительно оси опрокидывания. При повороте
относительно оси опрокидывания система подрессорива-
234
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
ния также оказывает влияние на процесс потери устой-
чивости. На данном этапе система подрессорпвапия ча-
стично возвращает в систему энергию, которая была
затрачена на ее деформацию при повороте планетохода
относительно центра тяжести.
Поэтому если рассмотреть два планетохода, отличаю-
щиеся только тем, что один из них — подрессоренный, а
другой — бесподвесочный, то критическая скорость под-
рессоренного планетохода vK может быть представлена
в виде
+ Ai2T — Аро, (3.44)
где Az;T — приращение скорости за счет упругости систе-
мы подрессоривания при повороте планетохода относи-
тельно центра тяжести в вертикально-продольной плоско--
сти, Дро — приращение скорости за счет влияния упруго-
сти системы подрессоривания на этапе поворота
планетохода относительно оси опрокидывания.
Проведенные рассуждения и уравнение (3.44) пока-
зывают следующее.
Если удар подрессоренного планетохода о непреодо-
лимое препятствие произойдет со скоростью v <Z А^т, то
процесс до опрокидывания не дойдет, так как подведен-
ной энергии будет недостаточно, чтобы началось враще-
ние относительно оси опрокидывания. Очевидно, движе-
ние планетохода с такой скоростью будет устойчиво.
Если удар подобного планетохода произойдет со ско-
ростью v > Дрт, то наступит процесс вращения относи-
тельно оси опрокидывания. В этом случае движение
планетохода будет устойчиво, если его скорость будет
удовлетворять условию v < vK.
Таким образом, чтобы судить об устойчивости подрес-
соренного планетохода, необходимо найти значения при-
ращений скоростей Дрт и Д^о, входящих в уравнение
(3.44).
В частности, для планетоходов с заблокированной
передней подвеской Дрт = 0, а А^о определяется из вы-
ражения (3.42), т. е.
Дк0 = А^.
Для планетоходов, у которых передняя подвеска обла-
дает конечной жесткостью, Др0 с некоторой корректиров-
кой также может быть определено по выражению (3.42),
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
235
а значение Дрт найдено, исходя из закона сохранения
энергии и момента количества движения.
При повороте планетохода относительно центра тяже-
сти энергия, затраченная на упругую деформацию (сжа-
тие) подвесок, расположенных впереди от центра тяже-
сти, определяется выражением
п/2
~2~ 1 (Дг)«
г—1
С другой стороны, кинетическая энергия планетохода,
затраченная на деформацию этих подвесок, составит ве-
личину
~2~ *^Ог/фо?
где Фо —угловая скорость поворота планетохода относи-
тельно поперечной оси, проходящей через центр тяжести.
Если рассеивания энергии не происходит, то справед-
ливо соотношение
п/2 _
i (А г) ~ ^Фо- (3.45)
г-1
Найдем величину поступательной скорости движения
планетохода, достаточной для того, чтобы в случае удара
о непреодолимое препятствие угловая скорость поворота
относительно центра тяжести достигла значения, равного
Фо. Величина этой скорости затратится на упругую де-
формацию передних подвесок и будет тем приращением
которое входит в уравнение (3.44).
Исходя из закона сохранения момента количества
движения, функциональная связь между Д^т и фо может
быть представлена уравнением
/\л\М1г = /oj/фо,
откуда
Фо” —г-----•
•'о?/
Подставляя последнее выражение в (3.45), получим
7— Л'^/2
ItT V ’ (3-46)
г-1
236
ГЛ.3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
где ATi — величина максимальной деформации j-й под-
вески, которая достигается в момент времени, когда не-
равенство (3.43) изменит знак.
Найдем величину этой деформации. Текущая дефор-
мация подвески при малых угловых перемещениях может
быть представлена в виде
Af Aoj ^гфО,
где фо — угол наклона корпуса планетохода относительно
поперечной оси, проходящей через центр тяжести.
Для симметричного планетохода относительно попе-
речной оси последнее соотношение может быть записано
в виде
А G cos а 7
Ai = —-------/гФо-
2 Спг
1=1
Для n-осного симметричного планетохода, пока его
колеса находятся в безотрывном положении с опорной
поверхностью, может быть записано следующее равенство:
п
2 спг (Аог — /гфо) = & COS ОС.
1=1
Так как l\ — —ln, h = —ln-i и т. д., то
п
2 CniAoi = Geos а.
i=l
Отсюда видно, что до тех пор, пока колеса не оторва-
лись от опорной поверхности, выполняется условие (3.43).
Поэтому если все колеса находятся в безотрывном поло-
жении с опорной поверхностью, то поворот планетохода
происходит относительно центра тяжести. Однако после
отрыва заднего колеса от опорной поверхности незначи-
тельная деформация передней подвески, обусловленная
угловым перемещением планетохода фо, приведет к вы-
полнению условия
п—1
G COS ОС СдгАг,
1=1
т. е. начнется процесс поворота относительно оси опро-
кидывания.
§ ^.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 237
\
Следовательно, затрата энергии на деформацию упру-
гих элементов подвески происходит до тех пор, пока угол
наклона планетохода относительно центра тяжести не
превысит значения
G cos а
Тт = ~------- •
lH 6 П2
г=- 1
Тогда максимальная деформация Дтг i-й подвески
определится из соотношения
I-G cos а
. А'г» = п ’
ч X
i
и уравнение (3.46) примет вид
/ п/2
=- gCOnSa V /0!/j (3.47)
lnh X cni i=1
Уравнение (3.47) определяет приращение скорости
подрессоренного планетохода, обусловленное деформа-
цией упругих элементов подвески при повороте его отно-
сительно центра тяжести.
В частности, для двухосного планетохода (3.47) опре-
деляет величину, на которую возрастет критическая ско-
рость подрессоренного планетохода по сравнению с соот-
ветствующей скоростью бесподвесочного планетохода,
так как Д^о = 0.
Поэтому для двухосного планетохода имеем
=^кж + Д^т. (3.48)
Если рассматривается многоосный планетоход, то при
повороте его относительно центра тяжести подвески, рас-
положенные впереди центра тяжести будут сжиматься,
а подвески, расположенные сзади,— разжиматься. Часть
энергии, запасенная передними подвесками при повороте
планетохода относительно центра тяжести, будет возвра-
щена в систему в виде опрокидывающего момента при
повороте планетохода относительно оси опрокидывания.
238 ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ планетохода
Ди0 подрессоренного
планетохода может быть определено по
в последнем вместо До» подстдвить Дог +
Поэтому приращение скорости
многоосного
(3.42), если
+ Атй т. е.
л 2
Дгй=-------------
ьомг-
W)8 2
0,5Jc cni (Aoi AT|)2
i-2______________________________
sin 2(pH cos 2а < cos 2<pH
cos 2фи
Фк
2<Рк
(3.49)
Таким образом, с учетом (3.41), (3.47) и (3.49) урав-
нение для расчета критической скорости многоосного под-
рессоренного планетохода (3.44), выраженное через кон-
структивные параметры и условия его эксплуатации, пре-
образуется к виду
Gl[i — sin (а + фн)] — фсГьСфк —
Рк =
?7— 1
-42
п \ 2'
2 Спг ~ liG C0S а \
1/2
\ lnZcni /
\ 1-1 / -i
X Jc (Л16Л)2{2 + ( cos 2фн - Sin ф"
cos 2а + cos 2фп
Фк
1-1/2
2Фк
g cos а
Уравнение (3.50) получено в предположении, что си-
стема препятствие — колесо — крепление не деформиру-
ется в процессе удара, т. е. является абсолютно жесткой.
Наиболее реальным является случай, когда сх<оо. По-
этому представляет практический интерес количествен-
ная оценка влияния жесткости сх па величину критиче-
ской скорости планетохода.
§ \3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
239
Влияние жесткости системы препятст-
вие—ко же со—крепление. На рис. 3.8, а показано
изменение критической скорости «Лунохода-1» в зависи-
мости от жесткости сх системы препятствие — колесо —
крепление для угла наклона поверхности а = 20°. Отсю-
да видно, что с увеличением жесткости сх критическая
скорость планетохода vK уменьшается, причем наиболее
интенсивное уменьшение критической скорости наблюдает-
ся при изменении сх от 2-Ю4 Н/м до 2-105 Н/м, а при
Рис. 3.8. Изменение критической скорости движения «Лунохода-1»
при ударе о непреодолимое препятствие на уклоне а = 20°:
а) в зависимости от жесткости системы препятствие — колесо —
крепление------ расчет по системе уравнений (3.17),------рас-
чет по уравнению (3.41)), б) в зависимости от ускорения сво-
бодного падения.
сх>2-105 Н/м критическая скорость практически не за-
висит от сх. Поэтому для «Лунохода-1» значение жестко-
сти сх, равное 2-105 Н/м, является предельной величиной,
так как дальнейшее ее увеличение не приводит к суще-
ственному изменению критической скорости по опроки-
дыванию. Количественное влияние жесткости сх на кри-
тическую скорость зависит от условий эксплуатации пла-
нетохода. На рис. 3.8, б показано изменение критической
скорости «Лунохода-1» в зависимости от ускорения сво-
бодного падения g на угле наклона поверхности а =. 20°.
Количественные результаты влияния жесткости си-
стемы препятствие — колесо — крепление, представленные
на рис. 3.8, а, характерны только для данной конструкции
«Лунохода-1». Поэтому, чтобы оценить влияние жестко-
сти системы препятствие — колесо — крепление на устой-
чивость движения планетоходов в более общем случае,
воспользуемся методами теории размерностей и подобия
[14, 48]. Оценку влияния жесткости сх проведем без
240 ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ планетохода^
учета сил тяги, т. е. при PKi = 0. С этой цельно приведем
систему дифференциальных уравнений (3.17) к безраз-
мерному виду. Умножая первое уравнение системы (3.17)
па l/g, а второе на 1/g, после проведения необходимых
преобразований получим ,
- _ 1
ф ~ t г2 sin2 (<рн — ср) Х
7?
( I V FT1 Ji л cos cpl (Д •)
J I2 cos (ос -• фн — ф) ' г'
Х 6о (pg +12)
/ 12 \2
~ Ф 2 , C0S (fP" - ф) -Sin (Ч>Н — Т) —
\ Ру + /
СХ1 / ]2 \ _
— Kg 2 , ,2 х х sin (Ф« - ф) 1 (*) +
°eu \ Ру -г I2 )
j / ]2 \ • 1
+ КГ 2 . ,, KG Sin а ~ SiSn Sin (фп — ф) ’
°0 \Ру ’Г 1 / I
(3.51)
1 1 I I2 \ • / X / ,
=--------------------г -т- -----------sin (фн — ф) cos (а +
t _ ;2Sin2(cp„-(p) | 6„ + р2 у ' и. г/ к
' Р?/
7?
с1_ _ 1 S /7niZiicos(₽sin(<pII-cp) l(Ai)
+ ---------------------------------------------i7-------------------
. 12 COS (<p„ - <p) f t . •
-----~7K~—2------------7“ (S1U а — / cos a signer)
O2 ' Pg) 6°
ф£ * * I/ Jnv ’* x - x
где ср = ср = ср у x = —, x = — — соответст-
венно безразмерные угловое ускорение, угловая скорость,
линейное ускорение центра колеса п деформация этого
колеса.
§'р. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 241
Отсюда > видно, что критическая скорость при сх < оо
зависит от безразмерных комбинаций
Q р ( s '2/пАЖ)
«•«’ р + рГ “,л
Структура последней безразмерной комбинации опре-
деляется характеристикой упругих элементов и кон-
струкцией подвески.
Если ограничиться рассмотрением бесподвесочных
п
планетоходов, то, очевидно, влиянием I Fnilui (Дг)/
г=2
l(gJny) можно пренебречь. Кроме того, влиянием / также
можно пренебречь, так как при отскоке передних колес
от препятствия (х < 0) сила сопротивления Fcx = Gf cos а
создает восстанавливающий момент и тем самым умень-
шает роль опрокидывающего момента, который возникает
при х > 0. Поэтому критическая скорость планетохода
может быть представлена в следующей зависимости:
(.С I 72 j \
(М2)
В уравнении (3.52) первый безразмерный критерий
характеризует влияние на устойчивость жесткости систе-
мы препятствие — колесо — крепление и зависит от гео-
метрических Z, инерционных бо и весовых G характери-
стик планетохода. Второй и последний безразмерные кри-
терии характеризуют влияние инерционности планетохо-
да, причем второй критерий характеризует инерцион-
ность планетохода при вращении его в вертикально-про-
дольной плоскости, а последний — инерционность плане-
тохода, обусловленную вращающимися частями. Третий
и четвертый безразмерные критерии характеризуют вли-
яние на устойчивость геометрических характеристик и
условий эксплуатации планетохода.
Из (3.52) видно, что критическая скорость плането-
хода при < оо зависит от пяти безразмерных комби-
наций. Поэтому задача сводится к определению этой за-
висимости. Чтобы решить эту задачу, надо, например,
16 Е. В. Авотин и др.
242
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
найти зависимость критической скорости рк от безразмер-
с I
ного параметра при разных значениях остальных
безразмерных параметров, входящих в уравнение (3.52),
Однако исследования показывают [6], что для кон-
структивных параметров транспортных машин, которые
реально могут быть воплощены в конструкциях планетохо-
дов, влияние жесткости системы препятствие — колесо —
крепление практически не сказывается на величине
критической скорости. Поэтому приближенную оценку
влияния жесткости системы препятствие — колесо — креп-
ление на критическую скорость найдем из более простой
функциональной зависимости вида
"вс , К + Ру) h <А
Здесь икс — критическая скорость бесподвесочного
планетохода при которая определяется из (3.17),
укф — критическая скорость бесподвесочного планетохода
при сх = оо, которая определяется из (3.41) при фс =
= 0, т. е.
^Кф —- , 9
^иЛ67!1 —sil1 & L чн)]}
sin 2срн cos 2а Н cos 2сри
cos 2ф, ——---------—-------------Г)-----
11 Фк 2ср“
(3.54)
На рис. 3.9 представлены результаты моделирования
устойчивости планетоходов, которые обработаны в соответ-
ствии с выражением (3.53). Иа этом же рисунке нанесена
сплошная кривая, которая с погрешностью до 10% ап-
проксимирует полученные результаты. Параметры и усло-
вия эксплуатации, при которых моделировалась устойчи-
вость планетоходов, варьировались в следующих пределах:
вес G от 1270 до 7000 Н, высота центра тяжести h от
0,4 до 1,0 м, плечо приложения усилий от подвески пе-
реднего колеса 1\ от 0,8 до 4,0 м, момент инерции /оу от
290 до 1320 кг-м2, жесткость системы препятствие — ко-
лесо — крепление сх от 60 000 до 240 000 Н/м, ускорение
свободного падения g от 1,63 до 9,81 м/с2, бо = 1, а = 0,
/ = 0,1.
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 243
Из рис. 3.9 видно, что при ксх > 100 ^Хсд. = сх Gly j
критическая скорость практически не зависит от жест-
кости системы препятствие — колесо — крепление, а при
изменении безразмерного параметра %сх от 20 до 100 при-
ращение критической скорости за счет упругости системы
препятствие — колесо — крепление не превышает 10%.
Рис. 3.9. Влияние жесткости системы препятствие — колесо —
крепление на устойчивость движения бесподвесочных плането-
ходов при а = 0.
Для планетоходов типа «Луноход-1» Хсх > 400, а для
«LRV» %сх > 50. Создание же планетоходов, у которых
безразмерный параметр Хсх был бы меньше 20, вероятно,
является нецелесообразным, так как при прочих равных
условиях это приведет к разработке колеса со значитель-
ной податливостью в радиальном направлении; увеличе-
ние же радиальной податливости колеса неизбежно свя-
зано с соответствующим увеличением податливости колеса
в боковом направлении. Это, в свою очередь, вызовет
снижение подвижности машин в режиме поворота.
Поэтому при рассмотрении устойчивости влиянием
жесткости системы препятствие — колесо — крепление
можно пренебречь и в практических расчетах пользовать-
ся формулой (3.50).
16*
244
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
3.3.3. Удар о непреодолимое препятствие одним коле-
сом (асимметричный удар). Асимметричный удар может
произойти при наезде планетохода одним колесом на ка-
мень, валун, ступенчатое препятствие. Удар о непреодо-
лимое препятствие одним колесом с точки зрения про-
дольного опрокидывания является менее опасным случаем
по сравнению с ударом двумя колесами одновременно.
Это объясняется тем, что некоторая часть энергии при
ударе одним колесом затрачивается на разворот плането-
хода относительно вертикальной оси.
Найдем величину этой энергии. Энергия, затраченная
на разворот, может быть определена следующим образом.
Перед началом удара планетоход движется со ско-
ростью и, поэтому обладает моментом количества движе-
ния В процессе удара момент количества движе-
ния планетохода может быть представлен в виде
t
-у- Мх±В + J±G 4- B^Fpdt, где xi — линейная скорость оси
о
переднего колеса, Л — момент инерции планетохода от-
носительно вертикальной оси, проходящей через точку
соударения колеса с пре-
пятствием (рис. 3.10), 9 —
угловая скорость относи-
тельно вертикальной оси.
Если предположить,
В
что расстояние — не из-
меняется, то скорость пла-
нетохода на расстоянии
в
от осевой линии опре-
делится из соотношения
х± — х---ВО. (3.55)
Рис. 3.10. Расчетная схема при
ударе о непреодолимое препят-
ствие одним колесом.
Тогда, в силу закона сохранения момента количества
движения, получим
t
= ^-М^В + JXQ + В Fpdt, (3.56)
о
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
245
где Fp — сила сопротивления, препятствующая развороту
планетохода.
Отсюда, с учетом (3.55), найдем
t
-L-MB(v -х + ± + В $ Fvdt-,
' 'О
(3.57)
здесь х — скорость центра тяжести.
Уравнение (3.57) связывает время разворота t, угло-
вую 0 и линейную х скорости планетохода и остает-
ся справедливым с момента начала удара и до его за-
вершения.
Обозначим через рв радиус инерции планетохода отно-
сительно вертикальной оси, проходящей через центр тя-
жести, и выразим момент инерции планетохода /1 через
радиус инерции рв и геометрические параметры, т. е.
Л = м(р1+/? + 4в2
(3.58)
Тогда энергия, затраченная на вращение планетохода,
определится из соотношения
Ев = 4 М (р2в + + 4 В2) Ок, (3.59)
где 0К — угловая скорость вращения планетохода в мо-
мент завершения удара.
Значение угловой скорости 0К может быть определено
из (3.56) при -у В0 — х = 0, так как момент количества
движения перед началом удара равен а после его
завершения — 710к. Поэтому справедливо соотношение
\ М V В В С р I .
«=177=77 J Fod‘-
(3.60)
и выражение для Ев примет вид
£в=4^еМу2, (3.61)
246
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЙ ПЛАНЕТОХОДА
В2
рЬи?
_1_
4
Коэффициент К& определяет долю энергии от общей
энергии планетохода, которая затрачивается на вращение
его относительно вертикальной оси. Если предположить,
что Fp = 0, то применительно к «Луноходу-1» коэффици-
ент KQ = 0,35. Таким образом, если силы сопротивления
незначительны и ими можно пренебречь, то при наезде
«Луноходом-1» на непреодолимое препятствие одним ко-
лесом около 35% полной энергии удара, преобразуется в
энергию вращения.
При наличии сил сопротивления, т. е. когда Fp =/=0,
кроме затрат энергии на вращение планетохода, появятся
дополнительные затраты энергии ДЕВ на преодоление со-
противления Fp. Эти затраты могут быть определены из
соотношения
0к
Д Еп = В [ Fpd0,
б
где 0К — угол, на который развернется планетоход после
столкновения с препятствием. Поэтому с точки зрения
устойчивости наиболее опасным случаем является наезд
на препятствия двумя колесами одновременно, хотя этот
случай является менее вероятным по сравнению с возмож-
ностью наезда на непреодолимое препятствие одним
колесом.
3.3.4. Торможение. Процесс потери устойчивости при
торможении во многом подобен процессу потери устойчи-
вости при ударе о непреодолимое препятствие.
Различия в процессах заключаются в том, что при
торможении внешнее возмущение приложено к ободу ко-
леса, поэтому потеря устойчивости может происходить
только относительно оси опрокидывания, проходящей
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 247
через точки контакта передних колес с опорной поверх-
ностью.
Следовательно, вывод уравнений движения планетохо-
да при торможении подобен тому, который был проведен
для случая удара о непреодолимое препятствие. Различие
состоит в том, что при торможении вместо геометрического
параметра h подставляется величина Н (высота центра
тяжести планетохода) и вместо силы удара Руд — силы
торможения 2?xi, приложенные к соответствующим коле-
сам. Кроме того, при торможении тяговые силы отсутст-
вуют, поэтому реактивный момент Мр = 0.
Рис. 3.11. Динамическая модель, характеризующая потерю ус-
тойчивости при торможении:-------перед началом торможения.
----- в процессе торможения.
Рассмотрим процесс потери устойчивости планетохода
при торможении в предположении, что торможение про-
исходит на ровной поверхности без поперечного наклона,
передняя подвеска является абсолютно жесткой, иепод-
рессоренные массы сосредоточены в центре тяжести пла-
нетохода. Динамическая схема, положенная в основу ис-
следования устойчивости, показана на рис. 3.11.
Применяя уравнение Лагранжа 2-го рода, получим
следующую систему дифференциальных уравнений, опи-
сывающих динамику планетохода при вращении относи-
248
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
тельно оси опрокидывания:
Ф = т-----с • 9?--------г [Gl cos (а + Фп — ф) —
Jny — sin (Фн - О’) I v r
n
— X Fnihi cos ф1 (Ai) — 60MZ2(p2cos (cp„ —гр) sin (<pH — cp) —
i—2
n
S Rxii (Ai) — G sin а + FC3C
i=l
Zsin(<pH — ф)
(3.62)
•• 1 (Г
Я = "7----------с Л/ГТ9 . 9/-------------; Gl cos (а + фн — ф) —
Juy - 60MZ2 sin2((pH - Ф) \ I TH
— 2 Fnilii cos ф! (A i) I sin (cpH — ф) +
г=2 J 1V1 °0
G sin а —
n
— 60MIff2 cos (ф„ — ф) — 2 RxiX (Ai) — Fcx
1=1
Будем предполагать, что к моменту начала торможе-
ния планетоход не выведен из статического состояния
равновесия. Тогда система дифференциальных уравнений
(3.62) должна подчиняться начальным условиям
ф(0)=0, <р(0)=0, я(0) =0, х(0) = v. (3.63)
В системе (3.62) под символом Rxi понимается тормоз-
ная сила, приложенная к i-му колесу, которая вводится
соотношением
l-Rxij Rxi^tycRnii
1фс-^Тпг? Rxi> фс^пЬ
n
a Fni = G cos a — 2 Т'пД (Аг) — усилие в передней под-
г=2
веске.
Кроме того, в уравнениях (3.62) I2 = + Н2 и фн =
= arctg—. Остальные обозначения в (3.62) совпадают
с обозначениями, введенными при исследовании устойчи-
вости в случае удара о непреодолимое препятствие.
Система уравнений (3.62), так же как и (3.17), явля-
ется существенно нелинейной. Рассмотрим ее решение в
одном частном случае.
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
249
Пусть тормозные силы Rxi полностью реализуются по
сцеплению, т. е. Rxi С cpcFni. Далее тормозные силы Rxi
выберем такими, чтобы за время торможения планетохо-
да tT угол его наклона ср (£т) —> 0. В этих предположениях
докажем, что при изменении t е [0, £т] справедливо соот-
ношение
п
Gl cos (а + фн) — 2 Рщ1ц = 0.
i=2
(3.64)
При торможении, так же как и в случае удара, про-
цесс потери устойчивости может быть разбит на две
фазы: фаза потери скорости (торможение) и фаза опро-
кидывания.
На первой фазе происходит интенсивное уменьшение
скорости, при этом планетоход по угловым перемещениям
сохраняет статическое положение, т. е. <р = ф(О) = 0.
Однако угловая скорость возрастает до некоторого макси-
мального значения.
Во второй фазе под действием импульса момента, ко-
торый воздействовал на планетоход в первой фазе, начи-
нается вращение планетохода относительно оси опрокиды-
вания. Поэтому по величине угла наклона, которого
достигнет планетоход во второй фазе, можно судить об
устойчивости или неустойчивости процесса торможения
с заданной скоростью и.
На рис. 3.12 показано изменение динамических пара-
метров «Лунохода-1» в процессе его торможения на ну-
левом уклоне с начальной скоростью v = 1,21 м/с. Отсю-
да видно, что при торможении с данной скоростью «Лу-
ноход-1» не теряет устойчивости, т. е. не опрокидывается.
При этом максимальный угол наклона составляет минус
0,6 рад, что соответствует 23 %-ному запасу устойчивости
лунохода.
Первая фаза. Обоснуем формулу (3.64). Так как
перед началом торможения планетоход находился в ста-
тическом положении, то условие (3.64) равносильно
еле дующему:
2 Рык — G-H sin а = 0.
г=1
50
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Так как при изменении t от 0 до tr планетоход не из-
менил своего положения относительно положения, кото-
рое он занимал до начала торможения, то усилия в рес-
сорах Fni в момент времени t = равны соответствующим
Рис. 3.12. Изменение динамических параметров «Лунохода-1» при
торможении на нулевом уклоне с начальной скоростью v =
= 1,21 м/с, / = 0,2 и g = 1,63 м/с2---- угол наклона ф, — • —
угловая скорость ф,—О — тормозной путь х,-----------скорость
движения х, £т — промежуток времени, в течение которого про-
исходит интенсивное уменьшение скорости).
усилиям в момент времени t = 0, т. е.
^пг(^т) =^пг(0).
Уравнение (3.64) может быть преобразовано к виду
GZiCosa — GTTsina — 2 = 0, ie [0, £т]. (3.65)
г=2
п
Очевидно, G cos а = 2 rni.
i=t
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
251
Подставляя последнее соотношение в (3.65), получим
11 2 Fai + 2 Fnili - Zx 2 Fni - GH sin a = 0. (3.66)
г=2 г=^2
После соответствующих преобразований выражение
(3.66) примет вид
2 РщЦ — GH sin a = 0.
г=1
Таким образом, соотношение (3.64) доказано, поэтому
в интервале времени t [0, tT] система (3.62) предста-
вима в виде
X 7?«i’(Ai)-Gsina + /',cx
ф d0MZ^2 . г~1 ____________________________
я - /пу - 6оМЯ2 + Jny - б0МЯ* ’
\О.0 /)
2 7W(Ai)-Gsina--^cx
do-Л^з? брА/^ф- । г—1
ХГ = /п//- б0мя2 •+ уп^ —б0мя2 *
Отсюда
60МН - п
Ф----j—х — 0.
Интегрируя последнее уравнение при [0, £т],
найдем
Ф (М = А— [ж (М — И, ф (М = —г— 1х (*т) — vM,
Jиу Jпу
(3.68)
где x(tr), x(tr) — скорость и тормозной путь планетохода
в конце процесса торможения, т. е. в момент времени
t = tT.
Из второго уравнения системы (3.68) видно, что при-
нятое выше предположение ф(£т) ►= 0 выполняется только
при £т->0 и x(tT)-+0. Последнему условию удовлетворя-
ет, например, тормозная сила вида
R*i = kiX при .(3.69)
252
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Действительно, подставим ср из первого уравнения
(3.68) во второе уравнение системы (3.67), получим
х + ах2 — | 2av — Ъ 2 ki | х — с, (3.70)
\ г=1 /
где
_ &йм2нч± jny
60M(JBy-80MHy
с — Juv 8Ш “ ~ Fcx^ — av2
С-60М(7пу-50ШР) aV
Линеаризуя в уравнении (3.70) нелинейный член х2 по
формуле (3.26), получим
х-]-пхх = с, (3.71)
где
п
пх = офх + Ъ ^ki — 2av, рж = v.
i=l
Решение последнего уравнения имеет вид
X (t) = (v — -^exp (— nxt) +
\ nx ) nx
I c V\ c (3-72)
x — 7Г I texP +т~л
\ x / x
Отсюда видно, что для любого бесконечно малого зна-
чения t = t?, такого, что tT =^= 0, но tT -> 0,
lim x(t)=0, lim x(t) = Q. (3.73)
fe{->oo
£—>0 t—^trp—>0
Таким образом, если торможение происходит под дей-
ствием тормозных сил вида (3.69), то вследствие инерци-
онности планетохода он не может быть выведен из состо-
яния равновесия по угловым перемещениям за бесконечно
малый промежуток времени t = tr действия тормозных сил.
Поэтому из (3.68) имеем
ф (М = - V,- ф (tT) = о. (3.74)
Jny
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ 253
Из сравнения выражений (3.34) и (3.74) видно, что
угловая скорость планетохода в момент отрыва передних
колес от соударяемого препятствия в два раза больше
угловой скорости планетохода в момент окончания про-
цесса торможения. Объясняется это тем, что импульс си-
лы в случае удара в два раза больше, чем при торможении.
Импульсы сил в случае удара о непреодолимое пре-
пятствие и торможения имеют вид соответственно
г (* п
Sy = J Руд (t) dt, ST — J 2 Rxi (t) dt, (3.75)
о 0 i=1
Рассмотрим процесс удара и торможения без учета
угловых колебаний и силы сопротивления при бо = 1.
Тогда упрощенные дифференциальные уравнения, опи-
сывающие поступательные перемещения при ударе ху
и торможении ят, имеют вид
> *у 1 (ху) = 0, хт + г м хт = 0 (3.76)
с начальными условиями яу(0) =ят(0) =0, £у(0) =
п . п
= д:т(0) = v, где схху — РД1 2 = 2 Pxi- Решения
г=1 г—1
уравнений (3.76) запишутся в виде
Ху
хт (t) = v exp
J Ki I
^4
t
(3.77)
Подставим последние уравнения в (3.75) и после
преобразований получим
*у ________
Sy = 1/cxMv j sin 1 f t dt,
о *
n \
ki \
l~ir~ у dt-
(3.78)
254
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Из уравнений (3.77) найдем пределы интегрирова-
ния ty и tT из условий ^у(^) = О, £Т(ЛГ) = 0, т. е. ty =
—Л 1 f оо,
У
Подставляя эти значения в выражение (3.78) и про-
ведя интегрирование, найдем
5У — 2Mv, ST = М о,
т. е. действительно Sy = 25т.
В табл. 3.4 представлено изменение импульсов сил
удара Sy и торможения в зависимости от жесткости
сх системы препятствие — колесо — крепление и суммар-
п
ной жесткости тормоза 2 рассчитанных по систе-
г = 1
мам уравнений (3.17) и (3.62) для параметров «Луно-
хода-1» при v — 2 км/ч.
ТАБЛИЦА 3.4
Изменение величины импульсов удара и торможения
в зависимости от жесткости соударяемых колес и тормозов
сх, Н/м 10 000 100 000 1 000 000 10 000 000
5 у, Н • м 1 740 1 800 1 860 1 860
П Н«с i=i м 10 000 100 000 1 000 000 10 000 000
5т, Н»м 1 200 950 920 920
5у—25т, Н-м —660 —100 -20 —20
п
Отсюда видно, что с увеличением сх и S Ац разность
г=1
(5У — 25т)->0. Значительная разница при малых зна-
п
чениях 2 к* и сх между Sy и 25т объясняется тем, что
г=1
на величины импульсов начинает сказываться отрыв ко-
лес от опорной поверхности. При больших значениях
этих величин колеса планетохода не успевают оторвать-
ся от опорной поверхности, прежде чем отскочат от со-
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
255
ударяемой стенки (случай удара о непреодолимое пре-
пятствие) или закончится процесс торможения (т. е.
скорость колес планетохода х обратится в нуль).
Таким образом, если тормозные силы Rxi таковы, что
под их действием торможение планетохода происходит
практически мгновенно, т. е. при t -> 0, то в этом
случае в момент окончания процесса торможения t? пла-
нетоход сохраняет статическое положение ф(^т)=0, а уг-
ловая скорость последнего достигает значения ф(£т), ко-
торое определяется из уравнения (3.74). Значения
угловой скорости и угла наклона планетохода в момент
времени £ = используются в качестве начальных дан-
ных при исследовании устойчивости во второй фазе.
Вторая фаза. В общем случае устойчивость дви-
жения планетохода при торможении описывается си-
стемой дифференциальных уравнений (3.62), которая,
в частности, остается справедливой и при t^>tT. Однако
для аналититического исследования эта система является
достаточно сложной, поэтому сделаем некоторые упроще-
ния. Так как к моменту времени t=tT планетоход нахо-
дится практически в заторможенном состоянии (я(£т) ->
0), то можно предположить, что и в последующий мо-
мент времени t > £т его скорость будет близка к нулю.
Поэтому при t > t? приближенная динамическая модель,
отражающая потерю устойчивости планетохода, может
быть представлена в виде жесткого стержня с сосредото-
ченной массой, вращение которого происходит относитель-
но неподвижной точки (рис. 3.13). При этом необходимо
положить х = 0.
В этих предположениях из (3.62) получим следующее
дифференциальное уравнение движения планетохода во
второй фазе
Ф = Gl cos (а + фп — ср) — 2 Fnilti 1 (Aj) cos ср .
(3.79)
Уравнение (3.79) удовлетворяет начальным условиям
(3.74).
2Б6
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Рассматривая первый интеграл уравнения (3.79) при
ср е [0, ср3] и принимая во внимание начальные условия
(3.74), найдем следующее выражение для расчета скоро-
сти движения планетохода, при которой в случае тормо-
жения угол наклона не превысит значения, равного ф3,
т. е.
фз
У2 = _ 2/п?_- f
0 О
Gl cos (а + фн — ф) —
п
— S Fnilii 1 (Aj) cos ф
2=2
йф,
(3.80)
где ф3 — любой наперед заданный угол наклона корпуса
планетохода.
Рис. 3.13. Приближенная динамическая модель планетохода при
торможении во второй фазе опрокидывания.
В частности, ограничивая ф3 критическим углом на-
клона в вертикально-продольной плоскости фк и пренебре-
гая усилиями в рессорах, из (3.80) получим следующий
критерий для расчета критической скорости движения
бесподвесочного планетохода:
]Z2^Z[1-Sin(a + (₽H)1- (3,81)
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
257
Критический угол наклона в вертикально-продольной
плоскости в данном случае определяется соотношением
. к
фк = а — arctg-g-.
При наличии системы подрессоривания, так же как и
в случае удара о непреодолимое препятствие, при тормо-
жении часть энергии будет израсходована на деформацию
упругих элементов подвески. Поэтому критическая ско-
рость с учетом системы подрессоривания при торможении
будет несколько больше, чем это предписывает уравнение
(3.81).
Величина скорости, которая затрачивается на дефор-
мацию упругих элементов подвески при торможении Др,
определяется аналогично случаю удара о непреодолимое!
препятствие, т. е.
Др — Д рт + Дро. (3.82)
Г п/2
Здесь Дрт =------££oso 1/ — приращение
'=2
г—1
критической скорости, обусловленное влиянием системы
подрессоривания на процесс опрокидывания при враще-
нии планетохода относительно центра тяжести,
Ар2 =---------:--------
(МЯ60)2 2+-^г-
п—1
0.5Z-1 J2ny cni (Д0г— Дтг)2
г=2
sin 2ф„ cos 2а + cos 2<р„
cos2<pH — —----------------------------
н Фи 2<р2
— приращение критической скорости, обусловленное вли-
янием системы подрессоривания при вращении плането-
хода относительно оси опрокидывания.
Поэтому с учетом (3.81) и (3.82) критическая ско-
рость подрессоренного планетохода через его конструк-
тивные параметры и условия эксплуатации может быть
представлена в виде
Рк = икж + Ар.
Уравнение (3.81) получено в предположении, что
остановка планетохода происходит мгновенно, т. е. потерь
энергии на торможение не происходит.
1^ Е. В. Авотин и др.
258
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
В табл. 3.5 для двухосного планетохода сравнивают-
ся результаты расчета по уравнению (3.81) с данными
решения системы уравнений (3.62) на ЭВМ при g =
2
= 1,63 м/с2, Rxi = ktx, 2^ki= 2400 Н-с/м.
г = 1
ТАБЛИЦА 3.5
Сравнение результатов расчета по уравнению (3.81)
с данными решения системы уравнений (3.62) на ЭВМ
G, н J0yf кг-м2 Н, м 0,м а, град Фк, град V к по (3.81) vK на ЭВМ
0 54,5 2,62 2,65
1750 650 0,6 0,85 20 34,5 1,70 1,74
30 24,5 1,22 1,30
0 38,5 1,85 1,90
1300 1,5 1,2 20 18,5 0,85 1,00
30 8,5 0,42 0,50
0 38,5 1,56 1,68
3500 650 1,5 1,2 20 18,5 0,78 0,85
30 8,5 0,37 0,53
Хорошее совпадение результатов расчета, представлен-
ных в этой таблице, объясняется тем, что практически вся
кинетическая энергия, которой обладал планетоход перед
началом торможения, затрачивается только на опрокиды-
вание. Однако в реальных условиях эксплуатации мгно-
венно остановить планетоход невозможно, поэтому неиз-
бежны потери энергии при буксовании элементов тормоз-
ной системы и при наличии юза заторможенных колес.
Последнее приведет к тому, что критическая скорость
планетохода в реальных условиях эксплуатации будет
несколько больше, чем это вытекает из уравнения (3.81).
Подобная точность расчета по уравнению (3.81) может
п
быть только при очень большой жесткости тормоза
г= 1
и полной реализации тормозной силы по сцеплению.
Степень увеличения критической скорости по сравне-
нию с расчетом по уравнению (3.81) зависит от многих
факторов. Среди них можно выделить следующие: коли-
чество заторможенных колес, способ торможения и вид
§ 3.3. ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
259
тормозных усилий, а также сцепные характеристики ко-
лес с опорной поверхностью.
При выводе системы дифференциальных уравнений
(3.62) не накладывалось никаких ограничений на коли-
чество заторможенных колес, вид тормозных усилий,
способ торможения и сцепные характеристики колес с
опорной поверхностью. Поэтому по этой системе, при
необходимости, может быть определена критическая ско-
рость, а следовательно и ее приращение, относительно
соответствующей скорости, рассчитанной по уравнению
(3.81), с учетом различных особенностей (факторов)
планетохода.
Осветить в данном случае влияние различных факто-
ров на устойчивость планетохода не представляется воз-
можным, так как в зависимости от целей, назначений и
особенностей разрабатываемого планетохода может быть
применено множество способов торможения (механиче-
ское, электродинамическое, гидродинамическое, комби-
нированное и т. д.) с различным видом тормозных уси-
лий (RXi = const, Rxi = Rxi = kiX2, Rxi = const + kiX
и т. д.). Поэтому в дальнейшем при рассмотрении устой-
чивости планетохода будем предполагать, что его тормо-
жение происходит под действием тормозной силы вида
RXi = к{х, кг = const.
В табл. 3.6 представлено влияние жесткости тормоз-
2
ной характеристики 2 ^ki на величину критической ско-
г=1
рости при условии, что тормозные силы полностью реа-
лизуются по сцеплению, т. е. RXi < фсЛн. Расчеты, пред-
ставленные в табл. 3.6, проводились при g = 1,63 м/с2,
Н = 0,72 м, h = 0,72 м, JOy = 650 кг-м2, G = 1750 Н,
Сп1 = Сп2*=1Сп.-з = сп4 — 16 600 Н/м.
Из этой таблицы видно, что с уменьшением жесткости
тормоза 2 2 кг точность расчетов по уравнению (3.81 V
уменьшается, причем погрешность расчета может дости-
2
гать 100% и более. Однако с увеличением 2 У, А^расхож-
17*
260
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
дения в расчетах уменьшаются, и начиная с некоторого
2
значения кп = 2 2 ki, расхождений практически нет,
г=1
т. е. при достижении жесткостью тормоза значения, рав-
ного 24 000 Н-с/м, критическая скорость бесподвесочного
планетохода достигает своего минимального значения,
которое определяется уравнением (3.81). В дальнейшем
под символом кп будет пониматься такое предельное зна-
чение жесткости тормоза, при котором критическая ско-
рость достигнет минимального значения.
ТАБЛИЦА 3.6
Сравнение значений критической скорости
при торможении, рассчитанных по уравнению (3.81),
с результатами расчета на ЭВМ в зависимости
от суммарной жесткости тормоза
2 г=1 1>к, м/с при а=0° V , м/с к при а=20° Расчет
980 3,65 2,08 на ЭВМ
1,80 1,00 по уравнению (3.81)
1 920 2,50 1,38 на ЭВМ
1,80 1,00 по уравнению (3.81)
И 700 1,94 1,13 на ЭВМ
1,80 1,00 по уравнению (3.81)
24 000 1,87 1,06 на ЭВМ
1,80 1,00 по уравнению (3.81)
48 000 1,80 1,00 на ЭВМ
1,80 1,00 по уравнению (3.81)
Найдем некоторые количественные критерии влияния
суммарной жесткости тормоза на критическую скорость
бесподвесочного планетохода в более общем случае. С этой
целью, как и в случае удара о непреодолимое препятст-
вие, приведем систему дифференциальных уравнений
(3.62) к безразмерному виду путем умножения первого
ее уравнения на Z/g, а второго — на 1/g.
§ 3.3 ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
261
С учетом сказанного найдем
Ф = —Wfrt ! сю (“ + -
1S Лнгнт(дг)со8(р
__ i=2_____________
g^ny
xsinfa —cp) — ——
\ h / + P|
(I2 \ 2 •
——-2 Ф2 COS (фн - <p) X
1 + Ру/
Z3/2 2 M(M -
—;..2_ - Х8т(фн-ф) +
У Оо^^пу
do /2 + p2 ' ' •
77 1 ( 1 / I2 \
x~—Р31П-(Ф„-Ф) k тпд с°5(а + ф.-ф)х
i2+p£
n
1 S ЛнМ1 (Ai) cos ф sin (Фн - Ф)
хзт(фн-ф)--^----------j-----------
р -г 13/2i МОМ -
--------5 Фа cos (<Р„ — ф)---\ 1 ---- X 4-
<2 + рГ Р.64У
1 1
+ -г- (sin а — / cos а) I ?
Оо J,J
-
где х = ---------безразмерная скорость.
у OqUtL0
При рассмотрении этих уравнений можно заметить,
что критическая скорость планетохода зависит от следу-
ющих безразмерных комбинаций:
г3/22*< р „
1=1 ___12 Н f я i=2
V^GJny' lt + p2' h’ a’ °” gJny
262
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Последняя безразмерная комбинация показывает, что
в общем случае влияние суммарной жесткости тормоза
на устойчивость планетохода связано с характеристикой
системы подрессоривания.
Сделанный вывод является достаточно очевидным, так
как чем «мягче» характеристика упругого элемента под-
вески, тем больший промежуток времени колесо нахо-
дится в контакте с опорной поверхностью и, следователь-
но, тем больший импульс силы от тормоза £<го колеса
передастся на корпус планетохода. В дальнейшем огра-
ничимся исследованием устойчивости только бесподве-
сочных планетоходов при условии, что sin а = f cos а.
Поэтому критическая скорость планетохода может быть
представлена в виде
/ i3/2 s h I
vK = /l —feU-, —!—<н б I (3 83)
'\У«о^П1Л Z1 V
В уравнении (3.83) первая безразмерная комбинация
характеризует влияние жесткости тормоза на устойчи-
вость планетохода, остальные безразмерные комбинации
имеют тот же физический смысл, что и в (3.52).
п
Из (3.83) следует, что при S К 00 это выражение
г=1
определяет критическую скорость бесподвесочного
планетохода, скорость которого под действием тормозных
сил мгновенно обращается в нуль. Очевидно, скорость
ркж определяется соотношением (3.81). Найти оценочный
критерий влияния жесткости тормоза на устойчивость
планетохода в явном виде по (3.83) достаточно затрудни-
тельно. Поэтому рассмотрим влияние жесткости тормоза
только для двухосных машин, причем исследование про-
ведем, пользуясь следующим упрощенным соотноше-
нием :
г=^\ н
а, 60
(3.84)
§ 3.3 ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
263
Здесь рк — критическая скорость планетохода при
2
2 2 — критическая скорость планетохода при
г=1
2
2 2 “* °°» определяемая соотношением (3.81).
г—1
На рис. 3.14 и 3.15 представлены результаты модели-
рования устойчивости планетохода на ЭВМ, которые обра-
ботаны в соответствии с выражением (3.84). Исследова-
ния проводились на ЭВМ по системе уравнений (3.62)
Рис. 3.14. Влияние жесткости тормозной характеристики на ус-
Н
тойчивость движения бесподвесочного планетохода при у = 0,5;
— • — а = 0, —х— а = 20°, — о— а = 30°.
в широком диапазоне изменения конструктивных пара-
метров и условий эксплуатации. При этом вес G изменял-
ся от 1200 до 3500 Н, высота центра тяжести Н от 0,6
до 1,5 м, момент инерции /оу от 600 до 1320 кг-м2, плечо
приложения усилий от передней подвески 1\ от 0,8 до
1,2 м, угол наклона поверхности а от 0 до 30 град, сум-
п
марная жесткость тормоза 2 от 1000 до 24 000 Н* с/м,
г=1
ускорение свободного падения g от 1,63 до 9,81 м/с2;
/=0,2; 60= 1.
Из рис. 3.14 и 3.15 видно, что все кривые с увеличе-
нием безразмерного параметра Хк = - 2 У
264 1’Л.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
6) Г
Рис. 3.15. Влияние жесткости тормозной характеристики на
Я
устойчивость движения оесподвесочного планетохода: а) ~~г~ =
Н
= 0,7, б) -£- = 2,25, (-----а = 0, —х—а = 20°, —о^а =30°).
§ 3.3 ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
265
монотонно убывают и приближаются к единице. Однако в
Н
зависимости от отношения -г- и угла наклона поверхно-
сти а значения безразмерного параметра Хк, при котором
кривые достаточно близко приблизились к единице, раз-
личны. Значение безразмерного параметра %к, при кото-
ром кривые приближаются к единице, является критери-
ем независимости критической скорости планетохода от
жесткости тормоза.
Так, для отношения — = 0,7, а = 0, бо = 1 при
2 1
(Z2 + Ру) 2 2 12 (ISqGJпу) критическая скорость
i=i
планетохода не зависит от жесткости тормоза.
Результаты, представленные на рис. 3.14 и 3.15, пока-
зывают, во сколько раз критическая скорость бесподве-
сочного планетохода с заданной жесткостью тормозов
больше соответствующей скорости такого же планетохо-
2
да, у которого 2 2 kt~*- 00 • Поэтому критическая ско-
4=1
рость планетохода с учетом жесткости тормозной харак-
теристики может быть определена из следующего соот-
ношения:
где
(Р + р2)22^
_____4=1
V^y
(Р + р2)2 2^
4=1
Н я
7? а, 6в
(3.85)
определяется по гра-
Н я
7? “> s°
фикам рис. 3.14 и 3.15 и характеризует степень влияния
на устойчивость планетохода жесткости тормоза. Крите-
рий (3.85) с достаточной для практики инженерной точ-
ностью может быть использован для расчета критической
скорости планетоходов с числом осей более двух.
Учитывая уравнение (3.82), которое определяет при-
ращение критической скорости планетохода за счет жест-
кости системы подрессоривания, получим критерий для
266
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
расчета устойчивости планетоходов в более общем случае
С8 + р?)2 2*1
г=1
+ Др.
(3.86)
Н х
7Г- б»
Результаты, представленные на рис. 3.14 и 3.15 и
обобщенные формулой (3.85), получены в предположе-
нии, что тормозные силы полностью реализуются по
сцеплению. Поэтому если условия эксплуатации таковы,
что тормозная сила по сцеплению не обеспечивает реа-
лизацию тормозного усилия, заложенного в данной
конструкции планетохода, то устойчивость последнего,
рассчитанная по уравнениям (3.86), будет несколько за-
нижена по сравнению с действительностью. При этом
занижение будет тем больше, чем меньше значение
коэффициента по сцеплению <рс (рис. 3.16).
Во втором квадранте рис. 3.16 показана зависимость
критической скорости «Лунохода-1» от коэффициента
сцепления фс на уклоне а = 24°. В первом квадранте
этого рисунка показано изменение критической скорости
«Лунохода-1» в зависимости от угла наклона поверхно-
сти. Результаты, представленные в первом квадранте,
получены при условии, что тормозные силы полностью
реализуются по сцеплению. Из этого рисунка видно, что
при фс > 0,8 критическая скорость практически не зави-
сит от коэффициента сцепления. Однако, если фс < 0,8,
го на величине критической скорости начинает сказы-
ваться сцепление колес с грунтом, причем при фс = 0,7
«Луноход-1» сохраняет устойчивость при торможении
на уклоне 24° при любой скорости и. Таким образом, если
сцепные характеристики грунта заранее известны, то
критическую скорость необходимо рассчитывать с учетом
коэффициентов сцепления фс и качения /. Эти расче-
ты могут быть выполнены по системе уравнений (3.62)
на ЭВМ.
3.3.5. Разгон. Наиболее опасным случаем при разгоне
планетохода с точки зрения устойчивости является его
движение на подъем. Так как разгон планетохода проис-
ходит с использованием сил тяги, то при разгоне потеря
устойчивости может происходить только относительно оси
§ 3.3 ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
267
опрокидывания, проходящей через точки контакта зад-
них колес с опорной поверхностью.
Рассмотрим случай ускоренного прямолинейного
движения планетохода на подъем (рис. 3.17). Разгон
рассмотрим в предположении, что подвеска задних колес
Рис. 3.16. Влияние сцепных характеристик колес с опорной по-
верхностью (рс на устойчивость «Лунохода-1» (zT — тормозной
путь к моменту времени, когда угол наклона планетохода до-
стигает критического значения по опрокидыванию).
является абсолютно жесткой. При выводе уравнений дви-
жения планетохода применим уравнение Лагранжа 2-го
Рода.
Рассматривая вращение планетохода относительно
оси опрокидывания, проходящей через точку В, найдем
следующие выражения для расчета перемещений и
268
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
скоростей центра тяжести (рис. 3.17):
хп = х — Z[cos фн — cos(<pH +<р)], хи = х — Z<p sin((pH + ф),
Zn = Z[sin (фн + ф) — sin фн] , 2П = COS (фн + ф) ;
здесь I = ]/~Zn + я2’ Фн = arctg
Найдем скорость центра тяжести v с учетом верти-
кальных и горизонтальных перемещений планетохода,
Рис. 3.17. Динамическая модель планетохода при разгоне на
подъем (---------перед началом разгона, — в процессе
разгона).
а также выражения для потенциальной энергии П и
обобщенных сил Q. Принимая во внимание последние
соотношения для zn, zn, хП1 получим
v2 = х2 + Z2(p2 — 2xq> I sin (фн + ф).
Тогда кинетическая энергия системы определится из
выражения
Т = /вдф2 — 60Ma:<pZsin(cpH + <р),
где Jny — момент инерции планетохода относительно по-
§ 3.3 ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
269
перечной оси опрокидывания, проходящей через точку
В (рис. 3.17). Выражения для потенциальной энергии П
и обобщенных сил имеют вид
п
П — 4 У cos а,
г=2
Qv = Gl sin а sin (<рн + q>) -f- PBlB sin (срв + ф)>
n
Qx ~ — G sin а + 2 Pкг — Pв Pcxi
i— 1
где PB = kFx2 — сила сопротивления атмосферы, kF —
фактор сопротивления атмосферы, определяющий зави-
симость силы сопротивления от размеров и формы пла-
нетохода, F — лобовая площадь планетохода, к — коэффи-
циент сопротивления атмосферы, определяющий величину
силы сопротивления движению тела, имеющего лобовую
площадь в 1 м2 и перемещающегося со скоростью 1 м/с,
фв = arctg------угол между осью х и расстоянием ZB,
1в
1В — расстояние от точки приложения силы Рв до оси
опрокидывания, проходящей через точку В,
В общем случае сила тяги ограничена по сцеплению,
т. е.
( Рк|, если Ркг<фсРпг,
р = J с
кг (<РсРщ, если Рк<>Фс^п«.
Остальные обозначения в приведенных выше уравне-
ниях совпадают с теми, которые были приняты ранее.
Если при движении планетохода дует встречный или
попутный ветер со скоростью ив, то формула для расчета
силы сопротивления атмосферы Рв примет вид
Рв = kF(x ± рв)2,
где рв берется со знаком плюс, если ветер дует навстре-
чу движения планетохода, и со знаком минус, если ветер
попутный.
270
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Приближенно величина лобовой площади может быть
определена из соотношения
F = ВЛп,
где /гп — габаритная высота планетохода.
Коэффициент к определяется опытным путем методом
выбега или методом продувки модели планетохода в аэ-
родинамической трубе. Коэффициент к имеет размерность
Н-с2/м4.
Подставляя соответствующие производные и обобщен-
ные силы в уравнение Лагранжа 2-го рода и подчиняя
тяговые усилия и усилия в рессорах условию отрыва
колес от опорной поверхности, после соответствующих
преобразований получим
n —1 _
/пуф — ЬаМ1х sin (<рн + ф) = 5 FM (Аг) cos ф —
— Gl cos (a + срн + <p) + PBlB sin (<pB + ф), (3.87)
— 80Mlq> sin (фн + ф) = 80MZcp2 соз(фн+ф)—
— Gsin a + 2 Adi (A;) — Рв — Fcx.
Подчиняя систему дифференциальных уравнений на-
чальным условиям
<р(0) = 0, ф(0) = 0, я(0) = 0, я(0) = 0, (3.88)
получим математическую модель, которая описывает ус-
тойчивость движения планетохода при трогании с места
и последующем разгоне.
После разрешения относительно переменных ф и х
система уравнений (3.87) примет вид
______________1_______________
sin2 (фн + <р)
{— Gl cos (a + фн + ф) +
Ф =
п—1 ___
+ 5 АнМ (Аг) cos ф + Z sin (фн + Ф) X
1=1
X Gsina — 6омгф2соз (фн+ф)+Дрк{1 (Дг) — Fcx +
+ FBlB sin ,
(3.89)
§ 3.3 ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
271
X =
1
Jny-60Wsin2((pH+<p)
— Gl cos (а + фн + <р) +
п—1 __
' + .2 (Дг) cos Ф 4- FBlB sin (фв + ф)
г=1
XI sin (фн + <р) — ^[60Жф2соз(фн+ ф) — Gsina —
2 ^кг1 (Дг) Р сх р
i=l JJ
Предположим, что тяговые усилия полностью реа-
лизуются по сцеплению и характеристики их таковы, что
разгон планетохода происходит мгновенно. Тогда па эта-
пе разгона можно пренебречь влиянием сил сопротивле-
ния ветра. Кроме того, за бесконечно малый промежуток
времени, в течение которого происходит разгон, плане-
тоход не успевает приобрести каких-либо угловых пере-
мещений. Следовательно, справедливо условие
п+1 __
— Gl cos (а + фн + ф) 4- X Fnilai (Аг) = 0.
Тогда на этапе разгона система уравнений (3.89)
примет вид
MZ ф2 Gsina Fcx
Ф _ b0Mlnq i=1
n
« ,• У Pm + G sin a — FCx
iBMx _ 60MZn<p* Kl
Jny Jny-80MH* +
(3.90)
С учетом (3.89) из (3.90) найдем следующие урав-
нения для расчета угловой скорости и перемещения в
момент окончания разгона:
Ф(М = ^^р, Ф(М = 0. (3.91)
*'пу
Под моментом окончания разгона понимается такой
момент времени tp, при котором скорость планетохода до-
стигает значения x(tp) = и.
272
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Так как в момент времени разгон закончился, то при
t > можно принять х = 0.
Последнее условие выполняется в том случае, если по
мере отрыва колес от опорной поверхности скорость пла-
нетохода v остается постоянной. Рассмотрим процесс вра-
щения планетохода на этапе опрокидывания в предполо-
жении, что вертикальная координата силы сопротивления
атмосферы Дв не изменяется, т. е. ZBsin(cpH + ф) = =
= const при любом значении ф.
Тогда из (3.87) получим уравнение
1
ф==7~
*/пу
— GZcos (а + фн + ф) + PJiB +
п—1
+ 2 F пг ZH1 (Дг)С03ф
г—1
(3.92)
описывающее динамику планетохода в процессе опроки-
дывания и удовлетворяющее начальным условиям (3.91).
Пусть задняя ось планетохода подрессорена, т. е. ее
жесткость конечна (сПп<°°). Тогда процесс вращения
относительно оси опрокидывания начнется после того мо-
мента, когда момент сопротивления вращению плането-
хода относительно центра жесткости, обусловленный
упругостью подвесок, будет больше, чем момент сопротив-
ления вращению относительно оси опрокидывания. Как и
в случаях удара планетохода о непреодолимое препят-
ствие или торможения, этот момент наступит после
того, как плапетоход повернется относительно центра
жесткости иа угол фо — фт. В случае разгона этот угол
определяется выражением
G cos а
фт п
h 2 Спг
Поэтому в уравпепии (3.92) деформации подвесок
должны вычисляться с учетом последнего соотношения,
т. е.
Аг = Aoi — (Ji — In) sin ф — /гфт. (3.93)
При разгоне планетоход не перевернется, если угол
его наклона не превысит значения, равного
Фк = arctg— а. (3.94)
§ 3.3 ДИНАМИЧЕСКАЯ ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
273
Тогда первый интеграл уравнения (3.92) с учетом
(3.91), (3.93) и (3.94) запишется в виде
2J I
[Gl I1 — Sin (ф + фн)] ~
п— 1 ч
— -РвМк — 4 2 Сп« (A0i “ *i<PT)2 + ЛРт’
г=1 '
где Дрт вычисляется по уравнению (3.47) при 1п= 1\.
Подставляя в последнее уравнение значение силы соп-
ротивления атмосферы Рв при х = рк, получим
2 = ________2Jny________
* (б0мя)2 + 2тв/пЛ А
[ 71—1 1
X167 [1 — sin (а + фн)] — 4 2 Cni — (3-95)
I 7=1 )
Уравнение (3.95) определяет максимальную скорость
движения планетохода, полученную из условия устойчи-
вости при мгновенном разгоне на подъем.
В частности, если сопротивлением атмосферы можно
пренебречь, то для бесподвесочного планетохода (сПг->оо)
из (3.95) найдем
= + <₽»)]• <3-96)
Из сравнения (3.81) и (3.96) видно, что для симметри-
чного планетохода (Ц = 1п) максимальные скорости дви-
жения, полученные из условия устойчивости при мгно-
венном разгоне и торможении, равны между собой.
Последний вывод справедлив только в том случае,
если планетоход оборудован одноступенчатой коробкой
передач. При наличии нескольких ступеней в коробке
передач максимальная скорость движения может быть
больше, чем это следует из (3.96). Достигается это тем,
что вначале планетоход разгоняется на первой передаче
Цо скорости V[. После того как планетоход вернулся в
исходное положение (ср = 0), включается вторая пере-
дача, на которой он разгоняется до скорости z?2, и т. д.
Пусть максимальная скорость планетохода на первой
передаче выбрана из условия устойчивости при разгоне,
18е. в. Авотин и др.
274
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
т. е. V[ — i?K. Найдем максимальную скорость движения
на второй передаче.
Допустим, что движение планетохода происходит с
установившейся скоростью рк, тогда системы дифферен-
циальных уравнений (3.87), (3.89) и (3.90) должны
удовлетворять следующим начальным условиям:
ср(£1)=0, <p(£i) = 0, я(£1)=Я1, я(/1) = ук. (3.97)
Предположим, что за время разгона со скорости
До и2 угловых перемещений корпуса планетохода не про-
исходит. Тогда, проводя преобразования, аналогичные
тем, которые были проведены выше, получим
<p(«pi) = ^(^-vk), <р(«Р1)^0, (3.98)
J пу
где ф(£Р1)—угловая скорость планетохода в момент
времени, когда он достиг скорости z>2, <p(£Pi) —угол нак-
лона корпуса в тот же момент времени.
Подчиняя уравнение (3.92) начальным условиям
(3.98) и рассматривая его первый интеграл с учетом сде-
ланных выше предположений, найдем
V 2g Z[1 — sin (а + фн)] + vK, (3.99)
откуда
v2 = 2рк, .. ., vN = Мл,
где NK — число ступеней в коробке передач.
Таким образом, если в заданных условиях эксплуа-
тации атмосфера отсутствует (например, на Луне), то
при ступенчатом методе разгона может быть достигнута
скорость, которая в 7VK раз больше критической скорости
по опрокидыванию.
При наличии атмосферы максимальная скорость, да-
же с многоступенчатой коробкой передач, ограничивается
опрокидывающим моментом, который возникает от силы
сопротивления атмосферы Рв.
В заключение этого параграфа отметим, что расчет-
ные критерии (3.95), (3.96) и (3.99) являются прибли-
женными в силу тех допущений, при которых они были
получены. А именно, предполагалось, что разгон проис-
§ 3.4. ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
275
ходит мгновенно и тяговые усилия полностью реализу-
ются по сцеплению.
Однако выведенные уравнения движения (3.87) и
(3.89) свободны от этих допущений, поэтому при необ-
ходимости по ним могут быть проведены более точные
исследования на ЭВМ.
§ 3.4. Поперечная устойчивость
3.4.1. Боковое скольжение. Из большого многообразия
случаев потери поперечной устойчивости планетохода
рассмотрим только потерю устойчивости при ударе ко-
лесами одного из бортов о выступающие препятствия.
Ситуация, приводящая к опрокидыванию в поперечном
направлении, может возникнуть в результате встречи
колес одного из бортов с выступающими препятствиями
при боковом скольжении, а также в результате резкого
возрастания сопротивления, возникающего из-за зарыва-
ния колес в грунт. Поперечная устойчивость планетохода
при преодолении различного рода неровностей рельефа
рассмотрена в § 3.5. В поперечном направлении так же,
как и в продольном, различают два вида устойчивости:
статическую и динамическую. Рассмотрим оба вида ус-
тойчивости в отдельности.
Статическая устойчивость. Потеря стати-
ческой устойчивости планетохода возможна при его дви-
жении поперек склона в том случае, если вектор силы
веса выйдет за пределы ширины колеи В (рис. 3.2). Рас-
сматривая равновесие планетохода в вертикально-попе-
речной плоскости относительно оси опрокидывания, про-
ходящей через точку О, найдем
GH sin 0 + В 2 Fni - G-4 cos 0 =0,
i=l 2
п/2
гДе 2 Fni — усиление в рессорах одного из бортов, £ —
г=1
угол наклона поверхности к горизонту в направлении,
поперечном к направлению движения.
Так как потеря устойчивости сопровождается враще-
нием относительно оси опрокидывания, то последнее при-
ведет к отрыву колес того борта, относительно которого
18*
276
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
не происходит опрокидывания. Поэтому в последнем
п/2
уравнении влиянием 2 РщВ можно пренебречь, так
как при отрыве это выражение обращается в нуль.
Условие статической устойчивости запишется в виде
tg^B/(2ff).
Таким образом, поперечная статическая устойчивость
планетохода обеспечивается в том случае, если его дви-
жение происходит па углах наклона поверхности не
превышающих статических углов устойчивости (3.1).
При движении планетохода по поверхности с попе-
речным наклоном составляющая сила веса G sin [} стре-
мится вызвать, кроме опрокидывания, также и скольже-
ние планетохода в поперечном направлении. Однако
скольжению планетохода противодействует реакция
грунта. Поэтому различают устойчивость от опрокиды-
вания и устойчивость от скольжения. Потеря устойчи-
вости от скольжения возможна в том случае, если сос-
тавляющая сила веса не уравновешивается реакцией
п
грунта Fcv = 2 Ryi, т. е.
1=1
G sin р Fcy.
Реакция грунта, которая называется силой сопротив-
ления боковому скольжению, ограничена по сцеплению,
т. е.
Fcy =< цб cos р,
где ц — коэффициент сопротивления боковому скольже-
нию, зависящий от качества грунта и конструкции
движителя.
Отсюда найдем следующие условия устойчивости пла-
нетохода от скольжения:
ц > tg р.
Таким образом, устойчивость планетохода от сколь-
жения зависит от условий его эксплуатации и конструк-
ции движителя.
Динамическая устойчивость. Устойчивость
в поперечном направлении рассмотрим без учета дисси-
§ 3.4. ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
277
пативных сил и сил сопротивления ветра в предположе-
нии, что удар о препятствие происходит колесами всего
борта, поперечная сила удара Руд приложена в точке
контакта колес с опорной поверхностью, а массы непод-
рессоренных и подрессоренных частей объединены в об-
щую массу всей системы.
Если не принимать во внимание влияние сил тяги, то
процесс потери устойчивости в поперечном направлении
аналогичен случаю удара планетохода о непреодолимое
препятствие двумя колесами одновременно. Поэтому диф-
ференциальные уравнения движения, описывающие
процесс потери устойчивости в поперечном направлении,
и расчетные критерии аналогичны тем, которые были
получены при рассмотрении продольной устойчивости в
случае удара о непреодолимое препятствие.
Рассматривая процесс вращения планетохода относи-
тельно оси опрокидывания, проходящей через точку О
(рис. 3.2), и применяя уравнение Лагранжа 2-го рода,
получим следующую систему дифференциальных уравне-
ний, описывающую этот процесс:
•• If
Ф = т-------2 8/,------г. \Gs cos (В 4- ibH — 1|э) —
т /пх— Ms2 sin2(ipH —i|>) | 'r 1 T“
n/2 _
— S FniBl (Aj) cos — [Afs^2 cos (i|)H — ip) + Руд1 (у) —
1=1
— G sin P + Fcy sign г/] s sin (ipH — 'I’)), (3.100)
•v=_____________!__________x
У Jnx~ M^sin2^- ip)
n/2 _
Gs cos (P + 4>H — 4>) — 2 FaiBl (Ai) cos
1=1
X
X s sin (ipH — *!>) — [Msty2 cos (1|)H — 1р) + ^уд1(у)—
—- G sin a + Fcy signy] k
здесь s2 = H2 — геометрический параметр, хрн =
k= arctg -g- — угол между геометрическим параметром s и
278
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
и осью у, Jnx — 7ох + s2M — приведенный момент инер-
ции планетохода к продольной оси опрокидывания, про-
ходящей через точку О (рис. 3.2), JOx — момент инерции
планетохода относительно продольной оси, проходящей
через центр тяжести, Руд — сила, обусловленная ударом
колес одного из бортов о препятствие, Д< = До* + В sin гр —
деформация подвески f-го колеса, у — деформация систе-
мы препятствие — колесо — крепление в поперечном
направлении.
Статическая деформация подвесок До; при наличии
поперечного наклона опорной поверхности р может быть
определена из соотношения
л j В ,
Дог — /о 2 Фо>
где /о, фо — характеризуют, соответственно, проседание
планетохода и поворот его относительно продольной оси,
проходящей через центр тяжести в статическом поло-
жении.
Величина этих значений определяется выражениями
Gcosp ± 2 спг
/ _ _____________г—1
/О п i
X спг
г=1
Здесь верхний знак относится к колесам, расположен-
ным с левого борта, нижний — с правого.
Если возмущения по углу наклона корпуса плането-
хода и его производной в момент начала удара отсут-
ствуют, то система дифференциальных уравнений должна
удовлетворять следующим начальным условиям:
ф(0)=0, ф(0)=0, у(0)=0, y(fi) = v6. (3.101)
Решая систему дифференциальных уравнений (3.100)
с учетом начальных условий (3.101), а также учитывая
приращение скорости за счет деформации рессор, полу-
чим следующий критерий для расчета максимально до-
§ 3.4. ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
279
пустимой скорости при боковом ударе планетохода о
препятствие:
of 1 v / В \2
Jnx Gs[l-sin (M-'I’h)]-~2 '
Л; — Л/; V = —-________________________________________-- .
' к s' f Ms2 Г sin 2\|)и cos 2f+cos 2г|)н V
/„(МЯ)"(2 I 2^[“= - Й1- ] I
(3.102)
где
Jex = JOx + fl---------(sin 2P — sin 2i|)H)
. G cos 6 . Q . 7?
ipT = ——яри = p — arctg —j. — критический угол по
2/пг
г=1
опрокидыванию в вертикально-поперечной плоскости,
А 2g cos р / , 9п/2
&vs =-----л т ( в \ — приращение крити-
вн у Сп. |/ (Т J 2j Cni
i=l i=1
ческой скорости за счет упругости системы подрессори-
вания при повороте относительно центра тяжести в вер-
тикально-поперечной плоскости.
Критерий (3.102) определяет максимально допусти-
мую скорость при боковом ударе (скорость бокового
скольжения) без учета влияния жесткости системы пре-
пятствие — колесо — крепление в направлении бокового
скольжения. В поперечном направлении, так же как и
в продольном, влияние жесткости системы препятствие —
колесо — крепление зависит от характеристики силы уда-
ра Руд, конструктивных параметров и условий эксплуа-
тации планетохода. Если предположить, что сила удара
линейно зависит от жесткости системы препятствие — ко-
лесо — крепление су, т. е. Руд = cyz/, то оценка влияния
жесткости су на критическую скорость может быть про-
ведена по критериям, рассмотренным выше, т. е.
_ ,(cy(px + s2) 2Я
ркс — укж/ I q-s , -Ц-,
Здесь пкс — критическая скорость бесподвесочного плане-
280
ГЛ.З, УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
тохода при су < оо, ркж — критическая скорость плането-
хода при су->оо, определяемая из соотношения
„ ___________/^[1-sin (Р + Фн)]___
нж [ мs2 sin cos 2|3 + cos 2'фн
+ оМ2ф„-— ------------
(3.103)
f — некоторая функция, характеризующая влияние жест-
кости су. Очевидно, поведение
f (Су s ) 4L аналогично
I Gs 1 В ’ р /
кривых
поведению
функции
кривых,
представленных на рис. 3.9, если в соответствующих
выражениях заменить соответствующие параметры на
параметры поперечного опрокидывания, т. е. вместо 1\
подставляется В/2, вместо ру— рх и вместо I — s, где
9 ^ох
Рх = ~м~ —радиус инерции планетохода в поперечной
плоскости.
Таким образом, если в процессе эксплуатации пла-
нетохода возникнет боковое скольжение, то скорость
этого скольжения не должна превышать величины, опре-
деляемой из выражения
Vk=Vkc+A^
В
2
[ Ms2 Г sin 2грн cos 2P4-cos 2г|?н
(^[2+2^ —^2
(3.104)
Если скорость планетохода в боковом направлении
превысит величину, определяемую формулой (3.104), то
в случае удара о выступающее препятствие или возник-
новения резкого сопротивления может произойти потеря
устойчивости, т. е. опрокидывание. Поэтому, если ско-
рость скольжения планетохода в боковом направлении
приблизится к значению, опасному с точки зрения оп-
рокидывания, то в этом случае должны быть приняты
меры, препятствующие дальнейшему росту последней.
§ 3.4. ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
281
В качестве таких мер может быть предпринят пово-
рот в сторону, противоположную сползанию, остановка
планетохода или, если это не приводит к уменьшению
скорости, то «якорение» последнего.
Однако, прежде чем приступить к предотвращению
той или иной аварийной ситуации, нужно располагать
информацией, на основании которой можно было бы су-
дить о величине скорости скольжения планетохода в
боковом направлении.
Величина скорости скольжения планетохода в боко-
вом направлении может быть либо измерена с помощью
специальных устройств, либо может быть произведено
приближенное вычисление времени tc или величины ус
бокового скольжения, при достижении которых скорость
скольжения планетохода в этом направлении приблизится
к критическому значению.
Найдем вначале приближенные выражения для рас-
чета времени tG и величины ус бокового скольжения в
предположении, что движение планетохода происходит
по поверхности с постоянными поперечным наклоном р
и коэффициентом сопротивления боковому скольжению ц.
Тогда движение планетохода будет происходить без
скольжения, если G sin р Fcu. При Fcy < G sin р начнет-
ся процесс скольжения планетохода в поперечном на-
правлении, который приближенно может быть описан
дифференциальным уравнением
Му = G sin р — Fcv
с начальными условиями у(0) = 0, у(0) — 0.
Так как сила сопротивления боковому скольжению
ограничена по сцеплению, то из последнего уравнения
найдем
z/= g(sin р — ц cos Р).
Отсюда, исходя из условия устойчивости, время tc и
величина ус бокового скольжения определяется из вы-
ражений
рк VK
~~ g (sin Р — Р cos Р)’ ~ 2 g (sin р — р, cos Р)’ (3-105)
где vK — критическая скорость планетохода, определяемая
из выражения (3,104),
282
ГЛ.З, УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Таким образом, если в заданных условиях эксплуата-
ции возникло скольжение, то максимальный промежуток
времени, в течение которого происходит скольжение, или
максимальный путь скольжения планетохода не должны
превышать значений, определяемых уравнением (3.105).
Приведенные соотношения (3.105) для определения
времени и величины бокового скольжения являются
слишком приближенными, так как в процессе движения
планетохода условия эксплуатации [} и ц могут не оста-
ваться постоянными. Поэтому, если планетоход оборудо-
ван датчиком [31] бокового скольжения, то величина
бокового скольжения ус в этом случае может быть опре-
делена более точно. Кроме того, с помощью указанного
датчика может быть непосредственно измерена и скорость
бокового скольжения в процессе его эксплуатации.
На рис. 3.18 представлен планетоход с системой, поз-
воляющей измерить величину и скорость бокового сколь-
жения. Система состоит из свободно катящегося, само-
устанавливающегося колеса, которое через шарнирный
рычаг связано с планетоходом. Для определения вели-
чины, а следовательно, и скорости бокового скольжения,
необходимо определить угол отклонения самоустанавли-
вающегося колеса от продольной оси планетохода, кото-
рый обусловлен только боковым скольжением.
Из рис. 3.18, а видно, что отклонение этого колеса от
продольной оси планетохода может происходить как за
счет бокового скольжения, так и за счет искривления
траектории вследствии поворота или увода планетохода
от заданного направления движения.
В общем случае угол отклонения самоустанавливаю-
щегося колеса аот от продольной оси планетохода скла-
дывается, с одной стороны, из угла отклонения, обус-
ловленного уводом планетохода от заданного направле-
ния аув, а с другой — из угла отклонения, обусловленного
боковым скольжением аск, т. е. аот =• аув!+ аск, где аув,
ссек — угол отклонения самоустанавливающегося колеса,
обусловленный, соответственно, уводом от заданного на-
правления и боковым скольжением, аот — отклонение са-
моустанавливающегося колеса в процессе движения
планетохода относительно его продольной оси.
Поэтому, чтобы определить угол отклонения самоус-
танавливающегося колеса от продольной оси планетохо-
§ 3.4. ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
283
да, обусловленный только боковым скольжением аск,
необходимо осуществлять корректировку угловых откло-
нений этого колеса аот в соответствии с уравнением
ОСск ---- О^от ОСув«
Интегрируя последнее уравнение по пути 5, можно
определить но только факт наличия или отсутствия
СМЛЬМСНиЯ
О)
Рис. 3.18. Расчетная схема при боковом скольжении: а} положе-
ние самоустанавливающегося колеса в зависимости от бокового
скольжения или увода (1 — самоустанавливающееся колесо, 2 —
положение колеса при боковом скольжении, 3 — положение коле-
са при уводе, 4 — положение колеса при наличии бокового сколь-
жения и увода); б) к определению угла отклонения самоуста-
навливающегося колеса, обусловленного только уводом от за-
данного направления.
284
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
бокового скольжения, но и величину последнего, т. е.
s
ус = sin (аот — аУв) dS,
о
где S — пройденный путь.
Тогда скорость бокового скольжения может быть оп-
ределена из выражения
dyc ds . , .
y0 = ds"dF = sin^~a^v-
Так как угол отклонения самоустанавливающегося
колеса может быть определен с помощью датчика, изме-
ряющего его отклонение от продольной оси планетохода,
то для нахождения ус и ус необходимо определить ве-
личину угла отклонения этого колеса, обусловленного
только уводом от заданного направления ОуВ.
Из рис. 3.18, б видно, что этот угол определяется
соотношением
х — I
аув = arccos
где xR — ордината точки пересечения окружности радиу-
са Zp с прямой у = кх, которая может быть найдена из
системы уравнений
(X - 1пУ + (У- ну = Ll у = кх. (3.106)
Решая систему (3.106), найдем, что
I +Вк
т — п
Xr~ 1 + /с2 ’
где
к = —-------т---r-Z----.
Тогда угол, на который отклонилось бы самоустанав-
ливающееся колесо, если в процессе движения проис-
ходил бы только увод от заданного направления, т. с.
совершался поворот относительно некоторого центра О с
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 285
радиусом R, определится из уравнения
аув - arccos [Zn (L|-Z£) +R (Lp /Я2 + Z£ - £2 -7?Zn)] X
x(Li-Z^) {[(bp—Z*)2+ (LPr*24-^-^ -TJZj2]^}"1-
Таким образом, если на планетоходе имеется ЭВМ,
то по приведенным выше уравнениям могут быть вы-
числены интересующие величины без особых трудностей.
§ 3.5. Устойчивость при преодолении
характерных препятствий
При эксплуатации планетоходов неизбежны встречи
с такими единичными препятствиями, как трещина, ва-
лун, кратер, ступенчатые препятствия (типа контрас-карп,
эскарп) и т. п. Возможность устойчивого движения в
случае преодоления подобных препятствий зависит,
с одной стороны, от размеров этих препятствий и спо-
соба их преодоления, а с другой — от параметров плане-
тохода и условий эксплуатации.
При движении планетохода через различного рода
препятствия, в частном случае через ступенчатые пре-
пятствия, колебания его также можно разбить на две
фазы: фазу колебаний на элементах подвески относитель-
но некоторого центра и фазу вращения относительно
некоторой оси опрокидывания. Каждая из фаз может
быть описана соответствующей системой дифферен-
циальных уравнений, которые при определенных усло-
виях должны переходить друг в друга.
Однако исследование устойчивости с учетом этих фаз
осложняется тем, что при съезде, например, со ступен-
чатого препятствия, точка, относительно которой может
происходить опрокидывание, не остается постоянной и
может смещаться от переднего колеса к заднему и на-
оборот, к переднему, по мере съезда планетохода с этого
препятствия.
По мере того как колеса съезжают с ребра ступенча-
того препятствия или преодолевают какое-нибудь другое
препятствие, планетоход может совершать либо колеба-
ния относительно некоторого центра на элементах подве-
ски, либо совершать вращение относительно некоторой
оси опрокидывания.
286
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Таким образом, процесс опрокидывания при преодо-
лении различных препятствий происходит по довольно
сложному закону, точное описание которого требует
громоздких математических выкладок.
3.5.1. Дифференциальные уравнения движения при
переезде планетохода через препятствия. Устойчивость
движения при переезде колесных машин через некото-
рые виды препятствий рассматривалась в ряде работ
[5, 10, 12, 69].
В работе [5] получена система дифференциальных
уравнений, описывающая колебания планетохода отно-
сительно центра тяжести. Система имеет вид
Mz = 2 (Fm + Fat) 1 (Aj) — G cos a,
i-=i
i=l . i=l
(3.107)
Mx = 2 (Лг) + G sin a — Fcx
2=1
с начальными условиями
cp(O)=O, cp(O)=O, z(0) = 0, z(0) = 0,
<r(0) = 0, я(0) = v.
Усилие в рессоре Fui и амортизаторе F&i i-й подвески,
а также плечо приложения усилий Zi(cp) от рессоры и
амортизатора этой подвески в данном случае вычисляют-
ся следующим образом:
Fпг = Fni[Aoi - 2 + ?0i(<p) + 6f] ,
FAi = Fai[—z + cpZf (ф) + 6J,
it (q>) = ±Vh* + i\
f 4 H
cos arctg -ту- =F cp
\ I i\
где
i^) = V + il
(.Ah \ . , Ah'
arctg ту-; т (p — sin arctg ту-,
I i*l / I il_
— величина деформации подвески от угла поворота
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 287
корпуса в вертикально-продольной плоскости, АЛ — воз-
вышение центра тяжести над центром крепления под-
вески.
Здесь верхний знак принят для колес, расположенных
впереди от центра тяжести, нижний — сзади.
При выводе этих дифференциальных уравнений ис-
пользована расчетная схема, рассмотренная в п. 3.5.2.
Уравнения движения получены в предположении, что
массы неподрессоренных и подрессоренных частей объе-
динены в общую массу всей машины и на длину плеча
приложения усилий от рессоры и амортизатора не влия-
ет поднятие центра тяжести и статической прогиб
подвески.
Уравнения движения (3.107) описывают колебания
планетохода только относительно центра тяжести и не
учитывают возможность его вращения относительно осп
опрокидывания, которая может проходить через точку
контакта любого колеса с опорной поверхностью.
Приведенное в работе сравнение результатов расчета
по системе уравнений (3.107) с данными эксперимен-
тальных исследований при съезде со ступенчатого пре-
пятствия показывает, что система дифференциальных
уравнений (3.107) достаточно точно описывает реакцию
динамической системы на внешние возмущения. Поэтому
для дальнейших рассуждений в основу динамической
модели положим систему дифференциальных уравнений
(3.107).
Система дифференциальных уравнений (3.107) ре-
шает только плоскую задачу. Однако на практике может
возникнуть ситуация, когда требуется изучить устойчи-
вость в пространстве, например, при движении через
валун одним бортом или при несимметричном преодоле-
нии кратера.
Рассмотрим устойчивость планетохода при движении
через препятствия в пространстве. Предположим, что
усилия от рессор и амортизаторов в любой момент вре-
мени перпендикулярны опорной поверхности, единичные
препятствия не деформируются в процессе их преодоле-
ния, ударные усилия в направлении движения плането-
хода незначительны и таковы, что не вызывают разворота
планетохода относительно вертикальной оси и сползания
в поперечном направлении не происходит. Кроме того,
288
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
предположим, что преодоление единичных препятствий
происходит с постоянной скоростью, поэтому в любой
момент времени тяговые усилия па колесах и силы соп-
ротивления движению полностью уравновешиваются
составляющей от веса планетохода, т. е.
Mg sin а = Fcx — 2 Ркг, Mg sin р = Fcy.
i~l
На рис. 3.19 показана пространственная динамиче-
ская модель планетохода и связанная с ним система
координат. Суммируя силы п моменты, действующие на
Рис. 3.19. Пространственная динамическая модель планетохода.
планетоход, получим систему дифференциальных урав-
нений, описывающих его реакцию на внешние возмуще-
ния в пространстве:
71
Mnz = 2 (Лн + Fai) — Mag cos a0,
i -1
(3.108)
n
J Оуф — 2 (^ni + P ai) h (ф) — (H + z) F ex,
i=l
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 289
Ы = 2 (Fm + Fai) sKi (i|>) 1 (Д{) - (Я + z) Fcy, (3.108)
2=1
miii= (Я<+. ffaf)T(AK<) — Fni — Fai — mig, i = 1, 2, .... n,
x =, vq = const
co следующими начальными условиями:
q> (0) — 0, -ф (0) = 0, z (0) — 0, ср (0) = 0t
(3.109)
Ф (0) - 0, Z (0) = 0, £ (0) = 0, i (0) = 0.
Здесь
Аг = Аог — Z + АКг + ^Ог(ф) + $01 (4*) ,
Акг • АкОг ^г Н“
Soi О’) =
, / .,, , / В \2 Г . / . 2ДЛ . . 2ДЛ 1
= 1 / ДА2 + I-у I sin I arctg т ф I — sin arctg
— величина деформации подвески от поворота планетохода
в вертикально-поперечной плоскости,
sKi (Ф) = ± уАЯ2 + (-^-j cos (arctgт ср)
— плечо приложения усилий от рессор и амортизаторов
в вертикально-поперечной плоскости, Rzi — усилие, обус-
ловленное деформацией обода Z-ro колеса, 7?аг — усилие
демпфирования, возникающее в ободе Z-ro колеса, Дког —
деформация обода Z-ro колеса в статическом положении,
Шг — масса неподрессоренной части, связанная с i-м коле-
сом, z, — вертикальные координаты соответственно под-
рессоренной части и неподрессоренной, связанной с f-лг
колесом (начало координат расположено в равновесном
положении системы), 1(АИг) — единичная функция, ха-
рактеризующая отрыв Z-ro колеса от опорной поверхности,
«о — угол максимального подъема.
В выражениях для ^(ф), ^oi(^) верхний знак отно-
сится к колесам левого борта, нижний — правого.
19 Е. В. Авотин и др.
290
гл.з. устойчивость движения планетохода
Здесь и в дальнейшем за положительное направление
принят наклон планетохода на нос и левый борт.
Система дифференциальных уравнений (3.108) напи-
сана с учетом больших угловых перемещений корпуса
планетохода и применима поэтому к решению задач ус-
тойчивости. Однако система уравнений (3.108) может быть
применена и при решении ряда других задач, связанных
с подвижностью планетохода. К числу последних относят-
ся, например, задачи, связанные с плавностью хода и
управляемостью планетохода, а также пагружспностью
элементов ходовой части.
В частности, в результате исследования динамики
планетохода по системе уравнений (3.108) могут быть
даны ответы на следующие вопросы:
возможно ли преодоление препятствия или группы
препятствий без отрыва колес,
являются ли размер и форма препятствия опасными
для планетохода,
какая максимальная скорость может быть выбрана при
движении через различного рода препятствия, например,
из условия плавности хода, управляемости, иагруженпо-
сти и т. д.
Кроме того, при незначительной модернизации этой
системы она может быть применена к расчету тягово-
тормозных режимов планетохода.
Однако применение системы уравнений (3.108) к ре-
шению указанных задач в общем случае ограничивается
размером и формой препятствия. Это связано с тем, что
система уравнений (3.108) не учитывает ударных нагру-
зок, которые действуют на планетоход в продольном на-
правлении в процессе движения по неровностям.
К препятствиям, вызывающим значительные ударные
нагрузки, можно отнести непреодолимые и ступенчатые
препятствия, например, эскарп.
Исследование устойчивости планетохода при встрече
с непреодолимым препятствием проведено в § 3.3, а ис-
следование подвижности планетохода через препятствия
с большой крутизной переднего фронта должно рассмат-
риваться в статической постановке, так как преодоление
таких препятствий производится на малых скоростях.
В ряде работ [30, 46, 76] сделана попытка учесть
силы продольного взаимодействия колес с опорной по-
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 291
— тангенциальная
— ---производная
ворхностыо. Однако динамические системы, полученные
с учетом продольных колебаний, сложны и требуют еще
дальнейшего уточнения и развития.
В первом приближении продольные колебания могут
быть учтены, если ввести в систему (3.108) вместо Fcx
п
величину 2 и вместо выражения х = и уравнение
г=1
Ми -I- 2 mi ) х + У = О,
г=1 / г=1
где Д^г— продольная сила, приложенная к ободу Ого
колеса.
В работе [16] предлагается силы Дх\- определять из
выражения
Д*Ч = - —г + R^f, + X + -В- х + Rzi -2-,
7 кг 7 кг гкг
где Mi — крутящий момент, приложенный к f-му колесу,
Ли — момент инерции Z-го колеса,
жесткость обода Ого колеса, 6Z (t)
профиля препятствия во вре-
мени.
Для расчета продольных
сил в работе [76] применена
модель колеса, состоящего /
из ряда пружин, которые /
могут деформироваться в /
радиальном направлении [__
(рис. 3.20). При этом зна-
пение Дх\ определяется из \
выражения
Axi =- \
N
= S kj (uj — — yd) tg
j=l
7 . .. Рис.
где Kj — жесткость у-и пру-
жины обода Ого колеса, уз —
вертикальная деформация /-й пружины обода Ого колеса,
уd — длина /-й пружины обода Ого колеса в недеформи-
19*
многопру-
3.20. Модель
жинного колеса.
292
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
руемом состоянии, N — количество пружин, находящихся
в деформируемом состоянии, 0j — угол, измеряемый по
часовой стрелке от вертикали к линии, проведенной от
центра i-ro колеса вдоль /-й пружины.
В работе [30] при описании динамики взаимодействия
колеса машины, движущейся в вертикально-продольной
плоскости, предлагается пользоваться уравнением
М. j . ..
= — Т2 + cKifi (?i + fei) + —— a,i 4- migaii
кг rKi
где ai = — угол продольного наклона опорной по-
верхности к горизонту в точке контакта i-ro колеса с
препятствием (рис. 3.21).
Таким образом, общепринятой методики расчета вы-
нужденных продольных колебаний пока не существует.
Однако при необходимости эти колебания с некоторым
приближением могут быть
учтены, если воспользовать-
ся приведенными выше вы-
ражениями.
Введенная в уравнении
(3.108) переменная 6; харак-
теризует внешнее возмуще-
ние, возникающее в результа-
те взаимодействия обода i-ro
колеса с неровностью. Вели-
чина этого возмущения за-
висит от характера кривой
результирующей линии воз-
действия, в качестве которой
центра i-ro колеса. При взаи-
Рис. 3.21. Схема качения ко-
леса но плоской кривой.
может служить траектория
модействии колеса с препятствием результирующая ли-
ния воздействия может существенно отличаться от фор-
мы преодолеваемого препятствия. Поэтому при опреде-
лении зависимости б», кроме геометрических размеров
неровностей, необходимо учитывать геометрические раз-
меры колеса и упругую характеристику его обода. Ес-
ли принять обод колеса недеформируемым, то результи-
рующая линия воздействия определится обкаткой ко-
лесом данной неровности, а система уравнений (3.107)
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 293
Преобразуется к виду
Mz = 2J (Ли + Fai) 1 (Ai) — Mg cos a0,
Jot/Ф = 2 (Лн + Fa<) Ц (Ф) 1 (At) - (Я + z) FCXi (3.110)
/охф = 2 (Fni’+ Fa{) sK{ (ip) 1 (A{) - (Я + Z) Fcy,
i=l
X — V.
Система (3.110) удовлетворяет начальным условиям
(3.109), где Aj — AOi — НМч>) +«о.(^) + 6;.
3.5.2. Внешние возмущения, действующие на плане-
тоход при переезде препятствий. Найдем выражения
для определения внешних возмущений 6г-, входящих в
систему уравнений (3.110). Так как 6г- зависит от формы
преодолеваемого препятствия, то найдем эти выражения
для отдельных видов препятствий. При определении 6г
предположим, что в процессе преодоления планетоходом
препятствий их форма не изменяется.
Съезд со ступенчатого препятствия.
На рис. 3.22 показан общий случай движения планетохода
через такое препятствие. Из него видно, что связь между
внешними возмущениями 6п/2+й 6п/2+2ъ • • •, 6п левого и
61, 62, бз, ..., бп/2 правого бортов определяется так:
бБ = бф- vtg0)’
6e=62(«-4tg9)’ <зл11)
бп/2+i = 6Цг---— tg 0
здесь 6г — внешнее возмущение, действующее на ъ-е коле-
со правого борта, 0 — угол между направлением движе-
ния планетохода и перепендикуляром, проведенным к
верхнему основанию ступенчатого препятствия.
Здесь и в дальнейшем индексы с номерами от п/2 + 1
до п будем относить к колесам левого борта, а с номе-
рами от 1 до п/2 — к колесам правого борта.
294
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
б)
Рис. 3.22. Съезд со ступенчатого препятствия: а) схема сил,
действующих на планетоход в вертикально-продольной плоскости,
б) положение планетохода относительно ребра верхнего основа-
ния ступенчатого препятствия в плане (1 — ребро верхнего ос-
нования ступенчатого препятствия).
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 295
При выводе формул, описывающих внешние возму-
щения, обратимся к рис. 3.22, а, из которого видно, что
цо тех пор, пока центр колеса не переместится относи-
тельно верхнего основания ступенчатого препятствия в
направлении оси х на радиус гкг, им описывается окруж-
ность. Поэтому справедливо соотношение
бг — ^кг j/ / X'l,
г = 1, 2, ..., п/2, (3.112)
где Xi — путь, пройденный колесом в направлении оси х.
Имея в виду, что Xi = vt, с учетом (3.112) найдем сле-
дующее выражение для расчета внешнего возмущения,
действующего па i-е колесо правого борта:
ШО-яЛ(Ь),
(3.113)
где t — время^отсчитываемое с момента начала движения
планетохода, l(gt), 1 (£Кг) — единичные функции вида
= 1(< —-- V <1Н)*
1Ц — высота ступенчатого препятствия.
Внешние возмущения бп/2+г (£ = 1, 2, ..., п/2), дей-
ствующие на колеса левого борта, определяются по урав-
нению, аналогичному (3.113), в котором вместо t под-
ставляется
Таким образом, система из двух уравнений (З.ГИ) и
(3.113) полностью определяет внешние возмущения, дей-
ствующие на колеса планетохода правого и левого бор-
тов, причем уравнение (3.111) описывает возмущения
под колесами левого борта, а (3.113) — правого.
В частности, если положить внешние возмущения с
номерами бп/2+1- или равными нулю, то этот случай
296
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
будет соответствовать преодолению планетоходом впади-
ны одним бортом.
Преодоление валуна или камня. Процесс
преодоления планетоходом такого препятствия схемати-
Рис. 3.23. Преодоление валуна колесами одного борта: а) вер-
тикально-продольная плоскость, б) вертикально-поперечная пло-
скость.
чески изображен на рис. 3.23. Преодоление валуна мо-
жет производиться только колесами одного борта. Однако,
если препятствие по ширине соизмеримо с колеей пла-
нетохода, например, препятствие — гряда камней, выступ
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ
скальной породы типа шпалы или бревна и т. д., то в
процессе движения оно может быть одновременно рас-
положено под колесами правого и левого бортов. Кроме
того, под колесами правого борта может быть препят-
ствие одного размера, а под
4
колесами левого борта —
другого.
Пусть под колесами пра-
вого и левого бортов плане-
тохода находятся препятст-
вия разного размера. Пред-
положим, что условный про-
филь валуна после обкатки
его колесом данного радиуса
может быть представлен в
виде полуокружности, кото-
рой всегда можно задаться.
Тогда, располагая оси ко-
Рис. 3.24. Траектория^ внеш-
него возмущения, действую-
щего на колесо при преодо-
лении валуна.
ординат так, как показано
на рис. 3.24, можно получить следующие уравнения для
расчета внешних возмущений 8п/2+г (i= 1, 2, 3, ..., п/2),
воздействующих на колеса правого 6; и левого бортов:
51 = + v1 2 (* - ^)2 + а - rki] Г(Вв{), (3.114)
где
^i=7?B4-rKj, bi = V R2 — (rKi — а)2,
1 (U = 1
(26. + — Z.) {If —
— t
— единичная функция, RB — радиус валуна, который мо-
жет принимать только два значения соответственно для
правого и левого бортов: RBn и 7?вл- Последнее также отно-
сится и к геометрическому параметру а, который харак-
теризует расположение центра О полуокружности профи-
ля валуна по высоте (рис. 3.24).
Преодоление трещины в поперечном на-
правлении. Преодоление трещины, так же как и съезд
с контрэскарпа, может производиться в перпендикуляр-
ном направлении по отношению к движению планетохода
298
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
или под некоторым углом 0. Поэтому в общем случае
внешние возмущения, действующие па колеса правого и
левого бортов, связаны соотношением (3.111).
Рис. 3.25. Траектория внешнего возмущения, действующего па
•^т -^т
колесо при движении через ров: а) «—> 1, б) —<1
(LT — ширина трещины).
Внешние возмущения 6t, i=l, 2, 3, . . ., лг/2, для ко-
лес правого борта (рис. 3.25, а) определяются из соот-
ношения
А_
cos О
V
1 (gei),
Т(^сг) = Т(г - + VH;T/cose _
— единичные функции, Ят, LT — высота и ширина трещи-
ны соответственно,
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 299
Внешние возмущения для колес левого борта опреде-
ляются из уравнения (3.111). В частности, если поло-
жить б(п/2+г) = 0 или бг- = 0, то этот случай будет соот-
ветствовать преодолению трещины в поперечном направ-
лении колесами одного борта.
Рис. 3.26. Преодоление кратера со смещением продольной оси
планетохода относительно центра кратера: а) траектория внеш-
него возмущения, действующего на i-e колесо, б) положение
планетохода относительно центра кратера в плане.
Приведенные соотношения описывают внешние возму-
щения St только в том случае, если Z/T/cos 0 > 2ггЛ
(рис. 3.25, а). При LT/cos 0 < 2rKi результирующая линия
воздействия, которая характеризует ‘внешнее возмущение,
показана на рис. 3.25, б. При этом математическое опи-
сание 6t может быть получено из приведенных выше
300
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
формул, в которых ЯТ1 (£тг) =0, а в единичные функции
1(§г) и 1(£Сг) следует подставить вместо rKi значение i\
(рис. 3.25, б).
Движение через кратер. Обширный материал,
полученный «Луноходом-1» и «Луноходом-2» о микро- и
макрорельефе поверхности Луны, показывает, что на не-
которых участках лунной поверхности основными пре-
пятствиями являются единичные кратеры, размеры кото-
рых могут изменяться от десятков сантиметров до несколь-
ких десятков метров [37]. По своему строению кратеры
могут иметь разнообразную форму, поэтому подобрать
математическое выражение, описывающее геометрию кра-
тера, в общем случае достаточно затруднительно. С целью
упрощения задачи рассмотрим движение планетохода че-
рез кратер, форма которого в плане может быть представ-
лена в виде окружности, а в поперечнике — в виде некото-
рого набора синусоид (рис. 3.26). Пусть колеса правого
и левого бортов находятся на разных расстояниях от
прямой, проходящей через центр кратера параллельно
продольной оси планетохода. Тогда внешние возмущения
бг- (j=1, 2,....., тг/2), действующие на колеса плане
тохода правого борта, определятся из выражения
6i Sin Л — -Г (к- X 1 р?л + ел v X Silly г U «2 \ X 1 &Л + ^2 Н „С. _&л + ^ + ел~1 \ и X А 6 Л Х1[2Ь, V /~л \ К ^~^г + 8л^] -1 р г — х л L \ v / J — — *)] — (HK—hK) sin (у — тл) X + А-Ц-Г (. ^ + ^ + 1,-1^ ,z 1 u Г 1 /\ у / L \ v /. \ т . - £л + 1—~— — t1 sin л X -г1-гЛ1 J 1 Jt ^л+^+ел+^-^А] L \ v ! J I + + £л + и v (3.115)
§ 3.5. УСТОЙЧИВОСТЬ ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ 301
где ел = Аел1 (тя — тп), тп = В — тл,
Аел= У («! + у)2 — тя — (ах + ^)2 — ml,
Ья = j/^ + йх)2-^ - j/ffl-ml,
^ = 2]/ (%)2 ~ml,:
ai, hK — ширина и высота валика кратера, Нк — глубина
кратера, <22 — ширина кратера, измеренная по прямой,
проведенной через основания валиков, тпл, тп — расстоя-
ния, измеряемые от центра кратера до прямых, проходя-
щих через середины колес сответственно левого и правого
бортов.
Внешние возмущения S(n/2+i) для колес левого борта
определяются по выражению, аналогичному (3.115), в
котором вместо значения пгл следует подставлять тп, а
вместо Двл подставлять
Абд =
= (Я1 + + ml — ]/+ znnjl (m„ — тл).
Уравнения (3.115) написаны при условии, что
0 тл С а2/2 и 0 < тп 'С а2/2. Если пгл аг/2 + а\, то
S(n/2+o = 0, а при тп > а2/2 + 6г = 0 (i=l,
2, ..., п/2).
При изменении тпл или тп в пределах от а2/2 до
а2/2 -|- ai внешние возмущения, например, левого борта,
могут быть приближенно рассчитаны по уравнению
6г — hK sin (тпл — а2/2) sin — [t — -—-) X
fli «л \ v /
X i[p(i + + ел _|_ г)], (3.116)
где йл = 2 ]/— ml.
Расчет внешних возмущений для колес правого борта
производится по уравнению (3.116) с учетом вышесде-
ланных замечаний.
302
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Полученные выражения для расчете! внешних возму-
щений подставляются в систему дифференциальных
уравнений (3.110), по которой и производится исследо-
вание устойчивости планетохода при движении через пре-
пятствия заданного типа. Аналитическое исследование
устойчивости в силу существенной нелинейности уравне-
ний движения представляет значительные затруднения и
может быть проведено на ЭВМ. На основании выполнен-
ных исследований могут быть определены конструктив-
ные параметры, условия эксплуатации и режимы движе-
ния планетохода, при которых обеспечивается его безо-
пасность с точки зрения устойчивости к опрокидыванию.
§ 3.6. Оценка устойчивости при проектировании
и в процессе эксплуатации
3.6.1. Расчетный метод прогнозирования устойчивости.
Выше были рассмотрены методы определения устойчи-
вости планетохода, для которого известны тягово-тормоз-
ные характеристики ведущих и затормаживающих колес,
упруго-диссипатпвные параметры подвески и колес, габа-
ритно-весовые и инерционные данные планетохода. Приме-
няя эти методы, можно определить критическую скорость
и размеры допустимых препятствий при различных ре-
жимах движения и в различных условиях эксплуатации,
т. е. решить прямую задачу. Приведенные методы позво-
ляют решать и обратную задачу, т. е. при заданной ско-
рости и условиях эксплуатации подбирать конструктив-
ные параметры планетохода, при которых обеспечивается
его устойчивость к опрокидыванию.
Решение прямой пли обратной задачи зависит от це-
лей, преследуемых расчетом, и от количества исходных
данных, которыми располагает исследователь перед нача-
лом расчета.
Некоторые исходные данные для расчета устойчивости
могут быть заимствованы из технических характеристик,
которыми обычно задаются перед началом проектирова-
ния планетохода, а именно:
максимальная скорость движения планетохода,
размеры преодолеваемых препятствий,
максимальные углы наклона поверхности, на которых
должна быть обеспечена работоспособность планетохода,
§ 3.6. ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ зоз
вес и максимально возможные габаритные размеры.
Чтобы определить критическую скорость движения
планетохода и максимальные препятствия, которые он
может преодолевать, не опрокидываясь, необходимо знать
следующее:
вес,
геометрические размеры (база, колея, радиус колеса,
положение центра тяжести),
передаточное число трансмиссии,
коэффициент учета вращающихся масс,
моменты инерции относительно декартовой системы
коордппат, проходящей через центр тяжести планетохода,
жесткости подвесок и колес,
число осей,
коэффициенты демпфирования амортизаторов.
Кроме того, приступая к расчету, необходимо знать
тормозную и тяговую характеристики планетохода.
Определение исходных величин для рас-
чета. Вес планетохода определяется непосредственно
из задаваемых технических характеристик.
Геометрические размеры (база и колея) планетохода
также определяются из технических характеристик, кото-
рые выбираются,- исходя из габаритных размеров поса-
дочной ступени ракетоносителя. Если в конструкции пла-
нетохода заложен бортовой метод поворота, то из условия
поворотливости колесных машин их база Z и колея В
связаны обычно соотношением [55]
§ = 1,05 4- 1,1-
JD
Положение центра тяжести планетохода определяется
опытным путем или расчетом по формуле
k
н=4г 5
м 31
з 1
Расчет по этой формуле может быть выполнен, если
известны масса М; и положение центра тяжести hj для
всех элементов планетохода.
Если положение центра тяжести планетохода неиз-
вестно, то для оценки устойчивости может быть принято
его ориентировочное значение 0,74-1,1 м (высота центра
тяжести «Лунохода-1» составляла 0,835 м [6]).
304
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
В том случае, когда потребуется учесть силу сопро-
тивления атмосферы, то положение центра парусности
может быть определено опытным путем при продувке в
аэродинамической трубе. Для приближенных расчетов
можно воспользоваться рекомендациями [10], согласно
которым высота центра парусности hB принимается рав-
ной половине габаритной высоты планетохода hn.
Радиус колес определяется опорной и профильной
проходимостью, а также высотой преодолеваемых пре-
пятствий Яп, и в первом приближении может быть рас-
считан по уравнению
'’к - --------------(3.117)
1 - (1 - ФпЛ/^)/К(1 -I- О (1 +
где фпс — коэфицнент сцепления колес с преодолеваемым
препятствием, Рх — толкающее усилие, приходящееся на
одну ось, Pz — вертикальная нагрузка на ось. Для полно-
приводных планетоходов отношение PXIPZ может быть
рассчитано по выражению Px!Pz = фс(п — 1).
Передаточное число трансмиссии на /-й. передаче оп-
ределяется, исходя из скорости движения планетохода
Vj на этой передаче, радиуса ведущего колеса и типа ха-
рактеристики выбранного двигателя по формуле
0,377га гк
7/ — ’___ДЛ
где ггд — частота вращения ротора, сответствующая уста-
новившемуся режиму работы двигателя, Vj исчисляется
в км/ч.
Коэффициент учета вращающихся масс определяется по
формуле (3.3), в которой в первом приближении можно
пренебречь моментом инерции колеса /кг.
Моменты инерции планетохода определяются опыт-
ным путем, например, маятниковым методом или мето-
дом крутильных колебаний [53].
Если воспользоваться рекомендациями, применяемы-
ми в теории автомобиля, то приближенное значение мо-
ментов инерции планетохода может быть определено из
формул
jQy = AMS?2, JQx = АМВ2,
§ 3.6. ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 305
где А—опытный коэффициент, который может быть при-
нят равным 0,1 4- 0,2.
Число осей определяется опорной проходимостью пла-
нетохода. Так как планетоход должен сохранять подвиж-
ность в любых условиях эксплуатации, то все его оси
должны быть ведущими.
Жесткость рессор и колес определяется многими фак-
торами, основными из которых являются плавность хода
планетохода при его движении и способность его приспо-
сабливаться к неровностям рельефа. Кроме того, жест-
кость рессор и колес определяется способностью плане-
тохода совершать движение через единичные препят-
ствия.
Жесткость рессор и колес должна быть выбрана такой,
чтобы обеспечивалась непробиваемость их упругих эле-
ментов, достигалась сохранность всех механизмов плане-
тохода и обеспечивалось удовлетворительное состояние
водителя. Метод синтеза требуемых качеств системы под-
рессоривания применительно как к планетоходам, так и
наземным транспортным машинам, пока не разработан.
При выборе жесткости системы подрессоривания
обычно проводят исследования, позволяющие определить
влияние качеств этой системы на плавность хода и нагру-
женность элементов ходовой части планетохода. Послед-
нее может быть достигнуто применением методов анализа
колебаний планетохода при детерминированном или ста-
тистическом воздействии, которые рассмотрены в следую-
щей главе.
В общем случае выбор жесткости рессор и колес —
достаточно сложная и трудоемкая задача. Поэтому при
проведении предварительных расчетов устойчивости же-
сткостью этих элементов можно пренебречь или задаться
их приближенными значениями. Например, жесткость
рессор можно выбрать из условия, чтобы парциальная
частота планетохода не превышала 84-101/с. Если ско-
рость планетохода и невелика, не более 24-3 км/ч, то
жесткость колеса можно определить из условия, чтобы
при наезде на непреодолимую вертикальную стенку сила
удара, действующая на колесо Руд, не превышала допу-
стимого значения Руд тах.
Связь между конструктивными параметрами плането-
хода, парциальными частотами Qz или £2Ф, а также силой
20 Е. В. Авотин и др.
306
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
удара выражается формулами
п
fni c'ni^i
= г~~^г--1 = ~Г-----’ -Рудтах = V Усх^-
z MU Jou
Коэффициенты демпфирования амортизаторов выби-
раются из условия плавности хода. В предварительных
расчетах этими коэффициентами можно пренебречь или
выбрать их, исходя из соотношения (4.147).
Тяговая характеристика выбирается, исходя из усло-
вий эксплуатации, параметров и скорости движения плз
нетохода. Методика выбора этой характеристики изложе-
на в предыдущей главе.
Тормозная характеристика выбирается, исходя из спо
собности планетохода гасить скорость поступательного
движения. Последнее, как правило, оценивается величи-
ной тормозного пути, который проходит планетоход с мо-
мента начала действия тормозов.
Приведенные методы расчета интересующих величин
являются достаточно приближенными, и ими можно вос-
пользоваться только для ориентировочных и предвари-
тельных оценок устойчивости. Уточненное исследование
устойчивости планетохода может быть проведено лишь
только после того, как окончательно определится компо-
новочный облик планетохода и его технические характе-
ристики.
Задаваясь условиями эксплуатации (углы наклона по-
верхности, коэффициенты сцепления и сопротивления
качению, ускорение свободного падения), типами преодо-
леваемых препятствий (контрэскарп, валун, трещина,
кратер и т. п.) и режимами движения (удар о непреодо-
лимое препятствие, торможение, разгон, поворот, сколь-
жение, преодоление единичных препятствий) исследова-
ние устойчивости движения планетохода можно провести
по одной из схем, представленных в табл. 3.7.
Выбор расчетной схемы определяется целью расчета
и возможностями расчетчика. Первая расчетная схема
обеспечивает наибольшую точность и позволяет найти вли-
яние на устойчивость наибольшего числа факторов, воз-
действующих па планетоход. Однако расчет по этой схе-
ме достаточно трудоемок и может быть проведен только
§ 3.6. ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 307
0 применением ЭВМ. Вторая расчетная схема обеспечи-
вает несколько меньшую точность и меньшие возможно-
сти по сравнению с первой. Расчет по этой схеме упро-
щен и может быть выполнен с помощью логарифмической
ТАБЛИЦА 3.7
Расчетные формулы для исследования устойчивости планетохода
Режим движения Номера уравнений
уточненная схема приближен- ная схема
Удар бесподвесочного планетохода о не- преодолимое препятствие двумя коле- сами одновременно (3.17) (3.41)
Удар подрессоренного планетохода о не- преодолимое препятствие двумя коле- сами одновременно (3.17) (3.50), (3.53)
Удар бесподвесочного планетохода о не- преодолимое препятствие одним ко- лесом (3.61)
Торможение бесподвесочного планетохода (3.62) (3.81)
Торможение подрессоренного планетохода (3.62) (3.83), (3.86)
Разгон бесподвесочного планетохода (3.89) (3.96)
Разгон подрессоренного планетохода (3.89) (3.95)
Боковое скольжение (3.101) (3.103), (3.104)
Преодоление единичных препятствий ти- па валуна, кратера, трещины и т. п. (3.107), (3.108), (3.110)
линейки. Сравнение результатов расчета, приведенное в
этой главе, по уточненным и приближенным уравнениям
показывает, что вторая расчетная схема обеспечивает
20*
308
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
удовлетворительную точность, поэтому может быть ре-
комендована для использования в инженерной практике.
В результате решения уравнений, представленных в
табл. 3.7, могут быть построены кривые, характеризую-
щие устойчивость в зависимости от конструктивных пара-
метров и режимов движения планетохода, а также от
типов и размеров преодолеваемых препятствий. Знать
эти зависимости необходимо при разработке конструкции,
составлении инструкции по эксплуатации и выборе стра-
тегии движения планетохода в тех или иных условиях
эксплуатации.
3.6.2. Выбор допустимой скорости по вероятности без-
опасной эксплуатации. Скорость движения планетохода
должна выбираться таким образом, чтобы в случае не-
ожиданной встречи с препятствием сохранилась устойчи-
вость. Удар о непреодолимое препятствие, резкое тормо-
жение, поворот и другие случаи могут стать опасными,
(^сли они происходят па уклоне.
В случае дистанционного управления планетоходом
информация о рельефе поверхности может быть получена
по телевизионному изображению. Однако на качество
телевизионного сигнала может влиять целый ряд факто-
ров: высота солнца, положение планетохода, помехи в
каналах радиосвязи и др., что может внести существен-
ные погрешности в распознавание препятствий и приве-
сти к потере устойчивости [4].
Уклоны поверхности, по которой происходит движе-
ние, определяются главным образом углами въезда и вы-
езда из кратеров, которые меняются в пределах от 10 до
35° (табл. 1.8). Поэтому целесообразно задачу устойчи-
вости планетохода при движении по протяженной трассе
решать с учетом вероятности опрокидывания в статисти-
чески заданных условиях рельефа поверхности. Ниже
рассматривается эта задача на примере «Лунохода-1»
применительно к препятствиям, которые могут быть пред-
ставлены в виде углов наклона поверхности. Однако ме-
тодические основы, изложенные в этой части параграфа,
с успехом могут быть применены и к препятствиям дру-
гих типов, а также к любым вновь проектируемым пла-
нетоходам, устойчивость движения которых является од-
ним из основных вопросов с точки зрения их безопас-
ности.
§ 3.6. ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 30
При решении задачи примем допущение о том, что на
любом уклоне поверхности возможен выход скальной по-
роды или наличие других препятствий, которые являют-
ся для планетохода непреодолимыми. Тем самым предпо-
ложим, что на любом уклоне в процессе движения
планетоход может столкнуться с непреодолимым препят-
ствием или затормозиться.
Решить эту задачу можно, если известна вероятность
встречи планетохода с различными уклонами поверхности
а, которая обычно задана в виде функции распределения
уклонов
а
F (а) = j / (а) da,
— оо
где /(а) — плотность распределения углов наклона по-
верхности а.
Если плотность распределения углов наклона поверх-
ности априори не известна, то вероятность встречи плане-
тохода с этими углами наклона поверхности F (а) может
быть получена по результатам статистической обработки
фотографий заданной плапеты или по результатам непос-
редственных измерений углов а, которые могли быть
выполнены предыдущими планетоходами с помощью
специального приспособления — профилометра.
При построении функции F(а) необходимо в расчет
принимать только такие углы наклона поверхности се,
значения которых сохраняются иа длине поверхности,
равной базе планетохода, т. е. поверхность должна опи-
сываться с учетом конструктивных и геометрических ха-
рактеристик планетохода.
Чтобы связать критическую скорость движения пла-
нетохода с вероятностью безопасной эксплуатации, надо
решить систему из двух уравнений: одно из них опреде-
ляет критическую скорость планетохода в зависимости
от угла наклона поверхности, а другое — функцию рас-
пределения углов наклона этой поверхности.
Учитытзя нелинейный характер этих уравнений, та-
кую систему целесообразно решать графически.
На рис. 3.27 дано графическое построение функции
распределения уклонов F(а) согласно табл. 1.9 (четвер-
тый квадрант) и критических скоростей движения «Лу-
310
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИИ ПЛАНЕТОХОДА
похода-1» при столкновении с непреодолимым препят-
ствием и при торможении по уравнениям (3.50), (3.86)
(первый квадрант).
Располагая кривыми — критической по устойчивости
скоростью в зависимости от углов наклона поверхности
Рис. 3.27. Зависимость вероятности устойчивого движения «Лупо-
хода-1» от критической скорости: ----- расчет по уравнению
(3.50),------расчет по уравнению (3.86), >^—>|< расчет по урав-
нению (3.10); 7 —удар о непреодолимое препятствие двумя ко-
лесами одновременно, 2 — торможение, 3, 4 — соответственно
функции распределения критических скоростей при ударе и
торможении.
и функцией распределения углов наклона этой поверх-
ности, нетрудно найти функцию распределения критиче-
ских скоростей F(vK). График этой функции представлен
во втором квадранте, а метод ее построения ясен из
рис. 3.27. Задаваясь теперь вероятностью встречи с угла-
ми наклона поверхности а (вероятностью опрокидыва-
ния), из второго квадранта рис. 3.27 определим макси-
мально допустимую величину скорости движения плане-
тохода с учетом вероятности надежной эксплуатации в
заданных рельефных условиях.
§ 3.6. ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 311
Так, например, принимая вероятность опрокидывания
при встрече с углами наклона поверхности, большими
27°, равной 0,002 или надежность эксплуатации плането-
хода по критерию устойчивости 0,998, получим для «Лу-
нохода-1» значение максимально допустимой скорости
движения, равное 2,3 км/ч из условия устойчивости при
ударе о непреодолимое препятствие и 2,4 км/ч — из усло-
вия устойчивости при торможении.
Как известно [6, 37], максимальная скорость движе-
ния дистанционно управляемого аппарата «Луноход-1»
была выбрана равной 2 км/ч. Это соответствовало
15 Ч-20 %-ному запасу устойчивости по скорости, полу-
ченной с учетом вероятности падежной эксплуатации на
Луне.
Таким образом, если считать известной функцию рас-
пределения углов наклона поверхности предполагаемого
района эксплуатации планетохода, то на стадии проек-
тирования можно провести статистическую оценку
устойчивости, которая позволит более обоснованно по-
дойти к выбору максимальной скорости движения пла-
нетохода.
При этом метод статистической оценки устойчивости
не исключает метода расчета устойчивости планетохода
по уравнениям, которые получены, исходя из детермини-
рованного воздействия, а только дополняет его.
3.6.3. Прогнозирование устойчивости планетохода в
процессе его эксплуатации. На основе приведенных в этой
главе зависимостей и уравнений движения могут быть
выполнены исследования устойчивости, если известны
конструктивные параметры планетохода и условия его
эксплуатации (ускорение свободного падения, угол нак-
лона поверхности).
Ускорение свободного падения и все конструктивные
параметры планетохода остаются постоянными в процес-
се его эксплуатации, однако угол наклона поверхности
может изменяться в широких пределах. Поэтому для
обеспечения устойчивости планетохода необходимо в про-
цессе его эксплуатации знать величины углов наклона
поверхности, па которых находится планетоход в данный
момент времени (текущие углы наклона поверхности) и
на которые возможно его попадание в будущем (прогно-
зируемые углы наклона поверхности).
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
По величине углов наклона поверхности формируются
команды управления движением планетохода с таким
расчетом, чтобы обеспечивать его безопасность с точки
зрения устойчивости при обнаружении аварийной си-
туации.
Для дистанционно управляемого планетохода, ско-
рость движения которого сравнительно невелика (до
4 км/ч), обеспечение безопасности может быть возложено
иа экипаж, который по телеметрической информации,
передаваемой с борта планетохода на наземный комплекс,
определяет возможность его движения по поверх-
ности. Так, например, безопасность «Лунохода-1» при
эксплуатации на поверхности Луны в основном обеспечи-
валась водителем по информации, поступающей с борто-
вой телевизионной системы и датчиков, характеризующих
состояние лунохода по крену и дифференту [37]. Прогно-
зирование безопасности лунохода с точки зрения устойчи-
вости осуществлялось водителем на основе сопоставитель-
ного анализа телевизионной информации о поверхности
Луны и результатов обработки группой бортинженера
информации, поступающей с борта лунохода о текущих
углах его наклона по крену и дифференту.
Для планетоходов, работающих в режиме автономного
управления, устойчивость в основном должна обеспечи-
ваться на его борту по информации, поступающей от
бортовой информационной системы. При этом одним из
важнейших условий обеспечения устойчивости автономно
управляемого планетохода является прогнозирование уг-
лового положения по крену и дифференту в направлении
его движения. Для обеспечения возможности прогнози-
рования углового положения планетохода необходимо,
чтобы информационная система включала в себя устрой-
ство для определения рельефа поверхности (профилометр)
впереди движущегося планетохода. В качестве такого уст-
ройства может быть использован, например, лазерный
дальномер [15].
Прогнозирование углового положения планетохода
может быть выполнено двумя способами: с помощью спе-
циального макета-шаблона, который связан с планетохо-
дом и движется вперед него [54], или с помощью мате-
матической модели планетохода, описывающей его ре-
акцию на внешние возмущения, которые расположены на
§ 3.6. ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 313
некотором выбранном расстоянии впереди движущего-
ся аппарата. Минимальное расстояние, на котором необ-
ходимо производить прогнозирование, не должно быть
меньше длины его тормозного пути.
Ниже рассматривается прогнозирование углового по-
ложения с помощью математического моделирования уп-
режденного движения планетохода.
На рис. 3.28 схематически показано сплошной линией
положение планетохода в данный момент времени, пун-
ктирной — прогнозируемое положение планетохода после
того, как он переместился из положения 1 на расстоя-
ние хи.
Рис. 3.28. Схема для расчета прогнозируемого положения плане-
тохода на рельефе поверхности: 1 — положение планетохода в
данный момент времени (текущее положение), 2 — положение
планетохода после того, как он переместится на расстояние, рав-
ное ха (прогнозируемое положение), 3 — профилометр.
Очевидно, уравнения, описывающие движения плане-
тохода в прогнозируемом положении (позиция 2 на
рис. 3.28), по форме совпадают с уравнениями, описыва-
ющими его движение в данный момент времени (пози-
ция 1 на рис. 3.28). Поэтому, если не учитывать динами-
ку неподрессоренных частей, то реакция планетохода на
314 ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИИ ПЛАНЕТОХОДА
упрежденные внешние возмущения может быть описана
уравнениями (3.110).
Таким образом, измеряя упрежденные внешние возму-
щения (\ для каждого колеса и подставляя их в уравне-
ния (3.110), с помощью ЭВМ на борту планетохода по
этим уравнениям можно прогнозировать угловое поло-
жение в движении.
Следует отметить, что прогнозировать угловое положе-
ние планетохода по уравнениям (3.110) целесообразно в
том случае, если па величину его углов наклона сущест-
венное влияние оказывает динамика. Если динамика пла-
нетохода незначительна, то прогнозировать угловое поло-
жение можно по более простым зависимостям, для чего
следует упростить математическую модель (З.Г10).
С этой целью проведем линеаризацию входящих в нее
величин Zi(cpn), 5Кг(-фп), А;. Кроме того, предположим,
что планетоход симметричен относительно продольной и
поперечной осей. Тогда после соответствующих преобра-
зований и удержания членов только первого порядка си-
стема (3.110) в линеаризованной форме запишется в виде
п п
-р Zn CnjZj 4" /i (zn) — i
г = 1 г—1
п п
0//фп ‘ Ь фп Cni/j 4~ /*2 (фп) ~ Спг/г^г, (3.118)
г—1 г-1
п п
JОх^п "I" ^п /3 (4п) ~ ^пг^кг^г,
г ~ 1 г J
где срп — прогнозируемый дифферент, грп — прогнозируе-
мый креп, zn — прогнозируемое положение центра тяже-
сти по высоте, /i (zn), /г(фп), /з('фи) характеризуют усилия
демфирования в амортизаторах, обусловленные линейны-
ми и угловыми перемещениями планетохода относительно
центра тяжести.
Предположим, что в процессе перемещения по поверх-
ности внешние возмущения St на каждом колесе остают-
ся постоянными, т. е. не изменяются. Тогда, если харак-
теристики демпфирования амортизаторов линейны, то ре-
шения системы уравнений (3.118) по угловым переме-
§ 3.G. ОЦЕПИЛ УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 315
щениям фц и фи могут быть записаны в виде
Ф11 (0 = exp (- b.t) a (t) + ,
г~1 (3.119)
S cni*Ki^i
фп (t) = exp (- b2t) A (Z) А ,
X1 л <-2
где е )l fi(t) и е w/2(0~ общие решения однородного
дифференциального уравнения. В установившемся режи-
ме при ехр( —Z?1^)/1(Q->O, ехр( —&20/2(0^ 0; ура-
внения (3.119) примут вид
Фп = ,
i—1
п
Cni’VKi^i
= ----------•
i win
i—1
(3.120)
Полученные соотношения (3.120) позволяют рассчи-
тать прогнозируемые углы наклона, которые имел бы
планетоход в статическом положении, если каждое из его
колес находится на неровности, высота которой равна 6i
(i=l, 2, ..., п). При расчете прогнозируемых углов на-
клона (фп, 'фп) в уравнения (3.120) подставляются внеш-
ние возмущения 6f, которые будут действовать на колеса
планетохода после того, как он переместится на расстоя-
ние, равное хп (позиция 2 на рис. 3.28). При этом вместо
внешних возмущений могут подставляться либо высоты
неровностей, измеренные в неподвижной системе коорди-
нат (рис. 3.28), либо перепады высот неровностей бг,
измеренные в подвижной системе координат (рис. 3.29).
Например, для шестиколесного планетохода, у которого
я™ = ±BJ2, перепады высот неровностей могут быть
316
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
представлены в следующем виде:
бх = h± cos ф cos ф — йп cos ф cos (ср + фл) + I sin ф + — simp,
с В • I
o2 = -y Sin 1|),
63 = (/гх — /г») cos ф cos <p — I sin cp + sin ip, (3.121)
64 = h± cos ф cos ф — йл cos ф cos (ф + фл) + ^ sin ф—simp,
65 = (hr — й4) cos ф cos ф —~ sin ф,
б6 = (Й1 — й5) cos ip cos ф — I sin ф----------sin ф.
Расстояния hi через прогибы подвесок Д», деформацию ДКг
и радиус гкг колеса могут быть представлены в виде [2]
hi = ГКг + Дг + Дкг + Йкг-, ГДв ЙКг — НрОвКЦИЯ НИ ОСЬ Z ОТ-
резка от центра г-ro колеса до центра тяжести, измерен-
ная в статическом положении.
Рис. 3.29. Схема для расчета перепадов высот рельефа поверх-
ности: ----- текущее и--------прогнозируемое положения.
Если за уровень отсчета выбрать точку, которая уда-
лена от центра тяжести на расстояние, равное Н + z
(здесь z — смещение центра тяжести относительно стати-
ческого положения, обусловленное динамикой планетохо-
да), то перепады высот неровностей Sf могут быть опре-
§ 3.G. ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 317
делены из более простых соотношений, т. е.
61 = (/1 + Хп) sin Ф + sin 1|) + (Я + z) cos Ф —
— Лпсоз(ф 4- фп),
62 = Zi sin ф + sin т|) + (Al + АК1 4- z) cos ф,;
63 = l2 sin ф 4- ~ sin ф 4- (Д2 4- Д1<2 4- z) cos ф,
64 = (^4 + ^п) sin ф —sin 4- (Д 4- z) COS ф —
— /1ЛСОЗ (ф 4- фл),
65 = lt sin Ф — sin г|) 4- (А4 4- Дк4 4- z) cos ф,
66 = Z5 sin ф — -^-sinip 4- (Д5 4- Дк5 4- z) cos ф.
Здесь за нулевой уровень отсчета принято такое поло-
жение подвесок и колес, которое они занимают при рас-
положении планетохода на горизонтально ровной поверх-
ности.
Из сравнения последних соотношений с выражения-
ми (3.121) следует, что с точки зрения технической реа-
лизации они являются более простыми, но менее точны-
ми. При этом точность уменьшается за счет того, что в
этих уравнениях присутствует неизвестная величина z.
Так как в данном случае речь идет не об измерении
рельефа поверхности, а о прогнозировании углового по-
ложения планетохода, то неточность определения бг но
последним уравнениям не окажет влияния на точность
результатов прогнозирования. Это непосредственно сле-
дует из этих уравнений, поскольку в любом из б< присут-
ствует величина z. Поэтому при решении задач, связан-
ных с прогнозированием углового положения планетохо-
да, можно пользоваться любыми уравнениями для
определения перепадов высот неровностей бг-.
Рассмотрим частный случай, когда прогнозирование
устойчивости производится на расстояние, равное полови-
не длины колесной базы, т, е. xa=L/2=l и профилометр
установлен под прямым углом к продольной оси, т. е.
фл = 90°. Тогда, если положить БШф ~ ф, sin гр ~ гр,
318
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИИ ПЛАНЕТОХОДА
cos ф = cos *ф = 1, то из (3.120), (3.121) могут быть по-
лучены следующие выражения для расчета прогнозируе-
мого положения планетохода через текущие прогибы под-
весок А;, деформации колес Дкг-, углы наклона ф, г|) и
скачки дальности Дп, D t под правым и левым профило-
метрами:
Ч’п = ------------1- ф,
У. «„.-г?
6
слг5кг(\?г
г|>п = ^---------— + Ч’, (3.122)
Сиг6кг
i l
здесь 6Ki = Аг-i + Ак(1--1) — суммарная текущая деформа-
ция рессоры и колеса Z-й подвески для i = 2, 3, 5, 6,
бк1 = Z)u, бК4 = £>л — скачки дальности соответственно
под правым и лсвьш профилометрами, 1)п = (Дп—До),
Р.1 = (Дл—До), До — расстояние между профилометром и
рельефом поверхности, когда планетоход находится па го-
ризонтальной площадке (наклонная дальность).
Если параметры планетохода таковы, что l[ = Z3 ==
— Z4 = Z6 — I, l2 = Ц = 0, sni = В/2, ci i= C2 — C4 = се =
— cK, c,2 = св = cc, то выражения (3.122) могут быть
представлены в более простом виде, т. е.
^к4 ^кЗ $к6 >
Фи -----------------------Ь
+ \-3 - бк6 +~‘(^2-М
1|)п := -----—-------2---------ф ф,
В | 2 + I
\ ск /
Соотношения (3.120), (3.122) остаются справедливы-
ми в том случае, если в процессе движения не происхо-
дит отрыва колес от поверхности. Кроме того, в ряде
ситуаций расчет по уравнениям (3.120), (3.122) может
привести к погрешности, например, в ситуации, изобра-
женной на рис. 3.30. Из (3.120) следует, что в данной
ситуации прогнозируемый дифферент фп = 0, хотя его
значение фактически будет иным, определяемым накло-
ном планетохода вокруг диагонали, задаваемой первым
и шестым колесами (либо на левый борт, либо на правый
борт). Для устранения подобных ошибок можно прогно-
§ 3.6, ОЦЕНКА УСТОЙЧИВОСТИ ПРИ ПРОЕКТИРОВАНИИ 319
з-ировать дифферент отдельно по левому и правому бор-
там: фпл, Фпп (принимая в качестве допущения, что рама
планетохода не жесткая), а крен — по перепадам высот
между правым и левым профилометрами. Тогда зависи-
мости фпл, фпп и фп можно представить в виде
фпп — I ф, фпл ~ -у, F ф,_
бк1 — 6...,
Ч’П = + 1|>.
При прогнозировании дифферента и крепа по этим
соотношениям могут получиться завышенные результаты
по сравнению с полученными по формулам (3.120) и
(3.122). Это может привести к тому, что в от-
дельных сложных си-
туациях система будет
выдавать сигнал на ос-
танов планетохода. Од-
нако такой подход сле-
дует считать оправдан-
ным, учитывая уни-
кальность миссии пла-
нетохода, т. е. лучше
иметь некоторое увели-
чение числа остановок
и маневров, чем пол-
ную потерю подвижно-
сти, связанную, напри-
Рис. 3.30. Ситуация, при которой
могут возникнуть расчетные ошиб-
ки в прогнозировании углового по-
ложения планетохода; 7, 2, ...
..., 6 — колеса планетохода.
мер, с опрокидыванием.
В заключение отметим следующее. При измерении
расстояний hn или Ал (наклонная дальность) до рельефа
_ л
поверхности под углом фл <Z -у могут быть не замечены
Zu
опасные ситуации из-за наличия теневых зон, которые
образуются за неровностями рельефа вследствие «экрани-
рующего эффекта», возникающего от этих неровнос-
тей [39]. Очевидно, с увеличением высоты неровностей,
при прочих равных условиях, протяженность теневой зо-
ны увеличивается. Поэтому максимальное расстояние,
па котором может производиться уверенное распознава-
ние рельефа поверхности, а следовательно, и прогнозиро-
вание углового положения, зависит от протяженности
320
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
теневой зоны. В частности, для выступающих неровно-
стей, высота которых равняется Ян, протяженность тене-
вой зоны определяется из следующего соотношения
1т = 77
л уп
где Sa = ha sin <рл — проекция на продольную ось плане-
тохода отрезка от профилометра до препятствия, Яуп =
= Яп—Ян, Яп — высота установки профилометра на пла-
нетоходе.
Из условия проходимости протяженность теневой зо-
ны следует ограничить величиной ZT 1,4гк. Тогда макси-
мальное расстояние до препятствия, на котором возможно
уверенное прогнозирование углового положения плането-
хода, не должно превышать величины
1.4г Н
*Эптах ---•
Таким образом, расстояние 5П, на котором может про-
изводиться уверенное прогнозирование, с одной стороны,
зависит от протяженности теневой зоны, а с другой — от
величины тормозного пути, т. е.
rrT^Sn^5nmax, (3.123)
и2 . ,
где Хт = ----------------------Н ^Гзап — тормозной путь
2 у- (<рс cos а — sin а)
планетохода, £зап — время запаздывания срабатывания
тормозов.
Из (3.123) может быть найдено соотношение для
оценки величины максимально допустимой скорости пла-
нетохода при движении его в режиме автономного управ-
ления, т. е.
/о arxtH^„
Я2£зап + 2,8—-----,
gr
где cl = — (фс cos a — sin a).
°o
Так как высота преодолеваемой неровности Нп огра-
ничена по сцеплению, то с учетом (3.117) последнее со-
§ 3.7. ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА УСТОЙЧИВОСТИ 321
отношение может быть преобразовано к виду
V — Я^зап +
^2 । _______________2,8аНуп________________
1-[1-фпс<рс(п-1)]// (1 + Ф^с)[1-Ь Фс («—i)2]
№
Таким образом, в зависимости от места установки
профилометра на планетоходе, а также его тягово-сцеп-
ных характеристик с грунтом, по последним соотношени-
ям может быть определена максимально допустимая ско-
рость движения с точки зрения непопадания планетохо-
да в аварийную ситуацию из-за наличия теневых зон.
§ 3.7. Экспериментальная проверка
расчетных методов оценки устойчивости
В предыдущих разделах были изложены аналитичес-
кие методы исследования устойчивости планетохода. При-
веденные в них динамические модели для системы и их
математическое описание содержат некоторые допуще-
ния. Естественно, что целесообразно экспериментально
проверить, насколько точно описывают устойчивость пла-
нетохода дифференциальные уравнения движения и полу-
ченные па их основе расчетные зависимости.
На Земле трудно осуществить полную имитацию ус-
ловий работы планетохода для экспериментального ис-
следования динамических процессов, возникающих при
его движении. Особенно сложно имитировать гравитаци-
онные условия.
Существует несколько методов имитации гравитацион-
ных условий. В случае повышенных по сравнению с
Землей гравитационных сил имитация может быть дос-
тигнута на центрифугах, при пониженных — «обезвеши-
ванием» с помощью резинового троса (рис. 3.31), дви-
жением по наклонной поверхности (рис. 3.32), при поле-
те на самолете по специальной траектории, помещением
испытуемого изделия в жидкость с заданной плотностью
и т. п.
Каждый из этих методов имеет определенные недос-
татки, ограничивающие его возможности. «Обезвешива-
ние» резиновым тросом создает ограничения в перемеще-
Е. В. Авотин п др.
322
ГЛ. 3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
ниях планетохода, нестабильность разгружающей силы
вследствие его вертикальных перемещений и соответст-
венно увеличение погрешностей; движение по наклонной
поверхности не позволяет создавать трассы с сыпучими
Рис. 3.31. Схема «обезвешивания» с помощью резинового троса:
g3, g— ускорения свободного падения на Земле и заданной пла-
нете, G3 — земной вес макета.
Рис. 3.32. Схема «обезвешивания» с помощью наклонной стенки:
G3 — земной вес макета, G — вес макета на заданной планете,
/с — удерживающая связь.
грунтами, ограничивает маневренность планетохода; са-
молетные испытания по специальной траектории ограни-
чивают время испытаний в пределах 30 4- 40 с и размеры
испытательной площадки; испытания в жидкой среде вы-
§ 3.7. ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА УСТОЙЧИВОСТИ 323
зывают целый ряд специфических трудностей (проблема
размещения аппаратуры испытаний, создание трассы и
т. Д.).
Для экспериментальной проверки расчетных методов
оценки устойчивости нет нужды проводить испытания в
условиях, полностью имитирующих натурные.
Уравнения, описывающие устойчивость планетохода,
справедливы для любого гравитационного поля. Поэтому
достаточно провести испытания макета планетохода в ус-
ловиях земной гравитации с любой степенью приближе-
ния его параметров к натурным и выполнить для этих
условий аналитическую оценку устойчивости.
Для оценки корректности аналитических выражений,
характеризующих устойчивость планетохода, полезно
также провести сравнительный анализ его устойчивости
при работе на поверхности планеты.
Ниже приводится такое сравнение расчетной оценки
устойчивости лунохода с результатами испытаний спе-
циальных ходовых макетов и эксплуатации «Лунохода-1»
на Луне [5, 6, 40].
Экспериментальные исследования проводились для
случаев, когда ходовой макет сталкивался с непреодоли-
мым препятствием двумя колесами одновременно
(рис. 3.33), тормозился (рис. 3.34) и съезжал со ступен-
чатого препятствия (рис. 3.35).
В табл. 3.8 приведены параметры ходовых макетов,
на которых проводились исследования. Для сравнения
представлены также параметры «Лунохода-1» [6, 40].
Исследование устойчивости при съезде со ступенчато-
го препятствия проводилось на ходовых макетах № 1 и
№ 2. Ступенчатое препятствие было изготовлено из до-
сок, высота которого изменялась от 0,3 до 0,55 м.
Исследование устойчивости при ударе о непреодоли-
мое препятствие и торможении проводилось на ходовом
макете № 3 на специальной испытательной площадке,
угол наклона которой мог регулироваться.
Удар о непреодолимое препятствие, которое представ-
ляло собой стенку высотой 0,35 м и шириной 0,25 м,
проводился со скоростью 0,555 м/с. Стенка устанавлива-
лась в конце уклона строго перпендикулярно продольной
оси макета. Исследование устойчивости при торможении
производилось после разгона ходового макета до скорости
21*
324
ГЛ.3. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
Рис. 3.33. Столкновение ходового макета с непреодолимым пре
пятствием.
Рис. 3.34. Торможение ходового макета.
§ 3.7. ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА УСТОЙЧИВОСТИ 325
0,555 м/с. Разгон и торможение проводились с таким рас-
четом, чтобы к моменту съезда макета со стенда угол на-
клона его корпуса достигал максимальной величины. Ис-
следование устойчивости при ударе о непреодолимое пре-
пятствие проводилось при углах наклона стенда, равных
254-27°, а при торможении — 174-21°.
Рис. 3.35. Съезд со ступенчатого препятствия.
При испытаниях на ходовых макетах приборы реги-
стрировали угловые перемещения в вертикально-продоль-
ной плоскости (дифферент), вертикальные ускорения и
деформацию подвесок. При эксплуатации «Лунохода-1»
на поверхности Луны проводилось измерение углов нак-
лона корпуса датчиком крена и дифферента, сигналы от
которого по телеметрическим каналам передавались на
наземный измерительный комплекс. Скорости движения
«Лунохода-1» регистрировались по сигналам, поступаю-
щим от датчиков оборотов, которые были установлены в
каждом мотор-колесе лунохода [37].
Весь комплекс измерительной и регистрирующей ап-
паратуры с учетом неточности обработки осциллограмм
326
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
позволял определять регистрируемые параметры ходовых
макетов и «Лунохода-1» с погрешностью 10 4- 14%.
Сравнение результатов расчета с данны-
ми эксперимента, проведенного в земных
условиях э сп л уатации. На рис. 3.36 представле-
но сравнение результатов испытаний ходовых макетов
ТАБЛИЦА 3.8
Технические характеристики ходовых макетов
и «Лунохода-1»
Параметры Раз- мер- ность Ходовой макет «Луно- ход-1»
№ 1 № 2 К2 3
Масса кг 179 217 255 780
Момент инерции относи- тельно оси X к гм2 310 230 450 290
Высота центра тяжести м 0,835 0,75 0,98 0,835
Радиус колеса м 0,25 0,25 0,25 0,25
Проекция на продоль- ную ось расстояния от центра тяжести до ’ центра:’
передних колес м 0,85 0,81 0,58 0,85
вторых колес м 0,28 0,24 0,11 0,28
третьих колес м —0,28 -0,32 -0,80 —0,28
задних колес м -0,85 —0,89 —1,5 -0,85
Коэффициент учета вра- б/р — — 3,8 1,96
щающихся масс
. Удвоенная жесткость П/м 16 600 1520 1660 1660
крайних подвесок
Удвоенная жесткость Н/м 7 000 8800 7000 7000
средних подвесок
Жесткость колеса П/м 25-1О4 25-1О4 25-104 25.101
Удвоенная жесткость Н • с/м — — 2000 2000
тормоза
Коэффициент демпфиро- вания t-ro колеса Н-с/м 125 125 125 125
•№№ 1, 2 при съезде со ступенчатого препятствия под
прямым углом к его верхней кромке (0'=О) [5], па
рис. 3.37 — при симметричном (тп = тп) движении хо-
дового макета № 1 через кратер с данными моделирова-
Рис. 3.36. Сравнение результатов расчета с данными эксперимен-
та при съезде со ступенчатого препятствия: а) ходовой макет
№ 1, Нэ = 0,3 м; б) ходовой макет № 2, Нэ = 0,4 м (---------рас-
чет по (3.110),--------------------эксперимент).
328
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
ния этих же режимов на ЭВМ [40]. Моделирование ус-
тойчивости на ЭВМ проводилось по системе дифферен-
циальных уравнений (3.107).
На рис. 3.36, а показано изменение угла наклона кор-
пуса в вертикально-продольной плоскости ср, а на
рис. 3.36, б— угла ср, деформации Ai передней и Д4 зад-
ней подвесок, а также вертикального ускорения z центра
тяжести по времени.
Рис. 3.37. Сравнение результатов расчета с данными экспери-
мента при преодолении кратера диаметром DK = 3 м (--------------------
расчет по (3.110), ------’эксперимент).
Из рисунков видно, что результаты расчета и экспери-
мента достаточно хорошо совпадают. Так, для ходового
макета № 1 при съезде со ступенчатого препятствия
Н3 = 0,3 м максимальный угол наклона сртах, полученный
на испытаниях, составил минус 17,5°. Этот же угол, полу-
ченный при решении уравнений движения на ЭВМ, равен
минус 17,6°. Для ходового макета № 2 при съезде со сту-
пенчатого препятствия высотой 0,4 м совпадение резуль-
татов наблюдается не только по угловым перемещениям
ср, но и по другим параметрам, к которым относятся
вертикальное ускорение z центра тяжести и деформации
Д1, Д4 подвесок крайних колес.
§ 3.7. ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА УСТОЙЧИВОСТИ 329
При движении через кратер угловые колебания маке-
та, построенные на основании экспериментальных и рас-
четных данных, также совпадают как по количественному
значению величин, так и качественному характеру проте-
кания процесса.
Некоторые данные экспериментального и расчетного
исследования устойчивости для ходового макета № 3 при
ударе о непреодолимое препятствие *) и при торможении
представлены в табл. 3.9 [6].
ТАБЛИЦА 3.9
Сравнение результатов расчета и эксперимента
при ударе о непреодолимое препятствие и торможении
Вид эксперимента Критический угол наклона поверхности в вертикально-продольной плоскости, град
Эксперимент Расчет
по упрощенным _ уравнениям по соответствующим системам дифферен- циальных уравнений
Удар 26 24,5 25
Торможение 20,4 19 20
Приведенные в этой таблице результаты показывают,
что при ударе о непреодолимое препятствие и при тор-
можении расчетные значения критических условий дви-
жения макета находятся в полном согласии с результа-
тами, которые получены при проведении эксперимента.
Сравнение результатов расчета с экспе-
риментальными данными, полученными в
лунных условиях эксплуатации. В процессе
эксплуатации «Лупохода-1» па поверхности Луны по те-
леметрическим каналам были получены значения углов
наклона ср корпуса в вертикально-продольной плоскости
при торможении и величины соответствующих скорос-
тей v прямолинейного движения на различных уклонах а
лунной поверхности перед началом торможения «Лунохо-
да-1». На основании данных об условиях движения «Лу-
*) При ударе о непреодолимое препятствие вращение маке-
та происходило относительно оси переднего колеса при коэффи-
циенте по сцеплению срс = 0,64. '
330
ГЛ.З. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ПЛАНЕТОХОДА
находа-1» (и, а) на ЭВМ моделировалось торможение в
идентичных условиях эксплуатации [5].
В качестве участков лунной поверхности выбирались
участки, на которых колебания корпуса к моменту начала
Рис. 3.38. Торможение «Лу-
нохода-1» при эксплуата-
ции его на поверхности
Луны: -------расчет,
-----эксперимент . (А —
зона нечувствительности
телеметрии).
торможения затухали и углы
наклона поверхности до и после
торможения совпадали.
Некоторые результаты срав-
нения экспериментальных и
расчетных данных представле-
ны на рис. 3.38. На этом ри-
сунке экспериментальные ре-
зультаты соответствуют макси-
мальным значениям углов на-
клона «Лунохода-1» на первом
периоде колебаний. Отсюда
видно, что величина угла накло-
на в вертикально-продольной
плоскости в момент торможе-
ния, рассчитанная на ЭВМ, со-
ответствует результатам, полу-
ченным при эксплуатации «Лу-
нохода-1» на поверхности Луны
(расхождения в результатах не
превышают 0,2—0,4°).
Близость результатов расче-
та с данными эксперименталь-
ных исследований, проведенных в земных и лунных
условиях эксплуатации, подтверждает достоверность вы-
веденных уравнений движения и полученных на их ос-
нове расчетных критериев, которые остаются справедли-
выми и применимыми при анализе устойчивости движе-
ния колесных машин на различных планетах.
ГЛАВА 4
КОЛЕБАНИЯ ПЛАНЕТОХОДА
§ 4.1. Методические основы исследования колебаний
4.1.1. Задачи, решаемые при исследовании колебаний
планетохода. Движение любой транспортной машины, в
том числе и планетохода, сопровождается перемещениями
в вертикальных плоскостях его подрессоренных и непод-
рессоренных частей. В свою очередь, изменение во вре-
мени координат подрессоренных и неподрессоренных
частей, а также их производных, превышая некоторые
наперед заданные допустимые величины, может стать при-
чиной возникновения нежелательных для нормального
функционирования планетохода явлений. Так, например,
для лунохода с дистанционным управлением одним из важ-
нейших условий наличия радиосвязи между луноходом,
находящимся на Луне, и наземным пунктом управления
является направление антенны лунохода на антенну на-
земного пункта. Очевидно, что колебания подрессоренной
части лунохода, вызванные движением по неровной по-
верхности, могут в отдельные моменты эксплуатации на-
рушать это условие, что отрицательно скажется как на
процессе управления движением планетохода, так и на
получении необходимой телеметрической информации.
В работах [37, 38, 71], посвященных обработке теле-
метрической информации о функционировании шасси
«Лунохода-1» на Луне, указывалось, что шасси лунохода
может использоваться как инструмент для изучения физи-
ческих свойств лунной поверхности. Однако колебания
планетохода, вызывающие неравномерную загрузку колес,
отрыв колес от грунта и другие подобные явления, вносят
свои погрешности в принимаемую на Земле телеметрию
и должны учитываться при обработке полученной ин-
формации.
332
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Колебания планетохода, связанные с появлением цик-
лических нагрузок, являются причиной возможной уста-
лости материалов, из которых изготавливаются упругие
элементы шасси планетохода.
У планетоходов с непосредственным управлением,
предназначенных для транспортировки человека по по-
верхности планеты, одним из важнейших факторов огра-
ничения скорости движения является плавность хода,
обеспечение которой требует изучения как стационарных
случайных колебаний, так и реакций корпуса плането-
хода на импульсные случайные воздействия.
Эти соображения и задачи, связанные с исследованием
динамики планетохода при стационарных случайных не-
прерывных и импульсных воздействиях, определяют ме-
тоды их решения, которые можно подразделить на три
основные группы:
физическое моделирование колебаний планетохода на
Земле в условиях, имитирующих его колебания на задан-
ной планете,
математическое моделирование колебаний планетохо-
да, основанное на решении уравнений динамики ’ с по-
мощью ЭВМ,
расчетно-теоретические методы анализа колебаний и
синтеза динамических параметров шасси планетохода, ос-
нованные на аналитическом решении упрощенных урав-
нений, приближенно описывающих динамику планетохода
применительно к той или иной задаче анализа или син-
теза.
В настоящей главе основное внимание уделено послед-
ней группе методов, так как они позволяют па стадиях
разработки концепций планетоходов, эскизных и техни-
ческих проектов получать с приемлемой точностью раци-
ональные значения геометрических и динамических па-
раметров шасси, а также количественные характеристики
режимов их работы в условиях ожидаемой эксплуатации.
В основе предлагаемых методов лежит решение дифферен-
циальных уравнений пространственных колебаний корпу-
са планетохода, вызванных его движением по неровнос-
тям детерминированной и случайной формы. В отличие
от уравнений, рассмотренных в гл. 3, уравнения настоя-
щей главы описывают малые колебания корпуса плане-
тохода относительно положения статистического равнове-
\ § 4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ 333
сия, что позволяет осуществить их решение с помощью
методов динамики линейных и линеаризируемых систем.
4.1.2. Физическое моделирование колебаний плането-
хода в вертикальных плоскостях. Физическое моделиро-
вание движения инопланетных транспортных средств в
земных условиях основывается на имитации силовых воз-
действий на макеты планетоходов, которые при выбран-
ных критериях подобия адекватны воздействиям заданной
планеты на проектируемый планетоход.
При физическом моделировании колебаний плането-
хода под действием вертикальных возмущений, возника-
ющих от преодоления неровностей поверхности планеты
с заданной скоростью, необходимо соблюдение геометри-
ческих и динамических критериев подобия исследуемых
машин и воздействий.
Геометрическое подобие выражается в равенстве от-
ношения геометрических размеров элементов ходовой
части к размерам неровностей поверхности. Обозначим
параметры неровностей под колесами планетохода. Пусть
LH — длина неровности заданной формы, //„ — высота
неровности заданной формы, например,
6 (х) '= — cos £j, (4.1)
где 6Х — текущее значение высоты неровности в точке %,
х — текущее значение пути, пройденного планетоходом.
Тогда можно получить геометрические критерии подобия
модели «м» и натуры «н» в виде
гм Гн А м Ан //
= Г—, о— = 77—, 77- = 77- И Т. Д. (4.2)
нм ^нн “нм “нн “нм “нн
Соблюдение условий (4.2) обеспечивает одинаковую
фазу воздействий неровностей поверхности на различные
колеса (катки) планетохода и его макета в натурных
(планетных) и моделируемых (земных) условиях.
Для динамического подобия колебаний макета и пла-
нетохода необходимо совпадение ’ парциальных частот Q
по угловым и вертикальным колебаниям натуры и моде-
ли, а также равенство соответствующих им безразмерных
коэффициентов апериодичности X. Как будет показано
334 ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА '
/
ниже, вертикальные колебания центра тяжедти подрес-
соренной части планетохода можно описать/ уравнением
п ф п
Mnz + 2 bi z + 2 ciz = I Qz 18,
2=1 2=1
(4.3)
где — коэффициент кинематического преобразования,
осуществляющий переход от воздействия неровностей
дороги к центру тяжести подрессоренной части. Он за-
висит от числа колес (катков), их расстановки по базе
и отношения длины базы планетохода £ к длине прео-
долеваемой неровности Лн типа (4.1). Условия динами-
ческого подобия вертикальных колебаний подрессоренной
части натуры и модели имеют вид
Нетрудно показать, что для обеспечения подобия уг-
ловых колебаний подрессоренной части планетохода с мо-
ментами инерции Ухн, /Vh относительно центра тяжести и
Лм и yvM макета необходимо соблюдение следующих ус-
ловий:
для вертикально-продольных колебаний (р вокруг
оси у
4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
335
для вертикально-поперечных колебаний ф вокруг
оси х \
Т| Л^м сгм f .X Сгн
йфм = I/ \ = I/ ,
' \ ^ХМ т ХН
Одновременное выполнение условий (4.4), (4.5) и
(4.6) физического подобия колебаний планетохода на
заданной планете и макета па Земле теоретически воз-
можно, однако практически такой макет при большой
разнице в гравитации на Земле и заданной планете будет
существенно конструктивно отличаться от своего пла-
нетного прототипа, и диапазон исследовательских задач,
решаемых с применением его, будет весьма узким. Он
не позволит совместить исследование колебаний с зада-
чами исследования тяговой динамики поворота и тор-
можения. Однако, если ограничить область исследования
колебаний только колебаниями в вертикально-продольной
плоскости, то становится вполне реальным и достаточно
простым создание макета, удовлетворяющего условиям
(4.4) и (4.5), а также требованиям подобия тягово-дина-
мических процессов, поворотов и торможений.
На рис. 4.1 приведена фотография динамического
макета «Лунохода-1», испытанного на стадии его проек-
тирования [21]. Равенство частот макета и лунохода в вы-
ражениях (4.4) и (4.5) обеспечивается тем, что величины
веса подрессоренных частей лунохода и макета равны,
но массы подрессоренной части на макете разнесены на
значительное расстояние от центра, что обеспечивает ра-
венство моментов инерции макета и натуры. Подобие
по угловым колебаниям, осуществленное в данном слу-
чае, и некоторое пренебрежение к вертикальным колеба-
ниям центра тяжести вызвано тем, что при оценке коле-
баний подрессоренной части многоопорных машин, а к
таковым именно относится «Луноход-1», наиболее суще-
ственными являются параметры угловых колебаний, в то
336 ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА /
/
время как влияние вертикальных колебаний центра тя-
жести на общую картину колебаний подрессоренной части
менее значительно. /
Макеты планетоходов типа изображенного на рис. 4.1
могут использоваться для приближенной эксперименталь-
ной оценки колебаний планетоходов ца трассах, имити-
рующих поверхность планеты. Kpoj/e того, они могут
/
Рис. 4.1. Ходовой макет «Лунохода-1».
быть использованы для оценки точности и отработки ме-
тода математического моделирования колебаний плането-
хода в условиях, максимально приближенных к эксплу-
атационным. Необходимость проведения работ по оценке
точности и по корректировке математического моделиро-
вания колебаний планетоходов обычно вызывается тем,
что при их математическом описании ряд коэффициентов
полученных уравнений и функциональных зависимостей
(например, коэффициентов демпфирования, величин мо-
ментов инерции и т. д.) выбирается либо на основании
расчета, либо по результатам некоторых частных авто-
номных экспериментов, что может вызвать погрешности
при решении полной задачи колебаний,
§ 4^. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ 337
Необходимо\от.метить, что физическое моделирование
колебаний планетохода, основанное на применении раз-
личных типов упругого «обезвешивания» подрессоренных
и неподрессорепных частей, не всегда может быть при-
менимо, так как, с одной стороны, связано с созданием
весьма громоздких обезвешивающих устройств, а с дру-
гой,— не обеспечивает приемлемой точности воспроизве-
дения динамических процессов колебаний из-за введения
в систему дополнительных упругих элементов и распре-
деленных масс самой системы «обезвешивания». Доста-
точно эффективным методом исследования колебаний
планетохода, движущегося по неровной поверхности, яв-
ляется их математическое моделирование с использова-
нием ЭЦВМ и АВМ.
4.1.3. Математическое моделирование колебаний пла-
нетохода. В основе математического моделирования ко-
лебаний планетохода, движущегося по неровной поверх-
ности, лежит решение дифференциальных уравнений
малых колебаний подрессоренных и неподрессорепных
частей планетохода, вызванных неровностями поверхно-
сти. При этом текущее значение высоты неровностей 6
представляется функционально зависящим от времени:
6 = 6(£). Например, геометрическое описание неровности
типа (4.1) или ему подобное преобразуется в выражение
6(f) =^^1-cosgf) (4.7)
с помощью подстановки х = vt.
Рассмотрение только малых колебаний при исследова-
нии плавности хода планетоходов и связанных с нею
задач объясняется следующими соображениями:
обычно отношение динамических ходов подвесок пла-
нетоходов к величинам их базы и колеи составляет не
более 0,1, что соответствует изменению углов колебаний
подрессоренной части в диапазонах 0—10°;
движение планетохода по подъемам, спускам и косо-
горам с уклонами, большими 10°, не вызывает динами-
ческих воздействий на подрессоренную часть планетохо-
да в силу их низкочастотности, и при исследовании
колебаний планетохода может не рассматриваться.
Таким образом, в отличие от динамических уравнений
планетохода, рассмотренных в гл. 3 при исследовании
Е. В. Авотин и др.
338
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
устойчивости, уравнения малых колебаний планетохода,
динамическая схема которого изображена на рис. 3.19,
имеют 1вид
п
MnZ + 2 С^плг + F ппг + F алг + Р апг) = Мп?,
г=1
п п
-/ИпР^ф 4" 2 ^г (Рпл г "Р Рппг) “Р 5 li С^алг “Р Parti) = О,
г=1 г=1
^г^лг ^плг Ралг “Р Fклг — ^iSi
^г?пг Рппг Fапг ~Р Ркпг ~ ТТЦ?» / = 1, 2, . . ., И, j
(4-8)
ГДе Рn.ai — Рnjii ^Дог 2 ^гф ~~2~ Ф“Р£л^ и Рппг — Рппг
(ДОг — Z ~ /гф + “ГТ + £пг | —ВСЛИЧИНЫ СИЛ уПруГИХ Дв-
формаций левой и правой i-x подвесок соответ-
ственно, ^алг = ^алг — 2 — Zj ф---у 4? — Влг^ и F апг =
= Fani (— 2 — ф + -г?- гр + ?пг^ — величины диссипатив-
ных сил левого и правого i-го амортизатора соответственно,
Рклг Fклг’ ( ДкОг ^лг "f” бЛг) И FКПг Fкпг ( ДкОг ^пг йпг)
величина упругих деформаций ободьев левого и правого
t-х колес (катков) планетохода соответственно, — вер-
тикальные перемещения Z-й левой неподрессоренной ча-
сти, gm- — то же для правой i-й неподрессоренной части,
по — число осей (пар колес) планетохода, Дког — статиче-
ская деформация f-го обода колеса планетохода.
При составлении уравнений (4.8), кроме малости ко-
лебаний, были использованы следующие предположения:
жесткость корпусов и рам планетоходов (подрессорен-
ных частей) высока и значительно превышает жесткость
упругих элементов системы подрессоривания, что позво-
ляет рассматривать подрессоренную часть как твердое
тело;
§ 4.1\ ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
339
усилия от каждого Z-го левого или правого упругого
элемента и амортизатора действуют на подрессоренную
часть вертикально и приложены в одной точке с коорди-
натами Uf,
планетоход симметричен относительно вертикально-
продольной плоскости;
движение планетохода по поверхности равномерное;
деформация упругих элементов подрессоривания, вы-
званная приложением тяговых и тормозных усилий к ко-
лесам планетохода, не учитывается;
участок неровной поверхности горизонтален в продоль-
ном и поперечном направлениях.
Эти предположения не нарушают общности исследо-
вания колебаний планетохода на основе решения уравне-
ний (4.8).
В уравнениях (4.8) функциональные зависимости
упругих и диссипативных сил Fai, FKi и Fai обычно имеют
существенно нелинейный ха-
рактер. На рис. 4.2, 4.3 и 4.4
представлены типичные харак-
теристики упругого элемента
подвески, амортизатора и шины
соответственно.
Характеристика подвески Fni
представляет собой кусочно-ли-
нейную зависимость усилия Fn
от величины ее относитель-
ного поджатия Аг. Участок ab
соответствует опусканию коле-
са на нижний ограничитель
хода подвески при отрыве ко-
леса от грунта. Участок Ъс —
это характеристика упругого
элемента подвески (торсиона,
рессоры, пружины), приведен-
Рис. 4.2. Характеристика
упругого элемента под-
вески.
кого к оси колеса. Участок cd соответствует работе подвес-
ки после выключения упругого элемента, т. е. после вы-
хода подвески на верхний ограничитель хода (упор).
На рис. 4.2 изображены значения статического AOi,
Динамического Ад и полного Ап ходов упругого элемента
подвески.
22*
340
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
от скорости деформации
Рис. 4.3. Характеристика
амортизатора.
Рис. 4.4. Характеристи-
ка упругости обода ко-
леса: ---— нелинейная,
------линеаризован-
ная.
Характеристика амортизатора (рис. 4.3) представляет
собой нелинейную зависимость диссипативной силы Fa
подвески Д. Верхняя часть ха-
рактеристики bed именуется
ходом сжатия амортизатора,
а нижняя ab — ходом отбоя.
Характерной особенностью
планетоходов является то, что
специфические условия эксплу-
атации их (разреженность или
отсутствие атмосферы, резкие
перепады температур и т. д.)
не позволяют применять гид-
равлические амортизаторы ко-
лебаний, наиболее часто упот-
ребляемые на наземных транс-
портных машинах. На плането-
ходах целесообразно использование амортизаторов сухого
трения и электродинамических систем.
Так, наличие электродинамического торможения в
приводе мотор-колес «Лунохода-1» при относительных
перемещениях балансиров, вызванных колебаниями кор-
пуса, совместно с конструкционным трением в шарнирах
подвески обеспечивало достаточ-
ное затухание колебаний под-
рессоренной части лунохода.
Колеса планетохода, выпол-
ненные либо со специальными
амортизационными устройства-
ми типа шин [70], либо на
эластичных спицах или ободьях,
могут обладать податливостью,
соизмеримой с податливостью
упругих элементов подвески.
В этих случаях жесткость их
должна учитываться путем вве-
дения в уравнение (4.8) харак-
теристики деформации обода
рис. 4.4. Участок аЪ соответствует отрыву колеса от грун-
та, а участок Ъс представляет собой характеристику уп-
ругости обода колеса в зависимости от величины его
типа
§4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
341
деформации Ак. На том же рис. 4.4 изображены величины
статических усилий Рст и деформаций обода АКОг, вызван-
ных весом, приходящимся на каждую шину в статичес-
ком состоянии на горизонтальной площадке.
Решение уравнений (4.8) сравнительно просто осу-
ществимо на ЭЦВМ по стандартной программе, основан-
ной на использовании метода Рунге-Кутта [13] или с по-
мощью известных методов на АВМ.
Процесс набора блок-схемы и решения уравнений
(4.8) на АВМ не представляет трудностей, но ввод в ма-
шину информации о микропрофиле поверхности связан
с необходимостью разработки специальных устройств или
с подключением к АВМ специального генератора случай-
ного шума и набора блоков запаздывания для имитации
воздействий на. каждое колесо планетохода в соответ-
ствующей фазе.
Для ввода информации о микропрофиле поверхности
бл(0 и 6П(£) в АВМ ее предварительно записывают на
магнитную ленту на магнитофоне с двухканальной за-
писью. Воспроизведение информации осуществляется
на специальном механизме, состоящем из лентопротяжен-
ного механизма с универсальными магнитосчитывающи-
ми головками, блока управления, частотных демодулято-
ров и усилителей.
Запись микропрофпля на магнитную ленту можно осу-
ществить с помощью полуавтоматического следящего ме-
ханизма, на вход которого поступает графическое изо-
бражение микропрофиля поверхности 8(х), как функции
от пути, проходимого планетоходом, а выходом явля-
ется частотно-модулпрованный электрический сигнал,
пропорциональный вводимому графическому изобра-
жению.
В отличие от моделирования движения и колебаний
земных машин, для которых получение реализации мик-
ропрофиля поверхности (дороги, бездорожья, спецполи-
гона и т. д.) не представляет трудности при. наличии
профилографов [41, 42] или путем непосредственного об-
мера неровностей, формирование реализации микропро-
филя какой-либо планеты сопряжено с целым рядом
подготовительных расчетных и графических работ.
Одним из путей формирования реализации микро-
профиля поверхности может быть следующий.
342
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Пусть в распоряжении исследователя находятся доста-
точно подробные фотографии или карты планеты, по ко-
торой намечена эксплуатация планетохода. Выбирая раз-
личные случайные направления движения, можно постро-
ить вертикальные разрезы поверхности, отстоящие друг
от друга на расстояние колеи планетохода. Любая из пар
полученных сечений при условии их достаточной протя-
женности может быть использована в качестве реализа-
ции микропрофиля заданной планеты при решении задачи
о колебаниях планетохода методом математического мо-
делирования.
4.1.4. Статистическое исследование колебаний плане-
тохода при случайных воздействиях. В соответствии со
статистическими методами исследования плавности хода
наземных транспортных машин можно рассмотреть ко-
лебания планетохода в вертикально-продольной плоско-
сти в предположении, что колеса левого и правого бортов
одновременно наезжают на одинаковые неровности, пред-
ставляющие собой случайные функции пути, а при задан-
ной скорости — функции времени 6 (t). При этом урав-
нения, описывающие колебания планетохода (4.8), при-
обретают более простой вид
?г0 ri0
Mz + 2 Fm + 2 Fai = Mg,
2 = 0 2 = 1
no
h (^ni + Pai) ~ 0, (4.9)
2=1
772-1^1 Fni Fai Fni :— 772^.
Здесь Fni, F&i и FKi — удвоенные характеристики упру-
гого элемента, амортизатора и обода, являющиеся функ-
циями :
Fni Fni (Аог £ ^/ф Si) ?
F&i = Р^(— Z — Iff + Si),
F nt = FKi (AKOi — + 6г-),
mi — масса i-й пары неподрессоренных частей.
Для дальнейшего упрощения уравнений (4.9) с целью
применения аналитических методов их решения на осно-
§4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
343
ве использования соотношений статической дина-
мики линейных систем можно ввести ряд предполо-
жений.
1. Считая, что пробой подвески, равно как и отрыв
колеса от грунта, являются критическими состояниями
работы системы подрессоривания и нежелательны при
нормальной эксплуатации планетохода, можно предполо-
жить работу упругого элемента подвески в зоне ее ли-
нейного участка Ъс (рис. 4.2), а жесткость обода заменить
энергетически эквивалентной линейной (рис. 4.4).
2. Учитывая, что демпфирование колебаний осущест-
вляется, по крайней мере, в течение одного цикла колеба-
ний, можно предположить, что на планетоходе установлен
амортизатор с линейной характеристикой, обеспечиваю-
щий то же демпфирование, что и амортизатор с характе-
ристикой вида, изображенного на рис. 4.3.
3. Планетоходы, предназначенные для исследования
планет без участия человека, а лишь с помощью бортовой
научной аппаратуры, имеют симметричную развесовку,
что позволяет использовать этот факт для упрощения
уравнений (4.9).
С учетом указанных предположений уравнения
колебаний планетохода линеаризуются и приобрета-
ют вид
Mnz = Сп'2 & - z) +'Ъ 2 & - Z),
i—1 i=l
.. п п . ,
МпРт/ф = Сп 2 (5г —5гф) + & 2 h (5г — ^гф)? (4.10)
г-1 г=1
= — Сп(Вг—Z — Z;q>) — b(li — z— /гф) +с„ (бг — gj),
где сп, Ъ и с„— коэффициенты линеаризованных характе-
ристик Fa, Fa и FK.
Обозначая
7?0 Г10
3 = В, X lili =
i=i г=1
344
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
после несложных преобразований уравнений (4.10) мож-
но получить
Mnz + nQbz + nocnz = сп£ + bg,
По .
л/пР^Ф + ь X ^1ф 4* сп S ^ф = сп^ + sc,
i=l 1=1
•• • (4.11)
-Н 4- (Сп 4- ск) £ = n0CnZ 4- nobz + ск 2j Si,
1=1
ne n0 n0
+ fan + £k) ~Cn 2 ^?ф + ь 2 2
1 = 1 1=1 1 = 1
Система уравнений (4.11) позволяет получить реше-
ние уравнений колебаний планетохода в координатах
z, ср, § и 5- Переменные z и <р, как и ранее,— вертикаль-
ные -и угловые перемещения подрессоренной части. Ко-
ордината 2 £1 / по = — — среднее перемещение колес
1=1 "°
машины.
Угловая жесткость всех подвесок определяется как
По
2 где cni— линейная жесткость i-й подвески.
1=1
По
В случае одинаковых подвесок сПг= сп и 2 ^ni^i =
1=1
—• сп 2 U упругий момент, действующий на подрессо-
1=1
репную часть, повернутую на угол ср, равен
П-О П-0 П-о
Муп — сп 2 (?1 ^1ф) ^1 — сп Сп 2 ^1Ф* (4-12)
1=1 1=1 1=1
С другой стороны, момент (4.12) равен произведению
угловой жесткости на относительный угол «закручива-
ния» 6|отн
Муп — Сп 2 (4*13)
1=1
где 0Отн = б’пр — Ф, 0 — фиктивный угол поворота опор-
ной поверхности в продольной плоскости, воздействие от
§ 4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
345
которого, передаваемое через угловую жесткость на кор-
пус, эквивалентно суммарному действию колес на угло-
вые колебания подрессоренной части.
Приняв моменты, определяемые выражениями (4.12)
и (4.13), получаем
По I п0
Опр = 2 1& 2 it (4.14)
i-=l / г=1
Поскольку слагаемые числителя состоят из произве-
дений l^i, то влияние крайних колес является определя-
ющим при нахождении положения фиктивной плоскости.
Фиктивная плоскость проходит вблизи центров крайних
колес. Так, для двухосных машин с жесткими шинами
при базе 21
епР = Цб1-б2)/2-4 = -ЦА
что соответствует прохождению фиктивной плоскости
точно через центры колес. В трехосном планетоходе с
расположением средней оси под центром тяжести корпу-
са положение фиктивной плоскости аналогично двухос-
ному.
Для четырехосной машины с жесткими шинами и
равномерной расстановкой осей по длине
При движении по синусоидальной трассе с периодом
Lc=2^(2’ = li+ р4|)
/р \ _ 2>04 л
(идрив)тах —
где А — амплитуда дорожной синусоиды, тогда как для
плоскости, проходящей через крайние колеса, максималь-
ный угол отклонения
(Qnp)max — “j >
т. е. отличие составляет 2%.
Расчеты показывают, что максимальный угол наклона
фиктивной плоскости мало зависит от жесткости обода.
346
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Применяя операционный метод решения дифференци-
альных уравнений (4.11), найдем
7 (п\ — ф (D\ — А
где р — параметр оператора Лапласа,
D(p) = Di(p)~ d2(p)= а11 а21 а31 а41 &и &21 &31 &41 С11 С21 С31 С41 й12 Я 22 а32 а42 &12 &22 ^32 ^42 С12 С22 С32 С42 й13 а23 азз Я43 ^13 ^23 Ъзз ^43 С13 С23 С33 С43 fl14 а24 а34 а44 &14 ^24 ^34 &44 С14 С24 С34 С44 t t (4.15)
где ^12 = #14 = #21 = #23 = Ьц = Ъ[2= Ь[4— &21 = ^32 = ^23 = = ^34 = &32 = ^41 = = ^34 = : ^43 = 0, : o,
С12= ^14= <?21 = С22 = «п= «и = Ж/>2+ п0(с «13= «24= &13 = ^24 = ^23 <?34 п+ Ьр), — «13= = С ^24 = ’41 = «43= 0, (cn+ bp),
^22 — ^22 — Пру7 92 + п0 X li («г i=l 1 + bp),
^31= Сз1= — ^о(сп+ Ър),
п0
^31 ~ ^32 ~ S
i=l
^33== ^44== &33== ^44== С33 = С44= Шр2-\- Ьр “р Сп-{" C‘Ki
п0
Ь41 = е42 =
1=1
п0
а42 = ^42 = 2 li (СП Ьр).
1=1
Z(p), ®(Р) и Дг(/?) — отображения функций соответствен-
§4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
347
но z(£), ср(£) и 8(t). Раскрыв определители (4.15), по-
лучим
Z(p) =
ск (сп + М S д;
__________________________г~1_______________________
1МпР2 + п0 (СП + Ml (тр2 + Ьр + СП + ск) — п0 (сп + ЬР)2
Следовательно, амплитудно-частотная характеристика
(АЧХ) вертикальных колебаний центра тяжести подрес-
соренной части no-оспой машины имеет вид
= (4Л6)
где
А = посп + &2®2,
В = Mam<sA — [Мп (сп + Ск) + тпосп] <£>2 + поспск,
Г (Мп \ 1
С = п0Ьа> ск — I----р т I ®2 ;
L \ по / J
она, как нетрудно заметить, эквивалентна АЧХ двухмас-
совой системы
________________
= СкУСп + &2®2 {[(сп — Мп®2)2 + 62®2] [(сп + СК — пг®2)2 +
+ 62®2] - (с2 + 62®2)2)-1 (4.17)
и ее упрощенному одномассовому аналогу
|^г(/®)|=___________
= Ск УСп + &2®2 {[(Сп + Ск)2 + &2®2] 1(сп — Мп®2)2 +
+ &2ю2] - (с2 + Ь2®2)2)-1. (4.18)
При МП^> ггц влияние величии пеподрессоренных масс
существующих многоосных колесных машин на вид
АЧХ (4.16) сравнительно мало. Поэтому предлагаемый
расчетно-теоретический метод исследования колебаний
планетоходов можно строить на основе решения системы
348
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
уравнений
Mz-cn(^-z)-b(\-z) = 0,
(4.19)
cn(g-z) + &(i-z)-cK(6-^)= 0.
Здесь, в зависимости от того, какие рассматриваются
колебания (вертикальные или угловые), введены обозна-
чения
По
Сп-> Сп ИЛИ Сп Ц,
i=l
п0
b-^-b ИЛИ b 2 12г,
г=1
М или Л/ру,
тг0
По
ск->ск пли ск 2 (4.20)
г—1
Z—>2 ИЛИ ф,
n0 По j п0
S liK или 2 ^/2 li,
г=1 г—1 / г=1
6(0 или q'(t),
где q(t) и q'(t) —эквивалентные вертикальные и угловые
воздействия опорной поверхности, вычисляемые соответ-
ственно по формулам
По
У W
2л1,.
.___1г
= 2е ° 61(i)/n0 = ?l3KBsin(®f + у),
(4-21)
2лГ .
1г
61 (0 = AKBsin (at — у),
Lc— период синусоидальной неровности, 1ц— расстояние
от i-ro колеса до первого, Лэкв— амплитуда эквивалент-
ного результирующего воздействия.
Уравнения (4.10) позволяют получить аналитическую
оценку точности решения исходных уравнений (4.9) в за-
§ 4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
349
висимости от точности задания исходных параметров пла-
нетохода (ра, Ь, сп, ск), получаемых из чертежно-техни-
ческой документации и результатов лабораторных ис-
следований опытных образцов и отдельных узлов
планетохода.
При расчетах планетохода на стадии проектирова-
ния наибольшую трудность доставляет получение точного
значения радиуса инерции подрессоренной части pv. Кро-
ме того, величина радиуса инерции pv может меняться
в процессе оснащения планетохода новой научной ап-
паратурой, устройствами для обеспечения связи с Землей
и т. д. Например, на планетоходах типа «Луноход-1» ра-
диус инерции подрессоренной части существенно менялся
в процессе эксплуатации, так как он зависел от
того, открыта или закрыта крышка с набором солнеч-
ных батарей.
Все это обязывает проводить оценку точности полу-
чаемых результатов исследования колебаний в зависи-
мости от точности задания радиуса инерции ру, для чего
можно рекомендовать соотношение, определяющее отно-
сительную погрешность вычисления угловых ускорений
подрессоренной части в зависимости от точности задания
величины момента инерции Миру'.
|Дф! = 1 П +_____________1_________1 (А 221
1Ф1 2 4+ сп^пРу(сп/ск+0 Л/пРу
- г—1 _
где Дф — величина абсолютной погрешности в определе-
нии величины ускорения угловых колебаний подрессо-
ренной части ср, А(МпРу) —величина абсолютной по-
грешности в определении момента инерции подрессорен-
ной части Мпру.
Что касается точности задания характеристик системы
подрессоривания Fn, Fa и FK или им эквивалентных ли-
неаризованных значений сп, b и с«, то обычно характери-
стики упругих элементов Fn и FK задаются довольно точ-
но, а характеристики Fa имеют значительный разброс.
Да и при реальной эксплуатации характеристика Fa ме-
нее стабильна, чем Fu и FK.
350
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Так, например, конструкция шасси «Лунохода-1»
обеспечивала достаточно эффективное демпфирование
угловых колебаний в значительной степени за счет сил
электродинамического торможения в мотор-колесах, при-
веденных к вертикальным перемещениям колес относи-
тельно корпуса лунохода.
В процессе движения по Луне в зависимости от той
или иной ориентации лунохода относительно Солнца
мотор-колеса испытывали различный тепловой режим,
что, естественно, отражалось на их электромеханических
характеристиках и соответственно на величинах демпфи-
рующих сил.
Относительная погрешность определения резонанс-
ных угловых ускорений корпуса как функция неточности
задания характеристики демпфирующего устройства
(амортизатора) находится по формуле
-Ц^- =-----------------------------(4-23)
II по О ' '
|ф| 1 + 2 +
г=0
из которой следует, что с увеличением демпфирования
относительная погрешность в определении угловых ус-
корений корпуса планетохода уменьшается.
Оценки, аналогичные выражениям (4.22) и (4.23),
могут быть получены и для относительных погрешностей
в вычислении амплитуд вертикальных колебаний центра
тяжести корпуса планетохода. Однако, как показал опыт,
они не превосходят указанных относительных погрешно-
стей | Дср|/|(р| и в практических расчетах могут не
оцениваться.
В некоторых конструкциях планетоходов отсутствуют
элементы, эквивалентные шинам наземных транспортных
машин, а неподрессоренные массы существенно ниже
подрессоренной. Это позволяет еще более упростить
уравнения (4.10):
4- njbz + n^cz = У (b8t + c6J,
i=l
. По п-о п0
л/пРуф Ьф 2 2 = 2 + c8i)
4=1 i=l 4=0
(4.24)
§4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
351
Применяя к уравнениям (4.24) преобразования Ла-
пласа при нулевых начальных условиях, можно получить
передаточные функции от воздействия 6(£) к вертикаль-
ным z(0 и угловым <р(£) колебаниям подрессоренной
части, используя свойство сдвига изображения
б(^+т)4-е-^Д(р),
где Д(р) — изображение по Лапласу функции 6(£).
Отсюда передаточные функции приобретают
По —рт.
(Ьр + С) 2 е 1
вид
^6z Mupl + пйЬр + пос’
По —рт.
(Ър + с) 2 1ге 1
(4.25)
ИЧ (?) =-------------------F------------
MnS>yP2‘ +6 2 1Ip +c 2
Zj I.
где тг = —-—.
Нетрудно заметить, что передаточные
функции
ЖеДр) и И7бФ(р) представляют собой произведения дроб-
но-рациональных составляющих
д (р\ =____п.° ___
z W МпР* -I- nQbp + cn^
Ho
(bp + c) 2Zi
(р) =-----------------------——
^пРу-Р2 + ЬР 2 + с 2 li
и трансцендентных составляющих
По
4 VI —•
= г>
• п“ -рг.
(4.26)
(4.27)
2 ‘I
что позволяет существенно упростить исследование ко-
352
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
лебаний планетоходов при случайном воздействии мето-
дами статистической динамики.
Это упрощение базируется на инвариантности транс-
цендентных составляющих Qz(p) и Q<p(p) к скорости дви-
жения планетохода, что поясняется следующими соотно-
шениями:
.2л h — . 2л /7 7 х
ргг = 7<втг = 7 -ц- v —-— = 7 — (Zx — lt).
В связи с тем, что величины трансцендентных соста-
Рис. 4.5. Зависимость коэффициентов передачи воздействий по-
верхности на подрессоренную часть (вертикальные колебания)
от соотношения длины неровности и базы планетохода.
неровности микропрофиля Lc и колесной базы 2?, можно
построить величины
I Сф| =
п0
2
г = 1
he~PXi
(4.28)
как функции отношения L]3?.
На рис. 4.5 и 4.6 показаны зависимости |(?2| и |<?Ф|
для планетоходов с различным числом колес (катков),
из которых следует:
повышение числа опор планетохода снижает эффек-
тивность воздействия микропрофиля на подрессоренную
часть,
§ 4.1. ОСНОВЫ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ
353
для планетохода с числом пар колес (катков) боль-
ше трех неровности длиной менее 0,755? практически
пе оказывают воздействия на подрессоренную часть.
\ЦГ(Ь/Я)\
Рис. 4.6. Зависимость коэффициентов передачи воздействий по-
верхности на подрессоренную часть (угловые колебания) от со-
отношения длины неровности и базы планетохода.
Последний результат позволяет для многоопорных
планетоходов получить нижнюю границу длины неров-
ностей микропрофиля
Lniln= 0,755^ (4.29)
которую следует принимать во внимание при построении
реализаций микропрофиля заданной планеты.
Верхняя граница длины неровностей микропрофиля,
оказывающих динамическое воздействие на подрессо-
ренную часть, может быть получена в результате ана-
лиза дробно-рациональных частей /?2(р) и ЯФ(р) пере-
даточных функций планетохода ТУбДр) и W^(p). По-
строив модули комплексных выражений 7?Д/со) и 7?ф(/о)),
представляющие собой амплитудно-частотные характери-
стики (АЧХ) эквивалентных одномассовых систем
Az (со)
Пр ~|/&2(02 С2
]/ (С — М(|)2)2 + П^2(02’
23 Е. В. Авотин и др.
354
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
на графике, как это показано на рис. 4.7, нетрудно за-
метить, что области существенных частот, пропускаемых
подрессоренной частью планетохода, располагаются
в диапазонах
< со < й2 I х 2, < со < Йф у 2,
Э/о ’ 3/9 4
где Йг и йф — собственные частоты вертикальных и уг-
ловых колебаний подрессоренной части.
Выбрав паинизшую из частот
сон = min {ЙФ, QJ,
можно получить величину максимальной длины неровно
сти микропрофиля Дпах, которая может вызвать колеба-
ния подрессоренной части, близкие к резонансным при
максимальной скорости движе-
ния планетохода
2“|/2npmqv
т v in ах / / о । к
Ьщах = ----------• (4.о 1)
Соотношения (4.29) и.(4.3Г)
определяют диапазон частот
пых воздействий па плането-
ход, которые могут вы-
звать существенные колебания
подрессоренной части при дви-
жении по поверхности с неров-
ным микропрофилем; при реше-
нии задач оптимизации подрес-
соривания планетохода трассы.
Рис. 4.7. Амплитудно-ча-
стотная характеристика
приведенной одномассовой
системы.
предназначенные для исследования различных вариантов
подрессоривания, должны выбираться с тем условием,
чтобы длины £и наиболее часто встречающихся неровно
стей на этих трассах соответствовали неравенству
0,752? <£н<2/2-^
’ л ' гл
(4.32)
В заключение необходимо отметить, что зависимо-
сти (4.26), (4.28) и (4.30) могут быть использованы для
решения задач анализа колебаний и синтеза подрессорп-
вания планетохода при случайном воздействии с по-
мощью методов статистической динамики, которые наряду
s 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
355
с физическим и математическим моделированием колеба-
ний планетоход*! являются достаточно эффективными
при расчете планетоходов па стадии проектирования и
доводки.
§ 4.2. Колебания планетохода
в вертикальных плоскостях
Б связи с тем, что основные воздействия со стороны
системы подрессоривания на корпус планетохода дейст-
вуют в вертикальных плоскостях, целесообразно объеди-
нить в одном параграфе задачи, посвященные исследова-
нию движения корпуса планетохода под действием
вертикальных возмущений со стороны ходовой части.
К числу таких задач относятся:
исследование колебаний под действием упругих сил,
возникающих в подвеске после освобождения (разблоки-
ровки) ее от удерживающих связей на посадочной сту-
пени космического аппарата;
оценка уровня перегрузок на корпус движущегося
•.планетохода;
оценка вероятности нарушений радиосвязи, вызван-
ных колебаниями остронаправленной антенны,
4.2.1. Колебание планетохода при разблокировке па
посадочной ступени, Па заданную планету планетоход
доставляется на посадочной ступени планетной станции
в закрепленном состоянии специальными устройствами,
которые перед съездом его с посадочной ступени осво-
бождают корпус от удерживающих связей. Конструкция
удерживающих связей, примененных на «Луноходе-1»,
была такова, что удерживала его на посадочной ступени
в поджатом состоянии. Поэтому после освобождения от
Удерживающих связей под действием усилий, возникаю-
щих от сжатия рессор, луноход подпрыгивает на поса-
дочной ступени [37].
Посадка может произойти па наклонную площадку,
поэтому в процессе подпрыгивания траектории различ-
ных точек планетохода опишут некоторые кривые в
кортикально-продольной и вертикально-поперечной пло-
скостях. В процессе разработки планетохода и посадоч-
ных устройств на основе анализа этих траекторий могут
быть приняты необходимые конструктивные решения,
3*
356
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
обеспечивающие безопасность планетохода перед п в про-
цессе съезда с посадочной ступени.
Колебание планетохода перед съездом с посадочной
ступени может быть изучено на основе решения следую-
щей системы дифференциальных уравнений, описываю-
Рис. 4.8. Динамическая модель планетохода при разблокировке
его на посадочной ступени.
щей его перемещение в вертикально-продольной и верти-
кально-поперечной плоскостях (рис. 4.8):
Л/д2 = 2 (^иг ’4“ Fаг) 1 (Аг) COS CXq,
i=l
Му = Mg sin p — Fcv,
(4.33)
Mx = Mg sin a — Fcx,
S = 2 1 (AKi) — Fni — Гаг] — 2 Wig COS a0,
i=l i—l i = l
где Rzi — усилие, обусловленное деформацией обода
i-ro колеса.
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
357
Система дифференциальных уравнений (4.33) удов-
летворяет начальным условиям, которые должны соот-
ветствовать положению планетохода на посадочной сту-
пени перед освобождением его от удерживающих свя-
зей, т. е.
1/(0)= О, ж(0) = 0, 2(0) =ЛД; |(0)=|д,
(4.34)
1/(0) =0, ж(0) =0, ^(0)=0, i(0)=0,
где /гд — поджатие корпуса планетохода на посадочной
ступени,. измеренное относительно статического положе-
ния, Вд — деформация обода Z-ro колеса, обусловленная
усилием поджатия планетохода на посадочной ступени.
Система уравнений (4.33) составлена в предположе-
нии, что угловые перемещения планетохода в процессе
подпрыгивания незначительны и ими можно пренебречь.
Кроме того, предполагается, что при подпрыгивании все'
неподрессоренные части планетохода совершают синхрон-
ные перемещения, т. е. = g2 = ...=£* = В. Поэтому
они могут быть объединены в одну неподрессоренную
п
массу, равную т = 2 тг-
г=1
Система уравнений (4.33) в общем случае является
нелинейной, поэтому, чтобы она разрешалась в квадра-
турах, приведем ее к более простому вцду.
С этой целью предположим, что упругие Rzi, Fui и
диссипативные Fai силы пропорциональны своим аргу-
ментам, т. е.
^пг СгАг> Rzi ’—‘ ^кг’Дкг» Fаг- ^гДг»
где сК1- — радиальная жесткость обода, а сцепление колес
с опорной поверхностью таково, что до тех пор, пока ко-
леса не оторвались от опорной поверхности посадочной сту-
пени, т. е. ДКг > 0, силы сопротивления Fcx, Fcy уравно-
вешивают составляющие от сил веса, т. е.
Mg sin а Fcx, Mg sin [J Fcy.
Тогда, объединяя подрессоренную и неподрессорен-
п
пую массы в одну, равную М = Мп + 2 и вводя
г=1
358
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
приведенную жесткость i-й подвески
_________________________ спгскг
Ci — i ,
cni Н“ снг
получим следующую упрощенную систему дифференци-
альных уравнений, описывающих колебания планетохода
на посадочной ступени:
z + a2z + bz = 0, 2 (0) = /гд , 2 (0) = 0,
2 = — g cos ао, У — g sin р, х = g sin а,
2 (^от) 0, У (^от) 0? #(^от) 0,
У (^от) - 0? *^(^от) - 0, 2 (£от) 20Т,
п п
2 Ci S &i
где а2 = —, Ъ = —, z0T — скорость перемещения
планетохода в момент отрыва колес от посадочной ступе-
ни, т. е. при 2 = 0, t0? — момент отрыва колеса от поса-
дочной ступени.
Первое уравнение системы (4.35) описывает верти-
кальные перемещения планетохода до тех пор, пока коле-
са не оторвались от опорной поверхности посадочной
ступени, а последующие — его перемещения после отры-
ва колес.
Решение системы (4.35) при — < а2 может быть за-
писаны в виде
z (£) = ехр (-~ t\ [2 (0) cos at + sin coi] (2 (t) 0),
\ " J L J
z(t) = ZotT—Tj-COSOtn (z(r)>0),
T2 (4.36)
У(т)== g-^-sinP,
x (t)= g — sin
где о) = ]/ a2 — —j — t — toT-
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
359
Отсюда момент времени tQT и скорость в этот момент
времени z0T соответственно равны
1 . 2(о . л
£от =-------arctg-г- Н ,
01 со & Ъ 1 со ’
•/nJ , И / ’’ . V . (4.37)
2ОТ = — Z (0) ^<0 + exp £0Tj SIH COioT-
b^1
Случай "4~ > применительно к транспортным ма-
шинам встречается редко, поэтому здесь не рассматри-
вается.
Выражая из второго и третьего уравнений систе-
мы (4.36) время т и подставляя его значение в первое
уравнение этой системы, получим следующие соотноше-
ния для расчета траекторий нижних точек колес соот-
ветственно в вертикально-поперечной и вертикально-
продольной плоскостях:
i_
' I 2у j 2 _ у cos а0
от sin fi/ sin р ’
(4.38)
• / 2y * cos oco
2 — Zqt I • I • •
\g sin a/ sin a
При разработке посадочных устройств важно знать
не только максимальное смещение, но также смещение
в продольном хп и поперечном уп направлениях в момент
выполнения условия
== 20Т — gr cos a0 = 0. (4.39)
Из (4.39) и последних двух уравнений системы (4.36)
найдем
ZOT sin ₽ 2от sin a
ту----------- g ------ -------'
2g cos2 a0’ n g cos2 a0 ’
Подставляя эти соотношения в (4.38), получим сле-
дующее выражение для расчета максимального смеще-
ния планетохода в вертикальном направлении:
__ ZOT
2шах — 2g cos ao‘
360
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
(4.41)
Если предположить, что в процессе подпрыгивания
демпфирование в подвеске сказывается незначительно
(Ь->0), то из (4.40) с учетом (4.37) получим
___________________________ a2z2 (0)
Zmax 2g cos aQ-
Найдем теперь максимальные смещения планетохода
в продольном и поперечном направлениях. Очевидно,
максимальные смещения планетохода в этих направле-
ниях достигаются в тот момент времени т = tK, когда
его колеса коснутся основания посадочной ступени, т. е.
2z
+ __ от
t к •
g cos а0
Подставляя это значение времени во второе и третье
уравнения системы (4.36), найдем следующие выраже-
ния для определения возможных максимальных смеще-
ний планетохода в поперечном утах и продольном ятах
направлениях:
2z2Tsina 2zqT sin р
g cos2 a0 ’ 2/max — g cos2
Если влиянием демпфирования можно пренебречь, то
с учетом (4.37) выражения (4.42) преобразуются к виду
______________2a2z2 (0) sin а __2a2z2 (0) sin р // / о\
Жтах - g cos2 а0 ’ ^тах - g cos2 а0 ’
#тах —
(4.42)
Таким образом, располагая конструктивными пара-
метрами и условиями эксплуатации, по приведенным
уравнениям можно построить траектории нижних точек
колес в процессе подпрыгивания планетохода на поса-
дочной ступени и определить его максимальные смеще-
ния в вертикально-продольном и вертикально-попереч-
ном направлениях (рис. 4.9). На основании этих урав-
нений и построенных на их основе графиков выбираются
конструктивные параметры соответствующих ограни-
чительных устройств, обеспечивающих безопасность
планетохода после освобождения от удерживающих связей
и в процессе схода с посадочной ступени.
4.2.2. Определение уровня перегрузок на корпусе пла-
нетохода. Обеспечение высокой надежности конструкции
корпуса планетохода и установленной в нем научной
аппаратуры в значительной степени зависит от знания
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
361
уровня и частотного спектра динамических нагрузок,
действующих на корпус и аппаратуру при движении пла-
нетохода по неровной поверхности планеты. При нали-
чии информации о микропрофиле поверхности планеты,
представляющем в общем случае случайную функцию
Рис. 4.9. Изменение положения центра тяжести планетохода пос-
ле разблокировки в вертикально-продольной и вертикально-по-
перечной плоскостях: zmax, Яшах, !/тах — соответственно макси-
мальные отклонения планетохода от транспортного положения
в вертикальном, продольном и поперечном направлениях.
изменения высоты неровностей от пути, проходимого
планетоходом, уровень и частотный спектр перегрузок
в любой точке корпуса могут быть достаточно точно оп-
ределены с помощью основного соотношения статистиче-
ской динамики линейных систем
|WK(/co)|256(co), (4.44)
где 5б(со)— спектральная плотность микропрофиля по-
верхности планеты, 57к(со)—спектральная плотность
вертикальных ускорений в А-й точке корпуса планетохо-
да, И/бгк(/со) — передаточная функция динамической си-
стемы, эквивалентной планетоходу, от воздействия мик-
ропрофиля б(^) к вертикальным ускорениям /с-й точки
корпуса планетохода.
Интегрирование уравнения (4.44) в бесконечном ча-
стотном диапазоне (0 < со < оо) позволяет определить
дисперсию вертикальных ускорений в заданной точке
корпуса к
4к = (4.45)
О
362
ГЛ. 4. КОЛЕВ АПИН ПЛАНЕТОХОДА
Вычисление интеграла (4.45) в случае, если подын-
тегральная функция представляет собой дробно-рацио-
нальную функцию от частоты, легко осуществить путем
приведения его к интегралу типа
4 ‘р S О’©) did
1п~2я J h ^)h <4,4 >
— oo
где
hn (p) = (hpn + «ip71-1 + ... + an,
gn(p) = b0p2n~2 + feip2n"4 + • • • + bn-{.
Все корни hn(p) предполагаются лежащими в левой
полуплоскости
Т __ т __________&о
1 2а0ах’ 2 2а0а1 ’
Я0а1^2
&0а2 — ао&1 +
1з = 2^ ’
j. (а^а^ а2а^) bQ а^а1Ь2 1 1
4 2#qA4 1 2Д4 CL^ (Л4Л2 я0Яз) &3
где Дп-1 — определители Гурвица для полинома hn(p).
Однако неодновремеиность наезда колес планетохода
на неровности микропрофиля вызывает фазовые сдвиги
воздействий каждой пары колес на корпус. Математиче-
ски это выражается в появлении в составе передаточных
функций угловых и вертикальных колебаний корпуса
трансцендентных составляющих типа (4.27) и (4.28),
что не позволяет безоговорочно воспользоваться реко-
мендациями (4.46). Вместе с тем практическое упроще-
ние передаточной функции |РИбх(/со) | можно осущест-
вить, если воспользоваться реальными ограничениями
частотного спектра воздействия, выраженными через
граничные значения существенных длин неровностей
микропрофиля (4.32), вызывающих интенсивные колеба-
ния корпуса планетохода в рабочем диапазоне скоростей
движения.
Выбирая из указанного диапазона (4.32) среднее зна-
чение длины неровностей LH = 0,3752? + лУ2итах(0н и
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
363
получая по графикам (рис. 4.5, 4.6) величины
и
можно с достаточной точностью интегрирова-
ние произведений
|ИМ/<о) I2 = 1<?Д/о))|2|Яг(/®)|2,
IW(/®)I2= 1<?ф(7С0) |2|Яф(/Д) I2
'ф И2
заменить интегрированием функций |Яг(/й))|2 и
(-Вф (/<*>) |2 с их последующим умножением на соответст-
вующие значения и Q{
Это легко распространяется и на передаточную функ-
цию динамической системы, имеющей входом воздейст-
вие микропрофиля -6(0, а выходом — линейную комби-
нацию вертикальных z(t) и угловых ср(£) колебаний
корпуса планетохода.
Так, вычисление дисперсий величин вертикальных
перемещений в к-ii точке корпуса м0-опорного планетохо-
да, отстоящей от центра тяжести корпуса на расстоя-
ние ZK (zK(0 = z(t) + ZK<p(0), можно осуществить по
формуле
(4.47)
где
Rz (7“)
о
Ъ (jas) н- с
М
— + ь (ju) + с
П0
"о
2^
1=1
— li
& ’
Для вычисления дисперсий вертикальных ускорений
в Л-й точке корпуса планетохода подынтегральная функ-
ция в выражении (4.47) должна быть умножена на со4
в связи с тем, что
Sz (со) = со25Дсо) = <o45z (со). (4.48)
364
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Как следует из выражения (4.44), спектр ускорений
корпуса планетохода зависит как от динамических па-
раметров планетохода, определяющих вид функции
| (/со) |, так и от частотного состава входного воздей-
ствия 5б(со). В гл. 1 было показано, что микропрофили
планет достаточно хорошо описываются спектральными
плотностями вида
S‘ <“> = Ш <4'49’
где gm (со) — полином степени m, fen(co)— полином степе-
ни п. При этом практически все возможные реализации
микропрофилей могут характеризоваться спектральными
плотностями четырех основных типов:
<? (г,\ _ о2 + + pj
1W л •(<02_р2_а2)2 + 4а2ш2’
_______«6 + Рб
(<02-Pi-a2)2+4a2w2’
которым
соответствуют
(а2 + со2)2’
нормированные корреляционные
функции
(т) = cos fJr,
Г2(Т) =е-«бМ,
гз (т) = е-“б,т| f cos рбт + sin р6т
\ Рб
Г4(т) = е"аб,т,(1 + аб|т|),
где аб и — коэффициенты частотного состава спектра,
Об — дисперсия высот неровностей микропрофиля.
В соответствии с выражением (4.47) дисперсия вер-
тикальных ускорений в любой /с-й точке подрессоренной
части планетохода, движущегося по поверхности, микро-
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
365
профиль которой характеризуется каким-либо Z-м спект-
ром из представленных в (4.49), вычисляется по фор-
муле
2
| ( L М2 Р w4 (^2 + С2) St (со) с/со
ZK v’s7) I ~7 м v
К о с~—<°2 + ^2со2
\ по 1
2
I.. .
ZK
(4.50)
Результаты вычисления интегралов в выраже-
нии (4.50), соответствующие ZK = “2» представлены
в табл. 4.1. Там же приведены численные значения ди-
2
сперсий azK для многоопорного планетохода, движу-
щегося по лунной поверхности в диапазоне скоростей от
2 до 12 км/ч.
ТАБЛИЦА 4.1
Результаты вычисления дисперсий ускорений
в k-ii точке корпуса планетохода
при разных скоростях движения
V, м/с а, 1/с I" , 1/с3 ZK* 2 о-- , Л12/С4 ZK
0,6 0,94 98 0,35
1,2 1,88 138 0,99
1,8 2,82 184 1,98
2,4 3,76 240 3,45
3,0 4,70 300 5,40
В расчетах принято: М = 500 кг, nQb = 2000 Н-с/м
Щс = 8000 Н/м, S? = 2,5 м.
Спектральная плотность 5г(со) неровностей поверхно-
сти планеты взята в виде
2оха
зд = -4-
(«в + “2)2
При Об = 0,05 м, а61 = -А- 1/м, ae = a61v, v — 0,5 ->
'г' 3,3 м/с.
366
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
На рис. 4.10 приведены зависимости скоростей дви-
жения v планетохода по неровной поверхности от вели-
чины = Оба^ при различных уровнях ускорении
Ozk в заданной точке к корпуса планетохода.
Зависимости у(Л) могут использоваться для опреде-
ления средних скоростей движения планетохода по по-
Рис. 4.10. Зависимости скоростей
движения планетохода v от интен-
сивности изменения микропрофиля
Л при различных уровнях средне-
квадратичных значений ускорений
подрессоренной части: 1 — а» = 1
ёл, % И” = 0,8g л, 3 — (У •• = 0,6gл,
Z 2
4"~q"z = °’^л’ — ускорение
лунного тяготения.
верхности планеты, для
которой известно рас-
пределение величин ди-
сперсий высот неровно-
стей микропрофиля о I
и средних длин неров-
ностей Z/H, так как
J, = ^. (4.51)
В выражении (4.51)
— Ст
величина ~~
средняя длина неров-
ности микропрофиля)
представляет собой сред-
нюю по спектру часто-
ту, которая может быть
легко рассчитана для
спектра любого вида
с помощью соотношения
между среднеквадрати-
ческой величиной производной и среднеквадратической
величиной самого случайного процесса:
аб
Для вычисления дисперсии производной случайного
процесса необходимо спектральную плотность про-
цесса 5б(ы) умножить на величину со2 и полученную
дробно-рациональную функцию (о25б(<о) = S& (ю) проин-»
тегрировать в бесконечном интервале частот
оо
о- = ю256 (®) da>. (4.52)
6
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
367
2(jgag
Для спектра о6(а>) = -----— вычисление по фор-
л 2
муле (4.52) приводит к результату о^ = о^а^. От-
сюда __
со = Об/Об = аб.
Замечая, что в выражениях (4.49) величина о^аб,
равная огб<о, входит в каждый из приведенных спект-
ров, и учитывая, что а& = сии, можно рекомендовать
величину J6 = olaL или = (coi = 2n/LH) в ка-
честве обобщенной интегральной статистической ха-
рактеристики микропрофиля, одновременно учитываю-
щей величины высот неровностей и частоту их сле-
дования по пути движения планетохода (щ. Интеграль-
ный характер полученного показателя Л можно проил-
люстрировать на примере того же процесса № 4. С этой
целью, вычисляя величину интервала корреляции I про-
цесса >б,
I = J |г (т)| dx = J е~“б1х| (1 4- а6 |т|) dx =
0 0 6
получаем
, f S6 (<0) da
у __ U6______ОО
Jt = ~T== - ’
f I?’ (т)| dx
0
т. е. величина /б представляет собой отношение двух ин-
тегральных характеристик случайного процесса-диспер-
сии о<з и интервала корреляции I и, следовательно, са-
ма является интегральной характеристикой. Исходя из
физического смысла величины /б, можно ее именовать
интенсивностью изменения микропрофиля планеты.
Величина интенсивности изменения микропрофиля J6
является, кроме того, его энергетической характеристи-
кой. Известно, что любая неровность поверхности, вызы-
вающая колебания планетохода, воспринимается его хо-
довой частью через какой-либо элемент (каток, колесо,
обод), обладающий конечной жесткостью с с размер-
368
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
ностыо Н/м. Умножив величину интенсивности J&, имею-
щую размерность м2/с, на величину с, можно получить
величину
N = Л • с,
имеющую размерность мощности Н-м/с.
Таким образом, интенсивность изменения микропро-
филя характеризует собой величину мощности, идущей
на раскачку планетохода при его движении по неровной
поверхности.
Зависимости (4.50), (4.51) и др. получены в предпо-
ложении, что процесс является стационарным слу-
чайным. Однако для поверхностей планет, например Лу-
ны, весьма характерным является микропрофиль, изо-
браженный на рис. 1.3 и представляющий собой последо-
вательность отстоящих друг от друга неровностей с фор-
мой, достаточно хорошо описываемой выражением
( 2л Л
6 (*) = -/• (cos х - 1 j. (4.53)
Нетрудно показать, что и в этом случае величина
дисперсий перегрузок на корпусе планетохода oZK будет
пропорциональна квадрату высоты неровности и
обратно пропорциональна ее длине Ln. Аналитическое
выражение, аналогичное интенсивности изменения слу-
чайного микропрофиля /п, имеет вид
т
При этом функциональные зависимости р(/б) и к(/н)
практически совпадают, если положить
& _ | 2к |шах
™ ~ 2 V2 '
где | ^ | тах — максимальная величина пика ускорений,
возникающих в /с-й точке корпуса планетохода при пре-
одолении одиночной неровности типа (4.53).
Таким образом, статистическая обработка микропро-
филей поверхности планет с целью получения величин Л
и /н при наличии расчетных или экспериментальных за-
висимостей к (Уб) и к(7н) для проектируемого плането-
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
369
хода позволяет достаточно просто оценить динамическую
нагруженность в различных точках корпуса планетохода
при заданных скоростях его движения v по неровностям
поверхности планеты.
4.2.3. Оценка вероятности прерываний радиосвязи
планетохода с Землей, вызванных колебаниями острона-
правленной антенны. Задача об оценке вероятности вы-
хода антенны из сферического сектора устойчивой связи
непосредственно вытекает из задачи о пространственных
колебаниях корпуса планетохода или, ограничиваясь наи-
более существенными составляющими пространственных
колебаний, из задачи об угловых колебаниях в верти-
кальных продольной и поперечной плоскостях.
Как показывает практика исследования колебаний в
вертикальных продольной и поперечной плоскостях на-
земных транспортных средств [46], симметричных отно-
сительно горизонтальной продольной оси, параметры
этих колебаний могут быть с достаточной точностью по-
лучены при раздельном исследовании колебаний в верти-
кально-продольной и вертикально-поперечной плоскостях
под воздействием
6 (я) [6л(ж) + 6пСг)]
и
?(*) =-§ IM*) — 6n(®)],
где бл (я) и бп (х) — текущие высоты неровностей микро-
профиля поверхности под левым и правым бортами
транспортной машины соответственно.
При этом с учетом кинематического преобразования
геометрических параметров микропрофиля через опоры
ходовой части (функции Qz и Q^) независимое исследо-
вание продольных и поперечных колебаний сводится к
решению уравнений одномассовых систем при случайном
воздействии. Реакциями этих систем на случайные воз-
действия являются случайные процессы, характер кото-
рых и математическое описание их спектров и корреля-
ционных функций могут быть получены из следующих
рассуждений.
Обычно наиболее интенсивные угловые и поперечные
колебания корпусов многоопорных машин развиваются
при достаточно высокой скорости движения. Сопостав-
24 е. В. Авотин и др.
370
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
ляя значения спектральной плотности воздействия при
достаточно большой скорости (движения планетохода с
амплитудно-частотной характеристикой колебаний корпу-
са (рис. 4.7), можно видеть, что в области существенных
частот со„ — спектр воздействия может быть доста-
точно хорошо аппроксимирован «белым шумом». С дру-
гой стороны, воздействие на одномассовую динамическую
систему (например, корпус планетохода на подвесках
в поперечной плоскости) «белого шума» процесса у(£)
со спектральной плотностью 5т(<о) = Кч = const, описы-
ваемое уравнением
+ 2п,|>^ + <0^ = Y (0, (4.54)
приводит к тому, что на выходе рассматриваемой систе-
мы допускается случайный процесс со спектральной
плотностью
ку
которому соответствует нормированная корреляционная
функция
(Т) =
= е (cos <0ф — Н------л ф - sin ]/~<Оф— |т А
\ к Ч-Ч /
и которая при обозначениях
^ф = 0&ф И ~\/~ ^ф ^ф
приобретает вид
Гф(т) = е а^/т1 (%os sin Рф | т |Y (4.55)
\ рф /
Аналогичный результат получается и при исследова-
нии угловых колебаний в вертикально-продольной плос-
кости
гф(т) = е a<₽kl [ cos РсрТ +sin р(Г | т |V (4.56)
§ 4.2. КОЛЕБАНИЯ ПЛАНЕТОХОДА
371
Знание корреляционных функций случайных колеба-
ний корпуса планетохода в двух плоскостях (4.55) и
(4.56) позволяет решить вероятностную задачу о воз-
можных прерываниях радиосвязи с планетоходом с по-
мощью теории выбросов случайных процессов.
В соответствии с рекомендациями [47] временная
плотность вероятности выброса случайного процесса гр
за некоторой уровень а вычисляется как
Р (a/t) = J / (a, грйгр,
где /(гр, гр/st) — двумерный закон распределения ордина-
ты случайной функции гр и ее производной гр в один и
тот же момент времени.
Это соотношение позволяет вычислить среднее число
выбросов в единицу времени процесса гр за уровень а
Va = f if (а, ф) dip
и среднюю продолжительность выброса
J mw
J гр/ (а, гр) с?гр
О
Вероятность выброса в случае, когда появление его
подчинено закону Пуассона, для стационарного случай-
ного процесса вычисляется как
Pq = 1 — exp — Т J гр/ (а, гр) йгр
(Т — интервал определения случайного процесса или
продолжительность его реализации) или
= 1 — ехр
т ] f _ (т)
2л V (т)
(а—ф)2
о 2
2(Гф
(4.57)
где гр — математическое ожидание гр.
24*
372
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Применимость закона Пуассона для решения рассмат-
риваемой задачи объясняется тем, что по своей сути вы-
бросы за нежелательный уровень — события достаточно
редкие и независимые, так как за время, равное 1/7а,
корреляционная связь между ординатами процесса гр
практически исчезает.
В качестве примера можно рассмотреть оценку сред-
него числа и вероятности появления выбросов острона-
правленной антенны «Лунохода-1» за уровень а =
= 0,12 рад в течение одной минуты при креновых коле-
баниях его корпуса со среднеквадратическим отклонени-
ем от вертикали = 0,05 рад при = 0,5 рад/с,
(5ц> = 4 рад/с.
В результате вычисления производной корреляцион-
ной функции определяется
(т) |г=о = — <4 (<Хф + ₽!)=— 0,0406 рад2/с2.
Отсюда средняя частота выбросов в единицу времени
= 11Z
Л V Лф (т)
а2
— 2
•е 2стф =0,073 1/с,
т=0
а вероятность появления выброса в течение заданного
интервала (600 с)
Ро = 0,89.
Если корпус планетохода одновременно колеблется
в вертикально-продольной ср и вертикально-поперечной
плоскостях гр с одинаковой дисперсией о2, то, вычислив
совместную плотность вероятности
*Ф2ч-ф2
1 “ 2а2
можно определить
f(r, Vr) =f(r) f(vr),
где r=iA|)2 + ф2, vr =-^~, и найти среднюю продолжи-
тельность выброса за заданный уровень а в виде
a loo
т<2 = J / (г) dr J vrf (a, vr) dvT (4.58)
о Io
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
373
или для рассматриваемого случая при условии =
= аФ = ос и = [Зф = р
Так, для представленного выше примера величина
Та = 4,3 с.
Приведенные формулы для оценки вероятности нару-
шения радиосвязи планетохода с Землей могут быть при-
менены и в том случае, когда планетоход квазистатиче-
ски преодолевает неровности поверхности планеты без
существенных колебаний корпуса на подвеске. Колеба-
ния же антенны происходят вследствие наклонов поверх-
ности, по которой движется планетоход. При этом ис-
ходной информацией для расчета должна являться дву-
мерная плотность распределения наклонов поверхности
во взаимно перпендикулярных направлениях.
§ 4.3. Определение деформаций системы подрессоривания
при преодолении препятствий
При колебании корпуса планетохода, движущегося по
пересеченной местности, днище может задеть отдельные
препятствия, что в конце концов выводит из строя жиз-
ненно важные элементы, необходимые для движения.
Для предотвращения подобных ситуаций па стадии про-
ектирования должны быть проведены исследования, оп-
ределяющие возможность преодоления различного рода
препятствий без задевания их днищем.
В настоящее время подобные исследования проводят-
ся без учета динамики транспортной машины и основы-
ваются на построении радиусов профильной проходимо-
сти. Однако критерии для расчета радиусом профильной
проходимости, предложенные в ряде работ [10, 29, 60],
не учитывают геометрических характеристик неровно-
стей рельефа. Поэтому при определении траекторий наи-
более низких точек, расположенных па днище, прихо-
дится прибегать к графическим построениям. Расчетные
критерии, полученные, например, в работе [12], также
имеют ограничения в том смысле, что не учитывают вы-
соты препятствий и имеют достаточно сложный вид,
74
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Рассмотрим движение двухосного планетохода по не-
ровностям (рис. 4.11) и предположим, что радиусы ко-
лес равны, а грунт не деформируется.
Свяжем неподвижную систему координат с рельефом.
Центр координат этой системы О поместим в точке пе-
ресечения горизонтали, проходящей через нижнее осно-
вание, и вертикали, проходящей через «максимальный»
Рис. 4.11. Расчетная схема для определения динамического дорож-
ного просвета при движении планетохода по пересеченной местно-
сти (квазистатичсский случай).
выступ D[ неровности. «Максимальный» выступ понима-
ется как величина расстояния от точки до пря-
мой А1Л2, где А[ и Л2 — точки пересечения передней и
задней колесных осей с продольной плоскостью инерции.
Пусть координаты точек Л1 и Л2 равны соответствен-
но (.Т1, 21) и (.г2, 22). Тогда уравнение прямой, проходя-
щей через точки ЛI и Л2, примет вид
Za = кХ + &0, (4.59)
где
ар — угол наклона прямой ЛдЛ2 относительно оси X.
Необходимым условием «максимальности» выступа D\
является различие знаков величины -бх слева и справа
от точки D[.
Здесь 6х — ~dx' “ текущая высота неровности
рельефа поверхности.
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
375
Условие проходимости планетохода через препятст-
вие может быть записано в виде
(4.60)
где hn = D\D2 — максимальная высота выступающего
препятствия над прямой А1Л2*), С(х) =C-{-f(x) — —
динамический просвет между днищем и прямой, прохо-
дящей через точки и Л2, f(x) —просадка корпуса от-
носительно статического положения в некоторой точке#,
обусловленная динамикой планетохода, С — статический
дородный просвет.
Под статическим дорожным просветом понимается
расстояние, отсчитываемое в статическом положении от
горизонтальной поверхности до некоторой точки #, рас-
положенной на днище.
Исследование проходимости с учетом динамики пла-
нетохода в самом общем случае может быть проведено
па основе решения системы дифференциальных уравне-
ний, описывающих процесс взаимодействия планетохода
с препятствиями. Если рассматривается только квази-
статический случай преодоления неровностей, то иссле-
дование проходимости значительно упрощается, а усло-
вие проходимости (4.60) может быть выражено в явном
виде через конструктивные параметры планетохода и па-
раметры рельефа.
Рассмотрим вначале квазистатическое преодоление
планетоходом неровностей и выразим условие проходи-
мости (4.60) через конструктивные параметры плането-
хода п параметры рельефа для некоторых частных слу-
чаев.
Обозначим координаты точки через (О, На). Тогда
уравнение прямой, перпендикулярной AiA2 и проходя-
щей через точку 7)[, будет иметь вид
ZI)1 = -4х + Я„. (4.61)
Из совместного решения уравнений (4.59) и (4.61)
найдем координаты точки Z)2(#*, 2*):
7^2 + 1 №±1 Г
*) В дальнейшем в обозначении ha вместо «н» будет под-
ставляться' первая буква названия препятствия, через которое
исследуется проходимость.
376
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
в результате чего расстояние hn = D\D2 определится
из соотношения
hn = -^.. ...°. (4.62)
Равенство (4.62) определяет максимальное возвыше-
ние неровности относительно прямой, проходящей через
точки А1 Лг-
Так как статический дорожный просвет С является
величиной постоянной, то чтобы оценить проходимость
планетохода через заданное препятствие, надо выразить
в динамическом просвете С(х) слагаемое /(.г) через па-
раметры планетохода и рельефа.
Слагаемое /(.г) может быть представлено в виде
/(*) =/(z)k-/(z)o, (4.63)
где / (х) h — просадка корпуса в точке х при к О,
/(я)о — при к = 0.
Заштрихованная зона рис. 4.11 обозначает просадку
корпуса планетохода относительно статического положе-
ния. Отсюда видно, что динамический просвет плането-
хода в процессе движения через препятствия является
переменным, и это надо учитывать при проведении со-
ответствующих исследований.
Свяжем подвижную систему координат с точкой
крепления задней рессоры к корпусу. Начало отсчета
совместим со статическим положением при к = 0. Тогда,
если днище планетохода плоское и упругие элементы рес-
сор и колес имеют линейную характеристику, то величи-
на просадки /(.г) приближенно может быть выражена
соотношением
(^n2)/i (^112)0 । (^nl)o (^nl)fe
"г
(^n2)k (^П2)р
с2
где (Fni)k, (Fai) о — усилия в г-й подвеске при к 0
и к = 0 соответственно.
Таким образом, чтобы оценить проходимость плане-
тохода через заданное препятствие с учетом динамики
его взаимодействия с неровностями рельефа, необходимо,
во-первых, на днище найти такую точку х = xm<i для
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
377
которой выполняется условие
С (хт) = min С (х),
во-вторых, определить усилия, действующие па Z-ю под-
веску при к #= 0 и к = 0, в-третьих, для минимального
значения динамического просвета проверить усло-
вие (4.60).
Усилия, воздействующие па подвески при к #= 0 и
место расположения точки на днище, в которой динами-
ческий просвет достигает минимального значения, зави-
сят от формы преодолеваемого препятствия. Поэтому ра-
счетные зависимости для этих величин будут приведены
отдельно при рассмотрении проходимости через конкрет-
ные препятствия.
Усилия, действующие па подвеску, в статическом по-
ложении при к — 0, определяются из следующих очевид-
ных соотношений:
( \ __ /Г? \ _(3? l-[) G
\*п2/о — У1 п1/о — •
Рассмотрим некоторые частные случаи, которые мо-
гут встретиться при движении планетохода по пересечен-
ной местности.
Выступ скальной породы высотой Нп = Н^
ширина которого меньше колесной базы,
например, камень (рис. 4.12).
Рис. 4.12. Преодоление выступа скальной породы типа валуна или
камня.
Из рис. 4.12 видно, что для данного случая z\ = 22 =
^к. Поэтому & — /(#)=. 0, bQ = гк. Следовательно, из
(4.60) найдем, что планетоход преодолеет выступ без
посадки на него днищем, если
hB<ZC(x) = С — гк.
378
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Рассмотренный случай является достаточно тривиаль-
ным и не требует дополнительного расчета. Однако при-
веденный пример показывает, что данный частный слу-
чай вытекает из общего критерия проходимости (4.60),
что и подтверждает достоверность последнего.
Рис. 413. Преодоление ступенчатого препятствия.
Въезд (съезд) на ступенчатое препятст-
вие высотой Нп = Н9 < гк. В этом случае согласно
рис. 4.13
2^2 — Гк, Z[ — IIэ *4“ Гк,
хн = 2? cos сср, cos ар = |/ 1 —
Тогда
_ — z2 + __ #Э
— *2 ’И ]/^2_Я2’
V а?-н*
Здесь с самого начала ясно, что условию «макси-
мальности» удовлетворяет точка (0, Яэ)? поскольку во
всех остальных точках рельефа = (4-62)
найдем
Ъ = \ (4.64)
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
379
где
Х1 €= [0, - У2гкНв-Н1].
Из (4.64) видно, что величина возвышения препят-
ствия над плоскостью, проходящей через точки контак-
та колес с опорной поверхностью, является линейной
функцией от xi. Поэтому параметр hQ достигает макси-
мального значения при
жх = -Яэ - У2гкН3 - Я|.
Следовательно, если днище планетохода плоское, то
при выполнении условия
J (/s2 -Яэ2 - V2гкН„ - Я|) - /s’2 - Я2 < С (х),
же=[0, S’], (4.65)
данное препятствие преодолевается без посадки па
днище.
Приближенные значения усилий (Fni)K (Z = 1, 2)
и место расположения точки на днище х = хт, в кото-
рой динамический просвет С (х) достигает минимального
значения, могут быть получены из соотношений
(F п2)к —
cos (а + а ) -J-- (ZZ — rK) sin (сс -J-czp) — sin а -|- ту sin а
= G--------------------=--------------------------,
<£ cos ар ’
(F п1)к =
(£?—Zi) cos (а -L а — (Я—ту) sin (сс | а ) -|~ sin а—ту sin а
= G----------------------------------------------:---,
cos а ’
Хт = V2гкнз — Яэ cos (<р 4- ар) — (гк — Яэ) tg (ср 4- ар).
Если исследуется проходимость через эскарп высотой
Нэ > Гю то в соответствующие уравнения следует под-
ставлять вместо выражения — Нэ‘ значение, рав-
ное радиусу колеса гк.
Предположим теперь, что на днище планетохода име-
ется местный выступ, расположенный на расстоянии 13
380
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
от передней оси. Тогда дополнительно необходимо про-
верить на проходимость точку, в которой расположен
этот выступ. Проверка проходимости в этом случае ана-
логична предыдущему, т. е. должно выполняться условие
Н ТА?2 — н2'
д? Гк------— < С Гк Йв + / (^в) — С (#в)«
Здесь х\ — расстояние, пройденное передним колесом
к тому моменту времени, когда динамический просвет
достигает минимального значения, — высота выступа.
Из рис. 4.13 найдем
, , X ZB-rKSin(ap+(P)
Х\ = COS (-ttp + ф)--н------, хв ZB.
1 —-g7sin (ар + ф)
Если значением угла ср по сравнению с ар можно пре-
небречь, то условие проходимости при наличии на дни-
ще выступа запишется в виде
2-^‘э
Яэ гкЯэ)
г к
С(тв).
2
2 ]/ - Н2Э
Преодоление выступа скальной породы
треугольного сечения. Прежде чем приступить
к исследованию проходимости через данное препятствие,
проведем обкатку неровности колесом заданного радиуса
гк, т. е. построим траекторию движения центра колеса.
При исследовании проходимости предположим, что
передние и задние колеса находятся по разные стороны
от вершины выступа треугольного сечения.
Вертикальную ось неподвижной системы координат
проведем через точку пересечения прямых, лежащих в
продольной плоскости инерции планетохода и проходящих
на расстоянии гк от каждого склона. Необходимые обоз-
начения и построения приведены на рис. 4.14. Найдем
zi = а — Х[ tg Pi, z2 = а + х2 tg Рг,
где
sin р1 4- sin р2
к sin (Pi + р2) ’
Отсюда получим
_ — ^2tgP2 —tgPi 7 _ а (^1 — х2) + *A(tg pj + tg Р3)
-------- - ? _
—*2
— хъ
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
381
Расстояние от прямой, проходящей через центры ко-
лес, до вершины валуна может быть определено из со-
отношения
7 _ — кхсм
(4.66)
Методика получения соотношения (4.66) аналогична
методике получения соотношения (4.62). Вначале через
Рис. 4.14. Преодоление выступа скальной породы треугольной
формы: ------реальный профиль препятствия,------------профиль
препятствия с учетом обкатки его колесом заданного радиуса.
центры колес проводится прямая, вид которой определя-
ется уравнением (4.59). Затем через вершину валуна
опускается перпендикуляр на эту прямую. Решая эти
два уравнения совместно, найдем координаты точки пе-
ресечения этих прямых. Используя координаты точки
пересечения и вершины валуна после соответствующих
преобразований, получим уравнение (4.66).
В уравнении (4.66) ясм — смещение вершины валуна
вдоль оси абсцисс
cos Bi — cos р2
Хсм - Гк sinfPi-b р2) •
Подставляя в (4.66) необходимые значения перемен-
ных, после соответствующих преобразований найдем, что
7 __ (#о — а) (хг — г2) + ясм tg Pi + х2 tg р2)
в — g
^1*2 (tg Pt + tg Р2)
3?
382
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Введем новую переменную ар, представляющую собой
угол между прямыми, одна из которых проходит через
центры колес, а другая — через вершину препятствия
под углом pi по отношению к оси абсцисс.
Тогда значения Xi и Х2 могут быть представлены в
виде
х\ = Z sin ар cos Pi/sin (£1 + §2),
(4.68)
£2 = — Z sin (Pi + p2 — ap) cos p2/sin(Pi + p2).
Подставляя (4.68) в (4.67), получим
[cos (pi + p2 - 2ap) - cos (Px + pa)]
2sin(p1 + p2)
2r cos (— aB) sin (fy. LP?
\ 2 Р/ \ 2
sin (p! + P2)
(4.69)
При рассмотрении проходимости через данное препят-
ствие могут встретиться два случая.
Днище планетохода плоское. В этом случае
максимальное возвышение препятствия над плоскостью
колес достигается в тот момент времени, когда переднее
колесо переместится на расстояние
ху = Z sin ap cos px/sin (px + p2). (4.70)
★
Значение ap = ap, доставляющее максимум выраже-
нию (4.69), определится из условия
dap
® cos + ₽2 - a 'j - г sin
- 2sin h+1. _ J ? °S\— — =
2sin^ 2 apJ + U-
Учитывая первое предположение, можно показать,
что hB достигает максимального значения при
а^^Х (4.71)
Действительно, предположим, что hB достигает
при ар = ар максимального значения, определяемого из
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
383
уравнения
9? cos — ар) — rK sin = 0, (4.72)
так как
d~hD _
<4
2rK cos ^-±. Р2 - a₽) sin + Pz) - 2^cos (₽! + P2 — 2ap)
“ sin (Pi + p2) *
Тогда в силу (4.72) из последнего уравнения полу-
чим
—® = — -----------------L > О
da| sin (Pi Ч~ Р2) ’
т. е.^в (ар #= Pi + Р2) для такого aj$ принимает минималь-
ное значение.
Подставляя (4.71) в (4.69), получим условие прохо-
димости в виде
. Л'В (^7п) ,
где
hB = 4 tg(Pl + РЛ - r„/cos(4.73)
При этом максимальное значение hB достигается при
хг = cos pi/cos + Р*.
Приближенное значение координаты х = хт и усилий
в подвесках (ГП{)К для расчета динамического просвета
могут быть определены из соотношений
•Г/n 3? Е (^1 *Гсм) /еО8 ОСр Л'в tg J ,
Gl2 cos (a + ap) + GH sin (a + ap)
(Гп1)к ,
G^ cos (a + ap) + GH sin (a + ap)
Ип2)к ------------.
384
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
На днище имеется местный выступ, рас-
положенный на расстоянии ZB от передней
оси. Предположим дополнительно, что
rK < ZB и С — гк = С (х) .= const.
Проведем через местный выступ прямую, перпенди-
кулярную отрезку, соединяющему центры колес, и рас-
смотрим две функции
/1 (ар) = (<£> — lB — rK/sin ар) tg ар — С + rK + dB,
(4.74)
/2(^3) — [ZB — Гк/sin (Pl + Р2 — CZp) ] tg(Pi + P2 — CXp) — C +
+ rK + dB,
где /i (ар) — разность между расстояниями, отсчитывае-
мыми по перпендикуляру от прямой, соединяющей цент-
ры колес, соответственно до левого склона и до нижнего
основания местного выступа, /г(сср) —то же, что и
/1 (ар), только — до правого склона (на рис. 4.14 скло-
нам соответствуют прямые с углами наклона Pi и Р2).
При рассмотрении системы (4.74) видно, что возмож-
ны следующие ситуации:
/1(а₽) > б, /2(а₽) < 0; /1(аэ) < 0, /2(а?) > 0;
(4.75)
/1(а?)<0, /2(ац) < 0; /i(as)>0, /2(а»)>0.
Любая из первых трех ситуаций означает, что нет
зацепления выступа за склон, а четвертая — что препят-
ствие непреодолимо.
Рассмотрим поведение функций (4.74) и найдем ус-
ловия проходимости в этом случае.
Анализ уравнений (4.74), выполненный с участием
Б. Е. Бумагина, показывает, что при
/ гк \
О < ap < arcsin I I /х (ар) < — с + гк + dB,
. / гк \
а при увеличении ар от arcsin I z 1 до + Л (ар)
монотонно возрастает, так как
da& cos2 ар
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
385
С другой стороны, при
0<а₽< [01 + 02
аГС5Н1(ГкЛв)]
/2(ац) монотонно убывает, так как
dfi («|з) _ гк sin (01 + 0а — + ~ гв < q
dap — cos2 (0! + 02 — a р)
а при 01 + 02 — arcsinl-Л ] < ар < 01 + 02 /г(ар) < О
\ в /
(рис. 4.15).
Пусть существуют такие ai, а2е[0, 0i + 02], что
fi(ai) =0,/2(аР) =0.
Тогда, если аг>ац то при ар (ai, аг) /2(&р) >0
и /1 (аР) > 0, т. е. препятствие непреодолимо. Если
аг < аь то при ар е [0, ai)
/1(«р) <0, а при ар<=
е [ад, Pi + Р2) /г(ар)<0,
т. е. препятствие преодо-
лимо.
Если /г(ар)+^О (£ =
= 1,2) при аР^[0, Р1+Р2],
то последний случай в
(4.75) заведомо не име-
ет смысла, так как в
противном случае в интер-
вале [О, ар], где Ма*р)>
>0, по теореме Коши о
непрерывной функции
нашлась бы точка ар = а*, для которой /г(а*) = 0 при
i = 1 или i — 2.
Для оценки проходимости значения ai и аг определя-
ются из соотношений
А С — гк ~ dB ,
ах = arctg——— ------Н arcsin —
^-гв 1/(2’-гв)2 + (С-'к-+)2
С — Гк — с?в
к
т. е.
-zZ+zi+dj
Рис. 4.15. Возможный вариант
поведения функции /1 (а ) и
.функции /2(ар):----- /1(ар),
------/2 (ар)-
К
a2 = Pi + Ра — arctg
25 Е. В. Авотин и др.
— arcsin — к .
А2+(С'-'-к-^2
386
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Заметим, что при ZB = -9-
/1 (а₽) /2 (а₽) 2 tg (₽* 2 /Pj + ₽2\
COS г, I
— С + гк + dR — hR — С 4" rK + dR,
т. е. проходимость планетохода в этом частном случае
оценивается достаточно простым соотношением.
Преодоление насыпи. Данный вид препятст-
вия показан на рис. 4.16. Из него видно, что препятст-
вис типа «насыпь» является
частным случаем препят-
^7/7////// ствия типа «валун треуголь-
ной формы». Поэтому, чтобы
у/т оценить проходимость плане-
тохода с плоским днищем
Л у________' через данное препятствие, до-
Г7ТПТГ^ % статочно в выражении (473)
Рис. 4.16. Препятствие типа принять fh = 0.
«насыпь». Максимальное возвыше-
ние препятствия hn над уров-
нем плоскости, проходящей через центры колес, имеет
место в точке =-?-cos р2/2, а величина возвышения
определяется из соотношения
‘.’Мл’ф <4-76>
Пусть
О - К - В • ГК
» - + arcs'” V(g
С --- Гк ? к
а, = Ь - arctg —---------------------arcs,., .
Если на днище
«2 > <xi препятствие
имеется местный выступ, то при
непроходимо, а при «2 < он — про-
ходимо.
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
387
1/2
полу-
(4.77)
(4.78)
На рис. 4.17 показано сравнение результатов расчета
проходимости через препятствие типа «насыпь» по урав-
7 & + ₽2 I (л 1 \
нению Лн = -^ tg Y - с^-2) и крш
ченному в [12], т. е.
йн = 0,5(Л +]/Л2 + ^2),
где
_ 4g2rK (cos р2 — cos2 р2)
4^2 sin2 р2 — 4г2 (1 — cos р2)2
4S?2rK (cos f2 — cos2 р2) ] 2
4^2 sin2 р 2 — 4r2 (1 — cos р2)2
4 S’4
4£’2sin2P2 — 4r2 (1— cos р2)2
Параметры для расчета приняты следующие: 2 —
= 3,02 м; гк = 0,61 м.
Из рис. 4.17 видно, что результаты расчета по урав-
нениям (4.76) и (4.77) совпадают. Однако полученные
здесь соотношения более удобны для использования в
инженерной практике.
Проходимость планетохода с учетом ди-
намики его взаимодействия с грунтом. На
основе приведенных выше соотношений может быть про-
ведено исследование проходимости только для двухосных
планетоходов и только при движении через вполне опре-
деленные типы неровностей. Кроме того, рассмотренная
методика исследования проходимости при движении пла-
нетохода по неровностям поверхности справедлива только
при квазистатическом огибании неровностей.
В тех случаях, когда препятствия преодолеваются на
достаточно больших скоростях, проходимость планетохо-
да будет в существенной мере определяться динамиче-
ским просветом, под которым в дальнейшем следует по-
нимать
Cd = min С (х) = min BS, (4.79)
где точки В и S принадлежат поверхностям соответст-
венно днища и грунта.
25*
388
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Вопрос о проходимости в динамике может быть ре-
шен аналогично тому, как это делалось для квазистати-
ческого случая. Однако, учитывая тот факт, что в общем
случае колеса могут отрываться от грунта, а деформации
подвесок заметно отличаются от статических, определить
величину Cd становится удобнее в зависимости не от
положения той или иной колесной оси, как это дела-
лось в квазистатическом случае, а непосредственно от
Рис. 4.17. Изменение высоты выступающей части препятствия
hn (см) в зависимости от угла наклона поверхности р2: о — о —
расчет по уравнению (4.77), *——расчет по уравнению (4.76),
в котором значение hH увеличено на величину гк = 0,61 м.
Для любой точки, расположенной на днище плането-
хода, это может быть сделано следующим образом.
Уравнение продольной оси, проходящей через центр
тяжести планетохода, относительно неподвижной системы
координат, связанной с рельефом, имеет вид (рис. 4.18)
Z = Xtg<p + (z0 — xotgq). (4.80)
§ 4.3. ДЕФОРМАЦИЯ СИСТЕМЫ ПОДРЕССОРИВАНИЯ
389
Тогда уравнение перпендикуляра к прямой (4.80) в
;-й точке запишется в виде
г. = ^+2), (4.81)
где (я?о, zo) — координаты центра тяжести относительно
неподвижной системы координат, (х,, Zj) — координаты
/-й точки относительно той же системы координат.
Рис. 4.18. Схема для расчета проходимости планетохода по пере-
сеченной поверхности с учетом динамики.
Связь координат с параметрами планетохода и его
положением при движении по заданному рельефу опре-
деляется зависимостями
Zq = 6i + (II — 7к 4- Z + Аг) COS ф + li ЭШф,
Xq = Xi — (II — Гк + Z + Аг) sin ф + li COS ф,
(4.82)
Zj = 6г + (H — rK + z + Аг) cos ф + Zj sin Ф,
Xi = Xi + (H — rK + z + Аг) sin ф + li cos ф,
где (Xi, 6г) — координата центра f-ro колеса, взаимодей-
ствующего с рельефом, Zj — длина проекции на продоль-
ную ось планетохода отрезка, начало которого в центре
390
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
f-ro колеса, а конец в j-й точке, расположенной на про-
дольной оси.
Здесь и в дальнейшем рельеф понимается с учетом
обкатки его колесом заданного радиуса.
При расчете значений хо, z0, xh Zj по (4.82) в каче-
стве Z-ro колеса выбирается любое из колес, которое в
данный момент времени находится в безотрывном поло-
жении с поверхностью.
Пусть рельеф, по которому происходит движение пла-
нетохода, описывается уравнением
6Р = 6(Х, гк). (4.83)
Из совместного решения уравнений (4.81) и (4.83)
найдем координаты точки пересечения перпендикуляра
с поверхностью грунта. Обозначим координаты этой точ-
ки (^6Й 2бг).
Тогда условие проходимости планетохода в процессе
движения его по заданному рельефу выразится в виде
У (Xj — ^6j)2 + (zj — z6j)2 — dj > 0, Zj[0, S7], (4.84)
где dj — расстояние, отсчитываемое по перпендикуляру
(4.81) от точки его пересечения с прямой (4.80) до ниж-
него основания выступа на днище.
Из (4.80) — (4.83) видно, что для оценки проходимо-
сти необходимо знать положение корпуса планетохода,
которое определяется вертикальными z, угловыми ф и
продольными х перемещениями. Чтобы найти перемеще-
ния, необходимо составить уравнения колебания плане-
тохода при движении его по неровностям рельефа по-
верхности. На основании решения этих уравнений опре-
деляются интересующие нас значения перемещений z,
Ф и х. В частности, перемещение по z, ф и х может быть
определено системой дифференциальных уравнений
(3.110), описывающих реакцию планетохода на внешние
возмущения.
§ 4.4. Динамическая нагруженность элементов
ходовой части при движении по неровностям
Создание надежной конструкции планетохода, харак-
теризуемой высокой долговечностью и безотказностью ее
элементов, включает в себя большой объем эксперимен-
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ
391
тальных работ с целью проверки в условиях, максималь-
но приближенных к эксплуатационным, работоспособно-
сти узлов и деталей планетохода в течение всего задан-
ного ресурса эксплуатации. В тех случаях, когда работо-
способность деталей существенно зависит от их динами-
ческой нагруженности, они проходят цикл динамических
испытаний на соответствующих стендах во всем диапа-
зоне эксплуатационных воздействий с учетом вероятно-
сти этих воздействий. При этом потребность в цикло-
граммах стендовых нагружений отдельных элементов
планетохода зачастую возникает до создания ходовых
макетов, поэтому единственными методами определения
стендовых режимов динамических испытаний являются
расчетно-теоретические методы, основанные на вероятно-
стном описании реальных воздействий в виде случайных
функций и определении эквивалентных им детерминиро-
ванных воздействий, возбуждаемых на стендах. Учиты-
вая, что все реальные воздействия на планетоход как на
динамическую систему можно подразделить на два ос-
новных класса — непрерывные стационарные или приво-
димые к стационарным случайные воздействия и случай-
ные импульсные (ударные) воздействия, целесообразно
подразделять и режимы стендовых испытаний на два ос-
новных вида:
при непрерывных детерминированных воздействиях,
эквивалентных реальному случайному воздействию;
при импульсных ударных воздействиях.
Моделирование стационарного случайного процесса
нагружения какой-либо детали обычно осуществляется
путем набора ряда гармонических воздействий, эквива-
лентных по тому или иному случайному критерию. Та-
кое представление процесса случайного нагружения тре-
бует изучения статистических характеристик циклическо-
го нагружения конструкций.
4.4.1. Циклическая нагруженность элементов подве-
ски планетохода. К числу элементов ходовой части пла-
нетохода, испытывающих нагрузки, относятся упругие
элементы и демпфирующие устройства системы подрес-
соривания. В реальной эксплуатации, при движении по
поверхности планет, эти нагрузки носят случайный ха-
рактер, в общем случае — нестационарный. Однако при
определенных условиях — стационарном микропрофиле и
392
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
равномерном движении планетохода — процесс цикличе-
ского нагружения элементов подрессоривания близок к
стационарному и допускает применение корреляционной
теории к исследованию работы упругих и демпфирую-
щих элементов подвески. Более того, если для того или
иного элемента существует математически сформулиро-
ванный критерий его работоспособности или долговечно-
сти, то можно найти, базируясь на этом критерии, такое
циклическое нагружение испытуемого образца в стендо-
вых условиях, которое было бы эквивалентно реальному
нагружению в эксплуатационных условиях. В качестве
такого критерия может служить величина работы, со-
вершенной узлом до предельного состояния, величина
мощности, рассеиваемой в узле в процессе работы, и т. д.
Применение ЭВМ позволяет решать подобные задачи на
основе весьма подробного математического моделирова-
ния процессов нагружения в реальных и стендовых ус-
ловиях. Однако это требует задания конкретных реали-
заций, подробного описания конструкции планетохода и
т. д.
Для расчетов циклического нагружения элементов
подвески и, в частности, демпфирующих устройств
(амортизаторов), на стадии проектирования может быть
использован расчетно-теоретический метод определения
величины мощности, рассеиваемой в амортизаторах, при
движении планетохода с различными скоростями по
трассам, микропрофили которых представляют собой ста-
ционарные случайные процессы со спектральными плот-
ностями вида (4.49).
По формулам (4.47) передаточная функция деформа-
ций 1-й подвески планетохода при колебаниях в верти-
кальной плоскости под воздействием неровностей микро-
профиля и линеаризованных характеристиках элементов
подрессоривания может быть получена в виде
по По
S е PXi h S lie~pXi
i=i । i=l
<4.85)
где Mi, bi, ci — приведенные
к первому колесу масса,
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ
393
коэффициент демпфирования и жесткость упругого эле-
мента, Тг — запаздывание воздействия на i-й каток по
сравнению с первым,
D /п\ _ ^1Р ~Г С1
Z1 \Р) Д/_i_ _|_ С1 >
2 e~-pXi
<Мр) = —п— +
П0
h 2 he~pxi
г=1________
no 9 ’
s l2i
i=l
p = M
Как было показано выше, величина |C?i(/<x>) | инва-
риантна к скорости движения планетохода и высотам не-
ровностей, она зависит только от числа пар колес тг0 и
отношения Поэтому при дальнейших исследованиях
параметров колебательных процессов в системе подрес-
соривания в зависимости от скорости движения и харак-
теристик микропрофиля можно использовать дробно-ра-
циональную составляющую 7?zi(/(o), полагая, что
Нетрудно заметить, что Rz\ (/?) представляет собой пе-
редаточную функцию линейной одномассовой системы,
описываемой уравнением
M^z + &i (z - 6),+ ci (z - б) = 0.
Предполагая, что колебания массы М\ происходят в
пределах линейного участка характеристики упругого
элемента с жесткостью с, а демпфирующее устройство
имеет нелинейную характеристику Ь[ (Д), (Д = z — б),
описываемую выражением
61 (Д) = ptA2signA, (4.86)
можно найти величины дисперсий скоростей деформаций
2
подвески ад.
Для решения поставленной задачи целесообразно вос-
пользоваться методом статистической линеаризации [36]
394
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
характеристики fei(A), заменив нелинейное уравнение
М1Д + (А) + пД = -Кб (4.87)
эквивалентным ему линейным
ЛЛА + ХА + ci А = -М{8. (4.88)
В связи с тем, что величина мощности, рассеиваемая
в амортизаторе заданной конструкции, определяется,
в основном, величиной относительной скорости штока А,
за критерий линеаризации можно принять минимум сред-
неквадратического отклонения процессов А в системах,
описываемых уравнениями (4.87) и (4.88).
Основной задачей процесса статистической линеари-
зации является получение коэффициента % как функции
параметров системы ц, с\ и статистических характе-
ристик входных воздействий об, «а и £fl. В соответствии
с выбранным критерием
minfo2. 1 I = min{nz[A(f) — Дл(г)]3}1!
I А— Дл)
где т{-} —операция математического ожидания, А(£) —
скорость деформации упругого элемента в нелинейной
системе (4.87), Ал(£) —то же в линеаризованной систе-
ме (4.88), можно получить
Т бЛЛХД-т.)/.^)^
Ь = . • (4-89)
f (А — т . )2/ . (Д)</Д
-~оо А А
Отсюда при нулевом математическом ожидании =
= 0
<4'эд
Величина о.д‘ легко вычисляется с помощью уравне-
ния (4.88) по известному [28] соотношению
°2д = J I |25е (4-91)
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 395
где 1^/бд(/со) I — амплитудно-частотная характеристика
рассматриваемой системы, 5б(со)—спектральная плот-
ность воздействия.
Очевидно, что величина является функцией Л, так
как К входит параметром в |И^бд(/о))|. Поэтому вычис-
ление величин X и о представляет собой итерационный
процесс совместного решения уравнений (4.90) и (4.91).
Для определения связи параметров режимов цикличе-
ского нагружения (амплитуды и частоты синусоидаль-
ного воздействия) со статистическими характеристиками
случайного дорожного воздействия об, аа, ра и парамет-
рами системы Mi, ц, с нужно найти величины рассеивае-
мой в амортизаторе мощности при случайном и эквива-
лентном ему синусоидальном воздействии с частотой
и амплитудой Уэ. С этой целью необходимо представить
величину мощности, рассеиваемой в амортизаторе, как
7VP = FaA = цА2 sign А • А = цА3 sign А. (4.92)
При синусоидальном воздействии величина средней
мощности, рассеиваемой амортизатором, за период вы-
числяется как
Уэ-
Nc = ^ Г =4- (4.93)
Л и О Л
-Уэ
Средняя величина рассеиваемой мощности Np в амор-
тизаторе при стационарном случайном воздействии А мо-
жет рассматриваться как математическое ожидание слу-
чайного процесса па выходе нелинейного элемента, опи-
сываемого выражением (4.92), т. е.
оо
Np = mN = цД3 sign А/ . (Д) dA = -£= р.а3. .
J Д |/ 2л Д
— оо
Пользуясь известным в теории выбросов [28] соот-
ношением между среднеквадратической величиной слу-
чайного процесса од и среднеквадратической его произ-
водной Од
О д -- СОдОд,
396
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
где сод — средняя по спектру частота процесса, можно
получить
Сравнение величин Nc = Np в соответствии с выбран-
ным критерием подобия синусоидального нагружения
(индекс «с») и реальной эксплуатации (индекс «р») по-
зволяет получить равенство
тэГ33 = ^Д°Д
Зя 1/2л ‘
Отсюда при ыэ — сод
Уэ 1,54 Од.
Этот результат уместно сравнить с известным соотно-
шением между амплитудой Ус и среднеквадратическим
значением синусоидального процесса Одс
Ус = уТодс.
Различие в коэффициентах перед од (~10%) явля-
ется следствием применения статистической линеариза-
ции к оценке величины средней мощности 7VP и может
служить оценкой точности этого метода.
Таким образом, определение параметров эквивалент-
ных режимов нагружения амортизаторов (Уэ и о)э) сво-
дится к вычислению статистических характеристик ра-
боты подрессоривания в реальной эксплуатации: диспер-
сий Иди средних частот деформаций подвесок сод.
Величины дисперсий деформаций ад и их скоростей
подвесок вычисляются по формулам
2 __ I л 2 С (со) dm
°А ” I S’/ J (С1 — Mjco2)2 + Хсо2 ’
Г (4-95)
2_|0/aV? A72co»56(<o)dw
°Д I ) J (Ci - M1Co2)2 + X2co2 ’
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 307
а средняя частота деформации
«4
(4.96)
Вычисления по формулам (4.95) и (4.96) для всех
четырех типов реальных воздействий (4.49) можно полу-
чить в виде
Од = -у1- ofabFа (АД, X, clt аб, 0б) | <21 (Jr) | , (4.97)
®д =-- (Mn X, cu a6, p6), (4.98)
где Fa и — функции от динамических параметров пла-
нетоходов и коэффициентов частотного состава спектра
микропрофиля afi, ре, представленные в табл. 4.2 и 4.3.
Там же приведены численные значения функций Fa и
Fa для величин аб и (Зб во всем возможном эксплуатацион-
ном диапазоне: минимальных amm, pmin, средних и Рб
и максимальных amax, pmax. Следует заметить, что значе-
ния (Од для процесов № 1 и № 2 получены путем экст-
t
раполяций значений средних частот процессов J Д (i) dt и
о
dt, так как процессы № 1 и № 2 не-
дифференцируемые. Это могло внести некоторую неточ-
ность в функциональные зависимости Fai и F^-
Учитывая, что
о? = ст^со2 =
Д А
можно найти значения произведения Fa и Fa во всем
возможном эксплуатационном диапазоне от •amln-Pmin =
= 4 l/С ДО (ХтахРтах = 100 1/с. РезуЛЬТЭТЫ СООТВвТСТВуЮ-
щих вычислений представлены в табл. 4.4.
Анализ табл. 4.2—4.4 показывает:
независимо от типа случайного процесса (микропро-
филя) величина произведения FaFa монотонно возрастает
от минимального до максимального значения примерно
в 4 раза при изменении произведения частотных коэф-
фициентов оф в 25 раз;
ША(£)й£
ТАБЛИЦА 4.2
Значения функций Foj(M, с. %, czj, pi) при различных величинах коэффициентов спектрального состава (ai и fh)
Процесс воздействия, номер Fa.(M, с, а6, ₽б) Значение F при коэффициентах и р^, 1/с
минимальное среднее (максимальное
а6 1 рб 4 аб 3 8 а6 8 р6 12,5
1 2 3 4 Cl , + ' С Л • j' v J % а6 1 %аб + с 2 Ма% + Хаб с М(аЬг-Й)(^'^^- + 2Л \ а6 / 0,43 0,28 0,21 0,48 0,42 0,25 0,16 0,29 0,32 0,05 0,23 0,38 0,28 0,30 0,29
>еднее значе: L аб с + о 1 Za6 4- с Ма% + Ла6 -j- с ^аб+ с 1 Ма% ние Fai по сумме всех процесс о 2 в
ТАБЛИЦА 4.3
Значения функций F^M, с, X, аг, 0г») при различных вэличинах коэффициентов спектрального состава (а; и Pi)
Процесс воздействия, номер (М, %, с, а6, ₽6) Значение F^ при коэффициентах и 1/с
минимальное среднее максимальное
“б ₽6 “б ₽б аб рб
1 4 3 8 8 12,5
1 [ V («1-Й) +1%] + [и(й+Й)+2».««+«] 0,96 2,72 7,46
i.±tpi+c «в
2 Ма| + %а6+ с С 1,13 1,58 3,66
3 -у--^ [м (“б + ₽б) + 2^аб1 + 2 (2to6 + с) 6 1,29 2,86 7,30
. «6 + ₽б , л т с аб
4 (i+^e.V.fi+_^L) \ с J \ Ло&ф — с J 1,26 2,10 6,84
Среднее значение F^i по сумме всех процессов 1,16 2,31 6,31
400
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
при средних, наиболее вероятных, эксплуатационных
значениях а и [3 величины произведений FJFa для всех
видов воздействий близки друг другу;
при пропорциональном изменении величин ад и |Зб,
т. е. при изменении скорости движения планетохода (так
как а = оиу, (3 = Pii?, где оц и [3i — параметры микро-
профиля при v = 1 м/с), величины Fa и практически
ие зависят от величины рб, что свидетельствует о преи-
мущественном влиянии коэффициента ссб на динамику
подрессоривания планетохода.
ТАБЛИЦА 4.4
Значения произведения функций FGi F^i
при различных величинах схб и
Процесс воздействия, номер Величины произведения F .F . QI (01
минимальные р6=4 средние аб=3 Рб=8 максимальные ал=8 6 =12,5 . 6 б
1 0,41 0,76 1,56
2 0,54 0,67 0,92
3 0,21 0,83 2,32
4 0,07 0,49 2,60
Среднее значение по сумме всех процес- сов 0,31 0,81 1,85
Полученные результаты позволяют из всех рассмот-
ренных типов воздействия выбрать тот (№ 4), для ко-
торого функциональная зависимость имеет наиболее
простой вид:
qF (о —
Л/1СС2
1 о
С1
(4.99)
и тем самым упростить дальнейшие вычисления.
Таким образом,
о I /Т\|2 9 ЛЛа? / Хал \
а- = Ш 1 + -^ . (4.100)
A I / I А \ С1 /
Но, как следует из приведенных ранее рассуждений,
величина X является функцией Од (см. формулу (4.90)).
Подставляя Мад) из формулы (4.90) в выражение
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 401
(4.100) и вводя в рассмотрение безразмерную величину
/сд = o'д/o',представляющую собой коэффициент усиле-
ния скорости изменения высоты микропрофиля (о’д =
,= обссб) до скорости штока амортизатора, можно полу-
чить уравнение
vk2 - 1 = (4.101)
А К
д
где
Г л Q2
, / Я С, 1 b<S 1
/7 — 1/___________!--------V — -------------------------
у 2 2>*
(4.102)
На рис.
уравнений
коэффициентов а и v. Значения
для
4.19 представлена номограмма
(4.101) при различных значениях
Для
решения
величин
плането-
хода с четырьмя колесами (по борту) могут быть полу-
чены из графиков, представленных на рис. 4.20, по за-
данным величинам средней длины неровностей микро-
профиля LH и базы машины 2?. По вычисленному
значению к определяются Од =ЛдПбаб, потом Х = Х(о^)
по (4.90) и далее величины соэ = (од и Уэ = ]/2од по
.(4.97).
Таким образом, процесс получения параметров цик-
лического нагружения элементов системы подрессорива-
ния планетохода представляет собой вычисление ампли-
туд и частот эквивалентных синусоидальных процессов
по формулам
у8 = /2ад = /2 1/
\ zc / у л м ла Cf
+ (4л03>
аб =
26 Е, В, Авотин и др,
л 2Д/2 7
л = “т=г- ца. , а. = /с. (Таосе
/л г Д® д д
402
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
4.4.2. Описание процесса соударения колес плането-
хода с препятствием. Выше излагались методы расчета
вертикальных нагрузок, возникающих при движении пла-
нетохода по случайному рельефу. Эти нагрузки необхо-
димо знать при определении режимов длительных ре-
Рис. 4.19. Номограмма для расчета коэффициента .
сурсных испытаний и долговечности элементов конструк-
ции. При оценке прочности различных узлов планетохода
необходимо знать максимальные значения динамических
усилий, которые могут возникнуть при том или ином
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ
403
режиме движения планетохода в процессе его эксплуа-
тации.
Для расчета максимальных усилий могут быть выде-
лены следующие ситуации: для продольных — столкнове-
ние с непреодолимым препятствием, для вертикальных —
съезд с контрэскарпа или преодоление камня, для попе-
речных — удар в препятствие крайними колесами при
повороте.
Рис. 4.20. Зависимость коэффициента передачи воздействий по-
верхности на переднее колесо четырехосного планетохода от со-
отношения длины неровности и базы планетохода.
В предыдущей главе было показано, что процесс
столкновения с непреодолимым препятствием условно
может быть разбит на две фазы: соударение и опрокиды-
вание. В фазе соударения происходит взаимодействие
соударяемых колес с непреодолимым препятствием. По-
этому именно в этой фазе динамические усилия, воздей-
ствующие на соударяемые колеса, достигают наибольше-
го значения. Кроме того, так как продолжительность
процесса соударения значительно меньше, чем продол-
жительность процесса опрокидывания (рис. 3.5), то в
фазе соударения угловые перемещения не успевают до-
стичь значительной величины. Последнее обстоятельство
26*
404
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
позволяет при определении усилий, действующих на со-
ударяемые колеса, ограничиться дифференциальными
уравнениями, описывающими малые колебания плането-
хода.
Рассмотрим столкновение с препятствием одного ко-
леса в предположении, что поглощения энергии в гори-
зонтальном направлении всеми подвесками и колесами,
кроме передних, не происходит.
Тогда процесс взаимодействия планетохода с непрео-
долимым препятствием может быть описан системой
дифференциальных уравнений
п
Mnz = 5 (Fni + Fai) 1 (Дг) — Mng cos a,
i=l
n
JOf/ф “2 (^пг “Ь Pаг) ^fl (Af) Pуд (H “h 2 ^’к) 1 (#)>
г=1
(4.104)
Jox® = — Руд 4 1 (ж)> Mx = ~ Руд! (x) -H Mg sin a
£
с начальными условиями ф(0) =0, z(0) =0, 0(0) = 0,
z(0) = 0, <p(0) = 0, z(0) = 0, 0(0) = 0, i(0) = v, где
Ai = Aoi—z—Zitp, Руд = Руд [x-fc (ср) —/2 (0) ] — сила уда-
ра, действующая на систему препятствие — колесо —
крепление, /1(ф), /г (9) —перемещения центра колеса,
обусловленные угловыми перемещениями планетохода в
вертикально-продольной плоскости и плоскости (х, у)
соответственно.
Перемещения /1 (ф) и /2(0) зависят от типа и конст-
рукции подвески. В частности, для рессорной и балансир-
ной подвесок эти перемещения могут быть выражены
следующими приближенными соотношениями:
для рессорной подвески
/1 (ф) = ]/”(# + z — rK)2 + I2 [cos arctg Я + *—— —
/ Н + z - гк \1
— cos (^arctg ---------ф^,
fz (0) = V + 4 cos arctg -4 -cos I arctg - 61 ,
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ
405
для балансирной подвески с расположением рычагов
в вертикально-продольной плоскости (рис. 4.21)
fi (ф) = КД^2 + Д^2 cos arctg cos (arctg 4т — ф^ —
• дм
— cos arcsin -т-S- ,
Д01
( . д/гр . A, — A,
cos arcsin—- — arcsin—2------
\ rp rp
-Гр
i A2 .
]/ "Ц 2 j
/2(0) =
x в I 4 В
cos arctg ------cos arctg
где Afe, AZ — абсолютные значения абсциссы и ординаты
центра крепления рычага к корпусу соответственно, от-
считываемые относительно центра тяжести, Айр — рас-
стояние по вертикали от
центра крепления рычага к
корпусу до центра соударяе-
мого колеса в статическом
положении.
Для балансирной подвес-
ки с расположением рычагов
в вертикально-поперечной
плоскости значения /1 (<р),
/2(6) с достаточной степенью
точности могут быть приня-
ты такими же, как и для
рессорной подвески.
Z
Рис. 4.21. Расчетная схема
для определения усилий с ба-
лансирной подвеской при ус-
тановке рычагов в вертикаль-
но-продольной плоскости.
Так как условились рассматривать малые колебания,
то нелинейные выражения /1(ф), /2(6) целесообразно
упростить п заменить линейными членами. Разлагая вы-
ражения для /1(ф) и /2(6) в ряд Тейлора и удерживая
члены только первого измерения, получим следующие
выражения для расчета силы удара:
для рессорной подвески
Г д
Руд = Руд X (Н Z -------- Гк) (р — 0 ,
для балансирной подвески
РуД
ГР
— Руд # 4~ ААср + *2“ 0 4- АДР (Аг — А01)/гр .
Из последних уравнений видно, что для рессорной и
балансирной подвесок уравнение, определяющее силу
406
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
удара, может быть представлено в более общем виде:
Руд = Руд (z + аоср + М + coz), (4.105)
где а0 = (Нz—rK),50 = -^-, cq = 0 для рессорной под-
В
вески и а0 = ДЛ—Д/гр Zi/rp, 50 = ~Т’> со =----для ба-
z гр
лансирной подвески.
Система (4.104) может быть еще несколько упрощена
путем замены во втором ее уравнении выражения
(Н + z — гк) при произведении (Я + z — гк) Руд на
(Я-гй).
Такое допущение вполне справедливо, так как пере-
мещение центра тяжести по вертикали, которое произой-
дет в процессе соударения колеса с препятствием, по ве-
личине не соизмеримо с расстоянием Н — гк. Кроме того,
чтобы система (4.104) разрешалась в квадратурах, надо
сделать еще предположение, что упругая характеристика
системы препятствие — колесо — крепление — линейная,
т. е.
Руд = СЛХ + аоф + &О0 + coz). (4.106)
При дополнительно сделанных предположениях си-
стема (4.104) становится кусочно-линейной и может быть
проинтегрирована в квадратурах, т. е.
Mnz = X (cniA; + b;Aj)T(A;) — Мп? cos а,
г = 1
/оуф = S (СпгАг + &гАг) /г1 (Аг) —
г=1
— сх (х + аоср + baQ + coz) (Н — rK) 7(я), (4.107)
Jozd = — Сх (х + а0<р + &09 + coz)T (г),
Мх = — сх (х + аоср + 509 -4- coz) 1 (я) + Mg sin а.
Последняя система является системой дифференци-
альных уравнений восьмого порядка, поэтому даже при
ее кусочной линейности найти общее ее решение пред-
ставляет значительные сложности, которые связаны, в ос-
новном, с большими преобразованиями и вычислениями.
§ 4,4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 407
Основная сложность при решении этой задачи связана
с нахождением корней характеристического уравнения.
Так как это уравнение в данном случае имеет восьмой
порядок, то при нахождении его корней необходимо вос-
пользоваться приближенными числовыми методами рас-
чета. Последнее приведет к тому, что построенное общее
решение системы (4.107) будет носить частный харак-
тер. Поэтому при современном уровне развития вычисли-
тельной техники целесообразно динамическую нагружен-
ность колес исследовать по системе (4.104) или (4.107)
с применением ЭВМ.
Рассмотрим некоторые частные случаи, для которых
могут быть получены сравнительно простые выражения
для приближенной оценки динамических усилий, прило-
женных к соударяемому колесу.
Столкновение с непреодолимым препят-
ствием двумя колесами одновременно. Ди-
намические усилия, действующие на колеса, найдем без
учета вертикальных перемещений и сил сопротивления
в амортизаторах. Так как при столкновении с препятст-
вием двумя колесами одновременно разворота планетохо-
да относительно вертикальной оси не происходит, то си-
стема дифференциальных уравнений (4.107) преобразу-
ется к виду
ср + а2<р + dx = 0,
(4.108)
х + Ъ2х + Ахр + s = 0,
где
X спг1{ + сх(Я-гк)2
= -----------т--------
J0y
= « = — g (sin а — /cosа).
Если в процессе соударения колеса не отрываются от
опорной поверхности (т. е. 1(Дг) =1), то решения си-
стемы (4.108) по угловым <р(£) и горизонтальным x(t)
408
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
перемещениям имеют вид
ф W = ~2 '2
®1-®2
— sin co.i Ч------^-cos coi£ —
<01 <01
v . , s Д . ds
-------Sin (dot--------COS GM 4-----------x-s,
<02 “ (d* )
Подставляя последние выражения в уравнение
(4.106), найдем следующую зависимость для расчета ди-
намического усилия, действующего на колесо в процессе
соударения с препятствием:
(со? + and — аД / « \
Руд (f) = V 1 ------------2^ p sin + 7Г cos +
(<°1 — <00 ' <°1 /
сж(а2 — <о| — а^)[ . s \ cs(aad — а?)
------------------ v Sin ©2« + — COS (02i 4--------5-5----.
С02(<01~ <00 \ <°2 / 0)^2
(4.109)
Очевидно, динамическое усилие достигает максималь-
ного значения в момент времени t = ^*, при котором
выполняется условие dPyJdt = 0, т. е.
(а2 — со? — Яо<О I v cos со2*--— sin co2i*) +
+ (со? + aod — а2) (v cos co1t* + — sin (0LZ*) = 0. (4.110)
\ <01/
§ 4.4, НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 409
Поиск значения t — £*, удовлетворяющего уравнению
(4.110), может быть проведен с помощью метода после-
довательных приближений или путем графического по-
строения. Из всех значений t = £*, удовлетворяющих
(4.110), только наименьшее из них соответствует реаль-
ному значению времени, при котором сила Руд достигает
своего максимального значения. Все остальные значения
в расчет не принимаются, так как не отвечают физи-
ческому смыслу поставленной задачи. Появление лишних
значений £*, удовлетворяющих (4.110), связано с пред-
положениями, которые были сделаны при получении си-
стемы (4.108), а именно,— что отрыва колес от соударяе-
мой стенки не происходит.
Физическому смыслу соответствуют значения Руд, рас-
считанные по (4.109); они, во-первых, положительны,
а во-вторых, их значения располагаются между первыми
нулевыми значениями этого уравнения. Первое нулевое
значение соответствует начальному значению удара, т. е.
Руд (0) — 0, а второе — моменту отрыва колеса от соуда-
ряемой стенки. Поэтому первый максимум, которого до-
стигнет уравнение (4.109), будет соответствовать значе-
нию времени £*, равному минимальному значению из всех
корней уравнения (4.110).
Если значение Н — гк таково, что влиянием угловых
перемещений на величину динамических усилий можно
пренебречь, т. е. процесс соударения планетоходов мо-
жет быть представлен в виде центрального удара, то
формула для расчета этого усилия имеет вид
/--- Г
Рур. (0 = У СхМ v sin у t +
+ Mg (sin a — / cos a) — cos p/"(4.111)
Последнее соотношение как частный случай следует
из (4.109) при Н — гк = 0, cd I = а2, = b2 или может
быть получено из (4.108) при Н — гк = 0.
Выражение (4.111) достигает максимального значе-
ния при
/М ' . -ж Г сх v
л — arctg I/ -—---Г .
с-----------------------------ь у М g (sin a — / cos a)
410
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Отсюда следует, что при sin а = / cos а максимальное
значение динамического усилия, действующего на одно
колесо, определяется уравнением
Руп max — V СХМ V. (4.112)
Столкновение с непреодолимым препят-
ствием одним колесом. Расчет динамического
усилия в этом случае проведем без учета влияния вер-
тикальных и угловых перемещений планетохода. Тогда
система дифференциальных уравнений примет вид
9 + а20 + dx = 0,
(4.113)
х + Ъ2х АО + 5 = 0,
схВ
к = s = — g (sin а — f cos а).
Характеристическое уравнение системы (4.113) имеет
вид р2(р2 + со2) = 0, где р — параметр оператора
Лапласа.
Поэтому ее решение представимо в виде
х (1Г “ sin — cos +
+ ~ (cos coi - 1) + t +
'со2 ' ' ‘со2 1 2со2 J
0/ ,\ dv . , ds /1 dv । ds ,л
(t) = Sin CO £----T (1 — cos wn----7 4" —T i2,
v 7 co3 co4 v 7 co2 1 2co2 ’
где co2 = a2 + b2.
Отсюда, с учетом (4.106), найдем следующие выра-
жения для расчета динамического усилия, действующе-
го на колесо в этом случае:
Р ул (^) ~
V
со
2^Jsin®f +
S' SC Я2
+ ^(coSCoi-l)+^-^ . (4.114)
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 4Ц
Максимальное значение это выражение достигает при
t = определяющемся из соотношения
( с В2 \ s. sc В2
v 1 — ь-—. cos(о£* —-sin+ t) ‘ - t = 0. (4.115)
2(о2/02/’ со 1 2coV0, х 7
Если 5 = —g(sin<z—/cos а) = 0, то t* = —.
V ’ 2/a2-hb2
Пояснения, которые давались при определении t* в
уравнении (4.110), относятся и к уравнению (4.115).
Полученные выше соотношения для расчета динами-
ческих усилий, действующих на колесо, остаются спра-
ведливыми только в том случае, если упругие характе-
ристики подвесок и соударяемых колес линейны. При не-
линейных характеристиках этих элементов выражения
(4.109), (4.111), (4.112), (4.114) теряют смысл, и рас-
чет следует проводить по (4.104) на ЭВМ, либо путем
линеаризации нелинейные характеристики привести к
линейным, а затем воспользоваться полученными выше
соотношениями.
Однако, если характеристика упругого элемента си-
стемы препятствие— колесо — крепление является не-
линейной, то, без учета влияния вертикальных и угловых
перемещений, в первом приближении процесс соударе-
ния планетохода с непреодолимым препятствием для
случая центрального удара (рис. 3.3) может быть описан
уравнением
Мх + РУД = Mg sin а — Fcx. (4.116)
Подчиняя уравнение (4.116) начальным условиям
я:(0) = 0 и я(0) = у, из (4.116) получим первый инте-
грал вида
хтах
У Руд (я) dx — 2g (sin а — / cos а) хшах, (4.117)
о
где а?тах — максимальная деформация системы препятст-
вие — колесо — крепление.
Так как интеграл, входящий в уравнение (4.117), яв-
но вычисляется, то после интегрирования из этого урав-
нения может быть найдено интересующее нас значение
412
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
#max, а следовательно, и максимальное динамическое уси-
лие, раВНОе Рудатах).
Рассчитанное таким образом максимальное динамиче-
ское усилие будет несколько завышено, так как часть
кинетической энергии затратится на вертикальное и уг-
ловое перемещение планетохода.
Съезд со ступенчатого препятствия. За-
дачу, связанную со съездом со ступенчатого препятствия,
рассмотрим в плоской постановке, т. е. будем предпола-
гать, что с ребра препятствия одновременно съезжают
два колеса. В § 3.5 получены уравнения движения, опи-
сывающие динамику планетохода при съезде со ступен-
чатого препятствия. Эти уравнения справедливы для боль-
ших угловых перемещений, нелинейны и поэтому нераз-
решимы в квадратурах.
Рассмотрим линейный вариант системы дифференци-
альных уравнений (3.110), которую в этом частном слу-
чае без учета сил сопротивления в амортизаторах можно
представить в виде
Мz = 2 Рщ 1 (Ai) — Mg cos а,
i=l
7оУф = 3 Pnili Т (Ai) - HFCX, (4.118)
i=l
x = v = const
с начальными условиями ф(0) =0, z(0) =0, cp (0) = 0,
z(0) =0.
ЗдеСЬ Fni Cni (Aoi ^гф 6f) , Si 51 £ t I (^г-~
—
Чтобы систему дифференциальных уравнений можно
было проинтегрировать в замкнутом виде, линеаризуем
в ней внешнее возмущение бг- (см. (3.113)) по формуле
61 = -гк1(1-со8сок^)Г(§1) -ЯЭТ(^1). (4.119)
Тогда (4.118) превращается в кусочно-линейную си-
стему дифференциальных уравнений, которая может
быть проинтегрирована в квадратурах с применением ме-
тода припасовывания решений.
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 413
Подставляя в (4.118) выражения для Fni и проводя
необходимые преобразования, получим
z + aKz + &кср = Лк + jDk cos okZ,
<р + dKq) + lKz = NK + Z?K cos coKf, (4.120)
x = v,
где
n n
= '7Й' Cni (^i)> Спг^г 1 (Ai), = 2r
i=i i=l Ki
n
Лк — Cni [Aoi ^кг 1 (Si) 1 (Sni)] 1 (Ai) S COS ОС,
i=l
n n
~ Спг^кг 1 (Ai) 1 (Si)» dK = -j CniZi 1 (Ai),
i=l °У i=l
n
Zk ~ у 2 1 (^i)»
J°yi=i
n
Nк = 7 Cni [Aoi Т'кг 1 (Si)
JQy
-Яэ1(£к0] Zi 1 (Ai)sin a,;
JQy
n
Fu = -j 2^ CniZirK£ 1 (Ai) 1 (£i).
J^y i^i
Основная трудность решения системы дифференци-
альных уравнений (4.120) состоит в том, что коэффици-
енты уравнений этой системы терпят разрыв, с одной
стороны, за счет отрыва колес от опорной поверхности,
с другой,— за счет внешних возмущений бг, которые воз-
действуют на все колеса не одновременно, а с некоторым
запаздыванием во времени.
Поэтому каждый раз, как только коэффициенты си-
стемы дифференциальных уравнений (4.120) терпят раз-
рыв, коэффициенты в общем решении этой системы--та#:-
же претерпевают изменения. Коэффициенты изменяются,
414
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
во-первых, за счет изменения коэффициентов системы
(4.120), а во-вторых, за счет того, что изменились началь-
ные условия, которые при каждом разрыве коэффициен-
тов принимаются такими, какое значение они имели в мо-
мент разрыва какого-либо коэффициента. Поэтому,
чтобы уменьшить количество вычислений и упростить в
какой-то мере методику расчета, рассмотрим решение си-
стемы (4.120) при самых общих начальных условиях, а
именно, положим
z(O)=z(ij), ср(О) = cp(ij), ф(0)=ф(^), z(O)=z(^).
Кроме того, при каждом разрыве коэффициентов от-
счет времени будет производиться от нуля путем введе-
ния новой переменной
г = I - 2 «„
г=1
где tj — время движения планетохода с момента /-го до
(/ + 1)-го разрыва коэффициентов дифференциальных
уравнений системы (4.120), t — время, отсчитываемое с
момента начала движения.
Тогда решение системы (4.120) может быть записано
в виде (при условии, что соi =# (о и сог =H=i<o)
z(r) =
== А[ sin (cojt + «j) + А2 sin (согт + аг) + Bi cos сот + Dt,
(4.121)
ф(т) -
= А3 sin (со 1 т + аз) + А< sin (согт + а^) + В2 cos сот + D2,
где
Ат == + ат = ~ (т = 1, 2, 3, 4),
тт
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 415
1
W1 — ш2
d„A„ — Лксо? — NKbK — DK Рк ю1)
НН К 1 КН । К п И \ Н 1 /
(0^ W2 __ ш2
+ М (ty) — Z (ty) (dK — ©2)],
Ni = 2 1 2 Z (Йк “ ®1) “ &кф +
CO ,• COn
। ^k) ' (^K ^2)
co| co2 — co|
+ IkZ (tj) — Ф (tj) (aI{ — co2
_ 1 ^к(пк (flK ^j) AJk ____
CD1 — co| L CD2 — <°2 ° 2
~ W (tj) + ф (tj) («к - 0)2)] ж
, = B = Wk~-“2HA
1 (co2 — COj) — (co2 — co|)’ 2 (co2 — co*) (co2 — co|)’
d A — b N ~
r\ _ H h n H T\ _______ b К H К
^1 9 2 ^2 о 9 1
co^ cofco^
W2 = o,5 [aK -k dK — V(лк + dK)2 — aKdK + ZK6K] ,
co| — 0,5 [aK 4" (ЯК + C?k)2 — + Wk] •
Уравнения (4.121) определяют вертикальные z(t) и
угловые ср(т) перемещения планетохода во времени по
мере того, как колеса съезжают с препятствия. В этих
уравнениях свободные члены, сдвиги фаз, коэффициенты
при синусах и косинусах остаются постоянными только
на некотором интервале времени t = th продолжитель-
ность которого зависит от условий эксплуатации, скоро-
сти движения и параметров планетохода. Поэтому каж-
дому участку времени, на котором указанные выше вели-
416
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
чины остаются постоянными, будут соответствовать свои
уравнения для определения з(т) и <р(т).
Как видно из (4.121), иа каждом участке времени
(t = tj) уравнения для определения з(т) и ср(т) будут
отличаться друг от друга только численными значениями
коэффициентов. Функции z(t) и ср(т) остаются непре-
рывными при любом значении т независимо от разрыва
коэффициентов их уравнений. Последнее достигается за
счет подбора начальных условий z(^), ср(^), 2 (Л>), ф(^),
которые для (/+ 1)-го промежутка принимаются такими,
какими они были в момент t = tj на /-м промежутке.
Момент времени, при котором может произойти раз-
рыв коэффициентов, определяется двумя факторами, из
которых один характеризует отрыв Z-го колеса от опор-
ной поверхности, т. е.
А, = ДОг- - z (т) - Z,cp (т) + б, = 0, (4.122)
а другой — съезд i-ro колеса с верхнего основания сту-
пенчатого препятствия, т. е.
h-li + rKi = vt. (4.123)
Таким образом, с учетом (4.122) и (4.123) по уравне-
ниям (4.121) может быть проведен расчет угловых и
вертикальных перемещений планетохода в процессе съез-
да его с препятствия. Очевидно, точность расчета по
уравнениям (4.121) тем выше, чем меньше угловые пе-
ремещения, совершаемые планетоходом. Поэтому уравне-
ниями (4.121) воспользуемся только для того, чтобы
определить момент касания передних колес нижнего ос-
нования ступенчатого препятствия. Расчет динамических
усилий проведем, исходя из закона сохранения энергии
в предположении, что максимальные динамические уси-
лия достигаются при ударе передних колес о нижнее ос-
нование препятствия.
При этом в момент касания передних колес нижнего
основания ступенчатого препятствия остальные колеса
находятся в отрыве от опорной поверхности и кинетиче-
ская энергия, которой обладал планетоход в момент ка-
сания передними колесами нижнего основания ступенча-
того препятствия, расходуется тЮлько на работу в перед-
ней подвеске. Кроме того, при определении динамических
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ
417
усилий откажемся от сделанного выше допущения о том,
что в передней подвеске упругая характеристика линей-
ная, а амортизаторы отсутствуют.
Тогда из условия, что изменение кинетической энер-
гии равно работе всех сил, получйм
д1тах д1(*к)
М z2, (£к) -|- Jоу(р2 (£к) — 4 j* FnitZAj + 4 j* FaidXj,
b b
(4.124)
где Aimax — максимальная деформация передней подвески,
z(ZK), <p(Q, Ai(£K)—скорость планетохода в вертикаль-
ном направлении, по угловым перемещениям в вертикаль-
но-продольной плоскости и в амортизаторе передней под-
веске соответственно в момент касания передними коле-
сами нижнего основания ступенчатого препятствия. Зави-
симости z(t), <р(т), Д(т) определяются из следующих со-
отношений:
z(t) = А 1(01 cos (coir + (Xi) +
4" A2G)2COS ((1)2Т + CZ2) — 51(1) sin (ОТ,
ср(т) — Л3(01 cos ((OiT + ai) +
•+ Л4(о2 cos ((о2т + а2) — В2,(о sin (от,
Д1(т) = — z(t) — Zrcp (т).
Момент касания передними колесами нижнего основа-
ния ступенчатого препятствия определяется из уравне-
ния (4.122) при i = 1.
В частности, если упругая и диссипативная характе-
ристики передней подвески линейны, то из (4.124) най-
дем следующие соотношения для расчетов максимального
динамического усилия в этой подвеске:
чЛп1[м^(М + /0г/Ф2(М-261А^к)]
T'nlmax — ^nl^lmax — у 2
(4.125)
Если упругая и диссипативная характеристики перед-
ней подвески нелинейны, то максимальное динамическое
27 Е. В. Авотиц и др.
418
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
усилие может быть определено путем графических постро-
ений следующим образом.
Найдем работу, совершаемую передними амортизато-
рами, и обозначим ее через 2Ла. Эта работа численно рав-
на удвоенной площади, ограниченной кривой Fai и орди-
натой Д1 = Д1(£к) (рис. 4.22, а). Вычислим выражение
1 а ~ --2----1 2 Z a*
Под кривой Fni ординатой Д1 =Д1тах отсечем площадь,
1
равную ~2 Тогда из графика (рис. 4.22, б) непосред-
ственно найдем величину максимального динамического
усилия Fnim, которое возникает в передней подвеске при
съезде со ступенчатого препятствия.
Рис. 4.22. Определение максимального динамического усилия,
действующего на подвеску переднего колеса: а) работа диссипа-
тивных сил, б) работа потенциальных сил.
Движение через валун. Движение через валун
рассмотрим в плоской постановке, т. е. предположим, что
препятствие одинакового размера одновременно воздейст-
вуют на колеса правого и левого бортов. В этом случае
6/ —6Д£------В аналитической форме внешнее воз-
мущение зададим в виде полуволны синусоиды (рис.
4.23), т.е.
бг = Яв(1 — COS С0в£) 1 (§1),
V
где (ов = Лу-.
§ 4.4. НАГРУЖЕННОСТЬ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ 419
При малых угловых перемещениях процесс движения
через валун без учета продольных сил может быть опи-
сан дифференциальными уравнениями, по форме совпа-
дающими с (4.120). Разница будет состоять только в ко-
эффициентах Лк, NK, Ек, которые в данном случае
определяются следующими соотношениями:
Л = 2Cni l-Aoi + ~~gcos
г—1
DK = -^^сп{Яв1(и1(Дг),
г=1
Як = 4- У Сиг [До* + ЯвТ &)] 1Д (Д.) >
Як= -7-Усп{да (Дг)1&).
°г/
Поэтому и уравнения, описывающие поведение пла-
нетохода по угловым ф(т) и вертикальным я(т) переме-
щениям, будут по форме также совпадать с (4.121). Од-
нако динамические усилия,
действующие на подвеску,
например, переднюю, необхо-
димо определять, исходя из
выражения
^р1 == Сп1[До1
— z(t) — /1ф(т) + 61].
Рис. 4.23. Траектория внеш-
него возмущения, действую-
щего на i-e колесо при пере-
езде валуна (------- профиль
препятствия; ------ траекто-
рия внешнего возмущения).
Если предположить, что
максимальное динамическое
усилие достигается при пре-
одолении валуна передними
колесами и при этом не
происходит отрыва колес от
опорной поверхности, то расчет эПэго усилия может быть
произведен сравнительно просто. Для более точного под-
счета динамических усилий необходимо следить за не-
прерывностью коэффициентов дифференциальных урав-
нений (4.120).
27*
420
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
§ 4.5. Плавность хода
4.5.1. Критерии плавности хода планетоходов. Плав-
ность хода как свойство транспортной машины, опреде-
ляющее ее способность обеспечивать сохранность груза
и экипажа при движении по неровной поверхности с мак-
симально возможными скоростями, для планетоходов раз-
личного назначения выступает в разных соотношениях
с другими свойствами шасси.
Так, для планетоходов с автономным или дистанцион-
ным управлением, движущихся с частыми остановками и
затрачивающими много времени на анализ условий по-
следующего движения, плавность хода является далеко
не первостепенным свойством.
Для планетоходов с непосредственным управлением на
борту, напротив, плавность хода является одним из наи-
более существенных факторов ограничения скорости дви-
жения по планете. При этом ограничения по плавности
хода могут иметь различные физические проявления.
Одним из факторов, ограничивающих скорость движения
транспортного средства по неровной поверхности, явля-
ется уровень скоростей, ускорений и скоростей нараста-
ния ускорений (третьих производных) на месте водителя
или другого члена экипажа. Другим ограничением ско-
рости движения планетохода может выступать появление
в процессе движения жестких ударов неподрессорепных
масс в ограничители хода подвесок (пробой). Третье ог-
раничение — появление отрывов колес от грунта, связан-
ное с ухудшением безопасности движения по неровной
поверхности. Все указанные факторы могут быть сфор-
мулированы в виде математических зависимостей тех или
иных физических параметров (скоростей, ускорений, де-
формации и т. д.) от параметров условий ы скоростей
движения и могут выступать в качестве частных критери-
ев оценки плавности хода планетоходов.
Для многоопорных планетоходов с несколькими управ-
ляемыми колесами наличие отрывов колес от грунта не
столь существенно, как для двухосных систем, и при
оценке плавности хода может не учитываться. Первые
же два фактора — уровень перегрузок и появление про-
боев — определяют плавность хода транспортных средств
с любой колесной схемой. Кроме того, конструктивная
§ 4.5. ПЛАВНОСТЬ ХОДА
421
реализация требований по снижению уровня перегрузок
и повышению скоростей беспробойного движения зача-
стую приводит к противоречивым решениям.
Так, например, снижение уровня перегрузок на кор-
пусе требует снижения жесткости упругого элемента под-
вески. В то же время снижение модуля жесткости под-
вески при сохранении величины ее полного хода приво-
дит к повышению вероятности и интенсивности пробоев
подвески, что, в свою очередь, сопровождается снижением
скорости движения планетохода по неровностям.
Наличие двух критериев, не связанных между собой
хотя бы параметрически, обычно не позволяет строго ре-
шить задачу оптимизации той или иной системы. Опти-
мизация возможна лишь в том случае, если улучшение
или ухудшение системы по одному из критериев одно-
значно и количественно приведено в соответствие измене-
нию ее качеств по другому критерию при использовании
для этих оценок более общего критерия, зависящего от
двух рассмотренных — частных. Таким общим критерием
при решении задач плавности хода, зависящим от качества
системы подрессоривания, оцениваемого величиной пере-
грузок на корпусе планетохода о и вероятностью про-
боя подвески Р (А > hg), является максимально допусти-
мая по двум частным критериям о’’ и Р скорость движе-
ния планетохода по неровной поверхности.
Математическая формулировка задачи оптимизации
плавности хода по этому критерию выглядит так:
определить максимально возможную скорость движения
планетохода ртах по поверхности с интенсивностью изме-
нения микропрофиля /в, одновременно удовлетворяющую
условиям
Цтах == ” тах (ci-доп, -М = ^az[P(A < he), Л],(4.126)
где У"тах— максимально возможная скорость движения
планетохода с величиной среднеквадратичных ускорений
на корпусе, не превосходящих о*;д0П, ^6max — максимально
возможная скорость движения планетохода без пробоев
подвески (А < hg).
В выражении (4.126) в качестве физического парамет-
ра, огранивающего интенсивность колебаний корпуса,
принята среднеквадратичная величина вертикальных ус-
422
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
корений в заданной точке корпуса планетохода 0£ДОП
[42,46].
Спецификой планетоходов, предназначенных для экс-
плуатации на планетах с более слабым, чем па Земле,
гравитационным полем, является то, что упругие элемен-
ты их подвесок могут выполняться со значительно более
низким модулем жесткости, чем для наземных транс-
портных средств при равных подрессоренных массах.
Так, при заданных величинах статических ходов •под-
весок Дог и при равных подрессоренных массах Мп вели-
чины жесткости упругих элементов планетохода спл и
земного транспортного средства с3 связаны соотношени-
ем, вытекающим из равенств
Гпл — ~сз-
ь3
Полученное соотношение указывает на то, что частот-
ная полоса пропусканий планетохода в сравнении с по-
добным наземным транспортным средством меньше в
Vga/gn раз.
Для планетоходов с жесткими колесами дисперсия
ускорений на месте водителя, располагающегося над пе-
редней осью шасси, определяется по формуле
а2.
ZB
! j L \|2 г Ь2 + MС1
J&V 2М2&!
(4.127)
а в случае упругих колес
Ъ2ск + ^14
(4.128)
Выражения (4.127) и {4.128) позволяют получить
функциональные зависимости у(0*’2ДоП, А), требуемые для
аналитического представления критерия (4.126):
__ гдоп М-^ 2М\
Pzmax ~ J6 ~ М1С1'
(4.129)
Z ДОП 2 Л/
Утах % + м1Сц-
(4.130)
§ 4.5. ПЛАВНОСТЬ ХОДА
423
Величины дисперсий деформаций первых подвесок
для обоих рассматриваемых вариантов ходовых частей
планетоходов вычисляются по формуле
4 = |<2d2gv6p (4.131)
1 £iU y
при « Хае + с±.
Отсюда максимально возможная скорость движения
при допустимой дисперсии деформаций ОддОП вычисляется
по формуле
2
.Дтах = 7^^. (4.132)
Выражения (4.129), (4.130) и (4.132) представляют
собой частные статистические критерии плавности хода
планетоходов, движущихся по неровной поверхности с
интенсивностью изменения микропрофиля J&. Однако для
использования их при практических расчетах необходимо
определить^ гдоп и оА доп. Для определения величины о гд0П
можно воспользоваться рекомендациями литературных
источников, из которых следует, что в области рассматри-
ваемых частот (0—5 Гц) целесообразно считать
ахДоп = (°’3^0’4^^Г^^- <4-133)
Эти рекомендации целесообразно распространить и па
планетоходы, заменив на величину тяготения на соот-
ветствующей планете gn. Величину (4.133) можно рас-
сматривать и как удовлетворяющую критерию безотрыв-
ности колес планетохода от грунта, так как примерно
троекратное (2"|/2) превышение величины оу ускорений
(именно этим характеризуются колебания машин в пре-
делах динамического хода при линейном подрессорива-
нии) практически нереально, т. е. ускорения, направлен-
ные вверх и превышающие тяготение, в таком случае не
возникают.
Для оценки допустимой величины Оддоп, соотнесенной
с величиной динамического хода подвески, можно рас-
смотреть резонансные колебания корпуса планетохода,
при котором деформации подвесок достигают своей мак-
симальной величины Fmax. Представим резонансное воз-
424
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
действие на первую подвеску планетохода как
Лэкв sin Qt, (4.134)
где Лэкв = У 2огб | Qi | = | 1 2 , со — средняя по спе-
(О
ктру микропрофиля частота воздействия при движении
планетохода cb скоростью v, равная Q = ~]/с\/М\ —
частота, вызывающая резонансные колебания подрессо-
ренной части.
В таком случае для первой подвески
^Imax — jtt- (4.135)
r 1V1 -£
при жестких колесах и
^1тах= + (4.136)
при упругих колесах.
Как указывалось выше, область резонансных колеба-
ний корпуса планетохода располагается в диапазоне ча-
стот Подставляя нижнее значение
в выражение (4.131), резонансную частоту йв (4.134),
а затем в (4.135), и полагая b — ^cMi (см. (4.127)),
можно получить
Утах = I <?! | У
(ТД1 = I Q11 У У
Отсюда
(4.137)
2 V2 2 V2
где hg — величина динамического хода подвески.
§ 4.5. ПЛАВНОСТЬ ХОДА
425
Полученный результат (4.137) хорошо согласуется с
приведенными ранее рассуждениями относительно веро-
ятности безотрывного движения и может быть по анало-
гии назван статистическим условием беспробойпого дви-
жения.
Подставляя результаты (4.133) и (4.137) в выраже-
ния частных критериев плавности хода (4.129), (4.130)
и (4.132), можно получить
v = м, M,b,
zmax 4/б | <?! |2 Cj M1C1'
zmax | |2 ^>2^ M^2’
7г 2
^AmaX 4J6 | Q± |2 M};
(4.138)
(4.139)
(4.140)
Сопоставление между собой выражений (4.138) и
(4.140), а также (4.139) и (4.140) позволяет получить
условия однозначности критериев по уровню ускорений
(4.138), (4.139) и по скорости беспробойпого движения
для планетоходов, предназначенных для движения по
планетам с гравитацией gn (4.140).
Так, для планетоходов с жесткими колесами
— Sn.
(4.141)
а в случае упругих колес __________
1 f
(4Л42>
Пример. Пусть на стадии проектирования лунохода
(gn = 1,6 м/с2) величина массы подрессоренной части,
приведенной к 1-му колесу, оказалась Л/i = 200 кг, вели-
чина жесткости упругого элемента подвески =
= 4000 Н/м, коэффициент демпфирования fei = 800 Н-с/м.
В таком случае динамический ход hg=l см.
Учитывая, что величина статического хода
Aoi — ——- = 8 см,
426
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
величина полного хода подвески рассматриваемого пла-
нетохода равна примерно 15 см.
4.5.2. Расчет рациональных параметров систем под-
рессоривания планетохода по критериям плавности хода
В соответствии с методическими основами исследования
колебаний планетохода, движущегося по неравной поверх-
ности (см. § 4.1), рациональные значения динамических
параметров планетохода (Л/, сп, ск, Ь) могут выбираться,
исследуя дробно-рациональные составляющие передаточ-
ных функций одномассовых систем, находящихся под
действием приведенных к выбранной оси детерминиро-
ванных (синусоидальных) или случайных воздействий.
При этом синусоидальное воздействие задается амплитудой
Лэкв и частотой Q, а случайное — интенсивностью измене-
ния микропрофиля /б. Обычно синусоидальное воздействие
используется для оценки экстремальных (резонансных)
режимов движения, а случайное — для определения наи-
более вероятных эксплуатационных показателей.
Для определения максимальных амплитуд перемеще-
ний, ускорений и других параметров планетохода при
резонансе можно воспользоваться величинами максиму-
мов соответствующих коэффициентов усиления
I 1+а (/»)!... =
I W, (4.143)
для планетохода с жесткими колесами и
= у; (1 + |).
I wz (>)|max = (Хи) 1/^? (1 + 2") +1,
V (4.144)
|W\(»|max = Сп j/4(1 + + mJ.
I W i /~ СП сп (л . cn) pn । b2 1
§ 4.5. ПЛАВНОСТЬ ХОДА
427
для планетохода с упругими колесами, где Ак — величина
деформации обода колеса.
Оптимизация параметров подрессоривания может быть
осуществлена, исходя из анализа экстремальных режи-
мов колебаний с помощью формул (4.143) и (4.144), а
также с помощью соотношений (4.127) — (4.132) между
интегральными статистическими показателями условий Л
и режимов движения v, о?., Од.
z
Выбор модуля жесткости упругого эле-
мента подвески. Из формул (4.127), (4.130),
(4.143), (4.144) следует, что величины ускорений умень-
шаются с уменьшением ci и сп.
Модуль жесткости упругого элемента следует выби-
рать как минимальный из возможных при заданном пол-
ном ходе подвески Дп, однако обеспечивающий беспро-
бойное движение планетохода в наиболее тяжелых резо-
нансных условиях.
Ограничивая величину |У(/(о)|тах величиной динами-
ческого хода подвески, определяемого выражением
hg = hn-
8 сп
где M\glcn — величина статической деформации, и поль-
зуясь формулами (4.143) и (4.144), можно получить
Из выражений (4.145) следует, что рациональная ве-
личина модуля жесткости является функцией параметров
планетохода (Mi, сп, сь ск, Ь) и условий движения (g,
Л, ось р). Поэтому для выбора величин Ci и сп по форму-
лам (4.145) необходимо предварительно найти наиболее
вероятные значения Л и далее, методом последователь-
ных приближений уточняя величины Ci и г, определить
наиболее рациональную величину модуля жесткости.
Выбор коэффициентов сопротивления
амортизатора. Как следует из выражений (4.143) —
(4.144), увеличение коэффициента демпфирования b вле-
42S
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
чет за собой уменьшение величин перемещений z и уско-
рений z подрессоренной части. Оптимальные значения Ъ>
обеспечивающие минимум коэффициентов усиления
| | max И | W ” (/CD) | max, ЛвЖЭТ В бвСКОНвЧНОСТИ.
Это достаточно очевидный факт, так как величины
| | max И |ИЛ”(/СО) |max СООТВвТСТВуЮТ реЗОНЗНСНЫМ
колебаниям корпуса планетохода, т. е. одночастотному
возмущению. Оптимум величины Ъ появляется только при
широкополосном случайном воздействии микропрофиля
на колеса планетохода. Это можно доказать, вычислив
д 2
производные —А с помощью выражений (4.127) и
до^
(4.128) и приравняв их нулю:
I
с1 Н- М
27^
61ск + М1сп^
(4.146)
2М\Ъ
Вычисление производных приводит к результатам:
Ьопт = УМ1С1 и &опт = ]/ (4.147)
Величины &опт обеспечивают минимум дисперсий уско-
2
рении а- при заданной скорости движения и и одновре-
менно .максимум скорости движения и при фиксирован-
2
ном уровне ускорении о.. .
Физический смысл наличия оптимального коэффици-
ента демпфирования при широкополосном возмущении
легко объясним. При малых значениях Ъ демпфирования
недостаточно, чтобы гасить резонансные колебания кор-
пуса (см. выражения (4.143) и (4.144)), а при слишком
больших Ъ и высокочастотных возмущениях амортизатор
передает перемещения колес, действующие с большой
скоростью на корпус, выключая из работы упругий эле-
мент подвески. Оптимальное подрессоривание должно
обеспечивать во всем диапазоне эксплуатационных воз-
§4.5. ПЛАВЙОСТЬ ХОДА
429
действий работу как упругого, так и демпфирующих эле-
ментов.
Это можно доказать, рассмотрев совместно деформации
упругого элемента, определяемые формулой (4.137), и
скорости перемещения амортизатора при оптимальных
коэффициентах демпфирования Ьопт.
В случае жестких колес планетохода
ОДопт = | <?! | 1/<4Л48а>
V 2 |/ci
в случае упругих колес
адепт = I <2х I ]/J6V. (4.1486)
Среднеквадратичные значения скоростей деформаций
подвесок имеют соответственно вид
Вычисляя среднеквадратичные усилия деформаций
упругих элементов <Урп = с1огд для жестких колес и
о>п = спод для упругих колес, можно убедиться, что
О'ГдОПт — | Qi 1 С1 -Г=Л]/2 для жестких колес и 1 Г °>попт — 2 | Qi 1 = Ьопт У2^ 7 = J&V = Ъота . (4.150) ус1М1 д J(,v 1 <21 I = ^оптСТ • (4.151) [т 1 1 А
для упругих колес.
430
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Но ЬоптО^ = о^допт, где сураопт — среднеквадратичное
значение усилий в демпфирующем устройстве подвески
при оптимальном коэффициенте сопротивления Ьотгг.
Выражения (4.150) и (4.151) иллюстрируют собой
принцип оптимальности подрессоривания: при оптималь-
ном подрессоривании среднеквадратичные значения уси-
лий, проходящих от дороги на подрессоренную часть че-
рез упругий элемент и демпфирующее устройство, долж-
ны быть равны.
Совместный выбор модуля жесткости
упругого элемента и коэффициента демп-
фирования планетохода. Подставив в формулы
(4.145) оптимальные коэффициенты сопротивления &опт,
определяемые по выражениям (4.147),
что
можно получить,
(4.152а)
(4.1526)
кости обода
в случае жестких колес и
~ “Ь -4экв А/ ~ Т
V ci
в случае упругих колес.
Отсюда
Cn™-hn-A^
для жестких колес и
M}g
(-ОПТ - , . , Г---
^ЭКВ у 1 ~r v с
ск
для упругих колес, где vc = —•
Выбор рациональной жест
колеса. Если сложить друг с другом приведенные ранее
уравнения (4.19), то оказывается, что
z'=^(6-^- (4.153)
Отсюда следует, что коль скоро в реальной эксплуа-
тации величина среднеквадратичных значений ускорений
§ 4.5. ПЛАВНОСТЬ ХОДА
431
ограничивается (о”доп = 0,35—0,5 g), то максимально до-
пустимые динамические перегрузки на ободе тоже долж-
ны соответствовать принятым пороговым значениям по
ускорениям. С другой стороны, жесткость обода должна
быть такой, чтобы при колебаниях планетохода на неров-
ностях обеспечивался контакт с дорогой (из соображений
управляемости).
Для выбора рационального значения ск наложим на
величину деформации обода в резонансном режиме коле-
баний, рассчитываемую по формуле (4.149), ограничения
динамической перегрузки P = 2V2PCT, где Рст— часть
веса машины, приходящегося на одно колесо, и условие
безотрывности колеса
В таком случае
| Г СП СП / Сп А \Г СП Ь2 1 -^СТ
— b У АДек ^^(Си + с,)]^ СК
— из условия безотрывности от грунта и
Мц /LfE (CJL । - 62 1 <
экв b У Ск %(сп + скр
(4.154)
ск
— из условия перегрузки (him — полная деформация
обода).
Принимая, что характеристика шины FK(AK) описы-
вается квадратичной зависимостью
Fu (Дк) = аДк,
где а — коэффициент упругости при квадратичной зави-
симости, и пользуясь методом статистической линеариза-
ции (или гармонической) [36], получаем, что жесткость
обода ск ст в статическом положении Дк = Ако и эквива-
лентная линейная жесткость ск связаны соотношением
ст 0,5 ск.
432
ГЛ. 4. КОЛЕБАНИЯ ПЛАНЕТОХОДА
Выбор рационального размещения осей
вдоль базы. Пусть задана база планетохода, т. е. по-
ложение крайних осей многоосной машины, и нужно
найти рациональное размещение остальных осей. Оценим
влияние расположения осей по показателям угловых ко-
лебаний подрессоренной части в вертикально-продольной
плоскости.
При воздействии с интенсивностью J& дисперсия уско-
рений угловых колебаний подрессоренной части характе-
ризуется величиной
по 9
спск S li
G?- = J&V--------т——---------
Ф (сп + ск)
(4.155)
Из выражения (4.155) следует, что чем больше вели-
ко
чина У1 li при прочих неизменных параметрах, тем
i=i
больше ускорения
В случае гармонического воздействия выражение для
коэффициента усиления возмущений опорной поверхно-
сти на подрессоренную часть записывается в виде
(/О)) |тах —
(4.156)
из которого следует, что существенное влияние на вели-
чину резонансных угловых колебаний оказывает величи-
не
на 2 минимизация которой возможна путем смеще-
г=1
ния средних осей ближе к центру планетохода.
Таким образом, при наличии данных по условиям эк-
сплуатации планетохода в виде величин интенсивностей
микропрофилей опорной поверхности Л, весовых М и
§ 4.5. ПЛАВНОСТЬ ХОДА 433
геометрических параметров планетохода р, hu и 2? пред-
ставляется возможным определение рациональных ха-
рактеристик подрессоривания сп, ск, Ъ и U на стадии про-
ектирования и доводки с помощью формул (4.147),
(4.150), (4.151) — (4.156). В связи с тем, что пользование
каждой конкретной формулой (4.147) и т. д. требует
задания некоторых параметров, оптимизирующих по дру-
гой формуле (например, сп, ск и т. д.), то стыковка ре-
зультатов, получаемых по каждой отдельной формуле,
должна осуществляться по методу последовательных при-
ближений. Практика показывает, что второе приближение
приводит в соответствие результаты расчета по указан-
ным формулам.
ЛИТЕРАТУРА
1. Авдуевский В. С., Бородин И. Ф., Бурцев В. П.,
Малков Я. В., Маров М. Я., Морозов С. Ф., Рож-
дественский М. К.,* Романов Р. С., Соколов С. С.,
Фокин В. Г., Черемухина 3. П.. Ш к и р и н а В. И.
Автоматические станции «Венера-9» и «Венера-10». Функцио-
нирование спускаемых аппаратов и измерение параметров ат-
мосферы.— Космические исследования, 1976, т. XIV, вып. 5,
с. 655—666.
2. Ав о тип Е. В., Бумагин Б. Е., X а х а н ов Ю. А. Устрой-
ство для измерения рельефа. Авт. св. № 649950.— Официаль-
ный бюллетень изобретений, 1979, № 8.
3. Ав о тин Е. В., Кемурджиан А. Л., Шпак Ф. П. Ис-
следование устойчивости нелинейной динамической системы по
кинематическому и энергетическому критериям.— Прикладная
механика, 1974, № 10, вып. 6, с. 49—55.
4. Ав от пн ьш Е. В., Александров А. К., Гарин И. С.,
Громов В. В., Котлов К). П., Поленов Л. Н.,
Яковлев Ф. П. О выборе рациональной скорости движе-
ния транспортной машины по Луне.— Докл. иа 27 конгрессе
МАФ. Баку, 1973.
5. Ав о тин ьш Е. В., Александров А. К., Яковлев Ф. П.
Исследование устойчивости движения транспортных машин в
условиях пониженной гравитации.— Космические исследова-
ния, 1973, т. II, вып. 6, с. 863—869.
6. Авотиньш Е. В., Александров А. Л., Михайло-
ва Н. М. Об устойчивости движения транспортных машин в
слабом гравитационном поле.— Космические исследования,
1976, т. XIV, вып. 4, с. 515—523.
7. А г е й к и н Я. С. Вездеходные колесные и комбинированные
движители.— М.: Машиностроение, 1972.
8. А л е к с а н д р о в А. К., Кемурджиан А. Л., Луни-
не в Л. Н. Самоходное шасси лунохода в системе дистанцион-
ного управления.— В кн.: Управление в пространстве, М.: Нау-
ка, 1976, т. 2.
9. А н д р о н о в А. А., В и т т А. А., X а й к и н С. Э. Теория коле-
баний.— М.: Физматгиз, 1960.
10. Армейские автомобили/Под ред. А. С. Антонова.— М.: Воениз-
дат, 1970, ч. I.
И. Б ал овне в В. И. Вопросы подобия и физического моделиро-
вания землеройно-транспортных машин.— М.: Строймаш, 1968.
ЛИТЕРАТУРА
435
12. Б е к к е р М. Г. Введение в теорию систем местность — маши-
на.— М.: Машиностроение. 1973.
13. Березин И. С.. Жидков II. П. Методы вычислений.— М.:
Фпзматгиз, I960, т. 2, с. 286—327.
14. Веников В. А. Теория подобия и моделирования.— М.: Выс-
шая школа, 1968.
15. Г е р х е н - Г у б а н о в Г. В., Кузнецов В. Г. Дальномер-
ная обзорно-информационная система для распознавания трех-
мерных предметов.—Тезисы докл. VI Всесоюзного симпозиума
по теории и принципам -устройства роботов и манипуляторов.
Тольятти, 1976.
16. Динамика системы' дорога — шина — автомобиль — водитель/
/Под ред. А. А. Хачатурова.— М.: Машиностроение, 1976.
17. Д р о з д о в Ю. Н., Павлов В. Г. Трение и к. п. д зуб-
чатых передач в вакууме.— Вестник машиностроения, 1970,
№ 2.
18. 3 а б а в н и ков И. А., К е м у р д ж и а н А. Л., Машков К. Ю.,
Назаренко Б. П., Н а у м о в В. Н. Стенд для исследования
взаимодействия движителя с грунтом.— Известия вузов. Маши-
ны, приборы, стенды. М., МВТУ им. Баумана, 1974.
19. 3 а б а в н и к о в Н. А. Основы теории транспортных гусеничных
машин.—М.: Машиностроение, 1968.
20. К е д р о в М. Б. Принцип историзма в его приложении к си-
стемному анализу развития науки.— В кн.: Системные исследо-
вания, М.: Наука, 1974.
21. Кемурджиан А. Л.. Громов В. В., Черкасов И. И.,
Ш в а р е в В. В. Автоматические станции для изучения поверх-
ностного покрова Луны.— М.: Машиностроение. 1976.
22. Коваль А. Д., Баженов В. И., Страут Е. К. От модели к
луноходу.— Авиация и космонавтика, 1966, № 8, с. 42—46.
23. Комиссар Н. И. Авиационные электрические машины и ис-
точники питания.— М.: Машиностроение, 1975.
24. Корепанов Г. Н., Маленков М. И., Сологуб П. С., Ко-
миссаров В. И., Койнаш В. И., Рыков Г. И., Дру-
ян Е. Н. Двухступенчатая коробка передач привода колеса
транспортной машины. Авт. св. № 329044.— Официальный бюл-
летень изобретений, 1972, № 7.
25. К р о т и к о в В. Д., Троицкий В. С. Радиоизлучение и
природа Луны.— Успехи физических наук, 1963, т. LXXXI,
вып. 4.
26. Кудрявцев В. Н. Планетарные передачи.—М.—Л.: Машино-
строение, 1966.
27. Ландау Л. Д.. Лившиц Е. М. Механика.—М.: Наука, 1973.
28. Левин Б. Р. Теоретические основы статистической радиотех-
ники.— М.: Советское радио. 1966, т. 1.
29. Михайловский Е. В. Теория и расчет автомобиля.—М.:
Автотранспорт, 1955.
30. Морозов Б. И.. Г и н г а у з И. М. Расчет движения колес-
ной машины по неровной дороге.— Механизация и электрифи-
кация сельского хозяйства, 1969. № 7.
31. М ю л л е р А. Г., С а в е н к о в В. М., Ушаков Ю. Т., Пуд-
ник о в А. И., Г л о б и н В. Б., П а н к р а т о в Н. И. Устройст-
28*
436
ЛИТЕРАТУРА
во для определения угла отклонения продольной оси трактора.
Авт. св. № 428714.— Официальный бюллетень изобретений,
1974, № 19.
32. Н а у м о в В. Н., Б е л о у т о в Г. С., М а л е н к о в М. И., На-
заренко Б. П. Динамическая модель транспортного средст-
ва с индивидуальными электромеханическими приводами ко-
лес.— Известия вузов. Машиностроение, 1975, № 7.
33. Наумов В. Н., Маленков М. И. Моделирование движения
транспортных средств.— Известия вузов. Машиностроение, 1976,
№ 5.
34. Новое о Марсе.— М.: Мир, 1974.
35. П а в л о в Б. И. Механизмы и приборы системы управления.—
Л.: Машиностроение, 1972.
36. Первозванский А. А. Случайные процессы в нелинейных
системах автоматического регулирования.— М.: Физматгиз, 1963.
37. Передвижная лаборатория на Луне «Луноход-1 »/Под ред.
А. П. Виноградова.— М.: Наука, 1971, ч. 1.
38. Передвижная лаборатория на Луне «Луноход-1 »/Под ред.
А. П. Виноградова.— М.: Наука, 1978, ч. 2.
39. Петров Б. Н., Лупичев Л. Н., Агафонов В. И., Ва-
сильев В. Ф., Козлов Б. Л., Шам ан о в И. В. Проблема
управления автономными планетными комплексами. Управле-
ние в пространстве.— М.: Наука, 1976, т. 2.
40. Петров Б. Н., Авотинып Е. В., Гринев В. Г., Кемурд-
жиан А. Л., Лупичев Л. Н., Панова Л. Т., Поле-
нов Л. Н., Семенов П. С. Информационная система плането-
хода и вопросы обеспечения безопасности движения.— Доклад
на 27 конгрессе МАФ. США, Анахейм, 1976.
41. Проскуряков В. Б. Динамика и прочность рам и корпусов
транспортных машин.— М.: Машиностроение, 1972.
42. Прутчиков О. К. Плавность хода грузовых автомобилей.—
М.: Машиностроение, 1966.
43. Р е ш е т о в Д. Н., Л е в и н а 3. М. Демпфирование колеба-
ний в соединениях машин.— Вестник машиностроения, 1956,
№ 12.
44. Рещиков В. Ф., Маленков М. И. Метод расчета и иссле-
дование к. п. д многорядного дифференциального редуктора.—
Известия вузов. Машиностроение, 1974, № 7.
45. Рещиков В. Ф., Корепанов Г. И., Койнаш В. И., Ма-
ленков М. И. Некоторые особенности конструкции и испыта-
ний планетарного редуктора с коническими колесами.— Извес-
тия вузов. Машиностроение, 1972, № 9.
46. Р о т е н б е р г Р. В. Подвеска автомобиля.— М.: Машинострое-
ние, 196'0.
47. С в е ш н и к о в А. А. Прикладные методы теории случайных
функций.— М.: Физматгиз, 1968.
48. Седов Л. И. Методы подобия и размерностей в механике.—
М.: Наука, 1965.
49. С е л и в а н о в А. С., П а н ф и л о в А. С., Н а р а е в а М. К., Че-
моданов В. П., Б о хон о в М. И., Герасимов М. А. Фото-
метрическая обработка панорам поверхности Венеры.— Косми-
ческие исследования, 1976, т. XVV, вып. 5, с. 678—686.
ЛИТЕРАТУРА
437
50. Соловьев А. Ф., К о р е п а н о в Г . Н., К о м и с с а р о в В. И.,
Сологуб П. С., Маленков М. И., Друян Е. И., Ры-
ков Г. И. Мотор-колесо. Авт. св. № 398423.— Официальный
бюллетень изобретений, 1973, № 38.
51. С о р о к и н Е. С. К теории внутреннего трения при колебани-
ях упругих систем.— М.: Стройиздат, 1960.
52. Сурков Ю. А., Кирнозов Ф. Ф., Христианов В. К.,
Корчуганов Б. Н., Глазов В. Н., Иванов В. Ф. Плот-
ность поверхностной породы Венеры по данным АМС «Вене-
ра-10».— Космические исследования, 1976, т. XIV, вып. 5, с. 697—
703.
53. Т а б о р е к Я. Механика автомобиля.— М.: Машгиз, 1960.
54. Т р а у т в е й н В. Стратегия управления самоходными аппара-
тами и манипуляторами. Управление в пространстве.— М.,
Наука, 1975, т. 2.
55. Ф а р о б и н Я. Е. Теория поворота транспортных машин.—
М.: Машиностроение, 1970.
56. Флоренский К. И., Базилевский А. Т., Г у р ш -
т е й н А. А., Зе зин Р. Б., Прошин А. А., Полосу-
хи н В. П., П о п о в а 3. В., Т а б о р к о И. М. К проблеме стро-
ения поверхности лунных морей. Современное представление
о Луне.— М.: Наука, 1972.
57. Флоренский К. П., Г у р ш т е й н А. А., Кораблев В. И.,
Б у г а е в с к и й Л. М., Шингарева К. Б. Классификация,
масштабный ряд и номеклатура карт Луны. Современное пред-
ставление о Луне.— М.: Наука, 1972.
58. Харкевич А. А. Спектры и анализ.—М.: Гостехиздат, 1957.
59. Черкасов И. И., Ш в ар ев В. В. Грунт Луны.—М.: Наука,
1975.
60. Ч уд а к о в Е. А. Теория автомобиля.— М.: Машгиз, 1950.
61. Эллис Д. Р. Управляемость автомобиля.—М.: Машинострое-
ние, 1975.
62. Я к о в л е в А. И. Конструкция и расчет элетромотор-колес.— М.:
Машиностроение, 1970.
63. А1 е х a n d г о v А. К., Borisov В. М., Garin I. S., G г а-
fov V. I., Ivanov A. G., Kotlov Yu. Р., Komarov V. I.,
Kuleshov A. F., Mishkin V. M., Nikolayev G. B.,
Polenov L. N., Semenov P. S. and Yakovlev F. P. In-
vestigations of mobility of «Lunokhod-1» USSR. Acad, of Scien-
ces. M., 1972.— Space Research XII, Akad.— Verlag, Berlin, 1972.
64. D i e c k m a n D. Die Wirkung mechanischer Schwingungen in
Kraft Jahrzengen auf den Menschen. ATZ, 1957, № 10.
65. Farouk El-Baz. The Moon after Apollo. Icarus, 1975, v. 25,
№ 4, pp. 495—587.
66. F i n e R. Car tests indicate comfort acceleration tie, SEA Journ.,
1964, pp. 23—31. ,
67. Harmonic drive, Mechanical power transmission sistems. Inter-
nal. Div. United Shoe Mach. Corp. Boston, Mass, 1969.
68. Hartman W. K. and Wood C. A. Moon: Origin and Evolu-
tion of Multi-ring Basins. The Moon, 1971, v. 3, № 1.
69. К a u f m a n S. Equation of motion of the Lunar Roving Vehicle.
Journ. of Spacecraft and Rockets 10, 1973, № 1, pp. 66—70.
438 ЛИТЕРАТУРА
70. М о г е a S. F., Adams W. R., Arnett С. D. America’s Lunar
Roving Vehicle. AIAA, 1971, Paper № 71-847.
71. P e n e t r i g о v V. P., Semyonov P. S., A 1 e x a n d г о v A. K.,
Gromov V. V., Kotlov Yu. P., Garin I. S., Vladimi-
rov M. P., Velikanov V. P. and Yakovlev F. P. Methods
of Constructing and Choosing the Relief of the Routes and Plat-
forms for Testing the Chassis of Lunokhods 1 and 2. (To be pre-
sented at the 24th IAF Congress. Baku, USSR, October, 1973.)
72. P i e r i D. Distribution of Small Channels on Martian Surface.
Icarus, 1976, v. 27, № 1.
73. Sagan C., Paul Fox. The Canals of Mars. An assesment af-
ter Mariner 9. Icarus, 1975, v. 25, № 4.
74. Sod er b lorn L. A., Con di t G. D., West R. A., Her-
man В. M. and К r e i d 1 e r J. I. Martian Planetwide Crater Dist-
ributions. Icarus, 1974, v. 22, № 3, pp. 239—263.
75. Soffen Gerald A. Scientific results of the Viking missions.
Science, 1976, № 4271, p. 194.
76. S t a r 1 e t о n R. Dynamic analysis of a four-wheel off-the-road
vehicle. Journ. of Terramechanics, 1974, № 3, pp. 25—48.
Евгений Викторович Авотин,
Игорь Сергеевич Болховитинов,
Александр Леонович Кемурджиан,
Михаил Иванович Маленков,
Феликс Павлович Шпак
ДИНАМИКА ПЛАНЕТОХОДА
(Серия: «Научные основы робототехники»)
М., 1979 г., 440 стр. с илл.
Редактор А. А. Могилевский
Техн, редактор Е. В. Морозова
Корректоры О. А. Бутусова, Т. А. Панькова
ИБ № 11105
Сдано в набор 14.12.78. Подписано к печати 12.07.79. Т-11250.
Бумага 84х108*/з2, тип. № 1. Высокая печать. Обыкновенная
гарнитура. Условн. печ. л. 23,1. Уч.-изд. л. 22,69. Тираж
1650 экз. Заказ № 358. Цена книги 2 р. 50 к.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
4-я типография издательства «Наука».
630077, Новосибирск, 77, Станиславского, 25
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
117071, Москва, В-71, Ленинский проспект, 15
ВЫЙДУТ В СВЕТ
в 1980 г.:
Солодов А. В., Солодова Е. Л. Системы с перемен-
ным запаздыванием.
Фомин В. Н., Фрадков А. Л., Якубович В. А. Адап-
тивное управление динамическими объектами.
Черноусъко Ф. Л.. Акуленко А. Д., Соколов Б. IL
Управление колебаниями.
СЕРИЯ «НАУЧНЫЕ ОСНОВЫ РОБОТОТЕХНИКИ»
Козлов В. В., Макарычев В. П., Юрьевич Е. И.
Динамика управления роботами.
Кулаков Ф. М. Супервизорное управление манипу-
ляционными роботами.