/





































































































































































































Текст
1 p. C9 к.
И
МОСКВА
« МАШИНОСТРОЕНИЕ »
1976
ИЯ ПОВЕРХНОСТНОГО ПОКРОВА ПУ!
АВТОМАТИЧЕСКИЕ
СТАНЦИИ
ДЛЯ ИЗУЧЕНИЯ
ПОВЕРХНОСТНОГО
ПОКРОВА ЛУНЫ
АВТОМАТИЧЕСКИЕ
СТАНЦИИ
ДЛЯ ИЗУЧЕНИЯ
ПОВЕРХНОСТНОГО
к ПОКРОВА ЛУНЫ ,
МОСКВА
« МАШИНОСТРОЕНИЕ»
19/6
УДК 629.78.001.5 : 523.3
Рецензент канд. техн. наук А. Ф. Евич
Автоматические станции для изучения поверхностного покрова Луны. М.,
«Машиностроение», 1976, 200 с.
Авт.: Кемурджиан A. JI.t Громов В. В., Черкасов И. Я., Шварев В. В.
В книге описаны автоматические станции для исследования поверхностного
покрова Луны, а также оборудование для отбора проб лунных грунтов. Приве¬
дены методика и результаты исследований физико-механических свойств грунтов.
На примере наземной отработки самоходного шасси луноходов изложены спо¬
собы имитации лунных условий, а также проведения стендовых и ходовых испы¬
таний на Земле.
Книга предназначена для специалистов, занимающихся конструированием
автоматических станций, их испытаниями и исследованием внеземных грунтов.
Она может быть интересна широкому кругу читателей.
Табл. 23, ил. 105, список лит. 49 назв.
31902-157
038(01)76
© Издательство «Машиностроение», 1976 г.
ПРЕДИСЛОВИЕ
4 октября 1957 года запуском в СССР первого
в мире искусственного спутника Земли было положено начало
новой, космической эре в истории человечества.
Это событие, явившееся само по себе результатом длительного
периода исканий человеческой мысли и отразившее высокий
уровень, достигнутый современной наукой и техникой, в свою
очередь дало толчок к появлению и развитию новых разделов
науки (механика лунного грунта, планетная геология и др.)
и отраслей техники (космическое транспортное машиностроение,
космическое телевидение и т. д.).
Прошедшее двадцатилетие ознаменовано быстрым развитием
космической техники. Появились технические средства, позво¬
ляющие многотонным космическим аппаратам достигать Луны
и планет Солнечной системы и доставлять туда научную аппара¬
туру для проведения космических исследований.
Отличительная особенность советской программы космических
исследований Луны и планет — широкое использование авто¬
матических аппаратов, которые в ряде случаев имеют преиму¬
щества перед пилотируемыми аппаратами, а иногда являются
единственно возможным средством исследования космического
пространства, например дальних планет Солнечной системы.
В книге «Автоматические станции для изучения поверхностного
покрова Луны» рассматривается одно из направлений космических
исследований — изучение поверхностного слоя лунного грунта,
которое проводилось под научным руководством академика
А. П. Виноградова.
Прямые исследования лунного грунта были начаты советской
автоматической станцией «Луна-9», совершившей в феврале 1966
года первую мягкую посадку на Луну. Переданные станцией
1* 3
панорамы лунной поверхности положили конец спорам о струк¬
туре и прочности верхних слоев грунта. Последующие полеты
автоматической станции «Луна-13» и американских аппаратов
«Сервейер» позволили получить разнообразную категорную инфор¬
мацию о лунной поверхности в местах посадок. Эти данные
послужили основой для проведения пилотируемых полетов на
Луну по программе «Аполлон».
Доставка на Землю лунного грунта станциями «Луна-16» и
«Луна-20», работа на Луне передвижных лабораторий «Луно¬
ход-1» и «Луноход-2» открыли новый этап в исследовании поверх¬
ности Луны с помощью автоматов — этап детальных исследова¬
ний лунной поверхности. Сочетание разнообразных методов иссле¬
дований на поверхности Луны с методами изучения доставленных
образцов лунного грунта на Земле позволило получить большой
объем информации о лунных грунтах, неизмеримо превышающий
всю сумму знаний о них, накопленную человечеством к началу
космической эры.
Автоматические станции в настоящее время являются основ¬
ным инструментом изучения поверхности планет Солнечной си¬
стемы. Освещенный в книге опыт изучения грунта Луны может
быть использован при исследовании грунта других планет. При¬
веденные в книге описания аппаратов, телевизионного обору¬
дования, шасси луноходов позволяют получить более широкое
представление о методах исследования грунта, применявшемся
при этом научном оборудовании, а также о принципах дистанци¬
онного и автоматического управления стационарными и подвиж¬
ными космическими аппаратами при их работе на поверхности
Луны и планет.
Академик Б. Н. Петров
ПРЕДИСЛОВИЕ АВТОРОВ
«Пути проникновения в глубины Земли так труд¬
ны, — говорит академик М. А. Садовский, — что более легким мо¬
жет оказаться способ получения сведений о ее строении из сопо¬
ставления свойств Земли с результатами наблюдений свойств иных
тел Солнечной системы».
Изучение Луны, в частности ее поверхностного покрова, —
один из вопросов, стоящих в этом плане перед космонавтикой.
Автоматические космические аппараты за историю своего раз¬
вития внесли существенный вклад в изучение Луны, ее поверх¬
ностного покрова. Автоматические станции передали на Землю
многочисленные изображения лунной поверхности, доставили об¬
разцы грунтов, а передвижные лаборатории — луноходы провели
комплекс исследований обширных территорий в различных райо¬
нах Луны. Получена уникальная информация, позволяющая вы¬
явить основные закономерности геоморфологического строения
наиболее типичных участков лунной поверхности и глубже по¬
нять процессы образования ближайшего к нам небесного тела.
Круг проблем, связанных с созданием космических аппаратов
для изучения Луны, весьма обширен: конструирование и отра¬
ботка автоматических лунных станций, их научного оборудова¬
ния, изучение грунта Луны, рельефа ее поверхности.
Цель . настоящей книги — лишь обобщить некоторые резуль¬
таты работ по исследованию лунного грунта автоматическими аппа¬
ратами. В книге рассматриваются вопросы, связанные с посад¬
кой автоматических станций и движением луноходов по грунту,
приводятся методы исследования поверхностного покрова Луны.
Здесь читатель найдет описание приборов для изучения лунного
5
грунта на месте и для отбора проб, доставляемых на Землю, позна¬
комится с устройством аппаратуры для определения физико¬
механических свойств грунта.
Особое внимание уделяется вопросам наземной отработки и
испытаний лунной техники, методам имитации лунных условий
на Земле. На примере отработки шасси «Лунохода-1» и «Луно¬
хода-2» показана методика проведения стендовых и ходовых испы¬
таний с использованием земных аналогов лунных грунтов. В книге
освещаются также наиболее важные результаты исследований
грунтов Луны и приводятся данные об их физико-механических
свойствах, полученные с помощью автоматических космических
аппаратов и вспомогательного наземного оборудования. Отдель¬
ные разделы книги посвящены исследованиям, проведенным со¬
ветскими автоматическими станциями «Луна-13», «Луна-16»,
«Луна-20» и самодвижущимися лабораториями «Луноход-1» и
«Луноход-2», а также американскими автоматическими аппара¬
тами «Сервейер».
Первую главу написал И. И. Черкасов, вторую — В. В. Шва-
рев совместно с В. В. Громовым и А. Л. Кемурджианом (разд. 2.6),
третья глава написана В. В. Громовым и А. Л. Кемурджианом.
Все замечания и пожелания авторы просят направлять по
адресу: 107885, Москва, Б-78, 1-й Басманный пер., 3, изд-во
«Машиностроение».
1.1. Автоматические станции „Луна-9“
и „Луна-13“
Первая мягкая посадка на Луну была осуще¬
ствлена 3 февраля 1966 года советской автоматической лунной
станцией «Луна-9» (рис. 1.1). В результате этого выдающегося
достижения отечественной науки и техники было доказано, что
поверхностный покров Луны достаточно прочен, чтобы выдержать
динамическую нагрузку от опускающегося аппарата, а затем
в течение длительного времени — статическое действие его массы
без существенных деформаций, представляющих опасность для
его существования и работы. «Луна-9» передала на Землю первые
панорамы лунной поверхности, которые позволили оценить ха¬
рактер структуры лунного грунта и распределения на нем мелких
кратеров и камней. Однако на «Луне-9» не было приборов, пред¬
назначенных для прямого изучения физических и механических
свойств грунта Луны.
Эта специальная научная аппаратура впервые была достав¬
лена на Луну советской автоматической лунной станцией «Луна-13»
24 декабря 1966 года [1.1—1.4].
Ракетная система, доставившая эту станцию на Луну и обес¬
печившая ее мягкую посадку, была аналогична той, которая
применялась на «Луне-9». Обе станции были выведены первона¬
чально на орбиту искусственного спутника Земли. После выклю¬
чения двигателей носителя в заданный момент включался двига¬
тель разгонной ступени, и лунная ракета, достигнув определен¬
ной скорости, отделялась от нее и начинала свой пассивный по¬
лет по направлению к Луне. После коррекции траектории при
сближении с Луной производилось торможение лунной ракеты, отде¬
ление от нее автоматической лунной станции и ее посадка на грунт.
Лунная ракета (рис. 1.2) состоит из автоматической лунной
станции (АЛС) с посадочным устройством, отсека управления и
7
гЧ'#Г*
м
5и ‘
р Места посадок на
Ц автоматических ;
g 1-„Луна -9 ‘; 2-„ Луна-13' 3~„ Луна-17 Луно-
|g ход-1 Ч-„Луна-21 („Луноход-2“);
щ 5~„Луна-16 6%Луна-20**/ 7-„
й 8-,Сер0ейер-6“; 9-,Сер8ейер-3“\
Ц 10-„Сервейер-1“; 11-,, Сербе й ер-7“
Рис. 1.1
Рис. 1.2. Лунная станция:
1 — узконаправленная ан¬
тенна радиовысотомера; 2 —
радиовысотомер; 3 — аппара¬
тура; 4 — микродвигатели
системы ориентации; 5 —
баллоны с газом; 6 — отсек
системы управления; 7 — ав¬
томатическая лунная стан¬
ция; 8 — блок системы астро¬
ориентации; 9 — сферический
бак окислителя; 10 — торо-
вый бак горючего; 11 — уп¬
равляющие двигатели; 12 —
ЖРД
контейнеров с различной аппаратурой. Вся аппаратура и агрегаты,
используемые только при полете на Луну, перед началом тормо¬
жения отделяются от ракеты для сокращения расхода топлива
на торможение. Внутреннее давление в отделяемых отсеках со¬
ставляет 13,3 кПа (100 мм рт. ст.), внутри же корпуса автоматиче¬
ской лунной станции — около 0,12 МПа (1,2 атмосферы).
Ракета приводится в движение жидкостным реактивным дви¬
гателем. Изменение движения достигается управляющими дви¬
гателями. Горючее и окислитель помещаются в баках, один из
которых — сферический — представляет собой основу конструк¬
ции лунной ракеты. На нем крепятся все ее системы и двигатель.
Это обеспечивает большую жесткость конструкции и высокую
точность монтажа при минимальной массе.
Заданное положение в пространстве придается ракете с по¬
мощью системы астроориентации, в которую входят оптический
блок, датчик угловых скоростей и счетно-решающие логические
устройства. В качестве опорных светил выбраны Солнце, Луна и
Земля. Вначале производится автоматическая ориентация одной
оси ракеты на Солнце, затем поворотом ракеты вокруг этой оси
10
начинается поиск Луны. В момент, когда Солнце и Луна попадают
в поле зрения соответствующих визиров, двигатель ракеты ока¬
зывается приблизительно ориентированным на Луну.
Повороты ракеты в процессе ее ориентации осуществляются
с помощью микродвигателей, работающих на сжатом газе.
Ракета оборудована радиовысотомером с узконаправленной
параболической антенной. Энергопитание всей бортовой аппара¬
туры ракеты осуществляется химическими батареями, большая
часть которых размещена в сбрасываемых отсеках.
Корпус автоматической станции шаровидной формы. Его на¬
ружный диаметр — около 50 см. Во время полета к Луне он на¬
ходился внутри мягкой оболочки, образованной двумя эластич¬
ными надувными мешками, соединенными между собой специаль¬
ным быстрорасстегивающимся устройством.
Ракета подлетала к Луне со скоростью 2,6 километра в секунду
и тормозилась практически до нуля перед отделением автомати¬
ческой лунной станции.
Поскольку до полета «Луны-9» данные о плотности и прочности
поверхностного слоя лунного грунта были противоречивы, си¬
стема мягкой посадки была разработана таким образом, чтобы
при любом грунте — будь то твердая скальная поверхность или
рыхлый дисперсный грунт — обеспечивалось надежное прилу¬
нение станции (рис. 1.3).
Мягкая оболочка АЛС перед посадкой на Луну наполнялась
сжатым газом. Оба эластичных мешка раздувались и образовы¬
вали единую сферическую упругую оболочку. Гигантский мяч
падал на грунт с небольшой высоты и, совершив несколько прыж¬
ков и прокатившись по уклону, останавливался в одном из наибо¬
лее низких мест рельефа. После этого устройство, соединяющее
амортизирующие мешки, размыкалось и оба мешка отбрасывались
в стороны. Корпус АЛС опускался на поверхность грунта. Бла¬
годаря яйцевидной форме и низкому положению центра тяжести
он принимал заранее заданное, слегка наклонное положение.
Приблизительно через 4 мин после посадки раскрывались ле¬
пестковые и штыревые антенны и приводились в рабочее состоя¬
ние приборы для исследования грунта.
Внешний вид автоматической лунной станции «Луна-13» в ра¬
бочем положении представлен на рис. 1.4. Снаружи на корпусе
укреплены четыре лепестковые антенны, которые в полете закры¬
вают верхнюю часть станции, а на Луне образуют дополнительные
опорные поверхности. Кроме них имеются четыре штыревые антен¬
ны, два механизма для выноса приборов на поверхность грунта и
научная аппаратура. В центральной части корпуса находится
головка телевизионной камеры. Масса станции — около 100 кг.
Внутри корпуса АЛС установлена жесткая рама с радиоаппа¬
ратурой, электронными программно-временными устройствами и
приборами автоматики, телеметрической и научной аппаратурой.
Для бесперебойной работы аппаратуры поддерживался нормаль-
11
Рис. 1.3. Схема мягкой посадки «Луны-9»:
I — торможение лунной ракеты и наполнение газом эластичных мешков посадочного уст¬
ройства; II — автоматическая станция в посадочном устройстве на поверхности Луны;
III — отделение эластичных мешков; IV — автоматическая станция после раскрытия ле¬
пестков и антенн; / — эластичные мешки посадочного устройства; 2 — автоматическая
станция; 3 — лепестковая антенна; 4 — штыревая антенна
12
Рис. 1.4. Автоматическая станция «Луна-13». Слева — выносной механизм с грунтомером-
пенетрометром; справа — ‘такой же механизм с датчиком радиационного плотномера:
/ — лепестковая антенна; 2 — грунтомер-пенетрометр; 3 — механизм выноса приборов;
4 — телевизионная камера; 5 — штыревая антенна; 6 — радиационный гамма-плотномер
Рис. 1.5. Выносные механизмы для исследования грунтов в сложенном виде под лепестками
корпуса «Луны-13». На переднем плане — механизм с грунтомером-пенетрометром;
в центре — головка телекамеры; на заднем плане — механизм с датчиком радиационного
плотномера
ный температурный режим. Это достигалось устройством наруж¬
ной теплоизоляции корпуса АЛС и работой системы терморегули¬
рования.
Система терморегулирования включала в себя бак с водой,
пироклапан, клапан-испаритель, вентилятор и систему трубопро¬
водов. После посадки на Луну происходил подрыв пироклапана,
включалась водяная испарительная система и начинал работать
вентилятор, который обеспечивал передачу тепла от приборов
к газу. Клапан-испаритель является чувствительным элементом
системы, регулятором подачи воды и испарителем. Вода поступает
к нему из бака под давлением тем интенсивнее, чем выше темпера¬
тура клапана. В клапане она испаряется и отнимает тепло от газа,
продуваемого через клапан вентилятором.
На рис. 1.5 видны в сложенном виде механизмы выноса при¬
боров для исследования грунтов. В таком положении они нахо¬
дятся при закрытых лепестковых антеннах. На переднем плане
находится механизм выноса грунтомера-пенетрометра, за ним —
головка телевизионной камеры и дальше — механизм выноса ра¬
диационного плотномера. Механизмы выполнены в виде склад¬
ных многозвенников, обеспечивающих вынос приборов на расстоя¬
ние 1,5 м от корпуса станции. Раскрытие механизмов произво¬
дится пружинами кручения, установленными в шарнирах звеньев.
Мощность пружин подобрана из условия преодоления сил трения
в механизме и лунного напряжения силы тяжести с запасом в 2—
3 раза. Механизмы удерживаются в сложенном положении зам¬
ками, которые раскрываются от движения лепестковых антенн.
Для предотвращения взаимного перехлестывания при одновре¬
менном раскрытии лепестковых и штыревых антенн механизмы
начинают работать после полного раскрытия штыревых антенн
и примерно на две трети — после раскрытия лепестковых.
Механизмы имеют тросовую систему синхронизации, которая
обеспечивает одновременное пропорциональное раскрытие всех
их звеньев, а также полное выпрямление механизмов до начала
падения их на грунт. После полного выпрямления системы синхро¬
низации отключаются, при этом углы поворота механизмов отно¬
сительно узлов крепления их на корпусе АЛС не ограничиваются.
Это позволяет правильно установить приборы на грунт, незави¬
симо от угла наклона АЛС. На концах последних звеньев шар¬
нирно заделаны вилки для крепления приборов. Оси вращения
приборов относительно вилки и оси крепления вилок к механизму
образуют карданную подвеску, обеспечивающую возможность
ориентации приборов на поверхности Луны.
В работах, проведенных АЛС «Луна-9» и «Луна-13», исключи¬
тельно большое значение имели съемки панорам лунной поверх¬
ности и передача их на Землю. Для этой цели использовались те¬
левизионные камеры, имеющие много общего с приборами фото¬
телеграфа, так как они основаны на оптико-механическом прин¬
ципе сканирования изображения. Оптико-механическая система
14
Рис.1.6. Схема сканирующего ус¬
тройства телекамеры «Луны-13»:
1 — зеркало; 2 — кулачок; 3 —
объектив; 4 — двигатель; 5 — Диа¬
фрагма; 6 — светоприемник
отличается медленной передачей изображения, но зато полоса
частот видеосигнала получается весьма узкой и сигнал может
быть передан через экономичные маломощные каналы радиосвязи
с ненаправленными антеннами на борту AJIC.
Схема оптико-механической системы телекамеры представлена
на рис. 1.6. Сканирование изображения производится с помощью
зеркала, кулачка и объектива. Зеркало совершает качание по
вертикали и медленное вращение в горизонтальной плоскости.
Профиль кулачка, вызывающего качание зеркала, таков, что
обеспечивает линейное угловое перемещение зеркала за период
строчной развертки и быстрый возврат его в исходное положение.
Система дает высокую и стабильную по времени линейность раз¬
вертки. Она может передавать изображение со скоростью одной
строки в секунду, время передачи круговой панорамы при этом
составляет 100 мин. В ускоренном режиме время полного оборота
сокращается до 20 мин. Угол зрения камеры в вертикальной пло¬
скости равен 29° и обеспечивает преимущественно передачу изо¬
бражения поверхности грунта. Высота головки камеры над по¬
верхностью 0,65 м, ближайшее расстояние до грунта по лучу зре¬
ния 1,5 м.
Разрешающая способность камеры 500 элементов в строке,
что позволяет различать детали размерами 1,5—2 мм с расстоя¬
ния 1,5 м.
Камера была оборудована системой автоматической регули¬
ровки чувствительности, которая реагирует на среднюю осве¬
щенность в нижней части панорамы и позволяет получить каче¬
ственные изображения в диапазоне освещенностей от 80 до
150 000 л к.
Телевизионная система позволила также получить достаточно
четкие изображения лунной поверхности и снимки деталей AJIC,
расположенные ближе 1,5 м от головки камеры. Примеры снимков
представлены ниже на рис. 1.9 и 1.11.
15
1.2. Научное оборудование станций „Луна-9“
и „Луна-13“
Запуск автоматической лунной станции «Луна-13»
позволил впервые определить плотность поверхностного слоя
лунного грунта и его сопротивление пенетрации. Определения
производились с помощью приборов, устанавливаемых на грунт
в месте посадки станции — механического грунтомера-пенетро-
метра и радиационного плотномера, а также динамографа внутри
АЛС, работающих независимо друг от друга.
При создании этих приборов, их тарировке на моделирующих
материалах и разработке методов дешифрования телеметрической
информации, получаемой с Луны, были решены сложные задачи,
связанные с предельной миниатюризацией и облегчением аппара¬
туры, выбором материалов для моделирования лунных грунтов,
учетом влияния неровностей на поверхности Луны.
Например, грунтомер-пенетрометр развивал усилие, вдавли¬
вавшее индентор, которое в 100 раз превышало его вес на Луне,
а сложную электронную аппаратуру радиационного плотномера
удалось разместить в корпусе объемом всего в 1,5 куб. дм.
Опыт, который был приобретен в процессе разработки этих
приборов, несомненно, будет полезен для конструирования ана¬
логичной аппаратуры для наземных исследовательских и изыска¬
тельских партий.
Грунтомер-пенетрометр (рис. 1.7) предназначен для оценки
механической прочности грунта. Он состоит из пластмассового
корпуса, нижняя часть которого образует кольцевой штамп диа¬
метром 7,15/12,0 см и титанового индентора с конической ниж¬
ней частью. Угол заострения конуса индентора 103°, максималь¬
ный диаметр конуса 3,5 см. Индентор может быть выдвинут из
корпуса вниз на расстояние до 5,0 см. Его перемещение относи¬
тельно корпуса измеряется потенциометром, сигнал которого по¬
дается на телеметрическую систему.
Верхняя часть индентора служит корпусом реактивного дви¬
гателя твердого топлива, сопло которого обращено вверх. Команда
на запуск двигателя подается после прилунения станции и опу¬
скания прибора на грунт выносным механизмом вслед за снятием
нулевого отсчета. Продолжительность действия двигателя в лун¬
ных условиях равна 0,8 с, сила тяги — около 65 Н.
После прекращения работы двигателя индентор остается в том
положении, которое было достигнуто им к этому моменту. После¬
дующая информация позволяет определить глубину его погруже¬
ния, а опросы телеметрической системой — проследить за изме¬
нениями положения индентора с течением времени.
Динамограф был смонтирован внутри корпуса АЛС на его
жесткой раме. Прибор состоял из комплекта акселерометров,
ориентированных в трех различных направлениях, и электрон¬
ного блока с выходом на телеметрическую систему. При посадоч-
16
Рис. 1.7. Грунтомер-пенетрометр. Внизу —
индентор в выдвинутом положении; в се¬
редине — кольцевой штамп; выше - корпус
прибора:
/ — корпус; 2 — крышка корпуса; 3 — по¬
тенциометр; 4 — кольцевой штамп; 5 —
индентор (в крайнем нижнем положении)
►
Рис. 1.8. Датчик радиационного плотно¬
мера:
/ — корпус датчика; 2 — боковые сегмен¬
ты; 3 — надстройка для крепления к вы¬
носному механизму
Т
ном ударе о поверхность грунта акселерометры регистрировали
возникающие ускорения и передавали их на Землю. Величина
ускорений при ударе зависит от жесткости грунта, а последняя
связана с его плотностью и структурой. Таким образом по сигна¬
лам динамографа можно было судить о механических свойствах
грунта, опираясь на результаты предварительных тарировочных
2 А. Л. Кемурджиан 17
испытаний, проводившихся на материалах различной жест¬
кости.
Радиационный плотномер предназначен для определения плот¬
ности верхнего слоя лунного грунта толщиной до 15 см. Он со¬
стоит из датчика (рис. 1.8), укрепленного на выносном меха¬
низме и прикладываемого непосредственно к поверхности Луны,
и электронного блока, установленного внутри корпуса станции.
Этот блок предназначается для обработки информации от датчика
и передачи ее телеметрической системе.
В датчике помещены радиоактивный изотоп цезий-137 актив¬
ностью в 1 мг эквивалента радия, свинцовый экран и три группы
гамма-счетчиков. Принцип действия плотномера следующий:
гамма-кванты, излучаемые изотопом, взаимодействуют с грунтом,
на поверхности которого установлен датчик. Часть гамма-квантов
поглощается грунтом, а другая после многократного рассеяния
возвращается к датчику и регистрируется счетчиками. Зависимость
между интенсивностью зарегистрированного рассеянного излу¬
чения и плотностью грунта при данной схеме измерения изобра¬
жается параболической кривой, обращенной выпуклостью вверх
и имеющей максимум при плотности 1,5 г/см3. Восходящая ветвь
кривой относится к материалам с плотностью от 0,1 до 1,5 г/см3,
а нисходящая — от 1,5 до 3,0 г/см3.
Поэтому любому показанию счетчиков отвечают два значения
плотности — меньше и больше 1,5 г/см3. Для окончательного вы¬
бора значений плотности необходимо использовать показания грун-
томера-пенетрометра, которые также зависят от плотности грунта.
AJ1C «Луна-13» так же, как и «Луна-9», проходила разнообраз¬
ные наземные испытания в условиях, имитирующих посадку
на Луну и пребывание на лунной поверхности. Для этого были
сооружены испытательные стенды, воспроизводящие предпола¬
гаемый рельеф района прилунения. На поверхности испытатель¬
ного стенда раскладывались различные материалы — как твердые,
так и дисперсные, — моделирующие лунный грунт. Станцию сбра¬
сывали с заданной высоты на поверхность испытательного стенда
и при этом регистрировали усилия и ускорения, возникающие
в элементах ее конструкции и оборудования. Кроме того прово¬
дились испытания в термовакуумных камерах при широком диа¬
пазоне изменения температуры. Этим испытаниям придавалось
исключительно серьезное значение и только благодаря высокой
тщательности, с которой проводились эксперименты, а также мно¬
гократности опытов удалось выявить все возможные дефекты и
неполадки конструкции и создать аппарат высокой надежности.
Особое внимание уделялось наземной тарировке всех трех
приборов для исследования лунных грунтов. Эти испытания
проводились на большом числе различных дисперсных и твердых
материалов, имитирующих по своей структуре, плотности и проч¬
ности лунные грунты. Наибольшее число опытов было проделано
на зернистых материалах малой плотности (табл. 1.1).
18
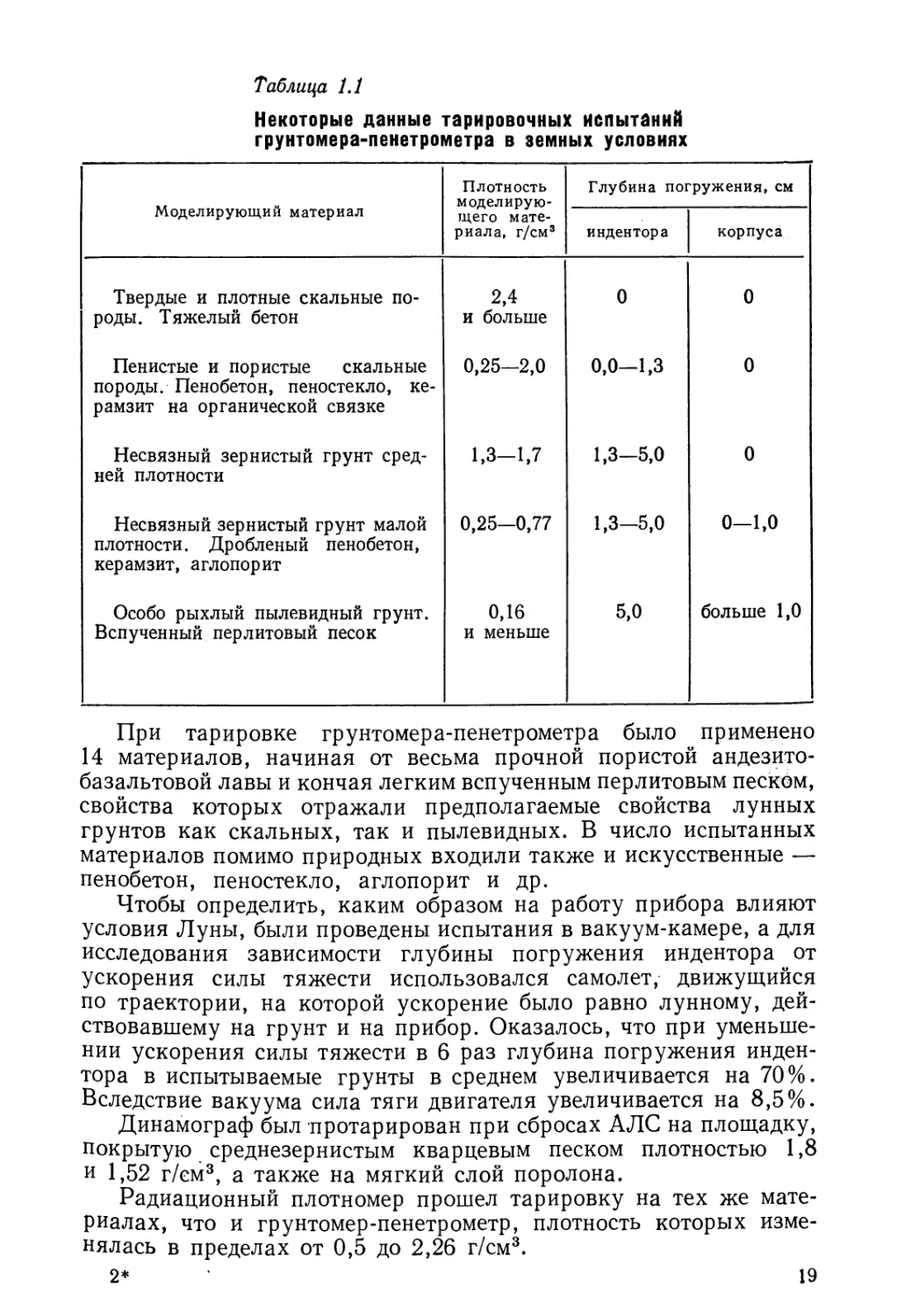
Таблица 1.1
Некоторые данные тарировочных испытаний
грунтомера-пенетрометра в земных условиях
Моделирующий материал
Плотность
моделирую¬
Глубина погружения, см
щего мате¬
риала, г/см3
индентора
корпуса
Твердые и плотные скальные по¬
роды. Тяжелый бетон
2,4
и больше
0
0
Пенистые и пористые скальные
породы. Пенобетон, пеностекло, ке¬
рамзит на органической связке
0,25—2,0
0,0-1,3
0
Несвязный зернистый грунт сред¬
ней плотности
1,3—1,7
со
1
сл
о
0
Несвязный зернистый грунт малой
плотности. Дробленый пенобетон,
керамзит, аглопорит
0,25—0,77
со
1
сл
о
0—1,0
Особо рыхлый пылевидный грунт.
Вспученный перлитовый песок
0,16
и меньше
5,0
больше 1,0
При тарировке грунтомера-пенетрометра было применено
14 материалов, начиная от весьма прочной пористой андезито¬
базальтовой лавы и кончая легким вспученным перлитовым песком,
свойства которых отражали предполагаемые свойства лунных
грунтов как скальных, так и пылевидных. В число испытанных
материалов помимо природных входили также и искусственные —
пенобетон, пеностекло, аглопорит и др.
Чтобы определить, каким образом на работу прибора влияют
условия Луны, были проведены испытания в вакуум-камере, а для
исследования зависимости глубины погружения индентора от
ускорения силы тяжести использовался самолет, движущийся
по траектории, на которой ускорение было равно лунному, дей¬
ствовавшему на грунт и на прибор. Оказалось, что при уменьше¬
нии ускорения силы тяжести в 6 раз глубина погружения инден¬
тора в испытываемые грунты в среднем увеличивается на 70%.
Вследствие вакуума сила тяги двигателя увеличивается на 8,5%.
Динамограф был протарирован при сбросах АЛС на площадку,
покрытую среднезернистым кварцевым песком плотностью 1,8
и 1,52 г/см3, а также на мягкий слой поролона.
Радиационный плотномер прошел тарировку на тех же мате¬
риалах, что и грунтомер-пенетрометр, плотность которых изме¬
нялась в пределах от 0,5 до 2,26 г/см3.
2* 19
150й 160й 170* 160° 190е ' 200й 210°
1
I 350й
390й
350°
О9
10°
20е
30°
■ J
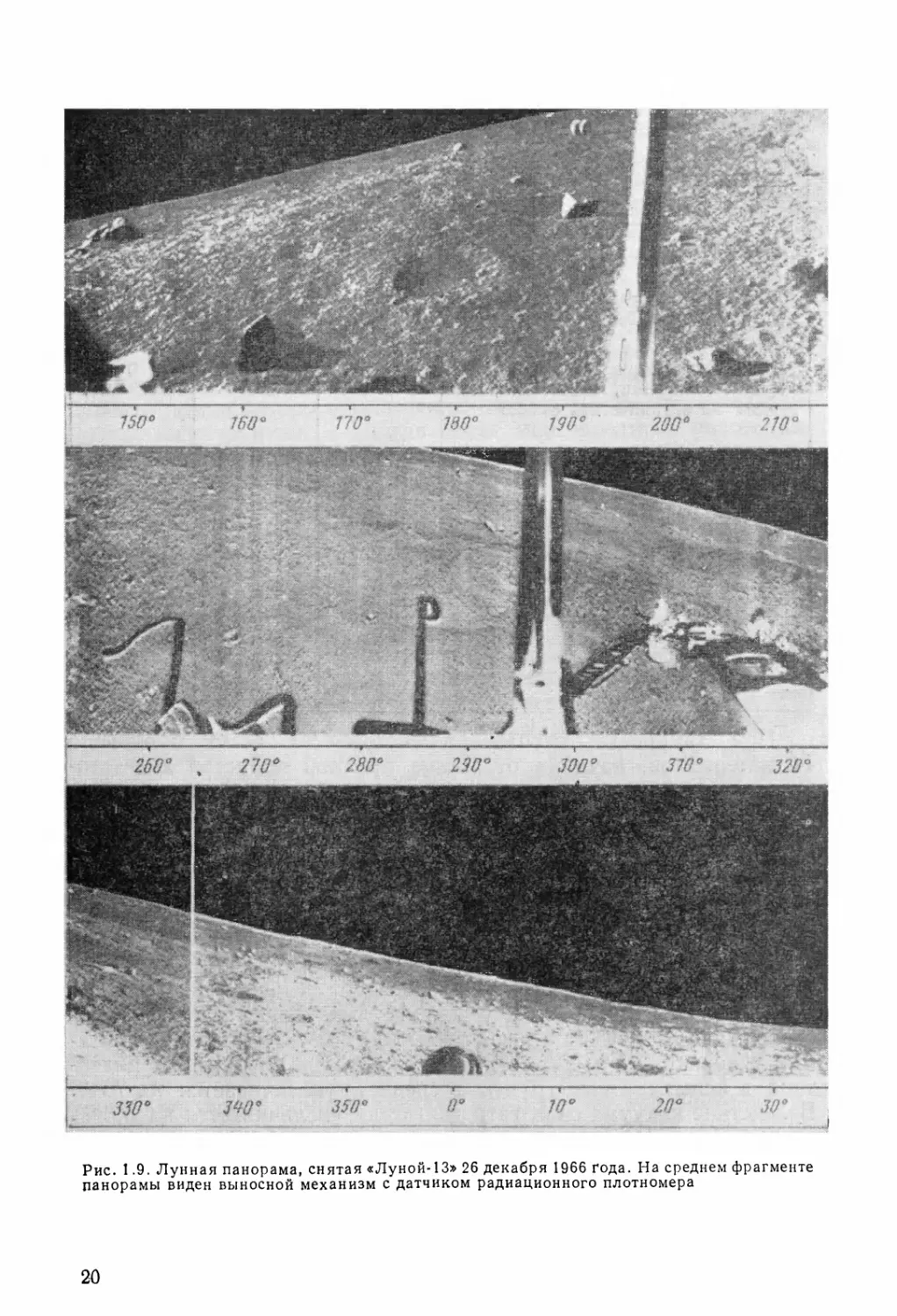
Рис. 1.9. Лунная панорама, снятая «Луной-13» 26 декабря 1966 года. На среднем фрагменте
панорамы виден выносной механизм с датчиком радиационного плотномера
20
Таким образом, показания обоих приборов были надежно при¬
вязаны к свойствам хорошо изученных земных материалов, как
в обычных для Земли условиях, так и в условиях, имитирующих
лунные.
«Луна-13» опустилась у западного края Океана Бурь в точке
с координатами 18° 52' с. ш. и 62° 03' з. д. Это типичная морская
равнина с плоским рельефом, расположенная на достаточном
удалении от материка. Станция попала в кратеровидную де¬
прессию. На панораме (рис. 1.9) видна четкая линия гори¬
зонта, более ровная, чем на снимках, полученных станцией
«Луна-9».
; Поскольку лунные панорамы, снятые станциями «Луна-9» й
;«Луна-13»,: показали,;что поверхность Луны изобилует многочис¬
ленными Мелкими неровностями в виде камней и лунок, которые
могут исказить показания приборов, рассчитанных на работу на
ровной поверхности, был сделан анализ вероятности полезной
информации, доставленной приборами.
Оказалось, что зазор между поверхностью грунта и прибором,
образуемый при попадании корпуса прибора в лунку или на ка¬
мень, искажает в сторону занижения замеряемые данные. Макси¬
мально допустимым можно считать зазор 12 мм, при котором
еще можно различить характер грунта — твердый, зернистый
или пылевидный. Таким образом стало возможным установить,
что так называемая «суммарная дефектная площадь» составляет
около 30% всей поверхности в окрестностях станции «Луна-9»
Вокруг станции «Луна-13» поверхность оказалась более ровной.
Суммарная дефектная площадь представляет собой сумму площа¬
дей, занятых камнями и лунками, и окружающих их кольцевых
площадок шириной, равной полуширине корпуса прибора, а
также отдельных площадок вокруг точек резких переломов уклона
поверхности между камнями и лунками.
В связи с приближенностью описанных расчетов было при¬
знано целесообразным считать, что наличие неровностей микро¬
рельефа может исказить данные измерений в тридцати случаях
из ста, или, иными словами, — получение достоверных резуль¬
татов обеспечивается лишь на 70%.
На панораме, снятой 26 декабря 1966 г., видны шарнир между
первым и вторым звеньями механизма, концевое звено, датчик
радиационного плотномера и четкая тень механизма, показываю¬
щая, что он опустился нормально.
Помимо описанных выше приборов для изучения физических
и механических свойств лунного грунта на станциях «Луна-9»
и «Луна-13» имелись также приборы для оценки оптических свойств
поверхности, измерений тепловых потоков, излучаемых лунной
поверхностью, дополнительные зеркала для получения стереопар.
Перечень научных приборов, устанавливавшихся на станциях
«Луна-9» и «Луна-13», приведен в табл. 1.2.
21
Таблица 1.2
Научная аппаратура автоматических станций «Луна-9»
и «Луна-13»
Аппаратура
«Луна-9»
«Луна-13»
Телевизионные камеры
Есть
Есть
Эталоны яркости
»
Нет
Дополнительные зеркала
»
»
Грунтомер-пенетрометр
Нет
Есть
Радиационный плотномер
»
»
Динамограф
ъ
»
Радиометр для измерений тепловых потоков
»
»
1.3. Результаты исследований грунта
станциями „Луна-911 и “Луна-13“
Обработка панорам, снятых «Луной-13», позво¬
лила составить достаточно четкое представление о рельефе лун¬
ного участка и построить топографический план и схему места
посадки (рис. 1.10). Были выявлены и подсчитаны многочислен¬
ные лунки и камни, попавшие в поле зрения телевизионной ка¬
меры, и составлены таблицы их распределения по размерам.
Суждения о структуре и механических свойствах верхнего слоя
грунта в месте посадки были составлены на основании следую¬
щих данных:
анализа телепанорамы и особенно участков поверхности,^ де¬
формированных станцией при посадке и установке приборов;
показаний грунтомера-пенетрометра и динамографа;
показаний радиационного плотномера.
Крупномасштабные изображения поверхности, полученные
с разрешением в несколько миллиметров, т. е. примерно на 6 по¬
рядков выше, чем на снимках, получаемых фотографированием
с Земли, свидетельствуют, что поверхность лунного грунта имеет
зернистое строение, для которого характерно присутствие мелких
зерен, вторичных агрегатов и комочков, состоящих из слипшихся
между собой мелких зерен, а также крупных обломков — камней.
Последние имеют остроугольную форму и отличаются от комоч¬
ков слипшегося мелкозернистого материала. По внешнему виду
поверхность относится к каменистым россыпям.
Распределение камней по крупности подчиняется закону вида
N = KD\ (1.1)
где D — диаметр камней, N — число камней с диаметром круп¬
нее D на единицу площади; /Сиу — параметры кривой распреде-
22
I I L
i . i Условные обозначения.
Сечение рельефа * отметки высот (см) а детали станиии
через 5 см
Отметки высот даны s' еоризонтали
относительно основания кратерь,
станции
4> камни
2" линия дальностей
60° яо°линии азимутов
бровка
отпечаток лепестка станиии
бороздка от камня
q углубления
Рис. 1.10. Топографическая схема места посадки «Луны-13»
ления. В первом приближении этот закон соответствует правилу,
по которому в равных логарифмических интервалах крупности
заключаются равные массы вещества (в пределах от нескольких
миллиметров до десятков сантиметров).
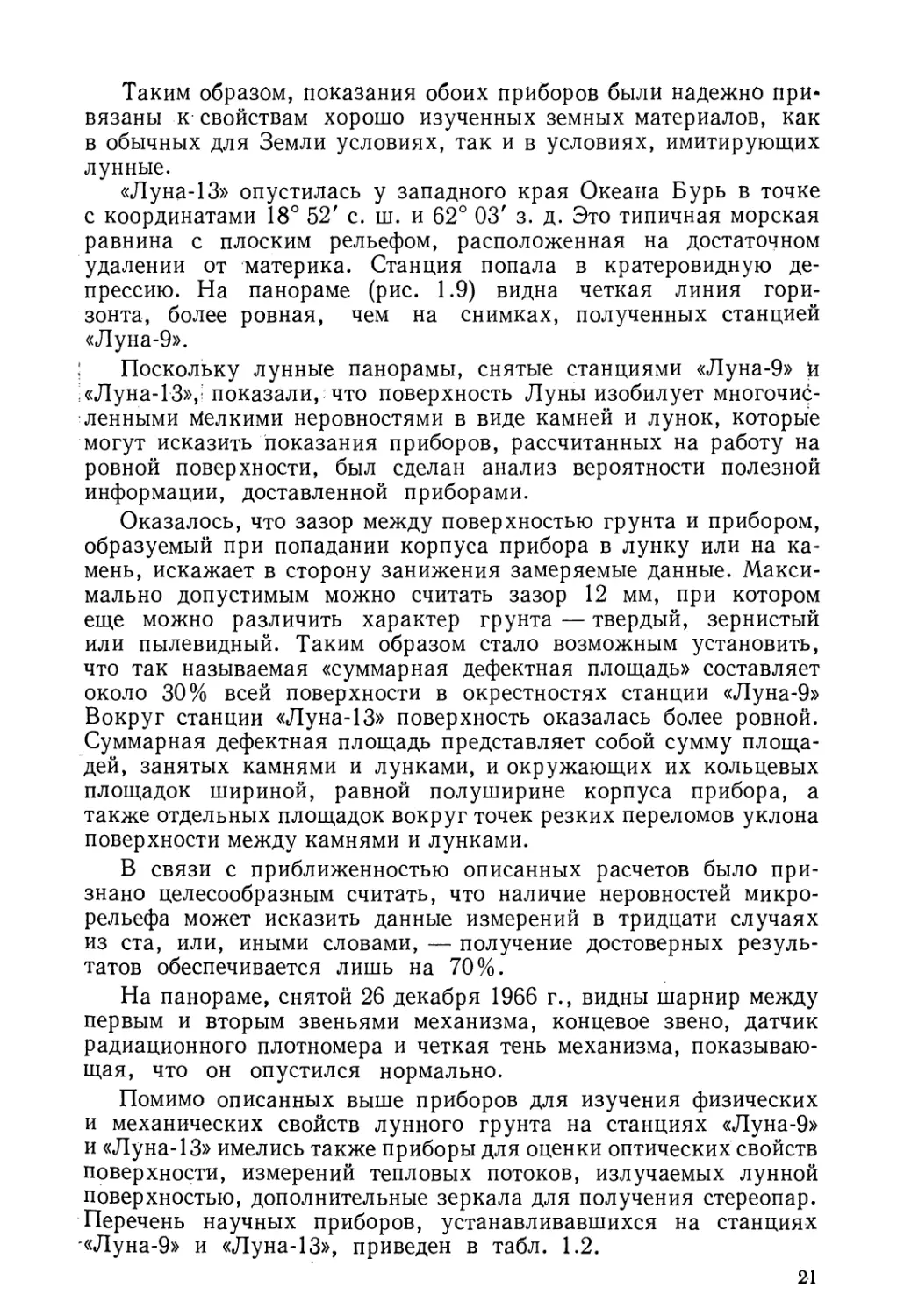
Структура верхнего слоя рыхлая. Материал отличается сла¬
бой связностью. Комочки, образованные мелкими зернами, легко
деформируются под нагрузкой, что хорошо видно по следу, остав¬
ленному датчиком радиационного плотномера (рис. 1.11).
Индентор грунтомера-пенетрометра погрузился в лунный
грунт на 4,5 см. Обработка результатов этого опыта показала,
23
Рис. 1.11. Датчик радиа¬
ционного плотномера на
грунте
что грунт на этом участке имеет угол внутреннего трения 32°,
сцепление 0,5 кПа и модуль общей деформации 44 кПа. Глубина
рыхлого слоя — не менее 5 см.
Плотность верхнего слоя оценивалась по данным всех трех
приборов, причем полученные результаты не совпадали. Погру¬
жение пенетрометра в грунт на глубину 4,5 см могло произойти
на несвязном песке плотностью 1,52 г/см3 или слабосвязном керам¬
зитовом гравии плотностью 0,77 г/см3. По показаниям динамо¬
графа, наилучшее совпадение результатов лунного эксперимента
с данными земных испытаний было получено при использовании
несвязного песка плотностью 1,52 г/см3. Показания радиацион¬
ного плотномера давали на выбор два значения плотности —0,8 и
2,1 г/см3. Таким образом, при расшифровке результатов экспери¬
мента предстояло выбрать одно из них. На основе господствовав¬
ших в то время представлений о низкой плотности поверхностного
слоя Луны предпочтение было отдано величине 0,8 г/см3. По совре¬
менным данным, такая плотность является минимально возмож¬
ной для самого верхнего горизонта лунного грунта.
Заканчивая изложение исследований, проведенных станциями
«Луна-9» и «Луна-13», необходимо сказать несколько слов о работе
станций «Луна-10», «Луна-11» и «Луна-12». Все эти станции стали
искусственными спутниками Луны. Они не совершили посадки на
ее поверхность и по этой причине не рассматриваются подробно
в данной книге. Однако вклад, внесенный этими станциями в дело
изучения лунных грунтов, очень велик.
На станции «Луна-10» был установлен многоканальный гамма-
спектрометр, определивший спектральный состав гамма-излуче¬
ния лунной поверхности. На станции «Луна-11», кроме того, была
еще и аппаратура для изучения рентгеновского излучения Луны.
На станции «Луна-12» были продолжены исследования, начатые
24
на Двух предыдущих станциях; кроме того были получены высо¬
кокачественные снимки лунной поверхности, позволившие раз¬
личить кратеры диаметром 15—25 м. Анализ этих работ дан
А. П. Виноградовым и Ю. А. Сурковым [1.1].
Гамма-излучение и рентгеновское излучение лунной поверх¬
ности характеризуют химический состав горных пород, ее состав¬
ляющих. Сравнивая рентгеновские и гамма-спектры разных уча¬
стков лунной поверхности со спектрами хорошо изученных зем¬
ных горных пород, можно оценить минералогический состав лун¬
ных грунтов, что и было сделано на основании исследований стан¬
циями «Луна-10», «Луна-11» и «Луна-12». При этом было впервые
установлено, что поверхность лунных морей состоит из базальто¬
вых пород, а поверхность материков — из хондритовых пород,
не подвергавшихся расплавлению. Так было сделано предположе¬
ние о широком распространении базальтовых пород на Луне, ко¬
торое впоследствии подтвердилось при анализе образцов лунных
грунтов, доставленных на Землю.
1.4. Автоматические лунные станции
серии „Сервейер"
Программа запусков на Луну американских авто¬
матических лунных станций серии «Сервейер» была осуществлена
в 1966—1968 гг. Основными задачами станций серии «Сервейер»
было исследование механических свойств лунных грунтов, опре¬
деление гранулометрического и химического состава грунта,
изучение взаимодействия посадочных органов с поверхностью и
воздействия газовой струи реактивных двигателей на грунт. Кроме
того, большое внимание было уделено телевизионным съемкам по¬
верхности Луны в точках посадки, изучению рельефа поверх¬
ности и законов распределения малых кратеров, лунок и камней
на поверхности. Всего было сделано пять успешных посадок, из
которых четыре в морских районах и одна в горном.
Станции «Сервейер» запускались трехступенчатой ракетной
системой «Атлас-Кентавр».
Внешний вид аппарата представлен на рис. 1.12. Каркас его
выполнен из алюминиевых труб, на каркасе крепятся три ноги
посадочного устройства и мачта для батареи солнечных элементов
и остронаправленной антенны. Высота аппарата 3 м, диаметр
окружности, проходящей через опоры посадочного устройства,
4,27 м. Аппарат имеет два герметичных контейнера для электрон¬
ной аппаратуры, двигательную установку, телевизионную камеру,
дополнительные антенны, навигационное и научное оборудова¬
ние. Состав последнего на разных аппаратах был различным.
Стартовая масса «Сервейеров» колебалась от 995 до 1037. кг,
а при посадке на Луну, после израсходования горючего и сброса
^асти оборудования, -;— от 279 до 286 кг. С учетом лунной грави¬
тации вес аппарата составлял на Луне в среднем 460 Н и на каж-
<25
Рис. 1.12. Внешний вид
автоматической лунной
станции «Сервейер-1»:
1 — верньерный двига¬
тель; 2 — ноги; 3 — те¬
лекамера
дую из трех опор приходилось около 153 Н статической нагрузки.
В момент прилунения динамическая нагрузка была много больше.
Главный тормозной двигатель аппарата, расположенный в его
центральной части, работал на твердом топливе. Он имел шаро¬
видную форму, массу в снаряженном состоянии 624,6 кг и силу
тяги в вакууме в пределах от 35 до 44 кН. Верньерные двигатели —
жидкостные. Они расположены вокруг тормозного двигателя
с трех сторон через 120°. Один из них имеет шарнирную подвеску.
Каждый двигатель имеет массу 1,71 кг и силу тяги в вакууме от
,140 до 480 Н. Кроме того, на каждой стойке посадочного устрой¬
ства установлено по два управляющих реактивных сопла, работаю¬
щих на сжатом азоте.
Система управления полетом и астроориентации аппарата имеет
основной солнечный датчик из пяти фотоэлементов, датчик для
автоматического поиска Солнца, датчик звезды Канопус и несколь¬
ко радиолокаторов, служащих для определения расстояния до
поверхности Луны. Радиолокационный альтиметр давал сигнал
для включения тормозного двигателя, второй локатор управлял
верньерными двигателями с помощью бортовой вычислительной
машины.
Энергетическая установка включала в себя солнечные эле¬
менты, а также основную и вспомогательную химические бата¬
реи. Панель с солнечными элементами имела специальное устрой-
26
а)
Рис. 1.13. Посадочное устройство «Сер-
вейера»:
а—кинематическая схема одной из ног
«Сервейера»; б — схема опоры
J — амортизационный блок; 2 — амор¬
тизатор с ходом в 11 см; 3, 4 и 5 — ша¬
рниры; 6 — максимальное отклонение
43 см; 7 — плита толщиной 1,3 см; 8 —
сотовая подушка прочностью 14 Н/см2;
9 — сотовая подушка прочностью
7 Н/см2
ство для ориентации на Солнце. В зависимости от температуры
солнечные элементы давали мощность от 60 до 85 Вт. Батареи
использовались в периоды пиковых нагрузок, а также до ориента¬
ции панели с солнечными элементами на Солнце.
Контейнеры для электронного оборудования, требовавшего оп¬
ределенной температуры для нормального функционирования, име¬
ли двойные стенки с многослойным теплоизолирующим покрытием.
Посадочное устройство аппарата (рис. 1.13) при старте нахо¬
дится в сложенном состоянии и развертывается лишь после того,
как аппарат выведен на трассу полета к Луне. Ноги имеют амор¬
тизационные стойки с амортизаторами самолетного типа. К ниж¬
ней части каркаса аппарата прикреплены амортизационные блоки
из алюминиевых сот, предназначенные для смягчения удара кар¬
каса о грунт в момент прогиба основных ног. К концам ног шар¬
нирно подвешены тарельчатые опоры, также выполненные из алю¬
миниевых сот. Посадочное устройство рассчитано на соударение
с грунтом при вертикальной скорости до 6 м/с и ее горизонтальной
составляющей до 2,3 м/с при посадке на склоны крутизной до
15° при отклонении продольной оси аппарата от местной верти¬
кали до 10°. Три ноги посадочного устройства расположены в плане
через 120°.
В элементах конструкции посадочного устройства и на каркасе
аппарата установлены тензометрические датчики и акселеро¬
27
метры, которые измеряли напряжения и ускорения, возникавшие
в процессе соударения аппарата с поверхностью грунта, и пере¬
давали их по телеметрической системе на Землю.
1.5. Научное оборудование станций
серии „Сервейер"
При компоновке очередной станции серии «Сер-
вейер» учитывался опыт предыдущего эксперимента и в комплект
научных приборов вносились соответствующие изменения
(табл. 1.3).
Таблица 1.3
Научное оборудование «Сервейеров»
Прибор
«Сер-
вейер-1»
«Сер-
вейер-3»
«Сер¬
вейер-5»
«Сер-
вейер-6»
«Сер-
вейер-7»
Телевизионная камера
Есть
Есть
Есть
Есть
Есть
Светофильтры
Цветные
Цветные
Цветные
Поля-
роидные
Поля-
роидные
Вспомогательные
Нет
2 плос¬
2 вы¬
3 вы¬
3 вы¬
зеркала
ких
пуклых
пуклых
пуклых
Зеркала для стереосъем¬
ки и регистрации запыле-
ния
Нет
Нет
Нет
Нет
Есть
Манипулятор
Нет
Есть
Нет
Нет
Есть
Углы захвата
От
+40°
ДО
+72°
о о
Альфа-радиометр
Нет
Нет
Есть
Есть
Есть
. -Постоянные магниты
Нет
Нет
Есть
Есть
Есть
Так же как и на советских автоматических станциях «Луна-9»
и «Луна-13», на американских аппаратах «Сервейер» особое вни¬
мание уделялось телевизионным съемкам поверхности.
-: В телевизионных камерах аппаратов «Сервейер» применен тот
же.принцип механического сканирования, что и в камерах, уста¬
новленных на автоматических станциях «Луна-9» и «Луна-13».
Допускается съемка с узким (6,4°) или широким (25,3°) углами
зрения. Развертка изображения может быть сделана на 200 или
600 строк. В первом случае передача может вестись через всена¬
правленную антенну, во втором — через плоскую остронаправ¬
ленную антенну. Разрешающая способность при съемке с расстоя¬
ния 1,5 м составляет 0,5—1 мм.
l Аппараты «Сервейер» передали большое количество снимков.
Многие из них отличались высоким качеством воспроизведения
28
мелких деталей, например, камней, лежащих на поверхности
(рис. 1.14). Снимки показали, что камни имеют различную струк¬
туру. Наряду с монолитными скальными обломками были обна¬
ружены трещиноватые или расколотые на большие фрагменты.
Высокая разрешающая способность телеснимков позволила на¬
дежно определить гранулометрический состав поверхностного
слоя в диапазоне крупности частиц и агрегатов от 1 мм до 1м
с последующей экстраполяцией результатов на более мелкие;
фракции.
Манипуляторы, установленные на аппаратах «Сервейер-3» и
«Сервейер-7», представляют собой механизмы, напоминающие
экскаватор типа «обратной лопаты» (рис. 1.15). Рабочим органом
служит металлический ковш емкостью до 100 см3 сыпучего мате¬
риала, способный захватить и удержать твердый обломок круп¬
ностью до 3,2 см. Ковш установлен на многошарнирном механизме
типа пантографа, который может перемещать его в плане внутри
сектора с дугой 112° на расстояниях от 0,57 до 1,53 м в радиальном
29'
Рис. 1.15. Манипулятор «Сервейе-
ра-3» и сСервейера-7»:
1 — мотор поворота по азимуту;
2 — мотор подъема; 3 — мотор об¬
ратного хода по горизонтали; 4 —
мотор ковша; 5 — ковш; 6 — шар¬
нирный механизм
Рис. 1.16. Ковш манипулятора. На
переднем плане датчик акселеро¬
метра
30
направлении. Кроме того ковш может быть поднят на высоту до
0,89 м и опущен в грунт на глубину 0,46 м, считая от горизонталь¬
ной плоскости.
Движение ковша вперед и назад, а также перемещения его
по азимуту осуществляются с помощью трех электродвигателей.
Вертикальные перемещения сверху вниз происходят под действием
заранее напряженной пружины, а перемещения снизу вверх —
с помощью электродвигателя, преодолевающего силу пружины.
С помощью пружины манипулятор может нанести сильный удар
по поверхности грунта, несмотря на слабую лунную гравитацию.
Четвертый электродвигатель приводит в движение крышку ковша.
Все двигатели управляются с Земли.
При наибольшем удалении ковша в радиальном направлении
его крышка своей плоской поверхностью ложится на поверхность
грунта, действуя как прямоугольный жесткий штамп размерами
2,5x5,1 см. На меньших расстояниях она врезается в грунт бо¬
ковой кромкой под различными углами. При открытой крышке
ковш работает подобно ковшу экскаватора (рис. 1.16).
С помощью манипулятора проводились следующие экспери¬
менты:
статическое нагружение поверхности закрытой крышкой
ковша или его острой кромкой;
динамическое нагружение путем подъема ковша над исследуе¬
мой точкой и последующего освобождения замка пружины, кото¬
рая толкает его вниз;
рытье траншеек и перемещение дисперсного материала и от¬
дельных камней и комков;
захват и раздавливание отдельных комков.
На аппарате «Сервейер-3» кроме обычных операций манипу¬
лятор мог также перемещать с места на место альфа-радиометр.
Ряд операций был запрограммирован и осуществлялся под
контролем бортового командного устройства. На основании наблю¬
дений за работой манипулятора с помощью телевидения с Земли
при необходимости подавались дополнительные команды. На аппа¬
рате «Сервейер-7» удалось измерить температуру двигателей и
потребляемый ими ток. При этом оказалось, что манипуляторы
обоих аппаратов работали совершенно одинаково и нагрузка на
грунт при идентичных положениях ковша была одной и той же.
В процессе опытов было получено много снимков поверхности
грунта до и после приложения нагрузки, а также снимков траншей,
которые затем использовались для суждения о структуре, грану¬
лометрическом составе и связности грунта.
Для определения химического состава поверхностного слоя
грунта радиационно-химическим методом использовался альфа-
радиометр. В головке этого прибора, опускаемой на грунт, со¬
держится источник альфа-излучения в виде пластинки кюрия-242
(рис. 1.17). Поток альфа-частиц попадает на поверхность исследуе¬
мого грунта и рассеивается ею, причем часть альфа-частиц отра-
31
Рис. 1.17. Схема £олобки
альфа-радиометра (вид сбо¬
ку):
1 — детектор альфа-частиц;
2 — источник альфа-частиц;
3 — детектор протонов
жается в обратном
направлении и воз¬
вращается к головке
прибора после соуда¬
рения с ядрами ато¬
мов элементов, со¬
держащихся в грун¬
те. Вместе с ними к головке прибора направляются протоны,
которые вылетают из ядер некоторых атомов при ударе альфа-
частиц. Внутри головки установлены детекторы альфа-частиц и
протонов. Сигналы обоих детекторов подаются на электронный
блок, находящийся в отдельном контейнере, который производит
подсчет поступающих частиц и определяет их энергию. Получен¬
ный спектр альфа- и протонного излучений грунта, вызываемых
облучением его альфа-частицами, передается на Землю.
При расшифровке результатов эксперимента использовалась
библиотека альфа- и протонных спектров, полученных аналогич¬
ным путем для разных химических элементов, и учитывалось влия¬
ние фона радиации, который имел место при проведении опытов
на Луне.
Следует заметить, что радиационно-химическое определение
состава горных пород Луны впервые было выполнено совет¬
скими искусственными спутниками «Луной-10» и «Луной-12»
в 1966 г. При этом использовались собственное и наведенное гамма-
излучение поверхности Луны и его рентгеновское излучение,
спектры которых сравнивались со спектрами ранее изученных
земных пород. Позже рентгенометрический прибор РИФМА для
химического анализа лунного грунта был установлен на совет¬
ских аппаратах «Луноход-1» и «Луноход-2».
С целью выявления магнитных свойств лунных грунтов на
опорах аппаратов «Сервейер» и на ковше манипулятора устанав¬
ливались постоянные магниты. Опыты с магнитами дополняют
данные радиационно-химического анализа.
1.6. Станции серии „Сервейер"
на поверхности Луны и результаты их работы
Места посадки станций «Сервейер» на Луну по¬
казаны на рис. 1.1. Четыре из них совершили посадку в эквато¬
риальных районах Луны, расположенных в морских областях,
один — в горном районе вблизи кратера Тихо (табл. 1.4).
Большая разница в рельефе морских и горных районов видна
на рис. 1.18. Здесь представлены снимки района посадки «Сер-
32
Таблица 1.4
Места посадки и исследования «Сервейеров»
Аппарат
Район посадки и его
особенности
Исследования грунта
«Сервейер-1» (2 июня
1966 г. — 7 января
1967 г.)
«Сервейер-3» (20 ап¬
реля 1967 г. — 4 мая
1967 г.)
«Сервейер-5» (21 сен¬
тября 1967 г. — 17 де¬
кабря 1967 г.)
«Сервейер-6» (10 но¬
ября 1967 г. — 14 де¬
кабря 1967 г.)
«Сервейер-7» (10 ян¬
варя 1968 г. — 21 фев¬
раля 1968 г.)
Юго-западная часть
Океана Бурь. Равнина
морского типа внутри
кратера Фламстед
Юго-восточная часть
Океана Бурь. Откос
кратера диаметром
200 м
Юго-восточная часть
Моря Спокойствия.
Верхняя часть откоса
кратера размерами 9Х
X 12 м
Залив Центральный.
Равнина морского типа
Поле выбросов из
кратера Тихо. Холми¬
стый горный район
Телевизионная съем¬
ка, измерение усилий и
ускорений в посадочном
устройстве
Телевизионная съем¬
ка, измерение усилий и
ускорений в посадочном
устройстве, рытье тран¬
шей, испытания грунтов
ковшом манипулятора
Телевизионная съем¬
ка, измерение усилий и
ускорений в посадочном
устройстве, радиацион¬
но-химический анализ
грунта и опыты с магни¬
тами
Телевизионная съем¬
ка, измерение усилий и
ускорений в посадочном .
устройстве, радиационно¬
химический анализ грун¬
та
Телевизионная съем¬
ка, измерение усилий и
ускорений в посадочном
устройстве, рытье тран¬
шей и испытания грунта
ковшом манипулятора
вейера-1» (рис. 1.8, а) — слегка волнистая равнина морского типа
внутри затопленного лавой кратера диаметром около 100 км и
района посадки «Сервейера-7» (рис. 18, б) — у кратера Тихо в гор¬
ном районе. Оба снимка были получены орбитальными аппара¬
тами «Лунар-Орбитер».
Сложный микрорельеф места посадки «Сервейера-7» хорошо
виден на рис. 1.19, составленном из отдельных снимков, получен¬
ных этим аппаратом.
Исследование грунтов по программе «Сервейер» производилось
под руководством американских ученых Л. Д. Яффе, Р. Ф. Скотта,
И. К. Митчела и др., труды которых использованы при составле¬
нии настоящей главы вместе с официальными отчетами НАСА
11.6; 1.7; 1.8]. При обработке полученных данных было уделено
большое внимание морфологии кратеров и законам их распреде¬
ления по лунной поверхности. Поскольку этот вопрос выходит
3 А. Л. Кемурджиан 33
Рис. 1.18. Рельеф морских и горных районов Луны:
а — район посадки «Сервейера-1» (равнина морского типа); б — район посадки «Сервей-
ера-7» (горный ландшафт)
Рис. 1.19. Местность в точке посадки «Сервейера-7»
34
рис. 1.20. Кумулятивные кривые
распределения камней, комков и. от¬
дельных зерен на поверхности лун¬
ного грунта, построенные по данным
«Сервейеров»:
«Сервейер-1»;
— — — — «Сервейер-3»;
X «Сервейер-5»;
«Сервейер-7»
за рамки данной главы, мы не
будем в дальнейшем им зани¬
маться, однако воспользуем¬
ся полученными данными
для того, чтобы привести
результаты оценки толщины
слоя реголита, полученные
на основе анализа рельефа
по съемкам «Сервейеров».
В тех кратерах, которые
окаймлены кольцом выбро¬
шенных из них крупных об¬
ломков, глубина воронки мо¬
жет быть равна толщине
рыхлого слоя реголита. Она
соизмерима с толщиной рего¬
лита только у наименьших
кратеров, имеющих такие
кольца. Кроме того на Луне
встречаются свежие кратеры,
совершенно не имеющие кольцевых валов. Предполагается, что они
могли образоваться вследствие утечки сыпучего материала в подзем¬
ные пустоты. Такие кратеры были обнаружены на снимках «Сер-
вейера-5». Толщина реголита в таких местах может быть опреде¬
лена по профилю кратера, так как его дно должно совпадать с по¬
верхностью подстилающего твердого слоя. Наконец в местах,
покрытых обломками, выброшенными из крупных кратеров,
как, например, в месте посадки «Сервейера-7», толщина реголита
должна быть наименьшей.
Ниже приводятся данные о толщине (в метрах) реголита в
морских районах Луны, сделанные на основании анализа сним¬
ков, доставленных аппаратами «Сервейер»:
2° Z1 ZzZ3Zl*Z5Z6r'
82 9Z10Z11мм
«Сервейер-1»
«Сервейер-3»
«Сервейер-5»
«Сер вей ер-6»
1—3
1—7
3—5
8—10
«Сервейер-7» 0,02—0,15
3*
35
Отсюда следует, что толщина реголита в морских районах
больше 1 м, а иногда составляет почти 10 м. В горном районе,
где работал «Сервейер-7», толщина реголита наименьшая.
Непосредственное отношение к физико-механическим свой¬
ствам лунного грунта имеет его гранулометрический состав,
т. е. распределение зерен, входящих в состав реголита, по круп¬
ности, выраженное в процентах от массы изучаемого образца.
В программе «Сервейер» в основном использовался метод под¬
счета по телефотоснимкам отдельных камней, обломков и круп¬
ных зерен с последующей обработкой полученных данных и пе¬
реходом от распределения на поверхности к распределению внутри
объема исследуемого грунта.
На снимках «Сервейеров» наименьшая крупность зерен, ко¬
торые еще можно было с уверенностью различить и подсчитать,
была равна 1 мм, а наибольшие размеры крупных обломков пре¬
вышали 1 м. Поэтому на первом этапе обработки были получены
законы распределения фракций крупностью от 1 мм до 10 м.
На рис. 1.20 представлены осредненные кумулятивные кри¬
вые распределения крупности частиц, лежащих на поверхности,
для всех пяти площадок, обследованных аппаратами «Сервейер».
Кривые построены методом графического сглаживания, без ста¬
тистического анализа и применения метода наименьших квад¬
ратов.
Содержание крупных обломков в месте посадки «Сервейера-7»
на порядок выше, чем у «Сервейера-3», «Сервейера-5» и «Сервейе-
ра-6». Много крупных обломков отмечено и на площадке прилу¬
нения «Сервейера-1».
Для перехода к распределению в объеме был принят прин¬
цип Розиваля, согласно которому отношение площадей, зани¬
маемых частицами разной крупности на поверхности, к общей
площади равно отношению их объемов к суммарному объему
образца. Допустимость применения этого принципа к лунному
реголиту не доказана и подлежит проверке по мере получения
данных о бурении и результатов анализа грунтов по глубине.
Кроме того, надо также знать пористость грунта. Поскольку
определить ее по сделанным снимкам нельзя вследствие недоста¬
точного разрешения, расчеты американских ученых были сделаны
для двух вариантов (пористость п = 50 % и п = 0), из которых
более вероятным представляется первый.
Наконец для того, чтобы оценить содержание фракций, раз¬
меры которых лежат за пределами разрешающей силы снимков,
было принято, что наименьший диаметр частиц не может быть
менее 1 мкм. Такое допущение было сделано исходя из следую¬
щих предпосылок:
оптические свойства поверхности реголита свидетельствуют
о том, что большая часть зерен должна проходить сквозь сито
с отверстиями в 20 мкм, а поляризационные свойства говорят
о наименьшей крупности более 1 мкм;
36
при механическом или взрывном дроблении силикатных гор¬
ных пород невозможно получить зерна мельче 1 мкм;
в межпланетном пространстве частицы мельче 1 мкм подвер¬
гаются выносу за пределы Солнечной системы под давлением света.
Исходя из сказанного были получены уравнения для участков
кумулятивных кривых при крупности зерен от 1 мкм до 1 мм
(табл. 1.5).
Уравнения имеют следующий вид:
N = KDV, (1.2)
где N — число частиц на площади 100 м2, которые имеют круп¬
ность, равную или превышающую D; К и у — параметры кривой
распределения.
Содержание мелких фракций {D = 1 мм) при пористости в 50%
составляет от 64 до 92,7%.
На основании полученных данных были построены кривые
распределения частиц в диапазоне от D = 1 мкм до D = 1-т-10 м,
эквивалентные обычным кумулятивным кривым гранулометри¬
ческого состава, если считать, что плотность зерен во всех фрак¬
циях одинакова.
Таблица 1.5
Значения параметров уравнений кривых,
характеризующих распределение по крупности
частиц грунта в пяти местах посадки «Сервейеров»
Аппарат
Пористость /2=0
Пористость п = 50%
К
У
К
У
«Сервейер-1»
0,5Х 10®
—2,58
5,0Х 105
—2,45
«Сервейер-3»
з,зх 106
—2,21
3,ЗХ 10е
—2,02
«Сервейер-5»
1,25X10б
—2,42
1,25Х 10е
—2,27
«Сервейер-6»
1,91X 10б
—2,33
1,91X 10е
—2,17
«Сервейер-7»
7,9Х 10б
—2,47
7,9Х 105
—2,29
На всех исследованных площадках (при пористости п = 50%)
средний диаметр зерен составляет 0,033 мм (диапазон в диаметрах
зерен от 0,005 до 0,088 мм). По принятой в СССР классификации
(СНиП П-15-74) грунт на площадках работы «Сервейера-1»,
«Сервейера-5» и «Сервейера-6» относится к пылеватому песку,
а на площадках «Сервейера-3» и «Сервейера-7» —к песку мелкому.
Дополнительные данные о содержании мелких фракций в лун¬
ном реголите дал анализ фотографических изображений отпечат¬
ков опор. Как отмечалось выше, аппарат «Сервейер-3» совершил
при посадке три прыжка, при каждом из которых его опоры по¬
падали на новые места, а отпечатки предшествовавших соуда¬
рений оставались на виду. Один из этих отпечатков был сфо¬
тографирован, а его изображение было передано на Землю. Ока-
37
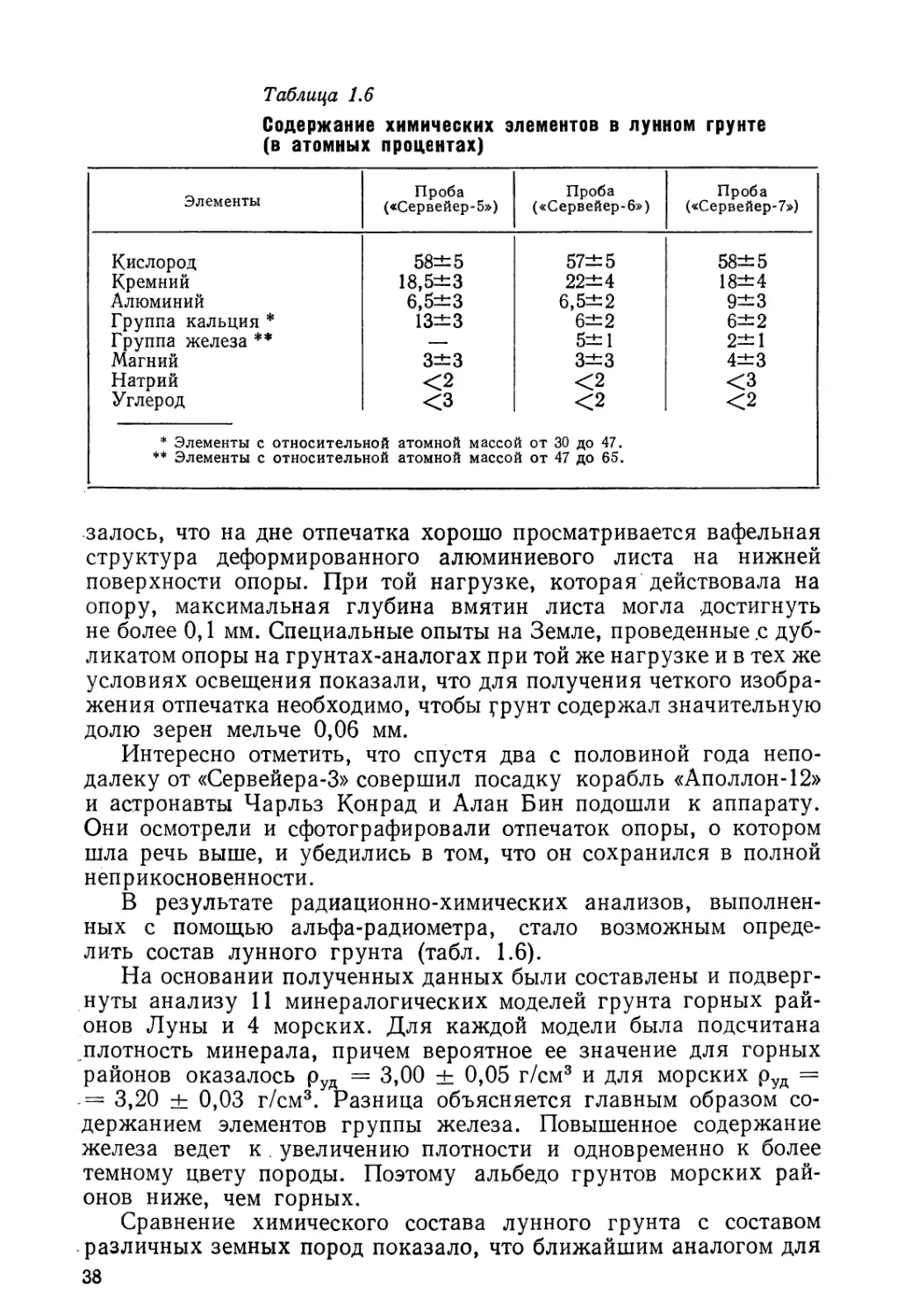
Таблица 1.6
Содержание химических элементов в лунном грунте
(в атомных процентах)
Элементы
Проба
(«Сервейер-5»)
Проба
(«Сервейер-6»)
Проба
(«Сервейер-7»)
Кислород
58=1=5
57±5
58=^5
Кремний
18,5=1=3
22±4
18±4
Алюминий
6,5=1:3
6,&±=2
9±3
Группа кальция *
13=±=3
6^2
6±2
Группа железа **
—
5±1
2±1
Магний
3±3
3±3
4±3
Натрий
<2
<2
<3
Углерод
<3
<2
<2
* Элементы с относительной атомной массой от 30 до 47.
** Элементы с относительной атомной массой от 47 до 65.
залось, что на дне отпечатка хорошо просматривается вафельная
структура деформированного алюминиевого листа на нижней
поверхности опоры. При той нагрузке, которая действовала на
опору, максимальная глубина вмятин листа могла достигнуть
не более 0,1 мм. Специальные опыты на Земле, проведенные .с дуб¬
ликатом опоры на грунтах-аналогах при той же нагрузке и в тех же
условиях освещения показали, что для получения четкого изобра¬
жения отпечатка необходимо, чтобы грунт содержал значительную
долю зерен мельче 0,06 мм.
Интересно отметить, что спустя два с половиной года непо¬
далеку от «Сервейера-3» совершил посадку корабль «Аполлон-12»
и астронавты Чарльз Конрад и Алан Бин подошли к аппарату.
Они осмотрели и сфотографировали отпечаток опоры, о котором
шла речь выше, и убедились в том, что он сохранился в полной
неприкосновенности.
В результате радиационно-химических анализов, выполнен¬
ных с помощью альфа-радиометра, стало возможным опреде¬
лить состав лунного грунта (табл. 1.6).
На основании полученных данных были составлены и подверг¬
нуты анализу 11 минералогических моделей грунта горных рай¬
онов Луны и 4 морских. Для каждой модели была подсчитана
плотность минерала, причем вероятное ее значение для горных
районов оказалось руд = 3,00 ± 0,05 г/см3 и для морских руд =
-= 3,20 ± 0,03 г/см3. Разница объясняется главным образом со¬
держанием элементов группы железа. Повышенное содержание
железа ведет к . увеличению плотности и одновременно к более
темному цвету породы. Поэтому альбедо грунтов морских рай¬
онов ниже, чем горных.
Сравнение химического состава лунного грунта с составом
- различных земных пород показало, что ближайшим аналогом для
38
грунта морских районов Луны является базальт с высоким, а для
горных с низким содержанием элементов группы железа.
Эксперименты с магнитами привели к следующим выводам:
небольшая примесь ферромагнитных материалов отмечается
в грунтах всех исследованных районов Луны. Количество магнит¬
ного материала эквивалентно содержанию менее 0,25 % чистого
железа;
налипание частиц лунного грунта на магниты зависит от их
крупности, что было подтверждено лабораторными опытами на
порошке из молотого базальта Литтл Лэйк, содержащего от 10
до 12 % по объему магнетита в виде зерен крупностью около 25 мкм;
обнаруженный на Луне магнитный материал может представ¬
лять собой либо магнетит, либо железоникелевые частицы метео¬
ритного происхождения. Последнее считается менее вероятным.
Механические свойства лунных грунтов в программе «Сер¬
вейер» оценивались по глубине следов мелких камешков, по глу¬
бине погружения в грунт головки альфа-радиометра под действием
его массы, по глубине вдавливания амортизационных блоков и
опор посадочного устройства. Кроме того производились расчеты
устойчивости откосов, образующихся в лунном грунте при воз¬
действии опор, учитывалось сопротивление эрозии, вызываемой
воздействием газовой струи реактивных двигателей, и скорость
распространения волн, возбуждаемых в грунте при посадочном
ударе аппаратов. Но все это относится к использованию косвен¬
ных данных, т. е. наблюдений и измерений, не направленных
прямо на изучение свойств грунтов. Более систематические опыты
были проведены с помощью манипуляторов, но их было мало.
«Сервейер-1» передал снимки опор и амортизационного блока,
по которым можно было определить глубину их погружения
в грунт. «Сервейер-3» совершил посадку с тремя прыжками на
площадку с наклоном 10—15°. Манипулятором были проведены
статические и динамические нагружения грунта и вырыты тран¬
шейки глубиной до 18 см (рис. 1.21). «Сервейер-5» совершил по¬
садку на крутой склон кратера (рис. 1.22). При этом его опоры про¬
пахали борозды длиной в несколько десятков сантиметров. Этот же
аппарат по команде с Земли включал на короткое время верньер¬
ные двигатели для наблюдения за эрозией поверхности. «Сер-
вейер-6» проводил аналогичные опыты на горизонтальной пло¬
щадке и затем при включении всех трех верньерных двигателей
на 25 с совершил прыжок высотой 3 м и длиной 4 м. «Сервейер-7»
сел на поверхность, усеянную камнями и обломками. С помощью
манипулятора были проведены опыты с нагружением поверхности
грунта и рытье траншей, причем была обнаружена твердая по¬
рода на глубине от 1 до 15 см. При переносе головки альфа-радио¬
метра производились наблюдения за вдавливанием ее в грунт под
действием собственного веса.
Рассмотрим прежде всего косвенные данные о несущей спо¬
собности грунта на разной глубине. Под несущей способностью
39
Рис. 1.21. Траншеи глуби¬
ной 18 см, вырытая на Луне
манипулятором «Сервейе-
ра-3»
Рис. 1.22. Схема посадки
«Сервейера-5» на крутом
склоне кратера:
1 — панель солнечной ба¬
тареи; 2 — остронаправлен¬
ная антенна; 3 — телекаме¬
ра; 4—опора № 2; 5 — амор¬
тизационный блок № 2; б —
верньерный двигатель № 2;
7 — амортизационный блок
№ 1; 8 — длина следа 81 см;
— опора № 1
9V
понимается среднее давление под подошвой тела, погруженного
в грунт той или иной силой на данную глубину.
Глубина следа мелкого камушка на рыхлой поверхности ре-,
голита, видного на одном из снимков, свидетельствует, что в этом
месте несущая способность грунта менее 1 кПа. На глубине
1—2 мм под давлением головки альфа-радиометра несущая спо¬
собность составляет около 2 кПа. По отпечаткам амортизацион-
40
ных блоков «Сервейера-5» и «Сервейера-6» несущая способность
на глубине 2 см составляет 17 кПа. На глубине около 5 см при
вдавливании опор «Сервейера-1» несущая способность оказалась
равной 54 кПа. Следовательно, в пределах верхних санти¬
метров несущая способность быстро увеличивается с глубиной.
Отпечаток, оставленный амортизационным блоком аппарата
«Сервейер-1», представляет собой цилиндрическую лунку с вер¬
тикальными стенками глубиной 2—3 см, у «Сервейра-3» — 2,5 см,
у «Сервейера-6» — 5,8 см, у «Сервейера-7» — 3 см. На дне отпе¬
чатка амортизационного блока «Сервейера-6», в центре, видна вы¬
пуклость, образованная, видимо, грунтом, сначала проникшим
внутрь блока, а затем высыпавшимся обратно.
Если допустить, что при всех посадках произошло разрушение
амортизационных блоков и максимальное давление в подошве
при максимальной глубине вдавливания было равно 280 кПа, то
по приведенным выше данным о глубине лунок можно приблизи¬
тельно подсчитать модуль общей деформации по формуле
Ео = 0,79 (1 — (xg) D-|-. (1.3)
Расчет дает следующие значения модуля:
«Сервейер-1» 1,41 МПа,
«Сервейер-3» 1,41 МПа,
«Сервейер-6» 0,61 МПа,
«Сервейер-7» 0,48 МПа,
что в среднем составляет 0,88 МПа.
Благодаря прыжкам и горизонтальным перемещениям аппара¬
тов удалось сфотографировать некоторые отпечатки их опор
(рис. 1.23), а по осциллограммам усилий в шасси определить на¬
грузки на них. По этим данным можно вычислить несущую спо¬
собность и модуль общей деформации для вдавливания опор.
Например, у «Сервейера-3» максимальная нагрузка на опору № 3
составила 2800 Н, площадь контакта с грунтом 520 см2 (D =
= 26,5 см) и глубина вдавливания 2,75 см. Соответственно несу¬
щая способность для этой глубины равна 54 кПа, а модуль
общей деформации Е0 = 0,38 МПа.
Однако в отчетах по программе «Сервейер» был принят другой
метод для вычисления несущей способности при динамическом
нагружении. Считая, что под опорой в рыхлом реголите наблю¬
дается местное уплотнение грунта от исходной плотности (р1?
г/см3) до конечной (р2, г/см3), динамическую несущую способ¬
ность (Один, Па) определяют по формуле Чандейсона:
стдин= Р2р^р i(t>2 —/ш), (1.4)
где h — глубина вдавливания, см; v — скорость удара опоры
о поверхность, см/с; а — ускорение торможения, см/с2.
41
Рис. 1.23. Отпечаток опоры «Сервейера-6» на лунном грунте и его
разрез
Так, для опоры № 2 «Сервейера-6» при третьем ударе о по¬
верхность v = 150 см/с, h = 2,5 см, а = 1875 см/с, рх =
= 1,1 г/см3, р2 = 1,7 г/см3, а = 30 кПа. Динамическая соста¬
вляющая несущей способности, по Чандейсону, адин=8,46 кПа.
Статическая составляющая несущей способности аСТаТ = сг —
— Один = 30 кПа — 8,46 кПа = 21,54 кПа.
В данном случае динамическая составляющая равна 28% об¬
щей несущей способности грунта.
Помимо этого метода обработки результатов измерений при
посадке проводилось математическое моделирование с помощью
ЭВМ. При моделировании учитывались масса аппарата, упругие
характеристики его посадочного устройства и свойства аморти¬
заторов. Механические свойства грунта учитывались в виде реак¬
тивного давления (Па) под опорой так:
0=0Стат а + т + (^_ »•) о,1, (1.5)
ГДе Остат
статическая несущая способность, кПа-10; £ — по¬
стоянная, зависящая от трения, см-1; h—глубина вдавлива-'
ния, см; v — скорость соударения опоры с грунтом, см/с; р —
плотность грунта, г/см3.
При моделировании задавались разные сочетания параметров
Остат) 5; Pi» Рз и строились кривые изменения усилий в ногах по
42
Рис. 1.24. Сравнение расчетных
усилий в амортизаторах с фактиче¬
ски измеренными при посадке «Сер-
вейера-6»:
а — нога № 1; б—нога № 2; в —
нога № 3; результа¬
ты измерений; — ре¬
зультаты расчета для поверхности,
характеризуемой сопротивлением
3,4 Н/см2
времени для заданной ве¬
личины скорости V с по¬
мощью ЭВМ. Затем эти
кривые сопоставлялись с
фактической осциллограм¬
мой и производился выбор
той комбинации парамет¬
ров, при которой достига¬
ется наилучшее совпаде¬
ние кривых.
На рис. 1.24 предста¬
влены соответствующие
кривые для трех ног аппа¬
рата «Сервейер-6». Наилуч¬
шее совпадение расчетных
и опытных данных полу¬
чилось при а = 36 кПа,
1=330 см-1, р х = 1,2 г/см3,
р2 = 1,6 г/см3. Такие же
параметры дали наилучшее совпадение для «Сервейеров-1,-3,-7».
Для «Сервейера-5» лучшие результаты получились при аСТат =
= 28 кПа и рх = 1,1 г/см3.
Поскольку на «Сервейерах» не было приборов для прямого
определения плотности грунта, данные об исходной плотности
реголита были получены этим косвенным путем.
Упругие свойства лунного грунта пытались определить по
частоте колебаний «Сервейера», которые возникали при посадке
и продолжались, постепенно затухая, некоторое время после нее.
Эти колебания регистрировались акселерометрами, установлен¬
ными на аппаратах, и были хорошо видны на полученных осцилло¬
граммах. Собственная частота колебаний аппарата, установленного
на жесткой поверхности, равна 8 ± 0,8 Гц. Фактически же на
Луне она составляла 6,3—5,5 Гц. Снижение частоты могло про¬
изойти в результате взаимодействия опор с нежестким грунтом,
который участвует в колебаниях и по которому распространяются
волны сжатия и сдвига.
Исходя из этого и задаваясь плотностью грунта и коэффициен¬
том Пуассона, можно рассчитать скорость распространения про¬
дольных и поперечных волн в грунте и вычислить модуль упру¬
гости грунта. Расчет для аппарата «Сервейер-3» показал, что при
43
1,3 1,4 1,3 1,6 1,7 1,8 С
Коэффициенте Пуассона \i0 = 0±0,5 скорость ёолн сдвйга равна
16—28 м/с, а скорость волн сжатия — 33—77 м/с. Такие малые
скорости в грунтах на Земле не наблюдаются. Даже в рыхлом
песке они на порядок выше. По-видимому, изложенный метод
пока не позволяет получить надежных данных.
Опыты, проведенные с манипулятором, позволили вычислить
значения угла внутреннего трения ср и сцепления С грунтов, ис¬
пользуя решения теории предельного равновесия и задаваясь
различными значениями плотности грунта по данным относи¬
тельно деформации поверхности рядом с вдавливаемым штампом.
Для грунта в месте посадки «Сервейера-3» проф. Р. Н. Скотт полу¬
чил данные, представленные в табл. 1.7.
Таблица 1.7
Значения ср и С при различных р
Параметры
Значения параметров при
плотности р, г/см3
1,0
1,5
2,0
Сцепление С, кПа
0,09
0,14
0,17
Угол внутреннего трения ф, •••°
42
39
37
Пористость пу %
67
50
33
«Сервейер-7» провел семь опытов со статическим нагруже¬
нием грунта закрытым ковшом манипулятора, при которых глу¬
бина погружения изменялась в пределах 0,6—2,9 см и давление
под нагружающей площадкой—в пределах 17,2—26,9 кПа. Кроме
того было произведено 13 ударов по лунной поверхности, из ко¬
торых три было сделано открытым ковшом.
«Сервейер-7» сделал 16 опытов со статическим нагружением
и два удара. Максимальная глубина вдавливания оказалась рав¬
ной 4 см. По данным проф. Р. Скотта, в месте посадки «Сервейера-7»
грунт на глубине нескольких сантиметров обладает следующими
свойствами: р = 1,5 г/см3, С = 0,35—0,72 кПа, ф =^37°—39°.
Работа манипуляторов показала, что самый^верхний^слой
толщиной в несколько миллиметров рыхлый и легко сжимаемый,
но плотность и прочность быстро^увеличиваются с глубиной уже
на первых 2—3 см, что было видно по увеличению потребления
тока двигателями манипуляторов.
На крупномасштабных снимках деформированной поверх¬
ности грунта, сделанных аппаратами «Сервейер», в нескольких
случаях в местах нагружения ковшом были обнаружены трещины,
которые позволили предположить, будто на поверхности лежит
тонкая хрупкая корочка. Однако в дальнейшем это не подтверди-
44
лось. Было установлено, что трещины распространяются в глу¬
бину и материал распадается на отдельные блоки.
Программа «Сервейер» предусматривала изучение процессов
воздействия газовой струи реактивного двигателя на лунный грунт.
В результате такого воздействия возникает эрозия поверхности,
образуются пылевые потоки, отбрасываются грунт, камни и комки
и происходит осаждение пыли на прилегающую местность и де¬
тали космических аппаратов.
Поверхность грунта разрушается газовой струей двумя пу¬
тями — вследствие отрыва и уноса частиц в горизонтальном на¬
правлении и вследствие образования взрывных кратеров. Послед¬
ние возникают после того, как в поры грунта проникает с поверх¬
ности сжатый газ, а затем производится отсечка двигателя и дав¬
ление на поверхности резко падает. Стремясь вырваться из пор,
газ устремляется вверх, увлекает за собой грунт и создает взрыв¬
ные кратеры. Оба процесса тесно связаны с газопроницаемостью
и связностью грунта.
При включении верньерных двигателей «Сервейера-6» струя
сносила с поверхности мелкие частицы грунта и камни крупностью
до 4,4 см. При отсечке двигателя под ним возник взрывной кра¬
тер глубиной 0,8—1,3 см и диаметром 20 см (рис. 1.25). Расчет
показывает, что газопроницаемость реголита примерно такая же,
как и проницаемость земной пыли, а связность колеблется от
0,07 до 1,2 кПа (по опытам с верньерными двигателями) и от 0,5
до 1,7 кПа (по опытам с двигателями управления).
Сила адгезии грунта, налипшего на фотометрическую мишень
(рис. 1.26) «Сервейера-6», оценивается 10—100 Па.
По наблюдениям за эрозией грунта и налипанием пыли был
сделан вывод, что адгезия пыли на деталях космической техники,
не будучи особенно сильной, может тем не менее осложнить реше¬
ние ряда задач, стоящих перед космонавтами. Пыль может повре¬
дить механизмы и помешать плотному соединению различных де¬
талей. Она может быть также занесена космонавтами в кабину
лунного корабля и затем загрязнять его атмосферу.
Приблизительная оценка модуля общей деформации приводит
к значениям Е0 = 400—1400 кПа.
Сравнивая между собой данные, полученные. «Луной-9», «Лу¬
ной-13» и «Сервейерами» (табл. 1.8), можно отметить, что, несмотря
на большое расстояние между районами работы автоматических
лунных станций, верхний слой лунного грунта реголита обладает
сравнительно постоянными свойствами. Везде лежит рыхлый пы¬
леватый песок с малым сцеплением и довольно высоким внутрен¬
ним трением, с малой несущей способностью и высокой сжимае¬
мостью. Колебания параметров, характеризующих перечисленные
свойства, от района к району в общем не так велики, что свиде¬
тельствует о сходном процессе формирования поверхностного слоя
под действием одинаковых факторов. На Земле такого постоян-
45
Рис. 1.25. Мозаика из отдельных снимков лунной поверхности со следами воздейст¬
вия струи верньерного двигателя «Сервейера-6»
Рис. 1.26. Налипание лунного грунта на фотометрическую мишень «Сервейера-6»
ства свойств при испытаниях грунтов в районах, удаленных друг
от друга на такие же расстояния, встретить невозможно.
Данные, полученные автоматическими лунными станциями
типа «Луна» и «Сервейер», дали возможность составить представ¬
ления о составе и свойствах верхнего слоя лунного реголита,
вполне конкретные и достаточные, чтобы спроектировать посадоч-
46
Таблица 1.8
Физические и механические свойства лунного грунта,
по данным станций «Луна-9», «Луна-13»
и «Сервейер»
Свойства грунта
«Луна-9» и
«Луна-13»
«Сервейеры»
Структура
Мелкозернистый, слабосвязный
грунт с примесью гравия и камней.
По гранулометрическому составу со¬
ответствует пылеватому песку
Плотность, г/см3
0,8—1,52
0
1
сл
о
Угол внутреннего трения ф, . . . °
32
30—40
Сцепление, кПа
0,50
0,12—0,70
Несущая способность, кПа (на глу¬
бине 3—5 см)
68
21—54
Максимальная глубина вскрытой
толщи грунта, см
4,5
17,5
ные устройства лунных пилотируемых кораблей и решить задачи,
связанные с движением по поверхности Луны людей и транспорт¬
ных средств. В результате работы автоматических лунных стан¬
ций типа «Луна» и «Сервейер» человечество получило сумму зна¬
ний о поверхностном слое лунного грунта, неизмеримо превосхо¬
дящую все, ему известное ранее. Для этого потребовалось в общей
сложности менее двух лет.
СПИСОК ЛИТЕРАТУРЫ
1.1. Исследование лунной поверхности на советских автоматических станциях
«Луна-9», «Луна-13». — В сб.: Физика Луны и планет. М., «Наука», 1972, 472 с.
Авт.: Виноградов А. П., Сурков Ю. А., Флоренский К. П., Черкасов И. И.,
Шварев В. В.
1.2. Определение плотности и механической прочности поверхностного слоя
лунного грунта в месте посадки автоматической лунной станции «Луна-13».—«Кос-
мич. исслед.», 1967, т. V, вып. 5, с. 746—757. Авт.: Черкасов И. И., Кемур-
джиан А. Л., Михайлов Л. Н., Михеев В. В., Морозов А. А., Мусатов А. А.,
Савенко И. А., Смородинов М. И., Шварев В. В.
1.3. Первые панорамы лунной поверхности. Т. 1.М., «Наука», 1966, 101 с.
1.4. Первые панорамы лунной поверхности. Т. 2. М., «Наука, 1969, 71 с.
1.5. Черкасов И. И., Шварев В. В. Начала грунтоведения Луны. М., «Наука»,
1970, 199 с.
1.6. L. D. Jaffe, Scientific results of the «Surveyor» lunar landings. Moon and
Planets. II. Amsterdam, North Holland, 321 p.
1.7. «Surveyor V» mission report. Part I. Mission description and performance.—
Cal. Inst, of Techn. JPL. NASA tech. rep. 32—1246, 1968, 113 p.
1.8. «Surveyor» project final report. Part. II. Science results. —Cal. Inst, of
Techn. JPL. NASA tech. rep. 32—1265, 1968, 403 p.
2.1. Задачи и методы внедрения
в оболочку Луны
Развитие лунных исследований невозможно без
внедрения сначала в верхние слои, а затем и в недра естественного
спутника Земли. Многообразны задачи, для решения которых тре¬
буется внедрение в оболочку Луны. Это прежде всего отбор образ¬
цов лунных пород. Последующий лабораторный анализ физи¬
ческого состояния и химического состава извлеченных и достав¬
ленных на Землю образцов горных пород имеет важное значение
для изучения происхождения и эволюции Луны. Проникновение
в Луну необходимо для изучения стратификации оболочки и опре¬
деления изменений с глубиной структурных и физических характе¬
ристик лунных пород, а также для оценки динамики тепловых по¬
токов и характера электромагнитных полей на Луне [2.2—2.4,
2.6].
Для проникновения в оболочку Луны возможно применение
различных методов: открытая разработка, горнопроходческие
работы и бурение.
Разработка лунного грунта, проводившаяся ручными геоло¬
гическими инструментами по программе «Аполлон», а также ков¬
шовыми манипуляторами по программе «Сервейер», показала, что
проникновение в грунт ручным инструментом и автоматическими
легкими ковшовыми манипуляторами на глубину свыше 15—
20 см неэффективно.
Так, например, космонавт Эдвин Олдрин из экипажа «Апол¬
лон-11» в своем отчете отметил, что даже верхний слой, казалось
бы, слабого порошкообразного лунного грунта обладал чрезвы¬
чайно сильной сопротивляемостью погружению.
Невозможным также оказалось вбить флагшток на глубину
более 15 см. В то же время лунный грунт оставался настолько рых¬
лым, что трубчатый пробоотборник не удерживался в вертикаль¬
ном положении даже после его погружения [2.24]. Все это указывает
48
на весьма своеобразное проявление свойств лунного грунта, ха¬
рактеризующих его взаимодействие с контртелами.
В 60-х годах рассматривалась возможность проникновения
в оболочку Луны с помощью взрывных или горнопроходческих
работ [2.19]. При этом отмечалась существенная особенность
использования таких методов на Луне.
При взрывных работах на Луне, вследствие вакуума наблю¬
дается совершенно особый характер распространения ударной
волны. Если на Земле практически вся энергия осколков взрыв¬
чатого вещества передается в форме ударных звуковых волн на
расстояние около 12 радиусов заряда шпура, то в лунном вакууме
скорость полета осколков, не встречающих сопротивления атмо¬
сферы, резко возрастет за пределами зоны взрыва. При отсут¬
ствии воздушных ударных волн основным энергоносителем взрыва
являются только осколки взрывчатого вещества, которые, однако,
не создают распространяющиеся волны. Таким образом механика
земного и лунного взрывов различна по своей природе.
Из-за отсутствия на Луне абсорбирующего эффекта атмосферы
ударная сила летящих частиц будет ощущаться на гораздо боль¬
шем расстоянии, чем на Земле.
Горнопроходческие работы и выемка грунта на Луне также
будут существенно отличаться от соответствующих наземных про¬
цессов/ Специфика лунного грунта, особенно его склонность
к уплотнению, по-видимому, потребует применения высоких по¬
грузочных и режущих усилий при разработке грунта даже на
небольших глубинах. Большой диапазон температур, высокий
вакуум, условия освещенности, пониженная гравитация, а также
другие лунные факторы делают неприемлемыми обычные способы
разработки грунта.
В обзоре [2.19] рассматриваются особенности перемеще¬
ния лунного грунта снарядами типа бульдозер, разработка
грунта экскаваторами, а также возможные способы размельче¬
ния и соскабливания лунного грунта с рабочих инструментов.
В результате проведенных исследований делается вывод, что
в настоящее время применение таких методов является неэффек¬
тивным из-за их большой энергоемкости, сложности и громозд¬
кости конструкции. В то же время на современном этапе изучения
Луны не требуется высокая производительность разработки грунта
которая обеспечивается применением горнопроходческих машин,
а также взрывных работ на Луне.
Осуществление бурения на Луне также связано с преодоле¬
нием многочисленных трудностей, обусловленных необычными
условиями бурения. Сложность бурения на Луне определяется
прежде всего еще недостаточной изученностью лунного грунта и
особенностями его взаимодействия при непосредственном контакте
с контртелами. Кроме того очевидны трудности, которые связаны
о выносом грунта из скважины, так как применение очистной
4 А. Л, Кемурджиан 49
жидкости или продува газом в условиях лунного вакуума чрез¬
вычайно осложнено. Необычные условия теплообмена, понижен¬
ная гравитация, жесткие требования по энергопотреблению и
ограничения по массе, в свою очередь существенно усложняют
бурение на Луне и требуют применения оборудования, во многом
отличающегося от земного. Однако на настоящем этапе освоения
Луны применение бурения имеет очевидное преимущество перед
другими методами проникновения в ее недра.
Это обусловливается прежде всего тем, что бурение позволяет
извлечь образцы породы без их нарушения, а также выполнить
проходку скважины в любой породе, которая может встретиться
на Луне, и обеспечить проведение в ней комплексных геохими¬
ческих и геофизических измерений. Кроме того в процессе буре-
ния^может быть оценена крепость пород, в которых осуществляется
проходка. Это имеет существенное значение, так как позволяет
непосредственно судить об изменении свойств грунта в месте
его залегания.
Оценке особенностей бурения на Луне, а также выбору целе¬
сообразных методов и конструкций посвящено большое число
работ. Обстоятельный обзор основных из этих работ сделан
Б. В. Захарьевым и В. Г. Кардышем [2.7]. В этом обзоре прежде
всего рассматриваются требования к оптимальным методам буре¬
ния на различную глубину (от 1,5 до 300—400 м). Подчеркивается,
что эти методы прежде всего должны быть универсальными,
т. е. должны обеспечивать бурение и отбор проб как совсем сла¬
бых неустойчивых пород, так и достаточно крепких, встреча с ко¬
торыми на Луне не исключалась.
Следующим важным требованием является обеспечение малого
энергопотребления и малых габаритов и весов бурового обору¬
дования. Кроме того должно быть возможно меньшим искажение
свойств породы при проходке скважины и отборе керна.
Поставленным условиям в наибольшей мере отвечают два ме¬
тода бурения: ударно-вращательный и вращательный.
Методы ударного бурения оказались неприемлемыми из-за
высоких весовых характеристик. Вибрационное бурение было
отвергнуто из-за опасности действия вибрационных нагрузок на
несущие конструкции, а также на космонавтов при ручном исполь¬
зовании бура.
Многие современные методы бурения — химические, терми¬
ческие, жароструйные, электродуговые и абразивные — были
отвергнуты из-за высокого энергопотребления, а также из-за
искажения свойств пробуриваемых пород.
Некоторые авторы считали, что весьма эффективным будет
применение на Луне лазерного бура, однако для использования
лазерного бурения необходимо создать сложное технологическое
и энергетическое оборудование, и в настоящее время разработка
лунного лазерного бурения представляется преждевременной.
В обзоре отмечается, что ударно-вращательное бурение имеет пре¬
50
имущество перед вращательным. Это обусловливается тем, что
при проходке крепких пород вращательным бурением необхо¬
димы высокие осевые усилия на буровой инструмент. Кроме того
неизбежно применение алмазных коронок, что ставит жесткие тре¬
бования по очистке забоя от шлака и по охлаждению породо¬
разрушающего наконечника. Все это ведет к усложнению и повы¬
шению массы бурового оборудования.
Преимущества ударно-вращательного бурения состоят прежде
всего в том, что оно может эффективно использоваться как для
бурения весьма твердых, так и слабых пород. Кроме того ударно¬
вращательное бурение осуществляется с использованием твердо¬
сплавного породоразрушающего инструмента, что не ставит
жестких требований к их охлаждению. Сочетание вращения и
ударных нагрузок увеличивает ресурс полезной работы коронки,
а также уменьшает вероятность подклинки керна при колонко¬
вом бурении. В результате повышается скорость бурения.
2.2. Назначение и устройство станций
„Луна-16“ и „Луна-20“
«Луна-16» и «Луна-20» были созданы для того,
чтобы отобрать пробы лунных грунтов в морском и материковом
районах Луны и доставить их для детальных исследований на
Землю, [2.14 и 2.15]. Одновременно с разработкой этих станций
был создан комплекс приемной лаборатории АН СССР, в которую
должен был поступать лунный грунт, и построен ряд лаборатор¬
ных приборов, допускавших проведение исследования грунта в ва¬
кууме и различной атмосфере 12.1, 2.18 и 2.23].
«Луна-16» совершила посадку 20 сентября 1970 г. в районе
Моря Изобилия, в равнинном, типично морском районе; «Луна-20»
—21 февраля 1972 г. в районе кратера Аполлоний-С в матери¬
ковой области Луны.
Обе станции имели одинаковое устройство (рис. 2.1). На поверх¬
ность Луны опустилась посадочная ступень с четырьмя опорами для
мягкой посадки на грунт. На ней были закреплены буровое устрой¬
ство для отбора образца грунта и ракета «Луна—Земля» с возвра¬
щаемым аппаратом для доставки контейнера с отобранными образ¬
цами на Землю. Масса станции при посадке на Луну 1880 кг.
Следует отметить исключительно продуманный подход разра¬
ботчиков этих станций к выбору основных конструктивных реше¬
ний. Им удалось унифицировать ракетные блоки, многие бортовые
системы и носитель, которые использовались без принципиальных
переделок при создании станций «Луна-16», «Луна-17», «Луна-19»,
«Луна-20» и «Луна-21».
Посадочная ступень представляет собой самостоятельный ра¬
кетный блок многоцелевого назначения, имеющий жидкостный ра¬
кетный двигатель, систему блоков с компонентами топлива, при¬
борные отсеки и амортизированные опоры для посадки на поверх-
4* 51
Рис. 2.1. Автоматическая станция «Луна-16» («Луна-20»):
I — посадочная ступень; II — ракета «Луна—Земля»; 1 — приборный отсек посадочной
ступени; 2 — управляющее сопло; 3 — топливный бак ракеты; 4 — приборный отсек
ракеты; 5 — антенна; 6 — возвращаемый аппарат; 7 — буровой станок; 8 — штанга грун¬
тозаборного устройства; 9 — телефотометр; 10 — топливный бак; 11 — двигатель поса¬
дочной ступени; 12 — двигатель ракеты «Луна—Земля»
ность Луны. На посадочной ступени установлены также антенны
бортового радиокомплекса.
Двигательная установка посадочной ступени имеет основной
двигатель с регулируемой тягой для осуществления торможения,
а также два самостоятельных двигателя малой тяги, работающие
на завершающем участке посадки. Основной двигатель посадоч¬
ной ступени имеет возможность многократного запуска.
В приборных отсеках посадочной ступени расположены: счетно¬
решающие и гироскопические приборы системы управления и ста¬
билизации; электронные приборы системы ориентации; радиопере¬
датчики и приемники бортового радиоизмерительного комплекса,
работающие в нескольких диапазонах радиоволн; программно¬
временное устройство, автоматически управляющее работой всех
систем и агрегатов; химические аккумуляторные батареи и преоб-
52
разоЁателй тока; элементы системы терморегулирования; авто¬
номные радиосредства измерения высоты, горизонтальной и вер¬
тикальной составляющих скорости при посадке на поверхность
Луны; телефотометры для передачи служебной информации о райо¬
не бурения; научные приборы, определяющие температурные и
радиационные условия как на участке перелета, так и на поверх¬
ности Луны.
При подъеме с Луны посадочная ступень служила стартовым
устройством для ракеты «Луна—Земля».
Вне приборных отсеков на внешних поверхностях посадочного
устройства установлены реактивные микродвигатели систем ориен¬
тации и стабилизации, баллоны с запасом рабочего тела для них,
оптические датчики системы ориентации.
В верхней части посадочной ступени установлена космическая
ракета «Луна—Земля» (рис. 2.2), представляющая собой самостоя¬
тельный ракетный блок с жидкостным реактивным двигателем,
системой сферических баков с компонентами топлива.
На центральном баке укреплен цилиндрический приборный
отсек, внутри которого установлены электронные, счетно-решаю¬
щие и гироскопические приборы системы управления ракетой;
передающие, приемные, дешифрирующие и программно-времен¬
ные приборы бортового радиокомплекса ракеты, химические
аккумуляторные батареи и преобразователи тока; электрические
приборы бортовой автоматики.
На внешней поверхности приборного отсека ракеты установ¬
лены четыре штыревые приемо-передающие антенны бортового ра¬
диокомплекса.
В верхней части приборного отсека с помощью металлических
стяжных лент прикреплен возвращаемый аппарат сферической
формы. Ленты, закрепляющие возвращаемый аппарат, соединены
специальным пиротехническим замком, который открывается по
радиокоманде из Центра управления полетом при подходе ракеты
к Земле.
Возвращаемый аппарат представляет собой металлический шар,
на внешней поверхности которого нанесено специальное теплоза¬
щитное покрытие, предохраняющее аппарат и установленное
внутри него оборудование от воздействия высоких температур
при входе в атмосферу Земли.
Внутренний объем возвращаемого аппарата разделен на три
изолированных отсека. В одном из них, наибольшем по объему,
расположены: радиопеленгационные передатчики, обеспечиваю¬
щие возможность обнаружения возвращаемого аппарата при спус¬
ке на парашюте и на Земле; химические аккумуляторные батареи;
элементы автоматики и бортовое программное устройство, управ¬
ляющие вводом в действие парашютной системы.
Во втором отсеке расположены в сложенном виде парашют,
четыре упругие антенны пеленгационных передатчиков, два на¬
полненных газом эластичных баллона, обеспечивающих необхо-
53
Рис. 2.2. Космическая ракета «Луна —Земля» с возвращаемым аппаратом
54
I а) ![:
Рис. 2.3. Схема грунтозаборного устройства
(а) и грунтового отсека возвращаемого аппа¬
рата (б):
I — возвращаемый аппарат; 2 — буровой ста¬
нок; 3 — исходное положение выносной пово¬
ротной штанги; 4 — демпфер штанги; 5 —
электромеханический привод поворота штанги в вертикальной плоскости; 6 — рабочее
положение штанги; 7 — привод сканирования штанги по азимуту; 8 — контейнер для
бурового снаряда с грунтом; 9 — буровой снаряд с грунтом; 10 — крышка контейнера;
II — фиксирующие пружины
<0
димое положение возвращаемого аппарата на поверхности Земли
после посадки.
Третьим отсеком является цилиндрический контейнер для
образцов грунта, взятого с поверхности Луны. Контейнер имеет
с одной стороны приемное отверстие, герметически закрываемое
специальной крышкой после помещения в него лунной породы.
На посадочной ступени установлено также автоматическое
грунтозаборное устройство [2.17].
Грунтозаборное устройство (рис. 2.3, а) состоит из выносной
поворотной штанги 3 с закрепленным на конце буровым станком
колонкового бурения 2 с отделяемым буровым снарядом 9. Штанга
позволяет опустить буровой станок в рабочее положение 6 не¬
посредственно на поверхность Луны для взятия пробы грунта.
Она же обеспечивает подъем бурового станка в положение, необ¬
ходимое для помещения отделяемого бурового снаряда с пробой
грунта в возвращаемый на Землю аппарат 1 ракеты «Луна-Земля».
Поворот штанги в вертикальной плоскости осуществляется
электромеханическим приводом штанги 5, ось вращения выход¬
ного вала которого совпадает с осью поворота штанги по углу места.
На выходном валу этого привода имеется рычаг, соединенный со
штангой пружинным демпфером 4, обеспечивающим плавное на¬
гружение электродвигателя привода,
55
При вертикальном положении штанги привод сканирования
по азимуту 7 производит разворот штанги вокруг вертикальной
оси на 180°, ориентируя рабочую часть бурового станка в сто¬
рону возвращаемого аппарата (для уборки отделяемого бурового
снаряда с пробой грунта в герметизируемый контейнер) или в про¬
тивоположную сторону (для взятия пробы грунта).
При горизонтальном или наклонном положении штанги при¬
вод сканирования по азимуту обеспечивает выбор места для взя¬
тия пробы грунта в пределах дуги, определяемой длиной штанги
и конструкцией автоматической станции. Для станций «Луна-16»
и «Луна-20» этот разворот мог осуществляться на 120°.
После окончания отбора пробы штанга поднимается в верти¬
кальное положение, разворачивается на 180° вокруг своей оси
и подводит буровой станок к возвращаемому аппарату (см.
рис. 2.3, б). Затем буровой снаряд с грунтом 9 выдвигается,
помещается внутрь контейнера 8 возвращаемого аппарата, отде¬
ляется от бурового станка и фиксируется пружинами контей¬
нера 11. После окончания этой операции приемное отверстие в кон¬
тейнере возвращаемого аппарата закрывается крышкой гермети¬
зации 10.
Все операции разворота штанги производятся в соответствии
с программой по радиокомандам с Земли. Включение электроме¬
ханических приводов в заданных положениях штанги осуществля¬
лось кулачковым устройством и микровыключателями, размещен¬
ными внутри приводов штанги.
Отключение электродвигателя привода, осуществляющего вра¬
щение штанги по углу места при упоре бурового станка в грунт
производится по достижении определенной силы прижатия буро¬
вого станка к грунту.
Пружинный демпфер компенсирует перемещение бурового
станка при деформации грунта в процессе бурения, обеспечивая
при этом усилие прижатия бурового станка к грунту в расчетных
пределах. В то же время схема отключения привода, осуществляю¬
щего вращение штанги по углу места, гарантирует прижатие бу¬
рового станка к грунту при различных расстояниях от оси враще¬
ния штанги до поверхности Луны. Положение оси вращения
штанги относительно поверхности Луны зависит от рельефа места
посадки, плотности грунта и величины обжатия посадочных амор¬
тизаторов. В состав грунтозаборного устройства входит буровой
станок ударно-вращательного типа.
2.3. Буровое оборудование станций
„Луна-16“ и „Луна-20'4*
На основании теоретических исследований, стен¬
довых испытаний и соответствующей конструкторской прора¬
* Описание бурового оборудования составлено В» В, Акслером и Б. В. За¬
харьевым.
56
ботки был спроектирован и изготовлен буровой станок ударно¬
вращательного действия со следующими техническими дан¬
ными:
Глубина бурения 380 мм
Диаметр бурения 26 мм
Число оборотов вращателя 508 об/мин
Скорость подачи бурового снаряда ... 56 мм/мин
Ход подачи (вращателя) 400 мм
Усилие подачи 80—120 Н
Число ударов ударного механизма . . . 1524 удар/мин
Длина бурового снаряда 417 мм
Номинальная мощность электродвигателей 140 Вт
Габаритные размеры 690—290 мм
Масса 13,6 кг
Буровой станок состоит (рис. 2.4) из корпуса 1 и основания,
на котором смонтированы электродвигатели, вращатель 2 с буро¬
вым снарядом 3, электроаппаратура и телеметрические датчики.
Корпус служит для размещения и крепления основания станка
со всеми смонтированными на нем узлами и механизмами и для
их герметизации. Корпус выполнен в виде стальной трубы, к тор¬
цам которой приварены точеные фланцы для установки и крепле¬
ния нижней и верхней крышек, герметичность посадки которых
обеспечивается резиновыми кольцами. К наружной поверхности
корпуса приварены две скобы, с помощью которых станок соеди¬
няется с основным объектом. На наружную поверхность корпуса
выведен герметичный электроразъем для соединения бурового
станка с блоком управления объекта. !
Основание станка состоит из верхнего и нижнего фланцев,
соединенных между собой стойками, которые одновременно слу¬
жат и направляющими для подвижного вращателя. На верхнем
фланце основания установлены электродвигатели и микровыклю¬
чатели исходного и конечного положения вращателя, а на ниж¬
нем фланце—микровыключатели датчика сигнализации сброса
нижней крышки корпуса станка и микровыключатели рабочего
хода вращателя.
Привод бурового станка, состоящий из двух электродвигателей,
служит для передачи крутящего момента на вращатель через
систему зубчатых колес и ходовой трехгранный винт с нарезан¬
ной резьбой, обеспечивающей поступательное движение враща¬
теля.
Вращатель служит для:
закрепления на его шпинделе бурового снаряда;
передачи крутящего момента и осевого давления на буровой
снаряд и подачи его на забой скважины.
В корпусе вращателя размещено устройство, состоящее из
Двух полумуфт и пружины для регулирования осевого давления
на буровой снаряд.
57
Рис. 2.4. Общий вид бурового станка:
1 — корпус бурового станка; 2 — вращатель; 3 — буро¬
вой снаряд
Ударный механизм пружинного типа
с кулачковым взводом, обеспечивающий
в процессе бурения нагрузку на буровой
снаряд, расположен в отдельном корпусе,
который крепится к нижней части кор¬
пуса вращателя.
Микровыключатели исходного и конеч¬
ного ^положения вращателя служат для
автоматического отключения электродви¬
гателей бурового станка при переводе вра¬
щателя в соответствующие положения.
Микровыключатели смонтированы на стой¬
ке и закреплены на нижнем и верхнем
фланцах основания.
Буровой снаряд колонкового типа слу¬
жит для отбора проб слабосвязного или
монолитного грунта и представляет собой
цилиндрическую трубу, на наружной по¬
верхности которой нанесена винтовая нарезка (шнек). Нижний
конец бурового снаряда армирован пятью резцами твердого
сплава.
Имеется специальное приспособление для удержания сыпу¬
чего грунта, выполненное в виде ворсового клапана, и цанговое
кольцо для срыва и удержания монолитного керна (породы).
Крепление бурового снаряда к шпинделю вращателя произво¬
дится пружинно-шариковым замком, который автоматически рас¬
крывается после укладки бурового снаряда в ампулу спускаемого
аппарата.
Для контроля за работой бурового устройства в состав буро¬
вого станка включены следующие телеметрические датчики:
датчик сигнализации сброса нижней крышки;
датчик величины проходки;
датчики температуры на корпусах бурового станка и его элек¬
тродвигателя;
датчики крутящего момента и величины токов электродвига¬
телей.
В транспортном положении все узлы и механизмы бурового
станка, находящиеся внутри его корпуса, герметично закрыты
верхней и нижней крышками. Последняя соединена с корпусом
станка тремя пироболтами.
Порядок работы бурового станка следующий.
После посадки АЛС на поверхность планеты с Земли подается
команда на отделение нижней крышки, после чего буровой станок
устанавливается на грунт.
58
По радиокоманде включаются двигатели установки, и враща¬
тель, находящийся до этого в крайнем верхнем положении, вместе
с буровым снарядом начинает движение вниз. Одновременно с на¬
чалом движения вращателя включается ударный механизм.
По достижении нижним концом бурового снаряда поверхности
грунта начинается процесс бурения скважины, по окончании кото¬
рого двигатели бурового станка автоматически отключаются;
после этого подается команда на включение электродвигателей
на обратное вращение и происходит процесс извлечения бурового
снаряда из скважины. В это время (при обратном ходе) ударный
механизм не работает во избежание высыпания отобранного
образца грунта из бурового снаряда^.После извлечения бурового
снаряда из скважины двигатели станка автоматически отклю¬
чаются. При этом вращатель занимает верхнее положение в кор¬
пусе станка, а грунтозаборное устройство с буровым станком
устанавливается в исходное положение; подается радиокоманда
на повторное включение электродвигателей, и вращатель станка
вместе с буровым снарядом начинает движение по направлению
к ампуле спускаемого аппарата. При этом ударный механизм не
работает.
По окончании закладки бурового снаряда в спускаемый аппа¬
рат происходит автоматическое отсоединение снаряда с грунтом
от шпинделя вращателя.
На этом все операции по бурению скважины заканчиваются.
Целесообразность применения метода бурения была устано¬
влена в результате рассмотрения различных вариантов разра¬
ботки и отбора грунта. Было установлено, что только бурение
указанным методом может обеспечить надежность внедрения и
отбора грунта, свойства которого были неизвестны и могли ме¬
няться в очень широких пределах по имевшимся представлениям:
от весьма слабого рыхлого грунта (в самом верхнем слое) до чрез¬
вычайно крепких твердых (в подстилающем слое) горных пород,
залегающих на глубине.
Некоторым недостатком отбора проб грунта бурением явля¬
ется опасность нарушения структуры отбираемых образцов, но
какого-либо другого достаточно надежного и простого способа
автоматического отбора пробы грунта, не нарушающего его струк¬
туры, найдено не было. Существенным было также то обстоятель¬
ство, что параметры, характеризующие кинетику работы бура
при проходке скважины, позволили ориентировочно судить о меха¬
нических свойствах пробуриваемых пород.
Следует отметить, что оценка свойств грунта по их сопроти¬
вляемости бурению в отдельных случаях находит применение
в земных условиях и иногда может заменить другие виды механи¬
ческих испытаний. Так, характеристики кинетики бурения исполь¬
зовались для оценки зависимости прочности пород от глубины
их залегания, для оценки их неоднородности. Н. Я- Денисов
установил наличие тесной корреляционной связи плотности и
Б9
Рис. 2.5. Наземные испыта¬
ния бурового станка
прочности горных по¬
род со скоростью бу¬
рения [2.5]. Тем бо¬
лее было полезно вос¬
пользоваться воз¬
можностью оценить
свойства грунта при
бурении на Луне.
Учитывая вышеизложенное в конструкции бурового станка
предусматривалась возможность измерения в процессе бурения
ряда параметров, характеризующих взаимодействие бурового
снаряда с грунтом: токов, потребляемых электродвигателями;
момента сопротивления бурению; глубины бурения.
При разработке бурового станка были проведены тщательная
его наземная тарировка и испытания на грунтах-аналогах
(рис. 2.5), в число которых были включены рыхлые грунты и твер¬
дые горные породы [2.17].
В качестве рыхлого грунта-аналога было рекомендовано ис¬
пользовать аглопоритовую дресву, свойства которой в наиболь¬
шей мере приближались к свойствам лунного грунта, установ¬
ленным в результате эксперимента, выполненного на станции
«Луна-13».
Кроме рыхлого аналога, были рекомендованы для испытаний
бурового станка твердые горные породы, которые, по имевшимся
представлениям, могли залегать на лунной поверхности. Краткие
характеристики грунтов-аналогов, приведены в табл. 2.1.
Наземные испытания на грунтах-аналогах были выполнены
в три этапа.
На первом этапе бурение осуществлялось в обычных атмосфер¬
ных условиях при нормальной температуре. Испытания первого
этапа позволили отработать элементы конструкции бурового меха¬
низма и добиться надежного отбора проб как сыпучих грунтов,
находящихся в слабосвязанном состоянии, так и горных пород
с временным сопротивлением сжатию до 70 МПа.
На втором этапе испытаний проводилось бурение при атмос¬
ферном давлении, но при различных температурах (—50° и
+ 100°-4- +150° С), что моделировало уже не только грунтовые
условия бурения на Луне, но и в какой-то мере тепловые.
На третьем этапе испытаний в число моделируемых условий
включался высокий вакуум. Бурение проводилось в вакуумной
60
Таблица 2.1
Грунты-аналоги, применявшиеся при испытании
и тарировке грунтозаборного устройства
Наименование породы
Удельная
плотность,
г/см3
Средняя
объемная
плотность,
г/см3
Временное
сопротивле¬
ние сжатию,
10 МПа
Контактная
прочность,
10 МПа
Лава андезито-базаль-
товая плотная
2,85
2,6
11,60
2,1
Лава андезито-базаль-
товая пористая
2,85
2,15
7,0
0,5
Туф вулканический
высокой прочности
2,69
1,55
3,5
0,25
Туф вулканический
малой прочности
2,67
1,10
0,8
0,12
Дресва аглопорито-
вая в воздушно-сухом и
увлажненном состоя¬
ниях
1,6
0,98
камере, позволяющей получить давление порядка 1,0 мПа при
поддержании температуры на корпусе бурового механизма в пре¬
делах от —50° до +150° С.
В процессе испытаний измерялись глубина бурения, напряже¬
ние и токи двигателей механизма, время бурения и взятия пробы,
а также время обратного хода. Была установлена зависимость глу¬
бины проходки от времени бурения для различных грунтов и гор¬
ных пород.
На рис. 2.6, а, б и б представлены графики зависимости глу¬
бины бурения Н от времени t для аглопоритовой дресвы (в сухом
и увлажненном состояниях), туфа вулканического малой прочности
и пористой андезито-базальтовой лавы, построенные по данным,
полученным во время эксперимента второго этапа.
Приведенные графики показывают, что температура окружаю¬
щей среды, а следовательно, и температура самого бурового станка,
оказывает некоторое влияние на скорость бурения различных
пород. Однако степень этого влияния в значительной мере зависит
от физико-механических характеристик буримой породы. Так,
при бурении андезито-базальтовой лавы наибольшая скорость
проходки, определяемая крутизной кривой, имеет место при тем¬
пературе окружающей среды (и на корпусе станка соответственно)
■—50° С. С повышением температуры скорость бурения падает.
В то же время при бурении слабого туфа и аглопоритовой дресвы
скорость бурения практически не менялась с изменением темпе¬
ратуры, приближалась к максимальному значению скорости по¬
дачи станка. При этом следует отметить интересное явление, на-
61
t,MUH
6 8 JO
2 4-
t,MUH
8 10 12
t,muH
4 6 8 10 12 14 16 18 20 22 24 26 28 30 32
HjMM
Рис. 2.6. Зависи¬
мость глубины бу¬
рения от времени:
а — для аглопо-
ритовой дресвы;
кривая 1 — грунт
в увлажненном со¬
стоянии при + 20°С;
кривая 2 — грунт
при +150° С; кри¬
вая 3 — грунт в
воздушно-сухом
состоянии при
+ 20° С;
б — для вулкани¬
ческого туфа ма¬
лой прочности:
кривая 1 — грунт
п ри —50° С; кри¬
вая 2— при
+ 20° С; кривая
3 — при +150° С;
в — для андезито¬
базальтовой лавы:
кривая / — грунт
при —50° С; кри¬
вая 2 — при
+ 20° С; кривая
3—при -J-I500 С; г—
для вулканиче¬
ского туфа малой
прочности (в ва¬
кууме). Крести¬
ками показаны
данные натурного
бурения в лунных
грунтах
г)
62
блюдавшееся в ряде случаев при бурении по влажной аглопори-
товой дресве. Проходка на полную глубину снаряда при темпе¬
ратуре +20° С была произведена за 1 мин 12 с, т. е. со скоростью,
значительно превышающей максимальную скорость подачи станка.
Такое увеличение скорости бурения может быть объяснено только
возникновением эффекта самозавинчивания бура в породу. Так
как при бурении других пород, а также аглопоритовой дресвы
в воздушно-сухом состоянии аналогичного явления не наблю¬
дается, можно предположить, что эффект самозавинчивания бура
появляется только в очень слабых, но связных породах.
При бурении аглопоритовой дресвы в воздушно-сухом состоя¬
нии наблюдалось явление резкого увеличения сопротивления из¬
влечению бурового снаряда из скважин, приводящее к срабаты¬
ванию токозащиты. Очевидно, это происходит при осыпании сте¬
нок скважины и заштыбовке шнека бурового снаряда при его обрат¬
ном вращении. Извлечение бурового снаряда при бурении увлаж¬
ненной аглопоритовой дресвы происходит нормально.
В целом испытания показали, что при применении соответ¬
ствующих конструкционных материалов можно обеспечить отбор
пробы и работоспособность бурового станка в диапазоне темпе¬
ратур от —50° до +150° С.
Последний этап испытаний грунтозаборного устройства прово¬
дился в вакуумной камере при давлении порядка 1 мПа и темпе¬
ратуре на корпусе станка —50°; +20°; +150° С. Здесь следует
отметить, что при первых же попытках бурения рыхлого грунта
в вакууме буровой снаряд заклинило. Пришлось предусмотреть
применение специальных вакуумоустойчивых смазок, которые
обеспечивали нормальный процесс бурения в грунте. Однако
сопротивление бурению в вакууме было выше, чем сопротивление
бурению, которое наблюдалось на предыдущих этапах. Таким
образом, моделирование вакуумных условий даже при обеспече¬
нии небольшой глубины вакуума —1 мПа по сравнению с лунным
позволило выявить некоторые особенности взаимодействия буро¬
вого снаряда с грунтом, обусловленные адгезией. Следует отметить
также, что выделение газов в процессе бурения существенно сни¬
жало вакуум.
На рис. 2.6, г приведена зависимость глубины бурения от
времени для вулканического туфа малой прочности в вакуум-
камере при давлении 1 мПа и температуре +20° С.
2.4. Отбор и доставка на Землю
образцов лунного грунта станциями
„Луна-16“ и „Луна-20“
Первый эксперимент по автоматическому отбору
проб лунного грунта был выполнен с помощью автоматической
станции «Луна-16» [2.14, 2.17].
63
Автоматическая станция «Луна-16» стартовала 12 сентября
1970 г. Выведение на орбиту искусственного спутника Земли
было осуществлено с помощью более мощной ракеты-носителя по
сравнению с ракетой-носителем, обеспечивающей запуск автома¬
тических станций «Луна-9» и «Луна-13».
Параметры промежуточной околоземной орбиты, с которой
стартовала к Луне станция «Луна-16», по данным обработки траек-
торных измерений, составили: максимальная высота над поверх¬
ностью Земли — 212,2 км; наклонение к плоскости экватора —
51° 36'.
По сигналу бортового программно-временного устройства
через 70 мин после старта был включен двигатель последней сту¬
пени ракеты-носителя, который сообщил станции дополнитель¬
ную скорость, в результате чего станция вышла на траекторию
полета к Луне.
На пути к Луне была проведена одна из двух запланированных
коррекций траектории движения станции для обеспечения точ¬
ного ее выхода в расчетный район окололунного пространства.
Исходные данные для проведения коррекции траекторий — вели¬
чина и направление корректирующего импульса, а также время
включения двигателя — были рассчитаны в координационно-вы¬
числительном центре по результатам обработки траекторных
измерений. Эти данные в виде специальных кодограмм были пере¬
даны на борт станции в очередном сеансе связи и «заложены»
в блок памяти программно-временного устройства.
При достижении станцией заданного района окололунного
пространства была произведена подготовка и осуществлено вто¬
рое включение двигателя посадочной ступени с целью уменьшения
скорости подлета к Луне и перевода станции на орбиту спутника
Луны.
17 сентября в 2 часа 38 минут станция «Луна-16» перешла
на селеноцентрическую круговую орбиту с удалением от лунной
поверхности на 110 км.
В дальнейшем была успешно решена сложная задача форми¬
рования предпосадочной орбиты с небольшим удалением от по¬
верхности Луны. Такая орбита была необходима для создания
оптимальных условий работы автономных систем управления на
участках спуска и посадки станции на поверхности Луны.
С этой целью в течение трех суток пребывания станции на селе¬
ноцентрической орбите было проведено два маневра. С помощью
первого форма орбиты была изменена и стала эллиптической
с высотой в периселении 15 км и высотой, в апоселении 110 км.
В результате второго маневра была несколько повернута плоскость
орбиты в пространстве до нужного положения, высота в апоселе¬
нии при этом составила 106 км.
20 сентября в 6 часов 06 минут был начат один из наиболее
ответственных этапов полета станции — подготовка к осуще¬
ствлению мягкой посадки на лунную поверхность.
64
После ряда операций по ориентации станции и программных
разворотов в 8 часов 12 минут был включен двигатель посадоч¬
ной ступени, в результате чего скорость станции уменьшилась
до значения, обеспечивающего переход в режим снижения.
При достижении заданных значений высоты и вертикальной
скорости спуска, которые непрерывно измерялись бортовым допле-
ровским измерителем скорости и высотомером, был еще раз вклю¬
чен двигатель посадочной ступени. Скорость станции снизилась
на высоте 20 м примерно до 2,5 м/с. На этой высоте над лунной
поверхностью был выключен основной двигатель станции и вклю¬
чены два двигателя малой тяги, обеспечившие мягкую посадку
на поверхность Луны. Эти два двигателя были выключены в непо¬
средственной близости от поверхности Луны по команде от гамма-
высотомера.
Мягкая посадка станции была осуществлена в 8 часов 18
минут 20 сентября 1970 г. в районе Моря Изобилия в точке с коор¬
динатами 0° 41' южной широты и 56° 18' восточной долготы. При
этом фактическое отклонение от центра выбранной площадки
было незначительным.
После посадки на поверхность Луны по команде с Земли был
включен бортовой радиокомплекс. Анализ полученной информа¬
ции показал нормальное состояние как станции в целом, так и
отдельных ее систем. Определено было также и положение стан¬
ции на лунной поверхности.
Затем на борт станции была передана команда на ввод в дей¬
ствие грунтозаборного устройства. Открылся замок, удерживаю¬
щий грунтозаборное устройство во время полета станции, и штанга
с буровым станком под воздействием одного из приводов заняла
вертикальное положение. По команде с Земли были включены
камеры телефотометров, обеспечивающие передачу на Землю
информации о месте бурения. Далее штанга под воздействием вто¬
рого привода повернулась вокруг вертикальной оси на 180°
с тем, чтобы при последующем отводе штанги в горизонтальное
положение корпус бурового станка оказался обращенным рабочей
частью к лунной поверхности. В это же время также по команде
с Земли сработало устройство, открывшее крышку бурового станка.
Штанга была опущена до соприкосновения бурового станка с по¬
верхностью Луны. По сигналу оператора были включены приводы
бурового механизма.
Бурение производилось при угле места штанги 35° к горизонту.
Ось бурового станка была отклонена от вертикали на 13°. Буровой
станок был включен для бурения при температуре на корпусе
станка +26° С и температуре на корпусе электродвигателя
+26° С.
Бурение (прямой ход) продолжалось 6 минут 14 секунд и было
произведено на полную величину рабочего хода бурового сна¬
ряда — 350 мм. В конце рабочего хода электродвигатели бурового
станка были автоматически отключены микровыключателями,
5 А. Л. Кемурджиан 65
расположенными внутри бурового станка. Во время прямого хода
токи, потребляемые электродвигателями, были постоянными.
Момент бурения во время прямого хода тоже почти не изменялся
и находился в пределах 20—30 Н-см.
Результаты работы грунтозаборного устройства станции
«Луна-16» свидетельствуют об отсутствии каких-либо существен¬
ных изменений токов в цепи приводных двигателей и в скорости
бурения на протяжении всего цикла работы. Это позволяет пред¬
положить достаточную однородность свойства грунта в месте по¬
садки станции.
После окончания бурения бур с лунной породой был введен
в корпус бурового станка. Вновь был включен привод штанги
грунтозаборного устройства. Штанга была поднята в вертикаль¬
ное положение и повернута на 180° вокруг своей оси. Бур был
подведен к приемному отверстию герметического контейнера
возвращаемого аппарата. Очередная команда с Земли переместила
бур с лунной породой внутрь контейнера, затем бур был отделен
от буровой установки. После этого приемное отверстие в контей¬
нере возвращаемого аппарата было автоматически герметично
закрыто.
Кроме решения основной задачи — взятия лунного грунта —
производились также измерения температуры элементов кон¬
струкции станции и уровня радиации на лунной поверхности,
результаты которых передавались на Землю.
Дальнейший этап работ предусматривал подготовку к старту
и старт ракеты «Луна-Земля». При этом на борту ракеты в запо¬
минающее устройство ее системы управления было «заложено»
необходимое значение той скорости, которую ракета должна
была приобрести при взлете с Луны.
Старт ракеты «Луна—Земля» был произведен по команде
с Земли в 10 часов 43 минуты 21 сентября 1970 г.
После старта до достижении необходимой скорости', равной
2708 м/с, был выключен двигатель, и ракета с возвращаемым ап¬
паратом устремилась к Земле. Полет ее проходил по баллистиче¬
ской траектории. Коррекция траектории возвращения не пре¬
дусматривалась. При движении ракеты к Земле Центр дальней
космической связи регулярно проводил траекторные измерения,
по результатам которых уточнялся район приземления возвращае¬
мого аппарата на территории Казахстана.
При подлете 24 сентября в 4 часа 50 минут по команде с Земли
возвращаемый аппарат был отделен от приборного отсека косми¬
ческой ракеты, а в 8 часов 10 минут он вошел в плотные слои
атмосферы Земли.
Скорость входа аппарата несколько превышала 11 км/с. Аппа¬
рат развернулся лобовой частью против встречного потока воз¬
духа. Демпфирующее устройство надежно удерживало аппарат
в этом положении и тем самым обеспечило наиболее выгодный
режим торможения возвращаемого аппарата в атмосфере. Макси-
66
Рис. 2.7. Возвращаемый аппарат с образцами лунного грунта на Земле
мальные перегрузки, действовавшие на возвращаемый аппарат
при аэродинамическом торможении, достигали 350 единиц. Тем¬
пература пограничного слоя при этом превышала 10 000° С. Тор¬
мозной парашют раскрылся при скорости снижения 300 м/с на
высоте 14,5 км. Далее по сигналу барометрического датчика на
высоте около 11 км произошло отделение тормозного парашюта
и открылся основной парашют. Одновременно с этим включились
пеленгационные радиопередатчики.
В 8 часов 14 минут самолетами и вертолетами поискового ком¬
плекса, которые сосредоточились в расчетном районе приземле¬
ния возвращаемого аппарата, были приняты радиосигналы,
а затем спуск на парашюте визуально наблюдался с вертолета,
который сопровождал его до посадки на Землю. В 8 часов 26 минут
возвращаемый аппарат совершил посадку на Землю в 80 киломе¬
трах юго-восточнее города Джезказган.
Предварительный осмотр показал, что аппарат успешно вы¬
держал условия полета (рис. 2.7). Возвращаемый аппарат с образ¬
цами лунной породы был доставлен в Москву, и контейнер с грун¬
том передан в Приемную лабораторию Академии наук СССР для
проведения всесторонних исследований.
С целью доставки лунного грунта из труднодоступного гор¬
ного района Луны был осуществлен запуск автоматической стан¬
ции «Луна-20», которая 21 февраля 1972 г. в 22 часа 13 минут
совершила мягкую посадку на поверхности Луны в типично высо¬
когорной материковой области в районе кратера Аполлоний в точке
с координатами 56° 33' восточной долготы и 3°32' северной широты
5* 67
[2.20]. Посадка автоматической станции «Луна-20» была произ¬
ведена в условиях лунного дня при высоте Солнца 46° над гори¬
зонтом. Это позволило получить хорошие снимки панорамы
лунной поверхности в точке посадки. Обзор местности, проведен¬
ный с помощью телефотометров, показал, что «Луна-20» опусти¬
лась на сравнительно ровную и однородную поверхность, лишен¬
ную крупных, отдельно лежащих, камней.
Штанга грунтозаборного устройства (ГЗУ), на которой разме¬
щен буровой станок с пробоотборником, была опущена в грунт
без разворота по азимуту. Угол места штанги при опускании буро¬
вого станка на грунт составил около 37° к горизонту. Ось бурового
станка была отклонена от вертикали на 17°.
В связи с тем, что процесс отбора грунта станцией «Луна-20»
имел некоторые отклонения от программы (по сравнению с отбо¬
ром грунта станцией «Луна-16»), представляется необходимым
этот процесс описать несколько подробнее [2.20].
Буровой станок был включен для работы в 23 часа 14 минут
по московскому времени. После проходки скважины на 90 мм
произошла остановка бурового станка в связи с тем, что суммар¬
ный ток приводных двигателей превысил допустимую величину.
После второго включения двигателей скважина была пройдена
до глубины 150 мм. Здесь вновь произошло отключение приводных
двигателей. После третьего включения двигателей бурового станка
скважина была пройдена до глубины 340 мм.
Обратный ход станка проходил без осложнений и продол¬
жался 9,8 с.
Весь процесс отбора пробы грунта (без времени разворота
штанги и закладки снаряда в ампулу) продолжался около 16мин.
Причем время чистого бурения составило 4 мин 34 с, т. е.
средняя скорость бурения равнялась 76 мм/мин.
С целью проверки влияния температуры и вакуума на работу
механизма бурового станка 23 февраля 1972 г. в 2 часа 15 минут
по московскому времени, после уборки снаряда с отобранной
пробой в возвращаемый аппарат, было произведено пробное вклю¬
чение бурового станка на обратный ход и прямой ход с включен¬
ным ударным механизмом. При этом была зафиксирована нор¬
мальная работа всех механизмов станка. Следовательно, изме¬
нения скорости бурения и заклинивание происходили из-за осо¬
бенностей взаимодействия бурового снаряда с лунным грунтом.
Анализ зависимости глубины проходки и суммарного тока от
времени (рис. 2.8) целесообразно провести, разбив весь цикл
на четыре этапа.
Первый этап — бурение на глубину от 0 до 90 мм. На этом
этапе можно выделить два участка: первый участок (глубина
проходки от 0 до 47 мм) характеризуется постоянной скоростью
подачи, равной 82 мм/мин, и небольшой величиной суммарного
тока. Этот участок представляет собой участок хода бурового сна¬
ряда до контакта с грунтом, т. е. участок холостого хода; второй
68
о 1 О 6 8 10 12 10 16 t,MLJH
-2
■О
■ 6
■ 8
■ 10
■ 1>А
00
80 -тК=
120 —
160 —
200 —
200 —
г во —
320 —
Н,мм
Рис. 2.8. Зависимость глубины бурения и суммарного тока электродвигателей от
времени (автоматическая станция «Луна-20»):
глубина проходки; — — — — — время отключения двигателей;
— суммарный ток
участок (глубина от 50 до 90 мм) характерен почти постоянной
скоростью проходки, равной 60 мм/мин, и значительным увели¬
чением последовательно возрастающего суммарного тока привод¬
ных двигателей вплоть до срабатывания токозащиты.
Второй этап — бурение на глубину от 90 до 150 мм. В целом
этот этап, как и первый, может быть разбит на несколько основ¬
ных участков.
Первый участок (от 90 до 115 мм) характерен значительной
величиной скорости проходки (до 107 мм/мин) и сравнительно
небольшой величиной суммарного тока. При дальнейшей проходке
(от 115 до 150 мм), как и на первом этапе, наблюдалось уменьше¬
ние скорости от 107 до 46 мм/мин с таким же, как и на первом
этапе, постепенным возрастанием суммарного тока вплоть до
срабатывания токозащиты.
Третий этап — бурение на глубину от 150 до 340 мм. Этот
этап также разбит на участки. Первый участок — отсутствие про¬
ходки в течение 8 с с одновременным резким возрастанием вели¬
чины суммарного тока от 4 до 7,5 А. Второй участок (от 150 до
190 мм) — резкое увеличение скорости проходки до величины,
превышающей паспортную скорость подачи вращателя бурового
снаряда (240 мм/мин) с одновременным возрастанием суммарного
тока с 7,5 до 8,8 А. Третий участок — от 190 до 280 мм — сниже¬
ние скорости проходки с 240 до 60 мм/мин. При этом суммарный
ток приводных двигателей снизился до 5 А и оставался постоян¬
ным на всем этом участке. Четвертый участок — 280—300 мм —
характеризуется резким увеличением скорости проходки до
120 мм/мин при постоянстве суммарного тока (5 А). Пятый уча¬
сток—от 300 до 340 мм—дальнейшее резкое увеличение скорости
проходки до величины 228 мм/мин, превышающей паспортную
69
скорость подачи бурового снаряда. Это увеличение скорости про¬
ходки сопровождалось резким возрастанием суммарного тока до
срабатывания устройства защиты по току.
На глубине 340 мм бурение было прекращено.
Четвертый этап — обратный ход, как отмечалось выше, был
произведен за 9,8 с, т. е. со средней скоростью 2040 мм/мин, что
значительно превышает паспортную скорость при обратном ходе.
Анализируя приведенные данные и сравнивая их с результатами
тарировочных испытаний, проведенных на грунтах-аналогах,
а также с результатами бурения нй станции «Луна-16», можно
отметить, что характер процессов бурения на станции «Луна-20»
резко отличается от характера процесса бурения на станции
«Луна-16». По всей вероятности контакт бурового снаряда с по¬
верхностью грунта произошел после холостого опускания бурового
снаряда на 47 мм. Таким образом общая глубина проникновения
бурового снаряда станции «Луна-20» в грунт составила около
300 мм. На всех этапах работы бурового станка наблюдались
участки с превышением скорости подачи снаряда по сравнению
с номинальной паспортной скоростью.
Следует подчеркнуть, что увеличение глубины проходки на
каждом этапе бурения сопровождалось последовательным резким
возрастанием тока приводных двигателей вплоть до срабатывания
устройства защиты по току. Соответственно изменялся характер
величины крутящего момента. Как указывалось выше, характер
бурения на станции «Луна-16» был сопоставим с характером буре¬
ния туфа малой прочности. Характер же бурения на станции
«Луна-20» в большой мере можно сопоставить с бурением агло-
пор итовой дресвы.
Таким образом, грунт в месте посадки станции «Луна-20»
отличается от грунта в месте посадки станции «Луна-16». Нали¬
чие участков с повышенной скоростью проходки на всех этапах
бурения (см. рис. 2.8) позволяет сделать предположение о меньшей
плотности грунта в его естественном залегании.
В то же время значительное увеличение суммарного тока по
мере проходки каждого из этапов свидетельствует о более высоком
сцеплении между отдельными частицами грунта и частицами
грунта с поверхностью бурового снаряда.
Эксперименты по бурению аглопоритовой дресвы, проводив¬
шиеся во время тарировочных испытаний бурового станка, пока¬
зали, что объем отбираемой пробы слабосвязного грунта зависит
от его плотности.
Меньшей плотностью грунта в месте посадки станции «Луна-20»
очевидно объясняется тот факт, что масса пробы, доставленной
ею на Землю (50 г), в процентном отношении к глубине внедрения
бурового снаряда оказалась меньше, чем масса грунта, доставлен¬
ного станцией «Луна-16» (101 г).
Более высокие адгезионные и когезионные силы в грунте
в месте посадки станции «Луна-20» ухудшили процесс его выноса
70
из скважины по мере ее проходки. Принимая во внимание харак¬
тер изменения величины суммарного тока, можно предположить,
что вследствие высоких адгезионных и когезионных сил частицы
грунта своевременно не выносились из скважины, уплотнялись
и создавали дополнительный момент сопротивления вращению
бурового снаряда в скважине, что приводило к последовательному
увеличению суммарного тока и отключению двигателей устрой¬
ством токозащиты. Ш
Наибольшая величина приводного тока в начале второго и
третьего этапов, возможно, объясняется тем, что величина сил
сцепления между частицами грунта (когезия) превышала' вели¬
чину сил сцепления между частицами грунта и станками бурового
снаряда (адгезию). В этом случае при включении двигателя про¬
исходило частичное нарушение сил сцепления по поверхности
наименьшего сопротивления, т. е. по поверхности контакта
грунт — буровой снаряд. Это приводило к уменьшению момента
сопротивления вращению бурового снаряда и, как следствие, —
к уменьшению суммарного тока приводных двигателей. При даль¬
нейшей проходке скважины действие адгезионных и когезионных
сил грунта могло перераспределяться и это вызывало увеличе¬
ние потребляемой станком мощности и срабатывание токозащиты.
Уплотнение частиц невынесенного грунта могло также приве¬
сти к созданию «пробки», способствующей самозавинчиванию или
самовывинчиванию бурового снаряда из-за нарушения адгезион¬
ных связей по контакту грунт—снаряд и, как следствие этого,
вызвать увеличение скорости подачи вращателя бурового станка.
2.5. Комплекс наземного оборудования
для приемки и изучения образцов грунта,
доставленных с Луны
Приемная камера с атмосферой гелия
Приемка и первичное изучение вещества произво¬
дились на установке, специально сконструированной для этой
цели. Работа производилась в камере, заполненной особо чистым
гелием (гелий выбран как газ, минимально взаимодействующий
с веществом) [2.23].
Общий вид установки показан на рис. 2.9. Основными элемен¬
тами установки являются: рабочая камера, шлюзовое устройство,
перчаточные устройства, система вакуумной откачки и пульт
управления.
Рабочая камера имеет цилиндрическую форму. Она изгото¬
влена,, каю и большинство элементов установки, из нержавеющей
стали. Диаметр камеры 1200 мм, длина 1600 мм. Внутри камеры
помещаются приспособления и инструменты, для вскрытия кон¬
тейнеров и работы с веществом, расфасовочные контейнеры, весы,
Датчики и приборы.
71
Рис. 2.9. Приемная установка. Внешний и внутренний вид
72
Для детального осмотра вещества в рабочей камере имеется
столик с лотком из нержавеющей стали, который с помощью меха¬
низма вращения можно вплотную подвести к смотровому окну,
где вещество может быть изучено с помощью оптических при¬
боров.
В камере смонтировано приспособление для закрепления и
фиксации контейнера в положении, наиболее удобном для вскры¬
тия и выемки из него бура с веществом. В этом приспособлении
с помощью сменных призм могут быть закреплены контейнеры
и буровые снаряды различных конфигураций.
Для контроля герметичности контейнеров, прибывших на
Землю с внеземным веществом и не имеющих собственных мано¬
метрических датчиков, установка оборудована сверлильным устрой¬
ством, которое может быть установлено как на камере, так и на
шлюзе. Устройство включает корпус, полированный вал с вво¬
дами вращения и привод. Сверло закрепляется в плотно сидящем
на валу патроне. Вал с помощью привода одновременно с враще¬
нием получает продольное перемещение на величину подачи.
Вакуумное уплотнение вала осуществляется при помощи двух
втулок, выполненных из фторопласта, на тонкостенные концы
которых надеты резиновые кольца, прижимающие втулки к поли¬
рованной поверхности вала. Герметичность контейнеров оцени¬
вается по изменению давления, регистрируемого манометрическими
датчиками, установленными на камере и шлюзе.
В различных местах рабочей камеры расположены смотровые
окна с осветителями для исследования вещества, фото- и кино¬
съемок. Для доступа внутрь рабочей камеры с целью проведения
очистки, монтажа крупных приспособлений и приборов на одном
из ее торцов смонтирована откидывающаяся на петлях крышка
с вваренным в нее фланцем диаметром 500 мм. Предусмотрена
возможность монтажа на этом фланце прибора для изучения физи¬
ко-механических характеристик вещества.
На противоположном торце камеры установлено шлюзовое
устройство и два магниторазрядных насоса.
Электропитание приборов и датчиков, находящихся внутри
камеры, а также вывод информации от них осуществляются через
вакуумные штекерные разъемы, смонтированные на одном из
фланцев рабочей камеры.
Установка снабжена резервными фланцами, которые могут
быть использованы для монтажа исследовательской аппаратуры.
Работа в камере осуществляется оператором с помощью трех
перчаточных устройств, имеющихся на цилиндрической части
камеры.
Для выноса вещества из камеры и передачи его в специализи¬
рованные лаборатории без нарушения чистоты гелиевой среды,
окружающей лунный грунт, установка оборудована шлюзовым
устройством.
Шлюзовое^устройство состоит из шлюзовой камеры и двух
73
вакуумных затворов. Элемент, вводимый в камеру, помещается
в шлюзовую камеру через затвор. Затем затвор герметизируется
и шлюзовая камера откачивается. Далее шлюз заполняется ге¬
лием, после чего открывается затвор, соединяющий шлюзовую
камеру с рабочей. Используя перчатки, оператор вносит переда¬
ваемый элемент в рабочую камеру.
Перчаточные устройства включают резиновые перчатки, ва¬
куумные затворы и колпаки. Работа перчатками возможна лишь
тогда, когда камера заполнена газом до атмосферного давления.
В этом случае разгерметизируются вакуумные уплотнения затво¬
ров и колпаков, и оператор получает доступ к перчаткам. Во
время длительного хранения перчатки изолируются от объема
рабочей камеры вакуумными затворами, а со стороны атмосферы—
колпаками. Конструкция перчаточных узлов позволяет проводить
вакуумирование перчаток, для чего предусмотрена возможность
одновременной откачки объемов колпаков и затворов.
Система вакуумной откачки необходима для эвакуации атмо¬
сферного воздуха из рабочей и шлюзовой камер перед напуском
в камеру гелия. Предварительная откачка установки осуще¬
ствляется вакуумным агрегатом, состоящим из механического и
двухроторного насосов.
В линии предварительного разрежения размещен термостери¬
лизатор, так как установка спроектирована с учетом возможности
приемки токсического вещества.
Для высоковакуумной откачки на установке применены два
турбомолекулярных насоса (один из них резервный). Турбомо-
лекулярные насосы (скорость откачки каждого насоса 200 л/с)
присоединены к установке через вакуумные затворы и применя¬
ются для откачки рабочей и шлюзовой камер.
Для вакуумной тренировки рабочей камеры используются маг¬
ниторазрядные насосы диодного типа с охлаждаемыми анодами.
Скорость откачки каждого из них 250 л/с. Благодаря охлаждению
анодов эти насосы имеют большую производительность в области
высоких давлений. Предельное разрежение, достигаемое в камере
с помощью этих насосов, 0,2 мПа.
Гелий поступает в рабочую и шлюзовую камеры из баллона,
заполненного гелием высокой чистоты. Измерение давления в уста¬
новке осуществляется с помощью мембранных, термопарных и
ионизационных манометрических датчиков. Для контроля состава
остаточных газов в камере на установке имеются масс-спектро¬
метры — хронотрон и омегатрон.
Пульт управления установкой состоит из двух шкафов, в кото¬
рых расположены аппаратура управления насосами, вакуумными
вентилями системы откачки и приборы контроля вакуума в уста¬
новке. Световая сигнализация с мнемонической схемой откачки
позволяет судить о состоянии того или иного элемента установки.
Установка также оборудована системой аварийной, звуковой и
световой сигнализации.
74
Рис 2.10. Лунный грунт на лотке в рабочей камере приемной установки
Приемка и первичное изучение лунного грунта. Доставленный
лунный грунт находился в буровом снаряде, заключенном в гер¬
метичный контейнер. Перед приемкой вещества рабочая камера,
инструменты и приспособления для вскрытия контейнера и работы
с лунным грунтом были тщательно промыты и подвергнуты дли¬
тельной вакуумной тренировке. С целью исключить загрязнение
гелия органическими веществами, содержащимися в теплоизоли¬
рующем покрытии контейнера (контейнер является одним из узлов
возвращаемого аппарата), теплоизолирующий слой был заключен
в герметичный кожух из нержавеющей стали. Затем контейнер
с кожухом был закреплен в зажимном устройстве рабочей камеры.
После этого были произведены герметизация и откачка установки.
Перед проведением работ по вскрытию контейнера методом воз¬
гонки перекиси водорода в вакууме проведена стерилизация уста¬
новки. Цель стерилизации — исключить контакт земных микро¬
организмов с лунным веществом, что необходимо для проведения
медико-биологических исследований.
После проведения стерилизации и откачки рабочей камеры до
давления 2 мПа в камеру был напущен гелий высокой чистоты.
По достижении атмосферного давления гелия в рабочей камере
с перчаточных узлов были сняты колпаки, открыты затворы и
проведена операция по вскрытию контейнера.
С помощью специальных приспособлений из контейнера извле¬
кается буровой снаряд с лунным грунтом. Затем лунный грунт
взвешивается и помещается на лоток (рис. 2.10). После этого про¬
водится осмотр вещества, изучается характер изменения колонки
75
образца по глубине, проводится первичное изучение морфологий
образца лунного грунта и определение некоторых оптических и
физико-механических свойств. В частности здесь было впервые
обнаружено, что лунный грунт меняет цвет в зависимости от угла
зрения и расположения источника света; легко формуется и сли¬
пается в отдельные комки, хорошо выдерживает большие углы
естественного откоса. Эти и другие интересные свойства реголита
подробно освещены в специальных работах [2.3, 2.4].
Затем отбираются образцы реголита для специальных иссле¬
дований. Эти образцы после взвешивания помещаются в гермети¬
ческие контейнеры из нержавеющей стали и через шлюз переда¬
ются в лаборатории для дальнейших и всесторонних исследований.
При разработке установки принимались меры к уменьшению
содержания в остаточных газах паров воды и углеводородов.
В частности использование в системе откачки магниторазрядных
и турбомолекулярных насосов, вакуумных вводов вращения на
фторопласте без применения смазки, о которых упоминалось при
описании сверлильного устройства, позволило значительно сни¬
зить содержание в остаточных газах этих компонентов.
Исследовательский бокс для работы
с лунными образцами в атмосфере азота
Для предотвращения контакта исследуемых лун¬
ных образцов с кислородом воздуха, водяными парами и атмо¬
сферными аэрозолями был сконструирован и изготовлен специаль¬
ный бокс [2.1]. Бокс предназначен для проведения предвари¬
тельных физико-химических исследований, исследований механи¬
ческих и некоторых физических свойств образцов, приготовления
аншлифов и прозрачных шлифов образцов, а также фасовки и тер-
метичной упаковки образцов в соответствующие бюксы, ампулы,
кюветы, подложки для исследований в специализированных лабо¬
раториях. Для минимизации загрязнений в качестве конструк¬
ционных материалов при изготовлении бокса использовались
оргстекло и нержавеющая сталь 1Х18Н9Т. Ниже приводится
описание бокса [2.1].
Бокс представляет собой вращающийся барабан из плекси¬
гласа диаметром 1600 мм и высотой 500 мм, установленный на
центральной ноге-опоре. Сверху на барабане размещен плекси¬
гласовый короб-шлюз для ввода и вывода в бокс контейнеров
с образцами и необходимого оборудования без нарушения инерт¬
ной атмосферы рабочих камер бокса.
Весь внутренний объем бокса разделен на две герметично изо¬
лированные друг от друга половины, сообщение которых друг
с другом и с внешним пространством осуществляется через шлю¬
зовое устройство, расположенное на крышке бокса (рис. 2.11).
Для заполнения внутренней полости бокса азотом и поддер¬
жания избыточного давления бокс снабжен газовой системой.
76
Рис. 2.11. Общий вид исследовательского бокса
Работа внутри бокса осуществляется при помощи 10 перчаток,
одновременно двумя или тремя исследователями. Бокс установлен
на плите, закрепленной на полу лаборатории, и может для уста¬
новки в удобное для работы положение вращаться вокруг верти¬
кальной оси на 355°. Поворот более чем на один оборот ограничен
стопором, который служит также для фиксации бокса в выбран¬
ном положении.
Внутренняя полость бокса и шлюза заполняется «особо чистым»
азотом. Давление внутри бокса поддерживается равным 0,2 кПа
при помощи автоматического регулятора, обеспечивающего по¬
дачу газа.
В пяти отсеках герметичного бокса были размещены приборы
Для взвешивания лунного вещества, его фасовки, рассева, измель¬
чения и изготовления шлифов. Там же размещались приборы
77
для Определения механических свойств грунта — его сопротивле¬
ния сжатию, сдвигу и пенетрации.
Работа с грунтом в исследовательском боксе проводится сле¬
дующим образом.
Контейнер с пробой грунта переносится в шлюзовое устройство
исследовательского бокса. После продувки последнего азотом
для удаления атмосферного воздуха, поступившего при внесе¬
нии контейнера, контейнер через соответствующий люк пере¬
дается в фасовочно-исследовательский отсек бокса. Здесь после
вскрытия контейнера находящаяся в нем проба просматривается
под бинокулярным микроскопом и переносится на сита для рас¬
сева. После рассева сита с пробой возвращаются в фасовочно¬
исследовательский отсек, где полученные фракции просматри¬
ваются под бинокулярным микроскопом, переносятся в стеклян¬
ные бюксы, а затем взвешиваются на весах, установленных в весо¬
вом отсеке.
На этом заканчивается этап первичной подготовки пробы
и их первичное описание.
После изучения выделенных фракций под бинокулярным ми¬
кроскопом производится отбор проб из различных фракций в соот¬
ветствии с программой дальнейших исследований. Фракции и
их доли, выделенные для длительного изучения, помещаются в ма¬
ленькие стеклянные бюксы или ампулы и передаются на анализ
или переносятся в другие специальные бюксы с азотной атмосфе¬
рой, где они хранятся и где проводится их сепарация по типам
частиц и морфологическое изучение. С отдельными порциями
фракций работа проводится на воздухе.
Универсальная установка для исследования
физико-механических свойств лунного грунта
в вакууме и атмосфере различных газов
Составной частью приемного оборудования явля¬
ется специальная вакуумная универсальная установка [2.18].
Создание универсальной вакуумной установки, в которой
можно было бы определить комплекс физико-механических свойств
минеральных материалов, представляло собой весьма сложную и
трудоемкую задачу. Основная трудность состояла в моделирова¬
нии лунной среды, требующем создания прежде всего высокова¬
куумной камеры. В этой камере должны быть установлены испы¬
тательные приборы, которые не только позволяли бы измерять те
или иные свойства исследуемого материала, но и должны были
активно воздействовать на этот материал с целью выявления ха¬
рактеристик его взаимодействия с контртелами. При этом управле¬
ние приборами должно было осуществляться оператором, нахо¬
дящимся снаружи и имеющим возможность непосредственно на¬
блюдать за поведением грунта.
Для создания такой установки целесообразно было восполь¬
зоваться некоторыми принципами и конструктивными решениями,
78
применяемыми в высоковакуумных исследовательских установках,
которые в последнее десятилетие стали создаваться для решения
проблем космического материаловедения [2.13,2.21]. Однако
очевидной была трудность длительного поддержания вакуума
при исследовании грунтов (особенно пористых и мелкодисперсных),
насыщенность газами которых несравнимо больше газонасыщен-
ности металлов или полимеров, т. е. тех материалов, с которыми
был накоплен определенный опыт вакуумных исследований.
Кроме того поведение грунтов при воздействии на них контртел
существенно отличается от поведения конструкционных материа¬
лов и исследование характеристик деформации и разрушения
грунтов несравнимо сложнее, тогда как и установки для испытаний
металлов и полимеров представляли собой уникальные и чрез¬
вычайно сложные конструкции [2.13, 2.21].
В работах указывалась желательная степень вакуума для ис¬
следования тех или иных свойств и процессов применительно
к различным материалам. При этом величина вакуума может
варьироваться в пределах 10 мПа—0,01 мкПа. Учитывая значи¬
тельные технические трудности, возникающие при одновременном
обеспечении сверхвысокого вакуума и большой скорости откачки
в сравнительно больших объемах, величина предельного вакуума
на первом этапе исследований была выбрана равной 0,5 мПа.
На свойства грунта может влиять так называемый «фон» ва¬
куумных камер. Особенно существенно, по-видимому, влияние
паров различных масел, попадающих в камеру из диффузионных
насосов. Отличаясь высокой полярностью, молекулы масел могут
образовывать на поверхностях частиц грунта прочные сорбционные
пленки. Эти пленки могут существенно изменять поверхностные
свойства грунта (особенно фрикционные). Поэтому указывается
на необходимость безмасляной откачки камер или установки
ловушек. Рекомендуется особое внимание уделять выбору раз¬
меров или объема испытываемого образца. Образец должен быть
возможно меньших размеров, чтобы облегчить создание вакуум¬
ных условий, однако он должен быть достаточным для получения
достоверных результатов.
На основании изложенных принципов была создана универ¬
сальная испытательная установка, предназначенная для испы¬
тания минеральных материалов в вакууме и инертной среде, со¬
стоящая из приемной вакуум-камеры, внутри которой размещается
прибор ТОР-1, представляющий собой комплекс механизмов
с измерительными устройствами и приставками.
Приемная вакуум-камера (рис. 2.12) имеет объем 800 л, вы¬
бранный из условий создания необходимого вакуума, свободного
размещения измерительных узлов и обеспечения выполнения
всех манипуляций, связанных с испытаниями. Вакуум-камера изго¬
товлена из нержавеющей стали и позволяет проводить исследова¬
ния не только в вакууме, но и в атмосфере инертного газа
(гелия).
79
Рис. 2.12. Общий вид универсальной установки ТОР-1 для изучения физико-механических
свойств грунта в вакууме и в гелиевой среде
Использование атмосферы гелия диктовалось чисто методи"
ческими соображениями. С одной стороны, весьма слабая склон¬
ность гелия к сорбции практически исключила влияние его на
поверхностные взаимодействия частиц грунта. С другой стороны,
наличие атмосферы специально очищенного гелия значительно
расширяло технические возможности прибора ТОР-1, так как
позволяло операторам манипулировать с образцом непосред¬
ственно в процессе эксперимента, что было трудно обеспечить
в вакуумных условиях. Необходимо также учитывать, что воз¬
можность наличия инертных газов в порах лунного грунта счи¬
тается в настоящее время общепризнанной.
Вакуум-камера (рис. 2.13) состоит из рабочей камеры, системы
вакуумной откачки, системы напуска инертного газа и шлюзовой
системы, обеспечивающей ввод в камеру перчатки оператора.
Измерительное устройство крепится к торцевому фланцу 4. На
боковой стенке камеры имеются иллюминаторы 3 и вакуумный
шиберный затвор 2 с резиновой перчаткой 1, предназначенный
для обслуживания измерительного устройства.
Система откачки включает в себя вакуумный механический
насос ВН-1МГ, создающий предварительное разрежение 0,3 Па,
80
вн-тг
Рис- 2.13. Схема вакуум-камеры установки ТОР-1
Рис. 2.14. Общий вид установки ТОР-1
с>
А. Л. Кемурджиан
81
и вакуумный агрегат ВА-5-4, обеспечивающий предельное разре¬
жение в камере 50 мкПа. Для предотвращения случайного про¬
никновения в камеру паров масла применялась ионная .ловушка
ИЛ-1, установленная в системе предварительной откачки, и азот¬
ная ловушка, являющаяся частью агрегата ВА-5-4. Предваритель¬
ное разрежение в камере контролируются термопарным манометром
ЛТ-2, а рабочее давление — ионизационным манометром ЛМ-2.
Для обеспечения исследований в среде гелия применяется си¬
стема напуска, состоящая из баллона с химически чистым инерт¬
ным газом 7, газового редуктора 6 и вакуумного вентиля 5. Газ
напускался в камеру после ее откачки и достижения в ней вакуума
0,5 мПа.
Измерительное устройство установки ТОР-1 (рис. 2.14) смон¬
тировано на горизонтальной плите, которая с помощью двух
кронштейнов крепится к фланцу, служащему для присоединения
прибора к вакуум-камере. Исследуемые твердые или зернистые
образцы, насыпаемые в чашечку, с помощью цангового захвата
укрепляются на предметном столике, расположенном в централь¬
ной части горизонтальной плиты.
На горизонтальной плите вокруг предметного, столика распо¬
лагаются восемь рабочих измерительных узлов с испытательными
механизмами и датчиками.
Все основные части прибора выполнены из нержавеющей
стали марки Х18Н9Т. Детали измерительных устройств имеют
специальную конструкцию, обеспечивающую их работоспособ¬
ность в вакууме глубиной до 10 мкПа.
Все измерения производятся с помощью тензодатчиков. Тен-
зодатчики (типа ФКП-А и МФКП-А) наклеены на измерительные
балки, одни из которых служат для измерения усилий, прилагае¬
мых к образцу, а другие — для измерения перемещений. Тензо-
датчики работают с усилителем типа 8АНЧ-7М, а запись ведется
на бумажной ленте с помощью двух электронных самопишущих
потенциометров типа ПС1-02. Горизонтальное перемещение ка¬
ретки среза образца измеряется с помощью нониуса на валу, кото¬
рый приводит ее в движение. Нониус выведен наружу и располо¬
жен со стороны ручек управления прибором.
Была выбрана следующая схема проведения эксперимента.
На плиту измерительного устройства установки ТОР-1 устана¬
вливается герметичный контейнер с образцом грунта. После этого
камера герметизируется и откачивается до давления 1 мПа,
а шлюз и операторская перчатка — до давления 0,1 Па. Затем
осуществляется напуск гелия до небольшого, избыточного по срав¬
нению с атмосферным, давления. После этого шлюз открывается
и в камеру вводится рука оператора в перчатке, который таким
образом получает возможность разгерметизировать контейнер
с образцом исследуемого грунта и переложить или пересыпать
часть его в чашку для исследования. Затем производится откачка
камеры и начинаются измерения,
82
Измерительные механизмы установки ТОР-1 позволяют доста¬
точно просто, надежно и удобно, в приемлемо короткие сроки опре¬
делить в вакууме и инертной среде комплекс механических харак¬
теристик, в том числе сопротивление пенетрации, коэффициент
сжимаемости, параметры сопротивления сдвигу, коэффициенты
трения с различными контртелами и абразивность и, кроме того,
такие физические характеристики как теплоемкость, температу¬
ропроводность, теплопроводность, диэлектрическую проницае¬
мость, тангенс угла диэлектрических потерь, удельное электри¬
ческое сопротивление.
Особенность прибора ТОР-1 заключается в том, что определе¬
ние указанных характеристик может проводиться последовательно
на одном, и том же образце, который может доводиться до пол¬
ного разрушения. Последовательность испытаний выбирается
так, чтобы каждое из них в минимальной степени изменяло
свойства образца и влияло на последующие испытания.
Прибор ТОР-1 позволяет проводить испытания с весьма ма¬
лыми пробами зернистого грунта и твердой горной породы. Из
условий обеспечения вакуума в камере масса образцов грунта
не должна превышать 2—5 г. Указанные особенности прибора
ТОР-1 сделали его универсальным прибором, удобным для исследо¬
вания доставляемых образцов лунного грунта и грунтов-аналогов.
Определение механических свойств производилось с помощью
отдельных измерительных узлов — пенетрации, компрессии, вра¬
щательного сдвига [2.8]. Фрикционные свойства определялись
с помощью отдельного измерительного узла [2.10]. Кроме того
в ТОР-1 предусматривалось определение тепловых и электриче¬
ских свойств образцов [2.9, 2.11, 2.22].
Узел пенетрации
Рабочим органом узла пенетрации (рис. 2.15, а)
служит стальной полированный конус 7 с углом при вершине,
равным 30°. Масса конуса — 20 г. Внедрение конуса в поверх¬
ность образца 2, помещенного в чашечке <5, осуществляется под
действием силы тяжести. Конус укреплен на мембране 3, которая
свободно лежит на кольцевом упоре внутри головки узла 4. На
мембране наклеен тензодатчик типа МФКП, который измеряет
силу, передающуюся от конуса мембране. В исходном положении
нагрузка от конуса передается на мембрану.
Путем воздействия нажимной балки на вершину вертикаль¬
ного штока 6 производится опускание головки прибора и конус
входит в контакт с грунтом. Постепенно вся нагрузка передается
грунту, а мембрана полностью разгружается, о чем говорят пока¬
зания датчика. Глубина погружения конуса определяется по
всртикальному перемещению штока с помощью эллиптической
дружины 5 с наклеенными на нее тензодатчиками типа ФКП.
Максимальная глубина погружения 1,8 см.
Образец в чашечке может быть подогрет нагревателем 1.
6* 83
Рис. 2.15. Схемы измерительных узлов:
а — узел пенетрации; б — компрессионный узел; в —узел вращательного сдвига; г— узел
трения
Компрессионный узел
Воздействующим инструментом служит полиро¬
ванный ^поршень 6 (рис. 2.15, 6) с плоским основанием диаметром
11 мм, прикладываемый к поверхности образца 7. Поршень укре¬
плен на мембране 2 с наклеенным на неетензодатчикомтипа МФКП.
Мембрана укреплена на кольцевом упоре внутри головки 3. Вер¬
тикальное перемещение поршня и создание нагрузки на грунт
осуществляется путем воздействия нажимной балки на вершину
штока 5. При этом усилие на поршень передается через мембрану
и измеряется с помощью тензодатчиков, наклеенных на нее. Осадка
измеряется эллиптической пружиной 4 с тензодатчиками типа
ФКП. Образец может быть подогрет нагревателем 1. Вертикальное
давление на грунт может изменяться в пределах от 0 до 0,15 МПа,
глубина погружения поршня — от 0 до 0,8 см.
Узел вращательного сдвига
Узел смонтирован на консоли 8 (рис. 2.15, в).
Перед испытанием он наклоняется к поворотной чашечке при¬
бора 11, так что рабочий орган — ребристый диск 3 — входит
в контакт с поверхностью образца 2. Вертикальная нагрузка на
84
диск осуществляется Нажимной балкой через шток 7. Шток пере¬
мещается в направляющей втулке 6 и передает давление через
мембрану 5 и шток 4 на ребристый диск.
После приложения заданной вертикальной нагрузки, которая
измеряется тензодатчиком на мембране 5, чашечка с образцом
грунта приводится во вращательное движение вокруг вертикаль¬
ной оси и увлекает за собой ребристый диск с его штоком. На
штоке закреплен рычаг 9 с упором, касающимся измерительной
тензометрической балки 10. Тензодатчики МФКП, наклеенные
на балку, измеряют силу прижатия рычага. В процессе опыта
эта сила нарастает и, достигнув максимума, остается постоянной
или уменьшается. По максимальной силе вычисляется предель¬
ный крутящий момент, вызывающий срез образца под ребристым
диском.
Вертикальная нагрузка на образец может изменяться в пре¬
делах от 0 до 60 кПа, предельный крутящий момент — в пределах
от 0 до 1,5 Н-см. Чашечка прибора оборудована нагревателем 1.
Сигналы тензометрических датчиков для измерения усилий и
деформаций поступали на усилитель 8АНЧ-7М и далее на само¬
писцы ПС-1. В результате каждого опыта получали две диаграммы
зависимости усилия и деформации от времени, которые расшифро¬
вывались с помощью заранее составленных тарировочных таблиц.
Точность измерений в среднем составляла около 10% от предель-'
ных значений измеряемых величин.
В среднем продолжительность опыта по пенетрации составляла
0,5 мин, на компрессию — 10 мин и на вращательный срез —
3 мин. Учитывая полное отсутствие жидкостей в порах грунта и
невозможность замедления деформаций из-за процессов филь¬
трационной консолидации, эту продолжительность можно при¬
знать достаточной для того, чтобы считать на каждой ступени
опыта деформации завершенными.
Измерительный узел трения
Эксперименты по определению коэффициентов тре¬
ния выполнялись с использованием измерительного узла
(рис. 2.15, г). Цилиндры 7 с тонким слоем исследуемого мате¬
риала 8 укреплялись в центральной части прибора при помощи
механизма захвата и приводились во вращение электродвига¬
телем. Контртело 6 прижималось к образцу балочкой 2. Нор¬
мальная нагрузка измерялась системой датчиков 3. Тангенциаль¬
ные силы, возникающие при трении, фиксировались датчиками 5,
наклеенными на балку 4. Узел трения был размещен на поворот¬
ном кронштейне 1. Питание полумостов и усиление разбаланса
Датчиков осуществлялось усилителем 8АНЧ-7М.
Эксперименты проводились при удельных нормальных на-
гРУзках до 0,2 МПа со скоростью трения до 2 см/с, запись нормаль¬
ных и тангенциальных сил велась одновременно на двух электрон¬
ных самописцах ПС-1.
85
2.6. Результаты исследований
механических свойств лунных грунтов,
доставленных станциями „Луна-16“
и „Луна-20"
Исследования в герметичном боксе
в атмосфере азота
Для этих исследований был выделен образец
грунта массой около 20 г, что допускало применение приборов,
сравнимых по своим размерам с наименьшими из аналогичных
приборов, применяемых для исследований грунтов на Земле.
.Это сводило к минимуму влияние масштабных искажений и позво¬
ляло получить данные о механических свойствах лунных грунтов,
сопоставимые с теми же данными для грунтов Земли. Следует
отметить, что выделение такого большого количества грунта
для определения механических свойств было впервые сделано
в СССР. Как известно, в США для этой дели выделялось около
1,5 г грунта и лишь немногочисленные опыты были проделаны
с образцами большего объема.
Для работы в герметичном боксе были построены следующие
приборы, представленные на рис. 2.16: прибор СПГЛ-1 для опре¬
деления сжимаемости и сопротивления грунта сдвигу, микропе¬
нетрометр для определения несущей способности и прибор Кулона,
с помощью которого изучался характер разрушения грунта.
Схема устройства сдвигового прибора и микропенетрометра пока¬
зана на рис. 2.17 [2.12].
Прибор СПГЛ-1 относится к числу приборов одноплоскостного
сдвига, допускающих проведение компрессионных испытаний.
Размеры образца грунта для испытаний в этом приборе соста¬
вляют: диаметр 25,2 мм, высота 12 мм.
Микропенетрометр позволяет определить сопротивление вда¬
вливанию в грунт штампов различной формы.
В приборе Кулона имеется подвижная вертикальная перего¬
родка, передвигая которую можно наблюдать через прозрачные
стенки прибора характер деформации грунта.
Ниже приводятся основные результаты исследований, мето¬
дика которых подробно изложена в работах [2.12, 2.16].
Структура и гранулометрический состав образцов лунного
грунта. Гранулометрический состав образцов грунта, доставлен¬
ных на Землю, определялся путем рассева, кондуктометрическим
способом и микрофотосъемкой. Основной вывод этих исследований
заключается в относительном единообразии гранулометрического
состава образцов для верхнего слоя, хотя они были взяты из раз¬
личных районов поверхности Луны. Образцы в основной своей
массе состоят из мелких минеральных частиц самой разнообраз¬
ной формы. Частицы легко слипаются между собой, образуя от¬
дельные комки и агрегаты. На поверхности остаются четкие от¬
печатки.
86
5)
Рис. 2.16. Приборы для определения механических характеристик лунного грунта в иссле¬
довательском боксе:
сдвиговый прибор СПГЛ-1 (слева); микропенетрометр, прибор Кулона и бюкса (справа)
Рис. 2.17. Схемы устройств сдвигового прибора (а) и микропенетрометра (б):
1 — вертикальная нагрузка; 2 — штамп, передающий вертикальную нагрузку; 3 — обра¬
зец грунта; 4 — подвижная каретка; 5 — упругая балочка; 6 — индикатор прогиба упру¬
гой балочки; 7 — индикатор горизонтальной деформации; 8 — индикатор вертикальной
Деформации; 9 — индикатор перемещения штампа; 10 — пенетрометр-индентор
Преобладающими фракциями в грунте являются частицы с раз¬
мерами 40—100 мкм. Насыпная плотность исследованных образ¬
цов, коэффициенты пористости и ожидаемые показатели дефор¬
мации приведены в табл. 2.2.
Характер разрушения образцов лунного грунта. Процессы
разрушения образцов лунного грунта исследовались в приборе
Кулона для двух состояний грунта: предельно рыхлого и уплот¬
ненного до насыпной плотности 1,6 г/см3.
Грунт в рыхлом состоянии под воздействием бокового давле¬
ния деформируется без образования видимых сколов и линий
скольжения (рис, 2,18, а).
87
Таблица 2.2
Основные характеристики образцов лунного грунта
№
по
пор.
Параметры грунта
Образец грунта,
доставленного
станцией
«Луна-16»
Образец грунта,
доставленного
станцией
«Луна-20»
1
Состояние грунта
Рыхлое
Уплот¬
ненное
Рыхлое
Уплот¬
ненное
2
Насыпная плотность, г/см3
1,115
1,793
1,04
1,798
3
Коэффициент пористости
(для плотности частиц
3,0 г/см3)
1,7
0,67
1,88
0,67
4
Максимальная относи¬
тельная деформация
0,382
0,42
При приложении бокового давления к уплотненному грунту
происходит его раскалывание по плоскости, наклоненной к напра-
bj унию главного напряжения под углом 22° для образца, доста¬
вленного «Луной-16» и под углом 29° — для образца, доставлен¬
ного «Луной-20» (рис. 2.18, б). Это соответствует углу внутреннего
трения 46° и 32°.
Сжимаемость. Сжимаемость при невозможности бокового рас¬
ширения образцов определялась в приборе СПЛГ-1 с рабочей
камерой объемом 6 см3.
Предельное уплотняющее давление составляло 100 кПа.
Процесс нагружения образца предусматривал следующие ре¬
жимы:
а) ступенчатое возрастание нагрузки, а затем снятие ее;
б) ступенчатое возрастание нагрузки с последующей полной
разгрузкой образца на каждой ступени нагружения;
в) многократное приложение заданной величины нагрузки.
Кривые сжимаемости при первом режиме нагружения приве¬
дены на рис. 2.19, они достаточно хорошо аппроксимируются
следующей формулой:
е = Ле- k*p + Be-k*P, (2.1)
где в — коэффициент пористости; р — уплотняющее давление, кПа;
k\, &2 — показатели экспонент, 1/кПа; А, В — постоянные
коэффициенты, причем Л + В = е0; е0 — коэффициент пористости
в предельно рыхлом состоянии грунта.
Численные значения коэффициентов для образца, доставлен¬
ного «Луной-20», составляют: Л = 0,98; В = 0,9; k± = 0,1 1/кПа;
k 2 = 0,1 1/кПа.
Подобный характер компрессионной кривой можно объяснить
наличием двух механизмов деформации грунта. В рыхлом состоя¬
нии частицы грунта, слипаясь, образуют агрегаты, которые,
в свою очередь, образуют рыхлую структуру. В начальной стадии
Р8
Рис. 2.18. Схема деформации образца в приборе Кулона:
а — рыхлый грунт; б — плотный грунт
Рис. 2.19. Кривая сжимаемости грунта:
8 — коэффициент пористости; р — уплотняющее давление, кПа; I — по данным «Луны-16»;
2 — по данным «Луны-20»
сжатия грунта уменьшение пористости происходит в основном
благодаря перемещению и более плотной укладке частиц и агре¬
гатов. При дальнейшем увеличении нагрузки начинается разру¬
шение агрегатов, перемещение и сближение собственно частиц
грунта, при этом нагрузка в массе грунта передается через кон¬
такты между частицами. В диапазоне давлений (50—100 кПа)
процесс сближения частиц и увеличение числа контактов между
ними в основном завершается, а дальнейшее уплотнение грунта
происходит из-за разрушения частиц в местах их контактов друг
с другом.
При небольших давлениях (<40 кПа) изменение коэффициента
пористости определяется в основном первым слагаемым в формуле
(2.1). При больших давлениях эта составляющая имеет незначи¬
тельную величину, и изменение коэффициента пористости про¬
исходит за счет второго слагаемого.
Коэффициент сжимаемости а для любой точки кривой сжимае¬
мости, описываемой уравнением (2.1), будет равен:
й = А = (2.2)
В предельно рыхлом состоянии (при р = 0) коэффициент сжи¬
маемости (ао, 1/кПа) равен
а0 = —kxA — k%B.
Модуль общей деформации (Е0) по компрессионной кривой
Может быть определен по следующей формуле:
Е° = ( 1 _Т+Т) ’ (2‘3)
Где I — коэффициент бокового давления.
89
При небольших уплотняющих давлениях (р < 50 кПа) фор¬
мулы (2.1), (2.2), (2.3) могут быть несколько упрощены, если при¬
нять второе слагаемое в формуле (2.1) постоянным.
Тогда для кривой сжимаемости будем иметь:
е = 8оо + (е0 — ео^е-^, (2.4)
где е0 — некоторое предельное значение коэффициента пористо¬
сти при уплотнении.
Для коэффициентов сжимаемости тогда получим
а0 — ^1 (8о 8оо), 1
a = a0(l— D), J
(2.5)
где D = £°_ 8 степень плотности грунта.
80 8оо
Модуль общей деформации будет равен:
(1 + во)
К (6о~ 8°°)
7(6),
(2.6)
где /(g) = (l r+i)'
‘Из уравнений (2.3)—(2.6) легко выявить зависимость основ¬
ных параметров сжимаемости от степени плотности грунта, ве¬
личины уплотняющего давления и физического состояния грунта.
При снятии сжимающей нагрузки с образца грунта в компрес¬
сионном приборе его коэффициент пористости почти не меняется,
так как восстанавливающиеся деформации грунта являются
небольшими и составляют в среднем десятые доли процента от
остаточной деформации.
При возрастании нагрузки до прежнего значения происходит
дополнительная осадка грунта, величина которой уменьшается
на каждой ступени по мере увеличения сжимающего давления.
Общая деформация образца грунта получается несколько больше,
чем при непрерывном возрастании нагрузки. При повторном
многократном приложении нагрузки дополнительная осадка грунта
на каждом цикле уменьшается по мере увеличения сжимающего
давления. Общая деформация образца грунта получается несколько
больше, чем при непрерывном возрастании нагрузки. При повтор¬
ном многократном приложении нагрузки дополнительная осадка
грунта уменьшается по мере увеличения числа циклов нагру¬
жений.
Небольшая величина восстанавливающихся и дополнитель¬
ных осадок при циклическом нагружении показывает, что основ-
90
ная деформация грунта происходит при его первом нагружении
й носит остаточный характер.
Сопротивление сдвигу. Сопротивление сдвигу образцов лун¬
ного грунта определялось при одноплоскостном срезе в приборе
СПГЛ-1 по методу переуплотненного грунта *.
После окончания опыта образец грунта хорошо сохранял
форму рабочей камеры прибора. Трещин и расслоения образца
не наблюдалось. Отчетливо была видна поверхность сдвига.
Графики сопротивления грунта сдвигу, построенные в коор¬
динатах «напряжение сдвига — нормальное давление», показаны
на рис. 2.20, и их основная часть хорошо описывается уравнением
Кулона:
х = с + р tg ф, (2.7)
где х — напряжение сдвига, кПа; с — приведенное сцепление, кПа;
р — нормальное давление при сдвиге, кПа; <р — угол внутрен¬
него трения.
Параметры сопротивления грунта сдвигу в большой степени
зависят от уплотняющего давления (рис. 2.21).
В рыхлом состоянии грунт имеет незначительное сцепление
и угол внутреннего трения. По мере возрастания уплотняющего
давления происходит увеличение угла внутреннего трения и на¬
чального сцепления, что можно объяснить увеличением числа
контактов между частицами и увеличением количества слипшихся
частиц. При уплотняющих давлениях больше 40—50 кПа число
контактов увеличивается незначительно, и величины углов вну¬
треннего трения и начального сцепления приближаются к неко¬
торым установившимся значениям.
Стабилизация величины начального сцепления, с другой сто¬
роны, объясняется еще и тем, что в процессе сдвига при отсутствии
нормального давления происходит разуплотнение грунта и взаим¬
ное зацепление между частицами уменьшается. При наличии
уплотняющего давления в процессе сдвига разуплотнения грунта
не происходит, а при давлениях, больших некоторой величины,
грунт при сдвиге еще сильнее уплотняется. Этим явлением можно
объяснить линейный характер зависимости приведенного сцепле¬
ния от уплотняющего давления. Характер протекания процессов
Дополнительного уплотнения и разуплотнения грунта в процессе
сдвиговых испытаний показан на рис. 2'. 22. На этих графиках
можно выделить следующие характерные точки:
пересечение с осью нормального давления при сдвиге, когда
образец в процессе сдвига сохраняет свой объем;
пересечение с вертикальной осью (величина разуплотнения
грунта при отсутствии нормального давления при сдвиге).
* Перед проведением опыта на сдвиг к образцу грунта предварительно при¬
кладывалось вертикальное давление, равное максимальному при сдвиге. После
прекращения обжатия образца это давление снимали и прикладывали заданное
по режиму опыта.
91
1,кПа
Рис. 2.20. Кривые сопротивления
сдвигу для грунта, уплотненного
различным давлением:
х — напряжение сдвига, кПа; р0—
давление предварительного уплот¬
нения, кПа; с — приведенное сцеп¬
ление, кПа; с0 — начальное сцепле¬
ние, кПа; ф — угол внутреннего
трения, град; р — нормальное дав¬
ление сдвига, кПа
:,кПа (р
АН ММ
Рис. 2.21. Зависимость параметров сопро¬
тивления грунта сдвигу от уплотняющей
нагрузки
Рис. 2.22. Кривые деформации образца
в процессе сдвига:
АН — дополнительная осадка, мм; /7у —
уплотняющее давление, кПа; р — нормаль¬
ное давление при сдвиге, кПа
В первом случае можно считать, что внешнее нормальное
давление уравновешивается некоторым эквивалентным внутрен¬
ним давлением в грунте и поэтому нет дополнительного измене¬
ния объема грунта. Величину этого давления можно считать «кри¬
тическим» (ркр) для данного состояния грунта.
Во втором случае величина разуплотнения грунта при отсут¬
ствии нормального давления показывает степень разрыхления
(уменьшения коэффициента пористости грунта). Зависимость раз¬
уплотнения от уплотняющей нагрузки схожа с кривой осадки
грунта при компрессионном сжатии, и грунт в этом случае имеет
тенденцию принять состояние, соответствующее некоторому экви¬
валентному внутреннему уплотняющему давлению (рв).
Величину ркр можно рассматривать как эквивалентное вну¬
треннее давление в грунте, определяющее силы сцепления и
являющееся остаточным напряжением от воздействия уплотняю-
92
щей нагрузки. Эти напряжения сохраняются, если в процессе
сдвига внешнее нормальное давление равно или превышает ркр
для данного состояния грунта. В противном случае грунт будет
разрыхляться и новому состоянию будет соответствовать умень¬
шенное значение рк. При отсутствии нормального давления в про¬
цессе сдвига ркр = рв.
Анализ экспериментальных данных по сопротивлению сдвигу
показал, что ркр находится в линейной зависимости от уплотняю¬
щего давления, а рв мало зависит от степени уплотнения грунта
и может служить некоторой характерной величиной при опреде¬
лении сопротивления сдвигу.
С учетом выявленных особенностей процесса сдвига образцов
лунного грунта взаимосвязь между напряжениями сдвигу и
нормальным давлением носит сложный характер, которая зависит
от физического состояния грунта и условий его загружения и мо¬
жет быть записана в следующем виде:
Нелинейность начальной части графика сопротивления сдвигу
приводит к значительному изменению угла внутреннего трения,
определенному как тангенс угла наклона касательной к графику
сопротивления сдвигу.
Для любой точки угол внутреннего трения будет равен:
Сопоставление значений tg ср0, вычисленных по этой формуле
и определенных в приборе Кулона, показало их хорошее совпа¬
дение, что подтверждает правомерность сделанных ранее выводов
об особенностях протекания процессов сдвига лунного грунта.
Деформация лунного грунта в процессе испытаний на сдвиг
показана на рис. 2.23.
Величина напряжения сдвига достигает максимума при неко¬
тором значении деформации сдвига. Резкого падения напряже¬
ний при возрастании деформаций не происходит, что свидетель¬
ствует о сохранении относительно постоянного среднего значе¬
2.3р tg ф
г = с — (с — с0) е
с
+ ptg ф
ИЛИ
—2,3р tg ф
+/ч. dx / ч 2,3
= (с — с0)—е
С
+ 1 tgcp.
(2.9)
Начальный угол внутреннего трения, т. е. при р = 0:
tg<Po- 2,3+ l] tgcp,
(2.10)
93
ния сил сцепления в грунте. Уменьшение напряжений сдвига
наблюдается лишь при значительной величине деформации и объ¬
ясняется в первую очередь уменьшением сечения образца.
Процесс нарастания напряжений сдвига от перемещения сдвига
хорошо аппроксимируется показательной зависимостью:
где xs — текущее сопротивление сдвигу, кПа; т—предельное
сопротивление сдвигу, кПа; S — перемещение сдвига, см; I ~~~
характерный размер образца, см; т — показатель, малозависящий
от нормального давления сдвига.
Количественные значения для образцов грунта, доставленных
«Луной-16» и «Луной-20», по параметрам сопротивления сдвигу
достаточно близки между собой.
Аналогичные результаты и зависимости были получены также
на мелкораздробленном базальте с гранулометрическим соста¬
вом, близким к лунному грунту.
Несущая способность. Несущая способность доставленных
образцов лунного грунта определялась путем внедрения штампа.
Ограниченные размеры исследуемых образцов (по отношению
к размерам штампа) позволяют рассматривать полученные- данные
главным образом, как качественные характеристики процессов
внедрения штампа.
При внедрении в грунт, находящийся в предельно рыхлом
состоянии, штамп оставляет четкий отпечаток, вокруг которого
поверхность грунта не деформируется. Общий характер дефор¬
мации соответствует в наибольшей степени процессу местного
уплотнения грунта. G увеличением плотности грунта сопротивле¬
ние внедрению штампа возрастает. Изменяется также характер
деформации грунта, появляются зоны выпирания, вокруг штампа
образуются радиальные и концентрические трещины. При вне¬
дрении в сильно уплотненный грунт (насыпная плотность
1,6 г/см3) ход кривой осадки штампа изменяется и соответствует
деформации грунта при предельном равновесии.
На рис. 2.24 приведены значения несущей способности грунта
в зависимости от его насыпной плотности р.
Несущая способность определялась для начальной части кри¬
вой внедрения и соответствует нагрузке на штамп, деленной на
площадь штампа при глубине погружения, равной диаметру
штампа. Наблюдается резкий рост несущей способности с увели¬
чением насыпной плотности более 1,4—1,5 г/см3.
В кривой несущая способность—насыпная плотность можно
выделить следующие характерные участки. В области малых
плотностей грунта (р <1,4 г/см3) основной вклад в деформацию
грунта вносит сжимаемость грунта под штампом. При плотности
(р > 1,6 г/см3) деформация грунта происходит от общего сдвига.
94
(2.11)
Рис. 2.23. Кривые деформации лунного грунта в процессе испытаний на сдвиг
(S, мм) в зависимости от напряжений сдвига (т, кПа)
Рис. 2.24. Зависимость несущей способности образцов грунта от насыпной
плотности
При р = 1,4 -ь1,6 г/см3 осадка штампа определяется уплотнением
грунта и местными сдвигами вокруг штампа.
Анализ полученных результатов. Результаты проведенных
исследований позволили получить первое представление о меха¬
нических свойствах исследованных образцов лунного грунта и
провести сравнение с ранее полученными данными.
Лунный грунт, доставленный станциями «Луна-16» и «Луна-20»,
представляет собой мелкозернистый материал, объемная плот¬
ность которого может иметь значения от 1,04 до 1,8 г/см3. Объ¬
емная плотность грунта, доставленного космическими кораблями
«Аполлон», составляла 1,36—1,4 г/см3 в рыхлом состоянии и
1,8—1,9 г/см3 в плотном. При этом в обоих случаях грунт для иссле¬
дований брался из самого верхнего слоя глубиной 100—120 мм.
Если в плотном состоянии объемные плотности достаточно близки,
то в рыхлом наблюдается существенное отличие.
Лунный грунт сильно сжимаем. Коэффициент сжимаемости
имеет переменное значение и зависит от степени плотности грунта.
При уплотнении сжимаемость грунта уменьшается. В исследо¬
ванном диапазоне уплотняющих давлений (до 100 кПа) кривая
сжимаемости может быть описана достаточно простыми соотноше¬
ниями [2.12,2.16].
Характеристики сдвига лунного грунта существенно зависят
°т его плотности. Грунт в рыхлом состоянии имеет незначительное
сцепление и малый угол внутреннего трения. По мере уплотнения
грунта (объемная плотность до 1,5 г/см3) сопротивление сдвигу
возрастает вследствие увеличения сил сцепления и угла внутрен¬
95
него трения. При последующем уплотнении (объемная плотность
выше 1,5 г/см3) угол внутреннего трения приближается к 25°,
и дальнейший рост сопротивления сдвигу происходит в основном
в результате увеличения сил сцепления.
Полученные прямыми измерениями величины углов внутрен¬
него трения и сцепления заметно отличаются от значений, кото¬
рые были известны ранее. Так, по данным «Сервейеров», угол
внутреннего трения принимается равным 35—37°, а сцепление
0,3—0,7 кПа. По данным исследований образцов грунта, до¬
ставленных «Аполлоном-11», сцепление грунта оценивается вели¬
чиной 0,3—1,4 кПа.
К этим результатам близки данные, полученные автомати¬
ческой станцией «Луна-13», где угол внутреннего трения полу¬
чился 32°, а сцепление 0,5 кПа.
Это может быть вызвано различием свойств грунта в иссле¬
дованных районах, а также, возможно, различиями в методах
их определения.
Следует отметить, что определение сжимаемости и сопротивле¬
ния сдвигу лунного грунта, доставленного «Луной-16» и
«Луной-20», проводилось прямыми измерениями по методикам,
принятым в механике грунтов. До этого эти параметры опреде¬
лялись косвенными методами по характеру деформации грунта
при воздействии на него внешних тел. Очевидно, что для полу¬
чения сопоставимых данных о механических свойствах лунного
грунта, взятых из различных районов поверхности Луны, необ¬
ходимо проводить их исследованием единой методике и с помощью
идентичных приборов.
Сравнение механических свойств лунных и земных грунтов
и искусственных материалов показывает, что близким аналогом
лунного грунта является пылеватый вулканический песок.
В качестве возможной модели лунного грунта может быть
использована смесь из фракций молотого базальта, по грануло¬
метрическому составу близкая к лунному грунту.
Изучение механических свойств пробы
лунного грунта на универсальной установке
ТОР-1 ( в среде гелия)
Исследования механических свойств лунного
грунта на установке ТОР-1 предусматривали испытания на сжи¬
маемость, сопротивление сдвигу и сопротивление пенетрации,
определение фрикционных свойств [2.8, 2.10], а также измерение
некоторых других физических свойств грунта [2.9, 2.11, 2,22].
Для исследований было использовано 2 грамма лунного грунта,
доставленного станцией «Луна-16», и 1 грамм лунного грунта,
доставленного станцией «Луна-20».
Исследования были проведены в среде гелия, так как резуль¬
таты испытаний в вакууме (0,1—1,0 мПа) и в атмосфере гелия
96
Грунтов-аналогов (кроме испытаний на трение) были одинаковыми
(табл. 2.3 и 2.4).
Таблица 2.3
Механические свойства пробы лунного грунта,
доставленного станцией «Луна-16 и испытанного
на установке ТОР-1 в среде гелия
Исследуемый показатель
Состояние грунта
Полученное
значение
Коэффициент относительной
В интервалах:
0,017
сжимаемости, Vnlla
0—20 кПа
20—85 кПа
0,002
Угол внутреннего трения
Грунт уплотнен постукива¬
нием:
начало кривой
35° 30'
в целом для графика
29° 30'
Сцепление, кПа
Грунт уплотнен постукива¬
нием:
начало кривой
3
в целом для графика
1
Удельное сопротивление пе-
Рыхлое
0,2
нетрации, кПа
После уплотнения постукива¬
нием
25
После уплотнения штампом
28
Полученные характеристики механических свойств оказались
близкими к характеристикам, которые были определены при испы¬
таниях грунта в приемном боксе. Однако сжимаемость грунта
при испытаниях в среде азота была выше, а его сцепление несколько
ниже, т. е. общая связность грунта была меньше. Сжатие происхо¬
дит, по-видимому, преимущественно в результате изменения меж-
дузерновой пористости. При экспериментах давления были не¬
достаточно велики для разрушения зерен, в связи с чем влияние
пористости внутри зерен можно считать незначительным. Характер
компрессионных кривых обычный. Сжимаемость полностью за¬
висит от исходной пористости и предварительного уплотнения.
Сдвиг производился на предварительно уплотненных образ¬
цах. Однако уплотняющее давление было 55 кПа и предельной
плотности упаковки достигнуто не было. Поэтому кривая сдвига
имеет параболический характер без волнообразного возвышения,
свойственного переуплотненным и структурно связанным грунтам.
Сопротивление сдвигу осуществлялось в основном благодаря
трению между зернами. Роль сцепления невелика.
Фрикционные свойства (коэффициент внешнего трения) лунного
грунта и его двух аналогов были определены в среде химически
чистого гелия при температуре 20° С. Анализ результатов пока-
зал, что лунный грунт по своим фрикционным свойствам близок
к земным аналогам, причем из двух грунтов-аналогов ближе
к лунному грунту стоит базальтовый порошок.
^ Д. Л. Кемурджиан 97
Таблица 2.4
Коэффициенты трения различных контртел по лунному
грунту и грунтам-аналогам
Коэффициент трения
Лунный
Аналоги
, Контртело
грунт
(проба
взята
«Лу¬
ной-16»)
базальт
дробле¬
ный
песок ан-
дезито-ба-
з альтовый
Примечание
Резина натуральная
0,50
0,50
0,65
Виден износ
Капроновая ткань,
эластик
0,40
0,40
0,55
Интенсивно изна¬
шивается
Фенилон
0,50
0,45
0,60
То же
Резина натуральная
ЗОРП
0,55
0,50
0,60
Видны следы из¬
носа
Силиконовая резина
0,55
0,50
0,60
Износа нет
Кожа натуральная
0,40
0,50
0,45
Виден износ
Магниевый сплав
0,30
0,20
0,30
Интенсивно изна¬
шивается
Дуралюмин
0,45
0,25
0,40
Видны следы из¬
носа
Титановый сплав
0,35
0,30
0,30
Износа нет
Нержавеющая сталь
0,25
0,25
0,25
То же
Конструкционная
сталь
0,30
0,25
0,30
»
Твердый сплав ВК8
0,30
0,40
0,30
»
С использованием измерительного узла, предназначенного
для определения коэффициента внешнего трения, определялась
абразивность лунного грунта (и его аналогов) по потере в массе
металлического образца, трущегося во вращающейся торцевой
поверхности цилиндров с закрепленными частицами грунтов.
Металлический образец выполнялся в виде усеченной полу¬
сферы с шаровым подпятником. Масса тщательно промытого и
обезжиренного образца определялась на аналитических весах
с точностью до 0,1 мг. Испытание на износ проводилось в течение
пяти минут при нагрузке 5,0 Н и скорости скольжения 10 см/с.
После этого образцы вынимались из камеры и вновь взвешивались.
Данные, приведенные в табл. 2.5, свидетельствуют, что абразив¬
ные свойства лунного грунта и выбранных ранее грунтов-анало¬
гов близки друг другу.
Полученные результаты позволяют отнести лунный грунт
к весьма малоабразивным породам (износ до 5 мг).
Известно, что истирающая способность вещества в суще¬
ственной мере зависит от микротвердости его частиц. В связи
98
Таблица 2.5
Абразивные свойства лунного грунта
и грунтов-аналогов
Горные породы
Первона¬
чальная .мас¬
са образца,
г
Масса об¬
разца пос¬
ле испы¬
таний, г
Износ, мг
Лунный грунт
0,8324
0,8287
3,7.
Базальт молотый
0,8194
0,8154
4,0
Андезито-базальтовый вулканиче¬
ский песок
0,8107
0,8066
L
4,1 I;
с этим были проведены измерения микротвердости частиц лунного
грунта и его аналогов при комнатной температуре. Микротвер¬
дость измеряли на приборе ПМТ-3 при нагрузке 1 Н.
Для измерения отобрали частицы со средними размерами около
1 мм, которые помещали в специальную формочку и заливали
эпоксидной смолой. После отвердевания смолы окончательную
доводку шлифа производили с помощью абразивных кругов и
паст синтетических алмазных порошков. Готовые шлифы тща¬
тельно обезжиривались. Из результатов измерений, приведенных
Таблица 2.6
Микротвердость лунного грунта и грунтов-аналогов
Материал
Среднее
значение
микротвердости
(по восьми измере¬
ниям), кН/см2
Среднее квадратич¬
ное отклонение ми¬
кротвердости,
кН/см2
Лунный грунт
800
—6
Базальт
800
—4
Андезито-базальтовый вулканиче¬
710
—7
ский песок
в табл. 2.6, следует, что микротвердость частиц лунного грунта
и молотого базальта в пределах полученной точности измерений
совпадает (микротвердость андезито-базальтового вулканического
песка несколько меньше).
С помощью установки ТОР-1 были проведены также исследо¬
вания электрических свойств лунного грунта (относительной
Диэлектрической проницаемости е, тангенса угла диэлектрических
потерь tg А и удельного электрического сопротивления р) при раз¬
личных частотах /.
Методика измерений изложена в работах [2.9,2.11]. Основ¬
ные результаты измерений электрических свойств образцов лун-
7* 9
Е*
U
2
s
o:c
<i,
ьо2
s
«О
о
о
Ч
Ef
u
£
>»
ч
m
s
O:o
<a i
о
ьо —
CM*
Q
ЗГ
«2
a
Е-ч
CO
к
ас
о еэ
аз см
ewo/J
qjLOOHxoiru
ввнпетэвн
н- >*
CD О 00 CD
О 05 Ю СО
—Г —Г о" сГ
00 О —I
—Г см" со со
<э-о со^
со" ю"
—I СМ со со
CD to О Ю
CO^COD О
о" о" о" о"
ООО —
^ О CD СО
СОл
см" со" со со
СМ СО Ю ^
см со" со" со"
Я
X
03
4
я
я
в
о
ч
-О
>>3
£•*
“3
9S ~
2 »я
я 2
х S
>» 9
^ £
CM t"-
о"о"
о о
о" см"
см о
CM
ю t--
со см
Е*
и
р.
Ом
СМ —• см
о"
см о
2
*
<?
00 СО СМ
CD
со^—1
o'
II
Ьо2
о" о" о
о"—"
II
ONO
О
О CD
^со
см" со
X
X
<и
ч
о
ч
н
л
ч
, ч
03 ХО
£ я
&>>
*3
9К ^
3>я
я £
Я я
>> э
СГ к
03
о
си
ч
00
03
СХ,
о
я
4
о»
£
СВ
о
ч
А
о
см
I
со
со н-
со о
Оо
см
у
гг
v§
р2
>»Z
* с
СО СО
со *—
о
09
09 S
2 >»
со >*
о ж
2
СЗ
(X
<я
с
03
с
S
>>
>>
Я
03
СО
S
о
X
л
ч
03
S3
си
о
я
я
си
»я
1*
4 аз
аз е
и п
я
CD оо
СО CD
00
о"
о>
со"
СО Ь-
СО CM CD
ОО ^ ID
о о" со
—• см
со о ^ о
00 со 00 00
СО 00
СМ оо О)
оо со
о
— t>-
СМ оо
CM CD СМ
00 СО О
о
см —
со со Ю
^ о
ст> см
ID QQ ID
00 со 5g оо 00
о" о" cvf см" g"
СО to
—I со см о
ОО СО N СО
— см
_4 СМ ^
с» со CD
о" о" см"
ч
я
си
'ч
Я
си
"ч
Я
си
i,
О
<м
г
'н
PQ
'н
CQ
со
О
ОО*4
О
со
О
«i
«3
«i
100
ного грунта, доставленных станциями «Луна-16» и «Луна-20» (ди¬
электрическая проницаемость е, тангенс угла диэлектрических
потерь tg А и удельное электрическое сопротивление р), приве¬
дены в табл. 2.7. Определялись также тепловые свойства лунного
Таблица 2.9
Тепловые свойства аналогов лунного грунта
Темпера¬
тура
°С
Анортозит мелкораздробленный
Андезитовый
песок
р=1,1 г/см3
С, Дж/(г* град)
р = 1,53 г/см3
р= 1,29 г/см3
С, Дж/(г- град)
р- 1,62 г/см3
о
2
о
а
Я
я
а
и
С^СР
.tj
2
о
а
Я
я
а,
(-Н
о
2
о
а
Я
я
о,
оЗ
• н
о
2
00
О
а
S
а
оЗ
7'н
<<0Р
25
0,413
3,36
0,740
0,675
6,46
0,745
0,98
11,8
35
0,448
3,67
0,746
0,661
7,70
0,700
6,75
0,749
1,09
12,4
45
0,491
4,06
0,750
0,682
7,98
0,810
7,90
0,753
1,28
15,4
55
0,509
4,20
0,752
0,713
8,40
0,870
8,50
0,756;
1,36
16,6
65
0,548
4,56
0,760
0,795
9,39
0,925
9,08
;0,758
1,63
20,8
100
1,128
11,21.
0,770
2,00
26,0
150
1,347
13,58
0,781
2,39
30,2
грунта: коэффициент теплопроводности X, коэффициент темпера¬
туропроводности а и удельная теплоемкость С.
Методика этих измерений изложена в работах [2.9, 2.221.
Основные результаты определения коэффициента температуро¬
проводности (а), удельной теплоемкости (С) и коэффициента теп¬
лопроводности (Я) для образца грунта, доставленного станцией
«Луна-20», а также для его аналогов, приведены в табл. 2.8 и 2.9.
СПИСОК ЛИТЕРАТУРЫ
2.1. Бокс для работы с лунными образцами в атмосфере азота. — В кн. Лун¬
ный грунт из Моря Изобилия. М., «Наука», 1974, с. 34—37. Авт.: Стахеев Ю. И.,
Тарасов Л. С., Крестинина К- К., Иванов А. В.
2.2. Введение в физику Луны. М., «Наука», 1969, 311 с. Авт.: Жарков В. Н.,
Паньков В. Л., Калачников А. А., Оснач А. И.
2.3. Виноградов А. П. Предварительные данные о лунном грунте, доставлен¬
ном автоматической станцией «Луна-16». — «Геохимия», 1971, N° 3, с. 261—273.
2.4. Виноградов А. П. Предварительные данные о лунном грунте, доставлен¬
ном автоматической станцией «Луна-20». — «Геохимия», 1972, № 7, с. 763—774.
2.5. Денисов Н. Я. Использование данных, полученных при бурении, для
оценки состояния скальных пород. — В кн. Докл. к I Междунар. конгрессу по
механике скальных пород. М., изд. НИИОснований, 1967, с. 15—28.
107 Жарков В. Н. Внутреннее строение Земли, Луны и планет. М., «Знание»,
1973, с. 64.
2.7. Захарьев Б. В., Кардыш В. Г. Исследования США в области бурения
скважин на лунной поверхности. — В сб. Современные представления о Луне.
«Наука», 1972, с. 117—124.
101
2.8. Исследования механических свойств лунного грунта и его аналогов
в различных атмосферных условиях и в вакууме на установке ТОР-1. — В сб.
Лунный грунт из Моря Изобилия. М., «Наука», 1971, с. 571—581. Авт.: Вед^
нин А. И., Духовской Е. А., Маркачев В. В., Силин А. А., Черкасов И. И., Шва-
рев В. В.
2.9. Исследования физических свойств грунта Луны и его земных аналогов.
«Космические исследования», т. X, вып. 1, 1972, с. 120—124. Авт.: Головкин А. Н.,
Духовской Е. А., Петраченков Р. Г., Ржевский В. В., Силин А. А., Шварев В. в!
2.10. Исследование фрикционных свойств лунного грунта и его аналогов. —
В сб. Лунный грунт из Моря Изобилия. М., «Наука», 1974, с. 582—586. Авт.:
Духовской Е. А., Мотовилов Э. А., Силин А. А., Смородинов М. И., Шварев В. В.
2.11. Исследование электрических свойств лунного грунта («Луна-20») в зави¬
симости от частоты и объемного веса. — Докл. АН СССР, т. 218, 1974, № 4,
с. 799—802. Авт.: Ржевский В. В., Головкин А. Р., Духовской Е. А., Петрачен¬
ков. Р. Г., Силин А. А., Шварев В. В.
2.12. Механические свойства образца лунного грунта, доставленного автома¬
тической станцией «Луна-16».—«Космические исследования», т. IX, вып. 5, 1971,
с. 767—777. Авт.: Громов В. В., Дмитриев А. Д., Леонович А. К-, Ложкин В. А.,
Павлов П. С., Рыбаков А. В., Шварев В. В.
2.13. Моделирование тепловых режимов космического аппарата и окружаю¬
щей его среды. Под ред. Г. Н. Петрова. М.,‘«Машиностроение», 1971, с. 214—235.
Авт.: Козлов Л. В., НусиновМ. Д., Акишин А. И., Залетаев В. М., Козелкин В. В.
2.14. Освоение космического пространства в СССР, 1967—1976. М., «Наука»,
1971,’ с. 215—234.
2.15. Освоение космического пространства в СССР, 1972; М., «Наука», 1973,
с. 81—121.
2.16. Основные особенности процессов деформации и разрушения лунного
грунта. — В сб. Космохимия Луны и планет. М., «Наука», 1975, с. 58-5—592.
Авт.: Громов В. В., Леонович А. К., Дмитриев А. Д., Пенетригов В. Н., Се¬
менов П. С., Шварев В. В.
2.17. Первый эксперимент по бурению на Луне.—«Космические исследо¬
вания», т. IX, вып. 4,.1971, с. 580—586. Авт.: Графов'В. Е., Булеков В. П., Дрю-
ченко Д. Д., Захарьев Б. В., Мотовилов Э. А., Смородинов М. И., Стрелов Ю. Н.,
Шварев В. В.
2.18. Прибор ТОР-1 для исследования инженерно-физических свойств лун¬
ного грунта. —Докл. АН СССР, т. 199, 1971, № 5, с. 1038—1040. Авт.: Дрож-
жина М. П., Дымов В. В., Крылов В. М., Маркачев В. В., Силин А. А., Шва¬
рев В. В.
2.19. Природные богатства Луны и проблемы их разработки (по материалам
зарубежных журналов). — В сб. № 11 ОНТИ ВИЭМС, 1967, с. 21.
2.20. Проведение эксперимента по отбору пробы грунта с поверхности Луны
при помощи автоматической станции «Луна-20». — «Космические исследования»,
т. XI, вып. 3, 1973, с. 460—464. Авт.: Булеков В. П., Граф Л. Э., Дрюченко Д. Д.,
Захарьев Б. В., Мотовилов Э. А., Смородинов М. И., СтреловЮ. Н., Шварев В. В.
2.21. Силин А. А. Метод оценки влияния окружающей среды на процессы
внешнего трения и износа. — В сб. Научные принципы и новые методы испыта¬
ний материалов для узлов трения. М., «Наука», 1968, с. 128—132.
2.22. Тепловые свойства грунта «Луны-20» и его земных аналогов. — Докл.
АН СССР, т. 218, 1974, № 5, с. 1043—1045. Авт.: Ржевский В. В., Духов¬
ской Е. А., Круглов П. Т., Петраченков Р. Г., Силин А. А., Шварев В. В.
2.23. Установка,для работы с внеземным веществом в среде инертного гаэа. —
«Космические исследования», т. X, 1972, вып. 5, с 766—770. Авт.: Сурков Ю. А.,
Хейфец А. Б., Рудницкий Е. М., Данилов К- Д., Глотов В. А., Шварев В. В.
2.24. Apollo 11. Preliminary science report. NASA SP-214, Washington,
D. C., 1969, 204 pp.
Rk
ТОМАТИЧЕСН
ЕРЕДВИЖНЬ
1АБ0РАТ0РИ1
ПУЫПУПЛ-Г
щ
лупилид 1
„луноход-:
3.1. НАЗНАЧЕНИЕ ПЕРЕДВИЖНЫХ
ЛАБОРАТОРИЙ-ЛУНОХОДОВ
Прямые исследования лунного грунта в месте
посадки автоматических станций, изучение образцов грунта,
доставленных на Землю, давали информацию лишь об отдельных
точках лунной поверхности. Чтобы получить более полное пред¬
ставление о грунтах на больших площадях и установить связь
между их свойствами и элементами поверхности рельефа Луны,
следовало перейти от стационарных исследований в отдельных
ее точках к исследованиям на протяженных трассах.
Создание и использование подвижных аппаратов — следу¬
ющий важный этап в изучении Луны. Подвижные аппараты зна¬
чительно расширили возможности изучения Луны. Очевидное
преимущество космического автоматического подвижного аппарата
перед пилотируемым кораблем состоит прежде всего в том,
что его работа не связана с риском для человеческой жизни,
а также с возможностью вести исследования в местности, где
условия работы могут быть неблагоприятными для космонавтов.
Перед стационарными подвижные аппараты имеют несомнен¬
ные преимущества как по объему выполняемых работ, так и по
экономическим затратам.
Стремление к движению как средству познания мира вообще
свойственно человечеству. Ведь и Землю человек изучает с по¬
мощью различных подвижных средств.
Будущее в изучении Луны и других планет трудно представить
себе без транспортных средств. Вероятно, будут созданы луно-
х°Ды самого различного назначения — для перевозки космо¬
навтов, для транспортировки грузов, луноходы-тягачи, луноходы
с Установленным на них разнообразным оборудованием и т. п.
Люди, выйдя за пределы Земли, будут осваивать планеты и
в первую очередь Луну. Возникнут обитаемые станции, а следо¬
103
вательно, появится необходимость обрабатывать грунт, прокла¬
дывать дороги, строить стартовые площадки и т. д. [3.9]. Так же
как и на Земле, для всего этого понадобятся дорожные и строц!
тельные машины, средства механизации, буровые установки,
научное оборудование, установленное на автономных самоход¬
ных шасси.
«Луноход-1» — первое планетное самоходное транспортное
средство. И человечество всегда будет помнить первый луноход
советский «Луноход-1», поставив его в один ряд с первым паро¬
ходом, первым самолетом, первым автомобилем.
Автоматическая станция «Луна-17» была запущена 10 ноября
1970 г. в 17 часов 44 минуты с пусковой установки космодрома
Байконур и была выведена на промежуточную околоземную
орбиту. Станция состояла из посадочной ступени и установлен¬
ного на ней самоходного аппарата — лунохода. Главным назначе¬
нием автоматической станции была доставка на поверхность Луны
первой подвижной научной лаборатории — лунохода. Посадоч¬
ная ступень станции «Луна-17» была унифицирована с посадочной
ступенью станции «Луна-16» (см. гл. 2). Основное отличие ее
заключается в том, что на ней имеются устройства* и системы
для установки и крепления лунохода и устройства для съезда
лунохода на грунт. В 18 часов 56 минут станция вышла на траек¬
торию полета Земля-Луна. 15 ноября станция достигла окрест¬
ностей Луны и после включения тормозных двигателей перешла
на круговую орбиту спутника Луны. После корректировки орбиты
минимальное удаление станции от поверхности Луны составило
19 километров. Для посадки были второй раз включены тормозные
двигатели. 17 ноября в 6 часов 46 минут 50 секунд по московскому
времени автоматическая станция «Луна-17» совершила мягкую
посадку на поверхность Луны в районе Моря Дождей в точке
с селенографическими координатами 38° 17' с. ш. и 35° 00' з. д.
После проверки функционирования бортовых систем и осмотра
лунной поверхности по команде с Земли в 9 часов 28 минут по
московскому времени колеса лунохода коснулись поверхности
Луны. Впервые в истории человечества на поверхности Луны
началось движение самоходного транспортного средства.
Создание космической станции «Луна-17» и самоходного
аппарата «Луноход-1» позволило перейти от изучения отдель¬
ных точек поверхности Луны к исследованию значительных по
протяженности ее районов [3.11]. Изучение Луны с помощью
передвижной лаборатории «Луноход-1» явилось очередным этапом
советской программы по исследованию космического простран¬
ства с помощью автоматов.
С помощью лунохода предполагалось решить большой комплекс
научных и инженерно-технических задач, провести разносторон¬
ние научные исследования [3.12]. К ним относятся: изучение
топографических и геолого-морфологических особенностей мест¬
ности, определение химического состава (прибор РИФМА) и фи-
104
зико-механических свойств лунного грунта; исследование радиа¬
ционной обстановки на трассе перелета к Луне, в окололунном
пространстве и на поверхности Луны; исследование рентгенов¬
ского излучения, эксперименты по лазерной локации Луны с по¬
мощью уголкового светоотражателя, установленного на луноходе.
При запуске станции «Луна-17» и во время работы «Луно¬
хода-1» предусматривалось также решение ряда конструкторских
й инженерно-технических задач, отработка посадочной ступени
и способа посадки на поверхность Луны, отработка методов
и приемов дистанционного управления движением лунохода,
исследование характеристик подвижности, изучение лунной по¬
верхности для решения оперативных задач, связанных с обеспе¬
чением проходимости и устойчивости движения лунохода и выяв¬
лением опасных ситуаций, а также проверка системы терморегу¬
лирования при работе в периоды лунных дней и ночей и ряд дру¬
гих проблем.
Программа работы «Лунохода-1» была успешно выполнена.
Общая протяженность маршрута движения составила около
10 км. С помощью «Лунохода-1» была получена уникальная ин¬
формация о лунной поверхности, которая значительно расширила
и дополнила сведения о природе Луны. Многие научные резуль¬
таты были получены впервые, и это стало возможным лишь по¬
тому, что исследования проводились регулярно на обширной
территории и в течение длительного времени.
Общее время работы «Лунохода-1» составило 11 месяцев, было
передано на Землю несколько тысяч изображений лунной по¬
верхности, проведено детальное исследование поверхности Луны
на трассе протяженностью около 10 км, выполнено свыше 500 из¬
мерений механических свойств лунного грунта. 16 января 1973 года
в 01 часов 35 минут московского времени автоматической стан¬
цией «Луна-21» в район восточной окраины Моря Ясности был
доставлен самоходный аппарат «Луноход-2». Точка посадки стан¬
ции, расположенная неподалеку от южной кромки кратера Ле-
монье, имеет координаты 30° 27' восточной долготы и 25° 51'
северной широты. Методика и программа исследований лунной
поверхности с помощью «Лунохода-2» была разработана на осно¬
вании опыта, накопленного при работе самоходного аппарата
«Луноход-1». Особенность работы «Лунохода-2» состояла в соче¬
тании детальных исследований отдельных участков поверхности
маршрутных исследований по всей трассе движения аппарата
Участки комплексного изучения поверхности можно рассма¬
тривать как опорные точки вдоль трассы движения «Лунохода-2».
Сопоставление количественных характеристик, полученных в опор-
нЬ1х точках, позволяет оценить изменения исследуемых свойств
п°верхности по маршруту самоходного аппарата.
Программа работы «Лунохода-2» была составлена в соответ-
СТвии с главной комплексной научной задачей совместного изуче¬
105
ния изменений основных физико-химических и механических
свойств поверхности в зависимости от геолого-морфологической
обстановки в зоне перехода морского района Луны в материковый.
В эту задачу входило получение геолого-морфологических и то¬
пографических данных, изучение магнитного поля, химического
состава поверхностного слоя и физико-механических свойств
грунта, а также оптических свойств поверхности. Для этого на
«Луноходе-2» были установлены магнитометр, рентгеноспектраль¬
ный прибор «РИФМА-М», прибор для оценки физико-механических
свойств грунта, фотометрические марки. Кроме этих приборов
на борту «Лунохода-2» были установлены приборы и устройства,
предназначенные для решения других задач, имеющих важное
научное и техническое значение. Это астрофотометр, измеряющий
светимость лунного неба, радиометр, измеряющий характеристики
космического излучения, фотоприемник «Рубин-1», служащий для
проведения экспериментов по лазерной пеленгации лунохода,
а также французский уголковый отражатель лазерного излучения.
Намеченная программа исследований на «Луноходе-2» была
полностью выполнена. В течение пяти месяцев было -преодолено
рекордное расстояние и проведены исследования по трассе дли¬
ной 37 километров.
Успешная работа «Лунохода-1» и «Лунохода-2» продемон¬
стрировала широкие возможности и перспективы по исследованию
поверхности Луны с помощью подвижных станций. Нет сомнений
в том, что полученный опыт может быть успешно применен и при
разработке космических средств для исследования других косми¬
ческих тел (планеты Марс, Меркурий, Венера и др.).
3.2. ПОСАДОЧНАЯ СТУПЕНЬ
СТАНЦИИ «ЛУНА-17»
Посадочная ступень станции «Луна-17» (рис. 3.1)—
ракетный блок, аналогичный посадочной ступени станции
«Луна-16». Ее основные задачи — проведение коррекции полета
по трассе Земля — Луна и обеспечение всех маневров, связанных
с посадкой на Луну (переход на орбиту искусственного спутника
Луны, формирование предпосадочной окололунной орбиты, мяг¬
кая посадка).
Луноход жестко крепится к посадочной ступени с помощью
пироузлов, чтобы избежать колебаний при различных маневрах
на этапе полета и при посадке. Упругие элементы ходовой части
при этом поджаты. Перед съездом производится подрыв пиропатро¬
нов, отчего луноход несколько приподнимается — «отскакивает»,
при этом освобождаются механические связи и происходит разъ¬
единение электрических связей. В конструкции посадочных
устройств предусмотрена возможность после посадки при необхо¬
димости (путем подрыва пироустройств в узлах крепления амор¬
тизатора) дополнительно опустить посадочную ступень для улуч-
106
Рис. 3.1. Схема посадочной ступени станции «Луна-17»:
1 — блок баков; 2 — трапы; 3 — луноход; 4 — тормозной двигатель; 5 — пироузлы креп¬
ления лунохода; 6 — опора
Рис. 3.2. Трапы для схода лунохода с посадочной ступени (снимок, переданный «Луно¬
ходом-1» с Луны)
шения условий схода лунохода. Это и было сделано перед съездом
лунохода со станции «Луна-17».
Трапы для съезда лунохода во время полета сложены и нахо¬
дятся в поднятом положении. Перед съездом лунохода подвижные
части трапов спрямляются в горизонтальном положении и опу¬
скаются до соприкосновения с грунтом. Одна пара трапов пред¬
назначена для съезда вперед, другая — назад. Направление
съезда выбирается в зависимости от положения посадочного
Устройства на грунте, углов съезда и окружающей обстановки
(рис. 3.2). Для предохранения от сваливания лунохода с трапов,
107
при «otckoKb й в случае наклона посадочной ступени на боковой
поверхности подвижных и неподвижных частей трапов имеются
небольшие перила.
3.3. ОБЩИЕ ДАННЫЕ О ЛУНОХОДАХ
Советские автоматические передвижные аппараты
«Луноход-1» и «Луноход-2» представляют собой унифицированные
конструкции, предназначенные для проведения длительных науч¬
ных исследований различных районов лунной поверхности на
значительных территориях. Отличия в конструкции «Лунохода-1»
и «Лунохода-2» определялись особенностями научных программ
исследований, составом научной аппаратуры, а также накоплен¬
ным опытом эксплуатации подобных аппаратов.
Основные конструктивные различия «Лунохода-1» и «Луно¬
хода-2» состояли в установке фототелевизионных устройств и
изменении некоторых бортовых систем с целью повышения их на¬
дежности. Но в основном «Луноход-1» и «Луноход-2» имеют оди¬
наковое устройство. Поэтому в дальнейшем приводится описание
конструкции только «Лунохода-1».
Ниже приведены основные характеристики «Лунохода-1» [3.12,
3.16].
Масса 756 кг
Габаритные размеры:
длина (с открытой солнечной батареей) 2,94 м
ширина 1,96 м
Скорость передвижения
первая 0,9—1,0 км/ч
вторая
Преодолеваемый угол уклона на местности
Высота преодолеваемого препятствия .
Ширина преодолеваемой щели ....
Количество возможных маневров движе¬
ния
1,8—2,0 км/ч
до 30°
0,25—0,4 м
0,6 м
14
Луноход состоит из двух основных частей (рис. 3.3) — само¬
ходного шасси и установленного на нем герметичного приборного
отсека. Габаритные размеры лунохода показаны на рис. 3.4.
Приборный отсек является одновременно несущим корпусом
лунохода. На нем установлены все системы лунохода. В нижней
части через силовые элементы конструкции приборный отсек
соединяется с ходовой частью и воспринимает на себя статиче¬
ские и динамические нагрузки, возникающие при движении на
местности. Приборный отсек выполнен в виде усеченного конуса.
Верхнее и нижнее днище имеют выпуклую форму. Принятая
форма приборного отсека обеспечивает достаточную жесткость
и прочность конструкции. Верхнее днище выполняет функции
радиатора-охладителя и закрывается управляемой подвижной
крышкой. С наружной стороны крышка имеет термоизоляцию
108
Рис. 3.4. Габаритные размеры «Лунохода-1»
и в закрытом состоянии препятствует потерям тепла из отсека
(в условиях лунной ночи).
С внутренней стороны на крышке расположены солнечные
батареи. Лунным днем крышка устанавливается под необходимым
углом по отношению к Солнцу. Ток, вырабатываемый солнечными
батареями, производит подзарядку буферных аккумуляторов
лунохода. В нижнем днище отсека имеется силовой шпангоут,
к которому крепится рама с приборами. Снаружи приборного
отсека расположены: иллюминаторы для объективов малокадро-
109
Рис. 3.5. Принципиальная схема самоходного шасси:
1 — упругая подвеска; 2 — кабельная сеть; 3 — пенетрометр; 4 — мерное колесо; 5 —
электродвигатель с тормозом; 6 — редуктор; 7 — блок автоматики шасси; 8 — несущая
конструкция (кронштейн); 9 — движитель; 10 — механизм разблокировки
вого телевидения, электромеханический привод подвижной остро¬
направленной антенны, предназначенной для передачи на Землю
телевизионных изображений, неподвижная коническая спираль¬
ная антенна для приема радиокоманд с Земли и передачи телеме¬
трической информации, четыре штыревые антенны -для приема
радиокоманд в другом диапазоне частот, изотопный источник
тепловой энергии для подогрева газа системы терморегулирова¬
ния, рядом с ним установлен прибор оценки проходимости
(ПРОП). В передней части приборного отсека расположена науч¬
ная аппаратура — выносной блок аппаратуры определения хими¬
ческого состава грунта (РИФМА), уголковый отражатель, блок
рентгеновского телескопа и блок дозиметра.
Внутри приборного отсека помещается бортовая аппаратура
лунохода и электронно-преобразовательные устройства научной
аппаратуры.
Самоходное шасси — автоматическая система, осуществляю¬
щая передвижение лунохода по поверхности Луны (рис. 3.5.)
Управление движением происходит по командам с Земли,
передаваемым по радиокомплексу. Кроме этого на борту лунохода
имеется автоматическая система безопасности, следящая за рабо¬
той самоходного шасси и подающая команду «стоп» в случае
возникновения опасных ситуаций (с выдачей соответствующей
телеметрической информации на Землю о причинах остановки).
В состав самоходного шасси входит:
ходовая часть, включающая колесный движитель и упругую
подвеску, необходимые для движения по неровной местности и
на уклонах;
электродвигатели и механическая трансмиссия, предназна¬
ченные для вращения ведущих колес и передачи на них необхо¬
димых тяговых усилий;
блок автоматики шасси (БАШ) для исполнения команд, пере¬
даваемых с Земли, в состав которого также входят бортовые
110
логические устройства для автоматического исполнения маневров
и остановки при опасных дорожных условиях (система безопас¬
ности движения);
комплекс датчиков и измерительных приборов для наблюде¬
ния за работой механизмов самоходного шасси и получения
научной информации;
прибор оценки проходимости;
несущая конструкция (кронштейны) для крепления к при¬
борному отсеку лунохода;
кабельная сеть.
Колеса, трансмиссии и двигатели объединены в единые узлы
(мотор-колеса). Луноход имеет восемь мотор-колес, каждое из
которых является ведущим. При необходимости любое колесо
может отключаться от силового привода. Это позволяет сохра^
нять высокую проходимость при выходе из строя привода од¬
ного или нескольких колес.
Все колеса неповоротные относительно вертикальной оси.
Поэтому для изменения направления движения лунохода колеса
по бортам имеют различную частоту вращения (бортовой способ
поворота). Такой принцип поворота широко применяется для
гусеничных машин. При этом, если частота вращения колес одного
борта выше, чем другого, но все колеса вращаются в одну сторону,
происходит поворот с некоторым постоянным радиусом. Если
колеса имеют одинаковую частоту вращения, но по бортам вра¬
щаются в разные стороны, то поворот осуществляется на месте
вокруг вертикальной оси симметрии ходовой части.
Особенность самоходного шасси «Лунохода-1» состоит также
в одинаковых характеристиках движения как при движении
вперед, так и при движении задним ходом. Это имеет важное
значение при дистанционном управлении луноходом.
Техническая характеристика самоходного шасси «Лунохода-1»
приведена ниже.
Колесная формула
Колесная база
Колея
8X8
1,7 м
1,6 м
Среднее удельное давление * при
глубине колеи 30 мм
5 кПа
Способ поворота
изменением частоты
и направления враще¬
ния колес по бортам
Радиус поворота по забегающему
борту:
1-й режим
2-й режим
3,5 м
0,8 м
* При лунной силе тяжести
Ш
3.4. КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ
НЕКОТОРЫХ СИСТЕМ ПРИБОРНОГО ОТСЕКА
«ЛУНОХОДА-1»
Телевизионные системы. На «Луноходе-1» имеются
две телевизионные системы [3.12].
телевизионная система, имеющая передающие камеры с оп¬
тико-механической панорамной разверткой, предназначенная для
исследования структуры и топографической съемки местности,
а также для наблюдения Земли и Солнца;
система малокадрового телевидения, используемая для
управления движением. Малокадровая телевизионная система
состоит из двух передающих камер и одного моноблока. Камеры
располагаются внутри герметического приборного отсека луно¬
хода в специальных приливах, закрытых иллюминаторами. Одна
из камер расположена по продольной оси лунохода, вторая сдви¬
нута на 400 мм вправо (по ходу движения), что позволяет получить
стереопары телевизионных снимков с этой базой (рис. 3.6). Мало¬
кадровая телевизионная система имеет несколько режимов по
скорости передачи: 3,2; 5,7; 10,9; 21,1 с на один кадр. Масса
телевизионной системы 12 кг, мощность, потребляемая одним
полукомплектом, 25 Вт. Электромеханический затвор имеет основ¬
ную выдержку 1/25 с, что позволяет избежать смазов изображений
во время движения лунохода. Предусмотрена также возможность
устанавливать другую величину выдержки. Имеется также управ¬
ляемая головка с набором нейтральных светофильтров. Камера
имеет широкоугольный объектив F = 6,7 мм, и D/F = 1:4.
Угол зрения в горизонтальной плоскости 50°, в вертикальной
38°. Ось визирования камер наклонена вниз на 15°. Особенностью
видикона, используемого в этой системе, является способность
длительного запоминания сигналов. Время запоминания регули¬
руется от 3 до 20 с. Малокадровая телевизионная система обеспе¬
чивает для контрастных объектов сквозную четкость изображе¬
ния — около 400 линий и для малоконтрастных — 300 линий.
Панорамная телевизионная система «Лунохода-1» построена
с использованием принципа панорамных камер космических
станций «Луна-9» и «Луна-13». Панорамная развертка произво¬
дится в камерах с помощью сканирующего зеркала, которое полу¬
чает колебательное и вращательное движение от электродвига¬
теля и кулачка. В качестве светоприемника служит малогаба¬
ритный фотоэлектронный умножитель. Панорамные камеры «Лу¬
нохода-1» имеют две скорости передачи: одна строка в секунду
и четыре строки в секунду. Относительное отверстие объектива
1 : 6. Угловая разрешающая способность 0°,06, параметры раз¬
ложения — 500 элементов X 6000 строк в полной панораме.
Все это позволило получить высокое качество изображения.
Четыре панорамные камеры установлены в приливах корпуса
приборного отсека. С каждой стороны лунохода имеется одна
112
рис. 3.6. Схема установки теле¬
камер на «Луноходе-1»
У
J3°V/
V
-Ук
'//////////////Г?
’///у///////.
950
1 15°
камера для вертикаль¬
ного панорамирования
и одна — для панорами¬
рования в горизонталь¬
ной плоскости.
Вертикальные пано¬
рамы предназначены
главным образом для
передачи изображения
Земли и Солнца и пока- 501
заний датчика лунной
вертикали. С помощью
этих панорам можно
увидеть поверхность
Луны у колес лунохода,
а также и состояние по¬
верхности самих колес
лунохода.
Датчик лунной вертикали представляет собой чашу со сфериче¬
ской внутренней поверхностью, по которой свободно перекаты¬
вается шарик. По положению шарика определяется направление
лунной вертикали. На рис. 3.7 показана панорама, снятая после
съезда лунохода с посадочной платформы. На снимке видны трапы
и колея лунохода.
Передача изображения может происходить одновременно с двух
камер с использованием модуляторов на двух поднесущих ча¬
стотах 190 и 130 кГц. Запись изображения на Земле произво¬
дится на фотопленку, магнитную пленку и электрохимическую
бумагу.
Система терморегулирования [3.12, 3.16]. На «Луноходе-1»
задача поддержания нормального температурного состояния обес¬
печивается рациональным сочетанием активных и пассивных
методов терморегулирования. У некоторых узлов лунохода (на¬
пример, ходовая часть, ПРОП, приводы антенны, солнечная ба¬
тарея и др.) температурное состояние обеспечивается только
при помощи пассивных методов: применением специальных термо¬
регулирующих покрытий наружных и внутренних поверхностей,
экранно-вакуумной изоляции, созданием в конструкции дроссе¬
лей для тепловых потоков. Температурный режим внутри при¬
борного отсека регулируется двухконтурной активной цирку¬
ляционной системой.
Система имеет «холодный» и «горячий» контуры, по которым
направляется циркулирующий газ (при помощи управляемой
заслонки) в зависимости от температурного состояния отсека.
Для охлаждения газа (лунным днем) используется радиационный
8 А. Л. Кемурджиан ИЗ
Рис. 3.7. Панорама,^переданная «Луноходом-1» после съезда с посадочной ступени
охладитель (верхнее днище приборного отсека). Тепло в этом слу¬
чае отводится излучением в космическое пространство.
Лунной ночью происходит подогрев газа путем теплообмена
с изотопным источником тепла, расположенным вне контейнера.
Система терморегулирования обеспечивает достаточно стабиль¬
ный температурный режим внутри приборного отсека. За первых
три месяца работы «Лунохода-1» температура газа в отсеке на¬
ходилась в пределах +7^-+32° С, в то время как диапазон коле¬
баний температуры поверхности Луны в течение суток составляет
около 300°.
Так же в допустимых пределах находились температура узлов,
имеющих пассивное терморегулирование. Так, температура при¬
вода антенн не превышала днем +80° С, температура привода
солнечной батареи +50° С, мотор-колес самоходного шасси
+ 120° С, солнечной батареи +140° С.
Радиокомплекс 13.12]. Радиокомплекс лунохода предназначен
для приема команд с Земли, передачи их к бортовым системам
и передачи на Землю так называемых «квитанций» — подтвержде¬
ний исполнения команд, а также для передачи на Землю теле¬
метрической информации от различных измерительных датчиков
бортовой аппаратуры. При помощи радиокомплекса передаются
на Землю телевизионные и фотопанорамные изображения.
Радиокомплекс состоит из приемо-передающей дублированной
аппаратуры, преобразующе-коммутациоцных устройств бортовой
И 4
телеметрии, системы антенн. Радиокомплекс обеспечивает прием
более 200 видов команд. Часть аппаратуры радиокомплекса рабо¬
тает как при движении лунохода по поверхности Луны, так и во
время полета станции «Луна-17» к Луне. Система антенн, уста¬
новленных на луноходе, обеспечивает надежную радиосвязь
в различных диапазонах при стоянке и движении лунохода и при
полете станции «Луна-17». Всего на станции «Луна-17» установ¬
лено 10 антенн. Две пары штыревых антенн, установленных на
луноходе, осуществляют связь с Землей в диапазоне углов визи¬
рования =5=180°. Три малонаправленные конические спиральные
антенны (две из них расположены на сбрасываемом отсеке) обес¬
печивают сферическую суммарную диаграмму направленности.
На одной из опор посадочной ступени установлена дополнительная
малонаправленная антенна. Для передач телевизионного изобра¬
жения служит остронаправленная антенна (с диаграммой направ¬
ленности 30°). Управление положением этой антенны производится
электромеханическим приводом по командам с Земли. Бортовые
приемо-передающие устройства можно подключать к любой из
антенн.
Система электропитания [3.12]. Бортовая система электро¬
питания осуществляет снабжение всех систем постоянным током,
причем некоторые системы (для которых это необходимо) обеспе¬
чиваются стабилизированным напряжением с колебаниями не
более =5=2%. Система состоит из солнечной батареи, буферной
аккумуляторной батареи и автоматической системы управления
8* 115
зарядно-разрядными режимами. Система допускает значительные
кратковременные токовые перегрузки при движении лунохода по
пересеченной местности. Управление положением солнечной ба¬
тареи позволяет закрыть крышку солнечной батареи при наступле¬
нии лунной ночи и фиксировать ее в открытом состоянии в про¬
межуточных положениях в зависимости от положения Солнца.
3.5. УСТРОЙСТВО САМОХОДНОГО ШАССИ
.Особенности работы самоходного шасси луно¬
ходов. Самоходное шасси «Лунохода-1» не имеет прототипов.
Такая транспортная система разработана была впервые,
а условия и режим ее работы специфичны и отличаются от условий
и режимов работы наземных транспортных средств и различных
систем космических аппаратов [3.2].
В чем же заключается эта специфичность?
Первая особенность состоит в том, что самоходное шасси
является транспортным средством и должно иметь достаточную
.жесткость, прочность и плавность хода при движении по неров¬
ному рельефу и преодолении препятствий, обладать развитыми
опорными поверхностями для снижения удельных давлений на
грунт, обеспечивать необходимую устойчивость и хорошие сцеп¬
ные качества. В то же время конструкция шасси должна быть
легкой, с ограниченными габаритными размерами, что опреде¬
ляется возможностями компоновки в составе ракетной системы.
Поэтому при конструировании самоходного шасси лунохода
используются методы конструирования транспортных машин и
летательных аппаратов.
Вторая особенность — отсутствие экипажа, который мог бы
производить ремонт или регулировку систем в процессе эксплуа¬
тации лунохода. Это приводит к необходимости отрабатывать
конструкцию высокой надежности и иметь бортовую систему
безопасности движения. И, наконец, будучи первым механизмом
такого рода, самоходное шасси должно стать прототипом транс¬
портных машин будущего, а это значит, что помимо своей основ¬
ной задачи передвижения по поверхности космического тела оно
должно еще выполнять функции научных приборов, исследующих
ту или иную местность, а также различные системы лунохода
[3.2, 3.8]. Эти особенности наложили свой отпечаток на конструк¬
цию самоходного шасси и характер его наземной отработки. Для
ходовой части характерными признаками является применение
легких сплавов, ажурность конструкции и оптимальность форм
отдельных узлов, позволяющих весь материал включить в сило¬
вую схему нагружения. Соотношение массы самоходного шасси
и массы лунохода составляет 0,11.
Ходовая часть и электромеханическая трансмиссия. Ходовая
часть состоит из восьми ведущих колес и упругой подвески.
Обращает на себя внимание тот факт, что из всего многообразия
116
3
Рис.3.8. Устройство мотор-колес
самоходного шасси лунохода:
1 — ступица колеса; 2 — обод;
3 — грунтозацепы; 4 — сетка;
5 — реактивный рычаг; 6 —
кронштейн; 7 — торсион; 8 —
балансирный рычаг; 9 — сило¬
вой привод
существующих движителей для лунохода выбран колесный дви¬
житель, оказавшийся наиболее оптимальным. В нем сочетается
достаточно высокая проходимость с высокой надежностью, эко¬
номичностью и простотой конструкции.
В сравнении с ним проигрывает, например, гусеничный дви¬
житель, который, если сделать его с той же массой, что и колес¬
ный, обладает более низким коэффициентом полезного действия
и недостаточно надежной системой гусеничных лент и зацеплений
из-за большого количества открытых пар трения, не защищенных
от космического вакуума и от попадания лунного грунта. При гусе¬
ничном движителе на корпусе действуют значительно большие
Динамические нагрузки и гусеничный движитель не обладает
таким резервированием (по ведущим колесам), как колесный.
Выход из строя даже нескольких колес у колесного движителя
не лишает его подвижности.
Колесо лунохода (рис. 3.8) имеет три титановых обода, покры¬
тых сеткой из нержавеющей стали и соединенных грунтозаце-
пами, выполненными также из титана. Ступица колеса алюми¬
ниевая, покрыта снаружи и внутри специальными красками
117
с заданными оптическими характеристиками для регулирования
тепловых потоков мотор-колеса. Ободья спицами соединены со
ступицей. Такая конструкция колеса обладает высокой жест¬
костью и прочностью. При собственной массе около 3 кг колесо
выдерживает нагрузку до 5000 Н. Ступица на шариковых под¬
шипниках установлена на корпусе электромеханической транс¬
миссии. Между ступицей и корпусом трансмиссии имеется лаби¬
ринтное уплотнение. Подвеска каждого колеса состоит из балан¬
сира, обеспечивающего перемещение колеса в продольной пло¬
скости, и упругого элемента — пучкового торсиона, состоящего
из трех круглых торсионов, соединенных муфтой с наружными
шлицами. Торсионные упругие элементы устанавливаются с раз¬
личными запасами потенциальной энергии. Крайние подвески
более жесткие и позволяют преодолевать без пробоя подвески
уступ 400 мм. Динамический ход у всех колес 100 мм. Безраз¬
мерный коэффициент апериодичности колебаний корпуса равен
0,3, что близко к аналогичному показателю земных автомобилей
с хорошей плавностью хода.
Для разгрузки торсионов от реактивного момента корпус
трансмиссии, установленный в нижней головке балансира на
подшипниках, связан через рычаг и реактивную штангу с крон¬
штейном. Каждый пучок торсионов устанавливается в шлицевом
отверстии кронштейна. Кронштейны, упоры (служащие ограничи¬
телями хода балансиров) и часть балансиров в целях пассивного
терморегулирования покрыты алюминием методом вакуумной
металлизации.
На рис. 3.9 приведена кинематическая схема силового привода
мотор-колеса. Электромеханическая трансмиссия (рис. 3.10) вклю¬
чает двигатель постоянного тока со специальными щетками
для работы в вакууме, трехступенчатый планетарный редуктор
с плавающими солнечными шестернями, механический дисковый
тормоз, выключение которого производится электромагнитом,
датчик температуры, датчик количества оборотов колес, уплот¬
нение сильфонного типа для частичной герметизации внутреннего
объема. Дисковый тормоз используется на стоянках лунохода
для удержания его на уклонах. Торможение лунохода во время
движения после подачи команды «стоп» осуществляется переклю¬
чением тяговых электродвигателей в режим электродинамического
торможения и последующим включением дискового тормоза.
КПД редуктора не ниже 0,85. Передаточное число 216.
Выходной вал редуктора имеет ослабленное сечение, вокруг
которого расположен механизм разблокировки. При необходи¬
мости по команде с Земли после срабатывания механизма раз¬
блокировки выходной вал разрушается по этому сечению и колесо
превращается в свободно катящееся. Шестерни, валы, диски
тормозов и другие элементы трансмиссии изготовлены из специаль¬
ного самосмазывающегося композиционного материала, титана
и алюминиевого сплава. Мотор-колеса вместе с подвеской[попарно
118
Рис. 3.9. Кинематическая схема силового привода мотор-колеса:
1 — ступица колеса; 2 — корпус планетарного редуктора; 3 — электродвигатель; 4 —
балансирный рычаг; 5 — реактивный рычаг; 6 — тормоз; 7 — шестерни планетарного
редуктора; 8 — механизм разблокировки; 9 — уплотнение
Рис. 3.10. Устройство мотор-колёса «Лунохода-1»:
^ — уплотнение; 2 — механизм разблокировки; 3 — редуктор; 4 — тормоз; 5 — датчик
температуры; 6 — датчик оборотов; 7 — электродвигатель
U9
кН
1,0
%Q,75
*! 0,5
V
«5a
C\J
£ o
1
1
А
1
1
1
1
1 .
Г/-Г/-,
■ Г7 7~У
77
-г/
7-/у/,
с
7А
Б
Т/Р
zyi/l.
/Z/z:
Z/JlX
L L
i Z.
0,4 0,8
Скорость
1,1 1,6 2,0 км/ч
движения
Рис. 3.11. Тяговая характеристика
самоходного шасси (заштрихованная
зона — среднее значение силы со¬
противления движению):
А — предельно допускаемое тяговое
движение на первой скорости; £ —
предельно допускаемое тяговое дви¬
жение на второй скорости
Рис. 3.12. Прибор оценки проходи¬
мости, мерное колесо опущено
120
устанавливаются на кронштейне. Каждый такой блок колес —
компактная, высокоэкономичная система, обеспечивающая луно¬
ходу хорошие тяговые свойства при малых затратах энергии.
Потребляя в среднем около 300 Вт электроэнергии, самоходное
шасси обеспечивает высокую тяговую характеристику (рис. 3.11).
Прибор оценки проходимости — ПРОП (рис. 3.12). Прибор
предназначен для получения информации о дорожных условиях,
необходимой при управлении движением лунохода, о пройденном
пути для нужд навигации и для проведения научных эксперимен¬
тов по исследованию свойств грунта. ПРОП устанавливается на
корме лунохода и крепится к приборному отсеку. Он состоит из
свободно катящегося мерного колеса и механизмов для внедрения
и поворота в грунте конусно-лопастного штампа. Описание устрой¬
ства и работы ПРОПа приведено в разд. И этой главы. Мерное
колесо выполняет несколько функций. Прежде всего оно является
датчиком пройденного пути. Для этой цели на колесе имеется
отметчик, при помощи которого считается количество оборотов
колеса, что позволяет определить пройденное расстояние и факти¬
ческую скорость движения машины, так как измерение количества
оборотов производится в координате времени.
Еще один параметр определяется при помощи мерного колеса,
который никаким другим способом определен быть не может.
Это — коэффициент буксования. При движении любого транс¬
портного средства, будь то трактор или автомобиль, неизбежно
некоторое пробуксовывание ведущих колес по грунту. И, зная
степень этого буксования, можно оценить, в каких условиях
проходит движение. Ведь ясно, что буксование на разжиженной
грязи, или на сыпучем песке, или на асфальтированной дороге
будет разное. В общем для того, чтобы знать, по какому грунту
движется луноход, не опасна ли дорога, водитель постоянно
должен наблюдать за величиной этого параметра.
При экспериментальной отработке новых марок автомобилей
и других наземных транспортных средств, особенно машин,
предназначенных для движения по бездорожью, также исполь¬
зуется мерное колесо. Когда машина уже отработана и проверена
на различных дорогах, а сами дороги и грунты хорошо изучены,
тогда обходятся без мерного колеса, полагаясь на опыт водителя.
Но, как известно, движение лунохода происходит в основном
по новым неизученным трассам. Поэтому мерное колесо — состав¬
ная часть самоходного шасси лунохода—предназначено — для по¬
вышения надежности его движения. Оно участвует также и в вы¬
полнении эксперимента по определению механических свойств
грунта Луны. На мерном колесе установлен датчик, который
служит для измерения уровня грунта и глубины погружения зад¬
них колес в грунт, а также для уточнения глубины внедрения
штампа в грунт.
Как видно, мерное колесо выполняет функции, без осуще¬
ствления которых невозможно уверенное дистанционное управле¬
121
ние движением лунохода, а также проведение некоторых научных
экспериментов. Кстати, на примере мерного колеса виден один
из характерных признаков стиля конструирования самоходного
шасси лунохода — объединение нескольких функций в одном
узле, оптимальное конструкторское решение задачи.
Конструктивно мерное колесо выполнено в виде легкого,
тонкого спицованного колеса, имеющего на поверхности обода
грунтозацепы для лучшего сцепления с грунтом. По командам
с Земли шарнирная система опускает колесо на грунт или подни¬
мает его в транспортное положение. Общая масса ПРОПа 6 кг.
Наружные поверхности ПРОПа окрашены белой терморегулиру¬
ющей краской. На рис. 3.12 показан момент, когда мерное колесо
опущено на грунт.
Комплект измерительных датчиков. Показания измеритель¬
ных датчиков, установленных на самоходном шасси лунохода,
цередаются на Землю по телеметрическим каналам и используются
для нескольких целей: для оперативного текущего контроля
за работой и состоянием узлов самоходного шасси, для научных
экспериментов по исследованию поверхности Луны и тягово¬
сцепных свойств лунохода, а также для работы системы безопас¬
ности движения. Перечень датчиков, установленных на самоход¬
ном шасси, указан в табл. 3.1.
Блок автоматики шасси (БАШ). БАШ выполняет четыре
основные функции: управление движением, контроль за показа¬
ниями датчиков и формирование команд безопасности движения,
программирование работы ПРОПа, преобразование сигналов
измерительных датчиков и выдача их в телеметрическую систему.
Функциональная схема работы БАШ приведена на рис. 3.13: по
командам, поступающим в БАШ, осуществляется набор логики
движения, запоминание предыдущего режима работы, воздей¬
ствие через переключатели на тяговые электродвигатели.
В схеме БАШа предусмотрены дозированные режимы движе¬
ния, при которых производится автоматическая остановка луно¬
хода через заданное время (9 и 3 с) при прямолинейном дви¬
жении и по достижении заданного угла (20° и 5°) при повороте.
Всего с помощью БАШа осуществляется 14 видов движения луно¬
хода (табл. 3.2).
Одной из особенностей самоходного шасси, работающего в си¬
стеме дистанционного управления, является наличие бортовой
системы безопасности движения для предотвращения попадания
в опасные ситуации. Это повышает уверенность в управлении
и в конечном счете способствует повышению средней скорости дви¬
жения. На луноходе бортовая система безопасности состоит из
датчиков определения опасных ситуаций, логических схем в блоке
автоматики шасси, а также устройств для оперативной обработки
телеметрической информации об условиях движения, на основе
которой определяются режимы движения самоходного шасси.
122
Таблица 3.1
Измерительные датчики самоходного шасси
«Лунохода-1»
Наименование
датчика
Место
установки
Измеряемые величины
В определении
каких параметров
участвуют показа¬
ния датчика
1. Мерное ко¬
лесо
В составе
ПРОПа сна¬
ружи на кор¬
ме лунохода
1) Количество
оборотов мерного
колеса
2) Вертикальное
перемещение мерно¬
го колеса
1) Коэффи¬
циент буксования
2) Пройденный
путь
3) Уровень по¬
верхности грунта
4) Глубина ко¬
леи
5) Внедрение
штампа в грунт
2. Датчик кре¬
на и дифферента
В блоке ав¬
томатики шас¬
си
Угол крена и диф¬
ферента корпуса лу¬
нохода
1) Коэффици¬
ент тяги
2) Коэффи¬
циент сопротив¬
ления движению
3) Профиль
трассы
3. Датчики то*
ка тяговых элек¬
тродвигателей
Там же
1) Ток в каждом
эл ектр одв и гате л е
мотор-колеса
2) Сигнализация о
перегрузке электро¬
двигателя
1) Коэффи¬
циент сопроти¬
вления движе¬
нию
2) Коэффи¬
циент сцепления
3) Коэффи¬
циент сопротив¬
ления повороту
4) Коэффи¬
циент перегруз¬
ки
4. Датчики ко¬
личества оборо¬
тов
В ступице
мотор-колес
1) Количество
оборотов третьего и
шестого колес
2) Наличие вра¬
щения остальных
колес
1) Пройденный
путь
2) Частота
вращения колес
5. Датчики
температуры
электродвигате¬
лей
На корпусе
тяговых элек¬
тродвигателей
мотор-колес
Температура
электродвигателей
Поправки при
вычислении кру¬
тящих моментов
мотор-колес
123
Л ^
Ч о
2 ч
XVD
Я —
а-ля
у ho
£ о о
= \о л
О а я
я
• <я я
2 S Я
. <и н
«33
124
Таблица 3.2
Виды движения лунохода
Команда
Движение вперед
Движение назад
Поворот
на месте
1-я скорость
2-я скорость
Поворот в
движении
1-я скорость
2-я скорость
Поворот в
движении
налево
направо
налево
направо
налево
направо
1-я ско¬
рость
2-я ско¬
рость
1-я ско¬
рость
2-я ско¬
рость
1-я ско¬
рость
2-я ско¬
рость
1-я ско¬
рость
2-я ско¬
рость
1-я ско¬
рость
вперед
X
X
X
X
X
X
1-я ско¬
рость
назад
X
X
X
X
X
X
2-я ско¬
рость
X
X
X
X
X
X
Налево
X
X
X
X
X
Направо
X
X
X
X
X
Стоп
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Требования к системе безопасности движения определяются
в первую очередь конструктивными особенностями ходовой
части.
Система безопасности движения самоходного шасси лунохода
обеспечивает необходимую реакцию на следующие опасные си¬
туации:
превышение допустимых углов крена и дифферента;
превышение допустимых перегрузок тяговых электродвига¬
телей;
выявление ситуаций, при которых возможна потеря опорной
проходимости и застревание аппарата в грунте.
При превышении допустимых углов крена и дифферента воз¬
можны потеря устойчивости аппарата и его опрокидывание. При
этом особое значение приобретает динамическая устойчивость
при движении с заданной скоростью, так как на Луне относительно
небольшая сила тяжести.
125
Поэтому одним из основных критериев при выборе максималь¬
ной скорости движения и допустимых углов крена и дифферента
было сохранение устойчивости аппарата при внезапной встрече
с непреодолимым препятствием.
При скорости движения 2 км/ч потеря динамической устой¬
чивости происходит при угле наклона поверхности 25°—27°.
Это значительно ниже угла статической устойчивости, который
для лунохода составляет около 40°. На основе этого граничные
рабочие углы по крену и дифференту составляли ±20°.
Защита мотор-колес от перегрузок осуществлялась по инте¬
гральному значению тока на некотором промежутке времени.
Это в наибольшей степени соответствует процессу теплового
перегрева и допускает кратковременное повышение нагрузки
при пусковых режимах и преодолении одиночных препятствий.
Система защиты тяговых электродвигателей от перегрузки про¬
изводит автоматическое переключение со второй скорости на цер-
вую и, если перегрузки все равно остаются высокими, подается
команда на остановку.
Выявление ситуаций, при которых возможна потеря проходи¬
мости, проводилось тремя способами.
Первый способ состоит в оценке запаса по опорной проходи¬
мости по данным измерений механических свойств грунта при¬
бором оценки проходимости. Для этой цели используются зависи¬
мости между тягово-сцепными параметрами самоходного шасси,
которые определяют возможность и эффективность движения,
и физико-механическими свойствами грунта.
Измерения несущей способности грунта производятся прибо¬
ром оценки проходимости путем внедрения в грунт и последую¬
щего разворота конусно-лопастного штампа. Движение возможно,
если запас по величине коэффициента тяги (разность между
коэффициентом тяги и тангенсом угла подъема местности) пре¬
вышает 0,1.
При запасе по коэффициенту тяги в пределах 0,1—0,2 накла¬
дываются ограничения на маневренность шасси. Если запас
по коэффициенту тяги больше 0,2, движение не ограничивается.
Второй способ заключается в определении коэффициента
буксования движителя. Это осуществляется сравнением количе¬
ства оборотов ведущих колес самоходного шасси и мерного колеса.
Критерием, определяющим возможность потери опорной прохо¬
димости, является то значение коэффициента буксования, при пре¬
вышении которого эффективность движителя резко снижается.
При дальнейшем буксовании рост тяги движителя уменьшается
и значительно повышаются удельные затраты энергии на передви¬
жение.
Третий способ оценки опорной проходимости состоит в кон¬
троле за глубиной колеи ведущих колес шасси. Для этой цели
используются показания датчика положения мерного колеса,
126
В случае сильного зарывания колес возможно вывешивание
корпуса аппарата и полная потеря проходимости.
Оценка по всем трем способам выявления опасных ситуаций
по опорной проходимости производилась на Земле по данным
телеметрической информации.
Целям безопасности служит также и принятая схема включения
стояночного тормоза, по которой тормоз является «нормально
включенным», т. е. при снятии питания с катушек управления
тормоз находится во включенном положении. Это сделано для
того, чтобы в случае выхода из строя тормозных катушек или
снятия электропитания с них луноход находился на поверхности
Луны в заторможенном состоянии и не скатывался по уклону
с возможными аварийными последствиями. В систему безопасности
движения входят блоки дозированного движения. Эта система
позволяет уверенно управлять луноходом в сложных дорожных
условиях, когда вследствие задержек в получении телевизионного
изображения и исполнении поданных команд движение его ста¬
новится опасным.
3.6. УПРАВЛЕНИЕ ЛУНОХОДАМИ
Эффективность научной станции на Луне в зна¬
чительной мере определяется временем ее работы и размерами об¬
следуемого района лунной поверхности. При этом решающее
значение имеет факт проведения исследований на значительных
удалениях от места посадки.
Дистанционное управление луноходом, выполняемое экипа¬
жем, находящимся на Земле, представляет собой сложную научно-
техническую задачу. Несмотря на отсутствие прототипов такой
системы и опыта в управлении подвижными аппаратами с учетом
особенностей их эксплуатации на лунной поверхности, задача
по дистанционному управлению «Луноходом-1» и «Луноходом-2»
была успешно решена, что позволило выполнить обширную
программу научных исследований.
Эффективность передвижения лунохода по поверхности зави¬
сит, с одной стороны, от технических возможностей самоход¬
ного шасси, а с другой, — от возможностей системы дистан¬
ционного управления.
При работе аппаратов «Луноход-1» и «Луноход-2» применя¬
лись два отличающихся по задачам вида движения:
движение к заранее намеченному пункту;
движение на ограниченном участке поверхности при прове¬
дении научных экспериментов.
Различие в видах движения определяет соответственно и раз¬
личие в методах управления и требует особых критериев для
оценки результатов движения.
127
Рис. 3.14. Структурная схема системы дистанционного управления движением лунохода
При движении к заданному пункту одним из основных кри¬
териев эффективности движения является средняя скорость.
При выполнении научных экспериментов главная задача состоит
в точном выдерживании заданной траектории движения и преодо¬
лении сложных элементов рельефа, на которых проводятся науч¬
ные эксперименты.
Управление движением лунохода должно обеспечивать вы¬
полнение задач, указанных выше, с учетом особенностей дистан¬
ционного управления.
Управление движением лунохода осуществляется системой
дистанционного управления (СДУ) из Центра дальней космической
связи. В СДУ входит: наземный комплекс с пультами управления
и видеоконтрольными устройствами; командно-измерительный ком¬
плекс; бортовая автоматика лунохода и экипаж управления.
Вождение лунохода осуществляется с использованием малокадро¬
вого телевидения. При необходимости дорожные условия уточ¬
няются по телефотопанорамам, имеющим большее разрешение.
Структурная схема СДУ представлена на рис 3.14.
СДУ лунохода представляет собой адаптивную систему, в ко¬
торой функции опознавания препятствий, определение расстоя¬
ний до них, выполнение логических операций сопоставления
ожидаемых дорожных условий и возможностей самоходного шасси
лунохода выполняют члены экипажа, удаленные от лунохода
на расстояние около 400 тыс. км.
Можно представить, что эти функции, как и функции осталь¬
ных членов экипажа, будут переданы бортовым логическим
устройствам, т. е. будет создан планетоход-робот с адаптивной
128
системой, позволяющей самостоятельно передвигаться по планете,
в работу которой человек будет вмешиваться лишь время от вре¬
мени в специальных сеансах связи. Такой планетоход может иссле¬
довать обратную сторону Луны, планеты Марс и Венеру, т. е.
может быть использован в тех случаях, когда человек с Земли не
в состоянии оперативно вмешиваться в работу планетохода.
Особенности системы дистанционного
управления
Специфическими особенностями дистанционного
управления движением лунохода являются:
отсутствие непосредственного восприятия оператором про¬
цесса движения;
затрудненное восприятие местности по телеэкрану в сравнении
с непосредственным наблюдением;
большие временные задержки в приеме и передаче команд
телевизионного изображения и телеметрической информации;
зависимость характеристик подвижности самоходного шасси
от условий движения (рельефа и свойств грунта).
При телевизионном наблюдении за местностью происходит
значительное снижение остроты зрения, возникают трудности
в определении расстояний и размеров препятствий. Все эти фак¬
торы приводят к тому, что резко сокращается зона уверенной
видимости. Существенное влияние на восприятие местности ока¬
зывают условия освещенности лунной поверхности.
Большие временные задержки в системе управления и отсут¬
ствие непосредственного восприятия процесса движения требуют
от операторов определенных навыков и психофизических качеств.
К ним относятся: способность оперировать пространственными
представлениями в отрыве от управляемого объекта, умение
оценивать обстановку с упреждением во времени для компенсации
задержек в системе управления. Кроме того оператор должен
обладать хорошей памятью, способностью к длительному вни¬
манию, быстротой реакции и осмысливания информации, умением
по телевизионному изображению составить представление о раз¬
мере препятствий и расстоянии до них.
Зависимость характеристик подвижности самоходного шасси
от условий движения требует выработки у оператора определен¬
ных навыков в управлении движением, уменья оперативно оце¬
нить конкретную обстановку, выбрать наиболее рациональный
маршрут движения и соответствующие методы управления.
Особенности дистанционного управления движением лунохода
приводят по существу как к формированию нового класса задач
н теории управления, так и к появлению новой специальности —
«водитель лунохода», не существовавшей ранее на Земле.
Особое значение приобретают характеристики самоходного
Шасси лунохода — исполнительного звена в СДУ. Возможности
9 Л. Л. Кемурджиян 12Э
Рис. 3.15. Схема движения самоходного аппарата при дистанционном управлении
передвижения лунохода по поверхности определяются только
процессами взаимодействия самоходного шасси с грунтом. Назна¬
чение всех остальных систем дистанционного управления состоит
в том, чтобы наиболее полно и эффективно использовать потен¬
циальные возможности самоходного шасси.
Влияние СДУ на скорость движения лунохода. Особенности
дистанционного управления с помощью телевизионной системы
накладывают ограничения на допустимую скорость движения са¬
моходного аппарата: параметры системы управления находятся
в определенной взаимосвязи с техническими характеристиками
самоходного шасси.
Одним из необходимых требований к СДУ является условие
распознавания препятствий и возможность своевременной оста¬
новки перед ними или их объезда. На рис. 3.15 показана схема
движения аппарата при наличии впереди препятствия, представ¬
ляющего собой опасность для дальнейшего движения. Расстояние,
на котором возможно уверенное распознавание препятствия,
назовем дальностью обнаружения препятствия S v
Величина S г зависит от многих факторов, но главными следует
считать угловое разрешение телевизионной системы наблюдения
за местностью и допустимые размеры препятствия.
В первом приближении можно считать, что:
где Н — допустимый размер препятствия;
а0 — угловое разрешение телевизионной системы для уверен¬
ного наблюдения.
Величина Н зависит от типа, размеров и геометрии ходовой
части и не может превышать по вертикали клиренса аппа¬
рата.
Величина а0 определяется предельным угловым разрешением
ап и минимально необходимым количеством строк разложения
телевизионного кадра для формирования на экране достоверного
изображения.
130
С другой стороны, предельное угловое разрешение ап равно:
= (3.2)
где а — угол зрения телекамеры;
п — число строк разложения в кадре.
С учетом этого
- TsL- М
В момент обнаружения препятствия на расстоянии S± аппарат
продолжает движение со скоростью V. Для своевременной оста¬
новки перед препятствием должно быть выполнено следующее
условие:
Sx = S2+ S3, (3.4)
где S2 — путь, проходимый с момента обнаружения препятствия
до начала торможения, равный Vt (t — время задержки
системы СДУ);
S3 — тормозной путь.
Время задержки системы СДУ складывается из времени на
формирование и прохождение сигналов и команд, включая психо¬
физическую реакцию человека на орган управления, и времени,
необходимого для анализа телевизионного изображения и приня¬
тия решения.
Тормозной путь зависит от степени совершенства тормозной
системы, свойств грунта, величины и знака угла уклона поверх¬
ности и может быть определен по следующей формуле:
2g (ф cos у + sin у) ’ (3-3)
где ф — коэффициент сцепления движителя с грунтом;
g — ускорение силы тяжести;
у — угол наклона поверхности.
Зависимость предельно допустимой скорости движения аппа¬
рата от параметров системы дистанционного управления и па¬
раметров самоходного шасси может быть получена из приведенных
выше уравнений и имеет вид
У', . » + Vt — = 0. (3.6)
2g (ф cos у + sin у) 1 апт\п к 1
Реально допустимая скорость движения может быть определена
по этой формуле, если известно среднее фактическое время за¬
держки. Для «Лунохода-1» это время с учетом времени, необ¬
ходимого для анализа обстановки, составляет 10—15 с.
С учетом параметров телевизионной системы (п = 300; пШп =
= 10; а = 38°), высоты опасного препятствия 0,2 м, угла наклона
9* 131
поверхности—17° и коэффициента сцепления 0,6 предельно до¬
пустимая скорость движения составит 2,9—2,1 км/ч.
Другим ограничением скорости движения аппарата является
периодичность предъявления каждого кадра телевизионного изо¬
бражения.
С момента обнаружения препятствия для дальнейшего движе¬
ния, определяемого дальностью Sb необходимо, чтобы это пре¬
пятствие находилось в зоне видимости еще не менее чем в 1—2 ка¬
драх телевизионного изображения. В противном случае оператор
может потерять ориентировку на местности и наехать на пре¬
пятствие. Это означает, что путь, проходимый аппаратом за время
смены кадров телевизионного изображения, должен удовлетво¬
рять условно
где tK — время между сменами кадров;
S4 — нижняя граница зоны видимости.
Допустимая скорость движения из этого условия будет равна:
Чтобы препятствие было видно не менее чем в трех кадрах,
скорость движения должна составлять:
Для телевизионной системы «Лунохода-1» нижняя граница
зоны видимости равна 1 м, дальность обнаружения препятствия
высотой 0,2 м — около 9ч-10 м.
При времени предъявления кадра 5,7; 10,9 и 21,1 с скорость
движения не может быть более 3,1; 1,5 и 0,75 км/ч соответственно.
Таким образом, скорость движения лунохода (2 км/ч) оправдана
и согласуется с параметрами дистанционной системы управления.
Основные режимы движения лунохода при дистанционном
управлении следующие:
непрерывное движение;
старт-стопное движение;
дозированное движение.
Под режимом непрерывного движения понимается движение
до остановки на расстояние, большее дальности уверенного рас¬
познавания препятствий.
Этот режим движения применялся при движении на неслож¬
ных участках местности при благоприятных условиях освещен¬
ности.
При старт-стопном движении луноход передвигается на рас¬
стояние, меньшее чем дальность уверенного распознавания пре¬
пятствий. Этот режим движения применялся при движении
в сложных условиях.
(3.7)
1/gg 'Si —
(3.8)
(3.9)
132
Режим дозированного движения состоит в том, что аппарат
передвигается в течение заданного промежутка времени или по¬
ворачивается на определенный угол.
При дистанционном управлении с помощью моноскопического
телевидения средняя скорость движения резко снижается по
сравнению с управлением при непосредственном наблюдении.
Цз результатов статистической обработки материалов наземных
испытаний следует, что наиболее вероятными параметрами дви¬
жения шасси в режиме дозированного движения являются:
время движения между двумя остановками 8—9 с, время поворота
лунохода на месте за одно включение команды 2,8 с (угол 20°).
При угле зрения телевизионной камеры порядка 60° угол дозиро¬
ванного поворота 20° обеспечивает перекрытие телевизионных
изображений по углу поворота. Для выполнения точного маневри¬
рования при проведении научных исследований, а также в усло¬
виях сложного рельефа предусматривается дополнительный до¬
зированный угол поворота в 5°.
Работа экипажа при управлении луноходом
Определяющее звено в системе дистанционного
управления луноходом — экипаж (рис. 3.16).
В состав экипажа входят командир, водитель, штурман,
оператор и бортинженер.
Водитель непосредственно управляет движением лунохода,
используя специальный пульт, видеоконтрольное телевизионное
устройство (ВКУ) и светоэкран, на котором воспроизводятся
основные телеметрические параметры, характеризующие поло¬
жение и состояние самоходного аппарата на лунной поверхности.
Размеры деталей рельефа и расстояния до них оцениваются с по¬
мощью масштабной шкалы, нанесенной на экран ВКУ.
Командир осуществляет общее руководство работой, наблю¬
дает за трассой по экрану ВКУ, дублируя водителя, и принимает
окончательные решения.
Штурман проводит навигационные расчеты по данным курсо¬
вого гироскопа, гировертикали и датчика пути и вырабатывает
рекомендации по направлению и характеру движения лунохода.
Оператор постоянно следит за ориентацией остронаправлен¬
ной антенны на Землю и в случае необходимости изменяет ее
положение.
Бортинженер возглавляет группу специалистов, ведущих опе¬
ративный анализ телеметрической информации о состоянии систем
лунохода. Бортинженер регулярно докладывает о состоянии бор¬
товых систем и о параметрах процесса движения. Слаженная
и четкая работа экипажа определила успешное выполнение задач
По управлению, помогала уверенно ориентироваться на местности
и находить правильные решения для выхода из тяжелых ситуаций.
Например, 10 декабря 1970 г. луноход оказался в кратере
глубиной около двух метров, крен достигал 27°, дифферент —17°,
1008 133
Рис. 3.16. Схема взаимодействия экипажа при управлении луноходом
колеса самоходного шасси сильно буксовали. Сняв защиты по
крену, дифференту и току, экипаж, умело маневрируя, вывел
луноход из этого, казалось бы, безнадежного положения.
Интересно свидетельство многих авторов о том, что при под¬
боре экипажа будущих водителей лунохода проверку проходили
и профессионалы-шоферы. Однако они не выдержали испытаний.
Для экипажа лунохода были отобраны молодые люди, прошедшие
проверку по специальным испытательным программам. Вся даль¬
нейшая подготовка, обучение и тренировки, а затем и работа
по управлению луноходом проходили под наблюдением медиков.
Несмотря на тщательную предварительную подготовку, основной
навык- экипаж приобретал во время управления «Луноходом-1».
На первых порах вождение было неуверенным, люди проверяли
себя, проверяли системы, учились распознавать местность, рас¬
стояния до предметов, их размеры, учились прогнозировать,
пройдет или не пройдет луноход в данной местности, учились
вписываться в заданную траекторию движения. И, конечно,
огромное чувство ответственности давало себя знать. Напряжение
было велико. В первое время работали одновременно оба дубли¬
рующих состава экипажа, а водителям (которых было трое)
приходилось меняться через каждые 15—20 мин [3.6].
По наблюдениям медиков, контролировавших состояние води¬
телей, пульс у них поднимался до 120, дыхание учащалось, воз¬
растало кровяное давление, усиливалось потовыделение, общее
состояние через 20—30 мин соответствовало 6—7-часовой интен¬
сивной работе.
В первые дни движение осуществлялось главным образом
в старт-стопном режиме, за один сеанс проходились метры, затем
134
десятки и сотни метров. Со временем по мере выработки навыков
вождения увеличивались скорость и пройденный путь в течение
лунного дня (табл. 3.3).
Таблица 3.3
Расстояния, пройденные «Луноходом-1»
и «Луноходом-2»
Лунные дни
«Луноход-1»
«Луноход-2»
Период работы
Прой¬
ден¬
ный
путь,
м
Период работы
Прой¬
ден¬
ный
путь,
м
Первый
Второй
Третий
Четвертый
17—22 ноября 1970 г.
10—22 декабря 1970 г.
8—20 января 1971 г.
7—19 февраля 1971 г.
195
1524
1870
1572
16—24 января 1973 г.
8—22 февраля 1973 г.
9—23 марта 1973 г.
8—22 апреля 1973 г.
1261
9 806
16 530
8 522
Выработка методов вождения лунохода, определение ходовых
качеств самоходного шасси и тренировка экипажа проводились
на всех этапах эксплуатации лунохода и во время наземных испы¬
таний и позволили разработать методы оценки эффективности ра¬
боты самоходного шасси, в системе дистанционного управления.
Критериями оценки качества вождения лунохода можно
принять:
вероятность (частоту) попадания аппарата в опасные ситуации
(критерий безопасности управления);
точность движения по заданному маршруту (критерий точности
управления);
среднюю скорость движения и энергопотребление на единицу
пути (критерии качества процесса управления).
Под опасными ситуациями надо понимать такие случаи,
когда происходит остановка аппарата при срабатывании бортовой
системы безопасности движения или случаи, когда движение со¬
провождается значительными потерями времени и уменьшением
скорости.
Наиболее типичные опасные ситуации:
срабатывание защиты по крену и дифференту;
срабатывание защиты по перегрузке двигателей;
непреднамеренный заезд в «молодые» кратеры диаметром
более 2 м и углом наклона стенок 15—25°.
Основные причины опасных ситуаций — ошибки в определе¬
нии размеров препятствий и расстояний до них. В ряде случаев
происходит частичная потеря водителем ориентировки на мест¬
ности, что, в свою очередь, объясняется неудовлетворительными
Условиями освещенности лунной поверхности.
135
В работе «Лунохода-1» и «Лунохода-2» среднее число опасных
ситуаций составило 1—1,5 на километр пути.
Средняя скорость движения в системе дистанционного управ¬
ления «Лунохода-1» равнялась 0,14 км/ч, средняя скорость дви¬
жения «Лунохода-2» — 0,34 км/ч. Это значительно ниже машинной
скорости самоходного шасси, что объясняется тем, что время
чистого движения составляет только часть от общего времени
на управление.
Но* и машинная скорость самоходного шасси в значительной
мере зависит от условий движения и в первую очередь от угла
наклона поверхности.
При движении на подъем происходит существенное уменьше¬
ние скорости движения. Это объясняется в основном большим
буксованием колес при реализации значительной тяги.
На скорость движения лунохода в системе дистанционного
управления оказывает влияние курсовая устойчивость самоход¬
ного шасси.
Как показали результаты эксплуатации луноходов на Луне,
а также наземные испытания, движение шасси по горизонтальным
участкам сопровождается отклонением (уводом) траектории дви¬
жения аппарата от заданного направления. Это объясняется
различными температурными условиями работы мотор-колес по
бортам шасси, технологическими погрешностями их установки
и разбросом механических характеристик мотор-колес.
При длительном движении по уклону влияние температур
мотор-колес может вызвать увод аппарата в сторону увеличения
уклона. При движении по значительным уклонам (порядка 15°)
увод лунохода увеличивается, в частности, из-за сползания грунта.
Нарушение курсовой устойчивости приводит к необходимости
дополнительных остановок для корректировки курса, что затруд¬
няет анализ местности по телевизионному экрану особенно в слож¬
ных условиях освещенности. Этот факт учитывался при разра¬
ботке программ работы «Лунохода-1» и «Лунохода-2».
Точность выдерживания заданного маршрута при дистанцион¬
ном управлении определяется точностью определения положения
аппарата по курсу и пройденному пути, а также величиной сред¬
них отклонений действительной траектории движения от крат¬
чайшего расстояния между началом и концом движения. Эти
отклонения вызваны необходимостью объезда непреодолимых
препятствий и их величина в значительной мере определяет
точность вождения по трассе.
Отношение фактически пройденного пути к кратчайшему
расстоянию между началом и концом движения для «Лунохода-1»
и «Лунохода-2» составляет в среднем 1,1—1,15.
Высокая квалификация, приобретенная экипажем, точное
решение навигационных задач подтвердились безаварийной ра¬
ботой луноходов и точным выведением их в заданные точки Луны
(рис. 3.17). Например, после двухмесячного движения по Луне
136
а)
Рис. 3.17. Маршруты движения:
а — «Лунохода-1»; б — «Лунохода-2»
6)
«Луноход-1» был точно выведен обратно к посадочной ступени,
с большой точностью были выполнены маневры «Лунохода-2»
по выходу на склоны гор, изменению курса, выходу к краю тре¬
щины и объезд ее. Несколько раз водители, следуя научной про¬
грамме эксперимента, наезжали колесом на указанные селеноло¬
гами камни, выводили приборы (ПРОП, РИФМА) на предвари¬
тельно разрушенные участки поверхности грунта для исследова¬
ния глубинных слоев, осуществляли возвратно-поступательное
движение при экспериментах по измерению магнитного поля
Луны, двигались по бровке кратеров. Мастерство экипажа обес¬
печило успешную работу лунохода и проведение обширных науч¬
ных исследований.
3.7. ИМИТАЦИЯ УСЛОВИЙ РАБОТЫ
ЛУНОХОДОВ ПРИ ИХ НАЗЕМНОЙ ОТРАБОТКЕ
И ИСПЫТАНИЯХ
Задачи наземной отработки и испытаний лунохода
состоят в выявлении его рабочих характеристик, в определении
соответствия их требованиям технического задания, в проверке
надежности и работоспособности его отдельных систем и конструк¬
ции в целом в условиях реальной эксплуатации. Одним из важных
моментов наземной отработки лунохода является также отработка
навыков и приемов управления с учетом характеристик и свойств
передающих и приемных устройств командной радиолинии.
Одним из основных требований, предъявляемых к системе назем¬
ных испытаний лунохода, является обеспечение в конечном итоге
высокой надежности его работы на поверхности Луны. При этом
должны быть учтены все факторы, воздействующие на аппарат
как в процессе доставки его на Луну, так и во время движения
по лунной поверхности.
Наземные испытания включают в себя следующие основные
этапы:
изучение влияния отдельных факторов на работоспособность
и надежность аппарата. Основная цель этих испытаний состоит
в выявлении механизма влияния исследуемого фактора, в опреде¬
лении путей создания оптимальных конструктивных решений;
изучение влияния суммы различных факторов на работу
аппарата. Цель этих испытаний — определить последовательность
и интенсивность воздействия на луноход различных факторов
окружающей среды;
разработка и проведение комплексных испытаний аппарата
и его отдельных систем. Цель этих испытаний — отработка
взаимодействия отдельно испытанных систем и проверка их рабо¬
чих характеристик.
Наземные испытания проводятся на всех этапах разработки
и создания лунохода. На этапе проектирования основная цель
наземных испытаний состоит в выборе и проверке конструктивных
138
решений, схем и компоновок. При изготовлении —* в проверке
качества изготовления отдельных деталей, узлов и систем. В про¬
цессе сборки и отладки — в проверке сохранения рабочих харак¬
теристик и правильном взаимодействии различных систем. Ре¬
зультаты, полученные в процессе наземных испытаний, являются
основой для разработки методов управления, контроля и проверки
работоспособности аппарата при его работе на поверхности Луны.
Таким образом, наземные испытания представляют собой ши¬
рокий комплекс работ, которые являются неотъемлемой частью
разработки, изготовления и эксплуатации лунохода.
Особенности условий работы лунохода
Луноход предназначен для работы в чрезвычайно
широком диапазоне изменения внешних силовых, климатических
и физических условий.
Температура поверхности Луны изменяется в пределах
— 170т-+ 150° С, сила тяжести в 6 раз меньше, чем на Земле,
атмосфера практически полностью отсутствует, из-за чего поверх¬
ность Луны подвержена интенсивному воздействию солнечного
и космических излучений и метеоритной бомбардировке. Весьма
специфичны грунтовые условия и рельеф лунной поверхности,
условия освещенности. Все эти факторы существенно влияют на
работоспособность лунохода и его отдельных узлов и, прежде
чем послать аппарат на Луну, его необходимо подвергнуть тща¬
тельным испытаниям и многочисленным проверкам, чтобы быть
уверенным, что он сможет выполнить все возложенные на него
задачи.
Помимо необходимости работать в специфических условиях
на поверхности Луны луноход должен быть приспособлен и к осо¬
бым условиям при его доставке на лунную поверхность. К этим
условиям относятся:
климатические воздействия при прохождении земной атмо¬
сферы;
линейные, угловые и виброперегрузки в процессах старта
и выхода на расчетную орбиту, проведения коррекций траекто¬
рии, выхода на окололунную орбиту, торможения перед посад¬
кой и посадки на лунную поверхность;
воздействие невесомости в процессе перелета.
Методы имитации уменьшенной
силы тяжести
Пониженная в 6 раз по сравнению с земной лунная
сила тяжести приводит к изменению многих физических процес¬
сов, протекающих на Луне. Отличные от земных механические
свойства грунтов, другие соотношения между статическими и ди¬
намическими силами при взаимодействии с лунной поверхностью,
139
другой характер процессов теплообмена в газовой и жидкой
среде — все это учитывается при разработке конструкции луно¬
хода.
Одним из эффективных путей изучения уменьшенной силы
тяжести являются ее имитация и моделирование конечного ре¬
зультата процесса взаимодействия движителя лунохода с грунтом.
Уменьшенная сила тяжести на поверхности Луны определяется
малой массой Луны и ее размерами. Гравитационные силы про¬
порциональны массе тела и распределены в теле в соответствии
с законом распределения масс.
Смысл имитации в земных условиях лунной силы тяжести
состоит в создании компенсирующих сил, направленных противо¬
положно силам земного притяжения. При этом соотношение между
этими силами должно составлять
£з ~£л
£з
(3.10)
где £з — земное ускорение силы тяжести;
gn — лунное ускорение силы тяжести.
Наиболее полная имитация лунной силы тяжести может быть
достигнута, если использовать в качестве компенсирующих сил
силы инерции, которые так же, как и гравитационные силы, про¬
порциональны массе тела. На этом принципе построены многие
стенды, позволяющие имитировать пониженную силу тяжести.
На рис. 3.18 показана схема одного из таких стендов [3.17].
Стенд представляет собой систему падающих грузов, связанных
тросом. В качестве одного из них используется контейнер с испы¬
тываемым объектом. В момент падения на испытываемый объект
действуют сила земного притяжения и противоположные ей инер¬
ционные силы, вызванные ускоренным падением контейнера
вниз.
140
При этом имеют место следующие соотношения.
Ускорение падения контейнера:
*=-5+5-*з. (з.и)
где т1 — масса контейнера с испытываемым объектом;
т2 — масса противовеса;
g3 — земное ускорение силы тяжести.
Ускорение, действующее на объект (ускорение имитируемой
силы тяжести):
8и = Вз-В = ёз~^^- (3-12)
При отсутствии противовеса (т2 = 0) имитируется невесомость
(gn = 0).
Масса троса в вышеприведенных выражениях не учитывается.
Время имитации лунной силы тяжести (t) определяется высо¬
той падения (Я), и эти параметры связаны между собой выраже¬
нием
H = (g3—gjd-T- (3.13)
Скорость и кинетическая энергия падающего контейнера
с противовесом увеличиваются с высотой падения и соответственно
равны:
Vn = (g3 — gjdt = V(g3-gn)2H ; (3.14)
E„ = {g3-gjd,tt-!^^-. (3.15)
В конце падения происходит торможение падающего кон¬
тейнера и противовеса. При этом определяющим параметром
процесса торможения являются предельно допустимые перегрузки
(ёдоп) •
Для тормозного устройства с постоянным усилием тормозной
путь (L) будет равен:
L = (g3~Sjl)2 Р. (3.16)
£доп ^
На рис. 3.19 показаны соотношения между основными пара¬
метрами описанной выше схемы стенда для имитации лунной силы
тяжести в зависимости от времени имитации.
Из этого графика следует, что необходимая высота для падения
и торможения контейнера очень быстро увеличивается при уве¬
личении времени имитации. Кроме того при скорости падения
больше 5—10 м/с начинают заметно сказываться силы аэродина¬
мического торможения в процессе имитации ускорения.
Практически реальное время имитации нужной силы тяжести
на таких стендах не превышает нескольких секунд. Это время
141
н,м Уп,м/с
Рис. 3.19. Зависимость высоты (Н) и скорости (Уп) падения контейнера
от времени (t) имитации лунной силы тяжести
Рис. 3.20. Схема имитации лунной силы тяжести с помощью центробеж¬
ных сил
может быть увеличено, если падение контейнера будет происхо¬
дить в вакууме, т. е. когда отсутствуют искажения от аэродинами¬
ческих сил.
Другим способом увеличения времени имитации лунной силы
тяжести является сообщение вертикальной скорости контей¬
неру. В этом случае контейнер и противовес разгоняются до
некоторой скорости и затем совершают свободное падение. Достиг¬
нув наивысшей точки, контейнер падает вниз и затем тормозится.
При такой схеме время имитации удваивается.
Энергия, накопленная в тормозном устройстве, может быть
использована для разгона контейнера при последующих циклах
работы. Некоторым недостатком этой схемы являются значитель¬
ные перегрузки, предшествующие циклу имитации.
Другим методом имитации лунной силы тяжести является
использование в качестве компенсационных сил центробежных
сил инерции, которые также пропорциональны массе тела.
В этом случае контейнер с испытываемым объектом двигается
по криволинейной траектории в вертикальной плоскости, для
каждой точки которой выполняется следующее равенство
(рис. 3.20):
V2
g3 COS ф = gjj,
Акр
dV
&81Пф = _-,
(3.17)
где V — скорость движения контейнера по траектории;
Ф — угол между вертикалью и нормалью к траектории;
RKр — текущий радиус кривизны траектории;
t — время.
142
Практическая реализация этого метода имитации может быть
осуществлена при полете самолета по специальной траектории.
В этом случае контейнер с испытываемым объектом совершает
также вращательное движение.
Подъемная сила самолета и тяга двигателей регулируются
таким образом, чтобы обеспечивалось постоянное ускорение,
воздействующее на испытываемый объект с учетом его вращения
в пространстве. При этом может быть достигнуто время имита¬
ции лунной силы тяжести порядка 20—30 с.
В ряде случаев в качестве компенсационных сил для имита¬
ции пониженной силы тяжести могут быть использованы объемные
и сосредоточенные силы.
Примером объемных сил являются гидростатические силы
выталкивания тела, погруженного в жидкость. В этом случае
необходимо придать испытываемому объекту объем и форму таким
образом, чтобы суммарная сила, действующая на объект, и точка
ее приложения соответствовали лунному весу аппарата. При
этом, естественно, должны быть приняты необходимые меры для
сохранения работоспособности исследуемого изделия при его
погружении в жидкость.
Примером подобного метода имитации лунной силы тяжести
могут служить эксперименты по изучению механических свойств
базальтового песка в условиях лунной силы тяжести [3.15].
В качестве рабочей жидкости был применен водный раствор бро¬
мистого цинка (ZnBr2), имеющий плотность 2,42 г/см3. Для ба¬
зальтовых зерен плотностью 2,9 г/см3 достигается почти полная
имитация лунной силы тяжести.
Однако рассмотренные выше методы имитации лунной силы
тяжести имеют довольно ограниченные области применения из-за
малого времени имитации, больших технических трудностей при
их реализации и наличия в ряде случаев побочных эффектов,
значительно усложняющих подготовку и проведение испы¬
таний.
Поэтому для изучения процессов движения луноходов нашли
применение имитаторы лунной силы тяжести, использующие
в качестве компенсационных сил сосредоточенные силы.
Схема одного из таких стендов [3.14] приведена на рис. 3.21.
Сосредоточенные силы при этом могут создаваться различ¬
ными методами с использованием энергии упругих элементов,
противовесов, гидравлических цилиндров, электроприводов, ма¬
гнитов и др.
К устройствам, создающим компенсационные усилия для ими¬
тации лунной силы тяжести, независимо от их конструктивного
оформления предъявляются следующие требования:
относительная погрешность поддержания компенсирующего
усилия должна быть в 5 раз меньше, чем допускаемые относи¬
тельные отклонения в имитируемой силе веса;
143
Рис. 3.21 Л Схема! имитации
лунной силы ^тяжести с ис¬
пользованием ’“сосредоточен¬
ной компенсирующей силы:
1 — тележка; 2 — подшип¬
ники; 3 — цилиндр с посто¬
янным тяговым усилием; 4 —
трос; 5 — луноход
отклонения компенсирующего усилия от вертикали должны
быть малыми, чтобы не оказывать заметного влияния на тяговые
характеристики самоходного шасси;
подвижные массы и жесткости устройств для создания ком¬
пенсационных сил должны быть минимальными и не вносить
искажений в динамику движения аппарата;
точка приложения компенсационного усилия должна совпадать
с центром тяжести аппарата.
Практически точность поддержания компенсирующего усилия
должна составлять 1—3%, а угол отклонения от вертикали не
должен превышать 0,4—1,0°. Для имитации лунной силы тяжести
при испытании подвижных объектов это требует создания совер¬
шенных следящих систем.
Имитация лунной силы возможна также путем разложения
силы земного веса на составляющие. Это достигается при испыта¬
ниях на наклонной стенке. Угол наклона стенки должен состав¬
лять 80,7°. При этом методе имитации возникают серьезные
трудности по созданию беговой дорожки с грунтами, так как
угол естественного откоса сыпучих и слабосвязных грунтов
гораздо ниже, чем требуемый угол наклона стенки.
Имитация космического вакуума
и низких температур
Одной из важнейших задач при проектировании
и создании шасси лунохода явилась разработка установок для его
испытаний с целью получения в наземных условиях достоверных
данных о работоспособности узлов трения в условиях вакуума
и широкого диапазона температур.
Из множества узлов, имеющих пары трения, в шасси «Луно¬
хода-1» наиболее ответственными с точки зрения надежности
работы всего объекта являются: электромеханический привод,
включающий в себя двигатель и планетарный редуктор, опорные
подшипники подвески шасси, прибор оценки проходимости.
144
С целью максимального приближения к натурным условиям
эксплуатации стенды для наземных термовакуумных испытаний
механических узлов должны быть обеспечены вакуумом необхо¬
димой глубины и стерильности, требуемым диапазоном тем¬
ператур, эксплуатационными значениями нагрузочных и ско¬
ростных параметров режима испытаний.
Необходимая глубина и стерильность вакуума при наземных
испытаниях, как показывает опыт эксплуатации различных косми¬
ческих объектов и теоретические исследования, в значительной
мере определяются скоростями, нагрузками и режимами работы
при испытаниях узлов.
Известно, что влияние разреженности сред на процессы тре¬
ния и износа, а следовательно, и на работоспособность узла
трения тем сильнее, чем выше нагруженность и быстроходность
узла. Это влияние для нагруженных узлов лунохода уже может
быть существенным при вакууме 10_3—10“5 мм рт. ст. [3.18].
В узлах, где имеется смазка, при наличии достаточно надеж¬
ных уплотнительных устройств барометрическое давление в зоне
трения зависит от температуры и соответствует давлению насы¬
щенных паров смазки. Это давление практически не зависит
от величины внешнего вакуума в течение достаточно продолжи¬
тельного времени и имеет величину (при максимальных положи¬
тельных температурах) порядка 0,1—0,01 мм рт. ст.
Из этого следует важный вывод о том, что при наземных испы¬
таниях не всегда нужно обеспечивать сверхвысокий вакуум.
Достаточно получить такую степень разрежения, при которой
происходит стабилизация процессов газовыделения, испарения,
теплопередачи и других факторов, определяющих физическую
сторону явлений, характерных для испытываемого узла.
Поэтому выбор необходимых средств откачки должен проис¬
ходить с учетом этих требований и не давать существенных побоч¬
ных явлений, связанных с особенностями рабочего цикла откач-
ного устройства.
В настоящее время наиболее распространенными средствами
получения вакуума являются:
1) криогенные насосы;
2) насосы, принцип действия которых основан на поглощении
газов распыленными металлами;
3) диффузионные паро-масляные насосы.
Преимуществом криогенных насосов являются большая ско¬
рость откачки, малый коэффициент возврата, отсутствие влияния
рабочего тела насоса на состав остаточной среды, простота кон¬
струкции.
К недостаткам криогенных систем можно отнести необходи¬
мость в ожижительных станциях для получения хладоагента,
взрывоопасность, трудность получения высоких температур в ра¬
бочих камерах.
Ю А. Л. Кемурджиан 145
К диффузионному насосу
Рис. 3.22. Схема вакуумной ловущ.
ки с движущимся регенерируемым
адсорбентом:
1 — патрубок от насоса; 2 — патру.
бок от откачиваемого объема; 3 —
муфта привода барабана; 4 —бара¬
бан; 5 — корпус; 6— ХОЛОДИЛЬНИК;
7 — фланец; 8 — нагреватель; 9 -1
сорбент
р} мм рт. ст.
Рис. 3.23. Зависимость давления от
времени в вакуумной камере с ло¬
вушкой:
1 — с движущимся регенерируе¬
мым адсорбентом; 2 — с неподвиж¬
ным адсорбентом
Преимуществом насосов второй группы является возможность
получения сверхвысокого вакуума, а недостатком — необходи¬
мость создания в насосе предварительного разрежения, сложность
в эксплуатации, возможность попадания рабочего тела насоса на
поверхности испытуемых узлов.
Преимуществами диффузионных насосов являются простота
обслуживания, возможность проведения длительных испытаний.
К недостаткам следует отнести попадание паров рабочей жидкости
в вакуумную камеру.
Эффективным средством задержки паров масла служат адсорб¬
ционные и охлаждаемые ловушки. Охлаждаемые ловушки требуют
поддержания постоянной криогенной температуры. Адсорбцион¬
ные ловушки свободны от указанного недостатка, однако получе¬
ние глубокого вакуума в течение продолжительной эксплуатации
затруднено вследствие насыщения адсорбента. При дальнейшей
работе наблюдается повышение давления из-за прорыва паров
масла в камеру.
Интересна предназначенная для устранения указанных не¬
достатков адсорбционная вакуумная ловушка с регенерируемым
движущимся адсорбентом (рис. 3.22).
146
Ловушка работает следующим образом [3.18]. Барабан 4,
вращаясь со скоростью 0,5 об/мин, посредством муфты 3 (от
электродвигателя, не показанного на рисунке) подводит сорбент 9
к нагревателю 8. Последующее охлаждение сорбента производится
посредством холодильника 6. Регенерированный и охлажденный
адсорбент попадает в зону патрубка откачиваемого объема 2,
в котором обеспечена оптическая плотность между последним
и зоной регенерации. Весь процесс непрерывен.
На рис. 3.23 представлена зависимость от времени давлений
в вакуумной камере при ее откачке паро-масляным насосом с ис¬
пользованием ловушки со стационарным адсорбентом и движу¬
щимся адсорбентом, регенерируемым в процессе работы. Ловушка
с регенерируемым в процессе работы адсорбентом (кривая /)
позволила достаточно длительное время поддерживать сверхвы¬
сокий вакуум в системе. У ловушки со стационарным адсорбентом
(кривая 2) через 2,5 часа произошел прорыв паров масла в систему,
сопровождающийся повышением давления.
Создание требуемого диапазона температуры
Получение положительных температур, соответ¬
ствующих условиям эксплуатации шасси во время лунного дня,
не представляет особой трудности. Для этой цели могут быть
использованы кварцевые нагреватели определенной мощности.
Чтобы обеспечить необходимые градиенты температур, требуется
соответствующим образом располагать нагреватели.
Создание сверхнизких температур, соответствующих лунной
ночи, при длительной выдержке узлов в камерах и особенно
на работающих узлах — задача более трудная.
Низкие температуры могут быть получены в камерах-имита¬
торах, снабженных азотными экранами. Регулирование темпера¬
туры узлов осуществляется путем изменения давления газообраз¬
ного гелия или азота, напускаемого в камеру.
Расчет величины давления для получения заданной темпера¬
туры узла (Ги) производится с помощью уравнения теплового
баланса
= (3.18)
где 2 Qj представляет собой энергию, выделенную узлом при
испытаниях, а 2 Q2 = + QK (здесь С?л — количество тепла,
передаваемого путем лучеиспускания; QK — количество тепла,
передаваемого путем конвективной передачи).
После соответствующих подстановок и преобразований по¬
лучим
Рис. 3.24. Зависимость температу.
ры узла от давления газа в ваку.
умной камере:
J и 2 — гелий (мощность тепловыде-
ления 100 и 1000 Вт соответственно)-
3 и 4 — азот (мощность тепловыде.
ления 100 и 1000 Вт соответственно)
Ю'и 10~3 Ю~2 10~’ 1 101 10г 10э
р, мм pm. cm
где
Тэ — температура экрана;
Nu — критерий Нуссельта;
X—коэффициент теплопроводности газа;
Lt — определяющий размер узла;
FH — площадь поверхности узла;
Ft — площадь поверхности элемента узла;
е — степень черноты;
С0 — коэффициент лучеиспускания абсолютно черного тела.
На основании указанной расчетной зависимости построены
графики (рис. 3.24), показывающие взаимосвязь между давлением
газа в камере и температурой конкретного узла с определенной
величиной тепловыделения. Графики построены для двух газов —
азота и гелия.
Имитация солнечного и космического
излучений
Тепловой режим лунной станции определяется
из баланса тепловой энергии, выделяемой внутри станции, излу¬
чаемой в космическое пространство, а также получаемой в виде
излучения от лунной поверхности и Солнца.
Одной из главных задач наземной отработки лунохода яв¬
ляется проверка тепловых режимов станции в условиях, доста-
148
точно полно имитирующих реальную схему теплообмена с окру¬
жающей средой.
Одними из главных источников тепловых потоков являются
прямое и рассеянное солнечное излучение, тепловое излучение
поверхности Луны и космического пространства.
Тепловое излучение открытого космического пространства
соответствует излучению абсолютно черного тела. Для имитации
тепловых процессов, происходящих в космическом пространстве,
применяются вакуумные камеры, с внутренней стороны которых
расположены экраны с высокой степенью черноты поверхности,
обращенной к испытываемому объекту. Экраны охлаждаются до
низких температур.
Имитация излучения поверхности Луны может производиться
с помощью специальных экранов, а также путем применения
тепловых имитаторов лунного грунта.
Солнечное излучение хорошо имитируется с помощью ксе-
ноновых ламп, снабженных системой отражателей для формирова¬
ния светового пучка с заданным углом расхождения лучей. Для
получения спектра, близкого к солнечному, применяются фильтры.
Методика имитации солнечного теплового потока для различных
источников излучения достаточно подробно рассмотрена в ра¬
боте [3.3].
Имитация грунта лунной поверхности
На процесс движения по лунной поверхности
большое влияние оказывают физико-механические свойства лун¬
ного грунта и рельеф поверхности. Многие другие свойства поверх¬
ности Луны — цвет, альбедо, минералогический состав и др. —
при этом имеют второстепенное значение.
Поэтому основная цель имитаторов лунного грунта (аналогов)
для наземных испытаний лунохода состоит в воспроизведении
механической структуры и особенностей формирования верхних
слоев лунной поверхности.
Разработка аналогов лунного грунта имеет следующие основ¬
ные назначения:
создание наиболее полных аналогов лунного грунта для
изучения процессов деформации и разрушения, влияния физи¬
ческих и климатических условий лунной поверхности на поведение
грунтов, выявление особенностей взаимодействия ходовой части
транспортных средств с грунтом;
создание аналогов для отработки в земных условиях конструк¬
ции транспортных средств;
подбор наиболее близких аналогов лунного грунта из числа
земных грунтов в естественном залегании для создания испыта¬
тельных площадок с целью комплексной отработки процессов
движения по поверхности Луны.
149
Наиболее близкими аналогами лунного грунта являются искус¬
ственные материалы, полученные путем дробления горных пород,
близких по химическому составу к лунному грунту. Режим дробле¬
ния выбирается таким образом, чтобы по форме частиц и грануло¬
метрическому составу полученный материал в наибольшей степени
соответствовал аналогичным параметрам лунного грунта.
При соблюдении этих условий физико-механические свойства
аналога получаются достаточно близкими к лунному грунту.
Хорошими аналогами лунного грунта для решения отдельных
задач могут быть некоторые природные земные грунты. В этом
случае критерием для их оценки являются комплексные показа¬
тели механических свойств или конечные результаты процессов
взаимодействия. При этом по ряду физических свойств аналогов
лунного грунта (плотности, гранулометрическому составу, форме
частиц) могут допускаться существенные от него отклонения.
Современные вулканические отложения в ряде случаев могут
быть также использованы в качестве аналогов лунного грунта.
В табл. 3.4 показаны основные характеристики моделей лун¬
ного грунта, которые были использованы при наземных испытаниях
самоходного шасси «Лунохода-1» и «Лунохода-2».
Таблица 3.4
Основные характеристики моделей лунного грунта
Тип грунта (материала)
Средний
размер
частиц, мм
Насыпная
плотность,
г/см3
Коэффи¬
циент меж-
зерновой
пористости
Внутренняя
пористость
зерен, %
Раздробленный ба¬
зальт
0,05—0,1
1,04—1,89
1,9—0,59
0
Кварцевый песок
0,1—0,2
1,4-1,71
0,9—0,5
0
Аглопоритовая дрес¬
ва
0,6—1,5
0,85—1,0
—
25-30
Раздробленная пемза
2—4
0,3—0,4
—
30—60
Вулканический шлак
1—3
0,8—0,9
—
25 *
3.8. СТЕНДОВЫЕ И ХОДОВЫЕ ИСПЫТАНИЯ
ЛУНОХОДОВ НА ЗЕМЛЕ
В процессе наземных испытаний проверяются
заложенные конструктивные решения и расчетные характеристики,
выявляется фактический ресурс работы, оценивается надежность
узлов и лунохода в целом.
Ниже рассмотрены в качестве примера некоторые характерные
моменты испытаний узлов самоходного шасси «Лунохода-1» и
«Лунохода-2».
150
Применительно к самоходному шасси можно выделить следую¬
щие наиболее специфические виды испытаний:
проверка работы силового привода в условиях вакуума и
широкого диапазона температур;
проверка тягово-сцепных свойств движителя при взаимодей¬
ствии с аналогами лунного грунта;
определение устойчивости движения лунохода;
проверка ходовых качеств самоходного шасси и взаимодействия
отдельных его систем.
Испытание силового привода. Ресурс работы силового при¬
вода определяется износостойкостью, статической и динамической
прочностью отдельных деталей. Наиболее ответственными элемен¬
тами силового привода являются зубчатые пары, подшипники,
уплотнения, фрикционные элементы, тяговые двигатели.
Прежде чем создавать конструкцию силового привода, про¬
водятся исследования работоспособности характерных узлов с ре¬
жимами нагружения, сходными с режимом нагружения натурных
узлов. В этом случае определяются направления конструкторского
поиска, выбираются материалы, смазки, прогнозируется ожидаемая
надежность узла, закладываются методические основы испытаний
натурного узла.
На рис. 3.25 показана схема экспериментального редукторного
узла, предназначенного для исследований * одного из трансмиссион¬
ных узлов силового привода «Лунохода-1» и «Лунохода-2». Экспе¬
риментальный узел представляет собой две пары зубчатых передач,
нагружаемых циркулирующей мощностью. Поэтому энергия дви¬
гателя расходуется только на восполнение потерь в зубчатом
зацеплении и подшипниках. Для обеспечения работы двигателя
в вакууме передача крутящего момента производится через герме¬
тичную магнитную муфту. Этот экспериментальный узел устана¬
вливался на искусственных спутниках Луны и испытывался
в вакуумных камерах. В космосе фиксировались: ток якоря
двигателя, температура на узле, время работы. При испытаниях
в вакуумной камере кроме того измерялось давление среды.
Объективным показателем работоспособности зубчатых пар
служили температура и ток электродвигателя. По току и темпера¬
туре двигателя (с использованием тарировочных данных) опре¬
делялся крутящий момент на входном валу редуктора.
КПД зубчатой пары рассчитывался по формуле
ч = -2Щ [К(ЛШТ+4ЖГр -Млш, (3.20)
где Мд — момент на валу двигателя;
Мкр — крутящий момент пружины;
f2 — передаточное число приводной и испытуемой пар.
* По материалам доклада Углева А. Л., Розова И. И., Вайсберга М. О.,
Васильева В. С., Волкова М. И., Кузнецова Л. А. на 3-й Международной конфе¬
ренции по космической технике (Рим, 1971).
151
Рис. 3.25. Схема экспериментального редукторного узла:
1 — подшипники; 2 — датчик температуры; 3 — магнитная муфта; 4 — электродвигатель;
5 — датчик температуры; 6 — вакуумное уплотнение; 7 — герморазъем; 8 — нагрузочная
пружина; 9 — шестерни
На рис. 3.26 показана зависимость момента на валу двига¬
теля от времени при работе редукторного узла в окололунном
пространстве на борту спутника «Луна-12» и в вакуумной камере.
Из этого графика следует, что в процессе работы эксперимен¬
тального редуктора потери в зубчатой паре оставались практически
постоянными, а результаты, полученные в космическом вакууме и
в камерах, практически совпадают. Это дает основание сделать
заключение, что принятая методика позволяет с достаточно боль¬
шой достоверностью отрабатывать узлы трения лунохода в назем¬
ных вакуумных камерах.
Следующий этап наземных испытаний силового привода был
проведен на макетах силового привода «Лунохода-1», в котором
подвергались проверке все основные узлы ]3.18].
На этом этапе исследовались работоспособность и надежность
узлов трения лунохода в вакууме 10_6—10~8 мм рт. ст., при темпе¬
ратурах от —80° до +250° Сив условиях, имитирующих трех¬
кратную смену лунного дня и ночи; одновременно окончательно
отрабатывалась методика испытаний. Испытания силового привода
проводились на установке, представленной на рис. 3.27. Два
испытуемых силовых привода, жестко связанные муфтой 8,
устанавливались в кронштейне 9, закрепленном через крышку 3
на фланце вакуумной камеры 5. Испытывался редуктор 7, редуктор
10 выполнял роль мультипликатора, электродвигатель которого
работал в режиме генератора, создавая нагрузку в испытуемом
редукторе.
Во время испытаний контролировалось давление внутри
камеры, температура на корпусах двигателей и редукторов, частота
вращения ступицы, токи электродвигателей. По измеренным
величинам определялись крутящий момент и КПД.
Режимы работы экспериментального узла были заданы исходя
из расчетных вероятных режимов при движении лунохода по
152
М,Нм
Рис. 3.26. Зависимость момента на валу двигателя от времени испытания:
1 — испытания на спутнике «Луна-12»; 2 — испытания в вакуумной камере
Рис. 3.27. Схема установки мотор-редуктора:
1 — вакуумный датчик; 2 — уплотнение; 3 — крышка; 4 — уплотнение; 5 — фланец ва¬
куумной камеры; 6 — холодильник; 7 — редуктор; 8 — муфта; 9 — кронштейн; 10 —
мультипликатор; 11 — отражатель; 12 — нагреватель
поверхности Луны. Температура редуктора устанавливалась в со¬
ответствии с расчетным тепловым режимом самоходного шасси.
При этом выбирались наиболее тяжелые сочетания как по загрузке
внешними усилиями, так и по температурным условиям. Проведе¬
ние испытаний в несколько более жестких режимах по сравнению
с реальными условиями эксплуатации позволило быстрее выявить
наиболее слабые места в конструкции редуктора, а также наиболее
опасные режимы его работы.
Окончательная проверка силового привода проводилась на
специальной установке (рис. 3.28), состоящей из штатных мотор-
153
Рис. 3.28. Общий вид ус¬
тановки для испытаний
силового привода мотор-
колеса лунохода в ваку.
умной камере
редуктора, узлов трения подвески, торсиона, реактивных тяг.
Подвеска мотор-колеса осуществлялась в технологическом крон¬
штейне. Движение балансира подвески в опорных подшипниках
скольжения осуществлялось с помощью эксцентрика. Тормозной
момент создавался фрикционной колодкой.
Определение тягово-сцепных свойств движителя [3.17]. Про¬
верка тягово-сцепных свойств движителя при взаимодействии
с аналогами лунного грунта проводилась несколькими методами.
Один из этапов испытаний с имитацией лунной силы тяжести
проводился в самолете на установке, общий вид которой предста¬
влен на рис. 3.29.
Время имитации лунной силы тяжести составляло 25—30 с.
Установка состоит из грунтового канала, заполняемого различ¬
ными моделями лунного грунта, мотор-колеса лунохода, устано¬
вленного на подвижной каретке, пульта управления, комплекса
регистрирующей аппаратуры, а также систем, обеспечивающих
широкий диапазон изменения нагрузок на колесе.
Для изучения особенностей работы многоколесного шасси
производился многократный проезд по одному следу. На этой
установке были проверены основные зависимости, характеризую¬
щие тягово-сцепные свойства движителя, эффективность работы
сетчатого обода; были выявлены оптимальные формы, размеры и
расположение грунтозацепов. В процессе этих испытаний опре¬
делялись возможности шасси по созданию максимальной удельной
тяги на различных грунтах широкого гранулометрического спектра
(рис. 3.30). Было установлено, что главным фактором, определяю¬
щим тяговые свойства шасси, является несущая способность
грунта. При этом различия в физическом строении грунта, в раз-
154
мерах и распределении частиц, в удельной и объемной плотности
имеют второстепенное значение. Этот факт очень важен при по¬
строении искусственных трасс и выборе природных участков
местности для проведения ходовых испытаний макетов лунохода.
Проверка тяговосцепных свойств шасси в целом проводилась
несколькими методами. На первом этапе испытания проводились
методом масштабного моделирования. Сущность метода масштаб¬
ного моделирования состоит в обеспечении идентичности процессов
взаимодействия с поверхностью грунта натуры и модели. Это
Достигается путем выбора параметров масштабной модели для
сохранения равенства безразмерных критериев подобия, опреде¬
ляющих процесс движения.
155
Критерии подобия могут быть получены из основных теорем
теории подобия и представляют собой сочетания определяющих
параметров грунта, машины и физических условий взаимодействия.
Параметрами грунта, определяющими процессы движения,
считаются:
плотность р, кг/м3;
коэффициент сжимаемости а, м2/Н;
сцепление с, Н/м2;
коэффициент внутреннего трения ф;
коэффициент бокового расширения р.
Такие параметры грунта, как влажность и газовлагопрони-
цаемость, для лунного грунта не имеют значения, так как на Луне
нет ни воды, ни газа.
Основными параметрами машины, взаимодействующей с грун¬
том, являются:
характерный линейный размер /, м;
нагрузка (сцепной вес) G, Н;
скорость движения V, м/с;
масса т, кг;
сила взаимодействия с грунтом F, Н.
Остальные параметры, определяющие технические характери¬
стики машины (крутящие моменты, мощности, моменты инерции,
угловые скорости и др.)» могут быть получены как производные от
приведенных выше основных параметров.
Главным параметром, определяющим физические условия
взаимодействия машины с грунтом, является ускорение силы
тяжести g, м/с2.
На основе я-теоремы из приведенных выше параметров могут
быть составлены безразмерные критерии:
pgl3.
G ’
с/2
Я2 — G ,
а
со
II
<J О
» О
£
II
-ё-
>, Я5 |1,
ei .
У 2 »
а
<1
II
to
F
’ я8 - ~G •
(3.21)
Критерии Я1—я5 характеризуют физическую сторону взаимо¬
действия с грунтом. Критерии я6—я7 представляют собой крите¬
рии динамического подобия в механике. Критерий я8 тождественен
безразмерным параметрам тягово-сцепных свойств движителя,
определяющим силовое взаимодействие машины с грунтом.
Для подобия процессов в натурной машине и в ее модели
необходимо обеспечить равенство всех приведенных критериев.
При испытаниях на Земле это условие соблюдается, если линейный
масштаб моделирования равен 1/6, т. е. все размеры модели в 6 раз
меньше размеров натурной машины. Соотношения для всех осталь¬
ных параметров могут быть получены из приведенных выше кри¬
териев подобия. В этом случае грунт для испытаний по своим
физико-механическим параметрам должен соответствовать лунному
грунту.
156
Для проверки возможности и оценки точности метода масштаб¬
ного моделирования были выполнены эксперименты на стенде,
схема которого приведена на рис. 3.18.
Эксперименты заключались во внедрении в грунт «колесных»
штампов. На рис. 3.31 показаны результаты одного из эксперимен¬
тов, выполненных на кварцевом песке. Совпадение данных для
штампа диаметром 36,5 см и его 10-сантиметровой модели вполне
удовл етв о р ител ьн ое.
Масштабная модель самоходного шасси «Лунохода-1» и «Луно-
хода-2» показана на рис. 3.32. Модель была оборудована системой
датчиков для определения основных характеристик движения
(коэффициент сопротивления движению, коэффициент сцепления,
буксования и др.). Испытания масштабной модели позволили
оценить основные характеристики, определяющие проходимость
самоходного шасси, его способность преодолевать различные
препятствия на лунной поверхности, совершать маневры и т. д.
Испытания масштабной модели движителя лунохода и его
отдельных элементов могут проводиться и при ускорениях силы
тяжести, отличных от земного (например, при имитации ускорения
силы тяжести на падающем стенде, летающей лаборатории,
центрифуге). В этом случае изменение ускорения силы тяжести
при одних и тех же геометрических размерах модели эквивалентно
изменению масштаба моделирования. Поэтому испытания одной
и той же модели при различных значениях ускорения силы тяжести
будут соответствовать различным геометрическим размерам движи¬
теля натурной машины. Такой метод испытаний масштабной модели
позволяет выявить влияние геометрии движителя на процессы
взаимодействия с грунтом, хотя все исследования проводятся на
модели с постоянными размерами. При этом величины нагрузок,
скоростей и других силовых и кинематических параметров модели
для каждого значения имитируемого ускорения силы тяжести
определяются из критериев подобия.
При испытании полноразмерных макетов для моделирования
процессов взаимодействия необходимо применение модельного
грунта, т. е. грунта с измененными параметрами. Если исходить
из равенства сцепного веса земного макета и натурной машины,
то равенство критериев подобия будет обеспечено, если модельный
грунт будет отличаться от лунного лишь плотностью (плотность
модельного грунта должна быть уменьшена в шесть раз). Для
подобия динамических процессов скорость движения макета при
этом должна быть увеличена в ]/б раз.
Приближенное моделирование процессов взаимодействия
с грунтом полноразмерных макетов может быть выполнено исходя
из условия равенства комплексных показателей механических
свойств лунного грунта и грунта, на котором проводятся испыта¬
ния.
Предпосылками для такого метода моделирования должно
быть наличие четкой зависимости тягово-сцепных свойств иссле-
157
iFb iKfla
о D = 10cm
• D=3 6,5 см
о
О (
/о
г
с
о
• У
) /
(
оУс
) /0
)
Pi
ол
)
I I I . .
0 0,01 0,02 0,03 0,00 0,05 0,06
Рис. 3.31. Схема масштабного моде-
лированияТ процессов вдавливания
«колесных» штампов
, Рис. 3.32. Масштабная модель ca¬
ll моходного шасси «Лунохода-1 и
D «Лунохода-2»
дуемого типа движителя от оценочных параметров механических
свойств грунта. Примером такой зависимости является график
на рис. 3.30.
Определение устойчивости движения лунохода. Одним из важ¬
ных показателей подвижности лунохода, как уже было отмечено
выше, является его устойчивость при встрече с непреодолимым
препятствием и резком торможении (особенно на уклонах). Другим
существенным показателем, характеризующим подвижность луно-
158
хода, являются угловые и вертикальные колебания его корпуса
при движений по неровной поверхности. И то и другое ограничи¬
вает скорость движения.
Осуществить экспериментальную проверку этих характеристик
лунохода при наземных ходовых испытаниях довольно сложно,
так как необходимо, чтобы испытуемый макет имел полную массу
и момент инерции и в то же время лунный вес. И хотя сделать это
можно, тем не менее при оценке устойчивости на этапе разработки
лунохода целесообразнее пользоваться методом математического
моделирования, тем более, что при этом методе легко варьировать
конструктивными параметрами с целью поиска оптимального
решения.
Для исследования устойчивости движения лунохода потребо¬
валось создать специальную математическую модель. Авторы
работы [3.1] показывают ограниченность существующих методов
в транспортном машиностроении для исследования устойчивости
лунохода в условиях пониженной гравитации.
Исследование устойчивости лунохода при движении на уклоне,
для случая наезда колес на непреодолимое препятствие, проводи¬
лось по системе дифференциальных уравнений, описывающих
реакцию транспортной машины на внешнее возмущение. Система
дифференциальных уравнений учитывает габаритно-весовые и
упругие характеристики соударяемых колес и системы подрессо-
ривания.
Исследование устойчивости лунохода заключалось в определе¬
нии условий сходимости решений дифференциальных уравнений
по углу наклона корпуса в продольно-вертикальной плоскости.
Расходящееся решение физически соответствует наступлению
опрокидывания лунохода. В результате исследования были полу¬
чены аналитические выражения для определения критической по
устойчивости скорости движения в зависимости от габаритно¬
весовых и упругих параметров машины, а также от величины
угла наклона поверхности. Эта критическая скорость в зависимо¬
сти от уклона, по которому движется луноход, представлена графи¬
чески на рис. 3.33 (кривая 1) *.
Рассматривая движение машины по реальной поверхности
с учетом вероятности возникновения опасной ситуации. — встречи
с непреодолимым препятствием на уклоне, можно определить
максимальные скорости движения, обеспечивающие заданную
надежность по устойчивости.
Вероятность попадания машины на заданный уклон определя¬
ется законом распределения уклонов в заданном районе поверх¬
ности. На графике, в нижней части рис. 3.33, дана функция
распределения уклонов в районе Моря Дождей, исследованных
«Луноходом-1» (кривая 2).
* По материалам доклада Авотиньша Е. К-, Александрова А. В., Гарина И. С.,
Громова В. В., Котлова Ю. П., Поленова Л. Н., Яковлева Ф. П. на XXIV конгрессе
МАФ (Баку, АзССР, 1973).
159
0,5 0,2 0,1 0,05 0,02 0,01 О
0,01
Рис. 3.33. Зависи¬
мость устойчиво¬
сти «Лунохода-1»
от скорости дви¬
жения
0,02-
0,05-
0,1-
0,2
0,51
Р
Располагая кривы¬
ми — критической по ус¬
тойчивости скоростью в
зависимости от углов
наклона поверхности и
функцией распределе¬
ния углов наклона по¬
верхности, — нетрудно
получить максималь¬
на0 ную скорость движения
лунохода из условия со¬
хранения устойчивости
(кривая 3). Принимая
вероятность опрокиды¬
вания при наклонах по¬
верхности более 27° рав¬
ной 0,002 или надеж¬
ность эксплуатации лу¬
нохода по критерию ус¬
тойчивости 0,998, получаем для «Лунохода-1» и «Лунохода-2»
значение максимальной скорости движения 2,3 км/ч.
Ходовые испытания макетов самоходного шасси «Луно¬
хода-1»- и «Лунохода-2». Этот вид испытаний применяется для
комплексной проверки самоходного шасси в ходе наземных испы¬
таний. С помощью полноразмерных макетов определяется ресурс
работы ходовой части при взаимодействии с грунтом, размеры
преодолеваемых препятствий, тягово-сцепные характеристики,
параметры плавности хода, устойчивость движения. В процессе
ходовых испытаний самоходного шасси отрабатываются приемы
и методы управления, производятся тренировки экипажа, выявля¬
ются опасные ситуации, которые могут возникнуть при эксплуата¬
ции лунохода, а также способы движения в различных условиях.
Поэтому ходовые испытания самоходного шасси занимают важное
место в общем объеме наземных испытаний.
В зависимости от задач исследований ходовые испытания
могут проводиться различными методами. Процесс взаимодействия
с грунтом полноразмерных макетов можно моделировать исходя
из равенства комплексных показателей механических свойств
грунта. В качестве таких параметров при ходовых испытаниях
самоходного шасси «Лунохода-1» и «Лунохода-2» были приняты
несущая способность и сопротивление вращательному срезу,
определенные с помощью конусно-лопастного штампа. Необходи¬
мым условием испытаний полноразмерного макета при этом явля¬
ется равенство сцепного веса макета и лунохода* [3.16,3.17].
* По материалам доклада Пенетригова В. Н., Семенова П. С., Александ¬
рова А. К., Громова В. В., Петрова Ю. П., Гарина И. М., Владимирова М. Н-,
Великанова В. П., Яковлева Ф. П. на XXIV конгрессе МАФ (Баку, АзССР, 1973).
160
Один из методов испытаний предусматривал приведение веса
макета к лунному (так называемые «весовые» макеты). Вес само¬
ходного шасси,' естественно, не мог быть уменьшен. Остальная же
часть макета, включая измерительную аппаратуру, исполнитель¬
ную часть аппаратуры управления и др., компоновалась таким
образом, чтобы суммарный вес макета был близок лунному весу
лунохода. Часть аппаратуры и источники питания в некоторых
случаях располагались на машине сопровождения. Этим методом
проводились испытания на прочность и долговечность самоходного
шасси при движении по заданной трассе, исследования тягово¬
сцепных свойств, определение затрат энергии на передвижение
при испытаниях системы управления движением лунохода.
Другой метод предусматривал идентичность массы и момента
инерции макета и лунохода («массовые» макеты). Для равенства
сцепного веса макета и лунного веса всего аппарата применялся
имитатор лунной силы тяжести, с помощью которого осуще¬
ствлялась разгрузка неподрессоренных (ходовая часть) и подрес¬
соренных (корпус) частей макета в процессе движения. Примене¬
ние имитатора ограничивает зону испытаний макета, в связи с чем
этот метод использовался в основном для исследования устойчи¬
вости и динамики движения через отдельные препятствия и при
сходе с посадочной ступени.
В некоторых видах испытаний использовался макет промежу¬
точного типа. Вес макета — близкий к лунному, масса соответ¬
ственно меньше исходной, но с имитацией продольного момента
инерции и положения центра тяжести. На таких макетах прово¬
дились ходовые испытания на протяженных трассах со сложным
рельефом по исследованию характеристик подвижности (рис. 3.34).
Существенное влияние на проходимость машины оказывает
ее тяговая характеристика. В то же время известно, что характе¬
ристики тяговых электродвигателей зависят от рабочей темпе¬
ратуры. 'Поэтому в некоторых видах испытаний проводилась
корректировка тяговой характеристики с учетом влияния темпе¬
ратуры в лунных условиях.
Эффективность ходовых испытаний в значительной мере зави¬
сит от правильного выбора трасс. Испытания самоходного шасси
«Лунохода-1» и «Лунохода-2» проводились на трассах двух видов:
искусственные трассы и трассы, подбираемые на местности.
Искусственные трассы позволяли проводить испытания на
грунтах разнообразного гранулометрического состава и в широком
Диапазоне механических свойств. Важным преимуществом искус¬
ственных трасс является относительное постоянство грунтовых
условий в течение всего хода испытаний, что имеет большое значе¬
ние для сравнимости получаемых результатов. Некоторым недо¬
статком искусственных трасс является их небольшая протяжен¬
ность, что требует разработки специальных методов их построения
с тем, чтобы в максимально возможной степени воспроизвести на
них лунные условия.
И А. Л. Кемурджиан 161
Рис. 3.34. Макеты шасси «Лунохода-!»
а — на искусственной трассе; б 11
Одна из искусственных трасс для проведения ходовых испыта¬
ний самоходного шасси «Лунохода-1» и «Лунохода-2» показана
на рис. 3.35 и представляет собой кольцевой грунтовой канал
длиной 70 м и шириной 4 м. Кольцевая форма грунтового канала
обеспечивает непрерывное движение макетов. Для регулирования
влажности грунтов на дне грунтового канала была проложена
специальная система подогрева грунта. Для исследования харак¬
теристик подвижности шасси на уклонах различной крутизны
использовался один из участков грунтового канала, который мог
быть установлен под углом 30—35° к горизонту. Исследование
динамики движения и системы подрессоривания шасси произво¬
дилось как на элементах рельефа грунтового канала, так и на
искусственных препятствиях синусоидального профиля, а также
ступенчатой формы и других типовых препятствиях.
Рельеф трассы строился по результатам исследований системы
дистанционного управления движением луноходов с помощью
телевизионной системы. На трассе элементы рельефа лунной
поверхности располагались таким образом, чтобы при движении
макетов по осевой линии трассы частота и характер наезда движи¬
теля шасси на препятствия были аналогичны полученным при
дистанционном управлении движением.
Построенный таким образом рельеф трассы показан на топо¬
графическом плане (рис. 3.36). Соблюдение этого условия позво¬
ляет в известной мере воспроизвести статистический характер
приложения нагрузок на ходовую часть, цикличность и величину
прогибов упругих элементов подвески, степень загрузки силовых
приводов, количество команд, необходимых для управления, и
некоторые другие параметры. Это в конечном итоге позволяет
получить представление о технических возможностях и надежности
самоходного шасси. На рис. 3.37 показан план одной из искус¬
ственных площадок, предназначенных для отработки некоторых
элементов системы дистанционного управления. Рельеф этой
площадки был разработан на основании статистических данных
о распределении форм рельефа на различных участках лунной
поверхности.
В соответствии с методикой испытаний решалась задача выве¬
дения макета лунохода в заданную точку площадки и возвращения
его в исходное положение.
Для примера на рис. 3.37 показаны маршруты движения
макета самоходного шасси. В процессе движения фиксировались
скорость движения, пройденный путь, количество и характер
наездов колес шасси на различные элементы рельефа. В результате
статистической обработки результатов испытаний были определены
количественные данные, приведенные к единице пути.
Эти данные послужили основой для выбора режимов испытаний
отдельных узлов и механизмов шасси в процессе термовакуумных,
прочностных, усталостных и других видов испытаний при наземной
отработке. Одним из основных требований к выбору трасс для
164
исследования вопросов управления является отсутствие заметных
«земных» ориентиров в пределах площадки (деревья, искусствен¬
ные сооружения, растительный покров) и имитация лунных
условий освещенности.
Условия освещенности лунной поверхности могут быть в изве¬
стной мере воспроизведены при освещении трасс мощными напра¬
вленными источниками света. На рис. 3.38 показаны отдельные
фрагменты испытательной трассы при искусственном освещении.
Изменение угла падения световых лучей позволяет изучить влия¬
ние высоты Солнца над лунной поверхностью на процессы восприя¬
тия профиля трассы, обнаружение кратеров и других характерных
форм рельефа, определить расстояния до препятствий, возможность
движения под углом к источнику света и ряд других вопросов.
Испытательные трассы на местности выбирались в основном
в районах свежей вулканической деятельности, так как их поверх¬
ность во многом сходна с верхними слоями лунной поверхности
как по физико-механическим характеристикам, так и по рельефу.
В местах недавних вулканических извержений отсутствует расти¬
тельный покров, верхние слои грунта имеют незначительное
количество органических примесей, процессы консолидации под
воздействием атмосферных факторов находятся в начальной фазе.
Все это позволяет выбирать испытательные трассы и площадки
практически неограниченных размеров, соответствующие морским
и материковым районам Луны.
Статистическое распределение вулканических образований
хорошо согласуется с распределением аналогичных форм рельефа
на поверхности Луны. Для примера на рис. 3.39 по данным,
полученным станциями «Сервейер», приведено распределение
камней на некоторых испытательных площадках (кривые 1) и на
участках лунной поверхности, соответствующих морскому (кри¬
вая 3) и материковому (кривая 2) районам. Площадки с каменистым
рельефом и аналогичный ей по плотности распределения камней
участок лунной поверхности показаны на рис. 3.40. Последний
был зафиксирован на панораме, снятой «Луноходом-1».
Рельеф площадок оценивался как с точки зрения плотности
распределения различных неровностей, так и с учетом возможных
встреч шасси луноходов с неровностями. Для этого использовался
специально разработанный «импульсный метод» построения спек¬
тральной плотности рельефа. Сущность этого метода заключается
в том, что на основе представления о рельефе как о наборе случай¬
ных импульсов прямоугольной, треугольной, синусоидальной
и других простейших форм, а также знания плотности распределе¬
ния форм рельефа лунной поверхности определяется спектральная
плотность рельефа, как случайный процесс взаимодействия движи¬
теля шасси лунохода с рельефом. Спектральная плотность вычи¬
сляется методами теории импульсных случайных процессов.
Применение «импульсного метода» позволило оценить соответ¬
ствие рельефа тестовых площадок и имитируемых участков лунной
165
Рис. 3.35. Кольцевой грунтовой канал
Рис. 3.36. Топографический план поверхности искусственной трассы: 1 — макет шасси
«Лунохода-1» и «Лунохода-2»; 2 — рельсовая дорога; 3 — тележка сопровождения (циф¬
рами обозначены глубины и высоты элементов рельефа в метрах)
Рис. 3.37. Карта искусственной испытательной площадки для исследования системы ди¬
станционного управления:
1 — макет; 2 — маршрут движения; 3 — кратер, лунка; 4 — борозда; 5 — отдельный
камень
166
^>J0
167
IgN
Рис. 3.38. Фрагменты испытательной трассы
при искусственном освещении
Рис. 3.39. Распределение камней по размерам
на квадратном километре поверхности: N —
число камней; D — размер камней; 1 — испы¬
тательные площадки на вулканической местно¬
сти; 2 — участок материкового района Луны
(«Сервейер-7»); 3 — участок морского района
Луны («Сервейер-1»)
поверхности с учетом геометрии движителя и вероятности встречи
шасси лунохода с неровностями.
Большой объем ходовых испытаний самоходного шасси поз¬
волил всесторонне проверить его конструкцию и ходовые качества,
разработать методы и приемы управления, получить необходимый
168
Рис. 3.40. Участки каменистой поверхности:
а — площадка на вулканической местности на Земле; б — поверхность Луны
1008
169
опыт вождения аппарата в самых разнообразных условиях, что
в конечном счете увенчалось успехом в работе на Луне «Лунохода-1»
и «Лунохода-2».
3.9. ИССЛЕДОВАНИЕ ЛУННОЙ ПОВЕРХНОСТИ
С ПОМОЩЬЮ САМОХОДНОГО ШАССИ
Самоходное шасси «Лунохода-1» и «Лунохода-2»
помимо выполнения основной задачи — передвижения по поверх¬
ности приборного отсека и научной аппаратуры—выполняло роль
своеобразного «научного инструмента» для изучения ряда свойств
лунной поверхности. Возможность проведения таких своеобразных
исследований определяется тем, что ходовая часть самоходного
‘шасси непрерывно находится в непосредственном контакте с лун-
'ным грунтом и по ряду параметров, характеризующих процессы
движения, можно получать информацию о свойствах поверхности
Луны. Необходимость использования самоходного шасси для
проведения подобных экспериментов вызвана тем, что именно
характер взаимодействия элементов ходовой части позволяет
получить ряд обобщенных характеристик лунной поверхности,
оказывающих наибольшее влияние на процессы передвижения;
это особенно важно для оценок эффективности работы самоходных
аппаратов, выявления сфер их применения и получения исходных
данных для разработки новых машин. Рассмотрим некоторые
результаты исследований, полученные с помощью самоходного
шасси аппаратов «Луноход-1» и «Луноход-2».
Построение профиля лунной поверхности
На «Луноходе-1» самоходное шасси выполняло
роль своеобразного «профилографа» для построения рельефа
лунной поверхности вдоль трассы движения. Методика проведения
подобных исследований изложена в работах [3.16, 3.12] и суть ее
состоит в том, что по значениям крена и дифферента лунохода,
а также по пройденному им пути может быть построен продольный
профиль трассы.
Построение профиля трассы основывается на интегрировании
дифферента лунохода в функции пройденного пути. При этом,
чтобы избежать накопления больших ошибок по высоте трассы
периодически производится съемка контрольных точек на трассе
с помощью фотопанорамных камер. Сочетание этих двух методов
позволяет получить подробную информацию о всей трассе движе¬
ния, хотя визуальное изображение местности было получено лишь
для ее части.
Самоходное шасси не одинаково реагирует на уклоны различ¬
ной протяженности. Если длина уклона существенно больше
колесной базы и колеи аппарата, то профиль передается без иска¬
жений.
170
Уклоны с небольшими характерными размерами (меньше
размера колеса) вызывают слабую реакцию самоходного шасси
и мало различимы.
Уклоны с размерами, соизмеримыми с размерами самоходного
шасси, могут быть воспроизведены достаточно точно, однако для
их распознавания требуется решение сложной пространственной
задачи по динамике движения аппарата и при этом необходима
высокая разрешающая способность телеметрии.
Размеры кратеров и их расположение относительно трассы
движения могут быть определены путем геометрических построений
по характеру изменения углов крена (у) и дифферента (ос). Центр
кратера находится по пересечению касательных к его внутренней
поверхности в направлении максимальной крутизны. Угол между
направлением движения лунохода и линией, проходящей через
центр кратера, равен
0 = arctg-^- (i= 1, 2, п), (3.22)
где л — число точек измерений а и у.
Необходимость проведения многократных измерений углов
крена и дифферента при прохождении кратера вызвана тем, что
кратеры имеют довольно сложную поверхность, включающую
много неоднородностей. Кроме того часто встречаются наложенные
друг на друга кратеры. Поэтому параметры кратеров определяются
как средние значения для многих измерений.
Радиус кратера определяется как величина расстояния от
центра кратера до положения лунохода, в котором крен и диффе¬
рент приближаются к нулю (для горизонтальной поверхности
движения) или к значению основного уклона, предшествующего
моменту въезда в кратер.
Глубина кратера определяется по величине радиуса и средней
крутизне внутренних стенок кратера.
Отношение глубины кратера к диаметру является важным
морфологическим признаком кратеров, позволяющим получить
ориентировочное представление о характере и времени их про¬
исхождения.
Изучение расположения кратеров на поверхности — взаимо¬
связь между размерами кратеров и их количеством на единице
площади, соотношение между кратерами различных морфологи¬
ческих классов — позволяет глубже познать процессы, происходя¬
щие на Луне, понять механизмы образования лунной поверх¬
ности.
Таким образом, используя самоходное шасси лунохода как
своеобразный профилограф, можно получить много полезной
и интересной информации о строении поверхности Луны.
Весьма важной характеристикой рельефа лунной поверхности
является статистическое распределение уклонов. Обработка дан¬
171
ных о крене и дифференте самоходного шасси в процессе движения
позволяет получить эти данные для всей трассы. Получение данных
по фототелевизионным изображениям местности сопряжено с боль¬
шими трудностями, так как определение уклонов и их протяжен¬
ности по плоскостным изображениям может привести к существен¬
ным погрешностям из-за ограниченной зоны видимости, специфи¬
ческих условий освещенности и сложности процесса обработки.
Как показали исследования на «Луноходе-1», плотность вероят¬
ности распределения уклонов в районе Моря Дождей хорошо
описывается законом распределения Релея:
/(а) = 160ае-80а\ (3.23)
где а — угол уклона, рад,
f (ос) — плотность вероятности.
Подобные зависимости позволяют рассчитывать условия работы
самоходного шасси с учетом вероятности встречи с различными
уклонами (а не по предельным величинам), что в конечном итоге
дает возможность создать более оптимальные конструкции, избе¬
жать необоснованных запасов по прочности силовых узлов.
Затраты энергии при передвижении
на деформацию грунта
Передвижение по лунной поверхности сопряжено
с определенными затратами энергии, которые расходуются на
покрытие внутренних потерь в силовых приводах, на создание тяги
для преодоления уклонов и на деформацию грунта. Затраты
энергии на деформацию лунного грунта как обобщенные показа¬
тели свойств поверхностного слоя Луны могут служить критерием
для суждения об эффективности процесса передвижения.
Энергия, затрачиваемая на деформацию грунта, складывается
из работы, расходуемой на преодоление сил сопротивления движе¬
нию со стороны грунта, и работы буксования колес в процессе
создания тяговых усилий. В качестве оценочного параметра этих
процессов может быть использован приведенный коэффициент
сопротивления движению:
k
S (Mm)-TV
f i=l /о
где k — число колес;
Mi9 соi — крутящий момент и угловая скорость i-то колеса;
Т — свободная тяга;
V — скорость движения;
Осц — сцепной вес машины.
172
Рис. 3.41. Зависимость приве¬
денного коэффициента сопроти¬
вления движению от удельной
свободной тяги и угла преодо¬
леваемого подъема:
а — угол продольного уклона
поверхности; 1 — «Луноход-1»;
2 —«Луноход-2»; 3 — зона раз¬
броса значений коэффициента
При движении оди¬
ночной машины (без при¬
цепа) на продольном
уклоне а:
k
Е (Мт)
f lul +СГ (У
/п GKcoscc to ’
10
15
20
25 oi
(3.25)
где G — вес машины.
Зависимость /п от
у гл а п р еодол ев аемого
подъема и удельной сво¬
бодной тяги (Кт=tg ос)
приведена на рис. 3.41.
На рисунке показано,
что удельные затраты
энергии на деформацию
грунта в сильной степе¬
ни зависят от уклона лунной поверхности. Особенно резко воз¬
растают затраты энергии на уклонах, близких к предельным.
Исходя из этого преодолеваемые уклоны, допускаемые при
нормальной эксплуатации, выбираются меньшими, чем по условию
предельного значения удельной тяги по сцеплению с грунтом.
Другими словами, при движении самоходное шасси должно всегда
обладать некоторым запасом удельной тяги. По опыту работы
«Лунохода-1» и «Лунохода-2», этот запас должен быть не менее 0,1.
Некоторые результаты работы самоходного
шасси на Луне
В предыдущих разделах отмечалось, что одной из
задач, которые решались с помощью аппаратов «Луноход-1» и
«Луноход-2», было исследование самоходного шасси как первой
лунной транспортной системы для передвижения автоматической
научной станции. Эти исследования велись непрерывно в процессе
всей работы луноходов и позволили дать объективную оценку
эффективности работы самоходного шасси, проверить некоторые
методы его проектирования и наземной отработки, получить дан¬
ные об условиях работы отдельных узлов и систем [3.12, 3.16].
173
Так, в процессе работы «Лунохода-1» была произведена оценка
точности метода математического моделирования для решения
вопросов устойчивости и колебаний аппарата.
Особенность экспериментальной проверки состояла в выявле¬
нии соответствия экспериментальных и расчетных показателей
в допустимой области изменения параметров. С этой целью в про¬
цессе работы «Лунохода-1» производилась регистрация углов
дифферента корпуса при торможении на различных уклонах.
Затем производилось расчетное определение колебаний корпуса
в тех же условиях, в которых проводился эксперимент. Статисти¬
ческая обработка полученных отклонений результатов лунного
эксперимента и математического моделирования показала, что
их величина соизмерима с точностью измерений угла дифферента.
Хотя все эксперименты проводились в докритической области
(по опрокидыванию) наклонов корпуса лунохода, тем не менее
полученные данные полностью подтвердили достоверность приня¬
той математической модели, что дает основание и впредь применять
ее при исследовании критических состояний.
Исследования работоспособности ходовой части и силового
привода самоходного шасси состояли в определении загруженности
мотор-колес, величин прогибов упругих элементов подвески,
потерь холостого хода в редукторе. Было установлено, что в наи¬
большей степени мотор-колеса нагружаются при крутых подъе¬
мах. В этих случаях передние колеса часто совсем теряют контакт
с грунтом и основная нагрузка приходится на задние колеса.
Была выявлена также значительная неравномерность загрузки
мотор-колес в процессе поворота, особенно при повороте на месте.
Потери холостого хода в редукторе силового привода опреде¬
лялись при зависании колес при движении по препятствиям. По
величине момента холостого хода производилась расчетная оценка
коэффициента полезного действия редуктора.
Важным эксплуатационным параметром самоходного шасси
является величина энергопотребления. Средняя мощность, затра¬
чиваемая на обеспечение движения самоходного шасси, составляла
на первой скорости около 200 Вт при машинной скорости передви¬
жения 0,9—0,95 км/ч. Удельные энергозатраты при этом выра¬
жались в среднем величиной 0,22 Вт-ч/м.
Эксплуатационные параметры самоходного шасси «Лунохода-1»
и «Лунохода-2» при работе в системе дистанционного управления
представлены ниже.
«Луноход-1» «Луноход-2»
Время работы лунохода, сутки
302
125
Пройденный путь, км ....
10,5
37
Средняя скорость движения,
км/ч
0,14
0,34
Максимальная продолжительность
50
437
непрерывного движения, с . . . .
Предельный угол преодолевае¬
22—27
мого подъема, град
174
Удельные Энергозатраты,
Вт • ч/м
Коэффициент сопротивления дви¬
жению '
VXYCnjriHJ
Коэффициент буксования (сред¬
ние значения) . . .
0,2—0,22
0,15—0,25
0,05—0,07
Увеличение скорости движения «Лунохода-2» объясняется
установкой дополнительной выносной телевизионной камеры и
возросшим опытом экипажа. Этому способствовало также более
эффективное использование технических возможностей шасси,
в частности более частое включение второй скорости и поворотов
в движении. В результате «Луноход-2» за 5 лунных дней преодолел
расстояние в 37 км, в то время как «Луноход-1» за 11 лунных дней
прошел 10,5 км.
Общее количество команд управления движением «Лунохода-2»
по сравнению с управлением «Луноходом-1» снизилось, а продол¬
жительность непрерывного движения между остановками увели¬
чилась до 7 мин против 50 с.
Важным эксплуатационным параметром самоходного шасси
является соотношение затрат времени на управление луноходом.
Время работы ходовой части (время движения) составило 32%
от общих затрат времени на преодоление трассы.
Остальное время в сеансах движения использовалось на анализ
местности по телевизионному экрану, выбор направления для
дальнейшего движения, доклады экипажа, контроль систем и
Анализ затрат времени на управление луноходом показывает,
что дальнейшее повышение эффективности движения самоходного
шасси возможно путем совершенствования методов и приемов
управления, снижения времени на анализ обстановки и доклады и
уменьшения количества подаваемых команд.
Продолжительность пребывания советских луноходов на Луне
и возможность их перемещения на значительные расстояния
как отличительные признаки автоматических передвижных стан¬
ций позволили провести большой комплекс научных исследований
лунной поверхности и космического пространства [3.4, 3.5,3.12].
Научные эксперименты, выполненные «Луноходом-1» и «Луно¬
ходом-2», можно разделить на две группы.
Первая группа охватывает исследования свойств и характери¬
стик лунной поверхности на различных ее участках. Высокая
эффективность этих исследований достигнута благодаря возмож¬
ности передвижения по Луне и целенаправленного выбора изу¬
чаемых участков.
т. д.
3.10. НАУЧНЫЕ ИССЛЕДОВАНИЯ,
ВЫПОЛНЕННЫЕ «ЛУН0Х0Д0М-Ь
И «ЛУНОХОДОМ-2»
175
Вторая группа экспериментов связана с исследованиями косми¬
ческого пространства. Главным фактором, определяющим успех
этих исследований, является возможность продолжительных на¬
блюдений с помощью автоматических передвижных станций.
Отсутствие на Луне атмосферы — объективный фактор, способ¬
ствовавший успеху эксперимента.
Район исследований «Лунохода-1» находился в западной
прибрежной части Моря Дождей, примерно в 40 км к югу от
Мыса Гераклид, образующего западный берег Залива Радуги.
Море Дождей является крупнейшей кольцевой структурой,
окаймленной гористыми образованиями. На поверхности Моря
Дождей расположен ряд относительно крупных кратеров диаме¬
тром до нескольких километров. Другим характерным признаком
поверхности Моря Дождей является система вытянутых пологих
грядообразных возвышенностей — морских валов. Эти возвышен¬
ности шириной в несколько километров, высотой до 300—350 м
вытянуты на десятки и сотни километров.
Маршрут движения «Лунохода-1» проходил через район Моря
Дождей — типичный участок лунных морей, свободных от влия¬
ния крупных кратеров и кратерных лучей; подобные моря образо¬
вались в результате излияния базальтовых лав, верхние слои
которых подвергались интенсивной деструкции и консоли¬
дации. Рельеф поверхности относительно спокойный. Альбедо
в пределах 7,9—8%. На рис. 3.42 (вкладка) показаны типичные
участки местности, по которым проходил маршрут движения
«Лунохода-1».
В табл. 3.5 приведен перечень научных экспериментов, выпол¬
ненных «Луноходом-1» по исследованию свойств и характеристик
лунной поверхности, кратко сформулированы цели и задачи иссле¬
дований, описаны результаты экспериментов.
Программа изучения космического и окололунного простран¬
ства с помощью «Лунохода-1» предусматривала исследование
космических лучей малых энергий и протонной активности Солнца,
рентгеновского космического излучения и проведение лазерной
локации Луны уголковым светоотражателем, установленным на
луноходе. На Земле возможности проведения исследований косми¬
ческих лучей малых энергий и рентгеновского космического излу¬
чения существенно ограничены, так как магнитное поле и атмосфера
нашей планеты отклоняют и поглощают заряженные частицы
малых энергий.
Кроме того вращение Луны вокруг своей оси и Земли, а также
вращение Земли и Луны вокруг Солнца, изученные с высокой
точностью, позволяют сканировать небесную сферу при неизменной
ориентации приборов относительно поверхности Луны. Особо
интересные результаты могут быть получены, если измерения
проводятся с помощью идентичной аппаратуры, установленной на
космических станциях, находящихся в различных точках меж¬
планетного пространства.
176
В процессе работы «Лунохода-1» была зафиксирована сложная
картина изменения интенсивности солнечного излучения и галак¬
тических космических лучей. Производились также одновременные
измерения на станции «Венера-7», удаленной от Луны в тот момент
на расстояние около 60 млн. Км.
Установленный на «Луноходе-1» рентгеновский телескоп пред¬
назначался для обнаружения источников рентгеновского излуче¬
ния. Его поле зрения 3°. Вследствие вращения Луны произво¬
дится сканирование небесной сферы. Длительность одной экспози¬
ции составляет 6 ч. Для примера следует заметить, что экспозиция,
которую удавалось получить на вертикально стартующей ракете,
составляет всего лишь несколько минут. В процессе работы «Луно¬
хода-1» были проведены измерения интенсивности и углового
распределения рентгеновского внегалактического фона и излуче¬
ния отдельных источников.
Уголковый отражатель, установленный на «Луноходе-1», был
изготовлен французскими учеными. Он представляет собой 14
трехгранных призм со стороной грани 100 мм. Уголковый отража¬
тель предназначен для проведения экспериментов по лазерной
локации с целью определения расстояний до Луны с точностью до
долей метра. Это дает возможность детально исследовать тонкие
процессы движения Луны, что в конечном итоге позволяет глубже
понять особенности ее внутреннего строения.
Комплекты наземной аппаратуры для лазерной локации были
установлены в Крымской астрофизической обсерватории АН СССР
и в обсерватории Пик-дю-Миди в Пиренеях.
Эксперименты по лазерной локации проводились в периоды
лунных ночей. При этом были получены четкие отраженные
сигналы.
Научные исследования «Лунохода-2» были начаты внутри
55-километрового древнего кратера Лемонье, недалеко от его
южной кромки. С южной стороны кратер Лемонье граничит со
слабо приподнятой холмистой равниной, которая обладает свой¬
ствами, промежуточными между особенностями морских и матери¬
ковых областей. Участки поверхности маршрута «Лунохода-2»
показаны на рис. 3.43 (вкладка).
В начале работы маршрут движения «Лунохода-2» проходил
в типично морском районе. На этом участке встречались уже
известные формы рельефа: кратеры и выбросы камней. Толщина
верхнего, переработанного слоя грунта составляла 1—6 м.
При выходе в предматериковую зону «Луноход-2» достиг
внешнего края большого кратера, где были обнаружены оползне¬
вые террасы и значительное уменьшение плотности малых крате¬
ров. Толщина переработанного слоя грунта (реголита) достигала
местами 10 м.
Продолжая движение на восток, «Луноход-2» подошел к текто¬
ническому разлому — Борозде Прямой. Глубина этого разлома
составляет 40—80 м. По мере приближения к борозде толщина
12 Д. л. кемурджиэн 177
Таблица 3.5
Научные исследования лунной поверхности, выполненные „Луноходом-1
В х
Я Он
а а
а о
г 3 ч g | а
1 s я р w
5 0) § § О |
LS ^2 о а*
> а ^ ^ & с
a а> о> о
* о а а- н в
! а х а cd
!о«Су
о Я о &
• 8у2.*£
> о g а «
3 я ^ ё ^
> £2 а н \о
а я о ш л
* а о я 9К
> к а в 3
> н ч н к щ
I и П о м о
; О В Ч ,5- cd
» В & GR й
Г,'
Нрй *4 о
Рн а о
3 «
о S s
a
cu a i—•
О) СО I—I <->
о и я «
* о s н
« 2 а 53
a g си£
Оц S <D m
о» а н ^
а в в в
ю
a »go
*SS°
* U ’S * ч
о * я 2 <и
0 § |
1 Э2
2 Си 2
л§ я
а ° в
1 н о
„ос.
2 и
a a a
а в х
5? a ^
2 § «
a ®
о
в of g
* 11
£ § *
c a&
a n
£ о
2 a
Зало
S a
а си в
ч ^ 95 §
в m a 2
a § a
x a t-h
J?3
a >>
cu a
и a
cu
sa f_ e
a§ioSq[j
° a
2«
«|Э
i&s
a >s!
о a
о о
a '
x
а н
3 a
a «
x a
* a
в о
а П
- a
<D <u .
S S’£ «
a
cu
>.
* a
CQ ^
8 g.
aU
s2t,J^
а в •
aS’S о
<d * а в
о x 2 в
а я 2 2
!iph
в
в
>>
4S-
о 2
>>5 а
а а н о 9§
Ч! Cuas а
CD 9S Ч в
2ю>>|£
О a
в* q
2 e
н о
н
fl
о S
с a
ч
в ►у 2 a я
«?>>к2я«2
Н О Я >* о Я в Й
О в М « !а 3 ^
CD
§ 2
a
в a s
Ч о-,
a m
а ° о
, CD 4
£ VO Ч-,
a*
sag
>, a
s a
Is
о a
v a
a x
3
CD CO
2.§&S.g“ I
£ § £ £ !„* к
о ч a a i a
со a cu’Q-co a
£. * ^ a
>» о Я н
p< а за о
(н о (D яз
а н
CD <D
X a a g
g с й ^ i
h О Ю е
g * С a §
Й S a csi 3
£^а | «
« х a J, g
2 о ч S
с а о
нн 2Г
>*Й
Ч о
« §
2.1
0) «
а х
си в
а з ■
а:
а <
n !
3sS3
аЭ'о
2 л _
СВ QJ CD В О ’tS fJ ч
£ я л к(S'w»о:
2 н н а о ш s
В
в а
о ч
Ч о
о \о
О У о н
S 35 &§ § а
К в Й
4 g* а о § ^
« 2 cd о ^
а 2 в о
R <-> х %
я >» о
S * 2ю
g а Я
в в в а
св 6:3
а в 2
а о о) a <D
•If CD з В CD
>,§ * 0.0
ё а | o'0
a cd В 0Q а
s о,
О)
л к
с о
S «
CD —
о а
cd а
н >>
а о
VO Я
о X
^ °-
В О)
a cq
а о
g с
О «
а
а
в н о
а ° а
Я <d а
й а а
В в и •
я О) §
В в (_
ч >> а
ч 2 S
8 * ^
й " о я
в о ° S
й в
ь а д о
а § в а
ч 2 Л х
§!££■
ВЧ. Ч В
So
gg
В 5
CU Я
в а*
с н
CD
a S
а о
а си
Cl) f-H
2 С
2 з о
S-я?
*&> а
в
CD
>*°
§»а
С а
CD
ч
X п
3 X
• * £ я
• • CD £
Si2
&•«
a a си ° cd
>, x a a
CD CD О В Ч
H О О CD
и В CD CD
а
о
а
а
В
CD
а
в
в в
а а
в
х S *
^ 5 S
о Я 3
ч 2 ^
о д «
a cd ^
о си 2
со а
CD в
>»
(Л
X
в
в
о
а
со
а
в
CD в
Ч CD
2 >•
2 s
О Я
О а
в
в
в
CD
В
CD В
1—1 (->
в В
CD Я
h2
HS
в о
В VO
CD
а
а
о
CD
в
а
С-i
о „
ч g
о 5
•е* В
о о
Я §
О <D
й> Ч
D-1 CJ
CD
а
а
о
CD
в
а
*£Н w
в 5
&S
§ s
н ^
Н щ
178
Я s
О Ч
S* со
л н
Он О
X и
о
К Он
Я «
* S
g s
3 Он
S’ Ч
Он ч
С Ч
о
Л ЭК
о, о
Рч
к *
о£
я fc{
ей
со о?
Он
к о
Цs
4 я .
Я о S
>*я
' ей О
Ё
Я
ч
о
о •
§£
ей
СП
«о
I
Q
ч:
Он
8
ей
Он
я
о
ч
о
я *
2 *х
с 2
I S
«О §
■ s
|§
О) I
4
0 '
Он^С
я
Он -
5
s*S
ей Л
я я
«=* О
1 4
Он
окоз*
«2
я
Я
§
D,
>>
я
о
я
я
я
о
2?
я о
ч ~|
Sx
< V -Ф
ОнЮ
go
4 ЭЖ
°-’5
~ я
Я CJ
Я Он
я
н
я
>>
о.
*Я
»я Я
о t_r -
*8 «*
S Я я
Он я
<_ Я со
2 Ё §
я S \о
и й»
h J3 Щ
и м 2
к * h
S’ * о
Он я о
с т °
С к
«н «
я о
н о
Я \о
>» я
:§
я
«.VJ 7-7
Он ч ^
е-н о
К аЬ^4
° я
5g
л. я
О)
я ►*
X я
ОнЗ
£ о
О с
2 >>
^ £
я
- S . ч В Si A i- AoV^ « «о »»
*хсоьо St=: I"! &1
и ф <U?5 t< ^ PQ Ч S
н х о о я
о Я CJ 2 Я с
к Я кГ «
* &И 2
Я со ей ей
ою i
о я
о я
я
о
о •
* <11
я о
ч К
я
I я
.с
2 * 5
н я
я о я
>>ю я
Он-Н х
g ОнЯ я s g g 5
^ОЯУ^^Яд
*:3Lx g^a >Ȥ
2 о 5 Он Он
g Он £ (-Н S
° ей Ч ^ 3
и я я g
"-III
о ° S
О) ^ н о
3>я
я я
Он я
Я я
я §
я я
. н
я
о
я ^
Я к 2 *я я с.
яЯло^’е^л
ollsliss
2 ?? Он я
х S
Я со
я я
о
2 о
ч
■ я Он я
о
я
я
я
§ SS^-e-^я
° 5 Хл н
-1is
Igis®2
ii W-L| ^ «5
S ей ft 2
*яю
CJ Я 9Я
~ x о
Я ОнЯ
ь (U h
о И Я
О ^ Он
GJ
*°рй
К 8'8*
5эя
я
я
о
Я
я
я
я
я ..
* Р
О) CU
^ X
<-1 о
е Я
я go
>1 о
я
а -
Я я CJ
Он ч ю
2 е
Он g
О) о
Он я
2 и
с н
ЙХ8 к
я
X ОгЛ g Я
я00 К
Н ч X
О О) со Я
О Я Я я
оЯЯОнОЮНОЕС
1_н
5 »я
S о
(1) л Н* Й с[
я Я о Я
я о я У о
я я я 2 о
О я Я О
Ч с; Я О ч:
о а> я Он о
я g
3 a
s ч:
fi n
§S\og8
Ч О о 2 Й
• 3 я Й Он
: г' Й х ей
- о. я *g. Я §
о^Яо^сиотг
ЯН^яЙЯх
aaslg«K-
О Я •: я я
*&о 5 >>Х
Он S Он
о « я а) а> су с
я Й Й s 5 s
я 2 ^ я 2 я
w g* я а> е «
Ч я Он
g « s ~ .
О И 1=^ (L) >»
Э 2 « 3 9я 5 х
а. §< 3 g ’§ g Я
£ s о * 5
&®,з
<5 2 о
О я я
Я Он
Он Е-
1 я 1
я
>1
ч
о
я
я
>>
ч
►J4 X
1вв
О Я
я >>
2 Он
О) о
я °
§ О
S °
я я
X я
>1
а)
я g
>1 в
со о
I ^ (1) • •
О S я Он я
S° * Sx8
ч 0 <D S 'О
° - ч О о
I я
| н
§2В
я
га о я
^ н. S
►•5 S
»S|
Н.Н CJ Я
о я
3|
V-- Я ^
О О со О
а>
« я
S
я
<и х
S о
CD 9Я Я
Ч^ CD
g В CD
ч х Я
Я § g
CQ |В га
О я я о
g: g я я
г* о я
^ х о
ft <D с
S
>> с
о :
Я !
ч ;
о ,
я
R в
Я О
So
Is-
ОХО
я
я
<D »Я
Ч CD
я
X »я
3 S
о 5
►г я
я >-•
4 ч
CD со
s a§
Ш g* •
* а я !
Я 9S * (
о о £ 5
я я w
fto Я-&Я
CS S х 2 Ч о Я ^ 3 О
Я Он g Я ч О h со ,—.
П^с^ЛддПхяш
S eft, cj о Он CQ Ч >>S я Он я
CL) Я (U CL) о Он ХЮО
Я Он Я Я Они оос
о
я
§
X!
о
S
я
Л5
4S
a
<
к S
S
Й
и гг ^
2
2н Он
S н я
ч а> ft
2 о ь
р Он я
fc Н Он
2x4
< £ с
с я
о я
н о j
я я Я
«а |
Sis
О 2 *
)т Я я
& Ч CD
с О ч
х р я
^ о н Он
Он§ о Г
о ^ н г1
1^1
Он s я
С X . с
я я с
я о я
и 4
£ Он
2 X
3 я
и о
Он
я
2 s
5 4
Я Я
2 Он
S х
4 5
я $
г"> Ж
Го ш
° 1 §.
я <и
О- н
| 8
5 X
X ^
X Он
и
Я я
я я
я я
Я Ё
о °
§ о
4 о
5 В
W X
я
н
я
>1
Он
X О
ё s
2 о
Я О)
Я я
О S
Й ч
С 4
S ?■§
о И
Я о
12*
179
реголита уменьшалась й на ее бровке были обнаружены выходы
скального основания. Иногда обломки скальных пород достигали
размера в несколько метров. Стенки борозды имели наклон до
30—35° — это были осыпи из крупных камней.
Механические свойства лунного грунта по трассе движения
изменялись в пределах 10—150 кПа. Была выявлена определенная
взаимосвязь между геоморфологическими особенностями строения
местности и ее механическими свойствами. Общий характер рас¬
пределения механических характеристик по поверхности оказался
достаточно близким к данным, полученным в районе действия
«Лунохода-1».
При исследовании химического состава грунта на «Луноходе-2»
особое внимание было обращено на выявление наиболее характер¬
ных химических элементов (особенно железа) и соотношения между
элементами. В процессе работы «Лунохода-2» удалось зафикси¬
ровать изменения химического состава, связанные с различием
горных пород в морских и материковых районах.
В период лунных ночей на «Луноходе-2», как и на «Луноходе-1»
проводились эксперименты по изучению радиационной обстановки
(солнечного и галактического излучений), лазерная . локация
с применением французского уголкового отражателя. При изме¬
рении расстояния от Земли до лунной поверхности была достигнута
точность в несколько десятков сантиметров.
На «Луноходе-2» был поставлен и ряд новых экспериментов.
Впервые с помощью подвижного аппарата измерялось магнит¬
ное поле Луны непосредственно на ее поверхности. Эти измерения
проводились непрерывно как в процессе движения, так и на
стоянке, позволили выявить сильную неоднородность строения
магнитного поля, а также обнаружить некоторые характерные его
изменения, связанные с процессами индукции токов на теле Луны
под воздействием межпланетных полей.
На «Луноходе-2» были установлены фотометрические марки,
с помощью которых изучались отражательные свойства верхнего
слоя грунта Луны. Это позволило косвенным образом судить об
особенностях состава лунных пород и в сочетании с другими
методами исследований значительно расширило комплексные
представления о свойствах верхних слоев лунного грунта.
На «Луноходе-2» была установлена оригинальная аппаратура
для отработки системы измерения координат лунных космических
станций. Для этой цели на луноходе имелся фотоприемник лазер¬
ного излучения, который выдавал сигнал при попадании в него
лазерного луча. Лазерная пеленгация осуществлялась с помощью
оптических квантовых генераторов, установленных на телескопах
в высокогорной обсерватории Государственного астрономического
института им. П. К. Штернберга под Алма-Атой и в других пунк¬
тах СССР. С помощью лазерного луча осуществлялся спиральный
осмотр района кратера Лемонье. Направление излучения фиксиро¬
валось на пленку одновременно с фотографированием Луны. Была
180
установлена устойчивая оптическая связь с «Луноходом-2» и
получено около 1500 фотографий Луны с отметками попаданий
лазерного луча на ее поверхность для определения координат
лунохода. Эти эксперименты позволили определить местонахожде¬
ние лунохода с высокой точностью независимо от других методов
измерений.
Интересные исследования на «Луноходе-2» были выполнены
с помощью астрофотометра — прибора для измерения яркости
лунного неба, что очень важно при оптических наблюдениях
небесной сферы с лунной поверхности. Яркость в видимых лучах
оказалась неожиданно высокой, хотя в ультрафиолетовых лучах
светимость неба была невысокой. Эти данные требуют дальнейшей
экспериментальной проверки.
3.11. ИЗУЧЕНИЕ МЕХАНИЧЕСКИХ
СВОЙСТВ ЛУННОГО ГРУНТА
Целью исследований механических свойств лунного
грунта, проводимых с помощью «Лунохода-1» и «Лунохода-2», было
изучение его структурных, прочностных и деформационных свойств
на обширной территории, получение данных о неоднородности
строения грунта по трассе лунохода, изучение свойств грунта
в местах наиболее характерных лунных образований (стенки, вал
и дно кратеров, уклоны, отдельные камни и др.), выявление зако¬
номерностей изменения механических свойств грунта в различ¬
ных районах лунной поверхности [3.7 ].
Методы изучения механических свойств грунта
Исследования грунта луноходами проводились
несколькими методами.
Пер вый метод. С помощью специального прибора
производится внедрение в грунт конусно-лопастного штампа. При
внедрении штампа измеряются несущая способность грунта и его
уплотняемость. Затем штамп поворачивают и тем самым определяют
сопротивление вращательному срезу. С помощью этого прибора
можно проводить многократные измерения по всей трассе движе¬
ния. Измерения этим способом проводились регулярно через
каждые 15—30 м пути и более часто в местах наиболее интересных
геолого-морфологических образований.
Второй метод. В процессе движения лунохода по по¬
верхности Луны непрерывно измеряются параметры взаимодей¬
ствия ходовой части самоходного шасси с грунтом. Это позволяет
дать приближенную оценку механических свойств лунного грунта
по всей трассе движения и сравнить их с механическими свойствами
аналогов лунного грунта, которые были применены при наземных
испытаниях лунохода.
181
Параметры взаимодействия ходовой части с грунтом опреде¬
лялись с помощью комплекта специальных датчиков, которые
позволяли определить крутящие моменты на ведущих колесах,
скорости их вращения, углы наклона поверхности грунта. Буксо¬
вание ведущих колес и пройденный путь определялись с помощью
свободнокатящегося мерного колеса.
Третий метод. По фотопанорамам изучается характер
разрушения грунта под воздействием колес лунохода. По глубине
колеи и характеру деформации грунта под движителем шасси как
при прямолинейном движении, так и при повороте оцениваются
его структура и особенности строения.
За время работы «Лунохода-1» и «Лунохода-2» было выполнено
около 1000 измерений механических свойств грунта с помощью
конусно-лопастного штампа, пройдено 47 км пути с непрерывной
регистрацией параметров взаимодействия ходовой части лунохода
с грунтом и получено большое число фотопанорам, в том числе
с изображением колеи от колес лунохода и следов от мерного
колеса. Измерения механических свойств грунта проводились на
различных участках поверхности, включая кратеры, россыпи
камней, отдельные камни, горизонтальные и наклонные участки
поверхности.
Для определения механических свойств грунтов на луноходах
была установлена следующая аппаратура:
1) прибор оценки проходимости;
2) датчики тока тяговых электродвигателей мотор-колес само¬
ходного шасси;
3) датчик крена и дифферента лунохода;
4) датчик оборотов ведущих колес и мерного колеса.
Кроме перечисленных приборов при проведении исследований
физико-механических свойств применялась фототелевизионная
аппаратура лунохода, с помощью которой получались фотографии
отдельных участков лунной поверхности.
Общий вид прибора ПРОП показан на рис. 3.44. Его техни¬
ческие характеристики приведены ниже.
Прибор состоит из верхней головки /, с помощью которой он
крепится к корпусу лунохода, нижней головки 2 с конусно¬
лопастным штампом 3 и рычажной системы 5. В верхней головке
размещены электромеханические приводы для перемещения с по¬
мощью рычажной системы нижней головки, механизм для опус-
182
Усилие внедрения штампа
Глубина внедрения штампа
Угол поворота штампа
Вращающий момент на штампе
Диаметр основания конусно-лопастного штам¬
па
Высота штампа
Диаметр по лопастям
Время одного цикла измерений
до 230 Н
50—100 мм
до 90°
до 5 Н-м
50 мм
44 мм
70 мм
1 мин
Рис. 3.44. Общий вид прибора оценки проходимости (походное ‘Поло¬
жение):
/ — верхняя головка; 2 — нижняя головка; 3 — конусно-лопастной
штамп; 4 — мерное колесо; 5 — рычажная система
кания на грунт и подъема в исходное положение мерного колеса,
потенциометрический датчик вертикального перемещения штампа.
В нижней головке размещен механизм для поворота штампа,
датчики крутящего момента и усилия внедрения штампа.
Для обеспечения автоматической работы прибора по заданной
программе в верхней и нижней головках прибора установлен ряд
дополнительных устройств (конечные выключатели, ограничители
предельных нагрузок).
Механизм опускания мерного колеса обеспечивает его свобод¬
ное вертикальное перемещение при движении по неровностям
лунной поверхности; датчик механизма регистрирует положение
мерного колеса относительно верхней головки.
Прибор работает следующим образом. При подаче команды на
проведение измерений механических свойств грунта включается
электромеханический привод для перемещения нижней головки
с конусно-лопастным штампом. Штамп опускается до уровня
J83
грунта и внедряется в него. Внедрение штампа в грунт происходит
или до предельно возможной глубины, определяемой его конструк¬
цией, или до возникновения предельного усилия внедрения.
После этого перемещение нижней головки автоматически прекра¬
щается и включается механизм для поворота штампа.
Поворот штампа происходит до предельно возможного угла
или до возникновения предельно допустимого крутящего момента
на штампе. После этого механизм поворота штампа отключается
и все системы возвращаются в исходное положение. На этом
цикл работы прибора заканчивается.
Измерение механических свойств грунта производится при
опущенном мерном колесе, благодаря чему с помощью датчика его
положения можно определить расстояние до уровня грунта и
перемещение корпуса лунохода при внедрении штампа в грунт.
В процессе работы прибора производится непрерывное измере¬
ние следующих параметров: перемещение штампа; усилие вдавли¬
вания штампа в грунт; угол поворота штампа; вращающий момент
на штампе; вертикальное перемещение мерного колеса.
Для более точной расшифровки выполненных измерений по
тарировочным характеристикам прибора производится контроль
его температуры, напряжений питания и телеметрии..
С помощью датчика положения мерного колеса может быть
также ориентировочно определена глубина колеи от колес шасси.
Определение крутящего момента на ведущих колесах самоходного
шасси осуществляется по току тяговых электродвигателей с исполь¬
зованием тарировочных зависимостей, полученных при наземных
испытаниях мотор-колес.
Датчик крена и дифферента — гироскоп с тремя степенями
свободы — снабжен маятниковой коррекцией, что позволяет ему
сохранять вертикальное положение оси вращения.
Количество оборотов ведущих колес и мерного колеса изме¬
ряется с помощью индукционных датчиков.
Показания всех приборов передаются в телеметрическую
бортовую систему лунохода и затем по радиоканалам на Землю.
Структурные и деформационные свойства грунта
Структура лунного грунта в естественном залега¬
нии определялась по визуальной оценке характера его деформации
под движителем лунохода, мерным колесом и конусно-лопастным
штампом при анализе телевизионных изображений и панорам
лунной поверхности. Под действием мерного колеса образуется
четкий след, имеющий более светлый тон по сравнению с недефор-
мированной поверхностью, что свидетельствует о мелкозернистой
структуре грунта (рис. 3.45). По визуальным оценкам грануломе¬
трический состав верхнего слоя близок к составу пылеватого песка.
Разрушение грунта под движителем шасси (рис. 3.46) сопро¬
вождалось образованием трещин, сколов, комков и крутых неосы-
184
павшихся стенок, что может наблюдаться при мелкозернистой
структуре грунта, обладающего заметным сцеплением.
В процессе поворота лунохода отмечалось образование вала
грунта высотой до 150 мм; при этом крутизна его откосов превы¬
шала 40—60°. После внедрения конусно-лопастного штампа
в грунте образовалась лунка, хорошо повторяющая форму штампа.
В ряде случаев отмечалось вспучивание грунта и образование
трещин вокруг лунки. Последние явления характерны для плот¬
ного грунта и показывают, что при взаимодействии со штампом
возможны деформации сдвига, в процессе которых наблюдается
разрыхление грунта.
На рыхлых отложениях деформация грунта определяется
местным уплотнением под опорной поверхностью и отсутствием
характерных признаков деформации сдвига (не наблюдается боко¬
вое выпирание грунта и образование трещин и сколов).
Результаты исследований структурных и деформационных
свойств лунного грунта по трассе движения «Лунохода-2» во
многом совпадают с результатами предыдущих исследований,
выполненных «Луноходом-1», и анализа образцов, доставленных
на Землю. Это позволяет сделать вывод о том, что верхний слой
грунта в различных районах лунной поверхности имеет сходный
гранулометрический состав и структуру.
Механические свойства лунного грунта
Конусно-лопастной штамп дает возможность одно¬
временно определять в одной точке параметры несущей способ¬
ности и уплотняемости грунта, а при повороте штампа — сопроти¬
вление вращательному срезу.
Параметры несущей способности определяются по кривым
внедрения штампа в грунт, т. е. по зависимости между вертикаль¬
ной силой, приложенной к штампу, и глубиной его погружения
в грунт. В качестве основного параметра несущей способности
принималось среднее вертикальное давление на штамп при глубине
его внедрения в грунт, равной высоте штампа. Измерения несущей
способности грунта показали значительную изменчивость ее по
трассе движения лунохода.
Большое число измерений позволяет получить представление
о статистическом распределении механических свойств грунта по
трассам движения «Лунохода-1» и «Лунохода-2».
На рис. 3.47, а показана гистограмма распределения несущей
способности грунта, полученная в третий и четвертый лунные дни
работы «Лунохода-1» при движении по относительно ровной
местности, где основными формами рельефа были кратерные
образования.
Гистограмма распределения несущей способности, полученная
в течение первого и второго лунных дней работы «Лунохода-2»,
показана на рис. 3*47, бf В этот период маршрут «Лунохода-2»
185
Рис. 3.45. Колея на лунном
грунте от мерного колеса (в се¬
редине) и от ведущих колес
(справа и слева)
Рис. 3.46. Характер разруше¬
ния грунта под движителем лу¬
нохода
186
проходил в районе, весьма схожем по геоморфологическим особен¬
ностям с районом работы «Лунохода-1». Сравнение приведенных
гистограмм показывает, что статистические распределения несу¬
щей способности, полученные для различных участков лунной
поверхности, но имеющих однотипное геоморфологическое строе¬
ние, достаточно хорошо совпадают между собой.
В третий лунный день «Луноход-2» двигался в переходной зоне
от морского района к материковому. Гистограмма распределения
несущей способности лунного грунта на этом участке показана
на рис. 3.47, в. Несмотря на более сложное геоморфологическое
строение (значительные уклоны, осыпи, выбросы камней), механи¬
ческие свойства грунта существенно не изменились.
В течение четвертого лунного дня маршрут движения «Луно-
хода-2» проходил вблизи тектонического разлома. Для этого
участка были характерны скопления крупных камней, местами
рыхлый слой грунта имел малую глубину. Гистограмма распре¬
деления несущей способности за четвертый лунный день работы
«Лунохода-2» показана на рис. 3.47, г.
Сопоставляя результаты измерений за весь период работы
«Лунохода-2» (табл. 3.6), можно отметить, что по мере приближе¬
ния к материковому району среднее значение несущей способности
несколько увеличивается, а модальное значение уменьшается.
Однако эти изменения невелики и можно считать, что характер
распределения несущей способности практически не зависит от
геоморфологических особенностей исследованных районов.
Сопоставление результатов отдельных измерений несущей
способности лунного грунта с геоморфологическими особенностями
конкретных участков местности показало, что наиболее значитель¬
ные вариации несущей способности грунта наблюдаются вблизи
кратеров, т. е. неоднородность механических свойств на поверх¬
ности связана с процессами формирования верхнего слоя грунта
при образовании и деградации кратеров.
Экспериментальные данные по распределению несущей способ¬
ности лунного грунта хорошо описываются логарифмическим
нормальным законом распределения:
где / (q) — плотность вероятности; q — несущая способность;
а — математическое ожидание (lg q)\ о — среднеквадратичное
отклонение (lg q).
При этом величины а и а, среднее значение несущей способ¬
ности и ее среднеквадратичное отклонение связаны между собой
простыми соотношениями.
На рис. 3.47, д показана кривая дифференциального распре¬
деления несущей способности, рассчитанная по формуле (3.26),
.и экспериментальная гистограмма распределений за весь период
(3.26)
187
/'(q), нПа ’
0,02
0,Of
f(q), к Па'1
0,02
0,01
LtL
50
Щ^кЛсГ1
0,02
0,01
а)
100 (J, к Па 0 50 ^ 100 Ц, к Па
Щ),кПа
0,01
0,01
-/
О so
f(i1), кпа
ГТ-П г-1
100ц,
в)
д, к Па О
Ltd
50 100 д, к Па
г)
Рис. 3.47. Гистограмма рас¬
пределения несущей способ¬
ности лунного грунта
Таблица 3.6
Количественные показатели распределения
несущей способности лунного грунта (,,Луноход-2“)
Наименование параметра
Лунные дни
Пер¬
вый
.и вто¬
рой
Тре¬
тий
Чет¬
вер¬
тый
Пер¬
вый-
чет¬
вер¬
тый
Модальное значение, кПа
Среднее арифметическое значение, кПа
Среднеквадратичное отклонение, кПа
30.5
36.5
17,0
28,3
37,7
18,1
26,8
41,6
21,4
28,7
38,0
18,9
188
работы «Лунохода-2». Из этого рисунка следует, что приведенная
формула позволяет достаточно хорошо описать результаты экспе¬
римента. Для отдельных участков трассы хорошие результаты по
описанию экспериментальных распределений могут быть получены
с применением-иных уравнений, например уравнения смещенного
распределения Релея.
Сопротивление вращательному срезу лунного грунта опреде¬
лялось как отношение максимального вращающего момента на
штампе к статическому моменту поверхностей среза, которое может
быть отождествлено со сцеплением грунта.
Особенность работы прибора ПРОП состоит в том, что опреде¬
ление сопротивления вращательному срезу производится после
завершения цикла внедрения штампа, т. е. может осуществляться
на разной глубине от поверхности грунта. Сопротивление враща¬
тельному срезу (рис. 3.48) заметно увеличивается с глубиной.
С ростом несущей способности грунта сопротивление вращатель¬
ному срезу увеличивается, а изменение его по глубине умень¬
шается. Величина сопротивления вращательному срезу в местах
измерений 2—9 кПа. Угол внутреннего трения грунта по резуль¬
татам измерений несущей способности и сопротивления вращатель¬
ному срезу может быть определен на основе теоретических реше¬
ний механики грунтов.
Для вычисления угла внутреннего трения грунта по трассе
движения «Лунохода-2» были отобраны результаты измерений,
в которых определение несущей способности и сопротивление
вращательному срезу проводилось примерно на одной и той же
глубине.
В пределах основных вариаций несущей способности грунта
угол внутреннего трения имеет величину в пределах 15—30°.
Для наиболее вероятных значений несущей способности 27—32 кПа
угол внутреннего трения составляет примерно 20°, для значений
36—46 кПа — соответственно 22—24°.
Подобное соотношение между несущей способностью и углом
внутреннего трения характерно для пылеватых песков.
Для исследования уплотняемости лунного грунта проводились
эксперименты по многократному внедрению штампа в одно и то же
место.
Результаты такого опыта приведены на рис. 3.49. При повтор¬
ных внедрениях штампа сопротивление грунта значительно воз¬
растает. Несущая способность и сопротивление вращательному
срезу увеличиваются в несколько раз.
Для исследования механических характеристик грунта на
некоторой глубине от поверхности осуществлялся многократный
разворот лунохода на месте. В результате удалялся верхний слой
грунта толщиной 80—100 мм. Проведенные измерения показали,
что грунт в этом случае обладает более высокими механическими
свойствами. Несущая способность составляет 100 кПа, а сопроти¬
вление вращательному срезу — 6 кПа.
189
г, к Па
Рис. 3.48. Зависимость
сопротивления вращя
тельному срезу (т) от глу¬
бины (Н): 3
1 — несущая способность
грунта 20 —ЗОкПа; 2 —
несущая способность
грунта 30—40 кПа; 3 —
несущая способность
грунта 40—50 кПа
0 00 80 120 160 Р,Н
Рис. 3.49. кривые, характеризующие глубину внедре¬
ния штампа при исследовании уплотняемости лунного
грунта:
/ — первое внедрение штампа; 2 — второе внедрение
штампа; 3 — третье внедрение штампа; р — верти¬
кальная нагрузка, Н; // — глубина внедрения, см
//, СМ
0 00 80 120 160 200 р,Н
Рис. 3.50. Кривые, характери¬
зующие глубину внедрения
штампа при исследовании не¬
однородности строения лунного
грунта:
1 — разрушение камня; 2 — вы-
ходы твердого основания; 3
грунт с «повышенной просадоч-
ностью»; 4 — однородный слои
грунта; 5 — слой рыхлого грун*
та на твердом основании: 6
рыхлый грунт; р—вертикальная
нагрузка, Н; Н—глубина внеД"
рения, см
Н,СМ
190
Неоднородность строения грунта
Это свойство лунного грунта обнаружилось при
внедрении штампа в грунт и было подтверждено различным
характером кривых (рис. 3.50 и табл. 3.7).
Кривая 4 соответствует вдавливанию штампа в достаточно
однородный грунт. В начальной фазе нелинейность кривой внедре¬
ния объясняется переменной площадью контакта с грунтом. При
дальнейшем погружении штампа в грунт (на глубину больше
высоты штампа) кривая вдавливания приближается к прямой.
При наличии под слоем грунта твердого основания (выходы
скальных пород или крупные камни) происходит стабилизация
глубины внедрения по мере роста усилия на штампе (кривая 5).
На твердом (каменистом грунте) получается небольшая осадка
при предельном усилии внедрения штампа (кривая 2). При упоре
штампа в камень или твердый агрегат в ряде случаев происходило
их разрушение (кривая 1).
На рыхлом грунте получается большая осадка штампа при
небольшом усилии (кривая 6).
Были отмечены также случаи, когда нарастание усилия внедре¬
ния значительно отставало от нарастания глубины внедрения
(кривая 3) по сравнению с процессом внедрения штампа в одно¬
родный грунт.1При этом меняется знак кривизны кривой внедрения.
Такой характер внедрения штампа можно объяснить наличием
плотных слоев грунта и залегающих под ними более рыхлых
Таблица 3.7
Результаты наблюдений за вдавливанием штампа
в лунный грунт («Луноход-2»)
Кривая
на рис.
3.50
Характерные особенности
процесса внедрения штампа
в грунт
Частота
обнару¬
жения,
%
Примечание
1
Разрушение камня
0,5
—
2
Выходы твердого осно¬
вания
3
Несущая способность
больше 150 кПа
3
Грунт с повышенной
просадочностью
4
4
Однородный слой грунта
80
Несущая способность
15—150 кПа
5
Слой грунта на твердом
основании
7,5
Глубина залегания твер¬
дого основания меньше
100 мм
6
Рыхлый грунт
5
Несущая способность
меньше 15 кПа
191
слоев. Для обозначения подобной структуры грунта был введен
термин «грунт с повышенной просадочностью».
На глубине до 100 мм в большинстве случаев (около 80%)
грунт был достаточно однородным. Грунт с повышенной просадоч¬
ностью встретился в 4% случаев от общего количества измерений.
Механические свойства камней
и других лунных образований
Прочность камней и других выступающих над
поверхностью образований оценивалась по результатам внедрения
конусно-лопастного штампа и при наезде на них колес лунохода
[3.7 ]. Результаты этих экспериментов показали, что наряду с до¬
статочно прочными камнями, представляющими собой, очевидно,
обломки коренных пород, были обнаружены камнеподобные
образования с рыхлой структурой. Эти образования внешне мало
отличаются от камней, но под действием относительно небольшого
усилия легко рассыпаются. Характерным при их разрушении
(рис. 3.51) является образование гладких вертикальных поверх¬
ностей и измельчение колесами отколовшихся фрагментов. При
таком наезде крен и дифферент лунохода практически не изменя¬
лись, что также указывает на невысокую прочность этих обра¬
зований.
Большинство исследованных камней имело достаточно высокую
прочность. При приложении нагрузки свыше 200 Н наблюдалось
Рис. 3.51. Разрушенное колесами лунохода камневидное образование
192
Рис. 3.52. Колея от колес лунохода при движении по кратеру (на валу кратера глубина ко¬
леи заметно больше)
внедрение только остроконечной части штампа на глубину 0,5—
2,0 см. Давление при этом составляло до 0,50—1,0 МПа. В отдель¬
ных случаях (0,5%) происходило раскалывание камня.
Измерения механических свойств на различных элементах
рельефа показали, что несущая способность лунного грунта на
валу некоторых кратеров много ниже, чем на горизонтальных
участках и склонах кратеров. Это подтверждается также резуль¬
татами анализа деформации грунта под колесами лунохода по
фотопанорамам (рис. 3.52). На валу кратера глубина колеи заметно
больше. Несущая способность на валу относительно свежих
кратеров диаметром 1—1,5 м составляет в среднем 10—15 кПа,
на валу кратера диаметром 13 м — 25-^30 кПа. В межкратерном
пространстве и на различных элементах сильно эродированных
«старых» кратеров несущая способность грунта была несколько
выше средних значений.
Самый верхний слой лунного грунта представляет собой
пылевидный легко деформируемый материал. Под воздействием
колеса образуется четкий след глубиной 0,5—1,0 см. Грунт уплот¬
няется под мерым колесом без заметных выпираний в стороны.
Несущая способность этого слоя грунта, определенная расчетным
путем по глубине колеи мерного колеса, оказалась ниже несущей
способности основной массы грунта.
13 А. Л. Кемурджиан
193
Взаимодействие ходовой части самоходного
шасси лунохода с грунтом
Исследование процессов взаимодействия самоход¬
ного шасси с грунтом проводилось по всем трассам движения
«Лунохода-1» и «Лунохода-2». С этой целью проводились измере¬
ния крутящих моментов на колесах, углов наклона поверхности
буксования.
Осредненные результаты измерений показаны на рис. 3.53.
По горизонтальной оси отложены значения коэффициента буксо¬
вания (а), по вертикальной — коэффициент тяги /Ст и коэффи¬
циент сцепления (ф). Характер этих зависимостей позволяет до¬
статочно хорошо описать их степенными функциями.
Соотношения между коэффициентом сцепления, коэффициен¬
том тяги и буксования имеют следующий вид:
Ф = Фшах^7,
/Ст (*т шах -^то) ^ -^СтО»
(3.27)
где фтах — коэффициент сцепления при полном буксовании (а = 1)
К?* — коэффициент тяги при отсутствии буксования (а = 0)
/Стшах — коэффициент тяги при полном буксовании (а = 1)
/ — постоянный коэффициент.
Коэффициент буксования, показывающий относительное про¬
скальзывание движителя по грунту, определялся по формуле
а=1 Ц- , (3.28)
У К
где V — скорость движения машины;
Ук —: средняя окружная скорость колес.
Коэффициент тяги — отношение тягового усилия к сцепному
весу при движении одиночной машины: Кт = tg а (а — угол на¬
клона поверхности грунта в направлении движения).
Коэффициент сцепления фтах характеризует условия движения
с точки зрения сцепления с грунтом и определяется по формуле
Vm. (3 29)
_
Фтах — qR
-01
194
где 2 — сумма крутящих момен¬
тов на ведущих колесах; G — сцеп¬
ной вес машины; R — радиус колеса.
Разность Фтах— Кт — f определяет
коэффициент сопротивления движе-
Рис. 3.53. Кривые, 'характеризующие тягово¬
сцепные свойства движителя лунохода:
1 — на Луне; 2 — при наземных испытаниях;
о — коэффициент буксования; kT — коэффициент
тяги; ф — коэффициент сцепления
нию со стороны грунта, который может быть определен по фор¬
муле
/ = (фшах Кт шах ^то) °} + ^тО- (3.30)
Осредненные значения коэффициентов в формулах (3.27)
составляют: сртах = 0,72; /Стгаах = О»48; Кт0 = 0,15; / = 0,4.
Величина f в значительной мере зависит от свойств грунта.
Используя известные решения из теории движения машин по
грунту, можно определить некоторые механические параметры
грунта.
Для колесного движителя применимы следующие соотношения:
f = § Т/JL.
1 (ц + 1) (3 - |i) V d ’
N = ЛЬ (1 ^-) гцУ~гВ, (3.31)
где г — глубина погружения колеса в грунт, см; d — диаметр
колеса, см; b — ширина колеса, см; ky — параметры грунта;
N — нагрузка на колесо, Н.
Параметры k и \i входят в исходное уравнение деформаций
механической модели, связывающее давление (qz) и осадку (г):
qz = kz*. (3.32)
Для однородного грунта, имеющего линейную зависимость
между давлением и осадкой (jji = 1), параметр k представляет
собой коэффициент постели. В этом случае предполагаются мест¬
ные остаточные осадки грунта в соответствии с гипотезой Фусса
[3.10]. Это обстоятельство необходимо учитывать при интерпре¬
тации приведенных ниже результатов. Среднее значение коэффи¬
циента постели k при движении по горизонтальной поверхности
(Кт = 0) составляет 0,43 Н/см3. Значения аналогичного коэффи¬
циента, вычисленные для аппаратов «Сервейер», составляют 1,1—
0,47 Н/см3, по данным экспедиции «Аполлон-11» — 0,55 Н/см3, что
согласуется с полученными результатами.
Уравнение (3.30) с учетом уравнений (3.27) можно записать
в следующем виде:
/ = (фшах - Кт fflax - Кт0) -f * то- (3.33)
Ат шах "Г Л то
Из этого уравнения следует, что величина f меняется в зависи¬
мости от уклона поверхности а (при этом tg а = Кт)- Это поз¬
воляет оценить влияние наклонного приложения нагрузки на
деформационные свойства лунного грунта.
На рис. 3.54 показано изменение коэффициента постели k
для различных углов приложения нагрузки по отношению к по¬
верхности грунта. При отклонении внешней силы от нормали
13* 195
к, н/см3
0,51
Рис. 3.54. Зависимость коэффициента постели (}л
от угла отклонения внешней нагрузки (а)
0,3
0,2
0,1
о ю го зо wol°
к поверхности грунта наблюдается
весьма существенное изменение де¬
формационных свойств (коэффициент
постели уменьшается).
Движение лунохода с различной
скоростью позволяет оценить влияние
скорости и времени -приложения
нагрузки на процессы деформации
грунта. Было выявлено, что в интер¬
вале скоростей 1—2 км/ч прочностные
и деформационные свойства грунта
не изменяются. Скорость вертикальной деформации грунта при
этом составляет 0,12—0,3 м/с, а время воздействия внешней на¬
грузки на грунт 0,2—0,4 с.
Наземные испытания самоходного шасси на различных типах
грунтов позволяют дать общую характеристику грунта и опре¬
делить наиболее близкие аналоги лунного грунта. При этом крите¬
рием для сравнения являются тягово-сцепные свойства шасси (см.
рис. 3.30). Наиболее полное совпадение для всех режимов движе¬
ния наблюдалось для мелкозернистого кварцевого песка.
Величине Кттах = 0»48 соответствует среднее значение несу¬
щей способности 38 кПа, хорошо совпадающее с результатами
непосредственных измерений.
0 механизме уплотнения верхнего слоя
грунта лунной поверхности
Исследование механических свойств лунного
грунта в естественном залегании и сопоставление полученных
данных с результатами изучения образцов грунта, доставленных
на Землю, свидетельствует о некотором уплотнении верхних слоев
грунта лунной поверхности.
Степень уплотнения может быть оценена по зависимости:
несущая способность — коэффициент пористости (рис. 3.55), кото¬
рая была получена при исследовании образцов лунного грунта и
образцов из мелкораздробленного базальта, размеры и форма
частиц которого были близки к средним данным для лунного
грунта. Несущей способности 35—40 кПа (средние значения для
«Лунохода-2») соответствует коэффициент пористости 0,9 и вели¬
чина насыпной плотности грунта 1,6 г/см3 (при плотности частиц
3,0 г/см3). Эти значения можно считать средними для верхних
слоев лунного грунта в естественном залегании.
Одним из возможных гипотетических механизмов формиро¬
вания верхнего слоя грунта, позволяющих объяснить уплотнение
лунного грунта и ряд других явлений, может быть взрывной ха¬
рактер образования кратеров.
196
Рис. 3.55. Зависимость несущей способности (о)
от коэффициента пористости (е)
' Если рассматривать процесс обра¬
зования кратеров по аналогии с об¬
разованием воронки в грунте под
действием взрывчатого вещества, то
можно считать, что процессы образо¬
вания кратеров различных размеров
схожи по характеру выброса и осаж¬
дения раздробленного грунта.
Исходя из основных положений
теории размерностей энергия взрыва
(£), радиус кратера (.R) и средняя скорость выброса из него
грунта находятся из следующих соотношений [3.13]:
Е = КгpgR*\ V2 = K*gR, (3.34)
где р — плотность грунта;
Кг и Кь — постоянные коэффициенты.
Перенос и осаждение грунта, выброшенного из кратера,
происходят на Луне по баллистическим траекториям.
Дальность полета тела по баллистической траектории связана
со скоростью соотношением
L = — sin 2р,
8 к
где р — угол выброса.
С учетом выражения (3.34)
L = K2R sin 2(3.
(3.35)
(3.36)
Это означает, что дальность выброса грунта из кратера про¬
порциональна его размеру. Естественно предположить, что вал
вокруг кратера образован из материала, выброшенного из этого
кратера. Свежие кратеры имеют достаточно крутые стенки с углом
наклона как правило, не менее 25—30°. Поэтому углы выброса
основной массы грунта измеряются в пределах 30—60°. Объем
грунта, выброшенного под углами более 60°, составляет небольшую
долю от общей массы. Исходя из этого можно принять, что sin 2(3
^ 1. Средняя скорость переноса грунта из центра кратера на его
вал, вычисленная по уравнениям (3.34)—(3.36), имеет величину
1,3—1,6 м/с для кратера диаметром 1—1,5 м и 3,5—4 м/с для
кратера диаметром 13 м.
При падении частиц с некоторой скоростью происходит уплот¬
нение грунта за счет кинетической энергии удара.
Процесс уплотнения грунта при осаждении частиц с различной
скоростью был изучен в опытах с мелкораздробленным базальтом.
Зависимость коэффициент пористости — скорость осаждения
197
носит экспоненциальный характер, весьма схожий с кривой
сжимаемости лунного грунта в компрессионном приборе, и может
быть записана в следующем виде:
8 = 8оо + (е0 — 8оо) е-^, (3.37)
где V — скорость осаждения частиц; г] — постоянный коэффи¬
циент.
При малой скорости осаждения получается рыхлая структура
грунта с высоким коэффициентом пористости. С увеличением
скорости осаждения коэффициент пористости уменьшается при¬
мерно таким же образом, как и при увеличении внешнего давления
при сжатии грунта.
Следовательно, степень уплотнения грунта в зонах его осажде¬
ния на внешних элементах кратера (вал кратера) будет возрастать
с увеличением его размеров. Сравнение прямых измерений несу¬
щей способности грунта на валу кратеров с расчетной оценкой на
основе приведенных выше зависимостей показывает удовлетвори¬
тельную сходимость результатов.
С помощью рассмотренного механизма уплотнения грунта
можно объяснить и особо рыхлую структуру самого верхнего его
слоя. В этом случае происходит переработка верхнего слоя под
действием микрометеоритов, образующих большое количество
микрократеров и обеспечивающих малую скорость осаждения
продуктов выброса. Образование участков грунта с «повышенной
просадочностью» происходит в том случае, если рыхлый вал вокруг
относительно небольшого кратера оказывается засыпанным более
плотным грунтом, выброшенным из соседнего кратера большего
размера. Различие в механических свойствах грунта на отдельных
участках больших кратеров будет малозаметным, если скорости
выброса превышают 8—10 м/с, что соответствует диаметру кратера
более 50—80 м.
Очевидно, что существуют и другие механизмы уплотнения
верхнего слоя грунта Луны, например виброуплотнение грунта
под влиянием сейсмических воздействий, солнечной радиации,
межмолекулярных сил и др.
Исследования физико-механических свойств лунного грунта,
выполненные различными методами и для различных геоморфоло¬
гических районов поверхности Луны, показали, что существуют
некоторые общие закономерности для физико-механических свойств
грунта, которые сохраняются для значительных по площади
районов Луны.
К таким закономерностям следует отнести характер компрес¬
сионной сжимаемости, сопротивления сдвигу, соотношения между
физическим состоянием грунта и его основными механическими
свойствами, распределение механических свойств грунта в есте¬
ственном залегании и взаимосвязь с геоморфологическими особен
198
ностями рельефа, наличие различного типа неоднородностей
в строении грунта, особенности процессов взаимодействия с грун¬
том движителя передвижной станции.
Установление этих закономерностей позволяет сделать заклю¬
чение о едином механизме образования и формирования верхнего
слоя лунного грунта для обширных территорий Луны. По всей
видимости, главными факторами, определяющими механическую
структуру лунного грунта, являются локальные процессы мете¬
оритной переработки грунта и процессы последующей консолида¬
ции под воздействием окололунной среды.
СПИСОК ЛИТЕРАТУРЫ
3.1. Авотиньш Е. В., Александров А. К., Яковлев Ф. П. Исследования устой¬
чивости движения транспортных машин в условиях пониженной гравитации. —
«Космические исследования», т. II, вып. 6, 1973, с. 863—869.
3.2. Автомат движется по Морю Дождей (Беседа с руководителем работ по
созданию самоходного шасси «Лунохода-Ь>). — «Правда», 1970, 18 ноября, с. 3.
3.3. Автоматические планетные станции. М., «Наука», 1973, 280 с. Авт.:
Андреянов В. В., Артамонов В. В., Атманов И. Т., Березин В. И., Жукин В. М.,
Трошин В. С., Черенков В. Б.
3.4. Алексеев В., Лебедев Л. За лунным камнем. М., «Машиностроение»,
1972, 120 с.
3.5. Виноградов А., Соколов С. «Луноход-2»: Программа выполнена. Предва¬
рительные результаты исследований. — «Правда», 1973, 20 ноября, с. 3.
3.6. Губарев В. Хроника одного путешествия, или повесть о первом луно¬
ходе. М., «Молодая гвардия», 1971. 80 с.
3.7. Исследование механических свойств лунного грунта на самоходном аппа¬
рате «Луноход-1». — В сб. Передвижная лаборатория на Луне — «Луноход-1».
М., «Наука», 1971, с. 78—86. Авт.: Леонович А. К-, Громов В. В., Семенов П. С.,
Петров В. Н., Рыбаков А. В., Черкасов И. И., Шварев В. В.
3.8. Космическая колесница (Беседа с руководителем работ по созданию само¬
ходного шасси «Лунохода-1»). — «Известия», 1970, 18 ноября, с. 1.
3.9. Минчин С. Н., Улубеков А. Т. Земля—Космос—Луна. М., «Машинострое¬
ние», 1972, 244 с.
3.10. Орнатский Н. В. Механика грунтов. М., Изд-во МГУ, 1962, 447 с. .
3.11. Первое путешествие лунохода. Спец. выпуск.—«Известия», 1970, с. 311.
3.12. Передвижная лаборатория на Луне — «Луноход-1». Т. I. М., «Наука»,
1971, 128 с.
3.13. Седов Л. И. Методы подобия и размерности в механике. М., «Наука»,
1965, 388 с.
3.14. Хаусерман В. Лунный вездеход. — В сб. Управление в пространстве.
М., «Наука», 1973, с. 164—171.
3.15. Halajan I. D. Gravity Effects on Soil Behaviour. — In the Lunar Surface
Layer. N. Y. Acad. Press, 1964, p. 67—93.
3.16. Investigations of Mobility of Lunokhod — I. — In Space Research XII.
Akademie—Verlag. Berlin, 1972, p. 73—82. Aut.: Alexandrov A. K-, Borisov В. М.,
Garin I. S. Grafov V. I., Ivanov A. G. et al.
3.17. Methods of Investigation of Lunckhod’s Mobility Under Terrestrial Condi¬
tions. — In Space Research XII. Academie—Verlag. Berlin, 1972, p. 65—72. Aut.:
Alexandrov A. K., Nikolayev G. B., Grafov V. I., Ivanov O. G. et al.
3.18. The Technique and Results of Ground Tests of Lunokhod’s Friction Mem-.
bers. — In Proceedings the Ninth International Symposium on Space Technology
and Science. Tokio, 1971, p. 529—533. Aut.: Uglev A. L., Rozov I. I., Vaisberg L. O.,
Vasilyev V. S., Verhin В. I., Kuznetsov L. A., Gurov S. V., Shevtsov S. A., Gamu-
lya S. D.
199
оглавление
Предисловие 3
Предисловие авторов 5
Глава 1. Автоматические лунные станции «Луна-9», «Луна-13» и «Сер¬
вейер». Первые прямые исследования грунтов Луны .... 7
1.1. Автоматические станции «Луна-9» и «Луна-13» 7
1.2. Научное оборудование станций «Луна-9» и «Луна-13» 16
1.3. Результаты исследований грунта станциями «Луна-9» и «Луна-13» 22
1.4. Автоматические лунные станции серии «Сервейер» 25
1.5. Научное оборудование станций серии «Сервейер» 28
1.6. Станции серии «Сервейер» на поверхности Луны и результаты их
работы 32
Список литературы 47
Г л а в а 2. Бурение, отбор проб и исследования лунного грунта станциями
«Луна-16» и Луна-20» 49
2.1. Задачи и методы внедрения в оболочку Луны 49
2.2. Назначение и устройство станций «Луна-16» и «Луна-20» .... 51
2.3. Буровое оборудование станций «Луна-16» и «Луна-20» 56
2.4. Отбор и доставка на Землю образцов лунного грунта станциями
«Луна-16» и «Луна-20» 63
2.5. Комплекс наземного оборудования для приемки и изучения образ¬
цов грунтов, доставленных с Луны 71
2.6. Результаты исследований механических свойств лунных грун¬
тов, доставленных станциями «Луна-16» и «Луна-20» 86
Список литературы 101
Г л а в а 3. Автоматические передвижные лаборатории «Луноход-1» и
«Луноход-2» * 103
3.1. Назначение передвижных лабораторий — луноходов 103
3.2. Посадочная ступень станции «Луна-17» 106
3.3. Общие данные о луноходах 108
3.4. Конструктивные особенности некоторых систем приборного от¬
сека «Лунохода-1» 112
3.5. Устройство самоходного шасси 116
3.6. Управление луноходами 127
3.7. Имитация условий работы луноходов при их наземной отра¬
ботке и испытаниях 138
3.8. Стендовые и ходовые испытания луноходов на Земле 150
3.9. Исследование лунной поверхности с помощью самоходного
шасси 170
3.10. Научные исследования, выполненные «Луноходом-1» и «Луно¬
ходом-2» • 175
3.11. Изучение механических свойств лунного грунта 181
Список литературы 199
Александр Леонович Кемурджиан, Валерий Васильевич Громов,
Игорь Иванович Черкасов, Валентин Владимирович Шварев
АВТОМАТИЧЕСКИЕ СТАНЦИИ ДЛЯ ИЗУЧЕНИЯ
ПОВЕРХНОСТНОГО ПОКРОВА ЛУНЫ
Редактор издательства Ф. Г. Тубянская Художник А. Я- Михайлов
Технический редактор В. И. Орешкина Корректор А. И. К^арамьчикина\‘
Сдано в набор 14/1V 1976 г. Подписано к печати 23/VIII 1976 г. Т-16406 Формат 60X 90Vi/-
Бумага № 1. Печ. л. 13,5, в т. ч. бандероль вкл. Уч.-изд. л. 14,7,.
Цена 1 р. 09 к. Тираж 3000 экз. Изд. зак. 240
Издательство «Машиностроение», 107885, Москва, Б-78, 1-й Басманный пер., 3. 7
Ленинградская типография № 6 Союзполиграфпрома при Государственном комитете/-
Совета Министров СССР по делам издательств, полиграфии и книжной торгов и
193144, Ленинград, С-144, ул. Моисеенко, 10. Тип. заказ 1008.
UJ
Рис. 3.42. Панорамы лунной поверхности в месте работы «Лунохода-1», снятые 17 ноября
1970 г. (а), 21 декабря 1970 г. (б), 1В февраля I97J г. (в) и 7 февраля 1971 г. (г)
Д. Л. Кемурджнаи
Рис. 3.43. Панорамы лунной поверхности по трассе движения «Лунохода-2», снятые 16 ян¬
варя 1973 г. (а), 20 февраля 1973 г. (б), 18 марта 1973 г. (в) и 19 апреля 1973 г. (г)
г)
ж